/
































































































































































Author: Белоглазов И.Н. Джанджгава Г.И. Чигин Г.П.
Tags: сельское хозяйство лесное хозяйство охота рыбное хозяйство кибернетика навигация
Year: 1985


Text
И.Н. БЕЛОГЛАЗОВ
Г.И. ДЖАНДЖГАВА
Г.П. ЧИГИН
ОСНОВЫ
НАВИГАЦИИ
ПО ГЕОФИЗИЧЕСКИМ
ПОЛЯМ
Под редакцией А.А. Красовского
МОСКВА ’’НАУКА”
ГЛАВНАЯ РЕДАКЦИЯ
ФИЗИКО-МАТЕМАТИЧЕСКОЙ ЛИТЕРАТУРЫ
19 8 5
ББК 32.81
Б43
УДК-62^
Белоглазов И.Н., Джанджгава Г.И., Чигин Г.П. Основы навигации
по геофизическим полям. - М.: Наука. Главная редакция физико-
математической литературы, 1985. - 328 с.
Рассматривается (по зарубежным материалам) теория и техника сис-
тем навигации и наведения по геофизическим полям (так называемых
корреляционно-экстремальных навигационных систем - КЭНС). Излагаются
классификация, принципы построения КЭНС, характеристики ряда естествен-
ных навигационных полей, бортовые измерители этих полей, устройства
памяти и обработки информации в КЭНС. Подробно освещаются алгоритми-
ческое обеспечение КЭНС и результаты численных экспериментов.
Табл. 11. Ил. 167. Библиогр. 245 назв.
Рецензент доктор технических наук А.М. Батков
Иииокеитий Николаевич Белоглазов
Гиви Ивлианович Джанджгава,
Геннадий Павлович Чигин
ОСНОВЫ НАВИГАЦИИ ПО ГЕОФИЗИЧЕСКИМ ПОЛЯМ
Редактор Ю Г. Гуревич
Художественный редактор Т.Н. Кольченко
Технический редактор О.Б. Черняк
Корректоры Т.В. Обод, Е.А. Янышева
Набор осуществлен в издательстве
на наборно-печатаюхцих автоматах
ИБ № 11893
Сдано в набор 6.06.85. Подписано к печати 10.10.85
Т—20154. Формат 60 х 90 1/16. Бумага офсетная w
Гарнитура Пресс-Роман. Печать офсетная. Усл. печ. л. 20,5
Усл.кр.-отт. 20,5. Уч.-изд.л. 22,18. Тираж 2080 экз.
Тип. зак. 803 -Цена 3 р. 70 к.
Ордена Трудового Красного Знамени
издательство "Наука”
Главная редакция физико-математической литературы
117071 Москва В-71, Ленинский проспект, 15
4-я типография издательства "Наука”
630077 г. Новоснбнрск-77, ул. Станиславского, 25
_ 1502000000-151
Ь -----------—---— 1 с 7.0 с
053(021-85
©Издательство ’’Наука”,
Главная редакция
физико-математической
литературы, 1985
ОГЛАВЛЕНИЕ
От редактора ............................................ 5
Предисловие................................................ 7
Глава 1. Системы навигации по геофизическим полям и их классифи-
кация ................................................................ 8
§ 1.1. Классификация систем навигации по геофизическим полям . . . . 8
§ 1.2. Обзор развития систем навигации по физическим полям и прин-
ципов их построения ............................................ 14
1.2.1. КЭНС-1А (14). 1.2.2. КЭНС-1Б (20). 1.2.3. КЭНС-ПБ(25).
1.2.4. КЭНС-ШБ (26).
§1.3. Геофизические поля, используемые в системах навигации ... 30
§ 1.4. Общие характеристики естественных навигационных полей Земли 34
Глава 2. Поверхностные навигационные геофизические поля, их характе-
ристики и способы измерения т........................................ 41
§ 2.1. Навигационное поле рельефа, его характеристики и способы из-
мерения ........................................................ 41
§ 2.2. Поле радиотеплового контраста, его характеристики и способы
измерения....................................................... 53
Глава 3. Аномальные пространственные поля Земли, их характеристики
и способы измерения ................................................. 61
§ 3.1. Структура и основные характеристики пространственных полей
Земли ......................................................... 61
§3.2. Бортовые измерители магнитного поля Земли ............... 85
3.2.1. Основные составляющие ошибки измерения магнитного
поля Земли (85). 3.2.2. Бортовые магнитометры и магнитные
помехи (88)
§ 3.3. Бортовые измерители гравитационного поля Земли......' . 100
Глава 4. Устройства памяти и обработки информации систем навигации
по геофизическим полям............................................ 107
§ 4.1. Запоминающие устройства картографической информации КЭНС 107
4.1.1. Полупроводниковые запоминающие устройства (108).
4.1.2. Запоминающие устройства на магнитных лентах (110).
4.1.3. Запоминающие устройства на цилиндрических магнитных
доменах (И 1). 4.1.4. Оптические запоминающие устройства(112).
.4.1.5. Голографические запоминающие устройства (114).
1
3
§ 4.2. Аналоговые устройства обработки картографической инфор-
мации ............................................................ 119
§ 4.3. Цифровые устройства обработки картографической информации 127
Глава 5. Структура, принципы действия и алгоритмическое обеспечение
КЭНС.................................................................. 135
§5.1 . КЭНС эвристического типа ................................. 135
5.1.1. Дифференциальная схема КЭНС (135). 5.1.2. Нелинейные
эффекты управления в дифференциальной схеме КЭНС (139).
§5.2 . Беспонсковые КЭНС ........................................ 145
5.2.1. Использование нелинейной калмановской фильтрации для
синтеза субоптимальных беспоисковых КЭНС (146). 5 2.2. Про-
стейшие беспонсковые КЭНС (156). 5.2.3. Беспонсковые КЭНС
для оценивания пространственного положения ЛА по полю релье-
фа местности (163). 5.2.4. Беспонсковые КЭНС, использующие
изображение местности (177). 5.2.5. Использование марковской
теории нелинейной фильтрации для синтеза субоптимальных
беспоисковых КЭНС (185)
§5.3 . Поисковые КЭНС......................................... ,190
5.3.1. Эвристические поисковые алгоритмы КЭНС (191) 5.3.2. Оп-
тимальные поисковые алгоритмы КЭНС (196). 5.3.3. Оптималь-
ные поисковые алгоритмы совместного оценивания местоположе-
ния и скорости движущихся объектов (203). 5.3.4. Оптимальные
поисковые алгоритмы совместного оценивания местоположения
и скорости движущихся объектов при одновременном использо-
вании нескольких полей (206). 5.3.5. Использование нелинейного
программирования в оптимальных поисковых КЭНС (208)
§ 5.4. Рекуррентно-поисковые КЭНС............................. 213
5.4.1. Рекуррентно-поисковое оценивание и его непрерывный
аналог (214). 5.4.2. Частные случаи рекуррентно-поискового
оценивания для использования в КЭНС (217). 5.4.3. Рекуррент-
но-поисковая КЭНС для оценивания пространственного положе-
ния ЛА по полю рельефа (221)
§5.5 . Комбинированные алгоритмы КЭНС .......................... 234
5.5.1. Модуль рекуррентно-поискового оценивания (238). 5.5.2.
Модуль фильтрации угловых ошибок ИНС (241)
Глава 6. Синтез алгоритмов оценивания параметров вертикального дви-
жения. Вариант комбинированного алгоритма . ............... 248
§ 6.1. Циклические алгоритмы оценивания параметров вертикального
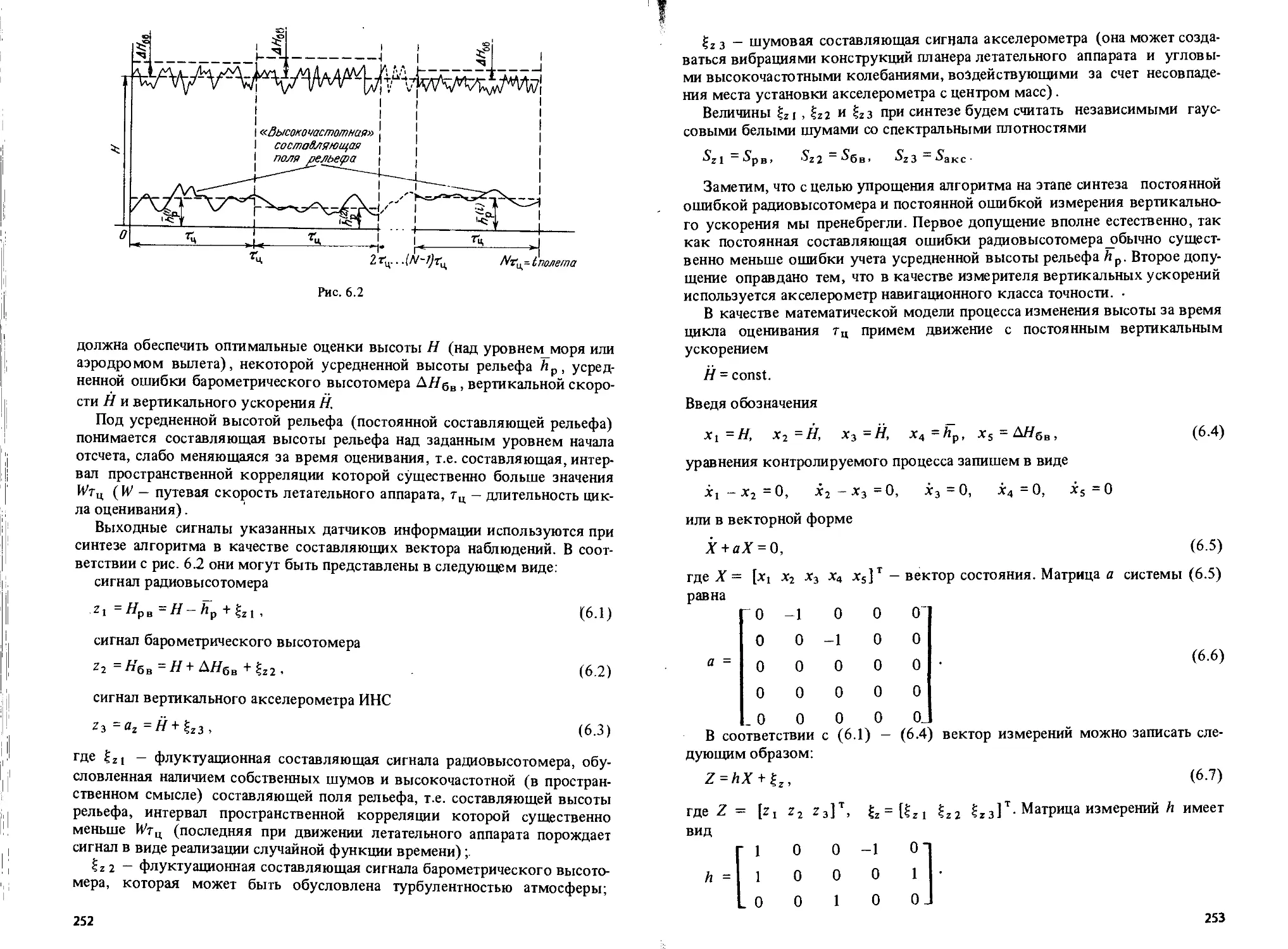
движения центра масс летательного аппарата ...................... 251
§ 6.2. Математическое моделирование циклических алгоритмов оцени-
вания параметров вертикального движения 270
§ 6.3. Синтез и аналитическое исследование алгоритмов коррекции вер-
тикального канала инерциальной навигационной системы........ 285
§ 6.4. Исследование беспоискового алгоритма оценивания простран-
ственных координат .............................................. 291
§6.5. Вариант комбинированного алгоритма ....................... 301
Основные обозначения ........................................ 318
Список литературы ......................................... 320
ОТ РЕДАКТОРА
Любой процесс навигации, как и управления, осуществляется с исполь-
зованием физических полей в широком смысле слова. Так, визуальное
ориентирование на местности происходит путем восприятия зрительным
анализатором поля оптического контраста, точнее, распределения яркости
и цвета на земной поверхности; навигация с помощью магнитного компаса
выполняется путем контроля направления горизонтальной составляющей
магнитного поля Земли; инерциальная навигация основана на измерении
компонент инерциального поля и поля гравитационных сил; радионавига-
ция осуществляется посредством создания искусственных радионавигаци-
онных полей и т.д.При этом в целой группе систем навигации (инерциальной,
радионавигации, навигации с использованием магнитного курса и др.)
применяются регулярные, или нормальные, составляющие полей, а случай-
но распределенные в пространстве и на земной поверхности аномальные
составляющие являются для этих методов помехами. Эти методы навига-
ции базируются на моделях нормальных геофизических полей и моделях
фигуры Земли, как правило, относительно простых и относительно легко
описываемых в масштабах районов навигации или даже в масштабах всего
земного шара. Соответствующие методы навигации давно автоматизирова-
ны и могут осуществляться без участия экипажа. В другой группе методов
навигации используются аномальные, высокочастотные в пространственном
отношении поля — такие, как поле оптического контраста (визуально ви-
димые ориентиры), поле радиолокационного контраста (радиолокацион-
ные видимые ориентиры) и другие. Основные из этих методов, служащие
для высокоточного определения местонахождения (а не скоростей), бази-
руются на моделях (картах, эталонах) соответствующих аномальных физи-
ческих полей. Эти модели весьма информативны, хотя отображают, по су-
ществу, случайные поля. Хранение соответствующих моделей-эталонов
требует значительных объемов памяти.
Методы навигации по аномальным физическим (геофизическим) полям
стали автоматизироваться сравнительно недавно — примерно с начала
шестидесятых годов. При этом сразу выявились возможности использова-
ния для навигации таких аномальных геофизических полей, которые раньше
в навигации были только помехами. Это произошло, в частности, с аномаль-
ным магнитным полем Земли. Ввиду ’’случайности” аномального геофизи-
ческого поля алгоритмы функционирования'соответствующих навигацион-
ных систем имеют резко выраженную специфику. Сопоставление наблю-
даемого геофизического поля с его эталоном осуществляется в бортовой
<;
навигационной системе, как правило, посредством функционала типа кор-
реляционной функции. При этом осуществляется определение или поиск
экстремума функционала. Поэтому системы навигации по геофизическим
полям получили в советской научно-технической литературе название
корреляционно-экстремальных навигационных систем (КЭНС).
Новая область — автоматическая навигация по аномальным геофизичес-
ким полям — бурно развивающееся направление науки и техники. В оте-
чественной литературе оно представлено рядом фундаментальных моно-
графий [1.12—1.14], не имеющих аналогов за рубежом. Однако в этих
монографиях освещаются в основном теория и алгоритмическое обеспече-
ние КЭНС. В данной книге, наряду с теорией и алгоритмами, на основе за-
рубежных публикаций рассматривается техника КЭНС, а также приводят-
ся более подробные сведения о навигационных геофизических полях. В
этом главное назначение книги.
При определении круга читателей, для которых данная книга может
представить интерес, следует иметь в виду, что корреляционно-экстремаль-
ные принципы находят применение не только в навигации и наведении, но
и в других областях науки и техники. Сюда относится робототехника,
управление некоторыми технологическими процессами, некоторые задачи
распознавания образов в биологии и медицине и др. Таким образом, круг
читателей этой монографии может быть достаточно широким.
А. Красовский
ПРЕДИСЛОВИЕ
Навигация по геофизическим полям (полю рельефа, аномальному маг-
нитному и гравитационному полям Земли и др.) является новым быстро
развивающимся видом навигации подвижных объектов. Непрерывно рас-
ширяются области применения систем данного класса, бурно развивается
теория КЭНС. Ведутся широкомасштабные работы по исследованию навига-
ционных свойств геофизических полей с оценкой их применимости в зада-
чах экстремальной навигации и наведения.
Первая глава посвящена принципам построения и классификации КЭНС.
Дается обзор развития систем навигации по геофизическим полям, излага-
ются общие характеристики и особенности естественных навигационных
полей.
Следующие две главы посвящены изложению основных характеристик
и способов измерение поверхностных и пространственных навигационных
геофизических полей.
Особенности практической реализации и эксплуатации КЭНС (по зару-
бежным данным), а также устройства памяти и обработки информации
рассматриваются в четвертой главе. Заключительные две главы моногра-
фии посвящены теории и алгоритмическому обеспечению КЭНС.
Результаты исследований, включенные в книгу, были получены при тес-
ном сотрудничестве авторов и неоднократно обсуждались непосредственно
в процессе написания. Личный вклад каждого автора в написание книги
распределяется следующим образом: И.Н. Белоглазовым написаны § 1.4,
§ 3.1, глава 5; Г.И. Джанджгава написал § 1.2, § 1.3, §3.2, главу 4;
Г.П. Чигин является автором § 1.1, глав 2 и 6. По просьбе авторов § 3.3
написал А.И. Сорока.
Авторы выражают благодарность А.М. Баткову за рецензирование
рукописи книги и полезные замечания.
7
ГЛАВА 1
СИСТЕМЫ НАВИГАЦИИ ПО ГЕОФИЗИЧЕСКИМ ПОЛЯМ
И ИХ КЛАССИФИКАЦИЯ
§ 1.1. КЛАССИФИКАЦИЯ СИСТЕМ НАВИГАЦИИ ПО ГЕОФИЗИЧЕСКИМ
ПОЛЯМ
Развитие авиационной и космической техники рождает все новые поко-
ления летательных аппаратов с высокими летно-техническими характерис-
тиками и широким спектром задач. Такие самолеты, как ’’Конкорд”,
Ту-144, Ил-86, В-1, F-18 [1.1-1.3] достигли рекордных показателей по вы-
сотности, скорости и дальности полета, грузоподъемности, степени автомати-
зации пилотирования на маршруте полета и при посадке, экономичности.
Непрерывно повышается плотность воздушного движения в сочетании
с ростом требований к безопасности полетов. Это расширяет задачи, решае-
мые летательными аппаратами, и предъявляет к современным средствам
их навигации требования высокой точности, надежности, помехозащищен-
ности, автономности, максимальной автоматизации, отсутствия ограниче-
ний по дальности, высоте и скорости полета.
За последние полтора-два десятилетия основой при построении систем
и комплексов навигации летательных аппаратов стали инерциальные нави-
гационные системы [1.4—1.8], удовлетворяющие указанной совокупности
требований, за исключением точностных требований, так как метод двойно-
го интегрирования ускорений, положенный в основу функционирования
инерциальных навигационных систем, приводит к принципиальному нарас-
танию погрешности местоопределения летательного аппарата с течением
времени полета.
Эта проблема решается в настоящее время двумя путями.
1. Уменьшением инструментальных погрешностей инерциальных навига-
ционных систем за счет повышения точности их чувствительных элементов —
гироскопов, акселерометров и вспомогательных элементов, а также точнос-
ти монтажа и юстировки [1.4, 1.7].
Трудности, встречающиеся на этом пути, можно проиллюстрировать
табл. 1.1, составленной в предположении равного вклада ошибок началь-
ной ориентации (выставки), ошибок акселерометров и ошибок (случай-
ного дрейфа) гироскопов. Из нее видно, что, например, для обеспечения
точности определения координат местоположения 1 км и 0,1 км при исход-
ной точности выставки вертикали 0,17 угл. мин и 0,017 угл. мин соответ-
ственно необходима реализация высокоточных приборов с малыми скорос-
тями дрейфа гироскопов.
Этот путь приводит в итоге к неэкономичности таких систем из-за боль-
ших материальных и трудовых затрат и необходимости решения ряда слож-
ных научных и технических задач.
8
2. Использование на борту летательного аппарата дополнительных
источников информации (барометрических, астрономических, радиотехни-
ческих, радиолокационных) для осуществления коррекции измерений
инерциальных навигационных систем. В ряде случаев такой подход являет-
ся более экономичным и эффективным при создании бортовых средств
навигации летательных аппаратов [1.8—1.11], так как предполагает исполь-
зование сравнительно недорого стоящих и грубых инерциальных навига-
ционных систем. Эти дополнительные источники информации не только
обеспечивают непосредственную коррекцию показаний инерциальной на-
вигационной системы, но в ряде случаев при использовании методов комп-
лексной обработки информации обеспечивают компенсацию первопричин,
порождающих погрешности определения навигационных параметров, на-
пример дрейфа гироскопов, ошибок акселерометров, погрешностей при
интегрировании.
Однако каждое из этих дополнительных средств навигации имеет те или
иные свойства, не позволяющие в полной мере удовлетворить указанной
выше совокупности требований к навигационным средствам. Например,
использование астрономических систем в ряде случаев ограничивается вы-
сотой полета и метеоусловиями. Радиоастрономические системы лишены
этого недостатка, однако они, как и просто астрономические, в лучшем
случае способны обеспечить лишь выдерживание направления в инерциаль-
ном пространстве, т.е. устранить дрейф гироскопов. Радиотехнические
и радиолокационные системы часто снижают показатели помехозащищен-
ности, скрытности и автономности работы; баровоздушные системы могут
привести к дополнительной инерционности в навигационных измерениях
и дополнительным ошибкам, порождаемым отличием реальной атмосферы
от расчетной.
Последние два десятилетия интенсивно развивается теория и практика
автоматических систем навигации по геофизическим полям, в полной ме-
ре удовлетворяющих всей совокупности требований, предъявляемых
к современным средствам навигации летательных аппаратов [1.12-1,15].
Этот класс систем наиболее эффективно дополняет инерциальные системы
навигации, но может быть успешно использован и для коррекции средств
навигации.
Таблица 1.1
t, Ч Д, км
1,0 0,1
о!др, град/ч 1 Шдр, град/ч <^др> град/ч со , град/ч ДР и 1
0,5 1,0 2,0 5,0 О' ф ШДР' ШДР ~ с время полета; Д 0,0075 0,0025 0,0015 0,0006 корости дрейфа ги — ошибка определе 0,20 0,045 0,013 0,002 роскопов, форм, ния координат ме 0,00075 0,00025 0,00015 0,00006 фующих вертика стоположения. 0,002 0,0045 0,0013 0,002 ль и курс; Г —
9
Рис. 1.1
Способ навигации по некоторым геофизическим полям использовался
издавна (измерение магнитного курса, наблюдение за ориентирами на зем-
ной поверхности). Однако лишь научно-технические достижения последних
десятилетий позволили реально поставить задачу создания автоматических
высокоэффективных автономных средств навигации по физическим полям
Земли — магнитному, гравитационному, рельеф а поверхности, оптическому,
теплового и радиолокационного контраста поверхности и др. Автоматичес-
кая навигация по геофизическим полям с определением местоположения
основана на сопоставлении информации, получаемой с помощью бортовой
системы наблюдения поля (датчика поля), с информацией о поле, храня-
щейся в бортовой памяти (карта поля). Сопоставление осуществляется
обычно посредством вычисления некоторого функционала типа корреля-
ционной функции и поиском или беспоисковым нахождением экстремума
этой характеристики. В системах, служащих для определения скорости,
бортовая карта поля может отсутствовать. Ее заменяет информация допол-
нительного (дополнительных) датчика поля. Однако здесь также необхо-
димо вычисление характеристики типа корреляционной функции и поиск
(определение) экстремума. Поэтому системы автоматической навигации
по физическим полям получили название корреляционно-экстремальных
навигационных систем (КЭНС).
В последнее время КЭНС находят широкое признание и применение.
Они имеют разнообразную структуру и могут иметь различное предназна-
чение. Одним из удобных способов классификации КЭНС является класси-
фикация по объему или характеру полезной информации, снимаемой с
навигационного поля бортовым датчиком в каждый момент времени или
10
за короткий цикл сканирования. В соответствии с этим КЭНС делятся на
три основных класса (рис. 1.1):
КЭНС-1 - в системах этого класса рабочая информация в текущий мо-
мент времени снимается в ’’точке”, т.е. выходной сигнал датчика поля пред-
ставляет собой скалярную величину;
КЭНС-П — для систем данного класса характерным является то, что
бортовой датчик за короткий цикл сканирования или мгновенно снимает
информацию о поле вдоль произвольных, но заранее выбранных линий.
Таковыми, в частности, могут служить линии, перпендикулярные к про-
дольной (в случае поперечного сканирования антенной системой датчика)
или поперечной (при продольном сканировании) оси летательного аппа-
рата, спирали (для объектов, совершающих движение в вертикальной
плоскости) и т.д.;
КЭНС-III - к этому классу относятся системы, в которых рабочая ин-
формация снимается с участка площади земной поверхности (’’кадра”),
просматриваемого бортовой системой в каждый момент времени
или за короткий цикл сканирования (КЭНС с сопоставлением изобра-
жений) .
Следует отметить, что в принципе возможны промежуточные типы КЭНС;
информация в которых одновременно или практически одновременно сни-
мается в нескольких точках, вдоль нескольких линий или нескольких кад-
ров и т.д. Однако существование цромежуточных типов не нарушает цен-
ности и достаточной общности приведенной классификации.
Особенностью КЭНС-1 - систем с точечным зондированием навигацион-
ного поля — является возможность использования как поверхностных
(поле рельефа, радиотепловое, оптическое, инфракрасное поля, поле радио-
локационного контраста и др.), так и пространственных (аномальные
магнитное и гравитационное) полей Земли.
Системы этого класса с памятью работоспособны при комплексировании
с системой, контролирующей (с относительно невысокой точностью) ком-
поненты скорости подвижных объектов и, быть может, другие навигацион-
ные параметры. Эта вспомогательная (или базовая) навигационная система
получила название грубой (ГНС). Комплексирование корреляционно-экст-
ремальной системы с ГНС может осуществляться или по разомкнутой
схеме, когда от ГНС получают приближенные значения навигационных па-
раметров и обратное воздействие отсутствует, либо по замкнутой схеме
коррекции, когда корреляционно-экстремальная система и ГНС представ-
ляют взаимосвязанный комплекс. Если в качестве ГНС в таком комплек-
се используется инерциальная система, то в результате коррекции можно
получить высокоточные определения (оценки) не только координат место-
положения, но и скорости, вертикали, курса.
Системы, мгновенно снимающие информацию с линии или кадра, могут
использовать только поверхностные поля Земли, так как геометрические
размеры подвижных объектов существенно меньше так называемого
радиуса корреляции пространственного поля. Даже в варианте систем с
памятью они могут работать без ГНС.
По объему исходной (априорной) информации об интенсивности физи-
ческого поля каждый из рассматриваемых классов КЭНС делится на два
подкласса: А — системы без памяти, Б — системы с памятью.
11
Примерами КЭНС без памяти могут служить корреляционные измери-
тели путевой скорости и угла сноса самолетов и ракет [1.16], корреляцион-
ные измерители скорости проката [1.17] и т.д. Для функционирования
КЭНС этого подкласса в основном могут быть использованы только по-
верхностные поля. К числу важных достоинств КЭНС без памяти следует
отнести возможность использования нестабильных (особенно в высокочас-
тотной части спектра) поверхностных полей: поля радиолокационного
контраста, радиотеплового поля Земли, поля облачного покрова с его
неровностями.
Для функционирования КЭНС с памятью требуется априорная информа-
ция о физическом поле. Эти системы объединяются в большую группу
систем навигации и наведения по картам местности. Основным достоинст-
вом таких систем является возможность получения высокой точности
в определении координат местоположения объекта, не зависящей (после
окончания переходного процесса) от продолжительности движения в преде-
лах закартографированной области, и скорости его движения. Основная
трудность, возникающая при реализации КЭНС с памятью, заключается
в необходимости их обеспечения исходной (априорной) информацией,
т.е. в создании рабочих карт поля.
В зависимости от степени закартографированности района полетов
КЭНС с памятью можно разделить на три группы: системы с полной, не-
полной и минимальной априорной информацией [1.13].
В системах с полной априорной информацией геофизическое поле запи-
сывается с высокой точностью в блоке памяти навигационного комплекса
для всего района полетов. Например, при дискретной форме представления
поля шаг дискретизации по горизонтальным координатам и шаг квантова-
ния по интенсивности должны выбираться такими, чтобы дополнительно
вносимые ошибки при воспроизведении поля в блоке памяти не превышали
ошибок его измерения датчиком [1.14]. В КЭНС с минимальной априорной
информацией в бортовом запоминающем устройстве хранится информация
о координатах отдельных ориентиров (точечных, протяженных), распо-
ложенных вдоль линии заданного пути (ЛЗП). Этим достигается зна-
чительное сокращение потребной памяти БЦВМ при реализации алго-
ритмов коррекции (с некоторым усложнением вычислительных про-
цедур) .
Системы с неполной априорной информацией предполагают коррекцию
навигационных комплексов как по точечным и протяженным ориентирам,
так и непрерывную на отдельных участках маршрута, имеющих необходи-
мые для корреляционно-экстремальной навигации показатели одного илн
нескольких геофизических полей.
Дальнейшее деление КЭНС может быт произведено по способу хранения
и обработки априорной и рабочей информации. С этой точки зрения КЭНС
делятся на аналоговые (непрерывные), цифровые и аналого-цифровые
(комбинированные).
Особенностью построения аналоговых КЭНС является то, что хранение и
обработка всей информации осуществляются в непрерывной форме с
применением аналоговой вычислительной техники.
В цифровых КЭНС выполнение аналогичных операций и хранение боль-
шого числового массива, отражающего структуру навигационного поля,
12
осуществляются в бортовой цифровой вычислительной машине с расширен-
ной во многих случаях внешней памятью.
Аналого-цифровые КЭНС предполагают использование аналоговой и
цифровой техники при реализации алгоритмов коррекции и построении
блока памяти системы. Они могут выгодно отличаться от рассмотренных
выше вариантов КЭНС в случае высоких требований к производительности
БЦВМ, обеспечения навигации по геофизическим полям над всей террито-
рией суши и Мирового океана, а также при работе контура экстремальной
коррекции в условиях больших начальных рассогласований.
По методу определения отклонения от экстремума КЭНС подразделяют-
ся на эвристические, поисковые, беспонсковые оптимальные (субоптималь-
ные) и комбинированные. Такая классификация в некоторой мере соот-
ветствует алгоритмам КЭНС, которые могут быть реализованы в КЭНС-1,
КЭНС-П и КЭНС-Ш на базе аналоговой, аналого-цифровой и цифровой
техники.
В соответствии со структурой КЭНС приведенная классификация
охватывает в основном только корреляционно-экстремальную часть. В ка-
честве грубой навигационной системы в КЭНС могут быть использованы
следующие навигационные системы: инерциальные (платформенные и
бесплатформенные) (ИНС), курсо-доплеровские (КДНС), курсо-воздуш-
ные (курсо-аэрометрические) (КВНС). В силу этого обстоятельства пре-
дусматривается также классификация КЭНС по типу ГНС. Например,
КЭНС с платформенной (бесплатформенной) ИНС в качестве базовой
системы в дальнейшем будет именоваться платформенной (бесплатфор-
менной) инерциальной корреляционно-экстремальной навигационной сис-
темой (ИКЭНС), КЭНС, построенная на основе курсо-доплеровской нави-
гационной системы — курсо-доплеровской КЭНС (КДКЭНС). Дальнейшая
классификация может учитывать тип навигационного геофизического поля.
Например, ИКЭНС в зависимости от типа поля подразделяются на ИКЭНС,
работающие по полю рельефа, ИКЭНС, работающие по аномальному магнит-
ному полю Земли, и т.д.
Аналогичная классификация имеет место и для курсо-доплеровских и
курсо-аэрометрических КЭНС. КЭНС может использовать одновременно
два или более геофизических навигационных полей.
В развитии алгоритмического обеспечения (теории) КЭНС-I (и КЭНС
других классов) можно вьщелить четыре основные этапа (направления).
Первый этап составила теория квазистационарных режимов непрерыв-
ных беспоисковых КЭНС эвристического происхождения. Как и для других
экстремальных систем [1.18], приближенная теория квазистационарных
режимов сводится к обычной теории следящих систем, в общем случае
нелинейных [1.19].
В теоретических исследованиях и математическом моделировании на
этом этапе рассматривалась в основном четырехточечная дифференциальная
схема формирования сигналов коррекции [1.14].
Главным недостатком дифференциального беспоискового алгоритма
является потеря работоспособности системой при начальных рассогласо-
ваниях, превышающих радиус корреляции поля, а также при нестационар-
ности поля по дисперсии, математическому ожиданию и спектру. Предло-
женные способы учета нестационарности поля и применение алгоритмов
13
'’сходящихся головок”, модуляционной головки и эффекта усреднения
[1.20, 1.21] позволили несколько расширить область допустимых началь-
ных рассогласований, но возникающее при этом уменьшение соотношения
сигнал/шумв системе затрудняло их применение.
Второе направление в развитии теории КЭНС составили поисковые
алгоритмы, исследованные главным образом в работах [1.13,1.14].
Теория таких систем строится на основе широко известной теории ста-
тистических решений [1.22]. Особенностью поисковых алгоритмов явля-
ется отсутствие ограничений на величину начальных ошибок навигацион-
ной системы. Однако реализация данных алгоритмов, особенно в случае
решения задачи многопараметрического оценивания, требует значительной
производительности БЦВМ.
Дальнейшее развитие теории КЭНС привело к созданию оптимальных
(субоптимальных) беспоисковых алгоритмов КЭНС, образующих третье
направление теории. Эти алгоритмы ведут свое происхождение от фильтра
Калмана, примененного к специфической задаче наблюдения нерегулярного
и не поддающегося аналитическому описанию навигационного поля. Впер-
вые в задачах этого класса применены теория усреднения и метод деком-
позиции, позволившие получить аналитические оценки точности в зависи-
мости от статистических характеристик навигационного поля и уровня
шумов, действующих по каналам измерения [1.14, 1.23, 1.24].
Комбинированные алгоритмы, составляющие четвертый этап развития
теории КЭНС, представляют собой сочетание поисковых и беспоисковых
алгоритмов, полученных как на основе строгого решения задачи оптими-
зации, так и на основе инженерной интуиции, опыта. Они не имеют ограни-
чений по начальным ошибкам рассогласования и в ряде случаев не предъяв-
ляют особых требований к БЦВМ при своей реализации. Поэтому возмож-
ности применения подобных алгоритмов достаточно широки.
§ 1.2. ОБЗОР РАЗВИТИЯ СИСТЕМ НАВИГАЦИИ ПО ФИЗИЧЕСКИМ ПОЛЯМ
И ПРИНЦИПОВ ИХ ПОСТРОЕНИЯ
Приведем несколько примеров построения корреляционно-экстремаль-
ных систем навигации и наведения по данным зарубежной печати.
1.2.1. КЭНС-1А
Бистатмческий корреляционный радиолокатор для измерения скорости
космического корабля [1.17]. Точное
Рис. 1.2
измерение скорости корабля отно-
сительно поверхности Луны весь-
ма важно при осуществлении
посадки на Луну. Применение
бистатического (полуактивного)
корреляционного радиолокатора
на борту корабля позволяет из-
мерить скорость относительно
поверхности в широком диапа-
зоне высот. Для этого на по-
верхности Земли устанавливает-
ся мощный передатчик, кото-
рый создает искусственное, от-
14
раженное от поверхности Луны микроволновое поле, с помощью кото-
рого бортовые приемники определяют скорость космического корабля.
Это электромагнитное поле представляет собой поле напряженности,
неравномерная распределенность которого вызвана интерференцией
волн наземного передатчика и волн, неравномерно отраженных лунной
поверхностью. Поскольку это неравномерное поле относительно Луны
является почти неподвижным, то измеренная относительно него скорость
корабля представляет собой скорость перемещения относительно лунной
поверхности.
Рис. 1.3
Измерения напряженности поля производятся приемниками с разнесен-
ными на борту корабля антеннами. Если две ненаправленные антенны
размещены на борту так, что одна строго ’’следует по следу” другой, то
обе они зафиксируют одни и те же колебания поля напряженности (рис. 1.2).
Но сигналы, фиксируемые этими антеннами, будут смещены друг отно-
сительно друга во времени t на величину, равную отношению расстояния
между этими антеннами s к скорости движения корабля V: xt =x(t),
х2 = хи---— I. Вычисление взаимной корреляционной функции этих
сигналов на конечном интервале наблюдения Т
1 ' / s \
у ,4 х(т) Т“ Т/ d{T)
позволяет получить меру смещения этих сигналов и1 и и2 во времени
(рис. 1.3).
Поскольку расстояние между антеннами s известно, можно вычислить
скорость корабля
при выполнении условия
1 > / s \
R (т0) = — J х(т — То) х т -- ------I dr = max.
Т t - т \ V )
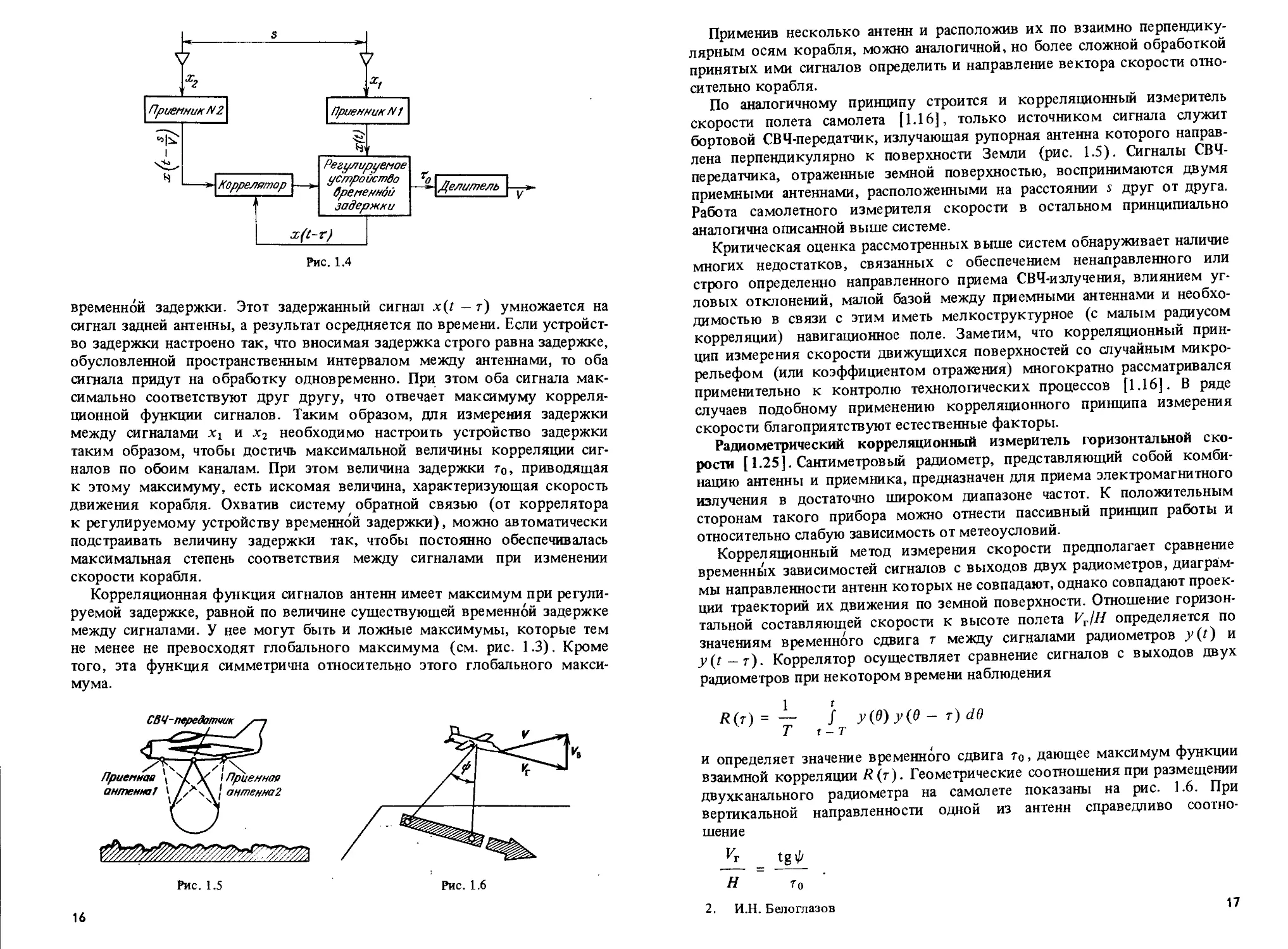
На рис. 1.4 приведена упрощенная блок-схема системы обработки сигна-
лов и измерения скорости.
Для выполнения операции вычисления взаимной корреляции сигнал
от передней антенны х(?) пропускается через регулируемое устройство
5
Рис. 1.4
временной задержки. Этот задержанный сигнал x(t — г) умножается на
сигнал задней антенны, а результат осредняется по времени. Если устройст-
во задержки настроено так, что вносимая задержка строго равна задержке,
обусловленной пространственным интервалом между антеннами, то оба
сигнала придут на обработку одновременно. При этом оба сигнала мак-
симально соответствуют друг другу, что отвечает максимуму корреля-
ционной функции сигналов. Таким образом, для измерения задержки
между сигналами Xi и х2 необходимо настроить устройство задержки
таким образом, чтобы достичь максимальной величины корреляции сиг-
налов по обоим каналам. При этом величина задержки т0, приводящая
к этому максимуму, есть искомая величина, характеризующая скорость
движения корабля. Охватив систему обратной связью (от коррелятора
к регулируемому устройству временной задержки), можно автоматически
подстраивать величину задержки так, чтобы постоянно обеспечивалась
максимальная степень соответствия между сигналами при изменении
скорости корабля.
Корреляционная функция сигналов антенн имеет максимум при регули-
руемой задержке, равной по величине существующей временной задержке
между сигналами. У нее могут быть и ложные максимумы, которые тем
не менее не превосходят глобального максимума (см. рис. 1.3). Кроме
того, эта функция симметрична относительно этого глобального макси-
мума.
16
Применив несколько антенн и расположив их по взаимно перпендику-
лярным осям корабля, можно аналогичной, но более сложной обработкой
принятых ими сигналов определить и направление вектора скорости отно-
сительно корабля.
По аналогичному принципу строится и корреляционный измеритель
скорости полета самолета [1.16], только источником сигнала служит
бортовой СВЧ-передатчик, излучающая рупорная антенна которого направ-
лена перпендикулярно к поверхности Земли (рис. 1.5). Сигналы СВЧ-
передатчика, отраженные земной поверхностью, воспринимаются двумя
приемными антеннами, расположенными на расстоянии s друг от друга.
Работа самолетного измерителя скорости в остальном принципиально
аналогична описанной выше системе.
Критическая оценка рассмотренных выше систем обнаруживает наличие
многих недостатков, связанных с обеспечением ненаправленного или
строго определенно направленного приема СВЧ-излучения, влиянием уг-
ловых отклонений, малой базой между приемными антеннами и необхо-
димостью в связи с этим иметь мелкоструктурное (с малым радиусом
корреляции) навигационное поле. Заметим, что корреляционный прин-
цип измерения скорости движущихся поверхностей со случайным микро-
рельефом (или коэффициентом отражения) многократно рассматривался
применительно к контролю технологических процессов [1.16]. В ряде
случаев подобному применению корреляционного принципа измерения
скорости благоприятствуют естественные факторы.
Радиометрический корреляционный измеритель горизонтальной ско-
рости [1.25]. Сантиметровый радиометр, представляющий собой комби-
нацию антенны и приемника, предназначен для приема электромагнитного
излучения в достаточно широком диапазоне частот. К положительным
сторонам такого прибора можно отнести пассивный принцип работы и
относительно слабую зависимость от метеоусловий.
Корреляционный метод измерения скорости предполагает сравнение
временных зависимостей сигналов с выходов двух радиометров, диаграм-
мы направленности антенн которых не совпадают, однако совпадают проек-
ции траекторий их движения по земной поверхности. Отношение горизон-
тальной составляющей скорости к высоте полета Vr!H определяется по
значениям временного сдвига т между сигналами радиометров у (г) и
y(t — г). Коррелятор осуществляет сравнение сигналов с выходов двух
радиометров при некотором времени наблюдения
Я(т)=^- f y(0)y(0-T)d0
Т t -т
и определяет значение временного сдвига т0, дающее максимум функции
взаимной корреляции R (г). Геометрические соотношения при размещении
двухканального радиометра на самолете показаны на рис. 1.6. При
вертикальной направленности одной из антенн справедливо соотно-
шение
____tgifr
Н ~ т0
2. И.Н. Белоглазов
17
Рис. 1.7
На рис. 1.7 приведена блок-схема корреляционного измерителя. Здесь
сигналы с выхода интегратора используются в блоках управления азиму-
том и управления задержкой с целью достижения максимальной степени
корреляции между сигналами радиометра. При использовании сигналов
высотомера возможно вычисление горизонтальной составляющей скорости
полета самолета.
Корреляционная система определения угловых координат. Для создания
автономных систем навигации искусственных спутников Земли (ИСЗ)
необходима информация об угловом положении спутника относительно
вертикали и плоскости орбиты, которая может быть получена оптико-
электронной корреляционной системой [1.26]. Введем правые системы
координат с началом в центре масс спутника (рис. 1.8): орбитальную
Ox0y0z0, жестко связанную с гиростабилизированной платформой, и
систему Oxyz. Ось Oz0 направлена по прямой, соединяющей центр Земли
с центром масс спутника, ось Оу0 — по бинормали к плоскости орбиты,
ось Ох 0 лежит в плоскости орбиты и направлена в сторону движения
спутника. При идеальной ориентации одноименные оси указанных систем
координат совпадут. В общем случае положение осей системы Oxyz по
отношению к осям системы Ox0y0z0 задано малыми углами а, 0, ф. На
стабилизированной платформе, плоскость которой перпендикулярна к оси
Oz0 и которая связана со спутником трехстепенным кардановым подве-
сом, установлены две пары объективов (см. рис. 1.8). Оптические оси
первой пары (1,3) расположены в плоскости Oxz (совпадающей при
идеальной ориентации с плоскостью орбиты) под углом ±0О к оси Oz.
Оптические оси второй пары объективов (2, 4) расположены в плоскости
Oyz и составляют с осью Oz углы ±а0. Если ось Oz совпадает с направле-
нием местной вертикали и спутник движется по круговой орбите, то ско-
рости V\ и Из, И2 и И4 движения изображения земной поверхности или
облачного покрова в фокальных плоскостях объективов соответственно
18
первой и второй пар будут
cos2/30,
/ V \
Уг = И4 =/1 ------I cosa0,
\ Н /
где f — фокусное расстояние объектива; V и Н — скорость и высота полета
спутника.
Если ось Oz отклонена от вертикали на малые углы а и 0, то возникают
разности скоростей движения изображений в фокальных плоскостях
/ И\ / V \
Д И з = 2sin/ (-) 2/30/3, Д 4 = 2sin/(-----) аоа,
’ \ s ) ’ \ Н /
которые могут служить мерой углов а и 0.
Для измерения Д 3 и Д K2j 4 корреляционным методом в фокальной
плоскости каждого объектива устанавливаются по два приемника лучистой
энергии (например, детекторы инфракрасного излучения). Случайные
сигналы на выходе приемников, обусловленные неравномерностью яркос-
ти фонов, будут идентичны по форме, но сдвинуты на интервал времени,
равный времени прохождения от приемника к приемнику.
Для определения ориентации гироплатформы относительно плоскости
орбиты поместим в фокальной плоскости одного из объективов приемники
лучистой энергии а, б, в (рис. 1.9). Если продольная ось платформы Ох
лежит в плоскости орбиты, то направление ’’бега” изображения земной
поверхности будет происходить по стрелкам N и значения корреляционной
функции, соответствующие сигналам приемников а, б, в, будут равны
друг другу, а при отклонении продольной оси от плоскости орбиты на
угол ф направление ’’бега” изображения будет происходить по стрелкам
N'. При этом значения корреляционной функции, соответствующие сигна-
лам а и б, возрастут, а значения, соответствующие сигналам айв, умень-
шатся. Разность этих значений корреляционных функций при определен-
ных условиях пропорциональна углу ф.
Как отмечалось выше, системы навигации с использованием эталонной
(картографической) информации - системы с памятью - могут содержать
бортовые средства измерения, позволяющие осуществить как ’’точечную”
выборку поля, так и одномерную и двумерную в виде ’’кадра” или любую
иную упорядоченную выборку. Работа такого типа систем основана на
сопоставлении текущей информации о каком-либо поле, контролируемом
бортовыми средствами в истинных координатах местоположения, с инфор-
2
19
мацией о том же поле, выбранной из бортового устройства памяти (рис. 1.10)
в предполагаемых координатах местоположения. Результат сопоставления
является мерой несоответствия предполагаемых и истинных координат
местоположения и может служить оценкой ошибки положения, а также
для привязки истинного местоположения на бортовой карте поля. При-
меняя в качестве датчика предполагаемых координат ГНС, например
инерциальную навигационную систему, можно - посредством указанного
сопоставления оценить ошибки инерциальной системы в определении
координат местоположения и использовать эти оценки как для коррекции
показаний инерциальной системы, так и для компенсации инструменталь-
ных ошибок, порождающих погрешности измерений.
Таким образом, инерциальные системы и системы с сопоставлением
информации о геофизических полях, работая в режиме взаимной коррек-
ции, образуют органически единую автономную систему. Приведем приме-
ры построения систем таких типов.
1.2.2. КЭНС-1Б
Система навигации по рельефу местности [1.15]. Метод навигации и
наведения посредством сопоставления профилей рельефа местности
TERCOM (Terrain Contour Matching) предназначен для применения на
борту различных летательных аппаратов: пилотируемых и беспилотных
самолетов, крылатых ракет, головных частей баллистических ракет. В осно-
ву метода построения системы TERCOM положен следующий принцип:
географическое положение любой точки земной поверхности (суши)
описывается единственным образом с помощью вертикальных профилей
или топографией окружающей местности аналогично тому, как каждый
20
человек обладает своими неповторимыми отпечатками пальцев. Как и при
анализе отпечатков пальцев, такая система требует предварительного
картографирования или иного определения характеристик профилей по-
верхности того района, над которым система будет использоваться. Это
может быть сделано, например, по стереоскопическим аэроснимкам мест-
ности с помощью известных в настоящее время способов. Предварительно
определенные данные о рельефе района полетов запоминаются в цифровом
виде в бортовом запоминающем устройстве.
Во время полета система TERCOM измеряет вертикальный профиль
рельефа вдоль истинной траектории полета с помощью радиовысотомера
(для измерения геометрической высоты полета) и баровысотомера (для
получения уровня отсчета профиля). Вычитая текущую высоту, измерен-
ную радиовысотомером, из барометрической, система определяет профиль
рельефа вдоль траектории полетай организует поиск в памяти вычислителя
наиболее ’’похожего”, заранее запомненного профиля с известными коор-
динатами (рис. 1.11).
Поиск осуществляется последовательным сопоставлением сигнала
датчика поля с цифровым образом и просмотром сначала назад и вперед
от предполагаемого местоположения, а затем поперек траектории в преде-
лах матрицы 64 X 64 ячейки (при размере ячейки Д от 30 м X 30 м до
240 м X 240 м).
Процедура сопоставления представляет собой минимизацию абсолютной
разности и приближенно может быть представлена выражением
1 64 ,
~~ 2 1-^ист (Л,, Ф/) Нк арт(Л/ + /Д, Ф/ + р Д) 1 — min
64 i=i
(1 </ С64, 1 Ср С64),
где /7ИСТ — превышение рельефа вдоль истинной траектории полета,
Якарт _ превышение рельефа, выбранное из бортовой карты, А,, Ф( -
объекта. Результат такого метода сопоставления иллюстрируется на
рис. 1.12.
Истинная
траектория
I Истинное
। местоположение
Предполагаемое
местоположение
Предварительная
подготовка данных
боковая
ошибка
Рис. 1.11
21
Фактическая
кривая
Гайка
совпадения
про/рилеи
Идеальная
кривая
Область
ор^еляуии
Снещенце па одной координате
Рис. 1.12
В соответствии с общими поло-
жениями для КЭНС-IE, указанными
выше, для того чтобы в системе
TERCOM приближенно определить
область совпадения профилей, на
летательном аппарате должна быть
установлена другая ГНС, работаю-
щая по методу счисления пути:
инерциальная, курсо-доплеров-
ская, курсо-воздушная. При на-
хождении в системе наиболее близкого профиля определяется истинное
местоположение летательного аппарата, и эта информация используется
для коррекции навигационной системы счисления пути.
Система навигации по рельефу морского дна и магнитному полю Земли.
В 1965 г. в [1.27] были опубликованы сообщения о создании в США систе-
мы BNE (Bathymetric Navigation Equipment), позволяющей осуществлять
всепогодную навигацию с круговой ошибкой 45 м. Работа системы основа-
на на использовании топографических карт рельефа морского дна и данных
фактических глубин, получаемых эхолотом вдоль действительного маршру-
та движения надводного или подводного корабля. Топографическая карта
рельефа морского дна (по аналогии с рабочей картой системы TERCOM)
представляет собой таблицу чисел, построенную для выбранных участков
коррекции. В аппаратуре BNE таблицы чисел составляются для квадратов
6,5 км X 6,5 км и полос 10 км X 1,2 км.
Корабль, двигаясь в этих акваториях, определяет свои координаты путем
измерения текущей глубины эхолотом и сравнения полученной реализации
по методу наименьших квадратов с реализациями, извлекаемыми из блока
памяти. Система BNE использовалась в космической программе ’’Апол-
лон” для привязки местоположения кораблей, входивших в командно-
измерительный комплекс, обеспечивавший космический корабль необходи-
мой информацией.
Для решения задач навигации движущихся объектов над акваториями
и в акваториях фирмой E-Systems был использован метод корреляции из-
меренных и запомненных составляющих аномального магнитного поля
Земли, названный MAGCOM (Magnetic Field Contours) [1.15]. Задача
обеспечения этих систем исходными рабочими картами АМПЗ частично
была решена в программе ’’Magnet”, проведенной ВМС США. Алгоритмы
обработки сигнала магнитометра и информации, хранящейся в памяти
БЦВМ, для подводных и надводных движущихся объектов практически не
отличаются от алгоритмов системы TERCOM. Для объектов, изменяющих
высоту полета в широком диапазоне, в БЦВМ вводятся дополнительные
алгоритмы по пересчету исходной рабочей карты на заданную высоту полета.
Комбинированная система навигации по рельефу местности. Фирма
McDonnell-Douglas (США) для крылатой стратегической ракеты ’’Тома-
гавк” разработала несколько вариантов комбинированной системы навига-
ции TAINS (TERCOM Aided Inertial Navigation System), представляющей
собой сопряжение с помощью БЦВМ LC-4516C аппаратуры AN/DPW-23
TERCOM с блоком автономной навигации, построенным на базе инерциаль-
ной системы LN-30.
22
В простейшем варианте системы TAINS сигналы ошибок определения
координат местоположения (выходные сигналы системы TERCOM) исполь-
зовались для коррекции показаний вторых интеграторов ИНС, т.е. коррек-
ция навигационной системы проводилась посредством сброса лишь пози-
ционных ошибок. Коррекция системы по скорости и угловому положению
не проводилась.
В другом варианте системы TAINS, получившем наибольшее распростра-
нение и отличающемся развитым математическим обеспечением, выходные
сигналы аппаратуры TERCOM используются в качестве наблюдаемых ве-
личин для оптимальной фильтрации ошибок инерциальной системы.
Фильтр Калмана, построенный для обработки поправок от системы кор-
реляции по рельефу местности, моделирует 11 состояний, в число которых
входят:
Дх, Ду — ошибки в определении продольной и боковой координат
местоположения объекта;
Д Vx, Д Vy — ошибки составляющих скорости движения;
а, у, ф — ошибки угловой ориентации гироплатформы в плоскости го-
ризонта и по азимуту соответственно;
ех, €у, ez — уходы гироскопов по соответствующим осям системы коор-
динат;
Rm — ошибка в вычислениях БЦВМ.
Таким образом, в рассматриваемом варианте комбинированной КЭНС
TAINS не только осуществляется коррекция ИНС по положению и скорос-
ти, но также проводится балансировка и калибровка гироплатформы.
Проведенные фирмой летные испытания подтвердили высокую точность
системы [1.28].
Беспоисковая система навигации по рельефу местности. Фирмой Sandia
разработана система SITAN (Sandia Inertial Terrain-Aided Navigation),
обеспечивающая непрерывную коррекцию ИНС на основе карты рельефа
местности с использованием фильтра Калмана и отличающаяся от системы
TERCOM принципиально иным решением задачи [1.28].
В системе S1TAN сравнение данных о рельефе местности, получаемых
от радиовысотомера в текущий момент времени, и коррекция ИНС проис-
ходят непрерывно на основе теории фильтрации Калмана в аналитическом
блоке с использованием дополнительной информации о наклонах рельефа,
вычисляемых в блоке памяти. В процессе такой обработки формируется
оценка вектора ошибок ИНС, поступающая в контур обратной связи для
компенсации действительных ошибок ИНС. Основу системы SIT AN состав-
ляют уравнения расширенного фильтра Калмана, записанные в дискретной
форме. Первые три компоненты вектора состояния представляют собой
продольную и боковую координаты местоположения и высоту полета.
В зависимости от длительности сеанса коррекции и качества ИНС век-
тор состояния может быть ограничен ошибками по скорости и смеще-
нием нуля вертикального акселерометра (при малой продолжитель-
ности полета) или может дополнительно включать ошибки угловой ори-
ентации гироплатформы, дрейфы соответствующих гироскопов
и т.д.
Разработанная новая концепция использования данных о рельефе мест-
ности для непрерывной коррекции ИНС, реализованная в системе SITAN,
23
Принимаемый отраженный Прогнозируемый отраженный
радиолокационный сигнал радиолокационный сигнал
(сигнал блока памяти)
Рис. 1.13
показала хорошую эффективность функционирования в процессе прове-
дения летных испытаний.
Проводятся дальнейшие исследования, связанные с обоснованием моде-
лей датчиков и отдельных подсистем, а также с улучшением схем фильтра
и бортового математического обеспечения.
Активная радиолакационная корреляционная система. Фирмой Goodye-
ar Aerospece для решения задач навигации и наведения разработана систе-
ма ROC (Range-Only Correlation), в основу работы которой положен прин-
цип корреляции вдоль линии [1.29]. Система определяет положение дви-
жущегося объекта по времени отраженных радиолокационных импульсов,
формируемых по четырем симметричным направлениям и по вертикали
(рис. 1.13).
Процессор содержит быстродействующий цифровой коррелятор, который
решает задачу определения координат летательного аппарата путем сравне-
ния обработанных отраженных радиолокационных сигналов (импульсов)
с соответствующими данными эталонных карт. Полученная информация
поступает в вычислительное устройство ИНС с целью формирования сигна-
лов коррекции навигационной системы.
Зоны коррекции (а их на маршруте может быть достаточное количество
для решения задачи высокоточной навигации) обычно составляют участки
размером 5 км X 10 км. Для хранения одной цифровой карты такой
зоны с шагом дискретизации по горизонтальным координатам Д1Х = Д1у =
= Д.1 = 40 м необходимо реализовать запоминающее устройство емкостью
5К бит.
Алгоритмом системы ROC предполагается сравнение 32-х последователь-
ных групп замеров с цифровой картой зоны коррекции. Поиск, дающий оцен-
24
ку положения объекта, осуществляется достаточно быстро (?расч 75 мс).
Ддя сохранения основных характеристик отраженных сигналов (с целью
последующего сравнения с эталонными данными) допустимый предел
поперечного смещения пятна диаграммы направленности антенн от наме-
ченной линии обзора не должен превышать ±20% ширины облучаемого
участка местности. Это в свою очередь обусловливает определенные требо-
вания к допустимым ошибкам навигационной системы к моменту про-
ведения сеанса коррекции.
1.2.3. КЭНС-ПБ
Система определения местоположения низко летящих самолетов по
профилю впереди лежащей местности [1.30]. В этой системе в качестве
измерителя параметра поля предполагается использование радиолокацион-
ной станции, сканирующей по углу места и азимуту и фиксирующей
профиль местности впереди летательного аппарата (’’профиль горизонта”).
Полученные данные сравнивают с эталонными профилями, храняшимися
на борту, для различных точек возможной трассы полета. Основное преиму-
щество такого метода заключается в том, что профиль горизонта может
быть получен с помощью радиолокационной станции (РЛС) обзора передней
полусферы достаточно быстро и для получения достаточного количества
информации не требуется продолжительного полета по маршруту. Эталон-
ные профили горизонта могут по сравнению с измеренными соответство-
вать более широким азимутальным секторам, благодаря чему обеспе-
чивается возможность определения местоположения даже в случае, если
курс летательного аппарата существенно отличается от заданного. Предпо-
лагается, что маловысотный летательный аппарат имеет правильный началь-
ный курс и оснащен бортовой аппаратурой, приближенно определяющей
его ориентацию в полете.
Информация, получаемая с помощью системы сопоставления профилей
горизонта, используется для оценки отклонения действительной траектории
полета летательного аппарата от заданной и выработки сигналов для коррек-
ции траектории.
Предварительная прокладка траектории полета производится на основе
топографических данных в цифровом виде с карты или фотографий, полу-
ченных с помощью ИСЗ. Для ряда возможных положений самолета вблизи
каждого контрольного пункта с помощью БЦВМ по топографическим
данным с учетом предполагаемой
профили горизонта.
На рис. 1.14 показаны эталон-
ный и измеренный профили гори-
зонта в координатах в (угол места)
и ф (азимут):
Фзад ~ заданное направление по-
лета в азимутальной плоскости;
'/'ист - истинное направление
полета;
2 Фсект — величина сектора эта-
лонного профиля горизонта;
±фб — сектор обзора РЛС.
высоты полета строятся эталлонные
Эталонный
^злд'/сект ^ист ^зад+&ект Ф
Измеренный
профиль
О +ф6 Ф
Рис. 1.14
25
Фактически вследствие использования данных в цифровой форме эти
профили имеют дискретный вид. Во время полета бортовой измеритель
определяет профиль горизонта в каждом из предварительно намеченных
контрольных пунктов. Этот профиль сопоставляется с каждым из эталон-
ных профилей с целью установления наибольшего совпадения. Такая про-
цедура обеспечивает определение местоположения и курса летательного
аппарата. Сопоставление профилей горизонта, выполняемое в БЦВМ, может
осуществляться вычислением:
среднеквадратической разности
S [s(n) — r(n+k- I)]2,
N п = 1
средней абсолютной разности
1 N
В(к) =— S Is (и) — г (п + к — 1)1,
N п = 1
где s (и) — измеренный профиль горизонта, г (п) — эталонный профиль
протяженностью 1 < к < /; = 7V+ 1.
Значение к, для которого одна из этих оценок является минимальной,
соответствует угловому положению вдоль эталонного профиля с наилуч-
шим совпадением измеренного и эталонного профилей. В окрестностях
данного контрольного пункта эта величина характеризует курс летатель-
ного аппарата, а в сочетании с дальностью — и его местоположение.
1.2.4. КЭНС-ШБ
Кадровая корреляционно-экстремальная навигационная система ракет.
Одной из первых систем этого класса, описанных в зарубежной литературе,
является система ATRAN (Automatic Terrain Recoguition and Navigation)
[1.31] для ракет, использующая для управления радиолокационную карту
местности.
Бортовой измеритель — сканирующий радиолокатор - выдает измерен-
ные сигналы на специальную электронно-лучевую трубку, на экране которой
формируется текущее двумерное изображение поля (рис. 1.15).
26
Эталонная карта в виде черно-белого изображения нанесена на фото-
пленку, заправленную в протяжное устройство, а фильмовой канал протяж-
ки расположен вплотную к экрану электронно-лучевой трубки. Источник
света через фокусирующую линзу освещает эти два изображения. При их
несовпадении количество света, поступающее на блок фотодатчиков, будет
меньше значения, при котором изображения совпадают, т.е. максимум
светового потока будет соответствовать максимальному совпадению
этих изображений на плоскости. Устройства привода, управляемые логи-
ческим блоком, будут перемешать изображения относительно друг друга до
’Ротокотой
Электронное
изображение
Электронный
умножитель
Оптическое
изображение
Запоминающая
сетка
Sb/*od
Рис. 1.16
их полного совпадения, что соответствует максимальному значению
взаимной корреляционной функции
R (Я,Т1) = к f ffi (x,y)f2 (x + %,y +ri)dxdy,
s
где k — весовой коэффициент, 5 — область кадра. Эта система характери-
зуется сложностью механической части.
Фирмой Goodyear Aerospace разработана система Correlatron [1.32],
позволяющая быстро сравнивать плоское наблюдаемое изображение с
эталонным изображением по корреляционному алгоритму. Эталонное
изображение записывается на запоминающей сетке специального электрон-
ного прибора следующим образом (рис. 1.16). Изображение проецирует-
ся на фотокатод, который излучает электроны с участков своей поверх-
ности, где изображение имеет светлые области. Поток электронов от фото-
катода к электронному умножителю образует электронное изображение,
эквивалентное проецируемому, притягиваясь к запоминающей сетке из
тонких проводников, покрытых диэлектриком (сетка находится под
положительным потенциалом). В результате изображение запоминается
в виде потенциального барьера, образованного осевшими на диэлектрике
запоминающей сетки электронами. Это создает определенное препятствие
для пучка электронов, проходящего от фотокатода к электронному умно-
жителю.
Обычно запоминающая сетка содержит 200—400 проводников на 1 см,
а для получения особо высокого разрешения плотность увеличивается
до 800 проводников на 1 см. Как только одно изображение запомнено,
на фотокатод экспонируется другое изображение. Картина, генерируемая
эмиссией фотокатода в соответствии с проецируемым изображением,
сравнивается с запомненным изображением в процессе преодоления потен-
циального барьера запоминающей сетки электронным пучком, излучаемым
фотокатодом. Прошедшие через запоминающую сетку электроны собираются
электронным умножителем и после усиления образуют выходной сигнал
27
коррелатрона, характеризующий меру различия между двумя сравни-
ваемыми изображениями, сходную с описанной при механическом сопо-
ставлении изображений. Причем, если раньше взаимное перемещение изо-
бражений осуществлялось механически, то теперь ту же функцию выпол-
няют две отклоняющие катушки, которые могут смешать по двум осям
электронный поток, эмиттированный фотокатодом.
Поскольку летательный аппарат может лететь на высоте, отличной от
той, на которой было снято эталонное изображение, коррелатрон содер-
жит фокусирующую катушку, выполняющую автоматическую установку
одинаковых масштабов текущего и эталонного изображений. Коррелатрон
выполняет сопоставление изображений менее чем за 0,25 с.
Пассивный радиометрический коррелятор. Фирма Lockhead разработала
пассивный площадной радиометрический коррелятор RAC (Radiometric
Area Correlator), предназначенный для навигации и наведения объектов
как днем, так и ночью. Система RAC включает радиометр, работающий
в диапазоне длин волн 0,834—0,909 см, со сканирующей антенной системой
и площадной коррелятор с большим быстродействием. С помощью специаль-
ного блока система RAC сопряжена с датчиком высоты, инерциальной
навигационной системой и БЦВМ.
Принцип работы коррелятора заключается в сравнении радиотепловой
карты местности, получаемой радиометром при сканировании антенной
системы в пределах ±50° по азимуту и ±80° по углу места, с эталонной
картой данного участка, заложенной в памяти площадного коррелятора.
В корреляторе на основании информации высотометра, ИНС и других
датчиков осуществляется преобразование сигнала радиометра в форму,
удобную для сравнения с эталонной картой: дискретизация, квантование
и масштабирование в соответствии с хранимой в запоминающем устройстве
информацией и условиями наблюдения — высотой, направлением движения
и т.д. Устройство сравнения изображений коррелятора RAC осуществляет
выбор возможных положений объекта на эталонной карте и для каждого
такого положения вычисляет меру сходства наблюдаемого (текущего)
изображения с эталонными, полученными из блока памяти. В качестве меры
сходства используется нормированный коэффициент корреляции. В [1.31]
отмечается, что подготовка эталонной карты производится с помощью
ЭВМ по аэрофотоснимкам автоматически с использованием 10 кодов.
Вычисленные ошибки в определении местоположения используются
БЦВМ для коррекции показаний ИНС и для внесения поправки в курс
летательного аппарата.
Комплексная инфракрасная корреляционная система. Военно-воздушные
силы США совместно с рядом фирм разработали комплексную инфракрас-
ную (ИЮ корреляционную систему навигации и наведения ATIPUS (Air-
borne Thermal Infrared Position Updating System), структурная схема
которой приведена на рис. 1.17 [1.33].
Принцип действия комплексной ИК-метрической системы состоит в
том, что входная информация в виде сигналов теплового излучения мест-
ности, формируемых ИК-радиометром, преобразуется в цифровую форму
в специальном блоке преобразователя сигналов, откуда поступает в БЦВМ
для последующей обработки. Если полученная информация имеет значи-
тельный разброс температуры (более 20° С), то происходит пересчет вход-
28
Рис. 1.17
ного сигнала в блоке калибровочной информации. После калибровки
входного сигнала определяется выходной сигнал коррекции путем сравне-
ния преобразованного в цифровую форму текущего сигнала с эталонной
тепловой картой (матрицей) данного участка местности, хранящейся в
БЦВМ.
Поступательное движение объекта дает развертку вдоль траектории
движения, а вращение зеркала антенны обеспечивает сканирование в пер-
пендикулярном направлении.
Выбор участков маршрута, над которыми будет осуществляться кор-
рекция местоположения летательного аппарата, производится с учетом
сведения к минимуму возможных сезонных изменений характеристик
подстилающей поверхности и т.д. В системе предусмотрено использование
нескольких независимых методов коррекции на разных этапах полета
объекта. В частности, возможно применение метода коррекции по рельефу
местности, по радиолокационному изображению местности и т.д. В этом
случае предполагается поэтапное использование различных устройств.
Например, систему коррекции по рельефу местности и систему, рабо-
тающую по радиолокационному изображению, можно использовать на
начальном и среднем участках траектории полета, а ИК-систему — на конеч-
ном участке полета.
Вырабатываемый в БЦВМ сигнал коррекции в дальнейшем исполь-
зуется для коррекции показаний инерциального блока типа IMU, имею-
щего средний класс точности. Предусматривается возможность исполь-
зования в инерциальном блоке IMU платформенной и бесплатформенной
инерциальной навигационной системы.
Интерполирование вблизи корреляционного пика (максимума корре-
ляционной функции двух сравниваемых изображений) позволяет повысить
точность определения координат местоположения.
В дальнейшем намечается применение калмановской фильтрации сигна-
лов коррекции и показаний инерциального блока IMU и формирование
сигналов управления в автопилоте по этим показаниям.
29
§ 1.3. ГЕОФИЗИЧЕСКИЕ ПОЛЯ,
ИСПОЛЬЗУЕМЫЕ В СИСТЕМАХ НАВИГАЦИИ
Геофизические поля, особенно пространственные, принято делить на
нормальные и аномальные, точнее, на нормальные и аномальные компонен-
ты поля.
Нормальным полем называется составляющая, имеющая практически
регулярный (т'ладкий) в пространственном отношении характер для всей
Земли или крупных ее регионов. Модель нормального поля описывается
относительно просто и для хранения этой модели требуется небольшой
объем памяти БЦВМ. Нормальные геофизические поля (магнитное, гра-
витационное) используются в навигации давно. Однако они способны дать
лишь ограниченную информацию, например: магнитный курс (и то с уче-
том склонения, что уже относится, вообще говоря, к аномальному полю),
вертикаль (без учета аномального уклонения отвеса).
В корреляционно-экстремальной навигации используются ано-
мальные геофизические поля, представляющие собой высокочастотные или
мелкоструктурные в пространственном отношении составляющие геофи-
зических полей. Их величины по отношению .к нормальным могут составить
малую долю, но содержат большой объем информации, если рассматривать
их в масштабах регионов или всей Земли. Модели аномальных полей весьма
сложны, а их удовлетворительное описание требует больших объемов
памяти БЦВМ. Возможность использования аномальных полей Земли раз-
личной физической природы в целях корреляционно-экстремальной на-
вигации основана на свойстве практически однозначного соответствия
распределения параметров какого-либо поля,’’образа” этого поля, конкрет-
ному месту на земной поверхности. Другими словами, земная поверхность
однозначно характеризуется распределением на поверхности или в прост-
ранстве геофизических полей: перепадом высот, растительностью, почвами
с различными свойствами, породами с различной намагниченностью и про-
водимостью, кажущейся температурой и т.д. Это позволяет каждой точке
земной поверхности в какой-либо системе координат поставить в соответ-
ствие определенные в количественном смысле физические величины, до-
пускающие возможность их измерения. Такими полями являются:
1.. Поле рельефа земной поверхности, характеризующееся взаимным
расположением высот, т.е. перепадами местности относительно какого-
либо уровня, например уровня моря. Перепады местности носят геометри-
ческий смысл, не зависящий от объектов, образующих эти неровности
земной поверхности [1.15]. Измерение параметров этого поля на борту
летательного аппарата осуществляется с помощью радиовысотомеров или
дальномеров с использованием сигналов барометрических или инерциаль-
ных измерителей высоты для задания уровня отсчета профиля рельефа
местности [1.15,1.34].
2. Оптическое поле земной поверхности, которое образуется отдельными
объектами и их взаимным расположением в видимом диапазоне излуче-
ний и характеризуется геометрическими, яркостными и спектральными
признаками изображения. Бортовые измерения параметров этого поля
осуществляются оптическими или телевизионными средствами получения
изображений.
30
3. Тепловое поле земной поверхности, образуемое электромагнитным
излучением отдельных ее элементов (почвой, водой, растительностью,
металлическими и железобетонными сооружениями) в инфракрасном,
сантиметровом или миллиметровом диапазоне волн и характеризующееся
кажущейся температурой этих объектов. Эта температура измеряется на
достаточно больших расстояниях, зависящих от поглощения радиации,
специальными бортовыми приборами (радиометрами), работающими в
соответствующих диапазонах длин волн [1.35,1.36].
4. Поле коэффициента отражения (поглощения) радиоволн (поле радио-
локационного контраста), образуемое элементами поверхности и харак-
теризующее отражательные свойства местности в радиодиапазоне длин
волн. Количественные показатели коэффициента отражения радиоволн
измеряются бортовыми радиолокаторами со сканирующим лучом или
с синтезированной апертурой [1.37, 1.38].
5. Магнитное поле Земли (нормальное и аномальное в совокупности),
обусловленное магнитными породами ядра Земли и ее поверхностного
слоя и характеризующееся напряженностью и направлением магнитных
силовых линий. Бортовые измерения этих полей как модульные (по абсо-
лютной величине напряженности), так и векторные выполняются индук-
ционными, феррозондовыми, квантовыми магнитометрами [1.39—1.41].
6. Гравитационное поле Земли, образованное всей массой Земли и
массами естественных и искусственных образований на ее поверхности и
характеризующееся силой притяжения [1.42]. Бортовые датчики этого
поля (гравиметры) строятся на основе измерения силы притяжения эта-
лонных масс, расположенных на летательном аппарате, к земной поверх-
ности в данном месте [1.43,1.44].
Существует целый ряд других полей (поле естественного у-излучения,
электростатическое и др.), менее стабильных во времени или слабо
изученных.
Как уже отмечалось, физические поля Земли, используемые в навига-
ции летательных аппаратов, можно разделить на два класса:
1. Пространственные поля Земли, параметры которых определены
в каждой точке околоземного пространства, — магнитное и гравитацион-
ное поля.
2. Поверхностные поля Земли, параметры которых определены лишь
на земной поверхности, — поле рельефа местности, тепловое, оптическое,
поле коэффициента отражения радиоволн.
Очевидно, что для получения информации о поверхностных полях Зем-
ли необходимо активное зондирование посредством радиотехнических,
лазерных высотомеров и локаторов или пассивное зондирование земной
поверхности посредством радиометров и оптических визиров.
Пространственные поля, определенные в трехмерном пространстве,
присутствуют на борту летательного аппарата в месте установки чувстви-
тельных датчиков и непосредственно измеряются магнитометрической
и гравиметрической аппаратурой.
Немаловажным фактором является наличие пространственных полей над
всей земной поверхностью, тогда как поверхностные поля, доступные
для контроля с летательных аппаратов, имеют место лишь над сухопутной
территорией Земли.
31
Рис. 1.18
Естественно, что поля Земли имеют различную физическую природу и
характеризуются информативностью, стабильностью во времени, зависи-
мостью от метеоусловий, времени суток и времени года, помехозащищен-
ностью. Поэтому они имеют различную ценность с точки зрения их приме-
нения в средствах навигации вообше и для конкретных летательных ап-
паратов в частности.
Кроме того, при практическом использовании полей в навигации важны
и такие аспекты, как наличие и простота реализации бортовых измерите-
лей полей, наличие картографического материала достаточной полноты
и подробности, простота аппаратурного построения системы в целом и т.п.
Качественное сопоставление геофизических навигационных полей при-
водится на рис. 1.18.
Контроль поверхностных полей может осуществляться в виде двумер-
ных или ’’объемных” кадров, тогда как пространственные поля позволяют
осуществить лишь точечное зондирование.
Наиболее информативными полями являются поверхностные поля,
в частности поле оптического контраста, ввиду информационной содержа-
тельности любого малоразмерного (до единиц метров и менее) объекта
земной поверхности в сочетании с высокой разрешающей способностью
оптических приборов. Пространственные поля, обладая свойствами по-
тенциальных полей, характеризуются информативностью, убывающей с
увеличением высотыполета летательного аппарата. Этот факт связан с необ-
ходимостью пересчета карт этих полей на высоту с помощью интегральных
32
операторов математической физики, описывающих так называемый эффект
сглаживания на высоте [1.45].
• Для глобальной навигации наиболее пригодно в настоящее время гео-
магнитное поле.
Сопоставление поверхностных полей позволяет выделить в качестве
основного поля для навигации над участками суши земной поверхности
поле рельефа местности, характеризующееся достаточно высокими значения-
ми всех показателей, определяющих его практическую применимость.
Однако достаточно высокая информативность полей оптического, тепло-
вого и радиоконтрастов делает возможным и актуальным их применение
в отдельных ответственных случаях, например для наведения на конечном
участке, уточнения местоположения в районе аэродрома и т.п. [1.46,1.47],
несмотря на имеющие место ограничения:
для оптического поля — влияние на работоспособность облачного покро-
ва и тумана, уменьшение чувствительности в вечернее и ночное время;
для теплового поля — зависимость от метеоусловий и времени года;
для поля коэффициента отражения радиволн — зависимость от сезонных
изменений, чувствительность бортовых систем (датчиков) к помехам.
Одним из основных вопросов, определяющих возможность практи-
ческого использования тех или иных физических полей в целях навигации,
является наличие карт поля и возможность пополнения этой информации.
Карты поля рельефа, имеющиеся в настоящее время, уже позволяют
осуществлять навигацию над большей частью континентов. Ввиду достаточ-
но высокой стабильности этого поля во времени, для навигации может быть
использован даже картографический материал, полученный в девятнад-
цатом веке. Например, фирма E-Systems проводила испытания системы
TERCOM по картам рельефа местности 1895 года и получила положитель-
ный результат^ [1.15]. Несмотря на это, ведутся интенсивные работы по
съемке данного поля с помощью искусственных спутников Земли [1.48].
Существующий материал по съемкам гравитационного и магнитного по-
лей может быть с достаточной степенью успеха использован для осуществ-
ления коррекции навигационных средств над отдельными участками и по
отдельным маршрутам полета как над акваториями, так и над участками
суши. Эти данные интенсивно пополняются результатами морских съемок,
выполняемых ВМС США, и аэрокосмических измерений [1.49], проводи-
мых отдельными фирмами, с обработкой результатов на ЭВМ [1.50, 1.51].
Например, во второй половине 70-х годов на самолете RP-30 Orion фирмы
Lockheed была выполнена съемка магнитного поля северной Атлантики
и прилегающих континентальных областей по программе Magnet. Для этих
целей фирмой Honeywell разработана самолетная инерциальная система с
гироскопом на электростатическом подвесе, позволяющая осуществлять
не только точную привязку измерений к местности, но и прецизионную
съемку компонент вектора напряженности геомагнитного поля [1.52].
Следует указать, что поля теплового и радиолокационного контрастов
допускают составление приближенных карт с помощью синтеза по аэро-
космическим фотоснимкам и заренее подготовленным каталогам кажу-
щихся температур (излучательной способности) и коэффициентов отраже-
ния земных покровов. Тем не менее ведутся интенсивные работы по не-
посредственному изучению полей и накоплению материала съемок. Фирмой
3. И.Н. Белоглазов 33
Goodyear Aerospace по программе Saphire разработана система SLAR, пред-
назначенная для обработки изображений, получаемых радиолокационной
станцией бокового обзора с синтезированной апертурой, и регистрации
изменений,,происходящих в них с течением времени [1.53]. Может выпол-
няться также операция нанесения топографических линий на эти изображе-
ния. Кроме того, этой же фирмой разработан ряд радиолокационных стан-
ций бокового обзора, предназначенных для картографирования земной
поверхности с высокой угловой разрешающей способностью [1.54].
Разработана оптимальная процедура обработки данных, получаемых
на искусственных спутниках Земли, для оптических сканирующих изме-
рительных систем, обеспечивающих уточнение мест положения до 80 м
[1,55].
В США разработана многоспектральная система MSS, основанная на
принципе спектральной дифференциации отражаемой (излучаемой) лучис-
той энергии и предназначенная для изучения земной поверхности с боль-
ших высот [1.56]. В системе в качестве первичных приемников приме-
няются фото- и термоэлектрические датчики, чувствительные к излуче-
ниям в различных диапазонах волн.
Отметим общие моменты, вызывающие определенную сложность осу-
ществления измерений параметров различных геофизических полей на бор-
ту летательного аппарата. Необходима определенная ’’развязка” бортовых
измерений от управляемых и неуправляемых эволюций аппарата. Компен-
сацией или фильтрацией возмущений в бортовых измерениях параметров
полей достигаются сходные условия измерений при картографировании
этих полей:
при измерении превышений рельефа необходимы компенсация влияния
колебаний центра масс аппарата по высоте и пересчет измерений для соот-
ветствующих углов таигажа и крена;
для двумерных измерителей поверхностных полей возникает задача
пересчета изображений по пространственным углам и исключения влияния
их изменений на измерения, а также масштабирования изображений в за-
висимости от высоты полета;
при бортовом измерении ускорений силы тяжести следует точно учиты-
вать или компенсировать инерционные воздействия всех видов;
осуществление точных бортовых магнитных измерений предполагает
компенсацию влияния магнитных масс, электрооборудования и других
факторов в условиях нестационарного возмущенного полета.
§ 1.4. ОБЩИЕ ХАРАКТЕРИСТИКИ ЕСТЕСТВЕННЫХ
НАВИГАЦИОННЫХ ПОЛЕЙ ЗЕМЛИ
В теории КЭНС, так же как и при исследовании геофизических полей,
весьма удобным является использование статистического подхода. Это
позволяет изучать некоторые средние, общие характеристики геофизи-
ческих полей и оценивать точность КЭНС при их использовании в опреде-
ленных географических районах.
Отказ от статистического подхода оставил бы нам лишь возможность
анализировать точность КЭНС при движении по конкретным траектория^.
Однако нет никакого основания точностные характеристики, полученные
34
для одной траектории движения, распространять на случаи движения по
другим траекториям. В этом состоит практическое неудобство исполь-
зования детерминированного подхода.
Обоснование статистического подхода представляет некоторую труд-
ность, если учесть, что реальные геофизические поля являются детерми-
нированными функциями пространственных координат: f(x*,y*,H).
Поэтому в настоящем параграфе в целях упрощения рассматривается
более простой вариант, когда поле f зависит только от горизонтальных
координат х*, у* и не зависит от высоты полета Н. Такая ситуация имеет
место при использовании поверхностных полей, а также при использо-
вании пространственных в случае, когда изменения высоты полета не-
существенны.
Даже в работах, посвященных статистическому анализу геофизичес-
ких полей (см., например, [1.57, 1.58]), обоснование статистического
подхода, строго говоря, не дается, т.е. не указывается, как математи-
чески вводится случайность в рассматриваемую задачу. По-видимому,
обоснование статистического подхода должно определяться дальнейшим
использованием рассчитываемых на его основе исходных статистичес-
ких характеристик геофизических полей. С этой точки зрения ситуация
в теории КЭНС относительно простая. Если одной из задач такой теории
считать выяснение средней точности КЭНС при движении по некоторому
множеству траекторий, то случайность целесообразно вводить путем зада-
ния возможных траекторий движения и вероятностей движения по этим
траекториям*). ~
Итак, исходное поле является детерминированным, а траекто-
рии движения T*(t) - случайными. Под векторной величиной Т* (г)
понимается совокупность x*(r), y*(f) (рис. 1.19). Обычно задаются ко-
нечное множество траекторий движения {?}*(/)} (г = 1, 2, ..., q) и ве5
роятности pi событий Н/, состоящих в том, что движение совершается по
траектории 7/(0 • Любые два события/// и Н/ при г ^/предполагаются
независимыми. По условию нормировки
я
2 Pi = 1.
z=i
*) Другой подход .заключается в задании множества возможных местоположений
(точек) и распределения вероятностей на этом множестве. Этот подход рассмотрен
в § 2.1.
3* 35
Как в этом случае перейти от детерминированного исходного поля
f (х*, у*) к случайному пЪлю?
Рассмотрим случай равномерного прямолинейного движения, когда пере-
мещение движущегося объекта по любой возможной траектории совер-
шается с одинаковой скоростью (рис. 1.20). Наряду с исходной системой
координат О*х*у* введем системы координат О^х^, связанные с траек-
ториями движения следующим образом: центры этих систем О, по-
местим в начальные точки траекторий Г,•*(/), оси xt совместим с положе-
нием вектора скорости движения, оси у( направим перпендикулярно к
Рнс. 1.21
осям х, так, чтобы движение от Xj к у, происходило по кратчайшему нап-
равлению против часовой стрелки, как показано на рис. 1.20.
В качестве реализаций f, (х,у) случайного поля f(x, у) рассмотрим ли-
нейные преобразования исходного детерминированного поля f(x*,y*),
получающиеся следующей заменой переменных:
х* = xoi +х cos tpj - у sin tpi, У* -yot + х sin щ + у cos ip,,
т.е. будем считать fj(x,y)=f(xol'+xcos<Pi — ysintpt, yoi -bxsin^ +
+ ycos ifli) и припишем этой рализации вероятность р( рассматриваемой
траектории движения T*(t).
В новой системе координат Оху все траектории начинаются в начале
координат (рис. 1.21) и уравнения этих траекторий имеют вид
Xi(t) = [х* (?) -х0/] cos <pi + |уг* (t) -yoZ] sin <pt,
У/(0 = - [x‘ (0 ~ sin й- + [ y* (t) - y0(] cos ,
причем /-я траектория 7} (t) = (x; (t),y,- (t)) обладает вероятностью'p,-.
Обозначим через X/ индикатор события///, т.е. такую функцию, которая
равна единице, если событие Я/ произошло, и равна нулю в противном
случае, тогда случайное поле f(x,у) будет связано с индикаторами х, и
со своими реализациями (х,у) следующим образом:
<?
f(x,y)= S Xifi(x,y),
i-l
а траектория движения T(t) определяется в виде
q .
Г(0= д х/Т’/М- (1-1)
Поскольку все исходные траектории 7’;*(/) могут быть получены из
какой-то одной траектории То (t) путем переноса начала координат и по-
ворота координатных осей, то все преобразованные траектории Tt (t) в
новой системе координат Оху совпадают с траекторией T0(t). Поэтому
ч
Г(Г) = T0(t) S X/ .
/•= 1
36
ч
Так как сумма индикаторов S х- полной системы несовместных собы-
1= 1
тий равна единице, то Т(т) = То (t) и, следовательно, траектория движения
T(t) является детерминированной.
От исходной постановки задачи, когда случайной была траектория дви-
жения, а детерминированным - поле f (х* у*), мы пришли к эквивалентной
задаче, в которой траектория движения детерминирована, а поле f(x,y) —
случайно. Легко найти математическое ожидание т^(х,у) и корреляцион-
ную функцию Rff(z!, z2) случайного поля/(х,у):
ч
mf(x,y)=M<f(x,y)>= S Pifi(x,y) =
i=l
Ч ~
= S + х cos <pt - v sin yoi + x sin tpt + у cos </>,), (1-2)
i=i
4
^(Z1,z2)=M</(Z1)/(z2)>= S р,Л(г1)Л(^) =
(= i
ч ~
= S P(/(x0( +Xj cos <pj - у t sintp,-, voi + x ,sin +yj cos ^,) X
i=l
x fi(xOI +X2COS(P,- - у2 sin y^i + X2 sin Щ +y2 COS (/?,), (1.3)
где M -- символ операции математического ожидания, z = (х,у).
Помимо корреляционной функции можно рассматривать также кова-
риационную функцию Kff(zltz2) поля/(х,у), связанную с корреляцион-
ной функцией Rff(zl,z2') зависимостью Kff(z ,, z2) = Rff{z i, z2) -
—)nif{z2). В случае центрированного поля понятия корреляцион-
ной и ковариационной функций поля совпадают. Подобное задание слу-
чайного поля /(х, у) на основании априорных вероятностей рг- траекто-
рий движения Т( (т) позволяет получить исчерпывающие статистические
характеристики этого поля.
Зафиксируем координаты z z 2, . .., z к и числа a j, а2, .. ., ак и найдем
функцию распределения F(a{, а2, .. ., ак), равную вероятности события
{f(zi)<a1,f(z2)<a2,. . . ,f(zk)<ak} .
Выберем реализации (х, у) (/' = 1,.. ., т), для которых //;- (z ।) < а ।,
fij (z2) < а2,.. ., fy (zk) < ак, и пусть Нц — события, состоящие в том,
что происходит движение по траектории и имеет место реализация
fij (•*>>’) Поскольку события Htj несовместимы, то событие
{/(Z|)<fli,/(z2)<iz2 • • • , f(zk)<ak}
т
равно U Hj- и
/=1
F(«i, а2,. . . , ак) = S p,i, (1.4)
Z! Z2 Zk 7 ~ 1
где Ру - вероятностьтраектории 7’*(т).
37
Иногда, как это будет показано ниже, достаточно знать математичес-
кое ожидание т?(х,у) и взаимную корреляционную функцию Rff{z 1, z2),
определяемые формулами (1.2) и (1.3).
Закон распределения, математическое ожидание и корреляционная
функция поля, рассчитанные по формулам (1.2) - (1.4), однозначно оп-
ределяются исходным полем f(x*,y*), множеством траекторий Т* (t) и
распределением вероятностей р,- на этом множестве.
Рис. 1.22
Если множество траекторий движения меняется или на тех же траекто-
риях задается новое распределение вероятностей, то математическое ожи-
дание, корреляционная функция и закон распределения случайного поля
также меняются. В качестве частного случая избранная постановка вопроса
охватывает движение по одной-единственной траектории. При этом корре-
ляционная функция поля тождественно равна нулю, а вся информация
о поле содержится в математическом ожидании т^(х,у).
Рассмотрим два частных случая задания семейства траекторий движения
и расчета соответствующих им статистических характеристик навигацион-
ных полей.
а) Пусть все траектории движения равновероятны [pt = !/<?(/ =1,2,...
...,</)] и расположены вдоль одной прямой, а начальные точки траекторий
сдвинуты на расстояния Д/ (рис. 1.22), так что xoi = (/ - 1) Д/, у0! =
= 0, ^>t - 0. Тогда, согласно (1.2) и (1.3),
1 ч ~
mf(x,y)=- S /[(»- 1)Д/ + х,у| , (1.5)
q 1
Rff{xity^,x^ +Дх,У1 + Ду) =
1 ч - ~
= — S /[(z-OAZ+Xb/)]/[(г—1)ДZ + л-, +Дх,^! + Ду], (1.6)
q »=1
где X) + Дх = х2, у) + Ду -уг.
Предположим, что поле /(х,у) стационарно и число q выбрано достаточ-
но большим для проявления стационарности, тогда математическое ожида-
ние поля znz(x, у) не зависит от х и у, а корреляционная функция поля за-
висит только от сдвигов Дх, Ду и не зависит от X) и У). Положив на этом
основании в (1.5) и(1.6)х = у=Х1 =yt =0, найдем
1 ’ ~
mz(0.0)=— Е /[(/ - 1 )ДД 0],
q /=1
K/z(0,0; Дх. Ду) = 1_ £ f [(/- ])Д/, 0]Д(/~ 1)Д/ +Дх, Ду].
q i= i ’
38
Часто при проведении теорети-
ческих оценок точности КЭНС
рассматривается одномерный ва-
риант системы, т.е. предпола-
гается, что боковые отклонения
у от траектории движения тож-
дественно равны нулю. В этом
случае для оценки точности тре-
буется знать лишь одно сечение
пространственной корреля-
ционной функции. Необходимые
формулы можно представить в
следующем виде:
1 я ~
mf=— S f [(/ — 1)Д/],
q i=\
1 я
= — S
q i=i
ДО - 1)Д/]/[(i- 1)Д/ + Д],
(1-7)
(1.8)
где
f(x, 0) =f(x), mf(0, 0) = mf , Rff(Q, 0; Дх, 0)= ЯЯ(Д), Дх = Д.
Формулы (1.7) и (1.8) полностью совпадают с теми зависимостями, по ко-
торым обычно рассчитываются статистические характеристики навигацион-
ных полей.
б) Пусть все траектории движения равновероятны, параллельны оси х, а
начальные точки траекторий заполняют квадрат (рис. 1.23). Вводя двойную
нумерацию траекторий и переходя от индекса i к индексам д, р = 1,..., Q,
так что х0 = (д — 1) Д/, уОдр = (у - 1) Д/, v = 0, q = Q2, на основании
формул (1.2), (1.3) получим
I Q Q ~
WJr(*->')= ТУ 2 2 f [х + (д - 1)Д/, У + (у~ 1)Д/].
Q д=1 м=1
1 Q Q ~
;*i + Д-v, У, + Ьу)= — S S f [х, +(д - 1 )Д/,
Q д=1 p=i
У1 +(р - 1 )Д/] Дх, + (д -- 1)Д/ + Дх,у] +(р - 1)Д/ + Ду].
Предположив стационарность поля и рассмотрев одномерный вариант,
находим
1 Q mf = —- S 3 Q2 m=i Q S М=1 f Кд- од/, (р- 1)Д/], (1.9)
^г(Д)~ Q S Д=1 <2 ~ 2 /[(Р -1)Д4 (р -1)Д/]Д(д-1)Д/+ i>= 1
+ Д,(р 1 )Д<]. (1.10)
39
Полученные расчетные формулы (1.7) - (1.10) могут быть использованы
Для предварительной обработки информации о навигационных полях.
Рассчитанные таким образом статистические характеристики описывают
не один какой-то маршрут, а целый район.
Если существует необходимость более тщательного учета особенностей
поля в районе навигации, то не следует делать предположения о стационар-
ности поля. Специальным выбором параметров q и Д/ необходимо добить-
ся, чтобы математическое ожидание поля т/-(х,у) было постоянным или
изменялось плавно, тогда основная информация о свойствах поля будет
содержаться в корреляционной функции. Некоторые рекомендации по вы-
бору параметров q и Д/ в подобных случаях можно найти, например, в
[1.59, 1.60].
ГЛАВА 2
ПОВЕРХНОСТНЫЕ НАВИГАЦИОННЫЕ ГЕОФИЗИЧЕСКИЕ ПОЛЯ,
ИХ ХАРАКТЕРИСТИКИ И СПОСОБЫ ИЗМЕРЕНИЯ
§ 2.1. НАВИГАЦИОННОЕ ПОЛЕ РЕЛЬЕФА, ЕГО ХАРАКТЕРИСТИКИ
И СПОСОБЫ ИЗМЕРЕНИЯ
Поле рельефа Земли является одним из основных физических полей,
обеспечивающих возможность построения корреляционно-экстремальных
навигационных систем. Оно характеризуется взаимным расположением
высот (перепадов местности) относительно какого-то начального уровня.
Например, в СССР за начало уровня отсчета высот рельефа принят уровень
Балтийского моря в районе Кронштадта.
Особенностями поля рельефа Земли как навигационного поля являются:
высокая стабильность и живучесть;
возможность использования на большей части территории суши;
относительно хорошая изученность и картографическая обеспеченность
в виде топографических карт;
удовлетворительная помехозащищенность и скрытность работы борто-
вого измерителя (радиовысотомера, лазерного высотомера);
возможность создания высокопроизводительных систем картообес-
печения.
Подтверждением высокой стабильности поля рельефа Земли является
сообщение [2.1], в Котором отмечается, что при испытаниях системы
TERCOM цифровая рабочая карта поля рельефа, записанная в памяти вы-
числительного устройства, составлялась по топографическим картам выпус-
ка 1895 г. Полученные при этом результаты испытаний аналогичны резуль-
татам, полученным при использовании современных топографических карт
этого же района.
Развивающаяся в СССР и за рубежом геометрия рельефа основывается
на представлении о земной поверхности как о поле высот. Наиболее рас-
пространенным изображением поля высот на плоской поверхности (карте)
является изображение в виде изолиний высот, так называемых горизон-
талей. Этот способ изображения позволяет получить количественную ин-
формацию о рельефе путем интерполяции между горизонталями и опознать
формы рельефа, т.е. содержит черты образности. На рис. 2.1 показан фраг-
мент участка суши полученный с топографической карты масштаба
1 : 25 000 [2.2]. Оцифровка горизонталей содержит информацию о вели-
чине перепада высот рельефа вдоль любого направления движения.
В корреляционно-экстремальных навигационных системах в настоящее
время используется только количественная информация о рельефе земной
поверхности. Связано это в первую очередь с реализацией подобных систем
на основе цифровой техники, при которой черты образности рельефа те-
ряются [2.3]. Области земной поверхности со сложным рельефом не под-
41
Рис. 2.1
даются аппроксимации функциональными зависимостями. Методы мате-
матического описания таких областей вытекают из представления о релье-
фе как о случайном поле высот [2.4]. Часто говорят, что поле рельефа,
как и любое другое геофизическое поле (ГФП), имеет случайное распре-
деление в пространстве (на двумерной плоскости). Однако в каждой за-
данной точке интенсивность стабильного во времени геофизического поля
является детерминированной величиной. Статистические характеристики
подобных полей, как уже отмечалось выше, могут быть получены, строго
говоря, только с привлечением некоторого вероятностного механизма,
генерирующего случаи. Таким механизмом может быть случайное распре-
деление точек (х, у) в области S на заданной поверхности, характеризуе-
мое плотностью вероятностей распределения р(х,у). Вероятностные ха-
рактеристики ГФП выражаются при этом обычными формулами:
математическое ожидание
fs =ff f(xy)p(x, y)dxdy; (2.1)
s
дисперсия
Ds =ff [/(x, y) -fs ] 2p(x, y)dxdy; (2.2)
корреляционная (ковариационная) функция
Rs(8x,8y) = ff [f(x,y)-fs] [f(x + dx,y + Ьу)-7зь]Р(х, y)dx dy, (2.3)
где fsl> = ff f(x + 5x, у + 8y)p(x, y)dx dy.
42 «
Ясно, что эти величины зависят, вообще говоря, от вида функции р(х,у)
и области задания этой функции 5. В [2.5] показано, что эмпирические
распределения высот рельефа для различных районов суши легко аппрокси-
мируются различными законами распределения . Причем наиболее близ-
кими к фактическим данным оказываются закон равномерной плотности,
показательный и нормальный законы распределения. Если распределение
является равномерным, то
fS =— К f(x,y)dxdy, (2.4)
Ds = —ff[f(x,y)~fs]2dxdy, (2.5)
s s
Rs(8x, 8y) = — ff [/(x,y)-fs] [f(x + 8x,y +5y) -^5] dxdy, (2.6)
s s
где s — площадь области S.
Величины fs, Ds,Rs(8x,t>y) также, вообще говоря, зависят от об-
ласти S. Если при достаточно большой области S(s ->°°) эта зависимость
исчезает, то ГФП f(x,y) называется стационарным. Для стационарного
ГФП имеем
1
= lim — ff f(x,y)dxdy,
s-*°° s s
1 — 2
Ds= lim — Л [/(x,y)-/] dxdy,
S-*oo S S
Rs(Sx, 5y)= lim — JJ[/(x, у) - Tyl [/(x + 8x,y + 8y)-fss ] dx dy.
s-*°° s s
Для стационарного эргодического изотропного ГФП соответственно
можно записать
1 1
f = lim — Л f(x, y)dxdy = lim — f f(x, y)dx =
J-KX> s s £-*«> L L
1
= lim — f f(x,y)dy, (2.7)
£-+~ L L
1 -2 1
D = lim — Л [ f(x, y)-f ] dxdy = lim — f [f(x, y)-f ] dx =
S S L £
1 _ 2
= lim —f [f(x, y)- / ] dy, (2.8)
Д-+00 £ £
7?(5x,O)= lim —- J lf(x,y)-f ] [/(x +6x,y)-7] dx,
L^°° L L (2.9)
R(Q, 5y) = lim -y- f [f(x, y)-f] [f(x, у + 8y)-f ]dy,
L-*«> L L
43
и корреляционная функция обладает круговой симметрией
R(6х, Sy) = R(у/ 8хг + 8у2).
Разумеется, строго стационарных изотропных эргодических ГФП нет,
однако такая идеализация весьма удобна при оценке точности КЭНС и точ-
ности того или иного вида аппроксимации при дискретной форме записи
навигационного поля в БЦВМ. Существуют районы протяженностью в де-
сятки и сотни километров, в которых ГФП можно считать практически
стационарным и изотропным. При численном определении статистических
характеристик интегралы (2.7) — (2.9) заменяются конечными суммами.
С использованием приведенного математического аппарата с помощью
крупномасштабных топографических карт были исследованы статистичес-
кие характеристики полей рельефа для различных районов суши. Изуча-
лась структура как самого поля, так и поля приращений, рассчитываемого
по формуле
Д/г (х) = h (х) — h (х + Д£ ),
где Д£ — база, на которой вычисляется первая разность.
На рис. 2.2 в качестве иллюстрации приведены отдельные реализации
поля рельефа и построенные для базы приращений Д£ = 1000 м реализации
44
поля первых разностей. Дискретность съема значений поля вдоль линии
маршрута составила Д/ = 250 м.
Для каждой реализации поля рельефа и поля приращений расчитывались
математическое ожидание и корреляционная функция по следующим фор-
мулами:
1 160
щл = —- S й[(20+/)Д/],
160 /=1
1 160
Ллл(Д=1Д/)= ------ 2 {Л [(20 + /)Д1] -mh}{h [(20 + /- 1)Д/] - mh} ,
160 /= 1
1 160
шдл = ----- 2 {й[(20+/)Д/]-й[(20+/)Д/+ 1000]} ,
160 /=1
1 160
Ядлдл(Д) = — S {Дй [(20+/)Д/] Дй [(20+/-/)Д/]} ,
160 /=1
Дй(х) = й(х) — й(х + 1000) (1 =0, 1,. . . , 20).
В качестве основных характеристик переменной составляющей поля
рельефа h (х) - mh и поля приращений рельефа Дй(х) использовались
среднеквадратические отклонения
ал - адл \/ ЛдлдДО)
и радиусы корреляции.
Поскольку в работах [2.6, 2.7] реальные корреляционные функции поля
рельефа аппроксимировались функцией вида
Ллл(д) = Ллл(0)ехр(-а2Д2),
для которой радиус корреляции равен
f
0___________ _ V “
Рл " ЛЙЛ(0) " 2а
45
и значение сорреляциониой функции составляло
7?лл(Д = Рл) = 0,45 Rhh(O),
то в качестве радиусов корреляции исследуемых реализаций принимались
такие значения Д, при которых значение соответствующих нормированных
корреляционных функций составляло 0,45. Как следует из рис. 2.3, радиус
корреляции поля рельефа рассматриваемого района изменяется в пределах
от 1,5 км до 2,5 км, а среднеквадратическое значение соответственно от
8 м до 15 м. На рис. 2.4 изображены корреляционные функции поля прира-
щений рельефа, рассчитанные для отдельных реализаций этого же района
суши. Можно считать, что типовые значения радиуса корреляции рдл на-
ходятся в пределах от 0,5 км до 1,0 км. Среднеквадратическое значение
поля приращений рельефа при Д£ = 1000 м для указанных реализаций
составляет
адл = (6-М0)м.
46
. На рис. 2.5 показаны сечения поля рельефа в районе Карпат, построенные
с топографических карт масштаба 1:100 000, и соответствующие им реали-
зации поля приращений (Д£ = 500 м). Корреляционные функции, рас-
считанные для данных реализаций, приведены на рис. 2.6 и 2.7. Из графиков
видно, что для рельефа района Карпат характерным является нестационар-
ность по математическому ожиданию и дисперсии. Радиус корреляции поля
не превышает 1,2 км, что свидетельствует о более широком спектре прост-
ранственных частот по сравнению с полем, реализации которого представ-
лены на рис. 2.2.
Результаты исследования статистических характеристик поля рельефа
для различных районов суши с учетом возможностей его измерения на
борту летательного аппарата со среднеквадратической ошибкой около
1 —2м [2.8] позволили условно провести классификацию (разделение)
поля по величине отношения сигнал/шум, определяющего в конечном счете
точность экстремальной навигации. Под шумом понимается обобщенная
характеристика, представляющая собой совокупность ошибок непосредст-
венного измерения рельефа бортовым датчиком ад, ошибок первичного
картографирования ак и ошибок дискретизации поля при составлении
цифровых рабочих карт аб п, т.е.
Г 2 2 2 л
°~д = + + 4.П-
Значения ак и аб п зависят от масштаба исходной топографической
карты и шага дискретизации по горизонтальным координатам ДI. В соот-
ветствии с ’’Основными положениями по созданию топографических карт
масштабов 1 : 10000, 1 : 25 000, 1 : 50000, 1 : 100 000” (М.: Геодезиздат,
1965) точность отображения рельефа не должна быть хуже 0,5 — 1,0 цены
сечения двух смежных горизонталей. В [2.8] показано, что точность вос-
произведения рельефа на борту летательного аппарата порядка 5 - 10 м
позволяет осуществлять экстремальную навигацию на большей части терри-
тории суши. Следовательно, топографические карты масштаба 1:100 000
являются достаточным исходным материалом для построения рабочих карт
КЭНС. Судя по сообщению [2.9], в некоторых странах ставится вопрос о
составлении карт масштаба 1:10 000, что позволит величину ошибки ак.
47
В силу изложенного будем считать,
непригодно для навигации, если
снизить до 2 — 3 м. Величина ошиб-
ки обп подлежит контролю и, на-
пример, при отсутствии ограниче-
ний на объем памяти БЦВМ выбо-
ром шага Д/ может быть сведена к
малой величине. В качестве ил-
люстрации на рис. 2.8 показана
зависимость величины об.п от шага
дискретизации Д/ для средне-
пересеченной местности (кривая 7)
и гористого района (кривая 2).
что поле:
слабое навигационное, если
нормальное навигационное, если
<5:
а~д
интенсивное навигационное, если
Подобная классификация условна, ибо увеличение точности измерения
поля, снижение ошибок первичного картографирования и ошибок при
дискретизации поля могут привести к переходу одного класса поля в дру-
гой. Отсюда вытекает, что наряду с повышением точности картографирова-
ния задача высокоточного измерения поля рельефа на борту летательного
аппарата (особенно в условиях интенсивных вертикальных маневров)
является важной самостоятельной задачей. Ее решение предполагает созда-
ние высокоточных приборов, измеряющих геометрическую высоту полета,
и разработку алгоритмов оценивания параметров вертикального движения
центра масс летательного аппарата.
В настоящее время наибольшее распространение получили следующие
способы измерения геометрической высоты полета: радиотехнический,
лазерный и акустический. Они основаны на измерении времени прохожде-
ния электромагнитных или звуковых волн от летательного аппарата до
отражающей поверхности Земли и обратно. Если акустический способ в ос-
новном находит применение для измерения глубины и рельефа морского
дна, а также при всевозможных океанографических измерениях, то радио-
технический и лазерный способы широко применяются в авиации и лета-
тельных аппаратах различного назначения.
48
Вопросам построения радиовысотомеров, радиодальномеров, анализа
отраженных сигналов при непрерывном, квазинепрерывном и импульсном
излучениях и различных видах модуляции посвящено большое число отече-
ственных и зарубежных работ (см., например, [2.10 — 2.14]).
При проектировании и создании приборов, предназначенных для измере-
ния поля рельефа, приходится иметь дело с противоречивыми требова-
ниями. С одной стороны, желательно уменьшить площадь следа пятна диа-
граммы направленности антенной системы, а с другой стороны, целесо-
образно выбирать большую длину волны, чтобы получить сигнал, отражен-
ный непосредственно от поверхности Земли.
Если решение первой задачи при заданной длине волны X зад возможно
путем увеличения геометрических размеров антенны (d2 >г/]),или приме-
нением сложных по конструкции антенных систем (рис. 2.9,а), либо при
ограниченных геометрических размерах антенны переходом на более корот-
кие волны (рис. 2.9,6), то обеспечить в отраженном сигнале преобладаю-
щее содержание когерентной составляющей при заданной геометрии антен-
ны можно лишь.путем перехода на более длинные волны. А это, в свою оче-
редь, сопровождается расширением диаграммы направленности, увеличе-
нием площади следа пятна на поверхности Земли и сглаживанием высоко-
частотной составляющей поля рельефа. Для уменьшения площади следа
пятна (т.е. для выполнения условия S2 <5ДОП , где 5ДОП — максимальное
значение пятна диаграммы направленности по поверхности Земли) необхо-
димо уменьшить высоту полета, т.е. ввести ограничения по высоте примене-
ния летательного аппарата (рис. 2.10).
Таким образом, вопрос построения измерителя геометрической высо-
ты — датчика поля рельефа — должен решаться в каждом конкретном слу-
чае с учетом особенностей применения летательного аппарата и его геомет-
рических размеров. Например, фирма Honeywell разработала радиовысото-
мер AN/APN-194, предназначенный для измерения (в совокупности с сиг-
налами вертикального акселерометра и барометрического высотомера)
поля рельефа на борту крылатой ракеты ’Томагавк”. Радиовысотомер
Рис. 2.9
4. И.Н. Белоглазов
49
AN/APN-194 имеет следующие характеристики:
Режим работы...............................................импульсный
Диапазон измеряемых высот, м'..............................3 - 1525
Погрешность измерения высоты, м............................±1 или 4%Я
Несущая частота, ГГц.......................................6
Импульсная мощность передатчика, Вт..........................не менее 100
Ширина диаграммы направленности антенной системы, град .... 13
Вес, кгс...................................................2
Габариты приемопередатчика, мм ............................ 97 X 80 X 188.
Видно, что жесткие ограничения по весу и габаритам в сочетании с необхо-
димостью выделения сигнала, отраженного непосредственно от поверхности
Земли, привели к тому, что при выбранных параметрах радиовысотомера
диапазон высот, в пределах которого обеспечивается точность измерения
рельефа со среднеквадратической ошибкой 1 м, составляет 10 — 1530 м.
Другой возможностью увеличения разрешающей способности радиовысо-
томеров с широкой диаграммой направленности антенн (особенно при по-
летах на больших высотах) без использования специальных методов обра-
ботки отраженного от Земли сигнала является применение неполного
перекрытия диаграмм направленности передающей и приемной антенн
(рис. 2.11), где 5ЭКВ — пятно диаграммы направленности ’’эквивалентной”
антенной системы. Однако увеличение потерь энергии при этом снижает
уровень принятого сигнала, что может быть отнесено к числу недостатков
данного метода.
Лазерные высотомеры (дальномеры), гмея практически ’’игольчатую”
диаграмму направленности, высокую разрешающую способность по высоте
и обладая хорошей помехозащищенностью (особенно при полетах на малых
высотах), измеряют геометрическую высоту до первого (близлежащего)
отражающего элемента поверхности. Это приводит к тому, что при полетах
над местностью, покрытой растительностью, в основном сигнале, несущем
информацию о рельефе, будет содержаться высокочастотная помеха, уро-
вень которой определяется плотностью и высотой насаждений.
В качестве иллюстрации на рис. 2.12 приведены реализации поля рельефа,
полученные с помощью радиовысотомера ( X - 35 см, 20 = 60°) и лазер-
Рис. 2.10
50
ного высотомера при полете на высоте 1200 м над участком местности
с лесным массивом. Видно, что если при пролете над открытыми участками
местности рельеф воспроизводится точно, то при пролете над лесным мас-
сивом в сигнале лазерного высотомера появляется дополнительная по-
стоянная составляющая, эквивалентная некоторой усредненной высоте
растительности, с наложенной на нее флуктуационной составляющей.
В целом можно отметить, что достижения радиоэлектроники и лазерной
техники позволяют с успехом решить задачу построения высокоточных и
надежных измерителей геометрической высоты для различного класса
объектов.
Повышение точности отображения рельефа и плановой привязки высот
рельефа, являющееся одной из важнейших задач при широком внедрении
КЭНС, возможно с применением специальных картографических спутников
и стереосъемки. Особенно значителен получаемый при этом выигрыш
в точности для районов с сильнопересеченным рельефом и гористой мест-
ностью. Так, например, американские космические комплексы типа
”Самос-М” и ”Ласп”, введенные в эксплуатацию в 1971 г., по своим техни-
ческим возможностям обеспечивают выполнение задачи по созданию топо-
графических карт масштаба 1:100 000 любого района территории со средне-
квадратической ошибкой относительных высот рельефа около 10 м. Потре-
бителем всей информации этих космических комплексов является автома-
тизированная фотограмметрическая система AS-11, предназначенная для
создания рабочих цифровых карт рельефа. Судя по сообщению [2.15],
аналогичные автоматизированные картографические системы созданы
в Великобритании и Канаде. Весьма перспективным с точки зрения уточне-
ния топографических карт для отображения рельефа земной поверхности
следует считать применение сканирующих спутниковых лазерных даль-
номерных систем и специализированных спутниковых радиовысото-
меров.
4
51
Таблица 2.1
Основные характеристики некоторых спутниковых радиовысотомеров США
Параметры ’’Скайлэб” ”Геос-3” ”Сеасат-1 ”
Высота орбиты, км 435 843 800
Тип антенны Частота излучаемого сиг- — параболическая, d = 0,6 м параболическая, d = 0,96 м
нала, ГГц Ширина диаграммы направ- 13,9 13,9 13,5
ленности, град Частота повторения нмпуль- 1,5 2,6 1,5
сов, Гц 250 100 1020
Мощность в импульсе, кВт Длительность несжатого 2,0 2,5 2,0
импульса, мкс Длительность сжатого — 1,2 3,2
импульса, нс 100 12,5 3,0
Отношение сжатия Отношение сигнал/шум для 13:1 100:1 1000:1
отдельного импульса, дБ Среднеквадратическое раз- 21 12 13
решение по высоте, м 1,0 0,5 0,1
Ширина следа, км 8,0 3,6 1,6
В США на базе радиовысотомера ’’S-193” космической станции
’’Скайлэб” был разработан специализированный радиовысотомер для спут-
ника ”Геос-3”, выведенного на орбиту в 1975 г. [2.28]. За период
с 1975 г. по настоящее время спутник ”Геос-3” обслуживали 19 стационар-
ных телеметрических станций NASA и 10 передвижных станций Картогра-
фического управления Министерства обороны США (DMA—Deffense
Mapping Agency). В результате обработки накопленных материалов были
подтверждены точностные характеристики радиовысотомера и появилась
дополнительная возможность его использования для изучения рельефа
местности. В работе [2.16] отмечается, что проведенное с помощью этого
радиовысотомера профилирование полуострова Флорида и сравнение полу-
ченных результатов с данными точных топографических карт дали средне-
квадратическую величину расхождения по различным сечениям не бо-
лее 3 м. Столь высокое разрешение по высоте, обеспечиваемое спут-
никовыми радиовысотомерами, достигается сжатием излучаемого им-
пульса. Причем коэффициент сжатия может достигать больших значе-
ний — в радиовысотомере ИСЗ ”Сеасат-1” отношение сжатия состав-
ляет 1000:1.
В табл. 2.1 приведены основные характеристики спутниковых радио-
высотомеров США.
52
§ 2.2. ПОЛЕ РАДИОТЕПЛОВОГО КОНТРАСТА, ЕГО ХАРАКТЕРИСТИКИ
И СПОСОБЫ ИЗМЕРЕНИЯ
В создании теплового излучения любого вещества принимает участие
очень большое число хаотически движущихся частиц. Однако, несмотря на
случайность движений, средние характеристики подобных процессов, как и
другие статистические характеристики вещества, могут быть рассчитаны
с достаточно высокой точностью.
Одним из наиболее важных законов теплового излучения является закон
Планка, выражающий зависимость спектральной плотности излучения
абсолютно черного тела от частоты и температуры:
Г Вт 1
р = ___________________ __________ (2.10)
° сг\e-x.p(hf/kT) - 1 ] [ Гц • м2 J
где h = 6,62 10"34 Дж с - постоянная Планка, с = 3 108 м/с — скорость
распространения электромагнитных волн, к = 1,38 10“23 Дж/град —
постоянная Больцмана, Т [К] — абсолютная температура черного тела
(температура излучения), f [Гц] — частота излучения, Ро - спектральная
плотность излучения, равная мощности, излученной на частоте f в полосе
1 Гц с 1 м2 поверхности излучателя.
Как следует из формулы (2.10), при прочих равных условиях спек-
тральная плотность достигает максимального значения при определенном
значении частоты излучения. Эта частота выражается формулой Вина
/тах = 1,03 10s Т МГц. (2.11)
Из (2.11) видно, что максимум спектральной плотности приходится на
диапазон видимых и инфракрасных длин волн. Спектральная плотность
в диапазонах сантиметровых и миллиметровых длин волн на много поряд-
ков ниже максимальной. Однако потенциальный порог чувствительности
приемников (детекторов) теплового радиоизлучения также на много
порядков ниже потенциального порога чувствительности детекторов
видимого и инфракрасного излучения. Практически достигнутые поро-
ги чувствительности для современных приемников близки к пре-
дельным.
Поэтому, несмотря на крайне малую мощность теплового радиоизлуче-
ния, его удается принимать сквозь толщу атмосферы на больших рас-
стояниях, чем более мощные инфракрасное и световое излучения. Это
обусловлено также и тем, что затухание радиоволн этого диапазона в толще
атмосферы мало по сравнению с поглощением волн оптического диапазона.
Рассмотрим основные особенности теплового излучения в диапазонах
радиоволн. Для этого формулу (2.10) при hf <кТ преобразуем к виду
Рэлея - Джинса
2 7Г
Л> = ТГкТ’ (212)
х2
где X = с// - длина волны.
В правой части формулы (2.12) в качестве сомножителя содержится
спектральная плотность тепловьтх шумовых токов активного
53
сопротивления
G = кТ. (2.13)
Активное сопротивление способно преобразовывать как электрическую
энергию в тепловую, так и тепловую энергию в электрическую (в значи-
тельно меньшей степени, разумеется). С другой стороны, любой высоко-
частотный ток, протекающий через сопротивление, создает поле электро-
магнитного. излучения.
Таким образом, радиотепловое излучение - это не что иное, как электро-
магнитное поле тепловых шумовых токов, протекающих в среде вещества.
Следовательно, интенсивность такого излучения зависит от диэлектриче-
ских свойств вещества, являющегося излучателем, — его проводимости и
диэлектрической проницаемости.
Интенсивность радиотеплового излучения зависит также от процессов
внутреннего переотражения энергии, исходящей из толщи вещества, и от
поверхности этого вещества. Чем больше диэлектрическая проницаемость
вещества, излучение которого исследуется, тем больше энергии, исходящей
из толщи этого вещества, отражается от его поверхности.
Кроме того, величина отражения зависит от угла падения излучаемой
волны и вида поляризации. Количественно эта зависимость описывается
формулами Френеля
/ sin 0 — x/е — cos2 9 \ 2 / е sin 9 — V е — cos2 9 \
рг(9) = --------, , рвW = (----------------------,
\ sin 9 + ye - cos20 / \ е sin 0 + V е -cos29 '
(2-14)
где рг(9) — коэффициент отражения составляющей излучения с горизон-
тальной поляризацией, рв(0) - коэффициент отражения составляющей
излучения с вертикальной поляризацией, е — диэлектрическая прони-
цаемость вещества-излучателя, 9 —угол падения излучения.
Отметим, что эти зависимости интенсивности теплового излучения от
направления справедливы только для идеально плоских излучателей,
обладающих диэлектрическими свойствами. Хорошо проводящие излуча-
тели, например металлические поверхности, имеют коэффициент отраже-
ния, близкий к единице, и поэтому интенсивность их собственного радио-
теплового излучения мала.
Рассмотрим некоторые количественные характеристики радиотеплового
излучения. Спектральная плотность излучения реальных тел зависит от двух
физических характеристик: коэффициента поглощения и абсолютной тем-
пературы. На практике не всегда удобно иметь две разнородные характе-
ристики одного физического процесса, поэтому в радиотеплолокации и
радиометрии используется одна условная величина, равная произведению
коэффициента поглощения на абсолютную температуру и называемая
радиояр костной температурой излучателя:
Тя = аТ. (2.15)
Выше указывалось, что хорошо отражающие вещества не создают значи-
тельного собственного излучения. Однако они способны в значительной
54
степени переизлучать падающее на них радиотепловое излучение протяжен-
ных источников. Спектральная плотность их суммарного собственного и
отраженного излучения записывается в виде
/’общ = ~к(аТ^рТ„) = ^-кТп, (2.16)
X2 X2
где р - коэффициент отражения тела, Тп ~ радиояркостная температура
подсвечивающего излучения, ТК — кажущаяся температура излучения.
Представляет интерес величина мощности излучения объекта (например,
естественного образования с известными характеристиками). Приближенно
[2.17] мощность излучения рассчитывается следующим образом:
9 7Т
/’изл ~ ~~kTKSuAf, (2.17)
А
где 5Ц — площадь объекта (цели), Д/ — полоса частот, в которой оцени-
вается излучаемая мощность.
Отметим, что при проведении количественных расчетов параметров
радиотеплового излучения следует учитывать и другие факторы: диаграмму
направленности радиотепловых излучателей, поляризацию приемных антенн
такого излучения и т.д.
Приближенно радиояркостная температура объекта с диффузным отра-
жением, состоящего из однородного вещества (материала), не зависит от
направления приема его излучения. Если поверхность вещества-излучателя
идеально гладкая или высота неровностей много меньше длины волны, то
коэффициент излучения (а значит, радиояркостная и кажущаяся темпера-
туры) будет зависеть от направления, под которым этот излучатель
’’наблюдается” радиометром [см. формулы (2.14) ].
Подробные сведения о физических основах радиометрии и радиотепло-
локации приведены в [2.17 - 2.23, 2.24].
Ввиду того, что для решения практических задач навигации летательных
аппаратов, оснащенных навигационными системами, использующими ин-
формацию о радиотепловом контрасте земной поверхности, необходимо
воспринимать это поле вдоль (или в некоторой окрестности) траектории,
представляют особый интерес количественные характеристики реальных
земных покровов.
Как уже указывалось выше, кажущаяся температура веществ-излучате-
лей (а значит, и суммарное излучение искусственных и естественных объек-
тов земной поверхности) зависит от длины волны, вида поляризации,
направления, с которого эти излучатели наблюдаются, и целого ряда других
физических факторов. Кроме того, на величину кажущейся температуры
влияют время суток и время года, метеорологические условия (особенно
степень влажности поверхностного слоя исследуемого вещества), наличие
экранирующего воздействия атмосферных метеоризмов или переотражения
излучения от внешних источников излучения (Солнца), вызванного этими
метеоризмами [2.25].
Поскольку точно учесть расчетным путем все основные факторы,
влияющие на величину радиотеплового излучения, трудно или невозможно,
необходимы экспериментальные исследования. Интересны результаты
55
многочисленных экспериментальных исследований радиотеплового излуче-
ния земных покровов, выполненных как за рубежом, так и у нас в стране.
Несмотря на то, что пока отсутствуют фундаментальные систематизиро-
ванные данные по этому вопросу, имеющиеся материалы позволяют соста-
вить определенное суждение об общих характеристиках естественных ра-
диотепловых полей земной поверхности и выработать алфавит для иденти-
фикации объектов радиотеплового излучения, необходимый для составле-
ния карт радиотепловых объектов.
За рубежом приводятся данные [2.26] о разработке таких алфавитов,
состоящих из десятка слов, причем для каждого типа земного ландшафта
составлен свой алфавит, учитывающий характер окружающего фона (лес,
предгорье, равнина и др.).
Имеется довольно обширная отечественная литература, посвященная
исследованиям излучательной способности различных естественных и ис-
кусственных объектов в широком диапазоне длин волн (от субмиллимет-
рового до сантиметрового). Исследуются и другие факторы, определяющие
радиотепловое излучение. Имеются исследования не только абсолютных
значений радаояркостной (или кажущейся) температуры, но и радиотепло-
вых контрастов земной поверхности [2.23], что тоже важно для практиче-
ской навигации и для целей разработки алфавитов для синтеза радиотепло-
вых карт.
Распространение радиоволн миллиметрового и даже сантиметрового и
дециметрового диапазонов длин волн сопровождается ослаблением потока
электромагнитной энергии и тепловым радиоизлучением в виде шумов.
В [2.21, 2.27] рассмотрено поглощение электромагнитной энергии
в атмосфере Земли за счет молекулярного поглощения в газах, образую-
щих атмосферу. Конечно, такую модель поглощения создать довольно
трудно, и это осложняет проектирование систем, использующих информа-
цию о радиотепловом поле земной поверхности.
Заслуживающим интереса в вопросе изучения радиотеплового излучения
является задача построения оптимального (или близкого к оптимальному)
приемника. Рассмотрим кратко этот вопрос.
Если поместить в поле радиотеплового излучения антенну, то на ее вы-
ходе появится шумообразное напряжение. Это напряжение было бы не
совсем правильно называть радиотепловым сигналом, так как его частот-
ный спектр гораздо шире полосы пропускания современных приемников.
Приемник, подключенный к такой антенне, будет воспринимать лишь срав-
нительно небольшую часть спектра входного напряжения. Соответствую-
щую этой области часть входного напряжения в радиотеплолокации назы-
вают радиотепловым сигналом.
Как видно из определения радиотеплового сигнала, его характеристики
зависят от характеристик приемника. Так, мощность радиотеплового сиг-
нала прямо пропорциональна ширине полосы пропускания приемника по
высокой (или промежуточной) частоте. Именно поэтому в радиотеплоло-
кации стремятся применять приемники с очень широкой полосой про-
пускания, достигающей сотен и тысяч мегагерц.
На практике часто бывает удобно выражать интенсивность сигнала не в
единицах мощности, а в единицах спектральной плотности. Такая оценка
более объективна, так как в отличие от мощности спектральная плотность
56
не зависит от полосы пропускания приемника. Спектральную плотность
радиотепловых сигналов выражают в температурных единицах. Мощность
сигнала и его спектральная плотность связаны соотношением
Рс = кТаД/ (2.18)
Величина кТа представляет собой спектральную плотность мощности сигна-
ла, а величину Та называют антенной температурой сигнала.
Важной характеристикой сигнала является ширина полосы частот, зани-
маемая им. От нее зависит не только мощность сигнала, но и точность изме-
рения времени прихода сигналов в многоканальных радиотеплолокацион-
ных системах [2,19].
Длительность радиотепловых сигналов зависит от продолжительности
нахождения излучающего объекта в пределах главного лепестка диаграммы
направленности антенны. Энергия сигнала пропорциональна его длительно-
сти, поэтому с увеличением длительности сигнала улучшаются возможности
его обнаружения и точность измерения амплитуды сигнала.
Рассмотрим кратко процесс приема радиотеплового сигнала. Основная
трудность при приеме слабых сигналов связана с необходимостью их выде-
ления на фоне собственных шумов, создаваемых первыми каскадами
приемников. Так как радиотепловые сигналы имеют шумоподобный харак-
тер, то приемники этих сигналов чаще всего выполняют в виде прецизион-
ных измерителей уровня шума. Такие приемники называют радиометрами.
Простейший радиометр представляет собой приемник прямого усиления.
Но такой простейший радиометр имеет два крупных недостатка. Первый —
существование собственных шумов на выходе радиометра при отсутствии
входного сигнала напряжения, пропорционального температуре. Этот недо-
статок устранен в компенсационном радиометре. Второй недостаток за-
ключается в том, что вследствие дрейфа коэффициента усиления высоко-
частотных каскадов постоянная составляющая продетектированного на-
пряжения собственных шумов оказывается промодулированной этими
изменениями. Возникающая дополнительная случайная помеха имеет
спектр, сосредоточенный в области очень низких частот, и поэтому беспре-
пятственно проходит через низкочастотный выходной фильтр. Этот недоста-
ток устранен в модуляционном радиометре.
В технике радиотеплолокации часто возникает необходимость сравнения
двух или нескольких радиотепловых сигналов. Радиометры, предназначен-
ные для совместного приема двух радиотепловых сигналов, называют
корреляционными. Подробные схемы радиометров приводятся
в [2.18,2.19,2.27].
Основной технической характеристикой любого радиометра является
чувствительность, которая характеризует способность радиометра прини-
мать слабые радиотепловые сигналы. Для удобства сравнения различных
радиометров их чувствительность часто пересчитывают на длительность
сигнала, равную 1 с. В настоящее время пороговая чувствительность совре-
менных приемников теплового радиоизлучения достигает 0,5 — 0,1 К и
менее [2.19] при т = 1 с, что позволяет различать и регистрировать с само-
летов естественные радиотепловые контрасты земной поверхности.
Так же, как и в активной радиолокации, дальность обнаружения целей
с помощью радиометра зависит от мощности принимаемого сигнала и чув-
57
ствительности приемника. При определении мощности поступающего на
вход приемника теплового радиоизлучения от объекта, расположенного
на расстоянии R от приемника, будем полагать, что излучение изотропно.
Предполагается также, что антенна направлена на цель (объект), поверх-
ность 5Ц которой перпендикулярна к осевой линии радиолуча, рас-
стояние R достаточно велико и поэтому эффективная поверхность А антен-
ны видна из каждой точки поверхности 5Ц под одним и тем же пространст-
венным углом. Воспользуемся формулой (2.12), дающей возможность
определять мощность теплового радиоизлучения с единицы абсолютно чер-
ной поверхности при полосе частот Д/. Так как цель характеризуется излу-
чающей поверхностью 5Ц, то мощность излучения у цели будет Р' = Ро$ц
Для цели с кажущейся температурой Тк величину Ро следует заменить на
Л>бщ согласно формуле (2.16).
При прохождении радиоволн от цели до антенны поток энергии на еди-
ницу площади будет ослабевать обратно пропорционально квадрату рас-
стояния (без учета поглощения). Вследствие этого мощность принятого
антенной сигнала будет определяться выражением
= = kT„SnA_
2ттЛ3 R2\2 1 ’
Эффективная поверхность А антенны связана с коэффициентом усиле-
ния антенны G соотношением
с учетом которого получаем
р = kTKS„G^f
4ттЯ2
(2.20)
Подставляя (2.20) в (2.18), находим антенную температуру
т - TkGS*
а 4ттЯ2
Можно получить более точное выражение для Та, введя поправки на
к.п.д., боковые лепестки и термодинамическую температуру антенны:
Та = Гк(1 -&s)rik3 + Гб^т? + Го(1 -тД (2.21)
где Тк — кажущаяся температура в направлении главного лепестка, к3 —
коэффициент заполнения, зависящий от телесного угла источника излуче-
ния 0И и телесного угла диаграммы направленности антенны 0а, - коэф-
фициент рассеяния антенны, - средняя кажущаяся температура излуче-
ния, попадающего в боковые лепестки, Та - температура антенны, т? -
к.п.д. антенны.
На практике величины 3s и т? равны примерно 0,3 и 0,8 соответственно.
Если в приемнике теплолокатора (радиометра) используются обычные
антенны с линейной поляризацией, то в среднем будет принята приблизи-
58
дельно половина поступающей в антенну мощности, так как при полете над
большинством типов ландшафтов равновероятны различные виды поляри-
зации теплового излучения.
Максимальная дальность обнаружения радиотеплового сигнала мало-
размерной цели определяется выражением
/kTKS4Abf
Ятах V 2
A ''min
(2.22)
При исследовании радиотеплового излучения от протяженных целей
часто необходимо вычислять мощность сигнала, принимаемого радиомет-
ром. Площадь поперечного размера диаграммы направленности на рас-
стоянии R от антенны равна' 5а = Я20а • Именно с этой площади принимает-
ся излучение протяженных целей (5Ц = Sa). С другой стороны, эффектив-
ная площадь А параболической антенны связана с шириной диаграммы на-
правленности соотношением 03= X2/Л, и выражение (2.19) переписывает-
ся в виде
Рп
kTK4ireaR2&f
Оа4ттЯ2
kTKbf
(2.23)
Итак, мощность принимаемого сигнала для данного радиометра с поло-
сой пропускания Д/ определяется только кажущейся температурой протя-
женной цели.
Прием сигналов в некоторой степени зависит от их формы. Для обзор-
ных радиометров, работающих по малоразмерным целям, форма сигналов
будет совпадать с формой диаграммы направленности антенны. В случае
протяженной цели, имеющей переменную кажущуюся температуру (так
называемый радиотепловой рельеф), форма сигнала будет повторять изме-
нения кажущейся температуры, но более плавным, сглаженным образом.
Вместе с полезным сигналом на вход приемника радиотеплолокатора
воздействуют другие излучения, источники которых расположены в на-
правлениях, близких к направлению луча антенны. Эти излучения, обычно
называемые фоновыми, затрудняют обнаружения малоразмерных целей.
С учетом влияния фона формула для антенной температуры сигнала от
малоразмерной цели принимает вид
-------------+---------------------+ + гв(1 -ч ), (2.24)
4nRz
4itR2
где Т’к.ц - кажущаяся температура цели, Тк.ф - кажущаяся температура
фона, - площадь фона, захватываемая главным лепестком диаграммы
направленности антенны.
Условия обнаружения радиотеплового сигнала цели определяются и ме-
тодом обзора земной поверхности.
При точечном зондировании проводится обзор поверхности Земли толь-
ко вдоль направления полета за счет движения летательного аппарата, осна-
щенного не сканирующей однолучевой антенной.
Существует двумерное зондирование, в результате которого обозревает-
ся некоторая область земной поверхности, прилегающая к траектории
59
полета. Реализуется двумерный способ посредством неподвижной относи-
тельно летательного аппарата многолучевой (многоканальной) антенной
системы либо сканирующей антенны. В первом случае радиотепловые изо-
бражения (портрет местности) получаются за счет съема информации по
направлениям многочисленных лучей антенной системы, во-втором — за
счет развертки луча в секторе обзора. Сканирование может быть строчным
(растровым), спиральным, циклоидальным и т.п. Особое место занимает
так называемый однострочный обзор, часто применяемый в бортовых ра-
диометрах. При однострочном обзоре игольчатый луч антенны сканирует
в плоскости, перпендикулярной к продольной оси летательного аппарата
в направлении земной поверхности, обеспечивая обзор по обеим сторонам
от траектории полета. Обзор вдоль направления полета осуществляется за
счет движения летательного аппарата. Возможно сочетание многоканально-
сти со сканированием. Антенны с несколькими разнесенными диаграммами
позволяют создать многоканальный радиометр. При этом уменьшается
время обзора и увеличивается дальность действия радиометра. Важное
достоинство многоканальных радиометров — их надежность, так как при
выходе из строя одного канала многоканальный радиометр сохраняет рабо-
тоспособность за счет оставшихся исправными каналов. Если число каналов
велико (например, порядка одного-двух десятков) и лучи распределены
равномерно в области обзора, то возможен упомянутый выше обзор по-
верхности с получением радиотеплового портрета местности без сканирова-
ния. Такой способ обзора называют радиовидением.
В заключение параграфа кратко остановимся на способах получения
радиотепловых карт. Эта задача может быть решена двумя способами. Пер-
вый способ получения карт предполагает предварительный облет местности,
второй связан с расчетом ожидаемой радаояркостной температуры объек-
тов (природных образований и искусственных сооружений), образующих
обозреваемый ландшафт.
Если первый способ для нужд навигации требует подробного картогра-
фирования заново всей поверхности Земли, над которой возможен полет
летательного аппарата, то второй может быть реализован на основе исполь-
зования банка стереофотоснимков.
В [2.26] приведена технология получения радиотепловых карт расчет-
ным путем. Кратко она сводится к следующим основным автоматизирован-
ным операциям:
составление алфавита типов объекта-излучателя на основе анализа экспе-
риментальных данных (тип радиотепловых контрастов для различных
ландшафтов);
локализация и разграничивание с кодированием границ объектов ланд-
шафта (природных образований и искусственных сооружений) ;
нанесение значений кодов радио яр костных температур (из числа алфа-
вита) в узлы координатной сетки радиотепловой карты исследуемой
местности.
Полученные любым из двух описанных способов радиотепловые карты
используются в системах навигации летательных аппаратов в качестве
эталонных карт, хранимых в блоках памяти навигационных систем.
ГЛАВА 3
АНОМАЛЬНЫЕ ПРОСТРАНСТВЕННЫЕ ПОЛЯ ЗЕМЛИ,
ИХ ХАРАКТЕРИСТИКИ И СПОСОБЫ ИЗМЕРЕНИЯ
§ 3.1. СТРУКТУРА И ОСНОВНЫЕ ХАРАКТЕРИСТИКИ
ПРОСТРАНСТВЕННЫХ ПОЛЕЙ ЗЕМЛИ
Распределение поверхностных полей, как видно из изложенного, не
подчиняется каким-либо строгим математическим уравнениям.
Иначе обстоит дело с магнитным и гравитационным пространственными
полями в силу того определяющего факта, что распределение этих полей
подчиняется уравнению Лапласа.
Существующее на поверхности Земли и в приземном пространстве
магнитное поле можно рассматривать как сумму постоянного поля и нало-
женного на него переменного поля, причем уровень переменного поля на
несколько порядков меньше уровня постоянного [3.1]. Переменное
магнитное поле порождается процессами, протекающими вне Земли, и
иногда его называют вариациями магнитного поля Земли (МПЗ). С точки
зрения осуществления навигации по МПЗ вариации магнитного поля явля-
ются неизбежными мешающими факторами. Полезную информацию
дает только постоянное магнитное поле. Постоянное МПЗ обусловлено
источниками, находящимися внутри земного шара, и поэтому имеет потен-
циальный характер. Для любой точки (X, Y, Z) среды с нулевой намагни-
ченностью (например, вакуум или воздух) потенциал UM постоянного МПЗ
подчиняется уравнению Лапласа [3.2]
=о
дХ2 dY2 dZ2
Ускорение силы тяжести g слагается из rpai итационного и центробежно-
го ускорений. Поле силы тяжести также является потенциальным, и его
потенциал WT определяется выражением
+ (3.1)
где Urp - гравитационный потенциал, Кц — потенциал центробежных сил.
Если ввести связанную с Землей прямоугольную систему координат
OXYZ, ось Z направить по оси вращения Земли, а оси X и Y расположить
в экваториальной плоскости так, чтобы ось X лежала в плоскости нулевого
меридиана, то
со2
V^-^-(X2+У2у, (3.2)
здесь сэ3 — угловая скорость вращения Земли.
Из двух функций, входящих в выражение потенциала силы тяжести
(3.1), вторая, как это следует из (3.2), является простой известной непре-
61
Рис. 3.1
(3.3)
рывной функцией и не требует специального
рассмотрения. Гравитационный потенциал, или
потенциал притяжения, зависит от распреде-
ления элементарных масс Земли и также
подчиняется (для внешнего пространства)
уравнению Лапласа
э2^гр b2UIp ь2ит,
- + 1 + •— = Q_
ЬХ2---------------bY2-bZ2
Таким образом, многие вопросы, свя-
занные с исследованием пространственных по-
лей, сводятся к рассмотрению уравнения Лапласа
b2U b2 U b2 U
---- + ------+-----~ о
ЬХ2 bY2 bZ2
и определяются свойствами решения этого уравнения. Заметим, что проек-
ции напряженности постоянного МПЗ и гравитационного ускорения на
произвольное направление s, определяемые как частные производные
потенциальной функции bU/bsno этому направлению, тоже подчиняются
уравнению Лапласа (3.3), в чем легко убедиться, продифференцировав
(3.3) по s и поменяв порядок дифференцирования у частных производных
\ 3s / \bs J \bs
ЬХ2 bY2 +dF
= 0.
В противоположность этому свойству проекций модуль напряженности
постоянного МПЗ или ускорения силы тяжести уравнению (3.3), строго
говоря, не удовлетворяет.
Разложение пространственных полей в ряды сферических функций.
От прямоугольных координат X, Y, Z перейдем к сферическим координа-
там г, 9, X (рис. 3.1)
X = г sin 0 cos X, У = г sin 9 sin X, Z = г cos 9, (3.4)
где г — радиус-вектор, 9 - дополнение сферической широты, X - сферичес-
кая долгота.
Уравнение Лапласа в сферических координатах записывается следующим
образом [3.3]:
, Ь2и ьи 1 3 ьи 1 ь2и
г2 —— + 2г— +—- —(sin 9— ) + —------------— = 0.
br2 dr sin0 30 30 sin20 ЭХ2
Потенциалы пространственных полей можно представить в виде
U= R S (—2 (g™ cosтХ + hm sin т Х)?1” (cos 0),
n = 0 \ Г / т = 0
где P™(cos 0) - присоединенные полиномы Лежандра, называемые также
(3-5)
(3-6)
62
I
сферическими функциями, g™ и ft™ - коэффициенты разложения, R —
некоторая постоянная (при сферической модели Земли — ее радиус).
Конкретизация на основе физических соображений выражения (3.6)
применительно к постоянному МПЗ дает следующее. При больших удале-
ниях постоянное МПЗ ведет себя как поле диполя, потенциал
которого обратно пропорционален г2. Поэтому коэффициент go должен
быть равен нулю [3.3] и потенциал UM постоянного МПЗ описывается
выражением
UM=R S + 1 £ (g^ cosmX + ft™sin™X)P™(cos0). (3.7)
п = 1\ Г f т = О
Вывод о том, что для магнитного поля коэффициентов = 0, может быть
получен и математически, если найти выражения, связывающие значения
этих коэффициентов с распределением элементарных магнитных масс
(элементарных диполей) внутри тела Земли. Условие g° = 0 означает,
что сумма всех элементарных магнитных зарядов равна нулю.
Конкретизируем теперь вид гравитационного потенциала. Из физических
соображений, связанных с интегральным характером распределения
элементарных масс Земли, следует, что коэффициент g? = 0. Проведя
несложные преобразования, учитывая соотношения (3.1) и (3.2), заменяя
cos 6 на sin и обозначая
С_ т /_О
пт ”* % nISo»
snm =hmn/g°o,
R2g°o=fM3, Jn=g°nlgl
получаем для потенциала силы тяжести следующее окончательное выраже-
ние [3.4, 3.5]:
fM3 Г “ / °° /п
WT =----- 1 + S Jn\—) P„(sim/>) + X I—J S (Cm„ cos mX +
Г L n =2 X r ' n = 1\ T / m = 1
+ Snm sinm X)Pn (sin <p) +--cos2 p,
(3-8)
где f — гравитационная постоянная, М3 — масса Земли, — географическая
широта, Jn, Спт, S„m — параметры, характеризующие гравитационное поле
и фигуру Земли.
Прямоугольные проекции Нк, Н^, Нг напряженности МПЗ и составляю-
щие gx> gp, gr ускорения силы тяжести могут быть найдены дифференциро-
ванием потенциальных функций UM и WT по осям выбранной ортогональной
системы координат. Обычно для этих целей вводится связанная с изучаемой
точкой О геоцентрическая система координат Оехе,^ег, оси которой ориен-
тированы следующим образом: ось — по касательной к меридиану в
направлении на север, ось — по касательной к параллели в направлении
на восток, ось ег — радиально от центра сферы вверх (см. рис. 3.1). Эле-
ментарные смещения точки О по этим осям равны
de^ = - rdO, deK = г sin 0d\, der = dr.
63
Следовательно, составляющие напряженности МПЗ определяются форму-
лами
di/M i эг/м н = ± г дв К Эек г sin в ЭХ (3.9)
= де,. ' Эг
Аналогично находятся и проекции ускорения силы тяжести.
Представление пространственных полей рядами сферических функций
целесообразно лишь для высот не менее нескольких сотен километров.
На меньших высотах с помощью этих рядов можно представить лишь
очень сглаженное поле, не отражающее даже весьма значительных по протя-
женности региональных аномалий. Уже при учете сравнительно крупных
аномалий, имеющих протяженность порядка ста километров, необходимо
развивать ряды по п = 350 4-400, т.е. сохранять в них более ста тысяч членов
[3.6]. Однако использование небольшого числа первых членов сферическо-
го ряда оказывается полезным при выделении аномальных полей из полных
пространственных полей.
Методика пересчета пространственных полей на высоту. Задача пересчета
пространственных полей на высоту Н может возникнуть, в частности, при
составлении высотных карт этих полей. Как уже отмечалось выше, исполь-
зование для этих целей разложения пространственных полей по полиномам
Лежандра практически невозможно. Распространенным является представ-
ление решений уравнения Лапласа с помощью интегралов Пуассона. Извест-
но [3.7, 3.8], что решение задачи Дирихле для сферы, когда задано распре-
деление Uo на сфере (на поверхности Земли) и необходимо найти значения
потенциала во внешней по отношению к сфере точке О, определяется
следующим интегралом Пуассона:
г2 - R2 ий
4ттК s Р
(3.10)
где r=R + Н,р- расстояние от точки О до произвольной точки сферы.
Хотя выражение (3.10) является точным решением уравнения Лапласа
для сферической Земли, использование его не вполне удобно, так как
требует знания однородной информации о распределении пространственно-
го поля по всей поверхности Земли и, кроме того, проведения трудоемких
вычислений. С другой стороны, нет никакой необходимости в использова-
нии строгого соотношения (3.10). При пересчете пространственных полей
на высоты в несколько километров можно пренебречь кривизной Земли
и искать решение уравнения Лапласа для плоской задачи Дирихле, полагая,
что задано распределение потенциала U (х, у, 0) на поверхности плоской
Земли и необходимо найти значения потенциала U (х. у,Н ) на высоте Н.
Решение этой задачи определяется интегралом Пуассона для плоскости
Н °°
U(x,y,H)=— J
2тг -оо
7 ЩЕ.п.о)________________
-»[(*-1)2 +(у - п)2 +н2]3/2 п '
(3.11)
64
На практике вместо интегрирования в бесконечных пределах произво-
дится интегрирование на интервале [— а, а], причем вполне приемлемая
точность достигается, если а 10//.
При пересчете полей на высоты от нескольких десятков до нескольких
сотен километров уже нельзя пользоваться зависимостью (3.11), так как
точность этого соотношения становится неудовлетворительной. В этих
условиях возможно применение комбинированного подхода, предложен-
ного в [3.9]. Поле на высоте Н разбивается на нормальную t/H и аномаль-
ную Ua составляющие
и(х,у.Н)=ин(х,у,Н)+иа(х,у,Н). (3.12)
Нормальную составляющую, если существуют достаточно качественные
данные, можно сколь угодно точно представить с помощью отрезка ряда
(3.6)
N / R \П + 1 п
Uu{x,y,H) = R Ё /-----] Ё (g"‘ cos т X +hmn sinm X)P^(cos 0).
n* o\R + H/ m = о
(3-13)
Имеются рекомендации выбирать N = 6 или N= 9 [3.10, 3.11]. По формуле
(3.13) можно рассчитать значение нормального поля на любой высоте Н.
Поле UH (х, у, Н) содержит только самые общие черты пространственного
поля, не включающие аномальных особенностей.
Аномальную часть поля можно представить в виде (3.11)
Я - - ВДр.О)
Ua(x,у, H)=—~S / ------------------ -2- (ЗЛ4)
2тт-=о _оо [(х - £)2+0-р)2+//2]3'2
здесь Ua (х, 0) = U(х, у, 0) - UH (х, у, 0), где U (х, у, 0) - наземная карта
поля. В соответствии с (3.13)
N п
UK(x,y,G)=R Ё Ё (gn cos т X +hn}t sin т X)Pn'(cos в). (3.15)
п - о т = о
В работе [3.9] показана высокая точность подобного способа пересчета.
Определение зависимости структуры аномальных пространственных
полей от высоты. Исходя только из того факта, что аномальные пространст-
венные поля подчиняются уравнению Лапласа, можно вывести совершенно
строгую зависимость структуры этих полей от высоты. Воспользуемся
представлением (3.14) и найдем выражение корреляционной функции R
аномального пространственного поля на высоте Н:
RuH(.Xi,yi-,x2,y2) = M <Ua(xi,yx,H)Ua(x2,y2,H)} =
_ /Jp » 7 C4(g..П.,О)С/а(Ь, 0)
\4тг2 [(Xi - Ю2 +0’i - Pi)2 +//2]3/2
x \ (3.16)
[02 ~ ?2)2 +02 - P2)2 +Я2]ЗР/
5.
И.Н. Бепогпазон
65
Меняя местами операции интегрирования и математического ожидания,
получаем
Н2
RuH(Xi,yi,x2,y2)= —
4л
“ “ ni;?2. ^2)_______
—> [(*! -?1)2 + (у1 -П1)2 +я2]3/2
^1 ^2 ^2__________
[0*2 - ?2 )2 + (У2 ~ *?2 / + #2 ] 3/2
(3.17)
Поскольку мы рассматриваем только мелкоструктурные аномальные
составляющие пространственных полей, то будем предполагать распределе-
ние аномального поля на поверхности Земли стационарным, т.е. положим
^r0(5i,T?i;^2,T?2):::7?(/0(5i - ?2, т?1 - т?г)- (3.18)
Подставляя (3.18) в (3.17) и вводя преобразование переменных
11=? + ?2, Т?1=Т?+Ч2> ?2=X2-t, T}2=y2-Tl',
приходим к соотношению
Н2 - - Ru (?, т?)
RuH^,yx;x2,y2}=-—S ... / ~7?; Л?.
4л -“(? + т? +л ) '
d£dq d%' dq'
[(*1 -х2 - О2 +(/i -У2+П-П)2 +Н2]312 '
(3-19)
Из формулы (3.19) видно, что аномальные пространственные поля и
на высоте Н остаются стационарными, так как их корреляционные функции
зависят от разностей координат. Перепишем (3.19), используя обозначения
Дх=х, -х2,Ду=у, ~у2:
Н2 - Ru (£, 1?)
Аг) /_ [(Д, - S)! + + ч' - ч)" + «’13/1
а +т?' +я )3'2
(3.20)
Для дальнейших преобразований введем в рассмотренные спектральные
йлотности аномальных пространственных полей. Распространение теории
преобразований Фурье на многомерный случай излагается, например, в
[3.12], где, в частности, показано, что для двумерных функций F (х, у)
справедлива следующая пара преобразований Фурье:
Sp(nx,Sly) = — J J F(x,y)e-/(Si^x + ny)’)dxdy, (3.21)
2 7Г — 00 — 00
F(x,y) = — 7 f° SF^x,ny)ei(n^x + ayy'>dnxdny. (3.22)
2л —— =0
Соотношение (3.21) является определением преобразования Фурье,
а справедливость соотношения (3.22) (обратного преобразования) доказы-
66
вается. Найдем спектральную плотность SUfJ (12х, 120 для корреляционной
функции Rин(Дх, Ду). По определению (3.21)
1 «. » ( Н2 » - R
и (S,7?)
SuH&x,ny)=— / f — f ... J 4 „\3/2 X
2тг-«>-оо(4я2-“> -““С? + т? + Н ) '2
d£drid%'dp' 1 А .
х-----------1-----5--!--------------- I е-/(.пхйх + ЯуАу)
[(Дх + ?' - 02 + (Ду + п' - п)2 + н2 ] 312 / d Дх d^У-
(3.23)
Обозначая х' = Дх + J' - ?, у' = Ду + т?' - rj, проводя еще некоторые искус-
ственные преобразования и меняя порядок интегрирования, приходим
к равенству
Н2 1 » ->
^ин(^х,Пу) — — f f RuAl.nje-'^^^y^d^dnX
4тт 2тг — *> — °°
» « е-/(Яхх'+Яуу') „ _ ^/(Я^'+Я-^')
х f J 772----72—”2" dx'dy' f J—д------------у—-dl-'dri'.
“>(Х +у + И у. I _оо _оо(£ + Т? +Н )3^2
Справедливо выражение [3.83]
.» =» ехр [-/ (12х + %, ц’)]
/ / -------------------------
($'’ + т? ’’ + Н2)3/2
(3.24)
+ я;'
dri е ’
поэтому
с zn п \ -гН'/пЪ + я]/
Sl/H(S2x,S20 = e у SUt>(nx,ny),
(3-25)
где
(12х, Ц.) = ~ / 7 RцA^rOe-’^^^y^d^dn (3.26)
2 7Г —ОО—ОО 0
- спектральная плотность аномального пространственного поля на поверх-
ности Земли.
Уравнение (3.25) выражает общий закон преобразования спектральных
плотностей стационарных случайных полей, подчиняющихся уравнению
Лапласа. На основании (3.25) можно вывести соответствующие законо-
мерности в пространственной области. С этой целью введем понятие пло-
щади корреляции F двумерного случайного пол я f(x, у):
7 f RjAA*’ by)dbxdby
о о
F= ------------------------- , (3.27)
где Rff(^x, Ду) - корреляционная функция поля f (х,у), oj =Rff(Q, 0) -
дисперсия этого поля.
5
67
Площадь корреляции совпадает с пло-
щадью цилиндра высотой о}, объем кото-
рого равен объему фигуры, ограниченной
поверхностью ЯЛ(Дх, Д_у) и горизонталь-
ной плоскостью Дх, Ду (рис. 3.2), и харак-
теризует спектральный состав поля. Если
поле изотропно, т.е. его спектральные свой-
ства вдоль осей х и у одинаковы, то корре-
ляционная функция Rfj является телом
вращения, а площадь корреляции удобно
представлять кругом радиуса р, так что
F=ttp2. (3.28)
Величину р назовем радиусом корреляции изотропного поля. В случае,
когда поле неизотропно, использование понятия площади корреляции
остается правомерным. Однако наряду с F для более точного описания
структуры поля вдоль направлений х и у целесообразно ввести понятия
радиусов корреляции рх и ру, под которыми можно понимать радиусы
корреляции (в смысле [3.13, 1.14]) одномерных сечений f (х, 0) h/(0,j):
f Rff(Sx, 0)d&x f Rff(0, by)dAy
0 0
Px~ Rff(G, 0) ’ Py~ Rff(0,0)
(3.29)
Введенные простые определения площади F и радиусов корреляции р,
рх и ру, к сожалению, не универсальны. Их удобно применять только в
случаях, когда корреляционная функция Rff(\x, Д_у) неотрицательна
либо области ее отрицательных значений незначительны.
Выше отмечалось, что уравнению (3.3), а следовательно, и выведен-
ному на его основе равенству (3.25) подчиняются как потенциальные
функции пространственных полей U, так и составляющие пространствен-
ных полей f (х, у), являющиеся частными производными от потенциала.
Поэтому как частный случай (3.25) при £1х=£1у=0 с учетом (3.21) по-
лучаем
7 7 RffJAx, Ay)dAx dAy = 7 7 Л//о (Дх, Ду)й1Дх dSy
— оо _ оо — оо — оо
(3.30)
или, приняв во внимание определение площади корреляции,
= F"°fH’ (331)
где Л^^(Дх, Д^), = RffH(0,0) и FH - корреляционная функция,
дисперсия и площадь корреляции аномального пространственного поля
на высоте Н.
Для изотропных аномальных пространственных полей на основании
(3.31) и (3.28) находим
pf af = pf ’ (3-32)
J4 Jo J Ц Jfj
где p — радиус корреляции изотропного поля на высоте Н.
68 Jn
Предположим, что аномальное пространственное поле на поверхности
Земли изотропно, и аппроксимируем его корреляционную функцию отрез-
ком ряда
м
Rff0 (Дх> ДУ) = .2 ki .ехр[-а2(Д2х + Д2^)], (3.33)
составляющими которого являются функции Гаусса aj . exp [-а2(Д2х +
+ Д2^)], а коэффициенты kt принимают значения +1 или -1 и вводятся
для обеспечения полноты системы базисных функций. Удобство такого
разложения будет проиллюстрировано чуть позже.
Проводя интегрирование, в соответствии с равенствами (3.27) и (3.28)
получаем
Определим спектральную плотность поля на поверхности Земли. Подстав-
ляя (3.33) в (3.26) и вводя преобразование переменных
£ = Acosta, T?=Asin^, (3.35)
после необходимых выкладок приходим к соотношению
(£1Х, Пу) =
1_
. 2тг
je-j^nxCos^ + Slysin^ d
(3.36)
В формуле (3.36) внутренний интеграл легко преобразуется к виду
1 я
— f e~Jд nsin0dO, что является определением функции Бесселя •/&
2тт - я
первого рода нулевого порядка, поэтому
М л ” _а?Д2
Sfv(nx, Пу)= S kjO^. f е 1 /0(ДП)Д^Д, (3.37)
где Q = \/ Q2 + S22'.
Интегрирование соотношения (3.37) выполнено в [3.9], где получено
п2 .
д2Уо(ДП) Д (/Д’- ---- е 4<? , (3.38)
о 2а
следовательно,
м af,i / И2 \
Sf (Пх, S2V)= S kt --— exp]------— ].
4 J , = i 2а2 \ 4а2 /
69
В соответствии с общим зако-
ном (3.25) преобразования спект-
ральных плотностей для произволь-
ной высоты Н находим
М
Цу) = S
1
X ZT ехр
2 а;
Q2
4а2
2Я£2
(3.39)
Определим корреляционную
функцию поля для произвольной
высоты Н. С этой целью вычислим
обратное преобразование (3.22).
Проделав те же математические выкладки, которые были выполнены при
выводе (3.27),получим
м afoi - I / £22 \]
Rff (Дх, Ду) = S к, —— f exp -I—— + 2ЯП1 /0(Д£2) £2 dSl,
н i = i 2а,2 о I \ 4а2 /J
(3.40)
где Д = \/Д2^ + Д2у .
Равенство (3.40) показывает, что изотропность аномальных простран-
ственных полей сохраняется с высотой. На основании (3.40) получаем
Q2 \1
—г +2Я£1) « d£2.
4 а, /]
м af„ j -
= 2 к‘ ТТ f ехР '
jh i=i 2а; о
Если ввести обозначения
1 ” I / z2 ..
G (а, Ь) = — J ехр| -1 — + az)J0 (bz) z dz,
2 о I \ 4 /I
1 °° Г / z2 \1
g(a) = G(a, 0) = — f expl-I----- + azl I z dz,
2 о L \ 4 / J
то формулы (3.40) и (3.41) перепишутся так:
м
Rff (Дх, Ду) = S Л,-a2 G(2а,Н, а,Д),
Н ; = j /Of
м
а? = S к(о}
’н , = 1 7<>'
(3.41)
(3.42)
(3.43)
(3.44)
(3-45)
G(a,Z>)
Вид функций #(я) и ----------- показан на рис. 3.3. и 3.4 соответственно.
g(a)
Заметим, что функция g (а) может быть представлена в явном виде [3.9]:
g(a) = 1 - vVae"2 [1 - Ф(а)], (3.46)
2 о
где Ф(л)=------ f е dt ~ интеграл вероятности.
о
Тй
e~a* ( 1 \
При л> 1 имеем 1 -Ф(л) =» ------- I 1----— I, и асимптотическая
лх/7 \ 2л2 /
оценка принимает вид
g(a)
1
2л2
(3.47)
Асимптотическая зависимость (3.47) также показана на рис. 3.3. Уже
при а > 2 точная и асимптотическая кривые отличаются не более, чем
на 0,05#п1ах.
Наряду с навигацией по аномальным пространственным полям, для
целей определения местоположения возможно использование и прира-
щений (градиентов) этих полей. Приращения аномальных пространствен-
ных полей могут вычисляться путем вычитания предыдущих измерений
поля из последующих на какой-нибудь выбранной фиксированной ба-
зе Д/.
Исследуем структуру градиентов аномальных пространственных полей.
Известно, что корреляционная функция производной f'(x) случай-
ной функции связана с корреляционной функцией Ry? исходного процесса
f (л) (в случае стационарного поля) соотношением
Э2ЯЯ(Д)
Л/.Л(Д) = _ . (3.48)
о Д
Будем считать, что полет осуществляется вдоль оси х. Тогда применительно
к двумерному полю/'(л-,.у) для градиента/^ (х,у) = df(x, у)/дх на основа-
нии (3.48) находим
Э2Я„(Дх, Ду)
(Дх, Ду) =-----—---------- . (3.49)
XJX ЭД х
71
Для корреляционной функции вида (3.33) у поверхности Земли согласно
(3.49) получаем
Rfxfx (Дх, Ду) = 2 Л,-2а.а^.(1 -2а?А2х)е
Дисперсия градиентов аномального пространственного поля у поверх-
ности Земли равна
, М
Of' = 22 kta? о} ..
(3.50)
Определим корреляционную функцию градиентов на произвольной
высоте Н. Для этого дважды продифференцируем (3.40) по Дх. Меняя
порядок дифференцирования и интегрирования, получаем
12 da. (3.51)
ki S е
о
а2 ч ,
“(+ 2и“’ Э2У0(х/д2х + Д2у 12)
ЭД2х
Э2У0/ЭД2х. Обозначим сложный аргумент \/Д2х + Д2У S2
Rfxfx (Дх, Ду) =
н
м °fa i
= 2 ------
i=i 2a?
Определим
через z и вычислим сначала первую производную
э/0(х/д2х + д2?'а.) _ oj0(z)
9z
9Jp(z)
9z -
Э Дх
12Дх
\/Д2х + L
+ Д г SZ
dz
dSx
Между бесселевыми функциями первого рода нулевого и первого по-
рядков Jo nJi существуют следующие зависимости (см. [3.14]. формулы
801.90,801.91):
K=-Ji, (3-52)
J[=J0- — (3.53)
z
Поэтому
Э ЛДх/Д2* + Д2У 12) £2Дх ______________,
---------------= - —----:----- Jx (7д2х +Д2 г’£2). (3.54)
ЭДх \/д2х + Д2;'
Дифференцируем (3.54) повторно:
!-----------------------------7—Г Д2Х
г----—л/д2х + Д2^— ' -----
d2Jo(y/A2x + Д2_у S2) VA2* + Д2?
—— ------------— — £2 ------------------• X
ЭД2х Д2х + Д2г
f—--—. Дх ddt(z)
X Л(х/Д2х + д2^ П) + ——_д ——____________X
уД2Х + д2>’ 9z 2 = + д2~7 п
72
£2 Дх
\/д2х + Д2/
Д2.У
(Д2х + Д2у)3/2
Л (\/д2х + Д2У £2) +
Д2х + Д2у
ЭЛ(г)
Эг
= \/а2* + А2/П .
(3.55)
Подставляя в (3.55) равенство (3.53), получаем
/\2
—— ./0(7Д2л- + Д2у' £2) +
Д2х + Д2у
Э270(\/Д2л.- + Д2у £2)
ЭД2х
= £22
Л(7д2л- + д2Г£2).
£2(Д2.х + Д2у)3/2
Совместное рассмотрение (3.51) и (3.56) приводит к соотношению
л? «
Rf (Дх Ду)= S kt -—-f
xJxjj i=i 2az о
(3.56)
Д2х
X J0(xA2* + Д2г'£2) +
Д2г - Д2х
+ Д2г£2) £237£2.
£2(Д2х + Д2у)372
Сечение поверхности корреляционной функции плоскостью
имеет вид
Rfxfx,SSX’Q^ =
(3.57)
Ду = О
rr \
--- +2НП г
4а? 7
7о(Дт£2)
aki -
о
Положив в этой формуле Дх = 0, можно
2
0^-' аномального пространственного поля
лета//:
м
= 2 к.
71(Дх£2)
Дх£2
П3с1П.
(3.58)
найти дисперсию
на произвольной
градиентов
высоте по-
м
oj’ = S kj
Jn i = i
2 /П \
Of о» -I т+2"^)
Joi “ \4» / ,
—~ f е ' £237£2,
4 а2 о
(3.59)
7i (z)
так как 70 (0) = 1, lim
2 “* О
Введем обозначения
z
1
2
z2
1 “
W(a, Ь) = — f exp
4 о
1 “
ш(а) = IV (а, 0) = — f exp
8 о
4
+ az
71 (bz) ’
70(bz) -
bz
z2 '
— + az
4
z3dz.
(3.60)
(3.61)
С помощью функций W и и формулы (3.58) и (3.54) перепишутся слг-
73
дующим образом:
м
Rf'xfx (A*’°) = 22 kiataf, .W(2aiH,afbx),
JXJXH i=I JOI
M
о,- =2 Z kfOi] o2, w(2aiH).
(3.62)
(3.63)
Зависимость w(a) может быть сведена к квадратурам. Осуществив
/ z \ 2
подстановку t = I— + а) , получим
w(a) = e*4 f te * dt -3a J t2 e fdt + За2 f e 'dt - a3 f t 2 e 'dr) =
\aJ a2 a2 a2
= (1 + 4л2) - 3aee’ Г(— , a2) -a3ea’ Г(—,a2
L \ 2 / \ 2
(3.64)
где Г(/,х) = / e f t1 1 dt - неполная гамма-функция (см. [3.15], фор-
мулы 3.381,8.350).
Графики функций w(a) и W (a, b)lw(d) показаны на рис. 3.5 и 3.6 соот-
ветственно. Воспользуемся асимптотическим представлением Г (/, х) при
больших значениях х:
Г(/,х)=х>-
р-1
S
т = 0
(3.65)
где О(|х|~р) - величина порядка малости 1x1 ₽; Г(х) - гамма-функция.
е
74
Представим Г(3/2,л2) и Г(1/2, а2) отрезками ряда (3.65), взяв р = 4:
Подстановка (3.66) и (3.67) в (3.64) дает
(3.66)
(3.67)
3 , / 1 \
w’(a) = —7 +л 01 — I,
4л \ л /
т.е. при а > 1
3
vv(a) (3.68)
4л
Асимптотическая зависимость (3.68) показана на рис. 3.5. Если а > 1,6, то
асимптотическая и точная кривые н’(л) отличаются не более, чем на
0,05 wmax.
Асимптотические соотношения (3.47) и (3.68) отражают важные статис-
тические свойства аномальных пространственных полей. Для конкретных
районов Земли после разложения корреляционной функции Луд (Дх, Ду)
в ряд (3.33) и определения параметров этого разложения kit t и а,
с учетом того, что а,- = 2а,77, по формуле
1
//> ------, (3.69)
in
где amjn=mina,-, может быть найдена та минимальная высота, начиная
с которой для каждого слагаемого рядов (3.45) и (3.63) с высокой сте-
пенью точности справедливы асимптотические представления (3.47) и
(3 .68) и вытекающие из них зависимости
1 /Мki°Jol ' 1
75
Если теперь вспомнить уравнение (3.32), а также равенства (3.34),
то получим
pf = 2-JTH. (3.72)
JH
На основании (3.70) и (3.71), кроме того, найдем
о. = 'LL °TfL (3.73)
2 Н '
На небольших высотах (Ж l/amjn) статистические свойства аномаль-
ных полей определяются точными сложными зависимостями (3.44), (3.45),
(3.62) и (3.63). Начиная с некоторой высоты Hmin, приближенно опреде-
ляемой уравнением (3.69) и различной для разных районов земного шара,
становятся справедливыми асимптотические формулы (3.70), (3.72) и
(3.73), из которых следует, что радиус корреляции аномальных простран-
ственных полей на больших высотах пропорционален высоте полета, средне-
квадратическое отклонение обратно пропорционально Н, а среднеквадрати-
ческое отклонение градиентов обратно пропорционально Н2.
Последнее обстоятельство подсказывает диапазоны предпочтительного
использования аномальных пространственных полей и их градиентов. На
малых высотах полета лучше осуществлять навигацию по градиентам
полей, а на больших использовать сами аномальные пространственные
поля. Точное значение граничной высоты может быть получено путем
тщательного исследования структуры поля и источников помех, препят-
ствующих измерению этого поля бортовым датчиком.
Полученные выше результаты по зависимости структуры аномальных
пространственных полей Земли от высоты носят важный и весьма общий
характер, так как относятся к фундаментальным вопросам статистической
теории потенциала. Они выведены из единственного условия, что простран-
ственные поля подчиняются уравнению Лапласа, хотя для получения конеч-
ных числовых данных пришлось сделать следующие дополнительные допу-
щения:
искать решение уравнения Лапласа для плоской задачи Дирихле;
предположить стационарность аномального пространственного поля у
поверхности Земли.
Ввиду важности рассматриваемого вопроса и для правильной физичес-
кой трактовки результатов еще раз обсудим сделанные допущения.
Поскольку рассматривается плоская задача Дирихле, то итоговые соот-
ношения строго обоснованы лишь для высот полета, измеряемых десятка-
ми километров. При изучении статистических свойств аномальных про-
странственных полей на больших высотах надо рассмотреть сферическую
задачу Дирихле. Однако представляется, что и в этом варианте новых прин-
ципиальных математических трудностей возникнуть не должно и конечные
качественные выводы должны остаться неизменными.
Более подробного обсуждения требует предположение о стационарности
аномального пространственного поля у поверхности Земли, причем одно-
временно следует уточнить само понятие аномального поля. Без такого
уточнения использование зависимостей (3.70)—(3.72) для некоторых
76
регионов могло бы привести к грубому расхождению с действительностью,
так как пространственные поля у поверхности Земли могут носить слож-
ный характер и не быть стационарными.
Разделение пространственного поля на нормальную и аномальную состав-
ляющие производится в известной мере условно и определяется теми це-
лями, для которых это разделение осуществляется.
При исследовании статистических свойств полей критерием такого
разделения как раз и может служить требование приближенной стацио-
нарности той части полного пространственного поля, которая относится
к аномальной составляющей. Тогда зависимость свойств нормальной сос-
тавляющей поля (рассматриваемой как детерминированная функция)
от высоты определяется рядом (3.13), а свойства аномальной составляю-
щей хорошо описываются предлагаемым статистическим методом. Чем
более мелкоструктурные компоненты относятся к аномальной составляю-
щей, тем с меньших высот, в силу (3.69), начинают проявляться статис-
тические закономерности (3.70) —(3.72).
Пример*). Расчет зависимости статистических характеристик ано-
мального магнитного поля Земли от высоты.
Введение статистического подхода и расчет статистических характерис-
тик аномальных пространственных полей содержит ряд типовых последо-
вательных этапов. Главными из них являются следующие.
1. Определение района земной поверхности, для которого рассчитыва-
ются статистические характеристики, и составление наземной карты полно-
го пространственного поля /п(х, у, Но =0). Может использоваться и при-
земная карта/п (х, у, Но), составленная для какой-то небольшой исходной
высоты Но Ф 0, на которой производилось картографирование.
2. Расчет нормальной составляющей пространственного поля/н (х,у,Я0)
с помощью ряда (3.13) и выделение аномального поля Д (х, у). Приме-
нительно к магнитному полю Земли нормальная составляющая содержит
поле однородно намагниченного шара и мировые аномалии. Чтобы опреде-
лить нормальную составляющую пространственного поля количественно,
необходимо задать число гармоник N, сохраняемое в ряде. Поскольку
ряд (3.13) описывает потенциалы пространственных полей, то нормальные
составляющие пространственных полей представляются соотношениями
л / % л - j „
f..(x,y,Ho)= -------I S (a"'(0) cos m\+ b™(9) sinwX|,
" л = о \ R + Ho / m = о
причем a™ (0) и b™ (0) выражаются через коэффициенты h”‘ и функции
P"'(cos 0). После вычитания из полной карты нормальной составляющей
получаем карту аномального поля на начальной высоте Но
А(х,у) =fn(x, У,Но) -fH(x,y,H0).
3. Введение статистического подхода, связанное с назначением общего
числа траекторий ц, выбором траекторий движения 7} и заданием вероят-
ностей р, этих траекторий. Обычно, чтобы охарактеризовать какой-либо
район земной поверхности, удобно представлять траектории движения
*) Расчеты в данном примере проведены В.Ф. Лебидем и А. А. Шлопаком.
77
в виде линий, параллельных оси х и отстоящих друг от друга на расстоя-
ние Д/, и считать их равновероятными (р, = 1/<?; i = 1,.. ,q).
4. Центрирование аномального пространственного поля. Оно произво-
дится путем расчета математического ожидания по формуле (1.2)
1 я ~
тЛх,у)= — S 7а [х, у +0 - 1) Д/] (3.74)
<1 ‘ = 1
и вычитания т^(х,у) из fa(x,y)
f(x,y):=fa(x,y)-mf(x,y). (3.75)
Математическое ожидание содержит информацию о региональных и более
мелких аномалиях пространственных полей.
5. Расчет корреляционной (ковариационной) функции аномального
пространственного поля по формуле (1.3)
Rff(xi,yr, xt + Дх,У1 + Ду) =
= — S Л*!, (/ - 1) Д/ +У1] 7[xi + Дх, G — 1) Д/ +У1 + Ду]-
? 1 = 1 (3.76)
В случае стационарного поля, когда Rff зависит только от сдвигов Дх,
Ду и не зависит от начальной точки (х1, у1), можно положить х1 = yY =0
и переписать (3.76) в виде
Л/д (Дх, Ду) = Rff(0,0; Дх, Ду) =
1 ~ -г
= — S /[0, (т-1) Д/]7[Дх, 0-1) Д/+Ду]. (3.77)
q i = i
После выполнения четвертого и пятого этапов выясняется возможность
и плодотворность статистического подхода. Если т?(х,у) окажется плав-
ной, медленно меняющейся (в идеале — постоянной) функцией координат
х и у, то использование статистического подхода в рассматриваемом ва-
рианте целесообразно. Если же т}(х, у) является функцией быстро изменя-
ющейся, напоминающей реализацию случайного процесса, то это означает,
что информация об аномальном пространственном поле содержится как з
центрированной составляющей f (х, у), так и в математическом ожидании
т}- (х, у), что неудобно при введении статистического подхода, так как тре-
бует в дальнейшем точной оценки влияния т?(х, у) на поведение КЭНС.
Тогда надо попытаться путем подбора параметров N, q, Ы добиться, чтобы
математическое ожидание превратилось в медленно изменяющуюся (неин-
формативную) функцию, что будет свидетельствовать о плодотворности
статистического подхода при новых значениях параметров N, q, Ы. Если же
никаким подбором указанных параметров не удается превратить т} (х, у)
в плавную [по сравнению с центрированной аномальной составляющей
f (х> у)] функцию, то это будет означать, что в рассматриваемом районе
аномальное пространственное поле обладает резкой аномальностью и вве-
дение статистического подхода нецелесообразно. В этом случае необходимо
рассматривать движение по детерминированным траекториям. Получаемые
при этом результаты будут характеризовать свойства КЭНС при движении
78
Рис. 3.7
объектов только по этим конкретным траекториям и не будут носить ста-
тистического характера. Однако статистические исследования показывают,
что на большей части территории земного шара, начиная с достаточно малой
исходной высоты Но, возможно введение статистического подхода реко1
мендуемым образом. Это очень удобно при оценке общих свойств КЭНС.
6. Аппроксимация корреляционной функции R/q (Дх, Лу) отрезком
ряда (3.33). Такая аппроксимация может производиться из условия наи-
лучшего среднеквадратического приближения, т.е. такого выбора парамет-
ров разложения М, kt, . и а,, чтобы средний квадрат разности
м
1 = ^RffB (А*- Д-У) - S1 к, о2 °. ехр [-а2 (Д2х + Д2у)]} (3.78)
был минимальным. Ниже будет приведена удобная инженерная методика
выбора параметров разложения. Надо заметить, что аппроксимация (3.33)
предполагает изотропность аномального пространственного поля у поверх-
ности Земли (или на исходной высоте Яо). Такое предположение было
принято лишь для сокращения математических выкладок. Без всяких
принципиальных затруднений можно искать приближение реальной кор-
реляционной функции отрезком ряда
м
S kt о} ехр [- (а2, Д2х + а2.. Д2у)],
i = I
соответствующего неизотропному аномальному полю.
7. Использование точных (3.44), (3.45), (3.62), (3.63) или^асимптоти-
ческих (3.70) — (3.72) зависимостей и расчет корреляционных функций,
дисперсий, радиуса корреляции аномальных пространственных полей и
их градиентов для различных высот полета, что позволяет оценить возмож-
ности КЭНС для конкретных регионов в зависимости от высоты.
Такова общая последовательность действий. Однако часто по различным
причинам она упрощается. Например, если картографирование МПЗ произ-
водилось феррозондовым магнитометром, то нет необходимости из исход-
ных карт удалять нормальную составляющую, так как феррозондовый
магнитометр осуществляет измерения от йекоторого текущего среднего
уровня.
Применим изложенную методику к расчету статистических характерис-
тик аномального магнитного поля Земли (АПМЗ). По исходной гипотети-
ческой карте АМПЗ, сформированной с помощью ЭВМ для высоты Яо =
= 150 м, в соответствии с (3.74) было рассчитано математическое
ожидание т? (х, у) и после исключения т? (х, у) получена карта
f (х, у) центрированного АМПЗ. Фрагмент этой карты для условного
района 120 км X 80 км показан на рис. 3.7, где значения поля указаны в
нанотеслах. В качестве траекторий движения рассматривались прямые
линии, параллельные оси х и отстоящие друг от друга па расстояние Д/ =
= 1 км; число траекторий движения q = 80. По формуле (3 77) была рас-
считана двумерная корреляционная функция R}Jo (Дх, Ду), причем поле
оказалось близким к изотропному. Нормированное сечение этой функции
плоскостью Ду = 0, совпадающее в силу изотропности с произвольным
сечением двумерной корреляционной функции, показано на рис. 3.8;
дисперсия АМПЗ о2о на исходной высоте Но равна (185 нТл)2. Корреля-
80
Рис. 3.9
ционная функция имеет сложный вид и обладает шестью экстремумами.
Найдем параметры разложения /?ро(Д) в ряд (3.33). Если в точках экстре-
мумов провести горизонтальные линии, как это выполнено штриховыми
линиями на рис. 3.8, то функция может быть представлена
алгебраической суммой типовых слагаемых, показанных на рис. 3.9, где вы-
читаемые составляющие изображены штриховыми линиями:
~ f о (А) — ^1 (А) + 1^2 (Д) - 1^3 (Д) + 1^4 (Д) — ^5 (Д) +^6 (Д).
6. И.Н. Белоглазов
81
В этом графическом разложении присутствуют слагаемые двух типов:
типа f0 (Д) и (Д) (/ = 1,2...6).
Представимте и набором Одехр(—а2Д2) типовых гауссовых функ-
ций. Стандартная нормированная гауссова кривая ехр(—х2) изобра-
жена на рис. 3.10. Слагаемое f0 (Д) легко приближается гауссовой функ-
цией 1,1 ехр [-(0,4 Д)2] (рнс. 3.11), т.е.для £0(Д) имеем о? = 1,1, а~
= 0,4 км’1.
82
Каждое слагаемое <£,(Д) может быть аппроксимировано разностью
двух гауссовых кривых, как это сделано для 01 (Д) на рис. 3.12:
(Р! (Д) = 0,45 ехр [—(0,154 Д)2 ]—0,26 ехр [-(0,313 Д)2].
Для остальных составляющих имеем:
02 (Д) = 0,75 ехр [-(0,1 Д)2] —0,6 ехр [-(0,133 Д)2],
0з (Д) = 0,6 ехр [- (0,067 Д)2 ] - 0,5 ехр [- (0,08 Д)2 ],
04 (Д) = 0,54 ехр [- (0,045 Д)2 ] - 0,45 ехр [—(0,053 Д)2 ],
0S (Д) = 0,45 ехр [- (0,029 Д)2 ] - 0,37 ехр [- (0,036 Д)2 ],
06 (Д) = 0,3 ехр [- (0,023 Д)2 ] - 0,26 ехр [- (0,026 Д)2 ].
Число членов разложения М = 2к + 1, где к - число экстремумов кор-
реляционной функции, совпадающее с числом составляющих типа (Д).
В рассматриваемом примере к = 6 и М~ 13.Параметры разложения Rff (Д)
в ряд (3.33), упорядоченные по убывающим показателям а, , приведены в
табл. 3.1, а соответствующая этой таблице аппроксимирующая нормирован-
ная кривая изображена на рис. 3.8.
Сопоставление действительной и аппроксимирующей кривых говорит
об удовлетворительном приближении. Однако при необходимости можно
добиться и большей степени совпадения, если найденные значения а^о2^.
использовать как начальные условия для минимизации функционала (3.78)
и, применив какой-либо из известных методов оптимизации, найти более
точное значение параметров разложения.
После того как получены параметры разложения корреляционной функ-
ции на исходной высоте Яо, можно определить статистические характерис-
тики АМПЗ на произвольной высоте И. На рис. 3.13 и 3.14 приведены
зависимости среднеквадратического значения АМПЗ, его градиента а^н
и радиуса корреляции от высоты полета. Функция PfH получена из соотно-
Таблица 3.1
Параметры разложения
Номер слагаемого ki Otf t КМ-1 a } (нТ л)2 Jo 1 '
1 1 0,4 3,76 10“
2 1 0,313 0,89 10’
3 -1 0,154 1,54 • 10’
4 -1 0,133 2,05 10’
5 1 0,1 2,57 • 10’
6 1 0,08 1,71 • 10’
7 -1 0,067 2,05 • 10’
8 -1 0,053 1,54 • 10*
9 1 0,045 1,85 10’
10 1 0,036 1,27 • 10’
11 -1 0,029 1,54 10’
12 -1 0,026 0,89 ' 10’
13 1 0,023 1,03 10’
6
83
шений (3.32), (3.34), (3.45) и равна
Наряду с точными зависимостями на этих рисунках штриховыми
линиями нанесены асимптотические кривые, определяемые выражениями
(3.70) — (3.72). Поскольку amjn = 0,023 км-1, то согласно (3.69) асимпто-
тическими зависимостями можно пользоваться, только начиная с высоты
Н = 43,5 км. Сопоставление графиков, приведенных на рис. 3.13 и 3.14,
показывает, что неравенство (3.69) дает несколько завышенную границу
и в действительности асимптотические соотношения начинают выполняться
раньше. На рис. 3.15 и 3.16 изображены высотные корреляционные функ-
ции АМПЗ и его градиента, рассчитанные по формулам (3.44) и (3.62)
с использованием графиков, представленных на рис. 3.4 и 3.6.
84
Анализ приведенных кривых показывает, что точный учет сложного
вида корреляционной функции АМПЗ с помощью ряда (3.33) вносит
существенные коррективы по сравнению с подходом, основанным на упро-
щенном представлении исходной корреляционной функции поля в виде од-
ной составляющей Rf^ (Д) = aj- exp (—а2Д2). Это проявляется уже при
рассмотрении асимптотических соотношений. Например, асимптотическая
зависимость от высоты в рассмотренном примере имеет вид 285/7/.
Если же воспользоваться упрощенным представлением корреляционной
функции и ограничиться лишь одним первым слагаемым в сумме (3.33),
то эта зависимость определяется соотношением Y12IH, т.е. занижает уро-
вень АМПЗ на больших высотах. Происходит это потому, что на больших
высотах возрастает роль низкочастотной составляющей наземной корреля-
ционной функции, соответствующей большим Д и малым at.
§ 3.2. БОРТОВЫЕ ИЗМЕРИТЕЛИ МАГНИТНОГО ПОЛЯ ЗЕМЛИ
3.2.1. Основные составляющие ошибки измерения
магнитного поля Земли
Как упоминалось выше применительно к КЭНС, под ошибкой контро-
ля магнитного поля понимается результат влияния всех причин, приводя-
щих к отличию измерений магнитного поля, производимых магнитометром,
от той априорной информации об аномальном магнитном поле, которая
содержится в блоке памяти БЦВМ. Примем во внимание следующие ос-
новные четыре причины: инструментальные ошибки магнитометра; ошибки
исходного картографического материала и ошибки составления высотных
магнитных карт; вариации магнитного поля; нескомпенсированность маг-
нитных полей носителя. Обозначим среднеквадратические значения перечис-
ленных составляющих соответственно , •••,Оду 4- Все эти возмуще-
ния будем предполагать независимыми, вследствие чего полная средне-
квадратическая ошибка равна
<>ду~ = х/ аду+ ... + »ду~4’ (3.79)
Практическая навигация по аномальному магнитному полю Земли мо-
жет производиться как по измерениям самого поля, так и путем использо-
вания градиентов (приращений) АМПЗ. Использование градиентов позво-
ляет устранить влияние постоянных и медленно изменяющихся составляю-
щих помех, что весьма существенно при навигации по АМПЗ.
Поскольку в дальнейшем будет рассматриваться вариант, связанный с
навигацией по приращениям АМПЗ, то в формуле (3.79) под оду
Оду ,..., Оду следует понимать среднеквадратические отклонения
приращений.
Зависимость среднеквадратического отклонения градиента АМПЗ от вы-
соты полета при аппроксимации (3.71) имеет вид
85
Возводя последнее выражение в квадрат
где теоретическое значение коэф-
фициента пропорциональности
равно
Для нахождения коэффициента
пропорциональности А можно
воспользоваться высотными кар-
тами градиентов АМПЗ. Обрабо-
ка экспериментальных данных
показывает, что для различных
районов можно принять *) А =
= (50 т- 500) у км. На рис.
3.17 построена зависимость
су (Я) для А = 80? км.
Оценим составляющие (3.79)
аД/~!’ • • • ’ ад/~4‘
Инструментальные ошибки
магнитометров. Градиент ДДх)
сечения магнитного поля f(x)
вдоль трассы полета, вычислен-
ный на базе Д/ по простейшей
двухточечной схеме, равен
Д/(х) =
f(x) ~f(x -Al)
Al
(3.80)
> /"<х) - Л/И/Чл' Л1,
4/1 (X >"---------------------------------
и взяв математическое ожидание от обеих частей, получаем
2 2[о} - Rff(Al)]
°* ~ Al2
(3.81)
На основании (3.81) для среднеквадратической ошибки вычисления гра-
диента , возникающей из-за инструментальной погрешности магнито-
метра (так же, как и для остальных составляющих помех), находим
У2[а/ .. -Rff ,(А1)\
’ (3.82)
где су . и R^ — среднеквадратические отклонения и корреляционные
*) Здесь используется распространенная в геофизической литературе единица
напряженности магнитного поля т наряду с предусмотренной системой СИ едини-
цей нТл.
86
функции помех. Можно считать, что радиус корреляции всех возмущений
меньше величины базы Д/; тогда Rff (Д/) = 0 и
=
" Д/
(3.83)
В дальнейших оценках примем Д/ = ЗН, что согласуется со значением
радиуса корреляции аномального магнитного поля (3.72). Тогда
=
3 И
(3.84)
Это равенство будем использовать для оценки влияния всех составляющих
ошибок измерения градиентов АМПЗ, в том числе и ошибки измерения
градиента с помощью магнитометра:
3 н
Полагая оу = ОД у, получаем
= °'24
ад/~1 Н
(эта зависимость приведена на рис. 3.17).
Помимо магнитометров с численным дифференцированием сигналов мо-
гут быть применены магнитные градиентометры.
При использовании индукционных градиентометров и градиентометров,
основанных на новых физических принципах, могут быть достигнуты чув-
ствительности (0,01—0,001) у /км независимо от высоты полета.
Ошибки составления высотных магнитных карт. Влияние ошибок исход-
ного картографического материала на точность высотных карт, как пока-
зано в [3.9], с увеличением высоты уменьшается. Если су — средне-
квадратическая ошибка исходного картографического материала,
а я — среднеквадратическая ошибка составления высотных карт, то
при правильном выборе частоты съемки Л [3.16]
af 1 1
_Gji =_____:_____
а/~0 2 2-п' Н
Принимая во внимание (3.84), получаем
_ 1 аГ~о
ал/~2 бхЛГ пя2 '
В настоящее время среднеквадратическая погрешность сводных магнит-
ных карт для большей части территории составляет [ЗД9] Of~Q~ (25^50)у.
Для дальнейших оценок примем а}- q = 50 у, Я = 2 1/км, тогда
(3.85)
(3.86)
' _ 2,4
~ Нг
(3-87)
(зта зависимость приведена на рис. 3.17). На рис. 3.17 приведена также за-
87
висимость ошибки составления высотных магнитных карт стд^ от высо-
ты Н для случая, когда частота съемки 12= 0,1 1/км. Сравнение графиков
V ” °^~2
показывает, что точность крупномасштабных магнитных
карт достаточна для осуществления навигации по аномалиям магнитного
поля. Однако при использовании карт более мелкого масштаба (уменьше-
ние 12) величина оДу возрастает и ошибки составления высотных
масштабных карт становятся одним из основных факторов, определяющих
точность навигации по АМПЗ.
Вариации магнитного поля. Эти вариации носят сложный характер и за-
висят от пространственных координат и времени. Однако количественная
оценка этих вариаций [3.17] показывает, что даже в самых неблагоприят-
ных условиях (при повышенной магнитной активности) полные простран-
ственные градиенты этих вариаций не превышают (0,05—0,1) у /км. Такой
уровень вариаций не препятствует осуществлению навигации по градиентам
АМПЗ вплоть до высот 25 — 30 км. Для дальнейших расчетов примем
°д/~3 = 0,1 у/км.
Нескомпенсированность магнитных полей носителя. Невозможность пол-
ной компенсации магнитных полей носителя является основной причиной,
ограничивающей достижимую точность навигации по АМПЗ. Даже при при-
нятии всех необходимых мер среднеквадратическое значение су оста-
точных девиаций составляет единицы и десятки у. Это приводит к ошиб-
кам вычисления градиентов
/2
3 н
На рис. 3.17 приведены графики и , рассчитанные соответст-
венно для о/ — 10у и о/’ ' — 20 у. Из анализа этих графиков следует,
что в районах, для которых имеются крупномасштабные карты АМПЗ,
достижимая точность навигации определяется главным образом остаточны-
ми девиациями магнитных полей носителей.
3.2.2. Бортовые магнитометры и магнитные помехи
Обеспечение высокоточного определения параметров магнитного поля
Земли на борту летательного аппарата связано в основном с решением сле-
дующих задач:
создание прецизионных бортовых измерителей компонент и полного
вектора МПЗ (магнитометров);
реализация точностных характеристик измерителей на борту летательно-
го аппарата.
Разработка измерителей и реализации их точностных характеристик -
вопросы взаимно определяющие, и обычно они рассматриваются совместно.
Существует несколько типов магнитометров, различающихся по физиче-
ским принципам, лежащим в основе первичного преобразователя. Наиболее
широкое распространение получили три типа: протонные, квантовые и фер-
розондовые. Первые два преимущественно используются в качестве абсо-
88
лютных измерителей модуля полного вектора индукции МПЗ Во, третий
применяется для измерений Во или его приращений ДВ0, а также для изме-
рений компонент этих величин, т.е. их проекций на соответствующие оси
чувствительности измерителя (В ,, Д В ,).
В основе принципа действия прогонных магнитометров лежит метод сво-
бодной ядерной индукции, основанный на внутриатомном явлении - пре-
цессии ядра атома вокруг силовых линий магнитного поля. Принципиаль-
ной особенностью этих магнитометров является цикличность их работы.
Процесс измерения складывается из двух последовательных процессов:
поляризации вещества первичного преобразователя магнитометра, в течение
которой устанавливается ядерная намагниченность, и измерения частоты
сигнала ядерной индукции, определяющей абсолютную величину
измеряемого поля. Используя явление динамической поляризации атомных
ядер, можно совместить во времени процессы поляризации и измерения и
существенно увеличить полосу пропускания измерительного тракта
(до 10 Гц).
Принцип действия квантовых магнитометров основан на выделении ча-
стоты резонансного поглощения (или испускания) электромагнитной
энергии при переходе атомов рабочего вещества (паров щелочных метал-
лов) между двумя дискретными энергетическими подуровнями (зееманов-
ские подуровни), расстояние между которыми и, следовательно, частота
перехода зависят от величины внешнего магнитного поля.
Квантовый первичный преобразователь имеет ориентационную зависи-
мость величины сигнала А от угла а между его оптической осью и направле-
нием вектора внешнего магнитного поля, которая выражается формулой
А ~ ^maxSin a cos а,
где A ma х — максимальное значение амплитуды сигнала.
Ориентационные погрешности такого магнитометра при выполнении из-
мерений с подвижных устройств ограничивают точность измерений или вы-
нуждают использовать дополнительны^ ориентирующие системы для
сохранения положения первичного преобразователя относительно направле-
ния вектора магнитного поля.
Принцип измерения индукции
магнитного поля при помощи фер-
розондовых магнитометров осно-
ван на том, что магнитная прони-
цаемость пермаллоя является функ-
цией индукции магнитного поля.
Эта зависимость очень резкая, и
пермаллоевый стержень (зонд) лег-
ко перевести из ненасыщенного сос-
тояния, когда он ’’концентрирует”
силовые линии МПЗ, в насыщенное
состояние, когда он ведет себя поч-
ти как немагнитное тело. Поэтому
при питании первичной обмотки,
намотанной на пермаллоевый стер-
жень, переменным током во вто-
89
ричной обмотке индуцируется ЭДС двойной частоты, зависящая от проек-
ции вектора магнитной индукции МПЗ на ось зонда.
Широкодиапазонные феррозондовые магнитометры могут быть по-
строены по следующим схемам:
1) с последовательным загрублением чувствительности основного кана-
ла магнитометра;
2) с последовательной ступенчатой компенсацией измеряемой величины
при сохранении чувствительности основного канала;
3) с использованием астатического дискретного уравновешивания с циф-
ровым выходом [3.18].
Аэромагнитные измерения в зависимости от систем координат, в кото-
рых они производятся, могут быть классифицированы следующим
образом.
1. Измерения в географической системе координат, которые обеспечи-
ваются пространственной стабилизацией магниточувствительного блока,
состоящего, например, из трех взаимно ортогональных феррозондовых чув-
ствительных элементов [3.19]. Для квантовых магнитометров это соответ-
ствует пространственной стабилизации вектора вспомогательного магнит-
ного поля [3.20], с помощью которого в данном случае появляется воз-
можность измерения компонент полного вектора МПЗ.
2. Измерения в системе координат, связанной с летательным аппаратом
(ЛА). В этом случае магниточувствительный блок жестко закреплен на
летательном аппарате. Обработка информации ведется путем пересчета
измеренных компонент в необходимую систему координат с учетом инфор-
мации об угловом положении ЛА [3.21 ].
3. Комбинированные способы, при которых измерения проводятся в ста-
билизированной условной системе координат, например только в горизон-
тальной плоскости.
Недостатками измерителей, построенных по первому способу, являются
угловые погрешности систем стабилизации и усложнение задачи компенса-
ции магнитных помех, так как магниточувствительный блок измерителя
меняет свое положение относительно ЛА и, кроме того, имеют место
помехи от собственной ориентирующей системы.
Измерители второго типа конструктивно проще, обеспечивают возмож-
ность компенсации магнитных помех известными способами, но требуют
выполнения определенных вычислительных операций. Кроме того, примене-
ние второго типа измерителей требует компромиссного решения при выбо-
ре места установки магниточувствительного блока (для обеспечения мини-
мального уровня помех и достаточной конструктивной жесткости относи-
тельно места установки источника информации о вертикали).
Выбор способа измерений зависит от решаемых задач, точностных требо-
ваний, типа летательного аппарата, технических возможностей и т.д.
Иногда в практике геомагнитных измерений используется и комбиниро-
ванный способ, позволяющий в конкретных условиях избежать части недо-
статков первых двух способов, при этом упрощается схема стабилизации
магниточувствительного блока и уменьшается вычислительная нагрузка.
Рассмотрим наиболее общую задачу измерений МПЗ магнитометром вто-
рого типа. Системы координат и обозначения углов приведены на рис. 3.18
(Т — полный вектор напряженности МПЗ, п— вертикальная составляющая
90
Таблица 3.2
Матрица перехода от измерительной системы координат к географической
C
я
.S
8
8
.5
а
8
g
.5
ta
,s
.s
.S
Ci
.5
Cl
Л
8
“B ci
& •'
8
<s
.s
=
Q
СЛ
о
4
a
•Я
Cl
«5
8
" S
g «Л
Ч
c
СЛ
8
(/uis X. uis p uis ф uis -
Рис. 3.19
МПЗ, Н — горизонтальная составляющая МПЗ, r]HR — магнитная система
координат, J — магнитное наклонение, D — магнитное склонение, i? —
угол тангажа, у - угол крена, фм - магнитный курс ЛА, хс ycz с - система
координат, связанная с ЛА).
Положение измерителя МПЗ в пространстве описывается матрицей, эле-
менты которой представлены в табл. 3.2. Элементы МПЗ в горизонтальной
географической системе координат могут быть вычислены по формулам,
приведенным в этой таблице.
Кроме инструментальных погрешностей, определяемых углами а0, 50 и
i?o, погрешностей информации о вертикали Д& и Ду, погрешностей, обу-
словленных нежесткостью конструкции у' й i? ', влияние которых на точ-
ность измерений элементов МПЗ можно определить при соответствующих
операциях с элементами матрицы табл. 3.2, на точность компонентных
аэромагнитных измерений влияет и ряд других факторов.
Классификация основных источников погрешностей измерений парамет-
ров МПЗ по второму способу представлена на рис. 3.19 (сплошные линии —
датчик жестко установлен на борту ЛА, штриховые - датчик маятникового
92
типа). Здесь же классифицированы и дополнительные погрешности, имею-
щие место при использовании в магнитометре маятникового датчика.
В зависимости от определяемых по МПЗ навигационных параметров
к отдельным точностным характеристикам измерителей могут предъявлять-
ся разные требования.
В настоящее время известны методы и устройства определения по нор-
мальному и аномальному МПЗ большинства навигационных параметров:
координат местоположения [3.6], скорости движения [3.22], угловой
Рис. 3.20
ориентации ЛА [3.23]. При этом главное значение в рамках излагаемой
в данной книге области имеет корреляционно-экстремальная навигация по
аномальному МПЗ. Однако для общности коснемся также требований,
возникающих при решении других навигационных задач посредством
бортового измерения параметров МПЗ. Это целесообразно сделать также
потому, что возможно комплексное использование МПЗ, когда, например,
наряду с корреляционно-экстремальной навигацией осуществляется оцени-
вание азимута посредством контроля магнитного курса.
При определении скорости и угла сноса основные требования предъяв-
ляются к чувствительности измерителя. Так, например, для получения
информации о путевой скорости с точностью 0,2% чувствительность измери-
теля должна составлять 0,01 нТл [3.22].
На рис. 3.20 представлены зависимости погрешности измерения магнит-
ного курса Дфм от точности информации о вертикали ДВ при измерениях
горизонтальных составляющих на разных широтах.
Из представленных на рис. 3.20 графиков очевидна критичность ошибок
определения курса к точности информации о вертикали. Этим, в частности,
объясняется использование в существующих геомагнитных корректорах
курсовых гироскопов маятниковых датчиков МПЗ, которые при отсутст-
вии возмущений обеспечивают стабилизацию чувствительных элементов
в плоскости горизонта с точностью 0, 5 -- 1,5 угл. мин. Требуемая при этом
точность измерительных каналов находится на уровне возможностей
существующих феррозондовых магнитометров (5—10 нТл).
Необходимо отметить, что при определении координат так называ-
емым топомагнитным методом [3.6] точностные характеристики борто-
вых измерителей в реальных эксплуатационных условиях не должны
превышать предельно возможную точность картографирования, кото-
93
рая, в свою очередь, ограничена: в случае аэромагнитных съемок -
точностью плановой и высотной привязок и, что самое главное; возмож-
ностями учета вариаций МПЗ, а в случае пересчета элементов МПЗ иа высо-
ту — погрешностью исходной информации (карты иа нулевой высоте)
и методическими погрешностями пересчета [3.9]. При традиционных ме-
тодах точность при пересчете МПЗ определяется формулой (3.85).
Следует учитывать, что применение более совершенных методов обработ-
ки съемочной информации, основанных, в частности, иа пространственных
аналогах фильтра КалмаНа в сочетании с теорией потенциального поля
(см. § 3.1), позволяет получить существенно более высокую точность кар-
ты при той же инструментальной точности.
По сообщениям, представленным иа Международном семинаре по геофи-
зике в 1967 г., аэромагнитные съемки, проведенные иа территории Франции
квантовым магнитометром с использованием современных средств навига-
ции и привязки (с учетом вариаций МПЗ по наземным квантовым магнито-
вариационным станциям) позволили провести картографирование иссле-
дуемого района со среднеквадратической ошибкой 4 иТл, что почти
в 100 раз выше точности самого магнитометра и вариационных станций.
Необходимо подчеркнуть, что для корреляционно-экстремальной навига-
ции, использующей аномальное МПЗ, определяющее влияние имеют точ-
ность картографирования и измерения именно этой составляющей магнит-
ного поля Земли. Эта точность может быть существенно выше точности
картографирования и контроля полного МПЗ. Действительно, такие факто-
ры, как изменения МПЗ во времени (вариации), имеют низкие частоты
в пространстве (одновременно охватывают регионы) и почти ие нарушают
тонкой структуры (локальных аномалий) МПЗ. Тонкая структура МПЗ
обусловлена распределением и намагниченностью кристаллических пород и
отличается высокой стабильностью.
Как уже упоминалось, аномальное МПЗ с успехом может сниматься
(оцениваться) не только посредством магнитометров, ио и магнитных гра-
диентометров, в частности буксируемых. Предельная точность оценивания
определяется при этом преимущественно пространственными градиентами
короткопериодических вариаций и шумами измерителя (не считая ошибки
плановой привязки).
В табл. 3.3 приведены характеристики некоторых зарубежных аэромаг-
нитометров.
Кроме точностных характеристик определяющее значение при выборе из-
мерителя МПЗ для той или иной системы навигации имеют его динамические
характеристики. Так, квантовый магнитометр обладает высокими точност-
ными характеристиками, но его использование на подвижных объектах огра-
ничивается дискретностью работы аппаратуры. Интервал между измерения-
ми составляет 1—5 с. Уменьшение времени измерения квантового магнито-
метра с сохранением точности связано с увеличением частоты прецессии ис-
пользуемого вещества и соответствующим усложнением аппаратуры [3.25].
Феррозондовые магнитометры имеют небольшую постоянную времени
Т = (0,1 ^-0,5) с и позволяют непрерывно фиксировать измеряемое поле.
Квантовые измерители обладают более высокими точностными характе-
ристиками чем феррозондовые, но достаточно сложны и менее надежны.
Кроме того, их характеристики из-за недостаточной точности систем пря-
94
Таблица 3.3
Характеристики некоторых аэромагнитометров
Фирма-разра- ботчик Тип Измеряемые компоненты полного век- тора МПЗ Диапазон измере- ний, нТл Точность (2 ст), нТл Примечание
Sperry Rand Corporation (США) TYP-2A (ф) Т, Н, Z, J, D до 60 000 пн, Z) < < 15 нТл J < 3 угл. мин D < 5 угл. мин Векторный маг- нитометр; бор- товой вариант; предусмотрено телеметрирова- ние информации наземными станциями
Е. I. Sharpe Instrument (Канада) МГО-ЮО-З (Ф) х, у. D - х < 10 нТл у < 10 нТл Бортовой, поле- вой, букси- руемый
Япония (п) Т, Н, Z, D до 100 000 Т(Н, Z) < < 15 нТл D < 0,2° Бортовой
Geometries США G-804 (к) Т - 1 с - 0,05 нТл Буксируемый 0,5 с - 0,1 иТл 0,33 с-0,25 нТл 0,2 с - 0,5 нТл
ф - феррозондовый, п - протонный, к - квантовый, ЯП - ядерно-прецессионный
мой и косвенной стабилизации не могут быть полностью реализованы на
ЛА в эксплуатационных условиях [3.26]. Выполнение компонентных
съемок квантовым магнитометром связано с усложнением и увеличением
габаритов магниточувствительного блока, вследствие чего затрудняется
установка его в местах с минимальным уровнем магнитных помех (на кон-
цевых частях несущих плоскостей, киле летательного аппарата), что сущест-
венно усложняет задачу компенсации магнитных помех с необходимой
точностью.
Совершенствование летно-технических характеристик летательных аппа-
ратов приводит к увеличению их энерговооруженности и необходимости
в значительно большем объеме использовать ферромагнитные конструк-
ционные материалы. Это приводит к повышению уровня магнитных помех,
обусловленных энергетическим оборудованием и элементами конст-
рукции.
Магнитные компасы, магнитометры и другие аналогичные приборы,
установленные на борту, не могут быть с успехом использованы без реше-
ния задачи компенсации магнитных помех от их носителя. Магнитные
95
помехи в зависимости от источников, их вызывающих, можно классифици-
ровать следующим образом (см. рис. 3.19).
Ферромагнитные элементы летательного аппарата, обладающие большой
коэрцитивной силой, оказываются постоянно намагниченными, и каждый
из них создает постоянное магнитное поле. Сумма этих полей неизменна по
величине и направлению относительно осей летательного аппарата.
Ферромагнитные элементы с малой коэрцитивной силой индуктивно
намагничиваются магнитным полем Земли. Каждая группа элементов, обла-
дающих индуктивным намагничиванием, создает индуктивное магнитное
поле, изменяющееся по величине и направлению в зависимости от широты
местонахождения объекта.
Индуктивное магнитное поле летательного аппарата от вихревых токов
индуцируется в проводящих частях летательного аппарата, например в ме-
таллической обшивке и металлических проводниках. Магнитное поле от
вихревых токов зависит от широты местонахождения летательного аппара-
та, положения и скорости изменения положения летательного аппарата
в пространстве.
В результате работы бортовых электроагрегатов на борту объекта возни-
кают дополнительные магнитные поля. Величины этих полей зависят от рас-
пределения токов в обмотках и конструкции магнитопроводов. Наличие
обширной бортовой электрической сети порождает магнитные поля, величи-
ны которых определяются конфигурацией и размерами контуров, а также
величиной проходящего тока.
Перемещение ферромагнитных масс объекта также приводит к появле-
нию и перераспределению помех в месте установки измерителя магнитного
поля.
Приведенная классификация магнитных полей летательного аппарата вы-
полнена в соответствии с природой их возникновения. Кроме того, воз-
можна классификация полей в зависимости от изменения их во времени.
По этому признаку различают стационарные и нестационарные магнитные
поля.
Магнитные моменты источников стационарных магнитных полей остают-
ся неизменными во времени или изменяются по определенному заранее
известному закону в функции времени или положения ЛА. Как видно, по-
нятие ’’стационарного” бортового магнитного поля здесь иное, чем в случае
стационарного (неизменного во времени) поля в общем случае.
Магнитные моменты источников нестационарных магнитных полей изме-
няются во времени по случайному закону в случайные моменты времени.
К нестационарным полям можно отнести магнитные поля от электроагрега-
тов и электроцепей, поля от перемещающихся ферромагнитных масс.
Магнитное поле летательного аппарата представляет собой сумму всех
перечисленных магнитных полей, изменяющихся по-разному.
Рассмотрим магнитные поля летательного аппарата с точки зрения их
математического описания.
Известно, что магнитные поля летательного аппарата от постоянного и
индуктивного намагничивания описываются уравнениями Пуассона
[3.27], которые дают выражения проекций напряженности магнитного по-
ля помехи в любой точке летательного аппарата на три взаимно ортогональ-
ные оси, связанные с осями объекта.
96
В выбранной системе координат (см. рис. 3.18) проекции магнитного по-
ля Земли на самолетные оси можно записать в виде
ЛТ3=Тс3,
где А - матрица преобразования горизонтальной системы координат в свя-
занную; Т3 = [? т? t ]т — вектор МПЗ в горизонтальной системе координат,
составляющие которого равны: £ = | Т31 cos J cos D, rj = |7^|sinJ, f =
= I T3 | cos J sin£>; Гс3 = [7'Л Ty 7z]T — вектор МПЗ в связанной системе
координат; I Т31 — модуль магнитного поля Земли.
Уравнения индуктивных помех можно записать в виде уравнения Пуас-
сона в матричной форме
дтс(. = ВТс3 = ВАТ3,
где ДГС,- =[&Txi ATyj ДГ2,]Т— вектор помехи от индуктивного намаг-
ничивания в связанных с ЛА осях,
а b с
В = d е
- к g
f
h __
— матрица коэффициентов Пуассона, характеризующих индуктивное намаг-
ничивание.
Введем вектор составляющих магнитных помех от постоянного намагни-
чивания
Д7-СР=Л4Т3=[Д7;Р ДГуР ДГ2Р]Т,
Р
Я
матрица коэффициентов Пуассона, характеризующих постоян-
г
ное намагничивание.
Вектор магнитных помех от постоянного намагничивания жестко связан
с осями летательного аппарата.
Отметим, что параметры матриц В и Р постоянные, они зависят только от
расположения источников магнитных помех относительно измерителя.
Введем вектор составляющих от нестационарных помех
ДГС.Н(Г) = [ДГС.НХ(О ДТ'с.нИО А7с.нг(О]Т
Тогда суммарная векторная величина Т, действующая на трехкомпонент-
ный магнитомер, равна
Т=Тс3 + ДТС,
где Д7'с = &Tci + ДГсР + Д Гс н(г) — суммарный вектор магнитных помех
носителя.
Целесообразно выделить два метода компенсации магнитных помех на
носителях магнитометрической аппаратуры — прямей и косвенный.
7. И.Н. Белоглазов 97
БКК
cosa _ „
Tcosgf'o-A^ r~~~peg
Tcosa(b+d)
I
I
I
I
Lcos/5
cosy
7cosa(c*ct)\-----iTcosa cosy(c+<[)
* KK3 ~------------
I **
a
Tcosf}
У
-6
42D
-ЕШ
CH
cosfl
Tcosp(e-k)------—
I cosy
| 7cosp(f+ty
\TcosJ}cosy(f+h)
KKf ==-====^>
cos a
hk6
p cosa
cos В'
— — q cosp
KK7
cosy
г cos у
* ыа
vbw^te-*/
л \ :--------
£
£
L
Рис. 3.21
Реализация первого метода предусматривает создание в месте установки
датчика магнитометра компенсационного поля, вектор которого равен по
модулю и противоположен по направлению вектору магнитных помех. Этот
метод широко используется в магнитных и гиромагнитных компасах
[3.28], а также в магнитометрах для геофизических работ [3.27].
Косвенный метод заключается в выполнении математических операций,
обеспечивающих ввод необходимых поправок в результаты измерений.
В связи с широким использованием в бортовом оборудовании вычислитель-
ных средств этот метод приобретает все большее значение [3.6].
Работы по компенсации магнитных помех выполняются в следующей
последовательности:
измерение магнитных помех носителя бортовым магнитометром при
различных положениях носителя в МПЗ или в одном положении
носителя [3.29];
вычисление по результатам измерений коэффициентов Пуассона [3.27];
настройка компенсатора магнитных помех.
Работы по измерению магнитных помех достаточно трудоемки. Их мето-
дические ошибки зависят от способа ориентации датчика магнитометра на
носителе и в пространстве, и они в основном определяют конечную точ-
ность выполнения всех работ по компенсации магнитных помех. В свою
98
очередь ошибки, но значительно меньших величин, порождаются преобразо-
вателями каналов компенсаторов. В связи с этим при размещении датчиков
магнитометров на носителе предпринимаются все возможные меры по
уменьшению этих ошибок путем применения немагнитных материалов и
максимального удаления датчиков от ферромагнитных масс и токопрово-
дящих кабелей.
Так, например, на самолетах чаще всего датчики магнитометров размеща-
ются в районе консоли крыла или хвостового оперения. Однако при этом сле-
дует иметь в виду, что в случае компонентных измерений, требующих точ-
ной информации о положении датчика магнитометра в пространстве, появ-
ляется дополнительная погрешность от нежесткости конструкции носителя,
которая может значительно превышать погрешности информации о верти-
кали навигационного комплекса.
На рис. 3.21 приведена блок-схема компенсатора, предназначенного для
компенсации магнитных помех, создаваемых ферромагнитными массами
самолета, при измерениях модуля вектора МПЗ [3^30]. Компенсатор ис-
Компенсатор используется в составе аэромагнитометров типа АММ-13.
В состав его входят два компенсационных феррозондовых магнитометра
КФМХ и КФМу, стабилизатор напряжения СН, блок делителей БД и блок
компенсационных катушек БКК.
Компенсационные магнитометры состоят соответственно из феррозон-
дов ФЗд., ФЗд, и электронно-преобразовательных каналов МКХ и МК^.
Блок делителей представляет собой восемь делителей, пять из которых
(Д1 — Д5) подключены к компенсационным магнитометрам, а три дели-
теля (Д6 - Д8) — к стабилизатору напряжения. Блок компенсационных
катушек состоит из восьми катушек, шесть из которых (КК] и КК6)
ориентированы по оси х, три (КК2, КК4 и КК7) - по оси у и три (КК3,
КК5 и КК8) - по оси z летательного аппарата.
Взаимодействие элементов компенсатора обеспечивает компенсацию
магнитных помех по первому методу.
В БКК по соответствующим осям вводятся следующие поправки:
Дх = ДГХ(. + ДГхр = Тcos2a(a - к) +р cos а,
Ду = Д Ту{ + Д ТуР = Г cos 0 [cos a (b + d) + cos 0(е - к) + <?],
Дг = ДГ2(. + Д^р = Г cos 7 [cos а (с + g) + cos|3(/'+h) + r],
где а, 0, 7 — углы между вектором Т и осями носителя х, у, z соответст-
венно.
При необходимости сигналы компенсации, формируемые в виде постоян-
ного тока, могут выдаваться непосредственно в трехкомпонентный датчик
магнитометра.
Опыт эксплуатации двухкомпонентных компенсаторов показал возмож-
ность подавления помех в 25—30 раз и снижение их до нескольких единиц
нанотеслы.
Для компенсации магнитных помех от малоразмерных источников
любой физической природы может быть использован градиентометрический
многозондовый компенсатор [3.6, 3.31].
7
99
§ 3.3. БОРТОВЫЕ ИЗМЕРИТЕЛИ ГРАВИТАЦИОННОГО ПОЛЯ ЗЕМЛИ
Под бортовыми измерителями гравитационного поля (БИГП) следует
подразумевать измерители первых, вторых и, в принципе, любых других
производных гравитационного потенциала поля сил тяготения Земли или
других, планет, установленные на борту подвижного объекта (рис. 3.22).
Наиболее распространенными типами БИГП являются бортовые грави-
метры и морские маятниковые приборы, с помощью которых производит-
ся основной объем морских, океанских, надводных, подводных и авиа-
ционных съемок гравитационного поля Земли (ГПЗ). Обзор общего
состояния разработок бортовых гравиметров можно найти, например, в
[3.32, 3.33]. Сравнительная характеристика параметров морских гравимет-
ров, находящихся в эксплуатации, приведена в работе [3.34]. К настояще-
му времени точность современных океанских гравиметрических измерений
достигла уровня 5—6 мГал. Специальные бортовые гравиметрические
определения, выполненные на научно-исследовательских судах, позволили
достигнуть точности 0,5 - 1 мГал, которая принципиально может быть
улучшена до 0,1 мГал [3.35].
Основная трудность измерения силы тяжести на борту движущегося
объекта, испытывающего различные по спектру и амплитуде вибрации и
перегрузки, состоит в сложности выделения полезного гравитационного
сигнала на фоне больших инерционных помех. При этом, ввиду малой
эффективности используемых в настоящее время в морской и океанской
гравиметрии методов частотного выделения полезного сигнала, требуется
применять прецизионные гироплатформы и автономные датчики инерцион-
ных возмущений, а также располагать достаточно точными и детальными
данными о пространственных координатах, скорости и направлении движе-
ния бортового носителя для того, чтобы с нужной точностью учесть поправ-
ки на эффект Этвеша. В настоящее время, несмотря на довольно многочис-
ленные разработки аэро гравиметров, выполненные в СССР и за рубежом,
достигнутый уровень точности бортовых измерений 7 — 10 мГал во многих
случаях оказывается недостаточным [3.36 — 3.44].
Трудности по разделению гравитационных и инерционных ускорений
при бортовых измерениях на движущихся объектах первых производных
гравитационного потенциала привели ряд исследователей к заключению о
перспективности разработок бортовых измерителей вторых производных
гравитационного потенциала [3.45 — 3.49]. При этом в качестве основной
помехи БИГП типа гравитационно-градиентных измерителей (ГГИ) будут
являться инерционные помехи от угловых скоростей и угловых ускорений
подвижного основания, которые поддаются эффективному контролю и
устранению путем использования гиростабилизированных ГГИ. В этом
случае, помимо значительного ослабления помехи от влияния эффекта
Этвеша и полного исключения влияния на ГГИ ускорения прямолинейного
движения бортового носителя, появляются дополнительные возможности
обнаружить структурные отличия полезного гравитационного сигнала от
инерционных помех [3.48, 3.49].
Современное состояние разработок бортовых ГГИ проследим по зару-
бежным данным [3.50 — 3.55]. Первые стационарные ГГИ были созданы
в 1888 г. венгерским ученым Этвешем [3.56]. Определенные попытки по
100
бортовые измерители
гравитационного поля
Измерители
первых произво дных
гравитационного
потенциала
Измерители
вторых производных
гравитационного
потенциала
(гравитационно - гради-
ентные измерители)
Измерители
третьих и высших
производных
гравитационного
потенциала
11
к е
ji S'g
X
<j к
’5 ’9
m
<ь
I
.=*
S; S
g-s
h
IB
it
th
IH
xP
rtl
5 g
'MJ
=3
J $ Q
< > ta
«а
ShM
*3 N
=> S
§
5
I
Рис. 3. 22
созданию бортовых ГГИ были предприняты в 1927 г. немецким ученым
Килхлингом [3.57]. Собственно исследования по созданию бортовых ГГИ
на современном техническом уровне были начаты за рубежом в 1964 г.
При этом можно выделить два этапа в разработках бортовых ГГИ: поиско-
во-исследовательский (1964 — 1974 гг.) и опытно-конструкторский
(с 1975 г.) К началу 1975 г. было известно около 12 вариантов различных
конструктивных схем бортовых ГГИ, из которых получили дальнейшее
развитие следующие семь типов конструкций ГГИ.
1. Гироскопические измерители градиентов гравитационного поля
(ГИГГП) [3.58, 3.59], реализующие принцип измерения градиентов грави-
тационного поля путем сдвоенных, разнесенных на определенную базу
гироскопических поплавковых акселерометров типа PIG. Недостатком
этих измерителей является сложность реализации двух акселерометров
101
со строгой идентичностью основных технических характеристик и обеспе-
чения их стабильности во времени при жестких эксплуатационных условиях.
2. Лазерные гравитационно-градиентные измерители (ЛГГИ) [3.60 -
3,62], из которых первые два основаны на методе измерения гравитацион-
ных градиентов сдвоенными баллистическими гравиметрами, а третий
выполнен в виде кольцевого лазерного гравитационного градиентометра,
основанного на использовании дифференциально включенных лазерных
акселерометров. ЛГГИ на баллистических гравиметрах малоперспективны
для практической реализации [3.53]. ЛГГИ на лазерных акселерометрах
более перспективны, так как в их конструктивной схеме предусмотрены
специальные меры, направленные на уменьшение влияния температуры,
вибрации, перегрузок и других помех.
3. Дифференциальные гравитационно-градиентные измерители (ДГГИ)
[3.54,3.63] для гравитационной картографии, выполненные в виде систе-
мы двух связанных тросом длиной 10 — 20 км низкоорбитальных спутни-
ков или в виде одного активного КЛА типа ’’Шаттл” [3.63], связанного
тросом длиной 100 — 200 км с контейнером, расположенным ниже или
выше его орбиты.
Известны проекты использования ДГГИ в программе ’’Спейс Шаттл”.
К положительным качествам ДГГИ следует отнести возможность измере-
ния высокочастотных характеристик гравитационного поля Земли на
заданной высоте или в диапазоне высот орбитального полета КЛА. Съемка
гравитационного поля Земли с помощью ДГГИ позволит существенно
уточнить математическую модель аномального гравитационного поля, что
упростит решение целого ряда народохозяйственных, научных и приклад-
ных проблем.
4. Компенсационные гравитационно-градиентные измерители (КГГИ),
реализующие способ измерения градиентов и кривизн гравитационного
поля Земли с помощью крутильных весов первого и второго рода [3.64].
Известно множество конструктивных схем КГГИ, из которых наиболее
перспективной для использования на движущихся объектах различного
назначения следует признать схему Трейгезера [3.65]. В течение 1973 —
1974 гг. Трейгезер испытал первый лабораторный макет КГГИ, выполнен-
ный в виде цилиндрического поплавка с диаметрально разнесенными
плотными массами и емкостной обратной связью [3.66, 3.67]. Проведен-
ные испытания подтвердили высокую чувствительность этого макета
на уровне 1 Е за 10 с интегрирования полезного сигнала. Одновременно
подтвердилось предположение о высокой чувствительности такой конст-
руктивной схемы к угловым ускорениям подвижного основания. Поэтому
к 1976 г. был изготовлен и испытан второй макет двухкомпонентного
градиентометра, измеряющего одновременно 1Г2Д. и Wzy, со сферическим
чувствительным элементом диаметром 10 см и массой 700 г. Чувствитель-
ный элемент этого макета в виде тонкостенной бериллиевой сферы плавает
почти при нулевой плавучести во фреоне внутри сферического корпуса
с золотым внутренним покрытием. В сфере установлены два диаметрально
разнесенных грузика из вольфрама. Прецизионное уравновешивание сфери-
ческого поплавка осуществляется путем высокоточного к.рмостатирования
до уровня ± 0,5 • 10~6 °C. Балансировка сферы осуществляется металлиза-
цией поплавка золотом в тлеющем разряде при токе питания 0,25 мА и
102
напряжении 2500 В со скоростью 1,5 • 10"3 г/ч. Использование вакуумной
прокладки между внешним и внутренним бериллиевыми корпусами
прибора позволило снизить требования к точности термостабилизации всего
прибора до 0,001 °C. Полезный сигнал первой действующей моде-
ли сферического КГГИ в 1 Е вызывает вращающий момент поплав-
ка с двумя вольфрамовыми массами по 100 г в 10~13 Н м. Такой
сигнал регистрируется амплитудно-фазовым емкостным датчиком угловых
перемещений, работающим на частоте около 100 кГц. Для работы емкост-
ного датчика и электростатической обратной связи на поверхности сфери-
ческого поплавка напылены две взаимно перпендикулярные (экваториаль-
ная и меридиональная) дорожки электродов. Электростатическая обратная
связь обеспечивает получение максимального значения восстанавливающего
усилия до 5 • 10’8 Н. В результате испытаний первой модели сферического
КГГИ были получены чувствительность и точность измерений 0,25 Е и 1 Е
за 10 с интегрирования полезного сигнала. При непрерывных испытаниях
в течение нескольких суток макет оказался нестабильным в работе и
показал отклонения в несколько сотен этвеш. Дальнейшее улучшение
стабильности работы КГГИ связано с преодолением ряда технических и
технологических трудностей по совершенствованию метрологических
свойств демпфирующей жидкости, теплоизоляции, электростатической
обратной связи и т.д.
К 1982 г. были изготовлены три образца морских градиентометров, из
которых два прошли 10-дневные испытания и показали точность 0,5 Е за
10 с осреднения полезных сигналов.
5. Сейсмические гравитационно-градиентные измерители (СГГИ) [3.68,
3.69], реализирующие метод измерения градиентов гравитационного поля
путем измерения смещения сферической пробной массы сверхчувствитель-
ного акселерометра, разработанного во Франции. В работе [3.68] показано,
что при условии доведения чувствительности измерений такого акселеро-
метра до 10*1 *gn размещения его в центре сферического массивного спут-
ника можно путем периодического сбрасывания (в свободном падении)
шарика акселерометра определить в течение одной или нескольких секунд
его смещение на величину порядка 5 • 10"4 см относительно корпуса спут-
ника. Такие смещения окажутся пропорциональными изменению гравита-
ционного градиента в 0,5 — 10 Е. В течение трех лет (с 1976 г. по февраль
1979 г.) акселерометр работал на борту французского спутника ’’Кастор”
с чувствительностью измерений порядка 10'1 ° g [3.69]. С помощью этого
акселерометра было измерено распределение плотности верхних слоев
атмосферы Земли в диапазоне высот 270 — 600 км, которое создавало
ускорение (торможение) спутника в диапазоне 10'4 — 10'9g. Было также
измерено давление, обусловленное радиацией Солнца на корпус спутника
(3 • 10~9 g) и земными источниками в инфракрасном диапазоне (4 • 10’1 ° g).
Измерение градиентов гравитационного поля Земли не производилось.
К настоящему времени во Франции разработан сверхчувствительный
трехстепенный акселерометр с чувствительностью измерений 10-11gB
диапазоне 10'7 — 1СГ17g и относительной точностью 10'3 .Разработка
акселерометра была предусмотрена программой BIRAMIS. Осуществление
этой программы позволит получить данные о радиационном излучении
Земли и Солнца (типа данных классического радиометра) с чувствитель-
103
ностью измерений 5 • 1СГ11 В г/м2, а также одновременно получить высот-
ную карту гравитационно-градиентного поля Земли с точностью 1 — 10 Е.
Трехстепенный акселерометр имеет сферический чувствительный элемент
из сплава платины и родия массой 0,6 кг и диаметром 40 мм. Точность
измерения положения шарика емкостными датчиками составляет
2 • 10"4 мкм в полосе частот 3 Гц. Среднеквадратические величины напря-
жений, приложенных к управляющим электродам, составляют менее 15 В.
В конструктивной схеме этого акселерометра оригинально решены пробле-
мы исключения влияния дрейфа нуля измерителя с помощью схемы изме-
рения перемещения шарика ”на месте”, обеспечивающей экранировку
измерительного емкостного мостика от вариаций паразитной емкости
между электродами и системой проводников, подводящих электро-
питание.
Заслуживают внимания методы наземной и орбитальной калибровки
акселерометра. В первом случае для целей калибровки выходного сигнала
акселерометра используется лазерный интерферометр с линейным разреше-
нием 3 • 10~4 мкм. В орбитальных условиях калибровка акселерометра
осуществляется путем создания известного инерциального ускорения
закручиванием спутника с большой угловой скоростью порядка 0,1 рад/с
и заданной децентровки шарика по оси калибровки до 30 мкм. При этом
обеспечивается относительная точность калибровки 2 • 10~3. Совмещение
центра масс спутника с центром масс шарика достигается с помощью
устройства, используемого для орбитальной калибровки акселерометра,
содержащего инерционные маховики и дистанционно управляемые по
осевому перемещению малые массы.
6. Сверхпроводящие гравитационно-градиентные измерители (СвГГИ)
[3.70], работающие по принципу измерения гравитационных градиентов
разнесенными на определенную базу спаренными сверхпроводящими
акселерометрами, начали разработываться в США в 1975 г. К 1979 г. были
созданы два опытных образца одноосных вертикальных сверхпроводящих
градиентометров, работающих на принципе взвешивания чувствительного
элемента акселерометров сверхпроводящим подвесом. В 1979 г. в Мэриле-
ндском университете по контракту с NASA начаты работы по созданию
трехосного гравитационного градиентометра, позволяющего"измерять все
вторые производные гравитационного потенциала и определять линейные
и угловые ускорения бортового носителя СвГГИ.
Отличительной особенностью конструктивной схемы СвГГИ является
использование для регистрации перемещений чувствительных элементов
сверхпроводящих квантовых интерференционных приборов, работающих
на эффекте Джозефсона. Заслуживает внимания разработанная методика
балансировки гравитационного измерителя.
7. Ротационные гравитационно-градиентные измерители (РГГИ) реализу-
ют принцип измерения градиентов гравитационного поля в равномерно
вращающейся системе координат. Равномерное вращение позволяет .лоду-
лировать квазистатические гравитационные силовые воздействия двойной
частотой вращения и использовать резонансные свойства (механическую
добротность, синхронное детектирование и т.д.) для выделения полезного
сигнала.
Известны два основных типа конструктивных схем РГГИ.
104
РГИИ акселерометрические (РГГИА) объединяют ряд конструктивных
схем, отличающихся тем, что в них с целью выделения градиентов гравита-
ционного поля на фоне инерционных помех используются сдвоенные вра-
щающиеся акселерометры. Впервые идею построения вращающихся грави-
тационных измерителей предложил Этвеш, который в 1912 г. построил
и испытал измеритель угловой скорости вращения Земли [3.71]. Спустя
почти 50 лет появился ряд предложений по использованию вращающихся
спаренных акселерометров для определения местной вертикали [3.72]
и измерения градиентов гравитационного поля [3.73].
РГГИ вариометрические (РГГИВ) также объединяют ряд конструктив-
ных схем. РГГИВ принципиально отличаются от вариометров Этвеша тем,
что измеряют кривизны гравитационного поля равномерно вращающимися
одной или двумя взаимно перпендикулярными гантелями. Полезный
сигнал таких измерителей формируется на двойной частоте вращения.
После первых попыток Килхлинга [3.57] построить в 1927 г. РГГИВ на
базе известного вариометра Этвеша в 60 — 70-е гг. появились предложения
по разработке различных вариантов конструкций РГГИВ [3.74 — 3.77].
Характерной особенностью конструктивных схем РГГИА является то,
что в них используются современные прецизионные угловые и линейные
акселерометры, элементная база микроэлектроники и современные методы
обработки экспериментальных данных, например методами оптимальной
фильтрации и идентификации.
После ряда неудачных попыток построить лабораторный макет РГГИА
на базе сдвоенных и счетверенных угловых акселерометров [3.73] работы
по реализации этой конструктивной схемы были прекращены.
В США основным разработчиком РГГИА с 1972 г. является фирма
Bell Aerospace. В этой фирме, начиная с 1974 г., ведутся исследования по
созданию промышленных макетов РГГИА [3.78]. Первый промышленный
макет РГГИА, испытанный в 1978 г., был выполнен в виде куба с гранью
длиной 43 см, объемом 0,1 м3 и массой 100 кг [3.55]. В результате испыта-
ний этого макета была достигнута точность измерения градиентов гравита-
ционного поля (1Рд, 2,5 Е за 10 с интегрирования и одновременно
было зарегистрировано значительное ’’сползание” нуля прибора (в несколь-
ко сотен этвеш). Отличительной особенностью конструктивной схемы
РГГИА является то, что в ней используются четыре линейных акселеромет-
ра с чувствительностью измерений порядка 10“! 'g, которые установлены
диаметрально противоположно на платформе, вращающейся на газовых
подшипниках с частотой 0,25 Гц. При этом линейные ускорения, перпенди-
кулярные к оси вращения, модулируются одинарной частотой вращения,
а гравитационные градиенты - двойной частотой вращения. Выходные
сигналы диаметрально противоположных акселерометров суммируются,
чтобы в идеальном случае исключить влияние линейных ускорений, и вычи-
таются, чтобы получить полезные сигналы. При этом у всех акселерометров
требуется обеспечить чрезвычайно высокую идентичность масштабных
коэффициентов. Для этого предназначен контроль с помощью периодичес-
кого встряхивания вращающегося блока акселерометров с частотой 3,5 1 ц
и амплитудой 0,2#. В дальнейшем предполагается существенно уменьшить
габариты РГГИА до 20 см по длине и 25 см по диаметру. Сведений о прове-
дении испытаний второго промышленного макета не имеется, работы но
105
улучшению основных характеристик акселерометров продолжаются.
К 1982 г. один образец РГГИА был испытан на борту надводного корабля
и показал точность 3 Е за 10 с осреднения полезного сигнала.
РГГИВ разрабатываются в США с 1968 г. [3.77, 3.79, 3.80]. До 1974 г.
проводились работы по совершенствованию отдельных узлов, систем и
лабораторных макетов измерителя [3.81]. Первый промышленный макет
РГГИВ был разработан и изготовлен в 1974 г., а его испытания продолжа-
лись до ноября 1976 г. [3.82]. Первый промышленный макет РГГИВ при
испытаниях с января 1974 г. по май 1975 г. показал отрицательные резуль-
таты [3.82]. В результате испытания второго макета РГГИВ было выявлено,
что его разрешающая способность близка к 1 Е, но при этом наблюдались
высокочастотные шумы до 10 Е за 10 с интегрирования полезного сигнала.
Получение требуемой точности измерений 0,6 — 1,0 Е во втором макете
ограничивалось следующими причинами:
подшипниковыми помехами, обусловленными ’’вскипанием” масляной
смазки в тонком зазоре (1 мкм) гидродинамического кварцевого подшип-
ника скольжения;
деформациями (изоупругостью) плеч спаренных алюминиевых гантелей
измерителя, приводящими к изменениям резонансной настройки колеба-
тельной системы на двойную частоту вращения ротора;
шумами усилительно-преобразовательного тракта прибора;
электромагнитными и электростатическими помехами алюминиевой
механической колебательной системы (МКС), обладающей магнитной
чувствительностью 2000 Е/Гс2 и испытывающей влияние трудноустрани-
мых вихревых токов.
В работе [3.82] рассматриваются вопросы улучшения характеристик
МКС и электронно-преобразовательного тракта прибора путем введения
глубокой отрицательной обратной связи на МКС измерителя, что позволит
увеличить чувствительность прибора до 0,03 Е за время осреднения полез-
ного сигнала 1 с при частоте вращения ротора 17,5 Гц. Таким образом, в
конструкциях РГГИВ наметился переход к конструктивной схеме, основан-
ной на использовании обратной связи чувствительного элемента измерителя.
ГЛАВА 4
УСТРОЙСТВА ПАМЯТИ И ОБРАБОТКИ ИНФОРМАЦИИ СИСТЕМ
НАВИГАЦИИ ПО ГЕОФИЗИЧЕСКИМ ПОЛЯМ
§4.1. ЗАПОМИНАЮЩИЕ УСТРОЙСТВА КАРТОГРАФИЧЕСКОЙ
ИНФОРМАЦИИ КЭНС
Отличительной особенностью КЭНС является наличие развитой памяти
для хранения картографической (эталонной) информации. Эталонная
информация (ЭИ) может быть представлена в аналоговом или цифровом
виде. Применение того или иного вида представления ЭИ определяется
характером используемого поля и способом его зондирования. В частнос-
ти, аналоговый вид представления ЭИ более приемлем для оптического
и локационного полей с кадровым зондированием (КЭНС-III). Приемле-
мость в данном случае определяется не только высокой информативностью
указанных полей, но и возможностью последующей оптической обработки.
При аналоговом виде ЭИ значение поля в каждой точке характеризуется
степенью прозрачности носителя (при работе в проходящем свете) или
степенью рассеяния света (при работе в отраженном свете). Изображение
поля может быть записано на носителе в непосредственном виде (как,
например, при фотографировании местности) либо в преобразованном
(например,в виде голограмм).
В первых образцах КЭНС [4.1-4.3] эталонные данные были представ-
лены в аналоговой форме. Носителем информации являлась аэрофото-
пленка, степень почернения которой в каждой точке пропорциональна ве-
личине используемого поля. Для подобных устройств характерны боль-
шие погрешности в представлении поля при записи и считывании.
Значительно большее распространение получили цифровые устройства
памяти. Это стало возможным в связи с развитием микроэлектроники.
Для хранения информации в таких запоминающих устройствах (ЗУ) исход-
ная информация о поле преобразуется путем квантования ”в плане” и по
величине в цифровые карты.
Очевидно, что требования к памяти зависят от требований, предъявляе-
мых к КЭНС по точности определения навигационных параметров и раз-
мерам района полетов. Рассмотрим в качестве примера наиболее общий
случай, когда район полетов включает всю сушу земного шара и точность
определения координат местоположения должна быть не хуже 60 м, а в
качестве навигационного поля используется рельеф земной поверхности.
Дискретность ноля в плане целесообразно принять Д/ =125 м. На одном
квадратном километре поверхности разместятся 64 значения поля.
• Общая площадь суши на земном шаре составляет примерно 1,5 • Ю8 км2,
и число точек поля будет А ~ 1010. Как показали исследования, для записи
одного значения поля требуется не более восьми разрядов ячейки памяти.
Тогда необходимая емкость памяти для хранения информации о поле
107
должна составить Т\ = 8Л'< 101 ’бит. В большинстве случаев полеты совер-
шаются в ограниченных районах, размеры которых не превышают 5 000 кмХ
X 5000 км. Тогда для хранения эталонных данных требуемая емкость па-
мяти составит Т2 < Ю10 бит. Учитывая, что площадь поля, пригодного для
целей навигации, составляет обычно не более 80% от исходной, а также
учитывая методы ’’сжатия” информации [4.4], необходимую емкость
памяти для одного района оценим величиной Т3 < 5 • 108 бит. Для
хранения карты пространственного поля на всем земной шаре с дискрет-
ностью 2 км требуется емкость памяти Т4 < 4 • 109 бит.
При выполнении полетов по заданным маршрутам требуемая емкость
ЭИ лежит в пределах (1—5) 106 бит. Помимо емкости к бортовым уст-
ройствам памяти предъявляются жесткие требования по потребляемой
мощности, весу, надежности, работе в экстремальных условиях, по тем-
пературе, механическим воздействиям.
Рассмотрим основные характеристики возможных видов памяти с уче-
том требований, предъявляемых к бортовым ЗУ.
4.1.1. Полупроводниковые запоминающие устройства
Полупроводниковые ЗУ интенсивно разрабатывались с момента их
первого появления (примерно с 1965 г.). В настоящее время они при-
меняются в большинстве новых цифровых систем хранения информации
емкостью до 107 бит. Полупроводниковые ЗУ находят применение в тех
ЗУ большой емкости, которые предназначены для малых ЭВМ. Элементом
полупроводниковых ЗУ является большая интегральная схема (БИС),
размещенная на одном кристалле (чипе).
В настоящее время находят широкое применение БИС на 4К бит и
16К бит, вес которых не превышает 2 г и потребляемая мощность не бо-
лее 10 мВт/K бит. По внутренней организации БИС-память делится на ЗУ
с произвольным обращением (ПО) и ЗУ с последовательным обращением.
На рис. 4.1 показана блок-схема ЗУ с произвольным обращением, на
рис. 4.2 — с последовательным. Элементы с последовательным обращением
характерны для ПЗС-структур (приборы с зарядовой связью).
Таблица 4.1
Основные характеристики ЗУ
ЗУ на 8Кбит(ПО) (1973 г.) ЗУ на 8К бит (ПЗС) (1974 г.)
Размер ’’чипа”, мм2 3,7 X 5,1 4,3 X 4,5
Обращение Произвольное Произвольное к эле- ментарному блоку, пос- ледовательная выборка внутри блока
Скорость передачи данных, бит/с 1,8 • 106 1 • 10б
Мощность при обраще- нии, мВт/8К бит 22,5 15
Мощность при хранении, мВт/8К бит 2,5 1
108
Рис. 4.1
Разрешение обращения
Тактовые импульсы
Считывание-запись
[ Синхронизация и управленйё\
Рис. 4.2
В табл. 4.1 приведены сравнительные характеристики двух типов ЗУ: с
произвольным обращением и последовательным [4.5].
На основе ’’чипов” с указанной организацией могут собираться запоми-
нающие системы емкостью до 108 бит. Согласно прогнозам к 1985 г. долж-
ны быть разработаны ’’чипы” емкостью 64К бит — 256К бит.
Характеристики одного предполагаемого запоминающего модуля ем-
костью 4000К бит приведены в табл. 4.2 [4.6].
Предполагается также, что полупроводниковые ЗУ с произвольным
обращением будут, вероятно, дешевле, чем любые другие типы ЗУ (это
относится к ЗУ емкость1ю до 107 бит.)
По сравнению с магнитными системами памяти на ленте или диске
полупроводниковые ЗУ обладают при заданном уровне емкости рядом
109
Т а б л и ц a 4.2
Характеристики запоминающего модуля
Организация 512К байт
Электрические параметры:
время обращения и цикла, мкс 1,2
мощность в режиме обращения, Вт 0,5
мощность хранения и регенерации, мВт 50
Размеры (без источника питания), см 15, X 20 X 1
Наработка на отказ, ч - 1,6 10s
ценных качеств: они более компактны, у них меньше время обращения,
потребляемая мощность и выше надежность. По сравнению с другими
типами памяти, например на ЦМД или оптическими, преимущество полу-
проводниковых ЗУ заключается в отработанности технологии материа-
лов и приборов.
В составе КЭНС полупроводниковые ЗУ целесообразно использовать
в качестве буферной памяти, в которой хранится эталонная информация
об очередном участке коррекции, ’’перекачиваемая” из банка данных
с последовательным доступом.
4.1.2. Запоминающие устройства на магнитных лентах
История создания накопителей на магнитных лентах связана с исполь
зованием 12,7-миллиметровой магнитной ленты. Первый удачный про-
мышленный образец такого накопителя появился в 1953 г. [4.7]. Плот-
ность записи информации на нем составляла 32 бит/мм. Дальнейшее разви-
тие техники магнитной записи привело к существенному увеличению
плотности записи и скорости считывания. В настоящее время плот-
ность записи возросла до 2000 бит/мм и скорость считывания до
107 бит/с.
Известен ряд бортовых ЗУ на магнитных лентах, емкость которых
достигает 3 • 108 бит. Одним из таких устройств является прибор (мо-
дель 6450), описанный в [4.8], который является развитием серии ЗУ 6401,
и находится в эксплуатации в системах управления оружием AN/AWG-9 на
истребителе F-14. Модель 6450 в варианте с двумя блоками кассет ис-
пользована в составе систем управления ракетами ’’Патриот” и ”Пер-
шинг-П”, в системах бомбометания бомбардировщиков В-52 и на самоле-
те ЕА-6ВЕ. Блок управления устройства принимает как команды управ-
ления, так и массивы данных от внешних устройств по каналам связи и
вырабатывает команды движения лентопротяжного механизма. Основ-
ным узлом всего устройства являются один или два герметизированных
блока транспортировки ленты модели 6110, в каждом из которых содер-
жится 48 м ленты марки Raymond Thermo-465. На четырех дорожках со-
держится до 18 • 106 16-разрядных слов. Скорость приема-передачи данных
составляет 96К бит/с при скорости движения ленты 76 мм/с. Частота появ-
ления ошибки составляет не более одной на 107 бит. Вес устройст-
ва 5,9 кг.
110
4.1.3. Запоминающие устройства на цилиндрических
магнитных доменах
Цилиндрические магнитные домены (ЦМД) представляют собой новое
направление в технике ЗУ. Разработка и реализация таких ЗУ позволяет
ликвидировать существующий в настоящее время разрыв во временах
доступа между оперативными ЗУ на магнитных сердечниках или полу-
проводниковых интегральных схемах и внешними электромеханическими
ЗУ на магнитных лентах или дисках. Последние достижения в области полу-
чения материалов для ЦМД, изготовление схем управления движением
доменов и разработка устройств на ЦМД сделали ЗУ на ЦМД реальным
кандидатом на применение в тех случаях, когда требуются емкости ЗУ
порядка 106—108 бит [4.9]. ЦМД представляют собой подвижные изоли-
рованные области цилиндрической формы, которые могут создаваться в
тонких магнитных пленках и перемещаться за счет взаимодействия с маг-
нитными элементами канала распространения, нанесенными непосредствен-
но на магнитный слой с ЦМД и намагничиваемыми внешними управляю-
щими полями. Запоминающей средой служит либо эпитаксильная пленка
магнитного граната, выращенная на подложке из немагнитного граната,
либо аморфный металлический магнитный слой, осажденный на стекло.
Таблица 4.3
Характеристики типовых ’’чипов”
Фирма Тип Структура Емкость
Texas Instruments Т1ВОЗОЗ П-П 224.1137 254К
T1B1000 П-П 2 (274.2049) 1024К
National Semiconduct BM2256 П-П 256.1024 256К
BM2201 П-П 583.2048 1024К
Таблица 4.3 (окончание)
Фирма Скорость передачи, Мбит/с Среднее вре- мя выборки, мс Потребляе- мая мощ- ность ВТ Габариты, мм
Texas Instruments 0,1 7,3 0,9 30 X 30 X 10
0,17 11,2 1,2 33 X 35 X 9,5
National Semiconduct 0,1 7 0,75 30 X 28 X 9
0,1 11 0,9 30 X 28 X 9
111
Магнитные материалы, содержащие ЦМД диаметром до 6 мкм, обеспечи-
вают плотность записи более чем 105 бит/см2.
Устройства памяти на ЦМД создаются на основе отдельных ’’чипов”,
емкость которых достигает 1024К бит. Характеристики типовых ’’чипов”,
выпускаемых в США, приведены в табл. 4.3 (где П-П обозначает парал-
лельно-последовательную структуру).
Фирма SAGEM разрабатывает ЗУ на магнитных доменах авиационно-
космического назначения. Один из вариантов — ЗУ кассетного типа —
будет иметь емкость 16М бит и будет применяться для хранения картогра-
фической информации в системах навигации [4.10].
Подобные устройства памяти могут найти применение в КЭНС. Ценными
качествами такой памяти являются отсутствие движущихся механических
частей, приемлемое быстродействие, сохраняемость информации после
отключения питания и возможность ее оперативной перезаписи.
4.1.4. Оптические запоминающие устройства
Оптические методы хранения информации получили большое развитие,
особенно с момента появления когерентных источников излучения. Опти-
ческие ЗУ обладают уникальными свойствами — высокой плотностью запи-
си и малым временем выборки информации, недостижимыми для других
типов ЗУ. Несмотря на отсутствие в настоящее время широкой промыш-
ленной реализации оптических ЗУ, разработаны отдельные устройства,
подтверждающие их высокие потенциальные возможности. Примерами
таких устройств являются:
постоянное ЗУ Unican 690 емкостью около 1012 бит фирмы Precision
Instruments [4.11];
устройство фирмы Holoscan для проверки кредитных карточек [4.11];
постоянное голографическое ЗУ с произвольной выборкой информации
фирмы Megafetch [4.11].
Существуют два основных подхода к построению оптической памяти:
методы поразрядной и голографической записи - считывания.
Рис. 4.3
Схема системы с поразрядной записью представлена на рис. 4.3. Основ-
ными компонентами этой системы являются лазерный источник излучения,
модулятор для управления интенсивностью луча, дефлектор для адресации
луча, формирующая и фокусирующая оптика и запоминающая среда.
Примером такого устройства является упомянутая выше система
Unican 690. Эта система поразрядной записи, в которой информация запи-
сывается путем прожигания лазерным лучом отверстий в полосках, покры-
112
Рис. 4.4
тых тонкой пленкой родия. Каждая полоска длиной 80 см и шириной 12 см
содержит 13 600 дорожек записи с расстоянием 7,5 мкм между их центра-
ми. Отверстия ф = 1,5 мкм выжигаются импульсами аргонового лазера
длительностью 90 нс при мощности 250 мВт. Полоска с записанной информа-
цией хранится в накопителе карусельного типа. При считывании полоска
выбирается из накопителя, помещается внутрь барабана записи и сканирует-
ся лазерным лучом, который отклоняется с помощью дефлектора типа
зеркального гальванометра, обеспечивающего слежение за дорожкой. Счи-
тывающий луч, отраженный от полоски, попадает на фотоприемник,
состоящий из двух фотодиодов. Суммарный сигнал фотодиодов пропор-
ционален коэффициенту отражения считываемого участка пленки, а раз-
ностный сигнал используется для формирования сигнала ошибки слеже-
ния для управления гальванометром.
Малое время записи (90 нс) и возможность быстрого переключения ре-
жимов работы со считывания на запись позволяют непосредственно после
записи осуществить проверку информации еще. до того, как записывающий
луч сместится с этого ’’бита”. При обнаружении ошибок неверная инфор-
мация отмечается и перезаписывается правильно. Время выборки произ-
вольного массива информации из емкости 1012 бит не превышает 7 с.
Одной из возможных схем построения бортового оптоэлектронного ЗУ
с ’’побитовой” организацией является схема, представленная на рис. 4.4.
Прибор строится по принципу оптического проектора изображений.
Оптико-механический блок состоит из лентопротяжного механизма
(ЛПМ), осветителя, проекционного объектива, фотоприемпика и привода
коррекциии изображения.
ЛПМ работает в старт-стопном режиме, причем считывание производит-
ся во время движения носителя. Носителем информации является 16-мил-
8. Н.П. Белоглазов ИЗ
Рис. 4.5
лиметровая перфорированная металлополимерная пленка с шириной ра-
бочей зоны 10 мм. Считывание информации производится многоэлемент-
ным фотоприемным устройством. Для компенсации поперечных уходов
во время движения в оптико-механическом блоке предусмотрено устройст-
во коррекции, выполненное в виде качающегося зеркала, которое смещает
изображение строки вдоль фотоприемной линейки. Датчиком сигнала кор-
рекции служит специальная ячейка, расположенная на линейке фотоприем-
ников.
Для првышения достоверности считывания и исключения влияния пара-
зитных засветок информация записывается в парафазном двоичном коде1
в виде перфорационных отверстий, т.е. логический 0 и логическая 1 отли-
чаются положением перфорационного отверстия вдоль строки.
Схема расположения информационных массивов представлена на
рис. 4.5. Весь объем информации записывается на пяти дорожках с ин-
тервалом между центрами 2 мм. Вдоль дорожки информация разделена
на массивы, содержащие по 256 строк. Между массивами имеется проме-
жуток 2,5 мм. Для увеличения надежности считывания массивов на каж-
дом маршруте записываются три синхродорожки. Расстояние между стро-
ками 20 мкм, диаметр информационного отверстия 10 мкм, шаг записи
отверстий вдоль строки 20 мкм.
Запоминающее устройство, построенное по указанной схеме, имеет сле-
дующие характеристики:
емкость памяти 4 X 108 бит;
время считывания массива на 8К бит 0,3 с;
время выборки числа из Б 03 У 2 мкс;
объем 6 дм3;
масса 8 кг;
потребляемая мощность 40 Вт.
4.1.5. Голографические запоминающие устройства
Полное использование когерентных свойств лазерного луча при гологра-
фической записи создает уникальные преимущества, достижение которых
невозможно при обычной магнитной записи или записи электронным лучом.
Основные компоненты голографической системы памяти схематически
представлены на рис. 4.6. В голографических запоминающих устройствах
114
(ГЗУ) с постраничной организацией считывания лазерный луч расщепляется
на опорный и сигнальный. Сигнальный луч проходит через устройство ввода
информации (управляемый транспарант — составитель страниц), а затем
взаимодействует с опорным лучом, образуя интерференционную картину,
которая записывается в регистрирующей среде. При считывании сигнальный
луч блокируется затвором. Записанная картина по отношению к считываю-
щему лучу (бывшему опорному) проявляет себя подобно дифракционной
решетке, а восстановленное ею изображение проецируется на приемник.
Приемник представляет собой многоэлементную матрицу, число элемен-
тов которой равно числу битов в каждой записанной странице. В результате
при считывании целая страница информации сразу же оказывается доступ-
ной для электронной обработки.
Приведенная схема ГЗУ характерна для первых поисковых разработок,
выполненных в начале 70-х годов [4.12]. Предполагалось, что в ГЗУ более
эффективно используются дорогостоящие оптические и электронные эле-
менты. Однако громоздкость и сложность таких ГЗУ привела к необходи-
мости разработки независимых систем записи-считывания. В результате
появилась возможность создания малогабаритных ГЗУ емкостью 108 бит и
более, которые могут быть использованы в качестве внешних ПЗУ бор-
товых ЦВМ.
ГЗУ обеспечивают высокую плотность записи (теоретически достижимая
плотность 108 бит/мм2) и высокую помехозащищенность; имеется воз-
можность оперативного тиражирования информации методами светокопи-
рования и тиснения рельефно-фазовых голограмм.
Одним из примеров ГЗУ является система Holoscan [4.13]. Эта система,
разработанная фирмой Optical Data Systems в 1973 г., предназначена для
оперативной проверки кредитных карт и рассчитана на массив в 25 000
12-разрядных слов. Цифровая информация в системе хранится в виде голо-
грамм на 35-миллиметровой пленке. Общая емкость одной кассеты
1,2 X 107 бит. Голограммы размером 0,50 мм X 0,75 мм записаны на
40 дорожках с расстоянием между дорожками 0,7 мм и промежутком
8
115
0,2 мм. С голограммы восстанавливается массив данных в 56 бит
(14 X 4), который считывается гибридной 5 6-элементной фотоприемной
матрицей, обеспечивающей выдачу информации параллельно по 4 бита. Га-
бариты ГЗУ 19 см X 25 см X 48 см, вес 15 кгс. Считывание в системе произ-
водится He-Ne лазером мощностью 2 мВт со скоростью 1600 голограмм
в секунду.
Запись информации производится с помощью системы Holodac, состоя-
щей из двух подсистем: ЭВМ и лазерной системы записи, в которой ис-
пользуется аргоновый лазер мощностью 4 Вт с длиной волны 514,5 мкм.
Скорость записи составляет 15 голограмм в секунду и ограничена вибра-
циями, возбуждаемыми ЛПМ при перемещении пленки шаговым двигате-
лем. Система записи Holodac размещена на гранитной плите в пылезащи-
щенном помещении.
Разработка бортовых ГЗУ стала возможна в связи с появлением полу-
проводниковых лазеров, твердотельных матричных фотоприемников и
управляемых транспарантов.
Однако возможности использования указанного типа ГЗУ в составе
бортовой аппаратуры сильно ограничены из-за жестких эксплуатационных
требований и весогабаритных ограничений, которым не удовлетворяют
газовые лазеры.
Получено когерентное излучение на основе различных полупроводнико-
вых соединений в диапазоне длин волн от 0,6 мкм до 8 мкм [4.14]. Наи-
большие успехи достигнуты в технологии изготовления лазеров из арсени-
да галлия (GaAs) и на основе двойной гетероструктуры, состоящей из
слоев AlxCaX-iAs, выращенных методом эпитаксии из жидкой фазы.
Достоинство этой технологии состоит в том, что она позволяет обеспечить
слабую зависимость порогового тока от температуры [4.15].
Исследование энергетических характеристик показало, что полупровод-
никовые лазеры обладают высоким к.п.д. (около 70%), в то время как у
газовых лазеров к.п.д. составляет единицы и доли процента. Расходимость
излучения полупроводниковых лазеров в плоскостях, перпендикулярной и
параллельной р - «-переходу, различна и составляет соответственно 20°
и 5°. Поэтому полупроводниковые лазеры используются, как правило,
в совокупности с коллимирующей оптикой.
Спектральное распределение излучения полупроводниковых лазеров
показывает, что на пороге генерации они работают на одной-двух продоль-
ных модах с шириной спектра около 1 А. Однако в режиме развитой генера-
ции при значительных превышениях тока инжекции над пороговым значе-
нием (в 5 — 10 раз) лазер работает в многомодовом режиме с шириной
спектра излучения 10 - 40 А.
При указанных характеристиках полупроводниковых лазеров, как
показывают расчеты, возможно создание ГЗУ при плотности записи инфор-
мации до 104 бит/мм2.
В ГЗУ могут использоваться, например, серийно выпускаемые полупро-
водниковые лазеры типа 32ДЛ101 (арсенид-галлиевые лазерные диоды),
имеющие следующие характеристики:
средняя мощность импульса лазерного излучения до 20 мВт,
ток накачки до 300 мА,
116
длина волны излучения 0,89 мкм,
минимальная наработка 1000 ч,
габариты: диаметр 9 мм, длина 8,5 мм,
масса 5 г.
Использование методов интегральной технологии привело к созданию
компактных малогабаритных лазерных излучателей — линеек и матриц.
К таким приборам относится серийно выпускаемая линейка полупроводни-
ковых лазеров ДЛ-7 со следующими характеристиками:
число лазерных диодов 8,
шаг между диодами (1,5 ± 0,05) мм,
длина волны излучения 850 — 920 нм,
средняя мощность импульса лазерного излучения (г = 100 нс, скваж-
ность 1000) 200 мВт,
габариты: параллелепипед 13,5 мм X 10 мм X 3 мм.
Ведется также разработка интегральных линеек полупроводниковых
лазеров с непрерывным излучением.
В качестве фотоприемного устройства ГЗУ используются интегральные
фотоприемные матрицы типа МФ-14 и МФ-16 на основе МОП-технологии
с размерностью 32 X 32 X 16 элементов [4.16]. Их основные харак-
теристики:
шаг между ячейками 0,25 мм,
размер чувствительного элемента 0,1 мм X 0,1 мм,
спектральный диапазон 450 — 1110 нм,
частота сканирования 10б Гц,
чувствительность 10"12 Дж/см2.
На основе указанной элементной базы могут создаваться различные ва-
рианты ГЗУ. Схемы построения таких ГЗУ показаны на рис. 4.7—4.9.
На рис. 4.7 представлена схема постоянной голографической памяти на
основе инжекционных лазеров 1 с растром линз 2, коллимирующих излуче-
ние, матрицы голограмм 3 и фотоприемной матрицы 4. Каждая голограмма
хранит одну страницу информации из N бит. Выборка любого, массива ин-
формации осуществляется включением соответствующего лазера в излу-
чающей матрице. При этом действительное изображение любой выбранной
117
Рис. 4.9
страницы проецируется на одну и ту же матрицу из N фотоприемников,
преобразующих световые сигналы в электрические. Использование матри-
цы полупроводниковых лазеров позволяет обеспечить систему адресного
отклонения светового пучка простым включением излучения определенно-
го лазера с нужным адресом. При этом время выборки соответствующего
лазера в матрице будет определяться в основном быстродействием элек-
тронной схемы коммутации, поскольку инерционность инжекционных ла-
зеров составляет величину 10-9 с.
На пластине размером 100 мм X 10 мм можно записать более 103 голо-
грамм. Если каждая голограмма содержит 103 бит, то общая информа-
ционная емкость пластины составит более 106 бит.
Информационная емкость голографических систем памяти определяется
плотностью записи в одной голограмме и геометрическими размерами но-
сителя голограмм. Исследования показывают, что информационная ем-
кость ограничивается не количеством позиций, реализуемых с помощью
оптической отклоняющей системы, или числом лазеров в излучающей мат-
рице, а лишь размерами самой запоминающей плоскости, длина одной сто-
роны которой может достигать 200 мм [4.17].
Одним из путей увеличения емкости ГЗУ является использование пере-
мещающегося носителя с оптимальными размерами стороны запоминающей
среды с голограммами и движущегося относительно считывающего
источника.
На рис. 4.8 и 4.9 (обозначения те же) представлены схемы таких
устройств с использованием линейки полупроводниковых лазеров, содер-
жащие либо вращающийся диск с голограммами, записанными на концен-
трических окружностях, либо ленту с голограммами. Каждая дорожка
голограмм имеет свой полупроводниковый лазер, и выбор дорожки осу-
ществляется электрической коммутацией лазеров, причем время выборки
соответствующего лазера в линейке определяется быстродействием элек-
тронной схемы коммутации.
Изображение страницы информации, записанное на голо!рамме, восста-
навливается-излучением инжекционного лазера, работающего в импульсном
режиме генерации с длительностью импульсов т, и регистрируется матрицей
фотоприемников.
118
Если принять радиус вращающегося диска равным 200 мм, то на диске
может содержаться до 105 голограмм при диаметре голограммы 0,5 мм.
Соответственно при плотности записи 103 бит в голограмме информацион-
ная емкость диска составит 108 бит. Поскольку считывание информации
осуществляется во время вращения диска, запись голограмм производится
по однолинзовой фурье-схеме. Плотность записи информации может быть
доведена до 104 бит на голограмму, и тогда общая емкость диска дости-
гает 109 бит. Время доступа к произвольной странице определяется скоро-
стью вращения диска и может составлять до 20 мс.
§ 4.2. АНАЛОГОВЫЕ УСТРОЙСТВА ОБРАБОТКИ
КАРТОГРАФИЧЕСКОЙ ИНФОРМАЦИИ
В ряде конкретных применений систем навигации по геофизическим по-
лям к устройствам памяти и обработки (УПО) предъявляются жесткие тре-
бования по быстродействию. Например, при выполнении автоматической
посадки решение о пространственном положении ЛА относительно границ
взлетно-посадочной полосы должно приниматься за сотые доли секунды.
Аналогичные задачи управления необходимо решать при облете складок
местности на минимальной высоте, наведении ракет на конечном участке.
В этих случаях более приемлемыми являются аналоговые УПО, в кото-
рых можно реализовать обработку больших массивов информации с при-
менением оптических методов и средств. Наиболее широко аналоговые
УПО применяются для распознавания ’’картинных” изображений (площад-
ная корреляция), т.е. в КЭНС-Ш.
В УПО в явной или скрытой форме распознавание геофизической инфор-
мации выполняется путем вычислений взаимной корреляционной функции
двух изображений: входного (с датчика поля) и эталонного, хранящегося
в памяти. Вычисление таких функций с осуществлением многоканальных и
интегральных преобразований решается в оптических корреляторах в реаль-
ном масштабе времени.
В течение многих лет в США, Японии, Англии, ФРГ и Франции ведутся
исследования по созданию оптических корреляционных систем. Так, фир-
мами Tompson-CSF (Франция) и Martin Marietta (США) совместно разра-
ботана система, имеющая ИК-устройство сопровождения с двумя полями
обзора и устройство площадной корреляции и сопровождения по
контрасту цели [4.18].
Фирма Hughes разработала для ракеты ’’Мейврик” с телевизионной го-
ловкой самонаведения (ГСН) оптико-электронное устройство, которое бу-
дет наводить ракету при подходе непосредственно к цели, когда телеви-
зионная ГСН уже не ’’видит” цель [4.19].
Фирма Me Donnell-Douglas разработала и испытала площадный корреля-
тор SMAC для наведения на конечном участке крылатых ракет типа
’’Томагавк”, причем принимаемые противником меры по маскировке с по-
мощью дыма и других средств не создают существенных помех для корре-
ляции [4.20].
Фирма Grumman Aerospace (США) разрабатывает систему OMFAC -
площадный коррелятор с оптически согласованным фильтром. Предусмат-
119
ривается создать помехоустойчивую, полностью автономную пассивную си-
стему наведения, использующую в процессе работы изображения целей,
введенные заранее в ее запоминающие устройства [4.21].
Общие положения. В аналоговых УПО задача автоматического совмеще-
ния двух изображений объекта (участка) сводится к вычислению величины
взаимной корреляционной функции и определению координат ее
максимума.
Согласно принятой терминологии экстремальные системы, для которых
рабочей информацией являются кадры или линии случайного поля
h(x, у), принадлежат к классу систем КЭНС-ПБ и КЭНС-1ПБ. Аналоговые
УПО являются составной частью таких систем. Принцип действия и матема-
тическая формулировка задачи для КЭНС-ПБ подробно изложены
в [4.22].
Координаты совмещаемых входного (х,у) и эталонного (х',у') изо-
бражений в КЭНС-ШБ связаны между собой соотношениями
х' = [(1 Х)х - £]cosi/9 + [(1 - Х)у - i?]sinip,
. (4.1)
у = [(1 - Х)у - i?]cos^ — [(1 - Х)х g]sin >р,
где £, т), ip, X — случайные величины, означающие соответственно смещение
по двум осям, угол поворота и размасштабирование.
Оптимальный алгоритм совмещения изображений можно получить путем
минимизации среднего риска, определяемого формулой
7?=[Р(М^,Х)6] =
а 0 v 2 и
= fd£fdV fdXfd^fdyf f df(Fl,F2H,v,4>,^^
-a . ft — v О Г П i П 2
X C(7,/<;,^2)P(g,7?,^,X)S(7/F1,F2), (4.2)
где/>(^,?7,^,X) —априорная плотность распределения; f(F\, Fj/^tj,^, X) —
условная функция распределения; Ft(x,y), F2(x'y,y' ) - входное и эта-
лонное изображения— множество реализаций Ft и F2 ;S (7/Fu F2) -
условная плотность вероятности того, что будет принято решение 7 на осно-
вании сравнения изображений F, и F2; C(7,FbF2) — функция потерь,
которая может быть задана в виде
С(7, F!, F2) = [F, (х, у) - F2 (л-; , j/ )]2 (4.3)
при условии, что на основании сравнения изображений будет принято
решение 7; Г — область вероятных решений.
Как правило, распределения вероятностей, входящие в формулу (4.2),
неизвестны, и математические ожидания приходится заменять средними
значениями по кадру. Так всегда делается при получении статистических
оценок вероятностных величин.
Если совмещаемые изображения — стационарные в широком смысле
функции (поля), удовлетворяющие условиям эргодичности, то для данной
функции потерь оптимальным алгоритмом, минимизирующим средний
риск, является тот, при котором будет максимизироваться функция их
120
Рис. 4.10
взаимной корреляции. Работоспособность оптимального алгоритма не нару-
шится при нестационарное™ функций и F2.
Блок-схема аналогового УПО приведена на рис. 4.10. Основными элемен-
тами блок-схемы являются устройство для вычисления взаимной корреля-
ционной функции сравниваемых изображений и автоматический оптимиза-
тор, обеспечивающий поиск такой совокупности £ 7, т]у ,<ру и X , при ко-
торой выходная функция оптического коррелятора /(£, ц, X) прини-
мает экстремальное значение. Исполнительное устройство выполняет функ-
ции смещения, поворота и изменения масштаба эталонного изображения.
Типы аналоговых устройств памяти и обработки. Существует большое
количество устройств для автоматического сравнения изображений, исполь-
зуемых в разнообразных условиях. Их различают по способу ввода эталон-
ного изображения, числу каналов обработки, виду используемого света.
В зависимости от способа ввода эталонного изображения оптические
корреляционные устройства можно разделить на статические, статико-дина-
мические и динамические [4.23].
Для статических корреляторов характерна необходимость двух масок,
на которых зарегистрированы оптические поля или временные процессы,
запись которых производилась заранее. Эти устройства находят применение
в основном при решении задач анализа и идентификации изображения в ста-
ционарных условиях, например привязка траектории полета ЛА по аэро-
фотоснимкам (задача фотограмметрии).
Статико-динамические устройства содержат блок памяти только эталон-
ной информации, которая используется для идентификации текущей ин-
формации датчика вдоль траектории полета. Эталонная информация может
быть записана на фотоносителе с переменной прозрачностью или на модули-
рующей среде с информационными признаками в виде переменного коэф-
фициента пропускания или отражения. Текущее изображение вводится в
систему посредством электронно-оптических преобразований. Устройства
такого рода применяются в автоматизированных системах управления
движением ЛА по заданной траектории.
В динамических УПО эталонное изображение записывается на модули-
рующей среде и стирается за короткие промежутки времени. Такие УПО
используются в головках самонаведения ракет класса воздух-поверхность,
работающих в условиях визуальной видимости исследуемого объекта
(цели) [4.24]. Характерными операциями для этих устройств являются
запись изображения в момент прицеливания и последовательная перезапись
эталонного изображения в процессе движения объекта по траектории. Это
121
вызвано непрерывным изменением масштаба входного изображения и
необходимостью сохранения достаточной амплитуды экстремума взаимной
корреляционной функции.
По структуре оптические аналоговые УПО разделяются на одноканаль-
ные и многоканальные. В одноканальных устройствах анализ сигналов
происходит последовательно во времени и каждый цикл работы позволяет
получить лишь одно значение взаимной корреляционной функции. Много-
канальные устройства дают возможность получить за один такт множество
значений взаимной корреляционной функции — соответственно числу кана-
лов прибора.
По виду используемого света оптические УПО разделяются на когерент-
ные и некогерентные. Отличительными особенностями первых являются
высокое отношение сигнал/шум для выходного сигнала, большая плотность
записи эталонных изображений или функций анализа. Анализ изображений
в когерентных УПО связан с необходимостью преобразования некогерентно-
го излучения в когерентное и последующей обработкой с применением
высококачественной оптики, запоминающих и моделирующих сред с высо-
ким разрешением. Некогерентные УПО менее сложны по структуре, в них
меньше сказывается влияние декоррелирующих факторов на работоспособ-
ность устройства, но точность сопоставления ниже, чем в когерентных.
Некогерентные оптические устройства памяти и обработки. В традицион-
ных схемах оптических корреляторов большое распространение получили
способы ввода эталонной информации на основе заранее заготовленного
изображения - транспаранта или фотоматериала с изменяющейся
прозрачностью. Сканирование одного изображения относительна другого
может производиться механически или электрическим путем [4.24].
В [4.24] описана многоканальная оптическая корреляционная система,
которая позволяет осуществлять взаимную корреляционную обработку
входного сигнала с эталонными сигналами одновременно по многим кана-
лам, в связи с чем этой системе присущ эффект двумерной обработки сиг-
налов, позволяющей получать результаты анализа в реальном масштабе
времени. Использование оптической системы для многоканальной корреля-
ции с передачей света через оптический транспарант позволяет весьма
быстро осуществить двумерную параллельную обработку светового сигна-
ла (рис. 4.11).
Непрерывный аналоговый входной сигнал, форма которого изображена
на рис. 4.11, подается в модулятор 1, управляющий яркостью источника
Рис. 4.11
122
Рис. 4.12
света 2. Источник света может быть некогерентным (например, светодиод).
Промодулированный свет проходит через объектив 3, который обеспечи-
вает равномерное распределение света в плоскости фотопленки 4 с эталон-
ным изображением. Фотопленка перемещается со скоростью, пропорцио-
нальной скорости движения ЛА. Свет, пройдя фотопленку, попадает на мат-
рицу фоточувствительных элементов. Интенсивность света после прохожде-
ния эталона в каждой точке пропорциональна произведению входного
/(н) и эталонного g!/n сигналов. В качестве фоточувствительных
элементов используются приборы с накоплением заряда. После А-го числа
циклов сравнения измеренной и эталонной информации на элементе фото-
матрицы 5 с координатами i, j накопится заряд, определяемый
зависимостью
N
СЧ ~ Sijnfn.
п = 1
Считывание информации с матрицы осуществляется построчно с помощью
коммутатора 6, и далее анализатор 7 определяет координаты i, j элемента
фотоматрицы с максимальным зарядом. Заметим, что входной сигнал
в данном случае является функцией времени и может быть получен путем
точечного зондирования поля. Поэтому данное устройство, несмотря на
многоканальность обработки информации, может применяться в КЭНС-1.
Примером площадного твердотельного коррелятора является устройст-
во, описанное ниже (рис. 4.12). Корреляционный сигнал образуется
в полупроводниковой структуре типа ’’сэндвич”, на одну сторону которого
проецируется текущее изображение (измеренное), а на другую — эталонное.
Конструкция ’’сэндвича” выбрана таким образом, чтобы максимум тока
достигался при минимуме корреляции между поданными изображениями.
Отдельные стандартные операции перемножения и интегрирования изобра-
жений происходят совместно и одновременно. Твердотельный корреля-
тор 5 состоит из матрицы фоторезисторов 4 и матрицы фотодиодов 6.
123
Текущее изображение 1 через линзу 2 и затвор 3 проецируется на матрицу
фоторезисторов. Эталонное изображение с фотопленки 12 через линзу 11,
видеотрубку 10 и вторую линзу 8 проецируется на матрицу фотодиодов 6.
В видеотрубке входное изображение преобразуется в видеосигнал, положе-
ние и масштаб которого можно изменять под воздействием поля, создавае-
мого катушкой 9, окружающей видеотрубку и соединенной с отклоняю-
щим усилителем 18, который связан с генераторами 16 м. 17.
Электрическая часть включает фазовый детектор 15, который восприни-
мает сигнал от усилителя 14, связанного с сеткой 7. Выход фазового детек-
тора 15 соединен с интегратором 17, который управляет отклоняющим
усилителем 18 и сервоприводом 13 линзы 2.
Твердотельный коррелятор представляет собой матрицу ячеистого типа,
каждая из ячеек которой включает фотодиод (или фототриод), фоторе-
зистор и сопротивление нагрузки. Ячейки соединены параллельно и вся мат-
рица питается от источника ЭДС, который включен в такой полярности, что
смещает переходы фотодиодов или области база - коллектор фоторезисто-
ров в обратном направлении’. Потенциал с каждого фоторезистора
снимается посредством суммирующего резистора, подключенного к
каждой точке соединения фоторезистора с фотодиодом. Выходной сигнал
суммирующего резистора пропорционален взаимной корреляционной
функции двух изображений, одно из которых проецируется на матрицу
фоторезисторов, другое - на матрицу фотодиодов. Управляющие напряже-
ния с интегратора 17, при которых достигается максимум взаимной корре-
ляционной функции, и будут определять положение экстремума относи-
тельно заданной точки.
Характерной особенностью взаимной корреляционной функции, полу-
ченной в некогерентном УПО, является наличие мешающего фона, что при-
водит к низкому соотношению сигнал/шум. Ряд разработок в области кор-
реляционного анализа направлен на то, чтобы повысить качество процесса
выделения координат экстремума.
Одним из характерных приемов, который нашел применение в классиче-
ских схемах оптических корреляторов, является дополнительная модуля-
ция взаимной корреляционной функции с целью выделения максимума при
небольшом соотношении сигнал/шум в плоскости корреляции. Этот ре-
зультат достигается за счет применения бистабильной записывающей
изображения среды (типа жидкокристаллического транспаранта), позво-
ляющей отделить постоянную составляющую фона от взаимной корреля-
ционной функции, и установки в коррелятор приемника, состоящего из
концентрического и центрального фотодетекторов [4.25, 4.26].
Когерентные оптические устройства памяти и обработки. Использование
в качестве носителя информации в оптических корреляционных системах
когерентного света стало возможным с разработкой и появлением источ-
ников когерентного излучения — лазеров.
В обычном когерентном корреляторе в качестве эталонного изобра-
жения используются голограммы — многоканальный согласованный
фильтр, полученный при облучении эталонного объекта опорной вол-
ной и зарегистрированный на фотоносителе в виде интерференционной
картины, являющейся результатом суперпозиции опорной и предметной
волн.
124
Блок-схема одного из когерентных оптических многоканальных корре-
ляторов показана на рис. 4.13 [4.27]. Входное изображение вводится в ко-
герентный коррелятор с помощью модулирующего элемента, на который
через оптическую систему и дифракционную решетку проецируется поток
когерентного излучения от лазера. Входное изображение может быть полу-
чено также путем облучения объекта лазерным источником.
Полученное тем или иным образом в когерентном свете изображение
объекта проходит через линзовый растр, состоящий из ряда отдельных
линз. В фокальной плоскости каждой из линз установлен голографический
фильтр. Поток, прошедший каждый голографический фильтр, попадает
в интегрирующее устройство и поступает на оптический датчик, который
может быть выполнен как в виде отдельных чувствительных элементов, так
и в виде единого элемента, чувствительная поверхность которого разделена
на множество частей, число которых равно числу отдельных голографиче-
ских фильтров (голограмм).
Значительные трудности в таких устройствах представляет ввод инфор-
мации, подлежащей обработке. В качестве преобразователей применяются
пространственно-временные модуляторы света типа PROM (свет — свет),
жидкокристаллические транспаранты (электрический сигнал — свет), элек-
трические и ультразвуковые модуляторы, матрицы излучателей, управ-
ляемые электронным лучом, и т.д. Параметры устройства ввода в значи-
тельной мере определяют характеристики и саму возможность работы опти-
ческого когерентного устройства.
Наглядным примером реализации приведенной на рис. 4.13 схемы коге-
рентного многоканального коррелятора является система, разработанная
фирмой Grumman Aerospace (рис. 4.14) [4.21]. Информация о мгновен-
ном положении ЛА поступает в систему при обзоре местности через объек-
тив 1 и запоминается в течение 1 мс на специальном преобразователе 2.
Запоминающей средой в преобразователе является жидкий кристалл. Запо-
минание происходит в момент подачи напряжения (10 — 15 В) на преобра-
зователь. Затем напряжение снимается и полученная картина просвечивает-
ся коллимированным лазерным пучком. Лазерный луч модулируется изо-
бражением, зафиксированным на жидком кристалле, и вводится в систему,
где осуществляется сравнение спектра входного изображения с эталонными
спектрами, хранящимися на матрице фильтров-голограмм 3. При совпаде-
нии спектров на выходе системы (на детекторной решетке 5) появится
четкое световое пятно — сигнал корреляции. Поскольку опрос всего ЗУ
осуществляется в режиме опознавания параллельно, то фильтры, не содер-
125
жашие предъявляемой для опознавания входной информации, рассеивают
свет в больших пространственных углах. Фильтр, имеющий распределение
амплитуды и фазы в соответствии с фурье-спектром предъявленного изо-
бражения, будет восстанавливать узкий коллимированный пучок, соответ-
ствующий опорному (при записи) и позволяющий определить адрес согла-
сованного фильтра по направлению его распространения.
Каждая элементарная линза в матрице 3 обеспечивает обзор всего вход-
ного изображения на преобразователе 2, образуя в задней фокальной
плоскости фурье-спектр этого изображения. Предложенное устройство
имеет 100 голографических линз на пластине размером 25,4 мм X 25,4 мм
и столько же голограмм на матрице 4. Время прохождения сигнала через
оптическую схему около 2 нс. Сигнал корреляции уменьшается при измене-
нии масштаба и ориентации входного изображения по сравнению с имею-
щимся в памяти. Для устранения влияния направления полета или подхода
к цели можно использовать ввод в ячейки ЗУ (матрица 4) различных
вариаций ориентации изображения или вращать вокруг оптической оси
входное изображение до ввода его в систему. В данном устройстве принят
метод вращения входного изображения с помощью призмы Пехана. В этом
случае можно записывать участки местности в ЗУ с предпочтительной
ориентацией плоскости фильтров по магнитному меридиану.
Масштаб изображения, помещенного в память, связан с профилем полета
(в вертикальной плоскости) и фокусным расстоянием объектива. Приме-
нение объектива с переменным фокусным расстоянием позволяет использо-
вать одномасштабный фильтр для большого диапазона высот.
Система позволяет:
вырабатывать сигналь! опознавания, когда текущий кадр в десятки раз
меньше хранящегося в памяти;
сохранять работоспособность на теневых участках как при низком, так и
при высоком контрасте входного изображения;
сохранять работоспособность при рассогласовании ориентации до ± 3° и
несоответствии масштаба до ±4%;
опознавать входную информацию, если имеется лишь ее часть ( > 50%);
размножать эталонные изображения контактным путем.
Другим примером когерентного коррелятора (УПО) является схема,
представленная на рис. 4.15. В этой схеме в качестве фильтра используется
само изображение объекта, а не его голограммы, т.е. фурье-образ.
Рис. 4.14
126
В основу УПО в данном случае заложена схема двухлучевого интерферо-
метра Маха - Цандера. Такая схема обладает рядом особенностей, отличаю-
щих ее от других схем. В частности, снижаются требования к когерентности
излучения, возможна обработка при непрерывном вводе информации, допу-
скается дополнительная обработка световой информации в каждом канале,
сравнительно легко реализуется схема для определения ракурса изображе-
ния. Сканирование изображений относительно друг друга осуществляется
совместно: в продольном направлении — лентопротяжным механизмом,
в боковом — транспарантом.
§ 4.3. ЦИФРОВЫЕ УСТРОЙСТВА ОБРАБОТКИ
КАРТОГРАФИЧЕСКОЙ ИНФОРМАЦИИ
Цифровые УПО получают в настоящее время преобладающее развитие
благодаря успехам электронной промышленности в создании интеграль-
ных микросхем. Это привело к созданию надежных быстродействующих
БЦВМ и специализированных цифровых вычислителей, позволяющих реа-
лизовать сложные вычислительные процедуры. Цифровые УПО обладают
рядом существенных преимуществ по сравнению с аналоговыми. К ним
относятся:
гибкость структуры, заключающаяся в возможности изменения алгорит-
мов обработки информации по мере их совершенствования без изменения
состава аппаратуры;
доступность и универсальность элементной базы;
технологичность.
С помощью цифровых УПО можно реализовать любой из рассмотренных
выше алгоритмов распознавания геофизической информации или их сово-
купность.
Конкретный состав задач, решаемых УПО, определяется требованиями,
предъявляемыми к навигационной системе конкретного ЛА. В общем слу-
чае при полете по заранее неизвестной траектории в заданном районе необ-
ходимо решать следующие задачи:
1) выбор участков, на которых необходимо осуществить коррек-
цию ГНС;
2) расчет размеров доверительной области текущего местоположения;
127
3) расчет статистических характеристик поля на предполагаемом участке
коррекции (дисперсию или среднеквадратическую ошибку, радиус корре-
ляции, среднеквадратический градиент и др.);
4) расчет параметров устройства обработки (дискретность в плане, дли-
на интервала наблюдения, доверительный интервал значений поля и т.д.);
5) восстановление картографической информации с требуемой дискрет-
ностью в плане по информации, хранящейся в бортовом ЗУ;
6) сопоставление измеренной и эталонной информации по выбранному
критерию;
7) формирование оценок ошибок ГНС в определении навигационных
параметров;
8) определение достоверности оценок.
Из этой совокупности задач следует, что цифровое УПО должно вклю-
чать в состав:
универсальный процессор;
специализированный процессор;
ОЗУ1 для хранения исходных эталонных данных (ЭД) в доверительной
области;
ОЗУ2 для хранения обработанных (восстановленных ЭД) в доверитель-
ной области;
банк эталонных данных.
Блок-схему цифрового УПО можно представить в виде, показанном
на рис. 4.16.
Специализированный вычислитель предназначается для выполнения
наиболее трудоемких в вычислительном отношении операций: восстанов-
ления эталонных данных, поиска и сопоставления измеренной и эталонной
информации в заданной области.
Универсальный процессор может выполняться на основе стандартных
БЦВМ или на основе микропроцессорных комплектов.
Современные БЦВМ строятся на модульном принципе с использованием
стандартных электронных модулей, что обеспечивает гибкость системы.
’’Арифметика” и ’’логика” БЦВМ используют исключительно полупровод-
никовую технологию. Применяется широкий набор интегральных схем
(ИС) различного уровня интеграции (СИС, БИС, СБИС) с применением
биполярной (ТТЛ, ТТЛ с диодами Шоттки, И2 Л) и униполярной (МОП,
КМОП, КМОП на сапфире) технологий [4.28]. Расширяющееся применение
Рис. 4.16
128
находят электрически перепрограммируемые ПЗУ. Надежность БЦВМ
обеспечивается целым комплексом технологических операций: стандарти-
зацией электронных модулей, за счет применения теплостойких элементов,
разнообразными структурными методами введения избыточности. Типо-
выми характеристиками стандартной БЦВМ являются [4.29, 4.30]:
управление — микропроцессорное;
структура — параллельная;
объем ЗУ — до 64К слов (16-разрядных);
длина слова - 16 и 32 разряда;
быстродействие — 5 • 105 опер/с;
количество команд — 50 и более;
вес — 5 кг.
Типовой современной БЦВМ, используемой в КЭНС, можно считать
БЦВМ семейства LC-4516 фирмы Litton [4.31, 4.32]. В настоящее время
существует несколько ее модульных модификаций (D, Е, С), отличающих-
ся быстродействием, элементной базой, конструкцией. Стандартный набор
модулей (по 24) позволяет удовлетворить- самые различные требования
и может находить применение в различных бортовых системах навигации.
Процессоры этого семейства машин — параллельные, 16-разрядные, выпол-
ненные на биполярных СИС, обеспечивают возможность обработки операн-
дов в режиме с плавающей запятой и выполнение арифметических операций
с двойной точностью.
Б метро действие:
LC-4516 - 200 4-247 тыс.опер./с;
LC-4516D - 475 тыс.опер./с (80% типа ’’сложение”, 20% типа ’’умно-
жение”) ;
LC-4516E — 446 тыс. опер./с в однопроцессорном варианте, 1340 тыс.
опер./.с в мультипроцессорном варианте;
LC-4516C - 300 тыс. опер./с.
Наличие большого числа подсистем и датчиков на ЛА требует такой
производительности БЦВМ, которая может быть обеспечена только путем
создания распределенной системы вычислителей. Реализация такой системы
стала возможной благодаря появлению микропроцессоров и созданию на
их основе специализированных вычислителей или микроЭВМ.
Рассмотрим более детально некоторые примеры построения цифровых
УПО на современной элементной базе.
Примеры цифровых устройств памяти и обработки. Варианты реализа-
ции цифровых УПО определяются техническими требованиями, предъяв-
ляемыми к конкретной системе. Рассмотрим это на примере двух специа-
лизированных процессоров, предназначенных для КЭНС с одномерным
зондированием поля рельефа земной поверхности [4.33].
1. В 1977 г. был разработан специализированный микропроцессор для
формирования сигналов коррекции навигационного комплекса по рельефу
местности ТСдР (Terrain Correlation Microprocessor ). Этот микропро-
цессор входит в состав сменного модуля, который связан с центральной
БЦВМ посредством информационной шины бортового электронного обору-
дования AMUX (рис. 4.17).
После взлета ЛА цифровые эталонные карты рельефа передаются (через
блок ввода данных) с кассеты данных в центральную БЦВМ и блок хране-
9. И.Н. Белоглазов 129
Кассета
данных
блок
сопряжения
блок
питания
Устройства
управления
Хранение
программ
ПЗУ
Центральная
6ЦВМ
A/WM
УВВ
блок
хранения
массивов
донных
(MS У)
TCJU.P
ОЗУ 2
матрица
функционалов
ОЗУ!:
матрица
средних
значений
I Модуль корреляционной обработки
Рис. 4.17
ния массивов данных MSU, где они находятся в течение полета. При под-
ходе к контрольной точке маршрута, в которой должна начаться коррек-
ция, в процессор подаются очередная цифровая эталонная карта рельефа
[М(т, «)] и данные о ее координатном расположении по отношению к
траектории полета. Контрольная точка начала коррекции определяется
с помощью навигационного оборудования таким образом, чтобы полет
проходил над местностью, соответствующей эталонной карте. В момент
прохода контрольной точки начинается передача в микропроцессор инфор-
мации о рысоте и скорости и поступает команда на начало формирования
выборочной последовательности данных высотомера.
После того как последовательность замеров высоты сформирована,
осуществляется процесс ее корреляционной привязки к карте по алго-
ритму MAD (средней абсолютной разности), подобному описанному в
§ 1.2. Полученные в результате привязки координаты точки экстремума
передаются по запросу в навигационный комплекс для коррекции место-
положения. Эта процедура повторяется при проходе каждой контрольной
точки маршрута.
Для управления микропроцессором ТСдР используются пять управ ляю-
щих слов, поступающих от центральной БЦВМ. Схему расчетов по алго-
ритму MAD в ТСдР можно разбить на шесть частей:
1) расчет частоты выборки (замеры датчика);
2) считывание и запоминание данных выборочной группы;
3) расчеты средних значений для выборочной группы;
4) расчет средних величин для маршрута, проложенного на карте, и
для каждой выборочной группы;
5) расчет среднего модуля разности;
6) расчет отклонений местоположения летательного аппарата от центра.
В микропроцессоре коррелируются группы из 128 байт выборочных и
эталонных разностей высот. Перед началом вычислений выбранные эталон-
ные разности высот корректируются в соответствии с изгибами траектории.
128 128
Алгоритм MAD записывается в виде Rm k = S (Rm k) = S | M (m +
« = i ’ n = i
+ p(k+n — MAm<k — S(k+n — l) + SAk\, rp,eRm<k - MAD-число,
130
т.е. (т, к)-й элемент матрицы (значение функционала сравнения); т -
номер эталонного столбца (т=1, 2, . .. , 63); к - номер выборочной
группы (Л = 1, 2, ..., 31); М(т + р(к + п — 1), и) — эталонная разность
высот; р(к + и — 1) — модификатор номера эталонного столбца; р(к +
+ п- 1) ~Рк\ Pj(j = 1,2,..., 158) - поперечная координата члена выбо-
рочной последовательности; / — номер выборочного члена; п — номер
эталонной строки (n= 1, 2, ... , 128); МАт^ — среднее значение разности
высот для маршрута, проложенного по карте:
1 128
МАт к= ------ S М(т +р(к + п - 1), и);
12В п=I
SAk — среднее значение по выборочной группе:
1 128
SAk = ----- S 5(Л + и-1).
128 и = 1
В [4.33] были выбраны для эталонной карты следующие параметры:
шаг 122 м (дискретность поля в плане), 63 дискрета в поперечном направ-
лении и 128 дискретов в продольном.
Каждое значение поля представляет собой превышение высоты поля в
текущей точке по отношению к минимальной для данной^сарты высоте
рельефа, а масштабный коэффициент одинаков для разных высот. Для
хранения одного значения отводится 4 бита.
При расчете Rin используется последовательность измеренных значений
разностей высот, состоящая из 158 точек-замеров. На рис. 4.18 показана
взаимосвязь этой последовательности и эталонной карты.
Реализация алгоритма MAD потребовала наличия памяти с произвольной
выборкой емкостью 18К и постоянной памяти емкостью 1К 8-битовых
слов.
Распределение памяти с произвольной выборкой:
матрица R — 63 X 31 = 1953 байта;
эталонные разности высот — 128 X 63 = 8064 байта;
средние значения эталонных разностей высот вдоль проложенных на
карте маршрутов (при т = const) - 31 байт;
центрированные выборочные группы - 128 X 31 = 3968 байт;
координаты относительного поперечного смещения членов апостериор-
ной выборочной последовательности — 158 байт;
модификаторы номеров эталонных столбцов д(Л + н- 1) - 128X31 =
= 3968 байт;
Рис. 4.18
Рис. 4.19
9
131
Таблица 4.4
Состав микропроцессора ТСдР
Плата Количество устройств на одной плате Потребляе- мая мощность одной пла- той, Вт Количество плат
Процессор 1 процессор 8080А 4,4 1
Постоянная память и логика 24 логические интегральные схемы 91 дискретизатор 2 устройства постоянной па- мяти на 512 8-битовых слов 2,9 1
Память с произ- вольной выбор- кой 20 логических интеграль- ных схем 40 дискретизаторов 18 устройств памяти с про- извольной выборкой на 4 К бит каждая 6,4 2
Резерв 7 логических интегральных схем 23 дискретизатора 20 логических интеграль- ных схем 20 дискретизаторов 1,5 1
резерв — 34 байта.
Итого: 18176 байт.
Распределение постоянной памяти:
предварительная обработка — 298 байт;
вычисления по алгоритму MAD — 516 байт;
поиск минимального MAD-числа — 69 байт;
резерв — 141 байт.
Итого: 1024 байта.
Состав микропроцессора ТСдР приведен в табл. 4.4.
По первоначальным расчетам для реализации алгоритма MAD требуется
приблизительно 2 мин рабочего времени микропроцессора ТСдР. В дальней-
шем это время предполагается значительно сократить за счет чередования
операций по выборке данных и ’’корреляции”.
2. Второй вариант построения специализированного процессора для
КЭНС представлен на рис. 4.19.
Сравнение измерений и эталонной информации в специализированном
цифровом вычислительном устройстве (СЦВУ) здесь выполняется с исполь-
зованием квадратичной функции близости
Rii (n + V)=Rif(n)a + (h[n+1 ™ - М"+1 > )2,
где Rtj (п) — значение функционала на и-м шаге оценивания в точке довери-
тельной области с координатами i, j (i, j = 0, 1, 2, .. ., 63); a — ’’коэффи-
циент затухания”; hk, ha — эталонные и измеренные значения.
132
СЦВУ содержит два оперативных ЗУ (ОЗУ 1, ОЗУ2), арифметическое
устройство (АУ), управляющее устройство (УУ) и устройство ввода-
вывода.
ОЗУ2 имеет емкость 4096 7-разрядных слов и предназначено для хране-
ния матрицы /?^',+ 0'7 . ОЗУ1 имеет емкость 4К 15-разрядных слов и пред-
назначено для хранения функционалов Ry. ОЗУ 1 иОЗУ2 организованы по
принципу стековой памяти, АУ — параллельное, УУ — микропрограммный
автомат с жесткой логикой.
Основные характеристики СЦВУ:
тип — синхронный, одноадресный, параллельного действия;
разрядность — 16 двоичных разрядов;
производительность — 1 млн. микроопер./с;
распределение памяти:
хранение исходных ЭД — 2 К 8-разрядных чисел,
хранение обработанных ЭД — 4К 8-разрядных чисел,
хранение функционалов — 4К 15-разрядных чисел,
сверхоперативная память — 256 бит (16 X 16) ;
число плат 5(150 мм X 150 мм) ;
число корпусов интегральных микросхем (ИМС):
ОЗУ - 22 корпуса - 1 плата,
АУ — 76 корпусов — 1 плата,
УУ — 178 корпусов — 2 платы,
УВВ — 38 корпусов - 1 плата;
потребляемая мощность 20 Вт;
объем 3 дм3, ве— 2,5 кгс.
Программа работы СЦВУ обеспечивает формирование оценок положения
экстремума на каждом замере поля датчика. Измеренное значение
Таблица 4.5
Основные характеристики специализированных вычислителей
Характеристики тем •’ СЦВУ
Функция близости измеренной и эталонной информации Модуль Квадрат
Сравниваемые характеристики Приращения отно- Приращения на
ПОЛЯ ситсльно средне- фиксированной
го уровня вдоль пре дпол агае мо й траектории базе
Объем памяти, бит 146К 90 К
Число битов для хранения одного значения исходного поля 4 + 1 (знаковый) 8
Доверительная область 31 х 31 63 х 63
Интервал наблюдения Длительность формирования, с Фиксированный Скользящий
одной оценки — 0,4
достоверной оценки <120 <40
Число корпусов ИМС 314 314
Потребляемая мощность, Вт 22 20
133
сравнивается со всеми значениями h'£n эталонных данных в доверительной
области и результаты сравнения запоминаются вОЗУ-1. Достоверными
считаются оценки после определенного числа циклов сопоставления. Дли-
тельность формирования одной оценки составляет не более 0,4 с.
Сравнительные характеристики описанных специализированных вычис-
лителей приведены в табл. 4.5. Наиболее существенным отличием является
длительность формирования оценок, объем памяти и число битов на одно
значение поля. Отличие по длительности оценивания связано со значительно
большим числом операций в ТСдР для определения оценок, чем в СЦВУ.
Качественным отличием ТСцР от СЦВУ является метод организации
поиска. Если в СЦВУ в одном цикле оценивания производится сканирова-
ние (поиск) в памяти по двум направлениям для одной и той же реализа-
ции, снятой датчиком, то в ТСдР по одним эталонным данным сканируются
различные выборочные группы замеров датчика, т.е. сканирование по
боковому направлению производится в памяти, а в продольном — по реа-
лизации датчика.
ГЛАВА 5
СТРУКТУРА, ПРИНЦИПЫ ДЕЙСТВИЯ
И АЛГОРИТМИЧЕСКОЕ ОБЕСПЕЧЕНИЕ КЭНС
§ 5.1. КЭНС ЭВРИСТИЧЕСКОГО ТИПА
В этой главе, если не делается специальных оговорок, рассматриваются
КЭНС с точечным зондированием полей. Однако полученные результаты
могут быть распространены на КЭНС-П и КЭНС-Ш. Хотя эвристические
алгоритмы почти утратили прикладное значение, их рассмотрение целесооб-
разно в силу физичности этих алгоритмов, а также потому, что свойства,
присущие КЭНС эвристического происхождения, проявляются и в некото-
рых типах КЭНС, синтезированных на основе строго оптимальных прин-
ципов.
5.1.1. Дифференциальная схема КЭНС [5.1]
Рассмотрим так называемую дифференциальную схему двумерной
КЭНС. Канал х будем называть продольным каналом управления, а канал
у — боковым. Сигнал f(x, у), поступающий от датчика 1 навигационного
поля (рис. 5.1), умножается множительными устройствами 2 и 3 корре-
ляторов 4 и 5 продольного и бокового каналов на разности сигналов,
извлекаемых из блока памяти, в котором записана карта используемого
поля. В дифференциальной схеме сигналы в блоке карт снимаются в четы-
рех фиксированных точках 6, 7, 8 и 9, отстоящих от координат х и у, вы-
даваемых скорректированной ГНС, на некотором фиксированном расстоя-
нии ±/, а затем образуются разности этих сигналов, чем и объясняется
термин ’’дифференциальная схема”.
Сигналы произведений их и иу могут подаваться на специальные фильт-
ры 10, входящие в состав корреляторов. Передаточные функции фильтров
обозначим через И'ф(р). Выходные сигналы корреляторов их и у,, исполь-
зуются для коррекции ГНС, суммируясь с сигналами скорости движения
И* и Vy, измеряемыми ГНС. Передаточная функция цепей коррекции 11
обозначена через И'(р).
Переменные их и uv равны
ux=f(x,y)[f(x-l,y)-f(x + l,y)], (5.1)
«у =f(x,y) [f(x,y-l) -f(x,y+l)]. (5.2)
гдехиу — действительные координаты движущегося объекта.
Выделим в сигналах их и иу их математические ожидания тх и ту \
тх = М{их) = Rff(kx - I, Ду) - 7?^(Дх + /, Ду), (5.3)
ту = M<mv> = Rff(Ax, Ду - /) - Rff(&.x, Ду +/), (5.4)
135
Рис. 5.1
где Rff — корреляционная функция используемого навигационного поля
f (х, у), принимаемого стационарным; Ах = х-хпАу=у~ у - продольная
и боковая ошибки ГНС.
Величины тх и ту представляют собой полезные составляющие сигна-
лов. Кроме них на выходах множительных блоков корреляторов присут-
ствуют центрированные помехи S их = их — тх и 8иу = иу —ту. Для сгла-
живания этих помех и предназначены фильтры корреляторов. Вообще
говоря, фильтры в корреляторах могут и отсутствовать. Тогда роль сгла-
живающих устройств выполняют инерционные части контура коррекции
ГНС. Заметим, что даже в случае абсолютно точного определения координат
Рис. 5.2
136
движения ГНС, когда х = х и у = у, помехи 6их и не обращаются в нуль:
Sux=f(.x,y) [f(x-l,y)-f(x + l,y)] - 0)1 =
= f{x,y)[f{x-l,y)-fix + l,y)], (5.5)
6uy = f(x,y) [f{x,y -I) -f(x,y+l)]. (5.6)
Для ликвидации этого недостатка может устанавливаться еще один
центральный считывающий элемент, сигнал которого вычитается из сигнала
датчика поля, прежде чем последний подается на множительные блоки
корреляторов (рис. 5.2). Эта схема получила название дифференциальной
схемы с центральным считывающим элементом. В ней сигналы их и uv
имеют вид
[f(x,y) [fix —I,у) -f(x + l,y)], (5.7)
uy = [f(x,y)-f{x,y) ] [fix,у -/) -fix,у +/)]. (5.8)
Математические ожидания этих сигналов
mv = М (Дх, у) [f(x -1, j)) -fix + /, у)] > -M(f(x, j)) X
X [/(x - I, y) - f(x +1, y)]> = Rffi&x - l, Д3,) - Rff{£xx + /, Ду),
= Mif(x, y) [f(x, у - I) - f[x, у + /)] > -Mff[x, у) X
X [/(*, У ~- fix, у + /)| > = Rff(Ax, Ду - /) - Rffi^x, Ду + /)
совпадают с (5.3) и (5.4), а значения возмущений 8их, Ьиу в установив-
шемся режиме при х-х, у=у равны нулю. Поэтому дифференциальная
схема КЭНС с центральным считывающим элементом обеспечивает более
высокую точность.
Рассмотрим статические характеристики эвристических КЭНС диф-
ференциального типа. Для упрощения ограничимся рассмотрением одно-
мерной задачи, полагая Ду = 0, /(х, у) = f (х) и вводя обозначения Дх ~ Д,
mx = т, Rf f (Д, 0) = Rf} (Д). Тогда из (5.3) находим
ш=%(Д-/) -Д/7(Д + /). (5-9)
Для оценки пространственного спектра случайной функции воспользуем-
ся понятием радиуса корреляции р. В соответствии с изложенным будем
считать, что
р = Rff (0) fRffiA)db, (5.10)
где Rff (0) - дисперсия/(х).
Простейшие выражения корреляционных функций имеют вид*)
Rff, (Д) =%(0) е'а^г, (5.11)
7?ЯДД) =7?/Z(0) е-"2д2со5|ЗД, (5.12)
/?/Л(Д)=/?//(0)е-“|д|, (5.13)
*) Вследствие обстоятельств, указанных в главах 2 и У ни одна из функций (5.11) -
(5.13) недостаточна для высокоточной аппроксимации корреляционной функции
реального поля. Лучше всего реальные корреляционные функции аппроксимируются
суммами членов типа (5.11) с различными а и Rff. Однако для рассматриваемой здесь
динамики КЭНС вполне допустимо использовать простые выражения (5.11) - (5.13).
137
причем радиусы корреляции для них соответственно равны
л-l
v ” х/я ~ Т~2 1
Pi = —— , р2 = — е 40 , р3 =--------------.
2а 2а а
Перечисленные корреляционные функции показаны на рис. 5.3.
Радиус корреляции р является удобной обобщенной характеристикой
случайной функции f (х): чем выше величина р, тем медленнее в прост-
ранстве изменяется f (х), и наоборот. Значение радиуса корреляции явля-
ется очень существенным для работы КЭНС. Величина р является тем ес-
тественным масштабом, в котором измеряются основные показатели
КЭНС: установившаяся точность, допустимые начальные отклонения, дли-
тельность переходных процессов и т.п.
Статическая характеристика КЭНС дифференциального типа как при
наличии центрального считывающего элемента, так и без него определяется
одним и тем же соотношением (5.9) и равна первой разности корреляцион-
ной функции используемого поля, вычисленной на базе 21 (21 — расстояние
между считывающими элементами блока памяти). На рис. 5.4 приведены
статические характеристики 1, 2 и 3 для корреляционных функций,
определяемых соответственно уравнениями (5.11) — (5.13), в случае,
когда расстояние между считывающими элементами равно al = l/VT и па-
раметр корреляционной функции (5.12) X = /3/а = 2. При небольших откло-
нениях Д, не превосходящих радиуса корреляции р, статические характе-
ристики практически линейны, и в этом диапазоне изменения Д процессы
коррекции ГНС подчиняются линейным дифференциальным уравнениям.
Установившимся режимом дифференциальной КЭНС является положение, в
котором первая разность корреляционной функции обращается в нуль, т.е.
дифференциальная КЭНС отыскивает положение экстремума корреля-
ционной функции поля. Этому свойству эвристических КЭНС и обя-
зан своим происхождением термин ’’корреляционно-экстремальная
система”.
При больших отклонениях Д наблюдаются нелинейные эффекты. Если
аД > 2 -г 3, то для корреляционных функций (5.11) и (5.13) (кривые
138
т
Рис. 5.4
1—3 на рис. 5.4) сигнал коррекции сильно ослабляется, и без принятия
специальных мер работоспособность дифференциальной КЭНС обеспе-
чена быть не может.
Важную роль играет правильный выбор расстояния 21 между считываю-
щими элементами блока памяти. При недопустимо больших значениях
I знак статической характеристики может оказаться противоположным
знаку отклонения Д и контур коррекции ГНС будет неработоспособным.
Этот нежелательный вариант иллюстрирует кривая 4 на рис. 5.4, соответст-
вующая корреляционной функции (5.12) с параметрами X = 2 и al =2.
5.1.2. Нелинейные эффекты управления
в дифференциальной схеме КЭНС [5.2]
Проанализируем ряд существенных особенностей динамики процессов
коррекции в дифференциальной схеме КЭНС. Чтобы сосредоточить внима-
ние на существе дела, рассмотрим простейший случай: одномерный вариант
КЭНС, когда сигнал коррекции v с выхода коррелятора подается на усили-
тельное звено и вычитается (для обеспечения отрицательной обратной свя-
зи) из сигнала скорости движения, измеряемого ГНС, т.е. примем W(р) = —к.
Соответствующая структурная схема показана на рис. 5.5, а, где V = dx/dt —
действительная скорость движения, 8V — ошибка измерения скорости
движения с помощью ГНС. При составлении структурной схемы предпола-
галось, что коррелятор вместе с входящим в его состав фильтром осу-
ществляет преобразование (5.9), т.е. выделяет полезный сигнал и полностью
подавляет помеху 5и. При более подробном рассмотрении этот вопрос
оказывается достаточно сложным. Показано [5.1], что преобразование
(5.9) может иметь место лишь при соблюдении ряда дополнительных
условий, главными иГз которых являются стационарность используемого
навигационного поля и наличие так называемого квазистационарного ре-
жима коррекции, когда пространственная длительность коррекции велика
по сравнению с радиусом корреляции навигационного поля. Мы не будем
углубляться в тонкости динамики квазистационарных режимов управления
139
Рис. 5.5
в дифференциальной схеме КЭНС, поскольку это выходит за рамки настоя-
щей книги.
Дифференциальное уравнение движения, соответствующее структурной
схеме, приведенной на рис. 5.5, б, имеет вид
dx
— = V+ 5V-k [АЯ(Д -Z)+/)]
или
ЛД
— [Яг/(Д + /)-Яя(Д-0]+6К. (5.14)
Разделив обе части соотношения (5.14) на скорость движения и перейдя
к пространственному аргументу х = f V dt, получим
ЛД к 8V
— (5.15)
dx V V
(5.16)
Пусть L — некоторый интервал такой, что на нем с большой точностью
соблюдается равенство
б/Д Д (х + L) — Д (х)
dx L
Интервал L определяется пространственной структурой поля /' (х) и сте-
пенью квазистационарного режима управления. В частности, в квазистацио-
нарном режиме управления можно выбрать L равным радиусу корреля-
ции р. Подстановка (5.16) в (5.15) превращает (5.15) в рекуррентную
140
зависимость
(5.17)
(5-18)
kL 8V
дп + 1 - дп + ~ [.Rff (дп + 0 - Rff (дп - 0] +
(л = 0,1,2,...),
где Д„ = Д (х), Д„ + ! = Д (х +L), До = Д (0).
Рассмотрим стационарное поле, корреляционная функция которого об-
ладает ложными экстремумами и имеет вид
Rff(A) = о2е_"2л2 cos/ЗД.
Для этой корреляционной функции радиус корреляции равен
x/tF / 02 \
р -----exp I-----1.
2а \ 4а7
После подстановки (5.18) в (5.17) найдем
s„ + 1 = - kN {exp [- (s„ - e)2 ] cos X (s„ - e)-
u
- exp [— (sn + e) ] cos X (sn + e)} + kN —.
o2
ЗдесьN=aL, X = 0/a, e = al, K=ko2/V, p = 8Vlk,
x/F / 02 \Д
.s = аД = — exp I---]—,
2 \ 4a2/P
т.е. s представляет собой ошибку регулирования Д, выраженную в еди-
ницах радиуса корреляции.
Движения рассматриваемой корреляционно-экстремальной системы во
многом определяются видом нелинейной статической характеристики КЭНС
т (sn) Rff (Д„ - I)- Rff (Д„ + /)
(5.19)
(5.20)
о2 о2
= exp [-(s„ - е)2] cosX(s„ - е) -exp [-(s„ + е)2] cosX(s„ +е), (5.21)
которая зависит от корреляционной функции (параметр X) и расстояния
между считывающими головками е . Статическая характеристика КЭНС
для корреляционной функции, описываемой уравнением (5.18), показана
на рис. 5.6 (кривая 1 соответствует X = 2, е = 1/VX а кривая 2 - X = е = 2).
Если параметр X мал (например X = 0), то знаки статической характе-
ристики и отклонения совпадают. В этом случае существует единствен-
ное положение равновесия. При отсутствии возмущения (д= 0) корреля-
ционно-экстремальная система всегда приходит в положение = 0. Если
параметр X достигает больших значений (например X = 2), могут возникать
более разнообразные движения. В этом случае статическая характерис-
тика коррелятора (кривая 1 на рис. 5.6) при положительном отклонении
s имеет области положительных и отрицательных значений, чему соответ-
ствуют два различных возможных положения равновесия. В зависимости
от величины начального рассогласования s0 КЭНС может либо придти в
нужное положение равновесияs„ = 0 [захватить главный экстремум — мак-
симум корреляционной функции (5.18)], либо захватить ложные экстре-
141
мумы корреляционной функции. Далее будет рассматриваться лишь корре-
ляционная функция вида (5.18) для значения X = 2.
На фазовой плоскости с осями s„, sn + j изобразим зависимость
$п + 1 = V (sn) = sn - к N { ехр [- (sn - е)2 ] cos X (s„ - е) -
. д
-ехр [-(s„ + е)2] cos X (s„ +е)} + k,V— . (5.22)
о2
Тогда если по оси абсцисс отложить некоторое предыдущее значение ошиб-
ки регулирования sn, то на оси ординат можно получить последующее зна-
чение sn + 1; затем, отложив на оси абсцисс полученное значение sn+1,
на оси ординат можно найти следующее значение sn + 2 и таким образом
шаг за шагом построить весь переходный процесс. На рис. 5.7 описанное
построение проведено для е =1/\Л’, X = 2, к = 0,02, N = 10, д = 0.
Для облегчения построений удобно провести биссектрису dd'. Пусть на-
чальное отклонение s0 = 1, тогда согласно фазовой траектории, приведен-
ной на рис. 5.7, последующее значение Sj = 0,8; отложив Sj =0,8 на оси
абсцисс, находим s2 = 0,6. То же самое построение можно проделать быст-
рее, если из точки а, соответствующей s0 = 1, провести горизонтальную
линию до пересечения с биссектрисой в точке Ь, а затем из точки b провес-
ти вертикальную линию до пересечения с кривой у (s„) в точке с. Продол-
жая этот процесс далее, определим всю траекторию движения при началь-
ном отклонении s0 = 1. В установившемся положении равновесия в этом
случае = 0. Если выбрать начальное отклонение s0- 1,8, то в установив-
шемся положении равновесия = 3,2, т.е. система захватит ложный экст-
ремум — ложный максимум корреляционной функции (5.18). "Водораз-
делом” между этими двумя положениями равновесия является начальное
отклонение s0 = 1,5, чему соответствует, согласно (5.20), До =4,6р.
Итак, если корреляционная функция Л//(Д) кроме главного экстре-
мума — максимума имеет ложные экстремумы (максимумы или мини-
мумы) , желаемое положение равновесия Д«> = 0 может наступить лишь
при условии, если начальные отклонения До не превосходят некоторого
предельного значения. Предельным значением До является как раз то зна-
чение, при котором статическая характеристика меняет знак (см. кривую
1 на рис. 5.6 и рис. 5.7).
142
В рассмотренном случае допустимое положительное начальное отклоне-
ние sдоП = 1,5, а установившееся значение х» = 0. В силу симметричности
графика tp (sn) (см. рис. 5.7) допустимое отрицательное начальное откло-
нение 5доП = -1,5.
Оценим теперь влияние возмущения д. При положительном значении
д график функции xn+1 = <£(х„), согласно (5.22), поднимается вверх на
величину kNu/<? .На рис. 5.8 изображен график sn+ { = >p(sn) для значе-
ний параметров е = 1/V2, X = 2, к = 0,02, N = 10, д/а2 =0,1. Точки пересе-
чения функции *p(sn) с биссектрисой первого координатного угла теперь
сместились (по сравнению с рис. 5.7), следовательно, изменились и положе-
ния равновесия: появилась установившаяся ошибках» =0,05; допустимое
положительное начальное отклонение ХдОП уменьшилось до ХдоП = 1,42,
в то время как допустимое отрицательное отклонение возросло (ХдоП =
= -1,72).
Увеличение ХдОП и уменьшение ХдОП объясняются следующими причина-
ми. Если начальное отклонение х0 < 0, а возмущение д>0,то ддействует
благоприятно, вызывая движение системы к положению равновесия; в
этом случае вырабатываемый системой сигнал коррекции совпадает по
знаку с возмущением д. Если же х0 > 0 и д > 0, то возмущение д стремит-
ся увеличить ошибку регулирования х,в результате чегоХдОП уменьшается.
Поскольку установившееся значение ошибки и допустимые началь-
ные отклонения ХдОП и х~оп графически определяются в точках пересече-
ния функции у>(хп), задаваемой соотношением (5.22), с биссектрисой пер-
вого координатного угла, имеющей уравнение xn+1 = sn, то х^, x*on и
х ~оп являются решениями уравнения sn = <p(sn), которое после элементар-
ных преобразований приводится к виду
ехр[—(sn - e)2]cosX(x„ - е)-ехр[—(х„ + e)2]cosX(x„ + е)=д/а2.
(5.23)
Левая часть этого уравнения есть не что иное, как статическая характеристи-
ка т (s)/a2, следовательно, отклонения ХдОП и ХдОП можно графи-
чески находить при пересечении статической характеристики горизонталь-
ными линиями, проводимыми на высоте д/о2.
143
Описанное построение выполнено на рис. 5.9. В результате такого по-
строения, кроме Je, 5дОП и s"on, удается также найти все возможные по-
ложения равновесия, соответствующие ложным экстремумам корреляцион-
ной функции. Как следует из рис. 5.9, для значения д = 0,1 о2 наряду с
= 0,08 возможно положение устойчивого равновесия s^ = —2,5, соот-
ветствующее минимуму корреляционной функции.
Если возмущение д достигает заметных значений (0,15 а2 < ц < 1,05а2),
то существуют только две точки пересечения статической характеристики
с горизонтальными линиями, проводимыми на высоте д/о2.
Одна из этих точек (ей соответствует меньшее по модулю значение s)
определяет установившееся значение ошибки , другая — допустимое
положительное начальное отклонение s*on. В этом случае допустимое отри-
цательное начальное отклонение s~on = — оо, т.е. любые отрицательные на-
чальные отклонения будут отработаны системой, так как возмущение д,
имеющее в рассматриваемом варианте значительную положительную вели-
чину, вызовет движение системы в область положительных ошибок регу-
лирования s и, таким образом, ликвидирует любое отрицательное начальное
отклонение.
На рис. 5.10 изображены фазовые траектории для е = 1/у/2] X = 2,
к = 0,02, N = 10 и д = 0,5 о2, подтверждающие сделанные выводы. На этом
рисунке показаны траектории движения для трех начальных отклонений:
s0 ~ ~ 2; 0,8; 1,4. Первые два отклонения s0 = — 2 и s0 = 0,8 корреля-
ционно-экстремальная система отрабатывает и приходит в положение равно-
весия = 0,25. Третье начальное отклонение s0 = 1,4 оказывается непо-
сильным для системы: в этом случае возмущение д выводит систему из
синхронизма, положения равновесия не существует и ошибка s со време-
нем неограниченно возрастает в результате действия возмущения д.
Существует предельное значение помехи д = 1,05а2 (см. рис. 5.9), при
котором уравнение (5.23) имеет единственное решение = 5дОП = 0,65.
Фазовая траектория движения, соответствующая предельному значению
д = 1,05а2, изображена на рис. 5.11.
При ц = 1,05а2 установившееся значение ошибки = 0,65; любые от-
рицательные начальные отклонения отрабатываются системой, положитель-
144
ные же начальные отклонения,
превосходящие 0,65, КЭНС от-
работать не в состоянии, так
как вырабатываемый сигнал уп-
равления не может скомпенси-
ровать возмущения д, а зна-
чительно усилить этот сигнал
нельзя, потому что нарушается
условие квазистационарности ре-
жима управления. Если возму-
щение д превосходит предель-
ное значение, т.е. д > 1,05 а2
(см. рис. 5.11), то не сущест-
вует никакого положения рав-
новесия.
Выше было рассмотрено по-
ведение КЭНС при различных
положительных значениях воз-
Рис. 5.12
мущения д; в случае отрицательных д аналогичные зависимости сим-
метричны. На рис. 5.12 показаны зависимости s„, 5дОП и 5дОП от возму-
щения д, полученные в результате графического решения уравнения
(5.23). Как следует из рис. 5.12, в широком диапазоне измене-
ния возмущения д (-0,9а2 < д < 0,9а2) наблюдается линейная зависи-
мость между установившимся значением ошибки и возмущением д, при
этом 5°° изменяется в пределах —0,45 < < 0,45. Область пропорцио-
нальности между s^ ид соответствует линейному участку статической
характеристики (5.21), когда
ехр[—(s„ - e)2]cosX(s„ - е) - ехр[ —(s„ + e)2]cosX(s„ + е) ~
2(Х sin Хе + 2 е cos Хе)ехр(—e2)s„.
Уравнение (5.23) в этом случае принимает вид
2(XsinXe + 2e cosXe)exp( — e2)s„ = д/а2,
т. е.
М
s = —------------------------------—
00 2
2a2(XsinXe + 2ecosXe)e~e
Проведенный анализ показал, что дифференциальная схема КЭНС рабо-
тоспособна лишь в области относительно малых (по сравнению с анома-
лиями навигационного поля) начальных позиционных ошибок ГНС и,
кроме того, критична к величине ошибки измерения скорости движения.
§ 5.2. БЕСПОИСКОВЫЕ КЭНС
Известны два строгих теоретических подхода к синтезу субоптимальных
беспоисковых КЭНС: нелинейная калмановская фильтрация [5.3, 5.4] и
нелинейная фильтрация в смысле Р.Л.Стратоновича [5.5, 5.6], причем пер-
вый подход появился раньше и имеет большую глубину проработки. В этом
10. И.Н. Белоглазов
145
параграфе последовательно рассматриваются оба варианта применительно
к КЭНС с точечным зондированием полей.
5.2.1. Использование нелинейной калмановской фильтрации
для синтеза субоптимальных беспоисковых КЭНС
Конечная запись алгоритма, предназначенного для реализации на БЦВМ,
естественно, должна быть дискретной, но поскольку математические моде-
ли ошибок навигационных систем, например инерциальной, описываются
дифференциальными уравнениями, то возможно использование как непре-
рывного, так и дискретного фильтра Калмана. Если используется дискрет-
ный вариант фильтра, то сначала дифференциальные уравнения ошибок
навигационной системы с каким-то приближением заменяются на рекур-
рентные, что сводит задачу к канонической постановке дискретной нелиней-
ной калмановской фильтрации. Если же используется непрерывный вариант
фильтра Калмана, то уравнения фильтра получаются в дифференциальном
виде и лишь затем рассматривается вопрос о численном интегрировании
этих дифференциальных уравнений, что и приводит в конце концов к ре-
курретным соотношениям, пригодным для реализации в БЦВМ. Поэтому
при синтезе беспоисковых алгоритмов КЭНС допустим определенный
произвол в выборе непрерывного или дискретного варианта фильтра Кал-
мана. В настоящем параграфе будет рассмотрен непрерывный вариант
в связи с большей компактностью описания соответствующих алгоритмов.
Распространенная постановка задачи в непрерывной нелинейной фильтра-
ции такова [5.7].
Заданы уравнение контролируемого процесса
X +А(Х, ty=^(X, t)u + £ (5.24)
и условия наблюдения
Z=h(X, г) + т), (5.25)
где X — n-мерный вектор состояния, Z — т-мерный вектор наблюдения,
и — известный вектор, иногда называемый вектором управляющих воздей-
ствий, t — непрерывное время, А(Х, t),<p(X, f),h(X, t) — известные нели-
нейные функции вектора состояния и времени, £, Т) — случайные возмуще-
ния, имеющие характер белого шума.
Начальное значение вектора состояния является случайным и подчиняет-
ся нормальному закону с математическим ожиданием т0 и ковариационной
матрицей G:
p(X0)fEN(m0,G). (5.26)
Возмущения 7?— центрированные, взаимно некоррелированные, они не
коррелировали также с вектором Хо:
М<$(г)> = 0, Л/<т?(г)> = О, М <Цг)тГ(т)) = О,
Л/(?(г)Уот> = О, 2И <t?(Z)XJ > = 0. (5 27)
Интенсивности белых шумов %, ц задаются матрицами спектральных
плотностей 5^, Sn:
М(Цг)^(т)> = S^(t)6(t-T), М(71(г)т}т(т)> = ЗДЙЦ-т), (5.28)
146
где М - символ операции математического ожидания, 3(г) — дельта-
функция.
Субоптимальная в смысле минимума дисперсии ошибок всех координат
оценка вектора состояния определяется двумя уравнениями: уравнением
оценок
X + А(Х, t)=tp(X, t)u+R
/э^у ,
\эх/
[Z - h(X, г)], X(0) = mo
(5.29)
и уравнением ковариации
+ -^-Л К(0) = 6, (5.30)
\дХ / дХ \ЭХ / \ЭХ /
где ЭЛ/ ЭХ, ЭЛ/ ЭХ - матрицы Якоби, вычисленные в точке X = X. Если,
например,й(Х,Г) = [At (Х,г), ...,hm (X,г)]т, X = (xt.х„)т, то
"Эй, Эй,- dxi дхп Эй2 ЭЛ2
Эй _ ЭХ ЭХ] дх„ dhm ЭХ[ Эх„_
R(t) — условная ковариационная матрица ошибок оценивания в момент
времени t при условии наблюдения сигнала Z (т) на интервале т G [0, г]:
R(t) = М< [Х(Г) - Х(Г)][Х(О - X(r)]T I Z(r), те [0, г] > =
- . . • М([л(0-л(0]Ы0Л(')Р
где *i (г), х2 (t),..., xn(t) - проекции вектора Х(О •
Алгоритм (5.29), (5.30) обычно называется расширенным фильтром
Калмана первого (линейного) приближения.
Оценка X(t) является приближенно оптимальной (субоптимальной).
Теоретически показано, что она тем ближе к оптимальной, чем выше точ-
ность начального оценивания. При больших начальных ошибках уравнение
(5.29) может не давать удовлетворительного оценивания и система, описы-
ваемая уравнениями (5.29) и (5.30), вообще может стать неработо-
способной.
При использовании идей нелинейной калмановской фильтрации для син-
теза беспоисковых алгоритмов КЭНС уравнения (5.29) и (5.30) конкрети-
зируются. Уравнения контролируемого процесса, в качестве которых обыч-
10* 147
но используются уравнения ошибок грубой навигационной системы
(инерциальной, инерциально-доплеровской, курсо-доплеровской, курсо-
аэрометрической или какой-либо другой), являются линейными
X+A(t)X = b(t)u +$. (5.32)
Слагаемое Ьи может присутствовать или отсутствовать. Все зависит от
постановки задачи синтеза. Если уравнения ГНС записываются в ошибках,
то составляющая Ьи пропадает. Если же уравнения навигационной системы
записываются в полных координатах, то в качестве составляющей Ьи
выступают измерения ГНС [5.8]. Конечные структуры КЭНС при любой
записи уравнений навигационной системы оказываются тождественными.
Уравнение наблюдения часто представляет собой зависимость навига-
ционного поля f (х, у, z) от координат местоположения
Z =f (х, у, z)+ftf, (5.33)
где х,у — горизонтальные координаты движущегося объекта, z — вертикаль-
ная координата, S/ — разность между измеренным значением поля в точке
(х, у, z) и значением поля в этой же точке, записанным в бортовой карте,
т.е. помеха 5/ определяется ошибками измерения геофизического по-
ля 5/[ и ошибками составления бортовой карты S/2:
V = 5Л + б/2 • (5.34)
Зависимость геофизического поля от координат местоположения является
существенно нелинейной, носит характер реализации случайной функции,
и в этом состоит своеобразие задачи оценивания в КЭНС.
В первом приближении значения поверхностных полей, если пренебречь
усреднением полей внутри пятна диаграммы направленности датчика по-
верхностного поля, определяются только координатами х и у. Значения же
пространственных полей зависят и от высоты полета; поэтому навигация по
пространственным полям требует дополнительного пересчета наземных
карт f(x, у, 0) на высоту z (см. § 3.1).
Алгоритм субоптимальной нелинейной калмановской фильтрации в зада-
чах навигации по геофизическим полям принимает вид
X+AX = bu + R
^\rS-l[Z-h(X)]. А(0) = шо,
(5.35)
R+AR+RAT +R[^YsZl( ^-]R=St, R(0) = G.
\дх/ \дх/
(5.36)
Запись (5.35) предполагает, что в наблюдение /г (А), кроме геофизического
поля f (х, у, z), могут входить и некоторые другие величины, т.е. уравне-
ния фильтра (5.35) и (5.36) составлены для модели наблюдения (5.25) бо-
лее общей, чем (5.33).
Математические модели ошибок инерциальной
системы. Из всех типов ГНС наиболее перспективной и важной являет-
ся инерциальная система. Поэтому далее рассматриваются вопросы коррек-
ции именно инерциальных систем. Такая коррекция, кроме измерения
148
навигационного поля, предполагает для реализации оптимальных (или
субоптимальных) алгоритмов обработки использование априорной инфор-
мации в виде уравнений ошибок инерциальной системы.
Уравнения ошибок платформенной инерциальной системы со свободной
в азимуте гироплатформой на основе проведенного в [5.8] рассмотрения
могут быть представлены в следующем виде:
Дх = ДКХ> Дх(0) = Дхо, (5.37)
Дг = Д Vy, Д^(0) = Д v0 , (5.38)
Дг = ДИ2, Дг(0) = Дго, (5.39)
дйх = Vx дих--^д7г-а^+а;д^+д^+д^,
ДИХ(О) = дих0,
(5.40)
ДКу = г/-2 Дг —— ДКу-----------^-Д^+д^а-д/Д^+Д^+Д^,
г* г* г*
ДКу(0) = ДКу0, (5.41)
, *2 *2
Л Л _ Л R + Vy \ Vt V*,
ДК-^0—«2 /Дг+2~ ДР^+2—^ДР^-д^а+д^+Д^ + Дд^,
Д72(0) = ДИ20, (5.42)
• vy Д1>’ а=—Г-дг -Л - г* г * * Vx Уу — Д^”“ —+ <^дра > Г Г а(0) = «о, (5.43)
Vx ДИХ & = 2 Дг + — г* г у* Vy -^Д^+г—+ 0(0) = 0О, (5.44)
• V* V* д1^=_Д_а+_Г)3 + Г г Д^(0) = Д^о. (5.45)
Здесь Д7Х , AVy, Д К — ошибки измерения скорости движения в горизон-
тальной свободной в азимуте системе координат xyz, Дх, Ay, кг — ошиб-
ки измерения местоположения движущегося объекта в этой же системе
координат, а, (5 — углы отклонения гироплатформы от вертикали, Д^ —угол
ухода гироплатформы в азимуте, Дд^, Ддр, Дд$- — ошибки акселеромет-
ров вдоль соответствующих осей, содра, соДР0 — скорости дрейфа горизон-
тальных гироскопов, содр^ - скорость дрейфа курсового гироскопа,
Д#х, Д^_р, Д^2 — отклонения действительных составляющих гравитацион-
ного ускорения gx, gy, gz от модельных значений gx, gy, g* , принятых
в формульной схеме инерциальной системы, ка, Кр - относительные неста-
бильности кинетических моментов гироскопов, Их, Vy — составляющие аб-
солютной скорости движения, определенные с помощью инерциальной
149
системы, а^, af — показания горизонтальных и вертикального акселе-
рометров в системе координат, связанной с гироплатформой (при отсут-
ствии возмущений системы координат £ r/f и xyz совпадают), г * -
радиус-вектор, проведенный из центра масс Земли в точку местоположения
движущегося объекта, г * — вертикальная скорость, о;о, (30 , Д ф0 — ошибки
начальной выставки ИНС по вертикали и в азимуте, Дхо,Д>о, Дг0 и
Д Ухо, Д Vyo, Д Vz о — ошибки начального задания координат местоположе-
ния и составляющих скорости движения.
При выводе уравнений ошибок ИНС использовались простейшие модели
Земли и гравитационного потенциала, когда Земля предполагалась одно-
родным шаром радиуса R, чему соответствовало
U(r,X,<P) = ,
где U(r, X, у) — гравитационный потенциал в точке с координатами
г, X, <р; frp — гравитационная постоянная, Л/3 — масса Земли.
Если при получении алгоритма вычислителя ИНС использование простей-
шей модели гравитационного поля оказывается недопустимым, то
при выводе уравнений ошибок ИНС, когда речь идет о малых отклонениях
от идеального движения, это вполне обосновано. В уравнении (5.42)
g0 обозначает модуль гравитационного ускорения у поверхности Земли
(при г = R). Ошибки, возникающие из-за неточности вычислений, в соот-
ношениях (5.37) - (5.45) не учитывались.
Величины а$, а Г), а^, V*, V , г*, г * либо измеряются акселерометра-
ми ИНС, либо получаются после однократного или двукратного интегриро-
вания ускорений.
Полные уравнения вычислительного алгоритма ИНС, работающей в гори-
зонтальной свободной в азимуте системе координат, имеют следующий
вид [5.8]:
И* г*
Vx* = al-----х~ + gx‘(r*,x’, /), (5.46)
г
у* г*
Vy = а'п------4- + gy(r* ,Х*,/), (5.47)
г
*2 *2
• * * И* + V
Vz = + ———— + g2(r‘,x‘,ip*), (5.48)
г
Г* = И*, (5.49)
X = —----------; ~ ш3, (5.50)
г cos (0
Здесь X *, ip * — сферические долгота и широта, со3 — угловая скорость вра-
150
щения Земли, V*, - восточная и север-
ная составляющие скорости движения,
связанные с И* и Vy соотношениями
(рис. 5.13)
VK* = V* cosp*- I^’sinp*,
V* = V* sinp* + Vy cosp*, (5.52)
где p* — угол между осью x и направлением
на восток:
p*=-^tg/. (5.53)
г
Интегрирование уравнений (5.46) — (5.53) при известных начальных
условиях X * (0), <р * (0), г * (0), Т/(0), V* (0), V* (0), р* (0) позволяет
найти текущие сферические долготу и широту движущегося объекта.
Структурная схема алгоритма ИНС представлена на рис. 5.14, где звездоч-
кой отмечены (так же, как и в написанных ранее формулах) измеряемые
входные воздействия и величины, рассчитываемые в БЦВМ, т.е. вся та
информация, которая имеется на борту движущегося объекта и может
быть использована для управления.
Позиционные ошибки Дх и Ду рассчитываются в свободной в азимуте
системе координат. Иногда в задачах коррекции по геофизическим полям
лучше рассматривать ошибки местоположения ДХ и Д<р в сферической
системе координат. Переходя в равенствах (5.50) — (5.53) к приращениям,
получим
ДX = (r*cos<p*)-2 [r*cosip*(AKxcosp* -AFySinp*- V^Ap)-
— l$* Arcos<p* - ИЛ*г * Д<р sin <p* ], (5-54)
Д<р = г* [г*(ДИх sin р* + AVycosp* + ИЛ*Д р) - V^ Аг], (5.55)
Др = г* [r*tgip*(AKcCosp* - AVysinp* - V*Ap)-
- V* Ar tg <p* +r* Д<р cos-2 ]. (5.56)
Полная ошибка измерения курса с помощью ИНС равна Д 0+ Др.
Приведенные уравнения ошибок ИНС являются весьма подробными —
в них отражены и очень слабые связи между различными переменными.
Эти уравнения были получены в предположении, что вертикальная коорди-
ната г*, необходимая для реализации алгоритма ИНС (5.46) — (5.56),рас-
считывается только на основе данных ИНС без привлечения дополнительной
внешней информации.
Такое решение не всегда целесообразно. Анализ соотношений (5.37) —
(5.45) подтверждает известное утверждение о неустойчивости вертикаль-
ного канала ИНС. Действительно, если в равенствах (5.39) - (5.42) оста-
151
/Г коррекционным
моторам
Рис. 5.14
вить только составляющие, зависящие от Аг, то после подстановки
(5.42) в (5.39) получим
Дг -
Второе слагаемое, стоящее в скобках, для реальных значений составляю-
щих скорости Vx и Vy намного меньше первого. Поэтому движение не-
устойчиво по Дг и имеет место тенденция к нарастанию ошибок вертикаль-
ного канала ИНС. Но ошибка Дг входит в уравнения горизонтальных кана-
лов и приводит к снижению их качества. Вследствие этого необходимые для
построения замкнутой схемы вычислителя значения г* и г* (см.рис.5.14)
152
вводятся обычно не от вертикального канала ИНС, а от внешних источни-
ков. В этом случае уравнения (5.37) — (5.45) сохраняют свою силу, но
в них следует величины Дг заменить на ошибки измерения высоты Дл
внешними измерителями. Так как ошибки Дг невелики, то составляющие
д7,
/ r2
„з
\ г
* •* * * ♦
Г COS \р г г
в уравнениях (5.40) — (5.44), (5.54) — (5.56) становятся пренебрежимо
малыми и их можно ввести в эквивалентные ошибки акселерометров
Аа^, Аа^, Аа^ и эквивалентные дрейфы гироллатформы содра, содр/3.
Кроме того, эти составляющие целесообразно объединить с Аа^, Аа^,
Аа$ , содр а и содр в также еще и потому, что они не зависят от интегрируе-
мых величин AVX, AVy , АГ, , а и /3.
С учетом сделанных замечаний перепишем уравнения ошибок ИНС сле-
дующим образом:
ДХ = (Г*СО5^‘)'*(Д jA-cosp*-AKj-sinp*- ApV^ - A<pl\*tg<p*), (5.57)
Aip = r* (AVxsin p* + AVycos p + ApV\), Ar = AVZ , (5.58) (5-59)
Др = /-' 1 [tgip*(AVxcosp*-AVySinp - Ap V^ )+Д<р V\ cos 2ip ], (5.60)
AVX =—]~~AVX-~^',+a'ax +a* Аф +S/Xi , r r (5.61)
y* JZ* * * AVy = ~ AVy — ~—AVz + ap ay - a*_ A^ + bj y , , (5.62)
* * к. к, AVz = 2 — AVx + 2 -7- AVy - a ay - a» ax + 6/z t , r r (5.63)
. AVX Vy = . + . + ^дрл-i > r r (5.64)
AVy VX %, = r. Аф + ^дру1, (5.65)
V* V* Дф = -Ч-вх + '^Г'ау + 4ipzl - (5.66)
153
Здесь
5/х1 =Д£Х+Да{, 8jyl = &gy + Дап , 5/г, = Д£г + Aaf , (5.67)
Vx' _ уу х
^дрх! “ ^.K0~W,xp0’ ДР.1'1 r* Ka + wflpa, Wnpzl ^flpi/i’
(5.68)
и для придания уравнениям (5.61) - (5.66) симметричного вида проведено
переобозначение ах = — 0, ау = а. В эквивалентные ошибки акселеромет-
ров 8/х1, 8/yl, 8jzl помимо инструментальных погрешностей акселеро-
метров ДЛ{, Длп, Дл$- включены также гравитационные аномалии, неучи-
тываемые в прйнятой модели гравитационного поля. Эквивалентные
дрейфы соДр Х1 и бэдр у j учитывают нестабильность кинетических момен-
тов ГИрОСКОПОВ Ка И К0 .
Система уравнений (5.57) — (5.66) представляет собой детальную мате-
матическую модель ошибок ИНС и может использоваться для оценки оши-
бок местоположения ДХ , Д<р, Дг, скорости движения ДИХ, ДИу , ДИ2 ,
вертикали ах, ау , азимутальной погрешности Дфи угла Др (что обеспечи-
вает измерение курсовой ошибки), а также постоянных составляющих
дрейфов гироплатформы <-%₽*], содру1, шдр21 и погрешностей акселе-
рометров 8jxl , 8j yl, S/z ,. При использовании поля рельефа пространст-
венная длительность такого полного оценивания для авиационных скоро-
стей полета может достигать 200 - 300 км, при этом модель (5.57) - (5.66)
оказывается приемлемой.
Дальнейшее упрощение моделей ошибок ИНС может быть осуществлено
в предположении равномерного прямолинейного горизонтального полета
на небольшой (по сравнению с радиусом Земли) высоте, когда Vz* = 0,
а’ = = 0, = g, r' = R. Предположим также, что счисление коорди-
нат ведется в ортодромической системе. Тогда в уравнениях (5.57) — (5.66)
под X и надо понимать ортодромические долготу и широту. При не-
больших отклонениях от ортодромии costp* « 1, a simp* и tgp* являются
малыми величинами. Согласно (5.53) в этих условиях и р* является малой
величиной. При сделанных допущениях Vx* = = V, V* = Vy = 0 и
уравнения (5.57) - (5.66) упрощаются и принимают вид
• И . ДИХ
Дх-ДИх, ДИХ-~-rAVh +gax +8jxl , ах=--~—+ оэдрх],
(5-69)
ДК,
Д^ = ДИу, ДУу = gay + 8jyl , ау=---^-+ <одру2 , (5.70)
ДЯ=ДИя, ДЙЯ = 2^ ДКе+5/г1. (5.71)
При записи уравнений (5.69) —(5.71) проведено переобозначение некото-
рых величин: Дг заменено на ДЯ, а ДИ2 - на ДИН, где ДЯ и ДИН -
154
ошибки измерения инерциальной системой абсолютной высоты и верти-
кальной скорости. Кроме того, азимутальная погрешность Дф исключена
из числа оцениваемых параметров и введена в эквивалентный дрейф
V
^ДРУ2 =о)дру1 Д0, (5.72)
К
а позиционные ошибки, как в (5.37) и (5.38), снова измеряются в свобод-
ной в азимуте системе координат
Дх=ЯДХ, Ду^ЯД^. (5.73)
Уравнения (5.69) — (5.71) достаточно просты и сохраняют все сущест-
венные черты поведения реальных ошибок ИНС. Эти уравнения описы-
вают шулеровские движения ошибок ИНС. Достоинством уравнений
(5.69) —(5.71) является взаимная независимость горизонтальных кана-
лов. Если считать движение строго горизонтальным (ДИ// = 0) ив воз-
мущениях 5/х1 и содрх! сохранить только постоянные составляющие
5/х и сЗдр то решения уравнений (5.69) будут
sin £2/ gax0 + &/'x
Дх(Г) = Дх0+ДИе0 ——— + ------------------ (1 - cos Sir)+
П Пг
+ ( nr - sin Sir), (5.74)
gax0+8ix g<^ ппх
ДИХ(Г) = ДИ-со cos Sir +------- sin Sir +-----—(1 — cos Sir),
^2 £2
дихоп 8fx (5/75)
ax(t) =----------sin П t + ax0 cosSir - -(1 — cosSir) +
g g
+ 03-- sin Sir, (5.76)
Si
где Si = yJg/R — частота Шулера.
Такой же вид имеют и решения для канала у. Формулы (5.74)-(5.76)
описывают шулеровские колебания ошибок ИНС. Их анализ позволяет
оценить влияние возмущающих факторов 8fx, солрх и начальных ошибок
выставки ИНС Дх0, ДИЛ.О, ахо- Хотя уравнения (5.69) — (5.71) были
получены в предположении равномерного горизонтального движения, их
можно использовать и в условиях, незначительно отличающихся от указан-
ных. Соотношения (5.69)-(5.71) являются хорошей моделью ошибок
ИНС при обработке информации в КЭНС для длительностей оценивания
50-80 км, когда требуется определить ошибки местоположения Дх,
Ду, ДЯ, скорости движения Д Ух, Д Иу, ДИи и вертикали ax, ау.
При коротких интервалах оценивания (10 — 20 км), что также харак-
терно для КЭНС, допустим переход к предельно упрощенным моделям
ошибок ИНС. В этих условиях, когда
т / у \ т
f (------ДИ„ +gax +8/xi ]dt< ДИх0, f (gay +8fyi)dt « Vy 0,
о \ Л / о
155
где Т — временной интервал оценивания, вместо уравнений (5.69) — (5.71)
можно использовать соотношения
Дх = ДИх, ДЙХ=О, (5.77)
Ду = ДИу, ДД, =0, (5.78)
ДЯ = ДИя, ДЙн=5/я- (5.79)
Здесь 5/н обозначает правую часть второго уравнения системы (5.71) и
рассматривается как случайное возмущение.
Углы отклонения гироплатформы от вертикали а.х и о^, не входят в ра-
венства (5.77) — (5.49) и, следовательно, при использовании этих моде-
лей ошибок ИНС вообще не оцениваются. Уравнения (5.77) — (5.79)
позволяют определить лишь ошибки местоположения и скорости движения.
5.2.2. Простейшие беспоисковые КЭНС
Одномерные беспоисковые КЭНС для оценки местоположения. Будем
считать, что скорость движения V измеряется ГНС абсолютно точно (И =
= V *) и имеет место лишь постоянная ошибка Дх. Тогда уравнение движе-
ния запишется в виде
Дх = 0, (5.80)
а наблюдение z (г), под которым понимается сигнал датчика используемого
геофизического поля f (х), представляется равенством
г(г) =У[л:(г)] + 5Д. =f[x*(t)_ Дх(г)] + 5Д, (5.81)
где S Д, — ошибка измерения геофизического поля, предполагаемая белым
шумом со спектральной плотностью До, -Y(O — координата действитель-
ного местоположения движущегося объекта, х*(г) — координата местопо-
ложения, определенная ГНС:
t
х*(т)=/ V*(r)dr. (5.82)
о
Соотношение (5.81) предполагает такой выбор начала координат, при ко-
тором х*(0) = 0. Начальное распределение ошибки х0 считаем нормальным
с нулевым математическим ожиданием и дисперсией <Д0 •
Теперь определены все величины, необходимые для написания урав-
нений нелинейной калмановской фильтрации. В рассматриваемом случае
векторы X и Z вырождаются в скалярные величины X = Дх, Z = z, возму-
щение £ = 0, ошибка наблюдения т; совпадает с 5Д., 5^(т) = 0, Sn(f) =S0,
m0 = 0, G = а2, а матрицы А и b равны нулю.
На основании (5.29) и (5.30) уравнение субоптимального беспоиско-
вого оценивания имеет вид
A R c)f л
Дх= —------- л {г-Дх*(т)-Дх(г)]}, Дх(0) = 0, (5.83)
До Эх
а уравнение ковариаций — вид
. R2
R +----
До
\ Эх
)2
= 0, /Д0) = Д
(5.84)
156
причем по физическому смыслу [см. (5.31)] R(t) в первом приближении
совпадает с текущей дисперсией а2(т) ошибки оценивания координаты
местоположения *).
Сопоставим полученное решение с эвристическими структурами, рас-
смотренными в §5.1. Для этого приближенно заменим производную
Э/
--- на первую разность
Эх х*_ дх
Э/ Дх* - Ах + Z) - Дх* - Ах - I)
- ~ ’ (5-85)
Эх х»-дх 2/
где I — достаточно малое (по сравнению со структурой навигационного
поля) расстояние, на котором возможно представление (5.85).
Подстановка (5.85) в (5.83) дает
Ах = k[f(x +1) - f(x - I)] [z—Дх)], (5.86)
где x(t) = x*(z) — Дх(т) — уточненное с помощью КЭНС местоположение
движущегося объекта,k(t) = R(t)/21 So.
Зависимости (5.86) соответствует структурная схема, приведенная на
рис. 5.15. Эта схема совпадает со структурой продольного канала эврис-
тической КЭНС с центральным считывающим элементом, изображенной
на рис. 5.2, если положить И-ф(р) W(p) = к. Динамика такой системы при
к= const исследовалась в § 5.1. Аналогия структур дает основание пред-
полагать, что субоптимальной беспоисковой КЭНС свойственны нелиней-
ные эффекты, выясненные ранее при рассмотрении структурной схемы,
показанной на рис. 5.5, главным из которых является срыв оценивания
при начальных ошибках, превышающих радиус корреляции используемого
навигационного поля**). Если обратная связь (уточнение положения счи-
тывающего элемента) осуществляется одновременно с процессом оцени-
вания, то предположение (5.80) способствует существованию квазистацио-
нарного режима управления в непрерывной КЭНС.
Отличием простейшей беспоисковой КЭНС от эвристической является
зависимость коэффициента усиления к от времени t. Эту зависимость мож-
но определить путем решения уравнения (5.84). Переходя в (5.84) к об-
ратной величине, найдем
d()!R) J 1
dt SQ
= -^-/'2[x*(t)-Дх(т)]
^0
и
11 1 '
~ = — 2[х*(т)-Д^(7}]</7. (5.87)
R Ох0 So о
В первом приближении х*(т) — Ах(т) ~х(т) - Ут. Поэтому, проведя за-
*) Строго говоря, вследствие случайное™ М- = I величина R случайна.
г Эх Эх 1х*—Дх
**) Этот эффект наблюдается в среднем по множеству экспериментов со случай-
ными начальными условиями. Прн специальном подборе условий коррекции возмож-
на сходимость прн отклонениях, превышающих радиус корреляции [ 1.14].
157
-2
мену переменных г = Vt, получим
1 , 1 Vt „
(Г)Л
Если градиент поля стационарен и эргодичен, то начиная с некоторой
пространственной длительности Vt, достаточной для проявления свойст-
ва эргодичности,
1 vt
f f'2(r)dr^o2 . , (5.88)
V t о j
где oj - - дисперсия градиента навигационного поля.
Подстановка (5.88) в (5.87) дает
/ 1 tar' \ *
Я (/) = а| (/) = (—г- + • (5.89)
\ °х, So /
Приведенные рассуждения показывают, что уже в уравнении ковариаций
(5.84) можно произвести приближенную замену
f 2 i х * - Дх о2 • . (5.90)
При этом результат интегрирования уравнения ковариаций не меняется.
Флуктуационная ошибка измерения 6Д. .широкополосная по отношению
к процессу оценивания, может считаться белым шумом. Спектральная
плотность ее вычисляется по формуле
5'о=«1т~, (5.91)
2 1 ~
где и т~ — дисперсия и временной радиус корреляции реального воз-
мущения.
После подстановки (5.91) в (5.98) находим
<d(0 =
t -±- -L-Y
at т~ /
(5-92)
k(t) = 21
ol т~
------ + °}'
oi 1
(5.93)
158
Согласно (5.92), (5.93) точность простейшей КЭНС неограниченно воз-
растает во времени и тем быстрее, чем больше отношение of/o~ средне-
квадратического значения градиента используемого навигационного поля
к среднеквадратической ошибке измерения этого поля. Коэффициент
усиления фильтра Калмана со временем стремится к нулю. Но распрост-
ранять вытекающие из равенств (5.92), (5.93) выводы на большие интер-
валы времени нельзя, так как при этом нарушается принятая модель движе-
ния (5.80). В частности, на больших интервалах оценивания более точным
является уравнение
Дх = 6 ,
где 6 — случайная ошибка измерения скорости движения с помощью
ГНС.
Если считать 5 белым шумом со спектральной плотностью 5 v, то
уравнение ковариаций примет вид
• я2 ,
R + ----- f 2 л =SK-
So х*-Лх
Заменяя/'2 наа^ , найдем установившееся решение
5 yS0
откуда
2 _ х/ад7
^луст ’
°г
1 Л*7
куст 21 Of У So ’
т.е. при использовании более точной модели движения оказывается, что
и коэффициент фильтра Калмана и ошибка определения координат не
стремятся к нулю, а после окончания переходного процесса принимают
некоторые установившиеся значения. При этом простейшая беспоисковая
КЭНС полностью совпадает с эвристической КЭНС с центральным считы-
вающим элементом.
Одномерные беспонсковые КЭНС для совместного оценивания место-
положения и скорости движения. Предположим, что ГНС измеряет ско-
рость движения с ошибкой ДГ и имеет место начальная ошибка опреде-
ления местоположения. Тогда уравнения движения запишутся в виде
Дх-ДК = 0. ДГ = 6/~,
где 5/~ — ошибка измерения ускорения (например, в инерциальной сис-
теме) .
Условия наблюдения определяются по-прежнему равенством (5.81).
Для сведения задачи к канонической постановке (5.32), (5.33) достаточ-
но ввести обозначения
Х = [Дх ДИ]Т, А =
, 6 = 0, $ = [0 5/Jт-
0 0
159
Возмущение 3/~ полагаем белым шумом со спектральной плотностью S,.
Тогда матрица интенсивностей векторного белого шума £ равна
Начальное распределение вектора А'(О) считаем нормальным с нулевым
математическим ожиданием н ковариационной матрицей
Г 0 1
л о
0 Оу
*- ' О •
где OxQ , Оу — дисперсии начальных ошибок измерения местоположе-
ния и скорости.
Поскольку в рассматриваемом случае
dh
Их
то уравнение фильтра Калмана в векторно-матричной форме записывается
следующим образом:
Дх, -ДУ
0
’ Дх(0)
.ДК(0)
г£) 1 1
.0 1 So
U - Я*)] >
(5.94)
Здесь элементы ковариационной матрицы R обозначены через R11, R12,
R22 Из физического смысла ковариационной матрицы следует, что Rj i (?) =
= »х(0> R22 (О = Оу (t), Ri2 (О =Rxv (0>где a*(t),ay (Г) - диспер-
сии ошибок оценивания местоположения и скорости в произвольный
момент времени, RXv(t) — взаимный корреляционный момент Дх(/) и
ДИ (г).
Уравнение субоптнмального оценивания (5.94) можно представить так-
же двумя скалярными равенствами
Дх
Э/
Эх
U-/(x)], Дх(0) = 0,
(5-95)
A Rxv df
So Эх
Jz-/(£)], ДИ(0) = 0,
х=х
(5-96)
G =
О 0 ‘
0 5/
. Эх
х *- Дх
/?11
. К 1 2 R2 2
ДЕ=о*—
чему соответствует структурная схема, приведенная на рис. 5.16,а. Штри-
ховыми линиями обведены элементы контура оценивания, представляющие
собой нестационарный линейный фильтр. Его свойства могут быть опреде-
лены параметрической передаточной функцией W(p, t) [5.9].
Таким образом, н для рассматриваемого варианта структура субоптн-
мальной беспоисковой схемы оценивания совпадает с порождаемой эврис-
тическим алгоритмом, но эквивалентный фильтр оказывается более слож-
ным. Это указывает на глубокое сходство, существующее между эвристи-
ческой структурой КЭНС с центральным считывающим элементом н субоп-
160
тнмалъными беспоисковыми алгоритмами КЭНС, что оправдывает сохране-
ние термина ’’корреляционно-экстремальные” и применительно к субопти-
мальным беспоисковым КЭНС. Параметры эквивалентного фильтра опреде-
ляются путем решения матричного уравнения Рнккатн (5.36), которое в
рассматриваемом варианте записывается следующим образом:
-«12
« j 2
«2 2
1 + [
J L ~2«22
— «2 2 1 + «11/
о JS0
[Ruf Ruf] =
го о
L О S)
(5-97)
где
Г «, 1(0)
1«м(0)
«12(0)
«22(0)
о
о
11. И.Н. Белоглазов
161
В скалярной форме уравнение (5.97) имеет вид
f"1
/?и -2Rl2 +—-Rh =0, Лц(0)=а2о,
So
f'2
/?i2-R22 +------- /?11/?12=0, Л12(0) = 0, (5.98)
So
f'2
R22 + ~ T?i2 ~Sj, /?22(0) = а^о .
So
Как и раньше, при интегрировании системы (5.98) можно заменить
У'2 на of' .В установившемся режиме, когда Rt i = Ri2 = R22 ~ 0, получаем
систему нелинейных алгебраических уравнений
Of'
2Ri2 = —~- Rh,
*^0
Of’ af'
R22 ~ —— R11R12, ——— R12 - S/,
Oq On
решением которой являются:_______ ______________________________
2 ~ n _ /^SoV^oS/} 2 _ _ _ /2Sjy/SoSj'
®хуст ””''ll уст “V 3 : » ^Ууст *'22уст v @ ,
g/' f (5.99)
_ _ \/ So S, '
^XVyCT ~''12yCT " ~~ *
°r'
Для нахождения значений R11, R12 и R2 2 в переходном процессе следует
разрешить систему уравнений (5.98) численным путем с помощью ЭВМ.
Приближенное аналитическое решение системы уравнений (5.98) можно
найти, исходя из следующих рассуждений. Обычно в переходном процессе
вомущение 6/~ играет второстепенную роль. Поэтому в ковариационном
уравнении (5.97) можно положить S, = 0. Умножив равенство (5.36) сле-
ва и справа на R '*, найдем
, . , .foil [001 , 1 I У 2
R~lRR~l + R’1 + R'1 + —
L 0 0 J L -1 0 J So L О
О
О
= 0.
Вводя в рассмотрение обратную матрицу S = R "* и учитывая, что произ-
водная обратной матрицы равна—/?'1 RR'1 , для S получаем линейное
матричное дифференциальное уравнение
[0—11 [001 1 Гу'2 о 1
-S + S + I S +— =0,
[о о] [-101 s0 L о о J
Г О~2 0 1
2(0)= ’ . (5.100)
L 0 Оу J
г о
Обратная матрица также является симметрической; обозначим ее элементы
через S]!, Sj 2 и S22 • Элементы Rn, Ri2, R22 связаны с элементами Si 1,
162
2t2,Sj2 равенствами
2*2 2
/?ц = ----Л12 =-
|S|
bi. R„
ISI
Si i
ISI
(5.101)
где
ISpSnS.2-S?2.
В соответствии с (5.100) и (5.90) приходим к скалярным дифференциаль-
ным уравнениям
Sii= -X, Sii(0) = a?2, S12=-Sn,
212(0) = 0, Ё22 =—2212, S22(0)= ov2 ,
о
которым удовлетворяют решения
, а?- а?,
2и(0в^ + 212(0 = -»;^-
kJ о
S22(0 = o?2e + -~t3-
После подстановки (5.102) в (5.101) получаем
, /1 t2 o2-t3 \
«u(0=^a)=i2i‘1 ( —+ -v +
\ о2уа о2* 2S0 /
/ °?' \
/?! 2(0 = Rx r(0 = IS | -* (o;2t + -£ t2),
\ 2Sq /
/?22(0 = »r(0= 12Г*^п;о2 +
1 o2f’t ol’t3 Of’t4
iS|= -4-4-+ + —4— + -Ar--
°xo Oy^So 2<7X(i5o 125q
(5.102)
(5.103)
Уравнения (5.103) и (5.99) позволяют анализировать как переходные
процессы оценивания (приближенно), так и установившуюся точность.
На рис. 5.16, б представлены кривые изменения ах/аХо, Oy loy^, построен-
ные по формулам (5.103) прн а2 ° = 107 м2, о2у = 102 м2 с~2.
5.2.3. Беспонсковые КЭНС для оценивания
пространственного положения ЛА по полю рельефа местности *)
Траектории полета ЛА имеют переменный профиль и состоят из ряда
последовательных участков, таких как взлет, набор высоты, огибание пре-
пятствий на малой высоте и т.п., которые характеризуются большими вер-
тикальными маневрами. В этом случае в показания датчика поля рельефа
помимо информации о собственном рельефе входит информация о движе-
нии центра масс ЛА (рис. 5.17). Для выделения информации о рельефе из
♦) Как и выше, здесь используется методика [53]; излагаемые результаты полу-
чены совместно с А.С. Ермиловым.
11
163
показаний датчика поля необходимо знание абсолютной высоты полета
с точностью до шумов датчика поля (радиовысотомера). Существующие
барометрические измерители определяют абсолютную высоту полета с
большими постоянными ошибками. Известные методы определения вы-
соты на основе комплексирования вертикального канала ИНС и баромет-
рических измерителей в условиях интенсивных вертикальных маневров
ЛА также не позволяют оценить высоту с требуемой точностью.
(5.104)
Ниже рассматривается возможность использования беспоисковых КЭНС
для оценивания пространственного положения движущихся объектов по
рельефу местности. В качестве ГНС используется инерциальная система.
Поскольку пространственная длительность оценивания, как показали
исследования, оказалась небольшой (первые десятки километров пройден-
ного пути), то в качестве моделей ошибок ИНС можно использовать соот-
ношения (5.77) —(5.79)
Дх = ДИу, ДЙХ=О, Ду = ДУу,
Д vy = 0, дяин = д VH, Д VH = 6/„,
где ДНвн — ошибка измерения высоты инерциальной системой, bjH — слу-
чайное возмущение типа белого шума со спектральной плотностью 5//.
Необходимость введения Sjf/ объясняется тем, что в КЭНС точность
измерения вертикальных параметров полета (при использовании для на-
вигации поля рельефа) должна быть существенно выше точности изме-
рения местоположения в горизонтальной плоскости.
Так как вертикальный канал ИНС без принятия специальных мер яв-
ляется неустойчивым, обычно для его коррекции используются измерения
абсолютной высоты или вертикальной скорости с помощью других датчи-
ков. Рассмотрим использование барометрического высотомера*) в ка-
честве корректора вертикального канала. Примем следующую модель
баро высотомера:
Н^в=Н+ДНбв-8Нбв, (5.105)
где HgB — измерение баровысотомера, ДЯ6в и 6Ябв — постоянная и флук-
туационная случайные составляющие ошибки баровысотомера с диспер-
сией «бв и спектральной плотностью 56в соответственно,
ДЯбв=0.
(5.106)
*> Другие варианты оценивания вертикального движения подробно рассмотрены
в следующей главе.
164
В качестве датчиков поля
рельефа используются радио-
высотомеры больших и малых
высот, антенны которых жест-
ко связаны с корпусом ЛА.
Найдем зависимости, связы-
вающие координаты хд и уд той
точки земной поверхности,
куда направлена ось диаграм-
мы направленности датчика
поля и дальность до которой
D измеряет радиовысотомер
(рис. 5.18), с координатами
х, у и Н пространственного
местоположения ЛА, а также
с углами тангажа О, крена у
и рыскания ф. Будем предполагать, что ось диаграммы направленности ан-
тенны совпадает с осью у связанной системы координат. Имеем
Дхд = Dcose, Дуд = DcosS,
Deos & cos? = Н(х, у) — f(x + Дхд, у + Дуд),
где е и 8 — углы между осью диаграммы направленности антенны радио-
высотомера и горизонтальными осями х иу, которые определяются выра-
жениями [5.10]
cos е = cos ф sin & cos у — sin ф sin у,
(5.107)
cos8 = cos ф sin 7 + sin & sin ф cos 7.
Тогда
H(x* — Дх, у* — Ду) — Дх* — Дх + Ocose, у* — Ду + £>cos8)
cos (9 cos 7 (5.108)
где x‘, у* — координаты местоположения, измеренные ГНС, f (х,у) — рель-
еф земной поверхности. При этом действительные значения дальности D
и углов е, 3, (9, у, ф можно заменить на измеренные радиовысотомером
и инерциальной системой значения £>*, е*, 8*, 0‘, 7*, ф*, что вполне обосно-
вано в силу высокой относительной точности измерений этих величин.
Тогда выходной сигнал радиовысотомера равен
Н(х,у) —f(x* — Дх + £)*cose*, у* — Ду + £>*cos8*)
р- = .................................t--------__± _sf (5ЛО9)
cos a COS7
где 3/ - ошибка радиовысотомера, предполагаемая случайной функ-
цией типа белого шума со спектральной плотностью Хд, cose* =
= cos i^‘sin i?*cos 7* — sin ф*81п у*, cos3* = cos i^*sin 7* + sintf’sin i/'*cos7*.
Сформируем искусственным образом измерения. Выражение для пер-
вого измерения получаем вычитанием измерений радиовысотомера (5.109)
из показаний вертикального канала ИНС Н„„ = Н + ДЯИН, т.е.
2i =^h-Z>-cosO’cos7‘=A//h„+/(x* — Дх + Т>*cosе*, у* — Ду +
+ £>*cos8*) + 3/cosi?*cos7*. (5.110)
165
Второе измерение формируется как результат вычитания измерений баро-
высотомера из показаний вертикального канала ИНС
г2=//’и ^=ДЯии-ДЯбв+а//бв. (5.1П)
Запишем уравнения движения (5.104), (5.106) и уравнения наблюдения
(5.110), (5.111) в векторно-матричной форме (5.32), (5.25), введя обоз-
начения: b = 0,
Х=[Дх ДИХ Ду АГу ДЯ„И ДИ„ ДЯбв]т,
Z= [zj =Я*„ - D‘cosi9*cos7’ z2 =Я‘н -#6B]t,
$=(0 0 0 0 0 6/„ О]1,
(5.112)
т? = (cos<9*cos7* bf 6Я6В]Т,
h(X) = [ДЯИИ + /(x’ - Дх + D*cose*, у* - Ду +D*cos6*) ДЯИИ -
-дяввГ,
‘о 0 0 -1 0 0 0 0 0 0 0 -1 0 0 0 0 0 0 о’ 0 0
А = 0 0 0 0 0 0 0 (5.113)
0 0 0 0 0 -1 0
0 0 0 0 0 0 0
Имеем .0 0 0 0 0 0 0_
X + АХ = $, z = Л(*) + П-
Компоненты векторных шумов $ и р предполагаются некоррелирован-
ными между собой и взаимно, а матрицы спектральных плотностей этих
шумов — диагональными:
0 0
0
0
0
(5.114)
5'dcos2i3‘cos27* 0
0 5бв.
Начальное распределение вектора Х(0) считаем нормальным с нуле-
вым математическим ожиданием и ковариационной матрицей
G = diag(ax„, 4уо. п!нин0. ^нбв0), (5.Н5)
гдеаХо, ov Оуп, о», од// , оди , «дм - среднеквад-
0 < Q ини л 0 иви
ратические отклонения начальных ошибок Дх0, ДКЛ. .. .., ДЯбв0.
166
Приближенное решение задачи оценивания определяется соотношениями
А а , а / dh \т ,
X + АХ = k[Z - h(X)j, Х(0) = 0. k = Rl — ) S'1,
\ ЭХ/
/ dh\T , / ЭЛ \
R + AR + RAX + R| — ) S"‘l — )R = St, R(0) = G.
\ дХ/ \ ЭХ /
Согласно (5.112)
(¥/Эх) х._ДдА о (¥/Эг)|х._д5 о 1 о
дк у*-Ду |у*-Ду
ЭХ 0 0 0 0 1 0
(5.116)
(5-117)
.(5.118)
О
Если пренебречь в переходном процессе оценивания ошибкой вертикаль-
ного акселерометра (6/н =0, S£ = 0), то путем перехода к обратной мат-
рице S = R~l ковариационное уравнение можно записать в форме
/ЭЛ\Т ,/ЭЛ\
2-£Л-Лт2= — — I. S(0) = G-‘. (5.119)
'ЭХ' \ ЭХ /
Подставляя выражения матриц A, Sn, дк/дХ в уравнение (5.119), по-
лагая cos &* = cos7* 1 и переходя к скалярной форме, получаем
1 / Э/ V . 1 э/ Э/
S11 — —I —I* £ j j + S1 — 0, ’
SD\ дх) SD дх Эу
1 df
S 1 4 + S । 3 “ 0, S(5- Та"’ “ I 6 + S 1 5 - 0, St7-0;
SD дх
i-22+2St2=O, S23 + St 3 = 0, S3 4 + S ( 4 + S3 3 = 0,
2-25 Si 5 “ 0, S26 + S2 $ + S] j = 0, ^2 1 1 ~ O',
- _L( df\2
S33 _ 7\"7а/ ' +^зз -0,
(5.120)
1 э/'
S35 - " Т7Г’ S36 + S35 -0,
Sd dy
S3 ? = 0;
S44 + 2S34 = 0, S4S + 2.35=0, £45+S3 6+ £45=0,
S4 7 + S3 7 = 0;
Sss ~ ~~ + — ’ Ss6 +S55 =0, Ss7 =— — >
5d Збв Дбв
See 2S;e ~ 0, S6 7 *" S5 7 =0;
____1_
S77 -
^бв
167
Эти уравнения с учетом начальных
рируются в квадратурах:
1
Е
1
— t
OZ.
условий (5.119), (5.115) легко интег-
S13
Sd °
Sd о
а/ э/
Эх Эр
2
dr,
t
Si 2 = ~ —
at
df
S14 f dr f ——
Sd о о Эх
Sd 0
1 f 7
~Jdrf
S [) о 0
Э)'
2
Sj 5 -
S22 -
S23 -
1 f df
— f -xdr,
SD 0 "
1
W
* X
1
I ’ V
dx
t2
* A
S16 =--fd-rf —^dTi,
Sd о о Эх
,T . T2 / Э/
Si 7 ~ 0;
2 t r T> / Э/\2
---f dr] dri f ( —) dr2,
Sd о 0
о \ Эх
SD
1
S2S "T-
So
= 0;
S2 7
S
S3 5 ~
S44 -
1
ay
1
So
1
fdrf
о о
fdrf
О
о
1
Э/ df
— —dTi,
Эх dy
(If
— dri, S26
Эх
Sd 0
f ~~^dr,
0 dv
dy
t2
o2y
2 t т T> df Э/
S24 = — J drf dr, f TZdr2,
Sd о о 0 dx dy
I . ? Э/ ,
о 'о Эх
2 f T T' df
— fdrf dr if —dr2,
So 0
2
dr, S34=-
t 1 ‘ T
— - -- fdrf
Oya SD О 0
Э/
^36 =- — fdTf ^dTi
S[)Q 0 dy
2
1
S3 7 =0;
2
dr}.
(5.121)
2 t T T-
---fdrf dTif
0
Sq о 0
1 » т df
---fdrf — dr
So 0
2
J э/ ,
. ’1,
о dy
т' V
S46 = -----fdrf dr, f —xdr2,
0 dy
t
S4S =
Sd о 0
S55= -T^—
0д"инО
t
S6b
1
ОдЧ
i
°Д"бвО
S4 7 0;
t
S5 7
See
S77 =
Sd
Sf>u
I2
°Д"ИНО
t
S&B
Г
t
SS6 =-----2
°Д"инО
t2
t2
2Sd
2S6
3SD
t3
35бВ
S.
t2
25бв
168
Раскрывая алгоритм оценивания (5.116), получаем в скалярной форме
д£ - Д Ух
#и а/
SD дх
#13
Sd
df
—г +
d.v
#i s\
SD I
Az
R\ 5 “ #1 7
+ ----------Дг2,
#бв
Дх(0) = 0,
ДГХ
#1 2
SD
df Rt3
Эх SD
df Z?2s\ #2 5 #2 7
—— + ----- I Д/ ] + -------- Д- 2 .
Эг Sd ' Дцв
ДГг(0) = 0;
Д^-ДГр
Др(О) = О;
#13 df R33 df R3S\ #35-#37
------— + —---- + ---- 1Д2! + -------- Дс2
, Sd dx Sd dy Sd ’ Sqb
(5.122)
A / #14 df #34 df #45 \ #45 —#47
Д Vv = I------ +-------— + ---- Дз ] +---------- Дз2
\ Sd dx Sd dy Sd / #бв
ДИ„(0) = 0;
a a / #i5
ДЯИН-ДГ„ = —-
\ sD
ДЯин(0) = 0;
df । #35
Эх Sd
df
dy
Rs 5
Sd
Дз] +
#5 5 ~ RSI
S6B
ди„ =
#16 df t R36
Sd dx Sd
df
dy +
#56
7Г
#56 “ #67 .
---------- Дх2,
#бв
Az2,
ДИ„(0) = 0;
A ( #1 7
Д^бв - ( —
\ O£>
ДЯбв(0) = 0.
df R3-
—— + ----
Эх SD
df #S?\ #S7 —#77
-T- + ---- I Д2 ! + -------- Д?2 ,
dy Sd / Дбв
Здесь Az i и Az 2 — невязки измерений, определяемые выражениями
Azx=H* - D*cos t?*cos у* — АН —
1 ин ин
-/п (х* — Дх + О*cos е*,у* - Ау + О*cos 5*), (5.123)
Дг2 =Н* -Н* - АН +АНГ ,
х ин бв ин бв ’
где /п — рельеф, выбираемый из блока памяти в оцениваемых координатах
х = х*— Дх, у =у*— Ау. Из структуры алгоритма (5.122) видно, что в нем
используется усредненное по времени значение произведения невязки
по измерению рельефа Azx на производные df/dx и df/dy поля рельефа,
выбираемые из блока памяти в оцениваемых координатах х, у.
Таким образом, синтезированный субоптимальный (в силу прибли-
женности решения задачи) алгоритм является корреляционным. Кро-
ме того, вследствие изменения во времени всех элементов матрицы
R = (#1-/-(?)] алгоритм (5.122) является нестационарным.
169
С целью упрощения аналитических выражений предположим стацио-
нарность и изотропность поля рельефа f (х, у). На этом основании при
достаточно большом времени оценивания примем
' / bf \ 2 г / Э/ \ 2
•ЦТ*-/ f -ТХ-) dr^a2.t, (5.124)
о \ Эх / о \ by ) ’ 4 •
(5.125)
где и2 - дисперсия градиента поля f (х, у). Тогда скалярные уравнения
элементов матрицы S (5.121) существенно упрощаются:
1 t
Z|l = ^ + V-
х, D
t2
25?
2i3~^-i4“Sis - Sig-SjT-O;
2-2 2
1 t2 t3
----+ ------ + -------
2-2 3 ~ S24 - Sis ~ ^i6 _^-27
1 t
S33 ~ ~a f' , S34
у» d
(5.126)
S3S _ S36 ~ S37 - 0;
t2 t2
t
1
2-7 7 ~ ~
a*H6B0
170
Таким образом, матрица S, а следовательно, и обратная ей матрица
R получаются блочными ;
sj
о
о
R
где
Rx =
&L
'Ry',
\Rn
i
(5.127)
Sil
Si 2
Si 2
S22
2-33 S34
S3 4 S44
Sj 5
ss6
Ss 7
2^56
See
2-6 -7
Sj 7
2-67
S77
Ri 1 R22
R12R22 .
Теперь
нимают вид
R33 ^34
R34 Я44
c учетом (5.127) уравнения алгоритма
Дх - Д Vx ~
/?и а/
SD
Дх(0) = О,
^5 5
Rst,
Rs 7
Rs6 Rs7
Rbb Rb2
Rbl Rt2
оценивания (5.122) при-
S =
S
О
>
R
R =
0
’ RH
A R12 bf
ДИ =-------- ДИ ГО) = О,
* Эх
Д А Л33 и/ Л
Ду-ДИ =-—- -Д^!, Ду(0) = 0,
SD 9-У
дР -^Дг ДИ,(0) = 0,
у SD ду
+ 7 ^2, ДЯии(0) = 0,
dD дбв
Л ^5 6 &56 —^61 л
Д V„ = —— Д7! + —--------Д?2, ДИ„(0) = °>
Но 1 Q Hv
дбв
А 7 ~^77 л
д"бв = -—1 Д7, + - Д?2, ДЯбв(0) = 0.
dD дбв
Невязки измерений Дг ] иДг2 определяются выражениями (5.123).
171
Рис. 5.19
Структурная схема упрощенного с учетом условий (5.124), (5.125)
алгоритма оценивания представлена на рис. 5.19. Как видно из схемы,
вертикальный и горизонтальные каналы взаимно связаны, т.е. по оцени-
ваемым координатам хну, измеренным значениям дальности/)*до зем-
ной поверхности и углам тангажа <9* крена 7* и рыскания ф* в блоке па-
мяти выбирается рельеф
/п(х + D*cos е *, у + ZZcos 3*).
172
В свою очередь невязка измерений вертикального канала
&z,=H* - D *cos $*cos 7* — ДЯ (х +£)’cos е*, y+£)*cos3*)
1 ин ' ин •/nv J '
подается в горизонтальные.
Из выражений (5.126), (5.127) можно легко получить в аналитическом
виде элементы ковариационной матрицы R, определяющие текущую точ-
ность оценивания вектора состояния:
„ ^-22 „ ^11 „ ^44 „ S33
1 1 “ ~ , &22 “ , «33 — , «44 —
|S I I2J ISvl ISvl
У У (5.128)
Здесь |SX| и | S | — определители матриц и 2у, согласно (5.127)
равные
|SX l=Sn Х22 -SA , 1^1 = 233 S44-£з24
Для вертикального канала имеем
п _ 2-66 ^7 7 — 6 7
55 = is~i ’
1 1
Sg 5 S77 — £ S 7
/?6б= ----- ----------; (5Л29)
1 1
n S5 S 2б6 — 2 5 6
R 7 7 — ,
|S„|
где | | — определитель матрицы :
|2Я | = S55(S66 S77 -S67 )-S56(SS6 S77 -Ss7 S67) +
+ Ss7(Ss6 S67 — Ss7 S66)-
Рассмотрим сначала канал x. Раскрывая (5.128), с учетом (5.126) на-
ходим
173
Согласно этим равенствам получим при t -* °° простые асимптотические
выражения
' ° г’
(5.130)
о^. t3
Аналогичным образом для канала у имеем
2 4SP 2 ? 125Р
° У а2, ’ °Vy 2 з '
af t у a‘,t3
Если шум датчика поля рельефа имеет ограниченный, но достаточно
широкий по отношению к процессу оценивания спектр, то можно принять
SD = где — дисперсия флуктуационной ошибки датчика, — ра-
диус корреляции этой ошибки. При этом асимптотические выражения
(5.130) принимают вид
о.
t
2^3а~
а,, Г t
Выражения дисперсий оценивания параметров вертикального канала
выводятся из уравнений (5.129):
о2 1 Г/ 1
%нин(0 =К55(г) = —- —-----
t3
3^
t3 \
----- X
35, /
бв '
Х(Ч7^
' Д//бвО
5бв J~4S’
ов / бв .
a\v (t) = R66(t) =
н
1
°Чно
t \
---1 X
SJ
t
5К
бв
t2
Ч2
д бв
ul
а
1
I।
/ 1
Х(^и~
’ бвО
t
а^н»»о
t
°ьн (0 = л77(0 =
бв
1
|S„1
t
°\н,
адн0
t2
----+
250
-L + -L.V___L_
SD 5бвД О2
г!
25,
бв
t3 + t3
3SD 35бв
2 \2 ’
174
При t -> оо получаем следующие асимптотические выражения для точ-
ности оценивания вертикальных параметров:
2 . (4$бв + 2 * S6n
(*6П+5Р)' ДГ" (5О+5бв)'3
(5.131)
2
°дНк "*
on {
Как видно из (5.130) и (5.131), дисперсии ошибок стремятся к нулю
при t 00. Это является следствием предположения об отсутствии воз-
действий, возмущающих контролируемый процесс (5? =0). В действи-
тельности по окончании переходных процессов оценивания ошибки при-
нимают некоторые установившиеся значения, определяемые величиной
спектральной плотности SH.
Математическое моделирование синтезированного алгоритма проводи-
лось без учета допущений о стационарности, эргодичности и изотропности
поля по реальному участку поля рельефа Земли, имеющему радиус кор-
реляции р 1,2 км*). Уровень шумов датчика поля (радиовысотомера)
задавался таким, что соотношение сигнал/шум было равным а/а~ = 3.
Шаг дискретизации записи поля в блоке памяти равен Д/ х = Д/ = 250 м.
Частные производные Э//Эх и df/dy рассчитывались в процессе функцио-
нирования алгоритма по стандартным двухточечным разностным схемам.
При моделировании предполагалось, что движение в горизонтальной
плоскости ху прямолинейно и равномерно со скоростями Ух = 250 м/с
и V = 50 м/с. Ошибки ДЯНН> ДКН и ДЯбв на интервале оценивания
имитировались случайными величинами. Шумы измерителей 8/ и 6Ябв
моделировались последовательностями дискретных случайных величин
со среднеквадратическими отклонениями, равными 10 м, и спектраль-
ными плотностями SD = 300 м2 - с, 5бп = 250 м2 с. Интегрирование урав-
нений (5.116) и (5.117) выполнялось методом Рунге - Кутта с шагом
Дг = 0,02 с. При включении фильтра было принято предположение, что в
момент времени t = 0 оценки
д5(0) = Ду(0) = Д Гл(0) = ДГ,(0) = ДЯИН(°)= Д^/°) = ДА>в = °-
Результаты моделирования представлены на рис. 5.20—5.23, где изоб-
ражены кривые изменения во времени ошибок оценивания параметров
движения
8х(Г) = Дх(7) -Дх(0, 8 Ух = Д И,(/) - Д Vx(t),
by(t) = &y(t) - by(t), 8Vy = Д И/Т) - Д Vy(t)
при различных начальных отклонениях по координатам Дх(0)и Ду(0).
Кривым 1-4 соответствуют начальные отклонения Дх, = Ду, = 1500 м,
*) Приятие радиуса корреляции для нестационарных полей требует специального
определения. Здесь радиус корреляции вычисляется приближенно в предположении
квазистациоиариости поля.
175
Дх2 = Ду2 = 750 м, Дх3 - Ду з=-750 м, Дх4 = Ду4 = — 1500 м. Для удоб-
ства сравнения процессов оценивания остальные параметры движения выби-
рались одинаковыми для всех рассматриваемых вариантов.
Штриховыми линиями обозначены области, в которых заключены уд-
военные ” расчетные ” среднеквадратические значения ошибок оце-
нивания, определяемые через соответствующие диагональные элементы
матрицы R.
Внутренние штриховые линии соответствуют минимальным средне-
квадратическим значениям ошибок, а наружные — максимальным из
четырех вариантов оценивания. Эти области получаются вследствие того,
что работа фильтра начинается с разных участков рабочей карты блока
памяти. Поэтому производные Э//Эх и tiff'd у поля рельефа, входящие
в подынтегральные выражения элементов матрицы 2(f), в оцениваемых
точках х(Г) и у (г) для одних и тех же моментов времени различны по
знакам и величинам. Следовательно, и соответствующие элементы мат-
рицы R(t) также неодинаковы для различных вариантов оценивания.
Как следует из приведенных графиков, при начальных отклонениях
| Дх(0)| = | Ду (0)| = 750 м, меньших радиуса корреляции поля рельефа
выбранного участка коррекции, сходимость процессов оценивания доста-
точно хорошая (кривые 2 и 7), и со временем ошибки оценивания вхо-
дят в область, ограниченную удвоенным значением соответствующих
среднеквадратических отклонений.
Рис. 5.20
Рис. 5.21
176
Кривые 1 и 4, соответствую-
щие начальным отклонениям по
координатам | Дх(0) | = | Ду(О) I =
= 1500 м, показывают, что при не-
выполнении условия | Д х (0) |,
| Ду(0) |<р процессы оцени-
вания горизонтальных коорди-
нат х, у и скоростей Vx, Vy ста-
новятся расходящимися»).
На рис. 5.24 представлена об-
ласть начальных отклонений, при
которых обеспечивается выполне-
ние неравенств 1Дх(1к) К Д/ /2 и
I Ду(?к) I < А Z/2, где Д/ — шаг
Рис. 5.24
дискретности по координате при
цифровой записи карты рельефа, tK — время окончания процесса оценивания
(было принято Д/ =0,25 км, tK =200с). Эту область с учетом только что при-
веденного примечания можно считать областью сходимости субоптималь-
ного беспоискового алгоритма оценивания по начальным ошибкам место-
положения. Величины остальных ошибок могут быть достаточно больши-
ми, и для их списания до определенных пределов необходимо лишь увели-
чить время оценивания tK.
5.2.4. Беспонсковые КЭНС, использующие изображение местности
Рабочей информацией в КЭНС этого типа являются изображения (кад-
ры) поверхностного поля. Обозначим наблюдаемое поле через /(х, у)
приняв, что Оху — горизонтальная прямоугольная система координа
Вектор наблюдения будем представлять набором дискретных измеренны
значений поля z, (г =1,2, ...,<7) (рис. 5.25).
Предположим, что продольная ось х0 движущегося объекта ориентиро-
вана по оси х. Если курсовая ошибка отсутствует, то
/ / 1 i
z.- = f\ ха +1 -N - 1 + z - TV —
\ \ J N
+ rh,
(5.132)
где хд, уя- координаты той точки земной поверхности, куда направлена
ось датчика поверхностного поля (поскольку возможны отклонения
ДДХ, ДДу оси датчика поля от вертикали, то координаты хд, уд могут
отличаться от координат х0, у0)- Lx, Ly - действительные расстояния
(масштабы) между элементами изображения; NLX X (2М + \)Ly — раз-
мер изображения (кадра), в общем случае предполагаем кадр несимметрич-
ным [N = N' + N" + 1, N’ 4=N", q-N{2M + 1)]; р,- - ошибки измерения
поля датчиком поля в z-й точке :
*) Этот вывод верен в среднестатистическом смысле. В ходе конкретной коррек-
ции местная структура поля может как благоприятствовать, так и мешать сходимости
при Дх(0) = Ду (0) = р [1.14].
12. И.Н. Белоглазов 177
Элементы изображения пронумерованы так, что первым считается
верхний левый элемент.
Если теперь рассмотреть постоянную курсовую ошибку ф — рассогласо-
вание между осями х0 и х, появляющееся вследствие того, что на борту
движущегося объекта курс никогда не бывает точно известен, то выраже-
ние для наблюдаемых значений прля примет вид
УЯ + -лг
]г Г А /
—I )£у sin ф +(М —
^1/ \
(5.133)
а = 1, 2, ..., <7).
Масштабы изображения Lx и Ly в дальнейшем предполагаются постоян-
ными во времени, но неизвестными на движущемся объекте. Например,
в случае использования на летатель-
ном аппарате оптических изображений
эта неизвестность определяется неточ-
ным знанием высоты полета и углами
Д $х, отклонения оси датчика по-
ля от вертикали, в случае использова-
ния радиолокационных изображений
местности и при осуществлении раз-
вертки по горизонтальной дальности
(что обычно оказывается необходи-
мым) неизвестность масштабов также
объясняется неточным знанием высо-
ты полета.
Исследуем одномерный вариант
КЭНС и рассмотрим равномерное
перемещение движущегося объекта
(и установленного на нем датчика
поля) вдоль оси х:
xa = Vx{> Уа =0-
На основании сказанного выше уравнения движения в скалярной форме
запишутся следующим образом:
хд = Vx, Vx = 0, Lx = 0, = 0, (Д = 0.
Если ввести вектор состояния
X = [xt х2 х3 х4 х5]т,
где х( - хд, х2 = Ух, х3 = Lx, х4 = Ly, xs = ф, то уравнения движения
178
примут вид X + АХ = 0.
Здесь матрица А равна
“ 0 —1 0 0 0"
0 0 0 0 0
А = 0 0 0 0 0
0 0 0 0 0
_ 0 0 0 0 0-
(5.134)
Введем также векторное обозначение для вектора шумов i? = [17i, т?2 • • •
. ..т?/ . ..tjq]t. Поскольку курсовая ошибка имеет обычно малые
значения, то можно провести линеаризацию по ф, и тогда проекции век-
тора h (АЭ примут вид
W = /4, +(-У - 1 +/ - N Ц- )х3
\ \ 1тИ1/
7 1 / Г\
+ l-Af + 1—1 1х4х5,
(5.135)
Согласно (5.135) z = h(X) + 17.
Предположим, что матрица спектральных плстностей шумов диаго
нальна
(5.136)
где 5t, . . . , Sf, . . . , Sq - значения спектральных плотностей ошибок
измерения поля в различных точках кадра на нулевой частоте.
Будем считать измерения равноточными (51 = ... = 5, = ... = Sq = So) >
тогда Sz = S01,1 - единичная матрица размера q Xq.
Начальное значение Ro ковариационной матрицы ошибок оценивания
примем таким:
о
г2 а2
(5.137)
где а2о, a2Vxa, а2^
ложения, скорости
— дисперсии начальных ошибок оценивания местопо-
и курса движущегося объекта соответственно, а\о,
Одо — дисперсии начальных относительных ошибок оценивания масштабов
LX,LV.
179
Начальное значение обратной матрицы S 0 равно
Алгоритм оценивания в данном случае имеет вид
X + АХ = k^-h(X)},
/ ЭЛ V
** = Лга" Н* *
\ оЛ /
/ эл \т , / эл \
S-БА -Ат2 = —- Sz’1 —тН,
\ ЪХ \ЪХ
Б = Л’1.
Исследуем достижимую точность оценивания.
Матрица, входящая в правую часть уравнения (5.141), равна
где
ч dh: dh:
Ckj = S —с —г (kJ = 1,2,... ,5).
i = I OXk OXj
(5.138)
(5.139)
(5.140)
(5.141)
(5.142)
(5.143)
(5.144)
Будем рассчитывать производные для действительных значений коор-
динат, предполагая, что оценки близки к действительным значениям.
Матрица S симметрическая. Скалярные дифференциальные уравне-
ния для элементов матрицы 2 имеют вид
St t = So 1 Ct t, S12+Sii=5olCi2, St 3 = So1 С( 3, St 4 = So 1 С( 4,
St s = So 1 Ci 5;
S2 2 + 2St 2 = So 1 C2 2 > ^2 3 + St 3 = So 1 C2 3 , S2 4 St 4 = So 1 C2 4,
S2s +Sl5 =SolC2S; (5.145)
S33 =SolC33, 2з4=5о1Сз4, 2з5=5о1Сз5;
S44 = So1C44, Ё4 5 = So1C45;
S5 s = So1 Cs s.
Для пояснения промежуточных выкладок вычислим диагональный
элемент 211. Согласно (5.145), (5.144) и (5.138)
„ ч ' /ЭГ \2
S(l=a;2+S0-1 S f ——) dt. (5.146)
i = i о \ Эхд
Здесь (ЭУ/ЭэСд); — значение частной производной поля в текущий мо-
180
мент времени t в i-й точке кадра, т.е. в точке с координатами
а\ = Пт
Будем считать поле f(x, у) стационарным и эргодическим; тогда сред-
ний квадрат градиента поля Од равен
’ \2
-) dt
д/ <
и не зависит от номера г. По окончании переходного процесса формирова-
ния статистических оценок
1 г/эМ2
— / (-----) dt « lim
t о \ЭхдJi т -»
’ \ 2
—) dt,
'Д / i
т.е.
t fdf \2
J I-----1 dt a\t.
о \ Эхд )t
Подставляя (5.147) в (5.146),получаем
<7<7д
< (0 = о~х2 + —- t.
Оо
По такой же методике
ные элементы матрицы S:
2
, <7°д
—az. t--------
(5.147)
(5.148)
и при тех же допущениях рассчитываются осталь-
2\ 2
2S0
TV" - N' qa\
sT
t2,
2
t, 2\ 4 -Si 5 - 0;
= Op2 +aY2
r ~ -Iq
t2
qo\ 3 N" - TV'
---- t3, Sj3 =--------------
3S0 2
2
2S0 ’
2^2 4 “ S2 5 “Ci
(5.149)
S33 = L~x2^2
(N" - TV')2 + V(TV' + 1) + N"(N + 1)
6
доь {
So ’
S3 4 = S35 - 0;
М(М+1) qa\
3
, . М(М+ 1) ,
S55 = о- + ~
(TV" - TV') +N’(N' + 1) + N"(N" + 1)
S44 ~ Ly2
So
S45 - 0;
6
2
qoj,
So
t.
181
При выводе соотношений (5.149) дополнительно полагалось
; /Э/ \2 2 ;/э/
/ (— ) dt o\t, JI——
О \ Эуд /,• о \ Эхд
что эквивалентно предположению об изотропности поля/(х, у)..
Не уменьшая о бщно, предположим, что кадр
TV- 1 \
=-------1, тогда
2 /
2-13 = 2^2 з =0,
2-зз ~ Lx Ох + ’ —>—
" 12 So
М(М+У)
3
dt «= 0,
симметричен IN* = N‘
t.
(5.150)
2-5 5
N2 - 1
12
L2X
Я°1
-----t
So
и матрица S разбивается на блоки
2ч i
2ч 2
S =
2-12 1
2-2 2 j
0
О
I 2-5 5 ..
Это означает, что оценивание местоположения, масштабов и курса про-
исходит (после окончания переходного процесса формирования статисти-
ческих оценок поля) автономно.
Обращением матрицы S(r) находим ковариационную матрицу Л (г).
Текущие значения ах(г), 4/0, 4(О> 4(0> Дисперсий ошибок
оценивая координаты хд, скорости Vx, масштабов L x,Ly и курса Нравны
2
+ а/ t + е
3S0
2 2 4
a;2f3 +JL^_
3S0 " 12Sg
0 равны
Ov
a2(f) = ------------------
-2 -2 x
Gy a/ +------
xo rx0 O
□ o
(5.151)
or2
t4
4/0 =—
<2
qo\
-----1
So
qo\ _г u qo\
----- Of,2 t + ---- Ox2t2 +
So x° 3S0----------0
t4
12S2O
(5.152)
о2к(0 =
Я2 - 1 2 qai
12 х S
(5.153)
182
~ М(М+1) qal
a 2 +------- Ly ----1
"° 3 y So
1
иф\1) + 'A'2-! W+1) 21 Ху у Т Ху р I L 12 3 J So
(5.154)
(5.155)
Асимптотические оценки (при г ->°°) имеют вид
(5.156)
(5.157)
(5.158)
(5.159)
(5.160)
где So = ОдТд, Од - дисперсия ошибок измерения датчика поля, тд -
время корреляции этих ошибок.
Если Lx-Ly=L, кадр квадратный (2Л/ + 1 = N), 7V> 1, М > 1, то вы-
ражения (5.158) - (5.160) еще более упрощаются:
= <^(0 =
z ч _ ад /^д
(5.161)
(5.162)
где Q N2L2 =4M2L2 — площадь кадра.
При расчете и построении графиков (рис. 5.26) достижимой точности
КЭНС было принято, что одномерное сечение корреляционной функции
используемого поля/(х, у) описывается выражением
Л; (А) = о^ехр (-а2 Д2), (5.163)
где — дисперсия поля f(x, у). Радиус корреляции р такого поля, опре-
//?;(Д)<М
деляемый соотношением------—— , равен р = утг/(2а). Корреляцион-
ная функция /?ду(Д) градиента исходного поля связана с /?у(Д) урав-
нением
Э2Л/(Д)
R^>- •
183
Рис. 5.26
и, следовательно,
/?Ду(Д) = 2а2а2(1 - 2а2Д2) ехр(-а2Д2),
откуда средний квадрат од градиента используемого поля равен
, я а}
о2д=— -4 . (5.164)
. 4 Р
В КЭНС, использующих изображение местности, главной составляющей
ошибки датчика поля часто является ошибка первичного картографирова-
ния. Эта ошибка является функцией пространственной координаты, поэтому
Ра
тд=~~, (5.165)
' X
где Vx ~ скорость движения, рд — пространственный радиус корреляции
ошибки датчика поля.
На основании (5.164) и (5.165)
ОД 7Г / о/ у Ух
*5о 4 у Од у р Рд
(5.166)
Расстояния Lx и Ly между элементами изображения связаны с рд. Выберем
~ Ly — Рд .
По формулам (5.151)—(5.155) на рис. 5.26 построены в логарифмичес-
ком масштабе графики достижимой точности КЭНС, рассчитанные для
следующих исходных данных:
стх0= Ю4 м, оу = 10м-с"1, = 2 • 10-2, = 0,05 рад,
я / af \2
~ I---- ) = 4, р = р = 103 м, Vx = 250 м • с 1,
4 \ од /
N- 11 (квадратный кадр размером 20 км X 20 км).
Весьма характерно поведение кривой оЛ(г). В первые 5 с за счет исполь-
зования информации, содержащейся в исходном изображении, начальная
ошибка определения местоположения уменьшается в 120 раз. В последую-
щие 95 с ошибка ох(г) уменьшается только в 2,35 раза; причина дальней-
184
шего уменьшения ошибки ox(t) состоит в увеличении эквивалентной
площади кадра при движении объекта.
Улучшения точности оценивания скорости движения, напротив, в первые
10 с не наблюдается, поскольку информация о скорости движущегося
объекта не содержится в исходном изображении. Лишь по мере движения
улучшается точность оценивания скорости.
На рис. 5.26 штриховыми линиями показаны асимптотические зависи-
мости, вычисленные по формулам (5.156)—(5.160). Сопоставление точ-
ных и асимптотических оценок позволяет установить, через какой
интервал времени можно использовать более простые асимптотические
зависимости.
Полезно заметить, что частным случаем полученных результатов являют-
ся алгоритмы КЭНС-П, в которых информация о поле снимается вдоль
некоторых контуров или линий. Теорию таких КЭНС можно вывести из
обших результатов, если, например, положить N= 1. Тогда в каждый теку-
щий момент времени информация о поле /(х, у) будет сниматься вдоль
линии, перпендикулярной к оси х0.
5.2.5. Использование марковской теории нелинейной фильтрации
для синтеза субоптимальных беспоисковых КЭНС
В [5.5, 5.6] предложено для синтеза субоптимальных беспоисковых
КЭНС использовать марковскую теорию нелинейной фильтрации. В обще-
теоретическом плане уже установлена идентичность решений, доставляемых
нелинейной калмановской фильтрацией и марковской теорией нелинейной
фильтрации в смысле Р.Л. Стратоновича [5.11]. Покажем тождественность
решений применительно к синтезу алгоритмов беспоисковых КЭНС, следуя
при проведении преобразований работе [5.12].
Метод Р.Л. Стратоновича сводит заначу синтеза к отысканию решения
интегро-дифференциального уравнения для апостериорной плотности
вероятности р(Х, t \Zq) вектора состояния X в момент времени t при усло-
вии проведения векторных наблюдений Z(t) на интервале т& [0, Г].
Обозначим эти наблюдения через Zo •
Пусть уравнения контролируемого процесса и наблюдений имеют вид
Х + АХ=£, Х(0)=Хо, (5.167)
Z(t) = h(X,t) + т], (5.168)
где случайные возмущения £, 7} и начальное значение вектора состояния
Хо подчиняются условиям (5.27). Матрицы интенсивностей белых шумов
£, г) обозначим через S^-, S^. Уравнение контролируемого процесса предпо-
лагается линейным, а наблюдения — существенно нелинейными. Такая
постановка задачи, как это отмечалось ранее, характерна для КЭНС. Сла-
гаемое Ьи в уравнении (5.32) опущено для простоты изложения, что не
уменьшает общности рассмотрения вопроса.
Применительно к (5.167) и (5.168) уравнение Р.Л. Стратоновича имеет
вид
- -1 Z°-)- = 2 — [а,(Х, t)p(X, r| ZJ)] +
Эг 1 = 1 Эх,-
185
Э2р(Х r|Z£
1 п п
+ — 2 2 5£..(г)
2 (=1 / = i Эх/Ц.
+ р(Х Л Z’o) [h(X, t) —Mps(h(X, /)>]т 5’1 [Z(t) -
-Mps<h(X,t)>], p(X, 0|Z?)=p(Xo).
Здесь Mps (•) обозначает апостериорное среднее
Mpi(-) = M<-|Zj> = 7••• f ( )p(X HZ^) П dx„
— oo — co 7 ~ I
(5.169)
(5.170)
Xj — проекции вектора X, p(X0) — априорная плотность распределения
начального значения вектора состояния Хо, предполагаемая нами нормаль-
ной с математическим ожиданием т0 и ковариационной матрицей G,
а, (Х, г) - строки вектора А (г) X(t), называемые коэффициентами сноса,
Sv(t) — матрица интенсивностей (спектральных плотностей) шумов наблю-
дения, S£.. (Г) — элементы матрицы интенсивностей шума £ (Г) (5£ = [S£„]).
Запись стохастического дифференциального уравнения требует тщатель-
ного учета свойств белых шумов, при этом могут возникать различные
формы уравнений. Наиболее распространенными являются запись в смысле
Ито (5.13] и использование симметризованных стохастических интегралов,
соответствующих записи уравнений в смысле Р.Л. Стратоновича [5.14].
В уравнении (5.169) стохастические интегралы понимаются в смысле Ито,
хотя в рассматриваемом варианте, когда ковариационная матрица шумов
5£ (Г) не зависит от вектора состояния X, обе формы записи стохастических
дифференциальных уравнений совпадают. Если наблюдения не содержат
информации о векторе состояния, т.е. h(X, t) =h(t), то
h(X,t) - Mps(h(X,t)) = 0
и уравнение Р.Л. Стратоновича превращается в известное уравнение Фокке-
ра — Планка — Колмогорова [5.15]
др(Х, г) « Э
-4------- = 2 — [Д/(Х t)p(X, 0] +
dt i=i Эх,-
(5.171)
описывающее изменение во времени априорной плотности распределения
р(Х, t) вектора состояния X(t), подчиняющегося дифференциальному
уравнению (5.167).
Определим субоптимальную оценку вектора состояния Х(г), основы-
ваясь на уравнении (5.169). Рассмотрим оценку X(t), оптимальную в
смысле минимума дисперсии ошибки оценивания. Известно, что такой
оценкой является апостериорное математическое ожидание
А °о со ц
Z(r)=M(Z(r)|Z0?)=Mps<Z(r)) = f ... f Xp(X, tizi) ndx,. (5.172)
— OO _ CO I — I
Чтобы получить уравнение для %(/), заменим в соотношении (5.169) про-
186
изводную др(Х, t\Zo)/dt приближенным равенством
Эр(х HZp) р(Х, t + dtlZ^d,) --p(X, t)Zj)
dt dt
(5.173)
где p(X, t + dt \Zo+dt) — условная плотность распределения вектора состоя-
ния в момент времени t +dt при условии проведения наблюдений Z(t)
на интервале т & [0,t + dt ].
Подстановка (5.173) в (5.169) дает
р(Х, t^dt\Z,0+d,)~p(X.t\Zt0)
dt
п д
= X —-[ai(Xt)p(XtlzS)] +
I = I дх.
2 /=»
Л
S Sc..
/=1 ('t
d2p(X, tiz[)
dxjdxj
+ p(X, t\Zo)X
1 и
+ — S
X [А(X, t) - Mp, {h (X, t)>]т 5'1 [Z (f) - Mps (h {X, r)>]. (5.174)
Умножим обе части равенства на А" и проинтегрируем по dx, ... dxn в бес-
конечных пределах:
f ... f Хр(Х, t + dt\Z,0+<1') П dx, - f.J Xp(X,t\Z^ fldx,
__ OO ___ OO I — I __ 00 _ °° I “ I
dt
«3 co n Q n
= f ... f Z2 ---------------[ai(X, t)p(X, r|Zo)J П dxz +
, = i Эх,- i = i
I oo oo n n
+ ~f...fXT 2 Sr it)
2 —00 —00 4
d2p{X, t\Z^)
dx, dxj
n
П dx{ +
i
+ f... f Xp(X, tiz£){fi(x, t)^Mps<h(X, t))}JS-' {Z(t)
- Mps{h(X, t)>} П dx,. (5.175)
t= i
По определению (5.172) левая часть (5.175) может быть представлена в
виде
. (5.пб)
dt dt
Рассмотрим последовательно различные слагаемые правой части урав-
нения (5.175). Сначала рассмотрим первое слагаемое
A- f... / X £ ~^-k(X t)p(X. t{Z£)] П dx,,
— CO _ OO i = I OXj I ~ I
где R — вектор размерности л, составляющие которого обозначим через R^.
187
Выражение для Rk имеет вид
Г Э п д
Rk= f f — (акр) + S ~~ (а,р)
— <х __<ю [ ох^ /-1 dXf
i *к
П dx, =
i = 1
оо оо
= Л-. f°
~ э «
/ хк —- (акр) dxk Н dx, +
Эх, .i = 1
К i* к
оо f п оо °°Э И 1
+ f хк I П f ... f — (а,р) П dx, dxk.
— « I i - 1 — оо —ал (J X f 1-1 I
L iк I* к 1
Проводя интегрирование по частям, находим
ОО ОО оо оо П
Rk= f ... J - J ak(X,t)p(X,t\Zt0)dxk] П dx,+
___оо ____ал — оо — оо { — |
I* к
<ж> п оо °0 оо п
+ f хк. [ Z f ... f (aiP\ ) П 6/xJ dxk.
____ОО — 1 ОО _ ОО ---ОО / — 1
i + к I* к
< * t
Будем считать р(Х, t |Zo) убывающей на бесконечности так, что все функ-
ции х,а,р и а,р при х,- = ±°° обращаются в нуль. Тогда
оо оо п
Rk = ~ J . .. f ак(Х, t)p(X, r| Zj) П dx, = -Mps(ak (X, t)),
__OO __ OO I — 1
и поэтому
R = ~Mps(A(t) X(t)) = -A(f)X(t). (5.177)
Теперь рассмотрим второе слагаемое правой части уравнения (5.175),
обозначив его через V, где V — вектор размерности п, проекции которого
Vk равны
1 “ “ п п Э2о п
Ук=- / f xk.ZZS (Г)~£- ndx,=
2 -ОО -ОО <S7 1f=l ч oxfbxf- /=1
00 00 (р п п
= S / Хк-^Т~ п,/х'- <5-178)
2 »=!/=! Ч -оо -оо dXtdXj 1=1
Интегрируя (5.178) по частям и предполагая, что на бесконечности выра-
жениями Эр/Эх,-обращаются в нуль, получаем Vk = 0 и
И = 0. (5.179)
Преобразование последнего слагаемого (5.175) дает
7• • • f Хр (X, r| zl) 1й (X, t) - Mps(h (X, 0)]TS;* [Z(t) -
— 00 — 00 r ’
П oo oo
-Mps<h(X, r)>] П dxt= { f ... f Xp(X, tIZi) [h(X, r) -
I = 1 — oo ____ oo
188
п
-mps <л(х, r))]T Udx,} sp[z(0 - mps (h (x, г))] =
oo oo Ц oo oo Ц
= (/... f XhT (X, t)p(X, rl Z$) n dx, - [ f . .. f Xp(X, r(Zo') П dxt]X
— OO ---- OO ( я 1 — oo — OO / = 1
oo OO fj
X [ f ... f Лт (X, 0 p (X, r| zn n dx,] } 5'1 [Z (t) - Mps <h (X 0>] =
-OO — OO /=1 {
= I 7 •. 7 (X - X) Лт (X г) p (X rl Zl) П dx,] 5-‘ [Z(r) -Mps<h (X r))] =
— oo — oo 1
= Mps<(X -Х)ЛТ(Х, r))S-‘[Z(r) -Mps<h(X, r))]. (5.180)
Следовательно, с учетом (5.176), (5.177), (5.179) и (5.180) мы наш-
ли точное интегро-дифференциальное уравнение для оптимальной
оценки Х(г)
X +A(t)X = Mpi((X ~X)hT(Xt))S'1 {Z(t)-Mps<h(X,t)» , (5-181)
Х(0) = т0.
Будем искать приближенное решение (5.181) путем разложения нели-
нейной функции h (X, t) в степенной ряд в окрестности оптимальной оцен-
ки X
Л ЭЛ Л
Л(Х, Г)=Л(Х,Г) +-- Л(Х-Х)+..., (5.182)
ЭХ х
где матрица Якоби ЭЛ/ЭХ равна
р ЭЛ! ЭЛ! ЭЛ, ~
9xi Эхз дхм
ЭЛ _ ЭЛ2 ЭЛ2 ЭЛ2
ЭХ Эх, Эх2 дх„
bhm bhm
9X1 Эх2 Эх„
Апостериорные математические ожидания нелинейных функций Л (X, t)
и (X- X) Лт (X, Г) с точностью до линейных членов разложения равны
Л ЭЛ
Мр/Л (X, Г)> =Л/Р/Л(Х Г)+ — л (X - X) +... > =
' оХ х
л ЭЛ
= Л(Х0+ —
эх
Мр,(Х-Х)+... = Л(Х,г)+...,
(5.183)
л / л Г л л / ЭЛ\Т
Мр,<(Х - X) ЛТ(Х г)) =МрЛх - X) ЛТ(Х, 0 +(Х -Х)т -) А
\ 1 \ /X
189
Л Л А А / ЭЛ V
= Mps(X - X) h\X, t) + Mps(.(X - Х)(Х - Х)т>(—— )л + ...=
\ дх /х
/ эй V
= Л(0(^7 а + - - (5.184)
\ оХ /х
Подстановка (5.183) и (5.184) в (5.181) дает
Л а / Эй V ,
Х + А (t)X = R(t)\-)л5'*[7-й(Х /)], 3f(0) = wo, (5.185)
\ дХ )х
где R(t) =Mps((X-X)(X-X)t> = М< (X- X) (X- ХУ \2& - ковариа-
ционная матрица ошибок оценивания. Соотношение для R(f), совпадающее
с (5.36), может быть получено на основе использования уравнения (5.169).
Итак, для оценки X(t), являющейся субоптимальной в силу проведения
линеаризации h(X, t) и приближенного решения уравнения (5.181), на
основании применения марковской теории нелинейной фильтрации полу-
чены равенства, совпадающие с расширенным фильтром Калмана первого
приближения. Поэтому решения задачи синтеза алгоритмов беспоисковых
КЭНС, даваемые нелинейным фильтром Калмана и методом нелинейной
фильтрации в смысле Стратоновича, тождественны.
§ 5.3. ПОИСКОВЫЕ КЭНС
Рассмотренные в главах 1 и 4 практические алгоритмы КЭНС относят-
ся к поисковым алгоритмам. В поисковых КЭНС проверяются гипотезы
о возможных значениях ошибок местоположения и скорости движущего-
ся объекта. Для каждой проверяемой гипотезы на основе измерений гео-
физического поля и имеющейся бортовой карты этого поля с использова-
нием данных навигационной системы рассчитываются значения функцио-
нала, являющегося мерой близости полученной в полете реализации поля
и реализации поля, извлекаемой из блока памяти и соответствующей про-
веряемой гипотезе. Путем поиска экстремума функционала по всем про-
веряемым гипотезам определяются координаты местоположения и ско-
190
рость движения. Методы достижения экстремума функционала могут быть
различными.
Может применяться ’’слепой поиск”, когда вводится дискретизация
координат и значения функционала рассчитываются абсолютно для всех
возможных дискретных значений ошибок ГНС. Такой метод поиска, яв-
ляющийся в определенных условиях единственно возможным, надежно
решает проблему ликвидации больших начальных отклонений в КЭНС,
хотя в некоторых случаях требует чрезмерно высокой производитель-
ности БЦВМ.
Другая группа методов поиска связана с вычислением градиентов (или
их аналогов) функционала, определяющих направление движения к экстре-
муму. Здесь требования к быстродействию БЦВМ обычно оказываются
ограниченными, так как не возникает необходимость рассчитывать значе-
ния функционалов для всевозможных значений ошибок ГНС, но возни-
кают ограничения сходимости.
5.3.1. Эвристические поисковые алгоритмы КЭНС
Одномерная поисковая КЭНС для оценки местоположения. Будем
рассматривать равномерный горизонтальный полет. Пусть к текущему
моменту времени t, когда принимается решение, проведено N измерений
геофизического поля zt =/*, ..., zN =f*N (рис. 5.27, а) и пусть в памяти
БЦВМ записана карта поля/п (х) (рис. 5.27, б).
В поисковых КЭНС производится запись в оперативное запоминающее
устройство измеренных значений поля Zj=f* и выдаваемых ГНС коорди-
нат местоположения х* в момент проведения измерений. Пусть x^J — коор-
дината местоположения в момент последнего замера.
Эвристический алгоритм поисковой КЭНС сводится к следующему.
Назначается доверительный интервал 2Дтах с центром в точке х^, где
Дтах - возможная максимальная ошибка ГНС. Задается шаг дискрети-
зации по координате Д/ и в доверительном интервале с этим шагом вы-
бирается ряд дискретных точек. В дальнейшем предполагается, что реаль-
ное положение летательного аппарата совпадает с одной из дискретных
точек. В действительности это условие может и не выполняться. Однако
если величина Д/ невелика, то введение дискретизации при проверке гипо-
тез не приводит к существенным ошибкам. В рассматриваемом случае
гипотезами JC; являются возможные дискретные значения ГД/ продоль-
ной ошибки ГНС Дх (i=-n, ..., п; п = Атак/Ы). Поскольку мы предпо-
ложили отсутствие ошибки измерения скорости и постоянство Дх в про-
цессе проведения измерений геофизического поля, то с точностью до шу-
мов датчика поля и ошибок картографирования измеренная реализация
совпадает с некоторым участком реализации навигационного поля, хра-
нящейся в блоке памяти.
В процессе перебора различных возможных значений ошибок ГНС
(т.е. проверки различных возможных гипотез Jf,-, состоящих в предполо-
жении, что ошибка Дх=/Д/) из блока памяти извлекается для каждой
проверяемой гипотезы соответствующая ей (гипотетическая) реализация
поля
{/„ [х* - ГД/ - (N - !)/,], Уп [х* - ГД/ - (N- 2)L], ...,
........../п(х*-ГД/-А),
191
В
it
Сопоставляется гипотетическая реализация поля с измеренной z( = f[xN —
-(A-l)L], zN_x = f(xN - L), zN=f(xN), где xN - действитель-
ное местоположение ЛА в момент проведения последнего замера, L —
расстояние, пролетаемое ЛА между последовательными измерениями.
В результате такого сопоставления получается некоторое число кото-
рое характеризует степень несовпадения измеренной и проверяемой гипо-
тетической реализаций. Величина Ц= /(Xj) зависит от измеренной и гипо-
тетической реализаций навигационного поля. Кроме того, /, является
функцией проверяемого значения Дх = /Д/ ошибки навигационной сис-
темы.
Как видно из изложенного в главах 1 и 4, могут использоваться раз-
личные виды функционалов, но они должны обладать общим обязатель-
ным свойством: в идеальных условиях, при отсутствии ошибок измере-
ния поля и картографирования и других возмущений, функционал дол-
жен достигать абсолютного (глобального) эктремума на истинной гипо-
тезе, т.е. при Дх = х£ ~xN. Тогда и в условиях неизбежных возмущений,
рассчитав значения функционала для всех возможных значений ошибки
ГНС и выбрав то значение ошибки Дх, при котором функционал достиг
экстремума, мы получим оценку местоположения, близкую к истинной.
Точность этой оценки будет тем выше, чем меньше ошибки измерения
геофизического поля и больше длина обрабатываемой реализации (чис-
ло измерений поля N).
В качестве функционалов в эвристических поисковых алгоритмах ис-
пользуются:
среднее произведение
1 N -I
Л,-=— s fn(x*-iM~kL)zN_k, (5.186)
А к= О
средняя абсолютная разность
1 N- 1 i
I2i=— S lzN_k-f„(x*-iM-kL)l, (5.1^7)
А к=0
средний квадрат разности
1 АГ —I
/3,= — S [zN_k-f„(x*-iM-kL)]2. (5.188)
Л к = 0
Если ошибки картографирования отсутствуют, т.е. в одних и тех же
точках /п(х) = /(х), где Дх) — истинное значение геофизического поля,
а датчик поля производит измерения абсолютно точно
^N^k=f^N-kL), (5.189)
то выражения для функционалов принимают вид
1 N-1
1ц=— S Д(х* -/Д/-kl)f(xN-kL), (5.190)
N к = 0
Д \f(xN-kL)-fn(x*-iAl-kL)\, (5.191)
192
/3,= 4'V [/(^-Л£)-/п(х*-/Д/-^)]2. (5.192)
/V k=0
Видно, что все функционалы имеют абсолютный экстремум для прове-
ряемой ошибки /Д/, совпадающей с действительной ошибкой ГНС Дх =
= x^-xN. В этом случае 1ц -I3i = 0 и эти функционалы достигают абсо-
лютного минимума. Функционал /1(- достигает на истинной гипотезе аб-
солютного максимума. Обоснованием функционала /п является извест-
ное свойство корреляционной функции Л//(Д) стационарного процесса
f (х) достигать абсолютного максимума при нулевом сдвиге Д = 0. Дейст-
вительно, если поле стационарное и эргодическое, а длина реализации
NL достаточна для проявления эргодичности, то
Zti =s Rjy(xN — х^ — 1Д.Г)
и абсолютный максимум Ilt достигается при /Д/ = х* — хд, = Дх.
Кроме приведенных (5.186), (5.187) и (5.188), можно указать еще
ряд функционалов, пригодных для использования в эвристических поис-
ковых КЭНС. Например, функционал
/41- = V л2 - fn(x* - IД/ - kL)]2. (5.193)
к = 0
Положительные коэффициенты ак позволяют наилучшим образом учесть
возможную неравноточность различных измерений поля.
Далее, можно использовать функционал, представляющий сумму чет-
ных степеней:
N-i ,
/s,= S a2klzN^k-/п(х* -iAl-kL)]2k. (5.194)
fc = 0
Функционал /si при отсутствии погрешностей измерения навигационного
поля достигает абсолютного минимума (нуля) на истинной гипотезе Дх =
= гД/ = х£-xv.
Пусть F(z) — произвольная функция, удовлетворяющая условию, что
ее разложение в степенной ряд содержит только четные степени аргумен-
та, а коэффициенты разложения л; положительны:
F(z) = S ajZ^.
f=o
Тогда функционал
N- 1
/6,= S F[zN^k-fn(x^-iM-kL}]
к=0
носит весьма общий характер и пригоден для использования в эвристиче-
ских поисковых КЭНС, так как удовлетворяет основному условию: при
отсутствии щумов измерения его абсолютный минимум (нуль) достига-
ется на истинной гипотезе.
Типичный вид зависимости функционалов 1ц, 1ц, 1ц от рассогласова-
ния показан на рис. 5.28; при больших ошибках Дх могут появиться
локальные минимумы и максимумы.
13. И.Н Белоглазов 193
Двумерная поисковая КЭНС для совместного оценивания местополо-
жения и скорости движения. Будем считать движение в горизонтальной
плоскости произвольным и предположим, что ошибки ГНС на интервале
наблюдения описываются уравнениями (5.77) и (5.78)
Дх = ДИг, ДГХ =0, Ду = ДКу, ЬУу =0. (5.195)
Пусть в дискретные моменты времени /2, ..., произведено N изме-
рений используемого навигационного поля Zt,z2, ..., z^ и зафиксированы
показания ГНС xf, у* х*, yj, .... х^,у^. Вся полученная информация {х*,
у*, z к} (Л = 1, 2, ..., N) заносится в оперативное запоминающее устройство
БЦВМ для обработки. Необходимо определить позиционные ошибки
ДХдг, Дудг и ошибка измерения скорости, имевшие место в момент послед-
него замера. В соответствии с принятой моделью ошибок ГНС (5.195)
в рассматриваемом варианте гипотезами являются четырехмерные векторы
ЗСНДХлг ^Vx Д^]т.
Назначаются максимально возможные значения позиционных и скоростных
ошибок Дтах, ДГтах и вводится дискретизация по местоположению Д/
Рис. 5.29
194
и скорости и, при этом полное число проверяемых гипотез q равно
q = (2и + l)2(2m + I)2, (5.196)
Где П — Дщах/^1, т— ДИтах/и.
Алгоритм двумерной поисковой КЭНС сводится к следующему. На
горизонтальной плоскости с центром в точке (х*„ у*) строится довери-
тельный квадрат возможного нахождения движущегося объекта в момент
проведения последнего измерения геофизического поля (рис. 5.29). Для
произвольной проверяемой гипотезы которой соответствуют пред-
полагаемые значения ошибок &xN = iSl, &yN = /Д/, AVx = и A Vy = qv,
сначала строится гипотетическая горизонтальная проекция траектории
движения. Она получается смещением конца траектории ГНС х£, у* на
величины /А/, /А/ и растяжением (или сжатием) траектории ГНС в соот-
ветствии с предполагаемыми величинами скоростных ошибок ДКХ, А Ку.
Затем из блока памяти в соответствующих точках гипотетической траек-
тории 1, 2, ..., N извлекаются значения поля fnij^r)k (к= 1, ..., N) и таким
ббразом получается гипотетическая реализация поля (кривая / на рис. 5.30).
Она сравнивается с реализацией датчика поля (кривая 2). Результатом
сравнения является значение функционала=/(ДхЛ, =1Д/, k.yN=i&l,
AKX = gu, ДКу = тщ). Если проверяемая гипотеза далека от истинной, то
вычисленные значения функционала сильно отличаются от абсолютного
экстремума этого функционала. В процессе перебора всех гипотез, т.е. в
процессе последовательного расчета значений функционала для всех воз-
можных вариантов, наступит момент, когда будет проверяться истинная
гипотеза. При этом в идеальном случае (отсутствие ошибок измерения
поля, возможность пренебрежения дискретизацией переменных) значе-
ние функционала достигает абсолютного экстремума. В реальных усло-
виях при наличии ошибок измерений апостериорные оценки координат
и составляющих скорости движения также вырабатываются как такие
значения проверяемых параметров, которые доставляют функционалу
абсолютный экстремум. Однако выбранная траектория движения и соот-
ветствующая ей реализация поля, извлеченная из блока памяти (кривая 3
на рис. 5.30), будут незначительно отличаться от действительной траекто-
рии (см., рис. 5.29) и реализации датчика поля. В качестве функционалов
может использоваться один из рассмотренных выше.
13
195
53.2. Оптимальные поисковые алгоритмы КЭНС
Теоретической основой синтеза алгоритмов оптимальных поисковых
КЭНС служит теория статистических решений [5.16, 5.17]. Рассмотрим
последовательно ряд вариантов. При их изложении делается несколько
предположений, упрощающих изложение, но не снижающих общности
рассмотрения.
Одномерная КЭНС для оценки местоположения. Предположим, что
ЛА и установленный на нем датчик используемого навигационного поля
движутся с постоянной скоростью V вдоль оси х и эта скорость измеряет-
ся без ошибок (ДГЛ=О). Интересующая нас задача совмещения реали-
заций может быть сформулирована как задача теории многоальтернатив-
ных решений. Определим математические объекты, которые фигурируют
в теории статистических решений.
Пусть поле /(х) задано на бесконечном интервале (-°°, °°). Рассмот-
рим лишь один такт формирования сигнала коррекции. За начало отсчета
реализаций примем координату грубой навигационной системы и учтем,
что х*, измеряется в БЦВМ дискретно с интервалом дискретности Д/.
Пространство сигналов £2 = {S,} состоит из отрезков функции /(х)
длины NL и содержит 2п + 1 сигналов. Сигнал So оканчивается в точке
х* (рис. 5.27). Любой сигнал S, содержит/V точек, т.е. может быть пред-
ставлен TV-мерным вектором-столбцом
sil
S/2
Лх„ + /Д/]
/[х* + iSl-L]
Si =
siN
Дх* IK]
где Sjj - j-я проекция вектора S,-.
При избранной нами системе отсчета проекции сигналов подчиняются
следующим соотношениям:
si/ + к, j + к >
(5.197)
где / = 1,2,..., TV,; 1 - j < к < N - j.
Вход системы Z представляет аддитивную смесь сигнала и шума и также
является TV-мерным вектором-столбцом
z =
ДхД +s/[xw]
y[xw - Z,]+3/[xw - Z,]
f[xN - (TV - 1) L]+ 8f[xy - (TV - 1) L]
где 5f(xy), (>f(x\t —L),.. . ,8f [xN — (N — V)L] — ошибки измерения,
вносимые датчиком информации и имевшие место соответственно в точках
хдг, ху - L,. .. , ху -(N - 1) L.
196
Пространство решений G = {D/} совпадает (в случае одномерного вари-
анта) с пространством сигналов {•$)}.
Задача многоальтернативного выбора сводится к тому, чтобы, используя
сравнение входа Z со всеми сигналами S,(i = - п,.. . ,п) и имеющиеся
сведения о статистике шума 8/и об априорных вероятностях сигналов 5,,
выбрать оптимальную гипотезу Dv. Так как пространства сигналов {$,}
и решений {£>;} совпадают, то в результате принятия решения указывается
тот сигнал Sv, на который более всего похож вход Z.
Выбираем детерминированную решающую функцию
F(D\Z) = F°(D\Z) i 8(D-Df), (5.198)
j = - п
где 8(£>-£>/) —дельта-функция, a F°(£)|Z) принимает значения 0 или 1.
Закон распределения ошибок Д грубой навигационной системы обычно
известен; он определяется плотностью вероятности ошибки р (Д). Априор-
ная вероятность = p(Sj) сигнала S, легко выражается через р (Д) :
('+ 1)4/
Р,= f р(Д)сГД. (5.199)
/А /
Так как априорные вероятности сигналов известны, то целесообразно
выбрать бейесово решение, т.е. выбрать оптимальную решающую функцию
F°(D\ Z) из условия минимизации среднего (бейесова) риска RfF), опре-
деляемо го соотношением
K(F)=J s s WijpiP(Z\Si)F°(Dj\Z)dZ, (5.200)
1 / = - п i = - п
где Wjj — функция потерь при принятии /-й гипотезы Dj, когда на входе
системы имеется Т-йсигнал,P(Z |5,-) — функция правдоподобия, интеграл
в формуле (5.200) берется по всему пространству входов Г.
Оптимальное решающее правило F°(Dj |Z) для любого входа Z должно
обеспечить минимум подынтегральной функции, тогда получится минимум
и всего интеграла.
Пусть принят вход Z и решающее правило F°(Dj |Z) выбрало гипотезу
Dp, тогда F°(Z)„ | Z) = 1, F°(Z>/|Z) = 0 и подынтегральная функция опреде-
ляется следующим образом:
п
Av= S WiPpiP(Z\Si). (5.201)
i = -п
Если решение оптимальное, то Av ~ min Aj. Отсюда вытекает
/ = — п, . . . , п
правило построения оптимального решения: по принятому входу Z опреде-
ляются все числаЛ/И выбирается такая гипотеза Dv, для которой Л „мини-
мально.
Ограничимся рассмотрением простой функции потерь
(1, i ¥= j,
W.-. = (5.202)
l0, / = j,
197
для которой Aj = S PjP(Z I Sj) —. Pj P(Z I S;-) и минимум А/ достигается
i = — п
при максимуме Pj P(Z IS/).
Известно [5.17], что для нормального шума 5/ — а мы его таким пред
полагаем — функция правдоподобия P(Z|Sy.) определяется так:
P(Z | S/) = ptzi, z2.zN | S/) = [(^fVd^] -1 X
X exp
-1(Z-S/)TV(Z-S/)
(5.203)
где К21 - матрица, обратная ковариационной матрице Kz = II K,j II шума 5/.
Остановимся лишь на случае, когда шумы датчика информации 5/
являются высокочастотным случайным процессом и время корреляции
этого процесса меньше интервала L/V, за который движущийся объект
проходит расстояние L. При этом корреляция между соседними замерами
датчика отсутствует, матрицы Kz и Kjl являются диагональными и
1 / IIZ - S,- II2 \
) <5-204)
Здесь о~- среднеквадратическое отклонение шума 5/, IIZ - S; II — метрика
вектора (Z - S/,) :
IIZ - Sf- II = V(Z1 -Sjl)2 + ... + (zN-sjN)2'.
Величина PjP(Z | Sj) для простой функции потерь совпадает с апостериор-
ной вероятностью Pa(S/|Z) сигнала S, после того, как зафиксирован вход
Z. На основании предыдущих выкладок
- IIZ II2 + 2(ZS/) - II Sj II2 + 2 о2, In р/
2о2~
Pa(5/|Z)-(x/27o~)A' еХР
(5.205)
где (ZS/) — скалярное произведение векторовZ nSj.
Теперь становится очевидным, что по оптимальному решающему прави-
лу выбирается та гипотеза Dv, для которой апостериорная вероятность
P.A(DV\Z) оказывается наибольшей или, что то же самое, для которой
оказывается наибольшим число
М/ = - II Sj II2 + 2(ZS/) - IIZ II2 + 2alln pz (/ = - и.и). (5.206)
Обсудим этот вывод для различных предположений о распределении
априорных вероятностей Pj и о характеристиках поля f (х).
1. Если все гипотезы равновероятны (р; = const; j--n...п), поле
/(х) — стационарное и эргодическое, длина реализации NL достаточно для
вычисления по ней дисперсии и коэффициентов взаимной корреляции, то
II Sj II2 = const (J = — n.п) и максимум М/ совпадает с максимумом
(ZSj). Скалярное произведение (ZSj) пропорционально вычисленному
с помощью усреднения по времени коэффициенту корреляции векторов
Z и S/. Следовательно, для равновероятных гипотез S/ и простой функции
потерь Wjj при нормально распределенной помехе 5 f, носящей характер
белого шума, и в случае стационарного поля f(x) оптимальным является
корреляционный метод, что оправдывает сохранение термина ’’корреляцион-
но-экстремальные’и применительно к оптимальным поисковым системам.
198
2. Если все гипотезы равновероятны (pj = const, / = но поле
нестационарное ( II Sj II =# const), то максимум Wy совпадает с максимумом
IIZ - Sj II2. Алгоритм, обеспечивающий min IIZ - Sj II2, представляет собой
/
не что иное, как метод наименьших квадратов.
Будем оценивать точность совмещения реализаций величиной среднего
квадрата а2 ошибки xN - xN. Значение а2 может быть получено из (5*200),
если функцию потерь задать в виде Wy - j)1 Ыг:
„ п п .
а2= S Pi S (/-/)2Д/2/P(Z\Si)F°(Dj\Z)dZ. (5.207)
i=-n j=-n Г
В формулу (5.207) входит величина
/ P(Z | S,-) F° (Dj \Z)dZ = f P(Z | S. ) dZ,
г г/
где Г;- — область входов, для которых принимается решение Dj. Эта вели-
чина равна вероятности р(/- того, что при z-м входном сигнале Sf будет
принято /-е решение Dj. Вероятности Рц могут быть рассчитаны путем
рассмотрения случайных чисел Wy, а именно:
Рц = f duj f ... f р(и_„.......un\Si)X
X du_n .. . dtij~ idUj+l ... dun , (5.208)
гдер(м_„.....un |S,-) = P(U\Si) — условная совместная плотность распре-
деления величин и/ (j = - п..п) при условии, что на входе системы
имеется сигнал S,-.
Если шумы датчика S/, а следовательно, и вход Z распределены по
нормальному закону, то случайные величины также распределены по
нормальному закону и P(U\ S() определяется равенством
P(U\S;)= [(ч/2?)2"+,х/^Г^7] и). (5.209)
Здесь K(Jl — матрица, обратная ковариационной матрице Ку =
случайных величин wy = (Z5y), (/ = -п.и);
. w_„ -<W_„ >
о
и=
. ип — <ип>
где <Му>— условные математические ожидания величин «у при условии,
что на входе имеется сигнал St, UT — матрица, транспонированная по отно-
О
шению к U.
Можно показать, что элементы ковариационной матрицы для рассматри-
ваемого нами варианта, когда шум датчика является белым шумом, опре-
деляются следующим образом:
KUt. = M((Ui - (щ ))(Uj - (и, >) I St > = M< l(Z - Si)Sy] [(Z - Si)St ] | S,-> =
199
Л' N
= М< X (zp - sip)sJp S (z(/ -sit/)Si4 |S,-> =
p = । я = i
= M £ S/p £ SlqM^zp~ SipK2q~ Siq')\Si'>"
P ~ 1 4 - 1
= oi S s/psZ/, =al(5z5z) (/,/ = -«......и). (5.210)
p = 1
Из теории статистических решений известно, что вероятности имеют
наиболее простые выражения, когда сигналы ортогональны и равномощны,
т.е.
(5.211)
£2, 7 = Л
ВД) =
' (о, j*l.
В рассматриваемой нами задаче в случае определенного вида поля /'(л)
условия (5.211) также могут выполняться. Подтвердим это на примере
двух типов полей.
Мелкоструктурное поле/'(х). Такое поле имеет радиус
корреляции, не превосходящий шаг дискретности Д/. Если длительность
интервала наблюдения NL выбрана достаточно большой, то скалярные
произведения (SjSt) оказываются пропорциональными значениям корре-
ляционной функции поля *>
(5Z5Z) = Rff[(i -j)M]
и для мелкоструктурных полей
1 No2, / = /,
№Л) = L (5-212)
10, / =£(,
т.е. величина ?2 в соотношении (5.211) совпадает с увеличенной в N раз
дисперсией о2 поля /(х); условие равномощности сигналов означает
постоянство дисперсии поля.
Поле состоит из отдельного ориентира. В этом варианте
f(x=kM) =
С, к = 1,
0, кф\.
(5.213)
(5.214)
Предположим, что длина реализации NL настолько велика, что ориентир
все время находится в поле зрения датчика, тогда
( С2, i = j,
<Мо.
и в формуле (5.211) следует положить £ = С.
Продолжим рассмотрение точности для ортогональных и равномощных
сигналов. Матрицы К и теперь становятся диагональными:
Ку = о2Л2Е,
*) Предполагается, что поле f (х) центрированное.
200
(Е - единичная матрица), det Kv = (ol£2 )2" + 1 и
Л
1 / s < \
1 / q = — п I
P(U\Sj)- — ,------- , ехр\------—----I,
(V2?o^£)2n + 1 2о1£2 /
(5.215)
где uq = uq ~(uq) — центрированные величины, причем
(5.216)
q = i-
Подставив (5.215) в (5.208), находим
°° Г" /
f е 2 фЬ +-j-
Pi \ / °~ Pi \
In 2— ...ф(г+ In—L—IX
Р-п / \ £ Pi-l /
/ 5 о~ Pi \ / О~ Pi \ ( Pi \
X Ф1с------+— In — )ф1г +---------- In---- I . . . Ф1з +---In— jdz,
X £ Pt / \ $ Pi+i / \ £ Рп '
(5.217)
z2
1 ж _ — / £ и р.- \ / £ р.- \
Ра = —==; f е Ф1г + — + — In — ). . . ФI z + — + — In --------------- ) X
у2я \ о~ £ Р~п) \ £ Р/ -1 /
/ £ а~ Pi \ I о~ Pi \
XФ1г + — + —• In----------I. . . Ф1г + — +- In — jdz, (5.218)
\ cr~ ? Р, + 1 / \ $ рп /
где Ф(г) — функция интеграла вероятности
г2
1 z
Ф(?)=——— f е 2 dt.
у2тг -~
Вычисление вероятности р;/-в случае произвольного закона распределе-
ния р (Д) является сложной процедурой. Предположим, что распределение
р(Д) равномерное, тогда р, = const = 1/(2л? +1) и
РЦ
i * i
е 2 Ф2п '(г)Фк - —)dz,
(5.219)
7
После подстановки (5.219) в (5.207) получаем
,2
2 Д/2 =---------------------- / £ \
о2 =—п (п + 1)(2н + 1) i f е2 ф2" '(2)ф|2- — jdz. (5.220)
3 v2?z -<» \ с7~/
201
Интересно отметить, что без всякого управления при равной вероятности
реализаций средний квадрат ошибки ГНС равен
1 и (и + 1)
о2 = 2------[Д/2 + (2 Д/)2 + ... + (и Д/)2] =—--Д/2, (5.221)
° 2и +1 3
поэтому выигрыш в точности совмещения реализаций БЦВМ, получаемый
за счет перебора вариантов, оценивается формулой
J оо______1 / t \
~ = 2(2и + П ——; /е 2Ф2л1(2)ФЬ-----------------\dz. (5.222)
Интеграл
Jn ±V +J2 J ф2я-1(г)фЛ_1_Ъг (5.223)
\ o.J у/ 2тг — “ ' ° ~'
часто встречается в теории статистических решений. Точного выражения
'Р (п> 11°~) пока не найдено.
Результаты вычисления на ЭВМ зависимости ох1°х0 от и и при-
ведены на рис. 5.31. Хотя при выводе (5.222), как отмечалось выше, не
учитывались некоторые существенные возмущения, например ошибки из-
мерения скорости Д V грубой навигационной системой, тем не менее выте-
кающие нз (5.222) выводы правильно отражают существо дела и дают
оценку точности, близкую к реальной.
Обсудим полученные результаты.
1. Если поисковая КЭНС использует мелкоструктурные поля, а интер-
вал наблюдения достаточен для вычисления корреляционной функции, то
достижимая точность ох определяется уравнением . (5.222), в котором
надо положить % = \/jVo. Эта зависимость, рассчитанная для п = 20, пока-
зана на рис. 5.32. При достаточной длительности наблюдения (большие зна-
чения jV) для реальных соотношений сигнал/шум (о/о~ = 0,5^2) точ-
ность по сравнению с точностью ГНС увеличивается на порядок и более.
2. Если поисковая КЭНС работает по отдельным ориентирам, то в
(5.222) надо положить % = С. Зависимость достижимой точности совме-
щения реализаций ох от С/о~ совпадает с изображенной на рис. 5.31, где
следует считать, что по оси абсцисс отложена величина С) о.. .
202
5.3.3. Оптимальные поисковые алгоритмы совместного оценивания
местоположения и скорости движущихся объектов
Не уменьшая общности, рассмотрим одномерный вариант системы.
Модель измерений датчика поля представим в виде
Z =
/ (xN) + 8/(xN)
f[xN - £(1 +p J] + 8f[xN - £(1 +p J]
f[xN (N-l)L(\+i>~)]+8f[xN -(N- 1)£(1 +rj]
Это выражение предполагает, что движение объекта происходит с постоян-
ной скоростью, ось х направлена вдоль априорного (измеренного на дви-
жущемся объекте) направления скорости, £ — априорное (предполагаемое
на движущемся объекте) расстояние между последовательными замерами
датчика поля, — случайная относительная ошибка измерения скорости
.движения, предполагаемая постоянной во времени.
Априорная информация о поле заключена в бортовой карте, на основе ко-
торой может быть воссоздано множество гипотетических реализаций
(i =—п,...,п; j =-т,...,т). Реализация предствляет собой вектор
/(Хд, + /Д/)
/[х^ + / Д/ - £(1 +/Дг)]
/[х^+/Д/ -(7V- 1)£(1 +/Дг)]
где Др — шаг дискретизации по относительной скорости. Далее обозначим:
(2п + 1) Д /, (2т + 1) ИДр — доверительные интервалы по местоположению
и скорости движения, х^, V* — координата местоположения и скорость
движения, определенные ГНС. Множество { S(/} будем рассматривать как
пространство сигналов S2. В результате сравнения входа Z со всеми сигна-
лами S/j решающее устройство принимает некоторую гипотезу о дей-
ствительном местоположении и скорости движущегося объекта, где % , 1? —
апостериорные оценки параметров i, j. В [5.8] показано, что в случае ста-
ционарного эргодического поля и равновероятных гипотез по оптималь-
ному решающему правилу рассчитываются и сравниваются между собой
числа
М;/ — (ZSjj),
представляющие собой скалярное произведение (корреляционный момент)
векторов Z и , и выбирается та гипотеза для которой число
оказалось наибольшим. В качестве апостериорных оценок местоположе-
ния х и скорости Й движущегося объекта принимаются
xN=x*r + ^l, И*(1+7?Др).
203
Если поле нестационарное, то оптимальным оказывается алгоритм мини-
мума среднего квадрата (5.192).
Точность оценивания местоположения определяется формулой
^ = 2(2т + 1)2(2п + 1)у/-^ -f < J2n-'(z0,N,m)X
N+2my/2n_^aa
I \ ] 2° 1 2° [ 1 1т
XGlz0, N,m, а) —— f dzi f ехр S z2 -
\ °\/2тг. „о у 2 л _ oo I х = о
где
____1_
N + 2т
2 т
S
л = о
> dz0,
(5.224)
/ А-1 1 z
J(z, N, т) =у/------—— f dx0 . . .
N + 2m
/ о
G\z, N, tn, —
I a
N+lm
dx2m ,
о
f dyx
__1_ ।
N+2m
2m .2-
2 A)
A = 0 '
На рис. 5.33 приведены графики достижимой точности при наличии оши-
бок по скорости, рассчитанные *) по формуле (5.224). Анализ этих зависи-
мостей показывает, что при низких соотношениях сигнал/шум ( о / <
< 1) апостериорная среднеквадратическая ошибка определения мес-
тоположения превышает априорную. Происходит это вследствие того, что
при выбранной простой функции потерь (5.202) оптимальное решающее
правило максимизирует апостериорную вероятность правильного определе-
ния координат и не обеспечивает минимума среднеквадратической ошибки.
Использование функции потерь вида (5.202) позволяет получить простые
*) Вычисления произведены А.А. Аветисовым.
0 12 3 6/6.
Рис. 5.34
204
в расчетном отношении алгоритмы. В то же время при достаточной длитель-
ности наблюдения (большие значения N) и при реальных соотношениях
сигнал/шум (о/о~ > 0,5-^2) оптимальные поисковые алгоритмы позво-
ляют значительно (на порядок и более) увеличить точность определения
местоположения движущихся объектов. Зависимости, представленные на
рис. 5.34,характеризуют область повышенной достижимой точности.
Если т = 0 (ошибки измерения скорости отсутствуют), то
( N - 1 \
J(Z,tf, о) = Ф(-5у-г),
Производя замену переменной \Jz = t, находим
О2 1 оо -Г
-^=2(2и+1)-— fe 2 Ф2^'(Г)Ф(г- y/N'f-ydt,
°х0 \/2я_<«,
что совпадает с ранее полученным результатом (5.222).
В реальном двумерном варианте КЭНС необходимо производить поиск
экстремума функционала по четырем переменным: ошибкам определения
координат Дх, Ду и относительным ошибкам измерения скорости движе-
ния vx, vy. Однако достижимая точность поисковых алгоритмов и в этом
случае определяется соотношением (5.224).
5.3.4. Оптимальные поисковые алгоритмы совместного оценивания
местоположения и скорости движущихся объектов
при одновременном использовании нескольких полей
Выясним, какой эффект дает одновременное использование нескольких
полей fx (х) (X = 1,..., Л). Рассмотрим одномерный вариант КЭНС. В рас-
сматриваемом случае вход системы Z есть совокупность векторов Z х ,
причем Z х соответствует измерениям поля Д (х):
А(*лг) +
f\\XN ~ +Р~)] +5А[хЛг - +Р~)]
А[^ЛГ - (Л<- 1)£(1 + ^)] + 5Д[х„ - (N- 1)£(1 +^)]
где 5Д — шумы Х-го датчика поля.
206
Карты всех используемых полей имеются на борту движущегося объек-
та. Каждый сигнал представляет собой совокупность векторов
Д[х^+/Д/~£(1 +/Др)]
А[Х^+/Д/- (N - 1)£(1 +/Др)]
В предположении, что гипотезы равновероятны, для простой функции по-
терь по оптимальному решающему правилу [5.8] выбирается та гипотеза
D^, для которой оказалась наименьшей величина
л ||Zx-Sz/J|2
иц= S ---------г------ (/ = —«, — тт), (5.225)
х=1
где о~х — среднеквадратическая ошибка измерения поля Х-м датчиком.
Если используемые навигационные поля стационарны и эргодичны, а дли-
на обрабатываемых реализаций достаточна для проявления свойств эргодич-
ности всех полей, оптимальный алгоритм упрощается: вместо чисел (5.225)
по принятому входу рассчитываются и сравниваются между собой числа
Л ^^'/'х
и,у= S -------j----- (г = — п,..., и; / = — т.т) (5.226)
х = 1 а~х
и выбирается такая гипотеза для которой число (5.226) максимально.
Можно показать [5.18], что если все используемые поля — мелкострук-
турные и априорные ошибки измерения скорости движения отсутствуют,
то средний квадрат о* апостериорной ошибки оценивания местоположения
определяется формулой
о2 1 ~ , , / / Л Ох \
-у =2(2и+1)------- /е 2 Ф2"-1(2)Ф1г-х/^ S -f- )dz. (5.227)
°х0 \ х = I ст~х '
Эта зависимость совпадает с приведенными на рис. 5.32, только надо счи-
тать, что по оси абсцисс отложена величина х/^(°х/а~ х)2 - Поэтому для
получения такой же точности КЭНС, использующая одно поле, должна
иметь более высокое отношение сигнал/шум, чем КЭНС, использующая
много полей. Эквивалентное отношение сигнал/шум (для КЭНС, работаю-
щей по одному полю) равно
(о
Таким образом, использование в КЭНС нескольких полей позволяет
существенно улучшить точность определения координат движущихся объ-
ектов при прочих равных условиях.
207
5.3.5. Использование нелинейного программирования
в оптимальных поисковых КЭНС
Сплошной перебор всех возможных гипотез надежно решает проблему
ликвидации больших начальных отклонений в КЭНС, и к нему необходимо
прибегать в тех случаях, когда неопределенность начальных значений оцени-
ваемых параметров столь велика, что оптимизируемые функционалы могут
иметь ложные экстремумы.
Однако кроме сплошного перебора, обеспечивающего достижение гло-
бального экстремума функционала, в КЭНС с успехом могут использовать-
ся методы поиска, основанные на идеях нелинейного программирования
[5.19]. Область их использования, по-видимому, ограничена такими приме-
нениями, в которых оптимизируемые функционалы одноэкстремальны.
Назовем эти поисковые методы локальными. Области применения локаль-
ных поисковых алгоритмов и беспоискового оценивания совпадают. Более
того, оценивание типа Калмана, как показано в работе [5.20], можно ин-
терпретировать как градиентный поиск при квадратичном функционале
(функции) с определенным образом заданными весовыми коэффициента-
ми. Поэтому здесь, как это часто бывает с различными классификациями,
варианты, относимые к различным классам, сливаются. Тем не менее есть
поисковые варианты, совсем не похожие на непрерывное или рекуррентное
оценивание в обычных их формах. Сопоставление этих двух под-одов
должно производиться главным образом по сложности их реализации
в БЦВМ. Представляется, что локальные поисковые методы могут найти
использование в задачах высокой размерности, связанных с многопарамет-
рическим оцениванием. Но вопрос этот исследован еще недостаточно.
Далее для определенности будем считать, что оптимизируемый функцио-
нал обладает экстремумом—минимумом. В локальных поисковых КЭНС
могут использоваться методы минимизации, основанные на вычислении
производных функционала, такие как метод наискорейшего спуска, метод
Ньютона, метод сопряженных градиентов, метод переменной метрики и
др. Наряду с ними большой интерес представляют методы, не использую-
щие производных (прямой поиск Хука и Дживса, поиск по деформирован-
ным многогранникам, различные модификации метода случайного поиска
и др.), которые лучше учитывают специфику КЭНС, так как не требуют
непрерывности функционала и существования у него производных.
Из всего возможного многообразия локальных поисковых методов да-
лее описывается прямой поиск Хука и Дживса [5.19], так как этот подход
уже был успешно применен В.И.Капшуровым для синтеза алгоритмов
КЭНС. Рассматриваемый алгоритм, упрощенная блок-схема которого пред-
ставлена на рис. 5.35, включает два основных этапа: исследующий поиск
вокруг базисной точки и поиск по образцу, т.е. в направлении, выбранном
в результате исследующего поиска для минимизации. Вектор оцениваемых
параметров, образующий гипотезу и включающий в себя обычно ошибки
местоположения Дх, Ду, скоростные ошибки ДИЛ., ДИу, углы отклоне-
ния гироплатформы от вертикали ад., а3. и другие, обозначим через
Х = [Дх Ду ДИд ДИ3. ал. ау ... ]т.
Прежде всего задаются начальные значения этого вектора Хо и вектора
5%0 пробных шагов по всем координатам. Чтобы начать исследующий
208
Пуск
Рис. 5.35
поиск, следует вычислить значение функционала /(%б) в базисной точке
%б (начальная базисная точка совпадает с %0). Затем в циклическом по-
рядке изменяется каждая оцениваемая величина (каждый раз только одна)
на выбранные величины пробных шагов, пока все параметры не будут
таким образом изменены. В частности, Дх0 изменяется на величину Зх0,
так что Д%1 = Д*о + Зх0. Если приращение Зх0 не уменьшает функционал
/(%б), т0 Ахо изменяется на — Зх0 и значение 1(Х) проверяется, как и ра-
нее. Если значение 1(Х) не уменьшают ни Дх0 + Зх0, ни Дх0 — 5х0, то Дх0
оставляют без изменений. Затем Ду0 изменяют на величину 8у0 и т.д., пока
не будут изменены все оцениваемые параметры, что завершает один иссле-
дующий поиск. На каждом шаге или сдвиге по оцениваемому параметру
значение функционала сравнивается с его значением в предыдущей точке.
Если функционал уменьшается на данном шаге, то его старое значение заме-
няется на новое. Однако если произведенный пробный шаг по X неудачен,
то сохраняется прежнее значение /(%).
После проведения исследующего поиска применяется поиск по образцу.
Удачные изменения параметров в исследующем поиске, т.е. те изменения,
которые уменьшили /(%), определяют вектор е, указывающий направле-
ние минимизации, которое может привести к успеху. Серия ускоряющихся
шагов или поиск по образцу проводится вдоль этого вектора до тех пор,
14. И.Н. Белоглазов 209
Шаги поиска по образцу-
......... —успех, х ххххх - неудача.
Рис. 5.36
пока /(%) уменьшается при каждом таком поиске. Длина шага, при
поиске по образцу в данном координатном направлении приблизительно
пропорциональна числу удачных шагов, имевших место ранее в этом коор-
динатном направлении. Для ускорения процесса оптимизации изменение
размера рабочего шага 8рХ в поиске по образцу осуществляется путем вве-
дения некоторого множителя при величине пробного шага 8Х, исполь-
зуемой в исследующих поисках. Исследующий поиск, проводимый после
поиска по образцу, называется исследующим поиском типа II, успех или
неудачу поиска по данному образцу нельзя установить до завершения
исследующего поиска типа II.
Если функционал 1(Х) не уменьшается в процессе исследующего
поиска типа II, то данный поиск по образцу считается неудачным и прово-
дится новый ’’исследующий поиск” типа I для определения нового удач-
ного направления. Если исследующий поиск типа I не дает нового удачного
направления, то последовательно уменьшают величину пробного шага 8Х,
пока либо можно будет определить новое удачное направление е, либо
8Х, не станет меньше, чем некоторая заранее установленная допустимая
величина пробного шага 8%mjn, которая определяется необходимой и ожи-
даемой точностью оценивания различных составляющих вектора X. Невоз-
можность уменьшения 1(Х), когда 8Х достаточно мало, указывает на то,
что достигнут локальный минимум, и на этом процедура локального поис-
кового оценивания заканчивается.
Для пояснения описанного метода рассмотрим пример, когда двумерная
КЭНС предназначена только для оценивания местоположения. Оценивае-
210
мый вектор X содержит продольную Дх и боковую Ду позиционные ошиб-
ки ГНС. Предположим, что минимизируемый функционал имеет вид
/(Дх, Ду) = 1 + (Дх + З)2 + (Ду + 2,8)2 . (5.228)
Этот функционал достигает абсолютного минимума /mjn = 1 при Дх =
= — 3 км, Ду = — 2,8 км.
Начальные значения ошибок задаются нулевыми:
Дх0 = 0, Ду0 = 0.
Пусть начальная величина пробных шагов выбрана различной:
5х0 = 0,6 км, 5у0 = 0,84 км.
Исходное значение функционала /(0, 0) в базисной точке Хо = 0 равно
/0 = 17,84. Сначала проводится исследующий поиск типа I для определения
удачного направления:
Дх! = 0 + 0,6 = 0,6, /(0,6; 0 ) = 21,8 (неудача);
ДХ1 = 0- 0,6 = -0,6, /(-0,6;0) = 14,0 (успех);
Ду, = 0 + 0,84 = 0,84, /(—0,6; 0,84) = 16 (неудача);
Ду! = 0 -0,84 = -0,84, Л(-0,6;-0,84)= 10,6 (успех).
Исследующий поиск типа I оказался удачным. Заметим, что при каждом
поиске выбирается последний удачный вектор X. Новым базисным векто-
ром будет %б1 = [—0,6 —0/84] т. Теперь из точки [—0,6 —0,84] т прово-
дится поиск по образцу в соответствии с правилом
Xfc+1 = Хк+(Хк - Х6к) = 2Хк - Х5к,
(5.229).
где Хк — Х^к — величина рабочего шага, Х^к — предыдущий базисный век-
тор X (в данном случае это начальный вектор Хо).
В соответствии с (5.229) получаем (рис. 5.36)
Дх2 = 2(—0,6)-0 =-1,2,
Ду2 = 2(—0,84) — 0 =—1,68,
/2(-1,2; - 1,68) = 5,49.
Наконец, проводится исследующий поиск типа II, неудача или успех его
оценивается путем сравнения с /(—1,2; -1,68) = 5,49:
Дх3 = -1,2 +0,6 = -0,6,
Дх3 =-1,2 -0,6 =-1,8,
ДУз = -1,68+0,84 =-0,84,
Ду3 =-1,68 -0,84 = -2,52,
/(—0,6;—1,68) = 8,01 (неудача);
/(—1,8; — 1,68) = 3,69 (успех);
/(-1,8; -0,84) = 6,28 (неудача);
/3 (-1,8; -2,52) = 2,52 (успех).
Чтобы определить, оказался ли поиск по образцу успешным, сравнивают
/3 (—1,8; —2,52) = 2,52 с /3 (—0,6; -0,84) = 10,6. Поскольку поиск по
образцу успешен, то новой базисной точкой будет Х3 = [—1,8 — 2,52]т;
при этом старая базисная точка представлена вектором Х^ [ —0,6 —0,84]т.
211
14
Далее вновь проводится поиск по образцу в соответствии с формулой
(5.229):
Дх4 = 2(—1,8) — (—0,6) = —3,
Ду4 = 2 (-2,52) - (-0,84) = —4,2,
/4 (—3; -4,2) = 2,96.
После этого проводится исследующий поиск типа II:
Дх5 = -3 + 0,6 = -2,4, /(-2,4; - 4,2) = 3,32 (неудача);
Дх5 = -3 -0,6 = -3,6, /(-3,6; -4,2) = 3,32 .(неудача);
Дх5 = -4,2 +0,84 = -3,36, /5 (—3; —336) = 1,31 (успех).
Поскольку Ц (—3; -3,36) = 1,31 < /3 (—1,8; -2,52) = 2,52, поиск по
образцу представляется успешным и Х5 = [—3 — 3,36]т становится новой
базисной точкой.
Такая последовательность поисков продолжается до тех пор, пока
не будет достигнута ситуация, при которой в конце исследующего поиска
типа II значение 1(Х) окажется большим, чем значение / (Хд) в последней
базисной точке. Тогда, если даже исследующий поиск типа 11 является
успешным при одном (по 8А0 или двух (по 8Х, 5 Y) пробных движениях,
считается, что последний поиск по образцу неудачен, и проводится из
предыдущей базисной точки исследующий поиск типа 1 для определения
нового удачного направления. В иллюстративных целях продолжим поиск
из точки = [—3 —3,36]т.
Поиск по образцу:
Дх6 = 2 (-3)-(-1,8) = -4,2;
Ду6 = 2 (—336) — (—2,52) = —4,2;
/6 (—4,2; -4,2) = 4,4.
Исследующий поиск типа II:
Лху = —4,2 + 0,6 = — 3,6, /(—3,6;—4,2) = 3,32 (успех);
Ду7 = -4,2 + 0,84 = -3,36, /7 (-3,6;-3,36) = 1,67 (успех).
Однако поскольку /7 (-3,6; -3,36) = 1,67 >/5 (-3; -336) = 1,31, то,
несмотря на то, что исследующий поиск типа II оказался успешным, поиск
по образцу считается неудачным, и из точки Х5 = [—3 —336]т начинается
исследующий поиск типа I с уменьшенными пробными шагами 8Х.
Для уменьшения пробных шагов существует специальное правило, свя-
занное с числом последовательных неудач в предыдущих исследующих
1
поисках. В рассматриваемом примере можно взять 8Хновое = — 8Хстарое,
т.е. 8%новое = [0,3 0,42]т. Затем вся предыдущая часть процедуры
минимизации функционала I (20 повторяется с пробным шагом 8Х =
= [0,3 0,42]т. Когда и этот пробный шаг перестает приводить к уменьше-
нию функционала, осуществляется дальнейшее уменьшение величины проб-
ного шага, например до 8Х = [0,15 0,21 ]т. Это продолжается до тех пор,
пока 8Х не станет меньше заданного значения 8Xmin. В рассматриваемом
212
примере SA'mjn может быть принято равным [0,1 0,1]т, если потребная
точность определения координат местоположения не превышает 0,1 км.
Когда при уменьшении пробного шага до уровня 8Xmin не достигается
дальнейшее уменьшение минимизируемого функционала 1{Х), процесс
поиска прекращается и последнее значение вектора X принимается за окон-
чательную оценку.
§ 5.4. РЕКУРРЕНТНО-ПОИСКОВЫЕ КЭНС
Хотя глобальные поисковые алгоритмы, связанные со сплошным пере-
бором всех возможных вариантов, надежно решают принципиальную для
КЭНС проблему ликвидации больших начальных отклонений, их непосред-
ственное использование в случае многопараметрического оценивания
наталкивается на непреодолимые вычислительные трудности. Действитель-
но, если надо оценить п параметров, причем максимально возможное зна-
чение ;-го параметра равно ДтаХ!-, а допустимый шаг дискретизации по
z-му параметру равен Д/, то общее число проверяемых гипотез q составит
п / Дщ ах i \
q= П 2 ----------- + 1). (5.230)
i= I \ Д/ /
Если предположить, что число проверяемых значений для всех параметров
одно и то же
^гоах i
------- =т,
Д'
то равенство (5.230) принимает вид
q = (2m+\)n. (5.231)
Допустим, мы захотели бы оценить сплошным перебором все ошибки
инерциальной системы ДХ, Д<р, АН, AVX, ДИу, ДИ//, Др, <хх, ау, Дф,входя-
щие в уравнения (5.5 7) — (5.66), а также постоянные составляющие дрей-
фов гироплатформы <Ддр х, ёодр у, содр z по наблюдениям геофизического
поля, причем для каждой переменной проверяли бы лишь 11 возможных
значений (т = 5). Тогда, согласно (5.231), общее число гипотез составит
гигантское число q = II13, что доказывает нереальность чисто поисковых
методов при многопараметрическом оценивании в КЭНС. Необходимо
сократить число параметров, по которым осуществляется сплошной пере-
бор. Существенно нелинейной при синтезе алгоритмов КЭНС является
зависимость геофизического поля от позиционных координат. Эта нели-
нейная зависимость носит характер реализаций случайного процесса и даже
не может быть, строго говоря, разложена в ряд Тейлора, так как высшие
производные реализаций геофизических полей могут не существовать.
В отмеченном характере нелинейности и состоит специфика и трудность
синтеза алгоритмов КЭНС.
В общей задаче многопараметрического оценивания навигационных
параметров по наблюдениям геофизических полей, являющейся с математи-
ческой точки зрения существенно нелинейной, надо отделить часть, связан-
ную с нелинейной зависимостью геофизических полей от позиционных
213
координат, и сохранить в этой части сплошной перебор вариантов, чтобы
алгоритмы надежно решали проблему ликвидации больших начальных
ртклонений, а по отношению к другим параметрам (например, Я, VH,
ах, ау, Дф, ссдр х, Шдр у, ссдр 2) отказаться от сплошного перебора и ис-
пользовать методы фильтрации.
Теоретической основой такого подхода как раз и являются метод рекур-
рентно-поискового оценивания [5.21] и его непрерывный аналог [5. 8],
объединяющие идеи калмановской фильтрации и теории проверки стати-
стических гипотез.
5.4.1. Рекуррентно-поисковое оценивание
н его непрерывный аналог
Суть этих методов заключена в следующих двух теоремах.
Теорема о рекуррентн о-п оисковом оценивании.
Пусть имеется конечное множество гипотез G ={D\,...,Dj, ...,Di}h заданы
априорные вероятности гипотез Pj = P (Dj). В дискретные моменты времени
i = 0,2.N наблюдается сигнал
Zt = HjiXi+Fft + Vi, (5.232)
зависящий от вектора состояния Xj линейной дискретной динамической
системы, описываемой уравнением
Xf+ , =АцХ, + &. (5.233)
Матрица объекта Ац = А/ (Df), матрицы канала наблюдения Нц - Н{ (Df)
и Fjj = Ft (Dj), статистические характеристики возмущений 1?/; и началь-
ного распределения вектора состояния Хо зависят от гипотезы (варианта),
реализующейся на интервале наблюдения i = 0,1,..., N. Наблюдателю априо-
ри неизвестно, какая из гипотез выполняется. Случайные возмущения т?, и
£, — центрированные нормально распределенные дискретные белые шумы,
условные ковариационные матрицы которых равны
М <MT4iDi) = Qif8i4,
Начальные условные распределения вектора Хо нормальные
p(X0\Df)GN(mi,Gl) Q' = l,...,/),
(5.234)
(5.235)
(5.236)
где mj - т (Dj) и Gj = G (Dj) — условное математическое ожидание и кова-
риационная матрица распределения р (Хо I Df). Тогда оптимальный в смыс-
ле максимума р (xv, j\zN) алгоритм оценивания вектора состояния Xjy и
выбора гипотезы D/ включает три группы уравнений:
уравнения оценок
Xji + I — Ajj Xji + Kjj + j Дд + j ,
Д/f +i ~ zi + i — Нц + i Ajiх/j — Fjj + ,, (5.237)
214
уравнения ковариационной матрицы
Г//+1 =^/, + i + 1 ^ji+1 Hfi+1, Mjt+ j ~Qfi ~ Qji
' + (5.238)
уравнения функционалов
Iji+ 1 ~ hi + ^/7+ 1 ^/7+1 ^/i+1 + e/7+ I, e/i+ I = ln( I Qji I I I I I Пу/ | 1 ),
(5.239)
которые рассчитываются для всех проверяемых гипотез (/ = 1,.. .,/)
и для моментов времени i = 0, 1,. .., N.
Соотношения (5.237) — (5.239) решаются при следующих начальных
условиях:
для уравнений оценок
Xj0 = nij + К)о Д,о, Д/0 =z0 - Hjomj - Fi0, Kj0 = Г/Оя;о R-J ; (5.240)
для уравнений ковариационной матрицы
Г/Ь1 ; (5.241)
для уравнений функционалов
//о=Л/о2/о Д/о+е/о, е/о ~ In( I Gj II Rjo I Pj 2), (5 242)
S/o ~ Rjo ~ Rjo Hjo Г/оНj0 Rjo (/ = 1,... , /)
По формулам (5.237) — (5.242) рассчитываются конечные значения
функционалов //Лг. В качестве наиболее вероятной выбирается гипотеза
Du, минимизирующая функционал //Лг:
1VN = П,1П IjN ’
j
а оценка x^N, выдаваемая соответствующим этой гипотезе дискретным
фильтром Калмана, является оптимальной оценкой вектора состояния XN.
Равенства (5.237) - (5.242) полностью определяют алгоритм рекур-
рентно-поискового оценивания.
Схема оптимального алгоритма оценивания изображена на рис. 5.37,
где т означает блок единичного запаздывания. Видно, что алгоритм оцени-
вания структурно распадается на две части: рекуррентную, где реализуют-
ся дискретные фильтры Калмана и рассчитываются значения функционалов
Ijt, и поисковую, в которой отыскивается min/уд-. Этим обстоятельством
и объясняется название алгоритма. 7
Теорема о непрерывном аналоге рекуррентно-поис-
кового оценивания. Пусть имеется конечное множество гипотез
G = {Dj,. .., Dj..., Dt) и заданы априорные вероятности гипотез р7 =
= P(Dj). На интервале [г0, T’J наблюдается сигнал
Z(0 = + F7(f) + 77(r), (5-243)
зависящий от вектора состояния X(t) линейной динамической системы,
описываемой уравнением
<7%
— = A,(t)X(t) + w(t). (5.244)
at
2t5
Рис. 5.37
Матрица объекта Aj (?) - A (Dj, t), канала наблюдения Я,- (г) = Н (Dj, ?) и
F, (?) = F (Dt, t), статистические характеристики возмущения w(?) и на-
чального распределения вектора состояния зависят от гипотезы, имеющей
место на интервале наблюдения [?0, Г]. Наблюдателю априори неизвестно,
какая из гипотез выполняется. Случайные возмущения ш(?)ит7(?) -
центрированные нормально распределенные белые шумы, условные ковариа-
ционные матрицы которых равны
М < w(t) и,т (г) | Dj>= Sxf(t)8 (t - г), (5.245)
М < ‘ritt'ri* (т) I Df > = Sz (?)6 (г - т), (5 246)
М < w(t)rf (г) | Dj > = 0 для V / .
Начальные условные распределения вектора .¥(Г0) нормальные:
р[Х(?0)|£>у] eN(mf, G,) (/= 1,...,/), (5.247)
где mj = т (Dj) и Gj = G(Dj) - условное математическое ожидание и кова-
риационная матрица распределения р[Ж) I Dj}. Матрицы Я; (?), F, (?) и
Sz (?) непрерывны по ?.
216
Тогда оптимальные в смысле максимума р[х(7'),/1 ] оценивание
вектора состояния X(t) и выбор гипотезы Dj могут быть произведены
следующим образом.
По соотношениям
dx ~
— = Af(t)Xj(t) + rj(t)Hj^t)S;\t) [z(0 - Hj(t)Xj(t) - Fj(t)],
dt
Xj(t0)=mf, (5.248)
</Г,-
_L= гдол/со+ЛДОГ/СО - rz(0^T (O^1 (0^/(0Г/(0 +
dt
+ sxi(t), rf(t0) = Gj (5.249)
для каждой из возможных гипотез Dj моделируются I непрерывных фильт-
ров Калмана и путем интегрирования на интервале [Го, TJ уравнений
dh а , л
= (Z- HjXj - Ff)J S;\Z- HjXj - Fj) + Sp(2<4j + Хх/Г,~1),
dt
I Qi
/.(r0) = ln.-4- (5.250)
Pi
рассчитываются конечные значения функционалов Ij(T).
В качестве наиболее вероятной выбирается гипотеза Dv, минимизирую-
щая функционал Ij (Г):
/„(z) = min lj(T),
I
а оценка xv (Т), выдаваемая соответствующим этой гипотезе непрерывным
фильтром Калмана, является оптимальной оценкой вектора состояния
*(П-
Представляется, что рекуррентно-поисковое оценивание и его непре-
рывный аналог помимо использования для синтеза оптимальных алго-
ритмов КЭНС могут найти достаточно широкое применение и в других
областях, таких как идентификация динамических систем, статистическая
радиотехника, контроль динамических систем и т.п. Применение целесо-
образно там, где теоретическому рассмотрению подлежат как выбор неко-
торой гипотезы, так и одновременное формирование оптимальных оценок
о состоянии динамической системы.
Хотя общего решения задачи оптимальной нелинейной фильтрации не
существует, использование рекуррентно-поискового оценивания для целей
синтеза алгоритмов КЭНС (или его непрерывного аналога) дает строгое
решение задачи оптимальной нелинейной фильтрации в частном случае,
характерном для КЭНС.
5.4.2. Частные случаи рекуррентно-поискового оценивания
для использования в КЭНС
В задачах синтеза алгоритмов КЭНС часто возникает следующая ситуа-
ция. Вектор оцениваемых параметров может быть разбит на два подвекто-
ра % и У так, что подвектор Y подчиняется линейному однородному раз-
ностному уравнению, а рекуррентное уравнение для подвектора X и урав-
217
(5.251)
(5.252)
(5.253)
нение наблюдений линейны по X и произвольным нелинейным образом
зависят от Y:
Xi+l =Л,.(У,)Х,.+|,.,
yi+1 =Ф/К,,
Z,=W,-(y,)%,+F,(y,) + r?,..
Возмущения и т?7 — центрированные, взаимно независимые, дискрет-
ные гауссовы белые шумы с ковариационными матрицами Q, и R,. Началь-
ное распределение вектора нормально: р(Х0) е W(zw, G). Случайные век-
торы Хо, Yn, и т?,-взаимно не коррелированы. Требуется на основании
наблюдения вектора Z; в дискретные моменты времени i =0, 1,... ,N
и на основе заданной плотности p(YN} априорного распределения вектора
У/v найти оптимальные оценки координат динамической системы XN и Y^.
Покажем, что рекуррентно-поисковое оценивание позволяет с любой
степенью точности решить сформулированную задачу. Пусть вектор Удг =
= [Удп ... У^]т принадлежит некоторой области В евклидова пространст-
ва Rs (УN G В CRS) и предположим, что Y^ может принимать в области В
лишь конечное число возможных значений Y/N(j = 1,...,/). В рассматри-
ваемом частном случае гипотезами Dj являются возможные значения У(-N
вектора YN; вероятности гипотез р; легко вычисляются по заданной плот-
ности p(YN).
По аналогии с[5.8] введем дискретную фундаментальную матрицу ре-
шений W(i,q) уравнения (5.252), которая определяется разностным урав-
нением
У^Иф^У, (5.254)
и удовлетворяет условию
W(i, i) = E для V/, (5.255)
где Е - единичная матрица.
Из соотношений (5.252), (5.254) и (5.255) находим
П Ф1+ч-к-1, i >q,
к —ц
(5.256)
Траектория вектора У,,-, соответствующего конечному значению YN~
= Yj N, определяется соотношением
y/7=IV(^)y7W . (5.257)
Подстановка (5.257) в уравнения (5.251) и (5.253) дает
х,+1 = Лу.-х,- + §;,
Z-tf^ + F,,- +т?;
(« = 0, 1,..., /V),
218
где
Aj( = А,- [W(i, JV)Y/N], Hfi= H, [ИХ/, TV)Y/7V], Fa = Fj[W(i, N)YjN].
(5.258)
Задача оптимального оценивания составляющих вектора состояния
и Yn свелась к частному случаю рекуррентно-поискового оценивания,
когда ковариационные матрицы Q, и /?,• шумов £/ и т?,-, а также начальное
распределение р(Х0) вектора %0 не зависят от гипотезы Dj. Следовательно,
оптимальный алгоритм таков. Для каждого возможного значения Y,N
вектора Удг реализуется дискретный фильтр Калмана по уравнениям
Xji+i ~ Aj[W(i, "* j j,
Kji+l = Vji+lH\ 1 [rv(4 N)YfN] R-+\ ,
Дд+i =Zi+t-Hi+1 [W(i + l,TV)Y/7v] A/IWO, TV)Y/7V]x/7 -
- Fi + i [И/(т + \,N)Y/n], (5.259)
1=^1 +н]+, [Иф- + 1. N) Y/n] R^Hi+ J [!V(z + 1, N)Y/N],
M-'+i = C,’1- Qr'A^wa, H)Y/n1 п/7дт [Иф; tv)y/7V] q-1 ,
П/7* = Гд1 +Л?т TV)Y/7V] e,’1 Л,[И/(Л TV)Y/N]
(Z = 0, 1,. .. , TV),
которые решаются при начальных условиях
%о = т +Kj0Aj0,
Д/о = Zo - Но [W(0, N) YjN]m-F0[W(0, N)YiN],
Kjo = Г/оЯот [И/(0, N)YjN] R o1, (5.2601
Qo1 = G-1 + Hl [ИХО. /V)У>] Ro1 Ho [IV(0, N) Yf„].
Далее в соответствии с соотношениями
I Ijt+I =Iji+ 11 д/<>1 11 - In | П/7 I,
? =/?Г1 /?-1 //ДИД/. vV)y/z] VjiH^W^NyY^R^ (5.261)
(z =0,1,..., TV)
при начальном условии
//0 = II Д,о Ц - 21пр) (5.262)
“/•о
i рекуррентным образом рассчитываются значения функционалов /;7. В поис-
| ковой части находится такое значение YvN, которое минимизирует IjN.
« В качестве оптимальных оценок выбираются
| Yn = > %n = Xv\. (5.263)
J Так решается задача оптимального оценивания в рассматриваемом
I частном случае.
219
Следующий случай отличается от предыдущего только тем, что рекур-
рентные зависимости заменяются дифференциальными уравнениями
X = A(Y, f)X + %, (5.264)
У=Ф(Г)У, (5.265)
Z = H(Y, t)X + F(Y,t) + rp (5.266)
Возмущения £(f) и r;(Z) — центрированные гауссовы белые шумы с
матрицами интенсивностей S^(t) и 5’^(0. Начальное значение Хо распреде-
лено по нормальному закону:p(X0)£N(m, G). Требуется по наблюдениям
Z(r) на интервале т£ (О, Т) определить оценки X (Т) и У (Т), оптималь-
ные по критерию максимума апостериорной вероятности. Векторы Хо,
Y (Т) Д(г) и т?(г) взаимно не коррелированы.
Введем дискретизацию возможных значений вектора У (Г), обозначив
через YjT произвольное дискретное значение У (Г) [/ = 1,..., q, где q —
общее число рассматриваемых значений У (Г)].
Известно, что значения вектора У, определяемого уравнением (5.265),
для произвольных моментов времени t, т связаны соотношением
У(Г)= Ц/(Г,т)У(т); (5.267)
здесь lV(z, т) — переходная матрица системы (5.265), подчиняющаяся
дифференциальному уравнению
bW(t, т)
----—- = Ф(г) W(t, т), W(t, t) = Е. (5.268)
9z
С помощью переходной матрицы легко найти траекторию движения
Y,(t), которая в конечной точке t = T принимает значение Yj?
Yj(t)= W(t, T)YjT. (5.269)
Подставляя (5.269) в (5.264) и (5.266) и вводя обозначения
Aj(t) = A[W(t, T)YiT, t],
Я;(Г)=Я[И'(Г, Г)УуТ, г], (5.27О)
F>(z) = F[IV(t, T)YjT,t],
получаем
X(t)=A,(t)X(t) + ^t), (5.271)
Z(r) = ЯДг)Х(0 + Fy(r) + . (5.272)
Задача оценки X (Г) и выбора гипотезы Л), под которой понимается
возможное значение У/Т, свелась к частному случаю непрерывного аналога
рекуррентно-поискового оценивания, в котором матрица интенсивностей
Sx(t) и характеристики начального распределения р(Х0) не зависят от
проверяемой гипотезы. Сами вероятности гипотез pj =p(Xj) легко рассчи-
тываются по характеристикам распределения вектора У (Т).
Оптимальные оценки векторов X (Г) и У (Г) получаются путем решения
уравнений (5.248) — (5.250), которые в исследуемом варианте принимают
220
вид
%*Л7(/)х7(г) + rf(t)H^t)S;\t)[Z(t)-Fj(t)], Xj(t0)=m,
(5.273)
г, = г,-л)+л7г7 - r7.^Ts;W7r7 + sx, r7<t0) = g, (5.274)
/7- = (Z - ЯД- - F,)TS~l(Z - Hfxf - Ff) + Sp(2A/ + Sx Г"1),
I G. I
/7(?o)= In —t—- , (5.275)
Pj
и путем минимизации функционалов Ij(T) по всем возможным гипотезам.
В зависимости от характера задачи либо используется сплошной перебор
всех вариантов, либо применяется какой-либо из упоминавшихся методов
нелинейного программирования.
5.4.3. Рекуррентно-поисковая КЭНС для оценивания
пространственного положения ЛА
по полю рельефа
Остановимся на исследовании непрерывного аналога рекуррентно-поис-
кового оценивания. Применение для оценки пространственного положения
ЛА рекуррентно-поискового оценивания в чистом виде рассмотрено в
[5.22, 5.23]. Для определения вертикальных координат движущихся
объектов обычно используется вертикальный канал ИНС. Однако в силу
его неустойчивое™ необходимо принятае специальных мер, например
коррекции по показаниям датчиков абсолютной высоты или вертакальной
скорости движения. Применение коррекции по рельефу открывает новый
подход к решению задачи. В частности, оказывается возможным исключить
из минимально необходимого состава подсистем некоторые традиционные
подсистемы. Так, при использовании поля рельефа возможна выставка
вертикального канала ИНС только по показаниям радиовысотомера без
использования барометрического высотомера.
Известно, что при полете над морем выставка вертакального канала
ИНС осуществляется по данным радиовысотомера, ибо в этом случае он
становится измерителем абсолютной высоты полета. Однако при полете
над сушей с ярко выраженным рельефом такая возможность в традицион-
ном варианте исключается, так как радиовысотомер как измеритель абсо-
лютной высоты в этих условиях оказывается весьма неточным, поскольку
рельеф здесь играет роль помехи. Если же на борту ЛА иметь карту рельефа
и точно знать горизонтальные проекции траектории движения, то, извлекая
из блока памяти рельеф вдоль траектории движения и суммируя его с
измерениями относительной высоты, выдаваемыми радиовысотомером,
можно получить точные измерения абсолютной высоты. Таким путем
задача фильтрации вертикальных параметров движения сводится к ситуа-
ции полета над морем.
На первый взгляд, может показаться, что образовался порочный круг
в рассуждениях: с оцной стороны, чтобы с помощью КЭНС хорошо оценить
горизонтальные координаты хну, надо измерять рельеф местности, для
чего необходимо точное знание параметров вертакального движения центра
масс ЛА; с другой стороны, чтобы точно оценить абсолютную высоту
221
полета, надо знать проекции траектории движения на горизонтальную
плоскость. Более подробное исследование вопроса показывает, что никако-
го прочного круга в рассуждениях нет и совершенно строгое реше-
ние этой задачи достигается использованием рекурентно-поискового
оценивания.
Рассмотрим навигационный комплекс, в состав которого входят все три
канала ИНС, измеряющие координаты пространственного (х, у, Н) и угло-
вого (£, 7, ф) положения ЛА, радиовысотомер и БЦВМ с записанной в ее
памяти картой рельефа f(x,y). Совместная обработка перечисленной
входной информации производится с целью определения ошибок ИНС в
измерении координат (Дх, Ду, ДН) и скоростей (Д Ух, ДУу, Д Уц) движе-
ния. Барометрические измерители в состав рассматриваемого навигацион-
ного комплекса не входят.
Сначала проведем формальный синтез алгоритма оценивания. Уравнения
ошибок инерциальной системы примем в виде (5.77) — (5.79)
Дх = ДГх, ДЙХ = О, Ду = ДУу, ДУу=0; (5.276)
Д7/Ин = Д' = (5.277)
Если ввести обозначения X = [ДЯИН ДУН]т, Y = [Дх Д.УХ Ду ДИу]т,
£ = [0 б/я]т, то соотношения (5.276), (5.277) приведутся к каноническо-
му виду (5.264), (5.265), причем в рассматриваемом варианте
(5.278)
а параметры началык,по распределения вектора А'о и матрица интенсивнос-
тей Sx шума £(г) равны
0 0 Г 0 0
т = . о . , G = 0 0 , Sx = os, (5-279>
2 2
гДе ан0 > ° vH - дисперсии начальных ошибок измерения высоты и верти-
кальной скорости; S- — спектральная плотность шумов вертикального
акселерометра.
Наблюдение в данном случае является скалярным, оно образуется как
разность между измерениями вертикального кзнала ИНС и радиовысото-
мера
г =Яин _ D* cos cos 7*
и может быть представлено в соответствии с (5.109) и (5.110) в форме
(5.266), если положить
Я(У, г)=[1 0], (5.280)
F(Y, 0=/[Хд(0- Дх(г), у*а (t) - Д v(r)], (5 281)
где x;(r)=x*(0 + £»*a)cose*(0, Уд(г)=У*(0 +O*(r)cos б*(г) - гори-
222
зонтальные координаты следа оси диаграммы направленности радиовысо-
томера, рассчитываемые по показаниям инерциальной системы х*, у*, #*,
у*, ф* и измерению радиовысотомераD*.
Интенсивность шума наблюдения равна
Sz(f) = cos2 i3* cos2 ,
и если углы 17* и у* невелики, то Sz(t) = S~, где — спектральная плот-
ность ошибок радиовысотомера.
В алгоритм оценивания входит переходная матрица W(t, т ) системы
(5.276). Определим ее. Уравнение (5.268) для W(t - т) [в данном случае,
когдаФ не зависит от времени, W(t, т) = - т)] имеет вид
ЭИ/(г-т)
-------- =ФВ/(г-т), W(Q) = E (5.282)
или, заменив t-т на s, получим
dW
---= ФИ/, W(0) = £’. (5.283)
ds
Разобьем переходную матрицу, имеющую размер 4 X 4, на блочные
матрицы размера 2X2:
W,
w =
. W'ni
На основании
W[
Wn т
WIV J
(5.278) и (5.283) находим
Го i ’ 1
I о
0 Oi
о 'О" 1
О I
10 0J
Wj Wii
WHI Wiv
или
W[ =
Wji = а№ц,
Win =«^111,
W](0) = Е,
^п(0) = 0,
^ni(0) = 0,
(5.284)
Wjv(O) — Е,
Г 0 1
где a = I
L 0 0
Из (5.284) заключаем, что Wn(s) = Wni(s) = 0, W](s) = WiV(s). Поэтому надо
определить лишь Wr(s).Обозначим элементы матрицы Wt через w, 1( w12,
и>2 j, w22. Тогда
Wj j
М>2 1
Wii
W21
w12
iv22
w21 w22 '
0 0
H>] 2
W22 .
о
0
1
о
223
откуда находим скалярные уравнения
W] ] =w21, W] ](0)= 1,
w12 = w22, Wi2(0) = О,
vv21 — 0, w21 (0) — О,
w22 = 0, w22(0)= 1.
Решением этих уравнений являются функции
Wu(s)=l, w2i(s) = 0; w22(s) = l, w12(s) = s,
где s = t — т.
Итак, мы получили переходную матрицу
1 г - т 0 0
0 1 0 0
И/(Г, т) = 0 0 1 t - т
0 0 0 1
(5.285)
Структура блока оценивания. Определим выражение W(t, Т) YjT, входя-
щее в алгоритм оценивания. Для этого зададим множество ВС R4 возмож-
ных значений вектора Y (7). Будем считать, что позиционные ошибки
Дх(Г) и Ду (Г) могут измеряться только с дискретностью /, а максималь-
ные значения позиционных ошибок равны nl (рис. 5.38, а). Скоростные
ошибки ДУХ(7) и Д Yy(T) будем проверять с дискретностью и, предпола-
гая максимальные значения скоростных ошибок равными mu (рис. 5.38, б).
Перейдем от употреблявшегося обозначения гипотез к новому обозна-
чению и нумерации Гипотеза ^„^предполагает, что в момент
времени t = T, когда производится оценка, позиционные и скоростные
ошибки навигационной системы равны
Дх(Т)=д/, Ду(Т) = Х/, b.Vx(T) = vv, ДУу(Г) = £v, (5.286)
т.е.
У,т=У^т=[^ ™ м Мт-
(5.287)
Индексы д и X могут принимать значения - и, ...,и — 1,и,а индексы и и f
пробегают значения — т,. .. , т — 1, т.
Вероятность гипотезы определим как вероятность нахожде-
ния вектора Y(г) в следующих пределах:
f 1 \ / 1 \
д - —у I < Ах(Т)<1ц + — V,
1 \ / 1 \
Х-ур<Ду(7’)</Х + ур,
И / 1 \
р - — \v < ДУХ(Г) <h> +— ju,
' 1 \ / 1 \
f-- и<Д7 (Г)<к + — )и.
< 2 / ' \ 2 /
224
Плотность распределения р [У (7)] вектора У (Г) предполагается извест-
ной. Она определяется техническими характеристиками навигационной
системы и временем автономного движения, предшествующего моменту
коррекции. Через р [У(7)] вероятность выражается таким образом:
(м + тУ (х+—(и + -\
dbVx(T)K
р^ = f алх(Т)
d^y(T)
и
X
IU
р[У(Г)] d^Vy{T).
и
(5.288)
Интересующее нас выражение JV(r, T)YjTc учетом соотношений (5.285) и
(5.287) имеет вид
W(t, T)YiT= [pl + (t-T)vv vv XI +(t-T)tv MT,
и поэтому, согласно (5.270) и (5.281), получаем
ВД = Дх£(0- [д/+ (f-r)Avl. /£(')- [Х/+(Г-ПМ1 • (5.288а)
Теперь подготовлены все необходимые соотношения для записи алго-
ритма оценивания (5.273)-(5.275). Причем в рассматриваемом конкрет-
ном варианте возможны дополнительные упрощения.
Во-первых, уравнения для ковариационной матрицы Г; не зависят от
рассматриваемого варианта Tfgpxj, так как от него не зависят ни матрицы
А и Н, ни интенсивности шумов Sx mSz, ни начальное значение G. Поэтому
уравнение ковариций будет одно для всех гипотез и индекс / у Г, можно
опустить.
Во-вторых, поскольку роль фунционалов сводится лишь к отысканию
их минимальных значений по всем рассматриваемым гипотезам, то из всех
lj можно удалить равные значения, так как положение минимума при этом
не изменится. В рассматриваемом случае Sp(2.4,+ Sx Г-/) и G, не за-
висят от гипотезы и могут быть опущены в уравнении (5.275).
15. И.Н. Белоглазов
225
После сделанных замечаний упростим и конкретизируем уравнения
оценивания (5.273)-(5.275), одновременно перейдя от индекса/ к индек-
сам Получаем:
уравнение оценок
’ О
~ О
ДЯИН
-f{x* (г)~ (г-7>И>
X
(5.289)
J’*(O- [XZ + (t-T)M)
Д#„н (0) -
’ Ди„(о)
= 0;
уравнение ковариационной матрицы
Г12 (0) Г12 (0)1 = \°н0 о
.Г21 (0) Г22(0)] [о alH .
W = s~ (z - [1 0]
[ц!+ (t-T)vv],
(5.291)
уравнение функционалов
Д^ин-
.ДИн-
,у5(г)-[Х/+(г-П^]} У, W(°) =-21n7>xf.
Обратим внимание не невязку наблюдений ДДРх^(г), которая несет
обновляющую информацию:
ДЙИН
.ДИн
-f {xa(r)~ &I + (t-T)vv],
[1 0]
(5.292)
.^(0- [Л/+(^ЛМ> = Я*н(?)-D*(?)cos.t>*(?)cos 7* (Г) -
- (Г) ~ Л *£(г) - [д/ + а-Г)^] - 1}.
Она может быть представлена в виде разности
ДдрХ?(О=Яд^(г)-ЯдрХ?(Г), (5.293)
где (t) = Н*нн(^) - отфильтрованная абсолютная
высота полета, получаемая на выходе фильтра Калмана, синтезированного
для вертикального канала и использующего реализацию рельефа, извле-
каемую из памяти и соответствующую гипотезе ;
Яд„х?(0= £>*(r)cosi?*(r)cos7*(r)+/{x*(r)- [ц1 + (r-T’)ru],
Хд (О - [М + (f-7’KL'l} — гипотетическая (соответствующая рассмат-
226
риваемой гипотезе) абсолютная высота полета, получаемая путем сло-
жения относительной высоты D* costf* cos 7*, измеренной радиовы-
сотомером, с высотой рельефа местности У{х*(г) — [ц1 + (г - Г) ,
у*(г) — [X/ +(r-7’)fi>]} вдоль гипотетической траектории x*a(t) —
- [д/ + (t - Г) w], y^(t) —.[X/ + (t - , записанной в бортовой кар-
те рельефа.
В скалярной форме соотношения (5.289) и (5.291) запишутся следую-
щим образом:
уравнение оценок
А Л ГП Л
~ A + — (//дрх? ” А//инД1,д^(0) - О,
(5.294)
ДИ„мрМ.(0)=0;
уравнение функционалов
= "Г > Wf (°) = - 21п • (5-295)
Структурная схема блока оценивания горизонтальных и вертикальных
координат, составленная по уравнениям (5.294) и (5.295), изображена
на рис. 5.39.
Решение уравнения ковариаций. При анализе уравнение ковариаций
(5.290) позволяет определить установившуюся точность оценивания верти-
кальных параметров Д//ин и Д VH, а также точность оценивания в переход-
ном процессе. Запишем соотношение (5.290) в скалярном виде, учтя
симметричность матрицы Г:
1 > 1
Гц = 2Г12 — —— Гц, Г„(0)=а^ ,
S~ 0
Г12 = Г22 -1- ГПГ12) Г12 (0) = 0, (5.296)
f22 = _ _Ь_Г22 +Sj, Г22(0)=ар .
S~ н
Получилась система дифференциальных уравнений, точное решение которой
неизвестно. Однако можно найти приближенное решение для переходного
процесса и точное решение в установившемся состоянии. .
Исследуем сначала установившийся режим, в котором Гц = Г12 = Г22 = 0.
Имеем
Г12уст ~ ,
rnyCT = x/2S~VsZ^, (5.297)
Г22 уст - \/2Sj \/S ~Sj .
Шумы считаются белыми по отношению к процессу оценивания. Как обыч-
но, полагаем
5 (0) = а2 ткорр, (5.298)
где о2 = R (0) — дисперсия случайного процесса, ткорр — его время корре-
ляции. Поэтому
Sj=a2Tj, (5.299)
где al и а2 - дисперсия ошибок радиовысотомера (с учетом ошибок
картографирования) и вертикального акселерометра инерциальной сис-
темы, и г- — радиусы корреляции этих ошибок. Подстановка (5.299)
в (5.297) дает
аяУст = о~ ,
о2 = о- О: Т: , (5.300)
/?уст ' ' ' '
Г12 уст ~ \/ 7 j' •
Рассмотрим теперь переходный процесс. Будем предполагать, что в
переходном режиме случайное воздействие £ (Г), возмущающее контроли-
руемый процесс, играет второстепенную роль и им можно пренебречь,
положив Sj = 0. Тогда уравнение ковариаций (5.290) примет вид
г = глт+лг-гят5;1яг, Г(0)=с.
228
Переходя, как это уже было выполнено в § 5.2, к обратной матрице
что в скалярной форме дает (с учетом симметричности матрицы 2)
Хп =51*, 2„ (0) = а'2,
212 + 2ц - 0, 212 (0) - 0,
2 22 + 2212 = 0, 2гг (0) = a 2
h,
(5.301)
Решением написанной системы уравнений являются
t
+ —
211 = о-н2
1
а2
П,
+
t
al,T
г2
t------
2S~
[2
2 al т~
t
а2
t3
+ =
3S~
1
/Л,
Обращением матрицы 2 получаем
1 1 / 1
Гц(г)=а^(г)=|2Г’ (— + —
\ av °н
212 “ ° у
И,
+
и'2 t2
22 О
+
t2
+
t3
За1т~
t3
ЗаЪт^
. / t t2 \
Г.2 (О =1 2Г1 — + -v~ ,
\ а„ 3a~Tj
(5.302)
t. 1
о1т^.
Г22(О=а2и (О = 121-4 — +
\°нп
причем определитель матрицы 2 равен
г3 г4
За2 о1т~ 12o1,tL
Н о
1
121 = -2-Т-
аи av
на Гн
+
t
2 2
аи а.,?..
на
(5.303)
229
На рис. 5.40 в логарифмическом масштабе изображены переходные
кривые и установившиеся значения оцениваемых вертикальных параметров
движения, рассчитанные для он° = 1500 м, av^ = 5 м - с’1, <z = 10 м,
т~= 4 с, Oj = 2 1 О'4* м • с’2, т; = 1 с. Уже ко второй секунде ошибка оцени-
вания абсолютной высоты (для истинной гипотезы) уменьшается от 1500 м
до 15 м. Оценивание вертикальной скорости начинается лишь с 3-й — 5-й
секунды. Однако поскольку при рекуррентно-поисковом оценивании
одновременно осуществляются и фильтрация, и проверка гипотез, то
значения параметров, оцениваемых с помощью фильтрации, могут быть
получены лишь после выбора наиболее вероятной гипотезы путем мини-
мизации функционала. Реальная же длительность переходных процессов
рекуррентно-поискового оценивания по полю рельефа местности (совмест-
но с горизонтальными каналами) составляет 60—80 с. К этому моменту
времени абсолютная высота полета оценивается со среднеквадратической
точностью 3—5 м, а вертикальная скорость — с ошибкой 0,1—0,15 м - с'1.
Рассмотренная методика раздельного исследования переходных про-
цессов и установившегося режима достаточно проста и удобна в инженер-
ной практике. Она позволяет выяснить все характерные черты процесса
оценивания. Начиная с 10-й —20-й секунды, можно использовать асимпто-
тические зависимости для Гц (г), Г12 (Z), Г22 (Z):
\/ Т — * */ у
Он (О = 7Гц (Г)'«2а~ •-----, ТгТоТ ^2а~------------
t
Оу = х/г22 (г / ~2 .
н ty/T
Графики, характеризующие точные решения уравнения ковариаций, содер-
жат как участок переходного процесса, так и установившегося состояния.
230
Они могут быть получены путем соединения приведенных кривых, как это
показано на рис. 5.40 штриховой линией для зависимости л/Ги (?)
Обсуждение рекуррентно-поискового оценивания. Приведенное опти- '
мальное правило обработки информации, вытекающее из рекуррентно-
поискового оценивания, имеет ясное логическое объяснение. Назначаются
гипотезы о возможных значениях ошибок горизонтальных каналов нави-
гационной системы. Для каждой гипотезы по измеренным значениям
горизонтальных координат движущегося объекта x*(t) иу*(г), измерен-
ным значениям углов тангажа <>*(?), крена у*(г) и рыскания ф*(г), а
также по предполагаемым проверяемой гипотезой 3CM1?xj- значениям оши-
бок Дх(Г) = д/, Ду (Г) = XI, Д VX(T) = w и Д Vy(T) = fu рассчитывается
гипотетическая траектория
*M.A?(f) = x«(f)- [р/ + (?-r)ru], ум„х $(?)=Л (0- [х/+(?-т)j-y]
горизонтального следа оси диаграммы направленности радиовысотомера
(которая предполагается игольчатой или близкой к ней). Из блока памяти
извлекается соответствующий этому следу профиль рельефа (см.
рис. 5.39 и рис. 5.41). Этот профиль суммируется с измерениями радио-
высотомера D*(t) cos £*(?) cosy*(r) (на рис. 5.41 представлен случай,
когда углы д* и у* малы), в результате чего только на основании измере-
ний, проведенных радиовысотомером, и бортовой .карты рельефа получа-
ется гипотетическая абсолютная высота полета Кроме того,
профиль /M1,x.f(f) используется в фильтре Калмана (5.294), (5.296), где
на основании показаний вертикального канала инерциальной системы
Яи*н(0 и использования данных радиовысотомера и бортовой карты путем
фильтрации рассчитывается отфильтрованная высота H^xt (?). Несовпа-
дение этих двух высот, фиксируемое невязкой Дд(,х$- = Нцих$ -
содержит информацию и о точности фильтрации абсолютной высоты поле-
та (в предположении истинности гипотезы и о самой истинности
гипотезы . Поэтому разность высот Дд|,х? используется как в фильтре
Калмана для коррекции вертикальных параметров движения (опять же
в предположении истинности гипотезы JfMPxf), так и для расчета функцио-
нала 1цих^, который является мерой истинности гипотезы 3fgPx? Функцио-
нал 1ц1,х< образуется очень просто: он равен интегралу от квадрата невязки,
231
а начальное условие при интегрировании учитывает априорные вероятности
гипотез PgpAj-:
1 т ,
21nT’Jtl,xf+ ~
S,_ о
232
Для истинной гипотезы функционал мал, а для неверных гипотез — велик,
причем значение (Г) тем больше, чем сильнее предположение о гори-
зонтальных параметрах движения отличается от их действительных значе-
ний. Это обстоятельство и позволяет путем минимизации функционала
по всем гипотезам 56^^ определить правильную гипотезу.
Поскольку при формировании гипотез ’’захватываются” все возможные
значения ошибок навигационной системы, как бы велики они ни были,
то надежно решается проблема ликвидации больших начальных отклоне-
ний. При этом сплошному перебору подвергаются только горизонтальные
100
О 10 Z0 30 40 50х,кн
Рис. 5.43
координаты и скорости движения, а вертикальные параметры определяют-
ся путем фильтрации и исключаются из перебора.
На рис. 5.42 представлены результаты моделирования алгоритма*)
(5.294)—(5.296). Задавались следующие значения ошибок навигационно-
го комплекса: = 2 км, ДИ//(1 = 7,5 м • с’1, Дх0 = —5 км, Ду0 = 5 км,
Д VXo = —3 м • с-1, Д Vy = 1,5 м • с"1. Навигационное поле моделировалось
стационарным случайным полем со статистическими характеристиками:
а= 15 км, р = 2 км (а— среднеквадратическое отклонение поля, р — радиус
корреляции поля). Одно из сечений поля представлено на рис. 5.43. Разме-
ры доверительных квадратов предполагались равными: л =24, т=0;
общее число проверяемых гипотез составляло q = (2m + I)2 (2л + I)2 =
= 2401. Шаг дискретности по координате при задании множества гипотез
выбирался равным 0,25 км. Все гипотезы считались равновероятными
= const), углы тангажа, крена и рыскания предполагались нуле-
выми. *
На рис. 5.42 кривые 1 соответствуют гипотезе 56_2О,о 20, о, определяемой
ошибками Дх = —5 км, Д Vx- 0, Ду = 5 км, Д Vy = 0; кривые 2 — гипотезе
56-21,о,20,о, определяемой ошибками Дх=—5,25 км, &УХ = 0, Ду = 5 км,
Д Vy = 0; кривые 3 - гипотезе 5620,0,-20,0, определяемой ошибками Дх =
= 5 км, ДИХ = 0, Ду = -5 км, ДРу = 0.
Первый поиск экстремума функционала и первое оценивание
координат производились на 60-й секунде, когда уже была измерена реали-
зация рельефа длиной 15 км. Функционалы рассчитывались через каждые
4 с. В диапазоне 60 с < t < 134 с функционал минимизировался ги-
потезой 56-20,0,20,0, а в диапазоне 124 c<t <200 с минимум функцио-
налу доставлялся гипотезой 56_2i,o,2o,o- Ошибки оценивания гори-
зонтальных координат не превышали 320 м. Кривые 3 соответствуют
гипотезе 562ОО _20 0, предполагающей существенно неверные значения
Моделирование проведено А.С. Ермиловым.
233
координат горизонтального местоположения. Из рис. 5.42 видно, что и
оценки вертикальных параметров в этом случае оказались явно неудовлет-
ворительными.
Теоретически рекуррентно-поисковое оценивание является оптимальным
методом оценивания пространственного положения ЛА при навигации по
рельефу местности. Взаимодействие между горизонтальными и вертикаль-
ными каналами, предусмотренное в структуре рекуррентно-поискового
оценивания, позволяет наилучшим образом оценить абсолютную высоту
полета с использованием вертикального акселерометра инерциальной
системы, радиовысотомера и бортовой карты рельефа. Это обеспечивает
возможность наиболее точного измерения рельефа пролетаемой местности
в условиях интенсивного вертикального маневрирования, что в свою
очередь приводит к повышенной точности определения горизонтальных
координат.
Помимо сплошного перебора гипотез при поиске экстремума функцио-
нала 41Px.f(7’), могут использоваться и различные варианты нелинейного
программирования. Все определяется характером зависимости функций
нала от позиционных и скоростных ошибок в области возможных зна-
чений этих ошибок. С.А. Митриков показал, например, что при рекуррент-
но-поисковом оценивании область ложных экстремумов функционала
смещается по сравнению с обычными поисковыми алгоритмами. Это пред-
ставляет дополнительные благоприятные возможности при реализации.
§ 5.5. КОМБИНИРОВАННЫЕ АЛГОРИТМЫ КЭНС
Одним из направлений развития КЭНС явилось расширение вектора
оцениваемых параметров (вектора состояния). Предпосылками к этому
послужили следующие обстоятельства. Современные многофункциональ-
ные бортовые комплексы нуждаются в разнообразной навигационной и
пилотажной информации. Помимо координат и скоростей движения центра
масс ЛА, часто требуются точный курс (азимут), вертикаль и другие пара-
метры. Достижение необходимых точностей путем совершенствования
грубых навигационных систем, как уже отмечалось, связано с дорого-
стоящим и длительным путем технологического прогресса, построением
датчиков на новых принципах. Между тем показано [5.8], что при соблю-
дении определенного математического условия (условия, благоприятствую-
щего точному оцениванию) высокоточное измерение даже только одной
величины в течение достаточного интервала времени позволяет оценить
большую совокупность параметров, казалось бы, слабо связанных с изме-
ряемой величиной. Именно с таким случаем (при надлежащем алгоритми-
ческом обеспечении) мы сталкиваемся в КЭНС. И действительно, одно из
направлений развития КЭНС заключается в расширении размерности оцени-
ваемого вектора состояния.
Сначала рассматривались вопросы определения местоположения подвиж-
ного объекта по измерениям какого-либо геофизического поля, которое
связано с координатами сложной нелинейной (но безынерционной) зависи-
мостью. Такие процессы оценивания протекают достаточно быстро.
Далее по измерениям геофизических полей стали оценивать горизон-
тальные координаты и скорости движущегося объекта, что требовало не-
234
сколько большей длины наблюдаемых-реализаций, так как скоростные
ошибки ГНС связаны с наблюдаемым сигналом уже динамической запазды-
вающей нелинейной зависимостью. Если предположить, что позиционные
ошибки ГНС в какой-то момент времени отсутствуют, а имеют место лишь
скоростные, то сначала должно пройти некоторое время, в течение которо-
го скоростные ошибки приведут к появлению позиционных, и лишь после
этого скоростные ошибки могут быть выявлены по измерениям геофизиче-
ского поля. Поэтому длительность процессов совместного оценивания ско-
ростных и позиционных ошибок будет несколько превышать длительность
оценивания только позиционных ошибок, что хорошо иллюстрируют гра-
фики, приведенные на рис. 5.16,6. В зависимости от величины начальных
рассогласований совместное оценивание позиционных и скоростных оши-
бок может быть достигнуто в результате использования беспоисковых
либо поисковых алгоритмов в режиме стабилизированного горизонтально-
го полета.
Если же ЛА осуществляет интенсивное вертикальное маневрирование,
то для обеспечения высокой точности навигации по рельефу местности
лучше всего применять либо рекуррентно-поисковое оценивание, либо
нелинейную калмановскую фильтрацию ошибок вертикального и горизон-
тальных каналов навигационного комплекса с использованием карты
рельефа местности для оценки абсолютной высоты полета. Выбор одного из
этих вариантов опять-таки определяется величиной начальных ошибок гори-
зонтальных каналов ГНС. Дальнейшее развитие алгоритмического обеспече-
ния КЭНС привело к разработке способов оценивания полного вектора
ошибок инерциальной системы, включающего позиционные и скоростные
ошибки горизонтальных и вертикального каналов инерциальной системы2
ошибки выдерживания вертикали и азимутальную погрешность гироплат-
формы, постоянные дрейфы гироплатформы и (возможно) постоянные со-
ставляющие ошибок акселерометров. Попытки добиться такого много-
параметрического оценивания прежними методами поискового или рекур-
рентно-поискового оценивания приводили к очень высоким требованиям
к БЦВМ. Беспоисковое оценивание сталкивалось с обычными ограниче-
ниями на величину начальных ошибок.
Для решения задач многопараметрического оценивания при больших
начальных ошибках были созданы алгоритмы, которые можно назвать
комбинированными *). Они основаны на сочетании строго оптимальных
процедур и операций эвристического происхождения, объединенных в один
многоступенчатый вычислительный процесс. Комбинированные алгоритмы
КЭНС решают проблему ликвидации больших начальных отклонений, ра-
ботоспособны в условиях интенсивного вертикального маневрирования и
обеспечивают оценивание всего вектора ошибок инерциальной системы при
приемлемой загрузке БЦВМ. Поскольку в вектор оцениваемых парамет-
ров входит, например, постоянная составляющая азимутального дрейфа
гироплатформы, являющаяся компонентой производной четвертого по-
рядка от позиционной координаты (а следовательно, и от наблюдаемого
*) Первые формы комбинированных алгоритмов в СССР предложены И.Н. Бело-
глазовым и Л.П.Таранченко в 1974 г. Это направление в последующем развито
В.Л.Веремьевым, А.Н.Деменевым, С.А.Митриковым, А.И.Силаевым, В.Н.Капшуровым.
235
геофизического поля), то переходные процессы оценивания в комбиниро-
ванных алгоритмах могут быть длительными (до десятков минут).
Рассмотрим сущность комбинированных алгоритмов на примере оцени-
вания ошибок инерциальной системы по измерениям рельефа пролетаемой
местности. Наиболее полные уравнения ошибок ИНС (5.57) - (5.66) при
небольших отклонениях ЛА от ортодромии, когда р *, р* и являются
малыми величинами, имеют вид
• д vx дх =— г* (5.304)
ДИ. W* Д р = - + Д р , г * г* (5.305)
ДН=ЛУн, (5.306)
W* &р = — д^>, г (5.307)
И,* W* ... (5.308)
# v Н &х + ^rj г + ujx 1 ’ Г г
Ун М'у =- +afay- Ьф + &jyl, (5.309)
• w* * ♦ Д Иуу ~ 2 “ Д Vx ~ Я t <*у ** 6/г 1 > г (5.310)
дих ах ~ + ^дрX + WflpX ~ > (5.311)
ДИд, W* hy= ДФ + Чтрг+^дрд^, (5.312)
л I W* — ау+ ыдр f + Ыдр г~. (5.313)
Здесь W и VH обозначают путевую (проекция вектора скорости на гори-
зонтальную плоскость) и вертикальную скорости ЛА, а в дрейфах гироплат-
формы юДрх> wnpz выделены постоянные (медленно изменяю-
щиеся) шдрх, Юдрд,, йдрг и высокочастотные <одрд~, Ыдрд,^, wnpz _
составляющие; остальные обозначения в уравнениях (5.304) — (5.313)
сохранены прежними.
Коррекция ошибок ИНС осуществляется по сигналам, поступающим от
радиовысотомера и баровысотомера, на основании которых образуются
измерения z j и z2 [см. формулы (5.110) и (5.111)]
2i ~ Нин - D coscos7 * = Д//ин +f(r*X* - г*A X + £>*cose*, г* у* -
236
Рис. 5.44
- r*Ay + £>*cos6* ) + <\/ c<>si9*cosy* , (5.314)
- Ябв = Д#ин Д//бв+5#бв- (5.315)
Для сведения системы уравнений (5.304) — (5.315) к стандартной по-
становке задачи фильтрации вектор состояния расширяется за счет включе-
ния в него постоянных составляющих ошибки баровысотомера и дрейфов
гироплатформы. Дифференциальные уравнения для этих составляющих
элементарно просты:
ДЯбв=0, (5.316)
<одрх=0, (5.317)
^др>. = 0, (5.318)
йдрг=0. (5.319)
Если точность акселерометров недостаточна, то в вектор состояния могут
быть также включены постоянные составляющие ошибок акселерометров
б7х,б7у,б7г.
Комбинированные алгоритмы представляют собой сложные вычисли-
тельные процедуры, включающие несколько взаимно связанных модулей.
В простейшем варианте таких модулей должно быть по крайней мере два:
модуль рекуррентно-поискового (или просто поискового) оценивания
позиционных и скоростных (или только позиционных) ошибок вертикаль-
ного и горизонтальных (или только горизонтальных) каналов ИНС и модуль
фильтрации угловых ошибок инерциальной системы (рис. 5.44).
5.5.1. Модуль рекурреитио-поискового оценивания
Модуль рекуррентно-поискового оценивания работает в основном так,
как это описано в § 5.4. Только в общем случае искусственным образом
формируются не одно (как это было изложено в § 5.4), а два измерения:
Zj и z2. Путем использования показаний инерциальной системы X , у>
Н^н,д*, 7 и ф*, а также измерений радиовысотомера D и баровысото-
мера //бв оцениваются горизонтальные ДХ, Д^, ДИЛ, Д/у, Др и верти-
кальные Д//, ДЕ// , Д//бв координаты и скорости ЛА. В одном из приме-
ров численного моделирования зги процессы оценивания занимают
60 — 80 с, а пространственная длительность оценивания составляет
10-20 км. Дискретность т поступления входных сигналов в модуль ре-
куррентно-поискового оценивания равна 1 — 2 с, чему соответствует прост-
ранственная дискретность измерения рельефа местности 0,25 — 0,5 км.
Уравнения контролируемого процесса получаются из полной системы
уравнений (5.304) — (5.319). При этом производятся упрощения, связан-
ные с характером изменения ошибок ИНС. А именно: предполагается, что
на небольших интервалах наблюдения, которые свойственны рекуррентно-
поисковому оцениванию, скоростные ошибки ИНС не успевают заметно
изменяться. Это позволяет в соотношениях (5.308) и (5.309) правые
части считать нулевыми и, таким образом, из общей связанной системы
238
дифференциальных уравнений выделить уравнения скоростных и позицион-
ных ошибок вертикального и горизонтальных каналов ИНС, которые при
сделанных допущениях становятся автономными:
п ’ (5.320)
ДЙ„ = 2-^ ДИх+8/„, (5.321)
Г
дябв = о, (5.322)
• ДЕХ ДХ = -~, (5.323)
Г =0, (5.324)
ДЕу И/* д^ = —~ + ~ &р, (5.325)
г г дйу=о, (5.326)
Др = -^- Д<р. (5.327)
Здесь +6/zl рассматривается как некоторое эквива-
лентное возмущение типа белого шума. В режиме равномерного прямоли-
нейного полета = = 0 и 6/я = 6/zl. Если же коррекция ИНС должна
осуществляться и в режиме горизонтального маневрирования ЛА, то необ-
ходимые для синтеза алгоритма рекуррентно-поискового оценивания стати-
стические характеристики возмущения 6/н могут быть получены на основе
измерений акселерометров ,а* и точностных характеристик выдержива-
ния вертикали инерциальной системой.
Внутри модуля рекуррентНо-поискового оценивания задача решается
следующим образом. Вертикальные параметры Д/7, ДЕ//, Д//бв оцени-
ваются методом калмановской фильтрации, а горизонтальные скорости
и координаты ДЕХ, ДЕу, ДХ, Д|р, а также угол Др оцениваются поиском
минимума функционала. Если Д Т обозначает момент времени, в который
должны быть получены оценки параметров, то проверяемые гипотезы
представляют собой вектор, содержащий пять проекций:
Jf = [AX(AT) Др(ДГ) ДЕХ(ДГ) ДЕ/ДГ) Др(ДГ)]т.
Между поисковой и рекуррентной частями модуля рекуррентно-поисково-
го оценивания осуществляется взаимодействие: из поисковой части в ре-
куррентную подается извлекаемая из блока памяти реализация рельефа
fj, соответствующая проверяемой / -й гипотезе, а из рекуррентной части
в поисковую поступает значение невязки Д, для расчета минимизируемого
функционала.
Координаты, входящие в гипотезы, подчиняются уравнениям свободного
движения (5.323) — (5.327), а при фиксированной гипотезе (в частности,
при фиксированном предполагаемом значении ДЕХ) уравнения (5.320) —
239
I
(5.322) соответствуют исходной постановке калмановской фильтрации.
Следовательно, система уравнений (5.320) — (5.327) сводится к канониче-
ской записи задачи рекуррентно-поискового оценивания, наблюдениями
для которого служат величины zt и z2, определяемые равенствами
(5.314) и (5.315). Итак, при наблюдении Zi(t) и z2(0 на интервале
[0, ДГ] можно получить оценки ДЯ(ДГ), AVH(AT), АНбв(АТ),
ДА(ДГ), ;Д£(ДГ), Д^(ДГ), ДГу(ДГ), Др(ДГ). Модуль рекур-
рентно-поискового оценивания работает в циклическом режиме. Это озна-
чает, что весь промежуток наблюдения рельефа местности [0, Г], где Г —
полное время коррекции, разбивается на циклы длиной ДГ, а внутри каж-
дого такого цикла модуль рекуррентно-поискового оценивания запускает-
ся заново, вырабатывая к концу цикла оценки параметров ДХ(АДГ),
Д|р (АДГ), ... В упомянутом примере для модуля рекуррентно-поискового
оценивания дискретность поступления входных данных т = 1 -? 2 с, а дис-
кретность выработки оценок ДГ = 60 4- 80 с (рис. 5.45).
240
5.5.2 Модуль фильтрации угловых ошибок ИНС
В этом модуле методом линейной калмановской фильтрации оценивают-
ся углы ах, ау, Дф, постоянные составляющие дрейфа гироплатформы
^дрл, шдру > <^дрг и уточняются значения горизонтальных скоростных
ошибок ДУХ, ДУу. На основании (5.308) - (5.319) уравнения контроли-
руемого процесса запишутся в виде
И,* W* , ,
ДУн+а^ах+апДф+5]х1, (5.328)
Д^у = --~ДУу + а$ау - «£*Д^ + 5/yi > (5.329)
Дия _
ах ~ Г + ^дрл + идр.^ , (5.330)
Г
W*
-Дф + шдр +шдру Г (5.331)
W* (5.332)
Дф=— + др 2 + Др 2 >
Г = 0. (5.333)
63ДР У = (5.334)
£др2 = 0. (5.335)
В соотношениях (5.328) и (5.329) слагаемые У^ДУх/г*, У^ДУу/г*,
У*ДУ// /г * сравнимы или даже пренебрежимо малы по сравнению с по-
грешностями акселерометров bj xl, fijу1 и S/z,. Действительно, если при-
нять У* = 10 мс-1, W* = 250 м-с-1, ДУХ = ДУу = 10 м-с-1, ДУн =
= 1 м-с-1, г* = 6370 км, то ]$/ДУх]г* = \&ДУу/г* « 0,15-10-s g,
№*ДУН /г* ® 0,4-10"s g, что неразличимо на уровне шумов акселеромет-
ров, и поэтому указанные составляющие можно либо вообще опустить в
уравнениях (5.328) и (5.329), либо объединить их с возмущениями 5/Л1,
6/ у j и учесть при задании интенсивности шумов 6/Л1, 6/у1. Измерения
вертикального акселерометра несущественно отличаются от ускорения
силы тяжести g. С учетом этих замечаний уравнения (5.328) и (5.329)
можно переписать в виде
ДЙЛ =gax +а*Дф +6/Л1, (5.336)
ДЙу =gay - а^Дф +6/у1. (5.337)
Измерениями z3 и z4 для модуля II фильтрации угловых ошибок ИНС
(см. рис. 5.44) являются оценки ДУХ и ДУу скоростных ошибок горизон-
тальных каналов, вычисленные с помощью модуля рекуррентно-поисково-
16. И.Н. Белоглазов 241
го оценивания:
z3 = ДИХ = ДИХ+8ИХ , (5.338)
z4 = Дру = ДИу +5Vy , (5.339)
где 8 Их и 8 Иу — ошибки рекуррентно-поискового оценивания горизонталь-
ных составляющих скорости движения.
Дифференциальные уравнения (5.336), (5.337), (5.330) — (5.335) и
уравнения наблюдения (5.338) и (5.339) соответствуют исходной постанов-
ке задачи непрерывной линейной калмановской фильтрации. Вводя обозна-
чения вектора состояния
ДИу <*х а у Дф сОдру Шдр z ] ,
вектора наблюдения Z = [z 3 z 4 ]т, вектора возмущений
£~[6/х] &iyi идр^ идр^_ ООО]
и вектора шумов наблюдения т? =[6ИХ 6 Иу]т,а также матрицы объекта
0 0 0 0 g 0 0 g 0 0 0 0 0 0
__L 0 0 0 0 1 0 0
г*
1 _ w*
0 0 0 0 1 0
А = г* г*
w*
0 0 0 0 0 0 1
г*
0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0
0 0 • 0 0 0 0 0 0
——
и канала наблюдения
' 1 0 0 0 0 0 0 0*
Н =
_ 0 1 0 0 0 0 0 0.
перепишем скалярные уравнения (5.330) - (5.339) в векторно-матричной
форме
Х = АХ + $, (5.340)
Z=HX + r). (5.341)
Задача оценивания угловых ошибок ИНС, постоянных составляющих
дрейфов гироплатформы и уточнения скоростных ошибок Д Г* и Д све-
лась к типовой постановке непрерывной линейной калмановской фильтра-
242
ции. Однако в комбинированных алгоритмах КЭНС модуль фильтрации уг-
ловых ошибок ИНС должен использовать дискретный фильтр Калмана, так
как измерения z 3 и z 4 поступают из модуля рекуррентно-поискового оце-
нивания с большой временной дискретностью, например ЛТ = 60 4- 80 с.
Поэтому, чтобы получить рабочие: алгоритмы, необходимо произвести пере-
ход от (5.340), (5.341) к рекуррентным записям
Х/с+1 = , (5.342)
Zk=HkXk+rjk, (5.343)
что осуществляется широко известным способом [5.8]. Общая длитель-
16
243
ность переходных процессов Т в модуле фильтрации угловых ошибок ИНС
в рассматриваемом примере составляет 15—20 мин и даже больше.
Результаты моделирования *) описанного комбинированного алгоритма
КЭНС приведены на рис. 5.46 — 5.49. Графики на рис. 5.46 иллюстрируют
качество оценивания вертикальных параметров движения в рекуррентной
части модуля рекуррентно-поискового оценивания. Качество поисковой
части этого модуля характеризуется зависимостями, показанными на
рис. 5.47. Переходные процессы оценивания вертикальных параметров
заканчиваются за 20 — 30 с, а длительность оценивания горизонтальных
координат и скоростей совпадает с длительностью цикла ДГ = 60 с. Зави-
симости, приведенные на рис. 5.48 и 5.49, иллюстрируют работу модуля II
фильтрации угловых ошибок ИНС. Как следует из этих графиков, быстрее
всего (за 4 - 6 мин) оцениваются углы отклонения гироплатформы от
вертикали, так как они являются компонентами первых производных ско-
ростных ошибок, образующих наблюдения для модуля II. Более длитель-
ным (около 10 — 15 мин) оказывается оценивание азимутальной погреш-
*) Моделирование выполнено В.И.Деменевым.
244
1 ности гироплатформы и постоянных составляющих дрейфов <^дРх,
| горизонтирующих гироскопов, представляющих собой вторые производные
I скоростных ошибок. И, наконец, постоянная составляющая азимутального
' । дрейфа гироплатформы шдр2 , связанная с наблюдаемыми скоростными
ошибками операцией трехкратного дифференцирования, не успевает оце-
I ниться за заданное время Т = 25 мин. На рис. 5.46 — 5.49 наряду с реализа-
циями переходных процессов ошибок оценивания dVx, SKy, 6аЛ, 6ау,
5 Д0, бсодрх, бсЗдру и 6шдр2 приведены определенные из ковариацион-
ного уравнения удвоенные среднеквадратические значения ошибок оцени-
ваемых параметров, дающие представление о максимальных значениях этих
величин. По оценкам Др и Дф может быть рассчитана ошибка измерения
курса ИНС
) ДФ = Др + Д|//.
245
Реальные комбинированные алгоритмы могут оказаться еще более раз-
ветвленными и многоступенчатыми *). Если начальные позиционные ошиб-
ки очень велики, то проверка в модуле I гипотез, содержащих пять
параметров, может стать непосильной для БЦВМ. В этих условиях мо-
дуль I сам становится двухступенчатым. ’
Первую ступень этого модуля образуют просто поисковые алгоритмы,
когда путем сплошного перебора определяются только позиционные ошиб-
ки Д X и Aip. Шаг дискретизации по позиционным координатам может быть
выбран достаточно большим, что сократит число проверяемых гипотез.
Скоростные ошибки и вертикальное положение ЛА при этом не уточняют-
ся. Итоговая точность оценивания позиционных координат первой ступени
модуля Г может быть невысока, но все-таки достаточна для того, чтобы
существенно сузить область неопределенности и ввести оценки горизон-
тальных координат в область глобального экстремума функционала.
После ступени Г начинает работать ступень l" — это рекуррентно-
поисковое оценивание описанного выше типа. При этом шаг дискретизации
по позиционным координатам заметно уменьшается по сравнению со сту-
пенью Г (например, с 1 км до 0,25 км), оцениваются скоростные ошибки
горизонтальных каналов и вертикальные параметры движения. Число про-
веряемых гипотез на ступени I" может быть значительным, но так как
в результате работы ступени I' оценки координат местоположения уже
попали в область глобального экстремума функционала, то на ступени l”
можно отказаться от сплошного перебора и перейти, например, к поиску
экстремума функционала методами нелинейного программирования.
Деление модуля I на ступени I' и l” необходимо только в ходе пер-
вого цикла рекуррентно-поискового оценивания. В последующем, ввиду
того что большие начальные отклонения уже ликвидированы в первом
цикле, такая необходимость отпадает и модуль I осуществляет только ре-
куррентно-поисковое оценивание, причем поиск минимума функционала
может осуществляться более экономными в вычислительном отношении
методами нелинейного программирования **).
Помимо рассмотренного выше варианта возможны многочисленные мо-
дификации комбинированных алгоритмов. В частности, оценивание моду-
лем II угловых ошибок ИНС может осуществляться не только с дискрет-
ностью ДГ, но и более часто вплоть до дискретности т поступления вход-
ных данных о рельефе местности. В этом крайнем случае модуль I должен
работать не в циклическом, а в скользящем режиме, выдавая оценки
АН, АУИ, ДА, ..., Др через интервал т, но обрабатывая реализации
длиной Д Г.
*) Вариант комбинированного алгоритма с чисто поисковым модулем, реализую-
щим ’’модифицированный’ метод наименьших квадратов, рассмотрен в следующей
главе
**)Алгоритмы подобного типа были предложены и численно исследованы В.И.Кап-
шуровым.
ГЛАВА 6
СИНТЕЗ АЛГОРИТМОВ ОЦЕНИВАНИЯ
ПАРАМЕТРОВ ВЕРТИКАЛЬНОГО ДВИЖЕНИЯ.
ВАРИАНТ КОМБИНИРОВАННОГО АЛГОРИТМА
Как отмечалось ранее, применение корреляционно-экстремальных нави-
гационных систем в ряде случаев требует высокоточного контроля парамет-
ров движения центра масс летательного аппарата в вертикальной плоскости.
Действительно, если движение ЛА осуществляется по произвольным
в вертикальной плоскости траекториям (полет на малой высоте в режиме
следования рельефу местности, режим ’’пробивание облачности”, набор вы-
соты и другие виды маневров), в сигналы бортовых датчиков навигацион-
ных полей должны вводиться корректирующие сигналы, исключающие
-влияние изменения высоты полета на точность измерения поля. Например,
при использовании рельефа Земли в качестве навигационного поля верти-
кальные перемещения летательного аппарата будут восприниматься радио-
высотомером как изменение поля.
Использование пространственных полей (в частности, аномального маг-
нитного поля Земли) в целях навигации также приводит к влиянию высоты
полета на сигнал датчика поля — магнитомера.
Особо жесткие требования к точности определения параметров движения
центра масс летательного аппарата в вертикальной плоскости предъявляют-
ся при работе по первой производной гравитационного потенциала, когда
в качестве датчика поля используется вертикальный акселерометр ИНС
или гравиметр [1.14].
Наличие вертикального канала (вертикального акселерометра) в инер-
циальных навигационных системах решает задачу точного измерения верти-
кальных ускорений. Однако непосредственное интегрирование сигнала
акселерометра с целью получения вертикальной скорости и высоты полета
приводит к неустойчивым решениям (см. § 5.2, а также [6.1]).
Высоту и вертикальную скорость можно получить от других, внешних по
отношению к инерциальной системе, источников информации. Так, напри-
мер, абсолютную и относительную высоты полета можно определить с по-
мощью системы воздушных сигналов, геометрическую высоту (расстояние
от летательного аппарата до поверхности Земли) — с помощью радиовысо-
томера, а вертикальную скорость — измерением доплеровского сдвига
частот по трем лучам доплеровского измерителя путевой скорости и угла
сноса (ДИСС).
Возможно создание специализированного радиовысотомера с узкой диа-
граммой направленности, измеряющего не только геометрическую высоту
полета, но и вертикальную скорость движения центра масс ЛА за счет вве-
дения дополнительного канала регистрации доплеровского сдвига частоты.
248
Вид конкретных алгоритмов обработки информации, позволяющих по-
лучить наилучшие оценки параметров вертикального движения летатель-
ного аппарата, определяется составом датчиков (измерителей), распола-
гаемыми сведениями о шумах, действующих по каналам измерений и на
объект, располагаемой вычислительной производительностью и полнотой
описания математических моделей контролируемых процессов. В на-
стоящее время наибольшее распространение получило комплексирование
вертикального канала ИНС с барометрическим высотомером (каналом
измерения высоты системы воздушных сигналов).
Алгоритмы обработки информации указанных измерителей строятся
как по схеме фильтрации, так и по схеме компенсации взаимных ошибок.
При этом используется то обстоятельство, что благодаря различным физиче-
ским принципам, положенным в основу построения датчиков, частотные
спектры их ошибок лежат в разных областях. К числу недостатков рас-
смотренных в [6.2, 6.3] схем следует отнести зависимость среднеквадрати-
ческих ошибок измерения параметров вертикального движения от высоты
полета, что связано в первую очередь с изменением спектрального состава
действующих возмущений.
В работе [6.4] с позиции теории оптимального оценивания на основе
упрощенных математических моделей проводится синтез алгоритма после-
довательной фильтрации информации вертикального канала ИНС и баро-
высотомера и дается сравнительная оценка по точности синтезированного
алгоритма с фильтром, построенным на основе использования информации
Алгоритмы с прямым решением уравнения Риккати Алгоритмы с импириоеонои ковариационной матрицей Рис. 6.1 <£Сокра ценные"» алгоритмы оценивания Стационарные фильтры
249
Таблица 6.1
Основные варианты алгоритмов оценивания параметров вертикального движения
№ варианта Баровысотомер ^бв“^+^^бв + + *бв Лазерный или радио- высотомер ^ПВ = н-h + рв р + ДЯ + $ рв рв Доплеровский изме- ритель скорости и угла сноса (ДИСС)
1 z
2 г
3 z
4 z
5 z
6 z
7 z
8
9
10
11 г
12
13
14
15
16 г
17 z
18
19 z
z
Z
z и
г
г
г
z z
z
z z
Z Z
Z
Z Z
вертикального канала ИНС и ДИСС. При этом отмечается высокая точность
оценивания высоты и вертикальной скорости без дополнительного повыше-
ния требований к мощности специализированного вычислителя или Б ЦВМ
(программа занимает 700 ячеек ДЗУ и 40 ячеек ОЗУ одноадресной БЦВМ).
Дальнейший рост требований к точности определения высоты, вертикаль-
ной скорости и ускорения привел к необходимости разработки более
сложных алгоритмов, основанных на достижениях современной теории
оптимального оценивания, идентификации и управления. В [6.5] отмечает-
ся, что на борту крылатой ракеты, совершающей полет на малых и пре-
дельно малых высотах в режиме следования рельефу, в БЦВМ осуще-
ствляется одновременная обработка сигналов баровысотомера, радио-
высотомера и вертикального акселерометра. Это позволяет измерять про-
филь земной поверхности вдоль траектории полета ракеты со среднеквадра-
тической ошибкой около 1 м.
Наличие на борту летательного аппарата широкого состава датчиков ин-
формации позволяет синтезировать в общем случае большое число работо-
способных алгоритмов. Основные варианты построения алгоритмов оцени-
вания параметров вертикального движения сведены в табл. 6.1, где бук-
вой z отмечена принадлежность данного сигнала к вектору измерения,
250
Комбинированный лазерный или радиовысотомер Инерциальная навигационная система (ИНС)
Н* = H—h + рв р + НК + рв * рв о. . 1w й: + Х5: и *4 + инс_„ , я н . Л ИНС > л н +?инс Иинс=и + Н У И + дгинс н „инс_ п — = н + ДЯИНС
2
и
и
u(z)
а буквой и — к вектору управления. С учетом предлагаемой классификации
алгоритмов оценивания (рис. 6.1) общее число возможных вариантов
построения фильтров только для непрерывных процессов составляет 288.
Из всего возможного многообразия построения фильтров в данном раз-
деле будут исследованы наиболее экономичные в вычислительном отно-
шении алгоритмы оценивания, а также алгоритмы для упрощенных, но
отвечающих требованиям практики математических моделей контроли-
руемого процесса.
§ 6.1. ЦИКЛИЧЕСКИЕ АЛГОРИТМЫ ОЦЕНИВАНИЯ ПАРАМЕТРОВ
ВЕРТИКАЛЬНОГО ДВИЖЕНИЯ ЦЕНТРА МАСС
ЛЕТАТЕЛЬНОГО АППАРАТА
Рассмотрим задачу циклического оценивания параметров вертикального
движения центра масс летательного аппарата при использовании сигналов
барометрического высотомера, радиовысотомера и вертикального канала
(акселерометра) инерциальной навигационной системы. Комплексная си-
стема на основе обработки сигналов барометрического высотомера Нбв,
радиовысотомера Нрв и акселерометра вертикальных ускорений az
251
'I
Рис. 6.2
должна обеспечить оптимальные оценки высоты Н (над уровнем^моря или
аэродромом вылета), некоторой усредненной высоты рельефа hp, усред-
ненной ошибки барометрического высотомера Д//бв, вертикальной скоро-
сти И и вертикального ускорения Н.
Под усредненной высотой рельефа (постоянной составляющей рельефа)
понимается составляющая высоты рельефа над заданным уровнем начала
отсчета, слабо меняющаяся за время оценивания, т.е. составляющая, интер-
вал пространственной корреляции которой существенно больше значения
И^Тц (IV — путевая скорость летательного аппарата, тц — длительность цик-
ла оценивания).
Выходные сигналы указанных датчиков информации используются при
синтезе алгоритма в качестве составляющих вектора наблюдений. В соот-
ветствии с рис. 6.2 они могут быть представлены в следующем виде:
сигнал радиовысотомера
Z1 = Ярв=Я-йр+|г1, (6.1)
сигнал барометрического высотомера
z2 =Ь'бв = Я + ДЯбв + Ьг - (6.2)
сигнал вертикального акселерометра ИНС
z3=az=// + £z3, (6.3)
где £ZI - флуктуационная составляющая сигнала радиовысотомера, обу-
словленная наличием собственных шумов и высокочастотной (в простран-
ственном смысле) составляющей поля рельефа, т.е. составляющей высоты
рельефа, интервал пространственной корреляции которой существенно
меньше И'Тц (последняя при движении летательного аппарата порождает
сигнал в виде реализации случайной функции времени);
?z 2 — флуктуационная составляющая сигнала барометрического высото-
мера, которая может быть обусловлена турбулентностью атмосферы;
252
ijz 3 — шумовая составляющая сигнала акселерометра (она может созда-
ваться вибрациями конструкций планера летательного аппарата и угловы-
ми высокочастотными колебаниями, воздействующими за счет несовпаде-
ния места установки акселерометра с центром масс).
Величины £zi, ?z2 и £гз при синтезе будем считать независимыми гаус-
совыми белыми шумами со спектральными плотностями
Szl ~ 5’рв, Sz2 ~ к^бв> “!>z3 ~ “^акс-
Заметим, что с целью упрощения алгоритма на этапе синтеза постоянной
ошибкой радиовысотомера и постоянной ошибкой измерения вертикально-
го ускорения мы пренебрегли. Первое допущение вполне естественно, так
как постоянная составляющая ошибки радиовысотомера_обычно сущест-
венно меньше ошибки учета усредненной высоты рельефа hp. Второе допу-
щение оправдано тем, что в качестве измерителя вертикальных ускорений
используется акселерометр навигационного класса точности. •
В качестве математической модели процесса изменения высоты за время
цикла оценивания тц примем движение с постоянным вертикальным
ускорением
Н = const.
Введя обозначения
*1 = Н, х2 =Н, х3 = Н, х4 = йр, х5=Д//бв, (6.4)
уравнения контролируемого процесса запишем в виде
х1-х2=0, *2 - х3 = 0, *3=0, х4=0, х5 =0 или в векторной форме
Х + аХ = 0, (6.5)
где X = равна [Xi х2 х3 х4 х5]т - век '0 -1 0 0 0~ 0 0-100 тор состояния. Матрица а системы (6.5)
а = 0 0 0 0 0 0 0 0 0 0 _ 0 0 0 0 0_ (6.6)
В соответствии с (6.1) — (6.4) вектор измерений можно записать сле- дующим образом:
2 = йХ + £г, (6-7)
где Z = вид = [Zi Z2 Z3]T, ?z= Uzl • 1 0 0-1 0- ?z2 £х3]т. Матрица измерений й имеет
h = 1 0 0 0 1 . 0 0 1 0 0 _
253
Необходимое и достаточное условие полной наблюдаемости стационар-
ной линейной динамической системы, описываемой уравнениями (6.5) и
(6.7), состоит в том, чтобы ранг блочной матрицы размера п X т был
равен п:
гапк[йтатйт(ат)2йт . .. (ат)"-1йт] = п,
где п — размерность вектора состояния, т — размерность вектора
измерений.
Нетрудно убедиться, что в рассматриваемом случае
гапк[йтйтйт(дт)2йт(дт)3йт(дт)4йт] = 4 < п = 5
и условие полной наблюдаемости не выполняется. Следовательно, в резуль-
тате статистической фильтрации не все компоненты принятого вектора со-
стояния X будут оценены.
Невысокая размерность вектора состояния и матрицы измерений позво-
ляет определить ненаблюдаемую координату путем последовательного
исключения из вектора состояния одной из его компонент с определением
для каждого варианта ранга блочной матрицы
[йтдтйт . ..(а1)”-1^].
Равенство ранга этой матрицы размерности ’’усеченного” вектора со-
стояния свидетельствует о полной наблюдаемости выбранного варианта
построения системы, а исключенная координата относится к числу
ненаблюдаемых.
В рассматриваемой задаче, исключая из вектора состояния координа-
ту йр, т.е. понижая его размерность до четырех, блочную матрицу преобра-
зуем к виду
-1 10
ООО
0 0 1
-0 1 0
ООО
1 1 0
ООО
ООО
ООО
ООО
1 1 0
ООО
ооо-
0 0 0
0 0 0
0 0 0 -
Ранг вновь сформированной матрицы равен четырем, и система с ’’усе-
ченным” вектором состояния полностью наблюдаема.
Отсюда следует, что йр относится к числу ненаблюдаемых координат и
в процессе статистической фильтрации улучшение точности ее оценивания
происходить не будет.
Непрерывный фильтр Калмана имеет вид
X + аХ = K$[Z - hX], (6-8)
K^=RhJSzx, (6-9)
R+aR + RcT +RhTSz~'hR=0, (6.10)
где ^-[xj х2 х3 х4 х5]т — оптимальная оценка вектора состояния,
254
Кф - матричный коэффициент усиления, R — ковариационная матрица
ошибок оценивания.
В силу независимости компонент вектора £z матрица спектральных
плотностей шума диагональная и обратная ей матрица имеет вид
s-г =
1
Sz i
о
1
SZ2
1
Sz3
Основной модуль фильтра Калмана (6.8) в скалярной форме эквивален-
тен следующей системе уравнений:
л л R11-R14 * ^11 + ^15 * 7?1з «
х, = х2 +— ----AZ, +— -----AZ2 +-—AZ3,
ozi oZ2 uz3
A A ^2 1^24* ^2 1+^2S » ^2 3 „»
x2 =x3 +--=---AZ1 +--------AZ2 +——AZ3,
Oz1 OZ2 Jz3
A R31— ^34 * ^31+^35
X3 = —^----AZt +-—------
°zl дг2
Л R4 1 ^44 , * ^41 + #45
x4 =--£----AZj +—-------
oz1 3z2
A ^SI^S4 * Я51 +Л55
=--------AZ t + — ---
1 ^z2
* R3 я *
az2 + -^-az;,
огз
, ^43 .
+ а---
огз
az2
az2
jR$ з *
+—az;,
OZ3
о
о
о
о
о
где AZ* =Z| X! +x4 , AZ2 =z2-X!-x5, AZ3=z3-x3.
Если перейти к матрице А = R-1, то уравнение ковариаций (6.10) при-
водится к виду
Л-Ла-дтЛ-йт52'1Л=0.
(6-11)
Уравнение (6.11) решается при начальном условии Ао = Rq1 , которое
в силу независимости начальных ошибок оценивания вектора состояния
[компонент вектора Z(0) - Z(0) J, может быть записано в следующем
виде:
Ao ~
о. ..
днбв0
(6.12)
255
2 2 2 2 2 _
где oA ,, , ол , о, , а - , ол,, — дисперсии начальных ошибок
ДЯ„’ Д//„’ ДЯ0 ’ ДЛро’ Д//бвО
оценивания высоты, вертикальной скорости, вертикального ускорения,
усредненной высоты рельефа и постоянной составляющей ошибки баромет-
рического высотомера.
Матричное уравнение (6.11) с учетом симметрии матрицы эквивалентно
15-ти скалярным уравнениям
+-с > ^12+-4ц=0, Л1з+Л12=0, А14=—-"Z , Л15 =_7 ;
°Zl °Z2 OZJ
Л22 + 2 Ai 2 = 0, -^2 3 Ai -3 + A2 2 > A24 + A14 - 0, Л25 + A15 - 0;
A33 +2A23 = “о > Аз4 + A24 ~ 0, A35 + A25 = 0; (6.13)
A44=-^ , Л45 =0; Ass=~$
ozi oz2
Выполняя последовательно интегрирование уравнений (6.13) при началь-
ном условии (6.12), а также учитывая, что в конце каждого никла наблюде-
ния система оценивания приводится в исходное состояние (фильтр ’’сбра-
сывается’ ), получаем аналитические выражения для определения коэффи-
циентов матрицы А, справедливые для любого цикла (интервала)
оценивания:
Л»(’’) = одн0 +(^ + А12(т) = -0^ A^H°^ot2+1(s7i+S^)t3’ А“(г) А^^ = ^0+аЛ/2+Ц-^+^)73’ А2з(г) = ~о-2 т-±о~2 т3-4("Л +v ^24(7-)= 2Szi т2, A2s(t)-~ 2S22t2’ А3з(т)=а~1 +о'2 т2+^-°ли t4+^>h(v" + 1 1 ^34(т)--—— т\ Аз5(т)=-—~т3; vo2l Ь5г2 ^4s(’’) = 0; Л55(7) = о;2 +— т, дмбвО С . °zj где 0<т<тц. 256 / 1 х 1 \ 2 от \25ZI 2S22Jt ’ —тг—т, Л15(т)=-т—т; *^zl ^z2 —V4, (6.14) 2! X\T5+J_T Sz2] S23 T> А^(т) = а-^ро +^1-T;
Обращение матрицы А (т) на каждом шаге интегрирования уравнений
(6.8) позволяет найти .ковариационную матрицу Л(т), а следовательно,
и матричный коэффициент усиления
КФ (т) = R 5;1 = [А (т)] S'1 =
Ri 1 ~ Rm /?! 1 +Rl 5
Sz J ^z2
R21 - R24 R21 +R35
Sz 1 ^z2
R31 — R3n R31 + R3s
Szi $z2
R4 1 — Rah R4 1 + /^4 5
5Z2
Rs 1 — R$4 Rsi + Rss
S21 SZ2
$z3
R33
$z3
R33
$z3
R* 3
$z3
К21
Аз i
Kn Kl3
K22 K23
A3 2 A33
A42 K43
A52 A53
(6.15)
Заметим, что диагональные элементы матрицыR(f) в процессе функциони-
рования алгоритма характеризуют изменение во времени дисперсий оши-
бок оценивания вектора состояния X. Интегрирование уравнений основного
блока (6.8) производится при начальных условиях, определяющих для
z'-ro цикла характер движения летательного аппарата в вертикальной
плоскости:
Я(0)=Я(,) , Я(0)=Я(<), До)=я(,> .
v 7 зад v 7 зад v 7 зад
Для постоянной составляющей ошибки барометрического высотометра
в качестве начального условия для любого цикла оценивания можно при-
нять нулевое значение Д//бв (0) = 0. Начальное значение усредненной высо-
ты рельефа йр (0) задается отдельно для каждого цикла оценивания из
программного устройства.
Априорная информация об усредненной высоте рельефа снимается с
крупномасштабных (М 1:100000, М 1:50 000) топографических карт в.
процессе предварительной подготовки и прокладки маршрута полета.
Формулы (6.14), (6.15) и система уравнений (6.8) составляют по
существу полный алгоритм оптимального оценивания рассматриваемых
координат. Для реализации этого алгоритма с помощью БЦВМ все время
полета разбивается на циклы наблюдения (оценивания), а циклы для
осуществления численного интегрирования уравнений (6.8) разбиваются
на шаги интегрирования Дти. Одновременно формируется программная
траектория летательного аппарата в вертикальной плоскости, что эквива-
лентно заданию //(0), /7(0) и /7(0), и заносятся в память БЦВМ значения
усредненных высот рельефа Ар для каждого цикла оценивания вдоль
предполагаемых маршрутов полета. Причем в случае жестких ограничений
17. И.Н. Белоглазов 257
Рис. 6.3
на величину бокового отклонения от заданной линии пути высота рельефа
Лр может программироваться и выбираться из памяти в процессе функцио-
нирования алгоритма в зависимости только от одной продольной координа-
ты. При широком маневрировании летательного аппарата в пределах за-
данного коридора программирование и выборку значений Ар Необ-
ходимо проводить в функции продольной и боковой координат, т.е. Ар =
= Лр(х, j).
Далее по формулам (6.14) осуществляются вычисление коэффициентов
матрицы А (г), формирование матрицы R (т), вычисление матричного коэф-
фициента усиления Кф(т) и интегрирование уравнений (6.8) при соответст-
вующих данному циклу оценивания начальных условиях.
С течением времени внутри цикла наблюдения точность оценивания
движения непрерывно нарастает и при т = тц становится максимальной.
Фильтр при этом условии переводится в исходное состояние и процедура
оценивания повторяется заново.
Выходными параметрами системы оценивания являются значения оце-
нок в конце каждого цикла. Структура рассмотренного оптимального
алгоритма оценивания вертикальных параметров движения летательного
аппарата приведена на рис. 6.3. Диагональные элементы матрицы Л(тц) в
конце интервала оценивания характеризуют точность фильтра. Так, напри-
258
J мер, выражение для дисперсии ошибки оценивания высоты полета имеет вид
ал 1/(Ти) =----- 1 1 (7ц) ,
Д" Ц |Л(7Ц)|
где IЛ (7Ц) | - значение определителя матрицы А (т) в конце цикла наблюде-
ния, т.е. т = тц; ^‘‘(Тц) — алгебраическое дополнение верхнего левого
углового элемента этого определителя в тот же момент времени.
В развернутом виде выражения для диагональных элементов матрицы
Д(тц) громоздки. Изменение ошибок оценивания вектора состояния (6.4)
и достижимая точность исследованы с помощью математического модели-
рования, результаты которого обсуждаются ниже.
Как обычно, вычисление ковариационной матрицы Л (г) и матричного
коэффициента усиления Л^ф(т) происходит без учета измерений. Следова-
тельно, эти величины могут быть рассчитаны заранее и храниться в памяти
БЦВМ. Это позволяет реализовать данный алгоритм при ограничениях на
длительность расчетного цикла, затрудняющих вычисление R (т) и Кф(т),
в реальном масштабе времени. Отход от строгой оптимальности процессов,
у оценивания решает задачу дальнейшего сокращения потребной для реализа-
> ции алгоритма производительности БЦВМ. Связано это с выбором различ-
ного значения шага интегрирования Дти уравнения оценок (6.8) и темпа
обращения Дтобр к ДЗУ БЦВМ, где хранится таблица чисел, отражающих
| изменение элементов матрицR(т) или Кф(т)в пределах цикла наблюдения.
| Причем надо иметь в виду, что это справедливо и для случая, когда с тем-
! пом Дтобр осуществляется определение Кф(т) по формуле (6.15) с выпол-
[! нением операции обращенияR(r) = А(т). То есть в течение к шагов интег-
I рирования уравнений оценок (6.8) значение ковариационной матрицы R(t) ,
а следовательно, и значение коэффициента усиления Кф(т) остаются неиз-
менными. Коэффициент К =—может достигать больших значений.
' В частности, при исследовании алгоритма (6.8) — (6.10) шаг интегрирова-
ния уравнений (6.8) принимался равным Дти = 0,02 с, а расчет матрицы
А(т) по формулам (6.14), вычисление R(г) и Кф(т) проводились с Дтобр1 =
= 0,5 с до 71 = 10 с и Д7обр2 = 1 с до конца цикла оценивания, т.е. К] = 25
(на первом этапе работы фильтра) и К2 = 50 (на заключительном этапе).
Этим обеспечивается достаточное для практических целей приближение
упрощенного фильтра (особенно в переходном режиме работы) к опти-
мальному.
Потребное количество чисел, подлежащих записи и хранению в ДЗУ
БЦВМ при двухэтапном изменении темпа обращения Дтоер к ДЗУ, может
! быть рассчитано по формуле
«(« + 0/ 71 7ц-7!\
•^ДЗУ _
+ --------I,
2 Лд^обр! Атобр2 /
где и — размерность вектора состояния, тц — дительность цикла оценивания,
71 и Тг = 7Ц — 7] — длительности первого и заключительного этапов оцени-
вания.
Для алгоритма (6.8) — (6.10) при тц =30 с, rt = 10 с, ДтобР1 = 0,5 с,
Д7обр2 = 1 с, и = 5 имеем 7Удзу = 600.
17*
259
По рассмотренной выше методике могут быть синтезированы в дискрет-
ной или непрерывной форме циклические алгоритмы оценивания верти-
кальных параметров для различного состава и сочетания бортовых датчи-
ков информации. При этом важное значение для алгоритмов и структуры
системы в целом имеет рациональное распределение информации между
вектором наблюдения и вектором управления [6.6].
Применительно к задаче оценивания параметров движения центра масс
летательного аппарата в вертикальной плоскости для рассмотренного
состава измерителей (баровысотомер, радиовысотомер и вертикальный
акселерометр ИНС) сигнал акселерометра в соответствии с принципом
перераспределения информации [6.6] может быть использован не только
в качестве компоненты вектора наблюдения, но также и в качестве управ-
ляющего воздействия, а в ряде случаев — в качестве составляющих векто-
ров наблюдения и управления одновременно. Причем последний вариант
целесообразно применять при наличии на борту двух и более ИНС, что
позволит исключить коррелированность возмущений в системе.
Для наиболее распространенного варианта построения навигационного
комплекса, содержащего одну ИНС, проведем синтез циклического алго-
ритма оценивания вертикальных параметров для случая, когда сигнал
вертикального акселерометра используется в качестве управляющего
воздействия. Условия наблюдения и уравнения контролируемого процесса
запишутся в следующем виде:
сигнал радиовысотомера
zi = #рв =Я-Лр +%zl; (6.16)
сигнал баровысотомера
г2 = #бв -Н+ АНбв +?22i (6-17)
управляющее воздействие (сигнал вертикального акселерометра)
макс ~ Н + Амакс ?акс’ (6.18)
контролируемый процесс
Я- VH = О, VH = цакс - Диакс - 5акс, Д цакс = 0, ДЯбв = 0. (6.19)
При использовании обозначений Х] =Н, х2 = V//, х3 = Ди^, х4 = ДЯбв,
= — £акс уравнения (6.16), (6.17) и (6.19) в векторной форме принима-
ют вид
X + аХ = и + , (6.20)
Z = hX + Fp+$z, (6-21)
“0 -1 0 О'
0 0 10
где Fp = [- h р 0]т; а = 0 0 0 0 ; — матрица системы; и =
_0 0 0 0_
= [0
ний;
макс 0 0] т — вектор управления; Z = [zt z 2 ] т — вектор наблюде-'
fl 0001
0 0 0 11 матРица измерений; %х = [0 £акс 0 0 0]т и
h
260
£г = l%zi Ьг]' - шумы, возбуждающие контролируемый про-
цесс, и шумы измерений соответственно с матрицами спектральных
плотностей
О О
с _ 0 ^акс
О о
-° О
Оптимальные оценки вектора состояния Xнаходятся путем решения сис-
темы уравнений [6.7]
X + аХ = Rhr S~'[Z - hX - Fp] +и, (6.22)
R +aR +RaTRhTS;,hR=Sx
(6.23)
при начальных условиях х} (0) = ЯИИ, х2 (0) =//„„, х3 (0) = 0, х4 (0) - 0
для уравнения (6.22) и
для уравнения (6.23),где Нин и Яии — показания вертикального канала
ИНС, соответствующие моменту включения фильтра.
Значения усредненной высоты рельефа hp 'п выбирается в соответст-
вии с показаниями горизонтальных каналов ИНС по методике, изложенной
261
Структура оптимального фильтра, построенная с учетом уравнений (6.22)
и (6.23), приведена на рис. 6.4. Анализ структуры показывает, что использо-
вание сигнала вертикального акселерометра в качестве управляющего воз-
действия эквивалентно исключению из рассмотрения характера движения
центра масс летательного аппарата и представлению алгоритма оценивания в
ошибках.
На рис. 6.5 построены графики достижимой точности синтезированного
алгоритма, полученные численным интегрированием уравнений (6.23) при
следующих исходных данных: Szl = а2тд=100м2 -с, Sz2 = стбв тбв =
= 150 м2 с, 5акс = аакс такс = 0,000001 м2-с~3 и шаге интегрирования
Дти = 0,02 с.
Из графиков видно, что при достаточно высоком уровне флуктуацион-
ных составляющих ошибок датчиков информации через 100 с после начала
работы фильтра среднеквадратические ошибки оценивания составляют:
высоты (Тд//(Тц) = 2 м, вертикальной скорости одй(тц) =0,12 м • с-1,
ошибки баровысотомера (Тд//бв(т11.) =1,5 м, ошибки вертикального акселе-
рометра (Тди(Тц) = 1.210-3 м-с-2.
При полетах над сильно пересеченной местностью и в горах по каналу
радиовысотомера поступает интенсивная помеха либо в виде реализации
высокочастотной составляющей поля рельефа (при отсутствии карты
рельефа на борту), либо в виде ошибок, вызванных несовпадением реали-
зации датчика поля с реализацией, извлекаемой из блока памяти по сигна-
лам навигационного комплекса. В этом случае сигнал радиовысотомера
необходимо отключать, что сопровождается изменением структуры филь-
тра. При этом необходимо иметь в виду следующее. К моменту отключения
сигнала радиовысотомера фильтром была сформирована оценка постоян-
ной составляющей ошибки баровысотомера Д//бв с точностью до постоян-
ной составляющей ошибки радиовысотомера (при полетах над акватория-
ми) или с точностью до ошибки задания усредненной высоты рельефа Дйр
(в случае ее преобладающего влияния). Полезным приемом может оказать-
ся сохранение полученной оценки &Нбв с последующим ее включением
в состав вектора измерения с сокращением при этом размерности вектора
состояния [6.8]. Модель процесса и измерение в этом случае записываются
262
следующим образом*) :
W = И/у, Й/у — Макс — ДМакс — ?акс ^^акс — (^-24)
Z = /7бв - Д^бв = Н + Д//бв - Д Ябв + . (6.25)
Используя принятые выше обозначения, уравнения (6.24) и (6.25) в
векторной форме запишутся в виде
Х + аХ = мх+£х, (6.26)
Z=hX + M2+^2, (б,27)
где
“х=[0 Макс 0]т, Л=[1 0 0],
м2 Д/^бв
ДЯбв - 5//бв,
Х = [Н Уи
Переходя к дискретному времени ?( = j + т,, получаем
Х. = Ф.Х. , + В.их , + Г.?х , , (6.28)
i i i — 1 i £— 1 / /— 1
Z.=h.X , + uz + ^- 1 it i 1 ~2~ (6.29)
1 т. — 1
где Ф. = 0 1 - .0 0 т. 1 1 _ и h = [ 1 0 0 ] = h. — переходная матрица
системы и матрица измерения соответственно; Bj = Г, = т,!; I — единич-
ная матрица размера 3 X 3; их — [0 иакс 0]т — векторуправления; uf =
= 5//fB, £х = [0 £вкс 0]т — шумы, возбуждающие контролируемый
процесс; £? = ? — шумы измерений.
При синтезе алгоритма будем полагать, что £* и £(. — независимые цен-
трированные гауссовы дискретные белые шумы, для которых
cov(e;,ep = o,
cov(^,?p = Dx5..,
cov(£2 ,(?)-£) 3..,
vs I ’ J 7 z //
где 6if- - символ Кронекера; Dx, Dz - дисперсии шумов процесса и измере-
ний соответственно.
*) Излагаемые далее материалы исследований получены соместно с А.И. Силаевым
[6.81.
263
Для системы (6.28) и измерения (6.29) алгоритм, дающий оптимальные
оценки вектора состояния, описывается уравнениями [6.8]
Д =Ф|Л . J +BiUX. J +K,{Z, МФЛ - 1 ! ]-5ЙбВ } , (6.30)
K^Rih]D'\ (6.31)
Ri = Qi - QihtlhfQihl (6.32)
Qi = Ф,К,-_ j Ф) + ViDx Г?, (6.33)
решаемыми при начальных условиях 2f0 = -¥зад и Ro = Лзад. Величина
8Н бв считается известной.
I
Уравнения (6.30) и (6.31) образуют основной блок (модуль) алгоритма
оценивания, а (6.32) и (6.33) — блок ковариаций. В уравнениях (6.32) и
(6.33) через R. = RJ. = {г1 } (/, т = 1,2, 3) обозначена ковариационная
матрица ошибки оценки х(., а через 2,- = QJ = (/, т = 1, 2, 3) -
ковариацонная матрица ошибки экстраполяции оценки х{_ ] на момент
времени
С учетом выражений для матриц Ф,-, /г,-, Dx, Dz и пренебрежения вели-
1 2
чиной — т. уравнения (6.30) — (6.33) в скалярной форме записываются
следующим образом:
уравнения блока оценивания
Н. = И , + т.У. , + K\v„ V.= V. ,-т.Аи‘~г +r.ui l +K'v.,
i i—l i i—1 1 i i i-1 i акс i акс 1 i
Au1 = Au' 1 +K3 v Au0 =0. v. -1. - H. . - т. V. , - 6Ябв;
акс акс J f ’ о t i i 1 t i-l i
уравнения блока ковариаций
Чи = rn +2/^12 + rjr22, ql2=ri2 +т,г22 -т,Г1з +т-г2з-
<713 = Оэ +rtr23, q22 =r22 - 2т,.г2з + т](г3з + Dx), (6.34)
<?2 3 = r2 3 “Т(Гзз, <7зз =r33;
ri i = Qi i - f<i\ i, r it ~ Ч it ~ fyi 1Ч12 > ri3 =<71з - f4i i<?i3>
r2 2 ~ Ч22 - /<71 2 , r23=<?23 ~/l712,7l3, (6.35)
гзз = Чзз ~ /<713, f= ~ , n
41 1 T ‘-’z
В уравнениях (6.34) все естьг^1, qlm есть<7('т, а в уравнениях (6.35)
вСе r im • Qim m = 1 > 2, 3) соответствуют моменту времени t,-. Последо-
вательность вычислений в процессе функционирования фильтра очевидна:
при поступлении макс, Zf по уравнениям (6.32) и (6.33) рассчитываются
матрицы Rf и Qi, после чего по (6.31) вычисляются коэффициенты усиле-
264
ния Kf, определяется невязка v( и формируется оценка на момент ?,• со-
гласно (6.30).
Точность оценивания характеризуют диагональные элементы матри-
цы R, являющиеся апостериорными дисперсиями ошибок оценивания.
Ввиду полной наблюдаемости пары (Ф, h ) уравнения ковариаций имеют
единственное установившееся решение Л(°°) и Положив в рекур-
рентных уравнениях (6.32) и (6.33) R; = Ri~i = R(°°) и Q, =Qt_x =
— £?(°°), после несложных преобразований находим
п i(°°) = 4^02(0-2^)> ri2(“)='27^2 QtQ-lv),
(6.36)
2^ЭС
Г1 3 (°°) = Г2 3 (°°) = г3 3 (°°) = 0, г22 (~) --—
где
A All
Q = t2D2+(t*D +\6D )2
Введя безразмеоный параметр
к = ----\-
40 2
z
1
— D 2.
___, X
2
2- <Р =
и полагая к < 1, из точных формул (6.35) получаем приближенные
соотношения
_1 ________
ri 1 (°°) 2 77 Dz к 2 (1 - V 2к‘ + 1,5к),
г12(°о) -> 4Огк(1 -777),
877 4
Г22(°°) -* -у-к Dz,
т
которые удобнее для вычислений, чем (6.35). Например, при — Dz =
= 100 м2, о2кс = Dx - 6,2510-4 м2-с"4, 7 = 0,1 с находим 7r i г (°°) =
= 0,84 м, \1 т22 (оо)' = 0,04 м-с-1. Видно, что в установившемся режиме
работы фильтр характеризуется высокой точностью оценивания параметров
вертикального движения летательного аппарата.
Для оценки времени достижения фильтром стационарного режима
(постоянства коэффициентов усиления) положим Dx -> 0 и, приняв во вни-
мание очевидное соотношение
Л, = 12;’ ,
приходим к линейному относительно R~l рекуррентному уравнению
7?-1 = (Фт)-17?-,1Ф-1 +hrD~lh (1=1,2,...)
265
или
Aj = FAt_, FT + Wz (/=1,2,...), (6.37)
где At- - R7l, F = (Фт)-1, Wz = hTITlh. Применив (6.37) последова-
тельно и раз, будем иметь
п - I
Ап = FnA0(Fr)n + S F7H/I(FT)7. (6.38)
/ = о
Учитывая выражения для соответствующих матриц, из (6.38) после про-
ведения громоздких преобразований, связанных с обращением матри-
цы А п, можно получить точные зависимости элементов матрицы R от номе-
ра измерения. Асимптотические выражения, справедливые при больших п,
имеют вид
о D. D-,
rn(n) = --Dz, г22(п) = 192——гл 3(п) = 720 —--------,
п т п т ns
(6.39)
Dz Dz Dz
г12(п) = 36---, Г13(и) = -60-^—у, r23(n) = -360—- .
тн тп т n
Для приближенной оценки времени установления стационарного режима
приравняем Гц (л), вычисляемое по формуле (6.36), значению rii(°°),
вычисляемому по (6.39). В результате находим
нуст = 3,182[к 2(1 + V27 + 1,5к)]-1 .
Из полученного соотношения видно, что время достижения фильтром пре-
дельной точности оценивания определяется безразмерным коэффициен-
том к. При указанных выше числовых значениях получаем иуст ~ 1277, т.е.
фильтр достигает стационарного режима оценивания после обработки
1300 измерений, или через
7стац ~ ГЛуст ~~ 130с.
Для оценки влияния 6//бв примем, что величина 6//,бв неизвестна (что
в действительности имеет место). Тогда для ошибки оценивания
е(- = X, х, на основании (6.28) — (6.30) получаем рекуррентное сто-
хастическое уравнение
е,- = (/ - Kihi^iC^ I + (/ - Kihi)V^x. f - К^7. K.uz., e0 = x0 - x0 ,
(6.40)
из которого ясно, что при детерминированном значении ошибки 6//бв оцен-
ка х,- смещена. Однако ковариационная матрица ошибки рассчитывается
по тем же формулам, что и в идеальном случае. Обозначив математическое
ожидание F(e() = д(-, из (6.40) находим уравнение для среднего значения
ошибки
д. = (/- К.Н.)Ф.ц. ] - К.и*,
266
I
из которого следует, что
Р„ = ( П Л.)д0 - S ( П A }K.uz, (6.41)
1=1 i=I j = i + I
I
где Aj = (/ - Kjhi^i. Здесь П A, = A t Af _ ] ... А; для j < I;
< = i
i
П A, = I для / >1. Из (6.41) видно, что среднее значение ошибки отли-
< = i
чается от оптимального на величину
Дд„ = -2 ( п А )К.и2..
i = I j = i + I
Если система равномерно полностью наблюдаема и равномерно полно-
стью управляема [6.7], что в данном случае имеет место, то справедливо
следующее соотношение:
т + I
|| П A j || -+ 0 при I -* °°,
i = т
где Н Н — норма матрицы. Следовательно, при п -*<»
-* ДМп-
Постоянное смещение Дд находится из уравнения для среднего значения
ошибки в предположении постоянства матриц Kit hi, Ф, и равенства
= Mi-i = ДМ:
Дд = -[/ - (/- КН)Ф]~1Киг. (6.42)
Подставляя в (6.42) выражения для матриц Ф и h и учитывая, что
К= [А, К2 А'з]т, находим
Дд = [-uz 0 0]т.
Таким образом, в стационарном режиме смещенной на величину 3//бв =
= Д//бв - Д#бв является лишь оценка высоты полета. Влияния на оценки
вертикальной скорости и постоянной ошибки акселерометра ’’остаточная”
ошибка баровысотомера 8Hqb не оказывает.
Изменение во времени коэффициентов обратных связей [элементов мат-
рицы А(т)] относит полученный фильтр к классу нестационарных, что яв-
ляется существенным отличием от рассмотренных ранее схем. Реализация
синтезированных алгоритмов ввиду невысокой размерности даже с реше-
нием уравнений коварйаций в реальном масштабе времени не вызывает
затруднений. Однако в ряде случаев' все же целесообразно упрощение.
Варианты упрощения алгоритмов могут быть самые разнообразные.
Одни из них связаны с предварительным расчетом матрицы R (т) в пре-
делах заданной длительности цикла оценивания тц на наземных ЭВМ и хра-
нением в ДЗУ БЦВМ соответствующей таблицы чисел.
i
267
Другие — с переходом от строго оптимальных к субоптимальным (ста-
ционарным) фильтрам, когда решение уравнения ковариаций с первого
шага получения оценок вектора состояния заменяется на установившееся
значение, т.е. R (т) = R = const. Подобные системы с постоянными коэффи-
циентами просто реализуются как в аналоговом, так и в цифровом вариан-
те. В последнем случае алгоритм для реализации требует минимальной
производительности БЦВМ. На рис. 6.6 приведена преобразованная струк-
турная схема фильтра (6.22) , (6.23) с введенными дополнительно сле-
дующими обозначениями:
Ку=-^ Rn, K2=~z (Ru+Rn), K3=~z ^12,
Ozi O22 o2i
^4 =~7 (^12 —^2д)> K5 = ~C Ri3> Кб (^з +^34),
O22 a21 az2
где Кц — элементы матрицы R(t) = R — установившиеся решения уравне-
ния Риккати (6.23)
aR + Rar + Rhr Szl hR = Sx.
На схеме показана цепь сигнала вертикального акселерометра с двумя
последовательными интегрирующими звеньями, характерная для любой
инерциальной системы. Таким образом, в данном случае синтезирована
простейшая инерциальная система (вертикальный канал) с коррекцией
показаний с помощью радиовысотомера и баровысотомера. Цепи коррек-
ции с передаточными числами Kt, К2> К3 и К4, сохраняя структурную ус-
тойчивость системы, совместно с интегральной обратной связью (цепи с пере-
даточными числами К5/р и К6/р) делают систему астатической по отно-
шению к постоянной составляющей ошибки вертикального акселерометра.
Отключение сигнала радиовысотомера, как следует из рис. 6.6, при сохране-
268
Сигнал, содержащий инсрорнацию
нии цепи Zj — Н = Нрв — Н обеспечивает выделение флуктуационной со-
ставляющей поля рельефа вдоль траектории полета независимо от характе-
ра движения летательного аппарата в вертикальной плоскости.
Подобная схема подробно исследована в работе [6.9]. Основное отличие
алгоритма оценивания, приведенного в [6.9], от рассмотренного выше за-
ключается в использовании более подробной математической модели оши-
бок вертикального акселерометра.
В частности, было принято предположение, что ошибка акселерометра
включает не только постоянную составляющую, но и нарастающую во вре-
мени компоненту:'
Дм =Дм° +аг = Дм° +Дм'
акс акс акс акс
Не выполняя преобразований, связанных с составлением уравнений
фильтра, для случая полета над всхолмленной и гористой местностью (сиг-
нал радиовысотомера отключен от фильтра и используется только для полу-
чения информации о рельефе вдоль действительной траектории полета
объекта) приведем структуру фильтра оценивания параметров вертикаль-
ного движения центра масс летательного аппарата (рис. 6.7). Варианты упро-
щения фильтра при его технической реализации могут быть аналогичны ука-
занным выше упрощениям алгоритма.
Отметим, что при задании коэффициентов усиления цепей обратных свя-
зей в виде констант, рассчитанных по результатам статистического моде-
лирования, данный фильтр (стационарный вариант) может быть легко реа-
лизован и на аналоговых элементах.
269
§6.2. МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ
ЦИКЛИЧЕСКИХ АЛГОРИТМОВ
ОЦЕНИВАНИЯ ПАРАМЕТРОВ ВЕРТИКАЛЬНОГО ДВИЖЕНИЯ
Функционирование алгоритма оценивания параметров вертикального
движения центра масс летательного аппарата было проверено с помощью
математического моделирования. Рабочая программа была составлена в со-
ответствии с уравнениями (6.8) — (6.10).
В процессе моделирования исследовались следующие вопросы:
поведение оценок вектора состояния Х(т) для расчетных начальных зна-
чений ковариационной матрицы R(G), спектральной плотности шумов
измерений Sz при различном уровне флуктуационных составляющих оши-
бок радиовысотомера, баровысотомера и вертикального акселерометра,
задаваемых в виде
^1-Крв^’ ^z2-^6b^2’ ^z3~^акс^З’
гДе £1 > > £з — нормированные белые шумы;
влияние усредненной высоты рельефа hp, постоянной составляющей
ошибки барометрического высотомера Д//дв и постоянной составляющей
ошибки вертикального акселерометра АН на характер процессов оценива-
ния и установившуюся точность;
влияние отклонения начального значения матрицы R (0) от расчетного
с оценкой работоспособности фильтра в условиях априорной неопре-
деленности;
поведение ошибок оценивания при несоответствии начальных условий,
определяющих характер траектории в вертикальной плоскости, действи-
тельному движению летательного аппарата;
влияние коррелированное™ шумов измерений на эффекшвность синте-
зированного алгоритма при различном уровне флуктуационных помех и
постоянных составляющих ошибок датчиков информации.
Начальные условия для определения текущего значения матрицы R (т)
внутри интервала наблюдения (цикла оценивания) задавались исходя из
270
максимально возможных разностей между параметрами, характеризующи-
ми заданное и действительное движения летательного аппарата в вертикаль-
ной плоскости, и уровня ошибок датчиков информации.
Формирование флуктуационных составляющих ошибок датчиков (,
£z2 и Ьз осуществлялось с помощью стандартной программы’’ГАУСС”,
обеспечивающей получение случайных чисел, распределенных по нормально-
му закону. При этом случайные числа £lt и £з попарно независимы,
имеют нулевые математические ожидания и интенсивности, равные единице.
Масштабирование ошибок £zi, £г2 и ?г3 проводилось с помощью коэф-
фициентов Арв, Ябв и Какс соответственно.
Маневрирование летательного аппарата по высоте и полеты над различны-
ми ландшафтами (слабопересеченная местность, горные районы, акватории
и т.д.) приводят к тому, что интенсивность флуктуационных составляющих
ошибок измерения радиовысотомера, баровысотомера и вертикального
акселерометра будет меняться в широких пределах. Можно проводить
коррекцию значений Sz Sz2 и Sz 3 в зависимости от высоты поле-
та и горизонтальных координат местоположения или решать задачу
идентификации характеристик шумов и построения адаптивного фильт-
ра [6,10].
Однако это приводит или к дополнительной загрузке памяти БЦВМ, или
к усложнению алгоритма. В процессе моделирования исследовалась эффек-
тивность синтезированного алгоритма в условиях отклонения действитель-
ных уровней помех от расчетных значений.
На рис. 6.8 и 6.9 показано изменение во времени (в пределах одного цик-
ла наблюдения) ошибок оценивания высоты полета ДЯ = Яз‘ — Я, верти-
кальной скорости ДЯ = Язад — Я, вертикального ускорения ДЯ =
= Я* — Я, постоянной составляющей ошибки баровысотомера дЯби
и ошибки вычисления усредненной высоты рельефа ДЛр = hp — hp , полу-
ченных при моделировании работы алгоритма и следующих значениях
271
постоянных:
о АН0 = 100 м, а . = 4 м •с"1, о .. АН0 = 0,005 м , с’ 2,
О Лйр0 = 10 м, а д^бвО = 100 м, тц = 30 с,
S2 I = 200 м2-с Sz2 = 250 м2-с, $z3 = 0,00016 м2-с”
Начальные значения вектора состояния соответствовали горизонтально-
му полету на высоте Я3'ад = 5000 м и программному значению усредненной
высоты рельефа йр(0) =205 м. Ошибки баровысотомера и вертикального
акселерометра были приняты соответственно равными ДЯбв (0) = 50 м
и ДЯ (0) = 0,01 м-с"2. Действительное приборное значение высоты полета
составляло Н = 4900 м, а усредненной высоты рельефа — hp = 200 м.
Среднеквадратические значения шумов датчиков информации для графи-
ков (см. рис. 6.8 и 6.9) были выбраны равными: Ярв = 2 м, Kqb = 1 м,
Какс — 0,005 м-с"2 и КрВ = 15 м, Ябв = Ю м> Кзкс = 0,02 м-с”2 соответ-
ственно, что практически охватывает диапазон возможных ошибок измере-
ний (флуктуационных составляющих) современных радиовысотомеров,
баровысотомеров и акселерометров. Л л
Как следует из рис. 6.8 и 6.9, процессы оценивания ДЯ и ДЯбв проте-
кают весьма энергично с выходом на установившееся значение через 2—4 с
после начала работы. Несколько затянутый характер имеют графики, отра-
жающие процесс оценивания постоянной составляющей ошибки вертикаль-
ного акселерометра. Объясняется это принятым высоким значением интен-
сивности помех акселерометра (Sz3 — 0,00016 м2-с"3).
Уменьшение уровня помех акселерометра в два раза [S2 3
= 0,00008 м2-с'3], не меняя практически характера поведения оценок^ДЯ,
ДЯбв и ДЯ, форсирует процессы оценивания ЛЙ (графики ДЯ1 на
рис. 6.8 и 6.9).
Вертикальная скорость движения летательного аппарата оценивается
с высокой точностью. Однако, как следует из рис. 6.8 и 6.9, с увеличением
уровня шумов измерений при неизменном значении других постоянных
в переходном режиме наблюдается колебательность процессов оценивания
ДЯ. В целом к моменту окончания f-го цикла наблюдения (при т = тц =
= 30 с) ошибки оценивания вектора состояния составляют:
ДЯ(тц) = 5м, Д#(тц) = 0,1 м-с"1 ,
ДЙ(тц) = 0,001 м-с"2, ДЯбв(тц) = —5 м.
Интересно, поведение ошибки Дйр внутри интервала оценивания. Из пред-
ставленных графиков следует, что значение ошибки вычисления усреднен-
ной высоты рельефа Дйр(тц) в конце цикла наблюдения примерно
соответствует ее начальному значению, т.е. Дйр0. Причем после окончания
272
переходного процесса величина ДЛр оказывает существенное влияние на
уровень ошибок оценивания высоты полета ДЯ и постоянной составляю-
щей ошибки баровысотомера ДЯбв.
В качестве иллюстрации на рис. 6.10 и 6.11 приведены^графики измене-
ния во времени ошибок оценивания вектора состояния Х(т), полученные
при неизменных значениях постоянных начальных условий ДЯ (0) = 100 м,
ДЯ(0) — 0, ДЯ(0) = 0,01 м-с"2, ДЯбв(0) = 50 м, уровней шумов изме-
рений Крв = 5 м, Kqb = 5 м, Яакс = 0,005 м-с"2 и двух значениях началь-
ной ошибки определения высоты рельефа:
Дйр(0) = 10м (рис. 6.J0),
Дйр(0) = 20м (рис. 6.11).
Здесь же показан характер изменения среднеквадратического значения
18. И.Н. Белоглазов
273
начальные значения ошибок остаются практически неизменными в течение
всего цикла оценивания, а для графика о - характерно равенство
ДЛр
Не оказывая влияния на характер переходных процессов фильтра, эта
компонента практически полностью входит в установившуюся ошибку оце-
нивания высоты ДЯ и ошибку барометрического высотомера ДЯбв, т.е.
делает оценки этих координат смещенными.
Таким образом, усредненная высота рельефа в процессе функционирова-
ния алгоритма не оценивается. Она относится к числу ненаблюдаемых коор-
динат и в целях сокращения размерности фильтра может быть исключена из
вектора состояния. Однако при этом надо учитывать (особенно при полетах
на малых и предельно малых высотах и над акваториями), что ошибка ДЛ р
или ей эквивалентная постоянная составляющая ошибки радиовысотомера
определяет максимальную точность оценивания высоты полета и ошибки
баровысотомера в установившемся режиме работы фильтра.
Влияние постоянной составляющей ошибки баровысотомера ДЯбв на
качество процессов оценивания и установившуюся точность иллюстрируют
графики, представленные на рис. 6.12. Они были получены при следующих
исходных данных:
о = 100 м, о . = 4м-с *, а •• =0,01 м-с 2,
дн0 дн„ дя„
о- -10 м, о =100м, 5’.,=200м2-с
длр0 днбв г1
Sz2 = 250 м2-с, Sz3 =0,00008 м2-сЛ ДЯ(0)=100м,
ДЯ(0) = О, ДЯ(0) = 0,01 м с"2, Дйр(0) = 10 м.
274
Для графиков 1-3 было принято Ярв = 10 м, Kqb = 10 м, Какс =
— 0,01 м-с“2, а величины начальных ошибок задавались равными
дябво(1) = 100 м, ДЯбв0(2) = 50 м, ДЯбв0(3) =-50 м. График 4
построен по результатам моделирования при следующих измененных
исходных данных:
ДЯ, = 100м, Дй (0) = —10 м.
бв0(4) ’ pv ’
На этом же рисунке линии со штриховкой определяют в пределах цикла
наблюдения область, ограниченную удвоенным значением стдябв(т)-
На основании представленных материалов, а также из анализа результа-
тов моделирования можно сделать вывод, что величина постоянной состав-
ляющей ошибки баровысотомера ДЯбв практически не оказывает влияния
на характер переходных процессов и установившуюся точность фильтра.
Ошибка оценивания компоненты ДЯбв Для реальных уровней шумов дат-
чиков информации определяется в основном значением ошибки ввода
усредненной высоты рельефа для данного цикла или при отсутствии послед-
ней — величиной постоянной составляющей ошибки радиовысотомера.
Графики, представленные на рис. 6.13, отражают процессы оценивания
постоянной составляющей ошибки вертикального акселерометра инер-
циальной навигационной системы ДЯ при ДЯбво = 50 м и Дйр = 10 м.
Значения остальных параметров оставались неизменными.
Величина начальной ошибки ДЯ(0) при моделировании алгоритма меня-
лось в диапазоне ±0,15 м • с"2. Как следует из рис. 6.13, процессы оценива-
ния ДЯ протекают весьма интенсивно. К 20-й —30-й секунде работы фильт-
ра величина ошибки оценивания постоянной составляющей ошибки верти-
кального акселерометра составляет 0,0002—0,0004 м с 2.
18
275
Увеличение интенсивности шумов измерения вертикального ускорения
затягивает процессы оценивания и при фиксированном значении тц несколь-
ко ухудшает точность оценивания.
Было установлено, что при двукратном изменении интенсивности шумов
акселерометра для обеспечения заданной точности оценивания необходимо
увеличение длительности цикла наблюдения на 30—50% относительно
первоначального значения.
276
При моделировании исследовалось влияние неточного задания начального
значения ковариационной матрицы ошибок оценивания на переходные
процессы и установившуюся точность фильтра. На рис. 6.14 показаны гра-
фики, характеризующие изменение среднеквадратических ошибок оценива-
ния принятого вектора состояния в процессе функционирования алгоритма
при длительности цикла наблюдения тц = 30 с. Начальные значения средне-
квадратических ошибок оценивания были приняты равными:
о.., =100м, о.„ =100м, о.* =4м-с
ДЯ0 ДНбвО ДНо
ст : = 0,01м -с-2, оАс =10м;
р0
°ьнв = 50 м> <H6B0 = 50м> Стд/Уо =2м-с-
ад//0 = 0,005 м-с'2, ад/7рО=10м.
Значение других постоянных составляли:
S:i = 200 м2 • с, SZ2 = 250м2 • с, S2i = 0,00008 м2 • с’3,
ДЯ(0) = 100 м, Д//бв (0) = 50 м, ДЯ(0) = 0,
ДЯ(0) = 0,01 м • с-2, Дйр(0) = 10м,
КрВ = 10м, ЯбВ=10м, Яакс = 0,01 м • с~2.
Из рис. 6.14 видно, что, несмотря на существенное различие в начальных
значениях ковариационной матрицы R (0), текущие значения среднеквад-
ратических ошибок оценивания вектора состояния X начиная с 15-й —
20-й секунды работы фильтра, практически совпадают. Причем ад/у
иади
д//бв
стремятся к установившемуся значению, определяемому начальным значе-
нием среднеквадратической ошибки вычисления усредненной высоты о - .
Таким образом, результатами математического моделирования под-
тверждена справедливость утверждения, что для стационарного устойчиво-
го фильтра допустим определенный произвол в назначении начального
значения ковариационной матрицы: любая ошибка в выборе начального
значения дисперсии ошибки со временем стремится к нулю.
Исследование вопросов, связанных с оценкой работоспособности фильт-
ра при несоответствии принятой при синтезе алгоритма модели ошибок
датчиков действительному характеру их изменения в пределах интервала
наблюдения, проводилось при начальных условиях, соответствующих
горизонтальному полету над акваториями. Это позволило рассматривать
Дйр как постоянную составляющую ошибки радиовысотомера. При моде-
лировании алгоритма изменение составляющих ошибок радиовысотомера
ДАр и баровысотомера ДЯбв осуществлялось в соответствии с уравне-
ниями
Д//бв = Д//бв (0) + 6/7бв т, ДЛ^ДЛрСО) +бйрт,
где ДЯбв (0) и (0) — начальные значения постоянных составляющих
ошибок баровысотомера и радиовысотомера, функционально зависящих
от заданного начального значения высоты полета;
277
6//бв и 6йр - скорости изменения ошибок ДЯбв й ДЛр.
Влияние параметра 6Ябв на поведение ошибок оценивания вектора
состояния при 6ЛР = 0 иллюстрируют графики на рис. 6.15 и 6.16.
При 6ЯбВ = 0,2 м- с”1 характер процессов оценивания и установившаяся
точность фильтра практически не отличаются от результатов, полученных
при ЬНбв = 0, за исключением увеличения среднего значения ошибки по
скорости до величины ДЙср - 0,2 м • с-1. Увеличение скорости нарастания
ошибки баровысотомера 8Нбв до значения 1 м • с'1 привело к дальнейшему
увеличению среднего значения ошибки оценивания вертикальной скорости
(ДНср = 0,6 м с'1) и изменению со скоростью 0,5 м • с"' ошибки оценива-
ния погрешности баровысотомера. Наблюдается также изменение со ско-
ростью 0,25 м • с'1 ошибки оценивания высоты полета Д//. Если принять
во внимание тот факт, что реальные значения параметра 6Нбв существенно
меньше 0,2 м • с'1, то использование упрощенной модели ошибок баровы-
сотомера (6//бв = 0) ПРИ синтезе циклических алгоритмов вполне, до-
пустимо.
Графики, представленные на. рис. 6.17, позволяют оценить влияние
несоответствия принятой гипотезы об Ошибках радиовысотомера с дейст-
вительным характером их изменения. Графики получены для случая, когда
6Ябв = 0 и t>hp = 0,2 м • с'1. Значения других постоянных не менялись.
Рис. 6.16
278
На основании результатов моделирования можно сделать следующее 3aiyiro-
чение о влиянии.нарастающей во времени ошибкирадиовысотомера6//рт.
Если величина <5 Ар практически не оказывает влияния на установившуюся
точность и характер процессов оценивания ошибок вертикальной скорости
ДЯ и вертикального ускорения ДЯ, то ошибки оценивания высоты полета
ДЯ и ошибки баровысотомера изменяются во времени пропорционально
бйр . Следовательно, к радиовысотомеру, как датчику информации, должны
предъявляться достаточно жесткие требования не только по постоянной
составляющей ошибки, но и по скорости изменения ошибки измерения
высоты полета.
Влияние отклонения исходных данных, определяющих характер траек-
тории летательного аппарата в вертикальной плоскости, от действительных
параметров движения на поведение ошибок оценивания иллюстрируют
графики на рис. 6.18. Они получены для случая, когда заданные начальные
условия соответствовали горизонтальному полету на высоте Нзла = ПО м,
а действительное движение происходило с постоянной вертикальной ско-
ростью Н= -2,5 м-с"1,причем при т=0имеем Яо = 85 м, ДЯба(0) = 50 м,
ДЯ(0) = 0,005 м • с"2. Ошибка задания усредненной высоты рельефа
Рис. 6.18
279
(величина постоянной составляющей ошибки радиовысотомера) состав-
ляла 5 м, а ошибка вертикального акселерометра была выбрана равной
ДЯ = 0,005 м • с'2.
Видно, что фильтр сохраняет свою работоспособность при рассмотрен-
ном выше несоответствии условии и обеспечивает устойчивый режим
слежения в пределах цикла наблюдения за параметрами движения в верти-
кальной плоскости.
Моделированием также было установлено, что при начальных условиях,
соответствующих горизонтальному полету, и действительном движении
с постоянным ускорением Н = 0,2 м • с-2 через 10—12 с работы фильтра
наблюдается расходимость процесса оценивания.
На рис. 6.19 приведены графики изменения высоты, вертикальных ско-
рости и ускорения в действительном движении (штриховые линии) и их
оценки, полученные с помощью фильтра. Если в начальный момент оцен-
ки ’’стремятся отслеживать” действительное значение соответствующих
параметров вертикального движения, то через 10—12 с фильтр начинает
расходиться. Происходит это в силу быстрого стремления ряда коэффи-
циентов усиления фильтра к нулю и отключения соответствующего канала
от информации, содержащейся в последних измерениях.
Таким образом, без принятия специальных мер по исключению расхо-
димости рассматриваемого алгоритма ситуация, представленная на рис. 6.19,
является недопустимой для данного фильтра.
При синтезе алгоритма и математическом моделировании полагалось,
что случайные процессы £21, ?22 и £23 (флуктуационные составляющие
ошибок измерения) являются гауссовыми белыми шумами. Подобное допу-
щение может быть оправдано для объектов, совершающих полеты над аква-
ториями на малых и средних высотах. При полетах над сушей с пересеченной
местностью и на больших высотах шумы являются заведомо цветными.
280
Исследования статистических характеристик поля рельефа Земли и
турбулентности атмосферы показали, что радиус корреляции высоко-
частотной в пространственном отношении составляющей поля релеьфа
чаще всего лежит в диапазоне 1000—3000 м, а масштаб турбулентности,
отражающий пространственную структуру атмосферных возмущений,
изменяется в пределах 300—2000 м. Следовательно, выходные сигналы
датчиков информации (радиовысотомера, баровысотомера и вертикального
акселерометра) наряду с полезными сигналами будут содержать постоян-
ные составляющие ошибки измерения и цветные шумы, а в ряде случаев
и дополнительные широкополосные помехи. Методов учета коррелиро-
ванности шумов измерений разработано достаточно много [6.7, 6.10].
Рассматривая, наприМер, цветной шум измерений как процесс на выходе
линейного формирующего фильтра, на вход которого воздействует белый
шум, можно путем расширения вектора состояния учесть коррелирован-
ность измерений и провести для данного случая синтез алгоритма. Однако
основная трудность использования такого подхода, так же как и многих
других, заключается в сопровождающемся при этом значительном увели-
чении объема вычислений.
Цель исследований, результаты которых будут изложены ниже, заклю-
чалась в том, чтобы, не меняя структуру алгоритма, на основе статистичес-
кого моделирования оценить работоспособность и точность фильтра при
цветных шумах измерений. При этом предполагалось, что случайные про-
цессы £z*i(0> £*г(г) и ^*з (О попарно независимы, их математические
ожидания равны нулю, а корреляционная функция каждого процесса с
достаточной степенью точности представляется выражением
М[Ь,(^) =о£ехр 1 (/=1,2,3). (6.43)
h
Стохастическое дифференциальное уравнение для получения шумов изме-
рений с ковариационной функцией (6.43) имеет вид
где т?. • - белый шум единичной интенсивности.
В соответствии с принятыми допущениями составляющие вектора из-
мерений при моделировании формировались следующим образом:
сигнал радиовысотомера
Z, = //pB=//-Ap + Gi,
1 Г?
(')=- — L*1 (О + °Z1 V— V:i-,
2/ 71
сигнал барометрического высотомера
Z2=//6b=W+A/76b + L*2> L*2(0 = L‘2(0 + »z2
сигнал вертикального акселерометра
z3=<-=^ + C3, L*3(0 = - v К3(О + <\-3У|\3.
h Т3
281
Параметры Т\, Т2, Тз, характеризующие ширину спектра шумов изме-
рений, при моделировании изменялись в большом диапазоне. Значения 7\
и Т2 задавались равными 0,5 с, 1 с, 3 с, 5 с в различном сочетании, а величина
7з принималась равной 0,1 с и 0,2 с. Исследования проводились по той же
программе, что и для случая белых шумов измерений. Моделированием
было установлено, что до значений Ti = Т2 = 0,5 с и Тз =0,1 с характер
переходных процессов и установившаяся точность фильтра практически
не отличаются от аналогичных результатов, полученных в предположении,
что шумы датчиков информации белые.
При Ti = Тз = 3 с и Тз = 0,2 с наблюдается значительное ухудшение
качества переходных процессов и установившейся точности оценивания
по всем компонентам вектора состояния.
Следовательно, при полетах над районами с интенсивным рельефом и
гористой местностью использование сигнала радиовысотомера в качестве
компоненты вектора измерения для определения абсолютной высоты при
отсутствии бортовой карты рельефа становится нецелесообразным. Пара-
метры движения летательного аппарата в вертикальной плоскости в данном
случае могут определяться путем обработки сигналов баровысотомера
и вертикального акселерометра либо (при сохранении указанных измери-
телей) с использованием дополнительной информации о поле рельефа,
извлекаемой из блока памяти КЭНС по показаниям навигационной системы.
Эффективным способом борьбы с расходимостью фильтра (6.8) —(6.10)
при больших временах оценивания и ограниченных возможностях БЦВМ
является использование комбинированного алгоритма, представляющего
собой сочетание нестационарного фильтра (в переходном режиме работы)
с фильтром с ’’замороженными” передаточными числами. С помощью
математического моделирования проверялась работоспособность упро-
щенного в вычислительном отношении нестационарного фильтра, когда
шаги интегрирования уравнений (6.8) и (6.10) существенно отличались
друг от друга. Значение шага интегрирования уравнений оценок было при-
нято равным Дти = 0,02 с. Расчет матричного коэффициента усиления
А'ф, учитывая характер его поведения в оптимальном фильтре, проводился
в два этапа. На первом этапе шаг интегрирования уравнений (6.10) был
задан равным Дтф! = 0,5 с, на втором, заключительном, этапе Дтф2 = 1 с.
Длительность первого Ti -К^ Дтф1 и заключительного т2 =К2Лтф2 этапов
изменялась при моделировании в пределах, ограниченных значением тф =
= Л + Тз = 20 -г 40 с.
На основании анализа переходных процессов в оптимальном фильтре
было установлено, что задавать > 10 с нецелесообразно. Поэтому для
окончательных исследований упрощенного алгоритма на ЭВМ было принято
Ti = 10 с. Соответственно этому длительность заключительного этапа изме-
нялась от 10 с до 30 с. При выполнении условия т > тф значения коэффи-
циентов усиления ’’замораживались” и в процессе дальнейшей работы
оставались неизменными. Исследование упрощенного в вычислительном
отношении алгоритма показало, что он сохранил все достоинства и недос-
татки рассмотренного выше оптимального фильтра при незначительном
ухудшении точности.
На рис. 6.20 приведены графики изменения оценок вектора состояния,
полученные при моделировании комбинированного алгоритма и следующих
282
исходных данных:
о.„ =50м, о.- = 4м-с1, о. л = 0,005 м-с-2,
^Г70 &Н 0 Дг70
Л'рв = 2 м, = 1м, Какс = 0,005 м • с'2,
Szl = 100м2 • с, Sz2 = 100м2 • с, 523 = 0,00004 м2-с'3.
Начальные условия задавались в виде
ДН(0) = 50 м, ДН(0) = 2 м • с’1, ДН(0) = 0,01 м • с“2,
ДЯбв (0) = 50 м, Д/г,, = 5 м.
Было принято также, что Tj = 10 с, т2 = 20 с (тф =30 с), т.е. процедура
расчета матричного коэффициента усиления в рассматриваемых примерах
заканчивалась через тф = 30 с. Ограничений на длительность цикла оцени-
вания не накладывалось.
Как следует из рис. 6.20, процессы оценивания носят вполне удовлетво-
рительный характер с высокой точностью оценивания вектора состояния
в установившемся режиме работы.
Рис. 6.21 и 6.22 иллюстрируют влияние различных возмущений, не учтен-
ных в математической модели процесса, на работоспособность субоптималь-
ного фильтра. В частности, на рис. 6.21 отражено влияние нарастающей
283
во времени ошибки усредненной высоты рельефа (или составляющей
ошибки радиовысотомера при полетах над акваториями) на характер
оценивания компонент вектора состояния. Видно, что ошибки оценивания
высоты полета и составляющей ошибки баровысотомера пропорциональны
5 hp, что было характерно и для оптимального фильтра.
Графики на рис. 6.22 соответствуют случаю, когда движение объекта
в вертикальной плоскости происходит с ускорением, лежащим в пределах
зоны нечувствительности акселерометра, а ошибки баровысотомера изме-
няются по закону
ДЯбв1(т)=ДЯбв (0)+6//бвт.
Графики Д/Л (т) и Д//1 (т) отражают изменения высоты и вертикальной
скорости, происходящие из-за наличия неконтролируемого ускорения
6/7=0,005 м-с-2.
Если для оптимального фильтра при больших та характерной была
расходимость процессов оценивания, то для комбинированного субопти-
мального алгоритма наблюдается устойчивый режим слежения за верти-
кальными параметрами.
Аналогичная картина имеет место и в случае возникновения неконтро-
лируемого ускорения внутри интервала оценивания.
Что же касается вопросов технической реализации, то для субоптималь-
ного комбинированного алагоритма при Ti = 10 с, т2 = 20 с, Дтф1 = 0,5 с,
Дтф2 = 1 с требуется хранить в ДЗУ БЦВМ всего 600 констант. Основные
затраты машинного времени будут приходиться на интегрирование уравне-
ний оценок (пять уравнений для рассматриваемого случая) с шагом
Дти = 0,02 с.
284
§ 6.3. СИНТЕЗ И АНАЛИТИЧЕСКОЕ ИССЛЕДОВАНИЕ
АЛГОРИТМОВ КОРРЕКЦИИ ВЕРТИКАЛЬНОГО КАНАЛА
ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ
Широкое использование возможностей вертикального канала ИНС
позволяет задачу синтеза алгоритма оценивания вертикальных параметров
движения ЛА сформулировать как задачу коррекции показаний вертикаль-
ного канала ИНС. Для малых промежутков времени, ограниченных дли-
тельностью цикла оценивания та, справедливы следующие модели выходных
сигналов радиовысотомера, баровысотомера и вертикального канала ИНС:
= НрП= Н - hp — £zl, Z’ = Ябв = Н + ДЯбв — ?z2>
г3*=яин=я + дяин,
где ДЯИН — постоянная составляющая ошибки измерения высоты полета
вертикальным каналом ИНС.
Вектор измерения сформируем в виде разностей показаний вертикально-
го канала ИНС и показаний баровысотомера и радиовысотомера, т.е. в виде
Zj = ЯИН -Ярв = ДЯщ, + йр + £г1, (6.44)
гг = Яин - Ябв = ДЯИН - ДЯбв + ?z2 • (6.45)
По отношению к процесса оценивания величины £Z1 и £г2 будем считать
независимыми гауссовыми белыми шумами с интенсивностью 5рв = <ТрВтрв
И ^бв = абвтбв соответственно, где арв и ~ дисперсии флуктуационных
составляющих ошибок радиовысотомера и баровысотомера; трв и тбв -
времена корреляции указанных ошибок.
Модель ошибок контролируемого процесса (в данном случае модель
ошибок вертикального канала ИНС) получается следующим образом.
Допустим, что движение летательного аппарата в вертикальной плоскости
описывается уравнениями
Vh=“h> “н = 0< <646)
т.е. принимается гипотеза о движении с постоянным ускорением. Показа-
ния вертикального канала ИНС для малого интервала времени могут быть
представлены в виде
Яин^^Я+ДЯщц, ^нин- ^1/ + А^Иин’ (6-47)
ан^ = ан + 8ан+^-ааУ’
где [Зах и аау — ошибки измерений вертикального ускорения, обусловлен-
ные отклонением гироплатформы от плоскости местного горизонта и нали-
чием ускорений ах и ау по продольному и боковому каналам; 8a/f — по-
стоянная составляющая ошибки вертикального акселерометра. Она может
быть вызвана, например, смещением нуля акселерометра и ошибками
масштабного коэффициента.
При этом справедливы соотношения
Яин = ^Нин=анин’ ^Нин=0- (6.48)
Вычитание (6.46) из (6.47) с учетом (6.48) позволяет получить систему
уравнений, достаточно подробно описывающих поведение ошибок верти-
285
кального канала ИНС. Находим
Д^ин ~ Д^Яин’ Д^//ин _ ^ан + @а* ~~ аау ~ ^ан ’ Д<*я ~ О-
Если ввести в рассмотрение вектор состояния X с компонентами
*1 = Д^ин, хг = ДГНин, х3 = ДЯбв, х4 = Лан, (6.49)
то уравнение контролируемого процесса и уравнение измерений в вектор-
ной форме принимают следующий вид:
Х+аХ=0, (6.50)
Z=hX+FD+£z, (6.51)
где Х= [xj х2 х3 х4]т — вектор состояния; %г= [£zl £z2]T — вектор шу-
мов измерений. Матрицы, входящие в уравнения (6.50) и (6.51), равны
" 0 -1 0 0 ~
— —
0 0 0 -1 10 0 0 hp
а - , h = Fn -
0 0 0 0 10-10 р 3 .0 .
- 0 0 0 0 -
Оптимальные оценки вектора состояния Х(т) находятся в результате
решения системы дифференциальных уравнений вида
X+aX = RhTS:1[Z-hX-Fp], (6.52)
R +aR + Ra* + RhTSz1hR = 0. (6.53)
Матрица спектральных плотностей шумов измерений в силу независи-
мости компонент £Z1 и £z2 диагональная, и обратная ей матрица 5Z1 равна
Начальные условия для решения уравнений (6.52) и (6.53) задаются в
виде
Xi (0) = х2 (0) = х3 (0) = х4 (0) = 0
°Д"бвО
286
О 0 *5 1
соответственно, где о.,, , и‘. , а,„ , о, — начальные значения
. Д«о Д1Я0 Л"бв0 ДаН0
дисперсий ошибок оценивания высоты, вертикальной скорости, постоянной
составляющей ошибки баровысотомера и акселерометра.
Если перейти к обратной матрице А = R~l, то уравнение (6.53) преобра-
зуется к виду
А — А а — атА — hTS~zh = 0. (6.54)
Подстановка соответствующих матриц в (6.54) позволяет получить следую-
щую систему скалярных дифференциальных уравнений для нахождения
элементов матрицы А:
1 1
А 11 “ + ~~ ’ А ц + А ц - 0,
\1 ^z2
1
А 1з-----—- , А14 + А12 - 0;
д22 (6.55)
А а + 2.4 а = 0,
А 2з + А 1з = 0, А14 + А а + А14 = 0;
1
А зз = ~ , А 34 + А 2з = 0;
дг2
А 44 + 2/124 ~ О*
Выполняя последовательно интегрирование уравнений (6.55) при началь-
ных условиях А (0) = [А (0) ] ~1, получаем
A is
1
— Г,
S/2
(6.56)
А24 = ~аьн0~^
Обращение матрицы А(т) на каждом шаге интегрирования уравнения
(6.52) дает возможность рассчитать матрицу R(г), а следовательно, и
матричный коэффициент усиления Кф(т) = RlfS;1. Система скалярных
287
Рис. 6.23
дифференциальных уравнений для нахождения оценок вектора состояния
имеет вид
л л Дц ^11 —Д 13
X -х2 =------AZj +-----!------ AZ2,
Szi s:2
А л &21 &21 —^23
Х2 -Х4 =-----AZi +-----------AZ2, (6.57)
52i S,2
a R^i Ril — R33 л ^41 ^41~'^4Э
x3 -------AZj +-----------AZ2> x4 =--------AZj +-----------AZ,,
5.-1 Sz2 SZ1 Sz2
где AZt = Zt —Xi — йр П и AZ2 = Z2 — хг + x3 — невязки измерений.
Величина йр П программируется и вычисляется в процессе функциониро-
вания алгоритма по методике, изложенной выше.
Структура оптимального фильтра приведена на рис. 6.23. Выходными
сигналами фильтра являются оценки вектора состояния в конце цикла
(интервала) наблюдения. При выполнении условия т = тц фильтр ’’сбрасы-
вается” и цикл оценивания повторяется заново. Диагональные элементы
ковариационной матрицы R(r) отражают процесс увеличения точности
оценивания соответствующих компонент вектора состояния в пределах
рабочего цикла. Выражения для диагональных элементов матрицы R(r)
определяются через соответствующие элементы матрицы А (г) согласно
правилу обращения матриц:
Кц =Т7Гл" = С7д/Лт) = ГТ7И22 (А33Аы — А34) -
1-^1 IX |
~ -Л 23 G4 23-Л 44 - ^24-^ 34 ) + А 24 (А 23 А 34 — А 33 А 24 ) ] ,
288
Л 22 (f) - А 22 (Т ) - Од у (т ) “ ~ Ии (А 33 А 44 — А 34 ) —
Ml н М |
— А 1з (А 1з А 44 — А и А з4) + Аi4 (A j3 А 34 — А14 А 33) ], (6.58)
^33 (т) = 777^33 (т) = (т) = 7 л । 11 И22^44 -^м) -
IА | бв IА |
— Л 12 (А и А 44 —А14А24) +А14(А12А24 —А14А22)],
Я44(т) = ГТ’Л’иС') = а^аи(т) = [А 11 (А 2 2^23 ~ ^2 3 ) “
\ А I " | А I
— Л i 2М 1 2^3 3 ~ А1зА2з)+ A13(Ai2A23~~ ^4 1 3^2 2)] >
где М I — определить матрицы А (т), Ац(т) (/' = 1,2, 3,4) — алгебраическое
дополнение соответствующего элемента матрицы Л(т) .
Полученные формулы значительно упрощаются, если на этапе синтеза
алгоритма постоянной составляющей ошибки вертикального акселерометра
пренебречь. Справедливость этого допущения для циклического варианта
построения фильтра очевидна даже при использовании ИНС среднего класса
точности [с дрейфом платформы около 0,1 град/ч, ошибками начальной
выставки по вертикали не хуже 3—4 угл. мин и величиной постоянной
составляющей ошибки акселерометра Дан (0,5 + 1,0) 10'3 м • с2 ].
Формулы для расчета дисперсий ошибок оценивания высоты, вертикальной
скорости и ошибок баровысотомера в пределах интервала наблюдения с
учетом принятого допущения имеют вид
1
Rl I (Т) = = , " М 2 2^4 3 3 — ^2з),
Ml
Riiij) = Од y(j)-——(Ai Мзз - А3 з), (6.59)
н Ml
Лзз(т) = aAHfi»(T) =. 77 1 1 2 .2 — М 1 2 ),
bB I AI
где Ml — определитель преобразованной матрицы А (т) размера 3X3.
Подставляя в (6.59) из (6.56) выражения для соответствующих элемен-
тов матрицы А (т), получаем
т2 т3 /1 1 \ т3
-------------р---------- + 1--+ -----1 --------
аДН0 аДНбв0 S^°\h0 \Szl 'S'z2/3oah6b0
1 1 \ т4 1
Szi +45z2/ 3^7 ]
16 19. И.Н. Белоглазов
289
(6.60)
1/1 т
Л2 2(т) = аАун(т) = —I—-2— +—-з— +
ЛА Чя/дя^о^2 °Л«о
+ 1 + 2 т
Sz2S2i а1нбв0
, I
*зэ(т) = а1Нбв(т) = ~
/ 1 1 \ Г3
+ ------+ — I--------+
\ Sz, Sz2 I о
где
1
~ 2 2 2
°ДЯ, °ДИН(> °ДНбвО
72
1 + ( 1
°ДЯо°ДИНо \^Z1
/ 1 1 \ 2 74 '
fc +s7J .
5z2 <^И0 ОдиНо
\ т3
Sz2 / Зо2я„°2нбйО
/_2 1 \__г
' + U1 + Sz2)nsz
(6.61)
1 \ т
г----I------ +
Sz2/ °ьун о
(6.62)
1 1 \ т
— + ----I -------------+
Zi Sz2/
I.L + 1 \ 1-4 +
\SzI 4Sz2/ 3Sz2 Од,на
На рис. 6.24 приведены графики, рассчитанные по формулам (6.60) —
(6.62) при следующих исходных данных:
Од«0=100м, ад^ = 5м-с-1, адябв0 =Ю0 м,
521 =200 м2-с, 522 = 250 м2-с.
290
Длительность цикла оценивания была принята равной тц =100 с. На этом
же рисунке штриховыми линиями нанесены асимптотические оценки
точности, построенные по формулам
(Szl + 4Sz2) Szl
(52i + Sz2)t
nszlsz2
{Sz. + Sz2)P
Лзэ(т)^
SZ1 + Sz2
(6.63)
Лц(т)>
t
полученным предельным переходом (z -* °°) из (6.60) — (6.62). Из графи-
ков видно, что асимптотические оценки становятся приемлемыми уже при
т > 30 с. Следовательно, при длительности цикла оценивания тц >30*с
формулами (6.63) можно пользоваться для оценки точности рассматривае-
мой системы.
При этом необходимо иметь в виду, что постоянная и нарастающая во
времени ошибки радиовысотомера вызывают пропорциональное смещение
и нарастание во времени ошибки оценивания высоты полета и ошибки
барометрического высотомера.
§ 6.4. ИССЛЕДОВАНИЕ БЕСПОИСКОВОГО АЛГОРИТМА
ОЦЕНИВАНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ
Как неоднократно указывалось выше, применение беспоисковых алго-
ритмов оценивания при наличии в векторе наблюдения немонотонных
функций типа карт геофизических полей ограничено по начальным ошиб-
кам. Однако в высоконадежных высокоточных навигационных комплексах
начальные ошибки и не могут быть большими. Кроме того, применение
наряду с мелкоструктурными ’’гладких” ГФП позволяет решить проблему
ликвидации больших отклонений без поиска. Все это еще раз подчеркивает
значение беспоисковых КЭНС.
Наличие на борту летательного аппарата рабочей карты поля рельефа
позволяет получить информацию (с точностью до ошибок картографирова-
ния) о текущем значении интенсивности поля в координатах, определяе-
мых навигационным комплексом. Сигнал радиовысотомера в этом случае
может быть представлен в виде
ZPb ~ Н — h(xA, Уд) + h(xn, уп) + £рВ,
где h (ха, Уд) и h (хп, уп) — значения поля рельефа в координатах действи-
тельного местоположения и в координатах, определяемых навигационным
комплексом.
Очевидно, что чем меньше ошибки навигационного комплекса в опреде-
лении горизонтальных координат, тем меньше разница между значением
поля рельефа, извлекаемым из блока памяти КЭНС, и высотой рельефа,
содержащейся в полном сигнале радиовысотомера (радиодальномера),
а следовательно, меньше и уровень цветной помехи, действующей по каналу
измерения.
Таким образом, синтез алгоритма оценивания вертикальных параметров
движения центра масс летательного аппарата при полетах над пересеченной
и гористой местностью при сохранении сигнала радиовысотомера в качестве
одной из компонент вектора измерения необходимо проводить с учетом
'/г19* 291
движения объекта в горизонтальной плоскости, т.е. должна рассматривать-
ся совместная работа горизонтальных и вертикального каналов навигацион-
ного комплекса [6.11].
В этом параграфе рассматриваются расширенные задачи оценивания
вертикального движения и иллюстрируются принципы беспоисковых КЭНС,
изложенные в § 5.2 и в [6.12 — 6.16].
Рассмотрим случай, когда летательный аппарат испытывает произволь-
ное горизонтальное ускорение,контролируемое акселерометрами ИНС с
постоянными Днх, Дну и флуктуационнйми £аксх, ?аксу ошибками,
причем сигналы горизонтальных акселерометров при синтезе алгоритма
используются как управления:
их = ах + Дпх + ?аксх, иу = ау + &иу + ?аксу. (6.64)
Пренебрегая перекрестными связями между горизонтальными каналами,
уравнения контролируемого процесса представим в следующем упрощен-
ном виде:
х - Vx = О, Vx + Днх = их + £ ,, Дйх = О,
х х х х е*2 х ’ (6.65)
у - Vy =0, Vy + Дну = иу + gx5, Дйу =0,
где £х2 = - £акс х> £х5 = - £акс у- независимые белые шумы со спектраль-
ными плотностями SaKC х2 и SaKC х5 соответственно. Датчиками вертикаль-
ных параметров движения являются вертикальный канал ИНС, баровысото-
мер и радиовысотомер (используемый в качестве датчика поля рельефа).
Математическая модель процесса изменения высоты полета на интервале
оценивания для случая пренебрежения постоянной составляющей ошибки
измерения вертикального ускорения может быть представлена в виде
ДЯИН=ДГН , ДКн =0,
ин пии’ пин ’
где ДНин, ДКИН — ошибки измерения высоты и вертикальной скорости
вертикальным каналом ИНС.
Вектор измерения сформируем в виде разности показаний вертикально-
го канала ИНС и сигналов радиовысотомера и баровысотомера:
Zl ~ ^ИИ — -^рв ~ ^С*Д>.Уд) + ?Z1 >
Z1 ~ ^ин “ ^бв _ Д^ин Д-^бв ?z2>
где £Z1 и £z2 - независимые белые шумы со спектральными плотностями
в и |5*б в.
Кроме того, будем считать, что в пределах z-ro цикла оценивания выпол-
няется условие Д7/бв - 0.
Введя 9-мерный вектор состояния
Х=[х Vx Ьих у Vy Suy ДГИН ДЯбв]т =
= [х, х2 х3 х4 х5 х6 х7 х8 х9]т,
уравнения процесса и измерений в векторной форме можно записать
следующим образом:
Х+аХ = и + $х, (6.66)
Z = Hz(X)+^z, (6.67)
292
где
^ = [0 ?Х2 0 О ?х5 ООО 0]т,
?2=[?21 ?г2]Т = Крв £бв]Т,
и = [0 их О 0 иу ООО 0]т,
Яг(¥) ~ [ДЯИН + Ь(хд,Уд), ДЯИН Д^бв] >
ООО
1 о о
ООО
0 0-1
ООО
ООО
ООО
ООО
ООО
0 0 0 0 ]
0 0 0 0
0 0 0 0
0 0 0 0
10 0 0
0 0 0 0
О 0-1 О
0 0 0 0
0 0 0 0-
— матрица системы.
Оптимальные оценки вектора состояния X по результатам измерений Z
находятся путем решения следующих уравнений:
А а /ЭЯ2\Т ,
X + аХ = /?(-—) 5;1 [Z - Л(Х)] +и,
\дХ '
( ЪНг\т , ЭЯг
R+aR + Rar +Я(—Sz-l-^R=S.
'ЪХ i ЪХ
(6.68)
(6.69)
где
Г 1 1
---- О
0-1 =
z 1
о -------
I- S&B -
5Х - матрица размера 9X9 спектральной плотности шумов,возбуждающих
контролируемый процесс. Элементы 5х22 = ^акс х2 ,$х55 ~ $аксх5; осталь’
ные элементы матрицы нулевые.
ЭЯ2
Матрица Якоби---вычисляется в точке фазового пространства X.
ЪХ
Имеем
ЭЯг _Г ех 0 0 еу 0 0 1 0 01
dX L О ООО 0 0 1 0 -1 J
где
dh Эй
ех =---, еу = ” •
Эх Эу
Далее получаем
/ЭЯг\т , ЭЯг
-уМ 5;1 ~~ =
\эх ' ЪХ
293
Г-4 5рв 0 0 1 -Т~ехеу ^рв 0 0 1 ех Ярв 0 0
0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0
1 о ехеу ^рв 0 0 J—е2 SpB У 0 0 1 Теу 15 рв 0 0
0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 (6.70)
1 ех £рв 0 0 1 ’s~€y рв 0 0 1 1 -f- ^рв ^бв 0 1
0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 1_ 5бв 0 1 5бв_
При выводе формул достижимой точности синтезированного алгоритма
будем считать (как в [6.6]), что поле рельефа Земли стационарное, эрго-
дическое и изотропное. Тогда при большом времени усреднения справед-
ливы соотношения
ЭЛ ЭЛ ЭЛ ЭЛ I ЭЛ \2 / ЭЛ \2
— =~ = ~~ s°-(—) =1—) =е ,
Эх ду Эх Эр 'Эх' 'Эр'
где е2 - средний квадрат градиента поля рельефа. Теперь матрица (6.70)
преобразуется к виду
/ ЭЯДТ , Э//г
=
\ дХ ' ЭУ
"V. Ярв 0 0 1 0 1 0
0 _0_ 0 0 0 0 1 1 _
0 е2 1 — 0 0| Ярв 1 0 0 0* 0 0 о| — 0
0 1 -L 1 ^рв 0 1 0 Li I S бв 1 + — о ^бв 0 0 1 $бв 0 1 ^бв _
294
Переходя в уравнении ковариаций (6.69) к обратной матрице R~' = А
и считая спектральную плотность шумов акселерометров пренебрежимо
малой величиной, получаем
А11 = — е2, ./4i2+j4ii=O, A i 3 — A12 = О,
б'рв
А14 = А15 = -'41б='‘417=418=Л19 =0;
А 22 + 2 Л 12 = 0, Я 23 — Я22+Я1з=0,
А24 = А 25 — Аг б~ Я27 ~ А28 - А29 = 0;
А33— 2Л2з = 0, Я 34 = Я 35 = л"з6 = Л 37 = Л за = Л 39 = 0; (6.71)
Я44=~—е 2» ^45+^44 = 0, Я48 — ^45=0, Я47 = Я48 — Я49 = 0;
в
Ass+2A4S = 0, A se — A$s + Я46 = 0, Я$ 7 = As 8 = As 9 = 0;
Я66 — 2AS6=0> Я67 = А68 = Яб9 = 0",
11 • ; _ 1
a77=-—+-—, Л78+Л77-0, а79-- ;
*“*рв *^бв бв
1
А 38 + 2/4 87 = 0, -*489 +/479 = 0^ Адд~ .
^бв
Интегрирование уравнений (6.71) при начальных условиях
Ац(0) = а;2:
A44(0) = a;2,
Я 7 7(0) =
А 2 2 (0) “ ai/2 ’
х о
А 5 5 (0) = О)? ,
•'О
А 8 8 (0) = •
Лзз(0) = Од2„Хо>
Лбб(0) = о£2 °
У о
л”(°) = аднбво
[остальные А,у(О) = 0 при i ¥=/] позволяет определить приближенные
выражения для элементов матрицы А (г), а следовательно, и матрицу /?(г) :
Aii(r) = q;2 +~ е2т. А12(т) = -а;2т--^-е2т2,
*^рв ^^рв
1 _ 1
А13(т) =----ох20 т2 — е2т3, Ai4 = AiS = Ai6 = Ai7 = A18 = Ai9=0;
2 о6рв
А22(т) = ор! + of2T2+—-е2т3,
“ 3iPB
Я2з(т)=а^2 т+^а-Дт3
Язз(т) = а£2„ + а>2
Ао ло
1
+ Q е2т4, А 24 =А2 5 ~ А36 =А 2 7 = А 2 8 =Аг 9;
33рв
1 , 1
+— <\2 т4 +----- е2т5,
4 •’ 205рв
Я 34 - A3 5 - А36 - А 31 - А зз - А39 -0;
(6.72)
295
А44(т) = о-\ +— егт, Л45(т) = — (Г^т — —— е\\
ОрВ ^рв
1 . , 1 , ,
^4б(т) ~ — € т , А47 -Л48 - А4ч - 0;
2 Од рв
Л s s (т) = а"Ъ + 2 +-V А
>,J 36рв
А*6(т) = <&, г+~ а;>3 +—-eV, Л57 = Л58 =Л59=0;
у° 2 85рВ
1 1
Л66(т) ~ + <V т2 + — а., V +----е2'т5,
> ЬЬу<> Vyo 4 ). 205рв
Л87 ~ Лб8 = Л69 = 0‘,
/ 1
Атг(т) - ад//о + I
\ рв
^78(т) = -а£2/о
1 \ 1-2
SZ/2’
1
А19(т) = --~ т;
*$бв
ли(г)= — т2;
2Лбв
^99(т)-ад2Нбв0 + 5
Таким образом, матрица А (т) разбивается на блоки
Л(т) =
Л 11
Л 2 1
2^22
А 1 2 А ! 3 j j
Л 2 2 Л 2 3 । о | О
Л32 -^зз^ __ ।
| Л44 Л45 Л46|
О |Л54Л55Л56| о
I Л64 Л6s Л66|
! j"~Л77 Л78 Л79
о । 0 । Л87 Л8в Л89
I । л97 Л98 Л99
*_л^о_[о_
О । Ау1 О
(6.73)
Это означает, что при достаточно большом времени наблюдения, когда
практически закончится процесс формирования статистических оценок
поля рельефа, оценивание координат местоположения, скорости и постоян-
ных составляющих ошибок акселерометров в продольном (блок Ах) и
боковом (блокЛу) каналах, а также оценивание вертикальных параметров
движения центра масс летательного аппарата (блок Лг) происходят авто-
номно.
296
Вертикальный канал
Рис. 6.25
20. И.Н. Белоглазов
На рис. 6.25 приведена структурная схема фильтра в установившемся
режиме работы. Очевидно разделение горизонтальных каналов на два
независимых канала (продольный и боковой) и выделение в самостоя-
тельную схему канала оценивания вертикальных параметров движения
центра масс. Введение в соответствующие сумматоры структурной схемы
дополнительных сигналов А1Х, А2х, А3х (для продольного канала),
А1у, ^2у’ ^Зу (для бокового канала) и А1Н, А2Н, А3ц (для вертикально-
го канала) отражает наличие внутренних перекрестных связей между
каналами навигационного комплекса в переходных режимах работы.
Например,
/ 1 Э/г 1 \ 1
Aix - I — — Rи + — R17 Iz, + - (R17 — R19)Z2,
Х'-'рв fty ‘-'рв / -’бв
1 /Э/г \ j
1 у I л R j 4 + R4 -jjzi (R47 ~ R492 •
dPB\9x ' 5бв
1 / Э/г Э/г \
А т - —- | —- Ri 7 + —~R4 71 Z1,
^рв \ Эх Эу /
С течением времени указанные дополнительные составляющие непрерыв-
но уменьшаются, стремясь в пределе к нулю. Из (6.72) можно легко полу-
чить в аналитическом виде выражения для диагональных элементов матри-
цы R (т), определяющие текущую точность оценивания. Для вертикального
канала [блокДг матрицы Я (т) ] имеем
^77 = ~ (AgsAgg —Agg), Rus ~ ~—(А77Адд - А79).
\AZ\ \AZ\
1
Д99 - (Д 7 7^8 8 — Л 7в),
\AZ\
где \ Az \ - А7 т(А^»Ад д — А^д} — А-JS (А7 Адд ~ АтдА^д) + Д 7 9 (4 7 цА 8 9 —
- Л79Л88) — определитель блока Az матрицы Л.
Выражения для дисперсий ошибок оценивания высоты R7 7(7)
вертикальной скорости Я88(г)= (т) и ошибки баровысотомера
/?99(t) = ЦдЯбв(т), получаемые после подстановки соответствующих
элементов блока Az матрицы А (т), по своей структуре полностью совпада-
ют с формулами точности вертикального канала (6.60) — (6.62).
Математическое моделирование синтезированного алгоритма проводи-
лось без допущений о стационарности, эргодичности и изотропности поля.
Рабочая карта блока памяти составлялась по крупномасштабным топогра-
фическим картам с шагом дискретизации Д/х = Д/,, = 250 м. Усредненное
значение радиуса корреляции поля рельефа данного района составляло
рср « 1200 м. Уровень шумов датчика поля (радиовысотомера) задавался
таким, что соотношение сигнал/шум было равным о„/оа = 3. При моделиро-
вании предполагалось, что движение объекта в горизонтальной плоскости
прямолинейно и равномерно со скоростями Vx =250м • с'1 и Vy = 50м • с-1.
298
Начальные рассогласования в горизонтальных каналах принимались рав-
ными
Дх(0) = Ду(0) ~ 4 1500 м
и
Дх(0) = Ду(0) = ± 750 м.
Это позволило исследовать влияние начальных отклонений по координатам
х и у, превышающих радиус корреляции поля, на сходимость процессов
оценивания вертикальных параметров движения летательного аппарата.
Для удобства сравнения полученных при моделировании результатов
остальные параметры движения и уровень начальных ошибок оценивания
и возмущений принимались неизмененным для всех рассматриваемых
вариантов.
Поведение ошибок оценивания горизонтальных координат подробно
исследовано в [6.6]. Поэтому ниже будут обсуждаться только результаты,
относящиеся к вертикальному каналу навигационного комплекса. На
рис. 6.26 —6.28 изображены кривые изменения ошибок оценивания высоты,
вертикальной скорости и ошибки баровысотомера, полученные при модели-
ровании алгоритма. Кривым соответствуют следующие начальные отклоне-
ния в горизонтальных каналах: 1 - Дх(0)= Ду(0)= 1500 м; 2 - Дх(0) =
= Ду(0) = 750м; 3 - Дх(0) = Ду(0) = - 750 м; 4 - Дх(0) =Ду(0) = - 1500 м.
На этих же рисунках показаны области, в которых заключены удвоенные
’’среднеквадратические значения ошибок оценивания”, определяемые через
соответствующие диагональные элементы матрицы R (т). Причем внутрен-
ние штриховые линии соответствуют минимальным среднеквадратическим
значениям ошибок, а наружные — максимальным из всех рассмотренных
вариантов моделирования.
Как следует из приведенных графиков, при начальных отклонениях в
горизонтальных каналах, меньших радиуса корреляции поля [ | Дх(0) |
= | Д_т(0) | = 750 м < р], наблюдается интенсивное уменьшение начальных
20
299
рассогласований в вертикальном канале системы. По мере увеличения
точности оценивания параметров в горизонтальных каналах помеха, дейст-
вующая по каналу радиовысотомера и обусловленная несоответствием
действительных координат местоположения объекта и координат блока
памяти, уменьшается. Это в свою очередь приводит к дальнейшему повы-
шению точности оценивания высоты, вертикальной скорости и ошибки
баровысотомера. Кривые 1 и 4, соответствующие начальным отклонениям
по координатам х и у, превышающим радиус корреляции поля, показывают,
что невыполнение условия
Д = \/дх2(0) +Ду2(0)'< р
нарушает работоспособность горизонтальных каналов и резко увеличивает
дисперсию ошибок оценивания вертикальных параметров *)
*) См. второе примечание на стр. 157.
300
§ 6.5. ВАРИАНТ КОМБИНИРОВАННОГО АЛГОРИТМА
Понятие комбинированных алгоритмов оценивания введено в §5.5.
Ниже рассматривается один из конкретных апробированных вариантов
комбинированного алгоритма КЭНС, отличающийся тем, что в нем пре-
дусмотрен чисто поисковый модуль оценивания горизонтальных коор-
динат (модуль рассогласования), использующий так называемый моди-
фицированный метод наименьших квадратов (ММНК), и модуль непре-
рывного или рекуррентного оценивания (далее он именуется просто мо-
дулем оценивания)*). Структура модуля оценивания определяется ти-
пом используемой ГСН (инерциальная, курсо-доплеровская, курсо-аэро-
метрическая) .
Поясним процесс функционирования модуля рассогласования, исполь-
зующего алгоритм ММНК. Для конкретности дальнейшего изложения бу-
дем считать, что решается задача навигации в прямоугольной системе
координат Оху, в которой построена также и рабочая карта КЭНС
(рис. 6.29).
В момент времени Г1; соответствующий моменту начала работы мо-
дуля рассогласований, фиксируются показания ГСН x(?i), y(t\) и сиг-
нал датчика поля h1^ [хд(гi), y^G)], осуществляющего измерение
ГФП в координатах действительного местонахождения аппарата хд(7|),
ya(t ।). В общем случае
х(71) = хд(Г,)+Дх1, у(6)=Уд(Г4) +ДУ|, (6.74)
где Д*!, Ду 1 — ошибки по координатам.
Относительно координат x(G), y(?i) в памяти БЦВМ, как в лю-
бой поисковой КЭНС, ’’строится” доверительный квадрат размера
(2m х + 1) Д/xX (2m у + 1)Д/у, где Д/х и Д/у - размеры элементарной
ячейки, т.е. шаг дискретизации рабочей карты КЭНС по продольной и
боковой координатам соответственно. Для удобства считывания рабочей
карты в БЦВМ обычно принимают
Ых = д/3, = Д/.
Величины тх и ту в каждом конкретном случае задаются, исходя из
возможных'ошибок навигации к моменту времени tx. Будем полагать,
что тх = mv = т. В точках доверительного квадрата, координаты которых
определяются по формулам
= -(^ + 1 -одл
yfti) =y(ti) ~(т + 1 j)&l (6.75)
(i, j = 1, 2,. . . , 2m + 1),
производится выборка из памяти БЦВМ значений интенсивности поля
*) Рассматриваемые варианты построения поискового модуля были предложены
Г.П. Чигиным в 1973 г. Различные применения комбинированных алгоритмов, по-
строенных на этой основе, исследованы в работах В.М. Борисова, А.И. Силаева, А.А. Ка-
теринина, В.А. Стефанова.
301
Рис. 6.29
h . Из каждого элемента последовательности чисел h^'.) вычитается
постоянное число, равное значению поля, определенному датчиком йд’ ’
в момент времени Полученные разности Д/г - h д'^ возво-
дятся в квадрат и засылаются на хранение в строгом соответствии со зна-
чениями i и j . Таким образом, в памяти БЦВМ формируется ’’образ”
доверительного квадрата, каждая элементарная клетка (точнее, соответст-
вующая ячейка памяти) которого содержит результат проведенных вы-
числений.
В момент времени Г2 снова фиксируются показания навигационной
системы х(т2), у(т2) и сигнал датчика поля/г^2)[хд(Г2),уд(т2)]. Отно-
сительно координат х(г2) и у(т2) в памяти БЦВМ ’’строится” новый
доверительный квадрат размера (2т + 1) Д/ X (2т + 1) Д/, по форму-
лам (6.75) определяются координаты точек, в которых считывается зна-
302
чение поля /гЧ^, и формируются разности Д/г Р ’ = h^2) — . Сфор-
мированные разности возводятся в квадрат и засылаются в отведенные
для накопления результатов ячейки памяти БЦВМ. При этом должно соб-
людаться условие, чтобы индексы г и / результатов вычисления в мо-
менты времени /д и t2 совпадали. Таким образом, каждая элементарная
клетка ’’образа” доверительного квадрата к концу второго расчетного
цикла будет содержать сумму двух слагаемых вида
Продолжая по мере поступления информации от датчика поля вычис-
ления по рассмотренному алгоритму, при каком-то (заранее неизвестном)
числе измерений W в ’’образе” доверительного квадрата достаточно резко
выделится клетка, соответствующая ячейка памяти которой содержит
наименьшую сумму из всех (2т + 1) X (2т + 1) сумм вида
н^,712-
Значения индексов i и j определяют положение данной клетки от-
носительно центра ’’образа” доверительного квадрата, т.е. поисковые
оценки координат в момент времени tN. Величины рассогласований по
координатам в этом ст учае находятся из простых соотношений:
('Л) = x(tN) - x(tN) = [ (т + 1) - /] ДI,
^yi(tN)=y(tN) -y{tN) = [(т + 1) -/] Д I.
Здесь предполагается, что координаты местоположения летательного
аппарата кратны шагу дискретизации записи ноля Д/. Случай нахождения
координат действительного местоположения внутри элементарной клетки
игнорируется.
Таким образом, выходной сигнал модуля рассогласования в момент
принятия решения об ошибках по координатам может быть представлен
в виде
z,(fyv) = Дх,(Г;У) + ^, (6.76)
z2(Tv)= Ду1(ГЛ,)+^,
где и % - флуктуационные составляющие ошибок определения рас-
согласований, зависящие в общем случае от длины обрабатываемой реа-
лизации (числа измерений /V) и соотношения сигнал/шум в системе.
В первом приближении возмущения и по отношению к процес-
су оценивания можно принять за дискретный белый шум с нулевым сред-
ним. Отметим, что формулы (6;76) остаются справедливыми даже в
случае значительного превышения начального рассогласования Д величи-
303
ны радиуса корреляции навигационного поля, т.е. при
Д = \/дх2 + Ду2 > р. (6.77)
Сигналы z, и z2 блока рассогласования в комбинированных алгорит-
мах КЭНС используются в качестве измерений. Для конкретности дальней-
ших выводов примем, что ставится задача оценивания ошибок инер-
циальной навигационной системы, работающей в геоцентрической сво-
бодной в азимуте системе координат. Изменения ошибок ИНС опишем
следующей математической моделью*):
Дх = ДИЛ., Ду = ДКу,
ДИх = -^а+ЛуД^+?аксх,
ДЙу=^-ЛЛД^+?аксу,
/3 =--д Vy - Шу Дф + сСдр х, (6.78)
R
1
а=—ДИх+шхД^+шдр>>.
IX
Д^ = - йха + Шдр 2,
w др х = 0, шдр у = 0, щдр 2 = О,
где Дх, Ду - ошибки счисления координат местоположения; &VX, ДЦ, -
ошибки по скорости; а, р - ошибки ориентации гироплатформы в плос-
кости горизонта; Д^- азимутальная ошибка; ссдр х, о)др у, г - постоян-
ные составляющие дрейфа соответствующего гироскопа; £aKCJC, £акс>, —
флуктуационные составляющие ошибок горизонтальных акселерометров;
Vr, Vy,Ax, Av — горизонтальные составляющие скорости и ускорения ле-
Уу Ух
тательного аппарата; =------, ссу =----угловые скорости поворота
R R
местной вертикали.
Модель процесса (6.78), уравнения измерений (6.76) и априорные све-
дения о шумах позволяют синтезировать оптимальный фильтр для оцени-
вания ошибок навигационной системы. Введем вектор состояния
Х=[Дх Ду ДИх ДКУ 0 а Ьф шдр v а>дру щдрг]т.
Тогда уравнения измерений (6.76) и контролируемого процесса (6.78)
в матричной форме запишутся следующим образом:
Z = НХ + Ъ, X = FX + G$x,
где Z =[?] z2]T; £2=[L- £у]т;Я =
1 о о ... о
.0 1 о ... о
— матрица измерений
размера 2 X 10; = [$аксл. ?акс >>1 -шумы, возбуждающие контролируе-
*) Приводимые далее в этом параграфе результаты получены совместно с А.И. Си-
лаевым и В.А. Стефановым.
304
‘0 0 1 0 . . 0 ’
мый процесс; GT = 'О 0 1 0 0 0 0 0 0 0 0 0 0 0 0 - F= 1 0 0 — R 0 0 0 0 0 0 0 0 0 .0 0 0 Измерения Z в 0 0 0 1 ...0. 0 0 0 0 10 0 0 0 0 -g А 0 g О-Л 1 — 0 0 -а R 0 0 0 а 0 coy wv 0 0 0 0 0 0 0 0 0 0 0 0 0 силу специфики — матрица размера 10X2; 0 0 0 0 0 0 у 0 0 0 х 0 0 0 )у 0 0 0 \ 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 заботы модуля рассогласования дискре-
тизированы во времени. Это обстоятельство предопределяет рассмотрение
задачи оценивания в дискретной постановке. Дискретную форму уравнений
эволюции ошибок ИНС получим путем эйлеровой дискретизации уравне-
ний (6.78) с малым шагом тк = tk + tk, пренебрегая членами порядка
О (тк).: X (к.+ 1) = Ф(к + l,fc) X {к) + В (к + l.fc) £v(fc), где Ф(£ + 1,&) =
=/+rkF(k), В (к + 1, к) = тк G (к).
Вектор измерения в дискретной форме имеет вид
Z (к + 1) = Н (к + 1) X (к + 1) + (Г+1).
Процессы {£*(£ + 1) (к = 0, 1, . ..)} и {£-(£ + 1) (к = 0, 1,. . .)} суть
взаимно независимые белые гауссовы последовательности с нулевым сред-
ним и ковариационными матрицами
П = diag (aa2KCV о2кс у) и К2 -diag а|)
соответственно. Оценка вектора состояния вычисляется по стандартным
уравнениям линейного дискретного фильтра Калмана:
экстраполяция;
Х(к + 1/к) = Ф(к + 1,к) Х(к),
(6-79)
R (к + 1/Jt) = Ф (к + \,k)R (к/к) Фт (к + 1Д) + В {к + 1Д) VXB^ (к + I ,к)
(к= 0.1,2....), £(0) = Хзад, R (0/0)=/?Ид,
коррекция:
Х(к+1) = Х(к + 1/Л) +Кф(к+ 1) [Z(k + 1) - 1/(к+ 1)Х(к + 1/^)].
Кф(£-Н) = /?(Г+1/£+1)//т(Г+1) И;1, (6.80)
R(k+ 1/к+ 1)= {/ R(k + l/fc)//T(fc + 1) [Н(к+ 1) R (к + 1/7:) 7/т(Л+1) +
+ K2f ’ Н(к + 1)} R (к + 1/7:).
305
Здесь Л (0/0) — диагональная матрица вида
R (0) = diag (оХо оУо ov^ oVy<> оа<> ^др х/ыяр Уо г<>).
Порядок работы алгоритма следующий. До поступления из блока рассог-
ласования измерений Z ведется экстраполяция оценки с малым шагом
тк согласно (6.79). В момент времени (к + 1) Т поступает измерение
Z (к + 1) и строится оценка вектора состояния X (к + 1) в соответствии
с (6.80), после чего полагается X (к) = X (к + 1), R (k/k) =R {к + 1/fc + 1)
и вновь осуществляется экстраполяция оценок до поступления очередного
измерения. Причем продолжительность интервала экстраполяции зависит
от темпа Т выдачи измерений Z блоком рассогласования.
Взаимодействие основных модулей комбинированного алгоритма оцени-
вания приведено на рис. 6.30. Наличие обратной связи между модулем оце-
нивания рассогласования и модулем оценивания ошибок ГНС обеспечи-
вает последовательное (по мере формирования оценок ошибок навигаци-
онной системы) увеличение точности вычисления и формирования сигналов
hZ2 — выходных сигналов модуля рассогласования.
Моделирование процессов функционирования описанного комбинирован-
ного алгоритма КЭНС проводилось в два этапа.
На первом этапе предусматривалось исследование точностных характе-
ристик и работоспособности модуля оценивания ошибок по координате
(модуля рассогласования) при действии различных возмущающих факто-
ров. Причем исследования проводились как при работе по полному полю,
так и при работе алгоритма по полю приращений (полю первых разностей).
Второй этап моделирования включал в себя оценку работоспособности
рассматриваемого алгоритма в условиях воздействия шумов измерений и
шумов, действующих на объект, с полными и сокращенными математи-
ческими моделями- ГНС. В качестве навигационного поля при моделиро-
вании использовалось поле рельефа Земли.
Рис. 6.30
306
Рис. 6.31
Записанные в память ЦВМ реализации поля рельефа представлены на рис.
6.31. Они получены с помощью крупномасштабных топографических карт
параллельным переносом соответствующих сечений относительно начально
выбранного направления. Величина интервала между реализациями состав-
ляла Д/у = 250 м. Общая длина закартографированного участка 50 км,
ширина 4 км. Среднеквадратическое значение поля рельефа для выбран-
ного участка составляет оп = 16 4- 20 м, а радиус корреляции р < 3 км.
Реализация сигнала датчика поля 2Д, использованная при моделирова-
нии, показана на рис. 6.31 штриховой линией.
Для удобства выборки значений рельефа из памяти ЦВМ дискретность
записи поля в продольном направлении Д/х также была принята равной
250 м. Таким образом, весь участок размером 50 км X 4 км разбивался
на элементарные клетки размером А1Х X Д1у = 250 м X 250 м.
Результаты моделирования модуля поискового оценивания ошибок
по координате, использующего полное поле. В обсуждаемых ниже экспе-
риментах проверялось поведение ошибок оценивания продольной и боко-
вой координат в зависимости от длины обрабатываемой реализации, отно-
сительной ошибки определения составляющих путевой скорости летатель-
ного аппарата и величины постоянной составляющей ошибки датчика
поля рельефа.
Исследование влияния количества обрабатываемых точек W на точность
оценивания ошибок по координатам проводилось следующим образом.
307
По мере движения датчика поля (Kv = 200 м-с-1 = const, Vv = 0, AVX =
= Д Vy =0) и поступления информации из блока памяти в каждой ячейке
’’образа” доверительного прямоугольника формировались суммы вида
(z = 12, -11,..., 0, 1,2,... ,12; / = —7, -6, ...,0, 1,2,..., 7).
При выполнении условия А' = Л^адС^зад принималось равным 20,
40, 60, 80, 100, 120) фиксировались координаты минимальной суммы,
которые и являлись ошибками оценивания при заданном А’. Далее на
расстоянии х = (50 км — А3 Д/л. — х0) км наблюдался характер измене-
ния ошибок Дх и Ду (хо = 3 км — начальная точка движения датчика)
и на основании усреднения временных зависимостей Дх(1) и Ду (О1 по
пройденному пути рассчитывались среднеквадратические значения оши-
бок совмещения реализаций. На рис. 6.32 показано изменение сумм/Д^
при малом (Лзад = 20) и большом 6Узад = 100) количестве обработанных
точек. Обобщающий график, характеризующий изменение точности оце-
нивания координат Д = + минимальной суммы Т^при увели-
чении объема выборки (длины обрабатываемых реализаций), приведен
на рис. 6.33 (график ДИ/ V = 0). Анализ полученных результатов в соче-
тании с теоретическими соображениями показал, что при отсутствии
ошибок по скорости и постоянной составляющей ошибки датчика поля
рельефа за счет увеличения N3aa (увеличения длины обрабатываемой
реализации) может быть дос-
тигнуто практически абсо-
лютно точное определение
координат Даже при
3 Дх,кн
Рис. 6.32
if m in
наличии флуктуационной сос-
тавляющей ошибки измере-
ния поля.
При ДИ/ V Ф 0 наблю-
дается ухудшение точности
алгоритма. Если в области
малых значений Лзад влия-
ние ошибок по скорости нез-
начительно и точность в ос-
новном определяется флук-
туационной составляющей
ошибки датчика поля, то
при больших Азад имеет мес-
то искажение реализаций
(сжатие или растяжение в
зависимости от знака возму-
щений). Это вызывает допол-
нительное увеличение ошибок
определения координат
if m in
Графики зависимости точ-
ности оценивания ошибок по
308
Рис. 6.33
координате от длины обрабатываемых реализаций L, полученные при моде-
лировании алгоритма для различных значений относительной ошибки по ско-
рости Д V/V в случае, когда отсутствует постоянная составляющая ошибки
датчика поля, приведены на рис. 6.33. Из графиков видно, что существует
оптимальное значение числа обрабатываемых точек, обеспечивающее ми-
нимальную величину ошибки модуля оценивания. Зависимость Аопт от
Д V/V изображена на рис. 6.34 — график L опт
На том же рисунке показана зависимость минимальной ошибки модуля
Дт[п от величины Д V/V.
Как показали результаты моделирования, сильное влияние на точность
поискового оценивания ошибок по координате оказывает постоянная
составляющая ошибки датчика поля. Было, установлено, что даже при
kV/V < 2% и оптимальном выборе числа обрабатываемых точек ЛАзад
наличие в измерениях поля рельефа постоянной составляющей ошиб-
ки S = 20 м ухудшает точность определения координат до 400 м,
что по сравнению с вариантом нулевой постоянной ошибки дает ухудшение
точности практически в четыре раза (см. графики Адпт и Д'^ на рис.
6.34, построенные для случая S ~ 20 м). Чтобы избежать отрицательного
влияния постоянной составляющей ошибки измерения поля рельефа,
предлагается алгоритм модуля оценивания ошибок по координате стро-
ить с использованием поля приращений [6.16].
Результаты моделирования модуля поискового оценивания ошибок по ко-
ординате при использовании поля приращений. Переход к использованию в
модуле рассогласования поля первых разностей — поля приращений, наряду
с расширением спектра обрабатываемых сигналов, исключает влияние
постоянной составляющей ошибки датчика поля. Это позволяет в случае
наличия ограничений на память ЭВМ перейти к работе по бинарному (зна-
ковому) полю приращений. При моделировании база вычисления прира-
щений была принята равной I = 1000 м [6.16]. Исследовалось влияние
длины обрабатываемой реализации, ошибок по скорости навигаци-
онной системы и флуктуационной составляющей ошибки измерения
поля на точность оценивания координат местоположения. Обобща-
ющие графики зависимости точности модуля рассогласования от коли-
чества обрабатываемых точек (длины обрабатываемой реализации) при
309
различных значениях постоянной составляющей ошибки по скорости
грубой навигационной системы приведены на рис. 6.35. Как и следовало
ожидать, переход к работе по полю приращений привел к уменьшению
(см. график ДК/К = 0) длины реализации, необходимой для получения
максимальной точности, по сравнению со случаем использования полного
поля. Аналогично рассмотренному выше варианту работы по полному
полю здесь также наблюдается зависимость минимальной ошибки совме-
щения реализаций Дтт и оптимального значения £опт от величины отно-
сительной ошибки по скорости ДК/И (рис. 6.36). Дополнительно иссле-
довалось влияние флуктуационной составляющей ошибки датчика поля на
точность определения координат. Относительная ошибка по скорости
Д V/V принималась равной нулю, Л'зад изменялось от 40 до 100, что соответ-
ствовало изменению длин обрабатываемой реализации в пределах от 10 км
до 25 км. Обобщающие графики, построенные на основе обработки резуль-
татов моделирования, приведены на рис. 6.37. Если принять во внимание
тот факт, что отношение шум/сигнал обычно не привышает 0,3, то мож-
но считать, что использование поля первых разностей приДИ/И<2%и
длине обрабатываемой реализации L 15 км обеспечит точность оценива-
ния координат местоположения не хуже 100 м.
Программой моделирования рассматриваемого комбинированного алго-
ритма КЭНС предусматривалось:
исследование влияния темпа формирования измерений (параметра
Т) на процессы оценивания ошибок инерциальной системы;
изучение влияния характера траектории летательного аппарата в гори-
зонтальной плоскости на поведение ошибок оценивания вектора состо-
яния;
исследование влияния несоответствия принятой при синтезе алгоритма
математической модели процесса реальному поведению ошибок инерци-
альной системы;
изучение поведения ошибок оценивания при больших начальных ошиб-
ках выставки ИНС.
Временной интервщ Т выдачи модулем рассогласования последователь-
ности измерений Z (к + 1) (к = 0, 1, 2, ...) при моделировании алгоритма
задавался равным 10 с, 30 с, 120 с, 300 с. Это позволило проанализировать
поведение ошибок оценивания вектора состояния при коррелированных
310
(Т = 10 с) и независимых (Г = 120 с,
300 с) измерениях при неизменной струк-
туре фильтра.
На рис. 6.38 представлены временные
диаграммы поясняющие процесс функ-
ционирования фильтра при различных
временных интервалах поступления ин-
формации. На рисунке приняты обоз-
начения: ДГ = tN - t0 - временной ин-
тервал, необходимый для нахождения ко-
ординат минимума функционала и фор-
мирования сигналов Z j и Z2. Этот параметр
в значительной степени зависит от прос-
транственной структуры навигационного
поля и может изменяться даже в пределах одного численного эксперимента
в силу не стационарности физических полей Земли по спектру. Для исклю-
чения этого эффекта был проведен предварительный анализ процессов
формирования координат минимума функционала по большому числу
траекторий, и из всего многообразия значений параметра Дг для даль-
нейшего моделирования было выбрано наибольшее значение, которое
оставалось неизмененным;
311
8a,Sfi,угл MUM
. 6.39
мин
21. И.H. Белоглазов
Т - временной интервал между поступлениями измерений на обработку
в фильтр. В промежутке 0 г* < Тосуществляется экстраполяция оценок
вектора состояния в соответствии с формулами (6.79) с малым шагом
вычислений т^. Для всех экспериментов было принято = 1 с. Эта вели-
чина установлена экспериментально путем решения на ЭВМ тестовых
задач навигации.
Излагаемые ниже результаты математического моделирования комби-
нированного алгоритма получены при следующих значениях постоян-
ных [6.17, 6.18]:
=<Д =3км, = оу =10 м-с’1,
и v о У о
аа„ = aj30 ~ 3 угл. МИН, =30 угл. мин,
°-др Z а-ДР У = 0Д ГРад/Ч’ а-др z = °’3 ГРад/Ч>
ааксх = °аксу ~ 0,005 М • с’2, 0Zj = 0Z2 = 100 М.
Начальные значения ошибок вектора состояния были заданы равными: -
Дх0 = Ду0 = 3000 м, Д И((1 = Д И,,о = 10 м • с’1,
«о ~ Зо = 3 угл. мин, Дф0 = 30 угл. мин,
^др л'о = ^дРУо =0,1 град/ч, wHpz = 0,3 град/ч.
На рис. 6.39 приведены графики изменения ошибок оценивания век-
тора состояния (для случая равномерного прямолинейного движения)
Ъа = а(>а. 53 = 3о —3, 5i^ = Дф0 — Дф,
б^др.х ~ wflpx„ ' ^дрх. бСОдру - Шдр — Шдру,
Swflp z ~ z0 — w«p z,
полученные при моделировании алгоритма с темпом поступления измере-
ний Т = 300 с (графики без индексов). На этих же графиках линиями со
штриховкой обозначены области удвоенных расчетных среднеквадратичес-
ких значений соответствующих ошибок оценивания.
Из представленных графиков видно, что дрейф кренового гироскопа
является ненаблюдаемой координатой:
СТ, (О = > SWnOX = 6 ,
' идрх« ДРГ ДР*0 ’
что подтверждается проверкой условия наблюдаемости пары (Ф, //).
Процессы оценивания ошибки 5ф и дрейфа курсового гироскопа затя-
нутые. Для получения максимальной точности оценивания дрейфа курсо-
вого гироскопа содр , время оценивания необходимо увеличить до 60 мин.
Это не противоречит физической сущности рассматриваемой задачи.
При исследовании влияния характера траектории летательного аппарата
в горизонтальной плоскости на процессы оценивания ошибок ИНС зада-
валось движение с выполнением маневра типа ’’змейка”.
314
На рис. 6.40 приведены графики изменения ошибок оценивания ошибок
ИНС при Т= 10 с. На рис. 6.39 графики с индексами иллюстрируют пове-
дение ошибок оценивания ошибок ИНС при движении ’'змейкой” и темпе
поступления измерений Т = 300 с.
Приведенные результаты были получены в предположении адекватности
принятой математической модели реальному процессу поведения ошибок
ИНС.
Из графиков видно, что система становится полностью наблюдаемой,
и в результате обработки измерений оцениваются все компоненты вектора
состояния. При этом значительно повышается точность оценивания азиму-
тальной ошибки Дф и постоянной составляющей дрейфа азимутального
(курсового) гироскопа. На основании обработки большого числа экспери-
ментов было получено, что через 60 мин работы фильтра и выполнении
21* 315
маневра типа ’’змейка” точность оценивания ошибок ИНС составит:
ео ъ ое « 0,2 -i- 0,3 угл. мин, од « 6 угл. мин,
~ °^арг ~ °>025 град/ч, оидр) « 0,01 град/ч.
По полученным результатам математического моделирования можно
сделать вывод, что если на борту летательного аппарата решается задача
выставки (точнее калибровки) ИНС, то следует рекомендовать выполне-
ние различных маневров в горизонтальной плоскости.
Графики на рис. 6.41 отражают поведение ошибок оценивания ошибок
по горизонтальным координатам и составляющих путевой скорости. Кри-
вые 8х, Зу, S Vx, 8 Vy получены при Т = 120 с, а кривые 8х , 8у’, 3 Vx’, 8Vy’ -
при Т = 10 с. Здесь же показаны области удвоенных расчетных средне квад-
ратических значений ошибок оценивания соответствующих координат.
Анализ большого числа запусков фильтра показал, что практически во
всех численных экспериментах, проведенных с рассматриваемым комби-
нированным алгоритмом, после переходного процесса графики ошибок
оценивания располагаются в трубке размером ± 100 м по горизонтальным
координатам и ± 0,5 м/с по скорости. Это справедливо как для прямо-
линейного полета, таки для движения свыполнением маневра типа ’’змейка”.
Большое внимание при моделировании уделялось исследованию вопро-
сов устойчивости алгоритма и точности оценивания фазовых координат
при грубой начальной выставке ИНС и несоответствии математической мо-
дели процесса реальному поведению ошибок инерциальной системы. Моде-
лированием было установлено, что рассматриваемый алгоритм допускает
большие ошибки начальной выставки ИНС без нарушения устойчивости,
изменения длительности переходного процесса и установившейся точ-
ности. Несоответствие же математической модели ошибок ИНС, приня-
той при синтезе алгоритма, реальному их поведению сопровождается ухуд-
шением точности оценивания вектора состояния. В частности, появление по-
стоянной составляющей ошибки в сигнале акселерометра приводит к откло-
нению гироплатформы от плоскости горизонта в установившемся режиме,
затягиванию процессов оценивания ошибок азимутального гироскопа и по-
стоянных составляющих дрейфов гироскопов.
При моделировании дрейфа гироплатформы в виде суммы постоянной
составляющей и составляющих, пропорциональных ускорению и квадрату
ускорения, высокая точность оценивания координат местоположения и
скорости может быть получена только при сокращении времени работы
фильтра в режиме прогноза (экстраполяции).
Учет дополнительных составляющих ошибок ИНС за счет расширения
вектора состояния, наряду с увеличением потребной производительности
БЦВМ при реализации расширенного фильтра, требует для получения мак-
симальной точности значительного увеличения времени наблюдения.
В большинстве практических задач навигации выполнение последнего
требования затруднено. При конструировании фильтра с заданными харак-
теристиками влияние неучитываемых факторов должно оцениваться с по-
мощью моделирования на ЭВМ, обладающих большими возможностями.
ОСНОВНЫЕ ОБОЗНАЧЕНИЯ
А - эффективная поверхность антенны;
амплитуда сигнала.
В ~ индукция магнитного поля Земли.
F - функция распределения; площадь
корреляции.
G - коэффициент усиления антенны.
Н - высота полета; напряженность маг-
нитного поля Земли.
М - масса.
Р - мощность.
R - расстояние; радиус Земли.
S - спектральная плотность; площадь.
Т - абсолютная температура; объем па-
мяти.
U - потенциал постоянного магнитного
поля Земли.
Г - скорость полета.
Krf-ковариационная функция.
Pt - спектральная плотность излучения.
Rff корреляционная функция.
а - ускорение.
с = 3 10’ м/с - скорость распростра-
нения электромагнитных воли.
f - гравитационная постоянная; фокус-
ное расстояние; частота; случайное
поле.
g ускорение силы тяжести.
h = 6,62 • 10"34 Дж с - постоянная
Планка.
к = 1,38 • 10'23 Дж/град - постоянная
Больцмана.
р - вероятность.
f - исходное поле.
йр -усредненная высота рельефа.
rrif- математическое ожидание.
А - отклонение; ошибка регулирова-
ния.
Л - продольная координата.
Ф - боковая координата.
П = \/g[R'- частота Шулера.
а ~ коэффициент поглощения,
у - угол крена.
е - диэлектрическая проницаемость.
П - к.п.д. антенны.
в - угол падения излучения; телесный
угол; угол места.
0 - угол тангажа.
«' - длина волны; долгота.
ц - возмущение.
Р - коэффициент отражения; расстоя-
ние.
а - среднеквадратическое отклонение,
у - географическая широта.
- курс; азимут; угол рыскания.
о>- угловая скорость вращения Земли.
X - сферическая долгота.
а2 - дисперсия.
- сферическая широта.
- коэффициент рассеяния антенны.
Ph -радиускорреляции.
АББРЕВИАТУРЫ
АМПЗ - аномальное магнитное поле Земли. ГИГГП - гироскопический измери- тель градиентов гравитаци-
БИГП - БИС - бортовой измеритель грави- тационного поля. большая интегральная схе- ма. ГНС - ГПЗ - онного поля. грубая навигационная систе- ма. гравитационное поле Земли.
ГГИ - гравитационно-градиентный измеритель. ГСН - ГФП - головка самонаведения, геофизическое поле.
ГЗУ - голографическое запоми- нающее устройство. ДГГИ - дифференциальный гравита- ционно-градиентный изме- ритель.
317
ДИСС - доплеровский измеритель
путевой скорости и угла
сноса.
ЗУ - запоминающее устройство.
ИКЭНС - платформенная (бесплат-
формениая ) инерциальная
корре ляционио-экст ре маль-
иая навигационная система.
ИНС - инерциальная навигацион-
ная система.
ИС - интегральная схема.
ИСЗ - искусственный спутник Зем-
ли.
КВНС - курсо-воздушная (курсо-аэ-
рометрическая) навигацион-
ная система.
КГГИ - компенсационный гравита-
ционио-градиеитный изме-
ритель.
КДКЭНС- курсо-доплеровская корре-
ляционно-экстремальная на-
вигационная система.
КДНС - курсо-доплеровская навига-
ционная система.
КЭНС - корреляционно-экстремаль -
ная навигационная система.
ЛА - летательный аппарат.
ЛГГИ - лазерныйгравитационно-гра-
диеитиый измеритель.
ЛЗП -
ЛПМ -
ммнк -
МПЗ -
РГГИ -
РГГИА -
РГГИВ -
РЛС -
СБИС -
СвГГИ -
сгги-
СЦВУ -
УПО -
ЦМД -
ЭИ -
линия заданного пути,
лентопротяжный механизм,
модифицированный метод
наименьших квадратов,
магнитное поле Земли.
ротационный гравитацион-
но-градиентный измеритель,
ротационный гравитацион-
но-градиентный измеритель
акселе рометрический.
ротационный гравитацион-
но-градиентный измеритель
вариомегрический.
радиолокационная станция,
сверхбольшая интегральная
схема.
сверхпроводящий гравита-
ционно-градиентный изме-
ритель.
сейсмический гравитацион-
но-градиентный измеритель,
специализированное цифро-
вое вычислительное уст-
ройство.
устройство памяти и обра-
ботки.
цилиндрический магнитный
домен.
эталонная информация.
ИНДЕКСЫ
а - антенна: аномальное н - нормальная.
б - боковой; базис» обр — обращение.
бв - баровысотомер. общ - общая.
б, п - блок памяти. опт - оптимальный
в - вертикальная. п - подсвечивание; память; по-
г - горизонтальная. ле; полное.
гр - гравитационный. Р - рельеф.
д - датчик. расч - расчетное.
‘ДОП - допустимый. рв - радиовысотомер.
др - дрейф. с - сигнал.
3 - заполнение. сект - сектор.
зад - заданное. ср - средняя.
и - источник; интегрирование. стад - стационарный.
изл - излучение. т - тяжесть.
ин - инерциальная. уст - у станов ив ше еся.
ист — истинная. ф - фон; фильтр.
к - картографирование; кажу- ц - цель; цикл; центробежный.
щаяся; конечная. экв - эквивалентная.
корр - корреляция. я - • яркостная.
м - магнитный.
СПИСОК ЛИТЕРАТУРЫ
К главе 1
1.1. Миронов А.Д., Строев Н.С., Гайя МА., Уткин В.В., Чекалов А.В. Летные иссле-
дования/Развитие авиационной науки и техники в СССР. - М.; Наука, 1980.
1.2. International: Aircraft Concorde. - Jane’s all the World’s Aircraft, 1968-69.
1.3. Куцев И. Палубный самолет F-18 ’’Хорнет”. - Зарубежное военное обозрение,
1981, №12.
1.4. Андреев В.Д. Теория инерциальной навигации: автономные системы. - М.;
Наука, 1966.
1.5. Мак-Клур К.Л. Теория инерциальной навигации. - М.: Физматгиз, 1964.
1.6. Инерциальные системы управления/Под ред. Д. Питтмана. - М.: Восниздат,
1964.
1.7. Инерциальная навигация: анализ и проектирование/Под ред. К.Ф.О’Доннела. -
М.: Наука, 1969.
1.8. Андреев В.Д. Теория инерциальной навигации: корректируемые системы. -
М.: Наука, 1967.
1.9. Бона Б.Е., Хатчисон К.Е. Системы астроинерциальной навигации. - Вопросы
ракетной техники, 1966, № 12.
1.10. Митинский А.Ю. Ориентация, гироскопы и инерциальная навигация. - М.;
Наука, 1976.
1.11. Бромберг П.В. Теория инерциальных систем навигации. - М.; Наука, 1979.
1.12. Медведев ГА., Тарасенко В.П. Вероятностные методы исследования экстремаль-
ных систем. - М.: Наука, 1967.
1.13. Белоглазов И.Н., Тарасенко В.П. Корреляционно-экстремальные системы. -
М.: Советское радио, 1974.
1.14. Красовский АА., Белоглазов И.Н., Чигин Г.П. Теория корреляционно-экстре-
мальных навигационных систем. - М.: Наука, 1979.
1.15. Klass Ph.J. New guidance technique being tested. - Aviation Week and Space Techno-
logy, 1974, v. 100, No. 8.
1.16. Dickey f'.R., Craig S.E. Bi-static correlation radar for velocity sensing in spacecraft. -
A1AA Guidance and Control Conference 1963, Massachusetts Institute of Technology.
1.17. Козубовский С.Ф. Корреляционные экстремальные системы. - Киев.; Наукова
думка, 1973.
1.18. Красовский А.А. Динамика непрерывных самонастраивающихся систем. - М.:
Физматгиз, 1963.
1.19. Белоглазов И.Н. Нелинейные эффекты в экстремальных корреляционных
системах. - В кн.: Поиск экстремума. Томск: Томский государственный уни-
верситет, 1969.
1.20. Белоглазов И.Н. Ликвидация больших начальных отклонений в экстремальных
корреляционных системах. - В кн.: Поиск экстремума. Томск: Томский госу-
дарственный университет, 1969.
1.21. Джанджгава Г.И., Кичигин Г.Г. Управление статической характеристикой корре-
ляционной СЭР. - В кн.: Поиск экстремума. Томск: Томский государственный
университет, 1969.
1.22. Миддлтон Д. Введение в статистическую теорию связи, т. 1. - М.: Советское
радио, 1961.
1.23. Чигин Г.П. Моделирование оптимальной корреляционно-экстремальной систе-
мы. - Изв. АН СССР. Техническая кибернетика, 1978, № 2.
319
1.24. Красовский А.А., Чигин Г.П. Сопоставление рекуррентных алгоритмов беспоис-
ковых КЭНС. - Изв. АН СССР. Техническая кибернетика, 1981, № 4.
1.25. Blhui J.C., Campbell J.P. Microwave radiometric sensing for air navigation. - IEEE
Transactions on Aerospace and Electronic Systems, 1966, v. AES-2, No. 5.
1.26. Боднер B.A., Туваев BA. Инерциально-корреляционная система для определе-
ния угловых координат ИСЗ. - Космические исследования, 1967, т. V, вып. 5.
1.27. Способ определения своего места кораблями по рельефу морского дна. - Па-
тент США, кл. 33-1, № 3.212.189, опубл. 19.10.1965 г.
1.28. Andreas R.D., Hostetler L.D.. Beckman R. Continuous Kalman updating of an inertial
navigation system using terrain measurements. - NAECON’ 78, v. 3.
1.29. Reed C.G., Hogan J.J. Range correlation for cruise missiles. - NAECON’78, v. 3.
1.30. Carlson G. Horizon profile checkpoits for low-altitude aircraft. - IEEE Transactions
on Aerospace and Electronic Systems, 1976, v. AES-12, No. 2.
1.31. Klass Ph. J. Mace’s atran guidance resists jamming. - Aviation Week and Space Techno-
logy, 1958, v. 69, No. 25.
1.32. Klass Ph.J. Guidance device set for Pershing tests. - Aviation Week and Space Techno-
logy, 1975, v. 102, No. 19.
1.33. Conrow E.H. The feasibility of an airborne termal infrared position updating system. -
AIAA and Digital Avionics System Conference, Los Angeles, California, 1977.
1.34. Красовский АЛ., Джанджгава Г.И., Чигин Г.П. Синтез комплексных систем
оценивания высоты. - В кн.: Научно-методические материалы по исследованию
алгоритмов корреляционно-экстремальных систем. М.г Военно-воздушная
инженерная академия им. Н.Е. Жуковского, 1975.
1.35. Rainwater J.H. Radiometers: electronic eyes that ’’See” noise. - Microwaves, 1978,
v. 17, No. 9.
1.36. Flexible 10C dates key in new pentagon weapon management philosophy. - Aerospace
Daily, 1974, v. 65, No. 13.
1.37. Develet J.A. Performance of a synthetic-aperture mapping radar system. - IEEE Trans-
actions on Aerospace and navigational electronics, 1964, v. ANE-11 ,No. 3.
1.38. Janies L. Map-machmg estimation using range-scan radar images. - NAECON’74, v. 1.
1.39. Семенов H.M., Яковлев Н.И. Цифровые феррозондовые магнитометры. - Л.:
Энергия, 1978.
1.40. Афанасьев Ю.В., Студенцов Н.В., Щелкин А.В. Магнитометрические преобразова-
тели, приборы, установки. - Л.: Энергия, 1972.
1.41. Михлин Б.З., Селезнев В.П., Селезнев А.В. Геомагнитная навигация. - М.: Маши-
ностроение, 1976.
1.42. Бровар В.В., Магницкий ВА., Шимбирев Б.П. Теория фигуры Земли. - М.:
Геодезнздат, 1961.
1.43. Prey E.J., Harlan R.R Design configuration and error, analysis stady of an airborne
gravimetric systems. - AESWC-TR-77-6, Massachusetts Institute of Technology
April 1971.
1.44. Paik, H.J. Spaceborne superconducting gravity gradiometer for mapping the Earth’s
gravity field. - IGARSS’81, New York.
1.45. Винц Б.Д., Почтарев В.И., Рахматулин Р.П. Методика расчета магнитного поля
Земли вверх'в приземном пространстве. - Геомагнетизм и аэрономия, 1970,
т. X, № 1.
1.46. Elson В.М. Radiometric-map guidance aid tested. - Aviation Week and Space Techno-
logy, 1976, v. 104,No. 14.
1.47. Moskowitz S. Terminal guidance by pattern recognition - a new approach. - IEEE
Transactions on Aerospace and Navigational Electronics, 1964, v. ANE-11, No. 4.
1.48. The technological guts of the 1500-mile navy strategis cruise missile. - Ocean Science
News, 1974, v. 16, No. 25.
1.49, Иванов M.M, Магнитные съемки океанов. - M.: Наука, 1966.
1.50. Лозинская Л.М., Ямаев И.Л. Опытные аэрогравнметрические измерения над
Каспийским морем. - Доклады АН СССР, 1970, т. 103, № 1.
1.51. Morony G. Some computing techniques for storage, retrieval and interpretation of
gravimetric data. - APEA Journal, 1975, v. 15, No. 1.
1.52. Inertial navigational system fox research of the Earth’s mangetic field. - Interavia
Air Letter, 1973, No. 7707.
320
1.53. Klass Ph.J. Analysis pinpoints changes. - Aviation Week and Space Technology, 1975,
v. 102, No. 21.
1.54. Самолетная импульсно-допплеровская радиолокационная станция картографи-
рования с мгновенным построением изображения. - Патент США, кл. 343-9,
№ 3.228.028, опубл. 04.01-1966 г.
1.55. Caron R.H.. Simon К. И’. Attitude time-series estimator for rectification of spaceborne
imagery. - Journal of Spacecraft and Rockets, 1975, v. 12, No. 1.
1.56. Сафронов Л. Многоспектральная съемка местности. - Зарубежное военное
обозрение, 1977, № 2.
1.57. Луговенко В.Н. Статистический анализ аномального магнитного поля. - М.:
Наука, 1974.
1.58. Шрейбман В.И., Жданов М.С., Витвицкий О.В. Корреляционные методы преоб-
разования и интерпретации геофизических аномалей. - М.: Недра, 1977.
1.59. Солодовников В.В. Введение в статистическую динамику систем автоматичес-
кого управления. - М.-Л.: Гостехиздат, 1952.
1.60. Бендат Дж. Основы теории случайных шумов н ее применения. - М.: Наука,
1965.
К главе 2
2.1. Klass Ph.J. New guidance technique being tested. - Aviation Week and Space Techno-
logy, 1974, v. 100, No. 8.
2.2. Цифровая фильтрация аэроснимков, стереомоделей и карт/Под ред. А.А. Чигн-
рева. - Л.: Недра, 1976.
2.3. Мещеряков Ю.А. Рельеф СССР (морфоструктура и морфоскульптура). - М.:
Мысль, 1972.
2.4. Бусалаев И.В. О приложении методов статистического описания случайных
полей к характеристике рельефа земной поверхности. - В кн.: Рельеф Земли
и математика. М.: Мысль, 1967.
2.5. Николаев С/l. О закономерности строения рельефа. - Сборник статей по карто-
графия, вып. 7. М.; Геодезнздат, 1954.
2.6. Straliler A.N. Statistical analysis in geomorphye research. - Journal Geologica, 1954,
v. 62, No. 1.
2.7. Красовский A.A., Белоглазов И.Н., Чигин Г.П. Теория корреляционно-экстре-
мальных навигационных систем. - М.: Наука, 1979.
2.8. Andreas R.D.. Hostetler L.D., Beckman R. C. Continuous Kalman updating of an iner-
tial navigation system using terrain measurements.- NAECON’78, v. 3.
2.9. Бортовой лазер для измерений рельефа местности. - Electronics Weekly, 1968,
No. 426.
2.10. Жуковский А.П., Оноприенко Е.И., Чижов В.И. Теоретические основы радиовы-
сотометрии. - М.: Советское радио, 1979.
2.11. Сколъник М. Введение в технику радиолокационных систем. - М.: Мир, 1965.
2.12. Кульман Н.К., Тихонов В.Н. Нелинейная фильтрация н квазикогерентный прием
сигналов. - М.: Советское радио, 1975.
2.13. Ван Трис Г. Теория обнаружения, оценок и модуляции, т. 1/Подред. В.Н. Тихо-
нова. - М.: Советское радио, 1972.
2.14. Левин Б.Р. Теоретические основы статистической радиотехники, т. 2. - М.:
Советское радио, 1975.
2.15. Каляев Е.В. Изучение мирового океана странами НАТО. - Зарубежное воен-
ное обозрение, 1979, № 3.
2.16. Miller L.S, Topographic and backscatter characteristics of GEOS-3 overland data. -
Journal of Geophysic Results, 1979, v. 84, No. 8.
2.17. Николаев А.Г., Перцев C.B. Радиотеплолокация: пассивная радиолокация. -
М.: Советское радио, 1964.
2.18. Богородский В.В., Козлов А.И., Тучков Л.Т. Раднотепловое излучение земных
покровов. - Л.: Гидрометеонздат, 1977.
2.19. Горн Л.С., Хазанов Б.И. Схемотехника радиометров. - М.: Атомиздат, 1977.
2.20. Башаринов А.Е., Гурвич А.С., Егоров С.Г. Радиоизлучение Земли как плане-
ты. - М.: Наука, 1974.
321
2.21. Шифрин К.С., Рабинович Ю.И., Щукин Г.Г. Исследования микроволнового
излучения в свободной атмосфере. - Метеорология и гидрология, 1969, № 7.
2.22. Кудряшев К.П., Чухланцев А.А., Шутко А.М. СВЧ излучение земной поверх-
ности при наличии растительного покрова. - Радиотехника и электроника, 1979,
т. 24, № 2.
2й3. Башаринов А.Е., Шутко А.М. Определение влажности земных покровов метода-
ми СВЧ радиометрии. - Радиотехника и электроника, 1978,т. 23, № 9.
2.24. Федин В.Т. Естественное радиотепловое излучение и его измерение с самолета. -
М.: Военно-воздушная академия им. Н.Е. Жуковского, 1967.
2.25. Жевакин С.А., Троицкий В.С. Поглощение сантиметровых волн в слоистой ат-
мосфере. - Радиотехника и электроника, 1959, т. 4, № 1.
2.26. NAECON’76 Record.
2.27. Тучков Л.Т. Естественные шумовые радиоизлучения в радиоканалах. - М.:
Советское радио, 1963.
2.28. Медведев П.П. Исследование гравитационного поля и фигуры Земли новыми
методами космической геодезии. - В кн.: Итоги науки и техники, серия ’’Гео-
дезия и аэросъемка”. М.: ВИНИТИ, 1980.
К главе 3
3.1. Яновский Б.М. Земной магнетизм, ч. 1: морфология и теория магнитного поля
Земли и его вариаций. - Л.: ЛГУ, 1964.
3.2. Грушинский Н.П. Теория фигуры Земли. - М.: Физматгиз, 1963.
3.3. Идельсон Н.И. Теория потенциала и ее приложения к вопросам геофизики. -
М.-Л.: ГТТИ, 1932.
3.4. Веселов К.Е., Сагитов М.У. Гравиметрическая разведка. - М.: Недра, 1968.
3.5. Грушинский Н.П., Сажина Н.Б. Гравитационная разведка. - М.: Недра, 1972.
3.6. Михлин Б.З., Селезнев В.П., Селезнев А.В. Геомагнитная навигация. - М.:
Машиностроение, 1976.
3.7. Дубошин Н.Г. Небесная механика: основные задачи и методы. - М.: Наука,
1968.
3.8. Петровский И.Г. Лекции об уравнениях с частными производными. - М.: Гос-
техиздат, 1953.
3.9. Винц БД., Почтарев В.И., Рахматулин Р.Ш. Методика расчета магнитного поля
Земли вверх в приземном пространстве. - Геомагнетизм и аэрономия, 1970,
т. Х,№ 1.
3.10. Адам Н.В., Бенькова Н.П., Орлов В.П. Высотное распределение геомагнитного
поля. - Геомагнетизм и аэрономия, 1964, т. IV, № 4.
3.11. Gain J.C., Hendricks J., Landel R.A., Hudson W.V. — Geomagn. and Geoelectr., 1967,
v. 19, No.3.
3.12. Снеддон И. Преобразование Фурье. - М.: Иностранная литература, 1955.
3.13. Харкевич А.А. Борьба с помехами. - М.; Наука, 1965.
3.14. Двайт ГБ. Таблицы интегралов и другие математические формулы. - М.:
Иностранная литература, 19 48.
3.15. Градштейн И.С., Рыжик И.М. Таблицы интегралов, сумм, рядов и произведе-
ний. - М.: Физматгиз, 1963.
3.16. Почтарев В.И., Сипко В.Н. Опыт моделирования магнитного поля Земли. - Гео-
магнетизм и аэрономия, 1969, т. IX, № 6.
3.17. Пудовкин М.И. Основные закономерности пространственно-временного распре-
деления переменного магнитного поля Земли. - Л.: ЛГУ, 1971.
3.18. Семенов Н.М., Яковлев Н.И. Цифровые феррозондовые магнитометры. - Л.:
Энергия, 19 78.
3.19. Shonstedt Е.О., Jrons H.R. Vector airborn magnetometer type RA. - Erans. Amer.
Icoph. Union, 1965, v. 36, No. 1.
3.20. Яновский Б.М. Земной магнетизм, т. II. - Л.: ЛГУ, 1964.
3.21. Магнитометр СГК-64. Техническое описание. - Л.: НПО ’’Геофизика ”, 1964.
3.22. Система измерения скорости с помощью магнитометров. - Патент Франции,
кл. В64.01С, № 1.407.686,опубл. 05.10.1964 г.
3.23. Фармаковский С.Ф., Ротштейн А.Я., Попкова Л.И. Метод измерения углов
еклонсния и наклонения МПЗ. - Геофизическая аппаратура, 1969, вып. 41.
3.24. Красовский А.А., Шендрик В.С. Универсальный алгоритм оптимального управ-
ления непрерывными процессами. - Автоматика и телемеханика, 1975 ,
№ 2.
3.25. Бреннер Д. Аппаратура для аэромагнитной съемки фирмы ’’Пракла” (ФРГ). _
Геофизическая аппаратура, 1965, вып. 24.
3.26. Фармаковский С.Ф., Попкова Л.И. Косвенная стабилизация магниточувствитель-
ных датчиков на движущемся объекте. - Приборостроение, 1970, № 9.
3.27. Хвостов О.П. Приближенные методы компенсации магнитных помех носителей
магнитометров. - Геофизическое приборостроение, 1963, вып. 15.
3.28. Рыбалтовский Ю.Н. Магнитно-компасное дело. - Л.: Государственное издатель-
ство водного транспорта, 1954.
3.29. Гольденберг Ф.М., Грачева Н.С., Можаева И.И., Калинин В.А. Система определе-
ния и устранения девиации без поворота самолета СОУД (комплект учебных
плакатов). - М.: Военное издательство МО СССР, 1980.
3.30. Канторович В.Л., Резник Э.Е., Виноградов В.М., Хвостов О.П. Компенсатор маг-
нитных помех. - Геофизическая аппаратура, 1970, вып. 43.
3.31. Михлин Б.З. Способ автоматической компенсации действия в заданной точке
магнитного поля источника с постоянным распределением вектора относительно
объемной намагниченности. - Авторское свидетельство № 124527, бюллетень
изобретений № 23, 1959.
3.32. Боярский ЭД., Коган М.Г. Гравиметрия. - В кн.: Итоги науки и техники, серия
’’Геофизика”. М.: ВИНИТИ, 1970.
3.33. Шокин П.Ф. Гравиметрия. - В кн.: Итоги науки и техники, серия ’’Геодезия
и аэросъемка”. М.: ВИНИТИ, 1978.
3.34. Карев А.Г., Немцов ВД., Кузиванов В.А. Современное состояние и перспективы
развития морских надводных гравиметрических измерений. - Экспресс-
информация ОЦНТИ ВИЭМС, серия ’’Морская геология и геофизика”, 1976
№ 3.
3.35. . Пантелеев В.Л. Основы морской гравиметрии. - М.: Недра, 1983.
3.36. Попов Е.И. Опыт наблюдений сильно загашенными гравиметрами на самолете
и вертолете. - Изв. АН СССР, серия геофизическая, 1960, № 8.
3.37. Малахов Б.М., Хейфец М.Е. О возможности выполнения маятниковых измере-
ний силы тяжести на самолетах. - В кн.: Сборник рефератов и статей Централь-
ного научно-исследовательского института геодезии, аэросъемки и картографии
за 1961 год. М.: ЦНИИГАиК, 1962, вып. 32.
3.38. Пущина Л.В. Измерения с гравиметром на самолете в США. - Изв. вузов, серия
"Геоде'зия й аэросъемка”, 1962, № 1.
3.39. Батурин АЛ. Современное состояние аэрогравиразведки за рубежом. - В кн.:
Бюллетень научно-технической информации. М.: ВИМС, 1962, № 8.
3.40. Безвесильная Е.Н., Рябыкин С.Л. О некоторых чувствительных элементах авиа-
ционных гравиметрических систем. - Геофизический сборник АН УССР.
Киев: Институт геофизики АН УССР, 1977, вып. 77.
3.41. Балашова Э.Л. Новые достижения в области гравиметрового приборостроения
за рубежом. - Геофизическая аппаратура, 1978, вып. 66.
3.42. Лозинская А.М., Ямаев И.Л. Опытные аэрогравиметрические измерения над
Каспийским морем. - Доклады АН СССР, 1970, т. 193, № 1.
3.43. Лозинская А.М. Наставление по гравиметрической съемке с борта самолета. -
М.: ВНИИГеофизика, 1973.
3.44. Hammer S. Airborne gravity is here! - Geophysics, 1983, v. 48, No. 2.
3.45. Балабушевич ИА. О принципиальной возможности аэрогравиметрической
съемки. — В кн.: Публикации Киевской астрономической обсерватории. Киев:
Киевский государственный университет, 1954, № 6.
3.46. Федынский В.В. О разработке аппаратуры для гравиметрических измерений в
движении. - Изв. АН СССР, серия геофизическая, 1959, № 1.
3.47. Веселов К.Е. Измерения элементов гравитационного поля в движении. - Прик-
ладная геофизика, 1964, № 40.
3.48. Моритц Г. Современная физическая геодезия. - М.: Недра, 1983.
3.49. Крылов Г.О., Маслов И.А., Науменко-Бондаренко Н.И. Тензорные модели в
гравиметрии. - М.: Институт физики Земли АН СССР, 1973.
323
3.50. Antony D. Gradiometer applications and status of sensor development. -Environmental
Research Papers No. 355, AFCRL-71-0314, Air Force Cambridge Research Labora-
tories, 1971.
3.51. Williams O.W. Gradiometry an assessment of the state-of-the art. - Defence Mapping
Agency, Washington, 1974.
3.52. Heller W.G. Developments in moving-base gradiometry. - The Analytic Sciences Cor-
poration, Reading, Massachusetts, 1978.
3.53. Зенков B.C., Калинников H.H., Нюнин М.И., Нюнина Н.А. К вопросу об измере-
нии вторых производных гравитационного потенциала в движении. - В кн.:
Разработка и исследование гравиинерциальной аппаратуры. М.: Наука, 1980.
3.54. Медведев П.П. Исследование гравитационного поля и фигуры Земли новыми
методами космической геодезии. - В кн.: Итоги науки и техники, серия ’’Гео-
дезия и аэросъемка”. М.: ВИНИТИ, 1980.
3.55. Heller W.G. Prospects for gradiometric aiding of inertial survey systems.- Bulletin
Geodetica, 1981, v. 55, No. 4.
3.56. Этвеш Л. Опыты над тяготением и земным магнетизмом. - В кн.: Рефераты и
переводные статьи по геодезическим вопросам. М.: Военно-топографическое
управление, 1910.
3.57. Kilchling К. Messingen mit der Gleichmassing gedrehten Drewage und neues Rechen
verfahren. - Zeitschrift fur Geophysik, 1927, Nr. 3.
3.58. Вилк Л.С. Центробежно-сбалансированный гравитационный градиентометр. -
Патент США; кл. 73-382, № 3.630.086, опубЯ. 28.12.1971.
3.59. Бук С.В- Гравитационный градиентометр. -ПатентСША, кл 73-382, № 3.926.054,
опубл. 17.06.1976.
3.60. Стоун Р.С. Интерференционный градиентометр для исследования поля силы
тяжести. - Патент США, кл. 73-382, N8 3.688.584, опубл. 05.09.1972 г.
3.61. Данлэпа Г.Ф. Градиентометр для измерения силы тяжести методом свободно
падающих тел. - Патент США, кп. 73-382, № 3.693.384, опубл. 26.09.1972 г.
3.62. Лаутзенхизер Т.В. Кольцевой лазерный гравитационный градиентометр. -
ПатентСША, кл. 73-382, № 4.255.969, опубл. 17.03.1981 г.
3.63. Коломбо С.Ж. Спутник, связанный с помощью длинного троса с космическим
кораблем, имеющим двигательную установку. - Патент США, кл. 73-382,
№ 4.099.010, опубл. 27.01.1978.
3.64. Миронов В.С. Курс гравиразведки. - Л.: Недра, 1980.
3.65. Трейгезер М.Б. Устройство для измерения гравитационных градиентов. - Патент
ФРГ, кл.42с, № 2.130.266, опубл. 22.06.1970.
3.66. Trageser М.В. A gradiometer system for gravity anomaly surveying R-588. - Charles
Stork Draper Laboratory, Massachusetts Institute of Technology, 1970.
3.67. Trageser M.B. Feasibility model gravity gradiometer test results. - AIAA Paper,
1975, No. 75-1093.
3.68. Savet P.H Exploration of gravitational anomalies of planets from orbiting vehicles. -
American Astronautical Society, 16 - 18 September 1968.
3.69. Balmino G. (Bureau Gravimetrique International), Barlier F. (CERGA), Bernard A.
(ONERA), Bourat C. (CNES), Runavot J.J, (CNES), - ’’Gradio” gradiom^trie par
satellite proposition de projet, Les Arcs, September, 1981.
3.70. Paik H.J. Superconducting tensor gravity gradiometer for satellite geodesy and
inertial navigation. - The Journal of the. Astronautical Science, 1981, v. 29, No. 1.
3.71. Eotvos L. Gesammeltearbeiten. - Budapest: Akadeiniai Kiado, 1953.
3.72. Дизел Л.Р. Новый метод построения вертикали с использованием градиента
гравитационного поля. - Ракетная техника и космонавтика, 1964, т. 2, № 7.
3.73. Форвард Р.Л. Способ и устройство для измерения градиентов статических
полей. - Патент США, кл. 73-382, № 3.273.397, опубл. 05.06.1964 г.
3.74. Чоботов В.Н. Радиально вибрирующий вращающийся датчик градиента поля
тяготения. - Ракетная техника и космонавтика, 1968, т. 6, № 4.
3.75. Metrger Е.Н., Jircitano A. Analysis of real time mapping of horizontal and vertical gra-
vity anomalies aboard a moving vechicle suchas an aircraft. - International Sym-
posium on Application of Marine Geodesy, Battele Instituts, Columbus, Ohio, 1974.
3.76. Головин A.A., Сорока А.И., Лесков В.Ф., Урселов Л.В., Золотухин В.А., Рыже-
нин В.Г., Бодунов Б.П. Вертикальный градиентометр. - Авторское свидетель-
ство № 651285, Бюллетень изобретений, 1979, № 7.
324
3.77. Бела С.С. Гравитационный градиентометр с резонансным торсионным подве-
сом. - Патент США, кл. 73-382, № 3.564.921, опубл. 02.02.1968 г.
3.78. Metrger Е.Н Recent gravity gradiometer developments. - AIAA Paper, 1977, No. 70-
1081.
3.79. Ames C.B., Foward R.L., Rouse P.W. Final report on F 19628-75-C-0201 Test, evo-
luation, an modification of a prototupe rotating gravity gradiometer. - Air Force
Geophysics Laboratory, Hanscom Air Force Base, Massachusetts, 1975.
3.80. Ames C.B., Clark R.B., Peterson R.W. Rotating gravity gradiometer development. -
Air Force Geophysics Laboratory, Hansom Air Force Base, Massachusetts,
1977.
3.81. Decker B.L. Geodetic instrumentation. - Reviews of Geophysics and Space Physics,
1979, v. 17, No. 6.
3.82. Forward R.L. Electronic cooling of resonant gravity gradiometers. - Journal Ap-
plead Physics, 1979, v. 50, No. 1.
3.83. Гладкий K.B. Гравиразведка и магниторазведка. - M.: Недра, 1967.
К главе 4
4.1 Красовский А.А., Поспелов Г.С. Основы автоматики и технической киберне-
тики, - М.: Госэнергоиздат, 1962.
4.2. Белоглазов И.Н., Тарасенко В.П. Корреляционно-экстремальные системы. -
М.: Советское радио, 1974.
4.3. Тарасенко В.П., Раводин О.М. Корреляционно-экстремальный координатор
для речных и морских судов. - В кн.: Поиск экстремума. Томск: Томский
государственный университет, 1969.
4.4. Эндрюс Г. Применение вычислительных машин для обработки изображений. -
М.: Энергия, 1977.
4.5. Hoffman W.K., Kalter H.L. An 8К random access memory chip using the one device
fetcell. - IEEE Journal of Solid-State Circuits, 1973, v. SSC-8, No. 5.
4.6. Ходжес Д. Полупроводниковые элементы цифровых запоминающих устройств
(современное состояние и перспективы). - Труды Института инженеров по
электротехнике и радиоэлектронике, 1975, т. 63, № 8.
4.7. Родригес X. Лентопротяжные устройства. - Труды института инженеров по
электротехнике и радиоэлектронике, 1975, т.63, № 8.
4.8. AFCEA80 Show Conference. Heavy Stresson Communication. -Interavia, 1980,No.8.
4.9. Щучкин Г.С., Лебедев Ю.Б., Киреев A.H. Состояние и перспективы развития и
использования ЗУ на цилиндрических магнитных доменах. - Электронная
техника, 1978, сер. 10, вып. 6 (12).
4.10. Equipments: une progression tous azimuts. - Aviation Magazine, 1981, No. 805.
4.11. Tu Чжань, Зук. Оптические запоминающие устройства. - Труды Института
инженеров по электротехнике и радиоэлектронике, 1975, т. 63, № 8.
4.12. Raichmann J.A. An optical read-write mass memory. - Applied Optics, 1970, v. 9,
No. 5.
4.13. Sutherlin K.K. Holoscan commercial holographic ROM. - Applied Optics/ 1974
v. 13, No. 6.
4.14. Басов Н.Г. Полупроводниковые квантовые генераторы. - Успехи физических
наук, 1965, т. 85, вып. 4.
4.15. Hartman. R.L., Dyment J.C., Hwang C.J., Kuhn M. Continuous operation of GaAs-
Gaj_xAlxAs double-heterostructure lasers with 30°C half-lives exceeging 1000 h, -
Applied Physics, 1973, v. 23, No. 4.
4.16. Матиенко Б.Г., Нестерихин Ю.Е. Многоэлементные фотоприемные матрицы
для голограммных ЗУ. - Вкн.:ТрудыШ Всесоюзной конференции по голо-
графии, 1978.
4.17. Anderson L.K. Application of holographic optical techniques to bulk memory. -
IEEE Transactions on Magnetics, 1971, v. MAG-7, No. 3.
4.18. Air force syudies fighter pilot workload. - Electronic Warfare/Defense Electronisc,
1978, v. 10, No. 4.
4.19. Miller W.F. Inaccurate: mawerick or ’’flight”? - Flight International, 1978, v. 113,
No. 3612.
325
4.20. Scene-matching area correlator enhances Tomahawk assuracy. - Aviation Week
and Space Technology, 1978, v. 109, No. 4.
4.21. Funk J.E. Optimal path precision Terrain following system. - Proceedings of A1AA
Guidance and Control Conference, San Diego, Calif., 1976, v. 1.
4.22. Красовский A.A., Белоглазов И.Н., Чигин Г.П. Теория корреляционно-экстре-
мальных систем. - М.-. Наука, 1979.
4.23. Жовинский В.Н.. Арховский В.Ф. Корреляционное устройство. - М.: Советское
радио, 1975.
4.24. Многоканальная электрооптическая система. - Патент США, кл. 235-181.
№ 3.937.942, опубл. 10.02.1976 г.
4.25. Электростатический коррелятор. - Патент США, кл. 235-181, № 3.493.736,
опубл. 03.02.1970 г.
4.26. Датчик максимальной корреляции в оптической пространственной системе
фильтрации. - Патент США, кл. 356-71, № 3.666.359, опубл. 30.05.1972 г.
4.27. Когерентный оптический многоканальный коррелятор. - Патент США, кл.
350-1 62, № 3.802.762, опубл. 09.04.1974 г.
4.28. Венедиктова Э.К. Состояние и перспективы развития элементной базы совре-
менных БЦВМ и средств цифровой автоматики. - Обзоры по электронной
технике, сер. 10, вып. 2 (444). - М.: ЦНИИ ’’Электроника”, 1977.
4.29. Manuel Fernandez. Alternate: example of a standard missiles I Space Computer. -
NAECON’78, v. 2.
4.30. Lynn S. Wilson. Needs of the’80s. - Astronautics and Aeronautics, 1980, v. 18,
No. 4.
4.31. Инерциальные навигационно-прицельные системы LW-33A и LW-33B. - Прос-
пекты фирмыиноп, № 7786 и 7789.
4.32. Разработка бортовых ЦВМ в США. - Радиоэлектроника за рубежом, 1975,
№ 19.
4.33. Anderson G.E. A Terrain correlation microprocessor. - NAJ CON’ 78 v. 2.
К главе 5
5.1. Белоглазов И.Н., Тарасенко В.П. Корреляционно-экстремальные системы.
М.: Советское радио, 1974.
5.2. Белоглазов И.Н. Нелинейные эффекты в экстремальных корреляционных
системах. - В кн.: Поиск экстремума. Томск: Томский государственный уни-
верситет, 1969.
5.3. Красовский А.А. Оптимальная фильтрация в теории корреляционно-экстре-
мальных систем. - Изв. АН СССР. Техническая кибернетика, 1976, № 3.
5.4. Белоглазов И.Н. Оптимальная фильтрация в корреляционно-экстремальных
системах, использующих изображения местности. - Изв. АН СССР. Техничес-
кая кибернетика, 1977, № 2.
5.5. Баклицкий В.К. Применение метода нелинейной фильтрации для синтеза кор-
реляционно-экстремальных систем навигации. - В кн.: Корреляционно-экст-
ремальные системы управления. Томск: Томский государственный универ-
ситет, 1979.
5.6. Баклицкий В.К. Корреляционно-экстремальные системы навигации. - М.: Ра-
дио и связь, 1982.
5.7. Брайсон А., Хо Ю ши. Прикладная теория оптимального управления. - М.: Мир,
1972.
5.8. Красовский А.А., Белоглазов И.Н., Чигин Г.П. Теория корреляционно-экстре-
мальных навигационных систем. - М.: Наука, 1979.
5.9. Солодов А.В. Линейные системы автоматического управления с переменными
параметрами. - М.: Физматгиз, 1962.
5.10. Остославский И.В., Стражева И.В. Динамика полета, ч. 1. - М.: Оборонгиз,
1969.
5.11- Кульман Н.К., Тихонов В.И. Нелинейная фильтрация и квазикогерентный
прием сигналов. - М.: Советское радио, 1975.
512. Ярлыков М.С. Применение марковской теории нелинейной фильтрации в радио-
технике. - М.: Советское радио, 1980.
326
513. Ито К. Стохастические интегралы. - М.: Мир, 1974.
5.14. Стратонович Р.Л. Условные марковские процессы и их применение к теории
оптимального управления. - М.: Московский государственный университет,
1966.
5.15. Колмогоров А.И. Об аналитических методах теории вероятностей. - Успехи
математических наук, 1938, вып. 5.
5.16. Де Гроот М. Оптимальные статистические решения. - М.: Мир, 1974.
517. Амиантов И.Н. Избранные вопросы статистической теории связи. - М.: Со-
ветское радио, 1971.
5.18. Белоглазов И.Н. Оптимальные алгоритмы корреляционно-экстремальных
систем, использующих одновременно несколько полей. - В кн.: Научно-ме-
тодические материалы по исследованию алгоритмов корреляционно-экстре-
мальных систем. М.: Военно-воздушная инженерная академия им. Н.Е. Жу-
ковского, 1975.
5.19. Химмельблау Д.М. Прикладное нелинейное программирование. - М.: Мир,
1975.
5.20. Красовский А.А. Адаптивный алгоритм субоптимального оценивания. - Док-
лады АН СССР, 1976, т. 230, № 3.
5.21. Белоглазов И.Н. Рекуррентно-поисковые алгоритмы оценивания. - Доклады
АН СССР, 1977,т. 236, №2.
5.22. Белоглазов И.Н., Ермилов А.С., Карпенко Г.И. Рекуррентно-поисковое оцени-
вание и синтез алгоритмов корреляционно-экстремальных навигационных сис-
тем. - Автоматика и телемеханика, 1979, № 7.
5 23. Белоглазов И.Н., Ермилов А.С. О возможности использования рекуррентно-
поискового оценивания для коррекции инерциальных систем по полю релье-
фа. - Приборостроение, 1981, № 1.
К главе 6
6.1. Инерциальные системы управления /Под ред. Д. Питтмана. - М.: Воениздат,
1964.
6.2. Андреев В.Д. Теория инерциальной навигации: корректируемые системы. -
М.: Наука, 1967.
6.3. Инерциальная навигация: анализ и проектирование /Под ред. К.Ф.О’Доннела. -
М.: Наука, 1969.
6.4. Авиационные цифровые системы контроля и управления/ Под ред. В.А. Мяс-
никова н В.П. Петрова. - М.: Машиностроение, 1976.
6.5. Klass Ph. J. New guidance technique being tested. - Aviation Week and Space Tech-
nology, 1974, v. 100, No.8.
6.6. Красовский A.A., Белоглазов И.Н.. Чигин Г.П. Теория корреляционно-экстре-
мальных навигационных систем. - М.: Наука, 1979.
6.7. Сейдж Э., Меле Дж. Теория оценивания и ее применение в связи и управлении. -
М.: Связь, 1976.
6.8. Чигин Г.П.. Силаев А.И. Синтез алгоритмов оценивания вертикальных парамет-
ров движения летательного аппарата. - Изв. АН СССР. Техническая киберне-
тика, 1982, № 1.
6.9. Красовский А.А., Джанджгава Г.И., Чигин Г.П. Синтез комплексных систем
оценивания высоты. - В кн.: Научно-методические материалы по исследованию
алгоритмов корреляционно-экстремальных систем. М.: Военно-воздушная
инженерная академия им. Н.Е. Жуковского, 1975.
6.10. Фильтрация и стохастическое управление в динамических системах/ Под ред.
К.Т. Леондеса. - М.: Мир, 1980.
6.11. Белоглазов И.Н., Ермилов А.С. Оценивание пространственного положения
движущегося объекта в беспоисковых корреляционно-экстремальных навига-
ционных системах. - В кн.: Системы управления. Томск: Томский государст-
венный университет, 1978.
6.12. Чигин Г.П. Моделирование оптимальной корреляционно-экстремальной систе-
мы. - Изв. АН СССР. Техническая кибернетика, 1978, № 2.
327
6.13. Красовский А.А., Чигин Г.П. Об одном алгоритме оптимального оценивания.
В ки.: Научно-методические материалы по исследованию алгоритмов корреля-
ционно-экстремальных систем. М.: Военно-воздушная инженерная академия
им.Н.Е. Жуковского, 1975.
6.14. Чигин Г.П. Оптимальная фильтрация в платформенных корреляционно-экст-
ремальных навигационных системах. - В ки.: Проблемы управления движением
и навигации, вып. 10. М.: ВИНИТИ, 1976.
6.15. Красовский А.А., Чигин Г.П. Сопоставление рекуррентных алгоритмов бес-
поисковых КЭНС. - Изв. АН СССР. Техническая кибернетика, 1981, № 4.
6.16. Чигин Г.П. Проблемы моделирования корреляционно-экстремальных навига-
ционных систем. - В ки.: Корреляционно-экстремальные системы управления.
Томск: Томский государственный университет, 1979.
6.17. Джанджгава Г.И., Ягупов Ю.Д. Рекурсивное оценивание местоположения под-
вижного объекта в физическом поле. - В ки.: Научно-методические материалы
по исследованию алгоритмов корреляционно-экстремальных систем. М.: Воеи-
ио-воздушиая инженерная академия им. Н.Е. Жуковского, 1975.
6.18. Стефанов В А., Силаев А.И., Чигин Г.П. Комбинированный алгоритм оценивания
в корреляционно-экстремальных навигационных системах. — Изв. АН СССР.
Техническая кибернетика, 1984, № 6.