





























































































































Author: Гуськов Ю.П. Загайнов Г.И.
Tags: авиация и космонавтика летательные аппараты ракетная техника космическая техника воздушный транспорт авиация и воздушные соединения воздушные линии и аэропорты авиационное оборудование авиастроение
ISBN: 5-217-01357-5
Year: 1991




ДЛЯ ВУЗОВ
I
г
I
I
. Ю.П. Гуськов
ГИ.Загайнов
УПРАВЛЕНИЕ
ПОЛЕТОМ
САМОЛЕТОВ
( - Машиностроение-
ДЛЯ ВУЗОВ
Ю.ПТуськов
Г.И.Загайнов
УПРАВЛЕНИЕ
ПОЛЕТОМ
САМОЛЕТОВ
2-е издание,
переработанное и дополненное
Допущено Государственным комитетом СССР
по народному образованию
в качестве учебного пособия для студентов
высших технических учебных заведений
Москва
• Машиностроение •
1991
ББК 39.53-08я73
Г96
УДК 629.735.33.07 (075.8)
Рецензент д-р техн, наук, А. А. Красовский
Гуськов Ю. П., Загайнов Г. И.
Г96 Управление полетом самолетов: Учебное пособие для
студентов высших технических учебных заведений. —2-е
изд., перераб. и доп. —М.: Машиностроение, 1991.272 с.: ил.
ISBN 5-217-01357-5
Изложены вопросы реализации и динамики управления самолетами. Рас-
смотрены принципы построения, структура, функционирование типовых конту-
ров управления. Освещены вопросы использования автоматических систем для
обеспечения устойчивости и управляемости, автоматического полета, улучшения
летных характеристик самолета.
Второе издание (1-е изд. 1980 г.) переработано и дополнено материалами,
отражающими современные достижения в области управления самолетами.
Г
2705140400—104
038(01)—91
104—91
ББК 39.53-08я73
ISBN 5-217-01357-5
© Издательство «Машиностроение», 1980
© Ю. П. Гуськов, Г. И. Загайнов, 1991
ПРЕДИСЛОВИЕ
В учебном пособии изложены вопросы управления
самолетами. В нем рассмотрены принципы построения, структу-
ра, функционирование типовых контуров управления с учетом
объема решаемых в полете задач, требований летчика и осо-
бенностей самолета. Освещены вопросы использования автома-
тических систем в таких функциональных сферах управления,
как улучшение устойчивости и управляемости, автоматические
полет и посадка, улучшение летных характеристик самолета,
раздельное управление группами его фазовых координат.
Изучение материала предполагает знание авиационного обо-
рудования и основ динамики полета (устойчивости и управляе-
мости, траекторного движения самолета), а также основных све-
дений из линейной алгебры, теории управления и теории случай-
ных функций.
За годы, прошедшие со времени выпуска первого издания
книги (1980 г.), в технике автоматического и полуавтоматического
управления самолетом произошли изменения. Эти изменения ка-
саются прежде всего способа обработки информации в связи с ши-
роким использованием бортовых цифровых вычислителей, обес-
печивающих возможность построения интегрированных комплек-
сов управления. Необходимость освещения вопросов, связанных
с переходом к цифровой технике обработки информации, обус-
ловила введение новых разделов «Бортовые вычислительные
устройства» (разд. 1.8) и «Особенности динамики самолета с БЦВМ»
(разд. 3.12). Новыми также являются разделы «Управление
скоростью полета путем регулирования тяги двигателей» (разд. 6.4)
и «Интегрированное управление траекторным движением само-
лета» (разд. 6.6).
Наряду с этим внесены исправления, уточнения и дополнения
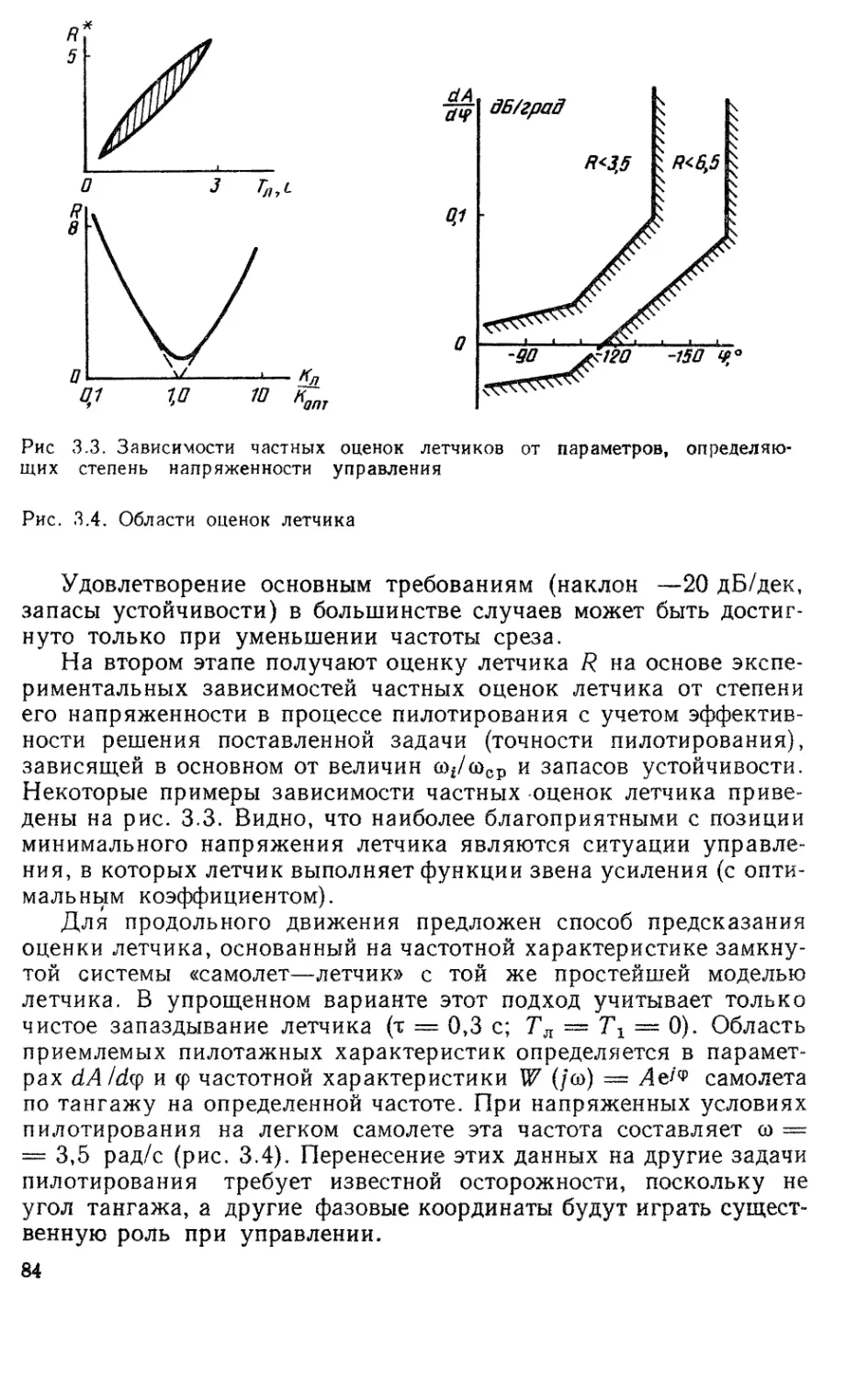
в ряд других разделов. Наиболее существенной переработке
подвергся материал гл. 5, а также разделов 1.5, 1.9, 4.4, 4.5,
6.2 и 6.5.
Книга написана авторами совместно. Новые разделы 1.8, 3.12
и дополнение к разделу 1.9 написаны А. И. Дынниковым. Новые
разделы 6.4 и 6.6 написаны Ю. Г. Борисенко.
Авторы выражают глубокую благодарность д-ру техн, наук
А. А- Красовскому за ценные указания, сделанные им при рецен-
зировании книги.
ВВЕДЕНИЕ
Управление полетом самолетов — интенсивно разви-
вающееся направление авиационной науки и техники. При деталь-
ном изучении задач управления самолетом полет самолета рас-
сматривается как непрерывно управляемый процесс. Здесь из-
учается взаимодействие летчика с самолетом, взаимодействие
системы автоматического управления (САУ) с самолетом. Резуль-
тат этого взаимодействия — целенаправленное движение само-
лета в пространстве. С этих позиций процесс управления самоле-
том представляет собой процесс регулирования в системах с об-
ратной связью: «летчик—самолет», «САУ—самолет». Поскольку
летчик осуществляет управление самолетом через систему управ-
ления, то в результате все сводится к разработке структуры и
определению параметров системы управления самолетом.
Управление самолетом на каждом конкретном этапе полета
преследует цель либо выдерживания определенных параметров
траектории (при этом траектория полета известна и допустимые
отклонения - от нее регламентированы), либо создания таких
наперед не заданных траекторий и движений вокруг центра масс,
которые диктуются конкретной обстановкой. Управление самоле-
том осуществляется путем отклонения органов управления для
изменения перегрузок самолета (включая продольную пере-
грузку пх за счет изменения тяги двигателей), его угловой ориен-
тации в пространстве, в результате чего изменяются параметры
траектории.
Практически до конца 1930-х годов управление самолетом
на всех этапах полета выполнялось летчиком вручную, в основ-
ном по визуальным ориентирам и с использованием информации
от небольшого числа приборов, устанавливаемых на борту (сна-
чала появились указатели высоты, воздушной скорости, затем
авиагоризонт, указатель курса). Естественно, что круг задач
пилотирования был весьма ограниченным, а точность выполнения
невысокой.
Первой была автоматизирована задача угловой стабилизации
самолета с помощью автопилота. Для самолетов е большой про-
должительностью крейсерского полета длительная стабилизация
установившихся параметров траектории полета для летчика
утомительна, хотя и проста, в особенности для винтомоторных
самолетов тех лет. Автоматическая стабилизация угла тангажа
обеспечивала движение с постоянной скоростью и высотой, а ста-
билизация углов крена и рыскания — движение в заданном на-
правлении.
Простейшие автопилоты появились в 1930-е годы. В 1950-х го-
дах автопилот становится неотъемлемой принадлежностью каж-
4
дого самолета. Функции автопилота расширяются: появляются
режимы стабилизации высоты и скорости, координированного
виража и других программных маневров. На этом этапе развития
средств автоматического управления автопилот облегчал самоле-
товождение на маршруте, т. е. на наиболее продолжительном
участке полета. Вопрос о необходимости включения автопилота
решался летчиком, который мог управлять самолетом и вручную,
ориентируясь визуально или по приборам. На этом режиме авто-
пилот не является единственно возможным средством управления,
поэтому требования к надежности первых автопилотов были не
очень высоки.
Однако в дальнейшем на бортовую автоматику стали возла-
гать функции управления, трудно выполнимые для летчика.
К ним относится посадка самолета при ограниченной видимости
или при отсутствии прямой видимости аэродрома.
Посадка является одним из самых сложных маневров само-
лета. Близость земли требует особо четкого и строгого управле-
ния снижением. Поэтому, если посадка происходит, например,
в сплошном тумане, т. е. при отсутствии визуального контакта
с землей, единственным средством управления самолетом является
автоматическая система посадки. В отличие от маршрутного
полета в облаках здесь управление по обычным пилотажным при-
борам невозможно. С появлением систем автоматической посадки
автоматике была передана функция целенаправленного управле-
ния траекторией. По сравнению с автопилотом, стабилизирую-
щим задания параметров, это существенный шаг вперед. В послед-
ние 30 ... 40 лет проблема автоматической посадки является одной
из центральных в организации управления полетом.
Все системы, о которых упоминалось выше, управляют поле-
том путем воздействия на аэродинамические рули. В последние
годы в контуры систем управления стали включать и четвертый
орган управления — рычаг управления двигателем. Впервые ав-
томатическое управление двигателем стало применяться при
заходе на посадку, когда требуется максимально разгрузить
летчика от многочисленных функций управления, чтобы он смог
сосредоточить внимание н'а главном — расчете захода на посадку.
Автоматическая система управления тягой двигателя — автомат
тяги — стабилизирует скорость захода на посадку относительно
заданного значения. Эта задача является особенно важной для
самолетов, неустойчивых по скорости, что довольно типично на
режимах посадки. В настоящее время автомат тяги применяется
и на других этапах полета.
Дальнейшее развитие систем автоматического управления са-
молетом идет по линии автоматизации целенаправленного управ-
ления траекторией движения на всех общих этапах полета. Пред-
посылкой для успешного решения этой задачи является прогресс,
достигнутый в области создания измерительных средств, опреде-
ляющих местоположение и скорость самолета. Эволюция этих
5
измерительных средств представляет собой следующую кар-
тину.
На заре авиации единственным источником информации о ре-
жиме полета был измеритель барометрической высоты и инди-
каторной скорости и указатель курса. С развитием радиосредств
появилась возможность самолетовождения по радиомаякам. Важ-
ной вехой эволюции было создание радиосредств посадки само-
лета. Существенно повысилась точность определения местополо-
жения самолета относительно заданной траектории снижения.
Затем появился радиовысотомер, точно измеряющий высоту по-
лета относительно поверхности земли. Было создано принци-
пиально новое средство информации — инерциальная система.
Инерциальная система — это автономное навигационное устрой-
ство, построенное по принципу интегрирования ускорений, заме-
ряемых в некоторой стабилизируемой системе координат. Инер-
циальная система определяет текущие значения скорости и место-
положение самолета, т. е. дает полную информацию о траектории
движения. Повышение требований к точности решения навига-
ционных задач стимулировало разработку специальных навига-
ционных вычислителей, которые сначала строились на аналоговых
устройствах, а затем на основе бортовой цифровой вычисли-
тельной машины (БЦВМ). Это положило начало использованию
в системах автоматического управления цифровой вычислитель-
ной техники. БЦВМ существенно расширяют возможности ав-
томатического управления полетом. Системы автоматического
управления с БЦВМ могут выполнять более сложные функции,
чем автопилот. Одной из таких функций является автоматическое
управление траекторией по заданной программе.
Параллельно с развитием функций систем управления поле-
том самолета идет их развитие как комплекса бортового обору-
дования. В этом развитии выделяются три стадии. Сначала си-
стемы, выполняющие отдельные функции, имели каждая свой
специализированный вычислитель (аналоговый или цифровой),
свои датчики первичной информации и свои исполнительные
элементы.
Прогресс в развитии цифровой вычислительной техники позво-
лил создать специализированные бортовые цифровые вычисли-
тельные комплексы, объединившие в себе по целевому признаку
функции нескольких бортовых систем, и обеспечить решение
полного объема задач, связанных с этой целью.
Дальнейшее развитие БЦВМ позволило на основе цифровых
каналов информационного обмена объединить все бортовые под-
системы, связать их в единый информационно-управляющий
комплекс, получивший название интегрированного бортового
комплекса.
Существенное повышение роли и ответственности автоматики
управления на борту самолета связано с развитием автоматики
штурвального управления. Начало было положено в конце 1940-х
6
годов, когда появление реактивной авиации, рост скоростей полета
и преодоление звукового барьера обусловили переход на бустер-
ное управление рулями самолета. Система бустерного управления
самолета явилась основой дальнейшей автоматизации ручного
управления самолетом.
Специфические особенности аэродинамических схем реактив-
ных самолетов (крылья малого и умеренного удлинения и большой
стреловидности, вытянутый эллипсоид инерции 1УИХ > 10;
IJIX >10), широкий диапазон режимов полета (^тах/^тш >
> 10 ... 15, #шах > 20 км, Мтах = 2 ... 3) привели к тому, что
обеспечение приемлемых характеристик устойчивости и управляе-
мости только средствами аэродинамической компоновки (выбором
центровки, площадей оперения, органов управления, попереч-
ного V крыла и т. д.) и бустерной системой управления стали прак-
тически невозможным. Для их улучшения в контур ручного
(штурвального) управления стали вводить автоматические уст-
ройства. Тем самым было положено начало развитию автоматиче-
ских систем улучшения характеристик устойчивости и управ-
ляемости.
Принципиальное отличие работы автоматики в режиме руч-
ного управления от режима автоматического управления полетом
заключается в том, что контур автоматики должен функциони-
ровать одновременно с летчиком: отклонение органа управления
должно быть суммой отклонений, обусловленных действиями лет-
чика и работой контура автоматики. При этом контур автоматики
не должен оказывать через сервопривод воздействия на летчика,
мешать ему управлять самолетом.
Характерной особенностью автоматизации ручного управления
самолета является то, что структура этой автоматики целиком
определяется параметрами аэродинамической компоновки само-
лета, характеристиками его устойчивости и управляемости. Так,
для одних самолетов приемлемые характеристики устойчивости
и управляемости обеспечиваются простыми демпферами колеба-
ний тангажа, рыскания и крена (не обязательно всех трех), а для
других — обратными связями по перегрузкам пу, nz. Требуемая
эффективность автоматики (т. е. степень изменения характери-
стик самолета) также может быть различной, что влияет на выбор
диапазона отклонения органов управления от сигналов автомати-
ческой системы: в одних случаях достаточно 2 ... 5° отклонения
органа управления, в других — требуется практически полное
отклонение (10 ... 20°).
Вследствие этого возникает проблема надежности автоматики,
допустимости изменений характеристик устойчивости и управ-
ляемости самолета при отказе автоматической системы, допусти-
мости возмущений, действующих на самолет при отказе, и воз-
можности их парирования летчиком. Иными словами, при исполь-
зовании автоматики в системе ручного управления очень серьезно
ставится вопрос о безопасности полета. Стремление к увеличению
7
углов отклонения органов управления от автоматики привело
к созданию резервированных систем управления, что решило
проблему надежности эффективной автоматики.
Компоновка системы управления самолета, имеющей полностью
автоматические режимы полета и режим ручного,пилотирования
с контуром улучшения устойчивости и управляемости, естественно,
усложняется. Увеличение степени автоматизации управления
обусловило постепенный отказ от механической проводки управ-
ления. На многих современных самолетах некоторые каналы
управления, в том числе и наиболее ответственный — продоль-
ный, переведены на дистанционное (по проводам) управление.
В настоящее время бурно развивается новый аспект в приме-
нении систем автоматического управления самолета и в соответ-
ствии с этим новый подход к проектированию самолетов. Этот
подход связан с возможностью улучшения летно-технических
характеристик самолетов вследствие автоматизации управления.
Улучшение летных данных самолета, уменьшение его взлетной
массы могут быть достигнуты различными средствами, например,
переходом на малые запасы продольной статической устойчивости
или продольную статическую неустойчивость аэродинамической
компоновки самолета при дозвуковых скоростях полета (центр
масс позади фокуса по углу атаки) с обеспечением необходимой
устойчивости в полете посредством автоматики. В этом случае
при М < 1 нет потерь подъемной силы на балансировку, улуч-
шается балансировочная поляра самолета, уменьшаются нагрузки
на крыло, оперение и фюзеляж, увеличиваются предельные
маневренные характеристики и т. д. Здесь обеспечение устой-
чивости самолета возлагается на систему управления, поэтому
к ее функционированию и надежности предъявляются особые
требования. Аналогичные нововведения могут быть применены
и в путевом канале управления.
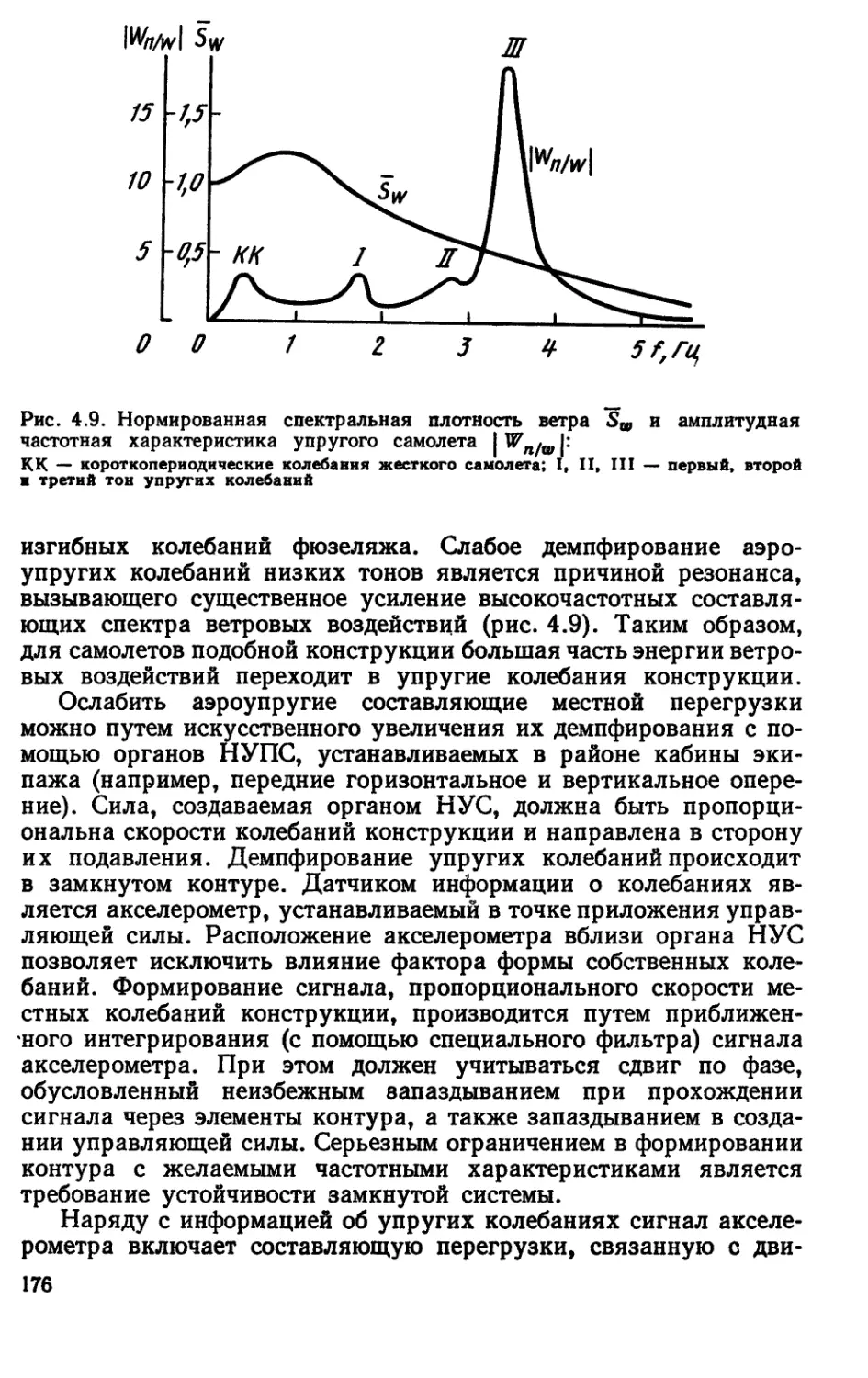
Другим средством является снижение нагрузок на конструк-
цию при маневрах (вследствие их перераспределения), а также
нагрузок от порывов ветра и упругих колебаний конструкции,
в результате чего уменьшается масса силовой конструкции само-
лета, повышается его ресурс. Эти задачи могут быть решены
применением специальных подсистем автоматики. В качестве
органов управления используются как обычные аэродинамические
рули, так и органы механизации крыла. Для решения этих задач
могут быть использованы и дополнительные аэродинамические по-
верхности (в качестве органов управления этих подсистем).
Внедрение таких подсистем на самолетах (их принято назы-
вать активными подсистемами) знаменует новый этап в развитии
автоматизации управления самолетом. При формальном едино-
образии построения всех контуров автоматики самолета по прин-
ципу систем с обратной связью активные подсистемы имеют прин-
ципиально новое смысловое значение. Их назначение — улучше-
ние летных характеристик самолета, а не управление траекторией
8
движения. Активные подсистемы, являясь неотъемлемой частью
самолета, функционируют на всем протяжении полета как при
автоматическом, так и при ручном управлении. Эта особенность
(параллельная работа с летчиком) позволяет рассматривать ак-
тивные подсистемы как часть системы штурвального управления.
Следующим шагом в развитии систем управления самолетом
является непосредственное управление подъемной и боковой
силой самолета. Использование дополнительных аэродинамиче-
ских поверхностей и дистанционного управления дает возможность
реализовать новые формы движения самолета. Так, например,
в продольном движении можно получить изменение высоты при
постоянном угле тангажа, изменение тангажа без изменения
траектории. Аналогичные формы движения получаются и в бо-
ковом движении самолета.
Прямое управление подъемной и боковой силой повышает
быстродействие самолета по перегрузке, придает специфические
динамические свойства самолету, упрощает его пилотирование
и повышает точность управления.
Таким образом, функции автоматики систем ручного управле-
ния самолетом могут быть чрезвычайно многообразными. Высокие
требования к техническим показателям процесса управления,
сложная динамическая структура объекта управления, много-
режимность самолетов — эти факторы существенно усложняют
компоновку системы управления, а в рамках аналоговой техники
реализация ряда функций с заданными показателями вызывает
большие трудности, приводит к неоправданному увеличению
объемов, массы и стоимости систем управления. Естественно
поэтому применение в системах ручного управления бортовых
цифровых вычислительных машин.
БЦВМ расширяют функциональные возможности систем управ-
ления, повышают точность их корректировки, упрощают исполь-
зование различных алгоритмов и т. п. Вместе с тем, БЦВМ имеют
особенности, связанные с дискретностью обработки информации,
которые должны учитываться при анализе динамики самолета
с системой управления, оснащенной БЦВМ.
По мере развития систем управления самолета, расширения
функций и возможностей автоматики возрастает их роль в обеспе-
чении безопасности всего полета самолета. От начальной поста-
новки задачи — обеспечения надежности системы управления,
ее элементов — был сделан шаг к обеспечению практической
безотказности той части системы, отказ которой, по условиям ее
работы является недопустимым. Эта задача решается путем резер-
вирования элементов и подсистем. Одновременно используются
средства контроля и отключения отказавших цепей и элементов.
Развитие систем встроенного контроля, более гибкая комму-
тация резервированных элементов и подсистем, создание опреде-
ленной избыточности информации — все это повышает надежность
систем управления и обеспечивает их безотказность. Автомати-
9
зация управления всех этапов полета, особенно наиболее трудных
для ручного управления, также повышает безопасность полета.
Проблема управления полетом современного самолета является
комплексной: круг задач управления чрезвычайно широк и мно-
гообразен. Подавляющее большинство перечисленных задач управ-
ления успешно решается на современных самолетах. Отечествен-
ные самолеты последних поколений оснащены сложными, много-
функциональными системами управления, например, такие как
Ту-144, Ил-86, Ил-96, МиГ-29 и др.
Значение систем автоматического управления для современ-
ного самолета чрезвычайно велико. В данной книге освещены
вопросы автоматизации управления полетом в целом.
ГЛАВА 1
ЗАДАЧИ И СРЕДСТВА УПРАВЛЕНИЯ ПОЛЕТОМ
1.1. ОБЩАЯ ХАРАКТЕРИСТИКА ПРОЦЕССА УПРАВЛЕНИЯ
Рассматривая вопросы управления самолетом, будем
исходить из положения, что самолет — это техническое средство,
выполняющее некоторую летную операцию. Летная операция,
как и всякая другая операция, представляет собой известную
совокупность упорядоченных действий, которые можно класси-
фицировать как определенные этапы, фазы операции. Опера-
ция — понятие иерархическое: определение круга задач, ре-
шаемых на каком-либо этапе операции, всегда связано с постанов-
кой задач и целей на более высоком уровне ее организации. По-
этому целью управления самолетом является обеспечение успеш-
ного выполнения операции в целом, а следовательно, и всех ее
этапов в отдельности.
Среди этапов любой операции можно выделить такие этапы,
которые обеспечивают возможность полета. Назовем их общими
этапами полета. Это:
1) взлет;
2) набор высоты с разгоном;
3) крейсерский полет (полет по заданному маршруту);
4) смена высоты крейсерского полета с сохранением скорости
(смена эшелона);
5) разгон или торможение на постоянной высоте;
6) снижение с торможением;
7) заход на посадку;
8) полет по глиссаде посадки и приземление.
Этапы операции, в свою очередь, могут представлять собой
последовательность фаз с более узкими целями, выполнение
которых связано с осуществлением определенных маневров или
режимов полета. Так, например, на этапе набора высоты наряду
с поддержанием заданного режима разгона с изменением высоты
выдерживается заданный курс, а также осуществляются маневры
бокового разворота с целью выхода на заданную линию пути.
Реализация целей операции на всех ее этапах производится
вследствие соответствующего управления движением. Движение
самолета как твердого тела характеризуется шестью степенями
свободы — тремя вращательными и тремя поступательными. Соот-
ветственно им положение определяется углами рыскания, тан-
гажа, крена и тремя координатами центра масс. Наряду с отме-
ченными шестью параметрами при исследовании движения рас-
11
значения
сматриваются скорости их изменения. В совокупности эти 12 па-
раметров называются фазовыми координатами. Каждый этап
полета, каждый маневр характеризуется заданным законом из-
менения тех или иных фазовых координат. Поэтому управление
полетом производится по принципу соответствующего регулиро-
вания фазовых координат.
Типовые фазовые траектории для общих этапов полета при-
ведены на рис. 1.1 и 1.2. На рис. 1.1 эти этапы охарактеризованы
в координатах I, Н, г, определяющих положение центра масс.
Характер изменения скорости здесь иллюстрируется зависимо-
стями М (//), представленными на рис. 1.2 (нумерация режимов
соответствует их перечню).
Управление полетом во время выполнения операции может
быть ручным, полуавтоматическим и автоматическим. Незави-
симо от способа управления его конечным результатом является
решение одних и тех же задач.
Задачи управления можно разделить на три уровня:
1) обеспечение требуемой устойчивости и управляемости;
2) стабилизация тех или иных фазовых координат;
3) целенаправленное управление траекторией, т. е. осуще-
ствление сложных траекторных маневров.
Задачи трех уровней связаны между собой иерархически.
При этом самым высоким является уровень целенаправленного
управления траекторией. Решение этих задач происходит путем
регулирования в соответствующих замкнутых контурах управ-
ления.
1.2. КОНТУР УСТОЙЧИВОСТИ И УПРАВЛЯЕМОСТИ
Под устойчивостью объекта понимается его способ-
ность сохранять тот или иной режим движения после прекраще-
ния действия возмущений. Управляемость же определяется ка-
чеством реакции самолета на действия управляющих рычагов
(ручки, педалей, рычага управления двигателем). Оба этих свой-
ства, определяемые динамическими характеристиками самолета,
тесно связаны.
12
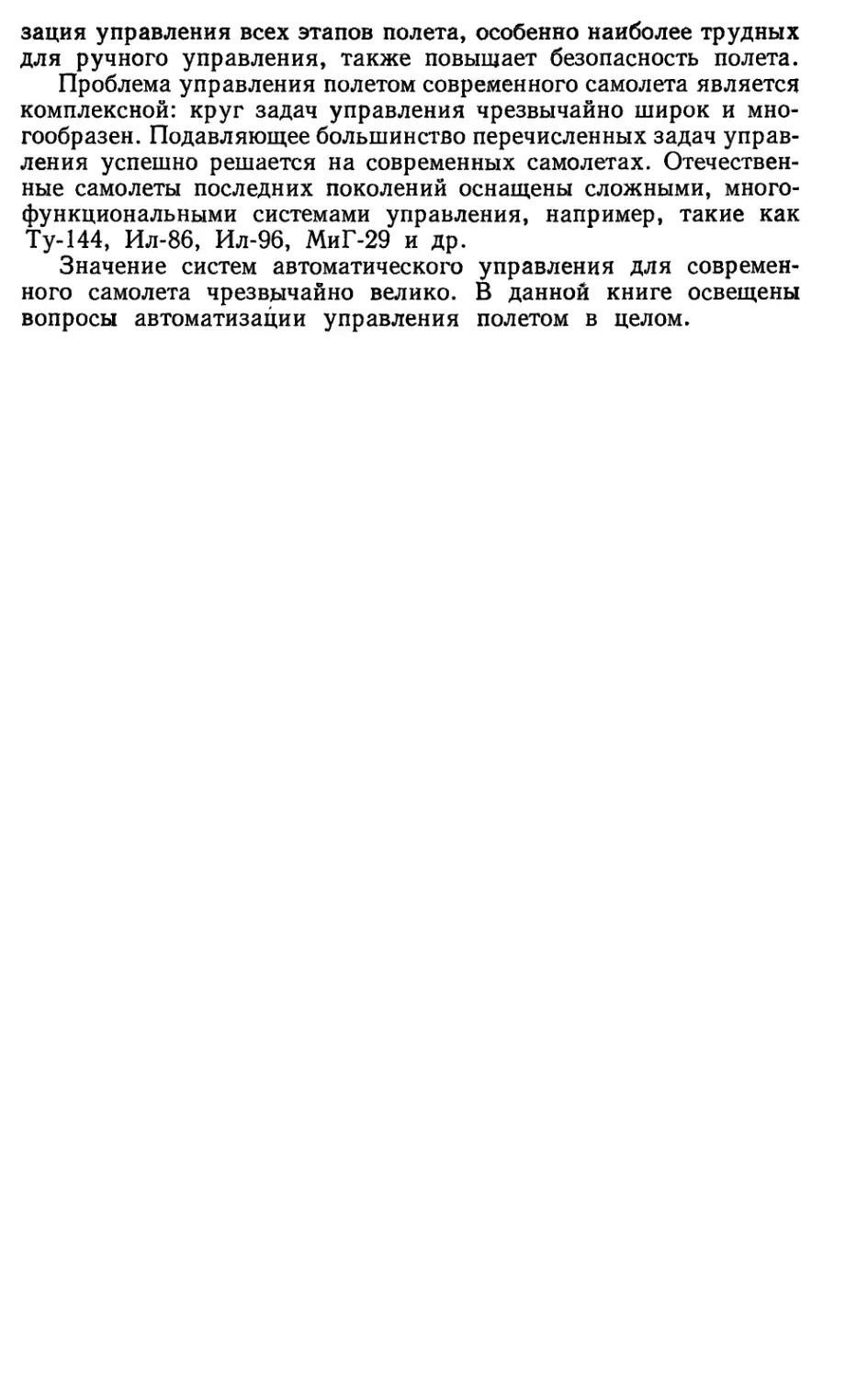
Летчик
Рис. 1.3. Общая схема ручного управления полетом
Действия летчика по управлению самолетом представляют
собой процесс регулирования в замкнутом контуре (рис. 1.3).
На основе информации о характере движения в центральной
нервной системе летчика формируются ответные реакции, кото-
рые в виде нервных импульсов передаются в двигательные ор-
ганы (мускулы рук, ног и других частей тела). Для реализации
этих управляющих команд необходим механизм дозировки управ-
ляющих действий, позволяющий произвести требуемые откло-
нения рычагов управления. Это механизм ощущения перемещений
и усилий, основу которого составляет так называемая кинеста-
тическая обратная связь. Следует отметить, что большую роль
в контроле управляющих действий играют усилия на рычагах
управления, чем их перемещения.
Обычно летчик судит об управляемости по реакции самолета
на управляющие действия, прикладываемые к рычагам. Наиболее
прост в управлении самолет со стабильными (по режимам полета)
характеристиками причинно-следственной цепи «управляющее
действие на рычаге — силовое воздействие на самолет» ('например,
перемещение ДХ — нормальная перегрузка Дп^). Идеальный
случай, когда эта цепь характеризуется усилительным звеном.
Здесь скачкообразному управляющему действию соответствует
скачкообразная реакция. Однако реальный переходный процесс,
зависящий от свойств устойчивости самолета, может существенно
отличаться от идеального (рис. 1.4, а). Поэтому летчик, реализуя
выработанную им «установку» (желаемое изменение того или иного
параметра движения), вынужден осуществлять, как правило,
достаточно сложные управляющие действия в контуре с обратной
связью (рис. 1.4, б). Этот замкнутый контур, в котором при управ-
лении обеспечивается соответствие фактической и желаемой ре-
акций самолета, назовем контуром устойчивости и управляемости.
В контуре устойчивости и управляемости летчик осуществляет
сложное регулирование, пытаясь приспособиться к изменяющимся
динамическим свойствам самолета и действующим возмущениям
такИхМ образом, чтобы суммарные динамические характеристики
замкнутой системы «летчик—самолет» были как можно более ста-
бильны. Возможности летчика по адаптации к изменяющимся
свойствам самолета ограничены: он в состоянии обеспечить хоро-
13
Рис. 1.4. Схема отработки входных команд на изменение перегрузки:
а — свободный самолет; б — управляемый самолет; / — перемещение рычага управле-
ния; 2 — идеальная реакция по перегрузке; 3 — реальная реакция по перегрузке сво-
бодного самолета; 4 — установка летчика (желаемая реакция по перегрузке); & — реак-
ция по перегрузке управляемого полета
шие динамические качества всей системы в целом только при
вполне определенных характеристиках устойчивости и управляе-
мости самолета. Показатели собственной устойчивости и управ-
ляемости самолета регламентируются рядом требований, выра-
ботанных практикой эксплуатации самолетов. Эти требования
направлены на то, чтобы обеспечить:
наиболее полное использование маневренных возможностей
самолета;
наибольшую простоту пилотирования;
максимальное ограждение самолета от выхода на недопустимые
режимы полета.
С развитием авиации показатели устойчивости и управляе-
мости современных самолетов ухудшаются. Их улучшение только
аэродинамическими и конструктивными средствами без ухудшения
летных данных самолета не представляется возможным. Здесь
на помощь приходит автоматика управления. Улучшая характе-
ристики устойчивости и управляемости, автоматика системы
штурвального управления помогает летчику в решении функцио-
нально необходимых задач управления, поэтому самолет воспри-
нимается им как объект с приемлемыми пилотажными харак-
теристиками.
1.3. КОНТУР СТАБИЛИЗАЦИИ
Хорошие характеристики устойчивости и управляе-
мо, hi м и/in ion» непременным условием успешного решения любой
1НЛГ1ЮЙ irtjtii’iH. Процесс целенаправленного управления само-
14
летом в ходе выполнения операции может быть разложен на
ряд типовых фаз. Для большинства из них характерным является
поддержание той или иной фазовой координаты относительно
постоянного значения. Например, на этапе крейсерского полета
скорость постоянна, угол тангажа стабилизируется относительно
значения, равного балансировочному углу атаки, а угол рыска-
ния — относительно значения, соответствующего заданному курсу.
Заход на посадку производится по траектории, состоящей из
прямолинейных участков, при постоянной скорости; набор вы-
соты и снижение происходит, как правило, при неизменной инди-
каторной скорости и т. д.
Большинство типовых этапов летной операции может быть
построено как комбинации двух или более режимов стабилизации,
которые определяются стабилизацией либо:
угла тангажа,
угла курса,
угла крена,
высоты полета,
вертикальной скорости,
скорости (истинной, индикаторной или числа М).
Некоторые параметры могут стабилизироваться в двух ва-
риантах управления, например: курс — с помощью руля на-
правления или элеронов, скорость — с помощью двигателя или
руля высоты.
После того как установлен режим стабилизации и определено
стабилизируемое значение параметра, действия летчика* сводятся
к довольно простым операциям. Эти операции заключаются в не-
прерывном устранении ошибки стабилизации, определяемой по
приборам (авиагоризонту, высотомеру, указателю скорости и
числа М, вариометру, указателю курса и др.). Выдерживая режим
полета по приборам, летчик становится звеном замкнутого кон-
тура стабилизации, входной величиной которого является рассо-
гласование между заданным и текущим значениями стабилизируе-
мой координаты, а выходной величиной —• усилие, создаваемое
на рычаге управления, или его перемещение.
Процесс длительной стабилизации для летчика утомителен.
Для разгрузки летчика на борту самолета устанавливают ряд
устройств, выполняющих функции автоматов стабилизации. Эти
устройства объединяются в две системы — автопилот и автомат
тяги. По традиции под автопилотом понимают систему автомати-
ческого управления, выполняющую функции стабилизации угло-
вого положения самолета, высоты и скорости (с помощью руля
высоты). Систему стабилизации скорости путем изменения тяги
двигателей называют автоматом тяги.
Разгрузка летчика' от длительных однообразных операций
управления снижает его утомляемость и может повысить общую
безопасность полета. При этом летчик должен иметь возможность
15
вмешательства в управление на любой стадии полета (принцип
«пересиливания» автоматики).
Системы автоматической стабилизации существенно помогают
летчику в осуществлении сложных маневров. Так, с помощью
автоматики стабилизации высоты и крена может быть осуще-
ствлен маневр приведения самолета в горизонтальный полет
из любого исходного движения.
1.4. КОНТУР ЦЕЛЕНАПРАВЛЕННОГО УПРАВЛЕНИЯ
ТРАЕКТОРИЕЙ
Ручное или автоматическое управление в контурах
стабилизации является одним из элементов процесса целенаправ-
ленного управления траекторией, под которым подразумевается
комплекс управляющих действий, связанных с реализацией того
или иного этапа полета.
Целенаправленное управление траекторией включает в себя
гибкое программирование и реализацию намеченной программы.
Гибкое программирование полета производится на основе конеч-
ной цели осуществляемого этапа (например, приземление само-
лета) и информации о текущих значениях навигационных пара-
метров, под которыми понимают фазовые координаты, опреде-
ляющие местоположение и скорость самолета относительно земли.
Рассмотрим навигационные параметры, используемые для
самолетовождения. Это, прежде всего, курс самолета — угол
между горизонтальной проекцией продольной оси самолета и
северным направлением меридиана. При полете без скольжения
в отсутствии ветра курс характеризует направление движения
самолета. При наличии ветра воздушная среда перемещается от-
носительно земли. В этом случае скорость относительно земли не
совпадает с воздушной (относительно воздуха).
В навигации важное значение имеет путевая скорость, под
которой понимают проекцию скорости относительно земли на
горизонтальную плоскость. Направление путевой скорости опре-
деляется путевым углом. Угол между горизонтальной проекцией
вектора воздушной скорости и путевой скоростью называют углом
сноса. При полете без скольжения угол сноса характеризует
отклонение вектора путевой скорости относительно продольной
оси самолёта.
При определении высоты полета различают барометрическую
(относительную) и истинную высоту. Барометрическая высота
отсчитывается от некоторого условного уровня (аэродром посадки,
вылета, уровень моря и т. д.). Под истинной высотой понимается
высота самолета над пролетаемой в данный момент точкой земной
поверхности.
Для определения места самолета относительно поверхности
земли могут использоваться различные системы координат, на-
пример, полярная, географическая (Широта—долгота), прямо-
16
угольная, ортодромическая. В ортодромической системе местопо-
ложение самолета определяют относительно ортодромии — дуги
большого круга, соединяющего две заданные точки земли.
Для получения информации о навигационных параметрах
используются навигационные измерители: инерциальная система,
доплеровский измеритель скорости и сноса (ДИСС), радиосредства
дальней (РСДН) и ближней (РСБН) навигации, измерители баро-
метрической и истинной (радиовысотомеры) высоты и т. д. Все
эти измерители входят в состав так называемого навигационного
комплекса самолета. Информация о навигационных параметрах
передается летчику через навигационные индикаторы системы
отображения информации (СОИ). В состав СОИ входят также
пилотажно-навигационные приборы — прЬстейшие измерители,
в которых чувствительный элемент и индикатор объединены в одну
конструкцию. Кроме того, летчик может получать информацию
через радиосвязь р землей и другими самолетами.
Общая картина показаний индикаторов и сведений извне
называется информационной Моделью полета. По этой модели
летчик получает представление о режиме полета. Формирование
в сознании летчика представления о режиме полета в целом
происходит в результате ряда действий, направленных на счи-
тывание показаний индикаторов и осмысливание получаемой
информации. Время, затрачиваемое на весь этот процесс (время
ознакомления с индикацией), можно представить как сумму [2]:
п
Т ~ S (+ ATi) + ТМ + т0,
где п — число контролируемых параметров; Д/г — время счи-
тывания показаний; Лтг — время, затрачиваемое на перевод
взгляда с одного индикатора на другой; тм — время формирова-
ния в сознании летчика обобщенной информационной модели
полета (формирование зрительного образа); т0 — время осмысли-
вания информационной модели.
Время Т зависит от многих факторов: натренированности
летчика, размещения и числа индикаторов, наглядности в ото-
бражении информации и т. д.
Осмыслив информацию, летчик получает представление о со-
стоянии управляемой системы. На основе этого представления
он вырабатывает программу действий на будущее, а затем уже
принимает меры по осуществлению этой программы.
Время программирования действий (время принятия решений)
существенно зависит от числа логических операций. Оно увеличи-
вается по мере усложнения логического процесса и в среднем
составляет 3 ... 5 с. В результате время ответной реакции летчика
на текущее состояние самолета может достигать 10 с.
Если время ответной реакции близко к времени выполнения
данного режима полета, наступает так называемый дефицит
времени для принятия решений. В этих условиях может возник-
17
нуть состояние психической напряженности, отрицательно влияю-
щее на работоспособность летчика.
Современная автоматика в состоянии разгрузить летчика
от чрезмерного напряжения в процессе принятия решения по
целенаправленному управлению траекторией. Одним из видов
помощи летчику является установка так называемых командных
(директорных) приборов, которые подсказывают летчику тактику
его действий, указывают, что он должен делать в создавшейся
ситуации. Взяв на себя логические функции управления, директор-
ные приборы непрерывно вырабатывают команды на требуемые
отклонения рычагов управления самолета. Отработка этих команд
является простой операцией компенсаторного слежения.
Автоматизация управления траекторией полета необходима
прежде всего для посадки — самого напряженного участка по-
лета с точки зрения психических нагрузок, испытываемых летчи-
ком. Командные приборы системы посадки существенно облег-
чают управляющие действия летчика, сводя их к действиям
по стабилизации определенных параметров. Процесс управления
посадкой может быть полностью автоматизирован. Система авто-
матической посадки не только разгружает летчика, но и повышает
эффективность использования самолетов.
Современное состояние навигационной и вычислительной тех-
ники дает возможность запрограммировать и полностью автома-
тизировать и ряд других общих этапов полета, таких, как набор
высоты, полет по маршруту и т. д.
Итак, мы рассмотрели три контура управления. Аэродина-
мическая компоновка самолета по существу определяет компо-
новку его системы штурвального управления, структуру и пара-
метры входящей в нее автоматики. В этом принципиальное от-
личие контура системы штурвального управления от следующих
за ним в иерархической последовательности внешних контуров
управления — контура стабилизации параметров движения (кон-
тура автопилота) и контура траекторного управления.
Структура автопилота определяется перечнем параметров,
которые необходимо стабилизировать (тангаж, крен, курс, вы-
сота). Аэродинамическая компоновка самолета оказывает влия-
ние лишь на параметры автопилота, его передаточные числа и
через систему ручного управления — на принцип его включения.
Контур траекторного управления определяется задачей (на-
пример, автоматическая посадка). Аэродинамическая компоновка
самолета косвенно влияет на параметры этой системы через те
динамические характеристики, которые реализуются у самолета
с двумя внутренними контурами управления, а также через его
летно-технические характеристики (располагаемую маневрен-
ность) и режим полета. В задачах навигации и управления траек-
торией на больших участках полета самолет вообще может рас-
сматриваться как материальная точка и здесь важны только его
выходные летно-технические характеристики.
18
1.8. КОМПЛЕКСИРОВАНИЕ СИСТЕМЫ УПРАВЛЕНИЯ
САМОЛЕТА
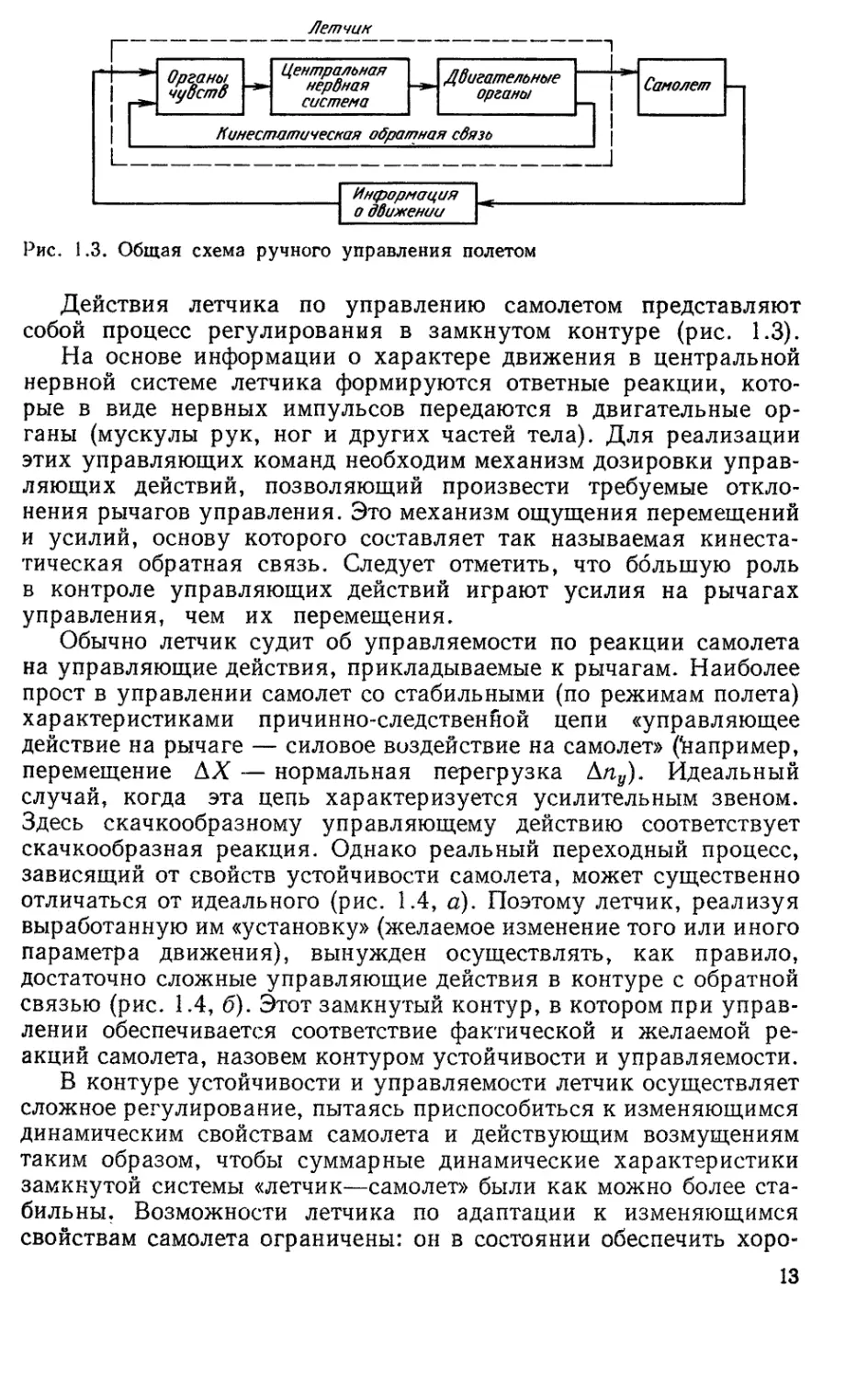
Ручное и автоматическое управление современным са-
молетом осуществляется о помощью разнообразных устройств
и приборов, составляющих комплекс бортового оборудования
[5], который может быть разделен на две основные функцио-
нальные части (рис. 1.5):
1) система штурвального управления (СШУ) — совокупность
всех средств, передающих управляющие воздействия летчика
и автоматики на органы управления самолетом, и автоматических
устройств улучшения пилотажных и летных характеристик само-
лета, работающих параллельно с летчиком;
2) пилотажно-навигационный комплекс (ПН К) — совокуп-
ность измерителей, индикаторов и автоматических управляющих
устройств, с помощью которых на борту создается информацион-
ная модель полета и решаются задачи стабилизации, автоматиче-
ского и полуавтоматического (по директорному прибору) самолето-
вождения.
Состав системы управления и круг возлагаемых на нее задач
устанавливаются конкретно для каждого самолета в зависимости
от его типа и назначения, конструктивно-аэродинамической схемы,
режимов использования и т. д.
Для самолета, не требующего улучшения характеристик устой-
чивости и управляемости, минимально необходимым является
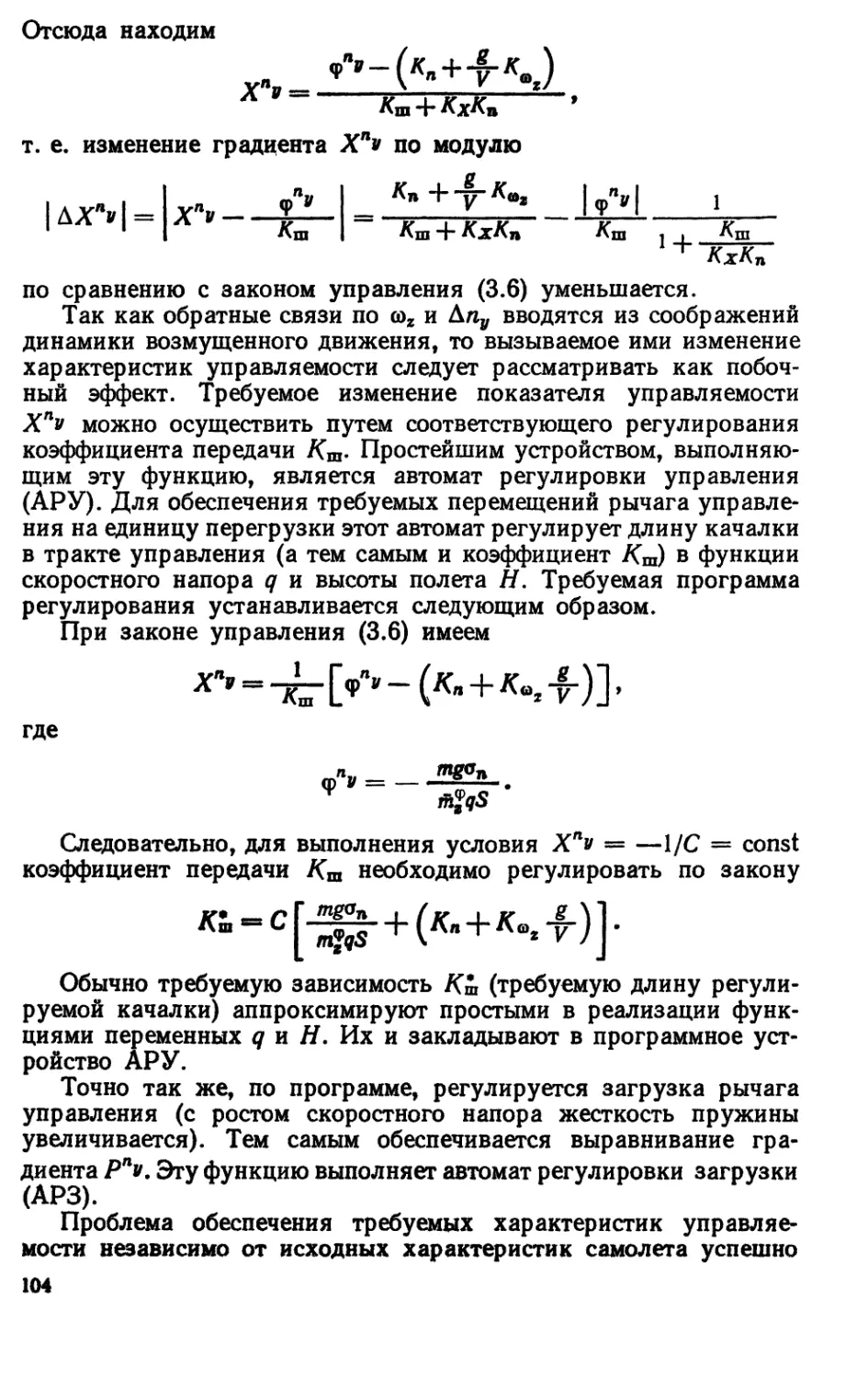
Рис. 1.5. Комплекс оборудования системы управления самолета
19
комплекс, состоящий из исполнительной части системы управле-
ния (включающей рычаги управления с загрузочными устрой-
ствами и механизмами триммирования, проводку управления и
рулевые приводы) и приборов индикации пилотажно-навигацион-
ной обстановки. Необходимость улучшения пилотажных свойств
самолета заставляет вводить в состав СШУ специальные автомати-
ческие устройства, а требование автоматизации самолетовождения
приводит к необходимости установки на борт самолета системы
автоматического управления (САУ).
Эти средства автоматики управления, осуществляя регулиро-
вание в контурах с обратной связью, обрабатывают информацию,
поступающую с измерителей параметров движения самолета,
и формируют управляющие команды. Обработка информации
производится в аналоговых или цифровых вычислительных устрой-
ствах. Звеном преобразования электрических управляющих сиг-
налов, вырабатываемых вычислителями, в механические переме-
щения органов управления являются следящие системы — серво-
приводы. Принято сервоприводы относить к исполнительной
части системы управления.
Представленная на рис. 1.5 схема характеризует структуру
системы управления с составом оборудования, ориентированным
на решение следующих основных задач:
1) система штурвального управления:
улучшение характеристик устойчивости и управляемости;
повышение летных и маневренных свойств;
ограничение предельных режимов;
повышение комфорта при полете в турбулентной атмосфере;
2) пилотажно-навигационный комплекс:
стабилизация режима полета;
приведение самолета в горизонтальный полет;
навигация и автоматическое управление по программе;
автоматизация взлета и посадки;
определение пилотажно-навигационных параметров и их
индикация летчику.
Эта структура предполагает подразделение измерителей по
трем группам. Первую группу образуют измерительные устрой-
ства навигационного комплекса, предназначенные для вычисления
фазовых координат, определяющих положение и скорость само-
лета относительно земли. Во вторую группу отнесены устройства,
в задачу которых входит централизованное измерение нужных
параметров полета и выдача соответствующей информации всем
потребителям «системы управления. Такие устройства получили
название централей. К ним относятся гировертикаль (измерение
углов тангажа и крена), курсовая система (измерение курса)
и система воздушных сигналов (СВС), измеряющая воздушную
скорость, число М, вертикальную скорость, высоту полета и т. д.
Наконец, третью группу составляют собственные информационные
устройства САУ и СШУ. Это измерители перегрузок (акселеро-
20
метры), угловых скоростей, углов атаки и скольжения и др.
К этой же группе следует отнести и пилотажно-навигационные
приборы системы отображения информации (СОИ), объединяющие
чувствительный элемент и индикатор.
Выделенные группы измерителей отличаются предъявляемыми
к ним требованиями по точности, надежности, динамическим
характеристикам. Самыми точными должны быть навигационные
измерители и централи, для измерителей СШУ наиболее актуаль-
ными являются требования к их динамике и надежности.
Следует отметить, что современные измерители представляют
собой устройства, требующие обработки первичной информации
по достаточно сложным алгоритмам. Поэтому многие из .них
оборудуются собственными цифровыми вычислителями. На основе
такого вычислителя организуется, например, система воздушных
сигналов. Навигационный комплекс представляет собой систему
более высокого уровня. В нем с помощью центральной ЭВМ об-
рабатываются сигналы, вырабатываемые как его собственными
измерительными устройствами, так и измерительными центра-
лями.
Рассмотренная структура комплекса оборудования представ-
ляет собой типичную большую систему. Как большую систему
комплекс характеризует следующие особенности:
1) системное построение, связанное с выделением функцио-
нально законченных подсистем;
2) ярко выраженная иерархическая структура, определяющая
порядок подчинения и соединений (связей) подсистем;
3) информационная и функциональная избыточность за счет
измерителей различной физической структуры и систем
различного уровня сложности и точности, а также полуав-
томатического пилотирования по командным (директорным)
приборам.
В соответствии с иерархией контуров управления алгоритми-
ческие модули систем автоматики могут быть подразделены на
три уровня (см. рис. 1.6).
Схема, приведенная на рис. 1.6, раскрывает иерархическую
структуру управления. Целенаправленное управление траекто-
рией полета в процессе выполнения летной операции является
задачей высшего уровня. Это управление осуществляется путем
требуемого изменения углового положения самолета или пере-
грузок. Поэтому в качестве параметров траекторного управления
принимают заданные значения углов тангажа, крена, курса или
заданные значения перегрузок. Сигналы заданного изменения
этих параметров, вырабатываемые автоматикой управления тра-
екторией, поступают в модули стабилизации углов и перегрузок,
которые в иерархической структуре располагаются уровнем ниже.
Эти модули формируют управляющие команды на перемещение
органов управления, отрабатываемые приводами. На вход этих
приводов поступают также сигналы из систем улучшения пилотаж-
21
Рис. 1.6. Уровни управления
ных и летных характеристик самолета. Это нижний исполнитель-
ный уровень иерархии.
Высшим звеном иерархии является летчик. Он включает
системы уровня III при автоматическом управлении полетом,
вырабатывает логику включения и задает режимы стабилизации
систем уровня II, осуществляет контроль, управляет самолетом
по индикаторам СОИ.
Обмен информацией внутри систем комплекса совершается
с помощью электрических сигналов. Преобразование электриче-
ских сигналов в механические перемещения органов управления
осуществляют сервоприводы. Вмешательство летчика Б работу
систем автоматического управления производится посредством
задающих устройств, преобразующих механические воздействия
в электрические сигналы.
Наряду с разделением модулей по функциональным иерархи-
ческим уровням («рассечение по вертикали») их разделяют и по
принадлежности к тому или иному каналу управления, например,
канал руля высоты, элеронов, руля направления, двигателя
(«рассечение по горизонтали»). Каждый из каналов управления
также является самостоятельным функциональным образованием
(объединением модулей).
22
Для современных систем управления характерна функцио-
нальная избыточность, проявляющаяся в том, что управление
самолетом может осуществляться несколькими способами. Этих
способов четыре.
1. Автоматическое управление траекторией. Все общие ре-
жимы полета программируются в ЭВМ навигационного комп-
лекса. С момента включения автоматики управление движением
самолета производится по отклонениям от программы полета,
определяемым в навигационном комплексе. Система траекторного
управления вырабатывает на основе этих отклонений команды
в системы уровня II. Эти команды отрабатываются системами
стабилизации путем соответствующих воздействий на рули и
двигатель. По такой же схеме происходит управление и в режимах
автоматического взлета и посадки. Только здесь все функции
управления траекторией возлагаются на систему взлёта и по-
садки. При автоматическом управлении полетом летчик выполняет
функции включения тех или иных систем и общего контроля за
ходом выполнения операции.
2. Управление траекторным движением по командному при-
бору. В этом режиме управление самолетом производится лет-
чиком вручную — посредством воздействия на рычаги управле-
ния. Стратегия управления траекторным движением вырабаты-
вается при этом системами уровня III. Так же, как и в рассмотрен-
ном выше способе управления, требуемую угловую ориентацию
самолета определяют здесь системы целенаправленного управле-
ния траекторией. Однако приведение самолета в заданное угловое
положение (отработку заданных углов тангажа и крена или пере-
грузки и крена) теперь осуществляет уже летчик, а не системы
автоматической стабилизации. Требуемое управление произво-
дится с помощью командного прибора СОИ. На стрелки команд-
ного прибора подаются сигналы рассогласования, и в задачу
летчика входит устранение этого рассогласования путем соответ-
ствующего перемещения рычагов управления. Таким образом,
здесь дополнительно к указанным выше функциям летчик выпол-
няет задачу стабилизации самолета. Решение этой задачи летчиком
облегчается функционированием автоматики системы штурваль-
ного управления, оказывающей параллельное воздействие на
рули. Для обеспечения устойчивости по скорости может также
включаться автомат тяги.
3. Автоматическая стабилизация параметров движения. При
этом способе самолетовождения стратегия управления траекто-
рией центра масс самолета вырабатывается летчиком. Ориенти-
руясь по пилотажно-навигационным (не командным) индикаторам,
летчик сообразно обстановке и этапу полега вызывает тот или
иной из режимов стабилизации, выполняемых автопилотом и
автоматом тяги. Управление самолетом по намеченной летчиком
логике производится посредством его манипуляций с задающими
устройствами (рукояткой, задатчиком автомата тяги, кнопкой
23
вызова режимов и т. д.). Автоматика функционирует в составе
систем уровней I и II.
В течение полета летчику приходится неоднократно переходить
от режима автоматического управления, когда требуемые управ-
ляющие воздействия задаются с помощью специальных задатчи-
ков, рукояток и кнопок, к штурвальному и наоборот. Эти пере-
ходы требуют определенного времени на адаптацию летчика.
Поэтому перед разработчиками автоматических систем ставят
задачу обеспечения возможности наложения двух режимов управ-
ления друг на друга. Эта возможность может использоваться не
только на переходных фазах, но и для корректировки действий
системы автоматического управления с помощью штурвала.
Такой тип управления, при котором летчик через обычные рычаги
управления совершает действия, совместные с действиями систем
автоматического управления, получил название «совмещенное
управление».
4. Полуавтоматическое управление по пилотажно-навигацион-
ным индикаторам или земным ориентирам. При этом способе
управления логический вклад автоматики в процесс управления
минимален. Летчик управляет самолетом с помощью рычагов
управления, в полном объеме решая всю сумму задач, связанных
с целенаправленным управлением полетом. Автоматика может
выполнять при этом только функцию улучшения характеристик
самолета (системы уровня I).
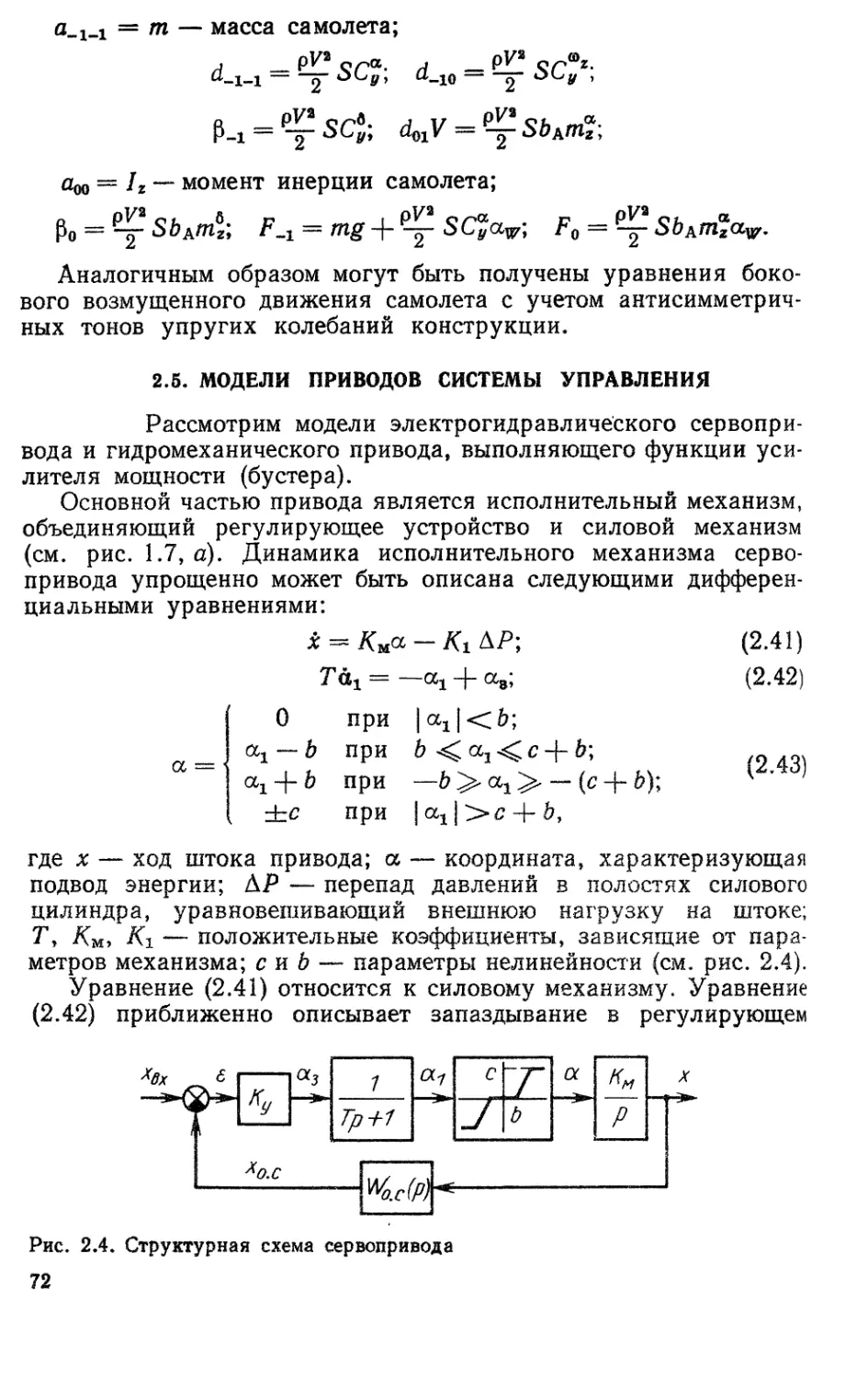
1.6. ИСПОЛНИТЕЛЬНАЯ ЧАСТЬ СИСТЕМЫ
УПРАВЛЕНИЯ САМОЛЕТА
Исполнительными устройствами систем управления,
преобразующими командные сигналы в механические перемещения
органов управления, являются приводы. В авиации применяются
приводы гидравлического и электрического принципов действия.
Приводы, подсоединенные непосредственно к аэродинамическим
рулевым поверхностям, называют рулевыми приводами. Наряду
с отработкой командного сигнала они выполняют функцию уси-
ления мощности. Привод, главной задачей которого является
преобразование электрического командного сигнала в механи-
ческое перемещение, называют сервоприводом.
Любой привод представляет собой следящую систему, входной
величиной которой является управляющий сигнал, а выходной —
перемещение либо скорость конечного звена привода, т. е. эле-
мента, соединенного с рабочим органом (рис. 1.7). Связь между
входом и выходом привода осуществляется с помощью обратной
связи. Если сигнал обратной связи несет информацию о перемеще-
нии выходного звена, обратную связь называют позиционной.
В этом случае управляющий сигнал вызывает соответствующее
смещение выходного звена привода относительно нейтрали. Если
вход и обратная связь гидравлического привода — механические,
24
Рис. 1.7. Схема привода:
О — обобщенная структура; б — гидромеханический привод; в — электрогидравличе-
СКИЙ привод; 1 — управляющий сигнал; 2 — сравнивающее устройство; 3 — регули-
рующее устройство; 4 — силовой механизм, 5 — выходное звено; б — звено обратной
связи; 7 — сигнал обратной связи; 8 — сигнал рассогласования
привод называют гидромеханическим. Гидравлический привод,
работающий по электрическим сигналам входа и обратной связи,
называют электрогидравлическим.
Иногда от сервоприводов требуется, чтобы входной сигнал
был пропорционален не смещению, а скорости выходного элемента
привода. Это может быть обеспечено обратной связью по скорости
перемещения выходного элемента (скоростная обратная связь).
Нечто среднее между приводами с позиционной и со скоростной
обратной связью представляют изодромные приводы.
Будем полагать, что рулевые поверхности перемещаются
гидромеханическими рулевыми приводами (бустерами). Этому
соответствует бустерный вариант исполнительной части системы
управления.
Бустерное управление на самолете появилось в 50-х годах,
В период освоения реактивной авиацией сверхзвуковых скоростей.
Для преодоления больших, во много раз превышающих физи-
ческие возможности человека, аэродинамических шарнирных мо-
ментов на органах управления стали использовать гидромехани-
ческие рулевые приводы — бустеры.
При бустерном управлении летчику достаточно приложить
К рычагам управления очень небольшие усилия, необходимые для
преодоления трения в проводке управления и трения в золотнике
бустера, чтобы вызвать отклонение органа управления. Действую-
щий при этом аэродинамический шарнирный момент не ощущается
летчиком, он полностью передается на конструкцию самолета
через опору бустера.
В том случае, когда на органах управления уровень шарнирных
моментов очень высок и отказ гидросистемы (например, снижение
25
давления в ней) приводит к потере управляемости в основных
каналах (по тангажу и крену) и тем самым влечет катастрофиче-
ские последствия, на самолетах применяются две гидросистемы
(одну из них условно называют основной, другую — бустерной).
Эти системы полностью автономны (начиная от гидронасосов),
они не должны иметь общих точек, чтобы отказы одной гидроси-
стемы не влияли на работу другой. Приведение в движение орга-
нов управления производится с помощью дублированных золот-
ников двухкамерного бустера. При отказе одной гидросистемы
(потери давления в ней) отклонение органа управления обеспе-
чивается другой гидросистемой.
Поскольку вероятность отказа одной гидросистемы достаточно
мала, то отказ в одном полете двух гидросистем (если не допущено
ошибок при сборке и эксплуатации, приводящих к ликвидации
их автономности) — событие, практически невозможное (вероят-
ность Р = 10“10 ... 1(Г12 на час полета). Здесь необходимо отме-
тить весьма важное свойство гидросистем, а именно: наличие про-
стого критерия основного вида отказа — потери давления. Это
свойство позволяет обеспечить достаточно высокую надежность
бустерного управления даже при использовании двух гидросистем
(в системах, где нет критерия отказа, используется более высокая
степень резервирования: трех- и четырехкратное резервирование).
Бустер является исполнительным элементом всех контуров
управления на самолете. Поэтому очень важно учитывать его
характеристики, понимать степень их влияния на формирование
этих контуров управления.
Очевидно, что от исполнительного звена, по крайней мере
в диапазоне характерных частот внутренних контуров, требуется
возможно меньшее внесение фазового запаздывания, что дости-
гается повышением добротности бустера. Однако при этом не-
обходимо обеспечивать устойчивость самого привода.
Рассмотрим вопросы выбора тяги бустера и скорости его пере-
кладки. Тяга бустеров в продольном канале управления выби-
рается на основании расчета располагаемых шарнирных моментов
органов управления для всех возможных режимов полета, конфи-
гурации самолета, его центровок. Шарнирный момент, как пра-
вило, рассчитывается для установившегося полета. Здесь могут
встретиться две характерные ситуации: одна обычно возникает
при дозвуковых и околозвуковых скоростях, другая — на сверх-
звуковых скоростях.
1. При заднем расположении оси вращения аэродинами-
ческий фокус органа управления оказывается впереди — явление
так называемой перекомпенсации органа управления. В этом слу-
чае аэродинамический шарнирный момент направлен в сторону
отклонения органа управления и препятствует его возвращению
в исходное положение. При этом должна быть обеспечена нормаль-
ная работа системы управления во всем диапазоне режимов по-
лета, в том числе и при отказе одной гидросистемы. В противном
26
случае при недостаточности тяги бустера самолет становится
неуправляемым.
2. При явлении недокомпенсации — расположения аэроди-
намического фокуса позади оси вращения — шарнирный момент
препятствует отклонению органа управления. Недостаточность
тяги бустера при работе одной гидросистемы приводит к снижению
маневренности самолета — ситуация менее опасная, чем в пре-
дыдущем случае.
Допустимость той или иной степени перекомпенсации должна
рассматриваться в каждом конкретном случае отдельно, след-
ствием чего должен явиться совместный выбор положения оси
вращени-я и тяги бустера.
Выбор скорости перекладки бустеров определяется из условия
обеспечения необходимого быстродействия системы, отсутствия
влияния ограничения скорости перекладки на пилотирование и
на функционирование системы автоматической стабилизации.
При ручном пилотировании должны рассматриваться режимы
и этапы полета, требующие точного, быстрого и достаточно энер-
гичного действия органами управления. К ним, в частности, от-
носятся режим захода на посадку, взлет, высший пилотаж. На
этих режимах для маневренного самолета может потребоваться
(и это в рамках физических возможностей летчика) отклонение
стабилизатора на Дф « 10° за время Д/ « 0,5 с. Для того чтобы
летчик не почувствовал «упора» во время отклонения ручки,
необходимо, чтобы скорость перекладки стабилизатора была не
менее 20 °/с. Отсюда можно определить необходимую скорость
перекладки бустер а.
На том же маневренном самолете скорость отклонения эле-
ронов и руля направления должна быть несколько больше, чем
стабилизатора, хотя бы из соображений большего диапазона
их отклонений
(бэ « ±20 ... 25°, бн « ±25 ... 30°).
На тяжелых самолетах в силу их большей инерционности
требования к быстродействию системы снижаются.
Бустер лишает летчика возможности непосредственно ощу-
щать нагрузку на руль, ощущать скоростной напор. Без этих
ощущений управлять самолетом невозможно. Поэтому бустерная
система управления содержит такие функционально необходимые
элементы, как загружателй рычагов управления и триммерные
механизмы.
Пружинная загрузка рычагов управления производится по
всем трем каналам. Для снятия усилий на рычагах управления
используют триммерный механизм. В бустерной системе управле-
ния он реализуется специальным сервоприводом в пружинном
загружателе. Этот сервопривод имеет скоростную обратную
связь и работает в релейном режиме по сигналам с кнопки трим-
мирования летчика (рис. 1.8).
27
Рис. 1.8. Схема бустерного управления:
/ — рыча! управления; 2 — бустер, J — пружинный загружателп.: 4 — сервопривод
триммиронамия со скоростной обратной связью; 5 — релейный элемент, 6 — кнопка
триммирования
В настоящее время находит применение так называемая
электрогидравлическая загрузка ручки управления (штурвала,
рис. 1.9). В этой следящей системе усилие на ручке управления
замеряется специальным датчиком, преобразуется через вычис-
литель и электрогидравлический сервопривод в перемещение
проводки управления. Согласование перемещений рычага управ-
ления и сервопривода осуществляется через датчик усилий. Тем
самым обеспечивается требуемая загрузка рычага. В системе
с электрогидравлической загрузкой триммирование производится
путем подачи соответствующего электрического сигнала непо-
средственно на вход сервопривода, осуществляющего загрузку
рычага управления.
После общего описания бустерной системы управления целе-
сообразно кратко остановиться на требованиях, предъявляемых
к этой системе.
Динамические характеристики системы ручного управления
оказывают существенное влияние на оценку летчиком пилотаж-
ных свойств самолета. Поэтому дополнительно к требованиям
Рис. 1.9. Схема электрогидравлической загрузки ручки управления:
* — бустер; 2 — сервопривод загрузки; 3 •— датчик усилий; 4 сигнал триммирова-
хшя; 5 — задатчик сигнала триммировання
28
но устойчивости и управляемости самолета выдвигаются тре-
бования по динамическим характеристикам системы управления,
в частности:
допустимому трению в проводке управления;
допустимым люфтам в проводке управления;
степени весовой балансировки проводки. Несбалансирован-
ность проводки вызывает дополнительные усилия на рычагах
управления при изменении перегрузок и угловых ускорений
самолета, что при освобожденном управлении приводит к само-
произвольному перемещению рычагов управления и к изменению
динамических характеристик самолета в возмущенном движении;
допустимому запаздыванию в отклонении органа управления
на приложение усилия к рычагу управления. Эта характеристика
помимо трения и люфтов проводки улавливает инерционные
характеристики проводки и запаздывание привода. Принято это
запаздывание нормировать величиной фазового запаздывания
в частотной характеристике на определенной частоте (1,0 Гц —
для легких самолетов, 0,5 Гц — для тяжелых).
1.7. ВКЛЮЧЕНИЕ АВТОМАТИЧЕСКИХ СИСТЕМ
В ТРАКТЫ УПРАВЛЕНИЯ САМОЛЕТОМ
Включение автоматики в тракты управления самолетом
осуществляется с помощью сервоприводов. Применяются два
способа подсоединения сервоприводов к проводке управления —
последовательное и параллельное.
При последовательном включении перемещения управляющего
органа по командам ручного и автоматического управления сум-
мируются. Этот способ реализуется по схеме раздвижной' тяги
(рис. 1.10, а) или дифференциала (рис. 1.10, б). В обеих схемах
обеспечивается механическая развязка каналов ручного и авто-
матического управления, так что перемещения выходного звена
сервопривода не влияют на движение рычага ручного управления.
При параллельном включении (рис. 1.10, в) сервопривод
жестко подсоединяется к проводке управления, руль переме-
щается вместе с рычагом управления. Здесь летчик и автоматика
управляют самолетом раздельно. В режиме ручного управления
сервопривод автоматики либо отключается от проводки управле-
ния (с помощью муфты), либо находится в «закольцованном»
состоянии (соединение полостей цилиндра протоком для жидкости).
В особых ситуациях на режиме автоматического полета лет-
чик может вмешаться в работу автоматики, взяться за рычаг и
«пересилить» ее. «Пересиливание» производится путем отключения
автоматики по сигналу с датчика усилия, прикладываемого к ры-
чагу управления.
Из особенностей рассмотренных способов включения следует,
что автоматика системы штурвального управления, работающая
одновременно с летчиком, должна подключаться только последо-
29
a — последовательное включение (раздвижная тяга); б — последовательное включение
(дифференциал); в — параллельное включение; / — рычаг управления; 2 — гидроме-
ханический рулевой привод; 3 — сервопривод; 4 — управляющий сигнал автоматики;
3 — пружинный загружатель
вательно. Что касается систем автоматического управлейия, то
они могут быть и последовательного, и параллельного типа.
Современный уровень развития электрогидравлических при-
водов позволяет организовать на самолете так называемое элекг
тродистанционное управление. В системе электродистанционногО
управления механическая проводка заменена электрической ли-
нией, связывающей датчик перемещений рычага управления
с входом силового электрогидравлического рулевого привода.
На этот же вход подаются электрические сигналы от автоматиче-
ских систем управления (рис. 1.11, а). Это частный случай после-
довательного подсоединения автоматики — с электрическим сум-
мированием управляющих воздействий. Дистанционное автомати-
ческое управление параллельного типа требует введения допол-
нительного сервопривода, подсоединенного к рычагу управления
(рис. 1.11, б).
Рис. 1.11. Схема электродистанционногО управления:
а — последовательное включение автоматики; б — параллельное включение автома-
тики; / — рычаг управления; 2 — электрогидравлический рулевой привод; 3 — датчик
перемещения; 4 — сигнал перемещения рычага; 5 — управляющий сигнал автоматики;
6 — сервопривод
30
В полете режимы ручного и автоматического управления
могут чередоваться. Естественно требовать, чтобы переход с од-
ного режима управления на другой происходил плавно, без рыв-
ков рулей и резких возмущений движения. Рассмотрим пути тех-
нического обеспечения этого требования.
Как автоматическое, так и ручное управление сводится в итоге
К созданию управляющего воздействия на входе рулевого при-
вода. Это воздействие имеет медленно и быстро изменяющиеся
составляющие. Медленное движение руля связано с балансиров-
кой в установившемся режиме полета, быстрое — имеет место
в переходном процессе и при парировании возмущений. Переход
от одного способа управления к другому происходит обычно на
установившейся фазе полета, когда руль находится в баланси-
ровочном положении (положении, обеспечивающем балансировку
самолета). При ручном управлении летчик триммирует усилия на
рычаге управления таким образом, чтобы балансировочному от-
клонению руля соответствовало нейтральное положение пружин-
ного загружателя (нулевое усилие на рычаге). Поэтому, когда
перед переходом к автоматическому управлению летчик освобо-
ждает рычаг управления, руль остается в балансировочном по-
ложении. Следовательно, для мягкого сопряжения автоматиче-
ского управления с ручным, во-первых, требуется, чтобы в момент
электрического подключения автоматики сервопривод при нуле-
вом сигнале на его входе оставался в исходном положении. Это
требование выполняется при последовательном подключении сер-
вопривода, а для его удовлетворения при параллельной схеме
необходимо организовать «плавающую» обратную связь, одна
ИЗ возможных схем которой рассмотрена ниже.
С другой стороны, для мягкого перехода от автоматического
управления к ручному необходимо, чтобы в момент отключения
автоматики нейтральному (по усилию) положению рычага управ-
ления соответствовало балансировочное отклонение руля. Это
достигается с помощью устройства автоматического триммиро-
няиия, обеспечивающего «перекачку» медленной составляющей
управляющего сигнала автоматики в тракт ручного управления.
Схема «перекачки» при последовательном включении системы
автоматического управления представлена на рис. 1.12, а. Конеч-
ным звеном линии «перекачки» является сервопривод со скоростной
обратной связью, воздействующий на рычаг управления через
пружинный загружатель. Начальным звеном этой линии служит
нелинейный элемент, возбуждаемый входным сигналом сервопри-
вода автоматики. Изменение балансировки в режиме автоматиче-
ского управления вызывает медленное смещение штока сервопри-
вода автоматики относительно нейтрали. При выходе этого смеще-
ния за пределы зоны нечувствительности нелинейного элемента
сервопривод загрузочного механизма начинает с малой постоянной
скоростью перемещать рычаг управления в сторону требуемого
изменения балансировки. В результате балансировочное отклоне-
31
9
Рис. 1.12. Схемы мягкого сопряжения ручного и автоматического управления*.
а — последовательное включение; б — параллельное включение; 1 — рычаг управле-
ния; 2 — гидромеханический рулевой привод; 3 сервопривод с позиционной обратной
связью; 4 —- сервопривод со скоростной обратной связью; 5 — пружинный загружатель;
6 — сигнал ручного триммирования; 7 — управляющий сигнал автоматики; 8 — сигнал
обратной связи; 9 — нелинейный элемент с зоной нечувствительности; 10 — датчик
перемещений
ние обеспечивается по каналу ручного управления, а «средняя»
составляющая управляющего сигнала автоматики стремится
к нулю. Нетрудно видеть, что при таком взаимодействии каналов
при выключении автоматики руль остается в балансировочном
положении.
В системе автоматического управления параллельного типа
воздействия от рычага управления и сервопривода автоматики
передаются на руль по одному и тому же тракту. В этом случае
должна быть создана «плавающая» обратная связь сервопривода
автоматики. На рис. 1.12, б изображена схема, обеспечивающая
мягкое сопряжение ручного и автоматического управления па-
раллельного типа. Здесь обратная связь сервопривода автоматики
вводится по деформации пружинного загружателя так, что нуле-
вому сигналу на входе сервопривода соответствует нейтральное
состояние пружины. Это обеспечивает безударное включение си-
стемы автоматического управления (при условии, что к момент}
включения усилие на рычаге управления было стриммировано),
32
Если в процессе автоматического управления балансировка изме-
няется, то работает механизм «перекачки», аналогичный рас-
смотренному выше. Вследствие этого происходит медленная де-
формация пружины (в сторону снятия напряжений), приводящая
К изменению сигнала обратной связи. Так как положение руля
Не должно изменяться, то управляющий сигнал на сервоприводе
автоматики приводится в соответствие с изменившимся сигналом
обратной связи (система автоматического управления восприни-
мает «дрейф» сигнала обратной связи как возмущение и парирует
его). В результате «средняя» составляющая управляющего сиг-
нала автоматики стремится к нулю, и в момент отключения авто-
матики пружина поставит руль в балансировочное положение.
Рассмотренные схемы мягкого сопряжения не могут, разу-
меется, устранить рывок при включении автоматики, если управ-
ляющий сигнал в этот момент значительно отличается от нуля.
Этого удара в случае необходимости можно избежать путем со-
ответствующего формирования управляющего сигнала (ограниче-
ние, введение фильтра и т. д.), а также применением согласования
п момент включения автоматики сигналов заданного и текущего
значений регулируемого параметра.
1.8. БОРТОВЫЕ ВЫЧИСЛИТЕЛЬНЫЕ УСТРОЙСТВА
Бортовые вычислительные устройства, входящие в со-
став систем бортовой автоматики, подразделяются на аналоговые,
цифровые и гибридные — аналого-цифровые.
Аналоговые вычислительные устройства — это устройства не-
прерывного действия. Входные и выходные сигналы этих устройств
(токи или напряжения) изменяются непрерывно по времени.
Цифровые вычислительные устройства являются устройствами
дискретного действия. Прием входных информационных сигналов
Н выдачу выходных управляющих сигналов эти устройства про-
изводят в дискретные моменты времени. Частота, с которой ве-
дется, прием или выдача сигналов в таких устройствах, называется
тактовой частотой или частотой прерывания, а соответствующий ей
период времени называется периодом дискретности. Прием и вы-
дача различных сигналов цифровым вычислителем может произ-
водиться с различной частотой. В этом случае система, содержа-
щая такой вычислитель, является системой с несколькими ча-
стотами прерывания и соответственно с несколькими периодами
дискретности.
Сам процесс преобразования непрерывных сигналов в дискрет-
ную форму называется квантованием по времени.
В непрерывных системах, содержащих только аналоговые
пычислительные устройства, необходимая функциональная связь
между входными и выходными сигналами системы может быть
реализована за счет использования линейных и нелинейных ре-
шающих блоков и R—С цепочек.
3 3»К. 278
33
Математические законы управления непрерывных систем опи-
сываются дифференциальными уравнениями, непрерывными фор-
мульными зависимостями, наборами непрерывных передаточных
функций, которые в вычислительных устройствах реализуются
с использованием определенного набора схемных решений с при-
менением операционных усилителей.
Используя линейные и нелинейные решающие блоки, можно
построить схему, реализующую необходимые функциональные
связи между входами и выходами системы. При этом необходимо
подчеркнуть, что реализуемые аналоговым вычислителем функции
жестко связаны с входящей в его состав аппаратурой.
Если в системе необходимо увеличить число функций, то не-
обходимо к аппаратуре системы добавить новые решающие блоки,
реализующие новые функции. Поэтому и масса и стоимость не-
прерывных систем линейно возрастают с увеличением числа функ-
ций. Это свойство аналоговых вычислителей ограничивает воз-
можность их эффективного использования для реализации очень
сложных систем управления. Кроме того, такие недостатки ана-
логовой техники, как смещение нулей, разбросы характеристик
элементов, нестабильность их параметров при изменении условий
окружающей среды делают затруднительным реализацию в ана
логовых системах определенных функций, а также заметно услож
няют настройку и регулировку таких систем. Цифровые системы,
где в качестве вычислительного устройства используется БЦВМ
обладают по сравнению с аналоговыми целым рядом преимуществ
высокой точностью и стабильностью вычислений,
практически неограниченной сложностью реализуемых функ
ций,
возможностью использования больших банков данных и т. п
Основные элементы БЦВМ иллюстрируются на рис. 1.13 н;
примере вычислителя, который был использован в экснеримен
тальной цифровой системе управления самолета А-7Д.
Схематически структура цифровой системы может быть пред
ставлена в виде структуры, приведенной на рис. 1.14. На этом ж<
рисунке показано, как изменяется информация при ее прохо
ждении через цифровую систему. Сигналы, которые формируют^
цифроаналоговыми преобразователями, могут иметь дискретны!
спектр значений, который определяется числом разрядов АЦ1
и ЦАП. Если, например, без учета знакового разряда ЦАП имее
п разрядов, то число дискретных уровней выходного сигнал
равно 2П — 1, а шаг квантования по уровню h — итах/(2п — 1) я
« 2nwmax, где цП1ах — максимальное значение сигнала на выход
ЦАП. Прохождение сигналов через цифровую систему упоря
дочено по времени и характеризуется определенной циклограммой
Циклограмма определяет порядок приема, обработки и выдач/
по времени сигналов в цифровой системе. Пример циклограмм^1
характеризующий прохождение сигналов через цифровую ci
стему, приведен на рис. 1.15. В начале такта определенное врем
34
Рис. 1.13. Функциональная схема БЦВМ:
I - коммутатор аналоговых входных сигналов 2 — устройство ввода разовых команд»
I мультиплексные переключатели и драйверы; 4 — аналого-цифровой и цифроана-
МИОИЫЙ преобразователи; 5 — центральный процессор; 6 — блок управления вводом-
нынодом; 7 — адаптер памяти; 8 — память; 9 — запоминающие устройства; 10 — устрой-
ств вывода разовых команд; 11 — устройство обмена данными; 12 — каналы обмена
с другим вычислителем
taiui тратится на аналого-цифровое преобразование сигналов,
«Ходящих в цифровой вычислитель, время тА затрачивается про-
цессором на вычисление управляющего сигнала, а время тцАП
необходимо для преобразования выходных цифровых сигналов
* непрерывные сигналы
цифровые сигналы
I ,|4. Структура цифровой системы:
датчики; 2 — аналого-цифровой преобразователь (АЦП); 3 — процессор; 4 — по-
ннннню аипоминаюЩее устройство (ПЗУ); 5 — оперативное запоминающее устройство
о’ устройство ввода-вывода разовых команд: 7 — таймер; 8— цифроаналого-
feiH нр^обриэователь (ЦАП); 9 — приводы
У* 35
Рис. 1.15. Циклограмма работы вычислителя:
1 — 'Прием и обработка информации; 2 — вычисление управляющих сигналов; 3 — вы-
дача управляющих сигналов; 4 — другие задачи
с цифровой системой штурвального управления очень важно
знать циклограмму работы вычислителя.
Запаздывание тЛ, связанное с вычислением управляющих
воздействий, зависит от характеристики быстродействия про-
цессора.
Современный вычислитель имеет: быстродействие порядка
500 000 операций в секунду; объем памяти 32 000 слов; разряд-
ность 16 или 32. Усложнение систем управления, возрастание
числа выполняемых ими функций, увеличение объема используе-
мой при работе системы информации требуют постоянного уве-
личения объема памяти и быстродействия БЦВМ.
Применение в системах управления самонастройки, сложных
алгоритмов распознавания ситуаций и принятия решения, эле-
ментов искусственного интеллекта потребует доведения быстро-
действия бортовых вычислителей до 100-106 операций в секунду.
Как и в аналоговых системах, для достижения высокого
уровня надежности аппаратуры цифровые вычислители резерви-
руются. Параллельно в системе могут работать два, три или че
тыре вычислителя. При этом вычислители объединяются в вы-
числительную систему. В такой системе вычислители работаю!
либо синхронно, либо асинхронно. В соответствии с этим и циф-
ровая система называется либо синхронной, либо асинхронной
В синхронной системе имеются общие для всех вычислителей
часы, которые задают общие для всех вычислителей отсчеты вре
мени. В асинхронной системе все вычислители различных под
каналов резервирования работают независимо друг от друга
каждый по своим часам. При этом начала тактов работы вычисли
телей различных подканалов резервирования могут не совпа
дать друг с другом. На рис. 1.16 приведена структурная схем!
цифровой трехкратно резервированной дистанционной системь
управления самолета F-8C. По своим вычислительным возмож
ностям бортовые цифровые вычислительные системы значителыи
превосходят аналоговые, что дало возможность создания ком
плексных систем управления, когда в одном цифровом вычисли
теле реализуется много функций и законов управления. Cocrai
реализуемых цифровым вычислителем программ в течение пс
лета на различных этапах выполнения полетной задачи може
по желанию летчика изменяться. Для изменения реализуемоп
36
Рис. 1.16. Структура цифровой дистанционной системы управления самолета F-8C:
/ - БЦВМ; 2 — блок интерфейса, 3 — команды управления поверхностями; 4 ко-
манды от летчика и сигналы датчиков; 5 — пульт управления в кабине летчика; 6 —
раорьмия система управления; 7 — переключатели; 8 — электронное оборудование
^арнопривода; 9 — сервопривод; 10 — силовой привод
бортовым вычислителем закона управления могут быть исполь-
зованы разовые команды от летчика или специальные управляю-
щие сигналы, которые летчик может задать цифровому вычисли-
телю через специальные устройства ввода информации, располо-
женные в кабине. Различные законы управления в одной цифровой
системе управления могут иметь различные периоды дискретности.
В Этом случае бортовые программы состоят из наборов блоков,
Имеющих различную частоту решения. Например, цифровая
система управления может иметь следующий набор функций:
улучшение устойчивости и управляемости,
компенсация перебалансировки в трансзвуковой зоне,
стабилизация курса,
стабилизация крена,
стабилизация тангажа,
стабилизация высоты.
Для каждой из перечисленных задач, выполняемых системой
управления, имеется свой закон управления, которому соответ-
ствует своя частота прерывания.
Структура бортовой программы, содержащей весь набор функ-
циональных блоков, показана на рис. 1.17. При этом в рамках
одной функциональной задачи алгоритмы управления различных
контуров могут иметь различные частоты решения.. Например,
и рамках функций улучшения устойчивости и управляемости
алгоритм контура обратной связи по wz может иметь частоту ре-
шения 80 Гц, а алгоритмы контуров обратных связей по угловым
скоростям крена, рыскания или по перегрузке — частоту реше-
37
Рис. 1.17 Структура бортовой программы:
1 — логика выбора ветвей; 2 — к программам предполетной проверки; 3 — блоки вы-
числения передаточных чисел; 4 — блоки логики и переключений; 5 <— самоконтроль
процессора; 6 — законы стабилизации; 7 — проверка контрольной суммы команд; 8 —
проверка контрольной суммы данных; 9 — тестирование таймера; 10 — законы управ-
ления; 11 — Контроль; /2 — формирование выходных сигналов
ния 40 Гц. Сама вычислительная система, используемая для
реализации комплексной системы управления, может быть либо
централизованной, либо распределенной.
Бортовые цифровые вычислители, входящие в систему управ-
ления самолетом кроме задач формирования управляющих сиг-
налов выполняют большое количество других функций:
обмен информацией с другими вычислителями,
контроль работоспособности собственной аппаратуры (АЦП,
ЦАП, процессора, памяти и т. п.),
контроль различных подсистем (на этапе предполетной под-
готовки),
обработки информации и т. п.
Соответственно и время, затрачиваемое процессором на вычис-
ления, связанные с формированием управляющих сигналов,
составляет около 17% всего времени в такте. Все остальное время
занято обработкой информации, синхронизацией, обменом ин-
формацией с другими вычислителями и т. п.
Аналогично обстоит дело с распределением памяти. На
рис. 1.18 приведена схема распределения памяти в цифровом
вычислителе системы управления самолета F = 8,
38
Рис. 1.18. Схема распределения памяти:
I — данные; 2 — операционная система и управление архи-
тектурой вычислительной системы; 3 — законы управле-
ния; 4 — управление избыточностью датчиков; 5 ~ про-
граммы предполетного контроля; 6 — программы индика-
ции: 7, 8, 9 — разделы памяти, не используемые
Программы, реализующие законы управ-
ления, вместе с данными занимают поряд-
ка 30% всего объема памяти. Остальная
память занята программами, обеспечиваю-
щими работу процессора и вычислительной
системы в целом (операционная система и
программы для управления конфигурацией
вычислительной системы), программами об-
наружения отказов во входной информации
и выборе достоверных сигналов, програм-
мами наземного контроля и т. п.
При исследовании динамики самолета с
цифровой системой управления для состав-
ления динамической схемы цифровой вычис-
лительной системы наряду с информацией
о типе аналого-цифрового и цифроаналогового преобразователя,
циклограмме работы вычислителей требуется также информация
о взаимодействии вычислителей друг с другом, методах обра-
ботки входной, выходной информации, наличии синхронизации,
порядке решения процессором задач, времени, затрачиваемом на
каждую из задач, и т. п.
1.9. ОСНОВНЫЕ АСПЕКТЫ БЕЗОПАСНОСТИ ПОЛЕТА
Безопасность полета — свойство самолета, заключаю-
щееся в его способности осуществлять воздушные перевозки
без угрозы для жизни людей. Количественно уровень безопас-
ности характеризуется вероятностью того, что в полете не воз-
никает катастрофическая ситуация, которая оценивается средним
количеством катастрофических ситуаций, приходящихся на один
полет.
Проблема обеспечения необходимого уровня безопасности по-
летов одна из наиболее сложных и трудоемких и теснейшим обра-
зом связана со всеми отраслями авиационной науки и техники.
Многолетний опыт создания и эксплуатации авиационной
техники привел к созданию различных технических средств, ме-
тодов, приемов, обеспечивающих создание конструкций, систем,
узлов самолета с заданными характеристиками надежности.
Практикой систем автоматического управления самолетом
выработаны свои методы и принципы обеспечения безопасности
полетов.
При рассмотрении вопросов автоматизации управления само-
лет рассматривается как объект управления, с которым взаимодей-
39
ствует летчик, и система управления, в первую очередь, должна
обеспечивать самолету такие характеристики устойчивости и
управляемости, чтобы летчик мог управлять самолетом. Ха-
рактеристики устойчивости и управляемости описываются целым
рядом параметров, которые должны лежать в определенных пре-
делах.
При этом сама система должна надежно функционировать и
выполнять свои функции с необходимой вероятностью в течение
полета. Если в процессе пилотирования летчик может вывести
самолет на опасный режим (режим сваливания в штопор, разру-
шающую перегрузку), то система должна автоматически предот-
вращать выход на опасные режимы. Отказы тех или иных эле-
ментов систем могут приводить к нарушению их функциониро-
вания. С точки зрения влияния на безопасность полета отказы
делятся на опасные и безопасные. Опасные — это те отказы, ко-
торые приводят к опасным ситуациям, а безопасные — те, ко-
торые не приводят к возникновению опасной ситуации. Напри-
мер, выход из строя рулевого привода обычно является опасным,
а отказ какой-либо радионавигационной системы на этапе полета
по маршруту — безопасным. Один и тот же отказ в зависимости
от условий, в которых он проявился, может быть опасным или без-
опасным, например, отказ радионавигационной системы на ре-
жиме автоматической посадки будет опасным.
По своему проявлению отказы можно разделить на активные
и пассивные. Активные отказы легко обнаруживаются. Напри-
мер, отказ гидросистемы может проявиться в резком падении
давления, а вот отказ датчика угловых скоростей может быть
долго незамеченным, если самолет долго находился в спокой-
ном горизонтальном полете. Пассивные отказы таят в себе оп-
ределенную опасность, так как могут накапливаться и вызывать
в конце концов резкое нарушение функций той или иной системы.
Отказы элементов системы управления могут приводить к ча-
стичному или полному прекращению выполнения ими своих
функций. При этом возможны ситуации, когда отказ системы
не приводит к опасному изменению пилотажных и динамиче-
ских характеристик самолета, и летчик в состоянии безопасно
управлять самолетом только лишь при увеличенной рабочей
нагрузке. В этом случае система называется отказобезопасной.
Если летчик не в состоянии парировать отказ системы и продол-
жать безопасное пилотирование после ее отказа, то для такой
системы допускается очень малая вероятность отказа, и такая
система должна быть практически безотказна.
Обеспечение отказобезопасности производится главным обра-
зом путем ограничения хода сервопривода (в системе последова-
тельного типа) или управляющего сигнала на входе сервопривода
(в системе параллельного типа). Так, например, построены дем-
пферы угловых колебаний самолета. Ограничение их воздействия
на рули величинами отклонений порядка 2 ... 5° дает возможность
40
2
7 2 3 4
Кратность резервирования
Гн« 1.19. Диаграмма вероятности отказа системы
иччику при их отказе быстро ликвидировать последствия отказа.
Нюрой мерой, обеспечивающей отказобезопасность, является
«и раничение скорости развития возможного отказа. Например,
н с истеме, где это возможно, могут применяться приводы с ма-
п»1мн скоростями перемещений. Так организуются контуры авто-
матического триммирования.
Многие системы, требующие полного отклонения руля (10 ...
не могут быть построены по принципам отказобезопас-
ное! и и должны быть практически безотказными.
В этой ситуации для достижения требуемого уровня безопас-
ности полета используется резервирование элементов систем и
। истом в целом, а также применяются средства контроля и само-
1О1Н‘1р()ЛЯ.
Элементы систем и основные системы резервируются двух-,
ipi’x- и четырехкратно. Кратность резервирования отдельных
ни (являющих частей системы управления зависит от требуемого
уровня надежности системы и от вероятности отказа резервируе-
мою элемента или системы. Качественно связь между уровнем
надежности и кратностью резервирования системы может быть
охарактеризована зависимостью, показанной на рис. 1.19. Если,
например, Q — вероятность отказа нерезервированной системы
41
--------электрическая связь
--------магистраль гидросистемы
— механическая связь
Рис. 1.20. Схема резервирования системы:
/ — измерители; 2 — вычислители; 3 — кворум-элементы; 4 — сервоприводы; 5 —
бустер; 6 — гидросистемы
равна 10"3 на час полета, то в дублированной системе при отсут-
ствии надежных средств обнаружения отказа вероятность отказа
системы возрастет и станет равна 2Q, а при наличии таких средств—
уменьшится и будет равна 2QKQ, где QK — вероятность несрабаты-
вания средств контроля.
В трижды резервированной системе легко находится и изоли-
руется отказ одного подканала, а в четырежды резервирован-
ной — отказы двух подканалов.
Чтобы полностью отказала трижды резервированная система,
необходимо, чтобы в ней произошли отказы двух подканалов,
а в четырежды резервированной — отказы трех подканалов ре-
зервирования. Соответственно вероятности отказа трех- и че-
тырехкратно резервированных систем будут пропорциональны Q2
и Q3. Важнейшим принципом построения резервированных систем
является принцип отсутствия общих точек. Общая точка — это
элемент резервированной системы, отказ которого приводит к от-
казу системы в целом.
В трех- и четырехкратно резервированных системах для об-
наружения и изоляции отказов используется контроль сравне-
нием. Система при этом строится по «гамачному» принципу
(рис. 1.20), и в ее структуру включаются кворум-элементы, осу-
ществляющие выбор достоверной информации. Обнаружение и
42
изоляция отказов в системе типа приведенной на рис. 1.20 осу-
ществляется следующим образом. Кворум-элемент из четырех
приходящих на его входы сигналов, формирует некоторый сред-
ний выходной сигнал. Если один из вычислителей откажет, то
ею сигнал будет отличаться от выходного сигнала кворум-эле-
меита и по этому рассогласованию отказ будет обнаружен и изоли-
рован. Для того чтобы случайные выбросы сигналов и малые от-
личия сигналов, связанные с разбросами элементов, из которых
состоит вычислитель, не приводили к срабатыванию средств кон-
троля и отключению исправного вычислителя, назначается порог
срабатывания и время задержки. Отказ фиксируется только тогда,
когда ошибка какого-то вычислителя превысит порог срабаты-
вания в течение заданного времени.
Выходные сигналы элементов голосования в системе, показан-
ной на рис. 1.20, подаются на входы сервоприводов. Сервопривод
преобразует входной электрический сигнал в перемещение штока,
который управляет положением золотника бустера. Все выходные
элементы сервоприводов соединены между собой общим звеном.
11оэтому, если произошел отказ одного из сервоприводов, то в трех-
или четырехкратно резервированной системе оставшиеся два или
Три исправных сервопривода пересиливают один отказавший и
обеспечивают правильное управление золотником бустера. Так
КйК питание систем осуществляется от источников электро- и
ГНДропитания, отказы которых приводят к отказам связанных
с ними элементов системы, то эти источники питания также ре-
зервируются.
Кроме резервирования имеются другие пути повышения на-
дежности функционирования автоматических систем.
Повышение надежности функционирования автоматических
систем может быть достигнуто также путем создания функциональ-.
пой избыточности в комплексе автоматики. В силу функциональ-
ной избыточности выход из строя отдельных систем может быть
компенсирован другими возможностями системы. Так, например,
программный набор высоты с разгоном может быть заменен (при
выходе из строя автоматики выработки команд) последователь-
ностью режимов стабилизации высоты и числа М, т. е. автомати-
ческое управление по программе заменяется автоматической ста-
билизацией. При выходе из строя быстродействующего серво-
привода системы автоматического управления на режиме посадки
Ине видимости земли летчик может перейти к режиму полуавто-
мйтнческого управления по директорному прибору и закончить
маневр.
Применение в системах автоматизации управления БЦВМ
Внесло в проблему обеспечения безопасности полета свои особен-
ности. Аппаратурная надежность цифровой вычислительной си-
«чгмы, как и в других системах, достигается резервированием.
При этом в отличие от аналоговых систем для обеспечения двух-
О1квэпости в цифровой системе управления может оказаться до-
43
статочным использование трехкратного резервирования. Первый
отказ, как и в обычных системах, в резервированной вычисли-
тельной системе может быть обнаружен и изолирован контролем
сравнением, а второй отказ — средствами самоконтроля БЦВМ,
которые позволяют это сделать с высокой вероятностью.
В отличие от аналоговых систем, где функции системы жестко
связаны с аппаратурой, в цифровых системах аппаратура и вы-
полняемые системой функции являются относительно независи-
мыми: в рамках одной и той же аппаратуры путем изменения
бортовых программ можно изменять выполняемые цифровой си-
стемой функции.
При этом возникает проблема отказов цифровой системы из-за
проявления ошибок в программном обеспечении. Если цифровая
система многократно (трех или четырех) резервирована, а про-
граммы во всех БЦВМ одинаковые, то программная ошибка, если
она имеется, может вывести из строя всю систему в целом. В та-
кой системе программа является для различных каналов резерви-
рования общей точкой.
Для того чтобы программное обеспечение не было общей точ-
кой, желательно для каждой из БЦВМ, входящей в состав резер-
вированной системы, иметь свои программы, но это не всегда
возможно из-за трудоемкости разработки и отработки програм-
много обеспечения. Путями решения проблемы защиты цифровых
систем от ошибок программного обеспечения являются:
а) совершенствование методов разработки и отработки про-
грамм, автоматизация этих процессов;
б) применение специальных проблемно-ориентированных язы-
ков программирования;
в) применение резервного управления, обеспечивающего без-
опасный полет при проявлении программной ошибки.
Примером системы, рассчитанной на один отказ сервоприво-
дов и два отказа каналов электроники, является система дистан-
ционного управления самолета «Круссейдер» (США) (рис. 1.21).
Основой здесь является система управления с цифровым вычисли-
телем. Резервная система состоит из трех электронных аналого-
вых каналов. В основной (цифровой) системе вырабатываются два
управляющих сигнала — действующий и контрольный. Во время
функционирования цифровой системы клапаны перепуска резерв-
ных каналов сервопривода исключают их из работы.
При отказе в действующем или контрольном канале основной
системы гидравлический компаратор, реагирующий на разность
давлений действующего и контрольного сервоклапанов, передает
управление на резервную систему с помощью переключателя кла-
панов перепуска и блокировки. Трехканальный привод в режиме
резервного управления работает как смеситель, суммирующий
усилия, пропорциональные сигналам, передаваемым по трем
резервным каналам. Для обнаружения отказа сравниваются
сигналы давления в каналах резервной системы. Отказав-
44
8
Рис. I 21. Многоканальная система дистанционного управления:
й общи я схема; б — сервопривод; / — датчик перемещений; 2 — цифровой вычисли-
те Лй; •'/ — электронные устройства резервной системы; 4 — измерители; 5 — сервопри-
Ннд» Л — контрольный канал; 7 — действующий канал; 8 — сигналы резервной системы;
9 * сервоклапан; 10 — клапан перепуска и блокировки; 11 — компаратор; 12 — сигнал
данлення
шнй канал привода тем самым может быть обнаружен и от-
ключен.
Применение БЦВМ в системах управления дает большие воз-
можности для широкого использования программных и аппа-
ратно-программных средств повышения надежности систем управ-
ления, которые предполагают использование всевозможных тестов
дли контроля состояния элементов подсистем, проверок данных
ни правдоподобие, формирование избыточной информации с ис-
пользованием информационных источников различной физиче-
ской природы и т. п.
Особенно ответственным звеном здесь являются средства ин-
дикации пилотажно-навигационной обстановки на приборной
доске летчика, которые создают летчику информационную мо-
дель полета. Следовательно, наряду с требованием надежности
к ним предъявляются требования наглядности, емкости (без
нелишней перегруженности) и доходчивости воспроизведения
1екущей обстановки. От этого зависит эффективность его дейст-
вий, особенно в критических ситуациях. Повышению информа-
iявности и наглядности индикации способствуют интегрирование
Информации в компактные блоки, избирательная индикация на-
электронно-лучевой трубке и лобовом стекле информации, не-
обходимой для управления лишь на данном режиме полета.
Качество отображения информации существенно влияет на
•надежность» летчика. Немаловажное значение при повышении
Надежности эргономической системы самолет—летчик имеет также
рациональное распределение функций управления между челове-
ком и автоматикой. Здесь необходимо найти оптимум в удовлетво-
рении двух противоречивых требований. С одной стороны, крайне
желательно разгрузить летчика от однообразных, продолжитель-
ных операций управления (например, стабилизация высоты),
45’
а, с другой стороны, очень важно, чтобы у летчика сохранялось
состояние высокой тренированности, способности активно вклю-
читься в управление в сложной ситуации.
Для защиты летчика от утомления операции по управлению
траекторией полета на длительных режимах целесообразно воз-
ложить на автоматику; что касается таких ответственных режимов
полета, как автоматическая посадка, то здесь для поддержания
необходимого динамического стереотипа летчика и сокращения
времени его включения в процесс управления в случае отказа
автоматики целесообразно совмещенное управление, при котором
летчик активно следит за приборами и может подправить работу
автоматики.
ВОПРОСЫ ДЛЯ САМОПРОВЕРКИ
1. Как иерархически соотносится контур стабилизации с кон-
туром траекторного управления и контуром устойчивости и уп-
равляемости?
2. Какие способы управления обеспечивает современный пило-
тажно-навигационный комплекс?
3. По какой схеме — последовательно или параллельно —
включается в тракт управления самолетом сервопривод системы
улучшения устойчивости и управляемости?
4. С какой целью в приводе системы автоматического управ-
ления параллельного типа организуется «плавающая» обратная
связь?
5. Вероятность отказа одного подканала четырехкратно ре-
зервированной системы равна 10‘3 на час полета. Какова вероят-
ность отказа всей системы?
I .'I А В A 2
МЛ I Г.МАТИЧЕСКАЯ МОДЕЛЬ САМОЛЕТА
КАК ОБЪЕКТА УПРАВЛЕНИЯ
2.1. ОБЩИЕ УРАВНЕНИЯ ДВИЖЕНИЯ САМОЛЕТА
Движение самолета как твердого тела в пространстве
описывается двенадцатью дифференциальными уравнениями пер-
noio порядка. Для случая полета в спокойной атмосфере (без
।ра) эти уравнения, включающие:
ipii уравнения сил, записанные в траекторной системе коорди-
н 1,
ipii уравнения моментов в связанной системе координат,
ipn соотношения для углов,
ipn кинематических соотношения для линейных координат,
н-|ГЮГ ВИД
dV #ха . п
= 0;
(Rya COS уа — Rza sin уа — mg cos 0);
6/UT 1
~ ~ mV cos 0 SH1 + Rza C0S Ya)’
-1
~ + V* - /z) “ lx"^z e
Iz - {Iу — lx) WylD.v -) Ixy (<0J a>J) — M
— t'>x — tg 0 (ыу cos v — ojj sin y),
= oj; cos у -|- Wj sin Y'.
=--Wjcsina-]• wycosa-j- (Rta 4-/7i£cos0 sin y«),
l/cos()cos4<, (2.1)
dH .7 . n
—ТГ- — V sinO:
at
-^£.--—1/ cos 9 sin V.
at
47
Здесь использованы стандартные обозначения параметров дви-
жения, инерционно-массовых характеристик, сил и моментов
самолета.
В уравнениях сделаны допущения: кривизна земли не учиты-
вается, гироскопический момент двигателей мал, масса самолета
постоянна.
Для определения угла атаки, от которого так же, как и от
угла скольжения, зависят аэродинамические силы и моменты,
и скоростного угла крена уо к системе уравнений следует добавить
соотношения
юг + tg р (<off sin a—eicosa)— ,ny‘-sp (Ry« - mgcosOcosyJ;
(2.2)
cos fl sin у + sin 0 sin В
sin?“=-------COS0COS0----’
К приведенным уравнениям может быть присоединено еще одно
уравнение для определения угла рыскания:
cos v ~ sin
На основании этих уравнений далее получены упрощенные
уравнения самолета для различных частных случаев. Показано,
каким образом может быть учтено влияние ветра, приведены урав-
нения продольного движения самолета с учетом упругости.
В дальнейшем продольная дальность обозначается буквой I
(вместо Xg), а боковое смещение — г (вместо Zg).
2.2. УРАВНЕНИЯ ПРОДОЛЬНОГО ВОЗМУЩЕННОГО
ДВИЖЕНИЯ САМОЛЕТА
В продольном движении самолет, как всякое твердое
тело, имеет три степени свободы. В соответствии с этим его дви-
жение характеризуется шестью параметрами состояния (фазо-
выми координатами). Это могут быть, например, следующие на-
боры параметров:
а) {Н, I, 0, V, О, <ог); б) {И, I, И, I, 9, ©,};
в) {Н, I, V, 0, а, <ог) и т. д.
Выбрав для описания движения совокупность параметров «а»,
получим следующие дифференциальные уравнения, записанные
с использованием траекторной системы координат OXKYKZ„.
связанной с земной скоростью VK (рис. 2.1):
VK = g (пх — sin 0): 0 = (п,, — cosO); = Мцг;
ft — И — sin 0; / — VK cos 0, (2.3)
48
Рнс. 2.1. Схема сил, действующих на самолет
hue пк и Пу — проекции перегрузки на соответствующие оси тра-
екторной системы координат; ЛГЛг = M.RjIz —составляющая
результирующего момента по оси OZ связанной системы коорди-
нат, отнесенная к моменту инерции.
Считая угол аг между векторами земной (VK) и воздушной (V)
скорости самолетам малым, для пх и пу имеем (см. рис. 2.1)
„ _ р cos (ак + <рдв) — Ха . _ _ Psin (ак + фдВ)4-Гв
-- , Пу------------— ,
где Р — тяга; Ха = CxaqS; Ya = CyaqS-, ак = й — 0 —угол
атаки, отсчитываемый относительно земной скорости. Составляю-
щая результирующего момента MRz определяется по формуле
MRz = M, + PlPbA,
где Mz = mzqSbA; lP = хР sin <рдв — уР cos <рдВ; хР и уР —
координаты точки приложения тяги в связанной системе коорди-
нат, отнесенные к ЬА (с учетом знаков).
Тяга Р и коэффициенты Сха, Суа, Mz есть функции
Р = Р (и, V, НУ, Сха = Сха (а, Фь V, НУ,
Суа = Суа (а, фЬ V, ну, mz = tnz (а, срь о>2, а, V, Н),
|ДР а - ан + ак,; <р; — углы отклонения управляющих аэро-
динамических поверхностей (руль высоты, горизонтальное опе-
рение, закрылок и др.); и — р а^ы\ ~ степень дроссели-
рования двигателя.
49
в общем случае управление движением самолета может осу-
ществляться отклонением всех имеющихся аэродинамических
поверхностей и изменением тяги как по величине, так и по на-
плавлению (поворотное сопло). Поэтому параметры <рь и, Фд„
будем относить к числу параметров управления.
У В приведенных уравнениях учтены наиболее существенные
яАЖекты действия вертикальной компоненты Wy случайной ско-
ппсти ветра Это действие описано введением случайной состав-
ляющей угла атаки aw - Wy/VK. Наряду с параметрами управ-
ления составляющая относится к числу внешних воздействий
на самолет.
На всех режимах управляемого полета задачей управления
является, как правило, обеспечение движения по заданной Лазо
вой траектории. Будем впредь называть заданное движение про
граммным. Поскольку управляющие воздействия направлены из
стабилизацию программного движения, то отклонения от про"
граммной траектории можно считать малыми. Линеаризуя си
стему уравнений (2.3) в окрестности невозмущенной (программной)
траектории, получим следующие уравнения в отклонениях (злее/
и далее принимаем У|; — V): v ' ‘
AV = g (fix AV — cosO* ДО + пхк Дак п" АН 4.
+ 5 п*1 д«р(. н- п’^дв Дфд[1 4- п" Ли + н*’гац
. а Г / и п2 — COS 6 * \
ДО = (пУ - —) ДУ 4- sine до-р
4- п“« Дак + «у А<г,. 1- Д<СД|1
-I- п‘‘ Ли ;
Д(о = MVR ДV + Д<х + Мр Д '.)2 .h Да -Н
+ АН 1 S Л%. 4- д((,л(1 + М‘\<г Ли 4-
4-Л^ак. -| (2.4)
Д А = Д<ог; Д Я =- sin 0* А У 4- У* cos 0* \0;
Л/ = cosO* ДУ — У* sinO* ДО; Да.к =. АЙ - ДО.
Здесь ДУ-^У-У"; ДО = 0-0'; Дш2 = шг -
Д# = АН = Н - Н -,
Лф, — <р; ф,; Дфдв = флв Фдв) Ан — и и .
50
Звездочкой отмечены значения параметров, соответствующие про-
граммному движению. Значения частных производных, являю-
щихся коэффициентами уравнений (2.4), вычисляются в точках
программной траектории по формулам, йриведенным в табл. 2.1 1
Математическая модель (2.4) описывает угловое и траекторное
движение по взаимосвязи. Эту модель используют при исследова-
нии режимов полета, в которых невозможно разделить угловое
и траекторное движения самолета (например, режим приземле-
ния). Однако для большинства этапов полета отмеченное разде-
ление возможно. Это — установившиеся режимы, допускающие
выделение длиннопериодического и короткопериодического дви-
жений. Для таких режимов модель (2.4) может быть упрощена
на основе следующих допущений:
1) при описании быстро протекающего короткопериодического
движения можно пренебречь изменением скорости и высоты,
в также изменением режима работы двигателя. Кроме того, можно
положить
g/V sin 0Д0 « 0;
2) длиннопериодическое движение можно рассматривать как
реакцию самолета на изменение угла тангажа Д0 и режима работы
двигателя, задаваемого управляющим воздействием и.
При этих упрощениях ниже получены модели короткоперио-
дпческого (углового) и длиннопериодического (траекторного)
движения.
А. Модель короткопериодического движения
Обратимся ко1 второму и третьему уравнениям системы (2.4).
Полагая ДУ = ДЯ = 0, -p-sin0 = O и рассматривая в качестве
внешних воздействий параметр управления Д<р (имеющий смысл
угла отклонения Д<рг конкретной управляющей аэродинамической
поверхности) и возмущение приводим эти уравнения к виду
= Л4« Дак дШг + Дак
// (2-5)
Д0 = 4- Дп„;
^ПУ = п“к Дак + П'*У ДЧ> + ^waw. (2.6)
Здесь в соответствии с табл. 2.1 частные производные перегрузки/^ и
углового ускорения определяются следующими выра-
жениями:
1 В дальнейшем знак звездочки (*) для обозначения параметров програм-
много движения опускаем.
51
Таблица 2.1
djdV д/дак a/№ д/дЭ
пх Pvcos(aK + <PaB)-X? Psin(ay+<PflB) + X“ — —~ -±-[/’«cos(aK.+ T„8)- y Ф > ~1 ° dH p J
mg mg
nv Pv sin(aK+<pAB) +ГУ Рсо5(ак + Фдв) + ^ — — ~ p" sin (ак + фдв) +
mg mg
Mv + PvlpbK lz £1 N Й s* N 1^ •a n к /2 (Mz dH p +P lPbA
д!дцц д/д<Гдв d/dtt d/da^
пх & a >< P sin («K + <рдв) mg Pu cos (aK 4- фдв) A?
mg mg mg
пУ Ya* mg P cos (aK + фдв) mg PU Sin (gK + фдв) mg yCZ 1 a mg
Mrz P (Xp cos фдв + Yp sin фдв) bA lz pUlPbb lz
a tfaQS + P cos («к + <Рдв) Tf“ m qSb^
n„« = —--------------—-------— ; Mz = —7 ;
У mg 1 z z lzy ’
IzV ’
<?S6A
lz
= Mv = m*
У yo mg z z
Ma — mn qSI>A
trig - friz r •
* Z
Имея в виду соотношения Д6 = ДФ — Дак, l
iM в системе уравнений (2.5), (2.6) Д0 через Дак и A<oz
пнем ее в матричной форме
1
p Д<ог'
рДсек -
Ml
___S_n4>
у пу
(Ml + Mlp)
---— fl ак
V пу
(Mi+Mip)'
___naw
V пу
Д(ог
Дак
= Д<bz, выра-
и за-
(2.7)
’ Дер
. aw J ’
d
"• I’ -di
• <’|M ювание Лапласа
•« 1‘ЫЛЬНЫХ условиях.
НИЙ
— оператор дифференцирования. Произведем
матричного уравнения (2.7) при нулевых
Получаем систему алгебраических урав-
npe-
М*
-^-п^
у ™у
(p+4
[Mf + Mlp'
if M(p)-T-
Дюг (p)' _
A«k(P). ~
(2-8)
n“W
V ПУ
<*w (p)-
Здесь символ «р» имеет смысл переменной Лапласа, а функцио-
“ • и.ной зависимостью вида х (р) обозначается преобразование
l.iti.'iaca функции х (О-
Полагая в уравнениях (2.8) aw = 0, найдем передаточные
I М1КИИИ от Дер к Д<ог и Дак. Они имеют вид
п/ , (п\ — Аак (?) —
^ак/ч>(Р) - Л(р(р) -
г, M®Z \ „ пФ
S-n'f -^-0
V у м*) V м*р
рг -j- 2hp + а>б
(2.9)
53
Здесь
М*
r-./- W -
P М%\ а (
Х~~п'у jр + Vпик (
Р* + 2hp + а>3
21
«ак
У
\]
I
— /J • (2.10
27р=| п“к - Мр - М“;
ю20 = - - X- п“км^ - -
m^z
где о/г = т^у -|-----степень продольной статической устои
чивости по перегрузке.
Приведенными передаточными функциями описывается резуль
тат действия создаваемых управляющим органом момента (пара
метр М?) и перегрузки (параметр /г£). В частных .случаях, когд,
одной из составляющих управляющего воздействия можно пре
т моментол
С/ О
z уа п>
небречь, они упрощаются. Так, в
(п* = 0) имеем
IV/ I п> — №
случае управления
р- + 2Лр +
(2.11
U7 (п\ -= г V у 2
w2/t w / д(р (р) р2 2Лр w*
Для самолета, устойчивого по перегрузке (оп <; 0),
ные функции (2.11), (2.12) будем представлять также в канони
ческом виде
(2.12
передаточ
Гак/<₽ (р) - Тгр1 + 1‘тср + 1 ’
Кс (Л< Р+1)
(2.13
№Ч/Ф(Р) T2p2 + 2gcTcp+l ‘
(2.1-1
Здесь
tc = —L
Vco;
lz
</S&AaZ!C“a
бе =
Л
'о
П*« - МУ -
У *
lz
дЗЬ^пСуа
V
^ = -4;; 7<с = —
ш0' 1с
Для самолета нормальной схемы все коэффициенты и постояп
ные времени в передаточных функциях (2.13), (2.14) положительны
54
Рассмотрим теперь случай, когда управляющий орган создает
п iv при пренебрежимо малом моменте. Полагая в, формулах
। * (2.10) = 0, получаем передаточные функции
W , (р)_ А«к(Р) _ _ (2.15)
*ак/ч(Р>- Дф(р) - />з + 2Лр + ®§ ’
П7 (п\ = V М* ' (9 1RX
W<^Z/4>(P) д<р(р) Р2 4-2ftp + ‘ (2-16)
Представляет интерес также передаточная функция от угла
>>1клонения органа силы Д<р к создаваемой им суммарной пере-
. руже. На первый взгляд может показаться, что эта передаточ-
ihi»i функция равна производной Пу. Однако это не так. Обратимся
чип ношению (2.6). На основе его при aw = 0 получаем следую-
щую зависимость:
(р) = «“К^ак/Ф (Р) Лф (Р) + «J Д<Р (Р).
। о< юда с учетом выражения (2.9) находим передаточную функ-
цию
п;₽ р2 ~ Р + ВДв/я* , (2Л7)
У I 17й ё «.А “Т7а S акТг(02 ’
Р — (Мг 1 + Мг — -у-пуKJ Р — Мг--у-пукМгг
>> > юнорой видно, что в установившемся режиме
—а —Ф а / ф
( &пУ \ Mzny !пу , Ф
Полученные передаточные функции характеризуют отклик
иниста на управляющее воздействие, создаваемое отклонением
«Фидинамической поверхности. Если в качестве параметра уп-
Г1ШЛГПНЯ рассматривается угол отклонения вектора тяги (сопла
‘нныгеля) ДфдВ, то получаем передаточные функции, определяе-
ма формулами, по структуре идентичными выражениям (2.9)
• (? 10). В этих выражениях в данном случае следует положить
Ч Афдв и вычислять параметры 7Игдв и /?^дв по формулам
' м 1абл. 2.1)
/И^дв .-Z COs<pAB + ур sin фдо);
п‘<’дв « —— cos (а. 4- ф„и).
и mg V к гдв/
55
Теперь обратимся ко второму внешнему воздействию — во
мущению «и/. Положив в уравнениях (2.8) Д<р ~ 0, найдем перо
даточную функцию самолета по углу атаки а,;
- -аГ-(р) ~
=-----------------------------------• (2-
Под углом атаки ак понимается угол между продольной осы
самолета и вектором его земной скорости. Истинный угол атаю
как угол между продольной осью и вектором воздушной скорости
равен а — аи + оцг. Отсюда следует, что = 1 4-
и для передаточной функции по а с учетом формулы (2.18) полу
чаем следующее выражение:
= -тгйг =
р(р — М^) + -у- - n*w) Р + -р- Л)"г (п“’г — п“к)
~ р- + 2hp + <og ‘
Т-Г aR
При упрощающем допущении пу* = пу , связанным с пренебрс
жением приращением перегрузки пу от тяги, приведенное выра
жение преобразуется к виду
р\р — Л4 z
Wa/aw(p)- (2.1!)
В заключение найдем передаточную функцию от возму
щения аг, обусловленного ветром, к создаваемой им перегрузке
Имеем следующую зависимость:
Дп(/ - п“к Дак + „“га17 п« (Д«к 4. да>
Произведя преобразование Лапласа, запишем эту зависимое)i
в виде
Ч, (р) = псу Wa!aw(p) aw (р).
Отсюда с учетом выражения (2.19) путем замены а1Г — Wv/\
находим передаточную функцию от Wv к A/tw:
(Р) - (р) ~ ; р'. + 2Лр 4- ws '
Б. Модель траекторного движения
Получим уравнения траекторного движения самолета для слу
чая, когда можно пренебречь действием силы на управляюще!
аэродинамической поверхности. Короткопериодическое движс
56
,, и >гом случае характеризуется передаточными функциями
И) (2 12). В качестве параметров управления траекторным
примем изменение угла тангажа ДО и приращение Дп
инициальной перегрузки, обусловленное изменением Дн сте-
пи дросселирования двигателя.
Выделим из системы (2.4) уравнения для ДУ, ДО, ДЯ, Д/.
(||;|t(i /;<с = — о, -у- sin ОДО = 0, ац? = 0 и выразив Дак
г. । ДО п ДО, приводим их к виду
- AV ~ «„ ^12 «13 0” - ДУ"
d ДО a.n a22 «23 0 до
dt —'• «31 азг 0 0 дя +
_ «41 ^2 0 0 _
boj Ьоо
О о
о о
1 дР
. ,1. \п - -у&и, а коэффициенты aik, bik определяются
. и дующим формулам:
v PvcoS(aK + <j)aB)-X^
------------т-------- '
.. - -g^-gax^ ^±fe_t>) + ^_gcos8;
1 s"" ’ ['’"«st». + <f„) - X.-&- -j-J ;
<t!l - JL„J' - P' ™|°,Х'1’") + >'°У :
„ £ A- p C0S (a« + фА») + .
v nti . __ ,
" • । - -y ny - sin (aK <рдв) 4- Ya -jjj- —J 5
«si = sin 0;
«3» — V cos 0;
«4i — cos 0;
«и = —V sin 0;
b - - P Sin (Кк + фдв) + ^xaqS •
П 6 A m 1
bVJ = g cos (aK + Фдв);
57
— йц',
622 = -|-sin (ак + <рдв).
Управляющими параметрами в системе (2.21) являются А
и Дп.
В общем случае вертикального маневра система (2.21) нестацт
нарна. Однако, если коэффициенты уравнений изменяются сравж
тельно медленно (в масштабе длинного периода), то можно при
менить метод замороженных коэффициентов и перейти к рассм<
трению стационарных систем. Предполагая, что замораживанп
коэффициентов допустимо, найдем передаточные функции, св>
зывающие параметры движения с параметрами управления.
Запишем систему (2.21) в более компактной форме. Введе
обозначения:
X =
“ ду-
де
дя
д/
' Aft"
А/г
«и
«21
«31
— «41
а12
«22
«32
«42
«13
«>3
О
О
О"
О
О
О
U =
А =
В =
^12
Ь-22
О
О
Ьц
Ьц
О
_ О
Тогда на основании (2.21) имеем
х = Ах + Ви.
Применив к уравнению (2.22) преобразование
лучим
(2.2
Лапласа, п
(рЕ - А) х (р) = Ви (р),
где Е —единичная матрица (4x4).
Отсюда находим
х (р) = (рЕ - А)'1 Ви (р).
Матрица W (р) = (рЕ — А^В, определяющая
образований Лапласа векторов х и и, называется
матрицей. Элементами матриц W (р) являются
функции от параметров управления Aft и Д/г к соответствуют:
компонентам вектора фазовых координат х. Действительно,
соотношения
связь пр
передаточн
передаточш
х (р) = W (р) и (р)
или
’ДУ(р)'
Д0(р)
АЯ (Р)
L А/(р)J
= W(p)
A0 (р) 'I
An (р) |
58
и* iy<*i, что W (р) есть матрица - IFv/e W'o/o вида wv/n- w9fll WH/n Wl/n _ » (2.23)
W, _ АУ(Р) . ДА(р) ’ Fe/<> = AQ(p) . ДО(р) ’ Ww = ДЯ(Р) . Д« (p) ’
IV/ — (Р) • ~ ДО (р) ’ Wv/n = ДУ(Р) . ,Дя(Р) ’ ДО(Р) . Дп (p) ’
wH/n- Atf (p). Дп (p)’ wl/n = ^I(p) Д« (p) ’
Определение передаточной матрицы W (р) связано с обраще-
ии м матрицы Wo = рЕ — А. Для нахождения обратной матрицы
и пильзуем известную формулу
U/-I W0 пр
Wo Iwo| ’
в щ, — присоединенная матрица для матрицы Wo.
< >пределитель |W0| матрицы
Р — «и —012 —«13 О
"«21 Р «22 «23 ®
—«31 —«32 Р О
—atl —ai2 0 р
(2.24)
и ниощийся характеристическим многочленом системы (2.22),
вид
Do (р) = р (р3 + Л2р2 + А1Р + Ло), (2.25)
*** Л 2 === -«11 «22*
Л1 — «ц«22 «32«23 «21«12 «31«13>
Л о = «32 («11«23 «21«1з) Н-
4" аз1 («13«22 «12«2з)*
Определитель (2.25) дает исчерпывающую характеристику
А ।пенного движения системы (2.22).
II рассматриваемой модели управления траекторией собствен-
ым ннляется траекторное движение с неизменными углом тан-
i-pii и степенью дросселирования двигателя.
1‘илнчественный анализ показывает, что кубический многочлен
o' ’,’h) имеет один большой и два малых действительных корня.
•и Н.П1ПЙ корень характеризует составляющую движения, выз-
iiitiviii изменением угла атаки. Малые корни определяют дви-
'Нне, причиной которого является изменение перегрузок пх
59
и. Пу вследствие вариаций скорости и высоты [члены анД1
aiSA/f, а21ДУ, а2<ДН в системе (2.21)].
Составляющая движения, вызванная этими вариациями, ра<
вивается очень медленно. При рассмотрении динамики управлж
мого траекторного движения ею можно пренебречь. Это допущ<
ние основывается на том факте, что управляющие воздействия
развиваемые системой управления в процессе регулирования тра
екторного движения, значительно превосходят силы, возникаю
щие вследствие вариаций ДУ и ДЯ, и поэтому легко подавляю
медленно развивающееся собственное движение.
Следовательно, для упрощения аналитического исследована
управляемого траекторного движения в системе (2.21) можш
положить
tin да О1з да да й23 да 0. (2.26
Разумеется, при исследовании собственных свойств траектор
ного движения в системе (2.21) должны учитываться во
члены.
При допущении (2.26) матрица (2.24) и определитель (2.25)
принимают вид
р —а12 0 0
0 р — а.г2 0 0
Wo = ; (2.27)
«31 «32 Р 0
_ «41 —«42 0 Р -
Do (р) = р3 (р - а22). (2.28)
Присоединенной для матрицы (2.27) является матрица
Wonp —
р2 (р — а22) а12р2 0 0
0 р3 0 0
«sip (Р — «22) Р (<2з1«12 + «згР) Р2 (Р - «3’) 0
_ «41Р (Р - «22) р (а41а12 + ai2p) 0 р2 (р - «22) _
(2.29)
Разделив матрицу (2.29) на определитель (2.28), находим ис-
комую обратную матрицу
Jl_ —_ о О
р р(р — а22)
О ---------------- О о
Р — ^22
а31 аз1а12 Ч~ азгР 1 л
, Р2 Р2(р — азг) Р
а41 а41а12 Ч~ a4iP Л ।
_ р2 рцр — а22) р _
60
Умножая матрицу (2.30) на матрицу В, находим передаточную
. ирицу W Wo’B. Сопоставив полученную матрицу с матрицей
•I), устанавливаем, что:
Ьир + (ауЛп — .
1) w v/0
р (р—«22)
2)
|W ___ O31 (“12*21 — Я21Ьп) -р (а;п*ц + #32*21) Р .
3) М^/7/о----------------рЦр-aJ)----------------’
4) W l/i} — Q41 (а‘-^г1 - “22*11) ~F (#41*11 4~ #42*21) Р ,
5) Wv/n =
Р2 (Р — а гг)
Ь\гр "Т- (О]2*22 — “22*12)
Р(Р — “?2> ’
6>
Р3 (Р — #22)
*7\ IV/ _ “31(“l2* •ла — floo^jo) Одо^оо) Р ,
/ ) w ц/п — -------------------------------=------------
g) W (Д12^22 — ^22^1?) + (д41^12 4~ Д42&2г) Р
Р2 (Р — #>.)
Произведем некоторые упрощения полученных соотношений.
Пренебрежем ввиду относительной малости слагаемым а12Ь22
выражениях 5, 7, 8 и слагаемым л42&22 в выражении 8. Кроме
ми<i, в выражении 3 можно пренебречь всеми слагаемыми, содер-
I*йщими в качестве сомножителя коэффициент а3] - sin 0.
В результате получаем следующие две группы передаточных
»|ц нкций:
I) канал тангажа
W'v,» =
№е/* =
> Л»’С|>
Xv(l-IT’vP). !У/ К И
'p(l+Ttcp)’ Wh/* - p(1 + Tlcp) ’
1 . w = _ Ki(l + TlP) .
1+ЛсР ’ Z/<> P3(l -t-ЛсР) ’
у
Лс = —» Ку ~ gcos0; Ту ---------------—г ;
gcosdn^
/
A'//^Vcos0; Ki == gcos20; Tt =------I------S _i_
' 6 ’ 1 geos ft \ na
’) канал двигателя
1У/ Kv . 1F/ Kv sin 0 (Kh + K'yT\c sin 0) p
«/„„, =------------p=(l + r,cp)-----------
'i7fi“ J -I- т1ср ; Л" = T/- ’
w< I. K'v = geos (a + (рдв); Kq = (a ~j~ Удв) ;
n„
61
К'н = gTic COS 0 sin (a <рдв); K't = g cos 0 cos (a -|- <рдв).
Если в качестве опорного движения рассматривается траекто
рия горизонтального полета, то передаточная функция по высоте
в канале двигателя принимает вид
W к'н
wH/n- р{1 + т1сР) •
2.3. УРАВНЕНИЯ БОКОВОГО ВОЗМУЩЕННОГО
ДВИЖЕНИЯ САМОЛЕТА
Система уравнений, описывающих боковое возмущенное
движение самолета по параметрам 0, у, <ох, шу, имеет вид
A g , , . , g COS fl
0 = -у- nz + шу cos a + <•>« sin a + -2—p— y;
= -V "«+
“ tJ- “«++ "X++'“‘A
у = wx — Шу tg fl,
где M, = i; Я„ = ^; „, = (ф + CX + CX)
При необходимости к этой системе уравнений добавляется
уравнение для угла курса
• 1
Y cos ft у
При анализе будем использовать уравнения движения, раз*
решенные относительно производных сох и
0 = -у-, («г0 + «гн6н) + «х sin a + Шу cos a + V;
шу = Afj0 + м*ишу + Мал + MX + (2.31)
= + м^шх + М“УШУ + Л?Х -F
V = — “у tg fl,
i X I 1 Г I
\ Ixly I
Приведенная система уравнений в связанной системе коорди-
нат является основной при исследованиях динамики самолета
62
nn । ом этической системой управления, поскольку датчики си-
нмы (ДУС и др.) ориентированы обычно по связанным осям.
При дальнейшем анализе, как правило, рассматривается гори-
• ппильное движение (9 0, б = а). При этом матричная форма
рпшюний (2.31) имеет вид
р---^-Пг —cos a —since-----------p-cos<z
—р — М1у —Му О
—М?‘х — Му р-му О Х
О —1 р
Для характеристического многочлена бокового возмущенного
тнжсния самолета имеем
Л (р) = Р4 4~ ^зР3 Ч- Д2Р2 + -4iP 4~ clo ~
— (р ^сп) (р ^-кр) (р2 4~ 2hcp 4~ &>бб)-
Приближенно корни характеристического уравнения опреде-
1Н1ОТСЯ следующими выражениями:
хКр« му -
М^ cos а + sin а + М^ (М*х -
cos а + М& sin а
^сп “р~ X
МУ cos а 4- М л sin а — Mv\ М„ у cos а 4- Mt,x sin а
у у л л / \ У У I
^Af”xcosa— мУ sina) — Мх cosa — Mly sinaj
2h6 =------му _
Al^cos а (улу + + sin а + Мх (м®* - /И®« )]
Му cos а Мх sin а
сооб « cos а — Мх sin а.
63
При анализе различных контуров управления интерес прел
ставляют следующие передаточные функции, полученные на сх
нове (2.32) в предположении пга ~ 0лгэ « 0:
1) по угловым скоростям крена и рыскания
где
Д(р)
а в ~ о
= у- nz Мх -( —- Му';
м«
at = —Мх sin all —
м?,м?
У X
У х
* У
а0 = — 4-Mucosa (1 —
v I
\ •* У/
(p3 + 62p2 4- ьхр + ^0)
= --------------------
А(р)
m6x -«> \
-^Myx ;
J
где
4 «4
«5 )
Ь! = — Mucosa |1 1 + -(-пЦМ!,!'
I мЧ v '
\ ух/
Ьо = М» sin а( 1
У \ MU Мх/
2) по углу крена
где
л У
iTly ir,x
W7 — + C^P +
Д (p) 9
C2 = _ M6y tg a;
Ci = —Mx (-p- + Myv + Myx tg a) -J
+ M6U (^Mxy + 4 tg a 4- Mxx tg a) ;
~ c ~ n / A46 \
cd = —Mucosa 11 - J (14-tg2a) +
I M6r мЧ
4- 4- M^x tg a) — At* Mxv 4- M"x tg a) ;
3) по углу скольжения
TVZ ________________ ^2p2 + + do
------X(p)—’
64
। ur d2 = My cos a + Mx sin a;
d-i = M* (—Mxx cos a + Mxy sin a-sin aQ +
+ Mx cos a — Myy sin a + "у" cos ;
-y-^Al^sina + Af^cosa^ — M% (Al^cosa + M^* sina^J .
Здесь в качестве органов управления могут рассматриваться
-» и роны, руль направления, интерцепторы и т. д., для чего в каж-
1мм конкретном случае букве 6 приписываются соответствующие
инягксы (например, бн, бэ).
Достаточно точная система уравнений бокового возмущенного
•снижения с детальным описанием динамики движения самолета
и».круг центра масс необходима при исследовании режимов руч-
ниц, (штурвального) управления и системы угловой стабилизации
• имолста.
При полете на малых углах атаки взаимосвязь движений
|и.кк;|ния и крена невелика. Здесь для приближенной оценки
1нш1мики управляемого бокового движения можно использовать
г|мппепия изолированного движения рыскания и изолированного
ишжгния крена.
.V равнения изолированного движения рыскания (при у =
— ™ 0, cos a ж 1) имеют вид
£ = -y-HzP + + 7" П2Н$н»
®F = Mfo + + ЛЙН6Н.
Нгргходя к преобразованиям Лапласа и пренебрегая попереч-
нм|| перегрузкой от руля направления, получаем следующие
нгргдаточные функции:
= <Мр) = ^н(р-~Гя0 = _ (1 + Лцр) .
“»/вн ба(р) р2 + 2Лбр + ®2б т|р2 + 2^грр+1’
W „ Р(Р)
$ * ба (р) р2 2ft6p -|- Т|р2 4- 2£gTрр + 1
<006 = 4- -М^, Т& = ;
v И “Об
2ft6= у-Пг—Муу; = - ^2-; =
V Ю0б
Уравнения изолированного движения крена (0 = 0, <оу = 0)
й >н. 278 65
®Х = М»Ч + Af °®68; Y = WX
приводят к следующим передаточным функциям:
w _ <i>x (р) _ = *1 .
w шх/вэ - 69 (р) ~ р_м°х Тахр+1’
W ,я _ Y(P) - М*9 Ъ
6а(р) ”р(р_м"х) PCW+1)’
где Кг = Мхв/М*х-, Тах = -1/Мхх.
При исследовании движения самолета по траектории можно
использовать упрощенную математическую модель. Для упро-
щения будем считать, что параметрами управления являются угол
крена у и поперечная перегрузка пг. Рассматривая у и nz как пара-
метры управления, обратимся к следующей системе уравнений:
Y = — (пу„ sin уа + n2 cos р cos у„);
V2 = — VslnY; Z=Vz,
полученной на основе уравнений (2.1), (2.2) при 0 = 0. Добавим
к ним кинематическое соотношение
. cos & ,
sin Та = sin У-
Линеаризуем приведенные уравнения в окрестности траекто-
рии прямолинейного горизонтального движения (&* = а*, у* =
= р* = V2 = z* = 0). В результате получим следующие урав-
нения возмущенного траекторного движения х:
V =-----р- [(n“a) cos ay 4- n2]; (2.33)
Vz = —VT = g (n%a) cos ay + gnz, (2.34)
i=Vz.
На основе уравнений (2.34) находим передаточные функции
(принимая n“a = 1)
1 Знак звездочки (♦) в обозначении параметров опорного движения далее
опускаем.
66
Снизь между угловой скоростью рыскания и углом крена
hi|>)i п, = 0) в линейном приближении определяется из кинема-
I НЧГСКОГО соотношения
ф = —<оюа + ¥,
н'норое с учетом (2.33) принимает вид
ф = —(»еа —п„ау.
< Исюда, полагая <оя = у, находим передаточную функцию
2.4. УРАВНЕНИЯ ПРОДОЛЬНОГО
КОРОТКОПЕРИОДИЧЕСКОГО ДВИЖЕНИЯ САМОЛЕТА
С УЧЕТОМ УПРУГИХ КОЛЕБАНИЙ КОНСТРУКЦИИ
Схематизируя самолет системой упругих балок (рис. 2.2)
и рпесматривая возмущенное движение в плоскости симметрии
хннн-нтельно установившегося горизонтального полета, можно
чнпиелть следующие три уравнения в частных производных:
I) уравнение изгибных колебаний крыла
1^. г. ф.
+ т (Z)- т (Z) о 11 - У (z) - F„(z) = 0; (2.35)
V) уравнение крутильных колебаний крыла
г, Ф, = +
+ - m Ы Ф — At (г) — М„(г) = 0; (2.36)
3) уравнение изгибных колебаний фюзеляжа
У (*) - F„(х) - 26 (х - х„) Ф„+2^ 6 (х - х„) М„. (2.37)
<wt. у (г, Ф (z, 0» £ (z, 0 — деформации изгиба и кручения
••рыли и изгиба фюзеляжа соответственно, удовлетворяющие
• инмгтрическим и силовым граничным условиям:
I) А4ВЗР = Е/-g|- = 0, Q = = 0 при z=±//2;
») МК9 = 01^ = 0 при z = ±//2;
••
67
Рис. 2.2. Балочная схематизация самолета
3)Е/ф-§- = 0, ± [Е1Ф -g-] = 0 при х = /х;х = -/2.
За начало координат выбрано место стыка фюзеляжной i
крыльевых балок, поэтому дополнительно получаем
4)Е(0)=Г(0); Т(О, 0 = -’^»>с«х; ^.(O) = g(O) = stai
s) 2 4 -аъ+£ («ф -&)+. - £ («Ф аь - »
2 7>^)+оsm х 2 (с/р ^г)+о c°s х (£/ф _
68
I» *тих уравнениях б (х — хст) — импульсная единичная функ-
У (z), М (z), Y (х) — погонные аэродинамические нагрузки:
.-иымная сила крыла и момент вокруг оси жесткости крыла,
.... сила фюзеляжа; Фст, Л40Т — сосредоточенные сила и
м-.м«ч1т, действующие на фюзеляж от половины стабилизатора;
- нннпиим силам и моментам FBH (z), Мвн (z), FBH (к) следует
। i'r< । к гравитационные силы, а также силы и моменты от возму-
||<чшй ветра 1
FBB (z) = С“ (z) b (z) — т (z) g;
Мвв (г) = -ф- С“ & ("Г “ + т
Рвн(х) — -у- C%(x)aw — тф(х)£.
< »цпнм из приближенных методов решения полученной си-
। гм и уравнений в частных производных является сведение
к системе обыкновенных дифференциальных уравнений. Это
<•'<!<< ! быть выполнено методом Бубнова—Галеркина. Для этого
,<i|iynie деформации конструкции представим в виде
N N
У (Z. О = JS t ft (2) 4i {ty, <P (z, 0 = <Pi (z) qt (t);
N
l(x, 0=^^(x)9<(0.
Функции fi (z), (z), (x) образуют некоторую полную си-
координатных функций, удовлетворяющих граничным ус-
В качестве такой системы целесообразно использовать
i ’рмы собственных колебаний самолета в пустоте. В качестве
I им|-|ы па рис. 2.3 приведены формы собственных колебаний
-ни|г|ического неманевренного самолета (взяты низшие тона
колебаний).
hoin’ia определения форм этих колебаний самолета в пустоте.
. «шнги самостоятельно (см., например, [7]).
При симметричных колебаниях конструкции (только они рас-
*йц1нн;потся в данном разделе) обобщенная координата
• Н1И1НСЯ к вертикальным перемещениям самолета как жесткого
= ь>|и, /| обобщенная координата относится к повороту самолета
- ьру| центра масс и тоже как жесткого целого. Частоты этих
н»»и колебаний в пустоте равны нулю. При этом
f-i= 1, Ф_1 = 0; g_x==l; /о = *ц.м —zsin%;
Фо = cos %; go = хц. м — х; q_x = И; q0 = Ф.
1 При вычислении аэродинамических сил от ветра пренебрегаем нестационар-
♦Mt н изменением величины аур по длине самолета и размаху крыльев.
69
Рис. 2.3. Формы собственных колебаний самолета:
а — фюзеляж; б — крыло
Обобщенные координаты qlt q2 и т. д. относятся к упругим ко
лебаниям конструкции.
Подставляя разложения у (z, t), <р (г, t), £ (z, t) в уравнение
с частными производными (2.35), (2.36), (2.37), получаем:
д2
LAfb <Pz> Чь z, =
7 N \ “I
(bi Z (О +
A /=—i / J
N N
+ m (z) ft (z) qt (0 — m (z) a J] <pt (z) qt (t) — Y(z) — Fm(z) = (I
M<Pz> ft, Чь z, 0 =
Г N
ъ oir^^4.W +
- i—1 -
N N
+ /(«) J J fi(z)qi(t) - M(z) - MBH(z) = (
i=—l i=—1
Г N
L.(b, Чь ^.0 = -^ Е1Ф J ^4i(t) +
L /"i
N
+ «Ф 2 W - Y W - w - 26 (X - хет) Фст +
I
H-2-^-6(x-xOT)AfCT.
Отсюда находим
Z/2
0
Z/2
Litfb 4>z, 4b 2, 0/>(z)dz + 2j La(<j>i, ft, qit z, Os>/(z)dzH
0
h
+ j L9£t, 4i, x, t)lidx = Q.
70
В результате получим систему обыкновенных дифференци-
альных уравнений движения упругого самолета
Jj i + djtqt + (bn + с л) ft] = Fj + РД
Коэффициенты Cji, Fj, |37- вычисляются непосредственно при
интегрировании, поскольку они характеризуют следующее: ап —
инерцию конструкции; Cjt — жесткость конструкции; Fj — внеш-
ние силы, действующие на самолет; Ру — эффективность органов
управления (подразумевается поворотный стабилизатор). В част-
ности/из условия ортогональности форм собственных колебаний
конструкции следует, что = 0 при / =/= I.
Более сложной проблемой является вычисление коэффициен-
тов djt — аэродинамического демпфирования и — аэродинами-
ческой жесткости. Фактически речь идет о расчете аэродинамиче-
ских сил и моментов, обусловленных деформациями и скоростью
деформации конструкции. При заданных формах колебаний кон-
струкции этот расчет может быть выполнен с привлечением раз-
личных аэродинамических теорий (например, теории несущих
поверхностей и т. д.). Правильность таких расчетов проверяется
при испытаниях жестких моделей в аэродинамических трубах:
рвсчет по первым двум степеням свободы q_t и qQ дает аэродинами-
ческие характеристики самолета как твердого тела. При этом
«место переменных q^ и qQ рационально использовать угол атаки
и угловую скорость тангажа:
“ = 9о —-v"; ®2 = ^0.
В результате порядок системы уравнений понижается на два
вследствие исключения двух нулевых корней:
—й-1 _iVa — Va (flLi _i V 4* ^-10) 4"
N
+ 2j 4" 4“ == F-1'1 (2.38)
—Va 4~ ^00 4“
4“ 2j (aoi4t 4* ^oiQi + 4* M = Fo; (2.39)
—aj-iV® — dj-iVa 4*ajo^z + (aj-iV 4" 4/o) ®z 4*
N
+ laH4i 4“ (dji 4- djt) qt 4* (bji + сл) 4tl = Fb (2.40)
где d'ji — коэффициент, характеризующий конструктивное демп-
фирование.
Ряд коэффициентов первых двух уравнений (уравнений сил
и моментов в короткопериодическом движении упругого самолета)
имеет простой физический смысл и соответствует обычным коэф-
фициентам в уравнениях движения:
71
= т — масса самолета;
d_1_1 = eySC?; й_10 = ф5С“г;
₽-i = P-^SC’; d01V = ^S6Am?;
а00 = lz — момент инерции самолета;
Р° = ЗЬд/Иг; — mg + ng- SCyaw; Fo =
Аналогичным образом могут быть получены уравнения боко-
вого возмущенного движения самолета с учетом антисимметрич-
ных тонов упругих колебаний конструкции.
2.6. МОДЕЛИ ПРИВОДОВ СИСТЕМЫ УПРАВЛЕНИЯ
Рассмотрим модели электрогидравлического сервопри-
вода и гидромеханического привода, выполняющего функции уси-
лителя мощности (бустера).
Основной частью привода является исполнительный механизм,
объединяющий регулирующее устройство и силовой механизм
(см. рис. 1.7, а). Динамика исполнительного механизма серво-
привода упрощенно может быть описана следующими дифферен-
циальными уравнениями:
х == 2<ма — ДР; (2.41)
Т&х = —04 + а8; (2.42)
О при |ai|<b;
a^ — b при 6 а3<:с4-Ь;
04 + b при —b > 04 > — (с + Ь);
±с при |о4|>г4-Ь,
(2.43)
где х — ход штока привода; а — координата, характеризующая
подвод энергии; ДР — перепад давлений в полостях силового
цилиндра, уравновешивающий внешнюю нагрузку на штоке;
Г, Км, Ki — положительные коэффициенты, зависящие от пара-
метров механизма; с и Ь — параметры нелинейности (см. рис. 2.4).
Уравнение (2.41) относится к силовому механизму. Уравнение
(2.42) приближенно описывает запаздывание в регулирующем
Рис. 2.4. Структурная схема сервопривода
72
устройстве, преобразующем электрический сигнал а8 в переме-
щение золотника, характеризуемое координатой аг. Функция
(2.43) описывает нелинейности, имеющиеся в распределительном
устройстве. Это, по существу, ограничение по скорости привода:
из уравнений (2.41), (2.42), (2.43) нетрудно определить, что уста-
новившееся значение максимальной скорости ненагруженного
привода (при ДР = 0) хшах = с/См.
Сигнал а, пропорционален сигналу рассогласования е:
а8 = Ку8,
а сигнал рассогласования е определяется как разность управляю-
щего сигнала на входе х8Х и сигнала обратной связи:
8 = Хвх ~ х0.0- (2.44)
Из уравнения (2.41) видно, что внешняя нагрузка на штоке
привода снижает скорость его перемещения. Однако у несиловых
сервоприводов эта нагрузка невелика, для них можно положить
ДР 0. Приняв это допущение, перейдем в уравнениях (2.41),
(2.42) от оригиналов к преобразованиям Лапласа. В результате
определяем передаточные функции исполнительного механизма:
х(р) = Км . «1 (р) _ 1
а(р) р ’ аз(р) Tpyi ’
Обозначив теперь через ВГ0. с (р) передаточную функцию звена
обратной связи, составим с учетом соотношений (2.43), (2.44)
структурную схему сервопривода. Она представлена на рис. 2.4.
Найдем на основе структурной схемы передаточные функции
сервоприводов с тремя типами обратных связей, о которых упоми-
налось в разд. 1.6. При этом будем пренебрегать нелинейностью
н исполнительном механизме. Тогда коэффициент усиления по
скорости (добротность) есть D = КУКМ-
Привод с позиционной обратной связью. Для него W0.c(p)=
- 1, и передаточная функция записывается в виде
а(Р) xm(p) Ty + 2gnTnp+l
где
= V ~D ’ ~ 2 VTD ’
Чем больше полоса пропускания привода (т. е. меньше Та),
тем меньше искажений привод вносит в динамику системы управ-
ления. Постоянная времени Тп обратно пропорциональна ]/£> =
•*= V Однако из соображений устойчивости (данная модель
учитывает не все запаздывания) коэффициент усиления электриче-
ского сигнала должен выбираться таким образом, чтобы выполня-
лось условие D •< 1/Т или Тп = У T/D Т. При этом условии
73
частота среза разомкнутой системы <оСр = D находится левее
точки 1/Т, что обеспечивает достаточные запасы устойчивости.
Привод со скоростной обратной связью. Для него Wo. с =
= р и передаточная функция замкнутой системы записывается
в виде
^п(р)= р(ТпрП+1У’
где
v D . ,г 7*
Лп D-f-1’ 1а~ D+Г
Так как значение коэффициента D намного больше единицы,
то можно принять Ка 1.
Изодромный привод. Полагая в структурной схеме (см. рис. 2.4)
для передаточной функции привода устанавливаем
w = ~Ь ______________!_________
тир Ти_з + £+Ги_ + 1+_1_
D р ДТИ р + 07и
(2.45)
Обычно Ти и D выбирают так, что Ти Т, DTa 1. Поэтому
выражение (2.45) можно упростить так:
1+ТиР 1
ТиР тУ+2£пТпр+1’
где
1
21/TD
Таким образом, в диапазоне частот со < 1/Ти изодромный
привод работает, как сервопривод со скоростной обратной связью
(Wn} а при со > 1/Тм— как сервопривод с позицион-
ной обратной связью [Wn)==~^>------------I-
\ ТУ+2?пТпр+1/
Модель бустера может быть получена как частный случай мо-
дели электрогидравлического сервопривода. У бустера золот-
ник перемещается прямым механическим воздействием проводки
управления. Поэтому для него в уравнении (2.42) следует поло-
жить Т = 0. Тогда при тех же самых допущениях, что и для серво-
привода (нагрузка на штоке бустера невелика, можно пренебречь
нелинейностью в исполнительном механизме), получаем следую-
щие упрощенные уравнения бустера:
х == De; е = хвх — х,*
где D — добротность бустера.
74
Отсюда находим передаточную функцию бустера
w. — х (р) — 1___
6 *вх(р) Твр+1’
еде То = 1/D.
Максимальная скорость перемещения штока бустера, так же
клк и у сервопривода, хшах = сКм-
ВОПРОСЫ ДЛЯ САМОПРОВЕРКИ
1. Запишите в каноническом виде передаточную функцию
по углу атаки ТГа/ф (р) самолета, неустойчивого по перегрузке
К > 0).
2. Определите передаточную функцию самолета по угловой
скорости тангажа <ог, рассматривая в качестве параметра управ-
ления угол отклонения поворотного сопла двигателя <рдв.
3. При каких упрощающих допущениях передаточная функция
от угла тангажа к высоте принимает вид: №ц/в = - п 5т—г?
Р к1 “г 1 icP)
4. Как изменяются значения коэффициента передачи и
постоянной времени передаточной функции изолированного
to
движения крена с увеличением модуля производной тхх?
5. Какими передаточными функциями характеризуется связь
между углом крена у и угловой скоростью крена <оя в полной и
упрощенной моделях крена?
6. Какая нелинейность входит в модель сервопривода?
ГЛАВ АЗ
УЛУЧШЕНИЕ УСТОЙЧИВОСТИ
И УПРАВЛЯЕМОСТИ САМОЛЕТА
3.1. ТРЕБОВАНИЯ К УСТОЙЧИВОСТИ
И УПРАВЛЯЕМОСТИ САМОЛЕТА
Сформулированные ранее (см. гл. 1) общие требования
к пилотажным характеристикам самолета (простота и удобство
пилотирования, безопасность полета, возможность эффективного
выполнения целевой задачи и т. д.) должны быть переведены в тех-
нические и обязательно количественные показатели, проверка со-
ответствия которым дает уверенность в том, что самолет и его си-
стема управления действительно обеспечивают приемлемый уро-
вень характеристик устойчивости и управляемости.
Все требования к пилотажным характеристикам можно раз-
делить на следующие группы:
требования к статическим характеристикам устойчивости и
управляемости, характеристикам балансировки по режимам по-
лета и при изменении конфигурации самолета (под изменением
конфигурации понимается, например, выпуск шасси, закрылков,
изменение стреловидности крыла);
требования к динамическим характеристикам самолета в уп-
равляемом движении (при отклонении летчиком рычагов управ-
ления);
требования к характеристикам самолета в возмущенном дви-
жении (в частности, при действии атмосферной турбулентности);
требования по обеспечению невыхода самолета за установлен-
ные режимы полета (ограничение предельных режимов полета
по а, пу, М, У, <ох, р, nz).
В рамках допустимых режимов полета можно выделить:
основную область режимов полета, где наиболее часто исполь-
зуется самолет;
эксплуатационную область режимов полета, выход в которую
допустим в условиях массовой эксплуатации;
предельную область режимов полета, выход за которую в мас-
совой эксплуатации (исключением могут быть только специаль-
ные летные испытания) недопустим ни при каких обстоятельст-
вах.
Требования к характеристикам устойчивости и управляемости
должны быть дифференцированными в зависимости от вероят-
ности выхода самолета на тот или иной режим полета. Так, наи-
более благоприятные характеристики устойчивости и управляе-
мости должны обеспечиваться в основной области режимов полета.
Допустимо ухудшение этих характеристик в эксплуатационной
76
области, но при этом должно обеспечиваться выполнение полет-
ного задания. В предельной области режимов полета характери-
стики устойчивости и управляемости должны обеспечивать без-
опасность полета и возможность возвращения самолета в эксплуа-
тационную область режимов полета.
Различают три уровня пилотажных характеристик:
первый уровень — наиболее благоприятные характеристики
устойчивости и управляемости, которые целесообразно обеспе-
чивать в основной области режимов полета;
второй уровень — приемлемые или удовлетворительные ха-
рактеристики устойчивости, управляемости, допустимые в экс-
плуатационной области;
третий уровень — характеристики устойчивости и управляе-
мости, обеспечивающие безопасность полета, которые допустимы
только вне эксплуатационной области.
Не следует думать, что три уровня пилотажных характери-
стик однозначно связаны с тремя областями режимов полета.
Но некоторым показателям самолет в эксплуатационной области
и даже в предельной области режимов полета обладает первым
уровнем характеристик устойчивости и управляемости; в виде
исключения по некоторым показателям в основной области режи-
мов полета может быть допущен второй уровень характеристик.
Однако третий уровень характеристик недопустим как для основ-
ной, так и для эксплуатационной области полета.
Понятие уровней характеристик устойчивости, управляемости
рационально использовать не только для разных режимов полета,
но и с точки зрения исправности самолета.
При появлении в полете отказов, неисправностей, в том числе
н в системе управления, допускается ухудшение характеристик
устойчивости и управляемости. Если отказ какого-то агрегата
и системы — событие довольно частое (например, несколько раз
за время эксплуатации самолета), допустимо ухудшение пилотаж-
ных характеристик, но не ниже второго уровня. Если отказ —
событие маловероятное или почти невозможное (встречающееся
раз за время эксплуатации какого-то парка однотипных само-
летов или вызвано серьезным механическим повреждением кон-
струкции, но не вследствие других, достаточно вероятных от-
казов), допускается снижение характеристик до третьего
уровня.
Дифференциация требований к характеристикам устойчи-
вости и управляемости, но принципиально другого характера
связана с классами самолетов, их назначением и этапами полета.
Отличия в требованиях к тяжелым и легким самолетам традицион-
ны (разный уровень усилий и перемещений рычагов управления,
существенные отличия в требованиях к динамическим характе-
ристикам и т. д.). Следует подробнее остановиться на различиях
в требованиях к устойчивости и управляемости, связанных с це-
левым назначением самолета и этапом полета.
77
В процессе ручного пилотирования на разных этапах полета
летчик должен решать разные задачи: в одних задачах важно
управление линейными координатами (дозаправка, полет строем,
полет по глиссаде), в других — угловыми координатами (напри-
мер, стабилизация тангажа), в третьих летчик оперирует комби-
нацией угловых и линейных координат.
В этих задачах предъявляются разные требования к точности
пилотирования, к быстродействию управления. Отсюда неиз-
бежно следует вывод, что самолет на разных этапах полета дол-
жен обладать различными динамическими характеристиками и
характеристиками управляемости. И здесь дело не в количествен-
ных изменениях требований по каким-то показателям в рамках
различных уровней, а в качественном изменении набора этих по-
казателей, в формировании требований в других терминах. В пер-
вую очередь, речь идет о динамических характеристиках самолета
в управляемом движении.
Чем же определяется степень соответствия пилотажных ха-
рактеристик самолета? Здесь ответ однозначен: оценкой летчика.
Отзыв летчика о самолете, о его характеристиках устойчивости
и управляемости является конечной инстанцией в оценке прием-
лемости этих характеристик. Оценка летчика по своей природе
субъективна, но при выполнении ряда условий, исключающих
элемент случайности (в частности, определение оценки по группе
достаточно тренированных на этом самолете летчиков), оценка
несет в себе объективную информацию о степени приемлемости
характеристик самолета.
Поскольку оценка летчика служит техническим показателем
совершенства самолета, то помимо эмоционального оттенка (типа:
отлично, хорошо, удовлетворительно, неудовлетворительно, плохо,
очень плохо, опасно и неопасно, приятно и неприятно, нравится
или нет) она должна быть выражена количественно. Естественным
здесь оказалось использование шкальной системы оценок. В на-
шей стране для оценок летчиков часто используется пятибалль-
ная система (5 — отлично, 4 — хорошо и т. д.). За рубежом рас-
пространена десятибалльная шкала оценок с обратным направле-
нием отсчета (1 — отлично). Практические рекомендации к ис-
пользованию ее в оценке характеристик самолетов разработаны
летчиком Купером (США). В табл. 3.1 приведены обе шкалы и
показаны соответствующие уровни характеристик устойчивости
и управляемости. Соответствие между шкалами следует рас-
сматривать как приблизительное.
Оценка летчика — результат психической деятельности чело-
века, в комплексе она учитывает все стороны процесса пилотиро-
вания, взаимодействия человека с машиной. Не рассматривая
эргономических аспектов этой проблемы (вопросов оборудования
рабочего места летчика, расположения приборов и рычагов уп-
равления, обзора и т. д., т. е. комплекса вопросов, которые со-
ставляют предмет специальной науки о взаимодействии летчика
78
Таблица 3.1
5-балльная оценка R* 10-балльная оценка R Уровень пилотажных характеристик
5 1 1-й уровень
2
4 3
4 2-й уровень
3 5
6
2 7 3-й уровень
8
1 9
10
С самолетом — эргономики или инженерной психологии), выде-
лим вопросы динамического взаимодействия человека с самолетом.
Говоря о характеристиках устойчивости и управляемости, следует
опираться на представление о процессе управления в замкнутой
системе «самолет—летчик», где летчик выполняет роль регуля-
тора той или иной сложности в зависимости от логического уровня
решаемой задачи начиная от простейшей стабилизации заданного
режима вплоть до выполнения целевой задачи и всего полета.
С этих позиций оценку летчика определяют два показателя:
успешность (точность) выполнения поставленной задачи пило-
тирования;
степень напряженности, степень затрат его умственных (а
иногда и физических) усилий на решение поставленной задачи
пилотирования.
Очевидно, что если летчик на данном самолете не может вы-
полнить тот или иной маневр из-за недостатков в характеристиках
устойчивости и управляемости, то оценка летчиком самолета будет
плохая. Задача может оказаться выполнимой (точность пилоти-
рования — приемлемая), но при предельной собранности, боль-
шом напряжении сил летчика. Оценка такого самолета будет выше,
Чем в предыдущем случае, однако летчик отметит необходимость
улучшения характеристик самолета. Наконец, задача легко вы-
полнима с высокой точностью и без особого напряжения со сто-
роны летчика. Такой самолет получит хорошую оценку летчика.
Следовательно, оценка летчика — совокупность двух факто-
ров: точности и напряженности пилотирования. Необходимо учи-
тывать тесную связь между ними. Существует корреляция между
оценкой летчика и точностью пилотирования. При характеристи-
ках самолета, близких к оптимальным, эта корреляция может
79
быть невелика, но по мере ухудшения характеристик самолета
степень корреляции повышается.
Из этого следует, что уровень характеристик устойчивости
и управляемости наряду с оценкой летчика можно во многих слу-
чаях (при наличии четко поставленной задачи и сформулирован-
ного критерия точности пилотирования) оценивать по ошибке
пилотирования.
Учитывая все это, можно дать общую характеристику требо-
ваниям к устойчивости и управляемости самолетов.
Существующие государственные [5] и международные требо-
вания по устойчивости и управляемости содержат наиболее важ-
ные показатели устойчивости и управляемости самолетов (без
излишней их детализации), без удовлетворения которых самолет
не может эксплуатироваться.
Так, в части статических характеристик управляемости нор-
мами летной годности гражданских самолетов СССР регламенти-
руются максимальные усилия Р на рычаги управления. Они не
должны превышать по абсолютной величине:
350 Н — при управлении самолетом по тангажу;
200 Н — при управлении самолетом по крену;
700 Н — при управлении самолетом по курсу.
При этом нормируется не только максимальное усилие, но и
изменение усилия по перегрузке. Критерий Рпу не должен быть
по абсолютной величине меньше 98 Н. Регламентируется также и
градиент перемещения X ручки на единицу перегрузки. Для граж-
данских самолетов значения критерия Хпу не должны быть менее
5 см. Для обеспечения единообразия управления разброс крите-
риев Рпу, Хпу по режимам полета должен быть небольшим.
Самолет должен быть устойчив по скорости на всех основных
эксплуатационных режимах полета. Наклоны балансировочных
кривых Р — f (М) и X = F (М) должны быть положительными.
Для самолетов различных классов с учетом специфики их при-
менения перечень требований и их количественные показатели
могут существенно отличаться.
Так, для легких маневренных самолетов, где вместо штурвала
используется центральная ручка управления, уровень допустимых
усилий при управлении с учетом физических возможностей чело-
века должен быть ниже, чем на неманевренных.
В отличие от тяжелых самолетов управляемость по крену
маневренных самолетов можно характеризовать угловой ско-
ростью крена, поскольку маневр по крену самолетов этого класса
практически не ограничен (возможно выполнение одной или не-
скольких бочек; бочка — поворот по крену на 360°). Естественно
также, что управляемость по крену самолетов этого класса должна
быть выше, чем у пассажирских самолетов; здесь необходимо обес-
печивать возможность поворота по крену, например, на 180° за
2...3 с.
80
Требования к динамическим характеристикам (характеристи-
кам устойчивости) самолета направлены на обеспечение возмущен-
ного движения в виде колебательного с быстрым затуханием и
малым забросом или апериодического с малым временем переход-
ного процесса.
Большинство нормативных требований к динамическим харак-
теристикам самолета является обобщением всего предыдущего
опыта авиации. Эти требования исходят в определенной степени
Hi технических возможностей обеспечения необходимых пилотаж-
ных характеристик самолетами предыдущих поколений и полу-
чены на основе компромиссного удовлетворения разнообразным
условиям пилотирования на различных этапах полета. В част-
ности, это относится к величине времени срабатывания по пере-
грузке — времени достижения самолетом установившейся пере-
грузки пу при резком отклонении органа управления. Для пас-
сажирских самолетов величина времени срабатывания регламен-
тируется для этапа посадки (не менее 4 с). Для самолетов этого
Класса наиболее напряженным является режим посадки; крейсер-
скому режиму полета свойственно более плавное управление. Тех-
нически же может оказаться более простым обеспечить высокое
быстродействие именно на крейсерском режиме полета.
Вопрос о рациональных динамических характеристиках, в
частности, продольного движения требует более глубокого рас-
смотрения.
С позиций теории регулирования самолет является регулируе-
мым объектом. Для обеспечения высокого качества процесса управ-
ления (регулирования) в замкнутой системе «самолет—летчик»
Могут использоваться три основных подхода к формированию
требований к динамическим характеристикам регулируемого
обьекта (регулятор—человек—в известном смысле является
заданным):
нормирование переходных процессов регулируемого объекта
(самолета) при заданном (ступенчатом) управлении;
нормирование расположения нулей и полюсов передаточной
функции самолета с системой штурвального управления на ком-
плексной плоскости;
нормирование частотной характеристики самолета (при этом
могут учитываться и динамические свойства летчика).
Эти три подхода, адекватные с позиции общей теории регули-
рования, имеют принципиальные отличия в практическом приме-
нении к такой проблеме как формирование количественных требо-
ваний к динамике самолета.
Со времени появления реактивной авиации, требования к
переходному процессу по перегрузке были основной формой
нормирования переходного процесса самолета в продольном
движении, так как эти требования легко проверить в полете: от
Летчика требуется простое ступенчатое отклонение органа уп-
равления.
81
Рис. 3.1. Области приемлемых
пилотажных характеристик ма-
невренного самолета
Для звена второго порядка, которое является простейшей
моделью самолета в переходном процессе по перегрузке (Су = 0)
параметры передаточной функции (о0, £ или пара каких-либо дру-
гих зависящих от них величин (например, частота колебаний
со = и перерегулирование v = е~я&/Сй) полностью опре-
деляют характер переходного процесса самолета по перегрузке.
Поэтому требования к переходному процессу могут быть изобра-
жены на плоскости параметров, например <о0 и (рис. 3.1),
в виде областей оценок летчика. Аналогичным образом могут быть
изображены требования к динамическим характеристикам самолета
в боковом движении. Несомненное преимущество такой формы тре-
бований — компактность информации: на плоскости параметров
может быть охарактеризована вся совокупность переходных про-
цессов самолета по всем режимам полета в виде исходной конфигу-
рации области. Отсюда наглядно видны степень соответствия
самолета предъявляемым требованиям и режимы полета, где
необходимо улучшение характеристик самолета.
В 60-е годы совершенствование критериев пилотажных харак-
теристик происходило на основе углубленного анализа процессов
ручного пилотирования. Сложилось представление, что на режи-
мах полета с большими скоростями (при > 15) летчик управ-
ляет самолетом в основном по ощущению перегрузки, поскольку
угловая скорость тангажа и, следовательно, изменения тангажа
сравнительно медленны и невелики: Ф = coz = — &пу. На малых
же скоростях полета пилотирование выполняется с использованием
82
информации в основном по углу тангажа. Для учета совместного
няниния перегрузки и угловой скорости тангажа на характерис-
Н1КИ пилотирования был предложен так называемый С*-критерий.
। >п связан с нормированием (рис. 3.2) функции
С*(0 = п₽л(Г) + К«*(О,
»дг ПуЛ — перегрузка в кабине летчика; К — постоянный коэффи-
циент, имеющий размерность VJg (рекомендуемое его значение
пюгветствует скорости полета — 120 м/с).
Однако использование С*-критерия имеет два недостатка:
I) характер переходного процесса самолета в соответствии
(.'•-критерием зависит от режима полета (V, Н). Более правильно
< ннзывать требуемый характер переходного процесса с конкретной
япдачей пилотирования;
2) обеспечение переходного процесса в рамках установленных
ограничений в общем случае не гарантирует высокой оценки лет-
чика и эффективного решения той или иной конкретной задачи
пилотирования. Иногда при этом может возникнуть проблема
устойчивости замкнутой системы «самолет—летчик». Прекрасной
иллюстрацией этого служит рассмотрение управляемого движения
спмолета по крену, приведенное ниже.
В 60—70 гг. получил интенсивное развитие метод, связанный
г нормированием частотной характеристики самолета. Он базиро-
иллся на рассмотрении разомкнутой системы «самолет—летчик»
<• использованием простейшей модели летчика:
те- _ *ле-₽*(Тлр-М)
м'л-------Тхр + 1 ’
где г ~ 0,3 с — запаздывание летчика; Ка, Та, 7\ — переменные,
ко торые, отражают способность летчика адаптироваться к конкрет-
ному самолету, условиям и задаче пилотирования.
Суть метода состоит в следующем. Задача пилотирования сво-
дится к слежению за входным сигналом с максимальной домини-
рующей частотой ©г. Вначале проводится синтез (путем подбора
Ал. Т’д, 7\) замкнутой системы «самолет—летчик» по известным
требованиям, предъявляемым к логарифмическим амплитудно-
флзовы'м частотным характеристикам (ЛАФЧХ) разомкнутой
системы в теории регулирования:
обеспечение заданной частоты среза (©ср > 2шг);
обеспечение наклона логарифмической амплитудной характе-
ристики (ЛАХ) — 20 дБ/дек в районе частоты среза;
обеспечение запаса устойчивости по амплитуде порядка 12 дБ;
обеспечение запаса устойчивости по фазе порядка 40...60°;
достаточное удаление сопрягающих частот ©ь ©а от частоты
среза (3©х < ©ор < -i- ©а^ ;
обеспечение достаточно большого усиления на нулевой частоте
(16...18 дБ).
83
Рис 3.3. Зависимости частных оценок летчиков от параметров, определяю-
щих степень напряженности управления
Рис. 3.4. Области оценок летчика
Удовлетворение основным требованиям (наклон —20 дБ/дек,
запасы устойчивости) в большинстве случаев может быть достиг-
нуто только при уменьшении частоты среза.
На втором этапе получают оценку летчика R на основе экспе-
риментальных зависимостей частных оценок летчика от степени
его напряженности в процессе пилотирования с учетом эффектив-
ности решения поставленной задачи (точности пилотирования),
зависящей в основном от величин со^/соср и запасов устойчивости.
Некоторые примеры зависимости частных оценок летчика приве-
дены на рис. 3.3. Видно, что наиболее благоприятными с позиции
минимального напряжения летчика являются ситуации управле-
ния, в которых летчик выполняет функции звена усиления (с опти-
мальным коэффициентом).
Для продольного движения предложен способ предсказания
оценки летчика, основанный на частотной характеристике замкну-
той системы «самолет—летчик» с той же простейшей моделью
летчика. В упрощенном варианте этот подход учитывает только
чистое запаздывание летчика (т = 0,3 с; 7\ = 7\ = 0). Область
приемлемых пилотажных характеристик определяется в парамет-
рах dA/d<p и ср частотной характеристики W (/со) = Ле/ф самолета
по тангажу на определенной частоте. При напряженных условиях
пилотирования на легком самолете эта частота составляет со =
— 3,5 рад/с (рис. 3.4). Перенесение этих данных на другие задачи
пилотирования требует известной осторожности, поскольку не
угол тангажа, а другие фазовые координаты будут играть сущест-
венную роль при управлении.
84
Описанные примеры подхода в формировании требований к ди-
’*Ш1 ке самолета на основе частотных характеристик системы
i-MHuieT—летчик» имеют несомненные преимущества, присущие
ниЛще частотным методам теории регулирования: при таких под-
>ндмх гарантируется устойчивость замкнутой системы «самолет—
•ник» и, более того, гарантирована эффективность решения
’Ж'типленной задачи слежения (точность пилотирования).
Следует проявлять гибкость в использовании тех или иных
•унтгриев пилотажных характеристик (временных, частотных, по
«шинирующим нулям и полюсам). В зависимости от задачи пило-
нронания может оказаться рациональным использование времен-
ах критериев (например, в задачах энергичного маневрирования),
итотных критериев (в задачах стабилизации режима полета,
••жсиия или директорного управления). Вместе с тем следует
Рискованно подходить к выбору параметра и соответственно той
••рсдаточной функции самолета, по которым будет происходить
«(учение процесса управления: перегрузка или тангаж, крен или
•урс и т. д. или комбинация этих параметров.
В качестве иллюстрации этого положения рассмотрим управ-
щмое движение по крену.
Имеем следующую передаточную функцию самолета по крену
••М. разд. 2.3):
Если коэффициенты полиномов второго порядка в числителе
«знаменателе близки, т. е. 2£в — 2£i, со? ©об. то реализуется
*к называемое изолированное движение по крену, которое в пред-
положении малости спирального корня описывается простой пере-
(•точной функцией
Мх»
V/°9 р (р-%Кр)
Дадим несколько эквивалентных выражений этой передаточной
(«уккции в пересчете на отклонение ручки Хр (система управления
идеальная):
у(р)_______ ®х ______тахТ <ах
Хр (Р) Р (Р— ^кр) Р (^<i>xP + 1) Р ыхР + 1) Хр шах
Области приемлемых пилотажных характеристик изолирован-
ного движения по крену наиболее часто представляют на плоскости
пух параметров: <вжтах и Та>х (рис. 3.5). Эти области могут быть
получены как экспериментально (в полете, на стенде), так и расчет-
ным путем (например, по приведенной выше методике с исполь-
«ованием ЛАФЧХ).
85
шх> раЗ/с2
0.1 .1.0 10 Т^.с
Рис. 3.5. Области оценок летчиком изолированного движения крена
Вернемся к общему случаю движения по крену, когда со? нс
равно сооб- Далее будем использовать их отношение в виде пара-
метра X2 = со?/со|б- Разница величин 2£б и 2£i, как правило, нс
очень велика, и эффекты, вызванные этим, здесь рассматриваться
не будут.
Не касаясь физического существа явлений, обусловливающих
возможность получения для самолета различных значений пара-
метра X2 (кратко: это связано с образованием угла скольжения
при поперечном управлении и наличием у самолета поперечной
устойчивости; подробнее см. разд. 3.8), выделим три возможных
диапазона изменения этого параметра: 0 < X2 < 1; X2 < 0; %2 > I
и изучим их, последовательно применяя все три указанных под-
хода в формировании требований к динамике самолета.
I. Переходные процессы по крену при ступенчатом отклонении
элеронов. Для упрощенной системы уравнений (Хкр « 0, 2£б
~ 2gx 0) движение по крену описывается следующим решением:
Y-2 (0 = 4- sin ©if] .
На рис. 3.6, а представлена качественная картина движения
самолета по крену при различных значениях параметра %2. Из
графика видно, что по мере уменьшения параметра %2 от значения
X2 = I возрастает колебательная составляющая в движении крена.
При X2 < 0,5 появляется сначала «зависание» самолета по крену
(у (^) = 0), а затем и динамическая обратная реакция самолета по
крену: (у (/)/у (0) < 0). При X2 0 самолет неуправляем по крену.
При X2 < 0 (это недопустимо в эксплуатации) самолет имеет обрат-
ную реакцию по крену на отклонение органов поперечного управ-
ления.
Из анализа этих переходных процессов становится очевидным,
что оценки летчика должны ухудшаться потере уменьшения пара-
метра X2 в интервале 0 < X2 < I. Это подтверждается исследова-
86
рис. 3.6. Кривые переход-
ных процессов по крену и
уценки летчиков (по пяти-
Йльной шкале) в зависимо-
сти от параметра %2
реакция по крену движение самолета
по крену летчиком
3)
Ниями на пилотажных стендах (см. рис. 3.6, б). Именно эта ситуа-
ция оговорена в нормирующих документах, когда накладывается
ограничение на степень уменьшения угловой скорости в переход-
ном процессе при ступенчатом отклонении органов поперечного
управления. Из этих же экспериментов следует, что при увеличе-
нии параметра V от значения %2 = 1 оценки летчика также ухуд-
шаются. Это связано с тем, что при %2> 1 падает точность стабили-
зации крена, появляется тенденция к раскачке самолета летчиком.
Однако из анализа переходных процессов трудно установить
причину ухудшения пилотажных свойств самолета при %2 > 1.
Для этого необходимо обратиться к другим методам исследования.
2. Корневой годограф замкнутой системы «самолет—летчик».
Передаточная функция разомкнутой системы имеет вид
КшМ6/Тах (р2 + 2gtp + <of) Кле-^ (Тяр + 1)
р(ТахР + 1) (р2 + 2g6p + О>об) (тхр 4- 1)
Примем, что Tj = О, Тл ж Т^х (условия, вытекающие из удо-
влетворения приведенным выше требованиям).
На рис. 3.7 представлен корневой годограф замкнутой системы
«самолет—летчик» при изменении коэффициента усиления летчика
Кл Для трех различных случаев: %2 < 0; 0 < V < 1 и %2 > 1.
Из графика видно, что случаю X2 < 0 (обратной реакции самолета
87
Рис. 3.7. Корневой годограф замкнутой системы «самолет—летчик»
по крену) соответствует апериодическая неустойчивость системы
«самол ет—л етчи к».
Случай 0 < V < 1 является благоприятным с точки зрения
устойчивости замкнутой системы «самолет—летчик», при этом
летчик в стремлении стабилизировать угол крена самолета повы
шает демпфирование боковых колебаний.
При %2 > 1 замкнутая система «самолет—летчик» в зависи-
мости от конкретной величины параметров X2 и £ может стать
неустойчивой.
3. Частотная характеристика разомкнутой системы «самолет-
летчик». На рис. 3.8 представлены частотные характеристики
№раз (/<*>) разомкнутой системы (при 7\ = О, Тл = 7\.) для двух
случаев: 0 < X2 < 1 и X2 > 1. В первом случае отчетливо видно
уменьшение фазового запаздывания в диапазоне частот (<оь <ооб),
благодаря чему легко обеспечивается устойчивость при замыкании
системы. Одновременно видны неблагоприятные тенденции в пере-
ходном процессе из-за наклона ЛАХ, равного +20 дБ/дек, по
сравнению со случаем %2 = 1 из-за уменьшения амплитудной
характеристики на малых частотах.
Во втором случае имеется увеличение фазового запаздывания
в диапазоне частот (сооб, <ог) с | ср | > 180°, что при неизменной
частоте сооб приводит к колебательной неустойчивости замкнутой
системы «самолет—летчик».
Как видим, в данном конкретном случае (задача стабилизации
крена) подходы с использованием доминирующих нулей и полюсов
и частотной характеристики помогли объяснить явления, которые
трудно выяснить из анализа переходных процессов. Этот пример
наглядно показывает, что при оценке динамики самолета с систе-
мой управления целесообразно использовать различные подходы.
Перейдем теперь к вопросам обеспечения требований устойчи-
вости и управляемости самолета.
Достаточно хорошие характеристики устойчивости и управляе-
мости для дозвуковых самолетов могут быть обеспечены путем
соответствующей аэродинамической компоновки без применения
средств автоматики и регулирования в системе ручного управле-
ния, а для самолетов сравнительно небольших размеров и без
применения бустеров. Примером могут служить винтовые самолеты
88
Рис. 3.8. Частотные характерис-
тики разомкнутой системы «само-
лет—летчик»
и первые реактивные самоле-
ты, Решить комплекс вопро-
сов устойчивости и управля-
емости таких самолетов тем
легче, чем уже рабочий диа-
пазон высот и скоростей са-
молета. Здесь существенную
роль играет и экономический
фактор: стремление получить
массовый, небольшой стои-
мости самолет (и в то же вре-
мя предельно надежный и
удобный в эксплуатации) ди-
ктует необходимость макси-
-200
-180
-160
-1Ю
-120 £
§
-100
-80
-60
н-ллъпъго упрощения системы
управления вплоть до простой механической связи рычагов уп-
равления в кабине с органами управления. Такой подход исполь-
зуется для современных спортивных самолетов, небольших пас-
сажирских самолетов местных авиалиний и других самолетов.
Класс самолетов, на которых может рассматриваться безбус-
терное управление, ограничен. Это — дозвуковые самолеты, на
которых выбором соответствующей аэродинамической компенсации
рулевых поверхностей, применением серворулевого управления,
пружинных сервокомпенсаторов и т. п. можно обеспечить прием-
лемый уровень аэродинамических шарнирных моментов. Аэроди-
намические шарнирные моменты зависят от размеров самолета,
его массы. Поэтому безбустерное управление при приемлемом
уровне усилий на рычагах управления может быть реализовано
только на сравнительно небольших по размерам и массе дозвуко-
вых самолетах.
Основные трудности в обеспечении устойчивости и управляе-
мости сверхзвуковых самолетов с бустерным управлением, обуслов-
ленные ограниченными возможностями средств аэродинамической
компоновки, сводятся к следующему.
L Приемлемый уровень перемещений и усилий в продольном
управлении без специальной регулировки системы обеспечивается
только на части режимов полета: на околозвуковых скоростях
п малых высотах уровень Хпи и Рпу недопустимо мал, на больших
высотах и сверхзвуковых скоростях (М 1,2..Л,5) уровень
Хпу и Рпу. наоборот, очень велик и общий диапазон изменения
этих характеристик во всей области режимов полета составляет
несколько десятков раз (10,..40 раз).
2. Динамические характеристики продольного движения не
соответствуют требованиям полета на малых скоростях (мало
89
значение частоты угловых колебаний со0, самолет обладает «вялой»
реакцией на управление), на больших высотах при М < 1 (кроме
«вялости» реакции возрастает колебательность переходного про-
цесса) и в значительной части сверхзвуковых режимов, в особен
ности на больших высотах, где самолет обладает очень низким
уровнем демпфирования короткопериодических колебаний. При-
емлемые динамические характеристики самолета реализуются на
умеренных и больших приборных скоростях при полете на неболь-
ших высотах.
3. Самолеты обладают моментной неустойчивостью по скорости
в диапазоне чисел М= 0,9...1,1 (балансировочная кривая Хеал(М)
имеет отрицательный наклон).
4. Удовлетворительные динамические характеристики боко-
вого возмущенного движения самолетов обеспечиваются только
на небольших высотах, самолеты имеют повышенную колебатель-
ность в боковом движении. На больших числах М мал запас путе-
вой устойчивости.
5. Современные самолеты со стреловидными крыльями харак-
теризуются большой взаимосвязью движения по крену и рыс-
канию.
6. На больших углах атаки при дозвуковых скоростях полета
обычно уменьшается поперечная управляемость, параметр X2
стремится к нулю. Поэтому допустимый угол атаки дополнительно
ограничивается.
Таким образом, приемлемый уровень характеристик устойчи-
вости и управляемости современных самолетов с бустерным
управлением может быть обеспечен в рамках аэродинамической
компоновки самолета в сравнительно узком диапазоне режимов
полета: Н = 0...5 км, М = 0,4...0,6 (пу = 1). Приемлемые харак-
теристики устойчивости и управляемости вне этой области режи-
мов полета могут быть обеспечены автоматической регулировкой
коэффициента передачи от рычага управления к рулю =
— д8/дХ и усилий на рычаге по режимам полета, а также приме-
нением автоматики, обеспечивающей в контуре ручного управления
искусственное повышение показателей демпфирования и степени
статической устойчивости самолета.
Необходимая степень автоматизации и регулировок системы
ручного управления должна определяться в каждом конкретном
случае отдельно. Так, если самолет без автоматики обладает вто-
рым уровнем пилотажных характеристик, то степень автоматиза-
ции и регулировок системы должна быть сравнительно небольшой
(типа демпферов колебаний по трем каналам и регулировки
в продольном канале). Если же аэродинамическая компоновка на
некоторых режимах полета в эксплуатационной области не обла-
дает достаточным запасом продольной или путевой устойчивости,
степень автоматизации ручного управления должна быть сущест-
венно более высокой: необходимы автоматы продольной и путевой
устойчивости.
90
8.2. ДЕМПФЕР ТАНГАЖА
Демпфер тангажа применяется для улучшения соб-
ственных демпфирующих свойств самолета. Изменение коэффи-
циента тг происходит вследствие дополнительного момента,
создаваемого рулевой поверхностью (будем считать, что это цель-
ноповоротный стабилизатор), отклоняемой демпфером по закону
(рис. 3.9)
Аф =
Нетрудно установить, что при этом происходит приращение коэф-
фициента тг самолета на величину
Am“z = .
В результате при соответствующем выборе значения коэффициента
Кч>г в системе «самолет—демпфер» можно обеспечить требуемое
изменение коэффициента демпфирования
| = -i- rig — M°z — М, J или степени устойчивости по пере-
грузке ап = miv + m“7 р.
Структурная схема системы управления с демпфером тангажа
представлена на рис. 3.10.
Передаточная функция самолета по угловой скорости <аж
получена в разд. 2.2 в виде
p2+2gp4-«>2 ’ (3J)
здесь <р — угол отклонения цельноповоротного стабилизатора.
Допущения при ее выводе связаны с пренебрежением подъем-
ной силой органа управления (С^ = 0). При исследовании систем
Рис. 3.9. Аппаратное построение демпфера тангажа:
/ — рычаг управления; 2 — пружинный загружатель; 3 — датчик угловой скорости
4 — вычислительное устройство; S — сервопривод; 6 — гидромеханический привод
91
Рис. 3.10. Структурная схема системы управления с демпфером тангажа
стабилизации и демпфирования самолета с использованием обыч-
ных органов управления на этапе качественного анализа подъем-
ной силой органа управления можно пренебречь.
Передаточная функция системы управления в режиме демпфи-
рования (от угловой скорости к отклонению стабилизатора)
имеет вид
пу ____
W ~ (Тбр + 1) (Тспр* 4- 2£0ПТспР + 1) •
Здесь учтены только основные элементы системы управления,
вносящие фазовое запаздывание (бустер и сервопривод). При
необходимости число учитываемых элементов может быть увели-
чено (датчик, дополнительные фильтры, проводка управления).
Характеристическое уравнение замкнутой системы имеет вид
, =____________M^z(p + -y- ___________
+ 2gp 4- (Т^ 4-1) (^пР2 + Vcnp 4-1)' 1 •
На рис. 3.11 изображено взаимное расположение нулей и
полюсов передаточной функции разомкнутой системы — правой
части выражения (3.2) — и характер корневых траекторий при
изменении коэффициента усиления от нуля до бесконечности
в двух случаях: когда фазовое запаздывание системы управления
на частоте собственных колебаний самолета <р (<в0) невелико и
когда оно достаточно велико.
В первом случае корневые траектории, выходящие из домини-
рующих полюсов (корней В ± характеристического уравнения
свободного самолета), замыкаются на доминирующий нуль Хо —
= —При увеличении коэффициента усиления устойчивость
замкнутой системы «самолет—демпфер тангажа» теряется вслед-
ствие перехода в правую полуплоскость корневых траекторий,
исходящих из недоминирующих полюсов (в данном случае корней,
соответствующих сервоприводу). Потеря устойчивости наблюда-
ется на частотах, характерных для частот системы управления
(порядка нескольких герц).
92
Риг. 3.11. Корневой годограф самолета с демпфером тангажа:
I - фазовое запаздывание системы управления ф (0>о) мало; б —* фазовое запаздывание
Йатамы управления ф (а>о) велико
Во втором случае в правую полуплоскость уходят корневые
Траектории, исходящие из доминирующих полюсов, а на домини-
рующий нуль замыкаются корневые траектории недоминирующих
Полюсов. Частота потери устойчивости ниже, чем в первом случае.
Введем условные названия — первый и второй типы корневого
годографа.
Очевидно, что первый тип корневого годографа предпочтителен
по следующим причинам:
1) область устойчивости замкнутой системы является более
широкой;
2) при первом типе корневого годографа обеспечивается любая
етепень затухания переходного процесса, поскольку обеспечи-
вается любое соотношение действительной и мнимой частей корней
На доминирующей корневой траектории. При втором типе корне-
вого годографа степень затухания переходного процесса ограни-
чена, ограничено соотношение V®;
3) при первом типе корневого годографа допустимые передаточ-
ные числа могут быть выбраны более близкими к граничному
(соответствующему границе колебательной устойчивости). Этот
Вывод следует из анализа переходных процессов и сопоставления
амплитуд различных составляющих движения.
При первом типе корневого годографа колебательная состав-
ляющая движения, соответствующая корневым траекториям,
исходящим из полюсов V 2 = —fe2- ± =— V I — Sen» имеет
J сп Чп
небольшую амплитуду по сравнению с составляющей доминирую-
щих корней вследствие удаленности от начала координат. Поэтому
она становится заметной в переходном процессе только при непо-
средственной близости этих корней к мнимой оси.
Во втором типе корневого годографа основные составляющие
переходного процесса более сопоставимы по амплитуде и в переход-
ном процессе затухание ухудшается задолго до достижения гра-
ничного коэффициента усиления.
93
Можно сделать и более общий вывод: в системах регулирована
необходимо всегда стремиться к реализации первого типа кори,
вого годографа, когда корневые траектории доминирующих Поль
сов замыкаются на доминирующие нули, а потеря устойчивое!
происходит вследствие перехода в правую полуплоскость корневы
траекторий, исходящих из недоминирующих полюсов (полюсо!
соответствующих исполнительным элементам).
Важно оценить, какой тип корневого годографа следует ожн
дать в том или ином конкретном случае. Однако трудно и по все
видимости невозможно указать рецепт для решения этой задач
в общем виде для произвольной системы управления. Дадим Э1
оценку только для демпфера тангажа. Тип корневого годограф
в этом случае определяется фазовым углом, вносимым полюсам,
системы управления по отношению к полюсу самолета. По существ
это — фазовое запаздывание системы управления на частоте cot
ственных колебаний самолета. Имея в виду принципиальнуи
важность именно этой характеристики, аппроксимируем переда
точную функцию всей системы управления звеном е~рх. Это те»
более допустимо, что на запаздывание системы управления влияю
очень многие элементы (бустер, сервопривод, датчик, проводка
и т. д.). Это приближает ее к системе с распределенными пара
метрами, где передача сигналов от входа к выходу происходит ।
временной задержкой т (в изображении по Лапласу егрх). Звен.
в-»* не имеет амплитудных искажений (Л — 1), но и реальныг
частотные характеристики системы управления имеют незначи
тельные амплитудные искажения в диапазоне частот, где фазовое
запаздывание от системы не превышает 90°. Далее будет показана
важность именно этого диапазона частот.
Замена реальной системы управления звеном е~рх эквивалентна
замене полюсов, соответствующих системе управления, одним
полюсом в —оо.
Второе принимаемое допущение связано с тем, что действитель
ные части доминирующих нулей и полюсов практически совпа-
дают, т. е.
-^пав^-МГ-М^, -fn^.
При этих допущениях характеристическое уравнение
к(р + т"я“) । — .
“1 = (p2 + 25p4-a>g)e^’ К =
может быть преобразовано к виду
путем следующей замены переменных
94
Р = + ®* = <офт;
w, = /®о- |2; К = Кте^.
»№ эквивалентно переносу мнимой оси влево на величину
• нормировке осей в терминах фазового запаздывания системы.
Рассматривая структуру корневого годографа на этой модифи-
мфованной комплексной плоскости (рис. 3.12), приходим к вы-
м|Ду, что между двумя типами корневого годографа (а и б) имеется
фОмежуточный: в — реализация трехкратной седловой точки
•ЮГДа три корневые траектории приходят в одну точку на действи-
адьной оси).
Условие существования трехкратной седловой точки может
путь определено из системы трех уравнений: характеристического
равнения, его первой и второй производных, приравненных
• нулю: _ _
(р24-а>2.)ер' + Кр = 0,
(2р + р2 + ^.)е^ + Л = 0,
2 + 4р + р2 + о2. = 0.
>гсюда находим параметры седловой точки
1- у? . 5Д/У с -
Р =----®2. = -1---------------5,5;
(5/5 \
K = (3-Z5)eV 2 ’'~0,41; со, ~ 0,3.
Но величина о* = по своему физическому смыслу есть
иа что иное, как фазовое запаздывание на частоте собственных
«олебаний самолета (в радианах).
Следовательно, для реализации первого типа корневого годо-
фафа у самолета с демпфером тангажа необходимо, чтобы фазовое
•апаздывание системы управления на частоте собственных колеба-
ний самолета не превышало 0,3 X 57,3 =17°. Эта граница в опре-
цденной степени условна; резкое изменение структуры корневого
ПИ. 3.12. Типы корневого годографа самолета демпфером сгангажа (№сис в
- Г1*);
« *> Ьй тип; б — 2-й тип; « —- промежуточный тип
95
годографа при достижении этого фазового запаздывания отнюд|
не означает качественного изменения динамических характеры
тик самолета с демпфером тангажа; на самом деле они изменяются
(ухудшаются) плавно по мере увеличения фазового запаздывания
системы управления. Если фазовое запаздывание системы управлс
ния на частоте собственных колебаний самолета меньше 15...20'
то можно до подробных расчетов и моделирований утверждать,
что с данной системой управления можно добиться любой необхо
димой степени демпфирования колебаний. Переходный процес<
здесь будет близок к переходному процессу с идеальной системой
управления. От динамических характеристик системы управления
зависит только граничное значение передаточного числа. При
фазовом запаздывании системы управления ср ~ 20...25° и болм
гарантировать необходимое демпфирование короткопериодически*
колебаний демпфером тангажа трудно, необходимо проведены
расчетов и моделирования.
Отметим, что собственная частота колебаний самолета макси
мальна при больших скоростных напорах, в особенности на сверх
звуковых скоростях, где велики запасы продольной устойчивости
Особенно остро стоит проблема обеспечения допустимого фазовом
запаздывания системы для легких самолетов: на этих самолета*
частота продольных колебаний выше, чем на тяжелых.
Перейдем к оценке граничного коэффициента усиления демп
фера тангажа. Нижнюю оценку его величины можно получить ю
упрощенного характеристического уравнения
—1
(р2 + ®2)ед
Подстановкой р = йо получим два уравнения:
(й2 — <о2) cos 5 = 0,
(со2 — со2) sin со + К. со = 0.
Из первого уравнения находим, что потеря устойчивост!
происходит на частоте, где фазовое запаздывание системы состаи
ляет 90° (cos © = 0, © = сот = <р (со) = . Коэффициент усн
ления на границе устойчивости
77__ (я/2)2 — Л
Д ~ я/2 — 2 •
После перехода к физическим параметрам получим следующун
формулу для оценки граничного значения
Иногда вместо отношения л/2т удобно пользоваться частотой
и,0, на которой фаза системы управления составляет <р = —90°:
К&ггр =
qSbAm* '
(3.3)
Приведенная формула дает весьма приближенную оценку гра-
ничного передаточного числа. При желании она может быть уточ-
нена различными способами, в том числе непосредственным расче-
том конкретной системы. Из этой формулы, в частности, видно,
что увеличение запаздывания системы сужает область устойчи-
вости замкнутой системы. При этом необходимо помнить, что основ-
ное влияние запаздывания системы управления проявляется в
ухудшении качества переходных процессов в замкнутой системе.
Основной результат этой формулы — обратно пропорциональ-
ная зависимость граничного коэффициента усиления от скорост-
ного напора, эффективности органа управления. Учитывая требо-
вания определенного запаса по коэффициенту усиления (не менее
чем в два раза от граничного), легко определить рациональную
программу изменения передаточных чисел по режимам полета
I зависимости от q и М.
Из оценки граничного передаточного числа можно получить
Допустимое значение K&z. Но остается вопрос: а какие же переда-
точные числа действительно рационально использовать в демпфере
тангажа? Для ответа на этот вопрос вспомним о параметрах сис-
темы «самолет—демпфер тангажа», соответствующих реализации
переходной седловой точки. Значение К составляло 0,41, в этот
момент данная система имела максимальный запас устойчивости
(три корня наиболее удалены от мнимой оси) и быстродействие,
близкое к максимальному. Сравнивая это значение К с граничным
(Кгр = 1,57), видим, что в демпфере тангажа диапазон рацио-
нальных передаточных чисел более чем втрое отличается от гранич-
ного коэффициента усиления.
Рассмотрим влияние демпфера тангажа на статическую устой-
чивость и управляемость самолета. Демпфер тангажа дает прира-
щение запаса устойчивости самолета по перегрузке
Дт®* /Р
Л ГТ — - -- -----* = * в
п ±Ц ±р*А
Если передаточное число не регулируется по режимам полета,
то приращение устойчивости будет возрастать с увеличением ско-
рости и падать с увеличением высоты полета. Размерность самолета
(iA) не входит в это выражение, входит удельная нагрузка на кры-
ло. Если же учесть ограничение на допустимые передаточные числа
NS соображений устойчивости замкнутой системы «самолет—
демпфер тангажа» (Л^дон а* 0,5/С^гр), то получим следующую
формулу:
4 Зак. 278 97
(Дап)шах — ' 2yZ ’ ГДе ’
из которой видно, что изменение ал от демпфера тангажа не зависти
от высоты полета и обратно пропорционально скорости полета
Наибольшее влияние демпфера на ап наблюдается на тяжелых
самолетах.
Из соотношения
ф -- КшХя “b ------ КшХЛ 4“ ^ПУ
устанавливаем, как изменяется характеристика Хпу:
т. е.
Хпу =
1
Лш
ф”у —
\Хпу
K*z g
Лш v *
g
V ’
Рассмотрим влияние ограничения хода демпфера тангажа на
его эффективность и безопасность полета в случае отказа. Ограни
чение по углу отклонения органа управления от демпфера приво
дит, в первую очередь, к тому, что при достаточно больших возму-
щениях и управлениях его эффективность в демпфировании про-
дольных колебаний снижается. Наиболее заметно влияет ограни
чение хода демпфера на его эффективность при маневрах с пере
грузкой, поскольку за счет постоянной составляющей угловой
скорости расходуется часть рабочей зоны демпфера:
Дф = у- Лп9-
При достижении некоторой перегрузки демпфер с ограничен
ным ходом выходит в зону насыщения, т. е. перестает выполнять
свои функции по демпфированию колебаний и, следовательно,
влиять на характеристики устойчивости (по оп) и управляемости
(по X"») самолета.
При выборе хода демпфера тангажа необходимо учитывать
возможность его отказа. Стремление заметно повысить Дол по
сравнению с сгл исходного самолета и при этом иметь достаточно
большой диапазон перегрузок, где обеспечивается нормальное
функционирование демпфера, противоречит безопасности полета
при отказе демпфера возникают большие приращения перегрузки
Если же учесть, что отказ демпфера в условиях маневра може,
привести к перекладке сервопривода из одного крайнего положения
в другое, то такой отказ приведет к удвоению изменения пере
грузки. Поэтому использование нерезервированной автоматики
требует существенного ограничения хода приводов по соображе
ниям безопасности. Вследствие этого нельзя обеспечить кардиналь
кого изменения пилотажных свойств самолета.
98
Иногда изменение характеристик статической устойчивости и
!Управляемости от демпфера тангажа является нежелательным
самолет без демпфера тангажа обладает приемлемыми значениями
и Хпу). По этой причине, а также для частичной компенсации
фазового запаздывания системы управления целесообразно исполь-
•овать в демпфере тангажа фильтр, передаточная функция которого
Выбор постоянной времени фильтра порядка Т Т1С дает возмож-
ность компенсировать нуль Хо = —1/7\с передаточной функции
самолета. Демпфер тангажа с таким фильтром не изменяет харак-
теристик сгп и Хпу и сохраняет свою эффективность в условиях
маневра.
Прежде чем переходить к рассмотрению других более сложных
стоматических систем улучшения продольной устойчивости и
управляемости сделаем последнее замечание по использованию
демпфера тангажа, облегчающее сопоставление различных струк-
тур управления.
В соответствии со структурной схемой, приведенной на
рис. 3.10, где в качестве основной переменной на выходе принята
перегрузка, передаточная функция находится в обратной
Цепи. В предельном случае при бесконечном коэффициенте усиле-
ния ее нуль определяет характер переходного процесса само-
лета с демпфером тангажа. Действительно, из передаточной
функции самолета с демпфером тангажа
w (Т2пр2 + 2^аТспр + 1)
fl /X - "г-
v/ л pp2 + 2gp4-a>2)(T6p+l)(Tc2np2 + 2gcnTcnp+l)-
— {р + ~р~ пв ) J
При Kaz -> оо получаем
Очевидно, что такой переходный процесс может оказаться
Неприемлемым (например, в силу малых значений Следо-
вательно, нецелесообразно выбирать значение передаточного числа
демпфера близким к граничному.
3.3. АВТОМАТ ПРОДОЛЬНОГО УПРАВЛЕНИЯ
С помощью демпфера тангажа можно благоприятно
Влиять на характеристики устойчивости самолета. Однако ради-
кальное изменение этих характеристик (например, для статически
Меустойчивого самолета) с помощью только одной обратной связи
4*
9»
по угловой скорости не представляется возможным. Эффективно
влиять на характеристики устойчивости и управляемости самолета
можно, если наряду с обратной связью по а>, вводить обратную
связь по приращению перегрузки Алу, а также автоматически
регулировать коэффициент передачи Автоматы с такой
структурой называются автоматами продольного управления.
Проанализируем вначале те дополнительные возможности в
улучшении характеристик устойчивости, которые открываются
с введением обратной связи по перегрузке.
Отклоняя поворотный стабилизатор на угол Л<р пропорциональ-
но приращению перегрузки в центре масс самолета Ап„ =
= HCylCe т. п автомат обеспечивает изменение коэффициента тг v
на величину
\mcV-K -К m?pR2
Am, - An~cvr— ~ Kn 2gm/s >
где
Если датчик перегрузки (акселерометр) расположен на рас-
стоянии £д (по оси ОХ) от центра масс самолета, то он измеряет
перегрузку
Пд = Пдц,Ы Н
где Пд ц. и — Пда + п’ф. Следовательно, при анализе систем с
использованием информации по перегрузке необходимо учитывать
как аэродинамическую силу органа управления, так и положение
датчиков перегрузки.
Смещение датчика перегрузки относительно центра масс,
в первую очередь, влияет на устойчивость замкнутой системы
«самолет—автомат управления», причем расположение датчика
в носовой части фюзеляжа является в этом отношении наиболее
благоприятным.
В дальнейшем для упрощения анализа будем считать, что дат-
чик перегрузки расположен в центре мгновенных ускорений само-
лета при отклонении органа продольного управления. Положение
этого центра определяется из условия
4 + ^L = 0. М
При выполнении условия (3.4) обеспечивается равенство нулю
линейного ускорения от органа управления: + L^z- = О
и датчик, по существу, выдает информацию о составляющей пере-
грузки от угла атаки: пу — пуа.
100
Опираясь на допущение, что датчик перегрузки расположен
в центре мгновенных ускорений, будем использовать упрощенную
передаточную функцию самолета по перегрузке
Л?фп“
(3-5)
Рассмотрим следующий закон отклонения стабилизатора по
каналу автоматики (рис. 3.13, а):
Д<р = 2СпДПр -|- Ка>г<&г, (3.6)
где
== Пу 1 •
Передаточная функция разомкнутой системы при принятом законе
управления имеет вид
| Мг | [р + (т- ПУ
"'раз (p2 + 2gp + ©§)F(p)
Здесь оператор F (р) характеризует запаздывание, вносимое
элементами системы управления (бустер, сервопривод и т. п.).
Примем, как и ранее, F (р) = е₽т.
Преобразованием переменных, рассмотренным в разд. 3.3,
получим следующее характеристическое уравнение:
1 - K(p + Q)
(р2 + «>2)еР ’
где К = I К<а М% |те6т; а>,=1Ла>о — g2r; Q = -^2- п®т.
I z I г Л о 2
Совершенно аналогичными приемами, что и для демпфера тан-
гажа, правда, с решением трансцендентных уравнений, можно
определить возможные типы корневого годографа. Эти данные
приведены на рис. 3.14 в функции Q и ©0. При этом рассматри-
вается и статически неустойчивый самолет (©^<0). Из анализа
корневых годографов следует, что приемлемые динамические ха-
рактеристики (1-й тип корневого годографа), обеспечиваются при
сравнительно небольших значениях й (порядка 0,1) и малых со 0.
Это означает, что в системе могут использоваться небольшие
по величине отношения Кп/Ка^
Кп _ 0.1
п“т
Отсюда следует, что передаточное число Кп по режимам полета
Должно регулироваться гораздо в большей степени, чем Kwz.
Обратим внимание на существенную зависимость получаемых
Динамических характеристик от выбора параметров системы:
101
Рис. 3.13. Схемы систем с сигналом по перегрузке:
а — простейшая; б — с введением сигнала по перемещению ручек
незначительное изменение отношения KnIK.<s>z ведет к довольно
резкой перестройке корневого годографа (см. рис. 3.14). Большая
чувствительность данной системы к настройке параметров опре-
деляется тем, что при двух доминирующих полюсах в системе
имеется всего один доминирующий (функциональный) нуль Хо =
= — f-n- + 1 уп ) и замыкание на него корневых траекторий
происходит после точки кратных корней.
Поскольку для данной системы стабилизации сохраняется та
же структура корневого годографа, что и для демпфера тангажа,
естественно ожидать, что улучшение продольной устойчивости
самолета и изменение его характеристик управляемости от вклю-
чения такой системы будет того же порядка, что и от демпфера
тангажа (хотя, несомненно, больше).
Оценим влияние системы с законом управления (3.6) на стати-
ческие характеристики управляемости. Обратившись к соотноше-
нию
102
Рис. 3.14. Типы корневых годографов системы с сигналом по перегрузке
ф — КшХл “Ь Кп Ally Д^у»
где Хл — перемещение рычага от воздействия летчика, опреде-
ляем
х"’“Т5г[У'_(к" + Л"-Т-Л- (37>
Следовательно, &Xnv =-+ т. е. отклонение
рычага управления, требуемое для изменения перегрузки на
единицу, увеличивается. Если этот эффект нежелателен, то влия-
ние обратных связей по со2 и Диу на характеристики управляемости
можно уменьшить введением сигнала с датчика перемещений
рычага управления (см. рис. 3.13, б). При этом имеем
Дф == КхКпХл + Кп
ф = 7СшХл 4” КхКпХл 4“* Кп &Лу + &Пу-
103
Отсюда находим
т. е. изменение градиента Xnv по модулю
|дхяИ = |хп»---
I Лщ
Кп + у | ^ПУ | |
Кш + КхКп Кш , , Кш~
+ КхКп
по сравнению с законом управления (3.6) уменьшается.
Так как обратные связи по coz и Дп„ вводятся из соображений
динамики возмущенного движения, то вызываемое ими изменение
характеристик управляемости следует рассматривать как побоч-
ный эффект. Требуемое изменение показателя управляемости
Xnv можно осуществить путем соответствующего регулирования
коэффициента передачи Кш- Простейшим устройством, выполняю-
щим эту функцию, является автомат регулировки управления
(АРУ). Для обеспечения требуемых перемещений рычага управле-
ния на единицу перегрузки этот автомат регулирует длину качалки
в тракте управления (а тем самым и коэффициент Кш) в функции
скоростного напора q и высоты полета Н. Требуемая программа
регулирования устанавливается следующим образом.
При законе управления (3.6) имеем
где
<рп» == —
*
Следовательно, для выполнения условия Xnv — —1/C = const
коэффициент передачи Кт необходимо регулировать по закону
I v • " / j
Обычно требуемую зависимость Ki (требуемую длину регули-
руемой качалки) аппроксимируют простыми в реализации функ-
циями переменных q и Н. Их и закладывают в программное уст-
ройство АРУ.
Точно так же, по программе, регулируется загрузка рычага
управления (с ростом скоростного напора жесткость пружины
увеличивается). Тем самым обеспечивается выравнивание гра-
диента Pnv. Эту функцию выполняет автомат регулировки загрузки
(АРЗ).
Проблема обеспечения требуемых характеристик управляе-
мости независимо от исходных характеристик самолета успешно
104
решается применением автомата с интегральным законом управле-
ния
ф = ХШХД + ТЦсо, + Кп Ьпу + К J (Ал, + Кх АХл) dt, (3.8)
где Ап„ = Пу — 1; АХЯ — Х„ — Хбал; ХСал — балансировочное
отклонение рычага управления.
Вследствие равенства подынтегрального выражения нулю в
установившемся режиме полета этот закон обеспечивает выполне-
ние условия
Хпи —-----= const при Кх — const
независимо от параметров исходного самолета.
Рассмотрим подробнее динамику самолета с интегральным
эаконом по перегрузке. Используя упрощенную передаточную
функцию самолета по перегрузке (3.5) (датчик перегрузки по-
прежнему в центре мгновенных ускорений), запишем передаточ-
ную функцию разомкнутой системы
™ ________2 L \ 7 *<»*/* K<Qz J
РМ p(p2 + 2gp + <o20)(T6p+l)(7’2np2 + 2gcnTcnp+l) '
Первое, на что следует обратить внимание, — это наличие
двух доминирующих нулей и трех полюсов. Для данной системы,
как и для предыдущих, следует стремиться к реализации первого
типа корневого годографа. Это достигается расположением нулей
в доминирующей области, т. е. в достаточной близости к домини-
рующим полюсам (в районе начала координат). При этом условии
можно обеспечить заданный колебательный переходный процесс
в замкнутой системе путем соответствующего выбора отношений
передаточных чисел KnlKaz, K^Kaz. Как видно из передаточной
функции, эти отношения определяют частоту и демпфирование
эталонного переходного процесса (при K<az-^~ оо), обусловленного
нулями этой передаточной функции.
Граничный коэффициент усиления Kaz в данной системе оцени-
вается аналогично граничному коэффициенту усиления демпфера
тангажа и по порядку величин близок к нему. Однако наиболее
рациональное значение этого коэффициента следует выбирать
иначе, чем в двух предыдущих системах. В предыдущих системах
коэффициент усиления мог быть выбран сравнительно небольшим
по отношению к граничному (Ka>z « 0,3/Со^р). В данной же сис-
теме коэффициент усиления следует выбирать возможно более
близким к граничному. Этим удается обеспечить максимальное
значение действительного корня, обусловленного наличием в сис-
теме интеграла, и тем самым приблизить переходный процесс
к звену второго порядка.
105
Интегральная система управления реализуется, когда тре-
буются достаточно жесткая стабильность характеристик управ-
ляемости (Xnv, Pnv), а разброс этих характеристик по режимам
полета исходного самолета весьма велик. Это означает, что распо-
лагаемое отклонение, органа управления в контуре автоматики
должно быть большим: необходимо радикально менять характе-
ристики самолета. Естественно, что система с большими отклоне-
ниями органа управления в контуре автоматики требует резерви-
рования (минимум трехкратного, если нет критерия отказа).
В этом случае целесообразен переход на дистанционное управле-
ние.
При интегральной системе управления реализация резервиро-
ванной системы требует особого рассмотрения, поскольку дрейф
интегрирующих устройств может приводить к большим рассогла-
сованиям между подканалами системы и отключению подканалов.
Поэтому иногда используют квазиинтегральные законы управле-
ния, заменяя интегрирующее звено апериодически^ с достаточно
большой постоянной времени фильтра.
Особо остановимся на обеспечении требуемых характеристик
устойчивости и управляемости статически неустойчивого самолета.
Схема системы дистанционного управления неустойчивым самоле-
том представлена на рис. 3.15. Средства автоматики обеспечивают
необходимое соответствие между усилием ДР, прикладываемым
к ручке управления, и развиваемой самолетом перегрузкой Дпр.
Благодаря изодромному приводу в закон управления вводится
интеграл от сигнала ошибки. Поэтому в установившемся режиме
управляющий сигнал на входе привода равен нулю и, следователь-
но, выполняется условие
Кр ЬР “Ь Кп &Пв 4" Х<а^г — О"
Из этого условия можно определить требуемое усилие на ручке
летчика для достижения приращения перегрузки на единицу
Рп1> = (Кп + (g/V)K^. (3.9)
При триммировании усилия сигнал заданной перегрузки посту-
пает в систему из канала триммера.
Наличие интеграла в законе управления позволяет установив-
шуюся ошибку сводить к нулю. Это обеспечивает балансировку
самолета при изменении скорости при неизменном усилии на ручке.
Вследствие этого самолет приобретает свойство нейтральной
устойчивости по скорости (балансировочное положение рычага
управления не изменяется при изменении скорости).
В полете степень устойчивости или неустойчивости по пере-
грузке может изменяться как вследствие целенаправленного
управления положением центра масс или фокуса самолета (см.
гл. 4), так и изменения числа М (при переходе через М = 1 фокус
самолета резко сдвигается назад). Поэтому система автоматиче-
106
Рис. 3.15. Схема системы управления нормальной перегрузкой
ского управления должна нормально функционировать во всех
возможных случаях. Это обеспечивается соответствующим выбором
коэффициентов Кп и Ka>z и их регулировкой в полете. При регули-
ровании коэффициентов Кп и K«>z должен регулироваться и коэф-
фициент Кр для обеспечения стабильности критерия Pnv [см.
формулу (3.9)].
Обратимся к структурной схеме (рис. 3.16) рассматриваемой
системы. Передаточная функция самолета по углу атаки 1Га/ф (р)
существенно зависит от устойчивости по перегрузке, а именно:
№а/ф =
ту + 2^тоР +1
Кд
Р (Тр 4-1)
КсЛс
(Т1Р- 1)(Т2р4-1) ’
при ап < 0:
при оп = 0:
Л>Т2 при оп>0.
Однако при р -» оо зависимость от оп ослабевает и передаточ-
ная функция стремится к единой для всех случаев асимптоте
Мг/р2, т. е. динамика самолета в области больших частот от а„
не зависит. Поэтому в замкнутой системе требуемые показатели
Рис. 3.16. Структурная схема системы управления нормальной перегрузкой
107
Рис. 3.17. Логарифмические амплитудные и фазовые частотные характеристики
разомкнутого контура управления перегрузкой
устойчивости и качества могут быть обеспечены как при ап < О,
так и при ап > 0 при неизменной структуре обратных связей.
В этом можно убедиться, обратившись к логарифмическим частот-
ным характеристикам разомкнутой системы, построенным на
рис. 3.17 в соответствии с передаточной функцией
1+Т1Суп° \ ТиР+1 1 w
"Г т1с ) Ttf т»р» + 2£тр-|-1
где V = KnlKaz.
Частотные характеристики построены для одного и того же
режима полета при следующих значениях параметров системы
управления:
Кп = 1,1; = 2,5 с; Ти = 1 с; т = 0,05 с.
Система управления неустойчивым самолетом, являясь неотъем-
лемой частью конструкции самолета, должна обладать достаточно
высокой надежностью, которая достигается соответствующим
уровнем резервирования датчиков информации, электронных
цепей, исполнительных приводов, источников электропитания
и гидропитания.
Рассмотрев некоторые принципы построения систем штурваль-
ного управления самолетов в продольном движении, отметим, что
108
аналогичными приемами могут быть проанализированы и другие
структуры управления. Важно соблюдать методическое единооб-
разие при качественном рассмотрении конкретных систем. При
качественном анализе проводят:
анализ расположения нулей и полюсов передаточной функции
разомкнутой системы и структуры корневого годографа;
оценку граничных и допустимых передаточных чисел в системе;
оценку переходных процессов и динамических свойств замкну-
той системы;
оценку характеристик управляемости.
Выполнение в таком объеме качественного анализа позволяет
составить предварительное представление о рациональности ис-
пользования той или иной структуры системы управления. На
этом этапе анализа можно вносить определенные изменения в
структуру системы управления, например, корректирующие филь-
тры (низкочастотные и высокочастотные) для расширения областей
устойчивости и т. п. На этапе расчетного анализа систем управле-
ния (математическое моделирование на ЦВМ и АВМ) постановка
задачи может существенно усложняться. Здесь можно выделить
два направления:
1) более детальное описание системы управления с учетом
основных нелинейных эффектов;
2) более подробная динамическая схема самолета — здесь
важен не столько учет фугоидного (длиннопериодического) движе-
ния, сколько влияние упругих колебаний конструкции.
Можно условно выделить три вида нелинейных характеристик
системы:
обусловленные технологией (люфты, зоны нечувствительности,
трение);
вызванные энергетическими ограничениями системы (скорости
перемещения штоков приводов);
определяемые из условий безопасности полета (скорость пере-
кладки триммера, ограничение хода сервопривода).
При наличии нелинейности в системе управления необходимо
проводить специальный анализ и расчеты, на основании которых
выясняют:
наличие в системе автоколебательных режимов и значения их
параметров (частот и амплитуд);
устойчивость предельных циклов автоколебаний;
характер возбуждения автоколебаний — мягкий (без дополни-
тельных возмущений по управлению от летчика или в виде внеш-
него воздействия типа порыва ветра) или жесткий (только при
наличии определенного уровня дополнительных возмущений);
функционирование системы с учетом нелинейности.
Многое из этого может быть выяснено еще на этапе качествен-
ного анализа системы с привлечением, в частности, методов гармо-
нического баланса (методы Гольдфарба, Попова). Однако, по-
скольку эти методы являются приближенными, необходимо про-
109
Рис. 3.18. Структурная схема замкнутой системы управления:
а — исходная; б — преобразованная
г
У
водить моделирование, которое одновременно позволит решить,
насколько существенно нелинейные характеристики системы вл и-
яют на ее функционирование.
В качестве иллюстративного примера рассмотрим статически
неустойчивый самолет (ап > 0) с позиционным автоматом по пере-
грузке Дф = Кв>гй)2 + Кп при этом учтем наличие зоны
нечувствительности и ограничение по скорости в сервоприводе.
Структурная схема замкнутой системы (рис. 3.18, а) преобразуется
к одноконтурной (рис. 3.18, б), при этом передаточная функция
линейной части системы имеет вид
^л-’ = — р(Тр+ 1) х .
{ ГбР + 1) (р2 + [р + (-|- +
Х (р» + 25р+<о§)(Т6р+1)
Полюса этой передаточной функции совпадают с полюсами
разомкнутой системы, при этом появляется еще один дополнитель-
ный полюс в начале координат. Нули этой передаточной функции
есть не что иное как корни замкнутой системы «самолет — САУ»
без учета сервопривода.
Два нелинейных эффекта в сервоприводе описываются одной ку-
сочно-линейной зависимостью, гармонический коэффициент усиле-
ния которой представлен на рис. 3.19, б. Выполняя условие замыка-
ния системы, получим следующее характеристическое уравнение:
1
р(Тр + 1)
{ (Тбр +1) (р2 + 2|р + ш2) - M*KWz [р + (^- + «“] }
(р2 + 2£Р + шо) бР + 0
Принимая К (А) в качестве коэффициента усиления передаточ-
ной функции разомкнутой системы, получим корневой годограф
(рис. 3.19, а).
ПО
Рис. 3.19. Корневой годограф линеаризованной системы (а) и гармонический
коэффициент усиления нелинейного элемента (б)
Из структуры корневого годографа видно, что пересечение
с мнимой осью соответствует некоторой частоте ша. Но именно
эта точка корневого годографа имеет физический смысл в данной
задаче: этой частоте соответствуют автоколебания в замкнутой
нелинейной системе. Имея расположение нулей и полюсов на ком-
плексной плоскости и зная частоту автоколебаний, легко опреде-
лить граничный коэффициент усиления Кгр (Л). После этого по
графику (Л) можно найти амплитуду автоколебаний. В данном
случае в системе реализуются два предельных цикла: с малой
амплитудой автоколебаний, который определяется зоной нечув-
ствительности, и с большой амплитудой, который обусловлен
ограничением скорости сервопривода. По формальным правилам
оценки устойчивости этих автоколебаний и из простых физических
соображений приходим к следующему выводу: автоколебания
«в малом» являются устойчивыми, автоколебания «в большем» —
неустойчивыми. При этом также из физических соображений
(исходный самолет неустойчив) ясно, что автоколебания «в малом»
имеют мягкое возбуждение, а автоколебания «в большом» имеют
жесткое возбуждение: только при наличии больших резких воз-
мущений, соизмеримых по величине с амплитудой предельного
цикла, возможно появление неустойчивого движения самолета
с САУ. При разработке системы управления необходимо стре-
миться, чтобы автоколебания «в малом» были практически неза-
метны для летчика (остаточные колебания по перегрузке должны
быть по амплитуде не более ж 0,05), а автоколебания «в боль-
шом» не должны возбуждаться при резком отклонении рычага
и реально возможных внешних возмущениях. У исследователя
много возможностей воздействия на параметры автоколебательных
111
режимов. Помимо очевидного влияния добротности сервопривода
(повышение добротности уменьшает амплитуды автоколебаний
«в малом» и увеличивает амплитуды автоколебаний «в большом»),
в рассмотренном примере уменьшение запаздывания системы управ-
ления (силового привода) также благоприятно влияет на характе-
ристики автоколебательных режимов: уменьшается амплитуда
автоколебаний «в малом» и повышается амплитуда автоколебаний
«в большом».
Результаты качественного анализа о возможности автоколеба-
тельных режимов в системе должны проверяться моделированием
и при летных испытаниях по двум причинам: во-первых, в силу
приближенности самого метода гармонического баланса, во-вторых,
существование автоколебательных режимов определялось в так
называемой автономной системе при отсутствии входных сигналов.
В реальном полете это условие практически невыполнимо: помимо
управляющих действий летчика на систему действуют возмущения
ветра, тряска конструкции, а также упругие колебания конструк-
ции. Последние рассмотрим далее (они коррелированы с отклоне-
нием органов управления). Разделим условно все входные воздей-
ствия на два вида: медленно и быстро изменяющиеся во времени
(по отношению к частоте ожидаемых автоколебаний).
Медленно изменяющиеся воздействия приводят к тому, что
в сервоприводе существует средний ненулевой сигнал скорости
перекладки, который выходит за пределы зоны нечувствительно-
сти. В окрестности этой точки линеаризованная система сразу
имеет конечный коэффициент усиления, равный добротности при-
вода. Отсюда автоколебания «в малом» на неустойчивом самолете
будут иметь жесткое возбуждение, а при определенных значениях
смещающего сигнала вообще не возникнут.
При быстро изменяющихся внешних воздействиях (гармониче-
ских или случайных) автоколебания могут устраняться. При этом
высокочастотный сигнал в силу фильтрующих свойств системы
может быть практически незаметен в отклонениях рулей. Известно,
что это один из методов борьбы с автоколебаниями «в малом».
Особое место занимают упругие колебания конструкции в том
случае, когда их характерные частоты находятся в полосе про-
пускания системы. Далее кратко рассматриваются проблемы
взаимодействия упругих колебаний конструкции с системой
автоматического упр авления.
3.4. ВЛИЯНИЕ УПРУГИХ ДЕФОРМАЦИЙ КОНСТРУКЦИИ
НА ДИНАМИКУ САМОЛЕТА С САУ
Эта проблема имеет два аспекта: один из них связан
с учетом квазистатических деформаций конструкции на характе-
ристики устойчивости и управляемости самолета в короткоперио-
дическом движении, другой — обусловлен упругими колебаниями
конструкции и их взаимодействием с системой автоматического
112
управления. Оба аспекта могут быть рассмотрены на базе уравне-
ний движения упругого самолета (см. разд. 2.4).
Для определения влияния упругих деформаций на характе-
II и стики устойчивости и управляемости самолета в уравнениях
2.38), (2.39), (2.40) qb (I = 1, 2, 3 ...) приравниваются нулю
гго и входит в понятие квазистатических деформаций). Из урав-
нений, соответствующих упругим колебаниям самолета, опреде-
ляются величины деформаций конструкции по каждому тону коле-
баний под действием аэродинамических сил от угла атаки, угловой
Скорости тангажа, отклонения органа управления (б).
Уравнения возмущенного движения упругого самолета при
квазистатических деформациях имеют вид
N
—a-i-iVa — d-i-iFa 4- (^-i-iV + d-10) + S b^qi — —P~i6;
(=1
N
do-iVa Uqq&z 4“ dooco2 4“ 2 bbiQi 5=3 —PoS; (3.10)
/=i
N
—4“ 2 (Qi + bjt) qi = —Pj6.
i—l
Для дальнейших преобразований уравнения удобно предста-
вить в матричной форме [16]. Введем обозначения: q — вектор-
столбец переменных
Г <71 1
qT — транспонированный вектор q, т. е. вектор-строка; [dj-J,
[d№], [pj] — матрицы соответствующих коэффициентов размер-
ности N х 1; С , В —матрицы коэффициентов с л и Ьц размер-
ности N X N.
Систему уравнений (3.10) теперь можно записать в более ком-
пактной форме
Va + (<?_!_! V + d_10) ®г + [£-idT q = P-i^;
—+ aoo®z H- d00co2 + [^огГ Я = —₽<Д
- [dj-J Va + [d}0] сог + [С + B] q = - [₽,] 6. (3.12)
Из уравнения (3.12) находим
q = (С + В)’1 {- [pj 6 + [d^] Va - [d;o] coz}. (3-13)
Значения деформаций согласно (3.13) подставим в уравнения
(3.11), соответствующие короткопериодическому движению, и
после группировки соответствующих членов получим коэффи-
113
циенты уравнений короткопериодического движения самолета
с учетом квазистатических упругих деформаций конструкции:
—Q-i-iVa — + (a^V + J_30) <oz = —0Д
--4-1 V& + “F dQQ(tiz ~
где
<i-i = - [Ь^Г (С + B)-1 [d^];
<1 = do-г - [&oiF (С + B)-1 ;
<10 = <10 “ [<idT (С + B)-1 [d>0];
<o -<o~[bodT(C+B)-* [d/0J;
0-i = p.x - [MT(C +
Ро-Ро~^]т(С + В)-Ч|ЗЛ.
Для рассмотрения взаимодействия упругих колебаний самолета
с САУ необходимо прежде всего оговорить особенности информа-
ции, принимаемой датчиками САУ.
Датчик угловой скорости, расположенный в фюзеляже, вос-
принимает следующий сигнал:
AZ
0)z уХд)дД/).
i=—l
Учитывая, что
d£-i п Ко __ i /7-0)
дХ " °’ дХ “ ’ 4/0 ' Wz’
получим
N
со;- (3.14)
1=1
Производная дЪ^/дХ (Хд) по каждому тону упругих колебаний
конструкции существенно зависит от места расположения датчика
(Хд) по длине фюзеляжа. Так, для низшего (1-го тона изгибных
колебаний фюзеляжа производная д^/дХ отрицательна при рас-
положении датчика в носовой части фюзеляжа и положительна —
в хвостовой части (для принятого направления оси X). Для более
высоких тонов упругих колебаний фюзеляжа производная д^дХ
изменяет знак в каждой пучности.
Возможны ситуации, когда низшие тона упругих колебаний
конструкции определяются упругими колебаниями крыла при
незначительных деформациях фюзеляжа. В этих случаях для
качественных оценок производные д^/дХ по этим тонам могут
быть приняты постоянными, и расположение датчика по длине
самолета не влияет на характер взаимодействия упругих колеба-
ний самолета с САУ.
114
Для упругих колебаний конструкции, обусловленных в основ-
ном деформациями фюзеляжа, расположение датчика угловой
скорости в пучности i-ro тона означает, что колебания Z-го тона
Не воспринимаются датчиком (д^/дХ — 0).
Датчик перегрузки воспринимает следующую информацию:
N
= У liW
g
или
(3.15)
Особенность восприятия информации о перегрузке упругого
самолета заключается в том, что при расположении датчика в узле
/-го тона составляющая перегрузки, обусловленная упругими
колебаниями i-ro тона, равна нулю; при расположении датчика
в пучности составляющая перегрузки упругих колебаний t-го
тона максимальна.
Таким образом, путем выбора расположения датчиков на само-
лете можно добиться, что упругие колебания конструкции опре-
деленного тона либо практически не будут восприниматься датчи-
ками, либо, наоборот, будут составлять значительную часть вход-
ного сигнала, причем отличие в фазе воспринимаемых упругих
колебаний может доходить до 180° в зависимости от местоположе-
ния датчиков на самолете.
Из системы дифференциальных уравнений движения упругого
самолета [см. (2.38), (2.39)], а также соотношений (3.14), (3.15)
нетрудно получить передаточные функции самолета по всем пара-
метрам движения U^a/б, 1^©2/б, и далее, на основе их соста-
вить передаточные функции по параметрам, измеряемым датчи-
ками системы
<йг (р) (£>z (р) у, _ qi (р) .
б(р) - 6(р) дХ Р 6(р) ’
™ nyf.P') nvn.M(p) 1дР<о2(р) Л -М?) .
i==l
у
Общие закономерности формирования передаточных функций
упругого самолета и возникающие при этом проблемы устойчи-
вости упругих колебаний конструкции с учетом САУ можно изу-
чить, рассматривая в качестве примера передаточную функцию
самолета по угловой скорости тангажа (имея в виду со£, а не ш2).
В качестве контура автоматики будем рассматривать контур демп-
фера тангажа.
115
Сигнал сот в любой системе (улучшения устойчивости и управ-
ляемости или стабилизации) вводится для обеспечения достаточно
широкой области устойчивости. Этот сигнал играет роль опереже-
ния по отношению к любым другим сигналам. Следовательно,
если по отношению ко всем другим сигналам может быть приме-
нена фильтрация, то этот сигнал должен проходить без искажений
в достаточно широком диапазоне частот, включая диапазон низших
тонов упругих колебаний конструкции. Часто естественным огра-
ничением диапазона характерных частот является только ограни-
чение полосы пропускания исполнительных элементов системы
управления (приводов).
Передаточная функция упругого самолета по сигналу (oj имеет
вид
(Р)
6(Р)
N 4-1
Ё Kpk
W4-2
k=0
или
-
A2 + 2|p + a>2
/V/2
П (p2 + 26OZP + a>20i)
t—I
/V/2
П (p2 + 2&X{P + <o21)
i=l
Представление передаточной функции в виде произведений
полиномов порядка не выше второго выполняется после опреде-
ления нулей и полюсов передаточных функций, т. е. вычисления
корней полиномов числителей и знаменателей. Рассмотрим под-
робнее эту передаточную функцию.
Часть передаточной функции, заключенная в квадратные
скобки, эквивалентна с точностью до коэффициента усиления
передаточной функции по (о2 самолета как твердого тела. Коэф-
фициенты входящих в нее полиномов не соответствуют аналогич-
ным коэффициентам, полученным по уравнениям движения са-
молета как твердого тела; коэффициенты этой части передаточной
функции учитывают влияние статических деформаций конструк-
ции Эти коэффициенты можно было бы оценить по процедуре,
описанной в начале этого раздела.
Теперь перейдем к рассмотрению части передаточной функ-
ции, соответствующей упругим колебаниям самолета. Порядок (N)
полиномов числителя и знаменателя этой части передаточной
функции одинаков. При этом каждой паре комплексно-сопряжен-
ных корней соответствует (и зачастую весьма близко расположена
на комплексной плоскости) пара нулей. Это позволяет выделить
уравнения короткопериодического движения самолета как твер-
дого тела. Это в высшей степени корректно, если частоты упру-
116
Рис. 3.20. Зависимость корней ха-
рактеристического уравнения упру-
гого самолета от скорости полета
(в) и иллюстрация условия струк-
турной устойчивости упругих ко-
лебаний (б)
—— корни, обусловленные упру-
гостью конструкции;-------кор-
ам, связанные с короткопериодическим
движением
гих колебаний достаточно
далеки от частоты коротко-
периодического движения.
Нули и полюса, соответ-
ствующие этой части пере-
даточной функции, — ком-
плексно-сопряженные и рас-
положены достаточно близко
к мнимой оси, слева от нее
(скорость полета предполага-
ется меньше критической скорости флаттера). Близость к мнимой
оси нулей и полюсов определяется малостью конструктивного и
аэродинамического демпфирования упругих колебаний. С при-
ближением скорости полета к критической скорости флаттера демп-
фирование, по крайней мере, одного тона упругих колебаний на-
чинает уменьшаться до нуля вследствие неблагоприятного взаи-
модействия этого тона с соседними тонами упругих колебаний
либо с короткопериодическим движением самолета (рис. 3.20, а).
Устойчивость замкнутой системы «упругий самолет—САУ»
в существенной степени зависит от взаимного расположения нулей
и полюсов передаточной функции упругого самолета. В частности,
для устойчивости упругих колебаний в диапазоне частот полосы
пропускания системы управления (<рснс (<о) < 90°) наиболее бла-
гоприятны случаи чередования нулей и полюсов (см. рис. 3.20, б).
При этом обеспечиваются условия фазовой стабилизации упругого
самолета. При нарушении чередования нулей и полюсов переда-
точные числа системы вследствие учета упругости дополнительно
ограничиваются (устойчивость обеспечивается так называемым
методом амплитудной стабилизации). Поэтому при изучении
устойчивости упругого самолета с САУ основное внимание следует
уделять анализу взаимного расположения нулей и полюсов, при-
чинам, порождающим то или иное их положение. Однако в за-
висимости от особенности аэродинамической компоновки, жест-
костных и массово-инерционных характеристик, а также режима
полета может наблюдаться чрезвычайно большое многообразие
упругих деформаций самолета (частот и форм упругих колебаний,
их взаимодействий между собой в потоке воздуха). По этой при-
чине исследование этой проблемы всегда должно быть конкретным,
опирающимся на данные конкретного самолета. Вместе с тем
следует иметь в виду, что несмотря на обилие конкретных ситуаций,
117
есть общие закономерности в этой проблеме. Кратко остановимся
на некоторых из них.
Введем понятие парциальной частоты колебаний t-ro тона
собственных колебаний самолета в потоке воздуха
со? = с» + ь» .
Действительные частоты колебаний самолета, определяемые кор-
нями характеристического уравнения, отличаются от парциаль-
ных вследствие аэродинамического взаимодействия (Ь^=/=0, djO=£0,
^>-1 =#= 0) между различными степенями свободы. Речь идет
как о взаимодействии упругих колебаний конструкции с коротко-
периодическим движением (при этом должны рассматриваться
только первые тона упругих колебаний), так и о взаимодействии
соседних тонов упругих колебаний (в этом случае могут рассмат-
риваться не только первые, но и высшие тона упругих колебаний)
В результате взаимодействия частоты соответствующих колебаний
(t-го тона упругих колебаний и короткопериодического движения,
двух соседних тонов упругих колебаний) могут сближаться по
сравнению с парциальными или раздвигаться. Эффект изменения
частоты колебаний' по сравнению с парциальной зависит от кон-
кретных характеристик рассматриваемого самолета, режима его
полета.
Как правило, ситуация со сближением соседних частот яв-
ляется более неблагоприятной, сопровождается заметным умень-
шением демпфирования одного из тонов колебаний вплоть до
появления вне области допустимых режимов полета неустойчи-
вости типа флаттера.
Сближение собственных частот колебаний конструкции по
сравнению с парциальными может усложнить решение задачи
демпфирования этих колебаний при наличии САУ.
Приведем простейший пример из [7] для самолета с упругим
стреловидным крылом (фюзеляж принят жестким), где сущест-
венно проявление взаимодействия изгибных колебаний крыла 1-го
тона с короткопериодическим движением самолета. На малых
скоростях полета (рис. 3.21) это взаимодействие несущественно
и приводит к некоторому расхождению собственных частот коле-
баний конструкции и парциальных. Здесь следует особо подчерк-
нуть важность соотношения собственной и парциальной частот
упругих колебаний. Дело в том, что при непосредственном вы-
числении передаточной функции Для уравнений (р_х^0)
(fl-i-iV + ^-ю) = 0;
--^0-1 + ^oo®z + ^00WZ + ^0141 + ^0171 = —PoS;
—Va d10o)2 + an4i + + (^n + cn) = 0
можно убедиться, что частота нуля этой передаточной функции
практически совпадает с парциальной частотой изгибных коле-
118
Рис. 3.21. Корневой годограф само-
лета с демпфером тангажа (с учетом
1-го тона изгибных колебаний фюзе-
ляжа)
баний крыла. Поэтому на малых
скоростях полета демпфер тан-
гажа обеспечивает улучшение
демпфирования изгибных коле-
баний крыла. На больших ско-
ростях полета, как показывают
расчеты, наблюдается сближе-
ние собственных частот упругих
колебаний и короткопериоди-
ческого движения, нарушается
условие чередования нулей и
полюсов и включение демпфера
тангажа при сравнительно не-
больших передаточных числах
будет приводить к потере устой-
чивости замкнутой системы.
Для принятой схематизации фюзеляжа твердым телом изме-
нение положения датчика по длине фюзеляжа не изменяет полу-
ченного результата. В большинстве реальных компоновок де-
формации фюзеляжа при упругих колебаниях конструкции весьма
значительны (отсюда и возникли названия 1,2-й и т. д. тон изгиб-
ных колебаний фюзеляжа). Следовательно, изменение положения
датчика по длине фюзеляжа играет существенную роль в обеспе-
чении устойчивости замкнутой системы «упругий самолет — САУ».
Очевидно, что это влияет на значения нулей передаточной функ-
ции упругого самолета (полюса характеризуют динамические свой-
ства упругого самолета и они не зависят от точки установки дат-
чика).
Если гироскопический датчик расположен в пучности /-го
тона упругих колебаний \д^/дХ = 0), то в передаточной функции
самолета по наблюдаемому параметру частоты /-х нулей и полю-
сов совпадут. Это следует из простых физических соображений.:
при расположении датчика в пучности Z-го тона угловая скорость
от /-го тона становится не наблюдаемой гироскопической системой.
Таким образом, система не может влиять на устойчивость этого
тона колебаний.
Для системы с датчиком перегрузки аналогичная ситуация во-
зникает при расположении датчика в узле (|f (Хд) = 0).
Смещение гироскопического датчика из пучности делает колеба-
ния Z-го тона наблюдаемыми, но в зависимости от направления
смещения (вперед, к носу фюзеляжа, или назад, к хвосту) фаза
наблюдаемых колебаний различна и это отличие составляет 180°.
Конкретные фазовые соотношения в замкнутой системе «упругий
самолет — САУ», или, иными словами, взаимное расположение
119
нулей и полюсов передаточной функции зависит также и от рас-
положения органа управления относительно формы i-ro тона
упругих колебаний (ХОрг))» т. е. от знака коэффициента
Анализ показывает, что если выполнено неравенство
-§-(Хд)^(ХорР)>0,
то частота i-ro нуля ниже частоты i-ro полюса и условия фазовой
стабилизации этого тона колебаний при включении САУ выпол-
нены. В одном случае (ХОрг) > 0) это обеспечивается переме-
щением датчика из пучности назад, к хвосту самолета, в другом
(tt (Хорг) < 0) — к носу самолета.
Основные трудности при обеспечении условий фазовой ста-
билизации упругих колебаний конструкции самолета путем соот-
ветствующего выбора положения датчика обусловлены двумя
причинами:
1) форма колебаний самолета в полете может существенно
изменяться с изменением массы;
2) положение датчика, благоприятное для одной формы коле-
баний, может оказаться неблагоприятным для другой.
В некоторых случаях для решения проблемы устойчивости
упругих колебаний самолета с САУ в системах применяют поло-
совые фильтры типа
Т2р2 + 2^гр+1
Т^ + 21Тр+1 ’
где 1/7 — частота, на которой необходимо уменьшить амплитудную
характеристику системы управления; | ~ 1, это условие
обеспечивает уменьшение А (со).
Такой фильтр позволяет ликвидировать неустойчивость зам-
кнутой системы при малых коэффициентах усиления на частоте
одного из тонов упругих колебаний. Но при этом следует иметь
в виду, что такой фильтр вносит фазовое запаздывание на малых
частотах (частотах колебаний твердого тела). Поэтому применять
такие фильтры следует только по отношению к достаточно вы-
соким тонам упругих колебаний конструкции. Если низшие тона
упругих колебаний конструкции имеют сравнительно небольшие
частоты, то устойчивость колебаний должна обеспечиваться путем
реализации условий фазовой стабилизации.
Наряду с фильтрами возможным способом для обеспечения
устойчивости упругих колебаний является корректировка харак-
теристик приводов, в частности, их добротности, что позволяет
иногда добиться выполнения условий фазовой стабилизации, но
чаще всего условий амплитудной стабилизации (сокращением
полосы пропускания системы). Но так же, как и в предыдущем
случае, необходимо обращать внимание на искажение частотной
характеристики системы на малых частотах.
120
Вопрос о том, сколько тонов упругих колебаний конструкции
*лжно учитываться при анализе динамики самолета с САУ, не
НМест однозначного ответа и должен решаться индивидуально
|Ди каждого самолета.
3.5. ДЛИННОПЕРИОДИЧЕСКОЕ ДВИЖЕНИЕ
И БАЛАНСИРОВКА САМОЛЕТА
При анализе продольного движения самолета с учетом
Вменения скорости и высоты должно рассматриваться следующее:
1) балансировка самолета по скорости и оценка моментной
устойчивости самолета по скорости, это позволяет судить о частоте
Виннопериодических колебаний;
2) силовая устойчивость по скорости и связанное с ней демп-
фирование фугоидных колебаний.
Качественная оценка моментной устойчивости самолета по
форости с обычной системой бустерного управления проводится
В основе расчета балансировочных характеристик самолета 6 =
• f (JZ). По известной кинематике системы управления б = f (Хр)
«ределяется положение рычага управления (Хр) и нестримми-
иванное усилие на рычаге (Р). Самолету, устойчивому по ско-
Ьсти, соответствует положительный наклон зависимостей Хр (У)
|Р(У)» т- е- перемещения и усилия для сохранения исходной
Црегрузки с увеличением скорости возрастают.
Здесь речь идет сразу о двух видах устойчивости по скорости
Аналогично самолетам с безбустерным управлением при рассмот-
Внии устойчивости по перегрузке): при фиксированном положении
Рычага управления и при фиксированном усилии на рычаге уп-
равления (при Р = 0— освобожденном управлении). При бу-
ферном управлении эти понятия различны. Это связано с тем,
(Ю кинематика продольного управления и усилия могут неза-
висимо регулироваться по скорости (например, с помощью АРУ
|АРЗ).
Покажем связь производных Xv и Pv с устойчивостью са-
Юлета по скорости. Для примера рассмотрим зависимость Хр =
и связанное с ней понятие устойчивости при фиксирован-
Й перемещении рычага управления. При анализе устойчивости
Цмолета предполагается, что :
1) летчик, обеспечив начальную балансировку на заданном
||жиме полета, далее не вмешивается в управление;
Йе. 3.22. Балансировочные кривые
перемещению рычага управления
121
2) возмущение действует именно по тому параметру, по коти
рому анализируется устойчивость самолета (в данном случае
по скорости).
Если на каком-то режиме полета возмущение по скорости
ДУ > 0 (рис. 3.22), то самолет с положительной производной А'1
будет иметь тенденцию к возвращению к исходной скорости
вследствие увеличения сопротивления, обусловленного возра
станием перегрузки при Хр — const, и искривления траектории
вверх. И наоборот, при Xv < 0 самолет имеет тенденцию к даль
нейшему увеличению скорости, т. е. является статически неустой
чивым по скорости при фиксированном положении рычага ун
равления. Аналогичная картина наблюдается и при фиксирован
ном усилии на рычаге управления.
Как правило, проблема моментной неустойчивости по скорости
возникает при полете на трансзвуковых скоростях. Моментная
неустойчивость определяется возрастанием запаса пррдолыкш
устойчивости mzv с увеличением числа М. Явление моментной
неустойчивости по скорости проявляется в полете в виде затяги
вания самолета в пикирование при переходе самолета к сверл
звуковым скоростям и в виде подхвата по перегрузке при тормо
жении на сверхзвуковых скоростях.
На самолетах с бустерным управлением летчик справляете»
с тенденциями самолета самопроизвольно изменять перегрузку
соответствующими вмешательствами в управление, однако поле!
на этих скоростях требует от летчика повышенного внимания
На дозвуковых и сверхзвуковых скоростях (при mzv<0]
моментная устойчивость самолета по скорости обычно обеспечп
вается.
Моментная неустойчивость по скорости может быть устранена
средствами автоматизации управления. Максимальный эффек,
обеспечивается интегральной системой управления с законом тип»
(3.7):
Ф = КшХр + К J (Дпр + Кх ДХР) dt',
ДХР = ХР-ХБАЛ.
Соответствующая организация сигнала Хвал» например пя
программе в функции скорости, позволяет добиться необходимой
степени устойчивости по скорости, так как переменная ХБЛЛ
в интегральном законе управления несет функциональную на
грузку заданной (желаемой) зависимости ХБАЛ (V). В частности,
если ХБАЛ = const (отклонения ДХР отсчитываются от некото
рого значения Хр, соответствующего моменту включения системы),
то обеспечивается нейтральная устойчивость по скорости.
Для ликвидации неустойчивости по скорости в горизонтальном
полете могут также использоваться специальные программны!
устройства Дбв = f (М) или ДР = f (М), позволяющие в завися
122
Юсти от конкретных условий изменить положение рычага ул-
овления или усилия на нем в функции скорости.
Перейдем к рассмотрению силовой устойчивости самолета по
Цорости.
Особое место занимает режим захода на посадку. Для режима
(Мета по глиссаде характерно достаточно жесткое (в том числе
федствами автоматизации управления) выдерживание прямоли-
Ийной траектории. На рис. 3.23 показано изменение лобового
^противления Ха самолета при пу = cos 0 ~ 1 в зависимости
It скорости полета. Там же приведена характеристика двигателя
(йпа ТРД) по тяге. Следует обратить внимание на так называе-
мые «вторые» режимы полета, на которых сопротивление самолета
(Ири пу = 1) возрастает с уменьшением скорости. На этих режи-
му самолет неустойчив по скорости: возмущение по скорости
IV < 0 при невмешательстве летчика в управление тягой при-
Юдит к падению скорости, что в условиях отсутствия запаса по
|Ысоте при недостаточном контроле за скоростью со стороны
Цтчика и ограниченной приемистости двигателей (темпе изме-
Кния тяги) может привести к неблагоприятным последствиям.
Граница «вторых» режимов по скорости примерно соответствует
Величине Сут.п = (С„) Ктю.
Устойчивость самолета по скорости важна и на других режи-
мах полета. Резкое возрастание тяги реактивных двигателей на
больших скоростях полета (Р > KV2) приводит к силовой не-
устойчивости в крейсерских режимах (в первую очередь, на сверх-
Цуковых крейсерских скоростях), где лобовое сопротивление
ймолета возрастает более медленно из-за влияния сжимаемости
Юздуха.
Для обеспечения силовой устойчивости самолета по скорости
Используются автоматы тяги с законами управления типа
Абруд = Kv (V — Уз)»
Построение автоматов тяги рассматривается в гл. 6.
Рис. 3.23. Зависимости лобового сопротивления Ха и тяги Р от скорости полета
123
3.6. АНАЛИЗ ОСОБЕННОСТЕЙ БОКОВОГО ДВИЖЕНИЯ
При рассмотрении динамики бокового движения и
необходимой степени его автоматизации следует, в первую очередь,
обращать внимание на присущее современным самолетам взаимо
действие движений крена и рыскания. Тесная связь движений
самолета по углу крена и углу скольжения как на коротких
интервалах времени, так и в фугоидном (спиральном) движении
заставляет все время оперировать системой уравнений 4-го по
рядка (см. гл. 2). Это существенно усложняет качественный ана-
лиз бокового движения по сравнению с продольным, где всегда
есть возможность предварительные исследования проводить на
основе короткопериодической аппроксимации движения (уравне-
ниями 2-го порядка), принимая V — const.
В связи с этим при рассмотрении бокового движения опущены
такие вопросы, как влияние фазового запаздывания системы уп-
равления, влияние ее нелинейностей, влияние упругости конст-
рукции. Постановка этих вопросов для бокового движения в такой
же степени правомерна, как и для продольного. Для их решения
могут использоваться те же методические приемы, что и при ана-
лизе продольного движения.
При выборе структуры и параметров системы управления
в боковом движении следует исходить из обеспечения необходимой
степени устойчивости невозмущенного бокового движения, управ-
ляемости и возможностей балансировки (ветра, несимметрии),
а также качества переходных процессов в управляемом и возму-
щенном движении.
Кратко рассмотрим характерные особенности бокового движе-
ния.
1. Боковая устойчивость самолета. Она определяется корнями
характеристического уравнения. Частоту боковых колебаний мож-
но определить из следующей приближенной формулы:
к>об ~ (т« cos а 4- Шх sin а) при ®гл = О-
\ /
Частота боковых колебаний зависит не только от запаса путе-
вой устойчивости ту, но и от запаса поперечной устойчивости т*,
причем степень зависимости тем больше, чем больше угол атаки
и отношение моментов инерции 1УИХ.
Это должно учитываться при формировании системы управле-
ния самолета, особенно на больших углах атаки. Однако отсюда
не следует, что запас путевой устойчивости может быть ниже.
Как будет видно из последующего анализа, и на больших углах
атаки необходимо стремиться к повышению путевой устойчивости
и использовать для этой цели и средства автоматики. Кроме того,
очевидна необходимость обеспечения путевой устойчивости и для
малых углов атаки. Здесь расчетными режимами полета являются
предельные числа М (М > I) и большие скоростные напоры.
124
Более точная формула для определения частоты боковых коле-
баний учитывает влияние остальных коэффициентов уравнений.
Это влияние сводится, как правило, к уменьшению роли т*
I частоте колебаний и обусловливается сдвигом фаз колебаний
По <ох и <о„ (при выводе приближенной формулы сдвиг фаз при-
нимался равным нулю). В предельном случае (Мхх -* —оо) ча-
стота боковых колебаний приближается к частоте изолированного
Движения рыскания
шов =----тУ cos а-
‘V
Из приближенной формулы
2£б «----у-Пг — Muv + -^- Г(Мух + -£-} COS а -|- Мхх S1Q а"|
®об L' v J
следует, что при сильной взаимосвязи движений крена и рыска-
ния (| | > 1) демпфирование боковых колебаний сущест-
ву
Пенно зависит от вращательных производных ту и весового
члена gIV. Здесь возможно как значительное увеличение демпфи-
рования (при Мух + -у-< О) совместного (крена и рыскания)
колебательного движения по сравнению с изолированным движе-
нием рыскания
9Е —_____-Л_____
так и его уменьшение вплоть до потери колебательной устойчи-
вости (при + о)- Последнее может наблюдаться на
средних и больших углах атаки при уменьшении демпфирования
©
крена тхх ж 0. Это необходимо учитывать при компоновке си-
стемы управления.
Опыт авиации показывает, что демпфирование бокового коле-
бательного движения, обеспечиваемое аэродинамической компо-
новкой самолета, как правило, недостаточно. На большинстве
режимов полета нербходимо использование демпферов колебаний.
Демпфирование движения крена определяется корнем
Хкр «41“x + -^-r(Ai“x + -p-)cosa-|-MT’sina1.
в»об ич 7 J
Из приведенной формулы видно, что при сильной взаимосвязи
движений крена и рыскания, определяемой величиной Мх, демп-
фирования колебательного и апериодического движения перерас-
пределяются между собой и благоприятный эффект для колеба-
тельного движения (мух + оборачивается неблагопри-
ятным уменьшением демпфирования крена.
125
Необходимость искусственного демпфирования движения по
крену, кроме случаев больших углов атаки (где возможно тхх «
~ (О
ж 0.), возникает на больших высотах полета Мхх ж pV и на ма
лых скоростях (при посадке).
Спиральное движение при наличии поперечной устойчивости,
как правило, устойчиво. Наибольшая устойчивость проявляется
на малых скоростях полета
2. Управляемость по крену. При изолированном движении
крена необходимо обеспечить достаточную эффективность органов
поперечного управления и демпфирование движения по крену
(Т&х < 1с). Однако упрощенным описанием движения крена
нужно пользоваться крайне осторожно, в основном для горизон-
тального полета со сравнительно небольшими углами атаки.
Для современных самолетов анализ поперечного управления сле-
дует производить с использованием полной системы уравнений
бокового возмущенного движения самолета (2,31).
Отклонение органов поперечного управления приводит за
счет моментов рыскания и кинематической связи сох sin а к об-
разованию угла скольжения. В силу поперечной устойчивости
образуется дополнительный момент крена (t). В зависимости
от знака момент является или подкручивающим или тормозящим
(препятствует кренению самолета в нужную сторону). Перемен-
ность по времени этого момента в случае, если < 0,
приводит к «зависаниям» по крену. Запаздывание в его образова-
(р) л
нии при > 0 приводит к раскачке замкнутой системы
«самолет—л етчи к».
Как отмечалось в разд. 3.1, вся эта совокупность динамических
эффектов характеризуется одним параметром отно-
ffi06
шением частоты нуля и частоты полюса в передаточной функции
самолета по крену. По своему физическому смыслу этот параметр
есть не что иное, как отношение осредненного ускорения самолета
по крену от действия управляющего и дополнительного моментов
крена к ускорению от управляющего момента крена:
Ш ₽)
Л “ 7(6) *
3. Балансировка в боковом движении. Балансировка ветра
при посадке определяется достаточной эффективностью органов
путевого и поперечного управления и разумной координацией
отклонений рычагов поперечного и путевого управления. Пред-
почтителен малый расход органов поперечного управления, что
обеспечивается при небольших запасах поперечной устойчивости.
При искусственном повышении путевой устойчивости необходимо
126
Иметь приемлемые расходы педалей для балансировки самолета.
Тормозящие моменты рыскания органов поперечного управления
облегчают балансировку ветра педалями, а подкручивающие за-
трудняют.
При наличии несимметричных моментов рыскания (например,
При отказе двигателя) условия балансировки самолета летчиком
с нулевым углом скольжения не зависят от автоматизации путе-
вого канала. Однако при невмешательстве летчика в управление
педалями возникающие при несимметрии самолета углы скольже-
ния существенно зависят от степени автоматизации путевого ка-
нала. Искусственное повышение путевой устойчивости позволяет
снизить углы скольжения от несимметрии. Одновременно облег-
чаются условия балансировки самолета по крену органами по-
перечного управления. Балансировка по крену дополнительно
облегчается, если при отклонении рычагов поперечного управле-
ния возникают подкручивающие моменты рыскания.
При порывах ветра, отказах двигателя и появлении несиммет-
рии по рысканию (сюда можно отнести и отклонение руля направ-
ления) наблюдается неблагоприятное взаимодействие движений
крена и рыскания в боковом движении самолета. Это взаимодей-
ствие может быть охарактеризовано параметром
При больших значениях этого параметра самолет обладает повы-
шенной реакцией по крену на порывы ветра, несимметричный от-
каз двигателя, отклонение педалей и т. п. Иногда это приводит
к снижению безопасности полета.
Эти особенности динамики самолетов необходимо учитывать
при выборе параметров системы управления, степени ее автомати-
зации. Проведенный краткий анализ показывает, что необходимо
стремиться к возможно большему разделению движений крена и
рыскания.
Проведем качественный анализ некоторых простейших уст-
ройств автоматики системы бокового управления.
3.7. ДЕМПФЕР РЫСКАНИЯ
Назначение и принцип действия демпфера рыскания
аналогичны демпферу тангажа.
Для качественного анализа механизма искусственного демп-
фирования рассмотрим сначала упрощенную систему уравнений
недемпфированного бокового движения (а — const)
127
0 = (oy cos a -|- (ox sin a;
^ = ^₽ + M>6B;
©х = Л4^+Л1>6н.
Из уравнений (3.16) находим передаточную функцию самолета
по угловой скорости рыскания
(3.16)
м6*
(Р) _
6н(Р) “
Л1Р
У*
p2 — sin a 1------=rs----»—
x к m6*
p f?— М& sin al l-f
My x '
gr^“
(3.17)
Обозначая через <Biy и ®об соответственно свободные члены
в квадратных скобках числителя и знаменателя, введем отноше-
ние 1д.р= wip/шоб, для которого из (3.17) имеем
, g
Мх М6*
Лд. p
AfP
ЯГС‘8“
у
Рассматривая закон управления (с датчиком, ориентирован-
ным по связанной оси OY) в виде
бн =
для характеристического уравнения замкнутого контура демпфи-
рования получаем
₽[₽=+«§»] “”w’
где ТГсис (р) — передаточная функция системы управления (серво-
привод, бустер, датчик).
Построим корневой годограф замкнутой системы при трех
значениях параметра %д. р (1д. р <0; 0 <%д. р <1; Ад. р > 1)
(рис. 3.24) в предположении, что фазовое запаздывание <р (со)
системы управления на частоте собственных колебаний самолета
меньше 90°. Из графика видно, что демпфер обеспечивает устой-
чивость самолета при 0 < Хд. Р < 1. Проанализируем, чему со-
ответствуют границы этой области. Приняв значение параметра
р равным нулю и единице, получим
ТЙ8®
при Ц. р - 0: 1) a = 0; 2) = ^-5
М°я
128
Рис* 3.24. Корневой годограф системы самолета с демпфером рыскания:
в р К 0; б — 0 < Хде р < 1; • — Кде р > 1
при Л.». р=1: 1) Mg — Q-, - ctg а.
М.*
Отбрасывая вторые условия (одно из них соответствует ней-
тральной реакции самолета на крену на отклонение руля направ-
ления, другое — физически не реализуемо при а > 0), приходим
к следующим выводам:
1) условия «идеальной» работы демпфера рыскания (Хд. р = 0 —
демпфирование боковых колебаний без влияния на демпфирование
движения крена) реализуются, если датчик демпфера рыскания
ортогонален вектору скорости. Важно именно это обстоятельство,
а не равенство нулю угла атаки. При ортогональности датчика
демпфера рыскания вектору скорости он не измеряет апериодиче-
ской составляющей движения самолета вокруг вектора скорости;
2) демпфер рыскания перестает выполнять свои прямые функ-
ции демпфирования боковых колебаний (Хд. р = 1), когда дат-
чик демпфера оказывается ортогонален вектору = iM* +
+ ]Му (рис. 3.25). В этом случае (в частности, при Му — 0) ко-
лебания самолета по углу скольжения происходят вследствие
Рис. 3.25. Схема ориентации датчика демпфера рыскания:
а — векторная диаграмма; б — графическая зависимость v = / (а)
5 Зак. S78 129
вращения самолета вокруг связанной оси ОХ, и колебательная
составляющая движения по оси OY отсутствует. Естественно, что
демпфер рыскания в этих условиях, не замеряя датчиком колеба-
ний, не может влиять на демпфирование этих колебаний.
Рассмотрим произвольную ориентацию датчика демпфера ры-
скания, в этом случае
6В = Ka>vW, и — а>в cos V + со, sin v,
что означает введение в демпфер рыскания сигналов от двух орто-
гональных датчиков. Характеристическое уравнение замкнутой
системы при этом имеет вид (TFCHC = 1)
1 =
М и \
^-tgv +
М/ )
Л?₽
где
У *
(0?. = -М»
1 * COS V
Здесь
в виде
Л1°н
также удобно ввести параметр X* д. р, определяемый
/ Mg м’н
sin (a —v) 1-----*-----
М* м**
X» д. р —
( ыР
sin a cos v 11 4- -=£- ctg а
I М%
М“И
•=4— tgv
М°н
и провести анализ граничных условий:
Xi д. р = O-*tgv = tga; v = a;
—
Xi д. p = 1 -*• v = arctg .
Таким образом, и в более общем случае условия работы демп-
фера рыскания определяются ориентацией его датчика относи-
тельно вектора скорости и вектора боковых колебаний AfP. Пред-
ставив граничные условия в функции угла атаки (см. рис. 3.25),
получим область возможных ориентаций датчика и представление
о работе демпфера при неизменной ориентации.
130
Названное ранее условие сидеальной» работы демпфера ры-
скания (v = а) соответствует следующей структуре управляющего
сигнала:
“ид = cos а <оя sin а = р.
Следовательно, для эффективного демпфирования колебаний
самолета по углу скольжения необходимо в демпфер рыскания
вводить сигнал, пропорциональный производной угла скольже-
ния. Но комбинация сигналов а>у cos а + <э3 sin а весьма грубо
воспроизводит производную угла скольжения, которая в соответ-
ствии с уравнением сил по оси 0Z равна [см. систему
(2.31)1
£ = -р- nt + <о9 cos а 4- со* sin а -р- у cos а.
Введение в закон управления сигналов, пропорциональных
углу крена и боковой перегрузке, позволяет добиться заданного
расположения нулей и тем самым заданного качества работы
демпфера рыскания.
Сигнал по углу крена (или его аналог) в демпфере рыскания
целесообразно использовать, в первую очередь, на тяжелых са-
молетах, поскольку углы крена там ограничены (ситуации с у >
> 90° в нормальной эксплуатации исключены), и роль весового
члена в особенности на режиме посадки в динамике самолета более
существенна (спиральный корень по модулю более сопоставим
с другими корнями бокового движения).
Таким образом, анализ одного из простейших средств автома-
тизации бокового движения самолета показывает необходимость
учета взаимодействия движений крена и рыскания. Для этого ор-
ганизуется сигнал обратной связи, соответствующий производной
основной переменной колебательного движения — углу скольже-
ния.
S.8. ДЕМПФЕР КРЕНА
Демпфер крена предназначен для улучшения собствен-
ных демпфирующих свойств самолета в движении крена.
Запишем передаточную фун кцию самолета по угловой скорости
К1?ена на отклонение органа поперечного управления для упро-
щенной системы уравнений (3.16); использовав вместо индекса б
индекс 6Э, получим н
—л Г , _й ( Мй*
Л1 ® р2 — М% cos а 1 —=3--------(г- I I
* у I Afg м э )
®х(Р) _ L_____________________\ У тх /J
(р) Г 2 -e ( Y
D tr — Mr cos а I 14- а
(3.18)
5*
131
Введем параметр Хд. к, аналогичный параметру кд. р; согласно
(3.18) получим
М6*
1 —- у
Л?*8
Этот параметр совпадает с приближенным значением критерия
поперечной управляемости Ха.
Используя закон управления в виде
6s =
при том же предположении о величине фазового запаздывания
системы, что и для демпфера рыскания (<р (сооб)) < 90°, предста-
вим качественную структуру корневого годографа (рис. 3.26)
для трех значений Хд. к : Хд. к < 0; 0 < Хд. к < 1; Хд. к > 1.
При Хд. к <0 самолет обладает обратной реакцией по крену
на отклонение органов поперечного управления и в этом случае
демпфер крена приводит к апериодической неустойчивости. При
этом весьма эффективно демпфируются боковые колебания само-
лета.
При 0 < Хд. к < 1 (наиболее типичная ситуация для самолета
при положительных углах атаки) демпфер крена демпфирует как
колебательное, так и апериодическое движение самолета.
При X2 = 1 демпфер крена «идеален», выполняет только свои
прямые функции демпфирования апериодического движения крена.
Наконец, при Х|. к > 1 демпфер крена приводит к боковой коле-
бательной неустойчивости самолета.
Выпишем граничные условия эффективной работы демпфера
крена:
I2
Лд. к
^Д. К
-V-0-н^- м*
= к2 = = —tga.
Л1$э
Си
х—
О 6
6)
о е
8)
Рис. 3.26. Корневой годограф самолета с демпфером крена:
в - *£ ж < 0; 6 — 0 < Ц. ж < I; в - Ц. ж > I
132
Рис. 3.27. Схема ориентации векторов ж6, относительно вектора скорости
при различных значениях к
В данном случае условия работы демпфера крена определяются
ориентацией управляющего момента (точнее, углового ускорения)
по отношению к вектору скорости и вектору (вектору углового
ускорения самолета от угла скольжения).
На рис. 3.27 показаны различные случаи взаимной ориента-
ции векторов У, Л4б = 1М% + }Му> М® — iM* + ]Му и соот-
ветствующие им значения параметра Хд. к. При Хд. к — 1 (Мб
направлен по вектору скорости) отклонение органа поперечного
управления не приводит к появлению углов скольжения, следо-
вательно, демпфер не может оказывать влияния на колебания са-
молета по углу скольжения. При Хд. к > 1 (вектор Л46 располо-
жен выше вектора скорости) отклонение органов поперечного
управления приводит к образованию узлов скольжения и соот-
ветственно подкручивающих моментов крена Но поскольку
эти моменты образуются с запаздыванием (ср — 90° на частоте
колебаний самолета), это приводит к раскачке замкнутой системы
«самолет—демпфер крена».
Здесь важно подчеркнуть принципиальное отличие условий
нормальной работы демпферов крена и рыскания при сильной
взаимосвязи движений самолета по углам крена и скольжения,
а именно: для демпфера рыскания важна ориентация датчика угло-
вой скорости, для демпфера крена — ориентация управляющего
момента.
Можно показать, что изменение ориентации датчика демпфера
крена оказывает меньшее влияние на эффективность его работы,
чем в случае демпфера рыскания.
133
Качественные эффекты, полученные из анализа упрощенной
системы уравнений, полностью сохраняются, если рассмотреть
полную систему уравнений бокового возмущенного движения.
Дополнительные эффекты заключаются в следующем.
1. Влияние демпфера крена на демпфирование боковых коле-
баний существенно зависит от степени демпфирования движения
крена исходного самолета. По мере увеличения демпфирования
движения крена (уменьшения запаздывания от полюса Хкр на
частоте боковых колебаний) влияние демпфера крена на затухание
боковых колебаний ослабляется.
2. В передаточной функции самолета по угловой скорости
крена, соответствующей полным уравнениям движения, всегда
есть нуль, близкий к началу координат. Это означает, что демп-
фер крена всегда способствует уменьшению спирального корня
независимо от того, устойчивым или неустойчивым является спи-
ральное движение самолета. В этом отношении демпфер крена
является хорошим средством устранения недостатка демпфера
рыскания (возможности образования второй пары комплексно-
сопряженных корней).
При рассмотрении управляемого движения крена самолета
с демпфером крена необходимо иметь в виду следующие обстоя-
тельства.
Демпфер крена при обычной схеме его включения через после-
довательный сервопривод уменьшает максимально располагае-
мую угловую скорость крена: уменьшается отклонение элеронов
на величину бэ = При этом для сохранения управляе-
мости нельзя воспользоваться фильтром с передаточной функцией
(который может быть рекомендован лишь для демпферов
тангажа и рыскания), поскольку демпфирование движения крена
будет не увеличиваться, а уменьшаться. Для этого рационально
вводить сигнал Хр? с ручки (штурвала) в закон управления
в виде
Л — \
Оэ. авт — -И тр+ 1 j *
Постоянная времени фильтра Т 0,2 ... 0,5 с подбирается
из условия обеспечения требуемого переходного процесса са-
молета.
Установка демпфера крена (при 0 < X2 < 1) повышает зна-
чение параметра %2, поскольку демпфер крена снижает частоту
боковых колебаний. В этом отношении демпфер крена помогает
устранять такие явления, как «зависание» самолета по
крену.
В возмущенном движении самолета демпфер крена является
эффективным средством снижения степени взаимосвязи движений
крена и рыскания. Благодаря демпферу крена уменьшаются воз-
134
мущения по крену при полете в турбулентной атмосфере, умень-
шается крен самолета при отказах двигателей, несимметрии, от-
клонении руля направления.
При рассмотрении замкнутой системы «самолет—летчик» в за-
даче стабилизации крена и замкнутой системы «самолет—демп-
фер крена» имеем однотипное явление колебательной неустойчи-
вости в случае Ц. к = %2 > 1 и апериодической неустойчивости
в случае Хд. к = X2 < 0. Сформулированное ранее (см. разд. 3.3)
условие фазовой стабилизации не выполнено: отсутствует чере-
дование нулей и полюсов разомкнутой системы вдоль мнимой оси.
В обоих случаях необходимо изменить ориентацию управляющего
момента органов управления М6.
Из этого можно сделать более общий вывод: многие трудности
в ручном пилотировании самолета нельзя решить прямой автома-
тизацией управления, даже при полном исключении летчика из
контура управления в конкретной задаче пилотирования. Не-
обходима такая организация управления (как для летчика, так
и для автоматики), которая исключала бы в принципе явления
структурной неустойчивости (невыполнения условий фазовой ста-
билизации).
Рассмотрение демпфера крена также указывает на целесооб-
разность разделения движений крена и скольжения. Наиболее
эффективная работа демпфера крена по демпфированию движения
крена без изменения демпфирования колебаний по углу скольже-
ния обеспечивается путем организации управляющего ускорения
по углу крена при отсутствии управляющего ускорения по углу
скольжения.
3.9. ПЕРЕКРЕСТНАЯ СВЯЗЬ РУЛЯ НАПРАВЛЕНИЯ
С ОРГАНАМИ ПОПЕРЕЧНОГО УПРАВЛЕНИЯ
Выше (см. разд. 3.6, 3.7, 3.8) были показаны основ-
ные трудности поперечного управления и особенности работы
демпфера крена, обусловленные взаимодействием движений крена
и рыскания. Основным фактором, определяющим все неблаго-
приятные эффекты, является образование углов скольжения при
отклонении органов поперечного управления. Кардинальным
средством устранения этих эффектов является подключение руля
направления к поперечному управлению для изменения соотно-
шения моментов рыскания и крена в управляемом движении
крена.
Решим задачу в следующей модельной постановке: необходимо
найти функциональную связь руля направления с элеронами,
обеспечивающую тождественное равенство нулю угла скольжения
при поперечном управлении. Эта задача — типичная задача раз-
деления движений — решается следующим приемом.
135
В общей матрице уравнений движения
— cos a — sin a y- cos a 0 0
—м$ p-M^ —Mg* 0 - —Mfr X
-mS P-Mxx 0 —м‘а -Mxa
0 tga — 1 P 0 0
(Оу
бн
-6, J
полученной из уравнения (2.32) при л*® са. О, перенесем в пра-
вую часть столбцы с р и бэ, рассматривая их в качестве уп-
равления:
. а
— cos а — sin а--------у- cos а
р - -М*х о
-мх* р-Мхх о
Р “I" *р“ п* О
М*в
Мх9
о
Далее воспользуемся обычным способом получения переда-
точных функций, рассматривая в качестве управления отклонение
элеронов. При этом угол скольжения автоматически будет равен
нулю. Получим передаточные функции вида
?(р) I
6э(р) 1Р=о
6н(р) I
бэ (Р) 1₽—О
. . ( М6хаМ6иа
М в /cosа 11---~в ~б
х ' \ М*М*
а2р2 + а1Р + а0
М*9 (^2р2 + 6jP + ^о)
(w* + alp + “о)
136
где
М°я
а2 = cosa -]—^4— sin а; Ь2 = sin а + cos а.
м°н м°9
Первая из передаточных функций описывает движение крена
в управляемом движении при р = О, вторая — необходимую
перекрестную связь между рулем направления и элеронами для
реализации условия р = 0.
На практике нет необходимости в реализации такого фильтра
в перекрестной связи по двум причинам. Во-первых, нет прямой
необходимости тождественного выполнения условия р = 0 на
достаточно длительном интервале времени. Важно добиться ко-
ординации разворота при крене на сравнительно небольших
интервалах времени (I & 1 ... 3 с). Во-вторых, самолет с такой
функциональной связью между органами управления оказыва-
ется неустойчивым (типа спиральной неустойчивости) из-за не-
устойчивости самого фильтра. Это объясняется тем, что условие
р = 0 эквивалентно бесконечному запасу путевой устойчивости
(Alf -> —оо), при котором, как известно, самолет действительно
имеет спиральную неустойчивость.
Для координации движения крена на коротком интервале вре-
мени достаточно сохранить члены со старшими степенями р.
В результате приходим к жесткой связи органов управления
„ sin а + —-г-- cos а
S® М®н / М®и
у I cos а Н---т— sin а
1# б
-г— тх9 sin а
1х__________
бя . би
cos а + -г— тя sin а
v I»
т9 cos а 4
(3.19)
которая обеспечивает равенство нулю общего ускорения по углу
скольжения
Р = cos а + sin а = (7Иун6н + Л4ув6э) cos а +
+ (М6х*8п + Л4х®69) sin а = 0
и при ненулевом ускорении по крену
Y = ®a> — «>(, tg а =
Л4®э 1
Л4®ИМ®Э
Л4®вМ®э
М®и
—т— sin а
=^0.
137
Из выражения (3.19) видно, что коэффициент связи руля на-
правления с элеронами должен зависеть от угла атаки, увеличи-
вая подкручивающий эффект от руля направления на больших
углах атаки и создавая при необходимости тормозящий эффект
на малых углах атаки (на этих режимах возможно появление рас-
качки из-за избыточных подкручивающих моментов органов по-
перечного управления).
8.10. АВТОМАТ ПУТЕВОЙ УСТОЙЧИВОСТИ
Проблема обеспечения приемлемой путевой устойчи-
вости является одной из важнейших в автоматизации бокового
движения самолета. Трудности в создании путевой устойчивости
средствами аэродинамической компоновки, особенно на режимах
полета, близких к предельным (М = М„.т. q = qmrr. а = gm„).
приводят к необходимости создания автомата путевой устойчи-
вости. Этот автомат принципиально не отличается от автомата
продольного управления, поэтому общеметодические вопросы
здесь не рассматриваются.
Кратко остановимся на специфике динамики бокового дви-
жения самолета.
Рассмотрим упрощенную систему уравнений недемпфирован-
ного бокового движения (3.16) и закон управления
6Н = КрР + К® <•>₽ — Ко (о>д ,
У у \ /
т. е. предполагается, что в системе может использоваться инфор-
мация как от боковой перегрузки пг = так и от угла сколь-
жения.
Выпишем передаточную функцию разомкнутой системы
р р* — sin a 11
Из всех возможных ситуаций взаимного расположения нулей
и полюсов наибольший интерес представляет та, при которой
демпфер рыскания приводит к колебательной неустойчивости бо-
кового движения (Хд. р > 1). Выясним, в какой мере введение
сигнала 0 (п2) изменяет эту ситуацию. На рис. 3.28 представлены
138
Рис. 3.28. Корневой годограф самолета с автоматом путевой устойчивости:
* - бн = V + 6 ~ бн ~ V + к<»у + а<ах)
траектории нулей этой передаточной функции при изменении от-
ношения /Ср/Лсу Там же приведена качественная картина корне-
вого годографа замкнутой системы. Из анализа этих данных сле-
дует, что введение в демпфер рыскания сигнала по углу скольже-
ния (боковой перегрузке) не обеспечивает колебательной устой-
чивости самолета. К тому же надо учесть фазовое запаздывание
системы управления. С этих позиций по-прежнему полезно в ав-
томатический контур руля направления вводить перекрестную
связь по угловой скорости крена.
Рассмотрим закон управления
SH = Лвр + (tty COS а + sin а).
Взаимное расположение нулей и полюсов для упрощенной системы
уравнений представлено на рис. 3.28. Из этого графика следует,
что в данном случае (при полной аналогии с продольным движе-
нием) выбором рационального соотношения К$1К.<йу можно до-
биться требуемых динамических характеристик самолета (задан-
ных значений g и со). При этой структуре автомат не оказывает
влияния на управляемое движение крена.
После краткого рассмотрения некоторых простейших элементов
автоматизации бокового движения самолетов необходимо сделать
ряд замечаний.
1. Были рассмотрены наиболее сложные ситуации, по существу
критические, возникающие в боковой устойчивости и управляе-
мости. Они обусловлены сильным взаимодействием движений крена
и рыскания. Для некоторых самолетов степень взаимосвязи этих
движений невелика и это позволяет не только упростить процесс
анализа (рассматривать изолированные движения крена и ры-
скания), но и обеспечить приемлемые характеристики устойчи-
вости и управляемости сравнительно простыми средствами, с при-
139
менением контуров автоматики в каналах крена и рыскания без
перекрестных связей.
2. Каждое простейшее средство автоматизации управления
(будь то демпфер крена или рыскания и др.) рассматривалось
отдельно, при этом выдвигалось требование с помощью этого
средства полностью решить какую-то частную задачу боковой
устойчивости и управляемости. Но если учесть, что на борту са-
молета будет реализован комплекс таких устройств, то можно
уменьшить требования по функциональной эффективности каждого
из них. Так, если демпфер рыскания на больших углах атаки не-
достаточно эффективен, требуемое демпфирование боковых коле-
баний может быть обеспечено демпфером крена. Наличие автомата
путевой устойчивости позволяет снизить требования к коэффи-
циенту перекрестной связи руля направления с органами по-
перечного управления и, наоборот, наличие перекрестной связи
может снизить требования к автомату путевой устойчивости.
3. Проведенный раздельный., анализ каждого из простейших
автоматических устройств улучшения боковой устойчивости и
управляемости дает ответ только на один вопрос: какова должна
быть структура системы управления боковым движением самолета.
Выбор параметров системы управления необходимо проводить
совместно с учетом всех элементов и контуров. Для этого рацио-
нально привлечение общих методов синтеза систем и методов тео-
рии оптимального управления. Важно правильно назначить рас-
четные варианты, для которых должно проверяться функциони-
рование системы.
Можно рекомендовать такую последовательность исследований.
Сначала определяется степень автоматизации путевого канала
(без перекрестной связи), анализируется устойчивость и каче-
ство переходных процессов при отклонении руля направления и
действии внешних возмущений (при сильной взаимосвязи движе-
ний крена и рыскания анализ проводится по полным уравнениям
бокового движения). Затем при установленной автоматике путе-
вого канала рассматривается поперечный канал. На основе ана-
лиза устойчивости и управляемости движения крена выбираются
параметры демпфера крена и перекрестной связи с рулем на-
правления. Далее исследуются балансировка самолета и его ре-
акция на возмущения при полностью выбранной системе управ-
ления.
З.П. КРИТИЧЕСКИЕ РЕЖИМЫ ПОЛЕТА.
ОГРАНИЧЕНИЕ ПРЕДЕЛЬНЫХ РЕЖИМОВ
К критическим режимам полета принято относить:
1) полет на больших углах атаки с возможным попаданием
самолета в сваливание и штопор;
2) выполнение энергичных маневров крена с выходом на
большие угловые скорости и заметным проявлением взаимо-
140
действия продольного и бокового движения, в результате которого
самолет может попасть в так называемый режим инерционного
вращения.
Под сваливанием понимается самопроизвольное развитие дви-
жений по крену, рысканию и тангажу при выходе самолета на
большие углы атаки. Рассматривая физическую природу явления
сваливания при выходе самолета на закритические углы атаки,
можно весьма условно выделить несколько его характерных
видов:
сваливание, обусловленное потерей несущих свойств прямого
крыла;
сваливание типа авторотации из-за потери демпфирования дви-
жения крена;
сваливание из-за потери боковой колебательной устойчивости;
сваливание из-за потери поперечной управляемости X2 < 0;
сваливание из-за потери путевой устойчивости.
Фактором, приводящим к преждевременному сваливанию,
может быть подхват по тангажу из-за нелинейности моментной
характеристики самолета по углу атаки.
Поведение самолета на больших углах атаки зачастую опре-
деляется не каким-то одним видом сваливания, а совокуп-
ностью нескольких видов, поэтому проведенное выше разделе-
ние применительно к конкретному самолету может оказаться
условным.
Движение самолета после начала сваливания, как правило,
развивается как пространственное и для его анализа необходимо
использовать полные уравнения движения с учетом инерционного
взаимодействия продольного и бокового движения. Последнее и
предопределяет самопроизвольный выход самолета на большие
углы атаки и попадание в режим штопора.
Сваливание самолета с переходом в штопор приводит к потере
скорости и высоты. Безопасный выход из этого режима обеспечи-
вается при достаточно большом запасе по высоте (Н 5 ... 7км).
Здесь для летчика крайне затруднена оценка обстановки (слож-
ное пространственное движение с переменными перегрузками),
а вывод самолета требует своевременных и четких (по дозировке
и последовательности) действий рычагами управления. В связи
с этим при проектировании самолета и организации его управле-
ния необходимо принять все меры, исключающие попадание са-
молета на эти режимы. В качестве таких мер можно указать сле-
дующие.
1. При превышении допустимых углов атаки1 должна быть
обеспечена эффективная сигнализация о приближении к пре-
дельным режимам полета.
Иногда таким источником информации является аэродинами-
ческая тряска самолета, обусловленная срывным обтеканием
1 адоп назначается из условия отсутствия сваливания, его величина на
3 ... 4° должна быть меньше асв.
141
самолета на больших углах атаки. По этой причине ее называют
предупредительной. Но это не универсальное средство: на мно-
гих самолетах тряска отсутствует вплоть до сваливания, на кото-
рых она заметна уже на малых углах атаки. Для этой цели при-
меняется искусственная сигнализация: световая, звуковая, так-
тильная (тряска рычагов управления). Одновременно с сигнали-
зацией в кабине (в центральном поле зрения летчика) устанав-
ливается указатель угла атаки.
2. Соответствующей организацией продольного управления
ограничивается (точнее затрудняется) выход самолета на большие
углы атаки. Это может быть выполнено:
обеспечением стабильного заданного значения dXv/da неза-
висимо от центровки, конфигурации самолета, режима полета
(например, интегральным законом управления). В этом случае
угол атаки ограничивается «упором» по усилию или перемещению
рычага управления;
введением упора по усилию или перемещению рычага управ-
ления от сигнала по углу атаки;
регулировкой передаточного числа в системе управления
от угла атаки или введением дополнительной обратной связи по
углу атаки, при этом значительно увеличивается расход рычага
управления на больших углах атаки.
Во всех случаях, когда используется сигнал угла атаки, не-
обходимо введение его производной, поскольку важен не столько
текущий угол атаки, сколько своевременный прогноз его изме-
нения. Для этой цели используется сигнал датчика угловой ско-
рости в>„ пропущенный через фильтр. Иными словами, с допусти-
мым значением Од0П сравнивается текущее значение упрежден-
ного угла атаки
®упр = « (0 + К т? ] ®г, -у -р- Пр •
3. Расширением диапазона углов атаки, на которых отсут-
ствует сваливание, средствами автоматизации ручного управ-
ления.
В продольном канале при наличии достаточного запаса пики-
рующих моментов система стабилизации перегрузки (угла атаки)
должна обеспечить правильный знак балансировочной зависи-
мости а — f (Хр), соответствующий устойчивому самолету, и
возврат к балансировочному углу атаки при действии порыва
ветра без вмешательства летчика в управление.
В системе управления боковым движением колебательная не-
устойчивость устраняется применением демпфера крена и рыска-
ния, потеря поперечной управляемости — подключением руля
направления к поперечному управлению, уменьшением переме-
щения элеронов на больших углах атаки (регулировкой /Сш. э
в функции угла атаки). Путевая неустойчивость устраняется ав-
томатом путевой устойчивости.
142
Функционирование средств автоматики на больших углах
таки без длительного выхода на ограничения по отклонению
органов управления должно быть проверено для всех расчетных
ситуаций: при управлении летчиком, ветровых порывах, отказе
двигателей и появлении несимметрии.
Рассмотрим взаимодействие продольного и бокового движений
при энергичных маневрах крена. Если режимы сваливания важны
как для маневренных, так и для неманевренных самолетов, то
режимы, связанные с взаимодействием продольного и бокового
движений, должны рассматриваться, в первую очередь, для ма-
невренных самолетов: в силу ограниченности углов крена для
неманевренных самолетов (у 30 ... 60°) заметное проявление
взаимодействия практически исключено. Для маневренных са-
молетов углы крена не ограничены и в процессе вращения самолет
может выходить на большие угловые скорости (порядка нес-
кольких радиан в секунду).
При таком вращении необходимо учитывать связи, в первую
очередь, инерционные продольного движения с боковым и при
анализе необходимо исходить из полных уравнений движения
самолета.
У самолета на достаточно больших высотах полета, где соб-
ственное демпфирование мало, могут существовать две критиче-
ские угловые скорости крена [4]:
которые соответствуют потере апериодической устойчивости са-
молета; возникает установившееся движение самолета с враще-
нием по крену, при нейтральном положении элеронов и руля на-
правления. Это — режим так называемого инерционного вращения
самолета. Угловая скорость вращения по крену при этом близка
к наибольшей из критических скоростей (а>а или ®р). Это вра-
щение сопровождается большими приращениями углов атаки и
скольжения и соответственно нормальной и боковой перегрузки.
Для режимов инерционного вращения характерно отсутствие
обычной реакции на отклонение органов управления: отклонение
элеронов для парирования вращения может привести к увеличе-
нию углов атаки и скольжения (и перегрузок) при практически
неизмененной угловой скорости крена; отклонение стабилиза-
тора на парирование нормальной перегрузки может привести
к увеличению угловой скорости крена при дальнейшем увеличе-
нии перегрузок.
Опасность попадания самолета в режим инерционного враще-
ния характерна при полете на околонулевых и отрицательных
перегрузках. При пилотировании самолета она может выражаться
характерным «подхватом» по угловой скорости крена.
Вывод из режимов инерционного вращения обеспечивается
нестандартными действиями органов управления.
143
Учитывая сложность такого режима и возможность в про-
цессе его развития выхода за установленные ограничения по
перегрузкам, углам атаки и скольжения, необходимо принимать
меры к предотвращению попадания самолета на эти режимы.
Помимо указания в инструкции летчику о недопустимости
выполнения особо энергичных маневров крена, в первую оче-
редь, на околонулевых и отрицательных перегрузках, эти ре-
жимы могут быть исключены средствами автоматизации управле-
ния. В частности, простейшее из них — ограничение управляю-
щего сигнала при использовании закона управления в виде
6э = ^х(КхХр + сох).
Здесь максимальная величина не должна превышать
допустимой угловой скорости крена. Использование системы
искусственного демпфирования в каналах тангажа и курса позво-
ляет ликвидировать на ряде режимов критические скорости
крена.
Применение автоматов в продольном и путевом канале, повы-
шающих собственные частоты колебаний самолета, расширяет
диапазон используемых угловых скоростей крена, смещает кри-
тические частоты <о0 и сор в сторону больших частот. Однако
при применении средств автоматики в различных каналах уп-
равления необходимо иметь в виду следующее:
в условиях пространственного движения, при сильной взаимо-
связи продольного и бокового движений, автоматическая система,
установленная в одном канале, оказывает влияние на динамиче-
ские свойства самолета в других каналах;
выход органов управления на максимальное отклонение по
сигналам автоматики приводит к тому, что автоматика перестает
функционировать в возмущенном (относительно пространствен-
ного маневра) движении, и проблемы взаимодействия продоль-
ного и бокового движений могут стать еще более острыми. Эта
ситуация должна анализироваться особенно тщательно.
При анализе пространственного движения самолета должны
рассматриваться не только управляемые движения (в пределах
ограничений, установленных летчику), но и различного рода воз-
мущения типа ветровых порывов, отказа двигателя, появления
несимметрии.
Выше рассмотрены задачи управления, связанные с выходом
на предельные режимы полета по углу атаки и угловой скорости
крена, и вопросы ограничения этих режимов. Помимо указанных
ограничений существует много других ограничений:
по нормальной перегрузке;
по боковой перегрузке и углу скольжения;
по числу М;
по максимальной индикаторной скорости;
по эволютивной скорости.
144
Ограничения по нормальной и боковой перегрузке (и углу
скольжения) могут быть обеспечены примерно теми же средст-
вами, что и ограничение угла атаки.
Ограничения по числу М и приборным скоростям, не требую-
щие от летчика большого быстродействия в принятии решений,
достаточно эффективно могут быть обеспечены средствами сигна-
лизации о приближении к опасным режимам.
8.12. ОСОБЕННОСТИ ДИНАМИКИ САМОЛЕТА С БЦВМ
Схематически структура цифровой системы управления
может быть описана схемой, показанной на рис. 3.29. Аналого-
цифровой преобразователь выбирает из входного непрерывного
сигнала X (t) его дискретные значения и превращает в цифровой
код.
В результате математических операций, предопределенных
заданным алгоритмом управления, с использованием дискретных
значений входных сигналов БЦВМ формируются коды выходного
сигнала, которые с помощью цифроаналогового преобразователя
преобразуются в кусочно-непрерывный сигнал.
Функционально структурная схема (см. рис. 3.29) цифровой
системы может быть представлена в виде схемы, изображенной на
рис. 3.30, где процесс прерывания входной информации описы-
вается с помощью импульсного элемента, а цифроаналоговый
преобразователь с помощью экстраполятора W3 (р).
Рис. 3.29. Схемы цифровой системы. Прохождение сигнала через цифровую
систему:
1 — аналого-цифровой преобразователь (АЦП) 2 — алгоритм управления; 3 — цифрой
налоговый преобразователь (ЦАП); 4 — входной непрерывный сигнал АЦП; 5 — дискрет-
ная выборка из входного сигнала АЦП; 6 — значения выходного сигнала алгоритма
управления; 7 — кусочно-постоянный сигнал на выходе цифрового вычислителя
Рис. 3.30. Функциональная схема цифровой системы управления:
1 — математическая модель алгоритма управления; 2 — импульсный элемент (модель
АЦП); 3 —» передаточная функция экстраполятора (модель ЦАП
145
Линейные алгоритмы управления цифровых систем зап и
сываются с помощью уравнений вида [9]
ЕМ((*-/)П + Е^((*-/)П. (3.20)
/=Х1 /«0
где у (kT) — значение выходного сигнала БЦВМ в моменты врс
мени t = (&Т); х (kT) — значения входного сигнала.
Если умножить правую и левую часть уравнения на e-fer/’
и просуммировать правые и левые части по всем k от 0 до оо, то
получим
со N
УЧр) = Е y(kT)e~kTp = - Е е-1трЬ}У*(р) +
k=Q /=1
+ £ ауе-'Г₽Х*(р).
/=о
Из этого уравнения находим
Y* = Ц7* tn\ =
X* (р) w
_ Чо + а1е~Тр + а^~2Тр Н--h aNe~NTp .
" 1+Ь1 + ^р + Ьг^Р + ... + Ь^ТР • )
Таким образом, алгоритму управления (3.20) ставится в соответ-
ствие дискретная передаточная функция W* (р) вида (3.21).
Если выходной сигнал БЦВМ является кусочно-постоянным,
то передаточная функция экстраполятора будет равна [9]
1 _ -~Тр
Г,(р) = —-р----.
Такой экстраполятор называется экстраполятором нулевого по-
рядка.
Рассмотрим замкнутый контур самолет — цифровая система
управления (рис. 3.31). Пусть нам заданы законы управления
трактов Хь, ®2 и Пу, которые характеризуются соответственно
дискретными передаточными функциями IF© (р), (р) и IF; (р).
Напишем для системы (см. рис. 3.31) уравнения в изображениях
по Лапласу
сог (р) = (р) IFпр (р) IF, (р) Е* (р),
Пу (Р) = г„/ф (р) IFnp (р) IF, (р) Е* (р), (3.22)
Е’ (р) = IFo (р) Х’ь (р) — Wi (р) со, (р) — IF; (р) пу (р),
где Е* (р) — изображение по Лапласу сигнала рассогласования
е* (/) (см. рис. 3.31).
146
Рис. 3.31. Структурная схема цифровой системы управления продольным дви-
жением самолета
Если перейти в уравнениях (3.22) к изображениям со звездоч-
кой и разрешить уравнения относительно а>£ (р) и п*у (р), то по-
дучим дискретные передаточные функции
(р) _ то.______________[^<аг/ф^пр^э (р) ] ^0 (р)___
*>)- “z/*B ~ 1 + г; + W*2 ’
ny (P) _ _________[^п/ф^пр^э] (p)________
x; (P) “ П/Хв 1 + irBi/q(rnpFef w; (p) + [rn/(pFnpV,f W2 ‘
Так же как непрерывные передаточные функции для аналоговых
систем, дискретные передаточные функции позволяют глубоко изу-
чать характеристики цифровых систем, решать для них задачи
анализа и синтеза.
На практике при исследовании динамических характеристик
цифровых систем пользуются не преобразованием со звездочкой,
а z-преобразованием, которое получается из преобразования со
звездочкой заменой еГр на г.
С использованием z-преобразования выражение (3.23) пред-
ставляется в виде
_ то (-Х _ [^а/Ф Уэ] (г) W0 (г)
X, (г) W 1 + [Wa/9 ГпрГ9] (z) + (г) + ’
М*> то м (‘ }
Х»(г) [^о/ф1Гпр1Гэ] (г) 1F, (г) + ’
+ Fn/Ф^пр^э] (г)^г(г)
где [^и/ф^пр^э! (г) и HFn/<plFnpir9J (?)—дискретные передаточ-
ные функции, соответствующие непрерывным передаточным функ-
циям W^fj)) Wnp (р) W3 (р) и Wn/4> (р) №Пр (р) W3 (р).
147
Замкнутый контур самолет—цифровая система управлении
содержит дискретную часть — это законы управления и непрс
рывную часть — это объект управления, приводы, аналоговые
фильтры.
Для получения дискретных передаточных функций, характе
ризующих законы управления, можно использовать соотношение
(3.20), если законы управления заданы разностными уравнениями
Однако на практике часто законы управления цифровых систем
задаются в виде схемы с эквивалентными непрерывными переда
точными функциями. Причем часто схема непрерывной системы
является исходной информацией для исследований цифровой си
стемы. В этой ситуации удобно для получения и дискретных пере
даточных функций алгоритмов управления и разностных уравне
ний для программирования БЦВМ использовать г-формы [9].
z-формы — это соотношения, определяющие связь между опера-
тором интегрирования p~k и переменной z"1.
Переменные риг связаны соотношением
1 , IT
p = ИЛИ - =.
r Т р In z
Функция Inz может быть представлена в виде степенного ряда
Тогда
Т
_ 2 _ Т / 1 v 4v3 44v6
р = , о3 , V8 , 243 45 “945
Отсюда
-i^ Т _ Т 1+z"1
Р 2v 2 1 — z"1
Выражение -у- * — называется z-формой, соответствующей р"1.
Для р“2 можно получить выражение
Т2 / 1 2 \ Т2 10 + Юг"1 + z“2
Р 4 3 / ~’ 12 (1—Z-1)2 ’
которое выводится путем возведения в квадрат и учетом главного
члена и константы в выражении для р"1.
Если есть передаточная функция W (р), то для получения
дискретной передаточной функции, соответствующей ей, доста-
точно p~k заменить в ней на соответствующую z-форму.
148
Например, пусть есть фильтр с передаточной функцией
ги-тйт-
Для получения дискретной передаточной функции заменяем р
2 z— 1
Ин Т-, и находим
1 Z -f- 1
w ы - 1 = Tl(^ri + T)(2+i)
w W 27\ z — 1 . 2Л — T ’
Т z-|-l + г 2Л4-Т
Можно для получения дискретных передаточных функций во-
спользоваться дискретными передаточными функциями оператора
интегрирования, соответствующими различным схемам численного
Интегрирования.
Для интегрирования по методу прямоугольников интеграл на
интервале (0, kT) представляется выражением
где
(3.25)
кТ (к— I) Т
Jk = di; Jk_j_ = J X dT; Xh = X (kT).
о 0
Если перейти в выражении (3.25) к z-преобразованию, то получим
J (2) = Z-V (2) + ТХ (О,
отсюда получим
J (2) Tt
X (г) г— 1 ’
Для метода интегрирования трапеций
Jk — Jк-1 (Хь + Xh_x).
Переход к z-преобразованию в этом выражении дает
J(z) = z-V(z) + 4-(l+z-l)X(z).
Отсюда находим
J(z) _ Г г +1
X(z)~ 2 г—1 '
(3.26)
(3.27)
Для получения дискретных передаточных функций по непрерыв-
ным передаточным функциям можно воспользоваться и символи-
ческим изображением оператора интегрирования р~г вида (3.26)
и (3.27), заменяя его на соответствующее символическое изобра-
жение. Если взять выражение (3.26), то для фильтра найдем
149
соответствующую дискретную передаточную функцию в виде
Г/(7, + 7)г
г____Т-Х_'
7,4-7
В системах управления часто для снижения амплитудной харак-
теристики на какой-нибудь частоте используют фильтры-«пробки»
с передаточной функцией вида
р2 + 2£
Р2 + + °»1
На частоте <о = со, такой фильтр имеет амплитудную характери-
стику Д, (со,) = -f1 и, выбирая нужное отношение £, и g2,
Ь2
можно достичь желаемого эффекта ослабления частотной харак-
теристики разомкнутой системы. При использовании таких фильт-
ров очень важно, чтобы он был настроен строго на определенную
частоту.
Использование указанных выше способов получения диск-
ретных передаточных функций, основанных на z-формах и мето-
дах численного интегрирования, может оказаться неприемлемым
для получения дискретной передаточной функции фильтра-пробки,
так как эти методы являются приближенными, а минимум ампли-
тудной характеристики фильтра желательно иметь на строго
определенной частоте»
Для того чтобы получить передаточную функцию цифрового
фильтра-пробки, настроенного строго на заданную частоту, удобно
воспользоваться ^-преобразованием, которое определяется как
Во пользуемся выражением
<3-281
Если взять передаточную функцию w (г), то соответствующая
ей частотная характеристика есть w (е‘шГ). Если в выражение
(3.28) подставить z = е‘тГ, то получим
Величину v-=tg~y-^- называют псевдочастотой или фиктив-
ной частотой. Для получения частотной характеристики достаточно
вместо переменной w подставить в нее значение fv, т. е. получается
полная аналогия с непрерывными частотными характеристиками.
150
Если мы хотим иметь цифровой фильтр-пробку, настроенный
Nfl частоту то можем поступить следующим образом.
хч 2х (OiT
Определим сначала псевдочастоту vx = -у tg и запишем
передаточную функцию
ТГ (и>) =
t»2 4- 2g, wv, -I- v,
a»24-2g2wvi+vi
Если теперь в это выражение подставить w, выраженное
через z, то получим
Г*) Т* т Slvl+vl
2 « 2 4 4 о ' 4 4 п
У» 4- — ?2V1 + vi yr + ~ &2vl + V1
Таким образом получаем дискретную передаточную функцию
фильтра-пробки.
Использование при реализации систем управления БЦВМ
вносит в динамику систем целый ряд особенностей.
Рассмотрим, например, цифровой и аналоговый демпфер тан-
гажа и сравним между собой частотные характеристики разомкну-
тых систем (рис. 3.32). Для непрерывной системы частотная ха-
рактеристика разомкнутой системы будет определяться соот-
ношением
А (<в) е<Фн<в) = Гпр (to) (to),
а для дискретной системы
Ал(ф)е'Ф«(Ш) «К.
а)
в)
Рис. 3.32. Структура цифровой и аналоговой систем:
а— непрерывный демпфер тангажа: б — дискретный демпфер тангажа
151
I _ е-тр
Wa = -—------
3 p
Если учесть, что для передаточной функции ^со2/Ф й^пр (р)
порядок числителя на две-три единицы ниже порядка знамена-
теля, то приближенно Аде/фд можно представить одним членом
разложения [№э№пр №ю2/ф]*
Лд i©' е‘Фд <ш> = Кп 1 ~^т— №пр (i®) Й\/Ф (i<o).
Если (он — частота потери устойчивости для непрерывной си -
стемы, а — критическое значение коэффициента усиле-
ния обратной связи, то
XH(ico) = 1, а Фн(юн) = - 180°.
Период дискретности в цифровых системах обычно выбирается
так, что (он и произведение свТ л при со < сон.
При таких частотах
(^) — Ан (^) » а
Фд(/со) = Фн(йд) - —.
1-е^г
iaT
При ш<ын величина
отличается от единицы на вели-
чину порядка св272, т. е. Ад (ш) « Лн (*<в). Таким образом,
в первом приближении при цифровой реализации системы в кон-
тур управления добавляется величина запаздывания 772. Это
запаздывание на самом деле является заниженным.
Фактически дополнительное чистое запаздывание, связанное
с цифровой реализацией сйстемы управления, будет больше и
составит величину
Т
т — _ ТцАП 4~ та + гЦАП + г» .
где тАЦП и тцАП — время аналого-цифрового и цифроаналого-
вого преобразования; ха — время, затрачиваемое процессором,
на вычисление управляющих сигналов; т' — возможное допол-
нительное запаздывание, связанное, например, с порядком реше-
ния задач в такте.
Дополнительное запаздывание ухудшает устойчивость системы,
снижает значение критического значения коэффициента усиления
и частоты потери устойчивости сод для дискретной системы по ,
сравнению с непрерывной.
Качественно влияние дискретной реализации системы на ее
устойчивость характеризуется зависимостью, изображенной на
152
к9(1')/кн
Малые значения д
Большие значения д
О Ц^2 ТТб ЦПВ ^7 Тс
Рис. 3.33. Влияние квантования по времени на устойчивость цифровой системы
рис. 3.33. Конкретный ее вид зависит от характеристик объекта
управления. Для режимов полета с большим скоростным напо-
ром, где объект управления является высокодинамичным звеном
и малы запасы устойчивости, влияние запаздывания на устойчи-
вость системы существеннее, чем для режимов полета с малым
скоростным напором, где объект является «вялым», а запасы
устойчивости контура самолет—система управления, как пра-
вило, на этих режимах заметно больше, чем на режимах больших
скоростных напоров.
Не случайно по этой причине частота прерывания сигналов
в цифровых системах управления выбирается достаточно высокой.
В системе управления самолета JA-37 Viggen, A7D и других
частота прерывания была выбрана равной 80 Гц.
Если в динамической схеме объекта управления учитывается
упругость конструкции самолета, то при определенном соотноше-
нии между частотой прерывания и собственной частотой тонов
упругих колебаний наблюдаются сложные эффекты.
Учет какого-либо тона в динамической схеме объекта управле-
ния добавляет в знаменатель передаточной функции самолета
звено (р2 -I- + ®<), где — демпфирование упругого тона;
— частота.
Так как демпфирование упругих колебаний характеризуется
очень малыми величинами (порядка нескольких сотых), то на
частоте <в = ®г амплитудная характеристика разомкнутой си-
стемы имеет резонансный пик. Качественно амплитудная харак-
теристика разомкнутой системы при учете в динамической модели
объекта двух тонов упругих колебаний может иметь вид, пока-
занный на рис. 3.34. Если в этом случае выбрать частоту преры-
вания а, = «1 + ®8, то может в цифровой системе получиться
следующий эффект.
Если в динамической модели объекта управления имеются
тоны с частотами сь и то в возмущенном движении на вход
системы будут поступать сигналы с частотами ®i и со2. В цифровой
системе происходит транспортирование частот и сигнал с часто-
153
Рис. 3.34. Амплитудная характеристика разомкнутого контура «самолет—
система управления» с учетом упругости конструкции самолета
той ©1 дает на выходе системы сигнал с частотой ©i и с частотой
со3 — ®1 = <о2. В то же время сигнал с частотой <о2 на входе циф-
ровой системы дает на выходе гармоники с частотами <о2 и <ов —
— <о2 = <01. Входной сигнал системы включает гармоника с часто-
тами ©1 и <о2 аддитивно. На выходе эти гармонику и гармоники
с комбинационными частотами будут также складываться. В за-
висимости от взаимных фаз гармоник <»i и <о2 на выходе цифровой
системы их амплитуды могут либо взаимно увеличиваться, либо
взаимно уменьшаться. Графически этот эффект можно объяснить
с помощью рис. 3.35.
Предположим, что на рис. 3.35 приведена частотная характе-
ристика звена
Кt>Wз (р) IF(р) Wпр (р).
Частотную характеристику разомкнутой системы (см.
рис. 3.32, б) представим двумя членами
- (ф) 1 _1 __________________________7
(iv) + 1 X
X WgWnpW{I
Если CO = , TO G) — (0g = — <o2.
Тогда
А W ег<₽ Г W3Wпр X
I _,i»,T
X Wа^ф (i<t>i) npIF ©z/<p ( •
Первое слагаемое в этом выражении есть вектор ОА (см.
рис. 3.35), а второе слагаемое — вектор ОВ, симметричный отно-
сительно вещественной оси вектору OB'.
154
Рис. 3.35. АФЧХ для упругого самолета с системой управления в комплексной
плоскости
Суммой этих векторов будет вектор ОС, который по модулю
больше и ОА и больше ОВ. Таким образом, резонансный пик на
частоте <вг усилится. Точно таким же будет по величине и пик
на частоте со2. Если бы вектор ОВ был направлен симметрично
вектору ОА (вектор ОВ") относительно мнимой оси, то, отражая
его относительно оси Re, получили бы вектор О'В", параллель-
ный и противоположно направленный вектору О А. В этой ситу-
ации ОА + ОВ" та 0, т. е. при таком расположении резонансных
пиков в цифровой системе происходило бы взаимное ослабление
резонансных пиков. Взаимное расположение векторов ОА и ОВ
можно регулировать, используя в системе чистое запаздывание,
которое легко реализуется в цифровой системе.
155
Если ввести в систему запаздывание на величину т, то угол
между векторами ОА и ОВ изменится на Д<р = (со2 — <oj) т
Таким образом, в цифровой системе путем изменения величины
чистого запаздывания можно добиться улучшения устойчивости
упругих колебаний конструкции самолета. Правда, вносимое запаз
дывание нежелательно, так как ухудшает устойчивость контура са
молет — система управления для самолета как жесткого тела.
Описанный выше эффект изменения устойчивости упругих
колебаний за счет запаздывания связан с тем, что на выходе
цифровой сигнал наряду с основной гармоникой содержит и тар
моники с транспонированными частотами. Этот эффект для цифро
вой системы ставит повышенные требования по помехозащищен-
ности. Если чувствительный элемент датчика измеряет высоко
частотную помеху, то из-за транспонирования частот колебаний
может иметь место следующий эффект.
Пусть входной сигнал цифровой системы и (f) = «0 (?) Ч
+ Ап sin ®п?, где «0 (?) — полезный сигнал, а Ап sin ®п? —
помеха и пусть ®п = ®s + А®, где А® < ®s.
При выборе дискретных значений из сигнала и (?), из сигнала по-
мехи образуется низкочастотный сигнал A' sin А®?, где А' та Ап.
Частота А® может попасть в полосу пропускания системы
управления, вызвать периодические отклонения поверхностей
управления и вызвать тем самым вынужденные колебания само-
лета. При большой амплитуде помехи эти колебания могут быть
значительными. Для того чтобы этого не происходило, на входе
в аналого-цифровые преобразователи обязательно должны быть
установлены аналоговые фильтры. Это могут быть специальные
фильтры для защ'йты системы от высокочастотных помех. Напри-
мер, фильтр с передаточной функцией W (р) = при Т1 =
= Т ослабит амплитуду помех с частотой, близкой к частоте пре-
рывателя, примерно в 1/2л раз, а фильтр с передаточной функцией
V (Р) = - при 7, « 7 - в 30 ... 40 раз.
В экспериментальной цифровой системе самолета A-7D после
датчиков различных сигналов были установлены аналоговые
фильтры с передаточной функцией 1ЦТр + 1) со следующими
постоянными времени.
Датчик Постоянная времени
(мс)
10
®₽ 20
®в 20
Я» 20
П« 20
156
Если в системе имеются фильтры, используемые для улучше-
устойчивости упругих колебаний, то при аналоговой реали-
||Ции такие фильтры могут снижать амплитуду высокочастотной
|0мехи в десятки раз.
В системе с аналоговыми выходными сигналами датчиков
Щалоговые фильтры на входе АЦП могут быть отнесены к аппара-
Spe вычислителя, а в системе с цифровым выходом датчиков —
алоговые фильтры должны быть встроены в датчики.
Аналоговые фильтры желательны не только перед входом
| аналого-цифровые преобразователи, но и на выходе цифро-
Щалогового преобразователя.
Кусочно-непрерывный выходной сигнал ЦАП меняется скачко-
|бразно, и аналоговый фильтр будет сглаживать эти скачки,
Улучшая тем самым условия работы привода. Для нормальной
Долговечной работы привода желательно иметь на его входе глад-
|ие сигналы.
Таким образом, цифровая система должна содержать и анало-
говые элементы, и иметь структуру вида, показанного на рис. 3.36.
Квантование сигналов по времени вносит в цифровую систему
^правления запаздывание, которое непосредственно связано с ди-
(Кретностью сигналов по времени и преобразованием информации
| АЦП, ЦАП и процессоре, а также дополнительное запаздывание,
Связанное с фильтрами, которые необходимо использовать в си-
стеме перед входом в АЦП и входом привода.
Другой особенностью цифровых систем, существенно влия-
ющей на ее динамические характеристики, является квантование
Во уровню. С учетом конечного числа разрядов АЦП и ЦАП
Структурную схему, показанную на рис. 3.31, необходимо пред-
ставить в виде схемы, показанной на рис. 3.37. Приведенная на
рис. 3.37 структура системы управления является нелинейной.
Наличие в контурах системы управления нелинейностей при-
водит к возникновению в контуре самолет — система управле-
ния периодических режимов — нелинейных колебаний.
Периодические режимы возникают как в контуре самолет —
Система управления, так и в контуре самолет — летчик, при
Попытке летчика стабилизировать параметры движения самолета.
Периодические режимы в контуре самолет — система управле-
ния имеют место как для статически устойчивого, так и статически
Неустойчивого самолета.
Влияние квантования по уровню на характеристики управля-
фмости отчетливо проявилось в программе исследований цифровой
Системы дистанционного управления на самолете F-8C. В коммен-
Рис. 3.36. Структура цифровой системы:
I — датчик; 2 — аналоговый фильтр; а — АЦП; 4 — алгоритм управлении; I — ЦАП;
» — аналоговый фильтр; 7 — привод
157
Рис. 3.37. Структура цифровой системы с учетом квантования по уровню
тариях летчика после полетов с цифровой системой отмечалось,
что он чувствует квантование по уровню.
Для того чтобы квантование по времени и по уровню не ока-
зывало заметного влияния на устойчивость и качество замкнутого
контура самолет — система управления, необходимо выбирать
достаточно высокой частоту прерывания (50 ... 80 Гц) и достаточно
высокую разрядность АЦП, ЦАП.
ВОПРОСЫ ДЛЯ САМОПРОВЕРКИ
1. Вывести выражение для передаточной функции от угла
отклонения руля Д<р к измеряемой перегрузке Дп^ при условии
выноса датчика перегрузки по оси ОХ на расстояние /д от центра
масс. При выводе в передаточных функциях по углу атаки и угло-
вой скорости <BZ принять Су = 0, непосредственный вклад руля
в перегрузку учитывать.
2. Проанализировать зависимость положения нулей пере-
даточной функции разомкнутой системы для закона управления
Кш-^р . KnAtiy
ф - Тор+1 + ТпР-М +
от параметров Тп и Кг.!Ка в предположении, что Су = 0.
3. Вывести выражение для граничного значения Аогр коэф-
фициента передачи демпфера тангажа, полагая, что со стороны
системы запаздывание вносится сервоприводом с передаточной
функцией
w? =_________!______.
ry + 2gnTnp+l
Принять, что при © = 1/Тп фаза равна —90°.
158
4. Построить АФЧХ для фильтра с передаточной функцией
Гф(р) =
7У + 2^Т1/>+1
При Т1 = 0,025 с; = 0,1; = 0,6.
5. Для улучшения устойчивости контура «самолет — система
^правления» можно использовать фильтр с передаточной функ-
цией ^ ^ । • > где 7'1<Т2. Построить АФЧХ этого фильтра
При 7\ = 0,015 с; Т8 = 0,25 с.
6. Как изменится граничное значение Кшгр коэффициента
Передачи в демпфере тангажа при использовании фильтра из
вадания 5 в обратной связи по <oz, если 1/Тп = 20 1/с?
7. Задавшись передаточной функцией в виде, получа-
ющимся из выражения (3.18) при Хд. к — 1. вывести формулу
для граничного значения коэффициента Ка>х в демпфере крена при
передаточной функции сервопривода
1
Wn Т^+21„Т„р+Г
8. Какова оптимальная ориентация датчика угловой скорости
в демпфере рыскания?
9. С помощью замены р = и р = Z~J- получить
дискретные передаточные функции фильтра из задания 5 и срав-
нить между собой АФЧХ этих передаточных функций при Т =
— 0,05 с.
10. Используя ^-преобразование получить дискретную пере-
даточную функцию для фильтра из задания 5 и построить АФЧХ
дискретного фильтра при Т = 0,025 с.
ГЛАВА 4
УЛУЧШЕНИЕ ЛЕТНЫХ ХАРАКТЕРИСТИК САМОЛЕТА
СРЕДСТВАМИ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
4.1. ПРОЕКТИРОВАНИЕ САМОЛЕТА С УЧЕТОМ
ВОЗМОЖНОСТЕЙ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Улучшить летно-технические данные современного
самолета (взлетную массу, дальность, платную нагрузку, манев-
ренность и т. д.) без существенных изменений в конструкции
весьма сложно. В последние годы при проектировании самолетов
стремятся объединить возможности автоматической системы управ-
ления с конструкцией самолета. Управление приобретает такое же
значение для самолета, как и аэродинамическая и конструкцион-
ная схема и силовая установка. Введение специальных систем
автоматического управления позволяет рационально изменить
конфигурацию проектируемого самолета.
С помощью автоматических систем управления, построенных
на основе традиционных и нетрадиционных — с использованием
дополнительных аэродинамических поверхностей — способов
управления, можно решать следующие задачи:
обеспечивать полет самолета с пониженным запасом устойчи-
вости вплоть до статической неустойчивости;
уменьшать нагрузки на конструкцию крыла при маневре
самолета;
уменьшать нагрузки, действующие на конструкцию самолета
при полете в турбулентной атмосфере, с целью повышения ре-
сурса самолета;
уменьшать перегрузки, действующие на экипаж и пассажиров
при полете в турбулентной атмосфере (улучшение комфорта);
повышать критическую скорость флаттера;
повышать маневренность и создавать новые формы управля-
емого движения самолета на основе использования дополнитель-
ных управляющих поверхностей.
Все перечисленное улучшает летные данные самолета. Резуль-
тат тем выше, чем раньше стадия в создании самолета, на которой
учитывается положительный вклад системы управления. Так,
возложение функции обеспечения необходимой устойчивости на
автоматические системы управления позволяет выбрать центровку
и площадь оперения исходя из требования снижения массы само-
лета и уменьшения его лобового сопротивления. Уменьшение
маневренных нагрузок на крыло, а также парирование атмосфер-
ных возмущений с помощью специальных систем управления
делают возможным снижение требований к прочности и жесткости
конструкции самолета, а это в результате ведет к уменьшению
160
его массы. То же самое относится и к системе повышения крити-
ческой скорости флаттера. Существенно, что в этих системах
автоматики используются дополнительные органы управления —
органы непосредственного управления силами (ОНУС). Непо-
средственное изменение подъемной и боковой сил с, помощью
специальных органов управления является также эффективным
средством повышения маневренных свойств самолета. В качестве
таких органов используют либо традиционные органы управления
(отклоняемые симметрично элероны, закрылки, интерцепторы
и т. д.), либо специально установленные для этой цели, например,
передние горизонтальное и вертикальное оперения. Важно, чтобы
органы непосредственного управления силами удовлетворяли
следующим требованиям:
1) нарастание силы после отклонения ОНУС должно проис-
ходить с минимальным запаздыванием;
2) ОНУС должны как увеличивать, так и уменьшать силу
при отклонении их от нейтрального положения.
При новом подходе к проектированию самолета ряд функций,
традиционно возлагавшихся на планер самолета, передается
автоматике управления. Поэтому в функциональном плане си-
стола управления существенно усложняется. Усложнение законов
управления и значительное увеличение числа электрических
сигналов, поступающих на вход приводов рулевых органов от
многочисленных подсистем автоматики, приводит к тому, что
суммарный сигнал систем автоматики, превалирует над управля-
ющим сигналом летчика. Это заставляет идти по пути создания
дистанционных систем управления с использованием бортовых
цифровых вычислителей. Внедрение таких систем предъявляет
высокие требования к надежности, особенно в части выполнения
столь ответственной функции, как повышение устойчивости.
Иными словами, новый подход к проектированию связан с созда-
нием дистанционных систем управления повышенной надеж-
ности.
4.2. УМЕНЬШЕНИЕ ЗАПАСА СТАТИЧЕСКОЙ
УСТОЙЧИВОСТИ САМОЛЕТА
Проектирование самолета с уменьшенными запасами
устойчивости позволяет существенно улучшить его летные харак-
теристики. Рассмотрим это вначале на примере тяжелого самолета.
Площадь хвостового оперения и центровка обычно выбираются
из условия балансировки самолета на всех режимах полета1
и создания приемлемых характеристик устойчивости и управля-
емости. Согласно новому подходу площадь оперения выбирается
только из условия обеспечения балансировки и отрыва носового
колеса, а создание требуемых характеристик устойчивости и
управляемости возлагается на автоматику управления. При таком
1 В боковом движении расчетными являются требования балансировки при
боковом ветре, отказе двигателя и других возможных несимметриях.
6 Зак. эта
161
подходе к проектированию площадь хвостового оперения может
быть существенно уменьшена. Это приводит к соответствующему
снижению массы самолета. К тому же в связи с уменьшением
нагрузок, прикладываемых к хвостовой части фюзеляжа, может
быть достигнуто уменьшение и массы фюзеляжа. Кроме того, при
уменьшении площади оперения снижается и его сопротивление
трению.
Комплексный учет всех факторов показывает, что для тяжелых
транспортных и пассажирских самолетов оптимум по запасу
продольной статической устойчивости находится вблизи точки
нейтральности (устойчивость порядка 1 ... 2%).
Рассмотрим теперь легкий спортивный самолет. Его маневрен-
ные качества определяются двумя основными показателями:
максимальной перегрузкой riy и приращением удельной избы-
точной мощности:
где Р — тяга двигателя; Ха — лобовое сопротивление.
Первый показатель (пуак), зависящий от допустимого угла
атаки адоп, характеризует предельную возможность самолета
по развиваемой перегрузке. Второй (ps) определяет способность
самолета производить маневры с разгоном. От параметра р, также
прямо зависит максимальное значение перегрузки, которую можно
развить в маневре с постоянной скоростью (ps = 0). При заданной
силе тяги двигателя значение показателя р, тем больше, чем
меньше лобовое сопротивление самолета.
У самолета статически неустойчивой конфигурации улуч-
шаются показатели маневренности. Это достигается за счет умень-
шения потерь на балансировку самолета. Балансировка статически
устойчивого самолета производится путем поворота стабилизатора
передней кромкой вниз. При этом подъемная сила горизонталь-
ного оперения (ГО) либо уменьшается (рис. 4.1, а), либо меняет
знак (рис. 4.1, б). Хотя одновременно происходит уменьшение
индуктивного сопротивления горизонтального оперения (вслед-
ствие уменьшения его угла атаки), все же суммарный эффект
влияния этих обоих факторов на поляру самолета, как правило,
неблагоприятен: балансировочная поляра располагается ниже
поляры самолета исходной (<р — 0) конфигурации.
У статически неустойчивого самолета при его балансировке
подъемная сила горизонтального оперения увеличивается
(рис. 4.1, в). Одновременно увеличивается и индуктивное сопро-
тивление цельноповоротного стабилизатора. Тем не менее
в результате можно добиться улучшения аэродинамического каче-
ства: балансировочная поляра располагается выше исходной.
Вследствие этого показатели маневренности статически неустой-
чивого самолета оказываются более высокими,, чем у статически
устойчивого.
162
Рис. 4.1. Схемы балансировки самолета:
1 — подъемная сила крыла и фюзеляжа; 2 — подъемная сила ГО; 3 — полная подъемная
сила; 4 — центр масс; 5 — фокус по углу атаки; б — исходная поляра; 7 — балансиро-
вочная поляра
Уменьшение запасов устойчивости может быть достигнуто
смещением центра масс назад или установкой дестабилизатора —
переднего горизонтального оперения (ПГО). Уменьшение площади
горизонтального оперения при переходе к малой степени устой-
чивости (тг 0) для спортивного самолета, как правило, ока-
зывается незначительным.
4.3. СНИЖЕНИЕ МАНЕВРЕННОЙ НАГРУЗКИ КРЫЛА
Решающее значение в нагрузке крыла имеет изгиба-
ющий момент. Снижение изгибающего момента посредством авто-
матики управления производится путем смещения центра давления
6* 163
Рис. 4.2. Характеристики разгрузки крыла:
1 — обычное расположение центра давления; 2 — центр давления при управлении манев-
ренной нагрузкой
к фюзеляжу (рис. 4.2). Требуемое для этого изменение формы
кривой аэродинамической нагрузки крыла осуществляется с по-
мощью его органов механизации (например, симметрично откло-
няемых элеронов и закрылков). Система управления маневренной
нагрузкой включается только при перегрузках, превышающих
единицу (например, > 1,2). Тем самым обеспечивается сохра-
нение оптимального (в смысле минимума индуктивного сопро-
тивления) эллиптического распределения подъемной силы по
размаху крыла на крейсерском режиме полета (пу — 1).
Прямое управление подъемной силой для разгрузки крыла
не должно ухудшать характеристики продольной управляемости
самолета. Сохранение обычной картины нарастания нормальной
перегрузки в ответ на отклонение штурвала является обязатель-
ным требованием. В системе управления оно обеспечивается
согласованным действием руля высоты и органов механизации,
вызывающих перераспределение нагрузки по размаху крыла.
Самым простым способом организации такого согласования яв-
ляется создание соответствующих связей между органами управ-
ления. При отклонении штурвальной колонки в сторону положи-
тельного приращения перегрузки формируется сигнал ДХ, про-
порциональный смещению штурвала относительно исходного поло-
жения, соответствующего перегрузке пу — 1. По этому сигналу
элероны отклоняются задней кромкой вверх, создавая отрица-
тельную подъемную силу на конце крыла, а закрылки откло-
няются вниз, создавая дополнительную положительную силу
в корневой части крыла. Одновременно отклоняется руль высоты,
вызывающий изменение угла атаки на увеличение общей подъем-
ной силы. Органы механизации не мешают каналу руля высоты,
если создаваемые ими силы составляют пару. При этом условии
суммарная подъемная сила зависит лишь от угла атаки. Такое
164
идеальное согласование в действиях закрылков и элеронов опре-
деляется выбором коэффициента связи между ними,
В рассмотренной системе взаимодействие органов управления
организуется на основе математической модели создания сум-
марной перегрузки, т. е. при выборе коэффициентов связи при-
сутствует элемент прогноза в поведении самолета по перегрузке.
Неточность математической модели, разнообразие режимов по-
лета, разброс характеристик самолета и т. д. могут явиться при-
чиной существенного искажения ожидаемой по прогнозу картины
управления, а следовательно, и недопустимого ухудшения харак-
теристик управляемости. Необходимость корректив во взаимо-
действии органов управления — для учета реальных условий
полета — привело к идее обратной связи по перегрузке Вве-
дение обратной связи позволяет использовать для разгрузки
крыла лишь элероны. При этом уменьшение подъемной силы
вследствие симметричного отклонения элеронов компенсируется
соответствующим увеличением угла атаки.
Упрощенная схема системы, построенной по такому принципу,
приведена на рис. 4.3. Как видно, сигнал АХ отклонения штур-
вала на маневр с перегрузкой пу > 1 помимо обычного канала
передается на руль высоты через фильтр с передаточной функцией
Тр тт ,
урр Через тот же фильтр сигнал поступает на привод сим-
метричных элеронов. Кроме того, руль высоты и симметричные
элероны дополнительно отклоняются по сигналу перегрузки
Длр == — 1. Взаимодействие органов управления организо-
вано следующим образом. По выходному сигналу фильтра элероны
отклоняются на увеличение подъемной силы, а руль высоты —
на уменьшение. Что касается обратной связи по перегрузке, то
логика здесь противоположная — для элеронов обратная связь —
отрицательная, а для канала руля высоты — положительная.
Рис. 4.3. Схема системы снижения маневренной нагрузки крыла:
/ — штурвал; 2 — датчик перемещений; 3 — акселерометр, установленный в центре
масс; 4, 5, 6 — коэффициенты передачи; 7 — руль высоты; 8 — симметричные элероны
165
Рис. 4.4. Структурная схема управления нормальной перегрузкой
Для разгрузки крыла решающее значение имеет отрицатель-
ная обратная связь по перегрузке в канале элеронов. Чем больше
положительное приращение перегрузки, тем значительнее задняя
кромка элеронов отклоняется вверх. При этом положительная
обратная связь в канале руля высоты заставляет восполнять
потерю в подъемной силе путем увеличения угла атаки. За счет
связи от штурвала к элеронам регулируется начальная фаза
маневра: при снижении темпа нарастания угла атаки маневренная
перегрузка создается элеронами.
Рассмотрим динамику описанного взаимодействия каналов.
Для простоты примем, что симметрично отклоняемые элероны
не создают момент относительно оси OZ. При этом условии для
приращения перегрузки от элеронов имеем: Дп^ — п/ Дб„ где
п/— положительный коэффициент. Тогда на основании схемы,
представленной на рис. 4.3, в предположении, что приводы идеаль-
ные, получаем структурную схему, приведенную на рис. 4.4.
Здесь для упрощения анализа пренебрегаем подъемной силой
руля высоты. С помощью структурной схемы определяем пере-
даточную функцию от ДХ к Anv
f^l = _ Г . ср w , Л __1______ 4 j
Uxj ^ + 2^+1 v+1 w P + W4P)’ ' ;
где
W(P) ту + 2^+1
5
у •
Система автоматического управления маневренной нагрузкой
крыла изменяет статические и динамические характеристики уп-
равляемости. Если для свободного самолета ХПу -----------——,
1 Здесь для обозначения отношения преобразований Лапласа —у/т
f Дп 1 Р
введен символ Такая символика будет использоваться и дальше.
166
то, как следует из (4.1), при введении обратных связей по пере-
грузке градиент Xnv принимает значение
у"» , 1+К9п;»-КвКс71сЯ«
Для сохранения градиента Хп« на прежнем уровне необходимо
обеспечить выполнение условия
КЛ9 = /Св/Сс71сп“. (4.2)
Требование (4.2) можно удовлетворить путем соответству-
ющего выбора коэффициентов и Кв. В этом случае передаточ-
ная функция (4.1) преобразуется к виду
РМ = _ *ш*с7’1еп“ _ ср 2agcTcp(Tc/2gcp+l) ,4 ,
т^+2е;т>4-1 tp + i т^ + г^р-м ’
где а = ЯвЯоЛХ =
В соответствии с (4.3) переходная функция самолета с системой
управления есть сумма двух составляющих. Первая соответствует
колебательному звену, вторая, затухающая со временем, изменяет
переходный процесс (в сторону увеличения быстродействия)
в начальной фазе.
4.4. ПАРИРОВАНИЕ ВОЗДЕЙСТВИЙ ВЕТРА
При анализе динамики самолетов обычно используют
две схемы ветровых воздействий1: дискретный порыв и непрерыв-
ную турбулентность. В схеме дискретных порывов принимается,
что порывы отделены достаточно большими промежутками вре-
мени. При использовании схемы непрерывной турбулентности
скорость ветра W рассматривают как векторный стационарный
случайный процесс, зависящий от времени и от положения точки
в пространстве. Отдельные компоненты этого процесса — гори-
зонтальную составляющую и и вертикальную составляющую w
считают независимыми. Кроме того, принимается гипотеза, что
при исследовании динамики самолета поле скоростей ветра можно
считать «замороженным», т. е. не зависящим от времени (гипотеза
Тейлора). Тогда случайные воздействия атмосферы на движу-
щийся самолет могут быть описаны как одномерные случайные
эргодические процессы. Одна из форм записи спектральных
плотностей для горизонтальной (Su) и вертикальной (Sw) состав-
ляющих скоростей ветра имеет вид (модель Драйдена)
о / , 2 1
So (<>) = <JU ( L ’
167
. L 1 + з(-р-®)’
Su,(ш) = a„ V.,(L VT ’
L1+(v“) J
где <o — угловая частота; oa, ош — средние квадратичные значе-
ния соответственно горизонтальной и вертикальной составляющей
скорости ветра; V — скорость полета; L — масштаб турбулент-
ности, характеризующий связь скоростей в различных точках
зоны турбулентности.
Ветровые воздействия вызывают движение самолета как твер-
дого тела и упругие колебания конструкции. При этом доля упру-
гих колебаний в создании вредных перегрузок возрастает с уве-
личением массы самолета, неизбежно сопровождающимся умень-
шением жесткости конструкции. Силовые эффекты, сопутству-
ющие полету в турбулентной атмосфере, оказывают отрицательное
физиологическое влияние на экипаж, являются причиной уста-
лостных повреждений и даже разрушений конструкции. Следо-
вательно, их снижение является важной задачей.
А. Повышение комфорта экипажа. Одним из факторов, влияю-
щих на работоспособность экипажа и самочувствие пассажиров,
является уровень действующих на них перегрузок. В дальнейшем
понятие «комфорт» используется для характеристики именно
этого фактора. Влияние турбулентности на комфорт экипажа
является определяющим на режимах полета с большими ско-
ростными напорами.
Работоспособность летчика зависит как от величины случайной
перегрузки и времени ее действия, так и от ее частоты. Так, ветро-
вые воздействия, вызывающие в течение нескольких минут нор-
мальную перегрузку со средним квадратичным значением по-
рядка 0,5, снижают качество управления, вызывают у летчика
чувство беспокойства. При случайных перегрузках свыше 0,2
летчику трудно считывать показания приборов. Колебания пере-
грузки с частотой около 1 Гц могут быть причиной функциональ-
ных расстройств организма летчика, приводящих к дезориен-
тации.
Основными путями уменьшения перегрузок, действующих
в точках размещения экипажа, являются:
1) изменение динамических характеристик самолета как
твердого тела;
2) компенсация изменений подъемной силы от турбулентных
возмущений посредством отклонения органов непосредственного
управления подъемной силой (НУПС);
3) увеличение демпфирования упругих колебаний самолета,
позволяющее снизить перегрузки в области собственных частот
конструкции.
Эффективность того или иного способа повышения комфорта
зависит от того, что является определяющим в генерации вредных
перегрузок — динамика твердого тела или упругие колебания.
168
Рис. 4.5. Нормированная спек-
тральная плотность ветра и
амплитудная частотная харак-
теристика жесткого самолета
| nfw |
Рассмотрим вначале первые два способа, которые служат для
подавления перегрузок, связанных с возмущенным движением
самолета как твердого тела.
Пусть Wn/a> (р) есть передаточная функция от ветрового воз-
мущения w к перегрузке Дп^ в месте расположения экипажа,
a Sa, (со) = ст® (со) — спектральная плотность скорости вер-
тикальных порывов ветра. Тогда для спектральной плотности
Sn (со) местной перегрузки Л/ly имеем
S„(co) = |IF„/a,(/<o)|8Sa,(co). (4.4)
В свою очередь, среднее квадратичное значение ап перегрузки
Anv связано со спектральной плотностью формулой
со сю
On = J Sn (со) dco = J Sa, (со) | IFnfa> X
о 0
X (/co) |2 dco. (4.5)
Амплитудная частотная характеристика жесткого самолета
I Wn/a, (J&) | имеет, как правило, пик на частоте короткопериоди-
ческих колебаний самолета (рис. 4.5). Так как основная энергия
ветровых возмущений сосредоточена в низкочастотной области
спектра, то, как следует из формул (4.4), (4.5), сдвиг резонанс-
ного пика частотной характеристики | Wn/a> (/со) | вправо и умень-
шение его по величине приводят к снижению перегрузок от тур-
булентных воздействий. Это и используется при повышении
комфорта путем увеличения частоты и демпфирования угловых
колебаний самолета посредством автоматики (введение обратных
связей по перегрузке и угловой скорости).
Механизм второго способа иной. Это создание контуров пря-
мого парирования турбулентных возмущений на основе исполь-
зования органа непосредственного управления подъемной
силой (ОНУПС). Идеальным решением проблемы является обес-
печение инвариантности к ветровым воздействиям, т. е. реализа-
ция условия Wn/w (/со) — 0. Однако создание инвариантной
системы сопряжено с принципиальными трудностями. Поэтому
169
на практике ограничиваются частичным парированием ветровых
возмущений — путем создания контура стабилизации перегрузки.
Введем следующие обозначения: Длв — перегрузка, создава-
емая при целенаправленном изменении угла атаки с помощью
органа управления моментом; Апцупс— перегрузка от органа
НУПС; Длш — перегрузка, обусловленная ветром; Дпу = пу —
— 1 — перегрузка, измеряемая акселерометром в центре масс
самолета. Тогда получим
Д/iy = Дпа Длцупс 4“ Дл»- (4-6)
Условием полной компенсации ветрового воздействия является
равенство
Дянупс = — Дли.
Для осуществления этого нужно, во-первых, измерять воз-
мущение Дпю и, во-вторых, дозировать воздействие Динупс.
что является сложной технической задачей. Более простое реше-
ние этой задачи может быть получено путем стабилизации задан-
ного значения перегрузки Дп8 в контуре непосредственного управ-
ления подъемной силой по схеме, представленной на рис. 4.6.
Сигнал Дп8 формируется по закону: Дп8 = &XjXnv, где ДХ —
отклонение ручки от балансировочного положения, соответству-
ющего пу = 1. Это значит, что в установившемся режиме выпол-
няется равенство Дп8 — &па. Рассогласование
6п = Дп8 — Дга„ = Дп8 —• Дпа — Дпнупс — Дп<в
устраняется органом НУПС в соответствии с законом управления
^нупс — Уф (р)
где Уф (р) — передаточная функция фильтра. Сигнал рассогласо-
вания 5п несет информацию о ветровой перегрузке Дпц,, поэтому
обнуление этого сигнала ведет к подавлению ветрового возму-
щения.
Рис. 4.6. Схема системы повышения комфорта (с формированием сигнала задан-
ной перегрузки):
I — рычаг управления: 2 — датчик перемещений: 3 — акселерометр; 4 — формирова
тель сигнала заданной перегрузки; 5 — фильтр; 6 — орган управления моментом, 7
орган НУПС; 8 — коэффициент передачи перекрестной связи каналов управления
170
Эффективность рассмотренного канала НУ ПС тем выше, чем
меньше запаздывание в создании перегрузки в ответ на отклонение
ОНУПС. Последнее прямо зависит от момента, создаваемого
ОНУПС. Действительно, из передаточной функции по непосред-
ственно создаваемой перегрузке, раскрываемой формулой (2.17),
видно, что постоянные времени ее числителя и знаменателя отли-
чаются тем значительнее, чем больше | Afg |. При < 0 постоян-
ная времени знаменателя оказывается меньшей по величине.
Это и является причиной фазового запаздывания в районе ча-
стоты (д0> которое может достигать значения порядка —90°. Фазо-
вое запаздывание можно устранить путем компенсации момента
от органа НУПС согласованным отклонением органа управления
моментом, которое обеспечивается по сигналам перекрестной
связи между каналами управления (см. рис. 4.6).
Фильтр в канале НУПС должен выбираться таким образом,
чтобы обеспечить максимальное подавление возмущений от ветра.
Рассмотрим частотный подход к решению этой задачи. Имея
в виду соотношение (4.6), составим структурную схему, соответ-
ствующую системе, представленной на рис. 4.6. В предположении,
что момент от органа НУПС скомпенсирован, можно принять
Д^нупс = пуНУПС 6Нупс и представить структурную схему
в виде односвязного контура (рис. 4.7).
На рис. 4.7 обозначено: Wn (р) — передаточная функция серво-
привода органа НУПС, Wnfw (р) — передаточная функция по
перегрузке от ветрового воздействия самолета без системы, опре-
деляемая формулой (2.20). Согласно приведенной структурной
схеме находим
Wn'" (р) ={-/} = (д) 1+л;нупсГф(р)й7п(р) • (4-7)
Исходя из критерия минимума среднего квадратичного значе-
ния перегрузки Дп„ устанавливаем, что выбор передаточной
функции фильтра (р) должен производиться таким образом,
чтобы значения амплитудной характеристики | Wn/w (Ja>) | на
частотах, дающих максимальный вклад в интеграл (4.5), были
минимально возможными. Степень подавления возмущений опре-
Рис. 4.7. Структурная схема системы повышения комфорта
171
деляется знаменателем (4.7). Ограничением является требование
устойчивости контура НУПС. В силу действия этого ограничения
эффект, достигаемый оптимизацией фильтра, тем больше, чем
шире полоса пропускания привода.
В спектре частот возмущений, создающих дискомфорт, есть
особенно неблагоприятные для летчика области. Для подавления
этих частот выбор фильтра может быть подчинен требованию
минимизации критерия
D = j | ^n/w (»|2 5ют2 (со) dco,
О
где Т (®) — функция веса, усиливающая вклад неблагоприятных
областей частот перегрузок.
Устраняя рассогласование 6л, орган НУПС наряду с сигна-
лом Длу от акселерометра реагирует и на изменение сигнала
заданной перегрузки Дл3, связанное с проведением маневра.
А так как канал НУПС имеет большее быстродействие по пере-
грузке, чем канал угла атаки, то при быстрых эволюциях ручки
управления орган НУПС реагирует на команду Дл3 раньше, чем
изменится угол атаки. В дальнейшем по мере выхода самолета
на установившийся угол атаки и при выполнении условия Дла =
= Дл3 орган НУПС возвращается к нейтрали.
Существенным элементом рассмотренной системы является
устройство, формирующее сигнал заданной перегрузки по закону:
Дл3 = &XIXnv. Введение такого устройства весьма желательно,
но отнюдь не обязательно. Существуют и другие способы ориен-
тации контура НУПС на парирование лишь вредной составля-
ющей перегрузки. Пример реализации одного из таких способов
представляет система, схема которой приведена на рис. 4.8. Но-
выми элементами здесь являются фильтры с передаточной функ-
Рис. 4.8. Схема системы повышения комфорта (без формирования сигнала за-
данной перегрузки):
/ — рычаг управления; 2 — датчик перемещений; 3 — акселерометр; 4 — фильтр; 5 —
орган управления моментом; 6 — орган НУПС
172
Тр /
циеи типа (с постоянными времени порядка нескольких
секунд). В начальной фазе маневра орган НУПС стремится пре-
пятствовать нарастанию перегрузки, обусловленной изменением
угла атаки. Для устранения этого вредного эффекта предусма-
тривается связь органа НУПС с рычагом управления. Фильтр
в цепи обратной связи фильтрует низкочастотную составляющую
сигнала, несущую, как правило, информацию о маневренной
перегрузке. Тем самым создаются условия, чтобы орган НУПС
парировал лишь воздействия от ветра.
Возможно построение и автономного, не связанного с рычагом
управления, контура парирования ветровой перегрузки. Здесь
для отделения в сигнале акселерометра полезной составляющей
перегрузки используется информация об угловой скорости тан-
гажа <о2. Суть этого способа состоит в следующем. Перегрузка &пу
и угловая скорость со2 коррелированы, так как причиной их воз-
никновения являются одни и те же воздействия, характеризуемые
параметрами Д<р, бНУПС и aw. Поэтому имеем
- {£} Дп“ + { Ал“упс} Д”»УПС + {£} (4’8)
Здесь
Г 1 ___ Г I .
1 Дла J ~" 1 Дф / /1 Дер / ’
При = 0, 6НУПС = 0 связь между &пу и со2 характери-
зуется передаточной функцией
fe] = tel / tel - X 1 (Л AX
( j l Дф JI l Дф J g Tlcp + 1 * ' • '
Следовательно, при полете в спокойной атмосфере выполняется
условие Дпу — = 0. Отсюда приходим к следующему
закону непосредственного управления силой:
бнупс = — ^п(р) Yф(р) |> y т1ср + 1 0)2 J ' (4-Ю)
При этом законе управления ОНУПС реагирует только на пере-
грузку, причиной которой являются атмосферные возмущения.
Найдем передаточную функцию | для самолета с рас-
сматриваемым контуром НУПС. На основе соотношений (4.6),
173
(4.8) разность в квадратных скобках формулы (4.10) можно пред-
ставить так:
Апу ~ j (°z ~ Лпнупс + [{^а} ^Па
+ ("Ддв*—) Алнупс + [дТГ") Апда1
( ллнупс J lan,w) J
[1 (Дла] ( ^z И д *, I
1 -----ИАПнупс +
I И ДЛНУПС JJ
(4J1>
Умножим обе части соотношения (4.10) на передаточную функ-
( ] /л 11\
цию J-*----Тогда с учетом выражения (4.11) оно запишется
(°нупс J
в виде
Апнупс = — (р) Уф (р) Гя——| X
(°нупс J
X [1 -1^1 { дгМ] Д«НУПС - Wn (р) Гф (р) X
[ I. J I алНУПС J J
Отсюда находим
Дпнупс----
ГП(Р) Гф(р)
1 + «7п(р)Уф(р)
[ ^reg j R (Дла) Г Oz ]1
^нупсЦ I ®2 ЛДпнупс) J
Lnm. (4.12)
Эффект подавления ветровой перегрузки определяется суммой
Д/г,,, + Дпнупс» которая с учетом равенства (4.12) имеет вид
Д/lp — Alta ~Г Д у ПС —
l-lFn(p) гф(р)
1 + Гв(р)Гф(р)
Дпш. (4.13)
Считаем ОНУПС безмоментным. Тогда для передаточной функции
^нупс
приближенно имеем
Дп» )___________________вНУПС
:----> — Пу
’нуле I
(4.14)
174
Передаточная функция f-т——2—) получается на основе пере-
IапНУПС J
даточных функций (2.16), (4.14). При М* « О
)
. ДпнупсJ
— М&
у тг
p? + 2fip +
(4-15)
Используя материал разд. 2.2, определяем также передаточную
функцию При допущении « О
«>Z )
М“/п$р
p«+2hp+®o‘
(4.16)
Теперь в результате подстановки выражений (4.9), (4.14), ...,
(4.16) в соотношение (4.13) устанавливаем искомую передаточную
функцию
а
1 + ^(р)Гф(р)«^пс___^
I A/itw,
1 + «Мр)Гф(р)п*нупс
1 + И7„ (р) Гф(р)п®нупс
М*
р* + 2hp + <Вр
(4.17)
^ЗР3~Ь^2Р2Ч~^1Р~Г^О
(ра+гдр+шВ) (Г1ср+1)
где коэффициенты bt определяются через параметры исходных
передаточных функций.
На основе (4.17) находим передаточную функцию
fA/lw 1
Wп/ы (р) — (Р)»
аналогичную передаточной функции (4.7). Передаточная функция
фильтра Уф (р) выбирается так, чтобы обеспечивалось макси-
мально возможное подавление атмосферных турбулентных пере-
грузок. При этом контур, характеризуемый в разомкнутом со-
стоянии передаточной функцией
W раз
{P) = Wa(p)Y^p)n^mc
Ьзр3 + + hp + ьо
(р2 + 2Лр + шВ) (Ticp+l)’
должен иметь достаточные запасы устойчивости.
Для тяжелых самолетов с длинным тонким фюзеляжем среди
причин, вызывающих дискомфорт, доминируют перегрузки от
175
Рис. 4.9. Нормированная спектральная плотность ветра Sw и амплитудная
частотная характеристика упругого самолета | Wn/w |:
КК — короткопериодические колебания жесткого самолета; I, II, III — первый, второй
и третий тон упругих колебаний
изгибных колебаний фюзеляжа. Слабое демпфирование аэро-
упругих колебаний низких тонов является причиной резонанса,
вызывающего существенное усиление высокочастотных составля-
ющих спектра ветровых воздействий (рис. 4.9). Таким образом,
для самолетов подобной конструкции большая часть энергии ветро-
вых воздействий переходит в упругие колебания конструкции.
Ослабить аэроупругие составляющие местной перегрузки
можно путем искусственного увеличения их демпфирования с по-
мощью органов НУПС, устанавливаемых в районе кабины эки-
пажа (например, передние горизонтальное и вертикальное опере-
ние). Сила, создаваемая органом НУС, должна быть пропорци-
ональна скорости колебаний конструкции и направлена в сторону
их подавления. Демпфирование упругих колебаний происходит
в замкнутом контуре. Датчиком информации о колебаниях яв-
ляется акселерометр, устанавливаемый в точке приложения управ-
ляющей силы. Расположение акселерометра вблизи органа НУС
позволяет исключить влияние фактора формы собственных коле-
баний. Формирование сигнала, пропорционального скорости ме-
стных колебаний конструкции, производится путем приближен-
ного интегрирования (с помощью специального фильтра) сигнала
акселерометра. При этом должен учитываться сдвиг по фазе,
обусловленный неизбежным запаздыванием при прохождении
сигнала через элементы контура, а также запаздыванием в созда-
нии управляющей силы. Серьезным ограничением в формировании
контура с желаемыми частотными характеристиками является
требование устойчивости замкнутой системы.
Наряду с информацией об упругих колебаниях сигнал акселе-
рометра включает составляющую перегрузки, связанную с дви-
176
жением самолета как твердого тела. Обычно используют два
способа отделения этой составляющей:
фильтрование низкочастотных составляющих сигнала аксе-
лерометра;
использование информации второго акселерометра, установ-
ленного в центре масс, и формирование сигнала разности показа-
ний двух акселерометров.
Б. Снижение нагрузок на крыло от воздействий ветра. Осо-
бенно важна проблема снижения нагрузок на крыло от воздей-
ствий ветра для тяжелых транспортных и пассажирских самоле-
тов. На автоматику здесь возлагают функции снижения макси-
мальных нагрузок от воздействий дискретных порывов ветра
и ослабления знакопеременных напряжений конструкции, вы-
званных действием мелкомасштабной турбулентности.
Вертикальный дискретный порыв ветра может вызвать суще-
ственное увеличение нагрузки и, следовательно, изгибающего
момента крыла. Рассмотренная в предыдущем разделе система
снижения маневренной нагрузки крыла с обратной связью по
перегрузке, реагируя на случайное изменение нормальной пере-
грузки, ослабляет эффект действия дискретного порыва. В этом
случае она является единым средством уменьшения изгибающего
момента — как от целенаправленного управляющего, так и от
случайного внешнего воздействий.
Знакопеременные напряжения являются причиной устало-
стного разрушения конструкции. Число N циклов до разрушения
определяется формулой
» = =>...5,
где а — амплитуда действующих напряжений. Накопление уста-
лостных повреждений крыла при прохождении турбулентных зон,
характеризуемых спектральной плотностью Sw (и), оценивают
с помощью показателя повреждаемости
’ п/2
В = J I гм/ш (/©) I2 sw (ш)(®)2/п d® .
(4.18)
Здесь Ум/ш (р) — передаточная функция от ветровых возмуще-
ний t» к изгибающему моменту Л4иа в корне крыла, полученная
с учетом упругости конструкции.
Парирование мелкомасштабной турбулентности подчиняется
требованию минимизации показателя повреждаемости Как
видно из формулы (4.18), вклад знакопеременных воздействий
в повреждаемость возрастает при прочих равных условиях с уве-
личением их частоты. Поэтому для упругого самолета определя-
ющее значение в явлении усталости имеют слабо демпфированные
высокочастотные упругие колебания конструкции. Именно они
должны быть подавлены в первую очередь. Метод их подавления
177
Рис. 4.10. Схема снижения нагрузок на крыло от атмосферных воздействий:
/ — акселерометры, 2 — акселерометр, установленный в центре масс, 3, 4, 5 — фильтры;
6 — привод элеронов; 7 — симметрично отклоняемые элероны; 8 — привод руля высоты;
9 — руль высоты
аналогичен рассмотренному выше методу демпфирования упругих
колебаний конструкции.
Упрощенная схема системы снижения нагрузок на крыло от
атмосферных воздействий приведена на рис. 4.10. Исполнительным
органом системы являются симметрично отклоняемые элероны.
С помощью их увеличивается демпфирование упругих колебаний
крыла и производится уменьшение изгибающего момента при
дискретных порывах ветра (по сигналу от акселерометра, уста-
новленного в центре масс). Для успешного выполнения первой
функции требуется, чтобы привод элеронов имел большую полосу
пропускания, успех выполнения второй функции существенно
зависит от быстродействия привода. Канал связи от акселерометра
к рулю высоты вводится для ослабления неблагоприятного вли-
яния элеронов на угловое движение самолета.
4.5. НЕПОСРЕДСТВЕННОЕ УПРАВЛЕНИЕ
АЭРОДИНАМИЧЕСКИМИ СИЛАМИ
Традиционная схема управления самолетом в полете
предполагает выполнение следующих действий:
непосредственное изменение продольной перегрузки пх при
изменении тяги двигателей или сопротивления тормозных щитков;
изменение нормальной перегрузки пу в плоскости симметрии
вследствие создания управляющего момента по тангажу;
изменение ориентации перегрузки пу в пространстве путем
управления моментом крена;
изменение поперечной перегрузки nz путем создания момента
рыскания.
178
Для управления самолетом в пространстве в принципе доста-
точно двух перегрузок пх и пу и угла крена у, руль направления
(и перегрузка nz) играет вспомогательную роль в управлении
современным самолетом.
При внимательном рассмотрении можно обнаружить, что
в этом так называемом «моментном» (Мг, Мх, Му) управлении
самолетом есть определенные недостатки. Первый и наиболее
очевидный из них — перегрузка при таком управлении создается
не мгновенно, а только по мере образования приращений углов
атаки, скольжения, крена. Этот процесс связан с преодолением
инерции самолета. К тому же у самолетов нормальной схемы
аэродинамическая сила рулевых поверхностей (высоты и направ-
ления) создает тенденцию к движению в направлении, противо-
положном желаемому. Поэтому с увеличением массы и размеров
самолетов их быстродействие по перегрузке для выполнения
тонких и «строгих» маневров (посадка, дозаправка в воздухе)
становится недостаточным. Эффективным средством устранения
этого недостатка является непосредственное управление подъем-
ной силой.
Для повышения быстродействия достаточно обеспечить непо-
средственное управление перегрузкой лишь в начальной стадии
переходного процесса, в той его фазе, когда угол атаки не достиг
еще заданного значения. Таким путем можно достигнуть значи-
тельного эффекта при использовании безмоментного органа НУПС
с небольшими располагаемыми перегрузками, так как возврат
органа НУПС в нейтральное положение (по мере приближения
угла атаки к установившемуся значению) позволяет избежать
выхода его на ограничение при последующем маневрировании.
Наиболее просто возврат органа НУПС в нейтральное поло-
жение можно обеспечить посредством фильтра с передаточной
функцией , устанавливаемого в канале связи органа НУПС
с рулем высоты (рис. 4.11). При резком отклонении штурвала
от исходного положения, направленном на изменение перегрузки,
возникает управляющее воздействие Д<р (см. рис. 4.11), которое
вызывает отклонение руля высоты и органа НУПС. Если Д<р —
ступенчатая функция, то реакция органа НУПС Дб (0 опреде-
ляется переходной функцией фильтра h (0, а именно: Дб (0 =
= Дфй (0. Переходная функция фильтра с передаточной функ-
цией есть следующая функция времени:
Таким образом, в начальный момент времени (t — 0) орган
НУПС скачком отклоняется на угол Дб (0) = v Д<р, а затем это
отклонение экспоненциально устраняется, что и обеспечивает
179
Рис. 4.11. Схема связи каналов руля высоты и органа НУПС:
1 — штурвал; 2 — датчик перемещений; 3 — фильтр; 4 — руль высоты; 5 — орган
НУПС
непосредственное управление подъемной силой лишь в начальной
фазе маневра.
Вторым недостатком обычного управления следует признать
достаточно сложный динамический характер переходных про-
цессов самолета, что в задачах точного управления требует от
летчиков высокой профессиональной подготовки. Но и это не
всегда гарантирует необходимую точность пилотирования. Слож-
ность .динамики самолета определяется тем, что при моментном
управлении самолетом по существу возбуждаются все фазовые
координаты, все степени свободы самолета. Можно выделить
три группы координат:
характеризующие движение центра масс: Z, Я, z (или Vy, Vz);
углы Эйлера Ф, у, ф;
углы атаки и скольжения a, |J, взаимодействие которых в упра-
вляемом движении нежелательно для летчика, поскольку услож-
няет прогнозирование движения.
Типичным примером является заход самолета на посадку.
Изменение курса путем кренения самолета вызывает сложное
перемещение визуальных ориентиров (ВПП) в поле зрения летчика
и затрудняет своевременное принятие решения о коррекции траек-
тории. Картина резко упрощается, если обеспечить самолету
боковое перемещение с требуемой скоростью Vz при у = ф = 0.
Вообще для задачи точного пилотирования представляется
весьма полезным раздельное управление группами фазовых коор-
динат [6]. Частично это может быть выполнено и при обычном
«моментном» управлении, но в достаточно полном объеме такое
управление возможно реализовать только в случае, когда наряду
с управлением моментами обеспечивается также непосредственное
управление силами по осям Y и Z.
Для непосредственного управления подъемной силой (НУПС)
может использоваться обычная механизация крыла (закрылки,
флапероны и т. д. совместно со стабилизатором). Для непосред-
ственного управления боковой силой (НУБС) необходима уста-
новка на самолете дополнительных поверхностей (например, на
нижней поверхности носовой части фюзеляжа), отклонение кото-
180
рых совместно с рулем направления дает боковую силу практи-
чески без момента рыскания.
В частных случаях раздельного управления могут быть реали-
зованы формы движения с неизменными значениями определенных
фазовых координат, которые будем называть характерными пара-
метрами формы. Классификация этих форм движения приведена
в табл. 4.1. Первые две формы являются традиционными и обеспе-
чиваются обычным моментным управлением. Формы III, IV, V
являются новыми и могут быть выполнены только в результате
согласованного отклонения органов управления моментами
и силой.
Рассмотрим качественную картину необходимого взаимодей-
ствия органов управления при осуществлении новых форм дви-
жения.
Форма III — маневр с неизменным углом атаки (скольжения).
Перегрузка создается органом непосредственного управления
силой. При этом орган управления моментом должен парировать
демпфирующий момент, возникающий при развороте вектора
скорости.
Форма IV — это по существу поступательное смещение фюзе-
ляжа. Здесь инвариантом является угол тангажа или угол курса.
Маневр производится вследствие перегрузки от непосредственно
создаваемой силы. Изменение угла атаки (скольжения), связанное
Таблица 4,1
Продольное движение Боковое движение
I ДУ=/=0 Управление ско- ростью I V 0 0=0 Управление по крену
II Да =/= 0 ДФ 0 дяу=о Обычное упра- вление по тан- гажу II Д₽ Дф =/= 0 Дг #= 0 7 = 0 Обычное управле- ние рысканием
III дя=#о ДЯ #=0 Да = 0 Изолированный тангаж III Дф =£ 0 Дг #= 0 др =и= о 7=0 Изолированный курс
IV дя=#о Да 0 ДФ = 0 Изолированное вертикальное пе- ремещение IV Дг =# 0 Д₽ 0 Дт|> = 0 У = о Изолированное боковое переме- щение
V ДО о Да 0 Длу = 0 Поворот фюзеля- жа около век- тора скорости V Дт|> =# 0 Др #= 0 Дп2 = 0 Т = 0 Поворот фюзеля- жа около век- тора скорости
181
с искривлением траектории, препятствует маневру. Это противо-
действие перекрывается непосредственно создаваемой силой до
тех пор, пока орган НУПС в состоянии парировать силу, вызы-
ваемую изменением угла атаки (скольжения), после чего искрив-
ление траектории прекращается. При этом рулем высоты стаби-
лизируется угол тангажа при вертикальном маневре, а при го-
ризонтальном маневре рулем направления стабилизируется
курс.
Форма V — поворот фюзеляжа около вектора скорости —
реализуется в результате изменения угла атаки (скольжения),
вызываемого управляющим моментом, при неизменной перегрузке.
ОНУС в данном случае выполняет функцию стабилизации пере-
грузки.
Законы согласованного взаимодействия органов управления
силой и моментом при выполнении новых форм движения уста-
навливаются в результате синтеза соответствующих полуавтома-
тических систем раздельного управления.
Возможны два подхода к синтезу систем управления новыми
формами движения:
обеспечение инвариантности характерных параметров формы
к управляющему действию летчика (компенсационный принцип);
построение контуров стабилизации характерных параметров
формы.
Существенной предпосылкой проведения синтеза является
допущение о возможности создавать силу без дополнительного
момента. Это условие значительно облегчает последующий синтез
системы НУПС и НУБС.
В общем случае каждый орган управления в продольном дви-
жении создает при своем отклонении приращение одного момента
Mz и двух сил Y и X, а в боковом движении — двух моментов Л4Х,
Му и одной силы Z. Рассмотрим способ компенсации соответству-
ющих воздействий на примере бокового движения.
Пусть боковое движение управляется отклонением элеронов бэ,
руля направления 6Н и органа НУБС 6г. Тогда в соответствии
с уравнениями (2.31) управляющее воздействие определяется
вектором
исходные, организуем перекрестные связи сигналов на входе
приводов управляющих поверхностей согласно следующему за-
кону:
182
б8 = 5а. о + а12^я. с + а1з52С;
5Н = 0215Э. с + 5Н. о + а2з5гс»
Sz = а315э. о + азг5н. о Н- 5ZO.
Если матрица эффективностей органов управления в соотношении
(4.19) не является особенной (определитель ее не равен нулю),
то всегда можно установить такие коэффициенты перекрестных
связей а1к, что при подаче раздельных сигналов
1) 5Э. с 0 (5н. С = 5zc = 0),
2) бд. с (5Э. с = 5zc = 0)«
3) б20 0 (5Э. с = 6Н. с = 0)
реализуются изолированные воздействия соответственно
1) Mx^0(My = Z = 0),
2) Mv 0 (Мх = Z = 0),
3) Z=£0(Mx = Mv = 0).
В результате такой процедуры, которую называют развязкой
управляющих воздействий, можно в дальнейшем оперировать
следующим соотношением с диагональной матрицей эффектив-
ностей:
и к органам продольного управления (тяге двигателя, закрылкам,
стабилизатору), что позволяет и здесь использовать соотношение
вида
Мг ] Г М2Ф°
Y J = L 0
0 фо
J L So
где Y ~ -у-Пу, Ф и S — углы отклонения стабилизатора и органа
НУПС, а фс и 6С — управляющие сигналы на создание изолиро-
ванных момента и силы.
Рассмотрим теперь процедуру синтеза системы раздельного
управления на основе первого из отмеченных подходов. Задача
ставится так. Для самолета с «развязанными» управляющими
воздействиями необходимо найти такие операторы перекрестных
связей управляющих сигналов, чтобы в ответ на управляющие
действия летчика, производимые с помощью перемещения Хр
единственного рычага, осуществлялась требуемая форма дви-
жения.
183
Проиллюстрируем метод синтеза на примере формы V боко-
вого движения. Схема системы управления этой формой при-
ведена на рис. 4.12. Для определения передаточных функций
/ ( ftс 1 операторов перекрестных связей сигналов,
| 0н. с J ( Он. с I
обратимся к уравнениям бокового движения (см. разд. 2.3). При
«развязанных» управляющих воздействиях они имеют вид
—м*
-м*
о
&
—1 о
Р _ м*„ -М“*
-М*у р - М**
О —1
о о
z6zc о о
0 м®нс 0
0 0 Л4®90 ^н. с = 0
0 0 0 _ ^э. с _
-z6zc о о
Здесь для простоты принято а = 0.
Перенесем в правую часть столбцы с Т, у, 6Н. с, рассматри-
вая эти координаты как параметры управления:
р - ZP -1 0
-М* р-М*” -м“х
- м* -мх» р - м>
0 0—1
zB о о
о о
Мун-с о
= 00
о о
—z“zc 0 ₽
0 0 (1)у
0 h о О)х —
0 0 ^2С
2вхс 0 ®9’с _
^н. с
у
Y .
g
V
о
о
р
0 -р -у-
184
блок развязки
Рис. 4.12. Схема системы управления для реализации III и V форм бокового
движения
Получим три передаточные функции j I, | I, I -Д— 1,
I Он. с J | Он. с J I Он. с I
которые в данном случае будут соответствовать условию ¥ —
Т = 0, т. е. форме V движения. Первые две функции опреде-
ляют перекрестные связи во входной части системы, необходимые
для реализации формы V движения:
| 6гс । = _
{ «н.е J ’
«э. с _ .й^(л4>р + л^)
«и. с м®н. С (р2 _ ’
а третья описывает динамические свойства самолета в этой форме
движения:
f Р ] = _ ">с
• 6й- с ) p2-M*Vp-M*'
Система управления формой III бокового движения имеет
такую же структуру. При управлении формой IV движения пер-
вичным (формируемым летчиком) является сигнал 61е. Операторы
185
блок развязки
Рис. 4.13. Схема системы управления для реализации новых форм продольного
движения
перекрестных связей во входных частях систем определяются
аналогичным образом. Передаточные функции этих операторов
для всех вариантов раздельного управления боковым движением
приведены в табл. 4.2.
На основе рассмотренного метода может быть проведен синтез
и системы управления для реализации новых форм продольного
движения. Схема этой системы приведена на рис. 4.13, а переда-
точные функции перекрестных связей — в табл. 4.3. Здесь для
формы III рассмотрены два варианта формирования управля-
ющего сигнала летчика.
После выполнения необходимых расчетов (результаты для
продольного движения сведены в табл. 4.3) можно путем сравне-
ния передаточных функций обычного самолета и самолета с систе-
мами НУПС и НУБС прийти к выводу, что непосредственное
управление силами в формах III и IV упрощает пилотирование
самолета, повышает его точность, а форма V нужна- как дополни-
тельная степень свободы экипажу (с точки зрения динамики эта
форма движения не дает особых преимуществ).
Реализация НУПС и НУБС в широкой области режимов
полета требует применения достаточно сложного вычислителя
(коэффициенты связей и параметры фильтров зависят от аэро-
динамических характеристик самолета), что удобно реализовать
на БЦВМ, и, следовательно, дистанционной системы управления.
Выполненный выше синтез раздельного управления прово-
дился на основе идеальной модели: рассматривались уравнения
самолета без системы улучшения устойчивости и управляемости
(СУУ), предполагалось, что осуществлена полная развязка управ-
ляющих воздействий. В действительности модель самолета с совре-
менной системой ручного управления более сложна, а идеальная
развязка каналов управления практически не осуществима из-за
всегда имеющегося отличия аэродинамических характеристик
186
00
Форма движе- ния Первичный сигнал управления ( дас 1 t ®н. с /
HI вн.с = *хХр 2вхс (р-М®»)
IV 62с=*лЛр —
V ^н- с *= ^х^р Л4*«- cZ3/z6xc р^-Мрр-М^
и *> ® я « «О рис] 1 6«с / [ °э. с ) ( б1С J
~<л М* смх* — —
— Z^M^I М**-е гвг°м* /м*а-е
P-Z* Р-?
— —
Co
Co
Форма дви- жения Первичный сигнал управления ( Лфс 1 { / ( 6e 1 ( ДФс J
II Дф — —
ш 6С = КшХр У -ci n -е о» О й Si * 8 N *-_ ' —
Дфс = Мр — o> Тл 1 о Si m 8
IV 6С = КщХ р Fa° (м“ 4- M*p] —
M^c (p-f-y“)
V Дфс M^Ya I?6 °
p2 ~[m“z + m^p~m
Таблица 4,3
f А'О* ) l ХР 1 1 *Р f
КшМЧ(р+Уа) Кшум*7а
р (р2 + 2Лр + <4) р (р2 4- 2йр + cog)
КшГ®0 vf8c
р р
Э* N 1 <5. р (р — л7“г)
0 ХщУГ°0 Р + Га
1 Е а Ы 43 О 0
‘а 2 . -Пй\ Т7а 'г Р — ^/ + ^г] Р~Мг
Самолета от номинальных значений. Более того, в полной раз-
вязке управлений моментами и силами нет необходимости. Опыт
показывает, что обязательно должны быть скомпенсированы лишь
момент Мг от органа НУПС и момент Му от органа НУБС. Это
необходимо, чтобы каналы управления силами имели динамиче-
ские свойства, близкие к усилительному звену.
Модель самолета с системой ручного управления, включая
Приводы и фильтры обратных связей, при неполной развязке
управляющих воздействий весьма сложна. Здесь целесообразно
иметь дело с частотными характеристиками этой сложной си-
стемы.
Обратимся опять к задаче управления боковым движением
формы V. Рассмотренный первый подход к синтезу приводит
К следующей структуре управления (см. рис. 4.12):
бн. с —
б2С = Ф5з(р)бн.с, (4.20)
69. С “ Ф&1 (р) бн. с*
Здесь первый индекс в обозначении (р) относится к номеру
реализуемой формы движения, а второй отмечает канал, в который
поступает сигнал. Будем рассматривать 6Н. с, 6ZC, 6Э.С как вход-
ные параметры системы «самолет — блок развязки — СУУ». Пусть
определены передаточные функции
Этой системы. Имея в виду, что признаками рассматриваемой
формы V движения являются <ох = 0, nz = 0, определим опера-
торы Ф53 (р), Ф51 (р) из условий
°* М -тМ бн. С + [ ) бн. С + [ 1 Ф5з (р) бн. С = 0;
( Оэ. с J [ °н. с J [ °zc J
n* М ИИР) 6н. с Я бМ бн- с + [ 4Н фм S=. с = °
[ Оэ. с J [ °н. С J [ °ZC J
Отсюда получаем уравнения относительно Ф61 (р), Ф63 (р):
/)фи (р) + ( Ф53 (р) = - [/2-);
[ Оэ. с J [ Oze J [ Он. с J
[ К (Р) +[-^)ф5з(р)= - [ ).
[ Оэ. с | Ozc ) [ UH. с J
Решением этих уравнений являются передаточные функции
189
где Д(
Вычисление выражений (4.21) в общем виде является гро-
моздкой процедурой, так же, как и определение исходных пере-
даточных функций сложной системы. Поэтому расчет надо про-
водить, оперируя частотными характеристиками рассматрива-
емых передаточных функций. После вычисления частотных харак-
теристик Ф61 (/со), Фм (/со) находятся аппроксимирующие их
передаточные функции, которые и реализуются в законе управ-
ления (4.20).
Таким способом могут быть определены законы управления
применительно к реализации и других новых форм продольного
и бокового движения.
Стойкость реализуемой формы движения к действию внутрен-
них и внешних возмущений можно повысить, если наряду с пере-
крестными связями организовать стабилизирующие обратные
связи (второй подход к синтезу раздельного управления). Так,
например, в закон (4.20) управления формой V движения должны
дополнительно вводиться сигналы обратных связей, стабилизи-
рующих угловую скорость фж и перегрузку nz относительно нуле-
вых значений. В результате этот закон управления преобразуется
к виду
бв.в = К«Хр;
/ г, \
= Фм (р) ®я. с Ч у пг>
в,. е=ф81 (р) б«. с++49
В рассмотренных структурах управление движением произ-
водится с помощью одного рычага. Возможности раздельного
управления используются более полно, если управляющие сиг-
налы формируются перемещением двух рычагов — основного
и дополнительного. В этом случае можно реализовать более слож-
ное, чем рассмотренные формы, движение с независимым измене-
нием координат.
Обратимся к системе раздельного управления с двумя управ-
ляющими рычагами, представленную на рис. 4.14. Это система
с комбинированными связями, синтезированными применительно
к реализации формы IV продольного движения. Управляющий
сигнал X имеет здесь смысл заданного изменения угла тангажа
АФ3, а управляющий сигнал Y — заданного изменения вертикаль-
ной скорости ДУрэ. Если X — 0, то реализуется форма IV дви-
жения. Одновременной манипуляцией двумя рычагами (X — vat,
Y = var) вызывается сложное движение с независимым измене-
нием угла тангажа и вертикальной скорости.
190
Рис. 4.14. Схема системы раздельного управления с двумя управляющими воз-
действиями X и Y
ВОПРОСЫ ДЛЯ САМОПРОВЕРКИ
1. С какой целью при проектировании маневренного самолета
выбирается конфигурация, делающая его статически неустойчивым
по углу атаки?
2. Каков механизм автоматического снижения маневренной
Нагрузки крыла?
3. Как зависит эффективность автоматического подавления
ветровых перегрузок жесткого самолета от полосы пропускания
сервопривода органа НУПС?
4. Укажите возможные способы ориентации контура НУПС
на парирование лишь вредной (ветровой) составляющей пере-
грузки.
5. Какие причины доминируют в создании дискомфорта эки-
пажу тяжелого самолета с длинным тонким фюзеляжем при полете
его в турбулентной атмосфере?
6. Каковы причины, побуждающие к созданию систем непо-
средственного управления подъемной и боковой силами?
7. Сколько рычагов управления потребуется в системе НУБС,
реализующей движение с заданным независимым изменением
фазовых координат ф, Vz при у = О?
8. К какой группе бортовых систем управления — ПНК
или СШУ относится система НУПС?
ГЛАВА 5
АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ
УГЛОВЫМ ДВИЖЕНИЕМ САМОЛЕТА
5.1. СТРУКТУРА СИСТЕМЫ АВТОМАТИЧЕСКОГО
УПРАВЛЕНИЯ
Автоматическое управление угловым движением само-
лета осуществляется с помощью автопилота (см. рис. 1.5). Оно
основано на регулировании углов тангажа, крена и курса по
сигналам заданных значений, вырабатываемым или летчиком
(путем манипуляции задающими устройствами), или в контурах
автоматического управления траекторным движением самолета.
Структура рассматриваемой системы, построенной по принципу
регулирования с обратной связью, раскрывается схемой, при-
веденной на рис. 5.1. Текущие значения углов тангажа и крена
здесь определяются с помощью центральной гировертикали
(ЦГВ). В качестве измерителя курса используется курсовая
система. Заданный курс можно стабилизировать как в канале
элеронов, так и в канале руля направления. В первом случае
боковая перегрузка создается за счет крена, во втором — за счет
угла скольжения. При управлении углом скольжения, как пра-
вило, используется обратная связь по поперечной перегрузке пг,
измеряемой акселерометром, выставленным по связанной оси OZ.
Рис. 5.1. Схема системы автоматического управления угловым движением само-
лета
192
С целью улучшения качества регулирования в систему управления
вводятся сигналы угловых скоростей относительно всех трех
связанных осей самолета.
Наиболее проста схема автопилота с параллельным включе-
нием сервоприводов. Часто в качестве сервоприводов автопилота
используют сервоприводы системы штурвального управления
с последовательной схемой включения. При параллельном вклю-
чении сервопривод автопилота может быть как с жесткой и ско-
ростной обратной связью, так и изодромным. В системе продоль-
ного управления обеспечивается мягкое сопряжение режимов
ручного и автоматического управления (см. гл. 1). Поэтому при
любом приводе сигнал сг<у вызывает дополнительное отклонение
руля относительно положения, соответствующего стриммирован-
ному положению рычага управления.
Система позволяет реализовать два режима регулирования:
стабилизацию и управление траекторией. В режиме стабилизации
сохраняется исходное угловое положение самолета. Здесь на
входе системы задаются сигналы Фэ = Ф (4), Т3 ~ Фа ~ Ф (4)»
где /0 — момент включения автопилота. Обычно автопилот вклю-
чают в горизонтальном прямолинейном полете, поэтому такой
режим регулирования при других неизменных условиях полета
(из них главное — постоянство скорости) обеспечивает выдержи-
вание простейшей прямолинейной траектории.
В режиме управления можно реализовать более сложные
траектории. Вводя в автопилот дополнительный командный сиг-
нал А'&з через рукоятку управления тангажом, летчик может
осуществить режимы спуска и подъема с заданным углом тангажа.
С помощью рукоятки крена можно сформировать команду у3 на
разворот с заданным креном, а посредством ручки курса сформи-
ровать сигнал фз требуемого изменения курса. В случае автома-
тического управления траекторией сигналы А'&з, ?3 формируются
во внешних по отношению к рассматриваемым контурах САУ.
Наконец, автоматическое управление угловым движением само-
лета делает возможным приведение самолета в горизонтальный
полет из любого исходного положения. Для этого надо сформиро-
вать сигналы у0 — 0, 0а — п — угол тангажа горизонтального
полета.
Как видно из рис. 5.1, в канале тангажа автопилота имеется
механизм согласования. Он предназначен для сдвига базы от-
счета угла тангажа, измеряемого ЦГВ, на величину О (/0), что
позволяет стабилизировать исходное положение по тангажу при
нулевом значении сигнала Д-&э. Механизм согласования представ-
ляет собой следящую систему (рис. 5.2), которая находится
в замкнутом состоянии, когда автопилот не включен. В этом ре-
жиме синхронизации сигнал на выходе интегрирующего звена
приближенно (с точностью воспроизведения сигнала апериоди-
ческим звеном) равен текущему значению угла тангажа. В мо-
мент /0 включения автопилота обратная связь отключается и на
7 Зак» 278
193
Рве. 5.2. Механизм согласования
выходе интегрирующего звена запоминается угол тангажа, кото-
рый самолет имел при включении автопилота. В результате по
каналу главной обратной связи будет поступать сигнал ДО =
= О — О (4), что при Д08 = 0 обеспечит стабилизацию самолета
с угловым положением по тангажу 0 = 0 (4).
5.2. РЕГУЛИРОВАНИЕ УГЛА ТАНГАЖА
Требуемое изменение угла тангажа по командному
сигналу Д03 производится путем соответствующего отклонения Д<р
органа управления моментом относительно оси 0Z (руль высоты,
цельноповоротное заднее или переднее оперение). В автопилоте
тангажа с механизмом согласования на входе привода (с жесткой
обратной связью или изодромного) формируется управляющий
сигнал
(р) ( Д03 — Д^) + (5.1)
где Д03 — входная команда; ДО — & — О (4), (р) — интегро-
дифференцирующий оператор х; 4 — момент включения системы.
Построим линейную математическую модель системы регули-
рования угла тангажа, ограничившись только короткопериоди-
ческой аппроксимацией продольного возмущенного движения.
При этом условии передаточная функция самолета по углу тан-
гажа имеет вид
Г ДФ 1 1 Г A(oz 1
[ Д<р J р 1 Дф J
Здесь согласно (2.12), (2.14) передаточная функция
( 1 = = __ ксу + т1ср) _
I Дф / p* + 2hp + <$ Т2р-2 + 2^Тс₽+1 ’
где для самолета нормальной схемы Кс > 0.
1 У самолета нормальной схемы коэффициенты оператора R# (р) и коэффи-
циент X'w положительны.
194
Рис. 5.3. Структурная схема регулирования угла тангажа
Пренебрегая динамикой измерителей и обозначив через Я7П
передаточную функцию привода, получим структурную схему
(рис. 5.3), соответствующую закону управления (5.1). Используя
соотношения
а# = Kaj) ДО — (Л03 — ДО) =
= -(к.л+я.)(1г-А—
преобразуем эту структурную схему к виду с одной обратной
связью (рис. 5.4) х. Схема, изображенная на рис. 5.4, представ-
ляет модель системы с единичной обратной связью. Выбор пара-
метров закона управления (5.1) производим, обращаясь к пере-
даточной функции этой разомкнутой системы
+ /?♦) Wa -±- {. (5.3)
Рассмотрим сначала вариант закона управления с позицион-
ной обратной связью (статический закон), когда R& (р) = —
коэффициент усиления, а привод имеет жесткую обратную связь.
В этом случае
(p + v) (р + -т~)
---------W
где
_ таг _ 1
V , Wa т^ + 21пТаР+1 •
Рис. 5.4. Преобразованная структурная схема регулирования угла тангажа
1 Здесь и далее аргумент р у передаточных функций 7?^ и опускается.
7* 195
a)
Рис. 5.5. Корневой годограф
к > т ’ & к <
л«г Z1C
системы
«самолет—автопилот» по тангажу:
T
1C
На рис. 5.5 приведены различные случаи взаимного располо-
жения нулей и полюсов передаточной функции (5.4):
** _ 1 1
v > Лс ’ v < Тс
и соответствующие им качественные картины корневого годографа.
Кл
Первая из иллюстраций (рис. 5.5, а) показывает, что при — >
шг
>-7f.— действительный корень замкнутой системы с увеличе-
но „
нием лш стремится к-----=— = —тгПу- В случае —
г * 1С 7 1С
этот корень стремится уже к меньшему по модулю значению — v
(рис. 5.5, б).
У современных самолетов крейсерские режимы полета (где
необходим автопилот) соответствуют достаточно большим высо-
там (при Мкр « 0,8 ... 0,9 высота #кр 8 ... 12 км; при 7ИКр «
2 ... 2,5 высота Якр « 18 ... 20 км). На этих режимах значе-
£ а gcfyv
ния параметра ~ У самолетов с большой удельной
нагрузкой на крыло невелики. Поэтому для них введение избы-
„ / Хф - S а\
точного сигнала угловой скорости тангажа
нецелесообразно. Хотя в этом случае и можно добиться быстрого
затухания колебаний, самолет будет медленно отрабатывать за-
данное значение угла тангажа (мал по модулю действительный
корень).
196
Таким образом, одной из задач при формировании автопилота
тангажа является выбор рационального соотношения передаточ-
ных чисел и из условий обеспечения достаточно хорошего
быстродействия по углу тангажа при отсутствии заметной колеба-
тельности в переходном процессе.
Передаточные числа можно выбирать на основе расчета кор-
невых траекторий и переходных процессов с последующим мате-
матическим моделированием. Поскольку система «самолет—авто-
пилот» может быть представлена в виде системы с единичной об-
ратной связью (см. рис. 5.4), для синтеза этой системы можно
с успехом использовать метод логарифмических частотных ха-
рактеристик. Удовлетворяя обычным требованиям (—20 дБ/дек
в районе частоты среза, максимально возможное значение ча-
стоты среза при хороших запасах по фазе и амплитуде), полу-
чаем, что характерное значение отношения v — — должно
быть порядка соо — или несколько больше. Так как со0 >
* с
_ 1 . 1
, то этим самым требование v > ?— удовлетворяется.
Следующим вопросом синтеза является установление рацио-
нального значения коэффициента передачи K^z- Стремясь ото-
двинуть действительный корень как можно левее от мнимой оси,
значение Kaz следует выбирать по возможности больше. Это зна-
чение, при котором частота среза частотной характеристики пере-
даточной функции (5.4) располагается на крайнем справа участке
ЛАХ с наклоном —20 дБ/дек.
Используя второе выражение передаточной функции (5.2),
перепишем соотношение (5.4) в виде
v(1 + TicP)(1 + vp)
Р*3 р(Г2р2 + 2?сГсР+1)(Г2+2|пГпР+1) •
У правильно сформированного автопилота собственная частота
привода по крайней мере на порядок больше собственной частоты
1 _ 1 „ . 1
самолета и, следовательно, . Если выбрано
* П * С * с
то асимптотическая ЛАХ передаточной функции (5.5) имеет два
участка с наклоном —20 дБ/дек: первый — при со < , вто-
11 1с
рой — при со Для интересующей нас второй асимп-
J с 7 и
тоты ЛАХ с наклоном —20 дБ/дек на основе (5.5) получаем сле-
дующую формулу:
раз —
Пр
1 _ _ 1
— <С со <С — •
1 с 1 и
(5.6)
р
197
Частота среза частотной характеристики передаточной функции
(5.6) ®Ср = —Так как фазовая частотная характери
стика передаточной функции (5.5) достигает значения —п на ча-
стоте <о_я « -J-, то для граничного значения коэффициента Ка>
(при котором <оср = со_я) имеем
Полученная формула идентична формуле (3.3) для определения
граничного значения коэффициента демпфера тангажа. Иден-
1
тичность имеет место при v < у—.
Исходя из запаса по амплитуде 12 дБ можно принять
v ___(\ 0,25
Гр При J, -гр •
z г 1П
Z
Итак, для ориентировочной оценки рациональных значений
коэффициентов передачи Ka>z и К-» можно использовать следую-
щие формулы:
>>- _ 0,25 _ 0,25/2 . у\
~ ~’т^~ ~ ~ m^SbkTa ’ { >
К, = «Л, = ]/ (6.8)
//<*2 4 ц '
Как видно из выражений (5.7), (5.8), коэффициенты и К®
зависят от режима полета. Это вызывает необходимость их регу-
лировки.
Рассмотренный статический закон работы автопилота обла-
дает одним существенным недостатком: автопилот имеет статиче-
скую ошибку бО при наличии возмущения по моменту Дтх (на-
пример, за счет сброса груза). Величина статической ошибки оп-
ределяется из соотношений (см. рис. 5.3):
Дт2 4" Дф = 0; Дф = —КобО,
где 60 = Д03 — ДО; отсюда 60 = -^т~.
С этих позиций рационально выбирать максимально допустимые
передаточные числа автопилота. Однако задача устранения стати-
ческой ошибки может быть решена и по-другому: введением ин-
тегральной коррекции в закон управления. Здесь возможны два
способа: введение изодромного оператора в за-
кон (5.1) в случае привода с жесткой обратной связью, либо ис-
пользование изодромного привода при
198
Как следует из формулы (5.3), для передаточной функции
разомкнутой системы в первом случае имеем следующее выра-
жение:
V,., = - (к, + -£ + к^р) i {45-} х
х 1_______________
Т^ + 2ЕПТПР+1 ~
*л<<1 + 7'.-'-)(-т^+у'’) (5Э.
р(Т^ + 2gcTcp + 1) (Т&* + 2£ПТПР + 1) ’ ^-а >
где Тя = -j7~. Во втором случае передаточная функция (5.3)
запишется так:
=- и»+л./) -Ц4^) х
Т^ + 21пТпр+\ ~
«Л.,т(1+Т*'’)(1+-Н т,р+1
- р (7>* + 2lcTcp + 1) (7>* + 2£п7> + 1) Тир ’
где Ти — постоянная времени оператора обратной связи изодром-
ного привода. Сравнение передаточных функций (5.9) и (5.10)
с передаточной функцией (5.5), соответствующей статическому
закону управления, показывает, что они отличаются наличием
изодромной составляющей —вносящей интегрирующий
1 шР
эффект на частотах со < . Так как интегральная коррекция
* и
вводится для устранения статической ошибки, она не должна
влиять на частоты, близкие к собственной частоте системы «само-
лет—автопилот». Это требование выполняется при условии
Д- < (0,1.. .0,2) <оср,
1 и
где соср — частота среза частотной характеристики передаточной
функции (5.5). Если при синтезе статического закона управления
выполнена рекомендация (5.7), то сйср = Отсюда для 7\
•* п
получаем Д—(0,025...0,05). (5.11)
J и 1 и
Пример частотных характеристик, соответствующих переда-
точной функции (5.10), синтезированной в соответствии с рекомен-
дациями (5.7), (5.8), (5.11), приведен на рис. 5.6.
Важным вопросом при исследовании динамики самолета с авто-
пилотом тангажа является оценка влияния ветровых возмущений
на траекторию движения и величину вертикальной перегрузки,
199
Рис. 5.6. Логарифмиче-
ские амплитудные и фа-
зовые частотные характе-
ристики разомкнутого
контура регулирования
угла тангажа
о
При больших значениях перегрузок от порывов ветра нарушается
комфортабельность полета как для пассажиров, так и для эки-
пажа, что может быть немаловажным в длительном полете.
В разд. 2.2 получена передаточная функция характе-
ризующая влияние на угол атаки ак ветрового возмущения
F гт ак
= -у-. При допущении пу = пу она принимает вид
( Дак ) (^-T~"°)P-№O
I J p2 + 2hp + ®l
При этом же допущении на основании уравнений (2.8) определяем
f Дсог 1 = Р
I aW J Р2 + 2hP + шо
Рассматривая в качестве входного воздействия на систему «само-
лет—автопилот» внешнее возмущение aWi преобразуем схему,
изображенную на рис. 5.4, к виду, представленному на рис. 5.7.
Из этой схемы определяем передаточную функцию по углу тан-
гажа в замкнутой системе (при Wn = 1):
f Aft 1* __
I атг j
=____________________м“)р_________________________
рЗ + (2Д _ p2 + (o>2 - R*M* _ KwM<?f
(5.12)
200
Рис. 5.7. Модель действия ветрового возмущения
Полагая в передаточной функции (5.12) р = 0, находим, что уста-
новившееся значение реакции по углу тангажа на скачкообразное
возмущение равно нулю.
Для установления реакции по перегрузке определим вначале
передаточную функцию от к Лак в замкнутой системе. Сог-
ласно рис. 5.7 (пунктирные связи) она равна
[ Дак, )« = ( _Д«к_ J + ( Дак, If _Д#_ у (5 13)
I aw J I aw J I Лф J i J ' z
помощью соотношений
Г I 1 * Г Ла 1 * _ 1 । Г Лад V
на основе передаточной функции (5.13) определяем передаточную
функцию по перегрузке
/ 1* _ пу Г1 । J Лак 1 I / Лак 11 (К п 1
(5-14)
Используя амплитудную частотную характеристику передаточ-
ной функции (5.14), можем вычислить дисперсию перегрузки от
ветра по формуле
оо
®пу ~ J (о)
О
(пгЧ/0)}*
где Sw (со) — спектральная плотность скорости W вертикальных
порывов ветра.
5.3. РЕГУЛИРОВАНИЕ УГЛА КРЕНА
Регулирование угла крена по команде у3 производится
с помощью элеронов, отклоняемых приводом по закону, обеспечи-
вающему обнуление сигнала ошибки бу = у3 — у. Из большого
числа возможных структур закона управления ограничимся
201
Рис. 5.8. Структурная схема регулирования крена
рассмотрением позиционного и интегрального. В первом случае
на входчпривода с жесткой обратной связью поступает сигнал
Оу = —Ку (Уз — Y) + Л<ах®х, (5.15)
во втором — сигнал
От = — Ку (Тз - 7) - J (Тз - ?) Л + KWx4>x. (5.16)
На рис. 5.8 приведена структурная схема системы регулиро-
вания крена, составленная при упрощающем предположении
(ох = Y, допустимом для анализа бокового движения с неболь-
шими значениями угловой скорости ф. Оператором Ry (р) здесь
в общем виде характеризуются составляющие законов управле-
ния (5.15) и (5.16), относящиеся к внешней обратной связи.
Объединяя обратные связи рассматриваемой структурной
схемы в одну, получаем следующее выражение передаточной функ-
ции разомкнутой системы:
( V )
^раз = “ + 2gnTnp 4-1 * (5-17)
Обратимся вначале к модели изолированного движения крена,
в которой передаточная функция
/ т 1 "°' = «1
I * / (р-м»р ’
где
При законе управления (5.15) Ry — и передаточная функ-
ция (5.17) принимает вид
w =______________^Хж(Р + х)
ра3 р (р - (ту + 2ВпТпр + 1) ’
где х = Ку/К<ах- На рис. 5.9 показано взаимное расположение
нулей и полюсов этой передаточной функции и качественная кар-
202
(5.18)
Рис. 5.9. Корневой годограф системы «самолет—автопилот» по крену:
К |_ ®| К I <в I
Мжх ; б-—L.>
х х
тина корневого годографа для двух вариантов расположения
нуля—х относительно полюса Мхх.
Из графиков видно, что при —< | Мхх | (рис. 5.9, а) пере-
до
х
ходный процесс замкнутой системы будет иметь затянутую апе-
риодическую составляющую, соответствующую малому действи-
тельному корню, величина которого может быть оценена значе-
нием
Отсюда становится очевидным, что рациональным является сле-
дующий выбор соотношения передаточных чисел Ку и Кох'
х =-£*-> |м“х|, (5.19)
Л (Ох
I ~ а I
причем неравенство должно быть тем сильнее, чем меньше | /Ихх|.
Реализуя структуру корневого годографа, показанную на
рис. 5.9, б, можно получить приемлемые характеристики стаби-
лизации самолета по крену. Для этого значение коэффициента К®х
должно быть достаточно большим — порядка 30% его гранич-
ного значения Л^гр.
Для оценки величины /С©хгр представим передаточную функ-
цию (5.18) в каноническом виде
Граз = Р (1 + Тахр) (Гпр2 + 2gnTnp + 1) * (5-20)
203
Из приведенного выражения видно, что при 1/Т®х -С х <
< 1/Тп асимптотическая ЛАХ передаточной функции (5.20)
в диапазоне частот х < ® < 1/Тп соответствует формуле
г.б»
w _ К М?
тахР ~ —у—
Отсюда, имёя в виду, что фазовая частотная характеристика пере-
даточной функции (5.20) достигает значения —л на частоте
®_я « -J-, устанавливаем
7 л 1
А®-гр — хг» I
Л&Т„
(5.21)
0,3
а для рационального значения коэффициента А®х получаем сле-
дующую формулу:
_ 0,3 _ 0,3/ж
~ А А
Af>Tn m?<?S/Tn
Соответственно, с учетом (5.19), для определения значения коэф-
фициента /Cv имеем соотношение
tr 0,Зх/ж
А У J •
m>SZTn
При выборе параметра х должны быть удовлетворены условие
(5.19), с одной стороны, и требование достаточной протяженности
(не меньше 0,5 декады) участка ЛАХ с асимптотой (5.21), с дру-
гой. Поэтому допустимое значение параметра х ограничиваем
неравенством
I Л? |
0,3
Tn •
Позиционная структура автопилота по крену при наличии
заранее несбалансированного момента /иж0 приводит к статиче-
ской ошибке по углу крена
бу =-----.
Использование закона управления с интегралом (5.16) ликви-
дирует статическую ошибку по крену (у = у8), элероны здесь
оказываются отклоненными на величину оэ = —--F- •
тх9
Интегральному закону соответствует выражение
Kh '+7У
204
где При. этом передаточная функция (5.17)
в каноническом виде представляется так
раз
r + V 1 )
т + х PJ
_______\ п__________7
р(1+Тахр)(Т№ + 21аТвр+1) ’
(5.22)
где по-прежнему обозначено х == Ку!Кв>х-
Если несбалансированность самолета по крену ожидается срав-
нительно небольшой и, что главное, мало изменяющейся в про-
цессе полета, коэффициент при интеграле может быть взят срав-
нительно небольшим. Он должен быть выбран таким, чтобы ча-
стотные характеристики передаточной функции (5.22) при зна-
чениях коэффициентов Ках, определенных по изложенной
выше методике, на больших частотах (в районе частоты среза <вср)
совпадали с частотными характеристиками передаточной функции
(5.20). Это требование выполняется при 0,1®Ср- Так как
„ 0,3 0,3
при = п ~ л ।------ частота среза юср =-=—, то в этом случае
|Л7>|ТП Т-
значение коэффициента выбираем согласно соотношению
0,03
К? Тп ’
Принципиально возможным следует считать появление в по-
лете значительной и переменной по времени несимметрии по крену,
обусловленной, в частности, движением самолета по рысканию.
Это делает необходимым более жесткую стабилизацию по крену
в рамках интегрального закона управления. В этом случае пере-
даточное число должно быть существенно больше, чем в пре-
дыдущем. Требуемые динамические свойства самолета по крену
здесь достигаются соответствующим выбором всех трех передаточ-
ных чисел.
В качестве метода синтеза системы жесткой стабилизации крена
может быть использован частотный метод с последовательным за-
мыканием контуров системы, представленной на рис. 5.8. Из
рассмотрения частотных характеристик передаточной функции
разомкнутого внутреннего контура
w раа (Тахр + 1) (7^ + 21аТаР + 1)
выбирается значение коэффициента Ке>х, обеспечивающее запасы
по модулю порядка 10 дБ. Затем внутренний контур замыкается
и рассматриваются частотные характеристики передаточной функ-
ции разомкнутого внешнего контура
205
1 + V
fr
где 1Г©я — передаточная функция замкнутого внутреннего кон-
тура. По запасам устойчивости ДЛ « 10 дБ при Д<р 40° сов-
местно выбираются значения коэффициентов и К^у.
Изложим теперь особенности динамики самолета с автопило-
том, обусловленные значительными отличиями реального боко-
вого движения от изолированного движения крена. Для изуче-
ния этих особенностей следует рассматривать полную переда-
точную функцию которая в предположении малости спи-
рального корня имеет вид
( У 1 __ Мх° (р2 + 2Л< + ®i)
IV / “ р(р-ЧР) (Р2 + 2Лбр + <40
Подставляя это выражение в формулу (5.17), устанавливаем,
что для позиционного закона управления полная передаточная
функция разомкнутой системы
/ (р2 + 2htp + со2) (р + j
ГРа3 = “ Р (Р - М (Р2 + 2Лбр + (Т®р® + 2gnXTnp + 1) ' <5-23)
Точно так же, как при ручном управлении (см. разд. 3.1),
при автоматической стабилизации крена следует различать два
случая:
О < %® — 1; X® > 1 (самолет с X® < 0 недопустим к экс-
<О0б
плуатации). На рис. 5.10 приведены частотные характеристики
передаточной функции (5.23), соответствующие этим двум случаям.
Они построены при значениях коэффициентов Ках и А?, выбран-
ных по изложенной методике, а именно:
= I Хкр КОх = 0,3/<вжГр.
Из рисунков видно, что, как и для ручного управления, наиболее
приемлем случай 0* < X2 L При значении X2, значительно пре-
вышающем единицу, возникает колебательная неустойчивость.
В случае, когда значение параметра %2 близко к единице, движе-
ние крена близко к изолированному. Именно поэтому изолирован-
ное движение крена рассматривалось в начале этого раздела.
Если параметр X2 значительно отличается от единицы, то обес-
печение его значений, близких к единице, достигается теми сред-
ствами, что и при ручном управлении, а именно — перекрест-
ной связью органов поперечного управления с рулем направле-
ния.
206
Рис. 5.10. Логарифмические амплитудные и фазовые частотные характеристики
разомкнутого контура регулирования крена:
а — 0 < X» < 1; б — X1 > 1
5.4. РЕГУЛИРОВАНИЕ КУРСА
Принципиально возможны два способа автоматической
стабилизации и управления самолетом по курсу:
через путевой канал путем создания боковой перегрузки
при жесткой стабилизации угла крена у = 0 (плоский раз-
ворот);
через поперечный канал путем накренения самолета (угол
скольжения при этом может быть близок к нулю, а движение
крена — изолированное).
Второй способ управления является предпочтительным в боль-
шинстве задач полета по следующим причинам.
Во-первых, возможности маневрирования по курсу при плос-
ком развороте, определяемые угловой скоростью
щ — JL „ — - с
~ у 2m/S °2’
крайне ограничены как с точки зрения несущих свойств самолета
по углу скольжения, так и с точки зрения допустимой для эки-
пажа (и пассажиров) величины боковой перегрузки.
Во-вторых, при характерной для современных самолетов по-
вышенной поперечной устойчивости угол крена самолета должен
быть достаточно жестко стабилизирован, чтобы возмущения по
крену /ПхР не оказывали заметного влияния на движение самолета
по курсу.
207
Не рассматривая детально этой проблемы, отметим, что до-
статочными условиями эффективной стабилизации крена через
путевой канал являются:
1) наличие запаса управляющего момента
/Пх бэ max > max»
2) выполнение неравенства
(0? > (Оф,
где ©у и <0ф — характерные частоты самолета с автопилотом по
каналам крена и рыскания.
При выполнении этих условий плоское движение самолета
по курсу может рассматриваться на основе уравнений изолирован-
ного движения рыскания. Как было показано в гл. 2, этим урав-
нениям соответствуют следующие передаточные функции:
( Р 1 _ =__________.
{ 6н } р2 4-2Лбр + ®20б T|p24-2gpTpp+l ’
I _®£_ 1 = = К10 (1 + Лрр) .
I 6Н / + + T|p24-2gpT₽p+l ’
( I ____ 1
[©7 J
Нетрудно заметить, что структура передаточных функций изо-
лированного движения рыскания точно совпадает со структурой
передаточных функций движения самолета по тангажу (в рамках
короткопериодической аппроксимации этого движения).
При автоматическом управлении плоским разворотом крен
стабилизируется автопилотом по крену, а отклонение руля на-
правления производится в логике обнуления сигнала ошибки
6ф=ф3 —ф. Рассмотрим закон управления с тремя обратными
связями, когда на вход привода с жесткой обратной связью по-
ступает сигнал
Стр = —R* (р) (фэ — ф) — Кппг +
Структурная схема рассматриваемой трехконтурной системы
представлена на рис. 5.11, где IFn = —T2p2^.2g у p^. i-пере-
даточная функция привода.
Внутренняя двухконтурная часть системы (ядро) по структуре
аналогична рассмотренному в гл. 3 автомату продольного управ-
ления. Отсюда все методические приемы исследования, применен-
ные выше в разд. 3.3, могут быть приняты для выбора рациональ-
ных значений коэффициентов передачи Knz и Ke>v- Для выбора
этих значений могут быть использованы рекомендации
208
Ядро
Рис. 5.11. Структурная схема регулирования курса через путевой канал
0,1
» ОгЗ/^С^гр.
Knz
К&У
Граничное значение Къугр коэффициента передачи К&у опреде-
ляется по формуле, структурно аналогичной формуле для /Uzrp,
полученной в разд. 5.1:
Раскрывая приведенные формулы, получим рекомендуемые со-
отношения
К 0,3
|<в|Гп
~ 0'03
'г 1^и||«е|^
Для выбора оператора R^ главной обратной связи представим
ядро в замкнутом виде. Считая привод идеальным (Wa = 1),
получаем для передаточной функции ядра выражение
Здесь
( р 1________________
( * J Т^ + 2ЦЦр+1 *
,=К*.
(5.24)
8 Зак. 278
209
E8_(E.+^rw>.
С учетом выражения (5.24) передаточная функция системы
(рис. 5.11), разомкнутой по внешней обратной связи, запишется
в виде
TFpas = R* (р) + + 1) * (5.25)
При простейшей, позиционной, стабилизации курса Rt = /(^ —
коэффициент усиления. Этот коэффициент должен быть выбран
так, чтобы частота среза частотной характеристики передаточ-
ной функции (5.25) располагалась на участке ЛАХ с наклоном
—20 дБ/дек и была максимально возможной. Из передаточной
функции (5.25) видно, что при Tip > Гр правой границей асимп-
тоты ЛАХ этого участка является частота == -J—, а частота
среза (если она расположена на отмеченном участке) шср«
« Отсюда исходя из условия юср « 0,8©i получаем ра-
циональное значение коэффициента передачи
„ 0,8 O,8g/v | nf I
к* т ~ '
л1$у 1₽ л1р
Необходимо отметить, что более слабые несущие свойства само-
лета по углу скольжения по сравнению с несущими свойствами
по углу атаки 0 | а# -----предопределяют малое
значение частоты ®i s а следовательно, и частоты среза.
Некоторого увеличения частоты среза можно добиться, переходя
к интегральному закону стабилизации курса. В этом случае
1 + Т^р К*
R* = К* + -у « К* —у р , где 7^ — %—, и передаточная
функция (5.25) принимает вид
-к 1 +V +
₽as * V ₽(r;v+2^+i)
Если выбрать исходя из условия 1/Tip < 1/Т^ < 1/Тр,
то правой границей ЛАХ с наклоном —20 дБ/дек передаточной
функции (5.26) будет частота <о2 = 1/7^ > ©j. Здесь частота
среза может быть увеличена до значения ©ср = ^—. Это при
J*
конкретном значении 1/Т^ обеспечивается следующим выбором
коэффициентов и
(5.26)
210
к — 0,8 • к - 0,8
Перейдем к рассмотрению системы стабилизации курса при
управлении через канал крена. Вначале отметим, что стабилиза-
ция и управление курсом самолета через канал крена весьма эф-
фективны. Использование «глубоких» кренов (у ж 30 ... 60° на
неманевренных самолетах и у « 80 ... 90° на маневренных)
с перегрузками, близкими к эксплуатационным, позволяет вы-
полнять энергичные довороты и развороты по курсу в автоматиче-
ском режиме:
= -f-tg? = -уУп2,- 1.
Из этого одновременно следует, что исследование таких манев-
ров не может опираться только на анализ линеаризованной си-
стемы уравнений. Уравнения движения должны быть нелинейны,
по крайней мере, относительно угла крена и, что наиболее важно,
включать параметры продольного движения, поскольку при вы-
полнении маневров бокового доворота со значительными углами
крена нормальная перегрузка также изменяется:
ПУ (0 cos у (f) ’
Следовательно, изучение и отработка системы стабилизации
и управления курсом должны сопровождаться расчетами и модели-
рованием с использованием полных уравнений движения само-
лета.
Для получения некоторых качественных результатов можно
использовать упрощенную систему уравнений движения. Упро-
щения связаны не только с линеаризацией и выделением бокового
движения самолета, но и с последующим переходом к изолирован-
ному движению крена.
Упрощенные уравнения движения будем использовать в сле-
дующем виде:
y = ®«;
Дф = — а®, —л®ау; (5.27)
а = «т.п-
Этим уравнениям соответствует передаточная функция изолиро-
ванного движения крена, а передаточная функция от у к Дф
при а ®= ар. п, п“ар. п = 1 определяется так:
(Дф 1 = _ (Р + ~ГЯ*) = _ g/V(l + TleP)
t V J Р Р ‘
8*
2U
Рис. 5.12. Структурная схема регулирования курса через поперечный канал
Рассмотрим только позиционный вариант системы стабилиза-
ции курса, когда элероны отклоняются по закону
6Э = Wn (р) [Л® (Тз ~~ ?)];
* (5.28)
Тз= — Л’^('фз-'ф),
где Wn (р) — оператор, соответствующий передаточной функции
привода с жесткой обратной связью. Математической модели
(5.27), (5.28) адекватна структурная схема, приведенная на
рис. 5.12. Передаточную функцию системы, разомкнутой по всем
обратным связям, согласно рис. 5.12 можно представить в виде
раз-------
^^х^х К ? 0 + аг- Р
XX
I Ку К _£_1 т
1- ЛФ? V п
X
(5.29)
Методика выбора параметров внутреннего контура —
-------дана ранее, в задаче стабилизации крена. Структура корне-
вого годографа, соответствующего передаточной функции (5.29),
приведена на рис. 5.13. В отличие от задачи стабилизации крена
здесь появляется один дополнительный нуль и один дополнитель-
Рис. 5.13. Динамические характеристики автопилота по углу курса:
в — корневой годограф; б — переходные процессы
212
ный полюс. Дополнительный (по отношению к задаче стаби-
лизации крена) малый корень
____Ktf/V
1 Т" П
характеристического уравнения замкнутой системы свидетельст-
вует о том, что самолет с автопилотом приобрел устойчивость по
курсу.
Обращаясь к частотному методу, дадим рекомендации по вы-
бору значения коэффициента передачи Замкнем две внутрен-
ние обратные связи системы (см. рис. 5.12). Считая привод идеаль-
ным (ТГП — 1), для передаточной функции автопилота крена полу-
чаем следующее выражение:
Ы} “ Т>2 + 2£?Ттр+1 ’ (5’30)
Здесь
у/"Т\Г 1 + ^*!
~ V 2KyKiTy '
С учетом аппроксимации (5.30) устанавливаем выражение для
передаточной функции системы, разомкнутой по внешней обрат-
ной связи:
W*
Ktyg/V(l + TlcP)
p(T2/ + 2gyV+l)' 1 >
Передаточная функция (5.31) по структуре совпадает с передаточ-
ной функцией (5.25) разомкнутой системы стабилизации курса
через путевой канал. Так как Т1с > 7\, то исходные посылки для
определения рационального значения коэффициента те же
самые, что и при выборе коэффициента Следуя им, получаем
следующее рекомендуемое соотношение:
Kipv ~ g!VTlc, “
Определим теперь передаточную функцию замкнутой системы.
Полагая в выражении (5.29) для передаточной функции разом-
кнутой системы JFn= 1, согласно рис. 5.12 находим
1 /с, к М^эа ( р± — па}
Д-ф) __ I 6э J I У J * г. и у пу J
Ws) 1 + Ъаз та *
Здесь Д (р) = р2 (р — М>) —
М х К <л Т Р к----(1 "F Кфуаг. в) Р Ч Т( /Сфу "р" •
L V “х -
213
Наличие нуля 1о =-----€-«? =—в этой передаточной
к 11с
функции повышает тенденцию к колебаниям в переходном про-
цессе, особенно проявляющуюся в контуре стабилизации крена
(см. рис. 5.13). С целью улучшения переходного процесса в за-
кон управления часто вводят дополнительный фильтр, формируя
сигнал у так:
?• = -
причем величина 7\, должна выбираться примерно равной по-
стоянной времени 7\с.
В заключение раздела по стабилизации курса выпишем пере-
даточные функции системы (см. рис. 5.12) по у и Дф на несбалан-
сированный момент крена
l/Af8’ 1
1 * ( М в Р
1 + Ъаз “ А (Р) ’
Из этих передаточных функций видно следующее. Наличие кон-
тура стабилизации курса делает самолет астатичным по углу
крена к возмущению по моменту крена: контур по ф эквивалентен
интегралу от у. Однако при этом сохраняется статическая ошибка
по углу курса.
ВОПРОСЫ ДЛЯ САМОПРОВЕРКИ
1. Из автопилота тангажа на вход сервопривода поступает
сигнал оФ = 0. В каком положении при этом находится руль
высоты?
2. Каково назначение механизма согласования в гироверти-
кали системы автоматического регулирования угла тангажа?
3. Постоянная времени сервопривода автопилота по тангажу
Тп = 0,04 с. Определить рациональные значения коэффициентов
передачи Ках и на режиме полета, характеризуемом следую-
щими значениями параметров передаточной функции по углу
атаки:
Tie « 1 с; Тс= 0,5 с; Кс = 3 1/с; = 0,5.
4. Установите диапазон рациональных значений коэффициента
передачи Кт автопилота по крену на режиме с = —5 1/с,
214
Мх = —100 1/с, если постоянная времени сервопривода Тл —
= 0,025 с.
5. Как зависит рациональное значение коэффициента пере-
дачи Кфу системы стабилизации курса накренением самолета
от высоты полета и от нагрузки на крыло mg/S?
6. На самолет со статическим автопилотом тангажа, летящий
со скоростью V = 250 м/с, подействовал продолжительный верти-
кальный порыв ветра скоростью 10 м/с. На какую величину изме-
нилось при этом значение истинного угла атаки?
ГЛАВА 6
АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ
ДВИЖЕНИЕМ ЦЕНТРА МАСС САМОЛЕТА
вл. ОБЩИЕ СВЕДЕНИЯ
Автоматическое управление траекторией может исполь-
зоваться на всех этапах полета. Выделяя управление посадкой
в самостоятельный раздел, рассмотрим задачи, связанные с про-
граммным регулированием координат и скорости самолета. Про-
стейшими в смысле реализации являются контуры раздельной
стабилизации барометрической высоты и индикаторной скорости.
В этих контурах текущие значения регулируемого параметра
поддерживаются относительно уровня, задаваемого летчиком,
а в качестве измерителей используются простые аэрометрические
приборы.
Более сложны режимы управления траекторией в продольном
и боковом движении самолета. Здесь требуемая траектория полета
определяется в бортовой цифровой вычислительной машине
(БЭВМ). В качестве измерителей координат и скорости самолета
применяются барометрические и радиотехнические высотомеры,
инерциальные системы, аэрометрические и доплеровские измери-
тели скорости, а также наземные радиотехнические средства.
В БЭВМ навигационного комплекса на основе информации нави-
гационных систем вычисляются отклонения от заданной траекто-
рии. В зависимости от этих отклонений в вычислителе системы
траекторного управления формируются команды на изменение
угловой ориентации (или перегрузки) самолета и определяется
режим работы двигателя. Выработанные команды отрабатываются
соответствующими системами регулирования.
Таким образом, в составе системы управления траекторным
движением может быть выделено ядро (уровень управления),
выполняющее исполнительные функции. Таким ядром при управ-
лении продольным движением является система регулирования
угла тангажа (или нормальной перегрузки), а при управлении
боковым движением — система регулирования угла крена. Если
структура ядра определена, то синтез системы управления тра-
екторным движением сводится к определению законов формиро-
вания входных сигналов ядра ДФ8 (или AnV3), у8 в зависимости
от отклонений от заданной траектории. При управлении по тан-:
гажу используется гировертикаль с механизмом согласования,
а в системе регулирования перегрузки входной сигнал сравни-
вается с сигналом обратной связи Дп„ = nv — 1. Поэтому в тан-
гажном варианте управления входному сигналу ДФа = 0 соот-
216
Рис. 6.1. Схема формирования сигнала управления траекторным движением
ветствует угол тангажа 08 = & (10), а в перегрузочном при ДпВ8 =
= 0 — перегрузка пВ8 = 1.
Входной сигнал ядра в общем случае формируется в функции
отклонения регулируемого траекторного параметра, а также
производной и интеграла от этого отклонения. В целях обеспече-
ния устойчивости при больших начальных отклонениях от за-
данной траектории полета в закон управления вводятся ограни-
чения, а именно: ограничиваются сигнал отклонения траектор-
ного параметра и интеграл от этого сигнала. Для предотвраще-
ния выхода на недопустимые режимы полета ограничивается и
сам входной сигнал ядра системы траекторного управления. Обоб-
щенная схема такого управления приведена на рис. 6.1, где
через ДХ обозначено отклонение регулируемого траекторного
параметра от заданного значения.
6.2. СТАБИЛИЗАЦИЯ ВЫСОТЫ
Автоматическая стабилизация высоты производится
в тех случаях, когда необходимо выдержать заданный режим го-
ризонтального полета. При этом, за исключением полета на малых
высотах, обычно осуществляется стабилизация барометрической
высоты на уровне, соответствующем заданному статическому дав-
лению. Отклонения барометрической высоты от заданного уровня
контролируются с помощью барометрического высотомера в си-
стеме воздушных сигналов. Регулирование производится посред-
ством руля высоты. В гл. 2 показано, что передаточная функция
для высоты в этом случае имеет вид
Гя/*~Р(1 + Т1ср) ’
где Кн = V.
Рассмотрим вначале возможность прямой стабилизации вы-
соты — с помощью только одной обратной связи по высоте. Струк-
тура такой системы изображена на рйс. 6.2, а (при идеальном
217
a)
Система регулирования тангажа
б)
Рис. 6.2. Структурная схема стабилизации высоты:
а — прямая стабилизация; б — стабилизация через систему регулирования тангажа
приводе и измерителях), где RH (р) — оператор, соответствующий
закону управления. Из передаточной функции разомкнутой си-
стемы
Wh
Г₽аз(Р)-^(Р) р2(гу + 2^ср+1)
видно, что система структурно неустойчива. Стабилизация здесь
возможна только при введении сигнала производной по высоте,
т. е. при законе управления вида RH (р) = 1И + iVy р.
Необходимость в дифференцировании сигнала ошибки &Н
отпадает, если стабилизация высоты производится через систему
регулирования тангажа. Структурная схема, соответствующая
такому управлению высотой полета , приведена на рис. 6.2, б г.
Для передаточной функции замкнутой системы регулирования
тангажа имеем
(р) - - *ott4(p)
W^P) дмр) ~ р + **«\(р) ’
^сО+ЛсР) 1Гп(р)
где Wa (р) =-------------------------------------------------
z + 2gcTcp + 1 + (1 + Tlcp) wa (р)
— передаточная функция замкнутого внутреннего контура.
При исследовании динамики низкочастотного процесса стаби-
лизации высоты привод можно считать идеальным, т. е. принять
1 Здесь также считаем измерители идеальными.
218
Wn = 1 • При этом допущении передаточная функция пре-
образуется к виду
w-v+vfar <61>
где
т9
л’ =—зге—’
л t + к Кс+КоК'Ты
Al - КоКс
Представим знаменатель передаточной функции (6.1) в виде
произведения двух сомножителей:
Азр9 + Агр2 + А\р + 1 = (1 + т,р) [$р2 -I- 2£2т2р + 1). (6.2)
Согласно результатам, полученным в разд. 5.2, при рекомендуе-
мом соотношении с возрастанием Ког постоянная
времени тх стремится к значению Т10 (см. рис. 5.5, а). При этом
выполняется условие тх > т2. Как показывают расчеты, при ре-
альных значениях Кшг в первом приближении можно принять
тх « Т1с. При этом допущении выражение (6.1) упрощается:
ф.+^+. <6-3>
Получим формулу для оценки параметра т, передаточной
функции (6.3). Приравнивая коэффициенты при р® в правой и
левой частях равенства (6.2), устанавливаем
т -
’ УтхКфКс
Отсюда, полагая тх = Т1с, находим приближенную формулу
т. = Тс . (6.4)
С учетом приближенного выражения (6.3) передаточную функ-
цию системы стабилизации высоты, разомкнутой по внешней об-
ратной связи, можно записать согласно рис. 6.2, б в виде
^..W = ^(P)p(,+T|eP)(^+2fev+l). (6.5)
Из выражения (6.5) следует, что теперь устойчивость системы
может быть обеспечена и при RH — iH.
2)9
Коэффициент iH выбираем из условия, чтобы частота среза
частотной характеристики передаточной функции (6.5) распола-
галась левее граничной частоты =Д-, а именно: соср « 0,8 -=J-.
При этой исходной посылке для iH согласно выражению (6.5)
с учетом того, что = V, получаем следующую формулу:
iH = 0,8 -yly = 0,8 = 0,4 .
11с у V т/Ь
В горизонтальном полете для требуемого значения угла тан-
гажа Фур имеем -&тр = «бал* Если -&тр = -&3 и RH — iH (статиче-
ский закон стабилизации высоты), то условие балансировки
-&тр = абал обеспечивается за счет ошибки по высоте 6Н = 2?^.
1н
Для уменьшения этой ошибки отсчет текущих значений угла тан-
гажа производится относительно тангажа, который имел само-
лет в момент начала стабилизации высоты. Сдвиг базы отсчета
обеспечивается с помощью механизма согласования в гироверти-
кали. Это эквивалентно тому, что заданное значение угла тангажа
формируется в виде
где -ft (f0) — значение угла тангажа в момент включения системы
стабилизации высоты.
Теперь при RH = iH, ^р = абал статическая ошибка по вы-
соте
^бал —#(М
1н
В процессе полета балансировочное значение угла атаки
может изменяться (например, в результате изменения массы или
скорости). Возможное отличие абал от ft (Zo) учитывается в схеме,
показанной на рис. 6.2, б возмущением f = О (/0) — абал. Устра-
нение статической ошибки от действия возмущения f может быть
достигнуто введением интеграла в закон управления. При этом
передаточная функция регулятора принимает вид
Rh (р) == Ч—h ~г^р1Р ’ (6-6)
где
Сигнал интеграла не должен ухудшать динамику стабилиза-
ции. Для того чтобы частота среза (оср разомкнутого котнура была
на участке логарифмической амплитудной характеристики (ЛАХ)
с наклоном —20 дБ/дек, в законе (6.6) должно выполняться ус-
ловие
220
(6-7)
Л т1с •
При выполнении условия (6.7) участок асимптотической ЛАХ
с наклоном —20 дБ/дек располагается в диапазоне частот -±- <
1 Л
<<£><;у—. Для хорошего регулирования рекомендуется, чтобы
значения постоянной времени 7\ и частоты среза ©ср были свя-
заны соотношением
-^•= (0,15 ... 0,2)<вср.
(6.8)
Отсюда с учетом того, что Tt = и <оср = iHV, получаем
соотношение для выбора i^H:
Zjд = (0,15 ... 0,2)i?,V.
При законе управления (6.6) участок с наклоном —20 дБ/дек
ограничен справа частотой тД-, т. е. имеется ограничение:
1 1с
®ср < -f—• Вследствие этого переходные процессы в замкнутом
контуре получаются затянутыми. Частота среза и, следовательно,
быстродействие могут быть увеличены при регулировании по от-
клонению и производной [81. Закон управления в этом случае
характеризуется передаточной функцией
_ , . ... , Цн
Кн(р) = *я + lvvP Н—— •
Преобразуем выражение (6.9) к виду
'яР + 'с/, /
(6.9)
“ H T1P
I* f у
где Т1 = ~т——у г = ^Х.
‘$я ‘я
При можно принять 1 р1Р » I- Поэтому выбор
значений коэффициентов iy и 1ц производится на основе упро-
щенного представления передаточной функции (6.9), а именно:
(р)« in (1 -{- тр).
221
Рис. 6.3. Логарифмические амплитудные и фазовые частотные характеристики
разомкнутого контура управления высотой
Целесообразно принять т « Т1е. При этом условии у ЛАХ ра-
зомкнутой системы отсутствует участок с нулевым наклоном.
При выбранном значении т значение iH выбирают исходя из тре-
бования, чтобы запас по фазе был порядка 40 ... 45°. После этого
на основании рекомендации (6.8) устанавливается значение коэф-
фициента
Для сравнения на рис. 6.3 приведены частотные характери-
стики разомкнутого контура стабилизации высоты, вычисленные
в соответствии с формулой (6.5) при законах управления (6.6)
и (6.9). Видно, что введение производной позволяет повысить
частоту среза примерно в шесть раз.
Рассмотрим теперь перегрузочный вариант системы стабили-
зации высоты. При использовании приближенного выражения
передаточной функции = эта система характеризуется
структурной схемой, приведенной на рис. 6.4. Ядром системы
является система регулирования нормальной перегрузки, кото-
рая по структуре аналогична рассмотренному в гл. 3 автомату
продольного управления.
Считая, как и раньше, привод идеальным, находим следую-
щее выражение для передаточной функции замкнутой системы ре-
гулирования перегрузки
™ ( V Дду (Р)___
"» ™ Дп„з (р) т; У+2£Т> + 1 ’
(6.10)
222
Система регулирования перегрузки
Рис. 6.4. Структурная схема стабилизации высоты
где
То
Г Ас
С учетом выражения (6.10) передаточную функцию разомкнутого
контура стабилизации высоты запишем в виде
(р) Rh (р) (т.у + 2g.r> + .
Из приведенного выражения видно, что система структурно не-
устойчива. Поэтому выбираем оператор Ra в виде
Rh (р) = 1'и + %Р = i’h (1 + Тур);
Т ___
1 У —
При стабилизации постоянной высоты этому оператору соответ-
ствует следующий закон управления:
Дл^з = iff (Ha Н) iVyV у
С учетом выражения (6.12) передаточная функция (6.11) за-
пишется так
(6.11)
(6.12)
где
WH (&- iHKx(1 + TyP)
раз {Р) р\КУ + ^т:р + 1У
*2 = Кп/с*Т1(л^.
(6.13)
223
Дадим рекомендации по выбору коэффициентов передачи iH
и iyy, опираясь на известные положения частотного синтеза
следящих систем. Из соображений обеспечения максимального
быстродействия и хорошего качества регулирования необходимо
придерживаться следующих требований:
1) частота среза а>ср разомкнутой системы, характеризуемой
передаточной функцией (6.13), должна находиться на участке
ЛАХ с наклоном —20 дБ/дек;
2) должны соблюдаться условия
п 1 _ _ 1
В диапазоне частот у-<«><— частотные характеристики,
соответствующие передаточной функции (6.13), могут вычисляться
по следующей приближенной формуле:
wh ~ 1'н^туР _ K^vv
Отсюда для частоты среза, располагающейся именно в этом диа-
пазоне частот, получаем
«ср =
С учетом приведенных выше рекомендаций получаем следую-
щие формулы для выбора коэффициентов Гц и Гу*.
тЛг;’ тЛ^<70‘’
1н = •
1 ‘v
Если выбрано — =(a 0,1), то коэффициенты передачи Гу
v Тс v
и Гн можно определить по следующим формулам:
Г За
Уу Wnfiti
.* / а
соответствующим выбору i'v# по нижней границе.
6.3. СТАБИЛИЗАЦИЯ СКОРОСТИ ПОЛЕТА
Действующие на самолет силы и моменты зависят от
воздушной скорости полета. Поэтому, говоря об управлении ско-
ростью самолета, имеют в виду прежде всего воздушную скорость.
Различают истинную воздушную скорость V — скорость пере-
224
мешения относительно воздушных масо и индикаторную скорость
Уин, которая связана с истинной воздушной скоростью соотно-
шением
УИН = У/Д,
где Д = р (Я)/р0 — относительная плотность воздуха.
Важной характеристикой воздушной скорости полета является
также число М.
Условиями эксплуатации самолета индикаторная скорость
ограничивается по максимуму и по минимуму. Максимальное
значение лимитируется из соображений прочности, а нижней гра-
ницей является скорость сваливания. Имеется также ограниче-
ние числа М полета. Поэтому при полете на режимах, близких
к граничным, скорость должна строго контролироваться. Автома-
тическая стабилизация воздушной скорости освобождает летчика
от выполнения этой функции, позволяя ему сосредоточиться на
решении других задач. В случае же неустойчивости по скорости
автоматическая стабилизация становится просто необходимой.
Полет с заданной скоростью может происходить как на по-
стоянной высоте, так и в режимах набора высоты и снижения.
Для управления скоростью полета производятся воздействия на
тягу двигателя или на руль высоты. В первом случае тангенциаль-
ное ускорение регулируется путем изменения силы тяги, а во
втором — вследствие изменения силы сопротивления. Система
стабилизации может быть в принципе построена на основе лю-
бого из этих способов. Однако на траекториях с существенно
изменяющейся высотой полета скорость полета регулируется
обычно с помощью руля высоты. При этом посредством изменения
тяги двигателя обеспечивается требуемый режим изменения вы-
соты: если тяга больше величины, необходимой для горизонталь-
ного полета, — подъем, меньше — снижение. При посадке само-
лета регулирование скорости производится двигателем: действия
рулем высоты здесь направлены на осуществление сложного вер-
тикального маневра.
На режимах набора высоты и снижения полет происходит
с постоянной индикаторной скоростью, однако истинная воздуш-
ная скорость (и число М) при этом изменяется (вследствие изме-
нения плотности воздуха). Поэтому регулирование таких режимов
полета должно осуществляться только путем контроля за индика-
торной скоростью. При полете по маршруту, когда высота не из-
меняется, контролируется число М. На режиме посадки значе-
ния истинной и индикаторной скорости совпадают, и регулиро-
вание скорости осуществляется для предотвращения сваливания
самолета.
Рассмотрим систему автоматической стабилизации индикатор-
ной скорости с помощью руля высоты. Будем рассматривать дви-
жение в отклонениях относительно опорной траектории, соответ-
ствующей некоторому режиму работы двигателя.
225
Для составления структурной схемы найдем выражение дли
вариации индикаторной скорости. Так как Vw — V]/p (Д)/р0,
то имеем
где
АУИВ= VhhAV + ^нАЯ, (6.14)
(здесь звездочкой отмечены значения, соответствующие опорной
траектории).
Обратившись к передаточным функциям самолета по скоро-
сти и по высоте, найденным в гл. 2, на основе формулы (6.14)
получим
Wуин/# (/>) = = VhhIFv/o (Р) + (р) =
У^Кур + ТуР) , У*аКн
p(14~Tlcp) PU + T’icP)
В результате имеем
117-../< w-^'f,;((i‘+т,")1’ <6Д5>
где - g/Д (Я*) - 2 :
_ TvgVK(fFj
1 ин “ *ин
Для уменьшения угловых колебаний самолета стабилизация
индикаторной скорости производится через систему регулирова-
ния тангажа. Такая система стабилизации характеризуется струк-
турной схемой, представленной на рис. 6.5. Так же, как и в слу-
чае стабилизации высоты, отсчет углов тангажа производится
относительно положения самолета в момент вызова режима ста-
билизации скорости. Возможное отклонение требуемого значения
тангажа 0тр от исходного 'О’ (/0) учтено на структурной схеме в виде
возмущения f = # (£0) — Для уменьшения ошибки от изме-
нения балансировки по тангажу в закон управления вводится
интеграл. Тогда закон управления запишется так:
$3 = Wo) — МУин — у J 6Уин^-
При этом оператор закона управления Rv (р) имеет вид
1 + 7\р
= lv Т^р ’
где = iyji^y.
226
Rv (Р) = iv +—7
Система регулирования тангажа
Рис. 6.5. Структурная схема стабилизации индикаторной скорости
Используя приближенное описание замкнутой системы регу-
лирования тангажа с помощью передаточной функции (6.3),
для передаточной функции разомкнутого контура управления
скоростью находим
mV 7 ч _ ; SP_____________Кии(1 -ЬТ’инР)____(6 '16)
BWp) tv Т^р р(1 + т1сР)(^ + 25Лр+1)
Значения постоянных времени Тин и Т1а получаются близкими.
Поэтому на участке частот от со, = до со = — наклон ЛАХ
разомкнутой системы везде близок к —20 дБ/дек. Частота среза юср
должна находиться на этом участке. Коэффициент iv может
выбираться так, чтобы при = 0 запас устойчивости по фазе
был не меньше 45 ... 50°, по модулю — не меньше 10 дБ. Этому
требованию примерно соответствует соотношение
0,3
I’ChhTs
(6.17)
полученное на основе выражения (6.16) при допущении * ZjZ т^р
При использовании соотношения (6.17) постоянная вре-
мени т2 вычисляется по формуле (6.4).
Если значение iv выбрано, то коэффициент усиления при ин-
теграле устанавливается согласно рекомендации
Рис. 6.6. Логарифми-
ческие амплитудная и
фазовая частотные харак-
теристики разомкнутого
контура управления инди-
каторной скоростью
из которой с учетом приближенного соотношения соср гуКин
следует
у = (0,15 ... 0,2)/у/(ин.
Частотные характеристики разомкнутого контура стабилиза-
ции индикаторной скорости, построенные в соответствии с ука-
занными рекомендациями, приведены на рис. 6.6.
6.4. УПРАВЛЕНИЕ СКОРОСТЬЮ ПОЛЕТА
ПУТЕМ РЕГУЛИРОВАНИЯ ТЯГИ ДВИГАТЕЛЕЙ
Основным задатчиком режима работы каждого двига-
теля является рычаг управления двигателем (РУД), который
установлен в кабине экипажа самолета на мотопульте. Число
рычагов определяется количеством двигателей силовой установки.
Все РУД через механическую проводку связаны с гидромехани-
ческой системой (ГМС) подачи топлива в двигатель. Количество
топлива, подаваемое в камеру сгорания, определяет показатель
работы турбины и компрессоров двигателя и, как следствие, —
его тяговые характеристики.
При ручном управлении тягой двигателей летчик непосредст-
венно воздействует на каждый РУД. При автоматическом управ-
лении РУД перемещается приводом регулирования тяги (ПРТ)
с муфтой сцепления (МС). ПРТ — это сервопривод со скоростной
обратной связью, поэтому входным сигналом ПРТ регулируется
скорость перемещения РУД дРУД. Во избежание резких воздей-
ствий на двигатель скорость ПРТ ограничена. При вызове авто-
матического режима управления тягой муфта сцепления под-
228
ключает ПРТ к РУД, и он по сигналу заданной скорости бРУДз
вызывает дополнительное перемещение рычагов управления дви-
гателями по отношению к их отклонению 6РУД (/0) в момент /0
включения автоматики.
В современных вычислительных системах управления скорост-
ными параметрами полета самолета (скорость, число Маха) для
достижения высоких динамических и точностных характеристик
управления организуются внутренние контуры регулирования
тяги. Обратная связь в этих контурах вводится по некоторому
параметру (эквиваленту тяги), несущему косвенную информацию
о величине тяги. В качестве эквивалента тяги (Эт) могут использо-
ваться следующие параметры:
обороты ротора высокого давления (пв.д),
обороты ротора низкого давления (пн, д),
степень повышения давления компрессора (лк),
степень повышения давления двигателя (пдв).
Здесь под степенью повышения давления следует понимать
отношение давления за компрессором (р ) или газовой турбиной
двигателя (рт) к давлению на входе в компрессор низкого давле-
ния (рвх), т. е.
JT — • тг —
Рвх Рвх
Полнота соответствия данных параметров величине и характеру
изменения тяги повышается от пдв к лдв.
Следует заметить, что механический регулятор тяги (ГМС),
как правило, обеспечивает достаточно грубую настройку пара-
метра тяги по заданному входному воздействию (6РУД) и режиму
полета. Поэтому на современных самблетах двигатели обязательно
имеют дополнительную регулировку за счет функционирования
тракта электрогидравлической системы подачи топлива (ЭГС).
Для примера на рис. 6.7 приведены расчетные зависимости экви-
валента тяги Эт (степень повышения давления двигателя — лдв),
реализуемые гидромеханической системой и электронной систе-
мой регулирования двигателя самолета В-767. Как следует из
рассмотрения рисунка, характеристика ГМС (ЭтМС) имеет су-
щественный разброс по температуре воздуха и нелинейный ха-
рактер по положению РУД. Задача электронной системы заклю-
чается в сведении характеристики двигателя к линейной зависи-
мости Эт = Эаад (6РУД) за счет дополнительной составляю-
щей Э?гс, обеспечиваемой работой тракта ЭГС.
Здесь внутреннее регулирование двигателя построено по ме-
тоду совмещения действия механического и электронного регуля-
торов подачи топлива. Из условий обеспечения безопасности по-
лета эквивалент тяги ГМС должен превышать заданное расчет-
ное значение (Э™с > Эаад) для устранения потери тяги при от-
229
Рис. 6.7. Располагаемые и заданная характеристики эквивалента тяги:
1 — температура наружного воздуха, соответствующая стандартной атмосфере; 2 —
пониженная температура наружного воздуха; 3 — повышенная температура
казе электронного регулятора. Схема управления тягой двига-
теля с внутренним регулированием эквивалента тяги по методу
совмещения представлена на рис. 6.8, а.
Рис. 6.8, б иллюстрирует вариант регулирования тяги, в ко-
тором электронный регулятор подключен по методу замещения.
В этом случае заданная характеристика регулирования целиком
реализуется за счет работы электрогидравлического канала,
т. е. Этэгс = ЭГА, а регулирование через ГМС осуществляется
только при отказе электроники. Как и при методе совмещения
требуется условие Э™с > ЭтГС для обеспечения безопасности.
Основным преимуществом метода совмещения перед методом за-
мещения является заметное уменьшение расхода топлива через
точный канал регулирования (электрогидравлическую систему),
хотя при этом существенно повышается требование в части быстро-
действия данного канала во. избежание перерегулирования экви-
валента тяги относительно заданного значения.
Внутренний контур регулирования и ограничения эквивалента
тяги по режимам полета организуют современные электронные
регуляторы двигателя (РЭД). Первичным и основным задатчиком
электронных регуляторов являются задатчики положения РУД,
сигналы с которых используются в качестве входной информации
электронного регулятора. Функция РЭД заключается в формиро-
вании программного эквивалента тяги в зависимости от бРУд,
рвх, температуры воздуха Тн числа М и других параметров:
Э?р = Гпр(6руд, рвх, М, ...)
230
Двигатель
а)
Двигатель
S)
Рис. 6.8. Схема автоматического управления тягой:
а — совмещение регуляторов топлива; б — замещение регуляторов топлива; ВУТ —
вычислитель управления тягой; ПРТ — привод регулирования тяги; МС — муфта сцеп-
ления; ДП — датчик положения; ДС — датчик состояния; РЭД — регулятор электрон-
ный двигателя; ГМС — гидромеханическая система; ЭГС — электрогидравлическая си-
стема; ТКАД — турбокомпрессорные агрегаты двигателя
и сравнении его с текущей информацией Эт. Сигнал ошибки ис-
пользуется для управления расходом топлива Q?rc через дви-
гатель, осуществляемого ЭГС по закону
&эгс=/(Этпр-Эт).
(6.18)
Структурная схема внутреннего контура регулирования двига-
теля представлена на рис. 6.9. Здесь обозначено F„p =
dF (6* .М * \
= —npV Р^бруД ’ ; под ^э/q (р) следует понимать пере-
даточную функцию двигателя, характеризующую связь между
расходом топлива и эквивалентом тяги, а под Ф/>/э (р) — пере-
даточную функцию, учитывающую зависимость самой тяги от ее
231
Рис б 9. Структурная схема внутреннего контура регулирования двигателя
эквивалента. Тогда передаточная функция замкнутого внутрен-
него контура регулирования двигателя записывается в виде
Фэ/б = ДврГуд(р) = [1/K3W3/q(p)]p+1 • (6-19)
Нетрудно видеть, что параметры передаточной функции (6.19)
зависят от режима работы двигателя.
Рассмотренный внутренний контур обеспечивает соответствие
между отклонением РУД и эквивалентом тяги. Наряду с ним
в рассматриваемых системах автоматического управления тягой
(см. рис. 6.8) создается еще один вспомогательный контур —
контур отработки команды Эт. 3 на заданное изменение эквива-
лента тяги. В этом контуре в зависимости от рассогласования
6ЭТ — Эт. з — Эт формируется входной сигнал 6РУд3 привода
регулирования тяги. Привод прекращает перемещать РУД по
достижении им крайних отклонений бруд и бруд, соответст-
вующих режимам работы двигателя «малый газ» и «максимал»
(крайние положения РУД определяются концевыми выключате-
лями, установленными на выходном валу ПРТ). Такое функцио-
нирование ПРТ обеспечивается следующим законом управления:
бруд з — Kb (Эт. з — Эт);
| брУД 3 | бтах,
t
бруД = бруд (10) -р J Одбруд 3 t,
i о
где ол — логическая функция вида
1 При [бруд > О Д (бруд — бруд) > 0] У
V [бруд < 0 Д (бруд — бруд) < 0]
о при [бруд > о д (бруд — бруд) о] v
V [бруд < 0 А (бруд — бруд) 0].
Логическое условие ол определяет требуемый процесс комму-
тации входного сигнала ПРТ.
Перейдем теперь к контуру управления скоростью полета.
Структура этого контура раскрывается схемой, приведенной на
232
Рис. 6.10. Схема управления скоростью полета
рис. 6.10. Здесь внутренний контур регулирования двигателя
упрощенно представлен передаточной функцией Ф9/в (р), а связь
между эквивалентом тяги и самой тягой характеризует передаточ-
ная функция Wp/3 (р).
Как видно из схемы, сигнал рассогласования по скорости оп-
ределяет с учетом необходимого ограничения величину потреб-
ного разгона — торможения V3:
Va=Rv(P)(V9-Vyf
V-a<Va<^t.
Данный сигнал через коэффициент передачи (Н, М) формирует
позиционный тракт управления тягой двигателей.
На основе сигналов заданного и текущего темпов изменения
скорости Va и V образуется сигнал ошибки (6К), который фор-
мирует интегральный тракт управления с коэффициентом пере-
дачи (И, М). Этот тракт обеспечивает астатизм контура регули-
рования скоростного параметра и устраняет ошибки по скорости
при изменении потребных тяг по режимам полета.
Сигналы по позиционному и интегральному тракту формируют
заданный эквивалент тяги
эт. 8 = Кх (Н, М) Va + (Уз - V) + Эт (/о), (6.20)
ограниченный в диапазоне значений располагаемых эквивалентов
двигателя от «малого газа» (Э“ г) до «максимала» (Э”ах). Как
видим, в закон управления (6.20) в качестве начального условия
эквивалента тяги вводится значение Эт (/0), соответствующее
моменту включения автоматики.
Коэффициенты передачи Ki (Н, М) и К2 (Н, М) в общем слу-
чае должны отражать взаимодействие между темпом изменения
скорости (изменения кинетической энергии) и тягой двигатель-
ной установки (полной энергии). Если пренебречь изменением
лобового сопротивления в начальной фазе разгона — торможе-
233
ния, то получим следующее соотношение между потребным изме-
нением тяги и заданным темпом изменения скорости
АР = mVB.
С другой стороны, согласно рис. 6.10 с учетом функциональной
зависимости тяги и ее эквивалента, находим (в статике)
АЭ°°
Сравнивая приведенные выше соотношения, определяем выраже-
ние для коэффициента передачи Kit
КЛН, М) = ^-/8”- ~оТ. (6.21)
Для коэффициента Ка обычно принимают
Ка (Я, М) = вКх (Я, М); в = 0,1 ... 0,5. (6.22)
Если располагаемые тяги двигателя по скорости (числу Маха)
изменяются незначительно, то можно положить коэффициенты за-
висящими только от высоты полета.
Следует отметить, что на ресурс двигателя оказывают влия-
ние диапазон и скорость возможных регулировок эквивалента
тяги в динамических процессах управления, что в основном оп-
ределяется величиной сигнала по позиционному тракту
ДЭП = /С1(Я, М)У8.
По опыту разработчиков двигателей, допустимый диапазон управ-
ляющих сигналов не должен превышать ±20% от эквивалента
тяги, соответствующего максимальному взлетному режиму.
С учетом данного положения определяется возможный диапа-
зон маневров по скорости (темп разгона — торможения) и, в свою
очередь, величина ограничения сигнала Й8, а именно (см.
рис. 6.10):
| | = | Va | = щ АЭТ .
Итак, основной параметр регулировки (по позиционному
тракту) следует использовать и при формировании переменного
ограничения величины заданного темпа изменения скорости на
основе учета требований к процессам регулировки двигателя.
В этом случае реализуется достаточно полное («в большом») со-
ответствие заданного (У3) и текущего (V) темпов изменения ско-
рости, что минимизирует работу интегрального тракта и, как
следствие, существенно улучшает динамические процессы в кон-
туре управления скоростным параметром движения самолета.
При этом роль интегрального тракта сводится к выполнению
двух задач:
234
корректировке нового установившегося эквивалента тяги,
при изменении режимов полета, т. е. выставке балансировочной
величины эквивалента
Э$ал-Э,(/о) + АЭи;
обеспечению точного соответствия текущего темпа изменения
скорости его заданному значению (так называемой интегральной
коррекции контура управления).
Такой подход к формированию контура отражает использо-
вание метода позиционно-интегральной коррекции (ПИК).
Составим теперь структурную схему рассматриваемой системы
управления (см. рис. 6.10). Эта схема, представляющая собой
модель поведения системы «в малом» (в линейном приближении),
приведена на рис. 6.11.
При выборе коэффициента передачи Kj для учета требований
устойчивости «в малом» можно обращаться к передаточной функ-
ции разомкнутого контура отработки заданного эквивалента тяги.
Согласно рис. 6.11 она имеет вид
(6.23
(6.24)
№’раз = >9/,
Соответственно передаточная функция замкнутого контура
т __________________ ДЭТ (р)___ 1
э-т ДЭТ. з (р) - 1 •
тгл7р+’
Касаясь вопросов формирования контура отработки заданного
эквивалента тяги, необходимо отметить следующее обстоятель-
ство.
Привод РУД, как правило, устанавливается под мотопультом
в кабине экипажа и механическим способом связан с гидромеха-
нической системой двигателя (см. рис. 6.8). Для управления элек-
тронным регулятором используется датчик положения РУД,
который может устанавливаться либо на выходном штоке ПРТ,
либо на входной качалке ГМС каждого двигателя. В последнем
Wj.r
Рис. 6.11. Структурная схема системы управления скоростью полета
235
случае в контур заданного эквивалента тяги включается нели-
нейное звено типа гистерезиса, отражающее характеристики ме-
ханической проводки, и в передаточную функцию (6.23) должен
вводиться в качестве сомножителя коэффициент гармонической
линеаризации люфтового звена. Учет этого коэффициента приво-
дит к ухудшению динамических характеристик контура и при оп-
ределенных условиях — к появлению автоколебаний. Поэтому
более предпочтительным вариантом является установка датчика
положения РУД непосредственно на ПРТ. Именно этот вариант
и рассматривался выше.
Однако с производственной и эксплуатационной точки зре-
ния некоторые авиадвигателестроители предпочитают второй ва-
риант установки датчика (на двигателе). В этом случае на заводе-
изготовителе компонуется и отрабатывается связка «двигатель —
РЭД» с датчиком положения РУД, входящим в эту комплекта-
цию. Поэтому здесь для улучшения динамических и точностных
характеристик контура автоматического управления скоростью
приходится искать специальные технические решения по устра-
нению негативного эффекта данной установки датчика.
Вернемся к структурной схеме, представленной на рис. 6.11.
Имея в виду соотношения
Й = 4-№,.тФр/эДЭт. з;
ДЭт.8=(к1+-^-)^--^-У,
преобразуем ее к более простому виду (рис. 6.12). Теперь, замк-
нув внутренний контур, устанавливаем передаточную функцию
разомкнутого контура регулирования скорости
IFpas = «V +2 tP (т/К2фр/Лэ т)р+1 ’ <6’25)
где Т2 = В выражении (6.25) передаточную функцию Фр/Э
можно представить в виде коэффициента усиления. Тогда с уче-
том соотношений (6.22), (6.21) и формулы (6.24) получим
— р + 1
Г £аз = R у ,---z----j----г-. (6.26)
Рис. 6.12. Преобразованная структурная схема системы управления скоростью
полета
236
Передаточная функция (6.26) должна приниматься во внимание
при выборе структуры и параметров оператора Rv.
Пока мы не акцентировали внимание на составе силовой
установки самолета, однако на всех среднемагистральных и даль-
немагистральных авиалайнерах устанавливаются, как минимум,
два двигателя, образующих в целом силовую установку самолета и
обеспечивающую необходимый уровень безопасности полета на
случай отказа какого-либо одного из двигателей. В этом случае
возникают некоторые особенности автоматического управления
каждым двигателем при сохранении задачи обеспечения суммар-
ной тяги силовой установки.
При ручном управлении тягой летчик осуществляет операцию
разведения регуляторов двигателей простым их перемещением
в какую-либо сторону (на увеличение или уменьшение тяги),
добиваясь при этом на индикаторах, например, одинаковых зна-
чений эквивалентов тяги. Тем самым обеспечивается одна из
частных задач раздельного управления — выравнивание пара-
метров регулирования двигателей.
Автоматическое управление с помощью общего привода для
всех двигателей обусловливает необходимость механической рас-
цепки привода от ГМС определенного двигателя путем снятия
летчиком электропитания с муфты сцепления. В этом случае
летчик имеет возможность осуществлять подрегулировку отдель-
ного двигателя без снятия режима автоматического управления
за счет некоторого изменения программного значения эквивалента
тяги путем перемещения РУД.
С целью разгрузки летного экипажа от дополнительной регу-
лировки двигателей, а также для обеспечения высоких точностных
характеристик управления тягой следует рассматривать допол-
нительные структурные и алгоритмические решения. На рис. 6.13
Рис. 6.13. Схема раздельного автоматического управления тягой двух двига-
телей
237
показана схема возможного варианта построения системы на
примере двухдвигательной силовой установки. Данный подход
предусматривает использование нескольких приводов регулиро-
вания тяги (по числу двигателей), которые управляются отдель-
ными управляющими сигналами от вычислителя управления
траекторией (ВУТ). Каждый привод образует свою следящую
систему по эквиваленту тяги соответствующего двигателя. Для
исключения влияния механической проводки на процессы регу-
лирования в данном варианте следует устанавливать датчики по-
ложения РУД непосредственно около ПРТ.
6.5. УПРАВЛЕНИЕ ПОЛЕТОМ
ПО ЗАДАННОЙ ЛИНИИ ПУТИ
Заданная линия пути есть проекция заданной траек-
тории полета на земную сферу. В общем случае она представляет
собой ломаную линию, составленную из частных ортодромий,
т. е. дуг большого круга, соединяющих заданные точки марш-
рута — исходный пункт маршрута (ИПМ), промежуточные пункты
маршрута (ППМ) и конечный пункт маршрута (КПМ). В орто-
дромической системе координат частные ортодромии превращаются
в отрезки прямых.
Координаты ППМ заданной линии пути заводятся в БЭВМ
навигационного комплекса самолета. В навигационном комплексе
также определяются боковые отклонения от заданной линии
пути — по перпендикуляру к частной ортодромии. В зависимости
от этих отклонений в системе траекторного управления форми-
руется сигнал заданного крена у3, отрабатываемый системой авто-
матического регулирования крена. На заданный угол крена вво-
дится ограничение | у3 | •< ушах.
В управлении боковым движением можно выделить две типо-
вые операции — стабилизацию заданной линии пути (очередного
отрезка прямой) и смену направления движения, осуществляемую
в окрестности ППМ. Рассмотрим вначале задачу стабилизации,
целью которой является устранение бокового смещения Дг в со-
ответствии с входной установкой Дг3 = 0. При стабилизации
заданной линии пути управляющее накренение самолета неве-
лико. С помощью обратной связи по поперечной перегрузке nz,
реализуемой в канале руля направления, поддерживается нуле-
вое скольжение. Движение по крену и рыскание в данном случае
можно считать развязанными, поэтому для исследования динамики
управления можно использовать структурную схему, представ-
ленную на рис. 6.14. Здесь связь между движением по крену и
боковым смещением характеризуется приближенной передаточной
функцией
238
Система регулирования крена
Рис. 6.14. Структурная схема стабилизации заданной линии пути
Считая привод идеальным, для передаточной функции замкну-
той системы регулирования крена получим
w (о\ •— ? № ------------!______
?з(р) ~ Т^ + 2^Тур+1 9
где Т-> ~ у кЛ При использовании этого выражения пере-
даточная функция разомкнутого контура стабилизации линии
пути принимает вид
= Р2 + 2^Т^р + 1) •
Из приведенного выражения видно, что для устойчивой стабили-
зации в закон формирования у3, характеризуемый оператором
Rz (р), необходимо вводить сигнал производной Az = Vz. Таким
образом, для оператора закона управления имеем
Rz (Р) = Kz + KVzP = Kz (1 + TzP)-,
'Г1 _ Kyz
lz~ KZ '
Соответственно передаточная функция разомкнутого контура
принимает вид
^раз (р) = р2 + • (6.27)
Подчиним, как и раньше, синтез закона управления удовлетво-
рению требования, чтобы частота среза разомкнутого контура
находилась на участке ЛАХ с наклоном —20 дБ/дек и при этом
выполнялось условие
1 / п 1 1 . 3 .0,4
Tz ’ Ту ’ Tz “СР Ту •
Отсюда с учетом того, что при выполнении сформулированных
требований частота среза частотной характеристики передаточной
239
Рис. 6.15. Логарифмическая амплитуд-
ная и фазовая частотные характерис-
тики разомкнутого контура стабилиза-
ции заданной линии пути
Рис. 6.16. Схема плавного сопряже-
ния отрезков заданной линии пути
функции (6.27) соер = , получаем следующие
формулы для выбора коэффициентов передачи и KVz.
77<_т7’ * = ~тГ' (6'28)
Уменьшение коэффициента KVz (при Tz — const) ведет к уве"
личению запаса устойчивости по модулю и снижению быстродей'
ствия системы, а увеличение постоянной времени Tz (при KVz —
= const) — к повышению запаса устойчивости по фазе.
Частотные характеристики разомкнутого контура управления,
соответствующие выбору параметров -2— и KVz по правым гра-
* Z
ницам рекомендаций (6.28), приведены на рис. 6.15.
Заданная трасса полета прокладывается в виде последова-
тельности отрезков прямых линий, составляющих ломаную ли-
нию. Отсчет отклонений Az от заданной линии пути производится
относительно этой линии по перпендикуляру к ее отдельным
составляющим. Переход отсчета с одного отрезка на другой должен
начинаться не в ППМ, а с некоторым упреждением, так чтобы
происходило плавное, без перерегулирования, вписывание тра-
екторий полета в заданную трассу. Рассмотрим один из простых
алгоритмов выбора бокового упреждения разворота (БУР), обес-
печивающего плавное сопряжение отрезков заданной линии пути.
Будем считать, что разворот производится при постоянной
скорости с максимально допустимым креном (на большей части
траектории разворота сигнал заданного крена находится на
ограничении). Отсюда следует, что траектория разворота есть
окружность с радиусом
Vя
gtgYmw '
240
Рис. 6.17. Схема формирования сигнала заданного крена
Из рис. 6.16 видно, что сопряжение отрезков 1 и 2 дугой радиуса R
производится при условии, что разворот начинается при боковом
упреждении, равном
Осуществление разворота производится путем перехода к от-
счету отклонений Az относительно новой базы (отрезка 2 на
рис. 6.16) в момент, когда расстояние Az0 самолета относительно
отрезка 2 равно БУР.
Производимый таким образом разворот представляет собой
по существу процесс отработки системой стабилизации большого
начального отклонения. Для обеспечения требуемого качества
регулирования «в большом» в законе формирования заданного
крена 7з наряду с ограничением выходной команды у3 ограничи-
вается также сигнал Az так, как это показано на рис. 6.17. Огра-
ничения и коэффициенты передачи выбираются таким образом,
что на подавляющей части разворота сигнал по производной пре-
валирует над сигналов по отклонению Az, при этом сигнал у3
находится на ограничении. Это и обеспечивает разворот с макси-
мальным креном в требуемую сторону.
Приведем некоторые соображения по выбору ограничения
сигнала Az на развороте.
Схеме, изображенной на рис. 6.17, соответствует следующий
нелинейный закон управления:
for, |a|<?max
Уз = <
I zt?max> I | > Ушах»
<j = -Kzte-KVzVz; (6.29)
_.^(Az |Az|<Az„,
2 (±Azm, |Az|<Azm.
Имея в виду, что Vz = —V sin T, где Y — текущее значение угла
пути (рис. 6.16), перепишем выражение для а в виде
а = — Kz Az + KVzV sin ¥; | Az | < Azm. (6.30)
Положив в выражении (6.30) а = Az„, = 0, найдем мини-
мальное достижимое значение
9 Зак. 278
241
= arcsin
угла пути самолета в конечной точке траектории разворота
с постоянным креном (у = у max)- Предельное значение Ymin
(при заданных V, Kvz и достигается при управлении только
по скорости Vz. Введение в закон управления сигнала по отклоне-
нию с ограничением | Az | •< Azm укорачивает траекторию раз-
ворота с у = Здесь угол пути в конечной точке этой траек-
тории равен
¥* = arcsin .
Исходя из приемлемого значения этого угла можно определить
параметр Azm по формуле
Л « _ КVz^ Sal У* — Ушах
Л2™ ~ Kz
где значение Т* должно удовлетворять неравенству
arcsin < ¥* < р.
При окончательном выборе коэффициентов передачи Кг и Куг
следует иметь в виду, что рекомендации (6.28) получены на основе
линейного анализа системы стабилизации. Правые границы ре-
комендаций (6.28) определяют максимально допустимые значения
этих коэффициентов, исходя из требуемой устойчивости «в малом»,
т. е. в ситуациях регулирования, когда | Az | <; Azm, а значения
управляющего сигнала о = —KzAz — не выходят за
границы ±?шах- Если значения параметров Kz, Kvz, &-zm закона
управления (6.29) чрезмерно велики, то при отработке больших
начальных отклонений Az на развороте может возникнуть коле-
бательная неустойчивость. Причиной неустойчивости являются
нелинейные эффекты уменьшения запасов устойчивости по фазе,
связанные с сильным подавлением сигнала а ограничением задан-
ного крена. Для устранения неустойчивости необходимо увеличи-
вать постоянную времени Тх путем уменьшения коэффициента Kz.
Благоприятным является также уменьшение параметра AzOT.
В ряде случаев неустойчивость «в большом» может быть предот-
вращена применением закона управления разворотом с коэффи-
циентом Kz, регулируемым в зависимости от угла подхода р.
Здесь значение Kz выбирается так, чтобы при смене базы отсчета
отклонений Az управляющий сигнал уа изменялся не скачком,
а выходил на ограничение плавно (хотя и быстро), причем в момент
смены базы отсчета отклонений (Azo = БУР) у3 = 0. Требуемое
обеспечивается, если в законе управления (6.29) Azm — БУР =
— R (1 — cos р), а значения коэффициентов Кг и KVt связаны
соотношением
—К, БУР + KVxV sin р = 0
242
или
Кг_________V sin р
Kvz ~~ (1—COSfJb)
(6.31)
Расчет по формуле (6.31) приводит, как правило, к большим
значениям постоянной времени Тг = KvJKz, что наряду с плав-
ностью возрастания сигнала ?3 и предотвращает явления неустой-
чивости. Заметим, однако, что формула (6.31) неприемлема в слу-
чаях, когда определяемое ею отношение KzlKvz выходит за рамки
Кг 0,1
установленного выше ограничения -<-у— •
Пример. Самолет имеет V = 200 м/с, |Л = 0,785 рад, ?тах— 0,35 рад,7\=1с.
Определяем радиус разворота и БУР
R=—^--------= 11200 м; БУР = Р (1—cos р) = 3290 м.
g Углах
По формуле (6.31) вычисляем
1 Kz
Tz &Vz
V sin p
БУР
0,043 1/c.
Вычисленное значение коэффициентов удовлетворяет требованию Kz/Kvz^
— = 0,1 1/с, поэтому принимаем его для определения Kz. Коэффициент Kyz
* z
выбираем исходя из рекомендации (6.20)
==
0,3
= 0,03 рад/(м/с).
Теперь устанавливаем значение Kz:
Кг = -U- KVz = 0,043-0,03 = 0,00129 рад/м.
/ Z
В момент смены базы отсчета отклонений
Дг0 = БУР = 3290 м;
Д^о — —V sin р = —141,4 м/с.
Поэтому на вход нелинейного элемента по крену в начальный момент поступает
сигнал
О = —Kz — %Vz ~
= —0,00129.3290 + 0,03.141,4 « 0.
Через 2 с после начала разворота, когда Дй «Д20, а величина Дз уменьшается
до значения Дз « Дг0 + Д20-2 = 3007 м, имеем
а= —0,00129.3007 + 0,03.141,4 = 0,365 рад,
что обеспечивает выход сигнала на ограничение ушах = 0,35 рад. Это значение
сохраняется на большей части разворота.
6.6. ИНТЕГРИРОВАННОЕ УПРАВЛЕНИЕ
ТРАЕКТОРНЫМ ДВИЖЕНИЕМ САМОЛЕТА
Управление пространственным движением самолета по
заданной траектории с требуемым законом изменения скорости
производится путем соответствующего регулирования углов тан-
гажа» крена и тяги двигателей. Так как каждой точке заданной
9*
243
фазовой траектории соответствует определенное энергетическое
состояние самолета, а источником его энергии является двига-
тель, то в итоге оптимальное управление траекторным движением
сводится к такому взаимодействию каналов регулирования тан-
гажа, крена и тяги, при котором темп изменения энергии самолета
соответствует требуемому. Такой взгляд на процесс траекторного
управления позволяет сформулировать принцип полной энергии,
на основе которого строятся современные системы траекторного
управления, объединяющие все упомянутые каналы регулирова-
ния в интегрированный комплекс (см., например, [61).
Рассмотрим исходные положения принципа полной энергии.
Полная энергия является суммой кинетической и потенциаль-
ной энергий и выражается в виде
Взяв производную от этого выражения по времени и учитывая
кинематическое соотношение -^~-== V sin 9, получим скорость
изменения (градиент) полной энергии самолета
(6.32)
С другой стороны, уравнение сил в проекции на скоростную
ось имеет вид
4г = gnxa - g sin 0. (6.33)
Отсюда сравнением соотношений (6.32), (6.33) получим
Пха ~ mgV dt ‘ *6'34)
Следовательно, величина тангенциальной перегрузки пха харак-
теризует скорость изменения полной энергии самолета.
Дадим еще одну трактовку соотношению (6.34). Преобразовав
его правую часть с учетом уравнения (6.32), получим
пха = у + sin 0 = sin 0П. (6.35)
Здесь 0П = arcsin пха определяет максимально возможный угол
наклона траектории полета с постоянной скоростью. Действи-
тельно, разность
А = sin 0П — sln0 =
характеризует процесс изменения скорости:
а) А > О (0П > 0) — разгон;
б) А < О (0П < 0) — торможение;
в) А = О (0П = 0) — скорость неизменна.
244
В последнем варианте осуществляется наибольший темп изме-
нения потенциальной энергии при сохранении уровня кинетиче-
ской энергии.
Выразим теперь в уравнении (6.33) тангенциальную перегрузку
пха через перегрузки пх и пу в связанной системе координат,
а угол наклона траектории — через углы тангажа и крена. Полу-
чим, принимая приближенно cos а « 1, cos О* 1:
у
— = пх cos а — sin а — sin $ + sin а cos у.
Отсюда при малых Ф, а и пу = 1 + Диу находим
пх + “ [д«» + (1 — COS ?)] + $. (6.36)
Так как при малых а можно считать пх & пха, то параметр пх,
определяемый выражением (6.36), характеризует градиент полной
энергии.
Соотношение (6.36) является основным уравнением принципа
полной энергии. Им определяется потребное (заданное) значение
пхз перегрузки пх, реализуемое путем управления двигателем,
в зависимости от заданных значений: угла тангажа (Од), прираще-
ния нормальной перегрузки (Диу3), угла крена (у3) и темпа из-
менения скорости (У3), а именно:
Пхз = -у- + а [Дп»з + (1 — COS Та)] 4- Ф8. (6.37)
Уравнение (6.37) определяет алгоритм формирования основ-
ного сигнала контура регулирования тяги силовой установки при
управлении скоростью (У3) с учетом параметров пространственного
движения. Для реализации этого алгоритма на основе системы
управления скоростью через тягу двигателей (см. разд. 6.4)
в этой системе необходимо перейти от сигнала V3 к сигналу V3/g.
При этом параметр пхз преобразуется в коррекцию заданного
эквивалента тяги в позиционном тракте управления
= М)ихз, (6.38)
а в интегральном тракте отрабатывается сигнал рассогласования
заданного и текущего значений перегрузки пх:
дЭи = (Пяз _ „д (6.39)
Коэффициенты передачи в соотношениях (6.38), (6.39) опреде-
ляются по формулам (6.21), (6.22).
Естественно, что сигналы -&3, у3, Дпу3, по которым корректи-
руется команда пхз согласно алгоритму (6.37), формируются
только в системе автоматического управления (САУ) самолета.
При ручном управлении самолетом сигнал заданного приращения
перегрузки определяется по формуле
= АХ.,
где ДХВ — отклонение рычага управления от балансировочного
положения, а вместо заданных значений углов тангажа и крена
используются их текущие значения.
С учетом данных положений схема комплексного управления
траекторией и скоростью примет вид, изображенный на рис. 6.18.
На схеме показан дополнительный тракт формирования заданного
эквивалента тяги на основе позиционной отработки сигнала рас-
согласования градиентов полной энергии
ДЭ; = Кз(Я, М)(Пха-пх).
Такое решение улучшает динамические характеристики контура
управления скоростью.
Рассмотренный выше подход к применению принципа полной
энергии заключается в регулировании тяги в соответствии с за-
данным пространственным маневром. Однако реальные распола-
гаемые тяговые характеристики силовой установки могут отли-
чаться от потребных как по величине (когда заданный эквивалент
тяги выходит на свое ограничение Э™ах), так и по динамике вы-
хода на новое значение (характеризуемой показателями приеми-
стости и дросселирования двигателя). Данное несоответствие рас-
полагаемых тяг двигателя потребным для конкретного режима
Рис. 6.18. Схема интегрированного управления траекторией и скоростью:
А у — автоматическое управление; РУ — ручное управление
246
пх, *, «
Рис. 6.19. Общая схема корректировки маневра
полета и выполняемого маневра может привести к неблагоприят-
ным полетным ситуациям. Поэтому для повышения безопасности
полета следует формировать обратную перекрестную связь из
канала тяги в канал продольного траекторного управления для
введения определенных корректировок в процесс регулирования
маневра (рис. 6.19).
Эти корректировки осуществляются путем гибкого ограничения
положительных значений сигналов 03 и Дп?8 в функции текущего
значения перегрузки пх. В рассматриваемом варианте корректи-
ровок приоритет отдается заданным ббковым маневрам: сигнал уа,
выработанный в задатчике маневра, поступает в исполнительные
модули САУ без изменения. Что касается первичных текущих
значений сигналов 03, Дпуз, сформированных в задатчике, то
они наряду с у3 подаются лишь на вход системы регулирования
двигателя (см. рис. 6.18), а исполнительными модулями САУ от-
рабатываются уже ограниченные сигналы Ф8, Апуа.
Заданный угол тангажа, определяющий требуемый градиент
потенциальной энергии, ограничивают сверху исходя из энерге-
тических возможностей самолета, характеризуемых перегрузкой
иж, с учетом заданного темпа изменения скорости и потребного
для разворота с креном у8 приращения нормальной перегрузки
Таким образом, для сигнала й8 на приведенной схеме (см. рис. 6.19)
имеем
_ ( fynax При 08 >^тах
8 — 1 'ба При #8 < Ом,
где ограничение вычисляется по формуле
Фщаж = П* — — а [Дп? + (1 — COS ?.)], (6.40)
полученной на основе выражения (6.36).
247
Ограничение нормальной перегрузки производят исходя из
энергетических возможностей и текущего градиента потенциаль
ной энергии. В алгоритме этого ограничения учитывается приори-
тетность реализации приращения Дп₽ = Дп£, что диктует не-
обходимость представлять полное потребное приращение пере-
грузки так:
= Ди£ +
где Дпуз — сигнал, вырабатываемый в модулях управления
продольным движением самолета. Максимально допустимое из
энергетических соображений приращение нормальной перегрузки
определяется на основании выражения (6.36). Оно равно
АПуШах = (П« ~ -у- — $) — (1 — COS ?8). (6.41)
Так как всегда fl << то, сопоставляя выражения (6.41)
и (6.40), устанавливаем
Ап» щах ДПу*
Исходя из текущего значения Апг
сигнал Дпу8:
формируют ограниченный
ДИу3 —
АП» max — Ап£ При
Апга при
А Пуз
Any
max
Д^уз Д#£ max*
(6.42)
В традиционных контурах автоматического регулирования
угла тангажа, в которых обратная связь по перегрузке не вво-
дится и, следовательно, сигнал Длуз не формируется, корректи-
ровку по алгоритму (6.42) можно осуществить путем соответствую-
щего ограничения сигнала Д83 на входе контура демпфирования
(рис. 6.20, а). Для устойчивого самолета нормальной схемы этот
сигнал ограничивается снизу уровнем Д6т1п, величину которого
устанавливают исходя из соотношения, связывающего устано-
вившиеся значения Д8а и Дп^. Как показано в разд. 3.3, это
соотношение
дп₽ = (1/б>) Д6э, (6.43)
где =--------—К®2-р-> Из равенства (6.43) определяем
A6min = (АПу щах — ДПу)*
Более радикальным способом реализации ограничения (6.42)
является создание тракта регулирования нормальной перегрузки
в соответствии с входным сигналом Дпу3. Схема такого тракта,
сформированного по методу ПИК (см. разд. 6.4), изображена на
рис. 6.20, б.
248
Рис. 6.20. Схема корректировки управляющего сигнала:
а — система без обратной связи по нормальной перегрузке; 6 — система о обратной связью
по нормальной перегрузке
В соответствии с методом ПИК коэффициент передачи пози-
ционной цепи
ii = бзХ
а для /2 имеем
ц = (0,1 ... 0,5) 1г.
Рассмотренные варианты предполагают непременное автома-
тическое управление тягой и возможность автоматической кор-
ректировки управляющих сигналов в тракте руля высоты в за-
висимости от энергетических запасов самолета. Однако в практике
могут иметь место режимы полета с одновременным изменением
скорости и высоты, осуществляемые летчиком вручную. Здесь
при наличии индикаторов, с помощью которых летчик получает
информацию о текущем значении градиента полной энергии,
также можно организовать вертикальный маневр на основе прин-
ципа полной энергии.
Измеряя перегрузки пда, пу и угол атаки, можно вычислить
тангенциальную перегрузку
пха = Пх cos а — пу sin а,
которая согласно соотношению (6.35) несет информацию о потен-
циальном угле наклона траектории, а затем определить потен-
циальную вертикальную скорость
249
Ууп = V sin 0n = Vnxa.
В современных системах электронной индикации на шкалу вер-
тикальной скорости выдается индекс потенциальной вертикальной
скорости. Тем самым летчику предоставляется возможность пол-
ного ручного пилотирования самолета по траектории с требуемым
изменением высоты и скорости (набор высоты с разгоном, сниже-
ние с торможением и т. д.). Летчик перемещением РУД осуще-
ствляет изменение полной энергии, наблюдая за отклонением ин-
декса потенциальной вертикальной скорости, а перемещением
рычага продольного управления реализует нормальную пере-
грузку и тем самым изменяет текущее значение вертикальной
скорости, наблюдая за соответствующим индексом на индикаторе.
В результате осуществляется ручное перераспределение полной
энергии между потенциальной и кинетической с желаемым соот-
ношением и наглядным контролем.
ВОПРОСЫ ДЛЯ САМОПРОВЕРКИ
1. Полагая закон изменения плотности воздуха от высоты
экспоненциальным, найдите аналитическое выражение для от-
ношения рациональных значений коэффициента передачи 1Я
системы стабилизации высоты, вычисленных для режимов, отли-
чающихся только высотой полета.
2. Докажите, что при позиционном законе управления Д^ —
— hi (Нг — Н) ъ системе стабилизации высоты с обратной связью
по & обеспечивается астатизм по отношению к входному воздей-
ствию На.
3. Объясните физическую причину отличия передаточной функ-
ции самолета по индикаторной скорости от соответ-
ствующей передаточной функции по истинной скорости.
4. Сравнивая закон регулирования эквивалента тяги в си-
стеме управления скоростью полета с законом регулирования угла
тангажа в системе стабилизации высоты, установите те состав-
ляющие этих законов, которые выполняют аналогичные функции
в устранении статических ошибок.
5. Как изменится частота среза разомкнутого контура ста-
билизации заданной линии пути, если в законе управления у3 =
= —Да — /<ИгДй: а) при KVz — const уменьшать коэффициент
передачи Kz; б) при Kz — const уменьшить KVz?
6. В какую сторону (на увеличение или уменьшение) изме-
няется угол тангажа самолета, если при одновременном управле-
нии тягой двигателей и рулем высоты создалась ситуация, когда
при 7 = 0, Длв = 0 выполняется неравенство пя >• V/g?
гй
ГЛАВА 7
АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ
ПРИ ПОСАДКЕ САМОЛЕТА
7.1. ОБЩИЕ СВЕДЕНИЯ ОБ АВТОМАТИЧЕСКОЙ
ПОСАДКЕ
Одной из важнейших задач авиации является обеспе-
чение регулярности полетов. От решения этой задачи зависит
соблюдение графика движения самолетов и экономическая эффек-
тивность их использования. Повышение регулярности и безопас-
ности полетов может быть достигнуто путем автоматизации управ-
ления заходом на посадку и посадкой самолета.
Управление посадкой является сложнейшей (в силу ее высокой
ответственности) операцией пилотирования. Поэтому передача
функций пилота автоматике сопряжена здесь с решением целого
ряда трудных технических задач как в плане аппаратурной реа-
лизации, так и принципов автоматического управления.
Процесс посадки можно разбить на следующие основные фазы
(рис. 7.1) [3]:
выход на продольную ось взлетно-посадочной полосы (ВПП)
(Н = const);
снижение по глиссаде (0 == const) с постоянной скоростью;
выравнивание (уменьшение вертикальной и горизонтальной
составляющих скорости до посадочных значений);
парирование угла сноса непосредственно перед приземлением;
послепосадочный пробег;
руление.
Первые две фазы составляют этап захода на посадку, три после-
дующие — этап посадки.
Рис. 7.1. Траектория посадки в вертикальной плоскости:
/ — выход на продольную ось ВПП; 2 — снижение по глиссаде; 3 — выравнивание; 4 —
парирование сноса; 5 — пробег; 6 — руление
251
Таблица 7.1
Категория Минимальная высота видимости, м Горизонтальная видимость на ВПП, м
1 60 800
2 30 400
За 0 200
3d 0 50
Зс 0 0
Степень автоматизации этих фаз определяется условиями ви-
димости, на которые рассчитывается система посадки. В зави-
симости от условий видимости ВПП международная организация
гражданской авиации (ИКАО) определила три категории автома-
тической посадки (табл. 7.1). При посадке по категории 1 обяза-
тельной является автоматизация управления лишь на первых
двух фазах, а посадка в условиях видимости категории 3 воз-
можна только при полной автоматизации маневра приземления —
от выхода на продольную ось ВПП до руления на стоянку са-
молета.
Безопасность системы автоматической посадки определяется
ее надежностью и точностью. На эти факторы и должно быть об-
ращено особое внимание при проектировании системы. Техниче-
ская реализация требуемого уровня безопасности обеспечивается
в основном путем совершенствования законов управления и ис-
пользования высоконадежных элементов, повышения точности
измерительных систем, двухкратного или трехкратного резерви-
рования наиболее ответственных трактов системы управления.
При этом резервируется как бортовое оборудование посадки
(обычно трехкратно), так и наземные радиотехнические системы
(двухкратно).
По существу, посадка самолета является процессом управле-
ния, направленным на обеспечение требуемых значений фазовых
координат самолета в момент контакта с ВПП, т. е. процессом
управления конечным состоянием. Однако традиционным мето-
дом автоматического управления посадкой является стабилизация
некоторой жестко заданной линии снижения. В известной мере
это обусловлено составом используемых измерительных средств
и стремлением к простоте законов управления.
Наиболее распространен способ задания глиссады с помощью
наземных курсового и глиссадного маяков, формирующих равно-
сигнальные зоны соответственно в горизонтальной и вертикальной
плоскостях. Пересечение этих зон и определяет заданную линию
снижения в направлений оси ВПП с постоянным наклоном к го-
ризонту порядка 2,5 ... 3°. Отклонения от равносигнальной линии
определяются посредством бортовых приемников. С помощью
маркерных маяков, излучение которых направлено вверх, фикси-
252
руются моменты прохода определенных точек. В эти моменты
контролируется высота полета.
Сигналы курсового маяка могут использоваться для управле-
ния боковым движением вплоть до приземления. Что касается
глиссадного маяка, то управление по его сигналам происходит
только до начала выравнивания: на участке выравнивания, кото-
рый начинается над входной кромкой ВПП, траектория снижения
задается бортовым программным устройством в виде программ
Н* (/) и Н* (/). Для определения отклонений от программ вы-
равнивания применяют радиовысотомер и измеритель вертикаль-
ной скорости. В качестве последнего чаще всего используют
вариометр, корректируемый с помощью интеграла от сигнала
акселерометра. Сигнал Н может быть получен также путем диф-
ференцирования выходного сигнала радиовысотомера.
Как только самолет приземлился, автоматика каналов руля
высоты и элеронов отключается, а канал руля направления управ-
ляет пробегом самолета, используя сигнал отклонения от луча
курсового радиомаяка.
Данные летных испытаний показывают, что при переходе
от линии планирования к точке приземления летчик изменяет
скорость снижения по экспоненциальному закону. Поэтому про-
грамму выравнивания обычно выбирают в виде экспоненты
Я*(/)=Лое^-Лк, (7.1)
где время t отсчитывается от начала выравнивания.
Для вертикальной скорости снижения согласно формуле (7.1)
имеем
Н* (/) == —йохе“^. (7.2)
Параметры Ло, и и Лк, входящие в формулы (7.1) и (7.2), опре-
деляются следующим образом. Пусть Но и Но — программные
значения соответственно высоты и вертикальной скорости в на-
чале участка выравнивания, а Н*к — требуемое значение скорости
снижения в момент контакта с ВПП. Тогда, полагая в формулах
(7.1) и (7.2) t = 0, находим
Ло = Яо‘+Лк; x = --4L-
"О
При Я* — О имеем
Лк Лое~хЧ Я« == —Лохе"“х/к.
Отсюда определяем
Лк - — “ •
к х
В окончательном виде имеем
ho = Но -J- Лк: Лк — ——-трг;
253
Тяга двигателей на участке выравнивания должна медленно
уменьшаться и при достижении высоты примерно 3 м сниматься
полностью.
Итак, управление посадкой сводится к стабилизации траек-
тории снижения, заданной в вертикальной и горизонтальной
плоскостях. Стабилизация заданного траекторного движения
производится путем соответствующего изменения тангажа или
нормальной перегрузки в продольном движении и курса — в боко-
вом. При этом скорость регулируется с помощью автомата тяги,
а рулем направления устраняется скольжение.
7.2. УПРАВЛЕНИЕ ПО СИГНАЛАМ
КУРСОГЛИССАДНОЙ РАДИОСИСТЕМЫ
Рассмотрим продольный канал системы управления.
Глиссадный радиомаяк дает возможность измерить в верти-
кальной плоскости угол ег между линией маяк—самолет и задан-
ной глиссадой (рис. 7.2). Система управления строится по прин-
ципу обнуления этого угла. В зависимости от угла ег формируется
заданное значение тангажа или перегрузки на входе соответствую-
щей системы регулирования. В дальнейшем будем рассматривать
посадки с регулированием угла тангажа.
Найдем соотношение между углом 8Г и ошибкой Д0 в угле
планирования. Из рис. 7.2 имеем в линейном приближении
ДЯр = V Д9;
(7.3)
где ДЯГ — условная высота над глиссадой (отсчитывается по
перпендикуляру к глиссаде); D = £>0 — V (t — /0) — текущее рас-
стояние до маяка.
Значение D в соотношениях (7.3) зависит от времени. Однако
на интервале времени,, сравнимом с длительностью переходного
процесса по углу ег, расстояние D можно считать практически
Глиссадный
маяк
Рис. 7.2. Схема движения по глиссаде
254
Система регулирования тангажа
Рис. 7.3. Структурная схема стабилизации глиссады
неизменным. Произведем при этом допущении преобразования
Лапласа соотношений (7.3):
р ХНГ(р) = V А0(р); ег(р) = -^-ДЯг(р).
Отсюда получим
8г(р) V/D
де (р) р
Теперь можно составить структурную схему системы управле-
ния. При пренебрежении динамикой измерителей: эта схема имеет
вид, представленный на рис. 7.3. На схеме Rr (р) обозначен опе-
ратор закона траекторного управления. При исследовании траек-
торного движения систему регулирования тангажа можно пред-
ставлять следующей приближенной передаточной функцией:
(Р) = M3(p) = Tlp2 + 2g2T2p+l • (7-4)
С учетом функции (7.4) передаточную функцию разомкнутого
контура стабилизации глиссады можно записать в виде
1Граэ (р) = /?г (р) —1 + зд(T2^+2g2T2p+1) • (7-5)
Из сравнения соотношений (7.5) и (6.2) видно, что рассматри-
ваемый контур отличается от контура стабилизации высоты лишь
наличием множителя 1/D (имеем в виду, что Кн = V). Из-за
этого множителя коэффициент усиления контура стабилизации
глиссады возрастает по мере уменьшения расстояния D до-маяка.
Поэтому параметры оператора 7?г (р) следует выбирать с учетом
требований устойчивости при минимальном рабочем расстоянии!).
Для уменьшения ошибок от постоянно действующих возмущений
в закон стабилизации глиссады помимо позиционного члена вво-
дят интеграл. Кроме того, производится фильтрация радиошумов,
присутствующих в сигнале ег.
Оператор (р) имеет следующую структуру:
где Уф (р) — передаточная функция фильтра радиошумов.
ЯВ6
Иногда для выравнивания общего усиления контура коэффи-
циент ir регулятора делают переменным, изменяя его, например,
в функции высоты, измеряемой радиовысотомером. Если такая
регулировка не производится, то на больших расстояниях от
маяка управление происходит замедленно.
Общее быстродействие можно увеличить, вводя в закон управ-
ления сигнал производной, т. е. выбирая передаточную функцию
регулятора в виде
/ \
*г(р) = \ъ+Ър+-^)Уф(р)-
По достигаемому эффекту здесь имеется полная аналогия с рас-
смотренным в разд. 6.2 контуром стабилизации высоты.
Перейдем теперь к рассмотрению бокового движения.
Кинематика бокового движения самолета при действии ветра
раскрывается схемой, приведенной на рис. 7.4. Соотношение
ДТ = Дф + УС, (7.6)
где УС — угол сноса от бокового ветра, следствие предположе-
ния, что угол скольжения непрерывно устраняется рулем на-
правления.
Из схемы, изображенной на рис. 7.4, находим соотношения,
связывающие боковое линейное смещение Дз и угол ск, определяе-
мый курсовым маяком. В линейном приближении эти соотно-
шения можно записать в виде
Д£=УПДТ; вк = -^-, (7.7)
где Уп — путевая скорость.
«Замораживая» расстояние D, найдем на основании (7.7)
передаточную функцию от ДТ к ек:
ек(Р) _ (7 я\
ДУ(Р) - р
Угол вк между линией маяк—самолет и осью ВПП является
мерой смещения центра масс самолета от оси ВПП. Для устранения
бокового смещения производится соответствующее управление по
256
Система регулирования крена
Рис. 7.5. Структурная схема управления боковым движением
крену. При рассмотрении контура стабилизации заданной линии
пути (см. разд. 6.5) было установлено, что для обеспечения устой-
чивости в закон управления необходимо вводить сигнал произ-
водной. Это требование остается в силе и для контура управления
боковым движением по сигналу углового рассогласования 8К ==
= &z/D. Производная в закон формирования заданного крена у3
может вводиться путем дифференцирования сигнала ек или путем
создания обратной связи по углу рыскания Дф, отсчитываемому
относительно оси ВПП. Ниже рассматривается этот второй путь
обеспечения устойчивости.
Структурная схема системы управления боковым движением,
составленная с учетом формул (7.6), (7.8), приведена на рис. 7.5г.
Здесь (р) обозначен оператор регулятора траекторного дви-
жения.
Из структурной схемы получаем соотношение
?3 (р) 8к “ ity (Д1? УС) ~ RK (р) ек ity -р- psK 1фУС,
из которого видно, что введение обратной связи по курсу экви-
валентно дифференцированию сигнала 8К. Выбор коэффициента ц
производится частотным методом на основе передаточной функции
разомкнутого контура регулирования Дф:
Wla»(p) = i*^W4(p),
где (р) — — передаточная функция системы регули-
рования крена.
Приведенное выражение передаточной функции отличается от
выражения (5.31) отсутствием множителя (1 4- 7\ср), так как
здесь не учитывается влияние на Дф угловой скорости (ол.
1 Здесь также считаем измерители идеальными и пренебрегаем множите-
лем cos а в передаточной функции от у к Дг.
257
Для передаточной функции системы, разомкнутой по внешней
обратной связи, имеем следующее выражение:
ц/ (п)
П/к (п\____/? п У* Y_______________ = /? (г)}______(р)______________
^раз(р) Кк Р g/y Rk(P} p[p + ^g/VWy(p)] ~
1 ’ w V \Р'
= RK .р)
g/D_________.
Р[ Wy(p) +
Представляя, как это было сделано в разд. 6.4, Wy (р) в виде
передаточной функции колебательного звена, для И7раз (р) по-
лучаем следующее выражение:
,№W>+,W/V]
Ви!цим, что с введением обратной связи по Дф система приобретает
структурную устойчивость.
Так же, как и в продольном движении, угловая ошибка 8К,
соответствующая одному и тому же линейному смещению Дг по
мере приближения к маяку, увеличивается. В результате запасы
устойчивости уменьшаются. Система становится чрезмерно чув-
ствительной к боковой ошибке. Для устранения этого явления
прибегают к регулированию коэффициента усиления регулятора,
например, в функции высоты.
Если управление боковым траекторным движением произво-
дить только по отклонению ек, то при боковом ветре неизбежно
будет возникать смещение относительно оси ВПП. Это следует из
рассмотрения структурной схемы (см. рис. 7.5). Записав выраже-
ние для передаточной функции от УС к е :
ек (р) _______________________________
устанавливаем, что при RK (р) = iK по отношению ко входу УС
система астатизмом не обладает: ст^Т"** ^ля пРиДания
ей требуемого астатизма управление необходимо вести по откло-
нению и интегралу от него. При таком законе управления по-
правка на угол сноса в команде на изменение курса вырабаты-
вается за счет интегрального члена, и самолет движется по осевой
линии ВПП.
Оператор RK (р) включает в себя также передаточную функцию
Уф (р) фильтра радиошумов. В результате имеем
Як (р)=(»к+-^-)гф(р).
258
При посадке с боковым ветром продольная ось самолета разво *
рачивается относительно оси ВПП на угол, равный углу сноса.
Перед самым приземлением, на высоте 3 ... 6 м, угол сноса пари-
руется путем доворота по курсу с помощью руля направления.
Это делается для устранения бокового удара при касании ВПП.
Следовательно, на заключительной фазе участка выравнивания
и при пробеге самолет движется со скольжением.
Наряду с автоматическим управлением в системах посадки
может быть предусмотрена возможность полуавтоматического
пилотирования. В этом случае летчик берет на себя функции ста-
билизации заданного тангажа в продольном движении и заданного
крена в боковом. Управление производится по командам директор-
ного прибора, на стрелки которого подаются сигналы требуемого
отклонения рычагов управления.
7.3. АВТОМАТИЧЕСКОЕ ВЫРАВНИВАНИЕ
Основными задачами продольного управления на уча-
стке выравнивания являются уменьшение вертикальной скорости
до допустимых значений и обеспечение контакта с ВПП с мини-
мальным разбросом по дальности. Решение этих задач можно
свести к стабилизации заданных временных программ выравни-
вания.
Синтез такой системы стабилизации имеет ряд особенностей,
обусловленных спецификой этапа выравнивания, а именно —
его нестационарностью и кратковременностью. По этой причине
подход к синтезу, основанный на разделении траекторного и угло-
вого движений и обращении к частотным методам, является не-
приемлемым. Кроме того, нужно учитывать, что стабилизация
движения выравнивания совершается на конечном интервале
времени, причем особенно важно минимизировать отклонения от
программ в момент касания ВПП.
Одним из методов синтеза, наиболее полно отвечающих спе-
цифике рассматриваемой задачи, является метод аналитического
конструирования регулятора [10]. Суть этого метода состоит
в следующем.
Рассмотрим управляемое движение объекта, описываемое ли-
нейной системой уравнений
и = А (/) х + b (/) и,
где х — вектор состояния; и — скалярный параметр управле-
ния; А и b — соответственно матрица и вектор-столбец переменных
коэффициентов.
Задачу управления можно поставить так. На фиксированном
отрезке времени [0, Т ] необходимо обеспечить выведение объекта
из заданной области начальных состояний х (0) в точку х (Г) = 0
с минимальной ошибкой. При этом требуется, чтобы:
259
1) фазовая траектория х (/) не имела больших отклонений
от точки х (Т) = 0;
2) интенсивность управляющего воздействия, характеризуе-
мого параметром и, не была чрезмерно большой.
Перечисленные требования математически выражаются кри-
терием
т
J = хт (Т) Qx (7) + J (xTGx 4- s2d2) dt, (7.9)
о
где Q и G — положительные матрицы весовых коэффициентов;
s — скалярный весовой коэффициент.
Требуется найти закон управления и — и° (х), минимизи-
рующий критерий (7.9).
Установлено, что оптимальным является управление с линей-
ными обратными связями вида
t° = -Кт t х; (7.10)
кт(0 =4-в1(0П(а (7.П)
где П (/) — есть решение матричного дифференциального урав-
нения Риккати
П = — ПА - АТП + 4" ПТВВТП - G, (7.12)
удовлетворяющее граничному условию П (Г) = Q.
Рассмотрим процедуру аналитического конструирования ре-
гулятора применительно к задаче автоматического выравнивания.
Первым шагом является программирование фазовой траекто-
рии. Оно заключается в определении программы 6в (f) отклонения
руля высоты, обеспечивающей снижение с заданным законом
изменения высоты, т. е. по экспоненте (7.1). При этом задается
программа дросселирования двигателя (скачкообразное или плав-
ное уменьшение тяги, обеспечивающее требуемое снижение ско-
рости). Программирование траектории представляет собой само-
стоятельную задачу, которая выходит за рамки данного курса.
Она решается на основе приведенной ниже полной системы урав-
нений продольного движения (фдв == 0):
Г ' 1 U <*z , бе “I
= |_т2 (а) + ЬАпгг ~ + /и26в J 5
Vy = g (пха sin0 4- пуа cos 0 — 1);
<> = о)2;
Я= V,;
V = g(nxa- slnQ); (7.13)
««« = [4 cos а—СЖ(В (а) ;
260
nUa = [p Slna + CPfl(a) + n®6B;
a = *& — 0;
0 = arcsin .
После того как программа отклонения руля высоты SB (О
найдена и определены соответствующие ей программы Я* (?),
Vy (О, 6* (0, (0, °z (0» производится линеаризация уравне-
ний (7.13) относительно программной траектории. Пренебрегая
влиянием малых вариаций скорости, получаем
Awz аи а12 ais й14 Acoz ~br~
d AVy 0 а22 023 «24 АУР b2 A6B
~dT — 1 0 0 0 A# + 0
_АЯ _ _ 0 1 0 0 _ АЯ _ _0 _
Здесь появление ненулевых коэффициентов при ДЯ обуслов-
лено зависимостью экранного эффекта земли от высоты.
Следующий шаг состоит в конструировании стабилизирующих
обратных связей, т. е. в замыкании управляющего воздействия
Дбв на отклонения Acoz, ДУу, Д-ft, ДЯ. Эта операция проводится
в соответствии с изложенной процедурой аналитического кон-
струирования. Самым тонким моментом здесь является задание
матриц весовых коэффициентов. Именно в этом звене строго фор-
мализованной процедуры осуществляется вмешательство в нее
исследователя. Матрицу Q проще всего выбирать в классе диаго-
нальных матриц вида
-------------(Г
Q= А ,
?33
_ 0—-----------<7^4 _
При этом первое слагаемое в критерии (7.9) превращается во взве-
шенную сумму квадратов конечных значений фазовых координат
хт (Т) Qx (Т) = (Г) + (Г) + (Цз (Т) х| + &£ (Г).
В матрице G целесообразно все элементы, за исключением 944,
соответствующего ДЯ2, принять равными нулю. Тогда задача
назначения весовых матриц сводится к выбору шести коэффи-
циентов 9п, 922, 9зз, <?44, s2. Они выбираются таким образом, чтобы
было удовлетворено требование ми нимального отклонения фазо-
вых координат в расчетный момент приземления Т при сравни-
тельно небольшом расходе управляющего воздействия Дбв.
261
В результате решения уравнений (7.12) (их в данном случае
всего 10: матрица П симметричная) по формуле (7.11) находится
вектор-строка коэффициентов обратных связей
К’=[^ Л» Ks Kt].
Наконец, согласно формуле (7.10) устанавливаем
бв = Kt t w2 - Kt (t) V„-K3t $-K<t \H.
Поскольку ~ 0, AVj, = ДЯ, то приведенное выше выра-
жение можно преобразовать к виду
6» = 6; (t) - Ki 6г + Кз [(О* - О) + J- (Ki + Кгр\ н* - Я)].
Это и есть закон управления выравниванием. Как видим, наряду
с созданием обратных связей по высоте, углу тангажа и угловой
скорости <dz, необходимо формировать программные сигналы
6В* (0, О* (0, я* (О-
Автоматическое управление выравниванием по экспоненциаль-
ному закону (7.1) можно организовать и без использования вре-
менных программ. В таком случае следует обратиться к зависи-
мости вертикальной скорости от высоты, которая имеет место на
желаемой траектории приземления. Согласно выражениям (7.1) и
(7.2) эта зависимость имеет вид
Я (t) = ~хЛое~х* = - х [Н t + Лк] •
Отсюда устанавливаем, что если текущие значения высоты и вер-
тикальной скорости Vy удовлетворяют соотношению
У, + х(Я + Лн) = 0, (7.14)
то выравнивание происходит по заданной траектории (без при-
вязки ее ко времени).
Выполнение условия (7.14) можно обеспечить путем управле-
ния отклонением перегрузки Длу, направленного на обнуление
сигнала
о = У, + х(Я + Лк).
Так как на участке выравнивания Vy < 0, Н > 0, то неравенству
о > 0 должна соответствовать управляющая перегрузка Дпу < 0.
Отсюда получаем следующий простейший, позиционный, закон
формирования сигнала заданной перегрузки
= — inv [Vv + х (Н + hK)].
Этот сигнал подается на вход системы автоматического регули-
рования, аналогичной «ядру» перегрузочного варианта автопи-
лота высоты, рассмотренного в разд. 6.2.
262
ВОПРОСЫ ДЛЯ САМОПРОВЕРКИ
1. Полагая в передаточной функции разомкнутого контура
стабилизации глиссады Rr = ir, установить диапазон частот,
в котором асимптотическая ЛАХ соответствующей частотной
характеристики имеет наклон —20 дБ/дек.
2. Покажите на основе соответствующих передаточных функ-
ций, что в системе управления боковым движением самолета по
сигналам курсового маяка астатизм к действию бокового ветра
обеспечивается при введении сигнала интеграла от углового
рассогласования 8К.
3. Чему равны значения угла крена, углового рассогласова-
ния Sr и угла сноса при автоматической посадке с боковым ветром,
если закон управления боковым движением — изодромный,
а скольжение устраняется рулем направления?
4. Сколько программных составляющих входит в закон авто-
матического управления выравниванием и как они определяются?
5. Запишите дифференциальное уравнение, которому удовле-
творяет функция времени вида зависимости (7.1).
СПИСОК ЛИТЕРАТУРЫ
1. Блейклок Дж. Г. Автоматическое управление самолетами и ракетами.
М.: Машиностроение, 1969. 286 с.
2. Боднер В. А. Системы управления летательными аппаратами. М.: Маши-
ностроение, 1973. 504 с.
3. Бородин В. Т., Рыльский Г. И. Управление полетом самолетов и верто-
летов. М.: Машиностроение, 1972. 240 с.
4. Бюшгенс Г. С., Студнев Р. В. Аэродинамика самолета. Динамика про-
дольного и бокового движения. М.: Машиностроение, 1979. 350 с.
5. Единые нормы летной годности гражданских транспортных самолетов
стран—членов СЭВ. Межведомственная комиссия по нормам летной годности
гражданских самолетов и вертолетов СССР, 1985. 470 с.
6. Итоги науки и техники. Авиастроение, том 9. М.: изд. ВИНИТИ, 1986.
266 с.
7. Колесников К« С., Сухов В. Н. Упругий летательный аппарат как объект
автоматического управления. М.: Машиностроение, 1974. 268 с.
8. Красовский А. А. Системы автоматического управления полетом и их
аналитическое конструирование. М.: Наука, 1973. 558 с.
9. Куо Б. Теория и проектирование цифровых систем управления. М.:
Машиностроение, 1986. 448 с.
10. Летов А. М. Динамика полета и управление. М.: Наука, 1969. 359 с.
11. Михалев И. А., Окоемов Б. Н., Чикулаев М. С. Системы автоматического
управления самолетом. М.: Машиностроение, 1987. 240 с.
12. Системы цифрового управления самолетом/Александров А. Д.,
Андреев В. П., Кейн В. М. и др. Под ред. Александрова А. Д., Федорова С. М.
М.: Машиностроение, 1983. 223 с.
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
А
Автомат продольного управления 99
— путевой устойчивости 138
— регулировки управления 104
— тяги 5, 15, 123
Автопилот 4, 15, 192
Активные подсистемы управления 8
Б
Безопасность полета 7, 39
Безотказность практическая 9, 41
Бортовая цифровая вычислительная машина 6, 9, 34
Бустерное управление 7, 25
В
Выравнивание самолета автоматическое гибкое 262
-------- по программе 259
Вычислительные устройства аналоговые 33
-----цифровые 33
Д
Демпфер крена 131
-----, оптимальная ориентация вектора управляющего момента 133
Демпфер рыскания 127
-----, оптимальная ориентация DYC 129
Демпфер тангажа 91
Демпфирование упругих колебаний конструкции 8, 176
Директорный (командный) прибор 18
Дистанционное управление 30
Добротность сервопривода 73
3
Загружатель рычага управления 27
Заход на посадку 251
--------, автоматическое управление боковым движением 256
--------, автоматическое управление продольным движением 254
И
Избыточность функциональная системы управления 23, 43
Интегрированный бортовой комплекс 6
Информационная модель полета 17, 45
К
Командный (директорный) прибор 18
Контур стабилизации 14, 21
265
Контур устойчивости и управляемости 12, 21
Контур целенаправленного управления траекторией 16, 21
Критические режимы полета 140
Л
Летная операция 11
М
Механизм согласования 193
Модель бустера 75
— летчика 83
— линейная бокового движения самолета 62
----продольного короткопериодического движения самолета 51
----траекторного движения самолета 56
— изодромного сервопривода 74
— сервопривода с позиционной (жесткой) обратной связью 73
----со скоростной обратной связью 74
Мягкое сопряжение режимов управления 31
Н
Навигационные параметры 16
Надежность автоматики 7, 41
Непосредственное управление аэродинамическими силами 9, 178
-----------, новые формы движения 181
-----------1 повышение быстродействия 179
-----------------------------------------9 раздельное управление фазовыми координатами 180, 190
-----------9 синтез 182
О
Отказобезопасность 40
П
Пилотажно-навигационный комплекс 19
Повышение комфорта экипажа при полете в турбулентной атмосфере 168
Посадка самолета, основные фазы 251
Приведение самолета в горизонтальный полет 16, 193
Привод рулевой 24
Псевдочастота 150
Р
Развязка управляющих воздействий 183
Регулирование курса накренением самолета 211
----плоским разворотом 208
— тяги 229
— угла крена 201
----тангажа 194
Резервирование систем управления 8, 41
С
Сервопривод 24
— , включение в тракт управления параллельное 29
—,-----------последовательное 29
Система управления 4
Система штурвального управления 19
Снижение нагрузок на конструкцию 8, 160
-----------крыла при маневре 163
266
----------от ветровых возмущений 177
Стабилизация высоты в перегрузочном варианте 222
--------тангажном варианте 217
Т
Триммерный механизм 27
Триммирование автоматическое 31, 41
Турбулентность атмосферная 167
У
Уменьшение запаса устойчивости самолета 161
Управление полетом по заданной линии пути 238
---самолетов 4
--------автоматическое 23
--------по командному прибору 23
--------полуавтоматическое 24
— пространственным траекторным движением самолета интегрированное 243
— скоростью путем регулирования тяги 228
— Уравнения движения самолета как твердого тела 47
— продольного движения упругого самолета 67
X
Характеристики устойчивости и управляемости 7
----------1 оценки летчика 79
----------f уровни 77
Ц
Цифровая система управления, квантование по времени 37, 153
--------,-----уровню 34, 157
--------, модель 145
--------9 резервирование 36
--------, структура и циклограмма 34
--------, цифровой фильтр 150
Э
Экстраполятор нулевого порядка 146
Этапы полета 11
ОГЛАВЛЕНИЕ
Предисловие ....................................................... 3
Введение........................................................ 4
Глава 1. Задачи и средства управления полетом....................... 11
1.1. Общая характеристика процесса управления............ 11
1.2. Контур устойчивости и управляемости.............. 12
1.3. Контур стабилизации.............................. 14
1.4. Контур целенаправленного управления траекторией. . . 16
1.5. Комплексирование системы управления самолета. ... 19
1.6. Исполнительная часть системы управления самолета. . . 24
1.7. Включение автоматических систем в тракты управления
самолетом ................................................. 29
1.8. Бортовые вычислительные устройства.................... 33
1.9. Основные аспекты безопасности полета.................. 39
Вопросы для самопроверки.............................. 46
Глава 2- Математическая модель самолета как объекта управления 47
2.1. Общие уравнения движения самолета..................... 47
2.2. Уравнения продольного возмущенного движения самолета 48
2.3. Уравнения бокового возмущенного движения самолета. . 62
2.4. Уравнения продольного короткопериодического движения
самолета с учетом упругих колебаний конструкции... 67
2.5. Модели приводов системы управления............... . 72
Вопросы для самопроверки............................. 75
Глава 3. Улучшение устойчивости и управляемости самолета. . . 76
3.1. Требования к устойчивости и управляемости самолета . . 76
3.2. Демпфер тангажа ...................................... 91
3.3. Автомат продольного управления................... 99
3.4. Влияние упругих деформаций конструкции на динамику
самолета с САУ........................................ 112
3.5. Длиннопериодическое движение и балансировка самолета 121
3.6. Анализ особенностей бокового движения............ 124
3.7. Демпфер рыскания .................................... 127
3.8. Демпфер крена ................................... . 131
3.9. Перекрестная связь руля направления с органами попе-
речного управления........................................ 135
3.10. Автомат путевой устойчивости........................ 138
3.11. Критические режимы полета. Ограничение предельных
режимов................................................... 140
3.12. Особенности динамики самолета с БЦВМ................ 145
Вопросы для самопроверки............................. 158
Глава 4« Улучшение летных характеристик самолета средствами авто-
матического управления ............................................ 160
4.1. Проектирование самолета с учетом возможностей автома- -
тического управления...................................... 160
268
4.2. Уменьшение запаса статической устойчивости самолета 161
4.3. Снижение маневренной нагрузки крыла................... 163
4.4. Парирование воздействий ветра......................... 167
4.5. Непосредственное управление аэродинамическими силами 178
Вопросы для самопроверки............................... 191
Глава 5. Автоматическое управление угловым движением самолета 192
5.1. Структура системы автоматического управления........ 192
5.2. Регулирование угла тангажа............................ 194
5.3. Регулирование угла крена.............................. 201
5.4. Регулирование курса................................... 207
Вопросы для самопроверки............................... 214
Глава б» Автоматическое управление движением центра масс самолета 216
6.1. Общие сведения........................................ 216
6.2. Стабилизация высоты................................... 217
6.3. Стабилизация скорости полета.......................... 224
6.4. Управление скоростью полета путем регулирования тяги
двигателей................................................. 228
6.5. Управление полетом по заданной линии пути............. 238
6.6. Интегрированное управление траекторным движением са-
молета .................................................... 243
Вопросы для самопроверки............................... 250
Глава 7. Автоматическое управление при посадке самолета....... 251
7.1. Общие сведения об автоматической посадке.............. 251
7.2. Управление по сигналам курсоглиссадной радиосистемы 258
7.3. Автоматическое выравнивание........................... 259
Вопросы для самопроверки............................... 263
Список литературы................................................... 264
Предметный указатель................................................ 265
УЧЕБНОЕ ИЗДАНИЕ
Гуськов Юрий Павлович,
Загайнов Герман Иванович
УПРАВЛЕНИЕ ПОЛЕТОМ САМОЛЕТОВ
Редактор А. А. Хрусталева
Художественный редактор В. В. Лебедев
Технический редактор Н. Н. Скотникова
Корректор Л. А. Ягупьева
ИБ № 6223
Сдано в набор 25.04.91. Подписано в печать 26.08.91. Формат 60X90Vie.
Бумага офсетная № 2. Гарнитура литературная. Печать офсетная. Усл. печ. л. 17,0.
Усл. кр.-отт. 17,0. Уч.-изд. л. 17,15. Тираж ^*00 экз. Заказ 278. Цена '
Ордена Трудового Красного Знамени издательство «Машиностроение»,
107076, Москва, Стромынский пер., д. 4
Отпечатано в типографии НИИ «Геодезия»
г. Красноармейск Московской области з. 181 т