/
























































































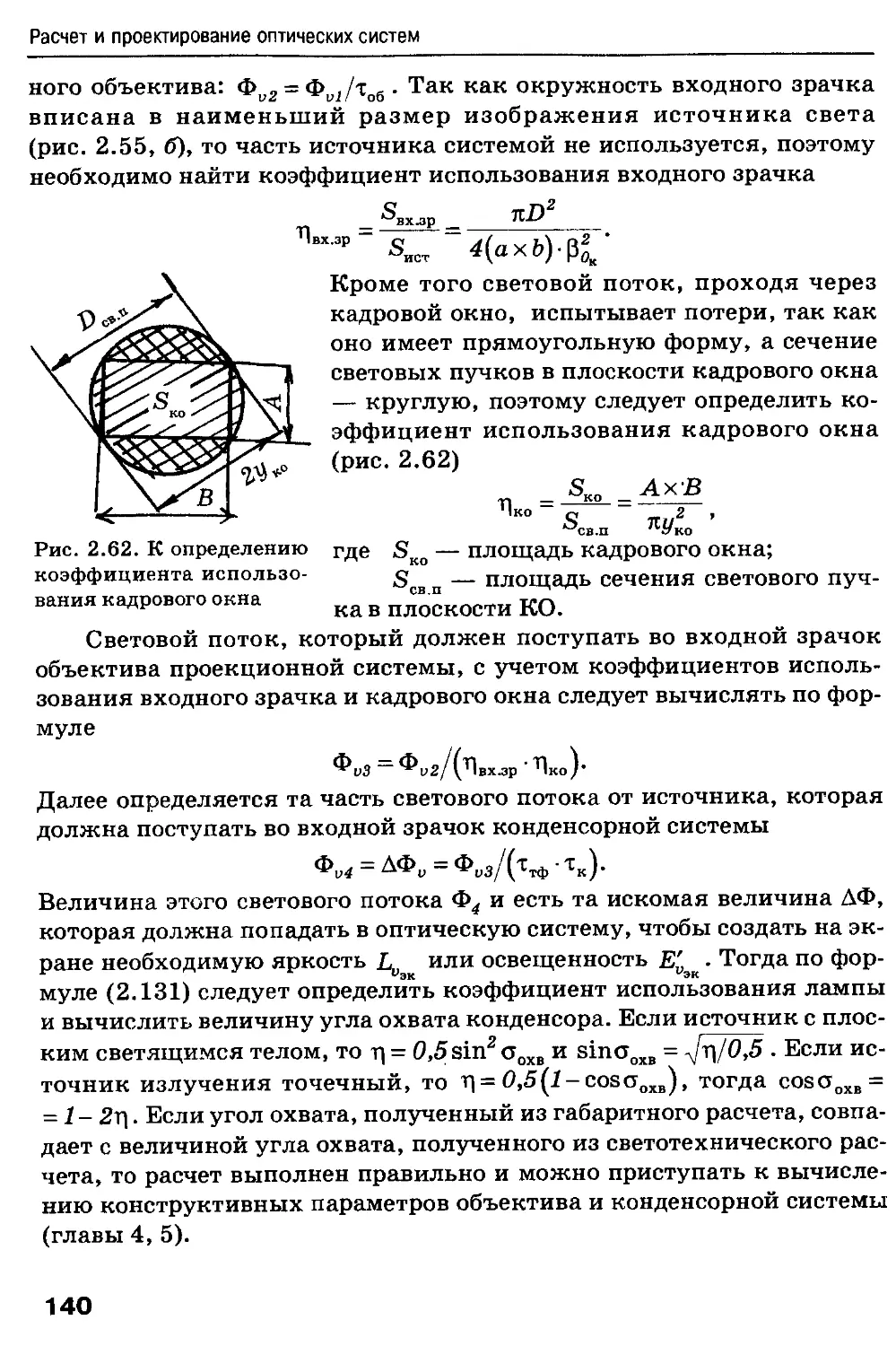























































































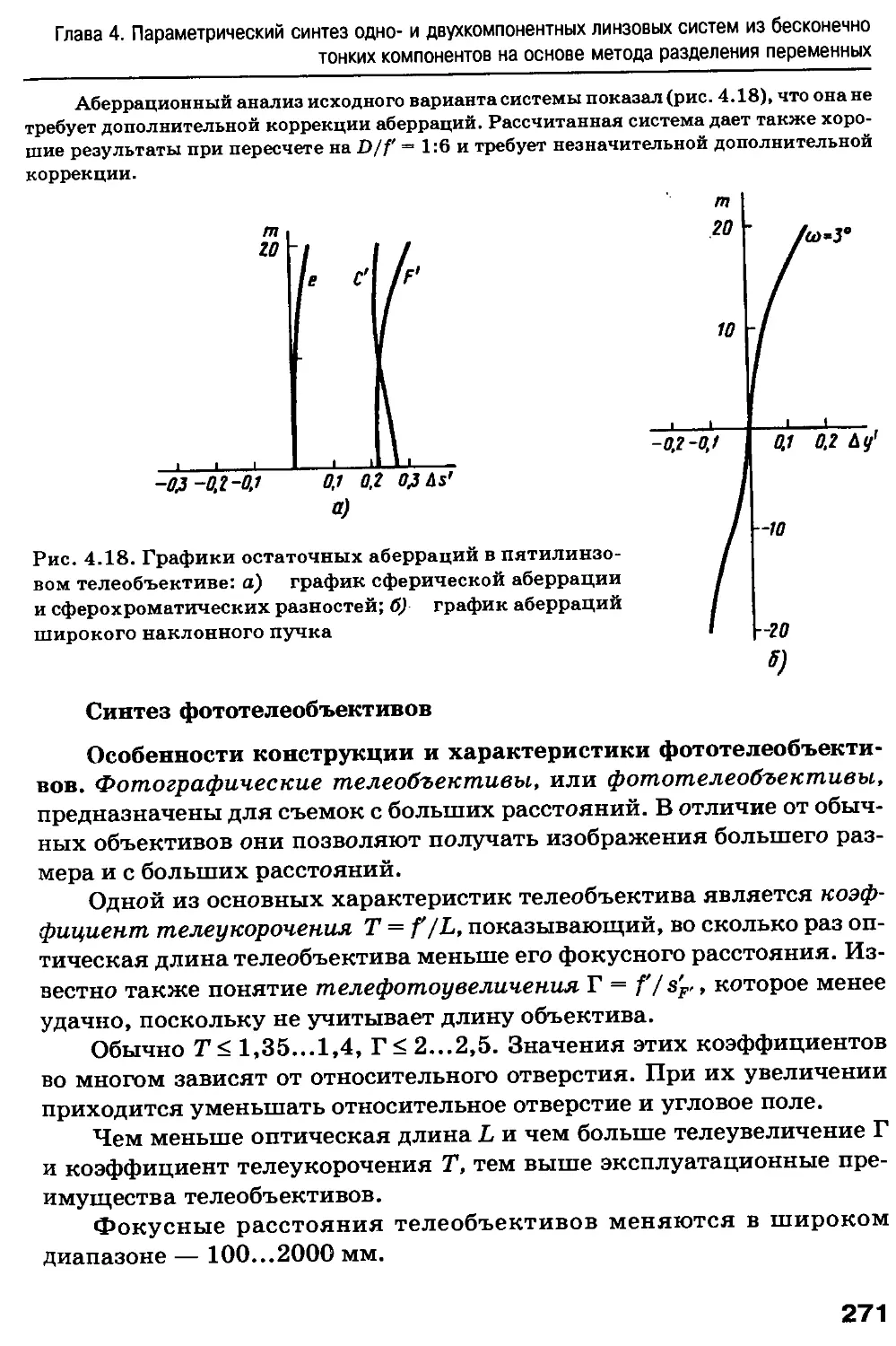






























































































































































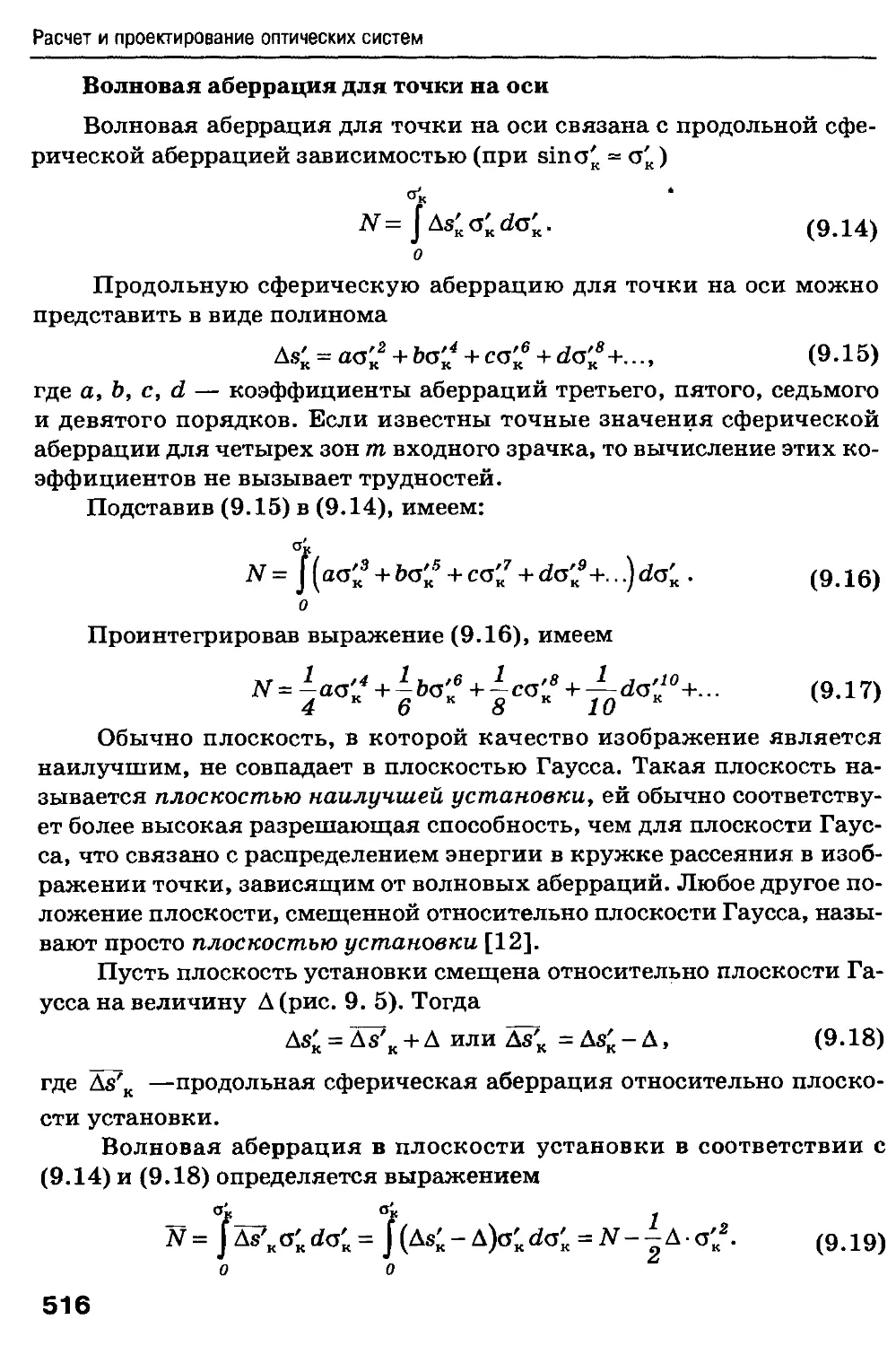
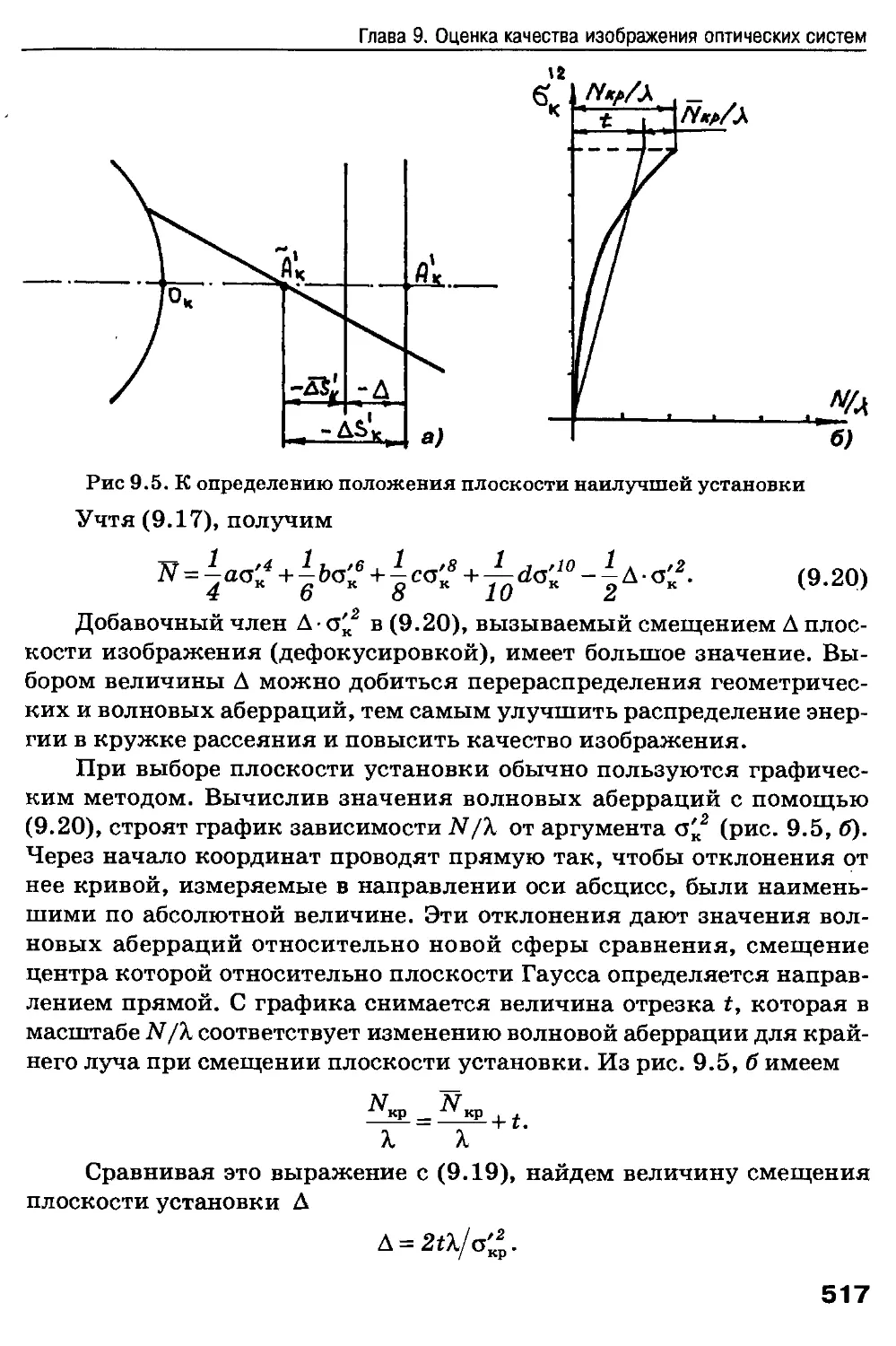













































Text
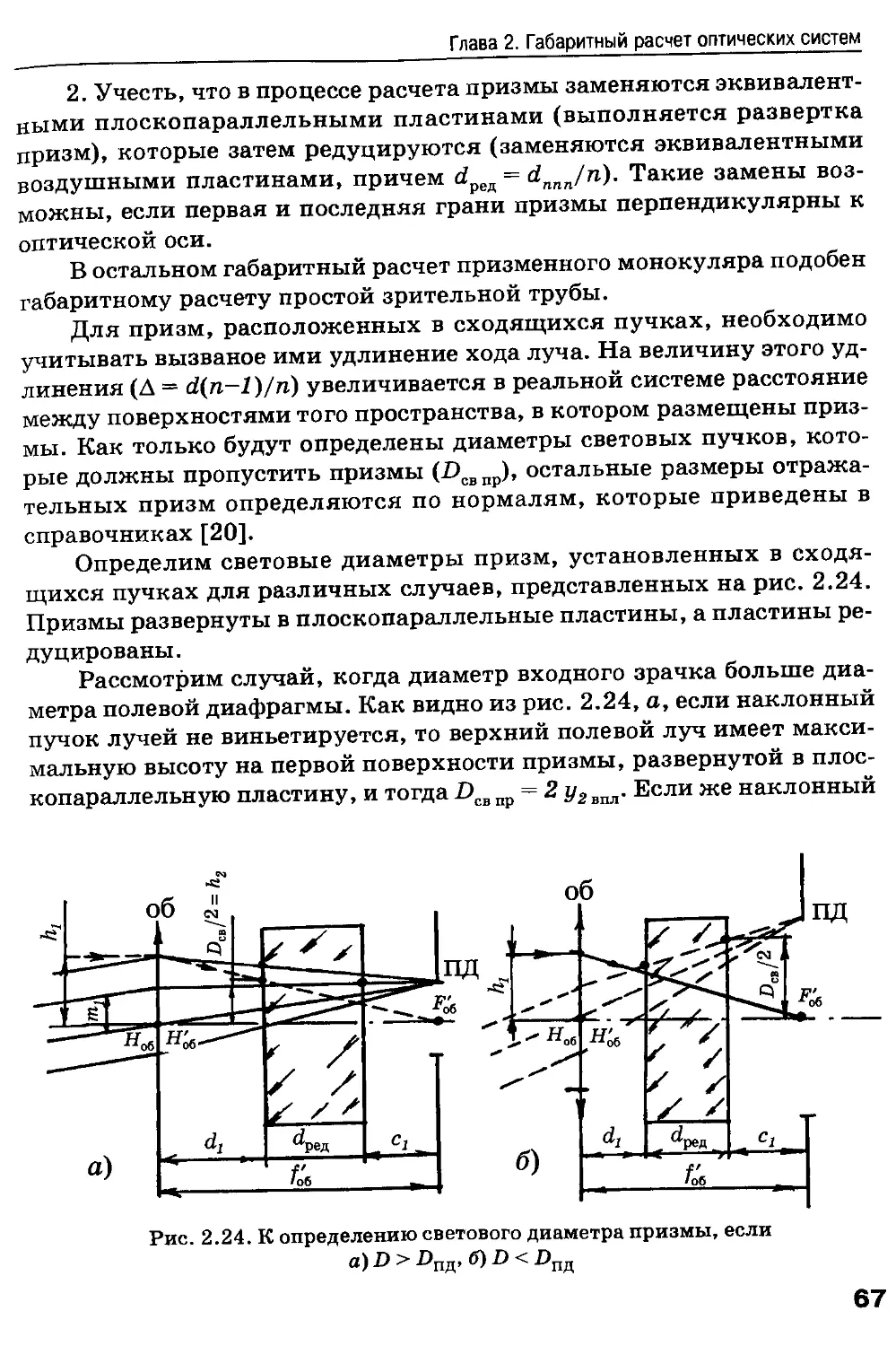
федеральная целевая программа
ГОСУДАРСТВЕННАЯ ПОДДЕРЖКА ИНТЕГРАЦИИ ВЫСШЕГО ОБРАЗОВАНИЯ
И ФУНДАМЕНТАЛЬНОЙ НАУКИ НА 19Э7-2000 ГОДЫ»
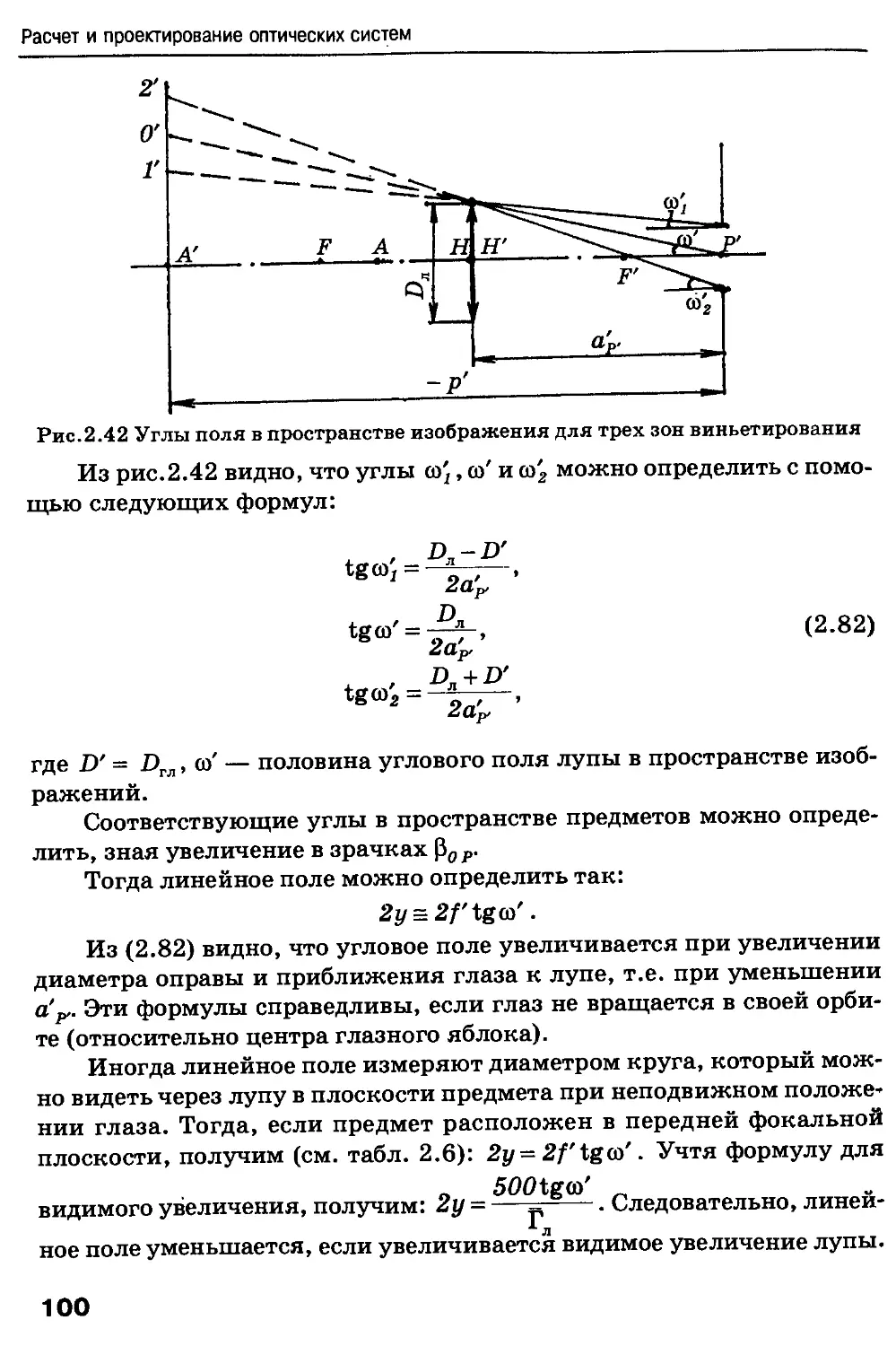
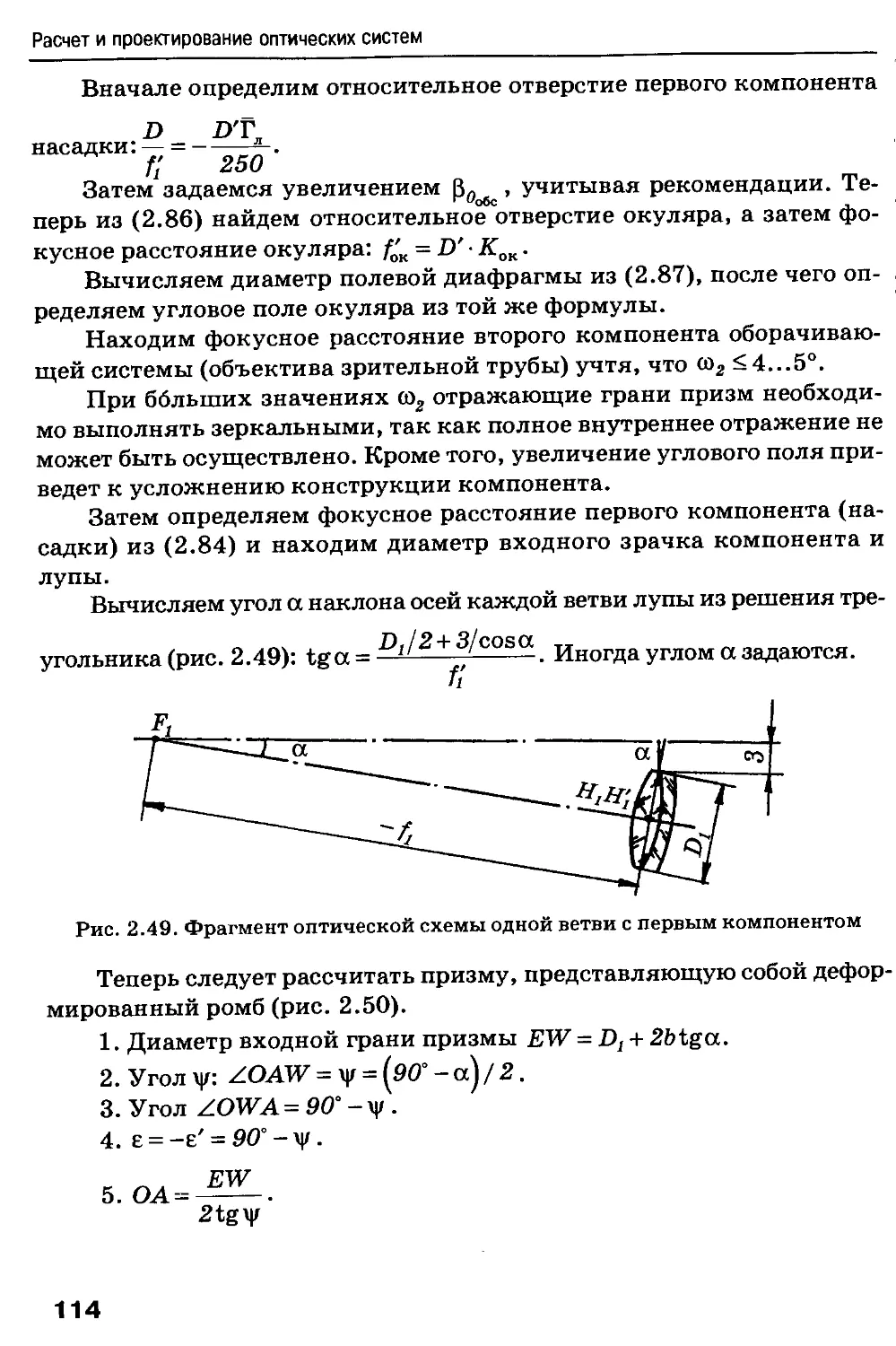
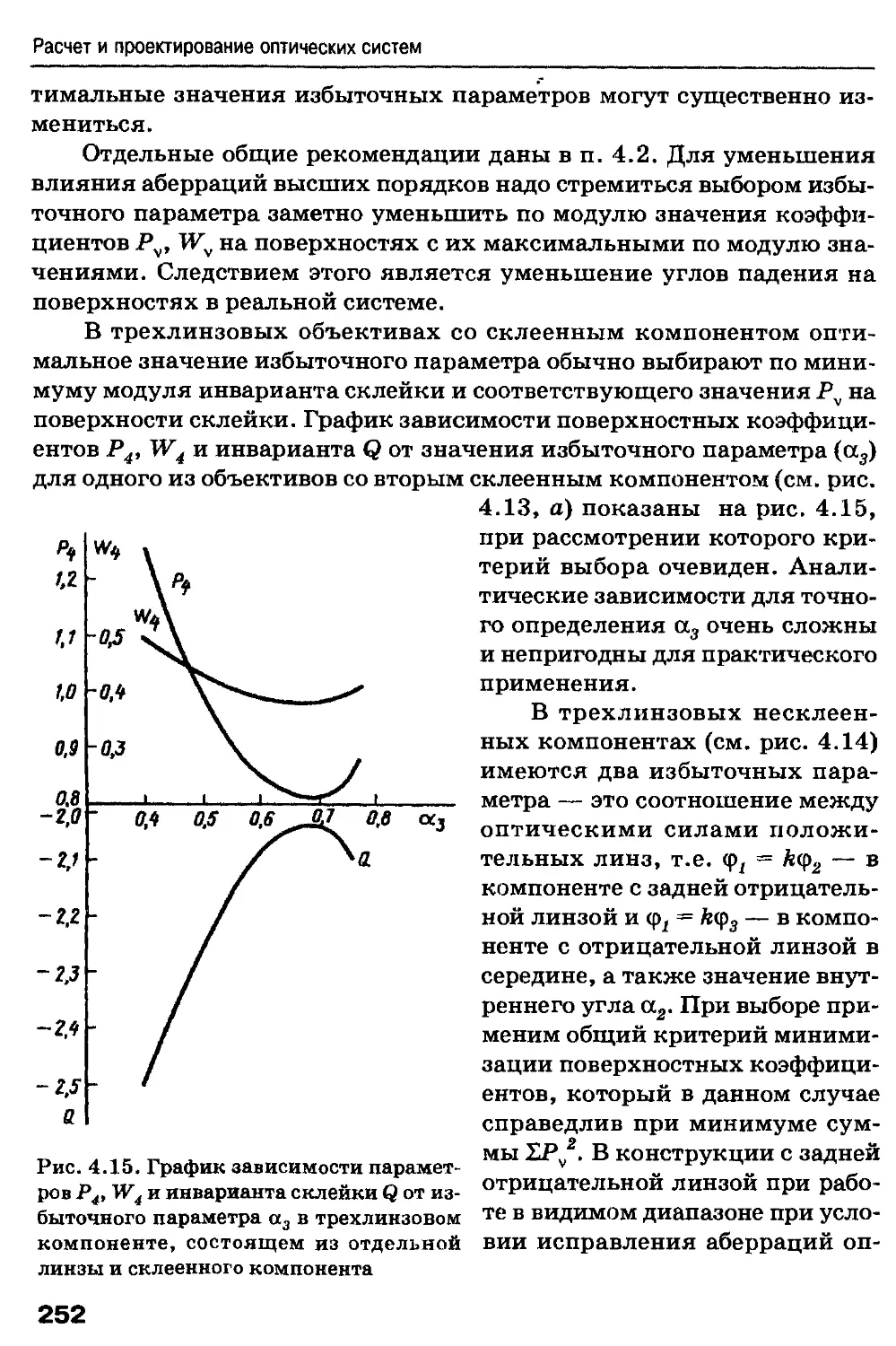
Л.А. Запрягаева, И.С. Свешникова
РАСЧЕТ
И ПРОЕКТИРОВАНИЕ
ОПТИЧЕСКИХ СИСТЕМ
ФЕДЕРАЛЬНАЯ ЦЕЛЕВАЯ ПРОГРАММА
«ГОСУДАРСТВЕННАЯ ПОДДЕРЖКА ИНТЕГРАЦИИ ВЫСШЕГО ОБРАЗОВАНИЯ
И ФУНДАМЕНТАЛЬНОЙ НАУКИ НА 1997-2000 ГОДЫ»
Л.А. Запрягаева, И.С. Свешникова
РАСЧЕТ И ПРОЕКТИРОВАНИЕ
ОПТИЧЕСКИХ СИСТЕМ
Рекомендовано Министерством образования Российской Федерации
в качестве учебника для студентов высших учебных заведений,
обучающихся по направлению «Оптотехника» и специальности
«Оптико-электронные приборы»
Москва • «Логос» • 2000
УДК 681.7.002 (075.8)
ББК 22.34я73
3-30
Рецензенты:
Доктор технических наук Н.П„ Заказнов
Кафедра «Оптико-электронные приборы научных исследований»
(Московский государственный технический университет им. Н.Э. Баумана)
Доктор технических наук С.Н. Бездидько
(Дом оптики ВНЦ «ГОИ им. С. И. Вавилова»)
Запрягаева Л.А., Свешникова И.С.
3-30 Расчет и проектирование оптических систем: Учебник для
вузов - М.: Логос, 2000. - 584 с.: ил.
ISBN 5-88439-143-9
Рассмотрены уровни автоматизированного проектирования оп-
тических систем оптико-электронных и оптических приборов, после-
довательно изложены габаритный и аберрационный расчеты основ-
ных типов оптических систем, их синтез, анализ и оптимизация. Опи-
саны методы синтеза и приведен синтез линзовых, зеркальных и зер-
кально-линзовых систем со сферическими и асферическими поверх-
ностями. Указаны собенности аберрационного анализа с последую-
щей оптимизацией и оценкой качества изображения по его результа-
там. Приведен пример оформления оптического выпуска.
Для студентов оптических специальностей вузов. Представляет
интерес для научных и инженерно-технических работников.
ББК 22.34я73
Издание осуществлено при финансовой поддержке
Федеральной целевой пррограммы «Государственная поддержка
интеграции высшего образования и фундаментальной науки
на 1997-2000 гг.»
ISBN 5-88439-143-9
© Центр «Интеграция», 2000
Светлой памяти Учителя
Дмитрия Алексеевича Романова
посвящается
ПРЕДИСЛОВИЕ
Оптические и оптико-электронные приборы (ОЭП) и системы при-
меняются во всех отраслях науки, техники и народного хозяйства. Без
них немыслим научно-технический прогресс. Многие научные откры-
тия в физике, астрономии, космологии, биологии, медицине и др. сде-
ланы благодаря оптическим приборам. С их помощью решаются за-
дачи автоматического слежения и управления, повышения точности
и быстородействия сложных современных комплексов.
Оптические приборы всю жизнь сопровождают нас в повседнев-
ных буднях и праздниках, помогая зрению и охраняя помещения, да-
вая нам возможность оставить потомкам память о делах и событиях
нашей жизни, приходя на помощь в профилактике здоровья и при
проведении сложных хирургических операций и т.п.
Большую роль они играют и в развитии культуры. Их использу-
ют в телевидении, кинематографии, книжном деле и театре. В искус-
ствоведении и археологии оптические приборы используют при рес-
таврации и идентификации произведений искусства и памятников
культуры.
Экология и криминалистика, исследование природных ресурсов
и генная инженерия, микроэлектроника и лазерная техника — везде
ОЭП и оптические приборы заняли свое достойное место. Сфера их
приложения непрерывно расширяется с появлением новых техноло-
гии и направлений в науке и технике.
Без преувеличения можно отметить исключительную роль опти-
ческой системы в ОЭП и оптических приборах. От правильного выбо-
ра принципиальной оптической схемы и ее расчета во многом зави-
сит не только успешная работа прибора, но и его габариты и масса,
принимаемой информации.
Создание оптических систем постоянно совершенствуется в свя-
зи с использованием непрерывно развивающейся вычислительной тех-
ники и автоматизированного проектирования, а также новой элемент-
ной базы.
Специалисты, способные квалифицированно и творчески разра-
ботать оптические системы (ОС) для решения перечисленных задач,
должны обладать фундаментальными знаниями по общеобразователь-
ным и техническим дисциплинам, в совершенстве знать основы опти-
ки и оптические системы приборов.
В настоящее время при разработке оптических систем широко ис-
пользуются профессионально-персональные ЭВМ (ППЭВМ), для кото-
рых существуют комплексы специализированных и универсальных
программ для синтеза, анализа и оптимизации систем, что позволяет
ускорить процесс их создания. Но это не привело к буму разработки
сверхоригинальных ОС и развеяло иллюзии неспециалистов о возмож-
ности уменьшений объема знаний и квалификации пользователей оп-
тических программ при автоматизированном проектировании ОС.
В учебнике сформулированы основные требования к разработке
ОС и рассмотрены все уровни автоматизированного проектирования.
Последовательно изложены габаритный и аберрационный расчеты ос-
новных типов оптических систем, синтез, анализ и оптимизация ОС
в соответствии с алгоритмом автоматизированного проектирования.
Рассмотрены методы синтеза — метод проб, метод композиции М.М.
Русинова по набору из поверхностей с известными аберрационными
свойствами и по базовым компонентам и метод разделения перемен-
ных, или алгебраический метод. Приведены методы оптимизации.
Описаны комплексы программ на ППЭВМ, применяемые на предпри-
ятиях и в учебной практике.
В книге приведены теория и габаритный расчет типовых ОС —
простых и сложных телескопических систем с линзовыми и призмен-
ными оборачивающимися системами, панкратических телескопичес-
ких систем, простых и сложных луп, микроскопов, систем для пре-
образования лазерного излучения, габаритный и светотехнический
расчеты проекционных систем для эпи- и диапроекции.
Отдельная глава посвящена аберрационному расчету типовых оп-
тических систем в области аберраций первого и третьего порядков,
позволяющему определить значения основных параметров компонен-
тов для последующего их синтеза.
При изложении синтеза систем использован метод разделения пе-
ременных. Многолетний опыт расчета ОС этим методом [23] на пред-
приятиях и в учебной практике показал его достаточную эффектив-
ность не только при расчете систем с небольшим угловым полем, но и
при расчете сложных ОС типа панкратических систем, фотообъекти-
вов, окуляров с угловым полем до 50°.
Для выбора удачной конструкции сложной ОС надо хорошо знать
аберрационные возможности и предельные значения оптических ха-
рактеристик отдельных компонентов, входящих в ее состав. Поэтому
в учебнике большое внимание уделяется описанию конструкций и
синтезу двух-, трех- и четырехлинзовых компонентов методом разде-
ления переменных. Аберрационные уравнения этих компонентов со-
ставляются с применением модульного принципа, описанного в учеб-
нике.
В книге рассмотрен синтез одно-, двух- и трехкомпонентных сис-
тем, в том числе конденсоров, объективов и компонентов телескопи-
ческих систем, двухкомпонентных телеобъективов телескопических
систем и фототелеобъективов, окуляров, трехкомпонентного фотообъ-
ектива — триплета, систем для преобразования лазерного излучения.
При изложении синтеза линзовых и зеркально-линзовых систем
приводится алгоритм решения аберрационных уравнений при усло-
вии получения заданных значений аберраций. Это облегчает состав-
ление программ синтеза на ПЭВМ, дает возможность исследовать ОС
и определять область существования решений для различных конст-
рукций.
В учебнике описаны общие свойства асферических поверхностей,
приведены основы теории аберраций и особенности синтеза систем с
асферикой с применением различных методов расчета.
После синтеза компонентов в области аберраций первого и третье-
го порядков проводится сборка системы с помощью ПЭВМ и аберра-
ционный анализ, а затем оптимизация. В книге рассмотрены извест-
ные методы оптимизации ОС, применяемые при автоматизированном
проектировании. Также описаны требования к оформлению оптичес-
кого выпуска, по таблицам аберраций которого можно оценить каче-
ство изображения ОС, и приведен пример.
Для приобретения практических навыков по проектированию оп-
тических систем помимо примеров, приведенных в книге, можно ре-
комендовать задачник [1].
Авторы благодарят рецензента первого оригинал-макета учебни-
ка, который планировался к изданию в издательстве «Машинострое-
ние» в 1995 г., доктора технических наук Е.Ф. Ищенко за ценные за-
мечания и пожелания, высказанные при рецензировании рукописи.
Авторы также признательны сотрудникам издательства «Маши-
ностроение» — редакторам Т.В. Абизовой и Г.Н. Сидоровой, художе-
ственному редактору В.В. Лебедеву, техническому редактору
Н.М. Харитоновой, корректорам Г. Л* Сафоновой и Л .М. Сажиной, ра-
ботавшим с 1992 г. над рукописью учебника.
Авторы считают своим долгом выразить глубокую признатель-
ность и благодарность ведущему программисту Е.В. Мельниковой и
начальнику редакционно-издательского отдела МИИГАиК Б.В. Куз-
нецову, выполнившим большую работу по созданию существенно до-
полненного и переработанного оригинал-макета учебника.
Глава 1. ОБЩИЕ СВЕДЕНИЯ О РАСЧЕТЕ И
ПРОЕКТИРОВАНИИ ОПТИЧЕСКИХ
СИСТЕМ
1.1. Исходные принципы автоматизированного
проектирования оптических систем
Расчет и проектирование оптических систем — область инженер-
ных расчетов, которая хорошо поддается автоматизации. И если в кон-
це 50-х и начале 60-х годов ЭВМ использовались только для расчета
хода лучей, то в настоящее время ЭВМ практически применяются на
всех этапах разработки оптической системы. Сейчас проектирование
оптических систем немыслимо без использования ЭВМ.
Однако, несмотря на высокую степень автоматизации, процесс
проектирования оптической системы по-прежнему занимает сущес-
твенную часть общего объема проектирования оптического прибора.
Это сложный творческий процесс с множеством трудоемких вычисле-
ний, который, к сожалению, пока выполняется при использовании
ограниченного числа унифицированных схем (алгоритмов).
Рассмотрим исходные принципы проектирования оптической си-
стемы, в частности, автоматизированного проектирования.
Объектом проектирования является оптическая система, предна-
значенная для формирования в заданном спектральном диапазоне
изображений объекта с помощью физических законов распростране-
ния электромагнитного излучения (преломления, отражения, диф-
ракции, поглощения, рассеяния) в неоднородных средах.
Физически оптическая система состоит из поверхностей, располо-
женных определенным образом в пространстве и разделяющих раз-
личные среды, а также содержит диафрагмы. Она должна обеспечи-
вать требуемое качество изображения объекта или требуемую струк-
туру выходящего пучка.
Под конструктивными параметрами оптической системы понима-
ют величины, необходимые и достаточные для однозначного опреде-
ления ее конструкции. Это параметры оптических сред (пХо , ); па-
раметры формы (rv, dv) и взаимного положения (<^возд); параметры
диафрагм и покрытий.
Цель проектирования заключается в определении номинальных
значений и допустимых отклонений всех конструктивных параметров
с учетом требований к качеству изображения, а также технологи-
ческих и экономических требований.
По степени автоматизации проектирование разделяют на неавто-
матизированное, когда все операции выполняет разработчик, авто-
матическое проектирование, когда все операции выполняет ЭВМ без
участия человека, и автоматизированное проектирование — самый
гибкий способ проектирования, при котором часть операций выполня-
ет ЭВМ, а часть — разработчик. В последнем случае существенными
являются свойства проектных операций: детерминированность или
эвристичность, объектно-независимость или объектно-ориентирован-
ность, а также сравнительная их трудоемкость.
Детерминированные операции осуществляются по определенным
алгоритмам, и результат их выполнения не зависит от исполнителя.
Для эвристических операций невозможно составить определенный
алгоритм, и результат их выполнения в большой степени зависит от
опыта, таланта и квалификации разработчика (выбор конструкции
исходной системы, синтез оптической системы, выбор параметров оп-
тимизации и т.п.).
1.2. Задачи, решаемые при проектировании
оптической системы
При разработке любой оптической системы необходимо решить
три осйовные задачи: 1) создание принципиальной схемы, обеспечи-
вающей действие всего прибора; 2) соответствие требованиям физичес-
кой осуществимости прибора; 3) обеспечение технической реализа-
ции.
Решение первой задачи зависит от назначения оптической систе-
мы. С учетом назначения системы определяют ряд требований к ее га-
баритным размерам, основным оптическим характеристикам (свето-
силе, диаметрам входного и выходного зрачков и их положению, ли-
нейному и угловому полям, увеличению системы, ее фокусному рас-
______________Глава 1. Общие сведения о расчете и проектировании оптических систем
стоянию), качеству изображения, а также требований, относящихся
к условиям эксплуатации оптического прибора (теплостойкости, мо-
розостойкости, допустимым вибрациям и ударным нагрузкам, ради-
ационному воздействию, возможности выполнения тех или иных от-
счетов и т.п.).
Вторая задача заключается в создании оптической системы, удов-
летворяющей законам образования изображения, т. е. при выборе на-
чальных данных для расчета системы необходимо исходить из физи-
ческой осуществимости прибора.
Так, при проектировании фото- и кинопроекционных систем с по-
стоянным фокусным расстоянием следует обращать внимание на со-
отношение между фокусным расстоянием объектива f9 относитель-
ным отверстием D/f и угловым полем 2со.
В результате анализа большого числа фотообъективов Д. С. Воло-
сов получил инвариант [3]
с = = (Р/Ц)^24й/1ОО =...
и ввел критерий добротности объектива Ст ~ 0,22...0,26. Если
С < Ст < 0,24, то расчет таких систем затруднений не вызывает, а если
С > Ст > 0,24, то качество изображения, даваемое таким объективом,
будет плохим. Таким инвариантом обеспечивается физическая осуще-
ствимость системы.
В связи с появлением новых марок стекол и совершенствованием
методов расчета, технологии, сборки и юстировки значение критерия
добротности в настоящее время можно принять равным Ст » 0,28.
Анализ лучших современных панкратических объективов, вы-
полненный М.Г. Шпякиным, показал, что между их оптическими ха-
рактеристиками и габаритными размерами существует приближенная
зависимость [10]:
4пах * _ /пг
~/м~
где /'тах — максимальное фокусное расстояние системы; е = D/f — от-
носительное отверстие, М — кратность изменения фокусных рассто-
яний; Lc — общая длина системы; С — критерий добротности. У наи-
лучших современных объективов С ~ 0,4.
При разработке систем микроскопов следует исходить из понятия
полезного увеличения Гм.п., получаемого из условия предельного раз-
решения: 500А< Гм.п. < 1000А, где A = n2|sinoA| — числовая аперту-
ра объектива микроскопа. Тогда, зная предельное разрешение 8 = 1/
А или 8 « Х/(2А) находят числовую апертуру А, а затем и полезное уве-
личение Гм.п.. Дальнейшее повышение Гм.п. не приводит к разреше-
нию более мелких объектов без увеличения числовой апертуры А. По-
этому физически реализовать предельное полезное увеличение мож-
но только в микроскопах с объективами высокой апертуры.
Для систем зрительных труб разрешающая способность телеско-
пической системы, работающей совместно с глазом, определяется, с
одной стороны, дифракцией света (y = 120"/Z>), а с другой — разре-
шающей способностью и свойствами глаза (\|/гл = 60"/Гт). Глаз может
полностью использовать разрешающую способность трубы лишь при
условии, что \|/ = \|/гл, или 120"/Р = \|/гл > т.е. полезное увеличение
зрительной трубы должно быть Гт п = D/2, где D — диаметр входного
зрачка зрительной трубы.
Третья задача заключается в создании оптических систем в рам-
ках существующих технологических и технических возможностей.
1.3. Этапы разработки оптических систем
и степень их автоматизации
Процесс расчета и проектирования оптических систем по задан-
ным оптическим характеристикам можно разделить на семь основных
этапов. Последовательность и взаимосвязь этапов проектирования ил-
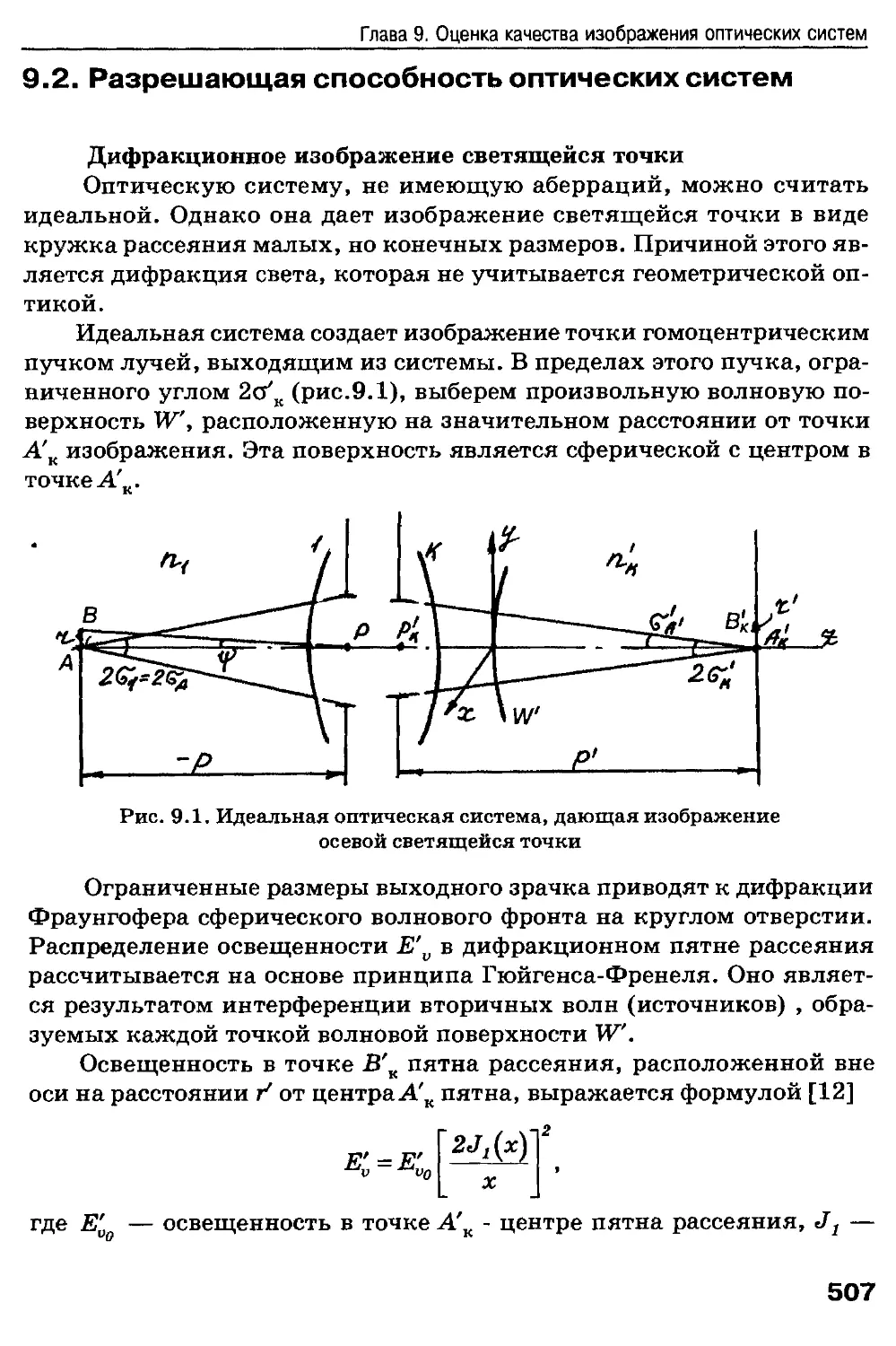
люстрирует рис. 1.1. Охарактеризуем каждый этап проектирования
и степень его автоматизации [4], [12].
На первом этапе разрабатывается принципиальная схема
оптической системы определенных размеров, конфигурации, отвеча-
ющая требованиям технического задания, и выполняется ее габарит-
ный расчет, а если необходимо, то и светотехнический.
В задачу габаритного расчета входит определение числа компо-
нентов, из которых должна состоять оптическая система, фокусных
расстояний, увеличений отдельных компонентов, апертурных углов
и углов поля, расстояний между компонентами, световых и полных
диаметров компонентов, расположения и размеров зрачков для всей
системы и каждого компонента, размера и положений призм, плоско-
параллельных пластин, зеркал, если таковые в системе имеются.
При габаритном расчете систему полагают состоящей из бесконеч-
но тонких компонентов, если это возможно, и используют соотноше-
ния параксиальной оптики. Появившиеся в последнее время устрой-
ства для ввода и вывода графической информации с ПЭВМ позволя-
ют автоматизировать первый этап расчета, имеющий значительный
удельный вес в общем расчете оптических систем. Однако выбор прин-
ципиальной конструкции оптической системы — работа больше эври-
стическая, и ее может выполнить только разработчик.
Данные с высшего уровня проектирования
Рис. 1.1. Этапы проектирования оптических систем
На втором этапе проектирования по полученным из габаритно-
го расчета значениям f, D/f, 2со, 2у, р0, А выбирают конструкции от-
дельных компонентов оптической системы и узлов и выполняют их
расчет (определяют конструктивные параметры).
Выбор конструкции узлов или компонентов является обязаннос-
тью оптика-разработчика и выполняется либо с помощью ЭВМ с
использованием личного архива оптических систем (ЛАОС), либо ка-
талогов и патентов. Если окажется, что какой-либо компонент или
узел по своим оптическим характеристикам резко отличается от
существующих, то в таком случае приходится заново рассчитывать
этот компонент или узел, чтобы обеспечить техническую реализацию
схемы.
Для расчета компонентов, узлов системы или самой системы мож-
но использовать следующие методы: проб; синтеза оптической систе-
мы по поверхностям с известными аберрационными свойствами; син-
теза по базовым компонентам; алгебраический метод (метод разделе-
ния переменных). Последний метод дает хорошие результаты при рас-
чете систем, компоненты которых можно принять за бесконечно тон-
кие, т.е. системы с небольшим относительным отверстием и малым
угловым полем.
С появлением ЭВМ возник вопрос о целесообразности применения
алгебраического метода. Надо ли первоначально исправлять аберра-
ции третьего порядка, если ЭВМ может автоматически исправить
аберрации любого порядка? Сейчас можно с уверенностью сказать, что
успех расчета оптической системы на ЭВМ во многом зависит от того,
насколько исходная система была близка к оптимальной. Ясно, что
система, исправленная относительно аберраций третьего порядка, бу-
дет значительно ближе к искомой, чем произвольно выбранная.
Известны специализированные программы расчета (программы
синтеза) на ЭВМ оптических систем с невысокими оптическими харак-
теристиками [18].
Аберрационный анализ и коррекция аберраций (оптимизация) —
третий этап проектирования, в наибольшей степени автоматизиро-
ванный. Для этой цели созданы и эффективно используются универ-
сальные программы анализа и оптимизации, позволяющие автомати-
чески изменять определенные параметра ~r исходной системе.
На втором и третьем этапах проектирования может быть установ-
лено, что некоторые габаритные соотношения неприемлемы для ис-
правления аберраций. Поэтому после выполнения части работ, соот-
ветствующих этим этапам, возникает необходимость вновь возвра-
титься к первому этапу и пересмотреть оптическую схему прибора.
На четвертом этапе проектирования проводится оценка каче-
ства изображения. Этот этап полностью автоматизирован и
осуществляется с помощью ЭВМ. Если качество изображения не со-
ответствует требуемому, то следует повторить коррекцию аберраций
в оптической системе.
На пятом этапе проектирования оценивается влияние погреш-
ностей изготовления на аберрации и параксиальные характеристики.
Внося малые изменения в конструктивные параметры и рассчитывая
ход лучей, составляют таблицы влияния изменения параметров на
аберрации. Этот этап полностью автоматизирован. Проводится веро-
ятностная оценка суммарного воздействия изменения всех парамет-
ров на изменение аберраций.
На шестом этапе определяют допуски на изготовление оптичес-
ких деталей и узлов. Устанавливают допуски на основные харак-
теристики стекла, из которого выполняются оптические детали:
однородность, бессвильность, двойное лучепреломление, светопогло-
щение и т.п. Если допуски оказываются жесткими, то систему пере-
считывают на радиусы пробных стекол, на плавки стекол, на комп-
лектацию линз по толщине, на изменение воздушных промежутков в
процессе сборки для компенсации влияния погрешностей изготовле-
ния. Если допуски слишком жесткие, то приходится возвращаться ко
второму этапу, т.е. замене нетехнологичных компонентов или узлов
более сложными, но менее чувствительными к погрешностям изготов-
ления. Расчет допусков полностью не автоматизирован. Сравнитель-
но легко поддается автоматизации расчет допусков на конструктив-
ные параметры. Существенные трудности представляет автоматиза-
ция выдачи требований к стеклу, а расчет допусков на призмы требу-
ет определенной теоретической работы.
Седьмой этап — оформление технической документации на
разработанную оптическую систему. Этап полностью автоматизиро-
ван, причем часть технической документации выдается ЭВМ в виде,
не требующем дальнейшего оформления (таблицы аберраций, табли-
цы влияния изменений параметров, графики аберраций, чертежи
оптических деталей и оптической системы, оптические выпуски и
оптические схемы рассчитанных систем).
Из сказанного выше следует, что процесс проектирования являет-
ся итерационным, т. е. содержит возвраты на начальные этапы с ус-
ложнением и изменением задания на их выполнение.
1.4. Автоматизированное проектирование оптических
систем
Теоретическую базу автоматизированного проектирования опти-
ческой системы составляют система математических моделей, описы-
вающих оптическую систему, и математические методы обработки
этих моделей [15].
Процесс автоматизированного проектирования представляет со-
бой последовательность операций, выполняемых над описаниями или
математическими моделями проектируемого объекта до получения
окончательных проектных решений.
Математические модели оптической системы, как и любого друго-
го объекта проектирования, должны быть адекватными (описывать
свойства объекта с необходимой точностью), универсальными (при-
годными для широкого класса объектов), экономичными, простыми
и наглядными для использования.
Никакая единая модель не может удовлетворить всем указанным
требованиям, поэтому используется система моделей, основанная на
блочно-иерархическом подходе к описанию и проектированию объект
та [15], и процесс автоматизированного проектирования разбивается
на несколько иерархических уровней, причем на каждом уровне рас-
сматривается своя математическая модель объекта проектирования.
При проектировании оптических систем выделяют три иерархи-
ческих уровня.
На высшем уровне оптическая система рассматривается как эле-
мент в цепи различных устройств, входящих в прибор и работающих
совместно. Здесь используется внешняя функциональная модель, ко-
торая описывает оптическую систему как преобразователь сигналов
общего вида. Поэтому полученные закономерности и характеристики
(внешние характеристики оптической системы) объектно-независимы
и применимы к любым преобразователям, работающим вместе с оп-
тической системой. Поскольку при этом оптическая система рас-
сматривается как линейный фильтр сигнала, то математический ап-
парат внешней модели основан на теории линейной фильтрации и ли-
нейных систем применительно к оптическим сигналам. В процессе
проектирования на высшем уровне определяют внешние характерис-
тики всех элементов схемы (в том числе и оптической системы), обес-
печивающие функционирование оптического прибора в целом.
На среднем уровне рассматривают оптическую систему как сово-
купность элементов. В качестве элементов можно принять узлы, фун-
кционально обособленные (объективы, окуляры, оборачивающие си-
стемы и т.п.), компоненты с известными аберрационными свойства-
ми, оптические поверхности и среды. На этом уровне проектирования
определяют номинальные значения конструктивных параметров эле-
ментов, допустимые их отклонения от номинала, исходя из требо-
ваний к качеству изображения, технологичности и экономичности.
Здесь используются две математические модели:
внутренняя функциональная модель, которая отражает физичес-
кие принципы формирования оптического изображения. Основным
понятием этой модели является зрачковая функция, описывающая
влияние оптической системы на проходящее через нее электромаг-
нитное поле. Полученные закономерности и характеристики (внут-
ренние характеристики оптической системы) являются объектно-ори-
ентированными и пригодными для описания только оптических сис-
тем;
Глава 1. Общие сведения о расчете и проектировании оптических систем
принципиальная конструкционная модель, включающая
конструктивные параметры, которые определяют функционирование
оптической системы — параметры оптических сред, поверхностей и
их взаимного расположения.
На низшем уровне проектирования оптическая система представ-
ляется как совокупность оптических деталей, закрепленных в опра-
вах. Задача проектирования на этом уровне заключается в определе-
нии конструктивных элементов, обеспечивающих надежное закрепле-
ние деталей и расположение их друг относительно друга с необходи-
мой точностью. Математическая модель — детальная конструкцион-
ная модель оптической системы, содержащая математическое описа-
ние крепежных элементов, взаимного расположения и подвижек де-
талей и т.п.
Кроме рассмотренных моделей, специфических для своего уров-
ня проектирования, существуют две модели, обладающие общими
чертами и поэтому используемые на любом уровне, — это оптимиза-
ционная и статистическая модели.
Оптимизационная модель описывает оптическую систему как
объект оптимизации. Модель включает характеристики оптической
системы, которые требуется улучшить на данном уровне; параметры
rv, dv, Оу, пХо, vx, изменяя которые, выполняют оптимизацию; ограни-
чения на область возможных изменений и математические соотноше-
ния, связывающие параметры и характеристики.
Статистическая модель характеризует оптическую систему как
объект, полученный в процессе изготовления и сборки деталей. Мо-
дель необходима при определении допусков на технологические по-
грешности.
Процесс автоматизированного проектирования можно предста-
вить как последовательность операций над математическими моделя-
ми оптических систем: синтез — анализ — оптимизация.
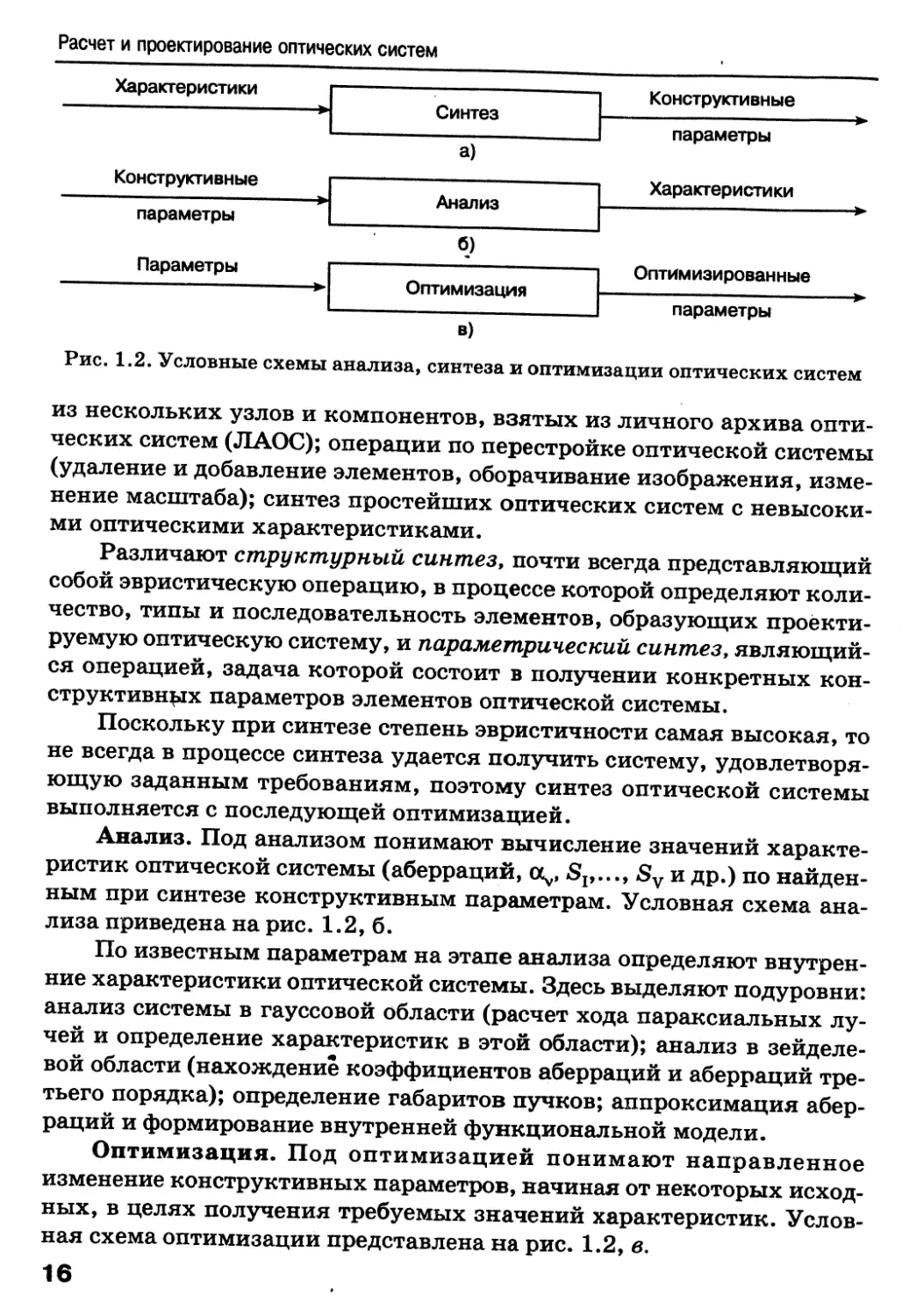
Синтез. Под синтезом понимают формирование конструкционной
модели, т.е. определение значений параметров г, d, п, обеспечивающих
требуемые значения характеристик Г, р0, Sp 8П, 8Ш,..., аберраций и
т.п. Условная схема синтеза представлена на рис. 1.2, а.
Синтез оптической системы — операция в большинстве случаев
эвристическая и сугубо объектно-ориентированная. Алгоритмизации
поддаются только некоторые виды синтеза: выбор конструкции опти-
ческой системы из существующих вариантов с помощью информаци-
онно-поисковой системы (ИПС); синтез по набору из поверхностей с
известными аберрационными свойствами; сборка оптической системы
Рис. 1.2. Условные схемы анализа, синтеза и оптимизации оптических систем
из нескольких узлов и компонентов, взятых из личного архива опти-
ческих систем (ЛАОС); операции по перестройке оптической системы
(удаление и добавление элементов, оборачивание изображения, изме-
нение масштаба); синтез простейших оптических систем с невысоки-
ми оптическими характеристиками.
Различают структурный синтез, почти всегда представляющий
собой эвристическую операцию, в процессе которой определяют коли-
чество, типы и последовательность элементов, образующих проекти-
руемую оптическую систему, и параметрический синтез, являющий-
ся операцией, задача которой состоит в получении конкретных кон-
структивных параметров элементов оптической системы.
Поскольку при синтезе степень эвристичности самая высокая, то
не всегда в процессе синтеза удается получить систему, удовлетворя-
ющую заданным требованиям, поэтому синтез оптической системы
выполняется с последующей оптимизацией.
Анализ. Под анализом понимают вычисление значений характе-
ристик оптической системы (аберраций, о^, Sp..., Sv и др.) по найден-
ным при синтезе конструктивным параметрам. Условная схема ана-
лиза приведена на рис. 1.2, б.
По известным параметрам на этапе анализа определяют внутрен-
ние характеристики оптической системы. Здесь выделяют подуровни:
анализ системы в гауссовой области (расчет хода параксиальных лу-
чей и определение характеристик в этой области); анализ в зейделе-
вой области (нахождение коэффициентов аберраций и аберраций тре-
тьего порядка); определение габаритов пучков; аппроксимация абер-
раций и формирование внутренней функциональной модели.
Оптимизация. Под оптимизацией понимают направленное
изменение конструктивных параметров, начиная от некоторых исход-
ных, в целях получения требуемых значений характеристик. Услов-
ная схема оптимизации представлена на рис. 1.2, в.
Математический аппарат оптимизации относится не к самому
объекту проектирования (оптической системе), а к ее оптимизацион-
ной модели, поэтому, когда оптимизационная модель построена, опе-
рация оптимизации будет объектно-инвариантной и детерминиро-
ванной. Выбор модели, т.е. решение вопроса о том, что оптимизиро-
вать и чем оптимизировать в данной системе, является задачей эври-
стической. Способность принять правильное решение приходит с опы-
том и пониманием принципов оптимизации.
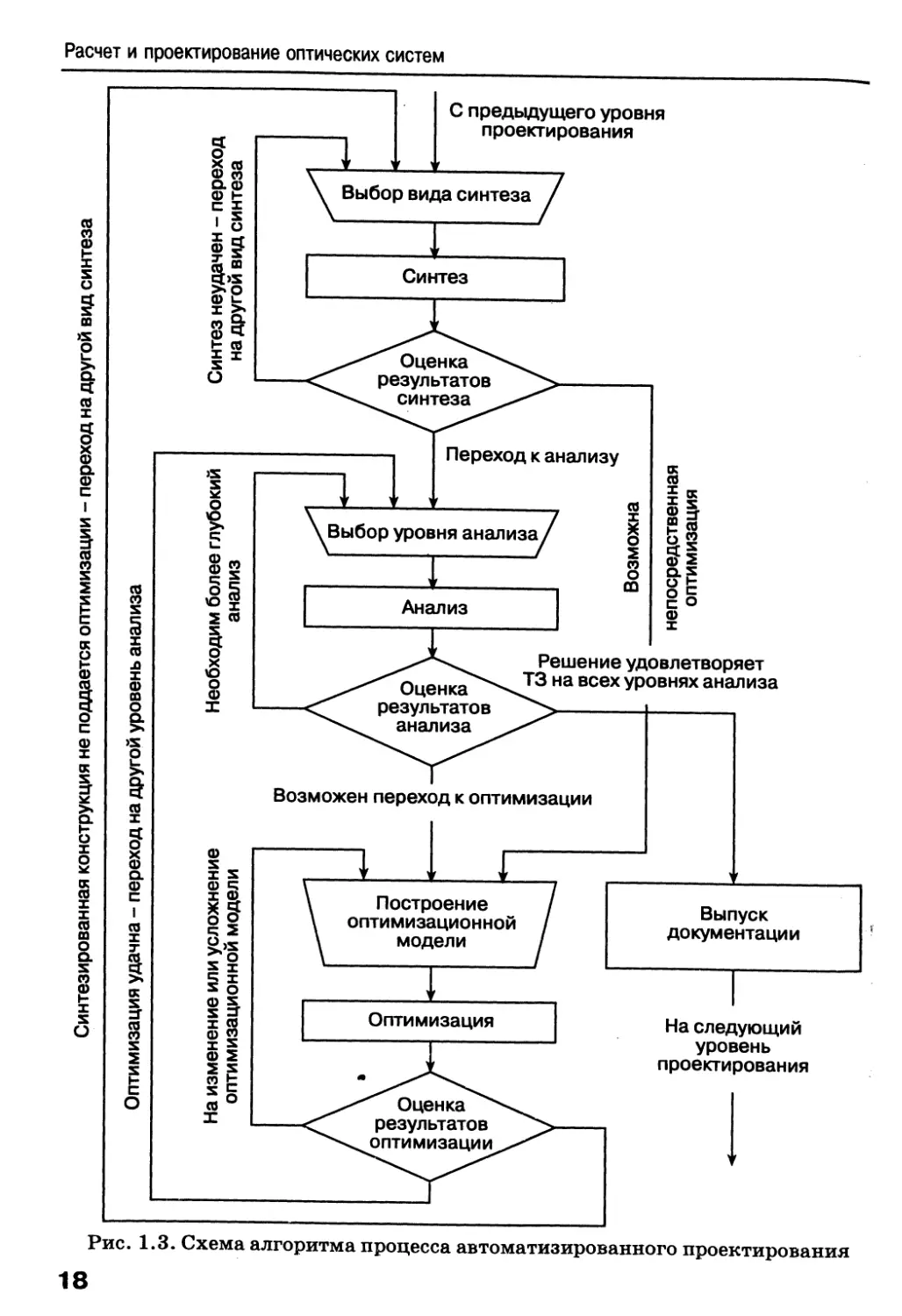
Алгоритм процесса автоматизированного проектирования, состав-
ленный из последовательности операций синтеза, анализа и оптими-
зации, представлен на рис. 1.3, из которого следует, что процесс про-
ектирования является итерационным и заканчивается после того, как
результаты анализа на всех его подуровнях будут положительно оце-
нены разработчиком [15].
САПР — высший уровень проектирования оптических систем
Сегодняшнее состояние автоматизации проектирования оптичес-
ких систем характеризуется переходом от отдельных программ и па-
кетов прикладных программ (ППП) к системам автоматизированного
проектирования (САПР), которые дают возможность осуществлять
проектирование на новом, более высоком качественном уровне.
В САПР оптических систем оптимальным образом распределены
функции между разработчиком и ЭВМ — все детерминированные опе-
рации выполняет ЭВМ, все эвристические — разработчик. Для этого
разработчик должен получать материал с ЭВМ в наглядной форме с
тем, чтобы оперативно вмешиваться в процесс проектирования в не-
обходимых точках. Эффективность САПР определяется теоретичес-
кой, программной и техническими базами [15].
Программное обеспечение САПР состоит из двух частей: систем-
ной и проблемной (рис. 1.4).
Системная часть включает программу-диспетчер, обеспечиваю-
щую взаимодействие САПР с разработчиком и выполнение его зака-
зов в диалоговом режиме. Программа-диспетчер вызывает соответ-
ствующую проблемную программу, банк данных, через который про-
исходит обмен информацией между разработчиком и системой.
Проблемная часть состоит из библиотеки унифицированных про-
грамм, выполняющих отдельные операции проектирования, — так
называемых функциональных блоков: трансляции с входного языка,
синтеза, анализа, оптимизации, отображения.
Функциональные блоки состоят из отдельных подпрограмм, ре-
шающих элементарные задачи общематематического характера (за-
Рис. 1.3. Схема алгоритма процесса автоматизированного проектирования
Рис. 1.4. Примерная структура САПР оптических систем
дачи линейной алгебры, интегрирования и т.п.), оптического харак-
тера (расчет хода лучей, вычисление коэффициентов аберраций и
т.п.). Эти подпрограммы пишутся на универсальных алгоритмических
языках высшего уровня, которые постоянно совершенствуются.
Отличительными чертами САПР являются: общая система мате-
матических моделей проектируемого объекта; автоматизация обмена
информацией между отдельными программами САПР с помощью си-
стемной программы-диспетчера; наличие личных архивов кон-
структоров, обеспечивающих хранение в ЭВМ и удобное использова-
ние исходных данных, промежуточных и окончательных результатов;
наличие банка общесистемных данных; общение разработчика с ЭВМ
посредством универсального машинно-независимого языка; графичес-
кое отображение информации; работа в диалоговом режиме, позволя-
ющая разработчику оперативно оценивать результаты и принимать
эвристические решения о дальнейшем ходе процесса.
Иными словами, компонентами САПР являются математическое,
лингвистическое, техническое, информационное, программное, мето-
дическое и организационное обеспечение.
Технические средства для автоматизации
проектирования оптических систем
При определении требований к техническим средствам для авто-
матизации проектирования оптических систем (АПОС) принимается
во внимание прежде всего необходимость для большинства оптичес-
ких расчетов выполнять операции с числами с плавающей запятой с
точностью порядка 10... 12 десятичных разрядов.
Критериями для выбора таких средств являются: достаточная
производительность, удобство взаимодействия с пользователем, нали-
чие программных продуктов для автоматизации задач проектирова-
ния, надежность, возможность расширения и обслуживания, прием-
лемая стоимость.
Принято считать, что показателем производительности ЭВМ при
АПОС служит число лучей, рассчитываемых через одну поверхность
оптической системы за время, равное секунде, разумеется, при
обеспечении таких основных ресурсов, как разрядность, оперативная
память, внешняя память и др.
Результаты анализа некоторых отечественных и зарубежных ЭВМ
для оптических расчетов приведены в табл. 1.1*).
Следует отметить, что большие ЭВМ 70—80-х гг. работали в ос-
новном в режиме разделения времени, в пакетном режиме и с исполь-
зованием удаленных алфавитно-цифровых или графических термина-
лов в режиме диалога, причем оптимальным считалось время работы
пользователя не более часа. В середине 80-х гг. с появлением профес-
сиональных персональных ЭВМ (ППЭВМ) и рабочих станций с высо-
кой производительностью стало возможным применение диалоговых
методов расчета на ППЭВМ непосредственно на рабочих местах при
использовании их практически в течение всего рабочего дня, а также
переход к созданию интегрированных программных систем для про-
ектирования и моделирования оптических систем. Поэтому рассмат-
ривая с точки зрения закономерности применения ЭВМ соответству-
ющих поколений, можно предложить следующую классификацию
поколений оптических программ:
70-е — начало 80-х гг. — пакеты программ АПОС, доступные в
пакетном или диалоговом режиме, двухмерная графика;
Середина 80-х — 90-х ₽г. — интегрированные программные сис-
темы, работа в режиме диалога, трехмерная графика;
*) Ган М. А. Автоматизация проектирования оптических систем // Оптический жур-
нал. 1994. № 8. С. 4-12.
Таблица 1.1
Тип ЭВМ или процессора Год внедрения ЭВМ Производительность лучей/с
БЭСМ-6 1971 2000*
ЭВМ сер. ЕС (ЕС 1045, 1060) 1980 1000* и более
«Эльбрус-1» 1988 5000*
INTEL 286/287 (10 MHz) 1986 530
INTEL 386/387 (20 MHz) 1990 3000
INTEL 386/387 CACH (33 MHz) 1991 7000
INTEL 486 (33 MHz) 1992 21000
INTEL 486 (66 MHz) 1993 43000
INTEL PENTIUM (66 MHz) 1993 73000
DEC Micro VAX 1985 2500*
SUN 4/75 SPARC 2 1985 9500*
SUN SPARC 10-41 1991 105000**
1992 250000**
Примечание.
* При работе в режиме одного пользователя.
** По данным фирмы ORA USA.
Конец 90-х гг. — интегрированные программные системы с ис-
пользованием баз знаний и элементов искусственного интеллекта.
Следует особо отметить, что с повышением производительности
ЭВМ, созданием цветных графических дисплеев и технических
средств организации диалога существенно расширились возможнос-
ти использования машинной графики отображения как самих опти-
ческих систем в виде двух- и трехмерных проекций, так и результа-
тов расчетов, включая ход лучей, двух- и трехмерных графиков абер-
раций, диаграмм распределения лучей в изображении точки и тест-
объектов, оптических передаточных функций и т.п.
В настоящее время наиболее перспективным представляется осна-
щение вычислительных бюро рабочими станциями INTEL 486 или
PENTIUM, а в перспективе — рабочими станциями типа SUN 10—41.
Программное обеспечение для АПОС
В настоящее время в мире известно около полутора десятка ком-
мерчески доступных программ для АПОС. Они существенно различа-
ются по своим возможностям.
На предприятиях и оптических конструкторских бюро стран СНГ
Успешно используются такие комплексы программ как CAPO, ИТМ
(«Спектр»), DEMOS, разработанные сотрудниками Государственного
Этического института им. С.И. Вавилова (ГОИ), пакет прикладных
программ ОПАЛ (оптический алгоритм), разработанный совмести#
сотрудниками Санкт-Петербургского государственного института точ^
ной механики и оптики (Технический университет) и Ленинградское
го оптико-механического объединения (ЛОМО). В настоящее врем4)
разработаны новые версии этих программ для компьютеров, совмес*
тимых с IBM PC/AT.
Наиболее перспективным, на наш взгляд, является комплекс про-*
грамм DEMOS, позволяющий осуществлять проектирование как осе-
симметричных, так и неосесимметричных оптических систем. В
1986—1988 гг. была разработана новая версия программы для компьч
ютеров, совместимых с IBM PC/AT. В настоящее время введена в эк-
сплуатацию третья версия этой программы. Не вдаваясь в подробности
возможностей этой программы, отметим лишь некоторые:
дружественный диалог с пользователем с помощью полиэкранно-
го меню, двух- и трехмерная графика;
описание оптической системы и исходных данных для расчета с*
помощью простого языка и таблиц;
встроенный мультиэкранный редактор;
встроенная база данных для хранения оптических систем и ре-
зультатов расчета;
каталоги оптических материалов, включая стекла и материалы,
производимые в СНГ, а также каталоги зарубежных фирм;
возможность задания оптических систем с плоскими, сферически-
ми, асферическими поверхностями второго и более высоких порядков;
возможность операций перестройки оптической системы, поворо-
та, сдвига поверхностей или группы линз, оборачивания, масштаби-
рования;
архив оптических систем на основе патентной информации с воз-
можностью поиска систем по 56 дискретным признакам;
синтез оптических систем в области аберраций 2...4 порядков,
синтез оптических систем с асферическими и киноформными компен-
саторами;
анализ оптических систем: расчет геометрических и волновых
аберраций, аппроксимация аберраций полиномами, анализ аберраций
2...4 порядков в окрестности реальных лучей, в том числе классичес-
кие аберрации Зейделя для осесимметричных систем, расчет полного
набора критериев качества издбражения и т.д.
Не останавливаясь подробно на возможностях программ, отме-
тим, что интегрированная система обеспечивает работу оптика от вы-
бора исходной оптической системы (или ее синтеза), анализа, оптими-
зации до технологической подготовки, изготовления и испытания.
При проектировании оптических систем также широко применя-
ются и такие комплексы программ как «ОПТИКА», «ПРИЗМА»,
«ВЫПУСК», «ФОТОЗЕНИТ» и т.д.
Основные направления развития АПОС
Основным направлением развития автоматизации проектирова-
ния оптических систем является дальнейшее совершенствование ин-
тегрированных систем, работающих в режиме диалога, причем в бли-
жайшем будущем можно ожидать (см. статью М. А. Гана):
упрощения интерфейса человек — ЭВМ за счет ведения диалога
на естественном языке и введения элементов искусственного интел-
лекта;
применения для визуализации оптических систем трехмерной
графики и стереоскопических изображений;
совершенствования математических моделей оптических систем,
включая и оптимизационную;
создания стандартизированного интерфейса между оптическими
расчетами и конструированием оптической системы, более широкого
моделирования оптических систем с учетом элементов конструкций
как с точки зрения светозащиты, так и термомеханических возмуще-
ний;
расширения элементной базы при проектировании оптических
систем, включая элементы дифракционной, компьютерной и интег-
ральной оптики;
внедрения методов синтеза оптических систем с использованием
элементов искусственного интеллекта и нелокальных методов опти-
мизации (нелокальный случайный поиск и метод оврагов был опробо-
ван на БЭСМ-6 Н.В. Цено);
создания интеллектуальных баз данных и знаний в области проек-
тирования и применения оптических систем и материалов;
применения параллельных вычислительных систем в оптических
расчетах и создания на их основе нового класса оптических алгорит-
мов и программ.
Рассмотрим некоторые принципы построения параллельных
оптических алгоритмов и программ. Независимо могут выполняться
расчеты отдельных лучей через оптическую систему, независимо мож-
но также вычислять траектории пучков лучей для различных длин
волн и точек в поле зрения оптической системы и выполнять расчеты
при различных ее конфигурациях. Расчет интерферометрических си-
стем и оптических систем с голограммными элементами также может
быть распараллелен естественным образом. Методы распарал-
Расчет и проектирование оптических систем
.................................................. '
леливания при вычислении быстрого преобразования Фурье уже дос
таточно разработаны и описаны и т.д.
Поэтому для реализации параллельных оптических расчетов в
вычислительную структуру должен входить управляющий модуль и
64-разрядные процессоры с возможностью выполнения операций с
плавающей запятой и большим объемом хранимой программы, неоф
ходимой для расчета хода лучей и пучков. Этим условиям в знач>
тельной степени отвечают модели Т800, Т900 транспьютеров фирмф
INMOS, но производительность доступных в настоящее время трава
пьютеров Т800 недостаточна, однако быстрый прогресс в области эле-
ментной базы позволяет предполагать, что разработка нового класег
оптических алгоритмов и программ на основе параллельных вычис
лительных структур даст практические результаты уже в ближайший
годы.
Прежде чем перейти к автоматизированному проектированию оп>
тических систем, рассмотрим методы синтеза оптических систем, ме^
тоды коррекции и машинной оптимизации. Изложенные в последу
ющих главах формулы синтеза позволяют составлять простейшие aji>
горитмы для АПОС и программы на ППЭВМ.
Глава 2. ГАБАРИТНЫЙ РАСЧЕТ ОПТИЧЕСКИХ
СИСТЕМ
2.1. Габаритный расчет телескопических систем
Большая группа оптических приборов (астрономические наблю-
дательные телескопы, геодезические, стереоскопические, контрольно-
измерительные приборы, бинокли, прицелы, дальномеры и т.п.) по-
зволяет рассматривать удаленные предметы. Оптические системы та-
ких приборов называют телескопическими (от греч. tele — вдаль, да-
леко 4- греч. scopeo — смотрю).
Пучки лучей, входящие в телескопическую систему, можно при-
нять за параллельные, так как входные зрачки значительно меньше
расстояний до предметов, наблюдаемых в эти приборы. Чтобы глаз мог
без напряжения рассматривать изображения, образованные телеско-
пическими системами, выходящие пучки лучей также должны быть
параллельными. Для этого в оптической схеме необходимо совмес-
тить точки фокусов первого и второго компонентов, так чтобы опти-
ческий интервал Д — расстояние между точкой заднего фокуса пер-
вого компонента и точкой F2 переднего фокуса второго компонента —
равнялся бы нулю. Системы с таким ходом лучей называются афо-
кальными (фокусное расстояние равно бесконечности) и их можно ис-
пользовать не только для наблюдения удаленных предметов, но и в ка-
честве коллимирующих систем для формирования излучения лазеров,
а также устройств для изменения увеличений (вращающиеся телеско-
пические системы).
Любая телескопическая система характеризуется видимым уве-
личением Гт, угловым полем 2со, диаметром D' выходного зрачка, его
Удалением а'р> или (з'р,), либо размером D входного зрачка, его поло-
жением ар (или sp) относительно первого компонента, а также угло-
вой разрешающей способностью у.
Для телескопической системы видимое Гт, линейное Ро, угловое
у0 увеличения являются постоянными величинами, не зависящими от
положения предмета и связанными друг с другом следующей зависи-
мостью
Гт = То = 1/р0 = tg(o'/tg(o = D/D’.
Простая телескопическая система состоит, как минимум, из двух
компонентов, каждый из которых может быть оптической поверхно-
стью (рис.2.1, а, б, д, е) или представлять собой оптическую систему
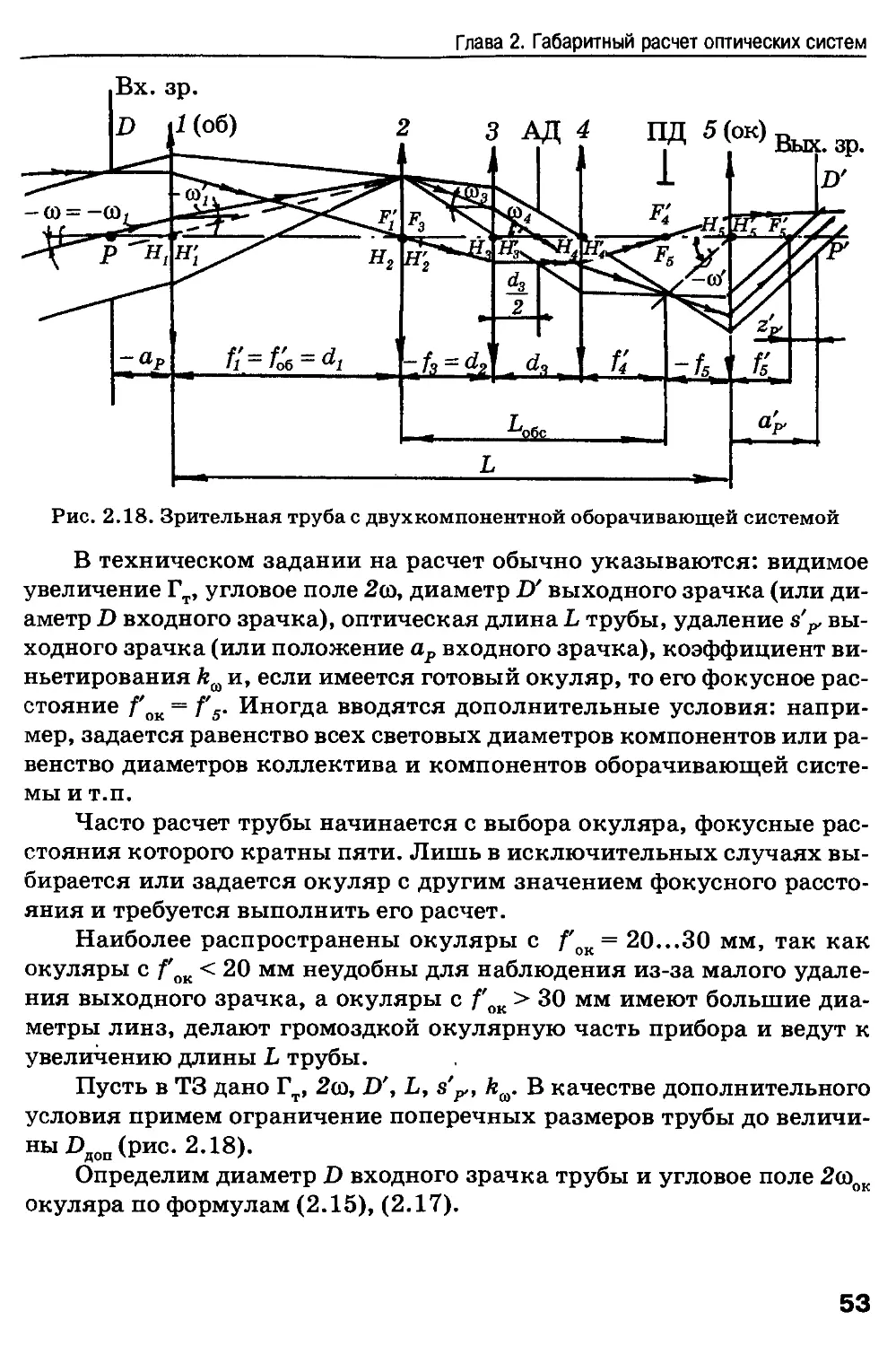
из двух (рис. 2.1, в, г) и более (рис. 2.17, 2.18, 2.26) компонентов. Если
телескопическая система визуальная, то первый компонент, обращен-
ный к предмету (объекту), называется объективом, а второй, обращен-
ный к глазу наблюдателя, — окуляром, а сама система в целом — зри-
тельной трубой, монокуляром и т.п. Простейшие виды телескопичес-
ких систем, выполненные по схемам Кеплера и Галилея, представле-
ны на рис. 2.1.
Изображение, построенное системой, наблюдается из центра вы-
ходного зрачка под углом 2<о', значительно большим, чем при рассмат-
ривании предмета невооруженным глазом из центра входного зрачка.
Рис. 2.1. Схемы простейших телескопических систем:
а), б) — телескопические линзы по схемам Кеплера и Галилея;
в), г) — линзовые телескопические системы;
д), е) — двухзеркальные телескопические системы по схемам Галилея и Кеплера.
Это приводит к искажению перспективы: все предметы кажутся при-
ближенными к наблюдателю, а само пространство — сжатым в осевом
направлении.
При выполнении габаритного расчета используют основные фор-
мулы теории телескопических систем [11, 12]. Видимое увеличение
Гт определяется по формуле
Гт = tgcn'/tgco = - fiir2 = - fa /fa. (2.1)
Это увеличение можно вычислить и как отношение диаметров вход-
ного D и выходного D' зрачков, т.е.
ГТ = 1Ж (2.2)
Знак видимого увеличения говорит о том, прямое (Гт > 0) или пере-
вернутое изображение (Гт < 0) дает данная система.
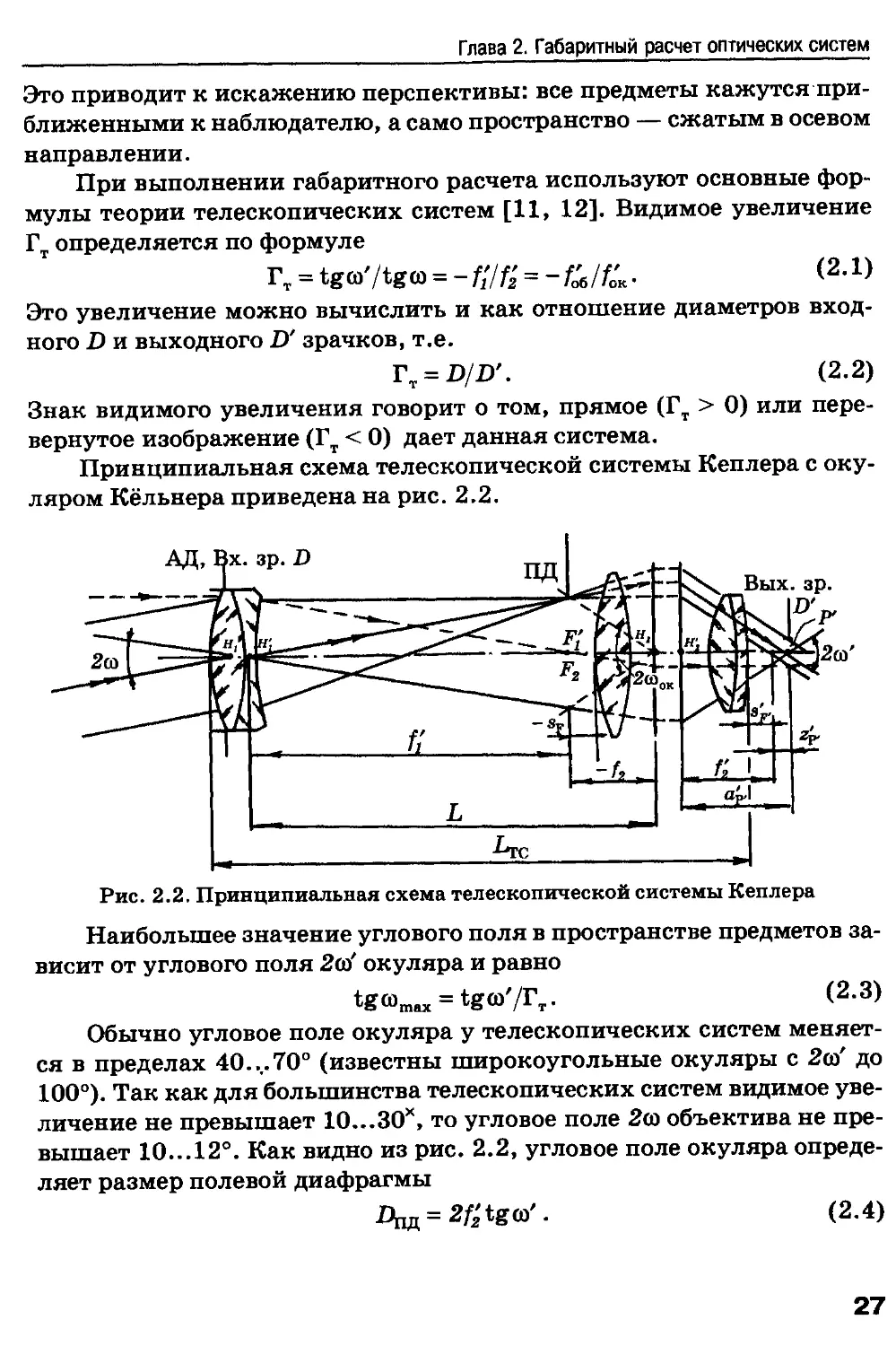
Принципиальная схема телескопической системы Кеплера с оку-
ляром Кёльнера приведена на рис. 2.2.
Рис. 2.2. Принципиальная схема телескопической системы Кеплера
Наибольшее значение углового поля в пространстве предметов за-
висит от углового поля 2а> окуляра и равно
tgwmftx = tg<o7rT. (2.3)
Обычно угловое поле окуляра у телескопических систем меняет-
ся в пределах 40....70° (известны широкоугольные окуляры с 2<о' до
100°). Так как для большинства телескопических систем видимое уве-
личение не превышает 10...30х, то угловое поле 2<о объектива не пре-
вышает 10...12°. Как видно из рис. 2.2, угловое поле окуляра опреде-
ляет размер полевой диафрагмы
A^^tgw'. (2.4)
Диаметр выходного зрачка в визуальных телескопических систе-
мах составляет 1,5...7,0 мм в зависимости от условий наблюдения, а
его удаление, если это не оговорено особо, от последней поверхности
окуляра s'p, > 5 мм. Диаметр D' выходного зрачка является главным
параметром оценки светосилы Н телескопической системы, работаю-
щей с глазом. Причем если D' < Пгл, то Н = gD'2 = g(D/FT)2 ; а если
Пгл < D', то Н = gD2n, где £ = т(п'/п)2 /(4f'2); f'гл = 22,8 мм.
Световые качества визуальной телескопической системы (зри-
тельной трубы) характеризуются относительной субъективной ярко-
стью, которая определяется как отношение субъективных яркостей
вооруженного и невооруженного глаза.
Если наблюдать через зрительную трубу точечный объект, то от-
носительная субъективная яркость при условии, что D' < £>гл опреде-
ляется как отношение световых потоков
Ф^л/Ф^М (2.5)
где Фгл = nD^IJ^a2} — световой поток при наблюдении предмета не-
вооруженным глазом; Ф^с+гл = ) — световой поток при на-
блюдении предмета в трубу; а} *= а2 = <*> — расстояния до предмета; Iv
— сила света точечного объекта.
Если D' > £>гл, то относительная субъективная яркость вычисля-
ется по формуле
Ф'итс+гл _ ^л^т Л/^) _ Г2
Фгл ~nD2Jv/(4a2)
(2.6)
Из формулы (2.6) видно, что при наблюдении в зрительную трубу то-
чечного объекта (например, звезды) относительная субъективная
яркость будет равна Гл , но при условии, что D' > DT11.
Если через зрительную трубу наблюдать предмет конечных раз-
меров, то относительная субъективная яркость определяется отноше-
нием освещенностей изображений
Ецтс+гл _ ДТтсТглД>-Р /(^гл )
е;л лтглд,игл/(‘/4л2)
(2.7)
где Е'и тс+гл — субъективная яркость вооруженного глаза; Е'гл—
субъективная яркость невооруженного глаза; ттс — коэффициент про-
пускания телескопической системы.
При наблюдении в зрительную трубу обычно зрачок глаза наблю-
дателя совмещают с выходным зрачком телескопической системы и
желательно, чтооы они совпадали не только по
диаметру (рис. 2.3).
Вых. зр.
ар'
Рис. 2.3. Ограничение пучков лучей зрачком глаза
положению, но и по
Видимое увели-
чение телескопичес-
кой системы, при
котором D' = _Огл,
называют нормаль-
ным увеличением
Гт н. Такое увеличе-
ние имеют зритель-
ные трубы, работаю-
щие с плохо освещен-
ными предметами.
Способность те-
лескопической сис-
темы раздельно изображать две точки или линии — разрешающая спо-
собность — оценивается по угловому пределу разрешения \|/. Разре-
шающая способность, согласно дифракционной теории, зависит толь-
ко от диаметра D входного зрачка и определяется выражением
W = 1,22X/D. (2.8)
Если принять А = 0,000556 мм, то
y = 140"/D.
В этом случае контраст между дифракционными изображениями
точек составляет 26% и, если глаз способен различить контраст по-
рядка 5%, то
y = 120"/D. ,
Для нормального глаза угловой предел разрешения в среднем со-
ставляет = 60".
Увеличение телескопической системы, при котором разрешающая
способность объектива полностью используется глазом, называется
полезным увеличением Гт п и определяется следующим образом:
р - - ^0__d - — (2 9)
тп Т 120'' 2’ ( ’
У разных наблюдателей угловой предел разрешения глаза колеб-
лется в пределах -30"... 120" и снижается от 60"до 90" из-за дифрак-
ции при малых значениях диаметров выходных зрачков прибора
(-1 мм). Поэтому полезное увеличение телескопической системы мо-
жет иметь значения [13]:
0,2D < Гт п> 0,75D. (2.10)
При габаритных расчетах телескопических систем необходимо
определять глубину резко изображаемого пространства, так как при
визировании на предмет в пространстве изображений будут также рез-
ко видны предметы, находящиеся и в других плоскостях, расположен-
ных за и перед плоскостью наведения (рис. 2.4).
Рис. 2.4. К определению глубины резко изображаемого пространства
На рис. 2.4. телескопическая система представлена диаметрами
входного и выходного зрачков. Пусть величина допустимого кружка
рассеяния в плоскости изображения 8', а \|/гл — угловой размер допус-
тимого пятна рассеяния на сетчатке глаза при наблюдении т. В2, рас-
положенной не в плоскости наведения (в заднем плане).
Для сопряженных отрезков, определяющих положенияpt ир2 пе-
реднего и заднего планов, а также положение р плоскости наведения
можно записать
Р = Р'Т* 5 Pi = Р'^т ; Рг = Рг^т > (2-11)
тогда глубина изображаемого пространства определится по формуле
& = P2~Pi’ (2.12)
где р' = р'Лгл/(Лгл -р»; р'2 = p'DTJl/(Drjl + р'у); р' — положение плос-
кости изображения относительно выходного зрачка телескопической
системы.
Если глаз аккомодирован на бесконечность, то р = <» и
р~ = p't°°rT = -_DrjITf/v— это расстояние называют началом бесконеч-
ности для телескопической системы.
Однако, как показывают практические наблюдения, из-за изме-
нения аккомодации расстояние до переднего плана будет меньше, чем
р~/2. Для зрительной трубы, если задний план расположен в беско-
вечности (р2 = °°), расстояние до переднего плана (в метрах) можно оп-
ределить по эмпирической формуле pt = rf /Ак , где Ак — объем акко-
модации в диоптриях (для нормального глаза А* = 4 дптр).
Расчет простых телескопических систем Кеплера и Галилея
Простая телескопическая система состоит из двух компонентов,
расположенных так, что задний фокус первого компонента совпадает
с передним фокусом второго компонента. Видимое увеличение Гт мо-
жет быть как положительным (Гт > 0), так и отрицательным (Гт < 0),
поэтому изображение в телескопической системе может быть прямым
(Гт > 0) или обратным (перевернутым) (Гт < 0).
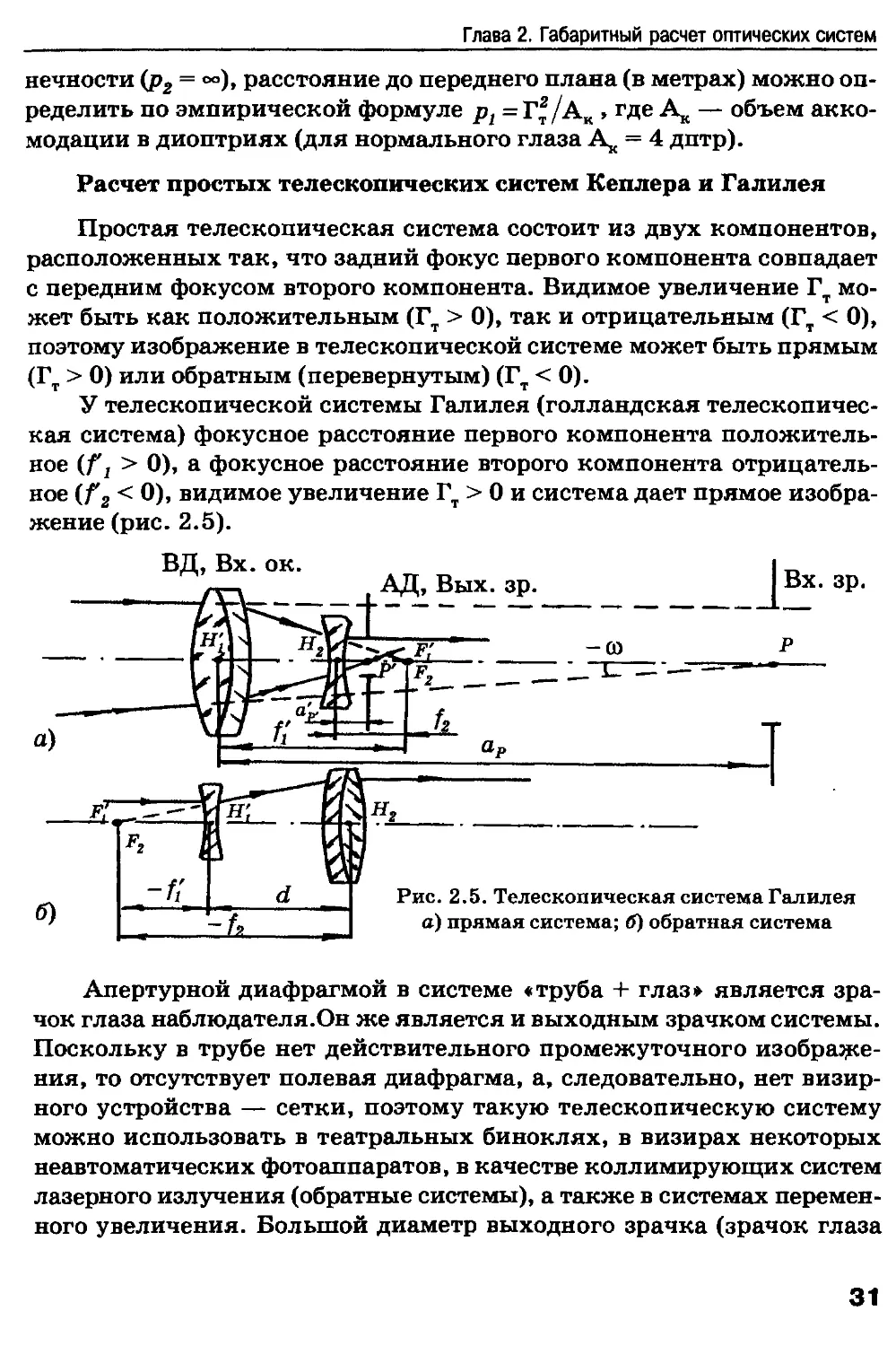
У телескопической системы Галилея (голландская телескопичес-
кая система) фокусное расстояние первого компонента положитель-
ное (Г; > 0), а фокусное расстояние второго компонента отрицатель-
ное (Гг < 0), видимое увеличение Гт > 0 и система дает прямое изобра-
жение (рис. 2.5).
Апертурной диафрагмой в системе «труба + глаз» является зра-
чок глаза наблюдателя.Он же является и выходным зрачком системы.
Поскольку в трубе нет действительного промежуточного изображе-
ния, то отсутствует полевая диафрагма, а, следовательно, нет визир-
ного устройства — сетки, поэтому такую телескопическую систему
можно использовать в театральных биноклях, в визирах некоторых
неавтоматических фотоаппаратов, в качестве коллимирующих систем
лазерного излучения (обратные системы), а также в системах перемен-
ного увеличения. Большой диаметр выходного зрачка (зрачок глаза
в сумерках 6...8 мм) позволяет проводить наблюдения при слабом ос-
вещении. В зависимости от увеличения (Гт > 1 или Гт < 1) использу-
ют прямые (рис. 2.5, а) или обратные (перевернутые) (рис. 2.5, б) сис-
темы Галилея.
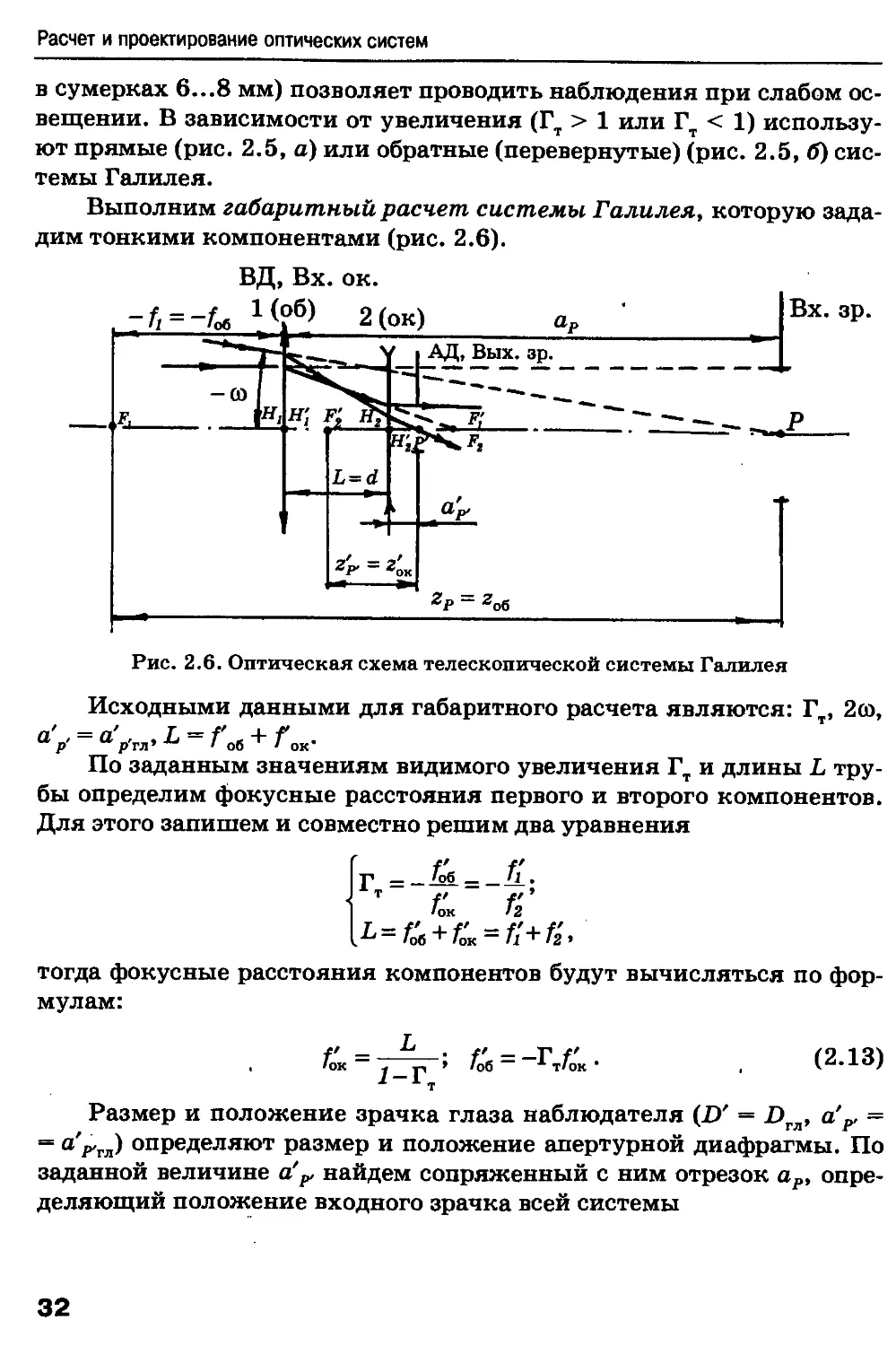
Выполним габаритный расчет системы Галилея, которую зада-
дим тонкими компонентами (рис. 2.6).
Рис. 2.6. Оптическая схема телескопической системы Галилея
Исходными данными для габаритного расчета являются: Гт, 2со,
а' . = а'. , L = f «+ f .
р ргл* 'об ' ок
По заданным значениям видимого увеличения Гт и длины L тру-
бы определим фокусные расстояния первого и второго компонентов.
Для этого запишем и совместно решим два уравнения
Г — />б — Zt .
' Т С Гг'
Л = /об + /ок = fl + /2 >
тогда фокусные расстояния компонентов будут вычисляться по фор-
мулам:
= /^ = -Гт/ок- . (2.13)
Размер и положение зрачка глаза наблюдателя (D' = 2)гл, а'р, =
= а'р,тл) определяют размер и положение апертурной диафрагмы. По
заданной величине а'р, найдем сопряженный с ним отрезок ар, опре-
деляющий положение входного зрачка всей системы
аР = (Гта^ + Ь)Гт*) (2.14)
и вычислим диаметр входного зрачка
П = П'Гт = ПглГт. (2.15)
Из формулы (2.14) следует, что входной зрачок мнимый и всегда
располагается за телескопической системой.
Поле в трубе Галилея ограничивается виньетирующей диафраг-
мой, роль которой выполняет оправа объектива. Угловое поле 2со в
пространстве предметов зависит от размера входного окна, которое со-
впадает с виньетирующей диафрагмой
^ВХ.ОК -^св.об •
В зависимости от степени виньетирования (срезания наклонного
пучка лучей плоскостью входного окна) угловое поле в пространстве
предметов можно рассчитать по следующим формулам:
а) при отсутствии виньетирования (коэффициент виньетирования
*м=1)
tg(O = ~Р ;
[2Гт(а^Гт + £)]
б) при 50%-ном виньетировании (km = 0,5)
t а ------_________.
g [2Гт (а'р,Гт + L)] ’ (2.16)
в) при 100% -ном виньетировании (Лш = 0)
fjrril — __________________~^св.об ___
[2Гт(а^Гт + £)]’
где Г)св об — световой диаметр объектива; L = d — расстояние между
компонентами телескопической системы.
Угловое поле окуляра определим из формулы (2.1)
tg(o' = rTtgco. (2.17)
Обычно входной зрачок трубы расположен на большом расстоя-
нии ар от трубы, поэтому, если не учитывать виньетирования (fem = 1),
то световой диаметр £>св об объектива получается большим. Поэтому
всегда габаритный расчет выполняют по заданному коэффициенту ви-
ньетирования. При больших значениях Гт и 2со практически всегда
световые диаметры компонентов определяют из расчета хода только
главного луча (рис. 2.7).
** Положение входного зрачка можно определить и по формуле Ньютона. Из рис. 2.6
видно, что г'р. =а'р - fOK. По формуле Ньютона найдем: z0K = - /о'к2/г'к = г'л, тогда
2oe = -/</Ak> ap = zo«-^- (2.14)
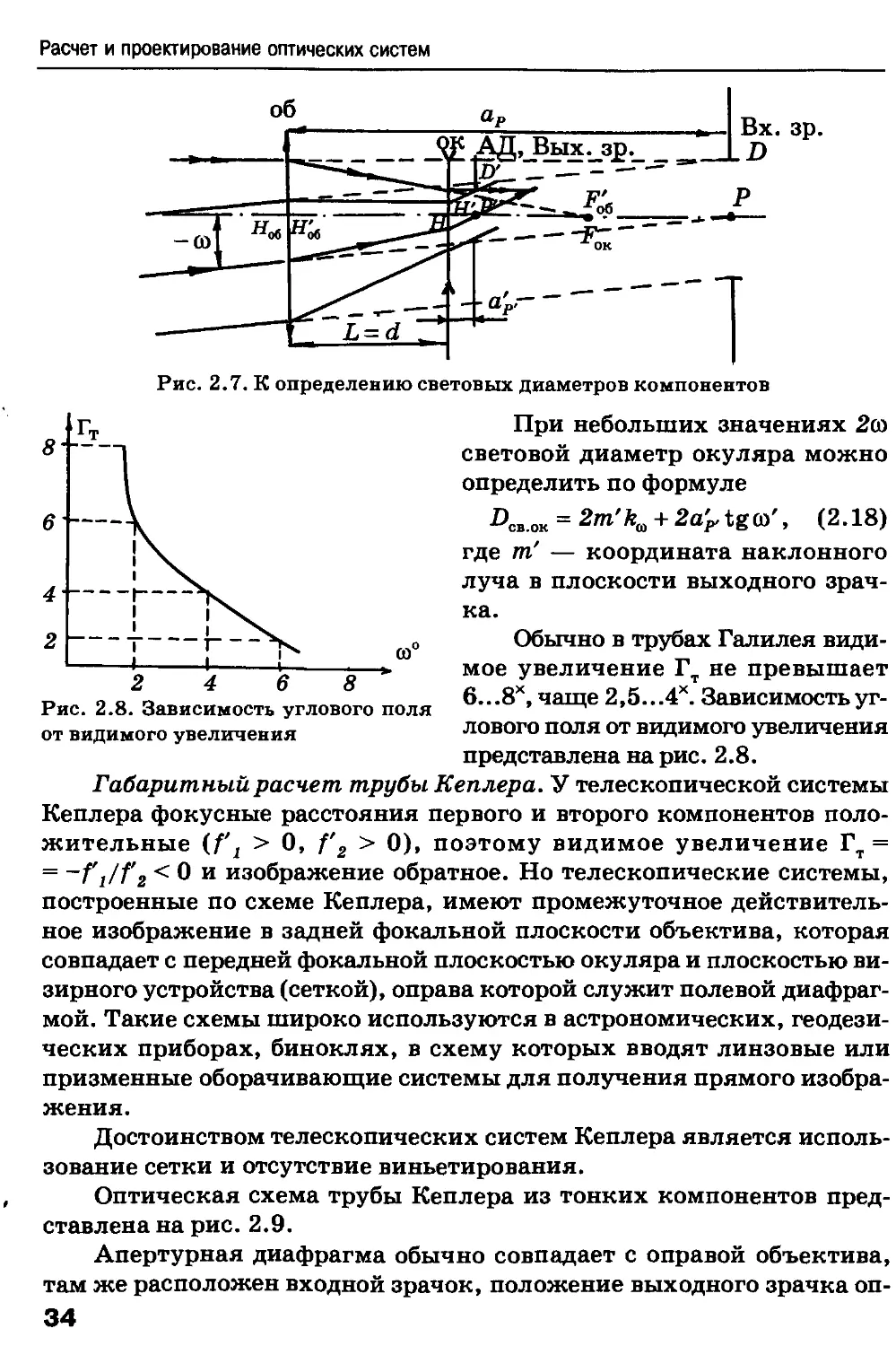
Рис. 2.7. К определению световых диаметров компонентов
2 4 6 8
Рис. 2.8. Зависимость углового поля
от видимого увеличения
При небольших значениях 2ол
световой диаметр окуляра можно
определить по формуле
Дв.ок = 2m'k№> + 2a'p,tg(x>', (2.18)
где т' — координата наклонного
луча в плоскости выходного зрач-
ка.
Обычно в трубах Галилея види-
мое увеличение Гт не превышает
6.. .8 , чаще 2,5...4 . Зависимость уг-
лового поля от видимого увеличения
представлена на рис. 2.8.
Габаритный расчет трубы Кеплера. У телескопической системы
Кеплера фокусные расстояния первого и второго компонентов поло-
жительные (Гj > 0, f 2 > 0), поэтому видимое увеличение Гт =
= -f iff 2 < 0 и изображение обратное. Но телескопические системы,
построенные по схеме Кеплера, имеют промежуточное действитель-
ное изображение в задней фокальной плоскости объектива, которая
совпадает с передней фокальной плоскостью окуляра и плоскостью ви-
зирного устройства (сеткой), оправа которой служит полевой диафраг-
мой. Такие схемы широко используются в астрономических, геодези-
ческих приборах, биноклях, в схему которых вводят линзовые или
призменные оборачивающие системы для получения прямого изобра-
жения.
Достоинством телескопических систем Кеплера является исполь-
зование сетки и отсутствие виньетирования.
Оптическая схема трубы Кеплера из тонких компонентов пред-
ставлена на рис. 2.9.
Апертурная диафрагма обычно совпадает с оправой объектива,
там же расположен входной зрачок, положение выходного зрачка оп-
34
ределяется ходом главного луча (1), а его размер — ходом апертурно-
го луча (2).В визуальных телескопических системах глаз наблюдате-
ля совмещен с выходным зрачком трубы.
Выполним габаритный расчет трубы, если известны Гт, L = +
+ f ок, 2со, D'. В трубе допускается 50% виньетирование наклонного
пучка лучей (рис. 2.10).
Рис. 2.10. Ход апертурного и наклонного пучка лучей при 50% виньетировании
Так как апертурная диафрагма совпадает с оправой объектива, то
световой диаметр объектива равен диаметру входного зрачка, т.е.
в = ^св.об> т-к- аР = 0.
Для системы из двух бесконечно тонких компонентов, располо-
женных в воздухе, по формулам (2.13) определим фокусные расстоя-
ния объектива и окуляра
f'= LT* ; f = . (2.19)
*об тч __ у * *ок / Т* ' ,
А Т 1~Л. т
Зная размер D выходного зрачка, учитывая, что Гт = D/D', опре-
делим размер входного зрачка
В = В'|ГТ|. (2.20)
Вычислим угловое поле трубы в пространстве изображений (угло-
вое поле окуляра):
tgco' = rTtgco, 2coOK = 2arctgco'. (2.21)
Определим удаление выходного зрачка при ар = 0, когда гр =
Тогда в соответствии с формулой Ньютона
Zpf —
f'2 f,2
• OK *OK
ZP fo6
и
•OK
rT
(2.22)
aP' — Tok + ZP' — p ~ p •
Найдем диаметр полевой диафрагм^: т
^ПД ~ | — 2| /о6 tg(O |.
Для уменьшения поперечных размеров окуляра, а в сложных те-
лескопических системах для уменьшения поперечных размеров ком-
понентов оборачивающих систем обычно допускают 50% виньетиро-
вание наклонных пучков.
Из рис. 2.10 видно, что при т2 = „„„ = D/4, что соответствует
= 0,5, виньетирующая диафрагма устанавливается на расстоянии
авд, на котором верхний полевой луч 2, идущий на высоте y^=D/4 пе-
ресекается с верхним апертурным лучом 1, идущим на край входно-
го зрачка на высоте ml=hl= D/2. По формулам расчета хода первого
вспомогательного луча при а; = tg = 0 запишем:
«2 = Л,Фоб = hl/f об’
h2 = ht~ авд а2 и полагая, что
й; = D/2, h2 = Ввд/2, получим
Ввд/2 = (^>/2) - a^D/(2f о6) и тогда
•^вд = D(fo6 ~ авд)//об • (2.23)
Запишем формулы для расчета хода второго вспомогательного
луча, полагая, что = tg со, где со < 0, yt впл = т2 = D/4'.
Ра = Рт + У1 впл^об»
У2 впл = У1 впл ~ авд Рг •
Принимая, что у2впл = Ввд/2, а у, впл = П/4, получим
Ввд/2 = D/4 - авд [tg со + D/(4f об)] . Если обозначить вы-
ражение tg со + D/(4f о6) = А, то Пвд = (В - 4авдА)/2. (2.24)
Приравняв (2.23) и (2.24), после преобразований найдем
2(D-2f^A)’ (2,25)
<2-26>
Проконтролировать вычисления отрезка авд и диаметра виньети-
рующей диафрагмы можно расчетом хода второго вспомогательного
луча на высоте yt = D/4 при = tg со при со < 0. Для этого необходи-
мо найти
Рг = Рт+ Ут//об»
Увд = У1~ ®вдРг >
-®вд = ^Увд •
При установке виньетирующей диафрагмы на расстоянии авд
(рис. 2.10) нижняя часть наклонного пучка полностью проходит че-
рез нее, т.е. происходит несимметричное виньетирование. Для сим-
метричного виньетирования необходимо установить вторую виньети-
рующую диафрагму. Однако второй виньетирующей диафрагмой мо-
жет быть оправа окуляра, так как в большинстве случаев окуляр —
это сложная оптическая система и виньетирующей диафрагмой может
быть оправа первой линзы окуляра.
Виньетирующая диафрагма необходима еще и для устранения зас-
веток из-за бликов рассеянного света от корпуса прибора, а также для
уменьшения аберраций широких наклонных пучков.
Если окуляр принять за бесконечно тонкий компонент, то для
вычисленного по (2.21) углового поля с учетом коэффициента винье-
тирования найдем:
ЯСв.ок = tg®' + D’2 при = 0,5;
Ц».ок = tg®' + D’ при = 1 •
Если в результате расчета окажется, что световой диаметр окуляра
при km = 1 увеличится незначительно, то в простой системе можно не
вводить виньетирование наклонных пучков лучей.
Разрешающая способность объектива телескопической системы
\|/об = 120"/D. Разрешающая способность системы Кеплера составляет
\|/т = 60"/Гт при \|/гл = 60". Если телескопическая система неполнос-
тью использует разрешающую способность объектива (\|/т > \|/об), то сле-
дует найти полезное увеличение трубы
Гтп = 60"D/120" = 0,5D и пересчитать диаметр
выходного зрачка трубы по формуле:
D' = О/Гтп.
Наблюдательные приборы работают совместно с глазом, который
имеет недостатки (аметропию), поэтому на выходе телескопической
системы необходимо получать пучки лучей различной структуры: для
нормального (эмметропического) глаза — параллельный; для близо-
рукого (миопического) глаза — расходящийся; для дальнозоркого (ги-
перметропического) глаза — сходящийся. Исправление указанных
недостатков глаза может быть достигнуто перемещением окуляра: к
объективу — тогда выходящие пучки лучей будут расходящимися; от
объектива — сходящимися. Обычно перемещения окуляра, характе-
ризующие пределы изменения сходимости выходящих пучков, при-
нимаются равными А = ±5...±10 дптр. Тогда перемещение окуляра,
выраженное в мм, можно вычислить по формуле:
Д = fg А/1000. (2.27)'
Таким образом из габаритного расчета зрительной трубы нашли
основные оптические характеристики для объектива (fo6, D/fo6, 2оз)
и для окуляра (f ок, D’, 2шок, а'р, или s'p,). По этим характеристикам
подбирают конструкцию объектива и окуляра (см. главу 4). Из ката-
лога для окуляра выписывают его конструктивные параметры (г, d,
п), методом проб пересчитывают их на требуемое фокусное расстоя-
ние (глава 3), выполняют аберрационный расчет зрительной трубы по
известным в обратном ходе аберрациям окуляра, определяют основ-
ные параметры объектива С, Pog, Wog. По этим параметрам синтези-
руют первый компонент — объектив (глава 4).
Расчет зрительной трубы Кеплера с коллективом
в фокальной плоскости
На первом этапе габаритного расчета компоненты зрительной тру-
бы принимают за бесконечно тонкие и по заданным Гт, L, 2оз, 1У, s'р, вы-
числяют по формулам (2.19) фокусные расстояния объектива и окуля-
ра, диаметр D входного зрачка по (2.20) и угловое поле окуляра по (2.21).
Как известно, окуляры телескопических систем представляют до-
статочно сложные оптические системы. Существуют каталоги окуля-
ров, поэтому на практике целесообразно окуляр выбрать из каталога
по найденным из габаритного расчета значениям f0K, 2озок, заданному
удалению s'p, выходного зрачка и пересчитать его конструктивные па-
раметры на требуемое фокусное расстояние. *’
Очень важно при выборе окуляра согласовать удаление выходно-
го зрачка зрительной трубы. Это объясняется тем, что при аберраци-
онном анализе окуляра в обратном ходе лучей наклонный пучок про-
ходит через входной зрачок окуляра, расположенный на вполне оп-
ределенном расстоянии sPoK . Объектив рассчитывается или выбира-
ется таким образом, чтобы скомпенсировать эти аберрации. Компен-
сация аберраций будет лишь в том случае, если -Sp, = sP0K . Из рис.
2.11 видно, что точки Р и Р', Fo6 и F'oK являются оптически сопряжен-
ными, поэтому величины гр и z’p, можно связать через продольное уве-
личение, которое обратно пропорционально квадрату видимого увели-
чения, а именно zp = 2'Г ГТ2.
АД, Вх. зр.
Рис. 2.11. К габаритному расчету трубы Кеплера
Можно задаться фокусным расстоянием окуляра с учетом требуемого удаления
выходного зрачка и по известным значениям fnK, 2шок выбрать готовый окуляр, не пе-
ресчитывая его конструктивные параметры, а фокусное расстояние объектива опреде-
лить как = -ГОКГТ, тогдаL =
Но в соответствии с рис. 2.11 z'p- = - s’F., a zP = ар -fo6, тогда
ар = (sr -(2.28)
С учетом сферической аберрации в зрачках Az'p, (сферической
аберрации главного луча), которая может достигать при больших 2соок
величины порядка 2...3 мм, формулу для определения положения
входного зрачка в трубе можно записать в виде:
Яр = (sp. — Sj., — Д2р<)Г^ — ^,6. (2.29)
Диаметр полевой диафрагмы, обеспечивающей заданное угловое
поле трубы, вычислим по формуле
^пд = 2/об| tg со j.
Для определения световых диаметров объектива (£>;), коллектив-
ной линзы окуляра (В2), глазной линзы окуляра (П3) следует рассчи-
тать верхний и нижний полевой лучи (рис. 2.11), тогда
Dt = 2т1 + 2ар tg со;
D2 = 2ар tgco — 2(f'6 - sF)tgco2 + 2т2;
D3 = 2s'p- tgco' + 2m',
где 2mt = kuD — поперечный меридиональный размер наклонного
пучка; 2т2 = 2m1sF/f о6 — расстояние между точками пересечения
нижнего и верхнего полевых лучей в плоскости коллективной линзы;
2т' = kjy — поперечный меридиональный размер наклонного пучка
в плоскости выходного зрачка;
х , х х У1 (fo6 + ap)^(£>
tgco; = tgco2 = tgco + v 06 --.
• об *об
Если при определении _D7 окажется, что < D, то световой диаметр
объектива следует принять равным диаметру входного зрачка = D.
После вычисления диаметров D2 и D3 эти значения следует срав-
нить со значениями D2 и D3, приведенными в каталоге.
Как было сказано выше, зрительная труба Кеплера имеет визир-
ную сетку в виде плоскопараллельной пластинки с нанесенными на
ней перекрестиями или делениями, которая устанавливается в плос-
кости действительного изображения. Цена деления сетки Аг/ зависит
от требуемой угловой величины Асо деления и фокусного расстояния
объектива: Дг/ = fo6tg (Асо).
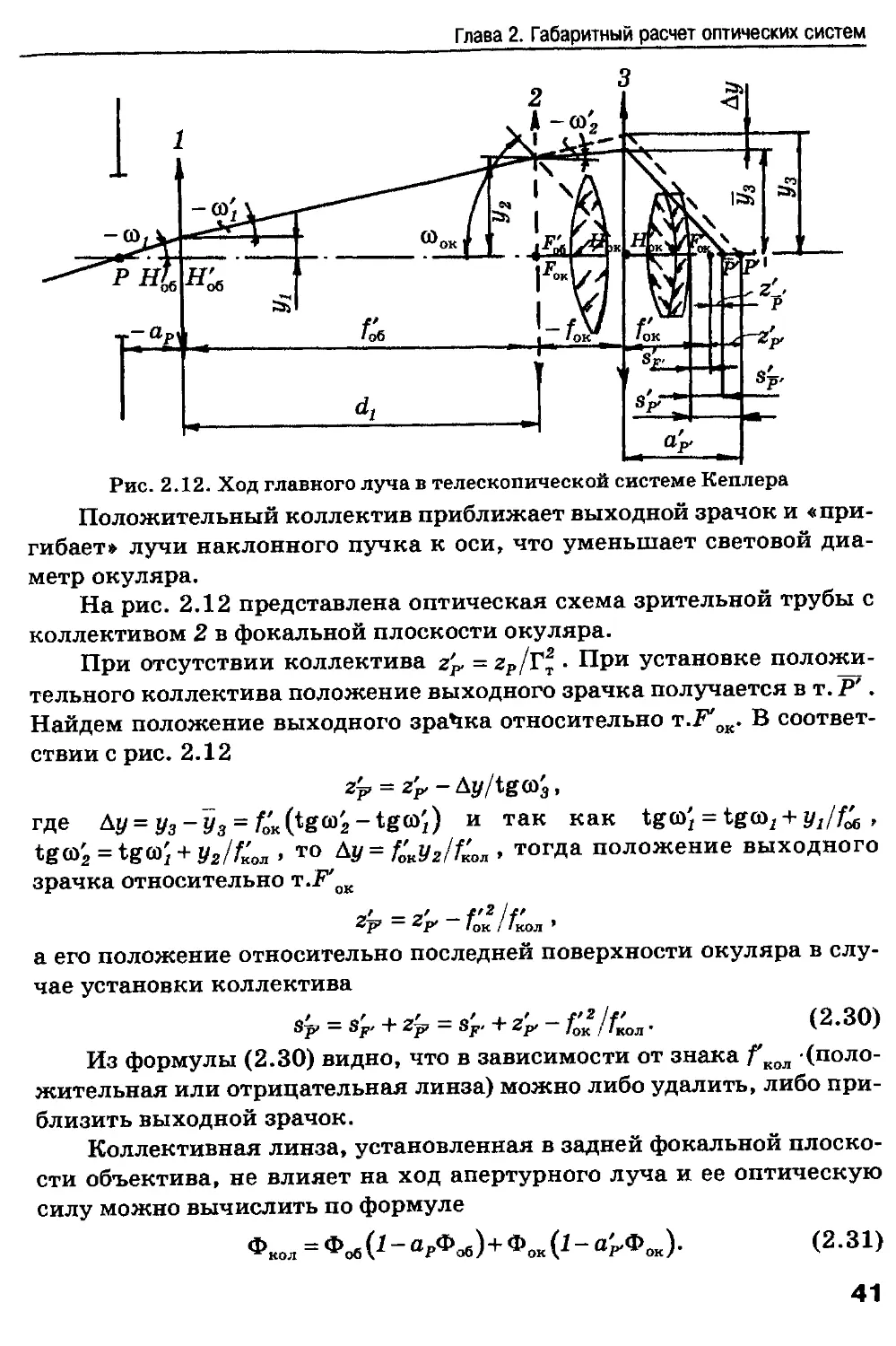
В том случае, когда требуется изменить положение выходного
зрачка без изменения всех остальных оптических характеристик тру-
бы, применяют коллективы — обычно одиночные плосковыпуклые и
плосковогнутые линзы, устанавливаемые в фокальной плоскости оку-
ляра (рис. 2.12).
Рис. 2.12. Ход главного луча в телескопической системе Кеплера
Положительный коллектив приближает выходной зрачок и «при-
гибает» лучи наклонного пучка к оси, что уменьшает световой диа-
метр окуляра.
На рис. 2.12 представлена оптическая схема зрительной трубы с
коллективом 2 в фокальной плоскости окуляра.
При отсутствии коллектива г'р = zP/Y^ • При установке положи-
тельного коллектива положение выходного зрачка получается в т.Р*.
Найдем положение выходного зраЧка относительно t.F'ok. В соответ-
ствии с рис. 2.12
zp — г'р — Ay/tgcoa,
где Ду = у3 - у3 = fo'K(tga)'2 - tgco'2) и так как tgco2 = tgco2 + yjf^ ,
tg®2 = + УЖол > то Ду = £ку2/4'ол , тогда положение выходного
зрачка относительно т.F'oK
2р = г'р ’
а его положение относительно последней поверхности окуляра в слу-
чае установки коллектива
4 = з'р + Zp = s', + г'р - /о'кгЖл • <2-30>
Из формулы (2.30) видно, что в зависимости от знака fKO!l (поло-
жительная или отрицательная линза) можно либо удалить, либо при-
близить выходной зрачок.
Коллективная линза, установленная в задней фокальной плоско-
сти объектива, не влияет на ход апертурного луча и ее оптическую
силу можно вычислить по формуле
Фкол = Фоб (1 - ОРФоб)+ ФОк (1 - 4-Фок)- (2-31)
Чтобы погрешности стекла, из которого выполнен коллектив, не
были видны наблюдателю, его смещают из фокальной плоскости
объектива (обычно в сторону объектива) так, чтобы это смещение со-
ответствовало бы перемещению окуляра на несколько диоптрий
(обычно А = 10...20 дптр). Перемещение определяется отрезком
Д = А/'* /1000, но в этом случае необходимо пересчитать 4^ол и Рас-
стояние dt между ними, чтобы сохранить положение выходного зрач-
ка ( Sp), а фокусное расстояние системы /^+кол должно быть равно пре-
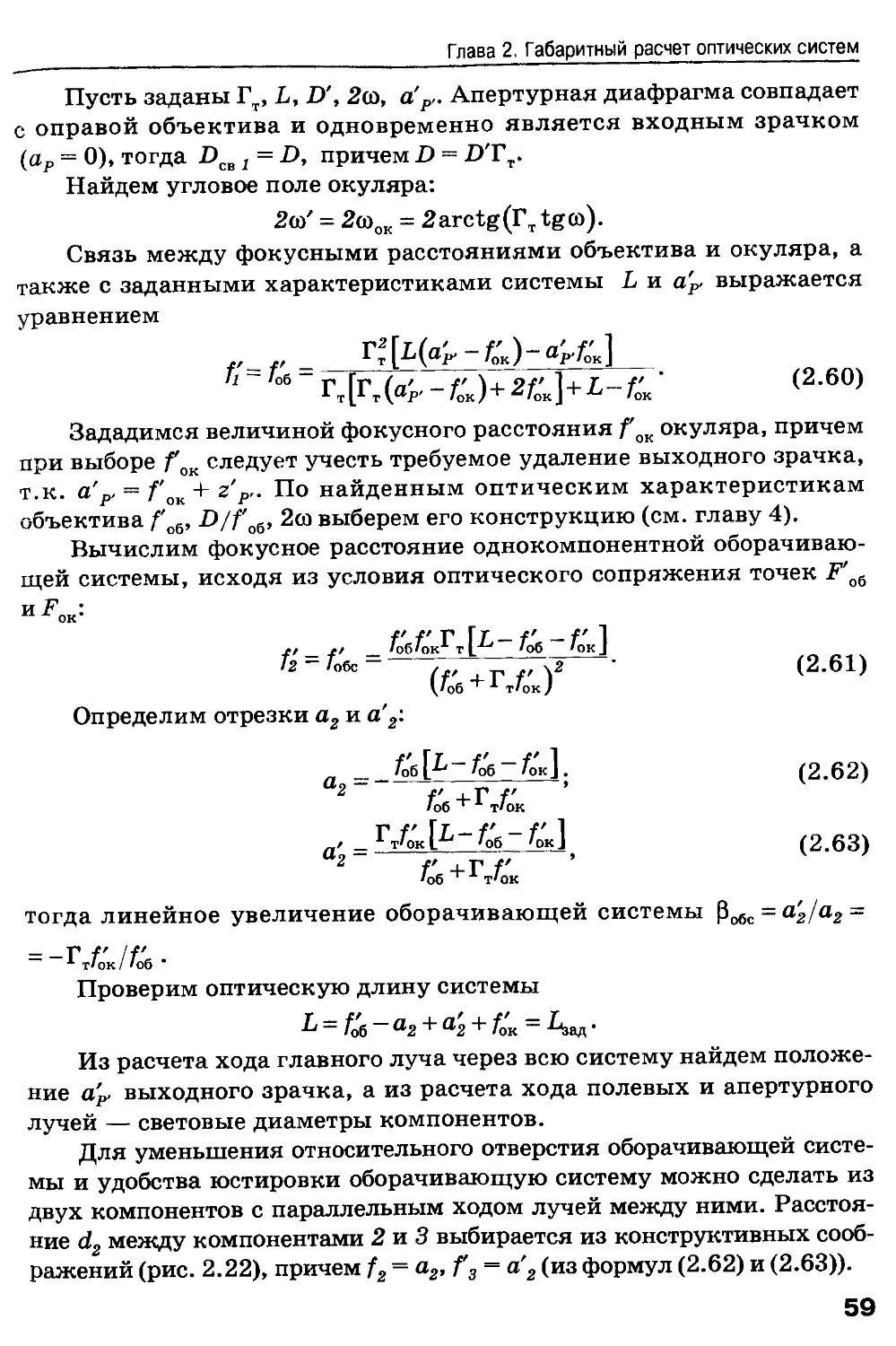
жнему значению /'ов. Пересчет /о'б, 4'ол приведен на с.60.
Расчет зрительной трубы с внутренней фокусировкой
В современных геодезических приборах широкое распростране-
ние получили зрительные трубы с внутренней фокусировкой [12]. В
таких трубах объективом является двухкомпонентный телеобъектив
(ТО), состоящий из положительного и отрицательного компонентов,
расположенных на некотором расстоянии d0 друг от друга. Оптичес-
кая схема телеобъектива, состоящего из бесконечно тонких компонен-
тов, представлена на рис. 2.13.
Особенность телеобъектива состоит в том, что фокусное расстоя-
ние f'o6 больше оптической длины L объектива, т.е. f'a6 > LTO,
f'o6 » а'г. Такая конструкция позволяет при малых габаритах иметь
большое фокусное расстояние объектива, а следовательно и большое Гт.
Для таких конструкций вводится понятие коэффициента телесок-
ращения т = Ът/?оЪ, величина которого для линзовых систем состав-
ляет т = 0,6...0,8, для зеркальных и зеркально-линзовых
т = 0,25...0,4. Для линзовых систем коэффициент телесокращения
нельзя сделать меньше 0,6, т.к. при этом уменьшится оптическая дли-
на объектива, увеличится линейное увеличение |3О2 второго компонен-
та, уменьшится фокусное расстояние первого компонента, что приве-
дет к повышению относительного отверстия и усложнению его кон-
струкции. Обычно для линзовых систем |3О2 = 1,5...2,2.
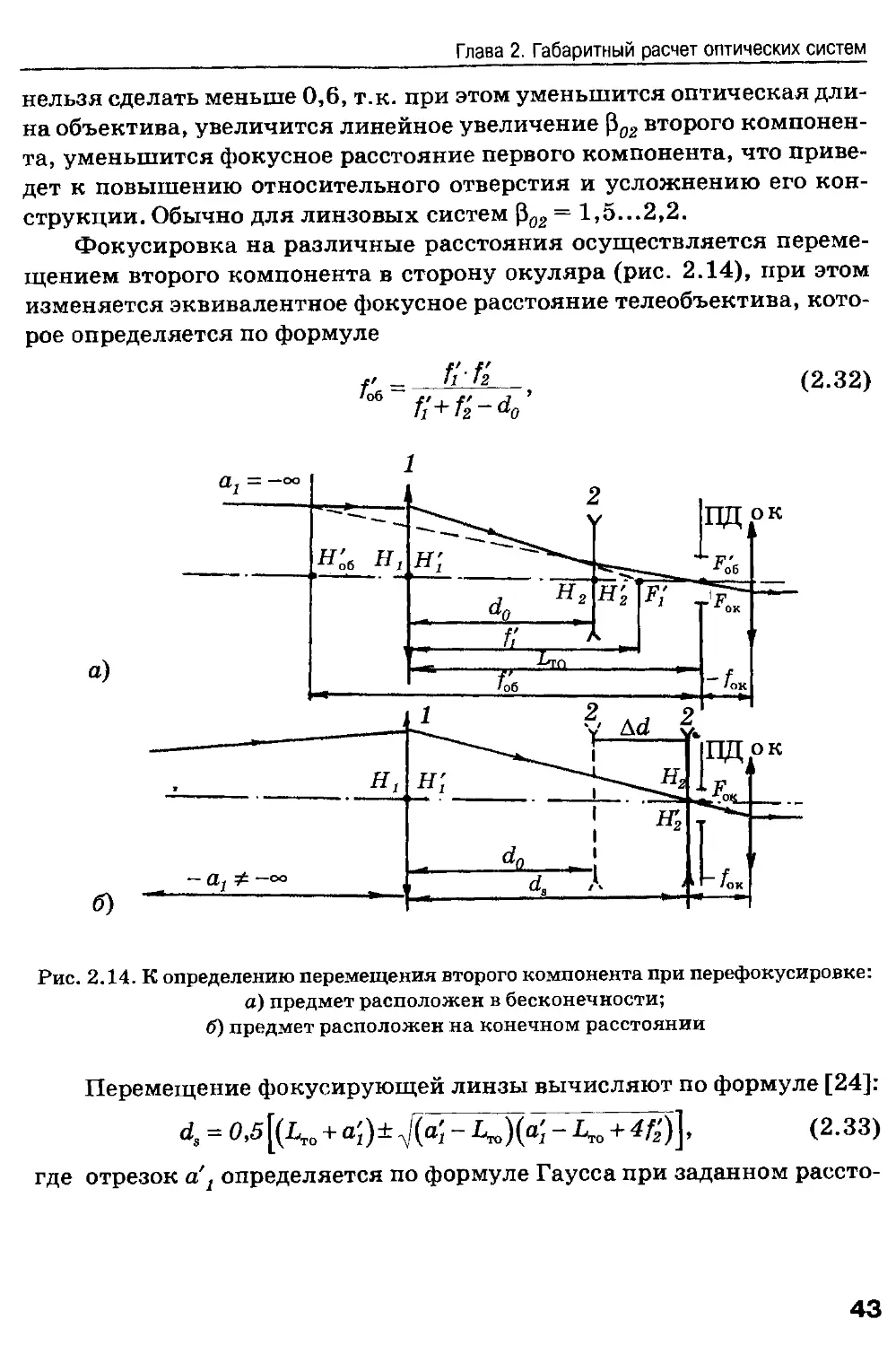
Фокусировка на различные расстояния осуществляется переме-
щением второго компонента в сторону окуляра (рис. 2.14), при этом
изменяется эквивалентное фокусное расстояние телеобъектива, кото-
рое определяется по формуле
Рис. 2.14. К определению перемещения второго компонента при перефокусировке:
а) предмет расположен в бесконечности;
б) предмет расположен на конечном расстоянии
Перемещение фокусирующей линзы вычисляют по формуле [24]:
ds = 0,5[(LTO + a[)±J^n^^-^^4f^)], (2.33)
где отрезок а'} определяется по формуле Гаусса при заданном рассто-
a fr
янии визирования а;: а\ =—-—f, и Г2 — фокусные расстояния пер-
ai+ fi ,
вого и второго компонентов телеобъектива.
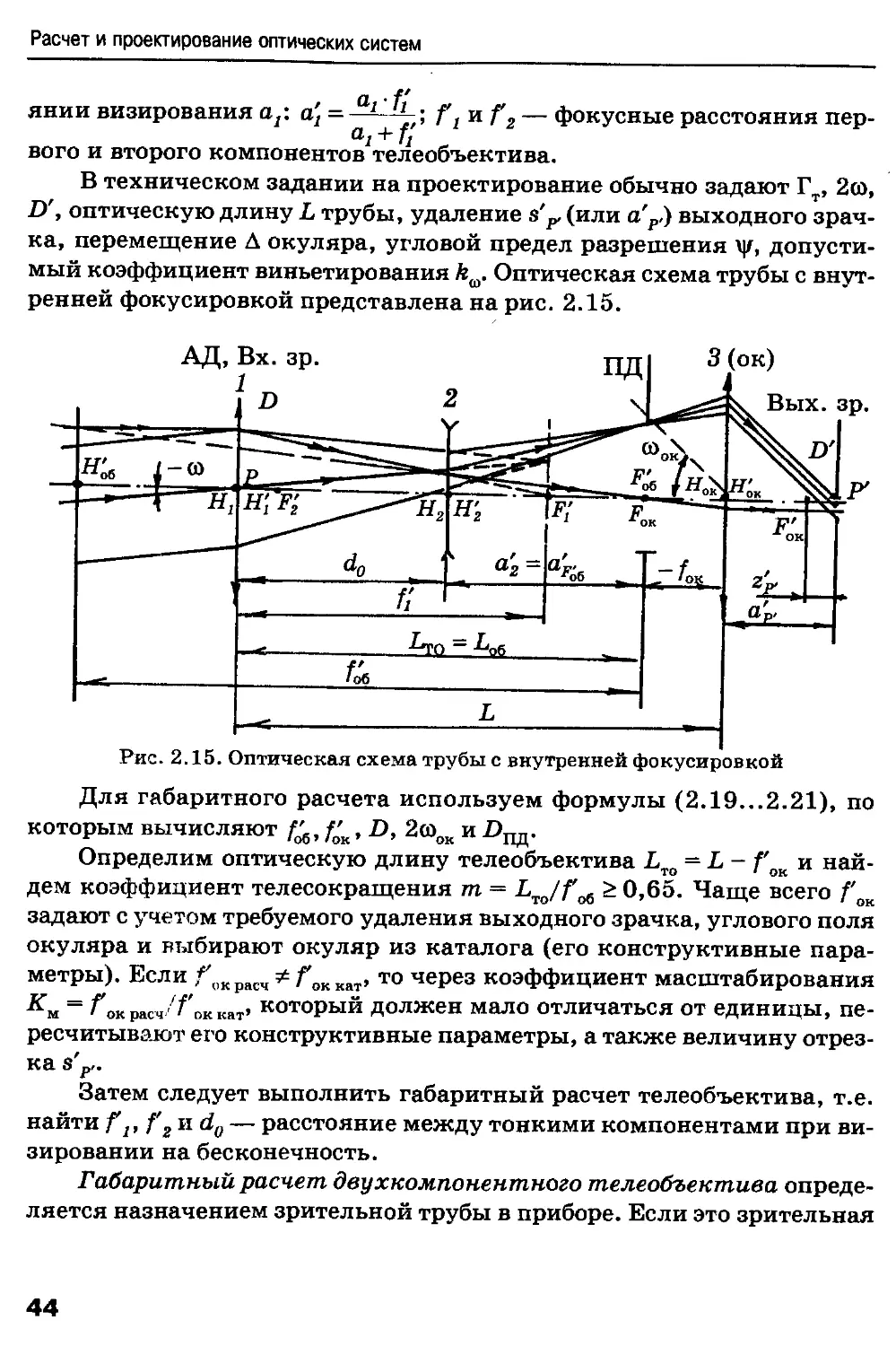
В техническом задании на проектирование обычно задают Гт, 2(0,
D', оптическую длину L трубы, удаление з'г (или а'р,) выходного зрач-
ка, перемещение Д окуляра, угловой предел разрешения \|/, допусти-
мый коэффициент виньетирования ka. Оптическая схема трубы с внут-
ренней фокусировкой представлена на рис. 2.15.
Рис. 2.15. Оптическая схема трубы с внутренней фокусировкой
Для габаритного расчета используем формулы (2.19...2.21), по
которым вычисляют f'K, D, 2(0ОК и -Опд.
Определим оптическую длину телеобъектива LTO — L - f'OK и най-
дем коэффициент телесокращения т = L^/f^ > 0,65. Чаще всего /'ок
задают с учетом требуемого удаления выходного зрачка, углового поля
окуляра и выбирают окуляр из каталога (его конструктивные пара-
метры). Если Гок * Гоккат» то через коэффициент масштабирования
= ^окрасч'Токкат» который должен мало отличаться от единицы, пе-
ресчитывают его конструктивные параметры, а также величину отрез-
ка з'р,.
Затем следует выполнить габаритный расчет телеобъектива, т.е.
найти ft, f'z и dQ — расстояние между тонкими компонентами при ви-
зировании на бесконечность.
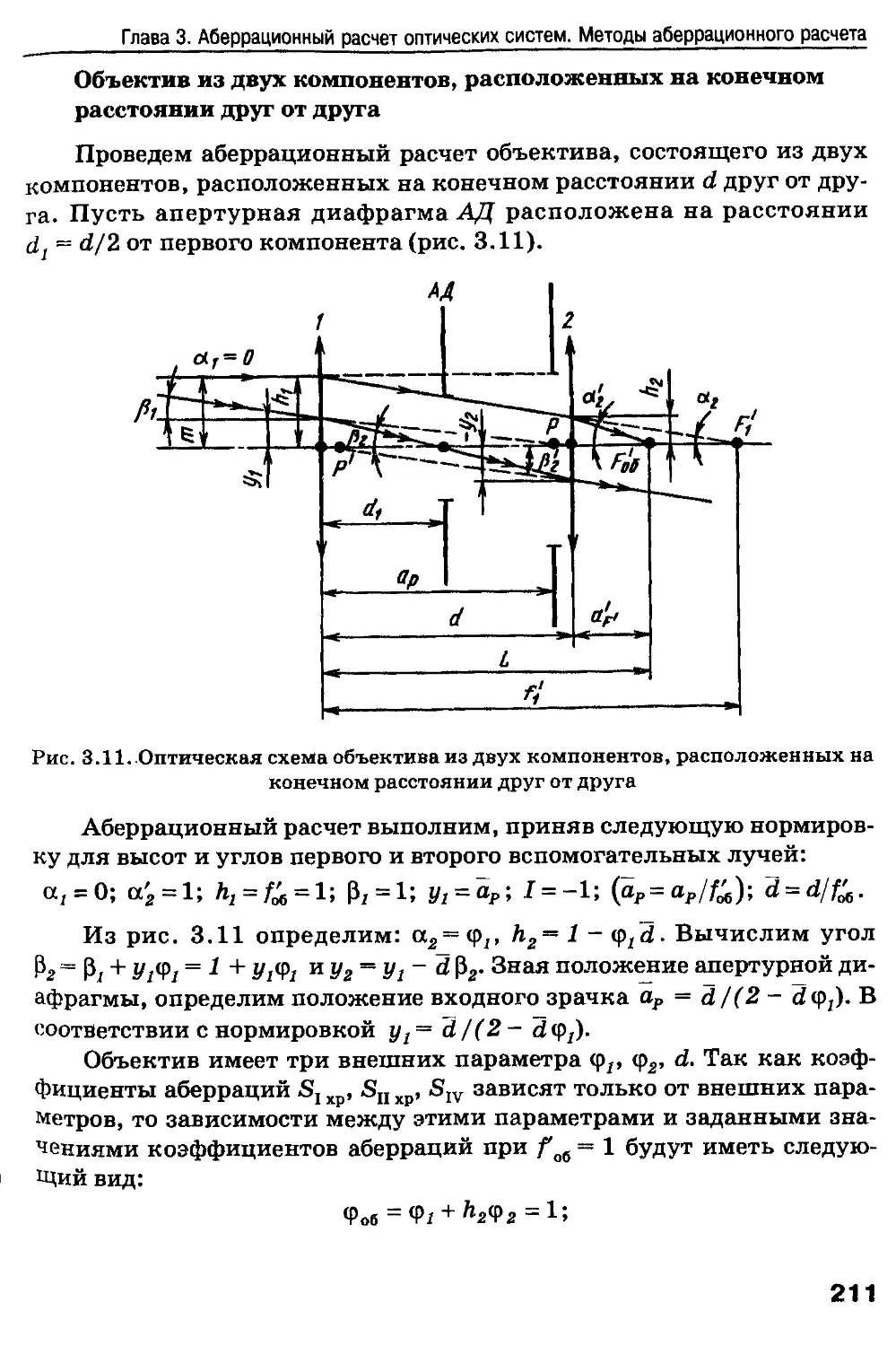
Габаритный расчет двухкомпонентного телеобъектива опреде-
ляется назначением зрительной трубы в приборе. Если это зрительная
труба дальномера, то она должна быть квазианаллатической, т.е. та-
кой, чтобы при изменении фокусировки аддитивный член cs в урав-
нении дальномера s = kl + cs был бы минимальным. Достичь этого
можно, если труба будет аналлатической т.е. расстояние от перво-
го компонента до проекции оси вращения прибора на оптическую ось
будет равно 5 = 0,5£о6 + (15...20) мм. Тогда из уравнения аналлатич-
ности, введенного в практику расчетов телеобъективов Б.В. Фефило-
вым [24], можно определить оптическую силу первого компонента те-
леобъектива
Ф| 8-£о6 + фД46(5 + 1)-5]+£об-8-2=0. (2.34)
Оптическая сила Ф2 второго компонента и расстояние d0 между
компонентами при визировании на бесконечность определяются из со-
вместного решения уравнений оптической длины объектива
А>б = d0 + ар' — /об(-^ — d^t)+d0 (2.35)
и фокусного расстояния (или оптической силы) двухкомпонентной си-
стемы
4'6 = . > фо6 = ф1 + ф2-d^^2. (2.36)
Из совместного решения уравнений (2.35) и (2.36) получим:
= (2.37)
l~f^
(2-38)
1 dg^P j
Если это зрительная туба теодолита, нивелира, прибора для про-
верки параллельности или соосности, то габаритный расчет телеобъ-
ектива следует выполнять из заданного расстояния ближнего визиро-
вания at min (минимальное расстояние, на которое можно сфокусиро-
ваться трубой). Было показано, что при фокусировке на расстояние
cij min второй компонент телеобъектива следует передвинуть в крайнее
правое положение, т.е. а'; = Lo6 — (10. ..15) мм = L. Тогда оптическую
силу первого компонента или его фокусное расстояние можно вычис-
лить по формуле Гаусса 1/а' 1 - l/at min = 1/f т.е.
______________________________ A O'! min ’ L
** Аналлатической трубой в теории дальномеров называют такую трубу, для кото-
рой вершина диастимометрического угла совпадает с точкой проекции вертикальной оси
вращения инструмента на оптическую ось трубы. Для такой трубы постоянная дально-
мера cs = 0 [12].
Оптическую силу второго компонента и расстояние между компонен-
тами вычисляют по формулам (2.38) и (2.37).
Если в техническом задании на проектирование не заданы ни
a; min» ни $> то можно задаться значением линейного увеличения (302
второго компонента телеобъектива. Обычно |302 = 1,5...2,2. Выбрав
значение увеличения второго компонента, находят f' = , так как
fа> Рог
= ’-I—. Фокусное расстояние второго компонента можно вычис-
о 2 (3 (ft d
лить по формуле (2.38) или как f' = ^ог^-1-, где d0 определяется по
формуле (2.37). ^°2
Для определения положения ар входного зрачка целесообразно
рассчитать главный луч в обратном ходе лучей через систему тонких
компонентов, полагая аР = -(^о'к + 2г)> ®;=(йок по формулам расчета
хода второго вспомогательного луча, принимая р; = tgcoOK, = ,
тогда а'р,3 = у3/ fr'3 = -аР.
Если после расчета окажется, что входной зрачок значительно
удален от первого компонента телеобъектива, то надо задать новое зна-
чение ар или положить ар = О, рассчитать главный луч в прямом ходе,
а требуемое удаление выходного зрачка получить введением коллек-
тива в фокальную плоскость окуляра.
Световые и полные диаметры всех компонентов зрительной тру-
бы определяются из расчета хода полевых лучей.
По найденным из габаритного расчета оптическим характеристи-
кам (Гоб» 7)//'об, 2(0^, т) выбирают конструкцию телеобъектива и либо
его конструктивные параметры выписывают из каталога, либо объек-
тив синтезируют (см. главу 4).
Следует отметить, что при перефокусировке изменяются фокус-
ное расстояние телеобъектива, видимое увеличение трубы, происхо-
дят колебания визирной оси.
Постоянное фокусное расстояние можно получить в трехкомпо-
нентных телеобъективах, а для исключения погрешностей визирова-
ния можно в качестве фокусирующих систем использовать призмы,
системы типа аксикона и т.п.
Расчет трехкомпонентного телеобъектива зрительной трубы.
В точных нивелирах, используемых в строительстве, машиностро-
ении, судостроении и т.п. необходимо получить малое расстояние ви-
зирования — до 0,4...0,5 м. В таких случаях в оптической схеме зри-
тельной трубы нельзя использовать двухкомпонентные телеобъекти-
вы, так как они обеспечивают расстояние st min ближнего визирования
не менее 1,5...2 м при значительном перемещении фокусирующего
компонента.
Эту задачу можно решить, применяя двухкомпонентный объек-
тив с положительным фокусирующим компонентом, позволяющим
фокусировать на предметы в диапазоне от нуля до бесконечности. Од-
нако это приведет к увеличению продольных габаритов трубы и ее мас-
сы, что неприемлемо. Поэтому для уменьшения расстояния st min до
0,4...0,5 м можно использовать трехкомпонентный телеобъектив
(рис. 2.16), содержащий фокусирующую систему из двух подвижных
компонентов — положительного 2 и отрицательного 3.
Рис. 2.16. Оптическая схема трехкомпонентного телеобъектива
Исходными данными для габаритного расчета телеобъектива яв-
ляются результаты габаритного расчета зрительной трубы:
фокусное расстояние и оптическая длина L телеобъектива; диаметр
D входного зрачка; положение ар входного зрачка (ар = 0); угловое
поле 2(0; расстояние а2 min ближнего визирования.
Требуется определить фокусные расстояния компонентов, рассто-
яния между ними, световые диаметры компонентов, величины пере-
мещения компонентов 2 и 3, закон их перемещения и выбрать конст-
рукции компонентов по значениям оптических характеристик.
При расчете надо учесть, что оптическая система (рис. 2.16) дол-
жна удовлетворять следующим условиям:
L = а', + L. - const;
1 фс (2.40)
г4 = г/г₽офс = const,
где 7фс — оптическая длина фокусирующей системы, т.е. расстояние
от плоскости предмета до плоскости изображения фокусирующей си-
стемы, причем /фс — величина переменная, зависящая от расстояния
визирования; р0 фс — линейное увеличение фокусирующей системы,
меняющееся с изменением расстояния визирования.
Из рис. 2.16 видно, что
L = dt + d2 + a3 = dt+a2 + l^. (2.41)
Используя известные уравнения параксиальной оптики, можно
вывести следующие соотношения, необходимые для выполнения рас-
чета:
(2.42)
(2.43)
(2.44)
(2.45)
(2.46)
(2.47)
(2-48)
_ _ ^фс ^2Ррфс) _
^гРо Фс + fz ~ Ре фс)
_ рфс ’ ^г)Ро фс + d2
1з=Мр0Фс-*М ;
= ctj — (ig;
— Уоб — а2 ‘ а3 .
О фс / 9
У1 а2
f'-.......... ЧЧЧ__________
(,4-dt)fz + (f3-d2)(f1'+f;-diy
Расчет можно проводить, приняв, что f2 = 1, тогда
/з7^/ = /з> ^фс/Ч = ^"
Поскольку система имеет постоянное положение плоскости изоб-
ражения и два подвижных компонента, перемещающихся при визи-
ровании на разные расстояния, то меняется фокусное расстояние
телеобъектива и его увеличение в зависимости от расстояния аг По-
этому расчет данного телеобъектива с малым расстоянием ближнего
визирования во многом аналогичен расчету панкратической системы.
Для получения приемлемых результатов надо выполнить иссле-
дование системы. Для этого удобно использовать ПЭВМ, поскольку
данная задача не решается однозначно. Рассмотрим рекомендации по
расчету и его примерную последовательность.
Зная оптическую длину L телеобъектива и диаметр D входного
зрачка, можно задаться значением f' так чтобы D/f г < 1:3. Но
48
Г<Л = Г; р02, поэтому надо проверить, чтобы было р03 < 1,8...1,9. При
расчете надо учесть, что для реальной системы величина L увеличит-
ся за счет толщин линз, поэтому заданное значение L надо уменьшить
примерно на 15 мм, т.е. на величину, соответствующую s^,.
Для расчета фокусирующей системы надо задаться значениями f2
и f 3, используя практические рекомендации: f2lf3 = -3...-4 при
f л = 250 мм, L = 165 мм, f's = 130 мм. Для данного примера оптималь-
ный вариант был получен при f2 = 148 мм и f3 = -49 мм.
Уточнив L, задавшись f t, f2 и f3, можно проводить расчет в сле-
дующей последовательности:
1. Определить величины a't и y't для разных расстояний аг Обяза-
тельно надо взять at = и а; = almin, & также, например, at =
=-1000.
2. Из условий (2.40) найти £фс и (30 фс.
3. Вычислить значения d2, а2, dJt а3 и а'3 из (2.43)...(2.47).
4. Определить величины Д2 и Д3 максимальных перемещений второ-
’ Л3 =(Оз)а;т.п-
5. Необходимо контролировать величину /'ов, а также L.
го и третьего компонентов: Д2 = (с?;)
_(оз)а,=^> •
6. Для нескольких расстояний визирования надо рассчитать полевые
лучи с целью определения световых диаметров Dcb^ и DCB3, а также
относительных диаметров и .
\ ' /2 \ / Л
Полученные результаты удобно представить в виде таблицы 2.1.
Подобные вычисления выполняются для нескольких пар выбран-
ных значений f2 и f3. Оптимальный вариант выбирают по значениям
относительных диаметров, величинам Д2 и Д3 смещения компонентов
и значению а'3. Прежде всего величины
и
не должны
привести к значительному усложнению конструкции компонентов.
Предпочтительней, когда эти компоненты можно взять двухлинзовы-
ми склеенными. При этом условии величины Д2 и Д3 не должны быть
большими. Кроме того, законы перемещения компонентов должны
меньше отличаться от линейных, по крайней мере они не должны содер-
жать особых точек, чтобы не было возвратного движения компонента.
Обычно закон перемещения представляется графически в виде
кривой зависимости = \]/7(а7) и а'3 = \]/2(а7). Если обе зависимости не-
линейны, что чаще всего дает расчет, то одну из них линеаризуют для
упрощения конструкции механизма перемещения (подробно см. 2.2).
Обычно зрительные трубы точных нивелиров дают прямое изоб-
ражение. В качестве оборачивающей системы можно использовать
призму Аббе с крышей, которая должна разместиться в пределах от-
резка а'3. Поэтому надо контролировать величину этого отрезка, чтобы
она была достаточной для размещения призмы. Ясно, что при наличии
призмы надо определить ее размеры в процессе габаритного расчета.
Габаритный расчет заканчивается выбором конструкции каждо-
го компонента по значениям их оптических характеристик.
Для упрощения конструкции механизма перемещения фокусиру-
ющей части телеобъектива предпочтительней использовать оптичес-
кую схему с одним перемещающимся вдоль оси компонентом 2 и не-
подвижными первым и третьим компонентами.
Основные условия разработки этой схемы следующие:
Р03 = const, а3 = const, у'г = const, + d2 = const.
В этом случае компоненты 2 и 3 должны быть более светосильны-
ми, что приводит к увеличению числа линз в каждом из них.
Габаритный расчет зрительных труб с линзовыми
оборачивающими системами
Прямое изображение в зрительной трубе можно получить, вводя
в ее схему динзовые оборачивающие системы (ОбС): однокомпонент-
ные (рис. 2.17), но чаще всего двухкомпонентные (рис. 2.18). Такие
трубы иногда называют земными зрительными трубами [24]. Линзо-
вые оборачивающие системы меняют не только знак видимого увели-
чения, но его численную величину, если увеличение ОбС отлично от
единицы, т.е. |30nfic * -1. *>
*’ (далее в тексте для упрощения написания Р0о& обозначается как Р^).
Обычно линейное увеличение оборачивающей системы Робс = -1,
тогда для однокомпонентой оборачивающей системы а3 = ~2f'3 и
Lo6c = 4/"3 (Рис- 2.17), в результате относительное отверстие (относи-
тельный диаметр) оборачивающего компонента оказывается в два раза
больше относительного отверстия окуляра. Если уменьшить по абсо-
лютной величине линейное увеличение, то это приведет к еще боль-
шему увеличению относительного диаметра компонента оборачиваю-
щей системы. При увеличении по абсолютной величине линейного
увеличения резко возрастает угловое поле 2оз3 и общая длина систе-
мы L. И то и другое нежелательно.
Рис. 2.17. Схема зрительной трубы с однокомпонентной оборачивающей
системой
Для уменьшения световых диаметров компонентов оборачиваю-
щей системы в задней фокальной плоскости объектива устанавлива-
ется коллектив 2. Он не изменяет фокусное расстояние системы, сто-
ящей перед окуляром, и поэтому не меняет видимое увеличение Гт
трубы.
Выполним габаритный расчет зрительной трубы с однокомпо-
нентной оборачивающей системой (рис. 2.17). Исходными данными
для расчета являются: Гт, 2(0, D' (или Р), L, а'р, (или ар), коэффици-
ент виньетирования ka, линейное увеличение ро6с оборачивающей си-
стемы.
С учетом требуемого удаления выходного зрачка зададимся
f4 = f0K. Так как видимое увеличение телескопической системы с обо-
рачивающей системой равно Гт = ;Робс/Лр то по известному f4 най-
дем: f 1 f об “ГтГок/Робс1 Далее расчет выполним по формулам:
D = ВТт, Dcb; = 2m; + 2aptg(0, причем, если окажется, что DCB; < D, то
следует принять Всв; = D, чтобы не срезать осевой пучок. Затем вычис-
лим tgo>4 = tg<00K = rTtgco , определим оптическую длину оборачива-
ющей системы Lo6c = L- (// + f4), и так как ро6с = а3/а3 , а Гобс = -а3 + а3,
то найдем отрезки а3 = Lo6c/(po6c-l); а3 = РОбс4бс/(Робс-7)- По форму-
ле Гаусса найдем фокусное расстояние компонента 3 оборачивающей
системы
/з ~
аЗаЗ _ Д>бс ' Робе
(^-Робс)2'
(2.49)
Фокусное расстояние коллектива 2 определим из условия, что он направ-
ляет главный луч в главные точки оборачивающей системы 3, тогда
Световые диаметры коллектива, компонента оборачивающей си-
стемы и окуляра определяются из расчета хода полевых лучей.
Однако применение однокомпонентной оборачивающей системы
приводит к большому относительному диаметру оборачивающего ком-
понента или к увеличению его углового поля и длины системы.
Хорошие результаты можно получить при использовании симмет-
ричной двухкомпонентной оборачивающей системы с увеличением
Робе = с параллельным ходом лучей между компонентами и апертур-
ной диафрагмой в середине воздушного промежутка d3 (рис. 2.18). В
этом случае система свободна от комы, дисторсии, хроматизма увели-
чения вследствие ее симметрии. Применение такой схемы значитель-
но улучшает исправление аберраций всей трубы. Воздушный проме-
жуток d3 можно использовать для уменьшения астигматизма. Благо-
даря тому, что между компонентами оборачивающей системы идут па-
раллельные лучи, существенно облегчается сборка и юстировка тру-
бы, так как изменение расстояния d3 между компонентами не изме-
няет увеличение Гт. К изменению d3 часто прибегают при сборке труб
для того, чтобы при неточно выдержанных расстояниях (допуск
2...3%) получить точную длину L или телескопичность. Пределы из-
менения d3 ограничиваются допустимым виньетированием.
Выполним габаритный расчет телескопической системы с кол-
лективом в фокальной плоскости объектива и симметричной обора-
чивающей системой (рис. 2.18).
Вх. зр.
Рис. 2.18. Зрительная труба с двухкомпонентной оборачивающей системой
В техническом задании на расчет обычно указываются: видимое
увеличение Гт, угловое поле 2®, диаметр D' выходного зрачка (или ди-
аметр D входного зрачка), оптическая длина L трубы, удаление s'r вы-
ходного зрачка (или положение ар входного зрачка), коэффициент ви-
ньетирования ka и, если имеется готовый окуляр, то его фокусное рас-
стояние f ок = f 5. Иногда вводятся дополнительные условия: напри-
мер, задается равенство всех световых диаметров компонентов или ра-
венство диаметров коллектива и компонентов оборачивающей систе-
мы и т.п.
Часто расчет трубы начинается с выбора окуляра, фокусные рас-
стояния которого кратны пяти. Лишь в исключительных случаях вы-
бирается или задается окуляр с другим значением фокусного рассто-
яния и требуется выполнить его расчет.
Наиболее распространены окуляры с f'0K = 20...30 мм, так как
окуляры с f0K < 20 мм неудобны для наблюдения из-за малого удале-
ния выходного зрачка, а окуляры с fOK > 30 мм имеют большие диа-
метры линз, делают громоздкой окулярную часть прибора и ведут к
увеличению длины L трубы.
Пусть в ТЗ дано Гт, 2®, D', L, s'p,, ka. В качестве дополнительного
условия примем ограничение поперечных размеров трубы до ВеЛИЧИ-
НЫ £>доп (Рис- 2-18)-
Определим диаметр D входного зрачка трубы и угловое поле 2®ок
окуляра по формулам (2.15), (2.17).
Из каталога выберем готовый окуляр по требуемым угловому
полю 2®ок и фокусному расстоянию f'0K, заданному удалению s'r и ди-
аметру D' выходного зрачка. Если же задана величина а'р,, то следует
учесть, что а'р, = s'р, — s'H,. Найдем положение выходного зрачка от
т.Е'ок z'p, = s'p, - , тогда удаление входного зрачка от т.Ео6 прибли-
женно определим по формуле для простой телескопической системы
zP ~ грГт • По значениям f'oK и ро6с вычислим фокусное расстояние
объектива /о'б = -Гт/о'к/ро6с и найдем расстояние от объектива до вход-
ного зрачка из соотношения
аР = 2Р - Да.
Определим диаметр полевой диафрагмы
®пд ~ 2fo6 |
Вычислим световой диаметр объектива с учетом заданного коэф-
фициента виньетирования (рис. 2.19)
DCB.o6 = = 2т + 2а Р tg <о = D km + 2а Р tg со, (2.51)
причем обычно ka = 0,5. Если угловое поле 2со трубы мало и относи-
тельное отверстие невелико, то ku> = 1. Если расчет по формуле (2.51)
дает, что Р; < D, то принимаем D1 = D, так как осевой пучок должен
проходить полностью без затенения.
Световой диаметр коллектива
DKOJl = D2 = 2y'o6 = 2f^\tg(a\.
По условию задания D3 = D4 = Рдоп.
В соответствии с рис. 2.19 из подобия треугольников с общей вер-
шиной в т.Е'о6 при условии, что диаметры D3 и D4 определяются хо-
дом луча, параллельного оптической оси, запишем
h] _ _ 4>б . ^3 /' _ ~^доп ' fo6
h3 f'' Тз ‘4 D
Расстояние d3 между компонентами 3 и 4 оборачивающей систе-
мы определим из подобия заштрихованных треугольников с учетом
50% виньетирования (/гю = 0,5)
d = = f, (2.52)
3 d2 13
где D2 = Ркол = D3.
Длина трубы L = fо6 + f 3 + f4 + d3 + f ок. И если L * Ьзад&в, то сле-
дует сделать пересчет, избежать который можно, если фокусное рас-
стояние в начале расчета определить по следующей формуле (при
km = 0,5 и D3 = D2) [23]
Рис. 2.19. Ход апертурного, главного и полевых лучей при ka = 0,5
в первых четырех компонентах зрительной трубы
(2.53)
Затем полученное значение fOK надо округлить до ближайшего
стандартного значения, кратного пяти, и далее расчет выполнять в
описанном выше порядке.
Определим фокусное расстояние f'2 коллектива. Оно должно быть
таким, чтобы центр входного зрачка трубы (т.Р) изобразился систе-
мой «объектив + коллектив + первый компонент оборачивающей си-
стемы» в т.Р4, лежащей на середине воздушного промежутка d3.
Именно в этой плоскости и должна быть установлена апертурная ди-
афрагма зрительной трубы. Для этого последовательно запишем фор-
мулы для расчета хода главного луча:
У1 = optgco, tgcOp = tg®; + y4/f^ = tgw(aP + &)/&,
y2 = -/Ogtg(o, y3 = d3tgco4/2. Для телескопической систе-
мы, образованной первым, вторым и третьим компонентами, запишем:
ГТ2 =~^ = ^^,тогда tg<o4 = -/o'6tg(o//3' и y3=-f^d3tg(o/(2f').
Так как tgo>3 -tg(H2 + y2/f^0Jl, то фокусное расстояние коллекти-
ва определим по формуле:
Г = Г =______У?___1
кол 2 tg(»3-tg(o2
и после подстановки и преобразований получим
2tff£
Асол
fob (%fa ^з)+ % fa (fob + ар)
(2.54)
Теперь следует уточнить удаление выходного зрачка по формуле:
г'р = Toif //кол “ •
Если z'p. значительно отличается от требуемой величины, то, изменив
ар, надо вновь вычислить /к'ол по формуле (2.54). Габаритный расчет
можно выполнять, приняв ар = 0.
Затем графически или расчетом хода верхнего и нижнего полевых
лучей определяют световые диаметры компонентов, а для контроля
вычисляют диаметр выходного зрачка. По главному лучу находят уда-
ление выходного зрачка.
Коллектив 2, установленный в задней фокальной плоскости
объектива 1, не изменяет фокусное расстояние системы, стоящей пе-
ред окуляром, и не изменяет Гт. Но из хода лучей видно, что изобра-
жение коллектива получается в передней фокальной плоскости оку-
ляра, где строится изображение наблюдаемого или измеряемого пред-
мета, поэтому наблюдатель увидит все дефекты стекла, из которого
выполнен коллектив. Чтобы избежать этого, надо рассчитать внефо-
кальный коллектив (см. стр. 60).
Габаритный расчет зрительной трубы с двухкомпонентной обо-
рачивающей системой и равными по диаметру компонентами.
Исходными данными для расчета являются: Гт, 2®, D', ар, ka,
₽0бс = -1-
Оптическая система трубы прямого изображения с равными све-
товыми диаметрами компонентов представлена на рис. 2.20.
Рис. 2.20. Ход лучей в зрительной трубе прямого изображения при условии
равенства световых диаметров 1, 2, 3, 4
Найдем диаметр D входного зрачка: D = Р'Гт. Тогда размер вход-
ного зрачка для наклонного пучка лучей в меридиональной плоско-
сти с учетом коэффициента виньетирования: 2т1 = kaD.
Согласно техническому заданию световые диаметры компонентов
1,2, 3, 4 должны быть равными, поэтому после объектива верхний по-
левой луч (впл) с учетом виньетирования должен идти параллельно
оптической оси, тогда Dt = D2, и нижний полевой луч (нпл) после
преломления на коллективе должен быть также параллелен оптичес-
кой оси, тогда D2 = D3 = D4 в том случае, если апертурная диафрагма
будет располагаться посередине между компонентами 3 и 4 симмет-
ричной оборачивающей системы с ро6с = -1. Тогда в соответствии с
рис. 2.20 при определении фокусного расстояния первого компонен-
та можно записать
fl fo6 впл
ГП,
tg®
feco-P
2tg®
(2.55)
Фокусное расстояние второго компонента (коллектива) определим
по формуле
f'2
f’ = f =f'-a' =--------, (2.56)
• 2 Iкол 'об ”7 нпл л/ > v 7
*4 нпл ‘ 'об
7П< kmD
где о— а.р + — О’р •
tg® 2tgra
По известным значениям /'о6 и Гт вычислим фокусное расстояние
окуляра: f 5 = f ок = f о6/Гт.
Определим длину оборачивающей системы Lo6c
Lo6c = L + аР - f[- f' = -f3 + d3 + f; = 2f3 + d3. (2.57)
Так как апертурная диафрагма расположена посередине между
компонентами 3 и 4 оборачивающей системы, то расстояние от кол-
лектива 2 до плоскости апертурной диафрагмы составит
~Г~Тз + ~2’
(2.58)
Плоскости входного зрачка и апертурной диафрагмы сопряжены
относительно оптической системы, составленной объективом, коллек-
тивом и первым компонентом оборачивающей системы. Тогда, запи-
сывая уравнение Гаусса, позволяющее определять линейные коорди-
наты промежуточных изображений осевой точки входного зрачка пос-
ледовательно через компоненты 1, 2 и 3 с учетом формул (2.56) и
(2.58), после преобразований получим
tf-2fra'2P + ^a'2P = 0, (2.59)
где а'2Р — положение изображения т.Р входного зрачка после второ-
го компонента (аР, а'1Р = aPf{/(aP + //); а2Р = а'1Р -dl = а'1Р - ; а'2Р =
= а2Р f2/(а2Р + f2j).
Уравнение (2.59) дает два решения для f2 . Из двух выбираем зна-
чение, приемлемое в конструктивном отношении.
Расстояния между компонентами определим по формулам:
= fl = /об ’ = /з ’ ^3 = /-'обе ~ 2fs > d4 = f4 + f5 = f4 + f'K.
Удаление a'p, выходного зрачка для всей системы найдем из рас-
чета хода главного луча через всю систему, полагая = tg со, ;
yt = aptg то.
Далее следует выписать оптические характеристики всех компо-
нентов, выбрать их конструкции (см. главу 4), выбрать готовый оку-
ляр, выполнить аберрационный расчет (см. главу 3), выбрать из ка-
талога или синтезировать компоненты (см. главу 4).
Выполним габаритный расчет зрительной трубы прямого изоб-
ражения с большим выносом выходного зрачка, которую, например,
можно использовать в качестве охотничьего прицела (рис. 2.21).
Рис. 2.21. Ход главного и апертурного лучей в оптической схеме
охотничьего прицела
Пусть заданы Гт, L, D', 2а>, а'р.. Апертурная диафрагма совпадает
с оправой объектива и одновременно является входным зрачком
(ар = 0), тогда Рсв 2 = D, причем D = Р'ГТ.
Найдем угловое поле окуляра:
2<о' = 2(oOK - 2arctg(rTtgco).
Связь между фокусными расстояниями объектива и окуляра, а
также с заданными характеристиками системы L и а'Р. выражается
уравнением
_ гт [ь(ар. — /ок)~ Др-Лк]
~ " гт[гт(ар, - &)+ 2C]+Z- С • (2-60)
Зададимся величиной фокусного расстояния /'ок окуляра, причем
при выборе f0K следует учесть требуемое удаление выходного зрачка,
т.к. а'р, = f ок + г'р.. По найденным оптическим характеристикам
объектива f о6, D/f'o6, 2со выберем его конструкцию (см. главу 4).
Вычислим фокусное расстояние однокомпонентной оборачиваю-
щей системы, исходя из условия оптического сопряжения точек F'o6
ИЛ,К:
_ J,/ _ fobfov^r [-£ — fob ~ foK ]
Определим отрезки а2 и а'2:
__/об[-^""^об_^ок]. 2 ~ г +г г /об ‘ Т'ОК 2 f + Г f /об 1 Т'ОК (2.62) (2.63)
тогда линейное увеличение оборачивающей системы Ро<>с = Д^/Дз =
~ т/ок / fob •
Проверим оптическую длину системы
~ /об а2 /ок ~ Дзад •
Из расчета хода главного луча через всю систему найдем положе-
ние а'р. выходного зрачка, а из расчета хода полевых и апертурного
лучей — световые диаметры компонентов.
Для уменьшения относительного отверстия оборачивающей систе-
мы и удобства юстировки оборачивающую систему можно сделать из
двух компонентов с параллельным ходом лучей между ними. Расстоя-
ние d2 между компонентами 2 и 3 выбирается из конструктивных сооб-
ражений (рис. 2.22), причем f2 = а2, f3 = а'2 (из формул (2.62) и (2.63)).
Рис. 2.22. К определению положения второй виньетирующей диафрагмы
Для уменьшения световых диаметров компонентов допускается
50% виньетирование наклонных пучков лучей.
Положение виньетирующей диафрагмы ВД; определяется пересе-
чением нижнего полевого луча и нижнего апертурного луча после
первого компонента
а _ (^i ~ У1 нпл)4б
ВД2
Такая диафрагма обеспечит одностороннее виньетирование. Для
ограничения прохождения верхней части наклонного пучка следует
установить вторую виньетирующую диафрагму ВД2 на пересечении
верхнего апертурного и верхнего полевого лучей после второго ком-
понента.
Второй виньетирующей диафрагмой может быть и оправа перво-
го компонента оборачивающей системы.
Расчет телескопических систем с внефокальным
коллективом
Как видно из схем, представленных на рис. 2.17, 2.18, 2.19, изоб-
ражение коллектива получается в передней фокальной плоскости оку-
ляра, т.е. там, где строится изображение наблюдаемого или измеряе-
мого предмета. И если стекло, из которого выполнен коллектив, име-
ет дефекты, то все эти дефекты увидит наблюдатель. Чтобы не допус-
тить этого, надо либо повысить требования к стеклу, либо сместить
коллектив из фокальной плоскости объектива на величину
Д = А/О'к2/1000, превышающую глубину аккомодации глаза (А =
= 10...20 дптр), т.е. рассчитать внефокальный коллектив. На
рис. 2.23, б, в показаны два случая смещения коллектива 2 относи-
тельно т.Г'о6, причем Ф(;+2) =Фо6, т.е. оптическая сила системы «объек-
тив + смещенный коллектив» должна быть равна оптической силе
объектива, полученной из расчета без смещения коллектива
(рис. 2.23, а).
Рис. 2.23. К расчету системы с внефокальным коллективом:
а) коллектив — в фокальной плоскости объектива, Д = О;
<5) смещение коллектива вправо (положительная величина а'2);
в) смещение коллектива влево (отрицательная величина а'2)
Так как при смещении коллектива из фокальной плоскости
объектива изменяется фокусное расстояние системы «объектив + кол-
лектив», то главный луч не будет проходить через центр апертурной
диафрагмы. Вследствие этого изменится Гт и нарушится симметрия
оборачивающей системы. Поэтому для сохранения фокусного рассто-
яния системы «объектив + коллектив» после перемещения коллекти-
ва (рис. 2.23, б, в), необходимо пересчитать фокусные расстояния
объектива, коллектива и расстояние между ними.
Для определения трех неизвестных f2 и dt следует выполнить
три условия:
1. Сохранить величину а'2 ~ А.
2. Фокусное расстояние системы (объектив + коллектив) должно быть
равно ранее рассчитанному значению фокусного расстояния объекти-
ва, когда коллектив находился в его задней фокальной плоскости (рис.
2.23, а).
3. Входной зрачок и апертурная диафрагма должны находиться в со-
пряженных плоскостях.
На рис. 2.23, б, в показаны два случая смещения коллектива, при-
чем при смещении коллектива в сторону объектива (рис. 2.23, в)
уменьшается расстояние между компонентами а, следовательно,
сокращается длина зрительной трубы L.
Для выполнения первого и второго условий запишем известное из
геометрической оптики уравнение для отрезка а'г = а'г :
а> = = = д
2 Ф2+Ф2-с/2Ф2Ф2 Ф2+2 Фо6
тогда
d = 1т.°гф1+2 _ ^~а2фоб . (2.64)
„ - Ф; ФА.
Для оптической силы двухкомпонентнои системы можно записать
ф1+2 = ф;+ ф2- 3 /Ф 1Ф 2= Ф1+ ф2а2ф1+2 ’
тогда
ф 0;+2-^j. (2.65)
а2Ф1+2
Следует помнить, что Ф2+2 = Фо6, где' Фо6 — оптическая сила объек-
тива, полученная из расчета, когда коллектив находился в задней фо-
кальной плоскости объектива.
Для выполнения третьего условия последовательно записывают
формулы Гаусса и перехода для отрезков главного луча, начиная от
положения апертурной диафрагмы а'зр, в результате получают урав-
нение для определения нового значения фокусного расстояния перво-
го компонента (объектива) :
1 ^/зг(^ + ара'2^1+2) + а2^/з~^з) /о
Ф; — а'гФ 1+2^3 Ф;+2
фокусное расстояние второго компонента можно вычислить по фор-
муле (2.65), а расстояние между компонентами — по формуле (2.64).
Поскольку при смещении коллектива изменились значения
f/, 3I, то следует уточнить величины световых диаметров компо-
нентов, рассчитав ход верхнего и нижнего полевых лучей или выпол-
нив в масштабе графические построения.
Габаритный расчет телескопических систем с призменными
оборачивающими системами. Призменные монокуляры и
бинокулярные зрительные трубы
Призменный монокуляр — оптический прибор, представляющий
собой простую зрительную трубу Кеплера с призмой или призменной
системой для получения прямого изображения. Кроме того, введение
призм в оптическую систему позволяет сократить габариты оптичес-
кой системы, получить заданный угол между оптическими осями
объектива и окуляра, который должен обеспечить удобное положение
головы наблюдателя и компенсацию вращения изображения. Это по-
ложительные стороны использования призм. Однако введение призм
или призменных систем в качестве оборачивающих систем увеличи-
вает массу прибора, появляются технологические трудности, связан-
ные с изготовлением и юстировкой.
Если в монокуляре применяется одиночная призма, то для полу-
чения прямого изображения она должна иметь «крышу» [5]. В табли-
це 2.2 приведены некоторые схемы монокуляров с призменными обо-
рачивающими системами.
Как видно из приведенных схем, призменная оборачивающая си-
стема позволяет существенно уменьшить габариты оптической систе-
мы вдоль оптической оси за счет ее излома.
Особенность габаритного расчета оптической системы с призмен-
ной оборачивающей системой состоит в том, что необходимо опреде-
лить положение и габариты призм, входящих в призменную систему.
Для этого необходимо:
1. Найти форму и размеры двух сечений пропускаемого через при-
зменную систему светового потока, а также расстояние между этими
сечениями вдоль оси.
Таблица 2.2
Оптическая схема
призма Пк - 0° состоит из двух частей,
разделенных воздушным промежутком
Примечание
Монокуляр с призмой
Шмидта (ВкР - 45°).
Угловое поле - 2ю < 8.
Обеспечивает угол отклоне-
ния 45° между визирной
осью и осью окуляра.
Монокуляр с призмой Аббе
(Ак - 0°).
Такая схема иногда исполь-
зуется для изготовления
призменных биноклей.
Монокуляр с призмой
Лемана (ВкЛ - 0°).
Если бинокулярный прибор,
состоящий из монокуляров,
должен обладать повышен-
ной пластичностью и ком-
пактностью, то применяют
призму Лемана.
Применение призмы Пеха-
на (Пк - 0°) позволяет полу-
чить компактную вдоль оп-
тической оси систему. Но
призма.имеет большой вес,
трудна в изготовлении и
сборке.
Продолжение таблицы 2.2
Оптическая схема
Примечание
Монокуляры с призменны-
ми системами Малафеева
1-го и 2-го рода.
Эти системы известны так-
же как системы Порро.
Особенностью этих систем
является то, что оптические
оси объектива и окуляра не
лежат в одной плоскости.
Такие призменные системы
используются в биноклях.
Монокуляр стереотрубы:
1 - защитное стекло;
2 - головная призма (АР-9О0);
3 - объектив;
4 - башмачная призма с
крышей (Бк - 90°);
5 - клин; 6 - сетка; 7 - окуляр.
Особенность схемы приз-
менной зрительной трубы -
большая перископичность,
которая оценивается рас-
стоянием Ln между оптичес-
кими осями объектива и
окуляра.
Продолжение таблицы 2.2
Оптическая схема
Примечание
Оптическая схема артилле-
рийской панорамы. Имеет
большую перископичность
(Ln) и возможность круго-
вого обзора при неподвиж-
ном окуляре (7):
1 - защитное стекло;
2 - вращающаяся головная
призма АР-90°;
3 - призма Дове (АР-О°),
служит для компенсации по-
ворота изображения. При ее
повороте вокруг этой же оси на
угол в 2 раза меньший угла
поворота головной призмы
происходит компенсация по-
ворота изображения.
Призменная оборачивающая
система из двух призм:
прямоугольной АР-90° и
пентапризмы с крышей
Б П - 90°.
К
2. Учесть, что в процессе расчета призмы заменяются эквивалент-
ными плоскопараллельными пластинами (выполняется развертка
призм), которые затем редуцируются (заменяются эквивалентными
воздушными пластинами, причем с/ред = dnnn/ri). Такие замены воз-
можны, если первая и последняя грани призмы перпендикулярны к
оптической оси.
В остальном габаритный расчет призменного монокуляра подобен
габаритному расчету простой зрительной трубы.
Для призм, расположенных в сходящихся пучках, необходимо
учитывать вызваное ими удлинение хода луча. На величину этого уд-
линения (А = d(n-l)/n) увеличивается в реальной системе расстояние
между поверхностями того пространства, в котором размещены приз-
мы. Как только будут определены диаметры световых пучков, кото-
рые должны пропустить призмы (Всвпр), остальные размеры отража-
тельных призм определяются по нормалям, которые приведены в
справочниках [20].
Определим световые диаметры призм, установленных в сходя-
щихся пучках для различных случаев, представленных на рис. 2.24.
Призмы развернуты в плоскопараллельные пластины, а пластины ре-
дуцированы.
Рассмотрим случай, когда диаметр входного зрачка больше диа-
метра полевой диафрагмы. Как видно из рис. 2.24, а, если наклонный
пучок лучей не виньетируется, то верхний полевой луч имеет макси-
мальную высоту на первой поверхности призмы, развернутой в плос-
копараллельную пластину, и тогда Рсвпр = 2 у2впл. Если же наклонный
Рис. 2.24. К определению светового диаметра призмы, если
a) D > ^пд> d) D < Рпд
пучок будет виньетироваться на 50%, то апертурный луч будет иметь
максимальную высоту на первой поверхности призмы и Всвпр = 2 h2.
Если диаметр полевой диафрагмы больше диаметра входного
зрачка (_ОПД > D), то как видно из рис. 2.24, б световой диаметр
призмы уже определится высотой верхнего полевого луча на второй
поверхности пластины, т.е. DCBnp = 2 У3вил- Однако многое зависит и
от положения входного зрачка в системе и положения призмы.
Поэтому прежде чем определять DcB пр необходимо правильно ус-
тановить призму в схеме, развернуть ее в эквивалентную плоскопарал-
лельную пластину (рис. 2.25). Заднюю грань призмы не следует рас-
полагать слишком близко к фокальной плоскости окуляра, так как все
дефекты стекла (пузыри, мелкие царапины, пылинки) будут резко
видны в поле окуляра и мешать наблюдению.
Но удаление призмы от фокальной плоскости пропорционально
двоению изображения из-за погрешностей изготовления угла крыши
призмы. Оптимальное положение призмы, определяемое отрезком ,
будет таким, при котором ее последняя поверхность размещается пе-
ред окуляром так, что изображение поверхности после окуляра полу-
чается вне пределов аккомодации глаза наблюдателя. Этому соответ-
ствует разность сходимости А за окуляром А = 10...20 дптр, причем
величины сг и А связаны формулой
c^tfA/1000.
Затем надо выполнить расчеты хода верхних полевых лучей при
kw = 1 и kw == 0,5 по формулам расчета хода второго вспомогательного
луча, а также расчет хода первого вспомогательного луча и определить
максимальную высоту лучей на поверхностях пластинки, удвоив ко-
торую получить -DCB . После этого по нормалям [20] надо определить
размеры призмы. Следует отметить, что световой диаметр призмы
Рсв пр = ^тах ограничивает ход верхней части наклонного пучка, а ниж-
няя часть этого пучка ограничивается оправами линз окуляра.
Бинокулярные зрительные трубы — приборы, предназначенные
для наблюдения предмета двумя глазами.
Бинокулярное зрение, т.е. зрение двумя глазами, позволяет на-
блюдателю различать равноудаленность предметов, что дает представ-
ление о глубине пространства, об объемном распределении наблюдае-
мых объектов. Способность оценивать расстояние до различных пред-
метов называют пространственным зрением или стереоскопическим
эффектом. Этот эффект значительно усиливается при наблюдении че-
рез бинокулярный прибор.
Все бинокулярные приборы состоят из двух одинаковых систем,
каждая из которых представляет зрительную трубу. Трубы соедине-
ны на общем основании, причем их оптические оси должны быть па-
раллельны. Если это условие не соблюдается, то наблюдается двоение
изображения. К бинокулярным зрительным трубам относятся: бинок-
ли Галилея, призменные бинокли, дальномеры, стереоскопические
зрительные трубы и т.д. Расстояние между осями объективов этих
приборов обычно больше, чем расстояние между осями окуляров.
Расстояние между осями объективов В называют базой прибора,
а расстояние между осями окуляров Ъ (глазами наблюдателя) — глаз-
ным базисом. Обычно глазной базис Ь = 65 мм, но при разработке при-
бора необходимо предусмотреть изменение базиса от 52 до 76 мм.
Для бинокулярных приборов определяют удельную пластику
Ро = В/Ь и полную пластику Р = РОГТ. Полная пластика характеризу-
ет увеличение стереоскопического эффекта восприятия наблюдаемо-
го пространства по сравнению с невооруженным глазом. Чем больше
база прибора В, тем больше его пластика Р, тем больше стереоскопи-
ческий эффект.
В бинокулярных приборах изображение должно быть прямым. По
сравнению с монокулярными приборами конструкция бинокулярно-
го прибора должна удовлетворять двум дополнительным требовани-
ям:
1. Оптические оси левой и правой половин прибора должны быть
строго параллельны между собой;
2. Видимое увеличение обеих частей должно быть одинаковым.
Несоблюдение этих требований приводит к ухудшению качества
изображения.
Габаритный расчет призменного бинокля.
Исходными данными для расчета являются: Гт — видимое увели-
чение бинокля, D' —диаметр выходного зрачка, L —оптическая дли-
на одной ветви бинокля, — угловое поле бинокля, Ь — глазной ба-
зис (Ь = 52...76 мм). Допустимая разность увеличений в правой и ле-
вой ветвях бинокля не должна превышать 1,5...2% от заданного Гт.
В качестве оборачивающей системы используется призма с крышей
или призменная система (пусть это будет призменная система Мала-
феева 1-го рода (призма Порро)). В системе допускается 50% винье-
тирование.
На рис. 2.26 приведена оптическая схема призменногр бинокля.
Согласно ТЗ в оптической схеме допускается 50% виньетирова-
ние наклонного пучка для уменьшения размеров призм. Следователь-
но, наклонный пучок опирается на половину диаметра входного зрач-
ка, который совпадает с оправой объектива (ар = 0). Оборачивающая
призменная система Малафеева (Порро) 1-го рода состоит из двух
призм БР-180°, развернутых друг относительно друга ‘под углом 90°
(рис. 2.27).
Для призм БР-180° отношение длины I хода луча (толщины эк-
вивалентной ППП) к ее входному (световому) отверстию равно
k = ^ппп/^свпр = УД:впр =
где k — коэффициент призмы (для БР-1800 — k = 2); I — геометричес-
кая длина хода осевого луча в призме (I = dnnn после того, как призму
развернули в ППП).
Рис. 2.27. Оптическая схема одной
ветви бинокля без окуляра
Для габаритного расчета рассмотрим одну ветвь бинокля, развер-
нув призмы в ППП и редуцировав их (рис. 2.28).
Определение оптических характеристик объектива и окуляра вы-
полняется по тем же самым формулам, что и расчет простой зритель-
ной трубы.
Положение выходного зрачка для всей системы определяется из
расчета хода главного луча (yt гл = О, = tg ®)
аР’ , а его расстояние от t.Fok вычисляется как
>ок
г'р- = а'р.— f'K.
Удаление выходного зрачка можно также найти, используя фор-
мулу Ньютона
г'р-=- f'x /гр-a так как гр = , то г’р. = f'^/&, а а’р, = /о'к + г’р..
Для определения размеров призм необходимо найти световой ди-
аметр призм из расчета хода апертурного и нижнего полевого лучей.
На рис. 2.28, рис. 2.29 представлены два случая, когда диаметр
входного зрачка D больше диаметра полевой диафрагмы (Р > -Оцц) и
наоборот — D < -Оцц.
Запишем формулы, по которым можно вычислить удвоенные вы-
соты:
апертурного луча на первой грани призмы
2h,^Dn^+-C-y.
nf^-2kD
нижнего полевого луча на первой грани призмы
9 — + ^1/об ~~ (С1 + Сг)]Р.2 нпл .
^нпл- 1 + 4^2япл/п
нижнего полевого луча на выходной грани второй призмы
%Уб нпл = -®^<о + 2[/о6 - Cj]р2 нпл •
(2.67)
(2.68)
(2.69)
Рис. 2.28. Оптическая схема одной ветви бинокля с призмами,
развернутыми в эквивалентные ППП
В формулах (2.67), (2.68), (2.69):
с2 — расстояние между призмами (задается из конструктивных со-
ображений); Cj — вычисляется по формуле с7 = f'^A/1000 ; А =
= 10...20 дптр — ширина аккомодации глаза; ka — коэффициент ви-
ньетирования (Аш = 1, если нет виньетирования; = 0,5 при 50% ви-
ньетировании); k = l/Dcsnp — коэффициент призмы; п — показатель
преломления стекла, из которого выполнена призма; D — диаметр
Рис. 2.29. К определению размеров призм (случай D < DnR)
В зависимости от данных на габаритный расчет по одной из фор-
мул (или графически) определяют Всв пр, а затем по нормалям [20] на-
ходят размеры призм. Размеры призмы БР-1800 приведены на
рис. 2.30.
а = 2D; h = В; с = 1.414D; b = D;l = 2D
Рис. 2.30. К определению размеров призмы БР-1800
Затем определяют по нормалям припуск на закрепление ДВ и на-
ходят Впр = В(.в пр +ДВ, вычисляют геометрическую длину хода луча в
призме 1 = kDnp = dnnn, находят толщину редуцированной ППП:
d =d /n;(d, —d« =d ).
ред ппп' ’ ' 'Чред 2ред ре д'
В соответствии с рис. 2.31 находят расстояния от бесконечно тон-
кого объектива до поверхностей редуцированных пластин:
di = Кб ~(ci + сг)~ 2^ред»
^2 = fob ~{С1 + Сз) ~ ^ред >
d-з — /об ~ С1 ~ ^рвд ’
d4 = %6~ci-
Рис. 2.31. К определению расстояний до
поверхностей редуцированных ППП
При установке призм в
сходящихся пучках лучей
происходит удлинение хода
лучей на величину Л =
= d(n - 1 )/п и тогда расстоя-
ние между объективом и
изображением будет равно
f'o6 + 2Д. Однако удлинение
хода автоматически учиты-
вается, когда редуцирован-
ные пластины заменяются
призмами (эквивалентными
ППП). Чтобы убедиться в
этом, необходимо найти расстояние между бесконечно тонким объек-
тивом и изображением предмета в плоскости полевой диафрагмы с
учетом хода осевого луча: fo6 + 2Д = + (с3 + с2) + 2daan.
Если расчет выполнен правильно, то приведенное выше равенство
должно выполняться, т.е. расстояние между объективом и призмами
такое же, что и расстояние между объективом и редуцированными
ППП.
Для исправления недостатков глаза (миопия и гиперметропия)
предусматривается перемещение окуляра на величину
Д = Д'/А/ЮОО,
где А — аметропия глаза ±5...±10 дптр.
Вычисляют удельную и полную пластику бинокля, показываю-
щую во сколько раз действительная дистанция на местности больше
кажущейся при наблюдении с помощью прибора. Ощущать глубину
наблюдаемых предметов можно в пределах радиуса стереоскопичес-
кого зрения
Rc = Po^Ro = PR0 = ВГт/&т\,
где Ro — радиус стереоскопического зрения невооруженного глаза
(Ro = 5/Дц); Rc — радиус стереоскопического зрения при наблюдении
в бинокль; Дц — острота стереоскопического зрения в секундах, ко-
торая колеблется от 2...3" до 30" и в среднем принимается равной 10".
При Ь = 65, Ro = 1341 м.
Например, у бинокля Гт = 8х, В = 125 мм, Rc = 20,4 км, а у нево-
оруженного глаза Ro = 1,3 км.
Опыт показывает, что угловая величина непараллельности осей
не замечается наблюдателем, если она не превышает установленных
60' и 30' в горизонтальной плоскости и 10' в вертикальной плоскости.
Тогда расхождение осей правой и левой ветвей бинокля в горизонталь-
ной плоскости в пространстве предметов не должно превышать
0 = 0'/(Гт -1) = 60’/(Гт -1);
схождение осей в вертикальной плоскости
0 = 0'/(Гт -1) = 30'/(Гт -1).
Непараллелъностъ осей в вертикальной плоскости
0 = 0'/(Гт -1) = 10'/(Гт -1).
Если указанные выше требования не соблюдать, то будет иметь
место двоение изображения.
Разность увеличений ДГт в правой и левой ветвях бинокля не дол-
жно превышать 1,5...2% от заданного Гт.
Определив из габаритного расчета размеры призм, их положение в
схеме, а для объектива и окуляра — их оптические характеристики, вы-
бирают конструкции объектива (глава 4) и окуляра. Выполняют аберра-
ционный расчет одной ветви бинокля по методике, изложенной в главе
3. Затем по основным параметрам и оптическим характеристикам син-
тезируют компоненты или выбирают готовые из каталогов.
Особенности габаритного расчета
оптических систем перископов
Перископ — зрительная труба, предназначенная для наблюдений
из укрытий большой глубины. Специфической характеристикой та-
кой трубы, кроме обычных характеристик телескопической системы,
является перископичностъ. Оптическая схема перископа (рис. 2.32)
состоит из головной призмы 1 (обычно АР-90°), объектива 2, коллек-
тива 3, оборачивающей линзовой системы 4 и 5 с параллельным хо-
дом лучей между компонентами, окулярной призмы 6, угломерной
сетки 7 и окуляра 8.
Перископичностъ Ln — это расстояние между осями объектива и
окуляра. И поскольку между компонентами 4 и 5 оборачивающей си-
стемы идет параллельный пучок лучей, то перископичностъ можно из-
менять за счет изменения расстояния d между этими компонентами.
Это расстояние мож-
но менять в широких
пределах, не нару-
шая телескопичности
оптической системы
и не меняя ее увели-
чение. Однако d не
должно быть больше
некоторой величины,
которая зависит от
степени допустимого
виньетирования, ко-
торое заранее огова-
ривается. В зависимо-
сти от назначения пе-
рископов их периско-
пичность колеблется в
широких пределах —
от 400 мм до 2 м и бо-
Рис. 2.32. Оптическая схема перископа лее. Ручные периско-
пы имеют перископичностъ от 400 мм до 700 мм, увеличение Гт = 1,5...4х,
угловое поле 2а> от 10° до 30°. Масса таких перископов до 4 кг.
Для габаритного расчета отражательные призмы 1 и 6 заменяют-
ся эквивалентными ППП, которые затем редуцируют. Оптическая
схема перископа в тонких компонентах приведена на рис. 2.33.
Рис. 2.33. Ход апертурного и главного лучей в оптической схеме перископа
Исходными данными для габаритного расчета являются: Гт, 2со,
D’, La, Lo6c, Ро6с (обычно Ро6с = -1). В системе допускается 50% винье-
тирование. Окуляр должен иметь линейное перемещение вдоль опти-
ческой оси ±5 дптр.
Если в системе нет оборачивающей системы, то оптическую дли-
ну L телескопической системы можно определить как
-£*ГС ^обс + foK _
Видимое увеличение такой системы Гт=-f0'6/f0'K , тогда
L = Г„ + f' = f' (1 - Г 1 и фокусные расстояния объектива и окуля-
•ОК Т 'ОК *ОК у Т j
ра определятся по формулам
г = _^. г =
*об .1 Г * г
Видимое увеличение перископа Гт = РобсГт и, если принять, что
Робе = -1, ТО Гт = -Гт . Найдем:
— диаметр входного зрачка перископа D = ВТт;
— общую оптическую длину телескопической системы:
Дре L 4" /об Д>бс + /ок
Вычислим фокусные расстояния компонентов оборачивающей
системы, задавшись расстоянием d5. Так как = -///Уз и в тоже вре-
мя /д' + = Lo6c - d5 , то
Для контроля вычислений фокусных расстояний компонентов
следует определить:
1) видимое увеличение первой части оптической системы (объек-
тив + первый компонент обрачивающей системы) TTj = - 5
2) видимое увеличение второй телескопической системы (второй
компонент оборачивающей системы + окуляр) Гт = - >
3) видимое увеличение перископа ГТ=ГТ; /Tj! и гт
должно быть равно заданной величине.
Определим положение входного зрачка перископа. Согласно ТЗ
апертурной диафрагмой и входным зрачком является световой диа-
метр головной призмы 1. Так как головная призма АР-90°, то коэф-
фициент призмы k = 1 и тогда 11 — геометрическая длина хода луча в
призме равна Всвпр = D. Толщина эквивалентной ППП d} = и поло-
жение входного зрачка
ар = ~
Из условия заданной перископичности
Д1 = 11/2 + d2 + f0^ + -f'oec — + ci)
найдем положение d2 первой призмы, полагая, что выходная грань
окулярной призмы должна быть расположена так, чтобы дефекты ее
последней поверхности не были заметны в окуляр. Как было показа-
но раньше, Cj = f'^A/lOOO , где А = 10...20 дптр и составляет обычно
10... 15 мм от фокальной плоскости окуляра, тогда d2 = L^ — IJ2-
~ 4>б ~ Д>бс+ (^2/^+ci) •
Фокусное расстояние коллектива 2 (если его необходимо устано-
вить) определяется из условия сопряжения плоскости входного зрач-
ка и плоскости апертурной диафрагмы.
Размеры окулярной призмы определяются по световому диамет-
ру призмы, который вычисляется из расчета хода апертурного и на-
клонного пучков лучей.
В системе две полевых диафрагмы: одна расположена в фокаль-
ной плоскости объектива и ее диаметр = 2f^ tgco, вторая распо-
ложена в фокальной плоскости окуляра, совпадающей с фокальной
плоскостью второго компонента оборачивающей системы, и если
Робе = ТО = Атд, •
Положение выходного зрачка всей системы определяется из рас-
чета хода главного луча. Если в системе необходимо уменьшить све-
товые диаметры компонентов оборачивающей системы, окулярной
призмы, то в системе следует установить коллектив 3 и ввести винье-
тирование. В остальном расчет аналогичен расчету телескопической
системы, приведенному выше.
Особенности габаритного расчета зрительных труб
с электронно-оптическими преобразователями
Для наблюдения предметов, излучающих в рентгеновской, ульт-
рафиолетовой или инфракрасной областях спектра, а также предме-
тов, создающих освещенность на зрачке глаза порядка 510-9 лк ис-
пользуют трубу с электронно-оптическим преобразователем (ЭОПом).
ЭОП — вакуумный фотоэлектронный прибор. С его помощью не-
видимое глазом изображение, образованное какой-либо оптической
системой на фотокатоде ЭОП, сначала внутри ЭОП преобразуется в
промежуточное электронное изображение, а затем на флюоресциру-
ющем экране — в видимое. ЭОП используют и для усиления яркости
видимого изображения.
Оптическая схема зрительной трубы с ЭОП представлена на
рис. 2.34.
Рис. 2.34. Схема зрительной трубы с ЭОП
Объектив зрительной трубы образует на фотокатоде ЭОП изобра-
жение предмета. Глаз наблюдателя рассматривает через окуляр, вы-
полняющий роль лупы, преобразованное ЭОП изображение на экра-
не. Так как ЭОП оборачивает изображение, то в схему не надо вводить
оборачивающих систем. Объектив и окуляр являются самостоятель-
ными оптическими узлами, так как в системе отсутствует оптическое
сопряжение лучей в пространстве предметов с лучами, проходящими
в пространстве изображений. В системе отсутствует взаимная компен-
сация аберраций, поэтому и объектив и окуляр самостоятельно рас-
считываются в отношении исправления аберраций, которые исправ-
ляются тщательно. ЭОП по сравнению с объективом и окуляром име-
ет невысокую разрешающую способность.
Зрительную трубу с ЭОП характеризуют [5]: видимое увеличение
Гт = -/обРзоп/Хк ’ угловое поле 2со объектива; длина системы L; элект-
ронно-оптическое (линейное) увеличение ЭОП РэоП: Рэоп = ~Дж/^фк»
где -Офк — диаметр фотокатода, Вэк — диаметр экрана; разрешающая
способность N3K экрана; интегральная чувствительность S фотокато-
да и коэффициент световой эффективности К = Фиэк/Фефк, которые ис-
пользуются при энергетическом расчете; яркость экрана Lv3K, завися-
щая от энергетической освещенности Е'е фк фотокатода и коэффициента
яркости экрана; расстояние -Цоп между фотокатодом и экраном ЭОП.
Габаритный расчет зрительной трубы с ЭОП выполняют по следу-
ющим формулам:
f Дэоп г» . f _ -^~Дэоп п
'°б т-1 Q Ат’ /ок П __р Рэоп ’
1 т Рэоп Рэоп 1 т
-Офк = ~2fo6 tgoi; Д,к = 2f'K tgco'.
По заданной энергетической яркости Le предмета и достаточной
энергетической освещенности Е'е фк фотокатода определяется диаметр
входного зрачка объектива.
Качество изображения, создаваемое объективом на фотокатоде,
значительно выше качества изображения на экране ЭОП, ибо оно за-
висит от размера пятна рассеяния 50 электронов на экране. Обычно эк-
раны ЭОП имеют разрешающую способность N3K = 20...40 мм4, что
соответствует 50 = 0,025...0,05 мм.
Разрешающая способность на фотокатоде N$K = РзоП/30 и ее надо
согласовать с разрешающей способностью объектива, причем
W Я>ЬГ.
об фк
2.2. Габаритный расчет зрительных труб переменного
увеличения
Область применения оптических систем
переменного увеличения
В оптических приборах, применяемых в различных отраслях на-
уки и техники, появляется необходимость изменять увеличение. Это
фотография, кинематография, телевидение, видеотехника, микроско-
пия, астрономические приборы, спектрофотометрия, тренажеростро-
ение, тепловидение, пирометрия, лазерная техника, медицинская тех-
ника, военные приборы, наблюдательные приборы и т.п. [10].
Изменением увеличения решаются прежде всего 2 основные за-
дачи:
1. Быстрый поиск объекта и его введение в поле системы. Для это-
го удобно использовать большое поле прибора, которому соответству-
ет малое увеличение (или малое фокусное расстояние).
2. Изменение увеличения (или фокусного расстояния) для наблю-
дения за объектом, выполнения измерений, наблюдения увеличенных
деталей и т.п. При больших увеличениях (или больших фокусных рас-
стояниях — для объективов) поле системы заметно уменьшается.
Рассмотрим телескопические системы.
Телескопические панкратические системы (ТПС) находят широ-
кое применение в светолокационных лазерных дальномерах для
уменьшения и регулирования угла расходимости излучения лазера,
направляемого на объект, для более эффективного использования
мощности излучения лазера. В лазерных дальномерах с помощью ТПС
узконаправленный пучок света можно сконцентрировать на различ-
ные расстояния, используя практически всегда полностью всю энер-
гию.
К зрительным трубам переменного увеличения относятся различ-
ные оптические прицелы, перископы, наблюдательные системы. Зри-
тельные трубы с плавно меняющимся увеличением имеют несомнен-
ные преимущества при наблюдениях за быстро движущимися объек-
тами.
Для удобства пользования приборами с переменным увеличени-
ем приходится решать две конструктивные задачи: сохранение поло-
жений входного и выходного зрачков. Положение входного зрачка оп-
ределяет всю конструкцию, а положение выходного зрачка в наблю-
дательных системах — неподвижность глаза наблюдателя.
Классификация зрительных труб переменного увеличения
Зрительные трубы переменного увеличения можно классифиро-
вать по способу получения переменного увеличения. Эти зрительные
трубы разделяют на две группы: трубы со ступенчатым, или диск-
ретным изменением увеличения и трубы с непрерывным, плавным из-
менением увеличения, называемые панкратическими трубами.
Переменное увеличение можно получить применением какого-либо
компонента или части системы с переменным увеличением или фокус-
ным расстоянием (объектива, окуляра, оборачивающей системы).
На рис. 2.35, где приведена схема классификации, представлены
известные способы изменения увеличения зрительных труб, а в таб-
лице 2.3 — оптические схемы зрительных труб дискретного увеличе-
ния и панкратических труб.
В таблице 2.3 не показаны только редко применяемые схемы со
сменными объективами и окулярами. Первый способ применяют
крайне редко, он приводит к неудобной конструкции прибора, к силь-
ному изменению габаритов. Известно его применение в некоторых пе-
рископах и прицелах. Обычно используется телецентрический ход
главного луча после сменного объектива.
Второй способ — сменных окуляров — самый простой и распрос-
траненный. Его широко применяют в астрономических системах и в
геодезических приборах. Габаритный расчет системы вполне опреде-
ляется расчетом по малому увеличению. Единственной особенностью
такой системы является возможность допущения значительного ви-
ньетирования на краю поля при малом увеличении, которому соответ-
ствует большое угловое поле. Диаметр выходного зрачка меняется, по-
ложение выходного зрачка непостоянно при изменении увеличения.
В панкратических зрительных трубах плавное изменение увели-
чения можно получить с помощью панкратического объектива —
объектива с непрерывно изменяющимся фокусным расстоянием и на-
зываемого также вариообъективом, а также за счет использования
панкратической оборачивающей системы с плавным изменением уве-
личения или, наконец, с помощью панкратического окуляра.
Известны панкратические объективы и оборачивающие системы
с механической и с оптической компенсацией смещения плоскости
изображения. Панкратические системы с механической компенсаци-
ей смещения плоскости изображения — оптические системы, в кото-
рых непрерывное изменение их фокусного расстояния или увеличе-
ния и неподвижность плоскости изображения осуществляется за счет
нелинейного перемещения компонентов.
Панкратические системы с оптической компенсацией смещения
плоскости изображения — системы, в которых непрерывное измене-
ние их фокусного расстояния (или увеличения) достигается за счет
перемещения компонентов с линейной связью между их перемещени-
ями. В таких системах плоскость изображения смещается в неболь-
ших пределах.
К панкратическим оборачивающим системам с механической
компенсацией относятся двух- и трехкомпонентные оборачивающие
системы (табл. 2.3, поз. 2.1 и 2.2). Нелинейное перемещение одного
Рис. 2.35. Схема классификации зрительных труб (ЗТ) переменного увеличения
Расчет и проектирование оптических систем
Таблица 2.3
Оптическая схема ЗТ переменного увеличения
Особенности схемы
ЗТ с дискретным переменным увеличением
1. Применение ОбС переменного увеличения
co
Увеличение ЗТ меняется путем смены
оборачивающей системы. ОбС состоит из
двух попеременно включающихся компо-
нентов 1 и 2.
^Afp^ 2, где М — кратность измене-
ния увеличения. Выходной зрачок удален
на разные расстояния а р. Можно сделать
а'^ const, но тогда ap=var.
ОбС состоит из двух компонентов с парал-
лельным ходом лучей между ними. Для
изменения увеличения один из компонен-
тов заменяется другим, f =Mf 2. В схемах
1.1 и 1.2 реализуется способ сменных ком-
понентов ОбС.
ОбС состоит из одного компонента, ко-
торый принимает 2 различных положе-
ния: 1 и 2.
р^ ,=ЛГр^ ,
г обе 1 ~ обе 2
В схеме 1.3 реализуется способ перемеще-
ния оборачивающей системы для получе-
ния переменного увеличения.
Глава 2. Габаритный расчет оптических систем
Продолжение таблицы 2.3
Оптическая схема ЗТ переменного увеличения
Особенности схемы
ОбС с отрицательным значением Ло6с-
Применяется в перископах. ОбС состоит из
одного компонента, занимающего положе-
ния 1 и 2. Компонент может быть трехлин-
зовым склеенным или состоять из двух со-
прикасающихся симметрично расположен-
ных двухлинзовых склеенных компонентов.
Изменение увеличения достигается поворо-
том ОбС из одного положения в другое на
180°- Ро* Г₽ОР Роос П=!/Р01; M=Pofc j/Робс П=Р2ОГ
Примечание: смена компонентов ОбС или ее
поворот на 180° усложняет механику прибора
и увеличивает поперечные размеры прибора.
Расчет и проектирование оптических систем
2. Применение дополнительных телескопических систем Галилея, устанавливаемых в
параллельном пучке лучей
1.6.
Перед ЗТ помещают вращающуюся на 180°
трубу Галилея г _ г = •
1 ТД; * 1 ТДр > Х ТД; р ’
1 ТД2
г =г г г =г г.
Выходной зрачок системы Галилея в обоих
положениях совпадает с входным зрачком
основной трубы. Поэтому ось вращения О,О;
трубы Галилея расположена посередине
между этими зрачками.
со
(Л
Продолжение таблицы 2.3
Оптическая схема ЗТ переменного увеличения Особенности схемы
Панкратические ЗТ (ПЗТ)
1. Применение панкратического объектива
1
объектив
внефок. 0§С
кол. С |
2.2.
2.3.
ж
Ш
М /max / /min ~~ max min'
Объектив может состоять из двух положи-
тельных компонентов. Предпочтительней
телеобъектив, дающий больший перепад М
(М=2...6Х)
2. Применение панкратической ОбС
г
н ш
Панкратическая ОбС с механической ком-
пенсацией. Оба компонента перемещаются по
нелинейному закону
^ = Po6cBuut/Po6cmin •
Выходной зрачок непостоянен.
ОбС
Панкратическая ОбС с механической ком-
пенсацией. Выходной зрачок постоянен,
положение стабильно. Входной зрачок меняет
размер и расположение.
Панкратическая ОбС с оптической компенса-
цией. 2-ой и 4-ый компоненты одновременно
перемещаются относительно 3-го. Плоскость
изображения смещается на величину 5.
3. Применение панкратического окуляра (см. рис. 2.36)
лава 2. Габаритный расчет оптических систем
из компонентов усложняет изготовление паза, по которому перемеща-
ется штифт, несущий оправу компонента.
Технологическими преимуществами обладает оборачивающая си-
стема с оптической компенсацией. Этому условию может удовлетво-
рить четырехкомпонентная ОбС, имеющая два жестко связанных по-
ложительных компонента, перемещающихся вдоль оптической оси,
между которыми находится неподвижный отрицательный компонент
(табл. 2.3, поз. 2.3). В этом случае упрощается механическая часть
конструкции, однако увеличивается число компонентов оптической
системы.
Зрительные трубы с дискретным изменением увеличения имеют су-
щественный недостаток: во время смены увеличения наступает краткий
момент, когда наблюдатель теряет из виду предмет наблюдения.
Основным недостатком панкратических ЗТ является невозмож-
ность получить одинаково высокое качество изображения при всех
значениях увеличения.
Оптические характеристики зрительных труб
переменного увеличения
Видимое увеличение сложной телескопической системы опреде-
ляется формулой:
Гт = "Роз • Рор>
•ОК
где P0J...|J0p — линейное увеличение оборачивающих систем, разме-
щенных между объективом и окуляром.
Одной из основных характеристик является перепад или крат-
ность увеличений М: М = Гттах/Гтгшп.
Большой перепад увеличений М = 5...6х можно получить при ис-
пользовании панкратических линзовых оборачивающих систем. Пан-
кратические окуляры позволяют получить М = З...4х.
Однако следует помнить, что требования к изготовлению обора-
чивающей системы жестче, так как за ней располагается короткофо-
кусный окуляр, который существенно увеличивает остаточные абер-
рации системы перед окуляром («объективной части») и вносит свои.
При использовании панкратического окуляра эти требования снижа-
ются, так как за ним располагается глаз наблюдателя.
Наиболее рациональной схемой ЗТ переменного увеличения счи-
тают схему, в которой окулярное угловое поле используется полнос-
тью при всех увеличениях, т.е. 2<о' = const. Следовательно, диаметр
полевой диафрагмы также постоянен.
В этом случае tg® = tg®'/FT = var, где Гт — переменное увеличе-
ние. Отсюда следует, что с возрастанием увеличения Гт угловое поле
2® трубы уменьшается.
Предпочтительней схема, в которой входной зрачок использует-
ся полностью при всех увеличениях, но тогда D' = О/Гт, следователь-
но, с возрастанием увеличения выходной зрачок D' уменьшается.
Угловое поле 2® и диаметр D' выходного зрачка ЗТ изменяются
обратно пропорционально увеличению Гт. Иногда изменяется также
положение з'р, выходного зрачка относительно окуляра. При разработ-
ке системы стремятся это изменение сделать минимальным.
Полное использование входного зрачка при всех увеличениях и
его постоянное положение обеспечивается в схеме зрительной трубы
с панкратической двухкомпонентной оборачивающей системой
(табл. 2.3, поз. 2.1). В этом случае положение s'p, и диаметр D' выход-
ного зрачка зависят от увеличения Гт.
Стабильное положение и диаметр выходного зрачка можно полу-
чить при использовании панкратической трехкомпонентной оборачи-
вающей системы (табл. 2.3, поз. 2.2). Однако это приводит к зависи-
мости положения sp и диаметра D входного зрачка от увеличения Гт.
Оптимальные оптические и технические характеристики панкра-
тической ЗТ выбирают исходя из условий эксплуатации. Например,
систему с входным зрачком от 60 мм и Гт > 8х требуется устанавли-
вать на штатив или упор, так как большая масса и тремор рук наблю-
дателя не позволяют использовать все технические возможности по
достижению предельной разрешающей способности системы
«глаз + прибор».
В менее громоздких панкратических зрительных трубах (ПЗТ),
удерживаемых в руках, используют гиростабилизирующее устрой-
ство.
Следует помнить, что в светлое время суток глаз наблюдателя
имеет размер зрачка до 2 мм и обеспечивает в среднем угловое разре-
шение в одну угловую минуту, поэтому для этих условий наблюдения
диаметр D входного зрачка трубы D = 2ГТ.
Если освещенность объекта низкая, то оптимальная яркость изоб-
ражения обеспечивается размером зрачка глаза 3 мм и более.
Панкратические ЗТ позволяют подбирать оптимальные оптичес-
кие характеристики (Гт, 2®, D') с учетом условий наблюдения.
Оптические и технические характеристики разрабатываемых ЗТ
определяются назначением прибора и характером решаемых задач.
Угловое поле в пространстве предметов определяет время поиска
объекта, увеличение прибора — дальность видимости, а диаметр вход-
ного зрачка и аберрационная коррекция оптической системы влияют
на разрешающую способность.
Важными параметрами, определяющими пределы использование
прибора, являются также яркость фона, контраст объекта и его угло-
вые размеры.
В качестве примера в табл. 2.4 приведены оптические и техничес-
кие характеристики, а на рис. 2.36 представлены оптические схемы
зрительных труб переменного увеличения, разработанные в ГОИ в
1993 г.
Таблица 2.4
№ п/п Гт, крат D', мм D, мм 2<о s'^, мм L, мм т, % Масса, 7П,Г
1 15...60 4 66 3°10,...0о48/ 17,1 343,6 70 378
2 7...35 5 50 6°48'...1°22/ 15,2 252,7 70 221
3 6..30 5 40 7°14'...1°28' 15,2 228,4 71 165
4 4...8 2 28 12°...6° 10,5 103,0 73 85
5 9 и 18 2 50 6°28' и 3° 13,2 181 200
На рис. 2.36 приведены 4 схемы панкратических зрительных труб
(1—4) и одна схема (5) зрительной трубы с двумя дискретными увели-
чениями.
Рассмотрим особенности конструкций. В схемах 1-3 и 5 исполь-
зуются телеобъективы. Наиболее компактной среди схем 1—3 с боль-
шим перепадом увеличений является схема 3, где используется теле-
объектив с f = 148,8 мм, D/f = 1:3,7, т = L/f = 0,59.
В схемах 1-3 используются двухкомпонентные панкратические
оборачивающие системы с механической компенсацией смещения
плоскости изображения, причем в схемах 2 и 3 каждый компонент
оборачивающей системы является трехлинзовым. В схеме 5 примене-
на оборачивающая система с двумя дискретными увеличениями.
В схеме 4 применен панкратический окуляр, установленный за
призмой Пехана с крышей.
Рис. 2.36. Оптические схемы новых зрительных труб переменного увеличения
Расчет панкратической зрительной трубы
переменного увеличения с двухкомпонентной
оборачивающей системой
В панкратических зрительных трубах чаще всего используется
двух компонентная оборачивающая система с двумя подвижными ком-
понентами (см. рис. 2.36). Рассмотрим габаритный расчет зрительной
трубы с однокомпонентным объективом 1, коллективом 2 и двухком-
понентной панкратической оборачивающей системой 3, 4 (рис. 2.37).
Рис. 2.37. Оптическая схема панкратической зрительной трубы (ПЗТ)
с двухкомпонентной оборачивающей системой
Увеличение трубы Гт = - f'6/f'K • Ро6с, где Ро6с = var, поэтому
Гт = var. Пределы изменения линейного увеличения 0обс оборачиваю-
щей системы зависят от пределов изменения Гт и выбранных значе-
ний /0'6 и /о'к.
Для удобства пользования трубой желательно, чтобы оптическая
длина Loec оборачивающей системы была постоянной, так как в этом
случае окуляр остается неподвижным.
В ТЗ чаще всего указывается Гтт1п ... Гттах (или ГттЫ и М), L, 2гоок,
D. Иногда задается f'K, если есть готовый окуляр. Чаще всего апертур-
ная диафрагма расположена между компонентами 3 и 4, при этом ар =* 0.
Выбор оптимальных значений гауссовых (параксиальных) харак-
теристик представляет собой неоднозначную задачу, решение которой
можно получить в результате проведения исследований и получения
возможной области рациональных решений.
В начале расчета компоненты ПЗТ принимают за бесконечно тон-
кие, поэтому надо заранее предусмотреть, что при введении конечных
толщин оптическая длина ПЗТ увеличится. Величина удлинения тру-
бы существенно зависит от оптических характеристик и конструкции
компонентов.
При расчете первого варианта схемы ПЗТ можно использовать ре-
комендации, предложенные И.А. Турыгиным [23].
Пусть заданы rTmin ... Гттах — пределы изменения увеличений
ПЗТ, тогда соответствующие им пределы изменения линейного уве-
личения оборачивающей системы — Ро6ст1П ... ₽обстах-
Для достижения лучшей коррекции аберраций в ПЗТ желатель-
но, чтобы Ро6стах =1/ РОбс min- ® этом случае у оборачивающей системы,
состоящей из двух одинаковых компонентов, при крайних значени-
ях увеличения эти компоненты занимают два симметричных положе-
ния. Поэтому, если в такой системе исправить аберрации для какого-
либо значения ро6с, то они будут исправлены или малы и при увели-
чении, равном 1/ ро6с. Это может значительно упростить всю расчет-
ную работу.
Пусть ро6с ср — среднее увеличение оборачивающей системы (ОбС),
относительно которого кратность изменения увеличения в сторону
обоих пределов одинакова.
Тогда Ёлбстах = ^обсср , откуда = -^/р^ тах • ро6с min = -1 .
Робе ср Робе min
Увеличению робсср ОбС соответствует увеличение Гтср трубы:
Г = — . в =
ХТСр у./ Робсср .
Можно легко получить, что при этом Г = ,/Г_о -IL.
* 1 г тер V т max т min
Далее необходимо выполнить расчет оптической схемы при уве-
личении Гтср. Для упрощения расчета, конструкции и изготовления
всей системы желательно вначале рассчитать вариант с симметричной
оборачивающей системой. Следовательно, надо ввести дополнитель-
ное условие: при Гтср ПЗТ имеет симметричную ОбС с робс= -1 с парал-
лельным ходом лучей между компонентами (рис.2.18). Для расчета
можно использовать теорию и формулы, приведенные в гл.2.
Зная //, dt для Гт ср далее рассчитывают перемещение компонен-
тов ОбС. Для получения оптимального решения следует рассчитать
несколько вариантов при разных значениях /3', , а также изменении
значений L, и fa.
При перемещении компонентов ОбС изменяются отрезки
а3, d, а4 (рис.2.37).
Получим формулы, которые позволят рассчитать перемещение
компонентов. Рассмотрим общий случай, когда f3 * f4 .
Найдем зависимость между ро6с и положением компонентов, т.е
отрезками а3, d, а4, которые меняются при изменении ро6с.
При расчете надо учесть, что
Lo6c = -а3 + d + а4 = const. (2.70'
Для Робе =-1’ когда аз = /з и а4 ~ К ’ имеем а3 = aF, а4 = a'F..
Оптическая сила оборачивающей системы
Ф = Ф3 + Ф4-Ф3Ф<й. (2.71)
Положение переднего и заднего фокусов оборачивающей системы
(ОбС) при ро6с Ф Робеср определяется известными формулами [12]
Линейное увеличение ОбС
Робе = ~ = -Фг'.
Из рис. 2.37 видно, что г' = а4 - , поэтому
Робе ' (.aF' ~
Учтя (2.72), получим:
^обс = 1-^з^-а4Ф.
Заменяя значение Ф из (2.71) и решая последнее уравнение отно-
сительно а4, получим:
= 1-ро6с-<м = 0-Робе)/я;-^
4 Ф3 + Ф4-Ф3Ф4(/ M-d ‘
Для отрезка а3, определяющего положение первого компонента
ОбС относительно фокальной плоскости объектива, получим:
R _ f _Г _ 1
г-а3 aF; Робс - 2 ~ г ~ гф
Угловое увеличение ОбС
Тобс = «Д’ = Ф* = Ф(«з “aF).
Робс
Подставив aF из (2.72), имеем:
7обс = Фа3-Ф^ + 1.
Отсюда получим расчетную формулу для а3:
а = +
3 Ф3 + Ф4-Ф3Ф^'
(2.74)
В уравнениях (2.73) и (2.74) при известных или выбранных Ф3 и
Ф4 неизвестными являются Ро6с и d. В (2.70) подставим (2.73) и (2.74).
В результате получим:
d2 -Lo6cd + (// + 4')Lo6c +-bgc)-/a7; = o. (2.75)
Робе
Решая уравнение относительно а, имеем:
d = 0,5Lo6c±0,5 L^-4 Lo6e(f'+f^+
Робе f3fi •
(2.76)
Если d < L^, то перед корнем ставим знак «-», что справедливо
для нашего случая.
При /3' = Д' формулы (2.73)-(2.76) несколько упрощаются.
Последовательность расчета перемещений очевидна:
1. Определив или выбрав Д' и Д', задаем для ро6с значения с опре-
деленным шагом от Робе min до ро6стах и из (2.76) определяем d.
2. Подставляя соответствующие пары значения ро6с и d в (2.73)
или (2.74), находим а3 или а4. Например, а4.
3. Отрезок а3 найдем из (2.70)
а3 = d + а4 — Ъо6с.
Результаты расчета удобно представлять в табличном виде:
Г т Робе d а; d + a4 аз
1 2 3 4 5 6
г т nun г т max
4-я и 5-я графа определяют перемещение компонентов 3 и 4 от-
носительно фокальной плоскости окуляра.
Следует обратить внимание на то, что прежде чем подробно рас-
считывать величины перемещений, вначале необходимо определить
расположение линз для крайних и среднего увеличений, уточнить по-
ложение и размеры зрачков и определить световые диаметры компо-
нентов и их оптические характеристики. Затем надо оценить возмож-
ность физической и технической осуществимости рассчитанной схе-
мы. Нельзя допускать большого относительного отверстия хотя бы для
одного компонента схемы. Лучше выполнить пересчет схемы, изме-
нив отдельные принятые данные.
Кроме того, надо оценить величину перемещения компонентов
оборачивающей системы для крайних увеличений и их взаимное по-
ложение. Если они расположены близко друг от друга при каком-то
увеличении ро6с, то при переходе к реальным линзам это может при-
вести к невозможности получения какого-либо одного или нескольких
увеличений из-за конечных величин и sH4 .
Помимо этого, удаление а'р. выходного зрачка обычно изменяется с
изменением увеличения. Изменение а'Р. должно быть минимальным.
Поскольку габаритный расчет панкратической зрительной трубы
включает исследование системы, неоднократное обращение к началу
с целью перераспределения f', , Lo6c, L, то для расчета целесообраз-
но составить программу для программируемого калькулятора или
персонального компьютера с целью получения оптимального вариан-
та с возможно малыми габаритами и приемлемыми оптическими ха-
рактеристиками компонентов.
Конструктивное оформление механизма перемещения линз.
Определение характера движения линз.
Возможный вариант конструктивного оформления движения
линз схематически показан на рис. 2.38 [23].
Рис. 2.38. Схема перемещения компонентов ОбС
Компоненты вставлены в подвижные оправы со штифтами 1, вхо-
дящими в продольный паз П внутренней трубы 2 и пазы наружной
вращающейся трубы 3. При вращении наружной трубы 3 вокруг оси
оправы компоненты, не имеющие свободы вращения вокруг этой оси,
движутся поступательно вследствие наличия продольного паза П на
трубе 2. Если вращение наружной трубы пропорционально изменению
увеличения Гт, то согласно формулам (2.76), (2.73), (2.74) пазы на этой
трубе будут винтовыми с переменным шагом.
Разметка этих пазов может быть сделана на основе результатов
вычислений для большого числа значений робс. Так как изготовление
спиральных прорезей с переменным шагом затруднительно, то жела-
тельно, чтобы один из пазов, определяющих движение компонентов,
был винтовым с постоянным шагом, при этом углы вращения наруж-
ной трубы не будут пропорциональны изменениям увеличения.
В этом случае перемещение компонентов и изменение увеличения
удобнее рассчитывать, выбирая произвольно ряд положений одного
компонента, при этом каждый раз определяется положение второго
компонента и их общее увеличение. По формулам (2.76), (2.74) и
(2.73) определяются лишь предельные значения а3 и а4.
Допустим, что первый компонент должен двигаться равномерно.
Выведем закон перемещения второго компонента.
Из формулы Гаусса для первого компонента оборачивающей сис-
темы имеем:
аз = «з/(^ *" азФз)- (2.77)
Из рис. 2.37 видно, что
с = а3 — а3 + Ъобс • (2.78)
Для второго компонента ОбС имеем:
1 1 Л , 1 1 _
—-----= Ф4; а4 = а4 - с, поэтому —----= Ф4 или
(&4 &4 (&4 CI4 С
а42-ca'4 + cf4-0. (2.79)
Из двух решений уравнения выбираем положительное:
a'4 = 0,5c(l — y]l — 4f4/cj, (2.80)
так как в нашем случае а4 > 0 и с <0.
Представим (2.80) в более удобном виде, чтобы избежать неопре-
деленности, получаемой при с = °°:
, - 2К
<2-80>
Общее увеличение оборачивающей системы определим по формуле:
о _ а3 ’ а4
<2-81)
Когда первый компонент оборачивающей системы имеет равно-
мерное перемещение при равномерном вращении наружной трубы, то
для расчета используют формулы (2.77), (2.78), (2.80'), (2.81). Резуль-
таты расчета удобно представлять в табличном виде, используя для
расчета ПЭВМ:
Таблица 2.5
аз а3 а3 с а4 а'4 «з/ аз a4la4 Зобе
Полученные результаты представлены в виде графиков на
рис. 2.39.
Рис. 2.39. График движения ком-
понентов панкратической оборачи-
вающей системы
По оси абсцисс отложен угол
вращения у наружной трубы в граду-
сах, а по оси ординат — перемеще-
ние компонентов. График движения
первого компонента имеет вид пря-
мой. Угол тг этой прямой с осью аб-
сцисс определяет подъем винтовой
линии. Значение этого угла должно
быть таким, чтобы усилие на пре-
одоление трения при перемещении
было невелико.
Для определения характера
движения второй линзы следует по
оси ординат отложить величину
Lo6c - а'4. Расстояние между обеими кривыми на графике равно рассто-
янию между компонентами. Форма кривой второго компонента дол-
жна отвечать следующим требованиям:
1. Кривая L^ — а4 не должна иметь экстремума (максимума или
минимума), так как это приводит к возвратному движению второго
компонента. На графике такая кривая показана пунктиром для слу-
чая максимума.
2. Кривизна кривой должна быть малой. В этом случае паз будет
мало отличаться от винтового с постоянным шагом.
3. Кривая Lo6c — а4 не должна близко подходить к прямой а3, а тем
более пересекать ее, так как в первом случае возникнут трудности в
разработке конструкции, а во втором случае конструктивное решение
невозможно.
4. Угол т касательной к кривой Lo6c -а4 в любой ее точке не дол-
жен принимать такого значения, при котором на преодоление трения
между краями паза и ведущим штифтом 1 (рис. 2.38) потребовалось
бы слишком большое усилие.
Выполнение этих требований возможно при соответствующем вы-
боре фокусных расстояний /3' и £, а также предельных значений уг-
лов вращения наружной трубы.**
После получения одного или нескольких вариантов расчета пан-
кратической зрительной трубы выбираются конструкции каждого
компонента.
Обязательно рассчитывается внефокальный коллектив (см. 2.1).
Для сокращения габаритов применяют ЗТ с внутренней фокусировкой
(особенности расчета см. 2.1).
После габаритного расчета выполняется аберрационный расчет.
2.3. Габаритный расчет луп и микроскопов
Лупа — самый простой и древний оптический прибор.
Лупой называется положительная линза или система линз, пред-
назначенная для наблюдения близкорасположенных мелких предме-
тов или деталей предметов.
Лупа, называемая иногда простым микроскопом, служит для рас-
ширения возможностей глаза.
Рис. 2.40. К определению
увеличения лупы:
а) ход лучей в лупе;
Основные оптические характерис-
тики — видимое увеличение Гл и ли-
нейное поле 2у. Иногда к ним относят
диаметр лупы £>л.
Предмет АВ расположен перед фо-
кусом линзы (рис. 2.40, а) или в пере-
дней фокальной плоскости. Лупа дает
мнимое прямое увеличенное изображе-
ние (рис. 2.40), которое глаз видит под
углом со' с расстояния р'. Без лупы тот
же предмет глаз видит под меньшим уг-
лом © (рис. 2.40, б) с расстояния рг
б) наблюдение предмета глазом Обычно р2 = 250 мм.
Видимое увеличение лупы Гл = tgro'/tg®.
Определим из рис. 2.40 tg® и tg®':
=____У' v , уг'
^-2’- УЧТЯ’ ЧТ° у~ f К У
Тл = -Р1(1 + г'у/р')/Г •
tg® =——; tg®' = -—=
Pi P
а г' = р' + г'р>, имеем:
*> При увеличении числа компонентов оборачивающей системы перемещение отдельных
компонентов будет почти линейным.
В таблице 2.6 приведены различные случаи расположения зрач-
ка глаза относительно лупы и предмета и соответствующие этому фор-
мулы видимого увеличения лупы. Следует отметить, что если пред-
мет расположен в передней фокальной плоскости лупы и изображе-
ние лежит в бесконечности, то глаз работает без напряжения (без ак-
комодации) и меньше устает.
Ограничение пучков лучей надо рассматривать в системе «лупа +
глаз», которая имеет две вещественные диафрагмы — оправу лупы и
зрачок глаза. В этой системе полевая диафрагма отсутствует, а поле
лупы ограничивается ее оправой, которая служит виньетирующей
диафрагмой, а одновременно входным и выходным окном.
Обычно диаметр оправы лупы больше зрачка глаза. Апертурной
диафрагмой и выходным зрачком является зрачок глаза (рис. 2.41),
а его изображение через лупу в обратном ходе лучей является вход-
ным зрачком.
Рис. 2.41. Ограничение пучков лучей в системе «лупа+глаз»
при условии Д > Др гл
Следует отметить, что лупы простой конструкции с большим ви-
димым увеличением и с малым фокусным расстоянием имеют малый
диаметр и малое поле. Здесь возможен случай, когда диаметр зрачка
глаза больше , чем диаметр лупы и тогда входным зрачком, апертур-
ной диафрагмой и выходным зрачком является оправа лупы, а роль
виньетирующей диафрагмы играет зрачок глаза. Однако это исклю-
чительный случай.
Для распространенного варианта Вл > Лзр гл. Величина поля за-
висит от диаметра оправы лупы и расположения зрачка глаза. При-
ведем формулы для определения углов СО;, со' и со^ для трех зон винье-
тирования 0%, 50% и 100%, определяемых соответственно лучами Г,
О', 2" (рис.2.42).
Таблица 2.6
Различные
варианты
расположе-
ния зрачка
глаза и
предмета
Оптическая схема
Формула
видимого
увеличения
Общий
случай
где
р =a'-(f'+z'p)=
=а'-а'р„
z'=z'
, Р гл
z = О
р'=а'-а'р=°°,
zp - любое
~р'= 250
-z'p, = f'
г = 250
1 ло f'
Г 250
1ЛО
Г =Г + 1
Л ЛО
Рис.2.42 Углы поля в пространстве изображения для трех зон виньетирования
Из рис.2.42 видно, что углы со^, со' и со^ можно определить с помо-
щью следующих формул:
tgco'2 =
tgco' =
tgco^ =
D.-D\
2a'p,
2dpl
(2.82)
где D' = Drjl, co' — половина углового поля лупы в пространстве изоб-
ражений.
Соответствующие углы в пространстве предметов можно опреде-
лить, зная увеличение в зрачках р0 р.
Тогда линейное поле можно определить так:
2у = 2f tgco'.
Из (2.82) видно, что угловое поле увеличивается при увеличении
диаметра оправы и приближения глаза к лупе, т.е. при уменьшении
а'р,. Эти формулы справедливы, если глаз не вращается в своей орби-
те (относительно центра глазного яблока).
Иногда линейное поле измеряют диаметром круга, который мож-
но видеть через лупу в плоскости предмета при неподвижном положе-
нии глаза. Тогда, если предмет расположен в передней фокальной
плоскости, получим (см. табл. 2.6): 2у- 2f'Iga'. Учтя формулу для
о 500tga>' „
видимого увеличения, получим: 2у = —=----. Следовательно, линеи-
А л
ное поле уменьшается, если увеличивается видимое увеличение лупы.
Разрешающая способность системы «лупа+глаз» в линейной мере
определяется формулой: 5 = 250у гл /Гл , где угл = Г при хороших ус-
ловиях освещения и достаточной контрастности. Но для обеспечения
более комфортных условий наблюдения при продолжительной рабо-
те, чтобы не утомлять глаз угол \|/гл должен быть не менее угла «удоб-
ного видения», равного 2'—4'. Этой величиной пользуются при расче-
те лупы и микроскопа.
Глубина резко изображаемого пространства, даваемого лупой,
складывается из двух величин — аккомодационной и волновой:
Аг = Агак + Дгв = 250/Г2 + X/(2 А2),
где A = ^~L.
2f
Основные виды луп и их характеристики приведены в табл. 2.7.
Известны более сложные конструкции луп. Когда расстояние от пред-
мета до лупы велико, применяют телескопические лупы. Они пред-
ставляют собой зрительную трубу, чаще всего половину оптической
системы бинокля, с насадкой. Предмет расположен в передней фо-
кальной плоскости насадки, поэтому после насадки формируется па-
раллельный пучок лучей, попадающий в зрительную трубу. Тогда уве-
личение телескопической лупы, формирующей изображение в пере-
дней фокальной плоскости зрительной трубы, можно определить сле-
дующим образом:
Г =В Г =
Хл гОн.об Хок ff ft 9
'ОК 'Н
где р0но6— линейное увеличение системы «насадка+объектив зри-
тельной трубы», Гок— видимое увеличение окуляра.
Насадка чаще всего представляет собой двухлинзовый склеенный
компонент.
Телескопические лупы имеют увеличение от 2х до 4х, большое
поле, хорошее качество изображения. По оптической схеме и прин-
ципу работы телескопические лупы правильней называть микроско-
пами. Их часто оформляют как бинокулярную систему и называют би-
нокулярными лупами.
К сложным лупам относят также расфокусированную систему Га-
лилея, в которой есть возможность плавно менять увеличение изме-
нением расстояния между компонентами. Известно применение по-
добной бинокулярной системы, называемой телескопическими очка-
ми, для сильно аметропических глаз. Конструктивно они оформлены
в виде очков. Они также применяются для глаз с небольшой аметро-
Таблица 2.7
Оптическая схема Название Видимое увели- чение Гл, крат Поле Примечание
Лупа Волластона (1812) 500 Мало Имеет историческое значе- ние. Свободна от хроматиз- ма увеличения, комы, ас- тигматизма и дисторсии.
—г — Простая лупа (плоско- выпуклая линза) До 7 До 15° Относительное отверстие мало, поэтому малы абер- рации. Заметны астигма- тизм и дисторсия.
Лупа- монокль 1,7...4 До 40° Исправлен астигматизм. Применяется редко.
— Дуплетная лупа До 15 До 30° Достаточно хорошо ис- правлены все аберрации, кроме хроматических.
V 1 е Г* 1 V» 1 Верантная лупа До 15 До 60° Исправлен хроматизм, сферическая аберрация, палевые аберрации.
—— Лупа Штейнгеля (апл апа- тическая) 6...15 До 20° Апланатическая лупа, хорошо исправлены сфери- ческая аберрация, хрома- тизм увеличения,абер- рации широких наклон- ных пучков..
Анастигма- тическая лупа До 40 До 40° По качеству изображения приближается к объекти- вам микроскопов.
7 Лупа в виде окуляра Рамсдена 15...20 До 35° Хроматизм не исправлен. Исправлена сферическая аберрация, удовлетвори- тельно исправлены поле- вые аберрации.
пией, когда требуется небольшое увеличение для рассматривания де-
талей на расстоянии 15-20 см при сохранении хорошего стереоскопи-
ческого видения.
Кроме бинокулярных телескопических луп разрабатываются би-
нокулярные призматические лупы. В этих лупах в отличие от теле-
скопических оптическая ось насадки составляет небольшой угол а с
осью лупы, а оптические оси насадок двух ветвей сходятся в центре
предметной плоскости (рис. 2.43).
Сфера применения бинокулярных призматических луп разнооб-
разна: медицина (стоматология, микро- и нейрохирургия, лаборатор-
ные исследования), криминалистика, искусствоведение (раставрация
картин и художественных изделий), промышленность (часовая, юве-
лирная, материаловедение, электроника, точное приборостроение).
Некоторые лупы имеют осветитель, что позволяет использовать
их и как наблюдательный прибор с подсветкой, и как источник све-
та. Иногда в осветительной системе используется световолоконный
жгут. Такая подсветка оперируемого или диагностируемого поля не-
обходима для исключения посторонней засветки. Одни модели могут
размещаться на головном обруче, другие — на специальном штативе,
который позволяет устанавливать прибор на операционном или про-
изводственном столе.
Основными оптическими характеристиками призматической
бинокулярной лупы являются видимое увеличение Гл , линейное поле
2у, диаметр D' выходного зрачка.
Видимое увеличение рассматриваемой лупы определяется так же,
как и телескопической лупы:
Г—Г.Г—R .Г — — . ^>б
1 л х н х т РОобс ’1 ок ’
/н /ок
250
где Гн =-----окулярное увеличение насадки;
Рообс - — линейное увеличение оборачивающей системы,
образованной насадкой и объективом зрительной трубы;
(2.83)
(2.84)
р _ _ /об
1 т - ,, — видимое увеличение зрительной трубы. (2.85)
/ок
Относительное отверстие окуляра можно определить с помощью
следующей формулы: & 250Р0обс- (2.86)
104
Рис. 2.43. Оптическая схема призматической бинокулярной лупы
Расчет и проектирование оптических систем
Диаметр полевой диафрагмы, расположенной в плоскости изоб-
ражения лупы, определяется из соотношения:
Ащ = = 2у р0о6с = 2£к • tg<o'OK. (2.87)
Сложной лупой часто называют микроскоп.
Микроскоп предназначен для наблюдения и измерения мельчай-
ших предметов или их деталей с увеличением значительно большим,
чем дает лупа, и с большей разрешающей способностью.
Принципиальная оптическая схема микроскопа состоит их трех
частей — осветительной системы, объектива и окуляра. Микроскопы
бывают монокулярными, бинокулярными и тринокулярными, если
есть ветвь для фотографирования.
Рассмотрим формирование изображения системой микроскопа,
состоящей из объектива и окуляра (рис. 2.44). Предмет расположен
за передним фокусом объектива (вблизи него), в передней фокальной
Рис. 2.44. Оптическая схема микроскопа с ходом лучей
а) оптическая схема визирного микроскопа; б) графическое определение f'u и fK
плоскости микроскопа. Увеличенное изображение предмета строится
объективом в передней фокальной плоскости окуляра (глаз работает
без аккомодации).
Видимое увеличение микроскопа равно произведению увеличения
объектива на увеличение окуляра:
г = R Г = хм НОоб хок л/ /об 250 _ 250
foK (2.88)
R А • где Рооб = ~7г; /об (2.89)
р 250
Гок = -р-; /ок (2.90)
А — оптический интервал или оптическая длина тубуса
(рис. 2.44).
Величина А = 160...200 мм в зависимости от фокусного расстоя-
ния объектива. Для того чтобы выдержать эти значения, положение
объективов при их установке на приборе фиксируется нижним срезом
тубуса микроскопа. Оправа окуляра опирается на верхний срез тубу-
са (рис. 2.45). Расстояние от нижнего до верхнего среза тубуса назы-
вается механической длиной тубуса, которая стандартизована. Она
равна 160 мм для микроскопов, работающих в проходящем свете и
190 мм для микроскопов, работающих в отраженном свете. Остальные
стандартные величины показаны на рисунке.
Известна третья длина тубуса — бесконечность, встречающаяся
в микроскопах, работающих в отраженном свете. В этом случае из
Рис. 2.45. Схема тубу-
са упрощенного мик-
роскопа
объектива выходит параллельный пучок лучей, поэтому в схеме за
объективом устанавливается тубусная линза. В этом случае видимое
увеличение микроскопа определяется формулой:
Р : Р
х М ff ок ’
'об
где /т'л — фокусное расстояние тубусной линзы.
В комплект микроскопа входят наборы объективов и окуляров,
позволяющие получать различные значения видимого увеличения
микроскопа. На оправе объектива гравируется его линейное увеличе-
ние и числовая апертура, а на оправе окуляра — видимое увеличение.
Тубус микроскопа (рис. 2.45), в нижнюю часть которого вверты-
вается объектив, а в верхнюю — окуляр, имеет согласованные поса-
дочные размеры с оправами объективов и окуляров.
Увеличения объективов для проходящего и фокусные расстояния
для отраженного света, для тубуса бесконечность, изменяются в гео-
метрической прогрессии со знаменателем 1,6. Это соответствует ряду
Ra5 (ГОСТ 6636-69).
Номинальные значения видимых увеличений окуляров рекомен-
дуется выбирать из ряда RalO и соответствуют кратности 4; 6,3; 10;
12,5; 16; 20; 25.
Ограничение пучков лучей зависит от вида микроскопа. В микро-
скопах средних и больших увеличений, содержащих сложные объек-
тивы, апертурной диафрагмой служит одна из последних линз объек-
тива или специальная диафрагма, устанавливаемая между последней
линзой и задним фокусом объектива. В объективах малых увеличе-
ний с простыми объективами, а также в визирных микроскопах, при-
меняемых в геодезических и контрольно-измерительных приборах,
апертурной диафрагмой и входным зрачком является оправа объек-
тива (рис. 2.44).
В отсчетных микроскопах апертурная диафрагма устанавлива-
ется в задней фокальной плоскости объектива (рис. 2.46), что обеспе-
чивает телецентрический ход главных лучей в пространстве предме-
тов. Это ослабляет влияние параллакса на точность измерений.
Полевая диафрагма установлена в плоскости действительного
изображения, т.е. в передней фокальной плоскости окуляра. В отсчет-
ном микроскопе там установлена измерительная шкала.
Диаметр полевой диафрагмы определяется величиной изображе-
ния, даваемого объективом:
Аш = 2/об = 2у р0о6 = 2£к tgco'. (2.91)
Рис. 2.46. Оптическая схема отсчетного микроскопа
Линейное поле микроскопа можно найти из соотношения:
„ 500tgw' Дпд
2У=~ Г-----=R—• (2.92)
м Р»об
Выходной зрачок микроскопа является изображением апертур-
ной диафрагмы через окуляр. Его положение определяется отрезком
Z рл
= (2.93)
Диаметр выходного зрачка можно вычислить по формуле:
D' = -500A/TM. (2.94)
Если диаметр выходного зрачка микроскопа равен диаметру зрач-
ка глаза наблюдателя, то субъективная яркость изображения глаза
будет максимальной. В этом случае увеличение называется нормаль-
ным:
Гм и=-500А/DTn. (2.95)
Линейный предел разрешения микроскопа зависит от вида осве-
щения.
Для прямого освещения имеем:
5 = Х/А. (2.96)
Для косого освещения:
5 = Х/2А, (2.97)
где A = n1|sinoA|, А — числовая апертура, nt — показатель прелом-
ления среды в пространстве предметов.
Если n^l, то объектив называется иммерсионным, а при = 1
— «сухим».
Для иммерсионного объектива имеем: D' = 2n1f^tgaA. С учетом
выполнения условия синусов из предыдущей формулы получим:
Z>' = 2nJM'isinoAj. (2.98)
Из условия полного использования глазом разрешающей способ-
ности микроскопа, полагая угл=2'...4', получим следующее соотноше-
ние для полезного увеличения микроскопа
500А<Гмл<1000А.
Применение микроскопов с увеличением, больше полезного, не
выявляет новых подробностей предмета, но при этом требуется более
точная фокусировка, так как глубина изображаемого пространства
уменьшается.
Световой поток, проходящий через поверхность предмета и попа-
дающий в объектив микроскопа Ф = 7„7tsin2 аА.
Субъективная яркость изображения при наблюдении в микроскоп
nn.TLvD'2 , ,
Ьи = —1^Т2 ’ где т — коэффициент пропускания микроскопа.
Относительная субъективная яркость глаза при наблюдении в
микроскоп —-“ = !• -
\ "^ГЛ )
Основными оптическими характеристиками микроскопа явля-
ются: увеличение Гм, числовая апертура А, линейное поле 2у, вид им-
мерсии (для иммерсионных микроскопов), разрешающая способность.
К важным характеристикам относится механическая длина тубуса.
Следует обратить внимание на то, что для микроскопов, приме-
няемых в геодезических и контрольно-измерительных приборах, до-
пускается отступление от стандартных значений механической дли-
ны тубуса.
При проектировании микроскопа важно оценить глубину резко
изображаемого пространства. Она складывается из аккомодационной,
геометрической и волновой глубин:
Az = Aza + Azr + AzB,
где
. 250 д 250пл/ТЛ
Aza = =2 , \zr = - ;
Г2 ГМА
Azo =
2 А2
При расчете величины Az надо учитывать ряд особенностей.
1. Если в микроскопе применяется окуляр с сеткой, то Aza =0.
2. При максимальном использовании увеличения микроскопа до-
пустимое снижение качества изображения определяется в основном
волновой аберрацией дефокусировки.
3. При наблюдении грубых объектов волновую глубину AzB мож-
но не учитывать.
При расчете отсчетных микроскопов геодезических приборов
надо учитывать их особенности. С помощью отсчетных микроскопов
решают следующие задачи: оценка десятых долей интервала, оценка
совпадений совмещения двух штрихов и оценка биссектирования.
Важным условием для точной работы отсчетного микроскопа яв-
ляется соблюдение равенства 8' = 5 • РО<Л, где 8 — малая часть окруж-
ности на лимбе, которая принимается за прямолинейный отрезок, а
8' — ее изображение. В линейной мере
~ га"
о =---,
р"
где г — радиус лимба; а" — отсчет по лимбу в секундах; р" — значе-
ние одной угловой секунды в радианах.
га"Р
Тогда величина 8' определится так: 8' =-
р"
Из-за технологических погрешностей расчетная величина не вы-
держивается с требуемой точностью и действительная цена деления
отсчетного приспособления отличается от расчетной, в результате по-
является необходимость в определении ро^ и введении поправок.
Можно привести ро^ в соответствие с расчетным изменением значе-
ния /о'б за счет изменения расстояния между двумя компонентами
f'- f'
объектива, так как /0'6 = — , В современных конструкциях изоб-
ражения различных частей лимба сведены в один канал. Из-за воз-
можного несоответствия расчетного /0'6 и полученного возникает по-
грешность, известная в геодезии под названием «run», на которую су-
ществует допуск.
При расчете надо учитывать известные рекомендации: при оцен-
ке десятых долей интервала увеличение Гм должно быть таким, что-
бы видимое значение интервала было равно 1,0...2,0 мм. Видимая ши-
рина штриха должна быть равна 0,1 интервала. Но технологическая
ширина штриха получается не более 2 мкм, поэтому увеличение оп-
тической системы микроскопа не должно быть больше 80... 100х.
При оценке совпадения (совмещения) двух штрихов и оценке бис-
сектирования видимое увеличение выбирают в зависимости от допу-
стимой погрешности отсчета.
К специальным областям применения микроскопа относятся мик-
ропроекция и микрофотография, широко используемые в научных
исследованиях. Микропроекция — это проектирование увеличенного
микропредмета на экран для его рассматривания несколькими наблю-
дателями. В этом случае в микроскопе вместо обычного окуляра при-
меняют проекционный.
Микрофотография — фиксирование на фотослое изображения
микропредмета или микропроцесса. В этом случае часто используют
отрицательный окуляр-гомал. При микропроекции и микрофотогра-
фии микроскоп формирует действительное изображение (рис. 2.47).
Рис. 2.47. Оптические схемы микроскопа для микропроекции и
микрофотографии:
а) с положительным окуляром; б) с отрицательным окуляром
Микропроекцию применяют для получения изображения микро-
объектов на фотокатоде ЭОПа, в телевизионной микроскопии и т.п.
Ниже приводятся основные формулы, применяемые при расче-
те микропроекционной системы.
Увеличение системы:
(2.99)
(2.100)
(2.101)
Рви “ Р«о6 ’ Роок ’
где
14.*-^ = ^;
'об об
R ____£ок - Zok ‘ Гок ~ _ ^2 ‘ Грн
°ок £к 250 ~ 250 ’
Т-К-<к»/ок и 2'к = а'.
Размер изображения на экране (фотослое):
2Уэк = -°пд ’ Роок = 2У ’ Рои •
Линейное поле:
2у = ^ = ^0В-.
Ром Рооб
Освещенность на экране определяется формулой:
т sin2 о*
Е = ttiL---z—,
Ром
где Lv — яркость источника,
т — коэффициент пропускания всей системы.
Отсюда следует, что при больших увеличениях надо
(2.102)
мощ-
ные источники света и микрообъективы с большой апертурой.
Линейный предел разрешения на экране зависит от предела раз-
решения объектива и увеличения системы:
$ = ^,,6 • рОм =-рОм.
^./1
Тогда величина разрешающей способности на экране в мм-1 свя-
зана с этой же величиной в мм следующим образом:
В = А =
5' 2А
Эта формула верна при условии, что окуляр не ухудшает качества
изображения.
В системе для микрофотографии, когда вместо экрана установле-
на фотопленка, время выдержки определяется освещенностью изоб-
ражения и светочувствительностью пленки.
Расчет бинокулярной призматической лупы
Исходные данные’, видимое увеличение Гл , линейное поле 2у, ди-
аметр D' выходного зрачка.
Плоскость предмета расположена перпендикулярно к оси ОО
лупы (рис. 2.43) и ее центр совпадает с передним фокусом насадки
(объектива) 1.
Габаритный расчет выполняется для одной ветви лупы, призмы
заменяются редуцированными плоскопараллельными пластинами
(рис. 2.48). При расчете надо учитывать следующие рекомендации:
угловое поле трубы 2(0? < 8... 10°, угловое поле окуляра 2(в„к < 55°,
а < 7°, (см. рис. 2.43), увеличение оборачивающей системы, образо-
ванной насадкой 1 (рис. 2.48) и объективом 2 зрительной трубы,
“ Цэбс
Особенности расчета зависят от расположения апертурной диаф-
рагмы и дополнительных условий в исходных данных. Возможны сле-
дующие варианты:
1) Апертурная диафрагма расположена между компонентами обо-
рачивающей системы, например, посредине (рис. 2.48).
2) Апертурная диафрагма совпадает с оправой первого компонента
оборачивающей системы.
3) Апертурная диафрагма совпадает с оправой второго компонента
оборачивающей системы, т.е. с оправой объектива зрительной трубы.
Рассмотрим ориентировочную последовательность расчета. Пусть
апертурная диафрагма расположена посередине между компонента-
ми 1 и 2 оборачивающей системы (рис. 2.48), которые имеют одина-
ковые световые диаметры.
Рис. 2.48. Развернутая оптическая схема одной ветви лупы
Вначале определим относительное отверстие первого компонента
2) DT„
насадки: — =----
f; 250
Затем задаемся увеличением , учитывая рекомендации. Те-
перь из (2.86) найдем относительное отверстие окуляра, а затем фо-
кусное расстояние окуляра: f'K = D' Кок.
Вычисляем диаметр полевой диафрагмы из (2.87), после чего оп-
ределяем угловое поле окуляра из той же формулы.
Находим фокусное расстояние второго компонента оборачиваю-
щей системы (объектива зрительной трубы) учтя, что S4...50.
При бблыпих значениях со2 отражающие грани призм необходи-
мо выполнять зеркальными, так как полное внутреннее отражение не
может быть осуществлено. Кроме того, увеличение углового поля при-
ведет к усложнению конструкции компонента.
Затем определяем фокусное расстояние первого компонента (на-
садки) из (2.84) и находим диаметр входного зрачка компонента и
лупы.
Вычисляем угол а наклона осей каждой ветви лупы из решения тре-
Рис. 2.49. Фрагмент оптической схемы одной ветви с первым компонентом
Теперь следует рассчитать призму, представляющую собой дефор-
мированный ромб (рис. 2.50).
1. Диаметр входной грани призмы EW = Dt + 2btga.
2. Угол у: ZOAW = у = (90° -а)/2.
3. Угол ZOWA =90°-у.
4. £ = -£' = 90°-у.
5.
ОА =
EW
2tgy
7. OD = ОА-sina.
8. DV = AK = OV-OD.
9. EK = EV + VK = EV+ DA =-sina + OA-cosa.
2
10. AB = AK +KB = AK+EK.
11. Определение BH и диаметра выходной грани SL.
ВТ = AB-tg\|/;
НТ=ВТ-ВН= АВ tgy-BBT;
SH = BH = НТ tg(90° - у) = (AB tg V - BH) tg(90° - y);
BH = AB tg у ctg у - BH ctg v = AB - BH • ctg у,
откуда
AR
BH = SH = ; SL = 2SH.
1+ctgy
12. Угол ZWEB = 45° + [90°-aJ.
13. ZASH = 360°-(45° + ZOWA +ZWEb\
Контроль: ZASH = 180° - \|/.
14. Длина пути луча в стекле, равная толщине эквивалентной ППП:
l = dnnni=OA+AB + BH.
d
15. Толщина редуцированной ППП (рис. 2.48) d = -55Н1 .
1 п
Затем выполняется расчет верхнего, главного и нижнего полевых
лучей и определяются размеры призм, световые диаметры компонен-
тов и коэффициент виньетирования, а также угол падения нижнего
луча (рис. 2.48) на грани призм АР-90°.
Определив оптические характеристики каждого компонента,
можно выбрать их конструкции.
Ход расчета существенно изменится, если имеется готовый окуляр,
и в исходных данных приведены его оптические характеристики и уда-
ление s'p, (а'р,) выходного зрачка, на которое он рассчитан. В этом случае
положение апертурной диафрагмы зависит от величины а'Р..
Завершается расчет определением допусков на параллельность
осей после окуляров и на наклон изображения.
Габаритный расчет отсчетного микроскопа
по заданной точности отсчета по нониусу
При расчете отсчетных микроскопов всегда следует исходить из
требуемой точности отсчета. Исходными данными являются: точность
£ отсчета по нониусу, линейное поле 2у, оптическая длина Lo6 объек-
тива, длина волны X, способ освещения.
Оптическая схема приведена на рис. 2.46.
Точность отсчета по нониусу, часто применяемому в отсчетных
микроскопах, зависит от разрешающей способности микроскопа
= 8/6. Учтя способ освещения и вычислив разрешающую способность
из (2.96) или (2.97), определим апертуру А микроскопа. Например,
для косого освещения получим: ^ = ^/12-А, откуда А - 'к/12-i, .
Используя (2.95), вычислим нормальное увеличение микроскопа
Гмн , задавшись диаметром выходного зрачка, например, приняв
Z)'=l мм.
Определим угловое поле окуляра из (2.92). Из каталога выбира-
ем окуляр и зная Гок, определим foK из (2.90).
Возможна и другая последовательность расчета. Можно по вели-
чине апертуры А выбрать из каталога микрообъектив с тем увеличе-
нием, которое указано, а затем определить видимое увеличение оку-
ляра.
Продолжим расчет для случая, когда выбран окуляр. Из (2.88)
найдем увеличение R объектива, а затем определим фокусное рас-
стояние объектива по известным значениям и р0 .
06 , a't = at • Р0об и определим
Ооб
Из рис. 2.51 видно, что = —al + a'l. Но ро^ = a'lfal. Из решения
двух уравнений найдем а; и а\: а; =
4'б по формуле Гаусса.
Затем вычислим диаметр сетки — полевой диафрагмы из (2.91).
Для устранения влияния параллакса на точность измерений апертур-
ная диафрагма установлена в задней фокальной плоскости объектива
(рис. 2.46) для обеспечения телецентрического хода лучей со стороны
пространства предметов.
Диаметр апертурной диафрагмы = 2f'6 tgoA.
В случае малых апертур sinoA = tgoA = оА и учитывая, что
А! = Л/р0об, получим Пдд = А = 2 • Д • А/|р0о61.
Оптический интервал Д = а', - f^.
Положение выходного зрачка г'р, можно определить из (2.93).
Определим оптическую длину микроскопа — расстояние от пред-
метной плоскости до выходного зрачка микроскопа:
L = -а; + d+ а'р.,
где йр. = f0K + Zp..
Для определения световых диаметров объектива и окуляра надо
Рассчитать ход полевых лучей.
Если объектив не выбирается из каталога, а рассчитывается, то
надо по его оптическим характеристикам выбрать конструкцию. При
малых апертурах и увеличениях часто используется двухлинзовый
склеенный компонент.
Расчет микроскопа для микропроекции
Исходными данными для расчета являются: Гок > Рос6 > Де > > 2у.
В данном случае целью габаритного расчета является определение
положения предмета аг, фокусного расстояния окуляра и взаимного'
расположения объектива, окуляра и экрана, размеров экрана, диамет-
ра апертурной диафрагмы (рис. 2.47, а), световых диаметров объек-
тива и окуляра.
При разработке микропроектора важную роль играет осветитель-
ная система, обеспечивающая равномерное освещение предмета и не-
обходимую освещенность экрана (см. 2.4). Будем считать, что прове-
ден светотехнический расчет, из которого определена апертура А
объектива.
Возможны различные варианты расчета. Рассмотрим один из них.
Из (2.99) найдем , затем определим фокусное расстояние f'K оку-
ляра по заданному Гок (рис. 2.47, а).
Положение zo6 предметной плоскости определим из (2.100), тог-
да - zo6 ~/о'б. Положение полевой диафрагмы относительно объекти--
ва + z'^, где z'^ найдем также из (2.100).
Смещение плоскости изображения объектива относительно пере-
днего фокуса окуляра z0K определим из формулы: z0K = /^К/Ро •
Теперь можно найти а2 (см. рис. 2.47) и расстояние d между объект
тивом и окуляром: а2 = /ок + zOK = zOK - £к.
Зная а2 и f'K, определим положение экрана а2 по формуле Гаус-
са. Размер экрана 2у'эк найдем из (2.102), так как задано 2у и .
Диаметр полевой диафрагмы можно также определить из (2.102):
£\id ~ ^Уэк/Роок •
В рассматриваемом микроскопе апертурная диафрагма обычно
установлена между объективом и его задней фокальной плоско-
стью. Если объектив не выбирается из каталога, то положением Ядд
диафрагмы можно задаться. Тогда диаметр этой диафрагмы
Пдд = 2(а, — a^)-tgoA. .
Зная Ядд и , можно легко найти положение входного зрачка ар,
затем величину А' — И диаметр входного зрачка: D = ар • tgoA.
Теперь можно рассчитать ход полевых лучей и определить свето-
вые диаметры компонентов. В некоторых случаях один из компонен-
тов выбирается из каталога.
Определим оптическую длину системы: L = -а; + d + а’2.
Получив из расчета оптические характеристики объектива и оку-
ляра, можно выбрать их оптические схемы, с тем чтобы после абер-
рационного расчета выполнить их синтез или подыскать готовые кон-
струкции.
2.4. Габаритный и светотехнический расчет
проекционных систем
Проекционными называются оптические приборы, предназна-
ченные для получения изображений (проекций) диапозитивов, кино-
кадров, негативов, чертежей, рисунков, текстов и т.п. в плоскости
изображения (экране, плоскости фотопленки, фотобумаги и др.). Та-
кими приборами являются: кинопроекторы, эпидиаскопы, аппараты
для чтения микрофильмов и микрофиш (читальные аппараты), фото-
увеличители, фотограмметрические проекторы, микрофильмирую-
щие аппараты, измерительные проекторы для контроля деталей (ча-
совой проектор), мультиплексы, проекционные устройства кинофото-
теодолитов и др. Во всех этих приборах гомоцентрические расходящи-
еся пучки на входе оптической системы преобразуются в сходящиеся
пучки на выходе. Оптические системы таких приборов состоят из ос-
ветительной и проекционной частей, которые всегда должны быть со-
гласованы для того, чтобы обеспечить требуемую освещенность плос-
кости, в которую проецируется предмет (например плоскость экрана
при кинопроекции), и ее распределение при заданном масштабе (ли-
нейном увеличении) проекции.
Проекция прозрачных предметов (кинокадров, диапозитивов,
слайдов) в проходящем свете называется диапроекцией, а проекция
непрозрачных предметов (чертежи, рисунки, текст книги и т.п.) в
отраженном ими свете называется эпипроекцией. Имеются проек-
ционные приборы с двумя видами проекций — диаскопической и
эпископической. Такие приборы называются эпидиаскопами, а опти-
ческие системы, обеспечивающие получение проекций обоих видов,
называются эпидиаскопическими.
Основными характеристиками проекционных приборов являют-
ся: размер плоскости, в которую проецируется предмет (размер экра-
на) или масштаб изображения р0 (линейное увеличение); расстояние
р' от проекционного объектива до плоскости изображения (проекци-
онное расстояние); размер проецируемого предмета (ахЬ), осевая ос-
вещенность E'v в плоскости изображения или ее яркость Lv.
Яркость изображения Lv зависит от мощности осветительной си-
стемы, оптической плотности диапозитива при диаскопической про-
екции или отражающей способности поверхности предмета при эпи-
проекции, а также отражающих (отражающие экраны) или пропус-
кающих (просвечивающие экраны) свойств экрана. Просвечивающие
экраны применяются в освещенном помещении или на открытом воз-
духе. Это обстоятельство необходимо учитывать при светотехничес-
ком расчете.
Качество изображения предмета на экране при диапроекции оп-
ределяется качеством диапозитива, аберрационными свойствами про-
екционного объектива. Существенное влияние оказывает посторонняя
засветка экрана, которая приводит к уменьшению контраста изобра-
жения. Способность наблюдателя различать предметы по яркости оп-
ределяется контрастной чувствительностью глаза, которую можно
определить как 1^,), которая достигает 50...70 и увеличивает-
ся с ростом яркости изображения. В формуле Lv — осевая*) яркость
изображения предмета на экране, Ьф — яркость фона экрана, образу-
емая посторонней засветкой.
На практике принято характеризовать проекционную систему
осевой освещенностью экрана Е'о или его осевой яркостью Lv при от-
сутствии диапозитива при диапроекции, или проецируя в плоскость
изображения белую, рассеивающую поверхность, при эпипроекции.
Для диффузно рассеивающего экрана при диапроекции или пред-
мета при эпипроекции яркость определяется как
; (2.103)
Я
для просветного экрана
т КУ
(2.104)
л
где р — коэффициент диффузного отражения экрана или предмета;
тэк — коэффициент пропускания просветного экрана.
Установлено [3], что необходимая яркость Lu экрана проекцион-
ной системы определяется ее назначением и для некоторых видов про-
екционных систем должна иметь следующие значения:
— при демонстрационной диапроекции Ly=3...50 кд/м2;
— для контрольно-измерительной проекции Lu=15...25 кд/м2;
— при проекции микрофиш в читальных аппаратах Lu=100...
...200 кд/м2 при работе в освещенном помещении;
— при эпипроекции LU=5...2O кд/м2.
*) далее по тексту слово «осевая» будет опущено
Яркость (или освещенность) экранов, как это следует из формул
(2.103), (2.104), зависит от коэффициентов диффузного отражения р
или пропускания тэк экранов. Для диффузно рассеивающих экранов
коэффициент р имеет следующие значения:
— для идеально белого рассеивающего экрана р=1;
— для экрана из углекислого бария р=0,88;
— для баритового экрана р=0,81;
— для матового экрана из пластмассы р=0,72 и др.
Кроме диффузных экранов, которые имеют постоянную яркость
во всех направлениях, существуют экраны направленного действия,
позволяющие концентрировать световую энергию в ограниченном те-
лесном угле. Такие экраны характеризуются коэффициентом яркости
г =^-,
9 L
где —яркость в направлении наблюдения на экране, Lv — яркость
идеально рассеивающего экрана, и полезным углом рассеивания 2<рп,
т.е. углом, в пределах которого коэффициент яркости не падает ниже
допустимого значения. Если коэффициент яркости гф диффузно отра-
жающего экрана равен коэффициенту отражения р и не может быть
больше единицы, то коэффициент яркости экрана направленного дей-
ствия может быть значительно больше единицы, поскольку при одном
и том же световом потоке отраженный свет концентрируется в нуж-
ном направлении. Если сравнить индикатрисы яркости диффузного
и направленного экранов, то будет видно, что направленные экраны
более эффективны.
При коммерческой кинопроекции обычно используют направлен-
но-рассеивающие отражающие экраны (алюминированные, бисерные,
«перламутровые»). Эти же экраны для улучшения светораспределе-
ния могут быть также растровыми (в растровых экранах выдавлено
множество сферических ячеек, причем форма и размер ячеек позво-
ляет достичь равномерного распространения света в пределах задан-
ного телесного угла).
В незатененных помещениях обычно применяются направленно-
рассеивающие пропускающие экраны (экраны отсчетных устройств
приборов, экраны читальных аппаратов и др.). От них требуется боль-
шой коэффициент яркости г . В качестве таких экранов применяют
восковые экраны, экраны из матированного стекла или лавсановой
пленки [20]. Наивысшую разрешающую способность имеют восковые
экраны, обладающие очень тонкой структурой, невидимой для глаз,
равномерным распределением светового потока в большом телесном
угле и создающие лучшие условия для наблюдения двумя глазами.
Существуют пропускающие экраны со специальным распределе-
нием света — это растровые пропускающие экраны. Они представля-
ют собой рифленое стекло или пластмассу типа линз Френеля или на-
оборот мелких положительных линз. Такие экраны имеют тэк=49%
(стекло), тэк=43% (пластмасса).
По требуемой яркости Lv экрана можно определить его освещен-
ность E'v, а по освещенности и площади S плоскости изображения (эк-
рана) можно вычислить тот световой поток Ф', который должен по-
ступать на экран из проекционной системы. Однако освещенность на
экране (плоскости изображения) неодинакова для различных точек
поля и для края поля равна
Е'а = E'vkacos<o', (2.105)
где Е'ю — освещенность на краю плоскости изображения, лк;
E'v — осевая освещенность плоскости изображения (экрана), лк;
ka — коэффициент виньетирования;
2(й' — угловое поле проекционного объектива в пространстве
изображений.
Если угловое поле проекционного объектива не более 30°, то мож-
но пренебречь виньетированием (fem=l) и влиянием углового поля 2со',
тогда световой поток, падающий на экран (плоскость изображения),
можно вычислить по формуле
Ф'и = ^-5, (2.106)
где — световой поток, выходящий из проекционной системы, лм;
EVcp — средняя освещенность экрана для различных его точек, лк;
S — площадь экрана (плоскости изображения), м2.
В качестве источников света при проекции используются:
а) лампы накаливания (в основном в любительских и передвиж-
ных кинопроекторах и проекторах). Световой поток таких ламп со-
ставляет 500...2 1 04лм и выше, а габаритная яркость достигает поряд-
ка 30 Мкд/м2. Форма тела накала должна быть близка к форме кад-
рового окна;
б) электрические пламенные дуги, имеют яркость Lu=180...
...300 кд/м2. В пламенных дугах большой интенсивности яркость до-
ходит до 2000 Мкд/м2. Используются в основном в мощных стацио-
нарных кинопроекторах;
в) газоразрядные лампы сверхвысокого давления, ксеноновые
импульсные лампы используются в качестве источников света в мик-
рофильмирующей и читально-копировальной проекционной аппара-
туре, а также для освещения оригинала (предмета) при эпипроекции
или создании светового потока при диапроекции. Яркость ксеноновых
______________________________Глава 2. Габаритный расчет оптических систем
ламп 250... 1200 Мкд/м2. Для освещения оригиналов при эпипроекции
используются также люминисцентные лампы, относящиеся к газораз-
рядным лампам низкого давления. Более подробные сведения об ис-
точниках можно найти в каталогах на электролампы и справочнике
[20].
Если в каталогах ламп указаны величины только полных свето-
вых потоков Фиист и размеры тела накала ахЬ, то силу света /иист и яр-
кость Lv ист для ламп с плоским светящимся телом можно приближен-
но найти по формуле Iv ист = Фи ист/2л, для ламп с точечным источни-
ком сила света определится как /иист = Фипол/4я.
Расчет проекционной системы для эпипроекции
Оптическая схема эпископической проекции представлена на рис.
2.52. Непрозрачный предмет АВ освещается источниками света 1,2 с
силой света 1Х и I2. С помощью зеркала 3, обязательно с внешним по-
крытием, чтобы избежать двоения изображения, и проекционного
объектива 4 изображение предмета АВ строится на экране 5. Исполь-
зование зеркала 3 в схеме обязательно, если необходимо получить пря-
Рис. 2.52. Оптическая схема эпископической проекционной системы.
Случай, когда | Р0об | < 1
мое изображение. Габаритный и светотехнический расчеты эпископи-
ческой системы выполняют одновременно, используя взаимосвязь
фотометрических и оптических параметров, исходя из требований
технического задания [21].
Приведем формулы, по которым следует выполнять габаритный
и светотехнический расчеты.
Если поверхность предмета АВ диффузно рассеивающая, то ее яр-
кость в соответствии с формулой (2.103) определяется соотношением
_ Рпр ’ ^np /л,
где — освещенность непрозрачного предмета источниками све-
та. Зная силу света 1и каждой лампы, расстояние I от тела накала до
центра предмета (т.С) в метрах, можно определить освещенность, со-
здаваемую в плоскости предмета, по формуле:
т т /
Япр = X//cose/ Л/’ (2.107)
/=г /=г /
где т — число ламп; £ — угол падения лучей; Ev — суммарная ос-
вещенность предмета.
Освещенность экрана при условии, что проекционный объектив
имеет увеличение в зрачках 0ОР = 1, вычисляется по формуле
^,к = ^осЧр sin2 ’ (2.108)
где %ос =хоб ‘Рзер — коэффициент пропускания системы «объектив+
зеркало»; с'А, — апертурный угол проекционного объектива в про-
странстве изображений.
В соответствии с рис. 2.52
sin<s'A, = D'/ 2р' (2.109)
и если проекционное расстояние р’ больше диаметра D' выходного
зрачка проекционного объектива, то выходной и входной зрачки
объектива лежат почти в главных плоскостях и поэтому увеличение
в зрачках 0О р = 1, тогда диаметры входного и выходного зрачков рав-
ны, D=D'.
Используя формулу Гаусса, зная масштаб изображения, можно
определить фокусное расстояние объектива
f - р' = s'
fo6 2-р^ 2-рд/ (2.110)
С учетом (2.110) выражение (2.109) запишется в виде
sino^z
D
а формула (2.108) для определения освещенности в плоскости изобра-
жения на экране будет иметь вид
(2.111)
Если известны требуемая освещенность экрана или его яркость,
то по формуле (2.111) можно определить относительное отверстие про-
екционного объектива
Е'
_______Чэк_____
^ос ' Рпр ' Ev пр
(2.112)
где К — диафрагменное число.
Так как коэффициенты то6, рзер, рпр невелики, то невелико их про-
изведение, поэтому для получения большой освещенности экрана не-
обходимо, чтобы объектив был светосильным, а увеличение проекци-
онной системы небольшим.
Угловое поле объектива определим, исходя из рис.2.53.
Рис. 2.53. К определению углового поля объектива и размеров зеркала
В соответствии с рис. 2.53
где
taco =-У=_У^~- У
,______, "5 ₽
У = у1А2 + В2/2 — половина диагонали предмета (оригинала), тогда
2сооб = 2arctg
(2.113)
а так как Р0о6 = 1, то 2ш'об = .
Обычно при эпипроекции объектив имеет относительное отвер-
стие D/f^= 1:1,5...1:2,5, угловое поле 2<»о6 < 45°.
Выполним габаритный расчет эпипроекционной системы. В тех-
ническом задании на проектирование обычно задают: увеличение Р0ов
проекционной системы, размер проецируемого предмета АхВ, рассто-
яние р' до плоскости изображения (проекционное расстояние), требу-
емую освещенность Е' плоскости изображения.
Расчет можно проводить в следующем порядке. По формулам
(2.110) и (2.113) найти фокусное расстояние объектива и его угловое
поле.
По рассчитанным значениям f'6 и 2<»о6 по каталогу выбрать про-
екционный (фотографический) объектив с возможно большим отно-
сительным отверстием и методом проб пересчитать его конструктив-
ные параметры на требуемое (пересчет конструктивных парамет-
ров проводить только после того, как этот объектив подойдет по све-
тосиле).
Далее, используя формулы (2.111) и (2.103), найти
^ос-Рпр(Жб)2
вычислить необходимую освещенность предмета, полагая первона-
чально тос = 0,5...0,7, рпр = 0,8. Для обеспечения требуемой освещен-
ности предмета при выбранном расположении ламп (I, 8), определить
их количество т. Если лампы одинаковые и имеют одинаковую силу
света Iv, то используя формулу (2.107), можно записать
7„т =
(2.114)
COS 8
где Iv'm — суммарное число кандел этих ламп. Из каталога выбрать
подходящую лампу, и по формуле (2.114) найти необходимое число
ламп.
Если потребуется увеличить освещенность в плоскости предмета,
то за лампами следует установить зеркало-рефлектор, а также мож-
но ввести дополнительную оптическую систему (конденсор) для боль-
шей концентрации света в поле предмета.
Размеры зеркала 3 с наружным покрытием можно определить по
формулам [12] или графически из построения хода лучей (рис. 2.53)
, т . 1 1
b = LsmcA --------— +-------— ; (2 115)
А . Ф + 2о. . ф-2оА на;
sin------А sm~------
L 2 2 J
, . ф-2оА
о sm-----==
а =------ 2 , (2.116)
, . ср-2оА
о sin—---—
9
COSOA1 ----------
у LsinaA
где Ь — длина зеркала; а — ширина зеркала; ф — угол отклонения осе-
вого луча зеркалом; оА — апертурный угол объектива в пространстве
предметов; L — расстояние от плоскости предмета до зеркала по оп-
тической оси (рис. 2.53).
Расчет проекционной системы для диапроекции
Проекционная система для диапроекции (рис. 2.54, а, б) состоит
из источника света 1, осветительной системы 2, кадрового окна 3, про-
екционного объектива 4, экрана 5. Проекционный объектив создает
изображение прозрачного предмета (например диапозитива), располо-
женного в плоскости кадрового окна (КО), на экране (просветном или
отражающем) с требуемым увеличением ро.
Наибольшее распространение получили две принципиальные схе-
мы диапроекции.
В первой из них (рис. 2.54, а) осветительная система строит
изображение источника света во входном зрачке проекционного
объектива. Это обеспечивает равномерную освещенность экрана даже
при неравномерной яркости светящегося тела. Такой способ проеци-
рования применяют при использовании ламп, у которых тело накала
имеет неравномерную яркость и не может полностью закрыть кадро-
вое окно. Такое осветительное устройство имеют диапроекторы, фо-
тоувеличители, аппараты для чтения с микрофиш и микрофильмов
и др.
Во второй схеме (рис. 2.54, б) осветительная система строит
изображение источника света в плоскости кадрового окна (напри-
мер, на диапозитиве или вблизи него). В этом случае на экране полу-
чаются одновременно два изображения: изображение структуры ис-
точника и изображение самого диапозитива и, чтобы обеспечить рав-
номерную освещенность на экране, необходимо иметь источник со
сплошным равномерным излучателем. Кроме того, необходима быст-
рая смена кадров в кадровом окне, чтобы избежать нагрева диапози-
тива, слайда, микрофиши и т.п. в кадровом окне. По такой схеме по-
строены кинопроекторы.
Рис. 2.54. Оптические схемы для диапроекции, в которых:
а — источник света проецируется во входной зрачок объектива;
б — источник света проецируется в плоскость кадрового окна.
Рассмотрим первую оптическую схему проекционной системы —
источник света проецируется осветительной системой в плоскость
входного зрачка объектива (рис. 2.54, а).
Если увеличение осветительной системы ро , а увеличение в зрач-
ках проекционного объектива рОр, то
= 2г/ИСт' Рок ’ 2У ~ 2У Pop = ^Уист РОк Pop ’
где 2уист— размер источника света; 2г/ — величина изображения ис-
точника во входном зрачке; 2у" — величина изображения источника
в выходном зрачке.
В большинстве случаев ро = 1 и поэтому 2у" = 2увст Ро . Чем боль-
шую площадь на выходном зрачке занимает изображение светящей-
ся поверхности источника, тем больший световой поток поступит из
объектива на экран. Возможны два варианта заполнения входного
зрачка изображением источника света.
В первом варианте изображение источника света вписывается
во входной зрачок объектива (рис. 2.55).
Рис.2.55. Изображение источника света во входном зрачке объектива:
а) изображение источника меньше светового диаметра входного зрачка;
б) изображение источника полностью заполняет входной зрачок
В этом случае площадь S' изображения источника меньше пло-
щади SB3 эр входного зрачка [S'c„ < SBX3p , или (а' х b') < id)2/4], а, сле-
довательно, световой поток, идущий на экран, будет меньше возмож-
ного. Отверстие входного зрачка полностью не используется, увели-
чение осветительной системы в этом случае равно
о D
fto*=~2^~’ (2.117)
,----- "f/ист
где 2г/ист = -\1а2 + Ъ2 — диагональ светящегося тела.
Такой способ проецирования имеет ограниченное применение.
Во втором варианте (рис.2.55, б) окружность входного зрачка
вписана в размер изображения источника. В этом случае входной зра-
чок используется полностью, что увеличивает световой поток на эк-
ране. Увеличение осветительной системы в этом случае будет равно:
(2.118)
к а
где а — высота тела накала источника.
Если тело накала источника имеет квадратную форму (а = Ь), то
увеличение осветительной системы будет наименьшим, а использова-
ние источника света — наибольшим. Оптимальным было бы приме-
нение источника с круглой излучающей площадкой, тогда
P0,=-D/dHCT [23].
Если размер тела накала (ахЬ) мал, то линейное увеличение ос-
ветительной системы согласно формуле (2.117) будет большим по аб-
солютной величине, что приведет к сложной конструкции осветитель-
ной системы. Усложнение конструкции можно избежать, если поста-
вить контррефлектор (сферическое зеркало), расположив тело нака-
ла источника света в центре кривизны этого зеркала (рис. 2.56). Это
позволит более полно использовать световой поток от источника. Мож-
но предложить два способа установки тела накала.
Рис. 2.56. Принцип действия дополнительного зеркального отражателя:
а) источник расположен симметрично относительно оптической оси;
б) источник расположен над оптической осью.
Если тело накала источника света установить в плоскости,
перпендикулярной к оптической оси, проходящей через центр кривиз-
ны зеркала но так, чтобы оно располагалось симметрично оптичес-
кой оси, то после отражения от зеркала изображения отдельных сек-
ций светящегося тела окажутся расположенными между соответству-
ющими секциями источника света. Это позволит увеличить габарит-
ную яркость источника на 20...30% (рис. 2.56, а).
Если светящуюся площадку источника света расположить над
оптической осью, то ее зеркальное изображение [а' х Ь') будет нахо-
дится над оптической осью и таким образом мы как бы получаем уд-
военный по ширине источник излучения 2а. Тогда линейное увеличе-
ние осветительной системы определится как
₽«.=-£ (2.119)
Диаметр входного зрачка проекционной системы независимо от спо-
соба проецирования источника света определяется требуемой осве-
щенностью на экране.
Запишем основные соотношения, необходимые для выполнения
габаритного и светотехнического расчетов проекционных систем в
проходящем свете.
В случае проецирования источника света неравномерной ярко-
сти в плоскость входного зрачка проекционного объектива (рис. 2.54,
а) на основании закона синусов запишем выражение для линейного
увеличения осветительной системы
R _ Ч _ sin<*A _ sinaOXB
Ро„ — — . , — . ,
sin aA< smoA.
(2.120)
где Ojk — положение тела накала относительно осветительной систе-
мы; а^к — положение изображения тела накала в плоскости входного
зрачка; аА— апертурный угол осветительной системы в пространстве
предметов (в дальнейшем угол 2аА для осветительных систем будем
называть углом охвата и обозначать 2аохв); о'А- — апертурный угол ос-
ветительной системы в пространстве изображений.
Угловое поле объектива в соответствии с принципом его работы
из рис. 2.54, а можно определить по формуле
fa-m - - ^к0 - _- ^к° Р°об
р-Х
(2.121)
тогда
2юо6 = 2^ = 2arctg-^<^
где р' — проекционное расстояние, которое либо задается, либо опре-
деляется по формуле р' - (i-P0o6); Уко = А2 + В2/2 —диагональ
кадрового окна размером Ах В. Так как а'к = юо6, то подставив (2.121)
в (2.120), получим
sina = ро sinax = --Ук—
Uad I UK К / у z-v \
(2.122)
Уко ' Рорд 'Роок
и тогда 2anXB = 2arcsin-------г.
Из практики расчетов осветительных систем известно [3], что чем
больше угол охвата 2аохв, тем сложнее по конструкции осветительная
система (глава 5). Для уменьшения угла охвата надо использовать бо-
лее мощный источник света или устанавливать вблизи кадрового окна
коллективную линзу.
Известно [12], что для проекционных систем, у которых р0 = 1,
освещенность изображения в плоскости экрана определяется по фор-
муле
Тогда, зная требуемую освещенность экрана E'v , можно определить
либо диаметр входного зрачка проекционного объектива
I "е^
(2.124)
V Лтос-Гуиист
либо его светосилу
00 уист
(2.125)
В формулах (2.123)...(2.125) тм— коэффициент пропускания оптичес-
кой системы; Lv — яркость источника излучения; р0о6— масштаб
изображения (линейное увеличение проекционного объектива); К —
диафрагменное число (7^/Л).
Можно поступить иначе. Вычислив фокусное расстояние объек-
тива по формуле (2.110), определив его угловое поле по формуле
(2.121), выбрать из каталога проекционный или фотографический
объектив с относительным отверстием в пределах 1:1,2...1:4,5 (имен-
но в таких пределах лежат относительные отверстия объективов для
диаскопической проекции) и по формуле (2.123) вычислить необходи-
мую яркость Lv источника в зависимости от заданной Е'эк и выбран-
ного относительного отверстия:
Чст-4-(7_Р0об) тж^/К)2 •
По требуемому значению яркости LVKCT источника и размеру (ах б)
площадки светящегося тела из каталога выбрать проекционную лам-
пу. Варьируя относительным отверстием объектива, можно получить
ряд вариантов источников света.
Для уменьшения поперечных размеров осветительной системы в
схему вводится линза-реле [5], устанавливаемая между конденсором
и кадровым окном (рис. 2.57), которая служит для оптического сопря-
жения выходного зрачка конденсора (т. Р*) с плоскостью кадрового
окна (КО). Для габаритного расчета линзы-реле (ЛР) следует приме-
нить формулы идеальной оптической системы.
Рис. 2.57. Оптическая схема диаскопической проекции с линзой-реле (Л.Р.)
В случае проецирования источника света в плоскость кадрового
окна (рис. 2.54, б) линейное увеличение осветительной системы опре-
деляется по формуле
В гУ«° - sing°xB
°к 2Уист sina'K ’
где 2уко— диагональ кадрового окна размером АхВ. Но как видно из
рис. 2.54, б выходной апертурный угол осветительной системы бу-
дет равен апертурному углу аА в пространстве предметов проекцион-
ного объектива. Тогда в соответствии с рис. 2.54, б запишем
tgoA =
-О _ ___
2Р 2р' 2/;6.(;-р0об)’
(2.125)
где р — положение кадрового окна относительно входного зрачка
объектива. Эту величину можно найти через известное проекционное
расстояние р', которое обычно задается, а именно р = р'/$0о6, или по
формуле Ньютона для объектива. Для этого найдем положение кад-
рового окна относительно переднего фокуса объектива
г = тогда р = ^ + 2 = ^1—Ы. (2.126)
Рооб Рбов
С учетом формул (2.125) и (2.126) линейное увеличение осветитель-
ной системы определится как
1-р.
P0K=-2^sinoOXB-^6-
(2.127)
Из формулы (2.127) можно всегда определить угол охвата 2аохв для
осветительной системы.
Далее расчет следует выполнять по тем же формулам, что и в слу-
чае, когда тело накала источника проецируется в плоскость входного
зрачка, т.е. по формулам (2.110), (2.121), (2.124).
Рис. 2.58. Заполнение кадро-
вого окна изображением ис-
точника света
Для того чтобы изображение источни-
ка света перекрывало отверстие кадрового
окна, а также, учитывая отклонение в ходе
действительных лучей вследствие аберра-
ций, необходимо соблюдать следующие ус-
ловия (рис. 2.58)
а>(л/рОк); &>(в/рОк),
где аиЪ — размеры светящейся площад-
ки источника света;
АиВ — размеры кадрового окна.
Из рис. 2.54, б видно, что при больших размерах кадрового окна
и диаметра входного зрачка объектива световой диаметр осветитель-
ной системы может быть большим, что приведет к громоздкой конст-
рукции, а также к увеличению остаточных аберраций осветительной
системы. Этого можно избежать, если около кадрового окна поставить
коллектив (прикадровую линзу) (рис. 2.59). Так как эта линза распо-
ложена вблизи кадрового окна, то она практически не влияет на ход
лучей, проходящих через центр кадрового окна (на рис. 2.59 линза
стоит в плоскости кадрового окна).
В соответствии с рис. 2.59 увеличение коллективной линзы мож-
но определить как
Рокол =а'/а’ (2.128)
где р = р'/р0о6 — положение входного зрачка объектива относитель-
но кадрового окна;
= а1к РОк — положение изображения источника света после ос-
ветительной системы (этим расстоянием можно задаться из кон-
структивных соображений).
Тогда фокусное расстояние коллективной линзы можно вычис-
лить, используя формулу Гаусса
<2.129)
а световой диаметр осветительной системы будет равен
Лвк = -О/Р0кол- (2.130)
Рис. 2.59. Оптическая схема проекционной системы с дополнительной
коллективной прикадровой линзой для уменьшения светового диаметра
осветительной системы
Введение прикадровой линзы (коллектива) дает большой эффект
при светосильном проекционном объективе, большом кадровом окне
и большом расстоянии р'. Коллективная линза может быть плосковы-
пуклой или двояковыпуклой. Если она плосковыпуклая, то по извест-
ному )^ол радиус кривизны сферической поверхности будет равен
г2 = 4'ол(^-п).
После габаритного расчета всегда выполняется светотехнический
расчет, который должен подтвердить правильность габаритного рас-
чета и, если угол охвата осветительной системы после светотехничес-
кого расчета не будет соответствовать углу охвата, полученному из га-
баритного расчета, то вычисления выполняются снова и до тех пор,
пока не будет соответствия между габаритным и светотехническим
расчетами.
Пример габаритного расчета проекционной системы для диа-
проекции (диапроектора, читального аппарата, проектора).
Оптическая схема проекционной системы представлена на
рис. 2.60. В соответствии с техническим заданием на проектирование
обычно задается: формат диапозитива АхВ; размер А'хВ' экрана (или
масштаб изображения р0ов); тип экрана (отражающий рэк или просвет-
ный тэк); освещенность Е' или яркость экрана Lv ; проекционное
расстояние р'. Иногда указывается тип источника излучения, для ко-
Рис. 2.60. Оптическая схема диаскопической проекции
торого из каталога выписывают размер тела накала axb, его световую
отдачу Т| (лм/Вт), мощность Р (Вт) или габаритную яркость Lv^ и пол-
ный световой поток Фист.
Определим оптические характеристики проекционного объекти-
ва. По заданным размерам диапозитива и экрана найдем линейное уве-
личение объектива
Р0об = А'/А= В'/В = 2рэк/2ук0 < 0.
По формуле (2.110) по известному проекционному расстоянию найдем
фокусное расстояние объектива f'6 = р'/{1 - Р0ов) = з'Д 1 - Р0ов), а из фор-
мулы (2.124) определим диаметр входного зрачка объектива, полагая
тос = 0,5 .
Если яркость источника не задана, то ее можно определить по следу-
ющим формулам:
4ИСТ = 4/\ет = Фрпол/^исг) = П^/(4ТЬ9ИСТ),
где 5ист — площадь светящегося тела в м2;
ф — полный световой поток от источника.
V пол
Найдем положение кадрового окна относительно точки передне-
го фокуса объектива, используя формулы (2.126)
2 = /об/Роов > Р = /об + 2 ИЛИ Р = р'/р0об .
Так как диапозитив расположен в кадровом окне, то угловое поле
объектива в пространстве предметов определится по формуле (2.121)
*£“об = Уко/р = y'3Jp' = уко ₽0о6/[/об(/- PoJ]-
По оптическим характеристикам /о'6, D/fa, 2соо6, предварительно рас-
считав коэффициент добротности С для проверки физической осуще-
ствимости такого объектива по инварианту Д.С. Волосова
из каталога выберем (или синтезируем) фотографический объектив,
выпишем его конструктивные параметры, предварительно пересчитав
их на требуемое фокусное расстояние (см. главу 4). Определим увели-
чение в зрачках РОр и, если оно отличается от единицы, то вычислим
эту величину и пересчитаем диаметр входного зрачка проекционного
объектива
S = -D/p0/>.
Для выбора конструкции осветительной системы (конденсора) и
дальнейшего ее расчета (определения конструктивных параметров) из
габаритного расчета найдем:
— линейное увеличение ро конденсора из условия, что тело на-
кала проецируется им в плоскость входного зрачка (формулы
(2.117...2.119) в зависимости от заполнения площади зрачка);
— угол охвата конденсора по формуле (2.122)
81п°охв — — УистРо06Рок/[/об(^ — Рооб)]’
Для того, чтобы дефекты стекла конденсора не изображались рез-
ко на экране, задают расстояние между последней поверхностью кон-
денсора и кадровым окном в пределах нескольких миллиметров
(10...15 мм).
Для определения светового диаметра Лсв к необходимо выполнить
расчет лучей, идущих от источника света во входной зрачок конден-
сора (рис. 2.61). Если кадровое окно принять за выходной зрачок кон-
денсора, то для определения положения входного зрачка можно, ис-
пользуя формулу Гаусса, найти:
аРк = aPi ’ /к/(/к “ а'ц) >
где £ = а, ) — фокусное расстояние конденсора; а'^ =а'1к+ р
— положение выходного зрачка; = а1к Рок — расстояние от конден-
сора до входного зрачка проекционного объектива; р = р'/Р0о6 — по-
Рис. 2.61. К определению светового диаметра конденсора
ложение кадрового окна относительно входного зрачка проекционного
объектива (рис. 2.60).
Зная увеличение в зрачках рОр конденсора, можно вычислить
диаметр его входного зрачка
DK = 2уко рОр, где 2уко = -^Аг + Вг •
Из рис. 2.61 видно, что верхний полевой луч определяет световой
диаметр конденсора, тогда
Рсвк = фИСТ + «4^,пл],
где 0;впл — угол верхнего полевого луча с оптической осью, который
в соответствии с рис. 2.61 равен:
В результате габаритного расчета получили оптические характе-
ристики для проекционного объектива и конденсора. По этим харак-
теристикам из каталогов выбирают конструкцию объектива, а по ре-
комендациям, приведенным в главе 5, выбирают конструкцию осве-
тительной системы.
Результаты габаритного расчета обязательно проверяют светотех-
ническим расчетом.
Светотехнический расчет оптической системы диапроекции.
Для получения требуемой освещенности Е'эк экрана проекцион-
ный прибор должен направлять на экран необходимое количество све-
товой энергии в виде светового потока Фи. Чем больший световой по-
ток выходит из проекционного объектива, тем больше освещенность
экрана, а, следовательно, и его яркость.
Пусть Фипол — полезный световой поток, посылаемый на экран,
когда в кадровом окне нет диапозитива. Если известна средняя вели-
чина освещенности Е' на экране, то величина полезного светового
потока определяется по формуле (2.106), а именно:
Ф«пол=^эк <5 (лм).
Однако при проектировании светооптической системы проекци-
онного прибора приходится определять предварительную величину
полезного светового потока. Если известны световой поток Фист от ис-
точника в пределах полной сферы и потери, испытываемые лучами
при прохождении ими всех узлов схемы, то
Ф = п • т « • Ф
^ипол Чист ‘'общ о ист’
где Т|ист — коэффициент использования источника; то6щ — коэффици-
ент пропускания системы, то6щ = ттф • тко • тк то6; ттф — коэффициент
пропускания теплофильтра, который может быть установлен в схеме;
тко — коэффициент пропускания диапозитива; тк — коэффициент про-
пускания конденсора; то6 — коэффициент пропускания объектива.
Для определения коэффициента использования Т]ист источника
света необходимо знать как распределяется световой поток в простран-
стве для того, чтобы определить ту его часть АФ„, которая попадает в
оптическую систему осветителя и направляется в сторону кадрового
окна. Тогда
Лист = АФ„/Ф„ ист. (2.131)
Определение величины АФ задача трудоемкая. Поэтому предлагается
следующий путь решения этой задачи.
Если задана осевая яркость L экрана, то определяют осевую ос-
вещенность экрана в зависимости от того, работает он на просвет или
отражение, по формулам (2.103), (2.104)
= или *4k = *4Jp-
Зная площадь экрана 5ЭК в квадратных метрах, определяют величи-
ну светового потока Фи1, который должен поступать на экран из вы-
ходного зрачка объектива: Фи2 = Е„эк • $эк. Далее определяют световой
поток Фи2, который должен поступать во входной зрачок проекцион-
ного объектива: Фиг = Фи1/^об Так как окружность входного зрачка
вписана в наименьший размер изображения источника света
(рис. 2.55, б), то часть источника системой не используется, поэтому
необходимо найти коэффициент использования входного зрачка
_ £„х.зр _ ПР2
зр Shct 4(ахЬ)р^’
Кроме того световой поток, проходя через
кадровой окно, испытывает потери, так как
оно имеет прямоугольную форму, а сечение
световых пучков в плоскости кадрового окна
— круглую, поэтому следует определить ко-
эффициент использования кадрового окна
(рис. 2.62)
$ко Ах В
nKo = ^ = --2-,
^св.п ^Уко
где Вко — площадь кадрового окна;
Всв п — площадь сечения светового пуч-
ка в плоскости КО.
Световой поток, который должен поступать во входной зрачок
объектива проекционной системы, с учетом коэффициентов исполь-
зования входного зрачка и кадрового окна следует вычислять по фор-
муле
ФцЗ = ФизДЛвх-зр ' Лко)'
Далее определяется та часть светового потока от источника, которая
должна поступать во входной зрачок конденсорной системы
Ф^ = АФр=Фр3/('ГТф-тк)-
Величина этого светового потока Ф4 и есть та искомая величина АФ,
которая должна попадать в оптическую систему, чтобы создать на эк-
ране необходимую яркость Lv или освещенность E'v Тогда по фор-
муле (2.131) следует определить коэффициент использования лампы
и вычислить величину угла охвата конденсора. Если источник с плос-
ким светящимся телом, то т| = 0,5sin2 аохв и sinaOXB = -/^/0,5 Если ис-
точник излучения точечный, то Т| = 0,5(1 -cosаохв), тогда cosaOXB =
= 1 - 2г\. Если угол охвата, полученный из габаритного расчета, совпа-
дает с величиной угла охвата, полученного из светотехнического рас-
чета, то расчет выполнен правильно и можно приступать к вычисле-
нию конструктивных параметров объектива и конденсорной системы
(главы 4, 5).
Пример 2.1. Выполнить габаритный расчет оптической схемы диапроекционной
системы с зеркальной осветительной системой.
Для расчета такой системы задано: линейное увеличение Р0о6= -200; размер про-
ецируемого кадраАхВ = 18x24 мм; расстояние до экрана р'= s' =20 м; освещенность эк-
рана Е' = 200 лк.
Оптическая схема кинопроекционного прибора представлена на рис. 2.63.
Рис. 2.63. К расчету оптической системы диапроекции с зеркальной
осветительной системой
Вычислим фокусное расстояние проекционного объектива по формуле (2.110)
й = Р'/\1 - М = 20000/(1 + 200) = 100 мм
и угловое поле объектива по формуле (2.121)
= 4л2 + В2/2р = 4182 + 24г (-200)/[4 -Ю1) = -0,15,
2^ = 17’04'.
Для обеспечения большей освещенности экрана примем относительное отверстие
объектива = 1:2 и с учетом установки в схеме теплофнльтра определим по форму-
ле (2.123) необходимую яркость источника света
_4{1 + 200)2-200-4 1р6 Кд
ЧЖб/ 0,3-3,14 4?
Такую яркость имеет пламенная дуга с диаметром dBCT = 10 мм. При использовании пла-
менных дуг применяют зеркальные осветительные системы, изображающие источник
света в плоскости кадрового окна (источник равномерной яркости), так как применение
линзовых осветительных систем (конденсоров) в таких схемах нежелательно, нбо от
сильного нагрева углей лннзы конденсора разрушаются.
Найдем диагональ кадрового окна 21/ко = 4182 + 24г =30 мм. Тогда увелнчеине зер-
кальной осветительной системы равно:
Согласно формуле (2.127) найдем угол охвата осветительной системы
sina0„ = -|VMW[2(7-M =
= (-200)(-3)- 0,5/2(1 + 200) = 0,746268, тогда 2<тохв = 96°32'.
Если в качестве осветительной системы использовать одиночное сферическое зер-
кало, то при sx =100 и s' =300 его радиус кривизны следует вычислить по формуле
Гаусса
2sKs' 2-100-300
—*—ь=-----------= 150 мм.
sK + s' 100+300
Прн угле охвата 2аохв = 96°32' зеркало имеет большие размеры и большую сфери-
ческую аберрацию. Диаметр зеркала можно определить либо из расчета хода нижнего
полевого луча (QKOT на рнс. 2.63), либо графически. Для данного случая Лзр = 250 мм.
Диаметр зеркала, определяемый расчетом хода апертурного луча АМА'Т, ра-
вен: Дзер = 2sttgvA = 2s;tga0XB = 2 100tg48°16’ = 224,22.
Уменьшить габариты зеркала можно, если перед кадровым окном поставить кол-
лектив, изображающий световой диаметр зеркала, определяемый ходом апертурного
луча, во входной зрачок проекционного объектива (рис. 2.63). Тогда линейное увеличе-
нне коллектива равно:
Ро =—— =-----^-=-0,22,
dmn 224,22
а его фокусное расстояние можно найти по формуле
Х1;од = _2А^ = _300(2^)=54Дмм.
1 + 0,22
Коллектив следует установить вблизи кадрового окна на таком расстоянии (10. ..15
мм), чтобы дефекты стекла его поверхностей не были заметны на экране прн проекции.
Чаще всего коллектив — положительная плосковыпуклая линза. Зная ее фокусное рас-
стояние, можно определить и ее радиусы кривизны: rt = /к'ол (1-п), г2 = °°.
Но сферическое зеркало при таком угле охвата будет иметь большие остаточные абер-
рации, поэтому целесообразнее в этой схеме использовать асферическое (эллипсоидное)
зеркало.
Пример 2.2. Выполнить габаритный расчет фотоувеличителя с зеркальным осве-
тителем (рнс. 2.64). Осветитель проецирует изображение источника в плоскость вход-
ного зрачка проекционного объектива [21].
Пусть в ТЗ на проектирование оптической системы фотоувеличителя заданы: ли-
нейное увеличение, которое должно изменяться в пределах от (Jmjn = -1,5 до ртвх = -10,
наибольший формат негатива 6x6 мм (устанавливается в плоскости кадрового окна); наи-
большее проекционное расстояние р'твх =825 мм; освещенность плоскости, где устанав-
ливается фотобумага E'Um = 100 лк; яркость источника 1^^ = 2,5105 Кд/м2.
Можно предложить следующий порядок габаритного расчета:
1. Для максимального масштаба изображения, которому соответствует максималь-
ное проекционное расстояние, определим фокусное расстояние объектива по формуле
(2.110)
& = Ках/(^- fjflj = 825/(1 + 10) = 75 мм.
2. Вычислим угловое поле объектива
tg(flo6 = = ^б2 + б2^10'> = -0,514260
2(0^ = 54°26'.
3. Найдем относительное отверстие проекционного объектива по формуле (2.125)
^2(2-00, ) I 2 2(1+ 10)1----------- 200 т=1:3,5.
& 1 V >yj3,14 0,75-2,5 10s
4. По оптическим характеристикам /о'б= 75 мм, D/f°6 = 1:3,5, 2(0^ = 54°20' выбн-
рем из каталога фотографический объектив «Индустар-58», у которого /о'б= 75 мм;
D/&-1:3,5; 2Шов-60°.
5. Определим отрезок pt mln, определяющий 1-е положение негатива относительно
входного зрачка проекционного объектива для Рот||х :
2 = - й/₽от„ = - 75/(-10) = 7,5 мм и
Pi min =/об + 2 = ~ 75 - 7,5 =-82,5 мм.
6. Выполним расчет зеркального осветителя — эллипсоидного зеркала, в первом
геометрическом фокусе которого (т. F;) помещен источник света, а второй фокус (т. F2)
совмещен с центром входного зрачка объектива. Из рис. 2.65 найдем световой диаметр
зеркала
DaM = 2gtg(flo6,
где g = -Ру max + k; k — расстояние между негативом в его крайнем положении (при
Pomln ) и краем зеркала (т. М). Это расстояние выбирают из конструктивных соображе-
ний и удобства работы. Пусть k = 35 мм. Найдем отрезок р111пах, используя формулу
Гаусса, тогда
Рпmax = 75 = -125 ММ,
а отрезок
£ = -₽цтах + k = 125 + 35 = 160 мм
и световой диаметр зеркала равен
Dax = 2 160tg27‘10' = 165 мм.
Расстояние между точками фокусов эллипса FjF2 = 2-Ja2 - b2 , где а и Ь — полу-
оси эллипса; s — расстояние от вершины эллипса до т. Fr Это расстояние обычно выби-
рается из конструктивных соображений для получения наименьшей высоты h зеркала
(рнс. 2.64) при условии удобного размещения электролампы с фокусирующим патроном.
Пусть s “ 40 мм, тогда в соответствии с рис. 2.65 можно записать
2а = 2s+ 2у1а2-Ь2 (2.132)
Для любой точки эллипса справедливо равенство
rt + r2 = 2a. (2.133)
Из треугольника FtNF2 запишем
FtF2 = -г, cosaOXB + r2 coster = 2у1аг-Ь2.
С учетом (2.132) и (2.133) запишем выражения для определения размеров полу-
осей эллипсоидного зеркала
«(s + ^coscoj . ЛГТГТг
U —• . U “ у uoU v)
2s - г2(1-COS(Ооб)
где
'•2 = -DM.K/(2sin(eo6).
Из (2.33) найдем
rt = 2а-Пса.к/(28што6), (2.134)
тогда а = 133,2 мм, Ь = 95,1 мм.
Определим угол охвата конденсора для случая Рообтах • И3 рис. 2.65 и формулы
(2.134) запишем
sin(l80-ооха)= Dzx J(2r^, тогда sino0XB = Dn к sin<flo6/(4asinoo6 - Осв к),
тогда 2aoxa = 211°.
Найдем увеличение эллипсоидного зеркала. В соответствии с рис. 2.64 имеем
Рок =-s’/s = -(s + F1F2)/s = -^2'Ja24b2 + s^s = -5,66. (FtF2 =2с).
Запишем уравнение профиля эллипсоидной поверхности
У1 = 2r0lz1-(l-efy],
где rOl — вершинный радиус эллипса, который для сферической поверхности можно
вычислить по формуле
г01 = 2ss'/(s + s') = 67,9880 мм;
е; — эксцентриситет поверхности, определяемый из соотношения:
е, = = ф-(Ь/а)2 = ,]1-(95,1/133,2)г =0,7.
Уравнение профиля асферической поверхности будет иметь вид:
у2 = 135,975zt-0,51г2.
(подробно о расчете систем с асферическими поверхностями см. главу 7).
Найдем наибольшую высоту фотоувеличителя (рис. 2.64)
Нта = + g + Л = 825 +160+66,4 = 1051,4 мм,
где h = 2а- s-g = 2-133,2-40-160 = 66,4 — высота зеркала.
2.5. Оптические системы для лазеров
Параметры пучка лазера и основные соотношения
при его преобразовании оптической системой
Специфические свойства лазерного излучения — узкая направ-
ленность, высокая монохроматичность, когерентность, поляризован-
ность, высокая спектральная мощность — позволяют создавать новые
высокоэффективные приборы и устройства, качественно отличающи-
еся от приборов и устройств с тепловыми источниками излучения. В
отличие от тепловых источников лазеры излучают негомоцентричес-
кий пучок лучей с определенным амплитудно-фазовым распределени-
ем (модовым составом). Направленность излучения обеспечивается
резонатором Фабри-Перо, состоящим из двух зеркал. На выходном
зеркале формируется излучение с плоским волновым фронтом, расхо-
димость которого ограничивается дифракцией.
Использование лазеров как источников излучения для решения
различных задач в большинстве случаев требует разработки оптичес-
ких систем, служащих для преобразования лазерного излучения:
1. Коллимирующих — для преобразования лазерного пучка в пу-
чок с малым углом расходимости;
2. Фокусирующих — для концентрации лазерного излучения в
пятно малых размеров;
3. Согласующих — для формирования лазерного пучка с парамет-
рами, необходимыми для согласования с последующей оптической
системой.
Известно [7], что распространение лазерного излучения в свобод-
ном пространстве или в оптических системах описывается с помощью
пространственных параметров: диаметра пучка 2у лазерного излуче-
ния; расходимости 2(0 (плоский или телесный угол с вершиной, со-
впадающей с точкой пересечения оси резонатора с плоскостью пере-
тяжки); радиуса кривизны R волнового фронта-, распределения мощ-
ности в поперечном сечении пучка-, ближней и дальней зонами лазер-
ного излучения (дальняя зона — область пространства вдоль оси ла-
зерного пучка, расположенная на таком расстоянии от излучателя, на-
чиная с которого диаграмма направленности остается постоянной).
Эти параметры получаются либо экспериментальным путем, либо рас-
считываются по известным параметрам резонатора. Связь параметров
пучка с параметрами лазера определяется типом резонатора.
Разработано несколько методов расчета характеристик лазерно-
го излучения, основанных на волновом представлении его формиро-
вания. Они позволяют рассчитать положение перетяжки лазерного
излучения, сформированного оптической системой, а также найти
диаметры пучка лазерного излучения в произвольных сечениях. Та-
кими методами являются [13]:
1. Метод конфокального параметра. В этом методе излучение,
генерируемое лазером с произвольным резонатором, представляется
генерируемым с помощью гипотетического (эквивалентного) резона-
тора, имеющего один параметр в виде его длины R3 = /(гп r2, d). На ос-
нове этого параметра и длины волны X излучения определяют поло-
жение плоскости перетяжки внутри резонатора, диаметры пучка и
радиусы его кривизны.
2. Геометрооптические модификации метода конфокального па-
раметра. Излучение представляется в виде пакета лучей, огибающая
которых является гиперболой, соответствующей дифракционной при-
роде распространения излучения. Геометрическая интерпретация из-
лучения позволяет воспользоваться формулами геометрической опти-
ки в параксиальной области при прохождении лучевого пакета через
оптические компоненты.
3. Метод вариансов. В этом методе амплитудно-фазовые соотно-
шения излучения описываются в исходном сечении произвольным
комплексным числом V — вариансом, содержащим радиус излучения
пучка и радиус R его волнового фронта. Использование варианса дос-
таточно для описания перетяжки на выходе лазера без использования
параметров резонатора.
Все методы являются эквивалентными и в ряде случаев дополня-
ют друг друга. Общим для всех методом является рассмотрение лазер-
ного пучка в виде одномодового с гауссовым энергетическим профи-
лем.
Прежде чем перейти к габаритному расчету оптических систем
для лазеров (коллимирующих, фокусирующих, согласующих), рас-
смотрим пространственные параметры пучка лазера и основные соот-
ношения при его преобразовании оптической системой.
На рис. 2.66 показан резонатор произвольной конфигурации из
двух зеркал 1 и 2 с радиусами кривизны и г2 соответственно. Ла-
зерный пучок, выходящий из резонатора, не является гомоцентричес-
ким. Лучи совпадают с нормалями к волновому фронту, но этот фронт
только вблизи оптической оси является сферическим.
Расстояние между вершинами зеркал обозначим через d. В неко-
торой плоскости (в плоскости АВ на рис. 2.66) волновой фронт плос-
кий и в этом месте лазерный пучок имеет минимальный поперечный
размер 2у (перетяжку), положение которой определяют по отношению
вершин зеркал резонатора отрезками з;и s2, которые можно вычис-
лить по формулам [5], [7]:
Ь1 , о > (z.loD)
4i + q2-2<h42
„ _ ^g/G-gJ
где qt и q2 — обобщенные параметры, определяемые соответственно
через радиусы кривизны г: и г2 зеркал:
^(l-d/r,); ?2 = (l-d/r2). (2.137)
Пространственные параметры лазерного пучка рассчитывают для эк-
вивалентного конфокального резонатора, у которого радиусы кривиз-
ны зеркал равны, т.е. г; = -г2. Фокусы зеркал совпадают. Для такого
резонатора расстояние между зеркалами (т.е. радиус кривизны каж-
дого зеркала) является конфокальным параметром лазерного пучка.
Любой резонатор с зеркалами разных радиусов и различным рассто-
янием между ними может быть заменен эквивалентным конфокаль-
ным резонатором, конфокальный параметр которого определяется по
формуле
_2d^q1g2(l-q^)
^3 — Л • (2. 1оо>
g, + 9г - 2q1qz
Если одно из зеркал резонатора плоское (резонаторы современных ма-
ломощных лазеров), то перетяжка находится в плоскости этого зер-
кала, а конфокальный параметр определяется как
R3 = 2j(r-d)d. (2.139)
Если резонатор имеет два плоских зеркала, то выходящий лазер-
ный пучок представляет собой совокупность плоских волн, расходя-
щихся под дифракционным углом. В этом случае понятия «перетяж-
ка» и «конфокальный параметр» не применяются.
Зная конфокальный параметр R3, находят диаметр 2у перетяжки:
2у = 2^kR3/{2n) = ^2АД/л. (2.140)
Диаметр 2ys сечения пучка и радиус R волнового фронта в произ-
вольном месте на расстоянии s от плоскости перетяжки равны соот-
ветственно
2ys = 2Уу[1 + £^, (2.141)
<2-142>
где 2s/R3 — относительная координата сечения.
Расходимость пучка лазера характеризуется плоским углом 2(а и
изменяется при изменении диаметра 2ys сечения пучка на произволь-
ном расстоянии s от перетяжки. В этом случае, если s » R3, то в со-
ответствии с формулой (2.141) диаметр 2ys сечения пучка изменяет-
ся линейно, поэтому пучок можно рассматривать как квазигомоцен-
трический, пересекающийся в центре перетяжки (рис. 2.66). Тогда
угол 2® расходимости этого пучка в радианах равен
2® = 2^2X/(nR3) = 2Х/(ку). (2.143)
В телесном угле, соответствующем плоскому углу 2со, заключено
около 86% всего потока излучения основного типа колебаний (для ос-
новной моды). Моды высших порядков характеризуются большими
углами расходимости.
Таким образом можно найти параметры лазерного пучка в любом
сечении (2у, 2ys, Rs, 2®), зная положение перетяжки (st и з2) и кон-
фокальный параметр R3.
Преобразование лазерного пучка положительным и отрицатель-
ным бесконечно тонкими компонентами.
После прохождения лазерного пучка через бесконечно тонкую оп-
тическую систему с фокусным расстоянием f преобразованный пучок
характеризуется новым значением конфокального параметра Кэ, но-
вым положением перетяжки а' и г' относительно главных плоскостей
и задней фокальной плоскости компонента соответственно, а также
Радиусом кривизны волнового фронта (рис. 2.67).
Рис. 2.67. Прохождение лазерного пучка через тонкий положительный (а)
и тонкий отрицательный (б) компоненты
Пусть волновой фронт падающего на линзу пучка имеет радиус
кривизны R. Этому сферическому фронту соответствует воображае-
мый гомоцентрический пучок, центр которого расположен на рассто-
янии s от бесконечно тонкого компонента и IR I = I s I. Таким образом,
лазер представляет собой точечный источник, расположенный на рас-
стоянии, равном радиусу кривизны волнового фронта пучка в плос-
кости тонкого компонента. Бесконечно тонкий компонент не искажа-
ет общего характера распределения когерентного поля, т.е. преобра-
зует сферический фазовый фронт волны тоже в сферический с радиу-
сом кривизны Д'. Этому фронту также соответствует воображаемый
гомоцентрический пучок, центр которого расположен на расстоянии
s' от компонента, причем IRI = I s' |.
В идеальной оптической системе отрезки s и s' связаны между со-
бой формулой Гаусса, поэтому можно записать
1 1 1
R' R~ f’ (2.144)
Дифракционный характер изменения параметров пучка сохраня-
ется и за компонентом, поэтому преобразованный пучок можно харак-
теризовать новым конфокальным параметром В"э, новым положени-
ем перетяжки а' и z' относительно главных точек и задней фокальной
плоскости компонента соответственно.
Воспользовавшись формулами, полученными в [7], запишем вы-
ражения, определяющие:
а) положение плоскости перетяжки, сформированной оптической
системой (рис. 2.67, а)
1~а' _ 1+a/f'
Г ” (1+a/f )2 + [K»/(2f)]2 (2Л45)
б) конфокальный параметр преобразованного пучка
/?=(7+о/г)>+[Д,/(2г)]г' <2146>
в) диаметр 2у' перетяжки и угол расходимости 2(о' преобразован-
ного пучка
2у' = 2фл^/(2п) = ^2Щ/п; (2.140')
2со' = = 2Х/ л/. (2.143')
Формулы (2.145) и (2.146) являются основными для габаритного
расчета оптических систем с лазером. Эти формулы остаются справед-
ливыми и для компонента конечной толщины, если расстояния а и а'
отсчитывать от соответствующих главных точек компонента. Исполь-
зуя формулы (2.145), (2.146), можно определять фокусные расстояния
и световые диаметры тонких линзовых компонентов, линейные раз-
меры других оптических деталей и расстояний между ними. И если
из-за аберраций компонент должен быть сложным, то его выбирают
или рассчитывают по правилам геометрической оптики.
Соотношения (2.145) и (2.146) можно записать и в другом виде
через отрезки z и г', равные расстояниям от передней и задней точек
фокуса компонента до положения плоскости перетяжки исходного и
преобразованного пучков (рис. 2.67, а, б), а именно:
4“(2/r)2+[B,/(2nr
, _ г
(2/Г)г + Гя./(2Г)]г'
Из соотношений (2.147) и (2.148) следует, что
2'/Я: = -2/Яэ.
(2.147)
(2.148)
(2.149)
Из формулы (2.148) видно, что если перетяжка лазерного пучка
будет расположена в передней фокальной плоскости компонента
(г = 0), то перетяжка преобразованного пучка будет находиться в его
задней фокальной плоскости.
После тонкого отрицательного компонента (рис. 2.67, б) перетяж-
ка будет мнимой, а расходимость увеличится по сравнению с расхо-
димостью падающего пучка.
Если перетяжку и ее изображение рассматривать как предмет и
изображение, то поперечное увеличение в перетяжке пучка лазе-
ра можно определить как
Роп = 7Дэ7Лэ или Роп = -^7Дэ-
С учетом формулы (2.147) находим, что
и, полагая р0 = f'/z (линейное увеличение тонкого компонента), пос-
ле преобразования получим
R2 _4f'z^p
4f2+pX2’ (2 50)
Угловое увеличение уОц для пучка лазера
7оп = “У^э/^э или Чоп= Д»
и так как в пучке лазера соблюдается соотношение УОп = 1/РОп , то из
выражения (2.150) получим
4=Т«2 + [Я./(2Г)]г- <2.151)
Равенства (2.150) и (2.151) можно использовать для расчета раз-
мера перетяжки и расходимости пучка лазера после преобразования
его оптической системой.
Чаще всего для преобразования излучения лазера используют
двухкомпонентные системы (рис. 2.68).
Найдем выражения для вычисления поперечного увеличения РОп
в перетяжках и углового увеличения уОп в пучке лазера для такой си-
стемы. Применяя последовательно формулу (2.147) к первому, а за-
тем ко второму компонентам, полагая, что расстояние между задней
фокальной плоскостью первого компонента и передней фокальной
плоскостью второго компонента равно Д и г2 = г'2 - Л, можно получить
выражение для конфокального параметра преобразованного пучка
Рис. 2.68. Двухкомпонентная оптическая система для преобразования
лазерного излучения
4f'2A^t
2 4(г, + ДА)2 + /?£’
где А = (zjfff + [^/(2//)] . Тогда угловое увеличение
запишется в виде:
(2.152)
в пучке лазера
г /л? 4(z, + A-A) + R2
< = Ж, = 4Г2 }а (2.153)
Если при выводе формулы (2.153) принять г2 = 0 (перетяжка пос-
ле первого компонента располагается в передней фокальной плоско-
сти второго компонента, z't = Д), то получим
2 (fl'}"
(2-154)
Все формулы для пучка лазера получены исходя из дифракцион-
ных соображений. Поэтому естественно, что соотношения в пучке ла-
зера и преобразования его оптической системой не подчиняются за-
конам геометрической оптики.
Однако, с другой стороны, волновой фронт пучка лазера в каж-
дой плоскости представляет собой сферу, соответствующую точечно-
му источнику света в геометрической оптике. Очевидно, что на тех
расстояниях от перетяжки, на которых всем фронтам соответствует
один и тот же центр кривизны (гомоцентрическая точка), пучок ла-
зера можно рассматривать как пучок прямолинейных лучей. В этом
случае применимы все законы геометрической оптики. На меньших
расстояниях необходимо использовать соотношения, полученные для
пучка лазера.
Оптические системы для концентрации излучения лазера
Для получения больших значений энергетической освещенности,
создаваемой лазером, поток его излучения необходимо сконцентриро-
вать в пятно минимальных размеров. Таким пятном может быть и пе-
ретяжка лазерного пучка, преобразованная оптической системой.
Из формулы (2.140) следует, что для получения минимального
сечения 2у' перетяжки преобразованного пучка необходимо стремить-
ся к уменьшению конфокального параметра R'3 этого пучка за счет
увеличения, как это следует из формулы (2.147), расстояния а от ис-
ходной перетяжки до компонента и уменьшения его фокусного рас-
стояния f.
Положение а' перетяжки преобразованного пучка определяют по
формуле (2.145) или (2.148). При этом следует иметь в виду, что при
использовании короткофокусных компонентов R3» f, поэтому со-
гласно (2.148) перетяжка преобразованного лазерного пучка получа-
ется вблизи задней фокальной плоскости (z' = 0).
Для полного использования потока излучения, создаваемого ла-
зером, диаметр входного зрачка оптической системы должен быть не
меньше диаметра сечения лазерного пучка в плоскости входного зрач-
ка. Если использовать в качестве оптической системы бесконечно тон-
кий компонент, то его диаметр определится из условия
D>2ys, (2.155)
где 2ys вычисляют по формуле (2.141), в которой величина s прини-
мается равной величине а — расстоянию от главной точки тонкого
компонента до плоскости перетяжки.
Из формул (2.141) и (2.155) следует, что для получения мини-
мального диаметра входного зрачка компонента лазер необходимо рас-
полагать как можно ближе к компоненту. В этом случае даже при ис-
пользовании короткофокусной системы получается минимально воз-
можное относительное отверстие (D/f), что позволяет уменьшить ос-
таточные аберрации компонента.
Итак, при расчете однокомпонентной фокусирующей системы
(рис. 2.67, о) определяют [4], [7]:
а) для выбранного типа лазера его конфокальный параметр R3 и
диаметр перетяжки 2у по формулам (2.138) и (2.140);
б) конфокальный параметр Rэ преобразованного пучка по форму-
лам (2.140'), исходя из заданного диаметра 2у' перетяжки (пятна);
в) фокусное расстояние f тонкого компонента по формуле (2.147),
задавшись из конструктивных соображений величиной г — положе-
нием перетяжки относительно передней фокальной плоскости компо-
нента
= + (2.156)
г) диаметр D входного зрачка системы по формуле (2.141), где
D > 2ys, а £ = 2а/Яэ;
д) положение перетяжки преобразованного пучка, отрезки а', г'
по формулам (2.145) и (2.148) соответственно.
При фокусировке лазерного излучения в пучок с малым попереч-
ным сечением следует учитывать дифракционное и аберрационное
увеличение диаметра пятна, определяемое по формуле:
2y' = 2fij^^ + l,22’ka/D + 2&y', (2.157)
где D — диаметр входного зрачка системы; Ду' — поперечная сфери-
ческая аберрация компонента в плоскости перетяжки преобразован-
ного пучка.
При использовании короткофокусных систем плоскость концен-
трации излучения лазера получается на небольшом расстоянии от
последней поверхности оптической системы из одного компонента, что
может оказаться неудобным при эксплуатации. Если фокусирующий
компонент установить на большом расстоянии от лазера, то размер
сфокусированного пятна будет меньше. Однако степень уменьшения
размера пятна с увеличением отрезка а невелика, так как второе сла-
гаемое в знаменателе формулы (2.146) значительно больше первого.
Только на большом расстоянии а » f будет сказываться влияние пер-
вого члена и размеры пятна заметно уменьшаться. Но при этом габа-
риты фокусирующей системы могут быть очень большими.
Длину фокусирующей системы можно сократить, если сделать ее
двухкомпонентной (рис. 2.68). Второй компонент уменьшает размер
пятна, полученного после первого компонента, если а2 > 2? 2. Этот ре-
зультат можно получить из формулы (2.146), если воспользоваться
общим выражением для увеличения всей системы. Сравнивая форму-
лу (2.150) для линейного увеличения однокомпонентной системы с
формулой (2.153) для увеличения двухкомпонентной системы, мож-
но видеть, что при г; = 0 и Д = f2 линейное увеличение последней си-
стемы становится меньше соответствующей величины при использо-
вании одного компонента. При увеличении отрезка 2; выигрыш ста-
новится ощутимым.
Линейное увеличение для однокомпонентной системы равно:
р2 =4/!;2/[42f + 7?2], (2.158)
Увеличение двухкомпонентной системы при 2; = О запишем в виде
₽о(2+2) = 4^2а/[4^2А2 + К,2 ], (2.159)
где А = (zjftf + |д /.
Из формул видно, что изменение отрезка Д сильнее сказывается
на значении увеличения, чем изменение гг Выбрав величины f; и f2
двухкомпонентной системы, вычислив значения 2j и Д при заданном
увеличении всей системы для выбранного типа лазера, можно найти
габариты оптической системы.
Если необходимо сконцентрировать излучение лазера в пятно ма-
лых размеров на значительном расстоянии от последней поверхности
оптической системы (несколько сот метров), то следует также исполь-
зовать двухкомпонентную систему: для этого первый компонент надо
сделать короткофокусным, с тем чтобы получить малое значение кон-
фокального параметра ; фокусное расстояние f2 второго компонен-
та и расстояние его а2 от перетяжки, образованной первым компонен-
том, выбирать из условия, чтобы
« (I + a2/ftf. (2.160)
В этом случае соотношения (2.145) и (2.146) после второго ком-
понента примут следующий вид:
^ = K,2/(l+a2/f2f; (2.161)
l-a2lf2 = l/{l+a2lf2). (2.162)
Если теперь выбрать значение отрезка а2 равным
а2 = -(1 + т)/2',
где т — небольшая положительная величина, то
а'2 = [(тп + l)/m]f2 » f2. (2.163)
Правда в этом случае конфокальный параметр R’32 будет в 1 /т2 раз
больше конфокального параметра Я£ . Если же с помощью первого
компонента величину сделать достаточно малой, то размер пятна,
сфокусированного вторым компонентом, будет также малым, а рас-
стояние а'2 большим.
Таким образом, расчет двухкомпонентной системы для фокуси-
рования излучения лазера на большом расстоянии можно выполнить
в следующей последовательности [4], [7]:
а) найти конфокальный параметр R^2 пучка, преобразованного
системой по формуле (2.140'), исходя из заданного диаметра 2у'2 пят-
на (перетяжки преобразованного пучка);
б) вычислить конфокальный параметр и положение г'{ пере-
тяжки пучка, преобразованного первым компонентом, по формулам
(2.146) и (2.148), исходя из выбранного положения at перетяжки ла-
зера относительно главных плоскостей первого компонента и задан-
ного фокусного расстояния f 1 этого компонента;
в) определить положение z2 перетяжки пучка после первого ком-
понента относительно передней фокальной плоскости второго компо-
нента из формулы (2.149): Д, = - z2iz!2 , где ДЭ2 = , а г'2 прини-
мается равным расстоянию а'2 от фокусирующей системы до пятна
(этим расстоянием задаются);
г) вычислить фокусное расстояние f2 второго компонента,исполь-
зуя формулу (2.147), а именно: fz = — A-^-\yz2 +В;г) ;
д) найти минимально необходимые для прохождения пучка лучей
диаметры Dt и D2 первого и второго компонентов:
D1 ~ 2У1-]1 + & > В г — 2Уг^ + ^2»
где 2у, = 2j’kR3i /(2п) — диаметр перетяжки лазера; — конфокаль-
ный параметр резонатора лазера; 2у2 ~ 2y't — диаметр перетяжки пуч-
ка, преобразованного первым компонентом; = 2al/R3i; = 2a2/R32 .
Для концентрации лазерного излучения в пятно малых размеров,
но с большим расстоянием от последнего компонента, можно приме-
нить двухкомпонентную систему, построенную по схеме реверсивно-
го (обращенного) телеобъектива, у которого a’F, » /0'6, или использо-
вать обращенные телескопические системы с насадками в виде поло-
жительных компонентов.
Оптические системы для уменьшения расходимости
лазерного пучка
Несмотря на то, что излучение лазера характеризуется острой на-
правленностью, тем не менее при передаче энергии на большое рассто-
яние требуется уменьшение расходимости 2со лазерного пучка. Тре-
бование малой расходимости, согласно формуле (2.143), совпадает с
условием получения большого конфокального параметра пучка. Дос-
тижение большой величины конфокального параметра за счет исполь-
зования в резонаторе зеркал меньшей кривизны нежелательно, так
как резко возрастают его дифракционные потери, а сам он станет
чувствительным к разъюстировке [7].
Рассмотрим возможность коллимирования лазерного пучка од-
ним тонким компонентом. Создание наибольшего значения конфо-
кального параметра за компонентом соответствует получению наи-
большего размера перетяжки, но в таком случае перетяжка должна
совпадать с главными плоскостями компонента. Так как размер пуч-
ка на компоненте не меняется, то для получения большей перетяжки
нужно увеличивать расстояние от лазера до компонента с тем, чтобы
за счет естественной расходимости пучка получить необходимый раз-
мер на компоненте. Например, для получения расходимости пучка за
компонентом 2со' = 10" необходимо иметь размер пятна
„ X 0,5 10~3р" Q9
2 у = —— =--------— ~ 3,2 мм .
2 л со п-10
Тогда при конфокальном параметре R3 = 2000 мм такой размер мож-
но получить лишь на расстоянии г = 8 м, что практически невозмож-
но из-за габаритных соображений.
Размеры коллимирующей системы можно значительно умень-
шить при использовании двухкомпонентной системы (рис. 2.69).
Если с помощью первого компонента увеличить угловую сходи-
мость лучей (что и делается при фокусировке), то после перетяжки
пучок будет быстро расходиться, и необходимый размер пятна на вто-
ром компоненте может быть получен на сравнительно небольшом рас-
стоянии.
Задача первого компонента аналогична задаче фокусирования
пучка, и выбор параметров первого компонента не отличается от рас-
смотренного выше случая. Фокусное расстояние f2 второго компонен-
та и его положение г2 относительно перетяжки, образованной первым
компонентом, выбирается в зависимости от того, задано ли фокусное
расстояние или габариты системы. В первом случае, когда задано f2,
как это видно из формулы (2.146), второй компонент следует устано-
вить на расстоянии -z2 = f2 так, чтобы перетяжка, образованная пер-
вым компонентом, совпадала бы с передней фокальной плоскостью
второго компонента. Если же задано г2, то максимальное значение
конфокального параметра Я£2 достигается при фокусном расстоянии
второго компонента, равным
Рис. 2.69. Двухкомпонентная система для уменьшения
расходимости пучка лазера
/2' = -z2[l + ^/(4zi)]. (2.164)
Это выражение совпадает с формулой для радиуса кривизны волно-
вого фронта пучка, падающего на второй компонент. При заданном z2
условие получения максимального размера пятна, а, следовательно,
минимальной расходимости пучка выполняется, когда фронт волны
на выходе компонента плоский.
В формуле (2.164) слагаемое U^J(4z2^ обычно малая величина и
поэтому f2 = -z2, т.е. системы с заданным f2 и гг практически совпа-
дают. Разница между ними появляется только в том случае, когда ди-
аметр выходного зрачка второго компонента ограничен реальной ди-
афрагмой (оправой). Тогда z2 фактически задано и фокусное расстоя-
ние f2 выбирается из условия (2.164).
Так как фокусное расстояние f2 второго компонента совпадает с
расстоянием от перетяжки до второго компонента, а чем оно больше,
тем меньше расходимость, то второй компонент должен быть длинно-
фокусным. Таким образом коллимирующая система напоминает те-
лескопическую, а в некоторых частных случаях полностью совпада-
ет с ней. Увеличение коллимирующей системы, т.е. отношение рас-
ходимости на выходе системы к расходимости пучка лазера равно об-
ратному отношению соответствующих размеров перетяжек:
Гт = У о = 2(й'/(2а) = 2у/(2у'г).
Однако эту формулу можно применять в случае, когда пучок су-
щественно не ограничивается на втором компоненте.
Первый компонент коллимирующей системы может быть поло-
жительным или отрицательным. Применение отрицательного компо-
нента (рис. 2.69) предпочтительнее, так как при этом сокращаются
габариты коллимирующей системы, исключается появление нежела-
тельных тепловых явлений из-за отсутствия промежуточного действи-
тельного изображения, и, кроме того, в такой системе легче компен-
сировать сферическую аберрацию второго компонента.
Чаще всего для коллимации применяют телескопические систе-
мы (афокальные насадки), линзовые или зеркальные, построенные по
схеме обращенной системы Галилея или по схеме обращенной двух-
зеркальной системы типа Кассегрена. Но не всегда эти системы ис-
пользуются оптимально. Из формулы (2.153) следует, что угловое уве-
личение телескопической системы при Д = 0 не зависит от параметров
лазера и равно угловому увеличению обычной телескопической сис-
темы. Действительно, подставляя в (2.153) значение коэффициента^
из (2.152) и принимая Д = О, получим
где YOji — угловое увеличение коллимирующей системы для лазера;
Гт — видимое увеличение телескопической системы.
С другой стороны, при г2 = 0, т.е. при z't = Д, получено выраже-
ние (2.154), в котором отношение (////г) = Г*. Следовательно, в этом
случае
Так как величина + RfJ] всегда меньше единицы (при 2; = О
она равна единице), то увеличение коллимирующей системы стано-
вится меньше, что и необходимо для получения минимальной расхо-
димости.
Таким образом, устанавливая второй компонент коллимирующей
системы так, чтобы перетяжка пучка, преобразованного первым ком-
понентом, располагалась в передней фокальной плоскости второго
компонента, получим угловое увеличение меньше, чем в случае, ког-
да Д = 0. Если это условие соблюдается, то надо стремиться к тому,
чтобы отрезок г2 был большим. Однако с увеличением пучок может
виньетироваться на оправах компонентов, кроме того, при »zt
влияние члена невелико. Поэтому величину 2; и выбирают из кон-
структивных соображений.
При достижении очень малой расходимости 2со' лазерного пучка
величина перетяжки преобразованного пучка становится такой боль-
шой, что пучок ограничивается реальными диафрагмами оптической
системы, обычно оправой второго компонента. Поэтому расходимость
пучка на выходе коллимирующей системы будет определяться не га-
баритными соотношениями, а дифракцией на этом компоненте.
При расчете двухкомпонентной системы для уменьшения расхо-
димости пучка лучей лазера определяют [4], [7]:
а) конфокальный параметр R3 для выбранного типа лазера с из-
вестными X, 2у = 2yt = Dn 2со;
б) угловое увеличение ТОл коллимирующей системы (афокальной
насадки на лазер):
= со2= 2у =
°л со 2у’
где со, со' —углы расходимости лазерного пучка на входе и выходе кол-
лимирующей системы; 2у = 2yt, 2у' = 2уг, = R3 и R[ = R^2 — диа-
метры перетяжек и конфокальные параметры соответственно лазер-
ного и преобразованного пучков лучей; обычно YOji = (0.02...0,2)*;
в) диаметр Dt первого компонента по формуле S 2y^l + iz\ где
£, = 2at/Ra; at — положение перетяжки лазера относительно главных
плоскостей первого компонента, выбранное из конструктивных сооб-
ражений;
г) фокусное’расстояние ft первого компонента с учетом того, что
из-за аберрационных соображений относительное отверстие Dt/f t
компонента не должно быть больше 1:4;
д) величину расфокусировки Д, равную смещению z'; положения
перетяжки преобразованного пучка относительно задней фокальной
плоскости первого компонента
Д - 2> -______h_________
где 2; = a1 + f1-, R3I=R3-
е) конфокальный параметр R^ пучка, преобразованный первым
компонентом
Я,,
ж) диаметр 2y't перетяжки пучка, преобразованного первым ком-
понентом
2у' = 2dXRj(2^ = ;
з) фокусное расстояние второго компонента
и) диаметр второго компонента
D2 > 2y2 .jT+ = 2yj~jl + E,2 ,
где ^2 = 2а 2/= —2f2i/R3J •
Расчет оптических систем для согласования параметров лазерно-
го пучка с последующими оптическими элементами аналогичен рас-
чету рассмотренных выше оптических систем для концентрации и
коллимации лазерного излучения.
Основные требования к разработке оптических систем
для преобразования лазерного излучения
При разработке принципиальных оптических схем и их расчете,
а также при выборе оптических материалов надо учитывать свойства
лазерного излучения, законы его распространения и взаимодействия
с оптической средой.
Особенности лазерного излучения приводят к ряду нежелатель-
ных эффектов, которые требуют принятия специальных мер.
Возникновение интерференционных эффектов искажает про-
странственную структуру сформированных оптической системой пуч-
ков. Чтобы избежать их, надо соответствующим образом выбирать
толщину оптических деталей. Цо этой же причине нежелательно ис-
пользование склеенных оптических деталей, например, склеенного
компонента. Наличие тонких клеевых слоев, вызывающих интерфе-
ренцию, приводит к искажению структуры пучка. Кроме того, при
воздействии мощного излучения лазеров клеевые слои разрушаются.
При расчете систем ориентации, геодезических светодальномеров,
интерферометрических и поляриметрических приборов надо учиты-
вать деполяризующее действие оптических деталей. Даже в любых
оптических системах, в которых состояние поляризации не имеет ни-
какого значения, оно может оказать существенное влияние на энер-
гетический расчет. Это объясняется несколькими причинами:
1. Коэффициент отражения (пропускания) излучения оптически-
ми элементами зависит от состояния поляризации.
2. При взаимодействии с оптическими поверхностями происходит
деполяризация излучения.
3. Распределение интенсивности в сфокусированном кружке за-
висит от угла сходимости лучей и состояния поляризации.
4. Чувствительность приемников излучения в ряде случаев зави-
сит от поляризации излучения.
По этой причине необходимо выбирать схему с наименьшим чис-
лом деполяризующих элементов, к которым относятся призмы пол-
ного внутреннего отражения, линзовые и зеркальные детали с угла-
ми падения больше 10°. Поэтому надо правильно выбирать кривизны
отражающих поверхностей, вид покрытия, устанавливать плоские
элементы так, чтобы углы падения не превышали критических зна-
чений.
К отрицательным последствиям приводят сфокусированные бли-
ки, возникающие в результате отражения излучения от поверхностей
системы.
Под действием мощного излучения могут возникать нежелатель-
ные нелинейные явления, произойти оптический пробой и т.п. Поэто-
му надо выбирать оптическую схему, в которой не образуется проме-
жуточное действительное изображение. При работе с мощными лазе-
рами надо правильно выбирать оптические материалы с учетом их лу-
чевой (оптической) прочности, чтобы не произошло их разрушение.
Достаточной лучевой прочностью обладает, например, стекло К8.
При решении вопроса о выборе вида системы — линзовой, зер-
кальной (ЗС) или зеркально-линзовой (ЗЛС) — надо принимать во вни-
мание прежде всего рабочий спектральный диапазон. В видимом и
ближнем инфракрасном (ИК) диапазонах используются линзовые си-
стемы, а в дальнем ИК диапазоне — чаще всего ЗС и ЗЛС, имеющие
значительно меньшие осевые размеры и массу.
ЗС имеют широкий спектральный диапазон, вследствие чего они
могут работать в многоканальных системах, спектрально разделен-
ных. Однако центральное экранирование ЗС и ЗЛС ограничивает их
применение. При преобразовании лазерного пучка этими системами
неизбежны потери излучения, величина которых зависит от коэффи-
циента экранирования, а также изменение диаграммы направленно-
сти. Для согласования гауссова пучка с ЗС или ЗЛС используют ак-
сиконы, изменяющие распределение интенсивности в сечении пучка
и расширяющие границы применения систем с центральным экрани-
рованием.
Оптические системы, преобразующие лазерное излучение, не
дают изображение, а формируют излучение в пучке с заданным рас-
пределением амплитуды и фазы. Поэтому эти системы можно услов-
но отнести к классу осветительных.
Преобразование пучка оптической системой достигается в основ-
ном за счет изменения кривизны волнового фронта на поверхностях
оптических деталей системы. Иногда средством для получения задан-
ного распределения могут служить и аберрации системы (например,
в аксиконах).
Для выполнения габаритного расчета системы лазерный пучок с
произвольным амплитудно-фазовым распределением заменяется мо-
делью, для которой известен метод расчета. К выбору модели — ква-
зиоптической или геометрооптической — надо подходить особенно
тщательно, учитывая особенности излучения конкретного лазера и
требования к преобразованию пучка [7].
Как было отмечено выше, во многих случаях можно с успехом ис-
пользовать геометрооптическую модель. Это было многократно про-
верено расчетом оптических систем и последующими испытаниями и
работой их в приборах.
Габаритный расчет оптических систем для коллимации
и концентрации лазерного излучения при использовании
геометрооптической модели излучения
Расчет систем для коллимации лазерного излучения.
Системы для коллимации излучения, или коллимирующие систе-
мы, предназначены для уменьшения угла расходимости 2со пучка лу-
чей лазера. Для различных типов лазеров угол 2со меняется от не-
скольких угловых минут до нескольких десятков градусов. Для
уменьшения угла расходимости лазерных пучков лучей используют
телескопические системы, иногда называемые афокальными насад-
ками. Они могут быть линзовыми и зеркальными в зависимости от
спектрального диапазона излучения и требований к структуре преоб-
разованного излучения.
Линзовые коллимирующие системы (рис. 2.70) представляют со-
бой обратные системы Галилея (рис. 2.70, а) или Кеплера (рис. 2.70,6).
Предпочтительней применять обратную систему Галилея, не дающую
промежуточное действительное изображение, недопустимое при ис-
пользовании мощных лазеров. Однако известно применение обратных
систем Кеплера при использовании лазеров малой мощности в систе-
мах оптической обработки информации.
Возможно использование зеркальной системы — обратной систе-
мы Мерсенна (рис. 2.71) или ее модификаций с асферическими повер-
хностями (расчет см. в гл.6).
Рис. 2.70. Оптические системы для коллимации лазерного излучения
а) обратная система Галилея; б) обратная система Кеплера
Основными оптическими
Рис. 2.71. Обратная система Мерсенна
характеристиками коллимиру-
ющей системы являются [4]: уг-
ловое увеличение у0, угловое
поле 2(0' (угол расходимости пуч-
ков лучей) в пространстве изоб-
ражений, диаметр D входного
зрачка, равный диаметру выход-
ного торца лазера, положение ар
входного зрачка относительно
первого компонента, длина L си-
стемы, длина волны X излучения лазера.
Для конкретного лазера известны величины X, D и 2со. Расчет си-
стемы аналогичен габаритному расчету телескопической системы
(п. 2.1).
Вначале находят угловое увеличение у0 системы: у0 = tgco'/tgco. В
случае малых углов можно использовать приближенную формулу
у0 = со'/со. Обычно у0 = 0,2...0,02.
Затем определяют диаметр D' выходного зрачка телескопической
системы, используя формулу углового увеличения: D' = D/y0. Чаще
всего D' = 5...12 мм. Световой диаметр первого компонента вычисля-
ют по формуле
DCBJ = D + 2aptg(f>.
Иногда рекомендуют выбирать Всв = 1,12D, что справедливо лишь
для дифракционно-ограниченных систем, т.е. систем, в которых ос-
таточные аберрации не оказывают заметного влияния на изменение
параметров лазерного пучка. (При условии сохранения структуры га-
уссова пучка диаметр компонента выбирают из соотношения Dcb =
= 2,2D).
Затем вычисляется диаметр ПСВ2 второго компонента. Часто при
малом угле расходимости 2т принимают, что DCB2 = D'. В этом случае
коэффициент виньетирования km - 1 - 2\h/D’ [4].
Фокусное расстояние f t находят из условия, что относительное
отверстие (относительный диаметр) первого компонента не более 1:3,
иногда 1:2 при небольших значениях fr
Фокусное расстояние f'2 определяют из формулы увеличения:
// = - ///у0 , вычисляют длину системы L = //+ и выбирают конструк-
ции компонентов.
Расчет систем для концентрации лазерного излучения
Оптические системы, фокусирующие лазерное излучение, или
системы для концентрации лазерного излучения предназначены для
получения наибольшей поверхностной плотности излучения в круж-
ке или на площадке малых размеров.
Для этого используют объектив, отдельную линзу или систему из
нескольких компонентов, устанавливаемых за выходным торцом ла-
зера, с фокусным расстоянием f и углом расходимости 2т пучка лу-
чей. Они фокусируют излучение в задней фокальной плоскости на пло-
щадку диаметром 8, тогда
8 = 2/'tgco. (2.165)
Часто ставится задача получения минимально возможного диа-
метра сфокусированного пятна. Однако следует учитывать при расче-
те, что предельный дифракционный размер пятна можно получить
при использовании безаберрационной системы и лазерных пучков с
идеальным распределением интенсивности излучения.
В общем случае диаметр 8 пятна определяется назначением сис-
темы. Например, для операций на сетчатке глаза лазерный пучок фо-
кусируется, образуя кружок диаметром 1 мкм.
Ясно, что при таких требованиях к оптической системе она дол-
жна иметь небольшое фокусное расстояние. Поэтому при использова-
нии простой линзы или однокомпонентного объектива плоскость кон-
центрации лазерного излучения расположена близко от линзы или
объектива. Это вызывает неудобства при эксплуатации и нежелатель-
ные эффекты, например, загрязнение и повреждение последней повер-
хности системы продуктами взаимодействия излучения с обрабатыва-
емым материалом в технологических установках и т.п.
Вследствие этого применяют двухкомпонентный обратный (ревер-
сивный) телеобъектив (рис. 2.72) или трехкомпонентную систему
(рис. 2.73), состоящую из обратной системы Галилея (реже Кеплера —
для маломощных лазеров) и объектива или линзы с фокусным рассто-
янием f 3. Первая система короче второй и может применяться при
использовании мощных лазеров. Подобные системы позволяют полу-
чить большой задний отрезок, в несколько раз превышающий фокус-
ное расстояние системы, при сохранении малой величины f. Следо-
вательно плоскость концентрации излучения значительно отдаляет-
ся от системы, эквивалентной обратному телеобъективу.
Рис. 2.72. Оптическая схема линзового обратного телеобъектива
Известно также применение обратного зеркального телеобъекти-
ва (рис. 2.74, а). Его расчет приведен в гл. 6. Его применяют, напри-
мер, в установках для лазерной обработки материала, не требующих
высокой интенсивности в зоне обработки. Для этих же целей исполь-
зуют децентрированный, или внеосевой обратный телеобъектив
(рис. 2.74, б).
Основными оптическими характеристиками системы для кон-
центрации излучения являются фокусное расстояние f, относитель-
ное отверстие D/f, задний отрезок s'F (a'F), величина диаметра 5 круж-
ка сфокусированного излучения, длина волны X излучения, располо-
жение и диаметр торца лазера (входного зрачка), ар и D.
Исходными данными для расчета являются перечисленные выше
оптические характеристики, а также угол расходимости лазера. Иног-
да задается оптическая длина L системы.
Рис. 2.73. Оптические схемы трехкомпонентных систем, эквивалентных
обратному телеобъективу:
а) схема, состоящая из обратной системы Галилея и отдельной линзы;
б) схема, состоящая из обратной системы Кеплера и отдельной линзы
При выбранной геометрической модели излучения расчет ведет-
ся в предположении, что каждая точка последней поверхности зерка-
ла резонатора лазера излучает пучки лучей с углом расходимости 2со,
и оси этих пучков параллельны между собой (рис. 2.75).
Вначале рассмотрим расчет трехкомпонентной системы
(рис. 2.73, а). Из этого рисунка видно, что
^2 ^3 Л аР'
(2.166)
Известно, что у0 = tgco'/tgco, поэтому f tgco = f 3tgco' = 8.
Рассчитывать систему можно в такой последовательности. Из
(2.165) определяют фокусное расстояние системы: f = 8/(2tgco).
При малом угле расходимости можно использовать приближен-
ную формулу: f = 3438 8/(2со).
Угловое увеличение телескопической системы находят из (2.166):
у0 = f la!г и далее рассчитывают эту систему. Световой диаметр пер-
Рис. 2.74. Оптические схемы зеркальных обратных телеобъективов:
а) осесимметричный обратный телеобъектив;
б) внеосевой обратный телеобъектив
вого компонента определяется так же, как при расчете коллимирую-
щей системы [12].
Формулы для определения фокусных расстояний компонентов
найдем, решив два уравнения: d = f1 + f'2ny0 = -f 1/f2.
В результате получим:
Рис. 2.75. Геометрическая модель
излучения применительно к его кон-
центрации отдельной линзой
А'=То^/(То-^); /г = ^/(^-То)-
Для определения f t и f 2 вели-
чиной d задаются или определяют,
исходя из заданных габаритов сис-
темы. При выборе значения d надо
находить относительные отверстия
компонентов, с тем чтобы их значе-
ния не были завышены и не приве-
ли к усложнению конструкции. В
зависимости от /' берут ИЦ' ~
= 1:2...1:3.
При малой расходимости пучка лучей ЛСВ2 = Всвз.
Следует обратить внимание на то, что для дифракционно-ограни-
ченных систем иногда рекомендуют следующее соотношение световых
диаметров линзовых компонентов и размеров лазерных пучков на
этих компонентах: 7>св = 1,12 7>пучка.
Рассмотрим особенности расчета двухкомпонентного обратного
телеобъектива (рис. 2.72) при тех же исходных данных.
Расчет удобно выполнять для нормированной системы (при
Т7 = 1). В соответствии с нормировкой первого вспомогательного луча
а2 = 0, а3 = 1, а2 = ф2 , h1 = f = 1, тогда h2 - a'F. , где a'F. = a'Flf .
Прежде всего из габаритного расчета надо определить f t,f2 и d.
Для нормированной системы определим <р;, <р2 и d
Для определения трех неизвестных величин запишем два уравне-
ния: <р/ + Л2ф2 = 1; h2 — a'F, = l-cla2 = l~dtpl.
Если задано L, то появляется третье уравнение L = d + a'F .
Если L не задано, то необходимо выбрать значение а2 = ф; или d.
Выбрав d, определим ф2 и ф2 из соотношений:
l-h9 l-a'v. 1-ф,
d d 2 a'F,
Для реального значения f получим:
= f2 = f'l<$2> d = d f'.
Значением d или a2 можно задаваться таким образом, чтобы ф2 и
ф2 были возможно меньшими, что приведет к большим f и, следова-
тельно, меньшим значениям относительных отверстий компонентов
и более простой их конструкции. Усложнение конструкции компонен-
тов вызовет уменьшение коэффициента пропускания т системы и сни-
жение плотности излучения.
Диаметры компонентов определяются так же, как рассмотрено
выше.
В отдельных случаях для концентрации излучения применяют-
ся простые линзы. Это могут быть линзы благоприятной формы и рас-
считанные на минимум сферической аберрации.
Требования к разработке отдельной линзы зависят от назначения
оптической системы, что ярко иллюстрирует приведенный ниже при-
мер применения плоскогиперболоидной анаберрационной линзы, на-
зываемой линзой Декарта (см. рис. 7, расчет в гл. 7).
При создании систем для концентрации излучения, например,
излучения лазера на неодимиевом стекле в экспериментах по высоко-
температурному нагреву плотной плазмы предъявляются требования
максимальной светосилы фокусирующей системы и минимального
пути прохождения в нем луча.
Выполнение первого требования позволяет получить максималь-
ную интенсивность излучения в каустике объектива, а также прово-
дить исследование при разных условиях фокусировки. Выполнение
второго требования дает возможность минимизировать самофокуси-
ровку лазерного пучка в материале линз или линзы, что также спо-
собствует увеличению интенсивности в каустике. Большой апертур-
ный угол <з'А, позволяет снизить вредное влияние рефракции лазерно-
го пучка в плазменной короне.
Однако эти преимущества светосильной оптики реализуются
лишь при отсутствии или малой величине аберраций в пределах уг-
ловой расходимости лазера. Аберрации отрицательно сказываются
также на равномерности облучения исследуемого объекта и могут при-
водить к возникновению и развитию неустойчивости плазмы, образу-
ющейся при взаимодействии с веществом.
При этих условиях хорошие результаты дает плоскогиперболоид-
ная линза, полностью свободная от сферической аберрации. При плот-
ностях потока излучения, присущих современным лазерам, положи-
тельным фактом является распространение в материале этой линзы
параллельного пучка. Это снижает влияние самофокусировки, особен-
но легко развивающейся в сходящихся пучках. Для исключения по-
вреждений вдоль оптической оси, как показал расчет хода лучей, от-
раженных от поверхностей линзы, необходимо сделать сквозное отвер-
стие. При f = 170 мм, диаметре линзы 120 мм, диаметр отверстия —
6 мм, что дает потерю энергии около 0,2% .
Расчеты и эксперимент показали, что использование линзы Де-
карта гораздо эффективней, чем трехлинзового объектива с просвет-
ленными поверхностями.
Глава 3. АБЕРРАЦИОННЫЙ РАСЧЕТ ОПТИЧЕСКИХ
СИСТЕМ. МЕТОДЫ АБЕРРАЦИОННОГО
РАСЧЕТА
3.1. Общие понятия
Под аберрационным расчетом понимают такой расчет оптической
системы, в результате которого определяются конструктивные пара-
метры элементов схемы, обеспечивающие необходимое качество изоб-
ражения или нужную структуру выходящих пучков. Кроме собствен-
но аберрационного проводятся габаритный и светотехнический расче-
ты, которые всегда предшествуют аберрационному. От того, насколь-
ко правильно выбраны тип и схема системы, зависят результаты рас-
чета, так как этот выбор в значительной мере определяет коррекци-
онные возможности системы, а в итоге и качество изображения.
Для ряда типов оптических систем существует взаимосвязь опти-
ческих и фотометрических параметров, поэтому результаты габарит-
ного расчета проверяются светотехническим расчетом.
На втором этапе аберрационного расчета выбирают конструкции
отдельных компонентов или узлов в зависимости от оптических ха-
рактеристик, от заданных значений допустимых остаточных абер-
раций и выполняют их расчет — определяют конструктивные пара-
метры, коэффициенты деформаций асферических поверхностей, если
таковые необходимо ввести в систему.
Если можно из каталога, архива, патентов и других источников
подобрать готовые компоненты с известными г, d, п, то на этом этапе
по известным конструктивным параметрам выполняют аберрацион-
ный анализ, определяют аберрации и по ним уже судят о пригоднос-
ти системы. Эта задача легко решается.
Если требуется синтезировать оптическую систему (определить ее
г, d, п), то необходимо знать аналитическую зависимость между задан-
ными значениями аберраций и конструктивными параметрами. Эта
задача наиболее трудная при создании новых оптических систем.
В общем виде аналитическая связь может быть записана лишь в
области аберраций третьего порядка. Применение теории аберраций
третьего порядка позволяет не только определять г, d, п, но и ответить
на вопрос, можно ли рассчитать оптическую систему с заданным ка-
чеством изображения.
3.2. Методы аберрационного расчета оптических
систем
Известно несколько методов аберрационного расчета: метод проб;
алгебраический метод, или метод разделения переменных; компози-
ционный.
Метод проб
Первоначально из каталогов, архивных данных, патентов, а если
есть машинные архивы, то с помощью ИПС по требуемым характери-
стикам подбирают наиболее подходящую оптическую систему, кото-
рую пересчитывают при необходимости на требуемое фокусное рассто-
яние или линейное увеличение. Для этого определяют коэффициент
масштабирования у = где — требуемое значение фокусно-
го расстояния; fK — значение фокусного расстояния из каталога, и все
значения радиусов кривизны, толщин и воздушных промежутков ум-
ножают на этот коэффициент. При выборе прототипа следует обратить
внимание на то, чтобы 2®^ < 2<ок, /т'р = /к'.
Систему, пересчитанную на требуемое фокусное расстояние, при-
нимают за исходную и выполняют аберрационный анализ по универ-
сальным программам, оценивают качество изображения и, если оно
не удовлетворяет техническому заданию, то выполняют оптимизацию
до получения оптической системы с требуемым качеством изображе-
ния. Для выбора коррекционных параметров находят зависимости
между изменениями аберраций и изменениями конструктивных па-
раметров.
Если выбранная из каталога и пересчитанная на требуемые харак-
теристики оптическая система после оптимизации не позволяет полу-
чить желаемого результата, то выбирают другую или усложняют ис-
ходную.
Расчет оптических систем методом проб достаточно трудоемок,
длителен и не способствует созданию новых, патентночистых опти-
ческих систем. Оптик-конструктор должен иметь высокую квалифи-
кацию и хорошую интуицию.
Если методом проб рассчитать оптическую систему нельзя, то сле-
дует использовать композиционный метод — самый эффективный ме-
тод создания патентночистых высококачественных систем с высокими
оптическими характеристиками.
Композиционный метод
Расчет оптических систем методом проб и алгебраическим мето-
дом, который подробно описан далее, приводит фактически к реше-
нию одной и той же задачи: изучению влияния различных парамет-
ров уже выбранной оптической системы на аберрации и отысканию
таких значений конструктивных параметров, при которых аберрации
будут допустимыми. Эти методы не затрагивают вопрос о выборе ис-
ходной системы, обладающей необходимыми свойствами для устра-
нения аберраций.
Исторически стали складываться приемы построения оптических
систем с заранее известными коррекционными возможностями [18].
Так, в 1634 г. Мерсенн создал телескопическую систему из двух па-
раболоидных зеркал. Оказалось, что такая система свободна от сфе-
рической аберрации, меридиональной комы и астигматизма. Суттон
предложил схему концентрического линзового объектива, свободно-
го от комы, астигматизма, дисторсии, хроматизма увеличения для
произвольно большого поля. Шмидт для исправления сферической
аберрации зеркал использовал афокальную коррекционную пластину
и, установив ее в центре кривизны сферического зеркала, исправил
кому, астигматизм и дисторсию.
В микроскопах для микрообъективов с большими апертурами
были введены фронтальные линзы с апланатической поверхностью,
что обеспечило большую апертуру без внесения сферической аберра-
ции и комы. Рудольф первый ввел в схемы объективов-анастигматов
склеенные аномальные поверхности. Штейнгель разработал схемы
симметричных объективов. Вследствие симметрии обеспечивалось ис-
правление нечетных аберраций — комы, дисторсии, хроматизма уве-
личения.
Перечисленные выше работы положили начало созданию оптичес-
ких систем, в которых предусматривается возможность устранения
тех или иных аберраций, т.е. к композиционному методу расчета.
Кроме того, в процессе развития оптического приборостроения
накапливались и теоретические материалы по композиции оптичес-
ких систем: были получены формулы, позволяющие определить абер-
рационное виньетирование в зависимости от значения комы в зрачках
для части системы, расположенной впереди материальной диафраг-
мы; получены точные формулы для расчета астигматизма асферичес-
ких поверхностей второго порядка и формулы, определяющие влия-
ние малых деформаций сферических поверхностей на неэлементарные
аберрации, а также их влияние в зависимости от положения дефор-
мированной поверхности относительно зрачка и плоскости изображе-
ния; развиты приемы устранения астигматизма; предложено разделе-
ние конструктивных элементов оптической системы на базовые, или
силовые, коррекционно-силовые, коррекционные с малой оптической
силой и т.д. Все это позволило создавать оптические системы того или
иного назначения, выбирать для исходной системы базовые элемен-
ты и уже после этого в зависимости от значений остаточных аберра-
ций базовых элементов определять коррекционно-силовые и коррек-
ционные элементы, что дало возможность заранее выполнить необхо-
димую коррекцию и избежать неоправданного нагромождения ненуж-
ных элементов.
Композиционным методом можно создать оптическую систему:
по набору из поверхностей с известными аберрационными свой-
ствами [16];
путем синтеза по базовым компонентам [16];
простейшим параметрическим синтезом для систем с невысоки-
ми оптическими характеристиками [18], [19].
Синтез оптических систем по набору из поверхностей с задан-
ными свойствами. Этот метод применяют для синтеза особо свето-
сильных (1:0,7...1:1,2) и широкоугольных (2(0 > 60°) объективов, для
которых другие методы практически отсутствуют.
В качестве поверхностей с известными свойствами используют
изопланатические поверхности, вносящие примерно одинаковые абер-
рации по всему полю. Синтезируя оптическую систему на базе линз с
изопланатическими поверхностями, можно получить исходную сис-
тему, обладающую хорошими коррекционными возможностями для
последующей оптимизации.
Этот метод, предложенный и разработанный М. М. Русиновым
[16], позволяет избежать введения в систему «лишних» параметров и
дает возможность проводить исследования свойств и коррекционных
возможностей в области действительных лучей.
Основными типами поверхностей являются:
апланатическая поверхность , которая образует идеальное
изображение одной сферы на другую (тип А). Апланатическая повер-
хность при совпадении предмета со сферой будет свободна от аберра-
ций по всему полю;
концентрическая поверхность по отношению к зрачку (тип КЗ).
На эту поверхность главный луч падает по нормали, поэтому она не
вносит астигматизма и комы, а имеет только сферическую аберрацию
и кривизну поля изображения;
концентрическая поверхность по отношению к осевой точке
предмета (тип КП). Для осевой зоны она обладает строгим апланатиз-
мом, но при удалении точки предмета от оси аберрации быстро возра-
стают.
Набор из указанных поверхностей можно вести в гауссовой облас-
ти, но полученная при этом система может иметь большие аберрации
для внеосевых точек предмета и даже не обеспечивать прохождение
реальных лучей. Поэтому рациональнее определять кривизну повер-
хностей по главному лучу, идущему от крайней точки предмета.
Для определения значений кривизны поверхностей получены
формулы, которые программой вводятся в память ЭВМ. Набор опти-
ческой системы по поверхностям с применением этих формул произ-
водится в процессе расчета главного луча и бесконечно узких пучков,
проходящих через систему. Перед началом расчета определяется кри-
визна поверхности в зависимости от ее типа и выполняется расчет хода
луча по формулам Федера. Последовательность поверхностей различ-
ного типа, а также осевые расстояния и положение зрачка задаются
разработчиком. Наиболее трудной задачей синтеза является опреде-
ление осевых расстояний, обеспечивающих заданные значения фокус-
ного расстояния, линейного увеличения, заднего фокального отрезка
и тех аберраций, исправление которых не обеспечивается автомати-
чески свойствами изопланатических поверхностей. Все эти характе-
ристики зависят от незначительных изменений осевых расстояний,
поэтому приближенное задание последних разработчиком без ЭВМ
затруднительно. Вот почему необходимым этапом синтеза является
автоматическое определение значений осевых расстояний.
В программе синтеза, разработанной в Санкт-Петербургском го-
сударственном институте точной механики и оптики, эта задача реша-
ется как задача оптимизации [16]. При этом в качестве параметров оп-
тимизации выбираются осевые расстояния и положение апертурной
диафрагмы или зрачка, а в качестве оптимизируемых функций — от-
клонения от заданных значений таких характеристик, как линейное
Глава 3. Аберрационный расчет оптических систем. Методы аберрационного расчета
увеличение |30, положение плоскости изображения — отрезок s', по-
ложение входного и выходного зрачков — отрезки sp, s'р„ некон-
тролируемые автоматически аберрации.
В ограничения включаются условия прохождения главного и
апертурного лучей на всех поверхностях, а также условия конструк-
тивной реализации системы.
Разработчик задает тип поверхностей, их число и начальные, весь-
ма приближенные значения осевых расстояний. Проба состоит в на-
боре системы из поверхностей с теми значениями осевых расстояний
d, которые соответствуют значениям параметров оптимизации в дан-
ной точке пространства параметров, в расчете хода лучей и определе-
нии необходимых характеристик.
Оптимизация проводится модифицированным методом наимень-
ших квадратов с контролем ограничений методом штрафных функций
[15], [16]. Особенностями оптимизации в процессе синтеза являются
специфические параметры оптимизации, связанные с типом синтеза,
небольшое количество оптимизируемых функций (две—пять аберра-
ций), но значительное число ограничений (условий прохождения лу-
чей, построения системы, конструктивных ограничений).
Этот метод позволяет просматривать множество вариантов, а так-
же в широких пределах менять конструкцию для получения требуе-
мых результатов, пригодных для последующей оптимизации. Таким
методом М.М. Русинов синтезировал светосильные широкоугольные
фото- и гидрообъективы [16].
Пример 3.1. Требуется синтезировать светосильный широкоугольный фотообъек-
тив с 2® = 80°, А' — 0,25, (50±2) мм.
Решение. Такой объектив был синтезирован М. М. Русиновым рассмотренным выше
методом на ЭВМ [16]. Объектив синтезировался из шести поверхностей со следующей
последовательностью: КЗ—КЗ—А—КЗ—А—КЗ. Апертурная диафрагма расположена
после первой линзы. Линзы выполнены из стекол марок ТФ7—ТК16—ТК16. Последо-
вательность поверхностей предложена М. М. Русиновым.
Система состоит из трех линз, первая из которых коицентрична зрачку, вторая и
третья образованы апланатической и концентрической зрачку поверхностями. Началь-
ные значения осевых расстояний указаны на рис. 3.1.
На первом шаге синтеза при наборе системы было нарушено условие прохождения
апертурного луча на второй поверхности. На втором шаге процесса это явление было ус-
транено, но оказались нарушенными условия преломления без полного внутреннего от-
ражения и прохождения апертурного луча на четвертой поверхности.
На третьем шаге процесса система была построена полностью без нарушения усло-
вий прохождения, однако фокусное расстояние f сильно отличалось от заданного, кро-
ме того, толщина по краю у второй линзы оказалась слишком малой (Гл— 21,65).
После четвертого шага было достигнуто значение 48,5 и удовлетворены усло-
вия конструктивности. Так как изопланатические поверхности не вносят астигматизма,
то для крайней точки предмета, для которой проводился набор, астигматизм ~= 0.
Шаг 4
Г/ = 13,0
d, - 5,0
Гг = 8,0
Г,= 16,411
У, = 3,92
Гг = 12,505
d2 = 18,25
г3 = -56,927
d3 = 5,17
г4 = -15,081
г, = 17,216
dt = 4,46
Гг = 12,759
dt = 20,06
г3 =-53,885
d3 = 6,24
Г4 = -18,386
<4 = 0,99
Fs= 31,118
d3 = 4,96
Ff = -92,809
rt= 37,606
d, = 20,75
FZ= 16,854
d2 = 23,0
r3 = -33,777
d3= 10,89
r4=- 20,686
d4 = 9,59
F3= 157,054
d3= 7,51
rs=-71,477
П = 23,323
dt = 8,08 ТФ7
Г2 = 15,248
d2 = 16,74
r3=-47,014
d3 = 26,50 TK16
r4 = -29,275
d4 = 8,65
r3= 117,383
d3 = 15,70 TK16
Fg= -105,375
Рис. 3.1. Синтез объектива по набору из поверхностей с известными свойствами
Однако система имела значительную сферическую аберрацию и кривизну изображения:
As' = —7,62; (z'm+ г'уг. = 0,8. Для устранения этих аберраций потребовалось еще два
шага, после этого получился отрицательный задний фокальный отрезок, и для исправ-
ления этого нарушения потребовался еще один шаг.
На седьмом шаге в результате синтеза и оптимизации получен объектив, удовлет-
воряющий требуемому качеству изображения.
Синтез оптических систем по базовым компонентам [16].
При разработке любой оптической системы первоначально опре-
деляются свойства узлов, из которых создается оптическая система,
и в первую очередь вычисляются Ф (/') этих узлов с учетом общих тре-
бований, предъявляемых к оптическим системам в целом: обеспече-
ние требуемых линейного увеличения, углового поля и светосилы, а
также габаритных размеров.
Оптические силы отдельных компонентов могут быть получены
различными сочетаниями элементов — преломляющих поверхностей.
Такие простейшие силовые (или базовые) компоненты представляют
собой одиночную линзу (базовую линзу). Свойства базовых линз бу-
дут определяться радиусами обеих поверхностей, показателем прелом-
ления, толщиной, линейным увеличением, положением входного и
выходного зрачков.
Однако при одной и той же оптической силе, но различных фор-
мах возможны различные и аберрационные свойства. Например, для
объективов зрительных труб, у которых 2(0 < 10°, исправление поле-
вых аберраций, таких, как астигматизм и кривизна поля, имеет вто-
ростепенное значение, а главной будет коррекция сферической абер-
рации и комы. Поэтому в качестве базовой целесообразно принять тон-
кую линзу, обладающую минимумом сферической аберрации и комы.
Для фотографических объективов главной задачей будет исправление
полевых аберраций — астигматизма и комы. В этом случае базовыми
будут линзы конечной толщины.
Итак, базовый элемент — это элемент, создающий оптическую
силу. Базовая линза — простейший базовый элемент, ограниченный
двумя преломляющими поверхностями.
Строя оптическую систему из таких элементов, которые не будут
обладать аберрациями того или иного вида, можно получить систему,
свободную от этих аберраций (апланаты, анастигматы и т.п.). При
этом надо помнить, что устранение нечетных аберраций — комы, ди -
сторсии, хроматизма увеличения — успешно решается при исполь-
зовании симметричных и пропорциональных систем. Однако это не
обеспечивает исправление четных аберраций — астигматизма, кри-
визны изображения, сферической аберрации. Астигматизм и кривиз-
ну поля устраняют введением аномальных склеек. Силовые концен-
трические линзы позволяют исправить сферическую аберрацию. Для
увеличения углового поля выгодно использовать первую поверхность
плоской, не дающей в параллельном пучке ни астигматизма, ни кри-
визны поля, ни комы.
Таким методом были созданы объективы «Руссары», «Лиар», ряд
репродукционных объективов.
Подробно композиционный метод расчета оптических систем при-
веден в монографии М. М. Русинова [16].
Алгебраический метод расчета (метод разделения переменных).
Основные уравнения
Параметрический синтез оптических систем на основе метода раз-
деления переменных применяют для расчета оптических систем, ком-
поненты которых можно принять за бесконечно тонкие, т. е. метод
применим к компонентам, у которых сумма толщин линз, входящих
в компонент, и воздушных промежутков в 8...10 раз меньше фокус-
ного расстояния (Ed + Ес?возд < 0,1/*^).
Если оптическая система или объектив состоят из нескольких
компонентов, расположенных на значительном конечном расстоянии,
то система принимается состоящей из двух или нескольких бесконеч-
но тонких компонентов, расположенных на некотором конечном рас-
стоянии друг от друга.
Особенность бесконечно тонкого компонента заключается в том,
что при переходе к линзам конечной толщины аберрации изменяют-
ся незначительно, т.е. толщины линз и компонентов не являются
параметрами, которые можно использовать для коррекции аберраций.
К системам, компоненты которых можно принять за бесконечно
тонкие, следует отнести астрономические трубы, геодезические инст-
рументы, визиры, бинокли, микроскопы малого увеличения и апер-
туры, стереотрубы, прицельные трубки, перископы, оптические сис-
темы оптико-электронных приборов и т.п. Для перечисленных выше
систем габаритный расчет имеет важное значение; им определяются
размеры системы и основные оптические характеристики: приведен-
ные оптические силы ф, воздушные промежутки с?возд, относительные
отверстия I>lf, линейные 2у и угловые 2со поля, иными словами, вне-
шние характеристики системы.
Синтез основан на аналитических зависимостях между конструк-
тивными параметрами (г, d, п) синтезируемой оптической системы и
аберрациями третьего порядка (аберрации высшего порядка счита-
Глава 3. Аберрационный расчет оптических систем. Методы аберрационного расчета
ются равными нулю). В литературе [12], [18] этот метод носит назва-
ние «метод разделения переменных».
Синтезу оптических систем этим методом посвящены гл. 4, 6.
Рассмотрим основные уравнения алгебраического метода. Из те-
ории аберраций известно [12], что меридиональную Ду' и сагит-
тальную Ах' составляющие аберраций для любого луча, идущего из
точки предмета, можно представить степенным рядом от координат
т, М луча на зрачке, размера у предмета при заданном его положе-
нии s2 = const и положении входного зрачка sp = const:
Ay' = Г7(у,тп7,М7); Ax' = Г2(у,тп;,М;).
Так как оптическая система симметрична относительно оптичес-
кой оси, то слагаемые этого ряда могут быть только третьего, пятого,
седьмого, девятого, ..., (нечетного) порядка, т.е. в разложении будут
члены вида зависящие от г, d, п, st, sp и являющиеся коэффици-
ентами аберраций, и члены уа,т$,М], а сумма показателей степеней
при у, mt, М} должна быть равна нечетному числу, т.е.
а+ Р + у= 2k + 1.
Ay' = X AjmfyTiy* = У Д.у“т?м/ +
а+В+у=3 а+В+т=3
(3.1)
+ У A{yam$M] =AyI'II + Ai<n.,
а+р+у=5
где Ayj'n = У Ajyam^M] — аберрации третьего порядка;
а+^+у=3
а+р+у=2Л+2
Ау'п. = У А^т^М]— «аберрации высшего порядка.
а+р+у=»5
Кроме этих аберраций при расчете оптической системы обычно
учитывают еще две хроматические аберрации и фокусное расстояние
системы.
Из формулы (3.1) следует, что аберрации одного порядка не мо-
гут быть полностью компенсированы аберрациями какого-либо дру-
гого порядка. Поэтому в идеальной (безаберрационной) системе
аберрации любого порядка должны быть равны нулю, т.е. должны
быть выполнены условия
У А]уат1М1 = 0 при а + р + у=3;
А;уат%М] = 0 при а + Р + у=5;
а так как практически получить это невозможно, то оптическая сис-
тема всегда имеет остаточные аберрации.
При малых значениях относительного отверстия и углового поля
главными являются аберрации третьего порядка, при средних значе-
ниях D/f и 2со — аберрации третьего и пятого порядка, в светосиль-
ных и широкоугольных системах — аберрации более высокого поряд-
ка. Иными словами, чем выше оптические характеристики системы,
тем большее число членов будут содержать ряды (3.1), тем сложнее
должна быть оптическая система.
Из теории аберраций [12] также известно, что если оптическая си-
стема должна быть свободна от пяти монохроматических аберраций
и двух хроматических аберраций, то при заданном фокусном расстоя-
нии надо удовлетворить восьми (5+2+1=8) поставленным условиям,
т.е. рассчитываемая оптическая система должна иметь восемь незави-
симых друг от друга параметров. Так как толщины линз мало влия-
ют на аберрации, а постоянные стекла и имеют дискретные
значения и небольшой интервал изменений, то действующими пара-
метрами будут радиусы кривизны поверхностей линз и воздушные
промежутки. Поэтому проектируемая оптическая система должна со-
стоять из трех линз, разделенных воздушными промежутками (типа
триплета).
Если стоит задача рассчитать оптическую систему, в которой дол-
жны быть исправлены пять аберраций третьего порядка, девять абер-
раций пятого порядка и две хроматические аберрации, то такая оп-
тическая система формально должна иметь 17 (5+9+2+1=17) свобод-
ных параметров, т.е. содержать пять-шесть линз. Число линз можно
уменьшить, если рационально выбрать марки стекол, форму линз,
причем отдельные параметры можно использовать для одновременно-
го исправления не одной, а двух аберраций и более.
Следует помнить, что аберрации третьего порядка для всех лучей
не могут быть компенсированы аберрациями высших порядков, по-
этому хорошие оптические системы должны иметь малые аберрации
третьего порядка или малые значения коэффициентов аберраций
Sp ..., Sv, SIxp, SIIxp.
Теория аберрации показывает, что аберрации высших порядков
будут малы, если каждое из слагаемых, входящих в состав этих сумм,
будет также мало.
Аберрационный расчет оптических систем с использованием тео-
рии аберраций третьего порядка основан на том, что все поперечные
Глава 3. Аберрационный расчет оптических систем. Методы аберрационного расчета
аберрации монохроматических лучей, а также обе хроматические
аберрации параксиальных лучей центрированной оптической систе-
мы из бесконечно тонких компонентов могут быть представлены в
виде рядов:
i = /> i = Р tssp / = р
дУш = У mipi + X niwi + У Pi^i + У
i-1 i=l i-l i-1
i=p i=p i=p i=p
д*ш = У + У + У р'п, + У q'\
1=1 1=1 i=l 1=1
(3.2)
Asx2x2 = У rici< by{iX2/y'Xo = ^rpi. (3.3)
i=l i=l
Здесь величины mi, m', nt, n't, rt, г- зависят только от внешних па-
раметров оптической системы (Фком, <^возд, D/f, 2со, 2у), значения ко-
торых определяются при габаритном расчете. Параметры Pt, Wit nf,
и q'i, Ct связаны с конструктивными параметрами (rv, dv, пХд, vXo ) и
зависят только от положения предмета относительно i-ro компонен-
та. Чтобы эти параметры не зависели от положения предмета, дела-
ют переход от неосновных параметров к основным Р", W“, которые
являются функцией только конструктивных параметров, или внут-
ренних параметров. Зависимость Pt, Wl от Р", Wt°° линейная и выра-
жается формулами:
Pt = (а' - аг)3Р“ + 4а;(а'- +
+ а<(а;-а,.)[2а,(2+л;)-а;]; • (3 4)
= (а; - а()2W- + а4 (а' - aj(2 + nJ,J
поэтому вид уравнений (3.2) и (3.3) остается без изменений.
Определив внешние параметры оптической системы, значения
слагающих аберраций и подставив их в формулы (3. 2) и (3. 3), мож-
но найти параметры Pit Wt, Ct, л;. Для этого по известным Фр е/возд, at и
ар рассчитывают ход первого и второго вспомогательных лучей:
для первого вспомогательного луча
Л(+; = - djCti; п’а{ - п(а( = ; (3.5)
для второго вспомогательного луча
У1+1 = У1 ~ = У2ф1- (3-6)
Вычислив координаты для первого и второго вспомогательных лу-
чей, составляют уравнения для пяти монохроматических и двух хро-
матических сумм для системы из р тонких компонентов с учетом пе-
рехода от неосновных параметров к основным по формулам (3.4):
s~ = У hi^i{hi^Pr + 4а{Л(<р(ТГ“ + аг[(4 + 2л;)аг - а']};
i=l
i=P
Sn = У ^{уЛ^Р? + hi(?l(l+4aiyi)wr +
+ аг[(1 + 2{/гаг)(2 + лг)- г/гага;]};
«ш = Е ^{yfh^fPr + 2УДф( (2+ 2а^)Ж“ +
+ 1+ 2aiyi(2 + л4)+а^42[а4(4 + 2л J-а;]};
Siv = Еф*л*;
i=l
Sy = Е Ы^уМ^р? + (3+ ^yjyfh^wr +
i=l
+ yt(3 + nt)+ 3atyf (2 + л,) + аг1/(3[(4+ 2лг)а( - а']};
Si~p = Ул'фД; 517хр = Ем;фД;
i=l i=l
__
Ci = “Е ФнЛн = ~(2/Фг)Е фч /vn• так как ф = ф/ф1 ’
ц=Т Ц = 1
(3.7)
где i — номер компонента; р — число компонентов; ц— номер линзы
в компоненте; I — число линз в компоненте.
Приравнивая коэффициенты аберраций Sf.-.Sy . 8Гхр>$пхР в фор-
мулах (3.7) нулю или каким-нибудь числам для компенсации аберра-
ций высшего порядка, получают систему уравнений, из которой на-
ходят значения основных параметров Р°°, Wt°° ,nitCt. По основным па-
раметрам и выбранным типам компонентов вычисляют внутренние
параметры, т.е. определяют конструкцию системы (г, d, и).
Иногда при расчетах оптических систем возникает необходимость
в вычислении основных параметров тонкого компонента для обратно-
го хода лучей. Установлена связь [18] между основными параметра-
ми P°°,W~ в прямом ходе и в обратном ходе лучей. Эта зави-
симость имеет вид:
Р~= Р~ -4Wi°° +4+ 2nt;
W"=-W°° + 2 + nt.
Из приведенных формул следует, что тонкий компонент не изме-
няет своих аберраций при оборачивании (WJ" = ), если вы-
полняется условие W" = 1 + tiJ2, при этом Р“ может быть любым. Это
свойство характерно для симметричных линз и компонентов.
Представление оптической системы бесконечно тонкими компо-
нентами позволяет вдвое сократить число параметров, от которых за-
висят аберрации, и облегчить исследования, связанные с выбором кон-
струкции системы. Это очень удобно на начальной стадии расчета, ког-
да известна лишь общая схема системы.
Рассмотрим коррекционные возможности оптической системы,
состоящей из тонкого компонента, который в свою очередь может со-
держать I бесконечно тонких линз.
Запишем коэффициенты аберраций третьего порядка для отдель-
ного i-ro компонента и проанализируем их:
Sj; = AjPp
51Ш = (^7Л()Р4-21(У4/Й4)^ + 12Ф(; • (3 8)
«Sjvi =
svi = (yf/AfJPi - 31(У2/й2)^ + I2{yl/hl){3+
где I = n1yat = nta1(a.P-а.^^.
Анализ формул (3.8) показывает следующее.
1. Сферическая аберрация и кривизна поверхности изображения
не зависят от положения входного зрачка, так как в выражения сумм
S11 и SIV i не входит величина yt = ар.
2. Кривизна поверхности изображения, определяемая суммой
SIVj, не зависит от формы линз, так как данную оптическую силу Ф;
может иметь линза любой формы.
Параметр тонкого компонента
"г = Х<Рн/ган =Ф//п; + Ф2/п2+...+ ф,/п,
ц=?
изменяется в небольших пределах для обычных комбинаций марок
стекол и не может оказать существенного влияния на SIV. Если пока-
затель преломления п = 1,5...1,7, то
Л( = (ф;+ф2+..-+Фц)/га = 1/п = 0,6 ...0,7.
3. Все остальные монохроматические аберрации, за исключени-
ем кривизны поля, зависят от формы линз.
4. Кома, астигматизм, дисторсия, которые соответственно опре-
деляются суммами Sn, Snl, Sv, зависят от положения входного зрач-
ка, так как yt = . Однако изменением положения входного зрач-
ка нельзя повлиять на исправление (£+1)-й аберрации, если первые t
аберраций исправлены. Например, если:
а) исправлена сферическая аберрация (t-я), т.е. Stl =0 (Рг = 0), то
кома — (t+1 )-я аберрация — не может быть исправлена за счет поло-
жения входного зрачка, так как Sllt = - IWt и, если Wt 0, то SUi О
при любом значении yt;
б) в апланатической тонком компоненте Sj (= 0, Sn 0 (Рг = 0 и
Wt = 0), поэтому исправить астигматизм нельзя, поскольку
Sini = 12Ф г * 0, так как I Ф 0 и Фг 0;
в) исправлены первые четыре аберрации (ST = Sn = Sm = SJV = 0), то
изменением положения входного зрачка нельзя влиять на дисторсию.
5. Если в бесконечно тонком компоненте ар= 0, то он не имеет ди-
сторсии.
6. Астигматизм в тонком компоненте исправлен только тогда, ког-
да ар Ф 0, и при этом либо Pf 0, либо Wt * 0, либо одновременно Pt О
и WL Ф 0. Например, если
а) О, Wt = 0, то SIIn = yfpjh^ + 12Ф1, и, приняв Sult = О,
можно найти положение входного зрачка, при котором астигматизма
нет: yf - - I2<S>ihi/Pl»
б) у, * 0, Рг = О, 0, то при Sm t = 0 yt = /ФД/(2И^);
в) yt Ф О, Р; Ф 0, Wt Ф 0, то при Sin , = 0 получают квадратное урав-
нение у2Р{1\ - 2IyiWi/hl + /2Фг = 0 , из решения которого находят уР
Анализ формул (3.8) позволяет сделать следующие выводы.
Все монохроматические аберрации третьего порядка бесконечно
тонкого компонента зависят от трех параметров Pt, Wt, лр причем па-
раметр Ttj практически постоянен. Поэтому формально в бесконечно
тонкой системе можно исправить только две аберрации, но при бла-
гоприятных условиях аберрационным параметром может быть пара-
метр yt = ар — положение входного зрачка.
Если в оптической системе требуется исправить все пять монохро-
матических аберраций, то система должна состоять из нескольких бес-
конечно тонких компонентов, разделенных значительными воз-
душными промежутками, причем каждый бесконечно тонкий компо-
нент может быть простым (линза, зеркало) или сложным, что зависит
от f, D/f, 2<о и требуемого качества изображения.
Используют следующий порядок аберрационного расчета [19].
В соответствии с требуемыми значениями аберраций и оптически-
ми характеристиками устанавливают число компонентов или линз
системы и выбирают марки стекол.
По формулам аберраций третьего порядка находят область изме-
нений параметров системы (углов и высот первого вспомогательного
луча с оптической осью и оптических постоянных стекла), внутри ко-
торой эти аберрации малы.
В пределах указанной области находят варианты, обеспечиваю-
щие малые поверхностные коэффициенты (Pv, Wv), и путем дальней-
ших изменений параметров доводят систему до окончательного вида.
Определяют точные значения аберраций и их изменения при ва-
риации параметров.
Обычно расчеты исходных вариантов оптических систем в облас-
ти аберраций третьего порядка проводят либо по специализированным
программам на ЭВМ, либо по программам, составленным по алгорит-
мам на ППЭВМ. Формулы, по которым можно составить алгоритмы
синтеза оптических систем с невысокими оптическими характеристи-
ками и отдельных компонентов сложных систем со средними оптичес-
кими характеристиками, приведены в гл. 4, 6.
Чтобы обеспечить возможность сравнения отдельных вариантов
и типов оптических систем по величинам Sp ..., Sv, SIxp, <SIlxp, необ-
ходимо вычислять их при одних и тех же начальных и конечных ус-
ловиях. Выбор значений начальных и конечных данных для первого
и второго вспомогательных лучей в зависимости от положения пред-
мета носит название нормировки. Так, для систем, у которых f > 0:
если s2 = -«о, то а, = 0, а' = 1, ht = f = 1, Р2 = 1, y1 = sp, I = -1 при
п} = 1; если s7 * то а, = Ро, а' = 1, ht = s1a1, Р, = 1, yt = sp,
1= nfi^Sp - s7). Для систем, у которых f < 0: если s, = -<*>, то а1 = 0,
а' = 1, = f = -1, Р7 = 1, уj = sp, I - +1 при n} = 1.
Выбор аберраций, подлежащих исправлению.
Допустимые значения остаточных аберраций
Выбор аберраций, которые необходимо исправить, — это одна из
наиболее ответственных задач при расчете и проектировании оптичес-
ких систем. Полного исправления всех аберраций достичь невозмож-
но даже в сколь угодно сложной оптической системе. Частичное ис-
правление всех аберраций приводит к неоправданному усложнению
конструкции оптических систем, ее нетехнологичности, большой чув-
ствительности прибора к внешним воздействиям и удорожанию опти-
ческой системы. Именно поэтому для большинства оптических при-
боров стремятся применять сравнительно простые зеркально-линзо-
вые и линзовые системы и для каждой категории оптических систем
Устанавливают компромисс между качеством изображения и сложно-
стью системы.
Число аберраций, подлежащих исправлению, связано с назначе-
нием прибора, его оптическими характеристиками 2со, D/f, 2у, A, f,
Ро и требуемым качеством изображения [18].
Так, в объективах с небольшим угловым полем 2(0 = 1...4° (напри-
мер, в объективах астрономических труб с большим увеличением) ис-
правляют хроматизм положения и сферическую аберрацию. Для
объективов зрительных труб среднего увеличения с угловым полем
2(0 < 10° кроме указанных выше аберраций следует исправлять и ме-
ридиональную кому или компенсировать ее остальной частью систе-
мы, например оборачивающей системой или окуляром. Для геодези-
ческих инструментов и биноклей допускают остаточную угловую сфе-
рическую аберрацию 1...2", а хроматизм — 2...3'. Суммарная монохро-
матическая аберрация внеосевых пучков может быть 5...10', из них
2...3' приходится на кому. В более сложных телескопических систе-
мах (дальномеры, перископы и т.п.) допускают сферическую аберра-
цию до 10. ..12', а во всем видимом диапазоне — даже до 20'.
Допустимые значения таких аберраций, как кривизна поля изо-
бражения, астигматизм и дисторсия, зависят от угловых полей окуля-
ров: астигматизм и кривизна изображения для обычных окуляров со-
ставляет 3...4 дптр, для широкоугольных окуляров 5...6 дптр; дистор-
сия для обычных окуляров примерно равна 3,5...7%, для широко-
угольных — не превышает 10%.
Хроматическая аберрация увеличения в зрительных трубах
допускается до 0,5... 1 %.
Допустимые значения аберраций зрительных труб приведены в
таблице 3.1.
Для панкратических зрительных труб допускается ухудшение
качества изображения на 20...30%.
При увеличениях, больших 10х, в зрительной трубе начинает ска-
зываться влияние вторичного спектра и сферохроматической аберра-
ции, поэтому необходимо применять объективы-апохроматы.
В объективах микроскопов малой апертуры (А = 0,1. ..0,2), малых
(р0 =-3...-10) и средних (Ро =-10...-40) увеличений обычно ис-
правляют хроматизм положения, сферическую аберрацию и меридио-
нальную кому.
В микроскопах, как правило, аберрация после окуляра больше,
чем в телескопических системах. Для точки на оси угловая аберрация
может достигать 10... 15'. Кривизна изображения и астигматизм
объективов средних увеличений соответственно допускаются: в ахро-
матах 1,2...3 мм и 0,5...3 мм; в апохроматах 2 и 1,5 мм. При исполь-
зовании компенсационных окуляров дисторсия допускается до 1,5%,
Таблица 3.1
Наименование аберраций Качество изображения
Удовлетвори- тельное Хорошее Отличное
Сферическая (точка на оси) А. В угловой мере: на краю зрачка на зоне зрачка Б. В диоптрийной мере: на краю зрачка на зоне 0,7 зрачка < 2' < 1' > 0.25 > 0,1 < 1' < 30" <0,25 <0,1 < 20" < 10" <0,1 <0,05
Хроматизм положения в угловой мере < 8' < 6' < 3'
Точка вне оси
Кривизна поля: в меридион. сечении, дптр в сагитт, сечении, дптр Л V 1 1 М О! V V 1 1 W СО >-2 > -0,1
Астигматизм, дптр 8 2 1,5
Дисторсия, %: для поля < 50° для поля > 50° 6 9 3 5 2 4
Хроматизм увеличения на краю поля в угловой мере < 8' < 5' < 3'
а в окулярах Кельнера — до 2% [21].
Однако в объективах микроскопов допустимые значения остаточных
аберраций определяются по волновым аберрациям. В табл. 3.2 приведе-
ны допустимые значения волновых аберраций для микрообъективов.
Таблица 3.2
Объектив микроскопа Аберрация
Сферическая для X Сферическая с учетом 1г и!^ Хроматизм увеличения, % Суммарные для внеосевого пучка
Ахромат Апохромат Планобъектив 0,251 0,51 >2 >0,51
(0,1...0,15)1 <0,251
<2 0,51
В фотографических и проекционных объективах с D/f > 1:2,8,
2со > 50...60° обычно исправляют сферическую аберрацию для края и
зоны отверстия, кривизну поля, дисторсию, хроматизм положения и
увеличения. Как правило, для фотографических объективов указывав
ются [2] предельно допустимые размеры кружков рассеяния 2Ду', рав-
ные 0,03...0,05 мм для снимков, полученных без увеличения, и
0,01...0,03 мм для снимков с последующим увеличением. Анализ оте-
чественных фотообъективов позволяет установить средний допус-
тимый размер кружков рассеяния для точки на оси 0,01...0,02 мм в
для точки вне оси 0,03...0,05 мм.
В приведенных допустимых размерах кружков рассеяния скры-
ты значения допустимых аберраций. Конкретизация в этом случай
сложна, так как в зависимости от характеристик фотообъектива и его
назначения допустимые величины аберраций будут различными. В
нормальных фотообъективах астигматическая разность примерно -
0,15...-0,3 мм, средняя кривизна до 0,3 мм и дисторсия 0,5...3% на
краю поля.
В аэрофотосъемочных объективах допускается дисторсия 0, 1 %
а в особоширокоугольных — 0,04% .
В объективах проекционных систем допустимые остаточньц
аберрации имеют примерно такие же значения, что и для фотообъек-
тивов. У проекционных объективов-апланатов хуже исправлена кри-
визна изображения, у кинопроекционных объективов-анастигматов
допускается дисторсия 1...2%.
В объективах спектральных приборов в основном исправляются
сферическая аберрация и меридиональная кома. В ряде случаев ис-
правление астигматизма обязательно только тогда, когда прибор дол-
жен давать резкое изображение каждой точки щели, что не всегда не-
обходимо. Исправление дисторсии необязательно, поскольку изме-
рение положения спектральных линий производится обычно сравне-
нием двух спектров, образованных той же оптической системой. В
ряде случаев не исправляют хроматические аберрации и кривизну
поля, так как поверхность изображения щели может быть и не плос-
кой.
Хорошее распределение светового потока обеспечивается линзовы
ми конденсорными системами тогда, когда кружок рассеяния не пре
вышает более З...Ю% размера изображения источника. В неот-
ветственных конденсорах этот параметр допускается до 30% [3].
В объективах оптико-электронных приборов (ОЭП) обычно ис-
правляют сферическую аберрацию, кому, хроматизм положения, ас-
тигматизм, кривизну поля, а иногда и дисторсию. Однако выбор кон-
190
Глава 3. Аберрационный расчет оптических систем. Методы аберрационного расчета
кретно исправляемых аберраций будет определяться назначением
прибора, приемником излучения, оптическими характеристиками
ОЭП и рядом специфических условий, связанных с работой прибора.
Допустимые значения остаточных аберраций объективов различ-
ных следящих фотоэлектрических устройств, определяемые допусти-
мыми размерами кружков рассеяния, удобнее оценивать в угловой
мере, в радианах. Если объектив такого устройства имеет допустимый
размер пятна рассеяния 2Ду'доп и фокусное расстояние f, то угловой
размер ДсТ пятна рассеяния в миллирадианах может быть вычислен
по формуле
Аа'=2Лу'лоа 1000/f'.
Особое внимание при выборе аберраций, подлежащих исправлению,
необходимо обращать на условия работы прибора. Так, в ряде схем
оптико-электронных приборов большое поле необходимо лишь для
обнаружения объекта, измерение же параметров объекта проводится
в центре поля, поэтому нет необходимости тщательно исправлять по-
левые аберрации. Следует также учитывать свойства коэффициентов
аберраций третьего порядка, описанные выше.
3.3. Аберрационный расчет оптических систем
Телескопические системы
Выполним аберрационный расчет телескопической системы Кеп-
лера и телескопических систем с линзовыми и призменными обора-
чивающими системами [23].
Телескопическая система Кеплера. Оптическая схема системы
представлена на рис. 3.2, в которую входит луч АВ с координатами
т, со.
Рис. 3.2. Схема для аберрационного расчета телескопической системы Кеплера
Если объектив и окуляр системы безаберрационные, то луч пой-
дет по направлению ABCDEGA'T и пересечет фокальную плоскость в
точке D с координатой у'^. Выходными координатами этого луча бу-
дут т', со', связанные с координатами т и со следующими соотно-
шениями:
т' = т|30 = т/Гт; tgco' = rTtgco;
Уов = -/o'etg® = f0'Ktgco'. (3’9)
Если объектив и окуляр системы имеют аберрации, то луч пой-
дет по пути ABMRNOA”T и в фокальной плоскости (точка R) будет
иметь координату у'об . Тогда поперечная аберрация луча в фокальной
плоскости Ау’ = у'^ - у'^.
Обозначим угловую аберрацию луча по выходе из системы Асо'
(ЛА'ТА'), а поперечную аберрацию в выходном зрачке — Ат'. Най-
дем значение угловой аберрации Асо'. Для этого выполним расчет хода
луча A'G через окуляр в обратном ходе лучей. Вследствие аберраций
луч A'G пойдет по пути SP. Обозначим координату безаберрационно-
го луча в фокальной плоскости^ у'ок , тогда поперечная аберрация луча
определится как Ду'к = у'ок - у'ок .
Если аберрации объектива компенсируют аберрации окуляра, то
^У'ов = Ьу'ок и Асо' = О, Ат' = 0, а = у'к .
При наличии аберраций в окуляре
Йк =Уок + А^к = ^gco' + A^'K . (3.10)
В том случае, если точка Р совпадает с точкой R, а направление луча
SP — с направлением RN,
△Йк = У'об~ У'ок = ^У'об ~ &у'ок .
Дифференцируя формулу (3.10) по переменным т', со' и переходя
от dco' и dm’ к их конечным приращениям 5m' = Am' и 5со' = Асо', после
некоторых преобразований будем иметь
= (А^к )/
С / cos^co' + Э (ДЙ'К ) / Эсо'
Для нахождения частных производных Э(Ду'к )/эт' и
Э(Ду^к )/Эсо', входящих в формулу (3.11), надо знать функции
Аг/ок = ^(/га ) ПРИ = const и Al/ок = F(®z) при т' = const.
Если Ду'к определяется только аберрациями третьего порядка,
то в зависимости от т' и со' при принятых условиях нормировки
△j/ок = ~ - “/n'0)'2(3SnI + $1у)-
" 'ок " /ок “___ <_____________ ,
Тогда частные производные Э(Ду'к уЪт' и Э(Ду'к )/Эс£>" соответ-
ственно будут равны:
= "“I?®'511 - 9“,2(3Sni + S1V);
дт 2 /ок 2 /ок 2
Э(д^к } = -f —-Sn-m'©'(3SnI + siv)-|co'2ro'KSv.
dco 2 f0K 2
У корригированных систем угловая аберрация Део' мала, и при
практических расчетах достаточно знать ее приближенное значение,
поэтому слагаемыми
3(Ду^к )/3®' и ФС^к )/Э/п']Дгп'
в формуле (3.11) можно пренебречь, и тогда
Лео'= cos2®'. (3.12)
'ОК
Из (3. 12) следует, что угловая аберрация отсутствует, если Ду^ =
= ДГок •
В случае, когда со = 0 (точка на оси), сферическая аберрация в уг-
ловой мере равна (рис. 3.3, aj
До' = Дю' = (Ду^-Дуо'к )/f'K. (3-13)
Если учесть, что Ду^ = Дз^о^; Ду'к = - Д4ко'о6, то
До' =
(Дз^д + Дз'к )о^ _ (Дз^ + \s'0K )т'
f' f'2
'OK 'OK
(3.14)
Из (3.14) следует, что До7 = О, если Дз^ = - ДзоК . Угловую сфери-
ческую аберрацию можно уменьшить, если раздвинуть фокальные
плоскости объектива и окуляра на величину Д (рис. 3.3, б), которая
может быть как положительной, так и отрицательной.
Из теории аберраций известно также, что кома телескопической
системы, обусловливающая асимметрию верхнего и нижнего лучей
относительно главного в выходном пучке лучей, определяется урав-
нением (рис. 3.4):
к = (д®;т - д®'_т)/з- до>;л,
(3.15)
где Дсо'+т — угловая аберрация для луча наклонного пучка с коорди-
натой на входном зрачке-1- т; Дсо'_т — угловая аберрация для луча на-
Рис. 3.4. Схема для определения меридиональной комы в телескопической
системе Кеплера
Глава 3. Аберрационный расчет оптических систем. Методы аберрационного расчета
клонного пучка с координатой на входном зрачке -т; До)'гл — угло-
вая аберрация главного луча в этом пучке. Но так как кому, вноси-
мую объективом, можно вычислить по формуле
^об = (/+т+ У'-т)Д- /гл = (Ау;т + Aj<m)/2- АУ™,
а кому, вносимую окуляром и рассчитанную в обратном ходе лучей,
можно определить как
*ок = (Ay;m + Ау2т )Д - А/гл,
то формула (3.15) после преобразований примет вид:
# = (#<*-Йок ) cos V/£K. (3.16)
Из формулы (3.16) следует, что кома телескопической системы
может быть исправлена, если она будет равна коме окуляра, вычис-
ленной в обратном ходе лучей, т.е. = + Кок . Аналогичным образом
можно показать, что дисторсия всей системы будет равна нулю, если
дисторсии в линейной мере объектива и окуляра будут равны между
собой: Ду',* = Ду'ок .
Для вычисления астигматизма и кривизны поля изображения те-
лескопической системы обратимся к рис. 3.5, на котором показан ход
главного и двух лучей 1 и 2, бесконечно близких к нему. Эти два луча
после объектива создают меридиональное изображение (точка А'т о6)
бесконечно удаленной точки предмета. Расстояние ее от фокальной
плоскости — отрезок z'm об. На выходе всей системы эти лучи образу-
ют меридиональное изображение (точка А"т) на главном луче на рас-
стоянии t'm от центра выходного зрачка Р'.
Если через окуляр в обратном ходе лучей направить два луча,
близких и параллельных главному лучу (на рис. 3.5 они проведены
штриховой линией), то при прохождении через окуляр эти лучи об-
Рис. 3.5. Схема для определения астигматизма в телескопической системе
разуют меридиональное изображение (точка А'т ок), которому соот-
ветствует отрезок z'm ок . Зависимость между отрезками г'тоб, z'm ок и
z' может быть записана в виде:
% fox /(^m об "* ^ток ) •
Пренебрегая расстоянием z'F, для отрезка t'm найдем
4 = - /ок2/[(^об + Ягок )СО8С0;л].
Аналогичным образом определим отрезок t'a:
7, = ~ /Ok2/[(zs'o6 + г’.ок )со8со;л].
Так как для характеристики астигматизма величины t'm и t'a
принято измерять в диоптриях (дптр), то
Ls = l ООО/?, =-1000(г'а „с + Р, ок ) cos <о'ТЛ/fg;
Цп = 1000/?т = -1000(z'mo6 + z'mOK )cos<o'r Jf^. (3‘17)
Тогда
AL = La - 4. = -(/000cos®'rjI/£K2)х
(3.18)
Из формулы (3.18) следует, что телескопическая система не бу-
дет иметь астигматизма, если астигматические разности для объекти-
ва и окуляра будут равны между собой: (z'ao6 - z^) = -&<,* - z'moK )•
Допустимыми считаются аберрации, если они в угловой мере в те-
лескопической системе не превышают 1...3'.
Поскольку телескопические системы, как правило, имеют неболь-
шое угловое поле, то глаз может изменить свою аккомодацию, поэто-
му величины La и Lm, а соответственно и отрезки Рв и t'm должны быть
такими, чтобы изображения точек А"в и А"т находились в пределах
объема аккомодации глаза с учетом его глубины резкого видения.
Хроматизм положения в параксиальной области можно вычис-
лить в диоптрийной мере по формулам, аналогичным формулам (3.17)
и (3.18), полагая в них cos а'= 1:
Ч - = -(юоо/tf) +(Д8;А, )ок
= -(1000/tf) + )ок
(3.19)
Глава 3. Аберрационный расчет оптических систем. Методы аберрационного расчета
где )ок — хроматическая аберрация окуляра для лучей с дли-
нами волн л2; — хроматическая аберрация объектива.
Обычно при расчете зрительных труб используются готовые оку-
ляры из имеющихся на производстве наборов. В наборах есть окуля-
ры с различными вариантами аберрационной коррекции.
Выбрав из набора окуляр, рассчитывают для него объектив, стара-
ясь по возможности компенсировать остаточные аберрации окуляра, т.е.
A ZOO А » ОО 'Г^оо ТТ ОО ./ОО » ОО
^У<Л ~ Ау 0К’ ~~ К ок; ^т об — ток’
Д^об = а/;ок;
Ав XjXjok’
(3.20)
А®Х.0 об AS Хрок
По известным значениям аберраций объектива определяют коэффи-
циенты аберраций, а по ним затем вычисляют_конструктивные пара-
метры объектива. Например, пусть As^”^ = - As'x~ ок , но так как
Авшоб = -0’5(т2//о'б)«Г’
то $1об = — 3/^As{Uo6/m2 = 2f^ As'0K /тпг; XT *» ТГ ОО Лоб - Л ок’
но ^nio6 = -A5(m2/fo'6)tgfflo6S„o6
тогда «Коб = - 2f;6K HIOK/(3/n2tgcoo6);
но △вХД2об = /ofiSlxp ’
тогда «Гхр=-^^ок/^
и т.д.
Так как все условия (3.20) точно и одновременно выполнить не
удается, то всегда оценивают значения остаточных аберраций в угло-
вой и диоптрийной мерах для всей телескопической системы.
Параметрический синтез объективов различных конструкций для
телескопических систем по известным коэффициентам аберраций из-
ложен в гл. 4.
Если готовый окуляр из набора использовать невозможно, то рас-
чет оптической системы начинают с окуляра. Чтобы правильно рас-
считать окуляр, оценивают влияние каждого компонента на коэффи-
циенты Sp ..., Sv, Slxp, Sllxp и аберрации третьего и первого поряд-
ков.
Рассмотрим случай (рис. 3.6), когда входной зрачок совпадает с
объективом (ар = 0) [18].
Рис. 3.6. Оптическая схема трубы Кеплера (случай ар = 0)
В соответствии с нормировкой высота первого вспомогательного
луча на объективе Л2 = 1, тогда по свойствам телескопической систе-
мы h2 = 1 /Гт. Так как ар = 0, то высота второго вспомогательного луча
на первом компоненте yt = 0, а угол второго вспомогательного луча с
оптической осью 02= 1/Гоб = 1- В соответствии с рис. 3.6 угол
= 1, высота второго вспомогательного луча на втором компонен-
те У г = У1 ~ ^Рг = 0- </ = -</и расстояние между компонентами
d = f^KK = f^l-l/TT).
Запишем выражения коэффициентов Sp Su, Sln, Sv аберраций
третьего порядка для системы из двух тонких компонентов:
<=2
Sj = У, Л(Р( = Pt + h2P2 = Pj + Р2/Гт.
ы (3.21)
Из (3.21) следует, что сферическая аберрация определяется только
первым компонентом, т.е. объективом;
2 2
«П = Z У& - = У1р> + Угр2 + W! + W2 =
i I (3.22)
= -dP2 + +Wt + W2 = -(1 - 1/Гт)Р2 + W, + W2.
Из (3.22) следует, что кома в одинаковой степени зависит и от
объектива и от окуляра;
2 2 2
«ш = Z yfPi/ht ~ 2I± y^Wi/hi + 12^ф( =
1 1 1
= y2Pz/h2 +2y2W2/h2 +Ф t +Ф 2 = (3.23)
= 2у 2W^2 / hz +1 — Гт.
Из (3.23) вытекает, что астигматизм зависит только от второ-
го компонента — окуляра, влияние объектива проявляется в присут-
ствии постоянной 1, представляющей собой относительную оптичес-
кую силу объектива;
2 2 2
«V = Z yWh? - 3I£ y?wi/h? + у!(з+п^ф t/h2 =
= y32P2/h2+3y22W2lh22+y^2(3+n2)lh2. (3'24)
Из (3.24) следует, что дисторсия зависит только от окуляра.
Так как хроматические аберрации телескопической системы оп-
ределяются уравнениями:
'S'lxp = ^Ф1С1 + Н2Ф2Сг = С; — С2/ГТ;
«пхр = hty^tCt + И2у2Ф2С2 = (1- 1/Гт)С2 J (3-25)
то можно заключить, что согласно (3.25) хроматизм положения за-
висит только от объектива, а хроматизм увеличения определяется
только окуляром.
Из сказанного выше можно сделать вывод, что при расчете телес-
копической системы по отдельным компонентам объектив необхо-
димо исправлять в отношении сферической и продольной хромати-
ческой аберраций, а окуляр — в отношении комы, астигматизма, хро-
матизма увеличения и дисторсии. Возможность распределять исправ-
ление аберраций по отдельным компонентам широко используется в
практике расчетов оптических систем.
Пример 3.2. Из габаритного расчета зрительной трубы Кеплера было получено, что
при увеличении трубы Гт = -6, угловом поле 2а>^ ~ 8° фокусные расстояния объектива и
окуляра соответственно равны f = 120 мм, 20 мм, диаметры входного и выходного
зрачков — D = 30 мм, D' = 5 мм, угловое поле окуляра 2<вок = 48°.
Выполнить аберрационный расчет телескопической системы, подобрав готовыми
объектив и окуляр, и сложением аберраций оценить систему в целом [21].
Решение. Выберем из набора окуляр Кельнера, который при Лок= 25 и 2а>ок —- 48°
имеет следующие значения остаточных аберраций в обратном ходе лучей:
Аберрации точки на оси Аберрации точки вне оси
т' s' ДЛ0 О)' 5 ОК 4— ШОК 4- 4- г' 3-г'т
0 7,43 0 -0,07 -23°30' -1,14 1,33 -2,47
1,75 7,24 -0,19 -0,07 4— Кома окуляра К = - т' = ±3,5 мм. -0,006 при
2,5 7,04 -0,39 -0,07
Сферическая аберрация окуляра Дэ'ок определяется только третьими порядками
поэтому для т'= 2, 5 мм найдем значение
_ 2 25 (-0,39)
т'2 2,52
Так как окуляр имеет /'ок= 25 мм, то пересчитаем его аберрации на требуемое фо-
кусное расстояние. Для этого определим коэффициент пересчета у = Локтре6 /Лок = 20/25 -
= 0, 8. Для заданного диаметра выходного зрачка D' = 5 мм и фокусного расстояния
foK= 20 мм найдем Дз'Х()0К : при пг'=2,5 мм Дз'“оОК=- (m'2/2f'm) S“ = -2,52-3,12/
/(2-20) =-0,488, а при т'= 1,75 мм Дз'70ОК = -0,239. Тогда аберрации окуляра с
f' — 20 мм будут иметь следующие значения (рис. 3.7):
Аберрации точки на оси
т' $ ок AS Xq ok A® XjX2ok
0 5,95 0,0 -0,056
1,75 5,95 -0,24 -0,056
2,5 5,95 -0,49 -0,056
Аберрации точки вне оси
co'ox % m ok 2 Я OK 4 T to О 54 1 ч,т 3 о X
23°30' 1,06 -0,91 -1,97
Кома окуляра К “ -0,0048 при
т' = ±2,8 мм, а при т' = ±2,5 мм
К = (2,5/2,8)2(-0,0048) = -0,004.
Следовательно, согласно (3.20) объектив телескопической системы при 120 мм
должен иметь следующие значения аберраций:
Аберрации точки на оси
Аберрации точки вне оси
m Asi Ao Д®Л,Л20в об ^8 Об %8 Об ^ТП Об
15 0,49 0,056 -4° 0,91 -1,06 1,97
10,5 0,24 0,056 Кома ообъектива К = -0,004 при т = ±15 мм
Пусть также мы рассчитали объектив и в результате аберрационного анализа на-
шли, что его остаточные аберрации имеют следующие значения (sp = 0)
Для точки на оси
т As( Д®Х,Х2об
15 0,18 0,097
10,5 0,02 -0,024
0 0 -0,13
Для точки вне оси
СО Ж об ^зоб ^Тпоб об об л-112,5
-4° -0,6 -1,2 0,6 -0,006
Определим значения остаточных аберраций телескопической системы в угловой и
диоптрийной мерах, используя соотношения (3.14), (3.16), (3.17), (3.19). Угловая сфе-
рическая аберрация равна:
при т' = 2,5 мм
да' = = Ш^-од9)2д = = _е
£,'/ 20г
при т'= 1,75 мм До" “ -0,00131 = -4,5';
при т'= 1,25 мм Да'“ 0,000938 =-3,21'.
Как следует из расчетов, угловая сферическая аберрация превышает допустимое
угловое значение. Найдем отрезок Д, определяющий перемещение окуляра с тем, чтобы
Ла' = -1'. В соответствии с рис. 2.3
Д< = [(4sx0 об + Д8;.о ок - д )"*']//ок2 = Да' - дт7,
тогда
(-Да' + Да') Д'2 (0,000282-0,00187}20г_
д -z л-------/— -----------——------------ -Ut4b4 мм
т
Иными словами, чтобы угловая сферическая аберрация телескопической системы
Acf= -1', точки и Foit должны быть смещены на величину Д = -0,254 мм.
Меридиональная кома для <о'ок = 23°30' и т' = ±2,5 мм
К = (ЛГов - Кйк)соа^со7д'к = (- 0,006 + 0,004)х cos2 23’30’/20 = -0,0001 = -20".
Астигматическая разность для телескопической системы
L; = (-1000/202)(- 0,6 - 0,91)сов23°30' = 3,46 дптр;
Lm = (-1000/202)(-1,2- 1,0б)сов23‘30'» 0,32 дптр;
L, - Lm = 3,46 — 0,32 = 3,14 дптр.
Хроматизм положения в параксиальной области
L’f - Ц, = (-1000/202)(- 0,13 - 0,056) = 0,46 дптр.
Как было показано выше, для обеспечения Л o'™ -1' необходимо переместить оку.
ляр на -0,25 мм, что соответствует перемещению его на 0,6 дптр (1 дптр= /о'2/1000 —
== 0,4 мм). На такое же значение изменятся величины Lf — 3,46 - 0,6 = 2,86 дптр,
Lm — 0,32 - 0,6 = 0,28 дптр, L-Ln = 2,58 дптр.
Призменные монокуляры (зрительная труба Кеплера с призмой
или призменной системой). Известно [12], [23], что введение призм
или призменных систем в схему зрительной трубы Кеплера позволя-
ет получить прямое изображение, заданный угол отклонения (угол
между оптическими осями объектива и окуляра), обеспечивающий
удобное положение головы наблюдателя и компенсацию вращения
изображения (рис. 3.8, а—в).
Так как призма по своему оптическому действию эквивалентна
плоскопараллельной пластинке, то для удобства расчета оптическую
схему монокуляра развертывают по горизонтальной оси, заменяют
призму эквивалентной плоскопараллельной пластинкой (ППП),
редуцированной к воздуху (рис. 3.8, г), и выполняют габаритный рас-
чет, аналогичный расчету телескопической системы. Отличием явля-
ется определение размеров призм (см. главу 2). Кроме того, для призм,
расположенных в сходящихся пучках, необходимо учитывать вызы-
ваемое ими удлинение хода луча Д = (п - 1) dnnn/п.
В задачу аберрационного расчета входит расчет объектива вмес-
те с призмой. Аберрации системы «объектив + ППП» должны полно-
стью или частично компенсировать аберрации окуляра. В таких сис-
темах обычно исправляют сферическую аберрацию, хроматизм поло-
жения и меридиональную кому [23].
Если окуляр выбрать из нормального набора или наборов, имею-
щихся на производстве, то его аберрации будут известны. Запишем
условия компенсации аберраций:
об + A^xjk2 ппп = ~ As ок ,
Рис. 3.8. Призменный монокуляр
об + ^SX0 ппп As Хо ок ’ ^Уу.о об + куу-о ППП &У х0 ок ’
^ + *ппп
Л ОК>
Г ОО г f __Г VO . Г f ОО
z* + z = — z « z * + z = —2 :
об тппп ток 9 зоб аппп sок 9
(^зоб ~ ^тоб) "* (^snnn — ^тппп) ~ з~^ т)ок’
При расчете монокуляров в области аберраций третьего порядка
при принятых условиях нормировки (az = О, а' = 1, й2 = 1, Р; = 1, когда
У1 = ар/Тоб> 1 = -1) уравнения компенсации аберраций будут иметь
вид:
об+ппп Лб\^1хр.об + ^Ixp.nnn)
2 ^2 <__
об+ппп ~ о г/ (^об + ®1ппп) “ ~~ && Хдок’
/об
г ^3 4___
ИЛИ АУх0 об+ппп = - («Го» + «I ппп) = ЬУ'>.О ок
k ^/об
^об+ппп ~~ о // tg®(Sno6+'siinnn) = Дк;
/об
“^об+ппп /об^ ^(^П1об ^Illniinj ^ок *
(3.26)
АУд.об+ппп 2/об ^(^Уоб + $Vnnn) Ay д.ок*
Известно [12], что для ППП в воздухе S. = Sn ппп = Sinппп =SVraJn=
= ~dnnn (п2~1)/п3 , a SjXPmra = dma(n- l)/(n2vxJ , поэтому в случае, ког-
да входной зрачок совпадает с оправой объектива ар = 0 (рис. 3.8), т.е.
когда у = ар = 0, Sz“Io6 = 1, Sy = 0, найдем:
qoo __ А$Х.0ОК ^/об о _ А$Хдок ^^об 1 dnnn
об ~ 2 I ппп- 2 ~3 7z ’
ZZI ТПг TL *об
тогда, поскольку h = 1,
poo _ AsX0OK ^/рб п —1 dnnn.
G-kfi 9 ' Q ?
£OK2&tg(0 n2~l dnnn.
3m2 + n3 ’
и так как = -ZW06 = W~, to
w°° —
ккоб —
f^tgt0_=414_
з m n fo6
*'>1хРоб ( А®хДгок ^ixp.nnn’
/-> 1 П ^ппп
Соб----------+ 2 ^,7 .
fgf п fo6 ' VX0
По значениям Co6,P^,W^ рассчитывают первый компонент, т.е.
объектив.
Если готовый окуляр из набора использовать нельзя, то расчет
начинают с расчета окуляра, находят несколько вариантов и выбира-
ют тот из них, для которого можно рассчитать объектив с наибольшей
компенсацией аберраций.
Зрительная труба Кеплера с симметричной оборачивающей сис-
темой и коллективом (рис. 3.9). Будем считать, что габаритный рас-
чет системы выполнен по заданным техническим характеристикам и
определены все фокусные расстояния компонентов, расстояния меж-
ду ними, диаметры компонентов, положение зрачков и их размеры,
углы поля.
Окуляр выбран или рассчитан заранее. Аберрационный расчет
выполним из условия компенсации аберраций выбранного окуляра
аберрациями системы, расположенной до окуляра, которую назовем
объективной частью и обозначим как ОС. Поэтому вначале надо сде-
лать аберрационный анализ окуляра в обратном ходе для определения
его реальных аберраций. Расчет будем проводить для спектрального ин-
тервала F е С'.
Рис. 3.9. Зрительная труба Кеплера с симметричной оборачивающей системой и
коллективом
Принимая во внимание сложение аберраций в зрительной трубе,
можно записать следующие условия компенсации аберраций:
Да- = -Да'“, К~=К:К, -^)ж = &7-^ок,
&SF’-C ос = “ &s' F'-C' ок’ ЛУу-С’ ос — &У F’-C’ ок •
Зная величины аберраций объективной части, определенные из
приведенных выше условий, можно вычислить соответствующие зна-
чения коэффициентов аберраций из следующих уравнений, учтя, что
Д'с<0:
2
А / 00 О,я
Soc = 1ос;
2 \Uc\
(*Г-2;~)oc4dte2®-SnIOC;
Asp-_c< ос = \f'e| • Sj xp oc; \y'p>_c> oc — у <Snxpoc.
Теперь перейдем к составлению аберрационных уравнений для
Sfoc ’ snoc ’ -Snioc ’ «Гхрос ’ Snхрос ’ значения которых известны.
Вначале надо принять нормировку первого и второго вспомога-
тельных лучей — лучей Зейделя. Для первого вспомогательного луча
имеем следующую нормировку (рис. 3.9): а; = 0, ht = Т'т - -1 , поэто-
му а5= 1.
Нормировка второго вспомогательного луча: Р2 = 1, поэтому
У1 = Ор , где ар = ар/\ |, I = -Л7 = 1.
Для расчета хода вспомогательных лучей надо определить при-
веденные значения 7J , di для объективной части системы: f't = f[/\ f'c |,
df= rfj/l |. Деление выполняется на | /о'с |, так как < 0, а нормиров-
кой первого луча уже учтен знак «минус».
Затем выполняется расчет хода первого и второго лучей по изве-
стным формулам.
Рассмотрим аберрационные свойства коллектива и симметричной
оборачивающей системы. Коллектив расположен в задней фокальной
плоскости объектива, т.е. в плоскости промежуточного изображения
или вблизи него. Следовательно, Лг = 0, аг = а3, поэтому для коллек-
тива ST = sjj== о, srxp = s^xp = о.
Для симметричной оборачивающей системы с параллельным хо-
дом лучей между компонентами и с апертурной диафрагмой в середи-
не воздушного промежутка (робс = -1) исправлены кома, дисторсия,
хроматизм увеличения, поэтому = 0, = 0, S£xp = 0 . Кроме того,
P3 = ^>W3 = -W4.
Выразим неосновные параметры объектива и компонентов обора-
чивающей системы через основные (3.4). Для объектива имеем: а; = О,
а2 = -1, поэтому Pt = -Р“, Wj = W". Для первого компонента оборачи-
вающей системы: а3 = -1, а4 = 0, поэтому P3 = P4 = P4,W3 = -W4 = -W4.
Для второго компонента оборачивающей системы получим:
а4 = 0, а5 = 1, поэтому Р4~Р4 ,W4 = W4 .
С учетом этого составим аберрационные уравнения, т.е. уравне-
ния для коэффициентов аберраций:
= hfi + h3P3 + h4P4= Pf + 2h4P4 ;
Sn ос = У Л + УэРз + У Л - W, - W3 - W4 = -У1РГ - WP;
+?Рз ~^W3 + ’
Лд j
+Ф1 +Фз+Ф< = у°РГ +^^-p; + 2yiwr - (3-27)
h4
2(У4-Уз)-чг-
--------- W4 -к^+фз+ф^;
STxpoc = Af4>iCI + 2ft<4C<; 1
$Пхрос — У1Ь1У1С1+%(У4 + Уз)^4^4=~ У1У1С1 \ ( )
Из системы трех уравнений (3.27) надо определить 4 неизвестных
Р~, W", Р/, W4“. Если отдельные компоненты являются двухлинзовы-
ми склеенными, то при решети уравнений надо вычислять величи-
ну Р“^1П = Р“ - 0,85(W“ - 0,1 б) . В соответствии с рекомендациями
предпочтительней, когда 7}^in = 0...1, что особенно важно при пре-
дельных значениях оптических характеристик для этого компонента
(см. гл. 4).
Из уравнений (3.28) надо определить С, и С4 .
При расчете систем с внефокальным коллективом надо учесть, что
h2 ф 0, поэтому аг * а3 и аг * -1, но а3 = -1. На эти особенности надо
обращать внимание при расчете вспомогательных лучей, при опреде-
лении основных параметров Р~,W4 и при составлении уравнений
(3.27).
Уравнения (3.27) можно решить, задаваясь значением одного из
основных параметров, например, приравнивая его нулю.
Затем выполняется синтез двух компонентов — объектива и ком-
понента оборачивающей системы по известным значениям основных
параметров и оптических характеристик.
Телескопические панкратические системы.
Особенности аберрационного расчета
Панкратическая зрительная труба должна иметь хорошее исправ-
ление аберраций для каждого увеличения Гттах...Гтт111. Но аберрации
изменяются с изменением положения подвижных компонентов, по-
этому их исправление для всего интервала увеличений окажется воз-
можным лишь в том случае, если величины аберраций, вносимые
каждым компонентом, будут невелики при любом положении подвиж-
ных компонентов. Для этого аберрации, вносимые каждым элемен-
том, должны незначительно изменяться при его смещении. Поэтому
удовлетворительное исправление системы во всем интервале увеличе-
ний возможно только в том случае, если каждый из компонентов рас-
считывается так, чтобы величины вносимых им аберраций были от-
носительно малы и, кроме того, остаточные аберрации панкратичес-
кой части системы были одинаковыми для максимально возможного
числа точек [10].
Эти основные положения необходимо учитывать в процессе абер-
рационного расчета и последующей коррекции аберраций.
Зрительные трубы рассчитывают с учетом сложения аберраций в
телескопической системе. Порядок составления аберрационных урав-
нений рассмотрен выше. Для панкратических труб необходим тща-
тельный анализ уравнений коэффициентов аберраций при нескольких
(5...7) положениях подвижных компонентов, чтобы выбрать опти-
мальные значения основных параметров Р“,ТУ~,С(. От их правиль-
ного выбора во многом зависят возможности последующей аберрацион-
ной коррекции остаточных аберраций и качество изображения системы.
Аберрационный расчет включает большой объем вычислений,
поэтому для его выполнения целесообразно составить программу для
ПЭВМ с учетом предлагаемых ниже рекомендаций.
Для каждого из нескольких выбранных положений компонентов
разработчик системы может задавать любой набор аберраций с учетом
аберраций окуляра и допустимых аберраций объективной части сис-
темы. Число уравнений может быть больше числа неизвестных. ПЭВМ
выполняет расчет всех аберраций третьего и первого порядков для
всех выбранных увеличений.
Надо предусмотреть, чтобы в результате расчета определялись и
выводились на экран и печать следующие результаты:
1. Максимальные высоты полевых лучей, главного луча, вычис-
ленные по формулам идеальной оптики, для каждого компонента и
углы между этими лучами с оптической осью. Эти данные позволяют
Глава 3. Аберрационный расчет оптических систем. Методы аберрационного расчета
оценить условия, в которых работает каждый компонент, и правиль-
но выбрать конструкцию компонета.
2. Коэффициенты аберраций третьего порядка для значений Рр
ИЛ, С( подвижных компонентов в выбранных положениях.
3. Основные параметры Р“, W“, С,.
4. Значения аберраций третьего порядка при всех положениях
подвижных компонентов, вычисленные по найденным Р°°, W“, С,.
В программе можно предусмотреть минимизацию основных пара-
метров одним из известных методов.
Затем по выбранным значениям основных параметров и оптичес-
ким характеристикам компонентов уточняется их конструкция, пос-
ле чего выполняется синтез каждого компонента (см. гл.4). После рас-
становки реальных компонентов выполняется аберрационный анализ
зрительной трубы для нескольких увеличений.
Система микроскопа
Выполним аберрационный расчет оптической системы микроско-
па, представленной на рис. 3.10.
Рис. 3.10. Оптическая схема объектива микроскопа с призмами,
развернутыми в плоскопараллельные пластины
Пусть из габаритного расчета системы определены фокусные рас-
стояния и увеличения компонентов, размеры и положения призм, рас-
стояния между компонентами, их световые диаметры и т. п.
Известно [12], что для систем небольшой светосилы с малым по-
лем аберрации одних компонентов можно переносить в сопряженные
плоскости изображения других компонентов по правилу сложения
аберраций. Выбрав готовый окуляр, зная его остаточные аберрации
и используя правила сложения аберраций, найдем для объектива мик-
роскопа значения параметров Роб, Wo6, Со6, исходя из условия исправ-
ления в рассматриваемой схеме сферической аберрации, хроматизма
положения и меридиональной комы.
Запишем условия исправления указанных выше аберраций:
(As( ) = (Аз( ) PooB + (As( ) + (As() + As' = О;
\ ко/мик \ а-о/пппг 006 К *-о/об \ 'о/пппП х0ок
(AS>-P-2)nnniPoo« + (ДвХД2)об +
+ Н^)пппП + (А<^ ^ = 0'
(3.29)
К«к = -^ппп! Ро + Коб + -КпппП “ К ок= °-
Тогда
Vi /о6
(А^)ппп1Р^в + (А^о)пппц + (А^о >>- ;
(Д5>.А2)ппп1Рооб + (Д5хд2)ппп11 + (Д5>.д2 )ок ;
(3.30)
-^nnnl Ро + ^nnnll ^ок
Подставив в формулы (3.30) значения аберраций As'nnnI и As'nnnII,
вносимых плоскопараллельными пластинками, после соответствую-
щих преобразований получим:
nf - 1 , Рооб п-п — 1 , 1 2Двок Рйоб
---о— а,------1---s— ап — ----1------»------,
Л1 а1 пН атРооб &1а1
zij I dj Рооб
^об ~ 2
nf V; at
_ гаП^П ок
пи Vn Л)Рооб атРооб
(3.31)
(3.32)
_2 ,
ТТЛ — —I_____2-Я ft2
"об — 3 alP0.o6
£2 «71т
пЦ ~ j __ ^Рооб
— 3 п ®П о_2 "‘ок •
атлиРо 3&1У
(3.3.3)
Сделав переход от неосновных параметров Р^, С^, Wo6 к основ-
ным параметрам P^,C^,W^, выполняют параметрический синтез
объектива микроскопа в зависимости от его конструкции.
Объектив из двух компонентов, расположенных на конечном
расстоянии друг от друга
Проведем аберрационный расчет объектива, состоящего из двух
компонентов, расположенных на конечном расстоянии d друг от дру-
га. Пусть апертурная диафрагма АД расположена на расстоянии
= d/2 от первого компонента (рис. 3.11).
Рис. 3.11..Оптическая схема объектива из двух компонентов, расположенных на
конечном расстоянии друг от друга
Аберрационный расчет выполним, приняв следующую нормиров-
ку для высот и углов первого и второго вспомогательных лучей:
сс; = 0; а2 = 1; ht = /^ = 1; р2 = 1; У1 = ар', I = — 1; {ар=ар//Об)^ d —
Из рис. 3.11 определим: af = (p;, hz = 1 - q>td. Вычислим угол
В? = Р, + у = 1 + yjtyj nyz^yj-d Рг. Зная положение апертурной ди-
афрагмы, определим положение входного зрачка ар = d/(2 - dtp,). В
соответствии с нормировкой у;= d 1(2- d ф;).
Объектив имеет три внешних параметра <р2, <pf, d. Так как коэф-
фициенты аберраций Sj , Sn , S1V зависят только от внешних пара-
метров, то зависимости между этими параметрами и заданными зна-
чениями коэффициентов аберраций при fo6 = 1 будут иметь следую-
щий вид:
Фоб = Ф/ + М2 =1;
2 _ __ _
«Гхр = £ Л(2ф,С( =ф7С, + hfaCr,
1=1
2 __ _ _
^Пхр = X htVt^tCi = У1Ч>1С1 + h2y2<$2C2-, (3.34)
1=1
2
«iv = У ФЛ( = Ф 1^1 + ФгЛ2 = 0,67(ф, + ф2).
1
В системе (3.34) из четырех уравнений пять неизвестных CltC2 ,
ф;, ф2, d.Приняв Sfxp = 0, Sft = 0, Sjy = 0 (в реальных объективах SIV* О
и имеет небольшое положительное значение, поэтому Ф2 * ~Ф2,
исправление средней кривизны изображения достигается за счет
допущения астигматизма) и считая С2 = 0, из условия = 0 можно
найти параметр С2 = 0, из условия SIV= 0 — значение ф; = -ф2 =
= 1/(1 - h2). Такие объективы называются телеобъективами.
Согласно рис. 3.10 оптическая длина объектива L = d + а'г и так
как угол а'2 = 1, то а'г= й2, причем h2=cl - d/(l - h2), а расстояние
между компонентами
d = (й2 - й2)/а2 = (1-Л2)/ф2 =(1-й2)2,
тогда L = l- 2h2 + h2 + h2 = h2 - h2 +1.
Конструктивно желательно, чтобы оптическая длина объектива
была минимальной. Найдем минимальное значение Lmin. Для этого
вычислим первую производную d.L/&h2, приравняем ее нулю;
dL/dft2= 2h2- 1 = 0 и найдем, что в этом случае й2= 0,5, тогда Lmln **
= 0,52 - 0,5 + 1 = 0,75, а это значит, что при выполнении условий
SIV= 0 оптическая длина £min не может быть меньше (3/4)Го6. Если
принять L = 0,75, h2 = 0,5, то d = (1 - h2)2 = (1 - 0,5)2 = 0,25. Оптичес-
кие силы компонентов ф; = -ф2 =1/(1 - 0,5) = 2. Высота второго вспОг
могательного луча на первом компоненте yt = d/(2 - с(ф2) -= 0,25/(2 -
-0, 25-2) = 0,17. Параметры С2 и С2 будут равны нулю.
Составим и совместно решим уравнения исправления монохрома’:.;
тических аберраций — сферической аберрации, меридиональной
комы, астигматизма и дисторсии:
S,°° = R + h,P, = Р2 + 0,5Рг;
1 L Л Л L £ *
Sn = РгУг + У2Р2 + W2 + W2 = 0,17Р2 - 0,17Рг + W2 + W2;
S?n = (0,17)2P2 + ^^-P2 + 20,17W2 -
S- = (0,17)3Pj ~^^-P2 + 3(0,17)2 W2 + + <3'35)
(/,0 (7,0
+ 0,17(3 + 0,67)2+°^ (3 + 0,67)2.
Из решения уравнений (3.35) найдем параметры Р2, Р2, W2, W2, за-
тем определим основные параметры компонентов и по ним выполним
параметрический синтез компонентов объектива.
Оптические системы для коллимации лазерного излучения
Лазерное излучение характеризуется высокой монохроматично-
стью, направленностью, большой мощностью и является когерентным
и поляризованным независимо от типа лазеров и их конкретных тех-
нических данных.
Использование лазеров как источников излучения в большинстве
случаев требует применения оптических систем для преобразования
лазерного излучения. Рассмотрим аберрационный расчет оптической
системы для уменьшения расходимости лазерного пучка.
Чтобы уменьшить расходимость лазерного пучка, целесообразно
использовать перевернутые на 180° телескопические системы Кепле-
ра (рис. 3.12, а) или Галилея (рис. 3.12, б). Если излучение лазера име-
ет большую мощность, то лучше использовать систему Галилея, так
как в этой схеме отсутствует плоскость промежуточного действи-
тельного изображения, что исключает концентрацию энергии внутри
оптической системы.
Рис. 3.12. Оптическая система для коллимации лазерного излучения:
а) по схеме Кеплера; <5) по схеме Галилея
Запишем условие исправления сферической аберрации всей систе-
мы:
(As'x0 ); —(As'X(? )2.
В области аберраций третьего порядка
(Лз;0 )l = -0,5mfP7 Д';
(As х0 )2 = — 0,5т22 Р°°г /f2,
(3.36)
(3.37)
где т1тлтг — координаты апертурного луча на компонентах 1 и 2 со-
ответственно; Р“ и Р^ — основные параметры тонких компонентов.
Подставив правые части выражения (3.37) в формулу (3.36),
после преобразований получим Р2 = “ mi • и так как
Гт = -А7/2>ТО
Р£=ГТР;. (3.38)
Если в системе требуется исправить и меридиональную кому, то
записывают условие ее исправления:
тогда (Sn)~ = -(Sn);.
Глава 4. ПАРАМЕТРИЧЕСКИЙ СИНТЕЗ ОДНО- И
ДВУХКОМПОНЕНТНЫХ ЛИНЗОВЫХ
СИСТЕМ ИЗ БЕСКОНЕЧНО ТОНКИХ
КОМПОНЕНТОВ НА ОСНОВЕ МЕТОДА
РАЗДЕЛЕНИЯ ПЕРЕМЕННЫХ
4.1. Уравнения первой и второй групп метода
разделения переменных. Внутренние и внешние
параметры. Свободные параметры
Метод разделения переменных, или алгебраический метод, осно-
ванный на теории хроматизма и аберраций третьего порядка, доста-
точно эффективен для синтеза широкого класса оптических систем,
включая объективы зрительных труб с небольшим угловым полем,
двух- и трехкомпонентные окуляры, микрообъективы, фотообъекти-
вы в широком понимании этого термина [2], астрообъективы, систе-
мы переменного увеличения, оптические системы оптико-электрон-
ных приборов и т.п.
Метод не утратил своего значения с появлением ЭВМ. Среди пос-
ледних разработок известна САПР оптических систем с возмож-
ностями синтеза систем с различными оптическими характеристика-
ми, в основу которой положена теория тонкокомпонентных систем.
Применение метода разделения переменных позволяет выбрать
оптимальный исходный вариант, изучить область существования рас-
считываемой конструкции, ее возможности и затем правильно выб-
рать направление коррекции при оптимизации в автоматическом ре-
жиме.
В основе метода лежит деление параметров на две группы: внеш-
ние и внутренние. Внешними параметрами оптической системы яв-
ляются углы а первого вспомогательного луча с оптической осью в воз-
духе и высоты h. Внешними параметрами определяются оптические
силы линз и расстояния между ними, и их вычисляют на первом эта-
пе синтеза. Внутренними параметрами являются углы а внутри
линз, в стекле. Внутренние параметры определяют форму, или про-
гиб, линз.
Метод основан на свойстве бесконечно тонкой линзы, заключаю-
щемся в независимости хроматизма от прогиба линзы, т. е. внутрен-
него угла а. Действительно, в условия устранения хроматизма поло-
жения и увеличения, условие Петцваля и различные конструктивные
условия не входят внутренние параметры. Поэтому оказывается воз-
можным на первом этапе определить внешние параметры оптической
системы, на втором — внутренние из условий исправления мо-
нохроматических аберраций.
На основе анализа технического задания выбирают конструкцию
системы и аберрации, которые следует исправить или для которых
надо получить определенные значения. Затем принимают компонен-
ты системы бесконечно тонкими и составляют аберрационные уравне-
ния, учитывая нормировку первого и второго вспомогательных лучей.
При этом выделяют две группы уравнений.
В первую группу входят уравнения, зависящие от внешних па-
раметров:
1) уравнение масштаба Ей(ф( = 1, где й( — высота первого вспомо-
гательного луча на i-м компоненте или линзе; ф( — приведенная опти-
ческая сила компонента или линзы при f = 1;
2) уравнение исправления хроматизма положения Sj хр = 0;
3) уравнение исправления хроматизма увеличения SIIxp = 0;
4) уравнение исправления вторичного спектра Sj в с =0 (для апох-
роматов);
5) уравнение исправления кривизны Петцваля SIV = 0;
6) уравнение исправления термооптической или термобарической
аберрации (для систем, работающих в условиях значительного пере-
пада температур или давления);
7) уравнение, представляющее собой конструктивное условие или
другое дополнительное уравнение, например уравнение массы.
Из решения уравнений первой группы определяют внешние па-
раметры системы и оптические силы линз, а также воздушные про-
межутки между бесконечно тонкими линзами или компонентами,
если они имеют конечные значения, и выбирают оптимальные ком-
бинации марок стекла или других оптических материалов. Для их
выбора исследуют несколько вариантов системы.
Во вторую группу входят уравнения, зависящие от внутренних
параметров системы, поскольку внешние уже определены из урав-
нений первой группы:
1) уравнение исправления сферической аберрации S; = 0;
2) уравнение исправления меридиональной комы Зп = 0;
3) уравнение исправления астигматизма <8Ш = 0;
4) уравнение исправления дисторсии Sv = 0.
При расчете новой, ранее неизвестной системы и требовании ис-
правления аберраций суммы Зейделя приходится приравнивать нулю.
Для рассчитанных ранее конструкций систем, например фото-
объектиров, известен диапазон значений сумм Зейделя, при которых
аберрации высших порядков практически минимальны.
При расчете компонентов сложных систем требуется получить
определенные значения аберраций из условий компенсации аберраций
остальной части системы, поэтому суммы Зейделя значительно отли-
чаются от нуля.
Выбор исправляемых в системе аберраций зависит от назначения
системы, ее конструкции и оптических характеристик (см. гл. 3).
Все уравнения первой и второй групп являются алгебраическими,
поэтому метод разделения переменных получил свое второе название
— алгебраический.
Для решения полученных алгебраических уравнений необходи-
мо, чтобы число свободных параметров оптической системы соответст-
вовало числу составленных уравнений. Свободными параметрами си-
стемы являются радиусы кривизны, воздушные промежутки конеч-
ной величины и оптические постоянные оптических материалов, если
они не заданы.
Если число уравнений больше числа свободных параметров, то в
качестве свободного параметра можно использовать оптические посто-
янные стекол (или других оптических материалов), иногда оказыва-
ется возможным пренебречь исправлением одной из аберраций.
Если число уравнений меньше числа свободных параметров, т.е.
имеется избыточный (лишний) параметр, то надо принимать допол-
нительное условие. Можно составить уравнение для исправления ка-
кой-либо аберрации высших порядков или использовать уравнение,
содержащее конструктивное условие (см. п. 4.3). Например, для трех-
линзовых компонентов в качестве дополнительного уравнения прини-
мают равенство одной из оптических сил определенному значению,
что позволяет уменьшить аберрации высших порядков. Иногда мож-
но упростить конструкцию. Добавляя новые условия, надо иметь в
виду их осуществимость и целесообразность. Следует избегать введе-
ния условий исправления трудноисправимых аберраций, к которым
относятся, например, кривизна Петцваля и вторичный спектр, если
в этом нет особой необходимости.
Точное математическое решение уравнений каждой группы удает-
ся получить только для систем с небольшим угловым полем, когда ис-1
правляются одна хроматическая и две монохроматические аберрации,
т.е. когда на каждом этапе решают по два уравнения, включая урав-
нение масштаба. Для этих систем удается получить исходную систе-
му, требующую незначительной коррекции или даже исключающую
ее.
При расчете сложных систем, когда необходимо решать семь-во-
семь уравнений (микрообъективы, окуляры, фотообъективы), точный
метод решения значительно усложняет задачу и, самое главное, чаще
всего приводит к конструктивно неприемлемым решениям, например,
получаются очень большие или отрицательные воздушные промежут-
ки, большие оптические силы линз и т.п. В этих случаях прибегают
к приближенному методу, изменяя в определенных пределах искомые
параметры и анализируя полученные значения сумм для выбора оп-
тимального варианта. Этот метод позволяет получить несколько кон-
струкций исходных систем и выбрать оптимальную на этапе автома-
тизированной коррекции аберраций.
При синтезе систем (кроме симметричных) с апертурной диафраг-
мой, расположенной в одном из воздушных промежутков, для упро-
щения уравнений допускается совмещение этой диафрагмы с одним
из компонентов, так как при хорошем исправлении аберраций объек-
тива положение входного зрачка практически не влияет на аберрации
[12]. В дальнейшем при переходе к реальной системе можно выбрать
другое положение зрачка, практически не меняя оптических свойств
системы.
4.2. Общая методика синтеза оптических систем
из бесконечно тонких компонентов
Уравнения синтеза
Для синтеза компонентов с небольшим угловым полем до 5...6° и
относительным отверстием до 1:3, а иногда и до 1:2 особенно эффек-
тивно можно использовать теорию аберраций третьего порядка систем
из бесконечно тонких компонентов. Такие компоненты применяют
при разработке зрительных труб (объективов, оборачивающих систем,
коллективов), оптико-электронных и контрольно-измерительных
приборов, систем формирования лазерного излучения, микроскопов
небольшой апертуры и т.п.
В начале расчета компоненты можно принять за бесконечно тон-
кие и применить к ним теорию аберраций первого и третьего поряд-
ков. В системах с небольшим угловым полем синтез исходного вари-
анта выполняется из условий исправления или получения заданных
значений хроматизма положения, сферической аберрации и мериди-
ональной комы. Остальные аберрации практически не влияют на ка-
чество изображения.
В результате для тонкого компонента, когда = й2 ... =hk = h,
у} = у2... =ук = у составляют четыре уравнения:
уравнение масштаба
Хфи = 1; (4.D
уравнение исправления (или получения заданного значения) хро-
матизма положения
«Гхр = £ hvCv = h^Cv = hC = 0; (4.2)
v=2 v=2
уравнение исправления (или получения заданного значения) сфе-
рической аберрации
к к
«Г = X Avpv = Pv = ЙР“ = 0; (4.3)
v=2 v=2
уравнение исправления (или получения заданного значения) ме-
ридиональной комы
к к
Sn = X " JX = УР~ - IW- = 0. (4.4)
v=7 v=I
Уравнения (4.2)—(4.4) приравнивают нулю для исправления абер-
раций третьего порядка или некоторому небольшому значению для
компенсации аберраций высших порядков. Например, для двухлинзо-
вого объектива для компенсации сферохроматической аберрации, ког-
да з; = -оо, рекомендуют принимать С = -0,1(тп//')2, где т = 0,7В/2,
а для компенсации сферической аберрации высших порядков можно
принять <8;“= (10...15) т = D/2.
Из уравнений (4.1), (4.2) определяют внешние параметры, а из
(4.3), (4.4) — внутренние параметры оптической системы.
(4.5)
(4.6)
(4.7)
(4-8)
При бесконечно удаленном предмете для компонента из несколь-
ких линз с бесконечно малыми расстояниями между ними с учетом
нормировки первого и второго вспомогательных лучей (а2 = О, й; = f =
= i, а\ = 1, sp = 0, р2 = 1, yt = у2 = ... =yk = О, I = -l, ht = h2 = ... =йЛ),
когда входной зрачок совпадает с оправой компонента, уравнения
(4.2)—(4.4) преобразуются к виду:
Ф; + Ф2+...+Ф( =1;
k I ___
-8Гхр = £^ = -ХФцЛм=С = 0;
k
«Г = L Pv = р~ = 0;
V=J
ft
S“ = £ Wv = W°° = 0.
V = 1
При наличии избыточных параметров к четырем уравнениям мо-
гут быть добавлены одно-два дополнительных условия.
В случае предмета на конечном расстоянии необходимо учесть
нормировку первого вспомогательного луча и соответствующим обра-
зом преобразовать аберрационные уравнения. Возможен и другой при-
ем: можно сделать переход от неосновных параметров Р, W, С к основ-
ным Р°°, W” и С и расчет вести как бы для эквивалентного объектива
или компонента, работающего с бесконечно удаленным предметом, ис-
пользуя уравнения с основными параметрами.
Описываемая методика синтеза справедлива также для расчета
компонентов сложных систем с высокими оптическими характеристи-
ками, когда из условий исправления двух хроматических и всех мо-
нохроматических аберраций определяют значения основных пара-
метров каждого из компонентов системы и в дальнейшем в зависи-
мости от значений Р°°, W°° и С выбирают конструкцию компонентов и
выполняют их синтез.
Последовательность выполнения синтеза
Внешние параметры системы определяют из решения двух линей-
ных уравнений (4.5) и (4.6) первой группы, а внутренние — из усло-
вий исправления монохроматических аберраций (4.7), (4.8) или равен-
ства их определенным значениям. Для большинства систем уравнение
(4.7) является квадратным, а (4.8) — линейным. Из двух решений
(4.7) выбирают меньшее положительное (для углов а) или меньшее по
модулю (для инвариантов Аббе Q для склеек) в целях получения бо-
лее благоприятной формы линз и меньших аберраций высших поряд-
ков.
Контроль составления и решения уравнений. Для контроля, а
также для выбора избыточного параметра и предварительной оценки
аберрационных возможностей системы рассчитывают параметры Cv,
Pv и Wv по поверхностям и определяют их сумму. При правильном рас-
л * *
чете £CV = C; ^WV = W-; £PV = P~ с точностью вычислений.
V=J V=1 V=1
Помимо контроля такой расчет позволяет при выборе избыточных
параметров найти оптимальный вариант с меньшими значениями па-
раметров по поверхностям. Особое внимание надо обращать на мини-
мизацию максимальных по модулю поверхностных коэффициентов,
так как согласно правилу Берека большие значения аберраций выс-
ших порядков обычно появляются на поверхностях с большими зна-
чениями (по модулю) коэффициентов. Так, в компонентах со склеен-
ной поверхностью надо стремиться уменьшить значение инварианта
склейки соответствующим выбором избыточного параметра (см. [1]).
При использовании ПЭВМ такой расчет одновременно является
контролем вычислений и исключает необходимость введения кон-
трольного примера.
Определение радиусов кривизны бесконечно тонкого компонен-
та. После определения внешних и внутренних параметров компонен-
та из решения аберрационных уравнений можно вычислить его ради-
усы кривизны:
гутн = )/(« -nvav).
Для наиболее часто встречающегося случая, когда з; = -<», то
h} = f , a; = 0, a\ = 1; если предмет находится на конечном расстоя-
нии, то a; = Ро, ht = а;Р0, = 1. Для бесконечно тонкого компонента
все высоты одинаковы, т.е. = Лг=... = hk.
JlfSiR контроля правильности вычислений радиусов кривизны рас-
считывают ход параксиального луча из бесконечности и определяют
фокусное расстояние: f = П (s\/sv+J).
Если предмет находится на конечном расстоянии, то надо опреде-
лить линейное увеличение компонента, рассчитав ход параксиально-
го луча с расстояния аг При контроле необходимо следить за равен-
ством полученных углов ctv расчетным значениям.
Если расчет выполняется для двух решений аберрационных урав-
нений, то выбирают вариант системы с максимальными значениями
радиусов кривизны, что приводит к уменьшению углов падения лу-
чей на поверхностях системы и уменьшению аберраций высших по-
рядков.
Переход к линзам конечной толщины. Общие положения. Полу-
ченные радиусы кривизны поверхностей компонентов системы обес-
печивают заданные значения ее оптических характеристик (увеличе-
ния, фокусного расстояния, поля, оптической длины), если эти ком-
поненты бесконечно тонкие. Переход к системе линз конечной толщи-,
ны осуществляется при условии сохранения значений фокусных рас-
стояний всех компонентов и углов первого вспомогательного луча с оп-
тической осью. Кроме того, расстояние между задней главной точкой
каждого компонента и передней главной точкой следующего компо-
нента остается равным расстоянию между двумя бесконечно тонкими
компонентами.
Расстояние от входного зрачка до передней главной точки перво*
го компонента принимается равным расстоянию от входного зрачка
до первого бесконечно тонкого компонента. В результате соблюдения
этих условии оптические характеристики системы остаются неизмен-
ными.
При таком переходе сохраняется неизменность значений основ-
ных параметров С, Р°°, W°° ,зависящих только от углов а и показате-
лей преломления сред. Однако суммы Зейделя не остаются без измене-
ния, так как для реальной системы высоты hv и yv обоих вспомога-
тельных лучей изменяются. Для систем с невысокими оптическими
характеристиками эти изменения несущественны. Последователь-
ность перехода к реальным линзам:
1) определяют световые и полные диаметры линз;
2) вычисляют толщины линз и воздушные промежутки между
линзами, которые вначале принимались за бесконечно малые;
3) рассчитывают высоты первого вспомогательного луча линз
конечной толщины, причем h^f при s2 = и Л2 = s2p0 при s2
Для предмета на конечном расстоянии предварительно надо рассчи-
тать луч в обратном ходе и найти расстояние st, характеризующее по-
ложение предмета относительно первой поверхности;
4) находят радиусы кривизны поверхностей линз конечной
толщины и выполняют контроль вычислений;
5) вычисляют расстояния между вершинами поверхностей компо-
нентов, расположенных на конечном расстоянии друг от друга.
Определение световых и полных диаметров компонентов. В об-
щем случае для вычисления световых диаметров компонентов необ-
ходимо рассчитать ход апертурного и полевых лучей — верхнего,
222
главного и нижнего — через бесконечно тонкую систему. Максималь-
ная высота падения какого-либо из лучей на каждый компонент и оп-
ределит световой диаметр Всв. Световой диаметр отдельного компо-
нента легко определить с помощью рис. 4.1. В случае бесконечно уда-
ленного предмета световой диаметр компонента (рис. 4.1, а)
DCB = D + 2aPtga,
где D — диаметр входного зрачка; ар — расстояние от компонента до
входного зрачка; <о — половина углового поля.
Рис. 4.1. Ход полевых лучей для определения световых диаметров компонентов
Если предмет находится на конечном расстоянии (рис. 4.1, б) и
имеет малые размеры, то
Всв = 2а; tg<JA,
где оА — апертурный угол в пространстве предметов. Для малых апер-
тур sin оА = tg <1А = оА, поэтому DCB = 2а,А.
В общем случае для предмета, находящегося на конечном расстоя-
нии, при линейном поле 2у световой диаметр определяют по формуле
Всв = В+ 2b. Как видно на рис. 4.1,6,
b = [аР/(а1 - аР)](В/2 + у),
и тогда
Всв = В + aP(D + 2у)/(а2 - аР).
Если входной зрачок совпадает с компонентом, то ар= О, Всв = D.
Полный диаметр линзы Впол = Всв + АВ, где ДВ — припуск на закреп-
ление линзы в оправе. Рекомендуемые значения ДВ в зависимости от
светового диаметра и способа крепления линзы приведены в табл. 4.1
[4]. В ней же указана наименьшая толщина dmin края положительной
линзы.
Таблица 4.1
Л.- ММ Полный диаметр при креплении dmln, мм Световой диаметр линзы Х)св, мм Полный диаметр В^мм, при креплении мм
завал ь- цовкой зажим- ным кольцом завал ь- цовкой зажим- ным кольцом
До 6 0,6 - 1,0 Св. 80 до 120 - 3,0 3,0
Св. 6 до 10 0,8 1,0 1,2 " 120 " 180 - 4,0 4,0
" 10 " 18 1,0 1,5 1,5 " 180 " 260 - 5,0 5,0
’ 18 " 30 1,2 1,8 1,8 " 260 " 360 - 6,0 6,0
" 30 " 50 1,5 2,0 2,0 ” 360 " 500 - 8,0 7,0
” 50 " 80 2,0 2,5 2,5
Полученное значение полного диаметра округляют до бли-
жайшего большего нормального диаметра по ГОСТ 6636—69 (табл.
3.2), в котором приведены ряды нормальных линейных размеров.
Ряды числовых значений построены по закону геометрически 4
прогрессии с определенными значениями знаменателя и с округле.
ными значениями чисел. Как следует из заголовков столбцов
табл. 4.2, пятому ряду (На 5) соответствуют числа только одного стол-
бца — 1-го, десятому (Ra 10) — числа двух столбцов — 1-го и 5-го,
двадцатому (Ra 20) — числа четырех столбцов — 1-го, 3-го, 5-го и 7-
го, а сороковому ряду (Ra 40) соответствуют числа всех столбцов таб-
лицы.
При выборе ближайшего нормального числа из табл. 4.2 ее надо
просматривать построчно (кроме ряда Ra 5). Предпочтительным яв-
ляется ряд Ra 5 с более крупной градацией. На отраслевых пред-
приятиях в зависимости от номенклатуры изделий и технологическо-
го цикла устанавливается тот или иной ряд, по которому рекоменду-
ется выбирать диаметры. В учебной практике можно использовать К|ЯД
Ra 40.
Определение толщин линз. При переходе к линзам конечной тол-
щины (к реальной системе) известны радиусы кривизны rVTH бесконеч-
но тонкой системы и все углы (\ первого вспомогательного луча при
заданных оптических характеристиках. По известным значениям ра-
диусов кривизны можно найти расстояния между вершинами поверх-
224
Таблица 4.2
Ra 5 —
~ Ra 10 Ra 10 —
Ra 20 — Ra 20 — Ra 20 — Ra 20 —
Ra 40 Ла 40 Да 40 Ra 40 Да 40 Ra 40 Ra 40 Ra 40
1 2 3 4 5 6 7 8
1 1,05 1,1 1,15 1,2 1,3 1,4 1,5
1,6 1,7 1,8 1,9 2,0 2,1 2,2 2,4
2,5 2,6 2,8 3,0 3,2 3,4 3,6 3,8
4,0 4,2 4,5 4,8 5,0 5,3 5,6 6,0
6,3 6,7 7,1 7,5 8,0 8,5 9,0 9,5
10 10,5 11 11,5 12 13 14 15
16 17 18 19 20 21 22 24
25 26 28 30 32 34 36 38
40 42 45 48 50 53 56 60
63 67 71 75 80 85 90 95
100 105 110 115 120 130 140 150
160 170 180 190 200 210 220 240
250 260 280 300 320 340 360 380
400 420 450 480 500 530 560 600
630 670 710 750 800 850 900 950
ностей — толщины линз и воздушные промежутки между ними.
Толщину линзы по оси следует рассчитывать с учетом ее кон-
структивных особенностей: в наиболее тонком месте линзы — на краю
отверстия для положительной линзы и на оси для отрицательной
(рис. 4.2) — толщина линзы должна быть не менее dmin что необходи-
мо для обеспечения ее достаточной
прочности. Слишком тонкие лин-
зы при полировании прогибаются,
что делает невозможным получе-
ние точных поверхностей и цент-
рировки.
Наименьшие толщины — от-
рицательных линз по оси и поло-
жительных линз по краю — (dmin),
также фаски и диаметр под кре-
пежные элементы определяются
согласно ныне действующим стан-
дартом [4].
рис. 4.2. Минимальная толщина
Положительной и отрицательной линз
Значение dmln зависит от диаметра линзы и отчасти от условий
применения. Для отрицательных линз толщина по оси принимает-
ся равной d = dmin =(0,08...0,15) £>пол и выбирается в зависимости от
ее диаметра £>пол и точности обработки (табл. 4.3). Для отрицатель-
ных менисков при отношении радиуса кривизны выпуклой поверхно-
сти к полному диаметру £>пол менее 1,5 толщину по оси следует при-
нимать не менее 0,15£>пол.
Таблица 4.3
Характеристика отрица- тельной линзы Наименьшие значения толщины по оси d^^d, мм, при допуске ДУ на местные погрешности
Форма Диаметр Чоя- ““ <0,3 0,3...0,5 0,5...2,0 >2,0
вогнутая До 50 50...120 120...260 260...500 0,150 1 пол 0,120 7 пол 0,100 ’ пол 0,100 7 пол 0,120 0,120 ' пол 0,100 7 пол 0,080 7 пол 0,120 7 пол 0,100 7 пол 0,080 ’ пол 0,080 7 пол 0,100 7 пол 0,080 7 пол 0,080 пол 0,080 7 пол
Мениск До 50 50...120 120...260 260...500 0,120 7 пол 0,120 7 пол о,юо_ Т пол 0,100 7 пол 0,120 7 пол 0,100 7 пол 0,100 7 пол 0,100 7 пол 0,100 7 пол 0,080 7 пол 0,080 7 пол 0,080 7 пол 0,100ОМ 0,080 7 пол 0,080 7 лол 0,080 7 пол
Толщину положительных линз следует вычислять, принимая во
внимание рекомендуемое значение dmin на краю линзы (см. табл. 4.1).
Обозначим kv стрелки прогиба поверхностей линзы (рис. 4.3), тог-
да толщина линзы d = fe2+ dmin - k2, причем
значения стрелок прогиба следует подстав-
лять со своими знаками.
Стрелку прогиба сферической поверхнос-
ти легко определить из чисто геометрических
соображений (рис. 4.4):
k = г - МС = г-у)гг -D^0J1/4.
Для отрицательных радиусов кривизны
перед радикалом должен стоять знак плюс.
Удобно для вычислений использовать следу-
ющую формулу, автоматически обеспечиваю-
щую правильный результат:
kv = rv- (rv/|rv |)л/г/-В^ол/4.
Рис. 4.3. К определению
толщины положительной
линзы
Рис. 4.4. Схема для расчета стрелки
прогиба сферической поверхности
Если гу » £>пол, то стрелку про-
гиба можно вычислить по прибли-
женной формуле
= В20Л/(8гу).
Следует помнить, что нормы,
приведенные в табл. 4.1, 4.3, не все-
гда обеспечивают достаточной
прочности линзы. При больших ра-
диусах кривизны линза по форме
напоминает плоскопараллельную
пластинку, и в этом случае необходимо учесть дополнительное усло-
вие для толщины положительной линзы: d > (0,1...0,12) Ппол.
Определение воздушных промежутков между линзами компонен-
та. Во многих компонентах в начале расчета воздушные промежутки
принимают бесконечно малыми. При переходе к реальной системе
важно правильно рассчитать или выбрать воздушный промежуток.
В зависимости от конструкции линз могут представиться два слу-
imla
чая: «касание» линз по центру или по краю, т.е. при максимальном
приближении друг к другу линзы могут соприкоснуться или краями
поверхностей, или вершинами (центрами).
При «касании» по центру
(рис. 4.5, а) воздушный проме-
жуток следует выбрать возмож-
но меньшим: dB n = 0,1...0,2 мм,
чтобы не нарушить исходное
предположение о бесконечно ма-
лом расстоянии.
При «касании» по краю
(рис. 4.5, б) необходимо рассчи-
тать толщину образовавшейся
положительной воздушной лин-
зы, принимая dmln= 0,1...0,3 мм;
<г».п_ = лу+(о,1...о,з)-луИ.
После этого остается вычис-
лить высоты Лу первого вспомо-
гательного луча, полагая, что
hj = f цри Sj = -о® и Л; = s2P0 при Sj -оо, сначала вычислив s; = at + sH,
а затем — радиусы кривизны реальной системы:
гур = Лу (пу — пу)/(пуосу — пуау).
dt.n А Ия
а) Б)
Рис. 4.5. К определению воздушного
промежутка между линзами компонента
Толщины линз и воздушные промежутки рассчитывают с точ-
ностью до десятых долей миллиметра, а радиусы кривизны — до ше-
сти значащих цифр.
Особенности перехода к линзам конечной толщины в случае
предмета на конечном расстоянии. После определения толщин линз
и воздушных промежутков между ними надо определить положение
предмета относительно первой поверхности, т.е. sr
При использовании известного метода перехода вначале необходи-
мо рассчитать пераксиальный луч из бесконечности в обратном ходе
через систему с радиусами кривизны rv та для бесконечно тонкой сис-
темы и с реальными расстояниями dv между вершинами поверхностей
для определения sH, а затем вычислить st. Надо помнить, что при рас-
чете луча в обратном ходе, когда система перевернута на 180°, ее кон-
структивные параметры связаны с теми же параметрами прямой сис-
темы следующим образом:
ni= nk+i
ri = ~г»
d1=dk_1 n2=nk
= dk_2 n3 - nk_l
4 = -rt
nk+l~ nl
В этом случае sH определяют приближенно, так как фокусное
расстояние f' системы отличается от заданного: оно сохраняется рав-
ным фокусному расстоянию системы только с радиусами rv тн и тол-
щинами dv = 0. Затем рассчитывают высоты hv первого вспомогатель-
ного луча с учетом нормировки, т.е. а, = Ро, Л; = и вычисляют ра-
диусы кривизны реальной системы:
'•vp = -nv)/(« -nvav)= hvrvt№/(a$0).
Для контроля линейного увеличения Ро рассчитывают ход перво-
го вспомогательного луча с конечного расстояния sp а для определе-
ния фокусного расстояния — при s; = Если значение фокусного
расстояния сохраняется неточно, то делается второе приближение.
Для этого уточняется значение sH для рассчитанной системы с радиу-
сами rvp, т.е. вновь определяется s2, затем hi,hv и rvp. Следует обра-
тить внимание на точность вычисления s2: целесообразно s2 округлять
Глава 4. Параметрический синтез одно- и двухкомпонентных линзовых систем из бесконечно
тонких компонентов на основе метода разделения переменных
до десятых долей миллиметра, что соответствует приемлемой точно-
сти установки предмета. Во многих случаях расчета бывает достаточ-
но первого приближения (см. пример 9.2 в задачнике [1, с. 175]).
Для более точного сохранения фокусного расстояния при перехо-
де к реальной системе можно рекомендовать несколько иную методи-
ку. Сущность ее такова. Вначале необходимо выполнить переход при
условии сохранения фокусного расстояния. Для этого нужно рассчи-
тать ход параксиального луча из бесконечности через бесконечно тон-
кую систему с радиусами кривизны rVTH, полагая, что а/” = 0, Л/" = f =
- - Ро), и определить углы <\", сохраняющиеся постоянными
в этой части перехода при вычислении hv" и rv“ . Для полученной сис-
темы с г~р надо рассчитать параксиальный луч из бесконечности в об-
ратном ходе и вычислить sH, а затем sr Дальнейший порядок расчета
аналогичен описанному выше, т.е. определяют Л2 = s2p0, и затем rvp че-
рез исходные углы av.
В целях контроля вычислений рассчитывают ход параксиально-
го луча при Sj = для определения /' и с конечного расстояния s2
для контроля расчетных углов av и линейного увеличения Ро.
После расчета радиусов кривизны линз конечной толщины не сле-
дует сразу округлять их значения по ГОСТу. Только после абер-
рационного анализа исходного варианта в случае допустимых значе-
ний остаточных аберраций (см. гл. 3) можно округлить значения ра-
диусов по ГОСТ 1807—75 (см. гл. 8).
Определение расстояния между компонентами, расположенны-
ми на конечном расстоянии друг от друга. В ряде случаев оптическая
система может состоять из нескольких многолинзовых компонентов,
расположенных на конечном расстоянии друг от друга. Расчет подо-
бных систем проводится по компонентам. Для сохранения фокусного
расстояния всей системы надо определить расстояние между компо-
нентами, считая, что расстояние dg между задней главной точкой Н\
первого компонента и передней главной точкой Нп второго равно рас-
стоянию между бесконечно тонкими компонентами (рис. 4.6). Тогда
^p-^0 + sHi ~SHir
Особые случаи перехода к реальным линзам. Иногда при расче-
те линз приходится учитывать конструктивные условия, например,
Равенство радиусов кривизны, определенные соотношения между
ними, разные формы поверхностей (одна из них является плоской) и
Др. Тогда при переходе к линзе конечной толщины для сохранения
конструктивных условий рекомендуется использовать уравнение оп-
тической силы реальной линзы:
Рис, 4.6. К определению расстояния
между компонентами, расположенны-
ми на конечном расстоянии друг от
друга
Л 1 z 1} (п-1)2 d
Ф = — = (п-1)----------------------.
f \.Г1 г2) п г}гг
Радиусы кривизны реальной линзы определяют из решения это-
го уравнения при известных толщине и фокусном расстоянии.
Модульный принцип составления аберрационных уравнений.
Параметры Р, W и С отдельной линзы и двухлинзового
склеенного компонента
Двух-, трех и четырехлинзовые компоненты (табл. 4.4), применя-
емые в качестве объективов систем с небольшим угловым полем и ком-
понентов сложных систем с повышенными оптическими характерис-
тиками, представляют собой различные комбинации отдельных лииз
и склеенного компонента, которые можно считать модулями [6].
Зная уравнения для параметров Р, W, С модулей, можно составить
соответствующие аберрационные уравнения для каждого из компо-
нентов, учитывая расположение модулей в определенной конструц?
ции. Поэтому приведенные ниже уравнения параметров модулей со-
ставлены в предположении, что перед ними расположено Ц линз и V
поверхностей.
Для модуля в виде отдельной линзы уравнения параметров име-
ют вид [6]:
С = (ау+,-ау+3)/уи+;;
Р = [1/(1 - mv+2/][ay+2 (ау+3 - ау+2)(2/пу+2 +1) +
+ («v+1 - а2+з)(т,+2 + 2)+ ау+3 - а®+1]; т = 1/п;
(4.9)
I
(4.10)
W = [V(^ “ zn',+2)][av+2(av+; - ау+з)(7ПУ+з + ^) +av+s - av+;]- (4.И)
Таблица 4.4
Обпдая формула составления 1 Ф 41 I 111
уравнении по модульному npi с п J? ф 4< + ф П. 1 с= Ф ii. + ф 1 с= + Ф + Ф »К EZ и + фГч + 7^ ф< 1 Ф U. + ФЙ. и с= ф Ц + ф il L"i"“ ф Ф Ф Д и cz + фП EZ фц + ф 11 ф ф
: зависимости нений а. *7*'' а* £ ft,” О? ftT £ в" в’ г S еГ ал? S в" Г § в’ k ft? м 0? еч Of
)ункциональной >ационных урав * Х_ а’ гГ •х_ ft, в’ в^ ft,” г? в’ КГ S в" ЙГ о? 8^ ft,” в’ гГ ОЙ ft,”
Общин вид 4 абер[ 9^ sXr в" в’ ей кг £h 9^ & S' в’ ей
Рекомендуемые । значения избыточных параметров для видимой области 1 I аа=1,1...1,3 (монохромат) к ч в" £ II е* гч °? 00 ’”1 О т I”8 И5 o' ИЗ о* II й“ 1О о 00 о’ II а* 1 1 из о“ 'Ч о* II а* г«Ч II #» ©-
фаметров I3 1 I ^Ч сч еч »“Ч 1 1 сч
н
§ 1 13 00 СО СО из 00 • СО
1 Оптическая схема компонента t? <2 f fl L s> t fl 9 J
2 2 ^ч сч 00 из СО ь- 00 а о ^ч ^ч
Более компактные и удобные при расчете уравнения параметров
для модуля в виде склеенного компонента (рис. 4.7, а)* могут быть по-
лучены с помощью инварианта Аббе для склеенной поверхности, ко-
торый в дальнейшем называется инвариантом склейки Q:
Q = Q2 = [(а3 - а2)/(п3~п2)]п2п3.
С учетом уравнения оптической силы <р; первой бесконечно тон-
кой линзы и инварианта Q выражения для углов аг и а3 запишем в
следующем виде:
a2 = (l-m2')Q + ^>1 + aI;
(4.12)
а3 = (7-wi3)Q + <p1 + a1.
a) S)
Рис. 4.7. Оптическая схема двухлинзового склеенного компонента. Ход первого
вспомогательного луча: а) в компоненте; б) в модуле
Так как перед модулем может быть расположено ц линз и v по-
верхностей, т.е. первый угол av+1, а последний и оптическая сила
первой линзы равна <рц +1 (рис. 4.7, б), то [6]
С = Фц+4 (^/^ц+2 — (“v+I ~ ®м+-<)/Уц+2 ’
P = aQz + bQ + с;
ТУ = aV+l~aV+4-a Q + (av+/-av+4)(<PU+l--«v+4)-b
2 3
где
(4.13)
(4.14)
(4.15)
*В оптических схемах линзовых компонентов, представленных на рис. 3.7—3.15,
для упрощения рисунков условно показан ход первого вспомогательного луча в реаль-
ных конструкциях компонентов. Следует помнить, что вспомогательные лучи прелом-
ляются на главных плоскостях понерхностей, представляющих собой касательные к
поверхностям в их вершинах. Высоты этих лучей могут быть значительно больше све-
тового диаметра компонента.
а = 2фи+1 (t?iv+2 - т^3)+(2т,+3 + l)(av+<f - av+1);
Ъ = 3<p*+I / (nv+2 -1) - 2аУ+1фи+1 - [l/(nv+3 -1)] x
x з(фи+1 + ау+1)2 + а^(2п
v+3 +1)-
-2ау+4(фи+1 + ау+1)(2 +
nv+s)]’
C = [nv+2/(nv+2 - 1)2][ф*+1 + av+1 Ф*+1 (I- nv+2)]+
+ [V(i“ "4+3)2][«v+< -а^(фц+1 + av+I)(2+mv+3)-
-(фИ+Т + «У+1)3"Ч+3 + «у+<(фи+1 + “v+l)\J + 2mv+s)
(4.16)
Уравнения кривизн поверхностей склеенного модуля при h = 1
имеют вид:
Pv+Z = Q + «у+1 + фм+;Пу+2/(«у+2 -
Ру+2 =О + Фи+т + ау+1; (4.17)
Ру+з = <3 + [пу+з(фи+т + «y+i)-av+4]/(nv+3 -1).
Общие формулы для составления аберрационных уравнений для
любого из компонентов на основе модульного принципа приведены в
табл. 4.4. В целях сокращения записи каждый из параметров Р, W и
С заменен символом П. Например, чтобы составить аберрационное
уравнение для параметра Р трехлинзового объектива, состоящего из
склеенного компонента и отдельной линзы, при использовании урав-
нений модулей надо учесть, что перед склеенным компонентом число
поверхностей и линз равно нулю, т.е. v = 0 иц = О, а перед отдельной
линзой расположено три поверхности и две линзы. Такая схема состав-
ления уравнений по модульному принципу в компоненте реализует-
ся следующей записью:
Сделав соответствующие подстановки, получим развернутое урав-
нение для Р.
4.3. Синтез одно- и двухкомпонентных линзовых систем
с бесконечно малыми воздушными промежутками
Виды однокомпонентных линзовых систем
При проектировании оптических систем одним из самых слож-
ных и важных вопросов является правильный выбор конструкции
всей системы и отдельных компонентов, имеющих заданные значения
оптических характеристик: фокусного расстояния, относительного
отверстия, углового поля. Чтобы сделать правильный выбор, надо хо-
рошо знать аберрационные возможности компонентов различных кон-
струкций и предельные значения их оптических характеристик.
Сложные многолинзовые системы состоят из ряда компонентов,
содержащих небольшое число линз. В системах с небольшим угловым
полем эти компоненты часто являются объективами, так как они дают
хорошее качество изображения.
При выборе конструкции системы надо учитывать технологи-
ческие и экономические соображения. Теоретически всегда можно рас-
считать систему, включающую асферические поверхности, и тем са*
мым обеспечить хорошее качество изображения при высоких относи-
тельных отверстиях и больших угловых полях. Однако нередко такие
системы практически неприемлемы вследствие их дороговизны.
При расчете систем также необходимо иметь в виду, что выбор
оптических материалов должен быть обоснованным и лишь в исклю-
чительных случаях допустимо применять дорогостоящие особые оп-
тические материалы.
Рассмотрим двух-, трех- и четырехлинзовые компоненты, входя-
щие в состав различных оптических систем. При небольших угловых
полях они могут служить объективами телескопических систем.
Двухлинзовый склеенный компонент (см. рис. 4.7, а, 4.8). Его
применяют в качестве объектива зрительной трубы, компонента те-
леобъектива, объектива микроскопа небольшой апертуры, в обора-
чивающей системе, фотообъективах и т.п.
Рис. 4.8. Оптическая схема двухлинзо-
вого склеенного компонента и ход пер-
вого вспомогательного луча при st=-~“°
При возможности выбора марок стекол компонент имеет доста-
точное число параметров (три радиуса кривизны и оптические
постоянные стекол), позволяющих исправить любые аберрации тре-
тьего порядка, кроме кривизны поля и иногда астигматизма. Астиг-
матизм, как известно, нельзя исправить в системе, если входной зра-
чок совпадает с оправой бесконечно тонкого компонента (Sj„ =1 при
= 0) [12].
В ахроматизованном двухлинзовом склеенном компоненте для
обычных стекол коэффициент Петцваля практически постоянен,
обычно принимают п = 0,7.
Чаще всего в компоненте-объективе исправляют сферическую
аберрацию, меридиональную кому и хроматизм положения при усло-
вии выбора оптических материалов. При заданных марках стекол
можно исправить только две аберрации — чаще всего хроматизм по-
ложения и сферическую аберрацию. В общем случае при использова-
нии компонента в сложной системе корректнее говорить о получении
заданных значений параметров Р, W и С при возможности выбора ма-
рок стекол.
Двухлинзовые компоненты с различными фокусными расстоя-
ниями целесообразно применять при следующих относительных
отверстиях:
Л,мм ................ 100 < 300 2500 <1000
D/f, не более.........1:4 1:5 1:6 1:10
Дальнейшее увеличение относительного отверстия невозможно
из-за быстро растущих аберраций высших порядков, особенно замет-
но проявляющихся на радиусе склейки. Угловое поле компонента не
превышает 10... 12° при малых фокусных расстояниях и 7... 10° — при
больших.
Двухлинзовый несклеенный компонент. Такой компонент (рис.
4.9) имеет один дополнительный параметр, по сравнению со склеен-
ным компонентом, что дает возможность лучше исправить сферичес-
кую аберрацию и меридиональную кому, не прибегая к подбору ма-
рок стекол. Несклеенный компонент отличается меньшими аберраци-
ос-, at ал
t Рис. 4.9. Оптическая схема двухлин-
зового несклеенного компонента и ход
первого вспомогательного луча при
Sj в “ОО
ями высших порядков, что позволяет получить относительное отвер-
стие до 1:3 при f =100 мм. Дальнейшее увеличение апертуры ограни-
чивается ростом сферохроматической аберрации. По сравнению со
склеенным рассматриваемый компонент имеет меньшую стабильность
центрировки и несколько большие потери на отражение.
Двухлинзовые несклеенные компоненты широко используются в
качестве объективов (или их компонентов) астрономических и геоде-
зических зрительных труб, объективов коллиматоров, биноклей, а
также в системах для коллимации лазерного излучения и т.п.
Трехлинзовый склеенный компонент. По сравнению с двухлинзо-
вым склеенным трехлинзовый компонент (рис. 4.10) имеет один до-
полнительный параметр, позволяющий исправить аберрации при лю-
бой комбинации марок стекол. Благодаря этому появляется воз-
можность для существенного уменьшения сферической аберрации
высших порядков и возможна ее коррекция для двух зон отверстия
— «двойная» коррекция [16].
Т* Г*
Рис. 4.10. Оптическая схема трехлин-
зового склеенного компонента и ход
первого вспомогательного луча при
Sy = -ОО
Хорошие результаты получаются при расчете трехлинзовых скле-
енных компонентов с применением трех различных марок стекол, ког-
да удается исправить сферическую аберрацию при относительном от-
верстии 1:2 и f = 100 мм.
В более ранних публикациях высказывалось мнение о том, что по
своим коррекционным возможностям трехлинзовые склеенные
компоненты не имеют преимуществ перед двухлинзовыми [19]. Оно
было основано на результатах анализа аберраций объективов, наруж-
ные линзы которых выполнены из одинаковых материалов, т.е.
справедливо для частного случая. Исследования показали, что трех-
линзовые склеенные компоненты, имеющие одинаковые с двухлинзо-
выми склеенными компонентами значения основных параметров и
стекла, могут существенно отличаться от них по аберрациям высших
порядков даже при небольших значениях Р°°, W°° и С •
Эти компоненты применяют в окулярах, в микрообъективах с по-
вышенной числовой апертурой и уменьшенной вуалирующей засвет-
кой, в фотообъективах, при разработке систем с уменьшенным вторич-
ным спектром.
Двойные четырехлинзовые объективы, состоящие из двух одина-
ковых двухлинзовых компонентов, разделенных бесконечно малым
воздушным промежутком. Двухлинзовые объективы нельзя приме-
нять, когда требуется большое относительное отверстие. В этом слу-
чае их можно заменить системой из двух одинаковых двухлинзовых
компонентов (рис. 4.11), разделенных воздушным промежутком.
a) S)
Рис. 4.11. Оптическая схема и ход первого вспомогательного луча в
четырехлинзовых компонентах, состоящих:
а) из двух одинаковых двухлинзовых склеенных компонентов;
б) из двух одинаковых двухлинзовых несклеенных компонентов
Каждый компонент имеет в 2 раза большее фокусное расстояние,
чем фокусное расстояние всего объектива, поэтому отдельный компо-
нент имеет и в 2 раза меньшее относительное отверстие. Следова-
тельно, радиусы кривизны поверхностей компонента примерно в 2
раза больше, чем радиусы кривизны в двухлинзовом объективе с ана-
логичными характеристиками. Вследствие этого уменьшаются углы
падения и преломления на каждой поверхности, поэтому умень-
шаются аберрации высших порядков. Это дает возможность повысить
относительное отверстие до 1:2... 1:3 в объективе из двух склеенных
компонентов и до 1:2... 1:1,5 при удачном выборе марок стекол — в
объективе из двух несклеенных компонентов при фокусном расстоя-
нии 50...100 мм. Конструкции объективов технологичны вследствие
равенства радиусов кривизны компонентов. Число свободных пара-
метров такое же, как и в двухлинзовых компонентах.
Следует помнить, что в наклонных пучках объектив не имеет пре-
имуществ перед двухлинзовым.
Четырехлинзовые объективы, состоящие из двух склеенных ком-
понентов с разными радиусами кривизны (рис. 4.12). По сравнению
с аналогичными двойными объективами рассматриваемые объективы
позволяют получить заданные значения параметров Р“, W~ и С при
любых комбинациях марок стекол. При удачных комбинациях мож-
но получить относительное отверстие до 1: 1,8 при f = 100 мм.
Рис. 4.12. Оптическая схема и ход пер-
вого вспомогательного луча в четырех-
линзовом компоненте с разными ради-
усами кривизны
Эффективно их применение в качестве компонентов телеобъекти-
вов телескопических систем, фототелеобъективов, в качестве самосто-
ятельных объективов.
Трехлинзовые объективы, состоящие из склеенного компонента
и отдельной линзы. Известны две конструкции подобного типа (рис.
4.13), позволяющие повысить относительное отверстие до 1:2...1:3 по
сравнению с относительным отверстием склеенного компонента. Ус-
ложнение конструкции компонента по сравнению с двухлинзовым
склеенным позволяет уменьшить аберрации высших порядков, одна-
ко теперь объектив состоит из двух положительных компонентов, по-
этому приходится компенсировать хроматизм отдельной линзы хро-
матизмом склеенного компонента, переисправляя его. Это вызывает
уменьшение радиуса склейки и увеличение аберраций высших поряд-
ков.
Рис. 4.13. Оптическая схема и ход первого вспомогательного луча в
трехлинзовых компонентах, состоящих:
а) из отдельной линзы и склеенного компонента;
б) из склеенного компонента и отдельной линзы
Предпочтительней конструкция с первой отдельной линзой (рис.
4.13, а). Такой компонент применяется в телеобъективах в целом ряде
отечественных и зарубежных теодолитов и нивелиров, в фототелеобъ-
ективах, проекционных системах.
Трехлинзовые несклеенные компоненты. Добавление к двухлин-
зовому несклеенному компоненту дополнительной линзы позволяет
повысить относительное отверстие до 1:2... 1:3. Отрицательная линза
необходима для корррекции сферической аберрации и хроматизма, а
две положительные линзы применяются вместо одной для уменьше-
ния относительного отверстия каждой из них и, следовательно, умень-
шения кривизн и аберраций высших порядков.
Рассматриваемые конструкции (рис. 4.14) различаются располо-
жением отрицательной линзы. Обычно аберрации высших порядков
меньше в симметричной по оптическим силам конструкции (рис.
4.14, а) при правильном выборе избыточных параметров. Во второй
конструкции (рис. 4.14, б) положительные линзы чаще всего имеют
одинаковые оптические силы.
а) 6)
Рис. 4.14. Оптическая схема и ход первого вспомогательного луча в
трехлинзовых компонентах разных конструкций
По сравнению с другими конструкциями трехлинзовые несклеен-
ные объективы имеют значительно меньшую сферохроматическую
аберрацию.
Опыт расчета показал целесообразность использования крона с
высоким показателем преломления и малой дисперсией и флинта с
высоким показателем преломления и большой дисперсией, что спо-
собствует уменьшению оптических сил линз и снижению аберраций
высших порядков.
Трехлинзовые несклеенные компоненты используются в телеобъ-
ективах телескопических систем и телефотообъективов, а также в ка-
честве объективов телескопических систем и т.п.
Синтез двухлинзового склеенного компонента
Уравнения синтеза получим из уравнений модуля, приняв, что
Ц = 0 и v = 0 (см. табл. 4.4). В общем случае, когда предмет находится
наконечном расстоянии (см. рис. 4.7), уравнения (4.13)— (4.16) име-
ют вид [6]:
С = фД1/у2- l/v;)+(a1-a4)/v2;
Р = aQz + bQ + c;
W = 0,5(as -a4- а)е + [(а2 - а4)(ф2 - a4)- b]/3,
где
а = 2ф;(тп2-т3) + (2т3+1)(а4-а1);
b = Зф?/(п2 -1)- За/р; - [1[{п3 - 1)]х
х [з(<₽1 + «/)2 + (2п3 + I)- 2а4 (фj + а;)(2 + п3)};
с = [п2/(п2 - 1)2][ф? + а2ф? (I - n2)]+ [nf / (п3 - 1)2]х
х[а^ - а4 (ф; + а,)(2 + т3)+ а4 (ф, + а,)2(1 + 2т3)-(ф, + а,)3т3].
Кривизны поверхностей при h = 1 и углы а2 и а3 первого вспомо-
гательного луча определяют с помощью (4.12) и (4.17). В результате
для кривизн р получаем следующие уравнения:
Р; = Q + aI + <p1n2/(n2-Г);
р2 = е + ф/ + а/;
Рз = Q + [V(n3 - (Ф1 + «т)“ «4
При а; = 0 и а4 = 1 получаются известные уравнения для основ-
ных параметров [19].
При заданных комбинациях марок стекол компонент имеет три
свободных параметра, поэтому может обеспечить получение заданных
значений двух из трех параметров (чаще всего С и Р) или в частном
случае исправление двух аберраций — хроматизма положения и сфе-
рической аберрации.
Синтез бесконечно тонкого компонента сводится к решению двух
уравнений и определению из них оптической силы ф; первой беско-
нечно тонкой линзы и инварианта склейки Q, а затем к вычислению
кривизн и радиусов кривизны тонкой системы и контролю вычисле-
ний. Пример синтеза приведен в [1, с. 175].
При условии выбора марок стекол склеенный компонент дает воз-
можность получать любые значения параметров Р, W и С. Для выбо-
ра комбинаций марок стекол и расчета компонента можно рекомен-
довать таблицы С. В. Трубко [22], являющиеся дальнейшим развити-
ем известных таблиц Г. Г. Слюсарева [19]. В таблицах С. В. Трубко уч-
тены результаты новых теоретических разработок и требования ГОСТ
3514—76 на оптическое стекло. В этих таблицах по сравнению с таб-
лицами Г. Г. Слюсарева число комбинаций марок стекол увеличено
почти в 5 раз, исключены старые марки стекол, снятые с производ-
ства. Таблицы С. В. Трубко охватывают все 62 марки стекла серии О
из ГОСТ 3514—76 и включают 864 комбинации марок стекол типа
«крон впереди» и «флинт впереди» в интервале изменения хромати-
ческого параметра С = —0,006...+0,006 с шагом 0,002. В качестве ос-
новной длины волны принята Хо= Хе= 0,5461 мкм вместо ранее при-
нятой 0,5893 мкм. В качестве спектрального интервала введен
диапазон F'—С вместо прежнего интервала F—С. Таблицы позволя-
ют выполнить расчет в спектральном интервале Х;...Х2, отличающемся
от F—C.
Порядок пользования таблицами несложен и подробно изложен
в их описании [22]. Опыт использования таблиц показал их эффектив-
ность при выборе комбинаций марок стекол с дальнейшим синтезом
на ППЭВМ по описанной методике.
При составлении таблиц для расчета двухлинзового склеенного
компонента [19, 22] были использованы формулы, выведенные
Г.Г. Слюсаревым. Их можно также применять при синтезе компонен-
та, поэтому рассмотрим их.
Между параметрами Р°° и W°° двухлинзового склеенного компо-
нента существует зависимость [19]:
Р°° = P“+pa/(a + l)2](W”-W0“’)2,
где Ро°°, Wo°° — основные параметры, полученные при соблюдении ус-
ловия минимума сферической аберрации, т.е. dP”/dQ = 0, поэтому их
также обозначают [12]:
Р0"=с-Ь2/(4а);
Wo" = -0,5 (а + f)Q0 + (1 - ф; - Ъ)/3 =
= ф2/3 + Ь(3-а)/(12а),
где
Q0 = -b/(2a).
Как известно, аналогичная зависимость между Р°° и W°° получена
и для отдельной линзы [12]. Однако для линзы параметр Ро°° может
быть только положительным, в то время как для склеенного компо-
нента в зависимости от марок стекол и значения основного хромати-
ческого параметра С параметр Ро°° может быть положительным, от-
рицательным и равным нулю.
Кроме того, Г. Г. Слюсаревым показано, что Р~ = Ро” + a(Q - Q0)2,
W°° = -0,5(а + 1)(Q - Qo) + Wo”. (Подробный вывод рассмотренных фор-
мул см. в [12]).
При расчетах можно использовать приближенные зависимости,
учитывая, что для большинства марок стекол а= 2,31...2,35;
WJ°~ 0,1 для комбинации «крон впереди»; Wo“’ = 0,2 для комбинации
«флинт впереди», поэтому в среднем принимают Wg°° = 0,14...0,15.
Тогда Р°° = Ро°°+ O,85(Wo” - 0,14)2. В результате при расчетах, опре-
делив сначала ф;, Qo и Ро, инвариант склейки вычисляют по форму-
лам
Q - Qo ± /(Р“-Р0”)Дз5; Q = Qo - (W~ - W0~)/l,67.
В зависимости от того, какую из величин Р°° или Ж” следует по-
лучить с большой степенью точности, применяется одна из последних
формул. Знак в первой из указанных формул берут тот, который при-
водит к значению Q, получаемому из второй формулы. Обе формулы
всегда приводят к близким, практически одинаковым значениям Q.
При этом степень соответствия двух полученных значений Q харак-
теризует степень соответствия выбранной комбинации ранее постав-
ленным условиям, что позволяет судить об одновременности коррек-
ции сферической аберрации и комы. Если значения величин суще-
ственно различаются, необходимо повторно выбрать комбинацию ма-
рок стекол.
В таблицах С.В. Трубко используются соотношения, учитываю-
щие значение параметра Петцваля л:
Р~ = Pg + (1 + 2л)/(1 + л)2(1У” - W~)* ,
где л = ф;/п2 + ф2/п3;
Q = Qo ± /(р“-р0")/(1 + 2л);
$ = $0-(ту“-и7)/(1 + л).
Поэтому при расчетах по таблицам для выбранной комбинации
марок стекол в зависимости от значения С находят оптическую силу
линзы из крона фк, затем Qo, Wo, л и вычисляют Q по приведенным
выше формулам. После этого легко найти углы а2, а3 и радиусы кри-
визны тонкого компонента rv ти.
Синтез двухлинзового несклеенного компонента
Двухлинзовый несклеенный компонент (см. рис. 4.9) имеет четы-
ре свободных параметра, что позволяет получить заданные значения
параметров Р, W и С при любых комбинациях марок стекол.
Уравнения синтеза получаются сложением уравнений параметров
для модуля (линзы) (см. табл. 4.4) и имеют вид:
С = (а, - a3)/v, + (а3-as)/v2; (4.18)
Р = [1/(1 - т2/][(а3 - а?) + af (2т2 + 1)х
х(а3 -a;)+a2(m2 + 2)(af-af)] +
[1/(т4 - 1)2][а3 - а33 + а4 (2т4 + 1)х (4.19)
х (а5 - а3) + а4 (т4 + 2)(af - af)];
W = [l/(l-m2)][af-af-a2(zn2 + 1)(а3-а,)]+
+ [1/(1 - m4)][а* - a3 - a4 (m4 + l)(as - a3)]. (4'20)
Приведенные уравнения являются универсальными и пригодны
для синтеза компонента при любом положении предмета. Для этого
достаточно принять соответствующую нормировку первого вспомога-
тельного луча: O.J = р0, as = 1 при з; -»; а; = 0, а5 = 1 при s; -
Для получения расчетных соотношений, удобных для синтеза и
составления алгоритма, надо выполнить преобразования, характер
которых одинаков для компонентов всех видов.
Из уравнения (4.18) определяют а3= <р; при s4 = -«>. Справедли-
вость этого равенства очевидна, так как = f — 1, а a3 = h1lf1 — 1/f t =
= (р;. Уравнение для параметра W™ преобразуется к виду: а4 = Аа2 + В.
Подставив а4 в уравнение (4.19) для Р°°, получают квадратное уравне-
ние вида:
Daf + Еа2 + F - 0.
Отсюда следует очевидный порядок решения аберрационных
уравнений.
Последовательность расчета
1. Из (4.18) определяют <р; = [v2/(Vj - v3](l + Cv3).
2. Далее вычисляют коэффициенты преобразованных уравнений:
a3b(a + 2) д _ ag(b-c)+c(l + bW“)
a(b + 2)(a3-l)’ a(b + 2)(l-a3)
где а = 1/п2- 1; b = 1/п4~ 1.
3. D = а3Ъ2 (2а + 3)+ а2 А2 (1 - а3)(2Ь + 3).
4. Е = 2АВа2 (2Ь + 3)(1 - а3)- а23Ъ2 (а + 3)+ Аа2 (b + 3)(af -1).
5- F - В2a2 (2b + 3)(1 - а3) + Ba2 (b + 3)(af -1^ + a33(b2 -а2) +
+ а2-агЬгР°°.
6. Находят угол а2 из решения квадратного уравнения:
Ла2 + Еа.г + F = 0.
Выбирают меньшее по модулю значение а2.
7. Вычисляют угол а4 = Аа2 + В.
Дальнейший расчет выполняется по общей методике (см. 4.2).
Примеры синтеза приведены в [1, с. 185].
Для компенсации сферической аберрации высших порядков и
сферохроматической аберрации, особенно заметной в длиннофокус-
ных системах небольших и средних апертур, параметры Р°° и С при-
равнивают некоторым значениям. При небольших относительных от-
верстиях хорошие результаты дают приведенные выше соотношения
(см. 4.2).
Выбор комбинаций марок стекол. Условие выбора комбинации
марок стекол следует из соотношения для <р;. Целесообразно выбирать
пары стекол или других оптических материалов с большой разностью
коэффициентов дисперсии. Для видимого интервала это комбинации
типа «крон — флинт». Такой выбор приводит к меньшим значениям
оптических сил <р; и <р2, следовательно, бблыпим радиусам кривизны
и меньшим аберрациям высших порядков. Обычно <р; < 2,5 (см. [12]).
При возрастании (р; приходится уменьшать относительное отверстие
из-за увеличения аберраций высших порядков. Стекла выбранных
марок (или другие оптические материалы) должны иметь разные по-
казатели преломления для основной длины волны Х.о (п4~п2 =
= Ап > 0,1). Выбирая материалы, надо обращать внимание на их фи-
зико-механические свойства и стоимость. Примеры расчета объекти-
ва из стекла разных марок приведены в задачнике [I].
Синтез четырехлинзовых компонентов из двух одинаковых
двухлинзовых компонентов
Четырехлинзовые компоненты (см. рис. 4. 11) имеют одинаковые
радиусы кривизны, поэтому при заданных марках стекол число сво-
бодных параметров равно их числу в двухлинзовом компоненте.
Для расчета надо определить параметры Р”, W™ и С одного двух-
линзового компонента и затем выполнить его синтез.
В соответствии с нормировкой первого и второго вспомогательных
лучей а, = 0, ап = 0,5, а'п = 1, hr = f = 1, Р; = 1, yt — ap = 0,1 — -1. Уч-
тем, что ht = h2 = h3 = 1, так как компонент тонкий.
Следует обратить внимание на различие индексов координат вспо-
могательных лучей, параметров аберраций, оптических сил для повер-
хностей (или линз) и компонентов. Индексы, соответствующие по-
верхности (или линзе), записываются арабскими цифрами, т.е. v = 1,
2, 3,..., k (или у, = 1, 2,.., Z). В отличие от этого индексы, соответству-
ющие компонентам, записываются римскими цифрами, т.е. i = I,
II,..., р. Например, <р7 — оптическая сила первой линзы (или в част-
ном случае оптическая сила поверхности, что бывает ясно из вывода
или текста), но <рт — оптическая сила первого компонента. Аналогич-
но Р] — поверхностный аберрационный коэффициент, соответствую-
щий первой поверхности, но Pt — аберрационный параметр первого
компонента.
Суммы Зейделя S~ и Sn°° можно записать по компонентам в сле-
дующем виде: Sj°° = Р°°~ Р( + Рп; Sn” = W°° = WT +1УП.
Выразим параметры Р“, W°° четырехлинзового компонента через
основные параметры двухлинзового компонента, используя формулы
перехода от неосновных параметров к основным [12]. Тогда, приняв,
что коэффициент Петцваля я = 0,7, и подставив значения углов аг для
компонентов в соответствующие формулы, найдем:
Pi = 0,I25P"; Wx = 0,25W^;
Ри = 0,125 Р£ +0,5Wu + 0,425; WIt = 0,25Wu + 0,675;
Р°° = Pi + Р„ = 0,125 Р" + 0,125 Ри + 0,5Wu + 0,425 = 0;
W°° = Wj + = 0,25W~ + 0,25Wu + 0,675 = 0.
С учетом конструктивных условий можно записать: Р~ Рх~ =
= Р“; IVf = W, тогда 0,250Р“+0,5W~ + 0,425 = 0; 0,50W~ +
+ 0,675 = 0.
Из решения системы двух линейных уравнений имеем: Р”= 1,0;
W” = -1,35. Известно, что при положительных значениях Р“ и W°° —
= -1,3 в склеенном компоненте аберрации высших порядков умень-
шаются [19].
При расчете компонента, состоящего из двухлинзовых склеенны:
компонентов, для выбора комбинации марок стекол удобно использо
вать таблицы С.В. Трубко. Хроматический параметр С при болыпи:
относительных отверстиях рекомендуется брать в интервале -0,001..
-0,002.
Следует помнить, что фокусное расстояние каждого двухлинзово
го компонента в 2 раза больше фокусного расстояния всего компонен
та. Далее выполняется синтез двухлинзового компонента (см. выше)
Рассмотренная методика расчета применима практически ко все»
системам, состоящим из двух одинаковых компонентов.
Пример синтеза см. в задачнике [1, с. 197].
Синтез трехлинзового склеенного компонента
Трехлинзовый склеенный компонент (см. рис. 4.10) имеет четы
ре свободных параметра и позволяет лучше исправить сферическуь
аберрацию высших порядков. Его можно рассматривать как услож
нение двухлинзового склеенного компонента. При условии выбора
комбинаций марок стекол он позволяет получить заданные значение
трех параметров Р°°, W°° и С. Синтез компонента проводится решени
ем двух уравнений, чаще всего для С и Р“, а заданное значение W
обеспечивается выбором оптических материалов.
Так же как в случае двухлинзового склеенного компонента, вве
дем в аберрационные уравнения инвариант склейки QP Для этого вы
разим углы Оу первого вспомогательного луча в зависимости от инва
рианта склейки Qt и оптических сил ф; и ф2 первой и второй бесконеч
но тонких линз. Принимая во внимание, что а; = 0, — (а3 - а2)л2п3,
/(п3 - п2); ф, = (л2 - 1)(р; - р2); ф2= (п3 - 1)(р2 - р3), получим
а2 = ф; + Ql(l-m2);
a3 = <f1+Q1(l-m3y, (4.21
а4 = ф, + (1 - т4)~ ф2 (п4 - п3)/[п4 (п3 -1)];
где mv = l/nv.
Подставив полученные выражения для в уравнения поверхнос
тных коэффициентов Pv и Wv, получим после их суммирования еле
дующие аберрационные уравнения:
v~4
= AQf + BQy + D; (4.22
v=I V
v=4
V=1
(4.23)
В приведенных формулах коэффициенты А, В, D, Е, F имеют сле-
дующий вид:
А = 2ф2 (т2-т4) + 2<р2 (т3 - т4)+as (1 + 2т4);
B^3^/(n2-l)-2n3^1<f2(m4-m3)/(n3-l) +
+ п3(р3[п4 (т3- 1)+п3(1- Зт4)+ 2]Д(п3 - l)2n4] +
+ [2а5ф; (2т4 +1)-а3 (т4 + 2)-Зт^2, +
+ ат4 (бф; - За)- 2а5 (1 + 2т4)а]/(1 - т4);
D = n2^3J(n2 - 1)г + ф|п*ф; (т.4 - тп3)/(п3 - 1)г -
- <р2П% (п4 - П3 )/[(П3 - 1 )3 П4 ] +
+ {«I - «1ф; ("*4 + 2)+а5ф| (2т4 + 1)-
- (р3т4 + ат4[а*(2п4 + I)- 2а5ф; (2 + п4)+ Зфf ] +
+ аг[а5 (1 + 2171^-Зф;тп4]+ а3т4}/(1 - т4)г-,
я = Фт (т4 - тг)-<р2т3 + фгп3 (п4 - 1)/[п3 (п3 - I)]-
- ат4 -as(l + т4);
F = <Pi/0-n3) + <p2n3[(p1(m4 - m3)-am4]/(n3-J[) +
+ {а3 + аа5 (1 + т4)-ф; [а5 (1+ т4)+ 2ат4] +
+ (р3т4 + a2m4J/(l-m4),
где а = <р2(п4-п3)/[(п3-1)п4].
(4.24)
Благодаря введению в аберрационные уравнения инварианта
склейки Qj они имеют более простой вид, чем в ранее известных пуб-
ликациях. Поскольку уравнения получены для случая бесконечно
Удаленного предмета, когда а,= 0, то приняв, что аб= 1, получим
^ = Р“, W= И7”.
Уравнение для хроматического параметра С имеет вид:
C = -(<Pj/v;+(p2/v2 + (p3/v3); (4.25)
Значения кривизн pv поверхностей бесконечно тонкого компонен-
та при h = 1 можно вычислить с помощью следующих формул:
Рт = Qi + n2(p;/(n2-l);
Р« = Ф1+Ор (4.26)
Рз =Фт + $1-Ф2/(пз-^);
Р4 = Qi + [п4Ф, - Фа (п4 - «з)/(газ “ аз]/(п4 - С*
Для синтеза ахромата на первом этапе необходимо решить со-
вместно три уравнения: уравнение масштаба
Фг+Фз + Фз = ^’ (4.27)
уравнение ахроматизации (4.25) и дополнительное уравнение
* = ф;/(ф/ + Фз) или (2 - t)(p; - t(p3 = 0. (4.28)
При t = О, <р; = О имеем случай перехода от трехлинзового к двух-
линзовому склеенному компоненту; если t = 1, то (р3 = 0 и опять — слу-
чай перехода к двухлинзовому компоненту.
При синтезе апохромата вместо дополнительного уравнения для
t вводится уравнение апохроматизации:
(Ф1Л1)у1+(фгЛ2)у2 + (фзЛз)Уз = -Св.с„ (4.29)
где — коэффициенты частных относительных дисперсий; Св.с. —
параметр вторичного спектра.
Между параметрами Р°° и W°° существует зависимость, аналогич-
ная зависимости для двухлинзового склеенного компонента. Диффе-
ренцируя Р°° и приравнивая производную нулю, установим зависи-
мость, связывающую основные параметры Р”, компонента с пара-
метрами P^n, W“in, Qmin соответствующими минимальной сферичес-
кой аберрации третьего порядка:
Р” = Р~п + (а/е2)(ти~ - W“n)2,
где
Р“Ы = Р-В7(4А),
W~ln = F - ВЕ/(2А)= EQmln + F,
Коэффициент А/Е2 можно считать постоянным для обычных сте-
кол и равным примерно 0,80.
Приведенные соотношения позволяют выполнить синтез компо-
нента из трех различных марок стекол. Задача синтеза ахромата сво-
дится к выбору комбинации марок стекол по заданным основным па-
раметрам и значению t, а затем к определению оптических сил тон-
ких линз из уравнений первой группы и инварианта склейки Qt из
уравнения для Р“. Дальнейшая последовательность расчета: опреде-
ление углов Оу, вычисление параметров Cv, V7v, Pv и их сумм ECV, EWV,
нахождение rv тн и переход к линзам конечной толщины.
Рекомендации по выбору оптических материалов. Лучшие ре-
зультаты можно получить при синтезе компонента из трех различных
оптических материалов. Для полного использования коррекционных
возможностей компонента и получения двойной коррекции сферичес-
кой аберрации рекомендуется применять сочетание «нормальной» и
'«аномальной» склеек. Нормальными считаются склейки, имеющие
отрицательную оптическую силу (и < п'), а аномальными - положи-
тельную (п > п'), т.е. пкроиа > пфлиита.
Кроме того, чтобы обеспечить принципиальную возможность
двойной коррекции сферической аберрации, разности показателей
преломления на склейках должны иметь либо разные знаки при
одинаковых знаках радиусов кривизны обеих поверхностей, либо
одинаковые знаки при разных знаках обоих радиусов склеек.
Использование малой разности показателей преломления и круто-
го радиуса в склейке оказывает большое влияние на аберрации выс-
ших порядков и позволяет выявить существенные преимущества трех-
линзовых компонентов с разными стеклами в наружных линзах по
сравнению с этими компонентами из одинаковых стекол в наружных
линзах и тем более перед двухлинзовыми склеенными компонентами.
Поверхность склейки с большой разностью Ди = п — п' и более по-
логим радиусом рассматривают как основную, а другую — с малой
разностью Дп и крутым радиусом — как дополнительную, позволяю-
щую осуществить двойную коррекцию сферической аберрации.
В табл. 4.5 представлены четыре известные формы компонента,
обеспечивающие двойную коррекцию, и приведены соотношения меж-
ду показателями преломления в линзах (две конструкции с отрица-
тельными линзами в середине и две — с положительными) [16]. Фор-
ма компонента с внутренним положительным мениском наиболее бла-
гоприятна для устранения сферохроматизма. В конструкциях 3 и 4 с
плоскостью Гаусса совмещена экстремальная точка кривой сфери-
ческой аберрации, но от такого вида коррекции легко перейти к двой-
ной коррекции небольшим изменением параметров или смещением
плоскости изображения. Для примера в табл. 4.5 приведены комби-
нации марок стекол для Хо = 0,5893 мкм и спектрального интервала
F—C.
Таблица 4.5
№ по пор. Конструкция компонента Марка стекла «в График сферической аберрации Ду' при f=100 мм
1 П2>П3<П4 ТК16 ТК23 ТФ7 1,6126 1,5891 1,7280 58,34 61,23 28,32 7-Z т'
-0,05 0,05
2 П2<пз<П4 ТК20 ТБФ4 ТБФ25 1,6220 1,7786 1,8122 56,70 38,07 37,442 г г -0,05 i &L 005
3 П2<П3>П4 БФ25 ТФ10 ТФ5 1,6076 1,8060 1,7550 46,10 25,36 27,32 г.з т J - 16,67 1 .Щ’
- 0,003 \ 0,003
4 ТК14 ТК21 ТФ10 1,6130 1,6568 1,8060 60,57 51,10 25,36 1:3 ™ 1-16,67
П2<П3<П4 1 > -0,003\, 0,003
Пример 4.1. Выполнить синтез компонента-апохромата, если Г =” 100 мм, D/f = 1:4,
2<о =• 3°, =• 0,5893 мкм, спектральный интервал/1—С, оптические материалы — флюо-
рит, ОФ4, ТФ4.
Решение. Из совместного решения уравнений ахроматизации (4.25), масштаба(4.27)
иапохроматизации(4.29)при С “ Ои С -0,0003получено:<р, = 2,1943; <р2 = -1,5519;
<р3 = 0,3576.
Решив уравнение (4.22), определив значения av из (4.21) и параметров по повер-
хяостям Pv, Wv, а также rv , найдем:
и( = 0 2,251834 Р, = 0,018480 W,- -0,041611
аг= 0,134367 ^*2 тн -0,216742 Рг= -18,0734 -2,65470
а3 = -0,488918 3 тв -0,448818 Р3 = -0,29748 ж,= -0,103636
а4 = -0,578185 Г. “ 4 та -0,368807 Р, =-18,35258 w4 = 4,94486
Для выбранной комбинации оптических материалов = 2,14.
1
После перехода к линзам конечной толщины конструктивные параметры компонен-
та имеют следующие значения:
nD VD
^ = 225,183
г2 =-21,3594 = 5,9 CaF2 1,43384 95,3
г3 = -46,7073 <*г=2,7 ОФ4 1,6505 43,45
г4 ~ -37,5089 d, = 2,0 ТФ4 1,7398 28,15
Обоснование выбора избыточных параметров в трех- и
четырехлинзовых компонентах
В компонентах с числом линз более двух, кроме склеенных, по-
являются избыточные параметры, поскольку число свободных пара-
метров оказывается больше числа решаемых уравнений. К таким ком-
понентам относятся трехлинзовые компоненты из отдельной линзы и
склеенного компонента в различных комбинациях, трехлинзовые не-
склеенные и четырехлинзовые компоненты с разными радиусами кри-
визны (см. схемы 5—11 табл. 4.4).
Избыточные параметры выбирают из условия исправления
аберраций высших порядков. Правильный выбор их значений особен-
но заметно сказывается при синтезе компонентов с относительным от-
верстием, близким к предельно возможному для каждого компонен-
та, когда влияние аберраций высших порядков велико. Это требует
исследования системы с применением ППЭВМ или должно быть пре-
дусмотрено при автоматическом синтезе.
Выбор оптимальных значений избыточных параметров позволя-
ет сократить время на дополнительную коррекцию аберраций. В табл.
4.4 приведен рекомендуемый диапазон значений избыточных пара-
метров компонентов для спектрального интервала F'—С', основной
длины волны = 0,5461 мкм и условий исправления аберраций. При
переходе к другим спектральным интервалам и оптическим материа-
лам, а также при С, Р°° и W", значительно отличающихся от нуля, оп-
тимальные значения избыточных параметров могут существенно из-
мениться.
Отдельные общие рекомендации даны в п. 4.2. Для уменьшения
влияния аберраций высших порядков надо стремиться выбором избы-
точного параметра заметно уменьшить по модулю значения коэффи-
циентов Pv, Wv на поверхностях с их максимальными по модулю зна-
чениями. Следствием этого является уменьшение углов падения на
поверхностях в реальной системе.
В трехлинзовых объективах со склеенным компонентом опти-
мальное значение избыточного параметра обычно выбирают по мини-
муму модуля инварианта склейки и соответствующего значения Pv на
поверхности склейки. График зависимости поверхностных коэффици-
ентов Р4, W4 и инварианта Q от значения избыточного параметра (а3)
для одного из объективов со вторым склеенным компонентом (см. рис.
4.13, а) показаны на рис. 4.15,
Рис. 4.15. График зависимости парамет-
ров Р4, W4 и инварианта склейки Q от из-
быточного параметра а3 в трехлинзовом
компоненте, состоящем из отдельной
при рассмотрении которого кри-
терий выбора очевиден. Анали-
тические зависимости для точно-
го определения а3 очень сложны
и непригодны для практического
применения.
В трехлинзовых несклеен-
ных компонентах (см. рис. 4.14)
имеются два избыточных пара-
метра — это соотношение между
оптическими силами положи-
тельных линз, т.е. <pz = k(p2 — в
компоненте с задней отрицатель-
ной линзой и <р2 = k(p3 — в компо-
ненте с отрицательной линзой в
середине, а также значение внут-
реннего угла а2. При выборе при-
меним общий критерий миними-
зации поверхностных коэффици-
ентов, который в данном случае
справедлив при минимуме сум-
мы XPV2. В конструкции с задней
отрицательной линзой при рабо-
те в видимом диапазоне при усло-
вии исправления аберраций оп-
линзы и склеенного компонента
тимальный вариант обычно получается при k = 1 и расчете первой лин-
зы на минимум сферической аберрации.
В четырехлинзовых компонентах, состоящих из двух склеенных
компонентов с разными радиусами кривизны (см. рис. 4.12), также
два избыточных параметра, за которые принимают оптическую силу
<Pi первого компонента и оптическую силу <р3 третьей линзы. Исполь-
зование общего критерия применительно к данной конструкции обес-
печивает минимальное значение величин Qn и Р5 — параметров на вто-
рой склейке. При этом обычно получается минимальная разность
между значениями инвариантов склеек и Qn и минимальная сум-
ма EPV2.
Предварительным критерием на первом этапе расчета может слу-
жить минимальная сумма Есрр2. В табл. 4.6 приведены значения Qp Qn,
IР5 lmax, UPV2 для различных пар избыточных параметров для комби-
нации марок стекол К8—ТФ5 при работе в видимом диапазоне
(F'—С')- Выбор оптимальных избыточных параметров позволил полу-
чить приемлемое качество изображения в исходном варианте для
f = 100 мм, D/f =1:1,5.
Таблица 4.6
Избыточные параметры Инварианты склеек Параметр склейки LP/
«4 % «п Qn
0,6 1,0 -1,284 -1,813 0,601 0,615
0,6 0,9 D<0 — — —
0,6 1,1 -1,156 -1,941 0,734 0,898
0,4 1,1 D<0 — — —
0,5 1,1 -1,282 -1,908 0,674 0,701
0,4 1,2 -1,187 -2,126 0,856 1,045
0,6 0,95 -1,294 -1,835 0,602 0,594
0,4 1,0 D<0 — — —
Тщательный выбор избыточных параметров особенно важен для
компонентов с большой светосилой, работающих на пределе их воз-
можностей. При сравнительно невысоких относительных отверстиях,
например D/f =1:5, и при f = 100 мм для трехлинзовых объективов
со склеенным компонентом можно воспользоваться известной реко-
мендацией и взять а3 или а4 равным 0,5 при работе в диапазоне
F'—C'.
Следует обратить внимание на влияние воздушных промежутков,
которые могут составлять несколько миллиметров и существенно из-
менять аберрации высших порядков. В некоторых случаях это может
стать причиной несоответствия между теоретически правильным вы-
бором избыточных параметров и остаточными аберрациями высших
порядков в вариантах с различными значениями параметров.
Синтез трехлинзовых компонентов
Синтез трехлинзового компонента, состоящего из отдельной лин-
зы и двухлинзового склеенного компонента [6]. Аберрационные урав-
нения для синтеза получим, используя правило сложения уравнений
модулей (см. табл. 4.4).
Поскольку компонент обычно формирует изображение бесконеч-
но удаленного предмета (см. рис. 4.13, а), то примем, что сс2 = 0, ав = 1,
= Г = 1.
Синтез сводится к определению параметров <р2, Q и а2из решения
трех аберрационных уравнений для С, Р” и Ж” [6] при выбранном зна-
чении избыточного параметра (см. табл. 4.4), вычислению rVTH и пе-
реходу к линзам конечной толщины.
Преобразовав уравнения так же как описано ранее, из уравнения
для W” получим уравнение вида: а2 = AQ+ В. Подставив его в аберра-
ционное уравнение для Р”, найдем KQ2 + LQ + М = 0. Свободные чле-
ны ВиМ содержат соответственно значения W™ и Р”.
Последовательность расчета
1. Определение оптической силы <р2 из уравнения для С:
Ч>2 = [l/v3 ~ аз ~ ~ ЦУг)-
2. Вычисление коэффициентов преобразованных уравнений Р” и
а = 2ср2(т4-m5)+(2ms + 1)(1-а3); mv = l/nv;
b = 3<р2/(п4 -1)-2а3ф3 -[1/(п5 - 1)]х
х[з(<р2 + а3)2 +(2п5 +1)-2(<р2 + а3)(2 + п5)];
с = \п,4/(п4 -1)2][ф| + а3ф^(1 - п4)]+ [п57(п5 - 1)2]х
хГ1-(ф2 + а3)(2 + тп5)+(ф2 + а3)г (1 + 2т5)~ (ф2 + а3)3т51;
d = а3 (п2 + 1)/(п3 - 2); А = (а3 - а - l)/(2d);
В = (l/d){n2af/(n2 -1)+ (1/3)[(а3 - 1)(<р2 -1)- &]- ТГ”};
/ = nf/(n2 -1)2; Т = 1а3 (1 + 2тгу, D —-1а^2 + т2у,
К = а + ТА2\ L = b+ AD + 2АВТ; М = с + la33 + В(ТВ + D)-Р°°.
3. Определение Q (меньшего по модулю) из решения квадратного
уравнения
KQ2 + LQ + M = 0.
4. Определение угла а2 = AQ + В.
5. Определение углов а4 = (1 — m4)Q + <р2 + a3; a5 = (1 — ms)Q + <р2 +
+ а3.
6. Расчет по общей методике (см. 4.2).
Синтез трехлинзового компонента, состоящего из склеенного
компонента и отдельной линзы [6]. Этот компонент (см. рис. 4.13, б)
отличается от рассмотренного выше только расположением компонен-
тов, и его синтез выполняется аналогично только что рассмотренно-
му, отличие лишь в нумерации неизвестных параметров — ср2, Q и а5.
Избыточный параметр а4 выбирается в соответствии с методикой, из-
ложенной ранее (см. табл. 4.4).
Из уравнения для Ж” получим соотношение a5 = AQ + В, подста-
вив которое в уравнение для Р°°, имеем: KQ2 + LQ + М = 0.
Последовательность расчета
1. Определение оптической силы <р2 из уравнения С
Ф/ = [2Лз - а4 V/Уз ~ 2Лз) + C]/[l/v2 - 1/vJ.
2. Вычисление коэффициентов преобразованных уравнений W°° иР”:
а = 2ц>1 (т2-т3) + (2т3 + 1)а4;
Ъ = J^L-----+ а2 (2п3 +1)-2а4<р1 (2 + п3)1;
п9-1 n„-V- J
с = 7 " S+ -<Иф/ - «J2(«4«3 - Фт);
(п2-7) (п3-1)
d = [(1 + п5 )(1 - а4 )]/(n5 -1); А = - (а4 + a)/(2d);
В = |{|[а4 (а4 -ф2)-Ь]+ ТУ"};
u> 1 ’’*5 I
Z = 2/(2-m5/; Т = /(2тп5 + 7)(7-а<();
Z> = Z(m5 + 2)(a^-l); Х = а + ТА2;
L = b + A(D + 2BT\, М = с +l(l-а^)+ В(ТВ + D)-Р“.
3. Определение Q из решения квадратного уравнения
KQZ + LQ + M = 0.
4. Расчет угла а5 =AQ + В.
5. Вычисление углов
а2 = (l - m2)Q + ф2; а3 =(1-т3)(? + ф2.
6. Расчет по общей методике (см. 4. 2).
Пример синтеза приведен в задачнике [1, с. 203, 208], где пред-
ставлены расчеты двух конструкций трехлинзовых объективов с обо-
снованием выбора избыточных параметров.
Синтез компонентов из трех несклеенных линз. Аберрационные
уравнения для синтеза компонентов двух конструкций (см. рис. 4.14,
табл. 4.4) получаются сложением уравнений для модулей линзы [6].
Синтез компонента заключается в выборе оптимальных значений двух
избыточных параметров, определении оптических сил ф2, ф2, ф3 из
уравнений масштаба, ахроматизации (или получения заданного зна-
чения С) и соотношения оптических сил (см. табл. 3.4), а затем опре-
делении внутренних параметров а4 и а6 при выбранном или рассчи-
танном значении а2.
Для получения удобных расчетных соотношений из уравнения ТУ"
получим зависимость: а6 = ba4 + d. Подставив ее в Р°°, имеем квадрат-
ное уравнение: Da42 + Еа4 + F = 0.
Последовательность расчета
1. Определение оптических сил из уравнений:
ф2 + ф2 + ф3 = /;
<Pi/Vj + <P2/v2 + Ф3/у3 = -С; ф; = /гф2 (или Ф; = Аф3);
«з = Фр а,5 = Фт + Ф2-
2. Вычисление коэффициентов преобразованных уравнений Р°° и W”:
= [1/(т2 - 1)][а2 (т2 + 1)а3 - а*],
где т2 — 1 /п2, а2 выбирают или вычисляют:
a2min = (2пг + -Оаз/[2(пг + 2)];
А = W” - Ж1л - (af - а2)/(т4 - 1)- (а2 - 1}/(т6 -I);
В = (^ + -^)(«з~«5). Т = (иг6+ .?)(/-а, );
’ тв~1.
Ь =- В/ Т; d = А/Т;
D = Ц-у[(2/п4 + 2)(а5 - а3)] + ------~^[b2(2m6 + 1)(1-а5)];
(тп4-1)
Е = —2- [(то< + 2)(а2 - а2)] + — 2 х
L /J (me-l)
x^2bd(2me +1)(1 - as) + b(2 + me)(a2 -
F = ---[afa3 (2m2 + J)- a2a3 (2 + m2) + a33 1 +
(m2 -1)
+ 7—-7.-2 (a5 - “0 + 7—2 ? r К (2me + 0(7 - a5 ) +
+ d(2 + me)(a2B-l)+l-a3s]-P-.
3. Решение квадратного уравнения Ва/ + Еа4 + F = 0. Выбирает-
ся меньшее по модулю значение а.4, которому соответствуют меньшие
по модулю Pv.
4. Определение ае = ba4 + d.
5. Расчет по общей методике (см. 4.2). Пример синтеза см. в за-
дачнике [1, с. 210], где приведены примеры синтеза объективов при
различных значениях хроматического параметра С и различных ком-
бинациях марок стекол.
Синтез четырехлинзовых компонентов
Синтез четырехлинзовых компонентов, состоящих из двух скле-
енных компонентов с разными радиусами кривизны [6]. Аберраци-
онные уравнения для С, Р°°, W°° четырехлинзового компонента (см.
рис. 4.12) получаются сложением уравнений модулей склеенных ком-
понентов (см. табл. 4.4). При заданных оптических материалах ком-
понент имеет шесть свободных параметров, из них два избыточных
-а4 = ф2 и <р3.
При выполнении синтеза на первом этапе при заданных а4 и ф3
(см. табл. 4.4) определяют ф2 из уравнения для С, что позволяет, ис-
пользуя уравнение масштаба, найти все оптические силы бесконечно
тонких линз. Затем из совместного решения линейного уравнения для
W“ и квадратного уравнения для Р°° вычисляют инварианты склеек
Qi и Qn.
Удобные расчетные соотношения получают после преобразования
уравнения W” к виду Qn = AQt+ В и подстановки его в уравнение для Р*'.
DQ^ + EQl + F = 0.
Последовательность расчета
1. Определение оптических сил линз ф2,ф2, Ф4:
тогда <р2 = а4 - <р2 и (р4 = 1 - (а4 + ф3).
2. Определение коэффициентов преобразованных аберрационных
уравнений Р°° и W°°:
ai - 2<р] (т2 - тп3) + а4 (2т3 +1);
Ъ1 = тг21?- ;гЦ[3(р*+ (2Пз+2а4<Р1 (2+"зЯ;
п9 — 1 По — 1 L J
Cl=Г^2 + ( ~~ л2^1 ~(а*Пз"
аг = 2<p3(m5 -m6) + (2m6 + !)(!-а
Ьг =3(pl/(ns -1)-2а4(р3-[1/(пе-1)]х
х[з((?3 + а4)2 + (2п6+1)- 2(<р3 + а4)(2 + п6)];
С2 = [п5/(ns - 1)2][ф| + а4ф2 (1 - п5)]+ [пб/(n6 - -z)2]x
х[-г-((Рз + а4)(2 + тб)-(фз + а4)3т6 +(ф3 + а4)2(1+ 2т6)];
d = a4-a2-l; А-(а4 + а^/сГ,
В = [l/(3d)]{6lF“ + 2[Ьт - а4 (а4 - ф2)] + 2[Б2 - (а, - 1)(Фз -1)]};
D-a1+a2A2‘, Е = bt + АЬг + 2а2АВ;
F = ct + с2 + агВ2 + Ьг В - Р°°.
3. Определение Qt из решения квадратного уравнения
DQ2 + EQX + F = 0.
Из двух решений выбирают то, которому соответствуют инвариан-
ты склеек Qt и Qn с меньшей разностью между ними, обычно при этом
QH меньше по модулю, причем Qn = AQj + В.
4. Определение углов и кривизн pv (при h = 1):
аг = Qi(i-m2) + <p1; а3 = (?1(2-7П3)+ф/;
а5 =Qn(l-m5)+^>3 + a4; ав = Qn(1 - т6) +ф3 + а4;
р2 =(?1 + Ф2п2/(п2-1); р2=(?1 + ф2;
р3 = Qi + [1/{п3 - 1)](п3ф2 - а4); Р4 = Qn + а4 + <$3п5Кп5 ~
р5 =Qn + q>3 + «<; ре = $п + [2/(пб--г)][пб(фз + «<)--4
5. Расчет по общей методике (см. п. 4.2).
Пример 4.2. Выполнить синтез четырехлинзового объектива из условии исправле-
ния хроматизма положения, сферической аберрации и меридиональной комы, если
f = 100 мм, D/f = 1:2, 2ш = 6°, sp = 0, стекла марок К8—ТФ5, Хо = е, - ).,sF' - С'.
Решение. Для обоснования выбора избыточных параметров воспользуемся данны-
ми табл. 4.6 и примем вариант с минимальными по модулю значениями QH и Р5 при
и4= 0,6и(р3= 1,0,
На первом этапе расчета получены <р( = 0,74828, <р2 = -0,14829, <р4 = -0,6. Коэффи-
циенты преобразованных аберрационных уравнений для Р~ и W", решаемых на втором
этапе расчета, имеют следующие значения: а, = 1,417345, &, =-3,332329, = 2,388722,
а^= 1,03612, Ъ2 = 4,370372, с7 = 4,071036, А = -1,40470, В = -3,61700, D = 3,46187,
Е = 7,72198, F = 4,20749.
Остальные результаты синтеза бесконечно тонкого компонента для второго реше-
ния приведены в табл. 4.7. В табл. 4.8 представлены значения углов av для двух реше-
ний, а в табл. 4.9 для сравнения приведены результаты расчета и отдельные данные абер-
рационного анализа объектива для двух решений.
Таблица 4.7
V Р, W V
1 0,168281 -0,185344 100,140
2 -0,155870 -0,121386 -186,638
3 0,434342 0,461518 -293,154
4 0,057481 -0,051498 58,2687
5 —0,601416 -0,331688 -469,045
6 0,097180 0,228398 174,061
Примечание. При этих результатах расчета = -1,4х1О6, a = 0.
Таблица 4.8
Решение «г “з «5
1 0,425184 0,339055 0,6 0,819145 0,610994
2 0,309941 0,193092 0,6 0,981030 0,816033
Таблица 4.9
Решение Qn Р. > SP,2 As' екр Ли' 7 4 кр As7-, СГ-е
1 -0,946 -2,287 -1,508 1,513 0,156 0,040 0,312 0,127
2 -1,284 -1,813 -0,601 0,615 -0,032 -0,008 0,062 -0,010
После перехода к линзам конечной толщины для оптимального 2-го, а также 1-го решений получим
г, = 110,140 d; “ 7,1 K8 rt = 80,2873 d, = 7,2 K8
г2 = -182,533 d2=5,3 ТФ5 r2= -489,077 d2= 5,3 ТФ5
г3 = -283,702 d3 = 0,l r3=-26972,3 d3 = 0,l
г4 = 56,3553 d4 —9,1 K8 r4- 76,5578 d4 - 8,9 K8
г5 -= -411,770 d5 = 5,8 ТФ5 r5= -127,710 d2- 5,3 ТФ5
г6 - 145,278 re- 843,116
Фокусное расстояние системы f = 100,00 мм; меридиональная кома для со = 3° со-
ставляет 0,02 мм.
Рассчитанная система практически не требует дополнительной коррекции при от-
носительном отверстии 1:2 и дает хорошие результаты при увеличении относительного
отверстия до 1:1,5 и проведении оптимизации.
Особенности синтеза объективов малых увеличении и небольших
апертур. В оптических системах часто применяются объективы и ком-
поненты простой конструкции, для которых предмет расположен на
конечном расстоянии. В качестве примера можно привести объекти-
р.ы отсчетных микроскопов геодезических приборов, фокусирующие
компоненты телеобъективов, компоненты систем оптико-электрон-
ных приборов и т.п.
Полагая объектив бесконечно тонким, из условий исправления
аберраций определяют параметры Р, и С и переходят к основным
параметрам Р°°, W°° и С. Затем выполняют синтез объектива по изве-
стной методике (см. п. 4.2 и 4.3). В объективе небольшой апертуры до-
статочно исправить хроматизм положения, сферическую аберрацию
к меридиональную кому.
Пример синтеза приведен в п. 4.4, где рассмотрен расчет фокуси-
рующего компонента телеобъектива, а также в задачнике [1, с. 175].
4.4. Синтез линзовых систем из двух компонентов,
расположенных на конечном расстоянии
друг от друга
Синтез телеобъективов телескопических систем
Виды телеобъективов и их характеристики. В современных оп-
1 ических приборах применяются преимущественно зрительные тру-
?,ы с внутренней фокусировкой, имеющие существенные преиму-
Щнства перед трубами с внешней фокусировкой: постоянство длины,
малые размеры, герметичность, большое постоянство линии визиро-
вания и возможность создания геодезических аналлатических труб.
В зрительных трубах с внутренней фокусировкой объектив состо-
ит из первого положительного компонента и второго отрицательного
фокусирующего компонента, расположенного на конечном расстоя-
нии d от первого (рис. 4.16). При такой компоновке задняя главная
плоскость Н' вынесена далеко вперед, что позволяет значительно со-
кратить продольный размер трубы. Как известно, такой объектив на-
зывается телеобъективом [12]. Он находит широкое применение в зри-
тельных трубах геодезических приборов, оптико-электронных прибо-
рах, фотообъективах и т.п.
Рис. 4.16. Оптическая схема бесконечно тонкого телеобъектива и ход первого
вспомогательного луча
Одной из основных характеристик телеобъектива является коэф-
фициент т телеобъектива, или коэффициент телесокращения (те-
леукорочения ), представляющий собой отношение оптической длины
L к фокусному расстоянию (т = L/f). Обычно для линзовых телеобъ-
ективов т = 0,6...0,8, а уменьшение этой величины приводит к уве-
личению относительного отверстия первого компонента, что обуслов-
ливает необходимость усложнения его конструкции. Как правило, от-
носительное отверстие первого компонента не более 1:3.
Линейное увеличение Ро п второго компонента чаще всего состав-
ляет 1,45...2,2. Его дальнейшее увеличение нецелесообразно, так как
вызывает значительный рост аберраций и предъявляет более жесткие
требования к коррекции аберраций первого компонента, что может
привести к усложнению его конструкции. Фокусирующий отрица-
Глава 4. Параметрический синтез одно- и двухкомпонентных линзовых систем из бесконечно
тонких компонентов на основе метода разделения переменных
тельный компонент представляет собой отдельную линзу или чаще
двухлинзовый склеенный компонент.
Зрительные трубы геодезических приборов отличаются значи-
тельным увеличением, малым угловым полем в пространстве предме-
тов и наличием окуляра с малым фокусным расстоянием. Поэтому
расчет объектива и окуляра можно вести раздельно.
Диаметры объективов труб в зависимости от точности прибора и
его назначения составляют 20...65 мм, а иногда достигают 100 мм.
Фокусные расстояния объективов могут меняться в интервале
100...700 мм, а относительные отверстия — в интервале 1:9... 1:6 [12].
Оптические схемы и характеристики телеобъективов зрительных
труб представлены в табл. 4.10, а в табл. 4.11 приведены оптические
характеристики компонентов телеобъективов труб некоторых геодези-
ческих приборов.
К зрительным трубам предъявляют высокие требования, так как
от качества изображения трубы зависит не только точность визирова-
ния, но и степень утомляемости наблюдателя и продолжительность
работы с прибором.
Телеобъективы зрительных труб могут быть построены по тради-
ционной двухкомпонентной схеме (схемы 1—6 табл. 4.10) или по трех-
компонентной схеме (схемы 7, 8 табл. 4.10). В телеобъективе, выпол-
ненном по схеме 7, существенно уменьшен сферохроматизм, а в теле-
объективе, выполненном по схеме 8, он исправлен благодаря введению
воздушных промежутков между компонентами положительной час-
ти. Апохроматическая коррекция телеобъектива (см. схему 7) достиг-
нута за счет применения стекла ТФ12, частная относительная диспер-
сия которого больше, чем для обычных стекол, особенно в сине-фио-
летовой части спектра. Это позволило увеличить продолжительность
работы в сумеречное время, однако вызвало появление желтоватого
фона вследствие применения стекла ТФ12. В объективах уменьшен
также коэффициент рассеяния до 0,06.
Эти объективы, несмотря на их преимущества, имеют существен-
ные недостатки из-за трудностей изготовления и сборки, вызванных
чувствительностью систем к изменению оптических постоянных сте-
кол и воздушных промежутков.
Габаритный расчет двух- и трехкомпонентных телеобъективов
рассмотрен в гл.2. Пример расчета двухкомпонентного телеобъекти-
ва приведен в задачнике [1, с.219].
Таблица 4.10
№№ п/п Оптическая схема телеобъектива т D/f
1 S3 0,78...0,80 1:7...1:10
2 0,78...0,80 1:7...1:10
3 ! 1 а Ф 0,75...0,78 1:7...1:10
4 0,65...0,72 1:6...1:9
5 0,65...0,70 1:6...1:8
6 0,65...0,72 1:6...1:9
7 —$ 0,65...0,71 1:6,6... 1:7,9
8 0,62...0,70 1:5,8.. .1:8,3
Таблица 4.11
Наименование геодезического прибора т D Г л Гп 00 п D/f D/f\
Нивелир технический 0,78 34 314 206 -223 1,52 1:9,2 1:6,1
Нивелир высокоточный 0,75 55 410 282 -281 1,45 1:7,5 1:5,2
Теодолит оптический точный ТЗО 0,74 27 156,8 97,81 -78,03 1,60 1:5,8 1:3,6
Теодолит оптический точный Т2 0,59 35 250 119,87 -47,97 2,08 1:7,1 1:2,9
Теодолит точный унифицированный серии 2Т 0,60 38 218,5 110,9 -41,24 1,97 1:5,6 1:3,47
Теодолит высокоточный Т05 0,59 64 500 222,22 -138,78 2,25 1:7,8 1:3,47
Теодолит высокоточный Т1 0,72 55 347 231,6 -112,48 1,50 1:6,2 1:4,2
Синтез телеобъективов с фокусирующим компонентом в виде от-
дельной линзы. Исходными данными для синтеза помимо оптических
характеристик телеобъектива являются результаты его габаритного
расчета. В исходных условиях часто задаются требования, определя-
ющие форму отрицательной линзы: rk+I = -гк+2', rk+1 =°°; гк+2 = °° или
ak+2 = amin, где k — число поверхностей в первом положительном ком-
поненте телеобъектива. В этом случае синтез телеобъектива выполня-
ется из условия компенсации аберраций. Конструктивные параметры
первого положительного компонента определяют из условия компен-
сации аберраций второго фокусирующего компонента.
Предположим, что телеобъектив состоит из положительного ком-
понента, имеющего k поверхностей, и отдельной линзы. Принимая оба
компонента бесконечно тонкими и учитывая известные условия нор-
мировки первого вспомогательного луча, получим h} = h2 — h3...hk =
~f = l, hk+1 = hk+2 = hn, a; = 0, a'k+2 = 1, тогда ak+1 = a\ = ^= •
Внутренний угол аА+2 для второго компонента зависит от выбора
его формы (табл. 4.12).
Таблица 4.12
Оптическая схема компонента конструктивное условие И*+2
J R р» т Г*+1 = ~Г*+2 J + tpJ ^П*+2
in Компонент рассчитан на минимум сферической аберрации (2п^г + 1)(а^ + 1) 2(пк+г + '2)
гъ+1 = “ Г*+2 = “ ак+11пМ 1 П^2
В результате для второго компонента известны все углы: afc+1, ak+2
и ct'k+2 = 1, и можно найти параметры Рп, Wn, Сп:
Рц ~ Л+1 + Л+2 5 - ^к+1 + Wk+2;
Qi ~ Q+i+ Q+2 ~ (фт -0/vii •
Из условий исправления хроматизма положения, сферической
аберрации и меридиональной комы определим параметры Ct, Pv TVj и
затем выполним переход к основным параметрам СТ, И^°°.
Условие ахроматизации имеет вид: S^v = C1 + haCn = 0, откуда
Q = “*nQr
Из условия исправления сферической аберрации третьего поряд-
ка sr -Р^ + Лц^п = 0 имеем Рт = ~hnPu, где йп = 1 - d0<pr
Из условия исправления меридиональной комы при у; = ар = О
= Упрп + wi + Wn = ° получаем - Wu.
Из расчета второго вспомогательного луча при ар = 0, = 1 име-
ем уи = ут- d0Pn = -d0, поэтому W\ = dgP^ - Wn.
Тогда с помощью формул перехода [11] можно определить основ-
ные параметры Q =C1/tp1; =WI/(pf; PI”=-pi/(Pi.
При известных значениях С1э и Р™ выполняется синтез пер-
вого положительного компонента по известной методике.
Для контроля правильности вычислений радиусов кривизны пер-
вого компонента проводится расчет хода первого вспомогательного
луча через реальный компонент (с радиусами кривизны линз конеч-
ной толщины) и контролируются значения углов о^, полученные в про-
цессе синтеза, и значение фокусного расстояния fv Для этого расче-
та принимается следующая нормировка первого вспомогательного
луча: ос; = 0, й2 = fv при этом a’k = 1, где k — число поверхностей в пер-
вом компоненте. При такой нормировке hk = s'Fl, и можно вычислить
= s'Fi - //. Величину s'Rj необходимо знать для расчета dp — рассто-
яния между компонентами (см. рис. 4.6).
Далее выполняется расчет второго компонента, в рассматривае-
мом случае фокусирующей линзы, для которой известно значение фо-
кусного расстояния fn, при условии сохранения конструктивных за-
висимостей (см. табл. 4.12). Толщина линзы dn = dk+1 = O,lDntulU.
Если задано условие гк+1 = ~гк+2, то радиусы кривизны определя-
ют из уравнения оптической силы линзы конечной толщины (см.
п.4.2), которое приводится к квадратному уравнению вида:
Г*+2 + 2(nk+2 ~ -0/п Гк+2 + (ПЛ+2 ~ fn dn/nk+2 = 0.
Из этого уравнения определяют второй (положительный) радиус
кривизны. Положение передней главной плоскости рассчитывают по
известной формуле: sHn = - fa(пк+2 - l)du/(nk+2rk+2).
Если одна из поверхностей является плоской, то гк+1 = <» или
rk+2 = оо (см. табл. 4.12). В этом случае уравнение оптической силы
упрощается, и тогда rk+2 = fa (1 -nk+2), sHn = d^/n^, если rh+1 = Если
Гк+2 = °°> TO ГК+1 = /п (Пк+2 -1), ZSHn= °-
Расчет несколько усложняется, если фокусирующая линза рас-
считана на минимум сферической аберрации. В этом случае при рас-
чете надо строго сохранить углы а первого вспомогательного луча. Ра-
диусы кривизны рассчитывают по известной общей формуле
rv = hv (n'v -ny)/(n'va'v -nvav),
но так как высоту hk+1 нельзя сразу точно определить, то расчет вы-
полняется методом последовательных приближений.
Для расчета hh+l надо знать hk и dp, поскольку hk+l = - dpaA+z •
Поэтому необходимо рассчитать ход первого вспомогательного луча
через первый компонент при условии, что а1 = 0, й; = f', где f — фо-
кусное расстояние телеобъектива. Тогда ctk+1 = ап = фР Для опреде-
ления величины dp надо знать отрезок зЯп, зависящий от второго ра-
диуса кривизны, который также нельзя рассчитать для реальной лин-
зы, но можно определить для бесконечно тонкой линзы.
Действительно, для бесконечно тонкой линзы йп = hk+I = ,
где ап = — d0. Можно определить приближенные значения гтиА+2 и
Гтнк+2 ~ ^11 0 “ Пк+гУ(.^ ~ nk+2ak+2)’
SHU = ~ Al (Пк+2 ~ l)dll/(nk+2 Гтн* + 2)-
Тогда расстояние между компонентами в первом приближении
вычисляют следующим образом: dp = d0+ s^, - 8°Нд . Теперь можно най-
ти в первом приближении hk+1, hk+2, rh+I и гк+2:
^к+i~ hk ~ hk+2 ~ hk+1- dnak+2;
Й+2 ~ hk+l (,nk+2 ~ 1)/(.Пк + 2 ak+2 ~ Ф1)»
Fk+Z = hk+2 {1 - nk+2)!(l~ пк+2ак+г}-
Проверим значение sHlI: ~sH11=-f{1(nk+2-l)dn/(nk+2rk+2). Если по-
лученное значение не равно первоначально вычисленному s°Hn, то
расчет повторяют, приняв за исходное последнее значение 8Нц , затем
вычисляют во втором приближении d , высоты hv , радиусы кривиз-
ны и новое значение sH// . Расчет выполняют до тех пор, пока значе-
ния зЯп , гА+/ и гк+2 не совпадут в двух последних приближениях с точ-
ностью до единицы третьего-четвертого знака после запятой.
Затем для контроля вычислений рассчитывают ход первого вспо-
могательного луча через весь объектив. Для этого можно воспользо-
ваться результатами расчета хода параксиального луча через первый
компонент яри нормировке az = 0 и ht = f и продолжить его расчет
только через отрицательную линзу. Фокусное расстояние телеобъек-
тива f = hj/u'a. После этого выполняется аберрационный анализ
объектива.
Пример синтеза телеобъектива рассмотрен в задачнике [1, с. 219].
Синтез телеобъектива с фокусирующим компонентом, содержа-
щим две линзы или более. В ряде конструкций телеобъективов (см.
табл. 4.10) фокусирующий компонент является двухлинзовым скле-
енным, и расчет телеобъектива проводится по компонентам с исправ-
лением аберраций в каждом компоненте.
Первый положительный компонент рассчитывается при извест-
ных из габаритного расчета значениях его фокусного расстояния,
относительного отверстия и углового поля.
Второй отрицательный компонент рассчитывается при известных
значениях линейного увеличения 0О п, положения предмета ап, фокус-
ного расстояния fu, апертуры А и линейного поля 2уа.
Пример 4.3. Выполнить синтез телеобъектива для видимого диапазона спектра, если
f = 300 мм, D/f == 1:6,5, 2со = 4°, ближнее расстояние визирования -3,5 м, коэф-
фициент телеобъектива т = 0,68. Первый компонент — трехлинзовый несклеенный сим-
метричной конструкции, второй — двухлинзовый склеенный (рис. 4.17).
Рис. 4.17. Оптическая схема пятилинзоного телеобъектива
Решение. Результаты габаритного расчета приведены г табл. 4.13. Выполним син-
тез каждого компонента из условий исправления аберраций.
Для первого компонента при а, = 0, ht == f\“ 1, а7 == 1, задавшись соотношением
<р, = 1,4<р3, из условия масштаба и уравнения ахроматизации при С= 0 получаем:
- 1,02585; <р2 = -0,74829; <р3 = 0,72243, поэтому а3 = ср7 == 1,02585, а5 - ср, + <р2 =
- 0,27757.
Из аберрационных уравнений для W~ и Р" при условии Р~ = W~ = 0 угол as==
= 0,77292 а4 +0,83546, тогда 0,03517а/+ 15,6741 а4+ 1,84906 = , откуда а, = -0,11800,
а6 = 0,74425. При расчете было принято аг = 0,12.
В табл. 4.14 приведены значения углов av, параметров Pv, TVv и радиусов кривизны
тонкого компонента при = 192,764.
Таблица 4.13
f г. f'n do an *^иол I ТУ t. гол II
при f = 300
1 300 0,64255 192,764 -0,18834 -56,50 0,57523 172,56 0,6732 20,196 46,2 48 22,9 25
Таблица 4.14
V av Л TH
1 0 0,00976 -0,027783 548,363
2 0,12 6,66709 2,51246 -118,424
3 1,02585 -7,64885 -2,89119 -119,011
4 -0,11800 0,28840 0,31523 -302,456
5 0,27757 0,39738 -0,29068 117,205
6 0,74425 0,28614 0,38194 768,538
TPv = -7,4 IO6 £TVv = 2,3-105
После перехода к линзам конечной толщины по известной методике (см. п. 4.2) по-
лучим: ne
г7~ 548,363 d, = 5,0 K8 1,5183
гг = -118,055 d2=0,l
г3=-118,577 d3 = 4,8 ТФ5 1,7617
г4~ -302,244 d4 = 0,l
г3 = 117,106 ds=4,8 K8 1,5183
г6= 753,644
Второй компонент также рассчитываем из условия исправления аберраций, т.е.
Р = W = С = 0. Чтобы исправить кому, надо выбрать комбинации марок стекол. Для это-
го воспользуемся таблицами С.В. Трубко [22]. Сделав переход от неосновных парамет-
ров к основным при а; = Р311, а, = 1, найдем Р" = 46,979, W~ = 7,4975. Поскольку
W” > 0,8, надо выбрать комбинацию «флинт впереди», и для выбора марок стекол вы-
числяем величину = 1,8384. При найденном РОф и С = 0 выбираем стекла марок
Ф9—ТК17 и выполняем синтез компонента на ПЭВМ по методике, описанной выше (см.
4.2).
После перехода к линзам конечной толщины имеем:
r2= 43,3311 d4 = 5,5 Ф9
r2 = 149,389
r3= 23,599 df=2,5 TK17
st = 46,86; Рен =1,566 SHn ~ 26’4
Выполнив расстановку компонентов, найдем de = 142,4.
В результате получены следующие значения конструктивных параметров телеобъектива:
г( = 548,363 d, = 5,0 K8
г2=-118,056 d2 = 0,1
г, = -118,577 d3 = 4,8 ТФ5
г4=-302,244 d4 = 0,l
г3= 117,106 d5 = 4,8 K8
г2= 753,644 de~ 142,4
г7= 43,3311 d7= 5,5 Ф9
г3= 148,389 d3 = 2,5 TK17
г9= 23,599 f = 300,0 S;. = 59,74
Для реальной системы m = (Ed +sy-)/f = 0,733.
Аберрационный анализ исходного варианта системы показал (рис. 4.18), что она не
требует дополнительной коррекции аберраций. Рассчитанная система дает также хоро-
шие результаты при пересчете на D/f = 1:6 и требует незначительной дополнительной
коррекции.
Рис. 4.18. Графики остаточных аберраций в пятилинзо-
вом телеобъективе: а) график сферической аберрации
и сферохроматических разностей; б) график аберраций
широкого наклонного пучка
Синтез фототелеобъективов
Особенности конструкции и характеристики фототелеобъекти-
вов. Фотографические телеобъективы, или фототелеобъективы,
предназначены для съемок с больших расстояний. В отличие от обыч-
ных объективов они позволяют получать изображения большего раз-
мера и с больших расстояний.
Одной из основных характеристик телеобъектива является коэф-
фициент телеукорочения Т = f /L, показывающий, во сколько раз оп-
тическая длина телеобъектива меньше его фокусного расстояния. Из-
вестно также понятие телефотоувеличения Г = fl s'F., которое менее
удачно, поскольку не учитывает длину объектива.
Обычно Т < 1,35...1,4, Г< 2...2,5. Значения этих коэффициентов
во многом зависят от относительного отверстия. При их увеличении
приходится уменьшать относительное отверстие и угловое поле.
Чем меньше оптическая длина L и чем больше телеувеличение Г
и коэффициент телеукорочения Т, тем выше эксплуатационные пре-
имущества телеобъективов.
Фокусные расстояния телеобъективов меняются в широком
диапазоне — 100...2000 мм.
Для современных линзовых систем характерны значения:
Г, мм.................................400 300 200 135
Г .................................... 1,666 1,428 1,25 1,11
£//'..................................0,6 0,7 0,8 0,9
Однако эти значения нельзя принимать за критерий, надо учиты-
вать также оптические характеристики системы.
Наиболее традиционные телеобъективы построены по двухкомпо-
нентной схеме. В табл. 4.15 показаны некоторые известные схемы фо-
тотелеобъективов, начиная от самых первых разработок, схемы кото-
рых применяются до настоящего времени, и кончая некоторыми раз-
работками последнего десятилетия.
Обычно предприятия-разработчики наряду с престижными теле-
объективами с высокими оптическими характеристиками, но громоз-
дкими и тяжелыми, выпускают простые компактные системы, хотя
и уступающие первым по техническим параметрам, но более удобные.
В соответствии с известной классификацией Д.С. Волосова [2] нор-
мальные линзовые телеобъективы-анастигматы имеют коэффициент
укорочения 1,2...1,25, относительное отверстие 1:7...1:5.
Широкое распространение получили объективы малого теле-
укорочения, но повышенной светосилы, к которым относится группа
телеобъективов «Таир» (см. табл. 4.15), имеющих преимущественно
простую схему и обеспечивающих следующие оптические характе-
ристики:
Г, мм ....................................50...150 200...300 1000
D/f.......................................1:2,5 1:3... 1:3,5 1:4.. .1:5
2со°......................................2 20 215 210
При усложнении конструкции первого компонента и замене ме-
ниска, являющегося плананастигматическим корректором, склеен-
ным компонентом, относительное отверстие повышается до 1:1,5.
Понятие «фототелеобъектив», так же как и «фотообъектив»,
обычно имеет более широкое содержание [2] и включает не только фо-
тографические объективы, но и объективы более широкого назна-
чения, имеющие высокие оптические характеристики. К ним услов-
но относятся, например, построенные по простой схеме телеобъекти-
вы, применяемые в инфракрасной области, изготовленные из таких
материалов, как кремний, германий и т.п.
В процессе синтеза компоненты телеобъективов можно в первом
приближении принять за бесконечно тонкие, кроме мениска в «Таи-
ре», и использовать метод разделения переменных. Тогда, получив ре-
Таблица 4.15
№№ п/п Оптическая схема Название Примечание
1 _х__™ I -и «Магнар» Г = 3; D/f = 1:10; 2со<15°
2 gg м т ш «Телетессар» D/f = 1:6,3; 2со=35...4О°
3 L 1 к L 1 ДА I W «Теликон», «Телемар» Г = 2,44; D/f = 1:6,3; 2ы = 30°
4 Жг8 «Таир» Примечание: фотография, киносъемка, телевидение £ = 0,8...0,85Г
5 г~® «Телеапотес- сар» Апохромат с внут- ренней фокусиров- кой f -= 500; D/f = 1:8; 2со = 9°
6 Йе КЧ V5 Объектив фирмы «Canon» f = 300; D/f= 1:2,8; 2со = 8°; масса 2,3 кг
7 Объектив фирмы «Canon» f = 300; D/f = 1:5,6; 2co=8°;L = O,7f масса 0,63 кг
зультаты на основе теории аберраций третьего порядка и учитывая
известные свойства рассмотренных двух-, трех- и четырехлинзовых
компонентов, можно получить и оценить исчерпывающую картину
тех возможностей, которые обеспечивают телеобъективы наиболее
распространенных типов (в отношении светосилы, габаритных разме-
ров и качества изображения).
Синтез двухкомпонентного телефотообъектива при заданном ко-
эффициенте телеукорочения. Определим оптимальные геометри-
ческие характеристики телефотообъектива. Расчет выполним, пола-
гая, что компоненты бесконечно тонкие, и принимая известную нор-
мировку первого вспомогательного луча: а, = 0; = f = 1; ani = 1 (см.
рис. 4.16).
Уравнение масштаба для двухкомпонентной системы имеет вид:
ср = еру + фп — d фг фуу = 1.
i=II
Из уравнения Петцваля •8уУ=^л;ф; следует
i=I
Фп = (*$IV - Л1 4>j)Aii-
Выразив расстояние d из уравнения масштаба и подставив в него
полученное значение фуу, найдем
d = [Фс (л„ ~ «у)" Яд + Siv]/[<Pi(Siv ~ «уФу)],
тогда
Йуу = Цу'у = 1 — </фу = Луу (1 — фу)/(5уу - Луфу).
Для коэффициента телеукорочения получаем следующее выражение^
T = f7L = l/(d + ^) =
= Фс (®iv ~ ni фО/р^уу _ Лу фу - (1 -фу) лп|.
Рассматривая Т как функцию фу, найдем ее экстремум и опреде*
лим соответствующие экстремальные характеристики телеобъектив^
[2]: ЭТ/Эфу = 0, и
[(^ ~ ‘Siv/nII)+ (1 - SIV/7ty)x л/1 —SIV/7tyy _
9lextr~ ф1е’
откуда видно, что ф1е является вещественной величиной при SIV< Луу»
так как Луг > 0.
Проанализируем экстремальные величины <рт g, de, а'ц и Те в раз-
ных частных случаях (табл. 4.16). Обозначим m-^l-S^r/n , приняв
л = Л; = лп, что значительно упростит общие формулы. При SIV = л ве-
личина пг = 0, при этом получим обычный однокомпонентный объек-
тив. Для наиболее высококачественных телеобъективов с угловым
полем 2(0 = 20...30° SIV = 0. Тогда пг = 1, оптическая сила первого ком-
понента ср1е = 2 и в экстремальном случае L = 0,75/, т.е. Те = 1,333. В
результате получаем телеобъектив с минимально возможными раз-
мерами.
Таблица 4.16
Условие Экстремальные характеристики в частных случаях
<Ple d е <п
STV*0 1 + т т 1 (1 + т)2
/, , -\2 — . L——
+ JTIJ 1 + т 1+2т
SIV = л, т = 0 1 0 1 1
SIV = 0, т = 1 2 0,25 0,5 1,333
Сравнивая линзовые телеобъективы с зеркальными, следует от-
метить, что в последних длина системы сокращается в 2 раза, но в
3—4 раза уменьшается поле и составляет 6...7°. При небольшом поле
сумма Slv может существенно отличаться от нуля, поэтому можно
уменьшить габаритные размеры системы.
Следует помнить, что кривизну поля в линзовых телеобъективах
можно не исправлять, если 2а> = 1...2°, D/f = 1:15...1:20, но и при этом
L = 0,5/. Например при SIV = -6л получим q>Ig = 3,64, L = 0,47/ [2].
Однако выбор экстремальных гауссовых характеристик для
SIV = 0 приводит к оптической схеме, в которой невозможно исправить
дисторсию. Поэтому приходится несколько отступать от экстремаль-
ных значений.
Большое значение приобретает правильный выбор значения оп-
тической силы q>! первого компонента. При условии исправления всех
пяти монохроматических аберраций третьего порядка при уп = 0 ос-
новные параметры компонентов являются функциями срт [2]:
РГ = 2(3 + тс)(Ф1 -1)2; W~ = -(3 + тс)(ф1 -1);
Ри = [V(<Pi" 2/]{2(3 + л)(ф1 - 2)<pf + [2(2 + л)ф1 + /]Ф1};
= [фгДфх - + л - (3 - тт)Ф1].
При <р1е = 2 получаем = 23,6. При таком значении основного
параметра нельзя выбрать простую оптическую схему второго компо-
нента. Однако при небольшом уменьшении Ф1 величина быстро
уменьшается, но при этом несколько возрастает длина системы.
Анализ зависимости оптической длины L от Ф1 показывает, что
при изменении Ф1 от 1,5 до 3 общая длина системы возрастает не бо-
лее чем на 3...4% от экстремальной при ср1е = 2. При 1,5 < Ф1 < 1, 7 все
основные параметры компонентов оказываются в интервале практи-
чески реализуемых значений без существенного усложнения конст-
рукции или снижения светосилы. Это обеспечивает в конечном счете
разработку планастигматических ортоскопических телеобъективов,
теория расчета которых разработана Д.С. Волосовым [2].
Последовательность расчета
Выбрав Фг в диапазоне 1,5...1,7, вычисляют Фц, d, а'и и Т, исполь-
зуя полученные соотношения.
При заданном коэффициенте Т телеукорочения определяют Фр а
затем остальные гауссовы характеристики для телеобъектива при
f = 1, используя приведенные выше уравнения. При SIV = 0 получим
Ф1 ~ ~Фп* Определив значения //, /ц и d для заданного значения фокус-
ного расстояния телеобъектива, выбирают положение апертурной ди-
афрагмы и находят диаметры компонентов. Обычно апертурную ди-
афрагму устанавливают на середине расстояния между компонента-
ми или ближе к первому компоненту, сравнивая относительные отвер-
стия компонентов.
Определив оптические характеристики каждого компонента, вы-
бирают их конструкцию.
Затем определяют значения основных параметров , W~, ис-
пользуя приведенные выше формулы для этих параметров. Часто при
заданном Т приходится решать систему уравнений для коэффициен-
тов аберраций Sf, S£, S~a, Sy . Все суммы, кроме Sy , приравнивают-
ся нулю. Значение Sy выбирают так, чтобы получить приемлемые
значения для основных параметров второго компонента с целью уп-
рощения его конструкции. При необходимости выполнения второго
Глава 4. Параметрический синтез одно- и двухкомпонентных линзовых систем из бесконечно
тонких компонентов на основе метода разделения переменных
компонента в виде двухлинзового скленного при решении уравнений
надо контролировать величину P“in (см. п.4.3).
Следующим этапом расчета является окончательный выбор кон-
струкции компонентов, выбор марок стекол компонентов и их синтез.
После расстановки компонентов с учетом реального положения апер-
турной диафрагмы проводят аберрационный анализ объектива.
Синтез телефотообъектива при заданном телеувеличении. В на-
чале расчета, как и обычно, принимаем компоненты за бесконечно
тонкие и вычисления проводим при f = 1. Тогда а'п = 1/Г, /гп = а'п.
Из уравнения масштаба срп + Лп(рп = <рт + а'ц фц = 1 определим
фп = (1 - (1 - ср^Г, но /гп = 1 - йфр поэтому
d = (I — йц)/ф1 = (1 - Оц)/ф1 • (4.30)
Расстояние d обычно выбирают не более 1 /(2Г) [19]. При большем
значении телеобъектив превращается в обычный объектив. При ма-
лом d получается большое значение фр что приводит к большому отно-
сительному отверстию компонента. Обычно рекомендуется d ~ 1/(2Г).
С учетом этого для оптических сил компонентов имеем:
фг = 2(Г-1); фп = Г(3-2Г); (4.31)
Определим оптимальное значение телеувеличения, при котором
исправлена кривизна Петцваля, SIV = 0.
Подставляя полученные выражения для ф! и фп из (4.31) в усло-
вие исправления кривизны поля и принимая лг = лп = 0,7, получаем
SIV = 0,7(ф! + фп) = 0;
2(Г-1)+Г(3-2Г) = 0;
2Г*-5Г + 2 = 0;
г(1)-1/2; Г(2) = 2.
Практическое значение имеет второе решение: Г(2) = 2. При Г > 2
плоское поле можно получить лишь при значительном усложнении
конструкции или существенном уменьшении светосилы.
Следовательно, на первом этапе расчета при известном значении
коэффициента телеувеличения Г можно определить фр фп и d из фор-
мул (4.30) и (4.31). Затем необходимо решить уравнения исправления
сферической аберрации, комы, астигматизма и дисторсии третьего
порядка, помня, что коэффициент Петцваля SIV зависит от телеуве-
личения Г.
Формулы сумм Зейделя значительно упрощаются при yY = ар = 0,
когда входной зрачок совпадает с первым бесконечно тонким компо-
нентом. В дальнейшем при переходе к реальной системе можно выб-
рать другое положение зрачка (см. п. 4.2), не изменяя коррекции. При
этом условии аберрационные уравнения имеют вид:
S~ =P1 + h-aPn;
Su=ynPn + W1 + Wn;
$ш = + ^Уп^п/^п + Фг + Фи»
$v = УиРц/^и + + г/цфп (3 + Лп)/Лп •
Из решения системы четырех уравнений определим параметры Рр
Wp Рп, Wn и выполним переход к основным параметрам Р“, WJ”, Рц ,
по известным формулам (см. гл. 2), найдя которые, выберем кон-
струкцию компонентов и проведем их синтез.
Из условий исправления хроматизма положения Sfxp = С, + АдСи =
= 0 и увеличения S[7xp = J/цСц = 0 следует, что каждый компонент дол-
жен быть ахроматизован.
При выполнении условия исправления дисторсии часто получают-
ся большие значения основных параметров, приводящие к снижению
светосилы системы [2]. Если принять Sy = 2,5...4, то основные пара-
метры будут иметь приемлемые значения и телеобъектив может быть
светосильным при простой конструкции каждого компонента. Но при
этом возрастает дисторсия. Так, при Sy = 3, (й = 15°, Ду'/у' = 10%. Не-
обходимо также иметь в виду, что дисторсию можно понизить, умень-
шив уц, следовательно и d, но тогда возрастают срр срп и в результате
приходится уменьшать светосилу.
Дисторсию легко исправить в длиннофокусных системах со сред-
ним телеувеличением, так как они имеют малое относительное отвер-
стие. Это позволяет оставить большие значения Р(“ и W” , при кото-
рых дисторсию легче исправить.
Пример 4.4. Определить значения основных параметров компонентов телефото-
объектива при телеувеличении Г = 2 при условии Sf = Sfi = SJj - Sfi, = S$ = 0.
Решение. В соответствии с изложенной методикой расчета при Г = 2 Лп — а’и = 1/Г —
= 1/2, = 2, поэтому d = (1 - а'п)/ф,— 1/4, уа = -d “ -1/4.
Коэффициенты аберраций третьего порядка при ар = 0 имеют вид:
Sj” = Pj + 0,5Р„ = 0; SJ = Wj - 0,25Р„ + Wu = 0;
ST„ = 0,125Ри - 1ГП = 0; = 0,0625Ра + 0,75Wn + 3,7 = 0,
откуда Р, = 60,0; W, = —15; Ра = -120; Wa = -15.
Сделав переход к основным параметрам при а, = 0, а'( = 9,-2, а1п -1,х* 0,7, по-
лучим:
Ра =23,6; W^=-9,6; Рт“ = 7,5; Wl~ = -3,7.
Основные параметры имеют большие значения, что ведет к существенным аберра-
циям высших порядков. Например, для склеенного компонента -0,85x(w" -
- 0,15) ; Р“ь = -60. Это приводит к большим оптическим силам линз и к выбору особых
марок стекол.
Синтез светосильного двухкомпонентного объектива
Объектив (рис. 4.19) состоит из двух положительных компонен-
тов, расположенных на конечном расстоянии друг от друга. Каждый
компонент имеет простую конструкцию, чаще всего двухлинзовую.
Объектив позволяет получить высокое относительное отверстие
(1:2...1:1,5) при небольшом угловом по ле 2<й < 20°. Применение трех-
линзовых компонентов и особых марок стекол позволяет увеличить
относительное отверстие до 1:1,4...1:1,3.
Рис. 4.19. Оптическая схема свето-
сильного объектива типа объектива
Петцваля
Оба компонента являются положительными, имеют небольшие
оптические силы, поэтому общая длина объектива больше фокусного
расстояния L = 1,3...1,5/*. Отсутствие в системе отрицательного ком-
понента делает принципиально неустранимой кривизну Петцваля
(SIV = 0,8...1,2), поэтому угловое поле 2(0 < 20°.
Объектив позволяет получить хорошую апланатическую коррек-
цию, а также исправить астигматизм выбором расстояния между ком-
понентами. Для компенсации кривизны поверхности изображения
допускается небольшой отрицательный астигматизм.
Объектив такой компоновки был разработан Петцвалем как пор-
третный объектив, от которого не требовалось строгой коррекции кри-
визны поля. Входной зрачок расположен обычно вблизи первого ком-
понента, и его расстояние от второго компонента примерно равно фо-
кусному расстоянию второго компонента, поэтому главные лучи в про-
странстве изображений образуют малые углы с оптической осью, т.е.
ход лучей близок к телецентрическому.
Такие объективы, называемые дублетами, применяются в каче-
стве светосильных кинопроекционных объективов, объективов при-
боров ночного видения для получения изображения на фотокатоде
ЭОПа и т.п.
Особенности синтеза. Считая объектив бесконечно тонким (рис.
4.20) и принимая известную нормировку первого вспомогательного
луча (dj == 0, = 1, <х1П =1), получим:
Рис. 4.20. Оптическая схема бесконечно
тонкой системы светосильного объекти-
ва и ход первого вспомогательного луча
<xn = cpi; ср = <pt + <рп - dqjjCPH = 1;
Лп = 1 - dcpr;
аш _ «п + ^пФп _
Фп _ 0_<хи)/^П’ d-(1 Лп)/ап- (4-32)
Из (4.32) определим внешние параметры, влияющие на хромати-
ческие суммы и кривизну Петцваля.
Для упрощения решения аберрационных уравнений примем, что
входной зрачок совпадает с первым компонентом [19], как это дела-
ется при синтезе других рассмотренных систем.
Тогда по нормировке второго вспомогательного луча ар = ут = 0,
так как pj = 1, а уп = ух - dpn, но Рп = р\ = 1, поэтому уп = -d.
Условия исправления хроматических аберраций имеют вид:
«Гхр = ф1С1 + ЛпФпСп = о;
— и п — п (4.33)
$пхр _ Уп^пФ^и - 0’
где Cj и С„ — основные хроматические параметры.
Из (4.33) следует, что для ахроматизации каждого компонента
необходимо, чтобы Cj — Сц=0.
С учетом принятого допущения (ар = 0) и нормировки первого и
второго вспомогательных лучей суммы Зейделя можно представить в
следующем виде:
вГ = Р1 + Л„РП;
Sn = yuPn + Wl + Wn; (434)
= УцДг/^ц + ^Уц^п/^п + Фт + Фп’
где ф1 = <хп; Фп = (1 - ац)/Ап.
Три уравнения (4.34) имеют четыре неизвестных: Рр WJt Pu,Wn,
поэтому при выборе недостаточного параметра надо принять во внима-
ние рекомендации, учитывающие аберрации высших порядков. Их
влияние в данном случае особенно велико, так как относительное от-
верстие большое.
Из практики расчета следует, что, чем выше относительное отвер-
стие, тем ближе к нулю сумма Sj”. Для компенсации обычно положи-
тельной сферической аберрации высших порядков надо ввести отри-
цательную аберрацию третьего порядка, поэтому принимают
sr =0,2...0,3.
Обычно Sjj = 0, a Shj = -(0,02...0,1) [19], что обеспечивает ком-
пенсацию кривизны поля. Но не рекомендуется брать Зщ < -0,1 во
избежание узеличеяия астигматизма и получения неблагоприятных
значений Р" и Рд , при которых возрастают аберрации высших поряд-
ков.
Выбор значений «и и йп должен обеспечить оптимальные значе-
ния основных параметров компонентов, при которых аберрации выс-
ших порядков минимальны, т.е. достаточно большие Р°°, но при
W~= 0.
На сферическую аберрацию высших порядков основное влияние
оказывает конструкция первого компонента, так как высота осевого
луча, проходящего через край зрачка, в 2—3 раза больше, чем его вы-
сота на втором компоненте. Поэтому выбор основных параметров Р/’
и 'Г должен обеспечить наименьшие аберрации высших порядков
первого компонента. Например, для двухлинзового склеенного компо-
нента аберрации высших порядков будут меньше, если Р^> 0, а
Wf «0...-0.2.
Последовательность расчета
1. Задаются значениями осп и Лп, учитывая, что наиболее удачные
решения получаются при а,, = 0,5...0,7 и Лп = 0,5...0,3 [19]. Затем по
формулам (4.32) определяют фп и d.
Реальные значения фокусных расстояний компонентов и рассто-
яния между ними находят из соотношений: Д' =
dv = df.
2. Определяют диаметры компонентов, устанавливая реальное
положение апертурной диафрагмы (см. пример 4.5), оценивают оп-
тические характеристики каждого компонента и выбирают их конст-
рукцию.
3. Выражают неосновные параметры Рр Wt через основные по из-
вестным формулам перехода [12], учитывая нормировку at =0,
a i = ап = Фр а п = Затем полученные выражения подставляют в
уравнения (4.34), принимая Wf = 0 или -0,2, суммы Зейделя при-
равнивают некоторым рекомендуемым значениям (Sf = 0,2...0,3;
=0; Sftj = 0...-0,1) и из трех уравнений с тремя неизвестными оп-
ределяют Р{°, /д’ и ТУц .
Возможен и другой путь решения уравнений. Определяют
Wi= WTan > задаваясь Wf°, и из решения трех уравнений (4.34) опре-
деляют неосновные параметры Рр Рц, WQ. Затем делают переход к ос-
новным параметрам, используя соотношения перехода и принимая
л = 0,7, и получают:
Рц = [1/(1 - ап)3][рп - 4апТУп + ап (1 - ап)(5,4ап +1)];
= [1/(1 - ап)г][^ - 2,7ап (1 - ап)].
4. В случае двухлинзовых склеенных компонентов надо вычис-
лить значения = Р°° - 0,85(w°° -0,15} , позволяющие оценить пра-
вильность выбора Од и йц, и затем выбрать комбинации марок стекол.
5. По значениям основных параметров и оптических характерис-
тик компонентов выбирают их конструкции.
6. Выполняют синтез каждого компонента (см. п. 4.3) при усло-
вии получения расчетных значений основных параметров Р“, W“ ,
принимая, что величина С равна нулю или имеет небольшое отрица-
тельное значение (для компенсации сферохроматизма).
7. Выполняют переход к линзам конечной толщины (см. п. 4.2).
Объектив является светосильным, поэтому толщины линз получают-
ся значительными и радиусы кривизны реальной системы будут за-
метно отличаться от радиусов тонкой системы.
8. Проводят контроль вычислений расчетом хода параксиально-
го луча через объектив и определяют его фокусное расстояние.
Для выполнения синтеза объектива целесообразно составить про-
грамму на ПЭВМ. Это позволит провести исследование системы при
разных значениях избыточных параметров и сумм Зейделя и выбрать
оптимальное решение, которое позволит уменьшить аберрации выс-
ших порядков.
Пример 4.5. Рассчитать светосильный объектив, если f = 150 мм, D/f = 1:2,
2<о= 12°.
Решение. Задавшись <хп = 0,71, Лп = 0,342, из (4.32) найдем <ри = 0,84795, d = 0,9268.
Тогда для f = 150 определим f\ = 211,268, fn= 176,897, d = 139,02.
Применяя формулы перехода к основным параметрам, получим
Pj = 0,358Pf; W1 = 0,504W“;
Pll = 0,0244Pu +0,2388Wu +0,5835;
= 0,84 IW^ + 0,5559-
Принимая = -0,2 и подставляя полученные соотношения в (4.34), находим:
ST“ = 0,358Р" + 0,0834Р£ + 0,0816W^ + 0,2 = 0,23;
SJ = -0,0226Pfi - 0,13 73Wu + 0,504Wf + 0,015 = 0;
Sm = 0,061 ЗРй + 0,144Wu + 0,011 = -0,13.
Из решения уравнений определяем основные параметры: Д“— 0,2069; -1,3569;
Wj“ = -0,4016. При этих значениях PImln = 0,1026, PUmln = -1,6155, что вполне приемле-
мо для склеенного компонента.
Далее расчет ведем, используя таблицы С.В. Трубко [22]. Поскольку W~ < 0,8, для
каждого из компонентов выбираем комбинации «крон впереди» и определяем РОк по
формуле
Рок = [Р” - 0,84(W - 0,08 \^ур - 0,022 (W" - 0,08) + 0,0002 (W~ - 0,08)2
В результате получим РОк = 0,140, Рд = -1,581. Из таблиц по значениям РОк вы-
бираем комбинации марок стекол: для первого компонента ЛК7—Ф9, для второго —
БК10—БФ24. Для этих комбинаций при заданных значениях РОк параметр С = -0,001,
что благоприятно для компенсации сферохроматизма. Результаты расчета бесконечно
тонких компонентов приведены в табл. 4.17.
Таблица 4.17
Марка стекла Q “2 «S Г? TH rs™
ЛК-Ф9 -4,317328 0,595506 0,355744 115,805 -91,357 -301,64
БК10-БФ24 -5,923843 0,631090 0,476242 101,914 -56,3527 -514,35
Для определения диаметров компонентов примем в данном случае, что апертурная
диафрагма находится посередине между компонентами [19]. Тогда d/2 = 69,51, ипофор-
муле Гаусса определим, что ар = 103,6, тогда D** =50,32.
Световой диаметр первого компонента 2) t = 2ар tgco + D = 99, а световой диаметр
второго компонента, как видно на рис. 4.21, определяется ходом верхнего полевого луча
при отрицательном значении <о. В результате имеем 63,0. Тогда полные диамет-
ры Впод1= 102, DnojlII = 66.
После перехода к линзам конечной толщины имеем:
Рис. 4.21. Ход полевого пучка лучей в
оптической схеме светосильного
объектива из тонких компонентов
г, = 115,803
Л, = -83,5288
г, = -276,006
dI = 30,4
d2 = 10,2
ЛК7
Ф9
1,4846
1,6180
//= 211,269; =-21,73
Для. второго компонента:
г, = 101,914
1 18,7 БК10 1,6386
г„= -52,5932
rf2 = 6,6 БФ24 1,5713
г, = -470,896
/'=176,89: s'. = 161,952; s' =-14,94; s„=l,142.
г11 г п ti
Реальное расстояние между компонентами dp = d0 + ч',;- -sH = 139,02 - 21,73 -
- 1,142 = 116, 15.
Значение d вычислено с точностью до сотых долей миллиметра для сохранения зна-
чения фокусного расстояния с точностью до пяти значащих цифр, т.е. для контроля вы-
числений. При выполнении дальнейших расчетов следует взять d = 116,2.
Положение апертурной диафрагмы относительно задней поверхности первого
компонента определяется sa д = аа д +8щ= 47, 78.
Таким образом, получаем следующие конструктивные параметры объектива:
г. = 115,803
dt = 30,4 ЛК7
гг - -83,5288
d. = 10,2 Ф9
г. = -276,006
с/, = 116,15
г4 = 101,914
rf,= 18,7 БК10
г, = -52,5952
d5 = 6,6 БФ24
г6= -470,896
f = 150,00; в/ =36,35; = -113,65.
В результате аберрационного анализа найдены следующие значения остаточных
аберраций: поперечная сферическая аберрация для края зрачка Ду' “ -0,076 мм, хрома-
тизм положения для зоны отверстия = 0,079 мм, астигматизм для ы = 6°,
г' = 0,29 мм, меридиональная кома К “ 0,97 мм, дисторсия бу'/уц ’0,15%. Хрома-
тизм увеличения весьма мал и составляет несколько микрометров.
Объектив требует дополнительной коррекции аберрации. После оптимизации на
ЭВМ качество изображения объектива вполне удовлетворительное.
Для улучшения качества изображения в исходном варианте апертурную диафраг-
му необходимо устанавливать ближе к первому компоненту, учитывая при этом, что зад-
няя главная плоскость реального компонента находится внутри него (5щ< О), поэтому
следует выбиратьаа >25...30 мм.
Синтез оптических систем для преобразования лазерного
излучения
При использовании лазеров в качестве источников излучения не-
обходимо применять оптические системы для его преобразования [7].
Рассмотрим особенности синтеза систем для коллимации и концент-
рации лазерного излучения.
Системы для коллимации излучения, или коллимирующие систе-
мы, предназначены для уменьшения угловой расходимости излуче-
ния.
Габаритный расчет оптических систем для коллимации излуче-
ния с учетом структуры лазерного пучка и для геометрооптической
модели излучения рассмотрен в [7, 13] и гл. 2. Аберрационный рас-
чет систем выполняется с использованием геометрических представ-
лений.
Для коллимации излучения можно использовать системы разных
увеличений, разработанные в С.-П. ГИТМО (ТУ) (рис. 4.22). Для син-
теза таких систем можно применить теорию аберраций третьего по-
рядка, считая компоненты в начале расчета бесконечно тонкими. Из
теории телескопических систем известно [12], что угловое увеличение
7 о = - fi/fu . а оптическая длина L = f(+ /jj = (1 - у 0 ).
Габаритный расчет рассматриваемых систем приведен в гл. 2, а в
гл. 3 представлен аберрационный расчет, из которого определяют ос-
новные параметры Р™ и Р^ отдельных компонентов системы.
Для синтеза конструкций телескопических систем разных увели-
чений с первым отрицательным компонентом в виде отдельной плос-
ковогнутой линзы были рассчитаны основные параметры этой линзы,
а также одно- и двухлинзовых компонентов разных конструкций при
различных значениях показателя преломления (см. [4]). На основе
сравнения значений первой плосковогнутой линзы и Р” второго
компонента разных конструкций были выбраны оптические схемы,
представленные на рис. 4.22.
Рис. 4.22. Оптические схемы систем различных увеличений для коллимации
лазерного излучения: а) у0= 1/2,2; б) у0 = 1/2,7; в) у0 =1/3,9;
г) у0= 1/4,7;^ у0 = 1/5,3; е) у0 = 1/10,8
В качестве примера рассчитана система для уменьшения угловой
расходимости пучка при следующих условиях: X = 0,488 мкм; у0 =
= 1/5; L = 62...65 мм; диаметр пучка излучения на входе D — 4 мм.
Для расчета выбрана система со вторым компонентом, состоящим из
двух плосковыпуклых линз. При этих условиях получено, что f\ =
= -15 мм, fn = 79,5 мм. Рассчитанная телескопическая система име-
ет следующие конструктивные параметры:
0,488
Г2 =°о
г2 = 7,827 Г3 = °о dt = 1,5 1,52182 К8 d2= 12,277
г. = -82,969 rs = 82,969 d3 = 3,3 1,52182 К8 d = 1,0
Гб = оо ds = 3,0 1,52182 К8
Аберрационный анализ системы показал, что расходимость осе-
вого и наклонного пучков лучей не более 2".
В зависимости от требований к угловой расходимости пучка на
выходе системы и к ее размерам возможен синтез различных кон-
струкций двухкомпонентных систем (рис. 4.23).
В обратных системах Кеплера (рис. 4.23, а, б, д, е) (см. гл. 2), Га-
лилея (рис. 4.23, в, г, ж, з) в качестве первого компонента малого ди-
аметра может быть использована отдельная линза, так как она вно-
сит небольшую сферическую аберрацию при малом фокусном рассто-
янии. Однако радиусы кривизны короткофокусной линзы имеют
очень малые значения, что затрудняет ее изготовление, поэтому по
технологическим соображениям часто приходится заменять линзу
двухлинзовым компонентом или для одной линзы принимать = -г2.
Рис. 4.23. Оптические схемы систем для коллимации лазерного излучения
Ясно, что простейшие конструкции систем, состоящие из двух
однолинзовых компонентов (см. рис. 4.23, а, в, г), имеют значитель-
ную длину, поскольку отдельные линзы имеют малое относительное
отверстие 1:10...1:12. В простейшей конструкции обратной системы
Кеплера (рис. 4.23, а) каждая из линз рассчитывается на минимум
сферической аберрации, но эта система имеет большие аберрации и
находит весьма ограниченное применение. В обратной системе Гали-
лея (рис. 4.23, в) возможна компенсация сферической аберрации, так
как компоненты имеют разную по знаку сферическую аберрацию. По-
этому составляется аберрационное уравнение исправления сфери-
ческой аберрации всей системы (Sj = 0) при условии расчета первой
линзы на минимум сферической аберрации (см. гл. 5) или при извест-
ном конструктивном условии (например, = ~г2) и определяется
внутренний угол а4 первого вспомогательного луча для второй линзы.
Значительно эффективней в аберрационном отношении выбирать
оптические схемы, в которых возможно исправление сферической
аберрации и комы (см. рис. 4.23, б, е, ж, з), поскольку одновременно
увеличивается технологичность системы. Для этого приходится при-
менять двухлинзовые несклеепные компоненты (см. п. 4.3), состоя-
щие из положительной и отрицательной линз.
Двухлинзовые компоненты имеют четыре свободных параметра
при заданных марках стекол, один из которых является избыточным,
так как исключается необходимость коррекции хроматизма положе-
ния. При расчете возможны две конструкции — с первой положитель-
ной и с первой отрицательной линзой. В соответствии с рекомендаци-
ями (см. п. 4.3) оптимальное значение избыточного параметра, выби-
раемое из условия исправления аберраций высших порядков, получа-
ют при возможно минимальных по модулю значениях поверхностных
коэффициентов Pv, Wv. Это приводит к увеличению радиусов кривизны.
Для конструкции с первой отрицательной линзой избыточный
параметр а3 = 0,22...0,38 (рис. 4.24, а), а с первой положительной —
а3 = 1,22...1,27 (рис. 4.24, б) для оптических материалов с показате-
лем преломления п = 1,5...1,7. Как видно на рис. 4.24, несколько
меньшие значения поверхностных коэффициентов Pv при указанных
значенях а3 имеет схема с первой отрицательной линзой.
Расчет двухлинзового компонента проводится по известной мето-
дике (см. п. 4.2 и п. 4.3), отличие заключается лишь в отсутствии урав-
нения ахроматизации и выборе оптических материалов. После расче-
та каждого компонента проводится их расстановка, заключающаяся
в определении расстояния dp между компонентами (см. п. 4.2).
При выборе оптических материалов надо учитывать их физико-
механические свойства и лучевую прочность. В отличие от ранее рас-
смотренных систем в коллимирующих системах можно применять
стекло одной марки. Для повышения светосилы каждого компонента
возможно использование двух стекол, лучше кронов, с наибольшей
разностью показателей преломления.
Рис. 4.24. График зависимостей поверхностных коэффициентов Pv от
избыточного параметра аэ в двухлинзовом объективе-монохромате:
а) с первой отрицательной линзой; б) с первой положительной линзой
После расчета исходного варианта проводится аберрационный
анализ и при необходимости выполняется коррекция остаточных
аберраций. Остаточные аберрации в коллимирующих системах сни-
жают осевую интенсивность формируемой диаграммы направленнос-
ти и тем самым уменьшают коэффициент ее заполнения. Поэтому не-
обходимо стремиться к получению минимально возможных значений
остаточных аберраций.
Оптические системы для концентрации (фокусирования) лазер-
ного излучения должны иметь совершенную коррекцию сферической
аберрации, которая оценивается по волновой аберрации и не должна
превышать О,IX (критерий Рождественского).
Это требование надо учитывать при выборе конструкций отдель-
ных компонентов или объектива при выполнении габаритного расче-
та (см. гл. 2).
Аберрационный расчет проводится традиционным методом в за-
висимости от вида оптической системы.
В качестве объектива можно использовать плоскогиперболоидную
анаберрационную линзу Декарта (см. гл. 2 и 6).
Синтез симметричного окуляра
При разработке оптических систем обычно стремятся использо-
вать уже готовый окуляр. Кроме того, имеются нормальные наборы
рассчитанных окуляров с различными вариантами аберрационной
коррекции. Выбрав из этого набора подходящий окуляр, рассчитыва-
ют объектив, стараясь компенсировать остаточные аберрации этого
окуляра. Однако в отдельных случаях возникает необходимость рас-
чета нового окуляра.
Наиболее часто применяемые на практике окуляры (в биноклях,
визирах, геодезических приборах, микроскопах) состоят из двух срав-
нительно тонких компонентов, разделенных более или менее значи-
тельным воздушным промежутком. Их угловое поле не превышает
40...50°, относительное отверстие — 1:4. При таких характеристиках
удовлетворительные результаты дает метод разделения переменных.
При синтезе окуляров необходимо исправить аберрации наклон-
ных пучков: астигматизм, кому, дисторсию, кривизну поля, хромати-
ческую разность увеличений. Осевые аберрации малы, так как фокус-
ные расстояния обычно составляют 10...50 мм, редко выходя за эти
пределы, чаще всего они не превышают 25...30 мм.
Симметричные окуляры, известные также под названием окуля-
ров Плосселя (рис. 4.25), широко применяются в различных оптичес-
ких приборах, особенно там, где требуется значительное удаление
выходного зрачка. Эти окуляры, построенные по традиционной схе-
ме, имеют удовлетворительную коррекцию сферической аберрации,
хроматизма положения, астигматизма и дисторсии, однако их кома
и хроматизм увеличения имеют достаточно большие значения 5... 10',
что ограничивает их применение.
Рис. 4.25. Оптические схемы симметричного окуляра:
а) классической конструкции; б) с улучшенной коррекцией аберраций
Кроме того, указанные аберрации особенно мешают в тех случа-
ях, когда в фокальной плоскости окуляра располагаются шкалы или
сетки. Причиной этих недостатков является наличие поверхности
склейки значительной кривизны, разделяющей среды с большой раз-
ностью показателей преломления.
В 1967 г. в С.-П. ГИТМО (ТУ) были разработаны конструкции
симметричных и квазисимметричных окуляров с хорошо исправлен-
ными хроматизмом увеличения и комой. Окуляр состоит из двух плос-
ковыпуклых склеенных компонентов с «хроматическим» радиусом
склейки, поэтому были использованы стекла с показателями прелом-
ления, близкими по своим значениям для основной длины волны, но
с заметно различными коэффициентами дисперсии.
Синтез окуляра легко выполняется с помощью метода разделения
переменных. Особое внимание обращается на исправление полевых
аберраций, включая хроматизм увеличения.
Расчет проводим в обратном ходе лучей, считая компоненты бес-
конечно тонкими (рис. 4.26). Примем, что а2 = 0, а' = 1, =f = 1,
= 1, тогда при условии, что входной зрачок установлен в передней
фокальной плоскости окуляра, т.е. yt = -1, для сумм Зейделя полу-
чаем:
S“ = -Р~ + W°°; (4.35)
S^n = P°° -2W°° + 1; (4.36)
SIV=cp/n; (4.37)
Sy =-Р°° +3W°° -3,7; (4.38)
Si“xp=-C. (4.39)
Принимая условие исправление астигматизма «елочкой» (г'т =
= ~z's), когда = -S^f/2 — -0,35, и учитывая, что в симметричных си-
стемах = 1,35 [18], из (4.35) и (4.36) находим Р°° — 1,35.
Наиболее близкие значения Р“ и W°° имеет система, состоящая из
двух плосковыпуклых линз, изготовленных из стекол с п — 1,7... 1,8
и расположенных выпуклыми поверхностями друг к другу.
Рис. 4.26. Ход первого и второго вспо-
могательных лучей в бесконечно тон-
ком симметричном окуляре
Большие значения показателей преломления, как следует из
(4.37), позволяют уменьшить кривизну изображения. Для исправле-
ния хроматизма параметр С должен равняться нулю.
Рассмотрим возможность ортоскопической коррекции. Из теории
аберраций известно [18], что для симметричной системы величина Р"
может быть выражена через основные параметры компонента («поло-
винки») следующим образом:
Р~ = 0,25Р^г - W,'2 + 2,45. (4.40)
Для отдельной линзы связь между Рц2 и W^2 при п = 1,75 такова:
Р%2 = 1,24 + 0,87(Wy2 -0,13)2. (4.41)
Подставив (4.40) и (4.41) в (4.38), получим
S” = -0,22\WtJ2) +1,05WiI2-2,41. (4.42)
Определим значение W^2, соответствующее минимуму Sy. Для
этого найдем минимум функции, продифференцировав (4.42) по W^2
и приравняв его нулю. В результате получим ~ 2,38, довольно
близкое к значению И7” плосковыпуклой линзы из стекла с п =
= 1,7...1,75 (VT = 2,43 при и = 1,7; = 2,33 при и = 1,75).
Следовательно, выбранная схема в виде двух плосковыпуклых
линз с высоким показателем преломления обеспечивает оптимальную
коррекцию монохроматических аберраций. Для исправления хрома-
тических аберраций вводится «хроматический» радиус поверхности
склейки [12]. Наиболее подходящими стеклами являются, например,
СТК9 (пе= 1,7460, ve = 50) и ТФ4 (гае= 1,7462, ve = 27,95). Для опреде-
ления «хроматического» радиуса вначале надо составить уравнения
масштаба и исправления хроматизма положения для одного компо-
нента. Определив оптические силы линз, несложно найти радиус кри-
визны линзы при известном втором радиусе.
Исследования показали, что по сравнению с симметричной квази-
симметричная схема, для которой k = Ф2/Ф2= 0,667, позволяет полу-
чить несколько лучшее исправление дисторсии, но в ней ухудшается
коррекция комы. Кроме того, очевидна меньшая технологичность
этой схемы.
Описанная методика обеспечивает чрезвычайно быстрый синтез
окуляра, который сводится в конечном счете к определению радиуса
кривизны плосковыпуклой линзы при f л = 2/* и затем введению «хро-
матического» радиуса. Переход к линзам конечной толщины заклю-
Большие значения показателей преломления, как следует из
(4.37), позволяют уменьшить кривизну изображения. Для исправле-
ния хроматизма параметр С должен равняться нулю.
Рассмотрим возможность ортоскопической коррекции. Из теории
аберраций известно [18], что для симметричной системы величина Р°°
может быть выражена через основные параметры компонента («поло-
винки») следующим образом:
Р” = 0,25 Pt~2 - Wfc + 2,45. (4.40)
Для отдельной линзы связь между Рц2 и W™2 при п = 1,75 такова:
Pf2 = 1,24 + 0,87 - 0,13) . (4.41)
Подставив (4.40) и (4.41) в (4.38), получим
Sy = -0,22(Wj/2)2 + l,05W^2 - 2,41. (4.42)
Определим значение W^2, соответствующее минимуму Sy • Для
этого найдем минимум функции, продифференцировав (4.42) по W^2
и приравняв его нулю. В результате получим И^Г2пЦп = 2,38, довольно
близкое к значению W™ плосковыпуклой линзы из стекла с п =
= 1,7...1,75 (W“ = 2,43 при п - 1,7; Ж” = 2,33 при п = 1,75).
Следовательно, выбранная схема в виде двух плосковыпуклых
линз с высоким показателем преломления обеспечивает оптимальную
коррекцию монохроматических аберраций. Для исправления хрома-
тических аберраций вводится «хроматический» радиус поверхности
склейки [12]. Наиболее подходящими стеклами являются, например,
СТК9 (п,= 1,7460, ve = 50) и ТФ4 (пе= 1,7462, ve = 27,95). Для опреде-
ления «хроматического» радиуса вначале надо составить уравнения
масштаба и исправления хроматизма положения для одного компо-
нента. Определив оптические силы линз, несложно найти радиус кри-
визны линзы при известном втором радиусе.
Исследования показали, что по сравнению с симметричной квази-
симметричная схема, для которой k = Ф1/Ф2~ 0,667, позволяет полу-
чить несколько лучшее исправление дисторсии, но в ней ухудшается
коррекция комы. Кроме того, очевидна меньшая технологичность
этой схемы.
Описанная методика обеспечивает чрезвычайно быстрый синтез
окуляра, который сводится в конечном счете к определению радиуса
кривизны плосковыпуклой линзы при fJl = 2fw. затем введению «хро-
матического» радиуса. Переход к линзам конечной толщины заклю-
чается в определении диаметра компонента и расчете толщин линз.
Радиусы кривизны пересчитывать не нужно, поскольку компонент
имеет форму плосковыпуклой линзы, оптическая сила которой оста-
ется постоянной при изменении толщины.
Пример4.6. Рассчитать симметричный окуляр, если/' = 22 мм, D/f = 1:4,2со = 40°.
Спектральный диапазон — видимый.
Решение. Из теории расчета следует, что надо рассчитать плосковыпуклую линзу,
выбрав по ГОСТ 13659—78 соответствующие материалы с почти одинаковыми значе-
ниями п. Оптические постоянные стекол для трех выбранных пар марок с наибольшей
разностью коэффициентов дисперсии приведены в табл. 4.18. Выберем пару ТФ4—СТК9,
приняв для расчета плосковыпуклой линзы п = 1,746. Тогда второй радиус этой линзы
г 2 32,824.
Таблица 4.18
Марка стекла п е
СТК9 1,7460 50,00
ТФ4 1,7462 27,95
СТК12 1,6950 54,81
ТФ8 1,6947 30,89
ТК20 1,6247 56,43
Ф13 1,6241 30,89
Введем «хроматический» радиус в плосковыпуклую линзу. Для этого сначала оп-
ределим оптическую силу первой бесконечно тонкой отрицательной линзы компонента
из уравнения масштаба и ахроматизации, приняв С = 0: <р; = - v3).
Реальное фокусное расстояние первой линзы Г, р= 2/'/<рг Тогда хроматический
радиус
Г2 = Гхр = 2(1 -п2)/'/ф; = 2/'(1 -пг)(у, -vf)/vr
Подставив числовые значения, найдем гг = 25,9021. Световой диаметр компонента
7>св = D + 2ар tgco =21,5 мм. Полный диаметр Г>пол = 24 мм.
Толщина первой отрицательной линзы компонента из стекла марки ТФ4 d7 =
= 0,1 JDnoJ> = 2,4. Толщина второй положительной линзы из СТК9 d2 =•= k2 + dmln - Л3 = 7,0
мм, где d . = 1,8 мм.
В результате получено
d, = 2,4 ТФ4
Гг = 25,9021
Гэ =-32,824 d2 = 7,0 CTK9
г# = 32,824 d3 = 0,2
.,. = -25,9021 d, = 7,0 CTK9
г« = ~ d5 = 2,4 ТФ4
При работе на ЭВМ в диалоговом режиме «хроматический» радиус легче подобрать
методом проб, поскольку решение уравнений дает приближенное значение, иногда тре-
бующее уточнения.
4.5. Синтез трехкомпонентных линзовых систем
типа триплета
Оптические характеристики я применение. Триплет (рис. 4.27)
был изобретен английским оптиком Тейлором в конце XIX в. и впер-
вые был изготовлен фирмой «Кук», поэтому вначале его называли
триплетом Тейлора — Кука. Правда, схема с отрицательной линзой
посередине была предложена еще Гауссом, но осуществлена Тейлором.
Рис. 4.27. Оптические схемы триплета разных конструкций:
а) классической; б) с двумя отрицательными линзами;
в) с отрицательной линзой посередине н апертурной диафрагмой,
расположенной в первом воздушном промежутке
Исторически это первый объектив-анастигмат с исправленной
кривизной поля. Он имеет одну из простейших схем, позволяющую
исправить две хроматические и все монохроматические аберрации, а
при необходимости — и термооптические.
Он относится к группе универсальных объективов, оптические
характеристики которых имеют средние значения: относительное от-
верстие не превышает 1:2,8, угловое поле не более 50°. При разработке
триплета важное значение имеет подбор марок стекол, поскольку он
в большей степени определяет пределы поля и светосилу объектива.
До появления лантановых стекол относительное отверстие трип-
летов не превышало 1:4... 1:3,5 при 2со — 50...55°. С появлением этих
стекол были созданы триплеты с относительным отверстием до
1:3...1:2,8 при тех же угловых полях.
Объектив типа триплета под разными названиями и в различных
вариантах до сих пор является продуктом массового производства по-
чти всех оптических фирм мира. При использовании особых марок
стекол его качество изображения примерно такое же, как у четырех-
линзового объектива «Тессар» («Индустар») с обычными марками сте-
кол.
В настоящее время триплеты применяют в основном в качестве
проекционных объективов массовых малоформатных диапроекторов,
эпидиаскопов с большими форматами кадров, в фотоувеличителях, в
малоформатных фотоаппаратах типа «Смена», «Вилия», среднефор-
матных зеркальных фотоаппаратах типа «Любитель», в читальных
аппаратах. Известно также применение триплета в приборах для ин-
фракрасной области.
Виды конструкций и модификации. Возможны различные ва-
рианты компоновки положительных и отрицательных линз в трипле-
те (см. рис. 4.27), однако наиболее рациональной является схема с от-
рицательной линзой посередине. В варианте с положительной линзой
посередине более сильный положительный компонент имеет значи-
тельную оптическую силу, которая почти в 2 раза больше, чем опти-
ческая сила отрицательного компонента.
В классической схеме триплета все оптические силы приблизи-
тельно равны по абсолютному значению, что благоприятно сказыва-
ется на коррекции аберраций. Остальные комбинации с отклонения-
ми от симметрии в отношении знаков оптических сил линз приводят
к значительным трудностям при коррекции дисторсии. Апертурная
диафрагма чаще всего находится в воздушном промежутке между вто-
рой и третьей.линзами.
Триплет оказался прототипом большого числа других первоклас-
сных объективов (см. табл. 4.19), часть которых применяется до на-
стоящего времени. Усложнение одного или нескольких компонентов
привело к созданию универсальных объективов, обеспечивающих по-
вышенное качество изображения, и объективов с повышенной свето-
силой, имеющих малые и средние фокусные расстояния и средние уг-
ловые поля.
Выбор комбинаций марок стекол. Как правило, применение кро-
ной с малыми показателями преломления приводит к значительному
увеличению астигматизма высших порядков, вследствие чего поле
триплета из стекол обычных марок не более 30° при относительном
отверстии до 1:3. При использовании флинта и тяжелых баритовых
кронов (п = 1,61) можно получить поле до 60°, D/f = 1:3,5, при f =
= 100...200 мм. Обычно применение тяжелых кронов для положи-
тельных линз при малом показателе преломления флинта для отри-
цательной линзы ведет к увеличению поля. Уменьшение показателя
преломления флинта в этом случае увеличивает сферическую аберра-
цию высших порядков и уменьшает относительное отверстие.
Следует помнить, что, чем длиннее объектив и чем больше его от-
носительное отверстие, тем меньше поле.
Таблица 4.19
Оптическая схема Название Примечание
♦Тессар» ♦Индустар» D/f не более 1:2,8
♦Гелиар» Качество изображения хуже, чем у «Тессара»
А Л4 «Сириус» ♦Сатурн» D/f =1:2; 2ш = 30.. .35°
«Целор» ♦ Ортогоз» —
т ;и_1 % % 4 /
.А Т
г? / LX1 ♦Калейнар» D/f не более 1:1,5
V дт
IWJA ♦Гектор» SIV=0,4 D/f = 1:2,5; 2to = 3O° Качество изображения хуже, чему ♦Тессара»
Продолжение таблицы 4.19
Оптическая схема Название Примечание
♦Эрностар» —
«Зоннар» «Юпитер» D/f'= 1:1,5; 2со = 46...50° Обобщенный триплет
Для получения большого относительного отверстия надо увели-
чивать значение суммы SIV, так как при этом увеличиваются радиу-
сы кривизны, что вызывает уменьшение сферической аберрации выс-
ших порядков. Однако при этом возрастают кривизна и астигматизм.
Из анализа рассчитанных объективов можно рекомендовать сле-
дующие комбинации марок стекол: СТК19—ТФЗ—СТК19; СТК9-
ТФ2-СТК9; СТК12-ТФ2-СТК12; СТК19-ТФЗ-БФ6 и др.
Способ Тейлора исправления кривизны поля в триплете. Чтобы
исправить кривизну поля, необходимо выполнить условие — высота
h первого вспомогательного луча на положительной линзе должна
быть больше, чем на отрицательной. Этот прием применяется при
разработке многих объективов.
Доказать это положение можно на примере двухлинзового объектива
с воздушным промежутком. Условие масштаба для него имеет вид: h1
+ h2<?2 = 1, а условие Петцваля: ср4/п2 + (р2/п4 = 0. Вследствие близости
значений показателей преломления это уравнение можно заменить бо-
лее простым приближенным: ф2 + ср2 = 0. Из решения двух уравнений
имеем: ф2 = -1/(й2 - 1); ф2 = 1/(й2 - 1). Следовательно, при
Ф, > 0 h2 < 1. Если ф; < 0, то h2 > 1, что доказывает исходное положение.
Методика синтеза. Большинство трехкомпонентных объективов,
включая триплет, состоят из нескольких линз, простых или склеен-
ных, сравнительно тонких, но разделенных воздушными промежутка-
ми. Поэтому для их расчета можно применить метод разделения пе-
ременных. Рассматриваемая здесь методика синтеза триплета приме-
нима с небольшими модификациями для расчета более сложных трех-
компонентных конструкций.
Триплет имеет восемь свободных параметров при заданных мар-
ках стекол — шесть радиусов кривизны и два воздушных промежут-
ка, а при условии выбора марок стекол или других оптических мате-
риалов добавляются шесть оптических постоянных (п и v), а также три
термооптические постоянные.
В общем случае задача по расчету триплета сводится к решению
девяти уравнений, выражающих условия исправления двух хромати-
ческих, пяти монохроматических аберраций и двух габаритных усло-
вий. При условии исправления термооптической аберрации появля-
ется десятое уравнение.
Для получения более простых аберрационных уравнений будем
считать, что апертурная диафрагма совпадает со вторым компонентом,
т.е. у2 = 0 (рис. 4.28).
Рнс. 4.28. Ход первого и второго
вспомогательных лучей в опти-
ческой схеме триплета
Расчет проводим при нормировке: at = 0; Л, = f = 1; = 1; I =
— -1. Вначале составим уравнения первой группы, зависящие от вне-
шних параметров. К ним относятся следующие шесть уравнений:
1) условие масштаба <р; + Л2ф2 + Л3ф3 = 1;
2) условие получения заданного значения заднего фокального от-
резка ftg = ;
3) уравнение кривизны Петцваля SIV = ф2/п2 + ф2/п4 + ф3/пв;
4) условие исправления хроматизма положения
5ГхР = -(ф2Л2 + h22 <p2/v2 + hl ф3/у3);
5) условие исправления хроматизма увеличения
впхр = ~(У1Ч>1/У1 + УзМзЛз);
6) условие исправления дисторсии Sy = 3,65 (yt<pt + У3ф3/Л3).
Условие (6) для Sy упростилось по сравнению с его выражением
в общем виде (см. [12]), поскольку общая длина объектива мала по
сравнению с его фокусным расстоянием. При малых воздушных про-
межутках dt и d2 значения yt и у3 малы и можно пренебречь их квад-
ратами и кубами, а для п принять: п — 0,65. Формула для требует
поправки при переходе к линзам конечной толщины. Дисторсия не
требует тщательного исправления, поэтому такая запись допустима.
Для упрощения уравнений (5) и (6) из них надо исключить yt и
у3. Используя формулу связи координат первого и второго вспомога-
тельных лучей [12]
k
Ук/^к = Vl/hl + dv-l/(nv-lhvhv-l)>
v=2
получаем
У2/^2 = У1~ dl/^2 » Уз/^3 ~ У1~ dl/^l2 ~ d2/{fl2^l3)’i
при у2= 0 высоты yt = djh2, у3 — -d2/h2.
Величины yt и у3 пропорциональны dt и d2, поскольку при у2 = 0
второй вспомогательный луч проходит через вторую линзу, не откло-
няясь (см. рис. 4.28).
В результате уравнения (5) и (6) для SJxp и приобретают вид:
$п хр = <^2^зФз/(^а''з)’
$v = З,65[с^ф;/Л2 — ^аФз/С^а^з)]»
где ht = 1; h2 = 1 - d/<p/; h3 = 1 - d^t- d2(<p2 + <p2 - с?;ф;ф,,).
В уравнения второй группы, зависящие от внутренних парамет-
ров, входят суммы SJ, SJ и SJ;, в которых неизвестными являются
углы а2, а4 и а6:
$i = Л + Л2Р2 + h3P3;
$п = У1Ъ + y3P3 + Wl + W2+W3-,
$ш = У1Р1 + 2У1™1 + y3P3/h3 + 2y3W3/h3 + Ф/ + Ф2 + Ф3.
В этих уравнениях р(, ht, ф( известны из уравнений первой группы.
Особенности решения уравнений. На первом этапе имеем пять
уравнений с пятью неизвестными, если исключить условие h3 — s'F, и
считать, что марки стекол заданы. Четыре суммы приравнивают оп-
ределенным значениям.
Несмотря на то, что число уравнений равно числу неизвестных,
их определение представляет трудности, так как уравнения нелиней-
ны относительно неизвестных. Чисто математические методы в боль-
шинстве случаев приводят к решениям, не имеющим практического
значения, например, могут получиться слишком большие значения ф(
или отрицательные значения d. Однако, оказывается, что часто дос-
таточно изменить одну из сумм на ничтожно малую величину, не
имеющую никакого практического значения (например, S[”p — на
тысячные доли), чтобы в результате решения получить вполне при-
емлемую систему. Поэтому оптимальное решение может быть найде-
но путем исследования системы при разных значениях искомых ве-
личин.
Сущность методики заключается в следующем.
1. Для величин ф; и ф2 задают ряд определенных значений: для
ф2 в интервале от 1 до 2 (иногда до 3) с шагом 0,1...0,2; для ф2 в ин-
тервале от -1 до-3 с шагом 0,1...0,2.
2. Для каждой пары значений <р, и ф2 находят (р3 из уравнения Пет-
цваля.
3. Вычисляют hs и h3 из квадратного уравнения для Sfxp и урав-
нения масштаба.
4. Определяют d, и d2 из уравнений для h2 и Л3.
5. Вычисляют значения S^xp и Sy •
Такой расчет связан с большим объемом вычислений, поэтому его
всегда автоматизируют. Для этого задают пределы изменения ф2 и ф2
и шаг изменений Дф2 и Дф2.
Результаты вычислений d2 и d2 представляются графически для
разных ф, и ф£ (рис. 4.29). Особенно эффективно эти исследования вы-
полняются на ПЭВМ с графопостроителем. По графику определяют
сочетание ф2 и ф2 при приемлемых значениях dt и d2.
Аналогичный график строится для других стекол, что дает воз-
можность быстро отбросить непригодные комбинации марок стекол,
приводящие к неудобным и неосуществимым решениям. При таких
комбинациях помимо слишком больших или слишком малых d2 и d2
могут получиться недостаточно симметричные системы, т.е. отноше-
ние ф2 /ф2 далеко от единицы, чрезмерно большие ф2 и т.п.
На втором этапе для исправления трех монохроматических абер-
раций третьего порядка выбирают значения внутренних параметров
а2, а4 и ае. Зависимости сумм Зейделя от внутренних параметров до-
вольно сложные, и для нахождения указанных углов вновь надо про-
вести исследование системы. Этот процесс также автоматизируется,
Рис. 4.29. График зависимости воздушных промежутков d} и d2 триплета от
оптических сил <р, и <р2
тем более что составление программ в данном случае не представляет
трудностей.
Вначале значения углов задают в довольно широких пределах
(1...-1) с определенным шагом их изменения, ограничивая значения
сумм Зейделя также этим пределом. Расчет проводится в несколько
этапов с постепенным сужением пределов изменения а и вычисляе-
мых сумм до получения оптимальных значений углов, которым соот-
ветствуют заданные или близкие к ним значения сумм.
Затем переходят к линзам конечной толщины, проводят аберра-
ционный анализ и вычисляют новые значения сумм в случае больших
остаточных аберраций, при которых коррекция затруднительна, и
вновь выполняют синтез системы. Таким образом частично компенси-
руются аберрации высших порядков аберрациями третьего порядка.
Известна еще одна разновидность перехода, разработанная
Г.Г. Слюсаревым [19], позволяющая учесть влияние толщин на сум-
мы Зейделя и хроматические суммы. Сущность методики заключается
в следующем. После первого этапа расчета вычисляют приближенно
толщины линз, а затем фиксируют положение апертурной диафраг-
мы в воздушном промежутке и вычисляют суммы Зейделя первых
двух реальных линз до диафрагмы для ряда значений а2 и а4. Далее к
каждой комбинации углов а2, а4 подбирают угол а6 для третьей лин-
зы конечной толщины так, чтобы сумма Sf была равна заданному зна-
чению.
В процессе вычисления реальных радиусов кривизны соблюдает-
ся условие равенства расстояний между бесконечно тонкими линза-
ми и главными плоскостями реальных линз.
Затем строят графики и в зависимости от тех же углов и
определяют значения а2 и а4, при которых эти две суммы имеют близ-
кие к заданным значения.
После аберрационного анализа находят необходимые изменения
сумм в случае больших остаточных аберраций и вновь проводят син-
тез по изложенной методике. Но объем повторных расчетов сокра-
щается благодаря тому, что при небольших изменениях Лиф кривые
равных углов а2 и а4 сдвигаются целиком без поворотов. Величину
сдвига можно определить, назначая те же пары значений для а2, а4.
Такой расчет позволяет впоследствии успешнее провести
оптимизацию на ЭВМ.
Рассмотренная методика дает возможность получить несколько
решений с разными значениями аберраций высших порядков, а в про-
цессе автоматической коррекции определить оптимальное решение,
а также получить несколько вариантов конструкции.
4.6. Специализированные программы синтеза одно- и
двухкомпонентных систем
Специализированными называют программы, предназначенные
для расчета определенных типов оптических систем. Они основаны на
применении известных методов и формул, применяемых при неавто-
матическом расчете.
К специализированным относятся хорошо известные программы
для расчета систем, состоящих из бесконечно тонких компонентов
(рис. 4.30), синтез которых выполняется решением аберрационных
уравнений для Р, W и С. Для каждого типа систем составлена кон-
кретная программа [4, 15, 18].
После решения аберрационных уравнений и определения кон-
структивных параметров тонких систем переходят к линзам конечной
толщины. В программах предусмотрено выполнение второго этапа, в
Рис. 4.30. Оптические схемы компонентов, синтез которых
выполняется на ППЭВМ
результате которого получают заданные значения трех аберраций для
осевой точки: Дз'кд, Т| и . Для этого выполняется расчет хода лу-
чей и сравнение полученных аберраций с заданными. Если разности
рассчитанных и заданных значений больше допусков, то вычисляют
поправку к основным параметрам и повторяют первый этап расчета
со значениями параметров Р + ДР, W + AW, С + ДС до получения за-
данных значений аберраций.
Программы синтеза различных компонентов имеют свои особен-
ности, и следует отметить, что различаются они не только видом абер-
рационных уравнений и числом свободных параметров. Рассмотрим
отдельные особенности программ.
Программа для расчета двухлинзовых склеенных компонентов
позволяет получить заданные значения трех параметров Р°°, W~ и С
благодаря возможности выбора марок стекол. Для этого в программе
заложены три набора для расчета: ахроматов, апохроматов, содержа-
щих комбинации стекла с флюоритом, и полуапохроматов — систем
с уменьшенным вторичным спектром, содержащих комбинации соот-
ветствующих марок стекол.
Для составления наборов использована приближенная зависи-
мость между основными параметрами компонента: Р°° = Р^1П +
+ 0,85Qy“ - 0,15) , где P~in — минимальное значение Р°° при посто-
янном С; Pmin представляет собой полином третьей степени относи-
тельно параметра б.
Для составления набора по синтезу ахроматов отобраны пары сте-
кол, для которых графики зависимости P~ln = \|/(С) не пересекаются
и расположены на плоскости по возможности равномерно. Всего в на-
боре ахроматов было 35 комбинаций марок стекол по ГОСТ 3514—76,
размещенных в программе в порядке убывания Р~п •
При расчете по программе по заданному С определяет Р”|п для
первых двух комбинаций марок стекол, сравнивает полученные зна-
чения РГ1п с расчетными и осуществляет перебор до тех пор, пока
разность /Ctn и Р”1пр не станет минимальной.
Для расчета выбираются две комбинации. Поиск выполняется для
комбинаций «крон впереди» и «флинт впереди», в результате в общем
случае выдаются четыре решения по два в каждом варианте. После
этого выполняется синтез по описанной методике. Эта программа была
реализована на БЭСМ-4 еще в 60-е годы.
Известна программа, предусматривающая обращение к таблицам
С.В. Трубко для выбора комбинаций марок стекол и получения задан-
ных значений аберраций. В программе склеенный компонент рассмат-
ривается как частный случай несклеенного, если г2 — г3. Алгоритм яв-
ляется универсальным и позволяет рассчитывать компонент при лю-
бом положении предмета; для этого достаточно изменить нормиров-
ку первого вспомогательного луча. В основе алгоритма лежат уравне-
ния для Р, W и условие склейки. После преобразования получено
уравнение пятой степени относительно а3, в зависимости от которого
выражаются углы а2 и Алгоритм основан на сочетании перебора с
решением уравнений для а2 и а4 и выборе системы, удовлетворяющей
условию г2 = г3.
Если для выбранных по таблицам марок стекол не удается полу-
чить заданных значений аберраций, точный расчет которых произво-
дится программой, то находят новые значения параметров Р, W и С и
Повторяют расчет, при необходимости вновь выбирая марки стекол.
Обращение к таблицам дает большое преимущество, так как сущес-
твующие программы содержат ограниченное число комбинаций, кро-
ме того, таблицы универсальнее и нагляднее. Программа была реали-
зована на БЭСМ-6 и в настоящее время входит в пакет прикладных про-
грамм для автоматизированного проектирования оптических систем.
Известны два варианта программы, предназначенной для расче-
та четырех типов двухкомпонентных систем (см. рис. 4.30). Предус-
мотрена возможность расчета при произвольном положении предме-
та. В качестве данных используются параметры Р, W, С, вычисленные
при нормировке a'k = 1. Разработчик задает комбинации марок стекол,
угол первого вспомогательного луча и высоту hr
Для конструкций II, III с избыточными параметрами их значе-
ния а3, а4 задает разработчик. При расчете конструкции IV задают
значения Сt и С2 для каждого компонента, причем С = С,+ С2. Для всех
этих компонентов задача сводится к решению одного квадратного и
двух линейных уравнений. При решении квадратного уравнения вы-
даются оба корня.
В последние годы разработан дополнительный блок программы,
расширяющий возможности расчета компонентов II, III из отдельной
линзы и склеенного компонента. Этот блок обеспечивает вычисление
граничных значений избыточных параметров а3 или в разных кон-
струкциях, для которых могут быть рассчитаны системы, удовлет-
воряющие заданным значениям Р, W и С.
Поиск производится перебором. Область возможных значений ог-
раничена диапазоном ±5, шаг перебора 0,00001. Программа позволяет
легко выявить те области изменения а, где возможны решения.
Для видимой области при изменении избыточного угла а в преде-
лах О < а < 1 получается система с минимальной сферической аберра-
цией пятого порядка, и в этом случае сферохроматическая аберрация
также практически минимальная.
Значения аберраций высших порядков при одинаковых Р, W и С
в значительной мере зависят от комбинаций марок стекол.
При расчете трехлинзового склеенного компонента V проводились
исследования зависимости между параметрами Р, W и С и углами а,
что в общем случае привело к уравнению шестой степени. В резуль-
тате в специализированной программе для ППЭВМ синтез данного
компонента рассматривается как частный случай системы III, когда
г3 = г4. Параметром, обеспечивающим это условие, является угол а4,
перебором которого добиваются равенства г3 и г4. Диапазон значений
а4 задается разработчиком, и это вполне осуществимо, поскольку все-
гда можно указать предельное значение I а4 I тах. При превышении это-
го значения оптические силы компонентов, определяемые формула-
ми
Ф< = (±la^ Lx Фп = (2±1а< Lx -а0А’
примут нереализуемые значения.
Алгоритм построен таким образом, что вначале задается значение
-| а4 I тах решаются уравнения относительно а,, а3, а4 и отыскивается
разность г4 - г3, затем принимается а4 =~| а4 Гтах +0,1, вновь отыски-
вается та же разность и так далее, до тех пор, пока не изменится знак
разности. Внутри последнего интервала путем интерполяции находит-
ся решение. Затем отыскивается второе решение внутри заданного ин-
тервала.
Программа позволяет выполнить переход к линзам конечной тол-
щины, осуществляет расчет для нескольких лучей осевого пучка и
позволяет провести расчет для нескольких вариантов, при этом пре-
дусмотрена возможность автоматизированной коррекции аберраций
для осевой точки изменением Р, W и С (см. выше).
Известны разработки специализированных программ для расче-
та рассмотренных компонентов на ПЭВМ. Так, на кафедре приклад-
ной оптики МИИГАиК для ПЭВМ и ППЭВМ разработан пакет про-
грамм синтеза компонентов и объективов, основные формулы для ко-
торых приведены в гл. 4, с последующим переходом к линзам конеч-
ной толщины. Также разработаны программы для синтеза светосиль-
ного объектива, фототелеобъектива, триплета, окуляра Кельнера, а
также компонентов и систем для коллимации лазерного излучения.
Глава 5. РАСЧЕТ ОПТИЧЕСКИХ ОСВЕТИТЕЛЬНЫХ
СИСТЕМ
5.1. Линзовые осветительные системы (конденсоры)
Осветительная система оптического прибора предназначена для
создания необходимой освещенности предмета, рассматриваемого с
помощью этого прибора или проецируемого им. Она должна собрать
как можно большую часть светового потока, даваемого источником
света, и обеспечить ему требуемое направление.
Осветительные системы могут быть линзовыми (конденсоры), зер-
кальными и зеркально-линзовыми. Выбор того или иного типа осве-
тительной системы определяется требуемыми углом охвата 2аохв и ли-
нейным увеличением Ро.
Оптическими характеристиками конденсора являются фокусное
расстояние f, линейное увеличение Ро, угол охвата 2аохв = 2аА и угол
сходимости 2<з'а- . Значения этих величин находят на этапе габа-
ритного и светотехнического расчетов оптических схем приборов с ос-
ветительными системами (см. главу 2).
Между входным апертурным углом аА = оохв и диафрагменным
числом К = f/D имеется зависимость, которую можно установить с по-
мощью рис. 5.1: tgaA = D/(2a) = лро/(2аРо) = лро/(2а'), но так как
а' = (1 - Рв)Л то
tgoA = DP0/[2(l - р„ )Г ] = Ро /[ 2(1 - р0Х].
Угол охвата осветительной системы определяет степень использо-
вания ею светового потока, испускаемого источником, или КПД (т|)
конденсора. Известно [3], что т| = Ф/Фпол, где Ф — световой поток в те-
лесном угле, соответствующем апертурному углу оА; Фпол — полный
световой поток, испускаемый источником света.
Рис. 5.1. Схема для выполнения габаритного расчета конденсора
Если источник имеет плоское светящееся тело, то
т| = nlv sin2<зА/(2п1и sin2 90°) = sin2 аА/2 = 0,5sin2 o0XB,
где Io — осевая сила света источника, и, если 2стохв = 60°, то
т| = 0,5 sin230°= 0,125. В случае точечного источника Т| = 0,5 (1 -
- COSOOXB).
Применение в линзовых осветительных системах дополнительно-
го рефлектора в виде сферического зеркала для использования отра-
женного от него светового потока может увеличить коэффициент т] на
20...70% в зависимости от формы нити накала лампы (глава 2).
Рассмотрим основные виды конденсорных систем. Так как
конденсоры обычно содержат только положительные линзы, то эти
системы обладают значительными сферической и хроматической абер-
рациями, и аберрации тем больше, чем больше угол охвата и увели-
чение. Наличие больших аберраций, например у осветительной час-
ти проекционной системы, приводит к тому, что часть световых лу-
чей не проходит через изображение источника света, лежащее во вход-
ном зрачке проекционного объектива, поэтому на экране могут по-
явиться темные и цветные пятна. Чтобы избежать вредного влияния
аберраций на равномерность освещения экрана, для каждого вида
конденсора устанавливают свои пределы угла охвата и линейного уве-
личения.
Линзовые схемы (конденсоры) используют в том случае, если
2аохв < 90°, причем при 2аохв < 30° применяют однолинзовые схемы
конденсоров, при этом сумма углов охвата и сходимости не должна
превышать 45°, т.е. 2аохв + 45°; если 2аохв < 50°, то применяют
конденсоры из двух линз, при этом 2аохв + 2<з'А. = 60°; если 2оохв < 75°,
то используют конденсоры из трех линз, причем 2аохв + 2<з'А. = 100°;
если 2аохв < 90°, то используют конденсоры из четырех линз [3].
Введение асферических поверхностей позволяет увеличить угол
охвата в линзовых системах до 150° или же упростить конструкции
уже рассмотренных выше схем.
Конструктивные схемы конденсорных систем, рекомендуемые к
применению в зависимости от увеличений и углов охвата, приведены
в табл. 5.1.
Часто в осветительную систему микроскопа вводят коллектор,
который служит для передачи изображения источника света в плос-
кость апертурной диафрагмы, что позволяет удалить источник света
от конденсора и исключить температурное воздействие на объект на-
блюдения. Виды коллекторов идентичны видам конденсорных систем
(см. табл. 5.1), а требования к коллекторам совпадают с требования-
ми, предъявляемыми к конденсорным системам.
5.2. Методы расчета конденсорных систем
Так как конденсор служит только для того, чтобы вся энергия,
поступившая в осветительную систему, прошла через заданную плос-
кость (входной зрачок, щель, предмет и т.п.), то чаще всего от него не
требуется хорошего качества изображения источника. Обычно конден-
сор должен изображать источник, расположенный вблизи оптической
оси, поэтому от него прежде всего требуют исправления сферической
аберрации (Дз^о) и отступления от условия синусов (Др), а также со-
блюдения условия ортоскопии. При расчетах строгое выполнение пе-
речисленных требований довольно затруднительно. Так, исправление
сферической аберрации в конденсорах со сферическими поверхностя-
ми возможно, как это будет показано дальше, лишь для определенных
показателей преломления материала линз и при определенном числе
линз конденсора. У хорошо корригированных конденсоров диаметр
2Лу' наименьшего кружка рассеяния должен составлять 3...10% раз-
мера изображения источника; для обычных конденсоров допускает-
ся 2 Ду’ < 30% размера изображения [3].
Марки стекол линз конденсора задают или выбирают в зависимос-
ти от условий, в которых он работает. Если конденсор не ахромат, то
все линзы изготовляют из стекла одной марки (обычно К8). Если ис-
точник излучения мощный, то первую линзу лучше делать из стекла
марки ЛКЗ или ЛК4, ЛК5, а остальные — из стекла марки К8.
Для некоторых схем микроскопов большого увеличения и аперту-
ры, а также схем читальных аппаратов требуется расчет ахромати-
ческих конденсорных систем, что заметно усложняет схему конден-
сора (рис. 5.2). Ахроматический конденсор большой апертуры обыч-
но содержит два апланатических мениска из стекла марки К8 и два
Таблица 5.1
Схема конденсора А 2о ,° охи* не более -₽0 Примечание
0,20 20 1...3 0,3...1 Линза, рассчитанная на минимум сферической аберрации
— — — Г7=оо
0,15 20 1 Г1 “ ~Г2
х) , А^^ГД ~ 0,5 60 10...о» Вторая поверхность линзы параболоидная
0,4 50 1...3 Из двух плосковыпуклых линз с параллельным . ходом лучей
4...10 Две линзы, рассчитанные на минимум сферической аберрации
10...<х> Апланатический мениск и линза на (д«^)
Продолжение таблицы 5.1
Схема конденсора А 2оои.° не более -₽0 Примечание
0,5 60 10...о» Мениск, близкий к аплана- тическому, и плосковыпук- лая линза
х) A/ufi ~~~ 0,7 90 Мениск,близкий к аплана- тическому; четвертая поверхность асферическая
0,6 70 1,5...5 Апланатический мениск и две плосковыпуклые линзы
'О* "**'**-*^1в
1,5...12 Все линзы рассчитаны на минимум сферической аберрации
АХ
Апланатический мениск и две линзы, рассчитанные на минимум сферической аберрации
ИМ р' —
0,7 90 2...6 Два апланатических менис- ка и две плосковыпуклые линзы
А1/*^
4...6 Два апланатических менис- ка и две линзы, рассчитан- ныена (д810)ш1п
Все линзы, рассчитанные на (AsUmta
Продолжение таблицы 5.1
Схема конденсора А 2а ,° охв’ не более -Ро Примечание
— 125 1 Две линзы со сфероэллип- соидными поверхностями
— 90 1,5...5 Апланатический мениск с асферической поверхностью
Рис. 5.2. Оптическая схема ахроматического конденсора
склеенных компонента из стекол различных марок. Расчет такого
конденсора выполняется на основе теории аберраций третьего поряд-
ка. Введение склеенных компонентов позволяет исправить сферичес-
кую аберрацию и хроматизм положения.
Расчет конденсорных систем на минимум сферической
аберрации
Конденсор из одной линзы (рис. 5.3). Оптические параметры про-
стой линзы, как и всякой оптической системы, можно разделить на
внешние и внутренние. К внешним параметрам относятся утлы at и
а3. Эти углы определяют фокусное расстояние линзы f, расстояние st
до источника излучения, линейное увеличение Ро. К внутренним па-
раметрам относятся угол а2, определяющий форму линзы (ее прогиб),
и показатель преломления п. Эти параметры задают конструктивные
элементы линзы (rv, d).
Свойства бесконечно тонкой линзы и ее параметры Pt и Wt рас-
смотрены в учебнике [12, § 77]. Анализ формул для параметров Pt, Wt
показал, что параметр Wt линейно зависит от угла а2 и может прини-
мать любые значения, а при а2 = (а3 + + (Л' п)] параметр Wt — 0.
Параметр Р1 является функцией <х22. Он может изменяться в широ-
ком интервале, однако имеет и некоторый минимум. Было показано [12],
что для получения Pt min, необходимо найти производную dPt/dag, при-
равнять ее нулю и определить значение угла а2. (Функция от Pt будет
иметь минимальное значение, если dP^da^ 0 и d*Pjda2 > 0.)
Как показали расчеты, функция Pt имеет минимальное значение
в случаях:
если 8г = -оо, то угол a2min будет вычисляться по формуле
а^п = (2п + П/[2(п + 2)], (5.1)
тогда
если st * -оо, Зты = (4n-l)n/[4(n + 2)(n-l)2]; то угол а2 niin будет равен (5.2)
тогда «2 min = (2» + 7)(“з + «/)/[4п + 2)]. (5.3)
р =4 1 ППП 1 3 1 3 hs (5.4)
Из формулы (5.2) следует, что минимальное значение зави-
сит только от показателя преломления п.
Расчет одно линзового конденсора выполним для двух вариантов.
1. Изображение источника А света проецируется конденсором в
бесконечность (рис. 5.3, а). Тогда конденсорную линзу следует рас-
считывать в обратном ходе лучей при нормировке: а; =0; а3 = 1;
f = 1. Полагая линзу бесконечно тонкой, d = 0, ht = h2 = h = 1, на-
ходят значение угла a“ml„, обеспечивающего форму линзы с миниму-
мом сферической аберрации третьего порядка по формуле (5.1). По из-
вестным углам Оу определяют радиусы кривизны бесконечно тонкой
линзы
^7™= /'(« -*)/; г 2ТИ= г(1 - п}/- п5;^,
вычисляют толщину и выполняют переход к радиусам линзы конеч-
ной толщины по методике, изложенной в главе 4.
2. Источник А и его изображение А' находятся на конечном рас-
стоянии L (рис. 5.3, б).
Исходными данными для расчета конденсора являются: аг (или
s;) — расстояние от линзы конденсора до нити накала источника (мо-
жет быть задана оптическая длина L конденсора вместо отрезка at);
Ро — линейное увеличение; 2оохв — угол охвата конденсора; 2у — раз-
мер тела накала источника (его диагональ); марка стекла линзы .кон-
денсора (п2= п). Необходимо определить конструктивные параметры
линзы, рассчитав ее на минимум сферической аберрации.
При расчете примем линзу за тонкую (d = 0, ht = h2 = h, Анн, = 0).
Определим ее фокусное расстояние, предварительно вычислив отрез-
ки ах и а'Г В соответствии с рис. 5.3, б запишем L = -at+ a'lt Ро =
=a'2/a, тогда a, = L/(fi0 - 1) и фокусное расстояние конденсора, если
задан отрезок aJt вычислим как f — ага'2 /(a; - a’= a,P0/(l - Ро) или,
если задано расстояние L, то f = -£Р0/(1 - ро)2. Примем нормировку:
a, = Ро; а3 = 1; Л - aia/ = а/Ро- Найдем по формуле (5.3) значение угла
a2 min и вычислим радиусы кривизны бесконечно тонкой линзы как
rlTH = а/Ро(П ~ ^)/(ЛаЛш1п — Ро)
d = 0
ггт„ = a/PoU - - na2min).
Переход к радиусам линзы конечной толщины при а -«> изложен в
главе 4.
Конденсор из I линз, рассчитанных на минимум сферической
аберрации (рис. 5.4, а). Рассмотрим два случая работы конденсора.
1. Конденсор проецирует изображение источника в заданную
плоскость, находящуюся на конечном расстоянии от конденсора.
Пусть конденсор состоит из I линз, разделенных малыми воздушны-
ми промежутками. При расчете примем их за бесконечно тонкие (рис.
5.4, б) (dt = d2 = d3 =... = d2l_t = Q;ht = h2 = h3~ ... = h « a;P0) и опреде-
лим неизвестные углы о^, приняв по нормировке а; — ро, а'к= 1, h =
= а1а1 = а7Р0.
Рис. 5.4. Конденсор из I линз, рассчитанных на минимум сферической
аберрации
Неизвестными являются углы а2, а3, а4,..., из них: а2, а4,
..., а21 — четные углы первого вспомогательного луча с оптической
осью, относящиеся к стеклу линзы; а3, а5, ..., а(2!_п — нечетные углы
первого вспомогательного луча с оптической осью в воздухе.
Если к материалу линз конденсора не предъявляются никакие
особые требования, то все линзы могут быть выполнены из стекла од-
ной марки с показателем преломления п.
Все четные углы определяют из условия минимума сферической
аберрации для каждой линзы. Эти утлы можно вычислить по эмпири-
ческой формуле [12]
а, = [(2п + 1)/(п + 2)] {[2Z - (i - 7)] р0 + (i -1)}/(21), (5.5)
где г - 2, 4, 6,..., 2Z.
Все нечетные углы относятся к воздушным промежуткам, кото-
рые рассматриваются как воздушные линзы с показателем преломле-
ния, равным единице, окруженные средами с показателями п. Рассчи-
тав эти воздушные линзы на минимум сферической аберрации, нахо-
дят нечетные углы. Эмпирическая формула для определения нечет-
ных углов имеет вид [12]:
щ = {[2Z-(i-2)]po + (i-l)}/(2Z), (5.6)
гдег = 3, 5, 7..(21 -1).
2. Изображение источника проецируется конденсором в бесконеч-
ность. Расчет конденсора такого вида проводят в обратном ходе лу-
чей при нормировке а; = 0, а' = 1, й2 = h2 = й3 =... = /'конд. Эмпиричес-
кие формулы для определения углов будут иметь вид [12]:
для четных углов
а~= [(2п + 2)/(п + 2)](i - 1)/(2Z), (5.7)
где i = 2, 4, 6.21;
для нечетных углов
a"=(i-7)/(2Z), (5.8)
гдет = 3, 5, 7.(21-1).
Формулы для вычисления amin конденсорных систем с различным
числом линз, рассчитанных на минимум сферической аберрации, све-
дем в таблицу (см. табл. 5.2).
Зная Оу, вычисляют радиусы кривизны бесконечно тонких линз
по формуле
гУтн = Zi«-nv)/(raCa;-nvav)
и выполняют переход к радиусам линз конечной толщины.
Как следует из формул (5.7) и (5.8), углы первого вспомогатель-
ного луча с оптической осью зависят только от показателя преломле-
ния п. Поэтому, если значения a7min подставить в выражение для
и вычислить значение показателя преломления, соответствующее
min = 0, то для случая, когда изображение находится в бесконеч-
Таблица 5.2
Схема конденсора Формулы для расчета углов <\,
S j s; — -°0
А) У А1 а/ = Р0; а2 = (2п + 1)(; + р0)/[2(п + 2)]; а3 =1 a2 = 0; a2=(2n + ;)/[2(n + 2)]; a3 =1
«/ =?»; а2=(2п + ;ХЗр0 + ^)/[ф + 2)]; «з = (Ро + ^)/2; а,=(2п + ;)(ро + 3)/[4(п + 2)]; а5 =1 7=? + cm e + sS “ \ + *ч _ e + «5^, о e o co *•< и и и и >4 «4 СП ч* «5 a a в a a
А| J L, ШО _ Р 1 л П Z й ' F' 7 е + + «сГ 'Ч 7 «г <=>...+ + СО. со О О Мй (g. gQ 7* + .. е со. е © е и и и и и и и «ч «4 СП Ч» М5 «О Ь. a a a a a a a R я я я я я я *4 OJ «Л 4b. СО *4 **• II II II II II II II ^7: to w 3 “ 3 3 •• + + Р7о гсГ z2. zsv z»v a + + + bo bo bo X.
-dожс/\ HRRRRRRRR ®(BNOlOl'kCj3t4k' II II II II II II II II II x—ч z—ч z—s z—ч Z-—s z—S z—«Ч "OS to "U5 to "СЭ bO 00 bO © 3 ° 55 ° 3 p 3 ” ТЭ ^CO "bo c w. -qs -QJ »u -qs 1 о CS •• © ^ + + + ^2 00 ГЗо roo J*1 + S' S' -s' bo + + + bo bo HRRRRRSSS <D00'*4©Cn>b.Cot4**>* II II II II II II II II II SU «Л 00® "To *^So a a -• a •• a ’ + + + X ^00 00 QO 00 ZCV a S' a + + + + bo bo bo .x
А а-1~О *"— > t” F'
ности, получим: для однолинзового конденсора п -= 1/4, что не имеет
смысла; для двухлинзового конденсора л = 2,5; для трехлинзового
конденсора п = 1,75 и для четырехлинзового конденсора п = 1,5.
Расчет конденеорных систем
из двух плесковыпуклых линз
Из теории аберраций известно, что плосковыпуклая линза имеет
минимум сферической аберрации, если она выпуклой поверхностью
обращена к бесконечности. Поэтому конденсор из двух плосковыпук-
лых линз (рис. 5.5) рассчитывают из условия, что между линзами, об-
ращенными друг к другу выпуклыми сторонами, идет параллельный
пучок лучей. Оптическая сила такого конденсора равна оптической
силе однолинзового конденсора, однако аберрации в рассматриваемой
конструкции в несколько раз меньше, чем в однолинзовой. Это обсто-
ятельство позволяет увеличить угол охвата по сравнению с углом ох-
вата однолинзового конденсора до 40...50°.
Рассчитаем конденсор. Пучок лучей между линзами будет парал-
лельным, если выполняется условие а{ = ft, тогда а'2 = f 2. Так как ли-
нейное увеличение в параксиальной области ро = ~f2/fv то f2 = ~$ofv
Известно также, что оптическая сила линзы в воздухе
Ф = 1/f' = (n- iyi/rt - l/rz)+(n- tfd^nr^),
Рис. 5.5. Конденсор из двух плосковыпуклых линз:
а) конечной толщины; б) бесконечно тонких
тогда для плосковыпуклой линзы, если один из радиусов ее кривиз-
ны равен бесконечности, можно записать:
для первой линзы Ф1 = 1/f/ = (п2 - 2)(- 1/г2);
для второй линзы Ф2 = l/f2 = (п4 - 2)(2/г3).
Зная марки стекол линз конденсора, найдем:
ГГ°°
dl ~ <Ашп _ ^2
г,-~Г,(пг-1)
d2 — 0,1...0,4 («касание» линз по центру)
г3-Гг(п4-1) (5.9)
^з"~^3 + *^min
Г< = оо
Здесь dmln — минимальная толщина линзы по краю; k2, k3 — стрелки
прогиба линз.
Возможны два случая расчета такой схемы конденсора.
1. Заданы: отрезок st, увеличение ро, угол охвата 2оохв. Тогда пер-
воначально необходимо найти отрезок at, отличающийся от отрезка
Sj на величину зя. Для этого выбирают значение sH, вычисляют отре-
зок at = Sj — sH, затем находят радиус второй поверхности первой лин-
зы г2 = а2(п2 - 1), определяют величины
^2 ~ Г2 + "]Г2 ~ (-^пол/^) ’ = ^min - ^2
и уточняют значение кардинального отрезка эя по формуле зя =
— d^/n2.
Расчет в такой последовательности выполняют до тех пор, пока
значение вновь вычисленного отрезка sH не будет равно предшеству-
ющему значению отрезка sH с точностью 0,001. После этого проводят
расчет конденсора по формулам (5.9).
2. Заданы: отрезок а1г увеличение Ро, угол охвата 2оохв. Кон-
структивные параметры конденсора определяют по формулам (5.9),
а значение отрезка а, вычисляют как а, = а, + зя, где кардинальный
отрезок зя для плосковыпуклой линзы зя — d1ln2.
Расчет конденсорных систем, содержащих
апланатические мениски
В конденсорах большой апертуры для уменьшения сферической
аберрации последующих линз за счет уменьшения для них апертур-
ного угла в качестве первых линз используют апланатические менис-
ки, в которых отсутствует сферическая аберрация и выполнено усло-
вие синусов.
Рис. 5.6. Схемы конденеорных систем, содержащих апланатические мениски
На рис. 5.6 представлены различные оптические схемы конден-
сорных систем, содержащих апланатические мениски. Из апланати-
Рис. 5.7. Схема для расчета апланатического
мениска
ческих менисков чаще все-
го используют положитель-
ные мениски, в центре кри-
визны первой поверхности
которых располагают тело
накала источника излуче-
ния (рис. 5.7).
Выполним расчет апла-
натического мениска. Пер-
вая поверхность мениска
концентрична предмету и
удовлетворяет, условию st =
гг = = s' v Луч проходит эту
поверхность без преломле-
ния. Вторая поверхность
апланатическая при усло-
вии, что n2s2 = n'2s'2. Для
системы в воздухе, когда
п'2=1, запишем n2s2 = s'2 и тогда линейное увеличение мениска
р0 м = s2/з2 = п2 • Апланатическая поверхность должна удовлетворять
равенствам, полученным из уравнения параксиального луча для сфе-
рической преломляющей поверхности:
S2 =r2{nZ+n'2)/n2 = r2(n2 + l')/n2-, (5.10)
s,2 = r2{n2+n'2)/n2 = r2{n2 + l'). (5.11)
Тогда из (5.10) найдем
Г2 = ^2^2/{р12 -0 = (®Т — )Пг/(^2 *" = (ri ~ dj^n2 I(п2 + I'j. (5.12)
Чтобы рассчитать радиус кривизны второй поверхности мениска
г2, необходимо вычислить толщину мениска
= kt +dmin - k2, (5.13)
где
= r} + Jr/ - (Z)n0JI/2)2; *2 = r2+Jr/-(£>пол/2)2.
Определим световой и полный диаметры апланатического менис-
ка. В соответствии с рис. 5.7 запишем DCB = 2s t tgaoxB, тогда Dnoji =
= DCB + AZ), где AD — припуск на закрепление.
Найти радиус кривизны второй поверхности мениска можно од-
ним из следующих способов.
1. Совместно решить два уравнения (5.12) и (5.13):
r2 = (ft -kt- dmin + k2)n2/(n2 + 1);
*2 = r2 + (Dnon/2)2.
Обозначив через a = rt - kt - dmin, из совместного решения уравне-
ний получают квадратное уравнение относительно г2.
г2(1 ~пг)~ 2ап2г2 + п22[а2 + (2)пол/2)2] = 0. (5.14)
Из решения уравнения (5.14) находят два значения радиуса кри-
визны и оставляют отрицательное значение, а если оба корня отрица-
тельные, то выбирают значение r2 < rt по абсолютной величине. За-
тем вычисляют толщину мениска dt и округляют ее до десятых долей
миллиметра. При округленном значении dt уточняют значение радиу-
са кривизны г2 = (г; -d1)n2/{n2 +1).
2. Принимают толщину мениска равной нулю d; = 0 и находят по
(5.12) значение тонкого радиуса кривизны г2тн = r;n2/(n2 + 1), затем
вычисляют стрелку прогиба на этом радиусе
^2тн — Г2 тн *“ т/Гйтв — С^пол/^)
и толщину мениска d1 = kt+ dmin - к2та. С учетом найденной толщины
пересчитывают значение радиуса r2 = (r; - d2)n2/(n2 +1), вычисляют
заново значения кг, di и определяют значение радиуса кривизны вто-
рой поверхности мениска r2 = (r;-di)n2/{n2 + 1). Расчет в указанной
последовательности выполняют до тех пор, пока вновь вычисленное
значение г2 не будет равно предшествующему значению г2 с точностью
единицы шестой значащей цифры.
После определения конструктивных параметров мениска пере-
ходят к расчету следующей за мениском системы, вычислив для ее
расчета:
отрезок s3 = s'2 - d2, где s'2 = r2(n2 + 1); расстояние d2 между лин-
зами выбирают в интервале 0,1...0,4;
апертурный угол о3 из соотношения sino3 = sinooxB/p0M = sinaoXB/
/п2,
линейное увеличение следующей за мениском системы р02 =
= Роконд/Ром = Ро/Л2-
По найденным значениям s3, о3, 0О2 проводят расчет линз, следу-
ющих за мениском. В зависимости от схемы конденсора рассмотрим
три варианта расчета (рис. 5.6, а, б, в).
1. За первым апланатическим мениском стоит линза, рассчитан-
ная на минимум сферической аберрации (см. рис. 5.6, а). Расчет этой
линзы выполняется при нормировке а3 = 3О2, а5 = 1. Линза принима-
ется бесконечно тонкой, при этом d3 = 0, h3 = h4 = h = a3a3. Внутрен-
ний угол a4 определяют из условия минимума сферической аберрации
для этой линзы, т.е. a4min = (2п4 + 1)(1 + р02)/[2(п4 + 2)]. Радиусы кри-
визны бесконечно тонкой линзы вычисляют по формуле
'•„н = h(n'v-nv)/(n'va'v-nvav).
2. За первым апланатическим мениском расположена система из
двух плосковыпуклых линз (см. рис. 5.6, б). Задавшись значением
кардинального отрезка sH, находят отрезок а3 = s3 - sH; полагая f3 = а3,
определяют r4 = ~f 3(п4 - 1), стрелку прогиба k4, толщину линзы d3 и
заново вычисляют sH. Расчет отрезка а3 выполняют до тех пор, пока
= 8ц .,с погрешностью не более 0,001. Затем находят конструк-
п Bbl *4 а ЗАД
тивные параметры плосковыпуклых линз:
= ОС
' 3
d3 = ^min ~ ^4
r4 = а3(п4 - 1)
d4 = 0,1...0,4
г5 = азРо2(Пб — 1)
d, = fe, + d
5 5 min
Г = oo
l6
3. За первым апланатическим мениском стоят второй апланати-
ческий мениск и линзы, либо плосковыпуклые, либо рассчитанные на
минимум сферической аберрации (см. рис. 5.6, в, г).
Для второго апланатического мениска первый радиус r3 = s3 = s'3.
Расчет второго радиуса мениска может быть выполнен любым из
способов, изложенных выше, а далее рассчитывают линзы по соответ-
ствующим конструкции методикам.
Примеры расчета всех видов линзовых конденеорных систем при-
ведены в книге [1].
5.3. Формулы для вычисления продольной и
поперечной сферической аберрации третьего
порядка в конденсорах различной конструкции
Для всех рассмотренных выше видов конденсоров на основании
формул теории аберраций третьего порядка можно определить про-
дольную As'ni и поперечную Аг/'ш сферическую аберрации, а также ди-
аметр кружка рассеяния 2Аг/'пнк в плоскости наименьшего кружка
(ПНК).
Для линз, рассчитанных на минимум сферической аберрации,
продольную сферическую аберрацию вычисляют по формуле
Да{п = -0,5(o')4PAin = - O,5a;afPmin/po, (5.15)
г«е Pmjn = £PV = £(8ау/5(1/п)у)28(а/п)у; a' = a;/p0, в радианах,
4=1 4=1
тогда поперечная сферическая аберрация
v=A
АУш = ASj'nO'= —O,5aIc'3^o^Pv. (5.16)
4=1
Кружок рассеяния в плоскости наименьшего кружка можно
вычислить по формуле
1 1 v=k
^ЛУпнк = .^ДУш = РоУ. -Ру- (5.17)
4 4 V=1
Если s7 = -к», то
1 2 ч 3
I /СЮ J- ZZI г*> СК> • » ОО TT'l' j-, оо
Д8Ш=--—Pmin; ЛУш 2-Pmin- (5.18)
В конденсорах из двух плосковыпуклых линз с параллельным хо-
дом лучей между ними продольная сферическая аберрация опреде-
ляется суммированием аберраций:
Д8Ш = (Да ш);Ро + (Д8 ш)2 = (f2/fi) (А® ш); + (А® 111)2»
где (Дв'“ ); = -0,5[тпг/Рг — продольная сферическая аберрация пер-
вой линзы в обратном ходе лучей; (Да'”^ = —0,5^mzlf^P2 — продоль-
ная сферическая аберрация второй линзы в прямом ходе лучей.
Для плосковыпуклой линзы при а7 =
р = р;= р;= (п3 - 2пг + 2)/[(n -1)2«].
Тогда
Да[п = -0,5(m2/f')p[l-^ (5.19)
2\y'm = 2|Да1/п|а^т3Р(1-Рр)Д'2, (5.20)
где пг = а7 tg о ।;
^АУпнк = m -Р(^~Ро)/(^^2 )•
Для конденсора, состоящего из апланатических менисков и либо
линз, рассчитанных на минимум сферической аберрации, либо плос-
ковыпуклых линз, продольная сферическая аберрация определяется
только аберрацией той системы, которая стоит после апланатов, так
как мениски не вносят сферической аберрации и отступления от ус-
ловия синусов.
5.4. Графический способ определения положения
плоскости наименьшего кружка рассеяния и
размера кружка рассеяния в этой плоскости.
Эффективное увеличение
Часто бывает целесообразно вычислять значения Дз' и Ду' точным
путем. В этом случае рассчитывается ход параксиального и действи-
тельного лучей для полного значения апертурного угла окр и его зоны
азон = 0,7окр. расчета хода лучей (рис. 5.8) получают отрезки s' и
324
s' и вычисляют As'p = s'Kp - s', As'OH = s'3OH - s', Ay'p = As'p tga^p ,
Ay'oH = As'OHtgo'OH, a положение плоскости наименьшего кружка рас-
сеяния (ПНК) и размер кружка рассеяния в этой плоскости опреде-
ляют графически. Для этого по оси абсцисс откладывают значения
продольной сферической аберрации для зоны (точка А2)и края (точка
Aj) отверстия, а по оси ординат откладывают размеры кружков рас-
сеяния в плоскости Гаусса (точки В7, В'; и В2, В'2). Точки А2, В7 иАр
В';, а также точки Аг, Вг иА2, В'2 соединяют прямыми линиями, на-
ходят точки С и С' их пересечения. Через точки С и С' проводят ли-
нию. Отрезок ОК соответствует положению s'nHK плоскости наимень-
шего кружка, СС' — диаметру кружка рассеяния в этой плоскости и,
если эта величина не превышает 3...10% размера изображения источ-
ника, то конденсор обеспечивает требуемое направление и распреде-
ление светового потока в заданной плоскости.
Рис. 5.8. Графический способ определения положения ПНК
Определим линейное увеличение конденсора в ПНК. Эта плос-
кость смещена относительно плоскости Гаусса на (3/4)As'Kp, кружок
рассеяния в этой плоскости в 4 раза меньше кружка рассеяния в плос-
кости Гаусса.
Увеличение в ПНК обозначим РОэф и назовем эффективным линей-
ным увеличением. Так как продольная сферическая аберрация про-
порциональна квадрату угла <У, то значение РОэф следует рассчитывать
Для некоторого зонального луча, образующего с оптической осью угол
- ^Зс^р/^ • Для этого угла [3] в ПНК найдем:
Роэф ~ Р<?_ (^/^)Роакр[Уозр’^1 ~ ’
еслит0зр=1,а/ = ар0, то
Роэф = Ро — (3/$)Ро(°кр/а )(®i — ®п)» (5.21)
где S; и Sn — коэффициенты аберраций третьего порядка.
5.5. Зеркальные и зеркально-линзовые
осветительные системы
Зеркальные осветительные системы отличаются отсутствием хро-
матических аберраций и имеют ббльший угол охвата 2оохв< 180°,
меньшую массу по сравнению с линзовыми системами при равных
D/f и ббльший коэффициент пропускания т. Часто перечисленные
особенности являются определяющими при выборе типа системы.
Зеркальные осветительные системы
Простейшая зеркальная осветительная система представляет со-
бой вогнутое сферическое зеркало (рис. 5.9), у которого 2оохв < 110°,
а линейное увеличение | р0| < 5. Однако такая система имеет ограни-
ченное применение вследствие большой сферической аберрации, боль-
Рис. 5.9. Вогнутое сферическое зеркало в
качестве конденсора
В соответствии с рис. 5.10 найдем
ших потерь светового потока и
неравномерности освещения.
При углах 2с > 180° раци-
ональнее использовать эллип-
соидный отражатель (рис.
5.10). Источник света распола-
гают в переднем фокусе эллип-
са, тогда свободное от сфери-
ческой аберрации изобра-
жение источника получают во
втором фокусе F2, совмещен-
ном с входным зрачком проек-
ционного объектива.
о а = 180° - arct g{D / [2(s- s)]}; tg o'A = y/p,
где p — расстояние плоскости предмета от плоскости входного зрач-
ка, определяемое из условия требуемого увеличения объектива; 2у —
диагональ диапозитива, причем полученный по формуле удвоенный
выходной апертурный угол отражателя 2cfA должен быть больше уг-
лового поля проекционного объектива, т.е. 2cfA> 2юов.
Задавшись расстоянием I между краем зеркала и диапозитивом,
найдем параметры эллипсоида: а и Ь — размеры малой и большой по-
луосей. Расстояние между точками Ft и F2 фокусов эллипсоида.
FtF2 = 2-Ja2-b2, (5.22)
а удаление точки Ft от вершины зеркала
s = a-~la2-Ь2. (5.23)
Кроме того, удаление любой точки, лежащей на поверхности эл-
липсоида, от его фокусов определяется соотношением
F1M + MF2 = 2a. (5.24)
На основании формул (5.22)—(5.24) и в соответствии с рис. 5.10
можно вычислить малую и большую полуоси эллипса, а также отре-
зок s (стрелку зеркала):
_ s(s + Z-p)
2s+ 1- р - В/(2в1пОд)
b = yl2as-s2;
(5.25)
(5.26)
s = 2a — s — l + p.
Как будет показано в гл. 7, уравнение профиля отражающей по-
верхности эллипсоидного зеркала имеет вид:
у2 = 2r0z-(l-e2}z2,
где г0 — вершинный радиус кривизны асферической поверхности, ко-
торый можно вычислить по формуле r0 = 2ss'/(s' + s); е — эксцен-
триситет поверхности, вычисляемый как е = (s' - s)/(s'+ s).
Эллипсоидный отражатель
проецирует излучатель во входной
зрачок объектива, заполняя изоб-
ражением всю площадь зрачка.
Обычно диаметр входного зрачка
больше диаметра окружности,
вписанной в световую площадку
излучателя, поэтому линейное уве-
личение зеркального конденсора
определяется как ро = -(s+ l-p)/s,
причем одновременно должно
быть выполнено условие ро = — D/
/(^Уизл)» где В — диаметр входного
Рис. 5.10. Эллипсоидный отражатель
зрачка проекционного объектива; 2уизл — диагональ светового тела
излучателя.
Известно, что анаберрационные зеркала любой формы, кроме
плоского, исправленные в отношении сферической аберрации для дан-
ного положения s предмета и его изображения s', вызывают отступ-
ление от условия синусов АР, кроме случая, когда р0 = ±1, что приво-
дит к различным линейным увеличениям в разных зонах широкого
пучка. Величина Др может достигать больших значений в системах с
увеличенным углом охвата. Известно, что для анаберрационных сис-
тем
ДР = [1 - Р* - (1 - P0z)cosoOXB]/(2p0),
и тогда, если эллиптическое зеркало имеет Ро = -5, при 2аохв = 140°
отступление от условия синусов составит др = -3,4.
Наличие большого значения Др особенно существенно, если ис-
пользуется источник света, яркость которого уменьшается от центра
к краям светящегося тела. В этом случае периферические зоны зер-
кала изображают источник с меньшим увеличением, чем центральные
Рис. 5.11. Зеркало ступенчатого профиля
в качестве конденсора
зоны, и дают изображение той
его части, где спад яркости не-
допустимо велик. Устранить
такой дефект можно лишь в
зеркале ступенчатого профиля
(рис. 5.11). Например, два
концентрических ступенчатых
зеркала дают небольшие значе-
ния Де' и Др. Однако такая кон-
струкция имеет свои недостат-
ки — трудность изготовления и
неравномерность нагрева вслед-
ствие того, что толщина зерка-
ла по высоте неодинакова.
Зеркально-линзовые осветительные системы
Сфероэллипсоидный отражатель (рис. 5.12). Отражатель пред-
ставляет собой линзовый мениск, у которого выпуклая поверхность
эллипсоидная и покрыта отражающим слоем, а вогнутая поверхность
сфероидальная (рис. 5.12, а). Такая конструкция используется для
изображения источника на близком расстоянии при углах охвата
2оохв = 140° и линейном увеличении р0 = -(6...8).
Рис. 5.12. Сфероэллипсоидный отражатель
Увеличение конденсора для крайнего луча определяется форму-
лой, справедливой для анаберрационных отражателей [3]:
P = [l + P^-(1-P^coso]/(2P0).
(5.27)
Радиус кривизны первой поверхности рассчитывают из условия
обеспечения малой разности толщин линзы по оси и по краю для наи-
более равномерного нагрева зеркала. Исходя из условия равенства тол-
щин линзы на краю и в центре, получают [3]
(5.28)
Эксцентриситет в второй поверхности рассчитывают из условия
компенсации сферической аберрации преломляющей поверхности
аберрацией отражающей поверхности.
Если dk = d0, то прогиб zt на первой и прогиб z2 на второй повер-
хностях на высоте у будут примерно одинаковыми (рис. 5.12, б).
Запишем уравнения профиля:
сферической преломляющей поверхности i/f = 2r01z- zf ;
эллипсоидной отражающей поверхности у% = 2rQZz2 - (1 + Ьг^г2 ,
где b = J-e2 — коэффициент деформации, и если zt = z2, то
r} = r2-bz2/2. (5.29)
Сравнив (5.28) и (5.29), получим
*2 = г2(Р0 - /)7{2Р0[р0 ctg2(o/2)- /]}. (5.30)
Метод расчета сфероэллипсоидной линзы основан на совместном
решении следующих двух уравнений при принятых условиях норми-
ровки а; = ~Р0, = -sP0, а4 = 1:
условия двойного преломления луча до и после отражения на по-
верхности радиуса гг Если п2 = — п3 = п,п1~ 1, п4 = -1, то
Г; = Л;(га - 1)/(па2 + Ро) = Л3(га - 1)/(гаа3 - 2); (5.31)
условия сохранения толщин по краю и центру г; = тг2, где т —
выражение, стоящее в скобках в уравнении (5.28).
К этим условиям добавляются известные соотношения между па-
раксиальными величинами:
ft3 = ft1+d0a2J Л3 = Лг-<20«з и
(5.32)
г2 = Лг(га3 - га3)/(га3а3 - га3а3) = 2Л3/(а3 + а3).
Совместное решение системы уравнений (5.31) и (5.32) приводит
к кубическому уравнению относительно угла а2, но множителем
[d0/(sP0)2] при «г можно пренебречь, и тогда приходят к квадратно-
му уравнению вида
Аа2 + Ва2 +С = 0,
где
А = 2ndo\mn - (га - 1)/2];
В = mra(ra + 3Podo)-(n-l)(ra + po3o); (5.33)
С = mPo(ra+ Podo)-0,5(га - 2)(га + Ро), где do = do/h1.
Так как все величины га, ро, d0, т, s, входящие в выражения (5.33),
известны, то из решения уравнения находят угол а2. Остальные неиз-
вестные следует вычислять в следующей последовательности:
1) = (n-2)ft1/(na3 + Po);
2) h2 = h4 + doa2;
3) a3 = a2 + (I + P0)/ra;
4) r2 = 2h2/(a2 + a3\,
5) s'= h3 = h2-d0a3.
Указанную последовательность расчета важно соблюдать, так как
квадратное уравнение является лишь приближенным решением сис-
темы сформулированных выше условий.
Для определения эксцентриситета е эллипса составляют уравне-
ние исправления сферической аберрации, т.е. полагают = 0:
Sj = + h2[p2 - 0,25nb(a2 + a3)3]/ft2 + h3P3/hI
где Р, = [п(а2 + Р0)2(а2 + Р0п)У(п-2)2 ;
Р2 = -0,25п(а3 - а2)2(а3 + а2);
Р3 = п(1 - а3)2(а3 - n)/(n -1)2 .
Полагая S2 = 0, находят коэффициент деформации b эллипсоид-
ной поверхности
Рис. 5.13. Линза Манжена в качестве
конденсора
Так как Ь = -\1-ег , то определяют эксцентриситет поверхности и
записывают уравнение профиля этой поверхности
У а = 2r02z2-(l-e2}z2,
где г02 — радиус кривизны соприкасающейся сферы.
Таким образом, в результате расчетов получили конструктивные
параметры отражателя. В рассчитанной системе выполняют аберра-
ционный анализ, вычисляют сферическую аберрацию и, если она не
в допуске, то изменяют либо коэффициент Ь, либо г2.
Отражатели сфероидальной формы (линза Манжена). Линза
Манжена (рис. 5.13) — отрицатель-
ный мениск со сферическими повер-
хностями, у которого сферическая
аберрация, вносимая отражающей
поверхностью, компенсируется абер-
рацией преломляющей поверхности.
Угол охвата для такого отражателя
может достигать 135°, причем при
больших углах охвата следует ис-
пользовать линзу Манжена, у кото-
рой r2 = f,r2 = nf. Расчет линзы при-
веден в п. 6.6.
Сферическое зеркало и плосковыпуклая линза. Такая зеркально-
линзовая система (рис. 5.14, а) применяется в качестве осветительной
при углах охвата 2оохв до 135°. Плосковыпуклая линза служит для
коррекции сферической аберрации сферического зеркала.
Рис. 5.14. Сферическое зеркало:
а) с плосковыпуклой линзой; б) с пластинкой Шмидта
Если между зеркалом и линзой идет параллельный пучок лучей,
то линейное увеличение конденсора определяется формулой
Ро= -<р2/<р2. Продольная сферическая аберрация в обратном ходе лу-
чей для зеркала
Д?ш= -0,5m2(SJ~
и для плосковыпуклой линзы Дз'ш= -0,5т2 / f'2 , тогда суммар-
ная сферическая аберрация осветительной системы
Asjn = -0,5т2 p*(Sj)7 / //+ (Sj); / f'z .
Если входной зрачок совпадает с вершиной зеркала (sp =0), то ме-
ридиональную кому рассчитывают по формуле
кт =рД 7+^;=-(з/2)тЧ&(й[р0(8п)7 //;+p0(sn); //;]•
Сферическое зеркало с коррекционной, пластинкой Шмидта. Эта
осветительная система (рис. 5.14, б) имеет угол охвата до 135°. Кор-
рекционная пластинка служит для коррекции сферической аберрации
сферического зеркала. Формы коррекционных пластинок и их расчет
приведены в гл. 6.
Оптический растр в качестве осветительной системы
Оптический растр (рис. 5.15) — это совокупность линзовых или
зеркальных элементов (ячеек), имеющих оптическую силу. Каждый
элемент растра формирует изображение предмета так, что число по-
лученных изображений предмета равно числу элементов растра. На-
клонный пучок лучей, идущих от источника света А, заполняет вход-
ной зрачок 3. Элемент растра 1 создает изображение A't центра источ-
ника света. Элемент растра 2 направляет пучок во входной зрачок про-
екционной системы, стоящей за растром.
Рис. 5.15. Оптический растр в качестве конденсора
Пусть задан период растра (расстояние между оптическими ося-
ми элементов растра 1), тогда период растра 2
^2 ~ d/si),
где d — расстояние между растрами; s2 — расстояние от тела накала
источника света до элементов растра 1.
Число элементов растров 1 и 2 должно быть одинаковым.
Найдем фокусные расстояния элементов растра
//= s2d/(s2-<i); f'2 = [(s2 -d)s;]/(s2 -d-s'),
где s'2 — удаление входного зрачка 3 от растра 2.
Зная фокусные расстояния элементов растра, легко определить
радиусы кривизны линз растра
Г2 = оо г3 = °°
r2 = -f2(n-2) г4 = -/'2(п-2)
Пример 5.1. Найти конструктивные параметры плосковыпуклых элементов растра
1 и растра 2 (см. рнс. 5.15), если s( = -50 мм, расстояние между растрами d = 25 мм,
период первого растра t, = 15 мм, угол охвата 100°. Линзы выполнены из стекла марки
К8 (пе= 1,5183).
Решение. По известному периоду t; растра 1 найдем период растра 2t2 — t;(l - d/st)—
=15 [1 - 25/(—50)] -= 22,5 мм. Определим фокусные расстояния элементов растров f ( =
= s,d/(sl - d) = [(-50) 25] / (-50 - 25) - 16,6666 мм; f'2 = (s, - d)s'2/(s, - d - s'2) =
= (-50 - 25) 150Д-50 - 25 - 150) — 49,9999 мм (удаление входного зрачка приняли рав-
ным а'г —150 мм).
Определим световой диаметр растра: -О„; = “ 2 (—50) tg (-50°) =119 мм.
Тогда на световом диаметре 199 мм с периодом (, — 15 мм будет расположено восемь эле-
ментов растра диаметром 15 мм.
Найдем конструктивные параметры плосковыпуклых линз растров:
dt - d^ - *2 - 1,5 + 1,7 = 3,2
г2 = (-16,6666)(1,5183 - 1) = -8,63833
d2= 25
r3 =
d3 = dml„ - = 2 + 2>57 = 4>57
r4 = -49,9999 (1,5183 - 1) - -25,9149
Световой диаметр второго растра Da2 = 2(-50 -25) tg (—50°) = 178,8 мм, а число
элементов растра — восемь с периодом t2 = 22,5 мм.
Глава 6. РАСЧЕТ ЗЕРКАЛЬНЫХ И ЗЕРКАЛЬНО-
ЛИНЗОВЫХ СИСТЕМ
6.1. Преимущества и недостатки зеркальных и
зеркально-линзовых систем перед линзовыми
Зеркальные (ЗС) и зеркально-линзовые (ЗЛС) системы обладают
рядом существенных преимуществ перед линзовыми системами и на-
ходят самое широкое применение. В них главная роль в образовании
изображения отводится отражающим поверхностям, не вносящим
хроматических аберраций, поэтому чисто зеркальные системы удоб-
ны для использования в ультрафиолетовой и инфракрасной областях
(УФ- и ИК-областях) спектра. Преломляющие поверхности, которые
вводятся в качестве коррекционных элементов в схемы зеркальных
объективов, имеют, как правило, небольшие оптические силы, поэто-
му они также не вносят заметных хроматических аберраций. При
сравнительно несложной конструкции ЗЛС и ЗС можно получить до-
статочно совершенную коррекцию сферической аберрации. Кроме
того, эти системы имеют высокую светосилу и разрешающую способ-
ность при большей компактности но сравнению с линзовыми система-
ми: при одних и тех же фокусных расстояниях продольные размеры
ЗС (zn = L/f = 0,25...0,33) меньше, чем размеры линзовой системы
{т = 0,6...0,8). Требования к стеклу, из которого может быть изго-
товлена подложка для зеркал (подложка может быть и металличес-
кой), значительно ниже, чем требования к стеклу, предъявляемые при
изготовлении линзовых систем.
Однако наряду с положительными свойствами ЗС и ЗЛС имеют и
недостатки, ограничивающие их применение: это — экранирование
Центральной части входного зрачка, вызывающее перераспределение
освещенности в дифракционном изображении точки; малое угловое
поле из-за большой комы этих систем; высокая чувствительность к
разъюстировке; необходимость применения защитных стекол для гер-
метизации; «паразитные засветки», для устранения которых ставят
бленды или экраны; сложность изготовления и контроля асферичес-
ких поверхностей.
Исходными данными для расчета ЗС и ЗЛС являются:
Случай, когда s2 = -<» Случай, когда st *
f — фокусное расстояние; — линейное увеличение;
D/f — относительное отверстие; А — числовая апертура;
2<в — угловое поле; 2у — линейное поле;
s2 — передний отрезок или оптическая
длина L:
8 — вынос плоскости изображения;
Аэк — коэффициент центрального экранирования;
sp — положение входного зрачка;
Хо, Х2 — рабочий спектральный интервал для ЗЛС;
— требуемое качество изображения ;
— общие конструктивные требования.
Если ЗС или ЗЛС используются в оптико-электронных приборах,
то исходные данные выбирают из следующих соображений:
P/f о6(А) — из условия требуемого качества изображения, причем
f'o6 должно обеспечивать необходимую точность измерений, отвечать
габаритным и конструктивным требованиям;
диаметр D входного зрачка и коэффициент экранирования /?эк на-
ходят из энергетического расчета;
2(о — угловое поле должно обеспечивать необходимое поле обзо-
ра, быстродействие системы, ее помехозащищенность, требуемое
качество изображения; в некоторых случаях 2(о определяется разме-
рами чувствительной площадки приемника;
Х2, Хо, Х2 — рабочий спектральный интервал; обусловлен спек-
тральными характеристиками излучения объекта, фона, среды, филь-
тров, приемника лучистой энергии и т.п.;
необходимое качество изображения, которое в общем случае мож-
но охарактеризовать распределением энергии в пятне рассеяния по
всему полю, определяется точностью измерений и выбранным типом
анализатора.
Основные схемы ЗС и ЗЛС приведены в [12]. Здесь же остановим-
ся на синтезе простых и двухзеркальных объективов с различными
видами линзовых компенсаторов.
6.2. Расчет простых зеркальных систем
Простыми ЗС будем называть системы, содержащие одно зерка-
ло (плоский зеркальный отражатель во внимание не принимается).
Применение плоского зеркала позволяет уменьшить размеры систе-
мы и рационально разместить приемник излучения, однако в этой схе-
ме имеет место центральное экранирование.
Габаритный и аберрационный расчеты
одиночного сферического зеркала
Выполним габаритный и аберрационный расчеты однозеркальных
систем для двух случаев: st = -«>, s2 * -«>.
Предмет расположен на
конечном расстоянии (s1
рис. 6.1, а). Заменим отражаю-
щую поверхность главной
плоскостью и проведем ход
первого вспомогательного луча
(рис. 6.1, б). Расчет выполним
при нормировке а2 = -р0; а2= 1,
тогда h1 = stat = -s2p0, 1 =
= njU^Sp - Sj) = -njttjSj = -SjUj,
если входной зрачок совпадает
с оправой объектива (sp = 0), и
I = -Po(sp - s2), если sp Ф 0.
Определим световой диа-
метр зеркала. Если sp = 0, то
DCB = 2s2tgo2. (6.1)
Если Sp Ф 0 (рис. 6.2), то из рас-
чета хода нижнего полевого
луча найдем tgoB п л
~-sj
б)
Рис. 6.1. Одиночное сферическое зеркало
= [CD/2) + i/]/(s2 - sp) и
Z>c» = -D + 2SptgOH.n.a
(6.Г)
Радиус кривизны поверхности зеркала вычислим, воспользовав-
шись формулой расчета хода первого вспомогательного луча п2аг -
- ntat = ht(n2 - n1)/r1 = й2Ф2, тогда
г1 = 2з1р0/(р0-2) = -2/Ф1. (6.2)
Например, пусть Ро = -2, s1 = -50 мм, тогда s' 1 = -pos2 = -(-2)(-50) =
= -100 мм, и радиус кривизны поверхности зеркала определим как
Рис. 6.2. К определению светового
диаметра зеркала
г; = 2(-50)(-2)/(-2 - 1) =
= -66,6667 мм.
По формуле Гаусса найдем фокус-
ное расстояние зеркала п'/s't -
- n/Sj = п'/ ff , тогда // = rJ2 =
= -33,3333 мм, Ф = n/ff = 0,03 > 0.
Таким образом, путем расчета
получили конструктивные пара-
метры одиночного зеркала:
г; = -66,6667 мм; п = 1; п' = —1;
// = -33,3333 мм.
Вычислим коэффициенты аберраций третьего порядка по следу-
ющим формулам [12]:
S1 = h1P1; Sn = y1PI-IWt;
-Sin = vlPi/ht -
Sjv = (a2 + = — Ф/» (6.3)
Sv = y^Pjh* - Sly^wjhl - 21гУ1(а2 + aj/ftf,
где
P2 = -0,25(a2 - af )(a2 - a2);
W2 = (af-af)/2; П2 = (a2 + a2)=-Л2Ф2;
7 = n2a2P2(sP-s2); P2 = 2; yt = sp.
С учетом принятой нормировки выражения для коэффициентов
аберраций Sj...Sv при условии, что sp = 0, примут вид:
Sj = O,25s2Po(l - Рд)(1 + р0);
' Sn = -szp0(2-p^)/2;
Зш = з,ро(2-ро)=72Ф; (бзэ
Sjv — — ~ Po)/(siPo)>
Sv = 0.
Рис. 6.3. Одиночное сферическое зеркало
при S
Предмет расположен в бес-
конечности (s2 = -о», рис. 6.3,
а). Заменим отражающую по-
верхность главной плоскостью
(рис. 6.3, б). Примем нормиров-
ку: а1 = 0; аг = 1; ht = /' = -1;
У1= sp> 1=п1УЛ =«Д (зр-
/St = [(sP/S/) -1]Л2 =(-1)(-1) =
= 1.
Найдем световой диаметр
зеркала. В случае, когда sp = 0,
он будет равен диаметру вход-
ного зрачка, т.е. Dcs = D. Опре-
делим радиус кривизны повер-
хности зеркала г = 2f = -2.
Рассчитаем коэффициенты
аберраций третьего порядка
для одиночного зеркала по фор-
мулам (6.3). С учетом принятой
нормировки будем иметь:
Pt = -0,25а32 = -0,25;
Wj = 0,5а2 = 0,5,
тогда
«Г = 0,25;
8~ = -0,25У1-0,5-,
8“ = 0,25у2г + у1 + 1; (6Л)
Sjv = -1;
= -0,25у3-Зу2/2-2у,.
Оценим влияние положения входного зрачка на аберрации оди-
ночного зеркала.
Если входной зрачок совпадает с оправой зеркала (sp = 0, см. рис.
6.3, б), то yt = sp = 0 и формулы (6.4) примут вид:
sr = 0,25; = -0,5; = 1; SIV = -1; Sy = 0.
Если центр входного зрачка совпадает с центром кривизны повер-
хности зеркала (рис. 6.3, в), то коэффициенты аберраций третьего по-
рядка будут иметь следующие значения:
8Г = 0,25; S„ = 0; S~ =0;SIV = -l; S; = 0,
так как yt = sp = -2.
Таким образом, изменяя положение входного зрачка, можно ис-
править полевые аберрации — кому, астигматизм и дисторсию.
Определим сферическую аберрацию в линейной Да'1Пи угловой До7
мерах, радиус кружка рассеяния Ду'1П в плоскости Гаусса, а также вол-
новые аберрации N, вносимые одиночным сферическим зеркалом
(sz =
Двг'Г = - 0,5т2 S^/f' = - 0,125т2/f-,
До' = Ьу'ы/Г ~ - m3/(8f'3]=-m3/r3 ;
ДУгп = As^o' = - 0,125т3/f'2; (6-5)
N =-0,25т4/г3 ,
где т — высота луча на входном зрачке.
Из первой формулы (6.5) следует, что сферическая аберрация,
вносимая сферическим зеркалом, оказывается в 8 раз меньше про-
дольной сферической аберрации линзы, рассчитанной на минимум
сферической аберрации, для которой при п - 1,5 P~in = 2,14 и
Двщ = -m2/f'.
При любом положении предмета относительно сферического зер-
кала (за исключением, когда s; = г2, (30 = -1) сферическая аберрация
остается неисправленной и ее можно точно вычислить по формуле
Да' = {г/2^1-1/(6.6)
Разложив в ряд подкоренное выражение формулы (6.6), раскрыв
скобки и ограничившись третьим членом разложения, получим
Да' = -(1/4)(ш7г)-(3/1б)(т4/г3)-(5/32)(ш7г5). (6.6')
Отдельное сферическое зеркало дает практически идеальное изоб-
ражение точки на оси, если его волновая аберрация не превышает
А./4. Условие получения первоклассного сферического зеркала, заме-
няющего параболоид, установленное Д.Д. Максутовым [8], имеет вид:
340
Dmax = 0,284(f'/D)3,
где Dmax — максимальный диаметр зеркала.
Ниже приведены допустимые значения относительных отверстий
при различных, значениях светового диаметра зеркала:
D/f' 1:1 1:1,4 1:2 1:2,5 1:3,5 1:5 1:7 1:10
мм 0,284 0,779 2,27 4,44 12,2 35,5 97,4 284
Например, одиночное зеркало диаметром D = 100 мм будет экви-
валентно параболическому, если его относительное отверстие не пре-
вышает 1: 7,05.
Однако зеркальные системы имеют ограниченное угловое поле
вследствие больших значений комы. Максимально допустимое угло-
вое поле для сферического зеркала, у которого кома будет минималь-
ной, определяется формулой, полученной Д. Д. Максутовым [8]
®тах = О,ОО302(ГЛО)7в.
Сферическое зеркало с плоским отражателем
В зеркальном объективе с плоским отражателем имеет место цен-
тральное экранирование (рис. 6.4, а) и входной зрачок имеет кольце-
вую форму. Так как предмет в бесконечности, то коэффициент экра-
нирования k3K определяется отношением диаметров зеркал, т.е.
кэк = D2/Dt = и Для ЗС и ЗЛС обычно fe3K лежит в пределах
0,3...0,5. Втабл. 6.5 приведены формулы для определения коэффици-
ентов экранирования для двухзеркальных систем при различных по-
Рис. 6.4. Сферическое зеркало с плоским отражателем:
а ') ход апертурного луча; б, в) формы входных зрачков экранированного и
неэкраяированного объективов
ложениях предмета. Во всех схемах с центральным экранированием
следует определять эффективное относительное отверстие объектива.
Для этого рассмотрим два объектива с кольцевым и сплошным зрач-
ками (рис. 6.4, б, в).
За эффективное относительное отверстие зеркального объектива
с экранированием принимается относительное отверстие объектива с
тем же fo6, но со сплошным зрачком, у которого площадь St входного
зрачка равна площади S2 действующего отверстия входного зрачка
экранированного объектива. Поскольку = S2, то nD3/4 =
= n^Df - &г)/4 , и так как fe3K = D2/Dt, то Do = D, -jl- k3K и эффектив-
ное относительное отверстие определится следующим образом:
D0 //об = 1 ~ ^эк /fob — Eeff • (6« 7)
Эффективное относительное отверстие необходимо учитывать при
расчете дальности действия прибора с зеркальным объективом, опре-
делении КПД прибора и оценке качества изображения. Центральное
экранирование вызывает перераспределение освещенности в дифрак-
ционном изображении точки. Уже при экранировании на одну треть
диаметра D, т.е. при 11%-ной потере света на экранирование, каче-
ство дифракционного изображения заметно отличается от идеально-
го оптимума при неэкранированном отверстии объектива: централь-
ный максимум дифракционной картины несколько снижается, а часть
энергии переходит из центрального кружка в ближайшие кольца, ко-
торые становятся более яркими, что уменьшает контраст изображе-
ния. Именно поэтому в оптических системах не следует допускать эк-
ранирования, превышающего 10...12% площади действующего отвер-
стия объектива.
Запишем конструктивные параметры объектива
Г; = -2ГО6
d = (k3K~l)fo6;5 = (2k3K~l)fo6.
Из последней формулы следует, что 8 = 0, если fe3K = 0,5, т.е. эк-
ранирование по диаметру составляет 50% и соответственно по площа-
ди 25%. При fe3K > 0,5 8 > 0, а при k3K < 0,5 8 < 0.
При нормировке а, = 0, а2= -1, а3 = 1, ht = fo6 = 1, 7 = -1, тогда
h2 = h: - d;a2 = 1 + dt, параметры P“ и W" имеют следующие значе-
ния: Р~ -~а32/4 = 0,25; И7° = 0-2/% = 0,5, а коэффициенты аберраций
«Г =0,25; S£= yj/4 + 0,5; S^ = y3/4 + У1+1; SIV =-1; 8у=у°/4 +
+ Зу3/2+2y}, т.е. аберрации определяются только аберрациями сфе-
рического зеркала.
Пример 6.1. Выполнить аберрационный анализ зеркального объектива из сфери-
ческого зеркала и плоского коитротражателя, если sI = -о», - 100 мм. D/fM = 1:2,
угловое поле 2со = 2°, кт — 0,5, sp = 0.
Решение. Найдем конструктивные параметры объектива при f об =100 мм:
г, = - 2fM = -2(100) = -200
d = (*„ - 1)ГЛ - (0,5 - 1) (100) = -50.
г2 = ~
Расчет аберраций проведем точным путем, воспользовавшись формулой (6.6'), и
сравним его результаты с результатами аберрационного анализа системы на ПЭВМ:
т 12,5 17,7 21,6 25
Дэ'2 -0,196 -0,394 -0,591 -0,790
Дэ'2 -0,196 -0,393 -0,591 -0,790
Примечание. As't — точное значение, рассчитанное по (6.6'), Дэ'2 — значение, полу-
ченное с помощью ПЭВМ.
Выполним аберрационный анализ системы в области аберраций третьего порядка.
Для этого вычислим коэффициенты аберраций по формулам (6.3): = 0,25 ;
$7 = 0,5 $n = l;$v = -l;S7 = 0,тогда
Дз£ =-0,5тг8?/fa = -0,5- 252 • 0,25/100 = -0,781;
Кщ = - (3/2)(тп2$7 tgco) /fa = - (3/2)^25z • 0,5tgl°) /100 = -0,082;
z'~ = -0,5 tg2<o(3$i+$y) = -0,5 100tg2l°[31+(-l)] = -0,0305;
z'~ = -0.5& tg2 + $v) = -0,5 100tg2l° [1 + (-1)] = 0;
Ду~ = -0,5 = -0,5- 100tg3l° 0=0.
6.3. Габаритный и аберрационный расчеты
двухзеркальных систем со сферическими
поверхностями
Если оптическая система содержит два неплоских зеркала и бо-
лее, то такая система называется сложной.
Рассмотрим расчет двухзеркальных систем, при этом большее по
диаметру зеркало будем называть главным зеркалом, а меньшее —
вторичным зеркалом.
Двухзеркальные системы для предмета в бесконечности
Зеркальные системы из двух сферических зеркал можно практи-
чески свести к трем видам: предфокальные системы (/'о6 > 0); зафо-
кальныс системы < 0); афокальные системы (f = »).
В предфокальных системах вторичное зеркало 2 располагается
перед точкой фокуса F'1 главного зеркала 1 (рис. 6.5). Различают уд-
линяющие и укорачивающие предфокальные системы. Фокусное рас-
стояние таких зеркальных объективов болыпе нуля (fo6 > 0).
Рис. 6.5. Предфокальные двухзеркальные системы типа Кассегрена:
а) удлиняющая (f > f,); б) укорачивающая (f <f1)
Удлиняющие системы в дальнейшем будем называть телеобъек-
тивами, а укорачивающие системы — зеркальными дублетами.
В зафокальных системах вторичное зеркало располагается за
точкой F'1 главного зеркала (рис. 6.6). Это системы типа Грегори. Фо-
кусное расстояние таких зеркальных объективов меньше нуля
(fоб < 0), и они дают прямое изображение. Различают удлиняющие и
укорачивающие зафокальные системы.
Рис. 6.6. Зафокальные двухзеркальные системы типа Грегори:
а ) удлиняющая; б ) укорачивающая
Афокальные системы — системы, у которых точки фокусов (F'1 и
вторичного и главного зеркал совпадают. Эти системы являются те-
лескопическими. Примером афокальных систем служат системы типа
Мерсенна (рис. 6.7, а, б), построенные по схемам Кеплера и Галилея.
Рис. 6.7. Оптические схемы двухзеркальиых афокальных систем типа Мерсенна:
а ) по схеме Кеплера; б) по схеме Галилея
Зеркальная система типа Кассегрена. Эта система представляет
собой зеркальный телеобъектив > L), оптическая схема которого
показана на рис. 6.8, а.
Рис. 6.8. Зеркальный объектив типа Кассегрена:
а ) оптическая схема объектива;
б) ход первого и второго вспомогательных лучей в объективе
Заменим отражающие поверхности бесконечными плоскостями и
Рассмотрим ход первого и второго вспомогательных лучей (рис. 6.8, б).
Расчет системы выполним при нормировке а, =0, а3 — 1, Р2 = 1,
Л, = Ло6 — 1, I ~ _1» У1 = sp = 0. Полагая, что система в воздухе (п, =
= n3 = 1, п2 = -1), определим расстояние между зеркалами d, прини-
мая угол а3 = 1, тогда h2 = -d + 8, и так как h2 = k3K, то d = 8 - fe3K. Най-
дем угол а2, воспользовавшись соотношением h2 — h1- da2:
a2 = (l-k3K)/d. (6.8)
Радиусы кривизны поверхностей зеркал вычислим по формулам
Г1 = [Л1(П2 - П1)]/(ге2«2 - П1«1)= 2/«2 ;
Гг = [Л2(п3 - л2)]/(п3а3 - п2а2) = 2^/(1 + а2). (6'9)
Определим оптические силы зеркал:
Ф/ = П2^ = ~а2’ ^2=Пз//2 = (1+а2)/Кк И
Фоб = Ф1 + Ф2 + <*Ф1Ф2 =1-
Найдем коэффициенты аберраций S“...S^ двухзеркальной систе-
мы при принятых условиях нормировки, предварительно вычислив
высоту второго вспомогательного луча на второй поверхности у2=
=У1 ~ = d-
Sf = P1 + k3KP2; S~ = dP2 + 0,5-,
Sm = d2P2/k3K + 2dW2/fe3K + 9,4-9,;
Siv = «2 - (1 + «г)Аэк = “(фл + Фг); (6.Ю)
s; = d3P2/k*K + 3d*W2/k2K + 2d(l + a2)/fefK,
где P,=-a32/4; P2 =(l-a3)(l-a2)/4; W, =a|/2; W2 =(l-af)/2.
В табл. 6.1 приведены формулы для определения конструктивных
параметров системы типа Кассегрена и ее разновидностей: системы с
равными радиусами кривизны (г, = г2) и системы с концентрическими
зеркалами (r2 =r, - d). Формулы даны для двух случаев, когда зада-
ны либо коэффициент экранирования fe3K, либо 8 — вынос плоскости
изображения.
Таблица 6.1
Оптическая схема объектива Формулы для габаритного расчета 1)
задан Аэк задан 8
Система типа Кассегрена И 1 ~d |Ч г, = 2/а2; d = b- йэк; г2-2Лэк/(1+а2); а2 = 1
Двухзеркальная система с зеркалами равных радиусов Г1=Г2 г, =2(^-2); г2 = 2(Лэк-2); d=-u-M2; 8 = ЗАЭК - *2К -1; «2= */(*„"*) Аэк = (3±^5-48)/2; г, = 2 ± л/5 - 48 ; г2 = г2; d = 8-(3±^5-48)/2; а2 = 2/(2 ±-/5-48)
1 -d
Система с исправленной кривизной Петцваля (SIV = 0)
Двухзеркальная система с концентрическими зерка- лами к с» £, fL^ -1 1 Е-1 fa Ч -a г/=2(*эк-2)/(1 + *эк); г2 = *эк - 2; а2 = (*2+/)/(*зк-О; <* = -U-*,//(* + *,к); 3 = (3*эк-2)/(Лэк + 2) *эк=(5+2)/(3-3); г2 = 3 - 1; г2 = 3(8-2)/(3-3); а2 = 2/(3-1); d = (3-2)2/(3-3);
Зеркальная система типа Грегори (рис. 6.9). Расчет системы бу-
дем выполнять при следующей нормировке углов и высот первого и
второго вспомогательных лучей, считая, что входной зрачок совпадает
с оправой главного зеркала: а2 = 0, а3 = 1, = f'o6 = -1, р2 = 1,
I = 1, = sp= 0. Для системы в воздухе n2= n3 = 1, п2 = --1. Аналогично
расчету системы типа Кассегрена найдем: d = 8 - fe3K, так как угол
а2=(Л2-Л2)/</ = -(йэк + 1)/</. (6.11)
Рис. 6.9. Зеркальный объектив типа Грегорн:
а) оптическая схема объектива;
б) ход первого и второго вспомогательных лучей в объективе
Тогда радиусы кривизны поверхностей зеркал определятся как
Г(=-2/а2, r2 = 2fe3K/(l + а2). (6.12)
Для контроля правильности вычисления радиусов кривизны
двухзеркальных систем необходимо определить фокусное расстояние
объектива как f'o6 — Q,5rJr2/{r1 - г2- 2d).
Вычислим коэффициенты аберраций <Sf ...Sy с учетом принятых
условий нормировки, полагая, что у} = sp = 0, у2 = у}- d$2 = d. Тогда
5Г =0,25[a| + fe3K(l-al)(l-a2)];
= 025d(l-af)(l-a2)-0,5;
«ш = d20,25(1 - a2)(l - a2)/fe3K -
-(d/*3)(l-af) + a2 +(J + a2)/*3K;
Siv = ~[a2 + (1 + агЖк] = ~(<Pi + <p2);
s; = d2(l - af)[d(1 - a2)- 6\/(4k2K) + 2d(l + a2)/k2K.
(6.13)
Анализ формул (6.9)...(6.12) показывает, что чем меньше угол а2,
тем больше радиусы кривизны зеркал rv и, следовательно, тем мень-
ше будут аберрации третьего [см. формулы (6.10) и (6.13)] и высших
порядков.
Значение угла а2, как это следует из формул (6.8) и (6.11), зави-
сит от длины отрезка 8 (выноса плоскости изображения) и коэффици-
ента экранирования fe3K. Чем больше вынос 8, тем меньше расстояние
d между зеркалами и больше угол а2, тем меньше радиусы кривизны
и больше аберрации высших порядков.
Оценим влияние 8 и k3K на аберрации в системах типов Кассегре-
на и Грегори. В табл. 6.2 представлены результаты расчета конструк-
тивных параметров, поверхностных коэффициентов Pv и Wv зеркаль-
ных систем в зависимости от значения 8 выноса плоскости изображе-
ния при постоянном коэффициенте экранирования /гэк = 0,4, а также
значения аберраций третьего порядка и ПРИ Го6 = 520 мм,
D/f(j6 = 1:7, sp = ° и 2а = 4°.
Из табл. 6.2 следует, что оптимальным является вариант с 3 = 0.
Обычно в зеркальных системах 8 = (0,05...0,15)
Как показывают расчеты, при одних и тех же исходных данных
система типа Кассегрена имеет значительно меньшие аберрации, чем
система типа Грегори. Но в системе Грегори есть промежуточное дей-
ствительное изображение в отличие от системы Кассегрена, система
Грегори дает прямое изображение и иногда эти обстоятельства явля-
ются решающими.
Оценим влияние коэффициента экранирования fe3K на аберрации
в зеркальной системе типа Кассегрена. Результаты расчета парамет-
Таблица 6.2
Значения параметров систем типа Кассегрена (I) и Грегори (II) и аберраций третьего порядка при:
Параметр 8 = 0 8 = 0 ,lf_ 7 ' об 8 = 0 ,2f. ’ ' об
I П I II I II
di -0,4 -0,4 -0,3 -0,3 -0,2 -0,2
«2 -1,5 3,5 -2,0 4,66666 -3,0 7,0
ri -1,3333 -0,571428 -1,0 -0,4285 -0,6666 -0,28571
гг -1,6 0,177777 -0,8 0,141176 -0,4 0,1
Р, 0,844 -10,718 2,0 -25,407 6,75 -85,750
Р2 -0,781 7,031 -2,25 19,046 -8,0 72,0
W, 1,125 6,125 2,0 10,888 4,5 24,5
W2 -0,625 -5,625 -1,5 -10,388 -4,0 -24,0
sr 0,532 13,53 1,1 33,025 3,55 114,55
0,812 3,312 1,175 6,214 2,1 14,90
Двщ -0,706 -17,941 -1,457 -43,791 4,708 -151,893
*Гп 0,113 0,459 0,163 0,863 0,292 2,071
Таблица 6.3
Параметр Значения параметров и аберраций третьего порядка в системе типа Кассегрена при коэффициенте экранирования
0,3 0,35 0,4 0,5
di -0,25 -0,3 -0,35 -1,45
-2,8 -2,166667 -1,71428 -1,111111
г, -0,71428 -0,923076 -1,16667 -1,800000
Г2 -0,33333 -0,6 -1,120 -9,0
Р< 5,488 2,543 1,259 0.343
Р2 -6,498 -2,925 -1,316 -0,124
w> 3,920 2,347 1,469 0,617
-3,420 -1,847 -0,969 -0,117
ST 3,539 1,519 0,733 0,281
2,124 1,378 0,960 0,556
д*ш -4,709 -2,020 -0,976 -0,374
0,296 0,192 0,134 0,077
Да'* -4,678 -2,024 -0,987 -0,334
ДГ -8,875 -2,213 -0,302 0,328
* Аберрации вычислены для f = - 500; В/f = 1:7; 2(0 = 4'.
Глава 6. Расчет зеркальных и зеркально-линзовых систем
ров системы при 3 = 0,05fo6 = const и переменном коэффициенте эк-
ранирования приведены в табл. 6.3.
Из табл. 6.3 следует, что с увеличением коэффициента экраниро-
вания аберрации уменьшаются, но, как было отмечено выше, при этом
происходит перераспределение интенсивности света в дифракционном
изображении точки за счет сужения кружка Эри, увеличения и уси-
ления дифракционных колец. В результате падает контраст в изобра-
жении и ухудшается ФПМ.
Рекомендуемые значения йэк = 0,25...0,50.
Обратный (реверсивный) телеобъектив типа Кассегрена
(рис. 6.10). В таком телеобъективе <L, а Sp. » fog; и его используют
тогда, когда изображение необходимо вынести подальше от поверхно-
стей зеркал при небольшом значении ?об. При расчете системы вынос
8 плоскости изображения в явном виде обычно не задается, а задает-
ся значение т = 6/s'2. Система имеет центральное экранирование, и
для определения экранированного пучка точку F'o6 необходимо соеди-
нить с точкой К на зеркале 1 (штриховая линия) и продолжить направ-
ление этого луча до поверхности зеркала 2. Затем надо построить от-
раженный луч от первого зеркала (пучок между штриховой линией и
оптической осью экранируется). Коэффициент экранирования
^к = «з/«з-
Рис. 6.10. Оптическая схема обратного (реверсивного) объектива типа
Кассегрена при з7 =
а) оптическая схема объектива; б) ход первого вспомогательного луча
Из рис. 6.10, б следует, что угол а3= й2/8, тогда при принятых
условиях нормировки (а; =0; а3 = 1; h1 = f'o6 = 1) запишем, что
йэк = а3= 1/8 = 1/(т82) и тогда s2 = l/(mk3K). В то же время поскольку
а3= 1, то s2 = h2 = 1 /(mk3K).
Определим расстояние d между зеркалами. В соответствии с рис.
6.10, б запишем d = 8 - s2 = ms2 - s2 = s2 (m—1), тогда
d = (m - 1)/(тпйэк), (6.14)
а угол
а г = (>h - = Опйэк - l)/(m - 1). (6.15)
Вычислим радиусы кривизны поверхностей зеркал реверсивного
телеобъектива:
О = 2/а3 = 2(т - 1)/(т*эк -1);
г2 = 2Л3/(1 + а3)= 2(т-1)/{тйэДт(1 + йэк)-2]}. (6’16)
Световые диаметры зеркал и отверстия в зеркале для всех типов
рассмотренных выше зеркальных систем определяются из расчета
хода полевых лучей по формулам расчета хода второго вспомогатель-
ного луча, а именно
<P'v-nvPv = yv(n'v-nv)/rv;
Уч+1 = J/v-dvPv>
где = tg a>;, уj — координаты полевого луча на входном зрачке.
Удвоенная максимальная высота на соответствующей поверхно-
сти зеркала определяет его световой диаметр**.
Зеркальная телескопическая система типа Мерсенна. Телескопи-
ческая система типа Мерсенна по схеме Галилея (рис. 6.11) состоит из
двух зеркал, расположенных так, что точка фокуса F'/ первого зеркала
совпадает с точкой фокуса F 2 второго зеркала.
Найдем конструктивные параметры системы, если заданы увели-
чение Гт = у0 и расстояние d между зеркалами. Расчет выполним при
нормировке: а;= а3 = 0, ht = —1; при n; = п3 = 1, п2 = -1,1 = 1, = 1
и У! = 8Р = 0.
Известно, что угловое увеличение
Уо = А/Л ~ Г11Г2 = ^1/^2 = DjJDz' (6.17)
После определения световых диаметров зеркал оказывается, что йэк свое значение уве-
личивает, поэтому следует учитывать виньетирование для наклонных пучков.
Для определения конст-
руктивных параметров сис-
темы воспользуемся форму-
лами расчета хода первого
вспомогательного луча.
Для первой поверхности
п2а2 - nflj =hj(n2 -
тогда ос2 = 2h1/rl. Кроме
того, h2 = hl- da2, и тогда,
разделив правую и левые
части уравнения на hlt по-
лучим 1/у0= 1 - 2d/r1.
Найдем радиусы кри-
визны зеркал:
r, = 2dy0/(y0-l);
г2 = П/Уо = 2d/(у0 - 1). (6Л8)
Выполним аберрацион-
ный анализ зеркальной си-
стемы в области аберраций
третьего порядка. Для это-
Рис. 6.11. Телескопическая система типа
Мерсенна, построенная по схеме Галилея:
а) оптическая схема; б) ход первого
вспомогательного луча
го найдем значения коэффициентов аберраций SV..SV, задавшись зна-
чением промежуточного угла а2 = 1, тогда ht = -1. При принятых ус-
ловиях нормировки получим следующие значения параметров Pv и
Wv, по поверхностям:
Р2 = -а|/4 = -//4; Р2 = а32/4 = 1/4;
W1 = a2/2 = 1/2; W2 = -a22/2 = -l/2.
Так как входной зрачок совпадает с оправой первого зеркала, то
sp = 0 и yt = sp = 0, тогда у2 = у, - d$2 = d = f t - f2 = (1 - y0)/y0, а значе-
ния коэффициентов аберраций в соответствии с формулами (6.10) бу-
дут равны:
-st = (y0-Wy0); s; = (y0-Wy0);
5Гп = -(т0-^)7(4т0); = (6Л9)
s; = (у0 - 2)7(4у0)+ (у0 - 1\3+Чо)/2-
Пример 6.2. Выполнить габаритный расчет четырех двухзеркальных систем — типа
Кассегрена, с зеркалами равных радиусов кривизны, двухзеркального объектива с кон-
центрическими зеркалами и системы типа Грегори — и сравнить их по аберрациям. Фо-
кусное расстояние объективов типа Кассегрена 250 мм, типа Грегори/'^ = -250 мм;
относительное отверстие для всех систем 1:4; угловое поле 2а> = 4°; плоскость входного
зрачка совпадает с вершиной главного зеркала, коэффициент экранирования km = 0,4.
Для систем типов Кассегрена и Грегори вынос плоскости изображения 8 = 0,2/'ов.
Решение. Габаритный расчет системы типа Кассегрена выполним по формулам (6.8)
и (6.9), системы типа Грегори — по формулам (6.11) и (6.12), а расчет двухзеркальных
систем с зеркалами равных радиусов кривизны и с концентрическими зеркалами — по
формулам, приведенным в табл. 6.1.
Тогда согласно указанным формулам при нормировке = 0, а3 = 1 найдем конст-
руктивные параметры систем и сведем их в таблицу (см. табл. 6.4). В этой же таблице
представлены результаты аберрационного анализа рассчитанных систем.
Таблица 6.4
Формулы для габаритного расчета ЗС различных конструкций Аберрации точки на оси
т Де' Ц,%
ЗС типа Кассегрена
При f = 1
d = 8 - = 0,2 - 0,4 = -0,2; 15,6 -1,74 -2,44 -0,11 0,41
«2 = (1 - kj/d = (1 - 0,4)/(-0,2) = -3; 22,1 -3,47 -4,88 -0,32 0,82
г, = 2/аг = 2/(—3) = -0,666667; 27,1 -5,20 -7,31 -0,58 1,24
гг = 2kJ(l + а2) = 2 0,4/(1 - 3) = -0,4; 31,5 -6,93 -9,73 -0,91 1,65
rt = -166,667
d = -50 при f = 250 мм
г2 = -100,0
ЗС типа Кассегрена с концентрическими
зеркалами
При f » 1
d = -(1 - ky/(l + kJ = -0,257143; 15,6 -0,83 -0,83 -0,05 0,29
а2 = (1 - kj/d = -2,33332; 22,1 -1,67 -1,67 -0,15 0,57
г, = 2(k„ - 1)/(1 + kJ = -0,857143; 27,1 -2,50 -2,50 -0,28 0,86
r2 = r, - d = -0,6; 8 = 0,142857; 31,3 -3,34 -3,45 -0,43 1,15
rt — -214,286
d = -64,28 при f = 250 мм
r2= -150,0
Продолжение таблицы 6.4
Формулы для габаритного расчета ЗС различных конструкций Аберрации точки на оси
7П Да' дг ду Т),%
ЗС типа Кассегрена с зеркалами равных радиусов (гг = г2)
При f = 1 d = -(1 - fej2 = -0,36; 15,6 -0,34 -0,08 -0,02 0,18
а2 = 1/(йж-1)=-1,66667; 22,1 -0,67 -0,16 -0,06 0,36
r?= 2/a2= 2/^-1) = -1,2; 27,1 -1,01 -0,25 -0,11 0,55
r2 = rt = -1,2; 8 = 0,04; 31,1 -1,35 -0,33 -0,17 0,73
r;= -300
d — -90 при f — 250 мм
r2 = -300
ЗС типа Грегори
Расчет при f = -1 d = 8 ~k3K = -0,2; 15,6 -34,6 99,4 3,61 1,73
a2 = -(1 + kj/d =7,0; 22,1 -49,8 143,4 10,6 2,45
r; = -2/аг = -0,285714; 27,1 -58,3 167,6 20,3 2,91
r2 = 2kJV + a2) = o,i; 31,3 -63,6 182,5 33,3 3,35
При f = -250 r, = -71,4286
d = -50
r2 = 25,0 Нормировка: a, = 0, a3 = 1, ht — — 1
Пример 6.3. Выполнить расчет системы типа Мерсенна, если угловое увеличение
системы у0 = 4, расстояние между зеркалами d = -60 мм, относительное отверстие D/f =
= 1:1, угловое поле 2(0 = 2°.
Решение. Расчет выполним при нормировке а; = ot2 = О, а2 = 1, тогда в соответствии
с формулами (6.18) найдем:
г, = -2dy,/(l - у„) = -2(-60)4/(1- 4) = -160
d =-60
r2 = ri/Yo= -160/4 = -40.
Коэффициенты аберраций найдем, полагая, что а2 = 1, = -1, yt = О, у2 = (1
Si = (yo-1)/(47o) = (4-1)/4-4 = 3/16=O,1875;
Sh = (y0-2)/(4y0) = O,1875;
Sih =-(1-7о)2/(4уо)=-(1 — 4)2/16 =-9/16 =-0,5625;
Srv =(Yo~^)=3;
Sv = 0 - YO)7(4Yo) + G - 7о )(3 + у0)/2 = -195/16 = -12,1875.
Двухзеркальные системы для предмета
на конечном расстоянии
Коэффициент экранирования. На рис. 6.12, 6.13 даны схемы
двухзеркальных систем разных конструкций. Коэффициент йэк цент-
рального экранирования в рассматриваемых системах, которые усло-
вимся называть соответственно прямой (рис. 6.12) и обратной (рис.
6.13), зависит от диаметров зеркал, но не определяется их отношени-
ем. Для предмета на конечном расстоянии в систему из точки на оси
направляется конический пучок лучей (в отличие от цилиндрическо-
го пучка для предмета в бесконечности), и поэтому коэффициент эк-
ранирования определяется не отношением высот h2 и h, на зеркалах,
а отношением углов а первого вспомогательного луча, под которыми
из точки А предмета (или точки А' изображения для обратной систе-
мы) видны края зеркал.
Для прямой системы Лэк = ос//а7 , но ai = h2/{sl-d), поэтому
йэк = ^/[(s/ - d)aj. (6.20)
Для обратной системы k9K = аз/а3. В соответствии с нормировкой
первого вспомогательного луча а3 = 1, поэтому k9K = аз. Однако часто
при расчете задается отношение т = 3/s'2, но при a3 = 1 s’2 = h2. На
рис. 6.13, б видно, что аз = ht/^ = й2/(тпй2), поэтому окончательно име-
ем
*эк = Л2/3 = Л2/(лгг Л2 ). (6.21)
Полученные соотношения (6.20) и (6.21) являются основными при
расчетах данных систем. В сводной табл. 6.5 приведены формулы, по
которым определяют коэффициенты экранирования двухзеркальных
систем наиболее распространенных конструкций для разных положе-
ний предмета. Аналогичные соотношения получаются для систем, со-
стоящих из сферического и плоского зеркал.
Рис. 6.12. Двухзеркальная система
типа Кассегрена для предмета на
конечном расстоянии s; -о»:
а) оптическая схема; б) ход пер-
вого вспомогательного луча
Рис. 6.13. Обратная система
типа Кассегрена для предмета
на конечном расстоянии:
а) оптическая схема; б) ход
первого вспомогательного луча
Особенности расчета прямой и обратной двухзеркальных систем.
Исходными данными для расчета прямой системы являются: s; —
предметное расстояние (или£ — оптическая длина системы); fJ0 — ли-
нейное увеличение; sp — отрезок, определяющий положение входно-
го зрачка; йэк — коэффициент экранирования; 8 — вынос плоскости
изображения; 2у — линейное поле; А — числовая апертура.
При расчетах надо принимать во внимание известную нормиров-
ку первого вспомогательного луча при s, а; = р0; ht = s1a.l = s7P0;
а3 = !.
Из рис. 6.12, б видно, что d = 8 - h2 при а3 = 1, тогда с учетом фор-
мулы (6.20) получим
& ~ (^3KSlPo — $)/(^эк?0 — ^)- (6.22)
Угол а2 и радиусы кривизны поверхностей зеркал определим по
известным формулам расчета хода вспомогательного луча, которые
являются общими для всех двухзеркальных систем:
h, - h,
а» = —-------
2 d
2h, 2h,
r=------1—; r2 —-----
a1 + a2 а2 + а3
(6.23)
При заданной длине L необходимо учесть, что = 8 - L (рис. 6.12,
а), тогда ht = (8 - L) fJ0, и надо соответственно преобразовать все фор-
мулы.
Аналогично проводится расчет обратной системы (рис. 6.13), для
которой в исходных данных вместо 8 часто задается величина
т = ?>/s'2. С учетом (6.21) h2 = hj/(mk3K), но d = 8 - h2, поэтому
d = (6.24)
Величины a2, rz и r2 можно определить по (6.23).
Для получения приемлемых конструкций с удобным расположе-
нием предмета и изображения прямую систему рекомендуется приме-
нять при увеличениях I fJ0 I > 1, а обратную — при I Ро | < 1.
Таким же образом можно получить соотношения для расчета си-
стемы, состоящей из сферического и плоского зеркал. В этом случае
в исходных данных задается либо 3, либо йэк. Расчетные соотношения
приведены в табл. 6.6 при нормировке а; = Ро, а2= -1, а3 = 1.
Аберрационный анализ. Рассматриваемые системы со сферичес-
кими поверхностями целесообразно использовать при небольших
апертурах, поэтому часто достаточно выполнить анализ в области
аберраций третьего порядка. Для этого вычисляют параметры Pv, Wv,
Щ, суммы Зейделя и аберрации третьего порядка. Ниже приведены
формулы в общем виде без учета нормировки, что делает их более уни-
Таблица 6.5
№№ п/п Оптические схемы днухзеркальных систем fe3K
1 л,
2 * Е 3> fe3K = V^ = i/Y0
3 -л2 i ’ fe3K — ~h2/hl
4 п — k,K = ~h2/hl
5 и л; Oj Л»^ а] ^k=“3/«3 = /ij/5
6 U < «э А' J~Z] *эк = “з/а3 = /12/5
7 л Q—**^~~^*в сГ __^Г fe3K = “3/a3 = /ii/5
8 А 0 J А' *3K=“j/«j = M(sJ-d)ai]
9 -а, А "5* ® А'1 J *3K=“l/«2
360
Таблица 6.6
№№ п/п Оптические схемы и исходные данные для расчета d h2 «X Общие соотношения
1 A^^g^. |- А' ^исРр8! ~s ^«Ро 8-d SA> ~&г d Ih = sjPo Sj =8-£ ft« hg 2h, fi[=-—L~ ai+a2 2ht r2- z— a«+a3 0,5rtr2 rl-r2-2d
2 А^,ПД‘ * х,к„,а и ^А«Ро j.g _^жРо 8-d 8Д> d
3 т^эк ht sfio~hi d
Расчет и проектирование оптических систем
Продолжение таблицы 6.6
ММ п/п Оптические схемы и исходные данные для расчета d л2 «2 Общие соотношения
4 ht + d = ’UM) -1 - -а3 та ® >>? С1 2_ " и и II V Q я о - + iZ 8 - ^= э- 5? । Л3"
5 ЦМ^) Л,+г/Р0 = _Щк+Ро) МРо+П "Ро а! Г,=оо 2 Л, Гг 1 + аг f = 0,5г2 3 — d + |Po|<;
361
Глава 6. Расчет зеркальных и зеркально-линзовых систем
нереальными и пригодными для различных нормировок первого вспо-
могательного луча:
Pt = 0,25(af-af)(a7-a2);
Р2 = 0,25(а23 - a2)(a3 - а2);
Wt = 0,5(a*-af); Wt = 0,5 (af - af);
W1 + W2 = 0,5 (a3 -af);
П7 = a, + a2 = -Л7Ф/, П2 = -(а2 + а3)=-Л2Ф2;
Sj = htPt + h2P2;
Sn = У1Р1 + У2рг ~ 0,5l(a2 - af);
2 2
C — P i & 2 n
О1П “ j, + x, *2
flj fl2
- 21] ^Wt + ^-W21 + 12(Ф7 + Ф2);
V ht h2 )
S;v = TI1/ht + П2/Л2 = — (Ф; + Ф2);
с _ У> Р t У 2 р _
°V - , 2 *1 + 1,2 <2
й.2 1г2
- 31] ^Wt + ^lw2]~ 212]Щ-П1 + yIп2
hz2 2 J \h2 1 h22 2 J
(6.25)
Следует обратить внимание на то, что при n; = 1 инвариант Лаг-
ранжа — Гельмгольца I = P;(sp - s7)a7, а при sp = 0, что наиболее ха-
рактерно для рассматриваемых систем, I = -h1.
Аберрации третьего порядка вычисляют по известным формулам
[12].
Качество изображения двухзеркальных систем во многом зависит
от конструктивных условий, и его можно несколько улучшить, варь-
ируя значения s;, йэк и 8 в приемлемых пределах.
При расчете необходимо контролировать значения d и s'2, завися-
щие от исходных данных, так как должны соблюдаться соотношения
I d I < s'2 и I d I < I s; I, чтобы предмет и изображение были расположены
вне системы.
Пример 6.4. Определить конструктивные параметры и выполнить аберрационный
анализ трех двухзеркальных систем:
1-я система (прямая, см. схему 1 в табл. 6.6), если s( = -50, Ро = -8, fesK = 0,33, 8 = 25,
Sp = 0, А = 0,4226 (оА = 25°);
2-я система (обратная, см. схему 2 в табл. 6.6), если s, = -50, Ро = -8, пг — 8/s'2 =
= 0,6; = 0,38, оА= 25°;
3-я система (обратная, см. схему 3 в табл. 6.6), если s; = -200, Ро = -0, 2, т = 0,6,
km- 0,38,0^=25°.
Решение. Расчет систем проводится по формулам, приведенным в табл. 6. 6. Резуль-
таты расчета систем сведены в табл. 6.7 с соблюдением его последовательности.
Для 1 -й (прямой) системы из точного аберрационного анализа в плоскости Гаусса
имеем: Ду' = 0,295, а при у = 1 мм получено: г'т = -3,84; z'e = -4,16; Ду' — -0,056, т.е.
(Ду'д/у')100% =0,7%.
Приведенный расчет подтвердил, что обратную систему нецелесообразно использо-
вать при | Р | > 1 (см. результаты расчета 2-й системы в табл. 6.7), так как это приводит к
практически неприемлемой конструкции, когда I st I < I d I, т.е. предмет расположен меж-
ду зеркалами, к тому же получается система с первым вогнутым зеркалом.
Следует обратить внимание на большие значения параметров Pv на поверхностях и
сумм Sp что обусловлено особенностями нормировки первого вспомогательного луча при
s; * -~, при которой все вычисления выполняются для системы с реальными значения-
ми отрезков и конструктивных параметров.
Таблица 6.7
Параметр Результаты расчета трех двухзеркальных систем:
1-й 2-й 3-й
400 400 40
h2=S'2 54,3956 1754,386 175,438
d -29,3856 -701,754 -70,1754
«2 -11,7570 1,9300 1,9300
ri -40,4920 -131,796 46,2428
Г2 -10,1135 1197,533 119,753
L 75 1102,63 305,262
5 25 1052,63 105,262
Р, 69,718 149,633 -1,962209
Рг -437,651 0,633539 0,633539
W, 37,1135 -30,1376 1,84245
W2 -68,6135 -1,36245 -1,36245
S, 4080,91 60964,6 32,6588
дгЛп 0,33 4,94 1,36
Апланатические двухзеркальные системы
При расчете двухзеркальных систем, апланатических в области
аберраций третьего порядка, исходными являются условия исправле-
ния сферической аберрации и комы, т.е. ST = 0 и Sn = 0.
Положив, что hj = 1, при а; = 0О получим s7 = h1/a.1 - 1/Р0, а3 = 1.
Инвариант I = nt(sp - s;)P,a7 = -1, так как Р; = 1, sp = 0. С учетом это-
го у2 = d, h2 = 1 - da2.
Сделаем вывод в общем виде, учитывая лишь, что sp = 0, и при-
нимая = 1. Это позволит впоследствии получить соотношения и для
частных случаев. Вывод справедлив и для зр^ 0.
Составим уравнения для первых двух сумм Зейделя:
Sj = hjPj + h2P2 = ~(а22 - af)(a7 - a2)+
+ |(7 - da2)(af - af )(a3 - a2)= 0;
Sn = dP2 + W1 + W2 =
= |(af - af)(a3 - a2) + |(af - af) = 0.
Из последнего уравнения получим
d = - 2(af - af )/[(af - af )(a3 - a2)].
(6.26)
Подставив (6.26) в уравнение Sj = 0, после преобразований полу-
чим af -a2(at +a3)-(af + a7a3 + af)- 0 , откуда
a2 = -(aI+as±^5af
a'
+ 6а7а3 + 5а|
Под корнем всегда получается положительное значение при лю-
бом а;, поэтому последнее уравнение дает два вещественных значения
а2.
Обозначим
D = ^5а.2 + 6a2a3 + 5af (6.27)
и в результате получим
a2 = j(“i+a3±-Z))- (6.28)
С учетом (6.28) уравнение (6.26) примет вид:
d = -|2/(a; + a3)3 |(af + a;a3 + 2af Таг2)).
(6.26')
Найдем
h2 = l-da2 = [1/(а2 + a3)3][2(af - af)±(af + af )l>].
Определим радиусы кривизны, используя соотношение (6.23):
Г1 = = ' (“3 + 3“2 * <6-29>
kA,j т kA, 2 ^3 1
2h2 _______1_________
2 аз + аз (a2 + a3)3(af-af)
(6.30)
х [af - 5a2af - 7af - 5afa3 ± (af + 3af )z>l.
Сравнение (6.29) и (6.30) показало, что r2= r2 - d, т.е. система яв-
ляется концентрической, поэтому свободна от астигматизма и дистор-
сии, но имеет большую кривизну изображения [25]. Для устранения
ее влияния предмет и изображение должны быть расположены на сфе-
рических поверхностях, концентричных с отражающими поверхнос-
тями объектива.
Фокусное расстояние для двухзеркальной системы при s2 * -«>
определяется как
Г = {У[(аз ” атХаз ” ат)]}(аз + атаз + 2ai +«7-Р).
Для оценки положения плоскости изображения необходимо
вычислить вынос плоскости изображения
8 = d + h2.
Коэффициент центрального экранирования Аэк при s2 зави-
сит от положения предмета и линейного увеличения системы и опре-
деляется по-разному для прямой и обратной систем (см. табл. 6.6).
При синтезе апланатических систем для предмета на конечном
расстоянии последовательно находят а2 из (6. 27) и (6.28), d из (6.26'),
а затем h2, г2 и г2 из общих формул (6.23), коэффициент экранирова-
ния — из (6.20) для прямой системы (af < 0) и из (6. 21) для обратной
системы (а2> 0).
При принятой нормировке первого вспомогательного луча, ког-
да й2 = 1, а2 = Ро, а s2 = Л2/а2, конструктивные параметры оказывают-
ся рассчитанными для з2 = 1/Р0. Для их приведения к реальному
заданному значению з2 надо эти параметры и 8 умножить на коэффи-
циент М = s2 зад/з2 = з2 зад р0.
Фокусное расстояние реальной системы можно определить так:
f = 0,5rtr2/(rj -r2- 2d).
Прямую систему можно рекомендовать к применению при увели-
чениях -10 < Ро < -5, а обратную — при -0,2 < Ро < -0,1. Указанные
диапазоны увеличении позволяют получить системы с удобным рас-
положением предмета и изображения, когда I s; I > I d I, s'2 > I d I.
Для бесконечно удаленного предмета расчетные соотношения для
апланатической двухзеркальной системы найдем, положив, что а; =
= 0 в уравнениях (6.26)—(6.30). Тогда получим два решения квадрат-
ного уравнения а2-а2-1 = 0 , представленные в табл. 6.8.
Таблица 6.8
Параметр Решение
первое второе
аг 1,6180339 -0,6180339
Г? 1,236068 -3,236068
Г2 3,236068 -1,236068
8 -2 -2
h2 = &'2 4,236068 -0,236068
2,618034 -0,381966
k 0,447 0,236
эк
Оптические схемы систем, соответствующие двум решениям, при-
ведены на рис. 6.14. Второе решение с s'2 < 0 практического интереса
не представляет.
Рис. 6.14. Оптическая схема двухзеркальной апланатической системы:
а) схема для первого решения уравнения; б) схема для второго решения
уравнения
Рассмотренные системы применяют в объективах микроскопов, ра-
ботающих в дальней ультрафиолетовой области. Обычно их рассчи-
тывают в обратном ходе лучей для того, чтобы выдержать оптическую
длину тубуса, и принимают следующую нормировку: ht = 1; а; = 1/ро ;
=81/Р0 , тогда Sj = р0 .
Однако в этих системах коэффициент центрального экранирова-
ния йэк увеличивается с ростом Ро объектива, поэтому их можно при-
менять при малых значениях Ро. Например, при Ро = -0,25, т.е. Ро =
-4, k3K = 0,3, что соответствует предельному значению экранирования,
устанавливаемому по дифракционному распределению световой энер-
гии в кружке рассеяния. Поэтому рассматриваемые системы обычно
прилуняют в виде насадок к микроскопам с большим рабочим рассто-
янием и в объективах высокотемпературных установок.
При Sj = -о® первое решение можно использовать в качестве ис-
ходного варианта при расчете кардиоид-конденсора для микроскопа
или для объектива с бесконечно большой оптической длиной тубуса,
когда р0 = -оо. Эта система также находит применение в системах для
концентрации лазерного излучения, оптико-электронных приборах.
Следует отметить, что объективы имеют малые аберрации высших по-
рядков. Например, при D/f = 1:1 As' = Af = 0,00167/'.
Пример 6.5. Рассчитать апланатические двухзеркальные системы: прямую систе-
му при s1 = -200 и увеличениях Ро = -5; -3,333; -10; обратную систему при st = -200 и
Ро = -0,1; -0,2; -0,3333. Пересчитать полученную систему с Ро = -3,333 на предметное
расстояние s, = -100.
Решение. Результаты расчета систем сведены в табл. 6.9.
Таблица 6.9
р0 -0,1 -0,2 -0,3333 -10 -5 -3,333
3, -200
Ъ 1,504751 1,4000 1,276170 15,0475 -7 -4,35030
h2 113,377 320 937,827 352,806 125 55,2698
Гг 28,4748 66,6666 141,398 -159,696 -166,666 -173,519
Г2 90,5296 266,166 824,040 -50,2304 -41,666 -32,9939
d -62,0548 -200 -682,642 -109,466 -125 -140,526
Йэк 0,390 0,333 0,261 0,389 0,333 0,278
5 51,322 120,00 255,185 243,340 0 -85,256
Как следует из расчетов, при Ро — -0,3333 предмет оказывается расположенным
между зеркалами, так как I st I < I d I, а при Ро = -3,333 s'2 < I d I, т.е. изображение располо-
жено внутри системы, между зеркалами. Кроме того, при I Ро I < О, 1 и I Ро I >10 коэффи-
циент экранирования становится больше 0,4. Этот пример иллюстрирует правомер-
ность рекомендаций по выбору увеличении.
Значения остаточных аберраций для точки на оси при А = 0,4226 (стА = 25°), полу-
ченные в результате точного аберрационного анализа системы с увеличением (30 — -10,
s( = -200, указаны в табл. 6.10.
Таблица 6.10
lOOtgrf As' △У' Т],%
0 0 0 0
2,117 0,262 0,0056 -0,00
2,990 0,901 0,0289 -0,02
3,652 2,140 0,078 -0,04
4,199 3,987 0,167 0,00
Фокусное расстояние системы f — 36,64 мм.
Система практически аплаиатичиа при А< 0,35, т.е. имеет малые аберрации выс-
ших порядков несмотря на то, что ее расчет выполнен в области аберраций третьего по-
рядка.
Выбранная нормировка первого вспомогательного луча, когда в, — р0 (так как ht —
— 1), позволяет легко пересчитать систему для данного увеличения на другое предметное
расстояние »(.
Пересчитаем систему с (30 — -3,33 на s, — -100. Коэффициент масштабирования
М — 100/200 — 0,5, поэтому, умножив на этот коэффициент конструктивные параметры
системы, получим:
г, - -86,7595
d - -70,26
г,--16,4970
Г - 10,18; -3,333; s' = 27,66.
При А — 0,4226 кружок рассеяния в плоскости Гаусса 2Aj/' — 0,036, коэффициент
изопланатизма Т| — -0,09%.
Аналогично для системы с увеличением — -0,1 после пересчета на в( — -100 име-
ем:
г, - 14,2374
d--31,03
г, —45,2648
Г-10,38; а'= 56,68.
Кружок рассеяния в плоскости Гаусса при А — 0,04937, что соответствует
а'А— 29,55°, составляет 2Ду' — 0,046, т] — 0,26%.
Приведенные примеры свидетельствуют о малых аберрациях при апертурах до
0,35...0,4.
Двухзеркальные системы с двумя проходами лучей
между зеркалами
Создание специальных оптических систем потребовало расчета
длиннофокусных зеркальных коллиматоров (fo6 = 3...5 м) с относи-
тельно малыми габаритными размерами. Сократить длину коллима-
тора можно, если ввести в рассмотренные выше двухзеркальные схе-
мы типов Кассегрена и Грегори дополнительные зеркала. Известны
трех- и четырехзеркальные системы со сферическими и асферически-
ми зеркалами [19].
Рассмотрим работу и расчет двухзеркальных систем, но с двукрат-
ным отражением света от первого и второго зеркал из условий ис-
правления сферической аберрации и меридиональной комы.
Оптические схемы объективов, построенных по схемам типов Кас-
сегрена и Грегори, представлены на рис. 6.15.
Габаритный расчет систем выполним при следующих условиях
нормировки:
для схем на рис. 6.15, а, б: а; = 0, а5= 1, ht = f = 1, причем для
схемы на рис. 6.15, a h2> 0, йвк = Л2; для схемы на рис. 6.15, б h2<0,
kaK = ~h2;
для схем на рис. 6.15, в, г: а7 = 0, а5= -1, причем для схемы на
рис. 6.15, в h2> 0, йэк = h2, а для схемы на рис. 6.15, г h2 < О,
Йэк =
Рис. 6.15. Оптические схемы двухзеркальных систем, построенных по схемам
типов Кассегрена и Грегори, с двумя проходами лучей между зеркалами:
a) ht<0;6) ht<O;e) Л2>0;г) Л2<0
Для всех систем в воздухе п} = п3 = п5 = 1, п2 = п4 = — 1 и, кроме
того, при двойном проходе лучей dt = d3 = -d2.
Определим конструктивные параметры объективов. Для этого
вначале выразим значение высоты h4 через конструктивные парамет-
ры системы г2, г2, dp кэк. Воспользовавшись формулой расчета хода
первого вспомогательного луча, запишем:
h4 = h3 - d3a4 = h2~ d2a3 -d3a4 = k3K + d;(a3 - a J, (6.31)
где a3 = -a2 + 2h2/r2 ; a4 = -a3 + 2h3jr3 , тогда, если r3 =
= k3K + dt(- a2 + 2k3K/r2 + a3 - 2h3/rt). (6.32)
Так как угол a2 = 2/rt и в то же время а2 = (Л; - h^/dt = (1 - k3K)/dt,
то
r1=2dI/(l-k3K). (6.33)
С учетом (6.33) выражение (6.32) после соответствующих преобразо-
ваний сведется к виду:
h4 = 2k3K — 1 + 2dIk3K(j. + k3K)/r2 . (6.34)
В то же время h4 = (8 - dr) as, и с учетом нормировки получим
h4 = 8-dt. (6.35)
Приравняв (6.34) и (6.35) и выполнив элементарные алгебраические
преобразования, найдем
r2 = 2dlkJ<l + k3K)/(8 - dt - 2k3K + 1). (6.36)
Кроме того, при двукратном отражении лучей r4= r2= 2h4/(l + а4),
тогда, подставив значение высоты h4 и значение угла а4, после ряда
преобразований найдем
r2 = 2d1(dI-8-k32K)/[2k3K(k3K-l)~dI]. (6.37)
Приравняв (6.36) и (6.37), после преобразований получим
dzt - dt(28 + k3K + 1) + (1 + 8)(8 - kzK)= 0. (6.38)
Аналогичным образом для схем, представленных на рис. 6.18, в,г,
для которых a5 = -1, находим
r2 = 2dt(dt -8 + kzK)/[2kw(l-k3K)-dt]; (6.37')
df -dt(28-k3K -1)+ (8-1)(8 + k32K) = 0. (6.38')
Задавшись выносом 8 фокальной плоскости относительно главно-
го зеркала и коэффициентом экранирования /?эк по формулам (6.33),
(6.37), (6.38) или (6.37'), (6.38') определим конструктивные параметры
системы, примем решение уравнения (6.38) в зависимости от знака
коэффициента экранирования приводит к двум видам схем: если
h2 > 0, то система построена по схеме, представленной на рис. 6.15, а; '
если h2 < 0, то система построена по схеме, приведенной на рис.
6.15,6.
Решение уравнения (6.38') также приводит к двум типам систем:
если h2 >0 — то к системе, представленной на рис. 6.15, в; если
hz < 0 — то к системе, приведенной на рис. 6.15, г. Но такие схемы на
практике применяются только как внеосевые.
В системах, схемы которых даны на рис. 6.15, а, б, можно полу-
чить малый коэффициент телесокращения (т — L/Лоб) при малом kaK.
Но если объективы будут со сферическими поверхностями, то даже
при относительных отверстиях 1:150 сферическая аберрация может
достигать больших значений (сотни миллиметров). Поэтому в таких
системах используют чаще всего асферические поверхности, причем
коэффициенты деформации и Ъ2 поверхностей определяют из совме-
стного решения уравнений исправления сферической аберрации и ме-
ридиональной комы (см. главу 7).
Пример 6.6. Найти конструктивные параметры двухзеркального объектива колли-
матора, построенного по схемам, показанным на рис. 6.16, а, б, если st = -<*>, f б = 3м,
h2 = 0,1, 8= 0,001/'^, D/rM = 1:50.
Решение. Расчет выполним при нормировке: а, = 0, as = 1, /'об = f »1. Для
системы в воздухе п! = п3 — п5 1,п2= n4= -1.
Тогда уравнение (6.38) для системы со схемой, показанной на рис. 6.15, а, можно
записать в следующем виде:
d2 - l,102d - 9,00910 3 = 0.
Из решения уравнения найдем два значения расстояний между зеркалами: dt =
= 1,11012, d2 = -8.114510"3. Приняв dt — — 8,1145-10-3, найдем
rt = 2d/(l - *эк)= 2(-8,1145-10"3)/(1 - 0,1) = -1,80322 10"4;
r2 = 2d(d-8-*32 )/[2*3K(A3K-l)-d]= 2(-8,1145 10"3)(-8,1145 10"3-0,001 - 0,12)/
/[20,1(0,1 1) (-8,1145 10'3)] = -1,80484-10'2.
Таким образом, конструктивные параметры двухзеркальной системы, построенной
по типу Кассегрена, при h2 > 0 и при = 3000 мм имеют следующие значения:
D СВ впол
Г,--540,967 d =-243,4 п1 = 1 п2 = -1 600 650
г2 = -54,1451 л — 1 60 62
Для зеркальной системы, построенной по типу зеркальной системы Грегори, при
= -0,1, 8 — 0,001 и нормировке а, = 0, а5 = 1 уравнение (6.38) примет вид:
d2 - 0,902d - 0,009009 = 0,
тогдаdt = 0,91188, d2 = -9,88-10“3. Принявd = -9,88-10“3, найдем значения радиусов кри-
визны поверхностей зеркал г, = -1,79636-Ю"1; г2= 1,79477-10~2.
При •= 3000 мм конструктивные параметры объектива коллиматора имеют
следующие значения:
л. D ПОЛ
г, = -539,455 п, = 7 600 650
d- = -296,7 пг 1
г, = +53,8970 п,= 1 60 62
6.4. Компенсаторы монохроматических аберраций
Аберрационный анализ зеркальных систем со сферическими зер-
калами показывает, что все они обладают значительными монохрома-
тическими аберрациями, для компенсации которых либо в системы
вводят специально рассчитанные линзовые компенсаторы, либо повер-
хности зеркал делают асферическими.
Компенсаторы устанавливаются как перед зеркальной системой
в параллельных пучках, если предмет в бесконечности, так и внутри
ее, т.е. в сходящихся пучках. Конструкция компенсатора должна
быть такой, чтобы он имел минимальные хроматические аберрации.
Рассмотрим некоторые схемы линзовых компенсаторов, которые
разделим на три группы: 1) афокальные ахроматические компенсато-
ры — коррекционная пластинка Шмидта, двухлинзовые компенсато-
ры в параллельных и сходящихся пучках, компенсатор комы Чури-
ловского; 2) неафокальные компенсаторы — мениск Максутова, лин-
зовые компенсаторы с отражающей поверхностью (линза Манжена,
склеенный и несклеенный компонент-отражатель); 3) компенсатор
кривизны поля (линза Смита).
Афокальные ахроматические компенсаторы
Коррекционная пластинка Шмидта. Оптическая схема объекти-
ва с коррекционной пластинкой Шмидта представлена на рис. 6.16.
Оригинальная по простоте и осуществлению эта зеркальная система
Рис. 6.16. Оптическая
схема объектива из
одиночного зеркала и
коррекционной плас-
тинки Шмидта
была создана в 1931 г. и обеспечивала угловое поле 2а> = 40° относи-
тельное отверстие D/f = 1:2, в то время как известные двух-
зеркальные системы имели угловое поле порядка нескольких угловых
секунд.
Коррекционная пластинка 1 с планоидной поверхностью устанав-
ливается в центре кривизны (точка С) зеркала 2. Входной зрачок со-
впадает с плоскостью пластинки, и поэтому главный луч падает на зер-
кало по нормали к поверхности и безаберрационно возвращается в
центр кривизны. Это обеспечивает автоматическое исправление поле-
вых аберраций: комы, астигматизма, дисторсии. Сферическая абер-
рация зеркала может быть исправлена за счет планоидной повер-
хности пластинки. Уравнение планоидной поверхности пластинки
имеет вид [8]:
у4 = 32f£(n - 1)г или г = DA3/[512{п -1)],
где D — диаметр пластинки; А = D/f.
Формы планоидных пластинок, используемых в качестве компен-
саторов, представлены на рис. 6.17. Благодаря соответствующему
выбору формы планоидной поверхности максимум 8® ах ее отступле-
ния от плоскости или ближайшей сферы составляет -0,1 мм, и его вы-
числяют по формуле
5U =DA3/[(n-1)2048].
Для пластинки, выполненной из стекла марки К8 (пе = 1,5183), зна-
чения 5°ах (в микрометрах) при различных значениях D и А приве-
дены в табл. 6.11 для Хо = 0,546 мкм.
К недостаткам следует отнести большую длину системы, в 2 раза
превышающую фокусное расстояние объектива, большой диаметр
Рис. 6.17. Формы пластинок Шмидта с планоидиыми поверхностями:
1 — ближайшая вогнутая сфера; 2 — ближайшая сфера, обращенная в
плоскость; 3 — ближайшая выпуклая сфера
Таблица 6.11
D, мм Значения 8°та1 при А, равном
1:0,7 1:1 1:1,4 1:2 1:2,8 1:4
100 275 94,2 34,3 11,8 4,29 1,47
200 549 188,0 68,7 23,5 8,58 2,94
500 1375 470,0 171,5 59,0 21,45 7,35
1000 2750 942,0 343,0 118,0 42,9 14,7
коррекционной пластинки, труднодоступное положение изображе-
ния. Кроме того, в системе не исправлена кривизна поля, соизмери-
мая с фокусным расстоянием. Но эти недостатки не играют решаю-
щей роли по сравнению с достоинствами системы (кривизну поля мож-
но устранить, если вблизи точки. 1"об поставить линзу Смита), и по-
этому сама система и ее модификации получили самое широкое рас-
пространение.
Рис. 6.18. Оптическая схе-
ма объектива Райта
Одной из разновидностей системы
Шмидта является объектив Райта (рис.
6.18). Вогнутое зеркало имеет форму сплюс-
нутого сфероида, длина системы почти вдвое
меньше длины системы Шмидта. В объекти-
ве хорошо исправлена кривизна поля, но на-
рушен принцип симметрии, поэтому камера
Райта имеет астигматизм, а это уменьшает
полезное поле системы и относительное от-
верстие не превышает 1:3.
Объектив Бейкера—Шмидта
(рис. 6.19) состоит из двух сферичес-
ких зеркал 2,3 с равными радиуса-
ми кривизны и коррекционной пла-
стинки 1. Объектив свободен от сфе-
рической аберрации, комы, астигма-
тизма и кривизны поля.
Рис. 6.20. Объектив «Супер—Шмидт*
Рис. 6.19. Объектив Бейкера—
Шмидта
Интересной является сис-
тема «Супер—Шмидт» (рис.
6.20). Два мениска 1 и 3 кон-
центричны сферическому зер-
калу 4, в центре кривизны ко-
торого расположена ахроматическая коррекционная пластинка 2. Для
устранения хроматической аберрации пластинку 2 изготовляют из
стекла двух марок. Внутренняя поверхность пластинки планоидная.
Объектив имеет относительное отверстие D/f =1:1 и поле 2а> = 30°.
Расчет деформированной поверхности пластинки ведется из условия
исправления сферической аберрации зеркала.
Афокальные ахроматические компенсаторы из двух линз (рис.
6.21). Компенсаторы монохроматических аберраций должны обладать
апохроматической коррекцией в широком спектральном диапазоне.
Рис. 6.21. Оптические схемы двухлинзовых афокальных ахроматических
компенсаторов, устанавливаемых в зеркальной системе:
а) в параллельных пучках; б) в сходящихся пучках
Запишем условия афокальности компенсатора <р; + <р2 = 0 и ахро-
матизации SIxp = <p;/Vj + <P2/v2 = 0. Эти два условия одновременно вы-
полняются, если v; = v2, т.е. когда обе линзы компенсатора будут вы-
полнены из стекла одной марки.
При переходе от бесконечно тонких линз к линзам конечной тол-
щины ахроматизация практически не нарушается. Однако в системе
с большим относительным отверстием хроматизм положения будет
все-таки значительным, что является следствием проявления сферох-
роматизма в такой системе [19].
С точки зрения исправления аберраций афокальные компенсато-
ры из стекла одной марки обладают двумя степенями свободы, т.е.
этим компенсаторам можно придать любую пару значений Рком и WK0M
(за исключением W= 0, Р 0). Параметр л — третий параметр для бес-
конечно тонких афокальных систем — равен нулю. Следует также от-
метить, что число коррекционных параметров в этих компенсаторах
равно трем, т.е. на единицу меньше числа конструктивных элементов
(четыре радиуса кривизны при выполнении условия афокальности).
Если компенсаторы применяют для зеркальных систем с небольшим
угловым полем, то их целесообразно использовать для компенсации
сферической аберрации и меридиональной комы, тогда третий пара-
метр будет избыточным, не влияющим на аберрации третьего поряд-
ка. Этот параметр служит для выбора удобной формы линз в техно-
логическом отношении или формы линз с уменьшенным значением
сферической аберрации высшего порядка.
Афокальный компенсатор в параллельных пучках (рис. 6.21, а).
Компенсатор предложен Д.С. Волосовым и устанавливается перед зер-
кальной системой, имеет три коррекционных параметра а2, а3, а4; из
них углы а2 и а4 — для исправления сферической аберрации и мери-
диональной комы, угол а3 — избыточный параметр для компенсации
аберраций высших порядков.
Запишем условия компенсации указанных аберраций:
Ч ==--Ч • Ч = — Ч
^Ikom к-’1зер* *“Ч1ком ^Пзер*
Так как при расчете компенсатор принимают за бесконечно тон-
кий компонент (dj = d2 = d3 = 0; ht = h2 = h3 = h4 = Лвом; y4 = y2 = y3 =
= y4 = Уком)> то уравнения компенсации будут иметь вид:
^комДсом ^1зер* Уком^ком ^Пзер* (6.39)
С учетом нормировки для углов и высот первого и второго вспо-
могательных лучей (а, = а5 = 0, йком - = 1, увом = sp, I = -1, = Р5
= 1) и при условии, что входной зрачок совпадает с оправой компен-
сатора, уравнения (6.39) примут вид:
где
-^ком — ‘$Тзер’ ""ком — ®Пзер’ (6.39')
(6.40)
V®4 . 1
= = —7«з(а2-а4). (6.41)
v=I П 2
Из совместного решения уравнений (6.40) и (6.41) определяют
углы а2 и а4. Для этого из уравнения (6.41) находят
“2 - а< = [(и " )/(« + -О) WBOM/a3,
а из (6.40)
а2 + а4 =
п
2 + п
р
___*• ком_
(а4-а2)а3
Тогда
2а - 1 р 1 _ п 2 -к 1\п -к *КОМ л * п -1WKOM .
J 2 + п VV КОМ ft п + 1 а3
(6.42)
2а 4
1 (2п + 1)а3 + Ркоя - п +П 1 Wkom .
2 + П V ' Whom П П + 1 а.
(6.43)
Из (6.42) и (6.43) следует, что неизвестным при вычислении уг-
лов а2 и а4 является угол а3. Для выбора его оптимального значения
углы а2 и а4 целесообразно вычислять при различных значениях из-
быточного параметра и в первом приближении выбрать тот угол а3,
при котором все поверхности компенсатора будут иметь достаточно
малую кривизну. Далее необходимо определить параметры Pv и Wv на
поверхностях и более точный выбор а3 провести на основании этих
' 4
параметров X Pv2 = min .
„ \ 1 J -
Из опыта расчетов установлено, что для систем, работающих в
видимой области спектра, угол а3 следует выбирать в интервале
0,5...1,0. Однако надо помнить, что многое зависит от параметров Рком
и которые определяются из расчета S; зер и Sn зер зеркальной ча-
сти объектива. Одновременное требование малого значения WKoM (ме-
нее 0,2...0,1) и даже не очень большого значения Рком приводит к боль-
шим значениям кривизны поверхностей компенсатора, так как в вы-
ражения (6.42) и (6.43) входит отношение Рком/^ком-
Если при аберрационном расчете зеркальной части объектива ока-
жется, что Рком и WrKoM имеют большие значения (-4...6), то радиусы
кривизны поверхностей компенсатора будут малыми, что вызовет по-
явление аберраций высшего порядка. И если при аберрационном
анализе системы с афокальным компенсатором выяснится, что оста-
точные аберрации превышают допустимые по вине компенсатора, то
следует один компенсатор заменить двумя двухлинзовыми афокаль-
ными компенсаторами, распределяя исправление аберраций третье-
го порядка на оба компенсатора (например, так, чтобы каждый из них
исправлял половину аберраций). В этом случае также необходим уме-
лый подбор избыточного параметра а3.
Значение угла а3 можно также определить из условия минимума
сферической аберрации для первой линзы компенсатора:
а3 = 2а3(2 + гГ)/(2п +1).
Определив с помощью формул (6.42), (6.43) углы а2 и а4, по ме-
тодике, изложенной в п. 4.2, находят конструктивные параметры ком-
пенсатора.
Афокальный компенсатор в сходящихся пучках лучей (рис.
6.21, б). Компенсатор предложен в 1934 г. В.Н. Чуриловским. Он со-
стоит из двух линз, имеющих форму менисков. Компенсатор устанав-
ливается в сходящихся пучках лучей, и, так как он афокальный,
= а^+1 = 1, где v — номер поверхности. Углы av+; и внутренние
и служат для исправления сферической аберрации и комы зеркаль-
ной части объектива. Угол av+2 является избыточным параметром и
служит для компенсации аберраций высшего порядка. Значение это-
го угла для видимой области спектра рекомендуется выбирать в сле-
дующих пределах: если в компенсаторе положительная линза впере-
ди, то = 1,5.. .2; если в компенсаторе отрицательная линза впере-
ди, что лучше в аберрационном отношении, то о^+2 = 0,3...0,5 [25].
Принимая компенсатор бесконечно тонким (dv = dv+; = dv+2 = 0;
ЛУ = hv+i = \+2 = hv+3 = лком; Уч = J/v+i = yv+2 = Уу+з = Ухом)’ c учетом того,
что nv = nv+2 = nv+4 = 1, nv+I = nv+3 = n и с\ = с\+4 = 1, выражения для
Рком, 1УКОМ можно представить в следующем виде:
^КОМ / f\2 (“v+/ ®у+зХ®у+2 -0* (п-1) X [(«v+1 + “v+3)(2 + п) - (1 + 2п)(1 + av+2)]; (6.44)
Whom- .(«v4 “v+3X2 “v^)' n -1 (6.45)
Из (6.45) найдем:
av+/ - »v+3 = [(« - + 1)]^ком/(1 - av+2). (6.46)
Из (6.44) найдем:
1 Г (1-п)г Рком
। — ____\ _ /__—________ком __
2 + П п (av+; ~ av+3)(av+2 — "О (6.47
+ (-?+«v+2)(^+2n)].
Решив совместно (6.46) и (6.47), определим
„ 2п + 1,1 ч пг -1 Рком
v*'“ 2 + n(2 + a”’)“<2+n)WK0;
n-i .
п + 1 av+2-l’
(6.48)
2п + 1( х пг-1 Рком п -1 WKOM
2 + п1 '+2> п(2 + п) WKOM n + lav+2-l'
(6.49)
Если в формулах (6.44) и (6.45) положить (\+2 = 1, то параметры
Рком = ^ком = 0 и компенсатор не будет выполнять своего назначения.
Задаваясь различными значениями избыточного параметра ocv+2,
получаем разные внутренние углы av+; и (\+3. Окончательный выбор
избыточного параметра делается по максимальным значениям радиу-
сов кривизны компенсатора, распределению параметров Pv и Wv по его
поверхностям и ^Р2 = min.
Если одним компенсатором не удается исправить аберрации зер-
кальной части объектива, то можно использовать два компенсатора —
один в параллельных пучках, другой — в сходящихся. Свободных па-
раметров в двух компенсаторах достаточно для исправления всех абер-
раций третьего порядка. Следует также помнить, что в аберрацион-
ном отношении система с компенсатором, у которого первая линза от-
рицательная, предпочтительнее.
Компенсатор меридиональной комы Чуриловского. В классичес-
ких зеркальных системах, имеющих асферические поверхности (сис-
темы Ньютона, Грегори, Кассегрена), сферическая аберрация отсут-
ствует, однако меридиональная кома имеет значительное положитель-
ное значение, что ограничивает полезное поле этих систем.
В.Н. Чуриловский в качестве компенсатора комы предложил ис-
пользовать мениск с равными радиусами кривизны, внутри которого
луч идет параллельно оптической оси (рис. 6.22, а) [25].
Рис. 6.22. Компенсатор
меридиональной комы
Чуриловского
а) из одной линзы;
б ) из двух линз с плос-
кими поверхностями и
воздушным промежут-
ком между ними
Мениск свободен от хроматизма положения (Sx хр = 0) и сферичес-
кой аберрации (Sx = 0). Хроматизм увеличения мениска небольшой и
не влияет на качество изображения. Покажем это, вычислив парамет-
ры Р, W, С на поверхностях мениска при условии, что nv+1 = n, Anv =
= Anv+2 = О, Anv+J = Дпу,о; = о\,+2 = 1, av+; = О, Av = Av+J, где v — теку-
щий номер поверхности. Тогда
Cv = - Дп/(1 - п); Pv = -(п/(1-п)]2; Wv = n/(l-n);
Cv+i =-Дп/(п-1); Pv+1 = [n/(l-n)]2; Wv+I = - п/(1-п), (6’50)
и коэффициенты аберраций
$1хр = \CV + hv+1Cv+t = 0‘, Sj = hvPv + hv+1Pv+l — 0;
Afi
$IIxp ~~ ЪУу<\ *" ^'у+1Уу+1^'у+1 ~ n — I ^v^vPv+I’
так как yv+l ~yv- dvPv+r
Расчет мениска сводится к определению его толщины dv из усло-
вия исправления им комы зеркальной части объектива, иными слова-
ми, компенсация комы достигается подбором толщины dv мениска.
Покажем это. Для определения толщины мениска dv запишем усло-
вие компенсации мениском меридиональной комы зеркальной части
объектива:
5Пком=-«Пзер ИЛИ
УЛ + yv+1Py+1 + Wv +WV+1 = -Sn^p. (6-51)
С учетом (6.50) выражение (6.51) запишем в виде:
f п У2
\ (j/v+l ~~ У у ) “ ~*$Пзер *
— П J
и так как yv+J =yv~ dv$v+l, то ~[n/(l - n)fdvPv+i = Лир- Найдем тол-
щину мениска:
dv=Sil3ep(n--?)7(n2Pv+i). (6.52)
где Pv+1 — угол второго вспомогательного луча с оптической осью, для
вычисления которого необходимо рассчитать ход второго вспомога-
тельного луча.
Так как мениск в зеркальной системе устанавливается в сходя-
щихся пучках, то его положение относительно поверхности зеркала,
предшествующей мениску, определяется из условия, что в мениске
луч идет параллельно оптической оси. Поэтому мениск следует рас-
положить так, чтобы задний фокус зеркальной системы совпадал
с гауссовым передним фокусом первой вогнутой поверхности менис-
ка f = г(1 - п) при nv = 1. Изображение, свободное от комы, получа-
ется в задней фокальной плоскости второй поверхности мениска.
При расчете систем с малым относительным отверстием и боль-
шим фокусным расстоянием может оказаться, что толщина мениска
будет большой, тогда мениск заменяют двумя линзами (рис. 6.22, б),
как бы вводя в него ограниченный плоскими поверхностями воздуш-
ный промежуток.
Неафокальные компенсаторы
Ахроматический компенсатор Максутова (рис. 6.23). Компенса-
тор представляет собой слабый отрицательный мениск небольшой тол-
щины, конструктивные параметры г, d, п которого связаны соотно-
шением (r2 - r^/d = (п2 - 1)/п, полученным из условия ахроматиза-
ции. Однако хроматизм положения в мениске равен нулю только в па-
раксиальной области. Компенсирующее действие мениска основано на
том его свойстве, что он неафокалеи и по своему действию близок к
пластинке Шмидта [8].
Рис. 6.23. Ахроматический ме-
ниск Максутова при двух его
ориентациях I и П:
а) 1-я ориентация мениска;
б) П-я ориентация мениска
Мениск имеет только один коррекционный параметр, и поэтому
его можно применять для компенсации одной сферической аберрации
зеркальной системы. Но если с оправой мениска совпадает входной
зрачок системы, то, изменяя положение мениска, можно добиться не-
которого исправления комы. Обычно компенсатор устанавливается в
параллельных пучках лучей и может иметь две ориентации I и II. При
ориентации I мениска (рис. 6.23, а) углы а2 и а3 имеют отрицательные
знаки, при ориентации II (рис. 6.23, б) знаки углов а2 и а3 разные.
Например, если в системах с одиночным зеркалом используется
мениск с ориентацией I (рис. 6.24, а), то его сферическая аберрация
компенсирует сферическую аберрацию зеркала, и если правильно по-
добрать расстояние d2, то система будет апланатической. Обычно ре-
комендуется расстояние d2 = (1,2...1,5)/'об.
При ориентации II мениска (рис. 6.24, б) система получается при-
мерно в 2 раза длиннее, чем при ориентации I. Но в некоторых случа-
ях, когда требуется, чтобы радиусы кривизны мениска были положи-
а) 6)
Рис. 6.24. Оптические схемы зеркально-линзовых объективов из сферического
зеркала и мениска Максутова:
а) 1-я ориентация мениска; б) П-я ориентация мениска
тельными, находит применение система, в которой мениск имеет ори-
ентацию II.
Расчет таких систем показывает, что фокальная плоскость — не
плоскость, а выпуклая ( в сторону зеркала) сфера умеренной кривиз-
ны, но астигматизм мал и даже может быть устранен.
Эмпирические формулы для определения конструктивных пара-
метров мениска из стекла марки К8, используемого в визуальной об-
ласти спектра, были получены Д.Д. Максутовым [8].
Особенность расчета мениска заключается в том, что его не при-
нимают бесконечно тонким (dl Ф О, Л2 Ф h2).
Из условия ахроматизации (Sj хр = 0) найдем связь между углами
а2 и а3, полагая at = 0 и считая, что для системы в воздухе пг = п3 = 1,
Ал; = Ап3 = 0, п2 = п. Так как SIxp = -h1bna2/n + А.,Дп(а3 - a2)/(n - 1),
то
аз = (йг - А,)а2/Л2 или а2 + (l-d2a2)(a3-a2) = 0. (6.53)
Уравнение (6.53) — условие ахроматизации мениска, из которо-
го следует, что мениск может быть ахроматизирован в любом
спектральном интервале, так как в выражение для угла а3 не входит
значение показателя преломления стекла, из которого сделан мениск.
Значение угла а2 находят из условия компенсации мениском сфе-
рической аберрации зеркальной части объектива.
Линзовые компенсаторы с отражающей поверхностью. К таким
компенсаторам можно отнести линзу (зеркало) Манжена, двухлинзо-
вый склеенный и несклеенный компоненты-отражатели, а также ком-
понент-отражатель из двух несклеенных линз из стекла одной марки
с первой плоской поверхностью, по своему действию эквивалентный
параболическому зеркалу. Оптические схемы зеркальных систем с
компенсаторами в виде отражателей представлены на рис. 6.25.
Рис. 6.25. Оптические схемы зеркальных объективов с компенсаторами
в виде отражателей:
а) главное зеркало в виде склеенного компонента-отражателя; б) линза
Манжена в качестве вторичного зеркала; в) главное зеркало в виде
несклеенного компонента-отражателя; г) двухлинзовые склеенные компонен-
ты в качестве главного и вторичного зеркал
Линзовые компоненты-отражатели в схемах, представленных на
рис. 6.25, играют роль либо главного зеркала (рис. 6.25, а, в), либо вто-
ричного зеркала (рис. 6. 25, б), либо того и другого (рис. 6. 25, г) и од-
новременно являются компенсаторами.
Расчет компенсаторов выполняется из условия компенсации ими
монохроматических аберраций зеркальной части системы. Однако
компоненты-отражатели применяются не только в качестве компен-
саторов и отражателей в зеркальных системах, но и используются са-
мостоятельно в качестве объективов зрительных труб, астрономи-
ческих объективов, объективов микроскопа и т.п., (расчет отражате-
лей приведен в п. 6.6).
Здесь же покажем, как следует определять конструктивные пара-
метры отражателей на примере расчета линзы (зеркала) Манжена, ис-
пользуемой в качестве компенсатора в двухзеркальной системе (рис.
6.25, б).
Линза (зеркало) Манжена (рис. 6.26) — мениск, выпуклая повер-
хность которого покрыта отражающим слоем. Поверхности линзы
сферические. Третья преломляющая физически идентична первой
поверхности, т.е. г, = г3. Так как толщина линзы мала (dt = ~d2) no
сравнению с фокусным расстоянием, то при расчете линзу можно при-
нять за бесконечно тонкую (d; = ~d2 = 0, = h2— h3 = h).
Рис. 6.26. Линза Манжена:
а) предмет в бесконечности; б) предмет расположен на конечном расстоянии
В аберрационном отношении линза имеет один параметр, позволя-
ющий исправить любую из монохроматических аберраций. Недоста-
ток линзы Манжена — большой хроматизм по ее краевым зонам [25}
Конструктивные параметры линзы определим из условия компен-
сации линзой сферической аберрации зеркальной части системы:
v=3
®Iaep" (6.54)
v=l
Для линзы в воздухе п1 = 1, п4 ~ -1, п2 = п, п3 ~ —п. Используя конст-
руктивное условие = г3, найдем зависимость между углами а2 и а3,
считая, что углы а, и а4 известны:
а3 = а2 + (а4 -at)/n, (6.55}
причем
Р1 = п(а2-а1)г(а2-а1п)/(1-п')2;
P2 = -n(af-a2)(a3-a2)/4-, (6.56)
Р3 = п(а4 - а3)2(а3 - а4п)/(1 - п)г.
Подставив в (6.56) значение ос3 = f (а2) из (6.55) и просуммировав па-
раметры по (6.54), получим уравнение третьей степени относительно
угла а2. Из решения уравнения найдем угол а2, а затем по формуле
(6.55) вычислим угол а3 и радиусы бесконечно тонкой линзы как rv та =
= A(n'v - nv)/(n'va'v - /lyOQ.Особенности перехода к радиусам линз ко-
нечной толщины изложены в п. 6.6.
Компенсатор кривизны поля (линза Смита). Этот компенсатор,
устанавливаемый вблизи плоскости изображения, представляет собой
плосковыпуклую линзу и является фактически коллективом.
Рассчитаем компенсатор в зеркальном объективе Кассегрена (рис.
6.27). Радиус плосковыпуклой линзы следует определять из условия
исправления кривизны поля (S]V = 0) для всей системы:
v=< / ( 1 \
SIV = -S- 8- =0.
Полагая, что г4 = °°, найдем:
г3 = (1 - n)/[2n(l/rt - 1/гг)],
где п — показатель преломления линзы; г2 и г2 — радиусы кривизны
зеркальной системы, полученные из габаритного расчета.
Рис. 6.27. К расчету компен-
сатора кривизны поля
6.5. Параметрический синтез зеркально-линзовых
систем с линзовыми компенсаторами
различных конструкций
Синтез систем с двухлинзовым афокальным
ахроматическим компенсатором в параллельных пучках
Зеркально-линзовая система типа Кассегрена с компенсатором
в параллельных пучках лучей (рис. 6.28, 6.29). При синтезе таких си-
стем возможны два случая:
а) компенсатор расположен на некотором расстоянии от зеркаль-
ного объектива, d4 * d5 и г4 Ф г6 (рис. 6.28);
б) вторичное зеркало нанесено на последнюю поверхность компен-
сатора, r4 = r6, d4 = -d5 (рис. 6.29).
Исходными данными для синтеза являются: s} = — удаление
предмета; Гов — фокусное расстояние объектива; D/fo6 — относитель-
ное отверстие; 2® — угловое поле; sp — положение входного зрачка;
— коэффициент экранирования; 5 — вынос плоскости изображе-
Рис. 6.28. Зеркально-линзовый объек-
тив типа Кассегрена с двухлинзовым
афокальным компенсатором в парал-
лельных пучках лучей (случай г4 * г6):
а) оптическая схема объектива;
б) ход первого и второго вспомогатель-
ных лучей
Рис. 6.29. Объектив типа Кассегрена
с компенсатором в параллельных лу-
чах:
а) оптическая схема объектива (при
г4 — г6); б) ход первого и второго
вспомогательных лучей
ния; конструктивные условия: г4 ге или г4 = г6; спектральный ин-
тервал: Хо, Х2; марка стекла линз компенсатора.
Первоначально компенсатор принимают бесконечно тонким (dz =
= d2 “ d3 = °; hl = h2 = h3 = h4 = У1 “ У2 = Уз = У4 “ Уком) И ВЫПОЛ-
НЯЮТ габаритный и аберрационный расчеты зеркальной части объек-
тива по формулам (6.8), (6.9) при нормировке а2 = а5 = О, а7 = 1,
лком = Гое =1> У = sp> I= -1- Затем:
а) если г4 ф г6 и d5 > d4, вычисляют расстояние ds = 5 - kaK, а рас-
стоянием d4 задаются (его можно принять равным I d5 I);
б) если г4 = г6, то расстояние d5 = -d4 = 8 - fe3K.
Далее вычисляют угол а6 = (1 - kav)/d5, радиусы кривизны повер-
хностей зеркал rs = 2/ае, r6 = 2k3J(l + а6) и выполняют абер-
рационный анализ зеркальной части объектива, вычислив Sj 3(.р и Sn
по формулам (6.10). Находят углы а2 и а4 в компенсаторе из условия
компенсации им сферической аберрации и меридиональной комы зер-
кальной части объектива, т.е. Рком = -SIaep, WKOM = -укоИРком - SIl3ep,
причем:
а) если г4 гв, то углы а2 п а4 вычисляют по формулам (6.42),
(6.43), задаваясь согласно рекомендации значением избыточного па-
раметра (а3);
б) если г4 = г6, то воспользовавшись формулой расчета хода пер-
вого вспомогательного луча через четвертую поверхность компенса-
тора п5ос5 - п4а4 = h4(ns - п4)/г4, находят угол
а4 = (п-1)/(пг6), (6.57)
а неизвестные углы а2 и ос3 определяют из совместного решения урав-
нения (6.39) компенсации аберраций. Если входной зрачок совпада-
ет с оправой компенсатора, то г/ком = sp = 0 и уравнения (6.39) примут
вид:
Р ____ _ Q , -ТТГ __ _ Q
*ком “ ^Тзер» ’’ком — ^Пзер*
Тоогда из условия компенсации меридиональной комы выражают
угол а2 = f(a4):
«2 = ^4- [(" - -*)/(" + ^)](^ком/о-3). (6.58)
Значение угла а2 из (6.58) подставляют в уравнение для исправ-
ления сферической аберрации ов = О и после соответствующих пре-
образований получают квадратное уравнение относительно угла а3:
Ааг3 - Ва3 + С = О,
где А, В, С — коэффициенты, зависящие от показателя преломления
материала компенсатора, угла а4 и параметровРком и 1Уком. Из реше-
ния квадратного уравнения получают два значения корня а3. Из двух
значений выбирают положительное (а3 = <р2), а если оба корня поло-
жительные, то берут меньшее значение. По углу а3, используя соот-
ношение (6.58), вычисляют угол а2 и радиусы бесконечно тонких линз
компенсатора по формуле
б.т.к = /i«-nv)/(n;a;-nvav).
Переход к радиусам линз конечной толщины осуществляется по
методике, изложенной в п. 4.2.
Однако при переходе к радиусам линз конечной толщины следу-
ет помнить, что радиус г4 кривизны поверхности компенсатора дол-
жен быть равен радиусу гв зеркальной части объектива (г4 = г6), а так
как в линзах конечной толщины h4 Ф h5, той гв. Чтобы выполнить
условие равенства радиусов кривизны и сохранить при этом заданное
значение необходимо пересчитать расстояние ds следующим об-
разом. Так как r4 = h4(n - l)/(na4), а re = 2h6/(l + ae), то, сохранив пре-
жним значение угла а6, найдем новое значение высоты h6 = r4(l+ а6)/
/2 и новое значение расстояния ds между зеркалами:
d5 = Uis-he)/ae. (6.59)
Приведем последовательность формул, по которым выполняется
синтез рассмотренных выше схем зеркально-линзовых систем, для
двух случаев: а) г4 * ге и б) г4 = г6.
Габаритный и аберрационный расчеты зеркальной части объекти-
ва выполняются для двух рассматриваемых случаев по одним и тем
же формулам:
1) d5 = 5- ЛэК;
2)a6 = U- kj/ds;
3) г5 = 2/ае;
4)г6 = 2Лэв/и + а6);
5) Р5 = -0,25а36 ;
6) Рв = 0,25(1-а62)(1-а6);
7) W5 = 0,5а2;
8) W6 = 0,5(1-а26)-,
9) У5 = ds или Уз “ ~d4’
ю) у6 = d5 -
Ц)1’ком = -1>5-*эЛ;
12) WKOM = -y6P5-y6P6-0,5
13) расчет конструктивных параметров компенсаторов имеет свои осо-
бенности:
в случае а (г4 * г6) определяют
1
2+п
2а2 —
(2п + 1)а3 + ^-^^
'’ком ”,
п-1WK0M .
п + 1 а3
2а4 =———
4 2 + п
(2п + 1)а3 + ^ ±
''ком п
П-IWkom
п + 1 а3
задаваясь значением избыточного параметра угла а3;
в случае б (г4 = г6) находят
а4 = (п-1)/(пг6);
14) вычисляют коэффициенты А, В, С квадратного уравнения
А = 2п +1;
В = [(п2 - 1)/п]Рком/Жком + 2а4(2 + и);
С =gn -1)(2 + п)/(п + 4) \л/км;
15) решают квадратное уравнение вида Aaf - Ва3 + С = 0:
а3 = (в± л/в2-4АС)/{2 А);
16) находят угол
«2 = «4 + [(1 - ")/(1 + Л)]^ком/“з •
Далее выполняют контроль правильности решения аберрацион-
ных уравнений. Для этого вычисляют параметры Pv и Wv по поверх-
ностям:
Находят их суммы, которые должны быть равны значениям Рком
и Wrom с погрешностью не более ±0,01.
Затем вычисляют радиусы бесконечно тонких линз компенсато-
ра по формуле
Гутн = /об(ЛС - "v )/(« - Лу“у )
и переходят к радиусам линз конечной толщины.
Однако в случае а, когда г4 * г6, после определения толщин линз
компенсатора и радиусов линз конечной толщины может оказаться,
что h4 * hj и фокусное расстояние объектива не равно заданному зна-
чению. Чтобы сохранить заданным fo6, необходимо найти коэф-
фициент масштабирования у = h4/hl и радиусы кривизны зеркально-
го объектива умножить на этот коэффициент.
В случае б, когда г4 = г6, после определения радиусов кривизны
линз конечной толщины для того, чтобы обеспечить равенство г4 = г6
и заданное фокусное расстояние объектива, находят новое значение
h6 = (1 + а6)г4/2 и пересчитывают расстояние ds = (hs -h6)/a6.
Примеры расчета систем, представленных на рис. 6.28 и рис. 6.29,
приведены в книге [1]. z
Зеркально-линзовая система из одиночного зеркала, плоского
контротражателя и двухлинзового компенсатора (рис. 6.30, а). В со-
ответствии с оптической схемой г4 = г6 = а так как компенсатор афо-
кальный, то ос, = а4 = ос5 = 0. Компенсатор при расчете принимаем бес-
конечно тонким, а отражающие поверхности заменим бесконечными
Рис. 6.30. Зеркально-линзо-
вый объектив из одиночного
сферического зеркала и
плоского отражателя с двух-
линзовым афокальным ах-
роматическим компенса-
тором:
а) оптическая схема
объектива; б) ход первого
и второго вспомогательных
лучей
плоскостями (рис. 6.30, б), тогда d1 = d2 = d3 = 0; й;= й2= h3= h4 — йком;
у;= у2= у3= у4 = уком.Пусть входной зрачок совпадает с оправой ком-
пенсатора, т.е. sp = 0, тогда в соответствии с принятой нормировкой
а;= 0, а7=1, Лком = Л5 = fo6 =1, Р, = Р5 = 1, уком =8Р = 0,1 = -1.
Конструктивные параметры зеркальной части объектива:
г5 = “2 п5 = 1
d4 = 1 — йэк; ае = —1 пв~~ ~ 1
г6 = °° п7 = 1
Определим коэффициенты аберраций Sj и Sn зеркальной части
системы:
«тзер = А5Р5 = Рв = -0,25а36 = 0,25;
«пэер = У5Р5 + W5 = -d4 • 0,25 + 0,5 = 0,25(2-d4)= (1 + k3K)/4.
Условия компенсации аберраций запишем в виде равенств
Рком = -Siaep = -0,25; WK0M = -SIl3ep = -0,25(k3K + 1), (6.60)
где
Рком = X Pv = , П)Чга3(*2 {(” + 2)а2 - (1 + 2и)а3}; (6,61)
; (П-1)
^ком = -[(п + 1)/(п-1)]а2а3. (6.62)
Из уравнения (6.62) выразим а2 = /(а3):
a2 = [(l-n)/(n + l)]WKOM/a3; (6.63)
и подставив значение а2 из (6.63) в выражение (6.61), после соответ-
ствующих преобразований получим
Аа3 - Ва3 + С = 0,
где
А=1+2п;
(6.64)
C = (n+2)(n-2)lVTO,/(„ + l).
Из решения квадратного уравнения определяем угол а3, а затем
по формуле (6.63) — и угол а2.
Дальнейший порядок расчета такой же, как и расчета предыду-
щих систем. Однако при синтезе рассматриваемых систем следует по-
мнить, что они имеют значительное центральное экранирование, так
как при выносе плоскости изображения 8 = 0 коэффициент экрани-
рования йэк = 0,5. Примеры синтеза объективов приведены в книге [1].
Синтез зеркально-линзовых систем с афокальным
ахроматическим компенсатором
в сходящихся пучках лучей
Зеркально-линзовый объектив типа Кассегрена (рис. 6.31, а).
Формально, если исходить из числа свободных параметров, влияющих
на аберрации, то система с афокальным компенсатором внутри может
показаться более предпочтительной, чем зеркально-линзовая система
с компенсатором в параллельных пучках, так как появляется лишний
параметр — положение афокального компенсатора (d2). Однако это
преимущество не реализуется, поскольку фактически положение афо-
кального компенсатора определяется однозначно (d2 = 0,5L). Если
компенсатор поставить близко ко второму зеркалу, то лучи будут про-
ходить через компенсатор дважды. Как показывают расчеты афокаль-
ного компенсатора при двукратном прохождении лучей, параметр
WKOM становится близок к нулю и коррекционные возможности сис-
темы уменьшаются вдвое. Если же компенсатор поместить близко к
фокальной плоскости объектива, то он практически будет влиять толь-
Рис. 6.31. Объектив типа Кассегрена с компенсатором в сходящихся пучках:
а) оптическая схема объектива; б) ход первого и второго
вспомогательных лучей
ко на дисторсию и кривизну поля. Поэтому рациональнее ставить ком-
пенсатор на половине оптической длины объектива, т.е. d2 = 0,5L. Это
приводит к максимально возможной высоте йком, а следовательно, к
максимально возможному значению (ЛР)К0М, действующему на сфери-
ческую аберрацию и кому. Но так как и в этом случае высота первого
вспомогательного луча на компенсаторе имеет малое значение, то Рком
и W ом для систем с различными значениями выноса 8 плоскости изоб-
ражения почти всегда имеют большие положительные значения. Что-
бы расширить коррекционные возможности компенсатора, его целе-
сообразно применять тогда, когда сферическая аберрация главного
зеркала частично или полностью исправлена применением асферичес-
кой поверхности.
Компенсатор имеет три коррекционных параметра — углы а4 и а6
для коррекции сферической аберрации и меридиональной комы и вне-
шний угол а5 для компенсации аберраций высшего порядка. Рекомен-
дации по выбору избыточного параметра (угла а5) приведены в п. 6.4.
Приведем формулы для синтеза оптической схемы, представлен-
ной на рис. 6.31, б. Синтез выполним при нормировке а; = 0, а7 = 1,
= Ло6 = 1, 3/ = 1» У1 = sp = О, I = -1. Компенсатор примем бесконечно
тонким: d3 = d4 = dB = 0; h3 = h4 = Л5 = h6 = Лком; y3 = y4 = yB = y6 = yK0M.
Зададимся расстоянием d2 ~ 0,5L = 0,5k3K, так как при a7 = 1 h2 = k3K=
= -d + 5 = L.
Для системы в воздухе n; = п3 = п5 =п7 = 1, п2 = -1, п4 = п6 = п.
Формулы синтеза:
l)d/ = 8-fe3K; 2) a2 = (1 - fe3K)/d2;
3) rt = 2/а2; 4) r2 = 2k3K/(l + a2);
5) Pt = -0,25a32; 6) W, = 0,5af;
7) P2 = 0,25(l-a2)\l + a2); 8)W2 = (l-a22)/2-,
9) Уг = У1~ d$2 = > Ю) Sl3ep = Pt + k3KP2‘,
11) зер = Уг?2 + 0.5; 12) йком — h2 — d2a3 = k3K — d2;
13) Уком = У г ~ ^гРз = dt — d2[d1 + 1)/йэк ;
14) Рком = ”SI зер/^ком’ 15) ^kom = ^ko/kom “^IIзер^
16) 2a4 = ^ ( l + a5)~ nZ . ; n(2 + n)WK0M n + laB-l
17) 2a6 =
2n +--(1 + a5)- ;
2 + n v 7 n(2 + n)WKOM n + laB-l
a--— избыточный параметр, выбирается согласно рекомендации;
18) Гутн ^'kom(^'v ^v)/(^v^v ^V^v)*
Контроль решения аберрационных уравнений:
/ 1 \ 2 Z \ 6
19) Д= 5а/8- 8 - ; £ Pv = Рком(± 0,01);
k ПЛ \nJv 3
Z ( п\ 6
Wv = 8а/8— 1 8 - ; £ Wv = WK0M (± 0,01).
к njv \njv ~
Далее осуществляется переход к радиусам линз конечной толщи-
ны по методике, изложенной в п. 4.2.
При расчете систем с компенсатором в сходящихся пучках лучей
в аберрационном отношении лучше ставить первой линзой компенса-
тора отрицательную.
Пример синтеза такой схемь# объектива приведен в книге [1].
Зеркально-линзовый объектив из сферического зеркала и ком-
пенсатора (рис. 6.32, а). Компенсатор применяют для коррекции сфе-
рической аберрации и меридиональной комы, вносимых одиночным
зеркалом. Для этой цели используют два параметра — углы а3 и а5,
третий избыточный параметр — угол а4 — служит для коррекции сфе-
а)
6)
Рис.6.32. Объектив из одиночного сферического зеркала и компенсатора
в сходящихся пучках:
а) оптическая схема объектива; б) ход первого и второго
вспомогательных лучей
рической аберрации высших порядков, астигматизма и дисторсии.
Степень влияния параметров а3 и а5 на коррекцию аберраций зави-
сит также от положения компенсатора относительно вершины поверх-
ности зеркала (расстояние d;).
При расчете компенсатор принимаем бесконечно тонким (рис.
6.32, б) (~d2 = -d3 = -d4 = 0, h2 = h3 = h4 = h5 = Лком, y2 = y3 = y4 = y5 =
уком) и синтез выполним при нормировке:
а; = 0, а2 = ае = 1, Л; = fo6 = -1, = 1, yt = sp = О
(в случае, когда входной зрачок совпадает с оправой главного зерка-
ла), I = +1. Для системы в воздухе = 1, п2= п4= п6= -1, п3 = п5 =
= -п.
Для зеркальной части объектива найдем:
Гг = 2Д'6;
Si,еР = = (~ ПС" 0,25)а.32 = 0,25; (6 65)
5п,еР = ^-^ = -а^/2 = -0,5.
Запишем условия компенсации аберраций, считая, что компенса-
тор расположен на расстоянии dt — 0,5L = -0,5. Тогда
Рком =-81зер/йком = -0,25/(-0,5) = 0,5; (6.66)
^ком Уком^ком + Sii3ep ^7-^ком 0,5 07)
= -0,5Рком-0,5 = -0,75,
гДе йком = hi “ di°-2 = "I - (-0,5)1 = -0,5; уком = - dft2 = dj = -0,5.
Найдем:
„ „ (а, -а5)(1- а4)
Дсом = Е Pv = Л + Рз + ?4 + Л = V — Х
v=2 (т--1)
х [(2m + 1)(а3 + а5)- (т + 2)(1 + а4)];
уд 5
= [(1 + т)/(1 - т)](«3 - а5 )(1 - «4 ), (6.69)
v=2
где т = 1 /п.
Решим совместно уравнения (6.68) и (6.69). Для этого из (6.69)
найдем
а3-а5 =
W
ком
1-а4
1-т
1 + т'
а из(6.68)
п +п Л,м("*--0 (т + 2)(7 + а4)
3 5 (а3 - а5)(1 - а4)(2т + 7) 2т+ 1
Тогда
_ (Пг~*~ 1 — ТП Лом ^ком 1~т . zzj
2“3“ 2т + 1 + 2m + l'WK0M + 1-а4' 1 + т’
Qn + 2)(l + a4), ^-'п2 Лом ^ком 1-т
^5~ 2т+1 + 2m+lWK0№ 1-а4'1 + т' (6>71)
Задаваясь различными значениями избыточного параметра а4,
вычисляем углы а3 и а5 и радиусы бесконечно тонких линз компенса-
тора.
Пример 6.7. Выполнить параметрический синтез зеркально-линзового объектива
из одиночного сферического зеркала и двух линзового афокального ахроматического ком-
пенсатора из стекла марки К8, установленного в сходящихся пучках лучей, если /'об =
= -250 мм, D/fM =1:5, sp = О. В объективе исправить сферическую аберрацию и мериди-
ональную кому. Коррекция визуальная (F', е, С').
Порядок расчета: 1) г, = -2f об = -500; 2) SIaep = 0,25; 3) ЯПзер = = -0,5; 4) Рком = 0,5;
5) WKOM = -0,75, если компенсатор установлен на расстоянии dI = -0,5.
Затем при различных значениях избыточного параметра а4 вычислим углы а3 и а5
по формулам (6.70) и (6.71) и выполним контроль решения уравнений компенсации абер-
раций, рассчитав параметры Pv и Wv иа каждой поверхности компенсатора. Результаты
расчетов сведем в табл. 6.12.
Таблица 6.12
«4 1,5 2,0 0,5 0,3
аз 1,50705 1,71670 0,62468 0,55405
а5 1,19834 1,56234 0,93339 0,77456
р2 0,01633 -0,57604 0,71147 1,08383
р3 -0,00022 -0,59873 -0,01181 0,03596
р4 0,55503 1,59603 -0,18499 -0,40615
Ps -0,07114 0,07874 -0,01467 -0,21364
Лом 0,50000 0,50000 0,50000 0,50000
W. 0,01100 -0,27437 -0,64711 -0,82965
Wz -0,01048 0,72145 -0,03235 0,04831
w4 -0,62807 -1,24488 -0,14571 -0,29216
Ws -0,12244 0,04780 0,07516 0,32349
W КОМ -0,74999 -0,75000 -0,75001 -0,75001
-0,20118 -0,16132 5,02673 1,63201
-0,32880 -0,42731 -0,57787 -0,47882
-0,81130 -0,69646 -0,28255 -0,29682
r. 5 ib -0,31625 -0,18887 -0,62120 -1,47233
Из четырех вариантов выбираем вариант с а4 = 0,5. После перехода к радиусам
линз конечной толщины получаем систему со следующими конструктивными парамет-
рами:
п е Tlj = 1 Марка стекла псв D пол
г, = -500 dj = -125 г = 1256,78 ra2=“1 50 52
d2 = -3,4 г3 =-142,014 d3 = -0,2 г, = -69,381 п3 =-1,5183 n4 = -i К8 31,6 34
^ = -3,1 г5 =-148,943 п5 =-1,5183 пв = ~1 К8 31,6 34
Далее проводится аберрационный анализ исходного варианта. Значения остаточ-
ных аберраций для точки на оси сведены в табл. 6.13.
Таблица 6.13
т Для одиночного зеркала Для зеркально-линзового объектива
As' е п, % As' е Т|, %
0 0 0 0 0 0 0 -0,0163
17,68 0,156 -0,011 0,125 -0,0012 9 10 5 -0,001 -0,0152
25 0,313 -0,031 0,249 -0,0022 2,3 10 1 -0,003 -0,0140
Синтез зеркальных систем с афокальным
ахроматическим компенсатором комы
Как указывалось в п. 6.3, чаще всего компенсатор комы устанав-
ливается в системах с исправленной сферической аберрацией, так как
он имеет только один коррекционный параметр для компенсации ме-
ридиональной комы. Рассмотрим расчет одно- и двухзеркальных си-
стем с компенсатором [25].
Одиночное параболоидное зеркало с компенсатором (рис. 6.33).
В соответствии с теорией компенсатора = а3 = а4 = а5 = 0, а2 = а6 =
= —1. Примем ЛОб = _1> = 1, тогда h2 = h3 = h4 = h5 = Аг - =
= 1 + dl и
dt = h2-l. (6.72)
Из условия компенсации меридиональной комы одиночного
зеркала согласно формуле (6.52) найдем толщину мениска d2, слив обе
линзы компенсатора в один мениск, т.е. считая d3 — 0:
<^2 = $Пзвр(П — -0 /(п Рз)’
где 5Пзер = ^Л-/ЖГ
Рис. 6.33. Зеркально-линзовый объектив
одиночного зеркала и компенсатора комы
P3 = -l/n + (ft2-j
Для плосковыпуклой линзы гг= I
щина мениска определится как
Так как sp = 0, то yt= sp=
= 0. Для системы в воздухе и
при принятых условиях нор-
мировки I = -1
S113ep = Wt = a2/2 = 0,5.
Найдем угол Р3 из расче-
та хода второго вспомогатель-
ного луча. Согласно норми-
> ровке Р; = 1, тогда Р2 = -1,
У2 = У/_£//₽2 = с//ИУГОЛ
и-1)/(иг2).
- 1 )h2, тогда Р3 = -1 /(nh2) и тол-
2 2п
(6.73)
Задавшись высотой h2, или положением мениска dt, находим тол-
щину мениска d2, и конструктивные параметры системы при = 1.
Г1=-2
d!=h2-l
r2 = (n-l)h2
d2 = -0,5h2(n -l)2/п
r3 = (n-l)h2
Например, пусть h2 = 0,2, положим, что d3 = 0, тогда при =
= -1000, если линза компенсатора выполнена из стекла марки К8
(пе = 1,5183), получим:
п; = 1
г01 =-2000
d, = -800
г2 = 103,66
d2 = -17,69
г3 = 103,66
n2 = -i
п3 = -1,5183
п4 = -1
Сферическую аберрацию зеркала исправим введением асферичес-
кой поверхности. Если зеркало параболоидное, то е = 1, и уравнение
поверхности запишется в виде: y2t = 2r0iZj = -4000zr
Менисковый компенсатор со сферическими поверхностями позво-
ляет простым и недорогим способом устранить влияние комы любого
параболоидного зеркала. Если в схеме требуется устранить астигма-
тизм, то необходимо сферические поверхности компенсатора сделать
асферическими — гиперболоидными с коэффициентом деформации b
= -0,25(п + I)2. При этом воздушный промежуток определяется по
формуле [25]
d
= - 2(l-m}h2/(3 + m}-m(d2 + d4^
где т = 1 /п.
Объектив Кассегрена с ком-
пенсатором комы (рис. 6.34). С
учетом условий нормировки и
апохроматической коррекции
системы полагаем, что а1 — а4 =
= а5 = ае = 0, а3 = а7 = 1, h} = f об
= 1,у1 = sp, Р; = 1. Если входной
зрачок совпадает с оправой глав-
ного зеркала, то = sp = 0. Най-
дем
Рис. 6.34. Зеркально-линзовый объектив
Кассегрена с компенсатором комы
й2 = Л; - d}a2 = 1 - dja2;
(6.74)
^ком ~ h-2~ ^2а3 — h2~ d2.
Зададимся габаритным условием, гарантирующим удобное распо-
ложение плоскости изображения: s'2 = h2 = -dt (так как а3 = b.2/d1 =1).
Тогда в соответствии с (6.74) запишем = 1 — dtci2, тогда
d; = I/(a2-l), (6.75)
а так как h2 = -d4, то
h2 = -l/(a2-iy (6.76)
Угол а2 в двухзеркальной системе можно найти по формуле (6.8)
либо из условия устранения в системе кривизны Петцваля (SIV = 0).
В соответствии с формулами (6.10) для двухзеркальной системы за-
пишем
SIV = -ja2 -(l-a3)j= 0 , т.е. а2 + а2 -1 - 0.
Из решения квадратного уравнения найдем два значения корня; по-
ложительное значение отбросим как неприемлемое, оставив отри-
цательное значение а2 = -1,618034, тогда в соответствии с (6.75),
(6.76) dj = 1/(а2 — 1) - -0,381966; h2 = -d4 = +0,381966 и радиусы
кривизны при вершине асферических поверхностей зеркал будут со-
ответственно равны:
г01 = 2/а2 = 2/(-1,618034) = -1,23607;
г02 = 2й2/(1 + а2)= 2 0,381966/(1-1,618034) = -1,23607.
Из расчетов видно, что по условию Петцваля зеркальная система
должна иметь равные радиусы кривизны, т.е. = г2.
Пусть обе линзы компенсатора слиты в один мениск, тогда его
толщину d3 можно определить из условия исправления им аберрации
комы зеркальной части объектива:
^3 = $Пзер(П —
где SIl3ep = у2^2 + +W2 = d2P2 + 0,5; Р4 — угол второго вспомога-
тельного луча.
Вычислив SIl3ep и угол Р4, из расчета хода второго вспомогатель-
ного луча получим
d3 = (n-l)2h3/(2n).
Если положить, что h3 = 0,2, то для системы с фокусным расстоя-
нием f = 1000 мм получим следующие конструктивные параметры
объектива с компенсатором из стекла марки К8 (пе = 1,5183):
rOl =-1236,07
d, = -381,95
r02 =-1236,07
d2 = h2 - h3 = 381,95 - 200 = 181,95
r3 = -103,66
d3 = 17,69
r4 = -103,66
В рассматриваемой оптической системе использован тот же ме-
нискообразный компенсатор, что и в системе с параболоидным зерка-
лом. Таким образом, одним и тем же мениском можно устранить кому
любого зеркального объектива, состоящего из анаберрационных по-
верхностей. В рассмотренной выше системе первое зеркало — пара-
болоидное, второе — гиперболоидное. Определение эксцентриситетов
поверхностей зеркал см. в главе 7.
Синтез зеркальных систем с мениском Максутова
Выполним расчет различных конструкций зеркальных объекти-
вов с компенсатором Максутова, установленным в параллельном пуч-
ке лучей.
Мениск Максутова и одиночное сферическое зеркало (рис
6.35, а). Особенность расчета та-
кого объектива заключается в
том, что мениск при расчете не
принимают бесконечно тонким
(d1 h2) (рис. 6.35, б). Рас-
чет можно выполнить двумя
способами.
1-й способ. Из совместного
решения уравнений ахроматиза-
ции мениска (6.53)
аз = -dta22/(1-dta2) и условия
компенсации мениском сфери-
ческой аберрации зеркала, запи-
санных при условии нормировки
а, =0, а4 = -1, ht = находят
Рис. 6.35. Мениск Максутова и одиноч-
ное зеркало: а) оптическая схема
объектива; б ) ход первого вспомога-
тельного луча
угол а2:
ftjP; + ^2^2 = — W
где
Р, = аа|;
Р2 = а(а3 - а2)2(па3 - а3);
Р3 = 0,25(1 + а3)2 (1 -а3);
а = п/(1- п)2.
Тогда
dfaf -dj(n + i)cL42 + (dfsl3ep/a)a3 -
— (2djSU3ep/a)a3 + Sl3ep/a = 0.
(6.77)
(6.78)
(первоначально значение Sl3ep вычисляют в предположении, что
a3= 0). Из решения уравнения (6.78) определяют единственное дей-
ствительное значение угла а2, по формуле (6.53) вычисляют угол а3 и
заново определяют Sl3ep= Л3Р3. Из уравнения (6.78) вновь находят
угол а2.
2-й способ (приближенный). Записывают условие устранения сфе-
рической аберрации для всего объектива:
®1об = ^1^1 + ^2-Р2 *3^3 = 0 •
где параметры Р;, Р2, Р3 вычисляют по (6.77), высоты первого вспо-
могательного луча находят по формулам = -fo6 = 1; h2 = 1 - d;a3;
^3 ~ ~ ^2^3'
Задаваясь значением угла а2, например а2 = -0,9, вычисляют по
формуле (6.53) значение угла a3 = (h2 - hI)ct2/h3 и определяют пара-
метры Рр Р2, Р3. Затем, полагая, что SIo6 = 0, находят высоту
й3 = —(h^Pj + h2P2)/P3 (6.79)
и расстояние d2 = (h2 — h3)/a3. Оставляют вариант, когда расстояние
d3 = (l,2...1,5)fo6. (6.80)
Система типа Кассегрена с компенсатором Максутова (рис. 6.36).
В оптической схеме, представленной на рис. 6.36, а, вторичное зер-
кало системы типа Кассегрена нанесено на вторую поверхность. Для
компенсатора * 0, ht Ф h2, yt Ф у2. Пусть sp = 0, тогда толщина ме-
ниска d j = 0,1Рмен (в расчетах фигурирует всегда приведенная толщи-
на мениска d1 = d1/fti^. Примем нормировку: а, = 0; а5 = 1; й; = =
=1 при = п3 = п5 - 1, п2 = п til п4 = -1.
Рис. 6.36. Зеркально-линзовый объектив типа Кассегрена с компенсатором
Максутова:
а ) вторичное зеркало нанесено на второй поверхности мениска; б) вторичное
зеркало имеет радиус кривизны, отличный от радиуса кривизны второй
поверхности мениска
Запишем условие равенства радиусов кривизны поверхностей ме-
ниска и вторичного зеркала г2 = г4, т.е.
h2(l - п)/(а3 - na2) = 2k3K/(l + a,), (6.81)
а также найдем значение угла а4 из расчета хода первого вспомогатель-
ного луча, отраженного от зеркальной поверхности,
a4 = -a3 + 2(/i2-d3a3)/r3. (6.82)
Подставим значение угла а4 из (6.82) в (6.81) и после преобразований
найдем радиус кривизны главного зеркала
г 2hth3(l-n)
Гз 2*эк(аз - па2)-h2(l-n\l- а3)' (683)
Радиус кривизны главного зеркала можно также определить по
формуле
r3 = 2(h2-d2a3)/(a4+a3), (6.84)
где угол а4 в соответствии с рис. 6.36 равен:
= (^3 — ^эк)/($ — ^эк)' (6.85)
Тогда выражение (6.84) с учетом выражения (6.85) после преобразо-
ваний запишем в виде
r3 = 2h3(fe3K - 8)/[fe9K - h3 + a3(feaK - &)]. (6.86)
Приравняв (6.86) и (6.83), после преобразований получим
„ - (2 ~~ + 2k3Kd2a2n + (7 -n)h2d2
3 d2[2k3K-(l-n)h2] ' <6-87)
Так как h2 = h1~ dta2 = 1 - dra2, то, подставив значение h2 в уравне-
ние (6.87) и введя соответствующие обозначения, получим
а3 = (С + Ва2 - Аа3 j/(Z> + ad;d3a2), (6.88)
где а = 1 - п; А = adf; С = а(Лэк + d2 - 1); В = d2(2k3Kn - adj + adt{2 -
~k3K)-,D = d2(2k3K-a).
Зеркальная система хроматизма не вносит, поэтому мениск дол-
жен быть ахроматом. Из условия ахроматизации мениска (6.53) име-
ем
a3 =-d/a2/(l-d;a2).
Тогда, приравняв правые части уравнений (6.53) и (6.88), после пре-
образований получим кубическое уравнение относительно угла а2
a2[Adj + adfd2] + a2[Z>d] - Bdt - А] + a3[B -Cdj] + С = 0. (6.89)
В соответствии с изложенным выше предлагается следующий по-
рядок расчета:
1) а = 1 - п; 2)d2 = k3K - 8;
3)d; = 0,WnojI/fo6; 4) А = adf ;
5) В = d2(2k3Kn - ad,) + ad^2 - Аэк); 6) C = a(k3K + d2-l)’,
7) D = d2(2k3K - а); 8) Е = d;(A 4- dtd2);
9) F = Dd4-Bd4-A; 10)K = B-Cdr
11) уравнение (6.89) принимает вид:
Еа32 + Fa2 + Ка2 + С = 0, (6.90)
и его можно решать либо по формулам Кардана, (см. и. 6.6) либо ме-
тодом хорд и касательной. Так как /(а2) - Еа32 + Fa2 + Ка2 + С , то
f'(a2) = ЗЕа2 + 2Fa2 + К , затем следует вычислить
//'(а2)] = а2 и найти разность (а2- а2). Вычисления выполнять до тех
пор, пока (а2-а2) = 0,0000001;
12) a3^-dIa2/(l-dIa2y, 13) rv = hv(n'v -nv)/(n;a; -nvav),
где = f hv = hv_j - d^a^.
Выполним расчет системы типа Кассегрена с компенсатором Мак-
сутова в случае, когда радиус кривизны вторичного зеркала системы
не равен второму радиусу кривизны поверхности мениска (рис.
6.36, б). Если сферическая аберрация исправлена асферизацией глав-
ного зеркала, то расстояние d2 является коррекционным параметром
для минимизации меридиональной комы или астигматизма. Таким
образом можно получать системы либо апланатические, либо анастиг-
матические с не исправленной комой.
Примем нормировку для углов и высот первого вспомогательно-
го луча: aj = 0; а5 = 1; h1 = = 1. Для системы в воздухе п1 = п3 =
= n5= 1; п4 = -1; п2 = п. И если входной зрачок совпадает с оправой
компенсатора, то sp = 0 и толщина мениска d; = 0,lDMm (d4 = d i/f^-
Первоначально, полагая, что угол а3 = 0, выполним габаритный
и аберрационный расчеты системы типа Кассегрена по формулам, при-
веденным в п. 6.2, определив величины d3, а4, г3, г4. Найдем
S13ep = -0,25а3 + 0.25k3K(l - atyl - а4).
Далее выполним расчет мениска из совместного решения уравне-
ний ахроматизации мениска (6.53) и условия компенсации мениском
сферической аберрации зеркальной части объектива, а именно
а2 + (a3 - а2)(1 - d4a2) = 0;
о - \2 / \ (6-91)
а2а + (1 - d;a2)(a3 -а2) (а3п- а2)а = -Sl3ep,
где а = п/(1 - п)2.
Из совместного решения уравнений (6.53) и (6.91) после преобразо-
ваний получаем уравнение пятой степени относительно угла а2.
af - Ва2 + Са2 - Da2 + Е = 0, (6.92)
где В = (1 + n)/d;; С = S13ep/a; D = 2Sl3ep/(ad;); Е = SIaep/(adf ).
Из решения уравнения (6.92) находим значение угла а2, по фор-
муле (6.53) — значение угла а3.
Затем следует вычислить SIo6 = Р4 + + Л;гР3 + h4P4. Эта сумма
не будет равна нулю, так как при вычислении высоты h3 = h2 - d2a3
угол а3 уже не равен нулю. Чтобы компенсатор полностью компен-
сировал сферическую аберрацию зеркальной части объектива, необ-
ходимо, найдя значения углов а2 и а3, вычислить новое значение угла
а4 = -а3 + 2h3/r3, где h3 = h2 - 3а3. При расчетах расстоянием d2 зада-
ются, причем d2 > d3. Определить новое значение Sl3ep= h3P3 + h4P4 и
заново решить уравнение пятой степени (6.92) с учетом вновь полу-
ченного значения Sl3ep.
Пример 6.8. Выполнить параметрический синтез зеркально-линзового объектива
из одиночного зеркала и менискового компенсатора, если s; — f = -250, D/f‘rX = 1:5;
sp = 0. Мениск выполнен из стекла марки К8. Коррекция визуальная.
Решение. 1-й способ. Порядок расчета системы в соответствии с формулами (6.53),
(6.78) при нормировке а( — 0, а4 = -1, = 1:
1) d, - 0,lDm~ 0,1 52 = 5,2; d, = 0,02;
2)SIjep = 0,25;
3) a = n/(l - n)1 = 1,5183/(1 - 1,1583)» = 5,65203;
4) d'(n + /) = 0,02(1,5183 + 1) = 0,0503658;
5) djS^/a = 0,02» 0,25/5,65203 = 0,0000176;
6) 2d,S; sep/a = 2 0,02 0,25/5,65203 = 0,0017692;
7) SIapp/a = 0,25/5,65203 = 0,0442314;
8)0,0004af -0,0503658 a2 +0,0000176af -0,0017692a2 + 0,0442314 = 0;
9) af -125,914af + 0,044af - 4,423a2 + 110,578 = 0;
a2 =-0,975566; a2 =-0,0186702;
10) ht = 1; P, = aaf =-5,24782;
Лг = 2 - d2a2 = 1,01951; P2 = a(a2 - a2)»(na3 - a2) = 4,90218;
h, = h, - d.a, = 1,04195; P, = 0,25(1 + aW - a,) = 0,245247;
11)^=5^=0,255526;
12) a2 - 125,914af + 0,44972a| - 4,52077a2 + 133,023 = 0;
Йг - -0,980954; a3 = - 0,0188749;
13) h, - 1;
Л2= 1,01962;
Л3 = 1,04227;
Р, = -5,33525;
Р2 = 4,98199;
Р3 = 0,245194;
з
=-0,018066
I
Л,Р, =-5,33525
/1^=5,07974
Л/1,"» 0,255558
з
= 0,00005
I
14) г, = h,(n - /)/(ла2) = -86,9980
d, = 5,2
г2 = Л2(1 “ л)/(аа ~паг)ю -89,9125
</2= 300
г3 = -2hJ(l - а3) = -511,86
Значения остаточных аберраций, полученные в результате аберрационного анали-
за исходного варианта, приведены в табл. 6.14.
Таблица 6.14
т As'e А/, Т|, % Д«'гс-
17,67 0,012 -0,0008 0,013 0,00930
25,00 0,015 -0,0015 0,024 0,01162
2-й способ (при расчете этим способом используют формулы (6.79) и (6.80)). Зада-
димся значениями угла а2 и вычислим параметры Pt, Рг, Р3, определив первоначально
- dta,, угол a3 по формуле (6.53). Результаты расчета сведем в табл. 6.15.
Таблица 6.15
№ п/п «г “з Р, Л Р, Аз
1 -0,9 1,018 -0,0159135 -4,12037 3,86921 0,245959 0,737986 -17,596
2 -0,98 1,0196 -0,0188387 -5,31970 4,96779 0,252203 1,00928 -0,5478
3 -0,98096 1,01962 -0,0188752 -5,33535 4,98208 0,245193 1,05612 1,19364
4 -0,981 1,01962 -0,0188768 -5,33600 4,98267 0,245119 1,042649 1,21996
5 -0,982 1,0964 -0,0189149 -5^5234 4,99758 0,245183 1,046600 1,42533
Так как рекомендуемое расстояние </2 = (1,2...1,5) f то выбираем результаты рас-
чета, указанные в строке 3 табл. 6.15, и для этого варианта найдем конструктивные
параметры объектива
п. л, = 1
г = = -86,9975 </, = 5,2 л2= 1,5183
Г2 = = -89,843 ds =289,41 лз=1
гз" = -511,423 л2 = -1
К8
Значения остаточных аберраций, полученные в результате аберрационного анали-
за исходного варианта, приведены в табл. 6.16.
Таблица 6.16
т Да; Т). %
17,67 -0,0046 0,00033 0,0124 0,00178
25 -0,0192 0,00193 0,023 0,00376
Пример 6.9. Выполнить параметрический синтез зеркально-линзового объектива с
компенсатором Максутова, оптическая схема которого представлена на рис. 6.36, б, если
f'M = 400, D/fM = 1:4, 2ш = 3°, sp = 0, km = 0,35, 8 = O.lf^. Компенсатор выполнен из
стекла марки ТК16 (ле — 1,6152). Коррекция визуальная.
Решение. На основании изложенного выше н в соответствии с формулами (6.91) и
(6.92) предлагается следующий порядок расчета объектива:
1) ds = O.lP^/f^» 0,1 103/400 = 2,575 10 2;
2) ds - 8 - km = 0,1 - 0,35 = -0,25;
3)a4-(l-k.)4 = -2.6;
4) г3 = 2/at = 2/(-2,6) = -0,769231;
5) r4 = 2kJ(l + а<) - -0,43750;
6) конструктивные параметры зеркальной части объектива в предположении, что
а3= 0 при = 400, имеют значения:
гз =-.307,692 л3=1
d3 = -100 = —1
г< =-175,0 п5=1
7) Ра - -aj /4 = -(-2,6)3/4 = 4,394;
8) = a,/2 = -(-2,6)72 - 3,38;
9) Р4 = 0,25(1 - a4f(l + a4) = -5,185;
10) W4 - (1 - a j )/2 = -2,88;
11) Si14. = рг + “ 4>394 + 0,35(-5,185) = 2,5796;
12) примем расстояние > ds. Пусть d, = ds = 0,25.
Выполним расчет компенсатора:
13) a = n/(l - n)2 =1,6152/(1 - 1.6152)2 = 4,26770;
14)B = (1 + n)/d, = (l + l,6152)/(2,575 10 2)= 101,562;
15) C = Sl3ep/a = 2,5796/4,2677 - 0,604447;
16) D = 2Slnf/(adl) = 2-2,5796/(4,2677-2,575 10 2) = 46,9474;
17)£ = Sl3tp/(adf)= 2,5796/(4,26770 2,575210“) = 911,5999;
тогда уравнение пятой степени относительно угла а2 примет вид:
af-101,562a2 + 6,04447 10->a*_46,9477аг + 911,5999 = 0;
а2 =-1,76213;
18)
19) Л, = 1; Л2 = 1 ~d(a2 = 1,04537;
Л3 = Л2-с?2а3 = 1,06449;
h4-h3~d3a4- 0,41449;
20) при а3 = -7,64855-10-2 найдем
Sleep = лз-рз+А4-Р4 =4,67737-2,14875 = 2,5286;
21) заново пересчитаем коэффициенты уравнения (6.92): В =101, 562; С = 5,59346-10'1;
D — 43,4444; Ё = 843,580, тогда
аг =-1,727705; а3 = -7,358897-Ю2
22) для контроля правильности решения уравнения исправления сферической аберра-
v=4
цин в объективе рассчитаем параметры Pv по поверхности и найдем 8^ =
Р,--22,0091; Л,Р; =-22,0091
Р2 - 18,7862; Л2Р2 =19,62199
Р3= 4,2662; h3P3= 4,534497
Р4 = -5,184; ^ = -2,140399
S\PV= 0,006988
v=J
23) вычислим радиусы кривизны поверхностей исходного варианта объектива, предва-
рительно определив h4 = — d4l av:
n = 1
h, = 400 г, = -88,1821 d t = 10,3 n2" 1,6152 TK16
й2= 417,795 г,--94,5998 d2 = 100 n3~ 1
й3= 425,154 г, =-318,0401 d3- -100 n4^ -1
^=165,154 г4 = -206,443 П5 = 1
Результаты аберрационного анализа исходного варианта объектива приведены в табл.
6.17. Рассчитанный объектив имеет /'об= 399,999; s'F = 165,154.
Таблица 6.17
m As' e T), % As7-c-
0 0,0 0,00 0,00 -0,0001
35 0,438 0,039 0,094 -0,05
50 2,113 0,264 0,119 -0,132
Синтез объектива типа Кассегрена с линзой Манжена
в качестве компенсатора на вторичном зеркале
Расчет объектива (рис. 6.37, а) выполним при следующих усло-
виях нормировки для углов и высот первого и второго вспомогатель-
ных лучей: а; =0; а5 = 1; =
= f06=l;PI = l;y1=sP;l = -l.
При расчете компенсатор
принимаем бесконечно тон- ____
ким, а отражающую поверх-
ность зеркала заменим беско- -<г
нечной плоскостью (рис. 6.37,
б): -d2 = d3 = 0; h2= h3 = h4 =
= ftKoM* пз = ~n’ n4 = n- Для си-
стемы в воздухе n; = ns= 1,
n2 = -1. Конструктивные пара-
метры компенсатора найдем
из условия компенсации им
сферической аберрации зер-
кальной части объектива с
учетом того, что в линзе Ман-
жена г2 = г4.
Запишем условие исправ-
ления сферической аберрации в
объективе:
Рис. 6.37. Объектив типа Кассегрена с ком-
пенсатором в виде зеркала Манжена вмес-
то вторичного зеркала: а ) оптическая схе-
ма объектива; б) ход первого вспомога-
тельного луча
«Юб — — Р1 + ^ком(^2 + Р3 + Р4~)~ 0’
(6.93)
^ком = ^2 + ^3 + Р4 = — Р1 /^эк •
Так как г2 = г4, то согласно формуле (6.55) получим
а4 =а3+(1-аг)/п.
Найдем значения параметров Р2, Р3, Р4 и их сумму. После соответ-
ствующих преобразований выражения для указанных параметров
примут вид:
р2 = [га/ (га - *)2][аг«з + ъгаз + с2аз +
Р3 = (n/4)[a3af + b3af + c3a3 + d3];
P4 = [га/(ra - 2)2][a4a3 + b4a3 + C4a3 + d4^
(6.94)
где
а3 = -1; а3 = a4 = -V,
Ь3 = 5сх3; Ь3 = °; b4 — (1/п)(пЬ + 3t);
с3 = -аа|; с3 = 2t2/n2; с4 = ~(п2а + 2ntb + 3t2)/n2;
d2 = па2; d3 = ~t3/n3; d4 = + an2t + Ьп*2 + *3)/га3>
здесь а = 2п 4-1\ Ь = п 4- 2\ / = а3 - /.
v-4
Найдем сумму параметров ^Pv и запишем условие компенсации
v=2
аберраций (6.93). После соответствующих преобразований получим
af + Baf + Ca3 + D = 0, (6.95)
где
B = --^-[bn(a2 +
C = -y an2(l + (
2n2 v
2) + 2nbt + t2 3 —
2
Г
2
na2 + ~з(п4 + an2t + bnt2 + £3)
(п -(t3 !
Sn2 n Лэк ,
Кубическое уравнение решаем по формулам Кардана (см. п. 6.6),
находим угол а3 и по формуле (6.55) вычисляем угол а4, а затем и ра-
диусы бесконечно тонкой линзы компенсатора. Затем переходим к
радиусам линз конечной толщины (см. п. 6.6).
Пример 6.10. Выполнить параметрический синтез зеркально-линзового объектива
типа Кассегрена с компенсатором в виде линзы Манжена на вторичном зеркале, если
s, = -о», — 350 мм, D/f'M = 1:4, Аак = 0,38, 5 = 0,1 Объектив работает в монохромати-
ческом свете = 2 мкм). Компенсатор выполнен из CaF2 (пХ/> = 1,4239). Входной зрачок
совпадает с оправой главного зеркала (см. рис. 6.37).
Решение. Приведем последовательность параметрического синтеза объектива:
1) </, = 8 - Лэк = 0,1 - 0,38 = - 0,28; 2) a2 - (1 - km)/dI = -2,21429;
3) г, = 2/аг =2/(-2,21429) = -0,903224; 4) гг = 2kJ(l + а2) = - 0,62588;
5) конструктивные параметры зеркальной системы из двух зеркал при = 350 мм:
г, = -316,128 п, = 1
</, = -98 пг = -1
г, = -216,058 п3 = 1
6) Р, - -<4/4 - -(-2,21429)74 - 2,7142;
7) Р2 - (1 - а2У(1 + а2)/4 - (1 + 2,21429)2[1 + (-2,21429)1/4 = -3,1364;
8) Sl3ep = Р, + knP2 =2,7142 + O,38(-3,1364) = 1,52236;
9) VF, = af /2 = (-2,21429)z/2 = 2,451; W2=(l- af)/2 =-1,951;
10) yt = 0,y2 = dI = -0,28, тогда Sa^ = + W, + W2 = 1,3782;
11) выполним расчет компенсатора. Предлагается следующий порядок расчета.
t = а2 - 1 = -3,21429; Ь = п + 2 = 3,42388; а = 2п + 1 = 3,84776;
В = -0,5[b(a2 + 1) + 3t/n] = 5,4691;
С = ^1Д2л2ЭДал2(а|+ 1)+ 2nt& + 3i2]-Jt2(n ~/)2Д4л2 = 11,0427;
1> = -0,5^ла| + (л4 + an2t + bnt2 + 13)/л3]+(л-1)2(т3/л + а2лДэк)/(£л2)= 7,67934;
12) af + 5,46491a2 +11,0427a3 + 7,67934 = 0;
a3 =-1,52649;
13) a4 - a3 + (1 - a2)/n = 0,730926;
14) контроль решения уравнения нсправления сферической аберрации: вычисляем Р2 —
= -2,7142, Р, - -6,0973, Р, - -1,44315, Р4 - 0,397589, тогда S, - Р, + h (Р, + Р, + Р „) -
л а <1 зер 1 ком ' 1а 3 4'
= -0,00008;
15) определение радиусов бесконечно тонкой линзы компенсатора:
7тв = ~ лком(п + *)/(аг ~ л«з) = 3,95260;
гзтв ~ ЗЛком/(а4 + “з)= -0,955297;
7тв = Лкоы(1-«)/(/-««<)= 3,95260;
16) -d2 = 0,1 Dmii = -4,5; тогда d3 = ~d2 = 4,5;
17) /'„« = 350;
Л2 = Л, - dta2 = 132,999; r2 = r2nh2/h^ = 1383,40;
h3 = h2 - d2a3 = 126,129; r3 = r3nh3/hmM = -317,083;
\ = Л, - d3at = 122,839; r4 = r4r,ht/h^ = 1277,73.
Так как IP21 > IP41, то примем согласно рекомендации (см. п. 6.6) г4 — г2 я получим
исходный вариант объектива с f л = 348,912 и следующими конструктивными парамет-
рами: ni = 1
г, = -316,128 dj = = -98 n2 = -1
г2 = 1383,399 --4,5 лз = -1,4239 CaF2
г3 = -317,083 d3 = = 4,5 n4 = 1,4239 CaF2
г4= 1383,399
л« = 1
Найдем коэффициент масштабирования у= 350/348,912 = 1,003. После масштаби-
рования получим:
= 1
г, =-317,112
d, =-98,3 г = 1387,704 п2 = -1
d2 = -4,5 г =-318,069 п3 =-1,4239 CaF.
ds = 4,5 г4= 1387,704 п4 = 1,4239 CaF. Л5=1
Рассчитанный объектив имеет f'^ = 350,1; s'F = 122,922. Результаты аберрацион-
ного анализа исходного варианта приведены в табл 6.18.
Таблица 6.18
т Остаточные аберрации системы
двухзеркальной зеркально-линзовой с компенсатором
Д<п ДЛо Д*Ло h, %
0 0 0 0 0 0
21,90 -1,043 -0,148 -0,010 -0,0006 0,278
30,97 -2,049 -0,292 -0,013 -0,0012 0,549
37,93 -3,091 -0,439 -0,010 -0,0010 0,811
43,80 -4,170 -0,594 0,001 0,0001 1,065
6.6. Параметрический синтез линзовых систем с
отражающей поверхностью
Синтез зеркала Манжена
Как известно, зеркало Манжена (рис. 6.38) представляет собой
линзу-мениск, выпуклая поверхность которой покрыта отражающим
слоем. Такую систему можно считать состоящей из трех поверхнос-
Рис. 6.38. Зеркало Ман-
жена:
а ) предмет в бесконечно-
сти; б) предмет располо-
жен на конечном расстоя-
нии
5)
тей: первой преломляющей, второй отражающей и третьей преломля-
ющей, идентичной физически первой, т.е. их радиусы г3 = гг К лин-
зовым системам, содержащим отражающие поверхности, можно при-
менить все формулы, выведенные для преломляющих поверхностей,
с учетом того, что при каждом отражении происходит перемена зна-
ка показателя преломления следующей за отражающей поверхностью
среды. И кроме того, если свет после нечетного числа отражений дви-
жется справа налево, то толщину соответствующей среды следует счи-
тать отрицательной.
Поверхности мениска сферические, а исправление сферической
аберрации в линзовом отражателе возможно только за счет взаимной
компенсации сферических аберраций отражающей и преломляющей
поверхностей. Хроматические аберрации в зеркале Манжена, свой-
ственные его краевым зонам, не устранены.
Использовать зеркало можно в качестве конденсора (см. рис.
5.14), компенсатора монохроматических аберраций (см. п. 6.5) в зер-
кальных системах, как самостоятельный объектив. Применять зерка-
ла Манжена в прожекторных системах вместо параболоидных отра-
жателей при мощных источниках нецелесообразно, так как основной
недостаток мениска — большая толщина его у края при малой тол-
щине в центральной части. В начале работы прожектора его централь-
ная часть быстро нагревается, в то время как его толстые края про-
греваются значительно медленнее. Вследствие этого в стекле отража-
теля возникают сильные внутренние напряжения, которые при мно-
гократном повторении нагрева и охлаждения приводят к «усталости»
материала, зеркало дает трещины и разваливается на куски. Это ос-
новной и важнейший недостаток зеркала Манжена.
Выполним параметрический синтез зеркала из условия исправле-
ния в нем сферической аберрации с учетом конструктивной особен-
ности (г3 = г2).
Примем мениск бесконечно тонким —d2 = 0; Л;= h2 — h3 = h)
и для системы в воздухе запишем nt = 1, п2= п, п3 = —п, п4 = — 1. Из
условия rs = г3 была найдена связь между углами а2 и а3 [см. форму-
лу (6.55)]:
а3 = а2 + (а4 -а;)/п.
Запишем условие исправления сферической аберрации в зеркале
Манжена
v=3 v=3
St = £ hvPv = h£Pv = hPOTp = 0. (6.96)
v=Z v=Z
(6.96")
Вычислим параметры Pt, Рг, Р3 на каждой поверхности по фор-
мулам (6.56) с учетом (6.55) и условий нормировки для углов и высот
первого вспомогательного луча. После преобразований получим:
Для предмета в бесконечности (рис. 6.38, а), когда а; = 0, а4 = +1,
h = f „6 = -1 и а3 = а2 + 1 /п,
4=3
Ротр = £ Л = (« - 2) р~/(2л)= а’ + Ааг2 + Ва2+С = 0, (6.96')
V=I
где
А = 0,5[3/п - (и + 2)];
В = 1,25/п.2 - 1,5п + п-0,75; (6.97)
С = 0,375/п3 - 0,75/п2 - 0,5п - 0,125/п +1.
Для предмета на конечном расстоянии (рис. 6.38, 0), когда
сс^ — а4 = 1, h — и а3 ctg + (р$ + 1)/п,
v=3
Ротр = У ftvpv = «2 + Ааг + Ва2 + С,
v=;
где
А = 0,5 [(и + 2)(р0 -1) + 3(р0 + 2)/п];
В = (1 + 2п)Ро /п - (р0 + JXn + 2)/п +
+ [з - 0,5(п - I)2](р0 + 7)2/(2п2) + п + 0,5;
С = 0,5 {[/ - (р0 + 1)/п]2[(р0 + 1)/п - п]-
- 0,25(п- 2)2(р0 + 1)3/п3 + пр2}.
Из решения кубического уравнения (6.96') или (6.96") определим
одно действительное значение корня (угол а2), а затем найдем угол а3
и вычислим радиусы тонкой линзы Манжена.
Уравнение третьей степени можно решить либо методом хорд и
касательной (см. п. 6.5), либо по формулам Кардана. Для этого вве-
дем новую переменную у = а2 + А/3, тогда уравнение (6.96') или (6.96")
примет вид:
y3+3pi/ + 2q = 0,
(6.98)
где Зр = В - (1 /3)А2; 2q = 2А3/27 - АВ/3 + С, тогда у = и + v, где
и = + v = ^-q- Jtf+p2 и а2 = у-А/3.
По найденным значениям углов а2 и а3 вычислим радиусы бесконеч-
но тонкой линзы Манжена:
rt = h(n - J)/(na2 - a,),'
r2 = 2h/(a3 + a2);
r3 = й(п - 2)/(na3 - a;).
Определим толщину мениска dt = 0.1DaoJl и высоты hv на поверх-
ностях с учетом толщины линзы.
При переходе к радиусам линзы конечной толщины окажется, что
Л3 h2, и поэтому г, г3. Чтобы правильно выбрать значение радиуса
кривизны первой поверхности линзы, необходимо вычислить парамет-
ры Pv на каждой поверхности мениска, и если окажется, что
I Pt | > IР3 I, то r3 = rv а если IР31 > I Pt I, то г; = г3.
Но тогда:
1. При s; = -о® фокусное расстояние рассчитанной системы не бу-
дет совпадать с заданным значением, т.е. Го6 зад * f'o6 расч. Чтобы полу-
чить заданное значение фокусного расстояния, необходимо найти ко-
эффициент масштабирования у, и все значения радиусов кривизны и
осевых толщин умножить на этот коэффициент.
2. При st -оо увеличение рассчитанной системы не будет совпа-
дать с заданным, т.е. Р0зад * Ро расч. Чтобы сохранить заданным увели-
чение Ро и оптическую силу отражателя Фотр, необходимо по заданно-
му отрезку at определить отрезок s; = at + sH, найти й; = s;a; = -8;|3О
и высоты на поверхностях мениска, вычислить rv тн, сравнить парамет-
ры | Р J и | Р3 |, определить Фотр = (2п - 1) (р, - р2) - 2pt и, сохраняя
Ро зад и ФОтр’ пересчитать радиусы кривизны и толщину мениска.
Если линза Манжена работает как конденсор (коллиматор, про-
жектор), то для устранения вредного влияния переднего рефлекса сле-
дует положить, что r3 = -1. В этом случае луч, идущий от точки ис-
точника на оси и отраженный от передней поверхности мениска, вновь
возвратится в осевую точку источника, тогда при нормировке й; =
= f = l,at = 0, а4 ~ -1 и при условии, что rt = г3 = й;(п - l)/(na3+ 1) =
= -1, найдем углы а3 = -1 и а2 = (1 - п)/п. Уравнение исправления сфе-
рической аберрации в этом случае примет вид [25]:
v=3
Ротр = Х^ = (2п-3)/(4п2) = 0,
V=I
из решения которого найдем, что п = 3/2 = 1,5.
Таким образом, получено практически удобное значение показа-
теля преломления стекла, из которого должна быть изготовлена лин-
за Манжена. При п = 1,5 углы а3 и а2 и радиусы кривизн^ будут иметь
следующие значения а3 = -1; а2 = (1 - 1,5)/1,5 = -1/3; r;= r3 = -1;
г2 = 2Л/(а3 + а2) = 2Л/[-1 + (-1/3)] = -1,5.
Практически показатель преломления п несколько отличается от
значения п = 1,5. Обозначим 1/п = т и положим, что т = 2/3 + Лиг,
считая приращение Дпг настолько малым, чтобы можно было прене-
бречь всеми степенями этой величины, выше первой. Кроме того, при-
мем а3 = -1 + Да3, тогда а2 = т - 1 = -1 + 2/3 + Дт = -1/3 + Дт, в то
же время а2 = а3+ 1/п = -1 + Да3+ 2/3+ Дт = -1/3 + Дт + Да3.
Подставим значения углов а2 и а3 в уравнение (6.96) для ис-
правления сферической аберрации и после преобразований получим
Да3 = (-3/10)Дт, тогда а2 = -1/3 + (7/10)Дт; а3 = -1 - (3/10)Дт.
Радиусы кривизны линзы Манжена будут равны: rt = r3 = -1 -
- (9/10)Дт; г2 = -3/2 - (9/20)Дт, или, так как Дт = Д(1/п) = -Дп/п2 =
= -(4/9)Дп = -(4/9) (п - 3/2), то а2 = 2/15 - (14/45) п; а3 = -6/5 +
+ (2/15)п; г, = г3 = -8/5 + (2/5)п; г2 = -9/5 + (1/5)п.
Таким образом, получены простые формулы для расчета зеркала
Манжена. Однако при их использовании необходимо помнить, что по-
казатель преломления стекла должен мало отличаться от значения,
равного 1,5 [25].
Выполним анализ основных параметров Р°°, W°° зеркала Манже-
на и сравним их с основными параметрами одиночной линзы.
Основные параметры зеркала Манжена при нормировке а; = О,
а4 = 1 имеют вид:
P°°k = а2 + Аа2 + Ва2 + С; k=-~——;
2п
W°° = -а2(1 + т)-0,5т2 + 1; (6.99)
л = 2(1 + т)а2 + т2; (6.100)
С = (l-m-2a2)/v. (6.101)
Сравнительный анализ приведенных формул для параметров Р°°,
W°°, С зеркала Манжена и одиночной линзы [12] показывает следу-
ющее.
1. Уравнение Р°° = f{ct2^ для зеркала Манжена является парабо-
лой третьей степени с точкой перегиба. Решение этого уравнения име-
ет один действительный корень, следовательно, сферическая аберра-
ция может быть исправлена.
Для одиночной линзы Р°° = f(oc2 )> и поэтому ее можно рассчитать
только на минимум сферической аберрации.
2. Основные параметры л и W°° для зеркала Манжена связаны ли-
нейной зависимостью л = 2(1 - W), кроме того л = Да2), и поэтому
изменением а2 можно исправить кривизну поля, в то время как для
линзы в воздухе л = 1 /п. ~ 0,7.
3. Параметр С, характеризующий хроматические аберрации, со-
гласно формуле (6.101) для зеркала Манжена является также функ-
цией угла ос2, поэтому, если положить С — 0, то п - 1 - 2агп = Ои а2 =
= (п - 1)/(2п); а3 = а2 + т = (п + 1)/(2п), тогда rt = -2; г2 = -2, Р°° «=
= 0,25; W°° = 0,5; л = 1 и линза Манжена превращается в сферическое
зеркало с внутренним покрытием. Для одиночной линзы С = —Ijv # 0
и поэтому исправить хроматизм в ней нельзя.
4. Для линзы Манжена, изготовленной из стекол распространен-
ных марок, кривизна поверхности р, = 1 /гр найденная из условия ис-
правления сферической аберрации, равна р; = 0,93...1,01, а кривиз-
на, найденная из уравнения W°° = 0 (л = 2), равна р; = -0,41...0,24.
Синтез двухлинзовых компонентов-отражателей
Компонентом-отражателем назовем линзовую оптическую систе-
му, последняя поверхность которой покрыта отражающим слоем,
вследствие чего свет, отраженный от этой поверхности, снова прохо-
дит через всю систему в обратном направлении. В отличие от линзы
Манжена, имеющей только один коррекционный параметр — угол а2,
двухлинзовые компоненты-отражатели имеют уже два коррекцион-
ных параметра, что дает возможность исправить две аберрации — сфе-
рическую и хроматизм положения, если компонент используется как
самостоятельный объектив, или компенсировать две аберрации, если
использовать его в качестве компенсатора.
Если компонент-отражатель использовать одновременно и как
одно из зеркал в двухзеркальной системе, и как компенсатор, то им
можно исправить кому, хроматизм, сферическую аберрацию и кри-
визну поля.
При удачном выборе марок стекла в склеенном компоненте-отра-
жателе можно получать практически любые значения основных па-
раметров Р°°, W°°, л, С.
Двухлинзовые компоненты-отражатели применяют либо самосто-
ятельно как объективы, либо в виде компонентов объективов зритель-
ных труб, астрономических объективов, объективов микроскопов,
репродукционных и проекционных объективов. Их использование
позволяет сократить размеры оптической системы и получить свето-
сильные системы (D/f = 1:1... 1:0,7 при f = 10). Возможность хоро-
шей коррекции сферической аберрации в широком диапазоне длин
волн спектра учитывается при использовании таких компонентов в
объективах микроскопов, работающих в УФ-области спектра (А =
= п | sin стА I = 0,85 при Ро ~ 60х).
Однако наряду с преимуществами компонент-отражатель имеет
и недостатки — экранирование, малое поле, технологические трудно-
сти изготовления, сборки и юстировки, высокую чувствительность к
внешним воздействиям.
Выполним синтез трех конструкций компонентов-отражателей,
используемых в качестве объективов, при различных положениях
предмета.
Объектив-отражатель, склеенный из двух линз (рис. 6.39). Сле-
дует отметить, что после каждого отражения света показатели пре-
ломления и толщины меняют знак. Все остальные величины при этом
знак не меняют, т.е. п. = 1, п,= -п„, и. = -п„, пй = -1, d., = -d„ d. =
1*4 а* О Z* о * о 2* 4
= ~dt.
Рис. 6.39. Оптическая схема
склеенного объектива-отра-
жателя для предмета, распо-
ложенного:
а) в бесконечности; б) на
конечном расстоянии
Примем компонент бесконечно тонким (d; = d2 = -d3 = -d3 = 0,
ht = h2 ' h3 = h4= h) и зададимся следующими условиями нормировки
для двух случаев:
1) если st = -оо, а; = 0, а6 = 1, h = = -1;
2) если st -оо, at = -0О, а6 = 1, Л = atat = -а;0о.
Найдем конструктивные параметры компонента-отражателя из
условия исправления в нем хроматизма положения <St хр = 0 и сфери-
ческой аберрации (St = 0). Однако при расчете данной системы кроме
условий коррекции аберраций необходимо принять во внимание еще
и чисто конструктивные условия. Таких условий два: r4 = r2; r5 = гt.
Если эти условия не будут выполнены, то система будет практически
неосуществимой. Найдем из конструктивных особенностей компо-
нента зависимость между углами а5 =/(а2) и а4 = /(а3).
Так как компонент склеенный, то а3 = (n3 — n2)Q/(n2n3) + а2, и
если значение угла а3 =/(а2, Q) подставить в выражение для опти-
ческой силы тонкой линзы компонента Ф; = (п2 - 1) (р; - р2), то после
преобразований получим:
а2 = Ф/ + at + Q(1 - 1/п2); (6.102)
а3 = Ф, + а, + Q(1 - 1/п3)-, (6.103)
где Q — инвариант Аббе поверхности склейки; т2 = 1/п2, т3 = 1/п3.
Из условия равенства г; = г5 и г2 = г4 найдем соответственно
“з = а2-(а,-а6)т2; (6.104)
а4 = а3 - (а, - ав)т3. (6.105)
После подстановки в (6.104) и (6.105) значений углов а2 и а3 из (6.102)
и (6.103) получим: а, = Ф, + а, + Q(l-m2); 2 1 1 К ’ (6.106) а3 ~ Ф1 + ос, + Q(1 - т3);
а4 = Ф;+ а;+ Q(1-т3)-(а; - а6)т3;
а5 = Ф; + а, + Q(1 - т2)~ (а, - а6)т2.
Запишем условия исправления аберраций:
v=5 v=5
SIXp = X hvCv = h^Cv = hC0TV = 0 , T.e. Corp = 0;
v=l v=I
v=5 v=5
Sj = X hvpv = ftX pv = ЛРотр = 0 , T.e. P0Tp = 0.
V=I V=1
С учетом (6.106) выражения для Сотр и Ротр после преобразований при-
мут вид:
Сотр = -2An3m3Q- (a; - а6)Лп3т3 - 2Ф,/у;; (6.107)
Ротр = AQ3+ BQ2+ DQ + E, (6.108)
где
А - 2т3(1- т3);
В = 2Фг(2тг + т3) + (а} - а6)т3(2- Зт3)+ 2m3aj - (а2 + ае);
D = 6тп2Ф?/(1 - т2)+ 2(а1 - ае)Ф;(2т2 + ти3)- 2Ф,(а, + ае) +
+ (а, - ае)2тп3(0,5- 2,5т3)+ 2(at - а6)(а;т3 - ае);
Е = -0,75(а, - аб)3т2 - а1ае[тп3(а, - 0,5ае)+ а, - 2ае] +
+ 0,5т3а3 - а3 + (а, - ав)2Ф1(2т2 + 0,5т3)~ 2(at - ав)аеФ, +
+ 2Ф|тп2/(1 - т2)2 -1/(1 - т2){ф;2 [(а7 + ае)- 3(а7 - а6)т2]}.
Решая совместно уравнения (6.107) и (6.108), получают кубичес-
кое уравнение относительно инварианта склейки Q (или Ф;). Из реше-
ния этого уравнения находят единственный действительный корень
(значение Q), затем по формулам (6.107) вычисляют Ф; =
= -An3m3vt[Q + (а, - ае)/2] и по формулам (6.106) определяют av, а
затем и значения rv га.
Переход к радиусам линз конечной толщины изложен в п. 6.6.
Объектив-отражатель из двух несклеениых линз (рис. 6.40). Ком-
понент имеет три коррекционных параметра (а2, а3, а4), и в нем мож-
но исправить три аберрации: хроматизм положения, сферическую
аберрацию и меридиональную кому (S, хр = 0, S, = 0, Su = 0). Если вход-
ной зрачок совпадает с оправой компонента, то условия исправления
указанных аберраций запишутся в виде Со6 = 0, Ро6 = 0, Wo6 = 0. Най-
дем выражения для параметров Со6, Ро6, Wo6. Так как по условию ра-
боты объектива г; = г7, г2 = гб, г3 = г5, то эти конструктивные особен-
ности накладывают определенные связи на углы (\, а именно:
если г; = г7, то а7 = а2 - (а; - а3)т2;
если г2 = гв, то ае = а3 - (at - а3); (6.110)
если г3 = т5, то а5 = а4 - (а1 - а.8)т4,
Рис. 6.40. Оптическая схема несклеенного компонента-отражателя для
предмета, расположенного:
а) в бесконечности; б? на конечном расстоянии
Для тонкого компонента dt = d2 = d3 = -d4 = -d5 = -d6 = 0, ht =
= h2 = h3 = h4 = hs = he = h7 = h. Для системы в воздухе n; = п3 = 1,
п5 = —п4, п7 = —п2, п6 = п8 = —1, и выражения для параметров Со6, Р^,
Wo6 с учетом (6.110) можно представить в общем виде:
Со6 =a3(2/v2-2/v1)-2a4/v2 + (as-a1)An4/n4 + 2a;/v1; (6.111)
wo6 = a3(a; -а8/т2-т4')+а.4(а1 -as)(m4 + 1)+
+ a|(l-0,5т4^ + (af -2а4а8)(т2 -0,5т4^+ (6.112)
+ [af (1- т32) + ajas(2mf - т2г - т2^/(т2 - 1);
Роб = Аа2 + Ва2 + С, (6.113)
где
А = 2(а3 - a2)(2ni2 +1);
В = (2 + т2)(а$ - 2а3 + af) + (a2 - as)2(4mf + т2 - 2) +
+ 2а8т2(а.1 - as)(l+ 2m2)+ 4a3(a; - as)(l- mf);
С - 2а3 -а3 -а8 + (<*, -а8)3(2т2 - 2т3г - 1)- а3(а, - а8)(2 + m2)m2 -
-a8(at~a8)2m2(2m2 + l)+af(at-a8)(m2-l\in2 + 3')+
+ а3(а1~а8)г(1-т2)2(2т2 + 3) + [(ш2 - 1)/(т4 -1)]2 х
х [2а4т4 - 2а3 + а3[(а; - а8)(1 - т.4)(3т4 +1)-2а3(2т4 + 1)] +
+ а4^2а3(т4 + 2)+ 4a3(at - а8^т4 -1) + (а, - а8)2(тп4 -1)2 х
+ (3т4 + 2)] + а3(а1 - as)(J - т4)(т4 + 3)-а3(а2 -а8)2(т4 -1)г х
х(2т4 + 3)+ (а2 - а8)2(т4 -1)2(1- m*)}-(т2 -1)2 х
х [о,5(а; - а3)2а4ш4 - 0,25(а1 - а8)3 т4 ]- Ро6(т2 -1)2.
Возможны два случая работы компонента: st = —°°; st * — и в за-
висимости от положения предмета принимают следующие условия
нормировки:
если st = -оо, то се2 - 0, а8 = 1;
если Sj -оо, то а2 = ~Р0, as = 1.
Решая совместно уравнения (6.111)—(6.113) для принятых усло-
вий нормировки находят углы а2, а3, а4, а затем по формулам (6.110)
определяют углы as, а6, а7. По значениям вычисляют радиусы бес-
конечно тонких линз компонента и переходят к радиусам линз конеч-
ной толщины (см. п. 6.6).
Если в двухлинзовом несклеенном объективе-отражателе в слу-
чае, когда st = -оо, обе линзы изготовлены из стекла одной марки
(п2 = п4 = п, п5 = п7 = —п), то этот объектив-отражатель будет
апохроматом.. В таком объективе имеются два коррекционных пара-
метра а2 и а3, причем параметр а2 используется для выбора системы,
наиболее выгодной в конструктивном и технологическом отношении,
а параметр а3 — для исправления сферической аберрации. Практичес-
кий расчет показал, что линзы объектива имеют наиболее благопри-
ятную форму при условии а2 = 0. При этом первая поверхность ста-
новится плоской.
Рис. 6.41. Оптическая схема компо-
нента-отражателя, эквивалентного
параболоидному зеркалу
Объектив-отражатель из двух несклеенных линз с первой плос-
кой поверхностью, эквивалентный параболоидному зеркалу (рис.
6.41). Линзы объектива изготовлены
из стекла одной марки, т.е.
п2 = п4 = п, п5 = п7 = —п, и для систе-
мы в воздухе п6 = п8 = -1, п2 =
= п3 — 1.
Так как rt = г7 = то в случае
предмета в бесконечности а; = а2 =
= 0 и из условия ахроматизации
Sj хр = О, принимая по нормировке
as = -1, найдем угол а4:
Сов = [Дп/(т - 1)][2а4 - (т +1)] = 0;
а4 = (т-1')/2. (6.114)
Подставив значение угла а4 в урав-
нение (6.112), после преобразований получим W“6 = 0,5; так как
г4 = -2, то при условии исправления сферической аберрации объек-
тив по своим аберрационным свойствам становится эквивалентным
параболоидному зеркалу. Для него также л = — 1.
Из конструктивных особенностей объектива (г2 = г7 = г2 = г6,
г3 = г5) найдем зависимость между углами:
а5 = а4 -т = -0,5(тп +1);
ae = a3-l; a7 = -m.
(6.115)
Тогда выражение для Р^ (5.113) с учетом нормировки и формул
(5.114), (5.115) после преобразований можно представить в следую-
щем виде:
Р£ =
4а3(т2 +т- 2} + 2а3^2т3 -т2 - 4т+з) + т2 - 2т+1
4(1—т)2
(6.116)
Из решения квадратного уравнения (6.116) относительно угла а3 оп-
ределяют два значения угла а3. Затем по формуле (6.114) вычисляют
угол а4, по (6.115) определяют а5, ае, а7 и рассчитывают радиусы бес-
конечно тонких линз объектива:
г; = г7=оо;
г2 = ^ = -(п-1)/а3;
г3 = г5 = - 2(п - Г)/(п -1 + 2а3);
г4 = -2.
Интересно отметить, что, если с четвертой поверхности объектива
снять отражающий слой, превратив ее из отражающей поверхности в
преломляющую, то луч AjA2 (см. рис. 6.41) выйдет из объектива па-
раллельно оптической оси, т.е. система окажется афокальной.
Пример 6.12. Выполнить параметрический синтез апохроматического объектива-
отражателя из двух несклеенных лииз с первой плоской поверхностью, если = -200,
= 1:2, 2а> = 2°, входной зрачок совмещен с оправой отражателя. Линзы выполнены
из стекла марки К8, спектральный диапазон F', е. С’ (nt= 1,5183).
Решение. Предлагается следующий порядок синтеза объектива:
l)zn = 1/п = 0,65864;
2) А = 4(тг + т — 2) = -3,63024;
3)B = 2(2zn3-zn*-4zn + 3) = 1,00615;
4)D = m! — 2m + 1 -0,11653;
5) уравнение (6.116) примет вид:
3,63024а23 -1,00615а3 -0,11653 = 0.
Из двух значений корня выберем меньшее по абсолютной величине, т.е. а3 = -0,0879253;
6) а4 = 0,5(т - 1) = -0,17068; а5 = - 0,5(т + 1) = -0,82923; ав = а3 - 1 = -1,08792;
7) контроль решения аберрационных уравнений
Р, = 0 TF, = O
Р2 =-0,00583 W2= 0,022647
Р3 =-0,00144 W3 = -0,0059372
Р4 = 0,164659 W\ = 0,329318
Р3 = 0,31091 VT5 = 0,41038
Р3 =-1,03449 W„ = -0,822605
Р7= 0,566196 W7 = 0,566196
£PV = 0,000009 2WV - 0,499999
8) найдем радиусы кривизны поверхностей тонкой системы: г, = г7 = гг = гв = -(п -1 )/а3=
= 1178,993; г4 = -2 = -400; r3 = r5 = -2(п -1 )/(п - 1 + 2а3) = -605,428;
9) определим световой и полный диаметры линз объектива: Da ~ 100; Dn(>jt = 103, тогда
d, = 10,3; d3 = 3,82; d3 =10,3;
10) вычислим радиусы линз конечной толщины, определив высоты первого вспомога-
тельного луча:
А, = 200 = h2 Л3= 200,366 г, -~ dt = 10,3 d3 = 3,82
г2= 1178,932
Л4 = 202,094 Л5= 193,552 he = 189,396 й7 = 182,612 г3 =-606,437 г, = -404,188 г5 = -585,901 г6= 1116,425 Г7 = оо d3 = 10,3 d„ = -10,3 d5= -3,82 de = —10,3
И так как 1 Ре 1' > 1Р21, то гг = re, 1 Р51: > 1 P3 1, to r3 = rs;
11) конструктивные параметры исходного варианта: = ОО d, = 10,3 г, = 1178,932 d3=3,82 г3 =-606,437 d3 = 10,3 г, = -404,188 d4 = -10,3 г5 =-606,437 d5 = -3,82 г5= 1178,932 d6 = -10,3 rz = “
/'^ = -197,922
Найдем коэффициент масштабирования у= 200/197,922 = 1,0105. После масшта-
бирования получаем следующие конструктивные параметры исходного варианта (ради-
усы приведены по ГОСТ 1807—75): n7 = 1
Г; = оо d, = 10,4 n2= 1,5183 K8
r2= 1191,2 d2 = 4,0 пз= 1
r3 =-612,4 d3 = 10,4 n4 = 1,5183 K8
r„ = -408,4 d4 = -10,4 n5 = -l,5183 K8
r5 = -612,4 d5 = -4,0 n6 = ~1
1191,2 d„ = -10,4 n7= -1,5183 K8
r7 = =o n =-l
В результате аберрационного анализа получены следующие значения остаточных
аберраций:
zn = 50; As'e = -0,05; Д/е =-0,014; г; = 0,4% ;
zn = 35,4; As'rс= -0,03; т] = 0,4%.
Глава 7. РАСЧЕТ ОПТИЧЕСКИХ СИСТЕМ
С АСФЕРИЧЕСКИМИ ПОВЕРХНОСТЯМИ
7.1. Применение асферических поверхностей
в оптических системах
Применение асферических поверхностей (АП) позволяет улуч-
шить качество изображения, повысить оптические характеристики
систем, упростить их конструкцию, уменьшить габаритные размеры
и массу.
Преимущества АП по сравнению со сферическими поверхностя-
ми объясняются их большими коррекционными возможностями. Если
сферическая поверхность имеет один свободный параметр — радиус
кривизны, то АП в общем случае имеет множество параметров, опре-
деляемых коэффициентами уравнения профиля. Так, наиболее широ-
ко применяемые поверхности конических сечений — эллипсоиды,
параболоиды, гиперболоиды — имеют два свободных параметра — ра-
диус кривизны при вершине и эксцентриситет.
Однако АП, известные со времен Декарта, до сих пор находят ог-
раниченное применение. Основными причинами этого являются тех-
нологические трудности их изготовления и контроля и, следова-
тельно, высокая стоимость.
В настоящее время АП применяют только в тех случаях, когда без
них невозможно обойтись или когда их применение дает существен-
ные преимущества по сравнению с системами из сферических повер-
хностей. Рассмотрим эти случаи.
Без асферики невозможно создать оптические системы приборов
для рентгеновской области спектра, где лучи отражаются от оптичес-
ких поверхностей лишь при углах падения, близких к 90°. Это при-
водит к необходимости разработки внеосевых (децентрированных)
систем.
Синтез систем с повышенными оптическими характеристиками
часто с дифракционным разрешением, имеющих малые размеры и
массу, становится невозможным без применения АП. Такие системы
прежде всего необходимы для космической и астрономической опти-
ки.
Особое значение приобретают АП в инфракрасной области спек-
тра, когда оптические системы должны быть компактными, свето-
сильными вследствие малой интенсивности излучения объектов и низ-
кой чувствительности приемников, а также отвечать требованиям к
аберрациям в широкой области спектра. В таких случаях чаще всего
применяются зеркально-линзовые системы, но иногда используются
и простые линзовые конструкции с асферикой. Применение линзовых
систем ограничивается недостаточным количеством прозрачных в ин-
фракрасной области материалов и их высокой стоимостью.
При введении АП значительно упрощается конструкция освети-
тельных систем, к качеству изготовления которых предъявляются в
основном невысокие требования. Кроме того, это позволяет решить
проблемы, неразрешимые при использовании сферических поверхнос-
тей.
Широко известно использование цилиндрических и торических
поверхностей в очковой оптике, цилиндрической оптики — в анамор-
фотных системах. АП применяют и в лазерных оптических системах:
линзы Декарта — в системах для концентрации излучения, аксико-
ны — в системах формирования пучка по плотности излучения и т.п.
Перспективным является применение АП в широкоугольных и
сверхширокоугольных объективах для увеличения относительного
отверстия и углового поля при сохранении габаритно-массовых харак-
теристик, в объективах с переменным фокусным расстоянием.
Можно привести примеры наиболее эффективного использования
АП. Это анаберрационные (декартовы) поверхности, полностью уст-
раняющие сферическую аберрацию. Одна линза или зеркало с такой
поверхностью при относительном отверстии 1:1 позволяет заменить
пять-шесть линз. Одна АП может заменить несколько линз в случае
полного исправления одной аберрации при создании светосильных
неширокоугольных и широкоугольных, но малосветосильных систем.
Такая замена особенно эффективна в случае применения линз боль-
шого диаметра.
В общем случае при расчете светосильных и широкоугольных си-
стем одна АП равноценна одной дополнительной тонкой линзе, поэто-
Глава 7. Расчет оптических систем с асферическими поверхностями
му вопрос о применении асферики надо решать с учетом следующих
факторов:
существенное упрощение конструкции по сравнению с конструк-
цией из сферических поверхностей;
возможность исправления аберраций;
значительное уменьшение габаритных размеров и массы системы;
степень сложности технологии изготовления и возможности кон-
троля;
обеспечение технических требований и экономические соображе-
ния.
Одновременно важно также учитывать светопропускание систе-
мы и уменьшение числа вторичных изображений. В линзовых систе-
мах следует обратить внимание на возможность исправления хрома-
тических аберраций высших порядков, так как уменьшение числа
линз может привести к возрастанию сферохроматической аберрации
и других хроматических разностей аберраций.
Рассмотрим основные виды асферических поверхностей, преиму-
щественно применяемых в оптических системах. К ним относятся:
поверхности конических сечений (коникоиды), к которым отно-
сятся параболоиды, эллипсоиды, гиперболоиды — поверхности вто-
рого порядка;
цилиндрические поверхности;
конические поверхности;
торические поверхности;
поверхности высших порядков с малым отступлением: от сферы,
от поверхностей второго порядка и от плоскости (планоиды).
Поверхности высших порядков дают большие возможности ис-
правления аберраций, так как имеют большее число независимых пе-
ременных.
7.2. Общие свойства асферических поверхностей
Уравнение профиля асферической поверхности
Профиль асферической поверхности (или кривая меридионально-
го сечения, или образующая) может быть задан тем или иным уравне-
нием либо просто таблицей значений координат. Уравнения могут
быть произвольными, однако на практике обычно используют степен-
ные функции различного вида.
Центрированная АП вполне определяется уравнением своей обра-
зующей. Способ задания уравнения зависит от формы поверхности.
Для определения профиля поверхности удобно совместить начало ко-
ординат с вершиной поверхности, а ось вращения — с оптической
осью.
В табл. 7.1 приведены различные виды уравнений профиля АП,
применяемые для описания разных форм поверхностей [17], [18].
Таблица 7.1
Номер уравне- ния Уравнение профиля Виды поверхностей, описываемые уравнением Примечания
(1) у2 = Az + Bz2 Поверхности второго порядка — коникоиды А = 2rg; В=-(1~ е2) = -(1 + Ь)
(2) у2 = Az + Вг2 + Cz3 +... Все поверхности, кроме планоидных (г0 = Рекомендуется для поверхностей, мало отличающихся от поверхностей второго порядка
(3) z = Ay2 + By4 + Су6 + ... Все поверхности Рекомендуется для задания планоидной поверхности; не реко- мендуется для дефор- мированной сферы
(4) R = Ro + a<p2 + bq4 + + ар* + ... Поверхности, мало отличающиеся от сферы Начало координат не совмещено с вершиной кривой
(5) R = -rg + b<p4 + c<p* + ... Начало координат сов- мещено с центром де- формированной сферы
(6) уг = NAz+ Bz2 + + °z3+... N Все поверхности, кроме планоидных (г0 = Рекомендуется при пересчете системы с коэффициентом подобия N (при масштабировании)
(7) -A 2 В 4 2=—y* + 7 у4 + N N3 c e + —zV +— Ns Все поверхности
В уравнении (1) табл. 7.1 А = 2г0, где г0 — радиус кривизны в вер-
шине кривой (вершинныйрадиус), или радиус соприкасающейся сфе-
ры. Коэффициент В, содержащий коэффициент деформации Ъ, в от-
личие от коэффициента А не влияет на параксиальные параметры си-
стемы, и изменяя его, можно воздействовать на аберрации для одно-
го апертурного луча. Исключение составляют анаберрационные повер-
хности второго порядка, позволяющие полностью исправить сфери-
ческую аберрацию для всего отверстия зрачка.
Уравнение (2) отличается от (1) большим числом членов алгебра-
ического ряда. Коэффициенты В, С... являются дополнительными
коррекционными параметрами и позволяют исправить какую-либо
одну аберрацию третьего, пятого и более высоких порядков. Такой вид
уравнения, особенно удобный для задания профиля поверхностей,
мало отличающихся от поверхностей второго порядка, теряет смысл,
если г0 = оо, т.е. в случае планоидной поверхности — поверхности с ма-
лым отклонением от плоскости. Уравнения этого вида неприменимы
также для задания профиля поверхностей, имеющих экстремальные
точки, например типа поверхности пластинки Шмидта с точкой пе-
региба.
Уравнение (3) представляет собой уравнение параболы высшего
порядка и определяет профиль поверхности, симметричной относи-
тельно оси г. Здесь А = 1 /{2 г0) = О для планоидной поверхности. Урав-
нение пригодно почти для всех случаев, но при апертурах не более оп-
ределенных предельных значений. Это уравнение неудобно для опи-
сания профиля поверхностей, мало отличающихся от сферы, так как
содержит большое число членов разложения. Получающийся в этом
случае практически бесконечный ряд удлиняет время расчета на ЭВМ.
На практике вычисление ряда z по степеням у представляет оп-
ределенные трудности вследствие крайней малости коэффициентов В,
С, особенно если система имеет большое отверстие, так как ве-
личины у6, у8, у10,... становятся большими. Во избежание таких труд-
ностей Г. Г. Слюсарев рекомендовал вместо у вводить пропорцио-
нальные ему переменные Y = y/yk, где yk = D/2 или Y = у/г0 [18].
Уравнение (4) в полярных координатах позволяет представить
профиль деформированной сферы. Здесь начало координат 0 (рис. 7.1,
а) не совмещено с вершиной поверхности, поскольку это неудобно,
поэтому в уравнении содержится постоянный член Ro — радиус-век-
Рис. 7.1. Два способа располо-
жения начала координат отно-
сительно асферической поверх-
ности
тор вершины кривой. Уравнение представляет собой четную функцию
угла ф, так как поверхность симметрична относительно оси z.
Если начало координат совместить с центром деформируемой сфе-
ры (рис. 7.1, б), то получим уравнение (5) (см. табл. 7.1), описывающее
профиль в полярных координатах. Следует обратить внимание на то,
что радиус-вектор R не является нормалью к поверхности.
Для определения деформации поверхности относительно соприка-
сающейся в вершине поверхности сферы надо определить разность
AR = R- (~г0) = Ьф4 + сф®.
На практике часто возникает необходимость пересчета оптичес-
кой системы по подобию в том или ином масштабе, т.е. необходимость
масштабирования. В уравнениях (2) и (3) в разные члены входят ли-
нейные величины z и у в различных степенях, но очевидно, что для
всех членов должна сохраняться одна и та же размерность. Следова-
тельно, размерность коэффициентов А, В, С,... должна быть различ-
ной, поэтому при масштабировании системы необходимо изменять ко-
эффициенты с учетом их размерности. При коэффициенте пересчета
(подобия) N получим уравнения (6) и (7).
Уравнение асферической поверхности
При расчете на ЭВМ обычно задают уравнения асферических по-
верхностей, а не уравнения профиля. Для асферических поверхнос-
тей, наиболее часто применяемых в оптических системах, уравнения
могут быть представлены в виде зависимостей двух типов [4]:
Ьу2 + сх2 + atz + a2zz + a3z3+...+anzn = 0; (7.1)
• z = a^y2 + x2}+ a2(y2 + x2j +...+an(yz + xz) . (7.2)
Уравнение (7.1) позволяет описать поверхности второго порядка,
имеющие ось симметрии, совпадающую с осью Oz, — параболоид, эл-
липсоид и гиперболоид. В некоторых случаях, например, при автома-
тизированной коррекции оптических систем, с помощью уравнения
(7.1) задается сфера. С помощью уравнения (7.1) можно также задать
цилиндрические поверхности, образующие которых параллельны
либо оси Оу, либо оси Oz, так как в уравнении имеются разные коэф-
фициенты при у2 и х2.
Уравнение (7.2) можно использовать для задания поверхностей с
осью симметрии, совпадающей с оптической осью — осью Oz. Это урав-
нение используется главным образом для задания поверхностей, име-
ющих точки перегиба, типа асферической поверхности пластинки
Шмидта.
Порядок асферической поверхности в уравнении (7.1) определя-
ется величиной п, а в (7.2) — 2п.
Коэффициент деформации и его определение
Основной поверхностью в оптике является сферическая поверх-
ность, уравнение профиля которой, т.е. уравнение окружности, име-
ет вид: z2 — 2rz+ у2 = 0. Решим это уравнение относительно z и разло-
жим решение в ряд:
z = r~4rz~y2
= г
2 4
У . У
2г2 8г4
16г6 128г8 )
(7.3)
= yt+yL + ^ + j£+_
2г 8г3 16г5 128г7
Любую асферическую поверхность можно рассматривать как де-
формированную сферическую, поэтому уравнение профиля асфери-
ческой поверхности можно записать, введя коэффициенты деформа-
ции Ь, с, de уравнение сферической поверхности:
.,2 -.4 -.6 г -.8
za=j7 + jp(1 + b^^(l^e)+-I^(l + d)+..., (7.4)
* 0 *'0 1и Го 1 Хо Гq
где г0 — радиус кривизны поверхности при вершине.
В уравнении (7.4) первый член разложения ряда, в который вхо-
дит кривизна поверхности 1/г0, характеризует область первого поряд-
ка, т.е. параксиальную область. В области аберраций третьего поряд-
ка появляется следующий член разложения, и поэтому коэффициент
деформации Ь влияет на аберрации третьего порядка. Аналогично ко-
эффициент деформации с позволяет изменить значения аберраций
пятого порядка и т.д.
Особый интерес представляют поверхности с малым отклонени-
ем от сферы, в которых коэффициент b равен нулю. Эти поверхности
имеют те же коэффициенты аберраций третьего порядка, что и сфе-
рические поверхности. Поэтому деформацией поверхности, т. е. вве-
дением коэффициентов деформации end при b = 0, можно влиять на
аберрации высших порядков, не изменяя аберраций третьего поряд-
ка. Кроме того, чем выше степень первого члена разложения в ряд,
тем меньше отклонение от сферической повер-
хности и тем дальше от вершины оно начина-
ется.
Меру асферичности Az, т.е. деформацию,
или отклонение от вершинной сферы (рис. 7.2),
можно определить разностью Az = za - z при од-
ном и том же у:
8г03 16г05 128г70
(7.5)
Определим коэффициент деформации сфе-
рической поверхности, которую надо заменить
асферической поверхностью второго порядка.
Уравнение профиля этой поверхности имеет
вид: у2 = 2roz - (1 - e2)z2.
Решим квадратное уравнение: г2 - [2г0/
/(1 - e2)]z + у2/(1 — е2) = О относительно z и раз-
Рис. 7.2. Определение
асферичности Az:
1 — асферическая по-
верхность; 2 — сфери-
ческая поверхность
ложим в ряд, как это было сделано выше в (7.3):
Сравнивая (7.4) и (7.6), найдем коэффициенты деформации Ь, с, d:
Ъ = -е2; с = е4-2е2; d = 3е4-Зе2-е6. (7.7)
Из (7.7) следует, что конические сечения для коэффициента b
дают только отрицательные значения, поэтому коническими сечения-
ми нельзя заменить любую заданную кривую, имеющую ось симмет-
рии, даже вблизи ее вершины.
При изменении коэффициента деформации b меняется форма по-
верхности, которую несложно определить, поскольку Ъ = -е2 (табл.
7.2). Следует обратить внимание на то, что положительные значения
Ь соответствуют поверхностям, меридиональные сечения которых
имеют вид эллипса с большой осью, перпендикулярной оптической
оси, т.е. при изменении Ъ образуется сплюснутый эллипсоид, который
трудно изготовить.
Таблица 7.2
Коэффициент деформации Ь Эксцентриситет е = 4-Ъ Форма профиля поверхности
0 -1 0> Ь>-1 Ь<-1 Ь> 0 0 1 0< е < 1 е > 1 е — мнимая величина Окружность Парабола Эллипс Гипербола Сплюснутый эллипс
Радиусы кривизны асферической поверхности
Для сферической поверхности длина нормали одинакова для всех
точек поверхности, т.е. радиусы кривизны одинаковы в меридио-
нальной и сагиттальной плоскостях независимо от высоты падения
луча.
Для асферических поверхностей такая закономерность не соблю-
дается. Если профиль поверхности представляет собой одну из кривых
второго порядка (конические сечения), то при совмещении большой
оси эллипса или действительной оси гиперболы с осью системы наблю-
дается увеличение радиуса кривизны по мере удаления от вершины
кривой.
Встречаются также поверхности, для которых наблюдается
уменьшение радиуса кривизны по мере удаления от вершины кривой.
Примером такой поверхности является сплюснутый эллипсоид.
Существуют поверхности с образующей, имеющей точки переги-
ба, радиус кривизны которой изменяется по сложному закону.
Для асферических поверхностей используются понятия меридио-
нального и сагиттального радиусов кривизны, являющихся перемен-
ными величинами. При расчетах оптических систем необходимо знать
их значения.
Поясним эти понятия для кривой, симметричной относительно
оси Oz. Пусть KCS — нормаль к кривой в точке К (рис. 7.3, а), тогда
КС = гт, где гт — меридиональный радиус кривизны.
Так как центр Cs кривизны поверхности в сагиттальной плоско-
сти лежит на прямой 0Cs, то rs = KCS, т.е. сагиттальный радиус
кривизны можно определить как проекцию отрезка нормали между
точками ее пересечения с поверхностью и осью системы.
Значение rs можно найти из &KCST (рис. 7.3, б):
rs = i//sin<p = у /cost, (7.8)
где т — угол, образованный касательной в точке К с осью. Из анали-
Рис. 7.3. К определению меридионального и сагиттального радиусов кривизны
dy
тической геометрии известно, что значение первой производной —
dz
определяет собой тангенс угла касательной с осью абсцисс, а тангенс
угла <р между нормалью и той же осью определяется тангенсом угла
касательной, взятой с противоположным знаком, т.е. tg <р = -1 /tg т.
Но в оптике принято другое правило знаков, с учетом которого полу-
чим
dy , 1 dz 1 ,
-=tgr =-----; — =-----= tg<p.
dz tg<p dy tgx
Так как 1 /cos2x = 1 + tg2T = 1 + у'2, то из (7.8) находим
г-3=У-1 + у'г, (7.9)
, dy
где y’ = ~.
dz
Меридиональный радиус кривизны гт можно найти по известной
формуле аналитической геометрии:
3/ 1 3/ 1
гт = -(7 + У'гуг/у" = -(7 + z'2)/2/z", (7.10)
Сравнивая (7.9) и (7.10), получаем
rm=-r*/(ysy"). (7.11)
В табл. 7.3 приведены формулы для гт и га для уравнения кривой,
заданной в полярных координатах, а также поверхностей второго по-
рядка.
Таблица 7.3
Вид формул г т r s
Общие г ->3/ г ,3/ [w)T Ы')Т у" Z" уф + у'2
Для уравнения кривой в полярных координатах 1г / \2"!3 Jb2+ - u dip ) l,d<p J dtp V J 1 dR 2 .Rtg(p dip
Для кривых второго порядка 2 2 \3 1 1 e Уг I 1 + 2~ V v ro ) L eay2 V ro
7.3. Расчет центрированных оптических систем
с асферическими поверхностями в области
аберраций третьего порядка
Коэффициенты аберраций третьего порядка оптических систем
с асферическими поверхностями
Впервые теория аберраций третьего порядка была расширена для
случая систем с асферическими поверхностями К. Шварцшильдом в
начале XX в.
Коэффициенты аберраций третьего порядка наиболее удобно и
эффектно с математической точки зрения можно получить из теории
эйконала. Для этого вычисляют изменение углового эйконала AW,
вызываемое деформацией сферической поверхности, и затем с учетом
этого изменения определяют изменения величин п'\у' и п'Дг' — про-
изведений показателя преломления среды на меридиональную и са-
гиттальную составляющие поперечной аберрации.
Уравнения для меридиональной и сагиттальной составляющих
поперечной аберрации третьего порядка имеют вид [18]:
- 2п'\у' = о'т [<у'т2 + a'/) Sj + (3o'„f + о'/) mSn +
+ (3Sni + l2SIV)o'mco2 + Svco3;
- 2n'Ar' = а'(a;2 + a'2)Sj + 2a'ma's coSu +
+ (Siii + I2Siv)o's(o2,
(7.12)
где a'm — апертурный угол в меридиональной плоскости в простран-
стве изображения; а' — апертурный угол в сагиттальной плоскости
в пространстве изображений; Sr...Sv — суммы Зейделя для оптичес-
ких систем с асферическими поверхностями; со — угол поля в про-
странстве предметов.
При исследованиях оптических систем, состоящих из k сферичес-
ких и асферических поверхностей, часто используются суммы Зейде-
ля в следующем виде [18]:
Si = X^(^ + Bv);
V=J
Sii = Xj/v(^ + 5v)-1Xwv;
v=i v=l
k 2 k k 1
«...=X тЧЛ + -в,)-21-^ ^w,+/’£ - s
fiv y—1 rt,y v=l rt,y ri,y
k у
S,v=Xv-nJ
V=I
* n3 * I/2
Sv = X 4(PV + Bv)- 31£ ^wv +
V = 1 V=1 Пу
(7.13)
где
bv [8(nvav)]3 . 8(ауПу)
(8nv)2 ’ V
= 8av gav
8-- nv
«V
Каждую из сумм Зейделя, кроме четвертой, можно разбить на два
слагаемых, причем первое определяет соответствующую аберрацию
третьего порядка системы из сферических поверхностей, а второе —
ту же аберрацию, вносимую деформированием поверхности.
Из формул (7.13) следует, что коэффициент деформации не вхо-
дит в четвертую сумму, следовательно, введением асферической по-
верхности нельзя исправить кривизну поверхности изображения. Но
деформирование поверхности в отдельных случаях позволяет косвен-
ным образом повлиять на исправление кривизны. При введении асфе-
рики обычно устраняется несовместимость условий одновременного
исправления сферической аберрации и кривизны поля. Такой случай
встречается, например, при расчете объективов микроскопов и свето-
сильных фотообъективов.
Суммы Зейделя для асферических поверхностей, так же как и для
сферических, зависят от положения входного зрачка и предмета, кон-
структивных элементов системы, показателей преломления опти-
ческих материалов и сред.
Из (7.13) также следует, что к величинам Pv добавляется член,
связанный с деформацией поверхности:
_bv[8(nvax
3
где bv — коэффициент деформации. Физический смысл добавочного
члена в суммах Зейделя заключается в изменении положения волно-
вого фронта вдоль луча. К этому выводу можно прийти, зная, что мера
асферичности определяется величиной у4Ь/ (8г3), а умножение ее на
разность (п' — п) дает изменение волнового фронта, путем сравнения
этого выражения с Bv.
Следует отметить, что деформация поверхности влияет только на
величину Pv, оставляя без изменения функции VKv, IIV, <р. Эта особен-
ность очень облегчает расчет.
Суммы Зейделя можно использовать для определения коэффици-
ента деформации из условия исправления той или иной аберрации тре-
тьего порядка, кроме кривизны поля. Подбором коэффициента дефор-
мации на следующем этапе можно добиться исправления и аберраций
высших порядков, так как число коэффициентов, определяющих фор-
му поверхности, бесконечно велико, по крайней мере теоретически.
Однако из этого не следует, что большое число дополнительных пара-
метров асферики позволяет исправлять несколько аберраций высших
порядков. Необходимо учитывать, что каждая аберрация также ха-
рактеризуется бесконечно большим числом коэффициентов.
При использовании для расчета сумм Зейделя надо помнить о нор-
мировке первого и второго вспомогательных лучей.
Влияние деформации асферической поверхности
на аберрации третьего порядка
бесконечно тонкого компонента
Многие оптические системы в начале расчета принимают состоя-
щими из нескольких тонких компонентов, толщинами которых мож-
но пренебречь.
Для бесконечно тонких компонентов, разделенных воздухом, сум-
мы Зейделя имеют вид [18]:
$ = £^ + Д);
1=1
i=l i=l
Р
®[V =
1=1
р 3 р 2 р
Sv = X +12 L т(з+к()Фг,
i=i hi ₽/ hi i=i hi
_ а' - а, хг Фц
ГДе ф(=-£_—L; л. = \ _н_;
Ц=Т
Ф
Л
Ф<
Для одного бесконечно тонкого компонента имеем: Л; = h2 = ...=
= ht, yt = у2=... = yt. Как видно из (7.14), в этом случае допол-
нительный член Bt входит во все суммы, кроме четвертой, в виде од-
ного дополнительного слагаемого вместо I, где I — число линз в ком-
поненте. Следовательно, для изменения Pt на некоторую величину АР.,
можно ввести одну либо несколько асферических поверхностей, при
этом влияние на аберрации третьего порядка будет одинаковым. Прав-
да, влияние на аберрации высших порядков в таком случае будет раз-
личным. Поэтому введение асферики в бесконечно тонкий компонент
позволяет исправить только одну какую-либо аберрацию, даже если
будут асферизованы все поверхности линз компонента.
Перенос деформации с одной поверхности
оптической системы на другую
Теория этого вопроса разработана М.М. Русиновым (17]. Для рас-
смотрения теории удобно представить суммы Зейделя в переменных
Аббе:
Sr = £ (*vА Г К.5 [l/(nvsv )] + tfv};
V=1
Su - £ (hv/ht )3(yv/У1 ){QPvQ^[l/(nvsv)] + *v};
V = 1
Sm = X (Mftj4yvW{QX^/(nvSv)]+*v};
V=1
Siv = -i,(hv/h1)\yJyiY(QPv~QSv)\l/rv)5(l/nvy,
v=2
Sv = X(ftv/^)(i/v/i/i)3{Qpv5[V(nvSv)] + Qpv(Qpv -QSv)x
V=1
xg[i/(nvspv)]+^v};
(7.15)
где
Kv =(bv/rv3)(<-nv);
Qpv = nv - 1/«Рч ) = П'у (*/rv - VSPv );
QSv = nv (Vrv - VSv) = n’y (!/rv - l/s'v) = -(2/ftv )[8av /8 (i/nv)];
Qpv - Qsv = nv (l/sv - l/sPv) = l/(yvhv).
Суммы Si...Sv в (7.15) связаны с суммами SV..SV в (7.13) следу-
ющими зависимостями:
S1 = h^Si; Sn = hfytSu; Sni = 7ifyfSni;
I2Slv = hfyfSiv; Sv = h1yfSv.
Из (7.15) следует, что влияние коэффициентов Kv, содержащих
коэффициент деформации bv, можно представить в таком виде:
(hJhrfKv, (hv/hrf(yJyi)Kv,
(7.16)
(hJhrftyJyrfKv, (hv/ht\yv/yt)3Kv.
Предположим, что в оптической системе есть какая-либо другая
поверхность с номером т, для которой справедливы равенства •
(hJh$Km = (hJhrfKv-,
(hJh^yJy^K,,, = (hJh^yJy^K,;
(7.17)
(hm/h, )2 (ym/yt )2 Кm = (hv /ht)2 (yv/У1 )2 Kv;
(hm/ht')(ym/yt')3Km = (hv/ht)(yv/ytj3 Kv.
Сократив на знаменатели обе части равенств (7.17) и составив от-
ношение коэффициентов Km/Kv, получим
Km/Kv = h4/h4m={h3y^/[h3mym^ =
(7.18)
= (^v!/v)/(^^)=(ftvyv)/(^^).
Соблюдение всех этих условий возможно при условии, что
hv/hm = yv/ym = l/^mv (7.19)
независимо от значений h и у. Полученное условие справедливо лишь в
случае, когда v-я и тп-я поверхности являются сопряженными.
Рассмотрим примеры практического применения переноса дефор-
мации при разработке оптических систем.
В системе типа Грегори с нулевым выносом изображения (рис.
7.4, а) сопряженными являются плоскости, проходящие через точки
F't и F'. Поместив в плоскость промежуточного изображения F't плос-
копараллельную пластинку, мы выполним условие (7.19). Теперь вме-
сто деформации сферической поверхности первого зеркала можно де-
формировать одну из поверхностей пластинки, что технологически
более целесообразно. В этом случае допуск на изготовление асфери-
ческой поверхности будет в 4 раза больше, чем при деформации зер-
кала. Кроме того, размер пластинки значительно меньше размера зер-
кала. Значение отношения коэффициентов деформации можно най-
ти из (7.18) и (7.19).
Другим особо интересным примером является система Мейнела
(рис. 7. 4, б). В этой системе осуществляется перенос деформации из
плоскости, проходящей через центр кривизны Ct первого зеркала, где
нужно было бы разместить коррекционную пластинку Шмидта, в фо-
кальную плоскость этого же зеркала F't, в которой устанавли-вается
планоидное зеркало. Эти плоскости являются сопряженными (см. рис.
7.4, б). Преимуществами такого переноса являются отсутствие лин-
зовых компонентов и существенно меньший диаметр деформируемого
элемента.
Рис. 7.4. Перенос деформации с одной поверхности на другую в системах
Грегори и Мейнела
Анализ сумм Зейделя (7.15) позволяет сделать еще один важный
вывод. Во все суммы коэффициенты деформации bv входят в первой
степени. Это дает возможность в любых оптических системах, состоя-
щих не менее чем из четырех поверхностей, не совпадающих друг с
другом и не являющихся изображениями друг друга, корригировать
все четыре аберрации третьего порядка: сферическую аберрацию,
кому, астигматизм и дисторсию. Коэффициенты деформации неслож-
но получить из решения системы четырех линейных уравнений с че-
тырьмя неизвестными.
Исправление сферической аберрации деформированием
поверхности в простейших оптических системах
Отдельная поверхность. Для обычной сферической поверхности
исправить сферическую аберрацию можно для нескольких пар точек,
причем одна из точек является мнимой (см. [12]).
Для исправления сферической аберрации третьего порядка дефор-
мированием поверхности достаточно определить коэффициент дефор-
мации приравняв нулю первую сумму Зейделя: Sr = hl(Pl + ВД =
0. Это приводит к условию Р; + Bt = 0. Раскрыв выражения для Р; и
Bt по известным формулам [см. (7.13)], получим для общего случая:
Ь, =-(<*; -а2)2(а,п; -а;п;)3. (7.20)
Результаты анализа (7.20) для преломляющих и отражающих по-
верхностей при различных расположениях предмета и изображения
приведены в табл. 7.4.
Таким образом, получены интересные результаты, поскольку к
тем же формам поверхностей можно прийти, применяя точное усло-
вие исправления сферической аберрации — условие точечного изобра-
жения [см. (7.4)] при расчете анаберрационных поверхностей. Под-
робно свойства полученных поверхностей рассмотрены в п. 7.4, здесь
же отметим, что сферическая аберрация полностью исправлена для
всех зон зрачка.
Особенности расчета линзовых конденсоров с асферическими
поверхностями. Применение асферических поверхностей в освети-
тельных системах позволяет упростить их конструкцию, увеличить
угол охвата и получить более совершенное исправление сферической
аберрации. Требования к точности изготовления поверхностей в этих
системах оказываются невысокими, что упрощает технологию их про-
изводства.
Таблица 7.4
Оптическая схема Pt го
SJ = —ОО a?2n2in2 (п1~п2)2 ъ „3_,3 Ь]П2^2 (n2~ni)2 ем еч 1 n2~nt f, п2
т а32п (7-п/ btn3a32 (п-1)2 1 п2 (эллипс)
V Л г а32п2 (п-/)2 bp3-, (1-п)2 п2 (гипербола)
п2—1 F’ J _ «2 Т Ьрг 4 1 (парабола) 2Г
St п} = 1 n2 = -l 1 х .Г w + 1 р й to -1~~^ -• to X 1 + р to ш / \2 ( a2-ai 1 ^а2 + а2 J 2sfi0 P0-i
rx.1^0.cti<0 или xJ 0Cl>0,0l2 <0 > 1 (гипербола)
<X-i<0 ,а,2<0 к ' А'й к, >0, а.2>о < 1 (эллипс)
В однолинзовых конденсорах, рассчитанных на минимум сфери-
ческой аберрации (см. п. 5.2), условие Sf = 0 можно выполнить при
определенных значениях показателей преломления стекла, а при
s; °° условие Sj = 0 выполняется для определенных увеличений [3]
без асферики. Введение асферической поверхности позволяет испра-
вить сферическую аберрацию при любом sr
Прежде чем деформировать одну из поверхностей конденсора,
надо выполнить его расчет и определить значения вершинных радиу-
сов кривизны. Коэффициент деформации bv тем меньше и, следова-
тельно, тем меньше отклонение асферической поверхности от сфери-
ческой, чем больше кривизна деформируемой поверхности. Значения
радиусов кривизны зависят от увеличения. Поэтому, рассчитав одно-
линзовый конденсор на минимум сферической аберрации по извест-
ной методике (см. п. 5.2), коэффициент, деформации определяют из
условия Sj = 0. Выражения для bv приведены в табл. 7.5.
Когда источник изображается в бесконечности, то конденсор рас-
Таблица 7.5
Вид конденсора Коэффициенты деформации
b 2n(2 + n)2(fi0-1)Т [n(7 + 2n)-npo(l -2п)-4$0]3 где Т = (4п-1)^д-2^2п2 + 1^д + 4п-1; Ъ2 = 0 2n(2 + nf tf>0-1)Т или Ъ2 = — - о; Ь, = 0 [п (7 - 2п) - п$0 (7 + 2п) + 4]
*%****Ч^ Г*' , п3 - 2пг + 2 Ь1 = п
При 1 ро 1 > 1 П[П-1)
/ \3 Ъз= 2п2+2}
Глава 7. Расчет оптических систем с асферическими поверхностями
считывают в обратном ходе. В этом случае можно выбрать плосковы-
пуклую линзу, которая имеет благоприятную форму в отношении сфе-
рической аберрации. Коэффициент деформации выпуклой повер-
хности определяется также из условий ST = О (табл. 7.5).
В двухлинзовом конденсоре из двух плосковыпуклых линз введе-
ние асферической поверхности позволяет повысить угол охвата до
65...70°. Если I Ро I > 1, то асферизуется вторая более «крутая» повер-
хность. Значение коэффициента деформации Ъ2 определяется из усло-
вия Sj = 0 (см. табл. 7.5). Поскольку данный конденсор применяют
преимущественно при увеличениях —1...-3, то вторая поверхность
должна иметь форму гиперболоида, что следует из выражения для Ь2.
Если I Ро I < 1, то асферизуется третья поверхность, так как
Последовательность расчета состоит из определения конструктив-
ных параметров по методике, изложенной в п. 5.2, а затем введения
асферической поверхности при условии Sj = 0.
Для увеличения угла охвата до 90° перед двумя плосковыпуклы-
ми линзами надо установить апланатический мениск. Здесь
целесообразно ввести асферику на вторую поверхность мениска, име-
ющую наибольшую кривизну, и в этом случае отклонение поверхнос-
ти от сферической будет несколько меньше.
В конденсорах больших увеличений (I Ро I > 15) и при углах охва-
та до 90° применяют двухлинзовую схему, состоящую из апланатичес-
кого мениска с асферической выпуклой поверхностью и плоско-вы-
пуклой линзы. Данная схема применяется также в случае, когда
s4 = —оо (см. табл. 7.5). Коэффициент деформации несложно опреде-
лить, если рассчитать систему в обратном ходе., приняв во внимание,
что сферическую аберрацию вносит только плосковыпуклая линза,
так как для мениска ST = Sn = 0. Тогда при нормировке первого вспо-
могательного луча а; = 0, h1 = h2 = h3 = h4 = 1, a4 = a5 = 1 получим
a2n = a3; a3 = 1/п = 0O м, где 0O M — увеличение апланатического ме-
ниска, и а2 = 1 /п2.
В результате можно записать Р4 + Р2 = (п3 - 2пг + 2)/[п5(п - I)2] и
при условии Sf = 0 получим уравнение, приведенное в табл. 7.5.
Поскольку сферические поверхности заменяются поверхностями
второго порядка, то уравнение профиля записывается в виде
(см. табл. 7.1): yf = 2r03z3 + (е2 - ijz2 , где r03 = nf'/(n + 1), так как
а3 = 1/п; а4 = 1.
Особенности расчета зеркальных и зеркально-линзовых освети-
телей. Для расчета простейшего зеркального осветителя, состоящего
из одной отражающей поверхности, из условия исправления сфери-
ческой аберрации (Sj = 0) надо определить коэффициент деформации
Ъ (см. табл. 7.4). При условиях нормировки az = -[30, а2 = 1
Ь = -е2 = -[(а2-а;)/(а2 + а;)]2 = -[(р0 + /)/(р0-/)]г.
Если источник света и его изображение расположены по одну сто-
рону от поверхности, то она имеет форму эллипсоида, 0 > е > 1. При
заданном увеличении и расстоянии до источника s1 (см. гл. 5) вер-
шинный радиус кривизны
г0 = 2sts'1/(s1 +s2') = ~2s2p0/(/-p0).
Оценим влияние деформации зеркала на кому при условии ис-
правления сферической аберрации. Для этого рассмотрим уравнение
для Sn. В общем случае, когда sp* 0, Sn = у1(Р1 + Bt) - IWr Но так
как Sj= ht(I j + В2) = 0, то Р2 + В} = 0, поэтому Sn = - IWt, откуда сле-
дует, что деформация зеркала не влияет на кому.
Приняв во внимание условия нормировки первого и второго вспо-
могательных лучей, т.е. а1 = —(30, ос2 = 1, I = -po(sp - s(), и учтя, что
Wj = 0,5 (1 - Ро), получим
= -IW2 = О,5$о (sP - st)(/ - р2 ) = 0.
Это уравнение имеет три решения: 1) ро = ±1; 2) ро = 0; 3) sp = sz.
Практический интерес представляет лишь первое решение: Ро = -1.
Для всех других увеличений, если сферическая аберрация ис-
правлена, кома не может быть исправлена ни деформацией формы зер-
кала, ни выбором положения входного зрачка. Следовательно, для ас-
ферических поверхностей подтверждается известная теорема тео-
рии аберраций: при исправлении первых t аберраций третьего поряд-
ка последующая (i + 1) -я аберрация не будет зависеть от положения
входного зрачка [12].
Для Sj = отражающая поверхность имеет форму параболоида
(г0 = 2f; b = -1). Подробно о свойствах этих поверхностей см. в п. 7.4.
При расчете зеркально-линзовых осветителей коэффициент де-
формации асферической поверхности определяется аналогичным об-
разом, т.е. из уравнения Sx = 0.
Расчет двухзеркальных апланатических систем
При расчете апланатических двухзеркальных систем со сферичес-
кими поверхностями (см. п. 6.2) получаются строго фиксированные
значения коэффициента экранирования k3K и выноса изображения 8,
зависящие от заданного увеличения системы, что ограничивает их
применение. Часто необходимо рассчитать апланатическую систему,
имеющую при заданном увеличении определенный коэффициент эк-
ранирования и заданный вынос изображения. В этом случае приходит-
ся вводить асферические поверхности.
Габаритный расчет двухзеркальных систем изложен в гл. 6. На-
шей задачей является определение коэффициентов деформации Ь1 и
Ъг из условий исправления сферической аберрации и комы третьего
порядка, т.е. при
( (.Z1)
Sn = yt (Д + Bt) + у2 (Р2 + Вг)~I{wt + W2) = 0.
Для упрощения вывода примем, что sp = 0, так как кома не зави-
сит от положения входного зрачка, если сферическая аберрация ис-
правлена. Тогда в соответствии с нормировкой второго вспомогатель-
ного луча yt = 8Р = 0. Так как = 1, Р2 = -1,1 =-ht, то у2 = yt - dfl2 =
d.
Принимая во внимание выражения (7.13) для параметров Pv, Wv
и учитывая, что Bv = bv [S^oQ]3 (8nv)2, получаем из (7.21) следующие
уравнения для первых двух сумм Зейделя:
Si = ~(ht/4)[(af - af )(a2 - a2) + (a2 + a2)3] +
+ (h2/4)[(“f - «г)(«з - a2)+ b2 (a3 + a2)3]; (7.22)
Su = (d/4)[(af-af)(a3-a2)+b2(a3 + a2)3]+(/i2/2)(af - af).
Из совместного решения двух уравнений (7.22) находим:
& _ Г а2 - a2 V 2^2 (аз ai )
la2 + a2J d(a2 + a2)3
^а3-а2^
- Ь2 = —3--
<a3 + a2J d(a3 + a2)
Те же результаты получим при sp Ф 0.
(7.23)
(7.24)
Уравнения (7.23) и (7.24) позволяют определить и Ъ2 для любо-
го положения предмета при соответствующем выборе нормировки для
первого вспомогательного луча.
Для бесконечно удаленного предмета, положив, что а1 = 0, =
= 1, а3 = 1, получим:
-bt = 1 + 2h2/(da32y,
_ Г ~ «2 t
1 + ос 2 J d (1 + а 2 )3
(7.23')
(7.24')
В этих формулах для величины d надо взять приведенное значе-
ние (при f = 1), в то время как для предмета на конечном расстоянии
в уравнения (7.23) и (7.24) надо подставить реальное значение d, а зна-
чения ht и h2 — с учетом выбранной нормировки первого вспомога-
тельного луча.
При Sj = I -« для прямой системы (rt < 0 и г2 < 0) получим е, > 1 и
е2 > 1, т.е. обе поверхности имеют форму гиперболоидов, а при
Sj I Ро I > 1 чаще всего et < 1, е2 < 1, т.е. зеркала представляют
собой эллипсоиды вращения.
Однако рассматриваемый метод не обеспечивает строгой аплана-
тической коррекции системы при любых оптических характеристи-
ках. Для частичного исправления аберраций высших порядков мож-
но уточнить значения bt и Ь2 методом проб в процессе аберрационного
анализа, но не всегда удается получить хороший результат.
С помощью формул (7.23) и (7.24) можно рассчитать апланатичес-
кую двухзеркальную систему с относительным отверстием не выше
1:2. В светосильных системах с относительным отверстием 1:1 апла-
натическая коррекция достигается при использовании асферических
поверхностей высших порядков.
Пример 7.1. Рассчитать апланатическую двухзеркальную систему, если
f - 100 мм, Dff = 1:2, sp = 0, 2<о = 5°, km = 0,35; 8 = 0,05f.
Решение. Используя известную методику расчета (см. п. 6.2), найдем: а2 = -2,16666,
d = -0,30, Л2 = з'2 = 0,35 при/' = 1. В этом случае апланатическую систему можно рассчи-
тать только при условии введения асферики. Из (7.23) и (7.24) определим bt = -1,22940,
Ь2 = -11,56560. В результате получим систему со следующими данными:
г01 =-92,3077
d = -30
г =-60,00
у/ = -184,6154г, + 0,2294г/; у* = -120г2 + 10,5656г/.
Аберрационный анализ показал, что поперечная сферическая аберрация для края
(т = 25 мм) и зоны (т = 17,68 мм) зрачка составляет соответственно Др'кр = 0,013 мм и
Ду'юп = 0,002 мм, меридиональная кома If" = 0,04 мм для наклона <о = 2°30'.
Расчет линз конечной толщины при условии исправления
четырех аберраций третьего порядка
Линза конечной толщины с двумя асферическими поверхностя-
ми. Линза конечной толщины (рис. 7.5, а) имеет четыре свободных
параметра (а2, d, bt и Ъ2) и, следовательно, позволяет исправить четы-
ре монохроматические аберрации третьего порядка.
Рис. 7.5. Линзы конечной толщины
Пусть центр входного зрачка совпадает с вершиной первой повер-
хности, т.е. sp = 0. Примем нормировку первого и второго вспомога-
тельных лучей: а; = 0, ht = f = 1, а3 = 1, р, = 1, поэтому yt = sp = 0,
I = -1. Условия исправления четырех аберраций имеют вид:
8Г = h1(P] + B])+k2(P2 + B2)=0; (7.25)
Sr = y2(P2 + B2) + W1+W2 = 0; (7.26)
Sm = ~-(P2 + B2)+ ~r^W2 + + Ml - Ы = 0; (7.27)
h2 h2 n h2\ n )
SIV =a2 + (/-a2n)/(ft2n) = 0. (7.28)
Из (7.28) определим h2 = ~(m - a2)/a2, где m = 1 /n. Ho h2 = 1 - a2d,
поэтому
d = m/a2 = l^(na2 j. (7.29)
Определим y2 = yt - d(i2, но yt = 0, P2 = 1, a P2 = 1/п, поэтому c
учетом (7.29) получим
у2 = ~т/а2=-1^(паг2у (7.30)
Из (7.26) и (7.13) следует, что В2 = -(W; + W2)/y2 - Р2=Ь2(т - а2)3/
/[(zn - 1)гт]. С учетом (7.29) и (7.30) из последнего уравнения после
преобразований получим
Ь2 = 1у|тп(тп -а2)3Шаг (т3 + т2 - 1^+а2г(1 - т - т2 - 2т3^ +
(7.31)
+ а2т2 (2 + т)- т2].
Выразив Bj из (7.25) и приняв во внимание, что В2 = Ь}(па2)3/
/(п - I)2, а также раскрыв выражения для Р2, В2 из (7.13), с учетом
(7.29) и (7.30) после преобразований найдем
t>2 - рД/naf )]{(тп - a2)(l - тп)[1 - &-2 (т +1)]}- тп2. (7.32)
Подставив в (7.27) В2, найденное из (7.26), и выразив все вели-
чины в зависимости от а2, получим
а2 (т3 + т2 + т- 1^-а2т2 (т + 1) + т2 = 0. (7.33)
Уравнение (7.33) имеет действительное решение при п > 1,6022.
В результате для конструктивных элементов линзы находим:
г02 = (и - l)/(na2)
d = 1 /(na22)
r02 = (n- 1)/(па2).
Таким образом, получена линза с равными радиусами, для кото-
рой а2 надо определить из (7.33), а коэффициенты деформации — из
(7.31) и (7.32). Так, для стекла марки ТК16 при f = 1 имеем:
г01 = 0,242442
d = 0,2508 1,6152 ТК16
г02 = 0,242442
=-0,01704105 = -е2
Ь2 = 2,7238341 = — е2
Первая поверхность имеет форму эллипсоида, вторая — сплюсну-
того эллипсоида. Выполнив аберрационный анализ линзы при
f =100 мм, можно убедиться, что хорошее качество изображения
получается при относительном отверстии 1:6, угловом поле 2<в = 12°.
Рассмотрим частный случай. Поскольку bt имеет малое значение,
примем Ь} = 0. Тогда, приравняв нулю (7.32) и сложив его с (7.33), най-
дем
а22т- а2(1 + т2}+ т = (т - а2)(1 - тпа2) = 0.
Практически пригоден один корень: а2 = и = 1/т, при котором
h2 = 1 - т2, d = т3, г2 = г2 = т (1 - т). Подставив а2 = п в уравнение
(7.32) или (7.33), получим
1-т-т2 = 0 или п2-п —1 — 0,
откуда п = 0,5^1 + 45^ = 1,618034 (для стекла Ф9 пе = 1,618), тогда
h2 = ~(т - а2)/а2 = 0,618034, d — 0,236068 = т3, = г2 = т(1 - т) =
= 0,236068, т.е. г2 = r2 = d.
Из (7.31) при а2 = п находим Ъ2 = п2 = 1+ п = 2,618034. Вторая
поверхность представляет собой сплюснутый эллипсоид.
После коррекции аберраций высших порядков уравнение профи-
ля поверхности будет иметь вид:
у2 = 0,472136г2 - 3,618034г22 + 0,0988z32 - 0,0035z42 - 0,00015zs2.
В результате при f = 100 мм, D/f = 1:2,5 была получена апланати-
ческая линза со второй асферической поверхностью.
Линза конечной толщины с одной асферической поверхностью.
Она (рис. 7.5, б) имеет четыре свободных параметра: а2, d, Ъ2, п, кото-
рые можно использовать для исправления четырех аберраций. В це-
лях упрощения расчета положим, что у2 = 0. Отсюда следует, что вве-
дение асферики на второй поверхности линзы будет влиять только на
величину Sf. Заменим сферическую поверхность поверхностью вра-
щения второго порядка, введя коэффициент деформации Ъ2 = - ег2.
С учетом нормировки при Ь} = 0, у2 = 0 суммы Зейделя можно опи-
сать следующими уравнениями:
Sj“ = p1 + h2{p2 + B2}=0-,
S^ = y1P1 + Wl + W2 = 0-,
^m = y2iPi + (2yl/hl)Wl + a.2/n + (l/h2){l-a2/Ti}=0-,
SIV = аг паг)/(^гп)= 0,
где yt = (1 - h2)/(h2na2), что вытекает из уравнения связи двух вспо-
могательных лучей.
Решив систему четырех уравнений, найдем а2 = п, h2 = 1/п,
У1={п-1)/п2.
В результате расчета получим следующие данные:
roi = (п ~ W71*
d = (n - Г)/пг
Г021 = 1/\п(п+ 1)]
= п5/[(п - У)3(п + J)3]; sp = у, = d; SiV=n~n2 + l.
При SIV = 0 показатель преломления п = 1,618, что соответствует
показателю преломления стекла марки Ф9 для линии е. Например,
для ТК16 п = 1,6152, SIV = 0,0063; для К8 пе = 1,5183, SIV = 0,213;
для ТК20 пе = 1,6247, SIV = -0,01495.
В результате расчета получена линза, для которой г, = d, т.е.
центр кривизны первой поверхности совпадает с вершиной второй по-
верхности. Для нее = п4/(п - 1)г, W2= п2/(1 - п), а Р2 = 0 и W2 = О,
т.е. вторая поверхность аплднатическая, имеет форму сплюснутого эл-
липсоида, как следует из уравнения для Ъ2.
Однако рассмотренные линзы можно рекомендовать для работы
только в монохроматическом свете, поскольку они имеют значитель-
ный хроматизм. Для исправления хроматизма положения или
увеличения можно рассчитать «хроматический» радиус склейки, по-
скольку линзы имеют достаточную толщину и позволяют преобразо-
вать их в склеенный компонент при введении поверхности склейки.
С этой целью надо выбрать стекла с одинаковыми показателями
преломления Щ.о для основной длины волны и возможно большей раз-
ностью коэффициентов дисперсии vXo . Для видимой области спектра
(е, F'...C') можно использовать следующие пары стекол: ТК8—Ф1,
СТК9 — ТФ4, СТК12 — ТФ8 и др. (см. гл. 4, пример 4.6).
Чтобы рассчитать «хроматический» радиус, вначале определяют
оптические силы линз из решения уравнений масштаба и ахромати-
зации (см. гл. 4). Затем несложно найти радиус склейки по известно-
му значению оптической силы одной из линз и одному радиусу кри-
визны этой линзы.
Расчет трехзеркальной системы с асферическими
поверхностями
Двухзеркальные системы имеют ограниченные коррекционные
возможности, а введение линзовых компенсаторов ограничивает ра-
бочий спектральный диапазон. Поэтому большой интерес пред-
ставляют трехзеркальные системы, имеющие достаточное число па-
раметров для исправления всех монохроматических аберраций.
Рассмотрим пример расчета трехзеркального объектива с глав-
ным параболоидным зеркалом. Поставим задачу определения коэф-
фициентов деформации второго и третьего зеркал при условии
исправления сферической аберрации, комы, астигматизма и кривиз-
ны поля.
Вначале надо выполнить габаритный расчет системы. Примерная
конструкция системы показана на рис. 7.6.
Рис. 7.6. Оптическая схема трехзеркальной
системы
Примем нормировку
первого вспомогательного
луча: а2 = 0; Л2 = 1; = -1;
f = 1. В этой системе, распо-
ложенной в воздухе, п2 =
= п3 = 1, п2 =п4 = -1. Из фор-
мулы перехода для высот с
учетом принятой нормиров-
ки получим:
d1 = (l-h2)/a2; (7.34)
h3 = h2- d2a3; но h3/(-s'3) = -a4 = 1; поэтому h3 = -s'3. (7.35)
Из рис. 7.6 следует, что d2 - 5 = h3, откуда с учетом (7.35) имеем:
d 2 — h3 + 5 — 5 + h2 — d2&. 3\ (7.36)
d2 = (8 + Л2)/(/ + а3). (7.37)
Из уравнений (7.35) и (7.37) путем несложных преобразований
получим:
h3 = (h2-5a3)/(I + a3). (7.38)
Поскольку главное зеркало имеет форму параболоида, то Ь4 = —1,
Р2 + В2 = 0. Так как sp = 0, то при Р2 = 1 высота yt = sp = 0, а I = -1.
При раскрытии сумм Зейделя и последующих преобразованиях учтем,
что
в 5v[8(nvav)]3 п _8(avnv)
(5nv)2 ’ v nvn'v
( Y
Pv= g2v.
5— "v 5^ nv
l «V J «V
з
Кроме того, нетрудно убедиться в том, что У Wv = 1/2 , так как
W1 = a22/2; W2 = (a23-a2)/2; W3 = (1 - а23)/2.
Все эти особенности учтены при записи уравнений исправления
монохроматических аберраций третьего порядка:
«Г = ht (Р2 + B2)+h3(P3 + B3)=0; (7.39)
Si7 = У2 (Рг + В2)+у3 (Р3 + В3) +1/2 = о-, (1AQ)
Вщ = (Уг+ В2) + /й3)(Р3 + В3) + (у3/й2)(а3 аз)+
' (7.41)
+ (г/з/Лз)(7-а1)-а2 + (7/й2)(“з + “2) + (7/йз)(7-аз)=0-
Sjv = а2 - (1/Л2)(а2+а3)-(1/Л3)(1-а3)= О. (7.42)
Из (7.42) следует, что в (7.41) последние три слагаемых равны
нулю, и это надо учесть при преобразованиях.
Из формулы связи координат двух вспомогательных лучей
определим у3 = d1h3/h2 — d2/h2.
Учтем, что
Р2 = (1/4)(а3-а2)2(а3 + а2); В2 = (1/4)&2(а3 + а2)3;
Р3 = (1/4)(1 + а3)2(1 - а3); В3 = (l/4)b3 (1 - а3)3.
В процессе преобразований получим следующие соотношения:
а3 = (8-Л2)/(2Л2); (7.43)
а2 = ~[й2(8 + й2)-8(8-й2)]/[2й2 (1 - й2)(2Л2-8)]. (7.44)
Учтя значение а3, из габаритных соотношений найдем:
d2 = 2h2; h3 = 2h2~6. (7.45)
Окончательно из решения системы уравнений получим:
ъ2 = "[(«а - “2)/(«з + “г)]2 ~ ~ 3)/[й2 («з + “г)3]: (7.46)
53 = -[(1 + а3)/(/ - а3)]2 + 1Д(1 - а3)3]. (7.47)
Подробный вывод см. в [25].
С помощью полученных уравнений можно провести полное иссле-
дование трехзеркальных систем разных конструкций.
Рассмотрим частные случаи. Пусть имеется объектив, в котором
первые два зеркала образуют телескопическую систему квази-Мерсен-
на, т.е. а3 = 0. Тогда из (7.43) и (7.44) получим:
3=й2; a2 = -l/(l-h2}. (1АЪ)
Из (7.46) и (7.47) находим:
b2=-l + (l-h2)3; Ъ3 = 0. (7.49)
С учетом значения а3, запишем новые выражения для d2, d2, h3:
dt=-(l-h2)2; d2 = 2h2; h3 = h2. (7.50)
Из (7.49) следует, что третье зеркало является сферическим, а вто-
рое имеет форму эллипсоида. Предпочтительней та конструкция сис-
темы, при которой вершины первого и третьего зеркал совпадают. В
этом случае d2 = -dlt тогда из (7.50) получим 2h2 = (1 - h2)2 или
h2-4h2 + 1 = 0, откуда h2 = 2--J3 = 0,26795.
Из (7.48) определим а2 = —0,5(л/3 + 1) = —1,36603; d2 = —dt = 2h2 =
= 0,53590.
Из (7.49) найдем Ъ2 = -(11-6л/з) = -0,60770.
Приведенные значения вершинных радиусов кривизны поверхно-
стей г01, г02 и радиуса кривизны г3 таковы:
г01 = 2/а2 = -2(л/3-1)= -1,46410;
r02 = 2h2/a2 = -2 (Зл/З —б)= 0,39230;
r3 = -2h2 = -2(2 - -Уз) = -0,53590.
Задний фокальный отрезок s'r = -h2 = -0,26795.
Для вычисления реальных значений конструктивных параметров
системы надо полученные приведенные значения этих параметров
умножить на заданное фокусное расстояние.
Коэффициент центрального экранирования системы
Чк = й2/(7-й2) = 0,5(^3-1)= 0,366.
Рассмотренная система разработана в С.-П.ГИТМО (ТУ) для аст-
рофотографического объектива. Объектив имеет простую компактную
конструкцию, исправление четырех монохроматических аберраций,
обеспечивает возможность работы в широком интервале спектра. Не-
достатками системы является центральное экранирование и неудобное
положение плоскости изображения, где размещается приемник лучи-
стой энергии.
В последнее время в С.-П. ГИТМО (ТУ) разработаны и исследова-
ны различные конструкции трехзеркальных систем с асферикой.
7.4. Анаберрационные и анастигматические
поверхности и системы
Анаберрационные преломляющие поверхности и линзы
Анаберрацио иными называются поверхности, свободные от сфе-
рической аберрации. Это осесимметричные поверхности вращения.
Для определения формы а ^аберрационной поверхности используется
условие точечного изображения, являющееся следствием принципа
Ферма: оптическая длина хода любого из лучей пучка, идущего из точ-
ки предмета и сходящегося в точке изображения, должна быть вели-
чиной постоянной, т.е. EnZ = const. Эти поверхности впервые были раз-
работаны Декартом в XVII в., поэтому их часто называют декартовы-
ми.
Рассмотрим общую задачу, когда предмет находится на конечном
расстоянии. Поместим начало декартовых координат в вершину пре-
ломляющей поверхности РР (рис. 7.7), разделяющей две среды с по-
казателями преломления п и п'. Ось Oz направим вдоль оптической оси
поверхности.
Рис. 7.7. Схема для вывода уравнения овала Декарта
Запишем условие точечного изображения:
- nl + n'l' = -ns + n's'.
Правая часть уравнения содержит оптическую длину хода луча, иду-
щего по оптической оси. Заменив I и V их значениями, полученными
из треугольников АРМ и А'РМ, получим
п-^у2 +(8-2)г + n'-Jy2 + (s' - z)2 --ns + n’s’.
Освобождаясь от квадратных корней, приходим к уравнению
[о,5(п'2 -п2^{у2 +z2)- (n'2s' -n2s^z] =
(7.51)
= nn'(n's' -ns)^(ns' -n's)[y2 + z2) + 2(n' - n)ss'zj.
Это уравнение четвертой степени является уравнением профиля
анаберрационной поверхности. Оно представляет собой уравнение кар-
тезианского овала, или овала Декарта. Такие поверхности вследствие
трудности их изготовления не получили практического применения,
за исключением частных случаев, когда анаберрационная поверхность
имеет более простую форму.
Приняв граничные условия, от овала Декарта можно перейти к
различным частным случаям (рис. 7.8).
Рис. 7.8. Схема получения уравнений профиля анаберрационных поверхностей
из уравнения овала Декарта
Для удобства преобразований приведем уравнение овала к следую-
щему виду:
п'2-п2 у2 + z2 (n'2s/s-n2^z
2s n's'/s-n n's'/s-n
(7.52)
= nn'
ns'/s-n' / 2
n's’/s - n
+ 2(n'- n)
s'z
n's’/s-n
Используя условие s'/s = п'/п, которое получается из уравнения
параксиального луча при г0 = <*>, получим анаберрационную поверх-
ность, радиус кривизны которой в вершине (вершинный радиус г0) ра-
вен бесконечности. Такая поверхность называется тгланоидной (или
планоидом), а уравнение ее профиля имеет вид:
у2 = ——-—?Г(п'2 + пп' + n2\z ± n\l2n (п' + n)szl- г2. (7.53)
71(71 +n)LV 7 v J
Следует обратить внимание га то, что г должен иметь тот же знак,
что и s, иначе в этой формуле возникнет мнимость. Приближенное
уравнение планоида в области аберраций третьего порядка имеет вид:
2 = (7/S)[n(n' + n)/n,2](i/'//s3).
(7.54)
Преломляющие анаберрационные поверхности для предмета в
бесконечности. Для бесконечно удаленного предмета уравнение про-
филя анаберрационной поверхности можно получить как частный слу-
чай овала Декарта, положив, что s' = f' (рис. 7.9) при =
= -оо. Преобразовав (7.52), для этого случая получим
у2 + z2 р -(n/n')2 j- 2/'z(l -п/п') = О. (7.55)
Аналогичный результат полу-
чим, записав условие точечного
изображения (см. рис. 7.9)
тгг + п'Г = n’f и преобразовав его,
учтя, что V = -jy2 + (/' - z)2 .
Для определения формы полу-
ченной поверхности второго поряд-
ка, профиль которой описывается
уравнением (7.55), надо привести
уравнение к каноническому виду и Рис. 7.9. Схема для вывода уравнения
определить эксцентриситет этой анаберрационной преломляющей
поверхности. поверхности при s; = -«>
Перенеся начало координат в центр кривой zc, расположенный на
середине расстояния zc = n'f /(ti’ + n) = (z; + z^/2 между ее вершина-
ми, получим
z2/[n77(n' + n)]2 + y2/[f'2(n' - n')/{n' + n)] = 1. (7.56)
Следовательно, длины большой и малой полуосей (рис. 7.10, а) оп-
ределяются уравнениями:
а = n’f’/(n' + и); Ъ = f ,J(n'- п)/(п'+ и). (7.57)
Тогда эксцентриситет поверхности второго порядка, как изве-
стно из аналитической геометрии, е = -Jl — (b/a}2 , и в данном случае
с учетом полученных значений а и Ъ имеем
е = п/п'.
(7.58)
Если свет идет из менее плотной среды в более плотную среду, на-
пример из воздуха в стекло, то п < п’, е < 1 и поверхность имеет фор-
му эллипсоида. Задний фокус поверхности F' совпадает при этом со
вторым геометрическим фокусом эллипса F2 (рис. 7.9).
Рис. 7.10. Кривые второго порядка
При распространении
света из более плотной
среды в менее плотную эк-
сцентриситет е > 1. В этом
случае получаем уравне-
ние гиперболы, отнесен-
ное к вершине левой вет-
ви, т.е. малая ось ги-пер-
болы мнимая, а ее опти-
ческим фокусом является
геометрический фокус
правой ветви (рис. 7.10, б) и фокусное расстояние f' = а + с = а +
+ \1~а2 - Ъ2 , что легко подтверждается подстановкой а и Ъ из (7.57).
Для перехода к уравнению профиля, принятому при расчетах оп-
тических систем (см. табл. 7.1), подставим в (7.55) фокусное расстоя-
ние преломляющей поверхности f = п'г01(п' — и) и учтем, что е = п/п'.
После преобразований находим у2 = 2r oz - (1 - e2)z2. В зависимости от
значений е поверхность имеет форму эллипсоида или гиперболоида.
Однако следует обратить внимание на то, что параболоидная прелом-
ляющая поверхность не является анаберрационной и вносит сфери-
ческую аберрацию :
. f'(cose' Л n'cose'-ncose i
Asn =—---------1 —j-,----r------+ 1 • (7.59)
2 v cose J (n +n)cose
Если n > n', то Д3д~ < 0, а если n < n', то Дз'“° > 0. Формула (7.59)
справедлива и для плоскопараболоидной линзы с первой плоской по-
верхностью.
Отступление от условия синусов в анаберрационных преломляю-
щих поверхностях. Рассмотренные анаберрационные поверхности не
являются апланатическими и вносят значительную кому.
Определим отступление от условия синусов, которое в случае
предмета в бесконечности имеет вид: Af' = f'~ f'. Как видно из рис. 7.9,
f - у! sin а' = I', а Г = -Jy2 + (f' - z)2 , тогда
Af' = ^y2 + (f'-z)2 -f'. (7.60)
Исключим из (7.60) у2, подставив вместо него его выражение из
(7.55), тогда получим
Af' = -(n/n'^z = -ez. (7.61)
Полезное угловое поле можно определить, задавшись допустимым
значением комы К”. Для этого можно использовать известную при-
ближенную зависимость, справедливую для малых угловых полей:
К°° = 3y'Af/f. Так как у' = -f tg со, то учитывая (7.61), получим
tgco = Jf”/(3ez). (7.62)
Анаберрационные линзы. Для получения анаберрационной лин-
зы с первой эллипсоидной поверхностью надо вторую поверхность
выбрать апланатической и так, чтобы луч шел через нее без прелом-
ления. В этом случае гг = s'p, (рис. 7.11, а и рис. 7.15).
Если анаберрационная поверхность имеет форму гиперболоида, то
для создания линзы, свободной от сферической аберрации, первую
поверхность необходимо выбрать плоской (рис. 7.11,6).
Рис. 7.11. Анаберрационные линзы
Анаберрационные линзы могут применяться в симметричных
комбинациях, например при р0 = -1. При этом получается система,
свободная от сферической аберрации, комы, дисторсии и хроматизма
увеличения. Неисправленными остаются хроматизм положения, кри-
визна поля и астигматизм.
Анаберрационные отражающие поверхности
Если предмет находится на конечном расстоянии (рис. 7.12, а),
то уравнение профиля поверхности можно получить из уравнения ова-
ла Декарта, положив, что п' — -п:
у2 = [4ss'/(s' + s)]z - ^4ss'/(s' + s)2]z2. (7.63)
Это уравнение отнесено к вершине кривой. Для определения фор-
мы кривой перейдем к каноническому виду уравнения, как это было
сделано и для преломляющих поверхностей. Перенеся начало коор-
динат в центр кривой zc = -(s' + s)/2, получим уравнение профиля в
каноническом, или нормальном, виде:
2 2
z У - 1
[(s' + s)/2]2+^~ ’ <7-64)
Рис. 7.12. Анаберрационная отражающая поверхность
Эксцентриситет кривой
е = 1 — (Ъ/а)2 = |(s'-s)/(s' +з)| = |(а-а')/(а + а')[, (7.65)
так как s' = h/a', s = h/a.
Если отрезки з и з' имеют один и тот же знак, то уравнение (7.64)
представляет собой уравнение эллипса, а если знаки § и s'разные, то
уравнение (7.64) становится уравнением гиперболы, большую ось ко-
торой можно вычислить так же, как и для эллипса, ее малая ось —
мнимая.
Следует обратить внимание на то, что для эллипсоида и гипербо-
лоида предмет и изображение находятся в геометрических фокусах
поверхности. Различные случаи расположения предмета и изображе-
ния относительно отражающих анаберрационных поверхностей пока-
заны на рис. 7.13.
Рис. 7.13. Различные виды анаберрационных отражающих поверхностей
Уравнение (7.63) можно преобразовать. Учтем, что вершинный
радиус r0 = 2ss'/(s' + з) для отражающей поверхности, а эксцентри-
ситет е = (s' - s)/(s' + s). Тогда из (7.63) получаем у2 = 2r0z - (1 - e2)z2.
Уравнение профиля поверхности для бесконечно удаленного пред-
мета несложно определить из (7.52) или (7.63), принимая во внима-
ние, что s; = a s' = f. Правда, в данном случае уравнение проще
найти, записав условие точечного изображения (см. рис. 7.12, б). В
результате получим
у2 = 4f'z = 2r0z. (7.66)
Анаберрационные отражающие поверхности применяют в извес-
тных классических двухзеркальных системах Кассегрена, Грегори и
Мерсенна (см. гл. 6), в осветительных системах, системах накачки ла-
зеров и т.п.
Отступление от условия синусов в анаберрационных отражаю-
щих поверхностях. Для предмета на конечном расстоянии условие
синусов обычно записывается в следующем виде: Др = р - р0 или
Др/ро = (р - Ро)/Ро, где р = -sino/sincf, р0 = -з'/з = -а/а'.
Определив sin а и sin o' из рис. 7.12, а, находим
р=+~ s'H/[y2+~ sH-
Преобразуем подкоренное выражение, учтя, что у2 = 2roz - (1 - е2)г2и
r0 = 2ss’ (s' + s). В результате получим
р = ±(ez-s')/(ez + s). (7.67)
Знак увеличения выбирают таким же, как и для его параксиаль-
ного значения р0. Тогда
Ap = [ez(l-P0)]/(ez + s);
Лр/Ро =[ez(l-Po)]/[Po(ez + s)].
Для параболоидной поверхности отступление от условия синусов
выражается формулой Af' = f'— f', так как st = —
Как следует из рис. $. 12, б, f = Г = ^у2 + (z-f'')2 . Но у2 = 4f'/z, по-
этому получим
Af' = z = y2/(4f'). (7.68)
Вследствие значительного отступления от условия синусов ан-
аберрационные поверхности вносят заметную кому, что ограничива-
ет их полезное поле.
Анаберрационные поверхности и линзы,
не имеющие параксиальной области
Одним из частных случаев овала Декарта является поверхность
в форме улитки Паскаля вблизи узловой точки (рис. 7.14, а), урав-
нение которой можно получить, записав выражение для овала Декар-
та в полярных координатах и проведя его анализ [11]. Это единствен-
ный пример оптической анаберрационной поверхности, имеющей осо-
бенность — узел на оптической оси. Такую поверхность нельзя полу-
чить на основе теории аберрации третьего порядка, и она не имеет па-
раксиальной области.
Если предмет находится на поверхности, в узловой точке на оси
симметрии, то изображение не лежит на поверхности.
Можно разработать линзы с профилем поверхности в виде улит-
ки Паскаля (рис. 7.14, б—д), позволяющие получить большую свето-
силу (2ст/ = 180°). Исследования показали, что могут быть получены
даже более светосильные линзы из германия и кремния, которые мо-
гут найти применение в инфракрасной астрономии и технике. Такие
линзы изготовляют путем их обработки алмазным резцом на станке с
программным управлением.
Рис. 7.14. Анаберрационные поверхности и линзы, не имеющие
параксиальной области
Расчет анаберрационных линз
К анаберрационным линзам, часто называемым линзами Декар-
та, относятся плоскогиперболоидная и сфероэллипсоидная линзы. Их
применяют для концентрации лазерного излучения, в качестве объек-
тивов спектральных приборов, в схемах контроля асферической оп-
тики. Линзы Декарта, свободные от сферической аберрации, могут
иметь большую светосилу.
Расчет линз сводится к определению их диаметра, конструктив-
ных параметров и расчету значения отклонения от вершинной сферы.
Эксцентриситет анаберрационной поверхности полностью определяет-
ся показателем преломления оптического материала. Фокусное рас-
стояние каждой линзы равно фокусному расстоянию анаберрационной
поверхности, зависящему от радиуса кривизны вершинной (соприка-
сающейся) сферы.
В результате расчета плоскогиперболоидной линзы получают кон-
структивные параметры, соотношения между которыми приведены в
табл. 7.6.
При расчете сфероэллипсоидной линзы вершинный радиус г01 пер-
вой эллипсоидной поверхности
Рис. 7.15. Оптическая схема
сфероэллипсоидной линзы
вычисляют при заданном значении f.
Найдем радиус кривизны второй апла-
натической поверхности, имеющей
сферическую форму (рис. 7.15). Как
следует из рис. 7.15, d = f -г2. Но так-
же d = z2 + dmin - k2, где стрелка проги-
ба k2 определяется по известной фор-
муле: k2 = r2- у)г22 - D20j4 .
На основании приведенных соот-
ношений для d и выражения для k2
получаем:
Г2 = V~Z1~ rfmin )2 + ^пол /4 •
Определив г2, легко найти толщину d линзы.
В результате для расчета линзы имеем соотношения, приведенные
в табл. 7.6.
Рассмотренные линзы целесообразно использовать при работе в
монохроматическом свете, поскольку они вносят хроматизм. Для ра-
боты в конечном спектральном интервале надо ввести «хроматичес-
кий» радиус склейки (см. гл. 4, пример 4.6).
Расчет анаберрационных зеркальных систем
Расчет однозеркальных анаберрационных систем сводится к оп-
ределению вершинного радиуса г0 и эксцентриситета е (см. табл. 7.1),
диаметра зеркала и асферичности Az.
Классические двухзеркальные системы, разработанные в XVII в.,
—объективы Кассегрена (см. рис. 6.8), Грегори (см. рис. 6.9), телес-
копическая система Мерсенна (см. рис. 6.11) — состоят из двух ана-
беррационных поверхностей, поэтому также являются анаберра-цион-
ными. Они широко применяются в настоящее время и представляют
практический интерес. В телескопической системе Мерсенна помимо
сферической аберрации исправлены кома и астигматизм
(Sn = Sin = О), о чем не подозревал сам автор.
466
Таблица 7.6
Оптическая схема rv,d е Уравнение профиля анабер- рационной поверхности ДГ Вершинная асферичность Дг
= Ог = 0 rt=°° d = ^min ~ г2 г02 = fU - п) е2 = п y22=2r02Z2-(l-nZ)Z2 ~e2Z2 ^ = ^+_<+5rf/ 8г2 16г^ 128г2 где Ь = -е2; с = е* - 2е2; d= Зе4- Зе2 - е6 или точно: Дг = za - z„. из а сф решения уравнений ,2_ 2г0 У2 _0. z^,^2r02^+y2 = 0
с/ "типерйола
<х.1=о —и.. = а.3 = 1 f j 'bi = ~('i-Z) п d = Zt + dmin - k2 Г2 = SF‘ = 1 е1=- п у2=2r012j-p-4Vf < nJ ~elZ,
t I \ С2 Эллипс
I •> п2 = ^z1 + dmin^f')2 + ^
Расчет и проектирование оптических систем
Большое зеркало в каждой из систем имеет форму параболоида,
а малое зеркало — гиперболоид в системе Кассегрена, эллипсоид — в
системе Грегори, параболоид — в системе Мерсенна.
Габаритный расчет систем, рассмотренный в гл. 6, позволяет оп-
ределить вершинные радиусы кривизны г01 и г02. Для расчета анабер-
рационной системы надо вычислить эксцентриситет второго зеркала
в объективах, зная, что е2 = I (а3 - а2)/(а3 + а2) I, где угол а2 известен
из габаритного расчета. Затем надо определить значение Az асферич-
ности зеркал и записать уравнения профилей поверхностей.
Для расчета рассматриваемых систем помимо известных оптичес-
ких характеристик для систем Кассегрена и Грегори задаются коэф-
фициент экранирования йэк и вынос изображения 8, а для системы
Мерсенна — угловое увеличение у и расстояние d2 между зеркалами.
С учетом этого запишем уравнения профилей поверхностей для каж-
дой из систем:
1) система Кассегрена
Уl 2 * *1 = [4 (8 - /гэк )/(2 - йэк )]f'z2;
1 - 2k3K + 8
2) система Грегори
У1 = [Жк - 5 *)/(7 + b3K)]f'zr,
l + 2k3K-S
уравнения записаны для заданного фокусного расстояния, но величи-
ну 8 надо подставлять приведенной к f ~ 1 для системы Кассегрена и
к | f | = 1 для системы Грегори.
3) система Мерсенна
У21 = [4dy/(y-7)]z2;
i/J = [^d/(y-/)]z2.
Запись уравнений в таком виде удобна при анализе различных
систем, сравнении значений асферичности и т.п.
Расчет двухзеркальных анаберрационных систем для предмета на
конечном расстоянии аналогичен рассмотренному. Можно заранее
сказать, что в прямой системе Кассегрена при з; Ф первое зеркало
имеет форму эллипсоида, а второе — гиперболоида.
Анастигматические поверхности и линзы
Условие анастигматичности. Анастигматические выходные зрач-
ки поверхностей второго порядка. Условие анастигматичности асфе-
рических поверхностей можно получить, используя меридиональный
и сагиттальный инварианты Юнга — Гульстранда:
, 9 . 9 . >
n cos е ncos e_n cose -ncosE.
t' t г
bm bm 'm
n’ n _ ti'cose' - n COSE (7.69)
rs
где tm и ts, как известно из теории аберраций, — отрезки вдоль глав-
ного луча, отсчитываемые от точки пересечения луча с поверхностью
до точки предмета, соответственно в меридиональной и сагиттальной
плоскостях; t'm и t's — отрезки вдоль главного луча, отсчитываемые
от точки преломления луча на поверхности до точки изображения
[12].
Примем, что точка предмета на главном луче находится в беско-
нечности, т.е. tm = ts = °°, а также зададим равенство t'm = t's, которое
будет справедливо, если поверхность не вносит астигматизма. С уче-
том этих условий из астигматических инвариантов получим
rm cos2 е' = г,. , (7.70)
Условие (7.70) справедливо для всех асферических поверхностей.
Для поверхностей второго порядка меридиональный и сагитталь-
ный радиусы кривизны связаны соотношением: rm = rf /г$ (см. табл.
7.3). Подставив его в условие анастигматичности (7.70), получим
cose' = г0/г3. (7.71)
Записав уравнение главного луча в пространстве изображений и
используя (7.71), можно доказать, что отрезок s'P, = (1 ±^1 + В\
1J
(7.72) определяет положение анастигматического выходного зрачка.
Составив сумму и разность двух решений, найдем
s?'i + sp'ii = _ 2Го/В = 2а;
sP'i ~ sp'ii ~ ~(2r0 / B^'JT+B = 2с.
Отсюда следует, что расстояние между анастигматическими вы-
ходными зрачками кривой второго порядка равно расстоянию между
геометрическими фокусами этой кривой, а выходные зрачки совпада-
ют с этими фокусами, если предмет находится в бесконечности.
Условие анастигматичности справедливо и для отражающих по-
верхностей, в чем нетрудно убедиться, положив в инвариантах Юнга
— Гульстранда п — -п' = 1. В отличие от преломляющих, отражаю-
щие поверхности анастигматичны при произвольном положении пред-
мета. Действительно, положив в (7.69) п' = -n, tm = ts и t'm = t's (усло-
вие анастигматичности), вновь получим rmcos2E = rs. В этом случае
главный луч, прошедший через один анастигматический зрачок по-
верхности второго порядка, после отражения от поверхности пройдет
через второй геометрический фокус, т.е. входной зрачок будет анас-
тигматичным для обратного хода лучей. Это свойство используют при
разработке зеркально-линзовых широкоугольных объективов [17].
Анастигматические линзы. Для преломляющей параболоидной
поверхности один анастигматический выходной зрачок расположен в
геометрическом фокусе параболы, а другой — в бесконечности, что
объясняется геометрическими свой-
ствами параболы. Это свойство по-
верхности использовано в плоскопа-
раболоидной линзе, которая не име-
ет астигматизма в случае предмета,
расположенного в бесконечности, и
обладает телецентрическим ходом
лучей в пространстве изображений.
Следовательно, ее входной зрачок
совпадает с оптическим фокусом
(рис. 7.16).
Рис. 7.16. Оптическая схема анастиг-
матической плоскопараболоидной
линзы
Сферическая аберрация широких наклонных пучков для такой
линзы меньше, чем осевая сферическая аберрация. При соответству-
ющем выборе показателя преломления линза может быть свободна от
дисторсии при полевых углах до 120°. Поэтому такая линза может
служить в качестве базового элемента при разработке широкоуголь-
ных окуляров, в проекционных системах с телецентрическим ходом
лучей при хорошей ортоскопии, в объективах с вынесенным входным
зрачком. Однако эта линза не является анаберрационной.
Рассмотрим возможность создания анаберрационной анастиг-
матической линзы на примере плоскогиперболоидной линзы (рис.
7.17).
Рис. 7.17. Оптическая схема анас-
тигматической плоскогиперболоид-
ной линзы
Для нее коэффициент В = п2 - 1.
Тогда, воспользовавшись формулой
(7.72), найдем
s'pn=ro/(n+1)-
Первый корень соответствует па-
раксиальному изображению точки
на оси и не имеет практического ин-
тереса. Второй корень определяет по-
ложение выходного зрачка, для ко-
торого не будет астигматизма при
большом угловом поле. Однако вследствие сферической аберрации в
зрачках удается исправить астигматизм только для одного полевого
угла. Этого можно добиться подбором толщины линзы [17].
Для анаберрационной эллипсоидной поверхности также сущест-
вует одно положение анастигматического выходного зрачка, совпада-
ющее с первым геометрическим фокусом эллипса. Это свойство ис-
пользуется при разработке фронтальной линзы в гидросъемочных
объективах.
Применение условия точечного изображения к расчету
сложных систем. Метод дифференциальных уравнений
Если центрированная оптическая система состоит из одной-двух
асферических и произвольного числа сферических поверхностей, то
для получения стигматической системы используется условие точеч-
ного изображения, позволяющее определить форму поверхности. В
простейших случаях задача решается с помощью алгебраических со-
отношений. Однако чаще всего использование этого условия приводит
к дифференциальным уравнениям, которые преимущественно реша-
ются приближенными методами или численно с помощью ЭВМ.
Методы, основанные на применении дифференциальных урав-не-
ний, особенно удобны для расчета компактных систем, имеющих све-
тосильные компоненты, в частности для космических и астро-номи-
ческих приборов. Расчеты подобных систем методами, основанными
на теории аберраций третьего порядка с последующей оптимизацией
на ЭВМ, часто не позволяют получить хорошо исправленную систему
и приводят к потере решений.
Часто разработка таких систем представляет собой сложную ма-
тематическую задачу, реализуемую на ЭВМ с последующей разра-
боткой технологии с применением станков с ЧПУ. Эти особенности
значительно повышают стоимость проектирования, что допустимо
лишь для уникальных специальных систем. Правда, в некоторых слу-
чаях удается получить приближенное решение и упростить задачу,
заменив асферические поверхности высших порядков коникоидами
при условии снижения светосилы системы.
Для расчета строго апланатических систем используются условие
точечного изображения и условие синусов, совместное решение кото-
рых приводит к системе дифференциальных уравнений. Так, методом
дифференциальных уравнений рассчитана апланатическая линза с
относительным отверстием на теоретическом пределе — 1:0,5, при
этом As' = Af' = НГ10/' [10].
Одна из первых двухзеркальных апланатических систем была рас-
считана Шварцшильдом, затем независимо друг от друга Д.Д. Мак-
сутовым и Кретьеном. Известны различные модификации подобных
систем [8, 9]. Задача разработки и исследования подобных систем ча-
сто решается и в настоящее время.
Рассмотрим одно из известных решений задачи в параметричес-
ком виде [21]. Исходными являются условие точечного изображения
и условие синусов.
Условие точечного изображения для этой системы (рис. 7.18) за-
пишем в виде: TM + МК+ KF' = О2О1 + О fl 2 + О fl' или
-]{z1-z2-d'f +{<y1-y2'f + ^{s'p.-z^2 + yz2 +z1 + d- s'p' = 0. (7.73)
Из рис. 7.18 следует, что y2/(s'p. — z2) = tg o'. Введем параметр
t = tg (o'/2), тогда
y2/is'p,-z2)=2t/(l-t2). (7.74)
Рис. 7.18. Оптическая схема апланати-
ческой двухзеркальной системы
Условие синусов имеет вид: f = i/2/sin o', но при f = 1 получим
ут = sins'= 2tj[l + t2y (7.75)
Из совместного решения уравнений (7.73)—(7.75) найдем коор-
динаты поверхностей двухзеркальной апланатической системы в за-
висимости от параметра t и двух постоянных величин d и s'r:
z2 = - 1Д(1 + t2)2Sp- [I + t2 (d + ;)/d](2d+7)/(d+/) _ + .
yt = 2t/(l + t2)-,
z2 = d(l- t2)I|t2 - (d/s;,)[l + t2(d + l)/d]1/{1+d'>| + s'F,;
y2 - - 2td j|t2 - (d/s^,)[l + t2(d + l)/d]V(2+d)|,
где t = (l- -Jl-t/f уi
Эта методика расчета, известная под названием метода Робертса,
обеспечивает получение светосильных систем с асферическими повер-
хностями высших порядков, к которым можно перейти от уравнений
в параметрическом виде, выполняя аппроксимацию одним из извест-
ных методов.
Особенности расчета системы Шмидта
Как известно, в системе Шмидта (рис. 7.19), разработанной в
1929 г., исправлены все аберрации, кроме кривизны поля. Полевые
аберрации исправляются благодаря выбору положения входного зрач-
ка в центре кривизны сферического зеркала, а сферическая аберрация
исправляется введением коррекционной пластинки с планоидной по-
верхностью.
Задачу определения профиля пластинки можно решить точным
методом, применяя условие точечного изображения, однако получае-
мое при этом решение довольно громоздко и неизящно.
Для определения уравнения поверхности пластинки сравним два
зеркала: сферическое с фокусным расстоянием f и параболлоидное с
фокусным расстоянием f'n [9]. Вершины зеркал совмещены и обе по-
верхности пересекаются на зоне у0 (см. рис. 7.19). Уравнения профи-
лей сферы и параболоида имеют вид:
z = y2/(4f')+y4/(64f'3); (7.76)
Рис. 7.19. Оптическая схема системы Шмидта
2П = У2/{4 £). (7.77)
Отклонение Дз параболоида от сферы, касающейся его в вершине
и пересекающейся с ним на зоне у0, с достаточной точностью определя-
ется уравнением, полученным как разность (7.77) и (7.76):
\г = (у2-1/Г)-у4/(64Г3). (7.78)
Поскольку при у = у0 Дз = О, получим, что на произвольной
зоне у
bz = (y2y20-y4)l(64f'3). (7.79)
Это отклонение вызывает появление волновой сферической абер-
рации N в сферическом зеркале:
Ny = 2^z = (y2y20-y4)/(32f'3).
Выразим у и у0 в долях полудиаметра 77 = D/2 пластинки, как это
принято в астрономии: у = у/Н, у0 = у0/Н; тогда у = Dy/2, у0 = Dy0/2.
Обозначим у0 через а. С учетом этого
Ny = -\^y4-y2a)/512\A3D,
r&eA = D/f'.
Эта аберрация должна быть скомпенсирована во входном зрачке
соответствующим профилем пластинки:
z = d- d0 = ^(у4 - ау2)/[512(п - 1)^A3D,
где п — показатель преломления стекла пластинки.
Одной из важных характеристик пла-
2
стинки является величина а = у0, в зави-
симости от которой меняются вид профи-
ля пластинки (рис. 7.20), смещение фо-
кальной плоскости Д системы относитель-
но фокуса сферического зеркала, положе-
ние нейтральной зоны и отклонение от
плоскости. При а = 0 профиль наиболее
легок в изго-товлении, а при а = 1,5 пла-
стинка имеет минимальный хроматизм.
Действие планоидной поверхности
пластинки аналогично действию клина.
Угол отклонения 0 определяется углом
наклона нормали к оптической оси, сле-
довательно,
0 = (п - Л— = 4У3 ~2УоУ = 4У3 ~2аУ Аз
V dy 32f'3 256
Рис. 7.20. Виды профилей пла-
ноидной пластинки Шмидта
для различных значений а
Тогда линейное смещение луча, проходящего через зону у пластинки,
в фокальной плоскости будет
У'х0 = Qf' = [(4^3 - 2ау)/25б]А3Г. (7.80)
Эти соотношения справедливы для длины волны Хо.
Составив аналогичные выражения для длин волн Х2 и получим
Ух, ~ Ук2
n-Ki ~пк2 4у3 - 2ау Аз
. п-1 256 ' '
(7.81)
Из (7.81) видно, что хроматическая аберрация системы Шмидта
будет минимальной, если выбрать такое значение а, которое для
0<у<1 обеспечивает минимальное значение абсолютной величины
разности ^ = 4у3 -2ау. Оно экстремально при dZ,/dy = 0, поэтому
12у -2а=0, откуда У = Ут = -ja/6. Экстремальное значение
= 4y3m-2aym = -(4/3)a-fii/6.
На краю пластинки у = 1, 2; = = 4 - 2а. Поставленное требование
будет удовлетворено, если с,т = -^г, т.е. ~(4/3^а^а/6. = 2а - 4. Это
уравнение имеет решение при а = 1,5.
Следовательно, профиль поверхности пластинки Шмидта, удов-
летворяющий условию минимума хроматизма, описывается уравне-
нием
zm = d - d0 = {(у4 - 1,5уг)/[512(п - 1)]}а3П. (7.82)
Условию минимума хроматизма, вносимого пластинкой, со-ответ-
ствует смещение фокальной поверхности из параксиального фокуса
сферического зеркала на Д = -(3/16) [H2/(8r)] = -3D2/(64г).
Для а = 1,5 известны эмпирические формулы для оценки углово-
го и линейного диаметров кружков рассеяния, вызванных хромати-
ческой аберрацией [9]:
2Ay'(Xt,X0) = [(пХ/ -пХп)/(пКп- 1}]1600А3, угл.сек. (")
Задаваясь допуском 2&у'л, получим условие, ограничивающее ра-
бочий спектральный диапазон:
= пКо+128(У2/о)(пКо-1)2^у'л-,
пх2 = пКд-128(У2/о)(пКо-1)2Ау'л
где V = 1 /А= f /D.
Единственную неисправленную аберрацию — кривизну поля —
можно существенно уменьшить, применив линзу Пиацци—Смита или
изогнув фотопленку (поверхность изображения) по выпуклой сфери-
ческой поверхности. Линза Смита, однако, вносит сферическую абер-
рацию и кому, которые ограничивают поле светосильных систем.
Правда, пересчетом пластинки Шмидта можно устранить аберрации,
вносимые линзой Смита.
При значительном хроматизме пластинки устранить его можно,
используя ахроматическую пластинку, склеенную из деталей, кото-
рые выполнены из стекол двух марок.
Данная теория позволяет рассчитать системы с относительным
отверстием до 1:2, поскольку при выводе уравнения профиля исполь-
зовались два члена разложения в ряд уравнения сферы и не учитыва-
лись аберрации высших порядков. Правда, их влияние можно учесть,
пересчитав коррекционную пластинку после аберрационного анализа.
7.5. Исправление аберраций высших порядков
введением малых деформаций
Метод исправления аберраций высших порядков введением ма-
лых деформаций предложен Г.Г. Слюсаревым [18] и применяется в
том случае, если оптическая система исправлена в отношении абер-
раций третьего порядка. В качестве исходных данных для расчета
этим методом необходимо иметь волновые аберрации системы, так как
деформация поверхности непосредственно связана с изменением вол-
новой аберрации.
Если система состоит из преломляющих и отражающих поверх-
ностей, то целесообразнее асферизовать отражающие поверхности, так
как деформация в этом случае будет в 4 раза меньше, чем в случае пре-
ломляющей поверхности.
Пусть для системы определена волновая аберрация для несколь-
ких зон зрачка: это аберрации N2, N2, N3, N4; деформация на соот-
ветствующих высотах у составляет Дз = N(n' — ri).
Уравнение поверхности имеет вид:
z = Ay2 + By4 + Су6 + Dy8.
В процессе решения задачи надо определить такие приращения
коэффициентов уравнений, при которых z для соответствующих вы-
сот у принимают значения з2 + Дз2, z2 + Az2,... Полагая, что высоты у
находятся в отношении л/4, 43, у2 , 1, и учитывая, что высоты т на
зрачке находятся в таком же отношении, можно написать четыре
уравнения вида
Дз2 = ААу2 + &Ву4 + &Су8 + &Dyf
для четырех значений уг Из решения системы уравнений определя-
ются соответствующие приращения ДА, ДВ, ДС, ДВ.
Добавляя эти значения к первоначальным значениям коэффици-
ентов, получаем уравнение профиля поверхности, исправленной в от-
ношении определенной аберрации. После введения деформации надо
выполнить аберрационный анализ системы. Наибольший эффект от
деформации поверхности получают в том случае, когда эта повер-
хность является последней в системе. Если поверхность находится
внутри системы, то не всегда удается исправить аберрации с первой
попытки, так как после деформированной поверхности происходит
непредусмотренное изменение волновой аберрации последующими
поверхностями.
Деформирование двух и более поверхностей также можно прово-
дить с применением этой методики. Такая необходимость возникает
при исправлении двух аберраций, так как в общем случае нельзя ис-
править две аберрации деформированием одной поверхности. Правда,
в отдельных случаях [17] это возможно при соблюдении нескольких
условий, касающихся характера изменения аберраций, однако и в
этом случае исправляются аберрации только для одного полевого угла
или для одной высоты на зрачке.
Исправление сферической аберрации в тонком двухлинзовом
объективе. При устранении в тонком двухлинзовом склеенном объек-
тиве сферической аберрации третьего порядка остается неисп-равлен-
ной сферическая аберрация высших порядков, которая положитель-
на и по характеру изменения близка к зависимости 4-й степени от вы-
соты или о' [16].
Эта зависимость может быть представлена в виде As' = Ао '4. Тог-
да поперечная сферическая аберрация Ay' = As'o' = Ао '5.
Учитывая связь геометрической и волновой аберраций
<з'
N = j As'o'do', получим
о
N = (&у'/б)а' = (А/б}в'6 = (As'/6)ct'2.
Например, если для объектива As' = 1 мм при D/f' = 1:5 (o' = 0,1), то
волновая аберрация = 0,00167 мм. Для устранения этой аберрации
можно деформировать поверхность объектива, граничащую с возду-
хом. Значение деформации Az определяют по формуле Az = -N/(n -
- 1). Для нашего примера при п = 1,6 Az = -0,0028 мм, т.е. асферич-
ность очень мала.
Исправление сферической аберрации в триплете введением ма-
лой деформации поверхности [17]. При синтезе триплета обычно по-
лучается несколько конструктивных схем (см. п. 4.5). Широко распро-
странена конструкция с отрицательной линзой посередине со сравни-
тельно большими воздушными промежутками и средним полем. Уг-
ловое поле ограничивается астигматизмом высшего порядка, а отно-
сительное отверстие — остаточной сферической аберрацией на зоне,
имеющей отрицательное значение.
Сферическую аберрацию третьего порядка можно устранить за
счет значительной положительной сферической аберрации на краю
отверстия, описываемой зависимостью, близкой по своему характеру
параболе 4-й степени. Для коррекции подобной сферической аберра-
ции можно ввести малую деформацию на одну из сферических повер-
хностей. Деформация описывается параболической зависимостью
6-й степени и направлена вовнутрь линзы, что потребует незначитель-
ного съема стекла по краю поверхности. Деформируемая поверхность
должна быть расположена вблизи апертурной диафрагмы, чтобы де-
формация не вызвала изменений других аберраций.
Например, деформация одной из поверхностей триплета с /' =
= 150 мм позволила повысить относительное отверстие до 1:2,8 и сде-
лала возможным замену этим объективом шестилинзового объектива
типа Гелиос [17].
7.6. Технологические характеристики асферической
поверхности. Определение радиуса ближайшей
сферы для поверхностей второго порядка
В настоящее время благодаря применению ЭВМ синтез оптичес-
ких систем с АП разной формы не вызывает серьезных проблем. Од-
нако чисто теоретическое решение вопроса разработки высококаче-
ственных оптических систем с АП является недостаточным. При рас-
чете таких систем особенно важно оценить технологичность АП. Для
этого служат так называемые технологические характеристики АП,
позволяющие сделать вывод о степени сложности изготовления и кон-
троля АП и выбрать соответствующие методы.
Технологические характеристики АП. Рассмотрим некоторые
технологические характеристики, которые необходимо определить в
процессе разработки систем с АП. К ним относятся крутизна, асфе-
ричность, градиент асферичности, а также габаритные размеры.
Крутизна поверхности определяется максимальным углом <ртах
наклона нормали к поверхности с оптической осью. Для монотонной
АП этот угол соответствует крайней зоне, т.е. половине диаметра. По-
верхность с <ртах < 30° относят к пологим, с Фтах> 30° — к крутым.
Иногда вводят понятие «апертура АП», причем в отличие от об-
щепринятого Адп = tg фтах. Поверхности с апертурой Аап > 0,25 от-
носят к высокоапертурным. Например, параболоидное зеркало с от-
носительным отверстием 1:1 имеет Аап = 0,25. Для известного урав-
нения профиля АП расчет фтах не вызывает трудностей.
Второй важнейшей технологической характеристикой является
асферичность, т.е. максимальное отклонение от базовых поверхнос-
тей — от ближайшей сферы или плоскости. Ранее рассматривалась
вершинная асферичность, представляющая собой отклонение АП от
вершинной сферы. В этом случае с увеличением высоты у на повер-
хности растет отклонение АП от сферы, достигая максимального зна-
чения на крайней зоне. Можно изменить радиус сферы сравнения так,
чтобы ее отклонение от АП было минимальным, и получить радиус
ближайшей сферы г6 с. Часто ближайшую сферу выбирают так, что-
бы она проходила через вершину АП и ее край. При задании асферич-
ности обязательно указывают способ выбора ближайшей сферы — сфе-
ры сравнения.
Асферичность определяет толщину слоя стекла, удаляемого при
изготовлении АП механическими методами, и толщину наносимого
слоя дополнительного вещества при изготовлении методом вакуумной
асферизации.
По значению асферичности поверхности разделяют на три вида:
с малой асферичностью (до 30 мкм), со средней асферичностью (30...
1000 мкм) и с большой асферичностью (более 1000 мкм).
Градиент асферичности характеризует наибольшее изменение
асферичности на 1 мм дуги кривой профиля. Его обычно определяют
по зависимости асферичности от ф или у. Максимальное значение гра-
диента соответствует наибольшему углу между касательной к кривой
и осью. Графическое определение градиента асферичности обеспечи-
вает достаточную для практики точность.
По габаритным размерам оптические детали с АП разделяют на
малые (до 30 мм), средние (30...300 мм) и крупные (свыше 300 мм).
Определение радиуса ближайшей сферы для АП второго поряд-
ка. В настоящее время в оптических системах часто применяют АП
второго порядка, технология изготовления которых достаточно хоро-
шо разработана. Рассмотрим метод определения радиуса ближайшей
сферы г6 с для этих поверхностей [14].
Для определения г6 с надо сначала ввести понятие продольной
аберрации нормалей АП [14]. Нормали пересекают ось АП в разных
точках и под разными углами. Следовательно, любой АП соответ-
ствует совокупность норма-
лей, которая образует негомо-
центрический пучок. Назовем
отрезок С0С (рис. 7.21) про-
дольной аберрацией нормали
(As'n) по аналогии с продоль-
ной аберрацией луча, принад-
лежащего негомоцентричес-
кому пучку. Поэтому поверх-
ность можно характеризовать
зависимостью As'n = /(ф) для
продольной аберрации норма-
ли.
Но As'n = z+ у ctg ф - г0 (см. рис. 7.21). Для поверхностей второго
порядка ctg ф = [г0 + (е2 - 1) з]/у, поэтому As'n = e2z.
Радиус ближайшей сферы равен радиусу окружности, проходя-
щей через вершину О АП и ее крайнюю точку А с координатами 2; и
(рис. 7.22):
МС = (г1/2)[( + (!/г/г;)2].
Но МС = ОС, поэтому про-дольная аберрация нормали PC
As'n = МС -r0 = e2z0.
Отсюда найдем координату z0 точки Р — точки касания АП и сфе-
ры ЕРВ.
Рис. 7.22. К выбору радиуса ближайшей
сферы для АП второго порядка
Зная z0, из уравнения кри-
вой найдем у0, а затем длину
нормали PC:
PC = 4ro + е*Уо •
Для выпуклой поверхности
радиус ближайшей сферы равен
отрезку МС, а для вогнутой —
длине нормали PC (рис. 7.22).
Тогда асферичность поверхнос-
ти второго порядка Az = МС -
PC.
Определение радиуса бли-
жайшей сферы для поверхностей высшего порядка можно найти в мо-
нографии [14].
Глава 8. АБЕРРАЦИОННЫЙ АНАЛИЗ ИСХОДНОГО
ВАРИАНТА ОПТИЧЕСКОЙ СИСТЕМЫ
И ОПТИМИЗАЦИЯ
8.1. Аберрационный анализ исходного варианта.
Методы коррекции аберраций
Конструктивные параметры исходного варианта определяют од-
ним из известных методов (см. гл. 3), после чего проводят аберраци-
онный анализ системы на ПЭВМ. Для этого используют известные
программы анализа оптических систем на персонально-профессио-
нальных ЭВМ (ППЭВМ), получивших широкое распространение в пос-
леднее время.
Современные системы САПР оптических систем позволяют полу-
чить оптические схемы с вычерчиванием хода лучей, таблицы и гра-
фики аберраций.
Аберрационный анализ оптических систем дает полную информа-
цию об остаточных аберрациях системы — хроматических и монохро-
матических как осевых, так и полевых.
Для систем с невысоким относительным отверстием и небольшим
угловым полем, синтез которых выполняется с применением метода
разделения переменных (см. гл. 4), возможно получение исходного
варианта с малыми значениями остаточных аберраций, не требующих
дальнейшей коррекции. В остальных случаях приходится проводить
исправление, или коррекцию, аберраций.
Под коррекцией аберраций понимают их уменьшение до опреде-
ленных допустимых значений (см. п.3.1), зависящих от типа опти-
ческой системы и ее назначения. Оптимальной можно считать кор-
Расчет и проектирование оптических систем
рекцию, обеспечивающую минимальные значения аберраций для дан-
ной системы, что позволяет увеличить допуски на изготовление опти-
ческих деталей и снизить требования к оптическим материалам.
Параметры, изменение которых влияет на определенные аберра-
ции, называют коррекционными. В качестве коррекционных парамет-
ров можно назвать радиусы кривизны, воздушные промежутки, мар-
ки стекол и толщины линз (в случае их значительной толщины). Для
систем со сравнительно невысокими оптическими характеристиками
коррекционными параметрами являются внешние и внутренние па-
раметры, исходные значения которых получены из решения абер-
рационных уравнений в процессе параметрического синтеза.
Известны два основных метода коррекции. Первый метод имеет
две разновидности и представляет собой продолжение метода разде-
ления переменных. В его основе лежит предположение о том, что при
небольших изменениях основных параметров Р°°, W~‘ и С влияние
аберраций высших порядков и толщин остается практически неиз-
менным, изменяются лишь аберрации третьего порядка. При исполь-
зовании метода определяют разность A(Ay£) между требуемым значе-
нием аберрации и полученным (здесь Ау£ = f(m,M,со) Sk; Sk— соот-
ветствующая сумма Зейделя). Дифференцируя эту функцию и заме-
няя дифференциалы конечными приращениями, находят все измене-
ния ASk сумм Sr..Sv и хроматических сумм хр и SIIxp. С учетом вы-
численных значений Sk определяют основные параметры и при новых
их значениях вновь определяют конструктивные элементы системы,
т.е. фактически повторяют расчет исходного варианта. Это является
недостатком метода.
Рассмотренная разновидность метода применяется, например,
при синтезе триплета (см. п.4.2) и фототелеобъектива на предвари-
тельной стадии коррекции, что позволяет выбрать направление
коррекции.
Другая разновидность метода, применяемая при коррекции одно-
и двухкомпонентных систем с небольшим угловым полем, дает воз-
можность дифференцированием аберрационных уравнений опреде-
лить приращения коррекционных параметров, с учетом которых вы-
полняется расчет новых значений конструктивных элементов систе-
мы. В этом случае нет необходимости заново проводить синтез систе-
мы. Метод позволяет одновременно исправить хроматизм положения,
сферическую аберрацию и меридиональную кому. Он используется в
специализированных программах для расчета двух-, трех- и четырех-
линзовых компонентов [4, 18] на ППЭВМ.
Второй метод коррекции — это метод проб. В его основе лежит
последовательное изменение коррекционных параметров системы и
определение тех значений параметров, при которых система удовлет-
воряет заданным условиям, т. е. дает требуемое качество изображе-
ния. В некоторых случаях приходится делать вывод о практической
непригодности рассчитываемой системы и выбирать другой исходный
вариант.
Использование метода проб предполагает линейный характер из-
менения аберраций при изменении коррекционных параметров сис-
темы, что справедливо при небольших вариациях параметров. Для
большинства систем эта зависимость явно нелинейная, причем нели-
нейность заметнее сказывается при больших порядках аберраций.
Вследствие этого приходится применять метод последовательных при-
ближений, в процессе которого параметры меняются незначительно.
При коррекции аберраций сложных систем особое значение име-
ет выбор параметров, оказывающих существенное влияние на исправ-
ляемые аберрации. Для этого рассчитывают таблицу влияния
параметров, в которой представлены последовательные изменения
разных параметров и соответствующие им вариации аберраций. На
основе анализа этой таблицы выбирают коррекционные параметры,
с помощью которых по программам автоматической коррекции
(см. 8.3) осуществляется исправление аберраций.
Общие рекомендации по выбору коррекционных параметров мож-
но дать лишь для несложных систем с небольшим угловым полем. В
остальных случаях большую роль играют опыт, хорошее владение те-
орией аберрации и даже интуиция.
Кроме описанных двух основных методов находит применение
комбинированный метод. При его использовании переменные делят
на две группы. К первой относят параметры, имеющие простую ана-
литическую связь с аберрациями для систем с конечными толщинами.
Примером такого параметра может служить оптическая сила ф лин-
зы, которая влияет на хроматические аберрации. Ко второй группе
принадлежат параметры, выбор которых зависит от вида системы и
результата анализа таблицы влияния изменения параметров.
При использовании описанных методов коррекции для получения
оптимального варианта приходится несколько раз изменять парамет-
ры, каждый раз пересчитывая конструктивные элементы и выполняя
аберрационный анализ системы. Эти методы коррекции применяют-
ся в специализированных и универсальных программах коррекции на
ППЭВМ (см. п. 4.6 и 8.3).
Рассмотрим коррекцию аберраций методом проб в одно- и
двухкомпонентных системах, исходный вариант которых можно по-
лучить методом разделения переменных. Применение этого метода
эффективно при работе на ПЭВМ или ППЭВМ в диалоговом режиме в
учебной практике.
8.2. Метод проб
Для систем с небольшим угловым полем, имеющих значительные
аберрации высших порядков, целесообразно использовать метод проб,
называемый также методом линейной интерполяции (или экстрапо-
ляции) и методом последовательных приближений. В таких системах
нарушается линейная зависимость между аберрациями и коррекци-
онными параметрами, поэтому дифференциальный метод, являющий-
ся продолжением метода разделения переменных, не дает быстрого
положительного эффекта.
Рассмотрим вначале особенности коррекции аберраций в двух-,
трех- и четырехлинзовых компонентах (объективах).
Из условия ахроматизации (п. 4.2) следует, что для коррекции
хроматизма можно поменять марки стекол, если это возможно, или
изменить (перераспределить) оптические силы линз компонента, со-
храняя их сумму.
Коррекция хроматической аберрации положения выполняется
для зоны зрачка т = О, 7O7.D/2 (или т = 0,87D/2 в некоторых случа-
ях), что необходимо для получения наиболее благоприятного распре-
деления сферохроматической аберрации по зрачку системы (рис. 8.1).
Рис. 8. 1. График сферической аберрации и сферохроматических разностей:
а) хроматизм положения исправлен в параксиальной области (ASqF._c- );
б) хроматизм положения исправлен на зоне т = 0,707 D/2
При коррекции хроматизма положения в параксиальной области, на-
пример, сферохроматическая аберрация значительно возрастает на
краю отверстия (рис. 8.1,а).
Коррекция сферической аберрации проводится для края отвер-
стия, т. е. при т = D/2 (рис. 8.2, а). Более благоприятной является
коррекция с небольшим переисправлением для края отверстия, что
Рис. 8.2. График сферической аберрации:
а) сферическая аберрация исправлена на краю отверстия (т = D/2);
б) сферическая аберрация незначительно переисправлена для края отверстия
позволяет уменьшить зональную сферическую аберрацию (рис. 8.2, б).
Сферическая аберрация и меридиональная кома в значительной
степени зависят от формы (прогиба) линзы, поэтому их следует ис-
правлять изменением внутренних углов av в отдельных линзах или
подбором инварианта склейки Qv в склеенных компонентах, что вы-
текает из соответствующих аберрационных уравнений.
В основе метода проб также лежит предположение о линейной за-
висимости между аберрациями и коррекционными параметрами. В
большинстве систем со значительными остаточными аберрациями,
что характерно для систем с повышенной светосилой, эта зависимость
является явно нелинейной, поэтому коррекция каждой из аберраций
выполняется после нескольких изменений коррекционных парамет-
ров.
Виды коррекционных параметров для компонентов разных кон-
струкций приведены в табл. 8.1: для коррекции хроматизма положе-
ния служат внешние параметры (оптические силы линз компонентов),
а для коррекции сферической аберрации и комы — внутренние пара-
метры, определяющие форму линз, к числу которых относятся так-
же инварианты склейки в конструкциях с двухлинзовыми и трех-
линзовыми склеенными компонентами.
486
Таблица 8.1
№ п/п Вид компонента Коррекционные параметры для исправления Рекомендуемые коррекционные параметры при работе на ЭВМ в диалоговом режиме, используемые для исправления
хроматизма положения сферической аберрации и комы хроматизма сферической аберрации и комы
1 <Р1 Q «з* а2*(при (fj = const)
2 «3=4’1 а2, <х4 «3 «2> «3
3 Ф1 QpQn Qp Qn
4 монохромат — «2’«3 — «2'«3
Расчет и проектирование оптических систем
Продолжение табл. 8.1
487
№ п/п Вид компонента Коррекционные параметры для исправления Рекомендуемые коррекционные параметры при работе на ЭВМ в диалоговом режиме, используемые для исправления
хроматизма положения сферической аберрации и комы хроматизма сферической аберрации и комы
5 «3>«5 4 о «3’«5 а., °v 4 6
6 «3-а5 «г «6 «3>«5 «с «6
7 % «2> Q «5* «2
8 <₽1 Q,a5 «з* «5
Глава 8. Аберрационный анализ исходного варианта оптической системы и оптимизация
488
Продолжение табл. 8.1
№ п/п Вид компонента Коррекционные параметры для исправления Рекомендуемые коррекционные параметры при работе на ЭВМ в диалоговом режиме, используемые для исправления
хроматизма положения сферической аберрации и комы хроматизма сферической аберрации и комы
9 Ч>1 Q «з* а2*(при <р<!] = const)
10 «з = Ч>1 а2,а4 аз «2-«<
11 Ф1 аз*> ае* а2* (при = const) а5* (при <р°3 = const)
Примечание. Знаком «*» отмечены «неполные» коррекционные параметры, которые одновременно влияют на все
исправляемые аберрации.
Расчет и проектирование оптических систем
Следует обратить внимание на то, что в трехлинзовых компонен-
тах с первой и второй склейками внешние параметры — углы а4 и а3
соответственно — не могут выполнять роль коррекционных парамет-
ров для исправления хроматизма положения, поскольку они прини-
мались за избыточные при синтезе исходного варианта и выбирались
из условия исправления аберраций высших порядков по минимуму
модуля Q и Р на склейке. По этой же причине не может быть кор-
рекционным параметром угол а4 в четырехлинзовом компоненте с раз-
ными радиусами кривизны.
Общие принципы метода заключаются в следующем. Вначале,
когда неизвестен характер изменения аберрации в зависимости от кор-
рекционного параметра, можно взять его приращение в интервале
±(5... 10)% исходного значения и рассчитать новые радиусы кривизны.
Затем выполняется аберрационный анализ системы с новыми значе-
ниями конструктивных элементов.
Рекомендуется строить график зависимости аберраций от коррек-
ционных параметров, чтобы выявить характер зависимости, что воз-
можно при наличии хотя бы трех вариантов. При существенном от-
клонении от линейности оптимальное значение коррекционного па-
раметра можно определить графически, соответствующим образом
выбрав масштаб построения.
Если имеются результаты расчета двух вариантов системы (напри-
мер, исходного и с измененными коррекционными параметрами), то
можно найти оптимальное значение параметра методом линейной ин-
терполяции. Для этого можно использовать известную формулу ли-
нейной интерполяции:
У = (8.1)
где у — искомое значение коррекционного параметра;
х — допустимое значение исправляемой аберрации (можно по-
ложить х — 0);
уопу1 — значения коррекционных параметров, которым соот-
ветствуют аберрации х0 и хг
Обозначив коррекционный параметр через а, а аберрацию через
As', получим следующее соотношение для определения оптимально-
го коррекционного параметра а0:
“о = «и + [(« - «и) / (As' - As; )](As'° - As;), (8.2)
где индексом «и» обозначены величины в исходном варианте.
Если имеются три пары значений аргумента и функции, то более
точные результаты можно получить, применяя формулу параболичес-
кой интерполяции, например формулу Лагранжа:
т, = (^-хг)(х-х3) (х-х2)(х-х3) (х-х2)(х-х2)
(х;-х2)(х;-х3)У/ (х3-Х;)(х2-х3)У2 (х3-х;)(х3-х2)Уз‘ ( >
Применительно к коррекции уравнение (8.3) примет вид:
(As'0 - As')(As'° - As') (As'° -As' )(As'° - As')
a ° = -_2 4 —+^-=—’—----------=-Aa +
(As; - As')l As; - As' I (As' - As; )(As' - As')
где As'0 — ожидаемое значение аберрации, чаще всего нуль;
As; — значение аберрации в исходном варианте;
As' — значение аберрации после первой коррекции;
As' — значение аберрации после второй коррекции;
а0, оси, а и a — соответствующие значения коррекцион-
ных параметров.
При таком расчете удобно данные сводить в таблицу.
Если при найденных значениях коррекционных параметров
значение исправляемой аберрации больше допустимого, то надо де-
лать следующее приближение, вновь повторяя описанный процесс,
включая и графическое построение. Данный метод удобно применять
в учебной практике.
Особенности коррекции хроматизма положения. Коррекция абер-
раций обычно начинается с исправления хроматизма положения, по-
скольку изменение внешних параметров, входящих также в абер-
рационные уравнения для Р W°° вызывает заметное нарушение кор-
рекции сферической аберрации и комы.
Как известно, коррекция обычно выполняется для зоны
zn=0,707D/2, но при этом надо следить за распределением хроматиз-
ма по всему отверстию зрачка. Для этого целесообразно строить гра-
фик зависимости аберрации от коррекционного параметра для не-
скольких зон зрачка. В некоторых случаях приходится принимать
компромиссное решение с тем, чтобы не увеличить в значительной сте-
пени хроматизм на краю отверстия при его тщательном исправлении
на зоне. Рекомендуется недоисправить хроматизм, т. е. получить его
отрицательное значение.
В некоторых случаях, например в двухлинзовых склеенных
компонентах, при неудачном выборе марок стекол кривая зависимо-
сти = f(<pj) может не пересекать ось ординат (рис. 8.3). Ясно, что
значение хроматизма положения нельзя получить менее значения,
равного — ) • Единственный способ исправления хроматизма
в этом случае — поменять марки стекол.
Рис. 8.3. График зависимости неис-
правленного хроматизма положения от
коррекционного параметра
Особенности коррекции в телеобъективах. Если фокусирующий
компонент представляет собой отдельную линзу, то коррекцию абер-
раций целесообразно проводить за счет изменения параметров перво-
го положительного компонента. При сравнительно небольших абер-
рациях высших порядков коррекцию можно проводить, используя
правило сложения аберраций и выделяя аберрации фокусирующего
компонента. Для продольного хроматизма можно записать:
(AsUi)o6 = (AsxaJjPoii + (AsXA2)n.
откуда для второго компонента получим:
(AsXjX2)n =(Д«х1хг)ов-(А8х1хг)1 ₽оп-
Затем можно определить (AsXjX2)t при условии, что = О'-
(А8М.Д =_(Asx1x2)n/₽oii-
Аналогичные уравнения получим для продольной сферической
аберрации.
Если фокусирующий компонент является двухлинзовым склеен-
ным или имеет более сложную конструкцию, то коррекцию можно
проводить, используя коррекционные параметры как первого, так и
второго компонентов.
Особенности коррекции хроматизма положения в зеркально-лин-
зовых объективах. При больших значениях относительного отверстия
(1:2 и выше) компенсатор может внести в систему значительный хро-
матизм. Для его исправления можно рекомендовать несколько нару-
шить афокальность компенсатора. Например, для этого в системе типа
Кассегрена с компенсатором в параллельных пучках лучей (см. рис.
6.28) надо взять а5 * 0, определив его значение методом проб, а в та-
кой же системе с компенсатором в сходящихся пучках лучей (см. рис.
6.31) следует принять а7 * 1.
Для сохранения фокусного расстояния системы надо провести
масштабирование, т. е. вычислить коэффициент, представляющий
собой отношение заданного фокусного расстояния к полученному при
нарушении афокальности компенсатора, и умножить на него кон-
структивные элементы системы, после чего проверить величину f.
В двухлинзовых компонентах-отражателях коррекционные пара-
метры выбирают так же, как и в линзовых компонентах.
После получения допустимого или минимально возможного
значения хроматизма положения проводится коррекция сферической
аберрации и меридиональной комы.
Особенности коррекции сферической аберрации и меридиональ-
ной комы. Виды коррекционных параметров для линзовых объекти-
вов представлены в табл. 8.1. Большинство объективов имеют два или
три коррекционных параметра, позволяющих исправить указанные
аберрации. Можно исследовать их влияние на аберрации и выбрать
один из них.
Поскольку одни и те же параметры влияют одновременно на обе
аберрации, то при коррекции сферической аберрации надо следить за
изменением меридиональной комы. В учебной практике удобно стро-
ить графики зависимости двух аберраций от одного и того же пара-
метра, выбирая с помощью него оптимальное решение.
При проведении коррекции необходимо также следить за измене-
нием зональной сферической аберрации. Стремление свести сфери-
ческую аберрацию на краю отверстия практически к нулю (см. рис.
8.2, а) в отдельных случаях не дает оптимального решения. Лучше
несколько переисправить сферическую аберрацию на краю и тем са-
мым уменьшить ее на зоне отверстия (см. рис. 8.2, б).
Для коррекции аберраций в зеркально-линзовых системах ис-
пользуют внутренние параметры компенсатора (см. гл. 6).
Особенности коррекции монохроматических аберраций в телеобъ-
ективе такие же, как и при коррекции хроматизма.
Коррекция аберраций методом проб при работе на ПЭВМ в диа-
логовом режиме. Работая на ПЭВМ иди ППЭВМ, при отсутствии про-
грамм синтеза компонентов и зеркально-линзовых систем с оптими-
зацией можно быстро и эффективно выполнить коррекцию, задавая
систему не радиусами кривизны, а углами av . В этом случае для не-
склеенных компонентов остаются те же самые коррекционные пара-
метры. При исправлении хроматизма положения в объективах, содер-
жащих склеенный компонент, удобнее использовать «неполный» кор-
рекционный параметр, которым является угол во второй линзе склей-
ки: угол а3 — в отдельном склеенном компоненте, угол а5 — в трех-
линзовом объективе со второй склейкой и угол а3 — в трехлинзовом
объективе с первой склейкой (см. табл. 8.1). Эти углы одновременно
влияют на сферическую аберрацию и кому, так как входят не только
в соотношения для соответствующей оптической силы <р линзы, но и
в инвариант склейки Q. В некоторых случаях одновременно с коррек-
цией хроматизма положения значительно уменьшаются сферическая
аберрация и кома.
После коррекции хроматизма во избежание пересчета
коррекционного параметра (для сохранения оптической силы одной
из линз) лучше корригировать сферическую аберрацию за счет внут-
реннего угла отдельной линзы (в трехлинзовых объективах с отдель-
ной линзой), а в склеенном компоненте при изменении ос2 необходи-
мо пересчитать а3 так, чтобы оставить неизменными оптические силы
компонентов, при которых исправлен хроматизм положения, что со-
ответствует изменению инварианта склейки Q при <pf = const.
8.3. Автоматизированная коррекция аберраций
оптических систем. Универсальные программы
для коррекции аберраций в оптических системах
любых типов и любой степени сложности
Автоматизированная коррекция аберраций с помощью ЭВМ (оп-
тимизация) при самом активном участии разработчика позволяет оп-
ределить конструктивные параметры оптической системы, обладаю-
щей заданными параксиальными характеристиками (2со, D/f, f, Ро,...)
и требуемыми характеристиками (аберрациями или коэффициентами
аберраций).
Автоматизированную коррекцию можно осуществлять двумя
принципиально различными способами.
Первый способ применим к системам любого типа и любой степе-
ни сложности и основан на использовании универсальных методов
постепенных приближений (метод проб). Для этого в исходном вари-
анте системы, которая либо выбирается, либо предварительно рассчи-
тывается в области аберраций третьего порядка (т. е. числовые зна-
чения конструктивных параметров rv, dv, п исходной системы извес-
тны), последовательно изменяют некоторые параметры. После ряда
изменений получают систему с требуемым качеством изображения
либо устанавливают, что данная система не может обеспечить требу-
емого качества изображения.
Изменения конструктивных параметров, как правило, выполня-
ют на основании изучения таблицы влияния изменения параметров
на аберрации и величины, характеризующие свойства оптической си-
стемы. Обычно считается, что между изменениями параметров и из-
менениями аберраций существует линейная зависимость. На самом
деле эта зависимость далеко не линейная, причем нелинейность тем
сильнее, чем выше порядок аберраций. Поэтому разработчик вносит,
как правило, незначительные изменения параметров и улучшает ис-
ходную систему с помощью универсальных программ коррекции по-
степенно.
Второй способ применим к ограниченному ряду оптических сис-
тем, обычно состоящих из бесконечно тонких компонентов. Здесь ис-
пользуются методы, основанные на решении системы уравнений, свя-
зывающих конструктивные параметры с аберрациями. Такие уравне-
ния удается составить только в области аберраций третьего порядка.
Специализированные программы, составленные на основе решения
этих уравнений, применимы для расчета двухкомпонентных систем
из одиночного и склеенного компонентов, двойного и тройного скле-
енного компонентов (см. п. 4.6).
Рассмотрим универсальные методы автоматизированной коррек-
ции.
Пусть оптическая система (например, ее исходный вариант) име-
ет N параметров: rv, dv,nXg, -лХ2, V, коэффициенты асферических
поверхностей и т. п. Часть параметров, которые назовем коррекцион-
ными, обозначим через pv р2, .... р;, ...,pt. Их число примем равным t,
эти параметры будем автоматически изменять в процессе расчета, при-
чем, какие параметры будут коррекционными, решает разработчик.
Часть параксиальных характеристик и аберраций, которые подле-
жат коррекции, назовем корригируемыми функциями. Обозначим их
через Фр Фр ..., Ф;, ..., ФЛ, а их число примем равным k. Какие функ-
ции будут вычисляться, решает также разработчик. Обозначим тре-
буемые значения корригируемых функций через Фу , допустимые от-
Глава 8. Аберрационный анализ исходного варианта оптической системы и оптимизация
клонения от требуемых значений (допуски) — через 8Ф;, значения кор-
рекционных параметров в исходной оптической системе — через ,
а соответствующие им значения корригируемых функции —через
ф(.°). Требуется найти такие значения параметров при которых кор-
ригируемые функции Ф. имеют значения, лежащие внутри интерва-
лов Ф; + 8Ф;.
Универсальные методы автоматизированного расчета оптичес-
ких систем можно разбить на две группы:
1) методы, при которых задача автоматической коррекции сводит-
ся к отысканию таких значений коррекционных параметров, при ко-
торых все рассматриваемые функции будут иметь требуемые значения
с заданными допусками;
2) методы, при которых оптическая система характеризуется оце-
ночной (целевой) функцией вида
(8.4)
i=i
где as = 1 / ЗФ2 — весовой коэффициент, учитывающий масштаб еди-
ниц измерения соответствующих функций Ф-.
Задача автоматизированного расчета оптической системы сводит-
ся к нахождению таких значений конструктивных параметров систе-
мы, при которых оценочная функция будет минимальной. Так как не
существует точных аналитических методов решения задач оптимиза-
ции, то поиск минимума оценочной функции всегда строится как ите-
рационный процесс последовательных приближений к минимуму, со-
стоящий из ряда повторяющихся шагов, при этом конечное состояние
предшествующего шага является начальным для последующего. По-
этому достаточно описать один шаг оптимизации, чтобы был ясен весь
ход процесса. Итерационное повторение шагов заканчивается, когда
изменение состояния от шага к шагу становится пренебрежимо ма-
лым.
Введение оценочной (целевой) функции F упрощает расчет, позво-
ляет оперировать только одной единственной величиной. Следует от-
метить, что если все функции будут иметь требуемые значения, то и
оценочная функция обратится в нуль.
В последнее время разработаны методы, которые включают в оце-
ночную функцию помимо отклонений функций от требуемых значе-
ний (Ф; -Фу) еще и изменения коррекционных параметров Др;, бла-
годаря этому происходит ограничение приращений параметров.
Математические методы автоматизированной коррекции
Рассмотрим ряд математических методов автоматизированной
коррекции аберраций, получивших широкое распространение на
практике.
Комбинированный метод. При комбинированном методе автома-
тизированной коррекции задача оптимизации имеет два этапа. На пер-
вом этапе осуществляется поиск соотношения между изменениями
коррекционных параметров Др (поиск направления движения), при
котором достигается убывание оценочной функции F.
Поиск направления движения осуществляется основными метода-
ми в зависимости от соотношения между числом коррекционных па-
раметров t и числом корригируемых функций k. В том случае, когда
основные методы не обеспечивают необходимую скорость сходимос-
ти итерационного процесса, независимо от соотношения между k и t
используется дополнительный метод, при котором направление дви-
жения выбирается противоположным по отношению к градиенту оце-
ночной функции F.
Итак, если k = t, то для поиска направления движения использу-
ется модифицированный метод Ньютона, заключающийся в том, что
решается система k линейных уравнений с t неизвестными, имеющая
в матричной форме вид:
АЛр=ЛФ, (8.5)
где А = {ЭФ / dpt} — матрица первых производных функций Ф; по кор-
рекционным параметрам оптической системы. Элементы матрицы
вычисляются методом конечных разностей. Компоненты вектора ДФ
сутьФ;-Ф*0).
Решение Ар = А^ДФ системы уравнений (8.5) трактуется как век-
тор, определяющий направление поиска минимального значения оце-
ночной функции F на данном шаге итераций.
Если k > t, то используется метод наименьших квадратов. Так
как k > t, то система линейных уравнений переопределена (уравнений
больше, чем неизвестных) и не имеет решения. Однако можно найти
такие приращения параметров, при которых оценочная функция F
убывает. Направление поиска определяется в результате решения нор-
мальной системы уравнений относительно Др:
ВтВДр = ВтД;Ф, (8.6)
где В — матрица, полученная из матрицы А путем деления элемен-
тов любой у-й строки на 5Ф.; Вт — транспонированная матрица В;
Д7Ф — компоненты вектора
Д;Ф7. = (Ф7.-Ф'О))/5Фг
Если k <t, то используется метод Лагранжа. В этом случае сис-
тема линейных уравнений (8.5) имеет бесконечное множество реше-
ний. Для дополнения системы уравнений (8.5) вводится требование
минимальности взвешенной суммы квадратов приращений парамет-
ров р.:
*=« 2
Р = • (8.7)
i=l
Весовые коэффициенты принимаются равными сумме абсолютных
значений производных
= ^|э2ф7/Эр?|.
i=i
Расчет Э2Ф7/Эр;2 осуществляется одновременно с расчетом первых
производных методом конечных разностей.
На втором этапе коррекции определяется минимальное значе-
ние квадратичной формы (8.7) при выполнении условия (8.5). В ре-
зультате получают систему из (й+ t) линейных уравнений с (й+ t) не-
известными, из которых первые t — искомые приращения парамет-
ров а остальные k — произвольные коэффициенты Лагранжа А...
Тогда система уравнений в матричной форме будет иметь вид:
Су = Ф) (8.8)
где у — вектор-столбец неизвестных (£-первых компонент — Др(, ос-
тальные й-компонент — множители Лагранжа Х7);
<р — вектор-столбец, £-первых компонент которого совпадают с
компонентами вектора ДФ системы (8.5), а остальные й-компонент —
нули;
С — матрица следующей структуры:
А
О О
О <з2 О
О 0 <з3 О
О
О
АТ
ООО
Решая систему линейных уравнений (8.8), получают множители
Лагранжа и вектор приращений параметров Др.
Если после применения основного метода не удается получить до-
статочной скорости убывания оценочной функции, которую можно
определить по формуле
q = (F(s^-F<s))/F<s), (8.9)
то используют дополнительный метод. В формуле (8.9) F(s~l) — зна-
чение функции F перед началом выполнения итерационного шага с
порядковым номером s; F(s) — значение функции F после выполнения
итерационного шага с порядковым номером s. И если £ < е', где е' —
некоторое заранее выбранное число, то осуществляется переход к до-
полнительному методу, с помощью которого определяют направление
поиска наименьшего значения оценочной функции. За такое направ-
ление принимают направление, противоположное градиентному на-
правлению для оценочной функции:
Фу-Ф;. /5Ф2,
Др = -gradf (р); ДР1 = atj
j=i
где atj — компоненты матрицы А. Получившийся вектор Др опре-
деляет направление поиска минимума оценочной функции F. Затем
вводится переменная величина ЧИ, характеризующая длину шага в
выбранном направлении. Изменения параметров, соответствующие
длине шага Т, вычисляют путем умножения приращения параметров
Др;, полученных в результате решения системы уравнений (8.5) на шаг
Т. Исходной точке соответствует шаг = 0. При поиске минимума
вектор коррекционных параметров определяется как р = р(0)+ ФДр.
Для определения шага Т используют оценочную функцию F, при-
чем эта функция обращается в нуль, когда корригируемые функции
примут требуемые значения, равные Ф;. И так как оценочная функ-
ция всегда положительна, то значение шага Т целесообразно прини-
мать соответствующим минимуму оценочной функции. Далее следу-
ет найти зависимость оценочной функции от шага Т и значение
соответствующее минимальному значению функции Emin. Поиск дли-
ны шага 4-'min осуществляется различными методами, изложенными
в работах [4, 18, 21].
Расчет прекращается либо тогда, когда ни один из рассмотренных
выше методов не обеспечивает установленной скорости сходимости
итерационного процесса, либо тогда, когда все корригируемые функ-
ции находятся внутри заданных интервалов Ф; ± ЭФ;. В первом случае
Глава 8. Аберрационный анализ исходного варианта оптической системы и оптимизация
решение не найдено, хотя аберрации и уменьшены, во втором — за-
дача решена.
Сдерживающий метод наименьших квадратов. При использова-
нии этого метода нет разделения задачи на поиск направления и вы-
бор шага: эти этапы объединяются и выполняются одновременно. Суть
метода заключается в том, что в оценочную функцию помимо откло-
нений функций от заданных значений включаются изменения коррек-
ционных параметров. При этом происходит ограничение приращений
параметров, а оценочная функция имеет вид:
Л 2 t
7? = Ха/(ф/~ф/) +?X(APi)2’ (8.10)
;=Т 1=1
где q — «сдерживающий» параметр. Иногда используют не один
«сдерживающий» параметр, а для каждого коррекционного парамет-
ра выбирают свое значение qt.
Для нахождения минимума функции F решается система нор-
мальных уравнений, которая в матричной форме имеет вид:
(АтА + дЕ^Др+АТДФ = О,
где компоненты вектора ДФ = Ф; - Ф; .
Метод применяется при любом соотношении между числом пара-
метров t и числом функций k. Если используется не один сдерживаю-
щий параметр q, а для каждого из коррекционных параметров выби-
рается свое значение сдерживающего параметра qit то это равносиль-
но изменению метрики пространства параметров pt.
Если при решении задачи оптимизации во всем пространстве па-
раметров не накладываются никакие ограничения на возможные из-
менения параметров, то такую оптимизацию называют безусловной.
Часто решение, полученное методами безусловной оптимизации, не
удовлетворяет требованиям конструктивной или физической реали-
зуемости. Например, могут быть получены отрицательные значения
расстояний между поверхностями в оптической системе, слишком
большие толщины линз и т. п. Все это приводит к необходимости вве-
сти ограничения, которые в общем виде могут быть выражены через
некоторые функции от параметров оптимизации.
К ограничениям типа неравенств можно отнести-.
математические ограничения, описывающие область существова-
ния оптимизируемых функций Ф^. К таким ограничениям относятся
условия попадания всех лучей на поверхность, преломление без пол-
ного внутреннего отражения и т.п.;
физические или конструктивные ограничения. К ним относятся
ограничения максимальной и минимальной толщины линзы, значе-
ния воздушных промежутков, ограничения на параметры стекол, на
общую длину системы, на длину заднего отрезка и положение зрач-
ков и т.п.
К ограничениям типа равенств относятся’
условия равенства заданным значениям увеличения, положения
зрачков, условия телескопичности или телецентричности и т.п.;
связи параметров оптимизации. Такие связи часто возникают в
процессе оптимизации зеркальных и зеркально-линзовых систем, ког-
да одна и та же физическая поверхность и среда появляются в конст-
руктивном описании несколько раз, а также и тогда, когда при опти-
мизации желательно сохранить пропорциональность отдельных час-
тей оптической системы.
Перечисленные связи являются линейными по отношению к па-
раметрам. Такие связи достаточно легко контролируются в процессе
оптимизации. Существуют и нелинейные связи. К ним относятся, на-
пример, связи концентричности. Нелинейность связей сильно услож-
няет их контроль при оптимизации.
Оптимизация с ограничениями, vljivi условная оптимизация, зна-
чительно более сложна и менее разработана, чем безусловная оптими-
зация. Разновидностью методов условной оптимизации являются ме-
тоды штрафных функций, которые наиболее просты и универсальны,
но для обеспечения точного контроля ограничений при их использо-
вании требуются многократные повторения процесса оптимизации.
Суть метода состоит в том, что каждому ограничению ставится в
соответствие некоторая штрафная функция, возрастающая при нару-
шении ограничений. Штрафы включаются в общую систему оптими-
зируемых функций наравне с остальными, после чего оптимизация
проводится уже как бы без ограничений рассмотренными выше спо-
собами. Более подробно об этих методах можно прочитать в [16].
Приемы автоматизированной коррекции оптических систем
При использовании универсальных программ автоматизирован-
ного расчета оптических систем разработчику приходится выбирать
исходную оптическую систему, назначать корригируемые функции и
устанавливать их требуемые значения и допуски, определять, какие
параметры будут использоваться в качестве коррекционных, и зада-
вать в случае необходимости ограничения на их значения.
В большинстве случаев полная коррекция оптических систем
представляет собой ряд этапов, каждый из которых включает набор
Глава 8. Аберрационный анализ исходного варианта оптической системы и оптимизация
условий, предъявляемых к оптической системе (требования к аберра-
циям). Выбор конкретных аберраций на каждом этапе коррекции —
процесс творческий, активно влияющий на ход коррекции оптичес-
кой системы.
Так как в основе методов автоматизированного проектирования
оптических систем (АПОС) лежат итерационные способы, то нет га-
рантии нахождения решения даже в тех случаях, когда решение су-
ществует. Если неудачно выбрана исходная система, неправильно на-
значены требуемые значения корригируемых функций или допуски
на них вследствие неудачного выбора коррекционных параметров, то
возможны случаи, когда программа обеспечивает нахождение бли-
жайшего локального минимума F, но он не удовлетворяет поставлен-
ным требованиям, хотя нужное решение и существует.
Выбор исходной оптической системы. Конструктивные парамет-
ры оптической системы можно взять из каталога, архива, патентов;
получить путем расчета оптической системы в области аберраций
третьего порядка (с помощью специализированных программ); найти
методами синтеза оптических систем по поверхностям или элементам
с известными аберрационными свойствами; сформировать путем ус-
ложнения какой-либо известной конструкции или путем сочетания
перечисленных выше методов.
К исходной оптической системе предъявляют обязательные требо-
вания: лучи, с помощью которых определяются аберрации, не должны
испытывать полное внутреннее отражение, должны иметь точки пе-
ресечения со всеми поверхностями оптической системы. В процессе
коррекции знаки у фокусного расстояния или увеличения не долж-
ны меняться.
Выбор корригируемых функций. Он определяется назначением
оптической системы и ее коррекционными возможностями (например,
при коррекции объективов микроскопов коррекция дисторсии неце-
лесообразна; в осветительных системах достаточно ограничиться кор-
рекцией сферической аберрации и меридиональной комы и т. д.). Кор-
рекция избыточных аберраций — это наиболее частая ошибка разра-
ботчиков, приводящая к отрицательным результатам. Так, в тонких
компонентах при небольших полях нельзя требовать одновременного
исправления сферической аберрации, меридиональной комы и астиг-
матизма. При расчете важно установить необходимое и достаточное
число корригируемых функций (аберраций). Опыт показывает, что
это число целесообразно определять постепенно, начиная с минималь-
ного.
Если зависимость между аберрациями и координатами точек пе-
ресечения с плоскостью предмета у и плоскостью входного зрачка от
т и М монотонная, то максимальные значения аберраций соответ-
ствуют предельным значениям апертуры и поля. Поэтому первона-
чально надо ограничиться коррекцией аберраций для предельных зна-
чений этих величин, затем установить, не превышают ли аберрации
для промежуточных значений у, т и М допустимых значений. Если
превышают, то следует провести дополнительную коррекцию, увели-
чив число корригируемых аберраций.
Можно сделать и так: задать сразу большое количество корриги-
руемых аберраций, тогда появление значительных аберраций для про-
межуточных значений у, т, М станет маловероятным, но в этом слу-
чае из-за большого количества корригируемых аберраций возрастают
затраты времени ПЭВМ и, кроме того, невозможно установить, какие
именно аберрации не поддаются коррекции.
Если аберрационные свойства корригируемой системы неизвест-
ны, то целесообразно принимать требуемые значения аберраций рав-
ными нулю. На более поздних стадиях коррекции часто в целях пере-
балансировки аберраций для получения оптимального качества изоб-
ражения эти значения задаются отличными от нуля.
Допуски на аберрации назначают, исходя из реальной потребнос-
ти. Изменяя допуски на аберрации, можно влиять на результаты кор-
рекции (если вследствие автоматизированного проектирования опти-
ческой системы все функции, кроме одной, получают заданные зна-
чения, то коррекцию повторяют, задав более жесткий допуск на эту
функцию). При k > t четко проявляется зависимость результатов рас-
чета от допусков 8Ф..
Выбор коррекционных параметров. В современных программах
АПОС оптическая система может быть задана как через rv, так и че-
рез (\. Поэтому коррекционными параметрами могут быть и rv (точ-
нее pv = l/rv) и углы первого вспомогательного луча av. На практике
использование углов av является предпочтительным и дает лучшие
результаты, чем применение кривизны pv. При использовании в ка-
честве коррекционных параметров av обеспечивается требуемое уве-
личение Ро или фокусное расстояние f оптической системы, если вы-
полнить условия n1a1/(n'a/) = 0О; h1/a' =f. Задание оптической систе-
мы через углы av сохраняет апланатичность заданных поверхностей
и обеспечивает афокальность системы. В большинстве случаев коррек-
ция одних и тех же исходных систем через углы av осуществляется
за меньшее число итераций, чем их коррекция при задании оптичес-
кой системы через кривизны pv. Это объясняется тем, что при зада-
Глава 8. Аберрационный анализ исходного варианта оптической системы и оптимизация
нии системы через углы av количество корригируемых функций
уменьшается, так как f или Ро поддерживаются автоматически и не
входят в число корригируемых функций.
В качестве коррекционных параметров можно брать и толщины
линз и воздушные промежутки, показатели преломления сред и ко-
эффициенты дисперсий у. Но эти параметры далеко не всегда явля-
ются активными параметрами (п и у можно изменять внутри узкого
интервала и они могут принимать дискретные значения, указанные
в ГОСТ 3514-76); величины dv и <2ВОЗД ограничены по конструктивным
соображениям.
Чтобы значения коррекционных параметров не выходили за гра-
ницы интервалов, в ряде программ предусмотрено задание явных ог-
раничений р^ 2 pt^ р^ . Если в качестве коррекционных парамет-
ров выбирают п, то обычно nmin = 1,47 и nmax = 1,808 (ГОСТ 3514-76).
После коррекции полученные значения показателей преломления за-
меняют ближайшими, предусмотренными ГОСТом.
При выборе коррекционных параметров в оптической системе с
неизвестными свойствами целесообразно выполнить работу «влияние
параметров» и по полученным результатам выделить параметры, из-
менения которых в пределах допуска не могут вызвать существенных
изменений корригируемых функций. Простейшим примером являют-
ся толщины линз dj и d2 в склеенном объективе при коррекции абер-
раций осевой точки: толщины практически не влияют на аберрации.
Изменения же углов а2, а3 пределах 0,1 вызывают в сотни раз боль-
шие изменения указанных аберраций (сферической аберрации и хро-
матизма положения).
Известны три метода коррекции аберраций.
1. Метод последовательной коррекции аберраций. Суть метода
заключается в том, что коррекция необходимых аберраций осущес-
твляется не одновременно, а постепенно: сначала корригируют абер-
рации, зависящие от коррекционных параметров более линейно, чем
остальные, и требующие для коррекции больших изменений коррек-
ционных параметров. Затем количество корригируемых функций
(аберраций) увеличивается. В случае необходимости добавляются все
новые и новые аберрации. Метод позволяет определить, какие из но-
вых аберраций не поддаются коррекции, и принять определенные
меры, например ввести дополнительные коррекционные параметры,
позволяющие исправить необходимые аберрации.
2. Метод целенаправленного изменения параметров исходной системы.
3. Метод произвольного случайного изменения параметров исход-
ной системы.
Глава 9. ОЦЕНКА КАЧЕСТВА ИЗОБРАЖЕНИЯ
ОПТИЧЕСКИХ СИСТЕМ
9.1. Исходные принципы оценки качества изображения
Оптическая система, полученная в результате синтеза и оптими-
зации, должна иметь определенное качество изображения, зависящее
от ее применения.
Под качеством оптического изображения обычно понимают сте-
пень соответствия геометрических, фотометрических и спектральных
характеристик изображения и предмета. Для оценки качества изоб-
ражения его необходимо характеризовать как с количественной, так
и с качественной стороны.
Каждая оптическая система должна давать изображение, подоб-
ное предмету не только по общему контуру, но и в каждой отдельной
его точке. Однако оптическая система никогда не изображает точку в
виде точки. С одной стороны этому препятствуют аберрации системы,
с другой — дифракция света. Это приводит к тому, что изображение
точки оказывается нерезким, расплывчатым, мелкая структура пред-
метов передается неправильно, в результате две близко расположен-
ные точки сливаются в одно пятно, изображения решеток расплыва-
ются в серый фон и т.п. Даже безаберрационная система вследствие
дифракции дает изображение точки в виде кружка рассеяния малых,
но конечных размеров. Размеры кружков рассеяния дают некоторое
представление о качестве изображения, поскольку величина, обрат-
ная размеру 2Ai/' кружка рассеяния, приближенно характеризует раз-
решающую способность системы.
С позиций геометрической оптики — чем меньше аберрации, тем
выше качество изображения. Однако это очевидное соответствие тре-
бует более глубокого анализа. Помимо аберраций надо учитывать та-
кие характеристики изображения, как контраст составляющих его
элементов, их количество и взаимное расположение в пределах поля
оптической системы, а также возможность их регистрации приемни-
ками (глазом, светочувствительным слоем пленки, фотоприемником
и т.п.) с минимальными искажениями.
Требования к качеству изображения определяются назначением
системы. Так, объективы телескопов, предназначенных для наблюде-
ния звезд и других астрономических объектов, должны иметь такое
качество изображения, которое бы позволило различать две звезды
при наименьшем расстоянии между ними. Астрообъективы имеют
малое поле и для них достаточно оценивать качество изображения осе-
вой точки, которое должно быть практически идеальным. В фотогра-
фических объективах, используемых в художественной фотографии,
важным является соответствие изображения и предмета не только по
геометрическим и фотометрическим, но и по спектральным характе-
ристикам. Поэтому для этих объективов рассчитывается коэффици-
ент цветопередачи, а для оценки качества изображения важна связь
количественных оценок изображения с его психофизиологическим
восприятием. Если оптическая система используется в канале связи,
то высококачественной она считается в том случае, если передает и по-
зволяет зарегистрировать максимальное количество информации, по-
ступающей от объекта и т.п.
Обычно оптические системы, формирующие изображения, счита-
ют высококачественными, если они имеют изображение, близкое к
дифракционному. Эти системы называют дифракционно-ограниченны-
ми. Для них дифракция оказывает существенное влияние на распре-
деление энергии в пятне рассеяния. К ним относятся не только объек-
тивы телескопов, геодезических зрительных труб, микрообъективы,
имеющие небольшое поле, но и объективы с достаточно высокими оп-
тическими характеристиками, предназначенные для микроэлектрон-
ного производства.
Достаточно большой класс составляют геометрически-ограничен-
ные системы, в которых остаточные аберрации не позволяют получить
изображение, сравнимое с дифракционным. К ним относятся кино-,
фото- и телевизионные объективы, многие системы для оптико-элек-
тронных приборов т.п. В большинстве случаев они имеют достаточно
большое угловое поле (от 40° до 120°). Для этих систем распределение
энергии в изображении точки и малой светящейся площадки полнос-
тью определяется геометрическими аберрациями, а не дифракцией.
Очевидно, что мерой оценки качества, т.е. количественные кри-
терии должны быть разными в зависимости от назначения оптичес-
кой системы, ее оптических характеристик, типа приемника.
Исторически одной из первых и важных характеристик качества
изображения является разрешающая способность, показывающая в
зависимости от типа системы, сколько линий или предметных точек
может изобразить раздельно система на отрезке длиной 1 мм, или при
каком минимальном расстоянии между двумя точками они изобража-
ются системой в виде двух точек. Однако этот простой количествен-
ный критерий не дает полного представления о качестве изображения,
так как не несет информацию о качестве формирования элементов,
имеющих размеры больше минимальных, не дает представления о пе-
редаче контраста и зависит от свойств приемника.
Во второй половине XX века процесс образования оптического
изображения стали рассматривать подобно передаче сигналов линей-
ными электрическими элементами. Появляется новая более универ-
сальная характеристика качества — оптическая передаточная фун-
кция (ОПФ), описывающая формирование элементов предмета от мак-
симальных до минимальных, контраст которых близок к нулю. На-
звание ОПФ появилось по аналогии с передаточной функцией линей-
ных радиотехнических элементов.
ОПФ — наиболее информативный критерий качества изображе-
ния, позволяющий оценить два параметра изображения — количество
сформированных элементов с соответствующим контрастом и каче-
ственное соответствие геометрического положения элементов изобра-
жения по отношению к предмету. Первый параметр определяется
функцией передачи модуляции (ФПМ) (ранее называлась частотно-
контрастной характеристикой (ЧКХ)), второй — функцией передачи
фазы (ФПФ) (ранее называлась частотно-фазовой характеристикой
(ЧФХ)). Обе эти функции можно получить из ОПФ . Интересно от-
метить, что выполнив различные преобразования ОПФ, можно полу-
чить частные критерии, включая известные классические критерии
Рэлея и Штреля (см. 9.1), применяемые для оценки качества изобра-
жения высококачественных систем с небольшим угловым полем. ОПФ
применяют для оценки качества систем с высокими оптическими ха-
рактеристиками.
9.2. Разрешающая способность оптических систем
Дифракционное изображение светящейся точки
Оптическую систему, не имеющую аберраций, можно считать
идеальной. Однако она дает изображение светящейся точки в виде
кружка рассеяния малых, но конечных размеров. Причиной этого яв-
ляется дифракция света, которая не учитывается геометрической оп-
тикой.
Идеальная система создает изображение точки гомоцентрическим
пучком лучей, выходящим из системы. В пределах этого пучка, огра-
ниченного углом 2<УК (рис.9.1), выберем произвольную волновую по-
верхность W', расположенную на значительном расстоянии от точки
А'к изображения. Эта поверхность является сферической с центром в
Рис. 9.1. Идеальная оптическая система, дающая изображение
осевой светящейся точки
Ограниченные размеры выходного зрачка приводят к дифракции
Фраунгофера сферического волнового фронта на круглом отверстии.
Распределение освещенности E'v в дифракционном пятне рассеяния
рассчитывается на основе принципа Гюйгенса-Френеля. Оно являет-
ся результатом интерференции вторичных волн (источников) , обра-
зуемых каждой точкой волновой поверхности W'.
Освещенность в точке В'к пятна рассеяния, расположенной вне
оси на расстоянии / от центра А'к пятна, выражается формулой [12]
2
'Щ*)'
К = К0
X
где Е'Оо — освещенность в точке А'к - центре пятна рассеяния, —
функция Бесселя первого рода первого порядка, х — аргумент функ-
ции Бесселя, причем
2п , . , ,
* = ^-raKSin<V • (9.1)
Л
Величина х выражает отрезок / в так называемых оптических
единицах (безразмерная). Удобство применения таких единиц заклю-
чается в том, что величина х, выраженная в этих единицах, сохраня-
ет постоянное численное значение во всех промужуточных средах, в
пространствах предмета и изображения, так как n'Kr'c5'K = = I —
инвариант Лагранжа-Гельмгольца, где o^sino^, так как имеет
малое значение.
Результаты расчета распределения освещенности в дифракцион-
ном пятне, выполненные впервые в 1834 г. Дж.Эри, приведены в
табл.9.1.
Таблица 9.1
X Е'/Е'д,% X E'o/E'vo,% Примечание
0,0 100,00 3,3000 1,79 —
0,5 93,91 3,5000 0,62
1,0 77,46 3,8317 0,00 Минимум
1,5 55,34 5,1356 1,75 Максимум
2,0 33,26 7,0156 0,00 Минимум
2,5 15,81 8,4172 0,42 Максимум
3,0 5,11 10,1735 0,00 Минимум
3,2 2,67 11,6200 0,16 Максимум
Центральный кружок дифракционной фигуры рассеяния
Рис. 9.2. График распределе-
ния освещенности в дифрак-
ционном пятне
(рис. 9.2) называется кружком, или дис-
ком Эри. Его радиус, равный радиусу пер-
вого минимума, составляет 3,8317 опти-
ческих единиц (табл. 9.1).
Дифракционное пятно рассеяния
(рис. 9.2) состоит из центрального кружка,
в котором освещенность быстро убывает от
центра к периферии, и ряда колец, разде-
ленных темными промежутками, в кото-
рых освещенность падает до нуля.
Для определения радиуса кружка Эри вначале из (9.1) найдем
, Хх
Г = (9-2)
Для предмета в бесконечности о' « , поэтому имеем
Подставив х = 3,8317 в (9.2) и (9.3), получим значение радиуса г'а
кружка Эри при п'к= 1 для з; * «>, когда = с'А. и з; =
?>' = г'=0,61к/с'А., (9.4)
5' = r,'=I,2W7D. (9.5)
Для бесконечно удаленного предмета из (9.5) получим величину
радиуса кружка Эри в угловой мере, учитывая, что \|/ = f /f
y" = l,22\p"/D, (9.6)
где X и D выражаются в мм, р" — 206265".
Найдем в пространстве предметов радиус кружка, которому в про-
странстве изображений соответствует радиус г'. Зная, что п'ка'кг' =
= TljOjT , получим
г = Хх/(2тгп;о2) = Хх/(2пп2оА). (9.7)
Из рис.9.1 видно, что о2 = оА = D/(2p), поэтому
г = -ур. (9.8)
Приравняв (9.7) и (9.8), опустив знак «минус», имеем
V = Хх/(лп2.О). (9.9)
Подставив х = 3,8317, получим из (9.7) и (9.9)
г = 0,61Х/(п2оА) = 0,6 IX/ А, (9.10)
V = Л22Х/(п2В). (9.11)
Формулы (9.10) и (9.11) определяют соответственно линейную и
угловую величину в пространстве предметов, которая соответствует
радиусу кружка Эри в пространстве изображений.
Чаще всего оптическая система находится в воздухе, поэтому п1 =
= п'к = 1.
Полученные соотношения справедливы для систем со сплошным
круглым зрачком. Достаточно большой класс составляют зеркальные
и зеркально-линзовые системы, имеющие центральное экранирование
и поэтому кольцевую форму зрачка (гл.6). Для них распределение ос-
вегценности в дифракционном пятне рассеяния можно рассчитать по
формуле [4]
Е> _ Е»о__ (х) _ ^2 (х1)
U^-<L х 3 х> J
где xt = k3x, k3 = Z>;/Z>', E'vg — освещенность в центре фигуры рассея-
ния, D, — диаметр центральной экранированной части выходного
зрачка.
При расчете распределения освещенности при различных значе-
ниях k3 обнаруживается, что при значениях k3 < 0,25 максимум осве-
щенности в кружке Эри становится более острым, благодаря чему кру-
жок уменьшается. Это благоприятно для четкости изображения, не-
смотря на то, что высота максимумов в кольцах несколько увеличи-
вается. При k3 =0,30 степень резкости изображения еще незначитель-
но отличается от случая неэкранированного сплошного зрачка. Толь-
ко при k3 = 0,40 наблюдается заметное, но во многих случаях допус-
тимое ухудшение качества изображения.
Как известно [4], оптические системы с центральным экраниро-
ванием применяются в качестве астрономических, фотографических
объективов и объективов микроскопов.
Дифракционная разрешающая способность оптических систем
Разрешающая способность является первым количественным
критерием оценки качества оптического изображения и характеризу-
ет способность оптической системы давать раздельное изображение
двух близкорасположенных точек.
Пусть в плоскости изображения идеальной оптической системы
получены близкорасположенные изображения двух светящихся то-
чек. Тогда дифракционные картины, соответствующие им, частично
наложатся одна на другую (рис. 9.3).
Учитывая, что свет является некогерентным, результирующее
распределение освещенности можно получить суммированием орди-
нат двух графиков. Полученный таким образом график напоминает
гору с двумя вершинами, разделенными
' «седловиной», глубина Ь впадины которой
/ V/ \: * 1 характеризует минимальную относительную
/ Д \ Рис. 9.3. Распределение освещенности в изображе-
\ _ нии двух светящихся точек, расположенных на наи-
I меньшем разрешаемом расстоянии друг относитель-
но друга
освещенность, получаемую двумя максимумами для двух точек. При
недостаточной величине Ь два пятна сольются в одно, и оптическая си-
стема не сможет передать раздельно (разрешить) эти изображения.
Критерий разрешающей способности для безаберрационной си-
стемы был установлен Рэлеем в 1879 г. умозрительным путем, по-
скольку он не располагал опытными данными [12]. Согласно этому
критерию минимальное расстояние между двумя максимумами в
изображениях двух точек должно быть равно радиусу г' кружка Эри,
т.е. необходимо совпадение нулевого дифракционного максимума од-
ного изображения с первым минимумом другого изображения (рис.
9.3). В этом случае отношение Е^/Е'^ = 0,775, обычно принимают его
равным 0,8. Если E'vlE'Vg < 0,8 то две точки сольются в одну и не мо-
гут быть различимы. Считается, что только если E'v[E'Vg =0,8, то глаз
различит оба максимума.
При этом условии для X = 0,546 10-s мм для системы в воздухе по-
лучим из (9.6) или (9.11) \|z = 138"/D. Обычно принимают
Vf = 140"jD, (9.12)
где D — в мм, — в угловых секундах.
Разрешающая способность объективов телескопических систем
выражается в угловой мере, чаще в секундах, для фотообъективов —
в мм4, для объективов микроскопов — в линейной мере (в мкм).
Критерий Рэлея для разрешающей способности позже был уточ-
нен на основании обобщения результатов астрономических наблюде-
ний двойных звезд, накопленных к началу XX века. Опыт показал,
что тренированный глаз наблюдателя способен различить две светя-
щиеся точки, если Е^/Е' = 5%. Тогда х = 3,3 и = 1,050Х/(п;П), и
для = 1 , X — 0,546-10”“ мм получим
y = 120"/D. (9.13)
Формула (9.13) определяет практический (астрономический)
критерий разрешающей способности объективов визуальных телеско-
пических систем.
Для невизуальных оптических систем при использовании прием-
ников (напр., ЭОП) разность освещенностей окажется другой. Поэто-
му был установлен абсолютный критерий разрешающей способности
оптических систем, полученный при расстоянии х = 3,0, когда мини-
мум освещенности между двумя максимумами фигур рассеяния изоб-
ражений двух точек достаточно мал, но не равен нулю. Для этого слу-
чая при = 1 и X = 0,546-10”5 мм имеем = 0,955X/D = 108"/D.
При изготовлении, сборке и юстировке всегда остаются погреш-
ности, поэтому практически рекомендуется использовать формулу
(9.12), а соотношение (9.13) справедливо лишь для уникальных и до-
рогостоящих астрообъективов.
Полученные выше формулы справедливы для некогерентного све-
та. При наложении изображений когерентных источников складыва-
ются амплитуды их световых полей. В результате разрешающая спо-
собность может быть определена по формуле [12] у = м//1,5'
Критерий разрешающей способности Рэлея характеризует каче-
ство изображения объективов телескопических систем, спектральных
приборов, микрообъективов большого увеличения, для которых пред-
метом являются две близко расположенные точки или линии [4, 12],
т.е. узкопольных систем.
Разрешающая способность фотообъективов и фотографических
систем показывает, сколько линий или предметных точек может
изобразить раздельно фотообъектив на отрезке длиной 1 мм.
Визуальная разрешающая способность для безаберрационного
объектива при использовании миры абсолютного контраста для
X = 0,546 10 s мм может быть определена из (9.5) , учитывая, что
R = 1/8':
R = 1500D/f'= 1500/К.
Фотографическая разрешающая способность связана с разреша-
ющей способностью фотослоя приближенной зависимостью [12,21]:
l/R^l/R^ + l/R^.
Разрешающая способность геометрически-ограниченных
реальных оптических систем
При увеличении оптических характеристик, т.е при расширении
поля системы и увеличении относительного отверстия качество изоб-
ражения определяется не только дифракцией, но и остаточными абер-
рациями. От величины остаточных аберраций зависит дифракцион-
ная картина изображения точки. Распределение освещенности в пят-
не рассеяния меняется в зависимости от положения светящейся точ-
ки в поле объектива и меняется диаметр центрального кружка в пят-
не рассеяния. Разрешающая способность снижается. Поэтому приве-
денные выше соотношения становятся непригодными. Кроме того, из-
за аберраций происходит перераспределение энергии между централь-
ным кружком и кольцами в пятне рассеяния, изображения двух све-
тящихся точек наблюдаются на фоне рассеянного света из-за возрас-
тания освещенности боковых колец. Фон уменьшает контрастность
изображения и разрешающая способность, даже полученная в резуль-
тате измерений, недостаточно характеризует качество изображения.
К таким системам относятся фото-, кинообъективы и др. При
оценке качества изображения фотообъективов большое значение име-
ет передача контраста. Однако за большой период времени был накоп-
лен значительный статистический материал, позволивший опреде-
лить связь числового значения разрешающей способности с субъектив-
ным психофизиологическим восприятием рассматриваемого изобра-
жения. В результате появилась возможность для определенных групп
однотипных объективов найти соответствие числового значения фо-
тографической разрешающей способности и оценки качества изобра-
жения по градациям — отличное, хорошее, среднее, удовлетворитель-
ное, пониженное (плохое) [2]. До настоящего времени эти оценки еще
используются несмотря на появление и использование таких совре-
менных критериев, как ОПФ.
Кроме того, для отдельных типов объективов эмпирическим пу-
тем были найдены приближенные формулы для оценки качества изоб-
ражения. Например, для анастигматов типа «Юпитер» можно прибли-
женно найти его разрешающую способность для центра поля по фор-
муле R = 560/К [21].
Фотообъективы обладают интересным свойством: их волновая
аберрация во много раз превосходит критерий Рэлея (см. 9.3), приме-
няемый для совершенных систем. Тем не менее, они часто имеют вы-
сокое качество изображения. Это объясняется тем, что фотообъектив
образует изображение на светочувствительном слое пленки, разреша-
ющая способность которой ниже, чем для объектива. Структура фо-
тослоя пленки маскирует влияние аберраций, так как зернистость
слоя приводит к срезанию высоких частот, на которых более всего ска-
зывается влияние аберраций.
Разрешающая способность этих систем может быть рассчитана по
ОПФ.
Интересно отметить, что на основе применения ОПФ были разра-
ботаны критерии, позволившие перейти к конкретным значениям раз-
решающей способности для центра поля и его края для широкого
класса систем типа фотообъективов.
9.3. Критерий Штреля и волновые критерии оценки
качества изображения
Критерий Штреля
Критерий разрешающей способности дает представление о том,
насколько реальная система отличается от безаберрационной, дающей
дифракционное изображение, но не позволяет качественно оценить
изображение.
При малых значениях сферической аберрации в качестве крите-
рия оценки качества можно использовать критерий, или число S
Штреля. В 1895 г. Штрель предложил оценивать качество изображе-
ния по отношению освещенностей в центре кружка рассеяния реаль-
ной системы и идеальной (в центре кружка Эри) с тем же фокусным
расстоянием. Отношение этих освещенностей Штрель назвал «опре-
делительной яркостью». Согласно критерию Штреля, систему можно
считать совершенной, если критерий Штреля равен 0,8, т.е.
S = E'Vo/E'vo=O,8.
Этот критерий оценивает качество изображения только осевой
точки, но с учетом контраста. С возрастанием сферической аберрации
происходит перераспределение освещенности в пятне рассеяния, уве-
личивается освещенность боковых колец за счет ее уменьшения в
центральном пятне, и применение критерия Штреля теряет смысл.
Считается, что «удовлетворительные» системы с остаточной сферичес-
кой аберрацией имеют S = 0,6 ... 0,7. Обычно рекомендуется исполь-
зовать критерий Штреля, когда он мало отличается от 0,8.
Для более полной характеристики качества изображения кроме
геометрических аберраций надо знать величины волновых аберраций,
что особенно важно для дифракционно-ограниченных систем.
Волновая аберрация и ее связь с геометрическими аберрациями
В системе, свободной от аберраций, волновая поверхность в про-
странстве изображений имеет сферическую форму, когда изображение
находится на конечном расстоянии. При наличии аберраций волно-
вая поверхность деформируется. Отступление деформированной вол-
новой поверхности от сферической называется волновой аберрацией.
Пусть из некоторой точки В7, расположенной вне оси в меридио-
нальной плоскости, выходит гомоцентрический пучок, которому со-
ответствует волновая поверхность сферической формы. Вследствие
аберраций по выходе из системы эта волновая поверхность не имеет
сферическую форму (рис. 9.4).
Отклонение волновой поверхности от сферической в точке N'K ха-
рактеризуется отрезком N — расстоянием между реальной W и сфе-
рической Wq волновыми поверхностями, отсчитываемым по норма-
ли к сферической волновой поверхности с центром в точке В', явля-
ющейся идеальным изображением внеосевой точки Вг (рис.9.4).
Отрезок N называется волновой аберрацией. Вершины волновых
поверхностей W', совпадают с центром Р' выходного зрачка, ра-
диус Д' — радиус кривизны сферической волновой поверхности Wo ,
называемой сферой сравнения. Геометрическая аберрация точки
Рис.9.4. Связь волновой аберрации с геометрическими аберрациями
В'к определяется отрезком В' В'к, а Лу'к и Дх'к соответственно явля-
ются меридиональной и сагиттальной составляющей поперечной абер-
рации.
Считая Ду'к и Дх'к малыми аберрациями, можно получить сле-
дующую зависимость между волновой и геометрическими аберраци-
ями [12]:
mi. _
N =
лг; _
J Дх'к dM'K
о
При расчета на ЭВМ волновая аберрация вычисляется одновре-
менно с расчетом хода лучей. Волновая аберрация может быть пред-
ставлена как разность оптических путей между двумя сферами срав-
нения — одной в пространстве предметов и другой — в пространстве
изображений для ряда лучей. Как известно, оптический путь есть
функция координат луча, выходящего из точки В7 вне оптической
оси. Если из оптических путей, соответствующих различным лучам,
вычесть оптический путь, например, для главного луча, то получим
волновую аберрацию этих лучей
^=АК-ДО,
где Дк — оптический путь для любого луча , До — оптический путь для
главного луча (обычно координата точки В'к, равная у'к, вычисляется
для главного луча). Выбор сферы сравнения в пространстве изображе-
ний влияет на результаты вычислений.
Волновая аберрация для точки на оси
Волновая аберрация для точки на оси связана с продольной сфе-
рической аберрацией зависимостью (при sino' = а'к)
°?
J ДЗкОк^к- (9.14)
о
Продольную сферическую аберрацию для точки на оси можно
представить в виде полинома
Де' = а<з'к2 + Ъо* + со*6 + do'9+..., (9.15)
где а, Ь, с, d — коэффициенты аберраций третьего, пятого, седьмого
и девятого порядков. Если известны точные значения сферической
аберрации для четырех зон т входного зрачка, то вычисление этих ко-
эффициентов не вызывает трудностей.
Подставив (9.15) в (9.14), имеем:
N = /(ао'к3 + Ьа'к5 + со'7 + do'9+...) do'K . (9.16)
О
Проинтегрировав выражение (9.16), имеем
#=+4ь<5к6+4c°ks°+-- (9.17)
4 6 810
Обычно плоскость, в которой качество изображение является
наилучшим, не совпадает в плоскостью Гаусса. Такая плоскость на-
зывается плоскостью наилучшей установки, ей обычно соответству-
ет более высокая разрешающая способность, чем для плоскости Гаус-
са, что связано с распределением энергии в кружке рассеяния в изоб-
ражении точки, зависящим от волновых аберраций. Любое другое по-
ложение плоскости, смещенной относительно плоскости Гаусса, назы-
вают просто плоскостью установки [12].
Пусть плоскость установки смещена относительно плоскости Га-
усса на величину Д (рис. 9. 5). Тогда
Де' = Д?к + Д или Дв'к = Де' - Д, (9.18)
где Дз'к —продольная сферическая аберрация относительно плоско-
сти установки.
Волновая аберрация в плоскости установки в соответствии с
(9.14) и (9.18) определяется выражением
n= ^дГ'кО'к^'^ )(Д8;-д)о'ксг<5'к = х-^до'к2. (9.19)
о о
Рис 9.5. К определению положения плоскости наилучшей установки
Учтя (9.17), получим
= 4 Ц Ьо'к6 + со'/ + dcs'J0 - 4 Д с'к2. (9.20)
4 О О 1U Z
Добавочный член Д-о^ в (9.20), вызываемый смещением Д плос-
кости изображения (дефокусировкой), имеет большое значение. Вы-
бором величины Д можно добиться перераспределения геометричес-
ких и волновых аберраций, тем самым улучшить распределение энер-
гии в кружке рассеяния и повысить качество изображения.
При выборе плоскости установки обычно пользуются графичес-
ким методом. Вычислив значения волновых аберраций с помощью
(9.20), строят график зависимости N/X от аргумента а'к2 (рис. 9.5, б).
Через начало координат проводят прямую так, чтобы отклонения от
нее кривой, измеряемые в направлении оси абсцисс, были наимень-
шими по абсолютной величине. Эти отклонения дают значения вол-
новых аберраций относительно новой сферы сравнения, смещение
центра которой относительно плоскости Гаусса определяется направ-
лением прямой. С графика снимается величина отрезка t, которая в
масштабе N/Х соответствует изменению волновой аберрации для край-
него луча при смещении плоскости установки. Из рис. 9.5, б имеем
У
КР __ КР I £
X X
Сравнивая это выражение с (9.19), найдем величину смещения
плоскости установки Д
д=2а/о'к2р.
Наиболее точное положение прямой и соответственно плоскости
наилучшей установки определяется на основе минимума суммы квад-
ратов волновых аберраций.
Значения волновых аберраций в плоскости наилучшей установ-
ки можно вычислить из (9.20).
В практике расчетов волновые аберрации определяются при вы-
полнении аберрационного анализа на ЭВМ .
Волновые критерии оценки качества изображения
Критерий Рэлея и критерий Рождественского. Известно несколь-
ко количественных критериев оценки качества изображения. Первый
волновой критерий был предложен Рэлеем в 1879 г. для оценки вы-
сококачественных систем. Рэлей показал, что остаточная сферическая
аберрация не оказывает заметного влияния на качество изображения,
если оптическая разность хода любой пары лучей из всего пучка не
более Л./4. Оптическую систему можно считать практически идеаль-
ной, если она удовлетворяет критерию Рэлея < 0,25Х. Этому крите-
рию примерно соответствует критерий Штреля, равный 0,8.
Для некоторых оптических систем (микрообъективы, астрономи-
ческие объективы) с малым полем выполнение критерия Рэлея недо-
статочно для получения хорошего качества изображения. К таким си-
стемам применяют критерий Рождественского N < X/10 [12].
Наибольшие отклонения или деформация AWmax*) волнового
фронта. В конце 40-х - начале 50-х годов
XX века были разработаны новые волно-
вые критерии, получившие большое рас-
пространение при расчете и оценке каче-
ства изображения оптических систем.
Величина AWrnov характеризуется ал-
гебраической суммой наибольших откло-
нений волнового фронта от сферы сравне-
ния (рис. 9.6).
В соответствии с критерием Рэлея
N < 0.25Х. Этот критерий успешно приме-
няется в тех случаях, когда график вол-
новой аберрации имеет плавный вид (де-
Рис.9.6. К определению сред- фокусировка, сферическая аберрация
неквадратического отклонения третьего порядка). Если волновая аберра-
волнового фронта ция меняется по сложному закону, то рас-
*'Сокольский М.Н. Допуски и качество оптического изображения.Л.: Машиностроение,
1989. 221с.
пределение освещенности в осевой точке (функция рассеяния точки)
может быть существенно искажено. Качество изображения зависит не
только от величины АИЛтах, но и от формы волнового фронта, от его
местных деформаций, их расположения. Для учета этих факторов
удобно применять критерий среднеквадратической деформации, или
отклонения волнового фронта.
Среднеквадратическое отклонение Игскв монохроматического вол-
нового фронта. Этот критерий был предложен Марешалем*) в 1947 г.
Выясним геометрический смысл величины 1УСКВ. Обозначим через Вщ
сферу сравнения (рис. 9. 6) , через W — волновую аберрацию относи-
тельно этой сферы. Введем новую сферу сравнения обозначим
волновую аберрацию относительно новой сферы сравнения через W'.
При этом В - Я' = \W0 — постоянная величина . Тогда получим
W2 - (W)2 = W' -(W)2. Подберем сферу сравнения Rw, так, чтобы
среднеарифметическое значение волновой аберрации
W - — JJ W'ds - 0, где S — площадь выходного зрачка, тогда W =
о
= <в = W ~ (W)2. Таким образом, величину WCKB можно вычислить
двумя способами.
Первый способ
w- w)2 Г = JJ (W - W)2 ds = [w2- (w)2
(9.21)
В полярных координатах выражение (9.21) можно представить
в виде:
~2-к1
21 °’5
где волновая аберрация W определяется относительно сферы сравне-
ния Bw.
Монохроматическую среднеквадратическую волновую аберра-
цию также можно найти вторым способом по формуле
WCKB=W' = 4f \W'2pdpd^
Л ' '
*'Марешаль А., Франсов М. Структура оптического изображения. М.:Мир. 1964. 296 с.
Здесь оставлены обозначения, встречающиеся в монографиях по оценке качества изоб-
ражения
в которой W' определяется относительно оптимальной сферы сравне-
ния Rw,.
Если аберрации малы, то освещенность в центре дифракционно-
го изображения можно выразить через средний квадрат WCBB.
Для нормированной освещенности, когда в центре дифракцион-
ного пятна освещенность равна единице, получим известную форму-
лу Марешаля
(2тС\2 9
wL- (9-22)
Для безаберрационной системы Е' = 1. При наличии аберра-
ций освещенность уменьшается на величину, пропорциональную сред-
неквадратическому отклонению волнового фронта. Приближенная
формула достаточно точна, погрешность составляет 1..2%, если отно-
сительная освещенность не менее 0,75.
Если принять, что волновая аберрация понижает освещенность в
центре дифракционного пятна на 20%, что почти не влияет на каче-
ство, то и из (9.22) получим известный критерий Марешаля
WC2KB < к2/1 96, WCKB <к/14.
Этот критерий означает, что среднеквадратичное отклонение вол-
нового фронта относительно оптимальной сферы не должно превы-
шать к/14.
Полихроматическое среднеквадратическое отклонение волново-
го фронта Wz скв. Полихроматическую среднеквадратическую волно-
вую аберрацию можно определить интегрированием по спектрально-
му интервалу монохроматического волнового фронта WCKB:
W =
ккХскв
1 2п1 1 ' 1 2п1
-j j jw^(p,<p,x)pdpd<pd%—2 j jj^(p,<p,x)pdpd(pd%
n о о о л Lo 0 0
1 2x1
0,5
где вместо длины волны к введена безразмерная относительная спек-
тральная координата %, изменяющаяся от -1 до +1 [15], % = (к - к0)/
/ДХ, где к0 = 0,5 (Xmax + Xmin) — средняя длина волны; ДХ = 0,5 (Хтах -
Xmin) — полуширина рабочего спектрального интервала.
При расчете предполагается, что функция спектральной эффек-
тивности постоянна во всем спектральном интервале.
Примерная классификация оптических систем по значениям
волновых аберраций. По качеству изображения, оцениваемому вол-
новыми аберрациями, оптические системы могут быть разделены на
две группы. К первой группе относятся системы с высоким качеством
изображения, волновые аберрации которых не превышают 1 ... 2 К. В
этом случае дифракция оказывает существенное влияние на распре-
деление энергии в изображении. Расчет распределения энергии вы-
полняется на основании принципа Гюйгенса-Френеля. К этой группе
относятся визуальные телескопические системы, микроскопы для на-
блюдения непрозрачных объектов и некоторые высококачественные
фотообъективы. Ко второй группе систем, имеющих более низкое ка-
чество изображения, относятся систеы с волновыми аберрациями свы-
ше 3 ... 5 X. Это большая часть фотообъективов, проекционные объек-
тивы и т.п. Распределение энергии в изображении светящейся пло-
щадки, величина которых превышает несколько наименьших разре-
шаемых расстояний, не определяется дифракцией и можно ограни-
читься тем, что дает геометрическая аберрация.
Рассмотренные критерии не дают полного представления о каче-
стве изображения, к тому же почти все они относятся к высококаче-
ственным системам с небольшим полем.
9.4. Требования, предъявляемые к универсальному
критерию оценки качества изображения
Оптические системы являются основной частью или одной из
важных частей оптического прибора. Современные оптические при-
боры представляют собой сложные комплексы, в которых сигнал, не-
сущий информацию об исследуемых свойствах предмета, проходит
обычно сложную цепь преобразований, включающую рассеивающую
и турбулентную атмосферу, оптическую систему, а также телевизи-
онные системы, электронно-оптические преобразователи, модулято-
ры, фотоэлектрические приемники, электронные блоки и т.п. Поэто-
му задача оценки качества оптического изображения должна базиро-
ваться на общей теории сигналов, в которой работа любых преобразо-
вателей рассматривается с единых позиций, не затрагивающих физи-
ческих принципов их устройства [4].
На основе такого подхода надо было разработать такие универ-
сальные критерии для оценки качества изображения, которые бы хо-
рошо согласовались с оценками качества для всех ступеней изобража-
ющей системы. Эти критерии должны удовлетворять следующим тре-
бованиям:
1. Быть универсальными, чтобы с их помощью можно было ха-
рактеризовать системы различных назначений.
2. Должны быть пригодными для оценки качества составных мно-
гоступенных (многозвенных) систем [26], в которых оптическая сис-
тема является лишь одной из ступеней (например, фотообъектив +
светочувствительный слой пленки, объектив + фотоэлектрический
приемник и т.п.).
3. Быть удобными для расчета их теоретических значений.
4. Они должны обеспечить объективный характер их измерения,
т.е. зависимость не от индивидуальных особенностей и опыта иссле-
дователя, а от показаний электроизмерительных приборов.
При оценке качества оптической системы ее представляют в виде
линейного фильтра, так как при оценке качества всего оптического
прибора так представляются его отдельные ступени. В этом случае
процесс преобразования сигналов, различных по своей физической
природе, достаточно строго представляется с помощью единого
математического аппарата, принятого в теории автоматического уп-
равления и связи, откуда было введено понятие передаточных фун-
кций. Впервые такой подход был предложен Дюфье в 1946 г. и Шаде
в 1948 г. В результате оптическая система была представлена как
фильтр низких пространственных частот.
Для оптической системы новый критерий был назван оптической
передаточной функцией (ОПФ). Она характеризует способность
оптической системы создавать изображение определенного качества.
Очевидно, что в зависимости от назначения оптической системы тре-
бования к качеству изображения заметно отличаются. Однако в лю-
бом случае качество изображения можно считать тем более высоким,
чем меньше отличается изображение от объекта по распределению све-
товой энергии.
При такой трактовке качества изображения в общем случае дву-
мерный объект характеризуют значениями яркости 1У в каждой точ-
ке , т.е. представляют объект в виде функции L(x, у) двух независи-
мых переменных. Тогда изображение можно представить в виде функ-
ции освещенности Е'(х', у') на плоскости, а воздействие оптической
системы выражается математическим оператором, названным ОПФ.
(Как известно, в геометрической оптике связь между осевой яркостью
предмета и осевой освещенностью изображения выражается формулой
-Е' =7i-cL„sin2o^)-
Однако для такого представления ОПФ оптическая система дол-
жна быть линейным фильтром, т.е. обладать свойствами линейности
и изопланатичности (пространственной инвариантности, или стацио-
нарности).
** Здесь и далее для простоты написания для яркости и освещенности опускается ниж-
ний индекс v
Свойство линейности используется при представлении значения
освещенности в изображении двумерного объекта с конечными разме-
рами в виде суммы освещенностей от каждой его точки для некоге-
рентного источника. Закон распределения освещенности в плоскости
изображения остается постоянным при переходе от одной точки
объекта к другой лишь при соблюдения условия изопланатизма. Для
большинства оптических систем это условие соблюдается лишь при
малых угловых полях.
В основе представления ОПФ лежит понятие о функции рассея-
ния для точки (ФРТ) или для линии (ФРЛ). Эти два понятия являют-
ся основными в современной теории оценки качества изображения.
9.5. Функции рассеяния точки и линии. Определение
освещенности в произвольной точке изображения
Математическое описание процесса образования изображения за-
висит от способа представления предмета. Предмет можно рассматри-
вать как совокупность светящихся точек или линий — это первый спо-
соб его представления [26]. Поэтому вначале рассмотрим функцию
рассеяния А'(х', у'), которая позволяет математически описать распре-
деление освещенности в изображении, образуемом оптической систе-
мой.
Функция рассеяния точки (ФРТ) для безаберрационного объекти-
ва при круглой форме зрачка (рис. 9.1) имеет вид А'(х', у') =
где J2(x) — функция Бесселя первого рода первого порядка (см. 9.1),
а аргумент х определяется формулой (9.1) и позволяет определить рас-
стояние г' от центрального максимума в оптических единицах.
Поскольку интерес представляет относительное распределение
освещенности, то удобно нормировать ФРТ, приняв объем, ограничен-
ный ею, за единицу [26]
J J А'(х', y'}dxdy = 1 (9.23)
Изображение бесконечно длинной светящейся линии можно по-
лучить суммированием бесконечного количества точек, расположен-
ных вдоль нее. Математическое описание ФРЛ А'(х') имеет вид
А^(х') = J A'lx^y'^dy. Тогда нормировкаФРЛ выражается формулой:
jA^(x')dx = J. (9.24)
ФРТ и ФРЛ иногда в литературе называют импульсным откли-
ком или импульсной реакцией по аналогии с терминами из радиотех-
ники и теории связи. В оптической системе аналогами бесконечно ко-
роткого импульса являются бесконечно малая точка и бесконечно уз-
кая щель.
Определим освещенность в точке изображения с координатой х
(рис. 9.7) для некогерентно излучающего одномерного объекта [21,
26].
Рис.9.7. К процессу свертки
функции £(х) распределения
яркости на объекте с функ-
цией рассеяния А'(^)
Кривая L(x) описывает распределение
яркости на предмете, а каждому элементу
В1 - В3 предмета соответствует некоторая
функция рассеяния А'(^) объектива, харак-
тер изменения которой зависит от влияния
аберраций и дифракции. Параметр отсчи-
тывается от точки изображения, в которой
определяется освещенность. Для определе-
ния освещенности в точке с координатой х
надо суммировать все элементарные ФР,
которые предварительно должны быть ум-
ножены на соответствующие значения фун-
кции распределения яркости L(x — ^) на
предмете:
Е'(х)= (9.25)
Тогда освещенность Е’(х', у') двумерного предмета для любой точ-
ки (х', у') в плоскости изображения может быть вычислена следующим
образом в предположении, что размеры предмета меняются от —<» до
+~ [26]:
£'(*'> У') = f f (9.26)
Интегралы в (9.25) и (9.26) представляют собой свертку функции
L(x) распределения яркости света в объекте с функцией рассеяния в
точке с координатами х или х, у соответственно , а х', у' координаты
точки в плоскости изображения, сопряженной с предметной точкой с
координатами х , у, причем х' = х 0О, у = у 0О, 0О — линейное увели-
чение оптической системы.
Формулы (9.25) и (9.26) описывают процесс формирования опти-
ческого изображения при некогерентном излучении с помощью ли-
нейной изопланатической системы.
9.6. Оптическая передаточная функция, функция
передачи модуляции и функция передачи фазы
(ФПМ и ФПФ)
Представление предмета в виде спектра гармонических
состав ляющих
Второй способ представления предмета — в виде совокупности
элементарных объектов, яркость которых изменяется по синусоидаль-
ному (косинусоидальному) закону. Каждая синусоидальная (косину-
соидальная) составляющая отличается от другой амплитудой, пропор-
циональной распределению яркости, фазой, т.е. ориентацией на плос-
кости, и пространственной частотой, равной обратной величине пери-
ода изменения яркости.
Изображение предмета, представленного таким способом, получа-
ется суммированием изображений синусоидальных гармонических
составляющих. При прохождении сигналов синусоидальной формы
через объектив их форма не меняется, а изменяются амплитуда и фаза
в зависимости от свойств оптических элементов. Этим и объясняется
выбор формы составляющих.
В случае предметов произвольной формы распределение яркости
описывается непериодической функцией. В виде периодической фун-
кции можно представить, например, распределение яркости в прямо-
угольной мире (мире Фуко), применяемой при исследовании оптичес-
ких систем.
Функция, выражающая распределение яркости в предмете, под-
вергается гармоническому анализу. Если эта функция периодическая,
то она разлагается в ряд Фурье, а если непериодическая, то ее выра-
жают интегралом Фурье, представляющим сумму бесконечно близких
по частоте синусоидальных составляющих по яркости. При этом
непериодическая функция должна быть всюду конечной и интегри-
руемой.
В результате распределение яркости на предмете представляет
собой спектр синусоидальных составляющих элементарных гармони-
ческих предметов, роль которых может выполнять синусоидальная
решетка с бесконечно протяженными полосами [26].
Описанный способ представления предмета основан на примене-
нии к оценке качества изображения математического аппарата Фурье.
Это позволило оценивать качество изображения по передаче простран-
ственных частот. Преобразование Фурье позволяет существенно уп-
ростить расчеты распределения освещенности в изображении по из-
вестному распределению яркости в предмете и функции рассеяния си-
стемы, описывающей распределение освещенности в отдельной точ-
ке или элементарной линии.
Для компактной записи уравнений гармоническую составляю-
щую, а также ряд и интеграл Фурье удобно представить в комплекс-
ном виде [26]. Так, например, косинусоидальное распределение яр-
кости для миры в направлении I с амплитудой Lo, частотой со = 2nN и
начальной фазой а представляется уравнением:
L(Z) = L0cos(coZ + a). (9.27)
С помощью формулы Эйлера уравнение (9.27 ) можно записать в ком-
плексной форме:
F0(l) = Lo exp[i(coZ + a)] = Lo cos (coZ + a) + iL0 sin(coZ + a). (9.28)
При такой записи распределение L(Z) служит вещественной час-
тью и может быть найдено как проекция вектора F0(l) на веществен-
ную ось, т.е. ось х. Вектор F0(l) образует с положительным направле-
нием вещественной оси угол, равный фазе coZ + а, следовательно при
Z = 0 этот вектор имеет наклон а, а при увеличении Z равномерно вра-
щается с угловой скоростью со. Теперь различные преобразования
можно выполнять не с L(l), а с F0(l), и в комплексном выражении, по-
лученном после преобразований, брать в качестве результата веще-
ственную часть.
Выражение ( 9.28) можно записать в следующем виде:
F0(Z) = Loexp[i(coZ + a)] = Loexp(ia)exp(icoZ) = Fexp(icoZ), (9.29)
где F0(l) = Lo exp (ia) называется комплексной амплитудой.
Аналогичным образом обычно представляется и комплексная ам-
плитуда световой волны.
Таким же методом можно в комплексном виде представить и ряд
Фурье.
Определение функции ОПФ
Теперь перейдем к Фурье-преобразованию изображения. Извест-
на теорема [26] с такой формулировкой: преобразование Фурье неко-
торой функции, являющейся сверткой других функций, равна произ-
ведению преобразований Фурье функций, подвергнутых свертке.
Рассмотрим двумерный предмет. Для него нет необходимости вы-
числять распределение освещенности Е'(х', у') в плоскости изображе-
ния как свертку распределения яркости в предмете с функцией рас-
сеяния точки по формуле (9.26). Используя записанную выше теоре-
му, упростим задачу, найдя преобразование Фурье изображения как
произведение преобразований Фурье предмета L(x, у) и изображения
А(х', у') изолированной точки.
Преобразование Фурье от распределения яркости в предмете
можно представить интегралом
g(Nx,Ny) = j jL(x,y')exp[-i2n(Nxx + Nyy)]dxdy = L(Nx,Ny), (9.30)
а преобразование Фурье функции рассеяния точки имеет вид
D(Nx,Ny) = j jA'(x\y,')exp[-i2n(Nxx + Nyy)]dxdy = A'(Nx,Ny).(Qi31y
Тогда преобразование Фурье от распределения освещенности
Е'(х', у') в изображении , обозначаемое g\Nх, Ny) представляется в
виде:
g\Nx,Ny) = D(Nx,Ny)g(Nx,Ny) или (9.32)
E'(NX, Ny) = A'(NX, Ny) L(NX, Ny). (9.32')
Полученный результат справедлив для линейной изопланатичес-
кой системы (или в пределах изопланатической зоны), если предмет
представлен в виде суммы гармоник синусоидальных (или косинусо-
идальных) составляющих различных пространственных частот и N .
Тогда (9.30 ) позволяет найти частотную или спектральную ха-
рактеристику предмета, т.е. представляет спектр пространственных
частот, а модуль g(N) выражает спектральную плотность.
Функция D(NX,N ) = A’(NX, Ny} называется оптической переда-
точной функцией (ОП«Ь). Она показывает, как передается оптической
системой каждая частотная составляющая (пространственная часто-
та) с учетом дифракции, аберраций, ошибок изготовления.
Из (9.31) видно, что ОПФ — преобразование Фурье от функции
рассеяния и в общем случае представляет собой комплексную функцию
D\NX,N^ = j jA(x',/)exp[-i2n(^x + ^y)]dxdy =
= T(^,^)exp[i<p(^,^)].
(9.33)
Модулем комплексной функции является T(N), а аргументом <p(N).
Модуль и аргумент ОПФ. ФПМ и ФПФ
Теперь покажем, как можно определить модуль и аргумент ком-
плексной ОПФ для одномерного предмета, а затем для отдельной
частотной составляющей предмета, чтобы выяснить физический
смысл T(N) и <p(N).
В качестве одномерного предмета можно представить решетку из
параллельных штрихов, узкую щель и т.п. Такие простейшие
тест-объекты чаще всего встречаются при измерениях ОПФ. В этом
случае ОПФ становится функцией одного аргумента — пространствен-
ной частоты N в направлении х, поэтому при Ny = 0 из (9.31) имеем:
D(N) = j А'(х') ехр[-dx. (9.34)
Применив к (9.34) формулу Эйлера, запишем функцию ОПФ в
виде:
D{N) = J А'(х') [cos2nNx-isin2nNx]dx =
= J -А'(х') cos2nNx dx-i J A^(x') sin2nNx dx = (9.35)
= Tc(N)-iT,(N).
В полученном выражении (9.35) интегралы, обозначенные Tc(N)
и Ts(N), называют соответственно косинус-преобразованием и синус-
преобразованием функции рассеяния, и они представляют веществен-
ную и мнимую части комплексной функции D(N). Модуль комплекс-
ной функции по определению равен:
r(tf)=4w]4TW’
а аргумент ty(N) можно определить из соотношений
I A4(x')sin27rNx • dx
_____________________________
" ' T(N) T(W)
„ I AL(x')cos2nNx-dx
cos«(M = ^ - - -________________
co»4>(«) T(N) TW
(9.36)
(9.37)
(9.38)
Рис. 9.8. Распределение яркости в
элементарном косинусоидальном
объекте (а) и распределение освещен-
ности в его изображении (б)
Покажем, как изображается
отдельная частотная составляю-
щая предмета системой с извес-
тной функцией рассеяния.
Пусть имеется предмет в виде
косинусоидального распределе-
ния яркости с постоянной со-
ставляющей Lo (рис. 9.8): L(x) =
= Lo + L2cos27dVx, период р =
= lfN, N — пространственная
* X частота.
Обозначим функцию рассе-
яния линии при текущей пере-
менной через АД£), тогда освещенность изображения согласно
(9.25):
Г(х')=J^G0[^+Acos2^(x-!0]^ =
= Lo j (€) + Lj j А' (£) cos 2nN(x - £) .
Интеграл в первом слагаемом во соответствии с (9.24) равен еди-
нице. В подинтегральном выражении второго слагаемого применим
формулу косинуса разности двух углов, преобразуем и получим:
Е'(х') - Lo + Lt cos 2nNx j A' (£) cos 2nN §d^ +
+ sin2nNx jА'л(£)sin2nM;di; .
Сравнивая c (9.35), видим, что 2 интеграла — это Tc(N) и Te(N)
функции рассеяния. Поэтому, умножая и деля на
- J[TC(N)]Z + [TS(N)]2 имеем [26]:
T(N) =
Е'(х') = Lg + Lj [тс (N) cos 2nNx + Та (W) sin 2tWx] =
= L0 + L1T(N)
^^cos2nNx +
T(N)
^Qsin2uXx
T(N)
Дроби Tc(N)/T(N) и Ts(N)/T(N) позволяют определить costp(N) и
sin<p(.?V) по аналогии с (9.37) и (9.38).
В результате получаем:
Е'(х') = Lo + L;7(77)cos[2xNx-(p(jV)], (9.39)
где 9(#) = arctg[T,(#)/Tc(^]. (9.40)
В итоге получено, что изображение отличается от предмета
амплитудой, которая в T(N) раз меньше, и фазой <p(jV), которая пока-
зывает, что для внеосевых точек изображение может не совпадать с
его идеальным положением.
Из (9.39) видно, что изображение косинусоидального предмета
остается также косинусоидальным, но изображение отличается от
предмета двумя особенностями. Первая из них заключается в том, что
коэффициент модуляции отличен от единицы. Для предмета модуля-
ция определяется отношением т = LJL0, а для изображения —
т' = LjT(N)/L0 , следовательно T(N) = т'/т.
Значение модуля T(N) ОПФ для каждой пространственной часто-
ты равно отношению модуляции в изображении гармонической со-
ставляющей к модуляции в предмете и называется коэффициентом
передачи модуляции (КПМ). Тогда T(N) — функция передачи моду-
ляции (ФПМ), которая определяет зависимость КПМ от простран-
ственной частоты. КПМ, иногда обозначаемый TN, равен единице для
пространственной частоты N = 0, что можно проверить подстановкой
в в (9.36) с учетом (9.24). Для Т(П) —> 0 N —> Nmax. Графическое пред-
ставление ФПМ показано на рис. 9.9, а.
Вторая особенность отличия распределения освещенности изобра-
жения от предмета заключается в наличии сдвига косинусоиды на
угол ф(ЛГ). Функция <p(N) называется функцией передачи фазы (ФПФ)
Рис. 9.9 Примерный вид функции передачи модуляции (а)
и функции передачи фазы (б)
и представляет собой зависимость значений фазы от пространствен-
ной частоты.
Линейное смещение Ах косинусиды (рис. 9.8) Ах = <p(^/27tN. Для
N = 0 угол 9^0= 0, что можно проверить по (9.39). Форма ФПМ зави-
сит от степени симметрии ФРЛ относительно оси ординат. В случае
симметрии функция ФРЛ — четная, синус-преобразование равно
нулю для всех значений N как интеграл от нечетной функции
A'(x)sin2nx в симметричных пределах. В результате ФПФ равна
нулю или л. При асимметричной ФР, что может быть для оптических
систем на краю поля, при дефектах центрировки и т.д., ФПФ для
N * 0 может принимать различные промежуточные значения между
Ч-ли-л [26] (рис.9.9, б).
ФПМ и передача контраста оптическими системами
Для оптической системы одной из важных характеристик явля-
ется соответствие изображения и предмета по контрасту. Контраст
К предмета, включая предмет с синусоидальным (косинусоидаль-
ным) распределением яркости, характеризуется отношением разности
и суммы их максимальных и минимальных значений. Для предмета
К = (Anax~ Anin)/(Anax + Anin)> (9.41)
гДе -^тах Lg + Lj, Lg .
Подставив эти выражения в (9.41), имеем К = L1/Lo. Этот коэф-
фициент показывает модуляцию амплитудного значения относи-
тельно среднего, поэтому его также называют коэффициентом моду-
ляции.
Контраст К' изображения обычно определяется аналогичным
выражением для освещенности:
К' = - -ЕАьЭЖах + *Ain)> 0-42)
где Е;,ах = Lg + Ь;Т(ЛГ), E;in = Lo - L;T(N). Тогда К' = T(N)]/Lo . В
результате получаем, что T(N) = К’/К .
Однако только при использовании записанных выше формул для
контраста можно говорить о том, что T(N) характеризует передачу
контраста оптической системой. Для ряда случаев можно встретить
такие соотношения, как К = 1^/1^ или К = (7max - /min)//max. где
через I обозначена интенсивность. В этих случаях нарушается
пропорциональность между контрастом изображения и предмета, и
нельзя вводить понятие коэффициента контраста [26].
ОПФ и ФПМ обладают еще одним важным свойством, позволяю-
щим определять эти характеристики для многоступенной системы:
ОПФ (ФПМ) многоступенной системы равно произведению ОПФ
(ФПМ) отдельных ступеней. Наглядным примером применения это-
го свойства является определение ФПМ для системы «фотообъектив
+ фотопленка».
Кроме того, графически представив ФПМ фотообъектива и функ-
цию порогового контраста фотопленки, можно найти фотографичес-
кую разрешающую способность, которая определяется абсциссой точ-
ки их взаимного пересечения [21].
9.7. ОПФ — автокорреляция зрачковой функции
Зрачковая функция оптической системы
Рассмотренный выше математический аппарат определения ОПФ
применим к линейным изопланатическим системам и не позволяет
точно учесть аберрации системы вне изопланатической зоны, а так-
же не учитывает коэффициент пропускания т.
Для полного описания всех особенностей работы оптической сис-
темы используют зрачковую функцию для определения ОПФ. Она
учитывает волновую аберрацию и коэффициент пропускания в выход-
ном зрачке системы, где расположена сфера сравнения, относитель-
но которой вычисляют волновые аберрации для точек изображения.
Коэффициент пропускания может быть различным для разных
точек сферы сравнения (рис. 9.10) с координатами и, v (аналогично
координатам у и х).
Обозначим коэффициент пропускания по интенсивности т(и, ц).
Тогда, учитывая связь интенсивности с амплитудой , получим, что ам-
плитудный коэффициент пропускания равен . Обычно пропус-
кание света приблизительно постоянно по всей площади выходного
зрачка, и если считать его равным 100%, то можно положить т(и, v) =1
в пределах контурах зрачка, а очевидно вне этого контура т(и, v) = 0.
В общем случае зрачковая функция может быть представлена в
комплексном виде:
P(u,v) = ^r(u/v)exp[i(2n/X)iy(u,v)], (9.43)
где модуль и) определяет уменьшение амплитуды пропускаемой
световой волны, а аргумент (2it/X)W(u, и) определяет сдвиг фазы вол-
ны, вызванный волновой аберрацией W(u, v).
Зрачковая функция Р(и, и) связана с комплексной амплитудой
световой волны. Очевидно, что в систему попадают световые волны,
распространяющиеся от предмета. Если ограничиться скалярной те-
орией дифракции, то можно представить распространение электромаг-
нитного поля в виде гармонического колебания U0cos(at + а) или в
комплексной форме C70exp[i (art + а)], где ю = 2пс/'к — круговая час-
тота, с — скорость света. В расчетах достаточно рассматривать зави-
симость для комплексной амплитуды С70ехр (ia), так как член exp (iart)
не зависит от координат рассматриваемой точки.
Связь комплексной амплитуды изображения со зрачковой
функцией
Комплексная амплитуда световой волны на сфере сравнения у
выходного зрачка (вершина сферы сравнения совпадает в центром Р'
выходного зрачка) связана со зрачковой функцией. Для определения
величины этой комплексной амплитуды надо учесть коэффициент
пропускания системы и фазовые сдвиги, вызванные волновой аберра-
цией, т.е. умножить комплексную амплитуду на входе (входном зрач-
ке) системы на зрачковую функцию Р(и, и).
Обычно качество изображения оптической системы анализирует-
ся в плоскости изображения, а не в плоскости выходного зрачка. По-
этому надо связать распределение комплексной амплитуды F(x) в
плоскости изображения с распределением комплексной амплитуды
вблизи выходного зрачка, пропорциональным зрачковой функции
Р(и, V).
Для этого в первую очередь надо учесть дифракцию света на ди-
афрагмах, в результате чего даже в идеальной системе точка изобра-
жается в виде дифракционного кружка рассеяния. Вследствие диф-
ракции бесконечно удаленная осевая точка (рис. 9.11) изображается
в виде кружка рассеяния радиусом р, а М' — произвольная точка в
пределах р вблизи фокуса.
Рис. 9.11. Образование дифракционного изображения точки
В результате комплексная амплитуда света пропорциональна
Р(и) du от каждого элемента du, а фаза в произвольных точках М'(х)
по сравнению с фазой в центре F" дифракционной картины определя-
ется главным образом разностью хода А от каждой точки А(и) на сфе-
ре сравнения до точек F' и М', т.е. А = AF' - АМ'. Изменение фазы в
точке изображения М', соответствующее величине А, составляет
exp [i (2лХ/А)]. Приближенно А ~ uxf - х?)2f.
Следовательно, надо просуммировать действия всех бесконечно
малых элементов du dv сферы сравнения в точке изображения. Мож-
но показать [26], что комплексная амплитуда световой волны в точке
изображения для двумерного случая представляет собой преобразова-
ние Фурье зрачковой функции:
F(x, у) = Jp(u, v)exp[i2n(ux+vi/)]dudv (9.44)
при kf' = 1.
Определение функции ОПФ
Теперь заменим оптическую ось линией, соединяющей точки М
и М', т.е. будем считать, что оптическая ось направлена по СУМ', а точ-
ка М' — начало координат (рис. 9.10). Рассмотренное выше влияние
дифракции на зрачковую функцию принципиально не изменится вви-
ду малости F’M’.
Однако теперь распределение световой волны F(x, у) представля-
ет собой амплитудную функцию рассеяния точки М предмета. Но эта
функция связана с ФРТ, т.е. с А'(х, у) в виде сопряженных комплек-
сных чисел:
A'(x,j/) = F(x,j/)F*(x,y). (9.45)
Для более компактной записи [26] введем векторные обозначения
х, u, N: х имеет проекции х и у; и — проекции и и v; N — проекции
Nx и Ny. Тогда формула (9.45) примет вид:
А'(х)=Р(х)-Р*(х). (9.45')
Теперь можно записать выражение для ОПФ в виде преобразова-
ния Фурье функции А'(х):
D0(N)= J J A'(x)exp[-i2nu0xdx],
где вместо N записана пропорциональная ей величина и0, смысл ко-
торой пояснен далее при рассмотрении формулы для N. Учтя (9.45'),
функцию ОПФ представим в следующем виде
Z>0(N)= J jF(x).F*(x)exp[- i2nu0xdx]=
= J Jp(x) J Jp*(u)exp(-i2nux)du exp(-i2nu0x)dx.
(9.46)
Согласно известному свойству преобразования Фурье от сопря-
женной комплексной функции
J P*(u)exp(i2nux) = F*(-x),
тогда подинтегральное выражение для первого интеграла в (9.46) —
это обратное преобразование Фурье для зрачковой функции, т.е.
P*(u)= J F*(x)exp(-i2nux)dx,
поэтому для ОПФ оптической системы получим
-°o(N)= J Jp‘(u)P(u + u0)du.
(9.47)
Известно, что интеграл от произведения какой-либо функции на
сопряженную и сдвинутую по аргументу называется автокорреляци-
онной функцией.
Теперь поясним физический смысл сдвига и0. Ранее в (9.44) было
принято kf = 1.
Сняв это ограничение, заметим, что фазовый член 2пих имеет вид
2тшх/'Л./' или 2пх[и/Ск,/'У\. Тогда фаза волны составляется как про-
изведение координаты х в единицах длины на член u/Xf, имеющий
размерность пространственной частоты. Так как интеграл в (9.47) яв-
ляется функцией и0 (и — переменная интегрирования), то значению
пространственной частоты соответствует
N = u0/(V'), т.е. u0 = X/'N. (9.48)
Сдвиг и и сдвиг и0 выражаются в единицах длины.
В результате получено, что ОПФ оптической системы можно оп-
ределить, зная распределение светового поля на сфере сравнения с ее
вершиной в центре выходного зрачка.
Для двумерного предмета имеем, исключая векторные обозначе-
ния
D0(Nx,Ny)=\ \p\u,v)P(u + 'kf'Nx,v + WNy')du dv. (9.49)
Автокорреляционная функция, как видно из (9.49), отлична от
нуля только в области перекрытия двух зрачков, смещенных один от-
носительно другого на величину, пропорциональную пространствен-
ной частоте. Эта область показана на рис. 9.12, из которого видно, что
пределы интегрирования можно ограничить заштрихованной площа-
дью ДЗр.
Следует заметить, что рассматриваемый метод пригоден для опре-
деления ОПФ системы не только с круглым, но и со зрачком произ-
вольной формы. Однако выше рассматривалась дифракция скалярных
волн, поэтому получаемые значе-
ния ОПФ как автокорреляцион-
ной функции могут отличаться
от точных значений при больших
относительных отверстиях и
больших угловых полях.
Для пространственной часто-
ты N = 0 сдвиг Xf'N = 0, т.е. в
этом случае область перекрытия
наибольшая и равна площади
зрачка .
Как выше было показано,
для нулевой пространственной
частоты ОПФ равна единице, по-
этому автокорреляционную фун-
Рис. 9.12. К пояснению автокорреляци-
онной зрачковой функции
кцию из (9.49) надо нормировать, разделив на наибольшее значение,
равное
JJ Р(и, v)^ du • dv.
В результате получим:
d(nx,n\ = .. у1---------.
JJ | Р(и, и)| dudv
(9.50)
9.8. Расчет ОПФ
Расчет дифракционных ОПФ
Рассмотрим систему с постоянным пропусканием по площади
зрачка и безаберрационную, в которой качество изображения опреде-
ляется лишь дифракцией. В этом случае зрачковая функция веще-
ственна, Jt(u,v) = 1, поэтому Р(и, и) = ^т(п,п) = 1. В результате фор-
мула (9.50) примет вид [26]:
T(NX,NU) = JJdu dv /jjdu dv. (9.51)
Для безаберрационной системы ОПФ5ёводится к ФПМ, т.к. отсут-
ствует сдвиг фазы. ФПМ равна площади области перекрытия ASp, за-
висящей от пространственной частоты, к площади зрачка Sp. Общую
площадь пересечения двух одинаковых кругов можно рассчитать.
Площадь сектора, образованного углом 0, равна S;= вг?/2, а площадь
треугольника АВО равна S2 = АВВО/2 = rsinO rcosO/2 = sinQ cosGr^/2.
Тогда заштрихованная на рис. 9.13, а площадь равна &Sp = 4(Sj - S2) =
= 2(9 - sinOcosGJr2 = ASp.
Отношение полученной площади к площади круга определится так
ASp/Sp = А8/7Длг2) = (2/л)(9-з1п9соз9). (9.52)
Рис. 9.13. К расчету ОПФ безаберрационной системы
Величина смещения ОО' одного круга относительно другого
определяется по формуле ОО' = 2r - 2(r - rcos9) = 2rcos9. Наиболь-
ший сдвиг, при котором область перекрытия исчезает, равен диамет-
ру D = 2г, т.е. относительный сдвиг, меняющийся от 1 до 0, равен
ОО’ID = 2rcosQ/(2r) = cos9. (9.53)
Важную характеристику позволяет найти наибольший сдвиг зрач-
ка, связанный с автокорреляционной функцией. Он дает возможность
найти предельную пространственную частоту. При больших часто-
тах КПМ системы равен нулю.
Из (9.48), полагая и0 = D, имеем D = X/Wnp, откуда
w„=P/(V)=4^-(/7o)],
где Nnp — в мм'1 .
Для предмета на конечном расстоянии вместо D/f' надо взять
2sino'A,.
Для графического представления ФПМ надо выразить простран-
ственную частоту в относительных единицах, приняв предельную ча-
стоту за единицу. Частота в относительных единицах R = N/Nnp свя-
зана с N соотношением
R = ’k(f'/D)N.
Из (9.53) следует: R = cos9. Тогда 9 = arccosJ?, и уравнение ФПМ
оптической системы дифракционного качества после подстановки в
(9.52) имеет вид:
T(N) = (2/n)^arccosJ?-J?2 j. (9.54)
График этой функции показан на рис. . В области низких частот
он является практически прямой линией и лишь при T(N) < 0,4 за-
метно отличается от линейной зависимости по направлению к точке
j?= 1. Заменив область перекрытия круглых зрачков многоугольни-
ком особой формы, можно получить более простую формулу, пригод-
ную для ориентировочных расчетов = 1 - 1-R2 .
Расчет ОПФ для оптической системы с аберрациями и
с постоянным пропусканием по площади зрачка
В этом случае ^т(и, и) = 1, с учетом чего получим из (9.43)
р(и + ’kf'Nx,v + ‘kf'Ny) = exp[i(27t/X) w[u + ‘kf'Nx, v+
P* (u, v) = exp[i(2x/X) W(u, u)].
Подставив эти выражения в (9.50), получим формулу для ОПФ
оптической системы, если известна ее волновая аберрация,
D(Nx,Ny) =
JJexp^an/XjjlFju + Xf^.v+X/Wj-W(u, v)]}du dv
MSp_____________________________________________:
JJ du dv
Рассмотренный метод определения ОПФ как автокорреляции
зрачковой функции чаще применяют для расчета ОПФ, так как зрач-
ковую функцию получают из аберраций рассчитанной системы. Рас-
чет выполняется с помощью ЭВМ. При расчете автокорреляционным
методом зрачковую функцию умножают на ее сдвинутый сопряжен-
ный аналог, после чего результирующую функцию интегрируют. При
расчетах ОПФ возникает необходимость определять полихромати-
ческие ОПФ, т.е. ОПФ для рабочего спектрального интервала.
9.9. Полихроматические функции ФРТ и ОПФ
Полихроматическая ФРТ может быть вычислена сложением ФРТ
для различных длин волн в конечном рабочем спектральном диапа-
зоне ... Л,2, где = A,min, Xj = A,min,
AZ (х', у') = j—--J (x'f ’
(9.55)
где g(X) — функция относительной спектральной эффективности;
А'(х', у') нормированная монохроматическая ФРТ для длины волны X.
Функция q(k) определяется по формуле
д(Л,) = В(Л,)т(Л,)8(Х),
где В(Х) — относительная спектральная яркость источника; т(Х) — от-
носительное спектральное пропускание оптической системы, <S(X) —
относительная спектральная чувствительность приемника (в том слу-
чае, если считается ФРТ для двухступенной системы). Функцию нор-
мируют таким образом, чтобы ее наибольшее значение было равно еди-
нице (gm>T(A.) = 1). Если вместо длины волны Л, ввести безразмерную от-
носительную спектральную координату %, изменяющуюся от -1 до
+ 1 [15], то после преобразования (9.55) имеем:
(*'> У') =
ЫхМУ'А
i[x(dAA0)+.Z]2
<*х-
(9.56)
Полихроматическая ОПФ может быть найдена как средневзве-
шенная величина монохроматических ОПФ в рабочем диапазоне длин
волн Х2 ... Х2
D^Nx,Ny
lq{X)D^Nx,Nv}dX
(9.57)
или в относительных спектральных координатах %
(9.58)
где D-K(Nx, Ny) — монохроматическая ОПФ для длины волны X. Из
(9.57) следует формула для полихроматической ФПМ
(9.59)
Выражение (9.59), как и строгое решение задачи определения по-
лихроматической ФПМ (ЧКХ) впервые было получено в 1964 г.
Д.Ю. Гальперном.
В случае, когда для всех длин волн рабочего спектрального диа-
пазона функция передачи фазы равна нулю, для полихроматической
ФПМ получим
где Т\ (Nx, Ny) — монохроматическая ФПМ. Такое выражение полу-
чают в том случае, когда в системе есть только симметричные абер-
рации, например, хроматическая аберрация для осевой точки пред-
мета.
Глава 10. ОТКЛОНЕНИЯ КОНСТРУКТИВНЫХ
ПАРАМЕТРОВ ОТ НОМИНАЛЬНЫХ
ЗНАЧЕНИЙ И ИХ ВЛИЯНИЕ НА
АБЕРРАЦИИ И ПАРАКСИАЛЬНЫЕ
ХАРАКТЕРИСТИКИ ОПТИЧЕСКОЙ
СИСТЕМЫ
10.1. Расчет влияния изменения параметров
на аберрации
При проектировании оптической системы необходимо знать вли-
яние малых изменений конструктивных параметров (радиусов кри-
визны поверхностей, расстояний между их вершинами, показателей
преломления, средних дисперсий, коэффициентов уравнений асфери-
ческих поверхностей) на аберрации и параксиальные характеристи-
ки, так как при изготовлении оптических систем значения конструк-
тивных параметров вследствие неизбежных погрешностей всегда от-
личаются от номинальных расчетных величин [4].
Для этого в оптическую систему с номинальными значениями
конструктивных параметров последовательно вносят малые измене-
ния этих параметров и выполняют расчет хода лучей. Таблицы с ре-
зультатами расчета аберраций и параксиальных характеристик при
небольших изменениях конструктивных параметров должны входить
в перечень обязательной технической документации на оптическую
систему. Эти таблицы используются, во-первых, для определения до-
пусков на изготовление оптических элементов схемы. Во-вторых, их
можно использовать для определения коррекционных параметров при
оптимизации. В-третьих — для оценки в производственных услови-
ях допустимости отклонений параметров, превышающих допуски (на-
пример, величин воздушных промежутков между линзами при сбор-
ке) с целью возможной компенсации влияния погрешностей изготов-
ления.
Каждый конструктивный параметр принято изменять симметрич-
но относительно номинального значения на величину ±8рг. Это позво-
ляет оценить степень нелинейности зависимости изменения аберра-
ции (или параксиальной характеристики) 8Ф; от изменения парамет-
ра 8рг Если приращение 8Ф. функции выразить с достаточной для
практики точностью в виде двучленного ряда
(10Л)
а затем в это выражение последовательно подставить приращения 8р(
и -8р;, то нетрудно найти, что:
^ = (8ф;-8Ф;)/(28й);
где 8Фу и 8Фу — соответствующие приращения функции Ф..
Так, если 8р; = 0,1, 8Ф* =0,015, ЗФу = — 0,01, то ЭФу/Эр(= 0,125, а
Ъ2ф/др2 = 0,5. Если данный параметр получит приращение 8р(= 0,2,
то приращение функции составит
8Ф; = 0,125 0,2 + 0,5 0,5 0,22 = 0,035.
Программы для расчета влияния изменения параметров на
ППЭВМ строятся в основном следующим образом. Разработчик зада-
ет номинальные значения конструктивных параметров, их изменения
8рР начальные данные для расчета хода лучей. Вначале выполняется
расчет хода лучей в оптической системе с номинальными значения-
ми конструктивных параметров. Результаты расчета распечатывают-
ся в виде таблиц остаточных аберраций, а некоторые из них запоми-
наются для последующего вычисления аберраций и параксиальных
характеристик. Целесообразно выдавать минимум информации о си-
стеме с номинальными значениями конструктивных параметров, так
как данные, характеризующие положения и направления лучей в про-
странстве изображений, координаты точек пересечения лучей с повер-
Глава 10. Отклонения конструктивных параметров от номинальных значений и их влияние на
аберрации и параксиальные характеристики оптической системы
хностями системы выдавать нецелесообразно, ибо они определяются
с помощью программ для аберрационного анализа систем. Расчет абер-
раций в системе с номинальными значениями конструктивных пара-
метров главным образом необходим для контроля правильности зада-
ния.
Изменения конструктивных параметров целесообразно осуществ-
лять по группам (группа радиусов кривизны, группа расстояний меж-
ду вершинами поверхностей, группа коэффициентов уравнений асфе-
рических поверхностей и т.д.) в порядке естественной последователь-
ности. Чаще всего в программах предусматривается, что изменения
радиусов кривизны, расстояний между вершинами поверхностей, ко-
эффициентов уравнений асферических поверхностей задаются для
каждого отдельного параметра самостоятельно, так как реальные из-
менения этих параметров колеблются в довольно широких пределах,
и, кроме того, влияние отдельных групп параметров на аберрации не-
равномерно. Так, например, в двухлинзовом несклеенном объективе
воздушный промежуток между линзами влияет на сферическую абер-
рацию сильнее, чем толщины линз. Поэтому в таком компоненте не-
обходимо задавать малые изменения воздушного промежутка и зна-
чительные приращения толщин линз.
Изменения показателей преломления и дисперсий могут быть
одинаковыми для всех линз. Поэтому в программах обычно предус-
мотрена запись одного числа для изменения Дпхо показателя прелом-
ления основной длины волны и одного числа для изменения
Д(пи - п^) дисперсии.
При расчете влияния изменения дисперсии на хроматические
аберрации в программе предусматривается изменение лишь одного из
двух показателей преломления: либо пи, либо п^. В действительнос-
ти при плавках стекол происходит одновременное изменение обоих по-
казателей преломления таким образом, что частная относительная
пх2~пх0 л
дисперсия---------сохраняет свое номинальное значение. Однако это
71, 71,
'~2 -
практически не сказывается на изменениях хроматических аберрации
и, следовательно, допущение, принятое в программах, не искажает ре-
зультатов расчета.
При задании расчета влияния изменения конструктивных пара-
метров на аберрации и параксиальные характеристики разработчик
оптической системы должен в первую очередь решить две основные
задачи:
1. Определить величины изменения параметров.
2. Определить, изменения каких именно аберраций необходимо
получить. Иными словами, расчет каких лучей следует произвести.
Рекомендуемые изменения конструктивных параметров. Измене-
ния конструктивных параметров не должны быть ни слишком малы-
ми, ни слишком большими. Малые изменения параметров приводят
соответственно к малым изменениям аберраций, что может вызвать
потерю точности или же, если заданные малые изменения параметров
будут меньше тех, которые могут появиться при изготовлении систе-
мы, то на результате может сказаться нелинейная составляющая при-
ращения, величиной которой можно пренебречь при малых измене-
ниях параметров. При больших изменениях параметров, существен-
но превышающих изменения (выше второй степени), которые могут
встретиться в практике, доля нелинейной части приращения может
оказаться большой. Тогда двучленная формула (10.1) для вычисления
приращения функции не обеспечит получения достаточной точности.
Поэтому задаваемые изменения параметров должны быть близки-
ми к изменениям, которые могут возникнуть при изготовлении сис-
темы, т.е. не должны превышать допуски на отклонения конструктив-
ных параметров. А так как допуски на конструктивные параметры
оптических систем изменяются в довольно узких границах (ГОСТ
2786-76 для радиусов, меньших 1000 мм, ГОСТ 3514-76 на стекло оп-
тическое бесцветное), то можно рекомендовать определенные измене-
ния конструктивных параметров оптической системы:
1. Для изменения радиусов кривизны Лг/г= 0,001 ... 0,01. Для
г = оо задается не приращение? а само значение радиуса. В этом слу-
чае следует исходить из числа колец Ньютона при наложении плос-
кого пробного стекла. Значение радиуса кривизны, соответствующе-
го N кольцам Ньютона на световом диаметре D, следует вычислить по
приближенной формуле: r~ 450Dz/N.
2. Для изменения расстояния между вершинами поверхностей
Ad = 0,01 ... 1 мм.
3. Для показателей преломления в пределах, предусмотренных
ГОСТ 3514-76, Лпе= 0,0002 ... 0,002.
4. Для дисперсии nF - пс, в пределах, предусмотренных ГОСТ
3514-76, А(пг - пс) = 0,00002 ... 0,0002. Если оптическая система ра-
ботает в другой области спектра от до Л,2, то рекомендуемое измене-
ние дисперсии
А(^-пХг) = А(пг -Пс,)^ -nxJ/(nr -пс.)].
5. Изменения коэффициентов асферических поверхностей целе-
сообразно находить по заданным изменениям Аг — стрелки прогиба.
Дифференцируя уравнение асферической поверхности вида
by2 + сх2 + a2z + a2z2 + a3z3+.. .+anzn = 0,
л*
получаем Ааг = -Az^T jajZ^1.
i=i
В случае асферических поверхностей, имеющих точки перегиба,
когда уравнение асферической поверхности записывается в виде
z = а2 (у2 + х2) + а2 (у2 + х2^+.. .+ал (у2 + х2)",
после дифференцирования получаем Да£ = &г/(у2 + х2)1.
Рекомендуемые значения изменения Аг = 0,001...0,01 мм.
Однако после выполнения расчета влияния параметров на абер-
рации может оказаться, что некоторые изменения были выбраны не-
удачно, поэтому иногда после первой попытки приходится повторять
расчет влияния параметров с измененными значениями части вели-
чин 8д.
Рекомендации по выбору рассчитываемых лучей. При выборе
лучей, расчет которых следует провести, необходимо исходить из того,
что их число должно быть минимальным, так как большой объем по-
лученных результатов может затруднять их использование. Как пра-
вило, наибольшие изменения аберраций имеют место для лучей, иду-
щих на край входного зрачка и край поля изображения. Поэтому для
подавляющего большинства оптических систем достаточно ограни-
читься расчетом следующих лучей:
1. Для точки на оси — луча, идущего на край входного зрачка.
2. Для края поля изображения — главного луча; двух меридио-
нальных лучей, идущих на верхний и нижний края входного зрачка
(с учетом виньетирования) и одного внемеридионального луча, иду-
щего в точку зрачка с координатами т = 0, М = ттлк, где ттах — ра-
диус зрачка.
Для оптических систем, работающих с большой числовой аперту-
рой (с большим относительным отверстием), целесообразно рассчитать
осевой и внеосевой лучи для зоны входного зрачка с координатой
т=40^5ттах.
Для систем со средними и большими полями изображений следует
дополнительно рассчитать лучи пучка, идущего из точки предмета с
ординатой У = 7^5Утах (ИЛИ ПРИ S1 = -°° «ЛЯ И = л/ОЛИтах )’ Г«е Утах “
размер предмета, цтах — синус угла поля.
Расчет влияния изменения параметров в оптических системах
с большим увеличением
Для систем, работающих при больших увеличениях, например
для проекционных объективов, принято выполнять расчет влияния
изменения параметров на аберрации в обратном ходе лучей. Если рас-
чет выполнять в прямом ходе, то даже малые изменения параметров
могут вызвать большие изменения увеличения и последнего отрезка
s', вплоть до появления разрывов функции (аберраций, параксиаль-
ных характеристик) ввиду того, что последний отрезок может сменить
знак, пройдя значение, равное бесконечности. Кроме того, расчет лу-
чей в прямом ходе принципиально неверен, так как не отражает ус-
ловий, в которых будет работать система — постоянное расстояние s'
изображения от последней поверхности объектива.
При расчете влияния изменения конструктивных параметров на
аберрации и параксиальные характеристики в объективах микроско-
пов следует обращать внимание на то, что в объективах с длиной ту-
буса 160 и 190 мм с большой точностью должно быть сохранено рас-
стояние L между предметом и изображением. Можно получить алго-
ритм, позволяющий выдерживать постоянным это расстояние. Для
этого необходимо с измененным значением какого-либо параметра
выполнить расчет параксиальных лучей в прямом и обратном ходе из
бесконечности, найти положение фокусов и фокусные расстояния
объектива. Затем по формуле Ньютона найти расстояние z от передне-
го фокуса до плоскости предмета, при котором расстояние между
предметом и изображением будет равно заданному. Однако в силу сло-
жившихся традиций расчет влияния параметров для объективов мик-
роскопов выполняется при обеспечении постоянства заднего отрезка.
Для этого в системе с измененным параметром сначала осуществля-
ется расчет параксиального луча в обратном ходе с заданного рассто-
яния s' от последней поверхности до изображения. Определяется по-
ложение предмета - отрезок s2, а затем выполняются расчеты лучей
в прямом ходе.
Для объективов с длиной тубуса «бесконечность» расчет влияния
изменения параметров осуществляется для системы, содержащей
объектив и дополнительную линзу. В этом случае поддерживается по-
стоянным расстояние от последней поверхности линзы до плоскости
изображения.
Расчет влияния изменения параметров в телескопических системах
Особенность расчета влияния изменения параметров телескопи-
ческих систем заключается в том, что при изменении любого из пара-
метров необходимо всегда сохранять афокальность телескопической
системы. В противном случае расфокусировка исказит картину изме-
нения аберраций, кроме того, сохранение афокальности отражает ус-
ловия работы телескопической системы, которая юстируется для вы-
полнения этого условия.
Сохранение афокальности при изменении конструктивных пара-
метров осуществляется путем изменения одного из воздушных про-
межутков системы; расстояния между объективом и окуляром; рас-
стояния между коллективом и окуляром и т.п. Какой конкретно про-
межуток подлежит изменению, указывается в задании. ППЭВМ рас-
считывает параксиальный луч из бесконечности в прямом ходе через
часть системы, предшествующей этому воздушному промежутку, и в
обратном ходе из бесконечности через часть системы, расположенной
после воздушного промежутка. Промежуток определяется как сумма
последних отрезков, полученных для прямого и обратного хода лучей.
10.2. Оценка чувствительности оптических систем
к погрешности изготовления
Для оценки отклонений аберраций и параксиальных характери-
стик в реальной оптической системе от расчетных номинальных зна-
чений следует определять суммарный эффект одновременного изме-
нения всех конструктивных параметров системы. Такую задачу необ-
ходимо решать, так как следует проверить не только правильность
назначения допусков на конструктивные параметры, но и решить воп-
рос о возможности реализации такой оптической системы при суще-
ствующем технологическом уровне. Известны случаи, когда оптичес-
кие системы, обладающие требуемым качеством изображения, оказы-
вались невыполнимыми из-за слишком жестких допусков, обуслов-
ленных сильным влиянием на аберрации отклонений конструктив-
ных параметров от номинальных значений. Если такая высокая чув-
ствительность системы к погрешностям изготовления обнаруживает-
ся поздно (например, на этапе расчета влияния изменения парамет-
ров на аберрации), то это приводит к большим непроизводительным
потерям времени. Во избежание этого программа для оценки чувстви-
тельности оптических систем к погрешностям изготовления должна
быть частью программы автоматизированной коррекции оптических
систем, что позволит на ранних стадиях разработки отказаться от ис-
пользования оптических схем, не обеспечивающих достаточную ус-
тойчивость системы. Для решения этой задачи в программе должны
храниться некоторые фиксированные отклонения конструктивных
параметров от номинальных значений, близкие или равные предель-
но возможным.
Для этого в программе оценки чувствительности системы к по-
грешностям изготовления вычисляют отклонения ДФ^ функций, выз-
ванные заданными отклонениями конструктивных параметров. Эти
отклонения функций определяются методом центральной разности,
учитывающей возможность нелинейного изменения Ф-. Отклонение
ДФ. функции при изменении параметра pt определяется по формуле
дф;7 = 0,5(ф;;-ф;;),
где Фу( — соответствует изменению Др. ; Фд — соответствует измене-
нию -Дрг Предполагается, что отклонение любого параметра р( рав-
новероятно в обе стороны от номинала, а также, что отклонения
ДФд подчиняются нормальному закону распределения. Тогда средние
значения отклонений функций ДФу7 ср = 0, среднее суммарное откло-
нение любой функции ДФ. ср = 0. Тогда и суммарное отклонение под-
чиняется нормальному закону. Поэтому для вычисления доверитель-
ного интервала отклонения ДФ^ дов используется формула теории ве-
роятностей
АФ/Дов = АЁ(ДФ/02 •
Суммарное отклонение ДФ^ находится внутри интервала ±ДФ^ дов
с вероятностью 99,75%.
Если количество конструктивных параметров мало, то следует
использовать максимальные изменения каждой функции, вычисляе-
мые в программе по формуле, которая дает несколько завышенный
результат
Лф/тах = £|АФ4
1=1
Доверительные интервалы для каждой функции следует выдавать
не только для всех параметров сразу, но и по группам: Дг/г, N, Ad,
Ап^д, A(nXI — nw). Это позволяет выявить причины значительных от-
клонений функций и оценить возможность их уменьшения не за счет
ужесточения допусков, а путем, например, пересчета на плавки сте-
кол, на радиусы имеющихся пробных стекол; комплектацию по тол-
щинам линз.
Знание доверительных интервалов изменения аберраций и пара-
ксиальных характеристик в некоторых случаях оказывается недоста-
точным для оценки вероятного ухудшения качества изображения.
Иногда требуется знать, являются ли изменения аберраций при ма-
лых изменениях конструктивных параметров независимыми друг от
друга или между ними существует определенная линейная связь. Зна-
ние связей между изменениями функций может быть полезным и при
оценке возможности компенсации аберраций при сборке путем регу-
лирования воздушных промежутков между линзами, что широко ис-
пользуется, например, при сборке объективов микроскопов.
Математически задача сводится к отысканию существования ли-
нейной зависимости между приращениями функций и Ф( вида
kjt = ДФ/ДФ;.
При этом диапазон изменения конструктивных параметров 8рг
столь небольшой, что изменения функций линейно зависят от изме-
-й ЭФ.
нения параметров, т.е. выполняется равенство ДФ. = Дрг.
Матрица частных производных {ЭФу/Эр(} вычисляется приближен-
но методом центральных разностей. Для вычисления коэффициентов
kjt целесообразно использовать метод линейной регрессии [4].
Если же использовать обычную алгебраическую форму записи, то
^ = £5ФЯ5Ф;У|;5Ф^
Степень связи между функциями характеризуетсяотносительной
погрешностью коэффициента kjP т.е. Afy=->Д~ Ру/ , где р —
коэффициент корреляции между ДФ. и ДФг, равный
£8Ф;/5Ф„
Pfl =
£6Ф* ^5Ф*
Чем больше ДА^/йд, тем менее зависимы функции. В большинстве
случаев учет связей позволяет назначать более широкие допуски на
отклонения конструктивных параметров от номинальных значений.
10.3. Влияние децентрировки на аберрации оптической
системы
Центрированная оптическая система, у которой центры кривиз-
ны сферических поверхностей лежат на одной прямой, являющейся
оптической осью, а оси симметрии асферических поверхностей совпа-
дают с ней, является идеализированной, практически недостижимой.
В реальных оптических системах вследствие погрешностей изго-
товления оптических деталей и сборки оптическая ось отсутствует —
системы получаются децентрированными.
Децентрировка вызывает появление специфических аберраций,
ухудшающих качество изображения. Для определения допустимых
величин децентрировки необходимо рассчитывать ход лучей через
оптическую систему, в которой поверхности поочередно децентриру-
ются, и выявлять аберрации, вызванные децентрировкой.
Существует несколько видов децентрировок:
1. Смещение центра v-й сферической поверхности с оптической
оси на расстояние cv, что при cv/rv « 1 эквивалентно повороту сфери-
ческой поверхности вокруг ее вершины на угол 0V = - cv/rv. Поэтому
в программах предусматривается лишь смещение центра кривизны
сферической поверхности с оптической оси.
2. Децентрировка плоской поверхности rv = «> проявляется как по-
ворот поверхности вокруг точки пересечения ее с осью на угол 0v.
3. Децентрировка асферической поверхности представляется дву-
мя составляющими: смещение оси симметрии поверхности парал-
лельно оптической оси системы на cv; поворот оси симметрии вокруг
вершины поверхности на угол 0V. В общем случае эти два вида децен-
трировок дают различный, а иногда даже противоположный эффект.
4. Смещение i-ro компонента оптической системы, состоящего из
нескольких поверхностей, в направлении, перпендикулярном к опти-
ческой оси, на расстояние с;. Однако при малых смещениях аберра-
ции децентрировки оказываются взаимно независимыми, и эффект,
вызванный смещением всего компонента, с достаточной степенью точ-
ности равен сумме эффектов, вызванных децентрировкой отдельных
поверхностей.
5. Поворот i-ro компонента вокруг некоторой точки К, располо-
женной на некотором расстоянии L от первой поверхности компонен-
та, на угол 0; (рис. 10.1). Но, если 0; мал, то эффект от поворота эк-
вивалентен сумме эффектов, вызванных смещением центра каждой
сферической поверхности на cv = Qfa - dv_2 - rv) и поворота плоских
поверхностей на угол 0Г
Рис. 10.1. Связь между децентрировкой компонента и децентрировкой
отдельных поверхностей
Для определения влияния децентрировки отдельных поверхнос-
тей и компонентов на аберрации выполняется расчет хода лучей с по-
мощью специальных программ для ППЭВМ. Для расчета используют-
ся формулы Федера. Децентрировка осуществляется в плоскости OYZ,
т.е. смещение центров поверхностей, параллельное смещение осей
компонентов, осей симметрии асферических поверхностей произво-
дится в направлении ОУ, а поворот осей симметрии асферических по-
верхностей и поворот компонентов — вокруг осей, параллельных оси ОХ.
Необходимо выполнить расчет следующих лучей.
1. Для вычисления комы в центральной точке поля необходимо
рассчитать три луча: луч 1, идущий вдоль оптической оси в простран-
стве предметов; луч 2 — из осевой точки предмета на верхний край
входного зрачка; луч 3 — из осевой точки предмета на нижний край
входного зрачка,тогда
К = 0,5(^ + у'3 - у[),
где у'с индексами — ординаты точек пересечения указанных лучей с
плоскостью Гаусса. Если необходимо определить зависимость комы,
вызванной децентрировкой, от числовой апертуры, тоследует рассчи-
тать еще два луча, идущих из осевой точки предмета на зрачок с коор-
динатами т = 40^5гптах, т = ~ ^10^5тт^.
2. Для вычисления хроматизма положения, вносимого децентри-
ровкой, рассчитывается ход двух лучей из осевой точки предмета для
длин волн и Х2.
Для больших угловых полей находят изменения хроматизма уве-
личения для внеосевой точки по формуле
(i/kj !/к2)Дец (У'ч ^г)центр'
3. Астигматизм, вызванный децентрировкой, непосредственно не
вычисляется. Поэтому для определения влияния децентрировки на
качество изображения внеосевых точек производят расчет хода лучей,
принадлежащих к широким меридиональному и сагиттальному пуч-
кам.
Изменение аберрации широкого меридионального пучка лучей
из-за децентрировки определяется по формуле
АО=(/, - у')дец - (у; - у')центр.
Изменение меридиональной составляющей астигматизма Лг'т свя-
зано с изменением АО следующим приближенным соотношением
Az; = AO/(tgo;-tgo'H).
Аналогично изменение аберраций сагиттального пучка лучей из-
за децентрировки вычисляется по формуле
А(5С,) = 5С;ец-5С;ентр,
где 5G' — сагиттальная составляющая поперечной аберрации для луча
с координатами на входном зрачке т = О, М = mmax. Изменение сагит-
тальной составляющей астигматизма Az' связано с А(бО')
Az' = A(8G')/tg8'.
4. Для вычисления дисторсии необходимо рассчитать ход трех
лучей: главного луча из верхней крайней точки поля; главного луча,
идущего из нижней крайней точки поля; луча, идущего из осевой точ-
ки поля вдоль оптической оси. Тогда дисторсия, вызванная децентри-
ровкой, определяется по формуле
АУдец = 0,5[(у; - уз)+(у'2 - у£)],
где у' с индексами — суть ординаты точек пересечения указанных
трех лучей с плоскостью Гаусса.
Следует отметить, что представление о коме, как наиболее опас-
ной аберрации, вызванной децентрировкой, является ошибочным и
может привести к недопустимому завышению допуска на децентри-
ровку.
При суммировании аберраций децентрировки необходимо прини-
мать во внимание, что последняя представляет собой вектор, имею-
щий длину cv и направление, определяемое, например, углом <pv, об-
разованным этим вектором с осью ОУ. Суммарные значения попереч-
ных аберраций, вызванных децентрировкой, вычисляются по формуле
Глава 10. Отклонения конструктивных параметров от номинальных значений и их влияние на
аберрации и параксиальные характеристики оптической системы
AZ'= ^AZ^cos<pv + ^AZ^sincp,
AZ'V — поперечная аберрация, вызванная децентрировкой v поверхно-
сти, к — количество децентрированных поверхностей. Так как децен-
трировка распределена по закону Рэлея, то нетрудно получить фор-
мулу для вычисления доверительного интервала изменения попереч-
ной аберрации децентрировки с вероятностью 99,73%
I к
М'лоя = 1,15- аЕ(А1С)2.
По заданному доверительному интервалу некоторой поперечной
аберрации AZ'0B (например, комы) можно вычислить допуск на децен-
тркровку cv. Чтобы задача имела одназначное решение, можно:
1. Доверительный интервал допустимой поперечной аберрации
А/'ов поделить поровну между всеми поверхностями оптической сис-
темы.
Тогда допустимая поперечная аберрация децентрировки AZ'on для
каждой поверхности составит одно и то же значение, равное
АСп = ^ов/1,15^/к.
Тогда допуски на децентрировку отдельной поверхности после
расчета предварительного влияния децентрировки каждой поверхно-
сти cv на изменение поперечной аберрации д Z v можно определить по
формуле
_ А^доп • СУ
2. Доверительный интервал допустимой поперечной аберрации
разделить между поверхностями системы, учитывая влияние децен-
трировки каждой поверхности на эту аберрацию. Тогда формула для
расчетов допусков на децентрировку cv будет иметь вид [4]:
где cv — децентрировка каждой поверхности, при которой путем рас-
чета хода лучей были вычислены изменения AZ'V .
Глава 11. РАСЧЕТ ДОПУСКОВ НА
КОНСТРУКТИВНЫЕ ПАРАМЕТРЫ
ОПТИЧЕСКИХ СИСТЕМ
Расчет на точность основных узлов и прибора в целом, а также за-
дание обоснованных допусков на оптические детали - обязательный
и важнейший этап проектирования.
На точность прибора влияют погрешности отсчетных и переда-
точных механизмов, а также погрешности оптической системы. От
рационально выбранных посадок и допусков в значительной мере за-
висит себестоимость изготовления прибора, его надежность и долго-
вечность в эксплуатации. При назначении допусков надо стремиться
к тому, чтобы обеспечить изображение высокого качества, иметь за-
данные характеристики и получить требуемую точность прибора.
11.1. Расчет допусков на изготовление и сборку
оптических деталей и узлов
На качество изображения оптической системы и ряд других ее
свойств влияют [20]:
1. Отклонения величины основного показателя преломления пе,
средней дисперсии nF — пс, и других констант оптических материалов
деталей от расчетных значений, а также такие дефекты, как оптичес-
кая неоднородность, двойное лучепреломление, свили и т.д.;
2. Погрешности обработки оптических деталей - отклонение фор-
мы их рабочих поверхностей от требуемой (N, AN, AR), децентриров-
ка линз или их поверхностей (с), клиновидность пластинок (0) и раз-
верток призм;
3. Погрешности сборки, из-за которых нарушается взаимное по-
ложение деталей и узлов в приборе и появляются децентрировка сис-
Глава 11. Расчет допусков на конструктивные параметры оптических систем
темы, расфокусировка изображения и биение осей, а также деформа-
ции оптических поверхностей.
Некоторые погрешности изготовления и сборки, а также некото-
рые отклонения констант оптических материалов влияют на одни и
те же свойства системы, например, качество изображения, благодаря
чему возможна взаимная компенсация таких дефектов. Это позволя-
ет иногда расширить допуски на оптические детали.
Согласно критерию Рэлея, качество изображения точки считает-
ся первоклассным, пока волновые аберрации оптической системы не
превосходят величины Х/4 — четверти длины волны света. Поэтому
при X = 0,55 мкм допустимые волновые аберрации визуальных опти-
ческих систем не должны превышать Лв= 0,14 мкм.
Допустимые аберрации фотографических систем могут значитель-
но превосходить критерий Рэлея, так как структура фотоэмульсии
грубее дифракционной структуры оптического изображения.
В визуальных системах из указанного допуска Лв= 0,14 мкм на
все технологические аберрации, возникающие из-за ошибок изготов-
ления и сборки оптических деталей, рекомендуется выделять только
его часть [4], не более (Лв)доп= 0,1мкм.
Этот допуск задается на погрешности всех оптических деталей
системы, влияющих на качество изображения, в пределах рабочего,
или действующего пучка лучей.
Рабочим, или действующим пучком называется пучок лучей наи-
большего сечения D, который дает в поле оптической системы изоб-
ражение одной точки предмета и на выходе из системы целиком по-
падает в зрачок глаза наблюдателя диаметром или другого приемни-
ка световой энергии.
Оптические поверхности и детали вызывают различные по харак-
теру деформации проходящего через них волнового фронта — нере-
гулярные микронеровности из-за микрошероховатости поверхностей
(рис. 11.1, а) и нарушение его формы вследствие, например, цилинд-
ричности поверхностей (рис. 11.1,6) или их местных ошибок. При ис-
пользовании немонохроматического света возникают поперечный хро-
матизм, например из-за клиновидности деталей (рис. 11.1, в), и про-
дольный хроматизм ввиду непредусмотренной их фокусности
(рис. 11.1, г).
Допуск на поперечный и продольный хроматизм можно задавать
в волновой мере. Так, для деталей астрономических приборов при-
нимают, что в пределах рабочего пучка лучей наибольшее расстояние
между волновыми фронтами для линий F' и С' не должно превышать
величины (Аг_с,)доп = 0,1 мкм [4].
Рис. 11.1. Прохождение плоского волнового фронта черех пластинку,
имеющую дефекты изготовления:
а) микрошероховатость; б) цилиндричность; в) клиновидность;
г ) сферичность
При расчете допусков на клиновидность деталей поперечный хро-
матизм удобнее выражать в угловой мере. Допустимый угловой хро-
матизм за окуляром прибора при диаметре D рабочего выходного
зрачка равен
(^8У'-с')д0П = (Af--c-)flon/^ •
При (Аг-с')доп = О Л мкм для допуска на хроматизм в угловых се-
кундах получилось бы (А8Г_С,)"ДОП = 20"/ D' и при D = 2мм допуск со-
ставил бы всего 10".
Обычно рекомендуется задавать большие допуски на хроматизм
— до 20" для каждой детали, вызывающей хроматизм, независимо от
размера выходного зрачка и сложности оптической системы [20].
Общий допуск на оптическую систему можно разделить на допус-
ки для отдельных деталей и их элементов, исходя из предположения,
что действия первичных погрешностей суммируются как случайные
величины — по квадратичному закону. Причем некоторые погреш-
ности имеют скалярный характер (например, хроматизм положения),
а другие являются векторными (например, клиновидность деталей,
цилиндричность поверхностей и др.).
В случае скалярных погрешностей средняя величина волнового
допуска (Ав)ск на каждый источник таких погрешностей рассчитыва-
ется по формуле
(А»)ск “ (Ав)доп.ск/•
В случае векторных погрешностей средняя величина волнового
допуска (Лв)вект на каждый источник таких погрешностей рассчиты-
вается по формуле
(^в)вект = '^(^в)доп.вект/Т^вёкт ’
где (Дв)допск и (Дв)доп вект — общий допуск на скалярные и векторные
погрешности всей оптической системы; тпск и твект — число первич-
ных скалярных и векторных погрешностей соответственно.
11.2. Расчет допусков на оптические поверхности и
детали
Между высотой Д дефекта оптической поверхности и величиной
вызываемой ею деформации Дв проходящего волнового фронта суще-
ствует прямая пропорциональность [20], [4]. Поэтому для расчета до-
пусков на погрешности оптических поверхностей можно пользовать-
ся формулой вида:
Ддоп ~ £(Дв)доп > (11.1)
где g — коэффициент, связывающий допуск на дефекты поверхности
детали с волновым допуском для нее.
Для поверхностей, перпендикулярных к оси пучка лучей, коэф-
фициент gравен:
1. Для преломляющей оптической поверхности, разделяющей
среды с показателями преломления и п2:
g = -l/(nI-n2).
2. Для преломляющей поверхности, граничащей с воздухом
(п; = 1, п2 = п):
3. Для внутренней отражающей поверхности (п2 = -п2 = п):
goa = -l/2n.
4. Для наружной отражающей поверхности:^ = -0,5. При п = 1,5
для последних трех случаев получим:
£п = 2; ^п = -1/3; go = -O,5,T.e.
требования к точности обработки наружной отражающей поверхнос-
ти в 4 раза, а внутренней отражающей поверхности даже в 6 раз стро-
же, чем к обработке преломляющей поверхности, граничащей с воз-
духом.
Допуск ANp на дефекты оптической поверхности в пределах ее ра-
бочей зоны определяется по формуле [20]:
bNp = gbNB = gbhB/(X/2), (11.2)
где ДЛВ — наибольшая допустимая разность стрелок выходящего вол-
нового фронта в пределах рабочего сечения пучка лучей; &NB — вол-
новой допуск на астигматизм и местные деформации выходящего вол-
нового фронта в пределах рабочего пучка лучей, заданный величиной
наибольшей допустимой разности числа интерференционных полос,
которая наблюдается при контроле формы оптической поверхности
под пробным стеклом (ГОСТ 2786-76); X — длина волны света, исполь-
зуемого для освещения при контроле поверхности пробным стеклом;
при контроле в белом свете по полосам красного цвета берется длина
волны зеленого участка спектра X = 0,55 мкм.
Для визуальных систем предельное значение допустимого волно-
вого допуска (Л^)доп в пределах рабочего участка не должно превы-
шать величины
14 К/4 V,AO
Допуск N на общее отклонение формы поверхности, перпендику-
лярной к оптической оси, можно определить также из допустимых
величин остаточных аберраций системы.
Допуск на несферичность AN (астигматичность) поверхностей в
пределах светового диаметра DCB можно увеличить в квадрате отноше-
ния светового диаметра DCB к рабочему диаметру пучка D, тогда [20]
( d \Z (D \2
= ^в)Д0П(д^| . (Ц.4)
Некоторые плоские поверхности и отдельные детали типа плос-
копараллельных пластинок (защитные стекла, разделительные плас-
тины, развертки призм) наклонены к оси пучка лучей.
Для коэффициента g, который связывает высоту неровности на-
клонной плоской поверхности, разделяющей среды с показателями
преломления и п2, с вызываемой этой неровностью деформацией
проходящего волнового фронта, получается более сложное выраже-
ние вида[20]
_ Д _ 1
Лв cose - - nf sin2 е (11 • 5)
где е — угол падения осевого луча на наклонную плоскость.
Формулы (11.1), (11.2), (11.4) для расчета допусков на микроне-
ровности, на цилиндричность и местные ошибки поверхностей сохра-
няют свой вид и для наклонных поверхностей, но коэффициент gB сле-
дует подставлять из формулы (11.5) в соответствии с типом поверх-
ности и углом падения осевого луча.
Если предположить, что рабочий пучок лучей — параллельный
или близкий к нему, т.е. имеет малый апертурный угол, а сечение пуч-
ка — круговое, то рабочий участок наклонной поверхности при этих
условиях будет эллиптической формы с длиной малой оси Zmin и дли-
ной большой оси Zmax. Если ось, вокруг которой наклонена оптическая
поверхность, перпендикулярна оси рабочего пучка, то 1^ = D, 1тах =
= Dcose , где D — диаметр рабочего сечения.
Величина допуска на цилиндричность в числе полос ANflon по фор-
муле (11.2) в пределах рабочего участка эллиптической формы и для
наклонной поверхности не зависит от направления оси цилиндра.
Если же допуск выражать не числом полос ДАГдоп, а величиной наи-
меньшего допустимого радиуса кривизны цилиндрической поверхно-
сти, то допуск будет зависеть от направления ее главных сечений. Это
следует иметь в виду при определении допуска AN в пределах свето-
вого размера поверхности по формуле (11.4).
Второй причиной возникновения астигматизма в изображении
точки является сферичность наклонной поверхности (рис. 11.2). Раз-
ность стрелок прогиба выходящего волнового фронта в пределах ра-
бочего пучка равна
Айв = \h/gt = (йтах - h^/g,. (11.6)
Наибольшая йтах и наименьшая
ftmin стрелки прогиба сферической по-
верхности относятся друг к другу как
квадраты длин осей рабочего участка
эллиптической формы, поэтому
(I V
*max = ^min =/!tain*2. (Ц.7)
\ nnin /
Выражая допуск на сферичность
наклонной оптической поверхности
числом полос Naon вдоль малой оси ра-
бочего участка, из формулы (11.6) с
учетом формулы (11.7) для общего слу-
чая получим
Рис. 11.2. Астигматизм при отражении от
наклонной сферической поверхности
^ДОП J.2 <(Д^в)доп> (11'8)
к — 1
где (Д^в)доп — допуск на астигматизм выходящего волнового фронта,
выраженный числом полудлин волны света, используемого для осве-
щения при контроле поверхности пробным стеклом.
Если перед поверхностью, для которой рассчитывается допуск,
расположена наклонная преломляющая плоскость, то учитывается
коэффициент анаморфозы ka пучка, вызываемый поверхностью, рав-
ный k& = coseb/coseh , тогда
k = ka /cos E = COS Ев/(cos EH COS e) ,
где eh и e'h — соответственно углы падения и преломления осевого луча
на наклонную поверхность.
Для сферической поверхности допуск йа отклонение радиуса кри-
визны г от его номинального значения может быть определен из до-
пустимого волнового хроматизма за окуляром (для визуальных при-
боров)
Аг =
^(А^г-с')допгг
(пр,-пс.)П^ ’
где h — стрелка кривизны сферической поверхности; Лсв — световой
диаметр; &hF_c = (nF - nc)Ah.
Для асферических поверхностей допустимое отклонение норма-
ли Аа"оп в различных точках асферической поверхности определяют
по найденному N [4]:
Аа"п = 55NROn/D,
где D — диаметр, на котором наблюдается Naon; N^on — предельное от-
клонение стрелки прогиба поверхности детали, выраженное числом
интерференционных полос или колец.
Однако допуск Аа"оп можно рассчитать, исходя из разрешающей
способности данного компонента системы
Да"п = Дф"п/(гс'-гс),
где А(р" = I — ... - I ф"; п' и п - соответственно показатели преломле-
ния стекла и среды; ф" — угловой предел разрешения для систем дан-
ного типа.
Допуски на изготовление углов призм и пирамидальность рассчи-
тываются, исходя из клиновидности развертки. Клиновидность раз-
вертки выражается двумя составляющими: клиновидностью 0с, воз-
Глава 11. Расчет допусков на конструктивные параметры оптических систем
никающей в плоскости главного сечения призмы из-за ошибок ее уг-
лов, и клиновидностью 0л, возникающей в плоскости, перпендикуляр-
ной к главному сечению из-за пирамидальности призмы л. Тогда сум-
марная величина клиновидности в силу взаимной перпендикулярно-
сти обеих составляющих будет вычисляться по формуле
0 = ^ + 0"-
Призмы с клиновидной разверткой вызывают такие дефекты как:
сдвиг изображения осевой точки предмета с центра поля и разворот
изображения; хроматизм увеличения; кома; двоение изображения
(обычно в призмах с раздельным ходом луча).
Приведем приближенные формулы для расчета допусков на кли-
новидность разверток призм [4], [20]:
1. Для угла отклонения луча клином:
- при ходе луча в главном сечении
8£ = 0(га -1) + [о(п2 -l) tg2 е]/(2п);
- при ходе луча в сечении, перпендикулярном главному сечению:
8' = S£ cos е = 0 cos е jn2 + ^(га2 - tg2 е - I j;
- при нормальном ходе луча 80 = 0(п - /).
2. Для приращения угла отклонения луча клином при повороте
от нормального положения (е = 0) на угол е:
- вокруг оси, параллельной ребру клина
Д8С = 8£-80 = [0(ra2-l)tg2E]/(2ra);
- вокруг оси, перпендикулярной к ребру клина и параллельной
главному сечению
Д8£ = 8'-8о = [0(n2-/1tgEsinEl/(2n)-20(n-J)sin2^;
L J/ 2/
3. Для хроматизма, измеряемого в случае визуальных систем уг-
лом между преломленными лучами для линий F' и С' и вызываемого:
- наклонным клином при ходе луча в главном сечении
Д8Г,_С, = S£/ve = (0/ve) ( ,jn2 + [(га2 +1) tg2E - ;
- наклонным клином при ходе луча в сечении, перпендикуляр-
ном к главному
Д8Г_С. = S£/ve = (0/ve)fcosE^ra2 + [(ra2-jj tg2E-Ip;
- клином, нормальным к оси пучка лучей
A8r_c=0(n-2)/ve.
4. Для комы в линейной мере, вызываемой клином в плоскости
изображения,
А/к = -3/2|б(п2 -
5. Для комы в угловой мере, пересчитанной через оптическую си-
стему, которая расположена за клином и имеет угловое увеличение W
для точки пересечения осевого луча с выходной гранью клина [4]
Д8К = -3/2[в(пг - /) <y2W/п].
6. Для величины двоения изображения со, вызванного ошибкой
прямого угла крыши Д^ призмы, за оптической системой, располо-
женной между призмой и наблюдателем,
со = Дкрш 4riW cos е.
Во всех приведенных выше формулах: п — показатель преломле-
ния материала призмы: vc — коэффициент дисперсии; 0 — преломля-
ющий угол клина; Е — угол падения луча на входную грань призмы
или ребро крыши; W — угловое увеличение системы для точки пере-
сечения осевого луча с ребром крыши; а — расстояние по осевому лучу
от клина до плоскости изображения; о — апертурный угол пучка лу-
чей.
Допуски на клиновидность пластин. Клиновидность характери-
зует непараллельность рабочих поверхностей, измеряемую углом 0.
Клиновидность вызывает отклонение выходящего пучка и попереч-
ный астигматизм. Допуск на клиновидность преломляющих деталей
можно определить по формуле [4]
®доп = ^F'-C'/(.nF' ~ пс') = Ve^F'C’/kne ~
где Д8у,_с, — допустимый угловой хроматизм , вызванный клиновид-
ностью пластины или разверткой призмы, нормальной к оси пучка лу-
чей; ve —коэффициент дисперсии;
Но чаще всего используют формулу
0 _ (а5г-с-)допу. 1 = A8f-_c- D've
яоп пе-1 W пе-1 D ’
где (А8г. _с.)доп — допустимый угловой хроматизм детали за окуляром
прибора; W — угловое увеличение оптической системы, стоящей за
деталью, для которой определяется допуск на клиновидность,
W-D/D'; D и D' — соответственно диаметры рабочего пучка лучей
в месте расположения детали и выходного зрачка прибора.
Допуск на децентрировку линз, исходя из допустимого волново-
го хроматизма, вычисляется по формуле
c<AF._c.vef'/D,
ку-с — допустимый волновой хроматизм за окуляром прибора, выз-
ванный децентрировкой линзы; f — фокусное расстояние линзы; D
— диаметр рабочего отверстия поверхности линзы.
Для большинства оптических систем имеет значение появление
комы для осевой точки. При расчетах допусков используют таблицы
влияния децентрировки отдельных поверхностей и целых компонен-
тов на аберрации системы (глава 10).
Расчет допусков на отклонение показателя преломления и тол-
щины линзы. Изменение показателя преломления линз оптической
системы и толщин линз являются причинами возникновения силовых
деформирующих элементов. Чаще всего в оптических системах зада-
ется отклонение Д/' фокусного расстояния, исходя из которого мож-
но рассчитать допуск на показатель преломления Агац.
Для сложной оптической системы, состоящей из I тонких линз,
используя формулу для оптической силы, можно получить Дгац =
_ А/доп / -l\f' 7 ,
_ ц,2 v ц /'н > гДе I = Н — число линз; h — высота луча на по-
верхности.
Так для двухлинзового склеенного объектива, исходя из условия
ахроматизации, можно определить влияние изменения показателя
преломления Ага на величину АЛ:
А/' = -Г2Ф1 ( .
П1 - 1 П2 — 1 V; J
В системах с небольшим угловым полем изменение Ага заметно
сказывается на сферической аберрации в области аберраций третьего
порядка. Тогда, используя формулу для сферической аберрации тре-
тьего порядка в случае бесконечно удаленного предмета, можно по из-
вестным отклонениям показателя преломления Ага определить изме-
нения сферической аберрации
Ц=1
Д(Да') =
Ц=1
Задаваясь допустимыми значениями сферической аберрации,
можно рассчитать допустимое изменение показателя преломления
. < А(А<)дОП(^/^)'
цдоп 0,541 h2 f'2(dPjdnJ'
Для пластинок и призм изменение сферической аберрации от по-
казателя преломления выражается зависимостью
ц=г 3 — п2
Д (As') = 0,5 <з2а. У Апц ,
ц=Т Пц
где оА. — апертурный угол, d^ — толщина Ломпонента.
Для системы из бесконечно тонких линз в воздухе для случая,
когда предмет бесконечно удален, допуск на дисперсию при заданном
допуске хроматической аберрации положения можно определить из
формулы
A(As'ra) = -f' У(Лц/Л2) -Фц,
а именно: A(nF,-nc) =-A(As'f,c.)/f'2 (hj/h^2 (пе -
Требования к типовым показателям качества стекла выбираются
по ГОСТу 23136-78, исходя из полученных значений и А(пг -
в зависимости от назначения оптических компонентов.
Изменение толщины линзы будет вызывать возникновение дефор-
мирующего элемента в виде линзы с равными радиусами и толщиной,
равной изменению толщины основной линзы. Оптическая сила тако-
го деформирующего элемента АФ = Ad(n — 1)2п4.
Допуск на отклонение толщины оптического компонента может
быть рассчитан через допуск Af на фокусное расстояние .
Затем следует выполнить расчет допусков на изготовление и ус-
тановку зеркально-призменных систем, если таковые имеются в схе-
ме. Здесь нередко возникают пространственные задачи, для решения
которых в простых случаях пользуются сферической тригонометри-
ей, а в сложных- векторной алгеброй или матричным исчислением.
На заключительном этапе проектирования оптической системы
выполняют расчет допусков на оптические детали с учетом требова-
ний к точности работы и сборке прибора.
ГЛАВА 12. ОФОРМЛЕНИЕ ТЕХНИЧЕСКОЙ
ДОКУМЕНТАЦИИ НА РАССЧИТАННУЮ
ОПТИЧЕСКУЮ СИСТЕМУ
12.1. Требования к оформлению принципиальной
оптической схемы
Оформление технической документации на оптическую систему
является завершающим этапом проектирования.
В техническую документацию входят: принципиальная оптичес-
кая схема, оптический выпуск на систему, таблицы влияния откло-
нения параметров на аберрации и параксиальные характеристики,
чертежи на оптические детали. Процесс оформления технической до-
кументации в настоящее время полностью автоматизирован.
Согласно ГОСТ 2.412-81 на оптической схеме должны быть изоб-
ражены оптические элементы, выполняющие определенную функ-
цию, упрощенно источники излучения, приемники лучистой энергии,
если таковые есть в схеме; элементы, поворачивающиеся или переме-
щающиеся вдоль или перпендикулярно оси, которые следует показы-
вать в основном рабочем положении; положение диафрагм, зрачков
(при необходимости), фокальных плоскостей, плоскостей изображе-
ния, предмета (для фотографических объективов и объективов мик-
роскопов), а также положение экранов, светорассеивающих плоско-
стей и поверхностей, если таковые есть в системе. На принципиаль-
ной оптической схеме необходимо привести основные оптические ха-
рактеристики в виде записей на поле схемы или в таблице произволь-
ной формы.
Так для телескопических систем следует привести : видимое уве-
личение, угловое поле оптической системы в пространстве предметов,
диаметр выходного зрачка, удаление выходного зрачка от последней
поверхности, предел разрешения, коэффициент пропускания (при не-
обходимости).
Для фотографических объективов: фокусное расстояние, относи-
тельное отверстие, угловое поле оптической системы или размер кад-
ра, разрешающую способность, коэффициент пропускания.
Для фотоэлектрических систем: размеры фотокатодов или типы
фотоприемников, размеры светового пятна на фотокатодах.
Кроме того, на оптических семах следует указывать дополнитель-
ные сведения: расстояние от последней поверхности фотографическо-
го объектива до плоскости изображения в зависимости от расстояния
до предмета; линейное перемещение окуляра на одну диоптрию; наи-
менования или типы источников излучения и приемников лучистой
энергии; световые диаметры и стрелки прогиба, толщины линз по оп-
тической оси.
В зависимости от типа оптической системы на оптической схеме
следует указывать: диаметры диафрагм, размеры зрачков, размеры
тела накала или других светящихся элементов источников излучения,
воздушные промежутки и другие размеры по оси, определяющие вза-
имное расположение оптических элементов, диафрагм, зрачков, фо-
кальных плоскостей, плоскостей изображения и плоскостей предме-
та (для систем, работающих на конечном расстоянии), источников из-
лучения и приемников энергии; размеры, определяющие положение
оптической системы относительно механической частей прибора; га-
баритные или установочные размеры, например, длину базы, высоту
выноса ( при необходимости).
Пример оформления принципиальной оптической схемы одной
ветви бинокля с призменной оборачивающей системой приведен на
рис. 12.1.
12.2. Требования к оформлению оптического выпуска
на оптическую систему
Для окончательного варианта системы с округленными по ГОС-
Ту радиусами кривизны составляется оптический выпуск [21], кото-
рый содержит чертеж оптической системы, ее оптические характери-
стики, конструктивные параметры, таблицы и графики аберраций.
В левой верхней части формата (рис. 12.2) записывают название
объектива, а затем указывают основные оптические характеристики,
зависящие от расположения предмета и особенностей системы: фокус-
ное расстояние или увеличение, относительное отверстие, апертуру
или диаметр входного зрачка, угловое или линейное поле оптической
567
3(1)
11!**
8.98
/. Увеличение
2. Угловое поле
3. Диаметр вх. зрочко
8х
5°
40мм
166*
гее*
Рис. 12.1. Принципиальная оптическая схема одной
ветви бинокля
4. Разрешающая способность!
в центре поля 4"
НО КРОЮ ПОЛЯ 60"
5. Удаление выходного зрочко 10.6мм
6. Перемещение окуляра но 1 дптр 0.62мм
7. Коэффициент пропускания 0,8
8. Детали поз. 3(2), 4, 5, 6, 7 условно повернуты
вокруг оси 001 но 90°
Т. Контр
Wtb.
Глава 12. Оформление технической документации на рассчитанную оптическую систему
системы в пространстве предметов. Для фотообъективов и проекцион-
ных объективов может быть указан размер кадра, предел разрешения,
а иногда и коэффициент пропускания.
Для телескопических систем указываются увеличение, угловое
поле, диаметр выходного зрачка, его расстояние от последней повер-
хности. Кроме того, могут быть указаны предел разрешения и коэф-
фициент пропускания. Для фотоэлектрических систем следует ука-
зать тип приемника излучения и размер светового пятна на площад-
ке приемника.
Для зеркальных и зеркально-линзовых систем рекомендуется по-
мимо общих оптических характеристик указать коэффициент цент-
рального экранирования и эффективное относительное отверстие. Для
телеобъективов следует записать значение коэффициента теле-
сокращения. Иногда приводятся дополнительные сведения, характе-
ризующие особенность работы системы.
Ниже, под основными оптическими характеристиками, приводит-
ся основная длина волны, для которой исправлены монохроматичес-
кие аберрации, а также интервал длин волн, для которого выполнена
ахроматизация системы (рис. 12.2).
Затем располагается чертеж оптической системы, выполненный
в масштабе. Под чертежом приводятся конструктивные параметры
системы (г, d, п, v), марки стекол или других оптических материалов,
световые и полные диаметры, а также стрелки прогиба поверхностей
по световым и полным диаметрам. Если система содержит асферичес-
кие поверхности, то соответствующие им вершинные радиусы запи-
сываются в виде , а ниже записывается уравнение профиля или по-
верхности.
Под конструктивными параметрами системы указываются значе-
ния заднего фокусного расстояния, а также переднего и заднего фо-
кальных отрезков.
Для случая предмета, расположенного на конечном расстоянии,
например для микрообъектива, проекционного, репродукционного
объективов, приводится расстояние от первой поверхности до предме-
та (передний отрезок) и от последней поверхности до изображения
(задний отрезок), а также оптическая длина системы L — расстояние
между плоскостями предмета и изображения.
Кроме того, указываются положение апертурной диафрагмы, рас-
стояние от первой поверхности до входного зрачка (зр) и от последней
поверхности до выходного зрачка (з'р,), а также приводятся диамет-
ры зрачков и апертурной диафрагмы. Иногда дается линейное увели-
чение в зрачках.
Телеобъектив телескопической системы
f = 240, D/f = 1:5, 2® = 3°, т = L/f = 0,77
Исправлен для длины волны X. = 546,07 нм (е)
Ахроматизирован для длин волн X = 480 нм (If) и X = 643,8 нм (С')
Ve Марка ^св •®ПОЛ Стрелка Стрелка
стекла п° DCB по D„„„
г, = 87,9 48,2 50 3,36 3,63
d7 == 9,8 1,5183 63,83 К8
= ”83,95 47,7 50 3,46 3,80
d2 = 0,2
г3 = -83,7 47,6 50 3,46 3,84
d3 = 5,0 1,6522 33,62 ТФ1
г4 = -397,2 46,8 50 0,69 0,78
d4 = 142,6
г5 = -32,66 13,1 15 0,66 0,87
ds= 1,5 1,5183 63,83 К8
г« = “ 13,1 15 0 0
Zd = 159,1
f = 239,49; sF = -815,40; s'F = 24,78
Центры апертурной диафрагмы и входного зрачка совпадают с верши-
ной первой поверхности, sp = 0. Диаметры апертурной диафрагмы и
входного зрачка равны 48 мм. Расстояние от последней поверхности
до выходного зрачка s' р, = -45,56 мм. Диаметр выходного зрачка
Л' = 9,16 мм.
Аберрации точки на оси
т е F С As
lOOtgo' As' А/ Т|, % Д87е А/ Д</
0 0 0 0 0 0,023 0 0,350 0 -0,373
12,00 5,030 -0,195 -0,009 0,020 -0,138 -0,007 0,088 0,004 -0,226
16,97 7,131 -0,288 -0,020 0,033 -0,143 -0,010 -0,077 -0,005 -0,066
24,00 10,082 -0,094 -0,009 0,037 0,258 0,026 0,049 0,005 0,307
Аберрации широкого наклонного пучка
в меридиональном сечении
т <о= 1°30'
е F С' △у FC'
lOOtgo' AlOOtgu' ДУ' ДУ' Ду'
24,00 19,20 10,24 -0,013 0,012 0,001 0,011
16,97 16,18 7,22 -0,028 -0,029 -0,001 -0,028
12,00 14,04 5,08 -0,015 -0,024 0,011 -0,035
0 8,96 0 0 -0,013 0,013 -0,026
-12,00 3,96 -5,00 0,008 -0,007 0,005 -0,012
-16,97 1,88 -7,08 0,018 -0,004 0,014 -0,018
-24,00 -1,01 -9,97 0,011 -0,034 0,016 -0,050
т л., нм ш ш
0,3 -0,1 О о-/ д>1 0>5
As',MM
Аберрации точки вне оси
(0 lOOtgo' SP s'p- 2'т z' s z' —z' s m Д/д Az/ "/ =^100 Ifo FC
1°03'38" 6,35 0 -45,501 -0,018 0,034 0,052 -0,006 0,150 -0,018
1°30' 9,01 0 -45,432 -0,035 0,070 0,105 -0,019 0,302 -0,026
Аберрации широкого наклонного пучка
в сагиттальном сечении
M co = l°30'
lOOtgE' Ax'
12,00 5,03 -0,0013 -0,006
16,97 7,13 -0,0022 -0,015
24,00 10,08 -0,0027 -0,002
Рис. 12.2. Пример оптического выпуска (с. 569-571)
Числовые значения остаточных аберраций оптической системы
сводят в таблицы и строят соответствующие графики аберраций. Сна-
чала приводят в правой верхней части (рис. 12.2) таблицу аберраций
для точки на оси, где указаны сферическая аберрация, условие изо-
планатизма, сферохроматические разности и хроматизм положения.
Затем следует таблица аберраций главных лучей и бесконечно
тонких астигматических пучков для различных точек поля: меридио-
нальная и сагиттальная кривизна поверхности изображения, астигма-
тизм, дисторсия и хроматизм увеличения. В этой же таблице приво-
дится удаление выходного зрачка при различных наклонах для оцен-
ки сферической аберрации в зрачках.
Далее следуют таблицы аберраций лучей широких наклонных
пучков в меридиональном и сагиттальном сечениях. Эти аберрации
могут быть даны как для основной длины волны, так и для длин волн,
подлежащих ахроматизации.
В отдельных случаях, например при больших относительных от-
верстиях и угловых полях, приводится таблица аберраций для внеме-
ридиональных («косых») лучей.
Для высококачественных оптических систем, например объекти-
вов микроскопов, приводят таблицу волновых аберраций и указыва-
ют положение плоскости наилучшей установки.
На основании данных таблиц строят графики аберраций под со-
ответствующими таблицами (рис. 12.2). Графики поперечных аберра-
ций для различных точек поля необходимо выполнять в одинаковом
масштабе.
Для объектива со сравнительно невысоким относительным отверс-
тием сферическая аберрация, сферохроматические разности и усло-
вие изопланатизма рассчитывают для двух лучей: крайнего (ткр=.О/
2) и зонального (т3 = /пкр / 42). При высоких относительных отверсти-
ях число лучей в осевом пучке увеличивают до трех-четырех
(пг3 = гпкр /2, = (4з / 2)ткр) .График хроматизма положения обыч-
но приводят для лучей на зоне т3 = (тпкр / 42).
Аберрации главных лучей и наклонных пучков рассчитывают для
двух или трех наклонов у объективов с угловым полем до 60° и для
четырех или пяти наклонов для широкоугольных объективов. Аберра-
ции широких наклонных пучков определяют на основании расчета
четырех или пяти лучей в меридиональном сечении и двух или трех
лучей — в сагиттальном сечении. Для светосильных систем с высоким
относительным отверстием число лучей в пучке увеличивается.
В различных оптических системах, в частности в фотообъективах,
обычно допускается виньетирование части наклонного пучка оправа-
ми линз или специальными диафрагмами, называемыми виньетиру-
ющими. На графиках аберраций наклонных пучков следует указы-
вать, какая поверхность или диафрагма вызывает виньетирование.
Коррекция аберраций оптической системы чаще всего выполня-
ется относительно плоскости Гаусса. Однако плоскость, в которой
получается наиболее благоприятное распределение лучей в пятне рас-
сеяния, смещена относительно плоскости Гаусса. Для определения
смещения этой плоскости на графиках поперечных аберраций для раз-
ных наклонов, построенных в системе координат Ду' и 100Д tg o', че-
рез начало координат проводят прямую, отклонение которой от кри-
вой поперечной аберрации является минимальным. В оптическом вы-
пуске указывают значение смещения этой плоскости.
СПИСОК ЛИТЕРАТУРЫ
1. Апенко М.И., Запрягаева Л.А., Свешникова И.С. Задачник по
прикладной оптике. М.: Недра, 1987. 310с.
2. Волосов Д.С. Фотографическая оптика. М.: Искусство, 1978.
543с.
3. Волосов Д.С., Цивкин М.В. Теория и расчет светооптических
систем. М.: Искусство, 1960. 526с.
4. Вычислительная оптика: Справочник/М.М. Русинов, А.П.
Грамматин, П.Д. Иванов и др. Под общей ред. М.М. Русинова. Л.: Ма-
шиностроение, 1984. 423с.
5. Заказнов Н.П., Кирюшин С.И., Кузичев В.И. Теория оптичес-
ких систем. М.: Машиностроение, 1992. 448с.
6. Запрягаева Л.А. Формулы параметров Р, W и С беконечно тон-
ких объективов, содержащих двухлинзовый склеенный компонент//
Изв. вузов. Геодезия и аэрофотосъемка, 1984, №5. С. 95-102.
7. Климков Ю.М. Прикладная лазерная оптика. М.: Машиностро-
ение, 1985. 128 с.
8. Максутов Д.Д. Астрономическая оптика. Л.: Наука, 1979. 395с.
9. Михельсон Н.Н. Оптические телескопы. М.: Наука, Гл.ред.
физ.-мат. лит., 1976. 512с.
10. Пахомов И.И. Панкратические системы. М.: Машинострое-
ние, 1976. 160с.
11. Попов Г.М. Современная астрономическая оптика. Л.: Наука,
Гл.ред.физ.-мат. лит., 1988. 192с.
12. Прикладная оптика/А.С. Дубовик, М.И. Апенко, Г.В. Дурей-
ко и др. Под ред. А.С. Дубовика. М.: Недра, 1982. 612с.
13. Прикладная оптика/М.И. Апенко, А.С. Дубовик, Г.В. Дурей-
ко и др. Под общей ред. А.С. Дубовика. М.: Машиностроение, 1992.
480с.
14. Пуряев Д.Т. Методы контроля оптических асферических по-
верхностей. М.: Машиностроение, 1976. 262с.
15. Родионов С.А. Автоматизация проектирования оптических
систем. Л.: Машиностроение, 1982. 270с.
16. Русинов М.М. Композиция оптических систем. Л.: Машино-
строение, 1989. 383с.
17. Русинов М.М. Несферические поверхности в оптике. М.: Не-
дра, 1973. 295с.
18. Слюсарев Г.Г. Методы расчета оптических систем. Л.: Маши-
ностроение, 1969. 670с.
19. Слюсарев Г.Г. Расчет оптических систем. Л.: Машинострое-
ние, 1975. 640с.
20. Справочник конструктора оптико-механических приборов/
В.А. Панов, М.Я. Кругер, В.В. Калугин и др. Под общ.ред В.А. Пано-
ва. Л.: Машиностроение, 1980. 742с.
21. Теория оптических систем /Б.Н. Бегунов, Н.П. Заказнов,
С.И. Кирюшин и др. М.: Машиностроение, 1981. 432с.
22. Трубко С.В. Расчет двухлинзовых склеенных объективов.
Л.: Машиностроение, 1984. 142с.
23. Турыгин И.А. Прикладная оптика. 4.1 и II, М.: Машиностро-
ение, 1965-1966. 362 и 431с.
24. Фефилов Б.В. Прикладная оптика. М.: Геодезиздат, 1947.
531с.
25. Чуриловский В.Н. Теория хроматизма и аберраций третьего
порядка. Л.: Машиностроение, 1968. 312с.
26. Шульман М.Я. Измерение передаточных функций оптических
систем. Л.: Машиностроение, 1980. 208с.
ОГЛАВЛЕНИЕ
ПРЕДИСЛОВИЕ...................................................3
Глава 1. ОБЩИЕ СВЕДЕНИЯ О РАСЧЕТЕ И ПРОЕКТИРОВАНИИ
ОПТИЧЕСКИХ СИСТЕМ....................................7
1.1. Исходные принципы автоматизированного
проектирования оптических систем............................7
1.2. Задачи, решаемые при проектировании
оптической системы..........................................8
1.3. Этапы разработки оптических систем
и степень их автоматизации..................................10
1.4. Автоматизированное проектирование оптических
систем......................................................13
Глава 2. ГАБАРИТНЫЙ РАСЧЕТ ОПТИЧЕСКИХ
СИСТЕМ......................................................25
2.1. Габаритный расчет телескопических систем................25
Расчет простых телескопических систем Кеплера и Галилея.31
Расчет зрительной трубы Кеплера с коллективом
в фокальной плоскости...................................38
Расчет зрительной трубы с внутренней фокусировкой.......42
Габаритный расчет зрительных труб с линзовыми
оборачивающими системами................................50
Расчет телескопических систем с внефокальным
коллективом.............................................60
Габаритный расчет телескопических систем с призменными...
оборачивающими системами. Призменные монокуляры и
бинокулярные зрительные трубы...........................63
Особенности габаритного расчета
оптических систем перископов............................75
Особенности габаритного расчета зрительных труб
с электронно-оптическими преобразователями..............78
2.2. Габаритный расчет зрительных труб переменного...............
увеличения.....................................................79
Область применения оптических систем
переменного увеличения....................................79
Классификация зрительных труб переменного увеличения......80
Оптические характеристики зрительных труб
переменного увеличения....................................86
Расчет панкратической зрительной трубы переменного увеличения
с двухкомпонентной оборачивающей системой.................90
2.3. Габаритный расчет луп и микроскопов.......................97
Расчет бинокулярной призматической лупы................. 112
Габаритный расчет отсчетного микроскопа
по заданной точности отсчета по нониусу................. 116
Расчет микроскопа для микропроекции..................... 118
2.4. Габаритный и светотехнический расчет
проекционных систем...........................................119
Расчет проекционной системы для эпипроекции............. 123
Расчет проекционной системы для диапроекции............. 127
2.5. Оптические системы для лазеров...........................146
Параметры пучка лазера и основные соотношения
при его преобразовании оптической системой.............. 146
Оптические системы для концентрации излучения лазера.... 154
Оптические системы для уменьшения расходимости
лазерного пучка......................................... 157
Основные требования к разработке оптических систем
для преобразования лазерного излучения.................. 162
Габаритный расчет оптических систем для коллимации
и концентрации лазерного излучения при использовании
геометрооптической модели излучения.................... 164
Глава 3. АБЕРРАЦИОННЫЙ РАСЧЕТ ОПТИЧЕСКИХ СИСТЕМ.
МЕТОДЫ АБЕРРАЦИОННОГО РАСЧЕТА................172
3.1. Общие понятия............................................172
3.2. Методы аберрационного расчета оптических
систем........................................................173
3.3. Аберрационный расчет оптических систем...................191
Телескопические системы................................. 191
Телескопические панкратические системы.
Особенности аберрационного расчета.......................208
Система микроскопа.......................................209
Объектив из двух компонентов, расположенных на конечном
расстоянии друг от друга.................................211
Оптические системы для коллимации лазерного излучения....213
Глава 4. ПАРАМЕТРИЧЕСКИЙ СИНТЕЗ ОДНО- И
ДВУХКОМПОНЕНТНЫХ ЛИНЗОВЫХ СИСТЕМ
ИЗ БЕСКОНЕЧНО ТОНКИХ КОМПОНЕНТОВ
НА ОСНОВЕ МЕТОДА РАЗДЕЛЕНИЯ ПЕРЕМЕННЫХ .............215
4.1. Уравнения первой и второй групп метода разделения
переменных. Внутренние и внешние параметры.
Свободные параметры....................................215
4.2. Общая методика синтеза оптических систем
из бесконечно тонких компонентов............................218
Уравнения синтеза......................................218
Последовательность выполнения синтеза..................220
Модульный принцип составления аберрационных уравнений......
Параметры Р, W и С отдельной линзы и двухлинзового
склеенного компонента..................................230
4.3. Синтез одно- и двухкомпонентных линзовых систем
с бесконечно малыми воздушными промежутками ................234
Виды однокомпонентных линзовых систем................. 234
Синтез двухлинзового склеенного компонента.............239
Синтез двухлинзового несклеенного компонента...........242
Синтез четырехлинзовых компонентов из двух одинаковых
двухлинзовых компонентов...............................244
Синтез трехлинзового склеенного компонента.............246
Обоснование выбора избыточных параметров в трех- и
четырехлинзовых компонентах............................251
Синтез трехлинзовых компонентов........................254
Синтез четырехлинзовых компонентов.....................258
4.4. Синтез линзовых систем из двух компонентов.................
расположенных на конечном расстоянии
друг от друга..........................................261
Синтез телеобъективов телескопических систем...........261
Синтез фототелеобъективов..............................271
Синтез светосильного двухкомпонентного объектива.......279
Синтез оптических систем для преобразования
лазерного излучения....................................285
Синтез симметричного окуляра...........................290
4.5. Синтез трехкомпонентных линзовых систем
типа триплета...............................................294
4.6. Специализированные программы синтеза одно- и
двухкомпонентных систем.....................................302
Глава 5. РАСЧЕТ ОПТИЧЕСКИХ ОСВЕТИТЕЛЬНЫХ........................
СИСТЕМ......................................................307
5.1. Линзовые осветительные системы (конденсоры)............307
5.2. Методы расчета конденсорных систем.......................309
Расчет конденсорных систем на минимум сферической аберрации.312
Расчет конденсорных систем из двух плосковыпуклых линз...318
Расчет конденсорных систем, содержащих апланатические мениски .. 319
5.3. Формулы для вычисления продольной и
поперечной сферической аберрации третьего
порядка в конденсорах различной конструкции..................323
5.4. Графический способ определения положения
плоскости наименьшего кружка рассеяния и
размера кружка рассеяния в этой плоскости.
Эффективное увеличение...................................324
5.5. Зеркальные и зеркально-линзовые
осветительные системы........................................326
Зеркальные осветительные системы ........................326
Зеркально-линзовые осветительные системы.................328
Оптический растр в качестве осветительной системы........332
Глава 6. РАСЧЕТ ЗЕРКАЛЬНЫХ И ЗЕРКАЛЬНО-
ЛИНЗОВЫХ СИСТЕМ .....................................335
6.1. Преимущества и недостатки зеркальных и
зеркально-линзовых систем перед линзовыми....................335
6.2. Расчет простых зеркальных систем.........................337
Габаритный и аберрационный расчеты одиночного
сферического зеркала.....................................337
Сферическое зеркало с плоским отражателем................341
6.3. Габаритный и аберрационный расчеты двухзеркальных
систем со сферическими поверхностями.........................343
Двухзеркальные системы для предмета в бесконечности......343
Двухзеркальные системы для предмета
на конечном расстоянии...................................356
Апланатические двухзеркальные системы....................364
Двухзеркальные системы с двумя проходами лучей
между зеркалами..........................................368
6.4. Компенсаторы монохроматических аберраций.................372
Афокальные ахроматические компенсаторы...................372
Неафокальные компенсаторы................................381
6.5. Параметрический синтез зеркально-линзовых
систем с линзовыми компенсаторами
различных конструкций....................................385
Синтез систем с двухлинзовым афокальным ахроматическим
компенсатором в параллельных пучках......................385
Синтез зеркально-линзовых систем с афокальным ахроматическим
компенсатором в сходящихся пучках лучей..................391
Синтез зеркальных систем с афокальным ахроматическим
компенсатором комы..........................................396
Синтез зеркальных систем с мениском Максутова.............399
Синтез объектива типа Кассегрена с линзой Манжена
в качестве компенсатора на вторичном зеркале................408
6.6. Параметрический синтез линзовых систем с
отражающей поверхностью......................................411
Синтез зеркала Манжена......................................411
Синтез двухлинзовых компонентов-отражателей.................416
Глава 7. РАСЧЕТ ОПТИЧЕСКИХ СИСТЕМ
С АСФЕРИЧЕСКИМИ ПОВЕРХНОСТЯМИ.................................425
7.1. Применение асферических поверхностей
в оптических системах........................................425
7.2. Общие свойства асферических поверхностей....................427
Уравнение профиля асферической поверхности..................427
Уравнение асферической поверхности..........................430
Коэффициент деформации и его определение....................431
Радиусы кривизны асферической поверхности...................433
7.3. Расчет центрированных оптических систем
с асферическими поверхностями в области
аберраций третьего порядка...................................435
Коэффициенты аберраций третьего порядка оптических систем....
с асферическими поверхностями...............................435
Влияние деформации асферической поверхности
на аберрации третьего порядка бесконечно тонкого компонента.438
Перенос деформации с одной поверхности
оптической системы на другую................................439
Исправление сферической аберрации деформированием
поверхности в простейших оптических системах................442
Расчет двухзеркальных апланатических систем.................447
Расчет линз конечной толщины при условии исправления
четырех аберраций третьего порядка .........................449
Расчет трехзеркальной системы с асферическими
поверхностями ..............................................452
7.4. Анаберрационные и анастигматические
поверхности и системы........................................456
Анаберрационные преломляющие поверхности и линзы............456
Анаберрационные отражающие поверхности......................461
Анаберрационные поверхности и линзы, не имеющие
параксиальной области ......................................463
Расчет анаберрационных линз.................................464
Расчет анаберрационных зеркальных систем....................465
Анастигматические поверхности и линзы.......................468
Применение условия точечного изображения к расчету сложных
систем. Метод дифференциальных уравнений..............470
Особенности расчета системы Шмидта....................472
7.5. Исправление аберраций высших порядков
введением малых деформаций.............................476
7.6. Технологические характеристики асферической
поверхности. Определение радиуса ближайшей
сферы для поверхностей второго порядка.................478
Глава 8. АБЕРРАЦИОННЫЙ АНАЛИЗ ИСХОДНОГО
ВАРИАНТА ОПТИЧЕСКОЙ СИСТЕМЫ
И ОПТИМИЗАЦИЯ...........................................481
8.1. Аберрационный анализ исходного варианта.
Методы коррекции аберраций.............................481
8.2. Метод проб...........................................484
8.3. Автоматизированная коррекция аберраций оптических
систем. Универсальные программы для коррекции
аберраций в оптических системах любых типов
и любой степени сложности.............................493
Математические методы автоматизированной коррекции....496
Приемы автоматизированной коррекции оптических систем.500
Глава 9. ОЦЕНКА КАЧЕСТВА ИЗОБРАЖЕНИЯ
ОПТИЧЕСКИХ СИСТЕМ.......................................504
9.1. Исходные принципы оценки качества изображения......504
9.2. Разрешающая способность оптических систем............507
9.3. Критерий Штреля и волновые критерии оценки
качества изображения...................................513
9.4. Требования, предъявляемые к универсальному
критерию оценки качества изображения...................521
9.5. Функции рассеяния точки и линии. Определение
освещенности в произвольной точке изображения..........523
9.6. Оптическая передаточная функция. Функция
передачи модуляции и функция передачи фазы
(ФПМ и ФПФ)............................................525
9.7. ОПФ — автокорреляция зрачковой функции...............532
9.8. Расчет ОПФ...........................................537
9.9. Полихроматические функции ФРТ и ОПФ..................539
Глава 10. ОТКЛОНЕНИЯ КОНСТРУКТИВНЫХ ПАРАМЕТРОВ ОТ
НОМИНАЛЬНЫХ ЗНАЧЕНИЙ И ИХ ВЛИЯНИЕ
НА АБЕРРАЦИИ И ПАРАКСИАЛЬНЫЕ ХАРАКТЕРИСТИКИ
ОПТИЧЕСКОЙ СИСТЕМЫ..........................541
10.1. Расчет влияния изменения параметров на аберрации...541
10.2. Оценка чувствительности оптических систем
к погрешности изготовления..........................547
10.3. Влияние децентрировки на аберрации
оптической системы..................................550
Глава 11. РАСЧЕТ ДОПУСКОВ НА КОНСТРУКТИВНЫЕ
ПАРАМЕТРЫ ОПТИЧЕСКИХ СИСТЕМ.................554
11.1. Расчет допусков на изготовление и сборку оптических
деталей и узлов.....................................554
11.2. Расчет допусков на оптические поверхности и детали.557
ГЛАВА 12. ОФОРМЛЕНИЕ ТЕХНИЧЕСКОЙ ДОКУМЕНТАЦИИ
НА РАССЧИТАННУЮ ОПТИЧЕСКУЮ СИСТЕМУ..........565
12.1. Требования к оформлению принципиальной
оптической схемы....................................565
12.2. Требования к оформлению оптического выпуска
на оптическую систему...............................566
СПИСОК ЛИТЕРАТУРЫ...................................574
ОГЛАВЛЕНИЕ..........................................576
По вопросам приобретения литературы
обращаться по адресу:
105318, Москва, Измайловское ш., 4
Тел./факс: (095) 369-5668, 369-7727
Электронная почта: universitas@mail.ru
Пейджер: (095) 956-1956 аб. 55-032
9
785884
391437
Учебное издание
Запрягаева Людмила Алексеевна
Свешникова Инна Сергеевна
РАСЧЕТ И ПРОЕКТИРОВАНИЕ ОПТИЧЕСКИХ СИСТЕМ
Учебник
Оригинал-макет подготовлен в УПП «Репрография» МИИГАиК
Б.В. Кузнецовым, Е.В. Мельниковой
103064, Москва, Гороховский пер., 4
ЛР № 071045 от 09.06.99
Подписано в печать 22.05.2000. Гарнитура Школьная. Формат 60x90/16.
Бумага офсетная. Печать офсетная. Печ.л. 36,5. Уч.-изд. л. 36,4.
Тираж 1000 экз. Заказ 827
Издательство «Логос»
105318, Москва, Измайловское ш., 4
Отпечатано с готовых диапозитивов
Марийским полиграфическо-издательским комбинатом
424000, Йошкар-Ола, Комсомольская, 112