/









Text
Техника
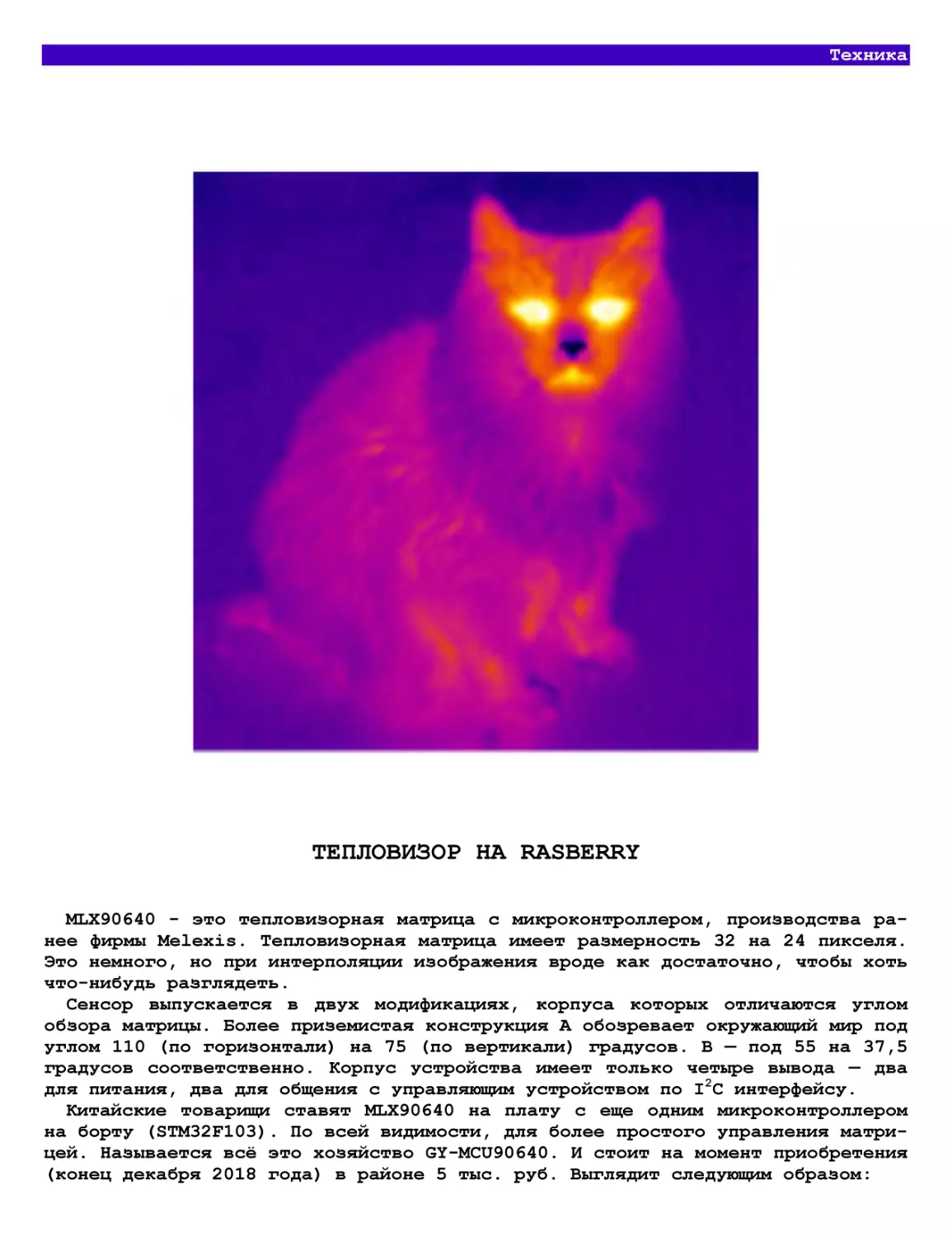
ТЕПЛОВИЗОР НА RASBERRY
MLX90640 - это тепловизорная матрица с микроконтроллером, производства ра-
нее фирмы Melexis. Тепловизорная матрица имеет размерность 32 на 24 пикселя.
Это немного, но при интерполяции изображения вроде как достаточно, чтобы хоть
что-нибудь разглядеть.
Сенсор выпускается в двух модификациях, корпуса которых отличаются углом
обзора матрицы. Более приземистая конструкция А обозревает окружающий мир под
углом 110 (по горизонтали) на 75 (по вертикали) градусов. В — под 55 на 37,5
градусов соответственно. Корпус устройства имеет только четыре вывода — два
для питания, два для общения с управляющим устройством по 12С интерфейсу.
Китайские товарищи ставят MLX90640 на плату с еще одним микроконтроллером
на борту (STM32F103). По всей видимости, для более простого управления матри-
цей. Называется всё это хозяйство GY-MCU90640. И стоит на момент приобретения
(конец декабря 2018 года) в районе 5 тыс. руб. Выглядит следующим образом:
Как можно заметить, есть две разновидности плат, с узко- или широкоугольной
версией сенсора на борту.
Более широкоугольная версия будет хороша на самоходных роботах или в систе-
мах безопасности (поле зрения будет больше). Согласно даташиту, она обладает
также меньшим шумом и большей точностью измерения.
Но для задач визуализации я бы больше рекомендовал более «дальнобойную»
версию В. По одной очень значимой причине. В перспективе при съемке её можно
разворачивать (вручную или на платформе с приводом) и делать составные «фо-
то», увеличивая тем самым более чем скромное разрешение в 32 на 24 пикселя.
Собирать тепловизорные снимки 64 на 96 пикселей, например... В дальнейшем по
тексту фото будут с моей широкоугольной версией А.
Управлять тепловизорным модулем можно двумя способами:
1. Закоротить перемычку «SET» на плате и по 12С обращаться напрямую к внут-
реннему микроконтроллеру MLX90640.
2. Оставить перемычку в покое и общаться с модулем через установленный на
плате STM32F103 через RS-232 подобный интерфейс.
Если вы пишете на C++, наверное, будет удобнее проигнорировать лишний мик-
роконтроллер , закоротить перемычку и воспользоваться API от производителя1.
Начинающим питонистам тоже можно пойти первым путём. Вроде как есть пара
библиотек на Python2. Но у меня, к сожалению, с ходу ни одна не заработала.
Продвинутым питонистам можно в принципе написать драйвер управления модулем
на Питоне. Процедура получения кадра подробно расписана в даташите3. Но тогда
придется прописывать все калибровочные процедуры, что кажется слегка обреме-
нительным. Поэтому пришлось пойти вторым путем. Он оказался умеренно терни-
стым, но вполне проходимым.
Благодаря прозорливости китайских инженеров или просто счастливому стечению
обстоятельств у платки оказалось очень удачное расположение выводов:
1 ftp://homelab.homelinuxserver.org/pub/arhiv/2019-04-al.rar (mlx90640-library-
master.zip)
2 MLX90640-python-master.zip и mlx90640-library-master-l.zip в архиве.
3 MLX90640-Datasheet-Melexis.pdf в архиве.
Осталось только поставить колодку и вставить платку в разъем Rasberry. На
плате установлен преобразователь 5 в 3 вольта, поэтому нежным Rx и Тх выводам
Raspberry вроде как ничего не угрожает.
Надо добавить, что подключение по первому варианту тоже возможно, но требу-
ет больших трудозатрат и паяльной сноровки. Плату нужно ставить с другой сто-
роны разъема Raspberry:
т
«•
,
•
, 1$Х90640
•ex?(*T wo,
•тх. \g, psoJ
41 """"IjJ
Tn r.
-^
|L-
ЕЯ
. к
г a?*
p
Г f **** ^^fl
• *
,# \
гП
i"V!
SU5=
SJIB
• я
5^И
а. У
&лч
1 I Ш
1 ^1
[fp^ : ,
'" f'.J •. Li
|£5j*
У
На известном китайском сайте для доступа к GY-MCU90640 предлагается соот-
ветствующее программное обеспечение:
По всей видимости, должно быть и какое-то описание протокола взаимодействия
с установленным на плате микроконтроллером, по которому сей программный про-
дукт работает! После недолгого общения с продавцом платки таковой протокол
мне и был выслан. Он оказался в pdf и на чистом китайском языке.
Благодаря переводчику Google и активному копипастингу примерно через час-
полтора протокол был расшифрован4. Оказалось, что платка понимает шесть базо-
вых команд, среди которых есть запрос кадра по СОМ порту.
Каждый пиксель матрицы — это, по сути, значение температуры объекта, на ко-
торый этот пиксель смотрит. Значение температуры в градусах Цельсия, умножен-
ных на 100 (двухбайтное число). Собственно, есть даже специальный режим, в
котором платка будет слать кадры с матрицы на Raspberry 4 раза в секунду.
Скрипт для получения тепловизорных снимков:
import serial, time
import datetime as dt
import numpy as np
import cv2
# function to get Emissivity from MCU
def get_emissivity():
ser.write(serial.to_bytes([0xA5,0x55,0x01,OxFB]))
read = ser.read(4)
return read[2]/100
# function to get temperatures from MCU (Celsius degrees x 100)
def get_temp_array(d):
4 GY-MCU90640-RPI-Python-master.zip в архиве.
# getting ambient temperature
T_a = (int(d[1540]) + int(d[1541])*256)/100
# getting raw array of pixels temperature
raw_data = d[4:1540]
T_array = np.frombuffer(raw_data, dtype=np.int16)
return T_a, T_array
# function to convert temperatures to pixels on image
def td_to_image (f) :
norm = np. uint8((f/100 - Tmin)*255/(Tmax-Tmin))
norm.shape = (24,32)
return norm
########################### Main cycle #################################
# Color map range
Tmax =40
Tmin =20
print (f Configuring Serial portf)
ser = serial.Serial (f/dev/serialOf)
ser.baudrate = 115200
# set frequency of module to 4 Hz
ser.write(serial.to_bytes([0xA5,0x25,0x01,OxCB]))
time.sleep(0.1)
# Starting automatic data colection
ser.write(serial.to_bytes([0xA5,0x35,0x02,OxDC]))
tO = time . time ()
try:
while True:
# waiting for data frame
data = ser.read(1544)
# The data is ready, letfs handle it!
Та, temp_array = get_temp_array(data)
ta_img = td_to_image (temp_array)
# Image processing
img = cv2 . applyColorMap (ta_img, cv2 . COLORMAP_JET)
img = cv2.resize(img, (320,240), interpolation = cv2.INTER_CUBIC)
img = cv2.flip(img, 1)
text = fTmin = {: + .lf} Tmax = {: + .lf} FPS =
{:.2f}! . format (temp_ar ray .min ()/100 , temp_array .max ()/100 , 1/(time . time ()
t0))
cv2.putText(img, text, (5, 15), cv2.FONT_HERSHEY_SIMPLEX, 0.45, (0,
0, 0), 1)
cv2.imshow(f Outputf , img)
# if f sf is pressed - saving of picture
key = cv2.waitKey(1) & OxFF
if key == ord("s"):
fname = fpic_f + dt. date time. now () . strf time (f %Y-%m-%d_%H-%M-
%Sf) + f.jpgf
cv2.imwrite(fname , img)
print(f Saving image f , fname)
tO = time.time()
except Keyboardlnterrupt:
# to terminate the cycle
ser.write(serial.to_bytes([0xA5,0x35,0x01,OxDB]))
ser.close()
cv2 . destroyAHWindows ()
print(f Stoppedf)
# just in case
ser.close()
cv2 . destroyAHWindows ()
Скрипт опрашивает тепловизорную матрицу и выводит кадры на консоль монито-
ра, на который подключен Raspberry PI, 4 раза в секунду. Этого достаточно для
того, чтобы не испытывать большого дискомфорта при съемке объектов. Для ви-
зуализации кадра используется пакет OpenCV. При нажатии на кнопку «s» в папке
со скриптом сохраняются тепловизорные «тепловые карты» в формате jpg.
Для большей информативности я вывел минимальную и максимальную температуры
на кадре. То есть, глядя на окраску, можно видеть какая примерно температура
у наиболее разогретых или охлажденных предметов. Погрешность измерения — при-
мерно градус с большую сторону. Тепловой диапазон задан от 20 до 40 градусов.
Выход из скрипта по нажатию Ctrl + С.
Скрипт работает примерно одинаково и на Raspberry Pi Zero W и на Pi 3 В+. Я
установил VNC сервер на смартфон. Таким образом, взяв в руки Raspberry, под-
ключенную к powerbankf у и смарфтон с запущенным VNC можно получить переносной
тепловизор с возможностью сохранения тепловых снимков. Возможно, это не со-
всем удобно, но вполне функционально.
После первого запуска возможно некорректное измерение максимальной темпера-
туры . В этом случае нужно выйти из скрипта и запустить повторно.