














































































































































































































































Author: Фетисов В.С. Артемьев А.Е. Муфаззалов Д.Ф
Tags: авиация и космонавтика летательные аппараты ракетная техника космическая техника воздушный транспорт авиация и воздушные соединения воздушные линии и аэропорты машиностроение беспилотные летательные аппараты авиатехника авиастроение
ISBN: 978-5-6040042-6-5
Year: 2017




В. С. ФЕТИСОВ, А Е. АРТЕМЬЕВ, Д Ф, МУФАЗЗАЛОВ
да мош
ЭЛЕКТРИЧЕСКИХ БЕСПИЛОТНЫХ
ЛЕТАТЕЛЬНЫХ АППАРАТОВ
В. С. ФЕТИСОВ, А. Е. АРТЕМЬЕВ, Д. Ф. МУФАЗЗАЛОВ
АВТОМАТИЧЕСКИЕ СЕРВИСНЫЕ СТАНЦИИ
ДЛЯ ОБСЛУЖИВАНИЯ
ЭЛЕКТРИЧЕСКИХ БЕСПИЛОТНЫХ
ЛЕТАТЕЛЬНЫХ АППАРАТОВ
Москва
«Инновационное машиностроение»
2017
УДК 629.735
ББК 39.52
Ф45
Рецензенты:
профессор кафедры электромеханики Уфимского государственного авиационного
технического университета, д-р техн, наук Гизатуллин ФА.;
доцент кафедры электротехники и электрооборудования предприятий
Уфимского государственного нефтяного технического университета,
канд. техн, наук Чигвинцев С.В.
Фетисов В. С., Артемьев А. Е., Муфаззалов Д. Ф.
Ф45 Автоматические сервисные станции для обслуживания электрических
беспилотных летательных аппаратов : монография/Уфимск. гос. авиац. техн,
ун-т. - М. : «Издательство «Инновационное машиностроение», 2017. - 253 с.
ISBN 978-5-6040042-6-5
Книга знакомит читателя с основными концепциями, терминологией и
классификацией, проблемами и перспективами, возможными подходами и
реализованными инженерными решениями, связанными с новым направлением в
авиационной технике - созданием сервисной инфраструктуры для беспилотной
авиации. Преимущественно рассмотрены вопросы, ориентированные на разработку
автоматических сервисных станций для малых беспилотных летательных аппаратов
вертикального взлета/посадки с электрической силовой установкой. Книга носит
преимущественно справочно-ознакомительный характер и написана по результатам
обзоров и анализа многочисленных литературных и интернет-источников, но
приведена информация и по оригинальным разработкам авторов.
Книга может быть полезна для студентов авиационных учебных заведений, а
также для всех интересующихся беспилотной авиацией.
УДК 629.735
ББК 39.52
ISBN 978-5-6040042-6-5
© ООО «Издательство «Инновационное машиностроение», 2017
© В. С. Фетисов, А. Е. Артемьев, Д. Ф. Муфаззалов, 2017
© Корректура и верстка, оформление. РИК УГАТУ, 2017
ОГЛАВЛЕНИЕ
Список используемых сокращений...................................7
Предисловие......................................................9
ГЛАВА 1. ОСНОВНЫЕ ПОНЯТИЯ И КЛАССИФИКАЦИЯ 11
1.1. Общие понятия из области беспилотной авиации.............11
1.2. Понятие автоматической сервисной станции
для обслуживания беспилотных летательных аппаратов............18
1.3. Структура и функции автоматической сервисной станции.....21
1.4. Возможные варианты распределения
автоматических сервисных станций по территории обслуживания...23
1.5. Автоматические энерговосстановительные станции............26
Источники информации по главе 1..................................32
ГЛАВА 2. АЛЬТЕРНАТИВНЫЕ СПОСОБЫ УВЕЛИЧЕНИЯ
ДЛИТЕЛЬНОСТИ ПОЛЕТОВ ЭЛЕКТРИЧЕСКИХ
БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ 35
2.1. Пути увеличения длительности полетов
электрических беспилотных летательных аппаратов
без использования энерговосстановительных станций.............35
2.1.1. Разработки новых источников питания.................35
2.1.2. Пути повышения энергоэффективности БЛА..............44
2.1.3. Подзарядка в воздухе................................45
2.1.3.1. Подзарядка от солнечных панелей.................45
2.1.3.2. Подзарядка от наземного лазера...................47
2.1.4. Концепция «Tethered UAV» - «привязанный беспилотник».49
2.2. Подзарядка или обмен источников питания
на наземных зарядных станциях..................................51
Источники информации по главе 2.................................52
ГЛАВА 3. АВТОМАТИЧЕСКИЕ ОБМЕННО-ЗАРЯДНЫЕ СТАНЦИИ 57
3.1. Известные разработки.....................................57
3.2. Основные узлы обменно-зарядной платформы.................69
3.2.1. Устройство позиционирования и фиксации БЛА..........69
3.2.2. Устройство съема/возврата АКБ.......................71
3.2.3. Устройство доставки АКБ в зарядную ячейку и обратно.75
3.2.4. Магазин-накопитель батарей с зарядными устройствами.77
3.3. Затраты времени на обменные операции.....................78
3.4. Сопоставительная оценка потребного количества ресурсов
для автоматических зарядных и обменно-зарядных станций........80
3.4.1. Общие замечания.....................................80
3
3.4.2. Оценка потребных ресурсов
для автоматических зарядных станций........................81
3.4.3. Оценка потребных ресурсов
для автоматических обменно-зарядных станций................83
3.4.4. Сопоставление результатов...........................86
Источники информации по главе 3.................................87
ГЛАВА 4. АВТОМАТИЧЕСКИЕ ЗАРЯДНЫЕ СТАНЦИИ
С КОНТАКТНЫМИ ТЕРМИНАЛАМИ 89
4.1. Типы контактных терминалов...............................89
4.2. Автоматические зарядные станции с контактными терминалами
на основе разъемных соединителей..................................90
4.3. Автоматические зарядные станции с контактными терминалами
на основе открытых контактов......................................98
4.3.1. Преимущества и области применения автоматических зарядных
станций с контактными терминалами на основе открытых контактов.98
4.3.2. Известные варианты реализации
концепции открытых контактных площадок.....................99
4.3.3. Зарядные станции на основе матриц
интеллектуальных контактов................................107
4.3.3.1. Концепция построения зарядных станций
на основе матриц интеллектуальных контактов.............107
4.3.3.2. Интеллектуальные контакты
на основе аналоговых компонентов.............................110
4.3.3.3. Матрицы интеллектуальных контактов
на основе цифровых компонентов..........................121
4.3.3.4. Определение предпочтительных вариантов
формы и расположения контактных площадок................124
4.3.4. Автоматические зарядные станции с контактными терминалами
в виде параллельных полосовых электродов..................128
4.3.4.1. Концепция построения зарядных станций
на основе терминалов в виде параллельных полосовых электродов .. 128
4.3.4.2. Геометрический анализ возможных вариантов
расположения бортовых посадочных электродов.............131
4.3.4.3. Имитационное моделирование соединения
бортовой и наземной частей зарядной системы.............140
4.3.4.4. Платформа с дискретно перестраиваемой шириной полос 149
4.3.5. Некоторые конструкторско-технологические
особенности реализации посадочных платформ
с открытыми контактами....................................152
Источники информации по главе 4................................155
4
ГЛАВА 5. АВТОМАТИЧЕСКИЕ ЗАРЯДНЫЕ СТАНЦИИ
С БЕСКОНТАКТНЫМИ ТЕРМИНАЛАМИ 158
5.1. Передача энергии посредством связанных резонансных контуров.158
5.1.1. Принцип действия и основные технологии.........158
5.1.2. Существующие стандарты.........................166
5.1.2.1. Стандарт Qi консорциума WPC................167
5.1.2.2. Стандарты альянса AirFuel..................173
5.1.3. Примеры реализованных технических решений......175
5.2. Зарядка от линий электропередачи....................183
Источники информации по главе 5............................185
ГЛАВА 6. ВОПРОСЫ ОБЕСПЕЧЕНИЯ ТОЧНОЙ ПОСАДКИ
БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ
НА АВТОМАТИЧЕСКИЕ СЕРВИСНЫЕ СТАНЦИИ 188
6.1. Обзор методов навигации беспилотных летательных аппаратов...188
6.2. Видеотехнические средства обеспечения автоматической посадки
беспилотных летательных аппаратов........................192
6.2.1. Классификация видеотехнических технологий навигации....192
6.2.1.1. Наземное техническое зрение................193
6.2.1.2. Визуальная одометрия.......................194
6.2.1.3. Навигация относительно цели................198
6.2.1.4. Навигация относительно ландшафта/ориентиров........202
6.2.1.5. Параллельная оценка движения и структуры:
методы SLAM и SFM...........................................203
6.2.1.6. Навигация с использованием оптического потока
на основе бионических подходов......................205
6.2.2. Классификация видеотехнических систем посадки
по критерию размещения видеокамер.....................205
6.2.2.1. Наземные видеотехнические системы посадки..206
6.2.2.2. Бортовые видеотехнические системы посадки..213
6.2.2.3. Комбинированные видеотехнические системы посадки...216
6.3. Методы трекинга объектов............................216
6.3.1. Представление объекта трекинга.................216
6.3.2. Собственно трекинг (отслеживание) объектов.....218
6.4. Определение ориентации и расположения БЛА
с использованием дискретного преобразования Фурье........220
Источники информации по главе 6............................223
ГЛАВА 7. ДИСПЕТЧИРОВАНИЕ И ОПТИМИЗАЦИЯ ПОЛЕТОВ
БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ
В СЕТИ АВТОМАТИЧЕСКИХ СЕРВИСНЫХ СТАНЦИЙ 230
7.1. Постановка задачи оптимального диспетчирования......231
7.1.1. Оптимизация расписания полетов
для выполнения задачи мониторинга объекта.............231
5
7.1.2. Оптимизация расписания полетов
для выполнения задачи доставки грузов.......................234
7.2. Генетический алгоритм как метод оптимизации
расписания полетов беспилотных летательных аппаратов...........238
7.2.1. Альтернативные методы оптимизации расписания полетов БЛА. 238
7.2.2. Общий принцип действия генетического алгоритма.......240
7.3. Примеры применения генетических алгоритмов
для оптимизации диспетчирования полетов БЛА....................243
7.3.1. Генетический алгоритм в задаче мониторинга объекта...244
7.3.2. Генетический алгоритм в задаче доставки грузов.......246
Источники информации по главе 7..................................249
Заключение.......................................................252
6
СПИСОК ИСПОЛЬЗУЕМЫХ СОКРАЩЕНИИ
АКБ
АЗС
АОЗС
АЭВС
БАК
БАС
БЛА
ГА
ДПФ
ДПЛА
ИНС
КПД
ЛА
НСУ
снс
хит
- аккумуляторная батарея
- автоматическая зарядная станция
- автоматическая обменно-зарядная станция
- автоматическая энерговосстановительная станция
- беспилотный авиационный комплекс
- беспилотная авиационная система
- беспилотный летательный аппарат
- генетический алгоритм
- дискретное преобразование Фурье
- дистанционно пилотируемый летательный аппарат
- инерциальная навигационная система
- коэффициент полезного действия
- летательный аппарат
- наземная станция управления
- спутниковая навигационная система
- химический источник тока
7
EKF - Extended Kalman Filter (расширенный фильтр Калмана)
GPS - Global Positioning System (спутниковая система глобального позиционирования)
MILP - Mixed Integer Linear Programming (смешанное целочисленное линейное программирование)
NASA - National Aeronautics and Space Administration (Национальное управление по аэронавтике и исследованиям космического пространства)
UAS - Unmanned Aerial System (беспилотная авиационная система)
UAV - Unmanned Aerial Vehicle (беспилотный летательный аппарат)
VTOL - Vertical Take-Off and Landing (вертикальный взлет и посадка)
8
ПРЕДИСЛОВИЕ
Бурное развитие беспилотной авиации в последнее десятилетие является
объективной закономерностью. Беспилотные летательные аппараты (БЛА)
становятся все более популярными и востребованными, а беспилотные
авиационные системы (БАС) внедряются в самые разные области человеческой
деятельности. Назначение современных БАС не ограничивается только военной
областью. Быстро расширяется и сфера их гражданского применения (в таких
отраслях, как нефтегазовая промышленность, транспорт, строительство,
сельское хозяйство, связь и др.), что придает дополнительные импульсы
развитию беспилотной авиационной техники.
На сегодняшний день большую часть парка всех существующих в мире
БЛА составляют малые БЛА со взлетной массой до 150 кг и радиусом действия
до 10 км. Как правило, основу силовой установки у них составляют
электродвигатели с пропеллерами, которые питаются от химических
источников тока, чаще всего от перезаряжаемых аккумуляторных батарей.
В названном классе электрических аппаратов, в свою очередь, можно
выделить БЛА вертолетного типа, а также различные аппараты гибридных
схем, способные выполнять вертикальные взлет и посадку и зависание в точке,
что особенно привлекает потенциальных пользователей. Особо следует
отметить мультикоптеры, которые в качестве малых БЛА появились в
Германии в 2006 г., а теперь их производство и распространение во всем мире
растет гигантскими темпами в основном благодаря росту спроса и появлению
новых областей применения в гражданской сфере.
Достоинства электрических мультикоптеров очевидны: отсутствие
необходимости иметь взлетно-посадочную полосу и вообще какие-либо
специальные приспособления для взлетов-посадок (например, катапульты,
специальные ловушки, парашютные системы и т.д., что часто бывает
необходимо для аппаратов самолетного типа); высокая маневренность и
9
способность выполнения самых разных задач с высокой точностью; высокие
значения грузоподъемности и скороподъемности; экологичность (низкий
уровень шума и отсутствие выбросов в атмосферу по сравнению с аппаратами с
тепловыми двигателями); простота и технологичность изготовления.
При наличии такого перечня достоинств внедрение электрических
мультикоптеров во все сферы жизни было бы еще более стремительным, если
бы не один их серьезный недостаток - относительно небольшая удельная
энергоемкость источников питания. Лучшие из них (на сегодняшний день это
литий-полимерные аккумуляторные батареи) обеспечивают максимальное
время полета порядка 30 мин. Для обеспечения выполнения летательными
аппаратами своих функций в течение более длительных временных интервалов
требуются средства для подзарядки или замены бортовых источников питания.
Проще всего это можно сделать с помощью специальных наземных сервисных
станций. Именно о таких станциях в основном и идет речь в этой книге.
Рассматриваются связанные с данной темой вопросы терминологии и
классификации, а также различные аспекты работы сервисных станций: от схем
построения зарядных устройств до функционирования координированных
сетей станций.
Данная книга носит преимущественно справочно-ознакомительный
характер, но приведена информация и по оригинальным разработкам авторов.
Главы 1-5 написаны В. С. Фетисовым, глава 6 - А. Е. Артемьевым, глава 7 -
Д. Ф. Муфаззаловым. Списки использованных источников информации
приведены отдельно к каждой главе. Авторы выражают благодарность всем,
кто способствовал написанию этой книги.
10
ГЛАВА 1. ОСНОВНЫЕ ПОНЯТИЯ И КЛАССИФИКАЦИЯ
1.1. Общие понятия из области беспилотной авиации
Прежде чем ввести понятие автоматической сервисной станции для
беспилотных летательных аппаратов, что является основным объектом
изучения в данной работе, необходимо последовательно рассмотреть понятия
собственно беспилотного летательного аппарата (БЛА), беспилотного
авиационного комплекса (БАК) и беспилотной авиационной системы (БАС),
а также некоторые другие термины и обозначения.
Летательный аппарат (ЛА) - это искусственный мобильный объект,
предназначенный для перемещения в земной атмосфере или космическом
пространстве.
Существует большое количество различных определений БЛА. Вот одно
из самых простых: «Беспилотный летательный аппарат - это летательный
аппарат без человека (экипажа) на борту» [1]. Однако в таком случае к БЛА
нужно причислить вообще все летающие искусственные объекты, что,
очевидно, неправильно.
На сегодняшний день наиболее адекватным определением БЛА авторам
представляется то, которое сформулировано в монографии [2] следующим
образом.
Беспилотный летательный аппарат - это летательный аппарат
многоразового или условно-многоразового использования, не имеющий на
борту экипажа (человека-пилота) и способный самостоятельно
целенаправленно перемещаться в воздухе для выполнения различных функций
в автономном режиме (с помощью собственной управляющей программы) или
посредством дистанционного управления (осуществляемого человеком-
оператором со стационарного или мобильного пункта управления).
Заметим, что к БЛА не относятся все ракеты, снаряды, бомбы
(независимо от того, управляемые они или нет), аэростаты без двигателей и
И
другие безмоторные летательные аппараты (планеры, дельтапланы, парапланы)
без экипажа на борту. Впрочем, по последним трем названным группам до сих
пор нет однозначного мнения, в некоторых источниках их относят к БЛА.
Но беспилотные дирижабли, моторные дельтапланы и парапланы
в соответствии с данным определением, безусловно, можно отнести к БЛА.
Существуют другие, более узкие понятия БЛА. Например, известны такие
определения, в которых к БЛА причисляют только беспилотные аппараты
самолетного и вертолетного типов [3].
Обычно к БЛА не относят беспилотные космические аппараты, для них
более устоявшимся названием является автоматические космические
аппараты.
Основные термины и аббревиатуры, касающиеся БЛА, приведены
в табл. 1.1. Разница в терминах БЛА и ДПЛА (дистанционно пилотируемый
летательный аппарат) в том, что первый является более общим понятием.
ДПЛА относится к тем аппаратам, которые управляются
оператором дистанционно по радио с наземного пункта, тогда как в общем
случае БЛА может выполнять задачу и автономно, по заложенной в нем
программе.
Приведенное выше определение БЛА в общем виде отражает
современные представления специалистов о данном техническом объекте. Эти
представления эволюционировали на протяжении многих лет. До недавнего
времени, например, существовала неоднозначность мнений специалистов
относительно того, должен ли БЛА быть многоразовым. Поэтому во многих
случаях до сих пор сюда же причисляются и многие летательные аппараты
одноразового использования. Например, крылатые ракеты во многом очень
похожи на беспилотные самолеты, что позволяло считать их разновидностью
БЛА. Однако по сути, крылатая ракета - это прежде всего средство доставки до
цели боевого заряда, который является главным компонентом ракеты
и интегрирован с ее другими подсистемами, подчиненными главной задаче -
12
поражению цели, после чего ракета перестает существовать. Именно из-за
специфичности назначения и вытекающих отсюда особенностей
функционирования подобные объекты (баллистические и крылатые ракеты,
управляемые и неуправляемые снаряды и бомбы) сейчас не принято
рассматривать как БЛА [4]. Не относятся к БЛА и одноразовые ракеты-
носители, предназначенные для вывода космических аппаратов на орбиту.
К БЛА относятся также аппараты условно-многоразового использования (сюда
относятся, например, мобильные мишени и аппараты диверсионного
назначения), которые могут быть уничтожены при первом применении, однако
при определенных условиях они могут возвращаться на базу.
Нельзя считать БЛА такой аппарат, который не имеет собственной
энергетической подсистемы и движителя. Например, не является БЛА
метеорологический зонд, свободно дрейфующий в атмосфере. По нашему
мнению, не является БЛА и беспилотный планер, так как возможности
следовать по заданной траектории и возвращаться на базу у него ограничены.
БЛА во многих случаях могут заменить собой пилотируемые ЛА, что и
наблюдается сейчас во многих странах мира. Происходит это по ряду
объективных причин. Сами БЛА, как правило, гораздо дешевле пилотируемых
самолетов и вертолетов. Дешевле, чем подготовка летчика, обходится и
подготовка оператора беспилотной системы. Отсутствие пилота позволяет
исключить бортовые системы жизнеобеспечения, уменьшить массу и габариты
БЛА, а также увеличить диапазон допустимых перегрузок и влияющих
факторов. Большое значение имеет и фактор безопасности - потери
беспилотных аппаратов не ведут к потере пилотов.
Как и пилотируемые ЛА, БЛА можно классифицировать по принципу
полета [2, с. 19]. Обычно выделяют 5 групп аппаратов: 1) БЛА с жестким
крылом (БЛА самолетного типа); 2) БЛА с гибким крылом; 3) БЛА с
вращающимся крылом (БЛА вертолетного типа); 4) БЛА с машущим крылом;
13
5) БЛА аэростатического типа. Отдельно рассматривают различные гибридные
ЛА (такие как автожиры и конвертопланы [2, с. 55-60]).
По способу выполнения взлетов-посадок различают аппараты:
1) с горизонтальным взлетом и посадкой («по-самолетному»);
2) с вертикальным взлетом и посадкой (VTOL - Vertical Take-off and Landing).
БЛА VTOL-типа по сравнению с первой группой гораздо более удобны с точки
зрения автоматизации их сервиса на земле. Поэтому описываемые далее в этой
книге технические решения ориентированы в основном на такие БЛА. К ним,
кроме аппаратов вертолетного типа, включая различные разновидности
многовинтовых вертолетов - мультикоптеров [2, с. 61-68], относятся также
конвертопланы, тэйлситтеры, кольцепланы, самолеты с вертикальным взлетом-
посадкой (с горизонтальным расположением фюзеляжа), аппараты с
зонтообразным крылом на эффекте Коанда [2, с. 27-39].
Любой БЛА функционирует не сам по себе, он является частью системы.
Недавно появились термины UAS (Unmanned Aerial System) и
соответствующий русскоязычный БАС (беспилотная авиационная система).
Беспилотная авиационная система - это совокупность одного или
нескольких БЛА, а также всей инфраструктуры и средств обеспечения полетов
и обслуживания этих БЛА (транспортно-пусковые устройства, средства связи,
наземные пункты управления и др.) [5]. В наших источниках встречается также
термин БАК (беспилотный авиационный комплекс). Многие БАС и БАК
считают синонимами, однако между ними есть некоторая разница, которая
заключается в том, что БАС является более широким понятием [6]. БАК - это
только совокупность материально-технических средств, необходимых для
выполнения определенных функций. Однако эти функции не могут быть
выполнены без наличия элементов, устанавливающих связи различного типа
(информационные, информационно-управляющие и т.п.) между структурными
элементами комплекса. Наличие таких элементов и таких связей является
отличительной особенностью БАС. Таким образом, кроме всего того, что
14
входит в БАК, в БАС должны быть включены еще: технический персонал,
протоколы обмена информацией, нормативно-регламентирующая
документация, средства интеграции с другими системами. Более подробно
состав БАС рассмотрен в [2, 1.3.1]. Однако пока ни один источник не
упоминает в составе БАС сервисные станции (и, в частности, автоматические
сервисные станции), служащие для обслуживания текущих полетов БЛА. Это
можно объяснить новизной такого объекта инфраструктуры БАС, они только
начинают появляться. В этой главе такое понятие вводится впервые и
развивается в последующих главах.
В последние годы международными авиационными организациями (FAI,
ICAO) и авиационными администрациями ряда стран принимаются
нормативные акты, призванные интегрировать беспилотную авиацию в общие
схемы управления воздушным движением с целью сделать полеты как
пилотируемых, так и беспилотных аппаратов более безопасными. В этой связи
появляются различные терминологические нововведения и уточнения. Так,
Федеральным законом от 30.12.2015 г. № 462-ФЗ «О внесении изменений
в Воздушный кодекс Российской Федерации в части использования
беспилотных воздушных судов» [7] вводятся, в частности, новые для
Воздушного кодекса термины «Беспилотное воздушное судно» (БВС) и
«Беспилотная авиационная система» (БАС). Вот цитата из этого документа:
«5. Беспилотное воздушное судно - воздушное судно, управляемое
в полете пилотом, находящимся вне борта такого воздушного судна (внешний
пилот).
6. Беспилотная авиационная система - комплекс, включающий в себя
одно или несколько беспилотных воздушных судов, технические средства
и оборудование, используемые для управления полетом такого воздушного
судна или таких воздушных судов».
15
Заметим, что трактовки здесь довольно узкие: в разряд БВС включены
только дистанционно пилотируемые объекты, а БАС - это просто комплекс
БВС и средства управления полетом.
Эти последние изменения в Воздушном кодексе РФ уже нашли свое
отражение в новом стандарте - ГОСТ Р 57258-2016 «Системы беспилотные
авиационные. Термины и определения» [8]. Там многие термины
гармонизированы с используемыми в международной практике документами
и трактуются несколько шире. Приведем здесь некоторые из них:
Воздушное судно - ВС (aircraft) - летательный аппарат, поддерживаемый
в атмосфере за счет его взаимодействия с воздухом, за исключением случаев
взаимодействия с воздухом, отраженным от поверхности земли или воды
(последнее означает, что из определения исключены экранопланы и суда на
воздушной подушке).
Беспилотное воздушное судно - БВС (unmanned aircraft) - воздушное
судно, управляемое в полете пилотом, находящимся вне борта такого ВС
(внешним пилотом), или выполняющее автономный полет по предварительно
заданному маршруту.
Дистанционно пилотируемое воздушное судно - ДПВС (remotely piloted
aircraft) - беспилотное воздушное судно, которое пилотируется внешним
пилотом с наземной станции управления полетом.
Автономное воздушное судно (autonomous aircraft) - беспилотное
воздушное судно, выполнение полетного задания которого не предусматривает
вмешательство пилота в управление полетом.
Беспилотная авиационная система - БАС (unmanned aircraft system) -
комплекс, включающий одно или несколько беспилотных ВС, оборудованных
системами навигации и связи, средствами обмена данными и полезной
нагрузкой, а также наземные технические средства передачи-получения
данных, используемые для управления полетом и обмена данными
о параметрах полета, служебной информацией и информацией о полезной
16
нагрузке такого или таких ВС, и канал связи со службой управления
воздушным движением.
Легкое дистанционно пилотируемое воздушное судно (light remotely piloted
aircraft) - дистанционно пилотируемое воздушное судно с взлетной массой
менее 150 кг.
Малое беспилотное воздушное судно (small unmanned aircraft) -
беспилотное дистанционно пилотируемое воздушное судно с взлетной массой
менее 30 кг.
Таблица 1.1
Основные англоязычные термины в области беспилотной авиации
и их русскоязычные соответствия
UAV - Unmanned Aerial Vehicle, Uninhabited Aerial Vehicle БЛА (БПЛА) - беспилотный летательный аппарат
UA - Unmanned Aircraft БВС - беспилотное воздушное судно
drone дрон, беспилотник (жаргонизм)
flying robot воздушный робот
ROA - Remotely Operated Aircraft, RPA - Remote Piloted Aircraft ДПЛА - дистанционно пилотируемый летательный аппарат, ДПВС - дистанционно пилотируемое воздушное судно
autonomous aircraft автономное воздушное судно
UAS - Unmanned Aerial System, Unmanned Aircraft System БАС - беспилотная авиационная система, БАК - беспилотный авиационный комплекс
Как видим, новые термины несут в себе некоторую новую трактовку.
Однако данные формулировки нельзя признать абсолютно четкими и
однозначными. Так, например, формально, если исходить из текста
упомянутого ГОСТа, под определение ВВС попадают и метеозонды, и
беспилотные планеры, которые, как было отмечено выше, не являются БЛА.
В то же время исключенные из определения БВС беспилотные экранопланы с
17
общетехнических позиций все же являются БЛА. Нет ясности и в отношении
ракет. Хотя в различных комментариях к новой редакции Воздушного кодекса
и говорится, что ракеты не относятся к БВС, но напрямую из данных
определений этого не следует. Трактовка БАС также довольно ограничена, а
понятия БАС и БАК совершенно не различаются.
Таким образом, в указанных документах термины БВС и БАС имеют
свою специфику, они рассматриваются исключительно с точки зрения
управления воздушным движением. Поэтому далее будем пользоваться
определениями БЛА и БАС, сформулированными ранее с общетехнических
позиций и которые, по нашему мнению, обладают полнотой и
универсальностью, более адекватно отражают сущность данных понятий и
более удобны для ввода новых понятий, описываемых в данной работе.
1.2. Понятие автоматической сервисной станции
для обслуживания беспилотных летательных аппаратов
Сервисные станции (СС) для обслуживания БЛА (одна или несколько) -
это часть инфраструктуры БАС, необходимая для обеспечения достаточно
длительного выполнения системой текущих полетных задач путем
непосредственного взаимодействия с БЛА. Назначением СС может являться:
- восполнение энергоресурсов, расходуемых БЛА;
- восполнение расходных материалов, расходуемых при выполнении
полетного задания;
- выполнение информационного обмена с БЛА;
- пополнение боекомплекта;
- замена легкосъемных агрегатов;
- выполнение разгрузки-погрузки транспортных контейнеров и др.
Необходимость введения в структуру БАС сервисных станций
продиктовано необходимостью увеличения длительности выполнения
полетных задач одним или группой БЛА, расширения зоны действия БЛА или
обеспечения непрерывности действия по отношению к объекту при том, что
18
возможности отдельного аппарата в пределах его разовой заправки ресурсами и
расходными материалами сильно ограничены.
СС может быть узкоспециализированной или универсальной
(с совмещением перечисленных функций). Примером специализированной СС
может быть зарядная станция для подзарядки или замены бортовых
аккумуляторных батарей БЛА.
Не относятся к СС те элементы инфраструктуры БАС, которые не
взаимодействуют с БЛА непосредственно, а осуществляют связь посредством
информационных каналов: станции связи и управления, радиолокационные
станции, станции систем глобального позиционирования и др. Не относится к
СС также та часть инфраструктуры БАС, которая не ориентирована на
выполнение текущих полетных задач. Например, базы для ремонта и
регламентного обслуживания БЛА, ангары для долговременного хранения БЛА
не относятся к СС. Также нельзя отнести к СС отдельно расположенные
стартовые и посадочные устройства, если они предназначены исключительно
для функций старта и посадки БЛА. Но любая СС содержит в своем составе
стартовые и посадочные устройства в том или ином виде.
СС могут быть распределены по территории функционирования БАС в
виде самостоятельных станций, но могут и интегрироваться с другими
элементами инфраструктуры БАС. Например, могут быть совмещены наземная
станция управления (НСУ) и СС, радиорелейные станции и СС.
СС по типу базирования могут быть стационарными, мобильными или
развертываемыми, а по среде базирования - наземного, морского или
воздушного базирования.
Стационарные СС рассчитаны на долговременное функционирование в
одной конкретной географической точке. Мобильные СС, наоборот, базируются
на подвижных объектах (например, на автомобилях, катерах) и могут
перемещаться, в том числе во время выполнения взлетов-посадок.
Развертываемые СС - это компактные портабельные установки, которые
19
можно быстро развернуть на время выполнения текущих полетов, они не
предназначены для постоянной эксплуатации.
Средой базирования наземных СС является земная поверхность, это
наиболее распространенный способ базирования. Однако для многих задач
более удобными могут оказаться СС морского (на морских и речных кораблях
или платформах) или воздушного базирования. Последний способ является пока
довольно редким и существует только в проектах, но принципиально не
представляет особой технической проблемы организация при необходимости
СС, например, на борту привязного аэростата или дирижабля.
Автоматическая сервисная станция (АСС) - это СС, на которой для
выполнения текущих полетных или межполетных задач не требуется человек-
оператор. Все свои функции по непосредственному взаимодействию с БЛА
АСС выполняет автоматически по заложенной в ней программе либо, при
необходимости, по командам, передаваемым дистанционно с НСУ.
Напрашивается явная аналогия с БЛА: так же как БЛА является необитаемым
автономным или дистанционно пилотируемым летательным аппаратом, так и
АСС является необитаемой автономной или дистанционно управляемой СС.
Однако если на сегодняшний день подавляющее большинство БЛА является
дистанционно пилотируемыми (а не автономными), то с АСС картина другая -
большинство уже существующих или проектируемых АСС предназначены
преимущественно для автоматической работы.
Все преимущества АСС по сравнению с обитаемой СС аналогичны тем,
которые выявляются при сравнении БЛА с пилотируемым ЛА: для АСС не
требуется какая-либо подсистема жизнеобеспечения персонала; в периоды
отсутствия непосредственного взаимодействия с БЛА АСС может переходить в
экономичный «спящий» режим; АСС может функционировать в том числе и в
непригодных для человека условиях (например, химического или
радиоактивного заражения, очень низких или очень высоких температур);
автоматическое выполнение функций гарантирует от ошибок, связанных с
20
человеческим фактором. Все это делает АСС более надежными и экономически
выгодными элементами инфраструктуры БАС по сравнению с обитаемыми СС.
Степень автономности АСС определяется не только степенью ее
информационной зависимости (алгоритмом ее функционирования), но и
степенью ее зависимости от источников энергии. По этому критерию АСС
можно подразделить на следующие типы:
- энергозависимая АСС с питанием от внешней энергосети;
- условно энергонезависимая АСС с питанием от периодически
пополняемого источника энергии (например, станция с питанием от дизель-
генератора, топливо для которого периодически завозится на станцию);
- полностью автономная АСС с питанием от естественно восполняемых
источников энергии (солнечные панели, ветрогенераторы и т.д.).
1.3. Структура и функции автоматической сервисной станции
Типичная структура АСС показана на рис. 1.1. Показан такой вариант
АСС, у которой основной функцией является подзарядка бортовых источников
электропитания. Поэтому центральное место в структуре занимает
соответствующая подсистема на основе зарядной платформы (либо зарядных
терминалов другого конструктивного исполнения).
Подсистема ближней навигации и посадки - обязательная часть АСС,
которая во взаимодействии с бортовыми средствами навигации обеспечивает
плавный и точный подвод БЛА в зону посадки. В частности, такой зоной
посадки может быть зарядная платформа.
Подсистема связи обеспечивает обмен информацией АСС с удаленным
центральным диспетчерским пунктом (ЦДП), куда оперативно передаются
данные о текущей ситуации на АСС (количество БЛА на станции, из них -
количество БЛА на зарядке, степень завершенности процесса зарядки для
каждого, количество БЛА в воздухе в зоне АСС, параметры сети
21
электропитания ACC и т.д.). При необходимости с ЦДП на АСС передаются
команды управления. Эта подсистема может быть реализована как на основе
радиоканалов, так и на базе проводных или волоконно-оптических каналов
связи.
Рис. 1.1. Типичная структура АСС
В функции подсистемы электропитания входит обеспечение всех
потребителей АСС электропитанием соответствующего уровня и качества.
Если АСС получает внешнее питание от естественно восполняемых источников
энергии, то в задачи этой подсистемы входит также обеспечение выполнения
рациональных алгоритмов получения, хранения и распределения энергии.
Подсистема диспетчирования является управляющим узлом АСС. Она
выдает необходимые скоординированные с другими подсистемами команды и
получает от них информацию о текущем статусе взлетов и посадок, процессов
зарядки бортовых аккумуляторов и различных сервисных операций.
22
Кроме перечисленных в состав АСС могут входить специализированные
подсистемы, выполняющие отдельные специфичные функции. Например,
в АСС, рассчитанных на всепогодные условия, вполне логично наличие
подсистем контроля доступа (для выполнения открывания-закрывания дверей
ангара станции только в короткие промежутки времени прибытия или убытия
БЛА) и термостатирования. Кроме того, в зависимости от назначения АСС, в
ее состав могут входить специальные подсистемы для выполнения тех
сервисных функций, которые обусловлены типом БЛА и их назначением.
Например, подсистемы для автоматической топливозаправки, разгрузки-
погрузки контейнеров, заправки распыляемыми реагентами и т.д.
1.4. Возможные варианты распределения автоматических
сервисных станций по территории обслуживания
Существующие и проектируемые БАС предназначены для выполнения
самых различных функций: мониторинговых, монтажных, транспортных,
сельскохозяйственных, спасательных и др. Количество, характер и
распределение по территории операционных объектов также могут быть
самыми разными. Рассмотрим различные варианты распределения по
территории операционных объектов и сервисных станций. От этого зависит вся
организация работы БАС, алгоритмы работы БЛА и АСС.
Общим для всех вариантов является то, что обслуживание выполняет
множество БЛА, которые в общем случае распределены по сервисным
станциям.
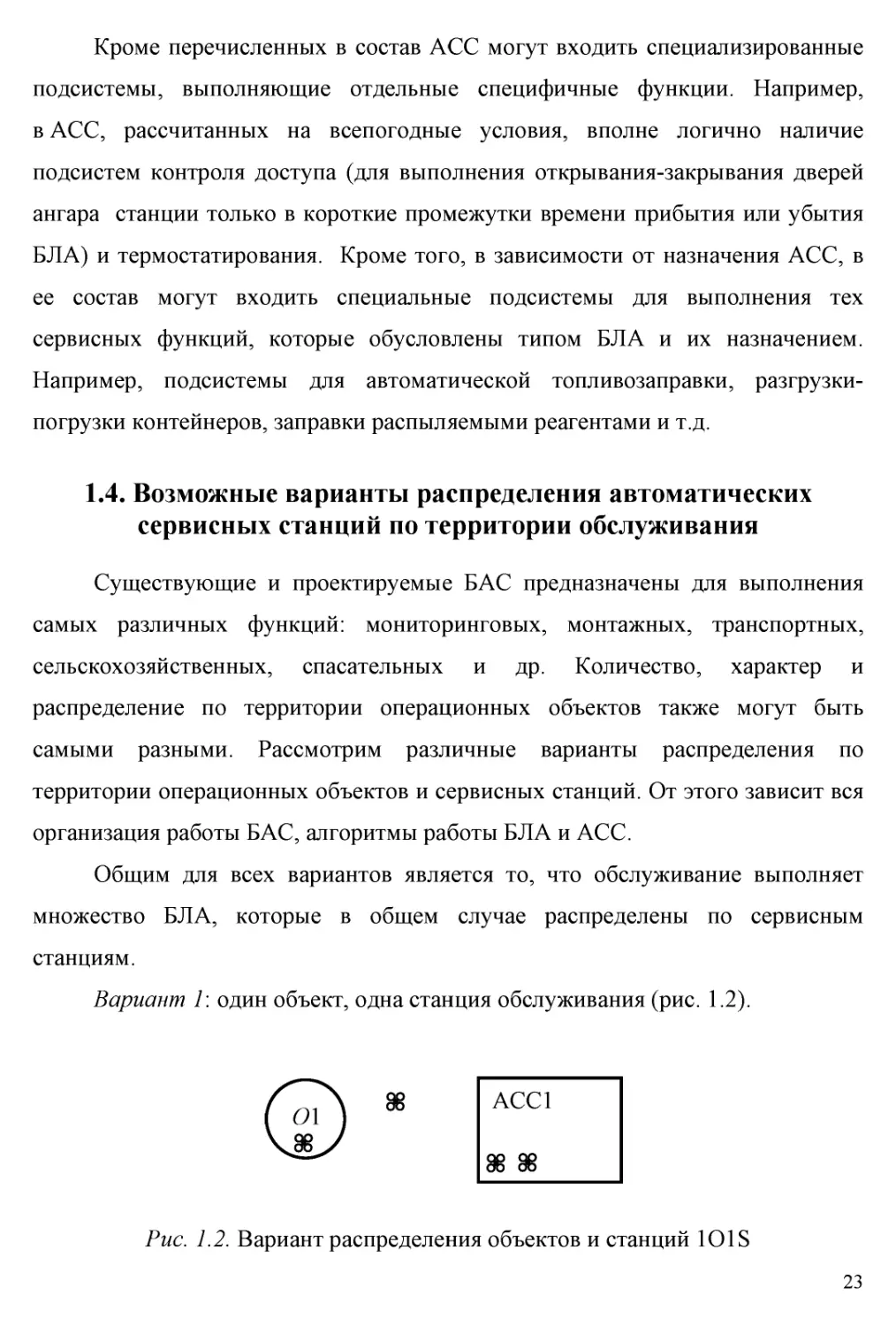
Вариант Г. один объект, одна станция обслуживания (рис. 1.2).
АСС1
86 88
Рис. 1.2. Вариант распределения объектов и станций 101S
23
Обозначим коротко этот вариант 101S (1 Object, 1 Station). Типичный пример:
непрерывное видеонаблюдение за объектом постоянно сменяющими друг друга
БЛА, которые периодически уходят на АСС для подзарядки.
Вариант 2\ один объект, много станций обслуживания (рис. 1.3).
Обозначим этот вариант 10MS (1 Object, Many Stations). Примером может быть
организация полетов БЛА с нескольких станций при тушении пожара на
объекте. При этом требуется частое массированное воздействие на объект.
В этом случае график полетов со станций до объекта и обратно должен
подчиняться в первую очередь требованию исключения столкновений БЛА в
воздухе.
Рис. 1.3. Вариант распределения объектов и станций 10MS
Последний вариант распределения имеет один важный частный случай
(рис. 1.4), более подходящий для транспортных задач с длинным маршрутом.
Рис. 1.4. Частный случай распределения объектов и станций 10MS
Образно этот вариант можно было бы назвать «ямские станции». Здесь
АСС распределены по длине маршрута до объекта, причем на каждой АСС для
сокращения временных затрат должен ожидать подготовленный БЛА, т.е.
время должно затрачиваться только на перегрузку транспортных контейнеров,
24
операции подзарядки (дозаправки) производятся с прибывшим бортом уже
после вылета дежурного БЛА с принятыми контейнерами.
Вариант 5: много объектов, одна станция обслуживания (рис. 1.5).
Обозначим этот вариант MO1S (Many Objects, 1 Station). Пример: БАС для
доставки почты с центра доставки, территориально совмещенного с АСС,
клиентам, распределенным в области вокруг АСС.
Рис. 1.5. Вариант распределения объектов и станций MO1S
Вариант 4\ много объектов, много станций обслуживания (рис. 1.6).
Обозначим этот вариант MOMS (Many Objects, Many Stations). Такая структура
обладает наибольшей сложностью и наибольшей гибкостью в обслуживании
объектов, а значит, большими возможностями по части оптимизации. Пример -
территориальная сеть срочной доставки медикаментов.
Рис. 1.6. Вариант распределения объектов и станций MOMS
АССЗ
25
Алгоритм работы БАС для каждого из рассмотренных вариантов может
оказаться значительно более сложным при условии, если АСС или объекты не
имеют жесткой привязки к координатам, т.е. являются мобильными.
1.5. Автоматические энерговосстановительные станции
Автоматические энерговосстановителъные станции (АЭВС) - это
реализации АСС, на которых не предусмотрено выполнение других сервисных
функций, кроме восполнения энергии для питания силовой установки БЛА. По
принципу функционирования АЭВС их можно разделить на следующие типы:
- автоматические зарядные станции (АЗС) - станции для
автоматической подзарядки бортовых аккумуляторных батарей без снятия их с
БЛА;
- автоматические обменные станции (АОС) - станции для
автоматической замены отработавших бортовых неперезаряжаемых батарей
или топливных картриджей (баллонов) на новые;
- автоматические обменно-зарядные станции (АОЗС) - станции для
автоматической быстрой замены бортовых перезаряжаемых батарей с их
последующей зарядкой;
- автоматические топливозаправочные станции (АТЗС) - станции для
автоматической заправки топливом аппаратов с тепловыми двигателями.
Поскольку БЛА с чисто электрической силовой установкой (на основе
электродвигателей, питаемых от перезаряжаемых аккумуляторов) на
сегодняшний день составляют большинство мирового парка БЛА, а функция их
подзарядки является наиболее востребованной, то вопросы построения АЗС и
АОЗС заслуживают более детального рассмотрения.
Схема классификации АЭВС по различным критериям приведена
на рис. 1.7.
26
Автоматические энерговосстановительные станции БАС
Способ восполнения энергии:
Тип конструкции:
Для БЛА с электрической
силовой установкой:
Замена батарей
Подзарядка батарей
Тип базирования:
Открытая платформа
Закрытые конструкции:
- ангар
- фургон
Отдельный терминал
Для БЛА с тепловыми двигателями
или топливными элементами:
Дозаправка топливом
Количество одновременно обслуживаемых БЛА:
Замена топливного картриджа
Одноместные
Многоместные
Способ подвода
энергии при зарядке:
- Контактные В
- С разъемными соединителями
С открытыми контактами
Со связанными
колебательными контурами
С емкостной связью
С питанием от линий электропередачи
Рис. 1.7. Классификация автоматических энерговосстановительных станций
По способу восполнения энергии, если речь идет о БЛА с чисто
электрической силовой установкой, возможны
варианты реализации АЭВС
27
с заменой неперезаряжаемых батарей (АОС), заменой перезаряжаемых батарей
с их последующей зарядкой (АОЗС) или подзарядкой перезаряжаемых батарей
без извлечения их с БЛА (АЗС).
Рассмотрим сначала станции с заменой батарей. Если в качестве
бортового источника питания используется ХИТ однократного применения
(в качестве таковых могут использоваться, например, батареи на основе литий-
тионилхлоридных неперезаряжаемых элементов [9], то на АОС производится
извлечение отработавших батарей и замена их на новые. При этом на обменной
станции содержится определенный запас новых батарей, а отработавшие
собираются для последующей утилизации. Если в качестве бортовых ХИТ
используются перезаряжаемые аккумуляторные батареи, то на АОЗС
извлеченные с БЛА батареи включаются в процесс их подзарядки, чтобы после
его окончания встать в очередь на замену батарей на последующих
прибывающих бортах. Все операции по замене батарей производятся
автоматически, обычно в «горячем режиме» (т.е. без обесточивания бортсети), с
помощью специализированных механических манипуляторов, специальных
разъемов и автоматических податчиков батарей [10-13]. Подробнее эти
вопросы рассмотрены далее в гл. 3.
Для БЛА с тепловыми двигателями АТЗС выполняет функцию
топливозаправки. Это может осуществляться путем дозаправки бортовых
топливных баков либо заменой отработанных топливных емкостей (баков,
баллонов, картриджей - в зависимости от вида топлива: жидкого, газообразного
или твердого).
Неавтоматическая дозаправка БЛА на земле реализуется обычно с
помощью специальных вспомогательных стационарных [14] или передвижных
наземных агрегатов. Примером последнего является технологическая машина
на базе автомобиля «Урал-4320» для обслуживания БЛА «Пчела-1Т» [15].
На сегодняшний день имеется крайне мало сведений о реализации
автоматической дозаправки БЛА топливом. Интересен проект инженерной
28
группы SSC из Сан-Диего, США [16]. В проекте реализовано выполнение
комплекса операций по запуску, посадке и дозаправке жидким топливом БЛА
VTOL-типа с помощью мобильной платформы на базе беспилотного
автомобиля.
Реализована также дозаправка жидким топливом БЛА в полете от
самолета-танкера: в апреле 2015 г. американская компания Northrop Grumman
впервые осуществила дозаправку в воздухе беспилотника Х-47В [17].
Для электрических БЛА перспективным видом бортовых источников
энергии являются топливные элементы [18]. Топливный элемент - это особый
вид ХИТ, отличающийся от гальванического элемента или аккумулятора тем,
что вещества для электрохимической реакции подаются в него извне. Одними
из самых эффективных являются водородные топливные элементы. В них в
качестве топлива используется сжатый водород, а в качестве окислителя -
атмосферный кислород. Превращение химической энергии топлива (водорода)
в электричество происходит напрямую, минуя малоэффективные, идущие с
большими потерями, процессы горения. Применение топливных элементов в
качестве бортовых источников питания БЛА позволяет почти на порядок
увеличить время полета. Есть примеры успешных разработок в этом
направлении у нас в стране: уже несколько лет ведутся разработки водородных
топливных элементов для БЛА самолетного и вертолетного типов в
подразделениях ИПХФ РАН в г. Черноголовке Московской области [19].
Сингапурская компания HES Energy Systems предлагает специальные решения
AEROPAK для БЛА, в которых к бортовому электрохимическому реактору
(собственно топливному элементу) можно пристыковать либо баллон со
сжатым водородом, либо специальный картридж с жидкими или твердыми
реагентами, в котором происходит выделение водорода, причем последний
вариант отличается наибольшей удельной энергоемкостью [20]. Таким образом,
на АЭВС возможна замена либо водородного баллона, либо (что более
технологично и безопасно) топливогенерирующего картриджа.
29
Остановимся коротко (подробно эти вопросы рассматриваются в гл. 4, 5)
на возможных вариантах реализации АЗС, т.е. АЭВС, выполняющих функции
подзарядки аккумуляторных батарей (без их извлечения). Реализация таких
станций гораздо проще, чем АОС или АОЗС, но сам процесс зарядки требует
определенного времени - обычно от десятков минут до нескольких часов. По
способу подвода энергии на БЛА такие АЗС можно разделить на контактные и
бесконтактные.
На АЗС с контактным способом подвода электроэнергии к БЛА само
контактное соединение бортовых электродов с электродами наземной
посадочной платформы может быть выполнено одним из двух принципиально
различных способов: 1) с помощью разъемных соединителей; 2) с помощью
открытых контактов.
Первый способ обеспечивает надежное соединение, но для его
реализации необходимы точная посадка БЛА на платформу или его точный
подход к разъемно-стыковочному терминалу после посадки, а также
приложение определенного механического усилия для стыковки-расстыковки
разъемного соединения.
Во втором способе качество контактирования несколько хуже - оно
обеспечивается в основном за счет прижима бортовых электродов к наземным
открытым контактным площадкам за счет собственного веса аппарата, поэтому
зависит от чистоты контактирующих поверхностей, но серьезным
преимуществом этого способа является то, что контактные площадки на
наземной платформе могут быть организованы таким образом, что точная
посадка БЛА не потребуется, и, кроме того, одна платформа сможет
обслуживать одновременно несколько БЛА.
При бесконтактном способе передача энергии на БЛА осуществляется
на переменном токе, при этом качество и чистота сопрягаемых поверхностей не
играют большой роли. Однако коэффициент полезного действия (КПД) для
такой передачи несколько ниже, чем для контактных гальванических
30
соединений. Кроме того, на борту приходится устанавливать выпрямительное
устройство, а также все другие устройства, обеспечивающие контроль процесса
зарядки, что неизбежно увеличивает массу БЛА.
Наиболее эффективен вариант бесконтактной передачи с использованием
связанных колебательных контуров. При этом индуктивные элементы, как
правило, одинаковые для бортовой и наземной частей, для эффективной
передачи энергии должны иметь достаточно большие размеры и массу.
Плотное прилегание бортовой и наземной катушек индуктивности друг к другу
совсем не обязательно, но для достижения максимального КПД передачи
желательно, чтобы совмещение осей катушек было точным для избежания
непроизводительных потерь магнитного потока.
Другим способом передачи энергии на переменном токе является
емкостная связь. Для обеспечения эффективности такой связи межэлектродная
емкость сопрягаемых бортового и наземного электродов должна быть
достаточно большой, а значит, большой должна быть площадь электродов (но
это ограничено размерами и возможностями самого БЛА), а зазор между ними
необходимо делать минимально возможным. Частота переменного тока должна
лежать в диапазоне сотен килогерц - десятков мегагерц.
Еще одна разновидность бесконтактной подзарядки - запитывание
зарядного устройства БЛА от токоведущего провода с переменным током
(например, от линии электропередачи) посредством разъемного
магнитопровода, совмещающего функции подвеса и сердечника
трансформатора [21].
Другим критерием классификации АЭВС является тип их базирования.
Здесь все полностью соответствует трем типам СС, упоминавшимся в 1.2:
АЭВС могут быть стационарными, мобильными и развертываемыми.
По типу базовых конструкций АЭВС на сегодняшний день можно
выделить несколько известных решений: открытые платформы, закрытые
конструкции (ангары, фургоны), одиночные терминалы.
31
В зависимости от количества одновременно обслуживаемых аппаратов
АЭВС можно подразделить на одноместные и многоместные (с несколькими
посадочными местами).
Источники информации по главе 1
1. Bento М. Unmanned aerial vehicles: an overview // Inside GNSS. 2008.
№ 1. P. 54-61. URL: http.7/www.insidegnss.com/auto/janfeb08-wp.pdf (дата
обращения: 30.09.2017).
2. Беспилотная авиация: терминология, классификация, современное
состояние / В. С. Фетисов, Л. М. Неугодникова, В. В. Адамовский,
Р. А. Красноперов; под ред. В. С. Фетисова. Уфа: ФОТОН, 2014. 217 с.
3. Зинченко О. Н. Беспилотный летательный аппарат: Применение в
целях аэрофотосъемки для картографирования // Сайт компании «Ракурс».
URL: http://www.racurs.ru/www_download/articles/UAV_l.pdf (дата обращения:
30.09.2017).
4. The Free Dictionary. URL: http://www.thefreedictionary.com/Unmanned+
Aerial+Vehicle (дата обращения: 30.09.2017).
5. Заблотский А., Ларинцев P. БЛА: первое знакомство // Авиация и
время. 2008. № 2 / Онлайн-библиотека Litrus.net.
URL: http://litrus.net/book/read/164811?р=15 (дата обращения: 30.09.2017).
6. Ростопчин В. В. Современная классификация беспилотных
авиационных систем военного назначения // Интернет-издание UAV.ru:
Беспилотная авиация. URL: http://uav.ru/articles/bas.pdf (дата обращения:
30.09.2017 ).
7. Федеральный закон от 30.12.2015 г. № 462-ФЗ «О внесении изменений
в Воздушный кодекс Российской Федерации в части использования
беспилотных воздушных судов» // Российская газета. Федеральный выпуск
№6869(1). 2016. 11 января.
32
8. ГОСТ Р 57258-2016 «Системы беспилотные авиационные. Термины и
определения». М.: Стандартинформ, 2016. 8 с.
9. Соболев В., Соколов М., Родин М. Литий-тионилхлоридные источники
питания // Компоненты и технологии. 2010. №7. С. 124-126.
10. Toksoz Т., Reddingy J., Micliini М., Micliini В., How J., Vavrina M.,
Vian J. Automated Battery Swap and Recharge to Enable Persistent UAV Missions
// Proc, of the AIAA Infotech@ Aero space Conference, St. Louis, Missouri, 2011.
URL: http://dx.doi.Org/10.2514/6.2011-1405 (дата обращения: 30.09.2017).
11. Suzuki К. A. О., Kemper F. P., Morrison J. R. Automatic Battery
Replacement System for UAVs: Analysis and Design // Journal of Intelligent &
Robotic Systems. January 2012. Vol. 65. Issue 1. P. 563-586.
12. Kemper F. P., Suzuki К. A. O., Morrison J. R. UAV consumable
replenishment: design concepts for automated service stations // Journal of
Intelligent & Robotic Systems. January 2011. Vol. 61. Issue 1. P. 369-397.
13. Swieringa K. A., Hanson С. B., Richardson J. R., White J. D., Hasan Z.,
Qian E., Girard A. Autonomous Battery Swapping System for Small-Scale
Helicopters // Proc, of the 2010 IEEE International Conference on Robotics and
Automation, May 3-8, 2010. Anchorage, Alaska, USA. P. 3335-3340.
14. Патент РФ № 2489327. Способ закрытой заправки топливного бака
жидким топливом и система для его осуществления // Бюл. «Изобретения.
Полезные модели». 2013. № 22 (10.08.2013).
15. Портал «Новости авиации». Яковлев Пчела-1Т. 06.04.2015.
URL: http://avia.pro/blog/pchela-lt (дата обращения: 30.09.2017).
16. Mullens К., Burmeister A., Wills М., Stroumtsos N., Denewiler Т.,
Thomas К., StancliffS. Automated launch, recovery, and refueling for small
unmanned aerial vehicles // Proc. SPIE 5609, Mobile Robots XVII, 233 (December
29, 2004). doi: 10.1117/12.580140.
17. Ведмеденко И. Видео: первая автоматическая дозаправка
беспилотника в воздухе // Он-лайн журнал «Naked Science». 25.04.2015.
33
URL: https://naked-science.ru/article/tecli/video-pervaya-avtomaticlieskaya (дата
обращения: 30.09.2017).
18. Larmini J., Dicks A. Fuel cell systems explained. Second edition. John
Willey & Sons, Ltd., 2003. 406 c.
19. Пылаева E. К взлету готов! Водородно-воздушные топливные
элементы ИПХФ РАН осваивают небо // Черноголовская газета. № 45. 2013.
7 ноября. URL: http://www.ptero.ru/download/publications/k_vzletu_gotov_l.pdf
(дата обращения: 30.09.2017).
20. Long Endurance Battery Alternatives for Electric UAS // Техническая
информация фирмы Horizon Energy Systems (Сингапур). URL: http://resources.
arcolaenergy.com/docs/Brochures/AEROP AKBrochure.pdf (дата обращения:
30.09.2017).
21. Moore J. L. Powerline Perching with a Fixed-Wing UAV. Thesis
(M. Eng.), MIT, 2011. URL: http://groups.csail.mit.edu/robotics-
center/public_papers/Moorella.pdf (дата обращения: 30.09.2017).
34
ГЛАВА 2. АЛЬТЕРНАТИВНЫЕ СПОСОБЫ УВЕЛИЧЕНИЯ
ДЛИТЕЛЬНОСТИ ПОЛЕТОВ ЭЛЕКТРИЧЕСКИХ
БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ
Прежде чем перейти к подробному рассмотрению различных типов
АЭВС (а в следующих главах речь будет идти об АЭВС для электрических
БЛА) остановимся на том, какие еще возможны альтернативные способы
увеличения длительности полетов электрических БЛА.
Существует два основных направления решения проблемы обеспечения
длительного (непрерывного) функционирования электрических БЛА при
выполнении ими своих полетных задач:
1) за счет повышения удельной энергоемкости источников БЛА и
повышения энергоэффективности самого БЛА (без подзарядки источника
питания);
2) с использованием АЭВС.
2.1. Пути увеличения длительности полетов
электрических беспилотных летательных аппаратов
без использования энерговосстановительных станций
Можно обозначить два возможных пути - это разработки более
энергоемких источников питания и всевозможные меры, которые направлены
на экономию энергии этих источников.
2.1.1. Разработки новых источников питания
Для бортового питания применяются различные химические источники
тока (ХИТ). Они подразделяются на первичные источники тока
(гальванические элементы однократного применения) и вторичные
(аккумуляторы - многократно перезаряжаемые ХИТ). Весь запас реагирующих
веществ в таких источниках сосредоточен в пределах их корпуса. Существует
35
еще особая группа ХИТ, называемых топливными элементами, в которых
реагенты непрерывно подводятся в элемент извне, а продукты реакции
удаляются из него. Можно также отдельно выделить промежуточную группу
полутопливных элементов, в которых один реагент находится в корпусе, а
другой подается извне (пример: металл-воздушные элементы) [1]. Как правило,
элементы питания последовательно соединяют в батареи для повышения
рабочего напряжения.
Разработчиков БЛА в первую очередь интересуют следующие параметры
ХИТ:
- удельная емкость, т.е. запасенная энергия в пересчете на единицу массы
(Втч/кг);
- допустимая мощность (или максимальный разрядный ток, который
обычно оценивается с помощью условного числа С; С - коэффициент,
численно равный значению емкости, но выражаемый не в ампер-часах, а в
амперах);
- диапазон рабочих температур (особенно критичны отрицательные
значения температуры);
- срок службы (количество циклов заряда-разряда);
- скорость зарядки (для аккумуляторов).
Традиционно в бортовом питании использовались кислотно-свинцовые,
никель-кадмиевые, серебряно-цинковые и другие аккумуляторы. На
сегодняшний день в электрических БЛА во всем мире наиболее используемыми
являются литий-ионные аккумуляторные батареи. Первый литий-ионный
аккумулятор для массового производства разработала японская корпорация
Sony в 1991 г. А в 2009 г. литий-ионные элементы и батареи составляли около
40 % всех продаваемых в мире батарейных источников питания [2]. Литий-
ионные аккумуляторы имеют множество различных типов [3]. Классический
литий-ионный аккумулятор состоит из катода и анода, разделенных пористым
сепаратором, пропитанным электролитом. В качестве электролита используют,
36
например, гексафторфосфид лития, растворенный в органическом
растворителе. Катодный материал представляет собой обычно оксид или более
сложное соединение металла (Li), а анодный материал - это пористый углерод.
Во время разряда поток ионов лития идет от анода к катоду через электролит.
При зарядке движение ионов меняется на противоположное.
Сейчас большое распространение получила разновидность литий-ионных
аккумуляторов, которые называют литий-полимерными. Свое название они
получили за то, что роль электролита в них выполняет тонкая полимерная
пленка с включениями гелеобразного литий-проводящего наполнителя. Литий-
полимерные аккумуляторы по сравнению с обычными литий-ионными более
технологичны и обеспечивают более высокие разрядные токи, обладают
большей удельной энергией.
Литий имеет большой электрохимический потенциал и наибольшее
отношение возможной энергии к собственному весу по сравнению с другими
металлами. Удельная энергия литий-ионных батарей в два раза выше, чем,
например, у никель-кадмиевых. А рабочее напряжение литий-ионной ячейки
составляет 3.6 В вместо 1.2 В у аккумуляторов на основе никеля. Постоянное
снижение стоимости, отсутствие выбросов токсичных материалов при
производстве, увеличение удельной емкости и срока службы сделали литий-
ионные батареи общепринятыми источниками энергии во многих отраслях
техники, в том числе для построения электрических силовых агрегатов БЛА.
Если еще несколько лет назад серийно производимые литий-ионные
аккумуляторные батареи редко имели емкость выше нескольких ампер-часов,
то сейчас многие причины, ограничивающие увеличение емкости, преодолены,
и многие компании выпускают аккумуляторы емкостью в сотни ампер-часов.
Поэтому значения длительности полета БЛА даже для энергозатратных
аппаратов вертолетного типа сегодня можно измерять не десятками минут, а
часами.
37
Литий-ионные батареи более неприхотливы в эксплуатации, чем батареи
других типов. У них нет эффекта памяти и они не нуждаются в полной разрядке
для сохранения своих свойств. Саморазряд литий-ионных аккумуляторов
составляет 4-6 % за первый месяц, затем существенно меньше: за год
аккумуляторы теряют 10-20 % запасенной емкости: это в несколько раз
меньше, чем у никель-кадмиевых аккумуляторов.
Типичный интервал рабочих температур (при работе на разряд) для
большинства литий-ионных аккумуляторов: от -20 до +60 °C. Однако многие
фирмы уже разработали аккумуляторы, работоспособные при -40 °C. Это
достигается применением специальных незамерзающих электролитов и
специальными конструкциями сепараторов. Рекордсменом по ширине
температурного диапазона являются литий-тионилхлоридные (Li S ОСЬ)
элементы (-60...+85 °C, в отдельных случаях до 150°С) [4]. Такие элементы
отличаются и максимальной удельной энергией: достигнуты показатели более
600 Втч/кг [5]. Они выпускаются обычно в виде первичных
(неперезаряжаемых) элементов. Однако такие элементы имеют высокую
стоимость, что вызвано технологической сложностью их изготовления: из-за
высокой химической активности лития требуется создавать его надежную
изоляцию, в то же время необходимо отводить из корпуса батареи газы,
образующиеся при разряде; кроме того, внутри корпуса батареи необходимо
размещать терморезистор, служащий для предотвращения перегрузок. Однако
несмотря на все эти сложности, этот тип источников питания применялся во
многих беспилотных системах, в том числе в космических аппаратах [6, 7].
Для любых типов литий-ионных аккумуляторов зарядка возможна только
в интервале 0...45 °C. При минусовых температурах она неэффективна или
опасна.
Недостатком многих типов литий-ионных аккумуляторов является их
пожароопасность при перезарядке или перегреве. Поэтому обычно они
снабжаются встроенной схемой защиты, предотвращающей эти нежелательные
38
явления. Эта же схема следит за недопущением слишком глубокого разряда,
что также вредно для аккумуляторов. По этой же причине требуются
специальные алгоритмы зарядки (зарядные устройства). Если батарея состоит
из нескольких последовательно соединенных ячеек (обычно не более 8 ячеек),
то для обеспечения максимального срока службы батареи требуется
согласованная равномерная зарядка каждой ячейки, поэтому применяют
специальные зарядные микропроцессорные устройства с т.н. балансерами [8],
которые, кроме обеспечения программы зарядки данного типа аккумулятора,
выравнивают напряжения на ячейках в процессе зарядки. Однако возгорания
серийно выпускаемых литий-ионных батарей иногда все же случаются, в том
числе в авиации. Пример: перегрев и возгорание аккумулятора на борту
самолета Boeing 787 японской авиакомпании ANA в январе 2013 г., после чего
компания Boeing была вынуждена вводить дополнительные уровни защиты
таких аккумуляторов и доказывать их безопасность [9]. Поиски более
безопасных типов литий-ионных аккумуляторов продолжаются.
Различия в типах литий-ионных батарей определяются, как правило,
материалом катода. Наиболее распространены следующие материалы катода:
LiCoO2 (литий-кобальт), LiMn2O4 (литий-марганец), LiFePO4 (литий-железо-
фосфат), а также LiNiMnCoO2 (литий-никель-марганец-кобальт). В табл. 2.1
показаны характеристики батарей с такими катодами (по материалам канадской
компании Cadex Electronics [2]).
Как видно из табл. 2.1, по совокупности показателей некоторые
преимущества имеют батареи с катодом на основе LiNiMnCoO2. Из серийно
выпускаемых аккумуляторов этому типу сегодня, так же как литий-
железофосфатным аккумуляторам, чаще всего предпочтение отдают
авиастроительные фирмы, включая разработчиков БЛА [10, 11].
Ведутся также исследования новых анодных материалов.
Вместо традиционного графита предлагается использовать, например,
кремниевые сплавы. Использование кремния позволяет добиться увеличения
39
удельной емкости на 20-30 %, но достигается это, к сожалению, за счет
снижения токов нагрузки и сокращения жизненного цикла.
Наноструктурированный титанат лития при использовании в качестве анода
позволяет добиться увеличения жизненного цикла, хороших нагрузочных
характеристик и удовлетворительной работы при низких температурах, но при
этом полученный аккумулятор обладает низкой удельной емкостью [2].
Таблица 2.1
Характеристики некоторых типов литий-ионных батарей
\Тип катода Характе- РИСТИКИ Хч LiCoO2 (литий- кобальт) 1лМп2О4 (литий- марганец) LiFePO4 (литий- железо- фосфат) LiNiMnCoO2 (литий- никель- марганец- кобальт)
Номинальное напряжение 3,60 В 3,80 В 3,30 В 3,60/3,70 В
Предельное напряжение зарядки 4,20 В 4,20 В 3,60 В 4,20 В
Количество циклов заряд/разряд 500-1000 500-1000 1000-2000 1000-2000
Удельная емкость 150-190 Втч/кг 100-135 Втч/кг 90-120 Втч/кг 140-180 Втч/кг
Максимальный разрядный ток (С*) 1С ЮС, 40С кратковременно 35С ЮС
Безопасность Средняя Наиболее безопасные батареи Более безопасные, чем батареи литий-кобальт
Начало использования 1994 1996 1999 2003
* С - коэффициент, численно равный номинальной емкости, но выражаемый в амперах.
40
Из других перспективных для использования в БЛА типов химических
источников тока стоит выделить пока еще не выпускаемые серийно,
а находящиеся в стадии разработок литий-серные аккумуляторы и литий-
воздушные элементы.
Литий-серные аккумуляторы. Первые удачные образцы таких
аккумуляторов несколько лет назад предложила американская компания Sion
Power [12]. В таком аккумуляторе серосодержащий катод и литиевый анод
разделены мембранами и слоем электролита, причем катод опционально может
быть жидким, что позволяет увеличить плотность тока через него. Удельная
емкость аккумулятора (до 300 Втч/кг) по сравнению с литий-ионными
значительно выше благодаря наличию серы в катоде [13]. ЭДС одной литий-
серной ячейки составляет 2,1 В. К достоинствам литий-серного аккумулятора
можно отнести его безопасность (в том числе экологическую безопасность при
производстве и утилизации), относительно небольшую стоимость, широкий
диапазон рабочих температур. К сожалению, существующие опытные образцы
аккумуляторов выдерживают пока не более 300 циклов заряда-разряда, но
ведутся работы по повышению этого показателя. Именно такой тип
аккумуляторов использовался на беспилотном самолете Zephyr 7 британской
компании QinetiQ. Этот аппарат, имеющий большое количество солнечных
панелей на своих плоскостях, в июле 2010 г. установил рекорды длительности
(336 часов) и высоты полета (21 562 м) [14]. Перепады температуры при этом
составляли от -75 до 40 °C, поэтому аккумуляторы были снабжены
встроенными нагревателями, которые обеспечивали температурный режим не
ниже 0 °C.
Существенного прогресса в технологии литий-серных аккумуляторов
удалось добиться исследователям Окриджской национальной лаборатории
(США). Они разработали полностью твердую батарею с обогащенным серой
катодом, литиевым анодом и материалом твердого электролита. Удельная
емкость составила порядка 600 Вт ч/кг [15, 16].
41
Литий-воз душные элементы являются представителями большой группы
металл-воздушных химических источников тока [17]. Их особенностью
является т.н. газовый катод, т.е. роль катода выполняет атмосферный кислород.
За счет этого можно добиться уменьшения габаритов и массы элемента.
Конструктивно этот электрод выполняют в виде пластины пористого углерода,
который абсорбирует кислород из воздуха. Активность этому процессу придает
специальный катализатор (например, марганец). В литий-воздушных элементах
анодом является металлический литий, а электролитом - тонкая полимерная
мембрана. Положительные ионы лития перетягиваются к ионам кислорода в
углеродную пластинку и образуют оксид лития. При этом если внешняя цепь
замкнута, в ней происходит постоянное движение электронов. Весь этот
процесс протекает в несколько раз интенсивнее, чем в традиционных литий-
ионных аккумуляторах. Теоретически удельная емкость литий-воздушных
источников может составлять 12 000 Втч/кг [18]. Это гораздо больше, чем у
всех известных типов химических источников тока. Однако пока такие
элементы не удается сделать перезаряжаемыми, т.е. аккумуляторами в обычном
понимании. Поэтому сейчас во многих лабораториях мира ведутся
интенсивные работы по преодолению этой и других технологических
трудностей и доведению этого типа источников питания до серийного
производства.
Резкий рост производства источников питания на основе лития привел к
тому, что в мире начинает ощущаться дефицит этого материала [19]. В качестве
альтернативы многие исследователи предлагают натрий - несколько
уступающий литию по электрохимическим свойствам, но зато гораздо более
распространенный и дешевый металл. Уже сделаны обнадеживающие попытки
использовать натрий в металл-воздушных аккумуляторах. Причем в этом
случае, в отличие от использования лития, удалось получить перезаряжаемую
систему. На сегодняшний день достигнуты удельная емкость 1600 Вт ч/кг и
количество циклов заряда-разряда 400 [20].
42
Весьма перспективны для построения энергетических силовых установок
БЛА топливные элементы. Есть примеры использования в БЛА водородных и
метанольных топливных элементов. Так, сингапурская компания Horizon
Energy Systems наладила серийный выпуск водородного топливного элемента
специально для использования в БЛА, названного Aeropak, обладающего
удельной энергетической емкостью более 400 Вт ч/кг. Это в 3-4 раза больше,
чем у существующих литий-ионных аккумуляторов, следовательно во столько
же раз можно увеличить дальность и длительность действия БЛА. Подача
водорода осуществляется из специального твердотопливного картриджа-
генератора или из пристыковываемого баллона со сжиженным водородом [21].
Несколько таких топливных элементов могут объединяться в батарею, поэтому
их можно использовать практически для любой беспилотной платформы. Одно
особое достоинство таких элементов - их низкое внешнее тепловое выделение.
Особую группу источников тока составляют т.н. суперконденсаторы
(ионисторы) [22]. Ионистор - это электрохимический конденсатор, функцию
обкладок в котором выполняет двойной электрический слой на границе раздела
электрода и электролита. По сути, это гибрид конденсатора и химического
источника тока. Типичная емкость ионистора - от единиц до нескольких тысяч
фарад, при номинальном напряжении 2-10 вольт. Хотя удельная
энергетическая емкость ионисторов меньше, чем у большинства аккумуляторов
(она составляет порядка 5-12 Вт ч/кг), этот вид источников тока привлекает
разработчиков из-за их высоких значений допустимой скорости зарядки и
разрядки, простоты зарядных устройств, широкого рабочего температурного
диапазона (-60...+125 °C) и малой деградации даже после сотен тысяч циклов
заряда-разряда [23]. Совершенствование технологии изготовления ионисторов
продолжается. Так, группа индийских исследователей предложила ионистор на
основе графеновых электродов, обладающий удельной энергоемкостью до
32 Вт ч/кг (для сравнения: у свинцово-кислотных аккумуляторов она
составляет порядка 30-40 Вт ч/кг) [24].
43
В бортсетях БЛА иногда объединяют ионистор и химический
аккумулятор, что позволяет использовать достоинства и компенсировать
недостатки тех и других.
2.1.2. Пути повышения энергоэффективности БЛА
Продолжительность полета электрического БЛА и длительность
выполнения им полетного задания зависят, в частности, от того, насколько
экономично аппарат расходует энергию бортового источника питания.
Перечислим основные пути снижения энергозатрат.
1. Уменьшение массы аппарата за счет применения более легких
материалов.
2. Повышение экономичности электрооборудования БЛА (уменьшение
непроизводительного энергопотребления и повышение КПД всех
электрических и электронных устройств, питающихся от бортсети:
электродвигателей, преобразователей, сервоприводов, навигационного
оборудования и т.д.).
3. Улучшение аэродинамических характеристик аппарата. Пример:
использование эффекта Коанда [25].
4. Применение гибридных схем построения БЛА с использованием
различных принципов полета, позволяющих улучшить энергоэффективность
БЛА на отдельных стадиях полета. Пример: в конвертопланах с отклоняемым
крылом при переходе на горизонтальный режим полета кроме тяги винта
используется еще и подъемная сила развернутого крыла, что повышает
экономичность полета [26].
5. Использование аэростатической разгрузки БЛА самолетного и
вертолетного типа. Суть в том, что в БЛА размещается герметичная оболочка с
легким газом, что позволяет частично компенсировать вес аппарата. Пример:
летательный аппарат Р-791 американской компании Lockheed Martin, в котором
44
совмещены аэростатический и аэродинамический принципы создания
подъемной силы [27].
6. Оптимизация траекторий и маршрутов полетов с использованием
информации о текущей ситуации. Пример: коррекция траектории с
использованием информации о восходящих потоках воздуха с целью
увеличения экономичности полета [28].
7. Нетривиальное решение, которое заключается в том, что единый
бортовой источник питания разделяется на множество источников меньшей
емкости, которые в полете разряжаются последовательно и по мере их полного
разряда сбрасываются на землю, облегчая тем самым БЛА. Такое решение
может добавить порядка 20 % полетного времени [29].
2.1.3. Подзарядка в воздухе
Иногда по условиям полетной задачи БЛА принципиально не может
совершать даже кратковременную посадку для подзарядки или замены
источника питания. В этом случае подзарядка может осуществляться от матриц
фотоэлементов (солнечных панелей), размещенных на самом аппарате, либо с
помощью наземного лазера и соответствующего бортового фотоприемника.
Первый вариант больше ориентирован на аппараты самолетного типа, второй
применим для любых типов БЛА, хотя проще его реализовать на
низкоскоростных аппаратах.
2.1.3.1. Подзарядка от солнечных панелей
Солнечное излучение является практически единственным естественным
источником энергии, пригодным для подзарядки БЛА в полете. Постоянный, не
перекрываемый плотными облаками поток солнечной энергии существует на
достаточно больших высотах (порядка 13 000 м и выше). Для размещения
солнечных панелей, способных приводить в движение двигатели и питать
бортсеть, требуются довольно большие площади. Для этого можно
45
использовать верхние и боковые поверхности крыльев, фюзеляжа и других
аэродинамических элементов. Большая площадь поверхности крыльев нужна
еще и для увеличения аэродинамической подъемной силы с целью сделать
аппарат более экономичным. Все это относится к БЛА самолетного типа; для
гораздо более энергозатратных аппаратов вертолетного типа вариант
подзарядки их источников питания от солнечных панелей вообще пока не
рассматривается.
В разных странах существуют проекты «солнечных» беспилотных
самолетов, которые в идеале могли бы круглосуточно находиться в воздухе в
течение многих месяцев, выполняя функции разведчиков, метеорологических
зондов, ретрансляторов сигналов и т.д. [30, 31, 32]. В проектах таких БЛА
большое внимание уделяется расчетам баланса энергии, получаемой в дневное
время от солнечных панелей и запасаемой в аккумуляторах, и энергии,
потребляемой в ночное время [33]. Отдельной темой являются новые
материалы самих солнечных элементов, позволяющих повысит эффективность
генерации электроэнергии. Например, американской фирмой Alta Devices
предложены солнечные генерирующие элементы, выполняемые в виде тонкой
пленки из арсенида галлия, которая позволяет при нормальном освещении
вырабатывать мощность в расчете на единицу массы пленки порядка 1 Вт/г, что
в 4-5 раз больше, чем у традиционных кремниевых аналогов [34].
Наиболее удачным реализованным проектом БЛА с подпиткой от
солнечного излучения является уже упоминавшийся аппарат Zephyr 7
британской компании QinetiQ (в настоящее время это подразделение Airbus
Defence and Space) (рис. 2.1). Он имеет массу 53 кг, размах крыльев 22,5 м. Тягу
обеспечивают 2 электродвигателя без редукторов. Потребляемая мощность в
горизонтальном полете была порядка 200 Вт, при наборе высоты увеличивалась
до 500 Вт. Беспосадочное двухнедельное нахождение этого аппарата в
воздухе - далеко не предел. Сейчас специалисты этой компании готовятся к
реализации многомесячных непрерывных полетов [14].
46
Рис. 2.1. БЛА Zephyr 7 британской компании QinetiQ (Фото: QinetiQ):
а - предполетная подготовка; б - в полете
2.1.3.2. Подзарядка от наземного лазера
Еще совсем недавно такие проекты казались фантастическими. Однако на
сегодняшний день существуют вполне успешные разработки, доказывающие
реальность идеи передачи энергии посредством лазерного излучения. В 2010 г.
американская компания LaserMotive продемонстрировала беспилотный
квадрокоптер, снабженный специальной фотоприемной матрицей, который
находился в воздухе в пределах закрытого помещения в течение более 12 часов
(обычно квадрокоптеры такого класса могут находиться в воздухе несколько
минут). При этом на матрицу постоянно был направлен луч лазера от наземной
станции, к которой подводилась мощность порядка 4 кВт [35]. В 2012 г.
LaserMotive совместно с компанией Lockheed Martin улучшили это достижение:
был реализован 48-часовой беспосадочный полет квадрокоптера с подпиткой
бортового аккумулятора посредством энергии лазерного луча. В качестве
излучателей предлагается использовать кластеры мощных лазерных диодов,
работающих в ближней инфракрасной области спектра. В настоящее время
эффективность преобразования энергии для таких излучателей составляет
порядка 70 %, в то же время они достаточно надежны (>20 ООО часов работы).
Для преобразования энергии луча на борту используют охлаждаемую матрицу
47
фотоэлементов. Удельная энергия, вырабатываемая такими матрицами,
составляет 6 кВт/м2. Наиболее сложной и ответственной частью системы
является подсистема слежения и автоматического управления направлением
луча. Подсистема выдает команду на передачу энергии только тогда, когда луч
беспрепятственно и точно попадет в приемник, если же что-то препятствует
прохождению луча или приемник потерян, передача энергии прекращается.
Очевидным достоинством предложенной технологии является то, что аппарат
может неограниченное время находиться в воздухе, избегая небезопасных
посадок (с точки зрения технической сложности, метеоусловий, наличия
неприятеля и т.д.). Дальность передачи энергии может составить от сотен
метров до 15 км в зависимости от состояния атмосферы. Лазерная установка
может быть стационарной или мобильной, в последнем случае она может
базироваться на автомобиле, на корабле или даже на большом воздушном судне
(рис. 2.2). Сеть лазерных станций может поддерживать большое количество
беспилотных аппаратов с различными маршрутами полета [36].
Рис. 2.2. Подзарядка БЛА посредством лазерного излучения
(Иллюстрация: LaserMotive)
Возможны три основных способа применения питаемых лазером БЛА:
- БЛА представляет собой стационарную наблюдательную платформу
для длительного наблюдения и разведки, при этом он висит над лазерной
установкой, мало отклоняясь от фиксированной точки;
48
- один или несколько БЛА выполняют многофункциональные операции,
перемещаясь периодически в зону выполнения задания, недосягаемую для
лазера; по мере понижения напряжения бортсети до предустановленного
уровня БЛА направляется в область досягаемости лазера и заряжается в
воздухе;
- непрерывное патрулирование аппаратом объектов в зоне досягаемости
лазерного луча и постоянная подпитка бортового источника питания.
Предложенная технология наряду с достоинствами имеет и некоторые
недостатки:
- зависимость процесса подзарядки от состояния атмосферы;
- пока еще низкий коэффициент полезного действия всей системы
заставляет подводить к лазерной установке довольно большие мощности, что
не всегда приемлемо, особенно для мобильных зарядных станций.
2.1.4. Концепция «Tethered UA V» - «привязанный беспилотник»
Есть еще одна тривиальная возможность подзарядки (или обеспечения
питания вообще) электрических БЛА, которая заключается в подаче
электропитания посредством кабеля [37]. При этом аппарат, конечно, теряет
свою автономность и мобильность, но во многих случаях это приемлемо.
Существует довольно много примеров реализации этой концепции.
Применима она только к аппаратам вертолетного или аэростатического типа.
Пользуются ей тогда, когда не требуется большой радиус действия аппарата и
его мобильность, но необходимо его длительное зависание на определенной
высоте для выполнения задач видеосъемки, наблюдения, ретрансляции
радиосигналов и др.
Хорошим примером является система HoverMast израильской фирмы Sky
Sapience (рис. 2.3). Основу системы составляет мультикоптер, который может
компактно укладываться внутри специального бокса, который может
размещаться на крыше здания, автомобиле (в т.ч. беспилотном), корабле. Для
49
выполнения задания бокс автоматически раскрывается, аппарат разворачивает
боковые пропеллеры и поднимается на определенную высоту, разматывая за
собой кабель питания. Высота подъема - до 50 м, которой он достигает за 15 с.
Управление аппаратом сводится к поддержанию вертикального положения
кабеля, при этом возможно следование за передвигающимся базовым
мобильным средством. На аппарате могут располагаться
гиростабилизированные камеры и различные датчики. По кабелю передается не
только питающее напряжение, но и команды управления, а также информация с
датчиков и камер [38].
Рис. 2.3. Система HoverMast израильской фирмы Sky Sapience
(Иллюстрация: Sky Sapience)
У такого технического решения есть очевидные достоинства:
- возможность длительного нахождения в воздухе без необходимости
подзарядки или замены батарей питания;
- отсутствие информационного и управляющего радиоканала и, как
следствие, невозможность выведения аппарата из строя противником с
помощью радиотехнических средств;
50
- практически нулевая вероятность потери аппарата вследствие сбоя в
навигационной системе.
Ограничения в высоте подъема в системе HoverMast определяются
массой кабеля - медный кабель не может быть слишком тонким в расчете на
довольно большие потребляемые токи. Частично решить эту проблему можно с
помощью предложения уже упомянутой фирмы LaserMotive, которая делает
небезосновательные попытки передачи энергии на мультикоптер не по медному
кабелю, а посредством лазера по гораздо более легкому волоконно-
оптическому. По этому же кабелю идут и информационные потоки.
Работоспособность системы, которая была названа InvisiTower, была
продемонстрирована в апреле 2013 г. на выставке «SPIE Defense, Security &
Sensing» в г. Балтимор (США). По сравнению с системой для передачи
излучения по воздуху она гораздо менее энергозатратна, более проста и
компактна [39].
2.2. Подзарядка или обмен источников питания
на наземных зарядных станциях
На сегодняшний день это, пожалуй, наиболее простой и экономичный
способ решения проблемы увеличения длительности функционирования
электрических БЛА в рамках определенной поставленной задачи. Конечно,
минусом такого решения является то, что аппарат в определенные промежутки
времени должен прекращать или сокращать выполнение своих функций и
уходить на посадку для восполнения своих энергетических запасов. Но часто
кратковременный перерыв в работе вполне допустим. Если же это критично, то
возможна организация сменной работы двух или более аппаратов с
периодической подзарядкой части из них на автоматической
энерговосстановительной станции (АЭВС). В гл. 1 для полноты рассмотрения в
качестве таких станций рассматривались в том числе и заправочные станции
для дозаправки топливом аппаратов с тепловыми двигателями (АТЗС). Таким
образом, под АЭВС в общем случае понимается совокупность оборудования
51
наземного (или надводного) базирования, предназначенного для обеспечения
автоматических операций взлетов/посадок БЛА и восстановления их
энергетических возможностей. Однако далее будем вести речь именно об
электрической подзарядке, т.е. обслуживании только электрических БЛА.
При этом, как было рассмотрено в гл.1, АЭВС может быть одного из трех
типов:
1)АОС - обменные станции, предназначенные для замены
неперезаряжаемых батарей или топливных картриджей (для топливных
элементов); в чистом виде такие станции пока встречаются крайне редко,
поэтому в дальнейшем не рассматриваются;
2) АОЗС - обменно-зарядные станции, на которых выполняется быстрая
замена аккумуляторных батарей на свежезаряженные с последующей зарядкой
снятых батарей;
3) АЗС - зарядные станции, предназначенные для зарядки бортовых
аккумуляторов без их извлечения.
Два последних типа АЗС рассматриваются в следующей главе.
Источники информации по главе 2
1. Современные химические источники тока. Гальванические элементы,
аккумуляторы, конденсаторы: учебно-справочное пособие / сост.
Ю. Б. Каменев, И. Г. Чезлов. СПб.: СПбГУКиТ, 2009. 90 с.
2. Learning the basics about batteries [Online] // site sponsored by Cadex
Electronics Inc. URL: http://batteryuniversity.com/leam/article/hthium_based_batteries
(дата обращения: 30.09.2017).
3. Lithium Batteries: Science and Technology / G.-A. Nazri, G. Pistoia (Eds),
Springer; 2003 edition (Janury 14, 2009). 708 p. ISBN-13: 978-0387926742.
4. Соболев В., Соколов M., Родин М. Литий-тионилхлоридные
источники питания // Компоненты и технологии. 2010. № 7. С. 124-126.
URL: http://kit-e.ru/articles/powersource/2010_07_124.php (дата обращения: 30.09.2017).
52
5. Lithium Thionyl Chloride Batteries (Li-SOCb) [Online] // Сайт компании
Eagle Picher Technologies, 2013. URL: http://www.eaglepicher.com/teclinologies/
battery-power/lithium-thionyl-chloride (дата обращения: 30.09.2017).
6. Winchester C., Squires T., Development and evaluation of large
lithium/thionyl chloride batteries for unmanned undersea vehicle (UUV) power //
Proc, of 17th Annual Battery Conference on Applications and Advances. Long
Beach, CA, USA, 18 Jan. 2002. P. 61. doi: 10.1109/BCAA.2002.986369.
7. A Description of the Rover Sojourner [Online] / NASA, 1997.
URL: http://mars.jpl.nasa.gov/MPF/rover/descrip.html (дата обращения: 30.09.2017).
8. Equinox: LiPo cell balancer [Online] // Сайт компании Electrifly.
URL: http://www.electrifly.com/chargers/gpimn3160.hhnl (дата обращения: 30.09.2017).
9. Boeing усовершенствует литиево-ионные батареи на Dreamliner
[Online] //РИА «Новости», опубл. 28.02.2013. URL: http://www.aviaport.ni/digest/
2013/02/28/250156.hhnl (дата обращения: 30.09.2017).
10. Dow Kokam XALT™ Cells [Online] // Сайт компании Dow Kokam.
URL: http://www.dowkokam.com/cell-products-technology/cells/dow-kokam-xalt-cells
(дата обращения: 30.09.2017).
11. Bond J. R. A safe solution to concerns with lithium-ion batteries //
AirRescue. 2013. Vol. 3. № 1. P. 50-52. URL: http://www.eaglepicher.com/
images/Li-Ion/Bond_EaglePicher.pdf (дата обращения: 30.09.2017).
12. Tudron F. B., Abridge J. R., Puglisi V. J. Lithium-Sulfur Rechargeable
Batteries: Characteristics, State of Development, and Applicability to Powering
Portable Electronics [Online] / Sion Power, 2004. URL: http://www.sionpower.
com/pdf/articles/PowerSources2004.pdf (дата обращения: 30.09.2017).
13. Liu Z. C., Fu W. J., Liang C. D. Lithium Sulfur Batteries. In «Handbook of
Battery Materials» Ed. by C. Daniel, J. O. Besenhard. John Wiley & Sons, 2011, 2nd
Ed., 2nd Volume Set.
53
14. Record breaking Zephyr offers 24/7 cost effective military surveillance and
communications [Online] / QinetiQ, 2013. URL: http://www.qinetiq.com/news/
pressreleases/Pages/world-record-UAV.aspx (дата обращения: 30.09.2017).
15. Ауслендер Д. Разработана литий-серная батарея, превосходящая
литий-ионную по многим параметрам [Online] // Портал HiTech News -
Новости высоких технологий, опубл. 06.06.2013. URL: http://hi-
news.ru/technology/razrabotana-litij-sernayabatareya-prevosxodyashhaya-litij-
ionnuyu-pomnogim-parametram.html (дата обращения: 30.09.2017).
16. Lin Z., Liu Z. С., Fu W. J., Dudney N. J., Liang C. D. Lithium
Polysulfidophosphates: A Family of Lithium-Conducting Sulfur-Rich Compounds for
Lithium-Sulfur Batteries // Angewandte Chemie International Edition. 2013. Vol. 52.
№ 29. P. 7460-7463. URL: http://onlinelibrary.wiley.com/doi/10.1002/anie.
201300680/pdf (дата обращения: 30.09.2017).
17. Zhang J. G., Bruce P. G., Zhang X. G. Metal-Air Batteries. In «Handbook
of Battery Materials». Ed. by C. Daniel, J. O. Besenhard. John Wiley & Sons, 2011,
2nd Ed., 2nd Volume Set.
18. Beattie S. D., Manolescu D. M., Blair S. L. High capacity lithium-air
cathodes // Journal of The Electrochemical Society. 2009. Vol. 156. № 1. P. A44-
A47.
19. The Trouble with Lithium 2 [Online] / Meridian International Research,
2008. URL: http://www.meridian-int-res.com/Projects/Lithium_Microscope.pdf
(дата обращения: 30.09.2017).
20. Zhu H., Jia Z., Chen Y., Weadock N., Wan J., Vaaland O., Han X., Li T.,
Hu L. Tin Anode for Sodium-Ion Batteries Using Natural Wood Fiber as a
Mechanical Buffer and Electrolyte Reservoir // Nano Lett. 2013. 13 (7). P. 3093-
3100.
21. Long Endurance Battery Alternatives for Unmanned UAS [Online] /
Horizon Energy Systems, 2010. URL: http://www.hes.sg/files/AEROPAK.pdf (дата
обращения: 30.09.2017).
54
22. Conway В. E. Electrochemical Supercapacitors: Scientific Fundamentals
and Technological Applications. Springer, 1999.
23. Кузнецов В., Панькина О., Мачковская Н., Шувалов Е., Востриков И.
Конденсаторы с двойным электрическим слоем (ионисторы): разработка и
производство // Компоненты и технологии. 2005. № 6. URL: http://kit-
e.ru/articles/condenser/2005_6_12.php (дата обращения: 30.09.2017).
24. Vivekchand S. R. C., Rout C. S., Subrahmanyam К. S., Govindaraj A.,
Rao C. N. R. Graphene-based electrochemical supercapacitors // J. Chem. Sci., Indian
Academy of Sciences. 2008. Vol. 120. Issue 1. P. 9-13.
25. Raskin J. Foiled by the Coanda Effect // Quantum. 1994. № 5. P. 5-11.
26. Oner К. T., Cetinsoy E., Unel M., Aksit M. F., Kandemir I., Gulez K.
Dynamic Model and Control of a New Quadrotor Unmanned Aerial Vehicle with
Tilt-Wing Mechanism // International Journal of Engineering and Applied Sciences.
2009. Vol. 5.№2.P. 133-138.
27. P-791 [Online] / Lockheed Martin, 2013. URL: http://www.lockheedmartin.
com/us/products/p-791 .html (дата обращения: 30.09.2017).
28. Solar UAV [Online] / Sanghyuk Park, 2011. URL: http://mercury.kau.ac.
kr/park/solar_uav.htm (дата обращения: 30.09.2017).
29. Abdilla A., Richards A., Burrow S. Endurance Optimisation of Battery-
Powered Rotorcraft. In: Dixon C., Tuyls K. (eds), Towards Autonomous Robotic
Systems // TAROS 2015. Lecture Notes in Computer Science. Vol. 9287. Springer,
2015.
30. Aurora Wins Design and Fabrication Contract for the Boeing SolarEagle
[Online] //UAS Vision, January 11, 2012. URL: http://www.uasvision.com/2012/01/
11/aurora-wins-design-and-fabrication-contractfor-the-boeing-solareagle (дата
обращения: 30.09.2017).
31. Gonzalez L. F., Alsabban W. The Green Falcon - Solar Powered
Unmanned Aerial Vehicle [Online], 2009. URL: http://eprints.qut.edu.au/34102 (дата
обращения: 30.09.2017).
55
32. Bhatt M. R. Solar power unmanned aerial vehicle: high altitude long
endurance applications [Online] / Master's project, San Jose State Univ., Dept, of
Mechanical and Aerospace Engineering, May 2012. URL: http://www.engr.sjsu.edu/
nikos/MSAE/pdf/Bhatt.S12.pdf (дата обращения: 30.09.2017).
33. Meyer J., Plessis F., Clarke W. Design Considerations for Long Endurance
Unmanned Aerial Vehicles. In «Aerial Vehicles» / Ed. By Thanh Mung Lam. InTech,
2009. URL: http://www.intechopen.com/books/aerial_vehicles/design_considerations
_for_long_endurance_unmanned_aerial_vehicles (дата обращения: 30.09.2017).
34. Solar Powered UAVs [Online] / NASA Tech Briefs, March 01, 2013.
URL: http://www.techbriefs.com/component/content/article/15992 (дата обращения:
30.09.2017).
35. LaserMotive and Lockheed Martin Skunk Works Developing «Power
Beaming» In-Flight Laser-Recharging for UAS/UAV/Drone Aircraft [Online] /
Crane D., Defense Review. July 19, 2012. URL: http://www.defensereview.com/
lasermotive-andlockheed-martin-skunk-works-developing-powerbeaming-in-flight-
laser-recharging-for-uasuavdroneaircraft (дата обращения: 30.09.2017).
36. Laser Power for UAVs [Online] / Nugent T. J., Kare J. T. A White Paper of
LaserMotive, 2010. URL: http://lasennotive.com/wp-content/uploads/2010/04/
Wireless-Power-for-UAVs-March2010.pdf (дата обращения: 30.09.2017).
37. Фетисов В. С., КулбаевБ.Р. Содержание и развитие концепции
«Привязанный беспилотный летательный аппарат» // Альманах современной
науки и образования. Тамбов: Грамота, 2014. №3 (82). С. 170-173. ISSN
1993-5552.
38. The HoverMast from Sky Sapience [Online] / Sky Sapience, 2013.
URL: http://skysapience.com (дата обращения: 30.09.2017).
39. Nugent T. J. New Product: Laser Power over Fiber for Tethered VTOL
[Online], April 29, 2013. URL: http://lasermotive.com/2013/04/29/new-product-
laser-power-over-fiber-for-tethered-vtol (дата обращения: 30.09.2017).
56
ГЛАВА 3. АВТОМАТИЧЕСКИЕ
ОБМЕННО-ЗАРЯДНЫЕ СТАНЦИИ
3.1. Известные разработки
На сегодняшний день в робототехнике сформировались определенные
устоявшиеся подходы к построению АОЗС. Причем большинство из них
применимо не только к воздушным роботам, но и к мобильным роботам
вообще, т.к. основные функции наземных обменно-зарядных станций для всех
мобильных роботов одинаковы.
В работе [1] были показаны различные варианты построения АЭВС.
Проведено сравнение АЗС на основе открытых контактов и АОЗС.
Справедливо отмечено, что обменно-зарядные станции значительно дороже
других вариантов, но их применение может быть оправдано в том случае, если
важно сократить до минимума время нахождения БЛА на земле. Авторами
предложен оригинальный вариант реализации АОЗС (рис. 3.1).
Рис. 3.1. Вариант реализации обменно-зарядной станции
(Иллюстрация: Kemper et al. [1])
Обменно-зарядная платформа этой станции представляет собой
закольцованную конвейерную линию из зарядных ячеек. Одна ячейка, над
которой оборудовано посадочное приспособление, оставлена пустой, остальные
заполнены заряжающимися батареями. Зарядные ячейки могут перемещаться
57
по конвейеру. БЛА производит посадку (посадка должна быть довольно
точной) над пустой ячейкой, при этом его АКБ высвобождается из бортового
аккумуляторного отсека, находящегося в донной части аппарата, и фиксируется
в зарядной ячейке. Затем конвейерная лента движется (БЛА при этом
неподвижен) до тех пор, пока в аккумуляторный отсек БЛА не попадет АКБ,
имеющая достаточную степень зарядки. После этого АКБ отстыковывается от
зарядной ячейки и фиксируется в аккумуляторном отсеке БЛА. Затем БЛА
покидает платформу.
В работе [2] тех же авторов произведено сравнение АЗС и АОЗС по
временным параметрам. Приведены полезные соотношения, выведенные на
основе анализа сетей Петри, которые можно использовать для расчетов
количества БЛА, количества зарядных ячеек и затрат времени на операции для
АОЗС. Систематизированы и формализованы операции, выполняемые
автоматически на АОЗС, и приведены примеры устройств, которые их
реализуют. Некоторые из них будут показаны в следующем подразделе.
Группой исследователей из Массачусетского технологического института
(США) был разработан прототип обменно-зарядной станции [3], имеющей
8 зарядных ячеек, распределенных по двум вращающимся барабанам (рис. 3.2).
Главная особенность этой станции - способность производить т.н. «горячую»
замену батарей, т.е. такую, при которой в течение этой операции бортсеть БЛА
не обесточивается (в отличие от «холодной» замены, когда между моментами
извлечения разряженной и подсоединения свежей батареи бортсеть
обесточена). Это достигается за счет особой конструкции корпусов-кареток
батарей, каждая из которых имеет в своей верхней части два металлических
продольных рельсовых электрода, соединенных с контактами батареи (рис. 3.3).
На рис. 3.2 показана последовательность операций при замене батарей.
После посадки БЛА корпус-каретка, в которой размешена бортовая АКБ,
оказывается между двумя барабанами. В одном из них одна ячейка оставлена
пустой, во всех других ячейках содержатся заряжаемые батареи.
58
Рис. 3.2. Последовательность замены батареи на обменно-зарядной станции
с двумя барабанами (Иллюстрация: Toksoz et al. [3]):
а - БЛА приземляется на платформу; б - БЛА фиксируется с помощью захватов;
в - выбрана новая батарея, правый барабан вращается; г - ячейка с выбранной батареей
останавливается у бортового отсека АКБ; д — новая батарея выталкивается влево, смещая
старую в пустую ячейку; е - обмен закончен, захваты освобождают БЛА; ж - двигатели БЛА
запущены; з - БЛА покидает платформу, начинается зарядка извлеченной батареи
59
а б в
Рис. 3.3. Элементы крепления батареи (Иллюстрация: Toksoz et al. [3]):
а - корпус-каретка батареи; б - элемент подвеса батареи на борту БЛА и в зарядной ячейке;
в - расположение двух корпусов-кареток в момент замены батареи
Барабан с пустой ячейкой поворачивается так, что именно она
оказывается напротив бортовой АКБ. Другой барабан поворачивается на такой
угол, чтобы напротив бортовой АКБ оказалась ячейка с другой батареей из
числа полностью заряженных. Эта батарея заключена в такой же корпус-
каретку, как и бортовая. Затем специальный механизм выталкивает эту батарею
из ячейки барабана. Она, продвигаясь, входит своими рельсовыми электродами
в соответствующие направляющие донной части БЛА и выталкивает корпус-
каретку с разряженной бортовой БЛА в пустую ячейку другого барабана. Таким
образом, в течение времени, когда бортовая АКБ сдвигается в пустую ячейку,
новая АКБ уже оказывается подключенной к бортсети, обеспечивая тем самым
непрерывность бортового питания. На борту БЛА вновь установленная батарея
фиксируется, и он покидает станцию.
В работе [4] описана АОЗС для малых беспилотных вертолетов. Сама
обменно-зарядная платформа выполнена на основе магазина зарядных ячеек,
распределенных на горизонтальном вращающемся диске, с соответствующими
обслуживающими механизмами. Для фиксации батарей в батарейном отсеке
вертолета используются магнитные замки (на основе постоянных магнитов на
корпусе батареи и в батарейном отсеке). Описан алгоритм работы системы
управления станции, которая содержит в себе подсистему мониторинга
состояния АКБ всех вертолетов, находящихся вблизи станции. Это позволяет
вовремя формировать команды захода на посадку. Радиообмен с бортами
60
осуществляется посредством сети на основе ZigBee-контроллеров. Система
контролирует также процесс зарядки батарей, находящихся в зарядных
ячейках. Таким образом, система осуществляет функции диспетчеризации
полетов на основе известной информации о количестве используемых
вертолетов, количестве заряжаемых батарей, а также о различных временных
интервалах (времени зарядки АКБ, среднем времени обменной операции,
среднем времени посадки, прогнозируемом времени полета). На рис. 3.4
приведен пример расчета количества доступных заряженных батарей на
обменно-зарядной платформе для случая трех используемых вертолетов при
следующих осредненных временных параметрах: время полета - 6 мин, время
замены батареи - 2 мин, время зарядки - 15 мин. Предполагалось, что
начальный запуск вертолетов происходит с интервалом ~2 мин для исключения
ситуации, когда одновременно для всех трех вертолетов потребуется посадка.
Рис. 3.4. Количество доступных заряженных батарей на обменно-зарядной
платформе для случая трех используемых вертолетов
(Иллюстрация: Swieringa et al. [4])
61
Из графика видно, что если исходное количество батарей равно семи,
АОЗС сможет обеспечивать непрерывную работу вертолетов только в течение
32 мин.
В статье [5] приводится информация о разработке АОЗС для больших
мобильных роботов. Основу составляет вращающийся диск, по краю которого
расположено несколько ячеек с разными функциями: выгружная, зарядная и
транспортировочная ячейки. Над диском смонтировано портальное подъемно-
погрузочное устройство. Идентификация текущего состояния осуществляется с
помощью датчиков положения и конечных выключателей. Для вращения диска
используется шаговый двигатель. Программирование последовательности
операций реализуется с помощью таблицы состояний автомата Мили. Несмотря
на то что станция оперирует с довольно тяжелыми АКБ, время на замену
батареи требуется относительно небольшое - порядка 32 с.
Авторы работы [6] в своей АОЗС для обслуживания наземного колесного
робота (рис. 3.5) используют оригинальную конструкцию перемещаемого
корпуса батареи.
АОЗС
Рис. 3.5. Колесный робот перед АОЗС до начала обменной операции
(Иллюстрация: Juan Wu et al. [6])
62
Внутри этого корпуса имеется реечно-шестеренчатая передача, ось
шестерни которой связана с рукояткой, выведенной на переднюю панель
робота, а реечные элементы образуют боковые замки. Рукоятка может быть
зацеплена специальным захватом АОЗС, после чего может выполняться
фиксация-расфиксация замков (при ее повороте) или вытягивание корпуса из
батарейного отсека робота. Конструкция и принцип использования съемного
корпуса батареи понятны из рис. 3.6-3.8.
Рис. 3.6. Корпус батареи (Иллюстрация: Juan Wu et al. [6]):
a - конструкция; б - фото корпуса с батареей
Рис. 3.7. Колесный робот с зафиксированным в нем корпусом батареи
(Иллюстрация: Juan Wu et al. [6])
63
Рис. 3.8. Различные положения захвата относительно рукоятки
при фиксации-расфиксации корпуса
(Иллюстрация: Juan Wu et al. [6])
В самой обменно-зарядной станции находится подвижная каретка с двумя
одинаковыми обменно-зарядными ячейками (рис. 3.9). На станции может
одновременно заряжаться только одна батарея, но для наземных роботов, у
которых время зарядки батареи обычно сравнимо со временем рабочего цикла,
такое решение часто является приемлемым. Как только робот вплотную
подходит к АОЗС, он касается датчика усилия, который размещен в передней
части АОЗС в одном корпусе с электромагнитом. По сигналу датчика усилия
электромагнит срабатывает и притягивает робота к АОЗС. Затем начинает
работать сервопривод с поворотным захватом: корпус батареи при этом
освобождается от фиксирующих его замков и затем с помощью линейного
привода 1 он втягивается в пустую зарядную ячейку (другая зарядная ячейка
содержит заряженную батарею в таком же механизированном корпусе).
Сервопривод поворачивает захват, фиксируя корпус батареи в зарядной
64
ячейке, а следующим поворотом освобождает его от этого захвата. Затем
начинает работать линейный привод 2, перемещающий каретку с зарядными
ячейками влево или вправо (в зависимости от исходного положения каретки).
В средней части АОЗС оказывается корпус с заряженной батареей. Он с
помощью линейного привода 1 вталкивается в пустой батарейный отсек
робота. Сервопривод поворачивает захват, фиксируя корпус батареи, а
следующим поворотом освобождает рукоятку корпуса от захвата. После этого
электромагнит отключается, и робот отъезжает от станции. Батарея,
оставленная в одной из зарядных ячеек, начинает заряжаться. Общее время
обменной операции составляет порядка 85 с. На это время робот не остается
обесточенным, т.к. предусмотрено подключение резервной батареи,
поддерживающей работу контроллера робота и информационных
радиоканалов. Синхронизация работы робота и АОЗС во время обменно-
зарядных операций осуществляется с помощью ZigBee-микроконтроллеров.
а
Рис. 3.9. Зарядная станция (Иллюстрация: Juan Wu et al. [6]):
a - конструкция; б - фото АОЗС
65
В работе [7] описан проект, в котором обменная операция выполняется с
помощью дистанционно управляемого манипулятора, а зарядка
осуществляется посредством беспроводной передачи энергии
высокочастотного электромагнитного поля с зарядной станции на батарею.
Батарейный корпус и станция имеют одинаковые резонансные колебательные
контуры, оси плоских индуктивных катушек которых в идеальном случае
должны совпадать. Но небольшие смещения контуров как в продольном, так и
в поперечном направлениях существенно не влияют на канал передачи энергии.
В этом состоит основное преимущество такого способа зарядки по сравнению с
контактными способами. Но в корпусе батареи при этом должна содержаться
электронная схема выпрямителя и драйвера зарядки.
Авторы разработки [8] предложили компактную конструкцию АОЗС для
обслуживания группы мобильных наземных роботов. Особенностью
конструкции является вращающийся в вертикальной плоскости барабан с
зарядными ячейками (рис. 3.10). Батарейный отсек робота помещается в его
нижней части (рис. 3.11). Пластиковые корпуса батарей имеют вырезы под
разъемы и специальные выступы для их захвата (рис. 3.12). Работа механизма
обмена проиллюстрирована на рис. 3.13. Когда робот вплотную подходит к
станции и его положение фиксируется, начинает работать привод выдвижного
поворотного штока, перемещая его сквозь пустую нижнюю ячейку барабана и
вводя в зацепление с батареей робота. После этого шток втягивается обратно и
вставляет батарею в зарядную ячейку. Затем шток отцепляется от батареи и
выходит из барабана. Барабан поворачивается, ставя в крайнее нижнее
положение ячейку с заряженной батареей. Далее шток снова входит в барабан,
проталкивая свежезаряженную батарею из ячейки барабана в батарейный отсек
робота. Для обеспечения бесперебойного питания робота во время операции
замены батареи используется суперконденсатор, емкости которого вполне
хватает для питания электронных узлов робота на время собственно обмена
батарей (=10 с). Общее же время замены батарей составляет порядка 40 с
(от подхода робота к станции до его отхода).
66
Рис. 3.10. Мобильный робот на зарядной станции
(Иллюстрация: Vaussard et al. [8])
Рис. 3.11. Расположение батарейного отсека на мобильном роботе
(Иллюстрация: Vaussard et al. [8])
67
Рис. 3.12. Батарея и ее пластиковый корпус
(Иллюстрация: Vaussard et al. [8])
Рис. 3.13. Фазы обменной операции (Иллюстрация: Vaussard et al. [8]):
а - вытяжной шток проходит через пустую зарядную ячейку; б - шток поворачивается
и захватывает разряженную батарею А; в — шток втягивается, фиксирует батарею А
в зарядной ячейке и отсоединяется; г - барабан поворачивается и позиционирует напротив
робота заряженную батарею В; д - шток выталкивает батарею В в батарейный отсек робота
Авторами статьи [8] описано взаимодействие роботов с диспетчерским
компьютером, которое осуществляется посредством Wi-Fi-сети. Как только у
какого-нибудь одного из группы активных роботов напряжение батареи
уменьшается до критического уровня, он запрашивает разрешение у
диспетчерского компьютера на подход к зарядной станции. Если в это время
зарядная станция не занята, роботу дается разрешение на подход к станции,
68
если же станция занята, то робот включается в «лист ожидания» и занимает
очередь на подход к станции.
3.2. Основные узлы обменно-зарядной платформы
Рассмотренные технические решения (а также многие другие, которые
здесь не представлены) позволяют сделать некоторые обобщения, касающиеся
структуры АОЗС. Основу АОЗС составляет обменно-зарядная платформа, на
которой выполняются основные операции по обмену батарей и их зарядке.
АОЗС, как разновидность АСС, состоит из нескольких подсистем (гл.1,
рис. 1.1). В нее, кроме обменно-зарядной платформы, входят также обычные
для таких станций подсистемы: подсистема ближней навигации и посадки,
подсистема диспетчеризации, подсистема связи, подсистема электропитания.
Обменно-зарядная платформа состоит из следующих основных узлов:
1) устройство позиционирования и фиксации БЛА;
2) устройство съема/возврата аккумуляторной батареи (АКБ); это
устройство извлекает АКБ с БЛА, а после зарядки выполняет обратное
действие - возвращает АКБ в отсек БЛА;
3) устройство доставки АКБ в зарядную ячейку и обратно; вначале это
устройство направляет АКБ в пустую зарядную ячейку, а после зарядки
выполняет обратную функцию - находит нужную ячейку и извлекает оттуда
АКБ;
4) магазин-накопитель батарей с зарядными устройствами.
Устройства 2 и 3 часто бывают конструктивно объединены в единый
функциональный узел. Рассмотрим подробнее перечисленные устройства.
3. 2.1. Устройство позиционирования и фиксации БЛА
После приземления БЛА на обменно-зарядную платформу, которое
производится с той или иной степенью точности, аппарат должен быть
69
позиционирован и закреплен так, чтобы можно было корректно выполнить
последующие операции по замене батареи.
По принципу действия устройства позиционирования можно условно
подразделить на пассивные и активные. Пассивные устройства основаны на
действии внешних сил (например, силы тяжести) и направляющих элементов
конструкции платформы и самого аппарата, которые естественным образом
позиционируют БЛА так, чтобы бортовая батарея оказалась в зоне выполнения
обмена.
Пример пассивного позиционирующего устройства приведен на
рис. 3.14, а. БЛА после посадки, которая может оказаться не самой точной,
«доводится» в зону обмена за счет наклонной гладкой поверхности - БЛА
под действием силы тяжести скатывается в центр платформы.
БЛА после неточной посадки
вид спереди
вид сверху
Самоскатывание БЛА
к центру платформы
БЛА после посадки
БЛА смещен к центру
Центрирование БЛА
с помощью жестких
доводчиков
БЛА смещен к центру
Центрирование БЛА
с помощью системы
блоков и тросов
Рис. 3.14. Варианты реализации устройства позиционирования БЛА
(Иллюстрация: Suzuki et al. [2]):
а - пассивное устройство позиционирования; б - активное позиционирование с помощью
синхронных жестких доводчиков; в - активное позиционирование с помощью системы
блоков и тросов
70
Активные устройства позиционирования содержат в своем составе
электрифицированный привод и вспомогательные механические элементы-
доводчики. Примеры приведены на рис. 3.14, б, в. В варианте по рис. 3.14, б
доводчики в виде четырех жестких ограничительных стержней совершают
синхронные угловые перемещения, сдвигая БЛА в центр платформы.
В варианте по рис. 3.14, в происходит примерно то же самое, но за счет
системы блоков и тросов, приводимых в действие двумя электромоторами с
бабинами.
После позиционирования в зоне обмена (обычно это центр платформы)
аппарат может быть дополнительно зафиксирован. Это может быть сделано с
помощью постоянных магнитов, электромагнитов (см. рис. 3.9) или
механических защелок (см. рис. 3.10).
3. 2.2. Устройство съема/возврата АКБ
Для быстрого съема АКБ с БЛА необходимо, чтобы сам корпус батареи
имел специальную конструкцию: в ней должны быть предусмотрены жесткий
ударопрочный корпус, специальные фиксаторы, удерживающие АКБ в
бортовом отсеке во время полета, а также легко подсоединяемые и
отсоединяемые электрические соединители, которые в общем случае должны
иметь не 2 контакта, а больше - в зависимости от числа последовательно
соединенных аккумуляторных ячеек, это необходимо для контроля напряжения
на каждой из них. Кроме этого, на платформе должен быть и сам механизм
съема/возврата, извлекающий и возвращающий батарею.
Рассмотрим сначала устройства фиксации АКБ на борту БЛА.
Пример устройства съема/возврата, в котором используется корпус АКБ
со встроенными механическими фиксаторами на основе выдвижных
держателей, уже был приведен выше (см. рис. 3.6-3.8). Для легких АКБ вполне
эффективными могут оказаться предложенные авторами работы [2] фиксаторы
на основе подпружиненных защелок или постоянных магнитов (рис. 3.15).
71
На рис. 3.15, а показано устройство с подпружиненными защелками.
Для вставки батареи в отсек БЛА привод устройства съема-возврата
прикладывает некоторую силу F, под действием которой пружины-защелки
раздвигаются, батарея входит в отсек и устанавливается электрическое
соединение между соответствующими контактами, после чего пружины-
защелки сдвигаются, поддавливая батарею и обеспечивая тем самым
надежность контактов.
Механический
пружинный фиксатор
Магнитный фиксатор
БЛА
Постоянные магниты -
контакты борта
I I
Магнитные силы
t t
Ферромагнитные контакты батареи
Рис. 3.15. Механическое и магнитное фиксирующие устройства
(Иллюстрация: Suzuki et al. [2]):
а - механический пружинный фиксатор; б - магнитный фиксатор
Рис. 3.16. Простая механическая защелка
(Иллюстрация: Suzuki et al. [2])
72
На рис. 3.16 приведен другой пример простой механической защелки.
Здесь также требуется поддавливающее усилие F. Для извлечения батареи это
усилие должно быть направлено в обратную сторону. Особенность этой
пружинной защелки в том, что плоские удерживающие пружины должны
соответствовать форме корпуса батареи. Для облегчения вставки и извлечения
батареи ее корпус рекомендуется выполнять с крупными фасками.
На рис. 3.15, б показан вариант магнитного фиксатора. Постоянные
магниты, расположенные на борту БЛА, выполняют одновременно роль
фиксирующих устройств и контактных терминалов. Для обеспечения качества
гальванической связи снаружи магниты должны иметь металлическое
антикоррозионное покрытие. При этом качество контактирования
обеспечивается автоматически за счет силы магнитного притяжения. Ответные
контактные терминалы на батарее могут быть также постоянными магнитами.
В этом случае магнитные полюса для плюсового и минусового контактов
можно сориентировать таким образом, чтобы разноименные контакты борта и
батареи отталкивались друг от друга, а одноименные - притягивались. Это
может обезопасить операцию от неправильного соединения контактов. Однако
расположение магнитов на корпусе батареи может вызвать другую проблему -
притягивание к полюсам случайных металлических предметов, что может
вызвать короткое замыкание. Поэтому на корпусе батареи располагают не
магниты, а просто ферромагнитные элементы с антикоррозионным покрытием.
На рис. 3.17 показан пример расположения терминалов на корпусе АКБ и
на ответной бортовой части. Сам корпус АКБ сделан из пластика, за
исключением выступающих ферромагнитных контактных терминалов.
В ответной бортовой части, наоборот, контактные терминалы слегка утоплены
в пластмассовое основание. Такое решение в совокупности с нерегулярным
расположением терминалов исключает соединение контактов при
неправильном взаимном расположении АКБ и бортовых терминалов. На
корпусе батареи терминалы «+» и «-» являются крайними полюсами батареи,
73
а терминалы 1 и 2 связаны с межсекционными контактами батареи,
(рассматривается вариант с 3-секционной батареей). Все 4 терминала батареи
используются во время ее зарядки. Несколько другие функции у бортовых
терминалов, выполненных на основе магнитов: «+» и «-» связаны с бортсетью,
а 1 и 2 электрически не связаны ни с чем, они просто выполняют роль
фиксаторов корпуса АКБ.
Рис. 3.17. Расположение терминалов на корпусе батареи
(Иллюстрация: Suzuki et al. [2])
Для съема корпуса АКБ с БЛА могут применяться различные
механические устройства в виде захватов с приводами (примеры см. на рис. 3.8,
3.12). Однако во многих случаях может быть удобнее электромагнитный захват.
Так, для корпуса АКБ, показанного на рис. 3.17, авторы [2] применили именно
74
электромагнитный захват. Для его функционирования в донной части корпуса
батареи была встроена ферромагнитная пластина. Последовательность работы
устройства понятна из рис. 3.18.
Рис. 3.18. Действие электромагнитного захвата
(Иллюстрация: Suzuki et al. [2]):
а - электромагнит на подъемном столике подводится к корпусу батареи; б - электромагнит
касается ферромагнитного дна корпуса и включается; в - опускающийся электромагнит
вытягивает корпус батареи
3. 2.3. Устройство доставки АКБ в зарядную ячейку и обратно
После извлечения АКБ из бортового отсека БЛА с помощью
специального привода (как правило, линейного) батарея доставляется в одну из
свободных зарядных ячеек. В этом процессе возможны самые различные
комбинации движений как самого привода с захваченной батареей, так и
магазина с зарядными ячейками, а также вышеописанного устройства
съема/возврата батареи. Чаще применяют барабанные магазины-накопители
батарей, которые могут быть расположены как вертикально (примеры см. на
рис. 3.2, 3.10), так и горизонтально. Пример горизонтального магазина-
накопителя с сопряженным с ним линейным приводом (актуатором) показан на
рис. 3.19. Линейный привод реализован на основе шагового двигателя и
шестеренчато-реечной передачи. На конце рейки расположен захватный
электромагнит. Фазы обменных операций для этого устройства
проиллюстрированы на рис. 3.20.
75
Рис. 3.19. Линейный привод с горизонтальным магазином-накопителем
барабанного типа (Иллюстрация: Suzuki et al. [2])
БЛА с разряженной батареей
Электромагнит
Вертикальный лифт
для батареи
Буферная зона
Привод вращения барабана
Роликовые суппорты
Барабанный магазин
Реечно-шестеренчатый
актуатор
Рис. 3.20. Функционирование устройства доставки АКБ в зарядную ячейку
(Иллюстрация: Suzuki et al. [2]):
а - элементы, участвующие в обменной операции; б - актуатор сдвигает разряженную
батарею в буферную зону, а заряженную в обменную зону; в - из обменной зоны заряженная
батарея на лифте подается в БЛА, затем актуатор втягивает разряженную батарею в ячейку
76
Кроме барабанных магазинов-накопителей известны магазины матричной
структуры (рис. 3.21). Для того, чтобы помещать батареи в ячейки такой
структуры, необходим кран-балка с захватным актуатором, способным
совершать перемещения как в горизонтальной плоскости по двум координатам,
так и по вертикали.
Рис. 3.21. Устройство доставки АКБ в матричный магазин
(Иллюстрация: Suzuki et al. [2])
3. 2.4. Магазин-накопитель батарей с зарядными устройствами
Особенности конструкций магазинов-накопителей батарей уже отмечены
выше: наиболее популярны барабанные и матричные магазины. Можно
предложить и другие варианты: например, линейный однорядный магазин,
впрочем, его можно рассматривать как разновидность того же матричного.
Обязательным элементом в конструкции каждой зарядной ячейки магазина
является разъемный соединитель, являющийся ответной частью для
соединителя на корпусе батареи. Число контактов соединителя должно быть на
один больше, чем количество секций батареи, так как кроме крайних контактов,
через которые протекает зарядный ток (эти контакты обычно имеют
77
увеличенную толщину), для контроля напряжений на секциях используются и
все другие точки межсекционных соединений. Управляет процессом зарядки
обычно специально выделенный микроконтроллер, в функции которого кроме
обеспечения изменения зарядного тока по специальной программе входит еще
балансировка напряжений на секциях, т е. поддержание примерно одинаковых
напряжений на всех секциях АКБ [9].
3.3. Затраты времени на обменные операции
Хотя для разных АОЗС структура и последовательность элементарных
операций при замене батарей может различаться, в целом алгоритм процедуры
замены батареи может быть представлен следующей укрупненной блок-схемой
(рис. 3.22).
Как видим, некоторые из элементарных операций могут выполняться
параллельно, и это может дать некоторую экономию по времени.
В работе [2] приводится пример типичных затрат времени по отдельным
операциям (табл. 3.1).
Таблица 3.1
Затраты времени на отдельные операции при замене батареи
Операция Время, с Примечания
Центрирование БЛА на платформе 15 для наихудшего случая
Придание БЛА правильной ориентации 13 для наихудшего случая
Фиксирование БЛА 1x2 считается дважды
Доставка батареи из отсека БЛА в зону обмена и обратно 6,5x2 считается дважды
Обмен с магазином батарей: доставка заряженной АКБ в зону обмена, а разряженной - в зарядную ячейку 4,5
ИТОГО: 47,5
78
В других источниках приводятся похожие результаты. В большинстве
случаев вся процедура замены батареи не превышает 1 мин.
Рис. 3.22. Укрупненная блок-схема алгоритма процедуры замены батареи
79
3.4. Сопоставительная оценка потребного количества ресурсов
для автоматических зарядных и обменно-зарядных станций
3.4.1. Общие замечания
Под планируемыми (потребными) ресурсами для АЗС и АОЗС будем
понимать сами БЛА, посадочные платформы и батареи (которые могут
находиться как в БЛА, так и в зарядных ячейках на АОЗС).
Приводимые далее расчетные формулы впервые были опубликованы в
работе [1]. Поскольку это довольно известная работа и часто цитируется, все
обозначения здесь намеренно сохранены для сохранения унификации с
авторским вариантом. Эти формулы имеют простой физический смысл и не
нуждаются в строгом доказательстве. Оценки потребных ресурсов даются для
их нижних границ, т е. для их минимального количества, рассчитанного в
предположении, что в системе отсутствуют сбои и связанные с ними повторы
попыток выполнения операций, нет необходимости в контрольных операциях
и т.д. Формулы справедливы при соблюдении допущений о том, что все БЛА,
платформы, батареи и зарядные устройства одинаковы и их параметры в
процессе работы не изменяются.
И для АЗС, и для АОЗС оценка ведется исходя из целевого среднего
количества БЛА, находящихся в воздухе в любой текущий момент времени.
Этот задаваемый параметр системы обозначен как С$у$ и может выражаться
не обязательно целым числом. Назван этот параметр «целевым покрытием» и
отражает потребности пользователя БАС в определенном среднем количестве
БЛА, которое должно быть задействовано одновременно в зоне действия БАС
для непосредственного выполнения задачи (мониторинга, транспорта,
ретрансляции сигналов и т.д.).
Исходными параметрами системы являются:
TF - время полета БЛА;
Тс - время зарядки батареи (включая время на вспомогательные
операции, такие как стыковка/расстыковка с терминалом);
80
TR - время, необходимое для замены батареи (только для АОЗС);
7} - время простоя (ожидания) - то время, которое БЛА проводит на
земле вне других перечисленных временных циклов.
Другие обозначения, используемые в формулах:
Силу ~ коэффициент полезного использования БЛА, или относительное
время полета в полном цикле его работы;
Сsys1 - максимально достижимое количество БЛА, находящихся в
воздухе в любой текущий момент времени для имеющегося в системе
количества аппаратов;
Nuav~ количество БЛА в системе;
N^av ~ требуемое количество БЛА в системе для обеспечения целевого
покрытия SYS ;
Nbat ~ требуемое количество батарей;
N^gr ~ требуемое количество зарядных ячеек;
Np - требуемое количество платформ.
3.4.2. Оценка потребных ресурсов для автоматических
зарядных станций
Эту оценку мы делаем здесь только для того, чтобы сравнить ее затем с
такой же оценкой для АОЗС.
На АЗС, в отличие от АОЗС, не происходит извлечения АКБ из бортового
отсека БЛА, поэтому во время зарядки БЛА находится на зарядной станции.
Коэффициент полезного использования БЛА при этом будет равен:
CUAv= TF/(TF+Tc). (3.1)
Максимально достижимое количество БЛА, находящихся в воздухе в
любой текущий момент времени для имеющегося в системе количества
аппаратов Nuav :
^sys1 = Сuav '^uav (3-2)
81
Тогда требуемое количество БЛА для обеспечения желаемого покрытия
rTGT .
'-SYS •
Nuav — 1<-sys /cuay], (3-3)
где квадратные скобки означают операцию округления до ближайшего
большего целого. Наличие этой операции приводит к тому, что если
задействовано NFAV БЛА, то Cgy^1 > Cgyg > т е- нет необходимости полностью
задействовать каждый БЛА, и в рабочий цикл БЛА можно включить интервал
простоя,чтобы понизить ('syg1 до .
Для каждого интервала TF+Tc время простоя можно определить так:
= ( TF+Tc ) • (NFAV- 1). (3.4)
Считаем, что на время паузы 7} каждый БЛА смещается с платформы и
не мешает другим. Кроме того, считаем, что зарядка и расход энергии АКБ
полные. Тогда полный временной цикл работы БЛА составит:
Т5=ТР+Тс+Тг, (3.5)
а относительное время зарядки:
TcITs = TcKJF+Tc + T,y (3.6)
Требуемое количество платформ:
A't>[^,-(7'c/7's)]. (3.7)
Считаем, что зарядное устройство используется все время, пока БЛА
находится на платформе. Тогда NFGR =
Так как каждая батарея все время находится на борту БЛА, то требуемое
количество батарей NFAT = NFAV.
Сделаем теперь расчеты для двух конкретных примеров.
Пример 1. Желаемое покрытие Cgyg = 3.
Время полета TF = 20 мин, время зарядки Тс = 50 мин.
Рассчитаем потребные ресурсы по формулам (3.1)-(3.7).
Cuav= 20/70 = 2/7.
82
С = С>[3/(2/7)] = 110,5] = 11.
Сд+ = (2/7) 11 ~ 3,14. Заметим, что это несколько больше, чем <++ = 3.
Вводим время простоя 7} = (20+50 )-(11-(2/7)/3 - 1) ~ 3,33 мин.
Ncgr= Мр > [11-(50/(20+50+3,33))] = 8.
Таким образом, требуется 11 БЛА и 8 зарядных платформ.
Оценим теперь ориентировочно стоимость такой системы. Пусть цена
БЛА составляет 40 условных единиц (у.е.), а цена зарядной платформы 5 у.е.
Следовательно стоимость всей системы составит 11-40 + 8-5 = 480 у.е.
Пример 2. Желаемое покрытие = 1.
Остальные параметры те же: время полета TF = 20 мин, время зарядки
Тс = 50 мин.
Аналогично рассчитав потребные ресурсы по формулам (3.1)-(3.7),
получим:
Cuav= 20/70 = 2/7.
Ст- = <(>[1/(2/7)] = [3,5]=4.
/(,+ = (2/7) 4 ~ 1,14. Заметим, что это несколько больше, чем = 1.
Вводим время простоя 7} = (20+50 ) (4 (2/7)/1 - 1) = 10 мин.
Ncgr= np > [4 (50/(20+50+10))] = 3.
Таким образом, требуется 4 БЛА и 3 зарядные платформы.
Ориентировочная стоимость системы при тех же ценах составит
4-40 + 3-5 = 175 у.е.
3.4.3. Оценка потребных ресурсов для автоматических
обменно-зарядных станций
Для АОЗС коэффициент полезного использования БЛА, в отличие
от (3.1), будет считаться по-иному:
CUAv=TfI(Tf+Tr\ (3.8)
где TR - время, необходимое для замены батареи.
83
После вычисления Cuav оценка требуемого количества БЛА NFAV может
быть произведена по формуле (3.3).
Для БЛА полный рабочий цикл, в отличие от (3.5), составит по времени:
TS=TF+TR+T1. (3.9)
Время простоя определится как:
T, = (TF+TR cuaf/c^' - 1). (3.10)
Требуемое количество платформ Np можно будет определить по
формуле:
w* >[лА (з.п)
Заметим, что в данном случае посадочная платформа содержит не одно
зарядное устройство, а всю необходимую структуру для замены АКБ и
зарядные устройства для нескольких батарей.
Рассмотрим теперь рабочий цикл батареи. Считаем, что на время замены
батареи отключены от всего - они не получают и не передают энергию. Для
каждой батареи минимальное время полного цикла (от загрузки в БЛА до
загрузки в другой БЛА) составит:
Tb = Tc+2Tr+Tj+Tf. (3.12)
На платформе БЛА пробудет как минимум:
Tp = Tc+2Tr. (3.13)
Считаем, что каждый БЛА проводит в воздухе полное расчетное время
TF. За период Ts каждый БЛА вызывается в полет только 1 раз. Значит,
количество батарей, которые должны быть полностью заряжены в каждом
цикле, равно NFAF. Для обеспечения 1 батареи в цикл TR требуется по
меньшей мере TPITs = (Tc+2TR )/Ts батарей. Тогда минимальное количество
батарей, требующееся для обеспечения целевого покрытия C^ys > будет равно:
NBAt- NFav + \N^(Tc+2TA!Ts\. (3.14)
84
Для зарядки этих батарей надо NGGR зарядных устройств (ячеек). Так как
зарядные устройства не требуются на время обменных операций, то
минимальное требуемое количество зарядных устройств должно быть равно:
^CGR- [NSai.-(Tc/Ts)1 (3.15)
Рассмотрим теперь примеры, аналогичные тем, что были рассмотрены
для АЗС.
Пример 1. Желаемое целевое покрытие = 3.
Время полета TF = 20 мин, время зарядки Тс = 50 мин, время на замену
батарей TR = 20 мин.
Рассчитаем потребные ресурсы по формулам (3.8)-(3.15).
CUAV= 20/21.
>[3/(20/21)] = [3,15] = 4.
= (20/21) 4 ~ 3,81. Заметим, что это больше, чем = 3
Вводим время простоя Tj = (20+1) (4• (20/21) /3 - 1) ~ 5,67 мин.
NR > [4 (1 /(20+1+5,67))] ~ [0,15] = 1.
П$АТ > 4 + [4 (50+2-1)7(20+1+5,67)] = 4 + [7,80] = 12.
NGGR > [4-50/(20+1+5,67)] = [7,50] = 8.
Таким образом, требуется 4 БЛА, 1 платформа, 12 батарей (из них 8
находятся в зарядных ячейках, а 4 - в бортовых отсеках БЛА).
Оценим теперь ориентировочно стоимость такой системы. Пусть цена
БЛА, как и в прошлых примерах, составляет 40 условных единиц (у.е.), а цена
обменно-зарядной платформы с 8 зарядными ячейками 180 у.е. Следовательно
стоимость всей системы составит 4-40 + 1 • 180 = 340 у.е.
Пример 2. Желаемое покрытие 1.
Остальные параметры те же: время полета TF = 20 мин, время зарядки
Тс = 50 мин, время на замену батарей TR = 1 мин.
Аналогично рассчитав потребные ресурсы по формулам (3.8)-(3.15),
получим:
85
CUAV= 20/21.
NyAV> [1/(20/21)] = [ 21/20] = 2.
Cgys^= (20/21)-2 ~ 1,90. Заметим, что это несколько больше, чем
rTGT _
“ 1 •
Вводим время простоя 7} = (20+1 ) (2 (20/21)/1 - 1) = 19 мин.
Np> [2 (1/(20+1+19))] = 1.
NpAT >2 + [2 (50+2• 1 )/(20+1+19)] = 2 + [2,6] = 5.
NcGr > [2-50/(20+1+19)] = [2,50] = 3.
Таким образом, требуется 2 БЛА, 1 платформа, 5 батарей (из них 3
находятся в зарядных ячейках, а 2 - в бортовых отсеках БЛА).
Ориентировочная цена на обменно-зарядную платформу с 3 зарядными
ячейками составит порядка 150 у.е. Ориентировочная стоимость всей системы
при тех же ценах на БЛА составит 2-40 + 1-150 = 230 у.е.
3.4.4. Сопоставление результатов
Результаты приведенных расчетных примеров сведены в табл. 3.2.
Таблица 3.2
Сопоставление ресурсов и стоимости АЗС и АОЗС
при разном целевом покрытии*
Целевое покрытие ^TGT ^SYS Ресурсы и стоимость
АЗС АОЗС
3 11 БЛА, 8 зарядных платформ. Стоимость 480 у.е. 4 БЛА, 1 обменно-зарядная платформа с 8 зарядными ячейками. Стоимость 340 у.е.
1 4 БЛА, 3 зарядных платформы. Стоимость 175 у.е. 2 БЛА, 1 обменно-зарядная платформа с 3 зарядными ячейками. Стоимость 230 у.е.
* Tf = 20 мин, Тс = 50 мин, Tr = 1 мин
86
Из сопоставления результатов можно сделать вывод о явном
преимуществе АОЗС перед АЗС при достаточно большом целевом покрытии.
При значениях целевого покрытия близких к 1, наоборот, экономически
выгоднее могут оказаться АЗС с простыми зарядными платформами и
неизвлекаемыми батареями на бортах БЛА.
Источники информации по главе 3
1. Kemper F. Р., Suzuki К. А. О., Morrison J. R. UAV consumable
replenishment: design concepts for automated service stations // Journal of
Intelligent & Robotic Systems. January 2011. Vol. 61. Issue 1. P. 369-397.
2. Suzuki К. A. O., Kemper F. P., Morrison J. R. Automatic Battery
Replacement System for UAVs: Analysis and Design // Journal of Intelligent &
Robotic Systems. January 2012. Vol. 65. Issue 1. P. 563-586.
3. ToksozT., Reddingy J., MichiniM., Michini B., How J., VavrinaM.,
Vian J. Automated Battery Swap and Recharge to Enable Persistent UAV Missions //
Proc, of the AIAA Infotech@Aerospace Conference, St. Louis, Missouri, 2011. URL:
http://dx.doi.Org/10.2514/6.2011-1405 (дата обращения: 30.09.2017).
4. SwieringaK. A., Hanson С. B., Richardson J. R., White J. D., Hasan Z.,
Qian E., Girard A. Autonomous Battery Swapping System for Small-Scale
Helicopters // Proc, of the 2010 IEEE International Conference on Robotics and
Automation, May 3-8, 2010, Anchorage, Alaska, USA. P. 3335-3340.
5. HuDandan, Wang Lei, Wang Man Design and realization of automatic
exchange station for mobile robot // Journal of Theoretical and Applied Information
Technology. 2012. Vol. 44. № 1. P. 55-59.
6. Juan Wu, Guifang Qiao, Jian Ge, Hongtao Sun, Guangming Song
Automatic Battery Swap System for Home Robots // International Journal of
Advanced Robotic Systems. InTech. 2012. Vol. 9. P. 255-264.
87
7. Jun Zhang, Guangming Song, YuyaLi, Guifang Qiao, ZhiwenLi Battery
Swapping and Wireless Charging for a Home Robot System with Remote Human
Assistance // IEEE Transactions on Consumer Electronics. 2013. Vol. 59. Issue 4.
P. 747-755.
8. Vaussard F., Retomaz P., Roelofsen S., Bonani M., Rey F., Mondada F.
(2013) Towards Long-Tenn Collective Experiments. In: Lee S., Cho H., Yoon KJ.,
Lee J. (eds) Intelligent Autonomous Systems 12. Advances in Intelligent Systems and
Computing. Vol. 194. Springer, Berlin, Heidelberg.
9. Мельничук О. В., Фетисов В. С. Особенности заряда и разряда
литиевых аккумуляторных батарей и современные технические средства
управления этими процессами // Электротехнические и информационные
комплексы и системы. 2016. № 2. С. 41-48.
88
ГЛАВА 4. АВТОМАТИЧЕСКИЕ ЗАРЯДНЫЕ СТАНЦИИ
С КОНТАКТНЫМИ ТЕРМИНАЛАМИ
4.1. Типы контактных терминалов
На АЗС в процессе зарядки батарея остается на борту БЛА. Передача
энергии от наземного зарядного источника на борт осуществляется
посредством контактных терминалов и, как правило, на постоянном токе.
По сравнению с АЗС, в которых передача энергии осуществляется
бесконтактным способом на переменном токе, станции с контактными
терминалами обладают большим КПД передачи энергии. Кроме того, в этом
случае не требуется размещать на борту БЛА соответствующие
преобразователи (выпрямители, стабилизаторы и т.д.).
Контактные терминалы на АЗС можно условно разделить на два типа:
терминалы на основе разъемных соединителей и терминалы на основе
открытых контактов. Каждый из типов имеет свои достоинства и недостатки.
Терминалы на основе разъемных соединителей имеют хорошее качество
контактирования за счет большой площади контактов и поджимающего усилия,
которым обычно сопровождаются разъемные соединения. Разъемные
соединители могут быть легко защищены от атмосферных воздействий. Однако
для осуществления автоматической стыковки частей разъемного соединения
требуется их довольно точное предварительное позиционирование и
приложение определенного механического усилия.
Основным достоинством терминалов на основе открытых контактов
является то, что в этом случае точная посадка и позиционирование БЛА на
платформе не является обязательным. Кроме того, такая платформа может
обслуживать одновременно несколько БЛА. Это достигается за счет
избыточности количества и размеров наземных электродов. Однако сами
электроды могут быть подвержены действию атмосферных воздействий, что,
конечно, снижает надежность контактирования. Поэтому такие платформы
целесообразно размещать внутри специально организованных укрытий.
89
4.2. Автоматические зарядные станции с контактными
терминалами на основе разъемных соединителей
Самый простой и экономичный способ подачи энергии от наземного
зарядного источника к бортовому аккумулятору после посадки БЛА состоит в
использовании гальванического соединения положительного и отрицательного
электродов бортового аккумулятора с соответствующими наземными
электродами. Традиционно такое соединение реализуется в виде
двухэлектродного разъема (кроме двух основных электродов в таком разъеме
могут быть дополнительные - например, для контроля и управления зарядом
каждой секции многосекционного аккумулятора). Но для нормального
контактирования электродов бортовой и наземной частей требуется довольно
точное наведение и стыковка аппарата с контактным соединителем. Поэтому
БЛА (речь здесь идет в первую очередь об аппаратах вертолетного типа) перед
такой стыковкой должен совершить маневрирование для точного причаливания
к стыковочному узлу либо во время самой посадки, либо после нее с
использованием дополнительных специальных средств - например,
управляемого колесного шасси и подсистемы поиска стыковочного узла [1].
Примеры таких решений показаны на рис. 4.1 и 4.2.
В первом случае (рис. 4.1) влияние погрешностей посадки уменьшено за
счет использования вертикального воронкообразного входа в разъемный
соединитель. Контакты наземной части соединителя размещены на конце
вертикального полого изолирующего стержня, куда подводится напряжение от
зарядного источника. При таком решении посадка на землю аппарата не
обязательна - стержень может представлять собой достаточно высокую мачту,
на которую при посадке «насаживается» БЛА с воронкообразным разъемом.
Во втором случае (рис. 4.2) реализуется концепция с условным названием
«crawling UAV» («ползающий БЛА»), Здесь предполагается, что БЛА снабжен
механизированным колесным шасси, и все маневры по причаливанию к
стыковочному узлу, который в данном случае может быть расположен в
90
вертикальной стене, осуществляются с помощью него. Такого рода системы
достаточно распространены в наземной робототехнике [2]. Сама же технология
амфибийных колесных и гусеничных мультикоптеров в последние годы бурно
развивается (рис. 4.3-4.5). Поэтому точный подход такого аппарата к зарядному
терминалу уже после посадки не представляет особой сложности.
Рис. 4.1. Схема контактного соединителя со штыревым элементом
наземной части и воронкообразным входом бортовой части:
1 - БЛА; 2 - воронкообразный вход бортовой части соединителя; 3 - наземный
посадочный стержень с контактной группой; 4 - места размещения контактов
Рис. 4.2. Мобильный БЛА и разъемный контактный соединитель:
1 - БЛА с колесным шасси; 2 - бортовой стыковочный стержень с контактной группой;
3 - корпус наземной части соединителя; 4 - места размещения контактов
Авторы работы [2] подробно описали конструкцию разъемного
соединителя, одна часть которого расположена на колесном роботе, а
ответная- на пристенном стыковочном модуле (рис. 4.6-4.8). Управление
движением робота на стыковочный модуль осуществляется с помощью
специальной подсистемы на основе инфракрасных излучателей и детекторов.
91
Рис. 4.3. Гусеничный квадрокоптер (Фото: Shouts [3])
Рис. 4.4. Мультикоптер с колесным шасси (Фото: Popular Science [4])
Рис. 4.5. Популярный колесный квадрокоптер от компании Syma
(Фото: DroneFlyers.ru [5])
92
Вид сверху
Рис. 4.6. Конструкция пристенного стыковочного модуля
(Иллюстрация: Silverman et al. [2])
Вид сверху
Вид сбоку
Рис. 4.7. Конструкция бортовой части соединителя
(Иллюстрация: Silverman et al. [2])
93
a
Рис. 4.8. Колесный робот и его стыковка с пристенным терминалом
(Иллюстрация: Silverman et al. [2]):
а - конструкция робота; б - максимальная допустимая погрешность наведения
Конструкция бортовой части соединителя и пристенного модуля
допускает определенную погрешность наведения. За счет системы пружин
приемный конус пристенного модуля может совершать ограниченные
движения в двух плоскостях. Подобное же устройство имеет и бортовая часть
соединителя, у которого, кроме того, концевая часть имеет сферическую
форму: все это облегчает стыковку частей соединителя при неточном подходе
робота к пристенному модулю.
Гораздо чаще все же используются вертикально сочленяемые части
разъемного соединителя. Для более надежного гальванического соединения
применяют выпуклые пружины на контактирующих поверхностях (рис. 4.9).
Верхняя по рисунку часть находится на БЛА, а нижняя - на посадочной
платформе. Сила упругости пружины преодолевается за счет действия
собственного веса приземляющегося БЛА.
Если посадочный терминал имеет только 2 контакта, как на рис. 4.9,
а бортовая АКБ является многосекционной, то для полноценной зарядки АКБ
необходимо размещать на борту так называемый балансер - устройство,
которое осуществляет управление зарядным током по специальной программе с
одновременным поддержанием баланса на секциях батареи, так, чтобы
напряжения на них сохранялись примерно равными друг другу [6]. Либо если
94
по каким-то причинам балансер обязательно должен располагаться на земле,
необходимо организовывать многоконтактный соединитель с числом контактов
N+1, где N - число секций АКБ.
Рис. 4.9. Разъемный соединитель с вертикальным соединением частей
Оригинальное техническое решение предложили специалисты
российской компании «Съемка с воздуха» [7]. Основная идея предложенной
ими зарядной станции состоит в том, что подлет БЛА к контактному терминалу
производится не сверху, как обычно, а снизу. Основа станции - это одиночный
терминал, который очень компактен и может располагаться у любой стены, под
крышей, на столбе или дереве (рис. 4.10). Терминал закрепляется в нескольких
метрах от земли. Устройство выполнено из композитных материалов и к нему
подведено электропитание, которое проходит через преобразователь питания и
зарядное устройство и далее на аккумулятор БЛА. Внутри станции находится
камера системы наведения и видеопередатчик, передающий картинку на
аппарат для корректировки курса подлета БЛА. На подвешенном терминале
находятся створки фиксации якоря аппарата, через эти створки организован
95
электрический контакт между зарядной станцией и так называемым якорем
аппарата. Сверху станции установлена метеостанция, измеряющая скорость и
направление ветра и другие параметры. На самом аппарате установлен
вертикальный стыковочный якорь, имеющий контактные группы, через
которые происходит заряд АКБ аппарата. Также на аппарате установлены
контрастные метки, для более надежной системы наведения.
БЛА подлетает к области расположения зарядной станции и, находясь на
высоте 50 м над ней, дает сигнал о своем приближении, после чего на
терминале открываются створки для захода аппарата. Аппарат снижается в
нескольких метрах от терминала и на несколько метров ниже него, затем
подлетает под открытые створки терминала и, используя точную систему
наведения, заводит свой якорь между створками, затем створки закрываются и
фиксируют аппарат, осуществляя заодно и поджимание соответствующих
контактных групп друг к другу. БЛА переходит в режим зарядки, и после его
окончания при получении нового задания в любой момент может вылететь на
его выполнение.
Основное преимущество предложенного решения авторы объясняют
следующим образом. Под любым аппаратом вертикального взлета/посадки,
когда аппарат находится близко к земле, создается «воздушная подушка»,
которая вызывается переотражением воздушных масс. Это явление даже
в условиях закрытого помещения ухудшает точность посадки до десятков
сантиметров. При сильном ветре задача точной посадки становится в
несколько раз сложнее. В предложенном же варианте системы в принципе не
возникает проблем с отражающимися воздушными потоками, что снижает
неконтролируемую ошибку посадки аппарата. Кроме того, система свободна от
проблем, связанных с воздействием на контактный терминал атмосферных
осадков, грязи и пыли, так как контакты терминала всегда направлены вниз и
защищены от вертикально падающих осадков, а в режиме ожидания, кроме
того, фиксирующие створки терминала плотно закрыты.
96
a
б
в г
Рис. 4.10. Система посадки/подзарядки мультикоптеров AEROD
(Иллюстрации: ООО «Съемка С Воздуха» [7]):
а - размещение системы в укрытии (под солнечными панелями);
б - квадрокоптер со стыковочным якорем; в - подлет квадрокоптера к станции
подзарядки; г - фиксация якоря обжимающими створками
97
Система очень экономична в использовании пространства, так как для ее
размещения фактически не требуется никаких горизонтальных наземных или
мобильных площадок, поэтому она может оказаться очень востребованной на
таких объектах, как корабли и морские платформы.
4.3. Автоматические зарядные станции с контактными
терминалами на основе открытых контактов
4.3.1. Преимущества и области применения автоматических
зарядных станций с контактными терминалами на основе
открытых контактов
При посадке БЛА на наземную зарядную платформу в силу разных
причин сложно избежать различных погрешностей приземления и соблюсти
точное позиционирование аппарата, при котором бы обеспечивалось
правильное соединение друг с другом бортовых и наземных стыковочных
элементов. Поэтому разработка зарядной станции с такой посадочной
платформой, на которой зарядка аппарата могла бы осуществляться при любом
его положении, - это актуальная задача. Более того, желательно, чтобы на
такой платформе могло бы обслуживаться одновременно несколько аппаратов.
Как показано в 4.2, контактирование соответствующих бортовых и
наземных электродов может быть реализовано, например, с помощью
разъемных соединителей, однако в этом случае потребуется либо довольно
точная посадка БЛА, либо специальный механизм (например, колесное шасси)
и подсистема управления, реализующие подход аппарата к соединителю уже
после посадки. Однако для малых БЛА такой путь неоправданно сложен и
приводит к утяжелению аппаратов. Авторами в качестве основной идеи для
разработки АЗС была принята концепция открытых контактных площадок. Эта
концепция состоит в формировании на посадочной платформе массива
специальным образом организованных плоских контактных площадок, которые
в совокупности со специальными электронными устройствами могут
98
обеспечивать подзарядку от наземного источника одного или одновременно
нескольких приземлившихся на платформу БЛА с открытыми электродами,
связанными с контактами бортового аккумулятора. При этом от подсистемы
посадки не требуется очень точное наведение аппарата на определенную точку
платформы - достаточно, чтобы БЛА приземлился в пределах ее площади.
4.3.2. Известные варианты реализации концепции открытых
контактных площадок
Систематизируя все известные технические решения, касающиеся
зарядных станций для БЛА с открытыми контактными площадками, можно
выделить несколько критериев их классификации. Рассмотрим некоторые из
них.
Во-первых, это количество уровней, на которых расположены контактные
площадки. Известны одно- и двухуровневые посадочные платформы. В первом
случае все контакные площадки расположены в одной плоскости, и это
решение довольно тривиально, далее будет представлено несколько таких
примеров. Пример двухуровневой платформы можно найти, например, в [8].
Такая площадка представляет собой два концентрических кольца-электрода,
меньшее из которых расположено на нижнем уровне, а большее - на верхнем
(рис. 4.11). Посадочные электроды на БЛА соответственно расположены на
двух уровнях. В центре такой платформы можно расположить светодиодный
маяк для ближней навигации и точного захода БЛА на платформу.
Преимущество такой концентрической двухуровневой конструкции по
сравнению со многими другими в том, что курсовой угол БЛА при посадке
может быть любым.
Другой критерий классификации можно сформулировать как
наличие/отсутствие у зарядной станции функций управления процессом
зарядки многосекционных аккумуляторных батарей. В практике работы
с такими батареями (где секции соединены последовательно) принято при
99
зарядке контролировать каждую секцию, и если на какой-либо из секций
напряжение начинает превышать напряжение, регистрируемое на каждой из
других, то зарядный ток для этой секции уменьшают до тех пор, пока не
произойдет выравнивание напряжений.
Рис. 4.11. Концентрическое двухуровневое расположение контактных
площадок на посадочной платформе:
1 - БЛА; 2 - верхний наземный электрод; 3 - нижний наземный электрод;
4 - верхний бортовой электрод; 5 - нижние бортовые электроды;
б - светодиодный маяк
100
Устройства, осуществляющие зарядный цикл по такой схеме, называют
балансерами [9]. При этом необходим доступ к точкам соединения всех секций
батареи. Таким образом, для управления зарядкой, например, 3-секционной
батареи требуется 4 электрода. Из соображений уменьшения массы БЛА
балансер, конечно, лучше размещать на земле, а не на борту. Однако при этом
на зарядной станции должно быть необходимое количество контактных
площадок, соответствующее точкам контроля батареи, и такое же количество
соответствующих посадочных электродов должно быть на аппарате [10].
Посадка для соблюдения соответствия наземных и бортовых электродов
должна быть достаточно точной. Это особенно относится к соблюдению
правильного курсового угла при посадке. На рис. 4.12 показан пример
платформы для управления зарядкой с земли 3-секционной аккумуляторной
батареи, а на рис. 4.13 - обобщенная схема бортовой и наземной частей
зарядной системы.
Рис. 4. /2. Пример зарядной платформы для зарядки бортовой 3-секционной
аккумуляторной батареи квадрокоптера от наземного источника с балансером
(Фото: Yash Mulgaonkar [11])
Надежный контакт бортовых и наземных электродов обеспечивается с помощью магнитов
101
Все управление процессом зарядки осуществляет входящий в состав АЗС
контроллер зарядки КЗ, в структуре которого предусмотрен и балансер
(рис. 4.13). На время зарядки важно отключать бортсеть от АКБ. Это делается с
помощью управляемого переключателя S1, получающего сигнал от полетного
контроллера ПК, который имеет собственный, не отключаемый на время
зарядки источник питания.
Рис. 4.13. Обобщенная схема бортовой и наземной частей зарядной системы
с наземным контроллером зарядки:
ПК - полетный контроллер; БС - бортсеть; КЗ - контроллер зарядки;
НИП - наземный источник питания
Если аккумулятор состоит из одной секции или балансер расположен на
борту БЛА, то на зарядной станции и на борту достаточно иметь по два
открытых электрода. Однако в этом случае необходимость точной посадки
сохраняется. Известно одно простое техническое решение, которое несколько
расширяет возможности захода аппарата на платформу, а именно: аппарат
может заходить на посадку с установленным курсовым углом а, либо
а ±180 [12]. Решение заключается в установке мостового выпрямителя на борту
БЛА, что делает безразличным то, в какой полярности оказалось приложенным
напряжение наземного источника питания к посадочным бортовым электродам
(рис. 4.14).
Допустимая погрешность посадки на все вышеописанные платформы
должна быть относительно небольшой: по крайней мере, она не должна
превышать по заданным координатам места посадки порядка 10 % размеров
102
самой посадочной платформы и примерно 10° - по курсовому углу. Однако во
многих случаях погрешность посадки может быть больше: например, в
условиях порывистого ветра, при посадке на мобильную платформу, при
посадке на морскую платформу при значительном волнении моря и т.д. Кроме
того, актуальным является создание такой платформы, на которой
одновременно могло бы обслуживаться сразу несколько БЛА.
Рис. 4.14. Мостовой выпрямитель на борту БЛА обеспечивает возможность
посадки как с установленным курсовым углом а, так и а ±180°
Реализация такой платформы возможна только при избыточном
количестве контактных площадок-электродов. Именно наличие/отсутствие
избыточности контактных площадок можно считать третьим критерием
классификации посадочных платформ с открытыми контактными площадками.
При избыточном числе контактных площадок (когда их количество
превышает количество бортовых посадочных электродов) способы подачи
103
питания на них могут быть разными. В одном известном способе [8, 12, 13]
реализуется концепция т.н. «матрицы интеллектуальных контактов», которая
заключается в том, что БЛА имеет 2 посадочных электрода или более, их
геометрические параметры выбраны так, что при посадке и контактировании их
с наземными контактными площадками в любом случае не происходит их
замыкания друг с другом; посадочная платформа имеет множество контактных
площадок, к каждой из которых подсоединена электронная схема, в функции
которой входит определение величины и полярности напряжения на этой
площадке (если оно передано от приложенного бортового посадочного
электрода) и подключение к этой контактной площадке соответствующего
напряжения от наземного источника питания.
Возможны 2 основных варианта реализации концепции матрицы
интеллектуальных контактов. В первом варианте (рис. 4.15) контроллер
зарядки расположен на борту БЛА, а бортовая контактная система состоит
только из двух электродов, соответствующих полюсам АКБ. Наземная
контактная система (матрица интеллектуальных контактов) может гибко
перераспределять подачу питания на отдельные контакты в зависимости от
того, контактирует ли с данным контактом бортовой электрод и какая у него
полярность. Таким образом, с каждым бортовым электродом будет связана
группа контактов платформы. На время зарядки бортсеть отключается от АКБ
GB1 с помощью полетного контроллера ПК. Контроллер зарядки КЗ кроме
регулирования зарядного тока, протекающего через бортовые посадочные
электроды и АКБ, выполняет также балансировку секций батареи.
Во втором варианте (рис. 4.16) контроллер зарядки расположен на
посадочной платформе, а бортовая контактная система состоит из N+1
электродов, где N - количество секций АКБ. В отличие от варианта 1, здесь на
матрице интеллектуальных контактов образуется не 2 группы
эквипотенциальных контактов, aN+1 группа. Каждая такая группа связана
104
с соответствующим выводом контроллера зарядки. Как и в предыдущем случае,
на время зарядки бортсеть отключается.
Рис. 4.15. Обобщенная схема бортовой и наземной частей зарядной системы
с матрицей интеллектуальных контактов (вариант 1):
ПК - полетный контроллер; БС - бортсеть; КЗ - контроллер зарядки;
НИП - наземный источник питания; КСБ - контактная система бортовая;
КСН - контактная система наземная (матрица интеллектуальных контактов);
БУСКС - блок управления структурой контактной системы
Рис. 4.16. Обобщенная схема бортовой и наземной частей зарядной системы
с матрицей интеллектуальных контактов (вариант 2):
ПК - полетный контроллер; БС - бортсеть; КЗ - контроллер зарядки;
НИП - наземный источник питания; КСБ - контактная система бортовая;
КСН - контактная система наземная (матрица интеллектуальных контактов);
БУСКС - блок управления структурой контактной системы
Второй вариант несколько сложней в реализации наземной части, но при
этом бортовая часть оказывается значительно облегченной.
105
Относительная сложность платформ с матрицами интеллектуальных
контактов компенсируется их очевидными достоинствами: возможностью
посадки БЛА в любой точке платформы и обслуживания группы БЛА
одновременно.
Матрица интеллектуальных контактов - не единственная возможность
эффективного использования принципа избыточности контактов. Авторами, в
частности, предложена подробно описываемая далее в этой книге (см. 4.3.4)
зарядная система [14], в которой посадочная платформа имеет множество
параллельных полосовых электродов с чередующейся полярностью, которые
разделены узкими диэлектрическими прокладками. На борту БЛА на концах
опорных стоек расположено несколько бортовых посадочных электродов.
Благодаря геометрическим особенностям при любом варианте посадки
обеспечена разнополярность бортовых электродов, т е. как минимум один из
них будет иметь полярность, отличную от других. Специальная
распределительная схема (диодный коллектор) на борту обеспечивает
правильное подключение бортового аккумулятора к зарядному источнику при
любой комбинации полярностей на бортовых посадочных электродах.
В таком решении (рис. 4.17) в общем случае используется избыточное
количество как наземных, так и бортовых электродов. Схема чередования
полярностей электродов наземной платформы зависит от размеров БЛА и
геометрических особенностей расположения его бортовых электродов, она
может задаваться оператором вручную или полетным контроллером
автоматически при подлете к АЗС (посредством радиоканала). Контроллер
зарядки здесь принципиально всегда находится на борту. Как и в других
случаях, предусмотрено отключение бортсети от АКБ на время зарядки.
Зарядная схема с параллельными полосовыми электродами значительно
технологичнее и дешевле схемы с матрицей интеллектуальных контактов,
однако последняя является более гибкой и универсальной (в смысле количества
и геометрии бортовых электродов) и позволяет располагать контроллер зарядки
на земле, а не на борту.
106
Рис. 4.17. Обобщенная схема бортовой и наземной частей зарядной системы
с наземными параллельными полосовыми электродами:
ПК - полетный контроллер; БС - бортсеть; КЗ - контроллер зарядки;
НИП - наземный источник питания; КСБ - контактная система бортовая;
КСН - контактная система наземная (матрица интеллектуальных контактов);
БУСКС - блок управления структурой контактной системы; ДК - диодный коллектор
4.3.3. Зарядные станции на основе матриц
интеллектуальных контактов
4.3.3.1. Концепция построения зарядных станций на основе
матриц интеллектуальных контактов
Основа концепции - специальная электронная схема, названная
«интеллектуальный контакт». Назначение этой схемы - определение величины
и полярности напряжения, переданного наземной контактной площадке от
бортового посадочного электрода, с последующим подключением к этой
площадке соответствующего напряжения наземного источника питания.
Процесс последующей зарядки аккумуляторной батареи БЛА осуществляется
под управлением бортового контроллера зарядки.
На посадочной платформе с матрицей интеллектуальных контактов все
контактные площадки одинаковы и могут иметь различную форму. Они
изолированы друг от друга узкими промежутками. Исходя из конфигурации
бортовых посадочных электродов и формы наземных площадок
107
формулируются требования к размерам и расположению бортовых посадочных
электродов. Например, если наземные контактные площадки квадратные, а два
бортовых посадочных электрода, к которым подключены полюса аккумулятора
бортсети, имеют плоскую прямоугольную форму, то ширина этих электродов
должна быть больше зазора между наземными контактными площадками, а
расстояние между бортовыми электродами должно быть больше диагонали
квадрата площадки (для избежания замыкания полюсов) (рис. 4.18).
наземные
контактные
площадки
бортовые
посадочные
электроды
Рис. 4.18. Гексакоптер на матрице интеллектуальных контактов
Перед посадкой на матрицу бортовые посадочные электроды
коммутируются с соответствующими выводами АКБ. Причем, как показано на
рис. 4.15 и 4.16, возможны два альтернативных варианта коммутации: один -
когда коммутируются только крайние выводы АКБ или другой - когда
коммутируются все выводы, включая межсекционные. Рассмотрим сначала
первый, более простой вариант.
До посадки все интеллектуальные контакты матрицы являются
пассивными, т.е. к ним не подводится напряжение зарядного источника, но они
находятся в ждущем режиме и способны анализировать напряжение,
приложенное со стороны какого-либо бортового электрода, который после
108
посадки своей наружной поверхностью прижимается к некоторым контактным
площадкам платформы. В зависимости от напряжения и полярности
приложенного внешнего напряжения к контакту платформы подводится
соответствующее напряжение от зарядного источника. Таким образом, после
посадки часть контактов платформы активируется - в случае двухэлектродной
схемы некоторые контакты становятся подключенными к положительному
полюсу зарядного источника, а некоторые - отрицательному (рис. 4.19). Если
при такой двухэлектродной схеме требуется заряжать многосекционную АКБ,
то БЛА должен иметь на борту контроллер зарядки с балансером.
Рис. 4.19. Активные контакты матрицы после приземления БЛА:
1 - неактивные контактные площадки; 2 - активные контактные площадки;
3 - отрицательный бортовой электрод БЛА; 4 - положительный бортовой электрод БЛА
109
Если реализуется вариант с бортовыми электродами, подключенными к
выводам всех секций многосекционной АКБ, то отличие от рассмотренного
примера будет состоять в том, что бортовых посадочных электродов будет
несколько, а каждый интеллектуальный контакт платформы должен
анализировать не только полярность, но и уровень прикладываемого
напряжения, чтобы правильно идентифицировать номер контакта для
подключения к балансеру.
Одним из достоинств концепции является то, что площадь
контактирующих поверхностей бортовых электродов может быть
значительной, а значит большими могут быть и зарядные токи, что может
обеспечить ускоренную зарядку АКБ.
Сама схема интеллектуального контакта может быть выполнена на
основе аналоговых или цифровых компонентов.
4.3.3.2. Интеллектуальные контакты на основе аналоговых
компонентов
На рис. 4.20 представлена схема узла управления интеллектуальным
контактом на базе операционного усилителя и пары биполярных транзисторов.
На вход данной схемы (площадка А'Г) подается остаточное напряжение с одного
из полюсов бортового аккумулятора GB относительно земли. На некоторые
другие площадки (такие, как А2) точно также попадает напряжение другой
полярности. К площадке Х2 подключена аналогичная электронная схема (на
рис. 4.20 не показана). Неинвертирующий усилитель на операционном
усилителе DA1 усиливает приложенное напряжение до насыщения. Этим
напряжением открывается соответственно один из ключей VT1 или VT2, и
напряжение источника питания +Е или -Е через ограничивающий резистор /?1
подается на контактную площадку XI, т.е. вход усилителя. Благодаря этому на
выходе будет сохраняться устойчивое состояние. Весь зарядный ток через Г1 от
источника будет протекать через транзистор РТ1 для контактов матрицы, на
110
которые попали «положительные» посадочные электроды, или через VT2 - для
контактов, на которые попали «отрицательные» посадочные электроды БЛА.
После окончания процесса зарядки и взлета аппарата возврат схемы в исходное
дежурное состояние производится коротким положительным импульсом
RESET. Для организации сброса применено твердотельное реле /4 7312,
обеспечивающее коммутацию сигналов любой полярности.
Рис. 4.20. Узел управления интеллектуальным контактом на основе
операционного усилителя и пары биполярных транзисторов
В среде моделирования Micro-Cap 9 от фирмы Specrtum Software [15]
авторами были проанализированы различные схемотехнические варианты
реализации данного узла и испытано его функционирование на макете.
Моделируемая схема представлена на рис. 4.21. Условные графические
обозначения элементов на схеме не везде соответствуют нормам ЕСКД - они
оставлены в их оригинальном изображении. Целью моделирования была
проверка устойчивости работы схемы и правильности подключения полюсов
зарядного источника к контактным площадкам. Основным исследуемым
111
режимом был режим моделирования переходных процессов {Transient),
который позволяет осуществить развертку во времени характерных
напряжений и токов схемы и оценить характер переходных процессов.
Рис. 4.21. Исследуемая схема узла управления интеллектуальным контактом
в среде MicroCAP
Сама контактная площадка электрически связана с узлом 10 (рис. 4.21).
Основу схемы составляет операционный усилитель DA1, к которому не
предъявляются какие-либо особые требования. Его назначение - усиление в
несколько десятков раз (до насыщения) входного напряжения, которое
приложено к узлу 10 через резистор R8 (последний имитирует сопротивление
контактирования электрода с контактной площадкой).
Питание схемы - двуполярное, ±12В. Источники питания схемы ЕСЗ,
ЕС4 являются, по сути, зарядными источниками, от которых через транзисторы
VT1, VT2 отбирается энергия для заряда бортового аккумулятора. Заряженный
аккумулятор имитирует элемент EVin. Предположительно, это литий-
полимерный аккумулятор емкостью 1-2 Ач. Его максимальная ЭДС
(в полностью заряженном состоянии) составляет 4,2 В, а минимально
112
допустимая - 3 В. Нормальным начальным зарядным током будем считать ток
в диапазоне 200... 1000 мА.
Для изменения полярности подключения EVin достаточно изменить его
номинал с +3 на -3 В. Транзисторы РТ1, VT2 - составные, выполненные по
схеме Дарлингтона. Они имеют высокий коэффициент передачи базового тока
и максимальный ток коллектора порядка 10 А.
Управляемый напряжением ключ S1 служит для имитации «посадки»
заряжаемого аккумулятора EVin на площадку матрицы. Когда он замкнут,
через EVin протекает зарядный ток. Периодичность замыкания-размыкания
обеспечивает источник импульсного напряжения EV1.
Особое значение имеет резистор R3. Посредством него контактная
площадка связана с землей. Его сопротивление нельзя делать слишком
высоким. Практически его номинал не рекомендуется выбирать более 100 Ом.
Когда аккумулятор EVin подключается к контактной площадке (узел 10), его
остаточное напряжение усиливается усилителем DA1 (коэффициент усиления
(R6/R5) > 30, поэтому сигнал усиливается до насыщения). Выходное
напряжение усилителя DA1 «отпирает» один из транзисторов VTA, VT2 и
«запирает» другой («плюсом» открывается VTA, «минусом» - EZ2). Таким
образом, транзисторный ключ VTA (VTA) через ограничительный резистор R2
подключает к узлу 10 источник ЕСЗ (ЕС4), т.е. источник той же полярности,
которая и вызвала открывание ключа.
Так как через резистор R2 на вход усилителя заведена положительная
обратная связь, то после отключения EVjn усилитель DA1 и ключи VTA, VT2
останутся в прежнем состоянии.
Для размыкания ключей РТ1, VT2 после удаления EVin и приведения
схемы в нейтральное состояние служит ключ S2, который замыкается
посредством короткого импульса сброса от источника импульсов EV2.
Результаты моделирования схемы в режиме Transient представлены на
рис. 4.22.
из
12500H------
10.000
7 500 I/
5 .□□□ :
5 500 ;
0-000W6o-
»(. 1) M
0.220
LI.44U
8500 ।-----
6880-------
6 160------
3.440 ---
1.720
ол°°Нбб—
v('0)(V)
600000m
450 000m
300000m
150000m
0 000m
-150 000m ь
0000
i(2 0)(A)
0.220
0.440
T (Secs)
0.220
0 440
Т (Secs)
5 500 r
4.400
5 200
5.200 -----
1 100 - J--
0Л00Мбб-
1414j (V<
0220
0 440
Т (Secs)
tl
Puc. 4.22. Результаты моделирования в режиме Transient
После подключения аккумулятора EVin (момент времени ?i) усилитель
DA1 входит в насыщение и на выходе устройства (узел 11) устанавливается
напряжение порядка 9 В. Причем оно почти не меняется и после отключения
EVin (момент времени t2) вследствие действия положительной обратной связи
через резистор R2. Сброс этого напряжения в ноль происходит только после
действия импульса сброса (см. v(14) - нижний график на рис. 4.22).
Напряжение на самой контактной площадке (v(10)) от момента
отключения EVjn (С) до начала импульса сброса имеет даже небольшой выброс,
который по амплитуде как раз соответствует напряжению насыщения каскада
~9В.
При изменении полярности EVin графики напряжений v(10), v(ll) и
зарядного тока z(2,0) выглядят аналогично, разница лишь в том, что названные
величины имеют отрицательные значения.
Таким образом, никаких проблем при моделировании работы отдельно
взятой схемы управления не обнаружено. Гораздо сложнее дело обстоит тогда,
когда в работу включается сразу несколько контактных площадок. В этом
114
случае аккумулятор EVin подключается не между контактной площадкой и
землей, как в рассмотренном случае, а между двумя контактными площадками,
непосредственно к земле он не подключается.
Для подключенного аккумулятора входные резисторы, аналогичные R3
по рис. 4.21, выполняют роль делителя его остаточного напряжения. Для
простоты рассмотрения пока будем считать, что аккумулятор подключается к
двум контактным площадкам (каждый из бортовых электродов - к своей
контактной площадке). При наличии жесткой положительной обратной связи,
а также с учетом возможного дребезга контактов, очень вероятна конкуренция
сигналов с выходов усилителей по их времени установления на контактных
площадках. Это может привести к тому, что сразу после подключения
аккумулятора полярности напряжения на обеих контактных площадках будут
одинаковыми. Для пояснения этого момента на рис. 4.23 приведена упрощенная
эквивалентная схема подключения аккумулятора (£И1, ЗВ) к контактным
площадкам (узлы 4, 5). Резисторы 7?1, R2 имитируют входные сопротивления
схем управления, резистор R5 - резистор положительной обратной связи.
Подключение зарядных источников EVI, EV3 не является строго
одномоментным, поэтому сначала подключается только один из них, например,
EV2. Для этого момента произведен расчет узловых потенциалов. Для узла 4
потенциал оказался равным +10,3 В, а для узла 5 он составил +7,1 В, т.е. они
оба находятся в одной полярности. Это значит, что и на выходах усилителей
полярность будет одной и той же, что совершенно неприемлемо.
Для исключения такой ситуации предложено замедлить действие
положительной обратной связи, для чего в схему управления (рис. 4.21) введен
конденсатор С1 емкостью порядка 1 мкФ. Это сразу сделало работу
рассматриваемых узлов более надежной.
Для удобства моделирования матрицы контактов с их схемами
управления основная часть схемы по рис. 4.21 (исключая импульсные
источники и ключ S1) была оформлена в виде макромодели.
115
Рис. 4.23. Эквивалентная схема подключения аккумулятора
к контактным площадкам (EV2 уже подключен, EV3 еще нет)
Затем испытывались различные комбинации подключения аккумулятора
к контактным площадкам (и площадок подключаются к «плюсу» аккумулятора,
т площадок - к «минусу», п, т = 1...5).
Простейший вариант, когда одна контактная площадка подключена к
«минусу» аккумулятора и одна - к «плюсу», показан на рис. 4.24,
а соответствующие временные диаграммы - на рис. 4.25. На графиках
показаны: v(4,3) - напряжение между контактными площадками, z(2,3) -
зарядный ток, v(5) - импульс сброса.
На рис. 4.26 показаны те же диаграммы при смене полярности
аккумулятора. Как видно по графикам зарядного тока (7(2,3)), схема правильно
отрабатывает это изменение. Заметим, что зарядный ток составляет ~ 630 мА, а
не 450 мА как для схемы по рис. 4.21, поскольку зарядка осуществляется от
двух источников разных полярностей.
Аналогичный анализ других комбинаций подключений не выявил каких-
либо сбоев в распределении полярностей напряжений, прикладываемых к
контактным площадкам от зарядных источников.
116
EV1
PULSE
Pin'
Х1
smart_oont.MAC
Pin'
X2
smart_corrt MAC
Puc. 4.24. Простейший вариант подключения контактной площадки
к аккумулятору
Степпинг (пошаговое изменение номинала) резистора R3 по схеме
рис. 4.21 показал, что при превышении значения ~ 100 Ом положительная
обратная связь становится слишком глубокой, и импульс сброса не оказывает
должного воздействия, т.е. усилитель продолжает оставаться в насыщении.
Поэтому было рекомендовано при сохранении других указанных параметров
схемы номинал этого резистора оставить на уровне 100 Ом.
Таким образом, анализ предложенной схемы управления контактами
интеллектуальной матрицы в среде Micro-Cap 9 подтвердил ее
работоспособность. Она вполне может быть реализована на относительно
недорогих аналоговых компонентах.
20000
^4.3 )(V)
15 000
10000
5 000
i(2,3)(A)
T (Secs)
v(5)(V)
T (Secs)
Puc. 4.25. Временные диаграммы простейшего варианта подключения
контактной площадки к аккумулятору
1(2.3) (А)
Т (Secs)
>X5)(V)
Т (Secs)
Рис. 4.26. Временные диаграммы простейшего варианта подключения
контактной площадки к аккумулятору при смене его полярности
118
Рассмотренная схема была реализована на макете, предназначенном для
управления 16-контактной интеллектуальной матрицей (рис. 4.27). Макетный
образец представлял собой четыре платы, каждая из которых управляла одним
рядом контактов. Для минимизации количества элементов использовались
микросхемы счетверенных операционных усилителей. Апробация макета
полностью подтвердила результаты, полученные при моделировании.
С целью повышения эффективности схемы пару биполярных
транзисторов можно заменить на пару мощных КМОП-транзисторов.
Рис. 4.27. Макет схемы управления для 16-контактной матрицы
Для оценки надежности контактирования бортовых электродов с
контактными площадками матрицы в среде Lab View был разработан
виртуальный прибор, визуализирующий подключение отдельных площадок
матрицы к положительному или отрицательному бортовым посадочным
электродам, установленным на модели радиоуправляемого вертолета S032 от
фирмы Syma (рис. 4.28, 4.29).
119
Рис. 4.28. Испытательный стенд с матрицей интеллектуальных контактов
на базе оборудования National Instruments и виртуальным прибором для анализа
состояния контактных площадок, разработанным в среде Lab View
Рис. 4.29. Расположение бортовых электродов на модели Syma S032
120
Для измерения напряжения на контактах матрицы использовалось
оборудование от компании National Instruments', системное шасси NIcDAQ-9188
и два модуля 8-канального сбора аналоговой информации NI 9201.
Модель вертолета S032 имеет односекционный литий-полимерный
аккумулятор, поэтому в любом случае для зарядки достаточно двух бортовых
посадочных электродов. И бортовые электроды, и наземные контактные
площадки матрицы были выполнены из меди. Длительные эксперименты с
посадкой модели вертолета на платформу дали хорошие результаты:
виртуальный прибор индицировал наличие контактирования каждого
бортового электрода как минимум с одной наземной контактной площадкой
практически в 100 % случаев.
4.3.3.3. Матрицы интеллектуальных контактов на основе
цифровых компонентов
В результате схемотехнического моделирования и экспериментов было
выявлено, что аналоговые схемы управления интеллектуальными контактами
нормально работают в ограниченном диапазоне номиналов резисторов 7?1 и R2
(по рис. 4.20), что обусловлено наличием в схеме петли непосредственной
положительной обратной связи. Это накладывает некоторые ограничения на
количество подключаемых контактных площадок и зарядные токи, поэтому была
разработана более совершенная схема управления подключением контактных
площадок на основе микроконтроллеров, свободная от указанных недостатков.
Обычно современные микроконтроллеры содержат 4, 8 или 16
аналоговых входных портов и большое количество цифровых портов ввода-
вывода. Поэтому в предлагаемой структуре один микроконтроллер управляет
подключением к зарядному источнику Е целой группы контактных площадок,
например, линейки площадок, образующих строку матрицы (рис. 4.30). В таком
распределительном устройстве количество микроконтроллеров равно
количеству строк матрицы контактов плюс еще один микроконтроллер для
выполнения синхронизирующих функций.
121
2
Рис. 4.30. Обобщенная структура схемы управления подключением
контактных площадок на базе микроконтроллеров:
1 - контактные площадки; 2 - бортовые электроды; GB\ - заряжаемая аккумуляторная
батарея; Е - зарядный источник; РУ - микроконтроллерное распределительное устройство
Каждый микроконтроллерный узел управления интеллектуальным
контактом представляет собой функциональную связку «Усилитель -
Анализатор - Коммутатор». Фрагмент схемы управления подключением
контактных площадок на основе микроконтроллера DD1 (ATMEGA32L-8AU)
показан на рис. 4.31. Один микроконтроллер может управлять подключением
/отключением восьми контактных площадок.
Контактные площадки А1-А8 через резистивные делители /?1, R9-R8, 7? 16
подключены к портам ввода аналоговых сигналов РА0-РА7 микроконтроллера
DD1. В дежурном режиме микроконтроллер производит циклический опрос
этих портов и анализ их состояния. После посадки БЛА на матрицу контактных
площадок на отдельных из них появляется напряжение, имеющее относительно
земли положительную или отрицательную полярность.
122
Рис. 4.31. Схема управления подключением контактных площадок
на основе микроконтроллера
Номера выявленных активных площадок и соответствующие полярности
запоминаются, после чего обращения к портам РАО-РАЗ прекращаются, а на
отдельные цифровые порты РВО-РВЗ, РСО-РСЗ выдаются управляющие
сигналы для подключения через ключевые элементы К1-/<16 и
токоограничивающие резисторы того или иного полюса зарядного источника Е.
Команда на размыкание ключей формируется этим же контроллером по
сигналам из других подсистем. Преимущество такой схемы управления состоит
в том, что измерительная и исполнительная части разделены, непосредственная
обратная связь между ними отсутствует, а следовательно, отсутствуют
123
предпосылки для случайных сбоев, обусловленные наличием такой связи.
Кроме того, практически отсутствуют ограничения на количество
одновременно коммутируемых контактных площадок.
Если сравнивать аналоговую и цифровую схемы управления
интеллектуальными контактами по стоимости реализации, то второй из двух
представленных вариантов оказывается лишь немного дороже первого. По
компактности и простоте настройки цифровая схема также может быть
предпочтительнее. Для того чтобы аналоговая схема могла конкурировать с
показанным цифровым вариантом, в ней необходимо использовать
микросхемы, содержащие в одном корпусе большое количество операционных
усилителей (такие как LM324 (Texas Instruments) - 4 операционных усилителя в
корпусе, или EL5811 (Intersil), содержащие по 8 элементов в одном корпусе).
Коммутирующие элементы К1-К16 (по схеме рис. 4.31) могут быть
выполнены на основе электромеханических или твердотельных реле. Второй
вариант будет иметь большую надежность, но высокую стоимость.
4.3.3.4. Определение предпочтительных вариантов формы
и расположения контактных площадок
Большой зарядный ток можно передать на БЛА, если только площадь
контакта бортовых и наземных электродов достаточна для его пропускания. Эта
площадь взаимного контактирования зависит от формы контактных площадок,
от величины зазора между ними, от размеров и формы бортовых посадочных
электродов.
Так как предположительно после посадки аппарата расположение
бортового посадочного электрода на матрице может быть совершенно
произвольным, то площадь контактирования есть величина случайная.
Естественно выбрать в качестве критерия оптимальности формы и
расположения контактных площадок среднюю площадь контактирования.
Однако при этом очень полезно принимать во внимание еще относительное
124
среднеквадратичное отклонение (CKO) этой величины, так как это служит
оценкой того, насколько площадь контактирования может измениться в случае
неудачного попадания плоского бортового электрода в зону, где преобладают
зазоры.
Аналитически оценить площадь контактирования при различных
положениях электродов довольно сложно. Поэтому в среде Lab View была
написана специальная имитационная программа (рис. 4.32), позволяющая при
заданных форме и размерах бортового посадочного электрода оценить площадь
его контактирования с матрицей наземных контактных площадок для
всевозможных вариантов расположения. Накопленный массив данных затем
используется для расчета относительного СКО площади контактирования.
Исследования проводились для прямоугольной формы бортового
электрода («лыжи»). Задавалась произвольная точка на изображении матрицы
125
контактных площадок, куда помещался центр бортового электрода. Затем
программа осуществляла виртуальное вращение «лыжи» вокруг ее центра с
дискретностью 1 ° и подсчет количества пикселей, соответствующих
контактным площадкам, которые попали в окно, вырезаемое в изображении
матрицы контуром бортового электрода. Таким образом оценивалась площадь
контактирования для каждого угла поворота (в пикселях). После окончания
цикла поворота (0-360°) определялось среднее значение площади
контактирования и СКО.
Были проанализированы следующие варианты формы и расположения
контактных площадок: квадратные с классической матричной укладкой,
квадратные с укладкой со сдвигом, гексагональные, круглые с матричной
укладкой, круглые с плотной укладкой (рис. 4.33).
Рис. 4.33. Варианты форм и укладки контактных площадок:
а - квадратные с классической матричной укладкой; б - квадратные с укладкой со сдвигом;
в - гексагональные; г - круглые с матричной укладкой; д - круглые с плотной укладкой
126
В данном имитационном эксперименте с целью уравнивания условий для
разных вариантов форм контактных площадок их габаритные размеры а
брались одинаковыми, минимальный зазор между площадками везде
принимался равным а/20, а размеры прямоугольного бортового электрода были
везде одинаковыми и составляли а-4а. Полученные результаты сведены в
табл. 4.1.
Таблица 4.1
Результаты имитационного эксперимента
Вариант формы и укладки контактных площадок Средняя площадь контактирования, pix CKO, %
квадратные с матричной укладкой 146 324 1,01
квадратные с укладкой со сдвигом 146 642 0,85
гексагональные 142 527 0,63
круглые с матричной укладкой 115 249 6,46
круглые с плотной укладкой 131 346 2,19
Из результатов следует вывод, что наиболее предпочтительны
квадратные площадки с укладкой со сдвигом. Повторные эксперименты с более
узкими бортовыми электродами подтвердили такой вывод. При увеличении
зазоров между площадками разница между исследуемыми вариантами
становится более резко выраженной. При уменьшении же зазоров разница
между вариантами вполне ожидаемо становится меньше и в пределе исчезает
(кроме вариантов с круглыми площадками).
127
4.3.4. Автоматические зарядные станции с контактными
терминалами в виде параллельных полосовых электродов
4.3.4.1. Концепция построения зарядных станций на основе
терминалов в виде параллельных полосовых электродов
В платформе с параллельными полосовыми электродами, как и в
платформах с матричными интеллектуальными контактами, используется
избыточность наземных электродов [14, 16]. Такая платформа содержит
множество лежащих в одной плоскости контактных площадок,
представляющих собой плоские параллельные металлические полосы
шириной <7, разделенные узкими диэлектрическими прокладками шириной 5
(рис. 4.34). Половина полос подключена к «плюсу» зарядного источника,
а другая половина - к «минусу», причем их полярности чередуются.
электроды
Рис. 4.34. Отдельный БЛА на посадочной платформе
с параллельными полосовыми электродами
Укрупненная зарядная схема показана на рис. 4.35. На схеме условно не
показаны секции батареи GB1 и соответствующие контрольные выводы
зарядного контроллера, а также цепи отключения энергопотребляющей части
бортсети на время зарядки.
128
Рис. 4.35. Укрупненная схема зарядки бортовой батареи
на посадочной платформе с параллельными полосовыми электродами
Пусть на борту БЛА имеется 4 бортовых посадочных электрода,
расположенных на концах опорных стоек аппарата таким образом, что их точки
касания с наземными электродами лежат в вершинах квадрата со стороной
b = <1+5, каждый из бортовых электродов подключен через соответствующие
диоды одновременно к положительному и отрицательному выводам зарядного
контроллера, связанного с бортовой аккумуляторной батареей GB1. Ввиду
малости 5 далее будем считать (7+5 ~ а.
Благодаря описанному особому расположению бортовых электродов
исключено замыкание ими соседних полос на платформе, а главное, что при
любом расположении аппарата на платформе исключена ситуация, когда все
четыре бортовых посадочных электрода контактируют с наземным электродом
только одной полярности. Практически исключена также ситуация
«застревания» бортового электрода на разделительном изоляторе, так как
концы бортовых электродов выполняются заостренными, толщина слегка
129
выступающих над электродными пластинами изоляторов также невелика,
поэтому даже в случае попадания конца бортового электрода точно на
разделительный изолятор первый обязательно соскользнет вниз, на одну из
пластин-электродов. Таким образом, при посадке бортовые электроды не будут
иметь одну и ту же полярность: как минимум один из них будет иметь
полярность, отличную от других, а значит, корректное подключение к
наземному зарядному источнику будет обеспечено при любом расположении
БЛА на платформе (рис. 4.36).
Рис. 4.36. Возможные случайные варианты расположения
бортовых электродов на платформе (для 4-контактной схемы)
130
Данная разработка ориентирована преимущественно на мультикоптеры,
хотя может быть обеспечено обслуживание и других аппаратов с вертикальным
взлетом/посадкой. Зарядка бортовых источников может выполняться
одновременно для нескольких БЛА, находящихся на платформе (рис. 4.37).
Рис. 4.37. Обслуживание на зарядной станции нескольких БЛА
4.3.4.2. Геометрический анализ возможных вариантов
расположения бортовых посадочных электродов
В приведенном примере БЛА имеет 4 посадочных электрода. Это
характерно для квадрокоптеров, в которых удобно располагать электроды-
стойки под несущими лучами рамы аппарата. В других случаях количество
электродов может быть выбрано также в соответствии с количеством несущих
лучей. Например, для трикоптера лучше иметь три посадочных электрода, а для
гексакоптера - шесть. Причем естественно расположить их в вершинах
правильных многоугольников, хотя иногда требуются и другие решения.
Рассмотрим более детально различные варианты расположения точек касания
наземной платформы бортовыми электродами. При этом допустимыми будем
131
считать только такие варианты, при которых вероятность попадания всех стоек-
электродов в полосы только одной полярности практически равна нулю.
1) Расположение точек касания в вершинах треугольника.
Из всех геометрических вариантов допустимым является только
расположение точек касания в вершинах правильного (равностороннего)
треугольника.
Рис. 4.38. Близкие к предельно допустимым варианты посадки для бортовых
электродов, расположенных в вершинах правильных треугольников
На рис. 4.38 для такого случая показаны два близких к предельным, но
допустимые варианты расположения точек касания. Для первого варианта
(длина стороны сг = а) очевидно, что при повороте треугольника возможна
такая посадка, когда все три точки касания окажутся на одной полосе. Для
второго варианта (ширина полосы а равна высоте треугольника h = c2 cos30°)
такое исключено: при любых поворотах одна точка касания будет лежать на
соседней полосе по отношению к двум другим. Таким образом, рекомендуется
выбирать с2 = <7/cos30° ~ 1,155(7. Дальнейшее увеличение длины стороны
треугольника недопустимо, так как возможна ситуация, когда две вершины при
132
основании окажутся на одной полосе, а противоположная вершина - на полосе
«через одну» (т.е. полярность у всех трех вершин будет одна). Именно из таких
соображений точки касания нельзя помещать в вершины неравностороннего
треугольника.
Расположение бортовых электродов в вершинах треугольника имеет одно
явное преимущество по сравнению со всеми другими возможными вариантами:
равномерный прижим всех бортовых электродов к плоскостям наземных
электродов гарантирован всегда, даже при наличии различных неровностей,
перекосов и несовпадении плоскостей наземных электродов. Для случаев 4 и
более бортовых электродов обеспечивать равномерный прижим всех
электродов приходится с помощью специальных мер.
2) Расположение точек касания в вершинах квадрата.
Для этого, уже упомянутого в 4.3.4.1 варианта расположения, требуется
точное соблюдение равенства: Ь = а, где b - длина стороны квадрата.
Расположение точек касания бортовых электродов в вершинах
прямоугольника недопустимо, так как при этом не исключено попадание всех
четырех бортовых электродов на полосы с одной полярностью.
3) Расположение точек касания в вершинах ромба.
Ромб - это параллелограмм, у которого все стороны равны.
Противолежащие углы в нем попарно равны. Будем считать, что малый угол
ромба а < 90°, а длина стороны равна d (рис. 4.39).
Верхний по рис. 4.39 ромб иллюстрирует предельный случай, когда его
противоположные стороны лежат почти точно над краями одной полосы.
Необходимо обязательное выполнение следующего условия:
<isina = (7. (4.1)
Если d sina < а, то это приведет к возможной ситуации, когда все четыре
вершины лежат на одной полосе, а если d sina > а, то по две вершины могут
133
оказаться через полосу друг от друга, но опять же все точки касания будут на
наземных электродах одной полярности.
Рис. 4.39. Предельные варианты расположения точек касания
бортовых электродов, расположенных в вершинах ромба
Нижний по рис. 4.39 ромб иллюстрирует другую предельную ситуацию,
когда дальнейшее растягивание ромба по горизонтали приведет к тому, что две
противолежащие вершины в середине и две крайние вершины справа и слева
окажутся в одной полярности (в данном случае положительной). Очевидно, что
для избежания этого необходимо выполнение условия:
d cos(o/2) < 1,5(7. (4.2)
Учитывая одновременно оба условия (4.1) и (4.2), после некоторых
тригонометрических преобразований получаем:
а > 2arcsin(l/3) ~ 39°.
134
Так как рассматриваем углы а только в пределах 90°, то окончательно
требования к геометрическим параметрам ромба можно сформулировать в виде
совокупности двух условий:
39° < а < 90°;
d = d/sina.
4) Расположение точек касания в вершинах выпуклого дельтоида.
Дельтоид - четырехугольник, который имеет две пары сторон
одинаковой длины. В отличие от параллелограмма, у дельтоида равными
являются не противоположные, а две пары смежных сторон. Выпуклый
дельтоид имеет форму, понятную из рис. 4.40, на котором показаны различные
критичные случаи расположения выпуклых дельтоидов относительно наземных
полос-электродов. Для всех дельтоидов введены обозначения: е - длина малой
стороны,/- длина большой стороны, 0 - угол при меньших сторонах, у - угол
при больших сторонах. Очевидно, что всегда 0 > у.
Варианты расположения 1 и 2 являются недопустимыми, т.к. все
контакты оказываются на одной полосе. Для исключения таких вариантов
необходимо выполнение требований:
e-cos(p/2) +/cos(y/2) > а, (4.3)
2e sin(p/2) > а или 2/ sin(y/2) > а. (4.4)
Вариант расположения 3 (две вершины дельтоида, симметричные
относительно его диагонали, лежат на разделителе полос) критичен тем, что
дальнейшее смещение угла у вправо может привести к тому, что вершина при
этом угле, так же как и три другие вершины, окажется на полосе с
отрицательной полярностью. Чтобы это исключить, необходимо выполнение
условий:
/ cos(y/2) < <7, (4.5)
e cos(p/2) < а. (4.6)
135
Рис. 4.40. Недопустимые или близкие к предельно допустимым положения
точек контактирования электродов, расположенных в вершинах
выпуклых дельтоидов
Исходя из сходных соображений формируются неравенства,
исключающие критичные варианты расположения 4 (большая сторона
дельтоида лежит на разделителе) и 5 (меньшая сторона лежит на разделителе).
136
Для исключения варианта 4 после некоторых тригонометрических
преобразований получено:
/siny><7, (4.7)
e-sin((y+P)/2) < la. (4.8)
Для исключения варианта расположения 5 получено:
(7 </sin((y+P)/2) < 2(7. (4.9)
Вариант расположения 6 аналогичен тому, что рассматривалось для ромба
(нижняя фигура по рис. 4.39). Для исключения такой ситуации требуется
выполнение условия:
/sin(y/2) < 1,5(7. (4.10)
Для совместного учета всех введенных требований (4.3)—(4.10) была
написана специальная программа для автоматизированных расчетов
возможного расположения точек касания электродов. Тестирование с помощью
этой программы различных конфигураций дельтоидов дало интересные
результаты, показывающие, что расположение точек касания в вершинах
выпуклого дельтоида дает разработчику гораздо больше возможностей в
выборе размеров и форм фигур, очерчивающих расположение концов бортовых
электродов, по сравнению со всеми рассмотренными вариантами 1-3
(треугольник, квадрат, ромб). Гораздо свободнее здесь могут быть и допуски на
соблюдение заданных размеров. Так, например, при выборе е = (7иу = 70°
разрешенный размер f может принимать значения от 1,07(7 до 1,22(7.
5) Расположение точек касания в вершинах равнобочной трапеции.
При такой конфигурации надо также рассмотреть несколько возможных
вариантов (рис. 4.41) и ввести требуемые ограничения на геометрические
параметры трапеции: длины оснований х,уи высоту h.
Для полного исключения случая 1 (основания параллельны полосам
посадочной платформы, все вершины либо на одной полосе (Л < а). либо (Л > а)
пары вершин лежат через полосу друг от друга) необходимо ввести
137
ограничивающее условие, аналогичное тому, что вводилось для треугольника,
квадрата и ромба, а именно: h = а (вершины строго на разделителях).
расположенных в вершинах равнобочных трапеций
Для случая 2 (основания трапеции перпендикулярны полосам)
необходимо отдельно рассмотреть случаи, когда х > а и х < а. Если х > а (на
некоторую небольшую величину), то необходимо, чтобы За < у < 5а. Но такая
конфигурация с точки зрения практической реализации неудобна, поэтому этот
случай не рассматриваем. Если х < а, то необходимо, чтобы а <у < За.
Для случая 3 (две противоположные вершины, связанные диагональю d.
лежат на разделителе полос). В этом случае необходимо, чтобы расстояние h\
от разделителя до вершины при большем основании не превышало а. Для того
чтобы это выполнялось, необходимо соблюдение неравенства:
кх=уа\(х+Ь)2 + а^~ш<а, (4.11)
где Д= (у-х)/2.
138
Таким образом, совокупность неравенств h = а, х<<7и(4.11) полностью
определяет требования к геометрическим параметрам равнобочной трапеции.
6) Расположение точек касания в вершинах правильного
шестиугольника.
На рис. 4.42 показаны близкие к предельно допустимым варианты
расстановки концов бортовых электродов, расположенных в вершинах
правильных шестиугольников. Из рисунка видно, что длина стороны
шестиугольника должна быть не менее gi (для недопущения попадания всех
вершин на одну полосу) и не более g2 (для того, чтобы противолежащие тройки
вершин не оказались через полосу друг от друга). Простые геометрические
выкладки позволили получить следующие неравенства для стороны
шестиугольника g:
<7/(2cos30°) = 0,577(1 < g < а.
Рис. 4.42. Близкие к предельно допустимым варианты посадки для бортовых
электродов, расположенных в вершинах правильных шестиугольников
139
Таким образом, расположение точек касания бортовых посадочных
электродов на платформе должно подчиняться определенным геометрическим
соотношениям, подробно разобранным выше. Соблюдение этих соотношений
гарантирует с вероятностью 100 % исключение ситуации, когда все бортовые
электроды контактируют с наземными электродами одной и той же полярности.
4.3.4.3. Имитационное моделирование соединения бортовой
и наземной частей зарядной системы
Наиболее употребительными схемами расположения точек касания
бортовых электродов следует считать 3-, 4-, 6- и 8-точечные схемы, причем
точки касания в них расположены в вершинах соответствующих правильных
многоугольников (такие схемы соответствуют расположению опорных стоек
аппаратов под несущими лучами роторов мультироторных аппаратов
вертикального типа).
Представляет практический интерес то, каким образом вероятность
правильного контактирования бортовой и наземной частей зарядной системы
зависит от количества точек касания, размеров соответствующего правильного
многоугольника, а также неопределенности расположения точек касания.
Оценивание вероятности правильного расположения аппарата на
платформе в аналитическом виде достаточно проблематично. Поэтому такая
оценка производилась с использованием специально разработанного
программного имитатора посадки воздушного робота на платформу,
представляющую собой набор полос с чередующейся полярностью [17].
Программа, названная CoptersLanding, позволяет задать количество, длину и
ширину полос, число бортовых электродов (точек касания), радиус
описывающей окружности правильного многоугольника, в вершинах которого
помещены точки касания, а также неопределенность координат точек касания
(предельное случайное отклонение координат от заданных значений).
В главном окне программы отображается результат имитации (рис. 4.43).
140
Можно задать однократную имитацию или прогон множества случайных
положений с оценкой результата.
Длина контактных лент, мм
2800 §
Ширина контактных лент,мм
200 ’ Ц
Число бортовых электродов
-ж
3 S)
Описывающий радиус, мм
500 @
Неопределённость расположения
бортовых электродов, мм
10 S
Очистить посадочную полосу
Начать заново
Рис. 4.43. Область задания параметров программы CoptersLanding
Результат индицируется в отдельной области окна, где для всех попыток
показывается полярность каждой из точек касания и результат посадки -
удачный (I) или неудачный (О, в случае совпадения полярностей всех точек).
141
Итоговый результат представлен в виде количества имитаций посадки и
процента удачных посадок (рис. 4.44). Оцениваются только те посадки, когда
все точки касания аппарата помещаются на платформе.
Рис. 4.44. Область результатов программы CoptersLanding
Практическая ценность программы в том, что она позволяет имитировать
одновременно как случайное положение аппарата на платформе, так и
случайные отклонения координат всех точек касания. При большом количестве
статистических испытаний (во всех имитационных экспериментах оно
задавалось равным 10 000) можно получить достаточно надежную оценку
вероятности успешных посадок.
142
Во всех оцениваемых случаях посадок постоянными задавались
следующие геометрические параметры платформы:
- количество полос - 20,
- длина полос - 3000 мм,
- ширина полос - 200 мм.
Варьировались следующие параметры аппарата:
- число бортовых электродов (3, 4, 6, 8),
- радиус описывающей окружности (50-400 мм),
- неопределенность координат точек касания (предельные значения
случайных отклонений координат 0, 3, 5, 7, 10 мм при случайном законе их
распределения).
В 4.3.4.2 были получены выражения, связывающие геометрические
параметры воздушного робота, описывающие расположение контактов
бортовых электродов, и ширину полосы, при которых обеспечивается
стопроцентная вероятность разнополярности бортовых электродов.
В частности, такие выражения получены и для случаев, наиболее интересных
при использовании мультикоптеров, когда контакты бортовых электродов
лежат в вершинах правильных многоугольников - равностороннего
треугольника, квадрата и шестиугольника.
В табл. 4.2 сведены итоговые выражения для названных конфигураций с
добавлением формул для правильного восьмиугольника. Добавлены также
выражения для радиуса R описывающей многоугольник окружности, а также
ожидаемые оптимальные значения R при ширине полосы а = 200 мм.
Выполнение приведенных теоретических выражений гарантирует
успешность посадки (в смысле разнополярности бортовых электродов) только
для идеального случая, когда контакты бортовых электродов установлены
жестко и не имеют случайных отклонений. На практике это обычно не
выполняется. Вследствие некоторой подвижности стоек, на концах которых эти
контакты размещены, положения всех контактов претерпевают случайные
143
смещения в определенном диапазоне (например, порядка 0-10 мм). Закон
распределения этих отклонений будем считать нормальным. Направление
смещения также случайно, его будем считать распределенным по
равномерному закону.
Таблица 4.2
Теоретически рассчитанные оптимальные соотношения*
геометрических параметров воздушного робота и ширины полосы
(при расположении контактов бортовых электродов в вершинах
правильных многоугольников)
Кол-во бортовых электродов Оптимальные длина стороны многоугольника с и радиус описанной окружности выраженные через ширину полосы а Ожидаемые оптимальные значения/?, мм при а = 200 мм
3 с = 1,155а R = 0,667а 7? = 133,4
4 с = а R = 0,707а 7? = 141,4
6 0,577а < с < а 0,577а < 7? < а 115,4 <R <200
8 0,414а < с < а 0,541а < R < 1,307а 108,2 <R <261,4
* Оптимальными считаются соотношения, при которых с наибольшей вероятностью
обеспечивается разнополярность бортовых электродов.
Спрогнозированные таким образом результаты были проверены путем
имитационного моделирования в программе CoptersLanding. Результаты для
случая полного отсутствия неопределенности расположения точек касания
электродов представлены на графиках (рис. 4.45-4.48).
144
Описывающий радиус R, мм
Рис. 4.45. Вероятность успешной посадки для 3-точечной схемы точек касания
Описывающий радиус R, мм
Рис. 4.46. Вероятность успешной посадки для 4-точечной схемы точек касания
Описывающий радиус R, мм
Рис. 4.47. Вероятность успешной посадки для 6-точечной схемы точек касания
>
с
о
>•
Описывающий радиус R, мм
Рис. 4.48. Вероятность успешной посадки для 8-точечной схемы точек касания
145
Теоретические прогнозы полностью подтвердились. Для всех
испытуемых вариантов схем расположения точек касания электродов
существуют оптимальные диапазоны размеров аппарата (радиуса описанной
окружности R), при которых посадка всегда будет успешной (в смысле
правильной коммутации электродов зарядной системы). Причем при
увеличении количества точек касания эта зона оптимальности расширяется.
Несколько неожиданным оказалось наличие зоны минимума вероятности
успешной посадки, следующей после зоны максимума (она в том или ином
виде заметна на каждом из графиков рис. 4.45-4.48). Затем снова следует
повышение вероятности, хотя и не всегда до 100 %. Теоретически такой
характер поведения кривой на этом участке предсказать было бы довольно
сложно. Поэтому имитационный вычислительный эксперимент для оценки
исследуемых зависимостей - практически единственное надежное средство.
Отдельная серия имитационных экспериментов была проведена для
оценки влияния на вероятность успешной посадки р неопределенности
координат точек касания электродов. Эта неопределенность (у) задавалась
путем указания ее предельных значений в абсолютных единицах
(миллиметрах). Наиболее интересными для изучения представлялись
диапазоны R вблизи уже упомянутых оптимальных зон. Именно вблизи этих
зон подробно изучалось поведение зависимостей р =f(R) для значений у = 0, 3,
5, 7, 10 мм. Это типичные значения для реальных условий, когда
неопределенность координат может быть обусловлена такими факторами, как
технологические погрешности монтажа бортовых электродов или нежесткость
опорных стоек. Результаты для 3-, 4- и 6-точечных схем расположения точек
касания электродов представлены на рис. 4.49-4.51.
По графикам видно, что для 3- и 4-точечных схем, у которых зона
оптимальных значений R относительно узкая, уже при у = 5 мм и более
практически невозможно добиться стопроцентно успешной посадки.
146
Описывающий радиус R, мм
у О ---у 3 — — у 5 — у 7 -у 10
Рис. 4.49. Зависимости вероятности успешной посадки от радиуса
описывающей окружности R при различной неопределенности
координат точек касания у для 3-точечной схемы
135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150
Описывающий радиус R, мм
у=О----- у=3 — —у=5 — у=7 ----у=10
Рис. 4.50. Зависимости вероятности успешной посадки от радиуса
описывающей окружности R при различной неопределенности
координат точек касания у для 4-точечной схемы
147
Описывающий радиус R, мм
У=О-----------у=3
--- у=5
у=7 -----у=10
Рис. 4.51. Зависимости вероятности успешной посадки от радиуса
описывающей окружности R при различной неопределенности
координат точек касания у для 6-точечной схемы
Для 6- и 8-точечных схем (графики для 8-точечной схемы здесь не
показаны, т.к. они аналогичны представленным для 6-точечной), начиная с
определенных значений R (на рис. 4.51 это значения R ~ 126 мм)
неопределенность у перестает оказывать какое-либо влияние на вероятность
успешной посадки. Диапазон значений R, при которых р= 100 % при любых
значениях у < 10 мм, для 6-точечной схемы продолжается вправо до значений
порядка 260 мм, т.е. до конца зоны оптимальности, а для 8-точечной он
практически вообще не заканчивается.
Таким образом, разработанная имитационная программа позволила
оценить вероятность успешной посадки воздушного робота, имеющего
148
регулярное расположение бортовых электродов (точки касания которых
расположены в вершинах правильного многоугольника), на посадочную
платформу с параллельными полосовыми электродами. Разработанный
инструментарий помогает правильно выбрать соотношения между
геометрическими параметрами посадочной платформы и воздушного робота.
4.3.4.4. Платформа с дискретно перестраиваемой шириной
полос
Из вышеизложенного следует, что для стопроцентно успешной посадки
(при которой обеспечивается разнополярность бортовых электродов) ширина
полосы должна соответствовать типоразмеру аппарата, а точнее - расстоянию
между бортовыми посадочными электродами. В частности, для 4 бортовых
электродов, расположенных в вершинах квадрата, ширина полосы должна быть
равна стороне квадрата. Однако если платформа должна принимать БЛА
разных тироразмеров (с разным межэлектродным расстоянием), то, очевидно,
для сохранения успешности посадок, ширина полосы должна быть
адаптируемой к типоразмеру БЛА. Сделать ширину полосы плавно
настраиваемой в определенном диапазоне непрерывно изменяемых значений
проблематично, поэтому авторами было предложено техническое решение с
дискретно изменяемой шириной полос.
Суть идеи состоит в следующем. Пусть имеется узкая полоса с
некоторым базовым значением ширины, например, 50 мм, для которой
отдельно может устанавливаться полярность подключаемого зарядного
источника. Набор таких полос, разделенных узкими диэлектрическими
промежутками, образует посадочное поле, которое в зависимости от
типоразмера заходящего на посадку аппарата может переформатироваться, а
именно: чередование полярностей может происходить через 1, 2, 3, 4 и т.д.
полос, соответственно оптимальная межэлектродная база (для квадрокоптера)
будет меняться в соответствии с рядом 50, 100, 150, 200 мм и т.д. (рис. 4.52).
149
Фактически несколько подряд расположенных полос с одной полярностью
равносильны одной сплошной полосе.
Рис. 4.52. Платформа с чередованием полярности:
а - через 2 полосы; б - через 4 полосы
Коммутация полос на определенный полюс зарядного источника может
выполняться как автоматически, так и вручную. Последний вариант был
реализован в экспериментальной платформе, в которой коммутация полос
задается пользователем с пульта управления (рис. 4.53-4.54).
Рис. 4.53. Схема управления платформой
с дискретно перестраиваемой шириной полос
150
Рис. 4.54. Экспериментальный образец платформы:
а - общий вид; б - бортовые контакты БЛА; в - пульт управления
151
Основу этого пульта составляет контроллер Arduino Mega2560. Ручная
установка количества элементарных полос, через которое происходит смена
полярности, задается с клавиатуры. Контроллер задает полярность
30 элементарных полос посредством узла коммутации, в котором собраны
управляемые переключающие реле (К1 по рис. 4.53), подключающие к каждой
полосе либо положительный полюс источника питания Е, либо землю.
Каждый БЛА, приземляющийся на платформу для зарядки, должен иметь
на борту диодно-распределительное устройство (диодный коллектор) и
зарядный контроллер, который обычно содержит в своем составе балансер
(рис. 4.17,4.35).
Еще более гибкую и универсальную систему управления подключением
полос к тому или иному полюсу зарядного источника можно получить, если в
нее будет включена наземная подсистема определения наличия бортовых
электродов на полосах и сопряженная с этими посадочными электродами
бортовая подсистема выдачи при посадке сигнала присутствия. В такой системе
коммутация полос происходит уже не регулярным образом, а произвольно, т.е.
отдельно взятая элементарная полоса может иметь любую полярность в
зависимости от расположения аппарата на платформе после посадки.
4.3.5. Некоторые конструкторско-технологические
особенности реализации посадочных платформ с открытыми
контактами
Следующая по значимости техническая проблема при реализации
посадочных платформ с открытыми контактами (после обеспечения
правильности подключения контактов к зарядному источнику) - это качество
контактирования бортовых и наземных электродов.
Для платформ с матрицами интеллектуальных контактов и платформ
с параллельными полосовыми электродами эта проблема решается по-разному.
При работе с матрицами интеллектуальных контактов площадь бортовых
152
электродов может быть достаточно большой, поэтому перекрываемая ими
площадь наземных контактных площадок вполне обеспечивает потребности
процесса зарядки, в том числе быстрой зарядки, при которой через контакты
должны протекать довольно большие токи (порядка 5...20 А в зависимости от
емкости АКБ). Однако для того чтобы эффективно использовать большую
площадь контактирования, необходимо обеспечить плотное равномерное
прижатие друг к другу плоских наземных и бортовых электродов. Прижатие
обычно обеспечивается за счет веса самого аппарата. Еще одним возможным
решением вопроса улучшения контактирования бортовых и наземных
электродов является увеличение силы прижатия их друг к другу за счет
использования магнитных или электромагнитных элементов ( [11], рис. 4.12 ).
Так как наружные поверхности контактных площадок наземной
платформы не всегда лежат строго в одной плоскости, то жесткий бортовой
электрод может оставить некоторые наземные площадки (с пониженным
уровнем) без надежного контакта. Поэтому лучше, если бортовые электроды
обладают определенной гибкостью и упругостью. Полезно также сами
наземные пластины делать подпружиненными снизу: для этого можно
закреплять их на подложках из пористого упругого материала, например,
вспененной резины. Поверхности электродов желательно защищать
антикоррозионным покрытием (применяют золочение или серебрение).
Относительно небольшая площадь контактирования в системах с
плоскопараллельными полосовыми электродами заставляет искать технические
решения по повышению надежности контактов. Улучшение качества
контактирования может быть достигнуто разными способами: это применение
защитных металлических покрытий, увеличение количества бортовых
электродов, обеспечение равномерного и качественного прижима всех
бортовых электродов к полосам. Последнее проще всего обеспечить
подпружиниванием бортовых электродов. Но это не единственный вариант.
Например, на рис. 4.55 проиллюстрировано техническое решение, в котором
153
увеличение площади контактирования достигается за счет посадки аппарата на
полосы, представляющие собой мягкие металлизированные маты.
Рис. 4.55. Конструкция с подпружиненными электродами и мягкой полосой:
1 - стержень стойки БЛА; 2 - пружина; 3 - наконечник-электрод; 4 - диэлектрический
разделитель полос; 5 - металлизированное покрытие; 6 - мягкий упругий материал;
7 - токоведущий провод
Наконечник бортового электрода 3 должен иметь достаточно малый
радиус закругления в зоне контакта для того, чтобы исключить возможность
его установки и задержки на ребре разделителя 4. Поэтому при опускании
такого наконечника на жесткую металлическую поверхность касание будет
точечным, и площадь контактирования небольшой, что ограничивает токи
зарядки. Очевидно, что в случае посадки на мягкую полосу ее деформация
будет способствовать «обволакиванию» нижней части наконечника
деформированной поверхностью полосы и многократному увеличению
площади соприкосновения электродов.
154
Источники информации по главе 4
1. Fetisov V., DmitriyevO., NeugodnikovaL., Bersenyov S., Sakayevl.
Continuous monitoring of terrestrial objects by means of duty group of multicopters
// Proceedings of XX IMEKO World Congress «Metrology for Green Grouth»,
9-14 Sept. 2012. Busan, Republic of Korea.
2. Silverman M. C., NiesD., JungB., Sukliatme G. S., Staying Alive:
A Docking Station for Autonomous Robot Recharging // Proc. IEEE International
Conference on Robotics and Automation (ICRA), Washington DC, May 11-15,
2002. P. 1050-1055.
3. Chua M. It’s a tank. It’s a quadcopter. No, it is a radio control flying tank! //
Shouts portal. 17.06.2015. URL: https://mikeshouts.com/b-unstoppable-tank-
quadcopter-drone (дата обращения: 30.09.2017).
4. Atherton К. D. Inspector robot: Panther is a driving, flying drone // Popular
Science. 12.11.2016. URL: http://www.popsci.com/panther-flying-drone-car (дата
обращения: 30.09.2017).
5. Обзор SymaX9 Flying Car: квадрокоптер на колесах //
DroneFlyers.ru. 13.11.2016. URL: http://droneflyers.ru/2016/ll/13/obzor-syma-x9-
flying-car-kvadrokopter-na-kolyosah (дата обращения: 30.09.2017).
6. Мельничук О. В., Фетисов В. С. Особенности заряда и разряда
литиевых аккумуляторных батарей и современные технические средства
управления этими процессами // Электротехнические и информационные
комплексы и системы. 2016. №2. С. 41-48.
7. AEROD - Система посадки/подзарядки для беспилотников
вертикального взлета/посадки // Сайт компании «СЪЕМКА С ВОЗДУХА».
URL: Ьйр://съемкасвоздуха.рф/Ь^/203-аегоб-8181ета-ро8абк1-роб2агуабк1-б1уа-
bespilotnikov-vertikalnogo-vzleta-posadki-dlya-sozdaniya-avtomatizirovannykli-
setej-funktsionirovaniya-dronov.html (дата обращения: 30.09.2017).
155
8. Kemper F. P., Suzuki К. A. O., Morrison J. R. UAV consumable
replenishment: design concepts for automated service stations // Journal of
Intelligent & Robotic Systems. January 2011. Vol. 61. Issue 1. P. 369-397.
9. Triton EQ: описание зарядного устройства с функцией балансировки
[Online] // Сайт компании Electrifly, 2017. URL: http://www.electrifly.com/
chargers/gpmm3155.html (дата обращения: 30.09.2017).
10. Dale D. Automated ground maintenance and health management for
autonomous unmanned aerial vehicles: Thesis (M. Eng.) - Massachusetts Institute of
Technology, Dept, of Electrical Engineering and Computer Science, 2007. P. 32-36,
43-49.
11. Mulgaonkar Y. Automated recharging for persistence missions with
multiple micro aerial vehicles: Thesis (M. Eng.) - University of Pennsylvania, Dept,
of Mechanical Engineering and Applied Mechanics, 2012.
12. Фетисов В. С., Ахмеров Ш. Р., Сизоненко Р. В., Красноперов Р. А.
Наземные станции подзарядки электрических беспилотных летательных
аппаратов на основе открытых контактных площадок // Электротехнические и
информационные комплексы и системы. 2014. № 2. С. 44-53.
13. Патент РФ №2523420 на изобретение. Система подзарядки
аккумулятора электрического беспилотного летательного аппарата /
В. С. Фетисов, Ш. Р. Ахмеров, И. И. Мухаметзянова, Р. В. Сизоненко; заявл.
09.01.2013; опубл. 20.07.2014. Бюл. № 20.
14. Патент РФ № 135469 на полезную модель. Система подзарядки
бортового аккумулятора воздушного робота / В. С. Фетисов, Ш. Р. Ахмеров,
А. И. Мухаметзянова; заявл. 02.07.2013; опубл. 10.12.2013. Бюл. № 34.
15. Амелина М. А., Амелин С. А. Программа схемотехнического
моделирования Micro-Cap. Версии 9, 10. Смоленск: НИУ МЭИ. 2012. 617 с.
16. Фетисов В. С., Ахмеров Ш. Р. Системы подзарядки электрических
беспилотных летательных аппаратов с вертикальным взлетом-посадкой на
основе посадочных платформ с плоскопараллельными открытыми контактными
156
площадками // Приборы и системы. Управление, контроль, диагностика. 2015.
№ 7. С. 41-49.
17. Фетисов В. С., Мельничук О. В., Кудашов Д. Д., Сизоненко Р. В.
Имитационное моделирование состояния контактной системы на посадочной
платформе для подзарядки воздушных роботов // Электротехнические и
информационные комплексы и системы. 2016. № 1. С. 54-63.
157
ГЛАВА 5. АВТОМАТИЧЕСКИЕ ЗАРЯДНЫЕ СТАНЦИИ
С БЕСКОНТАКТНЫМИ ТЕРМИНАЛАМИ
В отличие от рассмотренных АЗС с контактными терминалами, где
передача энергии от наземного источника к БЛА происходит по постоянному
току, в зарядных станциях с бесконтактными терминалами электроэнергию
принципиально можно передавать только по переменному току. В бортовой
части такой системы применяют дополнительное преобразование переменного
тока в постоянный. В результате всех преобразований и сопутствующих потерь
КПД терминалов беспроводной зарядки в зависимости от передаваемой
мощности составляет обычно 10...60 %, в лучших случаях 70...80 %.
Беспроводная зарядка аккумуляторов БЛА, несмотря на относительно
низкий КПД, имеет свои преимущества по сравнению с традиционным
контактным способом: отсутствие необходимости точного позиционирования
аппарата на посадочной площадке и независимость от состояния ее
поверхности (она может быть покрыта слоем воды, инея, пыли, что критично
для контактных устройств). Беспроводной способ зарядки имеет преимущество
и с точки зрения безопасности: здесь полностью исключено искрение контактов
или их случайное замыкание.
5.1. Передача энергии посредством
связанных резонансных контуров
5.1.1. Принцип действия и основные технологии
Беспроводная передача электромагнитной энергии может осуществляться
либо посредством ее излучения от передающего устройства к приемному (это
т.н. дальняя зона передачи, когда расстояние между излучателем и
приемником намного больше длины волны), либо посредством
электромагнитной индукции (т.н. ближняя зона передачи, когда расстояние
158
между излучателем и приемником меньше или сравнимо с длиной волны)
(рис. 5.1).
Рис. 5.1. Различные технологии беспроводной передачи электроэнергии
Возможности передачи энергии с земли на борт в оптическом диапазоне
рассматривались в гл. 2 (2.1.3.2). Предпринимаются попытки передачи энергии
радиоволн на относительно большие расстояния в диапазоне СВЧ. Так,
компания Powercast (США) наладила серийный выпуск передатчиков
TX91501-3W и соответствующих приемников энергии, работающих в
диапазоне 915 МГц и позволяющих передавать мощность порядка 3 Вт на
расстояние до 10 м [1]. Однако относительно невысокая эффективность
передачи и высокая стоимость упомянутых устройств пока сдерживают их
широкое внедрение, в том числе для целей зарядки БЛА.
На сегодняшний день устройства беспроводной передачи, работающие на
принципе электромагнитной индукции, распространены гораздо больше.
Существует большое количество их разновидностей. Подавляющая их часть -
это устройства на основе электромагнитной индукции. Обычно
электромагнитная энергия высокой частоты (10...50 МГц) передается от
источника к потребителю посредством связанных магнитным потоком
резонансных контуров [2] (рис. 5.2).
159
Рис. 5.2. Резонансные LC-контуры, связанные магнитным потоком
Случай индуктивной нерезонансной связи катушек (трансформаторная
связь) для задач беспроводной зарядки БЛА не рассматривается ввиду его
малой эффективности. Но один частный случай - получение электроэнергии с
линий электропередач заслуживает внимания. Он рассмотрен в 5.2.
Еще одна классификационная ветвь электропередающих устройств,
работающих в ближней зоне, - это устройства на основе электростатической
индукции (емкостной связи). Теоретически это можно применить и для
зарядки БЛА, но малоэффективно по сравнению с другими способами, поэтому
такие устройства не рассматриваются в этой книге.
Любая система беспроводной передачи энергии на основе
электромагнитной индукции содержит первичную катушку L1 (источник) и
вторичную катушку L2 (приемник). Катушки образуют систему с индуктивной
связью (рис. 5.3). Переменный ток, протекая в обмотке первичной катушки,
создает магнитное поле, индуцирующее напряжение в приемной катушке,
которое может быть использовано для зарядки АКБ. По мере удаления
вторичной катушки от первичной все большая часть магнитного поля
160
рассеивается и не достигает вторичной катушки. Поэтому при определенном
расстоянии индуктивная связь становится неэффективной. Потери на рассеяние
магнитного поля в некоторой степени могут быть уменьшены за счет
применения ферромагнитных экранов и сердечников.
Рис. 5.3. Упрощенная эквивалентная схема связанных колебательных контуров
Взаимная индуктивность М определяется из известного соотношения:
РР — к Р-^Р^,
где к - коэффициент связи между катушками, зависящий от многих факторов,
в том числе от расстояния между катушками (z), соотношения диаметров
катушек, смещения между их центрами, от формы катушек и др.
Из анализа эквивалентной схемы на частоте резонанса эффективность
системы (т|), определяемая как ц = P[JP\ (где Р^ - мощность на нагрузке 7?^,
aPi - мощность на резисторе потерь 7?1), будет наибольшей при оптимальном
значении сопротивления нагрузки, которое равно [3]
L ~ Л2
СОдМ2
Hv2
где ©о - резонансная частота, М - взаимная индуктивность, R\ и R2 - активные
сопротивления потерь катушек индуктивности.
При оптимальном значении сопротивления нагрузки эффективность
системы на частоте резонанса равна
П =
&-1
’м +1
(5-1)
161
где Qm ~ коэффициент качества (эффективная добротность системы),
определяемая из выражения:
Ои=к,10&, (5.2)
где Qi и Qi - добротности резонансных контуров источника и приемника.
График зависимости эффективности системы т| от коэффициента качества
Qm в соответствии с (5.1) приведен на рис. 5.4. Он монотонно растет,
асимптотически приближаясь к единице.
В соответствии с (5.2) коэффициент качества, а значит и эффективность
передачи энергии, можно повысить за счет увеличения добротности катушек
и/или коэффициента связи.
Коэффициент качества (QM)
Рис. 5.4. Зависимость эффективности системы от коэффициента качества
Согласно классификации ассоциации потребителей электроники СЕА
(Consumer Electronics Association) технологии беспроводной зарядки
различаются в зависимости от величины коэффициента связи. Если к близко к
единице - это так называемая сильносвязанная система (tightly coupled), если
к < 0,1 - слабосвязанная (loosely coupled).
В настоящее время разработаны две технологии беспроводной зарядки,
использующие явление электромагнитной индукции. Одна из них, в которой
используются сильносвязанные катушки, получила название MI (Magnetic
Induction - магнитно-индукционная), а другая, со слабосвязанными, - MR
(Magnetic Resonant - магнитно-резонансная). Эти две технологии имеют много
162
общего. В каждой из них для беспроводной передачи энергии используется
магнитное поле и применяются резонансные контуры. И в той, и в другой
используются каналы информационного обмена между передающей и
потребляющей частью для управления процессом зарядки. В обеих технологиях
есть возможность использовать не одну, а несколько передающих катушек.
Но есть в этих технологиях и существенные отличия.
Технология MI ориентирована на повышение качества индуктивно
связанной системы Ом за счет высоких значений коэффициента связи катушек
к, а в технологии MR главное - это обеспечение высоких значений
добротностей передающей и приемной катушек О\ и Qi (см. (5.2)).
В Ml-технологии есть определенные требования к позиционированию
приемной катушки относительно передающей. Их размеры должны быть
примерно одинаковыми. В случае применения MR-технологии нет
необходимости в строгом позиционировании катушек, они могут иметь разные
размеры, а также имеется возможность использовать один источник для
одновременной зарядки нескольких устройств, причем они могут быть по-
разному расположены в пространстве (рис. 5.5).
Сильно связанные катушки: Z«D
а
Рис. 5.5. Расположение связанных магнитным полем катушек:
а - для Ml-систем; б - для MR-систем
Диаметр приемной катушки D2
<---------->
Слабо связанные катушки: D2<D1
б
163
Если коэффициент связи имеет большие значения (как в Ml-системах), то
из-за вносимого в оба контура дополнительного импеданса, происходит
расстройка контуров, поэтому АЧХ системы принципиально не может иметь
острого резонансного пика. Если коэффициент связи превышает некоторое
критическое значение, будут наблюдаться два пика с частотами /L2 = /ол/1±£,
где к = M/L - коэффициент связи катушек, L - индуктивность одной из катушек
(считаем здесь катушки одинаковыми) [4]. Поэтому важно выдерживать
значение к не выше критического (рис. 5.6).
Рис. 5.6. АЧХ связанной резонансной системы при различных к
В стандартах, основанных на технологии MI, резонансная частота
выбирается с учетом сопротивления нагрузки и может изменяться в достаточно
широком диапазоне. В связи с этим эффективная добротность системы
относительно низкая по сравнению с решениями на базе технологии MR.
Максимальная эффективность системы может быть достигнута только на
определенной резонансной частоте и при оптимальном сопротивлении
164
нагрузки. В случае использования MR-технологии, т.к. энергия передается на
строго определенной резонансной частоте, добротность контуров выше, однако
требуется очень точное согласование резонансных частот и поддержание их в
процессе работы. Типичные значения резонансных частот для MI-технологии -
сотни килогерц, а для MR - единицы и десятки мегагерц. Типичные значения
добротностей контуров для Ml-технологии - 20...50, для MR - 50...100.
Типичные значения КПД Ml-систем составляют 30...60 % при
номинальных расстояниях между катушками. У MR-систем КПД передачи
энергии ниже: лучшие системы даже при небольшом расстоянии между
катушками (2 см) имеют КПД порядка 30 %, а при расстоянии в 75 см он
падает до 15 % [5]. Но устройства с передачей энергии по Ml-технологии
гораздо более чувствительны к увеличению расстояния между первичной и
вторичной катушками: КПД при этом падает быстрее, чем в MR-устройствах.
Это заметно при применении катушек одинакового размера, но преимущество
в относительной стабильности КПД магнитно-резонансных систем особенно
проявляется, когда первичная и вторичная катушки имеют разные размеры
(приемные меньше). Системы с сильносвязанными передающей и приемной
катушками (MI) вообще не работают при большом соотношении их площадей
(порядка 10:1) [6]. То, что в магниторезонансной системе можно применять
несколько приемных катушек, очень удобно для пользователей. В этом случае,
например, одну большую первичную катушку, расположенную в основании
зарядной платформы, можно использовать для зарядки нескольких БЛА
одновременно.
Кроме того, что технология MR имеет сравнительно низкий КПД, она
также проигрывает технологии MI в отношении создаваемых
электромагнитных помех по очевидной причине: магнитные силовые линии
слабосвязанных катушек имеют гораздо большую протяженность и большее
рассеяние.
165
5.1.2. Существующие стандарты
В последние годы многие известные компании (Qualcomm Incorporated,
Intel, Integrated Device Technology, Linear Technology Corporation, NXP,
Powercast Corporation, PowerbyProxy, Samsung, Texas Instruments, WiTricity и
др.) активно занимаются разработкой и производством элементной базы и
оборудования для беспроводных зарядных устройств, а международные
отраслевые консорциумы Wireless Power Consortium (WPC) и AirFuel Alliance,
обобщая общий накопленный опыт, разрабатывают соответствующие
стандарты [7, 8, 9].
Пока беспроводные зарядные устройства серийно выпускаются только в
виде относительно маломощных настольных платформ для зарядки бытовой
электронной техники - мобильных телефонов, ноутбуков и т.п. Однако уже
есть проекты стандартов, ориентированных на зарядку более мощных
потребителей (порядка нескольких десятков Ватт и более). Таковыми могут
быть малые мобильные средства передвижения (электроскутеры, инвалидные
коляски и т.д.) и в перспективе электромобили, различные бытовые кухонные
гаджеты, электроинструменты и т.д. И БЛА также рассматриваются в качестве
перспективных объектов, которые будут заряжаться в соответствии с
разрабатываемыми стандартами.
Спецификации консорциума WPC ориентированы преимущественно на
применение MI-технологии, а спецификации AirFuel Alliance - на применение
различных технологий, включая MI, MR и другие, включая технологии
направленного излучения (включая сверхвысокочастотное, лазерное и
ультразвуковое). Наиболее известными на сегодняшний день являются
спецификации WPC. Они объединены стандартом беспроводной зарядки,
получившим оригинальное название «Qi» («Чи» - термин из китайской
философии, обозначающий жизненную энергию).
166
5.1.2.1. Стандарт Qi консорциума WPC
Обобщенно структура системы, построенной на основе спецификаций
WPC, показана на рис. 5.7. В ней наряду с передачей мощности происходит и
двусторонний информационный обмен между передающей и приемной
частями, необходимый для идентификации совместимого приемника и
управления передачей мощности в зависимости от потребностей процесса
зарядки.
Передатчик
Мощность
Контроллер
Драйвера
катушки
(DC - АС)
Датчики
обратной
связи
Приемник
_ Переменный ток
—— Постоянный ток
— Сигналы управления
Рис. 5.7. Обобщенная структура WPC-системы
На сегодняшний день (август 2017 г.) актуальной является спецификация
Qi 1.2.2. В ней предусмотрено расширение диапазона передаваемых мощностей
до 15 Вт (в версиях Qi 1.0 и 1.1 передаваемая мощность ограничивалась
уровнем 5 Вт, в дальнейших версиях стандарта намечен переход на уровень
передаваемой мощности 60 Вт). Регламентируется расстояние между
катушками 5...40 мм, частота тока возбуждения 100...205 кГц.
В WPC-спецификациях даны рекомендованные требования к мощности
передатчика, кроме того, приведены значения индуктивности передающих
катушек, диаметра и марки провода обмотки, габаритных размеров катушек, а
также рекомендации по выбору материала магнитных экранов и их
расположению. В некоторых случаях для более точного позиционирования
167
катушек предусматривается наличие постоянных магнитов. Кроме того, для
каждого типа передатчика даны размеры передающих катушек и приведены
рекомендации по структуре формирователя тока в первичной катушке.
Согласно WPC-спецификациям передатчик содержит мостовой или
полумостовой DC/AC-преобразователь, формирующий ток, и собственно
обмотку. В WPC-спецификациях предусмотрено использование двух типов
передатчиков - А (А1...А18) и В (В1...В5), каждому из которых соответствует
свой типоразмер катушек (на сегодняшний день размеры катушек лежат в
диапазоне 30...80 мм (рис. 5.8).
Рис. 5.8. Различные типоразмеры катушек WPC-систем
Спецификациями WPC предусмотрены определенные способы
организации каналов обмена между передающей и приемной частью и
установлен специальный информационный протокол. Физическим носителем
информационных сигналов в системе является само переменное магнитное
поле, посредством которого передается мощность. Индукция этого поля может
быть больше или меньше в зависимости от режима работы (режим ожидания
или зарядки) и параметров нагрузки. Информационные сигналы формируются
за счет модуляции магнитного потока (рис. 5.9).
168
WIRELESS POWER
CONSORTI UM
Communication (Modulation)
• Receiver modulates load by
- Switching modulation resistor (Rm), or
- Switching modulation capacitor (Cm)
• Transmitter de-modulates reflected load by
- Sensing primary coil current (lp) and/or
- Sensing primary coil voltage (Vp)
Transmitter
Load
4i-----'
20 April 2010
Receiver
How it works
Puc. 5.9. Использование модуляции магнитного потока
для организации информационного обмена
(Иллюстрация: WPC [8])
Это может быть сделано за счет специальных коммутируемых элементов
(резисторов или конденсаторов) в контурах или в самой нагрузке. Так,
например, коммутация элементов Rm или Ст в приемнике (рис. 5.9) приводит к
изменению вносимого сопротивления в передающий контур, а значит, к
изменению токов и напряжений (Ip, Vp) в задающих цепях, которые можно
детектировать.
Стандарты Qi рекомендуют формат данных для информационного
обмена (рис. 5.10). Регламентируется скорость обмена - 2 Кбит/с. Для
кодирования нулей и единиц используется фазовая манипуляция. Для обмена
байтами данных предусматривается использование стартового бита, 8-битовых
169
байтов данных, бита четности и стоп-бита. Внутри информационных посылок
содержатся: преамбула (не менее 11 бит, для разделения посылок), заголовок
(1 байт, содержит информацию о типе посылки и длине информационного
сообщения), собственно информационное сообщение (1 ...27 байт), контрольная
сумма (1 байт).
WIRELESS POWER
CONSORTIUM
Communication (Data-Format)
• Speed: 2 Kbit/s
• Bit-encoding: bi-phase
Я i ьо i ы i b2 i ьз i b4 i b5 i ьб i b7 i i si
• Byte encoding:
Start-bit, 8bit data, parity-bit, stop-bit
• Packet Structure
Preamble Header Message Checksum
- Preamble (>= 11 bit)
- Header (1 Byte)
• Indicates packet type and message length
- Message (1 .. 27 Byte)
• One complete message per packet
• Payload for control
- Checksum (1 Byte)
20 April2010
How it works
Puc. 5.10. Рекомендуемый формат данных информационного обмена
(Иллюстрация: WPC [8])
Сам процесс обмена информацией происходит следующим образом [10].
Передатчик находится в ждущем режиме, если над передающей катушкой
(катушками) нет приемной катушки или если приемному устройству не
требуется передача энергии (АКБ заряжена). Передатчик каждые 400 мс
посылает маломощный импульс. Если напряжение на передающей катушке при
этом не меняется, это означает, что энергия не передается. При наличии
170
приемного резонансного контура будет происходить некоторое падение
напряжения на передающей катушке. Если это детектируется, то посылается
цифровой запрос с целью выяснения, является ли устройство Qi-совместимым.
Если нет, то передатчик возвращается в ждущий режим. Если обнаружен
Qi-приемник, то он сообщает передатчику параметры зарядки - необходимое
количество электроэнергии, силу тока и время зарядки. После этого начинается
фаза передачи энергии, об эффективности которой приемник сообщает
передатчику каждые 32 мс, отправляя ему пакеты данных с информацией о
достигнутом уровне зарядки. При этом передаваемая мощность при
необходимости подстраивается. После полной зарядки АКБ приемник
отправляет сообщение «End Power Transfer» и передатчик останавливает
работу.
Стандартами Qi предусматривается возможность работы передатчика не с
одной, а с массивом катушек, расположенных в пределах определенной
площади и частично перекрывающихся (рис. 5.11).
Рис. 5.11. Массив перекрывающихся катушек
(Иллюстрация: WPC [8])
Причем передатчики типа А могут одновременно работать только на одну
катушку - именно на ту из массива, которая в текущий момент обеспечивает
наиболее эффективную передачу энергии приемнику. Выбор необходимой
171
катушки выполняется на начальном этапе обмена данными с приемником.
Передатчики типа В могут подключаться к нескольким катушкам
одновременно.
Стандарт допускает также такие проектные решения, где передающая
катушка может перемещаться в одной плоскости под корпусом передатчика для
поиска приемной катушки и обеспечения наилучших условий передачи энергии
(рис. 5.12).
WIRELESS POWER
N S . Р. Т I
Coil Alignment (Design Freedom)
• Guided positioning with tactile feedback
• Free positioning with moving coil
• Free positioning with selective activation
of coils in coil array
Guided Positioning
(Magnetic Attraction)
20 April2010
НэлК worts
Free Positioning
(Moving Coil)
Puc. 5.12. Различные способы обеспечения наилучших условий передачи
энергии от передатчика к приемнику (Иллюстрация: WPC [8]):
1 - фиксация приемной катушки с помощью постоянного магнита;
2 - поиск наилучшего положения передающей катушки внутри корпуса передатчика;
3 - селективная активация одной или нескольких катушек из массива
Такие технические решения, ориентированные на проблемы зарядки
БЛА, позволяют реализовать концепцию свободного позиционирования БЛА на
172
платформе, что дает возможность потребителям не беспокоиться о точном
совмещении приемной катушки БЛА с определенным участком поверхности
зарядной платформы, а также обеспечивать одновременную зарядку
нескольких БЛА (рис. 5.13).
Рис. 5.13. Активация передающих контуров при произвольном
посадочном положении БЛА:
1 - активированный контур; 2 - неактивированный контур; 3 - БЛА
5.1.2.2. Стандарты альянса AirFuel
Альянс AirFuel образовался в 2015 г. путем слияния двух других альянсов
разработчиков и производителей беспроводных зарядных устройств: РМА
(Power Matters Alliance) и A4WP (Alliance for Wireless Power), которые к тому
времени разработали свои стандарты беспроводных зарядных систем [9].
Альянс РМА, как и WPC, ориентировался на Ml-технологии, a A4WP -
на MR-технологии. При слиянии было достигнуто соглашение, что стороны
будут работать в направлении адаптации своих спецификаций с целью
173
выработки единого стандарта, что позволит создавать совместимое между
собой оборудование, ориентированное на разные приложения.
Ввиду явных преимуществ технологии MR, доминировать будет,
видимо, именно она. Ряд аналитиков предполагает, что преимущества
применения беспроводных MR-систем окажут большое влияние на
перераспределение рынка и это приведет к тому, что к 2020 г. доля MR-систем
составит примерно 80 % общего объема рынка всех беспроводных устройств
зарядки [7]. Поэтому можно ожидать, что в новых стандартах AirFuel большую
часть займет то, что было наработано альянсом A4WP в области развития
магнито-резонансной технологии.
Согласно A4WP-cneijn(|)nKaLinaM, частота тока возбуждения передающей
катушки - 6.78 МГц. Предусматривается передача мощности до 50 Вт на
расстояние до 5 см (в спецификациях AirFuel планируются большие
расстояния). Система состоит из единственного передатчика и 1-8 приемников.
В зависимости от мощности передатчики и приемники разделяются на классы и
категории. Также в зависимости от уровня потребляемой приемниками
мощности передатчику каждого класса соответствуют приемники
определенной категории. Например, передатчик второго класса может
обеспечивать питанием два приемника категории 2 или один категории 3.
Информационные обмены в A4WP-cncreMe осуществляются посредством
технологии Bluetooth Smart по отдельному радиоканалу (2,4 ГГц, скорость
обмена до 2 Мбит/с, потребляемая мощность до 0,5 Вт).
На сегодняшний день заметна тенденция к сближению представлений о
будущем беспроводной зарядки у двух главных конкурирующих альянсов
(WPC и AirFuel). Так, несмотря на ориентацию WPC преимущественно на
индукционную технологию, делаются определенные шаги и в освоении
магнито-резонансных систем, которые этот консорциум пытается приспособить
под свои стандарты. Можно предположить, что в недалеком будущем будут
выработаны общие подходы и появятся действительно всеобщие стандарты
174
для беспроводной зарядки. Это тем более вероятно, если учесть, что очень
многие известные фирмы являются одновременно членами и того, и другого
альянсов.
5.1.3. Примеры реализованных технических решений
Технические решения, в которых реализуется беспроводная передача
энергии посредством связанных резонансных контуров именно применительно
к задачам зарядки аккумуляторов БЛА, ориентированы в основном на
обеспечение постоянства и максимально возможной эффективности передачи
энергии с земли на борт при условии, что масса и габариты бортовой катушки
должны быть ограничены, а коэффициент связи катушек вседствие
неопределенности положения БЛА может сильно меняться.
В магниторезонансных системах для их эффективной работы необходимо
точное сопряжение импедансов передающей и приемной катушек с
генератором и нагрузкой соответственно [11, 12]. Обычно такое сопряжение
выполняют с помощью небольших дополнительных настраиваемых контуров, в
которых катушки часто представляют собой одиночные витки (рис. 5.14).
Power Osdlator .ectifer Load
Soiree
Рис. 5.14. Передача и прием энергии посредством
дополнительных контуров сопряжения:
1 - передающая катушка; 2 - приемная катушка; 3 - согласующие катушки
В работе японских исследователей [13], в которой описаны опыты по
беспроводной передаче энергии на модель вертолета, настройку одного такого
175
контура (со стороны наземного передатчика) предложено выполнять с
помощью адаптивных смещений согласующего контура относительно
передающего (рис. 5.15). При перемещениях согласующей катушки (она же
катушка возбуждения - excitation coil) относительно передающего контура
(transmitter resonator) изменяется коэффициент связи этих контуров и,
соответственно, взаимно вносимые импедансы. Передающий и приемный
контуры также имеют свой коэффициент связи, который вследствие изменения
высоты вертолета постоянно изменяется, изменяя доротность всей системы.
Для ее поддержания и производятся адаптивные смещения согласующего
контура.
Receiver resonator on a helicopter
Рис. 5.15. Согласование контуров посредством перемещений катушки
(Иллюстрация: Koizumi et al. [13])
Дополнительный согласующий контур на стороне приемника (на борту)
не настраивается. Он имеет фиксированное положение относительно приемной
катушки. Для минимизации массы катушка этого контура выполнена из тонкой
медной фольги, а катушка приемного контура - из медной трубки (рис. 5.16).
Катушки квадратные, одновитковые. Размер стороны приемной катушки -
113 мм (размер подобной катушки передающего контура - 201 мм).
176
Рис. 5.16. Конструкция бортовых катушек (Иллюстрация: Koizumi et al. [13])
Зависимость КПД передачи энергии от расстояния между передающей и
приемной катушками в такой системе с односторонним согласованием
импедансов имеет некоторый оптимум (рис. 5.17) на расстоянии, несколько
отличном от нуля. Именно на этом расстоянии было организовано зависание
модели вертолета, включенного в систему управления с адаптивным
согласованием импедансов на передающей части.
Рис. 5.17. Зависимость КПД передачи энергии от расстояния между
передающей и приемной катушками (Иллюстрация: Koizumi et al. [13])
177
Модель вертолета не имела на борту аккумулятора - выпрямленное
переменное напряжение подавалось непосредственно на моторы. Частота
колебаний составляла 40,68 МГц. Передаваемая мощность не превышала 5 Вт.
Подъемная сила была достаточной, чтобы компенсировать вес вертолета
(6,56 г) и обеспечить его висение на высоте 10 см.
В дальнейшей работе тому же коллективу удалось поднять модель
вертолета на высоту 590 мм. При этом размеры передающей катушки были
увеличены до D = 600 мм, а частота передаваемых электромагнитных
колебаний составляла 13,56 МГц [14].
В работе [15] авторы сделали вывод, что передача энергии посредством
нескольких небольших катушек эффективнее, чем передача той же энергии
через одну пару больших катушек. Поэтому они расположили 4 приемные
катушки на основаниях 4 опор квадрокоптера, а в посадочной платформе
разместили соответствующие 4 передающие катушки. Для точного
позиционирования квадрокоптера после посадки использованы механические
рычаги, которые смещают аппарат в центр платформы так, что приемные и
передающие катушки оказываются друг над другом. Для запуска механизма в
действие, которое должно начаться после появления аппарата на платформе,
используются инфракрасные датчики движения и датчики давления,
вмонтированные в покрытие платформы. Еще до посадки позиционирование
аппарата производится с помощью видеокамеры, которая обнаруживает на
платформе специальное контрастное изображение-маркер. Далее производится
зависание аппарата над маркером и медленное опускание. Система управления
квадрокоптера при этом пытается выдерживать изображение маркера в центре
кадра, подавая соответствующие управляющие команды на двигатели. Так как
неточное позиционирование все же не исключено, предусмотрены
дополнительные передающие катушки. На рис. 5.18, <7 показано состояние
системы до приведения в действие позиционирующих рычагов, а на
рис. 5.18, б - после.
178
a
б
Рис. 5.18. Система с беспроводной передачей энергии через 4 терминала
(Иллюстрация: Jung et al. [15]):
а - до приведения в действие позиционирующих рычагов; б - после
В работе [16] предлагается необычный подход к обеспечению точного
сопряжения положения передающей (наземной) и приемной (бортовой) катушек.
Эти катушки предлагается делать небольших размеров, а значит, их можно сделать
легкими и высокодобротными (можно также снабдить их сердечниками).
Посадочная платформа имеет довольно большие размеры, что позволяет выполнять
посадку БЛА (мультикоптера) без прецизионной точности - достаточно, чтобы
мультикоптер попал в пределы площади платформы (рис. 5.19).
179
Рис. 5.19. Общий вид платформы с перемещаемой передающей катушкой
(Иллюстрация: Chung Hoon Choi et al. [16])
Передающая катушка является конечным подвижным элементом в
сканирующей системе, состоящей из двух линейных приводов на основе
шаговых двигателей и винтовых передач. Таким образом, передающая катушка
может перемещаться под пластиковым покрытием платформы по координатам
X и Y (рис. 5.20). С подвижными каретками винтовых передач связаны два
простых лазерных датчика, каждый из которых может выдавать логический
сигнал, соответствующий наличию или отсутствию отражающего препятствия
перед ним. В углу платформы жестко закреплен ультразвуковой датчик с
широкой диаграммой направленности, способный определять наличие или
отсутствие БЛА на платформе (рис. 5.21).
Рис. 5.20. Катушка, перемещаемая линейными приводами
(Иллюстрация: Chung Hoon Choi et al. [16])
180
Рис. 5.21. Конструкция платформы с перемещаемой катушкой
(Иллюстрация: Chung Hoon Choi et al. [16]):
1 - рама; 2 - пластиковое покрытие; 3 - передающая катушка; 4 - шаговый двигатель;
5 - винтовая передача; 6 - лазерные датчики; 7 - ультразвуковой датчик
Все процессы на платформе управляются контроллером Arduino Uno.
После посадки мультикоптера (в данном случае квадрокоптера) на
платформу ультразвуковой датчик обнаруживает его и запускает процедуру
сканирования пространства над платформой лазерными датчиками в
направлениях по осям X и Y. При этом на выходах датчиков будут появляться
импульсные сигналы при отражении зондирующих лучей от элементов
квадрокоптера - стоек и центрального модуля с приемной катушкой (рис. 5.22).
Так как квадрокоптер имеет симметричную конструкцию (стойки-опоры
расположены в углах квадрата, а приемная катушка - в центре этого квадрата),
то при любом положении аппарата на платформе х-координату центра можно
вычислить по формуле: xc=(Xj+Xf)/2, где х, и Xf- координаты, соответствующие
начальному и конечному импульсам последовательности, полученной при
сканировании. Аналогично можно получить у-координату центра.
181
1
50 100 150 200 250 300 350 400 450 500 550 600
distance[mm]
Рис. 5.22. Различные положения БЛА и соответствующие сигналы
лазерного датчика (Иллюстрация: Chung Hoon Choi et al. [16])
182
Этот же алгоритм расчета координат центра приемной катушки можно
применять в случае посадки мультикоптера с регулярным расположением
стоек-опор (они должны быть расположены в вершинах правильного
многоугольника).
После определения координат центра приемной катушки линейные
приводы перемещают передающую катушку в точку с этими координатами.
Катушки оказываются одна над другой, после чего включается передача
энергии и процесс зарядки бортового аккумулятора. В работе рассматривалась
зарядка только односекционного литий-полимерного аккумулятора.
5.2. Зарядка от линий электропередачи
Среди возможных вариантов организации бесконтактной передачи
энергии от зарядного источника к БЛА выделяется способ зарядки аппаратов от
энергии линий электропередачи (ЛЭП). Запитка от ЛЭП - это особый способ
среди других способов индукционной передачи электроэнергии. По сути здесь
реализуется трансформатор, в котором первичная обмотка вырождена и
представлена проводом, проходящим через сердечник. Развитие этой идеи
можно проследить в ряде американских патентов на изобретения [17, 18]. Такое
техническое решение ориентировано на аппараты вертолетного типа или
аппараты с гибридной аэродинамической схемой (винтокрылы,
конвертопланы), т.е. те аппараты, которые при приближении к ЛЭП способны
зависать в определенной точке и выполнять плавный маневр для подключения
к линии (рис. 5.23). Нахождение ЛЭП осуществляется с помощью системы
GPS, видеокамеры и специального магнитометрического датчика [19].
Подвешивание аппарата на проводе осуществляется с помощью
кольцеобразного разъемного ферромагнитного подвеса, который является
одновременно и магнитопроводом трансформатора (рис. 5.24). Снимаемое со
вторичной обмотки трансформатора переменное напряжение далее
выпрямляется и используется для зарядки аккумуляторной батареи БЛА.
183
Рис. 5.23. Подвешивание БЛА на ЛЭП (Иллюстрация: Пат. США 7318564 [17])
Рис. 5.24. Магнитопровод-подвес (Иллюстрация: Пат. США 7318564 [17]):
а - магнитопровод замкнут; б - магнитопровод разомкнут
184
Источники информации по главе 5
1. ТХ91501 Powercaster transmitter [Online] // Сайт компании PowerCast.
03.09.2017. URL: http://www.powercastco.com/products/powercaster-transmitter
(дата обращения: 30.09.2017).
2. Aldhaher S. Design and optimization of switched-mode circuits for
inductive links: PhD Thesis. Cranfield University, 2014.
3. Grajski K. A., Tseng R., Wheatley C. Loosely-Coupled Wireless Power
Transfer: Physics, Circuits, Standards. IEEE, 2012.
4. Королев Г. В. Электронные устройства автоматики: учеб, пособие. 2-е
изд., перераб. и доп. М.: Высшая школа, 1991. С. 214-220.
5. Inductive Versus Resonant Wireless Charging: A Truce May Be a
Designer’s Best Choice. Contributed By Digi-Key's North American Editors. 2016-
08-02. URL: https://www.digikey.com/en/articles/techzone/2016/aug/inductive-
versus-resonant-wireless-charging (дата обращения: 30.09.2017).
6. Estabrook M. The convenience of wireless charging: It’s just physics. White
paper [Online], MediaTek, 2013. URL: http://cdn-cw.mediatek.com/Mediatek_
Wireless_Charging.pdf (дата обращения: 30.09.2017).
7. Охрименко В. Технология беспроводной зарядки, ч. 2 // Электронные
компоненты и системы. 2014. № 10-12. С. 11-19.
8. Официальный сайт консорциума WPT.
URL: https://www.wirelesspowerconsortium.com/developers/specification.html
(дата обращения: 03.09.2017).
9. Официальный сайт альянса AirFuel. URL: https://www.airfuel.org
(дата обращения: 03.09.2017).
10. Johns В. An introduction to the Wireless Power Consortium standard and
TI’s compliant solutions // Technical Information. Texas Instruments. 2011.
URL: http://www.mouser.com/pdfDocs/An-introduction-to-the-Wireless-Power-
Consortium.pdf (дата обращения: 03.09.2017).
185
11. Kurs A., Karalis A., Moffatt R., Joannopoulos J. D., Fisher P., Soljacic M.
Wireless Power Transfer via Strongly Coupled Magnetic Resonances // Science.
2007. Vol. 317. № 6. P. 83-86. doi: 10.1126/science.l 143254.
12. Vazquez-Leal H., Gallardo-Del-Angel A., Castafleda-Sheissa R., Gonzalez-
Martinez F. J. The Phenomenon of Wireless Energy Transfer: Experiments and
Philosophy // Wireless Power Transfer - Principles and Engineering Explorations,
Dr. Ki Young Kim (Ed.), InTech, 2012. doi: 10.5772/25829.
URL: https://www.intechopen.com/books/wireless-power-transfer-principles-and-
engineering-explorations/the-phenomenon-of-wireless-energy-transfer-experiments-
and-philosophy (дата обращения: 03.09.2017).
13. Koizumi M., Komurasaki К., Mizuno Y., ArakawaY. Wireless Power
Feeding with Strongly Coupled Magnetic Resonance for a Flying Object // Wireless
Engineering and Technology. 2012. Vol. 3. P. 86-89. URL: http://dx.doi.org/
10.4236/wet.2012.32014 (дата обращения: 03.09.2017).
14. Yamakawa M., Shimamura K., Komurasaki K., Koizumi H. Demonstration
of Automatic Impedance-Matching and Constant Power Feeding to and Electric
Helicopter via Magnetic Resonance Coupling // Wireless Engineering and
Technology. 2014. Vol. 5. P. 45-53. URL: http://dx.doi.org/10.4236/wet.2014.53006
(дата обращения: 03.09.2017).
15. Jung S., Lee T., Mina T., Ariyur K. Inductive or Magnetic Recharging for
Small UAVs // SAE Technical Paper 2012-01-2115, 2012. doi: 10.4271/2012-01-
2115.
16. Chung Hoon Choi, Hyeon Jun Jang, Seong Gyu Lim, Hyun Chui Lim,
Sung Ho Cho, Igor Gaponov. Automatic Wireless Drone Charging Station: Creating
Essential Environment for Continuous Drone Operation. // Proceedings of 2016
International Conference on Control, Automation and Information Sciences
(ICCAIS). October 27-29, 2016. Ansan, Korea.
17. Marshall P.T. Power line sentry charging. US Patent 7318564. Publ.
15.01.2008.
186
18. Silberg E. J. et al. Battery charging arrangement for UAV utilizing the
electromagnetic field associated with utility power lines to generate power to
inductively charge energy supplies. US Patent 7714536. Publ. 11.05.2010.
19. Moore J., Tedrake R. Powerline Perching with a Fixed-Wing UAV // Proc,
of the AIAA Infotech@Aerospace Conference, Seattle, WA, 2009.
URL: http ://groups.csail .init.edu/roboticscenter/public_papers/Moore09 .pdf
(дата обращения: 03.09.2017).
187
ГЛАВА 6. ВОПРОСЫ ОБЕСПЕЧЕНИЯ ТОЧНОЙ ПОСАДКИ
БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ
НА АВТОМАТИЧЕСКИЕ СЕРВИСНЫЕ СТАНЦИИ
Основное преимущество использования АСС при обслуживании
различных миссий БЛА заключается в отсутствии необходимости участия
человека при выполнении сервисных операций. Однако использование АСС
предъявляет особые требования к точности автоматической посадки. В
зависимости от типа сервисной станции для выполнения посадки требуется
разная степень точности стабилизации координат БЛА. Так, например, для
станций, имеющих устройства позиционирования и фиксации, описанных
в 3.2.1, эти требования могут быть снижены. Наземные станции на основе
открытых контактных площадок [1] также нетребовательны к точности
позиционирования - они обеспечивают контактирование с электродами БЛА
даже при неточной посадке. В то же время для других типов станций
необходима более высокая точность сопряжения стыковочных узлов БЛА и
АСС. В этой главе рассматриваются вопросы ближней навигации и
позиционирования БЛА при посадке на АСС. Как и раньше, рассматриваются
преимущественно БЛА с вертикальным взлетом/посадкой.
6.1. Обзор методов навигации
беспилотных летательных аппаратов
Для навигации БЛА вне помещений широко используются спутниковые
навигационные системы (СНС). Обычно используется система GPS и/или
ГЛОНАСС. Однако эти системы имеют довольно большую погрешность
позиционирования и не подходят для работы с АСС, на которых требуется
высокая точность посадки. К примеру, российский БЛА «Альбатрос» [2] в
режиме автоматической посадки использует навигационные сигналы
ГЛОНАСС/GPS, которые обеспечивают автоматическую посадку в круг
радиусом 3 м. Такая точность явно недостаточна для автоматического
188
сопряжения БЛА с терминалами для выполнения каких-либо операций по
подзарядке, дозаправке или восполнению расходных материалов. Сейчас в
подобных системах для выполнения этих операций требуется участие
оператора. Использование для позиционирования БЛА только СНС может
оказаться экономически неэффективным, т.к. потребует либо большой
посадочной платформы (например, на основе открытых контактных площадок),
либо дополнительной подсистемы для подводки БЛА к терминалу. Кроме того,
при использовании СНС не всегда гарантированы устойчивые сигналы
(и вообще их наличие), а в условиях городской застройки может происходить
затенение, переотражение сигналов спутников и, как следствие, заметное
снижение точности позиционирования [3]. С другой стороны, для нормальной
долговременной работы в условиях различных атмосферных воздействий АСС
должна располагаться в специальном ангаре, где использование СНС
становится затруднительным или вообще невозможным. Однако, несмотря на
недостаточную точность данных СНС для осуществления автоматической
посадки БЛА на АСС, эти системы прекрасно подходят для вывода БЛА в
назначенный район - зону расположения АСС. К тому же существует
возможность повышения точности СНС. Так, для GPS возможно применение
системы DGPS (differential global positioning system), основанной на измерении
и учете разницы между известными псевдодальностями до спутников и
фактическими кодовыми псевдо дальностями. В наилучших условиях
погрешность такой системы может уложиться в значение порядка 10 см.
Кроме СНС для позиционирования БЛА можно использовать различные
другие устройства и системы: системы технического зрения, сети
радиотрансиверов, сонары, оптические (в том числе лазерные) дальномеры,
инерциальные навигационные устройства, барометрические высотомеры.
С целью повышения точности позиционирования и повышения надежности
систем позиционирования, информация с различных датчиков может
комплексироваться [4]. Комплексирование достаточно часто используется при
189
реализации систем технического зрения БЛА. Так, например, данные
видеотехнической системы могут комплексироватья с данными инерциальной
навигационной системы, спутниковой навигационной системы, высотомеров и
дальномеров.
В [5] представлен обзор технологий позиционирования внутри
помещений. Основные технологии представлены в табл. 6.1.
Таблица 6.1
Технологии позиционирования внутри помещений
Технология Погреш- ность Покрытие (м) Принцип действия
Видеокамеры 0,1 мм-дм 1-10 определение координат по изображению
Инфракрасное излучение см-м 1-5 тепловизионный, активные маяки
Тактильная мкм-мм 0-3 механический щуп
Угломерно- дальномерные системы мкм-см 3-2000 теодолиты и др., лазерные сканеры и радары
Звук 2-10 см 2-10 дальнометрия
WLAN/WiFi метры 20-50 идентификация, измерение мощности сигналов от разных источников
RFID дм-м 1-50 система обнаружения сближения объектов, идентификация
Ultra-Wideband см-м 1-50 отражение сигнала
Высокочувст- вительные СНС 10 м планетарное спутниковая трилатерация, спутниковая дальнометрия
Псевдолиты см-дм 10-1000 аналогично СНС, псевдоспутники
Другие радио- частотные, в т.ч. радары м 10-1000 идентификация, определение расстояния
Инерциальная навигация 1% 10-100 счисление пути
Магнитные системы мм-см 1-20 идентификация и определение расстояния
Инфраструк- турные системы см-м здание идентификация
190
Графическое сопоставление покрытия различных систем с погрешностью
позиционирования в соответствии с [5] показаны на рис. 6.1, а место этих
систем в координатах «несущая частота - погрешность» - на рис. 6.2.
Подробное описание перечисленных технологий здесь не приводим, за
подробностями можно обратиться к тому же источнику [5]. Применительно к
навигации БЛА данная таблица и рисунки интересны с точки зрения выбора
технологии позиционирования для обеспечения требуемой точности
навигационной системы, предназначенной для посадки БЛА. Применение
данных технологий не ограничивается закрытыми помещениями. Возможно
использование многих из них и на открытых пространствах. Наиболее
привлекательными технологиями с точки зрения точности, стоимости, массы,
доступности являются видеотехнические технологии, о которых пойдет речь
далее (на рис. 6.1 и 6.2 они представлены сегментом Cameras).
Graphic: Rainer Mautz
Coverage
Rural
Pseudo-
lites
High
Sensitive
GNSS
Inertial
Navigation
Systems
E
g - Urban
Polar Systems
Floor
Sensors
Other Radio-
frequencies
WLAN
Cellular
Network
Methods
Room
UWB
Sound
E
Sub-
Room
Cameras Magnetic
Systems
RFID
Infrared
1pm 10 pm 100 pm 1mm 1cm 1dm 1m
10 m
Accuracy
100 m 1 km
Puc. 6.1. Погрешность позиционирования (Accuracy) и покрытие (Coverage)
для различных систем (Иллюстрация: Mautz [5])
191
Carrier Wavelength
Electromagnetic Spectrum
Sound Waves
10 km
30 kHz
Magnetic
Systems
10 km
1 km
3D0 kHz
1 km-
100 m
3 MHz
RFID
100 m
3 Hi
10 m
30 MHz
330 MHz
FM
сэн-зг Audible
Radar Sound
Pseudolites
10m.
0,1 m-
3 GHz
Radio
Digital TV
hq гмсс Cellular 1m’
r„ GNSS Networks
CSS 2igBeeB|uetooth
WLAN u‘1 m
34 Hz
343 Hz
3 kHz
10 mm
30 GHz
UWB
10 mm-
34 kHz
1 m
Sound
1 mm
100 pm
10 pm
1 pm
100 nm
300 GHz
3 THz
30 THz
300 TH z"
1 mm
100 pm-
343 kHz
3 MHz
Tactile and
Combined Polar Systems
Graphic Rainer Maulz
Infra red
10 pm-
34 MHz
Cameras
1 pm-
Accuracy
1pm 10 pm 100 pm 1mm 1cm 1dm
10 m 100 m 1 km
Puc. 6.2. Место различных технологий в координатах «несущая частота-
погрешность» (Carrier Wavelength - Accuracy) (Иллюстрация: Mautz [5])
6.2. Видеотехнические средства обеспечения автоматической
посадки беспилотных летательных аппаратов
Видеотехнические системы позиционирования имеют множество
преимуществ по сравнению с остальными. Они являются пассивными (т.е. в
них нет источника зондирующего излучения) и превосходят активные
навигационные системы с точки зрения энергопотребления, массогабаритных
показателей и стоимости [6].
6.2.1. Классификация видеотехнических технологий
навигации
В данном подразделе будут рассмотрены видеотехнические технологии,
используемые в современных БАС. С точки зрения осуществления посадки на
АСС точная навигация является ключевой задачей. Рассматриваемые далее
192
методы в различной степени пригодны для обеспечения точной посадки.
Некоторые из них для точной посадки малопригодны, но позволяют, например,
осуществить приведение БЛА в место расположение АСС.
Видеотехнические технологии по используемым методам определения
ориентации и положения БЛА можно подразделить на следующие классы [6]:
1. Наземное техническое зрение (on-ground vision (OGV)).
2. Визуальная одометрия (visual odometry (VO)).
3. Навигация относительно цели (Target relative navigation (TGRN)).
4. Навигация относительно ландшафта/ориентиров (Terrain/landmark
relative navigation (TRN)).
5. Параллельная оценка движения и структуры: методы
одновременной локализации и построения карты (Simultaneous
localization and mapping ( SLAM)) и получения структуры сцены
при движении (Structure from motion (SFM)).
6. Навигация с использованием оптического потока на основе
бионических подходов (Bio-inspired optic flow navigation (BIOFN)).
Дадим краткое описание перечисленных методов и ссылки на некоторые
работы.
6. 2.1.1. Наземное техническое зрение
В подобных системах камеры и вычислительные средства,
осуществляющие определение ориентации и положения аппарата в локальной
системе координат, располагаются на земле. Преимущества подобных систем -
это отсутствие ограничений на полезную нагрузку и вычислительные ресурсы,
возможность применения сложных алгоритмов видеообработки. С другой
стороны, мультикамерные системы (больше 2 камер) в основном используются
для построения стендов и исследования динамических свойств БЛА. К таким
относится, например, система VICON [7], более подробно об этой системе
будет рассказано в 6.2.2.1. Тем не менее есть разработки, в которых
используются наземные камеры для посадки БЛА. Так, в [8] используется
193
тринокулярная наземная система управления БЛА. В [9] представлена
стереоскопическая наземная система с поворотным устройством и
инфракрасными камерами. Наземные системы обладают достаточно высокой
точностью. Использование подобных систем для посадки на АСС представляет
большой интерес, особенно для БЛА, не оснащенных высокоточными
навигационными системами. Размещение системы технического зрения на
земле освобождает от необходимости размещения подобной системы на борту
БЛА, что увеличивает его полезную нагрузку. Кроме того, наземная станция,
оснащенная такой системой, может принимать различные типы БЛА.
6. 2.1.2. Визуальная одометрия
Традиционная одометрия использует данные о перемещении
исполнительных механизмов для оценки изменений положения и/или
ориентации в зависимости от времени. Визуальная одометрия - это метод
оценки положения и ориентации объекта при помощи анализа
последовательных изображений, полученных посредством установленной на
объекте камеры. В общем случае координаты объекта (БЛА) относительно
исходного или известного местоположения вычисляются путем суммирования
пройденных расстояний, полученных при отслеживании ключевых точек
пространства при помощи бортовой системы технического зрения. Алгоритм
визуальной одометрии включает следующие основные шаги:
1) детектирование ключевых точек изображения;
2) выявление соответствия или трекинг ключевых точек между двумя
последовательными изображениями;
3) оценка параметров движения на основе смещения ключевых точек.
Визуальные одометры могут быть основаны на монокулярной, стерео и
всенаправленной системе технического зрения. Пример одометра на основе
стереозрения для винтокрылого БЛА приведен в [10]. Одометр фиксируется на
произвольных объектах и отслеживает их на последовательных кадрах,
194
вычисляет ориентацию и расстояние до объекта (путем триангуляции). Для
вычисления координат вертолета относительно его исходного положения в
проекте используется вертолет R-50.
Исследователи из CSIRO [11] разработали недорогое устройство оценки
положения вертолета Xcell 60, используя стереозрение и штатный датчик
инерциального измерительного модуля. Предлагаемый подход основывается на
оценке высоты по разности стереоданных, а затем слиянии инерциальных
данных и данных оптического потока с использованием дополнительных
фильтров для вычисления скорости поступательного движения.
Визуальная стереоодометрия, предложенная в [12], основывается на
отслеживании ключевых точек и оценке положения с использованием метода
максимального правдоподобия. Точность системы была оценена по полетным
данным в ручном режиме. Для экспериментов использовался вертолет
AVATAR. Полученные данные продемонстрировали, что результаты
позиционирования БЛА с помощью одометрии и инерциальной навигационной
системы (ИНС) отличаются от таких же результатов, измеренных с помощью
GPS и ИНС, не более, чем на 1% при полете на дистанцию 400 м. Аналогичная
методика использована в [13].
В вышеописанных работах полеты выполнялись на открытых площадках.
В [14] система визуальной одометрии была применена для закрытого
помещения. В ней также предусматривается отслеживание ключевых точек.
Оценка движения объекта с 6 степенями свободы выполняется с применением
метода наименьших квадратов, нелинейного алгоритма оценки движения и
комплексирования данных визуальной оценки и данных ИНС с помощью
расширенного фильтра Калмана (Extended Kalman Filter (EKF)). В работе
использовался квадрокоптер, оборудованный стереокамерой и ИНС. Данные
координат и скорости, выдаваемые системой визуальной одометрии,
сравнивались с данными, получаемыми в системе VICON (использовалась в
качестве наземной системы контроля).
195
Альтернативой стереосистемам визуальной одометрии являются
монокулярные системы визуальной одометрии. Обычно монокулярные системы
применяются в случаях, когда на борту не удается разместить
стереоскопическую систему. Проблемой для таких систем является
неоднозначность масштабного коэффициента, обусловленная тем, что глубина
изображения не может быть однозначно определена на основании
поступающих кадров.
В [15,16] используется принцип одометрии, основанный на гомографии.
В работе [17] предложена вспомогательная система одометрии с
использованием монокулярных изображений. Предложенная архитектура
системы позволяет осуществлять оценку абсолютной позиции БАС в случае
отказа СНС. Это достигается путем начальной оценки ЗЭ-координаг
ориентиров, в то время пока СНС доступно. При потере сигнала СНС
изображения, получаемые с камеры, обрабатываются, так что формируются
линии прямой видимости в направлении ЗЭ-ориенгиров. Эти линии могут быть
использованы для получения абсолютной позиции камеры методом
триангуляции. Данные, получаемые таким путем, комплексируются с
информацией от ИНС. Подобная система позволяет увеличить точность
определения параметров ориентации и координат БЛА по сравнению с тем
случаем, когда используется только ИНС. Точность системы оценивалась при
моделировании, а также в полетных испытаниях с применением
квадрокоптеров и системы VICON.
В работе [18] предложен адаптивный алгоритм реального времени,
использующий для вычисления ЗЭ-координаг вертолета данные бортовой
камеры, инерциального навигационного модуля и датчика давления. Алгоритм
технического зрения вычисляет оптический поток, отслеживает характерные
точки и интегрирует смещение изображения для вычисления пройденного
расстояния в пикселах. Затем визуальные измерения сливаются с данными
инерциального навигационного модуля для того, чтобы компенсировать
196
нежелательный эффект вращения. Алгоритм визуальной обработки
дополняется адаптивным контрольным устройством, которое определяет
масштабирующий коэффициент из оптического потока и данных
инерциального навигационного модуля, затем корректирует ЗО-координаты и
скорость аппарата. С целью получения большей точности и устойчивости для
комплексирования полученных вычислений с инерциальными данными и
данными датчика давления используется фильтр Калмана, что позволяет
решить проблему определения масштабирующего коэффициента во время
парения и медленного полета. Система испытывалась как в закрытых
помещениях, так и на открытых площадках, в режимах автоматического взлета,
посадки, парения, отслеживания траектории и отслеживания движения
наземных целей.
В работе [19] представлена система оценки скорости снижения на основе
оценки смещения изображения (descent image motion estimation system
(DIMES)), которая была разработана NASA. Система позволяет оценивать
горизонтальную скорость аппарата во время его снижения для посадки на
поверхность Марса. Несмотря на то, что система предназначена для
космических целей, ее испытания проводились с применением вертолета.
Алгоритм DIMES комплексирует измерения от камеры снижения, радара,
высотомера и ИНС.
Основным недостатком визуальной одометрии является дрейф показаний
во времени, поэтому, как правило, показания визуального одометра требуют
комплексирования с другими системами, не имеющими дрейфа. Системы на
основе визуальной одометрии могут использоваться для определения
вертикальной и горизонтальной составляющих скорости. Эти параметры очень
важны для построения системы автоматического управления, с помощью
которой выполняется высокоточная посадка.
197
6. 2.1.3. Навигация относительно цели
Одна из задач машинного зрения для БЛА - это детектирование целей и
их отслеживание. Навигация относительно цели подразумевает детектирование
определенной цели и оценка ее расположения относительно БЛА. Эта
относительная позиция может выражаться в метрах или пикселах.
Потенциальное применение визуальных систем навигации относительно
цели - это точное приземление на заданную цель и отслеживание движущихся
воздушных/наземных целей, таких как машины, люди или другие БЛА.
В отличие от методов визуальной одометрии, в методах навигации
относительно цели вводится понятие «цель», которая должна оставаться в поле
зрения камеры. Эта цель может быть статичной или движущейся, заранее
известной или выбираемой во время полета оператором или автоматической
системой визуального восприятия. Системы навигации относительно цели, в
свою очередь, могут быть разбиты на четыре категории:
1) системы визуальной посадки на известную цель,
2) системы визуального отслеживания статической цели,
3) системы визуального отслеживания мобильной цели,
4) системы визуального приземления на незнакомую цель.
Последняя категория здесь рассматриваться не будет, т.к. предполагается,
что АСС - это известная платформа. Рассмотрим остальные три.
Системы визуальной посадки на известную цель (платформу). Методы
посадки на искусственные ориентиры с известными атрибутами, такими как
размер, цвет и структурированная раскраска, достаточно хорошо изучены.
Платформа для посадки или цель изначально разрабатываются таким образом,
чтобы упростить видеообработку и осуществлять точное вычисление
параметров движения с различных положений. Исследования с применением
принципов машинного зрения для посадки беспилотных винтокрылых
аппаратов на неподвижные площадки начались в 90-х годах. В работе [20]
выполнено моделирование с помощью симулятора полной динамики вертолета
198
и его навигационных систем при визуальной посадке на цель. В теоретической
работе [21] проблема автоматической посадки винтокрылого БЛА на
качающуюся платформу была представлена как проблема робастного
нелинейного регулятора. В работе [22] представлен алгоритм технического
зрения, который детектирует известную цель (белые квадраты) и вычисляет
относительное расположение и ориентацию вертолета. Алгоритм основывается
на геометрии множественных проекций (Multiple View Geometry), который
использует условие дефицита ранга матрицы множественных проекций.
Предложенная система была реализована на вертолете Yamaha R-50, было
выполнено зависание с применением технического зрения (18 секунд) над
целью, однако попытка автоматической посадки не осуществлялась. В работе
[23] для выполнения автоматической посадки на известную платформу
предложено комплексировать данные системы технического зрения и GPS.
Первая работа с экспериментальными результатами автоматической посадки с
применением технического зрения (без помощи GPS) беспилотного вертолета
была опубликована в 2004 г. [24]. Эта система основана на одной камере с
наклонно-поворотным устройством. Посадка осуществлялась на специально
разработанную площадку с черной окружностью на белой платформе.
Алгоритм обработки изображений вычисляет относительное положение
вертолета и его ориентацию путем минимизации ошибки репроецирования
выделенных центральных точек и полуосей трех эллипсов. При помощи
фильтра Калмана эти значения затем комплексируются с данными
инерциального навигационного модуля с целью повышения устойчивости
системы, особенно в те короткие моменты, когда система технического зрения
«ослеплена». Несколько автономных посадок вертолета Yamaha RMAX было
выполнено из различных относительных позиций на поле с травой, на
заснеженное поле, при различной силе ветра и разными условиями
освещенности. Были выполнены успешные приземления со средней
погрешностью около 42 см, вертикальная скорость в момент касания
199
варьировалась в диапазоне 18-35 см/с, горизонтальная скорость составляла
порядка 15 см/с.
Визуальное отслеживание неподвижных целей. В этих системах
главное - это не посадка на цель, а полет по направлению к цели или зависание
над ней. В этом случае цель может быть не обязательно на земле. Например,
она может располагаться на стене. Пример подобной системы описан в [25], где
решалась задача создания системы бокового обзора, которая позволила бы
вертолету определить свое местоположение и двигаться в направлении
центроида некоторого количества известных целей с использованием
всенаправленного зрения. Инерциальная навигационная система со
вспомогательной системой технического зрения представлена в [26], где
позиция вертолета и высота относительно известной цели (темный квадрат с
известным расположением, ориентацией и размером) вычисляется из
изображений и инерциальных данных при помощи EKF. Представлены
экспериментальные результаты тестового полета, в которых выходные данные
EKF используются в замкнутой системе управления вертолета RMAX.
В работе [27] описывается управление БАС на основе машинного зрения.
Визуальные характерные особенности цели проецируются на управляющие
входы через обратную матрицу изображений Якоби без определения
положения аппарата. Цель состоит из четырех черных меток на вершине
неподвижного плоского квадрата. Нелинейный регулятор обратного хода
(backstapping regulator) пытается свести к нулю сигнал ошибки, получаемый с
помощью системы технического зрения, что позволяет управлять положением
БЛА при помощи технического зрения и угловых скоростей. Этот механизм
визуального управления был протестирован в экспериментах в реальном
масштабе времени с применением маленького квадрокоптера с камерой,
направленной вниз. Аппарат должен был зависать на высоте примерно 1,4 м
над целью (при этом курс контролировался вручную). Было выполнено
50-секундное висение с максимальной ошибкой управления 10 см.
200
Системы визуального отслеживания мобильной цели. При навигации
на основе технического зрения относительно движущейся цели предполагается
движение наземной или воздушной цели. Проблема визуального трекинга
движущейся цели заключается в сложности вычисления скорости цели и
скорости летательного аппарата, т.к. возможно определение только
относительной скорости. При этом алгоритм обработки изображений должен
быть достаточно надежным для отслеживания динамической цели на
последовательности изображений. В ряде работ по вопросам посадки БЛА на
движущуюся платформу применяют системы управления с видеокамерой
[28, 29]. Для таких систем требуется, чтобы платформа была видима в течение
всего времени осуществления посадки, т.к. система полагается только на
визуальную информацию. Для того чтобы справиться с кратковременной
потерей цели, применяются методы, позволяющие предугадать движение
посадочной платформы, основанные на модели динамики платформы [30,31].
Альтернативные методы используют дополнительные устройства,
прикрепляемые к движущейся платформе. К таким устройствам относятся
инерциальные навигационные модули, приемники СНС и инфракрасные
маркеры. Так, например, в работе [32] БЛА осуществляет взлет с движущейся
платформы, слежение за ней на заданном расстоянии и посадку на нее,
используя в качестве основного датчика инфракрасную камеру. При этом на
движущейся платформе закрепляются инфракрасные маркеры-излучатели.
Такой подход позволяет осуществлять слежение и посадку при отсутствии
солнечного света, при этом на борту в качестве вычислителя используется
достаточно простой 8-битный микроконтроллер. В работе [33] представлена
система автоматической посадки квадрокоптера на движущуюся платформу на
основе только бортовой камеры и бортовых средств вычисления. Для
осуществления посадки не требуется предварительная информация о
движущейся платформе. В работе используется инновационный метод
визуально-инерциальной одометрии. Данный метод дополняется нелинейными
201
алгоритмами управления аппаратом. Используя бортовую камеру, система
детектирует платформу для посадки и может справляться с временными
потерями визуальной информации, осуществляя прогнозирование поведения
посадочной платформы, которое выполняется на основе ее динамической
модели. Подобная система не требует внешней инфраструктуры в виде системы
захвата движения или дополнительных активных маркеров на платформе.
Системами автоматического слежения и посадки оснащаются не только
БЛА, но и пилотируемые вертолеты. Так, компанией Black Peak Engineering
была проведена демонстрация опционально пилотируемого вертолета SA-400
Jackal [34]. Такие вертолеты могут выполнять полеты как под управлением
пилота, так и в автоматическом режиме под контролем внешнего оператора.
Вертолет массой 544 кг (с пилотом на борту) осуществил автоматический взлет
с движущейся платформы, слежение и посадку на движущуюся платформу
размером 4,9><6,1 м на скорости 18,5 км/ч, в том числе с имитацией качки
палубы. Полет осуществлялся под контролем пилота в полностью
автоматическом режиме.
6.2 .1.4. Навигация относительно ландшафта/ориентиров
Данный вид навигации относится к методам оценки координат и/или
скорости аппарата путем сравнения измерений параметров местности с заранее
известной картой местности. Реализация подобных методов может быть
осуществлена либо пассивно с помощью обработки изображений, либо активно
с помощью средств измерения расстояния. В качестве эталонной карты может
использоваться карта высот, спутниковые снимки, топографическая карта с
ориентирами и т.д. Основная задача навигации относительно ландшафта - это
создание аппаратуры, у которой отсутствует дрейф, что осуществляется путем
оценки координат (глобальных или локальных) или ориентации относительно
поверхностных ориентиров. Подобные системы являются очень хорошей
альтернативой СНС. Важно отметить, что некоторые животные, такие как
202
птицы и пчелы, используют навигацию на основе ориентиров, так же как и
визуальную одометрию.
Как правило, для навигации относительно ландшафта/ориентиров
используют пассивные системы с обработкой видеоинформации. Поскольку
изменения высоты достаточно малы, то трудно получить хорошее соответствие
с профилем местности, полученным посредством активных дальномеров. Среди
пассивных систем наибольший интерес представляет [35]. Данная система
объединяет в себе инерциальные датчики, визуальную одометрию,
барометрический высотомер, изображения с географической привязкой (такие
изображения могут быть получены путем аэрофотосъемки либо с помощью
спутников). Данная вспомогательная видеонавигационная система способна
осуществлять оценку координат и ориентации БЛА с высокой скоростью и без
дрейфа во времени при отсутствии GPS-сигнала. Автономные
экспериментальные полеты на расстояние 1 км на высоте 60 м показали
максимальную ошибку по координатам 5 м и максимальную ошибку по
скорости 1,5 м/с по сравнению с результатами измерений с помощью
СНС/ИНС. Как видим, такая точность достаточна для замены системы GPS,
однако этого явно недостаточно для осуществления высокоточной посадки на
АСС. Такие системы можно использовать для обеспечения выхода БЛА в район
расположения АСС.
6.2 .1.5. Параллельная оценка движения и структуры:
методы SLAM и SFM
Другая перспективная парадигма для определения местоположения
винтокрылых аппаратов и картирования сцен - это методы SLAM и SFM.
Между этими алгоритмами есть большое сходство, поскольку оба они
оценивают трехмерные координаты аппарата, а также структуру или карту
окружения. Эти методы имеют более высокий уровень абстракции, поскольку
кроме определения ориентации и координат аппарата осуществляют зрительное
восприятие (перцепцию), хотя в некоторых случаях они используют только
203
систему визуальной одометрии. Для методов SLAM и SFM характерны общие
нерешенные проблемы: недостаточная надежность отслеживания в реальном
масштабе времени, неоднозначность поворотов и перемещений,
неопределенный масштабный коэффициент, дрейф во времени, высокие
требования к вычислительным ресурсам.
SLAM (Simultaneous localization and mapping) - это задача одновременной
локализации и построения карты. Целью является построение карты
незнакомого окружения или обновление карты малознакомого окружения,
одновременно с этим происходит локализация аппарата. Для решения задачи
используются алгоритмы обработки данных с различных оптических устройств
и датчиков определения пройденного пути (одометров). Принцип работы
SLAM - это повторяющиеся действия. Первоначально происходит сбор данных
с датчиков с целью получения информации об объектах, расположенных в
окружающей местности. Затем определяется собственное относительное
местоположение на основе полученной информации и карты препятствий,
которая содержит предыдущие измерения. Определив позицию управляемого
объекта, система переходит к обновлению карты. Таким образом, на каждом
шаге алгоритма система располагает предположениями о структуре
окружающей местности (карте препятствий) и местоположении управляемого
объекта относительно этой карты. Метод SLAM по сравнению с методом SFM
имеет преимущество при повторном посещении того же самого места.
SFM (Structure from motion) - это задача получения структуры сцены
при движении. Данная задача относится к определению собственного движения
камеры и реконструкции трехмерной структуры сцены из ее проекции на
движущуюся двумерную поверхность. SFM многие десятилетия оставался
центральным методом компьютерного зрения, и в литературе существует
большое количество сравнений различных схем. Хотя SFM-методы вообще
достаточно широко используются, существует очень мало работ по их
применению в реальном масштабе времени для БЛА. Это связано с тем, что
204
данные методы требуют большой вычислительной мощности. Кроме того,
такие системы имеют невысокую надежность в естественных условиях.
6.2 .1.6. Навигация с использованием оптического потока
на основе бионических подходов
В большинстве подходов, используемых в системах технического зрения,
описанных выше, координаты аппарата и/или его скорость вычислялись в
явной форме и использовались полетным контроллером. Однако недавние
экспериментальные исследования в биологии показали, что некоторые
летающие насекомые используют для навигационных целей некое подобие
оптического потока без непосредственного определения параметров движения
и структуры окружения. Действительно, летающие насекомые, такие как пчелы
и мухи, используют альтернативные, простые и эффективные стратегии
использования SD-зрения для выполнения навигационных задач, таких как
ориентация и стабилизация курса [36], визуальная одометрия [37], контроль
скорости полета [38], посадка [39], контроль высоты полета и огибание рельефа
местности [40], облет препятствий [41]. Очевидно, что перспективные
технические системы, использующие подобные стратегии на основе
бионических технологий, будут выполнять те же функции, что и описанные
выше: определение пространственного положения аппарата, зрительное
восприятие (перцепцию) окружающей обстановки, обнаружение препятствий.
Системы на основе бионических технологий потенциально могут обеспечить
БЛА более высоким уровнем автономности.
6.2.2. Классификация видеотехнических систем посадки
по критерию размещения видеокамер
Классификационный признак, по которому можно подразделить
видеотехнические системы посадки БЛА, предложен в работе [42], где в
качестве такого признака выбрано размещение видеокамер (на земле или на
205
борту). В соответствии с таким критерием классификации выделяются
следующие виды систем:
1. Наземные видеотехнические системы посадки.
2. Бортовые видеотехничские системы посадки.
В дополнение к ним можно добавить комбинированные
видеотехнические системы посадки, в которых камеры располагаются как на
земле, так и на БЛА.
6.2.2.1. Наземные видеотехнические системы посадки
При использовании наземной системы технического зрения камера
(камеры) располагается на земле и используется для отслеживания аппарата,
при этом осуществляется определение его ориентации и/или расположения в
локальной системе координат. Преимущество подобных систем по отношению
к бортовым видеотехническим системам состоит в отсутствии жестких
ограничений на аппаратно-программные средства: имеется возможность
построения систем с применением камер высокого разрешения и применения
сложных алгоритмов видеообработки, отсутствуют ограничения по массе,
габаритам и энергопотреблению.
В качестве примера наземной системы технического зрения для закрытых
помещений можно привести систему VICON британской компании Vicon
Motion Systems [7] (рис. 6.3).
Это система, которая использует множество наземных камер для
отслеживания ориентации и 3 D-координат заданного объекта. Данная система
позволяет разрабатывать различные стенды для закрытых помещений. В состав
системы входят несколько камер, которые устанавливаются по периметру
контролируемого пространства, управляющий компьютер, компьютер
видеообработки, интерфейсные модули, пульты-радиопередатчики для
управления объектами. В зависимости от количества одновременно
отслеживаемых БЛА требуется разное количество камер (табл. 6.2).
206
Рис. 6.3. Состав системы VICON для задач управления группой беспилотных
мобильных объектов (Иллюстрация: Troy et al. [43])
Таблица 6.2
Конфигурации системы VICON для отслеживания разного количества БЛА
Количество отслеживаемых объектов Количество необходимых камер Размер помещения, м
1 4 5x5
3 8 7x7
4 10 9x9
10 16 15x15
Специальное программное обеспечение Tracker 3 для захвата движения и
потоковой передачи данных в режиме реального времени осуществляет
управление оптическими камерами VICON, реконструирует 3D-пространство,
идентифицирует маркеры, выполняет потоковую передачу координат движения
207
объекта по различным протоколам. Программа позволяет осуществлять
обработку данных с задержкой менее чем 1,5 мс, при этом обрабатывается до
500 кадров в секунду, причем программа имеет встроенный модуль для точного
измерения задержки, что важно знать при построении систем управления БЛА.
Программа может отслеживать до 100 объектов одновременно. Для
отслеживания объекта необходимо нанесение на него специальных
светоотражающих маркеров, которые входят в комплект поставки. Каждый
маркер должен быть виден хотя бы двум камерам. Благодаря малым значениям
задержки Tracker 3 позволяет осуществлять моделирование в режиме Hardware-
In-The-Loop (H1L) с применением MATLAB Simulink. На рис. 6.4 представлена
простейшая конфигурация системы с четырьмя камерами и одним объектом.
Рис. 6.4. Зоны покрытия камер системы VICON (4 камеры, 1 объект)
(Иллюстрация: Vicon [7])
Цветами выделены зоны покрытия: оранжевая зона - 43 % объема
попадает в поле зрения как минимум 4 камер, в этой зоне получаются отличные
результаты трекинга; желтая зон - 78 % объема находится в поле зрения как
208
минимум 3 камер; зеленая зона - 96 % объема находится в поле зрения хотя бы
двух камер. Размер зон зависит от типа камер и их количества. Если
увеличивать количество камер, то размер зон будет расширяться и при
определенном количестве достигает предела в 100 %.
Система может быть оснащена несколькими типами камер производства
VICON. Возможности системы можно наблюдать на видео [44]. Данной
системой пользуются такие компании, как Boeing, Airbus, Ford, BMW, UPENN,
NASA. В [37] система VICON использовалась для построения системы посадки
микро-БЛА, при этом точность определения расположения неподвижных
маркеров достигает 50 мкм. Как утверждают авторы, VICON достаточно
устойчив к экстремальным ситуациям, таким как быстрые маневры (скорость
3,5 м/с, ускорение 15 м/с2, угловая скорость до 1000 %). В проекте
исследовалась посадка микро-БЛА на ограниченную горизонтальную
поверхность с применением специально разработанного захватывающего
механизма («когтей»). При посадке на горизонтальную поверхность отклонение
составляло менее 1 см (рис. 6.5). Также были проведены эксперименты по
посадке на вертикальную поверхность.
Рис. 6.5. Посадка микро-БЛА с помощью системы VICON
на ограниченную поверхность (Иллюстрация: Mellinger et al. [45])
209
В [46] описано использование системы VICON для создания
испытательного стенда для тестирования мобильных объектов в реальном
масштабе времени в закрытых помещениях (Real-time indoor Autonomous
Vehicle test ENvironment (RAVEN)). Система предназначена для изучения
длительных автономных операций в воздухе с использованием нескольких
БЛА. Подобная система может быть использована для изучения различных
вариантов распределения БЛА на автоматических сервисных станциях.
Еще одна система, которая относится к наземным видеотехническим
средствам с множеством камер, описана в [47]. Данную систему можно
охарактеризовать как мультикамерную модульную SD-систему слежения
реального времени. Система использует методы выделения особенностей
объекта (светодиоды высокой яркости) для обнаружения его на изображении и
методы триангуляции для определения расположения объекта. Для
комплексирования показаний нескольких камер используется алгоритм
кластеризации Quality Threshold. Результаты экспериментов показали, что
система способна отслеживать объекты с миллиметровой точностью
и определять положение множества объектов с частотой 30 Гц, а при некоторой
оптимизации программного обеспечения потенциальная частота обновления
данных может достигать 80-100 Гц. Система позиционируется как более
простая альтернатива по сравнению с системами VICON [7], RAVEN [46], но
при этом обеспечивающая высокую точность отслеживания. Система может
использовать различные типы камер. На рис. 6.6 представлено расположение
камер (вид сверху). Размеры помещения 13,5x9x5 м. 6 камер Allied Vision
Technologies (AVT) Guppy F-033b с 8-миллиметровыми линзами (обеспечивают
обзорность 32,5x42,5 градусов). При нахождении объекта в рабочем
пространстве наблюдение обеспечивается как минимум тремя камерами.
Камеры подключаются к компьютеру с помощью интерфейса FireWire
(IEEE 1394а). Программное обеспечение, ориентированное на операционную
систему Windows, написано на языке C++ с использованием библиотеки
210
OpenCV. Для отслеживания объекта используются активные маркеры -
светодиоды высокой яркости, что упрощает систему и повышает точность.
Как правило, описанные выше системы предназначены для эксплуатации
внутри помещений и в пределах некоторой рабочей области. За счет того, что
объект наблюдается несколькими камерами одновременно, достигается
высокая точность позиционирования. При этом объект оснащается
специальными маркерами, которые облегчают его обнаружение и
отслеживание.
>:(т)
Рис. 6.6. Высокоточная 6-камерная система слежения за объектом
(Иллюстрация: Mannberg et al. [47])
Прямоугольник, показанный сплошной линией в центре,
ограничивает рабочее пространство системы
При другом подходе для обнаружения БЛА на больших расстояниях
используется наземная стереоскопическая система. На рис. 6.7 представлена
такая наземная система, описанная в [48]. Данная система оснащена наклонно-
поворотным устройством (рис. 6.8), что увеличивает поле обзора, и
инфракрасными камерами, которые позволяют осуществлять наблюдение в
любое время суток и при любых погодных условиях. Использование
инфракрасного диапазона позволяет затрачивать меньшие вычислительные
мощности по сравнению с отслеживанием особенностей текстуры. Еще одно
211
отличие от вышеописанных систем - это применение алгоритмов выделения
контуров для детектирования и отслеживания объектов, при таком подходе не
требуется нанесение на объект специальных маркеров, но при этом
усложняется алгоритм распознавания и слежения за объектом. Система
тестировалась для посадки как квадрокоптера, так и БЛА самолетного типа.
Рис. 6.7. Система слежения за БЛА с наземной стереокамерой
(Иллюстрация: Kong & Zhang [48])
Рис. 6.8. Наклонно-поворотное устройство PTS-3060 с камерами
(Иллюстрация: Kong & Zhang [48])
212
В системе используются инфракрасные камеры IRT301 производства
фирмы IRay Technology. Камеры имеют разрешение 320x256, частоту кадров
50 кадров/с. Фокальное расстояние линзы камер составляет 22 мм, угол поля
зрения может принимать значения 24,6x19,8, 4x3,2, 0,92x0,73 градусов,
спектральный диапазон 3,7...4,8 мкм. Объект с размерами 1,8x0,5 м (фигура
человека) может быть детектирован на расстоянии 12 км, распознан на
расстоянии 6 км, этого вполне достаточно для осуществления посадки.
Для поворота камер применяется наклонно-поворотное устройство
PTS-3060 производства PTS General Electronics Со. Наклонно-поворотное
устройство может неограниченно поворачиваться вокруг вертикальной оси, т.к.
оснащено токосъемными кольцами, наклон может осуществляться в пределах
от -30 до +90 градусов.
При построении подобных систем встает вопрос идентификации объекта
и его трекинга - непрерывного отслеживания положения. Трекинг
немаркированного объекта - задача более сложная, чем трекинг маркеров в
мультикамерной системе, т.к. маркер представляет собой простую
геометрическую фигуру (как правило, окружность), контур же объекта может
быть совершенно произвольным и меняется в зависимости от ориентации БЛА
относительно камер. Существует множество методов трекинга объекта:
Meanshift Method, Snakes, Level Set Method, Fast Marching Method, Distance
Regularized Level Set Evolution (DRLSE) и т.д. (подробнее о методах трекинга
написано в 6.4).
6.2.2.2. Бортовые видеотехнические системы посадки
В отличие от наземных систем, другой вид систем автоматической
посадки использует бортовое видеотехническое оборудование. Если
рассматривать приземление VTOL-аппаратов (с вертикальным взлетом/
посадкой), то, как правило, используются специальные вертолетные площадки.
Существует два вида обозначения вертолетных площадок, основанных на
точечных маркерах и на кривых определенной формы [6]. В [49] представлен
213
метод, использующий для определения позиции площадки хорошо заметные
оранжевые шарики для настольного тенниса в качестве пассивных маркеров,
которые закрепляются на черном полистироловом основании (рис. 6.9).
Рис. 6.9. Маркированная посадочная площадка
(Иллюстрация: Masselli & Zell [49])
Координаты указаны в миллиметрах
В работе показывается возможность того, что представленный метод
может использоваться для определения положения и ориентации при
автономном взлете, висении и посадке БЛА. Сам БЛА с бортовой системой
технического зрения показан на рис. 6.10. На борту используется одноплатный
компьютерный модуль Gumstix Overo Fire с процессором ARM Cortex-А8 CPU,
работающий на частоте 600 МГц и выполняющий операции по обработке
видеоинформации и вычислению позиции и координат БЛА. Бортовая камера
PointGrey FireFly USB 2.0 осуществляет захват видео с разрешением 640x480
с частотой 60 кадров/с. Оптическая ось камеры располагается вертикально,
вертикальный угол поля зрения камеры 48 градусов, это позволяет сохранять
площадку в поле зрения камеры при изменении углов крена и тангажа. Вес БЛА
составляет 570 г. Определение координат выполняется в два этапа: на первом
происходит детектирование маркеров по цвету на изображении, на втором -
вычисление позиции по расположению пикселей, соответствующих маркерам.
214
л
Рис. 6.10. Микро-БЛА с бортовой системой технического зрения
(Иллюстрация: Masselli & Zell [49])
Схожий подход применен в работе [50] для посадки на корабль. С целью
увеличения точности и надежности обнаружения маркеров используются два
цветных маяка различных цветов (активные маркеры), что позволяет различать
правую и левую стороны площадки (рис. 6.11). Кроме того, для увеличения
точности позиционирования осуществляется комплексирование показаний
системы видеотрекинга с сигналами датчиков ИНС и СНС.
•RANGE
•BEARING
•ROLL
•FLV-TO BARS
•EXPOSURE
•PIXEL
4 STOGRAPH
VI'JOU KMIDIHAOUNG MM'iOl Ц'йЛ MCrtlTO»
•RANGL
BEARING
•ROLL
BEACON SIZE
UAv СОМНЛЕЖ
Puc. 6.11. Бортовая система технического зрения, использующая двухцветные
активные маркеры на площадке (Иллюстрация: Yang et al. [50])
215
6.2.2.3. Комбинированные видеотехнические системы посадки
В работе [51 ] разработана система стабилизации для модели вертолета на
основе технического зрения с использованием двух камер. Предлагается
оригинальный метод определения координат вертолета, при котором одна из
камер расположена на борту вертолета, а другая находится на земле и имеет
наклонно-поворотное устройство с увеличительным объективом. Разработан
метод, позволяющий вычислять координаты БЛА с помощью направленных
друг на друга камер. Этот метод можно использовать для автоматического
взлета и посадки, особенно в случаях, когда очень важны точные
относительные координаты, например, при посадке на корабль в условиях
сильной качки. В качестве маркеров используются цветные шарики радиусом
2,5 см, присоединяющиеся к нижней части квадрокоптера и к наземной камере.
Система использует алгоритм отслеживания маркеров для определения
координат. Для приемлемой точности отслеживания достаточно двух маркеров
на квадрокоптере и одного на наземной станции.
6.3. Методы трекинга объектов
6.3.1. Представление объекта трекинга
Объектом слежения может быть все что угодно: автомобиль, человек,
животное, БЛА и т.д. Объекты слежения могут быть представлены через их
формы или особенности внешнего вида. В работе [52] представлена
классификация способов представления объектов через форму объекта:
1. Точки. Объект представляется точкой, которая является его центроидом,
или группой точек.
2. Примитивные фигуры (квадрат, эллипс, треугольник и т.д.).
3. Силуэт и контур объекта. Контур объекта определяет границу объекта.
Область внутри контура является силуэтом объекта.
216
4. Модели шарнирной формы. Шарнирные объекты составляются из
частей, которые соединяются через шарниры. Например, человеческое тело
можно представить как шарнирный объект, состоящий из торса, ног, рук и
головы.
5. Скелетная модель. Скелетный объект может быть получен путем
рисования медианных линий к отдельным частям силуэта объекта.
На рис. 6.12 изображены перечисленные способы представления объектов.
Рис. 6.12. Способы представления объектов (Иллюстрация: Yilmaz et al. [52]):
(а) центроид (одна точка); (Ь) группа точек; (с) прямоугольник; (d) эллипс;
(е) шарнирная модель; (J) скелетная модель; (g) группа точек по контуру объекта;
(h) контур объекта; (г) силуэт объекта
При трекинге представления объектов через форму могут
комбинироваться с их представлениями через статистические особенности
внешнего вида:
1. Плотности вероятностей отдельных проявлений внешнего вида объекта
(цвет, текстура), вычисляемые обычно для определенной области изображения,
определяемого его формой (например, внутренняя область эллипса или
контура).
2. Шаблоны. Шаблоны формируются с использованием простых
геометрических фигур или силуэтов. Преимущество шаблонов состоит в том,
217
что они несут информацию об особенностях внешнего вида объекта и
информацию о пространственных параметрах. Однако шаблоны представляют
объект только с одного ракурса, поэтому подходят только для случаев, когда
ориентация объекта в пространстве меняется незначительно.
3. Активные модели внешнего вида. В них одновременно присутствуют
два типа параметров: параметры, связанные с формой (параметры формы), и
параметры, связанные со статистической моделью изображения
или текстурой (параметры внешнего вида). Перед использованием модель
должна быть обучена на множестве заранее размеченных изображений.
Разметка изображений производится вручную или в полуавтоматическом
режиме, когда с помощью какого-либо алгоритма находятся приближенные
расположения меток, а затем они уточняются экспертом. Каждая метка имеет
свой номер и определяет характерную точку, которую должна будет находить
модель во время адаптации к новому изображению.
4. Многоракурсные активные модели внешнего вида. В этих моделях
содержится информация о нескольких ракурсах объекта. Для сжатого
представления каждого ракурса формируют подпространство характерных
особенностей, например, с помощью метода главных компонент.
Как правило, для навигации БЛА или для его автоматической посадки
используются способы представления искусственных ориентиров в виде
геометрических примитивов. Для представления самого БЛА используется
контурное представление объекта или же представление в виде плотности
вероятности какой-либо особенности внешнего вида, например цвета или
текстуры.
6.3.2. Собственно трекинг (отслеживание) объектов
Трекинг объектов - это одна из ключевых задач при осуществлении
навигации при помощи систем машинного зрения. Задачей трекинга является
определение расположения интересующего объекта на последовательности
218
изображений. Если известна информация о положении объекта на
изображении, то в дальнейшем это позволяет рассчитать координаты и
ориентацию БЛА. В случае наземной системы машинного зрения сам БЛА
является объектом трекинга. Задачи детектирования объекта на изображении и
выявление соответствий между изображениями объекта на последовательных
кадрах могут выполняться или раздельно, или одновременно. В первом случае
каждый кадр подвергается обработке с помощью алгоритма детектирования
объектов, затем трекер устанавливает соответствие между объектами на разных
кадрах. Во втором случае расположение объекта и соответствие между кадрами
осуществляется одновременно путем итеративного обновления расположения
объекта по информации из предыдущих кадров. При выполнении трекинга
объект должен быть представлен одним из способов, описанных в предыдущем
параграфе. Методы трекинга объектов могут быть разбиты на три основные
группы:
1. Трекинг точек. Объекты, детектированные на кадрах, представляются в
виде группы точек, взаимосвязь между точками основывается на предыдущем
состоянии объекта, которое может включать расположение объекта и
характеристики движения. Этот метод требует дополнительного механизма
детектирования объектов на каждом кадре.
2. Трекинг ядра. Ядро относится к форме объекта или его особенностям
внешнего вида. Например, ядром может быть квадратный шаблон или
эллиптическая фигура с некоторой ассоциированной гистограммой. Объекты
отслеживаются путем вычисления движения ядра на последовательных кадрах.
Эти движения обычно выражаются в виде параметрических преобразований,
таких как перемещение, вращение, аффинные преобразования.
3. Трекинг силуэта. Осуществляется путем выявления области,
ограниченной объектом на каждом кадре. Методы отслеживания силуэта
используют информацию о соответствии формы объекта на последовательных
кадрах, а также могут учитывать постепенную эволюцию силуэта.
219
6.4. Определение ориентации и расположения БЛА
с использованием дискретного преобразования Фурье
В работе автора [53] представлены методы определения ориентации
объектов с помощью компьютерного зрения. Основное назначение этих
методов - получение высокоточной навигационной информации посредством
одной или более камер при осуществлении посадки БЛА на автоматические
сервисные станции, в помещениях или на открытых площадках. В работе
предлагаются два метода дистанционного определения углов ориентации
объекта. Суть первого метода заключается в использовании свойства
дискретного преобразования Фурье (ДПФ), позволяющего определять угол, на
который повернуто текущее изображение контура объекта по отношению к
эталонному контуру. При этом вращение объекта происходит относительно
оси, параллельной оптической оси камеры. Второй метод позволяет определять
угол поворота относительно оси, перпендикулярной оптической оси камеры.
Главной особенностью данной системы является использование
эталонных дескрипторов и эталонных наборов дескрипторов ДПФ,
позволяющих как идентифицировать трехмерные объекты в пространстве, так и
определять их ориентацию. Формирование нужных эталонных дескрипторов
предлагается выполнять на основе ЗБ-модели объекта с использованием
средств компьютерной графики, причем такое формирование можно выполнять
динамически в зависимости от необходимой точности и требований к
быстродействию. Для идентификации объекта и дальнейшего определения
навигационной информации в вычислительной системе базовой станции
должны храниться ЗБ-модели объектов. Количество таких моделей
определяется количеством типов БЛА, посадка которых предусмотрена
системой.
В такой системе, в отличие от систем, использующих активные или
пассивные маркеры, из текущего изображения объекта выделяется его контур и
путем его сравнения с эталонными контурами осуществляется как
220
идентификация, так и определение ориентации объекта. На рис. 6.13 в верхней
части рисунка представлен квадрокоптер Hubsun в двух ракурсах, а в нижней
части - его соответствующие контуры. Как видно, даже при незначительном
изменении ориентации объекта контур претерпевает существенные изменения,
что значительно усложняет задачу трекинга объекта (по сравнению с трекингом
геометрических примитивов). С другой стороны, такие изменения позволяют
определять ориентацию объекта даже с одной камерой без использования
каких-либо маркеров.
Рис. 6.13. Квадрокоптер Hubsun х4 и его контуры при углах поворота
0° (слева) и 22,5° (справа)
Белыми окружностями отмечены точки, взятые для вычисления коэффициентов ДПФ,
красными - центры контуров
Задача определения ориентации такого рода объектов по изображению
контура была решена с помощью применения двумерного дискретного
преобразования Фурье. Алгоритм определения ориентации объекта использует
набор точек эталонных контуров, соответствующих определенному углу
поворота объекта относительно оси, перпендикулярной оптической оси камеры.
На основе ДПФ текущего изображения контура и двумерного ДПФ набора
точек эталонных контуров формируется система полиномиальных уравнений,
решение которой с помощью численных методов и применения
модифицированного алгоритма k-means++ для отбора корней позволяет
определять один из углов ориентации объекта. Предложенный алгоритм
221
пригоден для работы с разнообразными объектами. Например, на рис. 6.14
представлены скриншоты программы, определяющей угол ориентации модели
автомобиля.
Рис. 6.14. Практическое определение угла ориентации объекта
по изображению его контура
Значения вычисленных углов (сверху вниз): 11,7°; 22,5°; 89,9°
222
Кроме того, представленные методы позволяют осуществлять
определение расстояния до объекта даже с одной камерой, для чего
выполняется сопоставление нулевых гармоник дескриптора ДПФ эталонного
контура и дескриптора ДПФ наблюдаемого контура объекта.
Результаты практической работы системы можно наблюдать на видео по
ссылке [54].
Источники информации по главе 6
1. Фетисов В. С., Ахмеров Ш.Р. Оценка схем построения контактных
устройств в посадочных платформах для подзарядки электрических БПЛА
с вертикальным взлетом-посадкой // Вестник Уфимского государственного
авиационного университета. 2015. № 2 (68). С. 138-144.
2. Беспилотный летательный аппарат «Альбатрос» // Сайт группы
компаний «Стилсофт». URL: http://www.stilsoft.ru/download/catalog/pdf/polnoe-
opisanie-Albatros.pdf (дата обращения: 15.09.17).
3. Протокол № 1/2015 натурных испытаний НАЛ с использованием
мобильной измерительно-диагностической лаборатории (МИДЛ) // Отчет
информационно-аналитического центра координатно-временного и
навигационного обеспечения ФГУП ЦНИИМАШ. URL: https://www.glonass-
iac.ru/GLONASS/midlReports2/Report2015_l.pdf (дата обращения: 15.09.17).
4. Фетисов В. С., Артемьев А. Е. Комплексирование радиотехнических и
видеотехнических средств в системах локального позиционирования малых
беспилотных летательных аппаратов // Альманах современной науки и
образования. 2016. № 10 (112). С. 91-95.
5. Mautz R. Indoor Positioning Technologies. Habilitation Thesis, ETH Zurich,
Zurich, Switzerland, 2012.
6. Kendoul F. Survey of advances in guidance, navigation, and control of
unmanned rotorcraft systems // Journal of Field Robotics. Mar. 2012. № 2. P. 315-
378.
223
7. What is motion capture? // Сайт компании Vicon. URL:
https://www.vicon.com/wliat-is-inotion-capture (дата обращения: 15.09.2017).
8. Martinez C., Campoy P., Mondragon I., Olivares-Mendez M. A. Trinocular
ground system to control UAVs // IEEE/RSJ International Conference on Intelligent
Robots and Systems. IEEE. 2009, Oct. P. 3361-3367.
9. Kong W., Zhang D., Wang X., Xian X., Zhang J. Autonomous Landing of
an UAV with a Ground-Based Actuated Infrared Stereo Vision System //
IEEE / Intelligent Robots and Systems (IROS). Nov. 2013.
10. Amidi O., Kanade T., Fujita K. A visual odometer for autonomous
helicopter flight//Robotics and Autonomous Systems. 1999. №28(2-3). P. 185-193.
11. Buskey G., Roberts J., Corke P., Wyeth G. Helicopter automation using a
low-cost sensing system // Proceedings of the Australasian Conference on Robotics
and Automation, Brisbane, Australia. 2003, December.
12. Kelly J., Saripalli S., Sukhatme G. S. Combined visual and inertial
navigation for an unmanned aerial vehicle // Proceedings of the 6th International
Conference on Field and Service Robotics, Chamonix, France. 2007, July.
13. Mejias L., Campoy P., Mondragon I., Doherty P. Stereo visual system for
autonomous air vehicle navigation // Proceedings of the IF AC Symposium on
Intelligent Autonomous Vehicles, Toulouse, France. 2007, September.
14. Achtelik M., Bachrach A., He R., Prentice S., Roy N. Stereo vision and
laser odometry for autonomous helicopters in GPS-denied indoor environments //
Proceedings of SPIE Unmanned Systems Technology XI Conf., Orlando, FL, USA.
2009, April. Vol. 7332-733219. P. 1-10.
15. Caballero F., Merino L., Ferruz J., Ollero A. A visual odometer without
3D reconstruction for aerial vehicles. Applications to building inspection //
Proceedings Journal of the International Conference on Robotics and Automation,
Barcelona, Spain. 2005, April. P. 4684-4689.
224
16. Caballero F., Merino L., Ferruz J., & Ollero A. Vision-based odometry and
SLAM for medium and high altitude flying UAVs // Journal of Intelligent and
Robotic Systems. 2009. 54 (1-3). P. 137-161.
17. Madison R., Andrews G., De Bitettoand P., RasmussenS., BottkolM. S.
Vision-aided navigation for small UAVs in GPS-challenged environments //
Proceedings of the AIAA Infotech@Aerospace Conference and Exhibit, Rohnert
Park, CA. 2007, May.
18. Kendoul F., Nonami K., Fantoni I., Lozano R. An adaptive vision-based
autopilot for mini flying machines guidance, navigation and control // Autonomous
Robots. 2009. 27 (3). P. 165-188.
19. Johnson A., Willson R., Cheng Y., Goguen J., Leger C., Sanmartin M.,
Matthies L. Design through operation of an image-based velocity estimation system
for Mars landing // International Journal of Computer Vision. 2007. 74 (3). P. 319-
341.
20. Bosse M., Karl W., Castanon D., Debitetto P. A vision augmented
navigation system // Proceedings of the IEEE Conference on Intelligent
Transportation System, Boston, MA. 1997, November. P. 1028-1033.
21. Marconi L., Isidori A., Serrani A. Autonomous vertical landing on an
oscillating platform: An internal model based approach // Automatica. 2002. 38.
P. 21-32.
22. Shakemia O., Sharp C., Vidal R., Shim D., Ma Y., Sastry S. Multiple view
motion estimation and control for landing an unmanned aerial vehicle // Proceedings
of the IEEE Conference on Robotics and Automation, Washington, DC. 2002, May.
Vol. 3.P. 2793-2798.
23. Saripalli S., Montgomery J., Sukhatme G. Visually guided landing of an
unmanned aerial vehicle // IEEE Transactions on Robotics and Automation. 2003.
19 (3). P. 371-381.
225
24. Merz T., Duranti S., Conte G. Autonomous landing of an unmanned
helicopter based on vision and inertial sensing // Proceedings of the 9th International
Symposium on Experimental Robotics, Singapore. 2004, June.
25. Hrabar S., Sukhatme G. Omnidirectional vision for an autonomous
helicopter // Proceedings of the IEEE International Conference on Robotics and
Automation, Taipei, Taiwan. 2003, September. P. 3602-3609.
26. Proctor A. A., Johnson E. N. Vision-only approach and landing //
Proceedings of the AIAA Guidance, Navigation, and Control Conference and
Exhibit, AIAA 2005-5871, San Francisco, CA. 2005, August.
27. Guenard N., Hamel T., Mahony R. A practical visual servo control for an
unmanned aerial vehicle. IEEE Transactions on Robotics. 2008. 24 (2). P. 331-340.
28. Lee D., Ryan T., Kim H. J. Autonomous landing of a VTOL UAV on a
moving platfonn using image-based visual servoing // IEEE Int. Conf. Robot. Autom.
(ICRA). 2012. P. 971-976.
29. Serra P., Cunha R., Hamel T., Cabecinhas D., Silvestre C. Landing of a
quadrotor on a moving target using dynamic imagebased visual servo control // IEEE
Trans. Robot. 2016, Dec. 32 (6). P. 1524-1535.
30. Vlantis P., Marantos P., Bechlioulis С. P., Kyriakopoulos K. J. Quadrotor
landing on an inclined platfonn of a moving ground vehicle // IEEE Int. Conf. Robot.
Autom. (ICRA). 2015. P. 2202- 2207.
31. Kim J., Jung Y., Lee D., Shim D. H., Landing control on a mobile platfonn
for multi-copters using an omnidirectional image sensor // J. Intell. Robot. Syst. 2016.
P. 1-13.
32. Wenzel К. E., Masselli A., Zell A. Automatic take off, tracking and
landing of a miniature UAV on a moving carrier vehicle // J. Intell. Robot. Syst.
2011. Vol. 61. № 1-4. P. 221-238.
226
33. Falanga D., Zanchettin A., Simovic A., Delmerico J., Scaramuzza D.
Vision-based Autonomous Quadrotor Landing on a Moving Platfonn // Proceedings
of the IEEE/RSJ International Symposium on Safety, Security and Rescue Robotics
(SSRR), Shanghai, 2017.
34. SA-400 Jackal Autonomous Takeoff and Landing on a Moving Trailer
// Youtube. URL: https://www.youtube.com/watch?v=n_GBgTu3pO (дата обращения:
14.09.17).
35. Conte G., Doherty P. Vision-based unmanned aerial vehicle navigation
using geo-referenced information // EURASIP Journal on Advances in Signal
Processing. Vol. 2009. Article ID 387308. 18 pages, doi: 10.1155/2009/387308.
36. Hengstenberg R. Multisensory control in insect oculomotor systems, in
visual motion and its role in the stabilization of gaze // Reviews of Oculomotor
Research. 1993. 5 (2). P. 285-298.
37. Srinivasan M. V., Zhang S., Bidwell N. Visually mediated odometry in
honeybees // Journal of Experimental Biology. 1997. 200. P. 2513-2522.
38. Barron A., Srinivasan M. Visual regulation of ground speed and headwind
compensation in freely flying honey bees (Apis Mellifera L.) // Journal of
Experimental Biology. 2006. 209. P. 978-984.
39. Wagner H. Flow-field variables trigger landing in flies // Nature. 1982.
297. P. 147-148.
40. Ruffier F., Franceschini N. Optic flow regulation: The key to aircraft
automatic guidance//Robotics and Autonomous Systems. 2005. Vol. 50. P. 177-194.
41. Tammero. L. Dickinson M. The influence of visual landscape on the free
flight behavior of the fruit fly Drosophila melanogaster // Journal of Experimental
Biology. 2002. 205. P. 327-343.
42. Kong W. Vision-based Autonomous Landing System for Unmanned Aerial
Vehicle: A Survey // Proceedings of International Conference on Multisensor Fusion
and Information Integration for Intelligent Systems (MFI 2014), Beijing, China.
28-29 September 2014.
227
43. Troy J. J., Erignac C. A., Murray P. Haptics-Enabled UAV Teleoperation
Using Motion Capture Systems // J. Coinput. Inf. Sci. Eng. 9 (1), 011003 (Feb. 11,
2009). doi: 10.1115/1.3072901.
44. Vicon UAV Showcase 2016 // Портал Vimeo. URL:
https://vimeo.com/194815023 (дата обращения: 15.09.2017).
45. Mellinger D., Shomin M., Kumar V. Control of Quadrotors for Robust
Perching and Landing // Proceedings of the International Powered Lift Conference.
5-7 October 2010, Philadelphia, Pennsylvania, USA. P. 205-225.
46. How J. P., Bethke B., Frank A., Dale D., Vian J. Real-time indoor
autonomous vehicle test environment // IEEE Control Systems Magazine. Vol. 28.
№2. April 2008. P. 51-64.
47. Mannberg M., Silson P. Savvaris Al. High Precision Real-time 3D
Tracking Using Cameras // Proceedings of Infotech@Aerospace 2011 Conference.
Cranfield University, United Kingdom. 2011.
48. Kong W., Zhang D. Autonomous Landing of an UAV with a Ground-
Based Actuated Infrared Stereo Vision System // Proceedings of 2013 IEEE/RSJ
International Conference on Intelligent Robots and Systems (IROS). Tokyo. Japan.
2013, November 3-7.
49. Masselli A., Zell A. A Novel Marker Based Tracking Method for Position
and Attitude Control of MAVs // Proceedings of International Micro Air Vehicle
Conference and Flight Competition (IMAV). 2012, July.
50. Yang X., Mejias L., Garratt M. Multi-sensor data fusion for UAV
navigation during landing operations // Proceedings of the 2011 Australian
Conference on Robotics and Automation, Monash University. Melbourne, 2011.
51. Altug E., Ostrowski J. P., Taylor C. J. Control of a quadrotor helicopter
using dual camera visual feedback // International Journal of Robotics Research.
2005.24 (5). P. 329-341.
52. Yihnaz A., Javed O., Shall M. Object tracking: A survey // ACM
Computing Surveys. Vol. 38. № 4. Article 13. December 2006.
228
53. Артемьев А. Е. Дистанционное определение ориентации и
расположения беспилотных летательных аппаратов и других объектов по
изображению контура с использованием дискретного преобразования Фурье //
Авиакосмическое приборостроение. 2017. № 6. С. 23-33.
54. Артемьев А. Е. Определение ориентации объекта с помощью
наземной навигационной системы на основе машинного зрения // Youtube.
URL: https://youtube/uiQK9Jlk4xY (дата обращения: 14.09.17).
229
ГЛАВА 7. ДИСПЕТЧИРОВАНИЕ И ОПТИМИЗАЦИЯ
ПОЛЕТОВ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ
В СЕТИ АВТОМАТИЧЕСКИХ СЕРВИСНЫХ СТАНЦИЙ
В настоящее время сферы применения беспилотных авиационных систем
быстро расширяются. Наиболее перспективными областями применения БЛА
являются: мониторинг объектов (в том числе протяженных), доставка
небольших грузов, химическая обработка сельскохозяйственных участков,
военные задачи по уничтожению наземных целей и др. Для полного
выполнения многих миссий обычная продолжительность полета БЛА
оказывается недостаточной. Проблема может быть решена путем
использования подзарядки (замены) источников питания на АСС. При этом в
выполнении миссии участвует не один, а множество БЛА. От количества и
распределения операционных объектов и АСС зависит организация работы
БАС, алгоритмы работы БЛА и АСС. В 1.4 были обозначены 4 возможных типа
комбинаций объектов и АСС, существенно различающиеся по организации:
1O1S (один объект, одна станция), 1OMS (один объект, много станций),
МО 1S (много объектов, одна станция), MOMS (много объектов, много
станций). Для каждого из указанных типов организации БАС возникает задача
распределения имеющегося парка БЛА, способных заменять друг друга в
процессе выполнения общей задачи, с учетом остаточного заряда источников
питания, времени зарядки, требуемого времени полета, метеорологических
условий и других параметров. Конечно, названные комбинации объектов и
АСС еще не охватывают все многообразие возможных задач, ставящихся перед
БАС, и способов их решения. Эти задачи могут усложняться, например: при
наличии мобильных объектов или АСС, при необходимости учитывать
траектории полетов, при необходимости синхронной работы БЛА, при
многозадачности миссии каждого БЛА и т.д.
Диспетчирование полетов БЛА включает в себя отслеживание текущего
состояния каждого борта и назначение времени взлетов и посадок с учетом
230
меняющихся внешних условий (например погодных условий - температуры
воздуха, скорости и направления ветра, от которых зависят емкость и
энергозатраты АКБ, или изменений в общей задаче). Диспетчирование должно
быть оптимальным в определенном смысле (например, с точки зрения
минимального времени выполнения задачи или максимального качества
мониторинга) в течение заданного периода работы БАС [1].
В данной главе рассмотрены две частные задачи обслуживания объектов,
соответствующие разным типам организации БАС: это задача непрерывного
мониторинга объекта (тип организации БАС: 1O1S) и задача доставки
малогабаритных грузов группой мультикоптеров в сети сервисных станций
(тип организации БАС: MOMS).
7.1. Постановка задачи оптимального диспетчирования
7.1.1. Оптимизация расписания полетов для выполнения
задачи мониторинга объекта
Пусть имеется группа из А мультикоптеров, которые должны выполнять
дежурство над объектом, находящимся на расстоянии S от базовой станции в
течение времени Т. Обслуживание аппаратов на сервисной станции сводится к
зарядке аккумулятора. При контроле этого процесса определяется реальное
значение энергоемкости аккумулятора С. Необходимо составить расписание
полетов так, чтобы суммарная длительность перерывов мониторинга была
минимальна.
В общем случае количество используемых аппаратов А может быть
больше или меньше минимально необходимого количества 7V„,
обеспечивающего непрерывное дежурство над объектом. В наших
исследованиях А выбиралось несколько большим А„, но и в этом случае при
неудачном выборе последовательности вылетов возможны перерывы в
мониторинге объекта в течение времени Т, что будет показано далее.
231
Цикл работы одного z-го БЛА выглядит следующим образом:
тя (Forward) - время на перелет от зарядной станции до объекта;
Tot (Object) - время дежурства на объекте;
iBi (Backward) - время на перелет от объекта до зарядной станции;
та (Charging) - время зарядки аккумулятора.
Аппарат не может вылететь с зарядной станции до окончания цикла
зарядки. Во время дежурства какого-либо аппарата на объекте тсч следующий
должен вылететь ему на смену заранее, с учетом времени полета ти, таким
образом, чтобы по возможности не образовывался перерыв в мониторинге
объекта (рис. 7.1).
Борт 2
Борт 1
Tfi Toi 'CBl Tci
Рис. 7.1. Схема сопряжения двух соседних вылетов
Рассмотрим на примере, как могут различаться расписания полетов для
пяти аппаратов, составленные в виде комбинаций вышеописанных циклов
(рис. 7.2). Аппараты и соответствующие им рабочие циклы пронумерованы
(рис. 7.2, а). Комбинации подбираются случайным образом, но должно
выполняться условие полной зарядки любого аппарата до его вылета. Если к
моменту смены дежурства полностью заряженных аппаратов нет, то образуется
пауза, связанная с ожиданием завершения процесса зарядки аппарата, наиболее
близкого к его окончанию. Таким образом сформированы 2 случайные
комбинации (рис. 7.2, б, в). Но в первом случае суммарное время перерывов
мониторинга tg за период Т меньше, чем во втором.
Комбинации различаются также количеством вылетов, которые
необходимо совершить до окончания времени Т (14 и 13 вылетов
соответственно).
232
Рис. 7.2. Примеры расписания полетов для пяти БЛА:
а - распределение операционных интервалов (последовательно следуют Трр Три, Тр,, Та)',
б, в - примеры случайно набранных комбинаций
233
Наборы временных параметров Tot, рассчитываются для
каждого периода Т по моделям, разработанным и корректируемым исходя из
следующих зависимостей:
1) время полета тд(. а также время дежурства то, зависят от
энергоемкости аккумулятора С, аэродинамических параметров аппарата,
расположения объекта относительно зарядной станции, скорости и
направления ветра;
2) время зарядки аккумулятора аппарата та на зарядной станции зависит от
энергоемкости аккумулятора С. Предположительно ток зарядки
выбирается всегда номинальным, и процесс зарядки не форсируется;
3) энергоемкость аккумулятора С сложным образом зависит от всей
предыстории его работы (количества циклов заряда-разряда, токов заряда
и разряда, условий работы и хранения), а также текущей температуры.
Определение реальной энергоемкости производится в каждом цикле
зарядки каждого аппарата. Этот параметр передается в систему
управления для коррекции полетных моделей.
7.1.2. Оптимизация расписания полетов для выполнения
задачи доставки грузов
Пусть имеется множество пунктов двух видов:
1)АСС, на которых выполняется подзарядка бортовых аккумуляторов
БЛА, а также некоторые операции с грузами (погрузка, разгрузка, временное
хранение);
2) пункты назначения (заказчики) грузов.
АСС в настоящее время разрабатываются и производятся многими
компаниями и коллективами разработчиков, в их числе Skysense (Германия),
НЗ Dynamics (Сингапур), Amazon Technologies (США), Airobotics (Израиль),
Коптер Экспресс (Россия) и др. [2-6]. Это могут быть как стационарные
сооружения на поверхности Земли, так и платформы, располагающиеся
234
на крышах зданий, и даже небольшие корпусные системы, не требующие
значительных площадей для крепления. Некоторые из этих станций
располагают в непосредственной близости от логистических пунктов, с
которых БЛА получают груз. Известны координаты пунктов и допустимое
количество одновременно заряжаемых БЛА на станциях.
Имеется набор грузов, о которых известны их текущее положение (груз
может быть на станции или быть на борту одного из БЛА) и пункт назначения.
Все грузы имеют массо-габаритные характеристики, допустимые для поднятия
имеющимися БЛА.
Имеется множество БЛА. О каждом из них известно его текущее
состояние (статус): БЛА может быть в полете, в ожидании в заряженном
состоянии, может принимать или передавать заказчику груз, находиться на
зарядке или быть в нештатном состоянии (разрядился в полете, потерял
управление или другие причины), номер пункта, в котором он сейчас находится
или к которому направляется, и номер груза на его борту. Также известны
технические характеристики: грузоподъемность, максимальные габариты
принимаемого груза, характеристики процесса заряда/разряда источника
электропитания, крейсерская скорость и высота полета. Полагаем, что
технические характеристики БЛА позволяют осуществлять заряд на любой
АСС.
Заявки на доставку грузов поступают в режиме реального времени через
web-сервис напрямую от заказчика или от оператора, принимающего заявки по
телефону или другому виду связи.
С заданной периодичностью происходит опрос состояния и положения
БЛА, положения грузов.
На рис. 7.3 приведена описанная выше схема расположения АСС, БЛА,
доставляемых грузов и пунктов назначения (заказчиков).
На основании информации о текущем состоянии БЛА, грузах и
заказчиках ставится задача сформировать программу доставки всех грузов всем
235
заказчикам за минимальное время. Периодичность составления программы
задается оператором (например, 30 минут), кроме того, обновление программы
предполагается при поступлении каждого нового груза. Заказы, поступающие
во время формирования программы, помещаются в очередь ожидания.
Программа доставки содержит информацию о времени вылета БЛА с
АСС, номер перевозимого груза, время прилета на другую станцию или в пункт
назначения. Примеры программ доставки представлены на рис. 7.4 и 7.5.
Станция 1
(_ \ коптер
0 груз
Рис. 7.3. Схема расположения АСС, БЛА (коптеров), доставляемых грузов и
пунктов назначения (заказчиков)
На этих рисунках по горизонтальной оси откладывается время, цветными
прямоугольниками обозначены состояния БЛА, в нижнем левом углу
прямоугольников указана условная энергоемкость (заряд) бортовой АКБ
в начале временного интервала, а в правом верхнем - в конце его. В середине
236
прямоугольников расположены два ряда чисел: в первом ряду указан номер
пункта назначения или расположения, во втором - номер груза, который
находится на борту БЛА.
Для примера показаны 2 варианта программы доставки грузов (по схеме,
показанной на рис. 7.3) для простого случая с двумя БЛА и двумя грузами.
В одном случае оба груза доставляются БЛА № 1, во втором - БЛА № 2
(их технические характеристики различны).
По первой программе время доставки составляет 64 минуты, по второй -
47 минут.
Рис. 7.4. Пример программы доставки двух грузов в системе с двумя БЛА
и двумя грузами. Оба груза доставляет БЛА № 1
полет
выдача груза забор груза
ожидание
зарядка
Рис. 7.5. Пример программы доставки двух грузов в системе с двумя БЛА
и двумя грузами. Оба груза доставляет БЛА № 2
237
7.2. Генетический алгоритм как метод оптимизации расписания
полетов беспилотных летательных аппаратов
7.2.1. Альтернативные методы оптимизации расписания
полетов БЛА
Задачи построения оптимального расписания полетов БЛА можно решать
с помощью различных математических средств оптимизации. Часто такие
задачи решаются с помощью линейного программирования [11]. Известно
несколько примеров использования одной из его модификаций - MILP (Mixed
Integer Linear Programming) - смешанного целочисленного программирования,
в котором часть переменных должна принадлежать множеству целых чисел
[7-9].
На примере простейшей транспортной задачи для группы БЛА,
работающей в сети АСС, рассмотрим последовательность ее решения методами
линейного программирования. Пусть по некоторой территории распределено п
АСС, и имеется т точек доставки груза заказчикам. Весь груз для всех
заказчиков одинаков. Для каждой z-й АСС известно, сколько груза там
сосредоточено - <7;. Объем отдельного заказа составляет bj (не менее). Тогда
можно записать систему ограничивающих неравенств:
+ xi2 +... + xim < а,;
xij + x2j+ ... + x„j > bj,
где xtj - количество груза, перевозимого от z-й АСС к j-му заказчику. Если
стоимость отдельной перевозки составляет с#, то целевую функцию,
подлежащую минимизации, можно выразить следующим образом:
f(x) = хпсп + х12с12 + ... +
ХптСпт-
Эта минимизация может быть выполнена с помощью симплекс-метода -
алгоритма решения на основе перебора вершин выпуклого многогранника в
многомерном пространстве [10]. Существуют и другие решения (например,
метод правильных отсечений, циклический алгоритм Гомори), а также
238
различные программные средства на их основе: Advanced Integrated
Mathematical Modeling System (AIMMS), AMPL Optimization, IBM ILOG CPLEX
Optimization Studio, GAMS, GNU Linear Programming Kit Package, надстройка
«Поиск решения» в Microsoft Office Excel, Optimization Toolbox в Matlab
[11,12]. В этих средствах в качестве метода решения чаще всего используются
те или иные модификации метода полного перебора решений. И хотя
пространство поиска сокращено за счет отсева подмножеств допустимых
решений, заведомо не содержащих оптимальных решений, во многих случаях
(особенно при большой размерности пространства поиска) время решения
задачи может быть недопустимо большим. В таких случаях подходящим
средством оптимизации могут быть генетические алгоритмы (ГА), о которых
речь пойдет далее.
В работе [7] произведено сравнение результатов оптимизации расписания
полетов БЛА в сети АСС, полученных с помощью MTLP и ГА. Авторы не
отдают однозначного предпочтения какому-либо методу, отмечая, что при
относительно небольшой размерности поиска выбор зависит от конкретной
задачи и модификации алгоритма.
Обычно оптимизацию расписания полетов БЛА необходимо производить
«на лету», т.е. корректировать его с учетом меняющихся условий (например,
при появлении на АСС новых грузов, изменении состава парка БЛА,
поступлении новых заказов, изменении метеоусловий). Это сильно усложняет
оптимизационные расчеты. Предложены различные методы такой оптимизации
«на лету». Так, в статье [9] описано применение алгоритма RHTA (Receding
Horizon Task Assignment - распределение заданий при отодвигающемся
горизонте), ранее предложенного в работе [13]. В статье [14] обсуждается
использование для оптимального распределения по АСС группы одновременно
находящихся в воздухе БЛА с помощью т.н. аукционного алгоритма,
предложенного ранее в [15].
239
7.2.2. Общий принцип действия генетического алгоритма
Генетические алгоритмы широко используются в задачах комбинаторной
оптимизации, таких как поиск кратчайшего пути, задача компоновки,
составления расписания и т.д. Алгоритм основан на случайном подборе,
комбинировании и изменении оптимизируемых переменных с использованием
механизмов, аналогичных естественному отбору в природе [16].
Для применения ГА значения оптимизируемых переменных (это может
быть, например, маршрут следования объекта или формализованное
расписание) должны быть закодированы в виде вектора («генотипа») т.н.
генов - элементарных структурных единиц. Каждый ген может быть битом,
числом или неким другим объектом. В классических реализациях ГА
предполагается, что генотип имеет фиксированную длину. Такое
закодированное значение переменной, характеризующее определенное
состояние в задаче, называется хромосомой или особью. Набор таких особей -
популяция. Для оценки качества особей вводится целевая функция или в
терминах генетики - функция приспособленности. ГА основан на создании в
результате специальных операций над хромосомами - скрещивания и мутаций
- новых особей и отбору тех из них, которые обладают лучшими значениями
функции приспособленности.
Наибольшие трудности при использовании ГА связаны с кодированием
переменных (формированием хромосом), проектированием методов
скрещивания, способом отбора родителей и их количества для формирования
потомства, созданием начальной популяции. Таким образом, ГА имеет большое
количество настраиваемых параметров, от которых зависит эффективность
решения задачи. Обобщенная схема ГА показана на рис. 7.6.
Опишем подробнее каждый этап разработки ГА.
Кодирование значений оптимизируемых переменных. Если это числовые
переменные, то в большинстве случаев для их кодирования используется
двоичное представление. Если это формализованная запись маршрута,
240
расписания, изображения, то для кодирования могут использоваться, кроме
двоичных битов, натуральные числа или символы. Например, для кодирования
маршрута следования объекта в рамках определенной территории,
ограниченной прямоугольной границей, необходимо условно разбить эту
территорию на достаточно мелкие квадраты, пронумеровать их
последовательно, а затем приписать каждому квадрату 1, если маршрут
проходит через него, или 0, если маршрут через этот квадрат не проходит. Если
теперь выписать все кодированные значения в одну строку в соответствии с
номерами квадратов, получим хромосому - кодированный бинарными генами
маршрут.
Рис. 7.6. Обобщенная блок-схема генетического алгоритма
241
Формирование начальной популяции. Это в большинстве случаев
производится случайным образом с обязательным требованием соблюдения
формата особи и возможности вычисления функции приспособленности.
Предполагается, что в результате работы ГА даже нежизнеспособная начальная
популяция с неоптимальными значениями функции приспособленности будет
улучшена.
Отбор родителей. Этот этап необходим для создания новых особей
(размножения). В ГА обычно используются два родителя. Выбор родителей
может быть либо случайным, либо по принципу наибольшей схожести.
Размножение и мутация. Размножение (скрещивание) состоит в
образовании новых особей, обладающих чертами своих родителей. Возможны
различные способы формирования хромосом потомков. Обычно особь-потомок
от каждого родителя получает соответствующую часть генов. Каждая пара
родителей может иметь одного или нескольких потомков, получающих гены по
заданному правилу. Для обеспечения необходимого разнообразия в популяции
могут происходить мутации. Существуют различные операторы мутаций,
например, такой, при котором каждый ген с заданной вероятностью
инвертируется.
Селекция. Селекция предназначена для отбора наиболее
приспособленных особей (с наилучшими значениями функции
приспособленности). Распространены следующие операторы селекции:
турнирный отбор, при котором в каждом туре из популяции формируется
выборка и в ней отбирается лучшая особь; элитный отбор, при котором
гарантируется выживание лучшей или лучших особей всей популяции.
Возможно внедрение элитизма в любой другой метод отбора.
Оценивание значений целевой функции. Целевая функция является
количественной характеристикой жизнеспособности популяции. Обычно
ведется поиск экстремального значения этой функции.
Генетические алгоритмы гораздо быстрее находят оптимальный
242
или субоптимальный результат, чем алгоритмы на основе перебора вариантов
или случайного поиска (Монте-Карло). Это достигается во многом благодаря
«параллельности» случайного поиска в ГА, т.е. тому, что в каждой итерации
улучшение функции пригодности происходит не для отдельно взятой
хромосомы, а для целой популяции хромосом.
7.3. Примеры применения генетических алгоритмов
для оптимизации диспетчирования полетов БЛА
Идея применения ГА для оптимизации полетов БЛА все чаще встречается
в специальной литературе. Во многом растущая популярность ГА объясняется
быстротой нахождения ими субоптимального результата и возможностью
использования их в реальном времени, когда требуется быстрая адаптивная
перестройка маршрута, расписания или перераспределение заданий между БЛА
в соответствии с меняющимися условиями.
В [17] показана эффективность ГА для решения задачи коммивояжера
при планировании маршрута одиночного БЛА с целью минимизации длины
пути. В [18] ГА использован в задаче оптимизации (минимизации временных
затрат) облета группой БЛА распределенных целей. В статье [19] описано
решение с помощью ГА задачи адаптивного распределения в реальном времени
задач идентификации, атаки и контроля между несколькими БЛА,
работающими по множественным наземным целям на определенной
территории. В [7] ГА впервые использован для оптимизации полетов БЛА в
сети АСС с учетом процедур подзарядки на них.
Рассмотрим особенности применения ГА для решения
проанализированных в 7.1 двух задач оптимизации диспетчирования полетов
БЛА и результаты этой оптимизации.
243
7.3.1. Генетический алгоритм в задаче мониторинга объекта
В 7.1.1 была описана задача оптимизации расписания полетов для группы
БЛА, базирующейся на одной АСС и выполняющей миссию мониторинга
одного объекта. Для применения ГА предложено рассматривать в качестве
хромосом последовательности, составленные из номеров аппаратов (рис. 7.2).
При этом обычные операции отбора, скрещивания и мутации хромосом
дополнены операцией проверки очередного добавляемого в выстраиваемую
хромосому гена (номера аппарата) на завершенность процесса зарядки.
По сравнению с классическим генетическим алгоритмом, которым
принято считать алгоритм, описанный Дж. Холландом [20], операции отбора,
скрещивания и мутации имеют некоторые особенности.
Отличается также операция начального формирования хромосом, в
которой наряду со случайным подбором генов (номеров аппаратов) в процессе
построения происходит проверка на завершенность процесса зарядки для
текущего добавляемого гена. Если аппаратов с завершенной зарядкой нет, то
добавляется аппарат с наиболее заряженным аккумулятором и рассчитывается
возникающее при этом время перерыва в дежурстве.
Решаемая комбинаторная задача имеет некоторое сходство с известной в
теории оптимизации задачей коммивояжера и ей подобными [21, 22], где
оптимизируются перестановки. Однако в нашем случае перестановки могут
быть с повторами элементов, что значительно увеличивает количество
возможных комбинаций. Гены хромосом чаще всего представляют бинарными
элементами. В нашем случае применяется небинарный алфавит: удобнее
кодировать гены натуральными числами из конечного ряда, представляющего
собой номера аппаратов.
Селекция хромосом производится классическим методом колеса рулетки:
в новую популяцию хромосомы попадают с вероятностью, зависящей от их
значения функции приспособленности.
244
Во время мутации случайный ген любой хромосомы с вероятностью
0,01-0,1 подвергается изменению: его текущее значение меняется на любое
другое из выбранного алфавита (множества номеров аппаратов). После этого
выполняется проверка на завершенность процесса зарядки для измененного
гена и перерасчет возможных перерывов дежурства для части хромосомы,
стоящей после этого гена.
Для операции скрещивания выбирается несколько пар родительских
хромосом, для которых производится обмен частями, определяемыми точкой
скрещивания - фиксированной позицией гена, составляющей от 0,5 до 0,9
длины хромосомы; вместо пары родительских хромосом в популяции
появляется пара хромосом-потомков; здесь также выполняется перерасчет
возможных перерывов дежурства для части хромосомы, расположенной после
точки скрещивания.
Описанный алгоритм был реализован в специально разработанной
программе, которая позволяет выбирать лучшую хромосому
(последовательность номеров аппаратов) [23]. Для сравнения в программу
заложен также тривиальный алгоритм сплошного перебора вариантов.
Вычислительный эксперимент, результаты которого представлены в
табл. 7.1, был проведен для следующих исходных данных и параметрах
алгоритма: количество БЛА - 5 (их временные параметры tr, то;, тв;, были
назначены сходными с таковыми для реально существующих мультикоптеров);
длина хромосом варьировалась от 5 до 7 генов; функцией приспособленности F
(целевой функцией) являлось суммарное время перерывов дежурства tg,
которое минимизировалось; размер популяции составлял 5 хромосом.
Как видно из табл. 7.1, по времени вычисления генетический алгоритм
сравним со сплошным перебором только при небольшой длине хромосом, а уже
при длине хромосомы в 7 генов он значительно быстрее. Для более длинных
хромосом длительность сплошного перебора оценить уже невозможно,
а длительность генетического алгоритма меняется незначительно.
245
Таблица 7.1
Результаты вычислительного эксперимента в задаче мониторинга объекта
Длина хромосомы Алгоритм оптимизации Время вычисления Наилучшая хромосома
5 Сплошной перебор 0,24 с 45132
0,12 с 45132
0,12 с 45132
Генетический алгоритм 4,2 с 45132
6,5 с 15234
14,1 с 45132
6 Сплошной перебор 27 с 542132
39 с 542132
49 с 542132
Генетический алгоритм 5,2 с 542132
9,4 с 542132
11,3 с 124351
7 Сплошной перебор 2 ч 37 мин 3512435
2 ч 31 мин 3512435
Более 3 ч 3512435
Генетический алгоритм 27 с 3512435
19 с 1534251
31 с 3512345
7.3.2. Генетический алгоритм в задаче доставки грузов
В отличие от предыдущей задачи в данном случае было выбрано
двоичное кодирование. Все числовые параметры программы доставки груза
переводятся в двоичную систему счисления и собираются в одну бинарную
246
цепочку - хромосому (особь). Длина хромосомы в задаче с двумя БЛА, двумя
грузами и одной станцией равна 145, поэтому применение, например, полного
перебора даже в такой простой задаче уже не представляется возможным.
В начальную популяцию предложено внести несколько особей с
характеристиками, заведомо лучшими, чем у случайной особи. Такими особями
могут быть кодированные представления программ полетов, в которых,
например, все грузы перевозит один БЛА в каком-то заданном порядке
(например, в порядке возрастания их номеров). Особи такого вида легко
генерируются.
Для операции скрещивания количество родителей выбрано равным 2,
применяется панмиксия (оба родителя выбираются случайно, каждая особь
популяции имеет равные шансы быть выбранной в качестве родителя) с одним
потомком и одноточечный кроссинговер. Вероятность мутации гена является
настраиваемым параметром.
В качестве целевой функции выбрано время доставки всех грузов,
ведется поиск ее минимального значения. Во время селекции применяется
элитный отбор.
Для разработки приложения, реализующего ГА для решения
поставленной задачи, была выбрана среда разработки Matlab, имеющая
широкие возможности по проектированию интерфейса пользователя и, что
более важно, большое количество встроенных функций обработки массивов. На
рис. 7.7 представлена экранная форма разработанного приложения, в которой
пользователь имеет возможность задать изменяемые параметры задачи, такие
как количество грузов, аэродинамические и энергетические характеристики
БЛА, координаты АСС и пунктов заказчиков, а также параметры ГА:
количество особей в популяции, количество родителей и вероятность мутации.
С помощью описанной программы проведены серии вычислительных
экспериментов по приближению значений целевой функции к субоптимальным
значениям. Результативность этих поисков зависит от следующих настроек ГА:
247
- частоты и вида мутаций;
- количества родителей в операции скрещивания и критерия их отбора;
- способа кроссинговера (включая выбор точек деления хромосом);
- структуры хромосом;
- способа построения функции приспособленности.
4* main11
станции количество 1 абсциссы станций 0 30 3 ординаты станций грузы количество 2 абсциссы заказчиков -3 5 ординаты заказчиков коптеры количество коптеров 2 коэффициент заряда mA/мин 1 1 1 1 1 коэффициент разряда mA/мин 1 1 1 1 1 инициализация случайная популяция заданная особь типовая популяция
0 40 4 -4 12 начальное положение запуск ГА
ГА численность популяции 50 количество родителей 10 1 1 куда доставить 1 2 скооость 11111 начальное положение 11111 начальный статус 22222
вероятность мутации 10 какой груз несут 0 0 0 0 0 [ начальный заряд 16 0 0 0 1
0 типовая популяция
Рис. 7.7. Окно приложения для построения программы доставки грузов
В заключение подчеркнем, что генетические алгоритмы, адаптированные
для различных задач оптимизации полетов БЛА в сети АСС, в целом вполне
пригодны для практического применения. Те случаи, когда результат
оптимального поиска отличается от наилучших решений, являются следствием
не вполне подходящей настройки параметров алгоритма (выбор точки деления
хромосом при скрещивании, вероятности мутации и др ). Эти настройки,
которые необходимо делать индивидуально под каждый тип задач, являются
предметом отдельных интересных исследований.
248
Источники информации по главе 7
1. Муфаззалов Д. Ф., Фетисов В. С. Диспетчирование полетов группы
мультикоптеров на основе информационно-измерительных систем с
применением генетических алгоритмов // Перспективные информационные
технологии (ПИТ 2017): труды Международной научно-технической
конференции / под ред. С. А. Прохорова. Самара: Издательство Самарского
научного центра РАН, 2017. С. 956-960.
2. Сайт компании Skysense. URL: http://www.skysense.co (дата обращения:
22.09.17).
3. Сайт компании НЗ Dynamics. URL: https://www.li3dynamics.com/
products/drone-box (дата обращения: 22.09.17).
4. US Patent № 9387928 / Multi-use UAV Docking Station Systems and
Methods. Publ. 12.07.2016.
5. Airobotics Presents - The Airbase. URL: https://www.youtube.com/
watch?v=Y68UGMycZus (дата обращения: 22.09.17).
6. Autonomous drone with Charging docking station from Copter Express.
URL: https://www.youtube.com/watch?v=RjX6nUqwlmI (дата обращения:
22.09.17).
7. Kim J., SongB.D., Morrison J. R. On the scheduling of systems of
heterogeneous UAVs and fuel service stations for long-term mission fulfillment //
Journal of Intelligent & Robotic Systems. Vol. 70. Issue 1. 2013. P. 347-359.
8. Kim J., Morrison J. R. On the Concerted Design and Scheduling of
Multiple Resources for Persistent UAV Operations // Journal of Intelligent &
Robotic Systems. Vol. 74. Issue 1-2. 2014. P. 479-498.
9. SongB.D., Kim J., Morrison J.R. Towards real time scheduling for
persistent UAV service: A rolling horizon MILP approach, RHTA and the STAH
heuristic // Proceedings of 2014 International Conference on Unmanned Aircraft
Systems (ICUAS). Orlando, FL. 27-30 May 2014.
249
10. Симплекс-метод // ТахаХ. А. Введение в исследование операций =
Operations Research: An Introduction. 7-е изд. М.: «Вильямс», 2007. Гл. 3.
С. 95-141.
11. Шевченко В. Н., Золотых Н. Ю. Линейное и целочисленное линейное
программирование. Нижний Новгород: Изд-во Нижегородского университета
им. Н. И. Лобачевского, 2004. 154 с.
12. Алексеева Е. В. Построение математических моделей целочисленного
линейного программирования. Примеры и задачи: учеб, пособие / Новосиб. гос.
ун-т. Новосибирск, 2012. 131 с.
13. Alighanbari М. Task assignment algorithms for team of UAVs in dynamic
environments / Master Thesis, Massachusetts Institute of Technology, 2004.
14. Leonard J., Sawaris A., Tsourdos A. Energy Management in Swann of
Unmanned Aerial Vehicles // Journal of Intelligent & Robotic Systems.
Vol. 74. Issue 1-2. 2014. P. 233-250.
15. Bertsekas D. P. An Auction Algorithm for Shortest Paths / Massachusetts
Institute of Technology, Laboratory for Infonnation and Decision Systems, 1990.
16. Панченко T. В. Генетические алгоритмы: учебно-методическое
пособие / под ред. Ю. Ю. Тарасевича. Астрахань: Издательский дом
«Астраханский университет», 2007. 87 с.
17. Иванов А. А. Генетический алгоритм решения задачи коммивояжера
для планирования маршрута беспилотного летательного аппарата // Открытые
информационные и компьютерные интегрированные технологии. 2016. № 71.
С. 202-206.
18. Подлипьян П. Е., Максимов Н. А. Многофазный алгоритм решения
задачи планирования полета группы беспилотных летательных аппаратов //
Электронный журнал «Труды МАИ». Выпуск № 43. URL: https:// www.mai.ru/
science/trudy (дата обращения: 22.09.17).
250
19. Shima T., Rasmussen S. J., Sparks A. G. UAV Cooperative Multiple Task
Assignments using Genetic Algorithms // Proceedings of 2005 American Control
Conference, June 8-10, 2005. Portland, OR, USA. P. 2989-2994.
20. Holland J. H. Adaptation in Natural and Artificial systems. - University of
Michigan Press, Ann Arbor, MI, 1975.
21. Michalewicz Z. Genetic Algorithms + Data Structures = Evolution
Programs. Springer-Verlag, 2nd edition, 1994.
22. Батищев Д. И., Неймарк E. А., Старостин H. В. Применение
генетических алгоритмов к решению задач дискретной оптимизации: учеб,
пособие. Нижний Новгород: НГУ, 2007. 85 с.
23. Фетисов В. С., Ахмеров Ш. Р. Организация полетов группы
мультикоптеров для дежурства над объектом с применением генетического
алгоритма// Авиакосмическое приборостроение. 2017. № 1. С. 26-31.
251
ЗАКЛЮЧЕНИЕ
Авторы данной книги не ставили своей целью освещение вопросов,
связанных с созданием автоматических сервисных станций для беспилотных
летательных аппаратов, во всей их полноте и глубине. Но это одна из первых
попыток как-то систематизировать информацию по этому довольно новому
направлению в технике, которое сейчас переживает период становления и
быстрого развития.
Некоторые компании от идей и разработок перешли к серийному
производству АСС (это, например, упоминавшиеся в книге фирмы Skysense
(Германия), НЗ Dynamics (Сингапур), Airobotics (Израиль), Коптер Экспресс
(Россия) и др.).
В ближайшее время, видимо, возникнут новые направления в развитии
беспилотной авиации и воздушной робототехники. Например, уже сейчас
реализуются многие идеи относительно применения искусственного интеллекта
в управлении полетами БЛА. Бурно развивается направление, связанное с
управлением большими группами взаимодействующих БЛА - стаями.
Появляются сообщения о создании мультикоптеров с гибридными силовыми
установками (на базе двигателя внутреннего сгорания с генератором), которые
при сохранении всех достоинств чисто электрических мультикоптеров придают
им очень важное качество - способность к длительному автономному полету
продолжительностью более 4 часов.
Все эти и подобные им достижения, вероятнее всего, в той или иной
степени внесут существенные изменения или сместят акценты в подходах к
построению АСС для БЛА. Поэтому авторы надеются через несколько лет
вернуться к данной теме и переиздать эту книгу, в которой, несомненно, будут
и обновленные, и совершенно новые главы.
252
Научное издание
ФЕТИСОВ Владимир Станиславович
АРТЕМЬЕВ Анатолий Евгеньевич
МУФАЗЗАЛОВ Дмитрий Фиданович
АВТОМАТИЧЕСКИЕ СЕРВИСНЫЕ СТАНП,ИИ
ДЛЯ ОБСЛУЖИВАНИЯ
ЭЛЕКТРИЧЕСКИХ БЕСПИЛОТНЫХ
ЛЕТАТЕЛЬНЫХ АППАРАТОВ
Редактор Гарипова Ф. X.
Корректор Медведева Г.Р.
Оформление обложки Южакова М. В.
Подписано в печать 21.11.2017. Формат 60x84 1/16.
Бумага офсетная. Печать плоская. Гарнитура Таймс.
Усл. печ. л. 15,8. Уч.-изд. л. 15,7.
Тираж 500 экз. (1-й завод - 1-50 экз.). Заказ № 104.
ООО «Издательство «Инновационное машиностроение»
107076, г. Москва, Колодезный пер., д. 2А, строение 2.
ФГБОУ ВО «Уфимский государственный авиационный
технический университет»
Редакционно-издательский комплекс УГАТУ
450008, г. Уфа, ул. К. Маркса, 12.