/

















































































































































































































































































Text
В И соловьев КОРАБЛИ БЕЗ КАПИТАНОВ
\\\\\\\\\
ГО. Д. ПАХТАНОВ, В. И. СОЛОВЬЕВ
\ \ \ \ \ \
РАДИОУПРАВЛЯЕМЫЕ —*п₽ПИ КОРАБЛЕЙ
МОДЕЛИ
ПЕНИЕ"- ЛЕНИНГРАД1198 СУДОСТРОЕНИЕ
УДК 629.12-501.72:796-05
3—18—5
73—65
ПОЧЕМУ БЫЛА НАПИСАНА
ЭТА КНИГА
Когда авторы книги встретились впервые, ничто не предвещало, что вскоре они будут работать вместе и даже станут друзьями.
Казалось, все должно было быть совсем иначе... Беседа будущих соавторов уже через несколько минут приобрела тот пылкий характер, когда обе стороны совершенно уверены, что переспорить противника с помощью слов невозможно.
Но, как говорится «не было бы счастья, да несчастье помогло»!
По случайному совпадению спорщики охрипли в одно и то же мгновение, а когда не нужно торопиться подбирать новые колкие фразы — думается намного легче. Собеседники тяжело дышали беззвучными ртами, свирепо смотрели друг на друга и... думали. Когда же, в результате размышлений, многое прояснилось, то обоим стало даже немного стыдно и смешно — на очень уж нелепых позициях они стояли во время спора. Для того чтобы оценить комизм сложившейся ситуации, давайте представим себе жаркий «поединок» двух воображаемых персонажей — инженера, специалиста по электронной технике, и старого капитана, этакого просоленного морского волка. Каждый из них, конечно, имеет о предмете спора свое собственное, вполне определенное мнение.
Инженер глубоко убежден, что корабли — это лишь всего-навсего плавучие подставки, к которым, при желании, можно приколотить умные электронные приборы. А говоря откровенно, 3
I*
корабли и для роли подставок не очень-то пригодны, так как обладают свойством качаться и вообще малонадежны. . .
Капитан же твердо знает, что электронные приборы — это такие коробки со множеством шкал и ручек, которые в последнее время назойливо стараются привинтить в каждом свободном месте, какое только удается выискать на корабле. Правда, если ручки правильно повертеть и если внутри коробок все в порядке, то кое-какие полезные результаты, пожалуй, получить и можно. Поскольку же коробки набиты какой-то мистикой и обычно в нужные моменты всегда отказывают, то и полезность электронных устройств весьма проблематична. ..
Но договориться нашим персонажам просто необходимо, иначе для современной электроники будет закрыт выход в море.
Поэтому мы за капитанов, гостеприимно встречающих электроны, как верных своих помощников и друзей!
Поэтому мы за инженеров, которые знают суровый нрав моря, любят его романтику и могут заставить всемогущую электронику верно нести нелегкую морскую службу!
И еще мы за то, чтобы никогда не возникали споры, подобные описанному, чтобы электроны и корабли, инженеры и капитаны вместе уходили на штурм стихий — тогда они будут непобедимы.
Путь будущих капитанов и инженеров начинается еще в детстве. Первый опыт постройки кораблей, первые навыки судовождения они приобретают на моделях. Вот почему авторы и решили написать эту книгу.
Глава I
Корабль и его модель
В самом начале весны, когда на реках еще не шевелятся ЗАЧЕМ
льды и целые караваны судов стоят накрепко скованные в за- ЭТО тонах, начинают буравить снег звонкие ручейки талой воды. НУЖНО! Они очень похожи на большие реки. Так же замысловато извиваются их русла, есть широкие и спокойные плесы, есть мели и перекаты. И наверное в любой точке земного шара первыми открывают навигацию маленькие корабли.
Иногда это просто кусочки коры или согнутые из тетрадного листа бумажные парусники, а иногда и совсем похожие на настоящие корабли стройные фрегаты, стремительные лайнеры И строгие крейсеры. Дети всего мира создают, пусть пока еще
маленькие, не очень красивые, но зато своими руками, модели тех настоящих судов и кораблей, которые бороздят большие
океаны и реки.
В тихих лагунах коралловых атоллов плывут игрушечные катамараны, в прибрежных проталинах полярных морей качаются Модели эскимосских каяков, океанские лайнеры с водоизмеще
нием в несколько килограммов смело таранят щепки и мусор
на поверхности Невы, Темзы, Ла-Платы, Гудзона и ты-
сячи других известных и неизвестных рек мира.
«Детские игрушки»,— иронически бормочут иные прохожие. Не обижайтесь, услышав это. Так говорят те,
кто еще многого интересного не знает.
Убедиться в том, что модели кораблей — не просто забава, а очень серьезное и нужное дело, очень легко. Достаточно заглянуть в один из научно-исследовательских
институтов, где рождаются проекты кораблей. Серьезные люди сосредоточенно следят за показаниями десятков чутких приборов, установленных вокруг большого бассейна. Трещат кинокамеры, перья самописцев вычерчивают загадочные кривые, мерцают зеленые линии на экранах осциллографов. Что же здесь происходит?
Посмотрите — по водной глади бассейна плывет маленькая модель корабля. Подчиняясь неслышным радиокомандам, она то набирает скорость, то ложится на циркуляцию, описывая окружность, то дает задний ход или замирает, чуть-чуть покачиваясь на месте. Именно к ней, к этой модели, приковано внимание научных сотрудников, на нее нацелены объективы кинокамер, ее поведение изучается десятками точнейших приборов.
Многие качества будущего большого корабля могут быть заранее изучены на его модели. А это очень важно. Постройка корабля — сложное и дорогое дело. За каждую ошибку в проекте, за каждое решение, которое оказывается не самым лучшим, приходится расплачиваться сотнями тысяч рублей, долгими месяцами дорогого рабочего времени. И это еще не самое худшее.
Корабль строится не для того, чтобы стоять у причала в тихой гавани. Он уходит в моря и океаны, навстречу штормам, ураганам, ветрам и множеству других неожиданных опасностей. Поэтому корабль должен обладать очень важными свойствами: чтобы самые могучие десятиметровые океанские валы не опрокидывали его, чтобы он уверенно держался на курсе, когда многотонные соленые громады обрушиваются на палубу и борта, чтобы он был поворотливым и сумел проскользнуть в извилистых проходах между скалами и рифами, чтобы мощные машины унесли его от опасности, когда ветер и волны гонят судно на мели. Трудно, даже приблизительно, перечислить все разнообразные требования, которым должен удовлетворять современный корабль. Пренебрежение каким-либо из них может привести к аварии и гибели.
Далеко не все необходимые свойства будущего корабля можно рассчитать заранее, даже с помощью электронных машин. Вот здесь и приходит на помощь модель.
Но этим еще не исчерпывается ее полезность.
В большинстве стран мира есть морские музеи. Под стеклянными колпаками выставлены точные копии кораблей, кото-8 рые давно уже не бороздят океаны. Многие из них были овеяны
бессмертной славой подвигов. Теперь одни покоятся неведомо где на морском дне, другие пошли на слом и забыты. Но стоят в музеях сверкающие лаком модели, воскрешая живую историю развития кораблестроения.
Не думайте, пожалуйста, что среди посетителей — только школьники и свободные от дел пенсионеры. Вот группа морских офицеров, слушателей академии, внимательно изучает экспонаты. А кто этот человек с седыми висками, медленно проходящий между стендами? Почему-то его заинтересовали две совершенно различные модели — маленькая копия стремительного парусного клипера «Катти Сарк», который по праву считался лучшим из парусников, когда-либо пролетавших по океанским волнам, и последняя модель лайнера. Седовласый посетитель — главный конструктор одного из проектных институтов судостроения. Он обращается к наследию прошлого и ищет новое решение, которое поможет сочетать в проектируемом корабле чудесную легкость клипера с колоссальной мощью современного лайнера. Опытный конструктор хорошо знает, что «из ничего» пытаются строить только ограниченные люди и зазнайки.
Человечество накопило огромный опыт кораблестроения и создавать новое можно только освоив лучшее из того, что было сделано раньше. Эти неоценимые знания, добытые трудом ученых и моряками в жестокой битве со стихиями, предметно и зримо воплощены в стройных моделях — от долбленой пироги до атомного красавца.
.. .Во всех странах мира, на всех речках, ручьях и лужах, во всех заливах и лагунах плывут корабли ребячьего флота. Многим из ребят кажется, как и тому прохожему — скептику, что они просто играют. Но мы знаем, что они незаметно для самих себя учатся понимать море, строить корабли и управлять ими. Вот этот мальчуган, который старательно пытается поставить под ветер бумажный парус своей самодельной яхты, когда придет время и в его руках загудят туго натянутые шкоты настоящей большой яхты, уже будет знать, как ловят ветер, и не спасует перед шквалом.
Одна за другой стартуют изящные модели парусников, кренясь и вспарывая воду кончиками рей, устремляясь к заветной цели — воротам, отмеченным флажками. Идут соревнования судомоделистов. На этих соревнованиях можно увидеть много интересного. В вихре пены и брызг мчатся скоростные модели. 9
Маленькие суденышки, длиной меньше метра, развивают скорость более ста километров в час. Такой скорости позавидуют и капитаны большого флота.
Но самое любопытное наступает, когда в водоем выходят модели судов, управляемые на расстоянии. Тонкие ниточки антенн, натянутых на мачтах, принимают невидимые сигналы. Сложные системы автоматики перекладывают рули, двигатели увеличивают или уменьшают обороты винтов, и модели выполняют сложные маневры. Иногда на воду опускаются надутые резиновые шары, и модели несутся к «врагу» по команде операторов, чтобы проткнуть шар иглой, укрепленной на форштевне. Прокалывание шаров — один из увлекательных видов соревнований радиоуправляемых моделей судов.
Не столь уж много шагов отделяют изготовление и запуск таких моделей кораблей от работы научных сотрудников в испытательных бассейнах исследовательских институтов. И те, кто начинал с кусочка коры и бумажного паруса, станут достойной сменой ученым.
МОДЕЛЬ — ЭТО СОВСЕМ НЕ ПРОСТО
Слово «модель» знакомо нам с раннего возраста, а вот истинный смысл, который вкладывается в него, знают не все. В большинстве случаев модель представляется как маленькая игрушечная копия каких-нибудь больших предметов или сооружений или, наоборот, как лучший образец (нарядного костюма или обуви) — в натуральную величину.
Ни то, ни другое понятие для нашей модели не годится.
Прежде всего, она не может быть точной копией оригинала, так как тогда изготовление модели потеряло бы всякий смысл. Например, модель корабля при таком условии была бы просто его вторым экземпляром. Значит, в любом случае модель должна обязательно отличаться от своего прообраза — разме-
рами, весом, материалом и т. д., но в то же время быть и чем-то подобной ему.
Всякий предмет, а тем более сложное сооружение, обладает множеством свойств и характеристик. Главным признаком модели как раз и является то, что в ней повто
ряются только некоторые из множества признаков, присущих прообразу. Модель упрощает сложный предмет, и именно в этом заложены огромные возможности принципов моделирования. Моделируя какое-нибудь одно интересующее нас свойство, мы получаем возможность изучить его как бы изолированно от сложного взаимодействия с другими свойствами — в «чистом виде». Можно строить модели не только материальных предметов, но и каких-либо сложных явлений. Кстати, по сходному принципу моделирования явлений в ряде случаев работает и человеческий мозг, мгновенно решая простейшие житейские задачи.
Пусть, например, вы хотите объяснить приятелю, как пройти к известному вам грибному месту в лесу. Мозг ваш сразу построит модель маршрута, которую вы и сообщите своему товарищу. В этой модели исчезло все бесконечное разнообразие окружающей природы. В ней осталось только несколько упоминаний о наиболее характерных и заметных узловых точках маршрута — повороты, развилки дорог, поваленное дерево и т. п. Так, в правильно построенной модели сохраняется только то, что необходимо для достижения определенной цели, а все остальное отметается.
Любая карта нашей планеты — это тоже модель. На географических картах наносится рельеф поверхности земли, на геологических изображается распределение пород и минералов, на ботанических — зоны с различной растительностью. Разновидностей таких карт может быть очень много. Если бы сделать неразумную попытку свести вместе все данные, которые указаны на различных специальных картах, то получилась бы невообразимая мешанина. И здесь целенаправленное моделирование упрощает исследуемый предмет, делает его более понятным и доступным для изучения.
Просто ли построить модель? Оказывается очень и очень трудно. Только в некоторых случаях эта задача решается сравнительно несложно. Например, если нужно построить уменьшенную модель, подобную оригиналу только по геометрической форме, то достаточно изменить все линейные размеры в определенное число раз. Но другие свойства оригинала уже не будут отражаться данной моделью в том же масштабе. Уменьшенная в сто раз по диаметру модель шара по весу окажется меньше оригинала совсем не в сто, а во много раз больше. Это означает, что большинство свойств, присущих 11
реальным объектам, связывается с изменением линейных размеров или с другими характеристиками очень сложными зависимостями. Для того чтобы модель можно было исследовать, они должны быть известны. В некоторых случаях такие зависимости определены — они называются законами подобия. Опираясь на эти законы, можно, изучив поведение модели, предсказать, какими свойствами будет обладать реальная конструкция при любом увеличении ее размеров по сравнению с моделью. Вряд ли нужно доказывать, насколько это важно для конструктора, проектирующего сооружение, стоящее много миллионов рублей.
Но, к сожалению, точные законы подобия известны только для очень ограниченного набора явлений. В большинстве случаев они задаются приблизительно или вообще неизвестны. Несмотря на то, что модели начали строить, вероятно, еще в глубокой древности, создание науки о моделировании находится и сейчас еще в начале пути.
По-видимому нам придется смириться с тем выводом, что построить модель совсем не просто. Но мы убеждены — наш читатель не из пугливых и понимает, что хотя моделирование и нелегкая проблема, перспективы его велики, заманчивы и этим делом стоит заниматься всерьез.
Так как моделирование, в широком смысле, практически необъятно, целесообразно подробнее остановиться только на одной интересующей нас области — постройке моделей кораблей.
МОДЕЛЬ Все общие соображения о принципах моделирования, с ко-
КОРАБЛЯ торыми мы уже познакомились, применимы и при изготовлении моделей кораблей. Перед тем как приступить к постройке модели, необходимо с полной ясностью определить, какое качество или свойство корабля должно быть смоделировано с наи-
большей степенью подобия. Сделать модель абсолютно подобной настоящему кораблю невозможно. Поэтому перед конструктором модели всегда стоит проблема выбора.
Судомоделисты-любители чаще всего стремятся сделать модель, геометрически подобную кораблю-прототипу. В этом jA случае все размеры частей ко-
рабля просто делятся на определенный масштабный коэффициент и — чертеж модели готов! Конечно, при уменьшении размеров в сто раз и больше очень трудно будет изготовить все детали надстроек и палубного оборудования, так как многие из них окажутся слишком миниатюрными. Но стремиться к максимально возможной деталировке все-таки нужно.
Внутреннее устройство корабля обычно не моделируется. Исключение делается лишь, когда модель должна служить наглядным пособием для учащихся. Такие модели не предназначаются для пуска на воде и не снабжаются действующими механизмами. Не имеют механизмов и стендовые модели — уменьшенные копии внешних форм исторических кораблей. Для изготовления их могут быть использованы любые материалы — от слоновой кости до бумаги — ведь они не будут плавать.
В большом судостроении испытания моделей теперь уже непосредственно входят в процесс проектирования нового корабля. Дело в том, что теория не позволяет пока выполнить все необходимые расчеты по постройке корабля с требуемой точностью. Поэтому пренебрежение предварительным моделированием приводит порой к непоправимым ошибкам. Так, корабль «Кэптен», построенный в Англии без испытаний на модели, перевернулся и затонул.
Пересчет итогов испытаний модели на условия работы будущего корабля не так-то прост. При сравнении движения корабля и его модели вступают в действие динамические законы подобия. Эти законы намного сложнее, чем правило простого геометрического подобия модели и оригинала.
Например, если пренебречь вязкостью воды, то закон подобия потребует, чтобы модель имела скорость меньшую, чем сам корабль, но не во столько раз, во сколько она меньше его: отношение скоростей должно быть равно только корню квадратному из отношения размеров. Такая скорость модели называется соответственной.
Принимая же во внимание вязкость среды, получим совсем неожиданное, на первый взгляд, условие подобия — скорость модели должна быть больше скорости самого корабля во столько раз, во сколько корабль больше модели.
Для выполнения этого условия потребуется, чтобы модель двигалась с «астрономической» скоростью — порядка сотен и даже тысяч километров в час. Выполнить такое требование не стоит даже и пытаться.
Не менее сложные законы подобия определяют соотношения между моделью и кораблем при изучении маневренности и других его качеств. Как видите, только коснувшись, на первый взгляд, простой задачи постройки модели корабля, мы пришли к постановке сложнейших теоретических проблем, перед которыми пока еще пасует всемогущая математика. А это значит, что дел здесь — непочатый край и человек, посвятивший себя судомоделированию, вряд ли рискует оказаться в будущем без любимой работы.
Результаты, получаемые при испытании моделей, приобретают наибольшую ценность, когда модель самоходная, т. е. может находиться в автономном плавании, без помощи каких-либо механических тяг или толкателей для перемещения модели и управления ею.
Можно построить модель сравнительно больших размеров и поместить на ней водителя. Так иногда и делается. Но это очень неудобно потому, что модель приходится делать крупной — размером с настоящий катер. Кроме того, вес водителя резко нарушает нормальное распределение нагрузки по корпусу и не позволяет соблюсти полное подобие с оригиналом.
Поэтому наилучшие результаты достигаются при постройке самоходных моделей, управляемых на расстоянии. Дистанционно управляемые модели играют серьезную роль в судостроении, и не случайно этому виду судомоделизма уделяется большое внимание.
Научившись строить такие модели и управлять ими, можно и приобрести полезные знания, и накопить тот практический опыт, без которого немыслим хороший водитель или строитель кораблей. Но сначала придется ознакомиться с элементарными основами физики, электротехники, электроники, с началами теории связи и теории информации и некоторых других наук, освоить специальности плотника, слесаря, радиомонтажника и вообще стать мастером на все руки.
Эти первые попытки самостоятельной постройки модели корабля, управляемого на расстоянии, по праву могут считаться и первыми ступеньками широкой лестницы, которая приведет одних в научные лаборатории, а других на капитанские мостики могучих атомоходов.
Глава II
Нан управляют на расстоянии?
Даже для могучего лайнера, водоизмещением в несколько килограммов, опасно столкновение с таким поленом.
Когда отказывают механизмы. ..
Современный крейсер уходит в дальний поход. . . к другому берегу пруда.
Связь на расстоянии существует, вероятно, с тех пор, когда СРЕДСТВА на Земле только зародились примитивные живые организмы. СВЯЗИ Честно говоря, мы не очень четко знаем историю развития жизни, но можем, однако, с уверенностью сказать, что сред- оАГГТпанмм ства связи в те времена были столь же примитивными, как и те
существа, которые ими пользовались.
Жизнь развивалась. В гигантском процессе эволюции безжалостно подавлялось и вымирало все менее приспособленное, уступая дорогу более сложным и совершенным организмам. Пожалуй, одним из главных признаков, наличие которого обеспечивало преимущество какого-либо вида, всегда являлось развитие у него лучших способов связи на расстоянии, причем вовсе не обязательно между подобными друг другу живыми особями. Органы, способные воспринять на расстоянии сведения об окружающих предметах, явлениях, тоже можно отнести к средствам связи. Всякое живое существо в животном мире, лишенное этих средств, вынуждено мириться с тяжкими усло-
виями существования и фактически обречено на гибель.
Перенесемся в сегодняшний день и представим себе на ринге боксера, пусть даже чемпиона олимпийских игр, с завязанными глазами. Очевидно, он будет побит противником, даже не имеющим представления о боксе. И только потому, что у него отнято одно из средств связи на расстоянии — зрение.
2
Ю. Д. Пахтано», В. И. Соловьев
Организация групп и семейств подвижных живых существ немыслима без связи на расстоянии между ними. Косяк кильки в этом случае был бы вынужден либо перемещаться плотно спрессованной массой — прямо в сети рыбаков, либо безвозвратно рассеяться в море. Между этими двумя случайными примерами — от боксера до кильки — можно насчитать миллионы фактов, доказывающих, что познавание живым существом окружающего мира возможно лишь с помощью всех разнообразных видов связи.
Какими же свойствами должны обладать средства связи на расстоянии, как их сравнивать и как оценивать преимущества одного средства перед другим? Очень важным качеством является дальнодействие связи. Возможность получения сведений с больших дистанций дает серьезный выигрыш тому, кто пользуется такой дальней связью. Но этого еще мало. Сведения, которые будут получены хотя и издалека, но по истечении большого промежутка времени, могут оказаться совершенно бесполезными.
В одном научно-фантастическом рассказе была описана ситуация, когда свет по неведомым причинам стал распространяться со скоростью порядка одного метра в минуту. В этих условиях наблюдатель видел любой предмет, появившийся от него на расстоянии трех метров, только через три минуты. Прохожий шарахался от автомобиля, который уже давно находился на другом конце города, или попадал под приближающийся трамвай, которого он не видел, так как трамвай двигался быстрее света. Хозяин квартиры обнаруживал присутствие вошедшего гостя лишь после того, когда он уже давно ушел, обиженный тем, что на него не обращают внимания.
Такая ситуация, конечно, осуществиться не может, но иллюстрирует то обстоятельство, что важнейшим качеством связи на расстоянии, кроме дальнодействия, должно быть еще и быстродействие.
Хотя указанные свойства уже определяют качество данного способа связи, но для полной оценки, их тоже оказывается мало. Поставьте на пути светового луча какое-нибудь непрозрачное препятствие — и линия связи прервана. Все, что находится за препятствием, стало недоступным. Очевидно, именно поэтому у всех высокоорганизованных живых существ развивались параллельно органы для связи на основе и света, и звука.
18 Звук может огибать довольно значительные препятствия, и зву-
новая линия связи при ее экранировании не нарушается. В ночное время или в густом тумане она тоже продолжает действовать, когда предметы не отражают света, воспринимаемого органами зрения. Значит, третьим существенным качеством связи является его независимость от внешних условий: от наличия препятствия, времени суток или условий погоды.
У каждого вида связи есть и еще одно важнейшее свойство, которое определяется его способностью передавать большее или меньшее количество сведений. Ведь, в конце концов, именно передача сведений и является назначением любой линии связи. Этот сложный вопрос мы рассмотрим позднее, когда познакомимся с понятиями о сигналах и информации. Сейчас же остановимся только на тех факторах, которые позволяют осуществить саму линию связи, а что по этой линии передается и как это делается — нас пока не будет интересовать.
Известно, что связь возможна только тогда, когда имеется «нечто», способное покинуть точку отправления, и благополучно прибыть к получателю. Это «нечто» обязательно всегда материально и, следовательно, может быть изучено и понято. Вместе с тем, не исключено, что в природе уже имеются или могут быть в будущем осуществлены такие виды связи, о которых мы даже пока и не подозреваем. Например, некоторые ученые утверждают, что все-таки существует ранее отрицавшаяся телепатическая связь между мыслительными аппаратами двух находящихся в разных местах людей, хотя все известные нам в настоящее время приборы ее не обнаруживают. Материалиста это совершенно не поражает. Наоборот, неизвестность только побуждает его использовать все доступные ему средства для того, чтобы познать сущность явлений, поставить их себе на службу и тем самым еще более расширить возможности человека.
Следовательно, можно сказать, что связь на расстоянии возможна тогда, когда имеется материальная среда или некий материальный процесс, действующие в пространстве между отправителем и получателем.
Рассмотрим варианты видов связи на расстоянии. Пожалуй, наиболее древний и незабытый до сих пор — способ связи с помощью движущихся предметов. Разновидностей здесь много. Вы бросили камешек в окошко друга. Он получил сведения о вашем присутствии — линия связи замкнулась. Марафонский бегун, гонец Чингиз-Хана, загоняющий лошадей, поезд,
самолет, ракета — различные варианты этого способа связи, отличающиеся лишь скоростью и некоторыми другими свойствами.
Но такой способ очень несовершенен. Он слишком медлителен и не всегда легко осуществим: камешка может не оказаться под рукой, готовые к услугам гонцы не ходят толпой за вами, самолет или ракета, тем более, не столь доступны, чтобы послать их проверить, какой предмет находится впереди или передать какое-то сообщение. Кроме того, сведения при этом поступают отдельными порциями, с неизбежным перерывом.
Гораздо более эффективны те средства связи, которые используют разнообразные волновые процессы. Все они обладают необходимой способностью распространяться в пространстве, могут быть непрерывными в течение длительного времени и преодолевают расстояние весьма быстро. Эти достоинства были реализованы эволюцией самой природы, а затем сознательно использованы разумом человека. Подавляющее большинство развитых живых организмов снабжено органами, приспособленными к восприятию световых электромагнитных колебаний, к излучению или восприятию звуковых (акустических) колебаний, к тому и другому вместе. Некоторые организмы сами излучают световые волны, но они встречаются относительно редко.
Почти все живые существа способны воспринимать также и тепловое излучение, а у некоторых из них эта способность доведена до высокой степени совершенства. Например, змея своими теплочувствительными органами «увидит» теплый утюг на большем расстоянии, чем глазами.
Органы или приспособления для связи на расстоянии могут быть активными или пассивными. Обладая только приспособлением для приема определенного вида сигналов, можно получать с помощью его сведения о том, что происходит в окружающем мире, но ничего нельзя сообщить. Таким чисто пассивным устройством связи пользуется любой владелец радиоприемника. Для того, чтобы не только слушать весь мир, но и заявить ему о своем существовании нужен радиопередатчик — активное устройство связи, способное излучать сигналы. Наличие приемника и передатчика одновременно позволяет осуществить двухстороннюю связь, конечно, только в том случае, если ваш напарник обладает аналогичной аппаратурой.
20 Природа снабдила человека органами для двухсторонней
связи на звуковых волнах. Есть излучатель — голосовые связки и приемник — ухо. А вот органом для связи на электромагнитных световых волнах природа нас обделила. Глаза — лишь пассивные приемники световых сигналов. Если окружающие нас предметы не освещены, то есть не отражают и не рассеивают солнечный свет, или не светятся сами — их просто не видно. Правда, мы уже давно научились восполнять этот недостаток с помощью свечи, факела, костра, фонарика, прожектора и т. п. Попавшие в освещенное поле предметы отражают и рассеивают свет от искусственного источника его.
Так, человек заставил предметы, расположенные вокруг него, откликаться отраженным — «обратным» — светом на искусственное облучение, а вот со звуковыми колебаниями это долго не получалось. Конечно, если вы зовете заблудившегося в лесу друга, то он сам заинтересован в том, чтобы пустить в ход свой «звуковой передатчик» — голос и откликнуться на ваш зов. А если это враг? Тогда он постарается не издавать ни единого звука, а будет напряженно прислушиваться к любому шуму, который выдает ваше присутствие.
Некоторые живые существа, например летучие мыши, оказались в очень выгодном положении. Они посылают вперед узкий пучок звуковых колебаний, а когда звук отражается от препятствия, слышат его своими чуткими ушами почти так же, как наши глаза воспринимают отраженный каким-либо предметом луч карманного фонарика.
Человек, конечно, не мог допустить, чтобы мыши пользовались таким удобным средством связи с окружающим миром, а он сам этого делать не умел. И срочно изобрел устройства для звуковой локации (так называется в технике метод, которым пользуются летучие мыши). Когда же были созданы подходящие излучатели радиоволн, то этот принцип распространили на новую область. Появились радиолокаторы.
Методы радио- или звуколокации играют большую роль, когда применение световых лучей не дает нужного эффекта. Например, в воде световые лучи затухают на протяжении нескольких десятков метров, а звуковые колебания пробегают сотни, в некоторых случаях, и тысячи километров в океанах. При появлении облаков или тумана луч прожектора тонет в их толще, а радиолуч способен свободно проникать через сотни километров атмосферы, сквозь нагромождения облаков и туч, домчаться до Венеры или Марса и вернуться обратно.
Используя в зависимости от поставленной цели ту или иную разновидность колебательных процессов, можно обеспечить надежную связь в любых условиях. Кроме того, на современном уровне развития мы здесь далеко не исчерпали еще всех возможностей, и в недалеком будущем нас несомненно ожидает множество удивительнейших открытий. А пока пройдемся по уже изученному отрезку дороги прогресса и познакомимся с основными видами и свойствами колебаний.
ВОЛНЫ Е ели бы кто-нибудь подсчитал, сколько раз поэты и писа-ВОКРУГ тели всех времен и народов обращались к «волновой» тема-НАС тике< то числ°/ наверняка, получилось бы колоссальным. Вряд ли удастся найти хотя бы одного автора — восторженного романтика или реалиста, или мрачного пессимиста,— который не пытался бы связать с волнами самые разнообразные оттенки своих переживаний и мыслей. Пожалуй, только в творениях некоторых модернистов такой связи обнаружить не удастся, но
это, вероятно, потому, что там, как раз, вся оригинальность стиля заключается в полном отсутствии какой бы то ни было
связи...
Сколько вдохновенных строк было написано о волнах зримых и осязаемых — могучих валах, вздыбливающих поверхность океанов, о шелковистых прибоях, опоясывающих песчаные пляжи, о задумчивой ряби на тихих заводях. Потом выяснилось, что разновидностей волн в окружающем нас мире гораздо больше. Звук — тоже волны, только невидимые. И свет —
это волны, правда, иной природы — не механические, а электромагнитные. Когда в волновом хозяйстве немножко разобрались и навели кое-какой
предварительный порядок, то осталось только присесть и с удивлением оглядеться. Оказалось, что привычный с детства, окружающий нас мир буквально кишит самыми разномастными волнами, а неподвижность — лишь маска, под которой бушуют сложнейшие процессы. Каждая точка пространства ежесекундно прони-
зывается во всех направлениях стремительными потоками невидимых и неслышимых колебаний. Молчаливые, как думали раньше, пучины морей буквально звенят от переклички рыб и морских животных, которые беседуют на неслышимом для наших ушей ультразвуке. Потоки радиоволн проливаются на землю из далеких созвездий и галактик. Непрерывно пульсирующие атомы то выбрасывают порции электромагнитных волн, то улавливают их сами, забирая часть энергии волн, испущенных другими источниками.
Осознав все это, даже самые суровые ученые стали не меньшими «волнопоклонниками», чем лирические поэты. Так родилась одна из самых всеобъемлющих отраслей науки наших дней — наука о колебаниях и волнах. Попробуем приоткрыть завесу в эту важную область знаний.
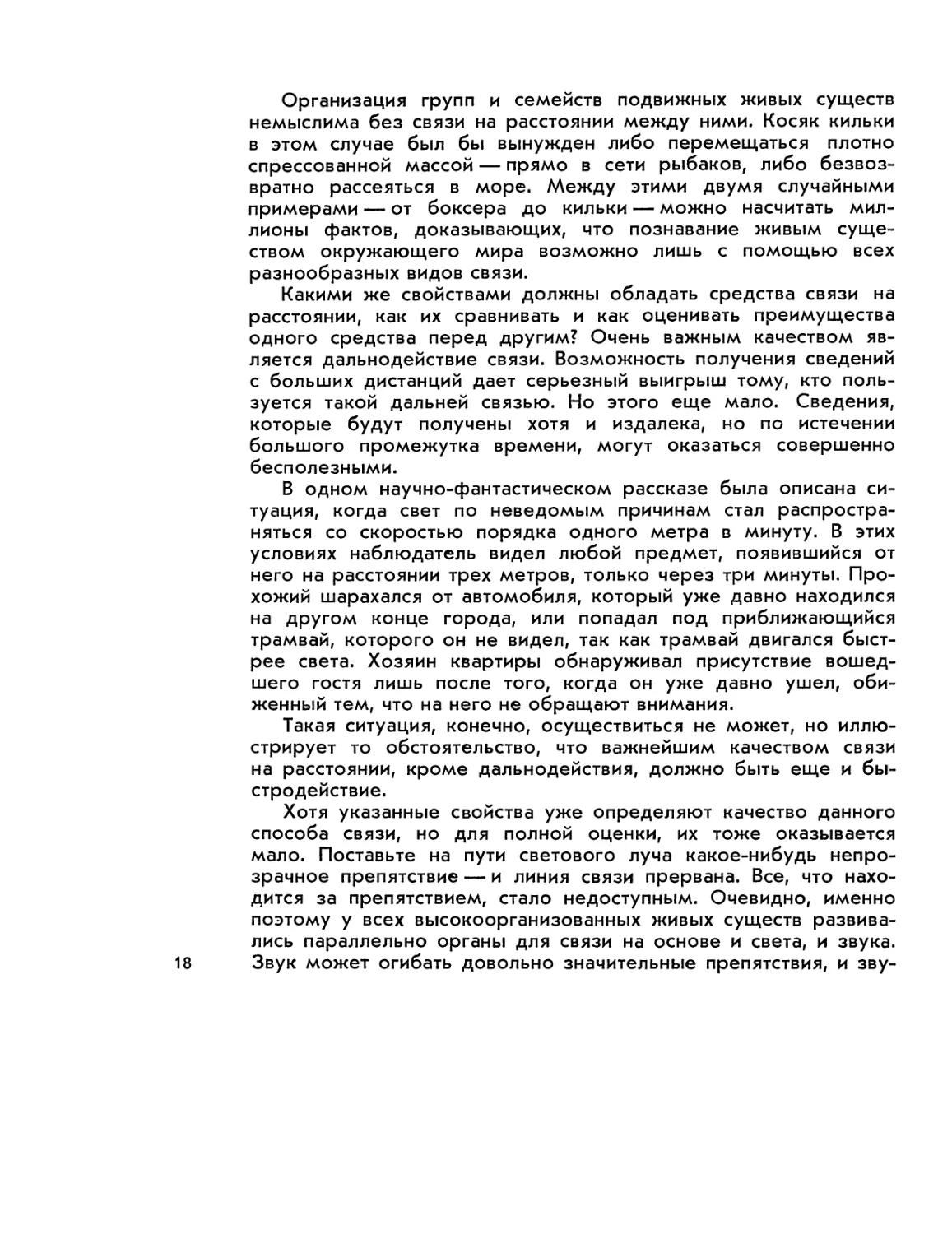
Всякий волновой процесс обязательно обладает свойством периодичности. Любая величина, характеризующая данный волновой процесс, изменяется во времени по определенному закону, проходит полный цикл изменения, а затем вновь и вновь его повторяет. Интервал времени, необходимый для полного завершения одного цикла, называется периодом колебания. Можно определить временные свойства волны иначе, а именно, подсчитать, сколько полных циклов колебаний совершается в единицу времени — секунду. Для этого достаточно разделить единицу на период колебания, тоже выраженный в секундах. Полученная цифра укажет частоту колебаний в герцах.
Наибольшее значение любой переменной величины, характеризующей колебательный процесс, называется амплитудой колебаний. Если мы имеем дело с электрическими колебаниями, то амплитуда может быть выражена в единицах напряжения или силы тока. Для механических колебаний амплитуда определяется как наибольшее отклонение колеблющейся частицы от положения равновесия, а для акустических волн — как максимальная величина давления или разрежения среды или как наибольшее смещение и скорость колеблющихся частиц в этой среде. В большинстве случаев мы имеем дело с гармоническими колебаниями, когда амплитуда изменяется по синусоидальному закону. Встречаются и более сложные виды колебаний. В конечном счете, все они представляют собой сумму простых гармонических колебаний с разными, но кратными частотами. Поэтому мы и ограничимся рассмотрением только гармонических колебаний. На рис. 1 изображен график
колебательного процесса и указаны его параметры — основные величины, характеризующие свойства данного процесса (размах или амплитуда колебаний, их период, частота и др.).
Между колебательным и волновым процессами существует различие, заключающееся в том, что колебательный процесс совершается в определенном участке пространства, а волна отрывается от своего источника и распространяется в пространстве, вовлекая в колебание все новые и новые его зоны. Приме-
ром чисто колебательного процесса могут служить колебания стальной пластинки, зажатой в тисках, или струны на гитаре.
Волновой и колебательный процессы тесно и взаимно связаны. Всякий колебательный процесс является источником, порождающим волну. При этом часть энергии исходного колебания затрачивается на образование волны или, как говорят, на излучение. Конечно, интенсивность излучения может быть самой различной. Так, колеблющийся камертон, помещенный в вакуум, не излучает ничего из-за отсутствия среды, способной передавать механические колебания. Но тот же камертон, находящийся в воздухе, свободно излучает звуковые волны. Обычная домовая электросеть, в которой происходит электрический колебательный процесс, излучает очень малую долю энергии, но антенна радиостанции, в которой действует совершенно аналогичный процесс, только со значительно большей
частотой, излучает электромагнитные волны весьма эффективно. Таким образом, любое колебание способно породить волну, а сколь успешно это осуществится — уже задача техники.
Обе категории волновых процессов — механические (акустические) и электромагнитные колебания — различаются следующим. Акустические волны способны распространяться только в вещественных средах, обладающих упругостью, а электромагнитные — где угодно, но лучше всего в вакууме. Волновым процессам, действующим в пространстве, присуща и определенная скорость распространения. Очевидно, что за время одного периода колебаний волна пройдет некоторый путь. Длина этого пути называется длиной волны. Если ввести обозначения: Т — период колебаний, f — его частота, X — длина волны и с — скорость ее распространения, то все эти величины можно связать друг с другом такими соотношениями:
J х J у
Существует еще один важный параметр, характеризующий волновые процессы,— фаза. Два колебания находятся в фазе, когда максимумы и минимумы их амплитуд точно совпадают во времени. Сдвиг фаз при этом равен нулю или любому целому числу полных периодов. Колебания находятся в противофазе, если сдвиг между ними равен половине периода. Таким образом, понятие фазы имеет смысл, если задана начальная точка отсчета или имеется второй волновой процесс, с которым сопоставляется первый. Фаза всегда относительна и измеряется в градусах или радианах. В одном полном периоде гармонического колебания укладывается 360° или 2я радиан.
Скорость распространения акустических волн относительно невысока и сильно зависит от среды. В воде скорость акустических волн примерно равна 1500 м/сек, в железе — 5000 м/сек, а в воздухе всего лишь 330 м/сек. Электромагнитные волны в этом смысле менее «разборчивы». В наших условиях их скорость мало отличается от скорости света в вакууме и равна 299 793 км/сек.
По мере распространения волны, происходит рассеяние ее первоначальной энергии — амплитуда колебаний постепенно уменьшается. Это явление называется затуханием колебания. Электромагнитные волны относительно слабо затухают в воздухе, окружающем нашу планету, но плотные среды, такие как
вода или земля, оказываются для них почти неодолимым препятствием. Радиоприемник, помещенный под водой или в глубокой шахте, практически не сможет принимать сигналы радиостанций.
Для акустических волн, наоборот, плотные и упругие среды обеспечивают наилучшие условия распространения. Если электромагнитные волны, проносящиеся над океаном, как бы отказываются проникать под его поверхность, то акустические волны легко пронизывают водные толщи, но почти не выходят за поверхность воды. Эти свойства волн приходится учитывать при разработке систем связи и управления на расстоянии.
Кроме того, распространение волн сильно зависит от частоты колебаний. Диапазон возможных частот колебаний и для акустических, и для электромагнитных волн поистине огромен. Сейчас известны акустические волны с частотами от долей одного герца (т. е. меньше одного колебания в секунду) и до частот, измеряемых сотнями и тысячами миллиардов колебаний в секунду (1011-н 1013 гц), относящихся к так называемым гиперзвуковым колебаниям. Правда, искусственно удается получать акустические колебания с частотами не выше сотен миллионов герц — более высокие частоты уже порождаются колебаниями молекул и атомов.
Диапазон электромагнитных колебаний еще шире. Он простирается вверх до частот, для записи которых потребуется цифра с двадцатью нулями. Взгляните на табл. 1. Вы увидите отдельные участки частотного диапазона электромагнитных и акустических волн и области их применения в нашей жизни и в науке.
Чем короче длина волны, т. е. чем выше ее частота, тем легче заставить эту волну распространяться узким пучком в определенном направлении — получить направленное излучение. При этом обеспечивается целый ряд серьезных преимуществ. Во-первых, энергия волны почти не рассеивается в пространстве, и даже маломощный передатчик способен перебросить такой волновой луч на большие расстояния. Во-вторых, передатчик связывается только с определенным приемником и не мешает работе других линий связи, а те, в свою очередь,— работе первой.
Поскольку скорость распространения акустических волн значительно меньше, чем электромагнитных, то и длины акустиче-26 ских волн при той же частоте оказываются намного короче.
Таблица 1
Диапазон частот электромагнитных волн и акустических колебаний
Частота, гц Электромагнитные волны Акустические колебания
IO1* 1011 ЮЮ Гамма-лучи Рентгеновские лучи Гиперзвуковые частоты
10» 10» 10’ СВЧ диапазон УКВ диапазон Коротковолновый диапазон
10’ Средневолновый диапазон Ультразвуковые частоты
10» 10* Длинноволновый диапазон
10» Звуковые частоты
10» Промышленные токи
10 TVГ Инфразвуковые колебания
Поэтому акустические волны можно излучать направленными пучками даже на не очень высоких частотах — порядка нескольких десятков килогерц, в то время как для направленного излучения электромагнитных волн нужны частоты в несколько миллионов герц и больше.
Строго говоря, направленное излучение можно получить и для низкочастотных колебаний, увеличив размеры излучающих устройств — антенн или вибраторов. Но в этом случае потребуется создание чрезвычайно громоздких сооружений, так как размеры излучателя должны быть не менее хотя бы одной длины волны. В длинноволновом радиодиапазоне, где длины волн бывают больше тысячи метров, выполнить такое условие очень трудно. Это в полной мере относится и к проблеме направленного излучения низкочастотных акустических колебаний.
Направленное излучение сигнала позволяет резко снизить влияние помех на радиопередачу. Это очень серьезная проблема. Дело в том, что помехи присутствуют всегда: в одних случаях они неизбежны, так как заложены в самой электронной аппаратуре (например, шумы ламп); в других случаях — это помехи необязательные, но, увы, наводняющие эфир (сигналы посторонних передатчиков, моторы автомобилей, искры над троллейбусными бугелями и т. д.). Помеха, как и фаза,— тоже относительное понятие. Гудок автомобиля создает помеху школьнику, делающему уроки, но он же — полезный сигнал об опасности для человека, переходящего улицу. Поэтому, что является помехой, а что — полезным сигналом, можно определить только в условиях каждой конкретной задачи.
Качество работы радиоаппаратуры хорошо оценивается отношением сигнала к помехе. Если это отношение меньше трех, то передача неизбежно будет идти с большими ошибками. Существуют методы и устройства, позволяющие вести устойчивые передачи и в тех случаях, когда помехи во много раз превышают полезный сигнал, но этот вопрос выходит уже за рамки нашей книги.
Для систем радиоуправления моделями, которым посвящена наша книга, в СССР отведен диапазон частот от 28 до 29 Мгц между коротковолновым (КВ) диапазоном, в котором работает большинство радиовещательных и служебных передатчиков, и ультракоротковолновым (УКВ) диапазоном, используемым для 28 телевидения и некоторых специальных линий связи. Конструи
руя систему радиоуправления, необходимо строго следить за тем, чтобы не выйти за пределы отведенного диапазона.
Диапазон частот для акустических систем не ограничивается, так как здесь нет риска помешать кому-либо. Подобные системы применяются, в основном, для целей гидролокации и для связи с подводными кораблями. Но интересующие нас модели, как правило, не путешествуют в морях и океанах, где плавают большие корабли; кроме того, для мощных корабельных гидроакустических станций наши скромные передатчики вряд ли будут серьезной помехой.
Не следует пользоваться для акустической связи с моделью низкими частотами, приблизительно до двадцати килогерц. В этом диапазоне во всех водоемах имеется очень много источников помех, которые будут мешать нормальной связи. Это винты буксиров и катеров, всплески весел, движения купальщиков и многие другие. Не рекомендуется применять и очень высокие частоты — такие волны сравнительно быстро затухают в воде. Наиболее целесообразно работать с акустическими колебаниями на частотах от 30 до 80 кгц.
Хотя в указанных диапазонах частот как для акустических, так и для радиоколебаний сравнительно легко можно обеспечить условия направленного излучения волн, но увлекаться этим не следует. Направленное излучение требует непрерывного наведения излучающего устройства на управляемый объект. Если модель выйдет из зоны действия луча, то связь полностью нарушится.
Обычно, когда системы телеуправления * моделями действуют на очень небольших расстояниях, маломощные передатчики справляются с работой без направленных излучателей.
Кроме того, у оператора, управляющего моделью, и так «хлопот полон рот», поэтому ему было бы слишком сложно то и дело целиться в модель излучателем.
Лучше всего применять несколько излучателей с очень небольшой направленностью и предварительно изучить характеристику направленности каждого из них. Это даст гарантию, что модель не выйдет неожиданно из зоны нормального приема, а будет всегда послушной командам.
* Телеуправлением называются любые методы управления на расстоянии. Вообще приставка «теле» означает «на расстоянии» (телевидение, телефония, телепатия и т. д.). 29
Пока мы узнали только о свойствах волн, которые можно послать на расстоянии к нашей модели. Но ведь сами по себе волны не несут с собой определенных команд. Это чистый лист бумаги, на котором еще нужно сделать записи. Посмотрим теперь, как это делается.
ЗАПИСЫВАЕМ Хотя выражение «писать вилами на воде» обычно употреб-КОМАНДЫ ляется в ироническом смысле, запись сообщений на волнах — НА ВОЛНАХ занятие вовсе не напрасное. Правда, и в том, и в другом случае записи получаются очень недолговечными — поверхность
воды сглаживается, а радиоволны рассеиваются и затухают в пространстве. Но мы и не требуем от них вечного хранения нашего сообщения. Радиоволна должна лишь быстро доставить его от передатчика к приемнику. На этом ее обязанности кончаются. Посмотрим, как можно осуществить запись команд на волнах.
Для передачи любых сообщений необходимо иметь алфавит. Всякий алфавит, точно так же, как и всем известный письменный, состоит из набора непохожих друг на друга символов. Чем больше разнообразие вариантов возможных сообщений, тем более обширный алфавит требуется для их записи. В простейшем случае каждому понятию или предмету может быть приписан некоторый символ — обозначение. Если идти этим путем, то в сложных системах, таких, как например, разговорные языки, пришлось бы завести гигантские по объему алфавиты, что в некоторых языках и было сделано. Иероглифическая письменность, в которой почти каждому понятию соответствует определенный символ, представляет собой пример подобного алфавита.
Подавляющее большинство современных языков основаны на иной системе. Здесь все множество понятий выражается путем образования различных сочетаний из очень ограничен-f ного набора символов (букв),
г Xv. При использовании такого ме-
тод а для самого сложного
ЛК языка вполне достаточен ал-
фавит, состоящий в среднем Яг из тридцати символов, причем Ш он в принципе мог бы быть со-
кращен, по меньшей мере, в два раза. Однако сокращение алфавита нецелесообразно. В заведомой избыточности его заложен глубокий смысл.
Большинство слов в языках всегда различается больше, чем на один знак или на одно взаимное расположение двух одинаковых знаков. Таким искусственным увеличением различий в записи и произношении слов языки застрахованы от возможных ошибок. Действительно, если бы при замене только одной буквы или соответствующего ей звука в разговоре всегда образовывалось бы новое понятие, вероятность неверного восприятия сообщений была бы очень высока. Использование алфавитов с большим запасом символов повышает надежность передачи сообщений — увеличивает помехоустойчивость.
Итак, для записи сообщений на радиоволнах нужно прежде всего выработать алфавит, каждому символу которого затем можно будет приписать смысл определенной команды. Если команд потребуется передавать очень много, то каждую из них достаточно обозначить сочетанием из нескольких символов. Тогда очень ограниченного алфавита хватит для передачи огромного числа команд. Система для обозначения набора понятий или команд называется кодом.
Мы хорошо понимаем, что каждый символ нашего «волнового» алфавита должен чем-то отличаться от других символов, так чтобы их нельзя было перепутать. Значит и волна, с помощью которой этот символ передается, должна чем-то отличаться от других волн. Как уже отмечалось, всякий волновой процесс характеризуется определенными параметрами (амплитудой, частотой или фазой). Этим и можно воспользоваться.
Самый простой алфавит легко осуществить, приписав каждому символу (или целому понятию) волну известной частоты. Волна превратится в сигнал, передающий строго определенную команду. Сколько нужно передать команд, столько же необходимо иметь волн — сигналов соответствующей частоты. Но таким алфавитом пользуются редко.
Другой, тоже очень простой способ заключается в том, что волну излучают короткими всплесками — импульсами. Каждой команде приписывают некоторое число следующих друг за другом импульсов. Достоинством этой системы кодирования является отсутствие необходимости каждый раз изменять частоту излучаемой волны. Такая, неизменяющаяся по частоте волна, несущая сигналы с кодом, называется несущей волной
или несущей частотой (или просто «несущей»). Однако этот способ имеет недостаток, о котором нетрудно догадаться. Вспомним, что языки защищались от помех увеличением различия кодовых сочетаний, соответствующих отдельным понятиям. Передача команд, записанных в виде некоторого числа импульсов, как раз такой защищенностью и не обладает. Достаточно приемнику не пропустить один импульс из передаваемой серии или принять постороннюю помеху за дополнительный импульс — и команда будет воспринята неверно. Несмотря на это, в системах управления моделями довольно часто применяется импульсный метод передачи команд из-за его простоты..
Дальнейшим развитием рассмотренного метода является амплитудная модуляция сигнала. Термин «модуляция» обозначает процесс, изменяющий какую-либо характеристику основного колебания (например, колебания несущей частоты). Обычно это изменение осуществляется по некоторому определенному закону, как бы накладываясь на основной сигнал. Волновой процесс, как мы уже знаем, характеризуется частотой, амплитудой, фазой. Любой из этих параметров можно использовать для модуляции. Если будет изменяться амплитуда несущего сигнала, то получится амплитудная модуляция, если частота — частотная, а если фаза — фазовая.
По сути дела, импульсный метод — это простейший вариант амплитудной модуляции. Амплитуда излучаемой волны при этом принимает только два значения: нулевое и максимальное.
Гораздо больше возможностей представляется, когда амплитуда несущей периодически изменяется по определенному закону, например синусоидальному. Частота, с которой изменяется амплитуда несущей волны, называется частотой модуляции. Она должна быть во много раз меньше собственной частоты несущей. Дальше все получается довольно просто: достаточно каждой команде приписать некоторое значение частоты и промодулировать этой частотой несущую волну. И хотя теперь антенна передатчика всегда излучает волны неизменной частоты, они уносят записанные на них сигналы команд. Кроме того, такая система более устойчива по отношению к помехам, так как полезный сигнал передается в течение длительного времени и случайные помехи мало что изменят в суммарном воздействии сигнала на приемник. Рассмотренные способы записи 32 команд на волнах наглядно изображены на рис. 2. Первый из
Модель охотится за шарами. Мимо...
Есть!
С большим интересом рассматривают творение юного моделиста — модель крейсера-ракетоносца капитан 1 ранга Г. А. Бутаков и Председатель Федерации судомодельного спорта Б. Н. Апостоли.
Радиоуправляемые модели ведут морской бой.
Ю. Д. Пахтанов, В. И. Соловьев
них соответствует случаю, когда частота несущей волны fa меняется с переходом к каждой новой команде. При втором и третьем методах модуляции частота fn всегда остается неизменной. Второй метод — импульсный, а с помощью третьего команда передается наложением частоты модуляции /м на несущую волну.
Есть и другие методы, но они оказываются либо очень ненадежными, либо слишком сложными.
Так, например, можно было бы приписать каждой команде определенное значение амплитуды излучаемой волны, но во-первых, амплитуда сигнала в точке приема будет колебаться в зависимости от многих причин — расстояния, направленности антенны, условий прохождения волн и т. д., а во-вторых, на передачу будут очень сильно влиять помехи.
Можно модулировать несущую волну и по другим параметрам — по частоте, фазе, длительности посылок импульсов и т. п. Многие из этих методов записи сигналов на волнах более надежны, чем способ амплитудной модуляции, но все они, к сожалению, слишком сложны, и для управления моделями их применять не стоит.
Зная, как записываются сигналы на волнах, следует подумать о выработке удобного алфавита для передачи команд, чтобы обеспечить наибольшую простоту всей системы управления.
Иначе говоря, волны должны переносить как можно больше полезной информации (в нашем случае — команд) к приемнику при минимальной затрате времени и наиболее коротком алфавите. Для решения этой задачи нам придется разобраться в некоторых трудных, но весьма интересных вопросах.
СКОЛЬКО Информация — понятие очень емкое. Оно включает в себя ВЕСИТ все сведения, которые могут быть переданы или получены ИНФОРМАЦИЯ с помои4ью речи, газет, радио, органов зрения, обоняния и бесчисленного ряда других источников передачи и средств приема. Но в этом бесконечном разнообразии возможных сообщений существует строгий порядок и даже мера. Информация может быть измерена так же определенно, как мы измеряем взвешиванием количество манной крупы или счетом — сумму денег в кармане.
Не всякие сообщения несут в себе информацию, а те, кото-34 рые и содержат ее, могут быть вовсе не равноценными. Пред
ставьте себя на месте капитана корабля, который уже попал в шторм, и только после этого получил извещение о том, что в данном районе океана ожидается штормовая погода. Очевидно, что ценность полученной информации для него будет равна нулю, так как поступившие сведения ничего не добавили к известным фактам. Наоборот, если такое сообщение было бы получено капитаном, когда еще ничто не предвещало шторма, то ценность этой информации оказалась бы очень высокой.
Именно из подобной оценки значения той или иной информации складывается общежитейское отрицательное отношение к «прописным истинам». В том-то и дело, что такие «истины» не содержат информации и ничего не изменяют в запасе уже имеющихся знаний.
Вряд ли будет представлять интерес сообщение о прогнозе погоды такого содержания: «завтра, 20 июля, в Ленинграде снег не выпадет». Снег в июле для Ленинграда — событие, прак
тически, невероятное, и мы совершенно не нуждаемся в дополнительном подтверждении этого. Вот если бы прогноз предупредил о том, что из-за необычайного июльского циклона в Ленинграде снег выпадет, то это сообщение было бы очень интересным. Заметьте, как повысилась ценность информации, когда она стала содержать сообщение о практически невероятном событии.
«Вероятно» и «невероятно» — очень знакомые для нас слова. Но и эти понятия имеют строгую количественную меру. А поскольку, рассуждая об информации, мы все время встречаемся с вероятностями событий, то путь к выработке меры
информации, очевидно, лежит через измерение вероятностей. Для того чтобы создать
любую систему измерений, прежде всего нужно выбрать ту знаменитую «печку», от которой начинают плясать, т. е. определить, что будет принято за единицу измерения.
Понятие вероятности относится к ожидаемым событиям. Поэтому целесообразно принять за единицу
вероятность достоверного события, т. е. такого, которое уже совершилось или совершится наверняка. Событий с большей вероятностью быть не может, а с меньшей — сколько угодно. Любое ожидаемое нами событие, относительно которого нет уверенности, что оно произойдет обязательно, имеет вероятность меньше единицы. Но на сколько меньше? Как ее измерить точной количественной мерой?
Проведем следующий опыт. Возьмем непрозрачный мешок и положим в него несколько совершенно одинаковых шариков. Шарики предварительно перенумеруем. Затем мешок как следует встряхнем и будем вынимать из него шарики по одному. Какова вероятность того, что нам удастся достать шарик с наперед заданным номером? Очевидно, что вероятность такого события будет зависеть от общего количества шариков — чем больше шариков в мешке, тем труднее ожидать, что с первой попытки удастся достать шарик с нужным номером.
Начнем наш опыт с простейшего случая. Опустим в мешок только два шарика — номер один и номер два. При этом мы создадим условие, когда набор возможных событий исчерпывается двумя вариантами: можно достать либо один, либо второй шарик. Логика подсказывает, что, еще не производя опыта, можно оценить вероятность извлечения из мешка шарика с номером один (или два) цифрой */2- В этой дроби числитель представляет собой количество событий, совершение которых выполняет поставленное условие, а знаменатель — общее количество возможных событий в данном опыте. Если мы опустим в мешок шесть шариков, то вероятность извлечения любого из них будет равна */б-
Можно усложнить опыт, сформулировав вопрос так: «какова вероятность извлечения из мешка шариков с номерами 3 или 5, если общее количество шариков по-прежнему равно шести»? Теперь удовлетворяют условиям задачи два события, и отношение, определяющее вероятность, запишется так: 2/б=1/з-
На основе этих рассуждений нетрудно выразить общее математическое определение вероятности:
Количество событий, отвечающих заданному Вероятность условию
ожидаемого события Р~----------------------------------
Общее количество возможных событий в опыте
Прежде чем двинуться дальше, убедимся в правильности 36 этого закона непосредственным опытом. Положим снова в ме-
шок наши два шарика и поставим задачу — вынуть шарик № 1. Вынимаем. Удалось! Ничего удивительного: реализовалось событие с вероятностью Уг. Но вероятность вынуть оставшийся в мешке шарик тоже должна быть равна Уз- А мы твердо знаем, что он теперь единственный — это же достоверное событие с вероятностью, равной единице! Значит, мы или неверно рассчитали вероятность перед началом опыта, или сама вероятность способна произвольно изменяться.
Не будем торопиться с выводами. Лучше внимательно проследим, насколько точно мы провели эксперимент. До первого опыта количество возможных событий было равно двум, а после извлечения первого шарика их количество сократилось до единицы. Если бы мы повторили расчет перед вторым опытом, то результат сразу показал бы, что это событие достоверное: Р= 1/1=1. Значит, вероятность события после проведения первого опыта действительно изменилась. Это первая «ямка» на пути к познанию теории вероятности. Но пусть она вас не смущает.
Дело в том, что наборы возможных событий неодинаковы. Есть события независимые и зависимые, связанные друг с другом иногда очень сложными отношениями. Во втором опыте мы и столкнулись с примером зависимых событий: после того как совершилось одно из них, изменилось условие в целом, а следовательно, и вероятность отдельных событий в последующих опытах.
Если перед началом второго опыта мы положили бы вынутый шарик обратно, то тем самым восстановили бы первоначальное условие. При этом можно повторять опыт бесконечное число раз, и вероятность, рассчитанная заранее, не изменится, так как события независимы. Следовательно, прежде чем рассчитать вероятности, надо твердо уяснить, с какими событиями мы имеем дело — зависимыми или независимыми.
Сделаем следующий шаг и возобновим опыт, обеспечив условие независимости событий. Постараемся извлекать тот же шарик № 1. Не вышло. Ничего удивительного, так как вероятность того, что это событие не совершится, равна Уг (вероятность несовершения события равна единице минус вероятность совершения события). Положим шарик обратно и повторим попытку. Теперь-то мы должны наверняка вынуть шарик № 1 — ведь вероятность ошибки, равная Уг, уже оплачена. Опять неудача! Повторяем еще раз. И снова неудача!
Обычно при такой ситуации восклицают «не везет»! И безнадежно машут рукой... Но в математике такие эмоции не уместны. Поэтому, вместо того, чтобы сомневаться в правильности формул теории вероятности и объяснять неудачи «невезением», упрямо продолжим наш опыт. Результаты будем записывать.
После первой серии попыток вытянуть шарик № 1 разделим число «удач» на общее число попыток — это и будет вероятность события, полученная опытным путем. По-видимому она не будет равна ^2, но вряд ли окажется близкой к нулю или единице. Скорее всего мы получим число, лежащее между 4/ю и 6/10г т. ©• близкое к 7г. После тысячи опытов можно гарантировать, что результат будет очень мало отличаться от Чч, а после миллиона разница станет совсем неощутимой.
Сам собой напрашивается вывод, что числовое значение вероятности точно характеризует действительность только при очень большом количестве опытов. Этот вывод и будет истиной. Но нужна ли нам такая истина? Не относится ли она к разряду несомненных, но бесполезных истин, неприменимых в повседневной практике? К чему тратить время на повторение одного и того же эксперимента, только для того чтобы увериться в торжестве теории вероятностей? Не лучше ли пользоваться проверенными и определенными законами, вроде закона Ома? Однако таких абсолютных законов в природе практически не существует.
Закон Ома точен именно потому, что он описывает поведение несметного количества электронов, составляющих электрический ток. Каждый свободный электрон может перемещаться во множестве направлений. Поэтому при отсутствии электрического поля вероятность того, что через любое сечение проводника пройдет какое-то количество электронов в двух противоположных направлениях, примерно одинакова. Появление электрического поля увеличивает вероятность прохождения электронов в направлении от плюса к минусу. Суммарный результат изменения вероятности и регистрируется как электрический ток.
Все наверное замечали, что лесные тропинки проходят, как правило, по наиболее удобным местам. Как же это получилось? Ведь тропинку не размечали топографы. Очень просто. Люди проходили здесь разными путями, но каждый, естественно, старался выбрать наиболее удобный путь. Одним это удавалось, 38 другим — нет. Но тот, кто попал по дороге в болото, в следую-
щий раз уже не сворачивал в эту сторону. Неудачные трассы не повторялись и зарастали травой, а все следы постепенно стягивались к самой удобной «оптимальной» трассе. Появилась тропинка.
Так, теория вероятности отражает самые глубинные законы движения материи, самые разнообразные закономерности, а то обстоятельство, что некоторые из них мы воспринимаем как абсолютно точные, свидетельствует об одном: описываемый данным законом процесс представляет собой средний результат миллиардов элементарных процессов. Закономерность пробивает себе путь среди случайностей.
Поставим вопрос так: «Если события, которые не являются достоверными, все-таки могут повторяться или не повторяться несколько раз, то есть ли какая-нибудь мера и для этого случая?» Иначе говоря, оценим степень «везения» или «невезения». Легко убедиться, что доставать шарик № 1 два раза подряд удается довольно часто. Три раза подряд — значительно реже. А извлечь один и тот же шарик десять раз подряд — практически невозможно.
Для того чтобы рассчитать вероятность повторения одного независимого события, надо умножить вероятность отдельного события на самое себя столько раз, сколько ожидается повторений. Или, еще проще, возвести это значение вероятности в степень, равную числу повторений событий. В нашем опыте вероятность повторения событий (извлечение шарика № 1) два раза подряд будет равна ‘Д, а десять раз подряд — всего лишь 1/1024. Это означает, что для единственного осуществления заданной комбинации нужно повторить операцию десятикратного извлечения шариков больше тысячи раз.
Вот почему, между прочим, таким редким является случай, когда у владельца трех лотерейных билетов выигрывают в один тираж все три билета. Если вероятность выигрыша на один билет равна, скажем, 1/100, то вероятность одновременного выигрыша на все три билета равна 1/1000000.
В последнем примере, по сравнению с примером об извлечении из мешка шариков, условия опыта уже несколько изменились. Раньше мы требовали повторения одного и того же события (последовательного извлечения шарика № 1), а теперь — одновременного осуществления трех разных событий (билеты имеют разные номера). Такая ситуация аналогична тому, если бы мы, опустив в мешок десять шариков и извлекая
их сразу по три, потребовали, чтобы одновременно были вынуты шарики № 1, № 5 и № 8.
Не ошиблись ли мы, применив и здесь правило умножения вероятностей? Нет. Это правило применимо во всех случаях, когда конечное событие представляет собой результат так называемого логического умножения составляющих его отдельных событий. Это новое понятие — логическое умножение — необходимо уяснить, так как оно очень пригодится в будущем при анализе автоматических управляющих устройств.
Логическое умножение соответствует тому случаю, когда окончательный результат достигается только при одновременном осуществлении нескольких отдельных событий или если они происходят в определенной последовательности. Логическое умножение называют операцией «и», так как результат достигается при условии выполнения и одного, и второго, и /г-го события. Например, в задаче извлечения одновременно трех шариков с заданными номерами — в единственном случае, когда извлечены шарики № 1, и № 5, и № 8. То же самое получается и в задаче, требующей повторения одного и того же события несколько раз: результат будет достигнут при извлечении шариков № 1, и № 1, и № 1, . .., и так далее.
Но если существует логическое умножение, то, вероятно, возможно и логическое сложение? Есть и такое — его называют операцией «или». Логическое сложение соответствует случаю, когда желаемый результат достигается при совершении или одного, или другого события. Применительно к нашему примеру это означало бы извлечение шарика № 1 или шарика № 2. А поскольку шариков всего два, то это событие достоверное. Вероятность его равна единице, в результате сложения вероятностей двух событий, каждая из которых равна Уг- Значит, вероятность результата, достигаемого при логическом сложении, равна сумме вероятностей отдельных первичных событий.
Теперь мы можем подсчитать, какова будет вероятность извлечения из мешка с десятью шариками одного, номер которого заключен в интервале чисел от 1 до 5. Следовательно, опыт считается успешным, если был извлечен шарик № 1 или № 2, или № 3, или № 4, или № 5. Вероятность такого события подсчитанная с помощью операции «или», равна: р = Ji J_ i _L_ . J_ I _L = J_ 40 10 + 10 + 10 + 10 + 10 2
Этого и нужно было ожидать, так как нас удовлетворяет половина всех возможных событий.
Пожалуй, на основе этих кратких сведений можно уже вернуться к основному вопросу — оценке информации и определить для нее количественную меру. Мы уже заметили раньше, что чем меньше было ожидание какого-либо события, тем большую ценность для нас представляло получение информации об этом событии. Но большее или меньшее ожидание события как раз определяется его вероятностью.
Вероятность того, что во время прогулки по Невскому проспекту на вашу голову упадет спелое яблоко — ничтожно мала. Этого события вы и не ожидаете. Иное дело — прогулка в яблоневом саду, под осень. Здесь такое событие очень вероятно, и появление на голове шишки от упавшей антоновки уже нельзя считать неожиданным.
Поэтому количество информации, содержащееся в сообщении, и оценивается по теории вероятностей следующим образом:
Вероятность события после по-Количество информации лучения сообщения в сообщении ---------------------------
Вероятность события до получения сообщения
Единицу измерения количества информации вполне логично выбрать исходя из следующих рассуждений. Примем за основу простейший случай. Пусть ожидаемое событие может иметь только два совершенно определенных исхода. Такая ситуация осуществляется в нашем старом примере, когда в мешке имеются два шарика или в случае, когда ваш партнер по шахматам держит в кулаке черную или белую фигуру и предлагает вам угадать ее цвет. Вероятность каждого события здесь равна 72. Если вам по секрету сообщат, какая фигура зажата в кулаке партнера, то вероятность этого факта для вас станет равной единице. Событие будет достоверным. То же самое произойдет, если заранее известно, какой шарик извлечен из мешка. Значит для этого простейшего случая:
Количество информации ~ .
в сообщении =2 еД”ниЧЫ информации.
Этим бы можно было и ограничиться, но для практических целей (которые встретятся нам в дальнейшем) удобнее несколько изменить определение единицы информации.
Будем оценивать количество информации не как простое отношение вероятностей отдельных событий, а как логарифм этого отношения, но не с основанием 0 (десятичный логарифм), а с основанием 2. Тогда предыдущая формула перепишется так:
Количество информации j
в сообщении log*»—- ~ — log2 2 = 1 единица информации.
Получилось очень удобно. Простейшему варианту с двумя возможными исходами, сводящемуся к определению двумя взаимоисключающими словами «да» или «нет», соответствует одна единица количества информации. Такую двоичную единицу количества информации часто называют «бит».
Следует понять, что применение логарифма не играет здесь никакой особой роли и можно было бы обойтись и без него, но применение его очень упрощает вычисления. Во-первых, путем логарифмирования сразу же удалось превратить дробную цифру, характеризующую количество информации в простейшем сообщении, в целую единицу, а как мы увидим дальше, законы накопления и суммирования информации при использовании «бита» выражаются очень простыми операциями. Во-вторых, и это самое важное, сообщения любой сложности передаются, принимаются и запоминаются в современных технических устройствах с помощью комбинации простых элементов, каждый из которых способен ответить лишь на один вопрос — «да» или «нет».
Как же из этих примитивных единичек информации образуются сообщения или записи любой сложности?
Проделаем такой опыт. Возьмем шахматную доску и поставим на любую клетку короля. Партнер, находящийся в соседней комнате, доски не видит, но хочет знать, на какую клетку поставлен король.
Как сообщить ему об этом?
Простейший, на первый взгляд, способ заключается в том, что можно приписать каждой из 64 клеток доски определенный символ. При этом условии для передачи любого из возможных сообщений потребуется алфавит из 64 знаков — 42 в два раза больше, чем алфавит русского языка, с помощью
которого можно составить миллионы сообщений. По-видимому такой способ явно не экономичен.
Можно составить соообщение о местонахождении короля иным путем — указать, в каком вертикальном столбце и в какой горизонтальной строке он находится. Для этого потребуется всего 16 символов — восемь для обозначения строк и столько же для обозначения столбцов. Объем алфавита сразу сократился в четыре раза, но сообщение теперь состоит из пары связанных символов. Интересно проверить, как обстоит
I 2 3 4 5 6 7 8
дело с количеством информации, содержащейся в сообщениях, составленных по первому и второму способу? Для первого из них количество информации равно Igo 64 = 6 двоичным единицам и для второго— lga8-|-lgo8 = 3 + 3 = 6 двоичным единицам.
Как видим, количество передаваемой информации не зависит от способа кодирования. Этого и следовало ожидать, так как содержание сообщения не изменилось.
Составление сообщений из нескольких символов в разных сочетаниях и последовательностях неизмеримо увеличивает число возможных сообщений, построенных на основе ограниченного алфавита. Это легко понять, если подсчитать, сколько разных вариантов можно образовать из сочетания нескольких символов, переставляя их в различном порядке. Достаточно поменять местами первый и второй символы, и мы получим новую последовательность. Если при двух символах в сочетании набор возможных вариантов и не очень велик, то их количество быстро нарастает при добавлении новых символов. 43
Как следует из математического закона, если алфавит содержит N символов, а сообщения составляются из последовательностей по п таких символов, то число возможных сообщений равно 7Vn.
Это легко проверить на практике. Арабская система счисления содержит 10 символов (от 0 до 9). Сколько отдельных цифр можно записать, используя пятизначные последовательности? Очевидно, что 105=100 000. Это хорошо известно, так как наибольшая пятизначная цифра 99999, а наименьшая — 00000.
Теперь можно понять, насколько огромны возможности языков, в которых слова образуются в виде довольно длинных последовательностей, а алфавит содержит около 30 символов.
Не составляет большого труда применение этих правил и к задаче посылки команд на расстояние. Например, если мы имеем аппаратуру с шестью частотами модуляции (алфавит из 6 символов), то, передавая каждую команду 2 символами, можно увеличить число передаваемых команд до 36 и т. д. Конечно, при этом увеличивается время для передачи одной колданды и, что более важно для моделиста, очень усложняется декодирующая аппаратура * на принимающей стороне. Передавая команды последовательностями двух и более символов, не следует стремиться к реализации всей теоретически достижимой емкости выбранной системы. Это позволяет увеличить число передаваемых команд и, в то же время, не слишком усложнять аппаратуру.
Пока все наши рассуждения относились к методам кодирования сообщений, но ведь волна, на которой они записаны, мгновенно проносится и затухает в пространстве. Команду, записанную на волне, мало принять, ее нужно «запомнить», по крайней мере, на то время, пока она не будет выполнена до конца либо заменена другой, либо отменена вообще. Как мы уже знаем, самая сложная команда должна запоминаться с помощью простейших элементов, способных отвечать только на вопрос «да» или «нет». Современная техника располагает большим набором таких элементов разных типов: электромеханические реле, электронные реле (триггеры), ферритовые и пьезоэлементы, элементы, использующие свойства сверхпроводимости, и много, много других. Наука приближается уже к решению проблемы
* Декодирование — операция, обратная кодированию, т. е. расшиф-44 ровка сообщения, переданного условными сигналами.
применения для этой цели отдельных молекул, по аналогии с принципом работы мозга.
Следовательно, каждый простейший элемент запоминающих систем должен обладать уменьем находиться в любом из ука
занных двух противоположных состояний: «нет» и «да», переходя из одного состояния в дру
гое при поступлении на вход элемента соответствующего сигнала. Такой элемент называется
элементарной ячейкой системы электронной памяти.
В качестве простого примера
построим запоминающую систему для регистрации сообщения о том, в каком вертикальном столбце находится король на шахматной доске. Возможных сообщений в этом случае восемь, а информации в каждом сообщении содержится три двоичные единицы. Значит, для записи любого сообщения необходимо иметь, по меньшей мере, три элементарные ячейки. Предположим также, что каждый символ представлен числом импульсов от 1 до 8.
Соединим последовательно
три элементарные ячейки, причем так, что когда предыдущая
Рис. 3. Работа запоминающей схемы на восемь состояний.
ячейка возвращается, например, из состояния «да» в исходное состояние «нет», то она возбуж-
дает находящуюся справа ячейку и переводит ее из одного состояния в другое. Процесс возбуждения осуществляется путем
подачи на вход ячейки запускающего электрического импульса. Такой импульс вырабатывается на выходе каждой ячейки только
при возвращении ее в исходное состояние.
На рис. 3 представлен набор различных состояний запоминающей системы, соответствующих восьми символам нашего
алфавита. Так как эта система, приняв сигнал, может сохранять его неограниченно долго, то, следовательно, она обладает свойством памяти.
Действительно, ведь это свойство и заключается в способности сохранять «впечатление» или, говоря техническим языком, состояние в течение некоторого времени после поступления внешних сигналов. В этом смысле и можно говорить о том, что система «запомнила» поступившие сигналы.
Запоминающие системы современных кибернетических машин содержат сотни тысяч и даже миллионы элементарных ячеек. Поскольку же объем информации с добавлением каждой новой ячейки умножается на два, то станет очевидным, что память у этих машин довольно обширная. И все-таки кибернетическим машинам пока еще очень далеко до человеческого мозга, в котором количество элементарных ячеек памяти исчисляется цифрой с тринадцатью — пятнадцатью нулями.
Для того чтобы реализовать записанную в системе памяти команду, достаточно каждое ее состояние непосредственно связать с положением контактов релейной группы, которые включат нужные исполнительные механизмы.
Релейная группа, представляющая набор из нескольких реле, входит в большинство современных систем автоматики. Каждое реле имеет пару или больше контактов, которые размыкаются или замыкаются при пропускании через обмотку реле электрического тока. Если такая релейная группа соединена с системой электронной памяти, то в зависимости от того, какие ячейки находятся в возбужденном или невозбужденном состоянии, некоторые реле окажутся под током, а другие — нет. Поскольку контакты реле находятся в линиях, подводящих электропитание к исполнительным механизмам, то ясно, что при каждом состоянии системы памяти будут включены только некоторые определенные реле и соединенные с ними механизмы. Изменение команды приведет к переключению реле и запуску других исполнительных механизмов.
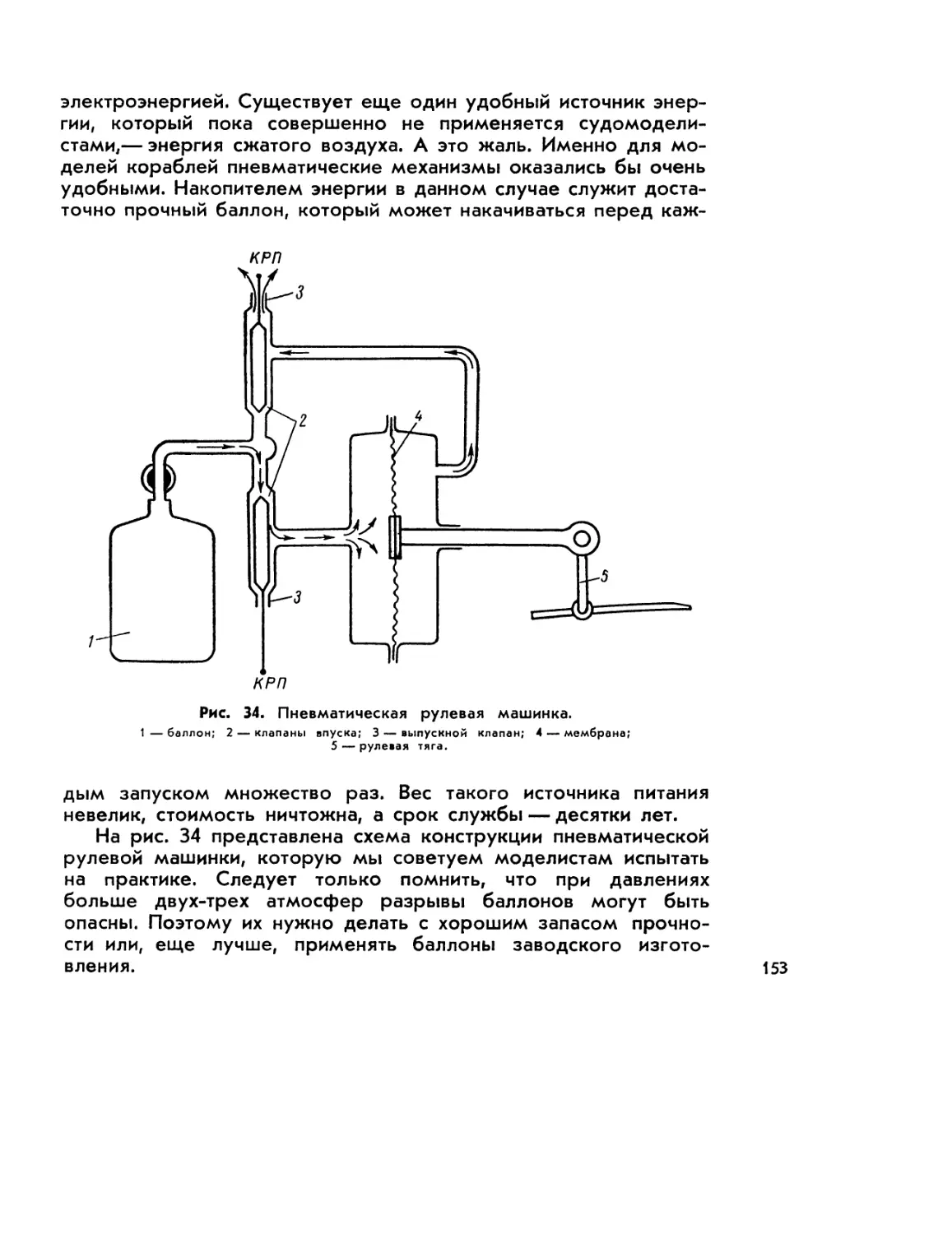
Итак, мы познакомились с основными принципами управления на расстоянии и проследили путь команды от записи ее на несущей волне до выполнения на месте приема. Но чтобы воплотить эти сведения в практическую систему радиоуправления кораблем, надо суметь построить аппаратуру, способную выполнить уже известные нам операции. Настало время этим заняться.
Глава III
Чем
управляют на расстоянии?
Мы уже знаем, что используя электромагнитные или акустические колебания, можно передавать на большие расстояния самые разнообразные сообщения или команды. Нам также известно, как должен изменяться колебательный процесс, чтобы сигналы, соответствующие разным командам, были не похожи друг на друга. Для применения наших знаний на практике прежде всего необходим излучатель выбранного вида колебаний строго определенной частоты и амплитуды. При этом какая-либо из характеристик колебательного процесса (частота, амплитуда, число импульсов и т. д.) должна быть легко изменяемой, чтобы мгновенно передать нужную команду.
Если такой излучатель уже имеется, значит сигнал может быть послан и помчится, преодолевая пространство со скоростью света или звука. Чем дальше от источника колебаний, тем слабее и слабее будет становиться сигнал, постепенно рас
СОСТАВЛЯЕМ БЛОК-СХЕМУ СИСТЕМЫ УПРАВЛЕНИЯ
сеивая на пути свою энергию.
Очевидно, что посланный сигнал выполнит свою задачу только тогда, когда на его пути окажется устройство, способное принять сигнал,— приемник. Какие же требования должны
быть предъявлены к приемнику? В точку приема может поступать очень много сигналов от самых разнообразных источников. Поэтому приемник должен уметь выделить из хаоса колебаний один-единственный сигнал, который для него предназначен. Это свойство
4
Ю. Д. Пахтонов, В. И. Соловьев
приемного устройства называется его избирательностью. Чем выше избирательность, тем надежнее работа приемника, тем меньше опасений, что он примет схожие, но «чужие» сигналы или помехи.
Так как в точку приема, удаленную от источника колебаний, сигнал всегда приходит очень ослабленным, необходимо в какой-то мере восстановить потерянную им по пути энергию. Эта операция называется усилением. В большинстве случаев усиление должно осуществляться так, чтобы важные характеристики сигнала не изменились по отношению друг к другу. Если, допустим, амплитуды сигналов, соответствующих двум разным командам, до усиления различались в два раза (например, 0,5 в и 1 в), то и после усиления это отношение должно сохраниться (50 и 100 в).
В том случае, если такое соотношение в процессе усиления нарушается, то усилитель вносит искажения. Когда искажения становятся большими, не исключено, что приемное устройство вообще перестанет правильно различать команды — «перепутает» их. Приемник оказывается в том же положении, в котором находится читатель, старающийся прочесть мелкий шрифт с помощью перекошенной линзы: буквы теряют свои привычные очертания, а когда искажения велики, то чтение становится невозможным.
Нет необходимости в том, чтобы приемник пропускал без искажений все характеристики принимаемого сигнала. Достаточно не испортить лишь ту, с помощью которой была «записана» на несущей волне при передаче полезная информация. Действительно, когда мы читаем газетный текст, информация определяется только формой букв, поэтому можно читать газету через синее или желтое стекло и ничего от этого не изменится. Иначе обстоит дело с цветной иллюстрацией — здесь информация заключена не только в форме линий, но и в цвете. Смотреть на такую иллюстрацию через цветное стекло, значит видеть совсем не то, что хотел выразить художник.
На основе этих рассуждений можно сделать следующий вывод: приемное устройство должно усиливать поступивший сигнал так, чтобы не исказить именно ту характеристику сигнала, которая была использована для записи информации.
Но вот сигнал принят и усилен. Что с ним делать дальше? Как мы только что вспомнили, каждая определенная команда 50 была зашифрована при передаче в изменение одной из харак
теристик сигнала (частоты, амплитуды, фазы, продолжительности или числа импульсов). Эту запись нужно расшифровать, т. е. «опознать» поступивший сигнал, запомнить и направить его к тому исполнительному механизму, для которого он был предназначен. Если принятый сигнал означает команду «право руля», то он должен включать двигатель, поворачивающий руль направо, а все остальные исполнительные механизмы — никак не реагировать на его поступление.
Такие устройства, способные различать сигналы с разными характеристиками, называются дискриминаторами. В зависимости от того, на какую характеристику сигнала реагирует данный дискриминатор, он называется частотным, амплитудным, фазовым или временным.
Мы уже отмечали, что чаще всего сигнал «записывается» в виде относительно медленных изменений, наложенных на высокочастотную несущую волну способом модуляции ее амплитуды. Тогда очевидно, что в этом случае (амплитудной модуляции) перед дискриминатором надо поставить устройство, способное выполнить обратную операцию. Такая операция выделения наложенного на несущее колебание процесса называется демодуляцией, а устройства, выполняющие эту операцию,— демодуляторами.
Теперь мы можем построить так называемую блок-схему системы управления на расстоянии, условно обозначив квадратиками каждое из перечисленных выше устройств. Блок-схемы играют большую роль при конструировании сложной аппаратуры. Они дают возможность конструктору наглядно представить все необходимые ее звенья во взаимосвязи, а потом создавать наилучшую конструкцию каждого отдельного звена.
Построим блок-схему аппаратуры, в которой сигналы зашифрованы в изменение частоты. Здесь могут быть два варианта: сигнал шифруется либо в изменение основной — несущей — частоты колебания, вырабатываемого генератором — передатчиком, либо в изменение частоты, наложенной на это несущее колебание, т. е. в изменение частоты модуляции. Обе схемы представлены на рис. 4. Давайте сравним их.
Уже при беглом взгляде ридно, что аппаратура, работающая с модулированным сигналом, содержит меньше составных звеньев и, следовательно, проще. Действительно, несущая частота модулированного сигнала всегда одна и та же, сколько 51
a)
Рис. 4. Варианты блок-схемы систем управления на расстоянии: а — команды зашифрованы в изменении частоты несущей волны; б — команды зашифрованы путем модуляции амплитуды несущей волны.
ГВЧ — генератор высокой частоты; М — модулятор; ИМС — источник модулирующего сигнала; Пр — приемник; УМ — усилитель мощности; ДМ — демодулятор; Д — дискриминатор; ИМ — исполнительный механизм; К — ключ.
бы разных частот модуляции мы на нее ни наложили. Следовательно, нужен только один передатчик, излучающий колебание с определенной частотой, и только один усилитель приемника, настроенный на эту же частоту. Разделение частот — несущей и модуляции — осуществляется дискриминатором после демодуляции.
Во второй схеме дискриминатор отсутствует, так как его функции выполняют усилители приемников, настроенные каждый на свой сигнал. Но при такой схеме понадобится столько же передатчиков и приемников, сколько передается различных команд. Правда, можно обойтись и одним передатчиком, для этого оператор должен с каждой командой изменять частоту посылаемого сигнала, как говорят, перестраивать передатчик. Что же касается приемников, то они находятся на управляемом объекте, где операторов нет, и перестраивать их некому. Поэтому число приемников должно быть равно числу передаваемых сигналов, что очень невыгодно при увеличении количества команд.
Отсюда следует, что систему управления на расстоянии надо всегда строить так, чтобы обойтись одним передатчиком и одним приемником. Этим условиям удовлетворяет система с модуляцией несущей частоты. У такой системы, кроме тех достоинств, которые были отмечены раньше (большая помехоустойчивость и меньший диапазон частот, занимаемый в эфире передатчиком), имеется еще преимущество: в простоте, меньшем весе и занимаемом месте, а также и в экономичности. Все это очень важно для конструктора моделей кораблей.
Итак, мы знаем в принципе все, что нужно для управления на расстоянии любым объектом. Правда, мы построили блок-схему аппаратуры для одного частного случая—для передачи команд, зашифрованных в изменение частоты, но по аналогии можно построить подобную схему и для другого метода зашифровки.
Остается решить, каким способом и с помощью каких средств можно выполнить необходимые операции:
1. Возбудить колебательный процесс и послать в пространство волну (электромагнитную или акустическую).
2. Записать на посылаемой волне нужную команду.
ЧЕМ ЗАПОЛНИТЬ КВАДРАТИКИ БЛОК-СХЕМЫ!
3. Принять сигнал в точке приема, отделить его от других соседних сигналов и помех и усилить его.
4. Расшифровать записанную на сигнале команду, запомнить и направить ее точно по адресу для исполнения.
5. Построить исполнительные механизмы, которые, получив команду, выполнят ее (дадут модели передний или задний ход, переложат рули, зажгут огни и т. д.).
Последняя задача не связана с переносом и расшифровкой информации и будет рассмотрена отдельно в следующей главе, посвященной автоматическим исполнительным механизмам. Для того чтобы справиться с первыми четырьмя задачами, надо заполнить соответствующими устройствами пока еще пустующие квадратики блок-схемы.
В наши дни это вполне разрешимо. А несколько десятков лет тому назад подобная проблема оказалась бы не по силам даже самым крупным ученым. Мы — наследники огромного опыта, который человечество накапливало веками, вырывая каждую крупицу истинного знания из бесчисленного множества ошибок, заблуждений и неудач. Никогда нельзя забывать тех,
кто впервые прошел по неведомым тропинкам науки, водрузив для нас указатели на всех перекрестках. Поэтому прежде чем привлечь для нашей цели в готовом виде современные средства техники, познакомимся вкратце с историей некоторых научных открытий.
Электромагнитные радиочастотные колебания стали известны
сравнительно недавно, и, следовательно, до их открытия за-
дача управления на расстоянии могла решаться только на основе звуковых и световых волн (электромагнитная природа света еще не была известна). Уже тогда, вообще говоря, можно
было бы заполнить
первый квадратик нашей схемы (генератор
колебаний), поставив в него искусственный источник излучения акустических волн — струну, колокол, камертон — или световых волн — свечу.
Для того чтобы излучаемые колебания могли приобретать свойства, характерные
для каждого сигнала, можно
было бы взять набор струн, колоколов или камертонов, колеблющихся на разных частотах, либо на пути света ставить раз-
ноцветные стекла. И тем, и другим способом задача посылки определенных сигналов решалась — передающая сторона блок-схемы могла быть осуществлена.
А вот на принимающей стороне дела обстояли значительно хуже. Достигающий точки приема сигнал, как правило, имеет ничтожную мощность и выполнить с его помощью какую-либо работу просто немыслимо. Для того чтобы давление луча света могло замкнуть контакт с приложением усилия в доли грамма, потребовалась бы фантастическая мощность светового пучка. То же самое относится и к звуковому сигналу. Поэтому в течение долгого времени такие системы связи на расстоянии применялись лишь в тех случаях, когда «приемником сигналов» был сам человек с его очень чувствительными органами слуха и зрения. Для замены человека искусственным приемником нужно было создать устройства, способные в тысячи и миллионы раз усиливать энергию приходящих сигналов.
Предпринимались попытки разрешить эту проблему с помощью хитроумнейших приспособлений, но все они не достигали заветной цели. Ученые после провала очередного эксперимента ставили новые и новые. Некоторые из них приводили к результатам, создававшим даже иллюзию успеха. Известно, что если вызвать колебание струны на гитаре, то на другой гитаре, лежащей в стороне, также начнет колебаться струна, настроенная в унисон с первой. Это явление называется в технике резонансом. Используя его, можно, например, построить передатчик, состоящий из колоколов разных размеров. Каждый из них будет излучать звуковую волну с определенной частотой. Сколько нужно передать команд — столько необходимо и колоколов. На принимающей стороне следует натянуть струны, настроив их так, чтобы каждая из них имела собственную частоту колебаний, точно равную частоте, излучаемой одним из колоколов. Еще лучше заменить струны камертонами. Рядом с камертонами или струнами ставится контактная пластинка. Затем подключается батарея так, чтобы электрическая цепь замыкалась через струну и пластинку. Пока струна не колеблется, пластинка ее не касается и цепь электрического тока разорвана. Ударим по одному из колоколов. Настроенная в резонанс с этим колоколом струна тоже начнет колебаться и, отклоняясь в сторону, замкнет цепь. Ударим по другому — замкнется другая цепь.
Как видите, система управления на расстоянии построена и в принципе может действовать. Но она совершенно неприменима на практике. В самом деле, чтобы передать сигнал на какую-нибудь сотню метров, придется взять многопудовые колокола и бить по ним тяжелой кувалдой. Иначе энергии доходящего до приемника сигнала не хватит, чтобы раскачать должным образом струну. Пока задачу усиления сигнала пытались решить с помощью механических средств — она оставалась невыполнимой. Но затем пришла всемогущая электроника.
БУДЬТЕ Ч еловеку всегда казалось, что природа отпустила ему до
ЗНАКОМЫ... смешного мало сил и возможностей. Еще в самом начале ци-ЭЛЕКТРОНИКА! вилизаЧии он не переставал размышлять над проблемой усиления. Вот почему одним из первых изобретений человечества был рычаг. Обыкновенный рычаг, принцип действия которого сейчас приходится изучать школьникам, основательно помог нам благоустроить свою землю. С его помощью человек начал ворочать каменные глыбы, на которые он раньше только робко посматривал, ощущая свое бессилие.
Потом последовали новые изобретения. Человек заставил работать падающую воду, ветер, пар, и, наконец, электричество. А ведь все эти могучие и сложные явления, по существу, тот же самый первобытный рычаг. Небольшое усилие рук, подымающих заслонку, открывает путь воде, падающей на мельничное колесо; нажим на педаль акселератора — и оживают десятки лошадиных сил,* скрытых в моторе; поворот рубильника— и тысячи киловатт электроэнергии превращаются в механическую работу.
Уже, казалось, в расцвете технического прогресса еще долгое время любой вид управления и не мыслился без поворота рычагов, кранов, движения педалей и вообще без механического перемещения какого-либо предмета в пространстве. А для этого нужно хотя и небольшое, но все же вполне ощутимое усилие.
* 1 лошадиная сила = 735,421 ватт.
Для того чтобы очень слабые сигналы могли управлять мощными потоками энергии, как мы управляем потоком воды, поворачивая ручку крана, надо избавить их от необходимости совершать какие бы то ни было механические перемещения управляющего элемента. Именно это избавление и принесла с собой электроника. Трудно сказать, какое событие следует отождествить с днем ее рождения: тот день, когда была открыта наименьшая частица, несущая отрицательный электрический заряд — электрон, или тот день, когда Эдисон с удивлением обнаружил, что между нагретым и холодным электродами, находящимися в вакууме, вопреки всем правилам, протекает электрический ток. Скорее всего, ни тот и ни другой. Электроника стала всемогущей только потому, что в ее устройствах используются принципы управления потоками заряженных частиц, а эти принципы еще не были известны в те времена.
Шестьдесят с небольшим лет тому назад американский инженер Ли де Форест поставил на пути потока летящих в вакууме электронов обыкновенную проволочную сетку и приложил к ней напряжение. Оказалось, что если изменить его, то поток электронов тоже изменится, совсем как струя воды при повороте крана. Только в данном случае ничего не надо поворачивать или перемещать — достаточно изменять напряжение на этой так называемой управляющей сетке. Принцип управления без механических перемещений был найден. С этого момента, по существу, и начинается триумфальный путь электроники.
В современных электронных системах используются, наряду с электронами, и другие носители электрических зарядов. Перемещаются эти носители не только в вакууме, как было на первом этапе развития электронной техники, но и в других средах-газах или даже в твердых кристаллических телах.
Поэтому современную электронику следует определить как науку, занимающуюся изучением и практическим использованием явлений, связанных с управляемым движением каких угодно элементарных носителей электрических зарядов в любых средах.
Но все же до сегодняшнего дня главную нагрузку несут электроны, выполняя основную работу почти во всех электронных приборах. Только в полупроводниках они потеснились, уступив часть дела носителям положительных зарядов — «дыркам». Учитывая прошлые и настоящие «заслуги» электронов, 57
полезно начать знакомство с вакуумной электроники, в которой безраздельно властвуют электроны.
Электрон — сверхминиатюрная материальная частица, обладающая очень малым отрицательным электрическим зарядом. Величина заряда е и массы те точно измерены (е = 1,0621 X Х10~19К; те —9,1091 • 10~28г). Размеры области, занимаемой электроном в пространстве, исчезающе малы (около 10~12 см). Если выстроить электроны в один ряд, вплотную друг к другу, то электронная шеренга длиной в один сантиметр будет состоять из 1 000 000 000 000 электронов.
Электрон — «двулик». В некоторых случаях он проявляет себя как частица, подобная дробинке, а иногда — как волна, у которой нет четких очертаний. Такая склонность к маскарадному перевоплощению наблюдается у всех элементарных частиц, и полностью разобраться в этом науке пока еще не удается.
Электрон — частица долгоживущая, и по сравнению со многими другими элементарными частицами, срок жизни которых исчисляется тысячными, а иногда и миллиардными долями секунды, он практически бессмертен.
Электронов в природе очень много, так как каждое ядро атома окружено целой свитой их. Но не все они могут быть использованы в электронике. Нам нужны свободные электроны, которые могут быть посланы в любом направлении и с любым заданием, а большинство электронов в природе крепко привязано к своим атомам. Но среди таких электронов-«домоседов» встречаются и «бродяги», непрерывно кочующие от атома к атому. Именно на плечи этих кочевников и взваливается вся полезная для нас работа. Это они, двигаясь в определенном направлении, создают тот эффект, который мы называем электрическим током. Если к куску материала, в котором бродят во всех направлениях свободные электроны, присоединить зажимы батареи, то под натиском электрического поля электроны помчатся, главным образом, только в одном направлении— от плюса к минусу. В проводнике потечет электрический ток. Свободных электронов очень много в металлах, поэтому они и являются хорошими проводниками электрического тока.
Совсем иначе обстоит дело, если батарею подсоединить к материалу, в котором свободных электронов нет. Электрический ток в этом случае не возникает. Такой материал мы назы-53 ваем изолятором.
Но для целей электроники недостаточно, что электроны свободно кочуют внутри проводника. Нужно, чтобы они могли вылетать из него в окружающее пространство. Оказывается, этой цели можно добиться рядом способов, заставив электроны двигаться более энергично, тогда некоторые из них с разбегу будут прорываться за поверхность проводника. Наи
более распространены способы подстегивания электронов с помощью нагрева и облучения светом.
Проводник определенной формы, способный испускать во внешнюю среду электроны, называется в электронике катодом. Катод и другие электроды, помещенные в вакуумный баллон, образуют электронную лампу, через которую протекает электронный ток во внешнюю электрическую цепь. В зависимости от того, как сообщается энергия, необходимая для освобо-
Рис. 5. Конструкции катодов прямого и косвенного накала и их изображение на схемах: а — катод прямого накала; б — катод косвенного накала.
а)
Н Н
ждения электронов, катоду присваивается определенное наименование: термокатод (подогревный), фотокатод и т. д. Для большин
ства вакуумных электронных ламп применяются термокатоды. В простейшем случае он представляет собой обычную проволочку из какого-нибудь тугоплавкого металла с большим электрическим сопротивлением. По этой проволочке пропускается ток накала — так же как по спирали в знакомой нам электроплитке. Проволочка накаляется и начинает испускать электроны. Катод готов.
Правда, такой катод (рис. 5, а) не очень совершенен, поэтому чаще применяются катоды с косвенным накалом — подогревные (рис. 5, б). В этом случае электроны испускаются не самой раскаленной спиралью, а поставленной рядом с ней пластинкой или одетой на спираль трубочкой. Эта пластинка
или трубочка и выполняет обязанности катода, а нить накала только подогревает его, точно так же, как спираль электроплитки нагревает поставленную на нее сковороду. Подогревный катод более удобен. Как видно из рис. 5, б, электрические цепи тока питания накала и электронного тока, протекающего через лампу, разделены и не мешают друг другу. Иногда это очень важно. Кроме того, поскольку через сам катод ток подогрева не пропускается, для его изготовления можно применять такие материалы, которые очень легко и активно испускают электроны, но были бы совершенно неудовлетворительными, если бы их использовать как нить накала. Имея в своем распоряжении катод, мы всегда можем получить свободные электроны.
Что с ними делать дальше?
Давайте сконструируем простейшую электронную лампу. Прежде всего вспомним и никогда не будем забывать впредь, что электрон — это носитель отрицательного электрического заряда. Следовательно, он будет притягиваться к электродам, имеющим положительный заряд, и отталкиваться от электродов с отрицательным зарядом. Мы вовсе не заинтересованы в том, чтобы электроны и после вылета из катода продолжали свою веселую бродячую жизнь. Наоборот, мы должны собрать их и заставить работать. Для этого достаточно поставить недалеко от катода металлическую пластинку и подвести к ней положительный потенциал от батарей. Теперь электроны от катода прямо устремятся к этой пластинке. Такой электрод, собирающий на себе испущенные катодом электроны, называется анодом.
Хотя расстояние между катодом и анодом может быть и невелико, путешествие для электрона в воздухе окажется очень нелегким. Все пространство заполнено движущимися молекулами воздуха, и протолкаться через эту толпу молекул электрону так же трудно, как вам было бы трудно пройти через колонну демонстрантов против ее движения. Электронам надо помочь. Для этого воздух из пространства между анодом и катодом убирают — выкачивают, создавая глубокий вакуум. Проще всего сделать так: поместить целиком катод и анод в стеклянный баллон, вывести наружу проводники, соединенные с электродами, а затем, откачав воздух из баллона, наглухо его запаять.
60 Вакуумная электронная лампа готова. В ней два электрода.
Такая лампа называется диодом. Как же действует диод? Чтобы выяснить это, надо изучить свойства сконструированной нами лампы. Соберем схему, как показано на рис. 6, а. Если постепенно повышать положительное напряжение на аноде, то все больше и больше электронов будет приходить на анод: миллиамперметр покажет возрастание анодного тока. В конце концов напряжение на аноде достигнет такого значения, что дальнейшее его повышение уже не будет увеличивать анодный ток.
Рис. 6. Схема для испытания диода (а) и полученная с ее помощью вольт-амперная характеристика (б).
Что случилось? Ничего особенного — просто анод при каком-то определенном напряжении собрал на себя все электроны, вылетевшие из катода. Анодный ток, соответствующий этому напряжению, называется током насыщения диода.
А что произойдет, если переменить полярность, т. е. приложить к аноду отрицательное по отношению к катоду напряжение, и, так же как и в предыдущем случае, увеличивать разность потенциалов от нуля и выше? Миллиамперметр покажет отсутствие тока в анодной цепи. Не удивительно. Мы знаем, что электроны не будут двигаться к отрицательно заряженному электроду. Значит, диод обладает свойством односторонней проводимости: ток протекает через него практически только в том случае, когда на аноде плюс, а на катоде минус.
Теперь изобразим результаты нашего опыта на графике (рис. 6, б). По горизонтальной оси отложим в некотором
масштабе напряжение между анодом и катодом, а по вертикальной оси, тоже в масштабе, измеренное значение тока. Нанесем на графике цепочку точек, каждая из которых иллюстрирует данные измерений. Соединим точки плавной линией. Полученная нами кривая называется вольт-амперной характеристикой диода. Она несколько идеализирована, но для наших целей ее вполне достаточно. Такие характеристики очень важны для изучения работы электронных ламп, так как значительная часть расчетов электронных устройств выполняется с помощью графиков.
Вспомним, как записывается известный закон Ома для участка электрической цепи:
I = — или U = IR.
R
Если в нашу экспериментальную схему, взамен диода, поставить обычное электрическое сопротивление, например в 1000 ом, то для него также можно построить вольт-амперную характеристику. Построив ее (пунктир на рис. 6, б), мы убедимся, что вольт-амперная характеристика для постоянного сопротивления— прямая линия. Такие сопротивления называются линейными. Сопротивление диода электрическому току не остается постоянным, а изменяется при изменении напряжения, его вольт-амперная характеристика замысловато изгибается и поблизости от нулевой точки вообще прерывается. Поэтому сопротивление диода называется нелинейным. Аналитический расчет электрических цепей с нелинейными сопротивлениями очень сложен, так как в формулу закона Ома придется подставлять для каждого значения напряжения новую величину сопротивления. Вот почему гораздо проще эти расчеты выполнить графическим способом.
Заменим батарею в нашей схеме с диодом генератором переменного синусоидального тока. Какой ток будет протекать через цепь с диодом? На этот вопрос можно ответить, не прибегая к расчетам, с помощью графика, приведенного на рис. 7.
Внизу, под вольт-амперной характеристикой диода, начертим в том же масштабе, в котором отложены напряжения на характеристике, так называемую развертку во времени синусоидального напряжения, совместив ось нулей переменного напряжения с нулевой точкой вольт-амперной характеристики. Будем 62 брать последовательно точки на кривой, описывающей измене-
Рис. 7. Преобразование переменного тока диодом.
ние переменного напряжения. Каждая из них соответствует определенному моменту времени t\, t2t h и т. д. От этих точек проведем вертикальные линии до пересечения с вольт-амперной характеристикой. Каждая точка пересечения покажет, какой ток протекает через диод при данном мгновенном значении напряжения. Но ведь точки на графике переменного напряжения взяты через определенные интервалы времени. Значит, теперь мы знаем ряд значений анодного тока, соответствующих тем же моментам времени.
Очевидно, можно построить график изменения анодного тока, который будет протекать через диод при известном напряжении, подаваемом генератором. Для этого справа от вольт-амперной характеристики проведем ось времени, также совместив ее с нулем характеристики, нанесем на ней в том же масштабе, как и на графике переменного напряжения, отметки времени и восстановим от этих отметок вертикали.
Если теперь мы проведем горизонтальные линии от уже полученных точек на вольт-амперной характеристике до пересечения с вертикалью, соответствующей тому же мгновению времени, то получим ряд новых точек. Соединив их плавной линией, изобразим график изменения анодного тока. Посмотрим на него внимательно. Там, где переменное напряжение проходит полупериод, во время которого плюс приложен к аноду, ток через диод приблизительно повторяет по очертаниям форму переменного напряжения. А вот во время отрицательного полупериода ток в цепи полностью отсутствует — на графике тока получается пропуск. Тот факт, что диод проводит ток только в одном направлении, мы знали и раньше; с помощью графического построения мы не только подтвердили
сказанное, но и смогли наглядно представить весь процесс преобразования переменного тока диодом.
Сопоставим график напряжения, создаваемого генератором, с графиком тока, протекающего через диод. Переменное напряжение состоит из симметричных полупериодов — отрицательного и положительного, а на графике тока остались только положительные. Это означает, что диод осуществил преобразование переменного тока в однополярный — выпрямил переменный ток. То обстоятельство, что непосредственно в цепи диода получается прерывистый, пульсирующий ток не так уж страшно. С помощью несложных приспособлений можно сгладить пульсации, и тогда ток после выпрямления ничем не будет отличаться от постоянного тока, полученного от батареи.
Теперь мы вправе сделать вывод, что главным назначением диода является выпрямление переменных токов.
График, изображающий вольт-амперную характеристику диода, очень полезен, но изучение на его основе свойств электронной лампы оказывается довольно трудоемкой операцией. Хорошо иметь, хотя бы для предварительной оценки, какие-нибудь цифровые данные о свойствах той или иной лампы. Такие числовые характеристики существуют и называются параметрами электронной лампы. Основная трудность в определении этих параметров заключается в том, что из-за криволинейности вольт-амперных характеристик полученное числовое значение будет правильным только для какой-нибудь определенной точки на характеристике. Чтобы преодолеть это затруднение, договорились условно заменять на некотором — рабочем— участке кривую линию прямой («спрямлять» характеристику), как показано на рис. 6, б и тогда все получается гораздо проще.
Первый вопрос, который следует задать, интересуясь свойствами диода, можно сформулировать так: «на какую величину изменится ток, протекающий через диод, если напряжение между анодом и катодом возрастет или уменьшится на один вольт?» Поскольку характеристику диода мы заменили прямой линией, то для ответа на этот вопрос достаточно взять произвольный отрезок на оси напряжения, найти соответствующие началу и концу отрезка точки на характеристике, определить два значения анодного тока и найти их разность Д/а- Теперь 64 остается разделить это значение тока на соответствующую
ему разность напряжении:
Д/а __ ампер
MJa вольт
Величина полученного отношения S называется крутизной характеристики диода. А если это отношение перевернуть и записать в таком виде:
аса
---- = R; ом, Д/а 1
получим на основании прямой аналогии
то мы действительно
с законом Ома (~^ = R) величину, измеряемую в омах. Этот
параметр Ri называется внутренним сопротивлением диода. Обычно в электронике величину тока выражают в миллиамперах (1 ма = 0,001 а), и тогда сопротивление будет получаться в килоомах (1 ком =1000 ом).
Следовательно, значение крутизны характеристики и показывает, на сколько миллиампер изменится анодный ток при изменении анодного напряжения на один вольт. Очевидно, чем больше крутизна характеристики, тем меньше внутреннее со
противление диода.
Если к этим параметрам добавить еще числовые характеристики, определяющие, какой средний ток способен пропускать через себя данный диод (номинальный анодный ток /аи) и какое напряжение, приложенное к аноду со знаком минус, диод может выдержать без искрового пробоя (обратное анодное напряжение (Лю), то все необходимые для предварительного выбора диода данные будут в нашем распоряжении. Эти сведения приводятся во всех справочниках по электронным лампам. Вместе с данными, показывающими, какие напряжения и ток накала ((/н и /н) необходимы для того, чтобы нормально разогреть катод, они составляют техническую характеристику лампы.
Диод сослужил нам большую службу — выпрямил переменный ток, но он все-таки не способен выполнить самую важную операцию — усиление сигналов. Для того чтобы добиться этого, придется усложнить конструкцию электронной лампы.
Поставим между катодом и анодом третий электрод, ту самую управляющую сетку, о которой мы уже кратко упоминали. В результате получится трехэлектродная лампа — триод.
5 Ю. Д. Пахтанов, В. И. Соловьёв
Соберем схему нашего триода (рис. 8, а), как и прежде для диода. В этой схеме надо добавить еще один отдельный источник электродвижущей силы (э. д. с.) для питания управляющей сетки: Ес. Как подключить этот источник — плюсом или минусом к сетке? Давайте подумаем. Если подключить его положительным полюсом к сетке, то она, по существу, превратится во второй анод, электроны будут притягиваться к ней и в сеточной цепи тоже потечет ток. Это почти всегда нежелательно, так как на сеточный ток будет зря расходоваться энергия от источника Ес. Если же напряжение на сетке отрицательное (по отношению к катоду), то она станет препятствовать электронам перемещаться к аноду.
Увеличивая или уменьшая отрицательный потенциал на сетке, можно менять величину электронного потока — управлять анодным током триода. Мы получим усилительную лампу. При этом сетка не сможет притягивать к себе электроны и сеточная цепь сетки не будет потреблять мощности. Такой режим является основным при работе усилительных ламп.
В отличие от диода анодный ток триода зависит не только от напряжения на аноде, но и от потенциала сетки, т. е. от двух независимых переменных величин. Поэтому отобразить свойства триода с помощью одной вольт-амперной характеристики уже нельзя. Для трехэлектродных ламп строят две серии («семейства») характеристик: анодных и сеточных.
Для того чтобы получить или, как говорят, «снять» анодную характеристику (рис. 8, б), давайте последовательно устанавливать на сетке разные потенциалы (0, —-1, —2 вит. д.), и при каждом его значении пройдем через все изменения напряжения на аноде — от нуля до максимальной величины.
Каждому напряжению анода будет соответствовать некоторый анодный ток. При потенциале сетки, равном нулю, мы получим характеристику, точь-в-точь похожую на вольт-амперную характеристику диода. Этого можно было ожидать — ведь сетка с нулевым потенциалом не участвует в работе лампы, и она превращается в обычный диод. Когда же на сетку подается отрицательный потенциал, то электронам труднее пробиваться к аноду и анодный ток уменьшается. Чтобы восстановить его прежнее значение, придется увеличить напряжение на аноде, причем эта добавка должна быть тем больше, чем боль-66 ший отрицательный потенциал приложен к сетке.
Рис. 8« Схема для испытания триода (а) и полученные с ее ная (б) и сеточная (в).
Вольтметр в сеточной цепи включается так, что напряжение на сетке
помощью характеристики: анод-
Ис = 2?с—показание вольтметра.
И вот, на рис. 8, б предстает перед нами изображение почтенного семейства анодных характеристик триода, состоящее из серии подобных друг дружке кривых, постепенно отодвигающихся в сторону более высоких анодных напряжений. Важно заметить, что при больших отрицательных потенциалах сетки для появления анодного тока нужно подавать на анод достаточно высокие напряжения, а при каком-то определенном значении отрицательного потенциала на сетке лампу можно вообще «запереть», т. е. прекратить прохождение через нее тока.
Это видно из рис. 8, в, где показано семейство сеточных характеристик триода. Они строятся аналогичным методом, только теперь на аноде каждое из выбранных значений напряжения поддерживается постоянным, а потенциал сетки изменяется от нуля в сторону минуса. По мере возрастания отрицательного потенциала на сетке анодный ток плавно уменьшается и в конце концов прекращается вовсе. Чем выше напряжение на аноде, тем большее отрицательное напряжение или, как его называют, напряжение отсечки анодного тока нужно подать на сетку для того, чтобы запереть лампу. Поэтому каждая характеристика из этого второго, не менее почтенного семейства, соответствующая большему анодному напряжению, располагается левее предыдущей, смещаясь в сторону больших отрицательных потенциалов сетки.
Оба семейства характеристик триода позволяют изучить все его свойства. Для того чтобы выразить их в удобной численной форме, применяется уже знакомый нам способ замены участка криволинейной характеристики прямой линией. Тогда, так же как и для диода, внутреннее сопротивление триода определится отношением изменения анодного напряжения к вызванному им изменению анодного тока, т. е.
Вычислить значение Ri можно по анодной характеристике (рис. 9, б). А вот с крутизной S дело обстоит иначе. Определение крутизны характеристики триода отличается от того, которое мы приняли для диода, так как в триодах крутизна характеристики показывает, насколько эффективно сетка управляет анодным током. Поэтому численное значение S опреде-68 ляется здесь как отношение изменения анодного тока к вы-
звавшему его изменению потенциала сетки, т. е. Д/а _________________________миллиампер
bUc волъпг
и легко рассчитывается по сеточной характеристике триода (рис. 9, а).
У триода есть еще один важный параметр — коэффициент усиления ц, который определяется следующим выражением:
Н = SRL.
Рис. 9. Спрямление криволинейных сеточной (а) и анодной (6) характеристик триода и способ определения его параметров.
Коэффициент усиления не имеет единицы измерения, т. е. является величиной безразмерной. Это означает, что он показывает какое-то отношение. Но отношение чего к чему?
Мы уже знаем, что анодным током в триоде можно управлять, изменяя как напряжение на сетке, так и напряжение на аноде. Однако изменения этих величин по-разному влияют на анодный ток, и эффективность управления им получается неодинаковой. Как же оценить ее в том и в другом случае?
Для этого поступим так. Изменим потенциал сетки на один вольт и заметим, на сколько изменится анодный ток триода. Запомним эту цифру и попробуем изменять анодное 69
напряжение, чтобы величина анодного тока стала снова той же, какой она была при первоначальном потенциале сетки.
Оказывается, что для компенсации изменения анодного тока, вызванного изменением потенциала сетки всего лишь на один вольт, понадобится изменить напряжение анода на десятки и даже сотни вольт. Значит, сетка гораздо энергичнее управляет током, чем может это сделать анод. Недаром ее называют управляющей. Теперь становится понятным смысл коэффициента усиления ц. Он показывает, во сколько раз управляющие свойства сетки больше по сравнению с анодом.
Посмотрим, как же триод усиливает сигналы. Для этого подведем к его сетке переменный сигнал синусоидальной формы. Но предварительно на сетку нужно подать некоторый постоянный отрицательный потенциал, так называемое напряжение смещения (7со- Иначе, если на ней окажется нулевой потенциал, то при положительных полупериодах сигнала потенциал сетки окажется выше, чем у катода, а это, как мы знаем, нежелательно.
Напряжение смещения следует выбрать так, чтобы положительные полупериоды сигнала не доводили потенциал сетки до нуля, а отрицательные — до запирания лампы. Соответствующая этому напряжению точка на сеточной характеристике располагается приблизительно в середине ее и называется рабочей точкой.
Протекающий при этом через лампу ток /ао называется током покоя или начальным анодным током.
При подведении переменного сигнала суммарное напряжение сетки—'смещения и поданного сигнала — будет колебаться поочередно то в сторону уменьшения, то в сторону увеличения, изменяя ток Idl протекающий через триод.
На рис. 10 показано, как эти изменения напряжения сетки преобразуются в подобные им изменения анодного тока, почти точно повторяющие по форме напряжение переменного сигнала, подведенного к сетке. Размах колебаний анодного тока, вызванный одним и тем же сигналом, будет больше в случае лампы с большим значением крутизны 3.
Дальше необходимо преобразовать колебания анодного тока в изменения напряжения. С этой целью последовательно с лампой включают активное сопротивление. Это сопротивление называется анодной нагрузкой лампы. Именно с нее и «сни-70 мается» усиленный сигнал. Как известно, падение напряжения
на активном сопротивлении пропорционально току, протекающему через него, и величине этого сопротивления. Всякое изменение тока немедленно изменит величину падения напряжения на сопротивлении нагрузки, и поэтому колебания тока, вызванные изменением напряжения сетки, преобразуются опять в колебания напряжения в анодной цепи.
Таким образом, электрическую цепь, состоящую из электронной лампы с внутренним сопротивлением Ri и анодной нагрузки Rdf можно представить в виде двух последовательно
Рис. 10. Режимы преобразования сигнала триодом (слева направо): класс А; класс В; класс С.
включенных сопротивлений. Сопротивление Ri — переменное, его величина изменяется в зависимости от напряжения, приложенного к управляющей сетке.
Процесс распределения напряжений в такой цепи удобно представить наглядно при помощи гидравлической аналогии, отождествив давление воды с электрическим напряжением, а поток жидкости — с электрическим током. Возьмем трубу с одним постоянным сужением и с одной заслонкой, которой можно управлять по желанию. Сужение и заслонка выполняют обязанности, соответственно, постоянного сопротивления нагрузки Rix и переменного сопротивления лампы Ri. Такая замена вполне законна. Действительно, всякое сужение на пути потока жидкости препятствует ее протеканию аналогично тому, как электрическое сопротивление мешает прохождению тока. Наконец, заменим батарею насосом, который взамен электрического напряжения создаст на концах трубы разность давлений, и проверим работу нашей модели.
Для начала заслонку закроем. Это будет соответствовать состоянию электрической цепи при запертой лампе. Вода через трубу протекать не может, и манометры, установленные до и после сужения, покажут одинаковые давления. Откроем заслонку полностью. Теперь наша модель отображает поведение электрической цепи при открытой до предела лампе. Если отверстие, перекрываемое заслонкой, очень велико по сравнению с размером сужения, то манометр, стоящий перед заслонкой, покажет давление, весьма близкое к нулю. Плавно закрывая заслонку, увидим, что столб жидкости, отмечающий своим уровнем величину давления, также плавно поднимается, пока не достигает наибольшего уровня. Если теперь заставить заслонку периодически подыматься и опускаться, то колебания столба жидкости в манометре будут зависеть от движения заслонки.
Аналогично протекает процесс и в электрической цепи. Колебания напряжения на сетке, открывающие или закрывающие лампу, будут повторены колебаниями напряжения на анодной нагрузке, но с многократно усиленным размахом. Таким образом, электронная лампа осуществляет усиление электрического сигнала. Но есть и существенные различия в поведении цепи с электронной лампой и ее гидравлического аналога.
Во-первых, внутреннее сопротивление лампы не может быть равным нулю, даже при отсутствии отрицательного напряжения на сетке. Значит, нулевой потенциал на аноде недостижим и возможный размах колебаний напряжения сужается. Анодный потенциал будет всегда меньше э. д. с. анодной батареи. Размах изменений анодного напряжения сильно зависит от правильного подбора соотношения величин /?, и /?а’
Во-вторых, необходимо учитывать то обстоятельство, что изменения анодного напряжения также влияют и на величину анодного тока. Увеличив с помощью сетки ток через лампу и сопротивление нагрузки, мы снизим напряжение на аноде. А снижение напряжения на аноде, в свою очередь, вызовет уменьшение тока. Значит, при наличии сопротивления нагрузки анод начинает мешать управляющему действию сетки. Но это не очень страшно. Влияние сетки во много раз больше, чем анода. Поэтому, хотя анодная нагрузка несколько и уменьшает коэффициент усиления, лампа все равно сохранит способность усиливать сигналы.
72 Имеется и третье существенное отличие. Как раз благодаря
ему электроника и стала такой всемогущей. На перемещение заслонки надо обязательно затрачивать изрядную мощность, а на управление лампой — почти нет. Действительно, при отрицательных потенциалах сетки ток в ее цепи отсутствует, значит и мощность, развиваемая в этой цепи, равна нулю, так как мощность определяется произведением напряжения на силу тока. Можно сказать, что сигнал изменяет напряжение на сетке, но не расходует своей энергии на управление электрическим током. На самом деле это не совсем так — некоторая мощность в сеточной цепи все-таки расходуется. Но она ничтожно мала и не может идти ни в какое сравнение с мощностями, нужными для управления механическими заслонками. Кроме того, любая механическая система обладает инерцией, а нам известно, что чем быстрее требуется изменять скорость движения тела, тем большую силу требуется приложить для преодоления его инерции.
Поэтому механические системы не могут передавать быстропеременные процессы. А электронные лампы могут! Напряжение сигнала на сетке способно изменяться с частотой в десятки и даже сотни миллионов раз в секунду, и управление анодным током не нарушится. Электронные устройства практически безынерционны. Конечно, это не означает, что в электронике нарушаются основные законы природы — просто инерционность электронных приборов настолько мала, что проявляется только в области очень высоких частот. Во всяком случае, подводя итоги, мы можем с уверенностью сказать, что при сравнении электронной и гидравлической систем преимущества явно на стороне электроники.
Мы убедились в усилительной способности электронных ламп пока на единственном примере триода. Но это самый старый по возрасту и самый простой по конструкции член династии электронных ламп, которая сейчас довольно обширна.
Следующим по сложности ее представителем является тетрод. В этой лампе имеется четвертый электрод — экранирующая сетка. Она устанавливается в промежутке между управляющей сеткой и анодом и к ней прикладывается положительный потенциал, несколько меньший по величине, чем потенциал анода. Потенциал экранирующей сетки стараются поддерживать неизменным при работе лампы.
Зачем нужна эта дополнительная сетка? Если бы мы исследовали тетрод так же, как сделали это для триода, то сразу
обнаружили бы, что изменения анодного напряжения у тетрода почти не влияют на величину анодного тока. Линии анодной характеристики вытянутся почти параллельно оси напряжений. Но управляющая сетка по-прежнему энергично регулирует анодный ток. Отсюда ясно, что коэффициент усиления тетрода может быть значительно больше, чем у триода. Это важное преимущество. Кроме того, имеются и другие достоинства, которые помогают тетроду более успешно работать в области высоких частот, но мы пока их рассматривать не будем.
К сожалению, при всех своих преимуществах тетрод имеет и существенный недостаток. Его анод обладает очень большим самомнением и не переносит ни малейшего унижения. Пока напряжение на аноде выше, чем на экранирующей сетке,— все обстоит благополучно. Но стоит аноду оказаться на потенциальной лестнице ниже экранирующей сетки, он устраивает форменный бунт. Вместо того, чтобы старательно собирать на себе все летящие с катода электроны, он начинает выбрасывать их сам. Выброшенные анодом электроны, естественно, выбирают путь к электроду с наибольшим положительным потенциалом и устремляются к экранирующей сетке. В лампе появляется второй ток, направленный противоположно анодному току. Токи вычитаются, и на характеристике возникает провал.
Откуда же берутся у холодного анода собственные электроны? Ведь он не подогревается, как катод, и не сделан из специального материала, легко испускающего электроны. Оказывается, существует еще одна разновидность электронной эмиссии, очень напоминающая явление, которое происходит при ударе быстро летящей капли о поверхность воды. При этом зачастую от места удара вылетают в разные стороны десятки новых капель — брызг. Точно так же и электрон, «врезавшийся» с разбегу в поверхность анода, способен выбить несколько других электронов, которые и не помышляли покинуть свое насиженное гнездо. Это явление вылета из анода вторичных электронов называется динатронным эффектом и по сути не отличается от катодной эмиссии, только здесь необходимая подвижность сообщается электронам не за счет тепла или света, а за счет энергии удара.
Пока анод обладает самым большим положительным потенциалом среди всех электродов в лампе, он легко справляется с беглецами. Им некуда деваться и они притягиваются 74 обратно к аноду, так же как брызги падают обратно на поверх-
ность воды. Положение резко меняется, если потенциал экранирующей сетки выше анодного. Теперь аноду нечем удерживать бегущие электроны, и они послушно мчатся к новому хозяину— экранирующей сетке.
Надо было как-то попытаться помочь ограбленному аноду. Для этого между ним и экранирующей сеткой лампы поставили еще одну сетку. Так родился новый наследник ламповой династии — пентод. Дополнительную сетку назвали защитной или антидинатронной. Она очень реденькая и даже если к ней приложен потенциал, близкий к нулю,— не в силах задержать электроны, молниеносно мчащиеся от катода к аноду. Скорости у них нешуточные — порядка 10->20 тысяч километров в секунду. Поэтому защитная сетка и не мешает прохождению прямого анодного тока. А с медленными электронами, выбитыми из анода, она справляется довольно легко и отталкивает их обратно к аноду. Кроме того, наличие второй сетки с постоянным потенциалом еще заметнее уменьшает влияние анодного напряжения на ток, а следовательно, еще больше возрастает коэффициент усиления лампы. И, действительно, построить триод с коэффициентом усиления даже больше ста очень трудно, в пентодах же его значение легко доводится до нескольких тысяч.
Пентод — наиболее совершенная лампа в электронной династии. Дальнейшее усложнение ее конструкции, по-видимому, нецелесообразно. Правда, существуют лампы с большим числом электродов в баллоне, но они либо предназначены для выполнения специальных операций (например, преобразователи частоты — пентагриды), либо представляют собой комбинацию из нескольких отдельных ламп. Такие комбинированные лампы применяются довольно часто, так как позволяют уменьшить габариты аппаратуры. Типичными представителями их являются лампы-близнецы — двойные диоды и триоды или смешанные лампы — диод-триоды, диод-пентоды и т. д.
Для нас очень важно понять, что при всем разнообразии конструкций, параметров и свойств электронных усилительных ламп принцип их действия, по существу, не отличается от рассмотренного нами на примере триода.
Все электронные лампы, о которых мы до сих пор рассказывали,— очень изнеженные особы и могут нормально действовать только в вакууме, т. е. если из их баллонов изгнаны посторонние молекулы. Но существует вторая династия
электронных триборов, в которых молекулы газа не только не изгоняются из междуэлектронного пространства, а наоборот, являются зваными гостями. Это — баллоны, наполненные разреженным газом или, как их еще называют, ионные приборы.
В этих приборах происходят то и дело столкновения электронов с молекулами газа. Пока электроны движутся не очень быстро, вся молекулярно-электронная толпа ведет себя сравнительно корректно. Электроны пробивают путь к аноду по самым замысловатым траекториям, лишь слегка отталкивая в стороны молекулы. Конечно, рассчитывать на то, что электроны быстро доберутся до анода, не приходится — слишком много приключений в дороге. Но внутри лампы жизнь течет спокойно.
Обстановка резко меняется, если скорость электронов под влиянием приложенного электрического поля превысит некоторую определенную величину. Электрон теперь не просто толкает, а сшибает с ног молекулу, разбивая ее на две части. Одна часть состоит из электрона (или электронов данной молекулы), а вторая — это ее остаток, ставший положительно заряженным ионола. От места столкновения подгоняемые электрическим полем помчатся дальше уже не один, а несколько электронов. Набрав необходимую скорость, каждый из них, в свою очередь, приобретает способность раскалывать встречную молекулу. Количество электронов и ионов внутри лампы все нарастает и нарастает. Ионы почти не участвуют в этих гонках — они слишком тяжелые: масса иона, по меньшей мере, в 1800 с лишним раз больше массы электрона.
Итак, электронов оказывается много больше, чем было первоначально испущено катодом, следовательно и образованный их движением электрический ток тоже будет большим. Это свойство ионных приборов является их достоинством. Но они не лишены и недостатков. Главный недостаток состоит в том, что мы пока не умеем управлять процессом размножения электронов и ионов. Начало его можно задержать или ускорить путем изменения напряжения на электродах. Но если процесс начался, он выходит из-под контроля. Единственное, что остается— полностью отключить электрическое напряжение от электродов и дать время на успокоение разбушевавшейся толпы заряженных частиц. После этого все можно повторить сначала.
Время успокоения или, как его называют, время деиониза-76 ции не так уж мало по масштабам электроники: немногим
меньше тысячной доли секунды. Это значит, что ионные приборы не способны преобразовывать быстропеременные сигналы, т. е. они обладают значительно большей инерционностью, чем вакуумные лампы. Кроме того, они не умеют плавно управлять ламповым током. В большинстве схем электроники поэтому нельзя заменить вакуумные лампы газонаполненными. Ионные приборы преимущественно применяются для выпрямления довольно сильных переменных токов, стабилизации электрических напряжений и еще для некоторых специальных целей.
Мы познакомились с электронными приборами, в которых рабочей средой является либо вакуум, либо разреженный газ. А нельзя ли в качестве рабочей среды применить твердые тела?
Наверное нельзя! — ответите вы сразу. Ведь газы, особенно разреженные, по сравнению с твердыми телами просто пустыня рядом с дремучим лесом. Молекулы в твердых телах упакованы в миллиарды раз плотнее, чем в остатках газов, заполняющих баллоны электронных ламп. Если представить, что в твердом теле молекулы расположены так же тесно, как деревья в лесу, то, чтобы сделать такую же модель для разреженного газа, на всей площади сибирской тайги придется оставить всего лишь несколько отдельных деревьев. Вряд ли можно заполнить пространство между электродами твердым материалом и вообще избавиться от вакуума и газов. Действительно, так думали очень долго — во всяком случае, дольше, чем полжизни современной электроники.
Но оказалось, что это неверно.
Веществ в твердом состоянии на земле очень много— КРИСТАЛЛЫ больше, чем газов и жидкостей. Что же касается вакуума, то его ПРИШЛИ и вовсе не существует на планете Земля. Вакуум приходится g создавать искусственным путем, но даже при всех стараниях он электронику получается далеко не абсолютным. Во всех этих состояниях разница в плотности заполнения пространства атомами колоссальна.
В одном кубическом сантиметре газа при нормальном давлении находится такое количество атомов, которое можно записать лишь числом с двадцатью нулями (1020). При переходе газа в жидкое состояние плотность заполнения объема атомами увеличивается в среднем в тысячу раз. А в самых лучших образцах вакуумных ламп после откачки из них воздуха каждый 77
кубический сантиметр объема все еще содержит количество атомов, записываемое цифрой с десятью нулями (1010).
Различие в атомной плотности жидкостей и твердых тел невелико. Но твердые тела принципиально отличаются и от жидкостей, и от газов по своей физической структуре. Точнее говоря, у жидкостей и газов структуры вообще не имеется — они представляют собой неорганизованную толпу молекул, мечущихся в любых направлениях и сталкивающихся друг с другом. Иное дело в большинстве твердых тел. Здесь наведен строжайший порядок — удивительная архитектура атомных построек. Такие тела называются кристаллическими. Исключение представляют некоторые твердые вещества, подобные стеклу, не имеющие определенной структуры. Им присвоено специальное название — аморфные (бесформенные).
Кристаллы вначале робко проникли в электронику, а затем обосновали там целое государство. Давайте совершим туристическое путешествие в эту воображаемую страну СК (Союз Кристаллов) и запасемся своеобразной «географической картой» (рис. 11). Как видно из нее, Государство СК делится на несколько областей, каждая из которых заселена кристаллами со сходными свойствами (это деление, конечно, условно. Нас, на-
It . \i 1ретья оо I | [I * I и । । । определивши^ || * I Л . I бы и не про-
II ft |Г" ' | * • нельзя сказа-Г * |1| I склонность. К
пример, интересует поведение кристаллов по отношению к электрическому току; химик или кристаллограф могли бы предложить и другие принципы деления).
Одна из областей заселена кристаллами, которые терпеть не могут электрического тока. Это — область изоляторов.
Население другой области, наоборот, про-сто обожает электрический ток. Это — об-Г Л ласть проводников.
* Третья область населена жителями с не-
определившимися склонностями. Они вроде противники электрического тока, но сказать, что и питают к нему явную Кроме того, их отношение к электрическому току очень зависит от настроения, а настроение, в свою очередь, от различных причин, например от погоды. Стало теплее — и житель этой области переселяется поближе к проводникам.
Рис. 11. «Государство Союза Кристаллов» (СК).
В зимние морозы он вероломно переходит в лагерь изоляторов. Это — область полупроводников.
В каждой области множество районов, заселенных одинаковыми по структуре и химическому составу кристаллами. Районы не похожи друг на друга — всегда найдется какое-нибудь различие в архитектурном стиле построек или в типе отдельных кирпичиков-атомов. Так что, пользуясь хорошим путеводителем, мы не заблудимся и не перепутаем районы. А вот внутри района нам уже не поможет никакая карта. Отдельные домики—ячейки кристалла — абсолютно подобны друг другу. Составленные из них кварталы — тоже. Города и поселки отличаются только размерами, и найти в них определенную ячейку кристалла по какому-то определенному признаку невозможно.
Но что это? В государстве неизменно повторяющихся геометрических структур появилось нарушение. Наверняка, любопытная достопримечательность, которую стоит осмотреть туристам. Ведь даже самое небольшое отклонение среди изумительного порядка кристаллических городов выглядит так же странно, как выглядел бы индейский вигвам в шеренге домов, расположенных вдоль Ленинского проспекта в Москве. Гид любезно разъясняет, что в этом месте поселились атомы (или атом) другой породы. Это атомы примеси. Их очень немного — обычно единицы на миллиард законных жителей кристалла. Но какие чудесные и поистине неожиданные свойства могут придать примеси кристаллу!
Атомы примеси крепко сцепляются с атомами основы и образуют с окружающими ячейками почти такие же химические связи, как и все остальные. Поэтому примесям и удалось поселиться в кристаллическом городе, не вызывая особого возмущения. То, что пришелец оказался не совсем такой же, выяснилось слишком поздно. В его постройке либо не хватает одной стенки, либо есть лишняя. Как его ни ставь — безупречного контакта с соседними участками не получается. Но прописка уже дана и обратно ее не возьмешь.
Архитектура кристаллических городов зависит от сорта населяющих их атомов и отличается большим разнообразием форм. Однако же все города осмотреть за время нашего краткого путешествия не удастся.
Ограничимся одним типичным районом, занятым германием. 80 Он имеет четыре электрона во внешней оболочке. При строи-
Сложный электронный блок меньше почтовой марки.
Целая радиостанция в кармане.
Электронные схемы можно печатать, как газету (фирма «Сторно», Дания).
Штыревая антенна УКВ передатчика.
тельстве кристаллического города «Германий», очевидно, было внесено рационализаторское предложение, сэкономившее уйму стройматериалов: в этом городе нет домов, у которых стены были бы собственностью только одного владельца. Вот так следовало бы автолюбителям построить себе рядом два гаража с одной общей стенкой. Очевидно, очень разумно, чтобы каждый владелец построил только половину ее. Атомы германия применили этот деловой принцип для всех четырех стен: каждый из них отдал на строительство общей стены по одному электрону. Образовались четыре парные связи, которые называются ковалентными. Правда, германий — полупроводник и строит стены не очень капитально. Станет его атому жарко, и он довольно бесцеременно устраивает для себя вентиляцию, выбрасывает полстены — один электрон. Бездомный стройматериал кочует среди глухих стен кристаллического города, пока не найдет другой атом, выбросивший полстены раньше. Хозяин к этому времени уже освежился и с радостью принимает свалившийся с неба стройматериал для восстановления стенки. Среди огромного населения кристаллических городов находится не так уж мало любителей свежего воздуха. Поэтому в полупроводниках всегда есть кочующие электроны, причем, чем выше температура, тем их больше. Если соответственно упорядочить движение этих кочевников, то они будут способны проводить электрический ток.
Вообще говоря, такое свойство мы могли бы наблюдать и в городах, находящихся в области изоляторов, но там атомы весьма неохотно выбрасывают свои электроны и поэтому их всегда мало. Видимо, жители изоляторной области стоически переносят жару, упорно не желая открывать отдушины в стенах. Что же касается области проводников, то там живут закаленные спортсмены — свободных электронов проводимости всегда хватает.
Способность вещества проводить электрический ток за счет электронов, оторванных от основных атомов кристалла, называется собственной проводимостью. Но бывает и другой вид проводимости. Он появляется в тех случаях, когда в кристалле присутствует упомянутая нами чужеродная примесь. Интересно посмотреть, как же ухитряется приживаться инородный пришелец среди аборигенов?
Подойдем к тому месту жилища германия, куда самовольно вселился атом мышьяка, имеющий пять внешних электронов.
6 Ю. Д. Пахтанов, В. И. Соловьёв
Четыре стенки он строит, как и германий, а вот пятый электрон уже сразу оказывается лишним. Германиевый кристалл, в котором поселились атомы мышьяка, будет иметь много свободных электронов. Поскольку они появились за счет примеси, то и создаваемая ими проводимость носит название примесной. Полупроводники с такой примесью называют электронными или полупроводниками типа п (от английского слова negativ— отрицательный), так как электроны являются носителями отрицательных зарядов.
Может ли быть в кристаллах какой-нибудь другой вид проводимости? Положительные ионы двигаться не могут — они крепко держатся в узлах кристаллической решетки. И все-таки еще один вид примесной проводимости существует.
Осмотрим участок, где поселился атом индия. Он имеет во внешней оболочке только три электрона — одна стенка сразу же оказывается недостроенной. Такие незаполненные связи в кристалле называются дырками. Оказывается, что дырки — места, где нет электрического заряда,— тоже способны проводить электрический ток и при этом преисполнены такого достоинства, как будто они являются носителями настоящих положительных зарядов.
Представьте узкий и длинный гараж, в котором автомашины могут стоять только в один ряд — одна за другой. Если с одного конца этого гаража машина выехала, то что нужно сделать, чтобы машина, ожидающая у другого конца, могла бы въехать в гараж? Выход один: поочередно передвигать все машины на освобождающееся место. В конце этой операции освободится место на въезде. Таким образом, незанятое место отсутствующей машины «пропутешествовало» вдоль всего гаража. Эта модель, конечно, очень упрощенно отображает поведение «дырки» при перемещении электронов в полупроводниковом кристалле. Через кристалл с дырочной проводимостью протекает вполне реальный электронный поток, а обеспечившие передвижение электронов «дырки» движутся навстречу этому потоку.
Таким образом, здесь протекает вполне реальный электрический ток, хотя в кристалле и нет свободных электронов, а есть только места с их отсутствием. Этот вид примесной проводимости называется «дырочной», а кристалл — полупроводником типа р от английского слова positiv— положительный. В итоге, «дырки» двигаются в электрическом поле от положительного 82 к отрицательному полюсу, а весь кристалл ведет себя таким
образом, словно в нем имеются положительно заряженные
частицы.
Открытие разных видов проводимости и оказалось тем решающим шагом, который привел кристаллы в электронику. В электронной лампе вакуум может тоже служить и прекрасным изолятором, если не подбрасывать в него электроны, и провод
ником электрического тока, когда электроны в нем появляются. Любая электронная лампа схожа с многослойным бутербродом, состоящим из сред с разными физическими свойствами. Поэтому долго и не удавалось создать подобный прибор из кристаллов, так как предполагалось, что существует только один сорт материалов с подходящими свойствами — кристаллы с электронной проводимостью. После открытия другого типа проводимости в кристаллах стал возможным и настоящий электронный бутерброд. Так родилась полупроводниковая элек-
а)
Р_______________1
© ф® I®1©® 11 j ।1 li''i *
© ©_,©©_ ® ® ©© © © ® ©1© ®© 1© 111®1 I1/?
ф дырка
- электрон
Рис. 12. Схема работы полупроводникового р — л-перехода.
троника.
Теперь попробуем разобраться, как жители государства СК трудятся в электронном хозяйстве.
Самый простой полупроводниковый прибор будет построен, если взять два кусочка полупроводника с разными типами проводимости и плотно притереть их друг к другу. Получится кристаллический полупроводниковый диод. С одной стороны, в нем имеется зона, обладающая проводимостью типа п, а с другой — типа р. Поскольку в одной половине объема электронов больше, чем в другой, на границе возникает разность электрических потенциалов— потенциальный барьер (рис. 12, а). Такой барьер существует на каждой границе между двумя разнотипными
зонами. Пограничный участок называют р—п- или п—p-переходом.
Этот переход обладает весьма интересными свойствами. Присоединим к нашему прибору электрическую батарею. Пусть сначала положительный полюс батареи подключен к зоне p-типа Тогда электрическое поле начнет толкать «дырки» в сторону перехода, а навстречу им от минуса батареи устремятся электроны. Через переход будет протекать электрический ток. Такое подключение прибора называют прямым или проводящим (рис. 12, б).
Переменим полярность, приложив к p-зоне минус электрической батареи. В этом случае «дырки» оттянутся от перехода. Электроны с другой стороны — тоже. В области перехода станет очень мало свободных носителей заряда. А мы знаем, что вещество при отсутствии их приобретает свойства изолятора. Ток через переход проходить не сможет. Такое подключение р—л-перехода называют обратным или непроводящим (рис. 12, в).
Наш простенький приборчик, состоящий из двух сортов полупроводникового кристалла, приобрел все свойства диода: он способен выпрямлять переменный ток подобно вакуумному диоду. Но кристаллический диод много проще по своей конструкции. Его размеры, при тех же величинах пропускаемого тока, в десятки и сотни раз меньше, чем у вакуумных диодов. Кроме того, его не так легко разбить, как стеклянный баллон лампы, и работать он может значительно дольше.
Есть и еще одно, совсем немаловажное, обстоятельство, заключающееся в том, что в полупроводниковых приборах не нужно «делать» свободные электроны. В вакуумных приборах без этого не обойтись, а в полупроводниках носители электрических зарядов существуют сами по себе. Значит, кристаллические приборы не нуждаются в расходе энергии на подогрев катодов. Это большая экономия. Казалось бы, одна вакуумная лампа требует не так уж много энергии на подогрев катода — в среднем несколько ватт. Но в современных сложных электронных устройствах, состоящих из множества ламп, потребление энергии может достигать десятков киловатт и даже больше. Кроме того, на разогрев катода нужно время, а полупроводниковый прибор готов к работе мгновенно после включения. Как видите, чужеземцы из страны кристаллов обладают исключи-84 тельными достоинствами.
Но способны ли кристаллы усиливать сигналы? Ведь, в конце концов, способность к усилению — это главное, что требует электроника от новых родственников. Да, кристаллы умеют делать и это, не уступая ничуть законным отпрыскам ламповой династии.
Кристаллический прибор — транзистор по своим свойствам аналогичен триоду, ввиду чего его часто так и величают: кристаллический или полупроводниковый триод. Он очень молод — родился в 1948 году. Правда, еще значительно раньше (в 1922—1927 гг.) русскому изобретателю О. В. Лосеву удалось получить эффект усиления на кристаллах цинковой обманки. Но в то время никто даже не представлял, какая стерильная чистота химических элементов нужна для того, чтобы успешно строить такие приборы, да она была тогда и неосуществима, поэтому практического применения и развития изобретение не получило. Заслуга создания современного транзистора принадлежит американским ученым (Шокли и др.), которые были отмечены за это Нобелевской премией.
В транзисторе, как и в вакуумном триоде, должна быть дополнительная цепь для подачи управляющего сигнала. Если кристаллический диод характеризуется двумя слоями полупроводника с разными типами проводимости, то транзистор трехслоен. По краям «бутерброда» располагаются зоны с одинаковым типом проводимости. При этом условии возможны два варианта расположения слоев: п—р—п и р—п—р.
Транзистор, по сути дела, состоит из двух диодов, которые имеют одну общую половину (рис. 13, а). Эта общая часть транзистора называется базой (Б). Два слоя, прилегающие к базе, носят названия эмиттер (Э) и коллектор (К). Коллектор включается в электрическую цепь так, чтобы его переход был непроводящим. Например, для транзистора типа р—п—р к базе подводится плюс, а к коллектору — минус. В коллекторной цепи при таком направлении включения ток отсутствует. Но все изменится, если мы подсоединим к источнику питания и эмиттер-ную цепь, причем так, чтобы ее переход был проводящим. Через эмиттерный переход в область базы устремятся дырки. База в транзисторах делается очень тонкой так, что оба перехода— коллектора и эмиттера — располагаются на ничтожно малом расстоянии друг от друга. Поэтому дырки, перешедшие из эмиттера в базу, оказываются, по существу, в зоне коллекторного перехода. Коллекторный переход раньше был
заперт из-за того, что при заданной полярности включения все носители зарядов оттягивались из его рабочей зоны. А теперь здесь появились пришедшие из эмиттера носители зарядов — «дырки», которые энергично притягивает к себе отрицательно заряженный коллектор. В его цепи появляется ток.
Рис. 13. Схема, иллюстрирующая работу транзистора.
Выход
Величина коллекторного тока зависит от количества «дырок», введенных в базу с эмиттера, т. е. от величины тока эмиттера. Значит, изменяя ток эмиттера, можно управлять током, протекающим через коллектор. Получилось устройство, обладающее управляющими свойствами.
А как же с усилением? Очевидно, коллектор способен, в лучшем случае, собрать на себя все носители зарядов, испущенные эмиттером, и. .. не больше? Значит, ток, которым управляют, не может быть больше, чем управляющий ток? Какой же смысл в управлении, которое требует даже больше энергии, чем для непосредственного исполнения нужной операции! Однако мы забыли, что электрическая мощность определяется не только величиной тока, но и напряжением. А напряжения на переходах разные. К эмиттерному переходу, включенному в прямом направлении, достаточно приложить очень маленькое напряжение, чтобы получить большой ток. Коллектор же без внешнего сигнала со стороны эмиттера тока вообще не проводит, и к нему может быть приложено значительное напряжение. Поэтому при одном и том же токе мощности, развиваемые в цепях эмиттера и коллектора, совсем неодинаковы, причем с явным преимуществом в пользу коллектора.
То, что происходит в транзисторе, можно проиллюстрировать такой аналогией. Представьте себе, что некто, желающий освободить свою квартиру, установил на окне одной из комнат, расположенной на третьем этаже, скользящий лоток и спускает по нему всякую домашнюю утварь. Сваливающиеся с конца лотка подушки, тюки, чемоданы и пр. попадают в гравитационное поле Земли и за время полета до ее поверхности накапливают значительную энергию. Энергия, которую должен затратить хозяин квартиры, относительно мала — он всего-навсего выталкивает различные вещи на край лотка. Всю остальную работу сделает гравитационное поле. Совершенно ясно, что падающие предметы смогут накопить тем больше энергии, чем выше расположен этаж, с которого их выбрасывают. Роль такого хозяина в транзисторе выполняет эмиттер. Гравитационное поле в этом случае заменяется электрическим, которое создается разностью потенциалов, приложенных к коллекторному переходу.
Таким образом, трехслойный полупроводниковый кристалл оказывается способным усиливать сигнал по мощности, если даже не происходит усиления тока. Но наш кристалл может усиливать и ток! Для этого его нужно иначе включить в электрическую цепь. В схеме на рис. 13, а транзистор был включен так, что общей точкой для источника сигнала и источника питания коллектора оказывалась база, потенциал которой всегда оставался неизменным при любых изменениях на
коллекторе и эмиттере. Такая «мертвая» общая потенциальная точка имеется в любой электронной схеме. Очень часто ее по традиции называют «заземленной» и даже рисуют на схемах рядом символ заземления. Не следует принимать это буквально-современная электроника редко нуждается в реальном заземлении.
Но вернемся к транзистору и попробуем поменять местами эмиттер и базу. Теперь эмиттер окажется общим электродом, а сигнал придется подавать на базу (рис. 13, б). Можно ли так поступать? А почему бы и нет? Эмиттер подает в базу носители, если его электрический потенциал выше, чем у базы (для транзисторов типа р—п—р). В новой схеме включения эмиттер всегда имеет нулевой потенциал. Значит, для сохранения нужных условий достаточно подавать на базу сигналы отрицательной полярности и картина как будто останется прежней. А может быть, в ней что-то изменилось?
Посмотрим повнимательнее на схему (рис. 13, б). Единственный электрод, способный снабжать базу носителями,— эмиттер. Но выхода базы эти носители почти никогда не достигают, так как их перехватывает по пути коллектор. Ток эмиттера разделяется в области базы на два потока. Один поток бодро устремляется в коллектор, а второй — скорее не поток, а жалкая струйка — с трудом добирается до вывода базы. Кроме этой струйки больше ничего и не проходит по цепи управляющего сигнала, замкнутой через базу. Источник сигнала, в этом случае, управляя транзистором, отдает ток, во много раз меньший, чем ток, протекающий через коллектор. Следовательно, получилось усиление по току.
В этой схеме включения транзистора, как и в предыдущем варианте (рис. 13, а), величина тока коллектора определяется разностью потенциалов на переходе эмиттер — база. Но если раньше забота о пропитании коллектора носителями зарядов возлагалась на источник сигнала, то теперь эти обязанности почти полностью переданы батарее, питающей цепь коллектора. В схеме с общим эмиттером база приобретает свойства управляющей сетки в электронных лампах. Она успешно руководит усилением, но сама почти ничего не делает.
У разных вариантов включения транзисторов в цепь есть свои достоинства и недостатки. О них мы подробно поговорим в дальнейшем, а пока продолжим знакомство с другими талан-88 тами пришельцев из Государства Кристаллов.
Итак, транзистор обладает способностью к усилению сигналов и по току, и по мощности. Отсюда остается один шаг до возможности усиления по напряжению. Поступая точно так же, как и в схемах с вакуумными электронными лампами, включим в одну из цепей транзистора сопротивление нагрузки. В лампах оно включалось в цепь анода, который собирал на себя управляемый электронный поток. Коллектор в транзисторах выполняет эти же функции. Значит, место сопротивления нагрузки должно быть как раз в коллекторной цепи. Сопротивление запертого коллекторного перехода довольно велико, и поэтому транзистор легко переносит присутствие в цепи коллектора нагрузки с большим электрическим сопротивлением. А на большом сопротивлении даже маленькие изменения тока вызовут значительные колебания падения напряжения. Получится транзисторный усилитель напряжения.
Для транзистора можно построить семейства характеристик, пользуясь знакомыми приемами по исследованиям вакуумных триодов. На рис. 14 представлены входная (а) и выходная (б) характеристики маломощного транзистора. Коллекторная характеристика, как и следовало ожидать, представляет зависимость тока коллектора/к от его напряжения t7K при нескольких фиксированных значениях напряжения на базе
Однако мы слишком увлеклись аналогиями. Для вакуумного триода задание фиксированных значений напряжения сетки давало исчерпывающую характеристику лампы (ведь сеточного тока в триодах практически не бывает). Но в цепи базы транзистора при любом значении сигнала, открывающего переход, обязательно будет протекать ток. По-видимому, у нас не было основания для того, чтобы при построении характеристики задаваться фиксированными значениями именно напряжения на базе U(y, а не тока /к, так как обе эти величины равноправны. Значит, безразлично, на какую из них опираться.
Действительно, всякое изменение напряжения, которое приложено к сопротивлению перехода база — эмиттер, вызовет пропорциональное изменение тока. Поэтому характеристики, снятые при фиксированных значениях тока базы, должны быть точно подобны характеристикам, снятым при фиксированных напряжениях на ней. Различие будет, по всей вероятности, только в масштабах.
Проверим наш вывод. Если мы нанесем на тот же график (рис. 14, б) линии коллекторных характеристик при фиксированных
значениях токов, то ожидаемого подобия не окажется. Но почему? Предсказывая этот факт, мы опирались на незыблемый закон Ома! Загадка оказывается в том, что сопротивление перехода база — эмиттер непостоянно, а всякое изменение режима коллекторного перехода немедленно отзывается на поведении базы или эмиттера.
Это для нас нечто новое. Знакомясь с электронными вакуумными лампами, мы привыкли к более солидному их поведе-
Рис. 14. Характеристики маломощного транзистора П19: а — входная; б — выходная.
нию. Там свойства сеточной цепи практически не зависели от поведения анода. К сожалению, «это еще цветочки, а ягодки будут впереди». Чтобы подружиться с транзисторами, нам следует отказаться от многих привычек, выработанных при общении с вакуумными лампами. Все параметры транзистора, а их больше, чем у вакуумных ламп, крепко связаны друг с другом. Поэтому теоретический расчет электронных устройств с транзисторами довольно сложен, по крайней мере, настолько, что в этой книге его не придется касаться. Для изучения теории транзисторов необходима основательная подготовка в области электроники, математики, физики. Однако разобраться в принципах работы и способах применения транзисторов на практике можно и здесь.
Прежде всего, уясним необходимые правила, которые надо 90 соблюдать, заменяя транзистором вакуумную лампу.
Транзистор перестает проводить ток через коллекторный переход, когда напряжение на переходе база — эмиттер становится равным нулю. Нулевой потенциал на входе транзистора соответствует напряжению запирания вакуумной лампы. Для того чтобы выбрать рабочую точку где-нибудь в середине характеристики, на транзистор тоже надо подать напряжение смещения, только для вакуумных ламп это напряжение всегда должно быть отрицательным, а для транзисторов это условие не обязательно. Транзисторы типа п—р—п требуют, чтобы напряжение смещения эмиттера было бы отрицательным по отношению к базе, а транзисторы типа р—п—р — наоборот, чтобы оно было положительным. Кроме того, используя схемы с общей базой или с общим эмиттером, можно изменять полярность смещения относительно нуля для транзистора каждого типа. Но существо процесса от этого не меняется.
Можно показать, как происходит преобразование переменного сигнала в транзисторе с помощью графического построения, очень похожего на уже проделанное раньше для триода (см. рис. 8). В этом построении не принимается во внимание снижение напряжения на коллекторе при увеличении тока, которое вызывается наличием нагрузки. Но линии коллекторной характеристики транзистора почти параллельны оси напряжений и похожи на характеристики пентода. Это означает, что изменение напряжения на коллекторе очень мало влияет на величину тока /к, и мы не сделали большой ошибки при построении.
Очень коварным обстоятельством, которое особенно сказывается при соединении нескольких транзисторов в общую схему, является неизбежное потребление их входными цепями электрического тока. В электронных лампах цепь сетки практически не потребляет мощности, и подсоединение ее к источнику сигнала почти не влияет на работу последнего. Транзистор не так бескорыстен и требует от источника сигнала определенной мощности. Поэтому при подаче сигнала от источника с большим внутренним сопротивлением обязательно уменьшается амплитуда этого сигнала. Вступает в действие закон Ома для напряжения U электрической цепи, состоящей из источника электродвижущей силы Е с внутренним сопротивлением Rbh и сопротивлением нагрузки /?п:
1 4-^
Ян 91
т. е. величина U всегда меньше величины Е, за исключением двух случаев, когда /?Вн = 0 или когда RH = оо.
Вопросы согласования сопротивления нагрузки с внутренним сопротивлением вакуумных ламп решаются очень просто, так как нагрузкой для источника сигнала является цепь сетки, а ее сопротивление очень велико.
У транзисторов это не так — их входное сопротивление весьма невелико (от единиц до сотен ом). Соединив последовательно два каскада усиления, можно получить в результате усиление меньше, чем было получено с одного каскада. Поэтому задача согласования внутреннего и нагрузочного сопротивлений в схемах с транзисторами играет первостепенную роль. Мы займемся этим в свое время, а сейчас важно понять принципиальное различие между вакуумными лампами и транзисторами: первые управляются напряжением, а вторые — током.
У транзисторов есть два существенных недостатка. Во-первых, транзисторы не переносят больших изменений температуры: для большинства германиевых транзисторов перепад температуры ограничен интервалом от —40° С до +50—60° С; у вакуумных ламп он значительно шире. Во-вторых, транзисторы уступают вакуумным лампам в способности усиления очень высоких частот. Не следует вместе с тем забывать, что транзисторы еще очень молоды (1948 года рождения) и они непрерывно совершенствуются. Уже в современных электронных системах, для которых крайне важны малые размеры и вес, экономичность, транзисторы почти незаменимы.
Изучая электронные устройства, мы интересовались пока только теми приборами, которые способны усиливать сигналы, т. е. активными элементами электронных схем. Но сами по себе они еще работать не могут. Вспомним: для того чтобы получить усиленный по напряжению сигнал, мы подключаем к лампе сопротивление нагрузки; чтобы обеспечить смещение, ставим сопротивление в катодную цепь и т. д. Очевидно, каждый из таких активных приборов нуждается в целой свите подсобных деталей и других, так называемых, пассивных элементов. Только все вместе, вступая в сложные сочетания, они дают возможность создавать неисчерпаемое разнообразие электронных схем. Прежде чем научиться собирать их, нужно обязательно познакомиться с этими деталями, с помощью которых 92 строится схема любого электронного устройства.
Электроника, как видно, была первой отраслью техники, СТРОИТЕЛЬНЫЕ освоившей метод строительства сложных сооружений из огра- ДЕТАЛИ ниченного набора стандартных деталей. История развития элек- ЭЛЕКТРОНИКИ троники убедительно доказывает, что при умелом использовании этого метода возможности образования самых разнообразных систем с самыми различными свойствами практически безграничны. Строителям жилых и индустриальных зданий неплохо бы поучиться у электроники в этом отношении. Тогда нам не грозила бы опасность заблудиться в своем собственном микрорайоне среди, порой, унылых однообразных строений...
Современная электроника уже не удовлетворяется простым применением набора стандартных деталей и элементов, а смело вводит в свои конструкции целые типовые комплексы, состоящие из многих деталей. Каждый такой комплекс — узел электронной схемы — способен самостоятельно выполнять какую-нибудь определенную операцию: усиление или генерирование электрических сигналов, преобразование формы сигнала или его частоты и т. д. Применяя полупроводниковую технику и печатный монтаж,* удается свести геометрические размеры каждого узла до таких величин, что в один кубический сантиметр объема вмещается несколько самостоятельных узлов. Так, сложный электронный прибор может уместиться буквально в наперстке. Некоторые образцы современной электронной аппаратуры показаны далее на фотографиях.
Сверхминиатюрные узлы электронных схем называются микромодулями. Их электрические выводы располагаются в строгом порядке так, что складывая микромодули, как детские кубики, удается образовать единую электрическую схему без всяких паек и дополнительных проводов. За этой изумительной простотой лежит мир сложнейшей технологии производства, мир такой точности и стерильной чистоты
* Печатный монтаж — изготовление монтажных проводов радиоаппаратуры способом металлизации поверхности платы (основание из изоляционного материала, на котором монтируется аппаратура) в соответствии с конфигурацией схемы.
п
ЮТРО гагакл
обработки, по сравнению с которыми образцовые аптечные и больничные условия могут вызвать только снисходительную улыбку. Однако все эти тончайшие устройства состоят из элементов, использующих те же физические принципы, что и более грубые конструкции. Соотношение между схемами, составленными из микромодулей или из обычных радиодеталей, примерно такое же, как у осей железнодорожных вагонов и осей часового механизма — принцип действия одинаков, но оформление, мягко говоря, разное. Поэтому мы ничего не потеряем, изучая интересующие нас строительные детали на примерах обычных по размерам электронных схем и обойдемся без микроскопа. ..
Как уже вскользь упоминалось выше, элементы, из которых строятся электронные схемы, разделяются на активные и пассивные. К активным элементам относятся устройства, способные увеличивать мощность поступившего сигнала. Конечно, дополнительная мощность создается за счет энергии источников питания прибора. С представителями группы активных элементов мы уже знакомы. Это усилительные электронные лампы и транзисторы.
Вторая группа, состоящая из пассивных элементов, более многочисленна, но все ее члены характеризуются общим свойством: добавлять энергию к поступившему сигналу они не могут. Зато пассивные элементы способны проделывать с поступившим сигналом самые разнообразные фокусы. Например, они могут выступать в роли хирургов и отрезать от сигнала положительную или отрицательную части — полностью или только небольшие кусочки их, делать из длинного импульса короткий или, наоборот, вытягивать короткий электрический всплеск в длинную покатую горку и т. п. Некоторые пассивные элементы способны даже во много раз увеличить напряжение сигнала, однако при этом во столько же раз уменьшится сила тока так, что мощность сигнала останется прежней. Пассивные элементы при соответствующем их сочетании могут осуществлять и сортировку сигналов, выделяя сигналы с определенными свойствами (с заданной частотой, фазой или амплитудой). Пожалуй, не совсем справедливо отводить пассивным элементам в электронных схемах вспомогательную роль. Они непременные участники всех чудес электроники и с ними стоит познакомиться подробнее.
Простейшими и очень распространенными представителями 94 группы пассивных элементов являются активные сопротивления.
Они обладают одним единственным свойством — мешать протеканию электрического тока. Такая, на первый взгляд, отрицательная способность оказывает неоценимую услугу и очень широко используется в технике. Достаточно вспомнить обычную электрическую плитку, в которой тепло создается именно за счет сопротивления спирали.
Все электронные устройства не могут обходиться без помощи активных сопротивлений: то они выполняют обязанности анодной нагрузки, на которой выделяется усиленный сигнал, то трудятся над созданием потенциала смещения сетки, то регулируют напряжение на электродах ламп и т. д. Во всех многочисленных случаях этих разнообразнейших применений строго соблюдается закон Ома: напряжение между концами сопротивления равно произведению протекающего через него тока на величину этого сопротивления, т. е. U = IR (U — в вольтах, / — в амперах, R— в омах).
В электронике чаще всего сила тока измеряется в миллиамперах (ма). Поэтому величину сопротивления целесообразно измерять в килоомах (ком), так как при этом результат вычислений по приведенной выше формуле, выражающей закон Ома, остается правильным и по-прежнему выражается в вольтах.
Соединив последовательно пару и более сопротивлений и включив их между полюсами источника э. д. с., получим делитель электрического напряжения. Изменяя относительные величины сопротивлений, образующих последовательную цепочку, можно получить в точках соединений между ними любое значение электрического потенциала от нуля до наибольшего (максимального) напряжения, которое способен создать данный источник э. д. с. на концах цепочки. Получается потенциальная лестница с целым рядом ступенек.
Во многих случаях желательно изменять напряжение не скачками, а плавно. Для этого служат переменные сопротивления. Фиксированная точка соединения между двумя сопротивлениями определенной величины уже отсутствует, ее функции выполняет движок, который может перемещаться вдоль всей проволочной или ленточной спиральной обмотки с большим электрическим сопротивлением. Та часть общей длины спирали, которая остается с одной стороны движка, образует первое плечо делителя напряжения, а та, что оказывается с другой стороны,— второе. Это тот же делитель, но взаимное соотношение обоих его сопротивлений может изменяться как угодно.
Электрическим сопротивлением, как известно, обладает любой отрезок металлической проволоки, но применять для электронных схем такой материал было бы в большинстве случаев очень неудобно—получились бы слишком громоздкие конструкции. Поэтому преимущественное распространение нашли так называемые мастичные сопротивления, в которых тонкий электропроводящий слой, обладающий большим электрическим сопротивлением, наносится на изолирующую основу в виде трубочки или пластинки. Проволочная намотка используется либо для сопротивлений, рассчитанных на большие мощности, либо если их нужно выполнить очень маленькими по форме. Подобные конструкции используются, когда нужно обеспечить очень большую точность и постоянство величины сопротивления, так как мастичные сопротивления не обладают этими достоинствами.
На рис. 15 показаны основные типы постоянных и переменных активных сопротивлений, применяемых в электронике, и их условные изображения на схемах. Номинальная величина мастичного сопротивления (в омах или комах) указывается на его боковой поверхности вместе с наибольшим значением мощности в ваттах, которую данный тип сопротивления может рассеивать при работе. Зная ток, который будет протекать
10
Рис. 15. Основные типы пассивных элементов электронных схем и их условные изображения.
1 — сопротивление нерегулируемое; 2 — сопротивление регулируемое;
3 — конденсатор нерегулируемый; 4 — конденсатор регулируемый;
5 — конденсатор электролитический; 6 — катушка индуктивности (дроссель без сердечника); 7 — трансформатор без сердечника с переменной связью; 8—* трансформатор с ферромагнитным сердечником;
9 — диод косвенного накала; 10 — диод полупроводниковый.
через это сопротивление, подсчитывают выделяемую на нем мощность по формуле
96
W = I2R вт.
Общий вид рулевых машинок, применяемых на моделях. Машинка с винтовым приводом.
Машинка с соленоидами.
Общий вид некоторых современных реле.
Разъемы для соединения отдельных блоков систем автоматики.
Двигатель со шкивом для перекладки шкотов радиоуправляемой яхты.
По этому значению выбирают соответствующий тип сопротивления, рассчитанного на ближайшую большую величину рассеиваемой мощности.
Все активные сопротивления обладают одним чрезвычайно важным свойством — они в равной мере препятствуют прохождению как постоянного, так и переменного тока. При этом они нагреваются и безвозвратно превращают в тепло часть энергии источника электрического тока.
Существуют электрические сопротивления, свойства которых резко отличаются от свойств активных сопротивлений. Это реактивные сопротивления. Здесь все обстоит совершенно иначе. Во-первых, реактивные сопротивления крайне разборчивы в отношении вида протекающего через них электрического тока. Для них очень существенно — постоянный это или переменный ток, а если переменный, то какой частоты. Во-вторых, мешая прохождению тока, они не отбирают от него ни капли энергии. Мощность на преодоление реактивных сопротивлений не расходуется. Этими, поистине волшебными, качествами обладают простенькие и незаметные элементы — индуктивности и емкости.
Простейшая индуктивность представляет собой обычный проводник, скрученный в спираль, а емкость (электрический конденсатор) — набор из двух или более изолированных друг от друга металлических пластинок. Таким примитивным конструкциям присущи, однако, очень любопытные особенности.
Если по проволочной спирали — катушке индуктивности — пропустить электрический ток, то его сразу же окружит электромагнитное поле. С изменением тока одновременно будет меняться и поле. В этом изменении электромагнитного поля заложена сущность явления электромагнитной индукции.
Пусть рядом расположены два проводника. К одному из них подключен источник тока, а ко второму — нет. Для того, чтобы заметить результаты нашего опыта, необходимо подключить к концам второго проводника чувствительный электроизмерительный прибор — гальванометр. Если сила тока в первом проводнике неизменна, прибор ничего не показывает. Но стоит только попытаться изменить силу тока, как стрелка прибора сдвинется, отмечая появление тока во втором, изолированном от первого, проводнике. Тот же эффект получится, если, не меняя силу тока, двигать проводники, сближая или удаляя их друг от друга. И в том, и в другом случае появление тока во втором проводнике обусловлено изменением электромагнитного 97
7
Ю. Д. Пахтанов, В. И. Соловьёв
поля. Вторичная электродвижущая сила и, следовательно, ток, наведенные в изолированном проводнике благодаря электромагнитной индукции, обладают характерной «неприязнью» по отношению к вызвавшим их изменениям первичных э. д. с. и тока: они всегда пытаются противодействовать им.
Посмотрим, что получается при прохождении тока по спирали. Каждый виток ее находится в электромагнитном поле, создаваемом током, протекающим по соседним виткам. Направление первичного тока во всех рядом расположенных точках соседних витков совпадает. А направление вторичного, индуктированного тока как раз противоположно. Значит, если мы попытаемся увеличить ток через спираль, то индукционный ток будет препятствовать его возрастанию, а при уменьшении первичного тока — тоже препятствовать, но теперь уже снижению величины первичного тока.
Чем больше витков и чем быстрее изменяется первичный ток, тем более энергично препятствует катушка индуктивности прохождению тока. От количества витков катушки зависит величина ее индуктивности L, измеряемая в генри.
Величина индуктивного сопротивления XL зависит не только от индуктивности, но и от скорости изменения тока, которая тем больше, чем выше его частота. Поэтому индуктивное сопротивление рассчитывается по формуле:
XL =2^fLoM,
где L — индуктивность в генри (Н);
f — частота в герцах (гц).
Осталось выяснить еще одно обстоятельство: почему на преодоление индуктивного сопротивления не затрачивается мощности? Ведь, в конце концов, индукционный ток не родился из ничего. На его возбуждение была затрачена определенная мощность при нарастании первичного тока. Вот тут-то полезно вспомнить, что индукция также ожесточенно препятствует и уменьшению тока. При этом в электрическую цепь возвращается ровно столько же энергии, сколько было забрано от источника при увеличении тока. Эту энергию бережно сохраняло электромагнитное поле, окружающее катушку.
Индуктивное сопротивление, кроме того, обладает странной, на первый взгляд, особенностью — разъединять такую дружную пару, как напряжение и ток. Имея дело с постоянным током 98 (или с переменным, но проходящим через активное сопротив
ление), мы привыкли к тому, что величина тока покорно следует за всякими изменениями напряжения. Если для этих случаев начертить график изменения синусоидального электрического напряжения во времени, то соответствующая кривая, изображающая изменения тока, точно повторит первую и расположится прямо на ней (рис. 16, а). Как говорят, напряжение и ток совпадают по фазе. В цепях с индуктивным сопротивлением (рис. 16,6) при прохождении через него переменного тока этого совпадения не получается. Индуктивность настолько энергично сопротивляется изменениям тока, что приложенное к ней напряжение успевает возрасти от нуля до максимума, и только затем в катушке начнет возрастать ток соответствующего направления. Таким образом, ток при прохождении через индуктивное сопротивление отстает по фазе от напряжения ровно на четверть периода, т. е. на 90 электрических градусов. Эта особенность и раскрывает до конца секре
тивление не потребляет мощности. Величина мощности равна произведению напряжения на ток, а в этом случае, когда напряжение наибольшее, ток равен нулю, и наоборот. Кроме того, за один период мощность изменяет знак, чего не случается при совпадении фаз.
Пассивные элементы с индуктивностями очень широко применяются в электронике. Они могут служить переменными сопротивлениями, величина которых зависит от частоты проходящего сигнала, или работать в качестве разделительных или заградительных фильтров, т. е. отделять постоянные токи
пях: а — цепь с активным сопротивлением; б — цепь с индуктивностью; в —
цепь с емкостью.
того, почему индуктивное сопро-
от переменных, или просто запирать вход в некоторые ветви переменным токам.
Пара изолированных катушек, помещенных так, что магнитное поле одной катушки охватывает другую, образуют трансформатор. Это устройство способно повышать или понижать электрическое напряжение — все зависит от соотношения числа витков в первичной и во вторичной катушках. Если во вторичной катушке витков больше, то трансформатор будет повышающим, а если меньше — понижающим. Для того чтобы магнитное поле первой катушки не рассеивалось по сторонам, а полностью дошло до вторичной катушки, обе катушки часто надевают на общий сердечник, изготовленный из материала с большой магнитной проницаемостью (железа, феррита и т. д.). Такой сердечник для магнитного поля действует подобно трубе для воды и направляет магнитный поток по определенному пути, не позволяя ему растекаться. Хотя трансформатор и способен повышать напряжение, он все же остается пассивным элементом: насколько повысится напряжение, настолько же уменьшится ток. Мощность остается неизменной.
У индуктивного сопротивления есть напарник, обладающий прямо противоположным свойством. Это конденсатор — электрическая емкость. В простейшем случае конденсатор представляет собой две металлические пластинки, разделенные изоляционным слоем. Чем больше площадь пластинок и чем меньше расстояние между ними, при одном и том же типе изолятора, тем больше емкость такого конденсатора.
Электрическая цепь, содержащая конденсатор (рис. 16, в), полностью непроницаема для постоянного тока, так как его пластины изолированы и цепь по существу разорвана. Переменный же ток через такую цепь проходит. При каждом изменении полярности приложенного напряжения конденсатор перезаряжается в противоположном направлении и соответствующая порция электрического тока, определяемая величиной емкости, протекает по цепи. Отсюда ясно, что общий ток за период будет тем больше, чем больше емкость конденсатора или чем чаще происходит перезаряд, т. е. чем выше частота.
Емкостное сопротивление Хс определяется по формуле
Хс = —
с 2itfc
где С — емкость конденсатора в фарадах (Ф).
ОМ,
100
Как видно из этой формулы, сопротивление цепи, содержащей емкость, уменьшается с возрастанием частоты — картина, полностью противоположная цепи с индуктивным сопротивлением. Но это еще не все. Если при наличии индуктивности ток отставал от напряжения, то в цепи с конденсатором он будет опережать его по фазе также на четверть периода.
Конденсаторы применяются в электронике столь же широко, как и катушки индуктивности. Если же одновременно использовать комбинированные цепи, содержащие индуктивность и емкость, то раскроются новые поразительные свойства таких электрических цепей.
Соединим последовательно индуктивность и емкость. На какой-то частоте численные значения их сопротивлений могут оказаться одинаковыми. При этом насколько индуктивность сдвинет фазу тока в одну сторону, настолько же емкость сдвинет ее в другую. Следовательно, сдвига фаз между напряжением и током вообще не будет. Общее реактивное сопротивление такой цепи становится почти равным нулю. Это явление называется резонансом. Наличие небольшого остатка сопротивления объясняется тем, что и катушка, и конденсатор обладают некоторым активным сопротивлением.
Можно соединить индуктивность и емкость параллельно. И в этом случае, при тех же условиях, наступит явление резонанса. Только теперь общее сопротивление цепи, наоборот, станет очень большим. Такое парное включение индуктивности и емкости называется колебательным контуром. Частота, при которой наступает резонанс колебательного контура, подсчитывается по формуле:
^рез ~ 2те /ЕС
Роль колебательных контуров в электронике огромна. Благодаря им электронные генераторы вырабатывают сигналы строго определенной частоты, которые посылаются к ожидающим их приемникам. Именно с помощью колебательных контуров создаются схемы, сортирующие сигналы по частоте, а следовательно, и выделяющие нужный сигнал из миллионов других, находящихся в эфире.
Резонансный контур необязательно должен состоять из индуктивности и емкости (LC-контур). В современных устройствах часто применяются резонансные системы, состоящие из
емкостей и активных сопротивлений (/?С-контур). Такие системы очень удобны для работы в области относительно низких частот.
Группа пассивных элементов включает и все выпрямительные диоды, но поскольку их конструкции и физические принципы во многом тождественны активным элементам, мы поговорим о них в дальнейшем.
Существует очень много других разновидностей пассивных элементов, которые либо строятся на тех же принципах, что и рассмотренные выше, либо применяются более редко или служат для специальных целей.
Теперь поближе познакомимся с активными элементами электронных схем. Как они действуют, нам уже известно. А каковы конструкции и основные данные этих деталей, выпускаемых серийно нашей промышленностью?
Династия электронно-вакуумных приборов имеет древнюю родословную, которая начинается с открытия почти шестьдесят лет тому назад Ли де Форестом управляющего действия сетки. Поэтому неудивительно, что в этом генеалогическом древе очень много ветвей, связанных дальними и ближними родственными узами. Здесь можно встретить и огромные генераторные лампы, превосходящие по размерам рост человека, и сверхминиатюрные, несколько десятков которых можно собрать одной горстью. Среди наших старых знакомых ламп с нагревающимся катодом можно встретить лампы, умеющие обходиться без подогрева, и лампы, которые, не имея никаких управляющих сеток, способны, несмотря на это, усиливать сигналы вплоть до очень высоких частот. Перечислить всех членов обширной электронно-ламповой фамилии — нелегкая задача. Поэтому ограничимся знакомством с теми ее представителями, которые более всего пригодны для систем радиоуправления моделями (рис. 17).
К ним относится несколько серий приемно-усилительных ламп, различающихся по конструктивному оформлению:
серия М — лампа обычных размеров в металлическом корпусе;
серия С — такая же лампа, но в стеклянном баллоне;
серия П — лампа уменьшенных размеров — «пальчиковая»; серия Б — лампа сверхминиатюрная, без цоколя.
Условное обозначение лампы состоит из нескольких символов, причем буквы, обозначающие серию, стоят на последнем 102 месте. Возьмем, например, лампу с обозначением 6НЗП. Что
это значит? Первый символ — цифра — указывает округленно
(без десятых долей вольта) значение напряжения накала. Второй
символ — буква — условно обозначает тип лампы (триод, пен-
тод и т. д.), в данном случае буква Н, под которой значится двойной триод. Третий символ — цифра, присвоенная заводом-изготовителем данному варианту конструкции (промышленность может изготавливать несколько вариантов триодов, пентодов или каких-либо других типов ламп, которые при том же оформлении и напряжении накала будут различаться по мощности, по крутизне и т. п.). Последний символ условного обозначения лампы — буква — нам уже знаком, он указывает вид оформления.
Лампы серий С и М имеют восьмиштырьковый (октальный) цоколь с направ-
ляющим ключом в центре. Ключ гарантирует, что при установке лампы на панельке штырьки попадут всегда в предназначенные для них отверстия. У ламп пальчиковой серии штырьки, соединенные с электродами лампы, выведены наружу прямо через донышко стеклянного баллона; специального направляющего ключа здесь тоже нет,
должная установка лампы на панельке обеспечивается несимметричным расположением штырьков. Выпускаются лампы с девятью и с семью штырьками.
Для того чтобы правильно включить лампу в электрическую схему, необходимо
Рис. 17. Основные
типы активных элементов электронных схем.
1 — триод; 2 — тетрод лучевой; 3 — пентод; 4 — пентагрид; 5 — триод двойной с раздельными катодами;
6 — транзистор р—п—р.
знать, к каким штырькам присоединены определенные электроды каждой лампы. Чертеж, показывающий внутренние соединения электродов со штырьками, называется схемой цоколевки лампы или просто цоколевкой. На этой схеме располо
жение штырьков наносится по виду на
лампу снизу, а счет штырьков идет по часовой стрелке от ключа или для пальчиковых ламп — от более широкого между-штырькового промежутка. Выводы ламп серии Б сделаны
гибкими проводниками и располагаются в один ряд. Нумерация выводов идет от стороны, отмеченной цветной точкой.
Все лампы серий М, С и П устанавливаются на специальных панельках. Это очень удобно, так как при этом соединения электрической схемы осуществляются пайкой проводников к выводам ламповой панельки, а сама лампа может легко заменяться. Лампы серии Б приходится непосредственно впаивать в схему.
Какие же именно лампы следует предпочесть для использования в системах радиоуправления? Давайте подумаем. Условия размещения аппаратуры на моделях кораблей выдвигают к ней жесткие требования в отношении минимальных размеров и веса. Поэтому мы правильно поступим, если сразу откажемся от ламп серий М и С, тем более, что современные лампы пальчиковой серии не уступают им по качеству. Но этих соображений еще недостаточно. Надо помнить, что бортовая электронная аппаратура нуждается в источниках питания для анодных и накальных цепей ламп. Обычно для этого применяются сухие элементы или аккумуляторные батареи. Электрическая емкость таких источников — ограничена, а вес, к сожалению, довольно велик. Следовательно, чем меньше аппаратура будет потреблять электроэнергии, тем выгоднее она в условиях работы моделей. Всегда нужно стремиться к максимальной экономичности и выбор ламп также подчинить этому требованию.
В первую очередь, следует обратить внимание на величину мощности, расходуемой на подогрев катода, так как она потребляется независимо от того, выполняют в данный момент анодные цепи полезную работу или нет. С этой точки зрения наиболее удовлетворительны пальчиковые лампы, рассчитанные на пониженное напряжение накала. Они выпускаются специально для переносной аппаратуры с батарейным питанием. Мощность, расходуемая на подогрев катода, у ламп этой серии в несколько десятков раз меньше, чем у аналогичных ламп в обычным напряжением накала. Такой эффект достигается за счет специальной конструкции катодов прямого накала. Например, современный пальчиковый пентод 1К2П потребляет на подогрев катода мощность 0,036 вт при напряжении 1,2 в. Аналогичная лампа 6К4П, рассчитанная на напряжение накала 6,3 в
и имеющая катод косвенного накала, потребляет в накальной цепи мощность около 3 вт, т. е. почти в 100 раз больше.
Однако пальчиковые лампы не свободны от недостатков. Их параметры хуже, чем у обычных ламп шестивольтовой серии, долговечность и надежность тоже не очень высоки. Но с этим приходится мириться. Разумеется, в некоторых случаях можно сознательно идти на использование ламп с большим расходом мощности в накальных цепях, если за счет этого достигается существенное улучшение качества аппаратуры или если аппаратура радиоуправления располагается на крупных моделях, оборудованных мощными источниками питания. Во всяком случае, необходимо прежде хорошенько подсчитать энергетический баланс всей системы. В табл. 2 приведены данные наиболее типичных ламп, применяемых в бортовой аппаратуре управляемых моделей кораблей.
Таблица 2
Параметры некоторых типов электронных ламп для бортовой аппаратуры
Название Тип лампы Напряжение накала, в Напряжение анода, в Напряжение на второй сетке, в Ток накала, ма Ток в цепи анода, ма Крутизна характеристики, ма/в
Выходной пентод 1П2Б 1,25 45 45 50,0 1,3 0,5
» » 1ПЗБ 1,25 45 45 27,0 0,75 0,425
Лучевой тетрод 2П1П 1,2 или 2,4 90 90 120 или 60 9,5 2,0
» » 2П2П 1,2 или 2,4 60 60 60 или 30 3,5 1,1
Двойной триод с отдельными катодами 6НЗП 6,3 150 — 350 7,7 4,9
Двойной ВЧ триод с общим катодом 6Н15П 6,3 100 — 450 9 5,6
Береговая часть системы радиоуправления не выдвигает таких жестких требований к экономичности электронных ламп. Здесь увеличение веса источников питания создает лишь неудобства в транспортировке. Кроме того, в ряде случаев можно 105
использовать питание от сетей переменного тока. При этом вопросы, связанные с экономичностью, вообще отступают на второй план, и можно применять любые лампы, подходящие для решения задачи. Но все-таки для береговых установок следует тоже добиваться наибольшей легкости и малых размеров аппаратуры.
В некоторых случаях, когда необходимо выполнять преобразование переменного тока в постоянный, для питания электронной аппаратуры используются электронно-вакуумные диоды — кенотроны. В последнее время они быстро вытесняются полупроводниковыми диодами. Правда, для питания анодных цепей вакуумный диод пока еще не сдает полностью своих позиций полупроводникам. Данные некоторых распространенных типов кенотронов отечественного производства указаны в табл. 3.
По сравнению с электронно-вакуумными приборами родословная полупроводниковых приборов значительно беднее. Тем не менее эти «выскочки» множатся с каждым годом и захватывают все больше и больше командных позиций в электронике. Для интересующих нас целей радиоуправления моделями они особенно заманчивы. Полупроводниковые приборы — чемпионы и по экономичности, и по минимальности габаритов и веса. Не нужно уже тщательно подбирать лампы с наименьшим расходом мощности на подогрев катода: аппаратура на полупроводниках в этом совершенно не нуждается!
Невзирая на такие соблазнительные преимущества, увлекаться заменой повсюду электронно-вакуумных ламп полупроводниковыми приборами все же не следует, особенно в тех частях схемы, где проходят пути-дороги высоких частот. Это пока еще стоит относительно дорого. Изготовление и наладка схем с полупроводниками требует больших знаний и опыта. Кроме того, такие схемы очень чувствительны к изменениям температуры. Поэтому полное использование для аппаратуры радиоуправления полупроводниковых приборов может быть доступно только очень опытным моделистам.
Группа активных полупроводниковых элементов насчитывает уже сейчас немало представителей. Однако хорошо освоены и выпускаются в массовых сериях промышленностью пока только плоскостные полупроводниковые триоды — транзисторы. Точечные триоды такого типа — уже пройденный этап и в на-Ю6 стоящее время по существу нигде не применяются.
Транзисторы имеют гибкие выводы, которые непосредственно подпаиваются в нужных местах схемы. Применение панелек для них не обязательно. Иногда для мощных триодов применяют установочные корпуса, основным назначением которых является отвод и рассеяние выделяемого тепла. В табл. 4 приводятся данные некоторых типов отечественных транзисторов.
Таблица 3
Параметры некоторых распространенных типов полупроводниковых и вакуумных диодов
Название Тип диода Среднее значение выпрямленного тока, ма Обратный ток, ма Обратное дополн. напряжение, в
Д1А 16 0,25 20
Д2А 50 0,25 10
Точечный диод Д9Г 25 0,25 30
Д9Ж 15 0,25 100
ДЮ1 30 0,01 75
Д7А 300 1,0 50
Д7Г 300 1,0 200
Плоскостной диод Д7Ж Д202 100 400 0,5 0,5 400 100
Д304 5 000 3,0 100
Д305 10 000 3,0 50
Двойной диод 6Х7Б 6Х2П 8 20 450 450
Двуханодный кенотрон 6Ц4П 75 — 1000
В качестве пассивных элементов широко применяются в современной электронике полупроводниковые диоды — точечные и плоскостные. Плоскостные диоды прекрасно работают как выпрямители переменного тока, но пока еще не могут заменить повсюду вакуумные кенотроны. Их можно использовать в выпрямляющих устройствах, если напряжение источника питания не превосходит допустимых для применяемого типа диодов величин. В табл. 3 приводятся также данные ряда полупроводниковых диодов отечественного производства. 107
Таблица 4
Параметры некоторых типов транзисторов
Название транзистора Тип транзистора Ток эмиттера, ма Напряжение коллектора, в Ток коллектора, ма Коэффициент усиления по току Полезная мощность, Коэффициент усиления по мощности, Об
Германиевый плоскостной П4Б —26 1000 84-20 10 23
транзистор Германиевый плоскостной П6Б 1 -5 10 0,92
транзистор напряжения для усиления (максим.)
Германиевый плоскостной П10 1 +5 10-10~3 0,94 —
транзистор П13 1 -5 (нулевой) 15-10—3 (нулевой) 0,92 — 304-35
Кремниевый плоскостной П101 1 +5 50-10“3 0,9
транзистор П105 1 -5 0,9 —
(нулевой)
Германиевый плоскостной П201 —— —20 20 ДО 1,0
транзистор П401 4 —5 — 0,94 —
Не так давно удалось создать полупроводниковый диод, выполняющий функции активного элемента — туннельный диод. Сущность его работы сложна, и здесь мы не сумеем в ней разобраться. Скажем лишь, что туннельный диод очень эффективен для систем радиоуправления, так как, обладая ничтожно малыми размерами и весом, способен значительно усиливать весьма слабые сигналы. Можно рассчитывать, что в недалеком будущем он займет достойное место в бортовой аппаратуре радиоуправляемых моделей.
Третья ветвь династии приборов электроники — газонаполненные приборы — в схемах радиоуправления практически не применяются, и нет смысла их специально рассматривать.
Мы закончили краткое описание устройств и элементов, из которых строятся электронные схемы. Конечно, полная номенклатура строительных деталей электроники неизмеримо шире, но не следует теряться при встрече с незнакомым образцом: он в большинстве случаев, наверняка, относится к одному из известных нам типов.
Блок-схему типовой системы радиоуправления мы представили себе уже давно, но тогда еще не сумели заполнить ее квадратики, каждый из которых должен был содержать какое-то неизвестное устройство, способное совершать определенную операцию. Мы знали, что требуется от каждого элемента блок-108 схемы, но не как осуществить это. Теперь же, располагая
основными сведениями об электронике, ее физических принципах, о деталях электронных схем, можно смело приступить к заполнению загадочных квадратиков блок-схемы.
Начнем с передающей стороны системы радиоуправления. Главной частью аппаратуры, ее сердцем, является устройство, вырабатывающее электрические колебания несущей частоты,— генератор. Эти колебания и есть тот самый лист чистой бумаги, на котором мы запишем сигналы команд. Оторвавшись от антенны передатчика, сигналы донесут информацию о наших командах к антенне приемника.
СТРОИМ ПЕРЕДАТЧИК СИСТЕМЫ РАДИОУПРАВЛЕНИЯ
В том, что электронная лампа умеет усиливать внешние сигналы, мы убедились. Но как «научить» ее вырабатывать сигналы? Оказывается — не столь трудно. На основе всякого активного элемента, обладающего способностью усиления, может быть построена автоколебательная схема, способная генерировать колебания высокой частоты. Для того, чтобы понять, как работает генератор, надо сначала разобраться в принципе действия обратной связи.
Обратная связь создается в тех случаях, когда некоторая часть сигнала, который появляется на выходе системы, ответвляется обратно к ее входу.
Принцип обратной связи был установлен сравнительно недавно — не более полустолетия тому назад. До этого мы и не
подозревали, что окружающий мир (да и наш организм) буквально пронизан сложнейшими переплетениями всевозможных обратных связей. Обрыв любой из них приводит к серьезным нарушениям жизнедеятельности. Какие поистине чудесные возможности скрыты в этом простом принципе! Попробуйте заставить палку стоять вертикально — не удастся. А человек уверенно держится в вертикальном положении, легко сохраняя равновесие даже при толчке. Это
работает обратная связь. При нарушении равновесия вестибулярный аппарат (орган, расположенный в области уха и чувствительный к наклонам тела по отношению к направлению силы тяжести) вырабатывает сигнал, который управляет мышцами так, что тело отклоняется в сторону приближения к равновесному состоянию. Чаще всего тело «проскакивает» точку равновесия, и возникает наклон в противоположную сторону. Система обратной связи срабатывает вновь, заставляя мышцы исправить положение тела, наклонив его в другом направлении. Оказывается, человек вовсе не стоит неподвижно, а незаметно непрерывно колеблется около положения равновесия — система обратной связи работает все время. Стоит ее повредить, и человек теряет равновесие.
Обратная связь в радиоэлектронном устройстве может действовать по-разному. Если прямой сигнал и сигнал обратной связи складываются так, что в результате суммарная величина сигнала на входе уменьшится, то такая обратная связь называется отрицательной. Введение цепи отрицательной обратной связи в электронный усилитель снижает коэффициент усиления, но существенно улучшает устойчивость его работы. Усилители с отрицательной обратной связью надежно работают и в тех случаях, когда изменяется напряжение источников питания или заменяются некоторые детали схемы. Кроме того, эти усилители менее чувствительны к воздействию посторонних помех, хорошо переносят тряску, вибрации, удары. За столь значительные преимущества стоит заплатить ценой некоторого снижения коэффициента усиления. Тем более, что величину его не так уж трудно и восстановить — достаточно добавить лишний усилительный каскад.
Возможен и другой случай, когда при сложении прямого сигнала и сигнала обратной связи общий входной сигнал увеличивается. Такая обратная связь называется положительной.
Пусть, например, коэффициент усиления электронного усилителя равен 10. Соединим выход усилителя с его входом. Очевидно, весь сигнал с выхода будет подаваться обратно на вход. Это очень сильная или, как говорят, стопроцентная обратная связь. В практических схемах обычно в линию обратной связи ответвляется только небольшая часть выходного сигнала — несколько процентов и даже меньше. Допустим, что в нашем усилителе образована положительная обратная связь. Подадим на 110 его вход слабый сигнал — 0,1 в. Так как, по условию, коэффи
циент усиления равен 10, на выходе усилителя появится сигнал уже с амплитудой в 1 в. Но вход прямо соединен с выходом, усиленный сигнал в 1 в немедленно попадает на вход. .. и опять усиливается в десять раз. Теперь на входе окажется сигнал в 10 в, а на выходе его амплитуда достигнет 100 в. До каких же пределов будет продолжаться эта гонка напряжений — до тысяч, миллионов или миллиардов вольт?
Такая опасность нам не грозит, и усилитель с положительной обратной связью не превратится в грозный источник молний. Вспомним, что всякая электронная лампа способна усиливать лишь сигнал, амплитуда которого укладывается между крайними точками ее характеристики — потенциалом запирания лампы с одной стороны и областью положительных потенциалов сетки — с другой. Как только размах колебаний на сетке превысит это значение амплитуды напряжения, дальнейшего усиления колебаний в анодной цепи не произойдет. Численное значение напряжения, соответствующее пределу его возрастания, зависит от типа лампы. Для обычных приемно-усилительных ламп, с которыми мы встретимся в нашей практике, это предельное значение не превышает несколько десятков или очень редко, сотен вольт.
А какую же роль играет теперь тот слабенький сигнал, с которого и началась гонка напряжений? А вот какую. По цепи положительной обратной связи с выхода на вход усилителя непрерывно поступает сигнал, измеряемый десятками вольт и, действительно, добавление к нему такого маленького довеска ничего не меняет в процессе усиления. Но этот первичный сигнал послужил первым толчком, он раскачал систему, а дальше она стремительно помчалась уже сама от одного из своих предельных состояний ко второму.
После того как предел достигнут, усилитель, казалось бы, должен замереть в этом положении и ждать, когда на вход поступит новый возбуждающий сигнал другой полярности. Но в большинстве случаев этого не требуется. В составе электрической схемы почти всегда имеются реактивные сопротивления, которые способны накапливать электрическую энергию, а затем возвращать ее. При этом они создают в цепи электрический ток, противоположный по направлению току заряда. После окончания процесса перехода схемы в предельное состояние в цепь обратной связи начинает поступать сигнал с обратным знаком. Вначале он еще очень мал, но так как обратная связь —
положительная, это маленькое напряжение немедленно усиливается. В результате электронная схема быстро переходит в противоположное состояние. Затем снова в предыдущее и так далее, и так далее. Заметьте, что, в отличие от обычных качелей, нашим электронным качелям новый «толчок» внешнего сигнала в дальнейшем уже не нужен: электрические колебания в схеме возбуждаются и поддерживаются без всякой посторонней помощи. Усилитель превратился в генератор, для начала работы которого нет необходимости в специальном постороннем сигнале, а достаточно любого ничтожно малого электрического «всплеска» на входе. Таких электрических всплесков и в эфире, и в электрических цепях всегда полным-полно.
Значит, любой усилитель в принципе может быть превращен в генератор, если в него ввести цепь положительной обратной связи, но при одном условии: сигнал, который поступает на вход усилителя по цепи обратной связи, должен быть больше вызвавшего его входного сигнала. Для рассмотренного выше примера это условие можно выполнить, отведя в цепь обратной связи больше чем 10 процентов от выходного сигнала. Если бы коэффициент усиления нашего усилителя был больше, то в цепь обратной связи достаточно было бы подать еще меньшую часть выходного сигнала. Величина положительной обратной связи, при достижении которой усилитель превращается в генератор, называется критической связью. Наличие положительной обратной связи больше критической является условием самовозбуждения, т. е. превращения усилителя в генератор.
Если в усилителе положительную обратную связь не доводить до критического значения, то в этом случае генерация не возникает, а коэффициент усиления усилителя увеличивается. Иногда это бывает выгодно, и такие, как их называют, регенеративные усилители применяются в электронике. Но выигрыш в усилении, достигнутый этим способом, приходится оплачивать ненадежностью работы: регенеративные усилители очень неустойчивы и все время норовят стать генераторами. Поэтому применять их стоит только в особых случаях.
Чаще всего положительная обратная связь применяется в схемах генераторов. При этом, разумеется, ее величина всегда выбирается больше критического значения. Усилитель с силь-112 ной положительной обратной связью будет работать примерно
так, как было описано выше: скачком перебрасываться в одно из предельных состояний, замирать в нем на некоторое время, пока разряжаются накопители зарядов-емкости, а затем, тоже скачком, переходить в другое предельное состояние. Этот процесс может продолжаться неограниченно долго. Частота перескоков определяется, главным образом, скоростью разряда конденсаторов, имеющихся в рабочих цепях. Иначе говоря, сам переход из одного состояния в другое совершается очень быстро, а период колебания — время до следующего аналогичного скачка — зависит от продолжительности «замирания» схемы между скачками.
Генераторы такого типа, которые скачком перебрасываются из одного крайнего состояния в другое, называются генераторами релаксационных колебаний. Электрический сигнал при этом имеет вид прямоугольных импульсов или острых пиков. Нужный же нам сигнал для его использования в качестве колебания несущей частоты должен иметь правильную синусоидальную форму. Как же заставить генератор вырабатывать его? Оказывается, совсем не трудно. Для этого нужно включить в одну из цепей (анодную или сеточную) электронной лампы колебательный контур, напряжение на котором всегда изменяется по синусоидальному закону. Если, например, включить такой контур в анодную цепь лампы и связать его положительной обратной связью с цепью сетки, то получится ламповый генератор гармонических колебаний. Частота их определяется резонансной частотой колебательного контура.
Применение колебательного контура, состоящего из емкости и индуктивности, очень облегчает постройку ламповых генераторов потому, что образовать цепь обратной связи в одном-единственном ламповом каскаде (т. е. на одной усилительной лампе с необходимыми вспомогательными элементами) не так-то просто. Напряжение на аноде лампы всегда изменяется в противоположном направлении по отношению к напряжению на сетке. Анод является выходом однокаскадного усилителя, а сетка—-его входом. Значит, если прямо подвести сигнал с анода к сетке, то образуется цепь отрицательной обратной связи. А нам нужна положительная обратная связь.
Преобразование отрицательной связи в положительную осуществляется с помощью катушек индуктивности очень просто. Нужно связать анодную и сеточную цепи посредством двух рядом расположенных катушек, т. е. трансформаторной или 113
8
Ю. Д. Пахтанов, В. И. Соловьёв
индуктивной связью, намотав катушку в сеточной цепи так, чтобы направление ее витков было противоположно по отношению к виткам анодной катушки. Тогда фаза индуктированного в ней напряжения повернется на 180°, что как раз и требовалось. При этом оба сигнала на входе будут складываться, а не вычитаться.
На рис. 18 изображены основные варианты схем генераторов с индуктивной связью.
Рис. 18. Схемы электронных генераторов с индуктивной связью: а—с последовательным питанием; б — с параллельным питанием; в — трехточечная.
Когда усилитель состоит из двух каскадов, то цепь положительной обратной связи можно легко образовать, соединив анод с цепью сетки предыдущей лампы.
Во всех случаях при создании связей анодных цепей с сеточными необходимо помнить, что эти цепи должны быть разделены по постоянному току. Анод всегда находится под высоким положительным напряжением, а на сетке имеется отрицательный потенциал. Поэтому соединить их гальванически, т. е. каким-нибудь проводником, нельзя. Цепь, соединяющая анод с сеткой, должна давать «зеленую улицу» для переменного тока и быть совершенно непроходимой для постоянного тока.
Существуют два решения этой задачи. Первое из них мы уже использовали, когда связали в рассмотренных схемах генераторов цепи анода и сетки с помощью трансформатора. Первичная и вторичная обмотки трансформатора гальванически 114 изолированы друг от друга, и цепь по постоянному току разо-
рвана. Индуктированная э. д. с. наводится во вторичной обмотке при изменениях тока в первичной, передавая только переменный ток.
Рис. 19. Схемы генератора релаксационных колебаний—мультивибратора (а), пушпульного генератора гармонических колебаний (б) и графики напряжения на их выходе.
иа
Другим решением может служить разделение анодной и сеточной цепей с помощью конденсатора. Для постоянного тока конденсатор—неодолимое препятствие, а для переменного — пожалуйста, путь открыт. Если связать попарно аноды с сетками у соседних каскадов, как показано на рис. 19, а, то
получится генератор, вырабатывающий релаксационные колебания. Он называется мультивибратором. Его можно превратить и в генератор гармонических (синусоидальных) колебаний, добавив в схему обычный колебательный контур (рис. 19, б).
Такая схема, состоящая из двух каскадов, всегда работающих в противоположных фазах, часто встречается в электронике и не только в генерирующих устройствах. Она называется
Рис. 20. Принципиальная схема /?С-генератора гармонических колебаний.
«пушпульной». Это название произошло от английского слова, которое в русском переводе звучит «тяни-толкай». Выражение, хотя и не очень научное, но весьма образно отражающее принцип работы данной схемы: когда одна половина ее находится в верхнем предельном состоянии, то другая всегда в нижнем. Затем роли меняются.
Можно поступить иначе и построить генератор, исключив индуктивности и используя в качестве элементов схемы только сопротивления и емкости (/?С-генератор). Пример такой схемы приведен на рис. 20. Здесь соединенная пунктиром группа сопротивлений и емкостей обладает свойством резонанса на определенной частоте и может служить в качестве колебательного
116 контура. Эти схемы плохо работают на высоких частотах, так
как тогда требуются очень малые по величине емкости. Но для генерации сигналов низкой частоты они подходят лучше, чем схемы с индуктивностями (LC-схемы), которые в данном случае должны иметь катушки с очень большой индуктивностью. Чтобы изготовить такую катушку, пришлось бы намотать много тысяч витков, т. е. использовать непомерно длинный провод, а чем длиннее провод, всегда обладающий некоторым активным сопротивлением, тем, следовательно, его сопротивление больше.
Качество колебательного контура или, как говорят, его добротность при этом ухудшается. А добротность — очень важная характеристика колебательного контура. Она показывает, насколько малы в нем внутренние потери энергии, рассеиваемой в виде тепла на активном сопротивлении. Контур с бесконечно большой добротностью должен был бы иметь нулевое активное сопротивление. Колебания в таком идеальном контуре, однажды возбужденные, никогда бы не затухали. Практически это конечно неосуществимо, но чем выше добротность контуров, тем лучше качество генераторов и усилителей.
Аналогичные схемы генераторов можно построить, заменив лампы полупроводниковыми триодами. Но для генерации высоких частот пока еще лучше применять электронные лампы. В связи с этим мы не будем рассматривать высокочастотные генераторы с транзисторами, а в дальнейшем, когда встретится необходимость в генерировании сигналов низкой частоты, рассмотрим попутно, как использовать с этой целью транзисторы. Кстати, до этой встречи уже недалеко.
Итак, генератор, способный вырабатывать сигнал высокой частоты, мы имеем. Если сигнал подвести к антенне, он отправится в путешествие. Хотя на нем еще нет никаких записей, простейшую систему управления можно осуществить уже и с его помощью. Эта система будет передавать одну-единствен-ную команду, потому что ее возможности исчерпываются случаями— либо есть сигнал, либо нет сигнала.
Если ваш приятель живет с вами на одной улице, то вы можете легко условиться с ним, что, например, висящее на окне полотенце означает «приходи ко мне». Таким способом передается тоже только одна команда. Чтобы послать другое сообщение, например «я приду к тебе», нужно как-то изменить сигнал: вывесить полотенце другого цвета или снова белое, но дважды. Последний способ подсказывает, что можно
приспособить генератор несущей частоты для передачи нескольких различных команд, повторяя включение и выключение передатчика один, два и более раз подряд.
Система управления передатчиком в этом случае очень проста: в цепь питания анода генератора ставят ключ, размыкающий или замыкающий ее. Когда ключ замкнут, питание к аноду подается, генератор посылает сигнал. Когда ключ разомкнут — генератор молчит. Для того, чтобы получить одинаковые посылки, т. е. равные по продолжительности периоды замыкания ключа, очень удобно приспособить обычный телефонный номеронабиратель. Если на нем набрать, например, цифру пять, то, возвращаясь в исходное положение, номеронабиратель пять раз замкнет контакты ключа, а наш передатчик пять раз пошлет в эфир импульсы высокочастотного сигнала (см. рис. 2).
Однако этот способ передачи команд хотя и прост, и удобен, но страдает серьезным недостатком. Он очень чувствителен к помехам. Приемник может ошибочно среагировать на случайную помеху, как на сигнал, а затем принять команду, зашифрованную тремя посылками. Таким образом он, по сути, выполнит совсем другую команду, соответствующую четырем посылкам. Случайных помех кругом очень много и бороться с ними нелегко.
Мы знаем, что можно передавать различные команды, другим, более сложным путем, если каждой из них приписать определенную частоту излучаемого сигнала. Реализовать такую систему тоже нетрудно, изменяя собственную частоту колебательного контура генератора. Это делается путем подключения к контуру либо разных емкостей, либо разных катушек индуктивности. Но простоту изготовления передатчика, работающего по такой системе, придется возместить неоправданно сложным устройством приемника. Ведь для каждой команды надо будет изготовить отдельный приемник, настроенный на нужную частоту. Сколько команд — столько и приемников. Нет, пожалуй, лучше сделать посложнее передатчик, тем более, что его не требуется размещать на борту маленькой модели, и если он окажется более громоздким — не так уж страшно.
Раньше мы установили, что метод передачи команд путем модуляции того или иного параметра несущего сигнала, неизменного по частоте и непрерывного во времени,— наилучший. Настала пора разобраться в том, как же это делается. Для пе-118 редачи команд в системах радиоуправления моделями чаще
всего используется амплитудная модуляция сигнала. Другие виды модуляции — частотная, фазовая, временная,— хотя и обладают определенными преимуществами, но из-за сложности аппаратуры редко применяются в малой электронике. Поэтому мы лучше вспомним о них, когда перейдем от моделей к настоящим кораблям, самолетам и ракетам...
Для осуществления способа амплитудной модуляции необходимо периодически изменять по определенному для каждой команды закону амплитуду подводимых к антенне колебаний высокой частоты. Это можно сделать непосредственно в самом генераторном каскаде или с помощью дополнительной усилительной лампы. Во втором случае генератор всегда вырабатывает сигнал с постоянной амплитудой, но прежде чем попасть в антенну, он проходит через промежуточный усилительный каскад. Если коэффициент усиления этого каскада будет изменяться по соответствующему закону, то сигнал генератора, поступающий в антенну, окажется модулированным по амплитуде. Заставив рабочую точку периодически перемещаться вдоль нелинейной характеристики усилительной лампы, можно получить каскад с переменным коэффициентом усиления. Достаточно к постоянному напряжению смещения сетки добавить переменное напряжение, изменяющееся по заданному закону, и рабочая точка будет путешествовать по рабочей характеристике. Это добавочное переменное напряжение называется модулирующим сигналом. Амплитуда напряжения высокой частоты на выходе будет изменяться, повторяя его форму. Такого результата мы и добивались.
Поскольку к каждой передаваемой команде подбирается определенный вид модулирующего сигнала, то передатчик даже на единственной генерируемой им частоте высокочастотного сигнала может передавать очень много различных команд. Конечно, нужно располагать необходимым набором модулирующих сигналов, причем делать их очень похожими не рекомендуется. Иначе на принимающей стороне создается трудная ситуация: устройство в приемнике, которое должно направить каждую команду по точному адресу к определенному исполнительному механизму (дешифратор), может и не суметь различить такие сигналы. Тогда произойдет ложное срабатывание, и модель взамен команды «полный вперед» выполнит команду «полный назад» или еще что-нибудь напутает. Чтобы застраховаться от подобных неприятностей, лучше ограничиться
меньшим числом команд, но зато избежать вторжения сигналов-близнецов в дешифратор приемника.
Например, когда модулирующие сигналы, которыми передаются команды, различаются по частоте (наиболее распространенный способ), то нельзя использовать для передачи трех команд рядом расположенные частоты 1000, 1001, 1002 гц. Их очень трудно будет различить при приеме. А вот если взять для этих же целей частоты в 1000, 1300 и 1600 гц, то задача будет решена, наверняка, без ошибок.
Вернемся к схеме модуляра. Способ изменения амплитуды высокочастотного сигнала путем изменения положения рабочей точки (он называется сеточной модуляцией или модуляцией на управляющую сетку) — не единственный. Та же цель достигается, если модулирующий сигнал приложить к экранирующей сетке пентода или тетрода. Этот способ называется модуляцией на экранирующую сетку. Правда, если для сеточной модуляции было достаточно подать модулирующий сигнал с амплитудой в несколько вольт, то для модуляции на экранирующую сетку требуется при том же качестве передачи (как принято говорить, для той же глубины модуляции) несколько десятков, а то и сотен вольт. Это и не удивительно, ведь управляющая сетка потому так и называется, что ее «руководящие способности» намного лучше, чем у экранирующей сетки.
Запомним,— это нам пригодится — что для системы модуляции на экранирующую сетку необходим источник модулирующего сигнала, способный развивать большое напряжение.
Следующий возможный вид модуляции — анодная модуляция. Если изменять напряжение на последовательной цепи, состоящей из усилительной лампы и сопротивления ее нагрузки, то амплитуда колебаний, выделяемых на этом сопротивлении, будет уменьшаться с уменьшением напряжения, и наоборот. Это как раз то, что нам нужно. Вполне понятно, что модулирующий сигнал должен иметь достаточную амплитуду — несколькими вольтами здесь не обойтись.
Анодная модуляция обеспечивает высокое качество модуляции, поэтому ее широко используют как в профессиональной, так и в любительской аппаратуре.
При всех рассмотренных способах модуляции сигнал высокой частоты вырабатывался отдельным самовозбуждающимся генератором. Если еще учесть, что необходим и источник мо-120 дулирующего сигнала, то меньше чем тремя каскадами не обой
тись. Система с отдельными каскадами для генерации высокой частоты и для последующей модуляции ее амплитуды обладает бесспорными достоинствами. В профессиональных линиях связи только она и применяется. Но если поступиться качеством пе
редатчика и за счет этого упростить аппаратуру, повысить ее экономичность, то можно обойтись и без модуляторного каскада. В данном случае модуляция амплитуды сигнала осущест-
вляется непосредственно в самом генераторе высокой частоты.
Такие генераторы работают чаще всего с анодной модуляцией.
Подачи модулирующего сигнала в чувствительные и капризные сеточные цепи обычно стараются избегать. На рис. 21 приведена схема самовозбуждающегося генератора с анодной модуляцией. Принцип действия ее тот же, что и в усилительном каскаде с анодной модуляцией. Эта схема очень удобна для радиоуправления моделями кораблей. Она представляет собой
Рис. 21. Схема самовозбуждающегося генератора с анодной модуляцией.
уже знакомый нам пуш-пульный (двухтактный) гене
ратор с настроенным резо-
нансным контуром в анодных цепях. Но питание анодов ламп осуществляется теперь не прямо от анодной батареи, дающей постоянное напряжение. К этому постоянному напряжению добавляется переменное напряжение от источника модулирующего сигнала. В итоге анодное напряжение генератора будет то увеличиваться, то уменьшаться в такт с изменениями модулирующего сигнала. Амплитуда сигнала высокой частоты в рабочем контуре будет тоже то возрастать — при увеличении напряжения на аноде, то падать — при его снижении. На выходе генератора появится амплитудно-модулированный сигнал.
Назначение дросселя в анодной цепи состоит в том, что он, в силу присущего ему, как всякой индуктивности, свойства, оказывает большое сопротивление токам высокой частоты и почти
не препятствует протеканию постоянного тока. Поэтому он спокойно пропускает к анодам постоянный ток от батареи, не мешает проходить низкочастотному модулирующему сигналу, но фактически непроницаем для сигнала высокой частоты, вырабатываемого генератором, не позволяя ему проникать в ненужных направлениях.
Познакомимся вкратце с конструкциями и схемами источников модулирующего сигнала. Можно насчитать очень много типов и разновидностей таких устройств — все зависит от целевого назначения аппаратуры. В радиотехнике для передачи музыки и речи широко применяется микрофон, с помощью которого акустические колебания преобразовываются в электрические, а последние управляют модуляторным каскадом. Так, неслышимый высокочастотный сигнал как бы уносит на себе запись сложных сочетаний звуковых частот. Строго говоря, источником модулирующего сигнала в этом случае является человек (диктор, артист, музыкант), а микрофон выполняет лишь скромные обязанности переводчика звукового кода в код электрический. Для электронных схем такое преобразование необходимо, поскольку единственно доступным для них языком является язык электрических сигналов. Поэтому для работы с неэлектрическими явлениями и процессами (акустическими, световыми, тепловыми и т. д.) электронные схемы всегда нуждаются в услугах «переводчиков» — преобразователей одного вида энергии в другой.
С помощью различных типов преобразователей электроника находит неисчислимое множество технических и научных применений — от поиска звезд, затерянных в глубинах космоса, до подсчета количества батонов на конвейере хлебозавода. Многие из этих возможностей еще не изучены и даже просто неизвестны. Электроника — наука, устремленная в будущее. И нас ожидает еще очень много не свершенных открытий.
Но вернемся к модуляторам. Применять в системах радиоуправления моделями кораблей какие-либо преобразователи чаще всего нецелесообразно. Микрофон очень удобен в тех случаях, когда передаваемую команду примет исполнитель — человек. Если же исполнитель — механизм, то для того, чтобы он «понял» смысл, заложенный в словах команды, придется сделать очень сложный дешифратор. Гораздо проще для наших целей сразу закодировать каждую команду в какой-ни-122 будь параметр модулирующего сигнала, например в его ча
стоту. Тогда, очевидно, источником модулирующего сигнала может служить любой генератор незатухающих колебаний, причем он должен легко и точно переходить с одной частоты на другую, в соответствии с передаваемой командой.
Частоту модулирующих колебаний всегда следует выбирать так, чтобы она была, по крайней мере, в десять раз меньше частоты несущего колебания. На практике стремятся сделать это отношение как можно больше, и, значит, частота модулирующего сигнала обычно оказывается относительно невысокой. Для систем радиоуправления моделями вполне достаточен небольшой участок звукового диапазона частот — от нескольких сотен до нескольких тысяч герц.
Какие же схемы генераторов лучше всего нам использовать? Прежде всего сразу откажемся от генераторов гармонических колебаний с резонансными ЛС-контурами. Причина очень проста, и о >ней мы уже говорили: LC-контуры для низких частот получаются очень громоздкими и плохого качества. /?С-генера-торы подходят лучше.
Однако при всех своих достоинствах /?С-генераторы страдают тем недостатком, что вырабатываемый генераторным каскадом сигнал имеет небольшую амплитуду и мощность. Для сеточной модуляции этого сигнала хватит, а для анодной — маловато, и приходится ставить дополнительный каскад для усиления мощности модулирующего сигнала. Конструируя высококачественную систему управления, стоит пойти на такое усложнение схемы. Если генератор вынужден непосредственно отдавать в нагрузку значительную мощность, то он всегда будет работать недостаточно удовлетворительно. Причиной этого является влияние нагрузки, проявляющееся в непостоянстве частоты и формы генерируемого сигнала. Генератор работает нестабильно.
Сущность дела заключается в том, что всякая нагрузка, в которую отдается полезная мощность, представляет собой обязательно активное сопротивление. Будучи подключенной непосредственно к генераторному каскаду, эта нагрузка как бы входит в колебательный контур и сильно уменьшает его добротность. А низкая добротность контура всегда ухудшает качества генератора: увеличивается нестабильность частоты, уменьшается амплитуда колебаний и т. д.
Если же поставить промежуточный каскад усиления мощности, то он принимает на себя обязанности по отдаче
мощности во внешнюю цепь, а его сеточная цепь служит нагрузкой генератора. Цепь сетки, имея большое сопротивление, не оказывает обратного вредного влияния на работу генератора. Такой промежуточный усилитель, расположенный между генератором и нагрузкой и смягчающий их «столкновения», называют буферным каскадом. Применение его повышает стабильность генератора и, следовательно, качество аппаратуры в целом.
Несмотря на это, простота, которой мы упорно добиваемся в схемах радиоуправления, заставляет продолжить поиски наиболее экономичного решения. И такое решение вполне достижимо при помощи генераторов релаксационных колебаний. Правда, они вырабатывают сигналы самой причудливой формы, да и стабильность их частоты не очень высока. Зато мощность, отдаваемая этими генераторами, может быть достаточна для непосредственного использования выработанного ими сигнала, в качестве модулирующего напряжения, даже при анодной модуляции.
Поскольку в их цепях имеются накопители электрической энергии — индуктивности и емкости,— они постепенно заряжаются в течение относительно долгого времени, а затем во время релаксации отдают накопленную энергию в виде короткого импульса. Описанный метод широко применяется в современной электронике. Результаты, достигаемые с его помощью, поистине чудесны: с маломощной электронной лампы, рассчитанной на несколько ватт, можно получить при работе в импульсном режиме несколько киловатт полезной мощности. Лампа выдерживает такой напряженный режим потому, что она «отдыхает» в тысячи и миллионы раз дольше, чем работает. Легко подсчитать, что если лампа отдает рабочий импульс длительностью в несколько микросекунд десяток раз в секунду, то время ее «отдыха» почти в сто тысяч раз длиннее рабочего времени. Но импульсные схемы только кажутся «бездельниками». В рабочие моменты они отдают максимальную энергию, обеспечивая анодную модуляцию, для которой требуется довольно большая мощность: ведь модулятор управляет анодной цепью, через которую протекает весь рабочий ток лампы.
С одним релаксационным генератором — мультивибратором — мы уже встречались. Это — два усилительных каскада, связанных друг с другом сильной положительной обратной связью. Форма напряжения, создаваемая на выходе такой 124 схемы, показана на рис. 22, а. На рис. 22, б изображена схема
мультивибратора на транзисторах. Принцип ее работы ничем не отличается от действия такого же устройства на вакуумных электронных лампах. И в том, и в другом случае процессы работы совершенно аналогичны.
Рис- 22- Схемы низкочастотных генераторов релаксационных колебаний, применяемые для выработки модулирующего сигнала, и форма напряжений на их выходах: а — блокинг-генератор; б — мультивибратор на транзисторах.
Проследим развитие рабочего цикла в мультивибраторе с самого начала. Допустим, что схема находилась в полном покое. Затем по какой-либо случайной причине напряжение на сетке 125
левой (усилительной) лампы стало чуть-чуть более положительным. В ответ на ничтожно малое приращение положительного потенциала сетки напряжение на ее аноде уменьшится на величину, в десятки и сотни раз большую. В аноде появится уже вполне ощутимый отрицательный сигнал, но так как этот анод непосредственно связан через конденсатор Ci с сеткой правой лампы, отрицательный сигнал немедленно передастся на сетку последней. Правая лампа тоже усилительная, и в ее аноде возникнет еще раз усиленный сигнал, но уже положительной полярности. Поскольку же и этот анод связан через конденсатор с сеткой левой лампы, тысячекратно усиленный сигнал мгновенно прибавится к тому слабенькому сигналу, который вывел схему из равновесия.
Далее все будет развиваться в нарастающем темпе, пока напряжение на одном аноде не достигнет максимально возможного значения, а на другом — наименьшего. Произойдет скачок или, как говорят, переброс (опрокидывание) мультивибратора из одного состояния в другое. Конденсатор в цепи сетки запертой лампы при этом заряжен и некоторое время будет сохранять лампу закрытой.
Это — период покоя. Он не может продолжаться до бесконечности. Конденсатор будет постепенно разряжаться на землю через сопротивление утечки. Наступит момент, когда напряжение на сетке запертой лампы, вследствие разряда конденсатора, дойдет до потенциала отпирания. В этот же момент в ее аноде появится отрицательный сигнал, который передастся на соседнюю открытую лампу и начнет ее запирать. Весь процесс повторится, но в обратном направлении. Схема скачком перейдет в другое состояние. И так далее.
Хотя форма напряжения на выходе мультивибратора довольно замысловата, но в электронике встретится еще не то! Релаксационный генератор можно построить, применив для связи и накопления заряда не только конденсаторы, но и емкости в сочетании с индуктивностями. Получится так называемый блокинг-генератор (см. рис. 22, а). В нем анодная и сеточные цепи лампы связаны сильной и, конечно, положительной обратной связью посредством трансформатора. Катушки такого блокинг-трансформатора выполняют здесь по совместительству и функции добавочных накопителей энергии. Вторичная обмотка его связана с сеткой лампы через емкость. Форма 126 напряжения на выходе блокинг-генератора явно оставляет муль-
тивибратор за флагом. Здесь и острый пик с внушительной амплитудой, и пологие скаты с провалами и хребтами, и крутые обрывы, похожие на трамплины. Самым важным в этом сложном электрическом рельефе является наличие высокого главного пика. Такие всплески напряжения или тока на поверхности электрического океана, как мы уже знаем, называются импульсами. Блокинг-генератор в момент действия импульса способен развивать очень большую мощность, во всяком случае, намного большую, чем та, какую можно получить от этой же лампы при ее непрерывной работе. Именно за этим качеством мы и охотились. Применяя в качестве источника модулирующего сигнала блокинг-генератор, построенный даже на маломощной лампе, можно легко осуществить анодную модуляцию без всяких промежуточных усилителей. Мультивибратор в этом отношении более слабосилен и бесспорно уступает блокинг-генера-тору. Но у мультивибратора есть своя область применения, где он абсолютный чемпион. К этому мы еще вернемся в дальнейшем.
А как заставить блокинг-генератор вырабатывать сигналы разных частот для передачи набора команд? Чтобы ответить на этот вопрос, надо рассмотреть элементы схемы, которые определяют продолжительность временных интервалов между соседними импульсами, т. е. период колебаний. Каждое резкое изменение состояния схемы, обусловленное положительной обратной связью, создает на конденсаторе в сеточной цепи такой большой заряд, что потенциал сетки выходит далеко за пределы граничных точек характеристики лампы — ее запирания или в область положительных смещений сетки. Оказавшись в таком положении, сетка утрачивает способность управлять анодным током, и вся схема как бы замирает в состоянии временного покоя. Но под этой маской покоя все время идет работа, подготавливающая очередной переброс схемы в другое состояние. Очевидно, продолжительность времени покоя и определяет интервал между импульсами и, в конечном счете, частоту генерации. От чего же зависит время покоя?
Зарядившийся конденсатор имеет большую разность потенциалов между его обкладками и служит тем источником напряжения, который держит управляющую сетку в нерабочей зоне. Вспомним, что сетка и соединенная с ней обкладка конденсатора имеет путь для отвода электрического тока на землю. Этот путь проходит по сопротивлению утечки, через
которое заряд конденсатора стекает на землю. С уменьшением же заряда будет снижаться и напряжение на сетке. Чем меньше величина сопротивления утечки, тем быстрее разряжается конденсатор. Как только напряжение сетки войдет в область, где сетка обладает управляющими свойствами, сработает положительная обратная связь, и схема стремительно перебросится в новое состояние.
Теперь становится ясно, что чем меньше емкость конденсатора и величина сопротивления утечки, тем чаще будет опрокидываться схема и чаще будут следовать друг за другом импульсы. Произведение этих двух величин — сопротивления и емкости — называют постоянной времени электрической цепи. С увеличением постоянной времени возрастают инерционные свойства цепи, все труднее она изменяет свое состояние и все большее время затрачивается на один цикл заряда или разряда.
Таким образом, для изменения частоты блокинг-генератора, а также и мультивибратора достаточно изменить либо величину емкости, либо сопротивления — как удобнее конструктору. Вероятно, вам уже стало понятно, зачем на схемах рис. 22 в сеточных цепях мультивибратора и блокинг-генератора стоят целые наборы сопротивлений и переключатели: вводя в эти цепи с помощью переключателя то одно, то другое сопротивление, можно заставить генератор вырабатывать колебания разных частот и каждое положение переключателя сочетать с определенной командой.
На рис. 23 представлены схемы двух передатчиков, которые мы рекомендуем вам собрать для системы радиоуправления моделью. Одна схема — простейшая с непосредственной анодной модуляцией высокочастотного (в. ч.) генератора от блокинг-генератора, а вторая — с промежуточным каскадом усиления мощности модулирующего сигнала. Разумеется, если у вас есть опыт и настойчивость, интересно сконструировать свою собственную оригинальную схему передающей установки, способной выработать сигнал, который будет командовать плывущей вдали моделью.
Это вполне возможно, если вы хорошо уяснили принципы действия всех составных элементов схемы. Но если опыта еще нет, то лучше как следует разобраться в приведенных схемах и постараться их построить. Схемы генераторов высокой частоты в обоих случаях одинаковы. Они представляют со-128 бой пушпульные генераторы с общим резонансным контуром
Пахтанов, В. И. Соловьёв
О
б
J=>
Рис. 23. Принципиальные схемы передатчиков для систем радиоуправления моделями: а — с буферным каскадом; б — с непосредственной модуляцией на сетку генераторной лампы.
в анодных цепях. Наличие во второй схеме промежуточных отводов в катушке контура позволяет обеспечить более выгодную величину обратной связи. Ключ К- замыкает катушку связи с антенной Lo на лампочку накаливания. Это — обычная маломощная лампочка от карманного фонарика или неоновая лампочка МН13 (на схеме она обозначена Л4), служащая для контроля исправности генератора. При нормальной генерации, отдаваемая высокочастотная мощность вполне достаточна для того, чтобы заставить лампочку ярко светиться. Конечно, при передаче сигналов контрольная цепь должна быть разомкнута, иначе лампочка поглотит почти всю энергию нашего генератора, и для питания антенны ничего не останется.
Контрольную лампочку-индикатор необязательно монтировать в схему. Ею можно пользоваться и как отдельным измерительным прибором. Для этого к выводам лампочки достаточно присоединить катушку из нескольких витков провода. Если приблизить катушку к контуру работающего в. ч. генератора, лампочка начнет светиться. Такой простейший и удобный прибор дает возможность обнаружить присутствие сильных электромагнитных полей высокой частоты.
В первой схеме применена анодная модуляция генераторного каскада. Модулирующий сигнал вырабатывается блокинг-генератором, собранным на полупроводниковом триоде любого типа (П1А, П2Б, П13 и т. д.). Сопротивления, которые по одному включаются в цепь базы нажимом соответствующей кнопки, надо подобрать по величине, в зависимости от нужных частот модуляции и типа триода. Если применить полупроводниковый триод помощнее, например П201 или П203, то можно осуществить анодную модуляцию непосредственно от блокинг-гене-ратора без промежуточного каскада. В нашей схеме такой промежуточный каскад имеется, что и позволяет обойтись самым маломощным блокингом, а заодно улучшить стабильность работы передатчика.
Модуляторный каскад собран на пальчиковой лампе 2П1П и представляет собой обычный усилитель, который увеличивает мощность сигнала с блокинг-генератора. Вторичная обмотка анодного трансформатора этого каскада включена последовательно в цепь анодного питания в. ч. генератора. Переменное напряжение модулирующего сигнала накладывается на постоянное напряжение анодной батареи, и общее напряжение пита-130 ния анода генератора изменяется с нужной частотой. При этом
высокочастотный сигнал на выходе генератора оказывается про-модулированным по амплитуде.
Во второй схеме применена сеточная модуляция. Блокинг-генератор здесь собран на вакуумной лампе Лз (2П1П), и его выход непосредственно подключен к сеткам ламп генератора. Результат достигается тот же, что и в предыдущем случае: изменение потенциала сеток приводит к изменениям амплитуды генерируемого в. ч. сигнала. Правда, здесь качество модуляции оказывается похуже, но зато сама схема проще. Частота модуляции, необходимая для передачи определенной команды, задается замыканием одного из ключей (от Ki до Kq, а если надо, то и больше). Переменные сопротивления в цепях включения каждой команды служат для точной подгонки частоты блокинга к резонансу с настроенными звеньями на принимающей стороне (например, с вибрационным реле).
Система радиоуправления, выполненная по данной схеме, выпускается нашей промышленностью под маркой РУМ-1. В связи с этим перед моделистом открывается более легкий путь — нужную аппаратуру можно просто купить в магазине. Советовать трудно. Легкий путь далеко не всегда оказывается лучшим...
Для излучения электромагнитной волны передатчик еще надо снабдить антенной. Поскольку передатчик и приемник находятся сравнительно близко друг от друга, уверенную связь обеспечит даже самая простая антенна. Очень удобна штыревая антенна (см. фото), изготовленная либо из цельной трубки, либо из набора трубок разных диаметров, входящих друг в друга. Антенна этого типа называется телескопической. Она более приемлема для моделиста, так как позволяет во время перерывов работы сделать ее очень короткой и удобной для перевозки.
Эффективность антенны резко повышается, если она настраивается в резонанс на частоту передатчика. Это имеет место, когда длина антенны близка к V4 или V2 длины излучаемой волны. Можно еще усилить излучение, применив полуволновой вибратор, состоящий из двух четвертьволновых штырей, расположенных горизонтально по одной линии (аналогично конструкции телевизионных антенн). Такая система будет обладать ярко выраженной направленностью, если «нацелить» ее на тот участок, где будет плавать модель.
Мы получили все возможности для того, чтобы отправить сигнал к нашей модели. Теперь надо подготовиться к его приему.
СТРОИМ ПРИЕМНИК СИСТЕМЫ
РАДИОУПРАВЛЕНИЯ
Электромагнитные колебания, сорвавшиеся с антенны передатчика, несут приказы исполнительным механизмам модели. Если их вовремя не принять, то они так и затеряются в бесконечных пространствах без всякой пользы.
Итак, нам нужен приемник. Он должен выполнять следующие операции: выделить адресованный ему сигнал из множества других, путешествующих в пространстве, и усилить его, снять с уже ненужной более высокочастотной несущей волны записанную на ней команду, а затем направить ее в соответствующий исполнительный канал.
Выполнить первую часть работы может любой ламповый или транзисторный усилитель, настроенный в резонанс на несущую частоту сигнала. Как мы знаем, резонансные свойства усилитель приобретает, если в его сеточной или анодной цепях установить резонансные контуры. Но идти этим путем не очень выгодно, так как для сравнительно высоких частот несущей волны трудно построить каскад с большим коэффициентом усиления. Поэтому придется конструировать приемник из нескольких усилительных каскадов, а это сложно и, следовательно, нежелательно.
Задача усиления очень высоких частот непросто решается и в «большой» радиотехнике. Наиболее эффективен способ гетеродинирования — искусственного понижения высокой частоты сигнала до промежуточной частоты, на которой и осуществляется усиление. Большинство промышленных радиоприемников — супергетеродинов — работает именно по такому принципу. К сожалению, и в этом случае конструкция приемника получается довольно сложной.
Для наших целей очень важно добиться высокой чувствительности приемника при максимальной его простоте, т. е. приемник должен иметь минимальное число
усилительных и других каскадов, но зато обладающих очень большим коэффициентом усиления. Как уже говорилось, усиление каскада можно повысить, если ввести положительную обратную связь, по величине меньше критической. Получится регенеративный усилитель, обладающий большим коэффициентом усиления, но очень нестабильный. Однако существует метод, который все же позволяет, сохранив достоинства регенератора, избавиться от некоторых его недостатков. Этот метод, представляющий собой дальнейшее развитие принципа регенератора, называется сверхрегенеративным усилением.
Нестабильность регенеративного усилителя приводит к тому, что он произвольно изменяет коэффициент усиления и легко переходит в режим генератора. Сверхрегенератор как раз отличается тем, что ему разрешается переходить в автоколебательный режим, т. е. превращаться в генератор. Возникает естественный вопрос: какой же это усилитель, если он сам генерирует колебания? Разве можно усиливать сигнал с помощью генератора? Оказывается, можно. Чтобы понять, как это осуществляется, придется начать издалека.
Сверхрегенеративный каскад работает в таком режиме, что он генерирует не непрерывно, а как бы отдельными вспышками. Автоколебательный процесс в сверхрегенераторе начинается от нуля, раскачивается до предельной амплитуды, а затем обрывается. После некоторого периода «молчания» цикл повторяется снова и так далее. Частота следования вспышек высокочастотных колебаний называется частотой срывов сверхгенератора. Создать сверхрегенеративный режим не так уж сложно. Для этого можно подвести от постороннего источника к сетке лампы периодически изменяющееся напряжение смещения. При достижении некоторого уровня отрицательного потенциала сетки автоколебания прекратятся и возникнут снова, как только управляющий сигнал опять доведет отрицательное смещение сетки ниже критического значения. Такое устройство называется сверхрегенератором с внешним гашением. Это хорошая схема, но для нее нужен источник управляющего сигнала, т. е., по меньшей мере, еще один дополнительный каскад.
Можно использовать более простую схему — сверхрегенератор с самогашением. Здесь периодический срыв автоколебаний осуществляется без подведения извне управляющего сигнала. Когда автоколебания достигают большой амплитуды, их положительные максимумы выходят из области отрицательных
смещении сетки и на некоторую часть периода потенциал сетки становится положительным. Как нам известно, при этом в сеточной цепи протекает ток. Он заряжает емкость, находящуюся или в цепи сетки, или в цепи катода, что и в том, и в другом случае приводит к увеличению отрицательного смещения сетки. Так же, как и в сверхрегенераторе с внешним гашением, автоколебания прекратятся при некотором отрицательном значении напряжения смещения сетки. Но в этом случае сверхрегенератор запирается сам, уже не прибегая к помощи внешнего гасящего сигнала. Без всякого содействия извне такой сверхрегенератор сумеет и отпереть себя. После прекращения автоколебаний ток в цепи сетки не протекает и подзаряда емкости не происходит. Параллельно емкости включается сопротивление, через которое заряд постепенно стекает с конденсатора. Отрицательное смещение сетки уменьшается, и автоколебания возникают снова, чтобы через некоторое время опять прекратиться.
Для самогасящегося сверхрегенератора нужен один-един-ственный ламповый каскад, поэтому такое устройство для нас наиболее предпочтительно. На рис. 24 приведены два варианта схемы сверхрегенератора с самогашением. В одной из них (рис. 24, а), на первый взгляд, отсутствует цепь положительной обратной связи между электродами. На самом же деле эта цепь замкнулась через внутриламповые емкости, которые обычно на схемах не показываются. Они очень малы, но при работе на высоких частотах ведут себя как настоящие реактивные сопротивления. Поскольку рабочая частота нашего приемника около 30 Мгц, то подобная схема действует вполне удовлетворительно. Чувствительность ее выше, чем у схемы с сильной положительной обратной связью через катушки индуктивности, но она более капризна в эксплуатации и требует тщательной наладки. Для нашего приемника целесообразнее применить схему с внешней обратной связью (рис. 24, б).
Прежде чем добраться до объяснения, каким образом сверхрегенератор усиливает сигналы, следует указать, что он способен еще на одну операцию — детектирование в. ч. сигнала. Разобравшись в этом, легче перейти и к принципу сверхрегенеративного усиления.
Когда сверхрегенератор не генерирует, то через лампу протекает некоторый постоянный ток — ток покоя /ао (рис. 25, а). Если бы после возникновения автоколебаний величина анодного 134 тока колебалась строго симметрично около этого начального
уровня, то среднее значение тока осталось бы неизменным. На самом деле так не бывает. Возрастание амплитуды колебаний анодного тока ограничивается загибом характеристики лампы, а отрицательные полупериоды срезаются, когда потенциал
Рис. 24. Схемы сверхгенераторов с самогашением: а — на транзисторе без внешней связи; б — с внешней цепью обратной связи.
сетки переходит точку запирания лампы. Анодный ток становится прерывистым, его среднее значение уменьшается. Чем больше амплитуда колебаний, тем меньше средний анодный ТОК /а. ср.
Если сгладить высокочастотные импульсы тока, то медленные изменения среднего значения анодного тока в точности повторят закон изменения амплитуды сигнала высокой частоты.
Иначе говоря, на выходе останется только низкочастотная огибающая высокочастотного сигнала. Происходит процесс, обратный модуляции,— модулирующий сигнал снимается с перенес-
шей его волны высокой частоты. Это и есть процесс детектирования. Для того, чтобы не пропустить в низкочастотные части приемника высокую частоту несущей, в цепи анода включена индуктивность (дроссель Др). После дросселя на выходе сверхрегенератора остаются только относительно медленные коле-136 бания среднего значения анодного тока.
Каждая вспышка автоколебаний в сверхрегенераторе вызовет на выходе появление импульса тока (см. рис. 25, б). Этот импульс будет возрастать по мере увеличения амплитуды автоколебаний, достигнет предельной величины, а затем по истечении некоторого времени при срыве колебаний опадает до исходного уровня. Площадь импульсов остается примерно одинаковой при отсутствии на входе сверхрегенератора сигнала. Если на вход подать сигнал не той частоты, на которую настроен контур сверхрегенератора, то в его работе ничего не изменится. Но в случае совпадения частот, поступивший сигнал вначале как бы помогает сверхрегенератору раскачаться быстрее, а затем препятствует срыву колебаний. Площадь импульса тока на выходе увеличится, причем тем больше, чем больше амплитуда сигнала.
Этот процесс схематически изображен на рис. 25 внизу. На нем показаны два импульса сверхрегенератора: первый из них—при наличии внешнего сигнала, а второй — при его отсутствии. Первый импульс нарастает быстрее, а спадает медленнее. Различие в площади огибающих отмечено заштрихованными участками. Изменение формы огибающей импульса, вызванное присутствием сигнала, не может не повлиять на величину среднего анодного тока. Отрицательный импульс его станет более продолжительным, и занимаемая им площадь на графике увеличится. Приращение площади импульса тока под воздействием сигнала показано зачерненными участками. Модулированный по амплитуде высокочастотный сигнал вызовет непрерывное и пропорциональное изменение площадей следующих друг за другом импульсов тока. Но ведь импульсы тоже можно усреднить, а после этого средний ток будет плавно изменяться, воспроизводя форму модуляции несущей. Это и есть как раз то, к чему мы стремились.
На выходе сверхрегенератора мы получаем низкочастотный сигнал, который был ранее «записан» на несущей волне, путем модуляции ее амплитуды, т. е. он выполнил обязанности детектора. Но не в этом заключается его главное достоинство. Про-детектировать сигнал можно было бы и более простым устройством. Дело в том, что очень слабые внешние сигналы весьма сильно влияют на величину импульсов тока сверхрегенератора. Таким образом, сверхрегенератор работает как усилитель с огромным коэффициентом усиления.
Сглаживание собственных импульсов тока сверхрегенератора осуществляется емкостью в цепи выхода, которая заряжается импульсами и отдает заряд во время их отсутствия. Чтобы она не сгладила заодно и полезные колебания тока, повторяющие относительно медленные изменения формы сигнала, необходимо иметь частоту срывов во много раз выше, чем частота модуляции несущей (не менее чем в 30—50 раз). При этом условии всегда можно подобрать величину емкости так, что она сгладит высокочастотные импульсы, а полезный сигнал будет передаваться через нее без больших потерь. Такой сверхрегенеративный приемник обеспечивает усиление в несколько десятков тысяч раз (в идеальном случае до миллиона) и вполне удовлетворяет всем требованиям, которые мы выдвигали к приемному устройству системы радиоуправления моделями.
Имеющийся теперь в нашем распоряжении низкочастотный сигнал, соответствующий определенной команде, еще слишком слаб для того, чтобы его можно было направить в схему, умеющую различать сигналы,— дискриминатор — или к исполнительным устройствам. Поэтому за сверхрегенератором, который выполняет функции избирательного в. ч. усилителя и детектора, нужно поставить усилитель низкой частоты (УНЧ). Эти усилители просты и работают очень надежно.
На рис. 26 представлены три схемы УНЧ — одна на электронных лампах и две на транзисторах. Первый каскад в транзисторном усилителе, показанном на рис. 26, а, имеет нагрузку в цепи эмиттера. Такая схема полностью аналогична ламповому каскаду, в котором нагрузка перенесена из анода в катод. Это — катодный повторитель. Усиления сигнала здесь не происходит потому, что напряжение катода, в лучшем случае, только повторяет изменения напряжения на сетке, но этот каскад имеет большое входное и малое выходное сопротивления. Применяют катодный повторитель для согласования сопротивлений, что совершенно необходимо, если сопротивление нагрузки во много раз меньше внутреннего сопротивления источника сигнала. Иначе, как известно, большая часть напряжения будет падать внутри источника, не оставляя почти ничего для полезной нагрузки. Транзистор, в отличие от электронной лампы, обладает небольшим сопротивлением управляющей цепи, и поэтому необходимо согласовать высокоомный выход лампового сверхрегенератора с низкоомным входом транзисторного усилителя. 138 Эту функцию выполняет эмиттерный повторитель. Для лампового
Рис. 26. Принципиальные схемы усилителей низкой частоты (УНЧ): а — с катодным повторителем; б — с отрицательной обратной связью; в — на электронных лампах.
усилителя низкой частоты такого согласования не требуется, так как его вход имеет большое сопротивление.
Дискриминатор (или дешифратор) должен «опознать» зашифрованную команду и направить ее в соответствующий канал для исполнения. В зависимости от способа зашифровки команды потребуются разные устройства и для ее расшифровки. Если команда зашифрована числом передаваемых импульсов, то самым простым дешифратором будет обычное телефонное реле — искатель. Это реле под действием каждого импульса тока передвигает щетку на следующий контакт и замыкает связанную с ним исполнительную цепь.
Механическое реле — искатель можно заменить набором электронных реле — триггеров. Триггер представляет собой заторможенный мультивибратор, который перебрасывается из одного состояния в другое при поступлении на вход импульса тока или напряжения. В главе II мы убедились, что схема, составленная из трех последовательных двоичных ячеек, может иметь восемь различных состояний. Очевидно, что каждое из них аналогично замыканию щеткой механического искателя определенного контакта и может быть точно так же связано с исполнительным устройством.
На рис. 27 приведена схема триггерной ячейки на транзисторах. Последовательное соединение таких ячеек позволяет образовать систему с большой емкостью, т. е. с набором возможных состояний. В коллекторных цепях триггеров включены обмотки реле, которые срабатывают, когда данный транзистор находится в открытом состоянии, т. е. проводит ток. Если составить схему из трех ячеек, то восьми возможным ее состояниям будут соответствовать восемь вариантов положений контактов релейной группы. Следовательно, такая схема может выполнить любую из команд, зашифрованных в последовательность импульсов от одного до восьми. Прежде чем прийти, например, в положение, соответствующее подаче пяти импульсов, схема неизбежно должна побывать во всех предыдущих состояниях. Поскольку каждое из них тоже связано с определенной командой, то нужно принять меры защиты исполнительных цепей от срабатываний в промежуточных состояниях.
Для этого обычно применяют систему задержки исполнения команды. При передаче командной серии следующих друг за другом импульсов искатель очень быстро переходит из одного 140 положения в другое, и цепи исполнения команд не успевают
сработать. Когда передан весь набор импульсов, искатель останавливается в соответствующем положении, и по истечении времени задержки определенная исполнительная цепь сработает. Можно применить и другой метод, состоящий в том, что сначала передается сигнал «набор команды», а затем второй сигнал — «исполнение команды». И в том, и в другом случае
Рис. 27. Запоминающая (пересчетная) схема на транзисторах.
время, необходимое для передачи каждой команды, увеличивается. В этом заключается еще один недостаток импульсной системы управления, помимо указанного раньше (ее слабой помехоустойчивости).
Теперь займемся расшифровкой сигналов, доставленных к приемнику промодулированной несущей волной. Каждая команда зашифрована на передающей стороне в известную частоту модуляции. Наш приемник уже выделил полезный сигнал, имеющий частоту модуляции, а усилитель низкой частоты усилил его. Поскольку сигналы команд отличаются друг от друга именно частотой, то и предназначенный для их сортировки
дискриминатор должен уметь различать частоты поступивших сигналов. Такой способностью обладает, как нам известно, резонансный усилитель. Значит, можно построить дискриминатор,
Рис. 28. Системы выделения сигналов на определенной частоте: а —'С LC-контуром; б — с /?С-контуром в виде Т-моста.
состоящий из набора резонансных усилителей, каждый из которых настроен на частоту сигнала определенной команды. Для этой цели можно использовать усилители с настроенными резонансными LC-контурами (рис. 28, а). Но эта схема отнюдь не 142 является наилучшей, так как резонансный LC-контур для низ-
ких частот неизбежно имеет значительный вес и плохие качества.
Резонансные контуры, предназначенные для выделения сигналов нужной частоты, называют фильтрами. Они как бы отфильтровывают нужные сигналы от всех прочих. Резонансный — избирательный — усилитель более высокого качества может быть построен на основе /?С-фильтров. Такой фильтр, собранный по схеме так называемого двойного Т-образного моста, совершенно не пропускает через себя сигнал на резонансной частоте. Поэтому если /?С-фильтр включить в цепь сильной отрицательной обратной связи (рис. 28, б), то на всех частотах, кроме частоты резонанса, обратная связь подавит усиление каскада. В то же время на резонансной частоте каскад будет иметь нормальный коэффициент усиления. Значит, избирательный /?С-уси-литель будет способен выделить сигнал нужной частоты. Острота настройки усилителя этого типа довольно высока, а вес и габариты его /?С-фильтра очень малы. Постройка /?С-уси-лителей возможна даже для работы на очень низких частотах (порядка десятков герц) при сохранении высокой избирательности.
Сортировка сигналов команд с помощью избирательных усилительных каскадов осуществляется очень точно, а вся схема обладает достаточным быстродействием. Поэтому такие дискриминаторы целесообразно применять в высококачественных системах радиоуправления для обеспечения высокой оперативности и надежности. Для более простых систем они слишком дороги и громоздки, так как требуют наличия в установке довольно большого количества активных элементов — электронных ламп или транзисторов.
Моделисты часто применяют для дискриминации сигналов по частоте вибрационные реле различных конструкций. Принцип действия таких реле основан на свойстве упругих пластинок и стержней колебаться с определенной частотой, зависящей от их размеров и материала. Эта частота называется собственной частотой колебаний данного упругого тела или частотой его механического резонанса. Если возбуждать колебания упругой пластинки именно на ее резонансной частоте, то уже очень малая вынуждающая сила вызовет быстрый рост амплитуды колебаний пластинки, а приложение к ней той же силы, но с другой частотой не приведет к возникновению сколько-нибудь заметных колебаний.
Собственная частота колебаний пластинки определяется ее геометрическими размерами, массой и упругостью. При прочих равных условиях чем длиннее пластинка, закрепленная одним концом, тем ниже частота ее механического резонанса. Изменяя длину пластинки, можно настроить ее в резонанс на ходимую частоту колебаний. Это похоже на приведенный чале книги пример с колоколами и камертонами.
необ-в на-
а)
о-
S)
PS*
Сн
Рис. 29. Вибрационное реле (а) и усилитель сигнала (б).
От т
о
Вибрационное реле (рис. 29) состоит из набора язычков — пластинок, каждая из которых настроена на известную частоту, и электромагнита, способного создавать усилие, притягивающее язычки. Пропустив через обмотку электромагнита переменный ток с выхода усилителя низкой частоты, мы возбудим магнитное поле, изменяющееся с частотой сигнала. Хотя в этом магнитном поле находятся одновременно все язычки вибрационного реле, но большой размах колебаний приобретает только один из них — тот, собственная частота которого совпадает с частотой сигнала.
На некотором расстоянии от язычков расположены неподвижные контакты (I—V). Когда амплитуда колебаний язычка становится большой, он периодически прикасается к неподвижному контакту и замыкает электрическую цепь. В этой цепи появится пульсирующий ток. Чтобы сгладить пульсации, ставятся конденсаторы-накопители (Ci—С5). Они заряжаются при за-
мыканиях язычка вибрационного реле, а в период разрыва цепи отдают запасенную энергию в нагрузку. Чем больше сопротивление нагрузки, тем медленнее разряжается конденсатор за время разрыва вибрирующих контактов и тем меньший ток должен будет пройти через контакты для очередной подзарядки емкости. Это очень важно, так как при больших токах контакты вибрационного реле быстро обгорают и перестают обеспечивать надежное замыкание. Нужно всегда стремиться, по возможности, разгрузить вибрационное реле от обязанности отдавать большие токи. Обычно в качестве его нагрузки используется высокоомная обмотка чувствительного, но маломощного реле или, что еще лучше, управляющий электрод активного элемента. Замыкание его контактов и включает нужную исполнительную цепь.
Следовательно, на выход нашего приемного устройства можно поставить несколько таких реле, каждое из которых срабатывает при поступлении определенной команды. Эти реле мы соответственно и будем называть: «приемное реле первой команды (Р1К)», «приемное реле второй команды (Р2К)» и т. д. Точно такими же выходными реле заканчиваются выходы приемников и с другими схемами дискриминаторов. Существенно облегчается работа вибрационного реле, если сигнал подводится с его язычка ко входу транзистора, который, в свою очередь, управляет током, протекающим через обмотку приемного реле, как это и показано на схеме рис. 29.
Итак, мы уже располагаем приемным устройством, на выходе которого установлен набор реле, и нам известно, какое реле отзовется на приход той или иной команды. Остается преобразовать замыкания и размыкания этих слабеньких контактов в работу исполнительных механизмов, приводящих в движение модель и управляющих ею.
Система автоматики (телеуправления) на моделях приводится в действие электрическими сигналами с выхода приемного устройства и обеспечивает включение, выключение и регулирование режима работы исполнительных механизмов.
Первая задача автоматических устройств — усилить командный сигнал или, иначе говоря, управлять с помощью слабых воздействий более мощными потребителями энергии. Но функции системы автоматики этим не ограничиваются. Она может
Ю Ю. Д. Пахтанов, В. И. Соловьев
ПРИВОДИМ В ДЕЙСТВИЕ ИСПОЛНИТЕЛЬНЫЕ МЕХАНИЗМЫ
быть построена так, что окажется способной воспринять одновременно несколько переданных в определенной последовательности команд, т. е. как бы «запомнить» команду, передан
ную раньше, и не прекращать ее выполнения при поступлении новых команд. Это свойство в ряде случаев является очень ценным. На такой основе одноканальную систему телеуправления (в которой нельзя передавать одновременно две и более команд) можно превратить в многоканальную. Кроме того, внутри самой системы автоматики удается образовать дополнительные связи, дающие возможность получить новые виды работы исполнительных механизмов при передаче комбинации из нескольких команд, что позволяет сократить их набор.
Главным элементом любой системы автоматики, как нам уже известно, является реле — устройство, которое при по
ступлении на его вход сигнала, скачком изменяет состояние выходной цепи. В большинстве случаев выходная цепь реле
имеет два состояния — «замкнута» или «разомкнута».
Сейчас известно немало устройств, обладающих релейными свойствами. Многие из них строятся с применением электронных приборов. Мы уже знакомы с принципом работы электромеханического и электронного реле. Однако использовать триггеры для наших моделей нецелесообразно, так как их основное достоинство— быстродействие — не потребуется. Такие реле способны совершать несколько миллионов срабатываний в секунду, а нам вполне достаточно.. . нескольких срабатываний в секунду или даже в минуту. Поэтому на радиоуправляемых моделях чаще всего устанавливают электромеханические реле,
так как они просты, сравнительно надежны и недорого стоят.
Всякое электромеханическое реле (рис. 30) состоит из магнитопровода, на котором находится катушка индуктивности, якоря и группы контактов. Магнитная цепь в реле замыкается через зазор между якорем и сердечником катушки. При прохождении тока через обмотку реле якорь стремится уменьшить величину зазора и притягивается к сердечнику. При этом он на
жимает на упругие контакты и перемещает их. Контакты реле могут работать как на размыкание, так и на замыкание. В первом случае, при отсутствии тока в обмотке, выходной контакт замкнут и разрывает цепь при подаче сигнала. Во втором случае — наоборот. Реле необязательно должно возбуждаться электрическим током. Существуют реле и других типов.
Кроме реле в систему автоматики обычно входят многие другие устройства и приборы — индикаторы, разъемные соединения и т. д. На рис. 31 приведены условные обозначения основ
ных элементов системы автоматики, указываемые на схемах.
Простейшие реле нечувствительны к направлению тока, пропускаемого через обмотку: якорек притягивается к сердечнику при любом направлении магнитного потока. Имеются более сложные конструкции реле, в которых магнитопровод предварительно намагничен (обычно в него заделан кусочек постоянного магнита), поэтому они реагируют на направление возбуждающего тока. Такие реле назы
Рис. 30. Схема конструкции электромагнитного реле.
1 — катушка; 2 — сердечник; 3 — ярмо; 4 — якорь; 5 — контактная группа.
ваются поляризованными.
Подбирая различные сочетания реле и контактных групп, можно построить автоматические системы, обладающие самыми разнообразными свойствами. Конечно, мы не можем разобрать в этой книге даже сотую долю всех вариантов релейных схем, но с некоторыми из них необходимо познакомиться.
Очень часто применяется схема включения реле на самоблокировку (рис. 32, а). Так как реле после снятия сигнала возбуждения возвращается в исходное состояние, то, очевидно, исполнительный механизм может работать только до тех пор, пока продолжается передача соответствующей команды. Это очень неудобно. Например, после подачи команды «вперед» желательно освободить радиоканал для передачи команд на
управление рулем и другими механизмами, не прекращая работы двигателей, включенных первой командой. Такой результат и достигается постановкой реле команды «вперед» (РВ) на самоблокировку.
Рис. 31. Основные элементы схем автоматики.
1 и 2 — ответвления проводов; 3—плавкие предохранители; 4 — лампы накаливания; 5 — телефон; 6 — контакты магнитного пускателя: а — замыкающий; б — размыкающий, в — переключающий; 7 — двигатель постоянного тока с последовательным возбуждением; 8 — двигатель постоянного тока с параллельным возбуждением; 9 — двигатель постоянного тока со средней точкой от обмотки возбуждения; 10 — двигатель постоянного тока с возбуждением от постоянных магнитов; 11 —гальванический элемент или аккумулятор; 12 — батарея аккумуляторов или элементов с отводом; 13 — амперметр; 14—вольтметр; 15 — датчик пневматический; 16 — датчик поплавковый; 17 — пьезоэлектрический преобразователь; 18 — магнитострикционный излучатель; 19 — контакты выключателя: а — замыкающий, б — размыкающий, в — переключающий; 20 — контакты реле: а—замыкающий, б — размыкающий, в — переключающий; 21 — разъем; 22 — обмотка реле; 23 — двухобмоточное реле; 24 — поляризованные реле:
а — с преобладанием, б — с нейтральным положением якоря.
Как видно из схемы, у реле должен иметься нормально разомкнутый контакт, который после срабатывания реле замыкается и подает питание на его обмотку. После этого сигнал от постороннего источника уже не нужен — реле питает свою обмотку самостоятельно. Чтобы снять реле с самоблокировки, нужно искусственно разорвать цепь питания обмотки. Обычно
это делается с помощью мально замкнутый контакт которого подводится питание к блокирующим контактам. Если этим реле замыкается
цепь питания нескольких самоблокирующихся линий, то подача на него сигнала отменит одновременно все ранее переданные команды. Возможен и другой случай, когда разрыв цепи самоблокировки осуществляется контактом реле той команды, которая несовместима с командой, выполняемой блокированной цепью. Например, так можно связать реле
дополнительного реле, через нор-
Рис. 32. Схемы включения реле: а — самоблокировка реле; б — пульс-пара; в — реле выдержки времени.
команд «вперед» и «на-
зад». Подача любой из них автоматически отменит предыдущую, и не потребуется подавать промежуточную команду
«стоп».
Если соединить два реле по схеме, показанной на рис. 32, б, то получится так называемая пульс-пара, работающая как генератор в автоколебательном режиме — аналогично мультивибратору. Эту схему можно применить для включения мигающих огней, периодического включения аппаратуры и т. п.
Присоединив параллельно обмотке реле конденсатор достаточной емкости, получим схему реле выдержки времени (рис. 32, в). Здесь после выключения возбуждающего сигнала ток в обмотке реле будет поддерживаться некоторое время за счет разряда конденсатора. Чем больше емкость конденсатора
и чем больше сопротивление обмотки, тем длительнее время задержки реле. Поскольку активное сопротивление обмоток реле обычно невелико, то для получения большой задержки потребуются конденсаторы огромной емкости. Это неудобство можно обойти, если включить обмотку реле в коллекторную цепь транзистора или в анодную цепь лампы, а емкость разряжать на сопротивление входной цепи. Такие реле можно применить для включения механизмов по истечении заданного времени (например, для команды на аварийное всплытие подводной лодки) или задержки исполнения при передаче команд, зашифрованных числом импульсов.
Теперь попробуем сами построить систему автоматики для радиоуправления механизмами модели. Предположим, что наша аппаратура способна передавать пять команд: 1. Вперед. 2. Назад. 3. Поворот влево. 4. Поворот вправо. 5. Стоп.
Прежде всего, посмотрим, какие командные цепи нуждаются в самоблокировке. Очевидно — первая и вторая команды, причем блокировка должна прекращаться, если в процессе исполнения любой из этих двух команд будет передана другая. Кроме того, передача пятой команды «стоп» тоже должна отменить исполнение первой и второй команд. Значит, каждая цепь самоблокировки должна замыкаться через две дополнительные пары контактов реле «вперед» (РВ), через контакты реле «назад» (PH) и реле «стоп» (PC), а реле PH — через контакты реле РВ и PC. Команды управления рулем в самоблокировке цепей не нуждаются — они должны выполняться только в моменты передачи этих команд. Если наша модель двухвинтовая, то для ускорения поворота полезно выключать один из двигателей. Для этого цепь питания каждого из них должна проходить через контакты реле поворота. Включая рулевую машинку для перекладки руля влево, это реле одновременно выключит левый двигатель. После снятия команды поворота двигатель автоматически включается снова.
Для того чтобы рулевая машинка с винтовым приводом не могла дойти до упора, устанавливаются концевые выключатели. С их помощью мотор отключается независимо от поступающего сигнала. Такое устройство необходимо, так как оператор не видит, в каком положении находится руль на управляемой им модели. В некоторых случаях удобно избавить себя от необходимости подавать противоположную команду поворота после 150 исполнения маневра. Для автоматического возвращения руля
в нейтральное положение можно применить простое устройство, состоящее из фигурного кулачка и системы контактов.
Разбираясь в схемах автоматики, следует учитывать, что контакты реле могут быть показаны в любом месте чертежа, подчас далеко от изображения обмотки этого реле. Если у него имеется несколько пар контактов, то все они обозначаются одним и тем же сочетанием букв, таким же, как и обмотка реле, но различаются номерами. Например, если реле команды «поворот направо» РП имеет три пары контактов, то их обозначения будут: РП1, РП2 и РПЗ.
Для управления цепями, потребляющими значительные токи (электродвигателями, соленоидами и т. п.), применяются, кроме основного реле, реле-повторители. Основное реле включает только цепь, питающую обмотку повторителя, а то, в свою очередь, замыкает исполнительную цепь. При этом основное реле может быть маломощным и несильно нагружать выход приемника, а реле-повторитель уже имеет достаточно мощные контакты.
Можно собрать схему автоматики так, что она будет выполнять команды, зашифрованные сочетанием двух или более последовательно передаваемых сигналов, т. е. реализовать принцип логического умножения — схему «и». Мы уже знаем, что в этом случае, при том же числе знаков алфавита (наборе различных сигналов), можно передавать большее количество команд. Например, взамен управления с помощью семи самостоятельных команд — «малый ход», «средний ход» и «полный ход» при движении «вперед» и «назад» и еще команды «стоп», можно решить эту задачу, ограничившись пятикомандной аппаратурой. При этом сначала подается команда «вперед» и «назад», которая подготавливает цепи питания, но не включает двигатель, а затем — любая из остальных.
Умело конструируя релейные схемы автоматики, можно решить практически все задачи, которые возникают при постройке управляемых моделей. Поэтому мы не стремимся навязывать моделисту готовые решения. Зная принципы работы релейных схем и ясно представляя, какие действия должна выполнять конкретная модель, всегда удастся построить нужную схему. Для тех, кто еще только начинает свой путь судомоделиста и пока не чувствует себя уверенно, можно посоветовать применение некоторых проверенных схем включения ходовых двигателей, которые представлены на рис. 33.
В рассмотренных схемах механизмы приводятся в действие
151
Рис. 33. Схемы включения двигателей.
электроэнергией. Существует еще один удобный источник энергии, который пока совершенно не применяется судомоделистами,— энергия сжатого воздуха. А это жаль. Именно для моделей кораблей пневматические механизмы оказались бы очень удобными. Накопителем энергии в данном случае служит достаточно прочный баллон, который может накачиваться перед каж-
КРП
КРП
Рис. 34. Пневматическая рулевая машинка.
1 — баллон; 2 — клапаны впуска; 3 — выпускной клапан; 4 — мембрана; 5—рулевая тяга.
дым запуском множество раз. Вес такого источника питания невелик, стоимость ничтожна, а срок службы — десятки лет.
На рис. 34 представлена схема конструкции пневматической рулевой машинки, которую мы советуем моделистам испытать на практике. Следует только помнить, что при давлениях больше двух-трех атмосфер разрывы баллонов могут быть опасны. Поэтому их нужно делать с хорошим запасом прочности или, еще лучше, применять баллоны заводского изготовления.
Мы подошли вплотную к «гвоздю» нашей программы — к постройке самой модели.
Но прежде познакомимся с особенностями аппаратуры, которая потребуется, если мы захотим управлять моделью не по радиоканалу, а используя акустические волны.
УПРАВЛЯЮТ ЗВУКОВЫЕ ВОЛНЫ
Все известные нам принципы передачи и исполнения команд остаются в силе и при использовании в качестве несущей волны акустических колебаний. Отличия такой системы будут заключаться в конструкции излучающих и приемных устройств, в схеме приемника и в некоторых особенностях передачи сигналов на несущей волне с небольшой частотой.
Колебания высокой частоты, вырабатываемые генератором
и подведенные к антенне, излучаются в виде электромагнитных волн. Если же мы хотим излучать звуковую волну, то нам придется сначала преобразовать электрическую энергию в другую форму — в энергию акустических колебаний. Для этого необходим специальный преобразователь.
Акустические волны представляют собой механические колебания и излучаются в упругие среды колеблющимися поверхностями. Значит, акустический излучатель можно построить, если заставить упругую пластинку колебаться в переменном электромагнитном поле. Этот принцип используется в динамиках и громкоговорителях, которые работают в звуковом диапазоне частот (до 15 --20 кгц). Но для излучения ультразвуковых колебаний (т. е. колебаний с частотами выше 20 кгц) такие конструкции не очень пригодны. Обычно для этих целей применяются устройства, основанные на пьезоэлектрическом и магнитострикционном эффектах.
Сущность пьезоэлектрического эффекта состоит в том, что при помещении некоторых кристаллов (кварца, турмалина, сег-нетовой соли и т. д.) в электрическое поле они или сжимаются или расширяются. Пьезоэффект обратим: если механически
деформировать кристалл, то на его поверхностях появятся электрические заряды. Магнитострикционный эффект проявляется как деформация некоторых металлов и сплавов в магнитном поле. Для нас бо-
Рис. 35. Схема конструкций пьезоэлектрических излучателей: а — плоский; б — шаровой.
1 — пьезоэломент; 2 — внешняя обкладке (электрод);. 3 — внутренняя обкладка (второй электрод); 4 — корпус-держатель.
лее удобны пьезоэлектрические преобразователи, поэтому мы и остановимся подробнее именно на их устройстве.
Пьезоэлектрический преобразователь состоит из чувствительного элемента, изготовленного из материала, обладающего пьезоэффектом, и двух электропроводящих обкладок, нанесенных на его поверхности (рис. 35). Формы чувствительного элемента могут быть самые разнообразные: диски, пластинки, кубики и даже полые шарики. Преобразователи шариковой формы наиболее подходят для наших целей. Для их изготовления не требуются природные кристаллы, и обычно применяется керамика титаната бария. Они недорого стоят и обладают хорошими качествами.
Как и всякая механическая система, пьезопреобразователи имеют собственную резонансную частоту, которая определяется
геометрическими размерами и свойствами материала. Если такой преобразователь возбуждать, приложив к нему напряжение с постоянной амплитудой, но плав
но изменяя частоту, то наи-
большая эффективность излучения будет достигнута на частоте резонанса. Типовая характеристика пьезопреобразователя показана на рис. 36. То же самое относится и к пьезопреобразователю, работающему в приемном устройстве: его чувствительность на резонансе будет максимальна. Поэтому каждый пьезопреобразователь в режиме излучения и в режиме приема желательно использовать на частотах, близких к резонансу.
Наиболее удобным диапазоном частот для акустических систем управления моделями является участок от 30 до 80 кгц. Очевидно, что и генератор передатчика должен быть сравнительно низкочастотный, и, следовательно, с успехом могут использоваться /?С-генераторы.
Электроакустический преобразователь потребляет мощность большую, чем требовалось в системах радиоуправления для питания антенны. Ввиду этого, генератор акустического передатчика следует на выходе снабдить усилителем мощности, собрав его на более мощных лампах, чем радиопередатчик (например, 6ПЗС, 6П14П и т. д.).
В акустических системах записывать сигнал на несущей волне можно любым из известных нам способов: изменяя частоту несущей, посылая импульсы или модулируя амплитуду.
Следует только помнить, что
несущая частота здесь невелика, и, подбирая частоты модуляции, необходимо выполнить условие, чтобы в один период модулирующего сигнала или в один импульс укладывалось не менее нескольких десятков периодов несущего сигнала.
На принимающей стороне отпадает необходимость в сверхрегенеративном каскаде— с задачей усиления сигнала ультразвуковой частоты прекрасно справится обычный усилитель, даже построенный на транзисторах. Усилитель узкополосным, настроенным на
0,8
I
0,5
0,1>
Рис.
пьезоэлектрического теля«
! 18 Ю 30 '<0 М ЬО Юе 80-19* /, щ
36. Резонансная характеристика преобразова-
приемника желательно сделать частоту сигнала. Этим способом удается избавиться от посторонних помех, которых очень много во всяком водоеме.
Принципы конструирования дискриминаторов и автоматики исполнительных механизмов ничем не отличаются от тех, с которыми мы познакомились в системах радиоуправления.
Система акустического управления модели обладает меньшим радиусом действия по сравнению с радиоканалами и требует относительно большой мощности передатчика. Кроме того, скорость доставки команд акустической волной от передатчика к приемнику тоже невелика, что может быть ощутимо при работе на больших расстояниях. Поэтому акустическую систему телеуправления целесообразно применять в тех случаях, когда объект недосягаем для радиоволны, например для управления моделью подводной лодки.
Г лава IV
До поры до времени, наши юные читатели, вы путешествовали только на электромагнитных и звуковых волнах. С этой же минуты вам предстоит «окунуться» в соленые морские волны. Но сначала надо приучить вас к «морскому жаргону». Не пугайтесь, когда вы начнете тонуть под грузом корабельных терминов. В конце книги вам бросит спасательный круг специальный морской словарик.
Постройка корабля, как и всякого другого сложного сооружения, немыслима без чертежей. В строительном деле или в машиностроении большинство деталей образуется из сочетания поверхностей простых геометрических фигур — шаров, цилиндров, плоскостей и т. п. Конструкция корабля гораздо сложнее. Основная его часть — корпус — обычно имеет хитрую конфигурацию. Здесь и выпуклые, и вогнутые, закругленные, конические и клиновидные поверхности. Кроме того, все эти
ТЕОРЕТИЧЕСКИЙ ЧЕРТЕЖ КОРАБЛЯ
участки с разнородными типами формы нигде четко не разграничиваются, а плавно сочленяются, образуя в переходных зонах поверхности еще более сложной формы.
Мореходные качества корабля во многом определяются обводами его корпуса, поэтому рациональному выбору их конструкторы кораблей уделяют самое большое внимание.
Корпус корабля изображается на так называемом
теоретическом чертеже. В отличие от других видов чертежей, он не содержит изображений деталей конструкции, не дает указаний о материале, размерах отдельных деталей и способах их соединения. Теоретический чертеж воспроизводит только очертания корпуса корабля в целом, подобно рисунку в журнале мод, который дает лишь облик, силуэт, характерные линии модели одежды. И если продолжить эту аналогию, то можно сказать, что как портной, заготовив детали из какого-нибудь материала, шьет из них пальто определенного фасона, так и конструктор корабля заполняет реальными конструкциями обводы теоретического чертежа. При этом материал, количество и форма отдельных деталей, технология изготовления и методы соединения отдельных частей могут быть самыми разнообразными. Важно только, чтобы обводы корпуса точно соответствовали теоретическому чертежу, а сам корпус имел достаточную прочность и ровную, гладкую поверхность.
Изобразить на теоретическом чертеже замысловатые формы обводов корпуса корабля не так то просто. Для этого необходимо как бы разложить объемную конструкцию на плоские поверхности чертежей. Такие плоские изображения пространственного объекта называются его проекциями. Обычно, для тела сложной конфигурации бывает достаточно трех проекций— «вид сверху», «вид сбоку» и «вид спереди». Но для теоретического чертежа корабля и этого недостаточно.
Представьте себе, как должен выглядеть чертеж «вид спереди». Очевидно, на нем изобразятся линия, очерчивающая корпус в самом широком месте, вертикальная линия форштевня и... все. Как сужается корпус от середины корпуса к форштевню — останется неизвестным. Чтобы все стало ясно, необходимо мысленно рассечь корпус корабля несколькими плоскостями, параллельными данной плоскости проекции, и нанести на чертеж линии, ограничивающие корпус в каждом сечении.
Поскольку в двух проекциях корпус корабля, как правило, симметричен, то первое сечение и проводится в плоскости симметрии. При этом достаточно изобразить на чертеже очертания одной половины сечения — вторая половина точно подобна ей.
Давайте, для наглядности, построим теоретический чертеж... обыкновенного батона, который вы покупаете в булочной. Этот пример мы выбрали потому, что батон можно действительно, 160 а не воображаемо разрезать. Проведем главное сечение боко-
вой проекции, т. е. разрежем батон на две равных части вдоль его длинной оси (рис. 37). Если теперь положить половину батона плоскостью среза на бумагу и обвести карандашом, то получится очертание его силуэта, видимого сбоку. Отрежем еще один продольный ломоть тол-
щиной, скажем, в один сантиметр (как показано на рис. 37). Снова положим на бумагу оставшуюся часть половины батона и обведем ее контур. Этот контур наверняка впишется в первый, так как размеры батона уменьшаются при удалении от его оси. Повторив несколько раз ту же операцию, получим изображения продольных сечений батона, сделанных на разных расстояниях от главной плоскости. Если таким же способом мы изобразили бы сечение корпуса корабля, то получили бы часть теоретического чертежа «бок» (рис. 38, а). Плоскости вертикальных сечений называются батоксами.
Можно разрезать наш ба
Рис. 37. Точно так же производится построение теоретического чертежа корабля: вверху — продольный разрез (батоксы); внизу — поперечный разрез (шпангоуты).
тон на длинные ломти не вертикальными сечениями, а пустить лезвие ножа параллельно поверхности стола, нарезав ломти равной толщины и
опять очертив их контуры на
бумаге. В этом случае мы получим набор горизонтальных сечений. В примере с разрезанным батоном нам приходилось обводить каждый ломоть вокруг всего криволинейного контура. Сейчас в этом уже необходимости нет, так как каждый ломоть симметричен относительно средней линии и можно ограничиться нанесением на чертеж только половины контура. В применении к корпусу корабля такой чертеж называется полуширотой (рис. 38, б), а плоскость разреза — ватерлинией.
11
Ю. Д. Пахтонов, В. И. Соловьев
Рис. 38. Теоретический чертеж корпуса модели корабля: а—бок; б — полуширота; в — корпус.
Остался последний и наиболее привычный для нас способ разрезания батона поперечными сечениями (рис. 37). В этом случае, очевидно, можно также ограничиться изображением только половины контура сечения. Но очертания корабля не совсем подобны форме батона, чаще всего корпус корабля сужается неодинаково по направлениям к носу и корме, если двигаться от середины. Поэтому на теоретическом чертеже корабля «корпус» (рис. 38, в) принято изображать справа очертания половинок сечений, расположенных по направлению к носу, а слева от ДП — расположенных по направлению к корме. Плоскости поперечных сечений на таком чертеже называются шпангоутами. Самое большое по площади сечение корпуса носит название мидель-шпангоута, и от него начинается счет других шпангоутов по направлению к носу или корме.
После того, как вы выберете для постройки нужную модель, теоретический чертеж ее желательно перечертить по отношению к размерам модели в масштабе 1:1. Кроме того, строить модель прямо по теоретическому чертежу неудобно, так же, как шить костюм только по картинке журнала мод. Необходимы «выкройки» — рабочие чертежи шпангоутов, киля, носовой и кормовой оконечностей корабля, форштевня и ахтерштевня, с помощью которых и «набирается» модель.
Шпангоуты вычерчиваются следующим образом. На листе бумаги, с размерами, перекрывающими сечение корпуса, по середине проводятся диаметральная плоскость (ДП), плоскости, параллельные ей — батоксы, а перпендикулярно батоксам — ватерлинии. Такие чертежи — сетки нужно заготовить на все шпангоуты, которые будут установлены в корпусе. Число их на модели может быть меньше, чем на теоретическом чертеже настоящего корабля. Затем отмечаются границы шпангоута с бортов, с днища и с палубы и вычерчивается прямоугольник. Найдя пересечение шпангоута с батоксами и ватерлиниями, нужно перенести точки пересечений на рабочий чертеж по обе стороны от ДП. Соединенные по лекалам линии и дадут очертания шпангоута (рис. 39).
Рабочий чертеж киля и штевней для такой наборной модели изготовляется по чертежу «бок» (см. рис. 38, а). Очертание силуэта корабля образует линию обшивки. Киль должен быть такой толщины, чтобы его верхняя кромка легла на 10—15 мм выше этой линии, а нижняя опустилась на 5—10 мм ниже ее.
И*
Рис. 39. Построение рабочего чертежа шпангоута.
Рис. 40. Построение рабочего чертежа киля и штевней.
| —носовая колобашка; II—фаска для укладки реек набора; III — кницы; IV — киль; V — дейдвуд; VI — кормовая колобашка
Если днище модели не должно иметь выступающего киля, то после сборки корпуса (при обработке модели) этот выступ следует состругать.
На чертеже киля (рис. 40) отмечают места установки шпангоутов (1, 2, 3 и т. д.), наносят очертания вырезов, с учетом их толщины и величины заглубления в килевую планку. Затем изображают очертания штевней и намечают места установки книц, скрепляющих штевни с килем. Если оконечности модели имеют закругленную форму (ледокол, буксир), то штевни лучше всего сделать из массивных колобашек. Это избавит строителя от необходимости выполнять реечный набор корпуса в местах с крутыми изгибами. Рассмотрев теоретический чертеж модели, можно решить какой величины нужны колобашки, чтобы рейки набора можно было хорошо уложить в зоне носового и кормового закруглений, вдоль борта до колобашек, не сломав их.
Подготовив рабочие чертежи основных деталей набора, можно, как говорится, засучив рукава приступить к постройке корпуса.
Теоретический чертеж у нас уже есть, мы умеем его чи- СТРОИМ тать и делать рабочие чертежи, но чертежи, разумеется, пла- КОРПУС вать не будут. Нужно построить корпус. Чем точнее он сделан, МОДЕЛИ т. е. чем больше его соответствие чертежу, тем выше будут ходовые качества модели. Поэтому к постройке корпуса нужно отнестись очень серьезно — это важный этап работы.
В настоящее время существует много способов изготовления корпусов моделей. Лучшими считаются конструкции корпуса, набранные из деревянных реек по шпангоутам или из
готовленные из стеклоткани, проклеенной эпоксидной смолой.
Для набора корпуса рейками необходимо предварительно заготовить все детали по рабочим чертежам. Из реек сечением 12 X 20 мм изготовляются крупные детали основы корпуса: киль, штевни и кницы. Сборка
киля со штевнями должна производиться на ровном столе после подгонки и предварительного проверочного соединения всех деталей без клея. Затем смазанные клеем детали закрепляются на разметочном столе и оставляются до полного затвердевания. На колобашках или на штевнях заранее должна быть выбрана фаска для укладки реек.
Шпангоуты лучше всего изготовить из 10-мм фанеры или, если ее нет, составить из реек. Такие шпангоуты называются составными или натесными. Для соединения частей составного
Рис. 41. Конструкция шпангоутов: а — составного; б—цельного.
1—стрингер; 2, 5 — кница; 3 — бимс; 4 — топтимберс; 6 — скуловой стрингер;
7 — киль; 8 — флор; 9 — флортимберс.
шпангоута в местах с малым радиусом закругления следует применить уголки — кницы из 2—2,5-мм фанеры. Ветви составных шпангоутов состоят из отдельных частей — футоксов; нижние называются флортимберсами, верхние — топтимберсами (рис. 41).
При сборке составных шпангоутов нужно учитывать направление слоев дерева. В идеальном случае оно должно точно повторять форму изгиба шпангоута. Такой материал, к сожалению, удается подобрать далеко не всегда. Во всяком случае, необходимо следить, чтобы в заготовках для шпангоутов продольные слои дерева не перерезались. Если материал с подходящим естественным искривлением слоев дерева отсутствует, то заготовку можно изогнуть дополнительно, придав ей необходимую форму. Изгибы большого радиуса получают, опустив рейку в кипящую воду. После такого прогрева в течение 10—15 минут рейку следует уложить в форму, соответствую-166 щую скруглению футокса, и высушить.
Форму для укладки футокса легко изготовить из гвоздей, наколоченных в доску так, чтобы их ряды шли по линии теоретического чертежа шпангоута. Более сложную форму можно выполнить из предварительно изогнутых металлических полос, зажимаемых струбцинами. Затем все изготовленные части каждого шпангоута проверяют, подгоняют по рабочему чертежу, склеивают и укрепляют, до высыхания клея, на ровном столе.
После окончания сушки шпангоуты необходимо зачистить рашпилем, напильником и шкуркой, а затем проверить их контуры по чертежу «корпус». Получившийся шпангоут еще не со-
поверхности перпендикулярны плоскости. В действительности корабль сужается к носу и к корме. Реечки, которые будут ложиться на поверхности шпангоута, должны плотно прилегать к ней, а для этого необходимо боковые поверхности шпангоута сделать наклонными. Для определения угла наклона достаточно приложить шпангоут его верхней частью — бимсом к теоретическому чертежу «полуширота», и отметить получившийся угол (рис. 42). Конечно, шпангоут нужно приложить точно в месте его расположения на чертеже. Когда он будет обработан по этой линии скоса боковой поверхности, рейки набора уложатся плотно без зазора. Затем на шпангоутах выпиливаются отверстия для киля и стрингеров, также с учетом наклона борта в соответствующем месте.
Один или два шпангоута из всего набора следует сделать сплошными — они будут служить водонепроницаемыми переборками, обеспечивающими непотопляемость модели. Какие именно шпангоуты выбрать для этой цели, решается на основании расчета. Пример такого расчета приводится далее (см. мелкий шрифт). 167
Некоторые моделисты, торопясь скорее увидеть результаты своей работы,— запуск модели — пренебрегают установкой водонепроницаемых переборок. Это приводит к плачевным последствиями. Свежий ветер дует часто, может появиться крен, один-два наклона под ударами ветра — и... модель, забрав большое количество воды, стремительно уйдет под воду. Могут быть и другие причины затопления—столкновение моделей или удары о плавучие предметы. Если, к счастью, подвернется водолаз, он достанет затонувшего неудачника, но некоторые модели так и остаются похороненными на дне. Поэтому лучше не торопитесь, а внимательно прочтите то, что написано здесь мелким шрифтом и тогда можете чувствовать себя гораздо спокойнее. Если же среди вас найдутся ярые враги расчетов — пеняйте на себя, за судьбу вашей модели мы не ручаемся!
Расчет непотопляемости модели
Расчет несложен и не занимает много времени. Лучше всего изучить его на конкретном примере. Для расчета необходимо знать основные элементы корабля. В качестве примера рассчитаем непотопляемость модели атомохода «Ленин», которая характеризуется следующими исходными данными (все размерения в масштабе 1 : 100):
Длина наибольшая L = 134,0 см;
Ширина наибольшая В = 27,6 см;
Осадка Т = 9,2 см;
Высота надводного борта F = 7,5 см;
Водоизмещение V = 16 кг.
Основное оборудование модели (двигатели, аккумуляторы, приемник со своим источником питания и др.) находится в средней ее части, поэтому этот отсек нужно изолировать, поставив две водонепроницаемые переборки. Получим три отсека. Носовой и кормовой отсеки могут быть наглухо закрыты палубой, а средний отсек должен открываться, так как к радиоприемнику и приборам необходимо обеспечить легкий доступ. Это достигается применением съемной палубы с установленной на ней надстройкой.
Предварительно зададимся расположением отсеков. Будем считать, что носовой отсек кончается шпангоутом № 3, а кормовой начинается от шпангоута № 7. Задача расчета и состоит в проверке того, что при таком расположении отсеков будет выполнено условие, при котором, в случае затопления даже самого большого, среднего отсека, модель еще будет иметь некоторый запас плавучести.
Сначала нужно определить объемное водоизмещение, запас плавучести 168 и вес воды, который может поместиться в объеме каждого отсека:
1. Вычисляем объемное водоизмещение V по формуле
V — ZLBT, где д — коэффициент полноты водоизмещения, показывающий какую часть объем, занимаемый корпусом корабля, составляет от объема параллелепипеда с размерами, равными габаритам подводной части корабля.
2. Запас плавучести зависит от объема надводной части корабля. Объем надводной части Унадв определяется по формуле
Vнадв &LBF,
где (4 — коэффициент полноты конструктивной ватерлинии (КВЛ), показывающий какую часть площадь КВЛ составляет от площади описанного вокруг нее прямоугольника с размерами LB.
3. Запас плавучести Q, выраженный в процентах, равен
Q -- ^£2. X 100%.
Поскольку V — объемное водоизмещение корабля, то запас плавучести и получается отнесенным к водоизмещению. Чем выше этот процент, тем лучше обеспечена непотопляемость. Конечно, если при этом не забыта и остойчивость корабля — способность его противодействовать опрокидыванию. Значения коэффициентов а и б указаны в табл. 5.
Таблица 5
Коэффициенты полноты для различных кораблей и судов
Тип корабля а 0
Линейные корабли 0,70 : 0,80 0,55-0,70
Крейсера 0,65—0,73 0,54—0,60
Эсминцы, фрегаты 0,60—0,75 0,44-0,53
Корабли ПЛО (противолодочной АПЛПЛиьЛ 0,70-4-0,75 0,55—0,68
ииироны j Пассажирские суда 0,75—0,85 0,60-:-0,75
Грузо-пассажирские суда 0,80-0,86 0,604-0,84
Грузовые суда 0,82-0,88 0,62-0,88
Речные пассажирские суда 0,78-4-0,86 0,60-0,76
Ледоколы 0,75—0,77 0,48-0,52
Буксиры 0,72-0,80 0,40-0,60
Для нашего примера, по табл. 5 а=0,75 и 6 = 0,5. Подставляя эти значения в соответствующие формулы, получаем:
V = ILBT = 0,5X134X27,6X9,2 = 16 кг\
Унадв = zLBF = 0,75х 134X27,6X7,5 = 20 кг\
90 Q = — X ЮО = 1250/0.
16 169
Для определения веса воды , которая может поместиться в отсеке,
нужно задать размеры всех трех длину li — 43,0 см; 12 - ширину &jl — 20,0 см; Ь2 = и высоту /i! — 17,5 см; h2 отсеков: - 46,5 см; 13 — 41,5 см; - 27,6 см; — 22,0 см; ~ 16,5 см; h3 — 16,5 см.
Коэффициент полноты водоизмещения будет вовсе не одинаков для
разных отсеков. Его проще всего определить приблизительно, подсчитав отношение площади, занимаемой очертаниями корпуса корабля в зоне отсека, к площади описывающего его прямоугольника. Это, конечно, не совсем точно, так как, строго говоря, нужно знать отношение объемов, но для решаемой задачи и этого достаточно. В нашем примере значения коэффициентов полноты получатся следующими:
для 1-го отсека — О] = 0,6;
» 2-го » — ^2"" 0,9;
» 3-го » —о3-0,6;
Вес воды G в заполненных отсеках равен: в отсеке 1
Gi - MiMi - 0,6X43,0X20,ОХ 17,5 - 9,0 кг;
в отсеке 2
02 - о2/2^2 = 0,9x46,5x27,6 X 16,5 = 19,0 кг;
в отсеке 3
G3 — 03/3&3/3 = 0,6X41,5x22,ОХ 16,5 = 9,0 кг.
Теперь можно сравнить полученные результаты и определить, что произойдет при заполнении водой разных отсеков.
Плавучесть модели в этом случае будет равна запасу плавучести, за вычетом веса воды затопленного отсека:
Qi- Q ~ Gi - 20,0 — 9,0- 11,0 кг;
Q2 - Q — — 20,0 —19,0—1,0 кг;
Q3 = Q — =- 20,0 — 9,0-11,0 кг.
Таким образом, мы установили, что водонепроницаемые переборки, установленные на месте 3 и 7 шпангоутов, обеспечивают условие непотопляемости. Если бы результаты расчета были неудовлетворительными, пришлось бы сменить место расположения сплошного шпангоута и повторить расчет.
Заготовив шпангоуты и киль со штевнями, можно начать сборку остова. На килевую раму (киль с прикрепленными к нему штевнями), зажатую в тисках, устанавливаются шпангоуты. Посадка их в пазы должна быть плотной и без перекосов. Шпангоуты связываются в продольном направлении стрин-
герами. Стрингер — это рейка, протянутая во всю длину корпуса и уложенная заподлицо в паз, вырезанный в теле шпангоута. Для модели обычно достаточно одного-двух стрингеров. Если устанавливается один стрингер (палубный стрингер), то он протягивается по верхнему краю шпангоута; если два стрингера, то второй ставится на крутом изгибе шпангоута (скуловой стрингер). Заготовленные стрингеры крепятся деревянными гвоздями в заранее просверленные отверстия. Установку палубного стрингера нужно производить одновременно с обоих бортов, следя за тем, чтобы шпангоуты не перекосились.
Связанный стрингерами остов можно установить на стапель, который изготовляется из толстой ровной доски (рис. 43). По-
Рис, 43. Стапельная доска для закладки корпуса.
верхность палубы корабля обычно не бывает плоской (прогиб палубы называется седловатостью). Поэтому уложить остов на плоскую доску нельзя. На боковых сторонах стапельной доски по теоретическому чертежу отмечается седловатость палубы и до этой линии доска состругивается. Затем на ней размечаются диаметральная плоскость и плоскости шпангоутов. После этого остов модели устанавливается на стапель и закрепляется гвоздями, шурупами и вспомогательными планками. Гвозди забиваются непосредственно только в носовую и кормовую колобашки. В процессе крепления остова необходимо проверить, не произошло ли искривления, прикладывая мерную рейку в различных частях корпуса, как показано на рис. 44.
Теперь можно приступить к заготовке реек. Дерево, применяемое для набора, следует тщательно отобрать. Оно не должно иметь сучков, а также быть очень сухим и крупнослойным. Сечение реек для набора нужно брать соразмерно с длиной корабля. Модели длиной до 1 м лучше набирать рейками сечением 3X5 мм, а более 1 м — сечением 4X6 мм. Набор удобнее начать от палубы, так как в этой части корпуса борт почти не имеет закруглений и рейки легко будут прилегать 171
друг к другу. Длину рейки следует брать с запасом. Смазанная клеем рейка приколачивается, начиная от шпангоута на форштевне, вдоль всего борта и на корме отрезается.
Однако так просто со всеми рейками набора справиться не удается. По мере приближения к более искривленным частям поверхности корпуса, рейки будут направляться все более и более изогнуто. Поэтому, если рейка пошла на пересечение скулового стрингера, то ее лучше здесь и обрезать, а набор, начатый с другой стороны (с днища), довести до этого места навстречу — встык. Рейки, по мере закругления борта, нужно
Рис. 44. Проверка рейкой правильности набора.
состругивать с боков, проверяя плотно ли они прилегают друг к другу, так как длина дуги по шпангоуту в средней части больше, чем в носовой. Мазать клеем и приколачивать рейку можно только после предварительной контрольной укладки ее на место. Гвозди не нужно заколачивать до конца (все равно придется потом вытаскивать), а лучше загнуть их, оставив 3—4 мм.
После окончания набора, от палубы до скулы (ширстрек) набирается днище и так же до скулового стрингера, где рейки обоих направлений стыкуются. Если некоторые рейки легли не плотно в месте стыка, то щель следует заделать щепками с клеем.
Для склейки набора корпуса можно применять различные водоупорные клеи и смолы, например, нитроклей АК-20, аэролак «Эмалит», смолы ВИАМ Б-3, ЭД-6 и т. л. Последние два сорта клея требуют особой осторожности при работе, так как содержат вредные для здоровья вещества. Необходимые рекомендации даются ниже.
Когда клей отвердел, можно приступить к грубой обработке носа и кормы — спилить и срубить лишнее дерево, заравнять стамеской, рашпилем и шкуркой. Вытащив гвозди, скреплявшие набор, нужно обстрогать корпус рубанком и зачистить его напильником и шкуркой.
Теперь корпус почти готов. Его можно снять со стапеля и выдолбить носовую и кормовую колобашки. Это очень полезно, так как уменьшает вес корпуса. Долбить колобашки следует так, чтобы не повредить готовый корпус. Для этого целесообразно просверлить в них несколько рядов отверстий, а потом стамеской выбрать нужное углубление. Чтобы корпус мог долгое время находиться в воде и не растрескиваться, его очень полезно оклеить одним слоем стеклоткани на эпоксидной смоле или, в крайнем случае, слоем хлопчатобумажной ткани.
Наиболее современным способом является изготовление корпуса модели из стеклопластиков, которые все больше и больше внедряются в судостроении. Из них создаются корпусные конструкции, так называемые дельные вещи (блоки, утки и т. д.), гребные винты, средства механизации и т. п. Сделать модель из стеклопластика значительно легче, чем набрать из реек — и времени затрачивается меньше, и качество выше. При этом, по единственной заготовленной форме («болвану»), на которую накладываются слои стеклоткани, можно построить не один, а ряд корпусов, что очень ускоряет постройку двухкорпусного судна — катамарана или серии однотипных моделей.
Для изготовления формы нужно по рабочим чертежам шпангоутов сделать шаблоны. Они будут служить лекалами при обработке корпуса-болвана. Если строящаяся модель имеет большие размеры, иногда проще сделать для нее сначала грубый наборный корпус, а уж затем, используя его как корпус-болван,— окончательный корпус модели из стеклопластика. При небольших размерах модели корпус-болван можно очень успешно выстругать из цельного бруска дерева. Обработка должна вестись с частой проверкой размеров шаблонами и лекалами.
После того, как выструганный по форме корпус будет обработан рашпилем, напильником и шкуркой, нужно заделать парафином все отверстия от сучков и впадины от неточной обработки, чтобы придать ему ровную поверхность. Для этого корпус поливается разогретым парафином. Если парафин окажется очень горячим, появятся пузырьки. Тогда нужно
повторить поливку этих участков. Поливать корпус следует из посудины с широким горлом, чтобы парафин выливался сплошным потоком. Застывшие струйки и капли пусть вас не смущают. Возьмите металлическую линейку или просто полоску стали, на электроточиле обработайте ее ребро так, чтобы грань была острой, и, взяв обеими руками, соскоблите линейкой налипы и струйки. Поверхность станет ровной и гладкой. Можно положить несколько слоев парафина в тех местах, где корпус проседает и также потом выровнять линейкой.
У модели, имеющей верхнюю часть борта — фальшборт — с наклоном внутрь корпуса (как у буксира), корпус-болван и отливку можно сделать сразу с фальшбортом, но потом, для снятия корпуса с болвана нос или корму придется разрезать по диаметральной плоскости.
Прежде чем начать постройку модели из стеклоткани, необходимо соблюсти требования по технике безопасности. Места закладки модели и раскроя стеклоткани должны иметь вытяжную вентиляцию, а моделист — работать в глухой спецовке, с резиновыми перчатками и респиратором. Только после такой подготовки можно приступить к раскрою стеклоткани.
В зависимости от длины моделей требуется различное число слоев стеклоткани:
до 700 мм —2 слоя;
от 700 до 1400 мм — 3 слоя;
свыше 1400 мм —4 слоя.
В заготовке каждого слоя нужно учесть запас по размерам для крепления стеклоткани к корпусу. Первый слой следует натянуть без промазывания клеем. После этого разводится эпоксидная смола холодного отверждения по следующему рецепту:
ЭД-6 — 76 весовых частей (в. ч.); дибутилфталат—10
20 в. ч.; полиэтилполиамина — 12 -*-16 в. ч.
Дибутилфталат является пластификатором, т. е. придает эластичность изделию. Он может быть заменен касторовым маслом, но в меньшем количестве. Если смола окажется большой вязкости, то, разогревая ее в паровой бане, нужно добавить немного ацетона, тогда и после остывания она останется в жидком состоянии. На модель средней длины требуется 500-*-600 г клея.
Процесс приготовления его следующий. Сначала смеши-174 вается эпоксидная смола с дибутил фтал атом, а затем добав-
ляется полиэтилполиамина. Первый слой промазывается клеем большой кистью. Второй и последующие слои кладутся ровно на поверхности, без натяжения и также покрываются клеем. Край каждого слоя заворачивается под корпус. На следующий день, сделав прорез скальпелем по краю палубы, можно с небольшим усилием отделить корпус от болвана.
Перед установкой шпангоутов — переборок корпус внутри нужно отшкурить и прочистить бензином, чтобы снять остатки парафина. Подогнанные переборки приклеиваются полоской стеклоткани. Из нее можно также сделать палубы на носовую и кормовую части судна, а соединив их с водонепроницаемыми переборками,—- получить наглухо задраенные отсеки.
На основе полиэфирной смолы холодного отверждения делается шпаклевка, хорошо обрабатываемая напильником и шкуркой. Для этого в разведенный клей из указанных выше компонентов нужно засыпать небольшими порциями тальк при постоянном размешивании до получения густой массы. Эту массу резиновым шпателем (толщиной 10—15 мм) наносят на всю поверхность, выравнивая изъяны. Такой шпаклевкой можно шпаклевать и несколько раз по одному месту, но лучше ограничиться одним покрытием, а последующие слои наносить нитрошпаклевкой или шпаклевкой, сделанной по следующему рецепту:
нитрокраска — 50 г; касторовое масло — 5 г; тальк — 100 г. Метод нанесения шпаклевки — тот же и также за один или, в крайнем случае, за два прохода. Окончательная обработка поверхности производится водоупорной шкуркой, смоченной в бензине или керосине.
Теперь корпус готов и перед тем, как продолжать постройку модели, необходимо испытать его в бассейне, а именно: определить водоизмещение и сравнить с предыдущими расчетами, предварительно наметить расположение будущего оборудования и балласта. Эти сведения очень пригодятся в дальнейшем при расстановке оборудования и источников питания. Помимо этого, приятно немного и помечтать, глядя как покачивается на воде модель, и представить свое детище в будущем быстроходным, маневренным, послушным и, конечно, красивым кораблем.
Определим сначала грузоподъемность модели. Для этого проведем на корпусе КВЛ, в соответствии с теоретическим чертежом, и поставленную на воду модель загрузим всем, что есть
под руками: напильниками, рубанками, резцами и т. п., предварительно взвешенными. Как только модель погрузится до ватерлинии, подсчитаем общий вес всех предметов. Это и будет грузоподъемность модели.
Затем перераспределим грузы по отсекам так, чтобы их местоположение и вес соответствовали положению и весу будущего оборудования. Не следует забывать, что надо учесть и вес пока еще отсутствующих надстроек.
На современном уровне техники, когда применяются мощные малогабаритные двигатели и питающие устройства, небольшие по объему и весу, но обладающие значительной электрической емкостью, некоторые модели приходится специально грузить балластом, чтобы обеспечить требуемую осадку/ Не забудьте учесть и это.
Кажется, все в порядке. Но это пока еще мертвая коробка, способная лишь держаться на волнах. Ее надо снабдить двигателями, редукторами, винтами, рулевым управлением и прочим необходимым оборудованием. Только после этого наша модель оживет, научится двигаться, а, может быть, впоследствии и выполнять команды. Для того, чтобы модель не разочаровала ожиданий строителя и оказалась послушной его воле, ее нужно хорошо оснастить.
ДЕЛАЕМ МОДЕЛЬ САМОХОДНОЙ
Припоминается немало случаев на соревнованиях моделей кораблей.
Один моделист никак не может отрегулировать прямолинейность хода, хотя винты, вроде бы, одинаковые и даже установлен редуктор. А это значит, что обороты винтов совершенно одинаковы, но модель все-таки уходит в сторону. В чем же дело? Оказывается, линии валов находятся под разными углами к диаметральной плоскости. Другой моделист установил валы пра-
вильно, но лопасти винтов имеют разный шаг или неверный профиль.
Во всех подобных случаях модель непригодна. Чтобы такого казуса не произошло и с нами, возьмемся снова за теоретический чертеж. Он выручит при любых обстоятельствах.
Обеспечить правильное размещение валов на модели можно двумя методами.
Первый метод заключается в том, чтобы сделать модель точной копией существующего корабля. В этом случае винты встанут правильно, так как на больших кораблях их размещение соответствует требованиям. Но это на модели иногда оказывается невыполнимым: угол наклона, либо расстояние между валами получаются другими из-за размеров шестерен редуктора, из-за увеличения диаметра винта и т. п.
По второму методу установка двигателей, редукторов, движителей (винтов) и валов на модели заведомо отличается от размещения тех же устройств на большом корабле-прототипе. Но моделиста это не пугает. Его задача разместить на модели все устройства так, чтобы обеспечить ее наилучшие ходовые качества: масштабную или наибольшую скорость хода, устойчивость на курсе и др.
Для этого необходимо подобрать двигатели с соответствующими значениями мощности, числа оборотов и с таким передаточным числом редуктора, чтобы наиболее удачно связать двигатель с винтом. Нужно должным образом выбрать размеры и шаг винтов, а кроме того, не забыть еще и об источниках питания. Чтобы обеспечить дружную работу всех этих устройств, приходится решать многие непростые задачи из областей физики, математики, электротехники, электроники и др. Построив свои модели, любитель, разумеется, еще не станет инженером, но зато приобретет прочную основу для получения технической специальности в будущем. Не мало бывших кружковцев теперь уже решают настоящие инженерные задачи. Их успехи несомненно подготовлены этими первыми и, по правде говоря, трудными шагами.
Винт, редуктор, двигатель, источник питания представляют собой как бы величины, связанные друг с другом одним уравнением. Можно сделать большой винт, чтобы обеспечить более сильный упор, но тогда надо увеличивать мощность двигателя, а следовательно, и вес источников питания. В результате, корабль оседает ниже ватерлинии. Значит, необходимо уменьшить вес источников электропитания, снизить мощность двигателей, изменить передаточное число редуктора, снова поработать с винтом, изменяя его геометрию. Не раз придется еще и еще сопоставлять, взвешивать, подсчитывать, решать. 177
12 Ю. Д. Пахтанов, В. И. Соловье!
С какого же неизвестного браться за решение нашего «уравнения»? Разумнее всего начать с двигателей. Если, например, взять маломощный двигатель, то что ни предпринимай с винтом и редуктором, а большой скорости модель не наберет — сил маловато. Если же взять двигатель с очень большой мощ-
Рис. 45. Схема включения двигателей постоянного тока и их рабочие характеристики: а — двигатель с параллельным возбуждением; б—двигатель с последовательным возбуждением.
ностью, по сравнению с предыдущим, то аккумуляторы разрядятся уже в самом начале дистанции. Поэтому двигатель нужно выбирать очень кропотливо и осторожно.
На моделях обычно используются двигатели постоянного тока. Во-первых, из-за отсутствия источников переменного тока. Во-вторых, потому, что двигатели постоянного тока обладают очень ценными качествами: они имеют небольшие размеры и вес при хороших силовых характеристиках, допускают измене-178 ние направления вращения и регулирование числа оборотов.
Применяются два основных варианта двигателей постоянного тока:
1. Двигатель параллельного возбуждения, в котором обмотки якоря и возбуждения включены параллельно (рис. 45, а). Ток, поступающий из сети /общ, разветвляется на ток в цепи якоря /я и ток обмотки возбуждения /в. Следовательно,
Л)бщ Л1 "Г Iв*
Обмотка возбуждения содержит большое число витков. Поэтому ток возбуждения /в мал по сравнению с током якоря /я и от него почти не зависит. Скорость вращения такого двигателя мало изменяется с увеличением нагрузки.
2. Двигатель последовательного возбуждения, в котором обмотки якоря и возбуждения включены последовательно (рис. 45, б). Здесь ток /Общг поступающий из сети, проходит последовательно через обмотку возбуждения и якорь. Следовательно,
общ = “ I в*
Скорость вращения этого двигателя сильно снижается по мере увеличения нагрузки.
Хорошо зарекомендовали себя двигатели постоянного тока с последовательным возбуждением отечественного производства, типа МУ-30, МУ-50, МУ-100, рассчитанные на напряжение питания 27 в. В табл. 6, на основании опыта постройки различных моделей с двигателями этого типа, даются рекомендации по их применению.
Таблица 6 Рекомендуемые двигатели для моделей различной длины
Размер модели, мм Количество и тип
для экономичного режима для достижения максимальной скорости
До 1000 Один МУ-30 Два МУ-30 Один МУ-50
До 1500 Два МУ-30 Один МУ-50 Два МУ-50 Один МУ-75
2000 и выше Два МУ-50 Один МУ-75 Два МУ-75 179
Следует сделать небольшое, но существенное примечание к этой таблице. Если нет малогабаритных аккумуляторов типа НКБ или СЦ, а имеются только батареи, нужно выбирать наиболее экономичный режим, т. е. взять двигатели меньшей мощности. С батареями тоже можно выступать на соревнованиях, и при правильном их использовании удается достичь неплохих результатов. Более подробно об этом будет сказано, когда мы займемся вопросами электропитания.
При работе электродвигателя под нагрузкой число оборотов вала, потребляемый двигателем ток и напряжение питания взаимно связаны. Как правило, увеличение нагрузки приводит к уменьшению числа оборотов (особенно у двигателей с последовательным возбуждением). Поэтому необходимо понять закономерности, связывающие эти величины. В начале работы полезно замерить обороты двигателя и снять его рабочую характеристику, иначе придется действовать вслепую, механическим подбором. Имея же рабочую характеристику двигателя, можно решать задачу выбора электродвигателя с более уверенных позиций.
Для снятия рабочих характеристик нужно иметь амперметр, вольтметр, тахометр и тормоз ленточного или другого типа. Если теперь собрать и включить схему, подведя определенное напряжение к клеммам двигателя, то при плавном увеличении нагрузки число его оборотов будет уменьшаться, а потребляемый ток возрастать. Получив несколько значений этого тока при соответствующих оборотах вала, можно построить график— рабочую характеристику двигателя. При другом напряжении питания получится иная характеристика, подобная первой по форме, но расположенная выше или ниже (рис. 46).
Величина тока, потребляемого двигателем при отсутствии нагрузки, называется током холостого хода /хх.
Точный расчет нагрузки на двигатель, которая будет создаваться винтом, очень сложен и практически невыполним для моделиста. Нам придется ограничиться ориентировочным расчетом. При этом мы исходим из того соображения, что, когда правильно подобранный винт увеличивает нагрузку на двигатель, то потребляемый им ток возрастает в 3—5 раз по сравнению с током холостого хода. Дальнейшее увеличение нагрузки нецелесообразно, так как это резко снижает число оборотов и увеличивает потребление электроэнергии. Таким путем можно, 180 в первом приближении, определить число оборотов выбран-
ного двигателя и необходимый для его питания ток при известном напряжении источника питания.
Назначение двигателей, в конечном счете, сводится к приведению во вращение винта или винтов. Поэтому электропривод должен быть сделан так, чтобы обеспечить наивыгоднейшие условия работы. Известно, что нельзя безгранично увеличивать число оборотов винта. Если оно превысит 5000 об/мин, то эффективность винта резко снизится. Дело в том, что при таких скоростях вращения винт уже не ввинчивается в воду, а образует вокруг себя разрывы в сплошной среде. Это явление называется кавитацией. Обычно, применяя для винтов высокооборотные двигатели серии МУ, нужно стараться искусственно, с помощью редуктора, снизить результирующее число оборотов, не выводя при этом двигатель из режима, соответствующего среднему участку рабочей характеристики. При правильно подобранном редукторе удается существенно повысить эффективность и экономичность двигателя модели.
Редуктор часто используется не только для понижения числа оборотов двигателя, но и для создания необходимого направления вращения винтов модели (например, для вращения двух винтов в противоположных направлениях).
Вращение может передаваться посредством гибких связей (ременные и цепные передачи) или путем непосредственного соприкосновения вращающихся деталей (фрикционные и зубчатые передачи). Для моделей лучше всего использовать зубчатые передачи. Они дают надежное сцепление при небольших размерах редуктора и малых потерях мощности в нем. Редукторы можно строить с цилиндрическими и с коническими шестернями. Проще всего для наших целей использовать шестерни от каких-либо готовых механизмов или приборов, но если в вашем распоряжении имеются фрезерный станок и делительная головка к нему, то нетрудно и самому нарезать шестерни.
Рис. 46. Рабочие характеристики двигателя постоянного тока типа МУ-50 при напряжении питания 27 в (1) и 20 в (2),
В качестве исходных данных для постройки редуктора необходимо знать число оборотов двигателя, винта и допустимые размеры редуктора. Передаточное число редуктора определяется соотношением: «2 где П\ и п2 — соответственно число оборотов ведущего вала (двигателя) и ведомого вала (движителя), либо соотношением Z1 где г2 и Z[ — соответственно число зубьев ведомой и ведущей шестерен. Зубчатая передача не допускает проскальзывания шестерен друг относительно друга и поэтому обеспечивает постоянство передаточного числа. Иногда приходится применять многоступенчатую передачу. Общее передаточное число ее равно произведению всех промежуточных передаточных чисел. На моделях, в зависимости от числа двигателей и числа винтов, могут быть применены самые разнообразные виды передач. Наиболее распространенные их варианты, используемые на моделях, представлены на рис. 47. Итак, перед конструированием редуктора необходимо выбрать его схему и рассчитать передаточное число. Схема выбирается исходя из числа винтов и двигателей, а также с учетом расстояний между ними. Для определения передаточного числа нужно воспользоваться характеристиками двигателя. Так, например, для двигателя типа МУ-50 при нагрузке, создающей потребляемый ток 4 5 а, число оборотов /11=10000 об/мин. Винты на модели должны вращаться со скоростью не более /12 = 2000-^- 4000 об/мин. Если не устанавливать редуктор, т. е. сделать передачу напрямую, то обороты двигателя можно понизить за счет увеличения нагрузки, но ток при этом возрастает до 10 15 а, что, в свою очередь, потребует установки батареи аккумуляторов большой емкости, а это невыгодно. Если же установить редуктор с / = 2->-3, то потребляемый двигателем ток будет порядка 5 а, число оборотов винта — 4000->- 2000 об/мин, т. е. создастся оптимальный режим по использованию емкости аккумулятора, мощности двигателя и
182 винтов.
Рис. 47. Наиболее распространенные варианты шестеренчатых передач, которые могут быть использованы на моделях: а — пара с изменением числа оборотов (2?i <£>г); б — пара, изменяющая направление вращения (£>i=Z)2); в — передача для двухвинтовой модели с различным направлением вращения валов г — тот же вариант, но допускающий увеличение расстояния между
ведомыми валами (D2=D4; Di<D2); д — передача для трехвинтовой модели (D2=D3=D4;
е — тот же вариант, но допускающий увеличение расстояния между ведомыми валами (D2=D4=D6;
Определив передаточное число, можно уточнить схему редуктора и подобрать необходимые шестерни. Для того, чтобы безошибочно разметить центры шестерен, нужно знать основные элементы зубчатого колеса (рис. 48). Наружная окружность с диаметром DUl которая ограничивает выступы зубьев, называется окружностью выступов, окружность с диаметром Dlit проходящая через дно впадин— окружностью впадин. Для удобства расчетов используют еще размер D — промежуточный диаметр начальной окружности, расположенной между окружностями выступов и впадин. Расстояние t между двумя соответственными точками двух соседних зубьев, взятое по начальной окружности, называется шагом зацепления. Зубчатая передача осуществима только тогда, когда шаг ведущего колеса точно равен шагу ведомого. Рассчитать расстоя-
Рис. 48. Элементы зубчатого зацеп- ние между центрами осей ления. шестерен при изготовлении
редуктора нужно очень точно, так как даже самая незначительная ошибка приводит к неудовлетворительной работе зацепления.
Расчет расстояния между центрами осей и разметка корпуса редуктора
Длина начальной окружности равна произведению zt, но так как zt-nD, то отсюда диаметр начальной окружности t D = z — = ztn, Tt t где m =---так называемый модуль зацепления.
7Г
Начальная окружность делит зуб на две части: головку высотой hi и ножку высотой h2. Следовательно, полная высота зуба h будет равна h ht /?2*
184 Обычно берут hi — m, /12=1,2 т, а отсюда /г=2,2 т.
Для практических расчетов желательно выразить формулы через те величины, которые легко измерить. На шестерне легко измеряется наружный диаметр />н. Поэтому определим некоторые соотношения, выразив их через эту величину:
DH — D — 2hr = 2т.
Но D = mz, тогда
Отсюда
Dn — mz 4- 2т ~ т (z + 2).
т ----
z + 2
По этой формуле легко найти модуль зубчатого колеса.
Установлены следующие стандартные значения модуля в миллиметрах: 0,3; 0,4; 0,5; 0,6; 0,7; 0,8; 1,0; 1,25; 1,5; 1,75; 2,0; 2,5; 3,0; 3,5; 4 и т. д.— до 50.
Для редуктора модели лучше выбирать шестерни с маленьким модулем, в которых потери на трение меньше. Уменьшению этих потерь способствует также применение шестерен, изготовленных из разных материалов (сталь — бронза; сталь — латунь и т. д.).
Рассмотрим процесс разметки боковых пластин корпуса редуктора для одновинтовой модели. Из латуни или стали толщиной 1 -> 2 мм вырезаются две пластины. По углам их сверлятся отверстия для крепежа и пластины сбалчиваются. Через центры узких сторон проводится средняя линия, на которую надо нанести центры окружностей. Разметка производится в таком порядке:
1) штангенциркулем измеряем диаметры шестерен ведущего вала и Z)ji2 — ведомого (в мм);
2) сосчитав число зубьев Zi ведущей и z2 ведомой шестерен, определяем модули зубчатых колес (они должны быть равны):
т± т2 т ;
Zi 2 z2 + 2
3) определяем расстояние между центрами ведущей и ведомой шестерен 01—02, равное
0г02 = — 2,2 т мм.
2 2
Это расстояние следует уменьшить на 0,1—0,05 мм для учета возможной ошибки. Полученные точки отмечаем кернером.
Если валы будут вращаться в подшипниках скольжения, то для установки и крепления их втулок необходимо просверлить отверстия с диаметром, равным внешнему диаметру подшипника. Внутреннее отверстие втулки следует проделать сверлом с диаметром на 0,1 мм меньше диаметра вала шестерни. Дальнейшее расширение отверстия до нужного диаметра 185
производится разверткой. Втулка должна иметь фланец, который служит для крепления ее винтами к корпусу редуктора.
Для того чтобы повысить к. п. д. редуктора, можно валы шестерен установить в подшипниках качения. С этой целью нужно подобрать четыре одинаковых шарикоподшипника: 3X10; 4X13; 5X16; 5X19 мм (первая цифра обозначает внутренний диаметр, вторая — внешний) и закрепить их в специальных переходных втулках с фланцами.
Оси шестерен вытачиваются на токарном станке под тугую посадку ступиц. Соединение шестерни с валом можно осуществить шпилькой, вставляемой в просверленное в ступице и оси отверстие, или винтами, которые крепятся к торцовому упору, выточенному вместе с осью. Втулки подшипников с толщиной стенок около 1,5-^- 2 мм вытачиваются на токарном станке.
Крепление втулок к боковым стенкам редуктора осуществляется в следующем порядке.
Сначала заготовьте 4 равных отрезка трубки длиной, равной общей длине двух втулок для подшипников, а также болты для стяжки боковых стенок. Затем отрежьте кусочки осей с диаметром, равным диаметру отверстий в боковых стенках и с длиной, равной длине двух втулок подшипников плюс две толщины стенок редуктора. Установите шестерни между боковыми стенками и через трубки вставьте крепежные болты. Если шестерня находится в нормальном зацеплении, можно уверенно продолжать работу.
Далее вставьте подшипники в предназначенные для них втулки, а в подшипники — кусочки осей. Через трубочки установите болты, завинтите гайки и проверьте плотность прилегания втулок к стенкам. После этого в пластинах редуктора просверлите 3—4 отверстия под резьбу для закрепления втулок по ранее проведенной окружности. Затем разберите редуктор, в отверстиях на фланцах втулок подшипников нарежьте резьбу, а отверстия в боковых стенках редуктора рассверлите под проход винтов.
Теперь редуктор можно окончательно собрать и проверить плавность хода. Для этого вращайте вручную ось шестерни — редуктор без особых усилий должен передавать вращение на другие оси. Если какая-нибудь пара шестерен идет немного туго, поставьте редуктор на холодную обкатку, приведя его в движение от токарного станка, а между этой парой шестерен 186 пропустите полоску бумаги. Если это не поможет и редуктор
все равно будет идти тяжело, нужно переделать боковые стенки. Имейте в виду, что если свой первый редуктор вы соберете правильно — это большое достижение!
Заканчивая работу, следует сделать днище и крышку для предохранения от разбрызгивания масла. Машинное масло увеличивает к. п. д., так как уменьшает трение между зубьями шестерен. Необходимо, чтобы хотя бы одна шестерня редуктора опускалась в масло, тогда во время работы смазка будет поступать на все шестерни.
Очень важной частью силовой установки является винт — движитель корабля. Чтобы добиться наилучших ходовых свойств модели, нужно знать принцип действия и геометрию винта, приводящего в движение корабль.
Самый древний, простейший способ приведения судна в движение— отталкивание шестом от берега или дна. Здесь почти все усилие затрачивается на преодоление сопротивления воды движению судна. Это происходит потому, что масса даже самого гигантского судна всегда неизмеримо меньше земного шара, и хотя усилие толкания в равной степени воздействует и на земной шар, и на судно — в движение придет судно, а земля, само собой разумеется, даже не шелохнется.
Ситуация резко меняется, если приходится отталкиваться от свободно плавающего тела с небольшой массой. Движущая сила здесь создается за счет реакции давления шеста на тело, однако обязательно возникает и некоторое его смещение. На этом принципе основано действие всех двигателей, отбрасывающих назад не только твердые тела, но и жидкие массы, захватываемые движителем.
Все варианты движителей могут быть разделены на две группы —• активные и реактивные. Активным движителем является парус, использующий энергию относительного движения воздуха. Однако и в этом случае, в конечном счете, движущая сила создается за счет реакции потока воздуха, отклоняемого парусами от своего первоначального направления. Разновидностей реактивных движителей гораздо больше. Существуют различные типы реактивных гидравлических движителей: весло, гребное колесо, гребной винт, крыльчатое колесо, водометный движитель, «рыбий хвост», и т. д.
Наиболее удобен для моделей кораблей гребной винт. Он представляет собой набор крылообразных лопастей, установленных на ступице, на равных угловых расстояниях друг от
друга. Форма лопастей такова, что они вызывают отбрасывание масс жидкости при вращении винта. Реакция отбрасываемых назад и в сторону масс жидкости воспринимается лопастями и создает так называемый упор винта. При вращении винта возникает вращающий момент, стремящийся накренить судно, и толкающее усилие, направленное вдоль оси корабля.
Винт корабля является сложной конструкцией. Лопасть его представляет собой тело, ограниченное двумя криволинейными поверхностями (рис. 49). Линия пересечения этих поверхностей
Рис. 49. Конструкция винта (а) и основные элементы его геометрии (б).
1 — выходящая кромка; 2— корень лопасти; 3 — профиль лопасти;
4 — входящая кромка; 5 — конец лопасти..
образует контур лопасти. Наиболее удаленная от оси часть лопасти называется концом лопасти, а устанавливаемая в ступице— корнем лопасти. Расстояние от конца лопасти до оси вращения определяет величину радиуса винта.
Площадь круга, перекрываемую лопастями винта при его вращении, принято называть площадью диска винта.
Расстояние I, измеренное от корня лопасти до ее конца, представляет длину лопасти.
Кромка лопасти, которая встречает воду при вращении винта, называется входящей кромкой, а другая—> выходящей кромкой.
Винт, вращающийся по часовой стрелке (если смотреть на корму по ходу судна) называется правоходным, а вращающийся против часовой стрелки — левоходным.
Заштрихованные на рис. 49 сечения лопастей представляют собой профиль лопасти на данном радиусе.
Размер 1Ш, определяющий длину профиля сечения лопасти, естественно и называется шириной самой лопасти на данном радиусе.
Гребной винт, у которого угол наклона поверхности лопасти одинаков для всех ее сечений, представляет винт постоянного шага, а гребной винт, у которого угол наклона поверхности лопасти изменяется с удалением от оси вращения — винт переменного шага. Для винта с переменным шагом за среднюю величину шага условно принимается шаг профиля на радиусе 0,7 /?.
Путь, пройденный лопастью вдоль оси вращения за один оборот, так называемый геометрический шаг винта Н, можно измерить. Для этого надо определить расстояние вдоль оси винта между входящей и выходящей кромками 1п и разделить его на угол у между радиусами, проведенными до точек на кромках винта, лежащих на расстоянии 0,7
Н = А. 360.
(
Особенно сложно изготовить винт переменного шага, у которого все лопасти должны иметь одинаковый угол наклона поверхности во всех соответственных сечениях разных лопастей. Чтобы выполнить это условие, целесообразно воспользоваться приспособлением, состоящим из колец, входящих друг в друга с некоторым зазором (рис. 50). Величина зазора должна быть равна толщине латунной фольги, из которой вырезан шаблон, и по которому устанавливаются углы наклона поверхности лопастей. Принцип применения этого приспособления понятен из рисунка.
Чтобы правильно выбрать винт для модели при известных значениях скорости вращения двигателя и его мощности, необходимо найти оптимальную форму поперечного сечения лопасти и наилучший угол наклона ее поверхности. Методы расчетов гребных винтов, применяемые в большом судостроении, довольно сложны. Поэтому при выборе винта для модели следует идти чисто практическим путем и ориентироваться на лучшие образцы гребных винтов существующих моделей. Если это окажется невозможным, то придется встать на путь последовательного подбора. Исходя из конструктивных особенностей корпуса, желательно выбрать возможно больший диаметр винта, какой еще может быть установлен. Затем нужно определить
площадь лопастей, которая для моделей линкоров, крейсеров, эсминцев, фрегатов и т. п. составляет около 100% площади диска винта, перекрываемой лопастями, а для моделей грузо-
Рис. 50. Приспособление для установки лопастей винта переменного шага: а — измерение шага винта; б, в — конструкция и внешний вид приспособления.
вых и вспомогательных судов — 60% и меньше. Коэффициент полезного действия гребных винтов обычно бывает порядка 190 0,4 ->-0,75. С точки зрения весовых и габаритных характеристик
самым выгодным является применение быстроходных двигателей с редукторами.
Гребные винты для обеспечения высокого к. п. д. должны иметь наибольший возможный диаметр при небольшом числе оборотов. Они изготовляются различными способами. Можно воспользоваться листом железа или латуни и просто, разрезав его на лопасти, закрепить на валу. Однако, такие примитивно изготовленные винты имеют низкий к. п. д. и устанавливать их на моделях нежелательно. Можно сделать отливки винта в гипсовой форме из алюминия или дюраля по предварительно изготовленной восковой или деревянной модели. Но этот способ в большинстве случаев невыгоден из-за значительных затрат времени на создание такого шаблона, по которому отливается всего один или два винта. Если требуется несколько одинаковых винтов, то в этом случае применение способа отливки может оказаться целесообразным.
Наиболее приемлем третий способ — изготовление винта, собранного из отдельных деталей, посредством пайки серебряным припоем. При этом легко изготовить винт любой геометрии и времени затрачивается значительно меньше. Кроме того, углы наклона лопастей такого винта могут быть без особого труда изменены в процессе ходовых испытаний модели.
Изготовление винта следует начинать с вытачивания ступицы длиной 8-5- 12 мм. Не снимая готовую деталь со станка, нужно сделать осевое отверстие, в котором нарезается резьба М3 или М4. Разметка ступицы для пропилов под установку лопастей выполняется с помощью штангеля, измерителя и чертилки. Начальные точки пропилов на ступице трехлопастного винта должны отстоять друг от друга точно на одну треть окружности. Зажав ступицу в трехкулачковый патрон токарного станка, можно получить отпечатки, которые ускорят работу по разметке. Пропилы делаются ножовкой по металлу с ножовочным полотном, равным по толщине материалу лопастей.
Лопасти винта, как уже сказано, изготовляются из латуни или листового железа, толщиной, равной ширине пропилов в ступице. Из другого, более мягкого материала (фанеры, бумаги, фольги) нужно тщательно сделать шаблон лопасти, контур его перенести на латунь или железо и ножницами по металлу вырезать лопасти с небольшим запасом в размерах. Для получения всех лопастей одинаковой формы их следует сложить в пакет и обрабатывать различными напильниками, зажав
в тисках, а затем обработать по отдельности каждую лопасть для придания необходимого профиля их плоскостям. Входящая кромка лопасти заваливается по окружности, радиус которой равен толщине самой лопасти. Выходящая кромка стачивается под таким углом, чтобы образовать острый клин, основание которого равно толщине лопасти, а боковая грань в 4—5 раз больше ее основания. На рис. 49 показаны несколько сечений лопасти, сделанных на разных расстояниях от корня. При этом всегда от корня к концу толщина лопасти уменьшается.
Если изготовленные лопасти входят в пропилы с небольшим усилием, их нужно слегка заколотить — и винт готов к пайке. Но бывает и так, что лопасти выпадают из пропилов, тогда следует воспользоваться приспособлением для установки и удержания лопастей под нужным углом и наклоном. Наиболее удобным является приспособление, изображенное на рис. 51. С его помощью лопасти можно установить в ступице под любым углом к оси и с любым углом наклона. Для пайки винтов применяется другое приспособление — в виде металлической конструкции, состоящей из планок с прорезями, корытообразных уголков и держателей для лопастей. Все детали конструкции соединяются болтами с гайками.
Планки для этого приспособления изготовляются следующим образом: сверлом, имеющим размер, равный диаметру скрепляющих болтов, просверливается ряд отверстий, которые распиливаются напильником и зачищаются надфилем для получения длинной прорези. Корытообразные уголки имеют по три отверстия —одно в середине для установки держателя с лопастью, а два — по краям для соединения с планками. Угол сгиба корытообразных уголков не одинаков для винтов с различным числом лопастей: для четырехлопастного винта он равен 45°, а для трехлопастного винта — 60°.
В зависимости от длины планок и корытообразных уголков при помощи такого приспособления можно собирать винты разных размеров. Для винтов диаметром от 15 до 60 мм нужны планка размером 72 мм и угольник размером 52 мм.
Держатель вытачивается на станке. На одном конце его нарезается резьба, другой конец пропиливается ножовкой, и в нем сбоку сверлится отверстие под резьбу М3 для крепления лопасти стопорным винтом.
Сборка винта в приспособлении начинается с установки зачи-192 щенных шкуркой лопастей в держателях под нужным углом.
При этом нужно следить, чтобы все входящие кромки лопастей были направлены в одну сторону. Затем вставляется ступица, держатели сдвигаются и вводят лопасти в пазы на ступице. Болты и гайки зажимаются — и винт готов к пайке. Но перед
Рис. 51. Приспособление для пайки трехлопастных винтов: а — планка; б — заготовка корытообразного профиля; в — ее окончательная форма; г — держатель лопасти; д — внешний вид приспособления.
этим следует ввернуть в ступицу вал и проверить правильность установки ступицы. Если сборка правильная, вал будет стоять перпендикулярно к плоскости приспособления. Пайка производится очень быстро, при условии, что собранный винт предварительно нагрет до температуры плавления припоя. Паять
193
13
Ю. Д. Пахтанов, В. И. Соловьёв
можно оловом и серебряным припоем. Винт, спаянный оловом, чувствителен к ударам. Лопасти его в местах пайки могут легко отвалиться. Винт, спаянный серебряным припоем, значительно надежнее, его лопасти можно гнуть и скручивать и от удара винт лишь согнется, но не развалится.
Хотя пайка оловом — наиболее простой способ соединения деталей, однако в нем есть свои трудности. Если, например, приходится паять крупный винт, то обычный паяльник может оказаться непригодным: деталь настолько быстро отводит и рассеивает тепло, что припой не плавится. В этом случае нужно пользоваться более мощным паяльником или даже двумя. Предварительный разогрев детали легко осуществить на газе или примусе. Только не забудьте сначала смазать соединяемые части хлористым цинком, т. е. травленой соляной кислотой. После разогрева соединений пинцетом кладите кусочки олова и пайка получится ровной, чистой и прочной.
Пайка серебряным припоем несколько сложнее, так как детали нужно нагреть до более высокой температуры бензиновой или какой-либо другой горелкой. Места соединения при этом посыпаются бурой, а припой так же накладывается пинцетом. Как только весь припой растечется по месту спайки, процесс закончен. Если деталь долго не удается разогреть, полезно подложить сзади кусок асбеста для уменьшения отвода тепла. Спаяный винт вынимается из приспособления и обрабатывается напильником, надфилем и шкуркой.
Воспользовавшись описанным ранее приспособлением для измерения геометрического шага, проверьте, все ли лопасти имеют одинаковый шаг. Если винт радиально-переменного шага, вырежьте латунные вкладыши для соответствующих сечений под необходимыми углами по рабочему чертежу винта и запишите положения шаблонов при его установке. Когда впоследствии придется менять геометрию винта в ту или другую сторону, вы уже будете знать, что привело к изменению скорости модели — увеличение или уменьшение шага.
Прежде чем закончить работу по изготовлению винта, его необходимо отбалансировать. Для этого нужно навинтить винт на ось, концы которой вставить в подшипники без смазки. Отбалансированный винт должен иметь безразличное равновесие. Если он не отбалансирован, то лопасть, которая перевешивает, необходимо сточить, но так, чтобы не нарушить симметрич-194 ность винта.
Другой способ балансировки состоит в том, что в ступицу ввинчивается втулка с отверстием, равным диаметру швейной иглы. В отверстие вставляется игла и винт устанавливается на двух параллельных лезвиях от безопасной бритвы. Отбалансированный винт также должен иметь безразличное равновесие и при этом способе испытания.
Необходимо помнить, что чем тщательнее отделан винт, тем выше его к. п. д. Поэтому после предварительной отделки винт нужно отполировать. Ступица его должна иметь обтекатель, который несколько уменьшит вихреобразование в потоке. Обтекатель вытачивается на станке и, так же как винт, полируется. Лучше всего детали полировать на быстро вращающемся войлочном круге, смазанном пастой «ГОИ». Круг может быть установлен и на токарном станке, и на электроточиле
Когда выбран двигатель, а редуктор и винт подготовлены, можно приступить к монтажу их в корпусе модели. Для модели с одним винтом произвести монтаж этих узлов относительно нетрудно. У двухвинтовой модели эта операция более сложна, но и она осуществима, если воспользоваться теоретическим чертежом для разметки линий валов на корпусе.
Исходя из высоты двигателя, редуктора, и учитывая условия их размещения в корпусе, а также в зависимости от диаметра винтов необходимо определить положение дейдвудной трубы и вала по отношению к корпусу модели. Наиболее удачное размещение достигается в том случае, когда оси винтов будут параллельны плоскости ватерлинии. Это условие удается выполнить не всегда; чаще всего двигательная установка может быть смонтирована в корпусе только при наклонном (по отношению к плоскости ватерлинии) направлении осей винтов.
Произведем разметку линии валов для двухвинтовой модели (рис. 52). Определив диаметр винта и высоту центра вала редуктора, проводим линии вала на теоретическом чертеже. Делается это так. На чертеже «полуширота» проводится линия (вал-батокс), параллельная диаметральной плоскости, на расстоянии, большем радиуса винта и двигателя. На чертеже внешнего вида находим то место, где должен располагаться винт, точнее, на какой шпангоут теоретического чертежа он проектируется. Проведя линию вала, описываем окружность радиусом винта так, чтобы дуга ее не касалась линии найденного нами шпангоута. С другой стороны окружность винта может несколько выходить из-за очертаний корпуса. Центр этой
окружности (точка В) будет концом линии вала. Если оказалось, что окружность неизбежно касается линии прилежащего шпангоута, то это значит, что валы следует разносить в стороны на большее расстояние или опустить их ниже. Для этого повторяем всю предыдущую операцию до тех пор, пока не будет удовлетворено заданное условие.
Теперь нужно найти точку выхода вала из корпуса модели и наклон его к плоскости ватерлинии. На чертеже «бок» находим точку В—-конец линии вала и точку Р— выход вала редуктора, которая должна находиться в плоскости того шпангоута, где намечено расположить редуктор и связанный с ним двигатель. Соединив эти точки, получим линию вала ВР (винт — редуктор). На этой линии, на пересечении линий вал-батокс и вала ВР находится точка О — точка выхода вала из корпуса. Зная шпангоут, в плоскости которого лежит эта точка, можно отыскать место на корпусе. Аналогичное построение следует произвести и для другого вала.
На корпусе прочерчиваются в натуре линии проекции вал-батокса и вала. Затем, найдя на их пересечении точку О, можно просверлить отверстие под требуемым углом к ватерлинии. Это отверстие нужно обязательно сделать меньше диаметра дейд-вудной трубы.
Прежде чем устанавливать дейдвуд, необходимо проверить, правильно ли просверлено отверстие. Для проверки, на ось, равную по длине будущему валу, надевают картонный диск, имеющий диаметр винта, и, установив в корпусе редуктор и двигатель, проверяют, произошло совпадение осей или нет. Если обнаружена небольшая ошибка, и вал надо сместить в какую-либо сторону — не смущайтесь: произведите разметку снова и распилите отверстие в нужную сторону. Ведь у вас имеется запас, так как дейдвудная труба больше просверленного отверстия и, кроме того, она вставляется в прямоугольный брусок размером 10X10 мм, под который распиливается предварительно круглое отверстие в корпусе. Если оси удовлетворительно совпали, можно убрать временные подкладки под редуктором и двигателем, заменить их постоянными и надежно закрепить к корпусу. После этого переходят к соединению валов редуктора, двигателя и винта.
Моторы устанавливаются на железных угольниках, имеющих толщину полки 1,5 -^-2 мм (рис. 53). В вертикальной полке 196 угольника делают одно большое отверстие для торцового
вывода мотора и четыре отверстия, диаметром 5 мм, для его крепления к угольнику. Необходимо в процессе расточки все время примерять получающиеся отверстия по торцовому заплечику двигателя, чтобы добиться более плотной посадки.
Если корпус имеет крутые закругления подводной части, то под нижнюю полку следует подложить сегментообразную подкладку или, распилив полку на две части, согнуть ее под нужным углом. Ось мотора может устанавливаться наклонно по отношению к днищу. Для выполнения этого условия следует разогнуть угольник до нужного положения, а под нависающий конец мотора поставить подкладку, прикрепляемую к полке угольника или к корпусу. Редуктор можно крепить при помощи небольших уголков.
Соединение валов обычно производится посредством специальных устройств — муфт. Некоторые типы их применяются только при строгом совпадении осей — это так называемые жесткие муфты (свертные, дисковые муфты и др.). На моделях, ввиду сложности установки двигателя и редуктора, передачу вращения чаще всего приходится осуществлять под некоторым небольшим углом. В этих случаях применяются соединения с промежуточным гибким валом или универсальный кардан. Схемы основных типов соединений, позволяющих сопрягать вращающиеся валы, расположенные под углом или несоосно, представлены на рис. 54.
Наиболее просты в изготовлении муфты с промежуточным гибким валом в виде тросика из пружин, навитых в разных направлениях. Обычно применяют 2-3-4 слоя навивки пружин на гибкий стержень, собранный из отдельных проволочек. Такие гибкие валы используются при передаче движения в зубной бормашине, мотоцикле, автомобиле и т. д. Для крепления гибкого вала к осям двигателя и редуктора вытачиваются переходные втулки с отверстиями, соответствующими диаметрам вала двигателя и гибкого вала. Места соединения втулок с гибким валом запаиваются оловом, а с валами двигателя и редуктора втулки скрепляются шпильками.
Соединение валов, направленных под углом, может быть осуществлено и при помощи промежуточных шарнирных соединений. В этом случае необходимо, чтобы концы соединяемых валов имели жесткий упор. Такое соединение состоит из двух втулок и промежуточного валика, концы которого имеют за-198 кругленные приливы большего диаметра, чем сам валик. Валик
5}
Рис. 54. Соединительные муфты, применяемые для моделей кораблей: а — глухая муфта; б — дисковая муфта; в — соединение при помощи гибкого вала; г — шарнирное соединение; д — дисковая муфта, соединяющая вал с маховиком компрессорного двигателя.
можно изготовить на токарном станке целиком или, выточив отдельно приливы, припаять их на концы валика. В центр закругления прилива вставляется стальной штифт диаметром 1,5
2 мм. Втулка сверлится под диаметры вала двигателя и прилива промежуточного валика. К валу двигателя втулка крепится пайкой или штифтом, а для штифта, находящегося на закруглении промежуточного валика, в ней делается продольная прорезь по размеру этого штифта.
Вывод вала через корпус модели в воду осуществляется при помощи дейдвудной трубы (рис. 55). Она должна обеспе-
Рис. 55. Установка дейдвудной трубы в корпусе модели корабля.
1 — вал; 2 — втулка; 3 — дейдвудная труба; 4 — корпус модели; 5 — клинья.
чивать вращение вала с небольшим трением и при этом быть водонепроницаемой. Внутренний диаметр дейдвудной трубы больше диаметра вала. На концах ее устанавливаются подшипники скольжения или качения, а также сальники, которые препятствуют проникновению воды через дейдвуд. Самый простой способ изготовления дейдвудной трубы — выточить две втулки для наружного и внутреннего конца трубы с внутренними отверстиями, равными диаметру вала. Полость трубы между втулками для обеспечения водонепроницаемости набивается ватой, пропитанной графитной смазкой.
После окончания монтажа двигательной установки — винта, редуктора, двигателя и соединительных валов—модель приобретает способность двигаться самостоятельно. На этом этапе работы желательно произвести обкатку отдельных механизмов и предварительные испытания двигательной установки в целом. В процессе испытаний необходимо убедиться в надежности 200 всех соединений, легкости передачи вращения от двигателей
к винтам, отсутствии заеданий в механизмах и т. д. При испытаниях на стенде не следует подавать на двигатель номинальное напряжение, так как при этом винты, не встречая сопротивления воды, разовьют очень большие обороты. Вполне достаточно ограничиться подачей на двигатель 40-:-50% номинального напряжения.
После такой обкатки модель можно поставить в любой подходящий по размеру бассейн и, погрузив винты в воду, подать на двигатели номинальное напряжение питания. Не следует только забывать, что модель еще далеко не полностью загружена механизмами и источниками питания, поэтому ее следует специально догрузить балластом, чтобы обеспечить погружение корпуса до расчетной ватерлинии.
Во время испытаний очень полезно измерить с помощью динамометра тяговое усилие, развиваемое движителями. Изменяя шаг винта и производя после каждого изменения новое измерение силы тяги динамометром, можно подобрать оптимальное значение шага, т. е. такое положение лопастей, при котором тяговое усилие окажется наибольшим.
Хотя наша модель уже способна двигаться самостоятельно, но пока еще лишена возможности изменять курс и выполнять различные маневры. Как придать нашей модели эти качества — мы сейчас узнаем.
Для того чтобы моделью можно было управлять (пока еще не на расстоянии), она должна иметь какое-нибудь устройство, позволяющее изменять направление ее движения — курс. Подавляющее большинство кораблей и судов, плавающих по океанам, морям и рекам, управляется с помощью руля.
Любой руль представляет собой пластину. Установленная параллельно ходу судна, она никак не влияет на направление его движения. Но при всяком отклонении пластины в сторону, встречный поток воды давит на ее поверхность, а появляющееся
ДЕЛЛЕМ МОДЕЛЬ УПРАВЛЯЕМОЙ
при этом усилие отклоняет корабль от первоначального направления. Управляемость — очень важное качество корабля — в значительной степени зависит от формы руля, от соотношения размеров его
и корпуса судна и от места расположения руля на корпусе. Чаще всего руль устанавливается в корме, так как при этом обеспечивается наиболее эффективное воздействие его отклонения на курс судна, а также наибольшая устойчивость корабля
на прямом курсе.
РуЛЬ — Не единственный способ управления кораблем. Можно заставить корабль маневрировать и с помощью двух
основных ходовых винтов. Иногда применяются специальные дополнительные винты, так называемые активные рули.
Принцип управления с помощью ходовых винтов состоит в том, что толкающее усилие каждого из них (на двухвинтовом или многовинтовом корабле) приложено не вдоль диаметральной плоскости корабля, а несколько в стороне от нее. Когда усилия, развиваемые обоими винтами, равны — корабль движется прямо. Достаточно изменить число оборотов одного из винтов, как сразу же возникает вращающий момент, поворачивающий корабль. Этот способ управления применяется на некоторых моделях и будет более подробно описан все корабли и их модели, даже
Рис. 56. Схема конструкции руля.
1 — перо руля; 2 — баллер; 3 — гельмпортооа труба; 4 — подшипники баллера; 5 — румпель.
в дальнейшем. Но, как правило,
если в них предусмотрена система управления винтами, снабжаются и обычными рулями.
Руль состоит из пластины обтекаемой формы. Эта пластина называется пером руля (рис. 56). Перо руля насаживается на ось — баллер, которая может поворачиваться в направляющей — гельмпортовой трубе. Для передачи усилия поворота на верхнюю часть баллера насаживается либо рычаг — румпель, либо зубчатый сектор. Баллер может быть по-разному прикреплен к перу руля: либо располагаться на краю пластины, либо сме-
щаться к ее середине. Рули, у которых ось баллера смещена к центру пера, называются балансирными или полубалансир-ными, в зависимости от величины этого смещения и, кроме того, от наличия выреза в передней части пера.
Привод руля управляемой модели осуществляется рулевой машинкой, называемой рулевым приводом.
Масштабная площадь руля модели может быть несколько увеличенной по сравнению с рулем корабля-прототипа. Желательно применять на моделях балансирные и полубалансирные рули. Для их перекладки требуется меньшее усилие, а следовательно, и меньшее потребление электроэнергии рулевым приводом.
Руль можно сделать из любого материала (дерева, пластмассы и т. д.), но лучше всего для обеспечения прочности спаять его из белой жести, пропустив внутрь баллер. Перед пайкой баллер необходимо слегка сплющить и залудить, затем, припаяв его к одной половинке пера руля, наложить вторую половину пера на первую, но с другой стороны баллера, и снова пропаять места стыка. Образовавшуюся сверху между щечками руля щель следует закрыть узкой полоской жести и тоже пропаять.
Гельмпортова труба не должна пропускать воду внутрь корпуса и позволять баллеру свободно вращаться. Для обеспечения упора руля применяются подшипники. Чтобы закрепить гельм-портову трубу, к днищу модели приклеивается колобашка и через нее и корпус сверлится сквозное отверстие, либо трубу припаивают к пластинке, которая крепится к днищу. Для придания прочности всей конструкции желательно припаять один или два угольника-раскоса к трубе и пластинке (ребра жесткости). Места соединения трубы с корпусом и колобашкой заливаются клеем или краской во избежание просачивания воды.
Рулевой привод может быть любой конструкции. В последнее время большое распространение получила рулевая машинка от радиоуправляемого механизма РУМ-1, выполняющая перекладку руля за 1 3 сек. Для управляемой модели, иду-
щей с большой скоростью, это недостаточно быстро.
В рулевой машинке данного типа электромотор через шестеренчатую передачу вращает длинный винт, по которому перемещается гайка, связанная с румпелем. Такая система развивает хорошее усилие, но, к сожалению, не может мгновенно
вернуться в исходное положение после перекладки руля в любую из сторон.
Ускорить процесс перекладки можно, если отказаться от винтового привода и перебрасывать руль в крайние положения с помощью тяговых или толкающих электромагнитов.
Пользуясь деталями от различных механизмов, не так сложно самому изготовить быстродействующую рулевую машинку, например, с помощью семафорных указателей поворота для автомобиля, соленоидов от реле выдержки времени и т. п. Для этого надо замерить их электрические параметры: напряжение, ток срабатывания и усилие, которое может быть передано на руль. Если же таких готовых деталей нет — сделайте соленоиды и толкатели самостоятельно по приведенному ниже расчету.
Расчет катушки соленоида
Для перекладки руля катушки соленоида должны развивать достаточную силу тяги, способную преодолеть сопротивление румпеля. Обычно, на моделях среднего размера мощность Р соленоида должна быть порядка 15-г-25 вт. Исходя из этого можно определить основные параметры катушки соленоида путем упрощенного расчета. Зная напряжение питания катушки U (например, 24 в), определим силу тока в ней /:
Для того чтобы обеспечить это значение тока в катушке соленоида, ее сопротивление Rk должно быть:
V 24
= — = — = 24 ом.
I 1
По данной величине сопротивления нужно подобрать для намотки катушки провод соответствующего диаметра и длины по формуле:
R = 1 ом.
ом-мм2
Здесь р —удельное сопротивление (для меди р = 0,0175-------);
Q nd2 М
о =---- — площадь поперечного сечения проводника, мм;
4
d — диаметр проводника, мм, I — длина проводника, м.
При выборе диаметра провода следует учитывать что на один мм2 сечения проводника сила тока не должна превышать 2 4- 3 а. Зная диаметр, можно определить полную длину провода /ЦОли( а затем рассчитать раз-204 меры катушки: внутренний диаметр DOl длину L и толщину обмотки Н.
Для расчета следует задаться любыми двумя величинами, а по ним определить третью. Если заданы Do и Н, то средняя длина витка /Ср будет:
1ср = itDo + (2Я-|-Оо) = (£>о + Яо).
Общее число витков в катушке W: w . ^ПОЛИ __ .
/ср “ 4p(Do+fl) *
В обмотке заданной толщины Н уложится следующее число слоев пл
Число витков в одном слое ДОСЛ:
^сл ------
П
Отсюда необходимая длина катушки:
L ~ t/йУсл-
В соответствии с полученными размерами можно выточить катушку из эбонита или склеить из картона. Выводы концов обмотки лучше всего сделать гибкими, многожильными проводниками. Между слоями обмотки полезно проложить тонкую изоляцию, а всю катушку обмотать лакотканью.
Рулевая машинка работает следующим образом. При подаче, например, команды «поворот вправо» включается левый соленоид и, втягивая сердечник, связанный с баллером, поворачивает руль. При снятии команды, т. е. при отключении тока, румпель возвращается в первоначальное — среднее положение под воздействием силы оттягивающей пружины.
Якорь соленоида имеет штифт, который входит в прорезь румпеля, и, чтобы якорь не мог повернуться, в штифт ввертывается винт с шайбой. Вся система получается быстродействующей, но имеет и существенный недостаток — небольшой угол поворота руля. Для увеличения угла поворота можно поставить промежуточное звено — две шестеренки с разными диаметрами На баллер насаживается малая шестерня, с большой соединяется якорь. Таким образом, незначительное перемещение якоря вызовет, через шестеренку, большое отклонение руля. Зная угол отклонения руля, легко рассчитать необходимый ход якоря соленоида. Если он не обеспечивается имеющимся соленоидом, то надо определить, какое передаточное 205
отношение должна иметь шестеренчатая или рычажная передача. Подобрав и смонтировав в корпусе все эти механизмы, мы будем иметь модель, которая не только способна двигаться по прямой, но и управляться. Но изготовленные нами ходовые системы мертвы без источников питающей их энергии. Надо позаботиться и о них.
ИСТОЧНИКИ ПИТАНИЯ для МОДЕЛЕЙ
Подавляющее большинство механизмов, устанавливаемых на моделях, приводится в действие электрической энергией. Конечно, возможны и другие варианты, например, использование энергии расширения предварительно сжатых газов или энергии расширяющихся паров жидкостей при нагреве, но эти способы применяются чрезвычайно редко.
Существует два основных практически удобных метода получения электрической энергии: применение электромеханических преобразователей (генераторов, приводимых в движение двигателями любого типа) и электрохимических источников. На управляемых моделях обычно устанавливаются электрохимические источники постоянного тока — гальванические элементы,
в которых электрическая энергия получается за счет электрохимических реакций, либо аккумуляторы. Поскольку отдельный гальванический элемент, как правило, развивает небольшую э. д. с., то для получения более высоких напряжений элементы соединяются в батарею. Для моделей более выгодно приме-
нять аккумуляторы, так как они позволяют производить многократный разряд и заряд.
Наиболее важными характеристиками системы электропита-
ния являются следующие:
1) номинальная электродвижущая сила, измеряемая в вольтах (в);
2) электрическая емкость, измеряемая в ампер-часах (а.-ч.), и показывающая, в течение какого времени элемент разрядится полностью при разрядном токе в 1 а (если величина разрядного тока больше, то время разряда уменьшается);
3) номинальная сила тока, который элемент способен отдавать при нормальном разряде во внешнюю цепь. Этот ток определяется величиной внутреннего сопротивления элемента (чем оно меньше, тем больше ток).
Для устройства управляемой модели требуются источники питания, рассчитанные на различные напряжения и токи. Например, электродвигатели модели потребляют при напряжении 27 в ток порядка 510 а, системы автоматики — 6 в при токах около 0,5 а, накал лампы приемника — 2,2 в, и т. д. Поэтому полный бортовой комплект источников питания модели должен состоять из нескольких отдельных групп. Для питания двигателей и систем автоматики наиболее широко применяются следующие аккумуляторы:
1. Батареи аккумуляторные щелочные, с электродами на металлокерамической основе, типа 2КНБ-2, 4КНБ-15 и т. д. Буквы КН означают состав активной массы (кадмиево-никелевые); буква Б — конструкцию батареи (безламельные); первая цифра—количество аккумуляторов в батарее; последняя цифра — номинальную емкость батареи в ампер-часах.
2. Батареи щелочные железо-никелевые, типа 2ЖНП-4 (ЖН — железо-никелевые; П — прессованные безламельные пластины).
Эти аккумуляторы монтируются в пластмассовых моноблоках (цельнопрессованный корпус). Отрицательные и положительные пластины изолируются друг от друга различными способами. Например, в батареях ЖНП для этих целей используются винипластовые перфорированные сепараторы и гофрированная пленка. В аккумуляторах КНБ — капроновое или полихлорвиниловое полотно. Технические данные аккумуляторов указанных типов приводятся в табл. 7.
Новые аккумуляторы заливают электролитом и подвергают двум тренировочным циклам заряда и разряда. Эта же операция проделывается и с аккумуляторами после длительного их хранения в сухом состоянии.
Состав электролита для аккумуляторов КНБ и ЖНП: раствор едкого калия, плотностью 1,19 н- 1,21 с добавкой 20 г/л моногидрата лития. При заливке электролита с помощью резиновой груши или стеклянного медицинского шприца необходимо соблюдать правила безопасности: при попадании электролита на
Таблица 7
Технические данные аккумуляторов типа КНБ и ЖНП
Характеристики 2КНБ-2 4КНБ-15 2ЖНП-4
Зарядная сила тока, а 0,4 4,5 1
Время заряда, час* 10,0 5 8
Разрядная сила тока, а 0,14-1,0 2,04-10,0 1,2
Номинальное напряжение, в 2,5 5,0 2,5
Вес батареи с электролитом, кг Габаритные размеры, мм: 0,22 2,1 0,450
высота 90 112 103
ширина 36 83 52
длина 36 125 52
Гарантийный срок службы, циклы заряд-разряд 100 100 300
кожу и одежду — промыть эти места водой, а затем слабым раствором борной кислоты и снова водой. Перед зарядом аккумулятора нужно отсосать шприцем электролит до уровня верхней кромки пластин, а перед началом разряда — долить его до нормального уровня. После двух циклов заряда и разряда следует на три часа оставить батареи с открытыми заливочными отверстиями, затем проверить уровень и, если необходимо, снова долить электролит, но уже с меньшей плотностью (1,07 ->-1,09).
Во время эксплуатации аккумуляторную батарею нельзя разряжать ниже 1 в на одну банку, так как более глубокие разряды вредно сказываются на состоянии пластин. Если батареи после употребления должны долго храниться (более года), то их желательно разрядить и вылить электролит, встряхивая при этом банку, чтобы удалить грязь. Промывать водой аккумуляторы воспрещается. Если перерыв в работе составляет меньше года, то аккумуляторы можно хранить с электролитом в разряженном или заряженном состоянии. Пробки при этом должны быть плотно завинчены.
Большое распространение в судомоделизме получают аккумуляторы типа СЦ. Активная масса их состоит из прессованного порошка окиси цинка, цинка и серебра, восстановленного
из его окиси, с последующей термической обработкой. Положительные пластины из серебра заключены в специальную капроновую ткань, а отрицательные — в целофан. Электролит аккумулятора СЦ состоит из раствора едкого калия плотностью 1,4 и расходуется в очень небольшом количестве — только на смачивание прокладок между пластинами и заполнение зазоров. В разряженном серебряно-цинковом аккумуляторе уровень электролита должен быть не выше 2/з высоты пластин. При зарядке он поднимается до их верхнего края. Благодаря наличию герметичной пробки аккумулятор может работать в любом положении, что очень важно для моделиста. При заряде (напряжением 2,1 в на каждую банку) аккумулятор должен стоять вертикально с ввинченной пробкой. Время заряда этих аккумуляторов колеблется в больших пределах. Для достижения 70 80% номинальной емкости достаточно 15 мин., но наибольший коэффициент отдачи, т. е. полная зарядка, достигается только по истечении 10 -н 15 час.
Напряжение включенного на разряд аккумулятора быстро падает с 2,1 до 1,5 в. Повышенное напряжение в начале разряда объясняется наличием перекиси серебра в активной массе. Как только перекись перейдет в окись, напряжение станет постоянным, равным номинальному, и не изменится до конца разряда.
Серебряно-цинковые аккумуляторы стоят пока еще сравнительно дорого, но все же целесообразно стремиться к их применению на моделях, так как они обладают ценными достоинствами: при небольших габаритных размерах аккумуляторы СЦ позволяют получить, хотя и кратковременные, но достаточно большие токи разряда, что очень важно на соревнованиях.
Эти аккумуляторы можно хранить в заряженном состоянии весьма длительное время, причем количество энергии, запасенной аккумулятором, уменьшится незначительно. Перед началом работы их полезно подзарядить небольшим током до напряжения 2,02 в. Технические характеристики серебряно-цинковых аккумуляторов приводятся в табл. 8 (габариты установочные).
Неплохие результаты можно получить, используя в качестве источника питания двигателей стандартные батареи типа КБС для карманных фонариков, составленные из сухих элементов с э. д. с. 3,7 в и емкостью 0,5 а.-ч. Эти батареи имеют сравнительно большое внутреннее сопротивление и не могут отдавать значительный разрядный ток. Поэтому их приходится соединять 209
14
Ю. Д. Пахтанов, В. И. Соловьёв
Таблица 8
Технические данные аккумуляторов типа СЦ
Основные характеристики
Зарядная сила тока, а Ток 5-мин разряда, а Номинальное напряжение, в Конечное напряжение, в при разряде при заряде
Вес с электролитом, кг Габаритные размеры, мм высота ширина длина
Гарантийный срок службы, циклы заряд —- разряд
СЦ-0,5 СЦ-1,5 сц-з СЦ-5 СЦ-12 СЦ-15 СЦ-18 СЦ-25
0,5 1,5 3 5 12 15 18 25
2,0 3,5 3,5 60 80 95 120 150
1,82 — — — — — — 1,86
1,0 — — — — 1,0
2,0 — — — — — 2,0
0,024 0,035 0,095 0,16 0,195 0,245 0,3 0,47
47 50 75 77 115 115 115 136
12 14 18 32 22 28 33 48
24 28 43 45 48 48 48 48
300 — — — — — — 400
по нескольку групп в параллель, что увеличивает емкость комплекта питания в целом.
Хотя батареи КБС предназначены для одноразового использования, их можно два-три раза подзарядить. Схема подзаряда
Рис. 57. Схема установки для заряда аккумуляторов и подзаряда батарей КБС.
(рис. 57) та же, что и для зарядки аккумуляторов. Желательно, чтобы выпрямитель, применяемый для этой цели, имел выходное напряжение на 1 2 в больше, чем значение номиналь-
ной э. д. с. комплекта источника питания. Подзаряд следует вести в течение 8-*- 10 мин. Потребляемый от выпрямителя ток
в начале подзаряда бывает порядка 2 3 а и быстро снижается
до десятых долей ампера. Повторные подзаряды можно производить только при условии, если батареи не были разряжены слишком глубоко, в противном случае заряд батарей не может быть удовлетворительно восстановлен.
Для питания систем автоматики желательно применять отдельный комплект батарей или аккумуляторов. В некоторых случаях можно сделать отвод от части батареи комплекта источников питания двигателей с нужным напряжением.
Для питания электронных схем лучше всего устанавливать отдельные источники питания. Это необходимо потому, что электронные схемы весьма чувствительны к колебаниям напряжения и, кроме того, помехи, которые наводятся в общую цепь питания от двигателей и реле, могут привести к ложным сраба-
Таблица 9
Технические данные батарей марганцево-цинковькх элементов
Тип батарей Напряжение, в Емкость, а.-ч. Размеры, мм 1 Вес, кг !
49САМЦГ-0.25 (анодная) «Звук» 49 0,25 80X25X100 0,25
1,58САМЦ-2,5 (накальная) «Звук» 1,58 2,5 36X101 0,16
30САМЦ4-0,02 (анодная) «Слух» 31 0,02 34X20X46 0,04
1,5САМЦ-0,6 (накальная) «Слух» 16ФМЦУ-3,2 (накальная) «Сатурн» 1,5 1,6 0,6 3,2 20X59 34X64 0,04 0,105
75АМЦГ-224 (анодная) «Радуга» 75 0,03 95X40X70 0,36
67,5АМЦГ-У-0,22 (анодная) «Малыш» 67,5 0,06 62X36X63 0,25
тываниям приемного устройства. Питание накалов ламп может
осуществляться от аккумуляторов любого типа или сухих элементов. Анодные цепи требуют подачи на них более высоких напряжений (если электронные схемы собраны не на транзисторах). Для этой цели удобно применять малогабаритные батареи, составленные из электрохимических марганцево-цинко-вых элементов одноразового действия. Основные данные таких батарей приведены в табл. 9.
В настоящее время наша промышленность начала выпускать несколько новых типов элементов. Все они отличаются малыми 14*
размерами и весом, имеют относительно большую емкость и допускают подзаряд в процессе эксплуатации. Большинство этих элементов герметизировано и может устанавливаться в любом положении. Наиболее удобны для моделей элементы ртутно-цинковые «РЦ», окисло-ртутные «ОР» и щелочные марганцево-цинковые «МЦ». Основные технические данные этих элементов приведены в табл. 10.
Таблица 10
Основные технические данные новых элементов для питания радиоаппаратуры типа «РЦ»Г «ОР» и «МЦ»
Тип батарей Ток, ма Емкость при разрядке током 25 ма Габариты, мм Вес, г
высота диаметр
МЦ1К 0,08 6,6 15,8 4
МЦ2К 0,25 7,6 21,2 8
МЦЗК 0,4 8,6 25,7 13,2
МЦ4К 0,85 9,6 30,3 20
ОР-1 10 0,5 12,5 15,6 9,0
ОР-2 20 1,0 13,0 21,0 17,0
ОР-3 30 1,5 13,5 25,5 28,0
ОР-4 47 2,5 14,0 30,1 38,0
РЦ-15 0,3 0,04 6,0 6,0
РЦ-31 0,1 0,06 3,5 11,6
РЦ-53 10,0 0,20 6,3 16,0
РЦ-63 20,0 0,50 7,4 21,0 до 170
РЦ-73 35,0 1,0 8,4 25,8
РЦ-83 50,0 1,5 9,4 30,2
РЦ-93 300,0 14,0 60,0 32,0
Рабочее напряжение, развиваемое отдельным элементом, обычно невелико и для всех этих элементов (типа «РЦ», «ОР» и «МЦ») не превышает 1,5 в. Поэтому составлять из них батарею, достаточную для питания анодных цепей вакуумных электронных ламп, было бы неудобно, так как для этого потребуется очень много элементов. Их целесообразно применять при наличии преобразователя напряжения, а также для питания схем на 212 транзисторах.
Сразу возникает вопрос: о каком преобразователе может идти речь? Ведь мы хорошо знаем, что преобразовать напряжение постоянного тока невозможно — трансформаторы могут работать только на переменном токе. Здесь используется многоступенчатое преобразование — сначала преобразование постоянного тока в переменный, затем повышение путем трансформации напряжения переменного тока до нужного уровня, и, наконец, выпрямление высоковольтного переменного напряжения, с последующей фильтрацией. Преобразование постоянного тока в переменный может осуществляться при помощи электромеханических вибраторов, периодически разрывающих цепь. Но они не очень надежны. Гораздо удобнее строить преобразователи на транзисторах. Основным элементом такого устройства является автогенератор с большим размахом колебаний, обеспечивающим попеременно полное отпирание или запирание транзистора.
На рис. 58, а приводится схема такого преобразователя на основе блокинг-генератора. В качестве активного элемента можно использовать транзистор П-13 или аналогичный ему по параметрам. Трансформатор блокинга должен повышать напряжение до необходимого уровня, в связи с чем его выходная обмотка имеет большое количество витков. Преобразователь потребляет во входной цепи постоянный ток порядка 6 ма при напряжении 4,5 в и отдает на выходе постоянный ток около 20 мка при напряжении 45 50 в. Трансформатор блокинга
следует намотать на Ш-образном железе, имеющем сечение магнитопровода 0,5 1,0 см2. Примерные данные трех его об-
моток I—III следующие: I — 40 витков провода ПЭМ-0,11; II — 20 витков провода ПЭЛ-0,08; III—450 -?- 500 витков провода ПЭЛ-0,08. В качестве выпрямляющего элемента можно использовать любой полупроводниковый диод с подходящими параметрами.
На рис. 58, б представлена схема преобразователя на двух транзисторах типа П-201 (или любого другого типа с номинальным током 1 2 а). Этот преобразователь может отдавать зна-
чительно большую мощность, чем предыдущий. Сердечник трансформатора набирается из железа Ш-10 при толщине набора (число пластинок, укладываемых в пакет) 13-*- 15 мм. Данные обмоток следующие: I—6 витков провода ПЭ-0,8 с выводом от средней точки; II — 40 витков провода ПЭ-0,8 с выводом от средней точки; III —100 витков провода ПЭ-0,15.
Выпрямитель собран по мостовой схеме на диодах Д7Ж. Преобразователь может отдавать в анодную цепь постоянный ток в несколько десятков миллиампер при напряжении в 130—150 в.
Рис. 58. Схемы преобразователей напряжения постоянного тока: а — на блокинг-генераторе; б — двухплечевая.
Применение этих преобразователей особенно выгодно в тех случаях, когда в состав электронной схемы входят и транзисторы, и вакуумные лампы. Таким образом, один источник пи-214 тания покрывает потребности всей электронной схемы в целом.
Очень полезно при монтаже источников питания в корпусе модели предусмотреть возможность удобного доступа к батареям для их замены или подзаряда. Кроме того, выходы отдельных комплектов источников питания следует защитить плавкими предохранителями и установить приборы для контроля напряжения.
Если смонтировать электроизмерительные приборы непосредственно на модели трудно, то нужно вывести на доступные места клеммы, к которым подключать прибор.
Теперь мы снабдили модель всем необходимым для того, чтобы она смогла самостоятельно перемещаться. В некоторых случах этим можно и ограничиться. Построенная модель — самоходная и вполне сможет принять участие в соревнованиях, в соответствующем классе. Но нам этого мало. Мы хотим иметь такую модель, которая умела бы выполнять команды, переданные на расстоянии. Значит ее необходимо еще снабдить системой автоматики.
Хотя бесконтактные системы автоматики обладают многими МОНТАЖ ценными преимуществами, но все они сравнительно сложны. СИСТЕМ Поэтому на моделях кораблей обычно ограничиваются кон- АВТОМАТИКИ тактными релейными схемами.
Подбирая реле для системы автоматики, нужно стремиться к тому, чтобы обойтись стандартными реле заводского изготовления. Конструировать и строить реле самостоятельно следует только в тех случаях, когда абсолютно невозможно обойтись без этого. Такая необходимость возникает при решении некоторых специальных задач — например при подборе вибрационных реле для сложных наборов команд или при очень суровых требованиях к габаритам и весу самих реле. Изготовить хорошее реле самому — задача нелегкая. Поэтому лучше всего приспособить готовые конструкции, тем более, что их много выпускается нашей промышленностью.
Нужный тип реле подбирается по следующим его основным параметрам: ток срабатывания — /ср, ток отпускания — /Отп, напряжение срабатывания — /7ср и напряжение отпускания (70ТП, -^***^ч^
а также величина рабочего тока, который может пройти через контакты реле без их ) X
повреждения. Конечно, ток и напряжение срабатывания связаны друг с другом и соотношение между ними определяется активным сопротивлением обмотки. Если, не изменяя числа витков, изменить сопротивление обмотки (например, применить провод большего сечения), то необходимая величина тока срабатывания будет обеспечена и при меньшем напряжении источника питания. Кстати, подобная переделка реле не очень сложна и в некоторых случаях полезно это сделать.
Как правило, чем мощнее контактная группа реле, тем большие ток и напряжение требуются для его срабатывания. Именно поэтому очень чувствительные и легкие реле имеют слабые контакты, и для управления механизмами, потребляющими значительные токи, приходится устанавливать реле-повторители. Выбирая реле системы автоматики модели, нужно обязательно учитывать значение силы тока, пропускаемого их контактами, и размещать их в схеме на соответствующих местах.
Контактные группы реле различных типов отличаются большим разнообразием. Они могут быть с одной или с многими контактными парами, работать на замыкание и размыкание. Применяются также смешанные контактные группы с контактами и того, и другого вида. В табл. 11 приведены основные технические данные стандартных реле, которые наиболее подходят для систем автоматического управления моделями кораблей.
Современные релейные схемы автоматики, состоящие из большого числа элементов, обычно монтируются отдельными блоками, каждый из которых имеет определенное целевое назначение. Такая система монтажа позволяет легко извлекать для ремонта, замены или проверки любой отдельный блок. Междублочное соединение осуществляется проводами, заплетенными в жгуты с разъемами на концах (см. фотографию). При наличии разъемов демонтаж не требует отпайки соединительных концов и сборка всегда производится быстро и безошибочно.
Если система автоматики состоит из небольшого количества элементов (до 10 реле), то разделять их на отдельные блоки не стоит. В этом случае достаточно ограничиться применением только одного разъема между выходом приемника и всей системой автоматики.
Размещая реле в корпусе модели, следует всемерно со-216 кращать длину соединительных проводов, т. е. устанавливать
Таблица 11
Основные данные малогабаритных реле
Тип реле Обозначение по каталогу Данные обмотки Ч ис л о контактов ср> м а Примечание (характеристика реле)
сопротивление, ом число витков 3 (замык.) Р (размык.) П (переключ.)
У 171-80.62 25 2000 1 137 Малогабаритные,
У 171.80.52 60 2800 — 2 — 80 постоянного тока,
РКМ У 171 80.27 400 5300 1 1 2 52 на три группы
У 171-80.29 500 8300 2 — 2 42 контактов, вес
У 171-80.38 700 10 700 — 3 3 31 120 г
РС-6М2 У 171.80.89/9 700 5200 1 1 — 32 То же, на один —
РС-6МЗ У 171.80.90/9 700 5200 — 2 — 32 два контакта, вес 25 г
РСМ-2 10.171.81.50 60 1400 — 2 — 68 То же, но улуч-
РСМ-2 10.171.81.53 250 3000 2 — 40 шенной конструк-
РСМ-2 10.171.81.30 750 5000 1 1 —. 25 ции
РСМ-2 10.171.81.50 30 1100 1 1 100
РСМ-3 10.171.81.22 750 5000 2 — — 24
РСМ-3 10.171.81.32 120 2100 2 — — 65
РС13-11 У 171.80.68/9 80 140 2400 2400 — — 6 6 300 170 То же, с большим числом контактов, вес 170 г
РС13-10 У 171.80.37/9 250 5400 2 96
PC 13-40 РЭС-9 У 171.80.326 PC 4.524.201 400 500 6250 — — 2 2 60 36 Миниатюрные,
PC 4.524.203 35 — — 2 140 герметичные, вес 17 г
РЭС-10 PC 4.524.300 4500 1 — — 4,0 То же, вес 7 г
каждое реле как можно ближе к управляемому им объекту. Для того чтобы не запутаться и легко обнаруживать неисправности, целесообразно вести монтаж разноцветными проводами. Если это не представляется возможным для всех линий, то выделить определенным цветом хотя бы цепи питания совершенно необходимо.
Переход через водонепроницаемые переборки нужно делать только в их верхней части, а само отверстие желательно гидроизолировать. Во все линии, подводящие питание к системе автоматики, установить плавкие предохранители. Очень полезно снабдить аппаратуру электроизмерительными приборами, которые дадут возможность контролировать режимы в любой момент. Вот теперь, когда мы закончили монтаж системы автоматики и установили на модели приемник, можно приступить к очень интересному этапу работы — к испытаниям и регулировке модели в бассейне.
СПУСКАЕМ МОДЕЛЬ НА ВОДУ
Перед тем, как «окунуть» нашу модель в воду, необходимо проверить правильность и надежность работы автоматики. Включать приемник при этом еще не нужно — достаточно просто нажать пальцем на контакт выходного реле, и тем самым подать сигнал, соответствующий определенной команде.
При отключенной батарее питания двигателей проверяется работа реле РВ (вперед), PH (назад) и PC (стоп). Реле РВ и PH при подаче на их обмотку напряжения сигнала должны становиться на самоблокировку (т. е. после снятия сигнала оставаться под током). Выключение реле РВ и PH должно осуществляться контактом реле PC — проверьте это обязательно. Если все якорьки реле исправно щелкают, а приборы показы-
вают расчетные величины токов, можно подключить к двигателям напряжение питания. Не забудьте снизить его вдвое, так как винты, не встречая сопротивления воды, разовьют очень большие обороты, что может вызвать различные повреждения. Затем надо проверить работу реле
РВ, PH и PC совместно с двигателями и, если нарушений нет,— перейти к испытанию рулевого устройства.
В некоторых схемах при перекладке руля двигатель, в сторону которого производится поворот, выключается. Это значит, что когда подается команда «влево» или «вправо», цепи питания нужного двигателя должны автоматически разрываться. Проверка работы рулевой машины осуществляется включением реле РП и РЛ и наблюдением за возвращением руля в среднее положение после снятия команды. Если скорость перекладки руля окажется невелика, повысьте напряжение питания рулевой машины на 10-20%. Это увеличит скорость вращения двигателя, а следовательно, сократит время перекладки руля. Далее проверьте работу реле увеличения циркуляции РУЦ (если оно имеется). Включение на переднем ходу реле РУЦ должно при подаче команды поворота предотвратить выключение соответствующего двигателя. Если вся система работает без нарушений, можно поставить модель на воду и еще раз проверить автоматику.
Налаживая систему автоматики, удобно составить графики очередности включения реле (рис. 59). На графике каждому реле отводится соответствующая строчка. Время вставания реле под ток тоже может влиять на управление моделью.
Как видно из графиков, выключение реле РВ и РУЦ происходит почти мгновенно после подачи команды «стоп» и, следовательно, модель практически не потеряет хода при мгновенной подаче после этого новой команды «вперед». Следующий поворот будет произведен с меньшим радиусом циркуляции, при условии, что предварительного сигнала на РУЦ не подается.
Убедившись в правильности и надежности работы автоматики, можно приступить к испытанию модели совместно с приемником. И если теперь окажется, что какая-то команда не будет «проходить» — причину надо искать в приемнике. Ведь автоматика налажена и неоднократно проверена.
Налаживание приемника сводится к тому, чтобы каждая команда вызывала уверенное срабатывание своего реле. Сначала надо убедиться в исправности источников питания. Если напряжение отсутствует, то следует проверить правильность монтажа. Проверку сверхрегенеративного каскада начните с цепей питания накала и анода лампы. После этого подключите наушники параллельно обмотке приемного реле. При отсутствии командного сигнала от передатчика должен прослушиваться
характерный беспорядочный шум сверхрегенератора. С подачей команды в наушниках появится отчетливый звук на частоте передаваемой команды. Наушники удобно подключить при помощи «крокодильчиков» (при этом можно обойтись без разрыва цепи и без пайки). Затем, включая на передатчике последовательно все команды, убедитесь, что соответствующие реле надежно срабатывают. Неплохо при этом испытании разнести
постепенно передатчик и приемник на большое расстояние, чтобы установить границы зоны уверенного приема.
Наконец, модель на воде.
Запустите ее по прямой, не включая аппаратуры радиоуправления. Проверьте, как модель держится на курсе. Постарайтесь еще раз добиться наибольшей прямолинейности хода — этого легко достичь, регулируя шаг винта. В последующих запусках надо определить циркуляцию. Разумеется, она должна быть одинакова в обе стороны при полной перекладке руля.
Далее приступайте к управлению моделью по радио. Не отпуская ее от себя, проверьте работу всей аппаратуры, включая поочередно команды. Если все хорошо, можно произвести за-
пуск на небольшое расстояние и проследить, как выполняются команды. Кроме того, начните постепенно приобретать навыки капитана — научитесь вовремя поворачивать модель, останавливать двигатели и т. д.
В процессе таких тренировок вы сумеете предвидеть путь модели после подачи команды и проводить ее по дистанции за минимальное время. Особенно сложно управлять моделью на заднем ходу. Следует также учесть, что одновинтовую модель бывает нелегко вывести из циркуляции. Даже перекладка руля с борта на борт для некоторых моделей не приводит к прекращению первоначально начатого поворота. Есть немало и других тонкостей в управлении моделями — их придется упорно осваивать на опыте. Остается окончательно отделать модель: установить надстройки и оборудование, окрасить ее и вообще придать ей достойный вид. Как же это делается?
Надстройки модели должны быть легкими, но прочными, ПОСЛЕДНИЕ а также без труда сниматься, чтобы обеспечить свободный до- ШТРИХИ... ступ к аппаратуре и к источникам питания. Вырезанное в палубе отверстие — кокпит обносится рейкой — комингсом, которая предохраняет корпус от попадания в него воды, а надстройку — от перемещений по палубе.
Для основных надстроек нужно изготовить жесткий каркас и в местах закруглений поставить рейки. На каркас накладывается и приклеивается тонкая фанера. Кстати, приемник можно с удобством расположить в надстройке: он мало весит и не займет много места, а кроме того удобно контролировать его работу, не снимая надстройки.
Выполнять надстройки из картона (прессшпана) не рекомендуется, так как он быстро деформируется и ппохо переносит сырость. Круглые и овальные детали, трубы и др. можно формировать оклеиванием по болванке. Болванка, после тщательной зачистки шкуркой, покрывается парафином или другой смазкой. Оклеивать форму можно бумагой, материей, капроном, стеклотканью с применением
различных клеев, за исключением АК-20, БФ и т. п. (при высыхании эти сорта клея деформируют изделие).
Изготовление мелких деталей можно вести по способу штамповки из целлулоида или тонкого оргстекла. Для этого деревянная модель шлюпки, так называемый штамп, крепится к патрону сверлильного станка, а на столе помещается кусок толстой фанеры с вырезом шире обводов шлюпки на толщину материала. Размягченный нагреванием кусок материала кладется на вырез, шлюпка-штамп быстро опускается, размягченный материал натягивается, завернутая кромка обрезается — и деталь готова. Такой способ дает высокую производительность изготовления.
Некоторые детали — локаторы, леера, краны и др. приходится делать из тонкой жести, латунной фольги и проволоки. Ряд деталей — кнехты, шпили, репитеры и т. п. нужно выточить на станке, тогда модель будет красивой. Если хотите, чтобы металлические детали долго оставались блестящими, их нужно покрыть бесцветным лаком или разведенным добавкой ацетона эмалитом. Можно применить и другие способы отделки: чернение, воронение, никелировку и др.
Все детали следует надежно крепить к надстройкам и палубе. Это лучше всего обеспечивается, когда деталь имеет опорную ножку, входящую в надстройку. На более крупных деталях ножку желательно сделать с резьбой.
Прежде чем окончательно закрепить все мелкие детали, надстройки и корпус нужно подготовить к окраске. В случае применения нитрокрасок необходима предварительная грунтовка нитроцеллюлозным грунтом ДД113, представляющим собой раствор нитроцеллюлозы в смеси растворителей и наполнителей с добавлением пластификаторов и каолина. Этот сорт грунтовки предназначается для грунтования кистью деревянных и металлических деталей (высыхает при температуре 18 20° С в течение 90 мин.). Можно также применить грунт № 622— раствор нитроцеллюлозы и смолы в летучих органических жидкостях с добавлением пластификатора и пигмента (высыхает при температуре 18 -*-20° С в течение 8 мин.). Если такого грунта не окажется, возьмите обычную нитрокраску, разбавьте растворителем РДВ и покройте все окрашиваемые поверхности из пульверизатора.
Для получения гладкой поверхности все неровности сглажи-222 ваются шпаклевкой. Шпаклевка может производиться по от-
дельным неровным местам (особенно глубокие впадины) или сплошь. Чаще всего применяют оба способа: сначала подмазываются отдельные участки, а затем, после их высыхания, шпаклюется вся поверхность. Иногда приходится наносить 2-3 слоя шпаклевки. Наносится она вручную шпателем из толстой 8 15 мм резины, имеющим скругленную поверхность. Удобно
работать шпателем с полукруглым вырезом и обработанным на электроточиле. После высыхания шпаклевку шлифуют мелкозернистой шкуркой, смоченной в бензине. Эту работу нужно производить в вентилируемом помещении.
Нитрошпаклевки выпускаются в виде густой вязкой пасты на нитроцеллюлозной основе с введением наполнителей, смягчителей и пигментов. Применяются следующие сорта шпаклевки:
Марка нитро- Цвет Время высыхания, час Поверхность
шпаклевки АШ-6 Красная Не более Металлическая и
АШ-22 АШ-24 Желтая Желтая и 2-х 1 деревянная Металлическая
АШ-30 АШ-32 коричневая Серая 2,5 Деревянная
Если нет готовой шпаклевки, ее нетрудно приготовить из талька, касторки и нитрокраски. На 50 г талька нужно взять 5 8 г касторового масла, необходимого для смягчения шпак-
левки.
Окраску модели лучше всего производить пульверизацией, разделяя места, окрашиваемые в разные цвета, наклеенными полосками бумаги. Клей для этой цели приготавливается из картофельной или ржаной муки, не слишком густой, без комков. Окрашиваемую поверхность перед покрытием нужно зачистить сухой шкуркой для удаления налипов и подтеков.
Окрасив корпус модели, например в черный цвет, следует отбить ватерлинию и по ней наклеить полоски бумаги. Затем окрасить другим цветом днище или надстройки и верхнюю часть корпуса. Участки поверхности, запачканные клеем, тщательно протрите, а когда краска просохнет, влажной тряпкой снимите пыль.
Не рекомендуется по ранее окрашенным в красный или зеленый цвет поверхностям красить белой краской, так как при 223
этом будет растворяться подслой и поверхность приобретет оттенок подслоя, сколько бы новых слоев не было положено.
Красить можно и кисточкой с мягким ворсом, только не задерживаясь долго на одном месте. Окрашенную нитрокраской поверхность следует полировать тряпкой, смоченной полировочной водой. Перед полировкой отшкурьте поверхность мелкозернистой полировочной шкуркой. На окрашенную поверхность можно ацетоном приклеить окна из черного целлулоида. Иллюминаторы лучше клеить краской того же цвета, что и корпус модели в этом месте.
После окраски устанавливаются и окончательно закрепляются все заранее заготовленные и подогнанные детали палубного оборудования.
Пожелаем модели счастливого плавания, а ее строителю — больших успехов в кораблестроении и судовождении!
Ю, Д, Пахтанов, В, И. Соловьёв
15
Глава V
Эти модели можно построить
Л едокол «Ленин» — первое в мире судно гражданского флота, на котором работает энергия атома. Этот ледокол уже немало поплавал в суровых условиях Арктики и блестяще подтвердил на практике свои отличные ходовые качества.
Модель атомного ледокола «Ленин» очень удобна для установки на ней системы дистанционного управления. Она обладает высокой маневренностью благодаря тому, что отношение длины корпуса к его ширине невелико^——4,5.^Широкий и емкий корпус позволяет легко разместить сложные системы
РАДИОУПРАВЛЯЕМАЯ МОДЕЛЬ АТОМОХОДА «ЛЕНИН»
автоматики и источники питания.
Ледокол — это судно с гладкой палубой, удлиненной надстройкой и двумя мачтами. На шлюпочной палубе размещены два мотобота, два вельбота, два катера и одна шестерка. В кормовой части помещаются взлетно-посадочная площадка для вертолета и ангар. Дымовая труба отсутствует. Гротмачта имеет большие размеры и служит для вентиляции парогенераторной установки. В средней части корпуса, на левом борту, установлен кран, используемый при перезарядке атомных реакторов. Поперечный люк в средней части как
раз и расположен над реакторами. В носовой части ледокола находятся две полуторатонные лебедки, а на корме — два трехтонных крана. В ходовой рубке имеются три командных прибора— два из них на крыльях верхнего мостика и один на корме. Кроме того, на мостике
15*
размещены телеграф, рулевые указатели и указатели скорости. Репитеры (повторители гирокомпаса) систем управления имеются на всех постах управления.
Ледокол снабжен радиолокационными станциями ближнего и дальнего действия, антенны которых вынесены на топовую площадку фокмачты. На кронштейне ее, расположенном ниже площадки антенных устройств радиолокаторов, установлена приемная антенна пеленгатора. Аппаратура радиосвязи помещается в носовой и кормовой радиорубках. Комплекс всех антенных устройств состоит из Г-образных многолучевых, однолучевых и штыревых антенн для коротковолновых передатчиков и приемников.
Все чертежи, необходимые для постройки моделей ледокола и других судов, описанных в этой главе (в масштабе 1 : 1), приложены к книге.
Познакомившись с чертежами, вы увидите, что на модели ледокола очень много надстроек и различных устройств, а это существенно затрудняет ее изготовление, особенно, если добиваться необходимой красоты отделки.
Можно упростить конструкцию надстроек и уменьшить число деталей, разработав новый проект, который позволит часть устройств скрыть внутри внешней обшивки. У ледокола, плавающего в условиях арктических морей, часто происходит оледенение механизмов, расположенных на открытых местах. Закрытая конструкция швартового, якорного, шлюпочного и другого оборудования предохранит их от этого, а внешний вид модели в таком варианте получится еще более красивым, современным. Конечно, это уже не будет точная модель ледокола «Ленин», но неплохо и пофантазировать, и попытаться строить модели кораблей будущего. На рис. 60 представлен эскизный чертеж общего вида такой модернизированной модели ледокола. Для спуска шлюпок в боковых стенках надстроек предусмотрены раздвижные щиты, а для выхода стрелы крана — отодвигающаяся крыша. Имеются аналогичные устройства и для других систем.
Изготовление корпуса, расчет энергетической установки были достаточно подробно рассмотрены в предыдущей главе и возвращаться к этому нет необходимости.
Модель нашего ледокола, выполненная в масштабе 1 : 150, будет иметь следующие основные размерения: L = 895 мм. В = 228 =185 мм, Т = 61,5 мм. Исходя из заданных размеров и данных
табл. 6, приходим к выводу, что лучшим вариантом силовой установки будет применение на модели двух электродвигателей МУ-30 с отдельными редукторами, передаточное число которых равно 1 2 или 1 3.
Схема системы автоматических устройств для управления ледоколом должна обеспечить управление ходовыми двигателями, рулевым приводом и некоторые вспомогательные операции, как например, зажигание ходовых огней, запуск сигнальной ракеты и т. п.
Как мы уже знаем, для передачи команд от приемника к исполнительным механизмам необходимо применять промежуточные реле, которые являются не только дублерами слабеньких контактов приемника, но и помогают осуществить более гибкое управление. Известно, что одновременно две команды подавать нельзя. Между тем, для управления моделью желательно иметь возможность перекладывать руль во время ее хода. Проследим работу реле РВ, PH и PC, служащих для этой цели. Они входят в часть схемы, изображенной на рис. 61.
При подаче первой команды «вперед» реле выхода приемника Р1К своим контактом Р1К1 включает реле РВ, которое са-моблокируется замыкающимся контактом РВ1. При подаче команды «назад» реле PH встанет под ток и своим контактом РН1 выключит реле РВ. Реле «вперед» обесточится, а его контакт РВ2 замкнет цепь блокировки реле PH, которое при прекращении команды «назад» все равно останется под током. Выключение и реле РВ, и реле PH можно осуществить, подав третью команду «стоп». Приемное реле третьей команды включит реле PC, которое своим контактом РС1 оборвет цепь питания реле РВ или PH. Обесточенные реле РВ и PH смогут встать под ток только при прекращении третьей команды «стоп» и подачи вновь первой или второй команды, т. е. «вперед» или «назад».
Следующая часть схемы (см. рис. 61) относится к системе включения двигателей. Если на модели установлены электродвигатели типа МУ-30, имеющие три вывода, то, в зависимости от подаваемых команд, они будут включаться в определенном порядке. При подаче команды «вперед» станет под ток реле РВ. Его реле-повторитель ПРВ своими контактами ПРВ1 и ПРВ2 включит двигатели, которые, получив питание, приведут модель в движение. Учтите то обстоятельство, что двигатели потребляют значительный ток, поэтому при их переключении и
J6
IQ
Рис. 61. Схема автоматики радиоуправляемой модели ледокола.
реверсировании между контактами всегда проскакивает довольно сильная искра, контакты будут обгорать. Для уменьшения плотности тока целесообразно в некоторых случаях дублировать контакты или для ослабления искры устанавливать искрогасящие контуры.
При подаче команды «поворот вправо» контакт РП2 выключит правый двигатель; при подаче команды «поворот влево» контакт РЛ2 выключит левый двигатель.
Эти выключения двигателей помогают произвести поворот с меньшим радиусом циркуляции. Если же на каком-то участке пути нужно, наоборот, сделать поворот с большим радиусом циркуляции, то можно воспользоваться 6-м каналом и включить реле увеличения циркуляции (РУЦ), показанное на рис. 61 пунктиром. Это реле своими контактами РУЦ2 и РУЦЗ зашунтирует контакты РП2 и РЛ2. Поэтому при подаче команд поворотов двигатели не будут выключаться, а повороты — осуществляться только рулевой машинкой и, следовательно, радиус циркуляции увеличится.
Система включения двигателей на задний ход работает так же как и на передний, но при этом не используется реле РУЦ. При подаче команды «поворот вправо» контактом приемного реле Р4К включается реле РП. При подаче команды «поворот влево» контакт реле Р5К включает реле РЛ.
В данной системе управления моделью, допускающей выключение одного двигателя для ускорения маневра поворота, целесообразно применять рулевую машинку с винтовым приводом от электродвигателя. Схема включений ее показана на том же рис. 61. Механизм рулевой машинки снабжен концевыми выключателями и кулачком, который размыкает контакты так, что
Таблица 12
Подбор реле для схемы автоматики модели ледокола
Название реле в схеме Количество и вид контактов Тип реле Количество реле, шт Название реле в схеме Количество и вид контактов Тип реле Количество реле, шт
РВ 13 и 1Р РСМ-2 1 PC 1Р РСМ-1 1
PH 13 и 1Р РСМ-2 1 РП 2Р РСМ-1 1
ПРВ 23 РСМ-3 1 РЛ 2Р РСМ-1 1
ПРН 23 РСМ-3 1 РУЦ 33 РСМ-3 2
при снятии команды руль автоматически возвращается в исходное положение.
Подбор реле для системы автоматики и определение их количества следует начинать с анализа схемы, предварительно подсчитав количество и тип контактов с помощью приведенной здесь табл. 12. Затем нужно начертить план расположения электрооборудования и автоматики. Пример такого плана представлен на рис. 62.
В нем предусмотрена система автоматики, которая предназначена для работы с одноканальной аппаратурой радиоуправления и может выполнять следующие шесть команд:
Рис. 62. Примерный план расположения автоматики и электрооборудования в корпусе модели.
1 — источники питания радиоприемника; 2 — выключатели цепи питания радиоприемника; 3 — источники питания двигателей и автоматики; 4 — выключатели цепей питания двигателей и автоматики; 5 — релейный блок двигателей; 6 — двигатель с редуктором; 7 — жгут соединительных проводов; 8 — релейный блок рулевой машинки; 9— рулевая машинка.
1. Ход вперед. 2. Ход назад. 3. Стоп. 4. Поворот вправо. 5. Поворот влево. 6. Увеличение радиуса циркуляции.
Эта система содержит не более 10 реле, поэтому их монтаж можно произвести без разъемов между отдельными группами. Реле крепятся на угольниках или пластинках, привинченных к корпусу или палубе. Контакты реле должны быть легко доступны для осмотра и чистки. Из-за большой влажности в корпусе модели даже серебряные контакты нужно чистить перед каждым запуском.
Реле РВ, PH, ПРВ, ПРН и PC следует расположить ближе к электродвигателям, а реле РП и РЛ — ближе к рулевому приводу.
Соединение устройств автоматики с приемником лучше всего осуществить через разъем. Приемник необходимо налаживать независимо от системы автоматики.
Модель ледокола, как и любая модель, имеет некоторые свои особенности в управлении. Их надо изучить и уметь правильно использовать. При первых запусках определите поточнее радиус циркуляции, так чтобы в дальнейшем уже на глаз безошибочно находить его при каждом положении руля. Тогда дистанция может быть пройдена гораздо быстрее. Для этого как можно чаще запускайте модель, это поможет вам накопить драгоценный опыт. Особенно трудно производить повороты при движении модели на вас. Некоторые моделисты для этого поворачиваются спиной к акватории, но и тогда они ведут модель менее уверенно. Попробуйте научиться пользоваться и левой рукой. При движении модели от себя манипулирует на пульте правая рука, при движении на себя — левая. Но, откровенно говоря, всякие советы в таких случаях носят только совещательный характер — каждый капитан должен самостоятельно выработать свой собственный стиль управления.
Кто из нас не любовался бесшумным бегом парусных судов. Разрезая воду, кренясь и царапая реями волны, птицей летят они вперед. Но стремительность их хода — это лишь первое и обманчивое впечатление. На самом деле яхты движутся со скоростью 10—15 км/час, а это не так уж быстро. Очень многое делалось и делается, чтобы хоть чуть-чуть поднять ско
МОДЕЛЬ РАДИОУПРАВЛЯЕМОЙ яхты
рость хода парусного судна: увеличивают площадь парусов, на
ращивают высоту вооружения, придают парусу жесткость, улучшают его аэродинамические свойства и т. п. и все-таки до-
стигнутые такой дорогой ценой результаты, увы, далеко не блестящи.
Теоретические и экспериментальные исследования показывают, что дальнейшее усовершенствование парусного вооружения и улучшение обводов корпуса обычных яхт не позволит увеличить скорость хода более чем на несколько процентов. Но, вместе с тем, известно, что скорость
движения буера — «ледовой яхты» может значительно превышать скорость ветра. Следовательно, есть какой-то путь ускорения хода яхт. Действительно, яхты новых типов, новой конструкции уже выходят на воду. Это — катамараны, глиссирующие яхты и яхты на подводных крыльях. Они очень заманчивы и для яхтсменов и для судомоделистов.
Катамаран — быстроходное судно, состоящее из двух длинных корпусов, соединенных помостом, на котором устанавливаются большие паруса и высокое вооружение. Катамараны имеют неоспоримые преимущества перед обычными яхтами. Расстояние от края одного корпуса до края другого гораздо больше, чем ширина обычной яхты и швертбота. Это делает катамаран чрезвычайно устойчивым и способным нести «форсированную» парусину, в три-четыре раза большую по площади. Катамаран, практически, не опрокидывается даже в сильный ветер, поэтому он может развивать значительную скорость за счет полного использования энергии ветра.
Существует и другой способ увеличения скорости — повышение ходовых качеств яхты за счет уменьшения смоченной поверхности корпуса. При этом корпус на ходу должен выходить из воды — глиссировать. Сопротивление движению резко снижается и поэтому скорость хода возрастает в 2 5 раз по срав-
нению с обычными яхтами.
Глиссирующий корпус — особой формы, с большими плоскими поверхностями, создающими гидродинамическую силу поддержания. Для того, чтобы яхта могла глиссировать, она должна идти попутным курсом. Под острыми углами к ветру обычная однокорпусная яхта не может глиссировать из-за неизбежного крена. У катамарана остойчивость лучше, он может глиссировать и в этих случаях. Поэтому глиссирующий катамаран способен развить очень большую скорость, так как в нем сочетаются одновременно преимущества обоих рассмотренных способов.
Для достижения наибольшей быстроходности катамаран должен обладать небольшим сопротивлением корпуса и достаточно большой тягой парусов. Чтобы уменьшить сопротивление корпуса, нужно поверхность подводной части сделать гладкой, как зеркало. Шероховатость поверхности даже порядка 0,2— 0,3 мм, увеличивает сопротивление трения на 20—30%, что 234 равноценно потере скорости на 6—10%. Кроме того, необхо
димо добиться наименьшего сопротивления формы, обусловленного возникновением завихрений при обтекании корпуса водой. Эти завихрения образуются на кривых участках корпуса,
а также около шверта и руля. Поэтому шверт и руль у быстроходной яхты должны иметь обтекаемую форму.
Быстроходность судна зависит также в большой мере от силы тяги, развиваемой парусами. Для того, чтобы научиться лучше управлять парусом, познакомимся с основными понятиями его теории.
Рассмотрим самый общий случай, когда ветер дует в борт судна. Сила Р давления ветра на парус направлена перпендикулярно к его плоскости и вызывает не только движение яхты вперед, но еще и крен, и снос судна вбок (дрейф яхты). Учтя это, можно разложить равнодействующую силу Р по правилу параллелограмма на две силы (рис. 63). Здесь Т — сила тяги, направленная по ходу движения яхты, а Д — сила дрейфа, направленная вбок. Хотя она очень велика, тем не менее яхта движется вперед, так как сопротивление яхты в сторону движения меньше, чем ее сопротивление движению вбок. Чтобы судно хорошо шло впе-
ред при направлении ветра, указанном на рис. 63, а, оно должно иметь большое боковое сопротивление. На любой яхте и на катамаране это достигается установкой швертов. Величину бокового сопротивления можно менять, выдвигая или убирая
шверты.
Рис. 63. Разложение сил давления ветра, действующих на парус: а — на силу тяги и силу дрейфа; б — на силу лобового сопротивления и подъемную силу.
235
Разложим силу Р7 (рис. 63, б) на составляющую Л в направлении ветра (сила лобового сопротивления) и на перпендикулярную ей составляющую П7 (подъемная сила). Сила Л создается парусом, такелажем, корпусом. Сила П7 оказывает большое влияние на возможности увеличения скорости хода. Если при той же силе Л лобового сопротивления нам каким-то путем удастся увеличить подъемную силу П7 до некоторой величины П77, то равнодействующая Р7 станет равна Р77 и соответственно сила тяги Т7 увеличится до значения Т77.
Уменьшить лобовое сопротивление очень трудно, а вот увеличить подъемную силу удается без особых хитростей, придавая парусу вогнутый профиль крыла. Такая вогнутость, называемая «пузом» паруса, составляет 6—10% от его ширины. Ось «пуза» проходит на некотором расстоянии от мачты. Парус подобной конструкции создает подъемную силу на 20—25% большую по сравнению с плоским.
Если перед этим основным парусом, который называется гротом, поставить передний парус — стаксель, то улучшится обтекание грота воздушным потоком, частично исчезнут завихрения на подветренной его стороне и, следовательно, увеличится подъемная сила. Можно уменьшить и лобовое сопротивление паруса. Аэродинамические исследования крыла самолета показали, что чем уже и длиннее крыло, тем, при той же площади, лобовое сопротивление меньше. Оно также зависит от состояния передней шкаторины, которая должна быть прямой и туго натянутой.
Большое значение при управлении яхтой имеет центровка парусов. Как мы видели, к парусу и корпусу яхты прикладываются различные силы, точки приложения которых находятся в разных плоскостях. Это может вызвать самые неожиданные явления. Так, например, при запуске яхты, она без всяких видимых причин может пойти по циркуляции. Во избежание подобных неприятных случаев и нужно уцентровать яхту. Схема построения для этой цели показана на рис. 64.
Сначала определяется центр парусности — ЦП, т. е. находится точка приложения равнодействующей силы давления на парус. Вычертив паруса в произвольном масштабе, проводим медианы в треугольниках, соединяя вершину каждого из них с серединой противоположной стороны. Центр треугольника, как известно из геометрии, находится на пересечении медиан. 236 Получив, таким образом, центры парусности грота (ЦПГ) и
стакселя (ЦПС), соединяем их прямой линией. К этой линии восстанавливаем перпендикуляры из ЦПГ и ЦПСГ а на них откла
дываем в противоположных направлениях отрезки, пропорциональные площади треугольников. Из центра большого треуголь
ника откладывается отрезок, пропорциональный площади меньшего, а из центра меньшего — площади большего. Полученные точки Г и С на концах отложенных отрезков также соединяются прямой. На пересечении двух проведенных прямых линий (одной, соединяющей ЦПГ и ЦПС, и второй, соединяющей точки Г и С) находится общий центр парусности яхты. К этой точке приложены силы давления, дрейфа и тяги.
Силе дрейфа противодействует сила бокового сопротивления, приложенная в его центре ЦБС, находящемся в подводной части яхты. ЦБС иначе называется центром тяжести силуэта подводной части по диаметральной плоскости. Когда яхта идет без крена, то ЦП и ЦБС должны находиться в одной плоскости. Если ЦП окажется впереди ЦБС, то сила
дрейфа начнет поворачивать нос судна под ветер, т. е. оно будет «уваливать» (рис. 65, а). Если же мачта стоит так, что ЦП окажется позади ЦБС, яхта будет поворачивать носом к ветру, т. е. «приводиться» (рис. 65, б). И уваливание, и приведение очень затрудняют управление яхтой. Для сохранения
ее прямолинейного движения потребуется перекладка руля, а это сильно увеличит сопротивление и снизит скорость хода.
Усвоив основы теории паруса, можно уже более уверенно приступить к выбору конструкции и постройке модели радиоуправляемой яхты.
Мы предлагаем вам построить глиссирующий катамаран, вооруженный парусами из синтетических материалов. При курсе, близком к галфинду, такая модель может развить скорость большую, чем скорость ветра.
а)
Ветер
////
Ветер
////
Рис. 65. Влияние взаимного расположения ЦП и ЦБС на ход судна: а — яхта уваливает (ЦБС сзади ЦП); б — яхта приводится (ЦБС впереди ЦП).
Основные данные парусного катамарана следующие:
Длина наибольшая, мм — 900
Длина по ватерлинии, мм — 880
Ширина двух корпусов, мм — 420
Ширина одного корпуса, мм — 120
Высота борта, мм — 110
Осадка, мм — 34
Водоизмещение, г — 3235
Площадь грота, м2 — 0,36
Площадь стакселя, м2 — 0,14
Общая площадь парусов, м2 — 0,50
Высота вооружения, мм— 1240
Из рассмотренных в предыдущей главе различных способов изготовления корпусов для катамарана наиболее пригоден корпус из стеклоткани. Затрата времени при этом будет значительно меньше, так как по одной форме сразу можно изгото-238 вить оба корпуса. Скреплять их нужно бимсами, которые кре
пятся к шпангоутам. Носовые части корпусов следует сделать водонепроницаемыми для обеспечения непотопляемости.
В корпусе необходимо предусмотреть места для расположения батарей источников питания. Люки в этих местах должны плотно закрываться и иметь комингсы. Для рулевого привода может быть применена несамоцентрирующаяся рулевая машинка от РУМ-1, что даст возможность фиксировать руль в любом положении.
Если такой машинки нет, можно приспособить винтовой механизм, в котором ведущим звеном будет вращающийся винт. Гайка на таком винте перемещается, но не вращается, так как этому препятствует румпель. На концах винта следует установить конечные выключатели.
Для перекладки гика-шкотов и стаксель-шкотов можно использовать мотор типа МН-145А с редуктором, дающим на выходе 145 об/мин при напряжении <7 = 27 в. На конец вала одевается шкив с канавкой, по которой проходит шкот (см. фотографию). Два оборота шкота по шкиву обеспечат его перемещение без проскальзывания. В качестве материала для шкотов можно использовать жилку или провод в перхлорвиниловой изоляции, которая обеспечивает хорошее сцепление с металлическим шкивом. У гика необходимо установить резиновый талреп для натяжения шкотов. Когда гик дойдет до конца, шкот будет проскальзывать по шкиву. Начало проскальзывания регулируется натяжением талрепа. Схемы включения двигателей приведены на рис. 66, а примерная схема расположения электрооборудования — на рис. 67.
При размещении электрооборудования старайтесь его располагать ближе к внутренним бортам корпусов катамарана. Для приемника и электроизмерительных приборов хорошо сделать прозрачную крышку. Общий вес электрооборудования и источников электропитания не должен превышать 2 кг. Только при этом условии яхта сможет глиссировать.
Сделаем примерный расчет веса нагрузки яхты.
Наименование оборудования
Мотор МН-145, 2 шт. (со шкивом) .
Рулевая машинка РУМ-1............
Батарея КБС, 8 шт................
Приемник с батареями питания . .
Вес, кг
0,250X2 = 0,500 0,080
0,115X8 = 0,920 0,500
Итого
2,0
239
Рис. 66. Схема автоматики радиоуправляемой модели яхты.
Радиоуправляемая модель атомного ледокола «Ленин».
Модель радиоуправляемой яхты класса «М» на дистанции.
Скоростная модель на дистанции.
Произведенный расчет показывает, что вес самой модели яхты не должен превышать 1,2 кг, так как иначе будет затруднен ее выход на глиссирование. Поэтому для постройки применяйте наиболее легкие материалы. Например, сплошные шпангоуты переборки, палубу над соединительными бимсами и т. д. сделайте из 1-мм фанеры.
На палубе для крепления вант и штагов нужно установить вант-путенсы и штаг-путенсы. Они должны быть надежными и
Рис. 67. Примерный план расположения электрооборудования на радиоуправляемой модели яхты.
1 — релейный блок; 2 — привод гроташкота; 3 — привод стаксельшкота;
4 и 5 — источники питания; 6 — приемник; 7, 8 — выключатели;
9—рулевая машинка.
легкими. Их можно сделать, пропустив через привальный брус тонкую проволочку в виде петли и закрепив ее под палубой. Для передвижения мачты необходимо сделать несколько таких петелек. Мачта крепится на палубе катамарана с помощью степса в виде металлической рейки или угольника. Мачта должна быть прочной и гибкой. Изготовить ее можно так.
Берутся две мелкослойные сосновые рейки без искривления. Внутри реек шпунтцубелем или узкой стамеской делается паз для прохода ликтроса паруса Края, где будет скользить
16 ю. Д. Пахтанов, В. И. Соловьёв
шкаторина паруса, нужно слегка сострогать, так чтобы при сложенных рейках остался зазор, равный со стороны паруса его толщине, с небольшим запасом. Паз в нижнем конце мачты (у шпора) и в верхнем (у топа) должен выходить наружу, чтобы можно было за фал поднимать парус. Затем рейки склеиваются и приколачиваются к ровному столу, во избежание искривлений в процессе сушки. Когда клей затвердеет, мачте придается в сечении эллиптическая или каплевидная форма. Затем ее нужно прошкурить и покрыть лаком или краской. Для крепления нижних шкаторин парусов служат гик (для грота) и реек (для стакселя). Способ изготовления их такой же, как и мачты.
К топу мачта должна сужаться на 40%, а к шпору на 15%. Самое толстое место, равное 19 мм, находится на ее длины от шпора.
Для крепления мачты применяется стоячий такелаж: боковые растяжки — ванты и передние — штаги. В зависимости от направления тяг различаются следующие штаги: топштаг, натянутый от топа мачты к носу; ахтерштаг, натянутый к корме; стак-сельштаг и кливерштаг, натянутые ниже топштага. Кроме того, мачта крепится ромбвантами, идущими от топа через краспицу к шпору мачты.
Сзади и с боков мачта поддерживается бакштагами. Они натянуты от точки крепления стаксельштага. Иногда сверху устанавливается вторая пара бакштагов — фордунов (см. рис. 68).
Для крепления такелажа на мачту насаживаются оковки, которые принимают все усилия его натяжения. Стоячий такелаж делается из тросов. Если вы не найдете тонких стальных тросов, сделайте их сами, свив из трех-пяти жилок.
После того как стоячий такелаж установлен, можно приступить к изготовлению паруса из тонкой плотной материи или полиэтиленовой пленки. Он должен быть скроен так, чтобы при постановке его образовалась выпуклость — «пузо». Края треугольного паруса называются передней, задней и нижней шкаторинами. Выкраивая парус, надо увеличить нижнюю и переднюю шкаторины на 10—15 мм. Линия центра на нижней шкаторине должна находиться на 2/з ее длины от шкотового угла, а на передней шкаторине — на 3/д длины последней от фалового угла. Парус по шкаторинам обшивается ликтросом. Диаметр ликтроса должен быть таким, чтобы он легко проходил в пазы 242 мачты и гика.
Заднюю шкаторину ликовать (обшивать) не надо. Скругление на ней делается значительно больше, чем на передней и нижней. В верхний фаловый угол вшивается головная дощечка. Это несколько увеличит ширину грота в верхней части. Задняя
Рис. 68. Варианты схем проводки стоячего такелажа: а — с ромбвантами; б — с топвантами; в — схема проводки штагов.
1—ромб-ванты; 2, 4—основные ванты; 3 — топ-ванты; 5 — контрштаг;
6 — стаксельштаг; 7 — бакштаг; 8 — фордуны; 9 — ахтерштаг.
шкаторина должна иметь выгиб, называемый горбом, а чтобы она не заворачивалась на ветер, на задней шкаторине или на весь парус пришивают узкие карманы, в которые вставляют латы — тонкие деревянные дощечки.
Для подъема и управления парусами применяется бегучий такелаж. Грот поднимается гротфалом, а стаксель — стаксель-фалом. Для управления парусами служат шкоты — гикашкот и 243
16*
стаксельшкот. При проводке гикашкота для уменьшения усилий обычно применяют блоки, но на модели усилия невелики и шкотовая машина вполне справится с выбиранием шкотов. У стакселя они должны быть проведены так, чтобы тяга шкота проходила через линию, соединяющую шкотовый угол паруса с точкой, расположенной (от галсового угла) на расстоянии, равном 40% длины передней шкаторины. Для обеспечения во-
донепроницаемости шкоты проводят в клюзы, выступающие над палубой.
При первых испытаниях нужно убедиться что яхта уцентро-
вана. Для этого ее запускают на различных курсах относительно
Рис. 69. Схема разложения ветра.
1 — истинный ветер;
2 — вымпельный ветер.
ветра. Направление ветра, определяемое по странам света (ветер, дующий с севера — северный, с юга — южный и т. д.), называется истинным, а направление ветра, показываемое вымпелом яхты,—• вымпельным. Эти направления не совпадают, так как движение яхты изменяет направление воздушного потока, воспринимаемого яхтой и ее парусами.
На рис. 69 представлена схема разложения силы ветра, из которой видно, что чем быстрее движется яхта, тем больше отклоняется вымпельное на-
правление ветра от истинного.
Яхта имеет наибольшую скорость, когда паруса дают хорошую тягу. Для этого их необходимо установить относительно направления вымпельного ветра, которое определяется по флюгарке, установленной на длинном штоке на топе мачты. Если вы еще не имеете опыта управления яхтой, то для установки парусов пользуйтесь следующим правилом. Грот должен быть расположен так, чтобы он делил угол между направлением ветра и диаметральной плоскостью судна пополам. При запусках на острых курсах, когда ветер дует с носа (так называемый крутой или полный бейдевинд), паруса надо ставить под углом, близким к 15—20°.
Большое значение для хода яхты также имеет правильное управление стакселем. На дистанции по нему можно ориентировочно определить направление ветра, кроме того стаксель хорошо тянет сам и создает лучшие условия для работы грота.
Первые запуски модели следует начинать на курсе галфинд (ветер дует прямо в борт). При этом руль должен быть закреплен, а стаксель выбран так, чтобы он не заполаскивал. Если яхта уваливает, передвиньте мачту назад и снова произведите запуск на том же галсе (ветер дует с того же борта). После того, как будет произведено несколько запусков и вы удостоверитесь в правильной центровке яхты, попробуйте запустить ее с выбранным стаксельшкотом. Все результаты испытаний записывайте. Это поможет вам разобраться в том, как нужно управлять яхтой при усилении или ослаблении ветра. Не забудьте отметить и скорость ветра (в метрах в секунду или в километрах в час). Если при запуске будут наблюдаться резкие скачки ветра — порывы или шквалы — определите, на сколько изменится при этом курс яхты. Все эти заметки нужны, чтобы научиться «чувствовать» яхту и в нужный момент правильно переложить руль, потравить или подобрать шкоты для удержания яхты на нужном курсе.
Испытав яхту на курсе гальфинд, проделайте то же на курсах бакштаг и бейдевинд. Шверт можно подобрать или потравить в зависимости от направления ветра, так как дрейф при этом также будет меняться. На курсе бакштаг яхта идет с наибольшей скоростью. На курсе бейдевинд надо выбрать угол, при котором яхта получит наибольший ход и на лавировке придерживаться его. Желательно произвести испытания при различной силе ветра.
Если в результате испытаний выяснится, что яхта слишком приводится, то следует переместить центр парусности вперед или центр бокового сопротивления назад.
В первом случае: 1) передвинуть мачту в нос; 2) перенести крепления стаксельштага вперед; 3) одновременно передвинуть мачту и перенести крепления штага в нос.
Во втором случае: 1) подобрать шверт; 2) перенести шверт в корму.
Если окажется, что яхта уваливает, поступают наоборот, т. е. центр парусности переносят назад или центр бокового сопротивления —вперед. Помните, что правильная центровка обеспечит наибольшую скорость и лучшую управляемость яхты.
После испытаний яхты на плаву можно приступить к налаживанию и испытанию системы радиоуправления. Для управления яхтой достаточно передавать следующие 6 команд: 1 —левый поворот руля; 2 — правый поворот руля; 3 — перевод гика
на левый борт; 4 — перевод гика на правый борт; 5 — перевод стакселя на левый борт и 6 — перевод стакселя на правый борт.
Аппаратура упростится, если передавать каждую команду двумя сигналами. Этот способ нам уже известен. Сначала должна быть подана команда «налево» или «направо», которая только подготовит исполнительные цепи, но не включит механизмы. Затем можно подавать любую команду — «руль», «стаксель» или «грот» — во всех случаях перемещение этих механизмов будет происходить в ту сторону, которая была задана первой командой. Следовательно, вместо шести достаточно пяти команд.
Принципиальная схема системы автоматики на шесть раздельных команд была приведена на рис. 66.
При запуске модели на заданном курсе стаксель и грот должны быть заранее установлены под нужным углом. При незначительном отклонении модели от курса достаточно действовать одним рулем. Таким образом, первой командой может быть «руль вправо» или «руль влево». Предположим, нужно переложить «руль вправо», тогда реле приемника пятой команды Р5К своим контактом включит реле РПР, которое передаст команду на рулевой привод, т. е. замкнет цепь перекладки руля. Руль будет поворачиваться до тех пор, пока команда не будет прекращена или конечный выключатель не выключит схему. Зная скорость перекладки руля, вы можете переложить руль на небольшой угол и яхта пойдет нужным курсом. В случае, если руль переложен больше, чем надо, подайте другую команду поворота руля, и руль начнет поворачиваться в обратную сторону. Через некоторое время, после нескольких таких проб, вы уже сумеете точно осуществлять перекладку руля.
Участник соревнований обязан провести яхту по периметру треугольника. Расположение сторон треугольника относительно ветра и линия старта определяются судейской коллегией на каждый запуск. Всего запусков — три. Спортсмен должен уметь проводить яхту на всех курсах относительно ветра, а также производить перемену галсов, т. е. поворачивать яхту.
При перемене галса, когда на повороте паруса должны быть перенесены на другой борт, кроме руля вступают в действие приводы перекладки шкотов. Перемена галса, совершаемая при плавании полным курсом, производится поворотом фордевинд (рис. 70, а). Для этого подается команда, включающая 246 привод стаксельшкота, и он подбирается до диаметральной пло-
скости. Выбранный стаксель поможет уваливанию. Следующая команда перекладки гика должна подобрать гикашкот и довести гик до диаметральной плоскости. После этого нужно сразу же
Рис. 70. Виды поворота, выполняемые парусным судном: а — поворот оверштаг; б — поворот фордевинд.
переложить руль в сторону поворота, а как только руль дойдет до крайнего положения, опять включить команду для перекладки гика и перевести его на противоположный борт. Яхта
при этом ложится на другой галс, и руль можно опять поставить прямо. Вслед за этим стаксель тоже доводится до места и в результате манипуляций рулем, гротом и стакселем нужно добиться наибольшей скорости яхты на новом курсе.
Перемена галса, совершаемая яхтой при движении острым курсом к ветру, производится поворотом оверштаг (рис. 70, б). Сначала подается соответствующая команда и гикашкот подбирается до диаметральной плоскости. Это вызовет перемещение центра парусности в корму и поможет приведению яхты к ветру. Следующая команда должна переложить руль в сторону поворота, а затем необходимо немедленно переложить стаксель под ветер. Нос яхты пересечет линию ветра, и руль можно поставить прямо, а гикашкот стравить до места. Поворот оверштаг является основным при лавировке, когда требуется вести яхту против ветра.
Как уже говорилось, особенностью данного курса является большая сила дрейфа. Для противодействия ей, т. е. для увеличения бокового сопротивления, шверты должны быть опущены до конца или даже могут быть заменены на шверты с большей площадью. Не забывайте и о возможности перемещения их в нос или в корму для того, чтобы сдвинуть центр бокового сопротивления. При сильном ветре, чтобы улучшить центровку и уменьшить приведение яхты, шверты можно подобрать. В случае, если у вас не выйдет поворот фордевинд, делайте поворот оверштаг или, наоборот, если не выйдет оверштаг, делайте фордевинд. Старайтесь, чтобы яхта не получила заднего хода, так как в этом случае она почти всегда уходит из под управления.
СКОРОСТНАЯ РАДИОУПРАВЛЯЕМАЯ МОДЕЛЬ
По условиям соревнований, скоростная управляемая модель должна пройти по внешней стороне равностороннего треугольника два раза, причем один раз по часовой стрелке, а другой раз — против. Поворот осуществляется вокруг вехи, стоящей в середине основания треугольника. Линия старта и финиша про-
ходит от этой вехи к судейскому помосту. Отсчет времени производится в моменты пересечения моделью линии старта — финиша. Первое
место занимает спортсмен, чья модель покажет наименьшее время прохождения дистанции.
Исходя из этих условий необходимо выбрать оптимальную конструкцию корпуса модели и подобрать двигатель. Электродвигатели для скоростных моделей непригодны, так как их мощность на единицу веса (вместе с источниками питания) очень мала. Здесь все преимущества у двигателей внутреннего сгорания, которые при весе в несколько сот граммов развивают мощность около 0,5 лошадиных сил.
Обычно применяются двухтактные двигатели компрессионного типа или, в некоторых случаях, с калильным зажиганием. Они очень просты по конструкции, имеют небольшие габариты и вес. Нашей промышленностью выпускаются несколько типов таких микродвигателей — «Комета», «Ритм», «Харьков» и др.
Прежде чем приступить к изготовлению управляемой модели, надо хорошенько потренироваться в умении быстро запускать двигатель и в его регулировке. Новый двигатель следует аккуратно разобрать и промыть в бензине или керосине, чтобы удалить смазку консервации. Перед разборкой отметить рисками положение носка двигателя относительно картера и положение шатуна. В случае последующей разборки необходимо устанавливать все детали строго в прежнем положении, так как они прирабатываются друг к другу.
При сборке двигателя смазывайте его тем же топливом, на котором он нормально работает.
Запуск нового двигателя производится на стенде, состоящем из площадки-рамы мотора, закрепленной к столу или в тиски. К площадке-раме крепится топливный бак с тем расчетом, чтобы уровень топлива в нем совпадал с жиклером или даже был несколько ниже его кромки.
Перед запуском двигателя шприцем или грушей заливается топливо в диффузор карбюратора в количестве 1—2 г. У двигателя с калильным зажиганием необходимо проверить накал свечи — он должен иметь темно-красное свечение. Если свечение будет ярче, то во время работы мотора свеча сгорит. Запуск на стенде нужно производить шнуром с винтом и маховиком. Ни в коем случае нельзя запускать двигатель на стенде с одним маховиком — двигатель при этом перегревается и выходит из строя. Обкатка должна продолжаться около часа на малых оборотах (5000 6000). После такой обкатки очень по-
лезно заменить шатун, так как в головках появится люфт. Если
249
к концу обкатки двигатель увеличит обороты, то это значит, что он приработался.
Лучше всего применить двигатель компрессионного типа с рабочим объемом 2,5 см3, так как он легче заводится и проще в обслуживании.
Корпус скоростной модели должен быть глиссирующим, т. е. при движении с большой скоростью гидродинамические подъемные силы уравновешивают вес модели и она начинает скользить по поверхности воды. Такой корпус имеет меньшее волновое сопротивление, чем погруженный. В общем сопротивлении глиссера почти отсутствует также сопротивление формы (корпус выходит из воды).
Уменьшение смоченной поверхности при глиссировании дополнительно уменьшает общее сопротивление. Если мощность двигателя достаточна и угол наклона корпуса к горизонтали составляет 5—6°, смоченная поверхность будет очень невелика. Транец глиссирующего корпуса должен располагаться под острым или прямым углом к днищу, что уменьшает завихрения.
Скоростная модель может быть следующего типа: однокорпусной, двухкорпусной (катамаран) или «на трех точках».
В последнем случае с боков корпуса устанавливаются два поплавка, на которые при движении опирается модель. Третьей точкой опоры служит корма. Кроме корпуса, скоростная модель состоит из винто-моторной группы и рулевого привода. Очень важно при изготовлении корпуса применять материалы, обеспечивающие минимальный вес модели — авиационную фанеру толщиной 1 1,5 мм, сосновые рейки и сплавы алюминия.
Стеклоткань с полиэфирной смолой холодного отверждения нужно применять не более чем из двух слоев.
Для начала рекомендуем вам выбрать однокорпусную модель на трех точках, снабженную двигателем «Ритм» или «Харьков».
Рассмотрим процесс постройки наборного корпуса для такой модели, так как способ применения с этой целью стеклоткани с полиэфирной смолой холодного отверждения, рассмотренный в предыдущей главе, может быть использован здесь без всяких изменений.
Прежде всего, необходимо сделать заготовки по рабочему чертежу, собрать отдельные узлы, а затем соединить их вместе. Такой метод обеспечивает правильную сборку и прочную 250 склейку.
винтами. Установка двигателя на
Рис. 71. Схема автоматики управляемой скоростной модели.
К вырезанным по чертежу из тонкой фанеры бортам приклеиваются стрингера и вся конструкция прикрепляется к ровному столу, чтобы не произошло перекосов. Подмоторные брусья приклеиваются к двум продольным переборкам и затем к шпангоутам. К низу подмоторной рамы крепится пластинка, в которой сверлятся отверстия и нарезается резьба. Это обеспечит надежную установку мотора и возможность быстрого съема его с подмоторной рамы. Транец модели несет основную нагрузку, поэтому его лучше изготовить из 10-мм фанеры. Кронштейн крепится к нему модели и конструкция кронштейна, несущего гребной винт, показаны на фотографиях.
Ведущий вал удобнее пропустить через дюралевую трубку диаметром 10— 12 мм, а не через колодец, как обычно делают на скоростных моделях. Окончательную сборку ее нужно
производить на ровном столе. В некоторые места соединений (транец, носовая бобышка) можно ввинтить шурупы и оставить их там после высыхания клея для увеличения прочности корпуса.
Схема радиоуправления скоростной моделью очень проста, так как для нее достаточно трех команд: «руль вправо», «руль влево» и «стоп». Регулировать режим двигателя на ходу нецелесообразно — эту операцию нужно тщательно выполнить перед запуском модели. Команда «стоп» исполняется любым приспособлением, пережимающим резиновую трубку подачи топлива, или опускающим клапан-заглушку на всасывающее отверстие диффузора.
Рулевая машинка с винтовым приводом слишком медлительна для модели этого типа. Лучше применить соленоидную систему управления рулем. Правда, рулевая машинка с соленоидом потребляет большую мощность и вес ее больше, что необходимо учитывать при выборе источников питания.
Принципиальная схема системы автоматических устройств управляемой скоростной модели представлена на рис. 71.
Реле для автоматики нужно выбирать такие, чтобы они выдерживали вибрацию, возникающую от работы двигателя, и не
замыкали контакты без команды. Рабочее напряжение этих реле должно быть таким же, как и напряжение питания рулевого привода. Схема включения очень проста и не требует дополнительных пояснений. Необходимо учесть время перекладки руля и добиться, чтобы оно было наименьшим. Запуски надо начинать с проверки работы автоматики, приемника и двигателя. Если все системы работают нормально, можно произвести первые запуски на воде. В первую очередь определите радиус циркуляции и как можно дольше потренируйтесь в управлении моделью. Будьте очень внимательны — скорость глиссирующего судна велика (5 метров в секунду и выше). На такой скорости легко промахнуться мимо вешек и напугать судейскую коллегию!
МОДЕЛЬ ПОДВОДНОЙ лодки с УЛЬТРАЗВУКОВОЙ СИСТЕМОЙ УПРАВЛЕНИЯ
Как хорошо известно, подводная лодка — это корабль, способный плавать в подводном положении. Все страны мира в настоящее время уделяют большое внимание развитию и совершенствованию своего подводного флота. Наряду с боевыми подводными лодками строятся подводные транспортные суда с атомными энергетическими установками, имеющие ряд преимуществ по сравнению с надводными.
При движении под водой волновое сопротивление почти отсутствует. Поэтому скорость, при той же мощности энергетической установки, у подводной лодки больше, чем у надводного корабля того же водоизмещения. Подводные лодки могут без особых трудностей плавать в любую погоду и независимо от ледовой обстановки в районе их плавания. Требования к мореходным качествам подлодки отличаются от аналогичных требований к надводному кораблю. Для того, чтобы корабль держался на воде, он должен обладать запасом плавучести. При этом необходимо, чтобы вес корабля был равен объему вытес-
ненной им воды до ватерлинии. Подводная лодка тоже должна обладать плавучестью, но, кроме того, еще обладать способностью идти под водой и в нужный момент всплывать.
Погружение под воду достигается приемом дополнительного балласта, т. е. путем искусственного уменьшения
запаса плавучести за счет заполнения главных балластных цистерн забортной водой.
Плавучесть подводной лодки может изменяться и вследствие ряда других причин. Так, при переходе из области с высокой температурой в область с более низкой температурой воды или в область, где вода обладает большей плотностью и соленостью, плавучесть подлодки увеличивается. Плавучесть уменьшается также из-за обжатия корпуса при увеличении давления на глубине.
Рис. 72. Схемы, иллюстрирующие поведение подводной лодки при разных положениях центра тяжести (ЦТ) и центра величины (ЦВ): а — лодка устойчива; б — неустойчивое равновесие; в — лодка опрокидывается.
Следующим важным мореходным качеством подводной лодки является ее остойчивость. У надводных кораблей центр тяжести выше центра величины (центра тяжести силуэта подводной части). Это справедливо и для подлодок в надводном положении, но под водой, наоборот, центр величины должен быть выше центра тяжести. Если оба центра совпадут, получится неустойчивое равновесие, а если центр тяжести окажется выше центра величины, произойдет опрокидывание. Посмотрите на рис. 72, и вы увидите, в каких случаях лодка выпрямляется, в каких опрокидывается. Для обеспечения нормальной остойчивости подводной лодки необходимо предусмотреть наличие в нижней ее части балласта.
Большое значение при движении подлодки имеет угол наклона горизонтальных рулей. Рассмотрим их работу.
В подводном положении, в случае какого-то угла наклона горизонтальных рулей, возникают вертикальные силы,
уравновешивающие остаточную плавучесть или приводящие лодку на заданную глубину. При определенной скорости и определенном угле наклона горизонтальных рулей происходит удержание подводной лодки на заданной глубине. Современная подводная лодка обычно имеет кроме кормовых рулей также и рубочные рули. Применение рубочных рулей дает возможность
увеличить их площадь, что приводит к возрастанию момента и подъемной силы.
При движении модели на ее рули действует сила давления воды Р, которую можно разложить на горизонтальную и верти-
Потон боды
Рис. 73. Схема сил, действующих на горизонтальные рули подводной лодки.
кальную составляющие (рис. 73). Горизонтальная составляющая Л всегда направлена против движения модели, т. е. уменьшает ее скорость, хотя и незначительно. Вертикальная составляющая П направлена вверх или вниз, в зависимости от положения руля. По
гружение происходит тогда, когда составляющая П, направленная вниз, совпадает с направлением силы тяжести. Если сумма этих сил окажется больше подъемной силы, лодка будет погружаться, если меньше — всплывать. Когда сумма сил тяжести и вертикальной составляющей П будет равна подъемной силе, подлодка будет двигаться на определенной глубине.
Поскольку модель подводной лодки не погружается на большие глубины и плавает в ограниченных водоемах, ее плавучесть не изменяется в процессе запуска. Поэтому, при правильной установке рулей и определенной скорости движения модель пройдет дистанцию на заданной глубине, не нуждаясь в подаче дополнительных команд на рули глубины.
Предлагаемая модель представляет подводную лодку, рассчитанную на применение атомной энергетической установки. Такая модель, выполненная в масштабе 1 : 75, будет иметь следующие главные размерения L = 1020 мм; В = 130 мм. При этом водоизмещение модели окажется весьма солидным. Подсчитайте его — эта цифра вам очень пригодится в дальней-
254
шем.
Расчет водоизмещения
Для того чтобы подсчитать водоизмещение модели подводной лодки, мысленно разрежем ее на отдельные простые геометрические фигуры, объем которых определяется легко.
1. Носовая часть приближенно представляет собой эллипсоид вращения вокруг полуоси а. Тогда объем половины его с размерами полуосей: а= 15 см, в = 6,5 см будет равен
1 4 2
Уэ = —х—X 3,14Х15Х6,52= 1380 см^. 2 3 3
2. Средняя часть представляет собой цилиндр высотой h = 47 см и диаметром d = 13 см. Тогда объем его будет равен
у = —v/i= 3>1^-><-1-3-2-х47 = 6220 см*.
4 4
3. Кормовая часть представляет собой конус с высотой /г=40 см и радиусом г = 6,5 см. Тогда его объем будет равен
VK = — №/i= — ХЗ,14Х6,52Х4О = 1800 слЯ 3 3
Полный объем нашей подлодки будет
Vn. л = + уц + = 1380 + 6220 + 1800 = 9400 cjh3.
Корпус модели подводной лодки представляет собой тело вращения вытянутой каплеобразной формы. Строить его сложнее, чем корпус надводной модели. Хотя теоретический чертеж подводной лодки и выглядит проще, но корпус ее должен точно соответствовать чертежу, так как даже небольшие отклонения будут сильно влиять на ходовые качества модели.
Одним из главных ходовых качеств является устойчивость на курсе. Она зависит от многих причин: от реакции винта, формы и положения рулей, дифферента и крена, симметричности корпуса и т. д. Корпус модели должен быть прочным и водонепроницаемым. Существуют два способа его изготовления. Первый способ — из белой жести, спаяв корпус оловом на деревянном корпусе — форме. Второй способ — из стеклоткани, с применением полиэфирной смолы холодного отверждения.
Для обоих способов форму можно выточить на токарном станке, который найдется в любой школе. Выточенный корпус получится гладким, если после обработки резцом пройтись по нему напильником и шкуркой. Для того, чтобы корпус соответствовал теоретическому чертежу, надо заготовить шаблоны по кривой, образующей корпус. Этими шаблонами следует
проверить правильность его обработки. Второй способ изготовления корпуса — путем склейки его из стеклоткани — надежнее. При этом корпус получается более прочным и не боится ударов. Как можно судить по фотографии, испытание такого корпуса прошло успешно: стоящий на бортах корпуса мальчик не сломал и даже не повредил модели. Не стоит, разумеется, пытаться испытывать подобным образом корпус, спаянный из белой жести. . .
В отличие от надводного корабля, форма подлодки оклеивается целиком, а извлечение ее осуществляется при помощи нескольких разрезов корпуса. Сначала вырезается та часть, которая в будущем будет съемной палубой. Затем делается разрез по диаметральной плоскости, и корпус легко отделяется от формы. После этого края среза зачищаются шкуркой и промываются бензином для снятия остатков парафина. Обе половины легко склеить полосками стеклоткани, и затем можно уже приступить к монтажу устройств и механизмов.
Необходимо сначала решить, какой двигатель, редуктор и винт поставить на модели. Возьмем наиболее экономичный и мощный двигатель типа МУ-30. На рис. 47 была приведена схема редуктора для одновинтовой модели. Он подойдет и в этом случае. Передаточное число редуктора должно быть равно 4 5, т. е. винт будет вращаться медленнее, чем у над-
водных кораблей, так как диаметр его на подводной лодке больше.
Крепление мотора, изготовление соединительных муфт для валов, деталей для редуктора и его последующая сборка не представляют особых трудностей, и эти способы нам уже известны. Особое внимание следует уделить конструкции выхода вала из корпуса. Выход осуществляется через специальный хвостовой стабилизатор (конструкция его показана на фотографии). Стабилизатор вытачивается из алюминия или его сплавов на станке, с последующей обработкой в слесарных тисках, или отливается по заранее изготовленной форме.
Обеспечение водонепроницаемости корпуса — одно из основных условий успешного запуска моделей. Для создания надежной гидроизоляции корпус модели следует разделить водонепроницаемыми переборками на три отсека. В носовом отсеке, кончающемся переборкой на расстоянии 150 мм от носа, расположена аппаратура управления; во втором отсеке, кон-256 чающемся на расстоянии 470 мм от первой переборки,— бата-
Общий вид основных устройств скоростной модели. Расположение двигателя в корпусе.
Установка винта в кронштейне.
Конструкция люка, закрывающего отсек С ИСТОЧНИКАМИ питания.
Модель подводной лодки на ходу.
Общий вид хвостовой насадки модели подводной лодки.
Корпус модели успешно выдержал испытание.
реи электропитания двигателя; в третьем — двигатель и рулевая машина. Вывод вала двигателя и рулевой тяги осуществляется через дейдвудные трубы, укрепленные в третьей переборке, в месте соединения корпуса с кормовым стабилизато-
ром. Переборки вклеиваются полосками стеклоткани, смазанными эпоксидным клеем. В местах перехода трубопроводов и электрических проводов через переборку устанавливаются трубки со втулками. Провод заматывается с двух сторон суровой ниткой, смазанной графитной смазкой; втулки с обеих сторон плотно закрывают переходную трубку. Такой же способ уплотнения можно применить в дейдвудной и гельмпор-товой трубах.
Верх корпуса вместе с рубкой сделайте съемным. Под него, в случае необходимости увеличе
Рис. 74. Схема расположения балластных цистерн.
1 — крышки люка; 2 — основание люка;
3 — балластная цистерна; 4 — свинцовый балласт; 5 — корпус лодки.
ния плавучести, можно положить кусок пенопласта. Отсеки должны закрываться металлически
ми крышками, которые
крепятся к краям люков винтами. Сверление отверстий под винты в люке, в основании люка и в резиновой прокладке осуществляется совместно.
В просверленное отверстие вставляются винты и навинчиваются гайки, припаиваемые к низу основания люка (не забудьте перед пайкой снять резиновую прокладку). Винты нужно взять с потайной головкой и длиной, равной сумме толщин люка, прокладки, основания и гайки. Припаянные гайки заклеиваются полосками стеклоткани. Края люков к бортам и
17 Ю. Д. Пахтанов, В. И. Соловьев
переборкам также крепятся стеклотканью на эпоксидном клее. Если переборки металлические, то основания люка можно припаять к ним. В люки впаиваются нипеля от автомобильной камеры. Накаченный при помощи насоса воздух создает в отсеке избыточное давление, которое и обеспечит водонепроницаемость. Этим же сжатым воздухом производится продувка балластных цистерн, расположенных в среднем отсеке. На рис. 74 показано расположение двух балластных цистерн и свинцового балласта.
Расчет размеров балластных цистерн
Зададимся объемом цистерн в 500 см3.
При центральном угле а = 90°: длина хорды
/г = 2r sin — = 2-6,5 sin 45 = 9,2 см;
2 стрелка
h — 2r sin = 2-6,5 sin 22,5 = 1,94 см; 4
длина дуги
/д = -кг= 0,017453г? = 0,017456X6,5X45 = 10,2 см;
площадь сегмента
ScerM = — (— ср — sin = — /511 х45 —sin45^ — 18,6 см2.
2 \180 Y / 2 \ 180 /
Отсюда необходимая длина одной балластной цистерны будет равна отношению ее объема к площади сегмента.
^'ссгм 18,5
Зная вес модели со всем ее оборудованием, легко подсчитать этим же методом объем свинцового балласта, необходимого для погружения модели до заданной ватерлинии.
Принятие воды в балластные цистерны должно обеспечить погружение модели на небольшую глубину от 0,5 до 1 м. Для продувки балластных цистерн в них вводятся трубки, которые соединяются с клапанами, открывающими, при подаче соответствующей команды, доступ воздуха. Для выхода воды в районе балластных цистерн в нижней части корпуса проделывается ряд
258 отверстий. Цистерны заполняются водой путем выпускания воз
духа через другие трубки, имеющие особый клапан. Для батарей электропитания нужно сделать коробку, каркас или другое крепление, обеспечивающее надежную установку их в корпусе. Любой предмет, передвинувшийся в корпусе модели, может нарушить горизонтальное положение подлодки, а это приведет к нежелательным последствиям: лодка либо начнет дельфини-ровать (всплывать на поверхность), либо воткнется в дно.
Как говорилось выше, чтобы подлодка шла на заданной глубине, нужно соответственно заполнить балластные цистерны. Во время хода может оказаться, что лодка либо погружается, либо всплывает. Во избежание этого регулируют глубину погружения горизонтальными рубочными рулями. В управляемой модели, если предусмотрены команды на рули глубины, проход тяг от механизмов к рулям должен осуществляться через водонепроницаемые втулки.
Уже отмечалось, что обычно команды на управление горизонтальными рулями не подаются, так как оператор не имеет сведений о положении модели в глубине. Гораздо проще установить на ней автомат, реагирующий на изменение гидростатического давления. С его помощью подлодка всегда будет двигаться на заданном уровне. Схема такого автомата приведена на рис. 75. Принцип действия этого прибора очень прост. Прогиб мембраны зависит от глубины погружения, а связанный с ней контактный рычаг замыкает цепь питания двигателя. Если модель погрузится ниже заданного уровня, мембрана прогнется, замкнет нижнюю пару контактов и двигатель повернет горизонтальные рули на всплытие. Точно так же прибор действует и в противоположном случае, только при этом двигатель будет вращаться в обратном направлении. Глубина погружения устанавливается перемещением контактной группы, которое подбирается опытным путем.
Дистанционное управление нашей подлодки ультразвуком осуществляется с помощью следующей аппаратуры.
Передающая часть состоит из звукового генератора, пульта управления и пьезоизлучателя.
В приемную часть входят: приемный преобразователь системы гидроакустического управления — гидрофон; усилитель и детектор — для усиления и детектирования сигналов, поступающих на гидрофон; дискриминатор для выделения сигнала и передачи его на реле автоматики; исполнительные механизмы.
Гидрофон удобно расположить в рубке. Но это не обязательно — его можно устанавливать в любом месте, лишь бы он был подальше от шумящего винта и не затенялся корпусом лодки от луча передатчика.
В качестве гидрофонного усилителя применима любая схема, обеспечивающая усиление сигнала примерно в тысячу раз. Для
включение на подъем
Рис. 75. Схема конструкции автомата глубины.
1 — мембрана; 2 — контактный рычаг; 3 — контакты; 4 — винт установки глубины погружения.
этой цели вполне подходят полупроводниковые усилители, аналогичные усилителям НЧ, которые применяются на радиоуправляемых моделях (рис. 76). Срезание низких частот в схеме усилителя осуществляется уменьшением емкости разделительных конденсаторов межкаскадной связи. Полезно применить хотя бы один резонансный каскад, настроенный на частоту передатчика. При этом уровень помех резко снизится.
Поскольку сверхрегенератора в ультразвуковом приемнике нет, на выходе гидрофонного усилителя придется установить
детектор для выделения модулирующего сигнала (см. рис. 76).
Дискриминатором также может служить любое известное нам устройство этого назначения: вибрационное реле, настроенные усилительные каскады на RC- или ЛС-контурах и т. д.
Рис. 76. Схемы детекторов: а — на диоде; б — на транзисторе.
Для гидроакустической системы управления можно рекомендовать способ зашифровки команд в изменение частоты несущего сигнала. Для системы радиоуправления мы от него ранее отказались, но в ультразвуковом диапазоне он оказывается вполне эффективным.
Частота передатчика гидроакустической системы относительно невысока (30 80 кгц) и гидрофонный усилитель пропу-
стит весь набор частот, соответствующий различным командам. 261
Значит, можно обойтись одним усилителем. Детектор в этой схеме не нужен, поскольку модулирующего сигнала нет. После усиления сигнал поступает прямо на дискриминатор, каскады которого настроены на частоты, приписанные каждой
РП1К
Рис. 77. Схемы приемной части системы акустического управления для приема команд: а — переданных модулированной несущей волной, с вибрационным реле; б — переданных на разных частотах несущей волны с дискриминатором из настроенных (от 1 до 5) резонансных каскадов.
команде (например, 50, 55, 60 кгц и т. д.). Конечно, применить в этом случае вибрационное реле не удастся — частоты слишком высоки для механической колебательной системы, но резонансные каскады на этих частотах будут работать нормально. На рис. 77 приведена принципиальная схема приемника, построен-
262 ного по такому принципу.
Схему автоматики для модели подводной лодки мы не приводим. Читатель, пользуясь уже изложенным материалом, сумеет разобраться в ней самостоятельно. Напомним лишь еще раз, что управлять моделью подлодки без специальной системы сопровождения (т. е. непрерывного определения ее координат) можно только на небольших расстояниях и в очень прозрачной воде. А сумеет ли моделист построить такую систему, должен решить он сам — от этого зависит выбор передаваемых команд.
В любом случае, модель подлодки стоит снабдить автома-
Рис. 78. Принципиальная схема автомата глубины (реле выдержки времени на транзисторах).
том всплытия. Этот простенький прибор может оказать большую услугу — спасти модель, когда откажут механизмы и она ляжет на грунт в неизвестном месте.
Автоматом всплытия может служить обычное реле времени, конденсатор которого заряжается в момент запуска модели. По истечении заданного интервала времени реле срабатывает и включает продувку балластных цистерн. Схема реле, изображенного на рис. 78, обеспечивает выдержку времени до 3 мин. Выдержка регулируется установкой потенциометров.
Конструируя передатчик, не забудьте, что для возбуждения пьезоизлучателя требуется большая мощность, поэтому очень хорошо поставить на выходе пушпульный усилитель мощности. Схемы таких усилителей описаны в радиолюбительской литературе. Приспосабливая обычный усилитель звуковых частот для наших целей, нужно применить в трансформаторах, взамен железа, пермалой или феррит и уменьшить число витков в обмотках.
Пробные погружения модели лучше всего производить в ванне или специальном бассейне. Для выхода в открытый водоем полезно вначале привязать модель тонкой, но прочной капроновой жилкой. Регулировка управляемой модели подводной лодки — очень сложная задача, и рассчитывать на легкий успех здесь не приходится. Поэтому приступать к изготовлению таких моделей следует только после приобретения достаточного опыта в моделизме и радиоэлектронике. При этом условии станет послушной и модель подводной лодки.
Итак, хорошего ветра вашим кораблям, а вам — успеха в управлении ими!
КРАТКИМ СЛОВАРЬ МОРСКИХ ТЕРМИНОВ
АХТЕРЛЮК — люк на корме.
АХТЕРШТАГ — снасть стоячего такелажа, удерживающая мачту с кормы.
АХТЕРШТЕВЕНЬ — кормовая оконечность корабля.
БАК — часть верхней палубы корабля от форштевня до фок-мачты.
БАКШТАГ—1. Снасть стоячего такелажа, удерживающая мачту с боков и сзади.
2. Курс корабля относительно ветра, когда ветер дует сбоку и сзади.
БАЛЛЕР — стержень, на котором укреплено перо руля.
БЕЙДЕВИНД — курс корабля относительно ветра, когда ветер дует спереди и сбоку.
БЕРМУДСКИЙ ПАРУС — парус треугольной формы.
БИМСЫ — поперечные брусья для настила палубы.
БИТЕНГ — тумба для крепления буксирных и якорных концов.
БОРТ — боковая поверхность судна.
БОУТ — накладка по углам паруса для его усиления.
БРАС — снасть для управления спинакером, проведенная на корму.
БРАШПИЛЬ — лебедка для подъема якорей.
БУЕК — маленький поплавок.
БУЛЬБКИЛЬ — сигарообразный балласт, укрепленный под днищем корпуса посредством металлического листа.
БУРТИК—рейка, прикрывающая края настила.
БУХТА — 1. Небольшой залив. 2. Трос, свернутый кругами.
БУШПРИТ — горизонтальный или наклонный брус на носу судна для управления парусом.
ВАЛКОСТЬ — недостаточная остойчивость судна, склонность его значительно наклоняться на бок.
ВАНТЫ — снасти стоячего такелажа, удерживающие мачту с боков.
ВООРУЖЕНИЕ — оснастка судна рангоутом, такелажем и парусами. 265
ГАКАБОРТ — надводная часть кормовой оконечности корабля.
ГАЛС — снасть, притягивающая нижние углы парусов. Левый галс, если ветер дует слева; правый галс, если ветер дует справа.
ГАЛФИНД — направление ветра, перпендикулярное курсу судна.
ГИК — рангоут для крепления растяжки нижней шкаторины косых парусов.
ГЮЙС—флаг, поднимаемый на носу военных кораблей во время стоянки.
ДИФФЕРЕНТ — разность в углублении судна между носом и кормой.
ДРЕЙФ — боковой снос судна под действием ветра или течения.
«ЕСТЬ» — приказание понято, будет выполнено.
ИЛЛЮМИНАТОР — окно на бортах или надстройках корабля.
КАМБУЗ — судовая кухня.
КИЛЬ — продольный брус, идущий вдоль судна, и служащий основой набора.
КЛЮЗ — отверстие в борту для пропуска тросов и якорных цепей.
КРАНЕЦ — сплетенная из троса, набитая пробкой подушка, опускаемая за борт для предохранения судна от ударов.
«КРУЧЕ ДЕРЖАТЬ» — держать ближе к направлению ветра.
КУРС — направление хода судна.
ЛАВИРОВАТЬ — идти против ветра, зигзагами.
ЛЕВЕНТИК — ветер дует в нос, паруса не наполнены, трепещут.
ЛИКТРОС — трос, которым для прочности обшит парус.
МОСТИК — надстройка, защищенная от ветра и волн, с которой происходит управление судном.
НАБОР СУДНА — совокупность всех брусьев, составляющих каркас корпуса корабля.
нок — оконечность реи и гика.
ОВЕРШТАГ — переход с бейдевинда одного галса на бейдевинд другого галса через линию ветра.
ОДЕРЖИВАТЬ — замедлить начавшийся поворот судна.
ОСТОЙЧИВОСТЬ—способность судна, получившего крен, быстро выпрямляться.
ПОДЗОР, СВЕС — свешивающаяся часть кормы корабля.
ПРИВЕСТИ — править ближе к линии ветра, идти круче.
РАНГОУТ — мачты, стеньги, реи, гафель, гики, грузовые стрелы.
РЕЕК — маленькая рея.
РУМПЕЛЬ — рычаг, закрепленный на баллере, для управления рулем.
СКУЛА — излом на линии корпуса судна (днищевая, носовая, кормовая).
СПАРДЕК — средняя надстройка, идущая от борта до борта.
СПИНАКЕР—парус, устанавливаемый на попутных курсах.
СТАКСЕЛЬ — передний косой парус.
СТАПЕЛЬ — фундамент, на котором строят судно.
СТЕПС — гнездо, в которое вставляется нижний конец мачты.
ТАКЕЛАЖ — совокупность всех снастей на корабле, служащих для управления парусами (бегучий такелаж) и для крепления мачт (стоячий такелаж).
ТОПЕНАНТ — снасть, поддерживающая ноки гиков, рей и грузовых стрел.
ТРАП — лестница на судне.
ТРЮМ — помещение на судне для перевозки грузов.
УВАЛИВАТЬ — поворачивать под ветер.
УГЛУБЛЕНИЕ СУДНА — расстояние от ватерлинии до нижней кромки киля.
ФАЛ — снасть для подъема парусов.
ФОРДЕВИНД — попутный ветер, дующий прямо в корму.
ФОРШТЕВЕНЬ — передний брус набора судна.
ШКОТ — снасть для управления парусами.
ШПАНГОУТ — деревянное или металлическое ребро в наборе судна.
ШПАЦИЯ — расстояние между соседними шпангоутами.
ШПИГАТ — отверстие на палубе для стока воды.
ШТАГ — снасть, поддерживающая мачту спереди.
ШТУРТРОС—трос, соединяющий румпель с нулевым приводом.
ЮТ — часть палубы от бизань-мачты до конца кормы. Полуют — надстройка, на пинающаяся с кормы, но не достигающая бизань-мачты.
ЯХТА — судно, предназначенное для водного спорта и туризма.
ЛИТЕРАТУРА
1. Бруинсма А. X. Радиоуправление моделями кораблей, Госэнергоиздат, Массовая радиобиблиотека, вып. 265, 1957.
2. Глуховцев С., Захаров С. Простейшие самоходные морские модели (альбом чертежей), изд-во ДОСААФ, 1960.
3. Клементьев С. Д. Телеавтоматика, книга II, Самодельная радиотеле-механическая аппаратура, Учпедгиз, 1958.
4. Клементьев С. Д. Управление моделями по радио, Детгиз, 1957.
5. ЛучининовС. Т. Юный моделист-кораблестроитель (альбом), Судпром-гиз, 1263.
6. Морской моделизм, изд-во ДОСААФ, 1960.
7. ОтряшенковЮ. М. Радиоуправление моделями самолетов, кораблей и автомобилей, изд-во ДОСААФ, 1959.
8. П а х т а н о в Ю. Д. Радиоуправляемая модель атомохода «Ленин», приложение к журн. «Юный техник», вып. 9, 10, 1964.
9. «Юный м о д е л и с т - к о н с т р у к т о р», изд-во «Молодая гвардия».
ОГЛАВЛЕНИЕ
Почему была написана эта книга...................................3
Глава I Корабль и его модель.............................................5
Зачем это нужно?.............................................. 7
Модель — это совсем не просто..................................10
Модель корабля.................................................12
Глава II
Как управляют на расстоянии?.....................................15
Средства связи на расстоянии...................................17
Волны вокруг нас..............................................22
Записываем команды на волнах...................................30
Сколько весит информация?......................................34
Глава III
Чем управляют на расстоянии?.....................................47
Составляем блок-схему системы управления.......................49
Чем заполнить квадратики блок-схем?............................53
Будьте знакомы... электроника!................................56
Кристаллы пришли в электронику................................77
Строительные детали электроники...............................93
Строим передатчик системы радиоуправления....................109
Строим приемник системы радиоуправления......................132
Приводим в действие исполнительные механизмы.................145
Управляют звуковые волны ....................................154
Глава IV Постройка модели корабля.......................................157
Теоретический чертеж корабля.................................159
Строим корпус модели......................................... 165 269
Делаем модель самоходной......................................176
Делаем модель управляемой.....................................201
Источники питания для моделей.................................206
Монтаж систем автоматики......................................215
Спускаем модель на воду.......................................218
Последние штрихи..............................................221
Глава V
Эти модели можно построить .....................................225
Радиоуправляемая модель атомохода «Ленин».....................227
Модель радиоуправляемой яхты..................................233
Скоростная радиоуправляемая модель............................248
Модель подводной лодки с ультразвуковой системой управления . . 252
Краткий словарь морских терминов ...............................265
Литература......................................................268
Комплект чертежей моделей ледокола, яхты, скоростника и подводной лодки (вкладки)
Юрий Дмитриевич Пахтанов Владимир Иванович Соловьев
КОРАБЛИ БЕЗ КАПИТАНОВ
РАДИОУПРАВЛЯЕМЫЕ МОДЕЛИ КОРАБЛЕЙ
БЗ 1965 г. № 43
Научный редактор А. И. Пустовалов Редактор М. М. Каль
Технический редактор А. И. Конторович Корректоры: М. И. Исаенкова и С. Л. Осмоловская
Переплет, суперобложка, шмуцтитулы и художественные иллюстрации художника Р. П. Костылева
Сдано в набор 2/VII 1965 г. М-22155. Подписано к печати 2/Х 1965 г. Формат бумаги 70X90/16. Факт,
печ. л. 24,3 (включая вклейку, 3 накидки и 2 вкладки).
Усл. печ. л. 28,37. Уч-изд. л. 24,5. Изд. № 1642—64.
Тираж 20000 экз. Цена 1 руб. Заказ № 1758
Издательство «Судостроение». Ленинград, ул. Гоголя, 8
Ленинградская типография № 4 Главполиграфпрома Государственного комитета Совета Министров СССР по печати, Социалистическая, 14
. . . Человек в морской форме стоит у небольшого круглого матового экрана и смотрит на голубоватую нигпЬ луча, бегающего по кругу. Луч словно рисует. Вот образовалась ломаная линия — это берег. Вон там, вверху точка — это встречное судно, а правей ее пятно— островок.
А за бортом — ночЬ, туман, и, как ни вглядЫвайся в далЬ, ничего не видно. Но кораблЬ идет полнЫм ходом, на лице моряка нет ни испуга, ни растерянности. . .
Что Же это за волшебнЫе приборЫ, komopbie помогают морякам видетЬ сквозь ночЬ, туман и расстояния, как они устроенЫ и как работают, каковЫ их физические основЫ? Где и как исполЬзуются замеча-телЬнЫе свойства радиолокации? Как ученЫе решили слоЖнЫе задачи видения на расстоянии и какие «хитринки» роЖденЫ их умом и талантом?
Обо всем, этом интересно и подробно рассказывается
в книге Б. И. Ракова
«СКВОЗЬ НОЧЬ, ТУМАН И РАССТОЯНИЯ»
ц. 55 к.
Купите эту книгу!
При отказе на месте обращайтесь по адресу: Ленинград, Ф-31, Садовая, 40. Магазин № 2.
ИЗДАТЕЛЬСТВО «СУДОСТРОЕНИЕ
Рис. 60. Эскизный чертеж общего вида модернизированной модели ледокола.
Ю. Д. Пахтанов, В. И. Соловьев
im
з
V
□ □
□ □
□ □
0
П
^411111111.1111
ooo
□□
□ □
HO
1 1 1 I U5111111 ITT
I
-Ш гптпп
<
a
<2
□ □
L
s
i
e
d
Е __F
Ш
г
i
л
1
J L
6
0
1
П
□□
□□
□ □
□ □
□ □ ] ([JO] [ □ □) 1 □□ J 1 □ □
к
<37
П Л П
5
□ □ I □ □ JI □ □ ] □ □
о
о
о
36,
Ледокол „Ленин". Внешний вид.
□ □
□ □
□
□ □ MN
□□
□□
□
□
□ □
00 0 01
53
1
□
а
□ □so □ D a _H-5-C
о
О
О
О
ЛЕНИН
-зеа.
Ледокол „Ленин". План палубы.
Ю. Д. Пахтанов, В. И. Соловьев. Корабли без капитанов.
1. Фальшборт
2. Киповая планка с роульсами
3. Клюз палубный
4. Стопор цепной
5. Стопор винтовой
6. Шпиль
7. Пост управления якорным устройством
8. Кнехты
9. Запасной якорь
10. Вьюшка
11. Люк
12. Лебедка
13. Грузовая стрелка
14. Кронштейн штыревой антенны
15. Ходовой мостик
16. Прожектор
17. Локаторы ближнего и дальнего действия
18. Штыревая антенна
19. Труба
20. Кран для загрузки атомного реактора
21. Люк для загрузки атомного реактора
22. Мотобот
23. Шлюпбалка
24. Шлюпочная лебедка
25. Вельбот
26. Грот-мачта
27. Трап
28. Люки
29. Катер
30. 3-х тонный кран
31. Вертолет
32. Скобы для крепления вертолета
33. Кранец
34. ЯЛ-6
35. Катер с водометным движителем
36. Парадный трап
37. Спасательные круги
С\
2V
км
КВА
3
7
/
г
Ледокол „Ленин1*. Теоретический чертеж.
я-я
в- в
я
□
С
□
о о
О
в
в
Скоростная модель. Конструкция.
KJ
о
С
J
ООО
Скоростная модель. Внешний вид.
ООО оо
on
/о
о
О
у
I
о
о
ООО
22200
“1 I
О I
___I
J
00
<х>
Л
0[
0[
00
sama да
ЕЙ] D0D0
оо
С’
2£(7£70
ЭДОООООО
оооооо
0001
8
7
I
оооооо оооооо
оооооо
ПППППП
1ППП
000 0000
□□0000
100000
ни
6
5
3
г
Подводная лодка.
оооооо оооооо
О
/
'/а
О
10
ИЮ
5
ЗЕ
/
2
Ю. Д. Пахтанов, В. И. Соловьев. Корабли без капитанов.
I
^вл
9
7
6
5
4
3
г
i
0
Катамаран. Теоретический чертеж.
I
I
I
I
Катамаран. Внешний вид.
ЗА СТРАНИЦАМИ УЧЕБНИКА SHEBA.SPBPU/ZA
Хочу всё знать (теория) ЮНЫЙ ТЕХНИК (ПРАКТИКА) ДОМОВОДСТВО (УСЛОВИЯ)