/





























































































































































































































































































































































































Author: Мигулин В.В.
Tags: физика

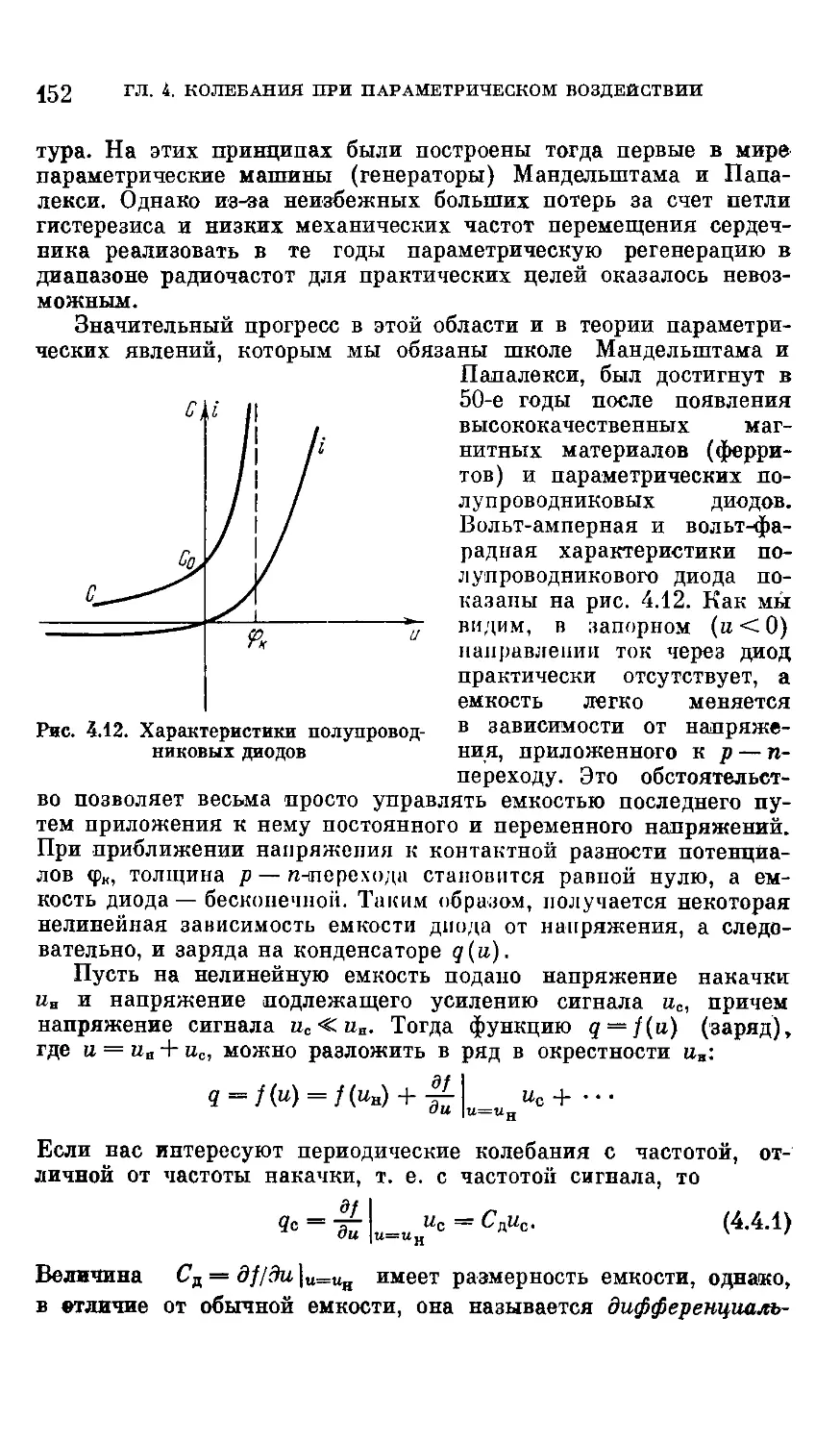
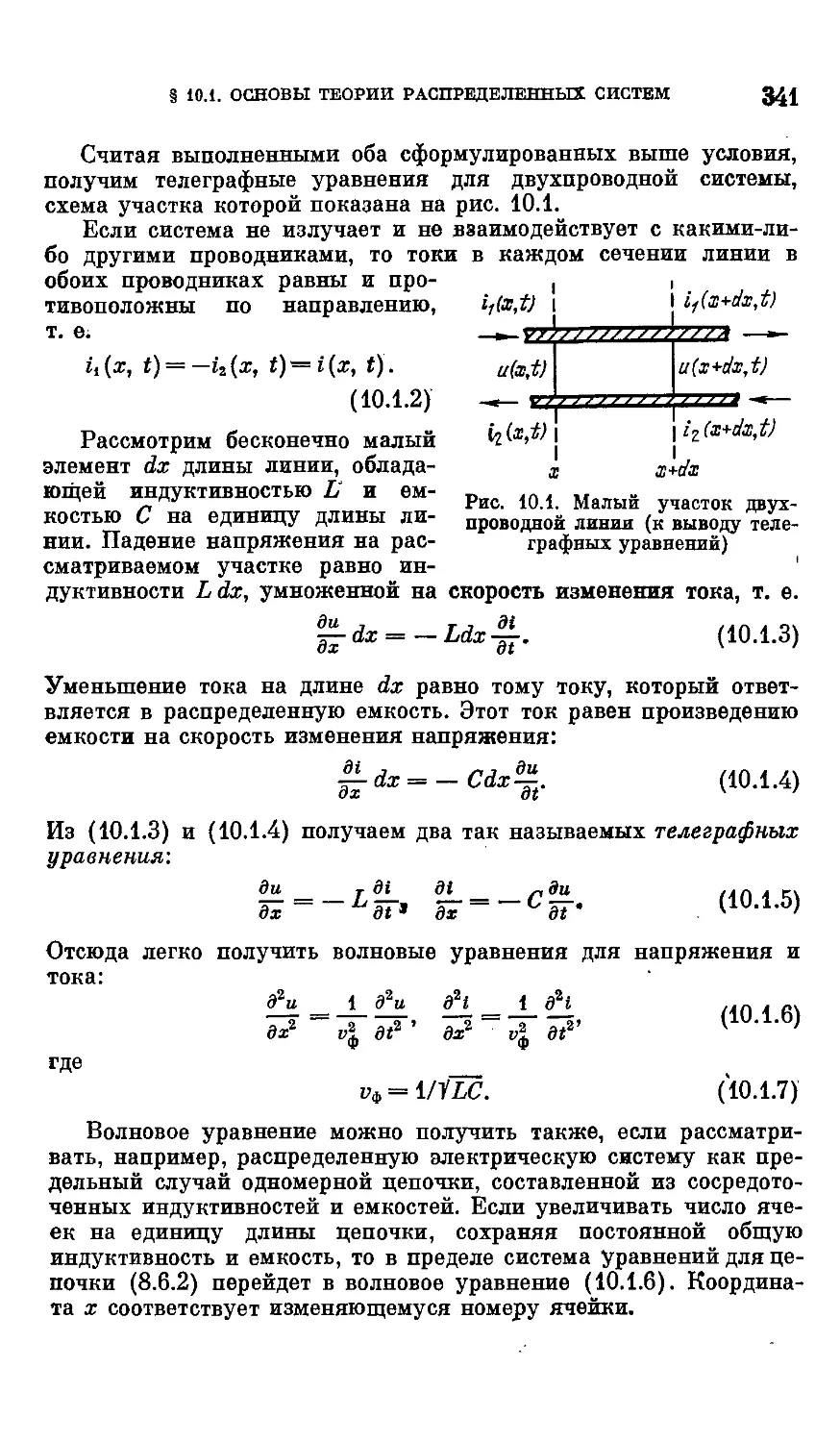
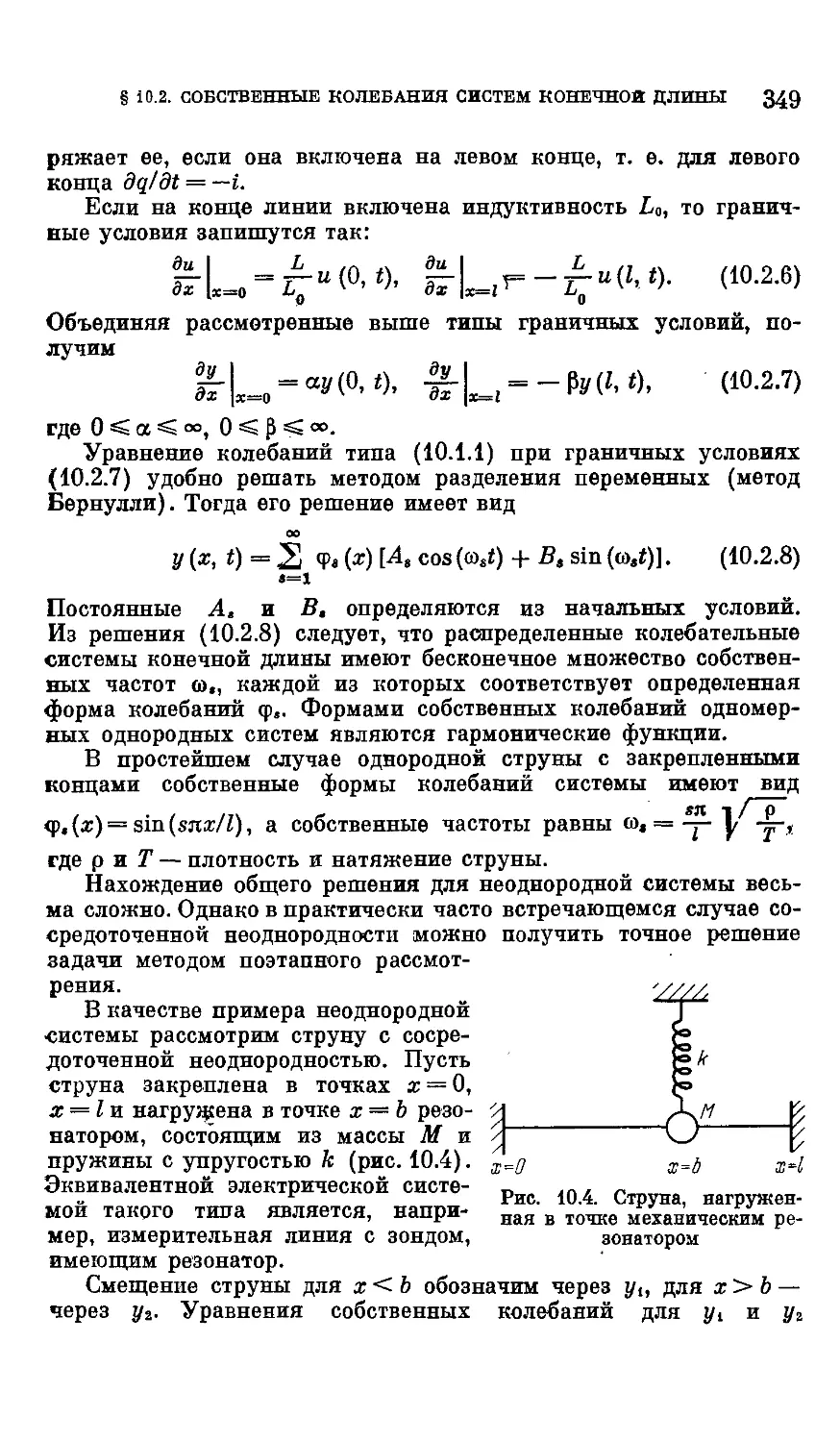
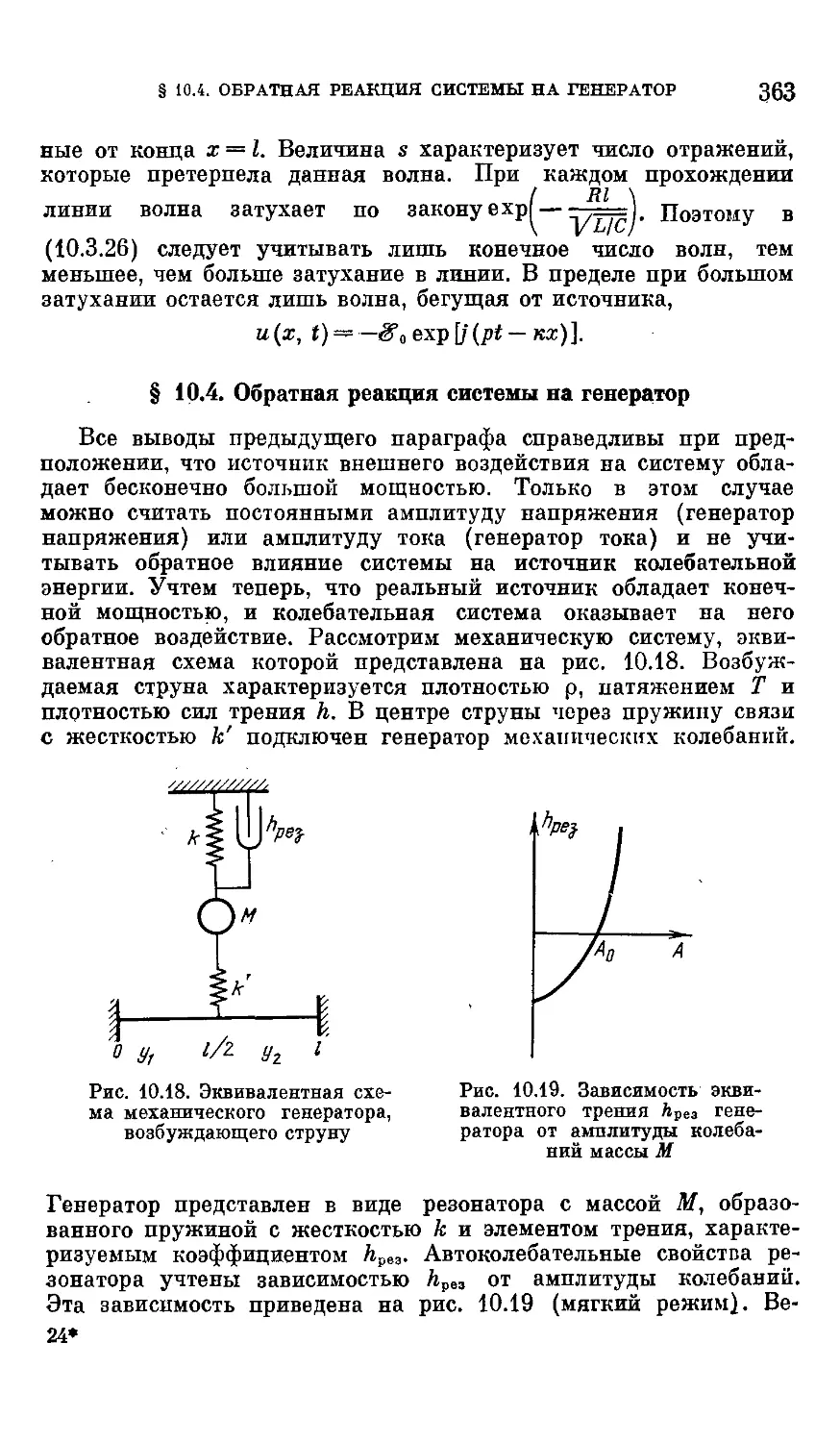
Text
3
ОГЛАВЛЕНИЕ
Предисловие ко второму изданию ................................ 6
Предисловие к первому изданию.................................. 7
Введение............................................... . 9
Глава 1. Свободные колебания в Консервативных системах с од-
ной степенью свободы ............. 14
§ 1.1. Консервативные колебательные системы и общее рассмотре-
ние свободных колебаний при консервативной идеализации 14
§ 1.2. Качественное рассмотрение колебании маятника . . . . 23
§ 1.3. Применение метода последовательных приближений ... 25
§ 1.4. Свободные колебания в электрическом контуре без затуха-
ния с нелинейной емкостью................................. 29
§ 1.5. Свободные колебания в контуре с нелинейной индуктив-
ностью.................................................... да
Глава 2. Свободные колебания в диссипативных колебательных
системах с одной степенью свободы...........................42
§ 2.1. Основные особенности колебательных процессов в диссипа-
тивных системах и методы их рассмотрения ..... 42
§ 2.2. Качественное рассмотрение свободных колебаний в диссипа-
тивных системах при различных законах трения .... 48
§ 2.3. Построение фазовых траекторий свободных колебаний мето-
дом Льенара . ..............................56
§ 2.4. Исследование свободных колебаний в нелинейных диссипа-
тивных системах с одной степенью свободы методом поэтап-
ного рассмотрения...................................... . 60
§ 2.5. Метод медленно меняющихся амплитуд и его применение к
расчету колебаний в слабо нелинейных системах с малым
затуханием................................................ 71
Глава 3. Колебания в системах с одной степенью свободы под дей-
ствием вынуждающей силы................................... 80
§ 3.1. Вынужденные колебания в линейной системе при гармони-
ческом силовом воздействии..................................80
§ 3.2. Элементы теории амортизации и регистрирующих приборов 86
§ 3.3. Вынужденные колебания в нелинейной консервативной си-
стеме при гармонйчеёком силовом воздействии .... 97 *
§ 3.4 Приближенное рассмотрение работы умножителя частоты с
нелинейной емкостью . . . . . . .... . 105
§ 3.5. Рассмотрение вынужденных колебаний в слабо нелинейных
диссипативных системах при гармоническом силовом воздей-
ствии методом гармонического приближения '. . . . . 112
§ 3.6. Применение метода медленно меняющихся амплитуд к ана-
лизу поведения слабо нелинейных систем с малыми потеря-
ми при гармоническом силовом воздействии...................119
1*
4
ОГЛАВЛЕНИЕ
Глава 4. Колебания в системах с одной степенью свободы при
параметрическом воздействии...................................129
§ 4.1. Параметрическое воздействие па колебательные системы 129
§ 4.2. Общие замечания о резонансных явлениях в колебательных
системах.................................................... 139
§ 4.3. Свойства активных систем и параметрическая регенерация 144
§ 4.4. Основные особенности одноконтурных параметрических уси-
лителей ................................................. , 151
§ 4.5. Параметрическая генерация электрических колебаний (пара-
метрические генераторы).......................................156
§ 4.6. Параметрические преобразователи (параметрические генера-
торы второго рода)............................................169
Глава 5. Автоколебания в системах с' одной степенью свободы 183
§ 5.1. Основные физические определения и классификация автоко-
лебательных систем............................................183
§ 5.2. Вырожденные автоколебательные системы....................188
§ 5:3. Общее рассмотрение автоколебательных систем .... 193
§ 5.4. Автоколебательные системы томсоновского типа .... 198
§ 5.5. Особенности поведения автоколебательных систем, содержа-
щих инерционные элементы......................................209
§ 5.6. Поведение автоколебательных систем при внешнем гармони-
ческом воздействии....................................... . 214
§ 5.7. Автоколебательные системы с запаздывающими силами 224
§ 5.8. Хаотические колебания в динамических системах .... 236
Глава 6. Колебания в линейных системах с двумя степенями сво-
боды .........................................................249
§6.1. Собственные колебания системы с двумя степенями свободы 249
§ 6.2. Связь и связанность......................................256
§ 6.3. Вынужденные колебания в системах с двумя степенями сво-
боды .........................................................260
Глава 7. Параметрические и автоколебательные системы с двумя
степенями свободы.............................................267
§ 7.1. Параметрическое усиление в двухконтурной системе . . . 267
§ 7.2. Параметрический двухконтурный генератор с некратными
частотами...........................................275
§ 7.3. Параметрическое деление частоты...................281
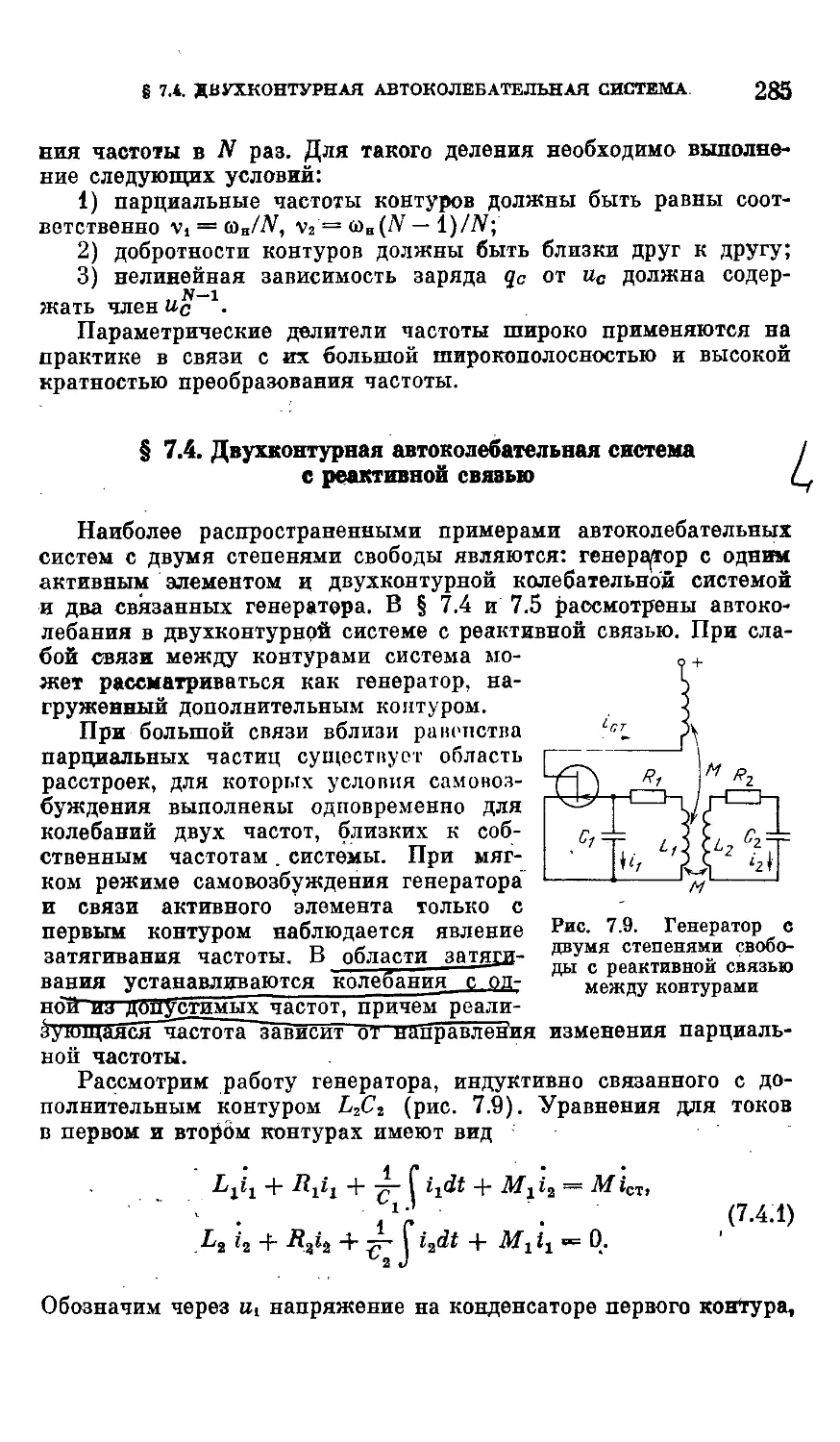
§ 7.4. Двухкоптурпая автоколебательная система с реактивной
связью..............................................285
§ 7.5. Явление затягивания...............................290
§ 7.6. Двухкоптурная автоколебательная система с резистивной
связью..............................................294
§ 7.7. Взаимная синхронизация двух связанных генераторов 297
Глава 8. Колебания в линейных системах с п степенями свободы 300
§ 8.1. Собственные колебания в консервативных системах . . . 300
§ 8.2. Ортогональность нормальных колебаний и экстремальные
свойства собственных частот...................................304
§ 8.3. Колебания n-атомной молекулы.............................309
§ 8.4. Вынужденные колебания в системах с п степенями свободы 314
§ 8.5. Колебания в диссипативных системах с п степенями свободы 316
§ 8.6. Колебания в однородных цепочках..........................317
Глава 9. Параметрические и автоколебательные системы с п сте-
пенями свободы................................................326
§ 9.1. Параметрические системы с п степенями свободы. Соотно-
шения Мэнли — Роу ...........................................326
ОГЛАВЛЕНИЕ * . 5
§ 9.2. Автоколебательные системы с тремя степенями свободы 331
§ 9.3. ЛС-генераторы почти гармонических колебаний .... 336
Глава 10. Колебательные процессы в распределенных системах 339
§ 10.1. Основы теории распределенных систем...................339
§ 10.2. Собственные колебания в системах конечной длины . . . 348
§ 10.3. Вынужденные колебания распределенных сиртем . . . 355
§ 10.4. Обратная реакция системы на генератор.................363
Глава 11. Распределенные автоколебательные системы .... 367
§ 11.1. Автоколебательная система с неэквидистантным спектром
собственных частот............................................362
§ 11.2. Стационарные автоколебания.......................... 372
§ 11.3. Распределенная автоколебательная система с эквидистант-
ным спектром собственных частот...............................376
§ 11.4. Лазер как распределенная автоколебательная система 381
Список рекомендуемой литературы ,................................392
ПРЕДИСЛОВИЕ КО ВТОРОМУ ИЗДАНИЮ
Со времени первого издания книги «Основы теории колеба-
ний» прошло около десяти лет. Естественно, что за это время и
точка зрения авторов книги, и уровень разработки различных
разделов теории колебаний, и соответствующие технические
средства претерпели определенные изменения. Однако, в основ-
ном, содержание книги, ее структура и характер изложения рас-
сматриваемых вопросов себя оправдали и книга оказалась полез-
ной для широкого круга учащихся, инженеров и научных работ-
ников. Это и позволяет нам — авторам — предложить читателям
второе издание книги с некоторыми отличиями от первого изда-
ния. Так, во втором издании подавляющее большинство рассмот-
ренных примеров автоколебательных систем содержит в качест-
ве активных элементов не электронные лампы, а транзисторы;
введен параграф (§ 5.8), в котором даны основные определения
и понятия о путях рассмотрения хаотических движений в дина-
мических детерминированных системах; исключена глава, посвя-
щенная рассмотрению волновых процессов в неоднородных и не-
линейных распределенных системах (глава 12 в первом издании).
В седьмую главу введен дополнительный параграф, посвященный
рассмотрению практически важного варианта автогенератора с
дополнительным контуром (§ 7.6). Кроме того, уточнен ряд фор-
мулировок и внесены различные коррективы в текст, рисунки и
подписи к ним. Авторы считают, что эти изменения должны улуч-
шить качество книги, сделать ее более целенаправленной и соот-
ветствующей современным представлениям и решаемым в настоя-
щее время задачам.
Мы выражаем глубокую признательность нашим коллегам и
читателям, которые своими советами и доброжелательной крити-
кой помогли нам устранить недочеты первого издания, и надеем-
ся, что выход второго издания будет полезен всем тем, кто изуча-
ет колебательные процессы или имеет дело с колебательными
системами и протекающими в них явлениями в различных раз-
делах науки и техники.
ПРЕДИСЛОВИЕ К ПЕРВОМУ ИЗДАНИЮ
В настоящее время можно с полной уверенностью говорить
о теории колебаний как о вполне определившейся дисциплине,
посвященной изучению общих закономерностей колебательных
процессов в различных системах. Имеется обширная литература
по вопросам теории колебаний, и на русском языке издано нема-
ло отличных книг по различным ее разделам. Однако большин-
ство из них посвящено рассмотрению методов теории колебаний,
а изучение колебательных процессов и их специфики в конкрет-
ных системах проводится лишь для иллюстрации тех или иных
приемов. С другой стороны, есть ряд интересных монографий, по-
священных рассмотрению отдельных типов колебательных про-
цессов в частном классе систем. Вместе с тем, по нашему мнению,
в основе теории колебаний для физиков и специалистов инже-
нерных специальностей должно лежать рассмотрение колеба-
тельных процессов в различных динамических системах, встре-
чающихся в технике и физике, с использованием в каждом слу-
чае наиболее адекватных методов анализа и расчета. Поэтому
наибольшее внимание должно быть уделено рассмотрению нели-
нейных систем с использованием соответствующих методов
анализа.
Эти соображения определяли выбор материала и характер из-
ложения курса «Теория колебаний», который многие годы чита-
ется студентам третьего и четвертого курсов отделения радиофи-
зики и электроники физического факультета МГУ.
В предлагаемой читателю книге сделана попытка системати-
чески и в краткой форме изложить содержание этого курса в том
виде, в каком он сложился к настоящему времени. Авторы счи-
тают, что данное учебное пособие может быть полезным для слу-
шателей ряда высших учебных заведений при подготовке специа-
листов радиофизического и радиотехнического профиля, а также
для инженеров и научных работников других специальностей,
сталкивающихся в своей деятельности с колебательными и вол-
новыми процессами в других областях.
Главное внимание в книге уделяется рассмотрению колеба-
тельных процессов в различных, наиболее распространенных ко-
лебательных системах от простейшего колебательного контура
до лазера как колебательной системы. При этом в каждом отдель-
ном случае использовались те из известных методов и приемов
8 ПРЕДИСЛОВИЕ К ПЕРВОМУ ИЗДАНИЮ
анализа расчета, которые наиболее адекватны данной задаче.
Рассмотрению же и обоснованию применяемых методов и прие-
мов уделяется минимально необходимое внимание и место, чтобы
сосредоточить изучающего курс теории колебаний ija самих коле-
бательных процессах и научить использовать конкретные методы
и общий подход к рассмотрению колебаний и связанных с ними
волновых процессов в различных динамических системах. Во
всех рассмотренных случаях теоретический анализ сопровожда-
ется качественным физическим толкованием особенностей коле-
бательных процессов.
Введение написано В. В. Мигулиным, и им же совместно
с В. И. Медведевым написана первая часть книги (главы 1—5).
Вторая часть книги (главы 6—12) написана Е. Р. Мустель
и В. Н. Парыгиным.
В. В. Мигулин
ВВЕДЕНИЕ
Колебания — это повторяющиеся ограниченные движения от-
носительно некоего среднего состояния, которое в частном случае
может быть состоянием равновесия. Такое определение объединя-
ет весьма широкий круг явлений, встречающихся в природе, изу-
чаемых физиками и находящих многочисленные применения
в технйке.
Предметом теории колебаний является рассмотрение общих
закономерностей колебательных процессов в различных динами-
ческих системах.
Колебательные процессы в системах с постоянными парамет-
рами (в линейных системах) изучены уже сравнительно давно,
и математическая их теория развита с большой полнотой. Однако
изучение общих закономерностей колебаний в системах с пара-
метрами, зависящими от состояния системы (в нелинейных си-
стемах) , началось значительно позднее и долгое время рассматри-
вались лишь отдельные частные задачи без обобщения получен-
ных результатов на широкие классы динамических колебательных
систем и протекающие в них процессы.
Общий подход к изучению колебательных процессов был впер-
вые сформулирован в трудах Л. И. Мандельштама, который
в 1931 г. создал в Московском университете кафедру колебаний
и тогда же начал читать курс теории колебаний.
В теории колебаний изучаются колебательные процессы
с целью выяснения общих особенностей и закономерностей про-
текания этих процессов в различных динамических системах и
условий их существования, т. е. проводится рассмотрение специ-
фического типа движений, присущего определенному классу си-
стем. Подобные динамические системы, в которых могут сущест-
вовать колебательные процессы, принято называть колебатель-
ными системами.
Современная теория колебаний, естественно, в большой степе-
ни основывается на тех работах, в которых был развит соответ-
ствующий подход к колебательным процессам и разработаны ме-
тоды их рассмотрения.
В этой связи представляется необходимым упомянуть ряд
имен ученых, внесших наиболее фундаментальный вклад в уче-
ние о колебаниях.
10
ВВЕДЕНИЕ
Дж. У. Стрэтт (лорд Рэлей, 1842—1919) в своем труде «Тео-
рия звука» впервые изложил расчеты ряда колебательных про-
цессов с последовательным учетом нелинейных свойств колеба-
тельных систем. В современной теории колебаний_ используются
также математические методы, развитые А. Пуанкаре (1854—
1912) в его работах по небесной механике; нашли применение и
исследования А. М. Ляпунова (1857—1918) по устойчивости дви-
жений и методы расчета колебательных движений, развитые
А. Н. Крыловым (1863—1945). Очень большое значение для фор-
мирования теории колебаний имели основополагающие работы
Ван дер Поля (1889—1959) по колебаниям в некоторых нелиней-
ных системах и общие исследования колебательных процессов
в нелинейных системах, проведенные А. А. Андроновым (1901—
Д952), развившим учение о самоподдерживающихся колебатель-
ных процессах, названных им автоколебаниями. Этот термин
в настоящее время является общепринятым.
При развитии теории колебаний весьма большое внимание
уделялось разработке эффективных методов анализа и расчета
различных колебательных процессов, и в настоящее время накоп-
лен богатый арсенал приемов и путей рассмотрения широкого
круга задач.
Однако следует иметь в виду, что для физиков и специалистов
технических направлений теория колебаний — это по совокуп-
ность методов анализа и расчета, а изучение закономерностей
протекания колебательных процессов в реальных системах с ис-
пользованием в каждом случае наиболее адекватных методов
рассмотрения. При этом чрезвычайное многообразие колебатель-
ных систем и их свойств требует при изучении протекающих
в них колебательных процессов нахождения общих черт у раз-
личных колебательных систем и объединения их по наиболее
характерным признакам в определенные классы и типы.
Однако последовательная классификация различных колеба-
тельных систем при их изучении возможна лишь при условии за-
мены конкретных реальных систем с их неизбежным чрезвычай-
ным многообразием свойств моделями, в которых отражается
только ограниченное число основных черт, существенных для
изучаемых колебательных процессов.
Выбор модели, передающей наиболее важные, основные и оп-
ределяющие свойства изучаемой реальной системы и вместе с тем
достаточно простой для применения известных методов анализа
и расчета,— первый и очень важный этап всякой теории и в том
числе теории колебаний. Такой выбор — первое упрощение рас-
сматриваемой задачи, и от его правильности решающим образом
зависит реальность и достоверность результатов последующего
исследования, а также оправданность выбора метода дальнейшего
анализа. Избыточно точный расчет чрезмерно грубой модели ли-
шен смысла, так же как и использование очень сложной и учи-
ВВЕДЕНИЕ
И
тывающей весьма многие Детали реальной системы модели при ее
дальнейшем грубом и упрощенном анализе. Во всех случаях
весьма важно правильно выбрать соответствие между степенью
идеализации при переходе к модели, точностью аналитической
аппроксимации реальных физических зависимостей и точностью
применяемых математических методов.
Заменяя реальные динамические системы их соответственно
выбранными моделями, мы можем провести последовательную
классификацию систем и протекающих в них колебательных про-
цессов по различным признакам. Кинематические признаки —
основа классификации колебательных движений. Основа класси-
фикации колебательных систем — их динамические свойства.
Кинематическими признаками колебательного движения
являются его периодичность и форма (амплитуда). Для строго
периодических процессов выполняется соотношение
F(t)-F(t + T)^O,
справедливое для любого момента времени t, где Т — период дан-
ного колебательного движения; 1/7’ = v — число периодов в еди-
ницу времени, или частота. Широко используется так называе-
мая круговая частота со = 2nv.
Особое значение имеет простейший вид колебательного про-
цесса — гармоническое колебание
F(t) = acos(2nvt + ф0) = a cos (cot + ср0);
здесь а — амплитуда колебания, at + ср0 — мгновенная фаза, <р0 —
начальная фаза колебания. Гармонические колебания представ-
ляют особый интерес не только в силу простоты их аналитиче-
ского представления, но в первую очередь потому, что эта форма
движений наиболее обычна для колебательных процессов в систе-
мах с постоянными параметрами и чрезвычайно часто встречает-
ся в реальных процессах, изучаемых в физике и в технических
дисциплинах.
В зависимости от природы изучаемых колебательных движе-
ний встречаются периоды, имеющие самые различные значения.
Так, например, периоды обращения планет Солнечной системы
составляют величины порядка 108 с, период вращения Земли, пе-
риоды приливных процессов — величины порядка 105 с, периоды
колебаний маятников в часах — порядка 10° с. Периоды колеба-
ний, изучаемых в акустике,— от 10-1 до 10“‘ с; в радиотехнике
имеют дело с колебаниями с периодами от 10_‘ до i0~t2 с. Коле-
бания молекул, связанные с инфракрасным излучением, имеют
периоды порядка 10~12—10-14 с. Оптический диапазон соответ-
ствует периодам колебаний 10~14—10-15 с, связанных с атомными
процессами, а периоды колебаний, соответствующих рентгенов-
скому излучению, составляют 10-1’—10-19 с. Из приведенных
примеров видно, насколько различаются периоды колебательных
12
ВВЕДЕНИЕ
процессов, изучаемых в астрономии, физике, технике, с которы-
ми приходится сталкиваться исследователям. Однако у всех этих
процессов, имеющих самую различную природу; есть ряд общих
свойств и особенностей, которыми занимается теория колебаний.
Следует отметить, что строгой периодичности реальных про-
цессов в природе нет и строгая периодичность — это тоже идеали-
зация. В реальных колебательных системах всегда существуют
возмущающие силы, случайные смещения (например, флуктуа-
ционные) и нестабильность параметров, исключающие возмож-
ность идеальной периодичности. Поэтому более последовательным
было бы изучение колебательных процессов, в которых условие
периодичности выполняется приближенно, т. е. положить в осно-
ву рассмотрения почти периодические колебания, для которых
\F(t) — E(t + 7’(e))l < е, где е— любая наперед заданная малая
величина и Tfe)—почти период. Примером такого процесса мо-
жет служить процесс затухающих колебаний
F(t) = Ae~6t cos (tai + ф0)
при достаточно малом 6. Здесь Т = 2л/са — почти период.
Процесс, представляющий собой сумму двух периодических
колебаний с несоизмеримыми частотами, также служит примером
почти периодического движения
F(t) = di cos (cOii) Ч- a2 cos(ca2£) •
Если, кроме того, можно указать такие /пип, что I пгТ1 — пТ2\ «
< р, то mTi или пТ2 также являются почти периодами этого про-
цесса при достаточно малом значении ц.
Однако теория почти периодических процессов сложна и во
многих случаях мало разработана. Поэтому в основу рассмотре-
ния большинства колебательных задач можно положить допуще-
ние о периодичности наряду с существованием заведомо неперио-
дических колебательных процессов.
Помимо периодичности, колебательные движения характери-
зуются формой и амплитудой, и эти кинематические признаки
позволяют определенным образом классифицировать разнообраз-
ные процессы колебаний.
В теории колебаний, как уже упоминалось, главной задачей
является изучение колебательных процессов в определенных ди-
намических системах — в колебательных системах. Поэтому не-
обходима классификация колебательных систем по их динамиче-
ским свойствам. Подобная классификация, естественно, будет
полностью последовательной лишь для соответствующих моделей
с ограниченным числом свойств. Классификацию колебательных
систем можно провести по ряду признаков: во-первых, по числу
степеней свободы, во-вторых, по энергетическим признакам, раз-
деляя системы на активные (с внутренним источником энергии)
и пассивные, в-третьих, по свойствам параметров системы, выде-
ВВЕДЕНИЕ
13
ляя системы с параметрами, не зависящими от ее состояния (ли-
нейные системы), и с параметрами, зависящими от состояния
системы (нелинейные системы), в-четвертых, по условиям дейст-
вия, разделяя системы на автономные и неавтономные.
Очевидно, что простейшими колебательными системами явля-
ются системы с одной степенью свободы, с которых и начинается
рассмотрение колебательных процессов в идеализированных ди-
намических системах (гл. 1—5). Далее рассматриваются автоном-
ные и неавтономные системы с двумя и большим числом степеней
свободы (гл. 6—9), а также колебательные и некоторые волновые
процессы в системах с распределенными параметрами (гл. 10—11).
Следует иметь в виду, что системы с одной степенью свободы
представляют собой объект, наиболее доступный для исследова-
ния возможных колебательных движений при самых разных их
нелинейных свойствах. Нелинейные же системы с двумя и боль-
шим числом степеней свободы и распределенные системы под-
даются последовательному анализу лишь в отдельных частных
случаях. Их рассмотрение даже в линейном приближении значи-
тельно более сложно, громоздко и не допускает ряда качествен-
ных и наглядных приемов, которые возможны для систем с одной
степенью свободы. Поэтому изложение материала в гл. 6—11
имеет несколько другой характер, чем в первых главах: оно не-
сколько более конспективно, в целях выделения основных физи-
ческих результатов опускается ряд промежуточных выкладок,
особенно при применении изложенных ранее методов анализа.
Однако эти различия в изложении отдельных разделов, по наше-
му мнению, вполне оправдываются спецификой рассматриваемых
вопросов, тем более, что значительная часть материала, приведен-
ного в книге, ранее не излагалась в учебных пособиях по теории
колебаний.
При написании этой книги авторы считали своей главной за-
дачей наиболее полное, последовательное и обоснованное рас-
смотрение колебательных процессов в различных динамических
системах, имеющих значение в физике и технике, с использова-
нием в каждом отдельном случае наиболее адекватных данной
задаче методов анализа и расчета.
ГЛАВА 1
СВОБОДНЫЕ КОЛЕБАНИЯ
В КОНСЕРВАТИВНЫХ СИСТЕМАХ
С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
§ 1.1. Консервативные колебательные системы
и общее рассмотрение свободных колебаний
при консервативной идеализации
При рассмотрении колебательных систем мы должны уделить
особое внимание системам с малым затуханием, в которых энер-
гия, рассеиваемая за период (или почти период) колебаний, мала
по сравнению с общим запасом энергии, связанным с исследуе-
мым движением. В подобных системах наиболее ярко проявляют-
ся их колебательные свойства. В большом числе практических
применений мы встречаемся с высокодобротнымп колебательными
системами. Можно ’упомянуть резонансные элементы входных
цепей радиоприемных устройств, колебательные контуры, входя-
щие в состав полосовых фильтров, маятник или баланс в часовых
механизмах, колебательные элементы в частотомерах и спектр-
анализаторах и др.
Многие колебательные свойства подобных систем весьма мало
зависят от величины и характера затухания, если оно при этом
остается достаточно малым. Поэтому, ограничиваясь не слишком
большими по сравнению с периодом колебаний интервалами вре-
мени, мы при изучении многих важных особенностей колебатель-
ных процессов можем вообще пренебречь затуханием и рассмат-
ривать изучаемую систему как консервативную. Очевидно, что
при этом имеет место существенная идеализация и применение
выводов, полученных при рассмотрении подобной идеальной
системы, к реальной должно проводиться с учетом тех особенно-
стей, которые вносятся затуханием, всегда наблюдаемым в реаль-
ных физических устройствах.
Консервативные колебательные системы — это идеализирован-
ные системы, в которых запас механической или электромагнит-
ной энергии, или и той и другой в совокупности, в процессе со-
вершения колебаний остается постоянным.
Существует также целый класс колебательных систем, в кото-
рых потери за период колебаний пополняются за счет внутреннего
источника энергии и, таким образом, запас энергии не меняется
от периода к периоду колебаний. Такие системы носят название
автоколебательных и будут рассмотрены в другой главе книги.
Несмотря на отсутствие в природе консервативных колебатель-
ных систем, их изучение позволяет получить много данных, по-
§ 1.1. ОБЩЕЕ РАССМОТРЕНИЕ СВОБОДНЫХ КОЛЕБАНИЙ
могающих исследованию \истем, отличных от консервативных,
особенно систем, близких к ним.
Число степеней свободы системы определяется числом незави-
симых переменных, которое необходимо для полного описания
движения системы. Ограничивая свое рассмотрение системами
с одной степенью свободы, мы в общем случае должны для опи-
сания движений в консервативных системах рассматривать диф-
ференциальные уравнения второго порядка *)
х = Ф(ж, х). (1.1.1)
Однако подобное уравнение будет описывать движение в кон-
сервативной системе не при любом виде функции Ф(я, х). Для
упрощения рассмотрения начнем с изучения случая, когда урав-
нение, описывающее движение в исследуемой системе,- не содер-
жит х, т. е. возвращающая сила не зависит от скорости. Тогда
общим видом подобного дифференциального уравнения второго
порядка будет уравнение
£ = /(*), (1.1.2)
причем считается, что от вида F(x, х)=0 всегда можно перейти
к виду (1.1.2), разрешив это уравнение относительно х.
Для механических систем в описывающих их уравнениях типа
(1.1.2) можно считать, что вторая производная х представляет
приведенную силу инерции, а правая часть — возникающую в си-
стеме силу, связанную только с положением рассматриваемой
массы (например, упругую силу), и обе они отнесены к единице
массы. В электрических системах, для которых принимается, что
основная переменная х— заряд, левая часть уравнения (1.1.2)
зависит от э. д. с., возникающей на индуктивности, а правая
часть — от э. д. с. на емкости системы.
К уравнению типа (1.1.2) приводится, например, уравнение
гармонического осциллятора
ж + ®оХ = 0. (1.1.3)
Для идеального математического маятника (рис. 1.1) с дли-
ной йодвеса I и массой т, находящегося в поле тяготения с уско-
рением g, дифференциальное уравнение движения для угловой
координаты ср имеет вид
ср + со’ sin ср = 0, где = g/l. (1.1.3а)
В случае электрического колебательного контура без потерь
(рис. 1.2) уравнение движения, найденное из уравнения Кирх-
гофа, принимает вид
' Lq + q/C = 0x'
♦); Здесь, как и далее, дифференцирование по времени мы часто будем
обозначать точкой над соответствующей переменной.
15 ГЛ. 1. КОНСЕРВАТИВНЫЕ СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
если в нем положить х~ q и обозначить = 1/LC, то вновь
получим уравнение (1.1.3).
Оба уравнения (1.1.3а) и (1.1.3) описывают процессы колеба-
ний в консервативных системах, но уравнение (1.1.3) линейно
относительно координаты х и, следовательно, описывает движе-
ние в линейной колебательной системе. Напротив, уравнение
(1.1.3а) нелинейно относительно коорди-
наты ф (возвращающая сила пропорцио-
нальна sintp), и поэтому колебательная
система, описываемая этим уравнением,
нелинейна.
Рис. 1.1. Математиче-
ский маятник
Z
Рис. 1.2. Электрический
контур без потерь
Вернемся к рассмотрению уравнения (1.1.2). Считая, что
функция f(x) является голоморфной, интегрируемой и, в общем
случае, нелинейной функцией координаты х, введем новую пере-
менную у = х, которая позволяет исключить из уравнений дви-
жений время в явном виде, хотя по-прежнему x = x(t) и У = !/(0-
Тогда можно записать 1
_ dy_ _ ц
jt2 dt dxdt dx °'
В новых координатах уравнение (1.1.2) принимает следующий
вид:
= Ж (1.1.4)
dx у ' '
Проинтегрировав последнее уравнение, получим
у г/2 — J / (я) =/I, (1.1.5)
где h — const.
Выражение — J / (х) dx= V (х) есть потенциальная функция,
пропорциональная потенциальной энергии системы; величина
у 7 2 представляет кинетическую энергию, отнесенную к единич-
ной массе. Поэтому соотношение
±у*+ V(x) = h (1.1.6)
является естественной записью условия консервативности систе-
мы, выражающегося в постоянстве общего запаса энергии.
§ 1.1. ОБТЦИИ РАССМОТРЕНИЕ СВОБОДНЫХ КОЛЕБАНИЙ 17
1 ГДля более общего случку, когда возвращающая сила зависит
от скорости, уравнение (1.1.1) может быть записано в виде
= Ф^). (1 л
dx у ' '
В этом случае (1.1.1) будет описывать консервативную систему
при условии существования' однозначного интеграла этого урав-
нения вида
/’(ж, р)= const.
При замене у = х можно использовать известный метод рас-
смотрения поведения исследуемой системы с помощью фазовой
плоскости — плоскости переменных х и у.
Каждому состоянию системы соответствует пара значений х
и у, т. е. точка на фазовой плоскости. Будем называть подобную
точку, координаты которой однозначно определяют мгновенное
состояние системы, описывающей или изображающей точкой.
Очевидно, что при движении, совершаемом системой, будут про-
исходить изменения значений х и у, а, следовательно', описываю-
щая точка будет перемещаться по некой кривой, которую приня-
то называть фазовой траекторией движения.
Для исследуемой системы переменные хну связаны системой
двух дифференциальных уравнений первого порядка
х = у, (1.1.8а)
y = f(z) (1.1.86)
или одним уравнением dy/dx = j{x\/y (см. (1.1.4)), интеграл ко-
торого дает уравнение фазовых траекторий*). Из общих свойств
дифференциальных уравнений следует, что через каждую точку
фазовой плоскости должна проходить одна и только одна фазо-
вая траектория, за исключением тех точек, в которых f(x) и у
одновременно обращаются в нуль. В этих особых точках направ-
ление и число фазовых траекторий становятся неопределенными
и свойства системы при таких значениях координат нуждаются
в специальном изучении.
Заметим, что, получая уравнение фазовых траекторий, мы
исключили время в явном виде. Форма фазовой траектории
дает только некоторое указание о временном ходе изучаемого
процесса и без дополнительных исследований не позволяет коли-
чественно получить основную переменную х в функции t.
*) В общем случае интегральные кривые, описываемые интегралом
уравнения (1.1.4), не однозначно соответствуют фазовым траекториям. Од-
нако мы в дальнейшем, интересуясь в первую очередь формой этих* кривых,
будем считать, что уравнение (1.1.4) дает семейство 'фазовых траекторий,
однозначное определение которых требует некоторого дополнительного рас-
смотрения с учетом начальных условий и свойств изучаемой системы.
2 В. В. Мигулин и др.
,FA&HQ8ecue,
18 ГЛ. 1. КОНСЕРВАТИВНЫЕ СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
Рассмотрим условия, при которых в системе возникают со-
стояния равновесия. В равновесном состоянии скорость движения
обращается в нуль, и в системе должны отсутствовать силы, вы-
зывающие движение, т. е.
у=>£ — 0, у = х = 0, (1.1.8)
Отсюда следует, что в точках, соответствующих положениям рав-
новесия (у = 0, х = х{),
/(*0=0, (1.1.9)
и потенциальная функция V (ж) при х = имеет экстремум, так
как у = /(ж) = — ^У(я), а при х = Xi
/(^) = ^Л(а:)1«=«1 = 0- <1ЛЛ°:
Особые точки, в которых выполняется условие (1.1.10), назы-
ваются особыми точками первого порядка. Если
. /?п яп+1
d-V(x)\x=Xi = 0, L^V{x)\x^0,
где п = 1, 2, ..., то мы имеем дело с особыми точками порядка «,
Таким образом, мы видим, что положения равновесия системы
соответствуют yf — 0, /(^)=0, т. е., как указывалось, особым
точкам на фазовой плоскости.
П L Пусть координаты особой точки на фазовой плоскости будут
х = xt, у = 0. Обозначим V (х() = Если V (х) при х = х{ Имеет
минимум, то
£XV (х) |ж=ж. = 0, ^V(x) > 0. (1.1.11:
В окрестностях точки х = xt потенциальную функцию V (х) мож-
но разложить в ряд по степеням £ = х — х(
V(x) - V (xt) + git + V + - 41.1.12
I***' IX—X£ " QX X—
Для малых вариаций хну вблизи положения равновесия можнс
написать уравнение фазовых траекторий (1.1.6) в виде
^П2 + у(Ж1) + |^.У(;г;)|х=х^ = Л,, (1.1.13;
или
т)2 + а&2 = 2(Л-Л(), (1.1.14;
d2V . п
где т) = у, а = > 0.
dx х=«».
§ 1.1. ОБЩЕЕ РАССМОТРЕНИЕ СВОБОДНЫХ КОЛЕБАНИЙ
Таким образом, с точностью до высших степеней £ мы полу-
чили в качестве уравнений фазовых траекторий вблизи положе-
ния равновесия, соответствующего минимуму потенциальной
функции (а следовательно, и потенциальной энергии), уравнения
эллипсов. Эти эллипсы различаются между собой размером полу-
осей, определяемым значением h — ht. Выбирая различные зна-
чения h, мы получаем различные эллипсы, которые по мере при-
ближения h к hf уменьшаются, стягиваясь в точку (хц 0)
при h — hi.
Наличие на фазовой плоскости замкнутых фазовых траекто-
рий (например, эллипсов в окрестностях рассмотренной особой
точки) указывает на существование периодических движений. Из
нашего анализа следует, что в окрестностях особой точки, отве-
чающей минимуму потенциальной энергии, происходят периоди-
ческие движения с эллиптическими фазовыми траекториями, со-
ответствующими гармоническим колебаниям. Реальное движение
тем ближе к гармоническому, чем меньше превышение запаса
энергии системы над запасом энергии в точке равновесия, т. е.
чем меньше значение h — ht. В системах, в которых потенциаль-
ная функция представляет собой квадратичную функцию коор-
динаты
ж,
dn
dxn
V (х) всегда равно нулю при п > 2, и уравнение
фазовых траекторий имеет вид
у2 + ом:2 = const
(1.1.15)
для любых значений h — h{. Можно лишь указать, что этот слу-
чай относится к тривиальному случаю линейной системы, так как
если V (х) = Oto + atx + а2ж2, то /(а:) = — cci — 2а2я, и уравнение
движения имеет вид х + 2а2ж = —«1. Последнее уравнение пред-
ставляет собой известное уравнение гармонического осцил-
лятора.
Таким образом, исследованное положение равновесия (мини-
мум потенциальной функции) соответствует на фазовой плоскйг
сти особой точке, называемой особой точкой типа центр, и отве-
чает положению равновесия, относительно которого система мо-
жет совершать колебания, близкие к гармоническим или точно
гармонические. Для представления на фазовой плоскости таких
движений характерно наличие семейства замкнутых фазовых
траекторий, окружающих центр, причем они (за исключением
специальных случаев зависимости потенциальной функции от
координаты в окрестностях данной особой точки) всегда стремят-
ся к эллипсам при уменьшении амплитуды колебаний. Для рас-
сматриваемого, случая можно из уравнения (1.1.6) получить по-
сле ряда простых выкладок выражение для периода колебаний
т. К. у = ±V2(/i — V(x)). (1.1.16)
2*
20 ГЛ. 1. КОНСЕРВАТИВНЫЕ СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
Так как у — dx/dt, то dt = dxj(±У2УЛ — ), и
(_± ' f *=.
V2 J Ул — V (г)
*0
(1.1.17)
Рассматривая движение в положительном направлении оси вре-
мени и учитывая симметрию семейства фазовых траекторий отно-
сительно оси х, получим при заданной амплитуде колебаний вы-
ражение для периода колебаний вида
а2
Т = /2 f .dx - :
J уh—V(x)
“1
(1.1.18)
Здесь at и a2 — отклонения системы в моменты прохождения
y = dxJdt через нулевые значения. Соответственно а2 — а, пред-
ставляет собой полный размах колебаний при данном, по произ-
вольном запасе энергии h.
В общем случае полученное выражение для Т будет функ-
цией ai и а2, так что для нелинейной системы имеет место зави-
симость периода колебаний от общего запаса энергии или раз-
маха совершаемых колебаний (неизохронность колебаний в нели-
нейных системах). Лишь для линейной системы, когда потенци-
альная функция представляет собой квадратичную функцию ко-
ординат V (х) = а0 + atX + а2ж2, для колебаний вокруг положения
равновесия имеем Т = 2л/У2а2 = лУ2/Уа2, т. е. период равен ве-
личине, не зависящей от амплитуды совершаемых колебаний.
В этом случае колебания становятся изохронными и период сво-
бодных колебаний в линейной системе не зависит от сообщенно-
го ей начального запаса энергии.
у Рассмотрим случай, когда положение равновесия системы,
а следовательно, и особая точка на фазовой плоскости соответ-
ствуют максимуму потенциальной функции У (ж). Тогда, проводя
те же выкладки, мы получим аналогичное уравнение для малых
вариаций у и х, но
л2
£2^)|x=xfe==-a<0, (14.19)
и уравнение (1.1.14) примет вид
T]2-aV = 2(/i-/ift). (1.1.20)
Это уравнение фазовых траекторий для окрестности исслодуемог
особой точки задает гиперболы с асимптотами
т) = ±Уа£. (1.1.21)
Таким образом, особая точка на фазовой плоскости, соответ
ствующая максимуму потенциальной функции, представляет со
§ 1.1. ОБЩЕЕ РАССМОТРЕНИЕ СВОБОДНЫХ КОЛЕБАНИЙ
21
бои такую особую точку, через которую проходят только две фа-
зовые траектории и в ее окрестности все остальные фазовые тра-
ектории имеют вид гипербол. Подобные точки соответствуют не-
устойчивому положению равновесия, так как любое сколь угодно
малое отклонение системы от положения равновесия приводит
к дальнейшему росту вариаций координат системы, т. е. к даль-
нейшему удалению от точки равновесия. На фазовой плоскости
это соответствует выходу описывающей точки из особой точки
п ее дальнейшему движению по одной из уходящих фазовых
траекторий.
Проиллюстрируем приведенные рассуждения графическими
изображениями двух описанных типичных случаев, сделав одно
очевидное замечание. По самому определению величины у = х
значения у > 0 соответствуют росту х, а у < 0 — убыванию х.
Поэтому движения описывающей точки по фазовым траекториям
всегда происходят в верхней полуплоскости фазовой плоскости
в сторону возрастания х, а в нижней — в сторону убывания х.
Если изобразить графически функцию V (х) и построить фазо-
вые траектории на основании уравнения у2/2 + V(x)=h или его
решения у = ±У2(Л—У(а:)), то, задаваясь различными значе-
ниями h, мы получим два характерных случая (рис. 1.3, точки
Л и В). Значение х — хА соответ-
ствует минимуму потенциальной
функции V(x), и точка А(хл, 0)
является особой точкой типа
центр. Точка В(хв, 0), соответ-
ствующая максимуму функции
И (я), представляет собой особую
точку типа седло и отвечает на
фазовой плоскости неустойчивому
положению равновесия.
Совокупность семейства фазо-
вых траекторий и особых точек
на фазовой плоскости принято на-
зывать фазовым портретом систе-
мы — он графически изображает
ее динамические свойства. К этим
двум основным элементам фазо.-
вого портрета консервативной си-
стемы следует добавить еще фазо-
Рис. 1.3. Построение фазовых
траекторий по заданной функ-
ции У(х)
вые траектории, пограничные между областями фазовой плоско-
сти, соответствующими движениям различного характера. Эти ли-
нии (например, линия С на рис. 1.3) носят название раздели-
тельных линий или сепаратрис. Их расположение очень наглядно
показывает области возможных движений разного типа и те зна-
чения фазовых координат х и у = х, при которых одно движение
переходит в другое. Например, на рис. 1.3 мы видим, как кри-
22 ГЛ. 1. КОНСЕРВАТИВНЫЕ СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
вая С выделяет вокруг точки А область, внутри которой сущест
вуют колебательные движения вокруг устойчивого положени;
равновесия. Вне нее эти движения отсутствуют и характер дви
жения системы, т. е. вид фазовых траекторий, может быть опре
делен только при задании вида потенциальной функции V (х) дл;
большей области изменений х.
Вообще, в большинстве случаев возможность хотя бы приблп
женного построения фазового портрета системы чрезвычайно
облегчает рассмотрение общих свойств системы, и вид фазовоп
портрета сразу показывает ряд наиболее характерных свойст
изучаемой системы. Поэтому метод фазовой плоскости являете;
исключительно полезным при качественном рассмотрении различ
ных колебательных систем, особенно нелинейных.
Мы здесь не будем излагать дальнейшего материала по мето
дам качественного рассмотрения динамических систем с помощы
фазовой плоскости и по более подробному рассмотрению возмож
ных типов особых точек и фазовых траекторий консервативны:
систем. Все это можно найти в [1—3]. Приведенные здесь основ
ные сведения и определения следует рассматривать лишь ка
напоминание об основах метода фазовой плоскости, которыз
(с соответствующими пояснениями) мы в ряде случаев буде:
пользоваться в дальнейшем.
Не распространяя качественное рассмотрение нелинейны
консервативных систем с одной степенью свободы па более слож
ные системы, для которых уравнение движения имеет не стол
простой вид, напомним лишь ряд общих положений.
Во многих случаях анализа более сложных систем целесооС
разно пользоваться уравнением движения Лагранжа
тг(^1-? = 0’ (1.1.2S
dt \ду ) дх ’ '
где L(x, у)—функция Лагранжа, которая для простых cncres
подобных рассмотренной выше, представляет собой разность кт
нетической и потенциальной энергий. Как известно, для ш
стем со многими степенями свободы получается система уравш
ний Лагранжа
i = 1,2,3,
dt \oyil \Sxi)
Для консервативных электрических систем (даже во многих пр<
стых случаях) уравнение движения не приводится к виду х =
= f(x), а имеет более сложный вид ф(х, х, х) = 0, что да<
x = f(x, х), y = f(x, у), и уравпопио фазовых траекторий заш
шется следующим образом:
dy __ / (х, У) (1.1.2.
dx у '
§ 1.2. КАЧЕСТВЕННОЕ РАССМОТРЕНИЕ КОЛЕБАНИЙ МАЯТНИКА 23
В этом случае не всегда просто найти его интеграл и получить
уравнение для построения фазовых траекторий.
Для консервативных систем существует так называемый ин-
теграл энергии
Иными словами, для таких систем существует интеграл уравне-
ния движения вида F(x, y)=h. Геометрически это сводится к то-
му, что интегралами уравнения движения являются функции, со-
ответствующие фазовым траекториям (Кривым равного уровня),
получающимся при сечении поверхности z = F(x, у) плоско-
стями z = h!
Отсюда следует обязательность существования замкнутых фа-
зовых траекторий, окружающих изолированные особые точки,
или убегающих траекторий для ограниченных интервалов изме-
нения х и у и невозможность для систем данного типа существо-
вания особых точек, в которые стягиваются все фазовые траекто-
рии из прилегающей области, называемых фокусом или узлом.
Заметим, что при рассмотрении электрических систем;легко
столкнуться со случаем, когда в консервативной системе кинети-
ческая энергия не выражается однородной квадратичной функ-
цией х. Напомним, что в механике для большого числа задач
инертная масса может считаться постоянной (т = const) и для
соответственным образом выбранных координат кинетическая
энергия есть однородная квадратичная функция, тогда как при
использовании ферромагнетиков электрический эквивалент мас-
сы — индуктивность — часто становится функцией тока (ско-
рости).
Но независимо от того, встречаемся ли мы с простейшим слу-
чаем или с упомянутыми здесь более сложными, все равно урав-
нение фазовых траекторий позволяет нам получить фазовый
портрет и произвести качественное рассмотрение изучаемой си-
стемы на фазовой плоскости. Разумеется, не всегда может быть
получено простое выражение вида г/ = ±У2(/г — V(x)), и тогда
для построения фазового портрета системы необходимо приме-
нять. более общие приемы, как, например, метод построения фа-
зовых траекторий с помощью изоклин.
§ 1.2. Качественное рассмотрение колебании маятника
Для иллюстрации путей качественного исследования колеба-
тельных движений весьма полезно рассмотрение некоторых ти-
пичных примеров механических систем. В качестве одной из про-
стейших механических нелинейных консервативных систем рас-
смотрим идеальный маятник.
Уравнение движения маятника (идеального)
Imx + mg sin х = 0, х = —(g/Z)sinx. (1-2.1)
24 ГЛ. 1. КОНСЕРВАТИВНЫЕ СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
Вводя со2 = g/l, получаем (см. (1.1.2)) /(#) = — co§sinx. Обозна-
чая х — у, имеем у = f(x) nnndy/dx = — (со2sinx)/y. Тогда с точ-
ностью до постоянной находим V (х) = — cOq cos х, и можно за-
писать
у2 = h + со2 cosx. (1-2.2;
Л
Используя это выражение, легко
Рис. 1.4. Фазовый портрет маятника
построить фазовые траектории
движения данной системы и
нарисовать на фазовой плоско-
сти общий фазовый портрет си-
стемы (рис. 1.4).
Два типа фазовых траекто-
рий соответствуют двум типам
движения. Замкнутые траекто-
рии, окружающие особые точки
типа «центр» с координатами
у = 0, х — 2пл (п — любое це-
лое число), соответствуют ко-
лебательным движениям маят-
ника вокруг устойчивого ниж-
него положения равновесия, от-
вечающего минимуму потенци-
альной энергии. Особые точкг
у = 0, х=(2п—1)л представ
ляют особые точки типа «сед-
ло», соответствующие верхнему положению равновесия маятни-
ка — максимуму потенциальной энергии.
Убегающие траектории, которые получаются при h> со2, со-
ответствуют вращательным движениям маятника, возникающим
при сообщении ему начального количества движения, которое
обеспечивает проход через верхнее положение со скоростью, от-
личной от нуля. На фазовой плоскости это будет соответствоватт
выходу описывающей точки за пределы области, ограничиваемое
кривыми Ci, С2. Эти кривые, проходящие через седла и служащие
в окрестностях данных точек асимптотами гиперболических фа-
зовых траекторий, являются сепаратрисами. Они разделяют топо-
логически различные области на фазовой плоскости: область тра-
екторий, приходящих из —оо и уходящих в +°°, и область замк
нутых траекторий.
Возвращаясь к нашему примеру, напишем у = dx/ dt =
= У2(/г — 7(х)), откуда
«2
f dx
J V2 (h — V(x)) ’
xi
§ 1.3. МЕТОД ПОСЛЕДОВАТЕЛЬНЫХ ПРИБЛИЖЕНИЙ
25
Если при х = ±а у = О, то h = V (а)= — coocos а, и мы получим
для полупериода колебаний выражение
+а
z = _L f dx
Да |/ <о® cos х — (oj cos а
или '
+а
4 = —$= f -7=^=. Т-ТОО (1.2.3)
i <oo1/2cosa Ja pcosx/cosa — 1
Отсюда следует, что в разобранном примере мы встречаемся
с зависимостью периода колебаний от их амплитуды, т. е. коле-
бания в рассматриваемой системе будут неизохронными. Если бы
система была линейной, то описывающее ее уравнение имело бы
вид х= — со® х, и тогда dy/dx = — со® (xfy). В этом случае — случае
линейного осциллятора —
4 У2 = — 4 “о*2 + Th’ У = ± Vh — '
Для колебаний с амплитудой а при х = ±а, у = 0 получаем
h и тогда у — dx/dt = ±Уа2 — х2со0. Для полупериода коле-
бании при х, изменяющемся от —а до +а, имеем
+.“
Т __ Г dx__________л
7 - Л “о
откуда получается характерное для линейной системы выражение *
Т = 2л/соо, показывающее независимость периода колебаний от их
амплитуды — изохронность колебаний в линейных системах.
§ 1.3. Применение метода последовательных приближений
оставляя пока в стороне другие примеры качественного рас-
смотрения систем с одной степенью свободы с помощью фазовой
плоскости, познакомимся с весьма распространенным методом
приближенного количественного расчета интересующих нас си-
стем, а именно с методом последовательных приближений. Не за-
нимаясь применением этого известного метода в общем виде, раз-
берем тот же случай маятника.
Записывая уравнение движения в виде
х + cousin х = 0, ..(1.3.1)
где со® = g/l, выразим sin а: в виде ряда
sinx = х — х3 + ... (1.3.2)
26 ГЛ. 1. КОНСЕРВАТИВНЫЕ СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
Ограничиваясь рассмотрением значений х < 1, остановимся на
члене с х3. Тогда
х + cog х — -g- cogx3 = 0. (1.3.3)
Представляя это уравнение в форме
х + соцХ + acog х3 = 0, (1.3.4)
будем сначала, как обычно, искать решение в виде ряда по сте-
пеням а:
х = xe + ах, + а2х2 +... (1-3.5)
Подставляя этот ряд в уравнение (1.3.4), получим
х0 + ахх + агх2 + ... + <ogx0 + acogxj + aacogx2 + ...
... + acogxg + а4сооХ1 + a’cogxg + ... = 0.
При а = 0 х = х0 — решение в нулевом приближении, а х0 + cogx0 =
= 0 — уравнение нулевого приближения.
Уравнение первого приближения мы получим из общего урав-
нения, учитывая члены, содержащие а в степени не выше первой,
tX0 + ахх + coqXq J- aiOoXj + acogxg = 0,
и, учитывая уравнение нулевого приближения для х0, получим
окончательное уравнение первого приближения
Xj + Cogxx = — Cogxg. (1.3.6)
В нашем случае, выбирая начальные условия в виде t = 0, х = а,
х = 0, находим решение уравнения пулевого приближения
х0 =а cos(coof). <’ =
Уравнение первого приближения соответственно будет
xr + cogxj = — a3cog cos3 (соо«). (1.3.7)
Воспользовавшись известным тригонометрическим преобразова-
нием, мы можем записать
хх + cogxx = — \ cog cos(3co0f) — -j-cog cos(co0f). (1.3.8)
Решение этого линейного дифференциального уравнения содер-
жит секулярный член, вызванный наличием в правой части урав-
нения члена с резонансной частотой.
Вынужденное решение имеет вид
„3 о„3
хх = cos (3cooi)----1 sin (coof). j (1.3.9)
§ 1.3. МЕТОД ПОСЛЕДОВАТЕЛЬНЫХ ПРИБЛИЖЕНИЙ
27
Ясно, что подобное решение не соответствует реальному движе-
нию системы.
Спрашивается, в чем же состоит порочность подобного спосо-
ба нахождения решений для рассматриваемого случая? Ответ на
этот вопрос мы находим в уже отмеченном свойстве неизохрон-
ности колебаний системы. В самом деле, выбранная нами форма
решения предусматривает существование движения с постоян-
ным периоддм 2л/соО) т. е. периодом колебания в нулевом при-
ближении. В действительности же период движения с конечной
амплитудой принципиально отличен от периода колебаний систе-
мы с бесконечно малой амплитудой. Поэтому и получается ука-
занное нами противоречие, которое может быть ликвидировано
только посредством отыскания решения с периодом, отличаю-
щимся от периода колебаний в нулевом приближении.
Так как это отклонение периода от 7’о = 2л/со0 должно суще-
ственно зависеть от степени нелинейности системы, вполне есте-
ственно ввести в рассмотрение новую частоту — частоту колеба-
ния с заданной амплитудой в виде
со® = Wq + ag + а2^ + ... (1.3.10)
Если при расчете ограничиться первым приближением, то можно
положить со2 = со2 + ag, где g — некоторая пока еще неизвестная
величина. Учитывая это добавление, можно написать с точностью
до первой степени по а (см. (1.3.4)):
х + со2# — agx + сссо2#3 = 0.
Уравнение нулевого приближения имеет вид
ха + со2#0 = 0;
при тех же начальных условиях t — 0, х — а, х = 0 его решением
будет #0 = acos(3cof).
Уравнение первого приближения имеет вид
#! + СО2#! = gxo — C02#q, (1.3.11)
или
#! + со2#! = agcos(cot) — a3co2 cos(3coi)— -l-a’co2 cos(cof). (1.3.12)
В этом уравнении мы можем избавиться от секулярного чле-
на, если выберем величину g так, чтобы
ag — у а3со® = 0. (1.3.13)
Тогда уравнение первого приближения примет цид
#! + со2#! = — 4"a8o)2 cos(3cot), (1.3.14)
26 ГЛ. 1. КОНСЕРВАТИВНЫЕ СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
Ограничиваясь рассмотрением значений х < 1, остановимся на
члене с х3, Тогда
х + ©ох — 4 юо«3 — 0- (1.3.3)
Представляя это уравнение в форме
х + (OqX + асо§ х8 = 0, (1.3.4)
будем сначала, как обычно, искать решение в виде ряда по сте-
пеням а:
х = хв + + агх2 + ... (1.3.5)
Подставляя этот ряд в уравнение (1.3.4), получим
х0 + axj + агх2 + ... + ci$r0 + асо§хг + а2со^г + ...
... + аафго + а4а>оХ1 + а7(Оох| + ... = 0.
При а = 0 х = ха — решение в нулевом приближении, а х0 + со§хо =
= 0 — уравнение нулевого приближения.
Уравнение первого приближения мы получим из общего урав-
нения, учитывая члены, содержащие а в степени не выше первой,
^0 + axj + сф:0.+ aco^i + = 0,
и, учитывая уравнение нулевого приближения для х0, получим
окончательное уравнение первого приближения
Xj + й)2^ = — (ОоХ3. (1.3.6)
В нашем случае, выбирая начальные условия в виде t — 0, х = а,
х = 0, находим решение уравнения нулевого приближения
х0 =acos((i)o0.
Уравнение первого приближения соответственно будет
= — «3®о cos3 (соо/). (1.3.7)
Воспользовавшись известным тригонометрическим преобразова-
нием, мы можем записать
Х]_ + = — ^ “о cos (3coof) — -J- СО2 cos (coof). (1.3.8)
Решение этого линейного дифференциального уравнения содер-
жит секулярный член, вызванный наличием в правой части урав-
нения члена с резонансной частотой.
Вынужденное решение имеет вид
„3 ч„3
xi = ^cos(3co0i)---} (1.3.9)
04 О
§ 1.3. МЕТОД ПОСЛЕДОВАТЕЛЬНЫХ ПРИБЛИЖЕНИЙ
27
Ясно, что подобное решение не соответствует реальному движе-
нию системы.
Спрашивается, в чем же состоит порочность подобного спосо-
ба нахождения решений для рассматриваемого случая? Ответ на
этот вопрос мы находим в уже отмеченном свойстве неизохрон-
ности колебаний системы. В самом деле, выбранная нами форма
решения предусматривает существование движения с постоян-
ным периоддм 2л/соо, т. е. периодом колебания в нулевом при-
ближении. В действительности же период движения с конечной
амплитудой принципиально отличен от периода колебании систе-
мы с бесконечно малой амплитудой. Поэтому и получается ука-
занное нами противоречие, которое может быть ликвидировано
только посредством отыскания решения с периодом, отличаю-
щимся от периода колебаний в нулевом приближении.
Так как это отклонение периода от Та — 2л/<оо должно суще-
ственно зависеть от степени нелинейности системы, вполне есте-
ственно ввести в рассмотрение новую частоту — частоту колеба-
ния с заданной амплитудой в виде
со® = со§ + ag + a2gi + ••• (1.3.10)
Если при расчете ограничиться первым приближением, то можно
положить со2 = со2 + ag, где g — некоторая пока еще неизвестная
величина. Учитывая это добавление, можно написать с точностью
до первой степени по а (см. (1.3.4)):
х + со2х — agx + асо2х3 = 0.
Уравнение пулевого приближения имеет вид
ха + ю2х0 = 0;
при тех же начальных условиях / = 0, х — а, х = 0 его решением
будет х0 = a cos (3cof).
Уравнение первого приближения имеет вид
хх + со2х1 = gx0 — ш2х®, (1.3.11)
ИЛИ
•• 13
хх + ci^Xj = ag cos(cof) — a3®2 cos(3co/)— yA2 cos(tirf). (1.3.12)
В этом уравнении мы можем избавиться от секулярного чле-
на, если выберем величину g так, чтобы
ag — а3<о2 = 0. (1.3.13)
Тогда уравнение первого приближения примет вид
хх + co2Xj = —a8©2 cos(3o)t), (1.3.14)
28 ГЛ. 1. КОНСЕРВАТИВНЫЕ СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
из соотношения (1.3.13) находим g = 3/*агсо2, а из (1.3.10)
(ог
1 — 3/4ая2'
(1.3.15)
Решение уравнения первого приближения будет иметь вид
з
= Cr cos (art) + C2 sin (art) + cos(3art),
где Ct и C2 — произвольные постоянные. Тогда полное решение
(1.3.4) в первом приближении запишется Следующим образом:
з
х = a cos (art).+ aCt cos (art) + sin (art) + a cos (3art). (1.3.16)
oZ
Значения произвольных постоянных С, и C2
Рис. 1.5. График зависимости соб-
ственной частоты от амплитуды
можно найти, требуя
от этого решения, чтобы опо
удовлетворяло тем же началь-
ным условиям. Проделав соот-
ветствующие выкладки, полу-
чим окончательно
х = а 1 — a I cos (art) +
\ ил /
.3
+ а & cos^art), (1.3.17)
где, как указывалось,
1 — 3/4aa2
Используя это приближенное решение уравнения (1.3.4),
найденное с точностью до первой степени а, получим д^йя маят-
ника (а = —1/6)
Х = а(1 + 192J Cos— 192 cos“>2= ^i/вдГ- (i-3-18)
В найденном нами решении, которое, как мы отмечали, го-
дится для не слишком больших отклонений (когда с достаточной
для нас точностью sin х » х — i/ex3) и является приближенным
для идеализированного уравнения
х + со2 fx — -g- х3} = 0, (1.3.19)
следует отметить две особенности. Во-первых, колебания неизо-
хронны (со — функция а), и, во-вторых, колебания не чисто си-
нусоидальны — в них присутствуют гармоники (в нашем случае
третья гармоника). Неизохронность колебаний можно наглядно
§ 1.4. КОЛЕБАНИЯ В КОНТУРЕ С НЕЛИНЕЙНОЙ ЕМКОСТЬЮ
29
представить, построив график зависимости со от а. В данном
примере график будет иметь вид, показанный на рис. 1.5, причем
его можно использовать до а « 1, так как .при больших амплиту-
дах колебаний теряет свою справедливость сделанное ранее упро-
щение sin х = х — 1/вх3.
§ 1.4. Свободные колебания в электрическом контуре , ~~
без затухания с нелинейной емкостью
В качестве примера нелинейной консервативной колебатель-
ной системы с одной степенью свободы рассмотрим электриче-
ский колебательный контур без затухания с конденсатором, в ко-
тором нет линейной зависимости напряжения от заряда. Подоб-
ными нелинейными свойствами обладают конденсаторы, в кото-
рых в качестве диэлектрика используются материалы, имеющие
сегнетоэлектрические свойства, и емко-
сти, возникающие в р — «-переходах
(например, в полупроводниковых дио-
дах) при обратном напряжении сме-
щения.
Как известно, для конденсаторов
с сегнетоэлектриком характерно отсут-
ствие прямой пропорциональности меж-
ду зарядом и напряжением на его об-
кладках. Пренебрегая гистерезисом,
можпо качественно изобразить эту за-
висимость в виде графика рис. 1.6. Для
каждого конкретного случая ее легко
получить экспериментально, и она
представляет собой характеристику не-
линейного элемента колебательной системы. Здесь следует иметь
в виду, что свойства конденсатора с сегнетоэлектриком сущест-
венно зависят от типа применяемого сегнетоэлектрика, который
обладает определенной инерционностью, связанной со скоростью
изменения заряда, что приводит к частотной зависимости емко-
сти конденсатора. Поэтому нелинейные характеристики таких
конденсаторов могут существенно изменяться при значительном
увеличении частоты электрических колебаний в контуре, содер-
жащем нелинейный элемент.
Если ввести привычное понятие емкости, определяемое С =
= q/uc, то, считая ис = Ф (<?), можно записать
C(g) = g/<p(g). (1.4.1)
Примерный вид функции C(q) для типичного сегнетоэлектри-
ка показан на рис. 1.7. В случае запертого р — «-перехода извест-
на зависимость Сд от напряжения, где Сл = dq/duc — дифферен-
циальная емкость данного устройства. Эта зависимость имеет
Рис. 1.6. Вольт-кулоновая
характеристика коиденса-
тора с сегнетоэлектриком
30 ГЛ. 1. КОНСЕРВАТИВНЫЕ СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
вид, изображенный на рис. 1.8, и аналититескиможет быть пред
ставлена формулой
С = А
Д (ио~“с)й’
(1.4.2
где А некоторая константа, и0 — контактная разность потен-
циалов для данного перехода, ис — напряжение на емкости, к —
показатель степени, принимающий значение для различных типог
переходов (плавный, резкий и др.) от 1/2 до 3 и выше. Запятптмг.г
Рис. 1.7. График зависимости ем-
кости от заряда для конденсато-
ра с сегнетоэлектриком.
Рис. 1.8. График зависимости
дифференциальной емкости за-
пертого р — л-первхода от на-
пряжения
наиболее часто встречающейся зависимостью дифференциально!
емкости от напряжения для узких германиевых переходов
: Отсюда
q = — 2А (щ — uc)1/2 + D, (1.4.4
где D — постоянная интегрирования, которую следует определит;
из начальных условий. Пусть ис = v — Е. Примем, что при ис =
= —Е (р = 0), где —Е — начальное отрицательное напряжение
смещения, v — внешнее напряжение, приложенное к р — п-перь
ходу, ? = 0. Иными словами, мы учитываем лишь тот заряд нг
емкости, который связан с отклонением напряжения на ней О'
исходного постоянного смещения —Е. При этих предположения;.
D = -2А[Uo + Е)1/2. Считая, что при v = 0, Сд — Сй, получаем
А — Со (п0 + Е)1/2, откуда Ь — 2С0 (u0 + Е).
Разрешая выражение (1.4.4) относительно ис, получим
ис = и0 - A (q - Д)2 = - Е + q-------------------q\ (1.4.5
° 1 Сд 4<72(и0 + ^)
§ 1.4. КОЛЕБАНИЯ В КОНТУРЕ С НЕЛИНЕЙНОЙ ЕМКОСТЬЮ
31
>ткуда
1 1 2
V~ ^O + E)q’
<4.4-6)
”. е. выражение типа
и = Д (? — ₽Л
со
(1.4.7)
соответствующее графической зависимости, изображенной на
эис. 1.9. Указанное соотношение справедливо лишь для v <
щ + Е, так как для напряжений на р — «-переходе ис Щ
“>ис. 1.9. Вольт-кулоновая харак-
теристика для емкости запертого
р — п-перехода
L С(д)^=.
Рис. 1.10. Схема контура без за-
тухания с сегнетоэлектрическим
конденсатором
зспользовапные соотношения теряют смысл и будет иметь место
трямая проводимость. Заметим, что для других видов исходной
зависимости Сд(ис), например при fc¥= 1/2 и при учете неизбеж-
ных параллельных постоянных емкостей, мы встретимся, с более
ложными зависимостями типа v = (1/С0) (q + ptg2 + {J2Q3 + ...).
Учитывая приведенное соотношение, рассмотрим сначала ко-
лебательные процессы, происходящие в консервативном колеба-
тельном контуре, в котором в качестве емкости использован кон-
денсатор с сегнетоэлектриком без потерь. Исследуем контур
(рис. 1.10), в котором отсутствует затухание, индуктивность L
имеет постоянное значение, независимое от токов и напряжений
в системе, а характеристика конденсатора С подобна характери-
стике, изображенной на рис. 1.6.
Согласно закону Кирхгофа
L -г + ис = 0,
О*
где i = dq/dt, uc = <f(q'). Тогда
,2
Ь-М + ф<<7) = 0. (1.4.8)
at
Метол илеклчн
32 гл. 1. КОНСЕРВАТИВНЫЕ СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
Для качественного рассмотрения движений в такой сист
на фазовой плоскости образуем уравнение у = — (1/£)<р(а:)
помним, что у — х), или
dy Ф (*) (л
dx Ly ' V1-
где х = q.
Для данной системы можно найти потенциальную фуню
V (х) == J <p’(z) dx, (1-4
которая для <р (х) в ис, соответствующей кривой на рис.
имеет характер, показанный на рис. 1.11. В согласии с э
в точке х = 0 потенциальная фунв
и,
О х
Рис. 1.11. График по-
тенциальной функ-
ции для контура с
сегнетоэлектрическим
конденсатором
имеет единственный минимум, ответ
щий устойчивому положению равнове
относительно которого система соверп
колебательные движения.
Таким образом, на фазовой плоск<
мы получим единственную особую тс
х = 0, у = 0 типа центр, вокруг коте
располагаются замкнутые фазовые тр.
тории, отвечающие колебательным i
цессам с различными амплитудами. У]
нение фазовых траекторий имеет вид
Построим методом изоклин фазовый портрет рассматривав:
нелинейной консервативной системы. Этот метод применим
систем с нелинейностью любого типа. Изоклинами на фазо
плоскости называются линии, на которых наклон интегралы
кривых dyJdx = const. Уравнения семейства изоклин для дани
случая запишутся как dy/dx = к(, где к{—произвольные чи<
Тогда, учитывая (1.4.9), находим уравнение семейства изок.
\ = £-<р (я). (1.4
Теперь для построения фазового портрета данной колебате
ной системы необходимо аппроксимировать нелинейную boj
кулоновую характеристику (см. рис. 1.6) определенной авали
ческой зависимостью. Для множества самых разнообразных <
нетоэлектрических материалов вольт-кулоновые характерист:
конденсаторов имеют вид кубической параболы с разными ко
фициентами нелинейности, т. е.
<Р (g) = ис = (1 + у$г), (1.4
2,
и £ * л Ч i 5 ( у И I в О -Y f"
5 1.4. КОЛЕБАНИЯ В КОНТУРЕ С НЕЛИНЕЙНОЙ ЕМКОСТЬЮ
33
где "(о — коэффициент нелинейности. Если в (1.4.8) ввести без-
размерный заряд х = q/qa, круговую частоту (Oq = 1/LCo и без-
размерное время T = то с учетом (1.4.12) уравнение фазовых
траекторий (1.4.9) примет вид
dy х-рух3
dx~ у *
(1.4.13)
2 «
где у = YoQo, а соответствующие ему уравнения семейства изоклин
запишутся следующим образом:
х + ух3
У = —
(1.4.14)
Рис. 1.12. Построение фазовых
траекторий методом изоклин для
контура без затухания с сегнето-
электрическим конденсатором
нелинейной системе близки
Как мы видим, для нелинейной системы изоклинами на фазовой
плоскости являются кубические
параболы с различными коэффи-
циентами ки Исключение состав-
ляют только изоклина бесконеч-
иости (А< = °°), совпадающая с
осью координат х (у = 0), и ну-
левая изоклина {kt = Q), совпа-
дающая с осью координат у (х =
-0). На рис. 1.12 показано по-
строение фазовых траекторий ме-
тодом изоклин для электрическо-
го колебательного контура с но-
лиивйным дивлоктриком. Замкну-
тость фазовых траекторий под-
тверждает, что мы имеем дело
о консервативной системой. Из
фазового портрета видно, что при
малых амплитудах колебаний, как
и в случае идеального маятника,
фазовые траектории близки к эл-
липсам, т. е. малые движения в
к гармоническим колебаниям в линейной системе. Это связано
о тем, что при малых значениях х влиянием нелинейного чле-
на по сравнению с линейным членом х на колебательный
процесс в системе можно пренебречь.
Полученный фазовый портрет системы, естественно, сущест-
венно зависит от вида исходной характеристики нелинейности
системы и позволяет нам качественно судить о процессах, кото-
рые могут протекать в подобной системе. Если характеристика
нелинейности имеет вид, показанный на рис. 1.6, мы из фазового
портрета можем сделать следующие выводы. Во-первых, в систе-
ме возможны симметричные колебания вокруг единственного по-
8 В. D. Мигулин и др.
34 ГЛ. 1. КОНСЕРВАТИВНЫЕ СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
ложения равновесия х = 0 (д = 0); у = 0 (q = i = 0). Во-втор1
форма этих колебаний отлична от синусоидальной и их разлив
тем больше, чем больше амплитуда колебаний. В-третьих, в си
специфики указанных нелинейных свойств конденсатора с сеп
тоэлектриком с ростом начального толчка (или начального запг
энергии) амплитуда колебаний у = х, т. е. амплитуда тока в кс
туре, растет быстрее, чем амплитуда заряда.
Итак, с учетом сделанных допущений мы сводим решен
нашей задачи к нахождению приближенного решения уравнен:
Lx + (х + ух3) = 0, (1.4.1
со
или
х + х + = 0, (1.4.1
где со® = 1/АС0. Это уравнение принадлежит к тому же тип
что и рассмотренное нами приближенное уравнение маятник
и мы можем сразу Же написать его решение
х = а(1 — у cos(<i>0 + уcos(Зы£), (1.4.1
\ V4U / V4U
где
а — амплитуда колебаний, а начальные условия суть: х — а, i =
= х = 0 в момент времени t = 0.
Для заданных свойств сегнетоэлектрика и выбранных масшт:
бов мы всегда можем найти численные значения у я. получит
приближенное решение, годное в той области значений х (—а
Сг^+а), внутри которой, во-первых, можно ограничитьс
выбранной нами аппроксимацией и, во-вторых, достаточно npi
ближение с точностью до у в первой степени. В этом случае м:
встречаемся с неизохронностью колебаний и обнаруживаем отхо
от строгой синусоидальности, выражающийся в появлении ко*
поненты с тройной частотой. Строя график зависимости частот:
© от амплитуды, мы получим график типа показанного на рис. U
Здесь следует обратить внимание на следующее обстоятельстве
Из (1.4.18) следует, что и обращается в бесконечность при а2 =
= 4/Зу, а для больших значений а выражение для о становитс
мнимым. Этот результат является следствием недостаточност
использованного нами первого приближения при таких амт
литудах.
Если аппроксимация типа (1.4.12) точно передает зависимост
напряжения на емкости от заряда, решение (1.4.17) в перво:
Рис. 1.13. График потенциаль-
ной функции для контура с
емкостью запертого р п-пе-
рехода полупроводникового
диода
§ 1.4. КОЛЕБАНИЯ В КОНТУРЕ С НЕЛИНЕЙНОЙ ЕМКОСТЬЮ 35
приближении верно лишь постольку, поскольку можно пренебречь
последующими членами. То же относится и к выражению для ча-
стоты (1.4.18). Поэтому при больших амплитудах колебаний при-
ближенное решение становится непригодным независимо от точ-
ности аппроксимации. Таким образом, здесь сказывается сама
ограниченность метода последовательных приближений, не даю-
щего точных выражений для реаль-
ных движений в системе в слу-
чае больших амплитуд. В дальней-
шем мы познакомимся с другим
приемом определения частоты коле-
баний в подобных системах для слу-
чая приближенного гармонического
закона колебаний.
Несколько иначе будут протекать
явления, если в качестве емкости
в контуре использовать емкость за-
пертого р — ге-пёрехода полупровод-
никового диода. Тогда вид функции
Ч>(7) будет другим. Если принять,
что график V(q), задаваемый функцией <р(?), будет таким же,
как на рис. 1.9, а аналитическая зависимость передается выра-
жением
<р(х)“ (1/Со) (х — fkr2),
то потенциальная функция
V (з) - 1 J <р (ж) dx = (1,4.19)
будет изображаться кривой, показанной на рис. 1.13. Хотя потен-
циальная функция, кроме минимума при х — 0, имеет еще и мак-
симум при х = ж,, этот максимум лежит за пределами примени-
мости принятой аппроксимации, пригодной лишь для х < ж0, где
ха соответствует заряду при напряжении на емкости, равном
контактной разности потенциалов. Поэтому на фазовом портрете
следует считать отвечающей реальным процессам только часть,
лежащую в области х < ж0. Рассмотрение фазовых траекторий
показывает возможность существования незатухающих колебаний
вокруг единственного состояния равновесия — состояния покоя
с положительным отклонением, меньшим ж0. Если при заданном
начальном условии описывающая точка выходит на траекторию,
заходящую за пределы указанных значений хй, то проведенный
анализ непригоден и для рассмотрения действительных процес-
сов в подобной системе следует учитывать появление существен-
ной проводимости р — «-перехода. При выполнении указанного
ограничения в системе будет происходить колебательный процесс
с формой колебаний, отличной от гармонической.
8*
36 гл. 1. КОНСЕРВАТИВНЫЕ СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
§ 1.5. Свободные колебания в контуре
с нелинейной индуктивностью
Рассмотрим теперь другой пример электрической нелиней]
консервативной системы, а именно контур с индуктивност.
зависящей от протекающего по нему тока. Этот случай не им
наглядного и простого нерелятивистского механического аналс
так как зависимость самоиндукции от тока эквивалентна J.
механики случаю зависимости массы от скорости.
С электрическими системами подобного типа мы встречав!
тогда, когда в индуктивностях используются сердечники из ф(
ромагнитного материала. В таких случаях для каждого дацщ
Рис. 1.14. Кривая зависимости
магнитного потока Ф от поля Н
или тока i в случае ферромаг-
нетика
Рис. 1.15. Колебательный конту
без потерь с катушкой индуктив
пости с ферромагнитным сердеч
ником
можно получить зависимость между намагничивав
и потоком магнитной индукции. Крцвая, изображав
сердечника
щим полем
щая эту зависимость, называется кривой намагничивания. Еш
пренебречь явлением гистерезиса, то примерный ее ход можг
представить графиком, изображенным на рис. 1.14. Так как зн;
чение поля Н пропорционально току, текущему в катушке, то в
оси абсцисс можно в соответствующем масштабе откладывав
ток.
Для контура, показанного на рис. 1.15, можно написать ypai
нение Кирхгофа
<1Ф , q п
nTt + С = 0’
где п — число витков катушки, пронизываемых магнитным поте
ком Ф, или (Выбирая масштаб Ф и i в соответствующих единв
цах) в виде
Тогда
£ф(1) + £-0, Афй) + ^_о. <4.5.1
™Я + $—0, (1.5.2
dq С
$ 1.5. КОНТУР С НЕЛИНЕЙНОЙ ИНДУКТИВНОСТЬЮ
37
ИЛИ
(1.5.3):
где ф = — q С —
1 \ dq
На фазовой плоскости (х = q, у = х — q) будем иметь фазо-
вые траектории, описываемые уравнениями.
i-y, (1.5.4)
€** у
Умножая уравнение (1.5.2) на dq и производя интегрирование,
получим интеграл энергии
+ = (1-5.5)
Здесь (1/2С) q2 — электростатическая (потенциальная) энергия,
I q dq — магнитная (кинетическая) энергия. В частности, для
J dq
d<i>/dq — L = const, т. e. для линейного случая, получается изве-
стное выражение для магнитной энергии Lg2/2 или 1&12.
По своей физической природе Ф(?)— нечетная функция, и,
следовательно, 1 q dq больше нуля и обращается в нуль при
J dq
4 — 0. Таким образом, точка ? '= 0, q = 0 есть особая точка на
фазовой плоскости, соответствующая минимуму потенциальной
энергии
£=h-\^qdq. (1.5.6)
20 У dq
Вид фазовых траекторий мы сможем установить, если нам будет
задана зависимость Ф, от i = q. Задаваясь по Дрейфусу выра-
жением
Ф(г)== A arctg(ai)+ Bai, (1.5.7)
где А, В и а — соответствующие константы (S = n/S, ц,— число
витков тока, пронизываемых магнитным потоком Ф при сечедии
витков, равном S), получим
Р£|Л-£М1 + Й’) + <Л
38 ГЛ. 1- КОНСЕРВАТИВНЫЕ СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
Отсюда находим уравнение фазовых траектории в виде
^ln(l + a^) + ^i2 + 2-tga^fe. (1.
Оно описывает семейство кривых, окружающих особую то
типа центр, причем сами кривые близки к эллипсам при ма;
h (малых значениях x = = (рис. 1.16).
Рис. 1.16. Фазовый портрет
контура без затухания с
катушкой индуктивности с
ферромагнитным сердечни-
ком при аппроксимации за-
Для ограниченного интервала е
чений i — q можно аппроксимирог
кривую намагничивания полиномом,
держащим нечетные степени q. Е
в процессе изучаемых движений э
чение тока не заходит далеко в обла
насыщения, то допустимо в качес
простейшей аппроксимации исполт
вать выражение
Ф(0=М* -!«*). U-
где 7 < 1, La — индуктивность.
В этом случае (в пределах выбр
ного интервала значений г) d<t>/d
— Lq — SfLoi2, и эта величина на:
вается мгновенным значением инд
тивности. Тогда
J г di == J Loi di — J 3yZ0i3 di ==
Уравнение семейства интегральн
кривых имеет вид
+ = (1-5.
висимости магнитного по-
тока от тока по Дрейфусу оно представляет собой также урав1
ние семейства кривых, близких к :
липсам (особенно в области малых значений h, т. е. в облас
малых q и q).
Для приближенного количественного рассмотрения зада
воспользуемся методом последовательных приближений. Уравт
ние (1.5.2) при выбранной простейшей полиномиальной аппрок<
мации кривой намагничивания записывается следующим образе
q (Lo — 3?L0?a) + £- g = 0, или q — 3yq2q + ufa = 0, (1.5.1
где co® = 1/LgC.
Пусть
q = x = xt + yxt + y2xt +
(1.5.1
§ 1.5. КОНТУР С НЕЛИНЕЙНОЙ ИНДУКТИВНОСТЬЮ
39
ограничиваясь первым приближением, положим q = х = х, + yxi.
Вводя поправку к частоте, обусловленную нелинейностью, в виде
®2 = ®о + ур, (1.5.13)
перепишем уравнение (1.5.11):
ха + yXi — Зу (х0 + ух,)2(io + yXi) + (со2 — ур) (х0 + TfXt) = 0.
Пренебрегая членами, содержащими у в степени выше первой,
получим
io + а2хв + у (х, + ®2Xi — рх0 — Зх Jio) = 0.
Уравнение нулевого приближения имеет вид
Хо + ®2х0 = 0.
Его решением х0 при начальных условиях t = 0, х = a, х = О
служит х0 = a cos (cot). Уравнение первого приближения ваписы-
лается следующим образом:
Xi + a^Xi = pa cos(®i) — За3®4 sin2(®i)cos(®i),
или после тригонометрических преобразований
*• ( 3 \ 3
хх + ®2хх = I ра —a3®41 cos (cot) + а3®4 cos (3®£). t
Отсюда из условия равенства пулю секулярного члена находим
частотную поправку ра — э/4а3®4 “ 0, а для частоты колебаний ®
получаем уравнение ®2 — ®3 + 3/4уа2®4. С точностью до членов по-
рядка у имеем для искомой частоты выражение
®2 = ®2 ^1 + у ya2®oj. (1.5.14)
(’> учетом этой поправки получаем уравнение первого приближения.
хх + ®2хх = a3®4 cos (3®i).
Его решением служит
Х| — С'| cos(wi) -|- С2 sin (®4) — д^а3®2 cos(3®£). <
Полное решение системы записывается в виде
х = a cos (®0 + уСх cos (®i) + уС2 sin (и!) — уа3®2 cos (3®f).
1 f рименяя те же начальные условия, получим Сх = *122а*<&2
(’, = 0 и окончательно для искомого решения находим
q = х = а (1 + ^уа2®2') cos(®i) — ^уа3®2 cos(3wi). (1.5.15)
40 ГЛ. 1. КОНСЕРВАТИВНЫЕ СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
Таким образом, и здесь мы получаем» качественно те же <
бенности движения, что и в случаях, разобранных выше. Раг
чие проявляется лишь в соотношениях между амплитудами к]
Ных гармонических компонент, их зависимости от парамет
системы и в другой частотной поправке, причем здесь част
найденного решения, так же как и для контура с сегнетоэлект
ком, увеличивается с ростом амплитуды. Это связано с тем,
значение эффективного коэффициента самоиндукции в даю
примере, так же как и эффективное значение емкости кондег
тора с сегнетоэлектриком, для больших амплитуд меньше, 1
для малых амплитуд.
Укажем еще на другой способ трактовки той же задачи. 3:
реальную кривую намагничивания Ф(г), можно проаналиэиров
поведение системы, исходя из соответствующей той же к
вой зависимости
1 = ф(Ф). (1.5.'
Уравнение системы
</Ф , 1 Г. ,. п </2Ф . 1 . п
_+-ф<й=о, иди—+ -1 = 0
в данном случае можно записать так:
$ + ^<₽(Ф)-0. (1.5.
Иными словами, эта задача по отношению к магнитному пото
как основной переменной оказывается совершенно аналогичв
разобранной выше задаче о простейшей консервативной систе
с нелинейной возвращающей силой (контур с сегнетоэлект!
ком). В этом случае нелинейную зависимость тока i от потока
также можно изобразить в виде кубической параболы
» = у- (ф + Тоф3)- (1-5/
о
Такое преобразование легко представить себе графически, ес
на графике рис. 1.14 поменять местами оси' координат. Тог
уравнение свободных колебаний в рассматриваемом электрет
ском контуре с нелинейной индуктивностью запишется так:
^ + г^(ф + тоф3) = о. (1.5.1
Вводя х = Ф/Фо, = 1/LOC, т = <М, получим
х + х + ух3 = 0, (1.5.2
где у — уоФо. Отсюда находим уравнение фазовых траекторий д.
§ 1.5. КОНТУР С НЕЛИНЕЙНОЙ ИНДУКТИВНОСТЬЮ
41
переменных у = х и х
dy _ д +Уд3
dx у
(1.5.21)
Замечаем, что особая точка типа центр находится в начале коор-
динат, т. е. при х = 0, у = 0. Семейство изоклин запишется в виде
У — — *7 (ж + уха). (1.5.22)
Мы видим, что это уравнение семейства изоклин качественно сов-
падает (с точностью до значения коэффициента у) с уравнением
изоклин (1.4.14) для электрического колебательного контура
с нелинейным конденсатором с сегнетоэлектриком. Поэтому фазо-
вый портрет свободных колебаний магнитного потока в контуре
с нелинейной индуктивностью аналогичен фазовому портрету сво-
бодных колебаний заряда в контуре с нелинейным конденсатором,
показанному на рис. 1.12, а при равенстве коэффициентов Нели-
нейности оба портрета совпадают друг с другом.
Аппроксимация зависимости i от Ф производится с помощью
полинома с большей точностью и в большем интервале значений
I и Ф при той же высшей степени полинома, чем в случае зави-
симости Ф от i.
Такой прием получения более удобных соотношений для опи-
сания той же системы посредством соответствующего выбора
основной переменной мы используем и в дальнейшем при анали-
зе вынужденных колебаний, и его следует иметь в виду при со?
ставлопии уравнений, описывающих исследуемые системы.
ГЛАВА 2
СВОБОДНЫЕ КОЛЕБАНИЯ'
В ДИССИПАТИВНЫХ КОЛЕБАТЕЛЬНЫХ СИСТЕМА]
С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
§ 2.1. Основные особенности колебательных процессов
в диссипативных системах и методы их рассмотрения
Как мы уже отмечали (см. § 1.1), в реальных системах вс<
происходит рассеяние энергии, ее потери, ее уход из систем!
как следствие этого, уменьшение общего запаса колебатель
анергии. Процесс рассеяния — диссипации энергии и уменыпе
ее общего запаса —присущ всем реальным системам, не содер
щим устройств, пополняющих эту убыль энергии. Поэтому
вправе ожидать, что учет процесса уменьшения исходного зап
Колебательной энергии позволит нам получить решения, пол
описывающие реальные движения, чем при рассмотрении кош
вативных систем. Можно указать на множество характерно
колебательных процессов, которые обусловлены наличием в
стеме потерь энергии, происходящих по определенному зак
и являющихся существенными как для линейных, так и для
Линейных систем. К числу проблем, требующих для свс
решения учета диссипации, относятся, например, оценка р<
нансной амплитуды в линейной системе или в системе с ма
нелинейностью, общий вид установившегося движения при на
чии вынуждающей силы, закон изменения во времени амплитл
свободных колебаний, устойчивость различных состояний и
На перечисленные выше вопросы и ряд других теория коне
вативных колебательных систем принципиально не может д
ответа. Учитывая зто, в каждом случае следует заранее оцеш
пригодна ли в данной конкретной задаче консервативная идеа
зация. Совершенно естественно, что учет диссипации неизбея
серьезно усложняет анализ и если можно получить ответы
интересующие нас вопросы в рамках консервативной трактов
то целесообразно этим воспользоваться. Что же касается pi
общих свойств системы, обладающей затуханием, то выводы, с
ъ данные из анализа идеализированных консервативных сист
могут оказаться принципиально неверными, так как мея
(консервативными и диссипативными системами имеется прин
.пиальное физическое различие, вытекающее из различного по
дения энергии в тех и других системах. И если на достаток
малом интервале времени эти различия могут проявляться вей
слабо, то всегда по истечении достаточно большого промежу'
§ 2.1. ОСОБЕННОСТИ КОЛЕБАТЕЛЬНЫХ ПРОЦЕССОВ
43
времени от начала процесса движение в реальной диссипативной
системе будет уже и количественно, и качественно отличаться;
от движения в идеализированной консервативной системе.
Так, свободные колебания в системе без затухания должны
существовать неограниченно долго и их амплитуда должна цели-
ком определяться начальными условиями, тогда как в диссипа-
тивной системе всегда можно указать такой конечный интервал
времени, по истечении которого амплитуда движения прй любых
реальных начальных условиях будет меньше любой наперед за-
данной величины.
С этим связано то обстоятельство, что сами по себе диссипа-
тивные колебательные системы, не содержащие источников энер-
гии, имеют только одно стационарное состояние: покой. В самом,
доле, любые начальные условия, любой исходный запас энергии
служит исходной причиной, вызывающей начало затухания сво-.
бодных колебаний, которые через достаточно большой промежу-
ток времени в реальных системах прекратятся или в случай'
идеализированных законов диссипации, например, линейное тре-
ние, их амплитуды станут меньше любых наперед заданных ма-
лых величин.
В математическом описании автономных консервативных си-
стем мы встречаемся с интегралом типа
Ф(ж, y)=h, у — х,
служащим математическим выражением условия постоянства за-
паса энергии движения системы с одной степенью свободах.,
В простейшем случае уг/2+ V(x)= h, где, как указывалось вЫч
шо, И(х)—потенциальная функция, выражающая в определен-
ном масштабе потенциальную энергию системы.
В неконсервативной системе Ф(х, у)— W(t), где dW/dt О,
Здесь функция IT(t) характеризует мгновенное значение запаса
колебательной энергии в системе. В подобном виде мы можем,
записать общее условие неконсервативности системы; следует
добавить, что если хотя бы для сколь угодно малого промежутка
времени А4 в рассматриваемом интервале времени dW/dt 0, то,
значит, для данного интервала времени система не консерва-
тивна, причем может оказаться, что на отдельных интервала^
времени dW/dt = 0 и в этих временных пределах систему можно
трактовать как консервативную, для которой dW/dt 0.
В диссипативной системе всегда dW/dt < 0, что физически
соответствует наличию потерь, приводящих к непрерывному
уменьшению запаса энергии, связанной с изучаемым движением.’
Обозначим ско^ост^дассипащи новой функцией F(x, у) =»,
= —dW/dt. В диссипативных системах всегда выполняется усло-
вие F(x, у)> 0. В реальных случаях эта функция выражает мощ-
ность потерь — мощность, рассеиваемую на диссипативных эле-
ментах колебательной системы. *
44
ГЛ. 2. КОЛЕБАНИЯ В ДИССИПАТИВНЫХ СИСТЕМАХ
Для простейшей системы, в которой движение описывг
энергетическим уравнением
р*/2+7(х)-17(f),
легко получить уравнение для действующих в ней сил
i(4yi‘+ VF(х’y — f(x) + iF(xiV) = 0;
*** \< J / -г _ V
здесь, как и раньше, — « - sz = —
X С1Т ч я Т
V(x) = — J/(x)dz,
о
где —/(ж)—возвращающая сила. Выражение (1/у)Е(ж, ;
== — {i/y)aW/dt дает силу трения, которая в различных систе
характеризуется той или иной зависимостью от состояния ;
^сения системы.
Заметим, что выражение для силы трения (l/y)F(x, у) до
но обращаться в нуль при у = 0, т. е. в отсутствие движения,
следует из физических соображений, а именно из того, что с
трения и потери могут иметь место лишь при наличии движе
в системе (у ¥=0). Отсюда следует, что в функцию F(x, у) ш
менная у должна входить в степени, большей первой.
Учитывая обязательное. для диссипативных систем уело
Р{х, У)> мы приходим к выводу, что выражение (Uy)F(x,
Должно быть знакопёремённым и принимать знак, совпадаюп
со знаком у, т. е. со знаком скорости движения в системе i
Тока в электрическом контуре.
Для многих диссипативных систем сила трения зависит то
ко от скорости (или силы тока) и не зависит от координаты (
ряда), однако Характер этой зависимости может быть различи
в зависимости от свойств системы и условий, в которых соверг
ётся изучаемое движение.
Сила трения, не зависящая от модуля скорости и связан!
Лишь с ее знаком, носит Этот идеали
рованный тип трения позволяет понять существенные особен!
сти процессов, происходящих в ряде реальных механических <
стем, но ему нельзя найти аналога среди процессов, реализу
йщхся в простых электрических колебательных цепях. Идеали:
рованная характеристика сухого трения имеет вид, изображенн
на рис. 2.1, причем (l/y)F(x, у) — а, где а > 0 при у > 0, а <
при у < 0.
Здесь характерно наличие разрыва непрерывности в вырая
нии для силы трения в точке у •= 0; в аппроксимацию реаяьн
физической зависимости силы трения от скорости необходи.
вводить конечный разрыв непрерывности, или скачок. Естестве
но, удобно рассматривать отдельные этапы движения в систем
на которых выполняются разные законы диссипации.
§ 2.1. ОСОБЕННОСТИ КОЛЕБАТЕЛЬНЫХ ПРОЦЕССОВ
45
С необходимостью раздельного рассмотрения этапов движения
|Ы столкнемся также и в тех случаях, когда сила трения (сопро-
цвления) выражается степенной функцией скорости с четным
Доказателен степени, например
атичного» трения (l/y)F(x, У)
Ври У < 0. В этом случае сила
Трения при у = 0 скачка не ис-
пытывает.
При наличии скачкообраз-
ного изменения силы трения в
Точке у = 0 удобно разбить всю
(ада чу о собственных колеба-
ниях в диссипативной системе
На дна этапа: первый соответ-
ствует одному знаку трения,
Второй — другому. Эти этапы
Ири свободных колебаниях по-
очередно сменяют один другой,
в случае так называемого «квад-
= 8уг, где б > 0 при у > 0, б < 0
Рие. 2.1. Характеристика сухого тре-
ния
и изучение всего движения в
целом требует раздельного анализа обоих этапов с соответствую-
щим сшиванием полученных решений.
Линейная зависимость силы трения от скорости наиболее рас-
пространена в механических системах и описывает[вязкое трение|
и механике при небольших скоростях.
В этом случае сила трения равна (1/у)/?(а:, у)—Ьу, т. е.
1‘'(х, У)“ йу* и б > 0 при любых у. В электрических цепях сила
трения соответствует напряжению, возникающему на обычном
линейном сопротивлении, и поэтому она выражается в виде Ri,
т. о. в наших обозначениях бу. Соответственно Ri* равно мощно-
сти потерь (мощности, выделяемой на сопротивлении).
Для «кубического» трения имеем (l/y)F(x, у) = ду*. Этот за-
кон трения, встречающийся в механике больпшх скоростей, сйра-
водлив также для электрических систем с нелинейным диссипа-
тивным элементом, причем часто встречается комбинация линей-
ного и кубического трения.
В случаях, когда степенная функция, аппроксимирующая за-
висимость силы трения от скорости, содержит лишь нечетные
степени, весь диапазон возможных изменений исследуемых вели-
чин (Уписывается одним выражением с коэффициентами, общими
для всей области значений переменных, и поэтому решение для
свободных колебаний годится без модификации для всех значе-
ний хну.
Для исследования движений в нелинейных диссипативный
системах, а также в консервативных системах, можно применять
различные качественные и количественные методы. Однако не
все они, пригодные для анализа движений в консервативных си-
стемах, могут без дополнительных оговорок или модификаций
46 ГЛ. 2- КОЛЕБАНИЯ В ДИССИПАТИВНЫХ СИСТЕМАХ
9
быть использованы для анализа диссипативных систем. При р
смотрении свободных колебаний метод фазовой плоскости оста
ся полностью пригодным и для этого класса задач, приводя ли
к большему разнообразию типов особых точек и фазовых тра
торий. Так, например, в фазовых портретах колебаний в дис<
нативных системах мы уже не встретимся с особыми точка
типа центр, но зато могут появиться особые точки типа фот
или узел, в которые стягиваются все фазовые траектории, р.
положенные в определенной области вокруг этих особых точ<
В фазовых портретах диссипативных колебательных систем i
встречаемся со сходящимися траекториями колебательных <
стем вместо совокупности замкнутых траекторий, окружающ
особые точки, соответствующие устойчивым положениям равт
весия. Так же как и при рассмотрении поведения консервативш
колебательных систем с помощью фазовой плоскости, построен
самих фазовых траекторий для диссипативных систем может пр
изводиться или посредством построения аналитически найденно
решения уравнений фазовых траекторий, или с использование
известных приближенных графических и аналитических методе
Отмеченные выше существенные особенности диссипативнь
систем, заключающиеся в том, что любые свободные колебаш
в системе, предоставленной самой себе, неизбежно затухают, пр:
водят к тому, что для количественного рассмотрения свободнь
колебаний с учетом потерь нельзя без существенных оговор<
пользоваться методом последовательных приближений, в которс
за нулевое приближение принимается гармоническое движени
Данный метод может применяться лишь для ограниченных вр
менных интервалов в случае достаточной малости затуханн
и поэтому его использование с подобными оговорками существе!
но снижает его практическую ценность. Это заставляет нас в те
случаях, когда не удается найти прямое и точное решение ди^
ференциального уравнения, описывающего систему, искать другв
пути нахождения приближенного решения, учитывающего спецт
фику нелинейных диссипативных систем и пригодного для люб<
го интервала времени. Из возможных методов нахождения прт
ближенного решения следует в первую очередь указать на мето
поэтапного рассмотрения и, в частности, на кусочно-линейны
метод, а также на метод медленно меняющихся амплитуд. Kj
сочно-линейный метод, пригодный для любых типов трения :
нелинейности, основывается на замене общего рассмотрения дви
жения всей системы в целом решением ряда линейных задач -
уравнений, приближенно описывающих различные этапы движе
ния системы, на которых ее можно считать более или мене
линейной. Так как любую нелинейную характеристику с требуе
мой степенью точности можно представить как совокупность пря
молинейных отрезков, а решение линейной задачи всегда можн<
довести до аналитического конца, то в результате мы получт
S 2.1. ОСОБЕННОСТИ КОЛЕБАТЕЛЬНЫХ ПРОЦЕССОВ
Точные решения серии идеализированных линеаризованных за-
Эти решения далее надо сшить для приближенного описания
фсого процесса в системе в целом при заданных начальных
условиях.
Этот метод принципиально прост и дает хорошие результаты,
обычно громоздок и страдает отсутствием общности, так кай
требует последовательного сшивания решения для йаждого этапа
С последующим, начиная с этапа, характеризующегося выбран-
ными начальными условиями. Безусловное его преимущество со-
стоит в том, что он пригоден для любых систем с любыми харак-
теристиками трения и нелинейности консервативных или, как их
принято называть, реактивных элементов и не требует аналити-
ческой аппроксимации этих зависимостей, а может с успехом
Применяться при наличии графического изображения соответ-
ствующих характеристик.
Метод медленно меняющихся амплитуд является весьма мощ-
ным средством анализа движений в исследуемых системах, обла-
дает большой общностью, может давать непрерывное решение
дли любых временных интервалов и позволяет изучать общие
свойства движений, процессы установления и стационарные ре-
жимы, но в полной мере применим лишь к ограниченному (прав-
да, широкому и весьма важному) классу колебательных систем,
а именно к системам с малой диссипацией и малой нелиней-
ностью, в которых колебания мало отличаются от гармонических.
В дальнейшем мы на ряде примеров разберем особенности
итого метода и познакомимся с путями его применения к реше-
нию конкретных колебательных задач, а также выясним возмож-
ность и целесообразность использования в различных случаях
и других методов.
Следует отметить, что уравнения, описывающие поведение
системы с малой диссипацией, но с существенной нелинейностью
реактивного элемента, можно привести к уравнениям, мало Отли-
чающимся от уравнений линейных консервативных систем, путем
перехода к новым переменным, для которых отклик сильно нели-
нейного реактивного элемента будет описываться линейным соот-
ношением. При этом исходное уравнение
где / (я) — существенно нелинейная функция, а ц — малая вели-
чина, переходит в уравнение
daar, ! dx \
. .=г- 7? + = V4’
причем между t и т и х и xt можно установить однозначное
соответствие и найти аналитические выражения, связывающие х
с х, й t ст. <
48 ГЛ. 2. КОЛЕБАНИЯ В ДИССИПАТИВНЫХ СИСТЕМАХ
К преобразованному уравнению применим метод медлен
меняющихся амплитуд (ММА). Метод нелинейного преобразо!
ния переменных расширяет область применения ММА на сис
мы, близкие к нелинейным консервативным. Таким образом, фс
мально этим методом можно воспользоваться и для аналв
Систем с большой нелинейностью (при малой диссипации) п
соответствующем нелинейном преобразовании переменных*).
При анализе конкретной задачи необходимо задаваться г
кой-либо аналитической или графической аппроксимацией реал
ных нелинейных зависимостей, т. е. переходить к рассмотрен!
системы, приближенно передающей свойства реальной систем
а затем искать точное или приближенное, качественное или к
яичественное решение соответствующей математически сформ
лированной задачи.
От искусства выбора вида аппроксимации реальных нелине:
ных зависимостей, от пути идеализации и метода решения зав:
сит сложным или простым путем будет найдено решение задач
будет ли это решение содержать ответ на все поставленные boj
росы о свойствах исследуемой реальной системы, не приведет л
нас анализ неудачно идеализированной системы к неправильны
выводам о свойствах реальной системы и, наконец, в каких npi
делах полученное решение будет правильно описывать действ!
тельные процессы.
§ 2.2. Качественное рассмотрение свободных колебаний
в диссипативных системах при различных законах трения
Рассмотрим с помощью представления движения на фазово
плоскости несколько характерных примеров диссипативных ш
линейных колебательных систем с одной степенью свободы с раг
личными законами трения. [СМУОБ TPfcMweJ
(Т) Начнем со случая, когда в системе, обладающей линейным:
реактивными элементами, трение описывается идеализированны]
законом сухого трения. В этом случае, как указывалось выше
функция диссипации имеет вид F(y) = ay; а>0 при у > 0 i
а < 0 при у < 0. Зависимость силы трения от скорости была по
казана на рис. 2.1. Для простейшей системы с одной степень!
свободы при линейности инерционных и упругих сил мы може!
записать уравнение, описывающее движение в подобной системе
в виде у * f tx>*x
ж + а + = 0. (2.2.1
Это линейное уравнение справедливо для всех значений ж, ж, npi
*) Этот метод описан детально в монографии: Самойло К. А. Мето)
анализа колебательных систем второго повядка.— М.: Сов. радио, 1976.
§ 2,2. СИСТЕМЫ ПРИ РАЗЛИЧНЫХ ЗАКОНАХ ТРЕНИЯ
4?
Которых а остается постоянным, т. е. в областях постоянства
ено на х = у.
Для всей совокупности отрицательных и положительных зна-
чений у уравнение (2.2.1) нелинейно, так как при проходе х = у
Через значение у = 0 а изменяется скачком от +а0 до —ал я
обратно. Поэтому для изображения соответствующих движении
Ка фазовой плоскости необходимо отдельно построить фазовые
траектории для у > 0 и для у < 0, а затем сшить их в точках
у —= 0 для Получения непрерывных фазовых траекторий на всей
фазовой плоскости. В самом деле, система изучаемого типа при
наличии инерционных и упругих сил, т. е.
с резервуарами кинетической и потенци-
альной энергий, может совершать лишь
непрерывные движения, допускает лишь
непрерывные изменения координаты и
скорости, а, следовательно, ее фазовый
портрет обладает только непрерывными
фазовыми траекториями. Разрывы непре-
рывности в значениях координаты или
скорости и наличие конечных скачкооб-
разных изменений этих величин означали
бы скачкообразное изменение потенциаль-
ной или кинетической энергий, что соответствовало бы физически
бессмысленному мгновенному выделению или поглощению беско-
нечной мощности.
Простейшая механическая модель подобной системы с сухим
трением может иметь вид, изображенный на рис. 2.2, где масса т
скользит по сухой поверхности, совершая колебания за счет инер-
ции самой массы и упругости пружины. Для электрической си-
стемы создать простой аналог сухого трения не представляется
нозможным, и мы в данном случае, характерном для применения
метода Линейного поэтапного рассмотрения, ограничимся указан-
ным механическим примером.
Для различных этапов движения получим уравнения
х -I- tiiix — ай для у > О,
.. (2.2.2)
х 4- сф — + а0 для у < 0.
Рис. 2.2. Модель механи-
ческой колебательной
системы с сухим тре-
нием
Простыми подстановками х «= кляу > О иж=г2 + ajto*
для у < 0 находим уравнение, общее для обоих знаков у:
= 0» (2.2.3)
Фазовые траектории, соответствующие этому уравнению, пред-
ставляют собой эллипсы с центрами соответственно при Xi.i = 0.
В. В. Мигулин др.
50
ГЛ. 2. КОЛЕБАНИЯ В ДИССИПАТИВНЫХ СИСТЕМАХ
Для построения фазовых траекторий, описываемых уравнением
„jfbl, (2.2.4)
e®i,a------------------------------*1.а
можно либо использовать прямое интегрирование уравнения
(2.2.3) и получить интегральные траектории, либо применить, на-
пример, метод изоклин. Семейство изоклин в верхней полупло-
скости (у > 0) представляет собой прямые у = — (1/А?<) (а0 + Wqx),
проходящие через особую точку типа центр с координа-
тами у = 0, х =—а0/&1. В нижней полуплоскости (у < 0) семей-
ство изоклин описывается уравнением
У= + у? (ао — ®оД
(2.2.5)
а соответствующие этому уравнению прямые проходят через
особую точку типа центр с координатами у = 0, 2г = ао/®о. При
построении полного фазового портрета системы мы должны вы-
полнить соответствующее построение для (у > 0) и для хл
(у < 0), сомкнув при у = 0 фазовые траектории верхней и нижней
полуплоскостей. В результате получаются фазовые траектории,
имеющие вид, показанный на рис. 2.3, на котором изображен фа-
зовый портрет идеализированной системы.
Из этого фазового портрета сразу виден основной характер
колебательных движений в данной системе, а именно затухание
•колебаний и прекращение дви-
жения после конечного числа
колебаний (при заданных на*
чальных условиях — отклоне-
нии и начальной скорости). На-
пример, одно такое движение
от начальных условий х = аг0,
У ~Уо (точка Р на фазовом
портрете системы) изображено
более жирной кривой. Фазовый
портрет (рис. 2.3) показывает
нам также одно характерное
свойство колебательных систем
с сухим трением, а именно на-
личие зоны застоя; в самом де-
с сухим трением ле, прекращение движения
(у = 0) может происходить при
любых значениях х в области — ло/®о х + Яо/Оо, откуда сле-
дует, что при каких-то начальных условиях система, будучи
представлена самой себе, не обязательно придет к состоянию
покоя в точке х = 0, у = 0. Зона застоя тем больше, чем больше
тренйе в системе.
§ 2.2. СИСТЕМЫ ПРИ РАЗЛИЧНЫХ ЗАКОНАХ ТРЕНИЯ
51
Подобное явление хорошо известно в механических системах,
и с ним часто встречаются в измерительных приборах, где коле-
бательным элементом служит подвижная система прибора с опре-
деленной массой, находящаяся под воздействием возвращающей
пружины и вращающаяся на оси с подпятником без смазки,
Заметим еще, что смыкание (сшивание) фазовых траекторий при
у = 0 обеспечивает также непрерывность производной dy/dx, т. е.
отсутствие изломов фазовой траектории, так как для у = 0 и в
нижней, и в верхней полуплоскостях dy/dx = как следует из
способа получения уравнения фазовых траекторий
di У’ dt ’ У'’ dx у * dx |j/=-o
независимо от вида функции Q (х, у), если тллт.кл опа сама не
обращается в нуль в этой точке. |~UOHTWP С R.I
(^Случай линейного трения, соответствующий для электриче-
ских систем наличию постоянного омического сопротивления при
линейности консервативных параметров, хорошо изучен и, как
известно, приводит к линейному дифференциальному уравнению
типа
х + 26х + (л^х = О, (2.2.6)
откуда при у — £
(2.2.7)
U* у
Подстановкой z = у/х последнее уравнение приводится к виду
dz г22бг Ц-ю®
dx zx ’
его интеграл легко найти, и мы можем написать
Infar* (z2.4- 26z 4-4)]= ^-arctg^^ + ln
где c — произвольная постоянная; <o2 = 4 — Возвращаясь
к переменным x и у, перепишем это решение в виде
fl^y2 4- 26ху 4-4а:8 - Сехр arctg^-^);, (2.2.8)
при 4 > б2 оно соответствует спиралям на фазовой плоскости,
описываемым уравнением
р2 = С1ехр(-^е). (2.2.9)
При выводе (2.2.9) из (2.2.8) мы воспользовались обозначениями
у + 6х = и, н = р sin 0, ах = v, v — р cos 0. При 4 < ®8 получаем
4»
52 гл- 2- КОЛЕБАНИЯ В ДИССИПАТИВНЫХ СИСТЕМАХ
кривые, описываемые уравнением
2) »’ + 26ч< + - С »>»)*'*, (2.2.9а
где у2 = б2 — а»®. Соответствующие этим двум случаям интеграль
ные кривые изображены на рис. 2.4.
При 6s < ®о мы имеем дело с затухающими колебаниями ли-
нейного осциллятора, фазовый портрет которых представляет со
бой совокупность спиралей, стягивающихся в особую точк’
типа фокус. Для б2 > система становится апериодической
я на фазовой плоскости движения изображаются (базовыми.
Рис. 2.4. Фазовый портрет линейной системы с затуханием меньше (в
и больше (б) критического
траекториями, имеющими вид кривых, сходящихся в особую
точку типа узел без обходов вокруг нее. В обоих случаях в дис-
сипативных системах особые точки (фокус и узел) устой
чипы и соответствуют единственному положению равновесия
системы — состоянию покоя, к которому система приходит из лю-
бых начальных условий, при любом начальном смещении или
скорости. 1
Случай о? < 0 может реализоваться, если вместо возвращаю-
щей силы действует отталкивающая. В этом случае уравнение фа-
зовых траекторий имеет вид
[у +(б + ш)х]1+б/“[у +(б - <1>)а:]‘-в/в = С, (2.2.1(Г
где (о2 = | ©J | + б2.
Уравнение (2.2.10) соответствует семейству гипербол с асимп
тотами при С = 0,
у = —(б±(о)х, (2.2;1Г
и мы имеем дело с особой точкой типа седло.
Пцдятнц к б зггзха*
§ 2.2. СИСТЕМЫ ПРИ РАЗЛИЧНЫХ ЗАКОНАХ ТРЕНИЯ 53
Отметим, что разобранные нами уравнения фазовых траекто-
рий для линейной системы остаются справедливыми и для нели-
нейных систем в ближней окрестности особых точек, так как для
такой системы в окрестности особой точки первого порядка мож-
но записать разложение нелинейной функции в ряд по степеням
малых вариаций | и ц по отношению к значениям, соответствую-
щим координатам особой точки х = xt, у = 0. Тогда для уравне-
ния х = /(х, у) в окрестности особой точки имеем
/(*< + ь о + Ч)-/(*,0) + + ^.^4 +...
Пренебрегая высшими степенями малых вариаций £ и ц и учиты-
вая, что f(X{, 0) = 0, получим уравнение фазовых траекторий в ок-
рестности особой точки
di) _aiS + a2n
dg П
рассмотренное нами выше (см. с. 51).
В системе, нелинейной за счет одного из консервативных па-
раметров, наличие линейного трения также приводит к качествен-
ному изменению фазового портрета системы по сравнению с фазо-
вым портретом подобной же системы в пренебрежении затуханием
(трением). При этом исчезают существовавшие в случае консер-
вативных систем особые точки типа центр и на их месте появля-
ются особые точки типа устойчивого фокуса или устойчивого
узла; а вместо континуума замкнутых фазовых траекторий возни-
кают свертывающиеся траектории, приводящие из любого места
фазовой плоскости (при любом начальном состоянии) к устойчи-
во:^ особой точке — состоянию покоя. Наличие нелинейного кон-
сервативного параметра в колебательной системе в первую
очередь сказывается на форме фазовых траекторий, которые
в этом случае не являются логарифмическими спиралями на всей
фазовой плоскости, а переходят в них в окрестностях особой точ-
ки тцда фокус. Для иллюстрации можно привести фазовый порт-
рет маятника при учете линейного трения (рис. 2.5). Описываю-
щее его дифференциальное уравнение имеет вид
х + 2бх + со® sin х = 0. (2.2.12)
В отличие от фазового портрета маятника без учета трения,
который был изображен ранее на рис. 1.4, здесь не появля-
ются убегающие траектории, нет замкнутых траекторий и нет зам-
кнутых разделительных линий — сепаратрис. Все траектории из
любой точки фазовой плоскости стягиваются к одной из точек ус-
тойчивого положения равновесия — устойчивым фокусам (х =•
= 2лп, р = 0). Это означает, что при наличии потерь система
в общем случае после конечного числа оборотов (вращений) ко-
54
ГЛ. 2. КОЛЕБАНИЯ В ДИССИПАТИВНЫХ СИСТЕМАХ
лебательным путем придет к устойчивому состоянию равнове-
сия — покою, соответствующему нижнему положению массы ма-
ятника относительно точки подвеса.
Введение затухания, обусловленного линейным трением, не
вносит в фазовые портреты новых особых точек, а лишь меняет
характер уже существующих и исключает возможность появления
новых точек типа центр в фазовых портретах диссипативных
систем.
Рис. 2.5. Фазовый портрет маятника с затуханием
па Рамен ное R
Наличие квадратичного трения при линейности консерва-
тивных параметров колебательной системы с одной степенью сво-
боды приводит к следующему дифференциальному уравнению:,
х + бт2 + ©ох == 0, (2.2.13)
где б > 0 при у > 0, б < 0 при у < 0.
Этот случай соответствует электрическому колебательному
контуру, содержащему постоянные индуктивность и емкость,
а также сопротивление, которое пропорционально протекающему
по нему току.
Уравнение фазовых траекторий имеет вид
dy
dx у
Вводя замену уг = z, проинтегрируем это уравнение
фазовых траекторий получим уравнение
Г «2
(2.244)
и тогда для
в)? <0„
Сехр(— 2бх) + — — х,
(2.2.15)
где С — постоянная интегрирования, определяемая, как обычно,
из начальных условий.
8 2.2. СИСТЕМЫ ПРИ РАЗЛИЧНЫХ ЗАКОНАХ ТРЕНИЯ
55:
Величина б скачкообразно меняется при прохождении значе-
ния у через нуль, и поэтому в данной задаче, как и для случая
'ухого трения, надо рассматривать решения для у > 0 и у < О
I строить отдельно фазовые траектории для верхней и нижней
половин «Базовой плоскости.
'’ис. 2.6. Интегральные кривые системы с квадратичным трением для
б > 0 (а) и для б < 0 (б)
Для б > О интегральные кривые описываются уравнением
Кривые, построенные для различных
ный на рис. 2.6, а. Для б < О
со: со:
С exp (2бя) + —а I
(2.2.156)
и соответствующие кривые изображе-
ны на рис. 2.6, б. Так как б > 0 при
у > 0, а б < 0 при у < 0, то для полу-
чения фазового портрета системы необ-
ходимо использовать верхнюю полови-
ну рис. 2.6, а и нижнюю половину
рис. 2.6, б, которые в совокупности да-
дут фазовые траектории движения в ис-
следуемой системе для всех вбзмЬж-
С, имеют вид, показан-
Рис. 2.7. Фазовый портрет
системы с квадратичным
трением
ных значений у. Этот фазовый портрет показан на рис. 2.7; из его
рассмотрения мы опять можем сделать вывод о затухающем
характере происход>йцих в системе колебательных движений,
приводящих независимо от начального состояния к устойчивой
особой точке — состоянию покоя системы (а: = 0, у = 0).
56
ГЛ. 2. КОЛЕБАНИЯ В ДИССИПАТИВНЫХ СИСТЕМАХ
Ограничивая качественное рассмотрение свободных колебаш
в линейных и нелинейных диссипативных системах разобранные
примерами, отметим, что в более сложных случаях, особенно да
нелинейных задач, целесообразно пользоваться методом изокли
построение которых позволяет составить представление об осно
ных чертах фазового портрета исследуемой системы и, тем самы
о характере совершаемых ею движений. При этом, как уже ук
зывалось, в диссипативных системах мы. должны получить нез
висимо от начальных условий такие движения, которые прив
дят систему к устойчивой особой точке — состоянию покоя, т.
к диссипации всей энергии, связанной с изучаемым движение!
§ 2.3. Построение фазовых траектории
свободных колебании методом Льенара
Познакомимся с возможностью приближенного графическо!
построения фазовых траекторий диссипативной системы с одно
степенью свободы при помощи приема, развитого Льенаром. Этс
метод предложен для случая, когда нелинейные свойства систем:
определяются исключительно законом зависимости силы трени
(или сопротивления) от скорости (или силы тока), причем сам
сила не зависит от независимой переменной (координата или зг
ряд). В таком случае уравнение движения имеет вид
У + YF(y) + а*х = 0; (2-3.1
здесь возвращающая сила линейно связана с отклонение!
— / (х) = (ОоХ.
К уравнению аналогичного типа мы придем, рассматрива
электрический контур с постоянными L и С и с сопротивлением
зависящим от тока. Уравнение Кирхгофа для подобного контур
(рис. 2.8) можно записать в виде
L^-+uH(i) + |g = °; (2.3.2
о» и
так как i = q, то, вводя ©о e 4LC, получим
Й+г“»(й + *"°- <2-3-г
Выберем соответствующий масштаб вре
меня, т. е. введем безразмерное время
т = ©ot (2.3.4'
Тогда в этом новом масштабе
d d ds 2 di
d? = “°d?’'
Рис. 2.8. Схема элект-
рического контура с
ЖО
§ 2.3. ПОСТРОЕНИЕ ФАЗОВЫХ ТРАЕКТОРИЙ МЕТОДОМ ЛЬЕНАРА 57
уравнение движения может быть записано в виде '
? + ф(<?)+? == О, (2.3.5),
^ + ф(у).+ ® = 0, (2.3.6)
”де q = х, q — у. Отсюда получаем
»-gff--------(2AJJ
U* <•* у
Пусть нам задан вид функции ф(у), изображенной графическж
®ис. 2.9. График функции ф(у),про-
порциональной напряжению на со-
противлении
ва рис. 2.9 (там же штриховой линией показан вид этой функ-
ции для случая постоянного сопротивления). Рассмотрим пло-
скость переменных х, у — фазовую плоскость нашей задачи. По-
строим график зависимости х = —ф(г/). Для любой точки фазовой
плоскости Р (х, у) можно получить направление касательной к фа-
зовой траектории, проводя перпендикуляр к прямой АР черов
точку Р(х, у) (рис. 2.10). Наклон этой касательной раной dy/dx,
в так как РВ = ф(у) + а:, АВ = у, то выражение (2.3.7) понййЫйй-
ет, что прямая АР перпендикулярна к касательной к фановой тра-
ектории в точке Р(х, у).
Производя подобное построение для последовательности ин-
тересующих нас точек (начиная с точки, характеризующей ис-
ходное состояние системы) и образуя на плоскости х, у достаточ-
но густую сетку (поле) направлений касательных к фазовым
траекториям, нетрудно построить искомую фазовую траекторию#
с желаемой точностью. |
При приближенном построении фазовой траектории по этоми
методу можно поступать следующим образом. Определим с по!
мощью описанного построения направление фазовой траектории
в исходной точке Р(х0, у0), соответствующей заданным началь*
58
ГЛ. 2. КОЛЕБАНИЯ В ДИССИПАТИВНЫХ СИСТЕМАХ
ным условиям (х,, у0). Заменяя на небольшом интервале фазовую
траекторию отрезком дуги окружности с центром в точке А
и повторяя ту же операцию для конца этого отрезка дуги с но-
вым мгновенным центром, определим новое направление касатель-
ной к траектории. Продолжив подобные операции необходимое
число раз, получим ломаную кривую линию, с необходимой точ-
ностью воспроизводящую ход действительной фазовой траектории.
Для диссипативных систем, у которых знак ф(у) обязательно
совпадает со знаком у, наклоны фазовых траекторий во всех точ-
ках фазовой плоскости таковы, что сами траектории проходят
внутрь окружности, которую можно провести через данную точку
с центром в начале координат. Это справедливо для любой формы
функции ф(у), определяющей характер зависимости потерь от
состояния системы, при условии, что система остается диссипа-
тивной. Такая окружность являлась бы фазовой траекторией на-
шей системы для ф(у)^О, т. е. в отсутствие затухания. Эти со-
ображения подтверждают заключение о том, что в случае дисси-
пативной системы фазовые траектории соответствуют более или
менее быстрому уменьшению амплитуды колебаний и имеют вид
спиралей или сходных с ними кривых, стягивающихся в начало
координат (состояние покоя).
Следует подчеркнуть, что в изложенном методе Льенара, учи-
тывающем нелинейную зависимость силы трения от скорости
(или напряжению на сопротивлении от силы тока), нужно
знать лишь ее графическое изображение, которое может быть по-
лучено и экспериментально. При этом построении, очевидно, нет
никаких существенных ограничений на вид фукции потерь ф(у)
и ее мгновенное значение, так что данный метод с одинаковым
успехом применим как к случаю малых, так и к случаю больших
потерь, а также к системам с большой и малой нелинейностью
в диссипативном элементе. Последнее обстоятельство придает ме-
тоду Льенара большую общность и позволяет с его помощью
изучать колебательные свойства систем при изменении затухания
от малых до весьма больших значений и с учетом различных за-
конов трения (как линейного, так и существенно нелинейных за-
конов) . Заметим, что метод Льенара широко используется для по-
строений фазовых портретов автоколебательных систем с разными
законами нелинейности, а именно для нахождения устойчивых
предельных циклов — замкнутых фазовых траекторий.
С помощью небольшого усложнения методики Льенара пред-
ставляется возможным производить также построение фазовых
траекторий для системы, в которой кроме потерь, зависящих про-
извольным, в том числе нелинейным, образом от скорости (силы
тока), имеется еще и нелинейная жесткость (нелинейная ем-
кость). Пусть мы имеем электрический колебательный контур
с нелинейным сопротивлением и конденсатором с сегнетоэлектри-
ком. Уравнение, описывающее колебания в подобной системе,
§ 2.3. ПОСТРОЕНИЕ ФАЗОВЫХ ТРАЕКТОРИЙ МЕТОДОМ ЛЬЕНАРА 59
имеет вид
х + ф(х) + ф(я) = 0, (2.3.8)
где х = q — заряд на конденсаторе. Время измеряется в новом
масштабе т — a>ot, где а* = i/LC0, а напряжение на емкости,
возникающее при сообщении этой емкости заряда д, равно
“с= £- = -^Ф(д), (2.3.9)
х
построим функции ф(х) и
Рис. 2.11. Модифицированное
построение Льенара в случае
нелинейных Я и С
а ф (д) — по-прежнему функция, характеризующая силу трения.
В системе координат х и у =
—ф(у) (рис. 2.11). Для произволь-
ной точки Р(х, у) найдем соот-
ветствующее значение ф(а:) (точ-
ка В) и отложим его на оси абс-
цисс в направлении к началу ко-
ординат от точки А до точки С
(точки пересечения прямой ВС с
осью абсцисс под углом в 45°).
Тогда отрезок АС будет равен от-
резку АВ и, следовательно, ф(х).
Соединив далее точку С с точкой
Е, проведем прямую FD, парал-
лельную СЕ, и, тем самым, пере-
несем отрезок, равный ф(у), на
ось абсцисс и прибавим его к от-
резку АС, равному ф(х). Отрезок
AD будет равен ф(х)+ф(у). Тог-
да очевидно, что прямая DP будет перпендикулярна к касатель-
ной к фазовой траектории в точке Р(х, у), так как
dy_ = _ Ф (у) + <р (ж)
dx у
(2.3.10)
Проводя подобное построение для интересующей нас последо-
вательности точек, мы можем построить с требуемой точностью
и саму фазовую траекторию, так же как и в предыдущем случае.
Заметим, что это построение переходит в предыдущее для случая
линейной емкости, когда С — Со и ф(т) = х.
В рассматриваемом случае нелинейной диссипативной системы
при нелинейной емкости фазовые траектории не обязательно во
всех точках направлены внутрь окружности, проходящей через
данную точку, с центром в начале координат. Но это не лишает
справедливости утверждения, что фазовые траектории для иссле-
дуемой системы при наличии потерь всегда направлены вйутрь
тех замкнутых фазовых траекторий, которые имейи бы место для
данной системы с данным видом нелинейности при исключении
из нее потерь (при ф(г/)^О, т. е. для консервативного случая).
60
ГЛ. 2. КОЛЕБАНИЯ В ДИССИПАТИВНЫХ. СИСТЕМАХ
Окружности же с центром в начале координат просто первт
стают быть фазовыми траекториями для консервативной системы
при наличии в ней нелинейности. Это соответствует графическо-
му воспроизведению на фазовой плоскости процесса, отличающее
гося от гармонического.
Приведенный выше способ приближенного построения фазо-
вых траекторий остается в силе и для нелинейной системы без
потерь. Можно также графически найти направление касательной
к фазовой траектории в любой ее регулярной точке, если известен
график функции ф(х), характеризу-
ющей нелинейность консервативного
элемента в системе. В таком консер-
вативном случае на фазовой плоско-
сти надо построить в качестве вспо-
могательной кривую ф (х) и, как ука-
зывалось выше, проведя из точки В
линию под углом 45° к оси абсцисс
BiCt, найти точку Ct (рис. 2.12). Лио-
ния CtPt будет перпендикулярна к
касательной к фазовой траектории' в
точке Pi(х, у). Это по-прежнему еле*
дует из основного уравнения для та-
кой системы
Рис. 2.12, Модифицированное
построение Льенара для си-
стемы без потерь
х 4- ф (х) = 0, или у 4- ф (х) = 0;
dy = _ ф(д)
dx у
(2,3.11)
Проводя подобные построения указанным выше способом для
последовательности точек, можно получить ломаную линию, ко-
торая сколь угодно близко будет воспроизводить искомую фазо-
вую траекторию движения в нашей нелинейной консервативной
системе.
§ 2.4. Исследование свободных колебаний
в нелинейных диссипативных системах с одной степенью свободы
методом поэтапного рассмотрения
Точное решение задачи о свободных колебаниях в нелинейных
диссипативных системах в подавляющем большинстве случаев
наталкивается на весьма большие и очень часто неразрешимые
трудности. Поэтому (как и в случае консервативных систем) при-
ходится искать методы приближенного расчета, которые с задан-
ной степенью точности позволили бы найти количественное соот-
ношения, определяющие движения в исследуемой системе при
заданных начальных условиях. Из ряда возможных приближен-
ных методов рассмотрим в первую очередь метод поэтапного рас-
$ 2.4. ПОЭТАПНОЕ РАССМОТРЕНИЕ НЕЛИНЕЙНЫХ СИСТЕМ
61
смотрения. Мы уже указывали, что этот метод заключается в том,
что в соответствии со свойствами системы все движение в ией
заранее разбивается на ряд этапов, каждый из которых соответ-
ствует такой области изменения переменных, где исследуемая
система с достаточной точностью описывается или линейным диф-
ференциальным уравнением, или нелинейным, но заведомо интег-
рируемым уравнением. Записав решения для всех выбранных
этапов, мы для заданных начальных условий находим уравнение
движения для первого этапа, начинающегося с заданных началь-
ных значений. Значения переменных (t, х, у = х) конца первого
этапа считаем начальными условиями для следующего этапа.
Повторяя эту операцию продолжения решения от этапа к этапу
со сшиванием поэтапных решений на основе условия непрерыв-
ности переменных х и у = х, мы можем получить значения иссле-
дуемых величин в любой момент времени. Если разбиение всего
движения системы на этапы основано на замене общей нелиней-
ной характеристики ломаной линией с большим или меньшим
числом прямолинейных участков, то подобный путь обычно назы-
вается кусочно-линейным методом. В этом случае на каждом эта-
пе система описывается линейным дифференциальным уравнени-
ем. Условие сшивания решений на смежных этапах — непрерыв-
ность х и у = х — необходимо и достаточно для системы с одной
степенью свободы при наличии в ней двух резервуаров энергии
й двух форм запасенной энергии (потенциальной и кинетической,
электрической и магнитной). Существование двух видов резервуа-
ров энергии является также необходимым условием для возмож-
ности осуществления в системе свободных колебательных движе-
ний, хотя для диссипативных систем оно недостаточно. При боль-
шом затухании система и с двумя резервуарами энергии можёт
оказаться неколебательной — апериодической.
Применение метода поэтапного расчета нелинейных диссипа-
тивных систем мы проиллюстрируем несколькими примерами
и начнем рассмотрение со случая системы с сухим трением, кото-
рая уже подвергалась качественному исследованию с помощью
построения ее фазового портрета.
ГТэУравнение, описывающее движение в колебательной системе
С-сухим трением, как мы уже видели, имеет вид
X + COqZ = а,
где а = — Оо при ж > 0 и а = + а0 при х < 0. Подстановками
х = хг — aol<i>o для х > 0 и х = ха+а0/©о для х < 0 получим
уравнение, одинаковое и для хи и для хг,
®1,а + 2 = 0»
его решение
ii.z = Л cos (©o^)+-Bsm(©ot). 12.4.1)?
<j2 Гл- 2- КОЛЕБАНИЯ В ДИОСИПАТИНТТЬТХ СИСТЕМАХ
Рис. 2.13. График движения в системе с
сухим трением, полученный методом по-
этапного рассмотрения
Задаёмся начальными условиями
t = 0, х=А, 0 = 0. (2.4.2)
Для первого этапа, соответствующего х = 0 < 0, 0 t =$ л/а0,
имеем
х = cos (aot) + Вг sin (aet) + aja},
или с учетом начальных условий
х = (х® — a®/tt>®)cos(a0t) + д®/а®. (2.4.3)
В конце этапа t = л/а0, ^л/ш0 = — я® + 2a®/aJ. Это значение хя/0в
следует считать началь-
ным для второго этапа.
Второй этап соответ-
ствует х = у > 0; л/а® <
2л/а0. Так как при
t =л/а0 х = — х0 + 2a0/aJ^
то
х = (х0—3a0/a®) cos(a0f) —
— a®/a®. (2.4.4)
К концу этого этапа
при t — 2 л/а о получаем
•^2Я/й>0= Х0 —4а®/<о®. Для
рассмотрения второго периода колебаний надо продолжить рас-
смотрение по этапам.
Третий этап соответствует х = у < 0, 2л/ао < t Зл/а0 и
х = А3 cos(a0t) + В3 sin (aot) + д0/а®.
Для t = 2л/а0,ж = х, — 4д0/а®, у = 0 имеем
х = (х® — 5д0/а®) cos (aot) -F а®/а®. (2Ц.5)
К концу этапа при t = Зл/а0 получаем Хэлд^ *= — хо +
Аналогично для следующего этапа при у > 0 и Зл/а0 t 4л/а®
находим
х = (х0 — 7д0/а§) cos (aot) — a0/a®t (2.4.6)
М И конце этапа x4Jl/M(j = х0 — Sa^a®.
Полученное решение представлено графически в координатах
t, х на рис. 2.13.
В соответствии с основными особенностями системы с сухим
трением подобные расчеты имеют смысл лишь до тех пор, пока
мри у = 0 | х [ > ag/а®, т. е. пока система не пришла в зону эа-
5 2.4. ПОЭТАПНОЕ РАССМОТРЕНИЕ НЕЛИНЕЙНЫХ СИСТЕМ
63
стоя. Если в момент наибольшего отклонения возвращающая сила
окажется меньше силы трения, то система не будет продолжат^
свое движение и останется в зоне застоя. За каждый период ко-
лебания амплитуда уменьшается на величину 2Д=4ао/со§. Таким
образом, через п целых периодов отклонение будет равно
|я| = х0 —(4ао/©о)п- (2.4.7}
Отсюда следует, что система совершит только конечное числа
колебаний, определяемое из условия 0 < х0 — bnajaft < Ия
этого условия вытекает, что п удовлетворяет
неравенству
в д -------------в — ___
4ао/“о 4ао/“о 4
качестве другого примера поэтапного
рассмотрения сильно нелинейной колеба-
тельной системы обратимся к движениям,
которые могут происходить в контуре, со-
стоящем из емкости, сопротивления и индук-
тивности с легко насыщаемым ферромаг-
нитным сердечником. Для такого контура,
рис. 2.14, уравнение Кирхгофа запишем в виде
(2.4.8)
Рис. 2.14. Схема кон-
тура, содержащего
катушку индуктивно-
сти с ферромагнит-
ным сердечником
изображенного на
+ + <2-4-9*
Здесь Ф — магнитный поток, пронизывающий п витков обмотки.
Запишем это уравнение иначе:
п^§ + Лг + г?==0- <2-4Л0>
С*» U4> О - .
Примем, что кривая намагничивания сердечника имеет идеализи-
рованный вид, показанный на рис. 2.15. Тогда, пренебрегая из-
менением магнитного потока при насыщении сердечника (что до-
пустимо при малом числе витков обмотки и высокой магнитной
проницаемости сердечника достаточно большого сечения), мы мо-
жем считать, что зависимость Ф от тока изображается графиком,
приведенным на рис. 2.16. Подобная идеализация позволяет нам
разбить процессы в системе на этапы, в которых |i| ie или
lil > io. Для lil io справедливо уравнение
2^ + Яд + ^г = 0, (2.4.11}
где L = п d&/di.
Для lil > i0 получаем дифференциальное уравнение первога
порядка
7?л + 1д = 0. (2.4.12}
* о
ГЛ. 2. КОЛЕБАНИЯ В ДИССИПАТИВНЫХ СИСТЕМАХ
&
Более строгое рассмотрение с учетом изменения Ф в облас
насыщения магнитного поля привело бы нас к уравнению с
лым параметром X типа
Xq + Rq + q = 0. (V-
Решение этого уравнения для малого X, взятое для достато
большого интервала времени, близко к решению написанг
выше уравнения первого порядка (2.4.12).
Рассмотрим теперь движения в исследуемой системе для
данных начальных условий. Пусть при t — 0, q = п- w л = ’ =
Рис. 2.16. Идеализированная кри
зависимости магнитного поток-
от тока I обмотки
Тогда в качестве первого этапа необходимо рассматривать прог
при |i| < 10, и мы получим
Lq + Rq + q = 0, или q + 26g + а®д == 0, (2л
С
где 26 = R/L, а>о = i/LC.
Решение этого уравнения имеет вид
q ~ e~i( [A cos (at) + В sin (cot)], (2.4
где а2 = а2 — 62. Из начальных условий находим
q0 cos (at) + A qe sin (at)], i = q = — -J- q0e~6i sin (a
(2л
Если начальный заряд q0 достаточно велик и через время
< л/2а значение i — q стало равным — i0, то процесс перех<
из первого этапа во второй. Конечные значения q и i = q г
мент времени ti равны
сов(а^) + •^sin(cot1)
-^о=—e<1sii
s 2.4. ПОЭТАПНОЕ РАССМОТРЕНИЕ НЕЛИНЕЙНЫХ СИСТЕМ
65
Решение идеализированного уравнения второго этапа имеет вид
g = = (2.4.17)
где D — начальная амплитуда заряда, т = RC — постоянная вре-
мени, Отсюда вытекает однозначная связь между q и i, даваемая
соотношением i = — (1/т)д.
Это условие может оказаться в противоречии с полученными
нами значениями qtt и — г0, явившимися результатом движения
системы от исходного состояния q =q0, i = 0 к границе первого
этапа. Значения qtt и —i0 должны служить начальными условия-
ми для движения во время второго этапа. Однако здесь получает-
ся одно лишнее начальное условие, так как для определения
исходного движения записанное нами идеализированное уравнение
Первого порядка требует только одного начального условия. Этот
«конфликт» между идеализированным законом движения системы
и начальными условиями требует введения дополнительных усло-
вий, если мы хотим остаться в рамках сделанной идеализации
(Ф = const при li| > i0) и не хотим исследовать решений урав-
нения (2.4.13), т. е. уравнения второго порядка.
Таким дополнительным условием является допущение беско-
нечно быстрого изменения той переменной, изменение которой не
связало с изменением запаса энергии системы.
В пашей задаче в рамках второго этапа возможно произволь-
ное мгновенное изменение i — q до значений, определяемых вы-
ражением (2.4.16), так как при постоянстве Ф изменение i не
связано с изменением магнитной энергии системы. Величина же
q определяет электрическую энергию заряженного конденсатора,
и ее скачкообразное изменение означало бы расход или потребле-
ние бесконечной мощности, что физически бессмысленно.
Естественно, в реальной системе не может быть бесконечно
быстрого изменения тока, но весьма слабая зависимость магнит-
ного потока от тока при li| > i0 эквивалентна исчезающе мало-
му значению индуктивности, и в подобной системе вполне допу-
стимы очень быстрые изменения силы тока. Таким образом, в на-
шей идеализированной системе, вырожденной по отношению
к полной системе с двумя резервуарами энергии, мы вводим ска-
чок г, ликвидирующий «конфликт» между возможными движе-
ниями системы и заданными начальными условиями и приводя-
щий значение i от значения—i0 к значению it± = — При
этом q не претерпевает разрывов непрерывности, так как на всех
этапах движения величина q определяет запас электростахиче-
ской энергии Ne = #2/2С.
Дальнейший процесс в системе будет протекать в соответствии
с решением уравнения второго этапа. Величина заряда будет из-
5 В. В. Мигулин и др.
66
ГЛ. 2. КОЛЕБАНИЯ В ДИССИПАТИВНЫХ СИСТЕМАХ
меняться по закону q — qtl exp [— (t — tj/x], а ток — согласно,
выражению i = — (<7ti/T) exP I— —М/х1- Этот экспоненциальный
процесс будет продолжаться до тех пор, пока значение i не ста-
нет вновь равным —г0.
Если в момент времени t = t2 мы приходим к концу второго
этапа, то
= — 10 = — Ыт:) ехР I— — *х)/тЬ
3ia = <ltt exp [— (t2 — t x)/t] = Tiot
откуда можно определить t2. .
С этого момента начнется движение, отвечающее этапу изме-
нения Ф, и для третьего этапа мы вновь должны воспользоваться
решением вида
q = exp [— б (t — £2)]{-4 cos [a (t —t2)] + В sin [a (t — f2)]}t (2.4.18)
причем А и В находят обычным способом.
Как нетрудно показать, указанные значения qtt ъ itt — — га
соответствуют экстремуму функции
q = — exp [—6 (t — t2)] X
X {(Ba — 64)cos[a(t — i2)] — (4a + 6B)sin [a(t —12)]}. (2.4.19)^
Вследствие потерь дальнейшее движение уже не будет выводить
значения i за пределы ±i0 и вплоть до полного затухания дви-
жение в системе будет описываться уравнением (2.4.14) и его
решением (2.4.15) с определенными обычным образом коэффи-
циентами.
Для начала этого третьего (и последнего) этапа при t = t2
получаем
<1 = ?t2 = \ = i0 = 5<3W — 64ts,
откуда
Таким образом, окончательные выражения для q и i для треть-
его этапа будут иметь вид
q = exp [— б (t — i2)] [qt cos [a (t — Q] + -1 (f>qt + i0) sin [a(f—f2)]L
(2.4.20)
i = exp [— 6(t—i2)] p0 cos [a (f — i2)J + -~-[afo(2 + 6i0)sin [a(£—t2)]j.
Так как, согласно закону изменения g, во втором этапе д*2 = тгог
g 2.4. ПОЭТАПНОЕ РАССМОТРЕНИЕ НЕЛИНЕЙНЫХ СИСТЕМ
07
то окончательно для третьего этапа мы можем записать
выражения
q = tD exp [— б (i — f2)] cos [a (t — i2)] + -i- (6r + 1) sin [©(t —
(2.4.21)
i = i0 exp [— 6 (t —t2)] fcos [a (t —12)] + (<ofr + б) sin[a(f — i2)A-
Этот затухающий процесс имеет один и тот же характер при
любых начальных значениях д0. Каков бы ни был начальный за-
ряд емкости, система после апериодического процесса в области
Ф = const придет к затухающе-
му движению в области I г| г0
с одними и теми же значения-
ми q и г, т. е. q — tia, i — ~ i0.
Рассмотренный процесс бу-
дет соответствовать фазовой
траектории на фазовой плоско-
сти q, q — i, показанной на
рис. 2.17. Все другие фазовые
траектории, отвечающие дру-
гим начальным условиям,
должны иметь тот же характер,
что и на рис. 2.17. В областях
|i| > г0 принятая идеализация
допускает только одно движе-
ние, соответствующее един-
ственной фазовой траектории
i = — qlx. Из любой другой
точки фазовой плоскости в этих
областях система должна скач-
ком с бесконечно быстрыми из-
Рис. 2.17. Фазовая траектория дви-
жения в контуре с насыщающимся
сердечником
менениями i перейти или на
границу области с дальнейшим движением по одной из спиралей,
или на единственную траекторию, соответствующую экспоненци-
альному разряду емкости.
Если построить графики изменения q и i в функции времени,
то для выбранных нами начальных условий они будут иметь вид,
показанный на рис. 2.18.
При других начальных условиях могут появиться и два скач-
ка (например, если в начальный момент t = 0, q = qQ и i > i0);
тогда сразу же движение начнется с первого скачка тока до зна-
чения i0, а затем после прохождения по первому этапу произойдет
второй скачок, приводящий систему в режим апериодического
разряда емкости, как наблюдалось в разобранном примере.
5*
68
ГЛ. 2. КОЛЕБАНИЯ В ДИССИПАТИВНЫХ СИСТЕМАХ
Учет слабого изменения Ф в областях насыщения и, следова-
тельно, рассмотрение уравнения второго порядка на всех этапах
процесса избавляет от необходимости допускать скачки и дает
возможность найти непрерывное решение задачи для всех воз-
можных значений q и i. Но такое уточнение связано с большими
трудностями и не дает интересующих нас принципиально новых
качественных результатов, так что для общего рассмотрения хода
процесса свободных колебании в изучаемой системе сделанная
Рис. 2.18. График изменения q (а) и i (б) в функции времени для колеба-
тельного контура с насыщающимся сердечником
идеализация вполне оправдана. Если жо лас будет интересовать
сама форма быстрого процесса перехода от одного типа движения
к другому, тогда, конечно, необходим более последовательный
и строгий анализ. При этом следует иметь в виду, что изучение
более тонких деталей схематически рассмотренных процессов тре-
бует также использования более точной аппроксимации реаль-
ных кривых намагничивания.
В действительности нет скачкообразных изменений хода кри-
вых намагничения, а магнитные свойства сердечников могут из-
меняться лишь непрерывно, хотя и достаточно быстро в опреде-
ленные фазы процесса.
3. Разберем еще один пример колебаний в диссипативной си-
стеме посредством поэтапного рассмотрения. Проанализируем ко-
лебания в уже описанном электрическом колебательном контуре
с катушкой индуктивности, содержащей ферромагнитный сердеч-
ник, но в отличие от ранее принятой идеализации не будем вво-
дить в рассмотрение насыщение, а учтем наличие нестационарной
§ 2.4, ПОЭТАПНОЕ РАССМОТРЕНИЕ НЕЛИНЕЙНЫХ СИСТЕМ
69
петли в кривой намагничивания. Будем считать, что петли гисте-
резиса можно приближенно представлять так, как показано на
рис. 2.19 для разных амплитуд периодически изменяющегося Н.
Уравнение колебаний в контуре (см. рис. 2.14) имеет вид
+ + ! где q = fid*; (2.4.22)
О» Cbk U J J
как и раньше, Ф — полный магнитный поток, пронизывающий все
п витков обмотки катушки.
Рассматривая движение по этапам, получаем следующие урав-
нения.
Для этапов, где п d<&/di — L, имеем
g + 2ftg + g = 0; (2.4.231
здесь q — заряд на емкости, в качестве масштаба времени взято
т = (о0/ (®о = 1/ZC), 2ft = Rjia0L.
Для этапов, где Ф = const, находим
? — 7?(ооС q’
(2.4.24)
Рассмотрим сначала этап возрастания i и Ф(г)' от начальных
условий qt~0 = — gc, qx-a = 0 до макси-
мального значения q (п соответствен- Ф ц
но Ф); потом проанализируем процесс,
описываемый уравнением (2.4.24), далее —~7
возьмем этап убывания Ф(г), когда вновь у *2/
вступает в силу уравнение (2.4.23), вплоть /С—7/
до достижения наибольшего отрицатель- /д
ного значения i = г3 и Ф (i3). Затем опять 7/7 Т/Т
следует этап постоянства Ф и, начиная //LJ//
от значения I = г4, движение описывается // / <
уравнением (2.4.24) вплоть до наступле- / ~ /
ния нового возрастания Ф(г).
При этом происходит постепенный пе-
реход от одной петли гистерезиса к дру- Рис 219 ИдеаЛизиро-
гой, соответствующей меньшим значениям ванные кривые гисте-
тока и магнитного потока. Строго говоря, резиса
здесь происходит некоторое отклонение
хода зависимости Ф(г) от выбранного нами идеализированного
закона, но при не слишком широкой петле гистерезиса оно
достаточно мало, и учет поправки при данном приближенном
рассмотрении не представляется оправданным.
Повторяя последовательно подобное исследование по этапам,
можно получить выражение для изменения q и q во времени. На
фазовой плоскости соответствующий фазовый портрет системы
70
ГЛ. 2. КОЛЕБАНИЯ В ДИССИПАТИВНЫХ СИСТЕМАХ
имеет вид, изображенный на рис. 2.20. Фазовые траектории буду
нредставлять отрезки спиралей, соединенные отрезками прямой
q — — q/totfiC в топках i == q, соответствующих началам и концам
этапов Ф = const. Таким образом, мы видим, что при учете ги-
стерезисных явлений должно происходить более быстрое умень-
шение амплитуды свободных колебаний исследуемого контурь
Это обусловлено тем, что существование гистерезисной петли при-
водит к потерям в материале сердечника за счет работы на ег<
Перемагничивание, вызванным взаимодействием элементарных об-
ластей намагничивания с остальной массой вещества сеолечникь.
Рис. 2.20. Фазовый портрет ко-
лебательной системы с потерями
и сердечником, обладающим ги-
стерезисом
Рис. 2.21. Фазовый портрет иде-
ального контура без потерь с ка-
тушкой индуктивности с сердеч-
ником, обладающим гистерезисом
и в конечном счете — к переходу магнитной энергии в тепло-
вую за счет работы, расходуемой на переориентацию указанных
областей, или доменов.
По этой причине наличие ферромагнитного сердечника с ги-
стерезисными свойствами в индуктивности колебательного конту-
ра даже при отсутствии в нем активного сопротивления приводит
к появлению потерь, и такая система оказывается принципиаль-
но диссипативной.
На рис. 2.21 показан фазовый портрет подобного идеального
контура, не обладающего активным сопротивлением, но содержа-
щего индуктивность с сердечником, имеющим гистерезисные свой-
ства. Здесь фазовая траектория составляется из полуокружностей,
радиус которых уменьшается в зависимости от ширины петель
гистерезиса. В этом процессе этап движения, соответствующий
Ф = const, происходит мгновенно, что связано с отсутствием в
изучаемом контуре активного сопротивления, которое ограничи-
вало бы скорость изменения q.
§ 2.5. МЕТОД МЕДЛЕННО МЕНЯЮЩИХСЯ АМПЛИТУД
71
§ 2.5. Метод медленно меняющихся амплитуд
и его применение к расчету колебаний
в слабо нелинейных системах с малым затуханием
Изложенный в предыдущем параграфе метод поэтапного рас-
смотрения, как указывалось, не накладывает никаких ограниче?
нии на нелинейность исследуемой колебательной системы и при-
годен для любых законов затухания. Однако этот метод обычно
приводит к громоздким вычислениям или сложным графическим
построениям, причем полученные результаты относятся только
к одному виду движения при заданных начальных условиях и не
позволяют наглядно представлять общие особенности движений
системы при различных условиях и разных значениях ее пара-*
метров. Поэтому весьма важно рассмотреть те приближенные ме-
тоды, которые хотя бы для ограниченного класса колебательных
систем могли бы дать единое решение для любого момента коле-
бательного процесса при произвольных начальных условиях. Та-
кого рода приближенный метод был в свое время предложен Ван
дер Полем и получил в дальнейшем название метода медленна
меняющихся амплитуд (ММА). Он позволяет весьма успешно ис-
следовать класс колебательных систем с малой нелинейностью
и малым затуханием. Электрические контуры с ферромагнитным
сердечником рри малых потерях на гистерезис в области значений
амплитуд магнитного поля, далеких от насыщения, контуры с не-
линейными емкостями при аналогичных ограничениях, линейные
контуры с постоянными L и С при малых затуханиях (независимо
от их линейности или нелинейности), многочисленные механиче-
ские аналоги указанных выше высокодобротных линейных и не-
линейных систем составляют тот класс систем, в которых движе-
ния можно приближеннр рассчитывать методом медленно меняю-
щихся амплитуд. Условия
немалого яатухапия~в~~СИ7Г
стемы И решения описывающего ее дифференциального уравнения
приводят к тому, что движение в ванном случае будет близко
к точно гармоническому, соответствующему линейной консерва-
тивнои системе.
‘ Для линейной консервативной системы с одной степенью сво-
боды уравнение, описывающее колебания в ней при соответствен?
но выбранном масштабе времени, нам уже известно: х + х -Д
В этом случае масштаб времени т определяется соотношением
т = (Bot, где <в» — круговая частота свободных колебаний системы,
t — обычное время.
Для системы, близкой к линейной консервативной,
х + х = ft(x, х), '(2.5.1)
где (ж, х)— произвольная регулярная в общем случае нелиней-
малой нелинейности подпбит.гг гигтем
цывнис1И'~измёнения свойств си-
72
ГЛ. 2. КОЛЕБАНИЯ В ДИССИПАТИВНЫХ СИСТЕМАХ
жая функция координаты х и скорости ее изменения, значения
которой остаются малыми по сравнению со значениями членов,
стоящих в левой части уравнения (2.5.1) (в силу слабой нели-
кейности параметров и малых потерь в системе).
Если соответствующим выбором масштаба координаты х рас-
сматривать такие изменения переменной х, при которых она по-
рядка единицы, то правая часть уравнения (2.5.1) будет мала по
сравнению с единицей. Поэтому это уравнение целесообразно
записать в виде
х + х = р/(х, х), (2.5.2)
где / (х, х) — заданная ограниченная регулярная функция, не свя-
занная условиями малости, а ц — малый параметр (р. < 1), зна-
чение которого характеризует степень близости данной системы
к линейной консервативной. Исследуемая система переходит в по-
следнюю при р. 0. При р = 0 решением уравнения (2.5.2) будет
л = a cos т + Ъ sin т, где а и Ъ — постоянные, задаваемые началь-
ными условиями, Т. е. начальным запасом колебательной энергии
н системе.
Следуя Ван дер Полю, считаем, что для р ¥= 0, но р < 1 ре-
шение может быть записано в виде
х = и cos т + v sin т, (2.5.3)
где и(т) и п(т)—медленно меняющиеся функции (медленно ме-
няющиеся амплитуды)*), так что й и и v < v. Перейдем от пе-
ременных х и х к переменным и и г посредством соотношений
х = и cos т + v sin т, х = — и sin т + v cos т,-И> (2.5.4)
что эквивалентно введению дополнительного условия/хвязываю-
«цего й и V-.
й cos т + i sin т = 0. (2.5.5)
Йспользуя (2.5.4) п (2.5.5), можно от уравнения (2.5.2) перейти
к системе
й = — p/(ucos т + г sin т; —u sin т + v cos x)sin т,
(15.6)
г = р/(и cos х + v sin т; —и sin т + v cos t)cos т.
Эта система двух уравнений первого порядка точно соответствует
исходному уравнению (2.5.2) второго порядка. Она не дает ника-
ких преимуществ в смысле упрощения задачи. Однако из этой си-
стемы следует, что производные й и г> имеют порядок малости
р.^1, что подтверждает справедливость выбранных условий
й < п, г> V. Существенный шаг в сторону нахождения прибли-
♦) В дальнейшем изложении метода медленно меняющихся амплитуд
(ММА) мы будем следовать Л. И. Мандельштаму и Н. Д. Папалекси, кото-
рые в своей работе (ЖЭТФ, 1934, т. 4) впервые дали математическое
обоснование метода ММА и областей его применения.
S 2.5. МЕТОД МЕДЛЕННО МЕНЯЮЩИХСЯ АМПЛИТУД
73
женного решения можно сделать, если заменить мгновенное зна-
чение и и v их средними величинами за каждый период колеба-
тельного процесса, равный 2л. Произведя усреднение по периоду
от 0 до 2л, мы приходим к системе так называемых «укорочен-
ных» уравнений -__________________________________
2Я 2Я .
и я — J Н/ (и1^т) sinx dxt V = ~ J р/ (ux vtx) COST du. (2.5.7)
О О I
Эта система вида
й = ф(и, v), v = ф(гг, и}
(2.5;8)
правых частях в явном виде времени т, и в»
можно проинтегрировать, получая временной
Рже. 2.22. Системы коорди»
ват х, и а,»
уже не содержит в
многих случаях ее
ход медленно меняющихся • функций
п(т) и п(т), являющихся «амплитуда-
ми» искомого решения.
Систему уравнений (2.5.8)’ можно
получить из системы (2.5.6), если пра-
вые части разложить в ряд Фурье как
периодические функции с периодом 2л
и отбросить все осциллирующие члены.
В этом отбрасывании осциллирующих
членов и заключается «укорочение»,
приводящее от системы уравнений, точ-
но соответствующей исходному уравне-
нию, к приближенным укороченным
уравнениям.
Переход от переменных х, х к пере-
менным и, v эквивалентен переходу от
одной декартовой системы координат х, х к другой, также прямо-
угольной с общим началом координат, повернутой на угол т п»
часовой стрелке (рис. 2.22). Это означает, что система координат
и, v в координатной плоскости х, х вращается с угловой часто-
той, равной единице. Поэтому в случав линейной консервативной
системы изображающая точка Р описывает окружность в фазо-
вой плоскости координат х, х, вращаясь с периодом 2л, а ъ
плоскости переменных и, v остается неподвижной. Это соответ*
ствует гармоническому колебанию с амплитудой А = Уи3 4- V*.
Полученная система укороченных уравнений позволяет от'ьв-
скивать состояния равновесия для переменных вир, что соответ-
ствует стационарным движениям.
Для стационарных движений (состояний) »=а?,к = &о в4*
= г = 0, и тогда
(2.5.9)
<р(аъ Ь,) = 0, Ь<) = 0;
так как й — v = 0.
74 ГЛ. 2- КОЛЕБАНИЯ В ДИССИПАТИВНЫХ СИСТЕМАХ
Решения системы (2.5.9) должны дать возможные стационар-
ные амплитуды гармонических движений, приближенно отра-
жающих реальный стационарный процесс.
Устойчивость стационарных движений можно определить из-
вестййм методом Jвозмущений, заключающимся в составлении
уравнений для малых вариаций вокруг найденных стационарных
значений u = a«, v = bt, соответствующих равновесию вспомога-
тельной системы, описываемой укороченными уравнениями.
Если задать и = а( + ц, v = bf + £, то для вариаций ц и £ име-
ем уравнения
ц = <р(а4+1), bi + t); "ф(в. + г], Ь£ + ^). (2.5.10)
Разлагая правые части этой системы в ряд в окрестности стацио-
нарных значений а<, Ь{ и пренебрегая степенями малых величин ц
и £ выше первой, получим систему линейных уравнений
П = аиП + а»?, £ = а21Т] + аг&. (2.5.11)
Вводя зависимость вариаций от времени ц = цоеКт и £ = £»еи и
подставляя эти выражения в (2.5.11), находим два линейных
уравнения для амплитуд вариаций ц0 и £0:
(сСи “ Цо + СС12^о = 0, OCaiTjo 4" (ОС22 — %) £0 = 0. (2.5.12)
Как обычно, поведение вариаций будет определяться характером
решений характеристического уравнения, которое получается из
условия нетривиальности решения системы (2.5.12)
“11 ~ “12
“21 “22-^
= 0.
(2.5.13)
Отсюда %’ — («и + агг)^ + схиИгг — ccuccji “0 и
^1,1 “ "2"(aii + а2г) ± ~2~ У(аы — а2г)2 4- 4а12а21, (2.5.14)
Если оба корня имеют знак минус у вещественной части %, то
соответствующее стационарное решение (u = а(, v = bt) устойчи-
во. Если хотя бы одно из значений X имеет знак плюс у веще-
ственной части, то исследуемое решение неустойчиво. Наличие
или отсутствие мнимой части в X определяет характер устойчи-
вости или неустойчивости стационарного решения.
Мы не будем сейчас углубляться в детали вопроса об иссле-
довании устойчивости стационарных движений, а вернемся к нему
позднее при рассмотрении параметрических и активных систем,
в которых возможны различные типы стационарных движений.
Для диссипативных же систем ясно, что может существовать
лишь одно стационарное состояние — состояние покоя, которое
всегда устойчиво.
4 Рассмотрим теперь другой вариант метода медленно меняю-
щихся амплитуд с переходом от исходных координат х и х к но-
§ 2.5. МЕТОД МЕДЛЕННО МЕНЯЮЩИХСЯ АМПЛИТУД
75
вым переменным — амплитуде Л и фазе 9, которые также явля-
ются медленными переменными в масштабе времени т.
Очевидно, что и = A cos 9; v = — A sin 9 и А2 = и2 + v2; tg 9 =»
= — v/u, где и и v — медленно меняющиеся амплитуды. А и 9
представляют собой соответственно полярные координаты опись»-
вающей точки на плоскости переменных и и V. Поскольку пере-
менные и и v — медленные функции времени т, то и амплиту-
да Л, и фаза 9 также медленно меняются со временем т.
Будем теперь искать решение исходного уравнения (2.5.2)
в виде
х = Лсоз[т+9(т)]. (2.5.15 J
Введем замену переменной х:
х = — Л sin [т + 9 (т) ]. (2.5.16)
Следует обратить внимание на то, что последнее выражение для
х не есть результат дифференцирования х по времени т, ибо
производная х по т имеет вид
х = Л cos (т + 9) — Л sin (т + 9) — Л зш(т 4- 9) - 9. t
Из (2.5.15) и (2.5.16JK следует условие У
Л соз(т + 9) —Л9 зш(т +9)== 0. (2.5.17J
Если переменную х продифференцировать по времени т и подста-
вить х, х и х, выраженные в новых переменных Л и 9, в исход-
ное дифференциальное уравнение (2.5.2), то с учетом (2.5;17|
получим систему двух уравнений
Л sin(r + 9) + Л9 cos(t + 9)'«= — р./(Л, 9, т),
(2.5.18)
. Л cos(x + 9)—Л9 sin(r+ 9) = 0. <
Отсюда находим точную систему дифференциальных уравнений,
описывающих процессы в системе, ;
Л == — р/(Л, 9, T)sin(x+9), Л9 = — ц/(Л, 9, т)соз (т + 9)'.
(2.5.19)
Здесь Л(т) и 9(т) являются медленными функциями времени, т,
что позволяет усреднить правые части (2.5.19) за период, считая,
что за это время Л и 9 не меняются. Указанная процедура усред-
нения приводит к системе двух укороченных уравнений вида
2.4 2Л
Ai - - J р/(Л, 9г т) sin с?т„ Л9 - — J ц/(Л, 9, т)с<ЩТ1'ЙГн
о • , о ‘ ,----------
———---------------------------------------------------г (2.5.20)
где Т1 = т + 9. . _
76
ГЛ. 2. КОЛЕБАНИЯ В ДИССИПАТИВНЫХ СИСТЕМАХ
Из системы укороченных уравнений (2.5.20) можно опреде-
лить стационарные значения амплитуды и фазы колебаний в кон-
кретной системе, исследовать процессы установления (переход-
ные процессы) этих величин, а также определить устойчивость
найденных решений.
Применение такого варианта метода медленно меняющихся
амплитуд иногда упрощает нахождение стационарных решений,
особенно в задачах, где отсутствует опорное колебание (вызван-
ное, например; внешней силой, модуляцией параметра, синхрони-
зирующим сигналом), фазовый сдвиг (фаза) которого относитель-
но искомого колебания естественно вошел бы в решение. К по-
добным системам относятся, в частности, пассивные линейные
и нелинейные колебательные системы, автоколебательные систе-
мы и др. Некоторое облегчение решения задач этот вариант метода
ММА дает также в тех случаях, когда нелинейные характеристи-
ки каких-либо параметров колебательной системы аппроксимиру-
ются высокими степенями разложения в ряд.
Проиллюстрируем теперь метод медленно меняющихся ампли- л
гуд примерами его применения к расчету колебаний в простей-
ших системах.
Линейный контур с постоянным затуханием (линейный ос-
циллятор с затуханием). Эта задача легко решается прямым ин-
тегрированием дифференциального уравнения (2.2.6), но для ил-
люстрации метода проделаем соответствующие расчеты для сво-
бодных колебаний методом медленно меняющихся амплитуд.
Колебания в рассматриваемом контуре описываются урав-
нением
d X • пс dx ,2 л
_+ 26- + (Ооа: = 0.
Ёсли положить т = (Hot, то d/dt = ©od/dr и х + 20х + я = 0, где
2^ = 2б/о)0. Тогда можно записать, что х + х = —2йх, т. е.
|л/(х, x)s= — 2'Qx. Условием применимости метода ММА в данной
вадаче будет требование О = р. < 1.
Применим вариант метода с медленно меняющимися ампли-
тудой и фазой. Укороченные уравнения для исследуемого линей-
ного осциллятора с трением будут
2Я 2Я
А = — J 20A sin2 тхйтх, А9 = — J 20A sin тх cos rx drlt
о о
где Tt = т + 0. Отсюда
А = -04, 40 = 0.
Эти укороченные уравнения легко интегрируются, и мы получаем
4=40е_<н, 0 = 0О,
откуда
х = 40e-<>t cos (т + 0О).
s Z.3. МЕТОД МЕДЛЕННО МЕНЯЮЩИМ?! АМПЛИТУД
77
Заметим, что найденное приближенное решение несколько отли-
чается от точного решения исходного линейного уравнения. В точ-
ном решении
х = 4, ехр cos (®i + 0О), где t = йт;
поэтому скорость уменьшения амплитуды одна и та же и в точ-
ном, и в приближенном решениях. Частота же колебаний в точ-
ном решении со = ]Лсо§ — б2, что отличается от ©0, принимаемой
за круговую частоту приближенного решения, найденного из уко-
роченных уравнений.
Нелинейный контур без затухания. Рассмотрим контур с кон-
денсатором с сегнетоэлектриком в пренебрежении затухайием.
В этом случае Lq + u(q) = Q. Введем x = q/qa, где q0 — некоторый
заряд, соответствующий ожидаемой максимальной амплитуде ко-
лебаний в контуре, и зададимся для нелинейной зависимости
w(g) выражением вида w(g) = (g/C0) (1 + у032). Тогда наше урав*-
нение примет вид
х + ©о (ж + ТоЗо*3) = 0» гДе = 1/ЬС0,
Введем новый масштаб времени т = ©£, где © не обязательно сов-
падает с ©о. С учетом этой подстановки
•• (й®
« + + ТоЗо*9) = 0.
Вводя обозначения ©о/®9 = 1 — ? = То?о, получим
х + х = ^х — (l-g)yxs.
Учитывая, что мы ограничиваемся случаем £ < 1 и у < 1,
можно, отбрасывая член второго порядка малости, приближенно
записать
!- х + х = fyc — ух3.
Это уравнение принадлежит к типу х + х = p.f (х, х), и к нему
можно применить метод медленно меняющихся амплитуд. Исполь-
зуем вариант с медленно меняющимися амплитудами и и v. Уко-
роченные уравнения будут иметь вид
2Я 2Я
и = — тг- \ (£ж — ух3) sinr dx, v — J- I (£x — w3) cost dr,
о 0
где x = и cos т + v sin т. После усреднения получаем
ue-.ljp + y7(«»-|-p8)p, и =-|-у (u2 + v3) u,
78
ГЛ 2. КОЛЕБАНИЯ В ДИССИПАТИВНЫХ СИСТЕМАХ
или иначе
1/3 t\ • 1/3
u = Т (Т — ь)p’ v = — ~2{туг~^]и-
Здесь z = и1 + V2 — квадрат амплитуды искомого колебания.
Не занимаясь решением полученной системы укороченных
уравнений, сделаем некоторые заключения о характере возмож-
ных движений в системе. Стационарный процесс в системе тре-
бует удовлетворения системы уравнений
(4vzo-&)*о = О. (4vzo —^)uo = °-
Это возможно при щ = vB = 0 или 3/4yz0 — £ = 0. Первая воз-
можность соответствует состоянию покоя, вторая — стационарно-
му колебанию с постоянной амплитудой Ло = Уг0. Наличие ста-
ционарной ненулевой амплитуды в этой задаче вытекает из усло-
вия консервативности системы. Однако при этом расстройка §
должна иметь определенное значение £ = 3/4yz0. Так как | =?
“ (®2 —®q)/o2, то мы получаем для частоты стационарных колет
баний выражение
где z0 задается начальными условиями, создающими в системе
определенный исходный запас колебательной энергии. Эта зави-
симость частоты свободных колебаний от амплитуды, уже полу-
ченная нами раньше другими методами (см. (1.3.15)), отражает
неизохронность данной нелинейной системы.
Электрический контур с малым нелинейным затуханием. Рас-
смотрим колебания в контуре с постоянными L и С, но с сопро-
тивлением Л (г), зависящим от тока по закону R = 7?0(1 + Yoi2).
Это соотношение качественно передает зависимость омического
сопротивления проводников от протекающего через них тока за
счет их нагрева.
Составим уравнение движения в этом контуре
Lq + Ro (1 + y0g2) q + -£ q = 0.
Вводя, как обычно, новые переменные x = qlq^ и T = ®of, где
ад = 1/LC, получим уравнение
х + 2б0 (1 + *{х2)х + х — 0.
Здесь 2Оо = Яо/Л®о, Т = 7о9о®о- При малом затухании, когда
2б0(1 + ух2)< 1, для приближенного решения задачи можно при-
менить метод ММА. Тогда исходное уравнение удобно записать
в виде
х + х = — 2'&11х — 2Фо'рс3 = м/ (х, х).
Положим х = А cos(t + 0); х — — A sin(r + 0); тогда для А и 9
§ 2.5. МЕТОД МЕДЛЕННО МЕНЯЮЩИХСЯ АМПЛИТУД 79
\
имеем укороченные уравнения \
2Л
А = — —- j (2d04sin?! + 2&0у43 sin3 тх) sinтх drv
о
2Л
40 = — J (2$04 sin тх + 2&оу43 sin3 тх) cos тх dr19
о
где Ti = т + 0. Производя интегрирование, получим
4 = -М(1 + т^3)« 0 = °-
Из уравнения для фазы 0 находим 0 = 0О. Уравнение для ампли-
туды мы можем записать в виде z = — 2Ф0 (1 + 3/4 7г) z, где z = Аг.
Интегрируя это уравнение, полупим
Z = _J__ : .
D exp (2О0т) — 3/4y 1
где D — постоянная, определяемая из начальных условий. Если
в начальный момент при т = 0 z = za, то Z) = l/z0 + */4 и мы
можем записать
Рис. 2.23. График уменьшения ам-
плитуды свободных колебаний в
контуре с нелинейным и линейным
затуханием
(1 + 3/4Г0) exp (2д0т) — з/<Т2о *
Полученное соотношение для z выражает закон уменьшения
квадрата амплитуды колебаний в исследуемом нелинейном кон-
туре, начиная от исходного зна-
чения z = z0. Этот закон пере-
ходит в обычный экспоненци-
альный при 7 = 0, т. е. при пе-
реходе к линейному случаю
(линейному осциллятору "с по-
стоянным затуханием). На
рис. 2.23 в условном масштабе
показано спадание квадрата
амплитуды z для некоторого
значения 7. На том же рисунке
приведен закон убывания z, со-
ответствующий 7 = 0.
Отметим также, что, как следует из проведенного рассмотре-
ния, величиной, определяющей ход процесса, является амплитуда
колебания (z или Vz), а фаза колебания не играет никакой роли.
Это обстоятельство вполне понятно, так как характер движения
задается исходным запасом колебательной энергии, сообщенной
контуру в начале процесса, а фаза колебания никак не определя-
ет ход колебания — соответствующим выбором, произвольного для
автономной системы начала отсчета времени фазу можно сделать
любой.
ГЛАВА 3
колебания в Системах
С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
ПОД ДЕЙСТВИЕМ ВЫНУЖДАЮЩЕЙ СИЛЫ
§ 3.1. Вынужденные колебания в линейной системе
при гармоническом силовом воздействии
До сих пор мы рассматривали колебания в изолированных от
внешних воздействий системах. В них могут происходить только
собственные колебания. Однако необходимо отметить, что даже
в изолированных колебательных системах затухающие или на-
растающие колебания возникают только после некоторого внеш-
него воздействия. Внешнее воздействие задает начальное отклоне-
ние и начальную скорость, которые в свою очередь определяют
начальную амплитуду и начальную фазу колебаний. Частота ко-
лебаний <в и коэффициент затухания б определяются только свой-
ствами самой системы.
Есдц же рассматривать колебания в системе под действием
внешней периодической силц — так называемые вынужденные
колебания', то их свойства зависят не только от параметров си-
стемы (а, б), но и от амплитуды и частоты внешней силы.
При изучении внешнего воздействия на колебательные систе-
мы необходимо различать силовое и параметрическое воздействия.
Силовым воздействием называется такоо воздействие, при котором
не изменяются параметры (ы, б) колебательной системы. Пара-
метрическое воздействие, напротив, изменяет только эти пара-
метры.
Как будет показано в следующих разделах, силовое воздей-
ствие на колебательную систему практически всегда сопровожда-
ется появлением вынужденных колебаний, тогда как при парамет-
рическом воздействии колебания в системах могут не возникать.
Очевидно, что чисто силовое воздействие на колебательные
системы может иметь место только при определенной их идеали-
зации, а именно при допущении линейности системы. Если же
происходит параметрическое воздействие, то колебательная си-
стема должна иметь по крайней мере один параметр, величина
которого зависит от мгновенного значения действующей на нее
внешней силы.
Однако в случае реальных систем, которые принципиально
нелинейны, нельзя строго разделить силовое и параметрическое
воздействия. Это можно пояснить простым примером. Представим
себе, что мы воздействуем на какую-либо реальную колебатель-
§ 3.1. КОЛЕБАНИЯ ПРИТАРМОНИЧЕСКОМ ВОЗДЕЙСТВИИ gf
ную систему внешней силой. Тогда при некоторых небольших
амплитудах внешнего воздействия колебательная система оста-
нется линейной и, следовательно, имеет место силовое воздей-
ствие на систему. По мере увеличения амплитуды внешней силы
или увеличения амплитуды вынужденных колебаний в системе-
появляется нелинейная зависимость какого-либо параметра систе-
мы от мгновенного значения внешней силы, и тогда такое воздей-
ствие следует считать сме-
шанным, т. е. и силовым,
и параметрическим.
Наиболее интересны и
важны такие внешние воз-
действия, которые изменяют
запас колебательной энергии
И системе. Рис. g । Способ задания силового во»-
Б случае механических действия на механическую кодебатель-
колебательных систем реше- ную систему
ние задачи о действии перио-
дической внешней силы наталкивается на известные трудности,,
ибо, согласно законам механики, источник такой силы будет ис-
пытывать обратное воздействие со стороны колебательной си-
стемы.
Одним из наиболее простых способов механического внешнего-
воздействия на механическую колебательную систему является
задание смещения некоторой определенной точки А системы
(рис. 3.1). Если чероз х обозначить отклонение массы т от поло-
жения равновесия, то уравнение движения без учета сил трения
запишется в виде
тх + кх — к' (F (i) — х), или тх + (к + к')х = F(t}k'.
На систему действует внешняя сила k'F(t), а собственная часто-
та системы равна <в0 = У (к 4- к')/т.
Если мы теперь потребуем, чтобы сила воздействовала на ко-
лебательную систему, собственное движение в которой описыва-
ется дифференциальным уравнением тх + кх = 0 (а>0 = Т/к/т),.
то для реализации этого нужно, чтобы к' < к, но величина внеш-
ней силы k'F(t) была достаточной для получения необходимого-
вынужденного процесса.
Анализ вынужденных колебаний в линейных системах об-
легчается благодаря возможности применения принципа суперпо-
зиции. Если внешняя сила F^t) вызывает вынужденное колеба-
ние xi(t), а сила F2(f)—колебание x2(t), то сила F(t) = Ft(t)+
+ E2(i) создаст вынужденное колебание x(t) — xt(t) + x2(ty. Ко-
лебания, вызываемые различными внешними силами, склады-
ваются друг с другом так же, как и внешние силы, если
они действуют одновременно на линейную систему с трением,
9 В. В. Мигулйн и др.
£2 ГЛ. 3. КОЛЕБАНИЯ ПОД ДЕЙСТВИЕМ ВЫНУЖДАЮЩЕЙ СИЛЫ
характеризуемым коэффициентом h, т. е. если
mxt + hxt + kxi = Ft (f), mx2+hx2 +kx2 = Ft(t),
TO
m (ft + x2) + h (it + x2) + к (xt + x2) = Ft (t) 4- F2 (£).
Если теперь через x(t) обозначить x1(t) + x2(t), а через F(t) =
— Ft (t) + F2 (i), то получим уравнение
mx + hx + kx = F (t).
Принцип суперпозиции, справедливый только для линейных
систем, означает, что в них отсутствует нелинейное взаимодей-
ствие колебаний, вызванных различными одновременно действую-
щими внешними силами.
Необходимо также иметь в виду, что в колебательной системе,
наряду с вынужденными колебаниями под действием внешней
силы, возникают также собственные колебания при изменении
внешней силы, при ее включении, выключении и других изме-
нениях. Однако в диссипативных системах собственные колеба-
ния затухают с постоянной времени переходного процесса. Через
время £>1/б переходный процесс в диссипативной колебатель-
ной системе можно считать закончившимся.
Грение
Рис. 3.2. Механическая колебательная систе-
ма с затуханием при внешнем силовом воз-
действии
L ’&(t)=«gcospt-
I *
Рис. 3.3. Электрическая
колебательная система с
вынуждающей электро-
движущей силой
диссипативной систе-
Рассмотрим вынужденные колебания в
ме под действием внешней синусоидальной силы. В случае меха-
I нической колебательной системы с трением (рис. 3.2) уравнение
движения имеет вид
mx + hx + кх = Fo cos (pt),
где р — частота внешней силы, Fa — ее амплитуда, а в случае
влектрической системы (рис. 3.3)—вид
Lq + Rq + q/C = ь cos (pt).
Если обозначить q через x, то оба дифференциальных уравнения
с точностью до коэффициентов совпадут:
х + 2бх + <р1х = Ро cos (pt)t
(3.1.1)
§ 3.1. КОЛЕБАНИЯ ПРИ ГАРМОНИЧЕСКОМ ВОЗДЕЙСТВИИ 83-
где 26 = h/m = R/L^ со® = к/т = l/LC, Ро — FJm = <£a/L. Реше-
ние дифференциального уравнения (3.1.1), как известно из соот-
ветствующего раздела математики, можно записать в виде
х (£) = Хо cos (pt + <p) + Ae~st cos (at 4- ф); (3.1.2).
здесь
X ро рМ
° /M-/)a+W
где ф — p/at, Qa = a0L/R,tg ф = 26р/(р2 — coj), Лиф — началь-
ные амплитуда и фаза собственных колебаний. Первое слагаемое
решения xt(t) характеризует вынужденное колебание в системе
под действием внешней силы. Второе слагаемое через время
t > 1/6 затухает и характеризует собственное колебание в системе.
Из выражения для Хо видно, что при определенных соотноше-
ниях медаду и р достигается максимум амплитуды вынужден-
ных колебаний Хмакс- Получив выражение для Хнакс = Хрез, можно
построить различные семейства нормированных резонансных кри-
вых, например, Ф(р) = Х(р)/Хрез. В этом случае переменным па-
раметром считается частота внешней силы р. Однако возможно
нахождение и построение резонансных характеристик другого ви-
да, при которых фиксируется частота внешней силы р, а пере-
менным параметром является или С, или L, т. е. в конечном сче-
те <в0. Тогда получаются семейства нормированных резонансных
кривых Ф(С), ®(L), Ф((в0). ___
Очень удобен для изучения вынужденных колебаний в линей-
ных системах метод комплексных амплитуд. По определению
комплексная амплитуда X — Хое*, где Ха — модуль комплексной
амплитуды, ф — аргумент (фаза) колебания. ;
Для решения уравнения движения (3.1.1) методом комплекс-
ных амплитуд нужно обратиться к уравнению с теми же пара-
метрами, но с комплексной вынуждающей силой Рое;р|, т. е.
у + 28у + (Boy = P0e3pt. (3.1.3>
Решение этого уравнения ищем в виде у — Xelpt. В силу линей-
ности (3.1.3) решение у = и + jv содержит реальную часть, ко-
торая относится к уравнению (3.1.1). Тогда
(-р2 + 26/р + (в$)Х = Р0
ИЛИ
V
— Р2 + 26iP
Обычным способом находим модуль Ха комплексной амплитуды X
6*
ГЛ. 3. КОЛЕБАНИЯ ПОД ДЕЙСТВИЕМ ВЫНУЖДАЮЩЕЙ СИЛЫ
и аргумент (фазу) <р:
X - _ Р°
° /(<o2_p7+46V
26р
<р = агс^7Т<
(3.1.4)
(3.1.5)
Следовательно, частное решение (вынужденное колебание) име-
ет вид
х = Re{X exp (jpt)} = Re {Xe exp [/ (pt + <p)]) = Xo cos (pt + <p).
Применим этот метод решения для случая последовательного
электрического колебательного контура (см. рис. 3.3), для ко-
торого уравнение движения, как нам уже известно (см. с. 82),
можно записать в виде
Рис. 3.4. Семейство нормированных резо-
нансных кривых Фт (р) для разных зна-
*о
чений добротности Qq
+ Ш + ± \idt ~
at С J
= (3.1.6)
Решая это уравнение
методом комплексных ам-
плитуд (i = Ieipt), полу-
чаем I = S JZ, где Z =
*=11 + ](рЕ — 17рС). Для
модуля тока имеем
VI? + (pL-ирС)2. '
(3.1.7)
Теперь нетрудно найти максимальную амплитуду тока Д маке Для
этого необходимо найти экстремум (минимум) знаменателя выра-
жения для модуля тока; тогда Д макс = *?о/Д, что справедливо при
pLi/pC, т. е. при р = ю0.
Семейство нормированных резонансных кривых для тока в по-
следовательном электрическом колебательном контуре (рис. 3.4)
может быть записано в виде
Ф/ (р) = = л ____ 1
° Дмако V^ + ipL-i/pC}2 (1 - 1/Т2)3
(3.1.8)
где Qt = asaLfR, 7 = pf&t.
§ 3.1. КОЛЕБАНИЯ ПРИ ГАРМОНИЧЕСКОМ ВОЗДЕЙСТВИИ
85
Заметим, что операции с комплексными амплитудами произ-
водятся так же, как при операционном исчислении, т. е. если
то di/dt = jplnJ idt = (i/ip)Ie?vt, Исходя из этого
легко получить выражения для напряжении на всех элементах
рассматриваемого колебательного контура:
|ид| = |7|7?л |uL| = pZ[/|, |uc| = -^|7|.
Отсюда путем нахождения экстремумов можно также найти мак-
симальные (резонансные) значения напряжений на элементах
контура R, L и С. Читателю нетрудно убедиться в том, что резо-
нанс напряжения при р = а>0 наступает только для напряжения
на сопротивлении R.
Резонанс напряжения на емкости 1ис|Макс ~ получается
при -у2 = 1— 1/2$}, т. е. при более низкой чем соо частоте р, а ре-
зонанс напряжения на индуктивности |иь1макс » Q<&<>— приу^==
= 1/(1—1/2$}), т. е. на более высокой чем ы0 частоте р. Все три
максимума совпадают только при Qa -> °° (практически при
Qo > 102). На этом примере легко убедиться в том, что при не-
больших значениях добротности электрических колебательных
контуров (Qa = 2 — 5) резонансные максимумы uL, ис, uR отлича-
ются друг от друга по частоте на несколько процентов, что может
быть весьма существенно при использовании таких систем в ра-
диоизмерительпых устройствах.
В приведенных выше рассуждениях мы считали, что L = const,
С = const, 7? = const (coo = const), а меняется только частота
внешнего воздействия р. Однако на практике часто интересуются
резонансными зависимостями, при которых частота внешнего воз-
действия р — const, а меняется один из энергоемких параметров1
L или С (или т или к в случае механической колебательной си-
стемы). Особенностьэтого случая состоит в том, что одновремен-
но с изменением собственной частоты а>0 (из-за изменения пара-
метров колебательной системы меняется также добротность си-
стемы Qo = (i)0L/R =(1/7?) liL/C (в случае механического аналога
Qomi = (ОоЖ/й = Vkm/h'). Поэтому резонансные зависимости в та-
ком случае' (рис. 3.5) отличаются от рассмотренных выше. -
Следует отметить, что в последовательном электрическом ко-
лебательном контуре при постоянной р и переменной экстре-
мальные значения напряжения на конденсаторе и на индуктив-
ности могут достигаться для каждого из этих напряжений при
различных значениях соо в зависимости от того, какой из пара-
метров L и С является переменным в данной системе и ответ-
ственным за изменение ы0. Для амплитуд колебаний напряжения
па конденсаторе, равных |7|/рС0 при переменной индуктивности
в системе, и для амплитуд колебаний напряжения на индуктив-
ности, равных |7|р£0 при переменной емкости, форма резонанс-
ГЛ. 3. КОЛЕБАНИЯ ПОД ДЕЙСТВИЕМ ВЫНУЖДАЮЩЕЙ СИЛЫ
ных кривых одинакова, а экстремальных значений они достига-
ют при одних и тех же собственных частотах со0 = р.
Итак, в такой колебательной системе при одном переменном
реактивном параметре всегда совпадают по частоте два экстрему-
ма: резонансное значение напряжения на сопротивлении и резо-
нансное значение напряжения на постоянном реактивном эле-
менте.
Рже. 3.5. Семейство нормированных резонансных кривых (ш0) при изме-
нении собственной частоты ш0 контура для различных добротностей:
Ф, (со.) = = — * Qt— р = const
0 7омакс —i)a л
С помощью метода комплексных амплитуд (для тока, напря-
жения, импеданса) можно построить различные семейства резо-
нансных кривых: амплитуды смещений (амплитуды заряда на
конденсаторе, напряжения на конденсаторе), амплитуды скорости
(амплитуды тока), амплитуды ускорений (амплитуды напряже-
ния на индуктивности).
Для каждого из перечисленных семейств резонансных кривых
можно построить свое семейство фазовых характеристик, опреде-
ляющее сдвиг фазы вынужденных колебаний относительно фазы
внешней силы, которую мы считаем начальной и для простоты
полагаем равной ную.
§ 3.2. Элементы теории амортизации и регистрирующих приборов
Амортизирующее устройство. На основе поведения колеба-
тельных систем, находящихся под внешним воздействием, можно
проанализировать действие амортизирующих колебательных
устройств. Обычно основное назначение амортизаторов состоит
в том, чтобы уменьшить силу давления на фундамент или другую»
§ 3.2. ТЕОРИЯ АМОРТИЗАЦИИ И РЕГИСТРИРУЮЩИХ ПРИБОРОВ 87
опору со стороны некоторой периодической силы (например, виб-
рирующих машин, станков, двигателей внутреннего сгорания
ит. д.).
На рис. 3;6 изображена простейшая колебательная система,
которую можно при определенных условиях рассматривать как
амортизирующее устройство. Уравнение движения в ней можно
ваписать в виде
т 5 + + кх = F ® = Р» 008 <3-2 Л>
Рис. 3.6. Схема амортизи-
рующего устройства
где т — масса вибрирующего тела, h — коэффициент трения, к —
жесткость пружины амортизатора, х—
отклонение массы от положения равно-
весия; внешнюю силу F(i) для просто-
ты будем считать изменяющейся по
гармоническому закону. Записывая си-
лу в комплексной форме PoeJI>‘, можно
благодаря линейности уравнения дви-
жения (3.2.1) искать решение методом
комплексных амплитуд в виде х = Xeipl.
Тогда нетрудно получить выражение
для модуля амплитуды колебаний
Х"-|Х|--У7Г <3'2'2>
V \к — пр ) -f- h р
На фундамент (опору) в этом случае действует со стороны виб-
рирующего устройства сила Р, = кх + Их, откуда находим
1FJ = Ей = (3.2.3)
Исли ввести коэффициент амортизации
а = Fa/Pa,
(3.2.4)
который, естественно, должен быть меньше единицы (что вытека-
ет из нормальных требований к работе амортизирующего устрой-
ства), и выразить его через параметры колебательной системы и
частоту внешней силы, то получим следующее выражение:
к^ + ^р1 у/ ! + ?/<?§
(Л_тр7 + Лу У + “
= V С02(1-^+Л’ (3,2‘5)
где f = р/со0; Со = k/toBh.
Легко показать (см. (3^2.5)), что а меньше единицы при
j(l ~ 72)2 > 1» т- е- ПРИ 7 > ^2.
88 ГЛ. 3. КОЛЕБАНИЯ ПОД ДЕЙСТВИЕМ ВЫНУЖДАЮЩЕЙ СИЛЫ
Рис. 3.7. Графики зависимости коэф-
фициента амортизации от f для раз-
личных добротностей
На рис. 3.7 приведены кривые для коэффициента амортиза-
ции при нескольких значениях добротности.
Из рассмотрения семейства кривых для а в интересующей
нас области (7 > V2, а < 1) можно сделать вывод, что для эф-
фективной амортизации амортизирующая колебательная система
должна иметь как можно большую добротность Qa и как можно
меньшую собственную частоту
й0. (При фиксированной часто-
те внешнего воздействия р это
приводит к повышению у и,
следовательно, к снижению а.)
Однако не следует приме-
нять амортизирующую систему
с очень высокой добротностью,
ибо такой выбор может при-
вести к опасным последствиям.
При высокой добротности
амортизаторов в них могут при
некоторых условиях возникать
опасные вибрации за счет воз-
буждения паразитных резо-
нансных колебаний. Это обсто-
ятельство хорошо известно из практики работы мощных тур-
богенераторов и других подобных механизмов.
Если вибрирующее тело является источником колебаний не
N
одной частоты р, а нескольких частот 2 Pm то в предположении
П=1
о линейности системы к пой можно применить принцип суперпо-
зиции колебаний. Тогда результирующее действие колебаний те-
ла т с разными частотами приведет к воздействию на опору
(фундамент) совокупности нескольких сил, каждая из которых
соответствует опрсделсппой частоте, т. е.
N N ________
F = 2 ^оп = 5 Хоп Vк2 + h2p2n. (3.2.6)
П=1 П=1
Однако, как нетрудно сообразить, наибольший вклад в совокуп-
ность сил, действующих на фундамент, вносят силы с самыми
низкими частотами рп, что следует из рассмотренных выше гра-
фиков для а (7, Qo). Поэтому во многих практических случаях
вполне достаточно рассчитать и выполнить амортизатор для наи-
меньшей из совокупности возбуждающихся в вибрирующем уст-
ройстве частот.
Регистрирующие приборы. На основе рассмотренных ранее
явлений можно построить некоторые типы приборов для регистра-
ции быстропеременных во времени величин. Такие приборы бу-
дем в дальнейшем называть регистрирующими приборами.
§ 3.2. ТЕОРИЯ АМОРТИЗАЦИИ И РЕГИСТРИРУЮЩИХ ПРИБОРОВ
89
Во всех типах приборов, которые мы здесь будем рассматри-
вать, имеется определенная закономерная связь между измеряе-
мой величиной и силой (часто моментом силы). Например, в маг-
нитоэлектрических приборах момент магнитных сил поворачивает
катушку с закрепленной на ней стрелкой до тех пор, пока он не
станет равным моменту силы, действующей на катушку со сторо-
ны «восстанавливающей» пружины.
Если х — показания стрелки прибора под действием измеряе-
мой величины z(t), то можно записать следующее очевидное со-
отношение: x = f(z), или x(t) = /[z(i)], которое позволяет сфор-
мулировать основные характеристики регистрирующих приборов.
Чувствительность прибора характеризуется отношением
Дгг/Дг, показывающим, насколько сильно отклоняется стрелка
йрибора при действии на прибор единицы измеряемой величины.
Погрешностью, даваемой прибором, называется отношение ми-
нимально регистрируемой измеряемой величины Дг ко всей изме-
ряемой величине z, т. е. kHz. Идеальным является прибор, с по-
мощью которого можно измерить z(t) = Bx(t), где В — const, т. е.
не зависит ни от величины z, ни от х. Немаловажная характери-
стика регистрирующего прибора — постоянство его показаний во
времени или, иными словами, воспроизводимость результатов из-
смерений.
Приборы, одинаково пригодные для регистрации совершенно
произвольных процессов, не существуют и существовать никогда
не будут. Каждый прибор вносит в измерения свои искажения,
которые можно определенным образом свести к минимуму только
для определенного класса физических или технических процессов.
Более подробно рассмотрим основные характеристики и осо-
бенности следующих четырех классов приборов, предназначенных
для регистрации определенных
типов процессов: квазистатиче-
ские, сейсмические, резонансные,
баллистические.
Квазистатические приборы.
Квазистатические приборы исполь-
зуются для регистрации больших
и малых сил как переменных во
///////////////////////^
F(t).
Рис. 3.8. Схема квазистатического
прибора
времени, так и от времени не за-
висящих (статических). На рис. 3.8 показана схема такого реги-
стрирующего прибора.
Идеальным квазистатическим прибором является прибор, в ко-
тором имеется пружина со стрелкой и отсутствует масса тп и тре-
ние Л, т. е. выполняются условия
|mi|=0, 1Лх|=0.
Если, кроме того, мы выберем для работы упругого элемента
(пружины) линейный участок, то, поскольку выполняются уело-
90
ГЛ. 3. КОЛЕБАНИЯ ПОД ДЕЙСТВИЕМ ВЫНУЖДАЮЩЕЙ СИЛЫ
вия квазистатичности, можно учитывать только упругие силы си-
стемы. Отметим попутно, что в настоящее время имеются надеж-
ные радиотехнические методы регистрации очень малых смеще-
ний (до величин порядка 10-15—10_1в см) в макроскопических
механических системах.
В действительности же при действии переменных во времени
сил на такую измерительную систему с одной степенью свободы
нельзя пренебрегать силами инерции и трения, как было сделано
выше. Рассмотрим факторы, которые способствуют или препят-
ствуют выполнению условия квазистатичности нашего измери-
тельного прибора.
Заметим, что статическая чувствительность прибора для реги-
страции силы равна kxf&F = l/к. Пусть на прибор действует
гармонический сигнал с частотой р. Тогда переменные процессы
прибор регистрирует как статические только при выполнении ус-
ловий
Imxl < Iкх\, Ifeil < Ifcrl. (3.2.7)
Здесь, как обычно, можно ввести = к/т и Qa = та0/Ь = k/at^h.
Эти два условия в предположении о гармоническом воздействии
принимают вид
mp2<g,k, или р2<С®ог плп Т3<1; (3.2.8)
hp < к, или 7 < Qo.
Таким образом, для того чтобы измерительный прибор работал
как квазистатический, необходимо выполнение двух требований:
f « 1 и 1 « ^о. Однако нетрудно заметить, что требование <
< 1 выполняется для заданной частоты внешнего воздействия р
тем лучше, чем больше <о0, но с ростом <о0 будет уменьшаться
чувствительность, ибо опа обратно пропорциональна к. Следова-
тельно, для квазистатических приборов характерно противоречие
между условием квазистатичпости (неискажаемости, или точно-
сти) и чувствительностью.
Если на регистрирующий прибор действует многокомпонент-
ная сила с частотами ръ р2, ..., рп, то не все частотные компонен-
ты будут «передаваться» правильно, так как не для всех компо-
нент будет выполняться условие квазистатичности. Оценим верх-
нюю границу частот тех компонент, которые квазистатический
прибор может регистрировать без заметных искажений. Для не-
искажаемости необходимо, чтобы все частотные компоненты вос-
производились с ошибкой, не превосходящей определенной напе-
ред заданной величины.
Пусть на прибор действует сложная сила
N
F(t)^^ Fn cos (pnt + en), (3.2.9)
n=l
где £n — начальная фаза частотных компонент силы.
g 3.2. ТЕОРИЯ АМОРТИЗАЦИИ И РЕГИСТРИРУЮЩИХ ПРИБОРОВ
91
Тогда при условии линейности системы используем принцип
суперпозиции и найдем собственные и вынужденные колебания
под действием этой сложной силы
Fn/k
x(t)=Ae~6t cos (coi +^)+ 2 ^)2 + cos(*’»*+‘P’»+e")«
(3.2.10)
где A — начальная амплитуда, ф — начальная фаза собственных
колебаний, а = рп/й>0, фп = arctgyn/((?0 (1 — у„))- Естественна,
что начальный участок регистрации воздействия искажен соб-
ственными колебаниями прибора. Однако по прошествии неболь-
шого времени (например, t = r/б, г = 5) амплитуда собственных
колебаний упадет до 1 % (е~5) от начальной.
Для неискаженной регистрации воздействия необходимо, что-
бы для всех компонент рп значения
сбыли примерно одинаковы. Так как обязательно выполнение ус-
ловия квазистатичности < 1, то с уменьшением уп до нуля вели-
чина ап стремится к единице, а Ъп — к нулю. Поэтому следует вы-
бирать величину Qo такой, чтобы при возможных больших зна-
чениях величина ап мало отличалась от единицы, а величина
Ь„ — от нуля. Разумеется, это требо-
вание можно выполнить только с не-
которой конечной точностью для ог-
раниченного диапазона частот рп.
На рис. 3.9 показана зависимость
1/Уа„ от для Qo = 0,9. Анализируя
зависимости ап и Ъп от 7„, мы видим,
что для достижения малоискажен-
ной квазистатической регистрации
воздействия необходимо работать с
приборами, у которых собственная
частота по крайней море в 10 раз
выше частоты рп (у„<0,1). Дей-
ствительно, при ’fn = 1 фп = 90°, что
Рис. 3.9. Кривая зависимости
амплитуды частотных компо-
нент от частоты воздействия
заведомо недопустимо; даже при
Чп « 1/2 <р„ = 35—40°, что также означает сильное искажение ре-
гистрируемой силы.
В области звуковых частот в качестве квазистатического меха-
нического прибора могут быть использованы пьезодатчики, имею-
щие очень высокую собственную частоту (<в0 « 105 — 107 рад/с,
Qo < 10; при этом ’(„«S 1), а также емкостные датчики давления.
92
ГЛ. 3. КОЛЕБАНИЯ ПОД ДЕЙСТВИЕМ ВЫНУЖДАЮЩЕЙ СИЛЫ
Рис. 3.10. Схема шлей-
фового осциллографа
Высокие значения добротности квазистатических приборов не-
желательны, так как это приводит к увеличению длительности,
переходных процессов.
В качестве квазистатического прибора можно также использо-
вать шлейфовый осциллограф, схематически показанный на
рис. 3.10. Прибор предназначен для опти-
ческой записи колебаний тока, пропускае-
мого по проводнику, изогнутому в виде
рамки и помещенному в поле постоянно-
го магнита. При пропускании тока через
рамку последняя поворачивается на угол,
пропорциональный изменению тока в це-
пи, и отклонение луча света, отраженного
от поворачивающегося вместе с рамкой
зеркальца А, регистрируется на програ-
дуированной шкало (в шлейфовых прибо-
рах <в0/2л = 103 Гц, Qo = 1 — 2).
Для процессов, закон изменения которых во времени не мо-
жет быть представлен гармонической функцией, в общем случае
нельзя оцепить воспроизводимость исследуемого процесса дан-
ным прибором. В этих случаях для анализа качества прибора ис-
пользуют кривую записи скачкообразного изменения измеряемой
Рис. 3.11. Графики функции отклика при внешнем воздействии в виде еди-
ничного скачка для различных добротностей
величины (например, силы), т. е. исследуют так называемую
функцию отклика р(£). В нашем случае
(0 д,
р(0 = 1 —-°е etcos (wi + ф)|,
(3.2.11)
где <р — начальная фаза осциллирующей части функции отклика,
св2 = со3 — б3» tg ф = —б/ы, б = h/2m.
На рис. 3.11 показан характер нормированных функций отклик
ка регистрирующего прибора при разных значениях добротности
§ 3.2. ТЕОРИЯ АМОРТИЗАЦИИ И РЕГИСТРИРУЮЩИХ ПРИБОРОВ 9$
Q, колебательной системы, рассчитанных на единичный толчок
внешней силы. Из рисунка видно, что в отсутствие трения (Qtr=°°y
прибор будет периодически показывать удвоенную амплитуду дей-
ствующей силы с периодом Т = 2л/<в = 2лV m/к. При наличии по-
терь максимальное превышение амплитуды над статическим от-
клонением(в процентах) равно а = 100 ехр(—лб/ш)= 100 exp X
X (— я] 4(?о — 1). На границе колебательного и апериодическо-
го режимов работы ((?0 — 1/2) о = 0, но зато Т -> °°, ибо <в -> 0.
Поэтому в данном случае, как и во многих других, необходимо оп-
тимизировать измерительную систему в соответствии с тем, для
какого класса измерений она предназначается. Если интересуют-
ся в первую очередь точностью измерений воздействующей силы,,
со необходимо использовать систему с Qo 1 и проводить изме-
рения через большие промежутки времени. Наоборот, если перво-
очередным требованием к измерительной системе является ее бы-
стродействие, то нужно использовать системы с Qq > 1, проигры-
вая при этом в точности.
Сейсмические приборы. Сейсмические приборы используются
для регистрации смещений. Для определения уровня вибраций
в автобусах, железнодорожных вагонах, на кораблях, самолетах
и аналогичных системах необходимы особые приборы, которые
называются сейсмическими по той причине, что все они построе-
ны по тому же принципу, что и сейсмограф, регистрирующий ко-
лебания почвы. В пих измеряются колебания точки вибрирующе-
го тела относительно неподвижной системы координат. Следова-
тельно, необходимо подобрать такую механическую колебательную
систему, которая покоилась бы относи-
тельно неподвижной системы коорди-
нат, а затем измерять смещения вибри-
рующего тела относительно этой «непо-
движной» системы.
На рис. 3.12 схематически показан
принцип устройства и работы приборов
сейсмического типа. Основу прибора
составляет колебательная система, со-
стоящая из массы, соединенной через
пружину с колеблющейся опорой (основанием, почвой и т. д.).
Если через Xt обозначить координату смещения массы отно-
сительно вибрирующего тела, а через х — координату смещения
всей опоры (основания) относительно неподвижной системы ко-
ординат, то уравнение движения массы m прибора относительна
системы отсчета, связанной с х, запишется как
<2*1 7 ^*1 7 С^Х
Ш---£ + + кхг = ТП--Tj
dta dt 1 dt2 '
где mdfx/dt1 — сила инерции.
/////////////’//.г’////
Рис. 3.12. Схема действия
сейсмических приборов
94 ГЛ. 3. КОЛЕБАНИЯ ПОД ДЕЙСТВИЕМ ВЫНУЖДАЮЩЕЙ силы
Как и раньше, предположим, что опора совершает колебание
по гармоническому закону x = zeipt' тогда и масса т колебатель-
ной системы после окончания переходного процесса будет коле-
баться (xi) по гармоническому закону с частотой р (вынужден-
ный процесс).
Для того, чтобы колебание Xi наиболее «правильно» передава-
ло колебание х опоры (почвы), необходимо, чтобы х^х. Рас-
смотрим условия, при которых можно выполнить это требование.
Оно выполняется при максимальном увеличении массы т реги-
стрирующего прибора и максимальном уменьшении жесткости
к пружины, а также при уменьшении трения в колебательной
системе, т. е. при у > 1 (у = р/<в0) и малых h(Qt > 1). Действи-
тельно, если искать и х в виде
Xl = х — ze,pt,
то к линейной системе можно применить метод комплексных
амплитуд, и тогда (— р2 + (h/т) ]р + со02) Х± = — р\ пли для
модуля амплитуды
1 X. I----- .*.? ... - Z --Г = = 2фх (у),
)/(а>2-г)24-А2(/Лп2) /(1-у2)2 + ?7С>2 к
' (3.2.12)
для фазы имеем
У
<p = arctg —1Г-2). (3.2.13)
Из выражения (3.2.12) видно, что условие |XJ =z достига-
ется при Фх(у)-*-1. Фаза вы-
нужденного колебания Xt
при у > 1, как следует из
(3.2.13), близка к л. Доброт-
ность системы Qo должна
быть небольшой (Qo» 1)
(рис. 3.13), что необходимо
для быстрого гашения соб-
ственных колебаний в систе-
ме (уменьшения длительно-
сти переходного процесса).
Для регистрирующих при-
боров этого класса требова-
ние неискаженности внеш-
ней силы при ее регистрации
совпадает с требованием мак-
симальной чувствительности
при 1, и, следовательно, для сейсмических приборов не воз-
никает противоречия между чувствительностью и неискажае-
мостью (точностью) при увеличении у, что имеет место для ква-
зистатических приборов.
Рис. 3.13. Кривые зависимости безраз-
мерных амплитуд вынужденных коле-
баний от 7 для различных добротностей
§ 3.2. ТЕОРИЯ АМОРТИЗАЦИИ И РЕГИСТРИРУЮЩИХ ПРИБОРОВ
95-
Таким образом, если частота колебаний вибрирующей опоры р
много больше собственной частоты а>0 регистрирующего прибора,
то колебание (с точностью до знака) сообщает нам информа-
цию о колебаниях вибрирующей опоры, к которой прикреплена
регистрирующая колебательная система.
Физически работу прибора сейсмического типа можно себе-
представить следующим образом. Благодаря очень высокой часто-
те р вибрации опоры по сравнению с собственной частотой <в0,
масса колебательной системы (см. рис. 3.12) остается прак-
тически неподвижной и образует, таким образом, неподвижную
систему координат. При этом опора (почва) будет двигаться
(колебаться) относительно массы т, и это относительное дви-
жение можно зарегистрировать тем точнее, чем больше р по
сравнению с ш0.
Резонансные приборы. Работа резонансных приборов основана
на особенностях резонансных законов в линейных цепях. Обычно
они используются для определения амплитуды и (или) частоты
одного гармонического колебания или для определения амплитуд
и частот нескольких гармонических компонент, входящих в состав
сложного колебания.
Поскольку ширина резонансной кривой колебательного кон-
тура обратно пропорциональна его добротности Qq, а амплитуда
вынужденных колебаний при резонансе почти в Qo раз превосхо-
дит амплитуду внешней силы, то, увеличивая добротность резо-
нансного прибора, можно одновременно повысить его чувствитель-
ность и избирательность. При высокой добротности (Qa = Ю2—
10‘ и выше) резонансный прибор практически реагирует только
на ту частоту, па которую он настроен.
Резонансные приборы пригодны только для индикации уста-
новившихся процессов в системе. Наиболее типичными их при-
мерами являются волномеры, спектр-анализаторы, куметры и то-
му подобные устройства.
Однако если прибор предназначен для регистрации процессов-
с меняющейся частотой, то в нем могут использоваться резонанс-
ные системы с различными собственными частотами при не слиш-
ком высокой добротности, чтобы затухание колебаний в каждом
резонаторе происходило достаточпо быстро по сравнению со вре-
менем изменения регистрируемой частоты. Подобные часто-
томеры с набором механических резонаторов, возбуждаемых
магнитным полем переменного тока, широко используются
в электротехнике для контроля частоты технического перемен-
ного тока наряду с цифровыми частотомерами.
Баллистические приборы. Баллистические приборы служат дл»
регистрации кратковременных импульсов сил или связанных с
ними величин. Если на механическую колебательную систему’ с
одной степенью свободы и с собственной частотой <вв действует
сила /(f) в течение времени т (рис. 3.14), то импульс силы, или
<)5 ГЛ. 3. КОЛЕБАНИЯ ПОД ДЕЙСТВИЕМ ВЫНУЖДАЮЩЕЙ СИЛЫ
количество движения, которое сообщается телу массы т, равно
mv (т) = J f(t) dt. (3.2.14)
о
Пусть на массу т действует импульс силы, но мы не учитываем
действия на ту же массу упругой силы пружины и силы трения;
тогда скорость г0, которую импульс сообщает массе т, с точ-
ностью до малых поправок, равняется
X
(3.2.15;
о
Если время действия т импульса силы /(f) мало по сравнении
с периодом Т колебательной системы (рис. 3.15), т. е. Т^х
Рис. 3.14. График им-
пульса силы
Рис. 3.15. Действие импульса силы
на колебательную систему
или 2л/св > т, и если принять, что г много меньше собственной
времени установления колебаний в системе f0 = l/6, т. е.
то с достаточной точностью можно считать, что в момент t =
смещение х массы т равно нулю (z » 0), а Го^О и определяете
выражением (3.2.15).
При указанных выше условиях после окончания действи
импульса силы, система колеблется как свободная с заданно,
начальной скоростью v0 и со своими характерными параметрам!
затуханием б и собственной частотой со2 = (Oq — б2. Наблюдая
измеряя эти колебания, можно определить скорость v0. Скорост
г0 определим из соотношения
х (t) = e-et cos (cot—e~6t sin(tof). (3.2.11
Время ti (четверть периода затухающих колебаний), необходимс
системе для достижения амплитудного значения коле(5ани
-fc(fi) = ai, вычисляется из соотношения
*1 = 4"arctS Т = 4"arctg У4$> ~ L
§ 3.3. КОЛЕБАНИЯ В НЕЛИНЕЙНОЙ СИСТЕМЕ
97
Теперь уже с учетом написанных выше соотношений можно
определить количество движения (импульс)
mva = ^mat, (3.2.17)'
где р — коэффициент баллистической постоянной прибора, равный
о st,
—---Те •
Sin (1)^
В зависимости от назначения баллистического прибора значе-
ния т, а следовательно и Т, могут выбираться в некоторых
пределах. Хотя точность прибора повышается с увеличением т
вследствие лучшего выполнения неравенства Т > т, при этом,
однако, уменьшается чувствительность (пропорциональная 0),
и поэтому в приборах такого типа наблюдается противоречие
между точностью й чувствительностью.
Если оценить максимальную погрешность в определении им-
пульса, возникающую из-за неучета действия упругой силы и
силы трения на массу пг во время воздействия импульса силы
на колебательную систему, то окажется, что суммарная ошибка
но превышает 1%, если сила /(f) имеет прямоугольную форму,
Т - 100т и Qt = 10.
j
§ 3.3. Вынужденные колебания в нелинейной консервативной
системе при гармоническом силовом воздействии
При воздействии гармонической силы на линейную систему
в пей, как хорошо известно, возникает гармонический вынужден-
ный процесс с частотой вынуждающей силы и с амплитудой,
определяемой параметрами системы, частотой и внешней силой.
В частности, при совпадении частоты воздействующей силы с
частотой свободных колебаний системы в ней при отсутствии
потерь (т. е. в случае консервативной системы) возбуждается
бесконечно нарастающий вынужденный колебательный процесс,
соответствующий наступлению резонанса. Однако если по-преж-
нему рассматривать консервативную, по нелинейную систему, то
вследствие возможной пеизохронпости при возникновении в ней
колебаний условие резонанса с изменением амплитуды колеба-
ний может измениться, и в этом случае мыслимо установление
конечной амплитуды вынужденного колебания при любой часто-
те~вбздействия.
Как и исследование линейных систем, изучение вынужденных
колебаний в идеализированных консервативных системах дает
нам очень много ценных сведений о протекании самого явления
в реальных диссипативных системах. Для нелинейных систем это,
вероятно, еще более справедливо, так как для большого класса
явлений в таких системах основными факторами, определяющи-
ми характер вынужденных процессов, служат именно нелинейные
7 В. В, Мигулин и др.
98
ГЛ. 3. КОЛЕБАНИЯ ПОД ДЕЙСТВИЕМ ВЫНУЖДАЮЩЕЙ СИЛЫ
свойства элементов, а не наличие затухания, как было в линей-
ных системах.
В данном параграфе нас будут интересовать исключительно
вынужденные процессы, и поэтому мы не будем рассматривать
вопросы, связанные с установлением вынужденных движений,
в особенности учитывая, что в консервативных системах они про-
текают принципиально иначе, чем в реальных диссипативных.
Укажем лишь, что в реальных системах всегда можно выбрать
такой интервал времени после начала воздействия, по истечении
которого в системе будет существовать практически только чисто
вынужденное движение, не зависящее от начального состояния
системы, тогда как в консервативных системах это принципиаль-
но невозможно.
Даже при анализе наиболее простого случая гармоническото
воздействия на нелинейную консервативную систему, вообще
говоря, приходится сталкиваться со значительными трудностями
и нет возможности указать удобные аналитические методы рас-
смотрения подобной задачи.
Нахождение вынужденного решения нелинейного уравнения
второго порядка, описывающего консервативную нелинейную ко-
лебательную систему с одной степенью свободы при периодиче-
ской вынуждающей силы, можно осуществить, отыскивая это
решение в виде ряда Фурье с основной частотой, равной частоте
воздействующей силы
w
X = S [(an cos (npt) + fcnsin(npf)]>
n=l
где p — частота воздействия.
Тогда после подстановки ряда с достаточно большим числом
членов в исходное уравнение принципиально возможно, произве-
дя соответствующие тригонометрические преобразования, полу-
чить систему алгебраических уравнений для отыскания коэффи-
циентов ап и Ьп. Таким путем в принципе можно находить зна-
чения ап и Ъп и определять их зависимость от параметров системы
и характера воздействующей силы, которая может быть представ-
лена в виде ряда Фурье с компонентами частоты р, 2р, Зр, ...
Однако такой путь весьма громоздок и сложен, и в редких
случаях с его помощью удается решить задачу достаточно полно,
а многие существенные особенности поведения нелинейных кон-
сервативных систем, находящихся под внешним периодическим
воздействием, не выявляются достаточно отчетливо. Поэтому мы
ограничимся лишь некоторыми частными случаями и отдельными
приемами, позволяющими выяснить наиболее характерные сто-
роны рассматриваемого явления.
Рассмотрим простейшую нелинейную консервативную си-
стему, описываемую уравнением x = f(x). При воздействии на
нее гармонической силы Р cos (pt) уравнение, описывающее ее
§ 3.3. КОЛЕБАНИЯ В НЕЛИНЕЙНОЙ СИСТЕМЕ
99
доведение, необходимо записать в виде
х — f(x)=>P cos (pt).
(3.3.1)
Из общих соображений вытекает, что вынужденное решение
должно иметь тот же период, что и вынуждающая сила, и со-
держать компоненту a cos (pt).
Принимая, что система не слишком далека от линейной и эта
компонента с частотой, совпадающей с частотой вынуждающей
•илы, является доминирующей в общем выражении для вынуж-
денного процесса, мы в качестве основного (первого) прибли-
жения будем рассматривать реше-
ние х = a cos (pt).
При этом, разумеется, наиболее
интересными будут выводы об
амплитуде этого процесса а, так
’’ис. 3.16. Графическое определе-
ние амплитуды вынужденных ко-
лебаний в нелинейной системе
Рис. ЗД7. Зависимость амплитуды
вынужденных колебаний от частоты
воздействия в системе с «жесткой»
нелинейной возвращающей силой
гак вполне очевидно, что особенности формы действительного
процесса здесь просто опускаются.
Если искать вынужденное решение в форме х = a cos (pt),
-о уравнение (3.3.1) будет иметь вид
—р2а cos (pt) — f(a cos (pt)) = P cos (pt). (3.3.2)
Так как оно должно удовлетворяться при любых значениях ар-
гументов, то необходимо потребовать, чтобы
—f(a) — P + p2a. (33.3)
’’егаение этого уравнения удобно получить графически (рис. 3.46).
Зтроя заданную функцию z= — f(a) и прямую z—P + p2a, мы
з точке их пересечения получим искомое решение а, т. е. найдем
лмплитуду приближенного гармонического решения. Для разных
э и р\ т. е. для различных амплитуд и частот воздействия, можно
найти значения а и построить соответствующие кривые а(р) для
ЮО ГЛ. 3- КОЛЕБАНИЯ ПОД ДЕЙСТВИЕМ ВЫНУЖДАЮЩЕЙ СИЛЫ
различных Р, т. е. построить некоторый аналог резонансным
кривым для резонанса в линейных системах. Изображенный на
рис. 3.16 график функции /(а) характерен для «жесткой» упру-
гой силы. При этом, как обычно, принято, во-первых, что /(0) =
= 0; во-вторых, упругая сила антисимметрична, т. е. /(—а) =
= —f(a); в третьих, для малых амплитуд а система близка к ли-
нейной, и в четвертых, — /(а) > 0, ибо сила возвращающая.
Для /(а), имеющей характер, показанный на рис. 3.16, эти
кривые а(р) имеют вид, изображенный на рис. 3.17, где показа-
ны три такие кривые, соответствующие трем значениям Р(Р1>
>Р2> Р3). При Р — 0 получим кривую, изображенную штрихо-
вой линией; она соответствует собственной частоте свободных
колебаний <в изучаемой системы при различных амплитудах и
называется скелетной кривой. Рассматривая характер получен-
ных резонансных кривых, мы замечаем следующее: при частоте
воздействия р, меньшей частоты свободных колебаний <о0, в систе-
ме всегда происходит однозначно определяемое колебательное
движение с амплитудой, зависящей от величин Р и р. Когда в
процессе своего изменения р становится больше <в0, то, начиная
со значения р > <о0, в системе, кроме существовавшего ранее
движения, оказываются возможными еще два колебательных
процесса с различными амплитудами. При этом амплитуда ис-
ходного вынужденного процесса с ростом р продолжает расти
(область 4), амплитуды же двух вновь появившихся решений
изменяются так, что одна из них растет с ростом р (область С),
другая уменьшается (область В). Линия раздела этих областей
показана на рис. 3.17 штрих-пунктирной кривой, и она проходит
через точки амплитудных кривых с вертикальными касательны-
ми. Таким образом, если для задаппой амплитуды Р воздейству-
ющей силы ее частота р изменяется, пачипая с малых значений
до любых сколь угодно больших значений и обратно, мы получим
однозначное решение, соответствующее одной из ветвей резонанс-
ной кривой в области А. Заметим, что здесь нас интересовало
лишь абсолютное значение величины а, а знак амплитуды, свя-
занный с возможным изменением фазы на л, не учитывался.
Отметим лишь, что колебания в областях А и В для одной и
той же амплитуды внешней силы Р отличаются друг от друга
по фазе на я.
Если же рассматривать поведение амплитуды вынужденного
движения, пачипая с больших значений р, то мы будем двигать-
ся по ветви резонансной кривой в области В в сторону уменьше-
ния р и роста а до той точки, гдо касательная к резонансной
кривой станет вертикальной. Дальнейшее уменьшение р может
сопровождаться лишь скачком амплитуды вынужденного коле-
бания а на ветвь кривой в области А и дальнейшим изменени-
ем а в соответствии с формой этой части резонансной кривой.
Таким образом, мы не обнаружили естественного хода процесса,
§ 3.3. КОЛЕБАНИЯ В НЕЛИНЕЙНОЙ СИСТЕМЕ
«и-.
при котором система оказалась бы на ветви резонансной кривой
в области С. Это согласуется с тем, что строгий анализ особен-
ностей всех трех типов решений показывает неустойчивость
движений, соответствующих области С, в отношении любых сколь
угодно малых вариаций параметров.
Правда, не следует придавать слишком большого значения
сделанным выводам о вынужденных колебаниях при больших а
и сильных уклонениях р от и», так как в этих условиях действи-
тельное движение может значительно отличаться от гармониче-
ского и допущения, положенные в основу построения рассмот-
ренной картины резонансных кривых, станут несправедливыми,
не говоря уже о расхождениях, связанных с заменой реальной
системы консервативной. Однако если оставить в стороне вопрос
о поведении реальной системы при увеличении р, сопровождаю-
щемся ростом амплитуды а до больших значений в области А,
то мы можем выяснить весьма характерные особенности резо-
нансных явлений в нелинейных системах.
Изобразив резонансную кривую для некоторой заданной амп-
литуды воздействия Р = const на отдельном чертеже (рис. 3.18),
отметим следующие особенности.
Во-первых, отсутствие бесконечно
нарастающей амплитуды а при
совпадении р с и», что является
следствием неизохронности коле-
бании в нелинейных системах.
Во-вторых, неоднозначность про-
текания явлений в зависимости от
направления изменения частоты
воздействия.
С ростом р, начинающимся от
малых значений, амплитуда а
растет монотонно. При уменьше-
нии р от больших значений в
сторону <и0 сначала а растет монотонно, затем в точке р'2 совер-
шает скачок и далее уменьшается, а при увеличении р ампли-
туда монотонно растет.
В дальнейшем мы увидим, что более полное рассмотрение
задачи указывает на наличие второго скачка а, который соответ-
ствует перебросу а с ростом р с ветви А на ветвь В, .но в области
значений р, превышающих величины, характерные для скачка
с В на Л.
Рассмотрим теперь ту же задачу приближенным аналитиче-
ским способом, методом гармонического баланса.
Для исследуемой системы, находящейся под гармоническим
воздействием, используем уравнение (3.3.1). Задавшись гармони-
ческим решением
х = acos(&)i)+ Ъ sin(ci)Z), . j[3.3.4)
Рис. 3.18. Резонансная кривая
для консервативной нелинейной
системы с жесткой нелиней-
ностью
102 ГЛ- 3‘ КОЛЕБАНИЯ ПОД ДЕЙСТВИЕМ ВЫНУЖДАЮЩЕЙ СИЛЫ
получаем для Р = 0
—аи2 cos (со/)— &o2sin(of) — y(acos(of) + &sin(of)) = 0, (3.3.5)
где У (a cos (of)+& sin (of))— периодическая функция с периодом
2л/й.
Если разложить —f(x) в ряд Фурье, то очевидно, что только
члены с cos (of) и sin (of) будут в сочетании с х давать тожде-
ственно нуль, как того требует уравнение (3.3.5). Члены же с
высшими гармоническими составляющими не будут скомпенси-
рованы, и это является естественным следствием сделанного до-
пущения о гармоничности искомого решения.
Таким образом, если представить функцию в виде ряда
—/ (a cos + b sin(of)) = .
OO 00
=' ax cos(of) + Pi sin (of) + У an cos (onf) 4- У pn sin (onf), (3.3.6)
П=2 П—2
то, пренебрегая a„ и 0„ для n > 2, можно записать
(oti — ao2)cos(of) + (0! — &o2)sin(of) = 0. (3.3.7)
Заметим, что постоянный член в фурье-разложении функции
— У(х) должен равняться пулю, как следует из самого существа
задачи.
Из уравнения (3.3.7) получаем два условия
ао2 = а(, &о2 = (3.3.8)
Для свободных колебаний оба уравнения совершенно иден-
тичны, так как ввиду произвольности выбора начала отсчета
времени значение х может быть с рапным успехом выражено
через cos (of) или sin(of) и их комбинацию. Коэффициенты а,
и [Ji определяются из соотношений для нахождения коэффици-
ентов Фурье
+л/ы
аг = — У у (a cos (of) + Ъ sin (of)) cos (of) dt,
— Л/<0
+ л/<0
Pi = —J у (a cos (of) + b sin (of)) sin (of) dt,
—л/ш
или, иначе,
+л
ax = — J у (a cos т + b sin т) cos т dx,
— Л
j 4-л
1 С
рх = — — I у (a cos т + b sin т) sin т dx,
—Л
(3.3.9)
где т e of.
§ 3.3. КОЛЕБАНИЯ В НЕЛИНЕЙНОЙ СИСТЕМЕ
103
Используя соотношение (3.3.8), определим частоту свободных
колебаний
+ л
со2 = — A- J / (a cos т + Ъ sin т) cos т dr,
—л
или
+л
й2 = — bJT J / (а cos г + Ь sin т) sin т dr.
—Л
(3.3.10)
Для заданного вида функции f(x) можно, произведя соответ-
ствующее интегрирование, найти и в функции амплитуды. На-
пример, при начальных условиях f = 0, х — а, х — 0 получаем
х — a cos (at), Ъ = 0 и тогда используем первое из выражений
(3.3.9). '
Пусть для примера — f(x) = а%х + ecooz3. Тогда
— /(a cost) = и2 а cost + еа^а3 cos3т,
или
— / (а cos т) cos т = и3а cos2 т + ее^а3 cos4 т =
= (4 + 4 e®ofl3^ + (4 ®оа + 4 eMoa4 cos 2т + 4 eMofl3 cos 4т.
При этом интеграл ранен
л
J (a cos т) cos т dr = f а^а + еи3а3^ 2л,
—л
а выражение для неизохронной частоты приобретает вид
и2 = и® (1+-теа2\ (3.3.11)
Найденное выражение для частоты свободных колебаний не-
сколько отличается от выражения (1.4.18), полученного при
использовании метода последовательных приближений для кон-
тура с нелинейной емкостью. Однако с точностью до членов с
более, высокими степенями г/къаг эти два выражения приводятся
одно к другому, а различие, существенное при не слишком ма-
лых значениях еа2, связано с тем, что в методе последовательных
приближений мы используем не чисто гармоническое решение,
а учитываем наличие высших (например, третьей) гармониче-
ских составляющих.
Для других типов нелинейностей мы, естественно, получили
бы другие выражения для частоты свободных колебаний нели-
нейной системы при конечных амплитудах колебаний. 0ти соот-
104 ГЛ. 3- КОЛЕБАНИЯ ПОД ДЕЙСТВИЕМ ВЫНУЖДАЮЩЕЙ СИЛЫ
ношения, характеризующие зависимость частоты свободных ко-
лебаний от их амплитуды, дают нам приближенное математиче-
ское выражение свойства неизохронности данной системы.
Разобранные примеры с нелинейной емкостью показывают, что
с ростом амплитуды колебаний возрастает действующее значе-
ние ее «жесткости», т. е. уменьшается действующее значение
емкости. Подобная «жесткая» система в согласии с полученными
выражениями характеризуется возрастанием частоты колебаний
с ростом их амплитуды, т. е. с увеличением сообщенного системе
запаса колебательной энергии.
Очевидно, что для обратной зависимости жесткости системы
от амплитуды колебаний, т. ё. при уменьшении §той величины
(росте действующего значения емкости электрической колеба-
тельной системы) с возрастанием амплитуды колебаний, мы бу-
дем иметь уменьшение частоты свободных колебаний при увели-
чении их амплитуды. Подобную закономерность нетрудно полу-
чить, например, если в выражениях, аппроксимирующих нели-
нейные свойства системы, считать е < 0. Тогда соответствующие
соотношения,- передающие свойства неизохронности системы,
дадут закон уменьшения частоты и с ростом амплитуды, т. е.
с увеличением сообщенного системе общего запаса колебательной
энергии (рис. 3.19).
Следует еще раз подчеркнуть, что найденные выражения,
равно как и использованный метод расчета, являются прибли-
г-0
г<0.
i Мягкая
J цпругая
- сила
Жесткая
упругая
' сила
<->в
Pz
Рис. 3.19. Графики измене-
ния частоты собственных
колебаний с ростом ампли-
туды для мягких и жестких
систем
женными, пригодными лишь для до-
статочно малых значений е, причем
чем меньше е, тем до больших зна-
чений амплитуд можно применить
как расчеты, так и полученные со-
отношения. Критерием для подобной
оценки может служить неравенство
lea2lcl. (3.3.12)’
Возвращаясь к анализируемой
задаче, рассмотрим теперь случай
действия внешней силы на систему,
т. е. Р =/*(). Тогда, отыскивая реше-
ние с частотой внешней силы в на-
шем приближении, положим
х = a cos (pt) + Ь sin (pi) (3.3.13)
и введем обозначение pt = r. Из уравнения (3.3.1) следует, что
—ар2 cos т — Ьрг sin т — / (а cos т + Ь sin т) = Р cos т.
Пренебрегая высшими гармониками фурьо-разложения, получим
два уравнения
(3.3.14)
«I — ар2 = Р, р, — Ърг = 0.
§ 3.4. УМНОЖИТЕЛЬ ЧАСТОТЫ С НЕЛИНЕЙНОЙ ЕМКОСТЬЮ
105
Здесь, как и раньше,
+ л
а1 = — J / (a cos т + Ь sin т) cos т dr,
—л
+я
Pi = — J / (а cos т + Ь sin т) sin т dr.
—л
Используя соотношение (3.3.8), находим
^асо2 - ар2 = Р, ba>2 - Ьр2 = 0, (3.3.15)
где, как и раньше, и — частота свободных колебаний в системе
при данной амплитуде. Так как соотношения (3.8.15) должны
быть справедливы при любых р и и, то второе из этих уравнений
может удовлетворяться лишь при Ъ — 0. Тогда из первого урав-
нения (3,3.15) получаем
гдеРкак указывалось, и2 есть функция а. Изменение знака зна-
менателя соответствует измене-
нию фазы колебания х — a cos т
на л, т. е. на 180°.
В таком виде исследование
резонансных свойств достаточ-
но затруднительно. Поэтому рас-
смотрим зависимость р2 от а.
Имея для данной системы
определенную, уже подсчитан-
ную зависимость и от а, можно
построить кривую и2 (а) и за-
тем, задаваясь различными зна-
чениями ±а, найти сответст-
вующие им значения р2 и по
полученным точкам построить
резонансные кривые для раз-
личных Р. Таким образом, мож-
Рис. 3.20. Построение резонансных
кривых для системы с нелинейной
возвращающей силой: р2 = ш-(а) ±
±Р/|а|
но построить и изучить поведение резонансных кривых исследуе-
мой системы и вновь получить те же особенности протекания вы-
нужденных колебаний, которые уже отмечались выше (рис. 3.20) .
§ 3.4. Приближенное рассмотрение работы умножителя частоты
с нелинейной емкостью
В предыдущем параграфе мы рассмотрели вынужденные ко-
лебания, возбуждаемые в слабо нелинейной консервативной си-
стеме гармоническим внешним воздействием. Определение слабой
нелинейности в нашем толковании основано на близости иссле-
106 ГЛ. 3. КОЛЕБАНИЯ ПОД ДЕЙСТВИЕМ ВЫНУЖДАЮЩЕЙ СИЛЫ
дуемого колебательного процесса к соответствующему колеба-
тельному процессу, происходившему в линейной системе. Поэто-
му, как указывалось ранее, даже для существенно нелинейных
консервативных систем в большинстве случаев*) можно найти
такую область амплитуд свободных или вынужденных колебаний,
оставаясь внутри которой нам удается с требуемой точностью
описывать процессы методом гармонического приближения. Од-
нако подобное ограничение исключает из нашего рассмотрения
ряд особенностей протекания колебательных процессов в нели-
нёйных системах.
В самом деле, из общих качественных соображений ясно, что
в нелинейной системе при гармоническом воздействии вынужден-
ный процесс не чисто гармонический и содержит гармонические
компоненты высших частот, кратные частоте воздействия.
Эти высшие гармонические компоненты достаточно малы, по-
ка система для данной амплитуды колебаний слабо нелинейна,
но возрастают по мере роста амплитуды вынужденных колеба-
ний. Если частота одной из возникших за счет нелинейности
системы гармонических компонент близка к собственной частоте
колебаний системы, то амплитуда этой компоненты может су-
щественно возрасти. В итого при исходной гармонической вы-
нуждающей силе результирующий колебательный процесс может
иметь характер весьма далекий от гармонического с резким уве-
личением амплитуды тех компонент, частоты которых лежат в
резонансной области. При этом, естественно, от вида нелинейных
зависимостей (тип нелинейности) существенно зависит возмож-
ный характер результирующего процесса.
Это свойство нелинейных систем используется в умножителях
частоты, в которых за счет соответственно подобранной нели-
нейности системы при гармоническом (или близком к нему)
воздействии возникают колебании значительной амплитуды с
частотами, кратными частоте воздействия. Подобные умножители
частоты с катушками индуктивности с ферромагнитными сердеч-
никами, конденсаторами с сегнетоэлектрическими диэлектриками
или другими нелинейными элементами позволяют производить
энергетически эффективное умножение частоты в 3, 5 и более
раз в одном элементе. Из нечетности функций, аппроксимирую-
щих нелинейные характеристики соответствующих катушек
и конденсаторов, следует, что в указанных устройствах эффек-
тивное умножение частоты возможно лишь в нечетное число
раз.
*) Исключением, конечно, будут те случаи, когда функция, описываю-
щая нелинейные свойства системы, имеет особенность в точке а = 0 и в
окрестности этой точки не может быть разложена в степенной ряд с ко-
нечным числом членов. К числу таких систем, например, относятся меха-
нические системы с люфтами.
§ 3.4. УМНОЖИТЕЛЬ ЧАСТОТЫ С НЕЛИНЕЙНОЙ ЕМКОСТЬЮ
107
Для соответствующего приближенного расчета подобных про-
цессов целесообразно пользоваться следующими элементарными
приемами. Исходя из известной (например, полученной экспери-
ментально) определяющей свойства системы нелинейной зависи-
мости необходимо выбрать ее математическую аппроксимацию.
Наиболее удобна полиномиальная аппроксимация. Наивысшую
степень аппроксимирующего полинома следует выбирать исходя
из условий желаемой точности аппроксимации реальной физи-
ческой зависимости в используемом интервале значений перемен-
ных и, что самое важное, из ожидаемой кратности умножения
частоты. Можно просто выбрать высшую степень полинома рав-
ной номеру интересующей нас гармоники гармонического воз-
действия. Считаем, что собственная частота системы близка к
частоте этой гармоники и составляем уравнение системы. Реше-
ние ищем в виде суммы компонент с частотами р, Зр, 5р, пр,
где п — кратность умножения. Подставляя предполагаемое ре-
шение в уравнение движения (3.3.1), разлагаем нелинейную
функцию /(х) в ряд Фурье по частоте р, начиная с основной
частоты и до членов с номером п. Из полученных выражений
можно составить систему п уравнений для нахождения амплитуд.
Как уже указывалось выше, этот прием, обладая общностью,
приводит к весьма громоздким вычислениям и может эффективно
применяться лишь для отдельных случаев.
Рассмотрим, например, колебания в нелинейной консерватив-
ной системе с конденсатором с сегнетоэлектриком при достаточно
большой амплитуде гармонического воздействия, причем собствен-
ная частота малых свободных колебаний системы близка к утро-
енной частоте воздействия (утроитель частоты). Уравнение в
такой системе запишется в виде
L It + Uc = Р<>cos (3-4.1)
где Ро cos (pt) — внешнее воздействие.
Пусть ис = (1/С0) (q + eg3), что достаточно хорошо согласуется
с экспериментальными зависимостями для конденсаторов с сег-
нетоэлектриками разных типов. Тогда, вводя обозначения 1/ЬС0 =
= ©о и Ро/L = Р, получаем
,2„
-Ч- + ®2о (3 + Б<73) =Р cos(p0' (3.4.2)
dt
Вводя новый масштаб времени т = pt, преобразуем это нелиней-
ное уравнение к виду
p2q + Ид(д + eg3) = Pcosx. (3.4.3)
Таким образом, мы вновь получили уже известное уравнение
типа p2q + /(g) = Pcos(x) (см. (3.3.1)). Однако в этом случае в
108 ГЛ. 3- КОЛЕБАНИЯ ПОД ДЕЙСТВИЕМ ВЫНУЖДАЮЩЕЙ СИЛЫ
соответствии со спецификой задачи ищем решение в виде суммы
двух компонент:
q = ai cos т + а3 cos Зт, (3.4.4)'
и тогда имеем
q = — ai cos т — 9а3 cos Зт.
Оставляя в разложении /(g) в ряд Фурье только члены с cost
и cos Зт и приближенно положив — f(q) = at cost + <z3 cosЗт, по-
лучим систему двух уравнений
—рга{ + <х.1—Р, —$р2а3 + ос3 = 0, (3.4.5)
где Xi = (alt а3), а3 = й?ф2 (ап я3).
Для выбранного вида нелинейности /(g) = й2д)(д) = <во(д + е93)
имеем
1 ( ,3 2,3 2 ,3 з\
ах = + -г + -т-еа/ L
/1 3 з (3-4-6)
а3 = (аз + £ai + £а1аз + 8а|).
Для свободных колебаний системы с нелинейностью (Р — 0) по-
лучим уравнения
—й)2Я1 + а.1 = 0, — 9й2а3 + а3 = 0. (3.4.7)
Здесь й — основная частота свободных колебаний нелинейной
системы, заменившая частоту р, которая задавалась внешним
воздействием. Последняя система дает два соотношения и2 =»
— a.i/a.1, и2 = а3/9а3, из которых определяется соотношение меж-
ду ai и а3
a.Ja.1 = а3/9а3, (3.4.8)
а для заданных начальных условий — форма колебаний, т. е.
относительные амплитуды свободных колебаний основной часто-
ты и третьей гармоники; частота этих колебаний задается соот-
ношением и2 = a.Ja.1 или и2 = а3/9я3. Нетрудно убедиться, что
частота таких свободных колебаний будет равна
й2 = й2 + -|- еа| + еа1а3 + еа^. (3.4.9)
Как мы видим, й2 отличается от и? лишь на величину порядка е.
Иначе обстоит дело при наличии воздействия (Р=^0). Тогда
частота возбуждаемого колебания будет задаваться внешним воз-
действием. В рассматриваемом случае частота и0 близка к Зр.
В результате соотношение между амплитудами основного коле-
бания и его третьей гармоники должно быть совсем иным.
§ 3.4. УМНОЖИТЕЛЬ ЧАСТОТЫ С НЕЛИНЕЙНОЙ ЕМКОСТЬЮ
109
Для определения at и а3 имеем систему
—p2at + = Р, —$рга3 + ос3 = 0. (3.4.10)'
Заменяя в первом уравнении «1 на afch, где по-прежнему
<в2 — квадрат частоты свободных колебаний нелинейной системы,
получаем —р2а1 + а2а1 = Р, откуда at — Р/(а>2 — р2).
Так как и « и0 (с точностью до величины порядка в), а ©0«
«Зр, то можно, не делая существенной ошибки, заменить и2
на и2 и получить выражение
= (3.4.11)
откуда с той же степенью приближения = Р/8р2.
Для определения а3 воспользуемся соотношением —9р2а3 +
+ а3 = 0; тогда
— 9р2а3 + ©о + "4" 8®? + ~2 еа1аз + easj = 0* (3.4.12)
Вводя относительную расстройку £, определяемую как
9р2/и? = 1 + g, (3.4.13)
получим из соотношения (3.4.12) уравнение третьей степени от-
носительно а3:
3 3 , / 3 2 ,1 з п
•4 Е«3 + I "2 8®!— sj аз + "4 sal ~ 0.
Положив £ = еА, имеем
al + Da3 + S = 0, (3.4.14)
где D = 2а\ — 4/3А, 8 = Изо-
графическое рассмотрение полученного уравнения позволяет
найти качественные особенности амплитуды колебания утроенной
частоты а3. Перепишем уравнение (3.4.14) в виде al = —Da3— <S
и построим график левой и правой частей этого уравнения в
функции а3.
Значение 8 = ИзО > 0, так как щ всегда больше нуля при
а «• Зр. В зависимости от величины А меняется наклон прямой
2 = —Da3 — 8v соответственно получаются различные (одна, две
или три) точки пересечения этой прямой с кубической параболой
z — al (рис. 3.21), соответствующие решениям исследуемого
уравнения. Примерный вид кривых, изображающих зависимость
абсолютного значения амплитуды |а3| от А, показан на рис. 3.22.
При А' = 3/2а2 = А имеем D = 0 и амплитуда | а31 =
1Д0 ГЛ. 3- КОЛЕБАНИЯ ПОД ДЕЙСТВИЕМ ВЫНУЖДАЮЩЕЙ СИЛЫ
Эти кривые нелинейного резонанса для жесткой системы по-
казывают, что значительная амплитуда утроенной частоты Зр,
т. е. эффективность умножения частоты, требует вывода рабочего
режима системы в область достаточных расстроек (£ или А).
Лишь в этом случае при режиме колебаний, отвечающих ветви А
(см. рис. 3.22), амплитуда колебаний тройной частоты может
стать достаточно большой. Вывод системы на данный режим до-
стигается либо соответствующим выбором начальных усло-
вий, либо постепенным изменением расстройки (начиная, напри-
мер, от начального значения £ = А = 0, т. е. от условия и0 =
= 3р).
Отметим весьма характерное обстоятельство, а именно то, чтс
эффективная работа умножителя частоты данного типа при воз-
растающей с амплитудой жесткостью системы требует наличие
определенной расстройки соответствующей Зр > и0.
Из исследования данной задачи в консервативной идеализа-
ции получаются также весьма важные выводы — возможность
Рис. 3.21. Графическое построение
для определения амплитуды колеба-
ния утроенной частоты
Рис. 3.22. График амплитуды колеса
ния утроенной частоты в системе ;
жесткой нелинейностью
существования различных режимов колебаний тройной частоты
(ветви А и В на рис. 3.22) и зависимость установившегося ре-
жима от начальных условий и «истории» системы. Эта особен-
ность аналогична соответствующим свойствам рассмотренного ±
предыдущем параграфе резонансного процесса в нелинейной си
стеме при воздействии с частотой, близкой к собственной частоте
колебаний системы, но в разбираемом примере она проявляется
по отношению к третьему обертону воздействующей гармониче-
ской силы.
§ 3.4. УМНОЖИТЕЛЬ ЧАСТОТЫ С НЕЛИНЕЙНОЙ ЕМКОСТЬЮ
111
Принятое нами пренебрежение затуханием системы привело
к возможности неограниченного роста а3 с ростом А (см.
рис. 3.22). Очевидно, что этот вывод несправедлив, и учет потерь
должен изменить картину процесса, в особенности в области
больших А. Увеличение А от малых значений приводит к пере-
ходу устойчивого состояния системы с ветви А на ветвь В ре-
зонансной кривой (см. рис. 3.22), а возможность увеличения |а3|
за счет выбора достаточно большого значения расстройки А огра-
ничена определенным оптимальным значением этой величины
(Аопт).
Увеличение амплитуды воздействия Р дает рост значения |а3|
при данной расстройке. Это следует из анализа корней кубиче-
ского уравнения (3.4.14) и из его графического рассмотрения,
так как величина at с большой степенью точности просто про-
порциональна Р.
Интересно отметить, что в нашем рассмотрении значение 1а31
при заданных Р, р и (o0 растет с уменьшением е, т. е. параметра,
характеризующего нелинейность системы. Это можно объяснить
следующйм образом. Уменьшение е при заданных р и и0 приво-
дит к увеличению А и, следовательно, к дальнейшему уходу
системы по ветви А в сторону возрастания |а3|, причем умень-
шение е приводит вместе с тем к увеличению крутизны ветви А,
что еще более ускоряет рост |а3|.
Этот результат физически вполне понятен, так как уменьше-
ние е хотя и сопровождается соответствующим уменьшением
«удельного веса» гармонических компонент в процессе вынужден-
ных колебаний системы в области, далекой от каких-либо резо-
нансов, но зато уменьшение нелинейности системы приводит к
более сильному возрастанию амплитуды третьей гармоники, ча-
стота которой лежит вблизи собственной частоты системы. Мы
рассматриваем консервативную идеализацию, и поэтому. ампли-
туда любой сколь угодной малой гармонической составляющей,
возникающей за счет нелинейности системы, может достичь боль-
шой величины при надлежащей близости частоты этой компо-
ненты к собственной частоте системы.
Следует лишь отметить, что в даппом случае будет возрастать
время установления стационарного колебания умноженной ча-
стоты. Влиянием же роста амплитуды третьей гармоники на зна-
чение щ мы с самого начала пренебрегаем. Очевидно, что учет
потерь должен принципиально изменить указанные выше особен-
ности. В самом деле, уменьшение амплитуды третьей гармоники
при уменьшении нелинейности соответствует уменьшению соот-
ветствующей доли энергии, тогда как потери считаются неза-
висимыми от нелинейных свойств системы. Последнее обстоя-
тельство существенно изменит характер зависимости амп-
литуды третьей гармоники воздействия от степени нелинейности
системы.
112
ГЛ. 3. КОЛЕБАНИЯ ПОД ДЕЙСТВИЕМ ВЫНУЖДАЮЩЕЙ СИЛЫ
Однако выводы, которые не нуждаются в существенной кор-
ректировке при учете затухания и были получены нами при кон-
сервативной идеализации, весьма принципиальны и дают много
ценных сведений о работе практически важных систем умножи-
телей частоты без активных элементов.
§ 3.5. Рассмотрение вынужденных колебаний в слабо нелинейных
диссипативных системах при гармоническом силовом воздействии
методом гармонического приближения
Как указывалось ранее, не представляется возможным вы-
брать единый эффективный метод для анализа вынужденных
колебаний в нелинейной диссипативной системе с произвольной
нелинейностью и любой диссипацией при наличии внешнего
силового воздействия произвольной формы. Поэтому в первую
очередь необходимо сузить наше рассмотрение рамками опреде-
ленных типов воздействий.
Обратимся к особо важному случаю гармонического воздей-
ствия и из всего многообразия нелинейных диссипативных си-
стем с одной степенью свободы выберем слабо нелинейные си-
стемы, в которых вынужденные колебания при таком воздействии
также близки к гармоническим. Требование малости диссипации
не столь уж принципиально, но поскольку нас интересуют в
основном системы с отчетливо выраженными колебательными
свойствами, а не апериодические, то мы в нашем рассмотрении
ограничимся случаями небольшого затухания (малой дисси-
пации) .
С учетом всех этих оговорок можно сформулировать задачу
следующим образом: требуется найти параметры (амплитуду и
фазу) приближенно гармонического колебания, возбуждаемого
в слабо нелинейной колебательной системе с малым затуханием,
при заданной гармонической внешней силе. С подобной задачей
мы встречаемся не только при рассмотрении механических систем,
но и при анализе различных колебательных цепей в радиотехни-
ческих устройствах при наличии нелинейных диссипативных эле-
ментов (полупроводниковые приборы, радиолампы), а также при
использовании ферромагнитных или сегнетоэлектрических мате-
риалов в катушках индуктивности и конденсаторах этих цепей.
Заметим также, что введение силы, действующей по заданно-
му временному закону, например гармонической силы, весьма
непринужденно осуществляемое в электрических системах, до-
вольно затруднительно реализовать в системах механических.
В самом деле, с помощью соответствующих устройств (напри-
мер, с помощью индуктивной связи) в электрические системы
легко ввести э. д. с. с заданной временной зависимостью при лю-
бом мгновенном состоянии самой системы. В механической же
системе легко задать определенное смещение, а задание силы,
§ 3.5. РАССМОТРЕНИЕ МЕТОДОМ ГАРМОНИЧЕСКОГО ПРИБЛИЖЕНИЯ ЦЗ
меняющейся по заданному закону, требует использования доста-
точно сложных устройств, например тех или иных электромеха-
нических приспособлений.
Итак, рассмотрим колебательную систему, описываемую урав-
нением вида
+ а*х = F (х, + Р cos (pt) (3.5.1)
при малых значениях функции F (х, dxjdt).
Подобным уравнением, например, описывается электрический
контур с нелинейной нагрузкой и нелинейным конденсатором
при гармонической внешней силе (рис. 3.23), для которого урав-
нение примет вид
L if+л(й S-+ ис (з) c/cos
Если считать, что вольт-кулоновая зависимость такого контура
выражаете^ как uc(q) — (1/С0) (<? + <₽(?)), то можно записать
+ fflfo = — 26 (q) — ©fo (q) + COS (pt),_ (3.5.2)
где ©о = 1/LCO, 26 = R (i)/L, i = dqjdt.
Полученное уравнение имеет тот же вид, что и (3.5.1), причем
F
/ dx \
dtj ~
—26(g) - а>о'р(7) /д0,
Р = U!Lq0,
и если нелинейность и диссипация в системе малы, то выражение
‘ -26(3)g--(ofo(g)
I ZZcoszzZ"
Н C('q)= =
[ R(i),
Рис. 3.23. Схема
контура с нели-
нейными конден-
сатором C(q) и со-
противлением R (г)
при гармониче-
ском внешнем воз-
действии
также мало по сравнению с членами, стоящими в левой части
уравнения (3.5.2). Это позволяет нам искать
приближенное решение уравнения (3.5.2) в
виде
х — a cos (pt) + 6 sin (pt) + a0, (3.5.3)
где x— q/q0 — безразмерный заряд.
В отличие от случая вынужденных колеба-
ний в консервативной нелинейной системе
(см. § 3.4), здесь необходимо учитывать по-
стоянный член а0. Нелинейные свойства дисси-
пативного члена R(i) могут привести к несим-
метрии вынужденных колебаний, которые учи-
тываются в решении при помощи постоянной
составляющей — члена а».
В примере с электрическим контуром (см. рис. 3.23) этот слу-
чай соответствует нелинейному сопротивлению R(i) и, следова-
тельно, на конденсаторе возникает постоянный заряд д0, вели-
8 В, В. Мигулин и др.
114 ГЛ. 3. КОЛЕБАНИЯ ПОД ДЕЙСТВИЕМ ВЫНУЖДАЮЩЕЙ СИЛЫ
чина которого связана с амплитудой переменной составляющей
вынужденного процесса. Очевидно, что в установившемся режиме
постоянная составляющая тока в подобном контуре существовать
не может и для установившихся колебаний ток определяется
выражением
= — ар sin (pt) + bp cos (pt), (3.5.4)
причем переходные процессы методом гармонического приближе-
ния рассматривать нельзя.
Подставляя (3.5.3) и (3.5.4) в исходное уравнение (3.5.2) и
сравнивая коэффициенты при cos (pt) и sin (pi), получаем систе-
му уравнений, справедливую с точностью до членов, содержащих
компоненты с частотами 2р, Зр, ... и т. д. в разложении функ-
ции F(x, х) в ряд Фурье,
а (®о — р2) = ах + Р, б(®о — р2) = Ыоао = а0, (3.5.5)
причем
FIх, 1 = «(, + «! cos (pt) + sin (pt) + ...,
\ /
+ Л
it / dx \
а0 = ^— I F lx, -r- }dx, x = a cos (pt) + b sin (pt),
л re I at i
—л ' '
+Я
= -^- J F (x, cost dr, = —ар sin (pt) + bp cos (pt),
—л x
+Л
₽i=4- sr)sinTc/T’
—л ' '
T == pt.
Система (3.5.5)
R
C(q)
l/cospt
Рис. 3.24. Схема
контура с нели-
нейной емкостью
C(q) при гармони-
ческом внешнем
воздействии
L
должна позволить найти величины а0, а, Ъ в за-
висимости от Р и соотношения между ®0 и р
для заданного вида функции F (х, dx/dt), ап-
проксимирующей в общем случае функцию,
описывающую нелинейные реактивные и дис-
сипативные свойства системы.
Рассмотрим этим методом два примера.
Контур с нелинейной емкостью и постоян-
ным сопротивлением. Уравнение, описывающее
систему, изображенную на рис. 3.24, имеет вид
§- + rwc(7) = -26g + ^cos(pt). (3.5.6)
Как указывалось ранее (см. с. 77), для аппроксимации реаль-
ной зависимости uc(q) для конденсатора с сегнетоэлектриком
можно с хорошим приближением воспользоваться выражени-
ем uc(q) = (i/C^)(q + ^qs). Вводя безразмерную переменную
§ 3.5. РАССМОТРЕНИЕ МЕТОДОМ ГАРМОНИЧЕСКОГО ПРИБЛИЖЕНИЯ Ц5
х — q/qa, получим
^-4- + = — ©оуа:3 —26^ + Р cos (pt); (3.5.7)
dt at
здесь (£>o = i/LC0, у = yoqo, 28 = R/L, P = U/Lq0. Решение для x
ищем в виде х = a cos (pt) + b sin (pt); тогда
= — ap sin (pt) + bp cos (pt).
Постоянную составляющую в решении для х мы опустим, так
как 26, согласно условию задачи, является постоянной величи-
ной, и правая часть уравнения (3.5.7) с учетом искомого реше-
ния представляет собой нечетную функцию cos (pi) и sin (pi),
и, значит, ао = О (см. (3.5.3)). Производя вычисления коэффици-
ентов а, и 0, фурье-разложения нелинейной функции F (х, х)
Л 'I
ссх = i J [— уы3 (a cost + 6 sinx)3 + 26 (ар sinx— bp cost)] cost dr,
—Л
Л
J [— y®o(a cost + Ъ sinx)3 + 26(ap sinx — bp cosx)]sinxdx,
—Л
где x = pt, получим
ax = — 2bpb — -г ®qY (a2 + b2) a,
3 , (3.5.8)
Px = 26pa -j- o>oY (a2 + b2) b.
Тогда система уравнений (3.5.5) для нашего случая примет вид
/п>о — р2 + (йоуЛ2^ а + 2bpb = Р,
' (3.5.9)
^аго — р2 + •|-ЫоуЛ2^ Ъ — 2Ьра = О,
где А2 = а2 + Ъ2.
Возводя в квадрат и складывая оба написанных выше урав-
нения, получаем
(ю? - р2 + | уАЧ?^А2 + 462рМ2 = Р2,
или
(со2 — Р2)2А2 + 462рМ2 — Р2 = 0, (3.5.10)
где со2 =. ®о(1 +3/4уЛ2)—квадрат частоты свободных колебаний
той же нелинейной системы при 6=0 (т. е. для консервативного
случая (см. (3.3.11)), характеризующей неизохронность системы.
8»
116 ГЛ. 3- КОЛЕБАНИЯ ПОД ДЕЙСТВИЕМ ВЫНУЖДАЮЩЕЙ СИЛЫ
Для удобства рассмотрения перепишем уравнение (3.5.10)'
в виде
р‘ + 2(2б2 - ю2)р2 + «в4-Р2/Аг = О,
откуда легко находим
р2 = (ю2 - 262) ± УР2/Л2 —462(со2 —б2). (3.5.11)'
Полученную зависимость р2 от А при у > 0 можно представить
графически в виде семейства резонансных кривых. На рис. 3.25
Рис. 3.25. Семейство резонансных кривых для нелинейного контура с жест-
кой нелинейностью и постоянным затуханием
изображено подобное семейство для одного заданного значения 6
и для различных амплитуд воздействующей силы Р.
Исследование особенностей поведения кривых р2(4), задавае-
мых уравнением (3.5.11), позволяет разделить их на два типа.
Кривые одного вида соответствуют значениям амплитуды
внешней силы, меньшим некоторой критической величины, и ха-
рактеризуются однозначным ходом амплитуды вынужденного ко-
лебания А в зависимости от частоты воздействующей силы
(тип 1). Все они расположены ниже кривой для Р=Ркр. Резо-
нансные кривые такого типа представляют собой несколько
деформированные кривые резонансной амплитуды для обычного
линейного контура с затуханием. Максимум у них смещен в
сторону больших частот в соответствии с возрастанием частоты
свободных колебаний с ростом амплитуды, обусловленным не-
изохронностью.
При значениях Р, больших определенного критического зна-
чения РКр, в резонансных кривых появляются участки с верти-
кальной касательной, и для определенной области значений р*
возникает неоднозначная зависимость амплитуды вынужденных
колебаний от частоты воздействия (тип 2). На рис. 3.25 заштри-
хована область, где резонансные кривые имеют обратный наклон,
§ 3.5. РАССМОТРЕНИЕ МЕТОДОМ ГАРМОНИЧЕСКОГО ПРИБЛИЖЕНИЯ Ц7
1 ее границы соответствуют вертикальным касательным к резо-
нансным кривым. Амплитуды резонансных кривых, лежащие
з заштрихованной области, неустойчивы, и при непрерывном
изменении частоты воздействия р для достаточно больших ампли-
туд внешней силы Р>Ркр появляются скачки амплитуды при
достижении границы неустойчивой области.
Неустойчивость этих решений не следует прямо из приведен-
ных расчетов. Метод гармонического приближения не дает воз-
можности определить устойчивость найденных решений. Для
5того необходимы дополнительные исследования полученных зна-
чений амплитуды.
Как видно из формулы (3.5.11) при 6 = 0, мы приходим к со-
отношению, аналогичному (3.3.15) и связывающему частоту
зоздействия и амплитуду вынужденного колебания в консерва-
’•ивной нелинейной колебательной системе рг = аг±Р/А. В со-
ответствии с этим и семейство резонансных кривых рис. 3.25 при
Рис. 3.26. Семейство резонансных кри-
вых для нелинейного контура с мягкой
нелинейностью и постоянным затуха-
нием
6 0 переходит в семейство
изолированных кривых, раз-
деленных скелетной кривой
шг(4).
Очевидно, что в случае
обратного закона зависимо-
сти ис от q или, говоря
языком механики, обратной
Рис. 3.27. Схема контура с посто-
янными L и С и с нелинейным
затуханием при гармоническом
внешнем воздействии
зависимости жесткости от отклонения при аналогичной аппрокси-
мации необходимо считать у < 0 и соответствующие резонансные
кривые будут заметь наклон в обратную сторону, что схематиче-
ски показано на рис. 3.26 (случай мягкой возвращающей силы).
Контур с постоянными L и С и с нелинейным затуханием
(рис. 3.27). Пусть
7?(i) = 7?o(l + M + "foi2)- (3.5.12)’
Тогда уравнение, описывающее поведение данного контура, мож-
но записать в виде
х + 260(z + Р^+уа;3) + а%х — Р сой pt, (3.5.13)
где х = q/qt, 260 = R^/L, к>о = Р = Ua/Lq0, р = род0, у = у0^.
118 гл. з. колебания под действием вынуждающей силы
Ищем решение в гармоническом приближении в виде
х = a cos (pt) + Ъ sin (pt) + а0, х = —ар sin (pt) + bp cos (pt).
Для определения a0, a, b получаем из (3.5.5) систему уравнений
®o«o = — SoPPM2>
(®o - p2) a = — 260p (1 + 4 ypM2j b + P, (3 5 14)
(®o — P2) b = 260p (1 + 4 ypM2^ a.
Из первого уравнения следует, что
«о = -(р2/®о)₽М2- (3.5.15)
Найденное выражение дает постоянное напряжение смеще-
ния, образующееся на емкости за счет песимметрии нелинейного
сопротивления. Появление этого напряжения на радиотехниче-
ском языке называется детектированием воздействующего гармо-
нического сигнала. Отметим, что постоянное напряжение сме-
щения для заданной амплитуды воздействия связано лишь с
коэффициентом 0, т. е. с коэффициентом при квадратичном члене
функции, аппроксимирующей нелинейность системы. Члены раз-
ложения нелинейной функции с нечетными степенями не при-
водят к возникновению постоянной составляющей. В нашем при-
мере, как и в более сложных случаях, ответственны за детекти-
рование члены с четными степенями полинома, аппроксимирую-
щего нелинейность, которые и приводят к несимметрии харак-
теристики последней.
Для определения амплитуды выпуждеппого колебания нужно
рассмотреть систему уравнений
(®о — Р2) а + 260р (1 + 4 УР*А*)Ь = Р,
(®о — р2) Ъ — 260р (1 + 4 YP2y42j а = °,
откуда получаем
(о2 - р2)2 + 462р2 (1 + 4 W^2)2 = J- (3-5.16)
Примем, что нам заданы параметры воздействия: его амплитуда
Р = const и частота р = const. Будем менять в системе собствен-
ную частоту контура ®2. Для нахождения апалитического выра-
жения зависимости А от <о2 запишем биквадратное уравнение:
- 2р2и2 + р* + 4бо (1 + 4 ?РМ2)2 - § = °’ (3-5.17)
§ 3.6. АНАЛИЗ НЕЛИНЕЙНЫХ СИСТЕМ МЕТОДОМ ММА
119
откуда
«о = Р2 ± 1/ J - 46?рг (1 + 4 ypU^-j2. (3.5.18)
Если изобразить передаваемую этим соотношением связь меж-
ду А и ©о, то получится семейство резонансных кривых
(рис. 3.28). Дифференцируя урав-
нение (3.5.16) по <Oq и находя
производную дА2/да1, нетрудно
показать, что в пределах выбран-
ного приближения она обращает-
2 9
ся в нуль при со0= Р независимо
от значения амплитуды колеба-
ний А.
Для контуров с нелинейным
затуханием резонансные кривые
при малых 7 и при небольших
амплитудах внешней силы незна-
чительно отличаются от обычных
резонансных кривых для линей-
ного контура, и лишь для боль-
ших амплитуд наблюдается упло-
Рис. 3.28. Семейство резонансных
кривых для контура с нелиней-
ным затуханием
щение их вершин. Это связано с ростом эффективного затухания
системы с возрастанием амплитуды колебаний по закону 61 =
= 60(1 + 74р2Д2).
§ 3.6. Применение метода медленно меняющихся амплитуд
к анализу поведения слабо нелинейных систем
с малыми потерями при гармоническом силовом воздействии
В § 2.5 были описаны основы метода медленно меняющихся
амплитуд применительно к анализу автономных слабо нелиней-
ных систем с малым затуханием. Там же были даны примеры
применения этого метода для исследования свободных колебаний
в некоторых нелинейных системах. Однако исходные положения,
на которых основана возможность получения упрощающих зада-
чу укороченных уравнений, допускают также применение этого
метода к случаю систем, находящихся под внешним воздей-
ствием.
Если на колебательную систему, близкую к линейной консер-
вативной, действует периодическая сила с частотой, существенно
отличной от собственной частоты колебаний системы, то эта сила
вызовет вынужденное колебание с частотой внешней силы и
амплитудой, в основном определяемой различием между частотой
воздействия и собственной частотой системы; при этом также
возможно умножение частоты внешней силы.
120
ГЛ. 3. КОЛЕБАНИЯ ПОД ДЕЙСТВИЕМ ВЫНУЖДАЮЩЕЙ СИЛЫ
При гармоническом воздействии на слабо нелинейную систему
с малым затуханием необходимо рассматривать уравнение вида
-2 / dx\
—f = р/ lx, dt) + P cos (pt), (3.6.1)
причем в рассматриваемом случае р достаточно сильно отличается
от (1)0, а ц« 1.
Пусть
х — Xi + a cos (pt), (3.6.2)
где а = Р/(а% — р2) — амплитуда вынужденного колебания для
подсистемы х + а>%х — Р cos (pt), в которую переходит (3.6.1)
при ц = 0. Тогда xt будет удовлетворять уравнению
I Их \
—gl + ®2Zi = p/fzj + a cos(pi)i —pa sin (pt)j. (3.6.3)
dt \ /
Это уравнение при P — 0 допускает только одно стационарное
решение Xi = 0, так как при этом исходная система должна на-
ходиться в покое. При Р#=0 уравнение (3.6.3) можно рассмат-
ривать как уравнение, описывающее колебательную систему с
вынужденными колебаниями и амплитудами порядка ц и перио-
дом 2л/р, взаимодействующими с собственными колебаниями
вследствие нелинейности системы. Вопрос же о существовании
стационарных собственных колебаний требует дополнительного
исследования, так как в этом случае система, вообще говоря,
претерпевает периодическое (с частотой, кратной р) изменение
энергоемких параметров, что может при выполнении определен-
ных частотных соотношений привести к эффектам параметриче-
ского вложения энергии. При этом предполагается, что амплиту-
да воздействующей силы Р по ограничена условием малости
подобно силам сопротивления и силам, связанным с нелинейными
свойствами системы, которые имеют порядок малости ц.
Если частотные и энергетические соотношения, обусловлива-
ющие параметрическое вложение энергии в систему, не выпол-
няются, то для р, достаточно отличающегося от <й0, движение
в рассматриваемой системе будет в основном зависеть от вынуж-
денных процессов, описываемых вторым членом соотношения
(3.6.2).
Если частота воздействия близка к собственной частоте коле-
баний слабо диссипативной системы, то соответствующие резо-
нансные колебания (х^ приобретут значительную амплитуду,
которая будет возрастать до величины порядка 1/ц при прибли-
жении частоты воздействия к собственной частоте системы. Это
обстоятельство не позволяет в подобном случае использовать
указанную подстановку и заставляет при рассмотрении данной
задачи ввести ограничения на амплитуду воздействия. Для воз-
§ 3.6. АНАЛИЗ НЕЛИНЕЙНЫХ СИСТЕМ МЕТОДОМ ММА
121
можности применения метода медленно меняющихся амплитуд
необходимо потребовать, чтобы внешняя сила была мала по
амплитуде и имела бы тот же порядок малости, что и малые
силы, связанные с нелинейными и диссипативными свойствами
системы и возникающие при конечных амплитудах колебаний в
ней. В таком случае воздействующую силу можно объединить
с этими малыми силами и свести рассмотрение задачи к при-
ближенному исследованию уравнения типа
X + ШдХ — p.f1 (х, х, t),
которое отличается от рассмотренного ранее (см. (2.5.2)) тем, что
функция ft зависит не только от переменной х и ее производной
х, но и явно от времени.
Решение этого уравнения будем искать в виде a: = wcos(pi) +
+ v sin (pt), где, как и раньше, и и v — медленно меняющиеся
функции. Вводя в исходное уравнение новый масштаб времени
т = pt, получим
х + (®о/Р2) х = Р/i (xi х, т)- (3.6.4)
Вводя обозначение
®07р2 = 1-£ (3.6.5)
и требуя, чтобы расстройка £ была величиной порядка малости
р, запишем уравнение (3.6.4) окончательно в виде
х + х= [if (х, х, т). (3.6.6)
Тогда в соответствии с изложенным методом медленно меняю-
щихся амплитуд имеем
х = и cos т + v sin т, х — —и sin т + v cos т
и можно перейти к укороченным уравнениям для определения
функций пир:
2Л 2Л
и = — 2^- J р./ (х, х, т) sin т dx, р = А- ц/ (х, х, х) cos х dx.
о о
(3.6.7)
Если х =Л cos (т + 6), х = — A sin(r + 0), то укороченные урав-
нения для определения амплитуды и фазы будут иметь вид
2Л 2Л
Л = — И/ (А, 0, TjsinTjdTj, Л0 = —ц/(Л, 0, t)cost1<Zt1
о о
(3.6.8)
где Тц = т + 0.
122 ГЛ. 3- КОЛЕБАНИЯ ПОД ДЕЙСТВИЕМ ВЫНУЖДАЮЩЕЙ СИЛЫ
В отличие от описанного пути нахождения методом медленно
меняющихся амплитуд приближенного решения уравнения
(3.3.1), мы для упомянутого ранее случая существенного разли-
чия между р и ©о (т. е. области, далекой от резонанса) должны
поступить несколько иначе.
Вводя через подстановку (3.6.2) новую переменную xt, соот-
ветствующую колебанию с частотой, близкой к собственной ча-
стоте системы (и~и0), мы, применяя метод медленно меняю-
щихся амплитуд, должны искать для xt решение с частотой р/п
(случай р = п<л) или тр (случай р—а>/т) и соответственно вво-
дить новый масштаб времени т = (р/п)£ = ю£ или x = mpt = a)t.
При этом расстройка будет определяться из соотношений
или
тгр р
а для основной подстановки (см. (2.5.3)) имеем по-прежнему
Xi = и cos т + v sin т, Xi ——и sin т + v cos т.
Когда ©о близко к тр, мы будем определять амплитуду колеба-
ния с частотой, соответствующей тп-му обертону воздействующей
силы, а когда ю0«р/п, речь будет идти об отыскании возмож-
ных унтертонов, или субгармоник. Если же не представляется
возможным подобрать такое т или п, чтобы расстройка | удов-
летворяла выбранному критерию малости, то тогда описываемый
путь решения теряет смысл. В этом случае наиболее вероятно,
что искомое установившееся решение будет с большой степенью
точности описываться вторым членом в правой части (3.6.2).
Исследование укороченных уравнений для описанных случаев
проводится теми же приемами, что и для автономных систем.
В качестве простейшего примера рассмотрим методом ММА
вынужденные колебания в контуре с нелинейным затуханием,
которые были рассчитаны в § 3.5 методом гармонического балан-
са (гармонического приближения). Для подобного контура (см.
рис. 3.27) мы можем записать уравнение Кирхгофа в виде
Ь + ^<I = U0cos(pt).
Если считать, что нелинейная зависимость сопротивления R от
тока i имеет квадратичный характер, а собственная частота кон-
тура &>о близка к частоте внешней силы р, то, вводя обозначения
= i/LC, 2ft = B^Lp, х = q/q0,
= 1 — т = pt, R = + yoia),
приходим к уравнению
х + х — — 2'Ох — 2'6'fx3 + Р cos т, (3.6.9)
§ 3.6. АНАЛИЗ НЕЛИНЕЙНЫХ СИСТЕМ МЕТОДОМ ММА
123
где Р = UJLqvp2, у = уо?оР2, а у0>0. Для применимости метода
медленно меняющихся амплитуд к решению этого уравнения
необходимо потребовать, чтобы выполнялись неравенства: рас-
стройка В < 1, затухание в системе 2Ь « 1, амплитуда внешнего
воздействия Р < 1, т. е. чтобы все члены в цравой части урав-
нения были малы по сравнению с членами в левой его части.
Решение ищем в виде х = A cos(r + 0), х =>— A sin(x + 0).
Тогда, вводя = т + 0, получаем следующие укороченные урав-
нения:
2Я
А — —| [£4 cos 14 + 2&А sin 14 + 2fty43 sin3 т1 4-
о
+ Р cos (тх — 0)] sin dxlt
2Л
40 = — J [£4 cos тт + 2&Л sin + 2fty43 sin +
о
+ Р COS (?! — 0)] COS T-L cZxlt
а после выполнения интегрирования имеем
4 = — ft4----i- Р sin 0-1- fty43, 40 =-----£4------Р cos 0.
(3.6.10)
Стационарные решения находят из укороченных уравнений при
условии 4 = 0 = 0, т. е. из системы уравнений
2ft (1 + у4>) 40 = — Р sin 0О, £40=—Рсоз 0О.
Возводя правые и левые части этих уравнений в квадрат и скла-
дывая их, получаем
4q = р2/^2 + 4$2 (1 + ];
оно представляет собой уравнение резонансной кривой для доб-
ротного колебательного контура с нелинейным сопротивлением.
В случае линейного контура (у0 = 0) получается известное
уже нам выражение (см. (3.5.10)) для резонансной кривой
43 = Р*/№ + 4ft2).
Соответствующие семейства резонансных кривых показаны на
рис. 3.28 штриховыми линиями. Как мы видим, резонансные
кривые для контура с нелинейным затуханием уплощаются в
области расстроек, близких к нулю. Это изменение тем больше,
чем больше резонансная амплитуда. Вдали от области малых
расстроек резонансные кривые линейного и нелинейного конту-
124 ГЛ. 3- КОЛЕБАНИЯ ПОД ДЕЙСТВИЕМ ВЫНУЖДАЮЩЕЙ СИЛЫ
R
L(i)
l/gGVSpt
Рис. 3.29. Схема кон-
тура с нелинейной
индуктивностью при
воздействии гармони-
ческой силы
ров практически совпадают. Однако следует иметь в виду, что
эти кривые нигде не пересекаются и резонансная кривая нели-.
нейного контура при у > 0 даже вдали от резонансной ча-
стоты всегда расположена ниже резонансной кривой линейного
контура.
Однако полученные выше укороченные уравнения позволяют
найти не только стационарные амплитуду и фазу вынужденного
колебания, но в принципе и закон установ-
ления стационарного процесса путем инте-
грирования системы укороченных уравнений
(3.6.10). В этом, в частности, заключается
большая эффективность метода ММА по
сравнению с методом гармонического при-
ближения, дающего в принципе только ста-
ционарные значения амплитуд.
• В качестве другого примера применения
метода ММА рассмотрим вынужденные
колебания в контуре с нелинейной индук-
тивностью (рис. 3.29). Будем считать однозначной связь между
магнитным потоком Фо и током г, т. е. пренебрежем гистерези-
сом. Значения R и С принимаются постоянными. При соответ-
ствующем выборе масштаба для функции Ф, пропорциональной
магнитному потоку Фо, мы можем записать уравнение, описы-
вающее процессы в контуре, в виде
-^-Ф(г) + Ri + -£-q = U0cos(pt),
или (3.6.11)
Зададимся выражением для аппроксимации зависимости Ф(г)
в форме
0(i) = Lo(i — 'Yoi3)> гДе i^dq/dt. (3.6.12)
Подобная простейшая полиномиальная аппроксимация кривой
намагничивания, естественно, может удовлетворительно переда-
вать ее реальный ход лишь в определенном ограниченном интер-
вале значений i. Поэтому, прежде чем обсуждать полученные
результаты, необходимо убедиться, что найденные значения амп-
литуды тока не выходят за те Пределы, в которых применима
выбранная аппроксимация.
Дифференцируя (3.6.12),
[/ \4 1 2
и подставляя найденное соотношение в (3.6.11), имеем
Lo?— 3L0y0?2g + Rq + ~q = t70cos(pZ).
§ 3.6. АНАЛИЗ НЕЛИНЕЙНЫХ СИСТЕМ МЕТОДОМ ММА
125
Перепишем это уравнение в виде
LoQ + -^-Я= + ^ocos W- (3.6.13)
которое допускает применение метода медленно меняющихся
Так как мы рассматриваем случай малого затухания и малой
нелинейности, то первые два слагаемых в правой части (3.6.13)
малы по сравнению с членами, стоящими в левой части, и мы
приходим к уравнению вида
q + cofo = pF* (g, q, q) + (Uo/L) cos (pt),
амплитуд для произвольного Pa при частоте р, сильно отличаю-
щейся ОТ (Do, и ДЛЯ Ро порядка Ц при р, близкой к (Оо.
I) Рассмотрим сначала случай частоты р, далекой от со0- Урав-
нение (3.6.13) запишем в виде
х + соо^ = — 26г + Ро cos (pt), (3.6.14)
здесь = 1/LOC, у = 3yogg, 26 = 7?/Л0, Ро => Ua/Lq0, х — q/qa.
р
Положим х = хг Н----- ° а-cos (pt). Тогда для xt получим из
И0 Р
(3.6.14)
Idx \2 / d^x \
—Т + = Т Hr — Рр sin (/’О I —у — 1>-Р COS (pt) —
at \ / \ at /
— 26 — рР sin (pt)j, (3.6.15)
где Р = Ро/(®о — Р2)-
Правая часть этого уравнения периодична с периодом 2л/р
и мала по сравнению с членами, стоящими в левой его части.
Поэтому при частоте р, далекой от ио, вынужденное колебание
в решении уравнения (3.6.10) будет иметь амплитуду по край-
ней мере того же порядка малости, что и члены с у и 26. Исклю-
чения соответствуют случаям, когда тр « со0. Тогда высшие гар-
монические компоненту в правой части уравнения (3.6.15) могут
вызвать резонансные эффекты. В этих случаях можно ожидать
появления вынужденных колебаний с конечными амплитудами
на частотах тр, т. е. работы подобной, системы как умножителя
частоты.
Довольно очевидно, что относительная интенсивность этих
гармонических компонент будет определяться видом нелинейной
характеристики системы и для выбранной аппроксимации будет
прямо задаваться видом аппроксимирующей функции.
При кубической аппроксимации появится лишь третий обер-
тон и резонансные эффекты могут возникать лишь при ю0, близ-
126 ГЛ- 3- КОЛЕБАНИЯ ПОД ДЕЙСТВИЕМ ВЫНУЖДАЮЩЕЙ СИЛЫ
кой к Зр, т. е. в этом случае исследуемая система будет работать
в качестве утроителя частоты.
Использование больших участков нелинейной характеристи-
ки привело бы к необходимости введения в аппроксимирующий
полином членов с более высокими степенями, и тогда имели бы
место отчетливо выраженные резонансные эффекты для т = 5, 7
и т. д. При этом антисимметрия характеристики намагничивания
соответствует присутствию в аппроксимирующем полиноме лишь
нечетных степеней и, следовательно, возможны резонансные про-
цессы только на нечетных гармониках воздействующей силы. Эти
же свойства нелинейной характеристики приводят к тому, что
в результате появления в системе вынужденных колебаний с ча-
стотой р возникает периодическое изменение ее индуктивности
с частотой 2р.
Как указывалось, случай со» » Зр соответствует работе систе-
мы в качестве утроителя частоты с использованием гармоники
воздействующей силы, возникающей на нелинейной реактивности
контура. Случай сщ ~ 2р соответствует появлению возможных
параметрических эффектов (параметрическая генерация, пара-
метрическое усиление (см. гл. 4)), а случай ю0 р — известному
явлению возбуждения резонансных вынужденных колебаний в
нелинейной системе.
Случай р«'(щ. Для возможности применения метода ММА
примем, что амплитуда внешней силы Ра имеет величину поряд-
ка малости 26 и у. Тогда уравнение (3.6.14) переходит в
х + х = %х — 2$х + + Р cos т. (3.6.16)
где т = pt, со®//;2 = 1 — £, 2й = 26/р, у' = ур2, Р = Pjp*.
Для решения задачи, вновь используя вариант метода ММА,
изложенный в § 2.5 с применением медленно меняющихся амп-
литуды А(т) и фазы 0(т), находим
г = Асоз(т + 0), х = — A sin(r + 0).
В правой части уравнения (3.6.16) следует ограничиться членами
первого порядка малости относительно единицы, и поэтому член
y'jfx нужно записать в виде
у'х2х = —у'A3 sin2(r + 0)cos(t + 0),
пренебрегая членами, содержащими А и 0, так как в силу «мед-
ленности» А(т) и 0(т) справедливы условия А<КА, 0 С 0. Уко-
роченные уравнения принимают вид
2Л
А = — J ^А cos Tj + 2ftA sin тх-----у'A3 cos ^ +
о
+ у'A3 cos Зтх+ Pcos(tx— 0)1 sinr1 drif
§ 3.6. АНАЛИЗ НЕЛИНЕЙНЫХ СИСТЕМ МЕТОДОМ ММА
127
2Л
9 = — J cos тх + 2fr sin Ti — у'A3 c°s т +
О
+ ?'43 COS 3?! + Р cos (тх — 0) j cos <hlt
где тд = т + 0. После выполнения интегрирования получаем сле-
дующие укороченные уравнения:
А = -$А------LpsinQ, 0 = _1^Л-----------1Y'43 + Pcose).
Стационарную амплитуду вынужденных колебаний Ао можно
найти из решения системы (3.6.17) при условии, что А = 0, 0 =
= 0, т. е.
2Mo + Psin0o = O, $А0 - ± /4® + Рcos0О = 0. (3.6.18)
Решая эту систему относительно получаем выражение, удобное
для расчетов и графического построения при заданных значениях
у', & и Р,
(3.6.19)
На рис. 3.30 приведено типичное семейство соответствующих
резонансных кривых для различных значений амплитуды вы-
нуждающей силы. Как видно из этого рисунка, здесь вследствие
затухания в системе мы не
встречаемся с бесконечным
нарастанием амплитуды вы-
нужденных колебаний с ро-
стом расстройки, как было
в консервативном случае (см.
§ 3.3). Здесь для каждой
амплитуды воздействующей
силы существует своя мак-
симальная амплитуда уста-
новившихся вынужденных т>_ о ол п
- j Рис. з зо. Семейство резонансных кри-
колебании на частоте воз- Вых для контура с нелинейной индук-
действия. Дальнейшее изме- тивностью
пение частоты воздействия
(или собственной частоты контура), приводящее к увеличению рас-
стройки £ до величины, превышающей значение, соответствующее
максимальной амплитуде вынужденных колебаний, приводит к
скачкообразному уменьшению этой амплитуды до значений, от-
вечающих монотонно спадающей ветви резонансной кривой.
128 ГЛ. 3- КОЛЕБАНИЯ ПОД ДЕЙСТВИЕМ ВЫНУЖДАЮЩЕЙ СИЛЫ
Уменьшение | приводит к возрастанию Ао в соответствии с уст<
чивой ветвью кривой вплоть до того значения В, при котор
касательная к резонансной кривой станет вертикальной. Toi
произойдет «обратный» скачок амплитуды Ао вверх до выхс
на верхнюю устойчивую ветвь резонансной кривой.
Очевидно, что при достаточно малой амплитуде внешнего в
действия и других соотношениях между параметрами у' и Ф Mi
гозначности может и не быть, и тогда возникает лишь некотор
несимметрия резонансной кривой за счет нелинейных свой<
системы, что уже было показано в § 3.5 (см. рис. 3.25).
Возможность получения трех значений стационарных, отл1
ных от нуля амплитуд, из которых два устойчивы, а одно ;
устойчиво, является следствием того, что для определения с
ционарных амплитуд необходимо решать уравнение третьей с
пени относительно Л о.
Устойчивость найдеппых решений можно определить метод
возмущений: тогда, задаваясь вариациями амплитуды и фа
вблизи стационарных значений Ао и 0О в виде Л=Ло + £, Е
= 0О + Т], получаем систему укороченных уравнений для вариав
j=-^_Xpcos0o.T), Ц =
(3.6.:
Если задаться временной зависимостью вариаций в виде S = So
т] = цоеХт, где Л — характеристический показатель (в общем с.
чае комплексный), и учесть, что Рsin0О = — 2бЛ0 и .Pcos0o
= — £), то получим систему однородных уравнёв
относительно So и т]0
— (б1 + A.) So-("У Ло = 0»
. , з • ’ (3.6.
24" (* ) £о — Ло = 0*
о \ /
Составляя определитель для этой системы и требуя для нет]
виальности решения равенства его нулю, получаем для харак
ристического показателя % следующее выражение:
х = т'Лоа) (4- 4 (3-6-
Для некоторой совокупности параметров колебательной сис
мы действительная часть X может быть положительной, и toi
система уйдет из этого стационарного состояния; для дру1
совокупности параметров она может быть отрицательной, и то;
вынужденное колебание с такой амплитудой Ао будет уст
чивым.
ГЛАВА 4
КОЛЕБАНИЯ В СИСТЕМАХ
С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
ПРИ ПАРАМЕТРИЧЕСКОМ ВОЗДЕЙСТВИИ
§ 4.1. Параметрическое воздействие на колебательные системы
До сих пор мы рассматривали колебательные системы, в ко-
торых происходили либо свободные колебания, определяемые
начальными условиями, либо чисто вынужденные, возникающие
под действием внешней силы, приложенной к колебательной си-
стеме. Для электрических систем это соответствовало введению
в изучаемый контур вынуждающей э. д. с. или введению задан-
ного тока в какой-либо элемент цепи.
Однако, как известно, существует еще один важный вид воз-
действия на колебательные системы, который заключается в том,
что внешней силой производится изменение одного из парамет-
ров системы. Такой вид воздействия мы называем параметриче-
ским. В этой главе будут рассмотрены колебательные системы,
в которых один из параметров меняется во времени.
Исследуя только системы с одной степенью свободы, мы огра-
ничим свою задачу рассмотрением лишь периодических измене-
ний или, как часто говорят, случаем периодической модуляции
параметра. Для выяснения специфических осо-
бенностей процессов, вызываемых периодиче-
ским параметрическим воздействием, рассмот-
рим простейшую модель.
Возьмем линейный колебательный контур
(рис. 4.1), состоящий из последовательно со-
единенных L, R и С. Пусть емкость конденса-
тора контура меняется во времени с помощью
какого-то внешнего устройства по изображен-
ному на графике закону Х₽и9- 4.2, а). Иред-
положим, кроме того, что заряд на конденса-
торе меняется по закону, близкому к гармо-
ническому.
Если при наличии колебаний Заряда на конденсаторе q(t)
изменять указанным образом его емкость во времени С(?), то
каждый раз при ее уменьшении на 2АС энергия конденсатора
соответственно увеличивается. Заряд q при скачкообразном из-
менении емкости не меняется, ибо является инерционной вели-
чиной. Пусть частотные и фазовые соотношения1 между q(t) и
С (?) таковы, что емкость кондесатора уменьшается каждый раз
точно в те моменты времени, когда заряд на емкости проходит
9 В. В. Мигулии и др.
Рис. 4.1. Колеба-
тельный контур с
меняющейся во
времени емкостью
130
ГЛ. 4. КОЛЕБАНИЯ ПРИ ПАРАМЕТРИЧЕСКОМ ВОЗДЕЙСТВИИ
через экстремум (рис. 4.2, б). При этом вложение энергии в си-
стему будет максимальным, так как при раздвижении обкладок
конденсатора для уменьшения С совершается максимальная ра-
бота против электростатических сил притяжения между его пла-
стинами. Частота изменения параийтра (емкости) в этом случае
в два раза выше частоты колебаний в контуре.
С0+АС
С
со
Рис. 42. Графики периодического изменения С (а) и U, q (б) при парамет-
рическом воздействии
Рассчитаем приращение электростатической энергии конден-
сатора &N, которое получается в момент скачка емкости:
?о Г 1 1 1 _ ?о 2ДС
2 [С0-ЛС 1 ЛС J 2 Сз_(ДС)2-
(4.1.1)
Считая, что АС < Со, можно записать
2
= (4.1.2)
со ьо
где No = ?о/2Со характеризует' энергию, запасенную в конден-
саторе до скачка емкости. Если ввести коэффициент т, называе-
мый глубиной модуляции параметра:
Смаке Смин ДС
f Л-г с ’ (4.1.0)
^макс “ имин о
то приращение колебательной энергии в контуре после одного
скачкообразного уменьшения емкости равняется &N — N„ 2т.
Важно отметить, что изменение колебательной энергии &N в
контуре при параметрическом воздействии или, как часто гово-
рят, при параметрической «накачке» пропорционально самой
энергии Na, запасенной в системе.
§ 4.1. ПАРАМЕТРИЧЕСКОЕ ВОЗДЕЙСТВИЕ НА СИСТЕМЫ
131
В соответствии с выбранным фазовым соотношением между
накачкой и колебанием, действующим в контуре, следующее
скачкообразное увеличение емкости не вызовет изменения энер-
гии в системе, ибо в соответствующие моменты времени началь-
ная энергия равна нулю (<? = 0), как показано на рис. 4.2. За
один период колебания энергия вкладывается два раза, строго
говоря, неодинаковыми порциями, однако в силу условия ДС <
<С Со их можно считать одинаковыми, и тогда общее приращение
энергии в системе за период равно
2A7V = 7V0-4m = -^-4m. (4.1.4)
Теперь необходимо определить потери в контуре. Если счи-
тать колебания заряда приближенно гармоническими, т. е. q =
= qa sin (of), то q == a>q0 cos (of), и, следовательно, мощность по-
терь W = Rq2/2 — 2?о2<7о/2.
Энергия, теряемая системой за период Т, равна
^-R(£?<^T = (4.1.5)
Л
Сравнивая (4.1.4) и (4.1.5), получим условие, при выполнении
которого вкладываемая энергия превосходит потери и в системе
происходит парастапио колебаний:
•4wi>>лЛод?, т. е. т>-уп/?С0о (4.1.6)
или
m > тноРог = -j- nR V CjL = -~d,
где d = — логарифмический декремент затухания кон-
тура. Этот процесс возбуждения колебаний за счет периодическо-
го тгауаидпия энергоемкого параметра колебательной системы мы
будем называть параметрическим возбуждением колебаний или
параметрическим резонансом.
Если емкость меняется с той же периодичностью, но по дру-
гому закону, то качественно получится тот же результат, хотя
коэффициент в соотношении (4.1.6) будет не л/2, а больше, так
как выбранный нами скачкообразный закон изменения С опти-
мален для вложения энергии. Нарастание амплитуды возбужда-
емого колебания, а следовательно, и увеличение энергии системы
происходят за счет работы внешних сил, изменяющих параметр.
В рассмотренном примере параметр изменялся дважды за пе-
риод возбуждаемых колебаний. Однако можно производить вло-
жение энергии за счет изменения параметра один раз за период,
9*
132 ГЛ- 4- КОЛЕБАНИЯ ПРИ ПАРАМЕТРИЧЕСКОМ ВОЗДЕЙСТВИИ
два раза за три периода и вообще при выполнении условия
р = 2ш/и, (4.1.7)
где п = 1, 2, ..р — частота изменения параметра, о — частота
возбуждаемых колебаний. При этом, конечно, энерговложение
в возбуждаемую систему за период будет тем меньше, чем боль-
ше п.
Аналогичные соотношения мы получим, если скачком меняет-
ся индуктивность L. При этом Nl — L^12. Однако поскольку при
изменении L изменяется также и ток г, то для расчета вложения
энергии удобнее пользоваться выражением At = Ф2/2£, где Ф —
магнитный поток, который является инвариантом при скачкооб-
разном изменении L. Поэтому при изменении L на величину 2AL
ДА == — (-----------------
2 1^-ДД Lo + ^)’
или при ДЛ <S
bNttN0.2-^ = N0-2m, где тп = -baKC.Z-^ . (4.1.8)
о ^макс “Г ^мин
Отметим, что в линейной колебательной системе при выпол-
нении условия параметрического возбуждения колебаний (усло-
вия параметрического резонанса) происходит неограниченное
нарастание амплитуды возбужденных колебаний. Это связано с
тем, что и потери, и вложение энергии в данном случае пропор-
циональны квадрату амплитуды колебаний (пропорциональны
колебательной энергии системы). Для вынужденных колебаний в
линейных системах при силоном воздействии вложение энергии
пропорционально первой степени амплитуды колебаний, а поте-
ри по-прежнему пропорциональны квадрату амплитуды, что при-
водит к образованию конечной амплитуды вынужденных коле-
баний.
Очевидно, что параметрическое возбуждение колебаний воз-
можно лишь при изменении одного из энергоемких параметров L
или С. Изменение R может привести лишь К изменению закона
диссипации — затухания имеющихся колебаний, но система оста-
нется диссипативной.
Мы уже говорили, что явление. _ состоящее в возникновении
в. контуре нарастающего колебательного процесса с частотой, же-
с т ко св я занпой с "частотой внешпего парамстричейк^о воядяй-
ствищ_и вызываомбё"именно-этим воздействием, принято назы-
вать параметрическим возбуждением колебаний или параметри-
ческим резонансом. Параметрический резонанс имеет место при
выполнении определенных соотношений между частотой измене-
ния параметра р и частотой возбуждаемых колебаний ы, близкой
или совпадающей с собственной частотой возбуждаемой системы
§ 4.1. ПАРАМЕТРИЧЕСКОЕ ВОЗДЕЙСТВИЕ НА СИСТЕМЫ
133
<ои(р = 2<в/п), а/также при выполнении условий, определяющих
изменение параметра m(m>mnopor) Для данного соотношения
частот.
Математическое описание параметрического резонанса в ли-
нейных системах производится с помощью линейного дифферен-
циального уравнения с переменными коэффициентами
х + (t)i + <р2 (t)x — О,
где «pi(?) и <p2(t)—периодические функции времени. Подста-
новкой х = z ехр -----F J<^1 это УРавнение преобразуется
к уравнению Хилла вида
z + ip(t)z = O, (4.1.9)'
1 ’ 1 2
где ф (t) = ф2 (t)-2~ Ф1 (0--4“ Фх (0 — периодическая функция.
Частным случаем уравнения Хилла является уравнение Матье
у + со® (1 + т cos (pt)) У = °- (4.1.10)
Теория этих уравнений разработана с большой полнотой, извест-
ны и все существенные свойства их решений, обычно записы-
ваемых в виде
= CiX(t)ew + с2%(—i)e-u, (4.1.11)
где %(t)— ограниченные функции с периодом,, равным периоду
изменения параметра или половине этого периода, и комп-
лексная величина, называемая характеристическим показателем,
вещественная часть которой определяет, имеет ли решение возра-
стающий характер или нет. Полный анализ решений математи-
чески довольно сложен и для линейных случаев, и, тем более,
для нелинейных задач. Поэтому он сводится к нахождению та-
ких областей значений соотношения частот 2<о(/р и глубин мо-
дуляции ш, для которых имеются комплексные значения и Х2.
Тогда в системе могут происходить нарастающие колебания, т. е.
возникает параметрический резонанс.
А. А. Андронов и М. А. Леонтович рассчитали эти области
значений для систем без затухания и с затуханием, описываемых
уравнениями
X + (1>о (1 + Ш COS (pt)) х = О,
у + 28у + <1>о (1 + m cos (pt)) у = 0.
Результаты их расчетов в виде графиков показаны на рис. 4.3. /
11а них видно, что при наличии потерь в системе вершины обла-
стей ппрвметрической неустойчивости поднимаются; они лежат
на прямой, которая составляет угол <p = arctg(26) с осью абс-
цисс. Заштрихованные области соответствуют нарастающему
134
ГЛ. 4. КОЛЕБАНИЯ ПРИ ПАРАМЕТРИЧЕСКОМ ВОЗДЕЙСТВИИ
процессу с частотой <о = npl“X ~ <а0 (n = 1, 2, 3, ...). Вне этих
областей в случае консервативной системы получается сложный
незатухающий процесс, а в случае диссипативной — затухающим
процесс колебаний. На границе областей имеет место баланс
энергии.
Рис. 4.3. Области параметрического возбуждения для системы без затуха-
ния (а) и с затуханием (б)
Рис. 4.4. Амплитудно-частотные
характеристики параметрически
возбуждаемой линейной системы
Из графиков видно также, что для заданного значения тл
ширина областей параметрического возбуждения для разных но-
меров п различна для консервативной и неконсервативной систем.
Ширина области неустойчивости с одним и тем же номером
области всегда меньше у диссипа-
тивной колебательной системы,
чем у консервативной. С ростом
этого номера иэ-за более редкого
вложения энергии в систему (р =
= 2(о/п, п=1, 2, 3, ...) необхо-
димо увеличить глубину модуля-
ции реактивного параметра для
получения той же ширины обла-
сти параметрического возбуж-
дения.
Если графики рис. 4.3 предста-
вить в виде амплитудно-частот-
ных характеристик параметриче-
ски возбуждаемой линейной коле-
бательной системы, то дй§ фикси-
рованных т0 и р они будут иметь вид, показанный на рис. 4.4.
Как мы видим, полосы возбуждения сужаются с ростом номера
области неустойчивости п, а также из-за наличия диссипации в
системе (полосы, ограниченные штриховыми линиями). Из
рис. 4.4 видно также, что для выбранного значения глубины мо-
дуляции (параметра т) и при данном конкретном значении зату-
хания 26 в системе возбудить параметрические колебания в чет-
вертой области неустойчивости не представляется возможным.
§ 4.1. ПАРАМЕТРИЧЕСКОЕ ВОЗДЕЙСТВИЕ НА СИСТЕМЫ
13$
Теперь необходимо рассмотреть, что нового вносит в проте-
кание параметрического резонанса наличие нелинейности. Даже
без дальнейшего анализа ясно, что наличие нелинейности, вызы-
вая неизохронность, будет приводить с ростом амплитуды коле-
баний к изменению частоты собственных колебаний системы,
а следовательно, к нарушению условий резонанса и к ограниче-
нию амплитуды параметрически возбужденных
колебаний. J
Мы уже познакомились с тем, как неизо- \-Lft) G--
хронность проявляется при обыкновенном си- г
ловом резонансе (см. рис. 3.25), и теперь еле- |
дует рассмотреть ее для случая параметриче-
ского резонанса. Постараемся выяснить неко-
торые наиболее существенные особенности по-
ведения интересующих нас систем при допу-
щениях и предположениях, весьма далеких от
строгости, но позволяющих правильно оценить
характер параметрического резонанса в ряде
нелинейных систем. Для простоты рассмотрим
систему, состоящую из индуктивности и конденсатора с сегнето-
электриком (рис. 4.5). Пусть в этой системе происходит такое
периодическое изменение индуктивности, что
L(t) = ——2--------.
' ' 1 |-m cos pt
Рис. 4.5. Схема
контура с меняю-
щейся во времени
индуктивностью и
конденсатором с
сегнетоэлектри-
ком С(д)
консервативную
(4.1.12)
Тогда уравнение, описывающее колебания в системе при р = 2<о,
будет
q + [1 + т cos(2at)]-j-uc(q) = 0.
Выразив зависимость uc(q) в виде uc(g) —(1/С,0)/(д), получим
q + [1 + т cos (2cot)] / (g) = 0, (4.1.13)
где ®o = 1/L0C0 — собственная частота колебаний при достаточно
малых амплитудах, f(q) — функция, описывающая нелинейную
характеристику конденсатора.
Заметим, что точно такое же уравнение было бы получено
при постоянстве индуктивности, но при периодическом измене-
нии значения емкости с глубиной модуляции т по закону C(t) =
C.J [1 + т cos (2(nt) ].
Для случая контура с нелинейной индуктивностью при пе-
риодическом изменении L или С описывающее его уравнение не
удается привести к такому простому виду. Однако общий-харак-
тер явлений, происходящих в подобном контуре, остается тем же,
так что для простоты ограничимся приближенным исследованием
решений уравнения (4.1.13).
136
ГЛ. 4. КОЛЕБАНИЯ ПРИ ПАРАМЕТРИЧЕСКОМ ВОЗДЕЙСТВИИ
Будем искать приближенное решение вида q = a cos (at) +
4-& sin (cd£) , т. e. вида установившегося колебания (а = const,
b = const) с частотой, равной половине частоты параметрического
воздействия, что соответствует первой области параметрического
возбуждения. Подставляя это решение в уравнение (4.1.13),
имеем
—aw2 cos (at) — ba2 sin (at) +
4- co® [1 + m cos (2at)] f (a cos (at) + b sin (coi)] = 0.
Разлагая f(q) в ряд Фурье и сохраняя лишь члены с cos ((Di)
и sin(at) (постоянный член в силу свойств нелинейного конден-
сатора равен нулю), находим уравнение, из которого, группируя
коэффициенты при cos(<oi) и sin(<oi), получим систему двух
уравнений
со3а1 (1 + т/2)4— аа2 = 0, (о^ (1 — т/2) — Ьа2 = 0. (4.1.14)
Здесь, как и раньше при замене at на т, имеем
я
<Xj = -i- J / (a cos т + b sin т) cos т dx,
—я
я
== 4 J f (a cos т + b sin т) sin х dx.
—я
Отсюда можно найти амплитуду возможного стационарного ре-
шения А = Уаг + Ьг и его фазу ср — arctg(«/6). Правда, прибли-
женное решение q = я соя (mi) + b sin (at) следует еще исследо-
вать на устойчивость для определения того, насколько оно фи-
зически реально; должны быть изучены и пути установления
процесса.
Рассмотрим в качестве примера случай, когда нелинейная
характеристика емкости задана выражением
„ f(q)=q + 't<r‘- (4.1.15)’
В этом случае
«! =« а +-|-та8 +-|~уа62, 0! = Ъ + у63 + уа2Ь,
и мы приходим к уравнениям
т02 [а -|- уа3 + -|- yab2j |1 + у - аа2 = 0,
®о (ь + 4" № + 4ya2bj (1 — -g-mj — ba2 = 0,
§ 4.1. ПАРАМЕТРИЧЕСКОЕ ВОЗДЕЙСТВИЕ НА СИСТЕМЫ
137
или
<о2а (1 + "7" "М2) + “5" m) - а®2 = Of
/ (, ( (4.1.16)
<в26 f 1 + yA2j (1------— Ь«»3 = О,
где A2 = a2 + b2.
Эта система допускает следующие решения: а = Ь = А = О,
что соответствует отсутствию в системе установившегося перио-
дического движения (состояние покоя). Такое состояние является
возможным равновесным состоянием системы, и вопрос о его
осуществимости при данных значениях параметров системы и
характере внешнего воздействия можно решить только на основе
рассмотрения вопроса об устойчивости данного состояния. Ана-
лиз устойчивости системы по отношению к малым отклонениям
от состояния покоя приводит к линейному уравнению с перио-
дически изменяющимся коэффициентом (типа уравнения Матьё).
Для этого уравнения, как мы уже указывали (см. рис. 4.3),
вблизи значений а>о/а> = 1, 2, 3, ..., п при данном mt — глубине
модуляции параметра — существуют определенные области зна-
чений со, в которых состояние покоя становится неустойчивым,
и в системе должен возникать и нарастать колебательный про-
цесс с частотами о, 2со, Зсо и т. д.
Мы в нашем приближенном рассмотрении ограничимся сна-
чала лишь решением с частотой о), соответствующим нарушению
условий устойчивости состояния покоя (а = 6 = 0), в первой
области неустойчивости в окрестности <в0 = св.
В рассматриваемой системе возможны также решения а^=0,
6 = 0 или а = 0, Ь ¥= 0. Случай а Ф 0, Ь ¥= 0 невозможен, так как
он приводит к несовместным уравнениям. Принимая а Ф 0, 6=0,
получаем
откуда
(1 + -Т (1 + -J-) = ®2,
42 = JL f tl)2______________________1
з? [ (О2 (1 + то/2) J*
(4.1.17)
Значение А тем больше, чем меньше у — коэффициент, характе-
ризующий степень нелинейности системы.
Этот результат вполне очевиден и из качественных сообра-
жений. В самом деле, чем меньше у, тем при большей амплитуде
колебаний средняя частота собственных колебаний системы за
счет ее неизохронности изменится на величину, достаточную для
выведения системы из области параметрического резонанса.
Амплитуда А реальна (А2>0) при -у > 0 только в случае
_____________1>0
<о2 (1 + т/2) ’
138
ГЛ. 4. КОЛЕБАНИЯ ПРИ ПАРАМЕТРИЧЕСКОМ ВОЗДЕЙСТВИИ
т. е. при ш/(Оо > V1 + т/2, о > оч = <i)0V 1 + т/2. Если а = 0, Ь^=
Ф 0, то из второго уравнения (4.1.16) находим решение
дг __ _____6)2_______J
3Y (_ ы2(1 —т/2)
(4.1.18)
откуда получим условие существования реального решения
(о/шо > V1 — т/2, о > (о2 = ffloV 1 — т/2.
Если в системе нелинейность имеет другой характер, при
котором у <0 и, следовательно, средняя частота свободных коле-
баний уменьшается с ростом амплитуды, то для вынужденных
колебаний при параметрическом воздействии получим два выра-
жения
А2 —
~3|Y|
1-----------------
ш* (1 + т/2)
1------------—
<»о — ™/2)
= ТТЛ
3| ?|
(4.1.19)
Изобразим полученные результаты графически. На рис. 4.6
в координатных осях о2 и А2 показаны зависимости, описывае-
мые (4.1.17), (4.1.18).
Характер процессов в изучаемой системе при параметрическом
воздействии с данной глубиной модуляции т можно себе пред-
ставить следующим образом. Система остается в покое (т. е.
в ней не появляются чюлеба-
Рис. 4.6. Кривые параметрического ре-
зонанса А2 (со2) для консервативной не-
линейной системы
ния с~ частотой ш) при всех
Значениях—И 0) > <01.
При значениях о, попадаю-
щих внутрь частотного ин-
тервала 0)1 — (о2, в системе
возникает колебательный
процесс с конечной амплиту-
дой А, которая существенно
зависит от степени нелиней-
ности системы (величины ^).
В зависимости от характера
нелинейности (знак у)коле-
бания при дальнейшем из-
менении о за пределы ука-
занной области (первой области параметрического возбуждения
2шо/р = й)о/с)« 1) или спадают до нуля, или нарастают, тогда
как состояние покоя на этих частотах со вновь становится устой-
чивым. .Таким образом, здесь на примере проведенного расчета
МЫ видим ограничивающую роль нелинейного элемента системы,
позволяющего получить конечные (ограниченные) амплитуды
параметрически возбужденных колебаний в консервативной си-
§ 4.2. ОБЩИЕ ЗАМЕЧАНИЯ О РЕЗОНАНСНЫХ ЯВЛЕНИЯХ .
139
стеме, подобно тому, как это имело место в нелинейной консер-
вативной системе при непосредственном силовом воздействии.
Неизохронность системы приводит к тому, что при возникно-
вении параметрически возбужденных колебаний собственная ее
частота с ростом амплитуды изменяется и сама система выво-
дится на границу соответствующей области параметрического
возбуждения. Это приводит к уменьшению энергии, вкладываемой
в систему устройством, изменяю-
ющим параметр, и тем
ограничивает нарастание
туды.
Если считать, что нам задана
частота воздействия р — 2®, и
принять, что в изучаемом случае
регулируемой величиной является
(Оо — собственная частота системы
(для малых амплитуд), то полу-
ченные нами соотношения будут
изображаться графически в коор-
динатах (Оо и А так, как показано
на рис. 4.7. Изображенные на нем
области параметрического возбуж-
дения для у > 0 (кривые парамет-
рического резонанса) для исследо-
ванного частотного соотношения,
соответствующего первой области неустойчивости линейного
уравнения Матьё, переходят при f -► 0 в соответствующую об-
ласть, изображенную на рис. 4.4. Здесь, как и в случае резонанса
при силовом воздействии, получается деформация резонансной
кривой для линейной консервативной системы и ее Наклон в сто-
рону больших или меньших частот в зависимости от знака не-
линейной поправки, т. е. в зависимости от типа неизохронной
системы.
самым
ампли-
О
А
^02 ^01 ^0
Рис. 4.7. Кривые параметрическо-
го резонанса А (со) для нелиней-
ной консервативной системы при
двух значениях коэффициента не-
линейности ("f2 > «(,) и при т =
= 0,2
§ 4.2. Общие замечания о резонансных явлениях
в колебательных системах
Выше уже указывалось, что характер протекания резонансных
явлений в колебательных системах с одной степенью свободы
существенно меняется в зависимости от того, является ли изу-
чаемая система линейной или обладает определенными нелиней-
ными свойствами, а также от характера рассматриваемого воз-
действия. Даже ограничиваясь случаем гармонической формы
воздействия, мы встречаемся с весьма различными особенностями
резонансных явлений при прямом (силовом) или параметриче-
140
ГЛ. 4. КОЛЕБАНИЯ ПРИ ПАРАМЕТРИЧЕСКОМ ВОЗДЕЙСТВИИ
ском воздействиях. В предыдущих параграфах рассматривались
процессы, протекающие при простейших видах воздействия в
линейных и нелинейных системах.
Консервативная идеализация, существенно упрощая рассмот-
рение, в ряде случаев приводила к выводам, не .оправдывающим-
ся в реальных системах. Но вместе с тем ряд принципиально
важных особенностей вынужденных процессов в нелинейных си-
стемах мало зависит от наличия или отсутствия потерь (разу-
меется, если они не слишком велики), и выводы о резонансных
явлениях в консервативных системах лини, с небольшими коли-
чественными поправками можно распространить на неконсерва-
тивные системы. G учетом этих замечаний рассмотрим некоторые
уже установленные особенности резонансных процессов в нели-
нейных системах при воздействиях различного типа. В нелинейных
системах (в отличие от линейных) при прямом гармоническом
воздействии резонансные явления наблюдаются при ряде частот-
ных соотношений, а не только при совпадении частоты воздей-
ствия с собственной частотой системы.
J В линейной системе с одной степенью свободы резонанс
(единственный) наступает при
р = ®0,
где р — частота силового воздействия, соо — собственная частота.
В нелинейной системе резонансные явления возможны при
<о0 = пр,
где п может принимать любое целое положительное значение
1, 2, ... Возможность возникновения резонансных процессов при
различных значениях п определяется видом нелинейности си-
стемы.
Далее, следует отметить, что в нелинейной системе (в отличие
от линейной) даже при консервативной идеализации всегда име-
ет место ограничение амплитуды вынужденных колебаний. Это
ограничение обязано своим существованием свойству неизохрон-
ности колебаний в нелинейных системах.
Такие специфические особенности резонансных явлений
(а также форма резонансных кривых) привели к тому, что по-
добные процессы в нелинейных системах часто выделяют в осо-
бую категорию и называют их феррорезонансом. Это связано с
тем, что чаще всего такие процессы наблюдаются в системах,
содержащих индуктивности с ферромагнитными сердечниками
или конденсаторы с сегнетоэлектриками. В зависимости от типа
нелинейности форма резонансных кривых при феррорезонансе
может иметь тот или иной специфический вид, но всегда сохра-
няется одна основная особенность, обусловленная отсутствием
такого значения частоты воздействия, при котором даже в кон-
§ 4.2. ОБЩИЕ ЗАМЕЧАНИЯ О РЕЗОНАНСНЫХ ЯВЛЕНИЯХ
141
сервативной системе наблюдалось бы бесконечное возрастание
амплитуды.
При силовом воздействии вынужденные колебания существу-
ют при любых соотношениях между частотой воздействия р и
собственной частотой системы (Оо и возбуждаются при любой
амплитуде воздействующей силы. При наступлении резонанса
происходит лишь соответствующее увеличение амплитуды вынуж-
денных колебаний.
Переходя к резонансным явлениям при параметрическом воз-
действии — параметрическому резонансу, можно также отметить
ряд их особенностей. Прежде всего следует обратить внимание
на то, что при параметрическом воздействии существует другой,
чем при прямом, ряд частотных соотношений, при которых на-
блюдаются резонансные явления. При чисто параметрическом
воздействии даже в линейной системе резонансные эффекты воз-
никают при ©о ~ пр!2, где п — 1, 2, 3, ...
Таким образом, существуют дискретные области параметри-
ческого возбуждения колебаний, или параметрического рочлняиса-
Нелинейный случай отличается от линейного случая только
деформацией границ этих областей при конечных амплитудах
возбудившихся колебаний. Поэтому для нелинейных систем (в от-
личие от линейных) мы всегда имеем конечную амплитуду пара-
метрически возбужденных колебаний опять-таки за счет неизо-
хронности колебаний. В линейных же системах при осуществле-
нии условия параметрического резонанса в любой из частотных
областей резонанса будет происходить неограниченное нарастание
амплитуды. При этом для возникновения параметрического резо-
нанса в диссипативной системе необходимо, чтобы амплитуда
воздействия (глубина модуляции параметра т) была больше
некоторого порогового значения,, различного для разных частот-
ных областей.
Для резонасных явлений в нелинейных консервативных си-
стемах как при силовом, так и при параметрическом воздействии
характерна и принципиальна несимметрия резонансных кривых,
связанная с законом неизохронности колебаний рассматриваемой
системы. Это общее свойство присуще также и неконсервативным
системам, но лишь при условии, что по крайней мере один из
их консервативных (энергоемких) параметров зависит от основ-
ной переменной, т. е. по введенной терминологии нелинеен (на-
пример, нелинейная емкость, нелинейная индуктивность, нели-
нейная жесткость и т. п.).
Для нелинейных систем (в отличие от линейных) неприменим
принцип суперпозиции, и поэтому не представляется возможным
разделить в результирующем процессе компоненты, вызванные
отдельными составляющими внешнего воздействия. Это обстоя-
тельство чрезвычайно усложняет анализ вынужденных процессов
в нелинейных системах даже в консервативном приближении и
142
ГЛ. 4. КОЛЕБАНИЯ ПРИ ПАРАМЕТРИЧЕСКОМ ВОЗДЕЙСТВИИ
делает не вполне корректным рассмотрение случая прямого си-
лового воздействия без учета одновременного воздействия на па-
раметры системы. В самом деле, если учесть, что вынужденный
периодический процесс, обязанный своим происхождением пря-
мому воздействию, вызывает в свою очередь периодическое из-
менение параметров нелинейной системы, то становится ясным,
что результирующие резонансные явления могут иметь весьма
сложный характер. Частотные соотношения, при которых про-
исходят резонансные явления, также будут задаваться условиями
нелинейных прямого или параметрического резонансов. Эти об-
стоятельства не позволяют применять для нелинейных систем
полное разделение двух упомянутых типов резонансных явлений.
Поэтому представляется разумным, выделяя случай чисто пара-
метрического резонанса, не противопоставлять ему случай сило-
вого, или прямого, резонанса для нелинейной системы. Можно
лишь классифицировать виды воздействия, связанные с различ-
ными способами внесения энергии в систему, что является опре-
деляющим для протекания резонансных явлений.
В консервативной системе при прямом воздействии внешняя
сила в каждый данный момент уравновешивается упругими и
инерциальными силами системы и, следовательно, внешняя сила
производит работу и тем самым увеличивает запас колебатель-
ной энергии системы лишь во время нестационарных процессов.
Это происходит при амплитуде вынужденного процесса, мень-
шей стационарного ее значения, определяемого данными частот-
ными соотношениями и параметрами системы. В таком случае
интеграл работы внешней силы за период не равен нулю. По
достижении стациенарного значения амплитуды работа внешней
силы за период становится равной нулю, и в консервативной си-
стеме дальнейший процесс не сопровождается изменением запа-
са ее колебательной энергии.
Лишь в случае линейности системы при ®0 — р не существует
конечной амплитуды стационарного вынужденного движения,>
а будет иметь место непрерывное возрастание амплитуды вынуж-
денного колебания и соответствующий рост запаса колебательной
энергии системы за счет работы, производимой силой внешнего
воздействия. Это и есть то явление, которое мы называем линей-
ным резонансом в консервативной системе. Очевидно, что харак-
тер его протекания принципиально изменится при введении в
рассмотрение любого сколь угодно малого затухания. При невы-
полнении условий резопанса учет малого затухания должен вно-
сить лишь небольшие количественные поправки.
Таким образом, при прямом воздействии энергия вынужден-
ных колебаний образуется за счет непосредственной работы внеш-
ней силы при движении системы. При параметрическом воздей-
ствии увеличение запаса колебательной энергии происходит с
преобразованием энергии из одного типа в другой. Так, напри-
§ 4.2. ОБЩИЕ ЗАМЕЧАНИЯ О РЕЗОНАНСНЫХ ЯВЛЕНИЯХ
143
мер, механическая работа, производимая при соответствующем
изменении емкости конденсатора (при модуляции его емкости
посредством периодического раздвигания или сближения пла-
стин), приведет к изменению запаса электростатической и общей
энергии электрических колебаний в электрическом колебатель-
ном контуре. Интеграл этой работы при периодическом воздей-
ствии не равен нулю (больше нуля) при частотах воздействия
вблизи точного выполнения условий
йо — пр!2, п = 1, 2, 3, ...,
что соответствует наличию при таких частотах нарастающего
вынужденного процесса. Это и есть параметрический резонанс,
а области частот, внутри которых работа внешних сил, расходуе-
мая на периодическое изменение параметра, создает увеличение
запаса колебательной энергии системы, являются областями па-
раметрического резонанса.
В линейной системе нарастание амплитуды параметрически
возбужденных колебаний не ограничено для всех частотных со-
отношений, лежащих внутри областей параметрического резонан-
са. Скорость нарастания амплитуды колебаний различна для раз-
личных областей, а внутри каждой области изменяется от макси-
мального значения при точном выполнении частотного соотно-
шения
со0 = пр/2
до нуля на границе областей. Вне пределов этих областей работа
внешнего воздействия за период равна нулю и наличие воздей-
ствия вызывает лишь соответствующее изменение формы собст-
венных колебаний, если они существуют в рассматриваемой .кон-
сервативной системе при данных начальных условиях.
В нелинейных системах, как было показано на отдельных
примерах (см. рис. 4.6 и 4.7), даже в консервативном прибли-
жении неограниченного нарастания параметрически возбужден-
ных колебаний не происходит, ибо присущая нелинейным систе-
мам неизохронность приводит с ростом амплитуды колебания к
нарушению требуемых частотных и фазовых соотношений и к
прекращению вложения энергии в систему со стороны механизма,
изменяющего параметр, а следовательно, к установлению опре-
деленной амплитуды вынужденных колебаний.
Сопоставим основные свойства силового и параметрического
резонансов. ; .
1. Силовой резонанс возникает при р « и0 или пр « и0 (в не-
линейной системе), но вынужденные колебания существуют.при
любой частоте воздействия р. В случае параметрического резо-
нанса существуют лишь ограниченные частотные интервалы
вблизи точного выполнения соотношения р внутри ко-
торых возникают параметрически возбужденные колебания..
144
ГЛ. 4. КОЛЕБАНИЯ ПРИ ПАРАМЕТРИЧЕСКОМ ВОЗДЕЙСТВИИ
2. Любая по величине внешняя сила может вызвать силовой
резонанс. Для возникновения параметрического резонанса в не-
консервативной системе величина воздействия должна быть боль-
ше некоторой пороговой величины.
3. В силу существования порогового значения амплитуды
параметрического воздействия в неконсервативной системе суще-
ствует ограниченное число частотных интервалов, внутри кото-
рых осуществляется параметрический резонанс.
4. Для линейной неконсервативной системы при силовом ре-
зонансе всегда характерна ограниченная амплитуда колебаний,
так как потери растут быстрее вложения энергии.
5. В линейной неконсервативной системе при параметриче-
ском резонансе происходит неограниченный рост амплитуды, так
как и вложение, и потери энергии пропорциональны квадрату
амплитуды и только в нелинейной системе происходит ограниче-
ние колебаний.
§ 4.3. Свойства активных систем и параметрическая регенерация
Уже из общей теории параметрического резонанса следует,
что путем периодического изменения реактивного (энергоемкого)
параметра при определенных соотношениях между частотой воз-
действия на параметр и собственной частотой системы можно
реализовать нарастающий по амплитуде процесс, т. е. обеспечить
увеличение энергии колебаний системы. Поэтому колебательные
системы, испытывающие определенное параметрическое воздей-
ствие, можно отнести к классу активных колебательных систем.
Активными колебательными системами называются системы,
в которых постоянно или в определенные интервалы времени
(например, в течение части периода колебаний) происходит уве-
личение энергии колебаний за счет источника энергии, входяще-
го в состав рассматриваемой системы.
Вложение колебательной энергии в систему за счет энергии
источника можно представить себе как процесс частичной или
полной компенсации потерь в системе. Этот процесс для данного
типа движения (например, для колебаний данной частоты и фор-
мы или для определенного широкого класса типов колебаний) за
счет внутренних свойств системы называется регенерацией.
Для того чтобы обеспечить компенсацию потерь или пополне-
ние запаса колебательной энергии, в системе должен содержаться.
внутренний источник в сочетании с устройством, преобразующим
энергию этого источника в требуемую форму (батарея с элект-
ронной лампой, батарея с туннельным диодом, источник. тока
с газоразрядным прибором, генератор напряжения или тока оп-
ределенной частоты, вызывающий изменение энергоемкого пара-
метра во времени и т. д.).
§ 4.3. ПАРАМЕТРИЧЕСКАЯ РЕГЕНЕРАЦИЯ
145
Для физического и математического описания активных сис-
тем широко используется понятие «отрицательное сопротивле-
ние». Если ограничиться случаем гармонических колебаний, то
мощность потерь (рассеиваемая мощность) для линейной некон-
сервативной системы можно записать в виде W = /?г2/2, где
/? > 0. Точно так же можно обозначить вводимую в систему
мощность, компенсирующую потери, только тогда необходимо
считать, что сопротивление 7?_ меньше нуля. В этом случае R-
отражает действие одного из возможных конкретных механиз-
мов, подкачивающих энергию в исследуемую систему.
Таким образом, отрицательное сопротивление уменьшает об-
щее сопротивление цепи. Если представить себе цепь, состоящую
из последовательно соединенных R и R-, то общее сопротивле-
ние цепи будет
RS=R — R-.
Как в колебательных системах можно создать отрицательное
сопротивление путем периодического воздействия на какой-либо
реактивный параметр системы? В § 4.1 мы, рассматривая случай
скачкообразного изменения емкости в колебательном контуре с
L, R, С, нашли, что при изменении емкости с соответствующей
фазой дважды за период колебаний в контуре вложение энергии
за период равно (^о/2Со)-4тп, где д0 — амплитуда заряда па емко-
сти, Со — среднее значение емкости, т — глубина модуляции
емкости.
Параметрическое вложение энергии в систему можно фор-
мально приравнять «отрицательным» потерям энергии в контуре
за период колебаний; тогда получаем
-j- 4т = лЯ_до«>,
откуда определим отрицательное сопротивление
d 2тд *1 /“ Lj 2zti _ f L !/ ъ л\
= = где р = и —о- <4-зл>
Таким образом, в колебательном контуре с периодически из-
меняющимся реактивным параметром при указанных частотных
и фазовых соотношениях происходит регенерация, формально
описываемая введением отрицательного сопротивления /?_; тогда
колебательный контур, изображенный на рис. 4.1, можно пред-
ставить эквивалентной схемой, показанной на рис. 4.8. При этом
энергия, вкладываемая в систему, черпается из механизма, про-
изводящего периодическое изменение реактивного параметра.
Подобный тип регенерации обычно называют параметрической
регенерацией.
10 в. В. Мигулин и др.
146
ГЛ. 4. КОЛЕБАНИЯ ПРИ ПАРАМЕТРИЧЕСКОМ ВОЗДЕЙСТВИИ
С помощью параметрического воздействия можно влиять на
вынужденные колебания в колебательном контуре. В частности,
при параметрической регенерации реализуется работа системы
либо в качестве параметрического усилителя, либо в качестве
параметрического генератора, что определяется соотношением
между омическим R и отрицательным сопротивлениями. При
параметрическом усилении /?>/?_, при параметрическом воз-
буждении (генерации) R < R_.
Рис. 4.8. Эквивалентная схе-
ма коптура с регенерацией
Рис. 4.9. Эквивалентная схе-
ма регенерированного кон-
тура с внешним воздей-
ствием
Рассмотрим линейный последовательный колебательныц. кон-
тур (рис. 4.9), в котором, кроме обычного омического сопротив-
ления R, имеется отрицательное сопротивление R-, обусловлен-
ное параметрической регенерацией; кроме того, в контур вводит-
ся внешняя сила u = C70cos(pi). Будем считать, что собственные
колебания, вызванные начальными воздействиями внешней силы
и механизма изменения реактивного параметра, через опреде-
ленное время затухнут и в системе останутся только регенериро-
ванные вынужденные колебания с частотой внешней сиды.. При
резонансе амплитуда
тока, как известно, равна
I = .^2—
о
введение регенерации действительно приво-
резонансной амплитуды тока в контуре.
Отсюда следует, что
дит к возрастанию
В этом и заключается принцип работы регенеративных усилите-
лей различных классов, в том числе параметрических усилителей.
Мощность, выделяемая на сопротивлении W = ^RIq, в ре-
генерированном контуре увеличивается, ибо Wl = l/2R[U<lf(R —
— 7?-)]2, тогда как без регенерации она равнялась 'Wo =
= l/zR(Ua/RY. Таким образом, получаем '
/ R \2
н, следовательно, ИЛ/И7» > 1- Итак, в линейном, частично . реге-
нерированном (R > R-) контуре происходит усиление введенных
в него извне колебаний. Введение отрицательного сопротивления
(^3.2)
§ 4.3. ПАРАМЕТРИЧЕСКАЯ РЕГЕНЕРАЦИЯ
147
емкость С,
Выражение
получается
приводит к увеличению отбираемой от источника колебаний
энергии.
Для осуществления параметрической регенерации в колеба-
тельном контуре можно изменять во времени не
а второй реактивный параметр — индуктивность L.
для отрицательного
таким же, как и при
=
u(t)
L
R
сопротивления в этом случае
изменении емкости, т. е.
2m -,Г Д. 2m ЛЬ
— V -yr = — р, где т = -у-.
л С л 1 Ъо
Приведенные выше выражения для отрицательного сопротив-
ления при параметрической регенерации были получены в пред-
положении об оптимальной фазе изменения параметра при дву-
кратном его изменении за период колебаний,
т. е. в первой области параметрического воз-
буждения. Очевидно, что фазовые соотноше-
ния между колебаниями, существующими в
регенерируемой системе, и силой, изменяющей
реактивный (реактивные) параметр системы,
существенно влияют на ход процессов и ха-
рактер параметрической регенерации.
Для иллюстрации указанных выше особен-
ностей параметрической регенерации рассмот-
рим линейную систему, представляющую со-
бой последовательный колебательный контур с
периодически изменяющейся емкостью C'(i),
в который включена внешняя сила u(t) (рис. 4.10). Пусть ем-
кость конденсатора меняется по закону
С
г (t\ _______о_____
' ' 1 + m cos (2at) ’
а выражение для внешней силы запишем в виде
и (i) = Ро cos (pi) + sin (pi),
чтобы можно было учесть фазовый сдвиг между внешней силой
и накачкой — механизмом, изменяющим емкость конденсатора
во времени. Уравнение движения в такой колебательной системе
можно записать в виде
Вводя безразмерный заряд x — qjq^ и безразмерное время
т = cot, получим
х + 2$х Ч—(1 + т cos 2т) х = Р соз(— т') + Q sin (
а \ а / v \ а /’
Рис. 4.10. Схема
линейного колеба-
тельного контура
с периодически
меняющейся ем-
костью и внешним
воздействием
где = Я/£со, Р =*= Ра/(Lq.a2), Q = QJ(Lqoa2).
10*
(4.3.3)
148
ГЛ. 4. КОЛЕБАНИЯ ПРИ ПАРАМЕТРИЧЕСКОМ ВОЗДЕЙСТВИИ
Если ограничиться исследованием колебательных процессов
в первой области неустойчивости, то необходимо считать, что
частота внешней силы р близка к половине частоты изменения
параметра 2а, т. е. р ~ <о, и что в свою очередь собственная
частота <а0 близка к со, т. е. <о « <о0; тогда можно записать, что
р/со = 1 + А, где А — малая величина.
Для упрощения решения задачи и анализа результатов допу-
стим, что со = со»; тогда уравнение примет вид
х + 2йх + (1 + т cos 2т)х = Р cos [(1 + Д)т] + (7sin [(1 + А)т].
(4.3.4)
Дальнейший анализ проведем для двух качественно отлич-
ных друг от друга случаев. Первый из них называется когерент-
ным и относится к ситуации, когда между частотой внешней
силы и половиной частоты изменения параметра имеет место
точное равенство, т. е. р = со (А = 0). Разумеется, такое соотно-
шение частот отвечает только первой области неустойчивости;
для других областей неустойчивости в соответствии с их номе-
ром требуются другие соотношения частоты внешней силы р и
частоты изменения параметра.
Если не рассматривать процессы установления, а интересо-
ваться только стационарными (установившимися) состояниями,
то решение полученного уравнения можно искать методом гар-
монического баланса, считая, что х = и cos т + v sin т, где и —
= const, v — const. Тогда, беря первую и вторую производные
х = —и sin т + v cos т, х = —и cos т — v sin т
и подставляя их вместе с выражением х = и cos т + v sin г
в уравнение (4.3.4) при А = 0, получим систему двух линейных
алгебраических уравнений относительно и и v. Их решение при-
водит к выражению
32 _ ,,2 , = „2 1^1- 'В2 I Sin2cp , „ _
А _ и + = р _____ , (4.3.5)
где рг = Рг + (72, ф = arctg(77(J). Здесь через р обозначена амп-
литуда внешней силы, действующей на колебательную систему.
Из полученного выражения для квадрата амплитуды вынуж-
денных колебаний в контуре при наличии когерентного пара-
метрического воздействия ясно видна роль фазовых соотношений
между внешней силой и силой, изменяющей реактивный пара-
метр системы.
Действительно, при ф = л/4 максимальная амплитуда вынуж-
денных колебаний в контуре равна
А - р - Ур2 + ^ (л з Вх
Лмакс 20 — т/2 20 — т/2 * -’ \4-б,Ь)
§ 4.3. ПАРАМЕТРИЧЕСКАЯ РЕГЕНЕРАЦИЯ
149
т. е. амплитуда вынужденных колебаний (тп>0) увеличивается
по сравнению с амплитудой, которая была в отсутствие модуля-
ции параметра (т = 0). Это эквивалентно внесению в систему
отрицательного сопротивления и называется случаем сильного
параметрического резонанса.
При <р = —л/4 получаем минимальную амплитуду вынуж-
денных колебаний в контуре (слабый параметрический ре-
зонанс) ______
4_________Р _ ^р2 + Q2 /л з 7\
Лмин - 20 + т/2 - 20 + т/2 • ?
Так как величина 2Q здесь характеризует потери в системе, то
увеличение знаменателя на положительную величину т/2 при-
водит к уменьшению амплитуды вынужденных колебаний по
сравнению с амплитудой, которая была в отсутствие модуляции
параметра (ш = 0). При таком фазовом соотношении часть энер-
гии вынужденных колебаний отбирается от источника внешнего
сигнала и передается в механизм накачки. Это эквивалентно
внесению в колебательный контур дополнительного положитель-
ного сопротивления, уменьшающего амплитуду заряда (тока)
в контуре, что можно описать введением 2ФЭИ> = 2в + т/2.
Таким образом, в зависимости от соотношения между фазой
воздействия на параметр и фазой усиливаемого сигнала в систе-
ме получаем параметрическую регенерацию или параметриче-
скую дегенерацию системы. Па этом принципе можно создать
системы фазовой селекции.
Рассмотрим некогерентный случай параметрического усиле-
ния. При этом расстройка А не равна нулю, и поэтому в правой
части дифференциального уравнения (4.3.4) следует записать
внешнюю силу в виде
Р cos[(l + Д)т] + Q sin[(l + А) т] = Р (cos т cos Ат — sin Ат sin т) +
+ Q(sin т cos Ат + sin Ат cos т) = P'(t)cos т + (J'(x)sin т. (4.3.8)
Из-за малости расстройки (Л<1) амплитуды Р'(т) и Q' (т)
мало изменяются за период основпого колебания. Поэтому в
каждый момент времени процесс параметрического воздействия
на вынужденные колебания можно приближенно считать устано-
вившимся и применять для расчетов амплитуд выражения, полу-
ченные ранее для стационарного случая. Поэтому, несмотря на
то, что Р'(т) и Q' (т) медленно изменяются во времени, фазо-
вый сдвиг между внешней силой и накачкой можно по-прежне-
му рассчитывать для каждого момента времени по формуле
<р (т) = arctg^-Ф-. (4.3.9)
Q (т)
Отсюда видно, что <р(т) также является переменной во вре-
мени величиной, причем медленно меняющейся. Поэтому иссле-
150
ГЛ. 4. КОЛЕБАНИЯ ПРИ ПАРАМЕТРИЧЕСКОМ ВОЗДЕЙСТВИИ
дуемая система будет проходить через все возможные значения
разности фаз между усиливаемым сигналом и накачкой, в том
числе и через значения, при которых достигается максимальная
и минимальная амплитуды, т. е. система попеременно будет пе-
реходить от сильного резонанса к слабому, затем снова к силь-
ному и т. д. Следствием этого является амплитудная модуляция
вынужденного колебания с частотой 2A<d. За один период в сис-
теме два раза реализуется сильный и два раза слабый парамет-
рический резонанс. Такое амплитудно-модулированное колебание
можно представить как биения двух гармонических компонент с
близкими частотами и постоянными амплитудами.
На диаграмме частот это выглядит следующим образом
(рис. 4.11). Здесь в полосе пропускания исследуемого контура
оказывается сумма двух компонент с частотами внешней силы р
и разностью между частотой накачки и частотой внешней
силы 2со— р. Из рис. 4.11 также видно, что частота накачки
2(о лежит далеко за пределами прозрачности рассматриваемого
контура.
Таким образом, в некогерентном случае в системе возникают
две близкие гармонические компоненты, в сумме дающие бие-
ния. Если общая энергия этих сложпых колебаний больше, чем
энергия простых вынужденных колебаний при т = 0, то на ос-
нове таких систем можно создать регенеративные усилители.
Резонансная
Рис. 4.11. Диаграмма распреде-
ления частот в некогерептном па-
раметрическом усилителе
принципу компенсации потерь
При помощи элементарных чис-
ленных расчетов нетрудно убе-
диться в том, что при сильном
параметрическом резонансе в сис-
тему вкладывается большая энер-
гия, чем отбирается при слабом
параметрическом резонансе.
Такой тип параметрических
усилителей наиболее распростра-
нен, так как слабый принимае-
мый сигнал, подлежащий пара-
метрическому усилению, принци-
пиально некогерентен сигналу
местного генератора накачки.
Регенеративный параметриче-
ский усилитель, работающий по
в системе за счет внесения в сис-
тему некоторого отрицательного сопротивления, в принципе мо-
жет давать неограниченное усиление. Действительно, при силь-
ном резонансе за счет вложения
компенсация потерь в системе и
чивается амплитуда тока А» так
на нагрузке, W = растет.
энергии происходит частичная
при Ро + Фо = const увели-
что мощность, выделяющаяся
Источник внешней силы при
§ 4.4. ОДНОКОНТУРНЫЕ ПАРАМЕТРИЧЕСКИЕ УСИЛИТЕЛИ
151
этом должен вкладывать в систему неограниченно возрастающую
мощность (идеальный генератор напряжения).
В более реальном случае ограниченной мощности источника
сигнала (внутреннее сопротивление источника больше нуля)
усиление можно получить за счет увеличения сопротивления
нагрузки RB при соответствующей параметрической регенерации
системы, когда
2ЙЭКВ — 2-6 — т/2.
Дополнительная мощность в этом случае получается только за
счет изменения реактивного параметра (накачки).
Итак, при работе нашей системы в качестве параметрическо-
го усилителя (т. е. в недовозбужденном режиме, когда т <
< winopor) для когерентного случая исходная форма гармониче-
ского сигнала сохраняется и он лишь увеличивает свою мощ-
ность. В некогерентном случае также происходит усиление мощ-
ности, но форма сигнала не сохраняется и вместо гармонического
колебания с одной спектральной компонентой получается слож-
ный сигнал, состоящий из двух гармонических компонент,- на-
блюдаемый как квазигармонический сигнал с периодически
изменяющейся амплитудой. Этот процесс усиления в некогерент-
ном случае можно формально описать с помощью представления
о периодически изменяющемся отрицательном сопротивлении
(от некоторой величины отрицательного сопротивления до значе-
ния, близкого к омическому сопротивлению колебательного
контура).
§ 4.4. Основные особенности
одноконтурных параметрических усилителей
В предыдущем параграфе было показано, что, используя па-
раметрическую регенерацию электрического контура, моЖнр соз-
дать усилитель электрических колебаний.
Достоинство подобных параметрических усилителей состоит
в том, что они позволяют усиливать сигналы, внося в тракт уси-
ления лишь небольшие собственные шумы. Типичным парамет-
рическим усилителем является охлаждаемый до низких темпера-
тур колебательный контур, в котором реактивный параметр,
например емкость конденсатора, периодически меняется во вре-
мени. Уровень тепловых шумов в такой системе можно сделать
минимальным.
Первые опыты по параметрическому резонансу производились
в ЗО-е годы путем механического перемещения ферромагнитного
сердечника внутрь катушки индуктивности колебательного кон-
тура. Используя нелинейную зависимость намагничивания сер-
дечника от проходящего по вспомогательной обмотке тока, можно
было, и электрическим путем менять реактивный параметр кон-
152
ГЛ. 4. КОЛЕБАНИЯ ПРИ ПАРАМЕТРИЧЕСКОМ ВОЗДЕЙСТВИИ
тура. На этих принципах были построены тогда первые в мире
параметрические машины (генераторы) Мандельштама и Папа-
лекси. Однако из-за неизбежных больших потерь за счет петли
гистерезиса и низких механических частот перемещения сердеч-
ника реализовать в те годы параметрическую регенерацию в
диапазоне радиочастот для практических целей оказалось невоз-
можным.
Рис. 4.12. Характеристики полупровод-
никовых диодов
Значительный прогресс в этой области и в теории параметри-
ческих явлений, которым мы обязаны школе Мандельштама и
Папалекси, был достигнут в
50-е годы после появления
высококачественных маг-
нитных материалов (ферри-
тов) и параметрических по-
лупроводниковых диодов.
Вольт-амперная и вольт-фа-
радная характеристики по-
лупроводникового диода по-
казаны на рис. 4.12. Как мы
видим, в запорном (и<0)
направлении ток через диод
практически отсутствует, а
емкость легко меняется
в зависимости от напряже-
ния, приложенного к р — п-
переходу. Это обстоятельст-
во позволяет весьма просто управлять емкостью последнего пу-
тем приложения к нему постоянного и переменного напряжений.
При приближении напряжения к контактной разности потенциа-
лов <рк, толщина р — «-перехода становится равной нулю, а ем-
кость диода — бесконечной. Таким образом, получается некоторая
нелинейная зависимость емкости диода от напряжения, а следо-
вательно, и заряда на конденсаторе д(и).
Пусть на нелинейную емкость подано напряжение накачки
ив и напряжение подлежащего усилению сигнала ис, причем
напряжение сигнала ис < ив. Тогда функцию q — f(u) (заряд),
где и = ив + пс, можно разложить в ряд в окрестности ив:
g = /(u) = /(uH) + ^|u=uHUc+ ...
Если нас интересуют периодические колебания с частотой, от-
личной от частоты накачки, т. е. с частотой сигнала, то
= i |u=uHUc = C^Uc' (4.4.1)
Величина Сд = 3//5и |u=UjI имеет размерность емкости, однако,
в отличие от обычной емкости, она называется дифференциалъ-
§ 4.4. ОДНОКОНТУРНЫЕ ПАРАМЕТРИЧЕСКИЕ УСИЛИТЕЛИ
153
ной емкостью и зависит от выбора рабочей точки на вольт-фа-
радной характеристике, т. е.
df I _ дд
ди |u=uH ди ’
(4.4.2)
тогда как обычная емкость C — qJu. Это обстоятельство необхо-
димо учитывать в расчетах при составлении уравнений Кирхго-
фа для цепей с переменными реактивными параметрами, где
заряд равен
U
q = J C^du.
о
Рис. 4.13. Эквивалентная
схема параметрического
диода
Параметрические диоды (ПД) отличаются исключительно
малой инерционностью: дисперсия в них отсутствует до частот
порядка 10“ Гц. При расчетах пара-
метрических усилителей (генераторов)
параметрический диод заменяется эк-
вивалентной схемой, показанной на
рис. 4.13 и справедливой для большин-
ства типов ПД в любых рабочих диа-
пазонах частот, включая СВЧ. Здесь
через R обозначено сопротивление по-
терь, Сп — емкость монтажного патро-
на, L—паразитная индуктивность вво-
дов. В диапазоне СВЧ типовые пара-
метры ПД следующие: С'я от 1 до 0,1 пФ, R от 10 до 1 Ом,
£«0,1 нГн, Са от 1 до 0,5 пФ (вторые значения относятся к
ПД высокого качества).
Для узких германиевых р — n-переходов функцию Сд(и)
можно аппроксимировать выражением
_____ о______
(1 - м/фк)1М ’
(4.4.3)
где к « 2 и зависит от типа полупроводника и технологии его
изготовления.
При расчетах параметрических усилителей необходимо задать
зависимости q(u) или u(g). Первую зависимость можно полу-
чить, используя выражение заряда через дифференциальную
емкость, т. е.
и и
q = J Слйи = Со J (1_Уфк)1-/2 = 2СоФк [ 1 - (1 - и/Фк)172]. (4.4.4)
Отсюда путем простых алгебраических преобразований нетрудно
154
ГЛ. 4. КОЛЕБАНИЯ ПРИ ПАРАМЕТРИЧЕСКОМ ВОЗДЕЙСТВИИ
получить выражение для и = u{q):
н =(?/£„) (!-£<?), (4.4.5)
где коэффициент нелинейности £ = 1/ (4С0<Рк) •
Задавая напряжение накачки иа относительно большим, а на-
пряжение сигнала ие малым, можно осуществить нелинейное
изменение емкости Сл от ия. Допущение, что ис« ин, оправдано
использованием в качестве элементов параметрических усилите-
лей колебательных систем с большой добротностью. При этом
контур настраивается на частоту, близкую к частоте малого
(усиливаемого) сигнала, и он практически не реагирует на ко-
лебание с частотой накачки. Тогда в нулевом приближении мож-
но считать, что напряжение накачки меняет (модулирует)
в контуре только реактивный параметр, и поэтому усиливается
только вынужденное колебание, на частоту которого настроен
контур параметрического усилителя. В полосе пропускания
(прозрачности) контура в общем случае оказываются два близ-
ких гармонических колебания, одно с частотой внешней силы р,
другое с разностной частотой шн — р = 2со — р » р.
Одноконтурные параметрические усилители обладают усиле-
нием в 20—30 дБ на каскад; эквивалентную шумовую темпера-
туру можно довести до нескольких десятков градусов по шкале
Кельвина, ширина полосы пропускания усилителя может дости-
гать 10—15% от «сигнальной» частоты. Очевидно, что такие
параметрические усилители не могут усиливать сигналы слож-
ной формы, спектр которых содержит набор частот от нулевой
(близкой к нулевой) до некоторой высокой частоты.
Для усиления подобных сигналов (видеосигналов) необходи-
мо использовать другую разновидность параметрического усили-
теля. Принцип действия параметрического усилителя видеосиг-
налов основан па возможности модуляции с частотой сигнала
реактивного параметра колебательного контура, в котором суще-
ствуют колебания, задаваемые внешним генератором. Рассмот-
рим работу параметрического усилителя видеосигналов на при-
мере параметрического усилителя видеосигналов с магнитным
(ферритовым) сердечником в катушке индуктивности парал-
лельного колебательного контура.
Если магнитное поле создается током, протекающим через
обмотку, размещенную на ферромагнитном сердечнике, то его
магнитная проницаемость является функцией этого тока. Тогда
дифференциальная магнитная проницаемость цд = дВ/дН сердеч-
ника при действии на пего дополнительного магнитного поля Н
(подмагничивание) имеет вид, показанный па рис. 4.14. Как мы
видим, от тока (дополнительного магнитного поля) зависит ин-
дуктивность обмотки L, что приводит к перестройке колебатель-
ного контура по частоте. Такая перестройка контура, в котором
поддерживаются вынужденные колебания высокой частоты, при-
§ 4.4. ОДНОКОНТУРНЫЕ ПАРАМЕТРИЧЕСКИЕ УСИЛИТЕЛИ
155
водит к модуляции сигналом амплитуды этих вынужденных ко-
лебаний (рис. 4.15) и после их демодуляции позволяет получить
усиленный сигнал.
Действительно, пусть на одном и том же ферромагнитном
сердечнике размещены две обмотки — контурная и сигнальная,
I пусть по параллельному колебательному контуру протекает
гармонический ток (ток накачки), задаваемые внешним генера-
тором. Частота последнего может изменяться вблизи резонанс-
ной частоты контура и значительно (в 5—10 раз) превышать
Ч Ч
’пс. 4.14. Кривая изменения диффо-
эенциалыюй магнитной проницае-
мости ферромагнитного сердечника
от ноля
Рис. 4.15. Принцип действия усили-
теля с модуляцией и демодуляцией
частоту сигнала. В результате модуляции индуктивности сигна-
юм настройка контура изменяется (контур «перестраивается»),
что приводит как к изменению уровня накачки в нем (ампли-
тудная модуляция), так и к изменению со временем разности
ваз контурного тока и тока внешнего генератора (фазовая моду-
тяция). Амплитудную и фазовую модуляции, несущие информа-
цию о сигнале, можно выделить с помощью амплитудного и фа-
гового детекторов. Амплитудно-фазовая модуляция тока накачки
эудет тем эффективнее, чем больше добротность контура и чем
значительнее глубина модуляции индуктивности сигналом
т. е. чем больше чувствительность устройства). Кроме того, глу-
бина и характер модуляции высокочастотных колебаний зависят
jt расстройки контура относительно частоты внешнего генерато-
ра. Мощность продетектированного тем или иным образом сиг-
нала может превысить мощность входного сигнала.
Для неискаженного воспроизведения сигнала необходимо
следующее: устранить симметрию кривой цд(гс) путем постоян-
ного подмагничивания ферритового сердечника; выполнить тре-
156 ГЛ. 4- КОЛЕБАНИЯ ПРИ ПАРАМЕТРИЧЕСКОМ ВОЗДЕЙСТВИИ
бование линейной зависимости L = f(ic) в пределах изменения
тока сигнала: при работе с амплитудной модуляцией следует
изменить настройку контура относительно частоты накачки.
Блок-схема одноконтурного параметрического усилителя ви-
деосигналов с нелинейной индуктивностью показана на рис. 4.16.
Ширина полосы такого уси-
Рис. 4.16. Блок-схема одноконтурно-
го параметрического усилителя ви-
деосигналов: I — генератор гармони-
ческой накачки, II — параллельный
колебательный контур, III — сиг-
нальная цепь, IV — цепь подмагни-
чивания, V — ферритовый сердечник
лителя уменьшается с увеличе-
нием добротности Q (коэффи-
циент усиления при этом рас-
тет) и зависит от расстройки,
так как ею определяется уро-
вень боковых полос. Увеличе-
ние частоты накачки приводит
к расширению полосы пропус-
кания контура, если Q неиз-
менно, и, следовательно, к
уширению полосы пропуска-
ния усилителя.
Для получения достаточно-
го усиления необходимо, чтобы
ферритовый модулятор обла-
дал достаточной чувствительностью (сильная зависимость ця
феррита от магнитного поля сигнала). Для того чтобы напряже-
ние с частотой накачки не проникло в сигнальную цепь, приме-
няется, например, модулятор со взаимно перпендикулярной ори-
ентацией взаимодействующих полей.
§ 4.5. Параметрическая генерация электрических колебаний
(параметрические генераторы)
Выше ужо упоминалось, что для нелинейных систем не пред-
ставляется возможным провести четкое разграничение между
силовым и параметрическим воздействиями. При силовом воздей-
ствии вынужденный колебательный процесс, вызванный внешней
силой, будет за счет нелинейных свойств системы приводить
к периодическому изменению соответствующих параметров. По-
этому в конечном счете результирующий вынужденный процесс
может иметь некоторое сходство с параметрически возбуждае-
мым колебательным процессом; может нарушаться монотонность
изменения амплитуды при изменении соотношения частот и мо-
гут наблюдаться интенсивные колебания при частотных соотно-
шениях, типичных для параметрических резонансов.
В связи с этими особенностями поведения нелинейных сис-
тем представляется разумным собственно параметрическим воз-
действием на такую систему считать воздействие, при котором
принудительное изменение реактивных (энергоемких) парамет-
ров системы не сопровождается введением в систему соответст-
§ 4.5. ПАРАМЕТРИЧЕСКАЯ ГЕНЕРАЦИЯ КОЛЕБАНИИ
157
вующих периодических сил, способных вызвать обычным путем
вынужденные колебания. Это, например, может быть реализова-
но при механическом изменении емкости или индуктивности.
Возможно также осуществление балансных схем (рис. 4.17,
4.18), в которых подбором соответствующих элементов можно
добиться практически полной компенсации э.д.с., наводимых па
частоте накачки 2® в
Рид. 4.17. Схема балансного
модулятора индуктивности
системы, и рассматривать последние как
колебательные цепи с периодически
изменяющимися параметрами. В первой
схеме (рис. 4.17) происходит перио-
дическое изменение индуктивности
Рис. 4.18. Схема балансно-
го модулятора емкости
с частотой 2(0; во второй (рис. 4.18) — периодическое из-
менение емкости, образованной двумя запертыми р — п-пе-
реходами в полупроводниковых диодах, также с частотой
внешнего воздействия (накачки) 2(0. Предположим теперь,
что условия параметрического возбуждения выполнены, и тогда
амплитуда любого малого колебания с частотой, удовлетворяю-
щей соотношению о = пр12, где п — номер соответствующей об-
ласти возбуждения, будет нарастать за счет вложения в систему
энергии со стороны устройства, периодически изменяющего па-
раметр с частотой р. Вследствие нелинейности системы нараста-
ние амплитуды можно ограничить, и при некотором значении
амплитуды подобных параметрически возбужденных колебаний
возможно установление энергетического баланса между потеря-
ми и вложением энергии.
Как отмечалось в § 4.1, в консервативной нелинейной сис-
теме установление стационарной амплитуды характеризуется
уменьшением до нуля вкладываемой энергии и реализуется за
счет изменения средних значений нелинейных реактивных пара-
метров (емкости или индуктивности). В диссипативной же сис-
теме достижение энергетического баланса и соответственно уста-
новление стационарной амплитуды происходит при отличных от
нуля вложениях энергии и может осуществляться не только за
счет эффективной расстройки системы, связанной с изменением
среднего значения одного из реактивных параметров системы,
но при наличии в возбуждаемой системе нелинейного затухания
и путем изменения величины потерь. Если в возбуждаемой сис-
158
ГЛ. 4. КОЛЕБАНИЯ ПРИ ПАРАМЕТРИЧЕСКОМ ВОЗДЕЙСТВИИ
теме значения А и С не зависят от тока и напряжения, а эффект
тивные потери растут с увеличением амплитуд колебаний быст-
рее, чем квадрат последней, что соответствует возрастанию со-
противления R или нагрузки с увеличением тока (это весьма
легко реализовать, например, за счет термических эффектов), то
можно ввести в рассмотрение медленно меняющееся затухание
и представить дело так, как будто с ростом амплитуды возбуж-
денных колебаний увеличивается наклон прямой, проходящей
через вершины областей неустойчивости, и области неустойчиво-
сти поднимаются вверх (см. рис. 4.3, б). Это будет происходить
до тех пор, пока изображающая точка, ранее находившаяся
внутри одной из областей неустойчивости, не окажется на ее
границе, что будет свидетельствовать о наступлении энергетиче-
ского баланса.
При ограничении же амплитуды за счет нелинейности реак-
тивных параметров процесс установления равновесного режима
можно связывать с соответствующим перемещением изображаю-
щей точки и некоторой деформацией самих областей неустойчи-
вости, происходящими до тех пор, пока изображающая точка
также не окажется на границе области параметрического воз-
буждения. В зависимости от механизма ограничения нарастания
амплитуд параметрически возбуждаемых колебаний процесс ус-
тановления стационарной амплитуды идет либо монотонно, либо
имеет осцилляторный характер.
При изучении кривых параметрического резонанса, т. е. кри-
вых, изображающих зависимость амплитуды установившихся
колебаний при параметрическом возбуждении от соотношения
между частотой изменения параметра и собственной частотой
колебаний возбуждаемого контура, можно наблюдать различные
типы кривых при различных видах полипейпости в диссипатив-
ных системах.
Если в нелинейной системе затухание постоянно и не зави-
сит от тока или напряжения в системе, то различие между по-
лучающимися кривыми параметрического резонанса для дисси-
пативных систем и консервативных (см. рис. 4.6) сводится к
тому, что в первых происходит смыкание двух различных ветвей
кривой и исключается возможность бесконечного возрастания
амплитуды при увеличении расстройки системы (т. е. ухода ее
собственной частоты от значения, определяемого точным выпол-
нением соотношения (о0 = пр/2). Примерный характер кривых
для случая параметрического возбуждения контура с постоян-
ным затуханием и с нелинейной емкостью при различных типах
этой нелинейности показан па рис. 4.19. Сплошная и штриховая
кривые соответствуют двум типам нелинейности реактивного
параметра (емкости). Сплошной кривой соответствует убывание
среднего значения емкости, штриховой — ее возрастание с рос-
том амплитуды колебаний. Видно также характерное для пара-
§ 4.5. ПАРАМЕТРИЧЕСКАЯ ГЕНЕРАЦИЯ КОЛЕБАНИЙ
159
лотрического резонанса существование ограниченной области
расстроек, т. е. ограниченного частотного интервала, внутри ко-
торого возможно параметрическое возбуждение, причем ширина
:того интервала 2£0 зависит от глубины модуляции параметра т
л обращается в нуль при т, равном критическому значению тир,
•оответствующему равенству энергии, вносимой в систему при
лзменении папаметра, потерям в системе.
°ис. 4.19. Кривые параметриче-
ского резонанса в диссипативном
:онтуре с Нелинейной емкостью
Рис. 4.20. Кривая параметриче-
ского резонанса в контуре с
нелинейным сопротивлением
Хогда ограничение амплитуды осуществляется за счет нели-
нейного сопротивления при постоянных средних значениях реак-
тивных параметров, форма кривых параметрического резонанса
шеет вид, показанный на рис. 4.20. Здесь характерна симметрия
гривой параметрического резонанса н отсутствие неустойчивых
ютвей и скачкообразных изменений амплитуды при монотонном
1змепении расстройки. По-прежнему в качестве основного при-
гнана параметрического резонанса остается существование ко-
нечного интервала расстроек (2|0), внутри которого возможно
юуществление параметрического возбуждения.
Из всего изложенного выше вытекает, что для теоретического
исследования явления параметрической генерации колебаний не-
гбходимо привлечь к рассмотрению нелинейные характеристики
тараметров системы. Их анализ позволяет получить как закон
’становления амплитуды параметрических колебаний, так и вы-
ражения для стационарных значений этих амплитуд.
Рассмотрим более подробно методом ММА процессы, проис-
ходящие в параметрическом генераторе при ограничении ампли-
уды колебаний в нем с помощью нелинейного элемента.
Одноконтурный параметрический генератор с нелинейным
сопротивлением. Рассмотрим колебательный контур с элемента-
ми L, С, R и допустим, что во времени меняется только реактив-
ный параметр C(t), а активное (омическое) сопротивление зави-
сит от проходящего через него тока R(i). Тогда при параметри-
ческом воздействии такая колебательная система с нелинейным
160
ГЛ. 4. КОЛЕБАНИЯ ПРИ ПАРАМЕТРИЧЕСКОМ ВОЗДЕЙСТВИИ
Рис. 4.21. Схема
параметрического
генератора с по-
линейным сопро-
тивлением
сопротивлением (рис. 4.21) при определенных условиях, налага
емых на параметры системы, может стать одноконтурным пара
метрическим генератором.
Если омическое сопротивление увеличивается при увеличе
нии проходящего через него тока, то повышается диссипацш
энергии в системе и, как следствие, наступает баланс межд;
параметрически подкачиваемой, энергией и энергией, рассеивав
мой на сопротивлении, т. е. ограничение амплитуды колебаний
При этом необходимо такое сопротивление, которое увеличива
ется с возрастанием тока вне зависимости О'
его направления в цепи. Этому требованив
можно удовлетворить, если выбрать закон па
дения напряжения на сопротивлении в виде
uR = RQ(i + p0i3), (4.5.1
что равносильно выбору следующей харак
теристики сопротивления:
Я = 7?о(1 + М2),
причем должно быть больше нуля.
Пусть закон изменения емкости во времени, как обычно, вы
ражается в виде
f-(-moos (2(ot)‘
Тогда уравнение Кирхгофа для рассматриваемой системы при
мет вид
/Д + + -Г- И + т cos И? = °-
at “£ Gn
Для обеспечения общности результатов введем безразмерную кс
ординату х — q/q<> и безразмерное время т = cof; тогда это ураг
нение движения запишется в виде
•• й • <о?
х -I—гх + -£(1 + т cos 2т) х = 0,
где дифференцирование ведется по т, (0q = llLCa и R = Ro (1 -
+ ₽о9о«>2т2).
Если ввести обозначения <Од/со2 = 1—%, 2Ql = R/mL, =
= р0?г<о2, то получим уравнение
х + 26iX + (1 — £) (1 + т cos 2т) х = 0.
Будем считать, что колебательная система обладает малой дис
сипацией (2^! < 1), а § и т— тоже малые величины (& С 1
§ 4.5. ПАРАМЕТРИЧЕСКАЯ ГЕНЕРАЦИЯ КОЛЕБАНИЙ
161
т «с 1). Тогда, обозначая RJ<&L = 2'0, имеем
х + х = & — 20х — 2-Щ}хэ — тх cos 2т, (4.5.2)
где опущен член второго порядка малости с коэффициентом ml,.
Применим к (4.5.2) приближенный метод решения — метод
ММА. Тогда, как и для автономных систем, решение можно ис-
кать (для первой области неустойчивости) в виде
х = и cos т + v sin т, х = —и sin т + v cos т,
где н(т) и п(т)—медленно меняющиеся функции времени т.
В соответствии с методикой получения решений методом ММА,
изложенной в § 2.5, для рассматриваемого случая можно запи-
сать укороченные уравнения, которые после усреднения примут
вид
2Л
u = — A. j — 2ft я — 2ftp#3 — тх cos 2т) sin т dx =
о
— + (4.5.3)
2Л
v = 2г? J ~ ~ ~ тх cos 2т) cos т йт =
о
'ьт₽4’
где через Л2 — и2 -I- v2 обозначен квадрат амплитуды параметри-
чески возбуждаемых колебаний в системе.
Решение системы укороченных уравнений позволяет в прин-
ципе получить полное решение задачи о возбуждении колебаний
в исследуемой системе и о процессе установления стационарного
режима. Однако в силу нелинейности дифференциальных урав-
нений (подобных (4.5.3)) их, как правило, не удается проинтег-
рировать до конца. Тем не менее они очень удобны для исследо-
вания стационарных состояний системы (при этом анализе, ес-
тественно, переходные процессы не рассматриваются).
В стационарном состоянии й = v = 0. Тогда из рассмотрения
системы однородных уравнений (4.5.3) вытекает, что в системе
возможно состояние покоя (по = Ро = О)—первое стационарное
состояние системы.
Второе стационарное состояние системы с отличной от нуля
амплитудой (wo¥=O, v0 0, Ао¥=О) можно найти из (4.5.3), если
ее записать в виде
11 В. В. Мигулин и др.
162 гл. 4- колебания при параметрическом ВОЗДЕЙСТВИИ
Поскольку и0 ¥= 0 и v0 ¥= 0, то мы вправе перемножить обе левы
и обе правые части уравнений и сократить на UoV0. Тогда
(о \ 2 л / 2 \
Извлечем квадратный корень из обеих частей равенства :
найдем выражение для стационарной амплитуды колебаний:
<4-54
Поскольку коэффициент нелинейности > 0 и 20 > 0, то зна
минус перед корнем нужно опустить, так как по определена
амплитуда должна быть больше нуля (Ло> 0). Тогда из вырг
жения (4.5.4) следует, что условием существования стационар
пой отличной от нуля амплитуды колебаний является следующе
неравенство:
<4-W
откуда получается, что расстройка в системе не может превосхс
дить величины
2
Ва = ^-4^
а на глубину модуляции параметра т должно быть наложег
условие
тг > 16й2 + 4g2. (4.5.Е
Эта связь между параметрами системы определяет возможност
или (при противоположном знаке неравенства) невозможном
возбуждения параметрических колебаний в системе.
Из выражения для ясно видна роль нелинейности conpi
тивления (£) системы. Если £ 0, т. е. если уменьшать нелт
нейность системы, то амплитуда параметрических колебанг
будет постепенно увеличиваться и в пределе для линейной си
темы должна обратиться в бесконечность, что согласуется с те
рией параметрического возбуждения .линейных диссипативнь
систем.
Кривые параметрического возбуждения для разных величт
коэффициента затухания системы и фиксированных значений
и 0 показаны па рис. 4.22. Из рассмотрения этих графиков
выражения для стационарной амплитуды можно сделать следу!
щие заключения. При наличии нелинейного сопротивления а?
плитуда параметрических колебаний всегда ограничена; облас
возбуждения симметрична относительно нулевой расстройки
сужается при увеличении потерь (Ф3>'б4). Кроме того, шири:
§ 4.5. ПАРАМЕТРИЧЕСКАЯ ГЕНЕРАЦИЯ КОЛЕБАНИЙ
163
юласти параметрического возбуждения не зависит от нелиней-
ности системы, а определяется исключительно соотношением па-
раметров т, g, б. В частности, при данном тп и потерях в систе-
ме, больших или равных (например, th), параметрические
колебания возбудить вообще невозможно.
Области параметрического возбуждения для разных коэффи-
диентов нелинейности [}2 и при фиксированных значениях т
л б показаны на рис. 4.23.
’’ис. 4.22. Области параметриче-
ского резонанса для различных
значений затухания
Рис. 4.23. Области параметрического
резонанса для различных коэффи-
циентов нелинейности 01 и р2
Амплитуда параметрических колебаний в системе максималь-
на при g = 0 и равна
(4-5-7)
Границы области возбуждения можно определить из выражения
ля стационарной амплитуды (4.5.4), приравнивая его нулю;
хмеем
g4 = Vm74 - 462, b = — Vm74 —4б2.
Исследуем найденные стационарные решения системы (4.5.3)
да устойчивость методом малых возмущений (вариаций); тогда
1 = и0 + ц, v — Vo + £. Подставляя эти выражения в укороченные
/равнения u = <p1(u, v), г> = cp3(u, v) и разлагая их правые части
з ряд по малым вариациям, получим, ограничиваясь первыми
членами разложения,
• ЭфI Эф. I
*> = + ............................>
т=3о ”=’о
г =^2
ди
дф„ I
Л + -д-Ч £ + •
u=u0 1 dv |u=u0 3
’=re B=ro
ибо в стационарном состоянии <pi(u0, vo)=O, <p2(u0, Ро)=О.
1*
164
ГЛ. 4. КОЛЕБАНИЯ ПРИ ПАРАМЕТРИЧЕСКОМ ВОЗДЕЙСТВИИ
Будем искать решение системы дифференциальных уравне-
ний для ц и £ в виде ц = £ = £ое*'т; тогда получается систе
ма линейных однородных алгебраических уравнений, детерми
нант которой для нетривиальное™ решения должен быть равег
нулю, т. е.
£51 —х £11
йи dv _ л
эф2 £51 - х -
ди ди
Вводя обозначения
_ _ аФ2 _ 0ф2
0,11 “ ди ’ Я13 ~ 17' asi ~ ди' а22~17
и разрешая приведенное выше уравнение второго порядка отно
сительно А, получим
k = + «22) ±7 /(аы — ам)2 + 4а1ааа1.
Применим ту же процедуру для исследования устойчивост]
состояния покоя системы (нулевой стационарной амплитуды, т. f
и0 = v0 = Ao = 0). Тогда
ь--о±4]/
Если потребовать, чтобы Re А > 0, т. е. интересоваться соотнс
шением параметров системы, при котором состояние покоя буде
неустойчивым, то это требование означает, что
Последнее выражение в точности соответствует условию cj
ществования отличной от нуля стационарной амплитуды Дл
области расстроек £, удовлетворяющих неравенству £2<т2/4-
— 4-в2, для которых существует стационарная отличная от нул
амплитуда Ло, состояние покоя системы неустойчиво. Следов!
тельно, опо неустойчиво внутри области параметрического рез<
нанса (от до £а). Состояние покоя устойчиво вне области ш
раметрического резонанса, когда Re А < 0 и для соотношения ш
раметров системы получается неравенство вида £2 > ш2/4 — 40
Аналогичным образом анализируется устойчивость состояни
с отличной от нуля стационарной амплитудой (Ао=/=О). Пош
довольно громоздких вычислений находим, что эта амплиту;
устойчива (Re А < 0) во всей области расстроек, где она сущее
§ 4.5. ПАРАМЕТРИЧЕСКАЯ ГЕНЕРАЦИЯ КОЛЕБАНИЙ
165
качестве механизма
яебаний использует-
Я
L
Рис. 4.24. Схема па-
раметрически воз-
буждаемого контура
с нелинейной ем-
костью
вует Области устойчивых стационарных реше-
ний системы (4.5.3) на графиках рис. 4.23 отмечены кру-
жочками, области неустойчивых стационарных решений — кре-
стиками.
Роль нелинейного механизма ограничения и установления
амплитуды параметрических колебаний выполняет в рассмотрен-
ной задаче нелинейное затухание (сопротивление). Нелинейным
сопротивлением на частотах до сотен килогерц может служить
обыкновенная лампа накаливания. Часто
ограничения амплитуды параметрических
ся нелинейная реактивность, например
нелинейная емкость.
Одноконтурный параметрический гене-
ратор с нелинейным реактивным элемен-
том. Рассмотрим колебательную систему
(рис. 4.24), в которой L — const, R — const,
а емкость является функцией времени и
нелинейно зависит от заряда q, т. е. С~
— c(£)q>(g). Пусть емкость по-прежнему
меняется по закону
с(£) =C(/[l + 7ncos(2(at)],
а напряжение на емкости — по закону uc = (g/c) (1 + Т>д*)’, т. е.
в отсутствие модуляции параметра напряжение на емкости из-
меняется по закону кубической параболы (конденсатор с сег-
нетоэлектриком, см. рис. 1.6), что реально наблюдается у боль-
шой группы сегнетоэлектриков, исследованных в ранних работах
И. В. Курчатова. С увеличением заряда емкость такого конден-
сатора уменьшается.
Если в уравнении Кирхгофа для рассматриваемой системы
Lq + Rq + ис (g, t) = 0
ввести прежние обозначения х = g/g0, т = at, ©о =
<Ро/(оа == 1 — 26 = R/aL, у = уода и считать величины у,
б, m малыми по сравнению с единицей, то можно получить сле-
дующее нелинейное дифференциальное уравнение движения, до-
пускающее применение метода ММА:
х + х = %х — 2'дх — уж3 — mx cos 2т, (4.5.8)
в котором отсутствуют члены второго порядка малости. Таким
образом, метод ММА в данном случае применяется к слабо не-
линейной системе с малой диссипацией.
Решение (4.5.8), как и прежде, ищем в вцде х — u-cos т +
+ vsinT, х~—и sin т 4- v cos т. Подставляя выражения для х и
х в правые части укороченных уравнений и проводя их усредне-
ние по периоду, получаем следующую систему укороченных
12 В. В. Мигулин и др.
166
ГЛ. 4. КОЛЕБАНИЯ ПРИ ПАРАМЕТРИЧЕСКОМ ВОЗДЕЙСТВИИ
уравнений для рассматриваемого случая:
2Л
и = —2“ J — — уж3 — ига:cos2т)sin? dr =
о
= - ftu — 1 [(-у + fc) — 4 ?л2] V = <рх {и, V)t
(4.5,9)
2Л
v = J (& — 2&х — ух3 — тх cos 2т) cos т dx=
о
1 ~ &)+ 4 v^2]и — &v = ф2
где А2 = иг + нг.
По-прежнему будем искать только стационарные решения
этих уравнений. При й = v = 0 могут реализоваться два режи-
ма: состояние покоя системы п0 в и0 = Ло = 0 и состояние с от-
личной от нуля амплитудой колебаний н0 0, н0 =/= О, Л» 0.
Рассмотрим условия существования этих режимов и исследуем
устойчивость состояния покоя (анализ устойчивости стационар-
ных решений, отличных от нуля, из-за громоздкости выкладок
проводить не будем).
Исследование укороченных уравнений (4.5.9) показывает, что
нулевые стационарные решения и0 = v0 = Ло = 0 (состояние по-
коя) возможны в системе при любых величинах параметров
т, £ (разумеется, в пределах малости этих величин пс
сравнению с единицей, что требуется для применения метода
ММА к данной задаче). Стационарное отличное от нуля реше-
ние системы (ио¥=О, Ро^О) определяется тем же путем, что и
выше (см. с. 161); имеем
•йр0 = — у (т ~ + 4 “о*
Тогда выражение для квадрата стационарной амплитуды при-
нимает вид
(4.5.11
Отсюда сразу виден физический смысл коэффициента нелиней-
ности f. Чем меньше коэффициент нелинейности ч, т. е. чем
ближе нелинейная система к линейной, тем больше возможна!
в системе амплитуда параметрических колебаний.
§ 4.5. ПАРАМЕТРИЧЕСКАЯ ГЕНЕРАЦИЯ КОЛЕБАНИЯ
167
Определим теперь условия существования действительных
значений отличной .от нуля стационарной амплитуды. Из формы
кривой для Uc(q) (см. рис. 1.6) видно, что у > 0. Поэтому, что-
бы не исключать йз рассмотрения область отрицательных рас-
строек S, необходимо потребовать выполнения условия
тп2/4 > 402 или т/2 > i/Q.
Тогда для выполнения условия 0 необходимо, чтобы
t2 < тп2/4 — 4б2,
или для глубины модуляции
тп2 > 4£2 + 1662. (4.5.12)'
График кривых параметрического резонанса для одноконтурного
параметрического генератора с ограничением амплитуды за счет
нелинейной емкости показан на рис. 4.25, где для общности
Рис. 4.25. Кривые параметрического резонанса в контуре с нелинейной
емкостью
картины изображена также область параметрического резонанса
для случая конденсатора с у < 0. Граничные расстройки Si и
получаются из условия = 0 и равны соответственно
= Утп2/4 —4’0, & = -Ут2/4-4б2. (4.5.13)
Исследование устойчивости стационарных решений можно,
как и в предыдущей задаче, провести методом возмущений. Тогг
да для случая нулевой стационарной амплитуды нужно составить
определитель для нахождения характеристического показателя Л.
Если правые части укороченных уравнений (4.5.9) обозначить
через Ф1(п, п) и <p2(u, v), то для рассматриваемой задачи имеем
ди
d<p2
du
5<рх
dv
d<p_
dv
= 0 или
-0-Х —
1 ( т
2 . 7
4-
2 V 2
-0-1
12*
168 ГЛ. 4- КОЛЕБАНИЯ ПРИ ПАРАМЕТРИЧЕСКОМ ВОЗДЕЙСТВИИ
Решения этого квадратного уравнения относительно К равны
Состояние покоя системы неустойчиво, если К имеет положитель-
ную вещественную часть, т. е. Re X > 0, тогда
? < тп74 - 4ft2.
Итак, получено условие параметрического возбуждения сис-
темы. Нетрудно заметить, что состояние покоя неустойчиво имен-
но в пределах области существования отличной от нуля ампли-
туды параметрических колебаний. Вне данной области, т. е. при
£2 > тп2/4 — 4ft2, существует устойчивое стационарное состояние
покоя (по = v0 = Л о = 0), так как при этом условии ReX<0.
Более подробный анализ устойчивости стационарных отлич-
ных от нуля решений показывает (см. рис. 4.25), что устойчивы
обе прямые с кружками (при у >0 и у < 0) и неустойчивы обе
прямые с крестиками (при у>0 и у<0). При движении (для
у > 0) из области отрицательных расстроек |(ю < gj0) амплиту-
да Ло, оставаясь сперва нулевой, затем, начиная со значения
= —Утп2/4—4ft2, мягко (плавно) начинает увеличиваться
В области расстроек от до состояние покоя неустойчиво я
малейшие флуктуации в системе нарастают до Al 0.
При движении в обратном направлении — из области поло
жительных расстроек g(£o>£o0)—параметрические колебания
можно возбудить при значениях, больших Bi = V»n2/4— 4й2, н<
такое возбуждение может быть только жестким. Если системе
находящейся правее точки сообщить толчок, больший ампли
туды колебаний в нижнем (неустойчивом) стационарном состоя
вии, то колебания в системе раскачаются до значения Л2^=0
соответствующего устойчивой стационарной амплитуде для дан
ной расстройки. Если же такой системе, находящейся прав&
точки §!, сообщить толчок ДЛ2, меньший амплитуды колебанш
в системе в неустойчивом состояний, то он не вызовет в систем
устойчивой параметрической генерации. Это возмущение со вре
менем затухнет, и снова наступит состояние покоя.
Экспериментальное исследование работы одноконтурны
параметрических генераторов показало, что кривые параметриче
ского резонанса для них в действительности имеют вид, показан
ный на рис. 4.26. Это связано с двумя обстоятельствами. Во-пеу
вых, использованное нами математическое приближение пр
решении укороченных уравнений привело к тому, что в ни
отсутствовали члены порядка у| и т$, ибо были удержаны толя
ко члены порядка у и т. Уже учет этих членов второго поряди
малости приводит к согласию теории с экспериментом.
§ 4.6. ПАРАМЕТРИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ
169
Во-вторых, в реальных колебательных системах с нелинейны-
ми реактивными элементами необходимо учитывать также нели-
нейную проводимость (сопротивление) последних, например
сопротивление запертого полупроводникового диода или конден-
сатора с сегнетоэлектриком. Сопротивления нелинейных элемен-
тов увеличиваются с ростом амплитуды параметрических колеба-
ний, в результате чего для областей параметрического возбуж-
дения таких систем характерно
присущих как системам с не-
линейной реактивностью (на-
клон области возбуждения),
так и системам с нелинейной
диссипацией (замкнутость кри-
вой, ограничивающей область
возбуждения), при решении за-
дачи с учетом членов только
первого порядка малости.
При изучении одноконтур-
ных параметрических генерато-
ров мы не рассматривали кон-
кретный механизм изменения
реактивного параметра во вре-
сочетание специфических черт,
Рис. 426. Реальная кривая парамет-
рического резонанса в диссипативной:
системе с нелинейной емкостью
мени, а задавались математическим законом модуляции пара-
метра, например, в виде C(i) = C0/[l + m cos(2a>i)J. Такие сис-
темы принято называть параметрическими генераторами первого
рода, в отличие от параметрических генераторов второго рода
(параметрических преобразователей), в которых изменение не-
линейного реактивного параметра происходит в результате дей-
ствия некоторой периодической силы, включенной в колебатель-
ную систему.
§ 4.6. Параметрические преобразователи
(параметрические генераторы второго рода)
В подобных системах параметрический механизм возбужде-
ния колебаний в колебательной системе реализуется за счет уп-
равления нелинейным параметром с помощью напряжения
накачки, что можно осуществить включением генератора напря-
жения в последовательный колебательный контур, содержащий
нелинейный реактивный элемент.
На рис. 4.27 представлен нелинейный электрический колеба-
тельный контур, состоящий из элементов L, R, C(q) и генерато-
ра напряжения Ua cos(2(oi). Проанализируем процессы, проис-
ходящие в такой системе, рассмотрим условия и особенности
возбуждения колебаний в ней, выясним вопрос о наличии ста-
ционарной отличной от нуля амплитуды параметрически воз-
бужденных колебаний.
£7() ГЛ. 4- КОЛЕБАНИЯ ПРИ ПАРАМЕТРИЧЕСКОМ ВОЗДЕЙСТВИИ
Для того чтобы не усложнять расчеты, нелинейным" парамет-
ром данной колебательной системы будем считать по-прежнему
только емкость конденсатора, которую можно аппроксимировать
выражением Uc(g)==(g/Co)q>(g), где tp(g)—нелинейная функ-i
ция. Если в качестве нелинейного параметра использовать ем-
кость конденсатора с сегнетоэлектриком, то, исходя из вида не-
Рис. 4.27. Схема
контура с нели-
нейной емкостью
и генератором на-
качки
линейности кривой ис (д') (см. рис. 1.6), можно
ограничиться кубическим : членом полинома
(кубическая парабола), аппроксимирующего
реальную вольт-кулоновую зависимость на
конденсаторе. Тогда
“с(д) = (д/Со)ф(?) = (д/С'о) (1 + То?2),
а уравнение Кирхгофа для рассматриваемой
системы примет вид
LWi + R^ + ^(i + ?0?2) = U° C°S (?<а<)*
Если ввести обычные обозначения x = qlqa, т = Ы, co2 = i/LCot
Фо/са2 = 1 — У = Yogo, 26=2f/aL и считать, что 26 « 1, £
f < 1, то исходное уравнение запишется следующим образом:
х -ha: ч= %х — "fa:3 — 26х + U cos 2т,
(4.6.1)
где U = U0/Lq0a2. При этом, как и раньше, мы пренебрегли чле-
ном второго порядка малости ~§уа:3.
В правой части (4.6.1) первые три члена малы, однако пос-
ледний член, представляющий напряжение генератора накачки,
в, общем случае достаточно велик. Это обстоятельство не позво-
ляет применять непосредственно к данному уравнению ме-
тод ММА. &
Однако если ввести новую переменную у такую, что
х = у — ((7/3) cos 2т, (4.6.2)
где — (77/3) cos 2т =—Рcos 2т — вынужденное решение уравнения
х + х = ЗР cos 2т = U cos 2т,
то, произведя в исходном уравнении замену переменной х на
переменную у, получим
у + у = £(у — Pcos 2т) — 26 (у + 2Рзш2т)— у (у — Pcos 2т)3.
(4.6.3)
Теперь правая часть дифференциального уравнения движения
содержит члены только первого порядка малости, поэтому к дан-
ному уравнению применим метод ММА.
В рассматриваемой системе происходят два процесса: один
с собственной частотой со0, другой с частотой внешней силы 2(о.
§ 4.6. ПАРАМЕТРИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ
171
Общий результирующий процесс складывается из двух периоди-
ческих процессов с соизмеримыми частотами ©0 и 2© и поэтому
также является периодическим. В соответствии с методом ММА
решение уравнения для первой области неустойчивости ищем
в виде
у = и cos т + v sin т, у — —и sin т + v cos т,
где и и v — медленные переменные времени т. Используя стан-
дартную процедуру нахождения усредненных по периоду укоро-
ченных уравнений, получим
и = — Ъи + 1 уА2 + уР2 — v = <рх (и, v)t
, . (4.6.4)
V = —I (т7"42 + Т77’2 — lju — Op = <p2(u, v).
Рассмотрим стационарные решения данной задачи (й = г> =
= 0). Сразу видно* что нулевые стационарные решения (ii0 =
= 1>о = Ао = О) существуют при любых параметрах исследуемой
системы во всей области расстроек |.
Для ненулевых стационарных амплитуд (Ао ¥= 0) находим
описанным выше способом следующее выражение:
2о=|/-(47л2+4^2-^
которое, как видно, по имеет физического смысла, ибо затухание
в системе всегда положительно и не может равняться мнимой
величине. Это значит, что стационарных отличных от нуля ре-
шений системы (4.6.4) быть не может, а может существовать
только состояние покоя (н0 = = До = 0).
Нетрудно убедиться в том, что если в системе не могут возбуж-
даться колебания на частоте © с отличной от нуля амплитудой,
то состояние покоя должно быть устойчивым. Для исследования
устойчивости этого состояния используем известный метод воз-
мущений, при котором необходимо потребовать равенства нулю
следующего определителя:
откуда - . .
1 — - .. ‘ ‘
Видно, что квадратный корень при любых у, Р, | является мни-
мой величиной, а вещественная часть характеристического пока-
172
ГЛ. 4. КОЛЕБАНИЯ ПРИ ПАРАМЕТРИЧЕСКОМ ВОЗДЕЙСТВИИ
зателя 1 всегда отрицательна, ибо по определению потери в сис-
теме всегда больше нуля, т. е. О > 0. Следовательно, состояние
покоя рассматриваемой системы всегда устойчиво, стационарной
амплитуды Ао^О в системе не существует ни при каких значе-
ниях параметров.
Объяснение невозможности возбуждения колебаний в систе-
ме на частоте, равной половине частоты напряжения накачки,
следует искать в невыполнении некоторых условий возбуждения
параметрических колебаний в первой области Матьё. Дело в том,
что взятая в рассматриваемой задаче симметричная относитель-
но начала координат вольт-кулоновая характеристика конденса-
тора обусловливает двукратное за один период напряжения
накачки увеличение емкости конденсатора и двукратное ее
уменьшение. Поскольку частота напряжения накачки в два раза
выше частоты искомых параметрических колебаний, то емкость
колебательной системы меняется четыре раза за период собст-
венной частоты системы, т. е. условия параметрического возбуж-
дения в такой системе не выполняются, ибо максимальная час-
тота изменения реактивного параметра за период искомых пара-
метрических колебаний (первая область Матьё) равная двум.
В областях неустойчивости с более высокими номерами она еще
ниже, так как частота изменения
Рис. 4.28. Вольт-кулоновая ха-
рактеристика нелинейного
конденсатора со смещением
показанный на рис. 4.28.
параметра должна подчиняться ус-
ловию
р ~ 2coo/n, где п = 2,3,4,...
Для того чтобы обеспечить вы-
полнение условий параметрического
возбуждения для колебательной си-
стемы с конденсатором на основе
сегнетоэлектрика, необходимо при-
дать вольт-кулоновой характеристи-
ке Пс(<?) несимметричный вид, что
можно осуществить путем подачй
на конденсатор постоянного напря-
жения смещения (например, —и0).
Тогда кривая uc(g) будет иметь вид,
Можно для этой же цели исполь-
зовать в качестве нелинейной емкости р — re-переход полупро-
водникового диода. Здесь кривая С (и) всегда несимметрична и
имеет вид, показанный на рис. 4.12.
Наличие несимметрии кривых uc(q) или С (и) требует учета
в их аппроксимирующих выражениях квадратичных членов;
иными словами,'для конденсатора с сегнетоэлектриком и с по-
стоянным смещением необходимо пользоваться зависимостью
uc(g)=(<7/Co)(l + M + W)-
(4.6.5)'
§ 4.6. ПАРАМЕТРИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ .
173
Тогда с учетом этого соотношения исходное уравнение движения
в тех же обозначениях примет вид
х + х = £х — 2Ъх — $г2 — ух3 + U cos 2т, (4-6.6)’
гдер = ро7о<1-
Это уравнение получено в результате пренебрежения члена-
ми второго порядка малости, т. е. в предположении, что
(1-ШМ-
Решение этого уравнения, как и прежде, ищем методом мед-
ленно меняющихся амплитуд с помощью следующих под-
становок:
х — у — Р cos 2т, у = и cos т + v sin т,
у = — и sin т + v cos т.
Тогда получаются следующие укороченные уравнения:
и = — Ou + l*}v, v = (РР + U и — Оп, (4.6.7)
где = В — уЛ2 — уР2.
Последнее обозначение оправдано физическими соображения-
ми и еще раз подтверждает, что расстройка частоты в колеба-
тельном контуре с нелинейной реактивностью зависит от ампли-
туд действующих в нем напряжений. При увеличении амплиту-
ды параметрических колебаний в системе изменяется среднее
значение нелинейной емкости, что вводит некоторую дополни-
тельную расстройку и ограничивает амплитуду колебаний на бо-.
лее низком уровне, чем при той же расстройке g и малых дейст-
вующих амплитудах А ж, 0 и Р«0. В полученном решений
присутствуют и вынужденные колебания, котор&е служат источ-
ником энергии для параметрических колебаний и способствуют
увеличению их амплитуды. Поэтому расстройка.характеризу-
ет изменение собственной частоты контура сов по отношению к
половине частоты напряжения накачки от первоначального зна-
чения при А = 0, Р = 0 до значений при Л =#= 0, Р 0.
В полученных укороченных уравнениях член $Р соответству-
ет члену т/2 для случая параметрических генераторов первого
рода и характеризует отрицательное сопротивление (степень ре-
генерации), вносимое в нелинейный колебательный контур ге-
нератором накачки.
Из системы укороченных уравнений легко находятся стацио-
нарные решения для Ло = 0 и Ло ¥= 0. Состояние покоя
= уо=Ло = О) возможно в системе при любой комбинаций пара-
метров.
Выражение для стационарной отличной от нуля амплитуды
параметрических колебаний имеет вид
[S - у ± /р2^ -4О2] (4.6.8)
174 ГЛ. 4- КОЛЕБАНИЯ ПРИ ПАРАМЕТРИЧЕСКОМ ВОЗДЕЙСТВИИ
и показывает, что ограничение амплитуды параметрических ко-
лебаний здесь также происходит за счет кубического члена не-
линейного реактивного параметра.
Для существования стационарного режима параметрических
колебаний с амплитудой, отличной от нуля, необходимо выпол-
нение двух очевидных требований: 1) величина — 40г дол-
жна быть вещественной; 2) должно выполняться неравенство
> В - 4 Т^2. (4.6.9)
Кривая параметрического резонанса в этом случае несимметрич-
на относительно оси ординат что видно на графике рис. 4.29
Рис, 4.29. Кривые параметрического резонанса для контура с нелинейной
емкостью при электрической накачке
и следует из выражения для стационарной отличной от нуля ам-
плитуды параметрических колебаний.
Характеристическое уравнение для анализа устойчивости сос-
тояния покоя можно найти из следующего приравненного нулю
детерминанта:
-О-Х 4(₽Р-5„)
л =0
Т(₽*’ + &*о) “О”*
где £*0 означает расстройку при До = О и Р ¥= 0. Решение ха
рактеристического уравнения
+ 2М + 1 (₽3Р2 - &>) = 0
приводит к
§ 4.6. ПАРАМЕТРИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ
175
Чтобы состояние покоя системы стало неустойчивым, необходи-
мо потребовать выполнения неравенства у Р2Р2 — от-
куда следует условие параметрического возбуждения
Йо<Р2^-4е®. (4.6.10)
Сравнивая условие параметрической неустойчивости состояния
покоя (4.6.10) с условием существования стационарного реше-
ния для (4.6.9), нетрудно заметить,, что эти условия сов-
падает. Из них легко получаются интервалы расстроек, в кото-
рых существуют неустойчивое состояние покоя и стационарные
ненулевые амплитуды параметрически возбужденных колеба-
ний; имеем
Ъ = _ /^ -4^ + | /₽2Р2 - 4б2 + 4 уР2 = 51.
(4.6.11)
Из этого выражения отчетливо видна несимметрия области па-
раметрического резонанса, о которой речь шла выше. Несиммех-
рию ’! области параметрического резонанса для колебательной
системы с нелинейным реактивным параметром и генератором
накачки можно объяснить также качественно. Дело в том, что в
рассматриваемом нелинейном колебательном контуре при воз-
действии на него напряжения пакачки возникают вынужденные
колебания, которые изменяют сродное значение емкости систе-
мы, чем и объясняется начальная расстройка контура в отсутст-
вие параметрически возбужденных колебаний (несимметрия 51
и 51 относительно оси ординат).
Анализ устойчивости показывает, что верхние кривые пара-
метрического резонанса, как и прежде, устойчивы, йижние —
неустойчивы. , 1 ..
Из выражений для 51 и 5г следует, что. изменением амплиту-
ды накачки Р можно регулировать ширину области параметри-
ческого возбуждения. При этом амплитуда накачки должна пре-
восходить некоторую минимальную величину — порог, определя-
емый из условия
Рпорог = 26/Р при 5*о = (4.6.12)
Наличие порога для величины накачки, естественно, объясняется
параметрической природой вложения энергии в рассматриваемой
задаче, как и во всех других случаях параметрического возбуж-
дения колебаний, когда вкладываемая за счет модуляции, реак-
тивного параметра энергия должна превосходить начальные
потери.
В реальных колебательных системах, где в .качества, нелиней-
ного элемента используются р — n-переходы полупроводниковых
(параметрических) диодов, одновременно фигурируют и оказы-
176
ГЛ. 4. КОЛЕБАНИЯ ПРИ ПАРАМЕТРИЧЕСКОМ ВОЗДЕЙСТВИИ
вают ограничивающее действие и нелинейная реактивность,
и нелинейное затухание. Поэтому кривые параметрического ре-
зонанса ограничивают наклонные замкнутые области параметри-
ческого возбуждения. Общий математический анализ реальных
параметрических систем — сложная задача, которая обычно ре-
шается приближенными методами, в частности методами чис-
ленных расчетов с использованием ЭВМ.
Таким образом, в рассмотренной Системе при определенных
условиях, накладываемых на параметры, и при несимметрично-
сти характеристики нелинейного реактивного элемента можно
возбудить параметрические колебания, частота которых точно
в два раза ниже частоты генератора накачки, а амплитуда на-
пряжения накачки через нелинейный реактивный элемент влия-
ет на амплитуду параметрических колебаний и ширину области
возбуждения. Поэтому такой параметрический генератор второго
рода называют также параметрическим преобразователем, т. е.
устройством, преобразующим один периодический процесс в дру-
гой периодический процесс, причем оба процесса являются коге-
рентными.
Как отмечалось выше, для задания определенного вида не-
симметрии вольт-кулоновой (u0(g)) или вольтч^арадной (С (и))'
характеристик пользуются источником постоянного напряжения.
В случае реальных реактивных элементов
таким путем можно одновременно задать
рабочую точку как на характеристике не-
линейной реактивности, так и на ее вольт-
амперной характеристике.
Однако и в случае параметрических ге-
нераторов для этих целей часто использует-
ся автоматическое смещение. Схема такого
одноконтурного параметрического генерато-
ра (параметрического преобразователя) с по-
лупроводниковым диодом имеет вид, пока-
занный на рис. 4.30. В полупроводниковых диодах с изображен-
ной на рис. 4.12 зависимостью С (и) напряжение на емкости
с достаточной степенью точности можно аппроксимировать вы-
ражением
uc(g) = (l/C0)(g + M2).
где для реальных диодов < 0.
Сопротивление диода в положительном (прямом) направле
нии, как видно из того же рис. 4.12, весьма мало, в обратим
направлении сопротивление очень велико. Чтобы учесть влиянш
токов через диод и резкого изменения сопротивления при захода
-в область положительных токов, можно ввести разделительны!
конденсатор с емкостью Ср. Диод с последовательно включенные
с ним конденсатором работает как пиковый детектор, и рабочш
Рис. 4.30. Схема одно-
контурного парамет-
рического генератора
с автоматическим
смещением
§ 4.6. ПАРАМЕТРИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ 177
точка при этом сдвигается влево ио характеристике (даже при
минимальном заходе в область положительных смещений).
Если предположить, что напряжение на конденсаторе равно
амплитуде колебаний, то решение можно искать в виде
х = у — Р cos 2т, у =* и cos т + v sin т — А, у = —и sin т + v cos г,
где по-прежнему н“ц(т), у = у(т).
Уравнение движения в рассматриваемой колебательной сис-
теме при указанной для полупроводникового диода аппроксима-
ции в принятых нами обозначениях имеет вид
х + х — ^х— 20х—0z2 + t7cos2r. (4.6.13)
Как видно, в нем в явном виде не фигурирует нелинейная про-
водимость, однако она скрыта в самом решении, точном в слу-
чае бесконечной проводимости диода в прямом направлении.
Решение задачи методом ММА при указанной замене перемен-
ных приводит к следующей системе укороченных уравнений,
аналогичной предыдущей и имеющей вид
и = - № + 4 (₽Р- U vt (₽Р + £*) и - 0^ (4.6.14)
где 5* = I + 204.
Поскольку в колебательной системе имеются параметрически
возбужденные колебания с амплитудой А, то существует допол-
нительное смещение (напряжение), которое смещает рабочую
точку влево от пуля, изменяя тем самым нелинейную дифферен-
циальную емкость диода. При этом, естественно, изменяется и
расстройка системы
Выражение для стационарной, отличной от нуля амплитуды
в рассматриваемом случае получается стандартным способом и
имеет вид
40 = - % U =F /р2Р3-4^2) = U Т /р^-402Х (4.6.15)
ибо для реальных диодов 0 < 0.
Сравнивая выражения для стационарных амплитуд в случае
одноконтурного параметрического генератора с нелинейной ре-
активностью и параметрического генератора на ПД с автосме-
щением, можно заметить их сходство; это, естественно, приводит
к аналогии в положении и виде областей параметрического воз-
буждения. Поэтому в рассматриваемом случае можно использо-
вать полученные ранее результаты исследования устойчивости
стационарных решений.
Если в укороченных уравнениях сохранить член с коэффици-
ентом 0£, то выражение для стационарной амплитудыг примет
несколько иной вид, а именно
4 = 2ТЙ h /02(1-£)2Р*-4Н- (4.6.16)
178 ГЛ. 4. КОЛЕБАНИЯ ПРИ ПАРАМЕТРИЧЕСКОМ ВОЗДЕЙСТВИИ
Это выражение соответствует замкнутым кривым, ограничиваю-
щим области параметрического возбуждения (рис. 4.31), что
весьма хорошо согласуется с экспериментальными результатами
по измерению ширины областей параметрического возбуждении.
Как и в рассмотренных ранее системах, наличие нелинейной
реактивности приводит в данном случае к наклону области воз-
буждения, причем кроме сохраняющейся области мягкого воз-
буждения (при Вг < £ < if) появляется область жесткого. воз-
Рис. 4.31. Кривая параметриче-
ского возбуждения для системы
: с автоматическим смещением
буждения, лежащая между И
£3. Для возбуждения в ней пара-
метрических колебаний системе
необходимо сообщить определен-
ный начальный толчок, вели-
чина которого зависит от рас-
стройки что хорошо видно на
рис. 4.31.
В случае одноконтурного па-
раметрического генератора наПД
с автосмещением ограничение ам-
плитуды колебаний происходит
не за счет нелинейного затухания
(ибо мы рассматривали идеаль-
ный пиковый детектор без по-
терь), а за счет расстроенного механизма ограничения ((3 ¥=0),
при котором получается, наклон области возбуждения, так как
кривая зависимости дифференциальной емкости от заряда у по-
лупроводникового диода имеет несимметричный вид. Этот меха-
низм ограничения амплитуд параметрически возбужденных ко-
лебаний в таком генераторе называют иногда ограничением act
счет автосмещения.
При анализе работы параметрических генераторов разного
типа с разными механизмами ограничения амплитуды парамет-
рических колебаний мы интересовались в основном стационар-
ными решениями, которые можно получить из общего решения
той или иной задачи (разумеется, если ее удается решить ана-
литически), если время устремить в бесконечность. Однако зна-
чительный интерес представляет рассмотрение переходных про-
цессов (процессов установления) в параметрических генераторах
различных типов, т. е. исследование зависимости амплитуды воз-
буждающихся колебаний от времени.
В большинстве реальных случаев, когда действует одновре-
менно несколько механизмов ограничения амплитуды, т. е. в си-
стеме имеется несколько нелинейных элементов, полное решение
задачи удается провести только числеппыми методами с по-
мощью ЭВМ. Однако характер переходного процесса можно ка-
чественно (а иногда и количественно) определить на основании
исследования характеристического показателя А.
§ 4.6. ПАРАМЕТРИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ
179
Общий характер устойчивости стационарных решений для
тараметрических генераторов всех типов следует из анализа ве-
цественной и мнимой частей характеристического показателя X.
Если вещественная часть для ненулевых решений отрицательна,
"о соответствующий стационарный режим является устойчивым
ло Ляпунову, причем наличие или отсутствие мнимой части ха-
эактеристического показателя выявляет характер этой устой-
чивости.
Если Rel<0 и отсутствует мнимая часть A(Iml = 0), то
возмущения в области устойчивости апериодически затухают;
"’ис. 4.32. График установления ста-
ционарной амплитуды в параметри-
ческом генераторе при диссипатив-
ном механизме ограничения
Рис. 4.33. График установления ам-
плитуды колебаний в параметриче-
ском генераторе при ограничении
за счет нелинейности реактивного
параметра
-ели же характеристический показатель X комплексен, то зату-
хание происходит в осцилляторном режиме. Поэтому выход на
стационарную амплитуду в случае диссипативного механизма
ограничения (ограничение за счет нелинейного сопротивления)
всегда имеет апериодический характер (рис. 4.32, сплошная кри-
вая). На том же рисунке штриховой кривой показан процесс
/становления стационарной амплитуды в генераторе с активным
элементом. Особенность переходного процесса при параметриче-
ском возбуждении колебаний связана с тем, что увеличение
энергии параметрически возбуждаемых колебаний пропорцио-
нально самой их энергии. Вследствие малости запасенной на-
чальной энергии (энергия тепловых флуктуаций) амплитуда па-
эаметрических колебаний вначале на участке 0 — f, растет мед-
генно, затем на участке —12 быстро увеличивается, а на
участке i>i2, когда вступает в действие механизм ограничения,
амплитуда колебаний параметрического генератора асимптотиче-
ски приближается к стационарной амплитуде Ло (случай нели-
нейного затухания).
|80 гл. 4. Колебания при параметрическом воздействии
При ограничении параметрических колебаний за счет нели-
нейной реактивности (расстроенный механизм ограничения) сис-
тема приходит к своему стационарному состоянию осцилляторно
(рис. 4.33) i Колебательный процесс установления колебаний мо-
жет возникать за счет инерционности реактивного параметра.
В этом случае характеристический показатель А является комп-
лексной величиной, в которой действительная часть (Re А) опре-
деляет скорость уменьшения амплитудных вариаций, а мнимая
часть (1mA)—частоту (период) осцилляций при выходе на ста-
ционарную амплитуду.
При наличии в параметрическом генераторе нелинейного со-
противления, нелинейной емкости и цепочки автосмещения в за-
висимости от соотношения нелинейных параметров, глубины
модуляции, расстройки и от соотношения между постоянной вре-
мени цепи автосмещения и периода параметрических колебаний
в системе можно реализовать как апериодический, так и осцил-
ляторный процессы установления; можно также получить ста-
ционарный режим с синусоидальной или прерывистой автомо-
дуляцией.
Физически процесс параметрического возбуждения колебаний
в параметрическом генераторе можно представить себе следую-
щим образом. Колебательный контур одноконтурного параметри-
ческого генератора представляет собой высокодобротную колеба-
тельную Систему; в ней еще до включения генератора накачки
вследствие наличия тепловых флуктуаций существуют электри-
ческие колебания с широким спектром частот, причем колебание
с одной из частот ю, на которую примерно настроен контур па-
раметрического генератора, значительно превышает все осталь-
ные по среднеквадратичной амплитуде. Тогда включение генера-
тора накачки с частотой 2со приведет к возрастанию амплитуды
шумовой компоненты с частотой, точно равной половине Часто-
ты накачки (для первой области параметрической неустойчиво-
сти); фаза этой компоненты по отношению к фазе колебаний
накачки соответствует случаю «сильного» параметрического ре-
зонанса. Однако, как Следует из особенностей «сильного» пара-
метрического резонанса, при изменении фазы усиливаемого сиг-
нала на л процесс ёго параметрического усиления абсолютно не
изменится. Отсюда вытекает важное следствие, а именно то, что
параметрический генератор позволяет возбудить колебание либо
в одной, либо в другой (противоположной) фазе.
Таким образом, одноконтурные параметрические генераторы
обладают тем свойством, что фазы параметрически возбуждае-
мых в них колебаний зависят от начальных условий. Если на-
чальные условия случайны (например, тепловой шум), то фаза
возбужденных колебаний тоже будет случайной. При непрерыв-
ном действии генератора накачки подбором начальных условий
можно возбудить колебание либо в одной, либо в другой (проти-
S 4.6. ПАРАМЕТРИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ
181
воположной) фазах, условно обозначаемых Ойл. Фаза этих ко-
лебаний относительно фазы напряжения накачки сохраняется в
параметрическом генераторе сколь угодно долго.
На этом свойстве параметрических генераторов основана ра-
бота параметронов — малых по габаритам и по потребляемой
мощности одноконтурных параметрических генераторов, которые
используются в технике в качестве элементов памяти, в счетных
и логических машинах и устройствах (сочетание большого ко-
личества параметронов в одной машине). В силу специфического
характера переходных процессов при параметрическом возбуж-
дении колебаний (наличие начального участка с медленным
ростом амплитуды, в результате чего процесс установления ста-
ционарной амплитуды длится примерно 20—30 колебаний основ-
ной частоты) счетные и логические устройства на основе пара-
метронов используются обычно в тех случаях, когда требуется
не очень большое быстродействие, но высокая надежность, на-
пример, для управления механическими станками с программ-
ным управлением.
В колебательных системах с параметрическим воздействием
возможно появление комбинационных явлений. В параметриче-
ских преобразователях, в которых преобразование частоты про-
изводится с помощью напряжения накачки с использованием
нелинейных элементов, может возникнуть
целый ряд комбинационных частот. <--------------СП---------
В частности, параметрические колебания ? R
могут возбуждаться при подаче на нели- >/. C(q)-~
нейный реактивный элемент не одного, и t 0Sfi> f
а, например, двух напряжений накачки с ।-------------------
разными частотами. Схема такого одно- рис 434 Схема пара-
контурного параметрического генератора метрического генератора
с двумя генераторами накачки с разны- с двумя генераторами
ми частотами . показана на рис. 4.34. накачки
Здесь в качестве нелинейного реактивно-
го элемента используется конденсатор с сегнетоэлектриком.
Уравнение, описывающее колебательный процесс в такой
системе, имеет вид
L + а + ис (7) = Uj cos (ojjt) + и2 cos (®2i).
Если вольт-кулоновую зависимость uc(q) на конденсаторе пред-
ставить в виде полинома ис[q) = 4-(q + Ро<?2+ ТоЗ3 +•• • ), что
•о
соответствует изменению емкости нелинейного конденсатора по
закону £• = (1 + Ро? + ТоЗ2 +•••)» и ограничиться записан-
ными выше членами разложения, а также положить, Что в рас-
сматриваемом контуре существуют вынужденные колебания с не-
13 В. В, Мигулин и др.
182
ГЛ. 4. КОЛЕБАНИЯ ПРИ ПАРАМЕТРИЧЕСКОМ ВОЗДЕЙСТВИИ
соизмеримыми частотами at и ®2, то эти колебания, воздействуя
на нелинейный элемент, вызовут комбинационные колебания.
Первый нелинейный член разложения обусловит появле-
ние компонент изменения обратной емкости с частотами вида
со, ± ®2 (т. е. с частотами, представляющими комбинацию ис-
ходных частот, отсюда и термин «комбинационные частоты»).
Если учесть еще более высокие степени разложения обратной
емкости по степеням заряда q, то комбинационных частот ста-
нет еще больше и они будут в общем случае иметь вид
± п®2,
где т и п — произвольные целые числа, причем сумма т + п
соответствует степени высшего члена в разложении обратной
емкости.
Если колебание какой-либо комбинационной частоты ® удов-
летворяет условиям параметрического возбуждения, то в конту-
ре возникают колебания с частотой © ~ ®0, где ®0 — собственная
частота контура параметрического генератора. Для первой обла-
сти параметрической неустойчивости это может произойти в слу-
чае ®1 = 2®(®2 = 0), в случае ®2 = 2®(®i = 0), в случае
®, ± а2 = 2® или в общем случае т®, ± па2 = 2®. Таким обра-
зом, кроме возбуждения колебаний с частотой, равной половине
частоты одного генератора накачки © = &J2 (а2 = 0) или © «
= а2/2 (®! = 0), в системе с двумя генераторами накачки могут
возбуждаться также колебания с частотами а = (®t ± а2)/2, или
в общем случае с частотами а = (та, ± па2)/2. (Для простоты
мы рассматривали частотные условия возбуждения параметриче-
ских колебаний, соответствующие первой области Матьё. Разу-
меется, комбинационные колебания могут также возбуждаться
в областях Матьё более высокого порядка.)
При рассмотрении комбинационных явлений в параметриче-
ских системах предполагалось, что а, и а2 — несоизмеримые
частоты, т. е. такие, что период повторения суммы колебаний
с частотами ®i и ®2 на много порядков превосходит периоды
колебаний а, и а2. Если бы частоты а, и а2 были соизмеримы,
то сумма напряжений
о2 cos (a,i) + u2 cos (a2i)
изменялась бы периодически. Тогда в правой части исходного
уравнения стояла бы периодическая функция времени и исполь-
зование метода ММА с усреднением точных дифференциальных
уравнении по периоду не представляло бы трудностей. Необхо-
димо только учесть еще и фазовые соотношения между воздей-
ствующими частотами. При несоизмеримых значениях а, и а2
применение метода ММА становится весьма неточным и для ре-
шения исходного уравнения необходимо прибегнуть к соответст-
вующим приближениям.
ГЛАВА 5
АВТОКОЛЕБАНИЯ В СИСТЕМАХ
С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
§ 5.1. Основные физические определения и классификация
автоколебательных систем
ма автоколебательной
системы
Автоколебательные системы относятся к классу активных ко-
лебательных систем, определение которых было дано в § 4.1.
Однако, в отличие от активных систем, в которых вложение
энергии можно однозначно описать с помощью отрицательного
сопротивления и которые могут быть линейными и неконсерва-
тивными, автоколебательные системы прин-
ципиально нелинейны и неконсервативны.
Это их свойство обусловливает возможность
существования в автоколебательных систе-
мах стационарных по форме и величине ко-
лебаний, что в рамках представлений о фа-
зовой плоскости означает наличие предель-
ных циклов — асимптотических замкнутых
фазовых траекторий.
Схематически простейшую автоколеба-
тельную систему можно представить так,
как на рис. 5.1. Если через N обозначить
запас колебательной энергии в системе, то
в стационарном режиме автоколебаний из-
менение колебательной энергии за период по
определению равно
нулю, т. е.
М+т-М = 0.
Напомним, что для консервативных систем dN/dt = 0, поскольку
запас колебательной энергии N = const. В случае диссипативных
систем dN/dt = —F(t)<0, где F(t)—функция, характеризую-
щая диссипативные свойства системы, причем для диссипатив-
ных систем F (£) > 0. Функция диссипации характеризует мощ-
ность потерь в системе.
Действительно, если написать уравнение, описывающее пове-
дение последовательного колебательного контура, т. е. диссипа-
тивной колебательной системы, в виде
13*
184
ГЛ. 5. ЭЛЕМЕНТЫ ТЕОРИИ АВТОКОЛЕН АНИЙ:
то отсюда легко находим
а[т£(Й)’ + ^8!]---------(5.1.2)
Следовательно, изменение магнитной и электростатической энер-
гий колебательного контура, т. е. изменение колебательной энер-
гии системы, равно мощности потерь, или в обобщенной записи
dN/dt =—F(t). Обычно F(t)>0, но в автоколебательных систе-
мах возможны интервалы времени при определенных амплиту-
дах и скоростях, при которых F(£)<0. Вполне очевидно, что ус-
ловие F(i)<0 присуще только активным системам. Из этих фи-
зических представлений вытекает основное уравнение энергети-
ческого баланса автоколебательных систем
т •
j>(0& = 0. (5.1.3)
о
Совершенно ясно, что в линейной и нелинейной диссипативных
системах невозможен автоколебательный процесс. Для осущест-
вления автоколебательного процесса необходимо, чтобы функция
диссипации F(t) была знакопеременной. При этом в течение од*
ной части периода происходит пополнение колебательной энер*
гии (что можно описать с помощью известного нам понятия от-
рицательного сопротивления-R-}, в течение другой его части —
уменьшение колебательной энергии. Тогда можно обеспечить
т
энергетический баланс системы f F (t)dt = 0, что означает нали-
п
чие стационарных автоколебаний в колебательной системе. Вели,
к примеру, считать, что в колебательной системе сопротивление
зависит от протекающего через него тока, т. е. R = R(i), то для
реализации автоколебаний необходимо потребовать, чтобы функ-
ция F (t) = R (i) i2 была знакопеременной. Только в этом случае
можно выполнить условие (5.1.3). Как видно, для этого необхо-
димо, чтобы знакопеременной была функция R(i).
По поводу формы автоколебаний можно сделать некоторые,
предварительные физически обоснованные предположения. Если
накопительный элемент (см. рис. 5.1) представляет собой добт
ротный колебательный контур и в системе происходят автоколе-
бания, то эти колебания будут близки к гармоническим; свойст-
ва цепи обратной связи лишь в небольшой степени повлияют на
форму колебаний, и в основном она служит только для пополне-
ния колебательной энергии в течение части периода автоколеба-
ний. Если при наличии автоколебаний разорвать цепь обратной
связи, то в накопительном элементе будут наблюдаться затухаю-
щие колебания. Автоколебательные системы, удовлетворяющие
указанным выше условиям, мы будем называть автоколебателъ-
CM-'
] § 5.1. КЛАССИФИКАЦИЯ АВТОКОЛЕБАТЕЛЬНЫХ СИСТЕМ ДО
'У
ними системами осцилляторного типа. В осцилляторных систе-
мах потери энергии за период, а следовательно, и добавляемая
энергия значительно меньше запаса энергии, накопленной в ос-
новной колебательной системе.
Если же накопительный элемент (см. рис. 5.1) представляет
собой апериодический контур, состоящий в основном из RL- или
7?С-элементов, то форма автоколебаний существенно зависит от
свойств цепи обратной связи. Если в Такой колебательной систе-
ме выполнены условия самовозбуждения, то форма генерируе-
мых колебаний, как правило, далека от синусоидальной, а пери-
од колебаний связан со временем релаксации системы, хотя в
некоторых случаях (см. ниже) подбором параметров автоколеба-
тельной системы можно заставить ее генерировать колебания,
близкие к гармоническим. Эти автоколебательные системы при-
нято называть релаксационными. Релаксационными системами
считаются системы, в которых после разрыва канала, по кото-
рому восполняются потери в системе (канал обратной связи на
рис. 5.1), колебания в накопителе апериодически затухают неза-
висимо от формы этих колебаний до разрыва цепи обратной свя-
зи. Отсюда сразу же вытекает, что в релаксационных автоколе-
бательных системах может происходить 100%-ный обмен энер-
гии (рассеиваемой на пополняемую) в течение каждого периода
колебаний. бес и п»/' уи g d . (•./-'ай..
Как уже было отмечено выше, для получения автоколебаний
в системе необходимо, чтобы функция диссипации была знако-
переменной, для чего можно использовать различные по физиче-
ской природе нелинейные двухполюсники с так называемыми
Рис, 5.2. Вольт-амперная характеристика туннельного диода (а) и газораз-
рядного прибора (б)
падающими участками на своих вольт-амперных характеристи-
ках (рис. 5.2). На этих участках путем принудительного под-
держания определенных тока i0 или напряжения и0 в двухпо-
люснике обеспечивается появление в системе отрицательного со-
противления и, следовательно, возможность возникновения авто-
186
ГЛ. 5. ЭЛЕМЕНТЫ ТЕОРИИ. АВТОКОЛЕБАНИЙ
колебаний. Такими падающими характеристиками обладают тун-
нельные диоды, газоразрядные приборы, многосеточные элек-
тронные лампы, тиристоры, диоды Ганна, джозефсоновские
сверхпроводящие контакты и другие приборы. В случае парал-
лельного подсоединения нелинейного двухполюсника с отрица-
тельным дифференциальным сопротивлением к параллельному
контуру необходимо использовать элемент с характеристикой
Рис. 5.3. Схема колебательной системы с нелинейным активным элементом
с характеристикой TV-типа (а) и S-типа (б)
ZV-типа, показанной па рис. 5.2, а, так как общим для всех эле-
ментов такой колебательной системы является напряжение и.
Уравнение Кирхгофа для этой системы (рис. 5.3, а) имеет вид
•IJuca+c^ + ^ + TW-o >
или после однократного дифференцирования
7? + С [л; + Ф (“)]Tt + Тси = °* <51-4>
где <р' (и) — дифференциальная проводимость нелинейного эле-
мента с падающей характеристикой, называемая также крутизной
характеристики. Условие самовозбуждения системы (неустойчи-
вость состояний покоя По = 0) получается, если потребовать вы-
полнения неравенства
Ц- + <Р»]<0. (5.1.5)
L о J
Для этого необходимо, чтобы, во-первых, <р' (и) |и=и0<0 и, во-вто-
рых, |ф' (u) I > 1/7?0.
Иными словами, на нелинейный .элемент нужно подать такое
постоянное напряжение, чтобы попасть на падающий участок
вольт-амперной характеристики, и, кроме того, обеспечить, что-
бы отрицательная дифференциальная крутизна <р' (и) в рабочей
точке была по модулю больше активной проводимости в систе-
ме. Данные требования отвечают выбору омического сопротив-
ления Ro в соответствии с неравенством R<> > l/|<p'(u) I.
При последовательном соединении элементов (рис. 5.3, б) об-
щим для всех элементов является ток i, и поэтому уравнение
§ 5.1. КЛАССИФИКАЦИЯ АВТОКОЛЕБАТЕЛЬНЫХ СИСТЕМ
187
движения в системе целесообразно записать в виде
L% + Rai + ±\idt + q(i) = Ot (5.1.6)
ИЛИ dt С J
g + rW + 4>'(01|;+^-'-0. (5.1.6а)
В этом случае необходимо использовать элемент с вольт-ампер-
ной характеристикой S-типа (рис. 5.2). Условие самовозбужде-
ния запишется следующим образом:
[7?0 + ^(i)]<0, (5.1.7)]
что можно выполнить, если
Я3' (0 |i-«„ < 0* I Ф' (О li-t0 > Ro-
Для удовлетворения условия (5.1.7)] необходимо введение в не-
линейный элемент дополнительного тока ia, обеспечивающего в
рабочей точке падающую характеристику, и соответствующий
выбор Re.
Заметим, что и для параллельного и для последовательного
контуров создание неустойчивого состояния равновесия требует
введения в систему дополнительных источников напряжения или
тока. Это означает, что свойства активного элемента могут быть
получены только при наличии источника энергии в системе.
Если в качестве независимой переменной выбрать напряже-
ние на емкости с тем, чтобы эта переменная х = ис не могла
меняться скачком (энергия, запасенная в конденсаторе, не мо-
жет меняться скачком), то с учетом ic = Cduc/dt = C dx/dt и
с введением безразмерного времени т = at, где аг = \JLC, полу-
чаем из (5.1.6а)
х 4- [7?0С<ох + Ф (Сах) ] 4- х = О,
или
х4-7(х)4-х = 0, (5.1.8)]
где /(x) = 7?oC®x4-ip(C'ci)i). Если при всех движениях в системе
функция /(х) мала, то это уравнение описывает систему, близ-
кую к линейной консервативной. Подобные автоколебательные
системы осцилляторного типа принято называть тпмслппвскимц.
Если х^ = х0 '^тплгбйсе ние р авновесия исследуемой системы,
то 7(0) = —х0. Устойчивость этого положения равновесия оп-
ределяется характером решения уравнения для малых ва-
риаций (возмущений) г] равновесного значения х = х0, т. е.
х = х0.+ п; тогда f(x) =/(ц) = f(0) +/'(0)ц+ ...
Уравнение для вариаций будет иметь вид
ц 4- 7'(0)ц 4- ц = 0. . (5.1.9)]
Если f (0) < 0, то любые сколь угодно малые возмущения ц
вблизи начального значения х0 превратятся в нарастающие ко-
188
ГЛ. 5. ЭЛЕМЕНТЫ ТЕОРИИ АВТОКОЛЕБАНИЙ
лебания. Параметры этих колебаний можно найти либо интегри-
рованием исходного уравнения (5.1.8), либо путем исследования
системы качественно на фазовой плоскости методом изоклин или
методом Льенара. Уравнение фазовых траекторий для рассмат-
риваемой системы имеет вид
dy _ (д + / (у))
dx у
(5.1.10)
где, как и ранее, у = х.
§ 5.2. Вырожденные автоколебательные системы
Вырожденной автоколебательной системой называется систе-
ма, не содержащая полного набора реактивных элементов. Рас-
смотрим пример такой системы, которая, естественно, является
системой релаксационного типа (рис. 5.4). Для нее можно за-
писать:
Ri и = Е, i = ic 1- i*, ic = C i* = <p (u),
где u—напряжение па нелинейном элементе, и следовательно,
RC^ = Е — и — R<p(u). (5.2.1)
В стационарном состоянии -тг = 0 и
<р(и) =
Е — и
(5.2.2)
R
В качестве активного двухполюсника необходимо использовать
элемент с падающей вольт-амперной характеристикой S'-типа
(см. рис. 5.2, б). Предста-
вим уравнение (5.2.2) гра-
фически для трех различ-
ных напряжений питания
Рис. 5.5. Графическое определение поло-
жений равповесия для вырожденного RC-
релаксационного генератора
Рис. 5.4. Схема вырож-
денной автоколебатель-
ной системы ей и С
схемы Ei, Ег, Е3, соответствующих трем стационарным состояни-
ям системы 1, 2, 3 (рис. 5.5). Исследуем на устойчивость ста-
ционарное состояние и0. Пусть u = u0 + r]. Линеаризуя по
малой вариации ту вольт-амперную характеристику <р(«) вблизи
§ 5.2. ВЫРОЖДЕННЫЕ АВТОКОЛЕБАТЕЛЬНЫЕ СИСТЕМЫ
189
Рис. 5.6. Фазовый порт-
рет колебаний в вырож-
денном ЯС-релаксацион-
ном генераторе
увеличение и невоз-
стационарного состояния и0, имеем
ср (и) = <р (и0 + ц) = <р (щ) + т)ср' (и0);
подставляя полученное выражение в исходное уравнение (5.2.1),
находим
RC lit = ~ Л(Р' (uo)l П. (5.2.3)
Если [1 +7?tp' (u0)]>0, получаем затухающее решение, при
[1 + 2?<р' (но) ] < 0 — нарастающее решение. Следовательно, при
[1 + Z?cp/(uo)] > 0 система, описываемая основным уравнением
движения (5.2.1), находится в устойчивом состоянии, а при
[1 + Лер'(ио)] < 0 состояние с и = и0 неустойчиво. Отсюда сразу
видно, что состояния 1 и 3 на рис. 5.5
устойчивы, а состояние 2 может быть не-
устойчивым, если q/ (w0) < — i/R.
Построим фазовый портрет исследуе-
мой релаксационной системы, для чего
на фазовой плоскости в координатах
ic —С du/dt и и изобразим вид функции
Сdu/dt — (E — u)/R~tp(u) (рис. 5.6).
Рассмотрим положение равновесия
(du/dt —О), соответствующее точке 2 на
рис. 5.5. Если система в силу флуктуаций
в ней испытала толчок в сторону увеличе-
ния значения и, то напряжение будет уве-
личиваться ввиду положительности du/dt
d ( zi du \
до того момента, когда у— — з— ( С — не
" ’ an аи \ at )
станет равным бесконечности. Дальнейшее
можно, но описывающая точка с dic/du = » не может быть рав-
новесной. Таким образом, при анализе системы появилось внут-
реннее противоречие, возникшее вследствие того, что математи-
ческое описание системы с помощью дифференциального уравне-
ния первого порядка не отражает всех ее существенных особен-
ностей. Для последовательного рассмотрения необходимо учесть
в системе малую паразитную индуктивность, которая всегда
существует в схемах, содержащих соединительные проводники.
Тогда систему описывает дифференциальное уравнение второго
порядка, что позволяет получить периодическое решение и, сле-
довательно, автоколебательный процесс.
Однако удается обойти возникшее противоречие, предполо-
жив, что система в процессе движения может совершать скачки
с оДной устойчивой ветви кривой на другую, т. е. из точки 1
в точку 2, а из точки 3 в точку 4. Такое предположение осно-
вано на том, что во время скачка тока при Л = О энергия- в си-
стеме не меняется, т. е. —2У(-о. Это ^условие непрерывности
энергии, которое применительно к дапной системе приводит к
услоЭйю непрерывности напряжения на конденсаторе (u/?)7^7 —
190
ГЛ. 5. ЭЛЕМЕНТЫ ТЕОРИИ АВТОКОЛЕБАНИЙ
= (uc)i-o. Допуская возможность существования бесконечнг
быстрых скачков тока в рассматриваемой системе, получим для
uc(t) и ic(i) стационарные автоколебательные процессы, покь-
занные на рис. 5.7. Такой упрощенный анализ движения не лае
исчерпывающей характеристики автоколебаний.
Рис. 5.8. Схема вы-
рожденной автоко-
лебательной ЬЯ-си-
стемы
Рис. 5.7. График изменения напряжения на конденсаторе и тока в вырож-
денном ЯС-релаксациопном генераторе
решение получается, если учитывать наличие реально существу-
ющей паразитной индуктивности, что приводит к конечной ско-
рости скачков.
Аналогичные автоколебательные процессы возможны и в си
стенах с неоднозначной зависимостью напряжения от токг
(вольт-амперная характеристика А-типа), например в системе
изображенной на рис. 5.8. В этой системе возможно возбужде-
ние и поддержание автоколебаний со сказ-
ками напряжения. Условием скачка в дан-
ном случае будет непрерывность тока, т. е
непрерывность изменения магнитного пото-
ка в индуктивности L, определяющей запас
энергии в системе. В момент скачк,.
1|+0 = J|-0-
Другим примером вырожденной автоко-
лебательной системы является транзитрон-
ный генератор, в котором используется па-
дающий участок вольт-амперной характе-
ристики зависимости тока второй сетки пентода от напряжения
на антидинатронной сетке ig2 = 4>(ugs) (рис. 5.9). Схема траь-
витронного генератора, представляющего собой систему с двумя
вырожденными степенями свободы, показана на рис. 5.10. Для
нее можно записать следующие уравнения (опуская для кратко-
сти индекс с у напряжения):
— + и -|- ur = Eg2f (5.2.4
+ <5'2-5
§ 5.2. ВЫРОЖДЕННЫЕ АВТОКОЛЕБАТЕЛЬНЫЕ СИСТЕМЫ
191
1з (5.2.4) получаем выражение для иг и подставляем его вме-
сте с первой производной по времени duT/dt = — RCdzu/dti + du/dt
з (5.2.5), что приводит к следующему уравнению:
RrCC1 § + [ЯС + гС+ rCJ + г1вл + и = ЕЙг, (5.2.6)
Обозначим аргумент нелинейной транзитронной характеристики
яерез х ~ иа^= RC dujdt", тогда уравнение (5.2.6) после однократ-
ного дифференцирования примет вид
। Г 1 । 1 .1 1 _ п /котт
dt2 + + ЯСХ + RC + J d7 + Х ~ °’ <5 2’7)
ще, как обычно, 5(х)'= ф'(л:)\ Нетрудно заметить, что 5(ж)’
лмее?1 пазмерность проводимости и, следовательно, падающий
Рис. 5.9. Трапзптроппая характе-
ристика пентода
Рис. 5.10. Схема транзитропно-
го генератора
участок транзитронной характеристики представляет собой часть
зольт-амперной характеристики TV-типа (см. рис. 5.2).
Анализируя уравнение (5.2.7), можно сделать некоторые
зажные выводы. Если предположить, что коэффициент при пер-
зой производной dx/dt в состоянии покоя системы (х = 0) можно
подбором параметров г, R, С, Clt 5(0) сделать меньше нуля, ю
з системе могут возникнуть автоколебания. Их частота опреде-
ляется произведением двух постоянных времени релаксации гС,
д RC, т. е. ©о = (RrCCj)-1. Условия самовозбуждения системы
имеют вид
5(0)<0, | S (0)| >-L + 4 + Й-- (5-2-8)
Зсли теперь предположить, что коэффициент при первой произ-
водной в уравнении (5.2.7) останется малым для всех возмож-
ных значений х в процессе колебаний, то такое уравнение опи-
сывает автоколебательный процесс, близкий к гармоническому.
Условие малости этого коэффициента можно реализовать,- если
обеспечить на линейном участке падающей характеристики сле-
1 1 С.
дующее слабое неравенство: |5(0)|^ — +
192
ГЛ. 5. ЭЛЕМЕНТЫ ТЕОРИИ АВТОКОЛЕБАНИЙ
Рассматривая поведение такой автоколебательной системы,
следует обратить внимание на особую роль, которую играет
в определении формы колебаний параметр Ct. Если уравнение
'(5.2.7) записать в виде
zi d х I Г 1 . 1 . 1 . п { \ dx 1 л
С1й? + 1~+"я' + ё:Я+‘5 ~dt + Я7с Х = 0
и считать, что (\ -* 0, то получаем дифференциальное уравнение
с малым коэффициентом при высшей производной. Такой класс
уравнений в теории колебаний имеет большое значение. Действи-
тельно, при Ct -► 0 первый член уравнения влияет на характер
движения только в тех областях изменения х, где dx/dt велико,
т. е. наличие емкости С, позволяет учесть быстрые изменения
тока (Cidfx/df). Когда изменение тока медленно, а С, близко
к нулю (например, С, —только паразитная емкость схемы), то
движение в системе описывается уравнением первого порядка
£[4 + 4 + 5<*>] + ятг-°- (5-2-9)
из которого следует, что
~di= бДЯ + г + Ягу (г)] • (5.2.10)
Поскольку выражение в квадратных скобках в (5.2.9) входит
сомножителем в функцию диссипации колебательной системы и
обязано быть знакопеременным в случае автоколебательных си-
стем, то выражение в квадратных скобках в (5.2.10) при изме-
нении х проходит через нуль в точках, определяемых соот-
ношением
= (5.2.11)
В этих точках в системе происходят очень быстрые изменения
тока, и для определения конечного времени скачка необходимо
учитывать член со второй производной C^xjdf. Чем меньше
тем резче выражены быстрые этапы движения, т. е. автоколеба-
ния носят разрывный релаксационный характер.
Таким образом, изменяя в широких пределах С\, можно
заставить релаксационную автоколебательную систему, какой яв-
ляется транзитронный генератор, генерировать колебания от
типично разрывных до колебаний, близких к гармоническим.
Наиболее близки к гармоническим колебания, получающиеся при
приближении к нарушению условия самовозбуждения (5.2.8)
в результате увеличения параметра Ct. Эти особенности поведе-
ния транзитронного генератора как релаксационной автоколеба-
тельной системы в зависимости от параметра Ci можно наблюдать
на фазовой плоскости путем построения фазовых портретов си-
стемы с учетом конкретного вида характеристики &(х).
5 5.3. РАССМОТРЕНИЕ АВТОКОЛЕБАТЕЛЬНЫХ СИСТЕМ
193
Если коэффициент при первой производной (5.2.7) записать
в виде
[4* + "7F + CR + S 1 (х)’
то уравнение фазовых траекторий для этой системы примет вид
dy _____1 х
dx у НгСС±
+ eih(z) у I,
а уравнение изоклин — вид
х/(ЛгССЛ
y = + гДе kt = dyjdx.
При малом 8, что соответствует большим Ct, изоклины близ-
ки к прямым, и такую автоколебательную систему можно счи-
тать близкой к линейной консервативной с фазовыми траектория-
ми, близкими к эллипсам. При большом 8 (С, мало) изоклины
сильно отличаются от прямых и фазовые траектории содержат
быстрые изменения производной от координаты. В пределе при
= 0 процесс описывается уравнением первого порядка и на
фазовой плоскости останется одна-единственная фазовая траек-
тория. В этом случае периодические движения возможны лишь
при наличии скачков производной при сохранении непрерывно-
сти изменения х, т. е. напряжения на емкости, определяющего
запас энергии системы.
Недостатком трапзптропного генератора следует считать не-
возможность изменения частоты колебаний без изменения их фор-
мы и амплитуды, ибо все параметры, определяющие частоту
колебаний, входят в условие самовозбуждения (5.2.8).
§ 5.3. Общее рассмотрение автоколебательных систем
На примерах релаксационных систем мы убедились в том,
что для математического описания движения в реальных авто-
колебательных системах с одной степенью свободы необходимо
пользоваться дифференциальными уравнениями второго порядка.
Для систем, описываемых такими уравнениями, можно получить
изображение соответствующего движения на фазовой плоскости.
В некоторых случаях, когда уравнение нелинейно и не поддается
аналитическому решению, построение фазового портрета движе-
ния в системе является существенной помощью в определении
формы колебаний и динамики их установления. Следует отме-
тить, что для решения сложных нелинейных уравнений исполь-
зуются также численные методы с применением ЭВМ.
Если рассматривать автоколебательные системы с постоянны-
ми реактивными параметрами в предположении, что нелиней-
194
ГЛ. 5. ЭЛЕМЕНТЫ ТЕОРИИ АВТОКОЛЕБАНИЙ
ность системы проявляется только в свойствах диссипативного
члена в уравнении движения, то в общем виде его можно за^
писать следующим образом:
§ + ^(^) + <Ф==°- (5-3.1)
При соответствующем выборе функции ф0(х, dx!dt} оно справед-
ливо для любого вида автоколебательных систем (как осцилля-
торных, так и релаксационных). Вводя безразмерное время т =
= <Doi, получим
х + ф(х, х) + х = 0. (5.3.2)'
Если, как обычно, положить £ = у, то уравнение фазовых тра-
екторий запишется в виде
dy_ = _ я + (Д, У)
dx у
(5.3.3)
Введение в уравнение (5.3.1) T = (o0i необходимо для получения
одинакового масштаба для х и у.
Из физических определений известно, что если система явля-
ется автоколебательной, то в ней должен существовать стацио-
нарный колебательный процесс, который на фазовой плоскости
соответствует замкнутой фазовой траектории, так как автоколе-
бательную систему можно рассматривать как квазиконсерватив-
ную. Если автоколебания в системе устойчивы, то и замкнутая
фазовая траектория также должна быть устойчива, т. е. к ней
должны сходиться все фазовые траектории в близкой ее окрест-
ности. Подобные предельные фазовые траектории называют nge-
дельными циклами,-
Для предельного цикла должен соблюдаться энергетический
баланс, т. е. за период колебаний
2Я
J ф(х, у) xdx = 0.
о
Доказано, что при определенных условиях, накладываемых
на вид диссипативной функции ф(х, у), такие предельные циклы
существуют, и они описывают автоколебательные процессы. При
представлении автоколебательных систем на фазовой плоскости
наряду с предельными циклами необходимо рассматривать также
особые точки, соответствующие состояниям равновесия.
Если положить, что ф(х, y) = f(y), что соответствует многим
физическим колебательным системам, то уравнение фазовых тра-
екторий примет вид
(?1. (5.3.4)
dx у 4 '
§ 5.3. РАССМОТРЕНИЕ АВТОКОЛЕБАТЕЛЬНЫХ СИСТЕМ
195
Приближенное графическое построение фазовых траекторий
таких систем (см. § 2.3) удобно проводить методом Льенара. На
рис. 5.11 показаны построения для нескольких точек (Л, С, В)
фазовой плоскости при заданной форме /(у).
Если система диссипативная, то функция /(у) должна иметь
тот же знак, что и у. При введении в систему энергии знак /(у)
противоположен знаку у. Мгновенный
центр для построения отрезков фазо-
вой траектории лежит при этом спра-
ва от начала координат, и сама фазо-
вая траектория раскручивается. В слу-
чае стационарных автоколебаний необ-
ходимо, чтобы вложение энергии ба-
лансировалось потерями в системе;
иными словами, функция /(у) должна
быть такой, чтобы в зависимости от со-
стояния системы менялся знак потерь.
Рис. 5.11. Построение эле-
мента фазовой траектории
методом Льенара
На рис. 5.11 это соответствует движе-
нию описывающей точки по фазовой
траектории из точки А к точке С; на
этом участке траектория скручивается.
На участке от точки С до точки В фазовая траектория раскручи-
вается. Такая смена состояний системы на фазовой плоскости
происходит четыре раза за период. Если уменьшения и увеличе-
ния амплитуды компенсируют друг друга, то наблюдается устой-
чивый предельный цикл и имеет место энергетический баланс
в системе.
Рассмотрим малые колебания вблизи положения равновесия.
Приближенно можно считать, что для функции f(y), характери-
зующей потери системы, мы вправе записать
/(у)«Г(О)у.
Как известно, для неустойчивости состояния покоя необходимо,
чтобы /'(0) и у имели разные знаки, т. е. чтобы /'(0)у<0.
В этом случае в системе происходит увеличение колебательной
энергии. Если же /'(0)у > 0, то в системе имеет место диссипация
энергии. Поэтому график —/(у) для автоколебательной системы
с малыми потерями должен иметь вид, показанный на фазовой
плоскости рис. 5.12.
При малых /(у) мгновенные центры для построения фазовых
траекторий близки к началу координат, сами фазовые траектории
напоминают окружности, а колебания в системе близки к гармо-
ническим. Подобные автоколебательные системы принадлежат
к системам томсоновского типа. Следовательно, для томсоновских
автоколебательных систем характерна малость fty), что физиче-
ски означает малую убыль и малое пополнение энергии за пе-
риод колебания в стационарном режиме.
196
ГЛ. 5. ЭЛЕМЕНТЫ ТЕОРИИ АВТОКОЛЕБАНИЙ
Рис. 5.12. Построение фазовых тра-
екторий для томсоновской системы
Начало координат (см. рис. 5.12) является неустойчивой осо-
бой точкой типа фокус, и все траектории, выходящие из начала
координат, через большее или меньшее число периодов колеба-
ний (в зависимости от добротности накопительного элемента си-
стемы) приходят да предельный цикл.
В зависимости от знака f(y) вся фазовая плоскость делится
на следующие области: I — инкрементная область, в которой
вложение колебательной энер-
гии превосходит потери; ZZ —
декрементные области, в кото-
рых потери превосходят вло-
жения энергии (см. рис. 5.12).
В инкрементной области рас-
стояние фазовой траектории от
начала координат увеличивает-
ся, т. е. увеличивается энергия
колебаний, в декрементной об-
ласти фазовые траектории при-
ближаются к началу коорди-
нат, что соответствует умень-
шению колебательной энергии
системы. В такой системе в за-
висимости от начальных усло-
вий (х0, у о) фаэовйя траекто-
рия придет к предельному циклу либо изнутри, если ха < жС1ац,
У а < Устац, либо снаружи, если XQ > Ясгац, уа > Устац, где Ястац и
Устац лежат на предельном цикле.
Рис. 5.13. Вид фазовых траекторий для систем промежуточного (а) и ре-
лаксационного (б) типов
Для автоколебательной системы, для которой функцию /(у)’
нельзя считать малой, фазовый портрет системы имеет вид, пока-
занный на рис. 5.13, а. В такой системе колебания заметно отли-
чаются от гармонических, процесс установления стационарных
автоколебаний происходит значительно быстрее, чем в случае,
показанном на рис. 5.12. Энергообмен в системе значительно
§ 5.3. РАССМОТРЕНИЕ АВТОКОЛЕБАТЕЛЬНЫХ СИСТЕМ
197
юлыпе, чем в системах томсоновского тина. Автоколебательная
истема такого типа занимает промежуточное положение между
•истемамн томсоновского и релаксационного типов.
Если мы построим на фазовой плоскости фазовые траектории
тля системы, у которой функция f(y) меняется в больших пре-
делах, то получим для данного вида /(у) фазовый портрет, по-
казанный на рис. 5.13,6. Нелинейная функция /(у) такого вида
оответствует автоколебательной системе релаксационного типа,
элизкой к вырожденной системе, для которой член с высшей
производной необходимо учитывать только во время быстрых из-
менений координаты у (случай скачков). Установление стацио-
нарных колебаний (выход на предельный цикл) в подобных си-
стемах происходит практически за доли периода колебаний.
Энергообмен в системе в режиме автоколебаний близок к 100%.
Вазовый портрет такой системы показывает, что форма предель-
ного цикла в сильной степени зависит от вида нелинейной
пункции f(y).
Если, как это сделал Ван дер Поль, провести численное
интегрирование уравнения
х + е (—1 + х2)х + х = 0, (5.3.5)
з котором функция /(у) имеет вид f(y) = — е (1 — х2)у, то при
эазличных значениях безразмерного параметра в получаются су-
шественпо разные картины процесса установления колебаний в
эис. 5.14. Графики установления колебаний для различных типов автоко-
лебательных систем
•системе, описываемой уравнением (5.3.5) (рис. 5.14). При 8 = 0,1
рис. 5.14, а) установление колебаний происходит медленно, си-
стема добротна и представляет собой автоколебательную систему
"омсоновского типа. При е = 10 (рис. 5.14, в) стационарные ко-
198
ГЛ. 5. ЭЛЕМЕНТЫ ТЕОРИИ АВТОКОЛЕБАНИИ
лебания устанавливаются за доли периода колебаний, имеют
четко выраженный разрывный характер и соответствуют авто-
колебательной системе релаксационного типа, близкой к вырож-
денной. При е = 1 (рис. 5.14, б) процесс установления происхо-
дит за несколько периодов колебаний; форма колебаний суще-
ственно отличается от гармонической; такая автоколебательная
система является промежуточной между системами томсонов-
ского и релаксационного типов. '
Процессы установления в системах, описываемых уравнением
Ван дер Поля с разными значениями коэффициентов при дисси-
пативном члене, соответствуют фазовым портретам систем
с разными значениями функции f(y), рассмотренным ранее на
фазовой плоскости методом Льенара.
Последовательное рассмотрение релаксационных систем,
близких к вырожденным с одной степенью свободы, может быть
проведено с помощью уравнений с малым параметром при выс-
шей производной типа
+ + = °’ (5.3.6)
at \ а(' /
где ц — малая величина.
Для уравнений подобного типа существуют разработанные
методы нахождения периодических решений с разбиением всего
периода на этапы быстрых и медленных движений. Подобный
характер процессов имеет место в релаксационных автоколеба-
тельных системах. При переходе к вырождению (при стремлении
одного из энергоемких параметров к нулю) этапы быстрого дви-
жения превращаются в скачки. В уравнении (5.3.6) подобный
переход соответствует уменьшению параметра ц до нуля.
Г § 5.4. Автоколебательные системы томсоновского типа
I Выше уже отмечалось, что для автоколебательных систем
томсоновского типа характерны малое затухание и малое вло-
жение энергии за период колебаний по сравнению с запасом
колебательной энергии системы. Колебания в таких системах
I почти гармонические.
Элементарная теория часов. Простейшая система такого ти-
па— обыкновенные часы с маятником или балансом в качестве
накопителя энергии. Принцип работы часов заключается в том,
что когда маятник (баланс) совершает колебания и проходит
через свое положение равновесия, ему через механизм, связан-
ный с заведенной пружиной, сообщается толчок, который не-
много увеличивает скорость движения маятника.
Если бы маятник (баланс) совершал колебания без подтал-
кивания со стороны заведенной пружины, то уравнение его
§ 5.4. СИСТЕМЫ ТОМСОНОВСКОГО ТИПА
199
движения записывалось бы в виде
х + 2б\г + х = 0, придем б > О, (5.4.1)
а фазовая траектория имела бы вид постепенно скручивающей-
ся спирали.
Обозначив через d изменение скорости в момент прохожде-
ния маятника через х = 0, находим
y(i + 0)- p(i —0) = d.
на рис.
устано-
автоколе-
траектория
вившихся
Палий в идеализиро-
ванной модели часов
В этом случае в стационарном режиме колебаний при
«подталкиваниях» за период предельный цикл на фазовой
скости имеет вид, схематически показанный
Для данной автоколебательной системы
нетрудно определить стационарную ампли-
туду колебаний, используя то обстоятельст-
во, что уменьшение амплитуды скорости за
половину периода (т = л) в точности ком-
пенсируется увеличением скорости на d в
результате одного толчка. Решение уравне-
ния (5.4.1), как известно, имеет вид х =
= 4r*'sinr, тогда
у = х = —sin т + Ae~°r cos т —
= Ле“вт(соз т — б sin т).
При Аг/ < d колебательная энергия систе-
мы возрастает; при Ay > d колебательная
энергия системы убывает; при Ay'=d
имеет место стационарный автоколебательный режим, при кото-
ром баланс вкладываемой и рассеиваемой энергий равен нулю.
Если считать, что толчок происходит при т = О, то можно
записать условие баланса за половину периода колебаний
Двух
пло-
5.15.
Аг/ = А — Ае~°~ = А (1 — е_#я) = d,
откуда сразу определяется стационарная амплитуда колебаний
л____________________________11
^0-
Электрические автоколебательные системы с цепью обратной
связи. В подобных системах накопителем энергии служит до-
статочно добротный колебательный контур, а вложение энергии,
компенсирующее потери и полезный отбор энергии, осуществ-
ляется с помощью активного элемента и цепи обратной связи.
В качестве активного элемента в электрических автоколебатель-
ных системах чаще всего используют транзистор,ы или электрон-
ные лампы, в которых управляющее напряжение определяет
выходной ток.
200
ГЛ. 5. ЭЛЕМЕНТЫ ТЕОРИИ АВТОКОЛЕБАНИЙ
При этом возможны два варианта автогенераторов: с кс
лебательным контуром в цепи управляющего напряжени
(рис. 5.16, а) и с колебательным контуром в цепи управляемог
тока (рис. 5.16, б).
Рис. 5.16. Схема генератора с контуром в цепи управляющего напряжени
(а) и в цепи управляемого тока (б)
Для генератора с колебательным контуром в цепи управляй
щего напряжения (рис. 5.16, а) уравнение, описывающее пов«
дение данной системы, имеет вид
" , оч’ . Мшо di» /с. / >
х + 2ihr + х = —V-r*, (5.4..
и0 dt ’ '
где х = ujua, 2й = R/<i>0L, т = aot и со® = i/LC. Для генератор
с контуром в цепи управляемого тока (рис. 5.16, б) дифферег
циальное уравнение движения имеет вид
х + 2йя + х = г^./г0, (5,4,<
где х = г/г0, 20 = R/a^L, т = (i)ot и co* = i/LC.
Поведение этих систем и методы анализа уравнений (5.4.2
и (5.4.3) зависят от типа систем и вида характеристик испол1
зуемых активных элементов.
Здесь рассматриваются только автоколебательные систем:
томсоновского типа, уравнения движения которых можно прив<
сти к виду
х + х = ц/ (х, £), (5.4.4
где f(x, х) — ограниченная однозначная функция, а р,«1.
у Допустим, что характеристика активного элемента имеет ви,
изображенный па рис. 5.17, т. е. активный элемент предста:
ляет собой релейное устройство, включающее или выключающс
ток i* в зависимости от знака управляющего напряжения и.<
Тогда для схемы рис. 5.16, а, описываемой уравнением (5.4.z
для всех значений и, кроме и = 0, мы будем иметь
= 0, х + 2йж + х = 0.
ат
§ 5.4. СИСТЕМЫ ТОМСОНОВСКОГО ТИПА
201
В момент скачка тока г* при х = u/u0 = 0 магнитный поток
в индуктивно связанных катушках (см. рис. 5.16, а) из-за его
инерционности должен меняться непрерывно. Отсюда следует,
что ток i через индуктивность контура должен испытывать ска-
чок Ai при скачке тока в индуктивно связанной с ней катушкой
обратной связи в соответствии с условием Li = L(i + Ai) + ML,
где Li — магнитный поток до скачка тока i*, a L(i + Ai) + MiL —
после скачка тока от нуля до значе-
ния it. Соответственно Ai = —LMJL.
На фазовой плоскости х, у, где у = . ________
= dxldx в момент прохождения х через 1
нуль, координата описывающей точки у
будет испытывать скачок на величину
Аг/ = — М/иаыаС, и отсюда --------
ду _ __Рис. 5.17. Характеристи-
& и0 ' ка релейного устройства
Таким образом, мы пришли к той же модели, что и в случае
элементарной теории часов. Соответствующий выбор знака М
(за счет выбора направления витков катушки обратной связи)
позволяет обеспечить вырастание у (Ду > 0) при возрастании х
и наоборот. Амплитуда стационарных колебаний х будет
А
яо-ио(1_е-ел)-
так же как это было раньше в случае элементарней теории ча-
сов (d = Ду = цМао/и,о). 4
Перейдем к случаю линейной характеристики активного эле-
^гента i* = I0 + Su, где /0— постоянная составляющая управ-
ляемого тока, S — крутизна характеристики (S = di*/du), 1 и —
управляющее напряжение. Этот вид зависимости i# от и описы-
вает поведение системы вблизи состояния покоя. Рассмотрим по-
ведение системы, приведенной на рис. 5.16, а. Очевидно, что
и = ц/С = уйх/С и уравнение (5.4.2) запишется следующим
образом:
х + х = (SMtih — 2$)х. (5.4.5)
Если (SAfcoo ~ 2Ф)> 0, то в системе будет иметь место на-
растающий колебательный процесс начиная с любого сколь угод-
но малого начального толчка, т. е. система самовозбуждается. ]/“
Аналогичное условие самовозбуждения получается для генера-
тора с контуром в цепи управляемого тока (рис. 5.16,6). Уп-
равляющее напряжение и = М di/dt = Мю^х. Тогда без учета
14 В. В. Мигулин и др.
202
ГЛ. 5. ЭЛЕМЕНТЫ ТЕОРИИ АВТОКОЛЕБАНИЙ
постоянной составляющей уравнение (5.4.3) примет вид
х + х = (SAfcoo ~ 2й)х. (5.4.6
Таким образом, условием самовозбуждения обоих генераторо
вблизи состояния покоя системы (х = 0) является неравенств
18Ма)я > 2й.
Следует отметить, что при сделанных предположениях сам<
возбуждающиеся колебания в исследуемых системах нарастак
неограниченно, чего не происходит в реальных системах. Эт
обстоятельство связано с тем, что принятая нами линейная ai
проксимация вольт-амперной характеристики активного элеме!
та пригодна лишь для небольших пределов изменения х. Э1
означает также, что при линейной характеристике невозможг
получение стационарных автоколебаний и при их описании с ш
мощью фазовой плоскости мы не будем иметь замкнутой фаз*
вой траектории — предельного цикла.
Метод колебательных характеристик. Для рассмотрения
расчета автоколебательных систем при нелинейных вольт-ампе
ных характеристиках активных элементов может быть испол
зован квазилинейный метод, называемый методом колебательнь
характеристик. В этом методе вводится усредненная крутизн
нелинейной характеристики, которая является переменной вел
чиной, зависящей от амплитуды колебаний управляющего напр
жения, т. е. S = f(A).
Сущность квазилинейного метода колебательных характер
стик состоит в том, что ищется такая усредненная крутизна
которая обеспечивает равенство нулю коэффициента при дисс
нативном члене в среднем за период колебаний, т. е. в стаци
парном режиме (2й — SMalt) — 0. Отсюда сразу получается
Под величиной S(A) здесь понимается отношение амплиту;
первой гармоники управляемого тока It к амплитуде А гарм
нического управляющего напряжения и. Пусть = Ф (и), г
и = A cos((o0i); тогда, разлагая в ряд Фурье, получим
i* =Л>+ h cos((o0i) + I2 cos(2co0Z) + ...
Зависимость от А называется колебательной характеристик
данного активного элемента.
В качестве примера рассмотрим случай, когда активным 3J
ментом является полевой транзистор.
На рис. 5.18 показана нелинейная характеристика iCT — q>(u
Если выбрать начальные рабочие точки 1 и 2 так, как показа
на рис. 5.18, т. е. точку 1 — в середине участка характеристи
с максимальной крутизной S, а точку 2 — где-то на изгибе :
g 5.4. СИСТЕМЫ ТОМСОНОВСКОГО ТИПА
203
рактеристики ср(н3), то для этих начальных точек зависимости
усредненной крутизны от амплитуды колебаний А на затворе
имеют существенно различный характер (рис. 5.19).
Графическое решение уравнения (5.4.7) при выборе в каче-
стве рабочей точки 1 имеет вид, изо-
браженный на рис. 5.19, а. В этом
случае находим единственное реше-
ние — стационарную амплитуду коле-
баний Ао, при которой в. системе обес-
печивается баланс вкладываемой и
рассеиваемой энергии за период коле-
баний. Из того же рисунка следует,
что полученное решение Ао не только
единственно возможно, но и устойчи-
во. Действительно, если амплитуда ко-
лебаний А станет больше Ло, то поте-
ри в системе, пропорциональные RC/M,
будут превышать вложение энергии,
пропорциональное S, и амплитуда А
Рис. 5.18. Типичная харак-
теристика зависимости то-
ка стока /с, от напряжения
1»з на затворе полевого
вернётся в точку Ао. И наоборот, если транзистора
А станет меньше Ао, то вложение энер-
гии будет превосходить потери и, как следствие, амплитуда
колебаний снова увеличится до значения Ло.
Такой режим возбуждения с выходом на продольный цикл
называется мягким и реализуется при выборе рабочей точки на
Рис. 5.19. Кривые средней крутизны для случаев мягкого (а) и жесткого (б)
режимов
участке характеристики с наибольшей крутизной; при этом на-
чальные толчки (флуктуации) в системе могут быть сколь угод-
но малыми.
Графическое решение уравнения (5.4.7) при выборе рабочей
точки на изгибе вольт-амперной характеристики (точка 2 на
рис. 5.18) показано на рис. 5.19, б. Из его рассмотрения можно
сделать несколько выводов. При таком режиме возбуждения
в потенциально автоколебательной системе не происходит само-
возбуждения; иными словами, если флуктуации (амплитуды
14»
204
ГЛ. 5. ЭЛЕМЕНТЫ ТЕОРИИ АВТОКОЛЕБАНИИ
толчков) в системе не превышают значения неустойчивой ст
ционариой амплитуды Ai, то эти флуктуации спадают до нул
Поэтому для возбуждения автоколебательной системы с так<
колебательной характеристикой 5(A) необходимо сообщить <
толчок, величина которого А должна быть больше или равна <
{жесткое возбуждение).
Качественное определение устойчивости стационарных ампл
туд At и А2, аналогичное случаю мягкого режима, показывай
что решение At неустойчиво, а решение А2 устойчиво.
Следует отметить, что квазилинейный метод основан на а
риориом предположении о существовании в рассматриваемой с
стеме стационарных гармонических колебаний, для котор!
можно вычислить усредненное значение крутизны и получить
зависимость от амплитуды колебаний. Только введение допуп
ния о достаточно медленном изменении амплитуды генерируем!
колебаний позволяет изучать процессы возбуждения и устанс
ления стационарных колебаний с помощью усредненных ура
нений, аналогичных получаемым в методе ММА.
Применение метода ММА к автоколебательным системам то
ооновского типа. Уравнение, описывающее автоколебательш
системы томсоновского типа с одной степенью свободы, всег
можно свести к обобщенному уравнению вида
х + х = р/(х, х), (5.4.
где р< 1. Такое же ограничение накладывалось на правую час
уравнения (2.5.1) с тем, чтобы для его решения можно бы
применять метод ММА. Поэтому для исследования различш
автоколебательных систем томсоновского типа очень часто i
пользуется метод ММА. На рис. 5.3 приведена обобщенная с:
ма автоколебательной системы с активным элементом с харг
теристикой A-типа. К такой схеме можно привести лампов!
генератор с контуром в цепи анода, генератор на туннельн
диоде и многие другие генераторы томсоновского типа. Отмет!
что характеристику A-типа с падающим участком можно noj
чить с помощью электронной лампы или транзистора (котор
представляют собой четырехполюсники или трехполюсники), :
пользуя системы обратной связи (как, например, в схеме, и
бражениой на рис. 5.16,6), тогда как соответствующие hoj
проводниковые и газоразрядные приборы вследствие специфи
ского механизма прохождения тока через них могут служт
активными двухполюсниками с требуемыми характеристика
без дополнительных цепей обратной связи.
• Уравнение Кирхгофа для токов в контуре (рис. 5.3) им<
вид
Ф (u) + iL + iR + ic = 0,
и при полиномиальной аппроксимации тока активного элеме:
§ 5.4. СИСТЕМЫ ТОМСОНОВСКОГО ТИПА
205
получим
—<p(u) = i0 + аои + ?ои2 + Той3, <Хо>О, 0О, То < 0,
где учитываются члены до кубического включительно. Тогда для
нашей системы можно записать следующее уравнение движения:
х + х = (к -Р + ух2)х, (5.4.9)
где к = а — 20, а = ао/Са>о, 20 = i/RCtOo, a2 = l/LC, 0 =
= 200^(00, у = Зуоп§/Ссоо, х = и/и0, т = (О0£. Введенный та-
ким способом коэффициент к = а — 20 называется коэффициен-
том регенерации и показывает соотношение между вложением и
потерями энергии в колебательной системе при различных зна-
чениях ее параметров. Если считать, что коэффициент регене-
рации к и коэффициенты нелинейности 0 и у удовлетворяют
требованию к« 1, 0 < 1, у «1, то к такой системе применим
метод ММА.
Вводим новые переменные*) х = и cos т + v sin т, х =
= — и sin т + v cos т и после усреднения уравнений
2Л
U==”"2n’J (^ + + 7^)х s^n т
о
2Л
v = J (к + fix + ух2) х cos т dx
о
получаем систему укороченных уравнений
и = -у- ^к + -i- yzj и, v = J/c + 4" Тзр, (5.4.10)
где z = и2 + V2. От двух укороченных уравнений для и и v мож-
но перейти к одному уравнению для z:
z = + -i- yzj z. (5.4.11)
В укороченных уравнениях (5.4.10), (5.4.11) отсутствуют члены
с коэффициентом 0, откуда следует, что квадратичные члены при
усреднении не влияют на процессы установления и стационар-
ные амплитуды в таких автономных автоколебательных режимах
работы.
Для данной системы существует два стационарных решения
(z = 0). Одно из них является нулевым решением и соответству-
ет состоянию покоя щ = Vo = z0 = 0, другое — с отличной от нуля
амплитудой — имеет вид z0 = —4/с/у. Так как для самовозбуж-
дения автоколебательной системы необходимо, чтобы коэффи-
*) Разумеется, здесь (как и много раз ранее) и — новая переменная,
а не напряжение.
♦
4 f-
206
ГЛ. 5. ЭЛЕМЕНТЫ ТЕОРИИ АВТОКОЛЕБАНИИ
циент регенерации был больше нуля (к > 0), то, значит, стацис
парная отличная от нуля амплитуда автоколебаний в систем
может быть только при 'f < 0 (при выбранной аппроксимаци
нелинейной характеристики). Здесь мы встречаемся с обычны
для автоколебательных систем условием, требующим, чтобы зна
коэффициента при высшем члене в разложении вольт-амперно
характеристики нелинейного элемента ('fo) был обратен знак
члена, обеспечивающего вложение энергии, а члены (член), о:
ветственные за вложение энергии в систему (аа), были всегд
более низкого порядка, чем высший член в разложении. В ш
шем примере а0 >0, у0 < 0.
Исследуем устойчивость стационарных состояний систем!
В случае состояния покоя системы z = 0 + т], и тогда уравнен!
для возмущений (малых вариаций) в первом приближении им<
ет вид
11 = Лт]. (5.4.12
Как мы видим, знак коэффициента регенерации к определяет у
тойчивость состояния покоя: при к > 0 (а > 2й) состояние и
коя неустойчиво, происходит самовозбуждение; при к < 0 (а •
< 20) состояние покоя устойчиво. В случае ненулевой стаци
парной амплитуды (z0 = —4Лг/*у) ее значение при возмущении
запишется как z = — 4/c/’f + ц; тогда уравнение для возмущен!
примет вид
ц = —Ащ. (5.4.К
При /с>0 (а >20) ненулевая стационарнай амплитуда усто
чива, при к < 0 (а < 20) амплитуда неустойчива. На рис. 5J
Рис. 5.20. Зависимость стацио-
нарной амплитуды от коэффи-
циента регенерации при мяг-
ком режиме
Рис. 5.21. Фазовый портрет
автоколебательной системы
томсоновского типа при мяг-
ком режиме возбуждения
приведена зависимость стационарной ненулевой амплитуды
коэффициента регенерации, где кружочками обозначены уст<
чивые стационарные состояния системы, крестиками — неуст
§ 5.4, СИСТЕМЫ ТОМСОНОВСКОГО ТИПА
207
чивые состояния. Показанный на этом рисунке жирной линией
режим возбуждения называется мягким режимом.
Таким образом, каждому значению соответствует одно-
единственное отличное от нуля стационарное состояние системы,
что соответствует на фазовой плоскости одному предельному
циклу — замкнутой фазовой траектории (рис. 5.21). Снаружи
предельного цикла фазовые траектории соответствуют затухаю-
щим колебаниям (скручивающиеся спирали), внутри предельного
цикла фазовые траектории (раскручивающиеся спирали) соот-
ветствуют нарастающим колебаниям; в начале координат нахо-
дится особая точка типа неустойчивого фокуса.
Если аппроксимировать г = ф(и) полиномом пятой степени:
—г = г0 + аои + ^и3 + е0п5,
то уравнение движения (5.4.9) будет иметь вид
i’ + х — (к + ух2 + exi)x, (5.4.14)
где е = 5eoUo/Cceo, а остальные обозначения те же, что и в
(5.4.9). Укороченное уравнение в этом случае запишется как
z — z (к + -^~"fz + ez2 j. (5.4.15)
Отсюда нетрудно определить стационарные состояния (z = 0)
системы, одно из которых является состоянием покоя (z0 = 0) и
возможно при любых параметрах системы. Второе отличное от
нуля стационарное состояние системы определяется из решения
уравнения
-Lez2 + _L?2o + к = о,
откуда
zo = “ V8 ± 4" ~ 8/се- (5.4.16)
Поскольку коэффициент е при старшем члене должен быть мень-
ше нуля (е < 0), то здесь возможны два случая: < 0 и 'f > 0.
Случай у < 0. Качественно он не отличается от ситуации,
когда е0 = 0, т. е. соответствует мягкому режиму возбуждения.
Тогда кривая второго порядка z0(k) проходит очень близко от
прямой, описывающей решение для кубической аппроксимации
(е0 = 0) (рис. 5.22, слева).
Случай у > 0. Решение для стационарной амплитуды можно
записать в виде
20=-Ттг± i4r/?+WT
При к = 0 возможны два решения z0 = z01 = 2у/1 е 1 и z0 = z02 = 0.
Однако оказывается, что и при некоторых отрицательных зна-
208
ГЛ. 5. ЭЛЕМЕНТЫ ТЕОРИИ АВТОКОЛЕБАНИЙ
чениях коэффициента регенерации к можно получить отличнув
от нуля амплитуду автоколебаний. Предельное отрицательно
значение к0 определяется из условия У у2 + 8к01 е I = 0, откуд.
ко — —72/8|е1;при этом z0 = z03 = у/|в|. Зависимость z0(k) пока
зана на рис. 5.22, справа. По-прежнему состояние покоя систе
мы устойчиво при к < 0 и неустойчиво при к > 0. Однако н;
Рис. 5.22. Зависимость стационарной амплитуды от коэффициента регенера
ции при аппроксимации характеристики полиномом пятой степени дл.
мягкого (7о < 0, во < 0) и жесткого (fo > 0, е0 < 0) режимов
участке от ка — — Y2/8lel до к = 0 состояние покоя лишь относи
тельно устойчиво; если амплитуда возмущения будет таког
что она достигнет нижней неустойчивой ветви амплитудной крт
вой, то в системе возбудятся автоколебания с отличной от нул
Рис. 5.23. Фазовый портрет
автоколебательной системы
томсоновского типа при жест-
ком режиме возбуждения; зам-
кнутая сплошная кривая —
устойчивый цикл, штрихо-
вая — неустойчивый цикл
устойчивой стационарной амплит}
дой. Такой режим возбуждения нг
зывается жестким. В облает
—72/8|е| к < 0 система самовозб}
диться не может. Физическое объя<
пение явления жесткого возбужд(
пня заключается в том, что при ш
которых достаточно больших воем}
щениях т]о регенерация системы во:
можна и происходит за счеткубич<
ского члена зависимости i = <p(u
несмотря на отрицательное значенв
коэффициента регенерации к.
На фазовой плоскости облает
жесткого возбуждения для фиксир<
ванного kai = const < 0 представлеь
двумя предельными циклами — oi
ружностями, один из которых (бол:
ший) устойчив и соответствует эн,
чениям амплитуд автоколебаний, л(
жащих в области от z03 = "f/iel до го1 = 2у/|е|; другой (меньшиг
неустойчив и соответствует значениям амплитуд, лежащих в обл;
сти от zo2 = O до z03 = Y/lel (рис. 5.23) . Начало координат на фаз!
§ 5.5. СИСТЕМЫ, СОДЕРЖАЩИЕ ИНЕРЦИОННЫЕ ЭЛЕМЕНТЫ
209
ВОЙ ПЛОСКОСТИ является особой ТОЧКОЙ типа «УСТОЙЧИВЫЙ фокус»
Все возмущения, меньшие амплитуды, соответствующей неустой-
чивому предельному циклу, осцилляторно затухают. Возмущения/
большие амплитуды, отвечающей неустойчивому предельному
циклу, осцилляторно увеличиваются, и амплитуды этих колеба-
ний стремятся к предельному устойчивому циклу изнутри. Если
амплитуда колебаний по какой-либо причине стала больше амп-
литуды, соответствующей устойчивому предельному циклу, то
первая постепенйо будет уменьшаться, стремясь в пределе сна-
ружи «навиться» на предельный цикл.
При изменении значения к происходит эволюция картины на
фазовой плоскости. При стремлении к к нулю слева радиус неус-
тойчивого предельного цикла уменьшается и стремится к нулю.
Начало координат на фазовой плоскости при этом обращается
из особой точки типа «устойчивый фокус» в особую точку типа
«неустойчивый фокус». Одновременно радиус устойчивого цикла
увеличивается.
При стремлении к к нулю справа радиус единственного ус-
тойчивого предельного цикла постепенно уменьшается, а неустой-
чивая особая точка типа «фокус» в начале координат прибли-
жается по характеру движения в ее окрестности к особой точке
типа «центр».
§ 5.5. Особенности поведения автоколебательных систем,
содержащих инерционные элементы
До сих пор при рассмотрении колебательных, параметриче-.
ских и автоколебательных систем мы считали, что все линейные
и нелинейные элементы, составляющие эти системы, безынер-
ционны, т. е. их вольт-амперные, вольт-кулоновые, вольт-фарад-
ные и другие характеристики выражаются мгновенными функ-
циями соответствующих координат. Например, токи туннельного
диода, электронной лампы, полупроводникового диода, тиристора,
омического сопротивления и аналогичных элементов зависят от
мгновенных значений переменных напряжений на них; напря-
жения на линейных и нелинейных конденсаторах и емкости та-
ких конденсаторов определяются мгновенными значениями заря-
дов на них и т. д.
Однако в природе существуют и искусственно могут быть
созданы элементы, параметры которых зависят не от мгновенных
значений координат, а от амплитудных значений. Такие элемен-
ты (устройства) называются инерционными нелинейностями, ибо
они принимают соответствующие значения не сразу, а через оп-
ределенное время, называемое постоянной времени того или ино-
го элемента. В § 4.5 описан одноконтурный параметрический
генератор с автосмещением, в котором действующее значение
емкости контура, содержащего полупроводниковый диод с цепоч-
210
ГЛ. 5. ЭЛЕМЕНТЫ ТЕОРИИ АВТОКОЛЕБАНИЙ
кой автосмещения, определяется не мгновенными значениями
генерируемых колебаний интересующей нас величины, а ее амп-
литудой, и устанавливается это значение емкости через время,
равное постоянной времени цепи автосмещения.
Другим примером инерционной нелинейности может служить
обычное сопротивление, значение которого неизбежно зависит от
протекающего по нему тока. В силу тепловой инерции темпера-
тура, а следовательно, и сопротивление такого резисторного эле-
мента не являются мгновенной функцией протекающего по нему
тока. Эти инерционные нелинейные активные элементы назы-
ваются термисторами, и их включение в те или иные автоколе-
бательные системы приводит к ряду особенностей, которые
будут рассмотрены ниже.
Известны также полупроводниковые термисторы, сопротивле
ние которых падает с ростом амплитуды протекающего в ни?
тока.
Уравнение теплового баланса для тонкого проводника, чере;
который проходит переменный ток I0cos(pt), можно записат]
в виде
тс dJL + kQ = 7?Г0 cos2 (pt), (5.5.1
где т — масса проводника, с — удельная теплоемкость, к — коэф
фициент теплоотдачи, 9 — температура проводника. В уравнени
(5.5.1) член тс dQ характеризует изменение запаса тепла в св
стеме, /с9 dt — количество тепла, отдаваемое системой за врем
dt', правая часть уравнения показывает количество тепла, полз
чаемого системой извне.
Решение уравнения (5.5.1) имеет следующий вид:
9 = 90е-»/Д + 4г- f 1 “ si”-(2^+-^1, (5.5.:
L V l+4p2A2J
где A = тс/к называется постоянной времени термистора, ф -
начальная фаза. При t °° в решении (5.5.2) останутся толы
члены, характеризующие постоянный нагрев 0_ термистора
пульсации нагрева 9~ вокруг некоторой постоянной температур!
Относительные пульсации температуры определяются из соо
ношения
0~ 1
0- /1 + 4р2А2 ’
(5.5.
Этими вариациями температуры можно пренебречь, если 4р2Д2
> 1, т. е. р > 1/Д. Если ввести период колебаний тока, протеи
ющего через термистор Т = 2л/р, то условием малости 9~/
будет неравенство
Д>Т.
(5.5.
§ 5.5. СИСТЕМЫ, СОДЕРЖАЩИЕ ИНЕРЦИОННЫЕ ЭЛЕМЕНТЫ
211
Физически это условие означает, что в течение всего периода
колебаний тока, протекающего через термистор, температура тер-
мистора остается постоянной с той же степенью точности, с ка-
кой выполняется условие (5.5.4). В таком случае можно считать,
что сопротивление термистора равно R(Q) или Z?(Zo)> т. е. зави-
сит от амплитуды тока, а не от мгновенных значений действу-
ющего тока. В этом и заключается принцип применения терми-
сторов в различных радиотехнических и электротехнических
устройствах.
Однако инерционность термистора не должна быть слишком
большой. Она должна быть по возможности меньше времени пе-
реходных процессов ti в колебательных системах, в которых ис-
пользуется термистор для стабилизации тех или иных парамет-
ров системы. Поэтому для нормальной работы термистора необ-
ходимо выполнение неравенства
Т « Д « (5.5.5)
Рассмотрим поведение автоколебательной системы томсонор^
ского типа с термистором в цепи последовательного резонансншю
контура с активным элементом с S-образной вольт-амперной ха-
рактеристикой if (ж). Уравнение движения для такой системы
имеет вид
§ + [26 (я0) + if' (я)] +>02z = 0, (5.5.6)
где я0 — стационарная амплитуда колебаний.
Если 26 = const, т. о. потери не являются инерционными, то
реализация стационарного автоколебательного- процесса в системе
возможна только при условии 26 = if' (х) (if' (х)—усредненная
крутизна падающей вольт-амперной характеристики), что озна-
чает обязательный выход мгновенных зна-
чений тока х за пределы линейного участка ZSi
падающей характеристики нелинейного эле-
мента.
Другой режим работы в такой системе
можно осуществить при наличии в системе
термистора, когда 26 (яо)^ const. В этом
случае можно выбрать достаточно большой
линейный участок вольт-амперной характе-
ристики u = if(a:), на котором if' (х) = 80 =
= const; при этом ограничение амплитуды
колебаний будет осуществляться с помощью
термистора. Стационарную амплитуду а0 для
автоколебательной системы, описываемой
уравнением (5.5.6), можно найти либо ана-
литически, либо графически, как показано
веским механизмом ограничения амплитуды
реакция термистора на процессы в системе.
с0 а
Рис. 5.24. Графиче-
ское определение ста-
ционарной амплиту-
ды в автоколебатель-
ной системе с терми-
стором
на рис. 5.24. Физи-
колебаний является
212
ГЛ. 5. ЭЛЕМЕНТЫ ТЕОРИИ АВТОКОЛЕБАНИЙ
Отметим некоторые принципиальные особенности данной ав-
токолебательной системы. В этой системе if' (х) = So = const, член
26 (а0) в силу своей инерционности также постоянен в пределах
всего периода колебаний. Поэтому коэффициент в квадратной
скобке в уравнении (5.5.6) в силу автоколебательности системы
равен нулю не в среднем за период, а для каждого момента вре-
мени в пределах любого периода колебаний. Следовательно, по-
добную систему можно с большой степенью точности считать
консервативной системой, для которой характерна неизменность
амплитуды и частоты колебаний.
Нетрудно убедиться в том, что в подобной системе невозмож-
но отклонение амплитуды от своего стационарного значения а0.
Действительно, пусть для определенности амплитуда колебаний
в системе увеличится, тогда сопротивление термистора увеличит-
ся в течение конечного времени из-за своей инерционности. При
этом потери в системе будут превышать вносимую в систему
колебательную энергию [26(а0) + So] > 0 и амплитуда колебаний
системы монотонно вернется к исходному состоянию. Однако да-
же такое кратковременное изменение амплитуды колебаний в
системе с термистором невозможно, если выполняется неравен-
ство (5.5.5), ибо переходные процессы во всей системе, опреде-
ляющие возможность случайного изменения амплитуды аа, в си-
лу этого неравенства имеют гораздо большую постоянную вре-
мени, чем процессы в термисторе. Поэтому всякие внешние
попытки изменения а0 будут компенсироваться соответствующим
изменением сопротивления термистора, что означает стабилиза-
цию амплитуды и частоты колебаний в системе. Однако если
правая часть неравенства (5.5.5) имеет вид Z, ~ Д, т. е. время
переходного процесса сравнимо с постоянной времени термисто-
ра, то в такой автоколебательной системе может наблюдаться
как апериодический характер установления стационарной ампли-
туды (случай ft > А), так и колебательный характер (случай
ti<A). Частота осцилляций переходного процесса в случае t, <
< Д определяется выражением
1 / 1 1 \V2
2 •
Возможность получения в колебательных системах с терми-
сторами автоколебаний, сколь угодно близких к гармоническим,
позволяет использовать системы, содержащие добротные конту-
ры, термисторы и активные элементы с линейными падающими
участками вольт-амперных характеристик, в ряде эталонов ча-
стоты (времени).
Рассмотрим теперь возможность применения термисторов в
релаксационных автоколебательных системах. Как было показано
ранее (см. с. 191), для того чтобы транзитронный генератор
с двумя вырожденными степенями свободы генерировал колебания,
§ 5.5. СИСТЕМЫ, СОДЕРЖАЩИЕ ИНЕРЦИОННЫЕ ЭЛЕМЕНТЫ
213
близкие к гармоническим, необходимо выполнение условия
Если положить в этой системе S ~ Se, а ограничение амплитуды
возложить на термистор, заменяющий резисторы с сопротивле-
ниями R и (или) г, то ожидаемой стабилизации амплитуды ав-
токолебаний не получится. Дело в том, что обычные термисторы
увеличивают свое сопротивление с ростом амплитуды тока, и по-
этому в рассмотренной схеме применение термисторов вместо
постоянных резисторов с сопротивлениями R и г вызовет лишь
улучшение условия возбуждения системы и дальнейшее увели-
чение амплитуды автоколебаний с обязательным ее выходом за
пределы линейного участка падающей вольт-амперной харак-
теристики.
Стабилизацию амплитуды автоколебаний в релаксационных
генераторах, генерирующих колебания, близкие к гармониче-
ским, можно осуществить, если использовать термистор в каче-
стве элемента, образующего отрицательную обратную связь
в системе. Действительно, если включить термистор с сопротив-
лением р в катодную цепь транзисторного генератора, а режим
работы усилительного элемента выбрать линейным, т. е. считать,
что i = Stu для всех допустимых амплитуд автоколебаний, то тог-
да с учетом отрицательной обратной связи имеем i = So (и — pi)
и, следовательно,
£
/=Г+^“- (5-5.7)
Отсюда видно, что ток в системе зависит от новой действующей
крутизны S0/(l + pS0), которая меньше So. Так как р является
функцией постоянной и переменной составляющих тока, то мож-
но считать, что р = р(а0), если на термистор и систему, в кото-
рой он применяется, наложены требования (5.5.5). Тогда усло-
вие стабилизации амплитуды транзитронного генератора можно
записать в виде
ттДи=4+4+Йг <^-8)
Соотношение (5.5.8) показывает, что в транзитронном генерато-
ре с термистором увеличение амплитуды автоколебаний по срав-
нению с а0 приводит к тому, что баланс (5.5.8) нарушается и
система из консервативной превращается в диссипативную с ес-
тественным уменьшением амплитуды колебаний до значения а<>.
Если амплитуда автоколебаний стала меныпё а0, то это оз-
начает, что в системе появилось отрицательное сопротивление,
и. следовательно, происходит увеличение колебательной энергии
214
ГЛ. 5. ЭЛЕМЕНТЫ ТЕОРИИ АВТОКОЛЕБАНИЙ
до тех пор, пока амплитуда снова не станет равной а0. Таким
образом, оставаясь в пределах линейного участка падающей
вольт-амперной характеристики релаксационных систем, можно
осуществить генерацию колебаний, сколь угодно близких к гар-
моническим, со стабилизацией амплитуды и частоты автоколе-
баний с помощью термистора. Аналогичным образом можно осу-
ществить стабилизацию автоколебаний в 7?С-генераторе и других
релаксационных автоколебательных системах. При этом следует
учесть, что в таких системах с термисторами баланс энергии
должен сохраняться постоянным в течение всего периода коле-
баний, что, естественно, накладывает ограничения на форму
генерируемых колебаний.
§ 5.6. Поведение автоколебательных систем
при внешнем гармоническом воздействии
Изучение поведения автоколебательных систем при внешнем
гармоническом воздействии имеет большое значение для науки
и техники, ибо его результаты позволяют осуществить синхро-
низацию колебаний нескольких маломощных источников, стаби-
лизацию излучения (колебаний) мощного генератора с помощью
стабилизированного маломощного источника колебаний, решить
многие вопросы преобразования частоты и т. п.
В зависимости от вида нелинейной характеристики автоколе-
бательной системы, уровня внешнего гармонического воздействия,
соотношения частоты внешнего воздействия и частоты колебаний
Рис. 5.25. Схема генератора
на полевом транзисторе с
контуром в цепи затвора
при внешнем воздействии
автоколебательной системы будут на-
блюдаться различные результирующие
эффекты.
1. Рассмотрим внешнее воздействие
на томсоновский генератор с конту-
ром в цепи затвора (рис. 5.25). Пусть
внешнее воздействие p(t) = P0 sin (pi);
напряжение на затворе выберем в ка-
честве переменной и; тогда уравнение
движения запишется в виде
£С$+ RC^+ “=^osin(pi) +
Вводя обычные обозначения х = u/u0, 26 = 7?/А, а>о = i/LC$ по
лучаем
§ + 26^ + sin (Pi) + М^. (5.6.1
Если искать решение с частотой внешнего воздействия р, т<
§ 5.0. СИСТЕМЫ ПРИ ВНЕШНЕМ ГАРМОНИЧЕСКОМ ВОЗДЕЙСТВИИ 215
безразмерное время необходимо определить как т = pi; тогда
уравнение (5.6.1) примет вид
х + 2$х + = Xsinx + (5.6.2)
р uo" а 1
где 2Ф = Я/р£, X = P0tt>o/MoP2-
1. Рассмотрим поведение исследуемой системы, в которой не
выполняется условие самовозбуждения, при слабом внешнем сиг-
нале. В этом случае, имея в виду малую амплитуду возбуждае-
мых колебаний, характеристику гст = /(и) можно аппроксимиро-
вать на линейном участке характеристики линейной зависи-
мостью iCT = Su, где S — крутизна характеристики. Тогда в ре-
зонансном случае (р = со0) получаем уравнение
х + [2-6 — М ш05] х + х — X sin т. (5.6.3)
При 26>2W®0S система недовозбуждена (коэффициент регене-
рации к < 0), но регенерирована, т. е. затухание в контуре ча-
стично скомпенсировано положительной обратной связью. По-
этому за счет такой регенерации происходйт усйление внешнего
воздействия на частоте р. При увеличении амплитуды внешнего
воздействия нелинейностью функции iCi = /(w) пренебрегать уже
нельзя и использованная нами линейная аппроксимация iCT = Su
становится несправедливой. В этом случае резонанс имеет такой
же характер, как и в контуре с нелинейным затуханием. Резо-
нансные кривые по-прежпему симметричны, но имеют немного
иную форму, а именно несколько сплюс-
нуты сверху в окрестности резонансного
максимума из-за увеличения потерь в си-
стеме с ростом амплитуды колебаний
(рис. 5.26).
2. Если регенерация переходит в са-
мовозбуждение (Ma>QS >2'6), то наряду
с вынужденными колебаниями на часто-
те р в системе появляются автоколебания
на частоте ® «<в0. В режиме автоколеба-
ний исследуемая система является ква-
зиконсервативной, что автоматически
регулируется амплитудой автоколеба-
ний.
За счет нелинейного взаимодействия
= /(и) характеристике) в такой системе могут возникать как би-
ения, т. е. колебания с частотой й=|р— со I, так и комбина-
ционные составляющие с частотами вида Inpdzmcol, где т и
п — целые числа.
Рассмотрим приближенную теорию синхронизации для мяг-
кого режима возбуждения на примере описанной выше автоко-
лебательной системы. Уравнение (5.6.2) при произвольной
Рис. 5.26. Резонансная
кривая регенерирован-
ного контура для нема-
лых сигналов
нелинейной i,
216
ГЛ. 5. ЭЛЕМЕНТЫ ТЕОРИИ АВТОКОЛЕБАНИЙ
icT = /(u) характеристике можно записать в виде
х + х = /(х) х + %х + X sinr, где 5 = 1 — <$>/р2- (5.6.4)
Если искать решение этого уравнения с частотой, точно равной
частоте внешнего воздействия (т = р<), то, используя обычную
замену переменных в методе ММА х = A cos (т + 6), х —
= — Asin(r + 6) и проводя стандартную процедуру усреднения,
получаем следующие укороченные уравнения:
2А = - D(A)A — Xcos6, 26 =-|+ (Asin6)M. (5.6.5)
Здесь функция D (А)
Рис. 5.27. График зави-
симости функции потерь
от амплитуды автоколе-
баний
описывает баланс потерь и вложения
энергии (эффективное затухание) в ав-
тономном генераторе (X = 0). В случае
мягкого режима график функции D(А)
имеет вид, приведенный на рис. 5.27. Ес-
ли, например, гст = i0 + аои +Р0и2 + у0и3,
то D (Л) = (2$ — а) — (у/4) А2, где а =
= Маош1/р, у = ЗЛ/у0и£соо/р.
Проанализируем уравнение (5.6.5).
При X = 0 (автономный режим генерато-
ра) имеем
2Л = -Р(Л)Л, 20 =-5.
Эти уравнения имеют два стационарных решения (Л = 0, 6 = 0):
состояние покоя системы (Ло = 0), устойчивое при D (0) > 0 и
неустойчивое при Z)(0)<0, а также ненулевое решение Л=Л0
и 6 = —5т/2 + const, где Ло определяется из приравнивания нулю
функции Д(Ло)=О. Учитывая, что 6 = —|т/2, 5= 1 — со2//’2^
я» 2(р — <в0)/р и т = pt, получаем выражение
(1 I
T + -у £т I = ло COS (coot),
(5.6.6)
которое подтверждает, что в автономном генераторе колебания
происходят с собственной частотой системы со0, а не с частотой
р, с которой мы искали решение. Таким образом, мы видим, что
использованный нами метод ММА исправил ошибку в опреде-
лении частоты генератора.
Теперь рассмотрим неавтономный режим работы генератора
(Х¥=0) в области синхронизации. При Z>(0)<0 (потери в си-
стеме превышают вложение энергии) в генераторе не выполня-
ется условие самовозбуждения, однако имеет место регенерация,
т. е. регенеративный режим приемника. В этом случае получа-
ется несколько сплющенная сверху резонансная кривая (см.
рис. 5.26), аналитическое выражение которой определяется из
§ 5.6. СИСТЕМЫ ПРИ ВНЕШНЕМ ГАРМОНИЧЕСКОМ ВОЗДЕЙСТВИИ 217
системы укороченных уравнений (5.6.5) и имеет вид 42[D2(4) +
+|2] = X2. Это уравнение при любых £ имеет одно-единственное
решение, соответствующее амплитуде вынужденного колебания
в регенерированном контуре.
При выполнении условия самовозбуждения генератора
(.0(0) >0) синхронный режим работы томсоновского генератора
имеет место лишь при малых значениях £. Действительно,
в стационарном синхронном режиме из системы уравнений
(5.6.5) получаем систему
AD(.4) = % cos 9, 4| = Xsin0,
или одно уравнение
42[D2(4)+g2] = X2.
При произвольном D(A) последнее уравнение аналитически не
разрешается. Однако для малых значений X можно считать, что
амплитуда автоколебаний в автономном режиме и амплитуда
автоколебаний при внешнем воздействии близки друг к другу,
т. е. А « 40; тогда из второго уравнения (5.6.5) получаем соот-
ношение sin 6 = — £Ао/Л, которое с очевидностью имеет стацио-
нарное решение лишь при
lgl^o = AMo, т. е. [lp-cool (5.6.7)
Это неравенство и определяет ширину полосы синхронизации,
которая' пропорциональна оТТППТпшию амплитуды внешнего воз-
действия к амплитуде автоколебаний в автономном режиме. На
Рис. 5.28. Схематическое изображение поведения амплитуды автоколебаний
при синхронизации: Штриховые кривые — амплитуда вынужденных колеба-
ний, штрих-пунктирные — амплитуда автоколебаний
рис. 5.28 схематически показаны области биений, синхронизма,
а также графики для амплитуд вынужденных и автоколебаний
томсоновского генератора с мягким режимом возбуждения при
внешнем гармоническом воздействии.
В действительности синхронный режим возникает за счет
совместного действия двух процессов. Во-первых, за счеишдав-
ления собственных автоколебательных движений в система, прп-
15 В. В. Мигулин и др.
218
ГЛ. 5. ЭЛЕМЕНТЫ ТЕОРИИ АВТОКОЛЕБАНИЙ
чем внутри области синхронного режима сохраняется только
чисто вынужденный колебательный процесс с частотой внешнего
воздействия р. Во-вторых, при внешнем воздействии синхронный
режим может возникать за счет принудительного изменения ча-
стоты автоколебаний путем воздействия вынужденных колеба-
ний на форму генерируемых автоколебаний. В томсоновских ав-
\ токолебательных системах, работающих в мягком режиме, глав-
у ную роль играет первый процесс. При достаточно малых рас-
» стройках вынужденные колебания за счет резонансных свойств
системы приобретают большую амплитуду и, накладываясь на
существующие автоколебания в генераторе, уменьшают среднюю
действующую крутизну. Это приводит к нарушению условия под-
держания автоколебаний, и в системе остаются лишь вынужден-
ные колебания.
""~В колебательных системах, далеких от томсоновских, и осо-
бенно в релаксационных генераторах, где отсутствуют четко вы-
раженные резонансные свойства, внешний сигнал вследствие
нелинейности активного элемента существенно воздействует на
форму автоколебаний и в некоторой области расстроек приводит
к совпадению частоты автоколебаний с частотой внешнего сиг-
нала, т. е. к возникновению синхронного режима.
3. Рассмотрим поведение генератора при внешнем воздействии
с большой амплитудой и с частотой воздействия, примерно в
п раз большей, чем частота генератора в автономном режиме
(р«псов).
Для генератора с контуром в цепи затвора уравнение движе-
ния имеет вид (5.6.1). Для удобства введем в рассмотрение та-
кую частоту со, что р = па. Из условий р = па и р « псоо следу-
ет, что со « со0. Введем безразмерное время т = cof, нормированное
по со, т. е. будем искать решение системы (5.6.1) с частотой,
точно в п раз меньшей частоты внешнего воздействия р — па.
Если ввести расстройку В = 1 — со^/со2 = [р2 — (псо)2]/р2 и аппрок-
симировать ток сСт = /(и) полиномом третьей степени гст = г0 +
+ <zou + р0и2 + у0м3, то с учетом написанных выше соотношений
уравнение движения примет вид
х + х ~ (к + $х + ух2)х + Р sin (пт) + (5.6.8)
где к = а — 2&, а = Маоа%/а, Р = 2МРоиосо2/со, у = 37Иуоп2со2/со,
2& = R/aL, Р = Р0со2/и0со2. Применение метода медленно меня-
ющихся амплитуд для решения уравнения (5.6.8) при к < 1,
Р < 1, у < 1, |<1 и большом Р требует перехода к новой пере-
менной у, определяемой соотношением
х = У + $ sin (пт), (5.6.9)
где Q — амплитуда вынужденных колебаний. Таким образом, ре-
шение уравнения (5.6.8) представляется в виде суперпозиции
двух решений, причем член Q sin (пт) соответствует чисто вы-
§ 5.6. СИСТЕМЫ ПРИ ВНЕШНЕМ ГАРМОНИЧЕСКОМ ВОЗДЕЙСТВИИ 219
нужденному процессу колебаний с частотой внешнего воздей-
ствия, а член у — колебаниям с частотой, близкой к собственной.
Амплитуда Q определяется условием @ = Р/(1 —п2). После под-
становки (5.6.9) в уравнение (5.6.8) последнее приобретает вид
' у + у = (к + $х + ух2)х + Ъх. (5.6.10)
Это уравнение уже допускает применение метода ММА, так как
в правой ласти уравнения стоят малые члены.
Рассмотрим случай п = 2; он представляет особый интерес,
ибо при этом значении п возникает так называемый резонанс
второго рода.
Применяя метод медленно меняющихся амплитуд, вводя но-
вые переменные у — и cos т + v sin т, у = —и sin т + v cos т и учи-
тывая, что х — и cos т + v sin т + Q sin пх и х = —и sin т + v cos т +
+ nQ cos пт, получаем укороченные уравнения
й=4Ь +4 v(z + 2^2)]u+4(2p?-b)v,
V = 4[* + 4v(z + 2^2)]^+ 4(2^ + ^)“,
(5.6.11)
где z = и2 + v2, Q = —Р/3.
Рассмотрим стационарные решения задачи (й = г5 = 0).
хУ В системе возможны нулевые стационарные состояпия (со-
стояние покоя системы) ий = v0 = z0 = 0. 2) Отличные от нуля
стационарные состояпия (п0 ¥= 0, v0 ¥= 0, z0 =# 0) легко получаются
из системы (5.6.11) путем простых алгебраических преоб-
разований:
z° = “ 4 [к + 4 ± V W-B2]. (5.6.12)
В зависимости от параметров рассматриваемой системы в ней
может реализоваться несколько различных режимов.
а) В автономном режиме (Р = 0, Q = 0) стационарная ампли-
туда колебаний = —4Аг/у существует при коэффициенте регене-
рации к > 0 (у < 0) и равна нулю (z0 = 0) при к < 0. Это пол-
ностью соответствует рассмотренной ранее автоколебательной си-
стеме с мягким возбуждением (кубическая аппроксимация вольт-
амперной характеристики). Генерация колебаний происходит на
собственной частоте св0 системы.
б) В неавтономном режиме при внешнем воздействии (Р=#0,
Q =/= 0) на автоколебательную систему (к > 0, у < 0) при упро-
щающем условии со = <Во амплитуда автоколебательного процес-
са определяется из соотношения
Z° = Т7Г [& + 4 ± 2₽С], (5.6.13)
график которого изображен на рис. 5.29.
15*
220
ГЛ. 5. ЭЛЕМЕНТЫ ТЕОРИИ АВТОКОЛЕБАНИЙ
Кривая АВ характеризует зависимость амплитуды автоколе-
бания z0 от амплитуды внешнего воздействия Q (Р). При увели-
чении амплитуды внешнего воздействия до значения Q > В в
автоколебательной системе прекращаются автоколебания и за-
штрихованной области соответствует чисто вынужденный процесс
с частотой р.
Таким образом, в определенной области щмплитуц^ внешнего
воздействия (Q < В) в системе будет существовать синхронный"
автоколебательный процесс с часто-
той, точно вдвое меньшей частоты
внешнего воздействия. Заметим, что
такая синхронизация автоколеба-
тельной системы на кратной частоте
позволяет делить частоту и фазу
внешнего сигнала в целое число
раз, как это имеет место в парамет-
рических генераторах, где можно
осуществить деление частоты и фа-
зы сигнала накачки в необходимое
число раз.'
Зависимость z0 от | при синхро-
внешней силы с удвоенной ча-
стотой
низации на кратной частоте по-
хожа на эту зависимость при обычной синхронизации (р = <в)
(см. рис. 5.28).
в) Случай к < 0, у < 0, ® со0 0) соответствует недовоз-
бужденной автоколебательной системе с внешним воздействием
на кратной частоте. Тогда в интервале —(вблизи точ-
ного совпадения значений со и со0) при определенных Q(P) воз-
можен колебательный процесс с амплитудой, определяемой из
соотношения
= ТУТ (к + 4 + У- £2)- (5-6.14)
Отсюда нетрудно определить граничные расстройки, при ко-
торых могут возникать колебательные процессы с половинной ча-
стотой. Из условия z0 = 0 получаем
Bi,2 = ± У W - [к + 4- (5.6.15)
Явление возбуждения колебаний с частотой, вдвое меньшей
частоты воздействия в недовозбужденной автоколебательной
(потенциально автоколебательной) системе, называется резонан-
сом- второго рода. Кривые резонанса второго рода z0(g) при раз-
ных значениях амплитуды внешнего воздействия показаны на
рис. 5.30.
§ 5.6. СИСТЕМЫ ПРИ ВНЕШНЕМ ГАРМОНИЧЕСКОМ ВОЗДЕЙСТВИИ 221
Зависимость z0 от Р = 31(71 имеет вид, изображенный на
эис. 5.31; кривая Р,Р2 показывает зависимость амплитуды вы-
нужденных колебаний в недовозбужденном генераторе от ампли-
туды внешнего воздействия на двойной частоте. В заштрихован-
ной области имеет место вынужденный процесс с небольшой
змплитудой из-за большого различия между собственной часто-
той системы (о0 и частотой внешнего воздействия р: (в нашем
лучае p« 2tt»o). Значение амплитуды внешнего воздействия,
/ис. 5.30. Кривые резонанса вто- Рис. 5.31. Амплитудная кривая
рого рода резонанса второго рода
завное Pi, называется порогом возбуждения, а значение Р2 —
потолком возбуждения. В области значений от Р, до Р2 суще-
ствует резонанс второго рода. Наличие порога возбуждения свя-
зано с параметрической природой резонанса второго рода, а на-
личие потолка возбуждения объясняется тушением (подавле-
нием) автоколебаний.
Параметрическая природа резонанса второго рода связана
с тем, что при наличии положительной обратной связи внешнее
зоздействие вызывает периодическое изменение параметров си-
стемы^ с частотой7 приблизительно вдвое большей собственной
частоты системы, ибо действующая крутизна меняется в системе
частотой воздействия.
В определенной области расстроек, если при этом обеспечи-
вается достаточная глубина изменения параметра (порог для
знешнего воздействия), происходит параметрическое возбуждение
колебаний в недовозбужденной автоколебательной системе с ча-
стотой, точно в два раза меньшей частоты внешнего воздействия.
Этим объясняется форма резонансных кривых второго рода, ана-
логичных кривым параметрического резонанса в параметрических
генераторах с нелинейным затуханием.
Дальнейшее увеличение амплитуды внешнего воздействия
приводит к уменьшению средней крутизны вольт-амперной ха-
эактеристики, росту эффективного затухания в системе и, как
следствие, к нарушению условий параметрического возбуждения.
Это явление сходно с явлением тушения автоколебаний при
синхронном и асинхронном воздействиях и приводит к суще-
222
ГЛ. 5. ЭЛЕМЕНТЫ ТЕОРИИ АВТОКОЛЕБАНИЙ
ствованию потолка для амплитуды внешнего воздействия при ре-
зонансе второго рода.
4. В генераторах томсоновского типа с термисторами, нахо-
дящихся под внешним воздействием с частотой, близкой к соб-
ственной частоте автономного генератора, процесс синхронизации
происходит и может быть описан несколько иначе. Считаем, что
характеристика активного элемента линейна и ее крутизна 50
постоянна.
Введем в контур генератора с термистором источник внешней
силы частоты р (рис. 5.32). Тогда уравнение движения в такой
системе можно записать в виде
+ [ 26 (?) - Оо^о] 4? + «о* = Рcos(pt), (5.6.16)
dt" аг
где 26 (z2) характеризует тепловой эффект разогрева термистора
за счет суммарного действия автоколебаний с амплитудой А и
вынужденных колебаний с амплитудой
А, т. с. ? = Л2 + А2.
Если амплитуда автоколебаний ав-
тономного генератора с термистором
была стабилизирована на уровне Ао, то
в присутствии вынужденных колеба-
ний (после включения внешнего воз-
действия) амплитуда автоколебаний
должна уменьшиться до значения
А2= А2 — А2, где А — амплитуда вынуж-
денных колебаний, которая для квази-
консервативной системы, какой являет-
ся генератор томсоновского типа с термистором, равна А =
— Р/(®о— Р2)- Дальнейший рост А при стремлении р к (о0 будет
ст —
И
L
u(t)=^T,OS pt
Рис. 5.32. Схема генератора
с термистором при воздей-
ствии гармонической силы
сопровождаться в таком генераторе уменьшением амплитуды авто-
колебаний А вплоть до полного их гашения. Тогда в некоторой об-
ласти расстроек в автоколебательной системе наступит режим чи-
сто вынужденных колебаний с частотой внешней силы, причем их
амплитуда может стать больше амплитуды А0 автономного генера-
тора. Однако это сопровождается появлением нескомпенсирован-
ных потерь в системе, ибо до наступления синхронного режима
автоколебательная система была квазиконсервативной, т. е.
26 (Л„)—<>>20MS0 = 0, а в режиме синхронизации при р2 ~ со2
выражение в квадратных скобках, характеризующее функцию
диссипации системы, становится положительным, т. е. 26 (А2) —
— <в2М50>0, ибо A2>.4g. Повышенный разогрев термистора
при А2 > Л2 приводит к тому, что колебательная система из ква-
зиконсервативной становится диссипативной, что сопровождается
«притуплением» резонансной кривой в полосе синхронизации ге-
нератора с активной инерционной нелинейностью (рис. 5.33).
§ 5.и. СИСТЕМЫ ПРИ ВНЕШНЕМ ГАРМОНИЧЕСКОМ ВОЗДЕЙСТВИИ 223
Для определения полосы синхронизации обозначим граничные
частоты, при которых она возникает, через _Pi,2 = ± £0. Тогда
в точках гашения автоколебаний можно записать, что амплитуда
вынужденных колебаний в точности равна амплитуде колебаний
автономного генератора, т. е. X = Ао — Р/((о2 — Pi,2), откуда
2|о = 2Р/А0. (5.6.17)
Из (5.6.17) следует, что ширина области синхронизации (гашения
автоколебаний) пропорцио-
нальна амплитуде внешней
силы Р. Это объясняется
тем, что, чем больше ампли-
туда внешней силы, тем боль-
ше амплитуда вынужденно-
го решения при той же рас-
стройке ((Од — Р2) и, следова-
тельно, тем раньше подав-
ляются автоколебания в си-
стеме (Л2 == Ад— X2).
Несмотря на внешнее
сходство явления синхрони-
зации в томсоновских авто-
колебательных системах без
Рис. 5.33. Графики изменения амплитуд
автоколебаний и вынужденных ко-
лебаний в томсоновском генераторе с
термистором при внешнем воздействии
термистора и с термистором
(ср. рис. 5.28 и 5.33), между этими системами и в режиме
синхронизации, и вблизи области синхронизации имеется су-
щественное различие. Томсоновский генератор без термистора
принципиально не может генерировать гармонические колебания
в автономном, синхронном и промежуточном режимах из-за неиз-
бежного «захода» колебаний в нелинейные области характеристи-
ки для снижения значения ее действующей крутизны S(x) до
величины, обеспечивающей квазиконсервативность системы.
В томсоновских генераторах с термисторами ограничение ампли-
туды колебаний происходит за счет термистора, а значение кру-
тизны характеристики выбирается постоянным (So — const), т. е.
колебания в автономном, синхронном и промежуточном режимах
не выходят за пределы линейного участка характеристики систе-
мы и в таких системах колебания при выходе на стационарный
режим не обогащаются гармониками и комбинационными ком-
понентами.
В заключение еще раз следует подчеркнуть, что в рассмотрен-
ных системах при внешнем воздействии происходит гашение, по-
давление автоколебаний и сохранение (в полосе синхронизации)
только вынужденных колебаний. Поэтому общепринятый термин
«синхронизация» не отражает физических процессов, происходя-
щих в подобных автоколебательных системах с термисторами под
действием внешней силы.
224
ГЛ. 5. ЭЛЕМЕНТЫ ТЕОРИИ АВТОКОЛЕБАНИЙ
§ 5.7. Автоколебательные системы с запаздывающими силами
Здесь мы рассмотрим особенности поведения автоколебатель-
ных систем с запаздыванием сил, определяющих работу этих
систем. Ранее мы считали, что состояние автоколебательной си-
стемы в каждый данный момент мгновенно и однозначно опреде-
ляется действием сил на нее. В реальной системе действие сил
в каждый данный момент времени зависит не от мгновенного ее
состояния, а от всей предыстории последней. Уже в случае ак-
тивной инерционной нелинейности было установлено, что значе-
ние одного из параметров, например сопротивления термистора,
зависящее от температуры проводника, не является мгновенной
функцией проходящего через термистор тока.
Необходимость учета запаздывания сказывается и в электро-
нике СВЧ. Например, за счет конечного времени пролета элект-
ронов между электродами лампы мгновенные значения анодного
тока не являются мгновенной функцией значений напряжений
на управляющей сетке лампы. Пролетные эффекты искажают
форму анодного тока, когда период колебаний становится соиз-
меримым со временем пролета электронов в системе. Аналогич-
ные явления имеют место в системах с транзисторами. Большую
роль играет запаздывание в акустических системах из-за отно-
сительно небольшой скорости распространения звука в газооб-
разных, жидких и твердых средах.
В теории колебаний существует множество задач, в которых,
как мы видели, учитывать запаздывание не нужно. Но есть и
такие, в которых невозможно не учи-
тывать явления запаздывания, так как
оно приводит к качественно иным ре-
зультатам.
Схематически автоколебательная
система с запаздывающей обратной
связью отличается, как это видно из
рис. 5.34, от обычной автоколебатель-
ной системы наличием условного эле-
мента с запаздыванием At. Термин «за-
паздывающие силы» предполагает, что
Рис. 5.34. Блок-схема ав-
токолебаний системы с за-
паздыванием
в системе причина возникает в момент
t, а вызванное ею действие сил вследствие конечной скорости
передачи информации — спустя время At Математически учет
подобного идеального запаздывания осуществляется просто: вре-
мя t в выражении для силы заменяется временем t — At.
В качестве примера систем с запаздывающими силами рас-
смотрим автоколебательную систему томсоновского типа с поле-
вым транзистором, в цепи обратной связи которой включен эле-
мент с запаздыванием At (рис. 5.35). Такая схема также соот-
ветствует электронной лампе, работающей в СВЧ-диапазоне.
§ 5.7. СИСТЕМЫ С ЗАПАЗДЫВАЮЩИМИ СИЛАМИ
225
Рис. 5.35. Схема генератора с за-
паздывающей обратной связью
Если система генерирует колебания, близкие к гармоническим,
то фазу колебания at при наличии запаздывания необходимо
заменить на со (t — AZ) = at — coAZ = at — 0. Всякое запаздывание
aZ для гармонического процесса может быть записано в виде
некоторого фазового сдвига, поэтому вместо элемента AZ в схему
можно включить фазовращатель,
юеспечивающий соответствую-
щий фазовый сдвиг.
Уравнение движения для схе-
1Ы рис. 5.35 имеет вид
->-^- + ^Z + -^-J(Z — ic^dt = 0.
(5.7.1)
Зудем считать ток стока гст мгно-
венной функцией напряжения и
на затворе, а само напряжение и — функцией с запаздывающим
действием, т. е. ZCI = /(Мdi^t/dt), где Zai(Z)= i(Z —AZ). Тогда,
зводя, как обычно, обозначения х = Z/Zo, 26 = RJL, а»о = i/LC
z дифференцируя (5.7.1), получим
d“x . ос dx , 2 2 гст
—- + 26-JT- + а„х - - со0 -г-.
al ‘о
(5.7.2)
Для простоты положим, что Zct = /(w) представлена кусочно-ли-
нейной характеристикой, показанной на рис. 5.36. Тогда при
правой части уравнения (5.7.2) будет п>о, а при и<0
правая его часть равна нулю.
4 Далее, предполагая решение до-
статочно близким к гармониче-
скому, будем считать, что и изме-
-о няется по закону синуса:
__________________________ и — М -£ = В sin (at — 0),
ОТ dt
?ис. 5.36. Кусочно-линейная раз- т- е> %м = А sin(<oZ 0).
эывная аппроксимация характе- Решение будем искать в виде
ристики tCI =/(и) х = —A cos (at). Это с необходи-
мостью следует из зависимости
и ~ sin ( g>Z — в). Разлагая пра-
зую часть уравнения (5.7.2) (единичную функцию) в ряд Фурье
н ограничиваясь первой гармонической компонентой, получим
sin (at—0). Тогда, подставляя в уравнение движения (5.7.2)
значения х, х, х и первый член разложения единичной функции
226
ГЛ. 5. ЭЛЕМЕНТЫ ТЕОРИИ АВТОКОЛЕБАНИЙ
в ряд Фурье, находим
Л(о2 cos ((dZ ) + 2бЛ(о sin (coi) — Ли2 cos (to/) = (D® sin (wi — 6) =
= co* cos 0 sin (<oi)----(Do sin 0 cos (oii).
Отсюда, приравнивая члены с синусами и косинусами, получим
два соотношения
Л ((D2 — (Do) = —(D* sin0, (5.7.3)
26Л© = -^-й?со8 0. (5.7.4)
Из второго соотношения сразу получается выражение для ампли-
туды колебаний
(О2
Л =—2jcos0.
шлб
(5.7.5)
Для автоколебательных систем томсоновского типа можно счи-
тать, ЧТО (D « (Do, и поэтому
д с достаточной степенью точ-
ности мы вправе записать
Рис. 5.37. Графики зависимости ампли-
туды и частоты генерируемых колеба-
ний от запаздывания
Л«^-со8 0, (5.7.6)
лб ’ ' '
(D2 — (Dq « 2(Do ((D — (Do).
(5.7.7)
Тогда из (5.7.3) с учетом
(5.7.6) и (5.7.7) получается
ю = (Do — 6tg0. (5.7.8)
На рис. 5.37 приведены
графики зависимости ам-
плитуды колебаний Л и ге-
нерируемой частоты (D от запаздывания (фазового сдвига)
0. На этом рисунке видны различные области возбужде-
ния (они заштрихованы) для различных сдвигов фазы. Умень-
шение амплитуды автоколебаний до Л = 0 получается
при значениях 0„ = (2п+1)л/2, п = 1, 2, 3, ... Физически это
объясняется тем, что по мере ввода дополнительного фазового
сдвига ток стока становится не в фазе с током в колебательном
контуре. Из аналитического выражения для частоты генерируе-
мых колебаний и соответствующего графика видно, что © одно-
значно связана с фазовым сдвигом 0 (с точностью до 2л). При
изменении фазы 0 частота генерации (D сама несколько смеща-
§ 5.7. СИСТЕМЫ С ЗАПАЗДЫВАЮЩИМИ СИЛАМИ
227
ется (в соответствии с (5.7.8)) так, чтобы в пределах области
генерации сохранить необходимый баланс фаз 0 = (2n + l)n.
Одна из существенных особенностей данной автоколебательной
системы состоит в том, что при достаточно большом, т. е. опре-
деленном Д£(0), при котором выполняются условия возбуждения,
небольшое изменение рабочей частоты системы и = <о0 — 6 tg 0
может привести к смене области (или областей) возбуждения
системы, ибо 0 = (оД£. Следовательно, в такой системе возможна
целая серия рабочих частот, лежащих в полосе прозрачности
контура автоколебательной системы, для которых выполняются
условия самовозбуждения. Установлено, что на возбуждение
в такой автоколебательной системе колебаний с теми или иными
частотами решающую роль оказывают начальные условия. Если
начальные условия для одной из возможных частотных компо-
нент будут преимущественными, то эта компонента может до-
стигнуть стационарной амплитуды раньше других и подавить все
остальные колебания. При этом система как бы «запомнит» ту
частоту, которая соответствовала задаваемым начальным ус-
ловиям.
Рассмотрим применимость метода медленно меняющихся ам-
плитуд для анализа автоколебательных систем с запаздываю-
щей обратной связью. Для этого, как известно, необходимо, что-
бы дифференциальное уравнение, описывающее добротную коле-
бательную систему, можно было привести к виду
, х + х = ц{(х, х, то, хо), где ц « 1.
В правой его части стоит функция, зависящая не только от х
и х, но и от запаздывающих координат т9 и хв. Тогда решение
уравнения методом ММА можно проводить путем подстановок
х — и cos т 4- v sin т, х = — и sin т + v cos т,
т9 = Me cos (т — 0) + Не sin (т — 0), (5.7.9)
т9 = — и» sin(r — 0)+ Ре cos(x — 0).
Теперь необходимо определить, при каких условиях и«и а
и v « V». Естественно, что и и v отличаются от и» и и» на вели-
чину, на которую они изменяются за <оД£ = 0. Скорость измене-
ния и, равная й, имеет порядок ц и, значит Дп = (и — и6) имеет
порядок р.0. Поэтому если потребовать, чтобы ц0 < 1, то можно
считать, что и9 ® и и и» « V, и применение метода ММА к таким
системам значительно упрощается. Тем самым мы вправе допу-
стить, что за время запаздывания амплитуда изменяется доста-
точно мало. Тогда можно записать:
хв = и cos 0 cos т + и sin 0 sin т + v cos 0 sin т — v sin 0 cos т =
= (u cos 0 — v sin 0) cos т + (u sin 0 + v cos 0) sin t, (5.7.10)
x9 = — (u cos 0 — p sin 0)sin x + (u sin0 + v cos 0)cos t.
228
ГЛ. 5. ЭЛЕМЕНТЫ ТЕОРИИ АВТОКОЛЕБАНИЙ
Укороченные уравнения находят в данном случае по обычным
правилам метода ММА; имеем
2Л
и = — ц./(х, х, хе, хв) sin т dx,
2Л ° (5-7.11)
р = 2^" J И/ (я, ^е, ^е)cos т
о
Найдем этим методом условия самовозбуждения генератора
с запаздывающей обратной связью (см. рис. 5.35) при аппрокси-
мации вольт-амперной характеристики полиномом третьей степе-
ни iCT = i0 + аои + 7о^3, где и = М di&t/dt. Тогда уравнение (5.7.2)
при т = й( и 1 = 1 — ®о/®2 примет вид
х + х = — 2ftz + ахе + у^е-
Укороченные уравнения, пригодные для анализа этой системы
на линейном участке характеристики (без учета члена ответ-
ственного за ограничение амплитуды автоколебаний), запишутся
следующим образом:
• 1 1
u s= у (a cos 0 — 2$) и--у (а sin 0 + £) v = <р (u, v),
. ! ! (5.7.12)
v = -у (а sin 0 + £) и + -у (а cos 0 — 2ft) v = tf> (и, v).
Система укороченных уравнений (5.7.12) позволяет опреде-
лить условия устойчивости и неустойчивости состояния покоя
системы. Для этого, как известно, необходимо потребовать ра-
венства нулю детерминанта
5<р . 5<р
ди ди
dip dtf л
7^ dv ~~ Л
откуда получаем выражение для характеристического показателя
Х1>2 =----g- (2ft — a cos 0) ± i-s-(a sin0 + |). (5.7.13)
Состояние покоя системы неустойчиво (система возбудится) при
условии, что вещественная часть X положительна, т. е. Re X =
= — */2(2ft — a cos 0) > 0, откуда следует, что условием самовоз-
буждения системы является
a cos 0> 2ft, (5.7.14)
где а cos 0 — некоторая приведенная крутизна с учетом запазды-
вания, 2ft — приведенные потери в системе.
§ 5.7. СИСТЕМЫ С ЗАПАЗДЫВАЮЩИМИ СИЛАМИ
229
Рис. 5.38. Блок-схема ав-
токолебательной систе-
мы с запаздыванием без
колебательной цепи (без
накопительного эле-
мента)
Как видно, запаздывание в автоколебательных системах том-
соновского типа приводит к уменьшению коэффициента регене-
рации по сравнению со случаем без запаздывания, т. е. всегда
(a cos 0 — 20) < (а — 2$). Если для конкретной системы заданы
параметры а и 20, то допустимое запаздывание (фазовый
сдвиг 0), при котором еще можно возбудить колебания в системе,
определяется из условия 0 < arccos(2O/a).
Подход и методы анализа, использованные при рассмотрепии
томсоновского генератора с запаздывающей обратной связью,
справедливы и могут применяться для
любых узкополосных систем такого типа.
Теперь рассмотрим другой крайний
случай, когда в автоколебательной систе-
ме с запаздыванием вообще отсутствует
колебательный контур, т. е. она являет-
ся системой неосцилляторного типа с
очень широкой полосой пропускания
(рис. 5.38). Будем считать, что усилитель
имеет неограниченную полосу пропуска-
ния и принципиально нелинеен, т. е.
u2 = i|>(u1). Элемент задержки (запазды-
вания) AZ является идеальным в том
смысле, что п4 = xu3 (Z — AZ), где х — по-
стоянный коэффициент, не зависящий от спектрального состава
сигнала. Физически это означает, что дисперсия в цепи обратной
связи отсутствует. Заметим сразу, что используемые для создания
запаздывания отрезки коаксиальных линий и искусственные ли-
нии (фильтры) неизбежно обладают дисперсией, и поэтому по-
стоянство коэффициента х может быть обеспечено практически
только для ограниченно^ полосы частот.
Для идеализированной схемы, показанной на рис. 5.44, можно
записать следующие очевидные соотношения: и2 = ф(М1), = и2,
ut = xu3 (Z — AZ); тогда
= Ui — Ф [гл (Z — AZ)].
Таким образом, для анализа поставленной задачи необходимо
решать нелинейное уравнение вида z = q>(z) с учетом запаздыва-
ния в системе. Подобные функциональные преобразования в мате-
матике рассматриваются методом итераций*).
Если задана функция <р (z), то процессом итерации называется
следующий процесс: задается некоторое начальное значение z0,
которое позволяет найти <p(z0); затем <p(z0) = z считается новым
*) Метод итераций и другие методы рассмотрения процессов установ-
ления колебаний в колебательных и автоколебательных системах в лите-
ратуре иногда объединяются под общим названием метода точечных преоб-
разований.
230
ГЛ. 5. ЭЛЕМЕНТЫ ТЕОРИИ АВТОКОЛЕБАНИЙ
аргументом и подставляется вновь в функцию ф(г); при этом
получается функция ф[ф(г0)], которая позволяет тем же способом
получить <р{ф [<p(z0)]}, и т. д. В теории итерационного исчисления
показывается, что если неограниченно продолжать итерационный
процесс, то получится последовательность величин zt, z2, zs, ...
..., zm, после которых вся последовательность итерационных зна-
чений z будет повторяться вновь и вновь. Иными словами, эта
Рис. 5.39. Построение Лемерея
для уравнения с одним кор-
нем
последовательность соответствует не-
которому предельному циклу. Если
в ней содержится т повторяющихся
значений z, т. е. zt, z2, ..., zm, то
эти значения по определению явля-
ются итерационными корнями индек-
са т.
Очень наглядно итерационный
процесс можно представить графи-
чески по методу Лемерея (рис. 5.39).
Если по оси абсцисс откладывать z,
а по оси ординат г/ = ф(г) и прове-
сти прямую у = z, то процесс на-
хождения итерационных корней сво-
Пусть задано значение
дится к следующему.
ф(г), например, в точке z0 = 0. Про-
ведем горизонтальную прямую через точку <p(z0) до пересечения
с прямой у = z. Из этой точки проведем вертикальную прямую
до пересечения с <р (z) — при этом получим
продолжение процесса даст <р{<р [<р (z0)]}
и т. д. Этот процесс приведет к неко-
торому значению z = zt — единственному
корню итерационного уравнения индекса
1 для данной системы. Устойчивость кор-
ня очевидна: где бы мы ни выбрали на-
чальное значение z0, мы всегда придем
в точку Zb Критерий устойчивости корня
соответствует
1ф' (zf) 1 < 1.
Если взять более крутую кривую <p(z)
Ф [ф (zo) ]• Дальнейшее
Рис. 5.40. Построение
Лемерея для уравнения
(рис. 5.40) и провести методом Лемерея с двумя корнями
итерационный процесс, то получится ста-
ционарный предельный итерационный цикл. При этом, как видно,
получаются два устойчивых значения функции ф(г), т. е корни
индекса 2 (z, и z2). Если бы функция ф(г) имела более сложный
вид, то итерационным способом можно было бы получить более
сложный стационарный цикл с корнями индекса т.
Система с идеальным усилителем и идеальной линией задерж-
ки математически адекватна итерационной задаче. В такой зада-
§ 5.7. СИСТЕМЫ С ЗАПАЗДЫВАЮЩИМИ СИЛАМИ
231
щ в зависимости от вида нелинейной функции можно найти
набор напряжений и2, ..., ип, набор корней, соответствующих
шределенному периоду колебаний.
Если считать, что для схемы рис. 5.38 выполнено условие
амовозбуждения, а нелинейная функция <p(z) имеет вид, изобра-
кенный на рис. 5.40, то в такой автоколебательной системе
периодически чередуются напряжения и4 и иг, соответствующие
двум копиям итерационной задачи zl и z2. Это означает, что
?ис. 5.41. Последовательное прохождение начальных импульсов через си-
стему с усилением и задержкой
•игнал проходит по системе дважды: первое значение соответству-
ет началу прохождения сигнала через усилитель, второе — окон-
чанию прохождения хвоста сигнала через систему задержки и
•нова через усилитель. Поэтому период итерации соответствует
гдвоенному времени задержки Т = 2&t. Таким образом, рас-
сматриваемая система должна находиться либо в одном (uj,
либо в другом (н2) состояниях, т. е. колебания в системе должны
эыть подобны последовательности прямоугольных импульсов.
Если задать системе (см. рис. 5.38) начальные толчки, то
ши без изменения своего спектрального состава должны уси-
литься (рис. 5.41). Со временем эти импульсы из-за нелиней-
ности усилителя ограничатся и система войдет в стационарный
лежим, повторяя периодичность начальных импульсов исходно-
-о (начального) режима. Такая последовательность импульсов
должна получаться в случае идеальной системы. В реальных
системах сохраняется только общий период колебаний, завися-
щий от времени задержки, но форма начальных импульсов пре-
терпевает существенные изменения по мере циркуляции в авто-
колебательной системе с запаздывающей обратной связью.
Дело в том, что даже при однократном прохождении сигнала
“'ерез реальную систему с задержкой последняя вносит из-за
неизбежной дисперсии (т. е. зависимости времени запаздывания
•армонических компонент сигнала от частоты) некие (пусть даже
небольшие) искажения формы сигнала, которые вследствие мно-
гократного прохождения через усилитель и линию задержки
232
ГЛ. 5. ЭЛЕМЕНТЫ ТЕОРИИ АВТОКОЛЕБАНИИ
приводят к установившемуся процессу, сильно отличающемуся пс
форме от исходного. Форма установившегося процесса будет при
этом определяться конкретными свойствами реальных линий за-
держки и усилителей.
Таким образом, рассмотрение процессов в автоколебательных
системах с запаздыванием с использованием аппарата метода
итераций позволяет объяснить только периодичность и условия
возбуждения колебаний в системах с запаздыванием. Уже из ка-
чественного анализа поведения реальных систем можно сделать
вывод о невозможности создания с помощью таких систем ди-
намической системы памяти, которая была бы способна запо-
минать не только время воздействия сигнала, но и его сложную
форму.
Для анализа автоколебательных систем неосцилляторного ти-
па с запаздывающей обратной связью можно применить метод
переходных характеристик. Этот метод основан на использовании
функции отклика ц(£), физический смысл которой заключается
в том, что если на вход линейной системы подать единичный
скачок напряжения, то па ее выходе появится отклик т](£).
Функция отклика, представляющая реальное значение выходно-
го напряжения, позволяет найти переходный процесс и напря-
жение на выходе четырехполюсника с помощью интегрального
соотношения Дюамеля
t
«вых (0 - 4 [и™ - S) n (9 <%>, (5.7.15)
С**’ 1/
О
где £ — переменная интегрирования.
Применяя этот стандартный прием для расчета автоколеба-
тельной системы неосцилляторного типа с запаздывающей об-
ратной связью (см. рис. 5.38), можно записать
t
“1 (о - “о=4 Jф ®(5-7-16)
о
где Ф — функция потерь и других параметров, ut — напряжение
на входе усилителя, и0 — начальное значение напряжения. По-
скольку функцию отклика можно интерпретировать как введение
некоторой задержки, то мы имеем ситуацию, сходную с той, ко-
торая получается при применении метода итераций. Действи-
тельно, в системе без дисперсии функция отклика представляет
«чистый» сдвиг во времени, т. е. ц (£) = х (£ — Ai). В этом слу-
чае решение интегрального уравнения Дюамеля для системы без
дисперсии имеет вид
w1(i) = ®i[ui(f —Ai)], (5.7.17)
т. е. получается изложенная выше итерационная задача.
§ 5.7. СИСТЕМЫ С ЗАПАЗДЫВАЮЩИМИ СИЛАМИ
233
Итак, задача о движении в автоколебательной системе с за-
паздыванием сводится к исследованию интегрального уравнения,
аналитическое решение которого представляет большие трудно-
сти; однако оно может быть решено численными методами с по-
мощью ЭВМ.
Аналитическое решение задачи возможно лишь для началь-
ной фазы процесса, когда характеристику усилителя можно счи-
тать линейной Ф(и) = ки и не нужно рассматривать задачу о ста-
ционарном решении. Переходную характеристику удается рас-
считать только для искусственной линии (цепочки) без потерь
и для коаксиального кабеля без потерь и с потерями.
В результате исследования удалось показать, что решение
задачи о начальном этапе автоколебаний в рассматриваемой си-
стеме имеет вид
ОО
«1 (о = 2 fam (О COS (co^f) + bm (t) sin (<iW)L (5.7.18)
m=l
где справа стоит не ряд Фурье, а сумма гармонических компо-
нент напряжения, в общем случае с несоизмеримыми неэкви-
дистантными частотами. Здесь и bm(t) — экспоненциальные
функции времени; они возрастают, если
коэффициент усиления усилителя к > 1
й достаточен для компенсации потерь в
цепи обратной связи, или если эти поте-
ри отсутствуют.
Рассмотрим приближенно, как будет
развиваться процесс колебаний в таких
Системах. Известно, что в автоколеба-
тельной системе с определенной фазоча-
стотной характеристикой будут нарастать
амплитуды тех колебаний, для которых
выполняются условия баланса фаз в сис-
теме. Если принять, что усилитель изме-
няет фазу колебаний на л, то удовлетво-
ряют условию фазового баланса компо-
ненты, у которых результирующий сдвиг
фаз равен 0 = (2п + 1)л. На рис. 5.42
Рис. 5.42. График зави-
симости фазы от часто-
ты (дисперсионная кри-
вая) и определение ге-
нерируемых частот в
автоколебательной си-
стеме с дисперсией
приведена типичная дисперсионная кри-
вая, т. е. нелинейная фазо-частотная характеристика систе-
мы. В системе могут нарастать колебания с частотами «ц, а2,
и3 и т. д. Эти частоты, как мы видим, не эквидистантны. Если
бы в системе не было дисперсии, то график представлял бы
собой прямую А = 0/и. При наличии дисперсии следует ввести
в рассмотрение и оперировать с дифференциальным временем
задержки Am — dQ/da, значения которого для многих реальных
систем всегда лежат выше прямой А = 0/и.
16 В. В. Мигулин и др.
234
ГЛ. 5. ЭЛЕМЕНТЫ ТЕОРИИ АВТОКОЛЕБАНИЙ
В линейном приближении, т. е. для начальной фазы процесса
возбуждения автоколебаний в такой системе, можно рассчитать
зависимость между дифференциальным временем задержки и ско-
ростью нарастания амплитуд гармонических компонент, удовлет-
воряющих условию баланса фаз в системе.
Пусть коэффициент усиления к лишь ненамного превышает
единицу, т. е. (fc—1)<С1, тогда am(t) и bm(t) можно считать
медленно меняющимися величинами за период колебаний. Кроме
того, для линейного участка развития процесса каждая колеба-
тельная компонента т-то порядка не взаимодействует с другими
компонентами. Тогда, используя разложение в ряд Тейлора ко-
эффициентов при sin и cos в (5.7.18), можно записать
dam
ат (f) ~ ат &т) 4 Ami
(5.7.19)
dbm .
bm (0 = bm (t — Am) + Am>
где Am одинаково для величин am и bm, ибо обе они характе-
ризуют одну колебательную компоненту тп-го номера.
Теперь рассмотрим, как будет развиваться процесс автоколе-
баний з своей начальной фазе для произвольной т-& компонен-
ты в предположении о линейности усилителя (н2 = — кщ) и с
учетом различного дифференциального времени задержки Дт для
разных частотных компонент.
Выражение для тп-й компоненты на входе усилителя имеет
вид
= ат cos + bmsin((omi). (5.7.20)
Кроме того, из схемы, приведенной на рис. 5.38, следует ря;
очевидных соотношений:
KSm(0=W2m(0, 42m(t) = — klllm(t),
П-lm (£) Изт (Z Am) kuim {t Am) ==
= — k{am (t — Am) COS [o™ (t — Am) ] + bm (t — Am) sin [cdm (t — Am) ]}
(5.7.2Г
Приравнивая друг другу (5.7.20) и (5.7.21) и заменяя в по
следнем и bm(t — Am) на соответствующие выражени:
из (5.7.19), получаем
(Г ^ат 1
(0 cos bm (t) sin (comi) к (i) X
Г 1
X cos — л) 4“ I (0---------Am j sin л), (5.7.22
где, согласно необходимому балансу фаз, мы потребовали, чтоб.
§ 5.7. СИСТЕМЫ С ЗАПАЗДЫВАЮЩИМИ СИЛАМИ
23$
®тДтч=л или, в общем случае, ытДт = (2п + 1) л. Тогда, при-
равнивая коэффициенты при членах с синусами и косинусами,
находим
ат (0 — (0----Дт^, Ът (£) = к (t)--------— Дт
откуда следует, что
rfa„ 1 / 4 \ db„ if 4 \
= тг=гвНК <5-7-23)
Из этих выражений видно, что при к > 1 dam/dt > 0, dbm/dt >
> 0. Таким образом, между скоростью нарастания амплитуд ча-
стотных компонент и дифференциальным временем задержки
установлена связь
(0 — ®шо ехр .
. т
(5.7.24)
Ьт (0 = Ьто ехр
которая показывает, что чем меньше дифференциальное время
задержки Дт (более низкочастотная компонента), тем быстрее
увеличивается амплитуда этой компоненты.
Учет дисперсии в автоколебательной системе неосцилляторного
типа с запаздывающей обратной связью привел к двум принци-
пиальным результатам:
1) колебания, развивающиеся в такой системе при условии
линейности усилителя, образуют спектр колебаний неэквидистант-
ных частот;
2) амплитуды этих колебаний нарастают по экспонентам не-
равномерно: чем выше частота компоненты, тем медленнее уве-
личивается ее амплитуда.
Из эксперимента известно, что в автоколебательной системе
неосцилляторного типа с запаздывающей обратной связью в ста-
ционарном режиме генерируется одна или несколько самых низ-
кочастотных компонент. Рассмотрим кратко возможное качест-
венное объяснение этого явления.
В начальный период под влиянием различных флуктуацион-
ных процессов возбуждаются все возможные частотные компо-
ненты. Затем низкочастотные компоненты в силу ускоренного
развития опережают по амплитуде высокочастотные компоненты.
При дальнейшем росте амплитуд низкочастотных компонент они
первыми выходят за пределы линейного участка характеристики,
что вызывает уменьшение эффективной крутизны усилителя и,
как следствие, ухудшение условий для нарастания амплитуд
высокочастотных компонент. Это в конечном счете приводит к
16*
236
ГЛ. 5. ЭЛЕМЕНТЫ ТЕОРИИ АВТОКОЛЕБАНИЙ
«выживанию» только одной или нескольких самых низкочастот-
ных компонент. \
Однако процессы возбуждения в такой широкополосной си-
стеме могут существенно измениться, если создать в ней началь-
ные условия, обеспечивающие преимущественное нарастание от-
дельной, например, высокочастотной, колебательной компоненты.
Для этого достаточно в момент включения автоколебательной
системы подать на нее высокочастотный (близкий по частоте к
одной из возможных высокочастотных компонент системы) сиг-
нал с амплитудой, значительно превышающей уровень флуктуа-
ционных шумов в системе.
В этом случае мы искусственно создаем большие начальные
значения ат0 и Ьт0 высокочастотной компоненты (5.7.24), и, хо-
тя скорость ее роста меньше, чем у низкочастотной, она первой
выйдет за пределы линейного участка характеристики и может
снизить действующую крутизну усилителя до значения, не обе-
спечивающего необходимой степени регенерации других (в том
числе и низкочастотных) компонент. Опыт показал, что таким
путем можно заставить широкополосную автоколебательную си-
стему с задержкой генерировать (запоминать) колебания до, при-
мерно, пятнадцатой частотной компоненты.
§ 5.8. Хаотические колебания в динамических системах
До сих пор мы рассматривали примеры колебательных и ав-
токолебательных систем, имеющих строго детерминированные
решения на основании существования и единственности решений
задачи Коши для динамических систем. Под динамической си-
стемой понимают какой-либо физический объект, математическую
модель или процесс, состояние которых однозначно определено
совокупностью некоторых величин в начальный момент времени.
а с помощью заданного функционального оператора можно най-
ти состояние системы в любой наперед заданный момент вре-
мени.
Спрашивается, могут ли в таких системах существовать слу-
чайные, непредсказуемые (хаотические) движения? Если рас-
сматривать системы с очень большим числом степеней свободы
например газ, жидкость, то даже интуитивно представляете}
естественной непредсказуемость траектории движения микрообъе
ма в таких средах. Если же рассмотреть на фазовой плоскоси
характер движений в линейных и нелинейных колебательных 1
автоколебательных системах строго с одной степенью свободы
то, как было нами показано ранее, колебания в таких система:
лосят строго детерминированный характер.
Однако уже при рассмотрении движений в окрестностях осс
бой точки типа неустойчивый фокус и особой точки типа седл
(рис. 5.43) видно, что малая неопределенность & в задании не
§ 5.8. ХАОТИЧЕСКИЕ КОЛЕБАНИЯ В ДИНАМИЧЕСКИХ СИСТЕМАХ 237
сальных условий (разброс)' приводит в случае экспоненциальной
неустойчивости (рис. 5.43, а) к большому разбросу S2 фазовых
"оаекторий через конечное время kt, а в случае возмущения
епаратрисы — к неопределенности движения в ее окрестности. На
1то указывал еще Пуанкаре, когда писал, что «ничтожная при-
чина может вызвать в неустойчивых системах значительное
действие». Физическая сущность в неопределенности задания
?ис. 5.43. Влияние неопределенности (разброса) на характер фазовых тра-
екторий для разных колебательных систем
начальных условий или возмущений движений заключается в
наличии в реальных колебательных системах флуктуирующих
параметров.
Таким образом, для непредсказуемости необходима экспонен-
циальная неустойчивость или сложное движение в окрестности
•епаратрисы, однако для получения хаотических колебаний не-
юходима еще и возвращаемость фазовых траекторий, что реали-
ювать на фазовой плоскости нельзя, так как на ней фазовые
-оаектории не пересекаются. Поэтому минимальная размерность
V фазового пространства, в котором можно описать такой про-
тесе, равна N = 3, что соответствует колебательной системе
. полутора степенями свободы. Такая система может состоять из
совокупности двух систем: колебательной системы с одной полной
степенью свободы (LCЯ-система) и системы с одной вырожден-
ной степенью свободы (LR- или СЯ-система).
Геометрический объект в фазовом пространстве, к которому
тремятся все фазовые траектории системы и от которого они от-
-алкиваются, так как неустойчивы на нем, принято называть
т ранным аттрактором, в отличие от известных нам простых ат-
-оакторов (притягивающих и отталкивающих множеств, состоя-
ний равновесия).
В трехмерном фазовом пространстве «странное» поведение
"паекторий можно себе представить, например, * следующим обра-
зом: они разбегаются по спиралям на плоскости, а возвращаются
на нее после выхода в пространство (рис. 5.44). Так как пове-
238
ГЛ. 5. ЭЛЕМЕНТЫ ТЕОРИИ АВТОКОЛЕБАНИЙ
дение таких систем в сильной степени зависит от начальных
условий, то, несмотря на детерминированность описания, нет
возможности предсказать эволюцию системы. В этом случае не-
обходимо построение статистической теории динамических си-
стем со странным аттрактором.
Изучение свойств и особенностей хаотических колебаний в
динамических системах потребовало привлечения для их анализа
ряда самостоятельных дисциплин и
Рис. 5.44. Возможный характер движения
изображающей точки в фазовом простран-
стве с W = 3
методов, таких как теория
нелинейных колебаний,
теория динамических си-
стем, теория дифферен-
циальных уравнений, тео-
рия возмущения, теория
устойчивости и бифурка-
ций (бифуркация — каче-
ственное изменение дви-
жения), статистическая
теория. Хаос в динамиче-
ских системах — одна из
важных проблем нелиней-
ной теории колебаний,так
как многочисленные задачи в области метеорологии, биологии,
экономики, экологии, многих разделов физики, в том числе радио-
физики, описываются общими или сходными динамическими
уравнениями. Исследования в этом направлении проводятся с
помощью численных и натурных экспериментов.
Для изучения характера движений в конкретной колебатель-
ной системе с целью установления наличия или отсутствия
странного аттрактора в ней используется ряд методов.
Рис. 5.45. Изменение во времени фазовой переменной x(t) для генератора
с инерционной нелинейностью в режиме хаотических колебаний
QP Численное интегрирование исследуемого дифференциально-
го уравнения с исключением переходного процесса. В результате
мы можем получить картину изменения во времени одной или
нескольких фазовых переменных x(t), x(t) и т. д. На рис. 5.45
показана одна такая временная реализация для генератора с
§ 5.8. ХАОТИЧЕСКИЕ КОЛЕБАНИЯ В ДИНАМИЧЕСКИХ СИСТЕМАХ 239'
лнерционной нелинейностью, работающего в режиме странного
аттрактора.
2. Исследование фурье-спектра получающихся колебаний ли-
ю в натурном эксперименте с помощью спектр-апализатора, либо
з результате интегрирования уравнения с помощью ЭВМ по
пециальной программе «быстрое преобразование Фурье». При
эволюции колебаний в системе от периодических к хаотическим
дпи изменении одного или нескольких управляющих параметров,
'ис. 5.4G. Спектральный состав колебаний в параметрическом усилителе на
джозефсоновском переходе в режиме хаотических колебаний
запример амплитуды и (или) частоты внешнего воздействия,
коэффициента нелинейности, декремента затухания (инкремента
зарастания) и т. п., в спектре наблюдается сперва возрастание
/ровней гармоник, затем появление субгармоник (бифуркация
периода колебаний) и при хаосе образуется сплошной сцектр,
з котором выделяются некоторые характерные частоты системы.
Ча рис. 5.46 показан спектр хаотических колебаний в парамет-
зическом усилителе па джозефсоновском переходе, описываемом
уравнением
ф + —7= ф + sin ф = р cos (со/), (5.8.1)
У Р с
ще ф — джозефсоновская разность фаз, р и со — амплитуда и
частота СВЧ-поля, — параметр, равный внешней частоте, нор-
мированный к частоте плазмы.
3. Исследование корреляционных функций хаотических коле-
заний. При наличии сплошного спектра в силу теоремы Винера —
240
ГЛ. 5. ЭЛЕМЕНТЫ ТЕОРИИ АВТОКОЛЕБАНИЙ
Хинчина получается спадающий характер функций корреляций
для любой фазовой переменной х{(1). Прямой расчет функции
корреляции может быть осуществлен с помощью соотношения
fc (т) — <XiXi+z — m2>, (5.8.2)
где т — среднее значение переменной х{ (m = xt).
4. Одним из критериев стохастичности (хаотичности) явля-
ется положительность энтропии К динамической системы, кото-
рая характеризует среднюю скорость разбегания фазовых траек-
торий в странном аттракторе:
# = (5.8.3)
8-»0 t~>oo *
где 8 — неточность измерений, t — время наблюдения, М(г, t) —
максимальное число траекторий, расстояние между которыми
У
<5
О
—з
~3 О . 2 "х
о - ? ь
-3-
~3 О 2 х
Рис. 5.47. Эволюция двумерного отображения сдвига при увеличении ампли-
туды внешнего воздействия в случае неавтономного генератора Ван дер
Поля с нелинейной реактивностью
больше 8. Таким образом, если траектории устойчивы по Ляпу-
нову, т. е. близкие исходные изображающие точки не расходятся
далеко, то Х = 0.
Другим критерием стохастичности является ляпуновский ха-
рактеристический показатель 1, который также характеризует
§ 5.8. ХАОТИЧЕСКИЕ КОЛЕБАНИЯ В ДИНАМИЧЕСКИХ СИСТЕМАХ 241
среднюю скорость экспоненциального разбегания близких тра-
екторий:
X — lim y In | x(f) Ь (5.8.4)
f-»oo *
Положительность X означает разбегание фазовых траекторий,
а значение X — глубину хаоса.
5. Определение дисперсии D2 = (х — х)2 и построение гисто-
грамм по реализациям. При сечении странного аттрактора пло-
скостью, называемой плоскостью Пуанкаре, можно снизить раз-
мерность фазового пространства на единицу и получить на ней
картину эволюции колебаний, от периодических до хаотических
при изменений управляющего параметра (двумерное отображение
сдвига). На рис. 5.47 показана такая эволюция отображения
сдвига для неавтономного генератора Ван дер Поля с нелиней-
ной реактивностью, уравнение движения которого имеет вид
£— е(1 — х2)х + я + ух3 = pcos(<oi). (5.8.5)'
На рис. 5.47, а показаны периодические и квазипериодические
колебания (0<р<1,7), которые переходят затем (1,9<р<
<2,65) к семитактному циклу (рис. 5.47,6), который в свою
очередь разрушается (рис. 5.47,в),
хаотические колебания. При р = 5
в системе наблюдается развитый
хаос (рис. 5.47, г). Существуют и
некоторые другие методы исследо-
вания колебательных процессов в
странных аттракторах.
В настоящее время известно не-
сколько сценариев развития хаоса в
неавтономных колебательных и авто-
и при р>2,75 получаются
колебательных системах. Наиболее рис. 5.48. Пример одномерного
часто встречается и теоретически необратимого отображения
разработан сценарий перехода к хао-
су путем бифуркаций удвоения периода колебаний. В связи
с этим рассмотрим свойства одномерных отображений /(ж)
(рис. 5.48) вида
х„+1 = /(жп, С), (5.8.6)
(С — параметр), имеющих единственный максимум (минимум).
Такой выбор вида функции необходим для получения хаотиче-
ских колебаний, которые возникают из-за наличия хотя бы од-
ного экстремума /' (г) = 0.
Если провести процесс итераций графическим методом 'Леме-
рея, то, во-первых, легКо убедиться в том, что 'вне зависимости
от выбора начального значения ха решение сходится к точке хп,
которая является неподвижной устойчивой точкой отображения
'242
ГЛ. 5. ЭЛЕМЕНТЫ ТЕОРИИ АВТОКОЛЕБАНИЙ
(корнем) Жц = /(®ц). Во-вторых, из рис. 5.48 видно, что ото-
бражение необратимо, так как одному и тому же значению xt
соответствуют два начальных состояния ж0 и х0.
В случае одномерного отбражения с одним максимумом, когда
f(x) = 0, a f"(x)=£O, т. е. отображение локально квадратично,
Рис. 5.49. Возникновение процесса с удвоенным периодом колебаний в слу-
чае квадратичного отображения /2==/(/(х)): а — С >—1/2, б — С < —1/2,
в — двухоборотный (сплошная линия) и однооборотпый (штриховая ли-
ния) циклы
можно линейным преобразованием разложения Тейлора вблизи
экстремума получить квадратичное отображение в виде
Zn+1 =/(*п), где f(xn) = 2Схп + 2х„. (5.8.7}
Рис. 5.50. Иллюстрация к
Возникновению бифуркаций
удвоения периода при из-
менении параметра С для
квадратичного отображе-
ния
Если построить функцию отображения /2(^) = /(/(я)) при
различных значениях параметра С (рис. 5.49) и прямую /(ж) = х,
то при С > —1/2 оба пересечения этих
линий соответствуют неподвижным
точкам с основным периодом; при
С<—1/2 точка х10 становится неустой-
чивой, и одновременно с этим рождает-
ся пара неподвижных устойчивых то-
чек с удвоенным периодом, которые
удовлетворяют условиям
2;2+ = /(^-) = /2(Мс
1 = / (3-2+) ~ /г
Это и есть пример бифуркации удвое-
ния периода. На рис. 5.49, в показан
двухоборотный цикл С2, рожденный при
возмущении одпооборотного цикла Ci.
При дальнейшем уменьшении параметра С происходит сле-
дующая бифуркация удвоения периода и т. д. На рис. 5.50 изо-
бражены первые три бифуркации удвоения периода, в результате
которых рождается колебание с периодом, равным восьми. Инте-
§ 5.8. ХАОТИЧЕСКИЕ КОЛЕБАНИЯ В ДИНАМИЧЕСКИХ СИСТЕМАХ 243
ресно отметить, что при этом закон изменения параметра (закон
подобия) подчиняется универсальной постоянной Фейгепбаума>
6 = 4,6692 (для отображения с одним квадратичным максимумом)
и имеет вид
= где а==1>2’3’- (5-8-8)
Последовательность бифуркаций Ск сходится к предельному
значению — —0,781 (при численном моделировании С» ==
= —0,785). Однако в численных и натурных экспериментах уже
после двух-трех бифуркаций удвоения периода возникают хаоти-
ческие колебания. В некоторых системах наряду с удвоением
периода колебаний при бифуркациях рождаются также колеба-
ния с периодом 3, 5, 7, ..., механизм образования которых не-
сколько отличается от рассмотренного выше. Другим механизмом,
ответственным за появление сложного неупорядоченного движе-
ния, является перекрытие резонансов. Если на линейный осцил-
лятор действует внешняя сила р (t) с периодом 2л/й
х + <$х = р (t), (5.8.9)
то, как известно, решением однородного уравнения является
х0 =А cos(a>04) + 5sin((Oo4). (5.8.10)
Если внешнюю силу р(4) разложить в ряд Фурье:
а 00
У, [an cos (nQt) + Ьп sin(пй4)],
П=1
то, разлагая частное решение X в ряд Фурье, для n-го члена
получим
ап cos (пй/) -|- Ьп sin (пШ)
1,1 = _ n2Q2 ’ (5.8.11)
UJq 'fl йй
При о>о«п2й2 получаются резонансы с раскачкой колебаний.
Если же колебательная система нелинейна, то в однородном ре-
шении (5.8.10) присутствуют все гармоники, кратные основной
частоте соо. В этом случае резонансы имеют место всякий раз,
когда отношение соо/Ф является рациональным числом, т. е. по-
лучается всюду плотная система резонансов. Так как в нелиней-
ных системах собственная частота колебаний является функцией
ИХ амплитуды, а резонансные явления как раз изменяют ампли-
туду и, следовательно, частоту колебаний, то тем самым наруша-
ется выполнение условий резонансов. Следовательно, малые зна-
чения знаменателей, препятствующие сходимости классических
рядов в окрестности резонансов, естественно, отражают определен-
ные физические явления, которые вызывают локальные измене-
ния характера фазовых траекторий. >
244
ГЛ. 5. ЭЛЕМЕНТЫ ТЕОРИИ АВТОКОЛЕБАНИЙ
Ч Многочисленные исследования в области хаоса в динамиче-
ских системах направлены на изучение областей хаотических е
периодических (если они есть) колебаний в конкретных системах
в пространстве (плоскости) некоторых управляющих параметров
с целью определения режимов нормальной работы систем, а так
же на аналитическое изучение некоторых особенностей переходе
к хаосу с математическим моделированием с целью проверку
результатов на ЭВМ, на изучение характеристик хаотически..
колебаний и их зависимости от параметров системы с целью ис-
пользования таких систем в качестве генераторов шума.
В качестве примера генератора хаотических автоколебании
рассмотрим генератор глума КПР (по первым буквам фамилии
его авторов: Кияшко, Пиковский, Рабинович). Генератор
Рис. 5.51. Схема генератора хаотических автоколебаний (а) и вольт-ампег-
ная характеристика туннельного диода (б)
(рис. 5.51, а) представляет собой автоколебательную систему с
одной степенью свободы, в последовательную цепь которой вклю-
чен туннельный диод с параллельной ему емкостью Clt повышаю-
щий степень свободы системы до 1,5. Уравнения движения такой
автоколебательной системы имеют вид
х = у — 6z, у = — х + 2уу + az + pi = х — / (z), (5.8.12'
где
х l0 lj у /0[^в L + Л2 «
T==2VZ5(gL~'C7*)’ P = g7; —Р = 6^’ а = 1 + Р — 2у6.
Вольт-амперная характеристика туннельного диода /(z) аппрок-
симируется кусочно-линейной ZV-образпой штрихованной линией
показанной на рис. 5.57, б.
Если ц. < 1, то все движения в фазовом пространстве этой
системы складываются из медленных, которым соответствуют фа-
§ 5.8. ХАОТИЧЕСКИЕ КОЛЕБАНИЯ В ДИНАМИЧЕСКИХ СИСТЕМАХ 245
зовые траектории, лежащие на поверхности x = f(z) (на Плоско-
стях z = —1, х<Л и z = 1, х>— 1), и быстрых (вдоль прямых
х = const, у = const). Иными словами, при ц -+• 0 фазовое про-
странство системы (5.8.12) вырождается в две перекрывающиеся
в полосе —1<х<1 полуплоскости (рис. 5.52). Переход изобра-
жающей точки с одной из них на другую происходит на прямых
Рис. 5.52. Фазовое пространство системы, описываемое уравнениями (5.8.12)
х = 1 и х — —1. Как и требуется для странного аттрактора, в
системе имеются три состояния равновесия (одно в начале коор-
динат и два расположенных симметрично на поверхности мед-
ленных движений), причем все состояния являются неустойчи-
выми. Ввиду палйчия в системе экспоненциальной неустойчиво-
сти разброс в начальных условиях приводит как к перемещению
V
(
Рис. 5.53. Хаотические автоколебания в генераторе КПР
положений неустойчивых фокусов, так и к неопределенности в
фазе перехода с одной плоскости на другую и, следовательно,
к числу колебаний в цугах напряжений, которые генерируются
таким генератором (рис. 5.53). Действительно, две сколь угодно
близкие фазовые траектории около границы срыва с поверхно-
сти медленных движений ведут себя совершенно различно. Те
из них, которые расположены внутри траектории, касательной
к прямой 1x1 = ±1, останутся на поверхности медленных движе-
ний и совершат еще почти целый виток, а те, которые лежат
246
ГЛ. 5. ЭЛЕМЕНТЫ ТЕОРИИ АВТОКОЛЕБАНИЙ
снаружи этой касательной траектории, переходят в окрестность
симметричного неустойчивого равновесия.
Можно показать, что выдаваемые таким генератором в ди-
скретные моменты времени значения напряжений будут близки
к последовательности независимых случайных величин.
Ранее при изучении ряда задач о воздействии внешней силы
на нелинейные колебательные и автоколебательные системы
(§ 3.3—3.6, 4.5, 4.6, 5.6) мы считали, что в рассмотренных си-
стемах возможны лишь одночастотные или двухчастотные строго
периодические движения. Однако нетрудно заметить, что, во-пер-
вых, все эти системы описываются тремя независимыми пере-
менными (3-я координата — время) и, во-вторых, являются
нелинейными. Следовательно, в таких системах при определен-
ных условиях, налагаемых на амплитуду и частоту внешней
силы, декремент затухания (инкремент нарастания), коэффици-
ент нелинейности, можно ожидать появления хаотических коле-
баний.
Выше мы уже привели примеры некоторых таких систем: па-
раметрического усилителя на эффекте Джозефсона (5.8.1), гене-
ратора Ван дер Поля с внешним гармоническим воздействием
(5.8.5), в которых обнаружены как области периодических, так
и области хаотических колебаний.
Хаотические колебания обнаружены также в нелинейных ко-
лебательных системах, находящихся под действием гармоничен
ской возбуждающей силы, урав-
нения движения в которых в
безразмерных переменных име-
ют вид
х + 2&х + х + х3 = р cos (©0,
Рис. 5.54. Метод отображения дву-
мерного фазового пространства на
себя через период Т внешней силы
х + 2$х + х — х3 = р cos ((00,
(5.8.13)
х + 2$х — х + х3 = р cos (о)0.
Эти уравнения достаточно хоро-
шо описывают многие радиофи-
зические, оптические и механи-
ческие системы, такие, как
сегнетоэлектрические резонато-
ры и контуры с ферромагнети-
ками, взаимодействие связан-
ных зарядов с полем электро-
магнитной волны, обтекание
воздушным потоком тел с тупыми обводами (плохо обтекаемых)
и др. Уравнения (5.8.13) известны в литературе как уравне-
ния Дуффинга.
Для исследования колебательных систем, находящихся под
внешним периодическим (гармоническим) воздействием, в част-
§ 5.8. ХАОТИЧЕСКИЕ КОЛЕБАНИЯ В ДИНАМИЧЕСКИХ СИСТЕМАХ 247
гости систем, описываемых уравнениями (5.8.13), используется
тетод отображения фазового пространства на себя через период
внешней силы (стробоскопический метод), когда па секущей
плоскости отображаются две фазовые переменные х и х либо
>дна из них (рис. 5.54).
При строго периодическом с периодом Т изменении х от вре-
мени t положение точек пересечения секущих плоскостей с траек-
торией не меняется. При бифуркациях периода колебаний
/>
»е.
1 1 'А1-'-1 । 1 । ~i । । I ' I । I । I г г ' i ' i । i r > i । i । i ' г । f । i----
ы ot as as id u 1,4 i,» i.s гр гр гр гр г» зл ш
Рис. 5.55. Области с разным характером движений для системы, описывае-
мой уравнением Дуффинга вида
х + 2Ьх + х + xz = р cos (<t>f) (20 = 0,1)
положение точек пересечения меняется, но они повторяются соот-
зетственно через 2Т (бифуркация удвоения периода), через 371
рождение трехоборотного цикла), через 471 (умножение перио-
да в 4 раза) и т. д. При возникновении в системе хаотических
248
ГЛ. 5. ЭЛЕМЕНТЫ ТЕОРИИ АВТОКОЛЕБАНИЙ
колебаний положение точек пересечения фазовой траекторий
с секущими плоскостями становится непредсказуемым. Этот ме-
тод исследования характера движения используется при прове-
дении численных экспериментов по изучению эволюции перехода
периодических с основным периодом Т колебаний к хаотическим.
Весьма распространенным способом представления результа-
тов таких исследований является изображение на плоскости па-
раметров, например амплитуды р и частоты со внешней силы
областей, периодических с основным периодом (область нормаль-
ной работы), областей бифуркационных движений и областей
хаотических колебаний.
На рис. 5.55 в качестве примера показана такая плоскость
параметров с разными видами движений для уравнения Дуф-
финга вида х +2Фх + я + я3 = р cos(coi) (2$ = 0,1). Точками на
рисунке показаны области периодических с основным периодом
Т = 2л/со движений, цифрами обозначены области бифуркаций
умножения периода (цифры указывают на новый период коле-
баний), а крестиками изображены зоны с хаотическими колеба-
ниями. Обращает на себя впимапие сложная картина располо-
жения областей с разным характером движения, что, однако,
наблюдается практически во всех системах с хаосом. Из
рассмотрения рис. 5.55 видно также, что переход к хаотическим
колебаниям происходит через бифуркации умножения периода ко-
лебаний, что подтверждает, в частности, справедливость теории
возникновения хаотических колебаний через последовательность
бифуркаций умножения периода.
ГЛАВА 6
КОЛЕБАНИЯ В ЛИНЕЙНЫХ СИСТЕМАХ
С ДВУМЯ СТЕПЕНЯМИ СВОБОДЫ
§ 6.1. Собственные колебания системы
с двумя степенями свободы
Число степеней свободы определяется как минимальное число
независимых переменных, необходимое для описания движений
в системе. В механической системе его можно найти как мини-
мальное число точек, которые необходимо закрепить для того,
чтобы прекратить движение. Для электрической системы эквива-
лентом закрепления является разрыв цепи, если независимой
переменной служит ток, и замыкание цепи, если в качестве неза-
висимой переменной выбрано напряжение.
Необходимо четко представлять себе, что в этом определении
речь идет не о реальной системе, а об идеализированной модели
реальной системы. Практически любая реальная система обладает
бесконечным числом степеней свободы, если учесть все возможные
в ней движения. Например, грузик, подвешенный на пружине^
может рассматриваться как система с одной степенью свободы,,
если он совершает колебания только вдоль оси пружины. Но эта
же система обладает тремя степенями свободы, если учесть еще
и маятникообразные колебания груза в двух плоскостях. Если же
принять во внимание возможность колебаний, связанных с изги-
бом пружины, то число степеней свободы становится бесконечным.
А ведь можно еще учесть и упругие колебания самого груза, и
даже колебания молекул, из которых состоит груз.
Поэтому определение числа степеней свободы, которые должны
быть учтены в идеализированной системе, зависит от характера
движения реального объекта. Как правило, можно пренебречь
теми степенями свободы реальной системы, которым соответству-
ют частоты, сильно отличающиеся от частот рассматриваемых ко-
лебаний.
Правильный выбор идеализированной системы, пригодной для
теоретического исследования, т. е. достаточно простой и в то же
время сохраняющей основные черты, присущие исходному реаль-
ному объекту, представляет наибольшую трудность при любом
физическом исследовании. Главным критерием правильности вы-
бора идеализированной системы является опыт.
17 в. Б. Мигулин и др,
250 ГЛ- 6- ЛИНЕЙНАЯ СИСТЕМА С ДВУМЯ СТЕПЕНЯМИ СВОБОДЫ
Многие реальные механические и электрические устройства
могут рассматриваться как системы с двумя степенями свободы.
Например, связанные колебательные контуры, широко исполь-
зуемые в радиотехнике в качестве полосовых фильтров, в двух-
контурных параметрических усилителях и т. д.
Систему с двумя степенями свободы можно представить как
две отдельные системы с одной степенью свободы, связанны^
друг с другом. Связь между ними приводит к тому, что колеба-
ния в одной из них влияют на
Система с одной степенью сво-
боды, на которые можно раз-
бить сложную колебательную
систему, называются парциаль-
ными.
Существует общее правило
выделения парциальных систем.
колебания ,в другой и нао.борот.
Рис. 6.2. Различные варианты раз-
биения системы, показанной на
рис. 6.1, на парциальные системы
Рис. 6.1. Схема электриче-
ского колебательного кон-
тура с двумя степенями
свободы
Парциальная система, поведение которой описывается данной
обобщенной координатой, получается из полной системы, если по*
дожить равными нулю все остальные координаты. Частоты сво-
бодных колебаний отдельных парциальных систем называются
парциальными частотами полной системы.
Разбиение полной системы на парциальные неоднозначно,
поскольку независимые координаты могут быть выбраны различ-
ными способами. Так, например, в колебательном контуре, изо-
браженном на рис. 6.1, в качестве независимых координат можно
выбрать любую пару токов и i2; h и il или i2 и is, и тогда
парциальные системы будут иметь вид, представленный на
рис. 6.2. Соответственно изменяются и парциальные частоты.
Для независимых координат h и г2 они равны
1 1
V , = г .. V» = у
для 13 и it —
________________________1_____ _ 1
V1 /¥1МС1+С/ V2
§6.1. СОБСТВЕННЫЕ КОЛЕБАНИЯ
254
для г2 и i3 —
_______1______ = 1
V1 “ /W2/(ci + c2)’ 2 +
Рис. 6.3. Два связан-
ных маятника
Характер связи между парциальными системами также зависит
от выбора независимых переменных. На рис. 6.2, а связь индук-
тивная, 6.2, б — емкостная и 6.2, в — смешанная. В качестве не-
зависимых переменных в контуре, изображенном на рис. 6.1,
можно выбрать также напряжения на конденсаторах и>. и п2.
В этом случае парциальные системы получаются при коротком
замыкании конденсаторов Ct и С2. Соответ-
ствующие парциальные частоты равны
1 1
V, = —г.. , V, = г ~ —- •
Физически ясно, что движение в полной
системе при заданных начальных условиях
будет одним и тем же, но запись его в
различных координатах различна.
Проведем изучение свободных колебаний
в системе с двумя степенями свободы на
классическом примере двух маятников, связанных пружиной
и совершающих колебания в плоскости рисунка (рис. 6.3).
Если углы отклонения маятников от положения устойчивого
равновесия достаточно малы (siu<p ~<р, cos ф « 1 — ф2/2), то ки-
нетическая и потенциальная энергия системы_ равны
т = | (6.1.1)
V = 4 + 4 + 4 (ч’х— (6.1.2>
где к — жесткость пружины. Последний член в выражении для
потенциальной энергии представляет собой энергию сжатой
пружины.
Зная выражение для кинетической и потенциальной энергий,
запишем уравнения движения системы (уравнения Лагранжа)
d 6Т &V_
dt а' 1 ' Зф,
3= 1,2,
(6.1.3)
или
Ш1?1Ф1 + ш^^ф! — ко? (ф2 — Фх) = О,
ш2г|ф2 + m2Z2g4p2 + ко2 (ф2 — ф^^= 0.
(6.1.4)
(6.1.5)
Положив в (6.1.4) ф2 = 0, получим уравнение колебаний первой
парциальной системы с парциальной частотой vt, определяемой
17*
252
ГЛ. 6. ЛИНЕЙНАЯ СИСТЕМА С ДВУМЯ СТЕПЕНЯМИ СВОБОДЫ
соотношением
V? = £ +
(6.1.6)
Из (6.1.5) при <pi = 0 получим выражение для второй парциаль-
ной частоты v2:
2 g , ка2
v‘=r‘+^i-
к<? ко2
: связи ах = —-, а2 =—то
m!ll m2li
(6.1.7)
уравне-
ния колебаний принимают вид
Ф1 Ч-v?<Pi — ахФг = 0, фа+^ф2 —а2фх = 0.
(6.1.8)
Мы получили систему двух линейных дифференциальных уравне-
ний второго порядка. Ее решение будем искать в виде
ф, = A cos(o)i + тр), ф2 = В cos (at + if).
Подставляя (6.1.9) в (6.1.8), находим
— (Л4 + V14 — otjB = 0, —(о2В-f-v2S — а24 = 0. (6.1.10)
Эта система уравнений имеет нетривиальное решение только в
том случае, если ее детерминант равен нулю, т. е. если
v? — со? — а
1 2 1 _ о
п 2 — V*
- «2 V2 - ®
1 =0.
(6.1.9)
Отсюда получим уравнение для определения частоты <в
со4 — ю2 (va + v2) + v|v2 — ага2 = 0. (6.1.11)
Решение этого биквадратного уравнения дает две возможные ча-
стоты колебаний системы он и со2:
©! = 4 Н + V2 ~ ~ v^2 + 4а1а2]« (6.1.12)
= Т [V* + V* + У~ V2^ + 4aiaj- (6.1.13)
Частоты а>1 и ю2 не равны парциальным частотам v4 и v2 и назы-
ваются собственными или нормальными частотами системы. Нор-
мальные частоты системы не зависят от выбора координат. Они
определяются только свойствами системы.
Из уравнений (6.1.10) можно найти отношение амплитуд В/А.
На частоте оь оно равно
4 = V1g Ю1 = 2ЕГ (V1 — v2 + V(V1 — + 4а1аг) = Xi- (6.1.14)
Величина полностью определяется параметрами системы и не
§ 6.1. СОБСТВЕННЫЕ КОЛЕБАНИЯ
253
зависит от начальных условий. Она называется коэффициентом
распределения амплитуд на частоте ©j.
Таким образом, амплитуда колебаний одного из маятников на
частоте оь может быть произвольной (она определяется началь-
ными условиями). Амплитуда колебаний второго маятника па
той же частоте всегда находится в определенном отношении к ам-
плитуде колебаний первого маятника.
Найдем теперь х2 — коэффициент распределения амплитуд на
частоте ю2:
и2 = J ш \ [v? - - ]/ (v| — < + 4аха2]. (6.1.15)
2 1 1
Общее решение уравнений (6.1.8) запишется в виде
<p1=41cos(©it + ijj1) + 42cos(®2t + i|;2), (6 1
<Рг == XiAj COS (©it + ifi) + Хг42 COS (ffl2t + 4г) •
Постоянные At, Л2, 'фг определяются начальными условиями.
Соотношения (6.1.16) показывают, что в общем случае колебания
каждого маятника представляют собой сумму двух гармонических
колебаний с частотами ©i и ю2- Если частоты ©i и ю2 близки, то
суммарные колебания носят характер биений.
Специальным подбором начальных условий можно получить
чисто гармонические колебания системы па частоте ©i или ©2.
Если, например, в начальный момент времени отклонить маят-
ники так, чтобы отношение их амплитуд равнялось а скорости
были равны нулю, то система начнет колебаться с частотой ©4.
Если отношение начальных отклонений маятников равно х2,
то в системе возбудится колебание с частотой ©2.
Соотношения (6.1.16) можно рассматривать как формулы ли-
нейного преобразования координат <р2, <р2 в координаты а: и у,
где
х = At cos(©^ + ipi), i/ = A2Cos(ffl2t + ^i). (6.1.17)
Тогда очевидно, что каждая из новых координат х и у совер-
шает гармоническое колебание с частотой ©! (или ©2) при лю-
бых начальных условиях. Координаты х и у называются нор-
мальными координатами системы. Координаты цд и <р2 связаны
с нормальными координатами х и у соотношениями
<ft = x + y, <р2 = Xi# + х2у. (6.1.18)
Нетрудно показать в общем виде, что для любой системы с
двумя степенями свободы с помощью соответствующего линей-
ного преобразования можно перейти к нормальным координатам,
254 ГЛ. 6- ЛИНЕЙНАЯ СИСТЕМА С ДВУМЯ СТЕПЕНЯМИ СВОБОДЫ
причем уравнения колебаний в этих координатах имеют вид
х + Орг = 0, у + <$1у — 0.
(6.1.19)
Особенностью уравнений движения, записанных в нормальных
координатах, является отсутствие членов, описывающих связи
между системами. Соответственно в выражениях для потен-
циальной и кинетической энергий, записанных в нормальных ко-
ординатах, отсутствуют члены с произведениями координат.
Поскольку каждая из нормальных координат совершает гар-
моническое движение с одной из собственных частот, последние
часто называют нормальными ча-
стотами системы. .
Рассмотрим зависимость нор-
мальных частот системы от соот-
ношения парциальных частот ма-
ятников. Для определенности бу-
дем считать, что изменяется толь-
ко одна из парциальных ча-
стот, например v2. С помощью
соотношений (6.1.12) и (6.1.13)
можно построить график зависи-
мости квадратов собственных ча-
стот системы от (рис. 6.4),
Рис. 6.4. График Вина
называемый графиком Вина. Как мы видим, при любом v2 пар-
циальные частоты лежат между собственными частотами. Это
свойство является общим для любых консервативных систем с
двумя степенями свободы.
Проанализируем более подробно предельные случаи сильно
различающихся парциальных частот v2<CVi, v2^vj и равных
парциальных частот v? = v2.
При v2<C vj частоты собственных колебаний равны
(6.1.20)
Поскольку обычно а1а2 частота со, близка к v2, а часто-
та ы2 — к Vi. При v2 vi нормальные частоты равны
,.2 _ ч-2 а1а2 ,,2 2 , а1а2 /д Л
-----Г. (Ь.1.21)
V2 V2
В случае связанных маятников вариацию v2 при постоянной
частоте vt можно производить, изменением длины второго маят-
ника. Одновременно происходит изменение коэффициента связи
а2. Предельный случай v2 0 соответствует увеличению 12 и
уменьшению а2. При 12 °°, вц -* 0, со2 -► vv Другой предельный
случай v2 оо имеет место при уменьшении lz. Можно показать,
§ 6.1. СОБСТВЕННЫЕ КОЛЕБАНИЯ
255
что при Z2~>0 co!~>Vi— 04, a v2 + о^. Если парциальные ча-
стоты маятников равны, то собственные частоты имеют вид
oil = v2— ]/ла1а2, ы2 = v2 + /ад. (6.1.22)
При равенстве масс маятников соотношения (6.1.22) упроща-
ются: !
,.2 S ..2 S । 2ка .п 4 Qo,
®1 — у, ®2 — -г Ч-----у. (0.1.2а)
1 1 тг
Рис. 6.5. Зависимость коэффи-
циентов распределения от пар-
циальных частот
Таким образом, при сильно различающихся парциальных ча-
стотах нормальные частоты близки к парциальным. По мере сбли-
жения парциальных частот нормальные частоты отходят от пар-
циальных. Наибольшее отличие ю от v наблюдается вблизи ра-
венства парциальных частот.
Проследим теперь за поведением коэффициентов распределе-
ния Xi и х2 при изменении парциальной частоты v2. Так как
всегда больше сщ и меньше <п2, то
из соотношений (6.1.14) и (6.1.15)
следует, что xt всегда больше нуля,
а х2 всегда меньше нуля. Поэтому
колебания маятников на частоте ок
всегда происходят в фазе (синфаз-
ны), а колебания на частоте оь все-
гда противофазпы. На основании со-
отношений (6.1.14) и (6.1.15) па
рис. 6.5 построена зависимость коэф-
фициентов распределения амплитуд
но координатам и х2 от v2 для
случая т1 — т2. Коэффициент рас-
пределения Xi, соответствующий син-
фазным колебаниям, при v2 < Vt при-
мерно равен Vi/a15 т. е. много боль-
ше единицы. По мере увеличения
v2 коэффициент xt уменьшается, и при v2 > v( Xj ~ a2/v2, т. e.
значительно меньше единицы. Будем считать, что изменение v2
связано только с изменением длины второго маятника. Тогда при
v, > v2 длина второго маятника 12 значительно больше длины
первого lt, а при Vi < v2 длина lt много больше 12. В этом случае
амплитуда синфазных гармонических кплойяний длинного маят-
ника. как 11111ИП и? рдо._ ft ПРПГГТ1 бллкито ямллитудм КОЛйбя-
НТайкороткого. Это связано с тем, что собственная частота син-
фазйых колебаний со, меньше чайоты противофазных колебаний
со2. Поэтому энергия синфазных колебаний в основном сосредо-
точена в низкочастотной парциальной системе.' Наоборот, энер-
гия противофазных колебаний сосредоточена в высокочастотной
парциальной системе, т. е. на частоте ы2 более короткий маятник
256 ГЛ. 6- ЛИНЕЙНАЯ СИСТЕМА С ДВУМЯ СТЕПЕНЯМИ СВОБОДЫ
колеблется с большей амплитудой. В соответствии с этим 1х2[
< 1 При Vi » V2 И |х2| > 1 При V2 > Vi.
При равенстве парциальных частот (vi = v2) коэффициенты
распределения оказываются равными по абсолютной величине
х2 = — хх.
(6.1.24}
Если маятники идентичны (Ц = 12, = тп2), то коэффициенты
распределения равны по модулю единице. Это означает равенство
амплитуд колебаний обоих маятников на обеих собственных ча-
стотах. При неидентичности систем (m-j. ¥= тп2) амплитуды коле-
баний различны даже при одинаковых парциальных частотах.
Однако энергии при равенстве парциальных частот распределены
по координатам равномерно.
§ 6.2. Связь и связанность
Коэффициент распределения х( характеризует относительную
амплитуду колебания второго маятника с частотой ©t. Поэтому
условие «1 показывает, что основная часть энергии колебания
с частотой ©1 сосредоточена в первом маятнике. Это означает, что
физическая связь между системами (их взаимодействие) мала.
Случаю < Г’всегда соответствует условие 1х2| > 1, т. е. коле-
бание частоты ю2 преобладает во второй координате. Слабая фи-
зическая связь между системами дает основание рассматривать
колебания в двух взаимодействующих системах как собственное
колебание одной из парциальных систем с большой амплитудой»
вынуждающей слабые колебания во второй системе. Л. И. Ман-
дельштамом введено понятие связанности системы, определяю-
щее степень физической связи между парциальными системами.
Связанностью системы называется величина I
а = .—-—
I Ч-val
(6.2.1>
Как видно из этого выражения, связанность определяется не
только коэффициентами связи, но и близостью значений пар-
циальных частот. Если связанность мала, то собственные часто-
ты близки к соответствующим парциальным частотам. Из фор-
мул (6.1.12) и (6.1.13) следует, что в случае слабой связанно-
сти ©2 « V], ©1 « V2 При Vi > V2 И ©2 « V2, ©1 » Vi При Vi < v2.
Вводя величину а в выражения для коэффициентов распреде-
ления (6.1.14) и (6.1.15), получим для v4>v2
х - 1 ^1 + п2 . . . /“71 ~
«1 у ai а >. I 1 ~ у g • (6.2.2а}
§ 6.2. СВЯЗЬ И СВЯЗАННОСТЬ
257
Для Vi < v2
X. ~j/|х,1-У^/П7+1- <e-2-26)
Таким образом, для каждого нормального колебания тот маят-
ник имеет большую амплитуду, у которого парциальная частота
близка к собственной частоте рассматриваемого колебания. При
равенстве парциальных частот связанность системы велика даже
при малых коэффициентах связи. В этом случае относительная
амплитуда каждого колебания одинакова в обеих координатах.
Можно оценить также взаимодействие парциальных систем
по степени передачи энергии от одного маятника к другому. Для
этого рассмотрим процесс колебаний двух связанных маятников
при начальных условиях t -- 0, <р4 = <р0, <Р± = 0, ср2 = 0, <р2 = 0.
Подставляя эти условия в (6.1.16), получим
Л1 + Л2 = <р0, —lh = 0.
Колебания маятников будут описываться следующими выра-
жениями:
<Pi = |'х |Ф-1 X *21 cos((01i) + cos(o2t)],
<б-2.з)
= [У|~-х [соя(ю10 — со.ч((.)20Ь
Колебания первого маятника можно записать в виде
<pi (t) = А (£) cos — 4 (i)], (6.2.4)
где
Ср2
А2 = ( | И~2 I + *1)2 № + Х1 + 2х1 I Х2 I C0S К®2 — “1)
tg tb (f) = -
+ 1*2 I cos [((Oj-wJ if
Если частоты coi и w2 не слишком далеки друг от друга, то A (t)
может рассматриваться как меняющаяся со временем амплитуда
колебания. Период изменения амплитуды равен 2л/(со2 — сщ).
Максимальное значение амплитуды равно <р0, минимальное —
Фо(Х1 — lz2l)/(lx2l + Xi). Колебания второго маятника представ-
ляют собой биения следующего вида:
2<р„х, |х„| (co— (o\t (m +<в„') г.
- ьжsin sin (6-2-5)
Если парциальные частоты маятников различаются сильно (ма-
258 ГЛ. 6- ЛИНЕЙНАЯ СИСТЕМА С ДВУМЯ СТЕПЕНЯМИ СВОБОДЫ
лая связанность), то один из коэффциентов распределения много
больше второго. Пусть, например, хи > |х2|, тогда минимальное
значение амплитуды первого маятника приближенно равно
фс(1 — 2|х21/%1), т. е. амплитуда первого маятника изменяется
Рис. 6.6. Колебания связанных маятников при слабой связанности
мало. Максимальная амплитуда второго маятника в этом случае
равна 2<р0|х2|, т. е. много меньше амплитуды первого маятника
(рис. 6.6.)
Рис. 6.7. Колебания связанных маятников при сильной связанности
Таким образом, при малой связанности обмен энергией между
парциальными системами незначителен’.
С приближением xt к |х2| минимальное значение A(t) умень-
шается, т. е. перекачка энергии от первого маятника ко второму
увеличивается.
§ 6.2. СВЯЗЬ И СВЯЗАННОСТЬ
259
При равенстве парциальных частот v1—v2 = v (т. е. |х21
= Zi = x) колебания маятников принимают вид
Ф1 = Фо cos
2----C0S—[Г
• X '2 ~ Wl) ‘ • (“1 +
ф2 = <рох Sin -2 - sin > * —
(6.2.6)
На рис. 6.7 представлены колебания маятников при Vi = v2 = v.
Оба маятника совершают биения, огибающая которых сдвинута
по времени на 774, т. е. периодически происходит перекачка
энергии от одного из маятников к другому. В полной перекачке
энергии и заключен физический смысл понятия сильной связан-
ное™ системы. Обмен энергией происходит независимо от коэф-
фициента связи между системами. Однако время т передачи
энергии от одного маятника к другому зависит от коэффициента
связи. Время т равно
л ___. nv
“2-“!
(6.2.7)
Следовательно, время перекачки энергии обратно пропорциональ-
но коэффициенту связи.
В любой реальной системе имеет место затухание с постоян-
ной времени т0. Наличие даже малого затухания может карди-
нально изменить картину колебаний в системе с малой связью
и большой связанностью, потому что колебания в первом маят-
нике успеют затухнуть быстрее, чем раскачается второй маятник.
Таким образом, сильная связанность в системе проявляется
только в том случае, если т < т0. При известном затухании в си-
стеме это условие накладывает ограничение на минимальную
связь, при которой происходит сильное взаимодействие двух
систем.
Наличие сил трения изменяет картину собственных колеба-
ний в системе с двумя степенями свободы. Уравнения Лагранжа
для системы с потерями имеют вид
d (дТ_ \ I 4- — == О
dt[dx.r dxi dxi
i = 1, 2,
где Ф — диссипативная функция. Если маятники совершают ко-
лебания с малыми амплитудами в среде, обладающей вязким тре-
нием, то диссипативная функция равна Ф = 261^1, б, — парциаль-
ные коэффициенты затухания. Уравнения колебаний маятников
в этом случае запишутся в виде
Ф1 + 2бхфх + Г1ф2 — ахф2 = О, ф2 + 2б2ф2 + т2ф2 — a?(fl = О,-
(6.2.8)
где 61, б2 — парциальные коэффициенты затухания, названные
так по аналогии со случаем систем с одной степенью свободы.
260
ГЛ. 6. ЛИНЕЙНАЯ СИСТЕМА С ДВУМЯ СТЕПЕНЯМИ СВОБОДЫ
Решая эти уравнения, получим
Фх = Аге 61< cos(®xf + ipx) + А2е 02< cos (®2< + 'Фгк
(6.2.9)
Ф2 =±= кгАге 01< cos + 4>х + Хх) + х2Л2е cos (®2f + Я’а + Ха)-
Колебание каждого маятника в этом случае представляет собой
сумму двух затухающих колебаний, причем затухание каждого
нормального колебания характеризуется определенным коэффи-
циентом затухания 9х или 02. Можно показать, что собственные
частоты Ю1 и ы2 и коэффициенты распределения Xj и х2 с точ-
ностью до членов порядка совпадают с собственными ча-
стотами и коэффициентами распределения в консервативной си-
стеме. Поэтому для систем с малыми потерями можно пользо-
ваться значениями ю и х, вычисленными по формулам (6.1.12)—
(6.1.15).
Особенностью колебаний в системе с затуханием является
сдвиг по фазе колебаний одной и той же частоты у разных маят-
ников. Эти сдвиги (%! и в (6.2.9)) зависят от параметров си-
стемы. Они пропорциональны коэффициентам затухания.
§ 6.3. Вынужденные колебания
в системах с двумя степенями свободы
Рассмотрим вынужденные колебания в системе из двух ин-
дуктивно связанных контуров, в один из которых включена внеш-
няя э. д. с. & (t) (рис. 6.8). Запишем уравнения колебаний для
этих контуров, пренебрегая вначале зату-
ханием:
f?t M z?2
2
।__87(У
Рис. 6.8. Схема связан-
ных контуров при внеш-
нем воздействии
^2= =
826У
(6.3.1)
ip,<# + L,-j*
ц, iz — токи в контурах, Lit L2, С,
di,
где
С2 — индуктивности и емкости контуров,
М — взаимная индуктивность контуров.
В линейной системе справедлив принцип суперпозиции, и поэто-
му достаточно рассмотреть воздействие на систему гармонической
внешней силы ^’(t) = ^’ocos(pt). Уравнения колебаний токов
принимают в этом случае вид
•• •• $ р •• ••
i'i + v? г’х — axi2 -------sin (pt), i2 + v2 г2 — a2 = 0, (6.3.2)
§ 6.3. ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ
261
где
— 7, с, ’
2 1 М М
^ = Т' а'2==Т~
Л a 1 А
(6.3.2а>
Колебания в системе будут состоять из собственных колебаний
е частотами и и2 и вынужденных колебаний с частотой внеш*
ней силы р.
Уравнение для собственных частот имеет вид
о4 (1 — аха2) — ©2 (v2 + v|) + vly% = 0.
Соответственно коэффициенты распределения Xi и х2 равны
х4 =i—a2a>i/(v| — и!), i = l, 2. Решение уравнений (6.3.2) для
вынужденных колебаний будем искать в виде
ii — Ilsm(pt), i2 = Z2 sin (pt).
Подставляя искомый вид решения в (6.3.2), получим уравнения
для определения амплитуд 7Н 1г.
(vi — рг)Л + аар272 = — (v| — Р2)Л + “2Р2Л = 0- (6.3.3>
Отсюда 72 = — a2p37j/(v2 — р3). Полученное отношение ампли-
туд 72 и 7, па частоте р о>, совпадает с Х| — коэффициентом
распределения амплитуд при собственном колебании с частотой
(Bi! на частоте р <о2 соотношение амплитуд равно х2. Таким:
образом, отношение амплитуд вынужденных колебаний в конту-
рах совпадает с отношением амплитуд при собственных колеба-
ниях (на соответствующей частоте). Подставляя найденное зна-
чение 72 в первое из уравнений (6.3.3), получим выражения для
амплитуд Ц и 72:
Г ____________(V2~P2)___________
1 ^[(v?-P2)(vJ-P2)-W1’ (6Л4>
J_____________g2gpP3_________
2
На рис. 6.9 приведены зависимости 7t и 72 от частоты внешней
силы р. В точках р = и р = <в2 амплитуды Ц и 72 обращаются
в бесконечность. Таким образом, в системе с двумя степенями
свобопы рр^ппчтаехтде. уоАдпцдпттР ямгглитутшт колебаний пвоисхо-
дит на обеих собственных частотах системы. При p<v2 г\ и
совершают противофазные колебания,.а при р> v2 — синфазные.
Точка р = v2 интересна тем, что в ней 7t обращается в нуль,
т. е. происходит успокоение колебаний в том контуре, в котором
действует внешняя сила. Во втором контуре колебания не обра-
262
ГЛ. 6. ЛИНЕЙНАЯ СИСТЕМА С ДВУМЯ СТЕПЕНЯМИ СВОБОДЫ
щаются в нуль ни при каком конечном р. Частота успокоения
в общем случае зависит от того, в какую из ветвей сложного
контура включена внешняя э. д. с. Она всегда равна парциаль-
ной частоте того контура, который получается при разрыве цепи
в точке включения э. д. с.
Выясним физическую причину отсутствия колебания в пер-
вом контуре при p = v2. Для этого рассчитаем э. д. с., наводимую
Рис. 6.9. Зависимости Ц и /2
для консервативной системы
с двумя степенями свободы от
частоты внешней силы
Рис. 6.10. Резонансные кривые дисси-
пативной системы с двумя степенями
свободы aja2 = 0, 1, vi/v2 = 0,87
в первом контуре па этой частоте колебаниями второго контура:
^21 = М = Mpl2 cos (pt) = — cos (v2i). (6.3.5)
Как мы видим, в точности компенсирует внешнюю э. д. с.
Поэтому вынужденные колебания в первом контуре на частоте
v2 не происходят.
На практике широко применяется демпфирование нежела-
тельных колебаний в контуре, на который действует внешняя
сила определенной частоты, с помощью дополнительного кон-
тура, настроенного на эту частоту. Так устроены фильтры-пробки
на промежуточную частоту в радиоприемниках, механические
успокоители колебаний валов и т. д.
Учет затухания в контурах при вынужденных колебаниях
приводит к тому, что амплитуды колебаний при резонансе ста-
новятся конечными. При р = v2 амплитуда колебаний в первом
контуре при учете затухания не обращается в нуль. Таким об-
разом, демпфирование в системе с потерями никогда не бывает
§ 6.3. ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ
263*
полным. Однако уменьшение амплитуды колебания на частоте v2
при малом затухании весьма значительно. На рис. 6.10 приведе-
на .резонансная кривая в первом контуре при наличии потерь
для двух значений декрементов затухания. Штриховая кривая
соответствует случаю небольших потерь: = fh = 0,01, где 0< =
= Rl/pLl, г = 1, 2. Сплошная кривая — значительным потерям:
^1 = ^2 = 0,1. В этом случае демпфирования практически не на-
блюдается.
Увеличение потерь приводит к уменьшению амплитуды коле-
баний вблизи резонанса и к уширению резонансной кривой. При
достаточной близости частот и, и ы2 потери могут превратить
резонансную кривую в одногорбую, полностью сгладив провал
между частотами.
Задачу о вынужденных колебаниях в диссипативной системе
с двумя степенями свободы удобно решать методом комплексных
амплитуд. Уравнения, связывающие комплексные амплитуды
токов It и 12 с параметрами контуров и амплитудой электродви-
жущей силы имеют вид
^)] + Wb,
-тУ] + '',м'
где 7?i, Т?2 — сопротивления контуров. Исключая из
нения 72, получим
<^о = Л Ъ+i P^i
1-^2 + j I PL2
(6.3.6}
1’
второго урав-
0 1 \ (7СкВ 3” /Хкв) 1
(6.3.7}
где
,+ 1Л= + (рЛ2-1/рС2)”
т И_____________р2^2 (nL
1 PC J R2 + (pL^i/pC2)AP 2
1 \
Таким образом, система из двух индуктивно связанных контуров
сведена к одиночному контуру, обладающему активным сопро-
тивлением 7?экв и реактивным Х9КВ. На контур действует э. д. с.
<Г0, в контуре течет ток амплитуды 7).
Условие резонанса в таком контуре сводится к равенству ну-
лю т. е.
Хкв = 0. (6.3.8}
Введем относительные расстройки = 1 — Vi/p2, Д2 == 1 ~
и парциальные декременты затухания = RJpL{ и Ъ2 = R2/pL2^
Тогда с учетом (6.3.2а) условие резонанса
Д/>2 + Д|Д2 — а1аЛ2 = 0. (6.3.9}
ГЛ. 6. ЛИНЕЙНАЯ СИСТЕМА С ДВУМЯ СТЕПЕНЯМИ СВОБОДЫ
В случае одинаковых парциальных частот контуров Vi = v2 ='
расстройки равны, и мы получаем
А (А2 + $2 — аха2) = О- (6.3.К
Этому уравнению удовлетворяют три значения А:
А2 = 0, Ап, щ = ± сс1а2 — й,| (6.3.1:
Отсюда находим три значения частоты внешней силы, при коте
рых Хэкв = 0:
Pi = v, Pi = г- -^ -===_., Pi = - ..- / =- (6.3.1!
М + ]/1-
Если затухание второго контура достаточно велико, то существу
от единственная резонансная частота р — V. Система с двум
степенями свободы ведет себя в этом случае как система с одно
степенью свободы. При аха2 > $2 имеются три значения чаете
ты р, при которых выполняется условие (6.3.8). На частотах 1
и р3 амплитуда тока достигав
максимальных значений, на Ч1
стоте Pi = v амплитуда миш
мальна. Этот минимум те
глубже, чем на большую вел:
чину коэффициент связи
Рис. 6.12. Схема связан-
ных контуров с внеш-
ними э. д. с. в обоих
Рис. 6.11. Резонансные кривые двух
связанных контуров с равными парци-
альными частотами при коэффициенте
связи, меньшем критического (J),
близком к критическому (2) и большем
критического (3)
контурах
превышает декремент затухания второго контура (рис. 6.11). К
эффициент связи, при котором аха2 = Of, называется критически
Амплитудно-частотная характеристика двух связанных ко
туров при критической связи имеет плоскую вершину и бол
крутые, чем одиночный контур, склоны. Поэтому такая систе!
используется в радиотехнике в качестве полосового фильтра.
Рассмотрим теперь особенности вынужденных колебаний
двухконтурной системе без затухания при одновременном де
ствии внешних э. д. с. в обоих контурах (рис. 6.12). Уравнен:
§ 6.3. ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ
265
колебаний для токов в таких контурах имеют вид
— аг ia = SjLy, i + v|ia — аа ir = 8(6.3.13)
Если внешние э. д. с. действуют на одной и той же частоте и
синфазны, т. е. =«5>i«cos(p£), ^i = S1,<i<^Qs{pt}f то амплитуды
токов It и Ц равны
1 L1L2 КЧ - Р8)М - Р3) ~ °WT ,
I
8 v4(vi-p2)(vl-p2)-aia2pT
Из соотношений (6.3.14) вытекают два интересных следствия.
Это, во-первых, принцип взаимности, который в нашем случае
гласит: амплитуда вынужденных колебаний во втором контуре
при включении некоторой э. д. с. в первый равна амплитуде ко-
лебаний в первом контуре, если ту же э. д. с. включить во второй
контур. Принцип взаимности справедлив вследствие линейности
системы. Одно из проявлений взаимности состоит в том — и это
широко используется на практике,— что диаграммы направлен-
ности антенны, работающей на передачу и прием, одинаковы.
Вторая особенность вынужденных колебаний в системе с двумя
Степенями свободы заключается в том, что при определенном
соотношении между амплитудами внешних о. д. с. и «Уго в си-
стеме может отсутствовать резонанс даже в том случае, когда р
равно со, или сог. Он отсутствует, если в выражениях (6.3 14)
при p — tOi или р = со2 одновременно со знаменателями обраща-
ются в нуль и числители.
Пусть, например, на частоте р = со± числитель Ц обращается
в нуль. Это возможно при следующем соотношении между
и <S)0:
&10 =(v2— Ml)/a2Ml- (6.3.15)
Подставляя (6.3.15) в выражение для 12 (6.3.14), получим, что
и числитель этого выражения также равен нулю. Отсюда сле-
дует, что при выполнении условия (6.3.15) числители и знаме-
натели (6.3.14) представляют собой бесконечно малые одинако-
вого порядка, и поэтому амплитуды колебаний в обоих контурах
остаются конечными, несмотря на наличие внешних сил резонанс-
ной частоты. Правая часть соотношения (6.3.15) равна — 1/х2,
где х, — коэффициент распределения амплитуд собственных ко-
лебаний на частоте соь Поэтому (6.3.15) можно записать в виде
А«’1о + В«’2() = О, (6.3.16)
где А и В — амплитуды собственных колебаний контуров на ча-
стоте Оь Условие (6.3.16) называется условием ортогональности
18 в. В. Мигулин и др.
266 гп- 6- ЛИНЕЙНАЯ СИСТЕМА С ДВУМЯ СТЕПЕНЯМИ СВОБОДЫ
внешней силы собственному колебанию с частотой «щ. Ортого-
нальность внешней силы собственному колебанию физически
означает, что работа внешней силы в первой системе равна и
противоположна по знаку работе силы во второй парциальной
системе. Так как полная работа внешней силы оказывается рав-
ной нулю, то и не происходит увеличения амплитуды колебаний
системы. Если, например, на два одинаковых связанных маятни-
ка действуют равные, но противофазные внешние силы с часто-
той ©!, соответствующей синфазным колебаниям системы, то
резонансного раскачивания колебаний в системе не произойдет.
Наоборот, две синфазные и равные внешние силы не смогут воз-
будить противофазных колебаний на частоте юг- Ортогональ-
ность внешней силы и собственного колебания можно использо-
вать для того, чтобы избежать нежелательного резонанса на
одной из нормальных частот.
ГЛАВА 7
ПАРАМЕТРИЧЕСКИЕ И АВТОКОЛЕБАТЕЛЬНЫЕ СИСТЕМЫ
С ДВУМЯ СТЕПЕНЯМИ СВОБОДЫ
§ 7.1. Параметрическое усиление
в двухконтурной системе
Использование колебательных систем с двумя степенями сво-
боды существенно улучшает характеристики параметрических
устройств. На практике используются двухконтурные парамет-
рические усилители, генераторы и делители частоты. Недостат-
ком одноконтурного параметрического усилителя в когерентном
режиме является необходимость выполнения определенных час-
тотных и фазовых соотношений между
сигналом накачки и усиливаемым сигна-
лом. При некогерентном режиме усиления
фазовые соотношения теряют смысл и
становятся принципиально неизбежными
искажения формы усиливаемого сигнала.
Это связано с тем, что в полосу пропуска-
Рис. 7.1. Принципиаль-
схема двухконтур-
параметрического
усилителя
ная контура усилителя попадают две пая
частоты: частота сигнала coi и разностная иого
частота ип — <в1( где сов— частота накач-
ки. Колебания в контуре представляют
собой биения этих двух близких частот. Если
ввести дополни-
тельный контур, настроенный на частоту == ®в — ®i, то при
достаточной добротности контуров в первом из них будут проис-
ходить гармонические колебания с частотой <ot, а в дополни-
тельном — гармонические колебания на частоте ®в — соь Такая
система из двух контуров, связанных переменной во времени
емкостью, представляет собой двухконтурный параметрический
усилитель (рис. 7.1).
В двухконтурном параметрическом усилителе фазовые соот-
ношения между сигналом и накачкой не играют роли, так как
частота и фаза колебаний во втором контуре автоматически уста-
навливаются такими, чтобы обеспечивалось максимальное усиле-
ние в системе. Автоматичность установления наиболее выгодных
частоты и фазы дополнительного колебания служит важнейшим
преимуществом двухконтурного параметрического усилителя.
Подобно одноконтурному параметрическому усилители! двух-
контурный усилитель с частотой накачки <вв, равной сумме
частот coj и (о2, является регенеративным, т. е. часть энергии
накачки преобразуется в колебательную энергию на частоте сиг-
18*
268 ГП- 7- ПАРАМЕТРИЧЕСКИЕ И АВТОКОЛЕБАТЕЛЬНЫЕ СИСТЕМЫ
нала. При этом часть анергии генератора накачки поступает во
второй контур.
Кроме параметрического усилителя с дополнительным конту-
ром, настроенным на частоту <ов — ан, можно создать усилитель
с дополнительным контуром, настроенным на частоту ив + ®(.
Качественно возможность усиления в такой системе можно по-
яснить следующими рассуждениями. Если на переменную во вре-
мени емкость C(t) = Со [1 + mcos((oat)] действует напряжение
сигнала ис = и0 cosfcojt + ip), то ток через емкость равен
i = = Соио [(1 + т cos (®hZ)) cos (их« -f- ф)] =
= — ^>х sin (©xt + ф) + — ®i)sin K®b “ ®i) * — Ф 1 +
1 1
+ m (й>н + ®x) sin [((Og + ©x) t + Ф1L
т. e. в спектре тока имеются компоненты с частотами ©t, соа +
Рис. 7.2. Схема двухконтурвого пара-
метрического усилителя с генератором
накачки и нелинейной емкостью
оя —©I. Амплитуды токов
всех компонент пропорцио-
нальны их частотам. Еслц
второй контур настроен на
частоту ©и + а>л, то при до-
статочной амплитуде накачки
энергия, выделяющаяся во
втором контуре, превосходит
энергию входного сигнала.
Система превращается в не-
регёнеративный параметри-
ческий усилитель. Усиление в этом случае сопровождается пре-
образованием частоты сигнала вверх.
В практических схемах двухконтурных параметрических уси-
лителей и генераторов параметрический механизм вложения
энергии обычно реализуется с помощью генератора накачки,
включённого последовательно с нелинейным реактивным элемен-
том (§ 4.6).
Принципиальная схема двухконтурного параметрическом
усилителя с генератором накачки и нелинейной емкостью изо-
бражена на рис. 7.2. Усилитель состоит из двух контуро!
(Li, Ci,Ri) и (Lt, С2, Иг), связанных нелинейной емкостью С
В схему включен источник накачки с напряжением ин и генера
тор сигнала, характеризуемый током г? и внутренним сопротив
лецием Rt. Полное активное сопротивление первого контура
R'ini
Ri + Ri'
Пусть частота усиливаемого сигнала равна (щ, а частота накач
§7.1. ПАРАМЕТРИЧЕСКОЕ УСИЛЕНИЕ В СИСТЕМЕ
269
ки — юя. Для работы усилителя необходимо, чтобы его первый
контур был настроен на частоту, близкую к частоте сигнала;
второй контур настраивается на частоту, близкую к <о2, которая
равна юя — <1>1 либо юа + ю4. Режим работы параметрического уси-
лителя в этих двух случаях оказывается различным. Обычно в
двухконтурных параметрических усилителях парциальные ча-
стоты контуров v1 и v2 далеки друг от друга, т. е. связанность
системы мала. Поэтому собственные частоты системы близки к
парциальным Ю1 « vt, ю2 « v2. Коэффициенты распределения да-
леки от единицы.
При достаточно высокой добротности контуров сопротивления
каждого контура для частот, далеких от его парциальной часто-
ты, практически равны нулю (3.1.7). Таким образом, контур
является активной нагрузкой лишь в небольшой области частот
вблизи своей парциальной частоты. В рассматриваемой нами схе-
ме в основном контуре активная мощность может выделяться
только на частоте ю,, а в дополнительном — на одной из частот
ю2 = юн ± Ю1. Токи остальных комбинационных частот могут не
приниматься во внимание. Таким образом, в изучаемой системе
следует рассматривать лишь
ю2 и юя. Для частот ю, й
колебаний:
токи и напряжения с частотами ю„
ю2 запишем следующие уравнения
(it (it [<0А
du2_dqc
°2 -Jt - ~dT
(7-1.1)
di (»2
Здесь nt — напряжения на первом и втором контурах, —
составляющая заряда на емкости С на частоте ю<.
Пусть зависимость заряда qc на нелинейной емкости от на-
пряжения на ней имеет вид ~
qc = Соис + аигс, (7Л.2)
где Со — постоянная составляющая емкости, а а — коэффициент
।к;линейности. Нацряжение ис, очевидно, равно
»с = »1 + »н —»г, (7.1.3)
где
Ui = Alcos(alt + ф1), и2 = А2 cos (ю2£ + ф2), иа = Лясоз(юя0.
Подставляя эти выражения в (7.1.2), получим для составляющих
заряда на емкости С на частотах Ю1 и ю2 соотношения
<7c|a>1 = GAcos((o1f + '$1) — аЛ2Лнсоз(ю^ ± ^2), „
(7.1.4)
qc |ша = — cos (M2f + M’a) + оЛаЛн cos (<d2t ± фх).
Здесь знак плюс соответствует случаю ю2 = юя + ю!, а знак ми-
нус — ю2 = юя — Юо
270 ГЛ. 7- ПАРАМЕТРИЧЕСКИЕ И АВТОКОЛЕБАТЕЛЬНЫЕ СИСТЕМЫ
Подставим полученные значения в уравнения колеба-
ний (7.1.1) и будем считать, что ic = /cos(co1t + ф):
1'1 *1
7—— — (С1 + С o') «>1 A sin (toLt + + -1 cosfcojf + фх) =
11 J Л1
= I cos (co^ + ф) — аЛг-Дне^ sin (co^ ± ф2), (7.1.5)
Г 1 1 . A->
j—-----(C2 + Co) ©2 A2 sin (co2f + ф2) + тг cos (Ogi + -ф2) =
L 2 2 J 2
= — аЛ1Лны2 sin(<jja? ± фх). (7.1.6)
Введем парциальные частоты vt и v2, добротности Qi и Q2 и
расстройки Tji и т)2 контуров усилителя:
V1 = 1/ + v2 = 1/ /Ь2(С2 + С0), Q, = (Cj + C0)t
Q2 = ы2И2(С2 + Co), П1 = (v? — ©1)/®?, n2 =(v« —©|)/©2.
При использовании этих обозначений (7.1.5) принимает вид
С?1Г|(Л 1 sin (соit + ф4) + Ai cos(coit + ф^ =
= IRi cos (co11 + ф) — аЛ2Т?1Л a sin (att + ф) .
Полученнсе соотношение должно выполняться в любой момент
времени, поэтому в нем следует приравнять в правой и левой
частях коэффициенты при cos (©4t + ifi) и sin (©(t + ф1). После
простых тригонометрических преобразований правой части
(7.1.5) получим
=—77?!sin(ф — •ф1)—*аы17?1Л24п008(1(3!Тф2), (7.1.7)
Л.! =77?1Соз(ф — •ф1) + а©17?1Л2Ли81п(ф1::Р1];2). (7.1.8)
Аналогичным образом из (7.1.6) имеем
СгЦгЛг = —асо2й2Л 1ЛЯ cos (ф2 =F ф,) , (7.1.9)
Л2 = а©2Т?2Л1Лнзш(ф2::Рф1). (7.1.10)
Из соотношений (7.1.9) и (7.1.10) можно получить
sin (ф2 4= ф.) = -------, соз(ф2 Ч2 фх) = — — ^2-Т)2-2—.
Сумма квадратов левых частей этих равенств дает единицу, по-
этому
Л2 = (7Л Л1
Подставляя в (7.1.7) и (7.1.8) выражения для зп^ф^фг) i
§7.1. ПАРАМЕТРИЧЕСКОЕ УСИЛЕНИЕ В СИСТЕМЕ
271
cos (ф1 , получим такие соотношения:
Сл А - “ IR1sin _
со,Л, А*
Aт 5^3*7 = IRl 008 ~
Возведем левые и правые части этих соотношений в квадрат и
сложим, а затем вместо А* подставим его выражение из (7.1.11).
В результате получается выражение для амплитуды колебаний
в первом контуре в зависимости от параметров усилителя:
Л2 Г8 02 (л , аШ1Ш2^1Л224Н ) । („ a2aia2RlR2A^2^2 \
А'~‘ Ц1 ±_7Т^Г/ + Гл 5+эд ) J
(7.1.12)
Полученное выражение показывает, что амплитуда параметриче-
ского усилителя с низкочастотной накачкой (®н = ®8 —вц) су-
щественно отличается от амплитуды усилителя с высокочастот-
ной иакачкой (а>я = ®1 + ®2). Рассмотрим теперь отдельно каж-
дый из этих типов усилителей.
Усилитель с низкочастотной накачкой. Максимальный сигнал
в таком усилителе достигается при точной настройке контуров
(^1 = ^2 = 0). В этом случае амплитуды колебаний в первом и
втором контурах равны
А ------------------- Аг----------(7.1.13)
На рис. 7.3 изображена зависимость Л4 и Аг от Лж при точной
настройке контуров усилителя. Из рисунка видно, что амплитуда
колебаний в первом контуре
монотонно уменьшается по ме-
ре увеличения амплитуды на-
качки. Таким образом, в этом
случае усиления сигнала в пер-
вом контуре не происходит. Од-
нако амплитуда колебаний в
дополнительном контуре, про-
порциональная амплитуде вход-
ного сигнала при Лн<Лн.Опт,
растет с ростом АИ. Поэтому в
Рис. 7.3. Зависимость амплитуд Ai и
Аг от амплитуды накачки Ав при
точной настройке контуров усили-
теля
системе возможно усиление с
н реобразованием частоты вверх, если в качестве выходного сиг-
нала использовать колебания во втором контуре усилителя. Та-
кой усилитель является нерегенеративным параметрическим уси-
лителем с преобразованием-частоты вверх. Определим коэффици-
ент его усиления по мощности. Под коэффициентом усиления по
272 ГЛ. 7- ПАРАМЕТРИЧЕСКИЕ И АВТОКОЛЕБАТЕЛЬНЫЕ СИСТЕМЫ
мощности будем понимать, отношение мощности на выходе уси-
лителя к мощности входного сигнала, выделяемой на согласован-
ной нагрузке. Поскольку генератор входного сигнала дает ток с
амплитудой I и имеет внутреннее сопротивление Rt, то на согла-
сованную нагрузку он отдает мощность
PC = W8. (7.1.14)
Мощность иа выходе усилителя (во втором контуре) равна
вых 2ffa=2(l + a2/?lflt4w1w2)s’
(7.1.15)
Максимального значения РВЫх.макс эта величина достигает при оп-
тимальной амплитуде напряжения накачки ^Н. ОПТ *= l/a3^;?^!®,.
В этом случае РВЫх.макс “P-Rifth/Soj. Поэтому коэффициент усиле-
ния по мощности усилителя запишется в виде РВЫх.1<акс/Рс“
= P1co2/Pj(o1. Если потери первого контура достаточно Налы И
то 7?i » Rt и максимальный коэффициент усиления не-
регенеративного двухконтурного параметрического усилителя ра-
вен отношению выходной частоты ы2 к частоте входного сигна-
ла (Оь
Р СО
вых» макс а
РС '“<»!*
(7.1.16)
Поясним физический смысл полученного соотношения. Посколь-
ку мощность входного сигнала на частоте равна Ри, то полное
число квантов энергии N, попадающих на вход усилителя, равно
N = PBX/7i(o1. Появление кванта частоты ы2 происходит в резуль-
тате сложения входного кванта и кванта накачки Й<в2 в
= ^со1 + Ао)н.
Таким образом, число кваптов на выходе системы NBbtI не
может превышать числа квантов на входе. В оптимальном слу-
чае Лгвх = АгВЫх, т. е.
Рвых/ == Рв»/О1.
Отсюда сразу получается соотношение (7.1.16).
Нерегенеративный усилитель — преобразователь частоты — об-
ладает стабильным усилением и низким уровнем шумов. Это свя-
зано с тем, что усиление по мощности происходит в данном слу-
чае без изменения числа квантов, а лишь в результате изменения
их частоты.
Из соотношения (7.1.12) можно определить полосу частот
нерегенеративного параметрического усилителя. "При определе-
нии полосы будем Считать, что частота накачки настроена на
разность частот контуров aH = vi-v1. В этом случае расстройки
41 и г|2 зависят только от разности частот еь — vc, щ«
» 2 (у,— fflt)/vi, ц2« 2(vi — й)1)/у2. Подставляя эти значения в
§ 7.1. ПАРАМЕТРИЧЕСКОЕ УСИЛЕНИЕ В СИСТЕМЕ
273
(7.1.12), определим полосу усиления нерегенеративного пара-
метрического усилителя при оптимальной накачке:
(И1 - vtf < 1/[(7?A - 7?А)а + 4ВД].
Наиболее широкая полоса достигается при RtCi = R2C2.
Усилитель с высокочастотной накачкой. Двухконтурный пара-
метрический усилитель, для которого справедливо соотношение
Юн = с01+со2, является регенеративным усилителем, т. е. систе-
мой, в которой под действием напряжения накачки в оба кон-
тура вносится отрицательное сопротивление, зависящее от напря-
жения накачки. Это напряжение определяет глубину модуляции
емкости, связывающей два контура. Из соотношений (7.1.11)
и (7.1.12) можно определить амплитуды колебаний в первом и
втором контурах при точной настройке усилителя (tji = = 0):
_ 7Я1ск>>3ЯаЛя
1 1 2
По мере увеличения Ав амплитуды колебаний в обоих контурах
увеличиваются. При -<41 кр ==» 1/а2<о1ы2Я]7?2 амплитуды колеба-
ний в обоих контурах нарастают до бесконечности, что свиде-
тельствует о равенстве вносимых параметрически отрицательных
сопротивлений активным потерям в контурах. При 4н>Лнкр
параметрический усилитель с высокочастотной накачкой самовоз-
буждается и превращается в параметрический генератор.
При Аа < Л„.кр амплитуды колебаний в первом и втором кон-
турах пропорциональны амплитуде входного сигнала I, поэтому
система может служить усилителем при отборе энергии как от
первого, так и от второго контура.
Мощность колебаний на выходе первого контура
Л? I2R,
; <7ЛЛ7)
мощность колебаний на выходе второго контура
Р — —
*вых 2 - 2Ла
/2Д^24Н
2(1-^Я1Яа4Ш1о>2р‘
(7.1.18)
Если выходной сигнал усилителя снимается с первого конту-
ра, то система усиливает сигнал без изменения его частоты. При
о тборе энергии на выходе второго контура система одновременно
< усилением производит преобразование частоты. В обоих слу-
чаях выходная мощность может быть сколь угодно большой, т. е.
коэффициент усиления такого параметрического усилителя, как
1 всякого регенеративного усилителя, не ограничен. Конечно,
аа практике значение коэффициента усиления регенеративного
274 ГЛ. 7- ПАРАМЕТРИЧЕСКИЕ И АВТОКОЛЕБАТЕЛЬНЫЕ СИСТЕМЫ
параметрического усилителя ограничено нестабильностью пара-
метров системй. При Лн, очень близком к Ац.^, система стано-
вится неустойчивой и небольшие уходы параметров приводят к
ее самовозбуждению.
Усиление в таком усилителе происходит в результате распада
кванта накачки на два кванта Л©н==Лм1 + Й©2. Этот распад
индуцируется входным сигналом, кванты с частотой ©i поступа-
ют во входной контур и регенерируют его. Кванты с частотой о»
возбуждают колебания во втором контуре. Так как мощность
накачки считается неограниченной, то количество квантов, по-
ступающих в контуры, может расти вплоть до достижения со-
стояния самовозбуждения системы.
Недостатком рассматриваемого усилителя, как и любого реге-
неративного усилителя, работающего вблизи точки самовозбуж-
дения системы, является его узкополосность. Действительно, вне-
сение в контур отрицательного сопротивления, компенсирующего
потери, приводит к увеличению добротности контура, что умень-
шает ширину полосы усиливаемых частот.
Для оценки полосы двухконтурного регенеративного парамет-
рического усилителя воспользуемся соотношением (7.1.12). По-
ложим для определенности, что ©н = v( + v2. Тогда «
® 2(vt —©J/vu ц2 « —2(vi — ©f)/v2. Соотношение (7.1.12) в этом
приближение принимает вид
A« = ^7?1[l + 4(v1-©1)27?iC®]
+ 2 (vx — ©х) I 7?1С1 + R2C2 —-
L \ Лнкр
1-~- + 4(у1-©1)2вдГ +
^якр
+ 8(г1-ю1)»я1с1я*с;
(7.1.19)
Коэффициент усиления двухконтурного регенеративного па-
раметрического усилителя существенно превышает единицу толь-
ко при Ав, близком к Лнкр. В этом_случае из (7.1.19) следует,
что амплитуда At уменьшается в У 2 раз по сравнению с резо-
нансной при расстройке
1®1 —*11 =
кр
4(V1 + W
(7.1.20)
Таким образом, полоса регенеративного параметрического усили-
теля тем уже, чем ближе Аа к Ан,кр. Рост коэффициента усиле-
ния регенеративного усилителя сопровождается сужением поло-
сы усиливаемых частот.
Важной характеристикой усилителя являются пределы линей-
ности его усиления, т. е. пределы изменения 7, внутри которых
выходной сигнал пропорционален входному. В проведенном намв
рассмотрении выходной сигнал всегда был пропорционален вход-
. § 7.2. ПАРАМЕТРИЧЕСКИЙ ДВУХКОНТУРНЫЙ ГЕНЕРАТОР
275
пому (см. (7.1.12), (7.1.15), (7.1.17)). Это связано с видом ха-
рактеристики нелинейного элемента (7.1.2). При больших ампли-
тудах входного сигнала необходимо учитывать следующие члены
разложения qc по ис, что и приводит к нелинейной зависимости
выходного сигнала от входного. Кроме того, мы считали, что
генератор накачки представляет собой источник с нулевым внут-
ренним сопротивлением, т. е. генератор неограниченной мощ-
ности. Это позволяло перекачивать любую энергию в контуры
с частотами (щ и ы2. При использовании реального генератора
накачки линейность усиления нарушается, когда мощности ко-
лебаний на частотах со, и со2 становятся сравнимыми с мощ-
ностью генератора накачки.
Основное достоинство параметрического усилителя заключа-
ется в низком уровне шумов. Малость шумов такого усилителя
обусловлена тем, что нелинейный элемент усилителя реактивен.
У ламповых, транзисторных и иных усилителей на нелинейном
активном элементе основную часть шумов вносит активный не-
линейный элемент. У параметрических же усилителей этот ис-
точник шума практически отсутствует. При этом наиболее слабы
шумы нерегенеративных усилителей, так как их усиление свя-
зано только с преобразованием частоты и не сопровождается
внесением отрицательного сопротивления в какие-либо контуры.
§ 7.2. Параметрический двухконтурный генератор
с некратными частотами
Регенеративный двухконтурный параметрический усилитель
при достаточной амплитуде накачки самовозбуждается и превра-
щается в параметрический генератор. Принципиальная схема
такого генератора дана на рис. 7.4. Для работы генератора необ-
ходимо, чтобы сумма парциаль-
ных частот контуров была близ-
ка к частоте накачки. В этом
случае в системе возбуждаются
колебания на частотах <»i «v,
п <i)2 ~ v2, причем
Рис. 7.4. Принципиальная схема
двухконтурного параметрического
генератора
«>14:ю» = Юв. (7.2.1)
Аналогично тому, как делалось
и предыдущем параграфе при
исследовании параметрического усилителя (см. (7.1.1)), запишем
уравнения колебаний параметрического генератора на частотах
uh и со2:
1 " I 1 “о ......
7“ и1 + + ^iui = —Чс I»1, иг + = Чс |а>а- (7.2.2)
(’вязь заряда с напряжением на нелинейной емкости выберем
276 ГЛ- 7- ПАРАМЕТРИЧЕСКИЕ и автоколебательные системы
в виде
фс== Соис + аис + Рис- (7.2.3)
Второй член в правой части (7.2.3) обеспечивает параметри-
ческое вложение энергии, а третий — нелинейность системы, не-
обходимую для ограничения амплитуды колебаний. Напряжение
на нелинейной емкости равно
ис = и, + и. — Пг,
где u, = X1cos(<Oit + ^l), u2 = 42cos((i)2t + i|?2), uB = 4Bcos(<aBt).
Считая амплитуды 4t, А2 й фазы -ф2, ф2 медленно меняющи-
мися величинами, получим следующие укороченные уравнения
(см. § 2.5):
а) Аг =* — б1А1 4- а^АлвШф,
б) Ф1 = — Д1р + аг^созф,
в) Л2 — — f)2A2 + а2А1Ан sin ф,
• А Л
г) ф2 == — Д2р + а2 -у-5 cos ф,
где 6i= l/2R{(Ci + C0) — коэффициент затухания колебаний в i-M
контуре,
di = a<Oj/2 (Ci + Со), = (Oj — Vj + Pi (24J + 2A2 + 4?)t
Д2₽ = ®2 4" Pa (24H + 24^ 4- 42),
Pi = 8(Ci+C0)’ ф = +
Величины Vi — Pj (24„ + 2A22 + 4?) и v2 — P2 (24^ + 24? + 4?)
можно рассматривать как парциальные частоты, смещенные аа
счет нелинейной емкости.
В случае стационарного режима работы генератора (4< = =
= 0) получим из уравнений (7.2.4а) и (7.2.4в) отношение ампли-
туд в контурах
Из уравнений (7.2.4) можно найти с1§ф и соотношение меж-
ду расстройками Д^ и Д2р:
сгяФ = ^₽ = ^-₽. (7.2.6)
, . . 1 2
Таким образом, фаза ф определяется .параметрами системы, фазы
же и ф2 в отдельности произвольны, но сумма их фиксирована,
т. е. 'ф1 + фл = ф.
S 7.2. Параметрический двухконтурный генератор
277
Воспользовавшись соотношениями (7.2.5) и (7.2.6) и равен-
ством ия = ©! + ©2, находим для частот генерации <ot и ©2:
со
2
б2 :
£1—_ (О 1 V1\ V261 Ьл2 4- a2 fi + ₽2М]
“н + —1 + б2----67+v L в + 1 v1 + ₽аЛ’
(7.2.7)
1 +
+ РА/Г
V2^1 ^2V1 । ^2^1 6гР2
^ + «2
Эти выражения показывают, что частоты генерации оц и ы2
остаются постоянными при медленных коррелированных флук-
туациях Avi и Ду2 парциальных частот Vt и v2, когда выполня-
ется условие — б2ДУ1 = 0. Это позво-
ляет получать стабильные частоты гене-
рации подбором параметров колебатель-
ных контуров. Другая отличительная осо-
бенность двухконтурного генератора — его
способность генерировать колебания со
стабильностью частоты большей, чем у ча-
стоты накачки. Из (7.2.7) видно, что при
64 < 62 нестабильность частоты со, значи-
тельно меньше нестабильности <оя, так
как Дсо,« 61Д<ви/62, а нестабильность ча-
Рис. 7.5. Зависимость ге-
иорируемых частот <0i и
<о2 от частоты накачки
<ои в полосе параметри-
ческой генерации
стоты со2 примерно равна Д®п.
Частоты генерации при определенном
соотношении параметров системы не за-
висят от амплитуды накачки и амплитуд
генерации. Из (7.2.7) следует условие их независимости вида
61^2 — --- 0.
(7.2.8)
Это условие означает, что cojfi = и2Я2. Соотношения (7.2.7) по-
казывают, что частоты со, и со2 линейно зависят от частоты на-
качки <вя в той области, где А2 не зависит от соя или зависит
от нее по линейному закону. Поэтому в большей части полосы
частот параметрической генерации со, и он линейно следуют за
изменением сов. На рис. 7.5 приведены типичные зависимости
о), и ы2 от <ов в полосе параметрической генерации.
Найдем теперь стационарные амплитуды параметрической
генерации. Для этого сложим попарно уравнения (7.2.4а) и
(7.2.4в), а также (7.2.46) и (7.2.4г):
(Л Л \
-Г + “я "Г I А 003 Ф»
Л1 Л2/ : ,
/А А \ (7.2.9)
S1 + 82 = (“1X + а2 т) Al sin ф.
278 гл- 7- ПАРАМЕТРИЧЕСКИЕ И АВТОКОЛЕБАТЕЛЬНЫЕ СИСТЕМЫ
Возводя левые и правые части (7.2.9) в квадрат и сложив их,
получим ' .
(А 1₽ + А2р)“ + (^1 + 62)2 — ^а1 + а2 ) ^2 •
Учитывая (7.2.5) и раскрывая выражения Д1₽ и Д2₽, получим
квадрат амплитуды стационарного колебания А[ :
“Л
Д2____________
1 ^П)+’М+2₽1)
— А — 2 (Рх 4- р2) -^н ±
±(6х4-6а) У^-1
(7.2.10)
где А = (ов — (v, 4- v2)—расстройка частоты накачки относитель-
но суммы собственных частот контуров.
Из (7.2.5) следует, что выражение для А* имеет аналогич-
ный вид. На рис. 7.6 приведена зависимость А‘1 от расстройки.
Рис. 7.6. Зависимость амплиту-
да двухконтурного параметри-
ческого генератора от рас-
стройки: крестиками показаны
неустойчивые состояния, кру-
жочками — устойчивые
Д для р > 0 и фиксированной ампли-.
туды накачки. Амплитудно-частот-
ная характеристика представляет со-
бой две прямые, наклоненные влево.
При р < 0 амплитудно-частотная ха-»
рактеристика наклонена вправо.
Для существования колебаний
необходимо, чтобы выполнялось еле-,
дующее неравенство:
61б2/а1а2 = А1,кр. (7.2.11
Условие (7.2.11) совпадает с приве-
денным в § 7.1 условием самовоз-
буждения параметрического усили-
теля с высокочастотной накачкой.
Однако даже при его выполнений
стационарная амплитуда генерации существует только при опре-
деленных расстройках
Л < (бх + б2) У — 1 — 2 (Рх + ра) А*.
В полосе расстроек
(бх 4- 62) У (А-)2 - 1 - 2 (Рх + Ра) > А >
> - (6х 4- 6а) У [-УУ -1 - 2 (рх 4- Ра) А* (7.2.12)
§ 7.2. Параметрический двухконтурный генератор
279
существует одна стационарная амплитуда Л12. При
Д < - («г + S2) 1/7 )* _ 1 _ 2 (рх + р2)Л1 (7.2.13)
к \ЛН.Кр/
имеем две стационарные амплитуды Ан и Л12.
Можно показать, что амплитуда Ait всегда неустойчива,
а амплитуда Л12 устойчива. Внутри полосы (7.2.12) состояние
равновесия системы неустойчиво и происходит мягкое возбуж-
дение колебаний. Полоса мягкого возбуждения несимметрична
относительно нулевой расстройки. При расстройках, удовлетво-
ряющих условию (7.2.13), имеет место жесткое возбуждение па-
раметрического генератора. Для возбуждения системы необходим
начальный толчок, величина которого должна превосходить Лп.
С помощью соотношения (7.2.10) можно проанализировать
зависимость амплитуды колебаний параметрического генератора
А, от амплитуды накачки при различных значениях расстрой-
ки А. Для удобства анализа введем новые переменные
х = (Л1 — Л|.кр)1/2 и Д' = Д + 2 (Pj + ₽2)-4н.кр- Кроме того, вве-
дем обозначения
А° = а1%(&1 + 2^) + аА(^ + 2Р1)’ а = Ь = 2 (Pi + W-
В этих обозначениях (7.2.10) принимает вид
Л?2 + Л„Д' = Ло (ах — Ьх2), (7.2.14)
Л + Л0Д' = - Ло (ах + Ьх2). (7.2.15)
На рис. 7.7 изображены правые части (7.2.14)—сплошная кри-
вая и (7.2.15) — штриховая кри-
вая. С помощью этого рисунка
легко определить квадрат ампли-
туды колебаний А2г при любом
значении Лд; и Д'. Например, при
Д' = 0 параметрическая генерация
возникает при г = 0 (Ли = Лякр).
Квадрат амплитуды колебаний в
соответствии с (7.2.14) равен ор-
динате сплошной кривой рис. 7.7.
С ростом х амплитуда колебаний
увеличивается, достигает макси-
мума при х = а/2Ь, а затем
уменьшается и при х = Ь обращается в нуль. При Д'¥=0 для
определения амплитуды колебаний на рис. 7.7 необходимо про-
вести горизонтальную прямую с ординатой Л0Д'. В соответствии
с (7.2.14) Л12 равно разности ординат сплошной кривой на
рис. 7.7 и прямой Л0Д'.
Рис. 7.7. Графическое решение
амплитудно-частотного уравне-
ния (7.2.10) для параметрическо-
го генератора
280 ГЛ. 7- ПАРАМЕТРИЧЕСКИЕ И АВТОКОЛЕБАТЕЛЬНЫЕ СИСТЕМЫ
Таким образом, при положительных Д' амплитуды колебаний
уменьшаются, а при отрицательных Д' — растут. Максимальная
амплитуда колебаний всегда достигается при х = а/2Ъ. При по-
ложительных Д', например Д1 на рис. 7.7, имеет место мягкое
возбуждение колебаний при хаор > 0 и прекращение колебаний
при хвот<в/Ь. При Д'>а2/4Ь возбуждения параметрических ко-
лебаний не Происходит ни при каких значениях амплитуды на-
качки. При отрицательных значениях Д', например Аа па
рис. 7.7, возбуждение параметрических колебаний происходит
при х = хь, соответствующем пересечению прямой А0Д2 со штри-
ховой прямой рис. 7.7. Это жесткое возбуждение колебаний С
конечной амплитудой, квадрат которой равен разности ордййат
сплошной кривой и прямой А0Д2. Прекращение колебаний с ро-
стом Ад достигается при х > b/а. При уменьшении амплитуды
накачки срыв колебаний происходит не при х = хь, а при х = 0.
Амплитуда колебаний при срыве равна А^> = — А0Да.
Таким образом, область существования параметрической гене-
рации оказывается всегда ограниченной как со стороны малых
амплитуд накачки («порог генерации»), так и со стороны боль-
ших («потолок»). Существование «порога» обусловлено необхо-
димостью полной компенсации потерь в системе за счет парамет-
рического вложения энергии. Наличие «потолка» связано с рас-
стройкой парциальных частот при больших амплитудах накачки
из-за нелинейной реактивности в системе. При жестком режиме
возбуждения колебания возникают при амплитуде накачки, соот-
ветствующей достижению неустойчивой ветви амплитудно-частот-
ной характеристики (см. (7.2.15)). Жесткий срыв колебаний про-
исходит при Ан = Ая кр.
В рассмотренном нами случае ограничение амплитуды свя-
зано с наличием в системе нелинейного конденсатора. Это так
называемый расстроенный механизм ограничения. Зависимость
средней емкости конденсатора от амплитуды напряжения на нем
приводит к расстройке между генерируемыми и парциальными
частотами системы. В результате ухудшаются условия передачи
энергии от генератора накачки к возбужденным колебаниям.
В параметрическом генераторе с цепью автосмещения огра;
ничение амплитуды возникает из-за смещения рабочей точки,
которое также приводит к расстройке системы. Однако в этом
случае наклон амплитудных кривых противоположен наклону
при расстроенном механизме ограничения.
Если в системе имеется элемент с нелинейной вольт-амперной
характеристикой, то ограничение амплитуды параметрически воз-
буждаемых колебаний происходит за счет нелинейной диссипа-
ции Энергии (диссипативный механизм ограничения). На прак-
тике чаще всего наблюдается одновременное действие несколь-
ких механизмов ограничения амплитуды.
S 7.3. ПАРАМЕТРИЧЕСКОЕ ДЕЛЕНИЕ ЧАСТОТЫ
281
Суммарное действие расстроенного и диссипативного механиз-
мов приводит к зависимости амплитуды от расстройки, изобра-
женной штриховой кривой на рис. 7.6. Более подробно о меха-
низмах ограничения амплитуды см. в § 4.5, 4.6.
Еще одной причиной, ограничивающей амплитуду параметри-
ческих колебаний, является обратная реакция на накачку. Энер-
гия возбужденных колебаний возникает за счет энергии источ-
ника накачки. Если мощность параметрически возбужденных
колебаний становится сравнимой с мощностью генератора накач-
ки, то амплитуда колебаний ограничивается из-за уменьшения
мощности накачки.
§ 7.3. Параметрическое деление частоты
В предыдущем параграфе был рассмотрен двухконтурный
параметрический генератор, когда в первом контуре имеются
колебания только частоты ю4, а во втором — ю2. Под действием
напряжений с этими частотами через нелинейную емкость в об-
щем случае протекает ток, кото-
рый содержит комбинационные
частоты вида + пи2, где т и
п равны 0, ±1, ±2, ... Макси-
мальные значения 1тп| и |п| оп-
ределяются видом нелинейной за-
висимости qc от ис. Если ни одна
из этих частот но попадает в
полосы пропускания контуров, то
мы имеем обычный параметри-
ческий генератор, описанный в
§ 7.2. Однако если какая-либо
комбинационная частота попадет
в полосу пропускания одного из
Рис. 7.8. Спектр колебаний в
двухконтурном генераторе вблизи
режима автозахватывания
контуров, то в этом контуре воз-
никнут колебания двух близких частот, т. е. биения. Возникно-
вение биений в одном из контуров генератора всегда сопровож-
дается биениями в другом контуре.
Пусть, например, комбинационная частота ©1=?nco1 +nco2 при-
мерно равна Юь Легко показать, что комбинационная частота
<о2= (1 — 7п)<й1+(1—п) <о2 близка к частоте ю2. Из-за наличия
нелинейной емкости колебания комбинационных частот влияют
па частоты генерации сщ и <о2. Эти частоты «подтягиваются»
к комбинационным и при определенных условиях может произой-
ти автозахватывание частот. Термин «автозахватывание» (авто-
синхронизация) подчеркивает то обстоятельство, что захват про-
исходит не под действием внешней силы, а в результате действия
колебания с комбинационной частотой, возникшего в самой си-
стеме. Наиболее легко автозахватывание происходит, когда ©2»
HI В. В. Мигулин и др.
282 ГЛ‘ 7- ПАРАМЕТРИЧЕСКИЕ И АВТОКОЛЕБАТЕЛЬНЫЕ СИСТЕМЫ
l)<uf, т. е. частота <о2 почти кратна Такая система в
синхронном режиме является делителем частоты накачки в N раз.
При этом частота оказывается точно в N раз ниже частоты
накачки, а частота ю2 отличается от <оя в раз. В авто-
синхронном режиме колебания с частотами со2 и <оя коге-
рентны.
На рис. 7.8 приведен спектр колебаний в двухконтурном ге-
нераторе для случая, когда «1 и со2 попадают в полосы пропуска-
ния контуров (комбинационные тона, расположенные вдали от
резонанса, на рисунке не изображены). Автосинхронный режим
наступает, когда частота ©i захватывает <в1? а частота со2 захва-
тывает и2. Устанавливающиеся в автосинхронном режиме часто-
ты соя/А и соя(А — i)/N показаны на рисунке штриховыми ли-
ниями.
Рассмотрим более подробно работу Делителя частоты в четы-
ре раза. Будем считать, что связь заряда на нелинейной емкости
с напряжением имеет вид (7.2.3). Напряжение на емкости в ре-
жиме деления (автосинхронный режим) равно
ис =* Ai cos (cof + \f>i) + Ав cos(4©f 4- фя) —A2cos(3(oi + ф2).
Укороченные уравнения для амплитуд At, Аг и фаз ф2 в
этих предположениях примут вид
Aj = — SjAj + cqAjAj! sin <p + P1Aj42 sin®,
Ф1 = — Ai + -costp + PiAjAj созФ + Pi(24h + 2A| +
(7.3.1)
A2 = — 6242 + a2AtAB sin cp — p2A® sin®,
Фг = — A2 + a2 —— cos <p + p2 -p cos Ф + p2 (2-4| + 2 Af + A2),
где
a _ 1
°^2Ri(Ci + C0)'
R — 3Pm
P1-4ci + Q’
Aa = 3© — v2,
a<£>
ai-2(C1 + C0)’
о 9fta>
рз-4(С2 + С0)’
<P = Ч1! + Ч’г,
3aa>
a;- 2(c2+c0)«
Aj = о — v2,
ф = 3^! — ф2.
Для получения стационарных амплитуд колебаний необходи-
мо учесть какой-либо из рассмотренных в предыдущем парагра-
фе механизмов ограничения амплитуды. Пусть в данном случае
действует диссипативный механизм, т. е. затухание системы за-
висит от амплитуды колебаний.
Будем считать, например, что 61 является функцией At.
9 7.3. ПАРАМЕТРИЧЕСКОЕ ДЕЛЕНИЕ ЧАСТОТЫ
283
Полученная система укороченных уравнений достаточно слож-
на. Для ее решения воспользуемся методом вторичного упроще-
ния укороченных уравнений, предложенным Р. В. Хохловым*).
Для этого проведем сравнение относительной величины отдель-
ных членов системы уравнений (7.3.1). При достаточно малых
напряжениях ис член рис в выражении (7.2.3) много меньше
члена caic- Поэтому можно ввести малый параметр ц, равный
Puc/a < 1.
В этом случае члены уравнений (7.3.1), содержащие коэффи-
циенты малы по сравнению с остальными членами. Будем
искать решение системы уравнений (7.3.1) с помощью разло-
жения в ряд по малому параметру ц:
Ai =>-410 + ..., Аг = Л20 + ца2 +..., ф = ф0 + Цф1 + ...
В нулевом приближении по ц система уравнений (7.3.1) прини-
мает вид
Аю = "Ь oci^42o^s sin фо,
Д2о== —62-42о "Ь а2Л 10Ля sin фо,
(7.3.2>
Фо= — + ftp2-0 + АН СО8ф0.
' Л10 Л20 '
Из этих уравнений определяется отношение стационарных амп-
литуд напряжений в контурах Л10, Л20 и стационарная фаза ф0:
лю =
^20
a2ei’
Подставляя эти выражения в (7.3.2), получим соотношение^
определяющее стационарную амплитуду Л10 при заданной рас-
стройке и амплитуде накачки Лн:
и2
(7.3.3)-
где А = А, + А2. При заданной амплитуде накачки соотношении
(7.3.3) представляет собой резонансную зависимость Л1о от рас-
стройки А. Так же как и для системы с одной степенью свобо-
ды, в случае диссипативного механизма ограничения резонанс-
ная кривая симметрична относительно расстройки А = 0.
Рассмотрим’ теперь решение системы (7.3.1) в первом прибли-
жении (с точностью до членов порядка р).
*) Хохлов Р. В. Ц ДАН СССР,— 1954. Т. 97. С. 411.
Ill*
284 гл- 7- ПАРАМЕТРИЧЕСКИЕ И АВТОКОЛЕБАТЕЛЬНЫЕ СИСТЕМЫ
Укороченные уравнения, в этом приближении имеют вид
Н«1 = -н ($1+ 5^л1о)а1 +
+ |*а1Лв (а2 sin Фо + АоФ1 cos Фо) + ₽1Л!оЛ2о sin ф> (7.3.4)
раа = — рб2а2 + ца24н (ах sin <р0 + 41оФ1 cos <р0) — 024fo sin Ф,
• / а.А — а А. А \
ИФ1 = Мн <*i — ;2 созфо —о^-т^фхбшфо +
\ лю io /
/ А2 \
+ I 01Л2(| + 02 I Л10 СОйФ +
\ АМ/
+ Pi (241 + 2420 + 4?е) + 02.(241 + 24’а + 4^),
, 4R X / А п \
= 3aX^+f- ЛиСО8фв +
и1 “ °2 \ А‘о zl20 /
+ На2 f т-1 + а2 -тН Л" cos Фо — НФ1 ( 3а1 зг — а2 зп) 4Н sin ф0 +
\ 10 А20/ \ 10 20/
+ 3Pi (24| + 24|0 + 4i0) — 02 (2Ай + 24|0 + Л20) +
+ I 301Л2О 02 д~ I ЛЮ C0S Ф-
В стационарном режиме деления частоты амплитуды должны
быть постоянными, а фазы ф, и if>2 жестко связаны между собой.
Поэтому левые части уравнений (7.3.4) в стационарном режиме
деления частоты равны нулю. Из первых трех уравнений этой
системы можно найти поправки к амплитудам и фазе а„ а2 и ср,.
Ширина полосы деления частоты Дгр определяется последним
уравнением системы (7.3.4). Поскольку все члены в правой ча-
сти этого уравнения, кроме первого, имеют порядок малости ц,
то при Ф = 0 первый член также должен быть порядка ц.
Это возможно в двух случаях, а именно, когда мала ширина
полосы деления Дгр/ (6t + б2) ~ ц или когда мала величина
(36i — 62)/(6i + 62)~ р. Последнее соотношение означает бли-
зость добротностей первого и второго контуров делителя часто-
ты, так как а ()2 = За>/6г. Если 36i « б2, то <21« <?2.
Таким образом, для получения большой полосы деления необхо-
димо использовать контуры с близкими добротностями.
Следует отметить, что вследствие зависимости 6i(4t) при-
ближенное равенство 36,«62 может выполняться лишь при
определенной амплитуде 4,. В этом случае полоса деления огра-
ничена областью, в которой 4, меняется мало.
Полученные выше условия широкополосного деления часто-
ты накачки в четыре раза справедливы и в общем случае деле-
6 7.4. ДВУХКОНТУРНАЯ АВТОКОЛЕБАТЕЛЬНАЯ СИСТЕМА
285
ния частоты в N раз. Для такого деления необходимо выполне-
ние следующих условий:
1) парциальные частоты контуров должны быть равны соот-
ветственно Vi = aB/N, v2 = <йн(Аг — i)/N;
2) добротности контуров должны быть близки друг к другу;
3) нелинейная зависимость заряда дс от ис должна содер-
жать член ис .
Параметрические делители частоты широко применяются на
практике в связи с их большой широкополосностью и высокой
кратностью преобразования частоты.
§ 7.4. Двухконтурная автоколебательная система
с реактивной связью
4
Рис. 7.9. Генератор с
двумя степенями свобо-
ды с реактивной связью
между контурами
Наиболее распространенными примерами автоколебательных
систем с двумя степенями свободы являются: генератор с одним
активным элементом и двухконтурной колебательной системой
и два связанных генератора. В § 7.4 и 7.5 рассмотрены автоко-
лебания в двухконтурной системе с реактивной связью. При сла-
бой связи между контурами система мо-
жет рассматриваться как генератор, на-
груженный дополнительным контуром.
При большой связи вблизи равенства
парциальных частиц существует область
расстроек, для которых условия самовоз-
буждения выполнены одновременно для
колебаний двух частот, близких к соб-
ственным частотам . системы. При мяг-
ком режиме самовозбуждения генератора
и связи активного элемента только с
первым контуром наблюдается явление
затягивания частоты. В области затяги-
вания устанавливаются колебания с од-
ной ИЯ допустимых частот, причем реали-
зующаяся частота зависит от направления изменения парциаль-
ной частоты.
Рассмотрим работу генератора, индуктивно связанного с до-
полнительным контуром L2C2 (рис. 7.9). Уравнения для токов
в первом и втором контурах имеют вид
i^dt + Mri2 — Mid,
(7.4.1)
i2dt + Afj 0.
г2 + +• тг’
Обозначим через и, напряжение на конденсаторе первого контура.
286 ГЛ. 7. ПАРАМЕТРИЧЕСКИЕ И АВТОКОЛЕБАТЕЛЬНЫЕ СИСТЕМЫ
а через и2 — напряжение на конденсаторе второго контура;
Uj == 77- f i^dt, U2 = "ТТ" I ^2^*
C2j
Кроме того, введем обозначения
Лс _ 26 Л2 _ 1 ..2 1 -v!
Л2 L1C1 L2C2 ‘
с" ^2 0^.
1 ¥х ’ 2 I. С
Будем считать, что генератор работает в мягком режиме и ха-
рактеристику полевого транзистора можно аппроксимировать по-
линомом‘третьей стййени: " ,
г'ст — S out — S (7Л. 2)
Введя все эти обозначения, получим уравнения колебаний на-
пряжений в контурах в виде
их + 261U1 + vjUi + ахи2 = (So — S2ul) ult
„ (7.4.3)
u2 + 262u2 + vf u2 + a2“i = 0.
(7.4.4)
(7.4.5)
Систему уравнений (7.4.3) будем решать квазилинейным мето*
дом. Для этого введем зависящую от амплитуды колебаний сред-
нюю крутизну S (см. § 5.4). Ее введение позволяет перейти от
нелинейных уравнений (7.4.3) к следующим квазилинейным
уравнениям:
и± + 2б1и1 + у^и1 + (tjUz =
иг + 262u2 + vfua + (ZjUj = 0.
Решение этой системы будем искать в виде
Ui = A cos(cof), и2 = В cos(coi + <р).
Подставляя его в (7.4.4) и учитывая, что оно должно быть
справедливо для любого момента* времени i, можно получить
систему уравнений, связывающую Л, В, ср и со. Будем в дальней-
шем считать, что изменяющейся величиной является лишь пар-
циальная частота vt, a v2 остается постоянной. Тогда удобно
ввести относительные расстройки: £.= (v|— v2)/co2 и ц =
==(©2 —v2)/co2. Введение этих расстроек позволяет записать си-
стему уравнений для определения А, В, ср и со в следующем виде:
(£ — ,т|)Л — a1Bcos<p = 0, — a1Z?sin<p==—А, (7.4.6)
х\В + а2А cos ip = 0, ЙгВ + а2Л sin <р = 0,
где = 26,/ © — декременты затухания первого и второго
контуров.
5 7.4. ДВУХКОНТУРНАЯ АВТОКОЛЕБАТЕЛЬНАЯ СИСТЕМА
287
Из последних двух уравнений системы (7.4.6) найдем отно-
шение амплитуд В/А колебаний во втором и первом контурах и
сдвиг фаз ф между этими колебаниями:
В _ а2 _ О2
Л-(п2 + ^)1/2> tS<P--T)-
Подставляя полученные выражения в первое и второе уравнения
системы (7.4.6), имеем следующие уравнения для определения
расстройки т] и амплитуды колебаний А:
1 — « >
(na+Vj
(А)
1 + (г)2 + О2) “
(7.4.7)
(7.4.8)
где к2 = а^г — коэффициент связи между контурами.
Для определения средней крутизны S(A) подставим в (7.4.2)’
гармоническое решение (7.4.5) и выпишем только выражение
для амплитуды первой гармоники тока стока. Отсюда находим
среднюю крутизну 8(A) в виде
— S
S(A) = S0--£A2. (7.4.9)
Из (7.4.8) с учетом (7.4.9) получим следующее выражение для
амплитуды стационарных колебаний:
4f>2fc2
где
Л 2 _ Л 2___________
©
(7.4.10)
~ 0 \ <о —
Из (7.4.10) следует, что включение в
водит к появлению дополнительного
от частоты генерации. При равенстве парциальных частот кон-
туров (t = 0) уравнение (7.4.7) принимает вид
к2
Н2 + ^
схему второго контура при-
затухания, которое зависит
7] 1
(7.4.11)
Один из корней этого уравнения ц = 0, т. е. co = v; два других
корня определяются из уравнения
т] = ± /к2 - О22.
Последнее соотношение дает действительные значения ц только
в том случае, когда /с>02. Полученное неравенство указывает
на существование критической связи между контурами k^^bt.
288' ГЛ. 7. ПАРАМЕТРИЧЕСКИЕ И АВТОКОЛЕБАТЕЛЬНЫЕ СИСТЕМЫ
Когда А < kvp, частотное уравнение при синхронизме имеет толь-
ко одно решение to=v. Если же к>кхр, то при синхронизме
существуют три действительных корня уравнения (7.4.11). Про-
ведем исследование этих двух случаев отдельно.
Случай слабой связи между контурами {к<ккр), Зависимость
т] от имеет вид, изображенный на рис. 7.10. Генерируемая ча-
стота однозначно связана с пар-
циальной частотой первого кон-
тура. При этом если г] < 0 (v2>
> и), то эквивалентная парциаль-
ная частота понижается, т. е. до-
полнительный контур влияет как
подключенная к основному кон-
туру шунтирующая емкость. Если
ц>0 (v2<co), то добавка к пар-
циальной частоте положительна,
т. е. дополнительный контур эк-
вивалентен подключению шунти-
рующей индуктивности. Ампли-
Рис. 7.10. Зависимость частоты ™ автоколебаний можно най-
ганерируемого колебания от рас- ти из соотношения (7.4.10). Её
стройки £ при слабой связи зависимость от относительной
расстройки £ изображена на
рис. 7.11. Наибольшее уменьшение амплитуды (отсос энергии
из первого контура во второй) имеет место при равенстве пар-
циальных частот (синхронизме), т. е. при £ == 0. Амплитуда ко-
лебаний при £ = г] = 0 равна
Уменьшение амплитуды генерации при синхронизме тем боль-
ше, чем больше связь между контурами и меньше потери второ-
го КОНТура. При ДОСТаТОЧНО ВЫСОКОЙ ДобрОТНОСТИ пторога—иан-
тура автоколебания ~в~систЁме вбли^ТГ~ттпТУронизма контуров во-
обще могут быиГ^подавлены. Условие такого гашения автёкеле-
баний состоит в том, что инкремент первого контура Mv50 —
= 0, в некоторой области частот оказывается-меньше величины
/с2/^, представляющей собой потери (декремент), вносимые до-
полнительным контуром в первый контур. Зависимость ампли-
туды колебаний А от расстройки £ при наличии области гашения
изображена на рис. 7.12. Границы этой области можно опреде-
лить, приравняв в (7.4.10) амплитуду нулю. При Фо = кг/Ьг об-
ласть гашения стягивается в точку.
Случай сильной связи между контурами (к>ккр). Зависи-
мость относительной расстройки ц от £ для к > к^ приведена на
рис. 7.13. Из рис. 7.13 видно, что при достаточно больших по
модулю расстройках £ (слабая связанность) система генерирует
§ 7.4. ДВУХКОНТУРНАЯ АВТОКОЛЕБАТЕЛЬНАЯ СИСТЕМА
289
частоту, близкую к парциальной частоте основного контура vt
ц -► р. Таким образом, второй контур из-за слабой связанно-
•ти не влияет на частоту генерации. Вблизи синхронизма (£ — 0)
зависимость ц от £ оказывается трехзначной. Исследование
Рио. 7.11. Зависимость ам-
плитуды генерируемого ко-
лебания от расстройки £
при слабой связи
Рис. 7.12. Зависимость ампли-
туды генерируемого колеба-
ния -от расстройки [ вблизи
области гашения
остойчивости колебаний доказывает, что средняя ветвь частот-
чой характеристики всегда неустойчива. Что касается наружных
зетвей частотной характеристики, то их ход качественно совпа-
дает с ходом нормальных частот линейной консервативной си-
стемы (на рис. 7.13 они изображены штриховыми линиями).
Рис. 7.13. Зависимость частоты гене-
рвгруемого колебания от расстройки
5 при сильной связи
Рис. 7.14. Области отсоса
энергии, гашения и затяги-
вания колебаний
Эднако наличие в (7.4.7) не равного нулю декремента Ф2 эквива-
чентно уменьшению связи между контурами, так что генерируе-
чые частоты лежат несколько ближе к парциальным частотам,
jeM в консервативной системе.
Подключение дополнительного контура, так же как и в слу-
чае слабой связи, уменьшает амплитуду колебаний в генераторе.
290 ГЛ- 7- ПАРАМЕТРИЧЕСКИЕ и автоколебательные системы
Степень ее уменьшения при сильной связи зависит от соотноше-
ния инкремента &» и декремента второго контура О2. Если й2>
> до, то вблизи синхронизма существует область гашения авто-
колебаний. Если Qt < О0, то вблизи синхронизма имеет место
явление затягивания, которое будет подробно рассмотрено в сле-
дующем параграфе. На рис. 7.14 в плоскости переменных Оо/й2
и показано расположение областей гашения, затягивания
и отсоса энергии колебаний.
§ 7.5. Явление затягивания
Проведенный выше анализ базировался на предположении
о том, что в системе в каждый момент времени существуют ко-
лебания только одной частоты. Между тем мы показали, что
вблизи равенства парциальных частот в системе устойчивы ко-
лебания с частотами mt и о>2.
Рассмотрим теперь условия одновременной генерации двух
гармонических колебаний с частотами и <в2. Для этого пред-
ставим напряжение затвор — исток и, в виде
и,— At cos (&it) + 42 cos(co2f). (7.5.1)
Так как частоты колебаний ю, и ю2 асинхронны, то относитель-
ные фазы не играют никакой роли и их можно опустить (это
соответствует определенному выбору начального момента време-
ни). В рассматриваемом случае каждому колебанию частоты
соответствует своя средняя крутизна. При этом и 6’<Й2 за-
висят, в общем случае, от обеих амплитуд 4, и А2.
Подставив (7.5.1) в (7.4.2), найдем компоненту тока стока
с частотой со,:
Г *s*
= — "4 (^i + 24^4?) cos^i).
Таким образом, средняя крутизна на частоте 6>t равна
__ с»
5Ш1 (4П 42) = So - -f (42 + 24?). (7.5.2)
Аналогичным способом получаем и 5 на частоте <в2:
_____________ 19
5И2 (4v 4а) = So - (24? + 42). (7.5.3)
Из (7.5.2) и (7.5.3) видно, что средняя крутизна уменьшается
с ростом амплитуд 4, и 42. Однако уменьшение £Ш1 на частоте
со, в большей степени зависит от Аг, чем от 4,. Уменьшение
определяется в основном амплитудой 4,. Отсюда следует,'
что одновременное сосуществование двух частот при мягком ре-
жиме взаимно уменьшает значения средней крутизны. Для оп-
§ 7.5. ЯВЛЕНИЕ ЗАТЯГИВАНИЯ
291
ределения стационарных амплитуд колебаний подставим выра-
жения для S (7.5.2) и (7.5.3) в соотношение (7.4.8). С учетом
(7.4.7) получим следующие выражения, связывающие амплиту-
ды колебаний Ai и Л2 с параметрами контуров:
к - 4 Ui+2^)1 = tfi+02 4F-е(7-5-4)
L J *1
^k-4U22 + 2A|)l=^1 + ^^Z^ = Z?ara(712), (7.5.5)
L •* J 42
где T]i = (of — v|)/©i, i = l, 2. Левые части уравнений (7.5.4) и
(7.5.5) описывают вклад энергии в контуры, правые части — по-
тери. Если при At = Д2 = 0 вклады энергии больше потерь в обоих
случаях, то выполняются условия самовозбуждения системы.
В системе возникают колебания с частотами ©, и ©2 и начинают
расти их амплитуды. Амплитуды At и А2 увеличиваются до тех
пор, пока для какого-либо колебания вклад энергии не сравня-
ется с потерями. Пусть, например, это произойдет сначала для
колебания с относительной расстройкой т]2. С этого момента
амплитуда Аг перестает увеличиваться, a At будет продолжать
расти. Это приведет к тому, что при расстройке ц2 вклад энергии
станет меньше потерь и Аг начнет уменьшаться, что увеличит
скорость возрастания At. В итоге А2 уменьшится до нуля, a Ai
возрастет до такой величины, что будут выполняться соотноше-
ния
= 2^(70,
Afvx ------AjJ <; RaKB (т]2).
(7.5.6)
(7.5.7)
Соотношение (7.5.6) — условие существования стационарного ко-
лебания с частотой ан (расстройкой tj±) и амплитудой Ас, не-,
равенство (7.5.7) показывает, что на частоте ©2(т]2) вклад энер-
гии меньше потерь.
Аналогичным образом можно получить условия существова-
ния колебания с частотой ю2 и амплитудой А2. Они имеют вид
/ С X
мV? (50- f = Яэкв(Т]2), (7.5.8)
(С \
50--^Л22)<Я8КВ(т11). (7.5.9)
Простые соображения показывают, что гармонические колеба-
ния, описываемые соотношениями (7.5.6) и (7.5.7), устойчивы.
Пусть, например, амплитуда А, немного возрастет, тогда! левая
часть (7.5.6) станет меньше правой и At вновь уменьшится.
Если А1 уменьшится по сравнению со своим стационарным зна-
чением, то вклад энергии на этой частоте станет больше потерь
292 ГЛ. 7. ПАРАМЕТРИЧЕСКИЕ И АВТОКОЛЕБАТЕЛЬНЫЕ СИСТЕМЫ
и At вновь возрастет. Вместе с тем небольшие изменения А,
слабо сказываются на неравенстве (7.5.7) н вклад энергии на
частоте ю2 не сможет превысить потерь. Аналогичные рассуж-
дения доказывают устойчивость колебанйй на частоте а>2 при
выполнении условий (7.5.8) и (7.5.9). Легко показать, что би-
гармонический режим, описываемый соотношениями (7.5.4) и
(7.5.5), неустойчив. Действительно, при небольшом увеличении
Ai вклад энергии на частоте ш2 уменьшается сильнее, чем вклад
на частоте (of; зто приводит к быстрому уменьшению А2, что
увеличивает вклад энергии на частоте ©i. Поэтому небольшое
увеличение Ai по сравнению со стационарным значением ведет
к резкому уменьшению А2 и росту At. Система переходит к гар-
моническим колебаниям с частотой ©4. Наоборот, небольшое
уменьшение At по сравнению со стационарным значением пере-
водит систему в режим гармонических колебаний с частотой ©2.
^ Рассмотрим теперь поведение двухконтурной системы с реак-
тивной связью в зависимости от изменения парциальной частоты
рервого контура, т. е. от относительной расстройки £. При часто-
те Vt < v2 ($ < 0) в системе существует гармоническое колебание
с частотой ©1, близкой к Vi. При увеличении v, система входит
в область, где возможно существование колебаний как частоты
©!, так и частоты ©2. Эта область носит название области затя-
гивания частоты. В области затягивания режим генерации зави-
сит от предыстории.
Если система вошла в область со стороны $ < 0 (рис. 7.12
и 7.15), то в ней будут существовать колебания с частотой ©t
и амплитудой At. При дальнейшем увеличении £ система при
£ = скачком перейдет в режим генерации с частотой ©2 и
амплитудой А2. Если система входит в область затягивания со
стороны £ > 0, то в ней происходят колебания с частотой ©2 и
амплитудой А2. Переход в режим (шь At) наступает при
меньшей Расстройки и g2, определяющие границы области
затягивания, можно найти из условия нарушения устойчивости
соответствующих колебаний. Различаются частотные и ампли--
тудные условия устойчивости. Частотные условия устойчивости
нарушаются при расстройках, на которых кривая т) = /(£) имеет
вертикальную касательную, т. е. е2£/<2т] = 0. При связи^ большей
критической (к>&2), условие дает два значения ц,
определяемые из соотношения
тр =
Амплитудная неустойчивость возникает при нарушении усло-
вий (7.5.7) или (7.5.9). Пусть при некоторой расстройке £ р
системе выполняются условия (7.5.6) и (7.5.7). При увеличений
—£ быстро растет (рис. 7.13). При этом правая часть
§ 7.5. ЯВЛЕНИЕ ЗАТЯГИВАНИЯ
293
(7.5.6) растет и At уменьшается. Что касается правой части
(7.5.7), то она уменьшается, а левая часть (7.5.7) растет. На-
конец, при некоторой расстройке £ = неравенство (7.5.7) из-!
менит знак. Вклад энергии на частоте <о2 станет больше потерь,
и начнется увеличение амплитуды Л».
Система перейдет в режим гармониче-
ских колебаний с частотой а>2. Обрат-
ный переход в режим колебаний с ча-
стотой (Of может произойти лишь при
уменьшении £, когда нарушается ус-
ловие (7.5.9), т. е. при £ = £2.
Зависимость амплитуд колебаний
At и At от расстройки £ приведена на
рис. 7.15. Соотношение амплитуд на
границе области затягивания £ — £i
можно найти из (7.5.7) и (7.5.8). Уста-
навливающаяся после скачка амплиту-
да Аг в V2 раз больше амплитуды
Рис. 7.15. Зависимость ам-
плитуды генерируемого ко-
лебания от расстройки £ в
режиме затягивания
Соответственно при £ —
существовавшей в системе до скачка.
. •= ?2 получим А* = 2Я|.
При связи, незначительно превышающей критическую, об-
ласть затягивания ограничивается частотной неустойчивостью—
При достаточно большой связи между контурами область затя-
гивания ограничивается условиями амплитудной устойчивости.
При самовозбуждении системы внутри области затягивания уста-
навливающийся режим зависит от начальных условий в системе.
Проведенный выше анализ показывает, что под влиянием ре-
зонансной нагрузки автоколебательная система может в опреде-
ленной области частот изменить свою частоту и амплитуду, во-
обще прекратить колебания (режим гашения) или попасть в
реЖйм скачкообразного изменения амплитуды ^“частоты. Поэто-
му при использовании резонансной нагрузки необходимо прини-
мать меры для уменьшения ее обратного влияния на автоколе-
бательную систему. Одним из примеров системы е резонансной
нагрузкой является генератор, связанный с контуром волномера.
Для правильного измерения генерируемой частоты необходимо’,
чтобы связь между контурами генератора и волномера была
достаточно мала (режим отсоса энергии). Явления затягивания
и гашений, наступающие при сильной связи, в этом случае сни-
жают точность определения частоты. Однако явление затягива-
ния может быть использовано для стабилизации частоты авто-
колебаний. Для этого в качестве дополнительного контура в
систёму включают контур с высокой добротностью. В радиодиапа-
зоне обычно применяется кварцевый резонатор, а в диапазоне
СВЧ — высокодобротный объемный резонатор. При малом б2 об-
ласть затягивания увеличивается. В этой области значительные
вариации парциальной частоты контура генератора сопровож-
294 ГЛ. 7- ПАРАМЕТРИЧЕСКИЕ И-АВТОКОЛЕБАТЕЛЬНЫЕ СИСТЕМЫ
даются малыми изменениями генерируемой частоты. На рис. 7.13
жирными линиями изображены области стабилизации частоты
при затягивании.
При использовании явления затягивания для стабилизации
частоты необходимо удовлетворить двум условиям, а именно:
а) диапазон изменения парциальной частоты генератора дол-
жен быть значительно меньше области стабилизации;
б) после включения системы генератор должен быть настроен
на соответствующую ветвь стабильной частоты.
При связи, большей критической, в рассмотренном выше ге-
нераторе с мягким режимом возбуждения и связью активного
элемента с первым контуром наблюдаются только одночастот-
ные режимы. Однако в более сложных системах, например в
генераторе с жестким режимом возбуждения или в случае об-
ратной связи с дополнительным контуром, при определенных
параметрах возможно существование двухчастотных режимов ге-
нерации.
§ 7.6. Двухконтурная автоколебательная система
с резистивной связью
Качественно иные амплитудные и частотные характеристики
имеет двухконтурная автоколебательная система с резистивной
связью между контурами*). Такая система изображена на
рис. 7.16. Введя в качестве независимых координат напряжения
на конденсаторах и,, и й2, получим следующие уравнения:
“i + 2S1u1 + V?»! - axu2 = g
u2 + 262u2 + v2u2 — a2ux = 0,
где
2Si = = Z“c.’ ai = ^RCi'
где i = 1, 2, / = 1, 2. Так же как и в § 7.4, уравнения (7.6.1)
будем решать квазилинейным методом, предполагая, что реше-
ние имеет вид
= A cos (coi), п2 = В cos (coi + <p).
При введении относительных расстроек С = (vi — v2)/co2 и q =
= (ю2—v2)/to2, и декрементов затухания <Ь = 26(/и, i = 1, 2
(v2 считаем заданной величиной), получим следующую систем}
♦) Курдюмов О. В., Минакова И. И. Ц Радиотехника.—1969. Т. 24, №6
с. 65.
§ 7.6. ДВУХКОНТУРНАЯ СИСТЕМА С РЕЗИСТИВНОЙ СВЯЗЬЮ
295
уравнений, связывающих А, В, ф и и:
(оА (£ — т|) + а^В sin <р = О,
— tof^A + а±В cos <р = — М viS (А)А,
гулВ + аа A sin <р == 0, ' ‘ ‘ )
— $2тВ + а2 A cos <р = 0.
Из этой системы получим уравнение для определения частоты:
к2
+
£ = П 1 +
(7.6.3)
где к2 — а^аг/<ог — коэффициент резистивной связи между кон-
турами.
Для нахождения амплитуды колебаний в первом контуре не-
обходимо воспользоваться вторым из уравнений этой системы.
Считая, что генератор рабо-
тает в мягком режиме, т. е.
средняя крутизна 5(A) рав-
на S = Зе — (52/4) А2, получим
следующее выражение для
амплитуды стационарных ко-
лебаний:
. . '
~ »+Р(^+02)-
-р^»+^+о24 (7-6-4)
Рис. 7.1G. Генератор с двумя степенями
свободы с резистивной связью между
контурами
где Ло — амплитуда колебаний в первом контуре в отсутствие
связи, Р = MS2vl/a, Оо — инкремент первого контура, равный
й0 = -^1 + Msovi/a.
Рассмотрим частотное уравнение (7.6.3). Сравнение этого
уравнения с уравнением для нахождения частоты при реактивной
связи между контурами (7.4.7) показывает, что единственное
различие между ними — знак перед вторым членом, стоящим в
скобке. Это отличие весьма существенно изменяет вид зависи-
мости ц от расстройки £. В точке синхронизма (£ = 0) всегда
имеется лишь один корень уравнения (7.6.3), т. е. при Vi = v2
частота генератора равна парциальной частоте первого контура
(П = 0).
На рис. 7.17 построена зависимость ц(£) для различных зна-
чений коэффициентов связи к. Из рисунка видно, что при боль-
ших значениях к вблизи синхронизма (£ = ц = 0) существует
область, где ц слабо зависит от £. Эта область соответствует
устойчивому режиму, при котором имеет место стабилизация ча-
стоты генератора. Коэффициент стабилизации частоты при син-
хронизме равен 3 = dZjdx\ |п==0 = 1*р А2/й2, т- е- тем больше, чем
296 ГЛ. 7- ПАРАМЕТРИЧЕСКИЕ И АВТОКОЛЕБАТЕЛЬНЫЕ СИСТЕМЫ
больше коэффициент связи и чем меньше декремент втоь
контура. Область стабилизации расположена между двумя or
стями неоднозначности, которые возникают при к > kKf. Крь
ческое значение к находится из условия dt,/dx\ = 0. Из э"
условия следует, что расстройка ц, соответствующая скач:
частоты, равна:
ч,-у-в;±
Действительные значения ц имеют место при &2>80|. Та:
образом, kgp = У863. Это значение /с„р значительно выше, чем
в случае реактивной связи между контурами. Условие неод
значиести ^>862 означает, что 8 (Д + Дг)®/Ь, должно б.
меньше R^/Li, что возможно лишь при Z2 > 8Zt.
Из выражения для амплитуды А (7.6.4) следует, что
наличии связи включение второго контура приводит к увеличеь
Рис. 7.17. Зависимость частоты
генерируемого колебания от
расстройки J при различных
коэффициентах связи: А, = 0,
к% Акр, Аз Акр
амплитуды генератора (рис. 7.
т. е. дополнительный контур п.
тирует сопротивление связи R
приводит к уменьшению затчха.
Рис. 7.18. Зависимость ампли-
туды генерируемого колебс
ния от расстройки £, к >• Аиг
в первом контуре. Чем меньше декремент затухания i
рого контура б2, _ тем больше увеличение . амплитуды
по сравнению с Ао — амплитудой генератора при пали
только одного контура. Уменьшение затухания основного, ког
ра является также причиной того, что в данной системе
£ = 0 могут возникнуть колебания даже в том случае, когда
ноконтурная система является потенциально автоколебатель:-
т. е. для нее до < 0. Возбуждение колебаний произойдет
условии &2б1/(т]2 + д2)>|д0|, т. е. для заданного коэффищ
та связи к при расстройках ц А26|/| д01 — При боль:
т] колебания срываются.
§ 7.7. ВЗАИМНАЯ СИНХРОНИЗАЦИЯ ДВУХ ГЕНЕРАТОРОВ
297
Двухконтурная автоколебательная система с резистивной
связью между контурами обладает лучшими стабилизирующими
характеристиками, чем система с реактивной связью. Это связа-
но с тем, что область стабилизации частоты расположена вблизи
£ = 0, где достигается максимум амплитуды колебаний. Кроме
того, ширина области стабилизации при резистивной “Связи зна-
чительно больше, чем при реактивной.
§ 7.7. Взаимная синхронизация двух связанных генераторов
В случае двух связанных генераторов с сильно различающи-
мися парциальными частотами автоколебательные системы рабо-
тают практически независимо. Вблизи синхронизма парциальных
частот имеет место взаимная синхронизация генераторов. В по-
лосе синхронизации в системе существуют колебания лишь одной
частоты, амплитуда и фаза которых зависят от расстройки пар-
циальных частот и от соотношения мощностей генераторов.
Процесс взаимной синхронизации двух генераторов рассмот-
рим на конкретном примере схемы, изображенной на рис. 7.19.
Для напряжений затвор —исток транзисторов Hi и и2 получим
следующие дифференциальные у + Q .
уравнения:
+ viu1 — 26j (ux) Uj — a1u2 =
= 0,
•• , . (7-7.1)
4~ у2и2 262 (u2) u2
— a2ut = 0.
Здесь v, и v2 — парциальные
частоты контуров, 26, =f= x
XSi—Ri/Li, Si—нелинейная
крутизна, зависящая от напря- Рис. 7.19. Схема двух связанных ге-
жения затвор — исток соответ- нераторов
ствующего генератора, а,, а2 г-
коэффициенты связи: а, = Csf(Ct + Cs), i = 1, 2, где С, — малая
емкость связи. Уравнения (7.7.1) получены при пренебрежении
членами порядка малости aiRi/Lt. Для решения системы (7.7.1)
методом медленно меняющихся амплитуд положим
ut = A (£) cos [<о0£ — if(i)], K2 = B(i)cos[(Boi —<p(OL (7.7.2)
где £o0 — (v, + v2)/2, A, В, if и <p— медленно меняющиеся функ-
ции времени.
Представление решения в виде (7.7.2) справедливо внутри
полосы синхронизации, когда генераторы работают на одной и
той же частоте или вблизи синхронизации, когда разность гене-
20 в. В. Мигулин и др.
298
ГЛ. 7. ПАРАМЕТРИЧЕСКИЕ И АВТОКОЛЕБАТЕЛЬНЫЕ СИСТЕМЫ
рируемых частот невелика. Частота колебаний первого генерато-
ра равна ан = со о — для частоты второго генератора имеем
©2 = ш0 —ф(г). Укороченные уравнения для А, В, ф и ср записы-
ваются в виде
А = (А) А -|—уД В sin Ф,
В = бДВ) В - A sin Ф,
ф = Ai —^-^-созФ, (7.7.3]
Ф = Д2 —созФ,
где Ф = ф — ф — разность фаз колебаний генераторов, Д1 = ю0 ~
— V15 Д2 = ©0 — V2,
2Л
------------ 1 С
61 = 2л 1 261 С08(“о* — М5)] sin(®ot) d(wof),
О
2Л
б2 (£) = 27 J 282 № cos (©oi — ф)] sin (©oi) d (©ot).
о
Разность фаз Ф удовлетворяет уравнению
Ф = Д ——с^-^ЛсойФ, (7.7.^
ы \ а а у
где Д = Ai — Д2 = v, — т2 — расстройка контуров.
Уравнения (7.7.3) будем решать методом вторичного упр<
хцения укороченных уравнений (§ 7.3). Малым параметром
будем считать величину a,©0/6i = р < 1, т. е. отношение козе
фициента связи к инкременту первого контура. Величина а2©о/'
тоже примерно равна р,.
Представляя решение первых двух уравнений системы (7.7.1
в виде ряда по малому параметру р, и пренебрегая членами п
рядка р2 и выше, получим
А =А0+ pepsin®, В = Во — pbjsin Ф, z (7.7.1
где А о, Во — амплитуды свободных колебаний генераторов (п]
р = 0),
( И8 I \-1
рах = а1ш0В0 ^2|А >
рЬх = ссаш0А0 ^2 j -j- B0'j . (7.7
В режиме синхронных колебаний система генерирует одну ’
стоту, равную © = ©о — ф = ©о — ф.
§ 7.7. ВЗАИМНАЯ СИНХРОНИЗАЦИЯ ДВУХ ГЕНЕРАТОРОВ
299
Эту частоту можно найти из второй пары уравнений (7.6.3):
а.со. Ал
“=v2 + -V/cosO. (7.7.7)
В синхронном режиме Ф — постоянная величина, т. е. Ф = 0.
Тогда из (7.7.4) следует, что
°юФ = (7'7'8)
Для заданной расстройки генераторов А при известных ампли-
тудах несвязанных колебаний Ао, Во из (7.7.8) нетрудно найти
фазу Ф. Подставляя ее в (7.7.5) и (7.7.7), определим амплитуды
А и В и частоту ю синхронных колебаний.
Ширина полосы синхронного режима находится из условия
созФ = ±1:
А — I а а
^гР- 2 \а*в0 а1 Ло
(7.7.9)
На рис. 7.20 приведены зависимости Л и В от расстройки А в
полосе синхронизации для случая Ло < Во. Если Ло < Во, то в
соответствии с (7.7.5) и (7.7.6) ампли-
туда более мощного генератора почти
не меняется. Этот генератор играет
роль захватывающего (§ 5.5). Зависи-
мость частоты от расстройки в полосе
синхронизации линейна. При Ло <Во
частота генерации близка к v2 — пар-
циальной частоте более мощного гене-
ратора. В случае близких мощностей
генераторов при синхронизации изме-
няются обе амплитуды Л и В. При этом
различие между захватываемым и за-
Рис. 7.20. Зависимость ам-
плитуд колебаний двух
связанных генераторов от
расстройки в области син-
хронизации
хватывающим генераторами уменьша-
ется и при Ло ~ Bj в системе возможны
два устойчивых режима: режим, при
котором генератор с амплитудой Л не-
ляется захватывающим, а генератор с амплитудой В — захваты-
ваемым, и режим, в котором эти генераторы поменялись ролями.
Внутри полосы синхронизации возможны переходы от одного
режима к другому, сопровождаемые резким изменением амплиту-
ды и частоты.
Взаимная синхронизация двух генераторов может быть ис-
пользована для стабилизации частоты в том случае, если захва-
тывающий генератор более стабилен, чем захватываемый.
ГЛАВА 8
КОЛЕБАНИЯ В ЛИНЕЙНЫХ СИСТЕМАХ
С п СТЕПЕНЯМИ СВОБОДЫ
§ 8.1. Собственные колебания в консервативных системах
Многие колебательные системы должны рассматриваться как
системы с п степенями свободы. К числу таких систем относятся
сложные электрические цепи, в частности фильтры. Эквивалент-
ные схемы СВЧ-цепей, как правило, также являются система-
ми с п степенями свободы. Примером механической системы с
п степенями свободы может служить многоатомная молекула.
Теория колебаний в системах со многими степенями свободы ин-
тересна также при изучении движения кристаллической решетки
твердого тела.
Движение в системе с п степенями свободы описывается л
независимыми координатами, выбор которых, так же как и т
системе с двумя степенями свободы, произволен. Так, в электри-
ческих цепях в качестве переменных можно выбрать напряже-
ния на элементах цепи или токи в соответствующих контурах
Число степеней свободы определяется минимальным числом пере-
менных, необходимым для полного описания движения.
Так же как для систем с двумя степенями свободы, в рас
сматриваемых системах можно ввести нормальные координаты
Число нормальных координат равно числу степеней свободы си
стемы. Движение каждой нормальной координаты происходи'
независимо от остальных. Поэтому каждая нормальная коорди
ната совершает гармоническое колебание с собственной, или нор
мальной, частотой. Любые свободные и вынужденные колебанш
можно представить в виде суперпозиции нормальных колебаний
Для исследования собственных колебаний в системе с ц сте
пенями свободы воспользуемся уравнениями Лагранжа. Пуст
движение в системе определяется п независимыми обобщенным!
координатами q2, q3, ..., qn.
В частном случае эти координаты могут представлять сме
щения некоторых точек механической системы или заряды н
проводниках электрической системы. Потенциальная энергия св
стемы является функцией обобщенных координат
V(qlt Яг, qn).
В положении устойчивого равновесия потенциальная энерги
§ 8.1. СОБСТВЕННЫЕ КОЛЕБАНИЯ
301
имеет минимум, т. е.
(8.1.1)
dq> 1<г«о
для всех s от 1 до п, где д,0 — значения координат в положении
равновесия. Если в качестве новых координат выбрать х, = q, —
— <7«о — отклонения от равновесных значений координат, то для
малых х, можно написать
V (xlf х2, ..., хп) — V (0, 0, ..., 0) =
п п
2дУ , 1 V S2V , ,Q .
дх Ха+ 2 dxadXl XsXl + • (8Л-2)
4=1 4 0 4,1=1 4 ‘ 0
Так как потенциальная энергия определяется с точностью до
константы, то положим V (0, 0, ..., 0) равной нулю. Используя
соотношения (8.1.1) и пренебрегая высшими степенями отклоне-
ний, получим
п 2 п
У(хъх2, ...,хп) = -^ xsXl = 2 k>ix&xi. (8.1.3)
4,1 = 1 4 1 0 4,1 = 1
V(Xi, Хп) является положительно определенной квадратич-
ной формой от х„ причем k,t = klt. Аналогичным образом кине-
тическая энергия системы представляет собой положительно оп-
ределенную квадратичную форму от обобщенных скоростей х*
71
Т (Жц х2, ..., хп) = 2 m,iXsxi. (8.1.4)
4,1=1
В (8.1.3) и (8.1.4) члены с s = Z соответствуют внутренней энер-
гии парциальных систем, а члены с $ ФI соответствуют энергии
связи между s-й и Z-й парциальными системами. В механическом
случае иг„ и kt3 соответствуют массе и упругости s-й парциаль-
ной системы.
Если теперь записать уравнения Лагранжа
d дТ dV = п
dt дх, + дх. ’
то получим п линейных дифференциальных уравнений вида
тПцХ! + Ш12Хг + ... + + kuXi + kl2x2 +__+ kinXn = 0,
+ m22x2 + ... + пг2пГп + k2lxt + k22x2 + ... + k2nxn — 0,
mnlfi “b win2^-2 “Ь*»* “Ь т&ппХп “b knlXt 4“ kn2x2 ... 4“.knnxn s= 0.
Для анализа системы (8.1.5) удобно перейти к матричной фор-
ме записи.
(8.1.5)
302
ГЛ. 8. ЛИНЕЙНЫЕ СИСТЕМЫ С п СТЕПЕНЯМИ СВОБОДЫ
Введем матрицы массы т и упругости к, равные
(тц т12 ГО1п\ /^11 ^’12 ••• ^1п\
те21 т22 т2П ) = ( ^21 к22 ‘ ’ к2П \ (8.1.6)
mnl теп2 • • • mnJ _ V^nl ^П2 • • • кпп/
Обе матрицы квадратные и симметричные. Будем теперь счи-
тать координаты #!, хг, ..., хп компонентами вектора колеба-
нии х, так что
/гА
В соответствии с правилами матричного исчисления уравнения
(8.1.5) можно записать в матричной форме
тх + ~кх = 0. (8.1.7)
Величина тх является вектором, (матрицей с одним столбцом)’
и называется вектором силы инерции. Соответственно кх — век-
тор силы упругости, или упругий вектор. Решение матричного
уравнения (8.1.7) естественно искать в виде вектора
х = Ае&{, (8.1.8)
где амплитудный вектор А в общем случае может быть комп-
лексным, т. е. его компоненты являются комплексными амп-
литудами колебаний соответствующих координат. Из (8.1.8) сле-
дует, что х — — <о24Л Используя свойство ассоциативност!
матриц, можно записать вместо (8.1.7)
(— со2пг + к) А = 0. (8.1.9
Нетривиальное решение однородного матричного уравненш
(8.1.9) существует только в случае равенства нулю детерми
нанта
I— со2иг + к\ = 0. (8.1.10)
(8.1.10) является уравнением n-й степени относительно со2. И
него можно определить п собственных частот колебаний систе
мы со,, s = 1, 2, ..., п.
Поскольку все коэффициенты уравнения (8.1.9) —. действи
тельные числа, вектор xs, соответствующий собственной частот
(Os, имеет вид
х, = А, ехр (усол) + A* exp (— /(o,t). (8.1.11
g 8.1. СОБСТВЕННЫЕ КОЛЕБАНИЯ
303
Амплитудный вектор Аг должен удовлетворять уравнению
(_(o^ + fc)4s = 0. (8.1.12)
Это матричное уравнение эквивалентно системе п однородных
уравнений для амплитуд А,т. Первый индекс у амплитуды со-
ответствует номеру собственной частоты, второй индекс — но-
меру координаты. Из системы (8.1.12) можно найти отношение
амплитуд Ae„/A,i = п,т. Величины xsm образуют вектор К„ ко-
торый называется вектором коэффициентов распределения амп-
литуд на частоте со, или формой s-го собственного колебания
системы. Коэффициенты xsm для всех s образуют квадратную
матрицу
/1 1 ... 1 \
x = |Z12 х22 • • • ХП2 (8.1.13)
\Х1П Х2П • • • хпп/
Амплитудный вектор А, выражается через К, следующим
образом:
As = Аг1Кг. (8.1.14)
В консервативной системе все коэффициенты xsm действительны,
т. е. колебания всех координат на данной собственной частоте
происходят в фазе или в противофазе. Для вектора А* анало-
гичным образом получим
А* = А\Ка. (8.1.15)
Поэтому s-e собственное колебание можно представить в виде
х, = AslKse “st + (8.1.16)
Общее решение матричного уравнения (8.1.7) представляет со-
бой суперпозицию решений типа (8.1.16)
x(t) = 2 СаКа cos (cosi + <ps), (8.1.17)
e=i
где С, = 2IA,J. В этом выражении С, и <р„ определяются на-
чальными условиями, а формы собственных колебаний К, и ча-
стоты со, зависят от параметров системы. Для выделения s-ro
собственного колебания необходимо задать в начальный момент
времени отклонения от положения равновесия системы каждой
из координат, пропорциональные Ks. В этом случае все ампли-
туды С, кроме С„ равны нулю.
Так же как в случае системы с двумя степенями свободы,
для системы с п степенями свободы можно ввести нормальные
координаты—т. е. такие координаты, которые совершают гармо-
нические колебания при любых начальных условиях. Их можнр
304 ГЛ. 8- ЛИНЕЙНЫЕ СИСТЕМЫ С п СТЕПЕНЯМИ СВОБОДЫ
ввести следующим образом. Зададим п гармонических колебаний
вида
т]. = С„ cos(cost + <ps), s = 1, 2, 3, ..., га. (8.1.18)
Каждое из колебаний т|а можно рассматривать как нормальное
п
колебание. Действительно, сумма 2 Л» представляет движение
3 = 1
первой координаты x1(t). Движение остальных координат при
заданных ц, также определено в соответствии с (8.1.17):
Xi (0 = У' хмЛ», / = 1, 2, ..., га. (8.1.19)
3 = 1
Соотношения (8.1.19) являются формулами преобразования от
нормальных координат к координатам xt. В матричной форме
(8.1.19) имеет вид
х = хН, (8.1.20)
где Н — вектор, образованный нормальными координатами.
Переходя в уравнении (8.1.7) от х к Н, получим
Н + « 0. (8.1.21)
Так как каждая нормальная координата совершает гармониче-
ское колебание, то для любого т|. справедливо равенство
Пз + <о|т]г = 0. (8.1.22)
Сопоставление (8.1.21) и (8.1.22) показывает, что
представляет собой диагональную матрицу. Ее диагональные
элементы являются квадратами собственных частот.
Таким образом, при собственных колебаниях системы каждая
нормальная координата совершает гармоническое колебание с
соответствующей собственной частотой. Любое собственное ко-
лебание представляет суперпозицию нормальных колебаний.
§ 8.2. Ортогональность нормальных колебании
и экстремальные свойства собственных частот
Каждому нормальному колебанию соответствует определенное
распределение амплитуд по координатам, или определенная
форма колебаний. Формы колебаний, соответствующие разным
собственным частотам, ортогональны друг другу. Для того чтобы
показать это, запишем уравнение (8.1.7) для s-й и r-й форм
колебаний:
— (o^zraKg + /сКа = 0, — o)fmKr + &Kr = 0. (8.2.1)
Умножим скалярно первое из уравнений (8.2.1) на Кг,
§ 8.2. ОРТОГОНАЛЬНОСТЬ НОРМАЛЬНЫХ КОЛЕБАНИЙ
305
а второе на К,:
- ®lKr^Ks + КДК8 = 0, (8.2.2)
— (о*К,^Кг + КЛКГ = 0. (8.2.3)
Поскольку матрицы т и к симметричны, то КгтпК8 = К3тпКг и
Kr&Ks = K,fcKr. Вычитая из (8.2.3) уравнение (8.2.2), получим
(<о2 - ш2) KrmK3 v 0. (8.2.4)
Если со, ¥= ®Г) то отсюда
КгтпК, = 0. (8.2.5)
Следовательно, справедливо и соотношение
КЖ = 0. (8.2.6)
Последние два соотношения являются условиями ортогонально^
сти s-й и r-й форм колебаний. Вектор тпК, называется вектором
силы инерции, соответствующим s-му нормальному колебанию,
а вектор АК,— вектором силы упругости, соответствующим то-
му же колебанию. Поэтому соотношения (8.2.5) и (8.2.6) мож-
но трактовать как условия ортогональности формы r-го нор-
мального колебания к векторам силы инерции и силы упругости,
соответствующим s-му нормальному колебанию. Использование
условий ортогональности нормальных колебаний дает возмож-
ность получить некоторые соотношения, общие для любых си-
стем с п степенями свободы. Покажем, например, что кинети-
ческая энергия любого собственного колебания равна сумме ки-
нетических энергий всех нормальных колебаний. Кинетическую
энергию системы (8.1.4) в матричной форме можно записать
в виде
Т — х(тх}. (8.2.7)
Переходя к нормальным координатам и учитывая условие орто-
гональности (8.2.5), получим
Т = 2 К8ц8 (m 2 КГЦГ) = 2 пЛк,шКг = 2 П»К8шКа. (8.2.8)
8 \ Т ] 3,Г «
Аналогично можно показать, что потенциальная энергия системы
с п степенями свободы имеет вид
Е = 2пХ£к8. (8.2.9)
Выражения (8.2.8) и (8.2.9) показывают, что систему с п сте-
пенями свободы можно представить в виде набора п невзаимо-
действующих систем с одной степенью свободы, каждая из ко-
торых обладает массой М, и упругостью К„ причем величины
306
ГЛ. 8. ЛИНЕЙНЫЕ СИСТЕМЫ С п СТЕПЕНЯМИ СВОБОДЫ
Mt и К, соответственно равны
M, = 2KsmKs, Я, = 2К,ЛК,. (8.2.10)
Условия ортогональности нормальных колебаний используют-
ся также дли отыскания собственных частот системы. Расчет
собственных Частот с помощью соотношения (8.1.10) во многих
случаях весьма сложен. Поэтому для их отыскания часто поль-
зуются свойством экстремальности собственных частот. Можно
показать, что собственные частоты являются экстремумами не-
которых соотношений, вытекающих из закона сохранения энер-
гии и условий ортогональности нормальных колебаний.
Зададим в момент времени t «= 0 произвольное отклонение от
положения равновесия системы всех п координат х0. Пусть ско-
рости изменения координат в тот же момент времени равны
нулю, т. е. ж0 = 0. Колебание в системе в любой момент вре-
мени t > 0 можно записать в виде
х (0 = S CgKa cos (cosO- (8.2.11)
При этом амплитуды С, должны удовлетворять начальному ус-
ловию
х0 = 2СаК„ (8.2.11а)
Потенциальная энергия системы в соответствии с (8.1.3) и
(8.2.11) равна 4
V = хкх = 2 С1К»/сК, cos2 (<М).
«=1
Для кинетической энергии колебаний имеем (см. (8.1.4))
Т = хтх 2 С1<о|КапгКа sin2 (®st).
«=i
При колебаниях в консервативной системе среднее по времени
значение потенциальной
нетической энергии, т. е.
V =_________________
Т 2с2а>2КатК,
8
Расположим собственные частоты в порядке их возрастания
< со| < ... < (0^.
Если заменить все квадратом наинизшей частоты <в?,; то
энергии равно среднему значению ки-
2 с2ка*к.
§ 8.2. ОРТОГОНАЛЬНОСТЬ НОРМАЛЬНЫХ КОЛЕБАНИЙ 307
(8.2.13)
(8.2.42) превращается в неравенство
' %с2акакк,
8
8
Левая часть неравенства (8.2.13) является функцией амплитуд
С„, т. е. функцией начального распределения отклонений коор-
динат х0. Величина со? является минимумом левой части (8.2.13)
как функции х0. Таким образом, используя соотношение (8.2.11),
получим _
„ х кх
©i = min °-. °. (8.2.14)
хотхо
Этот минимум достигается в том случае, когда все С„ за иск-
лючением Clt равны нулю. Тогда х0 = С1К1,т. е. распределение
амплитуд по координатам совпадает с первой собственной фор-
мой колебания. Для нахождения второй собственней частоты ®2
следует выбрать начальное отклонение х0 ортогональным первой
собственной форме колебания, т. е.
хотК1 = 0 и хокК1 — 0. (8.2.15)
Тогда в выражении (8.2.12) суммирование начинается с s = 2
и самой низкой частотой окажется частота ©2. Приводя рассуж-
дения, аналогичные изложенным выше, получим
. х Jex
©2 = min -Лг-2-
хотхо
(8.2.16)
Минимум этого выражения при дополнительном условии ортого-
нальности (8.2.15) достигается, когда xQ = СаК2, т. е. когда
Рис. 8.1. Механическая колебательная система с пятью степенями свободы
(а) и распределение амплитуд колебаний на наинизшей частоте (б): 1 —
точное решение, 2 — кусочно-линейная аппроксимация
начальное распределение колебаний совпадает со второй собствен-
ной формой. Аналогичным образом можно найти все собствен-
ные частоты колебаний ©, и собственные формы К,.
Тот факт, что квадраты собственных частот являются эк-
стремумами определенных выражений, позволяет приближенно
308
ГЛ. 8. ЛИНЕЙНЫЙ СИСТЕМЫ С п СТЕПЕНЯМИ СВОБОДЫ
находить собственные частоты, не зная точно собственных форм
колебаний. Если в правую час^ь (8.2.14) в качестве «0 подста-
вить распределение амплитуд, близкое к К1С1, то ошибка в оп-
ределении ец будет очень мала, так как функция вблизи мини-
мума слабо зависит от аргумента. В качестве примера рассчи-
таем наинизшую частоту собственных колебаний механической
системы, состоящей из пяти одинаковых масс т, связанных пру-
жинками с жесткостью к (рис. 8.1). Точное решение задачи при-
ведено в § 8.6. Из решения следует, что распределение ампли-
туд на всех частотах является синусоидальным, т. е. формы
собственных колебаний Kj имеют вид
(1 \ / 1\ ' / 1\ /л1\ / 1 \
Уз" \ ( I о \ I — 1 \ / — д/з \
2 I» I ° Г I ~1 I’ I 0 I» I 2 !•
уз~ / \ ~~1 / \ 0 / \ 1 / \ — д/з /
1 / \-1/ \ 1/ \—1/ \ 1 /
Частота наипизшего колебания равна
©х = ]Л(2 — Уз) к/т.
Покажем, что достаточно близкое значение собственной частоты
можно получить из соотношения (8.2.14), если в качестве х0
подставить кусочно-линейное распределение амплитуд, соответ-
ствующее кривой 2 на рис. 8.1, б:
(2/3 \ 4
4/3 \
2
4/3 J
2/3/
Матрицы т и к для рассматриваемой системы можно записать
в виде
(1 0 0 0 0\ /2—1 0 0 0\
0 1 0 0 о\ 1—1 2—1 0 01
0 0 1 0 0 |, £= /с 0-1 2-1 О I.
0 0 0 1 0 1 10 0 —1 2—11
0000 1/ \ 0 0 0—1 2/
Производя матричное перемножение, получим
— 2 — о 4
== 2 kf === 8 ш.
Подставляя найденные выражения в
ближенно собственную частоту системы
(8.2.14)', определим при-
2 6 к
§ 8.3. КОЛЕБАНМЯп-АТОМНОЙ молекулы 309
Это приближенное значение частоты отличается от точного не
более чем на 8%. Если х0 считать параболическим распреде-
лением амплитуд, то ошибка в определении собственной частоты
будет менее 1%.
Приведенный пример наглядно иллюстрирует то обстоятель-
ство, что даже приближенное знание формы собственных коле-
баний позволяет точно определить соответствующую собствен-
ную частоту.
§ 8.3. Колебания л-атомной молекулы
Многоатомная молекула представляет собой систему взаимо-
действующих атомов. Если общее число атомов, входящих в мо-
лекулу, равно п, то молекула имеет Зге степеней свободы. Од-
нако не все эти степени свободы являются колебательными. При
произвольном расположении атомов молекула имеет три посту-
пательные степени свободы, соответствующие ее смещению как
целого, и три вращательные степени свободы, соответствующие
вращению молекулы вокруг трех ортогональных осей. Таким
образом, полное число колебательных степеней свободы ге-атом-
ной молекулы равно Зге — 6.
В одном важном частном случае, а именно, при расположении
всех атомов данной молекулы вдоль одной прямой, молекула
называется линейной. Число колебательных степеней свободы
линейной молекулы равно Зге — 5, так как вращение вокруг дан-
ной оси молекулы нельзя рассматривать как самостоятельную
степень свободы. Вдоль оси линейной молекулы расположены ге
атомов, поэтому возможны ге независимых движений вдоль этой
оси. Из них одно движение является поступательным, а ге — 1 —
колебательными. Таким образом, для колебательных движении,
выводящих атомы с оси молекулы, остается Зге—5 —(ге—1) =
= 2(ге —2) степеней свободы. Поскольку обе ортогональные пло-
скости, проходящие через ось молекулы, равноправны, то все
колебания, выводящие атомы с оси молекулы, дважды вырож-
дены. Таким образом, линейная молекула из ге атомов имеет
2ге — 3 различные частоты собственных колебаний. При ге = 2
имеется лишь одна собственная частота, при ге = 3 — три соб-
ственные частоты и т. д. Примером линейной трехатомной мо-
лекулы может служить молекула углекислого газа СОг. Эта мо-
лекула имеет четыре колебательные степени свободы. Два нор-
мальных колебания молекулы происходят вдоль ее оси. Третье
и четвертое колебания выводят атомы с оси молекулы. Рассчи-
таем собственные частоты и коэффициенты распределения амп-
литуд по координатам для этой молекулы. Пусть атомы рас-
положены по оси ОХ и имеют координаты Xi, хг, xs. Запишем
кинетическую и потенциальную энергии для колебаний атомов
310 ГЛ. 8- ЛИНЕЙНЫЕ СИСТЕМЫ С «СТЕПЕНЯМИ СВОБОДЫ
/'
вдоль оси молекулы /
Т — т0 (#1 + жз) + ~2 тсх2> V ~ ~2~ к К3"! — ^-г)2 ~ ^г)2]»-
(8.3.1)
где к — жесткости, соответствующие продольным колебаниям
молекулы. Исключим поступательное движение молекулы, за-
крепив ее центр масс:
т0Х! + mcx2 + тох, = 0.
(8.3.2)
Исключая из соотношения (8.3.2) координату атома углерода
Хг = — (ТПо/Шс) (#1 + х3), получим
*1
тО
тс
(8.3.3)
то к , М
-д- И + —
2 \ тс/
)п
•, т0 * •
хз + Х1Х*-
Используя эти выражения для кинетической и потенциальной
энергий, запишем уравнения Лагранжа для движения атомов
молекулы вдоль оси ОХ
•• mi, •• / тЛ \
хз + I *Х2 + к хз =
*С V / *0
, X (8.3.4)
2 / 2 \
ТПл •• •• ?Пп I 1
-^Х1 + иг0Хг3 + 2к^-^-х1 + к х2 + — кз = °>
тС тС \ mi, /
где х = 1 + то/тпа^
Матрицы массы и упругости для молекулы углекислого газа
в соответствии с (8.3.4) имеют следующий вид:
Частоты колебаний вдоль оси ОХ найдем из уравнения (8.1.10).
Подставляя в это уравнение матрицы массы т и упругости к.
n-АТОМНОЙ МОЛЕКУЛЫ
311
§ 8.3. КОЛЕЕ
лолучим
/ 2
<o2/n0'x + fc Xs + —
\ тс
я
ц_о + 2Л-Х -°
тс
- ®2тох + к ( %2 + 22
\ тс
= 0. (8.3.5)
определим
тебаний
из последнего уравнения собственные частоты ко-
ю2 =
к
то’
..2 к
(Do == 1
m0
1 + 2 —
тс
Патричное уравнение (8.1.12) дает возможность найти вектор
коэффициентов распределения амплитуд на каждой из частот:
1
К,
к2 =
1
- 2то/тс
•Ч :
(8.3.6)
О
— 1
1з вида вектора К, следует, что колебание с частотой и, полно-
-имметрично (рис. 8.2, а), т. е. симметрия молекулы при колеба-
ниях не меняется. Это колебание носит название валентного,
3 С
О с о
7 _ 2-171Q
Рис. 8.2. Схема продольных колеба-
ний атомов в молекуле СО2: а —
симметричные колебания, б — анти-
симметричные колебания
Рис. 8.3. Схема изгиб-
ных колебаний моле-
кулы СОг
-ак как при нем меняется расстояние между атомами углерода
н кислорода, определяемое валентными силами. Колебание с ча-
стотой <в2 является антисимметричным валентным колебанием
рис. 8.2, б).
Рассмотрим теперь изгибное колебание молекулы СО2. Пусть
изгиб происходит в плоскости ZOX (рис. 8.3). Условие непо-
движности центра масс в данном случае имеет вид
тпо^! + mcz2 + mozt = 0, г2 = — ^2 (Zj + z3). (8.3.7)
/
312 ГЛ. 8- ЛИНЕЙНЫЕ СИСТЕМЫ С п СТЕПЕНЯМИ СВОБОДЫ
Исключая вращение молекул^ как целого вокруг ее центра
масс, получим следующее дополнительное условие, означающее
равенство нулю момента количества движения молекулы СО2,
m0zll = m0z3l. Отсюда и из соотношения (8.3.7) можно выразить
координаты z2 и z3 через Zi : z3 = Zi; z2 = —2mozjmc.
Учитывая эти равенства, получим выражение для кинетиче-
ской энергии изгибных колебаний молекулы СО2
/ \ • л
Т = m0 1 + 2— zl
\ тс /
(8.3.8)
Угол изгиба молекулы <р связан с координатами атомов z( соот-
ношением
Z1~Z2
I
Z — Z
з____22
I
справедливым для малых углов <р.
В том же приближении потенциальная энергия изгиба про-
порциональна квадрату ф
2 / \2
V = = 2^1.+ 2 zl, (8.3.9)
где к — жесткость, соответствующая изгибным колебаниям мо-
лекулы. Уравнение изгибных колебаний принимает в этом слу-
чае вид
то 1 + 2? z'1 + 24 1 + 2? U = 0. (8.3.10)
\ тс / I X тс/
Таким образом, частота изгибных колебаний молекулы СО2 равна
(8.3.11)
Вектор коэффициентов распределения амплитуд на этой ча-
стоте имеет вид
К3 =
1
2т0/тс
1
(8.3.12)
Колебание с частотой ю3 носит название деформационного ко-
лебания. Оно нарушает симметрию молекул (см. рис. 8.3) й
является вырожденным. Вырождение связано с тем, что пло-
скости ZOX и YOX равноправны. Поэтому в плоскости YOX
возможно изгибное колебание той же частоты и3.
Описанные выше собственные колебания молекулы С02 ис-
пользуются в газовом лазере на углекислом газе. Упрощенная
рхема энергетических уровней молекулы СО2 и азота .N2, входя-
Тцих в состав газовой смеси лазера, приведена на рис. 8.4. Элек-
§ 8.3. КОЛЕБАНИЯАТОМНОЙ МОЛЕКУЛЫ
313
тронный поток газового разряд возбуждает с большой эффек-
тивностью колебания, соответствующие наипизшему уровню мо-
лекул азота Ei. Частота этих кояебаний близка к частоте оь
антисимметричных колебаний молекулы СО2. В результате не-
упругого столкновения молекул N2 и СО2 происходит возбужде-
ние антисимметричного колебания СО2 и молекула переходит
на энергетический уровень Е2. Этот уровень метастабилен. С не-
го возможны переходы на более низкий возбужденный уровень,
симметричного колебания Е3 и второй возбужденный уровень,
деформационного колебания Е3. Уровни Е3 и Ек близки, между
ними в результате неупругого взаимодействия молекул суще-
ствует сильная связь. Деформационные колебания молекулы СО^
ОСО ОСО о Г "о
Рис. 8.4. Упрощенная схема энергетических уровней молекул СО2 и
Легко передают свою энергию электронам газового разряда. По-
этому уровни Е3 и Et имеют малую населенность. Переходы
между Е2 и Е3 или Е2 и Е3 являются рабочими переходами ла-
зера на СО2. Они соответствуют генерации излучения с длинами
волн 10,6 и 9,6 мкм. Следует иметь в виду, что на рис. 8.4
представлен лишь схематический спектр наинизших энергетиче-
ских уровней газовой смеси СО2 и N2. Реальный спектр значи-
тельно богаче, так как каждый колебательный уровень расщеп-
лен на несколько близких вращательных уровней.
Рассмотрим теперь плоскую молекулу, у которой в положе-
нии равновесия все атомы расположены в одной плоскости.
В этой плоскости такая молекула имеет 2га степеней свободы.
Из них две поступательные и одна вращательная, следователь-
но, число колебательных степеней свободы равно 2п — 3. На до-
лю колебаний, выводящих атомы из плоскости, остаются Зга —
— 6 —(2га —3)=га —3 степени свободы. Это означает, что у
трехатомной молекулы нет таких собственных колебаний, кото-
рые выводили бы атомы из плоскости. В качестве примера трех-
атомной молекулы рассмотрим молекулу Н2О. У этой молекулы
21 В. В. Мигулин и др.
314 ГЛ. 8- ЛИНЕЙНЫЕ СИСТЕМЫ С п СТЕПЕНЯМИ СВОБОДЫ
атомы в положении равновесия образуют равнобедренный тре-
угольник. Как уже указывалось выше, все три возможных
колебания молекулы происходят в одной плоскости. Схемы всех
трех видов изображены на рис. 8.5. Первый вид колебаний
(рис. 8.5, а) является валентным колебанием. При втором ко-
лебании, деформационном (рис. 8.5,6), изменяется угол между
прямыми, связывающими атомы водорода с атомом кислорода.
а 5 В
Рис. 8.5. Схемы колебаний атомов в молекуле HjO: а — валентное колеба-
ние, б — деформационное, в — антисимметричное
Первый и второй виды колебаний не меняют симметрии моле-
кулы воды и потому полносимметричны. Третий вид колебаний
(рис. 8.5, в) нарушает симметрию молекулы и антисимметри-
чен. Поскольку масса атома кислорода в 16 раз больше массы
атома водорода, при всех колебаниях смещение атома кислорода
много меньше смещений атомов водорода.
§ 8.4. Вынужденные колебания в системах
с п степенями свободы
В линейной системе с п степенями свободы справедлив прин-
цип суперпозиции колебаний. Поэтому задача о вынужденных
колебаниях в системе под действием любой периодической силы
сводится к нахождению вынужденных движений системы в ре-
зультате действия гармонической силы частоты р. В общем слу-
чае сила может действовать на каждую из координат. Таким
образом, внешняя сила представляется вектором Fe^pl, причем
его составляющие описывают амплитуды сил, действующих на
соответствующие координаты. Если рассматриваемая система
консервативна, то уравнение ее колебаний в матричной форме
принимает вид
тх + кх = Fe*pt. (8.4.1)
Вынужденные колебания системы, т. е. колебания, происходя-
щие на частоте внешней силы, можно записать в виде
х = (8.4.2)
где А—амплитудный вектор вынужденных колебаний. Подстав-
ляя решение (8.4.2) в (8.4.1), получим уравнение для ампли-
тудного вектора
откуда имеем
§ 8.4. ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ
(А — p^m'jtA = F,
А = (к — p2m')~1F.
315
(8.4.3)
(8.4.4)
Таким образом, для отыскания выражения для вынужденного
колебания в матричной форме необходимо найти матрицу, об-
ратную матрице к — ргт. Некоторые общие выводы о характере
колебания можно сделать на основании вида решения (8.4.4).
Матрица (к — р2т)-1 при частоте р, равной одной из собствен-
ных частот и, системы, обращается в бесконечность, так как
определитель матрицы к — ajm равен нулю (согласно (8.1.10)).
Таким образом, при р = со, в системе имеет место резонанс.
Другой путь отыскания вынужденных колебаний состоит в
разложении искомого решения по собственным колебаниям си-
стемы. Для этого амплитудный вектор А разлагают по К,-век-
торам коэффициентов распределения амплитуды собственных
колебаний системы:
4=2 BSK8.
«=1
(8.4.5}
Теперь задача сводится к отысканию неизвестных коэффициен-
тов Bs. Разложим внешнюю силу по векторам сил упругости^
F = 2 МК„
«=1
(8.4.6}
где /, — коэффициенты разложения. Коэффициенты /, можно
найти, используя условие ортогональности собственных форм и
векторов сил упругости (8.2.6). Умножая равенство (8.4.6) ска-
лярно на К„ запишем коэффициенты /, в виде
(Щ.
к8лк8’
(8.4.7}
Подставляя (8.4.5) и (8.4.6) в уравнение (8.4.3), получим
— /8 кКг = 0.
(8.4.8}
п
2
$
Используя условие ортогональности (8.2.6), легко получить вы-
ражения для коэффициентов В,’.
Вг =
к-Рг!^
(8.4.9}
21*
316
ГЛ. 8. ЛИНЕЙНЫЕ СИСТЕМЫ С п СТЕПЕНЯМИ СВОБОДЫ
Отсюда амплитуда вынужденных колебаний равна
у /Л
(8.4.10)
Из (8.4.10) непосредственно видно, что при р -> <в, амплитуды
всех координат стремятся к бесконечности, т. е. происходит
резонансное возрастание амплитуды. Резонанса на частоте и, не
будет, если вектор внешней силы ортогонален s-му собственному
колебанию. В соответствии с (8.4.7) коэффициент /, в этом слу-
чае равен нулю. В системе с п степенями свободы резонансное
возрастание амплитуды может не наступать и при действии
внешней силы только на одну l-ю координату. Это будет в том
случае, если на данной частоте и, x8i обращается в нуль, т. е.
l-я координата является узлом s-го колебания, и, таким образом,
сила приложена в узле соответствующего колебания.
§ 8.5. Колебания в диссипативных системах
с п степенями свободы
При наличии затухания расчет колебаний для систем с п
степенями свободы становится еще более громоздким. Если за-
тухание имеет характер вязкого трения, то можно ввести мат-
рицу рассеяния энергии вида -
/fen Л1а ... feln\
Л=( ' Лап I (8.5.1)
^П2 • • •
и решать матричное уравнение
mx + hx + кх = 0
или _
mx + hx + кх = FeSpt
(8.5.2)
(8.5.3)
в зависимости от того, ищем ли мы собственные или вынуж-
денные колебания.
Собственные колебания системы можно искать в виде
x(t) = AeM. (8.5.4)
Подставляя (8.5.4) в (8.5.2), получим уравнение степени 2га
для определения X
ImV + Wi + fcl =0. (8.5.5)
Так как уравнение (8.5.5) имеет действительные коэффициенты,
то все его комплексные корни будут попарно сопряженными,
\
§ 8.6. КОЛЕБАНИЯ В ОДНОРОДНЫХ ЦЕПОЧКАХ 3J7
т. е.
к = 68 + /®8, = 6, — >3, (8.5.5а)
где 6, и и, — вещественные числа.
Можно показать, что для неконсервативной диссипативной
системы, не содержащей источников энергии, все ба > 0. Вели-
чины X, часто называют комплексными собственными частотами
системы. Подставляя %а из (8.5.5а) в (8.5.4) и учитывая (8.5.2),
получим уравнения для определения коэффициентов распреде-
ления. В данном случае коэффициенты распределения будут
комплексными. Общее решение системы уравнений (8.5.2) имеет
вид
х (t) = У, Cse 6s<Ks cos((o,f + <ps). (8.5.6)
8
Здесь компоненты векторов К, комплексны и могут быть пред-
ставлены в виде ха( exp [/фа1].
Колебание каждой координаты представляет собой суперпо-
зицию затухающих колебаний, причем из-за1 комплексности ко-
эффициентов распределения колебания на частоте соа в разных
координатах сдвинуты по фазе на величину тра1. Амплитуда С,
и фаза ф3, как обычно, определяются из начальных условий.
При исследовании вынужденных колебаний в неконсерватив-
ной системе с п степенями свободы необходимо решать урав-
нение (8.5.3).
Разлагая амплитудный вектор вынужденных колебаний Ae^*
по векторам Ка, получим
Л = 8?х 1- р2/^ + 7268p/cof (8'5’7)
Таким образом, при совпадении частоты внешней силы с одной
из собственных частот в системе наблюдается резонанс. Однако
амплитуда вынужденных колебаний при резонансе остается ог-
раниченной.
§ 8.6. Колебания в однородных цепочках
Анализ колебаний в системе с п степенями свободы значи-
тельно упрощается, если система представляет собой цепочку
последовательно включенных однородных элементов. Рассмотре-
ние собственных колебаний в такой цепочке представляет ин-
терес в связи с тем, что цепочка является одномерным аналогом
кристаллической решетки, состоящей из одинаковых атомов. Од-
нородные электрические и механические цепочки в режиме вы-
нужденных колебаний используются в качестве фильтров, про-
пускающих или задерживающих определенную полосу частот.
318
ГЛ. 8. ЛИНЕЙНЫЕ СИСТЕМЫ С п СТЕПЕНЯМИ СВОБОДЫ
Рассмотрим колебания в однородной цепочке на примере
полосового фильтра, изображенного на рис. 8.6. Выберем в ка-
честве независимых координат заряды qh прошедшие к моменту
времени t через поперечное сечение соответствующих катушек,
С L 0 L С L С L
Рис. 8.6. Схема однородной цепочки
Запишем в этих координатах магнитную и электрическую
энергии системы, состоящей из 2V+ 1 элементов:
N+l N+1 2 _ 2
2Т = У Lql 2У = У -^ + (gw . (8.6.1)
П“1 п=1 о
Уравнения Лагранжа для цепочки с энергией (8.6.1) имеют
вид
" /1 9 \ 4
+ (-1- + + г„+1) - 0. (8.6.2)
Уравнение (8.6.2) справедливо для любого звена цепочки, кро-
ме первого и последнего. Заряды в 1-м и (У+1)-м звеньях
цепочки определяются граничными условиями. Рассмотрим слу-
чай системы с разомкнутыми концами, т. е.
qi ~ 0, Qn+i — 0. (8.6.3)
частное решение системы уравнений (8.6.2)' ищем в виде
qn = Qn^‘. (8.6.4)
Подставляя решение (8.6.4) в (8.6.2), получим соотношение,
связывающее амплитуды колебаний в соседних элементах це-
почки
(v2-®2)(?„-a(<?n-i + <?„+<) = 0, п = 2, ..., N, (8.6.5)
где v2 = 1/LC + 2/LC0 — квадрат парциальной частоты, а =
= l/LC0 — коэффициент связи.
Решение системы уравнений (8.6.5) можно записать следу-
ющим образом:
Qn = Ае™. (8.6.6)
При подстановке (8.6.6) в (8.6.5) получим
т2-м2-а(^ + е-^)=0. (8.6.7)
§ 8.6. КОЛЕБАНИЯ В ОДНОРОДНЫХ ЦЕПОЧКАХ
319
Отсюда
2 2
C0Sp = 2L_2L (8.6.8)
Величина р в соответствии с (8.6.6) представляет собой сдвиг
фаз на одном элементе цепочки. Поэтому уравнение (8.6.8),
связывающее частоту колебаний и и сдвиг фаз р, называется
дисперсионным уравнением цепочки. Действительные значения
Р имеют место лишь при условии
1 V2 — г? I
— 2а <1, v2-2a<(B2<v2 + 2а. (8.6.9)
Каждому значению со из иптервала (8.6.9) соответствуют два
равных по модулю, но отличающихся знаком значения [}.
Таким образом, общее решение системы уравнений (8.6.5)
имеет вид
<2п = 4е^" + Ве-Лп. (8.6.10)'
Для нахождения собственных частот колебаний цепочки вос-
пользуемся граничными условиями (8.6.3)
4е* + Ве-* = 0, + == 0. (8.6.11)
Эта система уравнений совместна, если
sin pTV = 0, (8.6.12)
т. е. = вл пли fi = sn/N и В — —Ае~2№. Используя соотноше-
ние (8.6.8), найдем собственные частоты
и! = v2 — 2acos-^-. (8.6.13)
Так как цепочка с разомкнутыми концами (qt = 0, = 0)
представляет систему с N — 1 степенью свободы, то мы имеем
N— 1 различных собственных частот: 8=1, 2, ..., N— 1, лежа-
щих в полосе прозрачности системы (8.6.9). Значения 8 = 0 и
s = N дают критические частоты: <о2Р1 — v2 — 2a и ®£Р2= v2 + 2a.
При s > TV из (8.6.13) получатся те же значения что и при
8 < TV.
Из (8.6.10), учитывая (8.6.12), можно найти выражения для
амплитуд Qns. Первый индекс у амплитуды заряда относится
к номеру звена, второй — к номеру собственной частоты
<2„8 = 4sexp^ + B8exp(-^). (8.6.14)
При 8 = 0 и s = N Qns равно нулю, т. е. амплитуды всех ко-
ординат на критической частоте равны нулю.
Таким образом, собственные колебания цепочки из TV + 1 эле-
ментов с разомкнутыми концами описываются следующими
320
ГЛ. 8. ЛИНЕЙНЫЕ СИСТЕМЫ С п СТЕПЕНЯМИ СВОБОДЫ
выражениями:
N-1
<?п = 2 sinns ^п~ cos(cost + ф8), га == 1, 2, ... , TV + 1. (8.6.15)
«=1
Величины Ds и <ps определяются начальными условиями. Соб-
ственное колебание га-го звена це-
почки представляет суперпозицию
N нормальных колебаний. Рас-
пределение амплитуд по коорди-
натам для каждой собственной
частоты происходит по синусои-
дальному закону.
На рис. 8.7 показано распре-
деление амплитуд Qn, по звеньям
цепочки на каждой собственной
частоте для случая N = 6, q, =
— q-t — 0. Как видно из рисунка,
при (о = со! колебания во всех
элементах цепочки происходят в
фазе и на длине цепочки уклады-
вается одна полуволна. С увели-
чением номера s количество полу-
волн, укладывающихся вдоль це-
почки, растет. На s-й собственной
частоте число полуволн равно з.
Рассмотрим теперь вынужденные колебания в однородной
цепочке, изображенной на рис. 8.8. Предположим, что на од-
ном конце цепочки действует гармоническая внешняя сила
& = , а другой ее
конец нагружен произ-
вольным сопротивлением
ZH. Используем так на-
зываемое Т-разбиение,
т. е. представим це-
почку в виде последова-
тельно соединенных Т-об-
разных четырехполюсни-
ков (рис. 8.9).
Для напряжений на
входе (га„) и выходе (щ>+1)
нения Кирхгофа:
Рис. 8.7. Распределение амплитуд
по звеньям однородной цепочки на
каждой из собственных частот
г I Г ! С '
Рис. 8.8. Схема однородной цепочки с
внешней силой и нагрузкой на конце
га-го звена запишем следующие урав-
(in — &n+i) “Ь 2С~ У
.. . (8-6.16)
„) dt + + 2^ J in+idt.
§ 8.6. КОЛЕБАНИЯ В ОДНОРОДНЫХ ЦЕПОЧКАХ
321
Нас интересуют только вынужденные колебания, и поэтому
представим напряжения и токи в виде
un(t) = Unexp(jpt), u„+1(0= Un+l exp (j pt), (8617y
in(t)= I„exp(jpt), i„+1(i)= In+t exp(jpt),
где Un, In, Un+l, In+t — комплексные амплитуды напряжений и
токов.
Z/2 20 L/2 20 L/2 20 L/2 20 L/2 20 L/2 20
Рис. 8.9. Представление однородной цепочки в виде последовательно соеди-
ненных Т-образных четырехполюсников
При подстановке (8.6.17) в (8.6.11) получим следующие ал-
гебраические уравнения для комплексных амплитуд:
t7n = (Z1 + Z2)7n-Z27n+I, —17n+1 = —Z2Zn + (Z1 + Z2)Zn+1, (8.6.18)
где Zj, Z2 — комплексные последовательное и параллельное со-
противления звена. Отметим, что уравнения (8.6.18) справедли-
вы для симметричной цепочки, состоящей из Т звеньев, содер-
жащих любую комбинацию линейных комплексных сопротив-
лений.
Решение системы уравнений (8.6.18) ищем в виде
ип = Ае'п, In = Beln, (8.6.19)
где 7 в общем случае может быть комплексной величиной, т. е.
7 = а+/р. (8.6.20)
Подстановка предполагаемого решения (8.6.19) в (8.6.18)
дает два линейных однородных уравнения относительно комп-
лексных амплитуд А и В:
A=(Zl + Z2)B-Z2e'lB, -A^-Z^B + IZ. + Z^B. (8.6.21)
Нетривиальное решение эта система уравнений имеет в том слу-
чае, когда ее детерминант равен нулю. Равенство нулю детер-
минанта приводит к следующему соотношению:
ch у = 1 + Z,/Z2. (8.6.22)
Последнее выражение дает связь между частотой внешней силы
р и величиной 7, определяющей характер процесоа.
Рассмотрим отдельно две возможности: ll + Zi/Z2l^l,
11 + Zt/Z2l > 1. Для рассматриваемой схемы неравенство
322
ГЛ. 8. ЛИНЕЙНЫЕ СИСТЕМЫ С п СТЕПЕНЯМИ СВОБОДЫ
\i + Zt/Z2\^l справедливо, если частота р лежит в предела^
pl = v2 — 2а ^р2^ v2 + 2а = р2. (8.6.23)
В этом случае у — чисто мнимая величина, причем существуют
два различающихся знаками значения yi = —7 Р, = ]$.
Соответственно решение (8.6.19) можно записать в виде
Un = А,?-®” + А2е^п, In = Ble~№n + B2e»n. (8.6.24)
Для каждого значения у можно найти из (8.6.21) связь между
комплексными амплитудами А3 и В3 (s = 1, 2). Так, для —
= —]'$ получим Bi/Ai =(Zi + Z2 — Z2e~,₽)_* или, учитывая соот-
ношение (8.6.22),
£i = _±_
\ ]Z2 sin р
Соответственно для имеем
д2 1
jZ2 sin р •
(8.6.25)
(8.6.26)
Таким образом, решения (8.6.24) можно записать в виде
Un (i) = Aj’exp [j (pt — рп)] + A2 exp [j (pt + 0n)],
in“° JzTsin'pexp U(pt ~ — 7Zalinp exp 17 (pt + (8‘6‘27>
Каждое из слагаемых (8.6.27) можно рассматривать как бегу-
щую волну. Однако в отличие от непрерывной среды фаза волны
меняется не непрерывно, а скачком на величину р при переходе
от п-го звена цепочки к п + 1-му.
Мы предположили, что входным звеном цепочки, к которому
приложена внешняя э. д. с., служит звено с номером п = 0.
В (8.6.27) первые слагаемые соответствуют волне, бегущей от
источника, а вторые — волне, отраженной от нагрузки. Ампли-
туды этих волн можно определить из граничных условий
н0 = «?о ехр (/>£)> wN = iNZa. (8.6.28)
Из второго граничного условия, которое задает связь между
напряжением и током на выходе цепочки (n — N), можно найти
отношение А2/Ас.
1Z sin В ехр (~/Р7У) + (л2М1)ехР (7W _ z т R 2СП
/Z2sinP ехр /pjV) _ (Л2/Лх) exp (/PAT) Za- (8.6.29)
Вводя обозначение /Z2 sin р = Zo, перепишем (8.6.29) в виде
^ = ^-оехР(-/2₽А). (8.6.30)
§ 8.6. КОЛЕБАНИЯ В ОДНОРОДНЫХ ЦЕПОЧКАХ
323
Если сопротивление нагрузки ZH равно Zo, то, как видно из
последнего соотношения, отраженная волна в цепочке отсутству-
ет. Величину Zo называют волновым сопротивлением цепочки.
Если цепочка нагружена волновым сопротивлением, то вся энер-
гия, распространяющаяся по ней, будет поглощаться этим со-
противлением. В отсутствие потерь волновое сопротивление вы-
ражается вещественной величиной, зависящей от параметров
щепочки и частоты вынуждающей силы. Для рассматриваемой
цепочки
, Г /2 2\2
(8Л31)
Вследствие зависимости волнового сопротивления от частоты
условие согласования цепочки с нагрузкой (ZH = Zo) не может
выполняться в широкой полосе частот.
Если ZH ¥= Zo, то наряду с волной, бегущей от источника, су-
ществует и отраженная волна. Решение (8.6.27) в этом случае
имеет вид
% ___
ип (i) = У exp [j (pt — Ртг)] + ° ехр [у (pt + £?г — 2p7V)L
“Г" ^0
(8.6.32)
А. Г
in(i) = 71 exp [J(pt — ртг)]
О
z , г- exp [у (pt + 0тг — 2P7V)] .
По аналогии с непрерывной системой отношение комплексной
амплитуды отраженной волны к амплитуде падающей называют
коэффициентом отражения в п-м рвене:
R = f н+ f-° ехр [- /2р (N - га)]. (8.6.33)
При ZH ¥= Zo лишь часть энергии поглощается в нагрузке, ос-
тальная часть возвращается к источнику энергии.
Для короткозамкнутой цепочки (Z’H = 0) и разомкнутой це-
почки (ZH ~* °°) модуль коэффициента отражения |Я| = 1, и в
цепочке существует чисто стоячая волна. Так, для ZH = О
un(t) — Di cos (pi) sin p (N — n), где Di = 2je~^NAl', (8.6.34)
для ZH oo
u„(t) = jD2 cos (pi) cos $(N — n), где D2 = 2e-ifiN^i.
Для чисто стоячей волны поток энергии от йсточника к на-
грузке равен нулю. Амплитуду At в (8.6.32) и (8.6.34) можно
определить из первого граничного условия (8.6.28).
324
ГЛ. 8. ЛИНЕЙНЫЕ СИСТЕМЫ С п СТЕПЕНЯМИ СВОБОДЫ
Кроме волнового сопротивления, практически важны следу-
ющие параметры цепочки:
а) входное сопротивление, определяемое как отношение на-
пряжения к току на входе линии:
U д ________
гВх = /о = 20ф-^; (8.6.35)
б) коэффициент передачи цепочки, т. е. отношение напряже-
ния выходного сигнала к напряжению входного:
К = UN/U0. (8.6.36)
Если на входе линии включен источник, внутреннее сопро-
тивление которого много меньше волнового, то (8.6.36) при-
нимает вид
R = (8.6.37)
При согласовании нагрузки с волновым сопротивлением цепочки
(ZB = Z0) получим Z„ = Zo и |^|=1. В случае несогласованной
цепочки (ZH ¥= Zo) входное сопротивление и коэффициент пере-
дачи при изменении частоты могут принимать любые значения
от нуля до бесконечности.
Рассмотрим теперь второй возможный случай: I1 + Z1/Z21>1.
Это неравенство справедливо либо при
Р = 0 и cha>l, (8.6.38)
либо при
[} = л и ch(a + ул) = —ch а < —1. (8.6.39)
Область частот, для которых [} = 0 и cha>l, располагается
между нулем и частотой р(, т. е.
0<P2<Pi = v2 — 2а. (8.6.40)
В этом диапазоне значений р решение (8.6.19) имеет вид
Un = + 42е“п. (8.6.41)
Здесь первый член характеризует колебательный процесс, при
котором все звенья колеблются в фазе, но амплитуда колебаний
экспоненциально уменьшается в направлении увеличения номера
цепочки. При большом числе звеньев (aN> 1) процесс затух-
нет раньше, чем колебания достигнут нагрузки. При выполне-
нии этого условия второй член в (8.6.41), возникающий в ре-
зультате отражения от нагрузки, можно не учитывать. В этом
случае огибающая распределения напряжения по звеньям имеет
вид экспоненты (рис. 8.10).
Коэффициент передачи цепочки для aN>1 будет равен
К = 17„/&0 = e““N. (8.6.42)
§ 8.6. КОЛЕБАНИЯ В ОДНОРОДНЫХ ЦЕПОЧКАХ
325
Отсюда следует, что R падает с увеличением числа звеньев N,
т. е. цепочка не пропускает колебаний всех частот, лежащих
ниже значения pt.
Область частот, для которых р = л и Ich al > 1, простирается
от рг до бесконечности. Решение для этой области частот
Un = (- 1)” (А^* + Л2е“п). (8.6.43)
При большом числе звеньев (<iN > 1) мы можем ограничиться
в решении только первым членом. В этом случае распределение
амплитуд по звеньям описывается по-
казательным законом. Однако в обла-
сти частот р> р2 соседние звенья ко-
леблются в противофазе (рис. 8.11).
Коэффициент передачи по модулю сов-
падает с К, определяемым формулой
(8.6.42). При большом N коэффициент
К для всех частот р < pt и р> р2 мо-
жет быть сделан очень малым.
Таким образом, рассмотренная це-
почка представляет собой полосовой
фильтр, пропускающий частоты, лежа-
щие в полосе прозрачности (8.6.23), и
Рис. 8.10, Распределение
напряжении на звеньях
цепочки для р < Pi
отфильтровывающий ча-
стоты р < pt и р> р2. Частоты pt и р2 являются граничными ча-
стотами фильтра.
Частотная характеристика полосового фильтра, т. е. зависи-
мость коэффициента передачи от частоты, при отсутствии Зату-
хания и ZH = Zo имеет вид, изображенный на рис. 8.12. Наличие
Рис. 8.11. Распределение напря-
жений по звеньям цепочки для
Р > Рг
Рис. 8.12. Частотная характери-
стика полосового фильтра
затухания сглаживает резкость изменения К при переходе через
граничные частоты.
В случае симметричных цепочек со структурой звеньев, от-
личной от рассмотренной нами, полоса пропускания будет опре-
деляться общим соотношением \1 + Zt/Z2\^i. Крутизна спада
характеристики при р < pt и р> рг зависит от числа звеньев N.
Чем больше N, тем резче спад характеристики.
ГЛАВА 9
ПАРАМЕТРИЧЕСКИЕ И АВТОКОЛЕБАТЕЛЬНЫЕ СИСТЕМЫ
С «СТЕПЕНЯМИ СВОБОДЫ
§ 9.1. Параметрические системы с п степенями свободы.
Соотношения Мэнли — Роу
Системы с п степенями свободы находят применение в па-
раметрических и автоколебательных устройствах. Параметриче-
ская система с п степенями свободы состоит из нелинейной ре-
активности и линейной цепи с п контурами, настроенными на
комбинационные частоты двух внешних сигналов, действующих
на систему. Мэнли и Роу *) показали, что между мощностями,
выделяющимися в каждом из контуров, существуют определен-
ные соотношения. Эти соотношения позволяют определять мак-
симальные коэффициенты усиления и преобразования сложной
параметрической системы.
Рассмотрим поведение нелинейной емкости под действием
двух э. д. с. несоизмеримых частот и <6Я. Если связь между
зарядом и напряжением ис на этой емкости q(uc) однозначна,
то заряд на нелинейной емкости будет содержать комбинацион-
ные частоты вида сот,г = тсон + Zco,. Величины т и I являются
целыми положительными или отрицательными числами. Одно
из них может быть нулем. Поскольку физический смысл имеют
только положительные комбинационные частоты, то числа т. и
I не могут быть одновременно отрицательными. Если число т
отрицательно, то ®т.г > 0 только при I > I ттгI coH/coi. Если же от-
рицательно I, то |ZI должен быть меньше чем mas/(i)i.
Пусть к емкости в параллель подключено бесконечное число
линейных цепей, состоящих из фильтра Ф и сопротивления R
(рис. 9.1). Фильтры считаем идеальными, т. е. пропускающими
токи только одной частоты, соответствующей определенному зна-
чению чиселПтг’и I. На каждом активном сопротивлении R вы-
деляется мощность Pmi на частоте <отг, пропущенной соответству-
ющим фильтром Ф. От внешних генераторов накачки и сигнала
поступают мощность Р10 на частоте накачки <он и мощность Р01
на частоте сигнала кщ. Если нелинейная емкость свободна от
потерь, то она не потребляет энергии, а преобразует поступаю-
щую на нее мощность в мощность колебаний Pmi на различных
комбинационных частотах. Будем считать мощность, вводимую
*) Manley J., Rowe Н. Ц Proc. IRE. 1956. V. 44, № 7. 904.
§9.1. СООТНОШЕНИЯ МЭНЛИ — РОУ
327
в систему, положительной, а мощности, рассеиваемые на сопро-
тивлениях,— отрицательными.
Мэнли и Роу получили в 1956 г. соотношения между Pmi
путем перемножения токов и напряжений в схеме рис. 9.1. Та-
кой вывод является весьма громоздким и не выявляет физиче-
ского смысла полученных соотношений. Поэтому мы получим
Рис. 9.1. Принципиальная схема многоконтурпой параметрической системы
соотношения Мэнли — Роу более простым и физически нагляд-
ным путем, исходя из квантового рассмотрения происходящих
в системе процессов преобразования мощностей.
Запишем закон сохранения числа квантов накачки в рас-
сматриваемой системе. Генератор накачки отдает в систему мощ-
ность Р10. Это означает, что в систему в единицу времени посту-
пает N„ — Р10/Айя квантов накачки. Эти кванты расходуются на
образование комбинационных колебаний. Генератор накачки не
является единственным в схеме источником квантов накачки.
Дело в том, что при образовании кванта комбинационной ча-
стоты <от! = тпйя + /й! с отрицательным значением т одновре-
менно происходит выделение квантов накачки. Образование од-
ного кванта частоты <omi сопровождается поглощением I квантов
частоты й! и выделением I mJ квантов частоты ия, так как
Ъ(йт1 — ^й! — ]т|Лйн- Число I при этом должно быть больше
чем Полное число квантов накачки, выделяющихся
в системе при образовании мощности Pmt колебания с частотой
йт1, при отрицательном т равно — |7тг|Ртг/йит1. При записи этого
выражения мы учли, что P-mi < 0. Суммируя по всем отрица-
тельным т и по всем возможным I, а также прибавляя число
квантов, приходящих от генератора накачки, получим общее
число квантов, выделяющихся в системе
N
+ —
^10
Й.а>я
оо
(9.1.1)
!>|ml<oH/u1
Все эти кванты расходуются на образование комбинационных
колебаний с т > 0. Рассмотрим комбинационное колебание с ча-
стотой йтг = тпйя + /йь для которого т > 0. Число I в этом
случае может быть любым числом, большим —тпйн/й1. При об-
разовании одного кванта частоты йтг затрачиваются т квантов
328 ГЛ. 9. ПАРАМЕТРИЧЕСКИЕ И АВТОКОЛЕБАТЕЛЬНЫЕ СИСТЕМЫ
накачки, так как tiami = rnhaB + tha^. Полное число квантов ч
стоты <omI, выделяющееся в системе за единицу времени, рав!
—P-mi/heimi. На образование этих квантов в единицу времени з
трачивается ~mPmiPhtonl квантов накачки. Суммируя по все
положительным т и по всем возможным I, получим число ква:
тов частоты <вн, поглощающихся в системе за единицу времен:
В выражении (9.1.2) необходимо исключить член, для кот
рого 771 = 1, 1 = 0, так как колебание этой частоты учтено
(9.1.1). Закон сохранения числа квантов накачки (N+~N_ = (.
принимает таким образом вид
в т=1 1>—т<йн/(й1
тРт! у у
К (тсо+ 1<п) *4 , .
\ н 1/ fn=—оо
lmlPrnl
I (отшн + 1аг)
Сменим знаки у индексов суммирования в последнем члене этох
равенства. Будем суммировать по т от 1 до бесконечности, a xi
I — от минус бесконечности до Z < —ттгсов/йр В стоящем под зн;
ком суммы выражении |тга| заменится в этом случае на п
•P-iw — на равную ей величину Pm-i, а частота колебаний Z<ot
— |7п|юн — на равную ей по модулю, но противоположную и
знаку частоту та, — IZfcot. Смена знака у частоты требует з<
мены знака перед суммой. Таким образом, закон сохранени
числа квантов накачки принимает вид
ОО 00 оо 1<-’Пйн/а>1
2 У mPml 4- У У mPml =0 ГР Г
, , Я(7П(0 +/со.)~^ ~ И(таа+1ы ) • \
тп=11>—тпшд/с^ v н 1 1/ тп=1 I——со \ а ' и
В первую из сумм (9.1.3) мы включили и член Р10/й(0н.
Умножим теперь (9.1.3) на % и объединим оба члена в одие
т—1
тРт1
т(йа+ /а>г
Суммирование по т в получившемся выражении можно начв
нать не с т = 1, а с т = 0. Это не меняет суммы, так ка
добавляет только равные нулю члены. При таком суммировани
получаем стандартное соотношение Мэнли — Роу
тРт1
mwa+ i©!
= 0.
(9.1.4а
Проведенные выше рассуждения показывают, что это соотноше
ние выражает собой закон сохранения числа квантов накачкг
§9.1. СООТНОШЕНИЯ МЭНЛИ — РОУ
329
Аналогичным образом может быть получено второе соотно-
шение Мэнли — Роу, представляющее собой закон сохранения
числа квантов сигнала
2 У lPml
тсо„ + /со,
1=0 т=—оо u 1
= 0.
(9.1.46)
Соотношение (9.1.4а) и (9.1.46) написаны при условии, что не-
линейный элемент не имеет потерь.
В каждое из соотношений Мэнли — Роу входят члены, со-
ответствующие всем частотам схемы рис. 9.1, но в (9.1.4а) ча-
стоты, для которых т > 0, считаются отрицательными, а в
(9.1.46) отрицательными оказываются частоты, для которых
Z<0.
Из вида соотношений Мэнли — Роу следует, что независимо
от вида нелинейности и вида потребителя энергии распределение
мощности по комбинационным частотам определяется величи-
ной и знаками комбинационных частот.
Применим соотношения Мэнли — Роу к анализу двухконтур-
ных параметрических усилителей, рассмотренных в гл. 7.
Регенеративный усилитель. Пусть на нелинейную емкость
действуют две э. д. с. с частотой накачки <он и частотой сигнала
(01, а в Цепи имеется дополнительный контур — фильтр, настро-
енный на частоту <он — «И. Таким образом, в соотношения Мэн-
ли — Роу войдут три мощности: Р10 — мощность накачки, Plt —
мощность сигнала и Рк-ц —мощность, выделяемая в дополни-
тельном контуре. В этом случае соотношение (9.1.2а) примет
вид
Р1» । _ о
шя — со,
н ы 1
(9.1.5)
Соответственно (9.1.26) запишется следующим образом:
Мощности P(-i)i и Pi(-i) тождественно равны. Поэтому вместо
(9.1.6) получим
^__£1-Ь = 0. (9.1.7)
“1 ®н-“1
Как отмечалось выше, мощность, поступающая от генератора
накачки Р10, больше нуля, и тогда из (9.1.5) следует, что
Р1(_п = - Р10 < 0, | Р(_1П1 < Р10.
22 В. В. Мигулин, и др.
330 ГЛ. 9. ПАРАМЕТРИЧЕСКИЕ И АВТОКОЛЕБАТЕЛЬНЫЕ СИСТЕМЫ
Эти неравенства означают, что только часть мощности накачки
поступает в дополнительный контур. Остальная часть, как видно
из (9.1.7), идет в цепь сигнала (P0i<0), т. е. расходуется на
его усиление. Система
Ы1 ы2 ын
Рис. 9.2. Распределе-
ние мощностей по
спектру колебаний
для регенеративного
двухконтурного пара-
метрического усили-
теля
тельном контуре Ри.
представляет собой регенеративный уси-
литель и способна к самовозбуждению.
На рис. 9.2 схематически показано рас-
пределение мощностей по спектру коле-
баний рассмотренного двухконтурного па-
раметрического усилителя. Там же стрел-
ками показано направление перераспре-
деления энергии между частотами,
Нерегенеративный усилитель — преоб-
разователь частоты. В этом случае допол-
нительный контур настроен на частоту
йв + Поэтому в соотношения Мэнли —
Роу будут ВХОДИТЬ МОЩНОСТИ Р10, Pot
и мощность, рассеиваемая в дополни-
Первое из соотношений Мэнли — Роу, при-
мет вид
£14 + = 0. (9.1.8)
®н И1 + V '
Для (9.1.26) соотношение запишется следующим образом:
+ ..Ли = о. (9.1.9)
Из цепи накачки в систему поступает мощность Р10 > 0. Тогда
из (9.1.8) следует, что Ри = — (сон + <01)Рю/<вя <0, и из (9.1.9),
ЧТО Poi = —(BiPii/ (<ВН + <О1) > 0.
Это означает, что теперь на управление емкостью идет энер-
гия как от генератора накачки, так и от генератора сигнала.
В таком случае схема не способна к самовозбуждению. При
съеме энергии с дополнительного контура получается усиление
за счет перераспределения энергии в пользу более высокой ча-
стоты. Максимальный коэффициент усиления по мощности та-
кого усилителя — преобразователя частоты — равен
£11
Р01
^h+^I
(9.1.10)
На рис. 9.3 приведено распределение мощностей по спектр}
колебаний для рассмотренного нерегенеративного усилителя.
Данная схема может быть использована как демодулятор
Подадим на нелинейную емкость модулированный сигнал <
комбинационной частотой <он + <»i и сигнал от генератора накач
ки с частотой <он. Считая, что задан сигнал с частотой <вн + <в
(т. е. Рц>0), из соотношений (9.1.8) и (9.1.9) получим Р10 <
§ 9.2. ТРЕХКОНТУРНЫЕ АВТОКОЛЕБАТЕЛЬНЫЕ СИСТЕМЫ
331
< 0 и Р01 < 0. Следовательно, энергия модулированного сигнала
частично идет в первый контур, а частично — в цепь генератора
накачки. В контуре выделяется продетектированный сигнал ча-
стоты ®1; причем его мощность меньше мощности модулирован-
ного сигнала в mJ((Щ + <вн) раз. Схема эта способна к самовоз-
буждению. На рис. 9.4 дано распределение мощностей по спект-
ру колебаний для данного случая.
и?2
Рис. 9.3. Распределение мощно-
стей по спектру колебаний для
нерегенеративного двухконтур-
ного параметрического усилителя
<>1
Рис. 9.4. Распределение мощно-
стей по спектру колебаний для
параметрического демодулятора
Если число взаимодействующих частот превышает три, то
два соотношения Мэнли — Роу не дают возможности решить за-
дачу до конца. Необходим анализ конкретной схемы. Однако
эти соотношения служат двумя дополнительными уравнениями,
облегчающими решение задачи о поведении параметрической
системы с п степенями свободы.
§ 9.2. Автоколебательные системы с тремя степенями свободы
В последние годы стали находить применение автоколеба-
тельные системы LC-типа с числом степеней свободы больше
двух. Такие устройства обеспечивают лучшую стабилизацию ча-
стоты, чем рассмотренная в гл. 7 автоколебательная система
с одним дополнительным
контуром *).
Наличие дополнитель-
ной степени свободы при-
водит к появлению третьей
устойчивой ветви нормаль-
ных частот, причем стаби-
лизация частоты может
оказаться выше, чем в
двухконтурной системе.
Рис. 9.5. Принципиальная схема геперато-
ра с тремя последовательно связанными
контурами
В качестве примера такого устройства рассмотрим генератор
с тремя последовательно связанными контурами (рис. 9.5). Бу-
дем считать независимыми координатами токи в контурах г\, i2,
*) Минакова И. И., Курдюмов О. А. Ц Изв. вузов. Радиоэлектроп —•
1968. Т. И, № 1. С. 41.
22*
332 ГЛ. 9- ПАРАМЕТРИЧЕСКИЕ И АВТОКОЛЕБАТЕЛЬНЫЕ СИСТЕМЫ
is. Допустим, что система работает в мягком режиме, т. е. ха-
рактеристику нелинейного элемента можно аппроксимировать
кубическим полиномом
и = Vi — 4 пД (9.2.1)
Составим дифференциальные уравнения, описывающие поведение
схемы:
»'i + 2 (6О + 6^1) — а4г2 = О,
г2 + 2б2г2 + v2i2 + a2i1 — a3is = 0, (9.2.2)
i3 + 263i3 + v3i3 — a4i2 = 0,
2 2 2
где Vi, v2, v3 — квадраты парциальных частот контуров, соответ-
ственно равные
ai, аг, а3 и a,i — коэффициенты связи между контурами:
= a* = z^P “8 = z^? “4 = W
2бв = 2SX = 4* 262 = 263 = ?•
Колебания в контурах считаем гармоническими:
ii = A sin(tof), i2 = 5sin((of-<p), i3 = Csin(<of - ф). (9.2.3)
Уравнения, связывающие амплитуды и фазы токов h, i2, is
в стационарном режиме, имеют следующий вид:
26осоА + -у- SjtoA3 + ахВ cos <р = 0,
263аВ — а2А sin ф — a3C sin (ф — ф) = 0,
2б3ыС + а4В sin (ф — ф) = 0,
и2 — vf + а4cos ф = 0, (9.2.4)
и2 — + а2 -у cos Ф + а3 4 cos (ф — ф) = 0,
и2 — v3 + а4 4 cos (ф — ф) =0.
Из последних четырех уравнений (9.2.4) можно определить
нормальные частоты системы, а из первого уравнения (9.2.4) —
$ 9.2. ТРЕХКОНТУРНЫЕ АВТОКОЛЕБАТЕЛЬНЫЕ СИСТЕМЫ
333
стационарную амплитуду колебаний в первом контуре. Здесь
удобно ввести относительные расстройки
(О2 — V? V? — V? V® — V»
Г 3 5- V1 v3 5- 2 v3
2 ’ =2 2 ’ =3 2
<0 <й <0
(9.2.5)
Зависимость нормальных частот от расстроек £2, £3 и параметров
системы наиболее просто проанализировать для следующего част-
ного случая. Пусть парциальные частоты v2 и у3 постоянны и
Рис. 9.6. Частотные кривые автоколебательной системы с тремя степенями
свободы при различных связях между контурами
равны между собой, т. е. £3 = 0. Единственной изменяющейся ве-
личиной будем считать парциальную частоту первого контура.
Тогда из (9.2.4) можно получить частотное уравнение. Разрешая
его относительно £2, находим
Г _ Г + + ~ + <>Л)2 + № - О») /О 9 R1
2 st+st - 2&o+(ki+<>A)2 :( }
где Ф2 = 262/ы, Фз = 263/о) — декременты затухания второго и
третьего контуров kf = «jC^/m4, к% = а3а4/ы4 — безразмерные
коэффициенты, характеризующие связь.
Частотное уравнение (9.2.6) может иметь до пяти действи-
тельных корней. На рис. 9.6 приведены частотные кривые, т. е.
зависимость от £2 (см. (9.2.6)) для различных соотношений
параметров системы. Равенство Ci = £2 = 0 соответствует син-
хронизму Vi = v2 = v3. Вдали от синхронизма частотные кривые
334 ГЛ. 9. ПАРАМЕТРИЧЕСКИЕ И АВТОКОЛЕБАТЕЛЬНЫЕ СИСТЕМЫ
однозначны, причем нормальная частота трехконтурной системы
и близка к парциальной частоте первого контура vt. Поэтому
асимптотой для ветвей частотных кривых, уходящих в бесконеч-
ность, будет биссектриса первого и третьего квадрантов. Для об-
ласти расстроек, близкой к синхронизму, частотные кривые будут
вести себя по-разному в зависимости от коэффициентов kt и к2.
Для наглядности целесообразно ввести в рассмотрение парциаль-
ную двухконтурную систему. Будем считать связанные между
собой второй и третий контуры такой парциальной системой. Сле-
довательно, полную систему можно рассматривать как регенери-
рованный первый контур и связанную с ним парциальную двух-
контурную систему. При этом коэффициент kt описывает связь
между первым контуром и парциальной системой. Коэффициент
к2 характеризует связь между вторым и третьим контурами. Если
к2 < к2> кр, то двухконтурную парциальную систему можно счи-
тать эквивалентной контуру с одной собственной частотой
(§ 6.3). Частотные кривые (см. рис. 9.6) при этом аналогичны
кривым двухкоптурной системы (см. § 7.4). Если kt <А\кр, то
кривая однозначна (кривая 1) при любых расстройках; если
ki > klt кр, то на частотной кривой вблизи точки синхронизма
появляется участок трехзначности (кривая 2). При связи к2>
> к2' кр двухконтурная парциальная система имеет две нормаль-
ные частоты (§ 6.3). Поэтому частотная кривая начинает пере-
секать биссектрису первого — третьего квадрантов, кроме точки
синхронизма, еще в двух точках, соответствующих совпадению
нормальных частот парциальной двухконтурной системы и часто-
ты первого контура. Так как, по предположению, v2 = v3, то точ-
ки пересечения расположены симметрично относительно начала
координат. При этом если kt < kt, кр, то частотная кривая сохра-
няет однозначность (кривая 3). Если же /ci>/ci.Kp, то появляют-
ся участки трехзначности (кривая 4). При дальнейшем увеличе-
нии связи kt и неизменных параметрах двухконтурной парциаль-
ной системы вблизи синхронизма парциальных частот появляются
участки пятизначности (кривая 5).
Не исследуя условий устойчивости, что представляет для
трехконтурной схемы сложную задачу, можно из общей теории
автоколебательных систем указать неустойчивые участки частот-
ных кривых. На рис. 9.6 они помечены крестиками. Из этого
рисунка видно, что для целей частотной стабилизации наиболее
пригодна работа в режиме, соответствующем средней ветви ча-
стотной кривой 5, проходящей через точку синхронизма.
Стационарную амплитуду колебаний в первом контуре можно
записать в виде
А* = А*-±к1
М* + М?
(9,2.7)
М1
§ 9.2. ТРЕХКОНТУРНЫЕ АВТОКОЛЕБАТЕЛЬНЫЕ СИСТЕМЫ
335
где Мг =й2 + %кЦ{^ + ^), Мг = - k^/fa + ^), 4 =
— 8^8^ На рис. 9.7 приведены зависимости амплитуды коле-
баний в первом контуре от расстройки £2 для kt > Zc1Kp и к2 > к2кр.
На рис. 9.7, а наблюдаются две близко расположенных области
затягивания 1 и 2, характерные
свободы (§ 7.5); на рис. 9.7,6
области затягивания 1 и 2 ча-
стично перекрылись. Средняя
ветвь амплитудных характери-
стик рис. 9.7 характерна толь-
ко для трехконтурной схемы.
Эта ветвь используется при
стабилизации частоты в трех-
контурном генераторе.
Стабилизирующие свойства
системы можно охарактеризо-
вать коэффициентом стабилиза-
ции и областью удержания.
Коэффициент стабилизации 9
определяется как значение про-
изводной При фиксиро-
ванных параметрах системы он
имеет максимум в точке син-
хронизма = Cs = 0. Об-
ластью удержания называется
область значений расстроек £2,
внутри которой существуют
устойчивые колебания на сред-
ней ветви частотной кривой 5
зации для случая = 0 найдем
Рис. 9.7. Зависимость амплитуды ко-
лебаний в первом контуре от рас-
стройки £2 для связи, соответствую-
щей на рис. 9.6 кривой 4 (а) и кри-
вой 5 (б)
рис. 9.6. Коэффициент стабили-
из (9.2.6):
+ Ш а’
(9.2.8)
Как мы видим, коэффициент 3? растет с увеличением коэффици-
ента ki и уменьшением декремента 6j. Зависимость ЗР от к2 при
фиксированных параметрах имеет оптимум, достигаемый при
kf = й2й3.
Зависимость ЗР от сложнее, так как значение 'бг существен-
но влияет на устойчивость колебательного режима на средней
ветви частотной кривой. Подробное исследование показывает,
что при больших значениях и добротности Qs = l/'&s макси-
мальное значение ЗР достигается при малой добротности второго
контура Q2 = 1/О2.
Область удержания растет с увеличением коэффициента связи
kt (см. рис. 9.6) .
336 ГЛ. 9- ПАРАМЕТРИЧЕСКИЕ И АВТОКОЛЕБАТЕЛЬНЫЕ СИСТЕМЫ
Таким образом, для создания высокостабильного генератора
можно использовать трехконтурную систему с высокодобротным
третьим контуром и сильной связью между первым и вторым
контурами, причем добротность второго контура должна быть
небольшой.
§ 9.3. RC-генераторы почти гармонических колебаний
.RC-генераторы — автоколебательные системы, линейная цепь
которых содержит только омические сопротивления и емкости.
Колебания в этой цепи апериодичны, и автоколебания появля-
ются только при регенерации. Колебания, близкие к гармониче-
ским, существуют в таких релаксационных системах при незна-
чительном превышении порога самовозбуждения и при наличии
достаточно протяженного почти линейного участка характеристи-
ки нелинейного элемента. В этом случае токи и напряжения во
всех участках схемы (нелинейном элементе, цепи обратной связи,
RC-цепочке) почти синусоидальны. При увеличении обратной
связи форма автоколебаний искажается. На рис. 9.8 приведена
Рис. 9.8. Принципиальная схема ЯС-геиератора
принципиальная схема п-звенного RC-генератора. Дифференци-
альное уравнение, описывающее колебания в таком генераторе,
является нелинейным уравнением А'-го порядка. Если колебания
в RC-генераторе почти гармонические, то это уравнение можно
линеаризовать, используя квазилинейный метод. Тогда коэффи-
циент усиления усилителя К?с = wBHX/w« является функцией толь-
ко амплитуды А напряжения и^. Полученное квазилинейное
уравнение удобно решать методом комплексных амплитуд.
Выберем в качестве переменных напряжения на сопротивле-
ниях R цепочки ut, и2, ..., ия. Комплексные амплитуды А, этих
напряжений должны удовлетворять следующей системе N линей-
ных уравнений:
(2+1//(bRC)^1-A2 = 5,
Л - (2 + l/jaRC)А2 + А3 = О,
4w_1-(1 + 1//(bRC)4k = 0,
(9.3.
§ 9.3. НС-ГЕНЕРАТОРЫ ПОЧТИ ГАРМОНИЧЕСКИХ КОЛЕБАНИЙ
337
где В — комплексная амплитуда напряжения на выходе уси-
лителя.
Решая эту систему уравнений относительно Ап, найдем коэф-
фициент передачи цепочки К, равный
К = An/B = Ал1, (9.3.2)
где Ая — детерминант, образованный коэффициентами системы
однородных уравнений (9.3.1).
Легко видеть, что Ai = 2 —//со7?С, А2 = (2 —j'/coflC)2 — 1,
а остальные Ап удовлетворяют следующим рекуррентным соот-
ношениям:
Ап = (2 — ;7©7?С)Ав-1 — Ав-2 для п = 3, 4, ..., N- 1, ~
Ая = (1-//®ЯС)Ая_1-Ая-2. ( }
В автоколебательном режиме должно выполняться условие
АН = А, откуда следует, что Дя равняется коэффициенту усиле-
ния усилителя:
Дя = Яуо(А0). (9.3.4)
Это соотношение определяет стационарную амплитуду колеба-
ний Ло. В общем случае Ая — комплексная величина. Если ко-
эффициент усиления Хус(4о) — вещественная величина, то из
(9.3.4) вытекают следующие два уравнения:
1шДя = 0, (9.3.5)
ВеАя = КуС(4о). (9.3.6)
Эти два уравнения отражают баланс фаз и амплитуд в генера-
торе и дают возможность найти частоты и амплитуды установив-
шихся колебаний.
Если усилитель дает сдвиг фаз между напряжением на его
входе и выходе, равный л, то, согласно условию (9.3.6), сдвиг
фаз, создаваемый цепочкой, должен равняться (2m+ 1) л, где
т = 0, 1, 2... Каждое из звеньев цепочки (рис. 9.7, б) дает
сдвиг фаз ф, определяемый соотношением tg9= 1/aiRC. Для ре-
альной схемы ф всегда меньше л/2 и поэтому минимальное число
звеньев, входящих в цепь 7?С-генератора, должно равняться трем.
Система, описываемая, уравнением (9.3.6), в этом случае имеет
одну частоту автоколебаний и,. На этой частоте сдвиг фаз, вно-
симый цепочкой, равен л. Вторая, более низкая частота ы2 воз-
никает при числе звеньев N > 6. Сдвиг фаз по цепочке на этой
частоте будет равен Зл. Третья частота появится при N > 10
И Т. д.
Условие самовозбуждения для каждой из частот имеет вид
| Re An |ш=ша <С | Куа (0) |, s = 1, 2, ... (9.3.7)
Стационарная амплитуда колебаний на частотах со, определится
из уравнения (9.3.6).
338 ГЛ. 9- ПАРАМЕТРИЧЕСКИЕ и автоколебательные системы
Рассмотрим в качестве примера четырехзвенный 7?С-генера-
тор. Запишем выражение для детерминанта Д4:
Выделяя из Д4 мнимую и вещественную части, имеем
та Ю 7 D * л 15 , 1
4 аДС ш3Д3с* 4 <о2Я®С2 <о4Я4С4
Приравнивая нулю мнимую часть, найдем возможную частоту
автоколебаний четырехзвенного ЯС-генератора
<0-3®. (9.3.8)
Подставляя это значение в вещественную часть Д4, получим
|ИеД4|~18,4. (9.3.9)’
ГЛАВА 10
КОЛЕБАТЕЛЬНЫЕ ПРОЦЕССЫ
В РАСПРЕДЕЛЕННЫХ СИСТЕМАХ
§ 10.1. Основы теории распределенных систем
В рассмотренных выше системах с сосредоточенными посто-
янными имеет место пространственное разделение элементов мас-
сы и упругости (механические системы) или емкости и индуктив-
ности (электрические системы). В этих системах можно не учи-
тывать времени передачи возмущения от точки к точке, оно мало
по сравнению с периодом колебаний. В системах происходят ко-
лебательные процессы, зависящие от единственной переменной —
времени t. Поэтому движения в системах со сосредоточенными
параметрами описываются обыкновенными дифференциальными
уравнениями.
В распределенных системах параметры распределены непре-
рывно по всему объему системы. Каждый сколь угодно малый
элемент распределенной системы обладает как массой, так и
упругостью. В случае электрической распределенной системы
каждому элементу присущи емкость и индуктивность. В качестве
примеров распределенных систем, имеющих широкое практиче-
ское применение, можно назвать струну, стержень, мембрану,
двухпроводную и коаксиальную электрические линии, волноводы,
объемные резонаторы и т. п.
Система рассматривается как распределенная, если ее линей-
ные размеры сравнимы с длиной волны, т. е. время передачи воз-
мущения по системе не мало по сравнению с периодом колеба-
ний. Таким образом, для распределенных систем условие квази-
статичности принципиально не выполняется. Основные движения
в таких системах — волновые.
Возможны две трактовки движения в распределенных систе-
мах. В первой считается, что по системе бегут волны, отражаю-
щиеся от неоднородностей. Таким образом, полное движение
представляет собой сумму бегущих в обе стороны волн. Это —
трактовка Даламбера, особенно удобная для описания процессов
в неограниченных системах и в системах, длина которых значи-
тельно больше длины волны. Колебательная трактовка (метод
Бернулли) применима лишь для ограниченных систем. В ней
любое движение рассматривается как сумма собственных колеба-
ний системы (стоячие волны).
Зависимость процессов от нескольких переменных — коорди-
нат и времени t — приводит к уравнению движения в частных
340
ГЛ. 10. КОЛЕБАНИЯ РАСПРЕДЕЛЕННЫХ СИСТЕМ
производных. Это уравнение, называемое волновым уравнением,
для одномерной однородной системы записывается в виде
д2у_____1 а2 у
дх2 ~ v2 at2’
(10.1.1)
где у = у (х, t) — функция, характеризующая движение, v — пара-
метр системы. Такому уравнению подчиняются, например, малые
поперечные колебания натянутой струны. В этом случае у (х, t) —
смещение точки струны в момент времени t,v = lT/p, где Т —
натяжение струны, р — масса единицы длины.
Тому же уравнению подчиняются продольные колебания од-
нородного стержня (или газа в трубе). Параметр v равен v=*
— 1Е/р, где Е— модуль упругости материала, р —объемная
плотность.
Точное решение задачи об электромагнитных колебаниях в
электрических линиях возможно лишь на основе уравнений Макс-
велла, из которых можно получить волновое уравнение вида
(10.1.1). Однако обычно волновое уравнение для электрических
систем типа длинной линии выводится из телеграфных уравне-
ний, связывающих токи и напряжения в линии. Телеграфные
уравнения не универсальны, и поэтому необходимо определить те
условия, при которых можно ими пользоваться.
Как уже отмечалось, распределенные системы не удовлетво-
ряют условию квазистатйчности; следовательно, для электриче-
2
ского поля rot Е =1= 0. В этом случае интеграл J Esds зависит от
г
пути интегрирования между точками 1 и 2, и поэтому нельзя
ввести понятие потенциала и понятие емкости. Ток и индуктив-
ность также введены для квазистатических полей, и использо-
вать их для описания процессов, происходящих в распределенных
системах, строго говоря, нельзя.
Однако если в двухпроводной или коаксиальной линиях вы-
полняются условия малости расстояния Ъ между проводами по
сравнению с длиной линии I и длиной волны X (Ь</, ЬСХ) и
малости сопротивления проводников, то в линии существует толь-
ко поперечная электромагнитная волна. Такая волна характери-
зуется тем, что векторы электрического и магнитного полей ле-
жат в плоскости, перпендикулярной к направлению распростра-
нения, и в этой плоскости удовлетворяют двумерному уравнению
Лапласа. Таким образом, в плоскости, нормальной к линии, рас-
пределение этих полей совпадает с распределением электрическо-
го и магнитного полей для статического случая. Поэтому для
малых участков линии dx можно считать применимой теорию
квазистатических токов и вводить понятия потенциала, тока, рас- ,
пределенных емкости и индуктивности.
§ 10.1. ОСНОВЫ ТЕОРИИ РАСПРЕДЕЛЕННЫХ СИСТЕМ
341
Считая выполненными оба сформулированных выше условия,
получим телеграфные уравнения для двухпроводной системы,
схема участка которой показана на рис. 10.1.
Если система не излучает и не взаимодействует с какими-ли-
бо другими проводниками, то токи в каждом сечении линии в
обоих проводниках равны и про-
тивоположны по направлению,
т. е.
ii(x, t) = —i2(x, t)=i(x, t).
(10.1.2)
i.f(x+dx,t) у у / 4 -
u(x,t) u(x+dx,t)
iz (x9t) iz(x+dx,t) dx
Рис. 10.1. Малый участок двух-
проводной линии (к выводу теле-
графных уравнений)
Рассмотрим бесконечно малый
элемент dx длины линии, облада-
ющей индуктивностью L и ем-
костью С на единицу длины ли-
нии. Падение напряжения на рас-
сматриваемом участке равно ин-
дуктивности Ldx, умноженной на скорость изменения тока, т. е.
^-dx = -Ldx^-. (10.1.3)
Ox ot ' '
Уменьшение тока на длине dx равно тому току, который ответ-
вляется в распределенную емкость. Этот ток равен произведению
емкости на скорость изменения напряжения:
£-dx= — Cdx%. (10.1.4)
ox ot
Из (10.1.3) и (10.1.4) получаем два так называемых телеграфных
уравнения:
= dJ- = -C^. (10.1.5)
dx dt 1 дх dt ' '
Отсюда легко получить волновые уравнения для напряжения и
тока:
д и___1 & и & i____<^1 /10 1 R1
- 5? ’ dx* ~ dt*' 1 >
где ___
v* = MlLC. (10.1.7)
Волновое уравнение можно получить также, если рассматри-
вать, например, распределенную электрическую систему как пре-
дельный случай одномерной цепочки, составленной из сосредото-
ченных индуктивностей и емкостей. Если увеличивать число яче-
ек на единицу длины цепочки, сохраняя постоянной общую
индуктивность и емкость, то в пределе система уравнений для це-
почки (8.6.2) перейдет в волновое уравнение (10.1.6). Координа-
та х соответствует изменяющемуся номеру ячейки.
342
ГЛ. 10. КОЛЕБАНИЯ РАСПРЕДЕЛЕННЫХ СИСТЕМ
Частным решением волнового уравнения типа (10.1.1) явля-
ется любая функция аргумента t — x/v^, т. е.
у = (10.1.8)
Смысл этого решения заключается в том, что любое возмуще-
ние, которое находилось в момент времени t — О в точке х, по-
вторится через время t в точке х + v^t. Таким образом, при уф =
= const возмущение распространяется по линии, не меняя своей
формы. Величина уф является скоростью распространения волны.
Второе частное решение волнового уравнения можно записать
в виде
. [ •. <0
j at-----------х
I V/h
at + х j . (10.1.11)
Оно также представляет волну, которая без изменения формы
распространяется со скоростью уф в сторону отрицательных х.
Полное решение уравнения (10.1.1) имеет вид
У = F^t--?-} +F2(t + £-}. (10.1.10)
Для процессов, синусоидальных во времени, решение (10.1.10)
принимает форму
У = А ехр
Величина <o(Z±x/v4) называется фазой волны.
Из (10.1.11) видно, что кф определяет скорость распростране-
ния фазы, поэтому уф называют фазовой скоростью, а величину
к = (о/гф — фазовой постоянной или волновым числом. Эта посто-
янная характеризует пространственную периодичность волнового
процесса и связана с длиной волны соотношением
к = 2лА. (10.1.12)
Исходя из волновых уравнений (10.1.6) зайишем волны напря-
жения и тока для электрической длинной линии:
и = ехр(—/кх) + Аг ехр(/кх)] ехр (/«>$),
(10.1.13)
i = ехр (—/кх) + Вг ехр (/кх) ] ехр (/cot).
Подставив значения и и i из (10.1.13) в телеграфные уравнения
(10.1.5), получим следующие соотношения между коэффициента-
ми Аа и В„:
Bi = Hi/Zo, B2 = -H2/Zo, (10.1.14)
где Zo = УLIC. Величина Zo имеет размерность сопротивления и
называется волновым сопротивлением линии.
§ 10. i. ОСНОВЫ ТЕОРИИ РАСПРЕДЕЛЕННЫХ СИСТЕМ
343
Учитывая (10.1.14), перепишем (10.1.13) в виде
и = [Лх exp (— Jkx) + Лг exp (jkx)] exp (jot),
(10.1.15)
i = Zo 1 [At exp (— Jkx) — A2 (jkx)] exp (/coi).
Таким образом, полное напряжение и полный ток в линии пред-
ставлены в виде суперпозиции двух волн. Если на конце линии
х = 0 задано возмущение exp(jat), то волну Ai exp [j(at — кх)]
можно рассматривать как бегущую от источника, а волну
А2 exp [/ (со£ + кх)] — как отраженную. Последняя волна может
возникнуть либо при отражении от неоднородностей линии, либо,
если линия ограничена в направлении х, от ее второго конца.
Если в линии существует только бегущая волна, то
u = ZZ0. (10.1.16)
Исходя из этого соотношения волновое сопротивление можно
определить как сопротивление, которое «оказывает» линия бегу-
щей волне напряжения.
Погонные индуктивности L и емкости С (т. е. индуктивности
и емкости на единицу длины) длинных линий определяются гео-
метрией проводников и свойствами окружающей среды.
Для двухпроводной линии имеем
L = ^-ln_L> ь>г,; (10.1.17)
где Ъ — расстояние между
скорость света в вакууме,
окружающей провода;
С =
где е — диэлектрическая проницаемость среды.
Учитывая последние два соотношения, получим для волнового
сопротивления следующее выражение:
Z0 = 2761g-y-VA-T[°M]’ (Ю.1.19)
Для линии без потерь волновое сопротивление является вещест-
венной величиной, зависящей от размеров линии и от свойств
среды.
Для коаксиальной линии имеем
Zo= 1381g 4 /-г10мЬ (Ю.1.20)
где D и d — диаметры внешнего и внутреннего проводников.
Подставляя погонные L и С в (10.1.7), получим, что фазовая
скорость волны в линии равна _______
Гф = с/V ер.. (10.1.21)
проводами, г — радиус проводов, с —
р — магнитная проницаемость среды,
е
.1.
344 ГЛ. 10- КОЛЕБАНИЯ РАСПРЕДЕЛЕННЫХ СИСТЕМ
Таким образом, фазовая скорость волны, распространяющейся
по длинной линии, зависит от свойств среды, в которой находит-
ся линия. Провода служат лишь направляющими, вдоль которых
происходит распространение волны.
Если провода линии обладают конечной проводимостью, то
существует продольная составляющая электрического поля, и
распределение электрического и магнитного полей в плоскости,
перпендикулярной к проводам, отличается от статического. Одна-
ко если поперечная составляющая электрического поля в провод-
нике мала по сравнению с продольной, а продольная составляю-
щая поля в диэлектрике, окружающем провода, мала по
сравнению с поперечной, то можно пренебречь этими малыми
компонентами поля и применять телеграфные уравнения, введя
в них распределенные сопротивление и утечку между проводами.
Телеграфные уравнения в этом случае примут вид
~ = —Ri — L^-t fL = -Gu-Cd-^-t (10.1.22)
их dtl дх dt 4 /
где R и G — сопротивление и утечка на единицу длины линии.
Для гармонического во времени процесса уравнения (10.1.22)
запишутся следующим образом:
d^ = -{R +^L)I = -ZI, ^^-(G + j^U^-YU,
(10.1.23)
где Z и Y — комплексные последовательное сопротивление и па-
раллельная утечка, U и I — комплексные амплитуды напряжения
и тока. Из этих двух телеграфных уравнений получим уравнение
для U
= (10.1.24)
ОХ
где
f = (Я + j&L) (G + j&C) = ZY. (10.1.24a)
Его решение имеет вид
U = Aie-'* + Aie'x. (10.1.25)
Постоянная распространения у в данном случае является комп-
лексной величиной. Представим ее так:
у = а + /к.
Тогда мы вправе написать
U = А^-^е-^ + A2es’xe^KX. (10.1.26)
Падающая и отраженная волны содержат теперь множитель, ха-
рактеризующий затухание волны а, который называется посто-
янной затухания.
§ 10,1. ОСНОВЫ ТЕОРИИ распределенных систем
345
Из (10.1.24а) получим
у = <о
(10.1.27).
Как мы видим, действительная и мнимая части у являются
нелинейными функциями частоты. Поэтому фазовая скорость
в линии, равная = ©/к, также зависит от частоты.
Зависимость фазовой скорости от частоты называется диспер-
сией. Любой сигнал при распространении по линии с дисперсией
будет искажаться. Рассмотренные выше линии с потерями обла-
дают дисперсией. Их волновое сопротивление является также=
комплексной величиной
= 1/ Я +
° Г G + jaC
Распределенные системы типа волноводов относятся к типич-
ным неквазистатическим системам, для которых нельзя ввести
такие электростатические и магнитостатические понятия, как на-
пряжение, ток и т. п. Несмотря на это, для описания волновод-
ных систем успешно применяются телеграфные уравнения. Вол-
новод, в котором существует один определенный тип колебаний,.
можно формально сопоставить элек-
трической линии с определенными
параметрами. Для такой линии мож-
но формально ввести понятие напря-
жения и тока. Напряжение и обыч-
но задается в виде величины, про-
порциональной поперечной состав-
ляющей электрического поля волны
данного типа. Ток i предполагается
пропорциональным поперечной со-
ставляющей магнитного поля. Коэф-
фициенты пропорциональности вы-
бираются так, чтобы произведение
Рис. 10.2. Распределение-
электрического поля волны ти-
па Яю в прямоугольном волно-
воде
V2i*u равнялось мощности, перено-
симой через поперечное сечение волновода. Мощность является
экспериментально измеряемой величиной, что дает возможность
проверить результаты расчетов опытным путем. Естественно, что-
выбор и и i при таком определении неоднозначен.
Рассмотрим в качестве примера вывод телеграфных уравнений
для прямоугольного волновода, в котором распространяется вол-
на типа Н1а (рис. 10.2). У волны этого типа отличны от нуля
лишь компоненты Еу, Нх и Hz. Поперечными компонентами явля-
ются Еу и Нх, которые и будут использованы для определения
параметров линии. Для упрощения выкладок допустим, что зави-
симость всех величин от времени имеет вид Расписывая
23 в. В. Мигулин и др.
346
ГЛ. 10. КОЛЕБАНИЯ РАСПРЕДЕЛЕННЫХ СИСТЕМ
уравнения Максвелла
rot Я = 7— Е,
С 1
по компонентам, получим
rotE = — ^Н
С
(10.1.28)
дН, ЭН.
я\ ___*£
' dz dx
б)
' dz с ’
„ дН* дН„
г)^=_/^яг>
(10.1.29)
Введем Uni следующим’образом:
= Л sin ^-t7(z), f/s = _4sin^/(z), (10.1.30)
где а — ширина волйовода.
Подставим (10.1.30) в (10.1.29в). Это даст одно из телеграф-
ных уравнений:
SU________.соц г
dz ~ > с 1
(Ю.1.31Х
Подставляя (10.1.30) в уравнения
телеграфное уравнение
(10.1.29а,г), получим второе
di
-57=
(е
с
с__л2\
со2ц а2/
U.
(10.1.32)
Из сравнения найденных уравнений с телеграфными уравнения-
ми (10.1.22) следует, что последовательное индуктивное сопро-
тивление линии, эквивалентной волноводу с волной типа Я10,
равно
Z = 7^ = /о)Г9КВ, т. е. £акв = (10.1.33)
о с
а параллельная емкостная проводимость определяется соотно-
шением
У =/со
8 С Л2
с м2ц а2
— /®СЭкв, т. е. Сдкв-------
с л2
0)2Ц а2 "
(10.1.34)
Таким образом, для волноводов можно применять телеграфные
уравнения, но с соответствующими эквивалентными параметрами,
различными для разных типов волн в волноводе.
Волновое сопротивление для волны типа Я10 в соответствии
с соотношением (10.1.14) будет иметь вид
(10.1.35)
§ 10.1. ОСНОВЫ ТЕОРИИ РАСПРЕДЕЛЕННЫХ СИСТЕМ
347
При воздушном заполнении волновода (е = ц = 1) получим для
постоянной распространения 7
(\2 / \2
-т) + • (10L36>
Нелинейная зависимость фазовой постоянной от частоты означает
существование дисперсии в волноводах даже в отсутствие потерь.
Из выражения (10.1.36) видно, что при
а = ся/а (10.1.37)
постоянная распространения обращается в нуль. Частота, опре-
деляемая соотношением (10.1.37), называется критической часто-
той для данного типа волны в волноводе и обозначается ©кр.
При частоте возбуждения © < сокр постоянная у2 > 0 и реше-
ние уравнения (10.1.24) отвечает колебаниям с затухающей по
длине волновода амплитудой
U ~ е~^.
При частоте возбуждения со > сокр постоянная распростране-
ния у2 < 0, и мы получаем решение в виде бегущей волны
£7 ~ е"**, где к = У(со/с)2 —(л/а)2. (10.1.38)
Итак, распространение волны вдоль волновода возможно толь-
ко на частотах ©, превышающих ®кр.
Учитывая (10.1.38), получим для
фазовой скорости волны в волноводе
выражение
<о с
П_Лр/./ <‘0.1.39)
Фазовая скорость в волноводе зави-
сит от частоты. Эта зависимость приве-
дена на рис. 10.3. При й » уф стре-
мится к скорости света с, т. е. условия
распространения в волноводе прибли-
жаются к условиям распространения
волны в свободном пространстве. При
Рис. 10.3. Зависимость фа-
зовой и групповой скоро-
стей волны в волноводе от
частоты
О) -> С0кр Уф ОО.
Такой закон дисперсии характерен для любого типа волны
в любом волноводе, меняется лишь значение икр.
Групповая скорость волны, определяемая как ргр = d&/dK, для
волновода равна
Ргр =сУ1 — (сокр/со)2.
(10.1.40)
Зависимость угр от частоты приведена на том же рис. 10.3.
23*
348
ГЛ. 10. КОЛЕБАНИЯ РАСПРЕДЕЛЕННЫХ СИСТЕМ
§ 10.2. Собственные колебания в системах конечной длины
с
При исследовании колебательных процессов в распределенных
системах конечной длины обычно используется метод Бернулли,
т. е. решение разлагается по собственным функциям краевой
задачи. Вид собственных функций существенно зависит от гра-
ничных условий, связывающих ток и напряжение или силу и
смещение на границах системы.
Остановимся лишь на простейших случаях граничных усло-
вий, которые, однако, часто встречаются на практике.
Наиболее простой тип граничных условий
у (0,0 = 0, y(l, t) = 0 (10.2.1)
соответствует закреплению концов струны, стержня и т. д.
В электрической линии такие условия имеют место для отрезка
линии, разомкнутой на концах, так что ток г (О, = 0 = 0.
Если линия замкнута на концах, то аналогичные условия могут
быть написаны для напряжения и: и(0, 0 = 0, и(1, 0 = 0.
Второй простейший тип граничных условий имеет вид
g- (0,0=0, g-(0 0 = 0. (10.2.2)
Это граничное условие характерно для стержня со свободными
концами. Оно следует из требования, чтобы сила, возникающая
на конце стержня вследствие его деформации, была равна нулю.
Для электрической системы этим условиям удовлетворяет напря-
жение на разомкнутых концах линии и ток в короткозамкнутой
линии.
Более общий случай граничных условий осуществляется в
электрической линии, нагруженной на конце емкостью Со. Для
напряжения на этой
шение и = q/C0, или
ди
"dt
Подставляя (10.2.3) в телегрйфйое уравнение (без учета утеч-
ки), получим
Если конденсатор включен на левом конце системы (х = 0), то
граничное условие будет иметь вид
Условия (10.2.4) и (10.2.5) различаются знаком. Это связано
с тем, что ток в линии заряжает емкость на правом конце и раз-
емкости и и заряда g справедливо соотно-
i (I, о
с.
(10.2.3)
7. dt
§ Ю.2. СОБСТВЕННЫЕ КОЛЕБАНИЯ СИСТЕМ КОНЕЧНОЙ ДЛИНЫ 34g
ряжает ее, если она включена на левом конце, т. е. для левого
конца dq/dt = —i.
Если на конце линии включена индуктивность Lo, то гранич-
ные условия запишутся так:
й- L - 4- “ <» <>• й- L, о- (10-2-в)
Объединяя рассмотренные выше типы граничных условии, по-
лучим
где 0 «£ a «S 0 «S £ <°°.
Уравнение колебаний типа (10.1.1) при граничных условиях
(10.2.7) удобно решать методом разделения переменных (метод
Бернулли). Тогда его решение имеет вид
у (х, t) = У, фа (х) [As cos(cM) + Вi sin (d),t)] • (Ю.2.8)
»=i
Постоянные А, и В, определяются из начальных условии.
Из решения (10.2.8) следует, что распределенные колебательные
системы конечной длины имеют бесконечное множество собствен-
ных частот <й„ каждой из которых соответствует определенная
форма колебаний ф«. Формами собственных колебаний одномер-
ных однородных систем являются гармонические функции.
В простейшем случае однородной струны с закрепленными
концами собственные формы колебаний системы имеют вид
ф.(я)= sin(snz/Z), а собственные частоты равны ю» = “р" 'у'м
где р и Т — плотность и натяжение струны.
Нахождение общего решения для неоднородной системы весь-
ма сложно. Однако в практически часто встречающемся случае со-
средоточенной неоднородности можно получить точное решение
задачи методом поэтапного рассмот-
рения. '////,
В качестве примера неоднородной \
системы рассмотрим струну с сосре- g
доточенной неоднородностью. Пусть
струна закреплена в точках х — 0,
х = I и нагружена в точке х — Ъ резо- 'А_________Х/у_______\/
натором, состоящим из массы М и Я
пружины с упругостью к (рис. 10.4). х=ь
Эквивалентной электрической систе- „ .п .
.. г Рис. 10.4. Струна, нагружен-
ной такого типа является, напри- ная в точке механическим ре-
мер, измерительная линия с зондом, зонатором
имеющим резонатор.
Смещение струны для х < Ъ обозначим через j/t, для х > Ъ —
через у2. Уравнения собственных колебаний для г/i и у2
350
ГЛ. 10. КОЛЕБАНИЯ РАСПРЕДЕЛЕННЫХ СИСТЕМ
одинаковы:
д*У, 1 д2У, , 9 1/7“
dt2 ’ S 4’ 2’ Рф г Р •
Их решения имеют вид
yt = A sin (кх) cos (at), у2 = В sin [к (I — х) ] cos (at),
где к — a/v^. Здесь уже учтены граничные условия
х = 0 и х = I. При х = Ъ решения необходимо сшить. Из непре-
рывности решения в точке Ъ вытекает, что
(10.2.9)
(10.2.10)
в точках
Vi(b, t) = y2(b, t) = y(t), (10.2.11)
где У (t)—смещение массы М. Второе условие сшивания можно
получить из уравнения движения массы М под действием сил
упругости струны и пружины:
= — ку —Т^-\ + Гр , (10.2.12)
dt2 дх |Ж=Ь дх Х=Ь ' '
где к — жесткость пружины.
Учитывая условия (10.2.11), получим из (10.2.10)
. Л sin(кЬ) = В sin [«(£—&)] = С,
откуда
а _ я __________£____
sin(K&)f sin[K(Z — Ь)]
Таким образом,
OOS(«>0. (10.2.13)
Подставляя эти значения в (10.2.12), получим
т [cos (кЬ) cos [к (*-&)) 1 _ м г 2 _ к
К (sin (Kb) + sin [к (I — 6)]J к
или
~ к Sin (кЬ) sin [к (f — &)] _ .
кТ sin (к?) ~ Ъ
Из трансцендентного уравнения (10.2.14) найдем к.
Рассмотрим сначала частный случай Ъ = 1/2 (резонатор нахо-
дится в середине струны). Уравнение (10.2.14) при Ь — 1/2 при-
мет вид
(Мк24 - к) sin2 -у = кГ sin («О-
Отсюда
. к1 / — к к1 /
sin4 ------л----tg 4 - 2 J = 0. (10.2.15)
§ 10.2. СОБСТВЕННЫЕ КОЛЕБАНИЯ СИСТЕМ КОНЕЧНОЙ ДЛИНЫ 35J
Одна группа решений этого уравнения определяется из равенства
sin-^- = 0, т. е. к1 = 2пл, (10.2.16)
4
п
уравнения для стру-
частотного
ны, нагружённой пружиной. Точ-
ками 1, 2, 3, 4 обозначены вели-
чины kl/2, соответствующие пер-
вым четырем собственным значе-
ниям частоты. Стрелками пока-
заны изменения собственных ча-
стот, обусловленные влиянием
пружины
где п — целое число.
Учитывая, что к = 2лА, получим I = п%. Таким образом, реше-
ния вида (10.2.16) дают собственные колебания, при которых на
струне укладывается целое число
длин волн. Это четные обертоны
струны. Для таких колебаний точ-
ка Ь == 1/2 является узлом, и по-
этому резонатор не влияет на соб-
ственные частоты. Для нечетных
обертонов имеем
. к1 = 2кТ
2 Л/Лф — *
Рассмотрим ряд частных слу-
чаев.
1. М = 0, упругая
Частотное уравнение в
чае имеет вид
. к1 2кТ 4Т
-----------к
(10.2.17)
нагрузка.
этом слу-
____ р
1к 2
(10.2.18)
Решим это уравнение графически
(рис. 10.5). Построим прямую
F — — (ДТ/kl)kl/2 и кривые F — tg(kl/2). Точки их пересечения
дают значения к, удовлетворяющие уравнению (10.2.18). При
малых к это уравнение определяет собственные частоты нечетных
обертонов ненагруженной струны: kZ/2 «(2п+1)л/2, т. е. I»
«(2ге+1)1/2. С увеличением к уменьшается угол наклона пря-
мой к оси абсцисс и собственные частоты обертонов растут.
/r=Z7
Первый тон
Второй тон
к*О
Рис. 10.6. Формы собственных колебаний струны, нагруженной пружиной
Их распределение неэквидистантно. Из рис. 10.5 видно, что сильнее
всего меняется основной тон. При к -*•00 со2п+1 стремится к со2п+2.
Изменение к меняет и форму колебания. Для цервого тона фор-
ма колебаний при различных к изображена на рис. 10.6 (первая,
третья и четвертая кривые).
352
ГЛ. 10. КОЛЕБАНИЯ РАСПРЕДЕЛЕННЫХ СИСТЕМ
По мере увеличения к смещение точки струны, в которой
подключена пружина, уменьшается. В пределе при очень боль-
шой жесткости пружины точка х = 1/2 остается при колебаниях
неподвижной. В
ЭТОМ
Рис. 10.7. Частотная ха-
рактеристика полосово-
го фильтра
случае частота первого тона близка к ча-
стоте второго. Подбором нагрузки частоты
соседних тонов можно сблизить настоль-
ко, что система будет вести себя как по-
лосовой фильтр с частотной характери-
стикой, изображенной на рис. 10.7.
2. к = 0, струна нагружена только мас-
сой. Частотное уравнение в этом случае
имеет вид
tg4=#T = >7r2- = 7i’- (Ю.2.19)
MkvjL ™
Ф
Для его графического решения построим кривые F = tg(KZ/2) и
F = (pl/M) (2/кГ) (гипербола) (рис. 10.8). По мере увеличения М
гипербола идет круче и собственные частоты понижаются тем
сильнее, чем выше номер обертона. При М °° щ2п+1 -»• со2в,
причем основной тон можно сделать сколь угодно низким.
Рис. 10.8. Графическое решение ча-
стотного уравнения для струны, на-
груженной массой. Точками 1, 2, 3,
4 обозначены величины kl/2, соот-
ветствующие первым четырем соб-
ственным значениям частоты. Стрел-
ками показаны изменения собствен-
ных частот, обусловленные влия-
нием массы
Рис. 10.9. Формы собственных ко-
лебаний струны, нагруженной
массой
На рис. 10.9 изображены три первые собственные формы коле-
баний для струны, нагруженной массой М. Штриховой линией
показан основной тон эквивалентной струны, имеющей ту же
частоту колебаний, что и рассматриваемая струна, нагруженная
массой М.
§ 10.2. СОБСТВЕННЫЕ КОЛЕБАНИЯ СИСТЕМ КОНЕЧНОЙ ДЛИНЫ 353
3. Нагрузкой струны является весь резонатор. Частотное урав-
нение (10.2.17) снова решаем графически (рис. 10.10). Правая
-чо часть обращается в бесконечность на частоте резонатора
орез = V fc/Л/. При со < йрез резонатор представляет упругую на-
грузку и собственные частоты нечетных тонов нагруженной стру-
ны повышаются. При со > сорез нагрузка действует как масса и
•2п+1 понижаются.
Таким образом, включение резонатора приводит к подтягива-
нию собственных частот со2п+1
к частоте резонатора. Если частота
какого-либо тона совпадает с соб-
ственной частотой резонатора, то
в установившемся режиме взаимо-
действия между струной и резо-
натором на этой частоте нет.
В качестве примера распреде-
ленной электрической системы с
сосредоточенной нагрузкой рас-
смотрим коаксиальную линию,
Рис. 10.11. Коаксиальная
линия, нагруженная сосре-
доточенной емкостью
“ис. 16.10. Графическое решение ча-
стотного уравнения для струны, на-
груженной резонатором. Точка пере-
сечения штрихпунктирной прямой с
•сью абсцисс соответствует резо-
нансной частоте контура <орез
закороченную на концах х = 0ях = 1, к которой в середине (х =
= 1/2) подключена сосредоточенная емкость Со (рис. 10.11). При
-армоническом законе изменения напряжения V (х, t) =
= С7(а:)ехр(/со£) волновое уравнение (10.1.6) перейдет в следую-
щие два уравнения для амплитуд Ut(x):
—Л + tfLCUi = 0, i = 1, 2, (10.2.20)
dx"
где Ui — амплитуда напряжения на участке линии 0=Cx<Z/2,
U2 — амплитуда напряжения для 1/2 < х I, L и С — погонные
индуктивность и емкость коаксиальной линии. Решения этих
уравнений при учете граничных условий Ul (0) = C72(Z) имеют вид
Ui(x) = A sin(K£), U2 =^sin[K(Z — ®)],
где к = to/LC — волновое число.
Учтем два условия сшивания решений в точке х = Z/2: 1) не-
прерывность токов, т. е. Ц (1/2) = 1г (1/2); 2) скачок напряжения
354
ГЛ. 10. КОЛЕБАНИЯ РАСПРЕДЕЛЕННЫХ СИСТЕМ
в точке х = Z/2 определен зарядом Q на емкости Со, т. е.
V I \ IT ( I \ Q • In I ^ \ Т7 I W 1 г / z \
уЦт) - yi (т) = с; или [и1 (т) - (т)] = с;1 (т)-
Учитывая телеграфные уравнения (10.1.5), получим
j =_________________________1 dU
jasL dx'
Таким образом, первое условие сшивания сводится к равенству
dt/jl =
dx |ж=1/2 dx х=1/2*
а второе — к соотношению
dU
dx x=l/2
Сл
Подставляя предполагаемое решение в оба условия сшивания,
получим два уравнения, из которых могут быть определены соб-
ственные частоты о», и формы собственных колебаний, т. е. за-
коны изменения U^x) и U2(x):
Ак cos = — Bkcos-^-, (10.2.21)
vl vl
Лк cos 4" = г° (В — Л) sin -я-. (10.2.22)
Из (10.2.21) следует, что либо cos(kZ/2) = 0, либо В — — А. При
cos(kZ/2) = 0 kZ/2 = (2s — 1)ji/2s — 1, где s = 1, 2, ... Это означает,
Рис. 10.12. Графическое решение ча- Рис. 10.13. Формы собственных коле-
стотного уравнения для линии, на- баний линии, нагруженной емкостью
груженной емкостью
что на длине коаксиальной линии укладывается нечетное число по-
луволн X = 2п/к, т. е. I — (2s — 1) V2. Собственные частоты этих нет
четных тонов не зависят от емкости Со. Амплитуда Л равна В.
При cos(kZ/2)=#= 0 из (10.2.22) получим уравнения для опре-
деления собственных волновых чисел, а следовательно, и соб-
. Kl С Cl 1
ственных частот <a,:tg — = - .
§ 10.3. ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ РАСПРЕДЕЛЕННЫХ СИСТЕМ 355
Для графического решения этого уравнения построим функции
этом случае
Второй тон
(рис. 10.12). Из рисунка видно, что подключение емкости Со
приводит к смещению собственных частот четных тонов. Чем
больше Со, тем сильнее смещаются собственные частоты четных
тонов к нечетным более низкого порядка (со2« -* co2s-i). Чем ниже
номер тона, тем сильнее смещение частоты.
На рис. 10.13 даны формы собственных колебаний первых че-
тырех тонов. В точке х = 1/2 для четных тонов имеет место ска-
чок напряжения, величина которого определяется отношением
емкостей Сй/С1. При ±, где s = 1, 2, ...— но-
мер тона.
Частотное уравнение (10.2.14) при любом 0<6<Z исследо-
вать сложно. Однако можно показать, что в
изменяться как нечетные, так и четные то-
на. Изменить число узлов конечная нагруз-
ка не может. Поэтому при любой нагрузке
частота n-го тона всегда выше частоты
(п—1)-го тона и ниже частоты (п + 1)-го,
т. е. (dn-i < со„ < (д„+1. В качестве примера
на рис. 10.14 приведены формы колебаний
для Ъ = Z/3 и М = 0.
Характерным примером распределенной
системы, взаимодействующей с резонатором,
является лазер. Резонатор лазера, образо-
ванный системой зеркал (резонатор Фаб-
ри — Перо), обладает эквидистантным спек-
тром собственных частот м„. Когда в резо-
натор лазера помещается активное вещест-
во, обладающее резонансной частотой <в0,
собственные частоты резонатора ып подтя-
гиваются к со0. Спектр становится неэкви-
дистантным. Это обстоятельство приводит к
тому, что частоты генерируемых лазером мод
симыми. Если с помощью специальных мер добиться, чтобы
спектр стал близок к эквидистантному, то начинается самосин-
хронизация мод лазера (гл. 11).
§ 10.3. Вынужденные колебания распределенных систем
Третий тон
Рис. 10.14. Формы
собственных колеба-
ний струны, нагру-
женной пружиной на
расстоянии Z/3 от
края струны
становятся незави-
Вынужденные колебания в распределенной системе конечной
длины представляются в виде разложения по собственным функ-
циям краевой задачи. Если частота внешней силы совпадает с
одной из собственных частот системы, происходит резонансное
увеличение амплитуды колебаний.
356
ГЛ. 10. КОЛЕБАНИЯ РА СПРЕДRTTF.HTTKTX СИСТЕМ
Вынуждающая сила может быть распределена вдоль системы
либо действовать в определенной точке. В последнем случае воз-
можно возбуждение только тех колебаний, для которых точка
включения внешней силы не является узловой.
Рассмотрим вынужденные колебания в распределенной систе-
ме на примере электрической длинной линии, на которую дей-
ствует распределенная э. д. с. произвольной формы <5 (х, t).
Уравнение колебаний в такой линии имеет вид
где L, С и R — постоянные погонные параметры линии.
Пусть линия разомкнута на обоих концах, т. е. q(0, t} =
= q(l, t) = 0. Предположим, что внешнюю силу &(х, t) в интер-
вале (0, 1} можно разложить в ряд по собственным функциям
однородной линии с разомкнутыми концами:
0 = 2ф"(г)вш^. (10.3.2)
п
Коэффициенты разложения Фп(0 получим из (10.3.2), пользуясь
условиями ортогональности собственных функций свободной
системы:
г
фп(0 = ±|^ (z, Osin^dz. (10.3.3)
о
Естественно искать решение уравнения (10.3.1) также в виде
ряда по собственным функциям линии с разомкнутыми концами
<Z(z,0 = 2?n(*)sin^. (10.3.4)
п
Подставим (10.3.2) и (10.3.4) в исходное уравнение (10.3.1):
Lqn + Rqn + qn = Фп (0. n = 1, 2, ... (10.3.5)
С *
Получилась бесконечная система обыкновенных дифференци-
альных уравнений относительно qn{t). Каждое из них имеет
обычный вид колебательного уравнения для системы с одной
степенью свободы, на которую действует внешняя сила Фв(2).
Уравнения независимы, и поэтому qn(t) можно рассматривать
как нормальные координаты системы. Число таких координат
бесконечно. Если отсутствует какая-либо компонента внешней
силы Фв, то соответствующая координата совершает только
свободное затухающее колебание.
§ 10.3. ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ РАСПРЕДЕЛЕННЫХ СИСТЕМ
Решения уравнений (10.3.5) имеют вид
t
qn (Г) =--z 1 — Г Фп (т) ехр [ — б (£ — т)] X
X sin[К<й^-в2(«-т)]</т, (10.3.6)
где ш2 = п2л2р2//2, v — 1/УЬС, б = R/2L.
Получим ?n(t) для разных частных случаев внешнего воздей-
ствия
Пусть Ф„(^) = Фnoe3,’,, т. е. внешнее воздействие представляет
синхронное и синфазное гармоническое возбуждение линии.
Тогда qn(t) можно записать в виде
?п (0 =
t
= ^.Ф”° . ==- Jехр [— б (t — т) + /рг] sin []/св2 — б2 (t — т)] dt —
_______Фп0 ехр (jpt) — ехр [— t (б — у /со2 — б2)] _
2jL /<о2-б2 б + j (р + /со2-б2)
ехр (jpt) — ехр [— t (б+/ /со2 — б2)]
6 + /(р- /^-62)
Для установившихся колебаний (t > 1/6) вторыми членами в-
числителе каждой дроби можно пренебречь, поэтому для qn(t)
имеем
Ф
?п(0 = 2 (10.3.7>
£(ШП Р +21РО)
Суммируя по п, получим общее решение уравнения (10.3.1):
q (х, 0 = У-----------------sin (10.3.8)
L ^<-р2 + 2/Рб I
При частоте внешнего воздействия р, совпадающей с одной и®
собственных частот со„ системы, имеет место резонансное возрас-
тание амплитуды колебаний n-го обертона тем большее, чем мень-
ше затухание системы б.
Рассмотрим следующий частный случай: гармоническая внеш-
няя сила приложена в точке х = Ь, т. е.
ЙГ(а:, t) = Фоб (х- Ь) е^, (10.3.9)
где б (ж)—дельта-функция. Определим коэффициенты разложения
358 ГЛ. 10- КОЛЕБАНИЯ РАСПРЕДЕЛЕННЫХ СИСТЕМ
функции S (х, t)
Фп (0 = -р <MPt J 6 (г - 6) sin дл = 2Ф0 sin еЧ
о
Общее решение в этом случае будет иметь вид
q (х, t) = 2 ^2- e?vt 2 sm (”л6/г>г8“* ^/г). (10.3.10)
Из его вида можно сделать ряд полезных заключений о поведе-
нии рассматриваемой системы под действием внешнего воздей-
ствия типа (10.3.9). Если внешнее воздействие приложено в узле
b xt х b х, х
Рис 10.15. Зависимость амплитуды вынужденного колебания от места вклю-
чения внешней силы
собственного колебания номера п, т. е. sin(nnfe/Z) = 0, то это ко-
лебание, а также все кратные ему обертоны не возникнут. Из
симметричности соотношения (10.3.10) относительно точек х и b
следует принцип взаимности. Заряд, наведенный в точке Ни-
когда э. д. с. приложена в точке Ь, равен заряду, наведенному в Ь,
если э. д. с. включена в точке xt. Принцип взаимности наглядно
поясняет тот факт, что амплитуда колебаний тем больше, чем
ближе точка включения к пучности колебания (рис. 10.15).
О практическом использовании принципа взаимности мы уже
упоминали в § 6.3.
Зависимость амплитуд Qn нормальных колебаний от р носит
резонансный характер. Максимальную амплитуду имеет то_коле-
бание. для которого собственная частота ып = г1ли/1 совпадает
с частотой рротпнейсильИй ’ “-------------
Если внешняя сила подключена к одному из концов линии,
ее можно учесть в граничных условиях при решении однородного
волнового уравнения
+ * ^-=0. (10.3.11)
dt2 dt С pi?
Рассмотрим ряд частных, но часто встречающихся на практике
случаев.
§ 10.3. ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ РАСПРЕДЕЛЕННЫХ СИСТЕМ 359
/(JLjHa одном конце линии включен генератор напряжения,
а второй конец линии разомкнут, т. е.
-£77 = &oe}pt при х — 0, q (I) = 0 при х = 1. (10.3.12)
Вынужденные колебания ищем в следующем виде:
q(x,t) = Q(x)eipt. (10.3.13)
Подставляя (10.3.13) в (10.3.11), получим уравнение для Q(x)
jRp) <2 = 0, (10.3.14)
° dx
которое имеет общее решение
Q = A cos (кх) + В sin (кх), (10.3.15)
где
K2 = C(Lp2-/flp). (10.3.15а)
Решим сначала задачу, пренебрегая сопротивлением R. Тогда
волновое число к, равное к = рУЬС = 2лА, действительно. Удов-
летворим граничным условиям (10.3.12) и получим для Q(x)
следующее выражение:
& .С sin[«(Z —г)1 „
Q(х) = —f- (Ю.3.16)
п tvo п 1г I
Перейдем от амплитуды заряда к амплитуде напряжения:
U (х) = -. (10.3.17)
k ' С dx 0 cos (к1) v r
Мы видим, что при »Z = (2s+1)лУ2 (s = 0, ±1, ±2, ...) имеет
место резонансное возрастание амплитуды напряжения в линии.
В этом случае на линии укладывается нечетное число четвертей
длин волн, т. е. l = (2s + 1)А/4. Частота внешней силы р, при ко-
торой наступает резонанс, совпадает с одной из собственных
частот линии, замкнутой на одном корце и разомкнутой на дру-
гом: <bs = (2s + 1)пу/2/. Вблизи точки подключения внешней силы
находится узел напряжения. На рис. 10.16, а показано распреде-
ление U (х) для первых трех обертонов. Отношение максимальной
амплитуды U к амплитуде внешней э. д. с. определяется доб-
ротностью. При добротности, стремящейся к бесконечности, мак-
симальная амплитуда всех обертонов также стремится к беско-
нечцости.
(2?)На одном конце линии включен генератор напряжения,
второй ее конец замкнут, т. е.
4" 77 = Й’ое5₽£ при х = °i 77 = 0 ПРИ х = 1. (10.3.18)
Is ох ох
360
ГЛ. 10. КОЛЕБАНИЯ РАСПРЕДЕЛЕННЫХ СИСТЕМ
Решая уравнения (10.3.11), при граничных условиях (10.3.1
получим
и(х) = <Г0 . (40,3.1
' ' 0 sin (к1) '
Резонанс в этом случае возникает при к1 = $л, т. е. при резона
се на линии укладывается целое число полуволн. Резонанса
частота системы совпадает с одной из собственных частот лини
короткозамкнутой на обоих концах, т. е. a, = snv/l. I
рис. 10.16, б приведено распределение амплитуд напряжения д;
первых трех обертонов.
Рис. 10.16. Распределение амплитуды напряжения вдоль линии, возбужда
мой генератором напряжения с разомкнутым (а) и с замкнутым конца!
(б) для первых трех обертонов
/cl/К одному концу линии подключен генератор тока, вторе
жонсэц линии разомкнут, т. е.
= /ое7₽‘ при х = 0, q (Z) = 0 при х = I. (10.3.2
Решение в этом случае имеет вид
Q(x) = Д sin tK G . (10.3.2
v ' ]р sih(kZ) '
Соответственно для амплитуды напряжения получим
u(x)^^KC0SlK<;l-x}]. (Ю.з л
' ' ]рС sih(kZ)
При резонансе к1 = sn и на линии укладывается целое число п
луволн. Резонансная частота р равна одной из собственных ч
стот линии, разомкнутой на обоих концах, т. е. со, = snv/l, ]
§ 10.3. ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ РАСПРЕДЕЛЕННЫХ СИСТЕМ 361
рис. 10.17 приведено распределение вдоль линии амплитуд тока
з напряжения для первых двух тонов.
4. К одному концу линии подключен генератор тока, второй
^е конец замкнут, т. е.
= /oe’pt при х — 0, = 0 при х ?= I. (10.3.23)
1ри этих граничных условиях решение имеет вид
п (-а — Z° cos t” О — *)!
jp cos (AZ)
Резонанс будет при совпадении р с одной из собственных частот
j). = (2s+ l)nv/2Z.
.-ис. 10.17. Распределение амплитуд тока и напряжения вдоль линии, воз-
эуждаемой генератором тока с разомкнутым (а) и с замкнутым (б) конца-
ми для двух тонов
Распределение вдоль линии амплитуд тока и напряжения для
двух наинизших тонов дано на рис. 10.17, б.
Таким образом, резонансные явления в рассматриваемой си-
стеме зависят не только от частоты р, но и от способа воздей-
ствия на систему. В зависимости от того, какой генератор (тока
-4 в. В. Мигулин и др.
362
ГЛ. 10. КОЛЕБАНИЯ Р А ОПРЕДЕЛЕННЫХ СИСТЕМ
или напряжения) подключен к системе, резонансные частоты
будут различны.
Номер тона s, на котором при заданной частоте р может воз-
никать резонанс, определяется соотношением
s ~ pl/nv = 21/к или s = 2Z/X—1/2.
При малых номерах з резонансное колебание происходит в основ-
ном на одном тоне, если же s > 1, то даже при небольшом зату-
хании в полосу резонансной кривой попадает несколько тонов.
При этом уже нецелесообразно пользоваться разложением по
спектру собственных колебаний. Лучшие результаты дает пред-
ставление вынужденных колебаний в виде набора бегущих от ис-
точника волн и волн, отраженных от конца линии. При учете ма-
лого затухания волновое число к можно записать, согласно
(10.3.15а), следующим образом:
, (10.3.24)
» \ 2 р ) и 2 yZ/c v '
Решая уравнение (10.3.11) при граничных условиях (10.3.12),
найдем закон изменения напряжения и (х, t):
и (х, t) = -g0 ехр (jpt)
= — goexp (jpt)
ехр [jk (Z — a)] + exp [— jk (I — a)l
exp (jkZ) + exp (— jkZ)
После простых преобразований получим
и (х, t) = - g. ехр (jpt) exp(-^) + exp(Mz)exp(-2/KZ)
' ’ ' 0 14- exp (— 2jkI} '
Учитывая (10.3.24), можем записать
exp (- 2/kZ) « exp - ^2/ + ^7=)],
откуда следует, что lexp(—2/kZ) I < 1. При этом предположение
(10.3.25) можно переписать в виде
и (х, t) = — <S0 {ехр [/ (pt — кх) ] — ехр \j (pt — кх)] X
X [ехр (—2]к1) — ехр (—4/kZ) +...] +
+ ехр \j (pt + кх)] [ехр (—2]к1) — ехр (—4/kZ) + ...]}. (10.3.26’
Таким образом, вынужденное колебание представлено в вид
суммы бегущих волн. Первое слагаемое характеризует волну, бе
гущую от источника. Слагаемые вида ехр [/(pt — кх)]ехр(—2]skI
(s = 1, 2, ...) описывают бегущие волны, отраженные от конц
линии х = 0, а слагаемые ехр [7 (pt + кх) ] ехр (—2/skZ)—отражен
§ 10.4. ОБРАТНАЯ РЕАКЦИЯ СИСТЕМЫ НА ГЕНЕРАТОР
363
ные от конца х = 1. Величина s характеризует число отражений,
которые претерпела данная волна. При каждом прохождении
линии волна затухает по
закону ехр|
RI \
Поэтому в
(10.3.26) следует учитывать лишь конечное число волн, тем
меньшее, чем больше затухание в линии. В пределе при большом
затухании остается лишь волна, бегущая от источника,
и (х, t) = —с?,, ехр [/ (pt — кя)].
§ 10.4. Обратная реакция системы на генератор
Все выводы предыдущего параграфа справедливы при пред-
положении, что источник внешнего воздействия на систему обла-
дает бесконечно большой мощностью. Только в этом случае
можно считать постоянными амплитуду напряжения (генератор
напряжения) или амплитуду тока (генератор тока) и не учи-
тывать обратное влияние системы на источник колебательной
энергии. Учтем теперь, что реальный источник обладает конеч-
ной мощностью, и колебательная система оказывает на него
обратное воздействие. Рассмотрим механическую систему, экви-
валентная схема которой представлена на рис. 10.18. Возбуж-
даемая струна характеризуется плотностью р, натяжением Т и
плотностью сил трения h. В центре струны через пружину связи
с жесткостью к' подключен генератор механических колебаний.
о у, 1/2- У г I
Рис. 10.18. Эквивалентная схе-
ма механического генератора,
возбуждающего струну
Рис. 10.19. Зависимость экви-
валентного трения Лрез гене-
ратора от амплитуды колеба-
ний массы М
Генератор представлен в виде резонатора с массой М, образо-
ванного пружиной с жесткостью к и элементом трения, характе-
ризуемым коэффициентом Лрез. Автоколебательные свойства ре-
зонатора учтены зависимостью hpe3 от амплитуды колебаний.
Эта зависимость приведена на рис. 10.19 (мягкий режим). Ве-
24*
364
ГЛ. 10. КОЛЕБАНИЯ РАСПРЕДЕЛЕННЫХ СИСТЕМ
личина А о является амплитудой устойчивых стационарных коле-
баний генератора в отсутствие связи со струной.
Обозначим через (Л и уг смещение участков струны слева и
справа от точки 1/2, а через z — смещение массы М от положения
равновесия. Тогда мы можем написать уравнения колебаний для
струны и для генератора в виде
p-^V- +h^ = T^, n = l, 2, (10.4.1)
r dt2 dt dx2 '
M -S’ + ^ез + kZ + k' [Z ” Уо = °’ (10,4-2)
где y0(i)—смещение струны в точке х — 1/2. Из условия сшива-
ния решений в точке х = 1/2 имеем
У1 (t, 1/2) = у2 («, 1/2) = у0 (t), (10.4.3)
Пусть струна закреплена на концах х = 0 и х = I, т. е.
У.(0, t) = yt(l, t) = 0. (10.4.5)
Тогда из граничных условий (10.4.5) и условий сшивания
(10.4.3) следует вид решения
Ух = Уо (О sin(B|/2)’ Уъ ~ Уо sin_(kZ/2) ’ (Ю-4-6)
где к — волновое число для колебаний ненагруженндй струны.
Подстановка этих выражений в условие сшивания (10.4.4) дает
связь между уо(О и z(t)
— 2кТу0 ctg -у- + k’ (z — у0) = 0
ИЛИ / .
Уо (0 = 2кТ ctg (Kl/2) + к' • (10.4.7)
Отсюда видно, что при 2кТ ctg (kZ/2)> к' смещение струны y<>(t) <
<z(i). Тогда в уравнении для генератора (10.4.2) можно пре-
небречь уо по сравнению с z. В данном случае струна практиче-
ски не оказывает влияния на генератор. При этом генератор
работает на частоте
ar = 1(k + k')/M. (10.4.8)
Однако при приближении частоты генератора к одной из соб-
ственных частот струны, нагруженной в центре пружиной, y0(t)
будет возрастать и станет сравнимым с z(t). При малом к' собст-
венные частоты нечетных тонов струны (четные тона не возбуж-
даются, так как пружина прикреплена в центре струны) близки
§ 10.4. ОБРАТНАЯ РЕАКЦИЯ СИСТЕМЫ НА ГЕНЕРАТОР
365
(10.4.9)
(10.4.10)
к собственным частотам струны без нагрузки:
(2s+1) л
-----1 г р •
Из (10.4.7) видно, что уй будет порядка z лишь вблизи тех зна-
чений к, для которых
к1 __(2s + 1) л
Г2 2
Для того чтобы получить связь между у0 и z при сильном взаи-
модействии струны и генератора, разложим ctg(«Z/2) в ряд вбли-
зи значения к1/2 = (2s+ 1)л/2:
. к1 (2s 4-1) л к1
-----т.
(10.4.11)
Величину к можно выразить через параметры струны и пока
еще неизвестную частоту системы и>. Для этого, предполагая,
что процесс носит гармонический характер, подставим УоЦ) =
= 2?ехр[/((о£ + ф)] в уравнение колебаний струны (10.4.1). В ре-
зультате получается следующее соотношение:
—рш2 +/Тгш + к2/7 = 0. (10.4.12)
Отсюда при малых h получим связь между киш:
(10.4.13)
Знаменатель (10.4.7) при подстановке в него (10.4.11) и (10.4.13)
примет вид
,7 / <0. \
2кТ ctg-y- + k' = pZ(o(<oe — ш) + jhl ---+ к'. (10.4.14)
Так как <в порядка и>„ то можно считать, что <о (<вв — а>)«
« (и>1 — и>2)/2. Таким образом, (10.4.7) принимает вид
4- Pl (<»? - (о2) + 4 +к'] у0 (t) = k'z (t). (10.4.15)
Для генератора можно записать: z(t) = A ехр(/и£). Колебания
струны происходят с фазой, отличной от фазы генератора, по-
этому yo(t) = В ехр[/ (at + ф)].
Подставляя z и уа в (10.4.15) и в уравнение колебаний для
генератора (10.4.2), получим
4 Р1 (“»—
-| 4
со2) + к’ В cos ф-----------------hlaB sin ф — к'А = 0,
4 pl — ®2) + к' j В sin ф + 4 hlaB cos ф — 0,
(— Л/g>2 + к + к') А — к'В cos ф = 0,
йрез(оЛ — к'В sin ф = 0.
(10.4.16)
366
ГЛ. 10. КОЛЕБАНИЯ РАСПРЕДЕЛИ ГГТТЬТХ СИСТЕМ
Мы получили систему из четырех уравнений относительно
четырех неизвестных А, С = В cos <р, Z) = Bsin<p, Лрез. Для нахож-
дения стационарных амплитуд необходимо знать конкретный вид
зависимости Лрез(^1). Однако если нас интересует только частот-
ная характеристика системы, мы можем ограничиться первыми
тремя уравнениями. Это — система линейных однородных урав-
нений относительно А, С и D. Нетривиальное решение система
Имеет при условии равенства нулю детерминанта
0 -L hal 2 — А ка>1 2 4 pz —®2)+*' = 0.
— М<о2 + к + к' —к’ 0
(10.4.17)
Раскрывая детерминант, получим
2 2
(а»3 — <Всв) (со2 — ш?) — аха + 462ш2 = 0, (10.4.18)
где al = 2к'/р1, а = к'/М, 26 «= Л/р, (Ocs = со2 + а2.
Это уравнение для данной частоты ©с, совпадает с уравнением
частот для автоколебательной системы, нагруженной дополни-
тельным контуром с парциальной частотой и>с, (см. (7.4.7)). При
Рис. 10.20. Зависимость частоты
колебаний в системе от парциаль-
ной частоты
связи, большей критической, т. е.
при аа,1 > 462(о2, вблизи частоты
(оса имеет место явление затяги-
вания. Струна обладает беско-
нечным числом собственных час-
тот и>са, и явление затягивания
будет возникать вблизи любой из
частот (о„ (s = 1, 2, ...). Зависи-
мость частоты рассматриваемой
сложной системы от настройки
генератора (ог имеет вид, изобра-
женный на рис. 10.20. Так как
критическая связь (§ 7.4) зависит
от частоты, то при достаточно
высоких частотах связь станет
меньше критической и области
затягивания исчезнут.
Так же как и в случае системы с двумя степенями свободы,
явление затягивания частоты генератора, нагруженного высоко-
добротным объемным резонатором, можно использовать для це-
лей его частотной стабилизации вблизи одной из собственных
частот объемного резонатора.
ГЛАВА 11
РАСПРЕДЕЛЕННЫЕ АВТОКОЛЕБАТЕЛЬНЫЕ СИСТЕМЫ
§ 11.1. Автоколебательная система
с неэквидистантным спектром собственных частот
Распределенная система конечной длины имеет бесконечное
число собственных частот, и поэтому при возникновении автоко-
лебаний существенную роль играет характер спектра собствен-
ных частот. Если спектр неэквидистаптен, так что комбинацион-
ные частоты не являются собственными, то в системе возникают
синусоидальные колебания на одной из частот, для которой вы-
полняются условия самовозбуждения и устойчивости стационар-
ной амплитуды. В автоколебательных системах с эквидистантным
спектром одновременно возбуждаются несколько собственных
колебаний и форма возникающих колебаний далека от гармони-
ческой.
i
Рис. 11.1. Распределенная автоколебательная система с отрицательным со-
противлением на одном конце и различными нагрузками на другом
В качестве распределенной автоколебательной системы с не-
эквидистантным спектром рассмотрим ограниченную двухпровод-
ную линию, на одном из концов которой включен нелинейный
активный элемент (туннельный диод, транзистор, электронная
лампа и т. д.) (рис. 11.1)*).
Пусть линия обладает распределенными параметрами L, С
и R. Нелинейный двухполюсник, включенный на конце линии,
обладает емкостью С, и вольт-амперной характеристикой гд(и),
имеющей падающий участок (§5.1).
Решение задачи проведем для случая, когда сопротивление
линии много меньше ее волнового сопротивления Za — 1L/С,
т. е. параметр ц = много меньше единицы. Используя
») Витт А. А. // ЖТФ.— 1934. Т. 4. С. 144.
368 ГЛ. и- РАСПРЕДЕЛЕННЫЕ автоколебательные системы
телеграфные уравнения (10.1.22) (в пренебрежении утечкой)
а)1? = -С4г> б) = ~Ri’
' ox at ' ox ot ' '
запишем волновое уравнение для линии:
Л._£СА + Лс^. (11.1.2)
Граничное условие на конце х = 0 имеет вид
+ (11.1.3)
Исключая с помощью этого соотношения из телеграфного урав-
нения (11.1.16) i и di/dt, получим граничное условие, записан-
ное для напряжения и:
= LCr % + RC1 - Ria (и). (11.1.4)
дх 1 dt2 ди dt 1 dt А' ' ' ’
Граничное условие на втором конце линии х — I зависит от
того, что подключено к линии. Рассмотрим несколько вариантов
возможных нагрузок.
а) К концу линии подсоединена емкость Со (рис. 11.1, а).
Тогда связь между током и напряжением на этом конце можно
записать в виде и = J i dt/C^. Используя телеграфное уравнение
(11.1.16), получим следующее граничное условие:
d£ = -RC^t-LC^-
6) К концу линии х — I подключена индуктивность
(рис. 11.1, 6). Тогда при x = l u = Ladi/dt и граничное усло-
вие примет вид
Граничные условия для случаев закороченного и разомкнутого
концов получаются как частные случаи (11.1.5) и (11.1.6).
в) Для коротко замкнутого конца (рис. 11.1, в) при х = I
имеем
и = 0. (11.1.7)
г) Для разомкнутого (рис. 11.1, г) при х = 1 конца имеем
— = 0. (11.1.8)
дх
Будем считать, что характеристику нелинейного элемента
можно представить кубическим полиномом (мягкий режим):
/д (И) = SQu (1 - и2/3и?),; (11.1.9)
§ 11.1. СИСТЕМА С НЕЭКВИДИСТАНТНЫМ СПЕКТРОМ
369
где щ — напряжение насыщения, — крутизна линейной части
характеристики.
Здесь удобно перейти к безразмерным величинам, и поэтому
введем ряд обозначений: _____
у = х/l, т = t/ld/LC, v = u/u0,
(ИЛ.10)
= LJLI, х = CJCI, 7 = CJCl, S — SJJRIC.
В этих обозначениях волновое уравнение (11Л.2) запишется
в виде
d2t> d2v dv ... . ...
Соответственно для граничных условий получим при у = О
= (ИЛ.12)
при y = i соотношения (11.1.5)—(11.1.8) примут вид
^- + ^-g- + ’‘7F = 0’ (нл.13)
^ + t< + fp = 0’ <11лл4>
v = 0, (11.1.15)
= 0. (11.1.16)
Поскольку потери энергии в системе считаются малыми, то и
вклад энергии, пропорциональный £д(и), также мал. Поэтому
в выражении (11.1.12) опущен член, пропорциональный Шя(у),
так как он имеет порядок малости ц2.
Решение задачи начнем с определения собственных частот
соответствующей консервативной системы. Для этого положим ц
равным нулю. Запишем для этого случая уравнение (11.1.11)
и граничное условие (11.1.12)
4-^ = 0, (11.1.17)
ду2 Зт2 '
= ° ПРИ У = °- (11.1.18)
При у = 1 имеет место одно из следующих граничных условий:
. ди , ~ d2v n d2v , i ди п
= 6)^ + V77 = 0’
(11.1.19)
в) v = 0, г) =
370
ГЛ. 11. РАСПРЕДЕЛЕННЫЕ АВТОКОЛЕБАТЕЛЬНЫЕ СИСТЕМЫ
Решение уравнения (11.1.17) можно записать в виде
v = [4cos((oz/) + Bsin((oy)]cos((oT+(p). (11.1.20)’
Подставляя это решение в граничные условия (11.1.18) и
(11.1.19а), получим уравнение для определения собственных
частот консервативной системы, нагруженной на конце у = 1
емкостью:
ctgoift = —l)/[®ft(x + у)], 7с = 1, 2, ... (11.1.21)
Соответственно для системы, нагруженной на конце у = 1
индуктивностью, имеем
tg(0ft = (1 - (Р + т)]. (И.1.22)
Уравнения для нахождения собственных частот системы с зако-
роченными или разомкнутыми концами получим как частный
случай уравнения (11.1.21) при х = °° или х = 0, т. е.
ctg о* = ст, (11.1.23)
tg =-©„у. (11.1.24)
Любое из приведенных выражений дает бесконечный спектр
допустимых частот. Особенностью этого спектра является его неэк-
видистантность. Заметим, что со* есть безразмерная частота.
Вещественная частота Q равна
= (11.1.25)
Собственные частоты находятся из уравнений (11.1.21) —
(11.1.24) графически. Пример нахождения собственных частот
с помощью уравнения (11.1.23) приведен на рис. 11.2. На этом
рисунке построены кривые F =
= ctg со и прямая toy. Точки
их пересечения определяют
собственные частоты ан, сог, и>3
и т. д.
Найдем теперь условия са-
мовозбуждения системы. При
исследовании условий самовоз-
буждения можно линеаризовать
Рис. 11.2. Графическое нахождение граничное условие на конце
собственных частот у — 0. Это означает пренебре-
жение в (11.1.12) членом иг
по сравнению с единицей. Для простоты выкладок будем в даль-
нейшем рассматривать линию, закороченную при у = 1. Анало-
гично можно решить задачу и при других типах граничных
условий.
§ 11.1. СИСТЕМА С НЕЭКВИДИСТАНТНЫМ СПЕКТРОМ
371
Волновое уравнение (11.1.11) и граничные условия в этом
случае примут вид
. ^v д2 v dv
б) = при у = 0, (11.1.26)
в) v = 0t при у = 1.
Решим полученную линейную задачу методом разделения
переменных, для чего искомое решение представим в виде
»(.У, x)^Y{y)T{x). (11.1.27)
Подставим (11.1.27) в (11.1.26а), находим для Y(у) и Т(т) сле-
дующие уравнения:
-^ + Л3У = 0, /L + p-^ + A2T = 0, (11.1.28)
d/ dt2
где Л* — собственное значение краевой задачи.
Общее решение уравнения (11.1.26а) запишется в виде
v(y, т) = (Л cosAi/+ SsinAi/)exp [(—р/2 ±/Л)т]. (11.1.29)
Подстановка (И.1.29) в граничное условие при у = 0 дает воз-
можность определить отношение амплитуд В и А:
BJA~*wS-&i (11.1.30)
С другой стороны, из граничного условия при у = 1 следует, что
отношение амплитуд BJA равно
P/A = -ctgA. (11.1.31)
Приравнивая (11.1.30) и (11.1.31), получим
ctgA = Ay±/p5. (11.1.32)
Разложим Л в ряд по степеням р:
Л = ® + pAt +..., (11.1.33)
где ф — одна из собственных частот соответствующей консерва-
тивной системы. В рассматриваемом случае закороченного кон-
ца ® удовлетворяет уравнению (11.1.23). Ограничившись в со-
отношении (11.1.33) членом порядка р, подставим его в (11.1.32):
ctg ® — pAi (1 + ctg2 ®) = у® + рА^ ± i\xS,
откуда
Л2 = ±------2s -2
1 + ? + ?2®2
Таким образом, поскольку Ai является чисто мнимой величи-
ной, поправка к частоте в первом приближении отсутствует.
(11.1.34)
372 ГЛ. и- РАСПРЕДЕЛЕННЫЕ АВТОКОЛЕБАТЕЛЬНЫЕ СИСТЕМЫ
Решение (11.1.29) теперь можно записать в виде
v(y, т) = [A cos(Ai/) + B sin(Ai/)]ехр [(—р/2 + p.|Aj ±/<в)т].
(11.1.35)
Отсюда следует, что нарастающее со временем решение будет
при |Aj>l/2. В эксиоиенте (11.1.35) член р/2 характеризует
Рис. 11.3. График функции /(со) для
линии с замкнутым концом
потери энергии (декремент),
а член plAj — инкремент си-
стемы. Из требования превыше-
ния инкремента системы над
декрементом (при малых ам-
плитудах) вытекает условие са-
мовозбуждения системы
5>(l + y + Y2£o‘)/2. (11.1.36)
Для этого построим правую
Исследование неравенства
(11.1.36) проведем графически,
часть выражения (11.1.36) как функ-
цию частоты /(со) (рис. 11.3). На том же рисунке проведем пря-
мую, соответствующую величине 5. На оси абсцисс отмечены те
дискретные значения частоты e>h (к = 1,2,...), которые соответст-
вуют собственным частотам системы, удовлетворяющим уравнению
(11.1.23). Как мы видим, с ростом номера собственной частоты
превышение инкремента над декрементом уменьшается. Начи-
ная с некоторой частоты (<в8), система не самовозбуждается.
§ 11.2. Стационарные автоколебания
Амплитуда стационарного колебания определяется решением
исходного уравнения (11.1.11), удовлетворяющим граничным ус-
ловиям (11.1.12) и (11.1.15). В консервативной системе (р, = 0)
периодические движения возможны с любой амплитудой, завися-
щей от начальных условий. В неконсервативной системе (р, =/= 0)
периодические движения существуют лишь с вполне определен-
ными амплитудами, соответствующими равенству вклада энергии
за счет отрицательного сопротивления и потерь в активном
сопротивлении линии. В частном случае мягкого режима, как
известно, имеется лишь одна стационарная амплитуда. Это —
амплитуда предельного цикла, близкого к одной из замкнутых
траекторий соответствующей консервативной системы.
Можно считать, что решение для неконсервативной системы
имеет вид
v = 1>0+ + H2y2 + ..(11.2.1)
где Vo — одно из решений для консервативной системы.
§ 11.2. СТАЦИОНАРНЫЕ АВТОКОЛЕБАНИЯ
373
Из (11.1.17) и граничного условия (11.1.18) vQ можно запи-
сать следующим образом:
v0 = A [cos (со;/)—у© sin (oi/)] cos (шт). (11.2.2)
Здесь амплитуду А надо подобрать так, чтобы она была близка
к амплитуде предельного цикла автоколебательной системы.
В этом случае величина и, и члены, соответствующие более вы-
соким приближениям, не будут возрастать со временем. Подста-
вим (11.2.1) в уравнение (11.1.11) и граничные условия (11.1.12)
и (11.1.15). Уравнение и граничные условия для принимают
вид
а)
д\
дуг
— Лш [cos (шу) — уш sin (шу)] sin (шт),
б)
ди ~ d2v.
(11.2.3)
= — (у — S) A® sin (шт) — 5Л3ш cos2 (шт) sin (шт) при у — О,
в) = 0, при у = 1.
Эти уравнения имеют вид уравнений, описывающих консер-
вативную систему, на которую действуют как распределенные
силы, так и силы, сосредоточенные на концах. В выражения для
этих сил входят компоненты с частотами ш и Зю, где ш — часто-
та, определяемая соотношением (11.1.23). Так как спектр частот
рассматриваемой нами системы неэквидистантен, т. е. Зш, =/= ш3,
то компонента силы с частотой Зсщ не создаст в системе движе-
ния с заметной амплитудой. Поэтому эту составляющую силы
можно не учитывать. Тогда граничное условие (11.2.36) при-
мет вид
sin (шт).
Таким образом, на консервативную систему с собственной
частотой ш действует сила резонансной частоты. Стационарное
решение в данном случае возможно лишь при выполнении усло-
вия ортогональности внешней силы и собственного колебания
системы. Это условие определит стационарную амплитуду, т. е.
амплитуду, не возрастающую со временем. Поэтому потребуем,
чтобы
к, = У (i/) sin (шт). . (11.2.4)
Подставляя решение в форме (11.2.4) в уравнения £11.2.3),
374 гл. н- распределенные автоколебательные системы
получим
л2
а) —«- + m2V = — Am [cos (ту) — ут sin (ту)],
dy
б) + усо27 = —Лео у —в(1-^-)] при у = 0, (11.2.5)
в) 7 = 0, при у = 1.
Общее решение неоднородного уравнения (11.2.5а) имеет вид
7 (у) = В cos (ту) + С sin (фу)-1- Ауту cos (ту) — -у Ay sin (ту).
(11.2.6)
Из (11.2.6) и граничных условий (11.2.56, в), учитывая (11.1.23),
получим два соотношения, связывающие А, В, С:
С + утВ = -47+ AS (1 -4),
А L 7 (11-2.7)
С + усоВ = 4 (1 + V2®2).
it
Отсюда найдем амплитуду стационарных колебаний
14- V +
4 = 4 1--- • (11.2.8)
«О
Стационарная амплитуда существует только на тех частотах coft,
для которых 5 > (1 + у + у2со*)/2. Легко видеть, что это условие
совпадает с условием самовозбуждения (11.1.36). Из выражения
(11.2.8) и из рис. И.З также видно, что с ростом номера соб-
ственной частоты стационарная амплитуда уменьшается.
Таким образом, мы получили стационарное решение, которое
в первом приближении можно записать в виде
v = v0 + = Ак [cos (ад) — ycoft sin (mky)] cos (mhx) +
+ pB cos (coftp)sin(coftT) + p |у4(1+®|уг)—ycofeB^sin(cofej/)sin(coftT)—
— p у Aky sin (mhy) sin (сойт) — p у A^mhy cos (mky) sin (mhx) (11.2.9)
(величина С исключена с помощью одного из соотношений
(11.2.7)).
Для исследования устойчивости этого решения дадим v не-
большое отклонение z. Движение будет устойчивым, если z —
ненарастающая функция времени.
Проводя соответствующие математические выкладки, можно
показать, что колебание с амплитудой Ак на частоте со* будет
§ 11.2. СТАЦИОНАРНЫЕ АВТОКОЛЕБАНИЯ
375
устойчивым, если
А1>2
1 +7+7<о24 '
i —- - -
25
(11.2.10)
где <ot — любая из собственных частот колебаний, удовлетворяю-
щая уравнению (11.1.23).
Обратим внимание на то, что в условие самовозбуждения
(11.1.36), в условие устойчивости периодического движения
(11.2.10) и в выражение для стационарной амплитуды £11.2.8)
входит одна и та же частотная функция: /(©i) = (1 + V 4- y2a>!i)/2.
Это позволяет относительно просто анализировать полученные
результаты.
Обратимся снова к рис. 11.3, где эта функция представлена
в виде непрерывной зависимости от частоты.
Устойчивыми будут те амплитуды Ah, для которых выполнено
условие
[S-/(©i)b (11.2.11)
Так как разность 5— /(©,) максимальна для наинизшей частоты
©t (рис. 11.3), то будут устойчивы те Ак, для которых
/(®а)>4 Р-/М- (11.2.12)
Прямая [5—/(®!)]/2 показана на рис. 11.3 штриховой ли-
нией. Из этого рисунка видно, что количество частот при задан-
ном S, для которых выполнено условие самовозбуждения (для
данного примера), равно семи (i = 7). Однако устойчивыми бу-
дут колебания только для к — 1, 2, 3, 4, 5, так как для них раз-
ность 5— /(©*) больше [5 —/(©i)]/2.
Из рис. 11.3 видно, что легче всего в системе возбуждаются
колебания на самой низкой из собственных частот ©i. Задавая
определенные начальные условия, в системе можно возбудить
колебания также на одной из частот ©2, ©s, ©4, ©5. Любое из
этих гармонических колебаний может устойчиво существовать в
системе. Если система генерирует колебания с частотой ©4, где
i > 2, то при уменьшении инкремента амплитуда колебаний дан-
ной частоты уменьшается. Как только нарушается условие устой-
чивости (11.2.10), происходит перескок с колебания частоты ©,
на колебание частоты (i)f. Вопрос о возможности одновременной
генерации колебаний нескольких частот требует отдельного рас-
смотрения.
Для линии, нагруженной при у = 1 емкостью или индуктив-
ностью, условия самовозбуждения, амплитуда стационарных ко-
лебаний и условие устойчивости имеют тот же вид, что и для
замкнутого конца. Разница будет лишь в форме зависимости
функции /(©i) от частоты.
ГЛ. 11. РАСПРЕДЕЛЕННЫЕ АВТОКОЛЕБАТЕЛЬНЫЕ СИСТЕМЫ
Так, для случая емкостной нагрузки имеем
(11.2.13)
а для линии, нагруженной индуктивностью, функция /(©<)
равна
,__-J__I I___I___I__I__L__J_______«.
0/ ®3 ®7 ®8 W
Рис. 11.4 График функции /(©) для
линии с емкостной нагрузкой
/ (®о=4+у++
|(1+ ?2<о|)
2(1+ЭМ)’
(11.2.14)
Из (11.2.13) и (11.2.14) видно,
что функция /(о) может быть
немонотонной. На рис. 11.4 при-
ведена зависимость /(о) для
случая емкостной нагрузки при x^y (Со>С,). В такой системе
возбуждаются колебания (для данного примера) на частотах от
<»s до <в7. Устойчивыми колебаниями являются колебания с часто-
тами С£>*, СО5, 6)«.
§ 11.3. Распределенная автоколебательная система
с эквидистантным спектром собственных частот
Если реактивные нагрузки на концах линии малы, например
при емкостной нагрузке х < 1 и 7 < 1, то спектр собственных
частот близок к эквидистантному. Колебания, возбуждаемые
в таких системах, являются негар-
моническими, так как происхо-
дит одновременное возбуждение
нескольких мод с кратными ча-
стотами. Поэтому форма автоко-
лебаний может быть весьма слож-
ной (вплоть до треугольной)*).
Рассмотрим автоколебательную
-- - i (x,t)
ufat)
_________________________I S
x=0 x=l
Рис. 11.5. Схема распределенной
автоколебательной системы с тун-
нельным диодом
систему, состоящую из отрезка
передающей линии, нагруженной туннельным диодом с прене-
брежимо малой паразитной емкостью (рис. 11.5).
Волновое уравнение для линии, свободной от потерь, имеет
обычный вид
— = LC —
дх2 dt2
(11.3.1)
) Витт А. А. Ц ЖТФ,— 1936. Т. 6. С. 1459.
§ 11.3. СИСТЕМА С ЭКВИДИСТАНТНЫМ СПЕКТРОМ
377
Для линии, закороченной при х = 0 и нагруженной при х = I
туннельным диодом, можно записать следующие граничные ус-
ловия:
и(0,Ч) = 0, (11.3.2}
i(l, t) = f[u(l, t)+&], (11.3.3}
где $ — постоянное смещение на диоде, a i = /(u„)— вольт-ам-
перная характеристика туннельного диода.
Решение волнового уравнения (11.3.1) в соответствии с § 10.1
при учете граничного условия (11.3.2) имеет вид
и(х, t) = F (t — —) — F(t + —1
' ’ ' \ v j \ v ]’
(11.3.4}
где Zt = У L/C — волновое сопротивление линии, v = 1/VLC — ско-
рость волны в линии.
Подставляя (И.3.4) в граничное условие при х = 1, получим
(11.3.5}
где 772 = l/v — время прохождения волной пути I. Уравнение
(11.3.5) можно переписать в виде
(11.3.6}
Это функциональное уравнение дает возможность определять
состояние системы в момент t + Т, если известно ее состояние в
момент времени t:
^(г + 7’) = Ф[7,(г)]. (11.3.7}
Пусть в начальный момент функцияF(t) известна, т. е. F(t) —
= Fo (t), где Fo — известная функция t в интервале 0 < £ < 77
Для любого t0, расположенного в этом интервале, имеем сле-
дующий итерационный процесс:
Fo — Fо (io),
F, = F(t0 + Т) = O[F0(i„)],
F2 = F(to+2T)==®[F(to + T)] =
= Ф{Ф[7Ш)]} = Ф(2>[2Ш)], (11.3.8}
Fn = F(t0 + nT) = Ф {F [t0 + (n - 1)7]} =
= ФФ... Ф [fo(io)] = Ф"1’ [Fo(io)].
25 в. В. Мигулия и др.
378
ГЛ. 11. РАСПРЕДЕЛЕННЫЕ АВТОКОЛЕБАТЕЛЬНЫЕ СИСТЕМЫ
При »-*-<» (11.3.8) может иметь два типа предельных решений.
В первом случае существует единственное значение Fx, удовлет-
воряющее уравнению
Ра> = Ф{Рж).
(11.3.9)
Это решение соответствует неколебательному процессу в линии
(напряжение и ток постоянны). Во втором случае последователь-
ность стремится к предельному циклу с корнями (см. § 5.4)
F„2, ..., F.m. (11.3.10)
Каждый итерационный корень индекса т из (11.3.10) удов-
летворяет соотношению
(11.3.11)
которое описывает периодический процесс в линии. Форма коле-
баний зависит от вида характеристики туннельного диода и ве-
личины смещения S.
Характер процесса, устанавливающегося в системе, удобно
исследовать геометрически (построение Лемерея, см. гл. 5). На
рис. 11.6 построена зависимость F(t+ Т) = O[F(t)]. Там же на
рисунке показана прямая F(t + T) = F(t), которая является бис-
сектрисой координатного угла. Для того чтобы проследить харак-
тер установления колебаний и определить устойчивость стацио-
нарного решения, произведем на рис. 11.6 следующее построение.
Рис. 11.6. Схема итерационно-
го процесса (построение Ле-
мерея) с одним стационарным
состоянием
Рис. 11.7. Построение Лемерея
для случая существования трех
стационарных решений. Штрихо-
выми линиями показан процесс
установления колебаний
Возьмем на кривой Ф точку с абсциссой F0(t0), проведем от нее
горизонтальную прямую до пересечения с биссектрисой. Из точки
пересечения прямой и биссектрисы проведем вертикальную пря-
мую до пересечения с кривой Ф. Продолжая такое построение,
получим последовательность значений Fn(t), которая полностью
соответствует итерационному процессу (11.3.8). На рис. 11.6
построена такая последовательность, которая сходится к един-
§ 11.3. СИСТЕМА С ЭКВИДИСТАНТНЫМ СПЕКТРОМ
379
ственному значению F„, соответствующему пересечению биссек-
трисы и кривой Ф. Легко Видеть, что стационарное значение
в этом случае устойчиво. F„ будет неустойчиво, если
| dQ/dF |f=fco >1-На рис. 11.7 Изображена зависимость F(t + T) =
= Ф[?(0], для которой существуют три стационарных решения
итерационного уравнения. Первому стационарному решению со-
ответствуют два предельных значения и Fxi. При втором
стационарном решенйи существуют также два предельных зна-
чения F„3 и Foo4. Третьему стационарному решению соответст-
вует Foos. Из построения видно, что первое и третье решепия
устойчивы, а второе решение неустойчиво.
Штриховые ломаные, соответствующие итерационному про-
цессу, аналогичны интегральным кривым на фазовой плоскости.
Предельные последовательности (на рис. 11.7 они изображены
сплошными линиями) подобны предельным циклам. Неустойчи-
вые предельные последовательности являются сепаратрисами,,
разделяющими области приближения к различным устойчивым
решениям. Какое из устойчивых решений установится в системе,
зависит от начальных условий, т. е. от распределения тока и
напряжения в линии при t — 0. Все предельные циклы образуют
на плоскости F(t+T), F(t) замкнутые многоугольники, верши-
ны которых лежат на кривой Ф и биссектрисе. В частном случае,
изображенном на рис. 11.7, предельные циклы являются квад-
ратными.
Вид предельной последовательности зависит от конкретной
характеристики диода и от смещения SS. На рис. 11.8 приведена
типичная характеристика зависимости г = /(ид) для туннельного
диода. При ия < щ и ия > и2 дифференциальное сопротивление
диода положительно, при щ < ия < и2 —
отрицательно.
Для получения функционального
уравнения (11.3.6) необходимо перейти
от переменных ия и i к перемен-
ным F(i) и F(t + T). Воспользуемся
соотношениями (11.3.3) и (11.3.4)
при х = I:
ия — & = u(l) = F(t) — F(t + T),
(11.3.12)
Zof(Z) = F(t) + F(t + T).
Отсюда видно, что для перехода от переменных ия, i к F(f),
F(t + T) необходимо сдвинуть начало координат на отрезок
по оси ия, повернуть полученную_систему координат на 45° и
изменить масштаб по оси ия в 1/V2 раз, а по оси i — в 20/72раз.
Соответствующее преобразование координат поясняется рис. 11.9,
где по оси абсцисс отложена величина и/У2 = (ид —<^)/72.
25*
и1 ид
Рис. 1.18. Вольт-амперная
характеристика туннельно-
го диода
38Q
ГЛ. 11. РАСПРЕДЕЛЕННЫЕ АВТОКОЛЕБАТЕЛЬНЫЕ СИСТЕМЫ
Стационарное состояние системы существенно зависит о-
смещения (S. Если <£ < ut win (S > u2, т. e. рабочая точка на-
ходится в области положительного дифференциального сопро-
тивления диода, то существует единственное предельное значе-
ние Foo. Процесс установления напряжения и тока в линии для
Рис. 11.9. Нахождение стацио-
нарного состояния при выборе
рабочей точки на участке харак-
теристики с положительным диф-
ференциальным сопротивлением.
Пунктиром показан итерацион-
Рис. 11.10. Нахождение стс
ционарного решения при вы-
боре рабочей точки на падак-
щем участке характеристик!
диода
щихся стационарных колебаний
Рис. 11.12. Предельная последов.?
тельность при больших Zo
случая (S < Uj изображен на рис. 11.9. Стационарному режиму
Foo соответствует нулевое напряжение в линии; при этом по ль
нии течет постоянный ток.
Если рабочая точка выбрана на падающем участке характе-
ристики диода (щ < < м2), то в системе возбуждаются авто-
§ 11.4. ЛАЗЕР КАК АВТОКОЛЕБАТЕЛЬНАЯ СИСТЕМА
381
колебания, форма и амплитуда которых определяются S и вол-
новым сопротивлением Zo. Если выбранная рабочая точка соот-
ветствует максимуму модуля отрицательного сопротивления
туннельного диода |7?-| и 20« |Я_|, то устанавливается режим,
иллюстрированный рис. 11.1Q.
Форма стационарных напряжения,
и тока в линии, соответствующая
данному режиму, приведена на
рис. 11.11. Через время Т =>
= 2lJv происходит переключение
туннельного диода. Ток в линии
при этом остается постоянным.
При увеличении Zo кривая
Ф[1?(4)] вытягивается вдоль бис-
сектрисы. Это приводит к более
сложной форме стационарной
предельной последовательности.
Соответственно более сложной
становится форма напряжения и
тока в линии. На рис. 11.12 при-
Т 2T зт зт тот t
Рис. 11.13. Форма тока и напря-
жения, соответствующая предель-
ной последовательности, показан-
ной на рис. 11.12
ведена одна из возможных
форм предельной последователь-
ности при больших Zo, а на
рис. 11.13 — зависимость напряже-
ния и тока от времени, соответст-
вующая рис. 11.12. Автоколебания в данном случае являются
периодическими с периодом 5Г; форма тока и напряжения весьма
сложна.
Таким образом, в автоколебательных системах с эквидистант-
ным спектром существуют автоколебания релаксационного харак-
тера (§ 5.2).
§ 11.4. Лазер как распределенная автоколебательная система
Оптический квантовый генератор — лазер является автоколе-
бательной системой с распределенным отрицательным сопро-
тивлением. Последнее создается средой с инверсной населен-
ностью.
Сопротивление может быть отрицательным лишь в определен-
ной полосе частот вблизи линии поглощения данной среды. Как
правило, в пределах ширины линии активного вещества уклады-
вается несколько собственных частот резонатора. Поэтому лазер
генерирует, в общем случае, ряд мод с частотами, близкими к
собственным частотам резонатора.
Анализ работы лазера обычно проводится в полуклассическом
приближении. Электромагнитное поле описывается уравнениями
Максвелла, а поляризация среды, определяющая отрицательное
382
ГЛ. 11. РАСПРЕДЕЛЕННЫЕ АВТОКОЛЕБАТЕЛЬНЫЕ СИСТЕМЫ
нелинейное сопротивление, описывается на квантовом языке.
Амплитуды и фазы колебаний, генерируемых лазером, можно
найти методом самосогласованного поля. Электромагнитное поле,
воздействуя на активную среду, создает в ней поляризацию
^(r,f). В свою очередь поляризация является источником
электромагнитного поля. Необходимо отметить, что поляризация
среды зависит не от мгновенного значения напряженности элект-
ромагнитного поля, а от его амплитуды. Поэтому лазер пред-
ставляет собой автоколебательную систему с инерционной не-
линейностью (§ 5.6).
В простейшем случае оптического резонатора, образованного
двумя плоскими зеркалами, расположенными на расстоянии i
друг от друга, наибольшую добротность имеют аксиально сим-
метричные типы колебаний. Электромагнитное поле таких коле-
баний медленно меняется в направлении, параллельном зерка-
лам, что позволяет ограничиться рассмотрением одномерной
задачи, в которой единственная пространственная переменная
z направлена вдоль оси резонатора. 1
Волновое уравнение для аксиально симметричных мод можно
получить из уравнений Максвелла
д2Е , f. ЭЕ . 1 д2Е , д2& ... ,
+ dt + r2 at2 Но at2 • (11.4.1)
Это уравнение записано в пренебрежении векторным характером
электрического поля, что справедливо для резонатора, в котором
созданы условия существования колебаний с определенной пло-
скостью поляризации. Величина £ характеризует все виды по-
терь энергии в оптическом резонаторе.
Напряженность электрического поля можно представить в
виде ряда по собственным функциям нормальных мод резонатора:
Е (z, t) = У, An (f) sin (кпг), (11.4.2)
п
где к„ = пп/1 = 2л/Х„ — волновое число к-го нормального колеба-
ния. Такой вид нормальных колебаний соответствует граничным
условиям Е(0, t) = E(l, t) = 0, т. е. в точках z = 0 и z = Z поме-
щены зеркала с коэффициентом отражения, равным единице.
Подставляя (11.4.2) в (11.4.1), получим дифференциальное
уравнение для пространственной фурье-компоненты электриче-
ского поля An(t):
_®_ dAn Q2 Л _
dt2 + <?П dt + -
<о2 d2Pn
' ео dt2 1
(11.4.3)
где Q„ — собственная частота резонатора, равная
Qn = япс/1,
(11.4.4)
§ 11.4. ЛАЗЕР КАК АВТОКОЛЕБАТЕЛЬНАЯ СИСТЕМА
383
Q„ — добротность резонатора на r-й моде, <в — частота электро-
магнитного поля, Рп — пространственная фурье-компонента по-
ляризации среды, равная
i
pn(t) = -lf ^»(Z, t)sin^dz. (11.4.5)
» J I
0
При достаточно высокой добротности Qn для решения уравнения
(11.4.3) можно использовать метод медленно меняющихся ампли-
туд (см. § 2.5). Решение уравнения (11.4.3) будем искать в виде
Ап (t) = (t) cos [conf + <pn (t) ],
(11.4.6)
Рп (t) = Сп (t) cos + Ф» (i) ] + Sn (t) sin [©„# + фп (f) ],
где En(t) и фп(0 — медленно меняющиеся за период 2 л/со ампли-
туда и фаза r-го колебания, Cn(t) и Sn(t) — медленно меняю-
щиеся компоненты Pn(t).
Обычно для газовых лазеров время установления инверсной
населенности много меньше времени установления амплитуды
колебаний. Поэтому можно считать, что поляризация Pn(t) успе-
вает следовать за амплитудой электрического поля. В этом слу-
чае укороченные уравнения для амплитуды и фазы n-й моды
имеют вид
Еп + у Еп = - + фп - Qn) Еп = - Сп. (ИА.1)
Из-за инерционной нелинейности лазера компоненты поляриза-
ции Сп и $п зависят от амплитуды электрического поля Еп. Эта
зависимость определяется механизмом создания инверсной на-
селенности среды и характером уширения спектральной линии
активного вещества. Если напряженность электрического поля
в резонаторе невелика (лазер работает вблизи порога самовоз-
буждения), то в разложении Сп и Sn по амплитудам поля можно
ограничиться членами третьей степени, т. е.
— 2е~ ~ апЕп 4" Pn#n + 2 ^nmEnEmt
V 3X2 (11Л'8)
2g~ Еп — ^опЕп Мп — ^птЕпЕт.
О т^п
В (11.4.8) опущены колебания комбинационных частот, т. е.
считается, что частоты вида lah + та>, при любых целых I и т
не попадают в полосы пропускания оптического резонатора.
Коэффициенты аОв, рп, 6ят, о„, р„ и гпт для газового лазера
рассчитаны Лэмбом*). При расчете предполагалось, что актив-
*) Лэмб У. Теория оптических мазеров Ц Квантовая оптика и кванто-
вая радиофизика,— М.: Мир, 1966. С. 282—368.
384
ГЛ. 11. РАСПРЕДЕЛЕННЫЕ АВТОКОЛЕБАТЕЛЬНЫЕ СИСТЕМЫ
ная среда может рассматриваться как двухуровневая система,
обладающая инверсной населенностью. Коэффициенты, входя-
щие в соотношения (11.4.8), зависят от собственных частот ре-
зонатора Qn, от степени инверсии населенности, от времени ре-
лаксации верхнего и нижнего рабочих уровней и от ширины
линии поглощения. С учетом (11.4.8) укороченные уравнения
для амплитуды и фазы r-й моды лазера примут вид
Ёп = ftXon — 20”) ~~ (11.4.9)
• ' ”п' т^п
®п + фп = Qn + On + РЛ 2 ^птЕт- (11.4.10)
т^п
Из уравнения (11.4.9) следует, что величина определяет уси-
ление активной среды на n-й моде колебаний для малого сиг-
нала. Поэтому условие самовозбуждения n-й моды колебаний
можно записать в виде аОп > <в/2^„. Это означает, что поступле-
ние энергии в систему превышает потери в резонаторе на со-
ответствующей частоте. Физический смысл остальных коэффи-
циентов уравнений (11.4.9) и (11.4.10) будет выяснен ниже.
Рассмотрим сначала случай возбуждения в системе только
одной моды. Уравнения (11.4.9) и (11.4.10) приобретают сле-
дующий вид:
= (“о --Jj £ - ₽£3, ® = Q + a + p£2. (11.4.11)
Отсюда можно найти стационарную амплитуду и частоту гене-
рации
= ® = Q + o + p< (11.4.12)
Стационарная амплитуда Еа тем больше, чем больше поступ-
ление энергии в систему превышает потери. Кроме того, Ео за-
висит от коэффициента нелинейности р. Этот коэффициент опре-
деляет уменьшение инверсной населенности, связанное с насы-
щением активной среды, вызванным колебаниями генерируемой
моды. Частота генерации <о отличается от собственной частоты
резонатора на величину а + рЕ%. Коэффициент о пропорциона-
лен разности между собственной частотой резонатора и частотой
спектральной линии атомного перехода. Поэтому он создает
линейное подтягивание генерируемой частоты к частоте атомного
перехода. Аналогичное явление было рассмотрено в § 10.2. Не-
линейный член р7?о дает зависящее от амплитуды смещение
частоты.
Если усиление активной среды превышает потери для двух
собственных частот оптического резонатора, то возможна одно-
временная генерация двух независимых мод колебаний.
§ 11.4. ЛАЗЕР КАК АВТОКОЛЕБАТЕЛЬНАЯ СИСТЕМА
385
В случае двухмодового режима укороченные уравнения для
чамплитуд Et и Е2 имеют вид
Ё2^а2Е2-^Е32~е21Е2Е1 (11.4.13)
где ai = «01 — <о/2^1, аг = а02 — <&/2Q2 — коэффициенты, характе-
ризующие превышение усиления над потерями для каждой из
мод. Коэффициенты 012 и 621 определяют уменьшение инверсной
населенности для каждой моды, вызванное колебаниями другой
моды, т. е. эквивалентны коэффициентам связи. Физический
смысл остальных коэффициентов, входящих в уравнения
(11.4.13), был определен раньше.
Уравнения (11.4.13) удобно переписать для квадратов ампли-
туд Е\ = X и Е* = У:
Х = 2Х(а1-р1Х-012У), У = 2У(а2-р2У-021Х). (11.4.14)
Будем исследовать эти уравнения на фазовой плоскости перемен-
ных X, Y (§ 1.1). Физический смысл имеют только положи-
тельные значения X и У, т. е. фазовые траектории расположены
в первом квадранте. Прямая
а1-р1Х-612У = 0 (11.4.15)
является изоклиной вертикальных касательных, т. е. на ней
dX/dY = 0.
Прямая
а2-§2У-021Х = О (11.4.16)
является изоклиной горизонтальных касательных (dX/dY = oo),
В общем случае возможны четыре стационарных решения си-
стемы уравнений (11.4.14):
Х1 = У1 = 0, Х2 = 0, Уг^еха/^г, Х,=а1/р1, У2 = 0, (11.4.17)
у _ ИА ~ «2е12 у _ ^"«Al
4 РА-Маг ’ 4 РА-М21*
Первое решение соответствует отсутствию генерации, второе и
третье — генерации одной моды. Четвертое решение, которому на
фазовой плоскости соответствует точка пересечения прямых
(11.4.15) и (11.4.16), описывает режим одновременной генера-
ции двух мод.
Устойчивость стационарных решений можно определить при
исследовании поведения малых отклонений от стационарных ре-
шений (см., например, § 4.2). Однако в данном случае устойчи-
вость стационарных состояний можно исследовать с помощью
фазовой плоскости.
Будем рассматривать только случаи, когда и больше
нуля, т. е. условия самовозбуждения выполнены для обеих мод.
Коэффициенты и ^2 для активной среды всегда положитель-
386
ГЛ. 11. РАСПРЕДЕЛЕННЫЕ АВТОКОЛЕБАТЕЛЬНЫЕ СИСТЕМЫ
вы. На рис. 11.14 представлены фазовые траектории для случая,
когда a4/Pi>a2/02i, a4/012>ajfyz. Прямые 1ъ2 — изоклины вер-
тикальных и горизонтальных касательных. Эти прямые не пере-
секаются в первом квадранте, что свидетельствует о невозмож-
ности двухмодового режима. Остальным трем режимам соответ-
ствуют стационарные точки (0, 0), (0, ajfa), (а4/р4, 0).
Рис. 11.14. Фазовые траектории в случае oti/₽i > a2/02i, ai/0i2 > a2/p2
Об устойчивости этих состояний можно судить по направле-
нию движения изображающей точки по фазовым траекториям
вблизи данного стационарного состояния. Как видно из рис. 11.14
и уравнения (11.4.14), правее прямой 1 переменная X умень-
шается со временем (X < 0), а левее этой прямой X возрастает.
Ниже прямой 2 переменная Y возрастает (X > 0), а выше —
убывает. В соответствии с этими представлениями проведены фа-
зовые траектории на рисунке. Видно, что положение равновесия
и состояние Х = 0, У = а2/р2 неустойчивы. Единственному устой-
чивому с'остоянию соответствует точка X = ai/B4, У = 0.
Таким образом, пока (а4/012)> а2/р2 и ai/p4 > аг/021, система
генерирует только одну моду. Вторая мода подавляется модой
с большим коэффициентом усиления. Можно ввести эффектив-
ный коэффициент усиления для второй моды а2= а2—02iai/₽i.
Пока а2 < 0, вторая мода не возникает. Если эффективные коэф-
фициенты усиления для обеих мод положительны, то в системе
могут существовать обе моды колебаний. В этом случае режим
§ 11.4. ЛАЗЕР КАК АВТОКОЛЕБАТЕЛЬНАЯ СИСТЕМА
387
работы системы зависит от величины связи между модами. При
слабой связи (Рф2 >012021) происходит одновременная генерация
колебаний двух частот. На рис. 11.15, я изображены фазовые
траектории, соответствующие этому режиму. Пересечение прямых
1 и 2 определяет устойчивую точку (узел) фазовых траекторий.
Положение равновесия и одночастотные режимы при слабой свя-
зи неустойчивы.
В случае сильной связи (Pi?2 < 6»i6i2), приведенном на
рис. 11.15, б точка пересечения двух прямых является неустой-
чивой (седло). Устойчивы одночастотные режимы генерации:
Х = а1/р1, У = 0 и Х = 0, У = а2/р2.
Из вида фазовых траекторий, изображенных на рис. 11.15, б,
следует, что в системе может установиться либо один, либо дру-
гой одночастотный режим в зависимости от начальных условий.
Если начальные условия таковы, что изображающая точка в мо-
мент t = 0 лежит правее бифуркационной кривой (штриховая
линия на рис. 11.15, б), то установятся колебания с частотой сц
и амплитудой Z?10 = Vaj/Pj. Все изображающие точки, лежащие
слева от бифуркационной прямой, в процессе установления дви-
жутся к точке, характеризующей процесс с частотой <я2 и ампли-
тудой £'2о = Уа2/р2. Таким образом, в случае сильной связи двух-
модовый лазер ведет себя аналогично автоколебательной системе
с двумя степенями свободы, описанной в § 7.5 (явление затя-
гивания).
Соотношения (7.5.4) и (7.5.5) показывают*), что в автоколе-
бательной системе с двумя контурами всегда осуществляется
сильная связь (0±202i = 40tp2). Поэтому бигармонический режим
в такой системе невозможен. В газовом лазере преимущественно
реализуется случай слабой связи. Это различие обусловлено тем,
что в системе с двумя контурами (§ 7.5) усиление колебаний
обеих частот происходит в одном и том же нелинейном активном
элементе, например в полевом транзисторе или лампе. В газовом
же лазере с неоднородным уширением линии поглощения уси-
ление для каждой из генерируемых мод происходит за счет энер-
гии различных атомов активной среды. Поэтому взаимное влия-
ние колебаний различных частот оказывается малым и возможна
одновременная генерация двух независимых колебаний.
Амплитуды этих колебаний связаны с параметрами системы
следующими соотношениями:
_2 B12g2
^10= РД-012021
р2 _ Р1«2-в21«1
20 _ М2-М21
(11.4.18)
*) В настоящем параграфе введены обозначения, принятые в цитиро-
ванной выше книге Лэмба, но отличные от использованных в гл. 7.
388
ГЛ. 11. РАСПРЕДЕЛЕННЫЕ АВТОКОЛЕБАТЕЛЬНЫЕ СИСТЕМЫ
Рис.
сильной (б) связях
§ 11.4. ЛАЗЕР КАК АВТОКОЛЕБАТЕЛЬНАЯ СИСТЕМА
38»
Частоты генерируемых мод в соответствии с (11.4.10) равны
®! == Qj + 01 + p^Jo + 1'12^20> ®2 ~ ^2 4" О2 4" Рг^20 4" Т21^ю-
(11.4.19)
Из последнего соотношения следует, что частота каждого из
колебаний зависит не только от его амплитуды, но и от ампли-
туды второго колебания.
Если в пределах ширины линии активного вещества уклады-
ваются три собственных частоты резонатора, то возможен трех-
модовый режим генерации. Поскольку спектр собственных частот
резонатора эквидистантен, т. е. Q2 — Q1 = QJ— й2, то и для гене-
рируемых частот и,- справедливо следующее приближенное соот-
ношение:
ю2 — tt>i ~ tt>3 — ©2- (11.4.20)
Поэтому вблизи каждой из генерируемых частот возникают ком-
бинационные частоты: 2®2 — ®3 ® ®i, ®з — ©а 4- ©, « ш2 и 2®2 —
— а, ~ ®3. Наличие этих комбинационных частот при кубической
аппроксимации нелинейной поляризации приводит к следующим
укороченным уравнениям для фаз генерируемых колебаний:
®i + Фх = 4- 4- Pi^i + т12Е2 + т13£’з +
4- (Пгз sin Ф — £23 cos ф)
®2 4~ Фг = ^2 о2 + р2£^ + та1Е? + т23Е| +
+ (П13sin Ф — £13 cos ф) ЕгЕ3, (11.4.21)
®з + Фз = + о3 4- Рз^з 4- т31Е1 4" т32Е2 4-
+ (Л21 sin Ф - &21 COS ф)
где слагаемые с коэффициентами ц,, и определяют вклад в
поляризацию членов с комбинационными частотами,
ф = (2®2 — ©1 — a3)t 4-(2<р2 — <pt — ф3). (11.4.22)
Из (11.4.22) видно, что в общем случае ф зависит от времени.
Уравнение для ф можно получить, дифференцируя (11.4.22) и
учитывая (11.4.21):
ф = о 4- A sin ф 4- В cos ф, (11.4.23)
где
о = 2о2 — cTj — О3 4- (2т21 — Pj т31) Ei 4- (2р2 т12 т32) Ег 4-
4~ (2^23 т13 р3) Е3,
390
ГЛ. 11. РАСПРЕДЕЛЕННЫЕ АВТОКОЛЕБАТЕЛЬНЫЕ СИСТЕМЫ
— 2ЕгЕ3т]13 — Е\ fr)23 + т]21
\ 1 3 /
( Е Е \
В = Е1 + и- 2£13ад.
Удобно записать (11.4.23) в виде
4 = а + С sin (ф + а), (11.4.24)
где С — У А2 + В2, tg а = В/А.
Характер функции ф(г) существенно зависит от соотношения
величин о и С. Если |о| < С, то уравнение (11.4.24) имеет сле-
дующее стационарное решение:
rL_ ф = — aresin-^г — а. (11.4.25)
О
Величина ф в этом случае не зависит от времени, и в соответ-
ствии с (11.4.22)
2и2 —Hi —и3 = 0. (11.4.26)
Генерируемые частоты эквидистантны, а фазы связаны соотно-
шением
2ф2 — Фх — ф3'= — arcsin -----а. (11.4.27)
Частотное (11.4.26) и фазовое (11.4.27) соотношения указывают
на самосинхронизацию мод. Каждая из генерируемых мод захва-
тывается соответствующей комбинационной частотой.
В синхронном режиме лазер генерирует последовательность
световых импульсов с частотой повторения А, равной
А = Из — и2 = и2 — ©!. (11.4.28)
Форма импульса зависит от амплитуд и фаз генерируемых мод.
В частном случае близких амплитуд « Е2 ~ Е3 ~ Ёо и разно-
стей фаз, удовлетворяющих соотношению
фз — ф2 = ф2- ф| = фо, (11.4.29)
импульс имеет вид
Е = Ео cos (иг + ф9). (11.4.30)
0 8Ш [(At + <Р0)/2] V ‘ те/ V /
Зависимость огибающей (11.4.30) от Аг изображена на рис. 11.16.
Если фазы не удовлетворяют (11.4.29), то форма импульса
искажается.
В случае |о| >С стационарного значения для ф не сущест-
вует. Поэтому генерируемые моды не синхронизируют друг
друга, их частоты и фазы не связаны. Обычно в лазерах наблю-
дается несинхронная генерация. Самосинхронизация мод возни-
| И 4. ЛАЗЕР КАК АИТОМОЛИНАТМЛЬНАЯ (1ИПТВМА
391
Е
О 2 4 в 8 10 bi
Рис. 11.16. Форма импульса в син-
хронном режиме для трехмодового
NIST лишь ири симметричном расположении собственных частот
риоиатора относительно центра линии усиления. Частота Q2
должка при этом совпадать с центром линии усиления, а часто-
ты Q| и U9 располагаются симметрично относительно центра,
В таком случае величина о
оказывается минимальной и вы-
полпяются условия самосинхро-
низации.
В лазере, генерирующем
много мод (больше трех), так-
же возможна их самосинхрони-
зация. При этом, чем больше
число синхронизируемых мод,
гем уже генерируемый импульс
и тем больше импульсная
мощность.
Синхронизация мод лазера
может также осуществляться
при подаче внешнего сигнала,
или его оптическую длину (внешняя синхронизация). Частота
внешнего сигнала должна быть близка к Д — разности частот
генерируемых лазером мод.
лазера
изменяющего потери резонатора
СПИСОК РЕКОМЕНДУЕМОЙ ЛИТЕРАТУРЫ
Мандельштам Л. И. Полное собрание трудов.—М.: Изд-во АН СССР, 1955
Т. IV; Лекции по теории колебаний.— М.: Наука, 1972.— 512 с.
Андронов А. А., Витт А. А., Хайкин С. Э. Теория колебаний.— М.: Физмат
гиз, 1959.— 912 с.
Стрелков С. В. Введение в теорию колебаний.—М.: Наука, 1964,—437 с.
Горелик Г. С. Колебания и волны.— М.: Физматгиз, 1959.— 572 с.
Боголюбов Н. В., Митропольский Ю. А. Асимптотические методы в теории
нелинейных колебаний.— М.: Наука, 1974.— 503 с.
Крылов А. В. О некоторых дифференциальных уравнениях метаматическов
физики, имеющих приложение в технических вопросах.— М.: Изд-во АН
СССР, 1949,— 368 с.
Теодорчик К. Ф. Автоколебательные системы.— М.: Гостехиздат, 1952.—
271 с. I
Булгаков Б. В. Колебания.— М.: Наука, 1969,— 892 с. ;
Стокер Дж. Нелинейные колебания в механических и электрических си-(
стемах.— М.: ИЛ, 1952.— 264 с.
Харкевич А. А. Нелинейные и параметрические явления в радиотехнике.—
М.: Гостехиздат, 1956.—184 с.
Хаяси Т. Нелинейные колебании в физических системах.— М.: Мир, 1968.—
432 с.
Моисеев В. В. Асимптотические методы нелинейной механики.— М.: Нау-:
ка, 1981.—400 с.
Блэкьер О. Анализ нелинейных систем.— М.: Мир, 1969.— 400 с.
Ка-план А. Е., Кравцов Ю. А., Рылов В. В. Параметрические генераторы и
делители частоты.— М.: Сов. радио, 1966.— 334 с.
Вайфэ А. X. Методы возмущений.— М.: Мир, 1976.— 455 с.
Ахманов А. С., Хохлов Р. В. Проблемы нелинейной оптики.— М.: ВИНИТИ,
1964.- 295 с.
Тихонов А. В., Самарский А. А. Уравнения математической физики.—М.:
Наука, 1977,— 735 с.
Бутенин В. В., Веймарк Ю. И., Фуфаев В. А. Введение в теорию нелиней
ных колебаний.— М.: Наука, 1976.— 384 с.
Самойло К. А. Метод анализа колебательных систем второго порядка.— М,:
Сов. радио, 1976,— 204 с.
Гапонов-Грехов А. В., Рабинович М. И. Ц УФН.—1979. Т. 128, выл. 4.—
С. 579—624.
Заславский Г. М. Стохастичность динамических систем.— М.: Наука, 1984,—
271 с.
Лихтенберг А., Либерман М. Регулярная и стохастическая динамика.— М,;
Мир, 1984.— 528 с. /
Анищенко В. С. Стохастические колебания в радиофизических систеэдо,
Ч. I, II.— Изд-во Саратов, ун-та, 1985—1986.— 377 с.
Рабинович М. И., Трубецков Д. И. Введение в теорию колебаний и вол!,—
М.: Наука, 1984.— 430 с.
Пиппард А. Физика колебаний.— М.: Высшая школа, 1985.— 453 с. V