/










































































































































































































































































































Author: Алфутов Н.А.
Tags: общее машиностроение технология машиностроения механика строительная механика издательство машиностроение
Year: 1978



Text
ОСНОВЫ РАСЧЕТА
НА УСТОЙЧИВОСТЬ
УПРУГИХ СИСТЕМ
БИБЛИОТЕКА
РАСЧЕТЧИКА
редакционная
коллегия:
лауреат Ленинской премии
заслуженный деятель науки
и техники РСФСР
д-р техн. наук
проф. С. Д. ПОНОМАРЕВ
(председатель);
д-р техн. наук
проф. Н. А. АЛФУТОВ;
лауреат Ленинской премии
д-р техн. наук
проф. В. Л. БИДЕРМАН;
д-р техн. наук
проф. В. П. КОГАЕВ;
лауреат Ленинской премии
заслуженный деятель науки
и техники РСФСР
д-р техн. наук
проф. Н. Н. МАЛИНИН;
д-р техн. наук проф.
В. А. СВЕТЛИЦКИЙ
Н.А.АЛФУТОВ
Основы расчета
на устойчивость
упругих
систем
МОСКВА «МАШИНОСТРОЕНИЕ» 1978
6П5.1
АБЗ
УДК 621.01 : 531.221.3.001.24
Рецензент проф. С. В. БОЯРШИНОВ
НЕ БОЛЕЕ »И КНИГИ В I
ОДНИ РУЮН И 2ХВДВЕ )
КОЯОХЗА
Алфутов Н. А.
А53 Основы расчета на устойчивость упругих систем.
«Машиностроение», 1978 (Б-ка расчетчика).
312 с ил.
В книге даны основы расчета на устойчнвость тонкостенных эле-
элементов машиностроительных конструкций, находящихся под действием
статических нагрузок. Рассмотрены задачи устойчивости стержней,
пластин н оболочек, причем особое внимание уделено постаиовие задач,
выноду исходных соотношений и пределам применимости расчетных
зависимостей.
Книга предназначена для инженеров-машниостронтелей, рабо-
работающих в конструкторских бюро, проектных организациях и научно-
исследовательских институтах; она может быть полезна преподавателям
строительной механики н сопротнвлеиия матерналов, аспирантам и сту-
студентам машиностроительных специальностей.
м.,
31301-026
038@1)-78
26-78
6П5.1
Издательство «Машиностроение», 1978 г.
Предисловие
Улучшение прочностных характеристик традиционных кон-
конструкционных материалов и использование новых высокопроч-
высокопрочных композиционных материалов обусловило широкое распро-
распространение легких, изящных и экономичных тонкостенных кон-
конструкций в современном машиностроении. Для таких конструк-
конструкций роль расчетов на устойчивость в общем цикле прочностных
расчетов существенно возросла, ибо разрушение тонкостенной
конструкции чаще всего связано с потерей ее общей устойчивости
или устойчивости отдельных ее элементов.
В нашей стране и за рубежом резко увеличился поток статей,
диссертаций и монографий как по общим подходам и методам
исследований устойчивости тонкостенных конструкций, так и
по ряду частных задач расчета на устойчивость тонкостенных
стержней, стержневых систем, подкрепленных пластин и оболо-
оболочек, трехслойных пластин и оболочек и т. д. В последние годы
особенно интенсивно развивались различного рода численные
методы расчета конструкций на устойчивость.
Однако в традиционно сложившихся учебных программах
большинства машиностроительных специальностей вопросам ус-
устойчивости конструкций не уделяется должного внимания. Инже-
Инженер нередко знаком с расчетами конструкций на устойчивость
только по небольшому разделу устойчивости стержней из общего
курса сопротивления материалов. Поэтому было решено включить
в серию «Библиотека расчетчика» книгу, облегчающую инженеру
переход от общих учебных курсов к чтению и пониманию спе-
специальной литературы по расчету на устойчивость тонкостенных
силовых конструкций.
За последние два-три десятилетия в теории устойчивости кон-
конструкций, видимо, как ни в одной другой области механики выдви-
выдвигались и дискутировались самые противоречивые концепции,
высказывались сомнительные точки зрения и давались неверные
рекомендации. Достаточно вспомнить долгое время пропаганди-
пропагандировавшийся многими специалистами и даже вошедший в справоч-
справочную литературу расчет конструкций на устойчивость по так
называемым нижним критическим нагрузкам. И только сравни-
сравнительно недавно благодаря усилиям ведущих отечественных и за-
рубежных ученых были выработаны единые точки зрения по
большинству основных вопросов теории устойчивости конструк-
конструкций. Круг вопросов, охватываемых данной книгой, сравнительно
узок: устойчивость тонкостенных упругих систем при статиче-
статических нагрузках. Но изложение этих вопросов базируется на сов-
современных представлениях теории упругой устойчивости.
В книге особое внимание уделено формулировке критериев
упругой устойчивости, постановке задач устойчивости стержней,
пластин и оболочек, выводу исходных соотношений и обсуждению
пределов применимости полученных расчетных зависимостей.
Автор умышленно стремился избегать ярких нестандартных
задач, красивые и неожиданные решения которых доставляют
истинное наслаждение специалистам, но отпугивают многих
студентов и вызывают недоумение у некоторых инженеров-прак-
инженеров-практиков. У автора было опасение, что интересные частные задачи
могут отвлечь читателя от более прозаичных, но не менее тонких
общих вопросов теории устойчивости.
В книгу не включен ряд практически важных задач расчета
тонкостенных элементов конструкций, например устойчивость
плоской формы изгиба балок, устойчивость витых пружин и
естественно закрученных стержней, пологих оболочек, тонко-
тонкостенных стержней и т. д. Это сделано по следующим соображениям.
Автор старался сделать понятным вывод каждого соотношения
даже неподготовленному читателю. Из множества задач устой-
устойчивости тонкостенных конструкций было выбрано несколько
основных, на которых показана специфика задач упругой устой-
устойчивости. Автор надеется, что читатель, познакомившись с изло-
изложенными в книге решениями, сможет легче и глубже понять другие
известные задачи устойчивости и главное скорее научится само-
самостоятельно ставить и решать новые задачи.
Глава I
Основные понятия
теории упругой устойчивости
Для выявления большинства характерных особенностей
задач теории упругой устойчивости совершенно не обязатель-
обязательно рассматривать сложные механические системы. Это мож-
можно сделать, ограничившись исследованием простейших механи-
механических систем, допускающих элементарное аналитическое опи-
описание.
В первой, вводной главе, важнейшие понятия теории упру-
упругой устойчивости — точка бифуркации, критическая нагрузка,
линеаризованное уравнение, граница области устойчивости и
энергетический критерий устойчивости — введены и проиллю-
проиллюстрированы на примерах упругих систем с одной-двумя степенями
свободы, подобно тому, как это обычно делается в теории меха-
механических колебаний. Кроме того, в первой главе рассмотрены
ограничения и допущения, используемые обычно при формули-
формулировке и решении задач устойчивости тонкостенных элементов
силовых конструкций.
§ 1. Неоднозначность состояний равновесия
упругих систем
При одних и тех же внешних нагрузках и условиях за-
закрепления упругая система может иметь не одно, а несколько
состояний равновесия. Покажем это на самых простых при-
примерах.
Рассмотрим жесткий стержень длиной /, один конец которого
закреплен в упругом шарнире, а другой — нагружен верти-
вертикальной силой Р. В исходном ненагруженном состоянии ось
стержня строго вертикальна. При отклонениях стержня сила Р
сохраняет вертикальное направление (рис. 1.1, а). Момент в уп-
упругом шарнире будем считать пропорциональным углу откло-
отклонения стержня ф и равным &<р, где k—жесткость упругого шар-
шарнира. Тогда, записав уравнение равновесия стержня в откло-
отклоненном от вертикали состоянии, получим
Лф. A.1)
-к
\P=(p/sinip
Жг *о л/г к
б)
Рис. 1.1
Полученное уравнение имеет два независимых решения:
1) Ф = 0 при любом значении Р;
2)
Р--4-.
A.2)
sin
Кривые, соответствующие этим решениям при | ф | < л, по-
показаны на рис. 1.1, б, где по оси ординат отложены значения
безразмерной силы Р = -г-Р. Как видим, при Р < 1 единственно
я
возможным будет исходное вертикальное положение равнове-
равновесия. При Р > 1 наряду с исходным вертикальным положением
равновесия стержня (ф = 0) становятся возможными и другие
положения равновесия при <р ф 0. Так, например, при Р = Рг
возможны три различных положения равновесия стержня, соот-
соответствующие точкам /, 2 и 3 на рис. 1.1,6. Точка 2 соответствует
вертикальному положению, а точки 1 и 3 — отклоненным поло-
положениям равновесия. Если рассмотрим поворот стержня на про-
произвольный угол ф, то увидим, что с ростом абсолютного значения
безразмерной силы Р число возможных положений равновесия
неограниченно возрастает.
Рассмотрим жесткий стержень длиной /, один конец которого
шарнирно закреплен, а на другом конце имеется пружина жест-
жесткости с, сохраняющая при отклонениях стержня горизонтальное
положение (рис. 1.2, а). Как и в первом примере, к стержню
приложена вертикальная сила Р, причем в исходном ненагру-
женном состоянии ось стержня строго вертикальна. Считая
усилие в пружине пропорциональным ее удлинению и, следо-
следовательно, равным cl sin ф, запишем уравнение равновесия стержня
в отклоненном положении:
PI sin ф = cl sin ф/ cos ф. A.3)
Рис 1.2
Это уравнение имеет несколько независимых решений:
1) sin<p = 0, т. е. при любом Р возможно
Ф = пп, где п = 0, 1, 2, 3,...;
2) Р = с/ cos ф.
A.4)
На рис. 1.2, б изображен график, соответствующий найден-
найденным решениям (по оси ординат отложены значения безразмер-
ной силы Р = —г)- И в этом примере при одном и том же зна-
значении нагрузки система может иметь несколько различных по-
положений равновесия. Так, при Р = 0 возможны четыре раз-
различных положения статического равновесия системы, соответ-
соответствующие ф = 0; +л/2; —я/2; я.
Очевидно, что другие корни уравнения A.3) не дадут новых
положений равновесия; например, ф = я и Зя будут соответ-
соответствовать одному и тому же «опрокинутому» положению равно-
равновесия стержня и т. д.
Итак, даже на простых примерах можно показать, что при
одной и той же внешней нагрузке и одних и тех же условиях
закрепления упругая система может иметь несколько различных
положений равновесия. Чрезвычайно важно подчеркнуть, что
эта множественность положений равновесия может быть обнару-
обнаружена только в том случае, когда уравнения равновесия состав-
составляются для деформированной, отклоненной от своего исходного
ненагруженного положения системы. В линейной теории упругости
уравнения равновесия составляют для недеформированной си-
системы, т. е. используют «принцип неизменности начальных раз-
размеров» сопротивления материалов. В этом случае при заданных
условиях закрепления и заданных внешних нагрузках всегда
будет обнаружено только одно единственное положение стати-
статического равновесия упругой системы. Так, в рассмотренных при-
примерах, составляя уравнения равновесия для недеформированной
системы, не обнаружим других положений равновесия стержня,
кроме исходного вертикального положения.
Рис. 1.3
Рис. 1.4
Для более сложных упругих систем число различных возмож-
возможных положений равновесия, естественно, возрастает, а вид воз-
возможных равновесных конфигураций усложняется. Так, например,
на рис. 1.3 и 1.4 показаны различные формы равновесия гибкого
стержня (они, конечно, становятся возможными только при
достаточно больших нагрузках).
В задачу теории упругой устойчивости входит определение
условий, при которых становятся возможными различные со-
состояния равновесия системы, установление форм равновесных
конфигураций и выяснение того, какие из этих конфигураций
соответствуют устойчивым состояниям равновесия, а какие нет.
§ 2. Устойчивые и неустойчивые
состояния равновесия
Наглядной иллюстрацией устойчивого и неустойчивого равно-
равновесия служит поведения тяжелого шарика на гладкой поверхности
(рис. 1.5). Интуиция и опыт подсказывают, что помещенный на
вогнутую поверхность шарик останется на месте, а с выпуклой
и седлообразной поверхностей он скатится. Положение шарика
на вогнутой поверхности устойчиво, а положение шарика на
выпуклой и седлообразной поверхностях неустойчиво. Анало-
Аналогично два соединенных шарниром прямых стержня при растя-
растягивающей силе находятся в устойчивом
положении равновесия, а при сжимаю-
щей силе — в неустойчивом (рис. 1.6).
'/тл
Рис. 1.5
Рис. 1.6
10
Но интуиция может дать верный ответ только в простейших
случаях; для более сложных систем одной интуиции оказывается
недостаточно. Например, даже для сравнительно простой меха-
механической системы, изображенной на рис. 1.7, а, интуиция может
лишь подсказать, что положение равновесия шарика на вершине
при очень малой жесткости пружины будет неустойчивым, а с уве-
увеличением жесткости пружины оно должно стать устойчивым.
Для изображенной на рис. 2.3, б системы стержней, соединенных
шарнирами, на основе интуиции можно только сказать, что ис-
исходное положение равновесия этой системы устойчиво или не-
неустойчиво в зависимости от соотно-
соотношения между силой, жесткостью
пружинь! и длиной стержней.
Для того чтобы решить устой-
устойчиво или неустойчиво равновесие
механической системы, необходимо
использовать аналитические при-
признаки устойчивости. Наиболее об-
общим подходом к изучению устой-
устойчивости положения равновесия в
механике является энергетический
подход, основанный на исследова- J^. s)
нии изменения полной потенциаль-
потенциальной энергии системы при откло- Рис- 1<7
нениях от положения равновесия.
В положении равновесия полная потенциальная энергия кон-
консервативной механической системы имеет стационарное значение,
причем, согласно теореме Лагранжа, положение равновесия устой-
устойчиво, если это значение соответствует минимуму полной потен-
потенциальной энергии. Не углубляясь в математические тонкости,
поясним эти общие положения на простейших примерах.
В системах, изображенных на рис. 1.5, полная потенциальная
энергия изменяется пропорционально вертикальному смещению
шарика. Когда шарик опускается, его потенциальная энергия,
естественно, уменьшается. Если шарик поднимается, то потен-
потенциальная энергия возрастает. Поэтому нижняя точка вогнутой
поверхности соответствует минимуму полной потенциальной энер-
энергии и положение равновесия шарика в этой точке устойчиво.
Вершина выпуклой поверхности соответствует стационарному,
но не минимальному значению полной потенциальной энергии
(в данном случае — максимальному значению). Поэтому поло-
положение равновесия шарика здесь неустойчиво. Стационарная точка
на седлообразной поверхности тоже не соответствует минимуму
полной потенциальной энергии (это так называемая точка мини-
макса) и положение равновесия шарика здесь неустойчиво. По-
Последний случай весьма характерен. В неустойчивом состоянии
равновесия потенциальная энергия вовсе не должна достигать мак-
максимального значения. Положение равновесия не будет устойчи-
11
вым во всех случаях, когда полная потенциальная энергия имеет
стационарное, но не минимальное значение.
Для изображенной на рис. 1.6 стержневой системы также не-
нетрудно установить, что при растягивающей силе вертикальное
неотклоненное положение стержней соответствует минимуму по-
потенциальной энергии и поэтому является устойчивым. При сжи-
сжимающей силе неотклоненное положение стержней соответствует
максимуму потенциальной энергии и является неустойчивым.
Предоставив возможность читателю самому установить усло-
условия устойчивости систем, изображенных на рис. 1.7, вернемся
к двум рассмотренным в предыдущем параграфе задачам.
Полная потенциальная энергия упругой системы (с точностью
до постоянного слагаемого, которое опускаем) складывается из
внутренней энергии деформации 0 и потенциала внешних сил Я:
Э = 1/ + П. A.5)
Составим выражение для полной потенциальной энергии
стержня с упругим шарниром, нагруженного вертикальной
силой (см. рис. 1.1). Энергия деформации упругого шарнира
U — -g-fop2. Потенциал внешних сил с точностью до постоянного
слагаемого равен взятому с обратным знаком произведению силы Р
на вертикальное перемещение точки ее приложения, т. е. Я =
= —Р1 A — cos ф). Следовательно, полная потенциальная энер-
энергия
Э = -\-ку*-Р1{\ -coscp). A.6)
Рассматриваемая система имеет одну степень свободы: ее
деформированное состояние полностью описывается одним неза-
независимым параметром. В качестве такого параметра взят угол ф,
поэтому для исследования устойчивости системы нужно найти
производные полной потенциальной энергии по углу ф.
Дифференцируя выражение A.6) по ф, получим
g A.7)
A.8)
Приравнивая нулю первую производную полной потенциальной
энергии, приходим к уравнению A.1), которое раньше было по-
получено непосредственно из условий равновесия стержня. Иссле-
Исследование знака второй производной позволяет установить, какие
из найденных положений равновесия устойчивы.
Исследуем устойчивость положений равновесия стержня, соот-
соответствующих двум независимым решениям A.2). Первое из них
соответствует вертикальному неотклоненному положению стержня
12
при ф = 0. Согласно выражению A.8) для этого положения рав-
равновесия
"Эр—*-«• d-9)
При Р<С-т- полная потенциальная энергия минимальна
k
и вертикальное положение стержня устойчиво, при Я>-?-
полная потенциальная энергия максимальна и вертикальное
положение стержня неустойчиво.
Для исследования устойчивости стержня в отклоненном по-
положении подставим второе из решений A.2) в выражение A.8):
-?-*('-¦&-)• <'•'*
Если |ф| < л, то вторая производная полной энергии поло-
положительна, поскольку тогда ф < tg ф, и отклоненное положение
стержня, которое возможно при Я>-у-, всегда устойчиво.
Осталось еще не выясненным, устойчиво или неустойчиво
положение равновесия, соответствующее точке пересечения двух
решений при <р = 0н.Р = -т-, поскольку в этой точке Вторая
производная полной энергии равна нулю. Как известно из курса
математического анализа, в таких случаях для исследования
стационарной точки следует использовать высшие производные.
Последовательно дифференцируя, находим
-35Г-ЛЯПФ: Т5г=:«совФ. A.11)
В исследуемой точке третья производная равна нулю, а чет-
четвертая положительна. Следовательно, в этой точке полная по-
потенциальная энергия минимальна и неотклоненное положение
k
равновесия стержня при Я = — устойчиво.
Результаты проведенного исследования устойчивости различ-
различных положений равновесия стержня с упругим шарниром пред-
представлены на рис. 1.8. Там же показано изменение полной потен-
k
циальной энергии системы при Р > -у-. Точки В2 соответствуют
минимумам полной потенциальной энергии и устойчивым откло-
отклоненным положениям равновесия; точка В1 — максимуму энер-
энергии и неустойчивому вертикальному положению равновесия'
стержня.
Составим выражение полной потенциальной энергии системы,.
представленной на рис. 1.2. При отклонении стержня на угол ф
пружина удлиняется на величину X = / sin <p, а энергия дефор-
Неустойчивое
i равновесие
мации пружины определяется
выражением U = -%- сХ2. По-
тенциал внешних сил подсчи-
тывается так же, как и в пре-
предыдущей задаче. Таким обра-
образом,
— СОБф). A.12)
Последовательно диффе-
дифференцируя, находим
-g— — с/2 sin фсовф — Plsiatp;
-^- = сР cos 2ф — PI cos ф.
Ряс. 1.8 Приравнивая нулю пер-
первую производную полной по-
потенциальной энергии, получим уравнение равновесия A.3).
Исследуя знак второй производной, можно выяснить, какие из по-
положений равновесия стержня устойчивы. Так, для неотклонен-
ного положения при ф = 0 вторая производная полной энер-
энергии равна
= ср — pi.
Следовательно, при Р <cl вторая производная положи-
положительна и вертикальное положение равновесия устойчиво;
при Р >cl вторая производная отрицательна и вертикаль-
вертикальное положение неустойчиво. В отклоненном от вертикали
положении равновесия, описываемом зависимостью Р =
= cl cos ф, вторая производная полной потенциальной энергии
равна
^ » сР cos 2ф — cl cos2 ф = — с/2 sin* ф.
Таким образом, при sin ф ф 0 вторая производная отрица-
отрицательна и отклоненное положение равновесия стержневой системы
неустойчиво.
Положения равновесия, соответствующие точкам пересечения
двух решений A.4), неустойчивы (например, неотклоненное
положение стержня при ф=0иР = cl). В этом нетрудно убе-
убедиться, определяя в этих точках знаки высших производных.
14
На рис. 1.9 показаны резуль-
результаты проведенного исследования
и характерные кривые измене-
изменения полной потенциальной
энергии при различных уров-
уровнях нагружения.
Продемонстрированный на
простейших примерах путь ис-
исследования устойчивости поло-
положений статического равновесия
упругих систем используют и в
случае более сложных систем.
С усложнением упругой систе-
системы растут технические труднос-
трудности его реализации, но принци-
принципиальная основа — условие
минимума полной потенциаль-
потенциальной энергии — полностью со-
сохраняется.
Рис. 1.9
§ 3. Точки бифуркации, предельные точки
и критические нагрузки
На диаграмме нагрузка — перемещение, относящейся к пер-
первому примеру, ось ординат соответствует исходному вертикаль-
вертикальному положению равновесия стержня, а кривая Р = ^-
отклоненному положению равновесия (рис. 1.10, а). Как установ-
установлено, исходное вертикальное положение равновесия стержня
остается устойчивым до тех пор, пока сила P^-j-. Поэтому
при нагружении до значения Р = 1 стержень остается в исходном
вертикальном положении. При малейшем превышении указан-
указанного значения исходное вертикальное положение равновесия
стержня становится неустойчивым и любые сколь угодно малые
возмущения непременно должны вывести стержень из этого
состояния. Поскольку в окрестности точки А1г соответствующей
Р = 1, имеется другое устойчивое отклоненное положение равно-
равновесия, то стержень и перейдет в это новое состояние. На
рис. 1.10, а поведение первой системы при нагружении схема-
схематично изображено стрелками. При Р > 1 стержень не сможет
остаться в исходном вертикальном положении и отклонится
вправо или влево.
На диаграмме нагрузка — перемещение для первой системы
(рис. 1.10, а) характерной является точка Ах, в которой ось
ординат, соответствующая исходному положению равновесия,
пересекается с кривой Р =—~2—, соответствующей отклонен-
15
1еустойчибое i ч
равновесие fj»
Перескок !
б)
Рис. 1.10
ному положению. Такие точки, в которых решение расщепляется
на две ветви, называются точками бифуркации или точками
ветвления решения.
В данном случае точка Ах характерна еще тем, что при пере-
переходе через нее исходное положение равновесия стержня пере-
перестает быть устойчивым: точки оси ординат, лежащие ниже точки А г
соответствуют устойчивым состояниям, а точки оси ординат,
лежащие выше точки Alt — неустойчивым состояниям. В даль-
дальнейшем точки на диаграмме нагрузка — перемещение, при пере-
переходе через которые исходное состояние равновесия перестает быть
устойчивым, будем называть критическими точками, а соответ-
соответствующие им значения нагрузок — критическими значениями
нагрузок или критическими нагрузками. Критические нагрузки
будем обозначать индексом кр, например, в рассмотренном при-
примере Ркр = -j-.
Вторая система качественно иначе ведет себя под нагрузкой.
Исходное вертикальное положение стержня остается устойчивым
до тех пор, пока Р < I. В точке бифуркации Вх ось ординат,
соответствующая на рис. 1.10, б исходному положению равно-
равновесия, пересекается с кривой Р = cos q>, которая описывает
новое неустойчивое положение равновесия. Точка Вх критиче-
критическая, поскольку при переходе через нее устойчивое исходное
положение равновесия становится неустойчивым. Для второй
системы критическая нагрузка Ркр — cl. При достижении кри-
критической нагрузки рассматриваемая система не сможет оставаться
в исходном вертикальном положении, поскольку оно становится
неустойчивым и любые сколь угодно малые возмущения выведут
ее из него. Но в отличие от первой системы у второй нет никаких
новых устойчивых положений статического равновесия в окрест-
окрестности критической точки бифуркации Вг. Поэтому потеря устой-
устойчивости исходного вертикального положения равновесия неиз-
16
бежно сопровождается скачкообразным переходом в удаленное
на конечное расстояние новое устойчивое положение статиче-
статического равновесия (в рассматриваемом примере стержень просто
опрокидывается). На рис. 1.10, а стрелками показано поведение
второй системы.
Важно подчеркнуть, что если в первой системе переход от
исходного вертикального положения равновесия к новому откло-
отклоненному положению статического равновесия при плавном уве-
увеличении нагрузки происходит плавно без перескоков, то во вто-
второй системе даже плавное увеличение нагрузки неизбежно сопро-
сопровождается скачкообразным переходом в новое" устойчивое ста-
статическое положение равновесия. (В реальных условиях при таком
перескоке возникают колебания относительно нового устой-
устойчивого положения статического равновесия. И только после
того как силы сопротивления погасят колебания, система займет
новое устойчивое положение статического равновесия. Этот
переходный процесс описывается с использованием динамиче-
динамического подхода и здесь не рассматривается [18].)
При разгрузке две рассматриваемые системы ведут себя также
по-разному. При уменьшении нагрузки первая система в обрат-
обратном порядке проходит все этапы нагружения: в точке бифурка-
бифуркации Ах устойчивое отклоненное положение равновесия сменяется
устойчивым неотклоненным положением (рис. 1.10, а). Вторая
система проходит через новую точку бифуркации В2, где становится
неустойчивым отклоненное положение равновесия. При дости-
достижении точки бифуркации В2 система возвращается в исходное
положение путем перескока (рис. 1.10, б). В таких случаях точку
Вг иногда называют верхней критической точкой, соответствую-
соответствующее ей значение нагрузки — верхним критическим значением.
Точку В2 называют нижней критической точкой, соответствую-
соответствующее ее значение нагрузки — нижним критическим значением
нагрузки. Эти значения нагрузок будем соответственно обозна-
обозначать Р1кр (или РкР) и Р2кР. Так, в рассмотренном примере Р1кр =
= d и Pay, = —cl.
В дальнейшем нам будут встречаться критические точки би-
бифуркации двух рассмотренных выше основных типов. В критиче-
критической точке бифуркации первого типа исходная устойчивая форма
равновесия сменяется другой устойчивой формой равновесия,
причем точка бифуркации первого типа соответствует устойчи-
устойчивому равновесию (например, точка Ах на рис. 1.10, а). В крити-
критической точке бифуркации второго типа исходная устойчивая
форма равновесия сменяется другой неустойчивой формой равно-
равновесия, причем и точка бифуркации второго типа соответствует
неустойчивому равновесию (например, точка Вг на рис. 1.10, б).
Вообще говоря, могут быть точки бифуркации других типов,
например, точки, в которых пресекаются два решения, соответ-
соответствующие неустойчивым положениям равновесия (согласно при-
приведенному выше определению они не являются критическими).
17
Рис. 1.11
Однако точки бифуркации указанных выше двух типов играют
первостепенную роль в теории упругой устойчивости.
Кроме точек бифуркации в теории устойчивости важное зна-
значение имеют так называемые предельные точки.
На рис. 1.11, а изображена система, состоящая из двух жест-
жестких стержней, соединенных шарниром. Зависимость между си-
силой Р и вертикальным перемещением и точки ее приложения
имеет вид кривой, показанной на рис. 1.11,6. (Считая Н < /,
нетрудно получить аналитическое выражение этой зависимости).
Точки Cj и С2 — типичные примеры предельных точек.
В предельной точке не пересекаются различные решения.
Однако при переходе через нее устойчивое равновесие становится
неустойчивым, причем предельная точка обычно соответствует
неустойчивому равновесию. В соответствии с приведенным
выше определением предельные точки исходной формы равновесия
являются критическими.
Критические точки бифуркации первого типа характерны
для задач устойчивости упругих стержней и пластин, критические
точки бифуркации второго типа — для задач устойчивости тон-
тонких упругих оболочек. Критические предельные точки харак-
характерны для задач устойчивости пологих оболочек и тонких упругих
оболочек с начальными геометрическими несовершенствами.
В предыдущих примерах при определении точек бифуркации
и критических нагрузок рассматривались не только простейшие-
механические системы, но и их предельно идеализированные
схемы. Возникает естественный вопрос, насколько полно и точно
такие схемы могут отражать поведение реальных систем. Так,
в рассматриваемых выше примерах считалось, что оси стержней.
до нагружения расположены строго вертикально. В реальной
системе практически всегда начальный угол отклонения оси
стержня от вертикали не равен нулю. На тех же простейших
примерах выясним, насколько существенно влияние начальных
геометрических несовершенств такого типа на поведение систем
под нагрузкой, т. е. насколько различно поведение систем, имею-
имеющих начальные геометрические несовершенства, и идеализи-
идеализированных.
Снова рассмотрим первый пример, но будем считать, что
в ненагруженном состоянии ось стержня отклонена от вертикали
18
на некоторый угол <р0 (рис. 1.12, а). Если полный угол откло-
отклонения стержня при нагружении обозначить ф„, то момент в упру-
упругом шарнире будет равен k (фп — <р0) и условие равновесия
стержня в отклоненном состоянии приведет к уравнению
Откуда при ф0 ф 0 получим
р __ k Фп— <Ро
Несложный анализ позволяет установить, какие из ветвей
полученного решения соответствуют устойчивым положениям
равновесия. Результат такого анализа схематично изображен
на рис. 1.12, б.
При плавном увеличении нагрузки реализуется правая ветвь,
все точки которой соответствуют устойчивым положениям равно-
равновесия отклоненного стержня. На этой ветви кривой при ф0 ф О
нет ни точек бифуркации, ни предельных точек: с увеличением
нагрузки угол отклонения стержня монотонно увеличивается.
Левая ветвь, содержащая предельную точку С2, может быть реа-
реализована только тогда, когда к стержню приложена некоторая
дополнительная поперечная нагрузка, а затем она снята.
На рис. 1.12, в показан вид правых ветвей в окрестности точки
¦бифуркации Аг для нескольких различных значений начального
угла отклонения ф0. Вид кривых позволяет сделать два важных
вывода о поведении рассматриваемой системы с начальными
геометрическими несовершенствами. Во-первых, точка бифур-
бифуркации первого типа Аг существует только в случае предельно
идеализированной системы, когда ф0 = 0. При любых не рав-
равных нулю значениях ф0 точка бифуркации исчезает и с ростом
нагрузки угол фп монотонно увеличивается без качественных
изменений форм равновесия. Во-вторых, если ф0 <? 1, то быстрый
рост фп происходит только с приближением нагрузки к ее крити-
критическому значению, соответствующему точке бифуркации Ах
идеализированной системы при ф0 = 0. При малых нагрузках
JC/J
19
Л/6 */J. 9>r>
0)
по сравнению с этим критическим значением отклонения стержня
остаются малыми.
Рассмотрим влияние начального отклонения <р0 на поведение
второй из исследованных выше простейших систем (рис. 1.13).
При отклонении стержня на угол <рп усилие в пружине равно
d (sin фп — sin ф0) и условие равновесия отклоненного стержня
приводит к уравнению
PI sin фп = cl2 (sin фп — sin ф0) cos фп.
Откуда при ф0 ф О находим
sin фп — sin
Проанализировав знак второй производной полной потенциальной
энергии по углу отклонения системы, можно установить, какие
из ветвей полученного решения соответствуют устойчивым поло-
положениям равновесия. Для |фп|<я результат такого анализа
изображен на рис. 1.13, б. Как видим, поведение этой системы
при ф0 Ф О качественно отличается от поведения рассмотренной
выше системы. При ф0 Ф 0 критическая точка бифуркации вто-
второго типа Вг трансформируется в критическую предельную точку
Сг. При достижении этой предельной точки происходит потеря
устойчивости исходной формы равновесия системы, причем по-
поскольку в окрестности предельной точки Сг нет новых устой-
устойчивых положений равновесия, система вынуждена скачком пе-
перейти в новое устойчивое положение, удаленное от исходного
на конечное расстояние.
На рис. 1.13, в построены кривые нагрузка—перемещение
для рассматриваемой системы при нескольких значениях началь-
начального угла отклонения ф0.
По результатам анализа влияния начальных отклонений на
поведение этой системы можно сделать следующие выводы. Во-
первых, критическая точка бифуркации второго типа Blt суще-
существующая только для предельно идеализированной системы,
20
при любых не равных нулю значениях <р0 трансформируется
в критическую предельную точку. Во-вторых, при наличии на-
начальных отклонений верхняя критическая нагрузка становится
меньше значения, соответствующего точке бифуркации Вх идеа-
идеализированной системы.
Поведение значительно более сложных упругих систем ана-
аналогично поведению рассмотренных простейших систем с началь-
начальными несовершенствами. Так, если предельно идеализированная
система без начальных несовершенств имеет критическую точку
бифуркации первого типа, то поведение реальной системы с на-
начальными несовершенствами вблизи этой точки бифуркации ана-
аналогично поведению первой из рассмотренных простейших систем
(см. рис. 1.12). Если предельно идеализированная система без
начальных несовершенств имеет критическую точку бифуркации
второго типа, то поведение реальной системы вблизи этой точки
бифуркации аналогично поведению второй из рассмотренных
простейших систем (рис. 1.13).
§ 4. Линеаризованные уравнения
В рассмотренных выше простейших примерах легко составить
и точно решить полные нелинейные уравнения при произволь-
произвольных значениях перемещений системы. Проведенный анализ дает
исчерпывающую информацию о всех возможных устойчивых и
неустойчивых положениях равновесия. Но подавляющее боль-
большинство практически важных задач значительно сложнее при-
приведенных и получение таких полных точных решений для них
не представляется возможным. Это заставляет искать приближен-
приближенные, упрощенные пути исследования поведения сложных упру-
упругих систем под действием приложенных к ним нагрузок.
При решении задач упругой устойчивости центральное место
занимает определение критических точек бифуркации и крити-
критических нагрузок. Точки бифуркации определяются как точки
пересечения различных решений нелинейных уравнений (именно
так они определялись в рассмотренных выше примерах). Но их
можно найти и иначе, минуя решение нелинейных уравнений.
Это можно сделать с помощью однородных линеаризованных урав-
уравнений.
Основная идея определения точек бифуркации с помощью
однородных линеаризованных уравнений состоит в следующем.
Предположим, что одна какая-то форма равновесия системы из-
известна и нужно найти точки бифуркации этой формы равновесия.
Для это*о достаточно, не интересуясь поведением системы вдали
от известной формы равновесия, найти условия существования
других форм равновесия, отличных от исходной, но бесконечно
к ней близких. Те точки, в окрестностях которых существуют
такие формы равновесия, и будут точками бифуркации.
21
Рассмотрим, как можно получить и использовать линеаризо-
линеаризованные уравнения на знакомых простейших примерах. В первом
примере тривиальное исходное состояние равновесия ф = О
можно считать известным и без решения полного нелинейного
уравнения. Найдем условия существования других состояний
равновесия, бесконечно близких к этому исходному. В данном
случае найдем условие равновесия стержня, отклоненного от
вертикали на бесконечно малый угол <рх (рис. 1.14, а). Угол фг
считаем бесконечно малым и в уравнении равновесия учитываем
только те слагаемые, которые содержат этот угол в первой сте-
степени (отсюда и название «линеаризованное уравнение»). Тогда
можно записать Pl<Pi = kq>u или
(Р/-^)Ф1 = О. A.13)
Полученное однородное и линейное относительно фг урав-
уравнение всегда имеет тривиальное решение фх = 0, соответствую-
соответствующее исходному вертикальному положению равновесия стержня.
Интересующее нас сейчас отклоненное положение равновесия
при ц>1 ф 0 возможно, если выражение, стоящее в скобках,
обращается в нуль, т. е. если Р = -г-. Таким образом из условия
существования нетривиального решения линеаризованного урав-
уравнения найдена та же точка бифуркации, которая выше определена
как точка ветвления решения полного нелинейного уравнения.
Аналогично можно получить линеаризованное уравнение и
для второго из рассмотренных выше примеров (см. рис. 1.2, а).
Рассмотрев равновесие стержня, отклоненного от вертикали на
бесконечно малый угол фц получим
(Р1 — el2) «Pj = 0. A.14)
Условие существования нетривиального решения этого урав-
уравнения, т. е. условие (P—Cl) = 0, приводит к той же точке бифур-
бифуркации, которая раньше найдена как точка пересечения двух
различных решений нели-
нелинейного уравнения.
\
р
(й'О
W,~0
9
в)
0)
22
Линеаризованные уравнения дают возможность найти точки
бифуркации, но при этом остаются совершенно не выясненными
ни тип точки бифуркации, ни характер поведения системы при
конечных отклонениях от исходного положения равновесия.
Действительно, однородные линеаризованные уравнения A.13)
и A.14) принципиально ничем не отличаются одно от другого,
хотя точки бифуркации соответствующих систем относятся к раз-
разным типам и при отклонениях от исходного положения равно-
равновесия эти системы ведут себя качественно различно. Схематично
это показано на рис. 1.14, б. Однородное линеаризованное урав-
уравнение получено для бесконечно малых величин'ф!, поэтому оно
не может дать никакой информации о поведении системы при
конечных отклонениях.
Этот способ определения точек бифуркации с помощью лине-
линеаризованных уравнений можно использовать при решении дру-
других более сложных задач.
Рассмотрим, например, систему, состоящую из двух жестких
стержней с двумя упругими шарнирами (рис. 1.15, а). До нагру-
жения оси стержней расположены на одной вертикали и сила Р
действует вдоль этой вертикали. Состояние равновесия такой
системы, при котором стержни остаются на одной вертикальной
прямой, будем считать исходным. С помощью линеаризованных
уравнений найдем точки бифуркации этого исходного состояния.
Отклоненное положение системы будем задавать углами фг
и ф2, так как система имеет две степени свободы. Внутренние
моменты в упругих шарнирах соответственно равны kx (фг — ф2)
и &2ф2» гДе &i и &2 — жесткости упругих шарниров. Рассмотрим
условия равновесия каждого из стержней. Считая углы <рг и фа
бесконечно малыми и учитывая только линейные относительно (fx
и ф2 слагаемые, получим систему линеаризованных уравнений
К (9i — Фг) — Pl&i = 0; j
- Фг) - ^аФг = 0. J
Эта однородная система линейных уравнений имеет тривиальное
решение ф! = 0 и ф2=0, соответствующее исходному верти-
вертикальному положению равновесия. Для существования решений,
отличных от нуля, необходимо, чтобы определитель полученной
системы был равен нулю. Таким образом, для того чтобы найти
точки бифуркации, необходимо решить уравнение
= 0. A.16)
Раскрыв определитель, получим квадратное относительно Р
уравнение
h-T^J—0. A.17)
23
4
Рис 1.16
Положив, например, lx = /, /2 = 2/, &х = k, k2 = 2k, найдем
корни уравнения Pi^-jr и Pz — —j~- Это и будут те зна-
значения нагрузки, при которых возможны смежные с исходным
отклоненные состояния равновесия системы.
Линеаризованные уравнения позволяют с точностью до мас-
масштаба определять равновесные конфигурации системы в смежных
с исходным состояниях. Так, из уравнений A.15) следует, что
при Р — Рх углы фх и ф2 связаны соотношением фг = 2ф2, а при
Р[— Р2 соотношением фх = —ф2. Соответствующие равновес-
равновесные конфигурации изображены на рис. 1.15, б и в.
Если отклонения упругой системы от исходного положения
равновесия могут быть полностью описаны N независимыми пара-
параметрами (т. е. если упругая система имеет N степеней свободы),
то линеаризация условий равновесия вблизи исходного поло-
положения системы приводит к системе N линейных однородных урав-
уравнений с # неизвестными. Для существования нетривиальных
решений этой системы ее определитель должен быть равен нулю.
Указанное условие приводит к уравнению, позволяющему
найти точки бифуркации исходного положения равновесия.
Если это уравнение не имеет кратных корней, то число точек
бифуркации равно числу степеней свободы рассматриваемой си-
системы.
Для системы с распределенными параметрами, которую можно
трактовать как систему с бесконечным числом степеней свободы,
линеаризация условий равновесия вблизи исходного положения
равновесия системы приводит к однородным дифференциальным
уравнениям. Их решение дает, вообще говоря, бесконечное число
точек бифуркации.
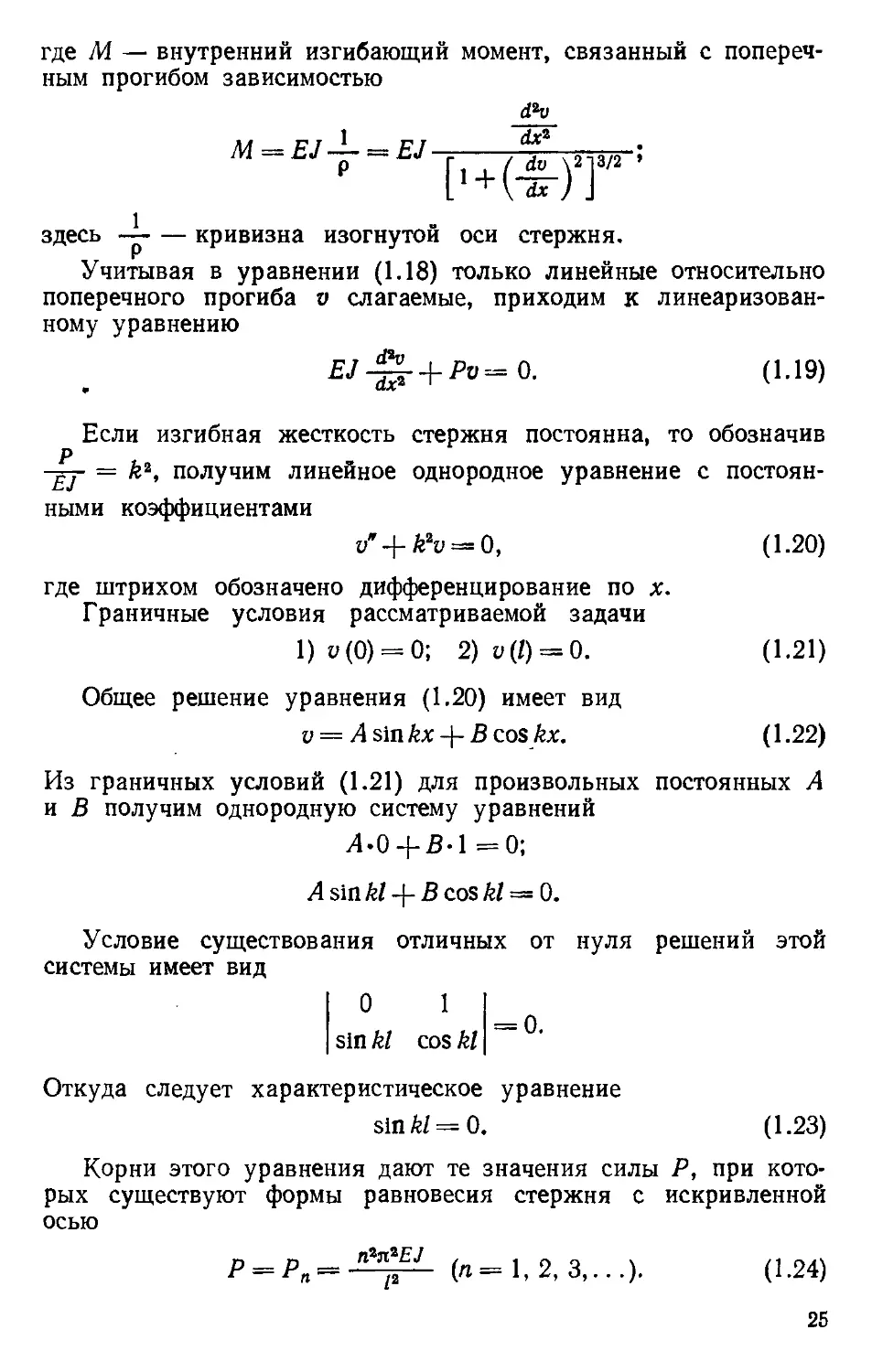
Рассмотрим шарнирно опертый стержень изгибной жестко-
жесткости EJ, сжатый силой Р (рис. 1.16, а). До нагружения ось стержня
считаем строго прямой, а линию действия силы совпадающей
с осью стержня. Тогда возможна прямолинейная форма равно-
равновесия стержня, которую примем за исходную. Найдем условия
существования форм равновесия стержня с искривленной осью,
бесконечно близких к исходной прямолинейной форме равно-
равновесия. Поперечные прогибы стержня обозначим v; тогда из усло-
условия равновесия части стержня в искривленном состоянии
(рис. 1.16, б) можно записать
M + Pv = 0, A.18)
24
где М — внутренний изгибающий момент, связанный с попереч-
поперечным прогибом зависимостью
dx
здесь кривизна изогнутой оси стержня.
Учитывая в уравнении A.18) только линейные относительно
поперечного прогиба v слагаемые, приходим к линеаризован-
линеаризованному уравнению
Ej4± + Pv~0. A.19)
Если изгибная жесткость стержня постоянна, то обозначив
р
-gj- = k2, получим линейное однородное уравнение с постоян-
постоянными коэффициентами
w" + ft4/=.O, A.20)
где штрихом обозначено дифференцирование по х.
Граничные условия рассматриваемой задачи
1) у@) = 0; 2) v @ = 0. A.21)
Общее решение уравнения A.20) имеет вид
v = Asinkx-\-Bcoskx. A.22)
Из граничных условий A.21) для произвольных постоянных А
и В получим однородную систему уравнений
Л.0 + 5-1 =0;
Условие существования отличных от нуля решений этой
системы имеет вид
0 1
sin kl cos kl
= 0.
Откуда следует характеристическое уравнение
sin/e/ = O. A.23)
Корни этого уравнения дают те значения силы Р, при кото-
которых существуют формы равновесия стержня с искривленной
осью
^ («=1,2,3,...). A-24)
25
Если Р = Рп, то форма изогнутой оси стержня с точностью, до
масштаба описывается функцией (рис. 1.16, в)
ц, - sin-5?Цл;= 1,2,3,...). A.25)
Наименьшее значение Рп соответствует п = 1
A-26)
В задачах устойчивости обычно нужно найти точку бифурка-
бифуркации, соответствующую наименьшему значению нагрузки. Как
показано ниже, эта точка и соответствующее ей значение нагрузки
являются критическими. В рассмотренном примере Ркр = " .2 ¦,
а потеря устойчивости происходит по форме, соответствующей
п = 1.
Таким образом, однородные линеаризованные уравнения дают
возможность находить точки бифуркации и с точностью до мас-
масштаба определять конфигурации равновесных положений системы
в окрестностях точек бифуркаций. Но однородные линеаризован-
линеаризованные уравнения не могут дать информации о поведении системы
при конечных значениях ее отклонений от исследуемого исходного
положения равновесия и о характере точек бифуркации.
Однородные линеаризованные уравнения теории упругой ус-
устойчивости — основной рабочий инструмент этой теории — отно-
относятся к разделу математики, называемому задачи на собственные
значения (см. приложение I). Кроме однородных линеаризован-
линеаризованных уравнений, служащих для определения точек бифуркации,
в теории упругой устойчивости широко применяют неоднород-
неоднородные линеаризованные уравнения для приближенного описания
поведения систем с начальными неправильностями при малых,
но конечных значениях отклонений. Такие уравнения достаточно
полно характеризуют поведение систем вблизи точек бифуркаций
первого типа (см., например, § 18).
Кроме изложенного способа получения линеаризованных урав-
уравнений возможен и другой более строгий способ, основанный на
линеаризации полных нелинейных уравнений [281.
§ 5. Энергетический подход
к определению критических нагрузок
Исходное состояние равновесия, рассмотренной в предыдущем
параграфе стержневой системы (см. рис. 1.15) <Pi = О и <р2 = 0
известно. Для определения точек бифуркации нужно найти
условия существования новых равновесных состояний, смежных
с исходным. Для этого можно подсчитать полную потенциальную
энергию в состоянии, смежном с исходным. Тогда условие ста-
26
ционарности этой энергии при <рх —> 0 и ф2 —» 0 должно при-
привести к точкам бифуркации исходного состояния. Если при этом
полную потенциальную энергию подсчитывать в виде разло-
разложения по ф! и ф2, то для определения точек бифуркации, видимо,
не понадобятся высокие степени фх и ф2. Как будет видно из
дальнейшего, для определения точек бифуркации в разложении
полной потенциальной энергии необходимо и достаточно учесть
квадратичные слагаемые относительно фх и ф2.
Полная потенциальная энергия складывается из внутренней
энергии деформации и потенциала внешних сил.
Энергия деформации упругих шарниров при отклонениях
системы на углы фх и ф2 равна
U = \ ki (фх - ф2J + ¦— %2- A.27)
Потенциал внешних сил с точностью до постоянного слагаемого
определяется выражением
П = — Р [1г A - cos фх) + к A - cos ф^].
Ограничившись квадратичными членами разложения коси-
косинусов, окончательно найдем
Э = 4"*i (Ф1 - ФгJ + 4~ *2Ф2 Г Р № + ЬфЭ + Эо, A.28)
где Э о — полная потенциальная энергия исходного состояния
равновесия, не зависящая от фх и ф2.
В рассматриваемой системе с двумя степенями свободы усло-
условие стационарности полной энергии приводит к двум уравнениям
дЭ M<Pq>)
дЭ
т. е. к той системе двух линейных однородных уравнений, кото-
которая получена в § 4:
*1(Ф1-Ф2)--Р/1Ф1 = О; A-29)
щ — ф2) — Р1^г = 0.
Приравняв нулю определитель этой системы, можно найти
значения Рг и Рг, соответствующие двум точкам бифуркации,
и конфигурации стержневой системы в окрестностях этих точек
(см. рис. 1.15, б и в).
В приведенном решении (как и в решении, полученном выше
с помощью линеаризованных уравнений) непосредственно не
фигурировало условие устойчивости исходного состояния равно-
равновесия. Поэтому пока не понятно, почему при Р > Рг исходное
состояние равновесия неустойчиво. Для доказательства того,
27
что при переходе через первую точку бифуркации исходное со-
состояние равновесия перестает быть устойчивым, приведем другой
вывод уравнений A.29), основанный на теореме Лагранжа.
Согласно теореме Лагранжа, консервативная механическая
система находится в состоянии устойчивого равновесия только
тогда, когда ее полная потенциальная энергия минимальна. Таким
образом, если система находится в устойчивом равновесии, то
всякие допустимые по условиям закрепления системы отклонения
приводят к увеличению ее полной потенциальной энергии.
Определим изменение полной потенциальной энергии A3,
происходящее при переходе рассматриваемой системы к новому
состоянию, смежному с исходным. Ограничившись квадратич-
квадратичными относительно ц>г и фг слагаемыми, из выражения A.28)
получим
аз = з - з0 = 4- h («pi - ч>2J + 4" *2ф2 —г р (/1ф> + к^-
A.30)
Если исходное состояние устойчиво, то при любых сочетаниях
Фг и ф2 должно выполняться условие A3 > 0. Ненагруженная
система при Р = 0 находится в устойчивом исходном состоянии
равновесия, так как A3 = U, где U определяется из выражения
A.27). При любых не равных нулю отклонениях фх и ф2 условие
A3 > 0 выполняется.
Критической называют нагрузку РКР, при превышении кото-
которой исходное состояние равновесия перестает быть устойчивым.
Поэтому при Р > Ркр имеются отклонения, приводящие к A3 <
< 0. Но при Р > РКР возможны отклонения, приводящие
к A3 > 0 или к A3 = 0. В соответствии с выражением A.30)
для тех отклонений, при которых A3 = 0, можно записать сле-
следующее:
—-ftj (фх — ф2J + -S- k2<fI
Р = — i . A.31)
M l
Критическую нагрузку можно определить как наименьшее
значение нагрузки, при котором возможны отклонения от исход-
исходного состояния, приводящие к A3 = 0. Нетрудно убедиться, что
необходимое условие минимума нагрузки Р, определяемой выра-
выражением A.31), снова приводит к системе уравнений A.29). Обо-
Обозначим
A.32)
где U = 4- ki (ф! - Ф2J + 4"*»Ф* V = 4"
28
Тогда необходимые условия минимума Р запишутся так:
dU dv
дР (Эф, (Эф, п
Эф!
дР
dU
V*
'q>t
или
v \ аф1 v аф1 )
1 / dU U дУ
v V Эф2 v дф2
О.
Так как V > 0, воспользовавшись выражением A.32), можно
записать
» />-|Le0;
Офх Оф2
Как видим, снова получена система уравнений A.29), опре-
определяющая точки бифуркации исходного состояния равновесия.
Но теперь можно утверждать, что значение Pv соответствующее
первой точке бифуркации, является критическим, т. е. в рас-
рассмотренной задаче Ркр = -~у-.
На рис. 1.17 схематично поясняются два варианта вывода
уравнений A.29). В первом варианте (рис. 1.17, а) использовали
условие стационарности полной потенциальной энергии системы
в состоянии равновесия, смежном с исходным. Bo-втором варианте
(рис. 1.17, б) исследовали знак изменения полной потенциальной
энергии кэ при отклонениях системы от исходного состояния
равновесия. Оба варианта решения приводят к одной и той же
критической точке бифурка-
бифуркации A v
В рассматриваемой задаче
система имеет две степени сво-
свободы и в соответствии с этим
выше найдены две точки би-
бифуркации. На рис. 1.18 показа-
показано изменение полной потен-
потенциальной энергии при откло-
отклонениях системы от исходного
состояния равновесия. При
Р <РХ = Р-
кр
полная потен- Рис. 1.17
29
циальная энергия минимальна и любые отклонения по фг и <р2
приводят к ее увеличению (рис. 1.18, а). При Ркр <Р <Рг
исходное состояние равновесия соответствует точке минимакса
полной потенциальной энергии. Это состояние неустойчиво, по-
поскольку возможны отклонения системы, приводящие к АЭ <0
(рис. 1.18, б). При Р > Р2 значение полной потенциальной энер-
энергии в исходном состоянии равновесия становится максимальным
и любые отклонения системы приводят к АЭ < О (рис. 1.18, в).
Энергетический подход к определению точек бифуркации и
критических нагрузок может быть применен и в более сложных
случаях. Для систем с распределенными параметрами при Р >
> Ркр исходное состояние равновесия всегда соответствует точкам
минимакса полной потенциальной энергии, т. е. при любых зна-
значениях Р > Ркр полная потенциальная энергия в исходном
неустойчивом состоянии не становится максимальной.
§ 6. Устойчивость упругих систем
при комбинированном нагружении
На упругую систему могут одновременно действовать не-
несколько независимо изменяющихся нагрузок. Некоторые особен-
особенности исследования устой-
устойчивости при таком ком-
комбинированном нагружении
Область продемонстрируем на про-
неустойчи- стых примерах.
бости Начнем с системы с
одной степенью свободы.
Рассмотрим закрепленный
в упругом шарнире жест-
жесткий стержень, на который
Pf одновременно действуют
-•силы Р1иР2(рис. 1.19, а).
Когда на стержень дей-
действует одна сила Plt то
Рие. 1.19 ее критическое значение
30
Область
устойчивости .
равно CPi)Kp = -T~; аналогично (Рг)кр — -7-- При одновременном
действии сил Рх и Р2 условие равновесия отклоненного стержня
приводит к линеаризованному уравнению
Из условия существования отличных от нуля решений этого
однородного уравнения находим границу области устойчивости
PA + Pzh^k. A.33)
Действительно, повторив рассуждения, приведенные в § 2, и
проделав несложные выкладки, нетрудно установить, что при
Рг1г-{-Рг12^. k исходное вертикальное положение стержня
устойчиво, а при Рг1г -\-PJ2 > k эт° положение неустойчиво.
В координатах Plt P2 граница области устойчивости (рис. 1.19, б)
является прямой линией, пересекающей оси Рг и Р2 в точках,
соответствующих критическим значениям (Рх)кр и СР2)кр. За-
Заметим, что в данном случае уравнение границы области устой-
устойчивости можно записать в виде
Если на систему с одной степенью свободы одновременно дей-
действуют N сил Plt то граница области устойчивости, очевидно,
описывается уравнением
где (Pi)gp — критическое значение силы Ри [действующей от-
отдельно.
Рассмотрим упругую систему с двумя степенями свободы,
нагруженную одновременно силами Рг и Рг (рис. 1.20, а). Усло-
Условия равновесия стержней в положении, отклоненном от исходного,
приводят к системе двух линеаризованных уравнений
— Фг) - ^УФх = 0;
2/гф2 - Рг (% + 2/фг) — Р22/<р2 = 0.
Приравняв нулю определитель этой однородной системы урав-
уравнений, получим уравнение
^(J^0. A.35)
Положив в этом уравнении поочередно Р2 = 0иР1 = 0, можно
найти критические значения сил, действующих отдельно:
31
Рис. 1
На рис. 1.20, б в координатах Plt Р2 изображена гипербола,
описываемая уравнением A.35). Ближайшая к началу координат
ветвь гиперболы, показанная сплошной линией, является гра-
границей области устойчивости в данной задаче. Следуя намеченному
в предыдущем параграфе пути, можно доказать, что все точки
плоскости, лежащие слева от этой ветви, соответствуют устой-
устойчивому вертикальному положению стержневой системы, а точки,
лежащие справа, — неустойчивому вертикальному положению.
В данной задаче (как и в предыдущей) граница принадлежит
области устойчивости.
При нагружении силы Рг и Рг могут возрастать пропорцио-
пропорционально одному параметру. В координатах Рг, Р2 такое нагру-
жение описывается лучом, исходящим из начала координат.
Так, например, на рис. 1.20, б изображен луч, соответствующий
Рг = Р2. Точка пересечения луча с границей области устой-
устойчивости А соответствует критической точке бифуркации исход-
исходного положения равновесия.
В рассмотренных выше примерах граница области устойчи-
устойчивости незамкнутая кривая и поэтому часть лучей, исходящих
из начала координат, ее пере-
перей
Рг
Рис. 1.21
г г
р?
. z
а)
Pi
1
0
г
_m
—»-*
6)
р р
секает, а часть лучей не пере-
пересекает. В этих случаях возмож-
возможны такие соотношения между
силами Рг и Р2, при которых
потери устойчивости не произой-
произойдет. Но бывают случаи нагруже-
ния упругой системы, когда
граница области устойчивости
является замкнутой кривой.
На рис. 1.21, а изображен
упругий стержень с неподвижно
32
закрепленными шарнирными
торцами. При нагружении та-
такого стержня силами Рг и Р
в правой опоре возникает про-
дольная реакция Q = -g--Pi +
+ -~-Ps. Поэтому задача опре-
О
деления критических значений
нагрузок стержня эквивалентна
задаче устойчивости стержня,
изображенного на рис. 1.21, б.
Решение задач устойчивости
такого типа рассмотрено в гл. 3.
Для получения качественной
картины заменим упругий стер-
стержень дискретной системой, со-
состоящей из трех жестких звень-
звеньев, соединенных упругими шар-
шарнирами (рис. 1.22, а). Дляреше-
ния этой задачи воспользуемся
энергетическим методом, изложенным в предыдущем параграфе.
Обозначив поперечные перемещения шарниров vx и t>2, определим
изменение полной потенциальной энергии системы при отклоне-
отклонениях от горизонтального положения:
—Pl)»+Pfl
Рис. 1.22
1 „a 1 /,¦ fi \2
* p ^2 . \_ p \V2 ul^ . j_
"T^1 / 2 Гг I
где k — жесткость упругих шарниров.
Условие стационарности A3 приводит к двум однородным
линейным уравнениям:
Vl{5~l ''ж + 2Q) — t», D-^ P1
Приравняв нулю определитель полученной системы уравнений,
найдем уравнение границы области устойчивости в координа-
координатах Р1г Р2:
А ^(^J = 0. A.36)
Положив в этом уравнении Ръ = 0, получим уравнение для
определения критических значений отдельно действующей силы Рх:
2 Н. А. Алфутов
Pi -3Pi~- 27 (-y-J = 0.
33
КОЯОХЗА
НЕ БОЛЕЕ »И КНИГИ В (
ОДНИ РУЛИ И 2X8 ДВЕ \
Вычислим два критических значения (Р^^р = -=--т-A ±
± ]/Тз)> В силу симметрии задачи для силы Р2 можно найти два
критических значения (/>2)кр = -у- -у- (—1 ± Kl3).
На рис. 1.22, б в координатах Ръ Р2 изображена граница
области устойчивости. В данном случае область устойчивости
ограничена замкнутой кривой (для дискретной модели стержня
это эллипс). Вернувшись к исходной задаче устойчивости упру-
упругого стержня (см. рис. 1.21, а), нетрудно установить физический
смысл замкнутости найденной границы области устойчивости:
потерю устойчивости могут вызывать внешние силы Рг и Р2,
действующие как вправо, так и влево.
Этот подход к определению границ областей устойчивости
применим для более сложных упругих систем, в том числе для
систем с распределенными параметрами. В общем случае гра-
граница области устойчивости может состоять из набора прямо-
и криволинейных участков, часть из которых принадлежит об-
области устойчивости, а часть — области неустойчивости.
Общие свойства границ областей устойчивости детально ис-
исследованы П. Ф. Папковичем [31]. В частности, им доказана
важная теорема о выпуклости границы области устойчивости.
Согласно этой теореме граница области устойчивости не может
быть обращена выпуклостью к области устойчивости. Так, для
случая действия на систему двух независимых нагрузок гра-
граница области устойчивости может состоять из криволинейных
участков, обращенных выпуклостью к области неустойчивости,
и отрезков прямых.
Теоремой о выпуклости области устойчивости часто поль-
пользуются для приближенного построения границы области устой-
устойчивости. Если известны только отдельные точки этой границы,
то соединяя их отрезками прямых, можно получить надежную
аппроксимацию истинной границы. (Когда на упругую систему
одновременно действуют более двух независимых нагрузок, то
аналогичные построения проводят в соответствующем много-
многомерном пространстве).
Но необходимо подчеркнуть, что теорема о выпуклости области
устойчивости (как и остальные теоремы П. Ф. Папковичао границах
областей устойчивости) доказывается только для линейной задачи
устойчивости. Эта теорема верна, если докритическое напряженно-
деформированное состояние упругой системы определено по линей-
линейной теории и при расчете на устойчивость докритические перемеще-
перемещения системы не учитываются. В противном случае граница области
устойчивости может иметь участки, обращенные выпуклостью в сто-
сторону области устойчивости [231. Более того, в общем случае,
когда для описания докритического состояния упругой системы
необходимо использовать нелинейную теорию, области устой-
устойчивости могут иметь самые причудливые очертания.
34
§ 7. О постановке задач
устойчивости тонкостенных систем
При исследовании упругой устойчивости стержней, пластин
и оболочек принимаем следующие основные ограничения и допу-
допущения.
Во-первых, всюду, где это специально не оговорено, материал
считаем линейно упругим (изотропным или анизотропным). Ко-
Конечно, многие практически важные задачи устойчивости дефор-
деформируемых тел требуют учета более сложных реологических свойств
(нелинейная упругость, пластичность, ползучесть и т. д.). Но для
тонкостенных элементов силовых конструкций из современных
высокопрочных материалов это ограничение вполне обосновано.
Как правило, работоспособность таких конструкций опреде-
определяется их устойчивостью в упругой области. Кроме того, для
правильной постановки и решения задач устойчивости дефор-
деформируемых тел с другими реологическими свойствами необходимо
понимать формулировки и решения задач устойчивости для ли-
линейно-упругого тела.
Во-вторых, все внешние нагрузки, действующие на дефор-
деформируемую систему, считаем консервативными, т. е. полагаем,
что работа этих нагрузок на любых допустимых перемещениях
системы зависит только от начальной и конечной конфигураций
системы. Наложенные на систему связи считаем идеальными,
полагая, что силы реакций этих связей не совершают работу
на любых возможных перемещениях точек системы, к которым
приложены эти силы. При таких нагрузках и связях упругая
система является консервативной.
В-третьих, при определении критических нагрузок и исследо-
исследовании закритического поведения системы используем статиче-
статический подход, не учитывая инерционные силы в системе, возни-
возникающие в процессе ее деформирования. Для консервативных
систем такой статический подход к определению критических
нагрузок всегда приводит к тем же результатам, что и более
общий динамический подход [14, 401. При исследовании закри-
закритического поведения статический подход дает возможность только
найти устойчивые равновесные состояния, в которых может
находиться система при определенном уровне нагружения, но
не позволяет проследить во времени подробности закритиче-
закритического поведения системы после потери устойчивости (подробнее
см. [18]). Однако для подавляющего числа практических задач
расчета силовых конструкций достаточно найти условия, при
которых произойдет потеря устойчивости, и оценить закрити-
ческое поведение конструкции, а эти цели могут быть достигнуты
на основе статического подхода.
Кроме перечисленных общих ограничений, о которых следует
помнить при практическом использовании той или иной конкрет-
конкретной формулы или уравнения, обсудим подробнее одно менее
2* 35
известное допущение, на основе которого решается большинство
задач теории упругой устойчивости тонкостенных конструкций.
Обратимся снова к классической задаче устойчивости шар-
нирно-опертого сжатого стержня (рис. 1.16). Как показано в § 4,
линеаризованное уравнение изгиба такого стержня приводит
к классической формуле Эйлера
°кр= Ji > A.37)
где EJ — изгибная жесткость стержня; / — длина.
При выводе этой формулы изменение размеров стержня в до-
критическом состоянии не учитывали; в частности, в момент
потери устойчивости длину стержня / считали равной начальной
длине /0.
Оценим порядок погрешности, содержащейся в формуле
Эйлера и связанной с пренебрежением докритической деформа-
деформацией стержня. В соответствии с законом Гука при упругом сжа-
тии стержня / = A +е) /0, где е = ^р-; здесь Е и F —
модуль упругости и площадь поперечного сечения стержня.
Критическую силу, подсчитанную по формуле A.37) при
начальных размерах стержня, обозначим Р?р. Тогда соответ-
соответствующее критическое удлинение («укорочение») стержня равно
где г,- = у -в радиус инерции сечения стержня. С учетом
изменения длины стержня можно записать следующее:
Uo(l+eKp)l2 ~ A+еКрJ ~{l ~ zb^)^p -
»p. A.38)
Так, для стержня квадратного поперечного сечения
, _ l/"«* Г а . р (л , п'а* \ ро
где а — сторона квадрата.
Следовательно, формула Эйлера органически содержит по-
погрешность порядка 8кР или (-у-) п0 сравнению с единицей.
Заметим, что критическое укорочение 8кр не зависит от модуля
упругости материала стержня, а является геометрической ха-
характеристикой стержня. Однако формула A.38) в действитель-
действительности не уточняет формулу Эйлера, а только дает оценку порядка
погрешности, содержащейся в классическом решении. В про-
процессе докритического сжатия изменяются не только длина стержня,
но и размеры его поперечного сечения (за счет коэффициента
36
Пуассона). Поэтому, учитывая, что J = A — |леLУ0» формулу
A.38)?можно записать в следующем виде:
р A — цекр) по _ . 1 | о п ri'¦ (\ | о,,ч ро
кр>
В классическом решении внутренний изгибающий момент
в стержне определяется зависимостью М = EJv", основанной
на гипотезе плоских сечений. Если построить решение, свобод-
свободное от гипотезы плоских сечений, то полученная в результате
такого решения дополнительная поправка для Ркр будет тоже
иметь порядок бкр, но знак этой поправки будет другой. Осво-
Освобождение стержня от гипотезы плоских сечений делает его менее
жестким и тем самым уменьшает критическую нагрузку (см. § 16).
Для получения окончательной достоверной поправки к фор-
формуле Эйлера необходимо пересмотреть закон Гука, учитывая
при его формулировке различие между значениями условных и
истинных напряжений и деформаций. И пока не внесена коррек-
корректировка в закон Гука, учитывать все перечисленные выше по-
поправки не имеет смысла.
На этом примере показана интересная и важная особенность
задач устойчивости. Задачи устойчивости в принципе нелинейны.
Классическую постановку задачи о точках бифуркации упругого
равновесия можно рассматривать как первое приближение полной
нелинейной задачи. Для дальнейшего уточнения классической
постановки необходимо тщательно и всесторонне изучать все
нелинейные факторы, которые могут оказать влияние на окон-
окончательный результат решения. Поэтому достоверные уточнения
классической постановки задач устойчивости удается сделать
только для некоторых частных задач [11, 26].
Классическая постановка задач теории упругой устойчивости
базируется на следующем допущении.
Докритическое напряженное состояние системы определяем
по уравнениям линейной теории упругости и пренебрегаем изме-
изменением начальных размеров системы до потери устойчивости.
Это допущение (если не сделано специальной оговорки) ис-
используем при выводе линеаризованных уравнений стержней,
пластин и оболочек, помня при этом, что все окончательные фор-
формулы для критических нагрузок неизбежно будут содержать
погрешность порядка е«Р по сравнению с единицей.
Это основное допущение можно трактовать следующим обра-
образом. До потери устойчивости упругое тело напряжено, но не
деформировано. Такая упрощенная модель упругого тела позво-
позволяет исследовать устойчивость большинства тонкостенных силовых
конструкций, но не может рассматриваться как универсальная.
Для некоторых задач пренебрежение изменением начальных
размеров системы или определение изменения размеров по урав-
уравнениям линейной теории упругости может привести к погреш-
погрешностям, существенно большим указанных выше, или даже каче-
37
ственно исказить результат решения. Например, сжатая витая
пружина может потерять устойчивость подобно сжатому гиб-
гибкому стержню. В этом случае критическую силу можно опреде-
определить по формуле для эквивалентного стержня
где С — коэффициент, отражающий способ закрепления торцов
(см. § 13); ?7пр — жесткость эквивалентного стержня при из-
изгибе; / — длина пружины. Но для получения правильного ре-
результата в этой формуле необходимо учесть докритическое обжа-
обжата I P \
тие пружины и принять, что 1 — 10 ~=10П ьг~)>
где /0 — начальная длина пружины; k — жесткость пружины
при сжатии.
Учитывая докритическое обжатие, из формулы A.39) полу-
получаем кубическое уравнение для определения критической силы
— /8 •
Если в формуле A.39) принять / = /0, то для витой пружины
получим качественно неверный результат [30].
В отличие от задачи устойчивости сплошного стержня, где
учет докритического изменения его длины без учета влияния
остальных факторов не имел смысла, учет докритического обжа-
обжатия пружины вполне логичен. Правда, для полной строгости
решения необходимо показать, как докритическое обжатие влияет
на значение (EJ)np.
Пренебрежение изменением начальной геометрии системы
приводит к погрешностям, значительно превышающим погреш-
погрешность порядка екр по сравнению с единицей, в тех случаях, когда
начальные деформации связаны с изгибом тонкостенной системы.
Более того, возможны случаи, когда пренебрежение началь-
начальными перемещениями, связанными с изгибом системы в докрити-
ческом состоянии, приводит к недопустимо большим погреш-
погрешностям определения критической нагрузки. Например, если
в задаче устойчивости сжатой в осевом направлении тонкой
цилиндрической оболочки с малыми начальными неправильно-
неправильностями формы (см. гл. 6) не учитывать начальное напряженно-
деформированное состояние, вызванное докритическим изгибом
оболочки, то можно получить качественно неверный результат.
Но тонкостенные элементы правильно спроектированных силовых
конструкций в докритическом состоянии обычно работают без
заметных изгибов. Изгиб таких элементов — это чаще всего ре-
результат потери устойчивости, вызывающий резкий рост напря-
напряжений и перемещений в конструкции и приводящий к частичной
или полной потере ее работоспособности. Для расчета на устой-
устойчивость таких тонкостенных элементов допущение о пренебре-
пренебрежении изменением начальной геометрии вполне оправдано.
38
Глава 2
Энергетический метод
решения задач устойчивости
В данной главе показано, как с помощью энергетического
метода можно исследовать устойчивость упругих систем с рас-
распределенными параметрами.
Дано обоснование двух вариантов записи энергетического
критерия устойчивости упругих тел: через начальные напряжения
и непосредственно через внешние нагрузки. Кроме того, в главе
изложены основы метода Рэлея—Ритца и метода Галеркина
применительно к задачам устойчивости упругих систем.
§ 8. Полная потенциальная энергия
и условия равновесия упругого тела
Рассмотрим механическую систему, состоящую из упругого
тела и приложенных к нему внешних «мертвых» сил, т. е. сил,
сохраняющих величину и направление при деформациях системы;
тело считаем закрепленным таким образом, что его перемещения
как жесткого целого исключены (рис. 2.1). Полная потенциальная
энергия такой консервативной системы в нагруженном состоя-
состоянии определяется суммой
Э = 1/ + Л, B.1)
где U — потенциальная энергия деформации тела; П — потен-
потенциал внешних сил.
Рис. 2.1
39
Потенциальная энергия, накапливаемая линейно упругим
телом при деформации, подсчитывается по выражению, известному
из курса сопротивления материалов:
U = Т \ (О*Е* + °у?у + а*г* + Хх№у + ГхгУх2 + г*Уу*) dV' B-2)
V
где V — объем тела. В изотропном линейно-упругом теле ком-
компоненты напряжений и деформаций связаны законом Гука:
B.3)
где Е — модуль упругости", \i — коэффициент Пуассона. Выра-
Выразив напряжения через деформации, получим:
Ох = ^ + 2Gv, т^ = Gyxy;
ау = Яе + 2Gey; rxz = Gyxz; B.4)
аг = Яе + 2Ge2; т^ = Gyyz,
где f = ех + е9 + Е., 1 и С — упругие постоянные Ляме, свя-
связанные с Е и \i соотношениями
лЩь ^Е ._ _.
В частности, для двухосного напряженного состояния при
*г = 0. т„ = 0, туг = 0
B-6)
Соотношения B.4) позволяют представить выражение B.2) в виде
V. B.7)
40
В частном случае двухосного напряженного состояния при аг = О,
*xz = 0, Tyz = О
и = 2(iiu«) Н8*+2^+е*+~4^у%]dv- B-8)
Компоненты деформаций можно выразить через перемещения
точек тела и, v, w (рис. 2.1). В линейной теории упругости ком-
компоненты деформаций связаны с производными от перемещений
линейными зависимостями
ди ди . dv . -
-!-; v« = ^ + ^-; B-9)
дг ' "У*
V</,=
dz ' djc
dv , dw
Подставив эти зависимости в формулу B.7), можно получить
выражение внутренней энергии деформации тела в виде квадра-
квадратичного положительно определенного функционала, зависящего
от производных перемещений и — и (х, у, z), v = v (х, у, z), w =
= w (х, у, z).
Потенциал мертвых объемных и поверхностных сил с точ-
точностью до постоянного слагаемого, которое всюду опущено,
равен
П = - J (Fxu + FyV + Fjm) dV - \ (pxu + Plp + Pzw) dS, B,10)
V S,
где первый интеграл берется по объему тела V, а второй — по
той части поверхности тела Slt к которой приложены внешние
поверхностные нагрузки. Знаки минус перед интегралами соот-
соответствуют тому случаю, когда объемные Fx, Fy, Fz и поверх-
поверхностные силы рх, ру, рг направлены так же, как и перемещения и,
v, w. Следовательно, с ростом перемещений потенциал внешних
сил уменьшается.
Согласно теореме «Пагранжа состояние равновесия консерва-
консервативной механической системы устойчиво тогда и только тогда,
когда ее полная потенциальная энергия минимальна [40]. Необ-
Необходимое условие минимума полной энергии записывается в виде
вариационного уравнения Лагранжа
0. B.11)
Этим уравнением выражается условие стационарности полной
потенциальной энергии механической системы в состоянии рав-
равновесия (не обязательно устойчивого!). Для того чтобы состояние
41
\>=V
Рис. 2.2
равновесия было устойчиво, кроме уравнения B.11) должно вы-
выполняться условие
А5>0 B.12)
при любых возможных отклонениях системы от положения равно-
равновесия; откуда следует условие положительной определенности
второй вариации полной потенциальной энергии системы (см.
приложение II)
623>О. B.13)
Вариационное уравнение Лагранжа несет большую информацию:
из него можно получить дифференциальные уравнения равно-
равновесия тела и те граничные условия, которые могут быть заданы
на поверхности тела.
Рассмотрим задачу поперечного изгиба балки под действием
распределенной нагрузки. Распределенная погонная нагрузка q
направлена в сторону положительных перемещений у
(рис. 2.2, а). Поэтому потенциал внешних сил
jqvdx.
B.14)
Согласно гипотезе плоских сечений (рис. 2.2, б) при изгибе
балки осевые перемещения равны
где у — координата, отсчитываемая от нейтральной оси балки;
¦ft — угол поворота поперечного сечения. Относительная про-
продольная деформация равна
da
е, = 4=- = — уЬ\ B.15)
где штрихом обозначено дифференцирование по х. Согласно
той же гипотезе углы сдвига уху равны нулю и
Ф = о\ B.16)
42
Пренебрегая нормальными напряжениями ог и ау по сравнению
с напряжениями ох, из выражения B.2) и зависимостей закона
Гука B.3) получаем
Заметим, что в это выражение не вошли касательные напряже-
напряжения хху, ибо по гипотезе плоских сечений уху = 0. Подставим
значение гх из формулы B.15), тогда
U = ±[EV*\\y*dF]dx.
Интеграл, стоящий в квадратных скобках, берется по площади
поперечного сечения и равен моменту инерции сечения балки /.
Выразив угол поворота сечения ¦& через угол наклона касатель-
касательной к упругой оси балки v' с помощью формулы B.16), запишем
Итак, полная потенциальная энергия нагруженной балки
равна
i
3 = | [-^-EJxf - qv] dx. B.17)
о
Из вариационного уравнения Лагранжа B.11) следует, что
63 = J [EJv"8zf — q8v] dx = 0.
Путем двухкратного интегрирования по частям преобразуем
определенный интеграл и получим
i
ЬЭ = (EJv"Nv |o- (EJvJ8v\l + J [(EJv)"- q]8vdx = 0.
о
Откуда следует дифференциальное уравнение поперечного изгиба
балки
(EJv")"-q = 0, B.18)
а также возможные для этого уравнения граничные условия при
х = 0 и х = I:
1) EJv" =: 0 либо 8v' = 0, т. е. v' = const;
2) (EJv")' = 0 либо 8v = 0, т. е. v = const.
43
z,
¦Р(*,У)
Рис. 2.3
Поскольку для балки EJv" = М и (EJv")' = Q, где М —
внутренний изгибающий момент, Q — внутренняя поперечная
сила, граничные условия можно записать в следующем виде:
1) М = 0 либо v' = const;
2) Q — 0 либо v = const.
Форма равновесия изогнутой балки устойчива, поскольку
вторая вариация полной потенциальной энергии положительна:
i
82Э = j EJ (8v"J dx > 0.
о
(Заметим, что если не ограничиться рассмотрением изгиба
балки только в плоскости главного момента инерции и в число
варьируемых перемещений включить закручивание балки вокруг
ее оси и поперечное перемещение в плоскости, перпендикулярной
плоскости действия нагрузки q, то можно обнаружить, что при
некоторых условиях плоская форма изгиба балки становится
неустойчивой).
В качестве второго примера рассмотрим задачу поперечного
изгиба тонкой пластины. Пластину толщиной h отнесем к прямо-
прямоугольной системе координат так, чтобы координатная плоскость ху
совпала со срединной плоскостью пластины (рис. 2.3, а).
При малых прогибах пластины ее срединную плоскость можно
считать нерастяжимой.
Согласно основной гипотезе тонких пластин нормаль к неде-
формированной срединной плоскости при изгибе пластины не
искривляется и остается нормалью к деформированной средин-
срединной поверхности пластины. При этом нормаль наклоняется в пло-
плоскости, параллельной координатной плоскости хг, на угол Ьх =
= -?- (рис. 2.3, б), и в плоскости, параллельной координат-
44
ной плоскости yz, на угол Ьу = -^—. При наклоне нормали
ее точка А, находящаяся на расстоянии z от срединной плоскости,
получает перемещения
п дю
х дх '
v — — z у г~ду~-
Эти перемещения вызывают деформацию слоя пластины, отстоя-
отстоящего на расстоянии z от срединной плоскости. В соответствии
с формулами B.9) компоненты деформаций равны
да d*w
ди
дц
дх
dv
ду
\
dv
дх
" дх2
*" dys
d*w
дхду
Пренебрегая нормальными напряжениями в площадках, парал-
параллельных срединной плоскости, напряженное состояние изогнутой
пластины можно считать двухосным. Тогда по формуле B.8)
получим
// Е f f \( d"w \2 _i_ о- d2w d*w л- ( diw \2 _|_
и - 2A-Й JJ [\~д^~) +гР-д-х1Г-Щр--г \-dlF) +
+А/2 \
[ z*dz\dxdy.
-ft/2 /
Проинтегрируем по толщине пластины, перегруппируем слагае-
слагаемые в квадратных скобках и введем обозначение цилиндриче-
Eh3
ской жесткости пластины D = . _ . Тогда
2
Потенциал внешних сил, очевидно, равен
П = — [ f pw dx dy,
где р = p (x, у) — действующая на пластину распределенная
поверхностная нагрузка.
45
Складывая U и П, находим полную потенциальную энергию
<2'20»
Из условия стационарности этого выражения можно получить
дифференциальное уравнение изгиба пластины и те граничные
условия, какие могут быть заданы на контуре пластины. Урав-
Уравнение Эйлера для функционала энергии B.20) имеет вид (см.
приложение II)
dF д* OF a» SF . д* dF ft
где F — подынтегральное выражение в этом функционале.
В частности, для пластины постоянной толщины уравнение
Эйлера принимает вид
Р^~ 2 (. дх? [г \ дх* "Т ду* ) /A W dp J r
откуда получаем уравнение поперечного изгиба тонкой пластины
DV2V2w-p(x,y) = 0, B.21)
где V2 (*) — оператор Лапласа,
В задаче поперечного изгиба упругих пластин вместо урав-
уравнения Эйлера можно пользоваться вариационным уравнением
Лагранжа B.11). Тогда, выполнив действия, аналогичные тем,
которые указаны для балки, можно получить уравнение B.21)
и граничные условия, которые могут быть заданы на контуре
пластины. Такой путь исследования изгиба пластин подробно
изложен, например, в работе [12].
§ 9. Вариационный принцип теории
упругой устойчивости
В линейной теории упругости компонент ы удлинений выра-
выражаются через перемещения точек тела с помо щью линейных соот
ношений B.9). Для решения задач устойчивости этих соотноше-
46
ний недостаточно, так как задачи устойчивости не линейны.
Если в выражениях удлинений наряду с линейными относительно
перемещений слагаемыми учесть квадратичные слагаемые, то
для компонентов удлинений можно получить следующие нели-
нелинейные соотношения * [281:
о _ ди J_ l If ди \2х/ * V ¦ /^
8* - ~дГ ¦ "F L \~дГ) • VdF) ' V дх
ди
ду !
до
дх
, ди
1 дх
ди
ду
dv
дх
dv
ду
. dw
1 . дх
dw
Применим эти соотношения при исследовании устойчивости
упругого тела, нагруженного системой мертвых сил (см. рис. 2.1).
Для простоты рассуждений будем считать, что все внешние силы
изменяются пропорционально одному параметру Р, а наложен-
наложенные связи исключают перемещения тела как жесткого целого.
Предположим, что состояние равновесия нагруженного тела,
соответствующее решению линейной задачи, известно. Это со-
состояние в дальнейшем будем называть начальным невозмущен-
невозмущенным состоянием равновесия. Устойчивость равновесия этого
состояния исследуем при следующих допущениях.
1. Начальное невозмущенное состояние равновесия тела
описывается уравнениями линейной теории упругости.
2. Изменениями размеров и формы тела в начальном состоянии
равновесия можно полностью пренебречь.
3. Зависимости закона Гука B.3) справедливы не только для
начального состояния, но и при малых отклонениях тела от
начального состояния равновесия.
Вариационная формулировка условий устойчивости упругого
тела может быть получена двумя различными способами (см. § 5).
Первый способ основан на определении условий, при которых
в окрестности начального невозмущенного состояния равнове-
равновесия может существовать новое возмущенное состояние равнове-
равновесия, т. е. на определении вариационным методом точек бифур-
бифуркации начального состояния равновесия. Второй способ связан
с непосредственным исследованием устойчивости начального со-
состояния ¦ равновесия с помощью теоремы Лагранжа.
Рассмотрим первый способ. Перемещения точек тела в началь-
начальном невозмущенном состоянии равновесия будем считать извест-
известными и обозначим uQ, v0, w0. Тогда перемещения, соответствую-
соответствующие новому возмущенному состоянию равновесия, равны
и = о +
= wo-j-awl, B.23)
* Вывод таких нелинейных соотношений для тонких стержней, пластин и
оболочек дан в следующих главах.
47
где аи1, av±, адах — дополнительные перемещения, которые
получают точки тела при переходе из начального невозмущенного
состояния равновесия в новое возмущенное состояние равнове-
равновесия. При этом функции «! = и± (х, у, z), vx = v± (х, у, z), Wx =
= w± (x, у, г) будем считать конечными, а коэффициент а беско-
бесконечно малой величиной, не зависящей от координат.
В новом состоянии равновесия компоненты деформаций выра-
выразим через перемещения B.23) с помощью соотношений B.22):
е* = г% + ссех + агех;
Уху = у% + Щ'ху + а?уху\
B.24)
где ъ°х, ..., уХу,
у —компоненты деформаций в начальном состо-
состоянии равновесия, определяемые линейными соотношениями B.9):
дх '
дио
ду
dv0 дю0
Величины г'х, ... у'ху, ... линейно зависят от производных функ-
функций ии vx, wi1.
а величины el,..., y"xy, ...—от квадратов производных ulf
B.27)
~ ~дх ду~ ' ~дх ду~ ¦ ~~дх ду~'
46
Заметим, что выражения для г'х, г'у, ..., у'ху, ... имеют следующую
структуру:
, диг , дщ диг , ду„ dv-y . dwa dwx
' дщ , ду-, . ди„ дщ до0 дух dw0 dwj .
Уху ду "Г дх -f- дх ду -f- дх ду -1- дх ду -f-
. dut диа _, dvr dv0 _j_ dwt dwa
dx dy~ H~ ~dx dy~ ' ~Sx dy~ '
Поскольку в соответствии с принятым допущением (см. § 7) изме-
изменением размеров тела в докритическом состоянии равновесия
пренебрегаем, вместо последних зависимостей получаем выра-
выражения B.26). Таким образом, при исследовании устойчивости
начального невозмущенного состояния принимаем такую модель:
до потери устойчивости тело напряжено, но не деформировано.
Закон Гука считаем справедливым для состояний, смежных
с начальным. Поэтому внутреннюю потенциальную энергию
в новом возмущенном состоянии равновесия можно вычислить по
формуле B.7), подставив значения деформаций из B.24). С точ-
точностью до слагаемых, имеющих множитель а2, получим
B.28)
Где Uo — потенциальная энергия деформации тела в начальном
состоянии равновесия,
Uг = 2 * J [2 (г°хгх + е'уе'у + г%) +
V; B.30)
г + V« + TiD] dV + 2(Д J [2(sxex + eje; + f&
+ Y°-Y^ + Y^Y^)]^. B.31)
49
Потенциал внешних (мертвых) сил в новом возмущенном состоя-
состоянии равновесия подсчитаем по общей формуле B.10), учитывая
зависимости B.23):
П = П0 + аП1г B.32)
где По — потенциал внешних сил в начальном состоянии рав-
равновесия,
По = - J (Fjb + />о + *>о) dV — J (рхи0 + pyv0 + Pzw0) dS; B.33>
,) dV-j
pxUl + W + pzWl) dS. B.34>
Полная потенциальная энергия равна
5 = 50 + a(t/1 + ^1) + a2t/2, B.35>
где Эо = U0 + По — полная потенциальная энергия в началь-
начальном состоянии.
Величина a (U\ + Я2) представляет собой первую специаль-
специальную вариацию б^о полной энергии в начальном состоянии рав-
равновесия, т. е. вариацию, при которой возможные перемещения
бы, бу, бда совпадают с перемещениями аи (х, у, z), avx (x, у, г),
aw! (x, у, г) [15]. Поскольку такая вариация является частным
случаем общей вариации, очевидно, ?/2 + #i = 0. Определим
условия существования состояний равновесия, смежных с началь-
начальным невозмущенным состоянием. Новое возмущенное состояние
является равновесным, если первая вариация полной потенциаль-
потенциальной энергии в этом состоянии равна нулю, т. е.
65 = 6ЭО + «2б?/2 = 0. B.36>
Так как начальное состояние равновесно, 650 = 0, и вариационное
условие существования новых состояний равновесия, смежных
с начальным, принимает вид
8UZ = 0. B.37)-
Величина a2t/2 пропорциональна второй специальной вариации
Ь2,Эо(точнее, а2?/г = -s-&1Эо)• Поэтому условие B.37) иногда
формулируют в виде следующего вариационного принципа [15].
Для существования равновесных состояний, смежных с началь-
начальным состоянием равновесия, необходимо, чтобы вторая специаль-
специальная вариация полной потенциальной энергии принимала стацио-
стационарные значения, т. е.
б(б2.30) = 0. B.38)'
Из этого вариационного принципа или вариационного кри-
критерия устойчивости можно найти собственные значения параметра
50
нагрузки Рп и собственные функции задачи, описывающие кон-
конфигурацию системы в момент перехода к новому возмущенному
состоянию равновесия.
Для того чтобы выяснить, при каких значениях Р начальное
состояние устойчиво и при каких его значениях оно неустойчиво,
можно воспользоваться вторым путем вывода, полученного выше
вариационного принципа (см. § 5).
Согласно теореме Лагранжа исходное состояние равновесия
устойчиво только тогда, когда полная потенциальная энергия
имеет минимум. Таким образом, при любых возможных отклоне-
отклонениях системы в окрестности устойчивого состояния равновесия
должно выполняться условие
ДЗ = 3 - 30 > 0. B.39)
Критическим является такое значение параметра нагрузки Ркр,
при превышении которого начальное состояние равновесия пере-
перестает быть устойчивым. Поэтому при Р > Ркр условие B.39)
для любых возможных отклонений не выполняется и, вообще
говоря, имеются такие отклонения, при которых A3 = 0. Следо-
Следовательно, Ркр можно разыскивать как нижнюю границу тех зна-
значений Р, при которых возможны отклонения системы от началь-
начального состояния, приводящие к условию ДЗ = 0.
Следует подчеркнуть, что при Р > Ркр полная потенциальная
энергия начального состояния не становится максимальной,
а только перестает быть минимальной. Поэтому при Р > Ркр
кроме отклонений, приводящих к ДЗ < 0, возможны отклоне-
отклонения, при которых ДЗ = 0 и ДЗ > 0.
Учитывая, что a (U\ + Ях) = 8%Э0 = 0, из выражения B.35)
получаем
ДЗ = 3 - 30 = a?U2. B.40)
Обозначим
I] = W 4- PV A А\\
где
+ {fxyi'xy
51
здесь е%, By, .... yly, ... — компоненты деформаций начального
состояния при Р — 1. Тогда для тех отклонений, при которых
ДЭ = 0, можно записать
/>=—?-. B.42>
Нетрудно убедиться, что условие минимума Р, определяемого
этой зависимостью, снова приводит к вариационному уравнению-
B.37), эквивалентному B.38). Действительно, из условия
получаем
v\
С учетом зависимостей B.42) и B.41) последнее равенство приво-
приводит к вариационному уравнению B.37). Теперь становится ясным,
что первое собственное значенне параметра нагрузки Р1ш опреде-
определяемое из этого уравнения, совпадает с нижней границей значе-
значений Р, определяемых зависимостью B.42), поэтому Рг = Ркр.
Из изложенного вытекает практическое правило, обычно
используемое при определении критических нагрузок.
Для определения критического значения параметра нагрузки PKJ>.
нужно подсчитать изменение полной потенциальной энергии си-
системы АЭ с точностью до квадратов перемещений, описывающих
переход системы в новое, отклоненное состояние, смежное с на-
начальным состоянием равновесия, устойчивость которого иссле-
исследуется. Собственные значения параметра нагрузки Рп можно
найти либо из условия стационарности Ад
6(ДЗ) = 0, B.43)
либо из условия
АЗ = 0 B.44)
при дополнительном условии минимума параметра нагрузки Р.
Первое собственное значение Р1 равно критическому значению Ркр,
а первая собственная функция задачи описывает конфигурацию
системы в момент потери устойчивости.
Формулу для АЭ можно преобразовать, выразив слагаемое V2
не через начальные удлинения, а через начальные напряжения.
Воспользовавшись зависимостями закона Гука C.3), получим;
v
т°х„у'Х1/
52
где ах, ..., т°ху, ... — компоненты начальных напряжений при
Р = 1. Выражение для АЭ перепишем еще раз, опустив множи-
множитель а2:
+ -\r (YiJ + У'Л + У'у\)] dV + P\ (&xe'x + в°еу +
v
+ аК + т%у1у + tSiY« + 4гу"Уг) dV. B.45)
Начальные напряжения ах, al, ... должны быть предварительно
определены из решения линейной задачи для начального невоз-
невозмущенного состояния равновесия тела. Удлинения е'х, г'у, ...
и е'х, е"у, ... подсчитываем по формулам B.26) и B.27).
Если по зависимостям закона Гука B.4) ввести величины
а'х = ta' -+¦ 2Ge'x\ i'Xy = Gy'xy\
o'y = № + 2Ge'v; -z'xt = Gy'xz\
J
V
. B.46)
то выражение B.45) можно записать в следующем виде:
АЭ = -у J (ОХЕХ + Оуе^ + ^ + ГхуУху + Т«?« + ТугУ'уг) dV -\-
+ Р J
V
Вариационное условие B.43) или B.44), выраженное через
начальные напряжения ох, Оу, ..., tSj,, ... с помощью зависимостей
типа B.45) или B.46), назовем энергетическим критерием
устойчивости (вариационным принципом) в форме Брайана.
Из выражения B.45) следует, что при Р — 0 состояние рав-
равновесия тела всегда устойчиво, поскольку первый интеграл этого
выражения больше нуля при любых комбинациях отклонений
«и vlt Wy. Величина АЭ может обратиться в нуль и начальное
состояние равновесия может стать неустойчивым только при зна-
значениях Р, превышающих некоторое критическое значение Ркр.
Оценим порядок значений начальных напряжений и деформа-
деформаций, при которых это может произойти. Сравнивая формулы
B.26) и B.27), видим, что порядок г" равен порядку е'2. Тогда
из зависимости B.45) следует, что для того чтобы АЭ могло об-
обратиться в нуль, порядок значений начальных напряжений
о° = Рох, ..., %ху — Pily должен быть такой же, как у модуля
упругости. Другими словами, для того чтобы начальное состояние
равновесия изотропного упругого тела перестало быть устойчи-
53
Рис. 2.4
вым, начальные деформации в нем долж-
должны быть порядка единицы. В этом случае
все изложенное выше становится не-
неверным, поскольку при выводе основ-
основных соотношений начальные деформа-
деформации считали пренебрежимо малыми по
сравнению с единицей.
Известны два исключения, при ко-
которых нарушается приведенная общая
оценка значений критических деформа-
деформаций. Это тела с резко выраженной анизо-
анизотропией упругих свойств и тонкостенные
тела (стержни, пластины, оболочки).
На рис. 2.4 изображен параллелепипед из анизотропного ма-
материала, равномерно сжатый вдоль оси х. Начальное напряжен-
р
ное состояние считаем одноосным, причем ах = тг , где F —
площадь поперечного сечения параллелепипеда. Материал обла-
обладает настолько резко выраженной анизотропией, что -М- <С 1»
где Gxy и Ех — соответственно модуль сдвига в плоскости ху
и модуль упругости в направлении оси х. У такого параллеле-
параллелепипеда возможна сдвиговая форма потери устойчивости в пло-
скости ху при малых начальных деформациях ех~-^-. Пере-
Перемещения при этой форме потери устойчивости зададим в виде
i>! = Ах; их = 0; wx = 0. Согласно зависимости B.46) имеем *
V V
По формулам B.26) и B.27) определяем
Учитывая зависимость закона Гука %'ху = Gxyy'xy, можно записать
где V — объем параллелепипеда.
Из условия ДЗ = 0 следует, что критические напряжения
(<7д:)кр = — Gxy.
* Зависимость B.46) получена для изотропного упругого тела, но нетрудно
показать, что она справедлива и для анизотропного тела.
54
Как видим, абсолютное
значение критических сжимаю-
сжимающих напряжений не зависит
от размеров тела и равно мо-
модулю сдвига в плоскости ху.
В силу принятого допущения
о резко выраженной анизо- ис# •
тропии упругих свойств поте-
потеря устойчивости происходит при малых абсолютных значениях
начальных деформаций
К).
'кр
В качестве второго примера рассмотрим шарнирно-опертый
прямой стержень, сжатый силой Р (рис. 2.5). Как и в предыдущем
примере, начальное напряженное состояние считаем одноосным:
р
а* = р-, где F — площадь поперечного сечения стержня.
Изгибное состояние равновесия стержня, смежное с начальным,
опишем с помощью обычной гипотезы плоских сечений (см. § 8).
Тогда, положив для простоты коэффициент Пуассона \к = О,
можно записать Vi = Vj_ (х); их = —у—gc ' wi — ®-
В данном случае согласно зависимости B.46) имеем
Д Э = 4" J е^ М + J о%
По формулам B.26) и B.27) находим
— У
По закону Гука а'х = Ег'х, следовательно,
55
После интегрирования по площади поперечного сечения стержня
получим
где J = J у2 dF — момент инерции поперечного сечения.
Потеря устойчивости шарнирно-опертого стержня происходит
по одной полуволне синусоиды (см.. § 5), поэтому положим
vx (х) = A sin ?j-.
Тогда из выражения B.47)' следует, что
где г,- = 1/ -р радиус инерции поперечного сечения.
Для тонких стержней можно считать (г,-//J <^ 1, поэтому
первым слагаемым в квадратных скобках можно пренебречь по
сравнению с единицей и из условия АЭ — О получить значение
Эйлеровой критической силы РкР = д,а .
Опуская знак, подсчитаем относительное удлинение (укоро-
(укорочение) стержня, соответствующее Ркр:
EF EF12
Для тонких стержней (г,//J <? 1 и критическая деформация
действительно оказывается малой. Следует еще раз подчеркнуть,
что критическая деформация е?р является геометрической харак-
характеристикой стержня, не зависящей от модуля упругости ма-
материала.
В заключение необходимо сделать следующее замечание.
n^EF
Из приведенного вывода формулы Эйлера РкР= ;а следует,
что эта формула органически содержит погрешность порядка
\-r-j == е°р по сравнению с единицей. Эти выводы сделаны
в § 7 без помощи энергетического критерия устойчивости. Погреш-
Погрешности того же типа содержатся во всех формулах для критических
нагрузок тонкостенных упругих систем, если при выводе формул
начальные деформации считают пренебрежимо малыми по сравне-
сравнению с единицей.
56
§. 10. Энергетический критерий устойчивости
в форме С. П. Тимошенко
Для записи энергетического критерия устойчивости в форме
Брайана предварительно требуется определить начальные на-
напряжения в упругом теле. При решении некоторых задач устой-
устойчивости иногда оказывается удобным записать энергетический
критерий в другой форме, не содержащей непосредственно на-
начальных напряжений невозмущенного состояния равновесия [6].
Покажем, как это можно сделать.
Устойчивость равновесия упругого тела, нагруженного си-
системой мертвых сил, исследуем при допущениях, которые исполь-
зованы в § 9. Для описания возмущенного состояния равновесия,
смежного с начальным невозмущенным состоянием, снова восполь-
воспользуемся бесконечно малым параметром а, не зависящим от коорди-
координат. Но теперь отклонения точек тела от их начальных положе-
положений будем определять с точностью до а2 включительно. Тогда
для перемещений точек тела в новом отклоненном состоянии можно
записать следующие выражения:
v = v0 + о»! + а\; B.48)
w = w0 + aw1 -j- a2w2,
где и0 = «о (х, у, г); v0 --= v0 (х, у, z); w0 = w0 (x, у, г) — пере-
перемещения точек тела в начальном невозмущенном состоянии рав-
равновесия; их = их (х, у, z); vx = vx (x, у, г); wx = wx [x, у, г);
и.2 = и2 (х, у, z); v2 -~ v2 (x, у, z); w, = w2 (x, у, г) — конечные
функции координат.
Компоненты деформаций в новом возмущенном состоянии
равновесия подсчитываем с точностью до слагаемых, имеющих
множитель а2:
е* = е2 + ае'х + а?г"х;
Уху = Уху + аУ*у + аУ*у B-49)
Компоненты деформаций в начальном состоянии е°х , у%, ...
определяем по формулам B.25), компоненты деформаций г'х,
..., у'Ху линейно зависящие от производных функций ы1(
57
i>i, wlt — по формулам B.26). Величины а"х, ..., у'ху, ... подсчи-
подсчитываем по формулам
_ ди2 д,'2 ^ дих dut dvx dvi , dwl dwx
В этих формулах, как и в формулах B.26), опущены слагаемые,
содержащие малые по сравнению с единицей множители типа
-jr-, -^- и т. д. Эта точность вычисления деформаций соответ-
соответствует введенной ранее модели упругого тела, которое до потери
устойчивости напряжено, но не деформировано.
В новом возмущенном состоянии внутренняя потенциальная
энергия тела определяется зависимостями B.28)—B.31) с той раз-
разницей, что входящие в зависимость B.31) величины ъ"х, ..., у'ху, ...
лодсчитываются по формулам B.50). Потенциал внешних сил
П = 77О + аП1 + <х2772, B.51)
где /70 — потенциал внешних сил в начальном состоянии рав-
равновесия:
По = — j (FjtQ + Fyv0 + F,w0) — j (pxu0 + pyv0 + p2wQ) dS. B.52)
Величина Я2 определяется перемещениями ult vlt Wi~.
+ FyVl + Fja>J dV - J (pA + pyvx + pp>x) dS. B.53)
V
Величина Я2 — перемещениями и2, v2, w2'-
2) dS. B.54)
Полную потенциальную энергию в возмущенном состоянии
представим в виде
S-So-fa^ + tfJ + c^I/. + tf,), B.55)
где и± и G2 определяются зависимостями B.30) и B.31).
Сделав преобразования, указанные в предыдущем параграфе,
энергетический критерий устойчивости (опуская множитель ос2)
можно записать так:
6(АЭ) = 0, B.56)
.58
где
Причем в выражение для АЭ входят перемещения и2, v2, w2.
Использовав зависимость B.45) и формулы B.50), из этого выра-
выражения можно выделить слагаемые, содержащие перемещения
и.г, v2, w2. Тогда получим АЭ = Аг -\- А2, где
+ Fzw2) dU - \ (Pxu2 + Pyu2 + p2w2) dS.
L
В значение А± включены все остальные слагаемые, не зависящие
от перемещений и2. у2> w.z.
Величину А 2 можно рассматривать как такую вариацию пол-
полной потенциальной энергии 8^ E0), когда возможные перемещения
совпадают с перемещениями ы2, v2, w2. Поскольку начальное
состояние равновесно, А2 — 0 при любых перемещениях и2,
v2, w2, совместимых с наложенными на тело связями. В частности,
положив перемещения и2, v2, w2 равными нулю, из выражения
B.56) вновь получим выражение для энергетического критерия
устойчивости в форме Брайана.
Перемещения и2, v2, w2 можно подобрать так, чтобы из вы-
выражения АЭ исключить начальные напряжения а%, а°у,
Тед, ...
Используя зависимости закона Гука B.4), введем вели-
величины
а"х = Ь (е."х + 4 + ег) + 2Ge"x; х"ху = Gyxy;
а"у = Х (гх + &у + el) + 2Gny; ххг = Gyxz;
в'г = Л, (е^ -f t"y + г"г) + 2Gtl\ %"уг = Gy"yz.
Тогда выражение B.31) для U2 можно преобразовать к виду
Ut = Wt + Vt, B.57)
где
Как и в выражении B.41), W» непосредственно не зависит от
начальных напряжений или деформаций.
59
Для дальнейших преобразований воспользуемся обычными
формулами интегрирования по частям объемных интегралов:
J \h~te + Ъ ~ду~ + Т*-дГ) dV ~
v
Ф + W ф + IT
где их, пу, пг — компоненты вектора внешней единичной нормали
к недеформированной поверхности рассматриваемого тела.
Выразив компоненты начальных деформаций е?, ..., у%, ...
согласно формулам B.25) через начальные перемещения иа, v0,
w0, получим
После интегрирования по частям это выражение принимает вид
V, = j Ойио + Р'уоо + pirn) dS ~ f [(^- + ^- + ?%) "о +
S V
где
р^ = о"хпж -4- t^Mj, +
р"у = т^х + (ГЛ + ЪгПг; B.59)
' + т"угПу -\- а"гПг.
Теперь из выражения для \[г исключим начальные перемещения.
Для этого достаточно потребовать, чтобы во всем объеме тела
выполнялись уравнения
до" дх" дх"
1 I *У J_ хг А.
дх • ду ' дг ~~ '
дх ' ду дг
<5т"_ |Эт"- до"-
{2Щ
дх ' ду < дг
На той части поверхности тела S1( для которой в явном виде
заданы поверхностные нагрузки рх, ру, рг, должны выполняться
условия
Рх = 0; р'у^О; р"г = 0. B.61)
¦60
Перемещения ы2, и2> ^2 Должны быть совместимы с наложенными
на тело связями, поэтому на той части поверхности тела S2>
для которой в явном виде заданы начальные перемещения «о,
v0, w0, всегда должны выполняться условия
м2 = 0; у2 = О;оу2 = О. B.62)
При выполнении всех перечисленных условий выражение
B.58) для V2 приводится к виду
У2 = | (р"хйо + p'yVo + plwo) dS.
I,
Причем интегрирование производится только на той части по
верхности тела S2, для которой перемещения ыо> v0, w0 заданы
в явном виде.
Выражение B.57) можно записать в следующем виде:
U2 = W2 + \ (р'хйо + р'уЩ
I.
С учетом выражения B.54) для Я2 изменение полной потенциаль-
потенциальной энергии A3 можно представить так:
j
где
АЭ = W2 + J {рхйо + plvo + p'zWq) dS —
- j (РХЩ + pyv2 + ргщ) dS - j (FA + Fjot + ^Щ) dV, B.63)
j [(в;* + в? + в;*) + -р^
Причем входящие в выражение B.63) перемещения ы2, у2,
не произвольны, а подчинены условиям B.60)—B.62).
Энергетический критерий устойчивости
= 0 (или ЛЭ = 0 при Р = Рт1„),
где изменение полной потенциальной энергии подсчитывается по
формуле B.63), назовем энергетическим критерием в форме
С. П. Тимошенко.
Те условия, которые были наложены на перемещения и.,,
v2, w2 с целью исключения из выражения для АЭ начальных
напряжений и деформаций, можно трактовать следующим образом.
Во-первых, величины <х2а*, .... аНхУ, •-., где а"х, ..., х"ху, ...
связаны cej, ..., у"ху, ... законом Гуна, можно рассматривать как
61
компоненты напряжений
второго порядка малости,
возникающих при перехо-
переходе тела из начального не-
невозмущенного состояния
равновесия в новое возму-
возмущенное состояние, описы-
описываемое перемещениями
Рис. 2.6 B.48). Тогда величины
<х2р'х, а?р"у, a,2p'z, введенные
с помощью формул B.59), можно считать нагрузками второго по-
порядка малости, возникающими на поверхности при переходе тела
в новое состояние.
Во-вторых, уравнения B.60) можно рассматривать как условия
самоуравновешенности напряжений второго порядка малости.
Условия B.61) можно трактовать как граничные условия на тонг
части поверхности тела Slt для которой заданы мертвые внешние
нагрузки рх, ру, рг. Поскольку при переходе в новое возмущенное
состояние внешние нагрузки остаются неизменными, дополнитель-
дополнительные поверхностные нагрузки второго порядка малости на части
поверхности S± равны нулю. Дополнительные поверхностные на-
нагрузки а?р"х, агр'у, а2р"г на части поверхности 52 можно рассма-
рассматривать как дополнительные реакции связей, возникающие при
переходе тела в новое состояние.
Переход от энергетического критерия в форме Брайана к энер-
энергетическому критерию в форме С. П. Тимошенко можно рассма-
рассматривать и как формальный переход от одного функционала к дру-
другому, осуществляемый с помощью преобразований типа Фри-
дрихса [16]. Но изложенная трактовка энергетического критерия
в форме С. П. Тимошенко имеет следующие основания. Во-пер-
Во-первых, для схематизированных механических систем типа абсо-
абсолютно жестких стержней, соединенных упругими шарнирами,
или стержней и колец с нерастяжимой осью такая трактовка
наиболее естественна. Вернемся, например, к рассмотренной
в гл. I простейшей системе с одной степенью свободы и исследуем
ее устойчивость с помощью общего энергетического критерия.
Если воспользоваться энергетическим критерием в форме С. П. Ти-
Тимошенко, то в соответствии с B.63) можно записать (рис. 2.6)
ДЭ = W2 - Риъ
2, 2.
При этом можно считать, что роль параметра а, фигурирующего
в B.48), играет угол <р. Условие A3 = -^-&ф2 — Р-|- /<р2 = О
ь
приводит к критическому значению силы Ркр = -у.
Энергетический критерий устойчивости в форме Брайана,
в котором изменение полной потенциальной энергии системы
62
Рис. 2.7
выражается через начальные напряжения или удлинения, приме-
применить к рассматриваемой системе нельзя: стержень считается
абсолютно жестким и при нагружении энергия в нем не аккуму-
аккумулируется. J
Для того чтобы при подсчете изменения полной потенциаль-
потенциальной энергии воспользоваться зависимостями типа B.45) или
B.46), необходимо ввести в рассматриваемую систему дополни-
дополнительный упругий элемент, аккумулирующий энергию в докрити-
ческом состоянии равновесия. Роль такого элемента может играть
пружина жесткости с (рис. 2.7). Причем в соответствии с приня-
принятыми выше ограничениями жесткость пружины должна быть
достаточно большой, чтобы можно было пренебречь изменением
длины стержня в докритическом состоянии.
Рассматривая перемещения только первого порядка малости
(рис. 2.7, а), соответствующие выражениям B.23), для подсчета
изменения полной потенциальной энергии можно воспользоваться
зависимостью типа B.45):
где NQ = -P; e" =-±-<р\.
Окончательный результат конечно такой же, как при решении
задачи с помощью энергетического критерия в форме С. П. Ти-
Тимошенко. При этом критическая сила не зависит от жесткости
пружины с, как Эйлерова критическая сила для сжатого стержня
не зависит от жесткости стержня на растяжение. Для сравнения
на рис. 2.7, б показан стержень с пружиной жесткости с, отклонен-
отклоненный в соответствии с записью энергетического критерия устой-
устойчивости в форме С. П. Тимошенко.
Аналогично в случае, когда рассматривается устойчивость
шарнирно-опертого стержня, сжатого силой Р, и ось стержня
считается нерастяжимой, энергетический критерий устойчивости
записывают в форме С. П. Тимошенко (рис. 2.8, б):
Г2-Ры2(— I),
63
Рис. 2.8
Для решения той же задачи с помощью энергетического кри-
критерия в форме Брайана, нужно отказаться от условия нерастя-
нерастяжимости оси стержня, определить начальное осевое внутреннее
усилие в стержне и подсчитать изменение полной потенциальной
энергии по зависимости типа B.45):
B.64)
г»*. —ft*--^)
Вид изогнутого стержня, соответствующий записи энергети-
энергетического критерия в форме Брайана, показан на рис. 2.8, а.
Энергетический метод определения критических нагрузок
стержней подробнее рассмотрен в следующей главе. Здесь отме-
отметим, что взяв для шарнирно-опертого стержня функцию прогиба
vt = sin —Z-, из критериев Брайана и С. П. Тимошенко получим
точное значение критической силы Ркр=—тг—•
Вторым доводом в пользу изложенной выше механической трак-
трактовки энергетического критерия в форме С. П. Тимошенко служит
то обстоятельство, что перемещения и2, v2, w2 могут быть исполь-
использованы для приближенного описания закритического поведения
упругих систем.
§ 11. Метод Рэлея—Ритца
в задачах устойчивости
Метод Рэлея—Ритца * является универсальным методом при-
приближенного решения основной задачи вариационного исчисле-
исчисления — задачи определения экстремумов или стационарных зна-
значений функционалов. Сущность этого метода состоит в замене за-
задачи поиска стационарных значений функционалов принципиально
более простой задачей поиска стационарных значений функций
нескольких переменных.
* Впервые метод был применен Рэлеем при решении задач колебаний упру-
упругих систем. Метод детально разработан Ритцем на примерах решения нескольких
конкретных задач (без должных ссылок на работы Рэлея). С большим успехом
метод был использован С. П. Тимошенко (независимо от Ритца и практически од-
одновременно с ним) для решения задач устойчивости [38].
64
Определение точек бифуркации и критических нагрузок энер-
энергетическим методом сводится к определению стационарных зна-
значений некоторых функционалов. Для решения последней задачи
может быть применен метод Рэлея—Ритца. Схему использования
метода Рэлея—Ритца в задачах устойчивости упругих систем
рассмотрим на примере определения критической силы для сжа-
сжатого прямого стержня. При этом следует иметь в виду, что задача
устойчивости стержня выбрана только для наглядности изложе-
изложения и все этапы ее решения, рассуждения и выводы носят общий
характер.
Энергетический критерий устойчивости в форме Брайана для
прямого стержня, сжатого продольной силой, "имеет вид
б (АЭ) = 0, B.65)
где при No = —Р согласно зависимости B.64)
АЭ = -y J [EJ {v"f - Р (&')*] их. B.66)
о
Штрихом здесь и далее обозначено дифференцирование по х.
Граничные условия для функции поперечного прогиба v =
= v (x) считаем заданными. Например, в случае шарнирно-
опертого стержня примем следующие граничные условия:
1) v @) = 0; 2) v (I) = 0; 3) v" @) = 0; 4) v" (I) = 0. B.67)
При решении задачи методом Рэлея—Ритца функцию попереч-
поперечного прогиба v = v (х) можно задать в виде ряда
&W = JUm*), B.68>
где ct — свободные независимые параметры, базисные функции
U (х) — допустимые функции задачи, т. е. в этом случае дважды
дифференцируемые функции, удовлетворяющие (каждая в от-
отдельности) геометрическим граничным условиям. Для шарнирно-
опертого стержня эти функции должны быть подчинены условиям
ft @) = о и и @ = о.
Подставив ряд B.68) в выражение B.66) и выполнив необхо-
необходимые операции дифференцирования и интегрирования, преоб-
преобразуем функционал изменения полной потенциальной энергии
стержня в функцию N независимых переменных ct и параметра
нагрузки Р:
ДЭ = Ф(с1>с2,...,сл,, Р). B.69)
При этом
Ф( CN> Р) =
3 Н. Л. Алфутов 65
Необходимое условие стационарности функции Ф = ф (clt c2,
..., cN, Р), которой заменен исходный функционал, сводится
к системе N уравнений
-?- = 0; t=l, 2 N.
B.70)
Полученная система уравнений будет линейной однородной си-
системой N алгебраических уравнений относительно независимых
параметров с{. В матричной записи эта система уравнений имеет
вид
Ау-РВу = 0, B.71)
где
У =
cN
а12
aNl
• aNN
В
bn...b
^22
it/
'JNl
UNN
причем aif
= j
о
4nr'd!C-
Итак, с помощью метода Рэлея—Ритца задача определения
точек бифуркации прямолинейной формы равновесия стержня
сведена к задаче на собственные значения для матриц (см. при-
приложение I). Условие существования отличных от тождественного
нуля решений системы B.71) приводит к уравнению, из которого
могут быть найдены собственные значения Рп:
detftA - РВ) = det [at, - Pbt,] = 0.
B.72)
Это уравнение степени N дает N собственных значений Рп, кото-
которые приближенно соответствуют N первым точкам бифуркации
исходной задачи устойчивости стержня. Наименьшее из найден-
найденных собственных значений приближенно равно критической
нагрузке, т. е. Ркр «* (Рп)«ап-
Для каждого собственного значения Рп решения уравнения
B.71) дают возможность с точностью до масштаба приближенно
найти форму изогнутой оси стержня в окрестности п-й точки би-
бифуркации. В частности, решение при (Р^ша приближенно опи-
описывает форму изогнутой оси стержня при потере устойчивости:
N
где с,--=-*-.
66
Если система базисных функций ft (х) полная, то при N —» оо
решение задачи методом Рэлея—Ритца сходится к точному реше-
решению. Но при практическом использовании метода, когда число
членов ряда B.68) невелико, сходимость к точному решению
имеет только теоретическое значение. Значительно важнее удачно
выбрать вид первых членов этого ряда.
В случае применения метода Рэлея—Ритца базисные функ-
функции fi (х) должны удовлетворять только геометрическим гра-
граничным условиям. Если система базисных функций полная,
то при N —* оо силовые граничные условия -удовлетворяются
автоматически. Однако выбирая базисные функции при не-
небольшом числе членов ряда B.68), удерживаемых в решении,
желательно удовлетворять не только геометрическим, но и
силовым граничным условиям (особенно для первого члена
ряда).
Представление искомой функции в виде ряда далеко не един-
единственный способ перехода от задачи определения стационарных
значений функционала к задаче определения стационарных зна-
значений функции нескольких переменных. Для этой цели функцию
v (х) можно искать среди семейства функций, удовлетворяющих
заданным геометрическим условиям задачи и зависящим от N
свободных параметров:
v (х) = F (х, cv с2,..., cN), B.73)
где ct — независимые параметры, причем геометрические гранич-
граничные условия выполняются при любых значениях с{ [ряд
B.68) — частный случай такого семейства функций]. Подста-
Подставив B.73) в выражение B.66), снова получим зависимости
типа B.69), но структура функции Ф = ф (с1( с2, ..., cN, P)
будет иная.
Переход от задачи определения стационарных значений функ-
функционала к задаче определения стационарных значений функции
нескольких переменных можно выполнить, минуя аналитическое
представление искомой функции v (х).
В исследуемом функционале все производные можно выразить
через конечные разности. Если стержень разбить на N + 1 рав-
равных участков и операцию интегрирования в выражении B.66)
заменить суммированием, то получим
где h = l/(N + 1), a EJt и vt — значения" изгибной жесткости
и искомой функции в узловых точках, причем в силу геометриче-
геометрических граничных условий шарнирного опирания v0 = 0 и vN+1 =
= 0. Рассматривая оставшиеся значения vt в качестве незави-
3* 67
симых переменных, запи-
шем Условие стационарно-
сти Ф в виде системы урав-
нений *
Рис 2.9 "'
B.74)
Условие существования отличных от нуля решений снова
приводит к уравнению типа B.72), наименьший корень которого
дает приближенное значение Ркр. Соответствующее этому корню
решение системы уравнений B.74) приближенно описывает форму
изогнутой оси стержня при потере устойчивости.
Уравнения B.74) являются уравнением Эйлера для функцио-
функционала B.66), записанным через конечные разности. Поэтому на-
намеченный путь решения вариационной задачи с помощью конеч-
конечных разностей фактически сводится к решению дифференци-
дифференциального уравнения Эйлера методом конечных разностей.
В настоящее время имеется ряд модификаций метода Рэлея—
Ритца, специально приспособленных для численного счета на
ЭЦВМ. Среди них особо следует отметить метод конечных эле-
элементов [34].
Использование метода Рэлея — Ритца в сочетании с методом
множителей Лагранжа. В описанной выше схеме метода Рэлея—
Ритца геометрическим граничным условиям задачи удовлетво-
удовлетворяла каждая координатная функция /,• (х). Но при выборе
аппроксимирующих функций можно потребовать, чтобы часть
граничных условий была удовлетворена не каждой функцией
ряда B.68), а их суммой. В некоторых случаях такой путь реше-
решения удобнее.
В качестве примера рассмотрим задачу устойчивости стержня,
один конец которого защемлен, а другой свободно оперт (рис. 2.9).
Граничные условия задачи 1) v @) =0; 2) v @) = 0; 3) v (I) =
= 0; 4) v" (I) = 0.
Первые три граничных условия являются геометрическими
и должны обязательно удовлетворяться при построении прибли-
приближенного решения задачи методом Рэлея—Ритца.
Функцию прогиба зададим в виде тригонометрического ряда
N
"!Ц1)«. B.75)
Каждый из членов этого ряда удовлетворяет двум геометри-
геометрическим граничным условиям: v' @) = 0 и v (/) = 0, но не удо-
* Представление искомой функции через конечные разности при исследо-
исследовании условий стационарности определенных интегралов использовал Эйлер
A744 г.).
68
влетворяет третьему условию v @) = 0. Для удовлетворения
этому условию параметры ct необходимо связать дополнительным
соотношением
B.76)
При этом, очевидно, будет выполняться условие v @) = 0. Под-
Подставляя ряд B.75) в выражение B.66) и дифференцируя, подсчи-
подсчитываем изменение полной потенциальной энергии стержня
h*cos<2'-2/1)?i*| dx
dx—
Для дальнейшего решения целесообразно воспользоваться
методом множителей Лагранжа (см. приложение II). Тогда при
любом числе членов ряда N получается единообразная схема
счета. Введем вспомогательный функционал
где X — множитель Лагранжа.
Условие стационарности Ф* и соотношение B.76) образуют
систему (N + 1) однородных линейных алгебраических уравне-
уравнений с (N + 1) неизвестными с{ и К:
ЭФ*
= 0;
l, 2 N;
N
Приравнивая нулю определитель этой системы уравнений,
получаем уравнение степени (N — 1) относительно Р:
(ап - РЬп) а,
12
aNl
1
(a22 — Pb22) . . .
¦ - ¦ (aNN-PbNN)
. . . 1
1
= 0, B.77)
69
где
uij = Я4
в частности, при ?/ = const
Наименьший корень уравнения B.77) приближенно равен Ркр.
Например, при EJ — const получим
1 — Ь11Р) О ... О 1
О {а2г — ЬпР) ... О 1
О
1
О
1
1
О
О,
где ац и Ьи определяются по формулам B.78).
В первом приближении при N = 2 приходим к уравнению
(при N = Г не может быть удовлетворено условие vJO) = 0)
— (Оц - РЬи) - (о,, - Р&аа) = 0.
Откуда
р _ au + a2i _ я»?/ A+34) _ 2,05я*?/
кр Ьц + *81 «» A+3») ~ /*
20 19?/
Точное значение Ркр = —'-ц—. Таким образом, погреш-
погрешность полученного приближенного решения +0,2%. Такая высо-
высокая точность объясняется тем, что использованные в решениях
функции удовлетворяют не только геометрическим, но и силовым
граничным условиям.
При аналитическом представлении искомой функции в виде
ряда B.68) или выражения B.73) метод Рэлея — Ритца всегда
приводит к завышенному значению критической нагрузки. Это
происходит вследствие того, что ограничивая выражением B.73)
или рядом B.68) класс функций, среди которых ищем решение
задачи, как бы накладываем на исследуемую систему дополнитель-
дополнительные связи. В результате таких дополнительных связей жесткость
системы может возрасти, что и приведет к завышенному значению
критической нагрузки. Значение критической нагрузки, получен-
70
ное методом Рэлея—Ритца, равно точному только в том случае,
когда взята точная функция прогиба. Но при численном пред-
представлении искомой функции приведенная выше оценка теряет
силу. Например, в случае представления A3 через конечные раз-
разности значение критической нагрузки может оказаться занижен-
заниженным по сравнению с точным.
§12. Связь метода Рэлея —
Ритца с методом Галеркина
Одним из наиболее универсальных методов приближенного
интегрирования дифференциальных уравнений является метод
Галеркина (или Бубнова—Галеркина *). Рассмотрим схему ре-
решения этим методом задач устойчивости, сводящихся к линейным
задачам на собственные значения (см. приложение I).
Приближенное решение задачи на собственные значения
M[y]-PLly] = 0, B.79)
где М [у] и L [у]—однородные линейные дифференциальные
выражения, конструируют в виде ряда
N
Y B.80)
где ct — произвольные постоянные; gt (х) — координатные функ-
функции, являющиеся функциями сравнения, т. е. удовлетворяющие
(каждая в отдельности) всем заданным при х — аи х = Ь однород-
однородным граничным условиям задачи. Ряд B.80) подставляют в исход-
исходное уравнение B.79) и получают некоторую функцию-ошибку
L — L (х, Р, с1г с2, ..., cN), вообще говоря, не равную тожде-
тождественно нулю. Основная операция метода Галеркина состоит в том,
что функцию-ошибку L (х, Р, Ci, с2, .-., cN) ортогонализируют
ко всем координатным функциям. Для этого ее поочередно умно-
умножают на все функции g{ (x) и интегралы от произведений прирав-
приравнивают нулю. Таким образом, для N неизвестных с, получают
систему N линейных алгебраических уравнений
ь
j L (х, Р, съ с2 cN) gx (x) dx = 0;
а
B.81)
ь
\h(x, Р, съ c2,...,cN)gN(x)dx =
* Впервые метод предложен в 1913 г. И. Г. Бубновым (для решения задач
устойчивости); несколько позже метод был применен Б. Г. Галеркиным для ре-
шеиня задач теории упругости.
71
В силу однородности исходного уравнения B.79) функция-ошибка
L (х, P, clt с2, •¦•, Сдг) является однородной относительно произ-
произвольных постоянных с;. Следовательно, система уравнений B.81)
тоже однородная, и для существования отличных от нуля решения
полученной системы уравнений ее определитель должен быть равен
нулю. Последнее условие приводит к алгебраическому уравнению
степени N относительно параметра Р. Корни этого уравнения
дадут приближенно N первых собственных значений Рп. Для каж-
каждого из найденных собственных значений Рп можно выразить все
произвольные постоянные через одну произвольную постоянную
(например, через сх) и найти приближенно N первых собственных
функций с помощью ряда B.80).
В задачах на собственные значения метод Галеркина тесно
связан с минимальным принципом Рэлея (см. приложение I).
В силу линейности исходного уравнения B.79) подстановка в него
ряда B.80) дает функцию-ошибку
N N
L (х, Р, съ с2,..., cN) = ? CiM [gi (x)] — P^ctL [gt (x)].
Система алгебраических уравнений B.81) метода Галеркина имеет
такую структуру:
N Ь N Ь
2 ci \ 8i <*) М & (х)] dx - Р ? ct J gl (x) L [gi (x)) dx = 0;
B.82)
N b N b
2 d J 8u № M l8i (x)] dx-P^Ctlto (x) L [gl (x)] dx = 0.
i=l a t=l a
Отношение Рэлея после подстановки в него ряда B.80) будет
функцией варьируемых параметров ct:
К-К (clt c2,..., cN) - L(Cl>C2 CN)i >
где
N N Ъ
М = М (сх, с„..., сы) = 2 2 ci°k J 8t (x)M igk (x)] dx;
г = 1 fe= 1 а
N N Ъ
L = L (сг, с„..., сы) = 2 2 с'с* J 8i № L [gk (x)} dx.
i = lft=l a
Запишем необходимые условия минимума отношения Рэлея
72
или учитывая зависимость B.83)
B.84)
Если исходную задачу на собственные значения считать полностью
определенной, то L8 > 0 и из B.84) следует, что
&-«?-* '-'•* "¦
Эта система уравнений повторяет систему уравнений метода
Галеркина B.82), причем i?^,, = Рг.
Если в качестве координатных функций gt (x) взята полная
система функций, то увеличивая число членов ряда B.80), можно
теоретически с любой степенью точности определить требуемое
количество собственных значений Рп и построить соответствующие
им собственные функции задачи. Но при практическом исполь-
использовании метода Галеркина, как и метода Рэлея—Ритца, при-
приходится ограничиваться сравнительно небольшим числом членов
ряда B.80). Точность и трудоемкость решения определяются не
полнотой системы координатных функций, а тем, насколько
удачно выбраны первые функции этого ряда.
В задачах устойчивости обычно требуется найти первое соб-
собственное значение, дающее критическую нагрузку. Поэтому
при выборе координатных функций следует стремиться к тому,
чтобы первый член ряда точнее отражал характер первой соб-
собственной функции решаемой задачи, а все последующие члены
ряда играли бы роль уточняющих поправок. Один из наиболее
естественных и надежных путей выбора координатных функций
состоит в использовании собственных функций родственной само-
самосопряженной и полностью определенной задачи, допускающей
точное аналитическое решение. Например, если задача устойчи-
устойчивости сводится к решению уравнения с переменными коэффициен-
коэффициентами, то, осреднив значения коэффициентов, можно перейти
к вспомогательной задаче с теми же граничными условиями, но
с постоянными коэффициентами. Определив систему собственных
функций для этой вспомогательной задачи, затем можно их исполь-
использовать для построения|приближенного решения уравнения с пе-
переменными коэффициентами. Такой путь решения обычно дает
возможность с высокой точностью определять критические на-
нагрузки даже при сравнительно небольшом числе членов ряда
(два-три); при этом гарантируется полнота системы координатных
функций.
Метод Галеркина может быть использован для решения не
только обыкновенных дифференциальных уравнений, но и урав-
уравнений в частных производных.
Метод Галеркина можно трактовать как способ приближенной
замены задачи на собственные значения для дифференциальных
73
уравнений задачей на собственные значения для матриц. Обозна-
Обозначив варьируемые коэффициенты ряда B.80)
систему B.82) можно записать в матричном виде
Ау — ЯВу = 0,
где А и В — квадратные матрицы, причем их элементы равны
ъ ь
<*ш = \gi (х) М [gk (х)] dx; bik = J g, (x) L [gk (x)\ dx.
a a
Приближенные собственные значения исходной задачи опреде-
определятся из решения уравнения det (А — Рй) = det [а1к — Pbik\ =
= 0. Такая матричная форма записи может быть удобной при
численной реализации метода Галеркина с использованием ЭЦВМ.
Примеры использования метода Галеркина приведены в гл. 3
и 4, где отмечены некоторые недостатки этого метода.
Используя энергетический критерий устойчивости B.65), за-
запишем уравнение Эйлера функционала B.66):
d dF , d? dF n
dx dv' ^ dx* dv' v'
где F = ~- (EJxf -Pv'%
Продифференцировав, получим
y + Pv'^O. B.85)
Это линейное однородное уравнение вместе с однородными гра-
граничными условиями описывает изгибную форму равновесия стерж-
стержня, смежную с исходной.
Построим приближенное решение уравнения B.85), взяв
искомую функцию в виде ряда
N
v(x) = ^ci^i(x), B.86)
где ct — независимые параметры; грг (л;) — функции сравнения
рассматриваемой задачи на собственные значения. В данном
случае это четырежды дифференцируемые функции, удовлетворя-
удовлетворяющие всем заданным граничным условиям задачи, например
условиям шарнирного опирания B.67).
74
Согласно методу Галеркина подставляем ряд B.86) в решаемое
уравнение и находим функцию-ошибку
EJ ^ cityl (х)\ -\- Р ^ citft (*)•
i=i J t=i
Ортогонализируя функцию-ошибку ко всем функциям v|)(- (x),
приходим к матричному уравнению
\у - РЪу = 0, B.87)
где
/Cl\ /~ ~ ~ n /?u Ь12...Ь1Ы
= | Ь21 Ь22 ... b2N
¦¦¦ bNN;
vat
здесь
ci/y = J (EJty'i)" ijpj dx; bif = —
о б
Условие существования отличных от нуля решений полученного
уравнения приводит к уравнению
det (А — РЪ) = det [ац - Pb(j] = О,
из которого можно приближенно найти N первых собственных
значений задачи Рп. Наименьшее из этих собственных значений
дает приближенное значение критической силы Ркр.
Рассмотрим решение задачи методом Рэлея—Ритца, но вместо
ряда B.68), в котором каждая функция была допустимой функ-
функцией задачи на собственные значения, воспользуемся рядом
B.86), построенным из функций сравнения. Подставив этот ряд
в^выражение B.66) и выполнив все необходимые операции диффе-
дифференцирования и интегрирования, получим
I I N \2
ДЭ = Ф(сь с2,..., cN, P) = -L\EJ V atf) dx-
12
0 \ i=l
Необходимое условие стационарности Ф приводит к матричному
уравнению
Ау-РВу= 0, B.88)
75
где
[cn
biN
bsNj
здесь aij
Покажем, что уравнение B.88) тождественно уравнению B.87),
полученному по методу Галеркина. Действительно, интегриро-
интегрирование по частям дает
I
r|)• dx =
= - (EJf{)' т|);. \l -f
f 4>M>> d^; = фМ>7 |j — J ij>M>; dx = — J i|v
поскольку функции сравнения г|), и ф, удовлетворяют граничным
условиям B.67), т. е. г|) @) = 0; т|) (/) = 0; г|>" @) = 0; ф" (/) =0.
Следовательно, аи — а.ц, Ьц = Ъц и результат приближен-
приближенного решения задачи методом Рэлея—Ритца полностью совпадает
с результатом решения методом Галеркина, если в обоих случаях
используется один и тот же ряд B.86), построенный из функций
сравнения. Но из сказанного не следует, что эти два приближенных
метода полностью идентичны. При решении задачи методом
Рэлея—Ритца можно использовать значительно более широкий
класс аппроксимирующих функций, чем при решении задачи
методом Галеркина: в методе Рэлея—Ритцз это допустимые
функции, а в методе Галеркина — функции сравнения.
Для иллюстрации различия между этими методами рассмотрим
следующий пример приближенного решения. Определяя крити-
критическую силу шарнирно-опертого стержня по методу Рэлея—Ритца,
в первом приближении можно взять аппроксимирующую функцию
в виде квадратичной параболы, удовлетворяющей геометрическим
граничным условиям задачи
c1f1 = cLx(x-l). B.89)
Тогда вместо системы уравнений получим одно уравнение
i i
сх \ EJ BJdx - с^Р j Bx - If dz = 0.
76
Откуда при EJ = const найдем приближенное значение кри-
критической силы Ркр = —jg—. Точное значение Ркр = —тз—•
Но все же приближенное решение дает верное представление
о порядке значений критической силы. Если попытаемся исполь-
использовать функцию B.89) для приближенного решения уравнения
B.85) по методу Галеркина, то придем к абсурдному результату,
так как в данном случае /}v (х) = 0.
Но если вместо квадратичной параболы, не являющейся функ-
функцией сравнения, возьмем четырежды дифференцируемую функ-
функцию, удовлетворяющую всем граничным условиям задачи, то
результаты приближенных решений метода Рэлея—Ритца и ме-
метода Галеркина совпадут. Примем, например,
Тогда методом Рэлея—Ритца и методом Галеркина получим
Ркр= 17 -75-. Причем в данном случае даже первое прибли-
приближение приводит к значению критической силы с погрешностью
всего +0,13%.
Задача устойчивости стержня использована в этом параграфе
только для наглядности изложения, и все замечания и выводы
носят общий характер.
Глава 3
Устойчивость прямых стержней
при продольном сжатии
Задачи устойчивости упругих стержней хорошо изучены и
достаточно широко известны.
Цель этой главы показать не специфику задач устойчивости
стержней, а то общее, что присуще всем задачам устойчивости
тонкостенных упругих систем. Именно с этих позиций следует
рассматривать подробный вывод основного линеаризованного
уравнения четвертого порядка, детальное описание смены форм
потери устойчивости стержня на упругом основании и на упругих
опорах, анализ влияния сдвиговых деформаций на критическую
нагрузку и приближенное исследование закритического поведе-
поведения стержней.
§ 13. Основное линеаризованное уравнение
и его решение
В предыдущих главах решено несколько частных задач устой-
устойчивости прямых стержней. В этом параграфе дан вывод общего
линеаризованного уравнения для произвольно нагруженного
упругого прямого стержня переменного поперечного сечения,
сформулированы граничные условия и приведены примеры точ-
точного и приближенного решения этого уравнения.
Представим стержень в системе прямоугольных координат,
как показано на рис. 3.1, а, причем примем, что одна из главных
центральных осей поперечного сечения стержня лежит в пло-
плоскости ху.
Линеаризованное уравнение изгиба стержня в плоскости ху
получим при следующих допущениях.
1. Ось ненагруженного стержня идеально прямая и все внеш-
внешние нагрузки и реакции опор до потери устойчивости действуют
строго вдоль этой оси.
2. Внешние нагрузки «мертвые», т. е. при деформациях
стержня они не изменяются ни по величине, ни по направлению.
3. Изменение геометрических размеров стержня при докри-
тических деформациях считается пренебрежимо малым; в част-
частности, в процессе нагружения длина стержня, площадь и момент
инерции его поперечного сечения считаются неизменными.
78
a)
м+dM
Рис 3.1
4. Связь между внутренним изгибающим моментом и попереч-
поперечным изгибом стержня при потере устойчивости описывается
обычной зависимостью линейной теории изгиба балок, основан-
основанной на гипотезе плоских сечений.
В силу первого допущения возможна прямолинейная исход-
исходная форма равновесия нагруженного стержня. При достаточно'
малых нагрузках прямолинейная форма равновесия является
единственной и устойчивой. Определим условия, при которых
возможны формы равновесия стержня с изогнутой осью, смежные
с исходной прямолинейной формой.
Условие равновесия элемента неискривленного стержня
(рис. 3.1, б) приводит к уравнению
Здесь и далее штрихом обозначено дифференцирование по х.
В дальнейшем задачу определения начальных осевых усилий-
No = No (х) будем считать решенной и закон изменения их по-
подлине стержня известным.
Рассмотрим равновесие элемента стержня в искривленном,
отклоненном от исходного состоянии (рис. 3.1, в), причем попе-
поперечные прогибы v = v (х) будем считать бесконечно малыми.
Порядок малости достаточно гладкой функции v (x) сохраняется
при дифференцировании, поэтому v' (x), v" (x), vm (x) и т. д.
можно считать величинами первого порядка малости *. Во всех
окончательных зависимостях в соответствии с основной идеей
линеаризации (см. § 4) следует удерживать только величины
* Для пояснения этого, например, можно принять v (x) = a,v1 (x), где
»х (х) — конечная, достаточное число раз дифференцируемая функция; а —
бесконечно малая величина первого порядка малости, не зависящая от коорди-
координаты. Тогда v — av\ (x), v" = av'[ (x), v" = av" (х) и т. д. тоже буду? вели-
величинами первого порядка малости.
79
первого порядка малости. В частности, при составлении уравне-
уравнений равновесия искривленного элемента следует положить о' = ft;
sin ft = ft; cos ft = 1; sin (ft + dft) = ft + dft; cos (ft + dft) = 1.
Тогда, проектируя на ось х все силы, действующие на искрив-
искривленный элемент, получим
— N-1 - Qft + q dx + (N -j- dN) • 1 + (Q + dQ) (ft + d») = 0.
Произведение dQ dft как величину высшего порядка малости
не учитываем и приходим к уравнению
+ д = 0. .. C.2)
Приравняв нулю сумму проекций всех сил на ось I/ и сумму всех
моментов и исключив величины высших порядков малости, по-
получим еще два уравнения:
Q' - (Wft)' = 0;
Q-JM'. J C-3)
В силу четвертого допущения и последнего уравнения внутренний
изгибающий момент М и внутренняя поперечная сила Q связаны
с прогибом такими же зависимостями, как и при обычном попе-
поперечном изгибе М = EJd'; Q = (EJ&')', где EJ = EJ (х) — из-
гибная жесткость стержня в плоскости ху.
Слагаемое (Qft)' = l(EJv")' v' ]' следует исключить из урав-
уравнения C.2) как содержащее произведение двух величин первого
порядка малости. Тогда это уравнение не будет отличаться от
уравнения равновесия неискривленного элемента стержня C.1).
Следовательно, при бесконечно малых поперечных прогибах
начальное осевое усилие остается неизменным с точностью до
величин второго порядка малости.
Учитывая сказанное, в первом уравнении C.3) можно поло-
положить N (х) = Na (x). Поскольку ft = v и Q = (EJv")', окон-
окончательно получим
(EJv")" - (Nov')' =- 0. C.4)
Это линейное однородное уравнение четвертого порядка является
основным уравнением теории устойчивости прямых упругих
стержней. Оно применимо при любых законах изменения жесткости
EJ (х), при любых нагрузках и условиях закрепления, охваты-
охватываемых сформулированными выше допущениями.
Для однопролетного стержня в соответствии с порядком
уравнения C.4) должны быть сформулированы четыре граничных
условия (по два на каждом из торцов). В силу первого допущения
эти условия будут однородными. Если все внешние нагрузки
считать изменяющимися пропорционально одному параметру Р,
то уравнение C.4) можно переписать в таком виде:
(EJv")" - Р (Nov'Y = 0; C.4')
80
А_ ж
Р
X
где No = No (x) — закон изменения У
начальных внутренних усилий в не-
искривленном стержне при Р = 1.
Таким образом, определение условий
существования изгибных форм рав- >;
новесия первоначально прямолиней- ^
ного стержня свелось к решению
задач на собственные значения. Для
того чтобы найти условия существо-
существования изгибных форм равновесия,
смежных с исходной прямолинейной
формой, необходимо найти значения
параметра нагрузки Рп, при кото-
которых однородное уравнение C.4')
при однородных граничных усло-
условиях имеет нетривиальные^решения рис 3.2
(см. приложение I).
Рассмотрим граничные условия в задачах устойчивости прямых
стержней. Геометрические граничные условия в задачах устой-
устойчивости формулируются так же, как и в задачах поперечного
изгибе балок: на торце стержня могут быть запрещены попереч-
поперечное перемещение v, поворот касательной v или и то и другое
одновременно.
Силовые граничные условия для ненагруженного торца ана-
аналогичны силовым граничным условиям задач поперечного изгиба.
Если поперечные перемещения на торце не стеснены, то попереч-
поперечная сила равна нулю, т. е. Q = (EJv")' = 0. Когда углы пово-
поворота не стеснены, изгибающий момент равен нулю, т. е. М —
= EJv" = 0. На свободном торце и поперечная сила, и изгиба-
изгибающий момент обращаются в нуль.
Принципиальное отличие силовых граничных условий задач
устойчивости от силовых граничных условий линейных задач
поперечного изгиба выявляется тогда, когда на торец стержня
передаются сосредоточенные внешние усилия. Оно обусловлено
тем, что в задачах устойчивости рассматриваются условия рав-
равновесия в отклоненном, искривленном положении системы.
Поэтому, если, например, к незакрепленному торцу стержня
приложена мертвая осевая сила Р, то условие равновесия
примыкающего к торцу элемента (рис. 3.2), составленное
для его отклоненного положения (в проекции на ось у), при-
приводит к {уравнению [Q — Nov' = 0. В данном случае, когда
Wo = —Р, получим граничное условие (EJv")' + Pv' = 0 при
х = I.
При формулировке силовых граничных условий особого вни-
внимания заслуживают те случаи, когда мертвые внешние нагрузки
передаются на стержень с помощью промежуточных деталей,
изменяющих при изгибе стержня воспринимаемое им силовое
воздействие. Несколько примеров такого нагружения стержней
81
V(O)-O
, -- ~—Q L
i X a
7777777
6)
Рис 3.3
приведены на рис. 3.3, где для каждого случая указаны граничные
условия. Так, например, на правый торец стержня изображенного
на рис. 3.3, с, передается изгибающий момент, пропорциональ-
пропорциональный длине жесткого рычага и углу поворота касательной к оси
стержня над правой опорой. Отсюда следует граничное условие
М = Рад, т. е. EJv" = Pav' при х — I. При изгибе консольного
стержня, нагружаемого через жесткий шатун (рис. 3.3, б), на
правый его торец кроме продольной силы Р передается попереч-
поперечная сила, пропорциональная углу наклона жесткого рычага
Ф =-Цр-• Граничное условие (EJv")' + Pv' + P — = 0 при
х — I. Аналогично поперечная сила (противоположного знака)
возникает при изгибе показанного на рис. 3.3, в стержня, нагру-
нагружаемого с помощью гибкой нити.
Уравнение C.4) удается точно проинтегрировать только в не-
некоторых случаях. Например, если стержень постоянной жесткости
(EJ = const) сжат одной продольной силой Р, то No = —Р =
= const и уравнение C.4) принимает вид
Pv" = 0.
C.5)
82
Это уравнение с постоянными коэффициентами допускает точное
решение при любых граничных условиях. Перепишем уравнение
C.5) в виде
Решением уравнения C.6) будет
v = Ах sin kx 4- Аг cos kx -f- А&х + Alt C.7)
где Alt A2, A3, At — произвольные постоянные.
Как отмечалось, для однопролетного стержня должны быть
заданы четыре граничных условия. Подставив в них общее реше-
решение C.7), получим систему четырех однородных линейных урав-
уравнений относительно четырех неизвестных Л,. Из условия равен-
равенства нулю определителя этой системы можно найти собственные
значения задачи Рп и соответствующие им собственные функции.
Наименьшее из собственных значений дает критическое значение
нагрузки, а соответствующая ему собственная функция описы-
описывает форму изогнутой оси стержня при потере устойчивости.
Изложенную схему решения используем, например, для опре-
определения критической силы и формы изогнутой оси при потере
устойчивости стержня, изображенного на рис. 3.4.
Выпишем четыре однородных граничных условия задачи
1) v @) = 0; 2) v' @) = 0; 3) v (I) = 0; 4) v' (I) = 0. Подчиняя
решение C.7) этим граничным условиям, приходим к системе
линейных однородных уравнений
C.8)
—A2k* = 0;
Лх sin kl -f- Л2 cos kl -f- Asl -f- Л4 = 0;
Axk cos kl — Azk sin kl -f- Aa = 0.
Характеристическое уравнение, дающее собственные значения
задачи, можно найти, приравняв нулю определитель полученной
системы. При аналитическом решении значительно удобнее не
раскрывать определители высокого порядка, а, последовательно
исключая неизвестные из исходной системы уравнений, выразить
постоянные А( через какую-нибудь одну из них, заведомо не рав-
равную нулю. В рассматриваемом примере согласно первым двум
уравнениям системы C.8) Л2 = Л4 = 0. Из третьего уравнения
следует, что Л3 = —Аг-^-—. Под-
Подставив это значение в последнее урав-
уравнение, получим
Al(hC0Skl ~ )=°- ¦
Необходимое условие существова-
существования решения, отличного от триви- Рис. 3.4
83
ального (равенство нулю выражения стоящего в скобках),
приводит к характеристическому уравнению tg kl — kl. Решив
это трансцендентное уравнение, найдем собственные значения
задачи {Ы)г = 4,49; (^2 = 7,73; (klK = 10,9; ...; (kl)n &
л
Так как в рассматриваемой задаче Аг = Л4 = 0; А3 =
= —Аг—Ц—, то собственные функции выражаются следующими
зависимостями, полученными из общего решения C.7) при под-
подстановке соответствующих собственных значений (kl)n:
vn (x) = [
sin
Наименьшее (первое) собственное значение (fe/)x = 4,49 дает*
критическое значение сжимающей силы
р __ D,49)» EJ _ 20.2Е/
Собственная функция, соответствующая первому собственному
значению, с точностью до масштаба описывает форму изогнутой
оси стержня при потере устойчивости:
vKP (х) — vx {x) = (sin -^? _ JLsin 4,49) .
Для рассматриваемой конкретной задачи, как и вообще для задач
устойчивости, непосредственный практический интерес представ-
представляет только первое собственное значение, дающее значение крити-
критической силы, и первая собственная функция, описывающая форму
потери устойчивости. Остальные собственные функции могут
быть полезны для построения приближенных решений более слож-
сложных задач с теми же граничными условиями.
Аналогично может быть решена и любая другая задача устой-
устойчивости равномерно сжатого стержня с постоянной изгибной
жесткостью. Причем окончательное выражение критической силы
обычно записывается в одном из двух вариантов:
или
/2
где ц — коэффициент приведенной длины, показывающий, во
сколько раз следует увеличить длину шарнирно-опертого стержня,
чтобы критическая сила для него равнялась критической силе
стержня длиной I при рассматриваемых граничных^ условиях.
84
Коэффициент С показывает, во сколько раз критическая сила
рассматриваемого стержня отличается от критической силы шар-
нирно-опертого стержня той же длины I. Значения этих коэффи-
коэффициентов приведены на рис. 3.5.
Кроме приведенных простейших примеров имеется большое
количество других более сложных задач, допускающих точное
аналитическое решение [21]. Однако в общем случае при про-
произвольных законах изменения EJ (х) и No (x) уравнение C.4)
не удается аналитически проинтегрировать. Тогда для определе-
определения критических нагрузок и форм изогнутой оси стержня при
потере устойчивости прибегают к приближенным методам. Одним
из наиболее эффективных машинных методов определения крити-
критических нагрузок в задачах устойчивости прямых стержней яв-
является метод начальных параметров.
Прежде чем перейти к изложению примеров использования
этого метода, необходимо подчеркнуть, что не всегда целесообразно
применять полное уравнение четвертого порядка C.4). В ряде
случаев удается предварительно понизить порядок этого уравне-
уравнения и существенно упростить решение (и аналитическое и особенно
численное). Остановимся сейчас на двух основных случаях пони-
понижения порядка уравнения C.4).
Для шарнирно-опертого стержня (рис. 3.6, с), сжатого осевой
силой Р, начальное внутреннее усилие No = —Р = const. В этом
случае, дважды проинтегрировав уравнение C.4), получим
EJ (x) v" -f- Pv = А3х -f- Л4
при граничных условиях:
1)у@) = 0; 2) t>"@) = 0; 3)и@ = 0; 4)и"(/) = 0.
Положив в этом уравнении х = 0, с учетом двух первых гранич-
граничных условий, найдем At = 0.
При х = I из двух оставшихся
граничных условий получим
Аг = 0 и придем к уравнению
второго порядка
EJ (x) v" + Pv = 0. C.9)
Рис. 3.5
Рис. 3.6
85
Это уравнение обычно выводится из условия равновесия части
стержня в отклоненном положении (см. § 4). Оно приведено в пре-
предыдущих главах. Нетрудно убедиться, что уравнение C.9) спра-
справедливо при решении задач устойчивости стержней, изображенных
на рис. 3.6, бив. Они эквивалентны задаче устойчивости шар-
нирно-опертого стержня с изгибной жесткостью EJ (х), симме-
симметрично изменяющейся относительно среднего сечения. Примеры
решения задач устойчивости стержней с помощью этого уравнения
приведены выше.
Иногда для понижения порядка основного уравнения в ка-
качестве искомой неизвестной целесообразно рассматривать не
поперечный прогиб, а угол поворота •& = О (х). Тогда заменив
в уравнении C.4) v' на ¦& и проинтегрировав один раз, получим
(EJft')' — ТУоФ = А х- Если на одном из торцов стержня (на-
(например, при х = 0) поперечные смещения не стеснены, то одним
из граничных условий будет (?/&')' — N $ = 0. Следовательно,
в этом случае А± = 0 и можно записать
(EJW)' - Noft = 0. C.10)
Для некоторых практически важных случаев это уравнение
второго порядка допускает точное решение. Так, например,
для стержня постоянного поперечного сечения, находящегося
под действием собственного веса, учитывая, что в этом случае
EJ = const и No (х) — —qx (рис. 3.7) и используя подстановку
уравнение C.10) можно привести к каноническому виду урав-
уравнения Бесселя
~тчг+ L1 \т) i5"Jfl'=o.
Решение этого уравнения хорошо изучено; оно сводится к та-
табулированным функциям Бесселя. В частности, подчиняя решение
уравнения Бесселя очевидным граничным условиям ¦&' = 0 при
х = 0 и Ф = 0 при х == I, можно найти, что
Уравнение C.10) интегрируется и еще для некоторых конкрет-
конкретных законов изменения EJ (х) и N0{x) [21, 31].
Наметим путь решения уравнения C.10) методом начальных
параметров. Введем двумерный вектор состояния, характеризу-
характеризующий вызванные изгибом перемещения и внутренние усилия
в произвольном сечении стержня:
.М
86
где О = О (*), М = М (л:) —
угол поворота и внутренний из-
изгибающий момент в текущем
сечении стержня.
Как следует из приведен-
приведенного выше вывода уравнения
C.4),
v EJ — и.
q,=j:onst
Уравнение C.10) запишем в ^
виде [напомним, что закон из- Рис. 3.7
менения внутреннего осевого
усилия No = No (х) считается известным] М'
Рис. 3.8
= 0. Два
последних уравнения объединим в одно матричное уравнение
у'-Ау = 0, C.11)
где
( 0 -='
А(*)-
\N0(x)
При заданных граничных условиях нетрудно найти критическую
нагрузку и форму изогнутой оси стержня при любых законах
изменения NQ(x) и EJ (х), решив численно уравнение C.11).
Общую схему решения покажем на примере определения за-
запаса устойчивости вертикально стоящей колонны переменного
сечения, находящейся под действием собственного веса и не-
несущей сосредоточенный груз Q. Законы изменения изгибной
жесткости колонны EJ = EJ (х) и погонной нагрузки q — q (x)
заданы (рис. 3.8).
_ Сначала найдем распределение внутренних осевых усилий
#о (х) по высоте колонны. Рассмотрим равновесие части колонны,
находящейся выше сечения х\ тогда получим
II X Л
Q+\q(x)dx-\q{x)dx\.
При численно заданных значениях q (x) интегрирование также
производится численно. Умножим все действующие на колонну
нагрузки на параметр Р и рассмотрим внутреннее осевое усилие
#о (х) = PN0 (х). Цель дальнейшего расчета — найти Ркр, ибо
значение Ркр равно запасу устойчивости колонны.
Прежде чем приступать к численному интегрированию урав-
уравнения C.11), ожидаемый результат можно оценить каким-нибудь
приближенным методом. Такая оценка, во-первых, облегчает
численный поиск Я
кр, во-вторых, до известной степени предот-
87
вращает грубую ошибку. Для этой цели воспользуемся методом
Галеркина (см. § 12).
Уравнение C.10) запишем в следующем виде:
Граничные условия задачи 1) Ф @) = 0; 2) ¦&' (I) = 0. Для оценки
Ркр в первом приближении, удовлетворив оба граничных условия,
возьмем
Согласно методу Галеркина находим
. C.12)
N0(x)
При численно заданных EJ (х) и No (х) интегрирование здесь
тоже производится численно. Стоящий в числителе интеграл сле-
следует преобразовать так, чтобы избавиться от необходимости диф-
дифференцировать численно заданную функцию EJ (х). Для этого
проинтегрируем стоящее в числителе выражение по частям.
Учитывая граничные условия, которым подчинена функция
<&х (х), получим
i
\
0
- f EJWi dx = — [ Em1 dx.
0 0
Тогда в первом приближении приходим к выражению
dx
Ркр = ? . C.13)
Для оценки точности приближенного решения задачи, полу-
полученного методом Галеркина, сравним его результаты с известными
точными решениями. Так, при EJ — const, ц (х) = 0 и No ~
— —Q = const точное решение задачи известно: QKP = ~ш~ —
«8
= 2,47-jj-. Для этого частного случая из выражения C.13)
имеем
EJ
/«¦*
о
Подставим в эту формулу выбранную функцию Фх (х). Тогда
Точное решение задачи известно и при EJ = const, Q = О,
q = const: (^)кр = 7,837 -—. В этом случае N0(x) =
= —ql (I —-7-) и из выражения C.13) имеем
Yi'dx
Подставив выбранную функцию ¦&! (х) и выполнив необходи-
необходимые операции дифференцирования и интегрирования, находим
EJ
= 8—jj-. В рассмотренных частных случаях точность
приближенного решения задачи, полученного методом Галер-
кина, вполне удовлетворительна. Использовав для решения вы-
выражение C.12), получим те же результаты.
В качестве примера для численного счета возьмем колонну
со следующими параметрами:
При этих параметрах приближенное решение методом Галер-
808
кина дает PKP*=-^g- = 1,54.
Численное интегрирование уравнения C.11) приводит к зна-
значению Ркр — 1,03. Причем с учетом ¦& @) = 0 и того, что решение
однородного уравнения C.11) должно быть получено только с точ-
точностью до масштаба, численное интегрирование начинаем со зна-
значения Ь @), М @) = 1 и подбором параметра Р добиваемся вы-
выполнения граничного условия на другом конце колонны М (I) = 0.
Одновременно можно получить форму изогнутой оси колонны при
х
потере устойчивости v= J Ф dx.
Для произвольно закрепленного и произвольно нагруженного
стержня вектор состояния, характеризующий перемещения и
внутренние усилия в произвольном сечении, можно принять в сле-
следующем виде:
М
Дифференциальные зависимости между компонентами этого че-
четырехмерного вектора следуют из вывода уравнения C.4):
М
EJ
М' = |
Приведенные зависимости объединяются в одно матричное урав-
уравнение
C.14)
где
А = А (х) =
Ау =
1
О
О
О
1
О -q(x)
EJ(x)
О
_No_
EJ
0\
О
1
О
Принципиальная схема определения критических нагрузок
с помощью метода начальных параметров остается такой же, как
и в изложенном выше примере.
Для определения критических нагрузок однопролетного
стержня могут быть использованы и другие приближенные методы
[19, 31, 36, 37].
§ 14. Решение задач устойчивости стержней
энергетическим методом
Задачу устойчивости прямого стержня рассмотрим при допу-
допущениях, сформулированных в предыдущем параграфе, но для ее
решения используем энергетический подход.
90
ч
Рис. 3.9
На рис. 3.9 изобра-
изображен упругий стержень,
находящийся под дей-
действием распределенной
нагрузки q {х) и сосре-
сосредоточенной силы Р,
причем правый торец
стержня упруго закре-
закреплен относительно про-
продольных смещений. Задачу определения начального напряжен-
напряженно-деформированного состояния такого стержня при неискривлен-
ном состоянии считаем решенной и начальные осевые усилия
No (x) — EFu'o известными [где EF = EF (х) — жесткость стерж-
стержня на растяжение и = и0 (х) — начальное осевое перемещение].
Для того чтобы при искривлении оси стержня выразить изме-
изменение полной потенциальной энергии A3 в форме Брайана, сооб-
сообщим точкам оси стержня поперечные перемещения v = vx (x) пер-
первого порядке малости (рис. ЗЛО, а). Изменение полной потенциаль-
потенциальной энергии стержня АЭ при переходе от прямолинейной формы
равновесия к новому искривленному состоянию определим с точ-
точностью до величин второго порядка малости (см. § 9). Представим
ДЭ в виде суммы двух слагаемых: АЭ = V -|- U, где V — потен-
потенциальная энергия изгиба стержня; U — изменение потенциальной
энергии растяжения стержня, вызванное поперечными перемеще-
перемещениями Wj (х).
Поскольку согласно принятому допущению (см. § 13) изгиб
стержня при потере устойчивости описывается обычной теорией
изгиба балок, можно записать (см. § 8)
C.15)
где \EJ = EJ (х) изгибная жесткость стержня в плоскос-
плоскости ху. ,
Для подсчета U найдем удлинения оси стержня гг = е2 (х),
вызываемые поперечными перемещениями vx (x). Ограничившись
квадратичными членами разложения (поскольку изменение полной
Р
Рис. 3.10
91
энергии A3 необходимо знать с точностью до величин второго по-
порядка малости), получим (рис. 3.10, б)
г AiB1-AB _ А& ._
При поперечных перемещениях стержня начальные усилия совер-
совершают работу на этих удлинениях, поэтому
/ i
U = J N0e2 d* = 4" J NoV'x* dx-
о о
Таким образом,
A3 = — J (EJv? + Mov[') dx. C.16)
о
Поскольку при выводе выражения C.16) точкам оси стержня
сообщались только поперечные перемещения vx (x), мертвые про-
продольные внешние нагрузки, не совершающие работу на поперечных
перемещениях, не вошли в это выражение.
Из условия стационарности A3 (или из условия A3 = 0 при
дополнительном требовании минимума критической нагрузки)
можно найти (точно или приближенно) точки бифуркаций прямо-
прямолинейной исходной формы равновесия стержня. В частности, из
условия стационарности следует основное линеаризованное урав-
уравнение C.4) и возможные для этого уравнения граничные условия.
Действительно, приравняв нулю первую вариацию изменения
полной потенциальной энергии A3, получим (см. приложение II)
б (A3) = J (EJvWi + Nov\8v\) dx = 0.
Последовательно проинтегрируем по частям:
EJvlbv'i у + My'i - {EJv\)'\ bvx |J + J [(EM)" - (Nov'i)'] &ц dx = 0.
Откуда следует основное линеаризованное уравнение C.4) и одно-
однородные граничные условия прид; = 0ид; = /:
?У1>1 = 0 (Л1 = 0) либо ui = 0;
(EJv'i)' — Nov[ = 0 (Q — Nw'i = 0) либо vr = 0.
Энергетический критерий в форме Брайана (и вытекающее из
него основное линеаризованное уравнение) справедлив при любых
условиях закрепления стержня в осевом направлении. Эти условия
закрепления должны учитываться при определении начальных
осевых усилий No — No (x).
92
В приведенном выше выводе выражения C.16) фигурировали
только перемещения первого порядка малости vx = vt (х), пере-
переводившие стержень из начальной прямолинейной формы равнове-
равновесия в смежную форму равновесия с изогнутой осью. При этом до-
дополнительные осевые перемещения считали тождественно равными
нулю. Нетрудно показать, что окончательное выражение C.16) не
изменится, если кроме поперечных перемещений vx (х) учесть до-
дополнительные осевые перемещения второго порядка малости
иг (х) (см. § 10).
Это обстоятельство позволяет перейти от энергетического кри-
критерия устойчивости в форме Брайана к энергетическому крите-
критерию в форме С. П. Тимошенко. Для изображенного на рис. 3.9
прямого стержня вместо общего выражения B.63) получим
Pu2(!), C.17)
где V — потенциальная энергия изгиба стержня, подсчитываемая
по формуле C.15).
Вместо системы уравнений B.60) получим одно уравнение
ЛД = О, C.18)
где Nг — дополнительное осевое усилие.
При не равных нулю дополнительных осевых перемещениях
удлинение е2 = и2 + -у (v'if.
Учитывая, что N% = EF&Z, из C.18) приходим к дифференци-
дифференциальному уравнению, позволяющему выразить дополнительные
перемещения второго порядка малости и2 через поперечные пере-
перемещения vx первого порядка малости:
]'=0- (ЗЛ9)
В рассматриваемом случае граничными условиями, очевидно, будут
1) ыа @) = 0; 2) EFu't (/) + сиг (/) = 0. Дважды интегрируя C.19)
и учитывая первое из этих граничных условий, находим
X X
М = А1 ~ww - ~т \v'1'dx-
о
1 w \
о о
Постоянная А определяется из второго граничного условия.
В частности, при с = 0 получаем А = 0 и
I'dx. C.21)
В этом случае е2 = щ. -\- -у v'i = 0 и N2 (а;) = 0, т. е. переход
от прямолинейного состояния равновесия к искривленному проис-
93
ходит без дополнительного растяжения оси стержня. Тогда изме-
изменение полной потенциальной энергии стержня
I х I
¦ A3 = V + -\-\q{x)\v[\dxdx + ^-\v[ldx. C.22)
0 0 0
При с —» оо, когда ы2 (/) = 0, из выражения C.20) получаем
C.23)
C.24)
A9^V-\q(x)u2(x)dx.
Причем дополнительные осевые удлинение в2 и усилие N2 не равны
нулю, а определяются выражениями
EF{x)
о,* dx
dx
EF(x)
= const.
Когда изменение полной потенциальной энергии АЭ подсчиты-
вается в форме С. П. Тимошенко, АЭ выражается непосредственно
через внешние нагрузки, а начальные осевые усилия N0 (х) в выра-
выражение C.17) не входят.
Дальнейшее решение можно вести (точно или приближенно)
из условия б (A3) = 0 либо АЭ = 0 при дополнительном требо-
требовании минимума нагрузки. Выражение изменения полной потен-
потенциальной энергии в форме С. П. Тимошенко удобно для прибли-
приближенной оценки критических нагрузок в тех случаях, когда потеря
устойчивости стержня может происходит без растяжения его оси,
т. е. когда справедлива зависимость C.22). В частности из этой
зависимости можно получить хорошо известную из курса сопро-
94
V
(Ok
N0M
a) 6) a)
Рис. 3.11 Рис 3.12
тивления материалов формулу для сжимающей критической
силы
f EJvfdx
п О
кр
v[f dx
где vx = Vi(x) — функция, удовлетворяющая геометрическим
граничным условиям задачи и доставляющая минимум значе-
значению Ркр.
Большинство авторов, излагая энергетический метод расчета
на устойчивость сжатых стержней, считают условие нерастяжимо-
нерастяжимости оси стержня C.21) совершенно очевидным и пользуются им без
всяких оговорок и ограничений. Однако нетрудно привести при-
примеры, когда это условие нерастяжимости не может быть выполнено
либо приводит к неверному результату. Так, например, стер-
стержень с закрепленными относительно осевых смещений торцами
(рис. 3.11, а) не может потерять устойчивость без изменения длины
оси. Если при исследовании устойчивости среднего стержня
системы, показанной на рис. 3.11,6, считать его ось нерастяжимой,
то это может привести к заниженному значению критической силы.
Рассмотрим решения нескольких задач устойчивости стержней
энергетическим методом. Исследуем устойчивость шарнирно опер-
опертого стержня при двух вариантах закрепления верхнего конца
в осевом направлении (рис. 3.12, а и б): 1) верхний конец может
свободно смещаться в осевом направлении; 2) верхний конец
закреплен неподвижно. Очевидно, и в том и в другом случае реше-
решение можно получить с помощью ряда
N
С{ sin -^-, C.25)
удовлетворяющего всем граничным условиям задачи.
95
В первом случае приближенное решение удобно получать,
представив изменение полной потенциальной энергии A3 в форме
С. П. Тимошенко, т. е. в форме C.22), как это обычно делается
в курсе «Сопротивление материалов». Приравнивая A3 нулю,
находим
dx
•dx
При EJ = const и 1г = 1/2, ограничившись одним первым чле-
членом ряда C.25), получим Ркр = —%-—= 19,7 —^— (при точном
решении Ркр= 18,7 —р—j . Учитывая в выражении для vt(x)
большее число членов ряда и минимизируя значение Р по параме-
параметрам с,-, при произвольном законе изменения изгибной жесткости
стержня EJ (х) критическую нагрузку можно найти практически
с любой степенью точности. Поскольку требуется определить
функцию v-l (х) только с точностью до масштаба, все параметры ct
удобно отнести к заведомо не равному нулю параметру сх и вести
поиск минимума Р по безразмерным параметрам с; = —, где
I = 2, 3 N.
Во втором случае при неподвижно закрепленном верхнем конце
стержня, как отмечено, потеря устойчивости без растяжения оси
стержня невозможна. Поэтому при решении в форме С. П. Тимо-
Тимошенко нельзя определять осевые перемещения второго порядка
малости и2 (х) по зависимости C.21). Для определения этих пере-
перемещений необходимо использовать более громоздкое выражение
C.23). Методически в таких случаях, видимо, более оправданно
вести решение в форме Брайана, построив предварительно зависи-
зависимость N0=N0(x). Тогда согласно зависимости C.16) можно записать
г /, i и
--Y к J vi'dx-(l-i\) jv['dx\,
где т) — коэффициент, зависящий от отношения 1г11 и закона изме-
изменения жесткости стержня на растяжение EF = EF (х). Прирав-
Приравнивая A3 нулю, находим
р
f EJvl'dx
2
0 I,
96
Дальнейшее решение ведем по описанной схеме: вводим безраз-
с,-
мерные параметры ct = —— (i = 2, 3, ..., N) и, минимизируя
с
выражение для Р при некотором конкретном числе варьируемых
параметров, находим Ркр. Следует отметить особенность рассма-
рассматриваемой задачи: эта задача не является положительно опреде-
определенной (см. приложение I). При решении подобных задач прибли-
приближенные методы следует применять с осторожностью. Если в данной
задаче ограничиться одним членом ряда C.25), то ошибка прибли-
приближенного решения может оказаться сколь угодно большой. Так,
, / 1 - . лх
например, для 1г = -%¦ и т) = -т-, приняв vt = сх sin-у-, полу-
чим бессмысленный результат Ркр = оо. Поэтому решение сле-
следует начинать, по крайней мере, с двух членов ряда. В частности,
тогда при EJ = const, -j- = —, т) = — получим
I ?7п2 с\ + 16с| _ 1 ?7я2 Зя 1 + Шс\
2 I* _4_ 2 /а 4 са '
Зя ClCa
Условие экстремума Р (—— = 0) приводит к значению
с2 = ± -г-. Следовательно, приближенное значение критической
силы
Ркп = ± Зл
кр — tJ#lb [2
а форма изогнутой оси описывается функцией
vKP(x) = sm-j- ±—sm-p.
В полученных формулах знаки «±» означают, что к потере устой-
устойчивости приводят силы, направленные вниз и вверх. В силу сим-
симметрии задачи абсолютные значения положительной и отрицатель-
отрицательной критических нагрузок совпадают. В общем случае при отсут-
отсутствии симметрии задачи получают два критических значения на-
нагрузок, различных по абсолютной величине. Точное значение кри-
критической силы в рассматриваемой задаче равно Ркр= ±8-^——.
Приближенное решение задачи энергетическим методом'прак-
методом'практически не усложняется в случае, когда на стержень действуют
распределенные продольные нагрузки типа собственного веса
(рис. 3.13). Причем если потеря устойчивости возможна без растя-
растяжения оси стержня, то удобнее использовать критерий устойчи-
устойчивости в форме С. П. Тимошенко, в противном случае — в форме
Брайана. Так, например, для изображенной на рис. 3.13, а задачи
критическое значение распределенной нагрузки может быть най-
4 Н. А. Алфутов 97
-гН
J
/?/j)s
<*)
w7
<0
дено из соотношения, следующего из
условия A3 = 0 и выражения C.22)
/ I х
-Y J EJvVdx - -L J q(x) J o[' dxdx = О,
где знак «—» взят в соответствии с на-
направлением действующей нагрузки. При
постоянных q и EJ, взяв ох (х) в виде
первого члена ряда C.25), из этого соот-
соотношения сразу получаем (<7/)кр =
=—и—= 19,7 —р- вместо точного зна-
EJ
чения (ql)Kp = 18,5-^-.
рис. з.13 ^я задачи, представленной на
рис. 3.13, б, критическое значение на-
нагрузки, видимо, удобнее определять, используя выражение C.16)
i i
A3 = -\-\EJvTdx-\--\- J tfe(jc)oif dx = 0.
При постоянной величине жесткости стержня на растяжение
EF {х) = const и при постоянной распределенной нагрузке q =
= const, в частности, имеем
И тогда, ограничившись двумя первыми членами ряда C.25)
[взяв один член ряда, опять приходим к абсурдному результату
(qt)Kp = оо I, получим
,== ±
10
±8,87
Взяв пять членов ряда, приходим к значению
Это значение критической нагрузки можно считать точным (при
дальнейшем увеличении числа членов ряда оно не изменяется).
Все такого типа задачи, конечно, можно решать при нагрузках,
изменяющихся по произвольному закону q = q (x), при перемен-
переменных EJ (х) и любых других граничных условиях.
В заключение заметим, что в тех случаях, когда мертвые внеш-
внешние нагрузки передаются на стержень с помощью некоторых меха-
механизмов, в выражения изменения полной потенциальной энергии
C.16) и C.17) войдут, естественно, дополнительные слагаемые.
98
Например, если мертвая сила Р передается на стержень с помощью
жесткого рычага длины а (см. рис. 3.3, а), то при изгибе стержня
потенциал этой силы дополнительно изменится на величину —РХ,
где X = -g- av'i (l). Аналогично можно подсчитать дополнительные
слагаемые и при других схемах передачи внешних сил на стержень
(см., например, рис. 3.3).
§ 15. Стержни на упругом основании
и упругих опорах
Задача устойчивости стержней, связанных с упругим основа-
основанием, представляет интерес, поскольку расчетные схемы такого
рода широко используются на практике. Кроме того, решение
этой задачи имеет методическое значение: сравнительно простая
задача устойчивости стержня на упругом основании имеет особен-
особенности, характерные для многих более сложных задач устойчивости
пластин и оболочек.
Ограничимся случаем так называемого винклеровского сплош-
сплошного упругого основания, т. е. будем считать, что распределенная
реакция упругого основания в каждой точке пропорциональна
прогибу стержня в этой же точке и не зависит от прогибов на других
участках стержня (рис. 3.14):
qK = kv,
где k — k (х) — коэффициент жесткости упругого основания
(коэффициент постели).
С учетом сформулированных в § 13 основных допущений не-
нетрудно вывести линеаризованное уравнение для рассматриваемой
задачи. Выкладки аналогичны выкладкам, приведенным в § 13.
Проектируя на ось у действующие на искривленный элемент стерж-
стержня силы, необходимо только дополнительно учесть реакцию упру-
упругого основания qk = kv. Окончательно вместо уравнения C.4)
получим следующее однородное уравнение:
{EJv')' — (Nov'Y + kv = 0. C.26)
Граничные условия, очевидно, не зависят от того, связан стер-
стержень с упругим основанием или нет. Они определяются условиями
закрепления и нагружения кон- „»
цов стержня. Поэтому гранич-
граничные условия, которые приве-
приведены в § 13, полностью могут /,
быть ^перенесены на случай
стержней, связанных с упругим
основанием.
Уравнение C.26) справедли-
справедливо для произвольно нагружен- Рис. 3.14
x7.
к*
///X/////////S/////SS/
ного в продольном направлении стержня переменной изгибной
жесткости EJ = EJ (х) и при переменном коэффициенте постели
k =k (x). В общем случае анализ этого уравнения затруднителен.
Поэтому сначала рассмотрим стержень постоянной изгибной же-
жесткости EJ = const, лежащий на упругом основании с коэффи-
коэффициентом постели k = const и сжатый силой Р. В этом случае
No = —Р и уравнение C.26) принимает вид
O. C.27)
Решение последнего уравнения с постоянными коэффициентами
не составляет принципиальных трудностей. Наиболее просто
решение уравнения C.27) может быть найдено для шарнирно-опер-
того стержня. В этом случае граничными условиями являются:
1) v @) - 0; 2) Vя @) = 0; 3) v (/) = 0; 4) v" (I) = 0. Выше рас-
рассмотрена задача устойчивости шарнирно-опертого стержня без
упругого основания и для нее найдена полная система собственных
функций
tU*) = sin-^-; „=1,2,3,... C.28)
Прямой подстановкой нетрудно убедиться в том, что такой на-
набор синусоид дает решение уравнения C.27), удовлетворяющее
граничным условиям. Поскольку система функций C.28) полная,
автоматически получаем полную систему собственных функций
для рассматриваемой задачи. Каждая из собственных функций дает
соответствующее собственное значение задачи. После сокращения
общих множителей из уравнения C.27) получим
откуда
C.29)
( пл \2
\~Т)
Способ угадывания решений в задачах на собственные значения
следует применять с осторожностью. Для гарантированного пра-
правильного решения необходимо использовать полную систему функ-
функций (как это сделано выше), иначе можно получить ошибочный
результат. Например, если в рассматриваемой задаче взять реше-
решение просто в виде v (x) = sin -уЦ то ошибка в значении критиче-
критической силы может оказаться сколь угодно большой.
В задачах устойчивости из всех собственных значений практи-
практический интерес представляет то, которое приводит к наименьшей
нагрузке. Это наименьшее значение нагрузки является критиче-
критическим. В отличие от задач, рассмотренных выше, в данной задаче
первое собственное значение, соответствующее прогибу стержня
100
по одной полуволне синусоиды, не всегда приводит к наименьшей
нагрузке.
Для дальнейшего анализа выражение C.29) перепишем в без-
безразмерном виде
р —п2 —
где
k =
Принимая последовательно п — 1, п = 2, п = 3 и т. д., получаем
зависимости
Л-1+-Т-; ?. = 4+-|-; ?з = 9+-§- и т. д.
В координатах Р, ^ при различных п эти зависимости дают на-
набор прямых (рис. 3.15, а). Участки прямых, лежащие ниже точек
пересечения, дают наименьшие и, следовательно, критические зна-
значения безразмерной силы. Как видим, различным значениям жест-
жесткости упругого основания соответствуют разные критические числа
полуволи, т. е. в зависимости от k меняется форма потери устой-
устойчивости стержня. Так, при 0 < k < 4 наименьшее собственное
значение соответствует п = 1 и форма изогнутой оси стержня при
потере устойчивости описывается одной полуволновой синусоиды
При 4 < k < 36 наименьшее собственное значение соответ-
соответствует п = 2; форма изогнутой оси стержня при потере устойчи-
устойчир
вости описывается функцией окр = sin ~- и т. д. Непрерывное
изменение параметра k сопровождается скачкообразным качест-
качественным изменением формы потери устойчивости стержня.
На рис. 3.15, б тот же результат представлен в других коорди-
р
натах: по оси ординат отложена безразмерная сила t по оси
vm
\
rt-J\
[n-2\ \ >N
П'У
X1N
I 2 К 4
Рис. 3.15
5 2*Л 8 9 ЗА U 124X
б)
101
абсцисс — безразмерная длина / у -^-. Эти безразмерные величи-
величины связаны соотношением
{'Vlr)
VWJ I, ,4/ПГ\2Т «2
В отличие от случая стержня без упругого основания в рассма-
рассматриваемой задаче не наблюдается монотонного уменьшения крити-
критической силы с увеличением длины стержня. При фиксированных
значениях EJ и k на некоторых участках Ркр возрастает с увели-
—j— критическая сила практически пере-
перестает изменяться с увеличением длины стержня и Ркр ^ 2 YkEJ-
К последнему результату можно было прийти также с учетом
следующих соображений. Когда при потере устойчивости по длине
стержня образуется достаточно большое число полуволн п, вели-
величину т| = " " , входящую в зависимость C.29), можно условно
считать непрерывно изменяющейся и искать минимум Рп, диффе-
дифференцируя эту зависимость по i\:
откуда находим
Таким образом, при достаточно большом значении безразмер-
безразмерного параметра / у -gj- критическая сила перестает зависеть от
длины стержня, а потеря устойчивости происходит по такому числу
полуволн, при котором длина одной полуволны примерно равна
АГ~ЁТ
л V k
Решение уравнения C.27) при граничных условиях, отличных
от условий шарнирного опирания, приводит к аналогичным резуль-
результатам, но технически более громоздко. В общем случае решение
этого однородного линейного уравнения с постоянными коэффи-
коэффициентами следует искать в виде v (x) = Ле"*, что приводит к харак-
характеристическому уравнению EJr* -j- Pr2 -\- k — 0. Четыре корня
этого биквадратного уравнения дают возможность представить
общее решение исходного уравнения в виде суммы четырех функ-
функций с произвольными постоянными A[i
102
Подчинив общее решение четырем заданным граничным усло-
условиям задачи, для постоянных Л,- получим систему четырех линей-
линейных однородных алгебраических уравнений. Равенство нулю опре-
определителя этой системы уравнений приводит к уравнению, достав-
доставляющему собственные значения задачи Рп, наименьшее из которых
равно Ркр.
Не анализируя различные возможные варианты решения урав-
уравнения C.26), отметим, что когда Р > 2 YkEJ, общее решение этого
уравнения может быть представлено в виде
v {х) = Аг sin mxx -f- A2 cos тхх -f- А3 sin т2х -\--Ал cos max,
где
4kEJ
P2
На основании^результата решенной выше задачи можно утвер-
утверждать, что условие Ркр > 2\fkEJ выполняется, если запрещены
поперечные перемещения обоих торцов стержня. В этом случае
независимо от двух других граничных условий с увеличением
безразмерной длины стержня критическая сила стремится (сверху)
к величине Ркр = 2 YkEJ. Однако если хотя бы на одном из кон-
концов стержня поперечные перемещения не стеснены, то с увеличе-
увеличением безразмерной длины критическая сила стремится к ве-
величине Ркр = YkEJ.
До сих пор рассматривались упругие стержни на абсолютно
жестких опорах, хотя в действительности всякая реальная опора
•обладает той или иной податливостью. В задачах устойчивости
однопролетных стержней жесткости упругих опор должны учиты-
учитываться при составлении граничных условий. Например, на
рис. 3.16, а показан стержень, один конец которого оперт на упру-
упругую опору жесткости сР; ^другой конец упруго заделан, причем
Р
С,'
103
У а жесткость заделки при повороте
конца равна см. При формулировке
граничных условий следует рас-
рассматривать равновесие концевого
—»¦ элемента стержня в отклоненном
* состоянии. Так, проектируя на
ось у все силы, действующие на
Рис- 3#17 элемент стержня у левого торца
(рис. 3.16, б), и учитывая, что
перемещение вызывает в упругой опоре реакцию cPv @), при
х — 0 получаем граничное условие
* @) #о @) - Q @) - сро @) = 0.
Равенство нулю суммы"; моментов, действующих на элемент
стержня у правого торца (рис. 3.16, в), при х = I дает граничное
условие М (I) + см$ (I) = 0, поскольку угол поворота Ь (I) вызы-
вызывает в упругой заделке момент, равный смЬ (I). Два других
граничных условия очевидны. Учитывая, что в рассматривае-
рассматриваемом примере No @) = —Р, окончательно можно записать следу-
следующие четыре граничных условия 1) о" @) = 0; 2) о' @) Р -\-
+ lEJv" @I' + cPv @) = 0; 3) v (I) = 0; 4) EJv" (I) + cMv' (I) =
= 0. Дальнейшая общая схема решения такая же, как и для стерж-
стержней на абсолютно жестких опорах.
Определим, например, критическую силу и форму потери устой-
устойчивости стержня, изображенного на рис. 3.17, считая изгибную
жесткость EJ постоянной. В данном -случае (упругое основание
не вводим) общее уравнение C.4) принимает вид
Граничные условия задачи 1) v @) = 0; 2) о' @) = 0; 3) о" (/) = 0;
4) EJvm (I) + Pv' (I) — cv (I) = 0. Общее решение уравнения
v (х) = At sin kx -\- At cos kx + A& + A h
Подчиняя это общее решение четырем граничным условиям задачи,
получаем систему четырех однородных линейных уравнений отно-
относительно четырех произвольных постоянных At. Как отмечалось,
для получения характеристического уравнения обычно удобнее не
приравнивать нулю определитель однородной системы уравнений,
а последовательно исключать из этой системы произвольные
постоянные. В соответствии с этим выпишем три первых уравнения,
следующие из трех первых граничных условий:
Аг + Л4 = 0;
— № sin klAx — & cos klA2 == 0.
104
Рис. 3.18
Откуда Л4 = —А 2, Лх = — А2 ctg А/, Л3
тельно, решение можно записать в виде
kA2 ctg А/. Следова-
Следоваkl— 1). C.30)
После определения собственных значений (&/)„ из этого выра-
выражения находим соответствующие собственные функции задачи,
причем собственная функция, соответствующая критическому
значению Ркр, описывает форму изогнутой оси стержня при по-
потере устойчивости.
Подчинив функцию C.30) четвертому граничному условию и
полагая А 2 ф 0, получим характеристическое уравнение, достав-
доставляющее собственные значения задачи; после несложных преобразо-
преобразований характеристическому уравнению можно придать следующий
вид:
При этом введена безразмерная жесткость упругой опоры
На рис. 3.18, а показано графическое определение первого
корня характеристического уравнения. В частности, при с = 0 и
с —> >о получаем, как и следовало ожидать, известные значения
Шг) = -яг и (Ы)г = 4,49, соответствующие второму и пятому
случаям, показанным на рис. 3.5. Результат решения характери-
характеристического уравнения представлен на рис. 3.18, б, где показано, во
сколько раз критическая сила в данной задаче отличается от крити-
105
ческой силы шарнирно-опертого стержня той же длины: Ркр =
— Р /Р° гттр Р° — *EJ
/Р
,2
При разной безразмерной жесткости с формы потери устойчи-
устойчивости оказываются качественно различными, причем при непре-
непрерывно изменяющихся значениях с качественная смена форм потери
устойчивости происходит скачкообразно. Проследим за сменой
форм потери устойчивости. При с = 0 и с —» оо имеем заведомо
качественно разные формы потери устойчивости. Переход от одной
формы потери устойчивости к другой в данной задаче можно уста-
установить по смене знака первой производной v' (/). Из выражения
C.30) следует
v' (I) = A2k (— ctg Ы cos kl - sin kl + ctg kl) = A2k
~ '
Первое собственное значение (klI изменяется в диапазоне
~Y < (kl)y < 4,49, поэтому cos (&/)x <. О и единственная смена
знака v' (I) произойдет при (Ы)г = я, когда меняется знак sin (kl)v
Этому значению (?/)i = я соответствует с% = яя. Таким образом,
при с <с# стержень теряет устойчивость по форме 1, при с >
> с* — по форме 2 (рис. 3.18, б).
Задавшись допустимой погрешностью определения критиче-
критической силы, из полученного решения можно найти то значение
безразмерной жесткости упругой опоры см, при превышении кото-
которого опору можно считать абсолютно жесткой._Например, при до-
допустимой погрешности порядка 5% получим с» л* 50.
Остановимся на расчете многопролетных стержней с несколь-
несколькими упругими промежуточными опорами (рис. 3.19, а). Решение
этой задачи при переменных EJ (x), k (x), No (x) можно вести мето-
методом начальных параметров. Граничные условия при х = 0 и х = I
формулируются так же, как и для однопролетных стержней. Жест-
Жесткость промежуточных опор учитывается следующим образом.
Из условия! равновесия элемента стержня над t-й опорой
(рис. 3.19,^6) следует, что
Q+ /д. \ __ Q- /уЛ _ с у (х-) C 31)
Рис. 3.19
106
где Q+ {xt) и Q~ (Xi) — соответственно поперечные силы слева и
справа над i-й опорой; v (xt) — перемещение над i-й опорой; С; —
жесткость этой опоры.
Вектор состояния, характеризующий перемещения и внутренние
усилия в сечениях стержня, примем в виде
М
¦ Q.
Тогда получим матричное уравнение
-?--Ау-0.
где
C.32)
о
0
0
k(x)
1
0
0
-Я{х)
О
1
EJ(x)
О
EJ(x)
Схема интегрирования уравнения C.32)сохраняется прежней, но
при переходе через каждую опору следует дополнительно учитывать
зависимость C.31), которуюможно записать в видематрицы перехода
1 0 0
А,-
0
0
1 0 0
0 1 0
^— С: 0 0 1.
В тех случаях когда k = 0 (стержень без упругого основания),
применим метод начальных параметров, однако при k ф 0 он может
не обеспечить необходимой точности расчета, поэтому целесообраз-
целесообразнее пользоваться одним из вариантов метода прогонки [12, 18].
Задачу устойчивости стержней на упругих основании и опорах
можно решать и энергетическим методом. Для этого в выражении
изменения полной потенциальной энергии должны быть учтены
энергия упругого основания и энергия деформации упругих опор.
Записывая выражение изменения полной энергии, например
в форме Брайана, получим
II К I
О О
где К — число упругих опор.
107
Однако энергетический ме-
метод может дать хорошее при-
приближенное решение при неболь-
небольшом числе членов ряда только
тогда, когда имеется полная фи-
физическая ясность в задаче, т. е.
когда полностью ясна качествен-
качественная картина потери устойчи-
устойчивости. Например, для шарнир-
но-опертого стержня с одной
симметрично расположенной
промежуточной упругой опорой
(рис. 3.20, а) нетрудно предста-
представить себе, что при малой жест-
жесткости опоры с стержень теряет
устойчивость по форме 1, близ-
близкой к одной полуволне синусои-
синусоиды. Кроме того, в силу симмет-
симметрии задачи всегда возможна потеря устойчивости по форме 2,
при которой упругая опора не деформируется. Для формы 1 кри-
критическую силу можно получить, задавая прогиб в виде ряда
N
Рис. 3.20
Причем, ограничившись даже одним членом ряда, можно быть уве-
уверенным в том, что существенной качественной ошибки в значении
Ркр не будет. Действительно, учитывая, что в рассматриваемой за-
задаче No = —Р, из условия A3 = 0 находим
где
n*EJ
~w
Для формы 2 можно записать, что
кр<
Полученные результаты иллюстрируются графиком
(рис. 3.20, б). При с <с% реализуется форма 1. Причем с ростом с
увеличивается Р%$ = Р$ = РЦР A + 2 ~-\. При с > с„. реали-
реализуется форма 2 и Ряр~Р1?р—4:Ркр независимо от жесткости упругой
опоры. Жесткость упругой опоры с*, при которой происходит смена
форм потери устойчивости, находим из условия Рк'р = Р&р- Так,
108
ограничиваясь только одним членом
ряда, получаем с* = ~~Т~' Точное />
значение с^ = 16я2. '
При решении задачи энергетиче-
энергетическим методом не всегда удается по- Рис. 3.21
лучить надежный результат. Напри-
Например, даже для внешне несложной задачи, изображенной на
рис. 3.21, невозможно предугадать форму потери устойчивости и,
следовательно, трудно подобрать подходящую .систему аппрокси-
аппроксимирующих функций. Причем решение задачи не облегчается, если
известно точное ее решение для какого-нибудь конкретного зна-
значения ее параметров, поскольку незначительное изменение этих
параметров может привести к резкой качественной смене формы
потери устойчивости.
§ 16. Учет деформаций сдвига; общая
и местная устойчивость трехслойных
и тонкостенных стержней
Выше при выводе основного линеаризованного уравнения ис-
использовалась обычная теория изгиба балок, не учитывающая влия-
влияния деформаций сдвига, вызываемых поперечными силами. Рас-
Рассмотрим вариант решения задачи устойчивости прямого стержня
с учетом влияния деформаций сдвига. Воспользуемся расчетной
схемой балки, предложенной С. П. Тимошенко. Согласно этой
схеме плоские сечения, до деформации балки нормальные к ее оси,
остаются плоскими и после изгиба балки, но перестают быть нор-
нормальными к ее изогнутой оси. Таким образом, в схеме С. П. Тимо-
Тимошенко положение каждого сечения деформированной балки опре-
определяется двумя независимыми величинами: поперечным перемеще-
перемещением v и углом поворота сечения ft (рис. 3.22). Угол сдвига равен
у = ft — v', где v' — угол поворота нормали к оси балки.
Внутренний изгибающий момент и поперечная сила в балке
С. П. Тимошенко определяются зависимостями
M = EJft'; Q = GFy = GF(ft — v'), C.33)
где EJ — обычная изгибная жесткость балки; G — модуль сдвига;
F —¦ площадь поперечного сечения *.
Для вывода основных уравнений и граничных условий восполь-
воспользуемся энергетическим критерием в форме Брайана (см. § 14).
* Обычно поперечную силу в балке С. П. Тимошенко определяют с помощью
зависимости Q = GFy/x, где к — коэффициент, имеющий порядок единицы,
учитывающий неравномерность распределения касательных напряжений по
сечению балки и зависящий от формы сечения. Здесь этот коэффициент не введен
по причинам, которые будут ясны из дальнейшего.
1Г.Э
Но теперь при подсчете измене-
изменения полной потенциальной
энергии следует дополнительно
учесть'^потенциальную энергию
деформаций сдвига, а потен-
потенциальную энергию изгиба в со-
соответствии с зависимостью C.33)
выразить через угол ft. Тогда
получим
i
при дополнительном
связи
C.34)
условии
¦ — I/ — Y = 0. C-35)
где No = No (x) — начальное
осевое усилие в стержне.
Рис 3.22 > . Применив метод множителей
Лагранжа (см. приложение II),
сведем задачу определения стационарных значений функционала
C.34) с дополнительным условием связи C.35) к задаче определе-
определения стационарных значений вспомогательного функционала
Ф* = J [4- (EJV[ + OF/
- v'
где X (х) — функциональный множитель Лагранжа.
Из условия 6Ф* = 0 получим
I {ЕЛУб®' -\- GFy6v -f- Nov'&v' -f- X (x) F0 — 8tf — 6y)] dx ¦• 0.
Последовательное интегрирование по частям дает
Щх)\ bv\ dx
0. C.36)
Приравнивая нулю множители при вариациях 6Ф, 8у, 8v в подын-
подынтегральном выражении, приходим к трем уравнениям:
-%(х)=*0;]
по
Учитывая условие связи C.35), получаем два уравнения относи-
относительно поперечного перемещения v и угла поворота сечения ft.
В данном случае функциональный множитель Лагранжа оказался
равен поперечной силе (к (х) = GFy = Q)
')'-GF(ft-о') = 0;
[GF (ft - t/)Y - (Nov')> = 0. C.37)
Кроме того, из условия C.36) находим возможные варианты одно-
однородных граничных условий задачи при х = 0 и'х = I:
EJW = О, т. е. М = 0, либо ft = 0; C.38)
Nov'-GF($-r/) = O, т. е. W0o'-Q = 0, либо о = 0.
Приведенный громоздкий вывод уравнений C.37) и граничных
условий C.38) имеет одно решающее преимущество: энергетиче-
энергетический подход дает возможность получить строго обоснованные ва-
варианты граничных условий задачи. В задачах такого типа с особой
тщательностью следует относиться к формулировке граничных ус-
условий. Так, например, привычное условие в заделке о' = 0 для
балки С. П. Тимошенко является неправильным, однако его часто
используют.
Для стержня постоянного поперечного сечения, сжатого по
торцам силой Р, систему уравнений C.37) можно записать в виде
— GF (ft - xf) = 0;
V ; C.39)
0
При заданных граничных условиях отсюда можно найти соб-
собственные функции задачи и собственные значения Рп, наименьшее
из которых равно Ркр. Наиболее просто решение получается для
шарнирно-опертого стержня при граничных условиях: 1) о @) =
= 0; 2) ft' @) = 0; 3) о (I) = 0; 4) ft' (/) = 0. В этом случае реше-
решение системы C.39) можно искать в следующем виде:
Подставив эти функции в систему уравнений C.39) и сократив
общие множители, получим систему двух алгебраических уравне-
уравнений относительно неизвестных А и В:
- [EJ (-^LJ +GF]B+ GF (^-) A = 0|
GF (-^-) В + (P - GF) (^-J A =- 0.
Ill
Из условия существования отличных от тождественного нуля
решений следует, что
nn
¦ +
GF T (n*n*EJil%)
Наименьшее собственное значение Рп получается при п — 1, кри-
критическая сила
C-40)
кр-
где РкР = —.а - — критическая сила для того же стержня, под-
подсчитанная без учета влияния деформаций сдвига.
Деформации стержня при потере устойчивости описываются
собственными функциями, соответствующими п = 1 (с точностью
до^масштаба):
C.41)
GF
Рассмотрим, как изменяется критическая сила при учете
деформаций сдвига. Как известно, для изотропного материала
G = ом i ' где Р — коэффициент Пуассона. Поэтому, если стер-
стержень изготовлен из изотропного материала, то в соответствии
с формулой C.40) учет деформаций сдвига дает поправку по
сравнению с единицей)
Jф?, C.42)
где а?р и s«p"_— критические напряжение и удлинение (укороче-
(укорочение) стержня,"подсчитанные без учета деформаций сдвига.
Для упругих конструкционных материалов эта поправка пре-
пренебрежимо мала по сравнению с единицей. Поэтому для стержней
из изотропного материала учет деформаций сдвига при определении
критических нагрузок не имеет практического значения. Более
того, для случая изотропного материала формула C.40) вообще
незаконна: поправка, вносимая за счет учета деформаций сдвига,
выходит за пределы точности, обеспечиваемой основными допуще-
допущениями (см. § 7).
Но учет деформаций сдвига может оказаться существенным
для стержней, изготовленных из анизотропных материалов, у ко-
которых G <? Е (такими свойствами обладают, например, некоторые
композиционные волокнистые материалы). Зависимости типа C.40)
широко используют также в расчетах на устойчивость различных
решетчатых стержней [37]. Особенно важное значение учет дефор-
деформаций сдвига имеет в задачах устойчивости трехслойных стерж-
стержней. Этот вопрос рассмотрим подробнее.
Для увеличения изгибной жесткости тонкостенных элементов
конструкций широко используют трехслойные пластины, панели
и оболочки. В них два несущих тонких слоя из высокопрочного и
жесткого материала (металл, стеклопластик, боро- или углепла-
углепластик и т. д.) разделены толстым слоем значительно более легкого
и менее прочного заполнителя (пенопласт, соты, гофры и т. д.).
Внешние нагрузки воспринимаются в основном за счет напряжений
в несущих высокопрочных слоях. Роль заполнителя сводится к обес-
обеспечению совместной работы всего пакета при поперечном изгибе.
Основные особенности расчета на устойчивость таких элементов кон-
конструкций выявляются при рассмотрении простейшего примера опре-
определения критических нагрузок сжатого трехслойного стержня.
Расчет трехслойного стержня на устойчивость без учета
влияния деформаций сдвига почти не отличается от расчета
обычного стержня. В этом случае гипотезу плоских сечений
считают справедливой для всего пакета слоев (рис. 3.23). Тогда
изгибная жесткость трехслойного стержня равна
J2
, Eab(h-2t)*__
~i 12
12
2/ \3
l2
I. 2/ \
V X/
Рис. 3.23
1
ш
b
113
где Еа и Е3 — модули упругости материалов наружных несущих
слоев и слоя заполнителя. В остальном все _уравнения
и окончательные расчетные зависимости задач устойчивости обыч-
обычных стержней полностью используются в задачах устойчивости
трехслойных стержней.
В тех случаях, когда жесткостные характеристики слоя за-
заполнителя существенно нижежесткостных характеристик несущих
слоев, упрощенный расчет может привести к существенно завы-
завышенным значениям критических нагрузок.
Рассмотрим простейшую расчетную схему трехслойной балки,
позволяющую учесть влияние деформаций сдвига слоя заполни-
заполнителя. Положим, что средний слой (слой заполнителя) работает на
поперечный изгиб как балка С. П. Тимошенко (см. рис. 3.22),
а тонкие несущие слои — только на растяжение — сжатие. Соб-
Собственной изгибной жесткостью слоев при изгибе всего трехслой-
трехслойного стержня пренебрегаем. Если принять t < h и считать, что
при изгибе стержня нет проскальзывания между его слоями,
вместо зависимостей C.33) получим
Q = G3bhy = GJbh (ft — v'),
где индексы «з» и «н» относятся соответственно к упругим характе-
характеристикам материала заполнителя и несущих слоев. Все уравнения
и формулы, описывающие потерю устойчивости балки С. П. Тимо-
Тимошенко, остаются в силе, однако следует положить F = bh, а из-
гибную жесткость EJ заменить на
*) C.44)
В частности для шарнирно-опертого стержня вместо формулы
C.40) получим
_ C.45)
где
В выражении для изгибной жесткости трехслойного стержня
C.44) жесткостью слоя заполнителя часто можно пренебречь и
считать
Рассмотренную модель трехслойного стержня можно несколько
усложнить и тем самым расширить область ее применимости, если
кроме жесткости несущих слоев на растяжение-сжатие дополни-
114
тельно учесть их собственную изгибную жесткость. Дальнейшее
уточнение расчетной модели трехслойного стержня может быть
получено, если наряду с продольными деформациями и сдвигами
ввести в рассмотрение поперечные деформации слоя заполнителя
[8, 20].
Приведенное выше решение описывает потерю устойчивости
трехслойного стержня, связанную с общим искривлением его оси.
Потерю устойчивости такого типа обычно называют общей
потерей устойчивости. Но для трехслойных элементов
конструкции, в том числе и для трехслойного стержня, возможна
потеря устойчивости («сморщивание») несущих слоев; потерю
устойчивости такого типа обычно называют местной поте-
потерей устойчивости (рис. 3.24, а). Критические нагрузки,
соответствующие местной потери устойчивости, практически не за-
зависят от длины стержня и граничных условий на его торцах, а
определяются изгибной жесткостью несущих слоев и жесткост-
ными характеристиками и конструкцией^.заполнителя [19, 33].
Общая и местная устойчивость тонкостенных стержней. Для об-
облегчения силовых конструкций, работающих на сжатие, широко
используют тонкостенные стержни разнообразных поперечных
сечений. Типичные формы поперечных сечений таких стержней
показаны на рис. 3.24, б. Тонкостенные^стержни^можно применять
в качестве самостоятельно работающих элементов и элементов
жесткости, подкрепляющих тонкие пластины и оболочки. В том и
115
I;
1 \"
\ \>
\)
X
r
f
\
3
4
"опт
в другом случае возможны две качественно различные формы по-
потери устойчивости тонкостенного стержня: местная потеря устой-
устойчивости тонкой стенки (рис. 3.24, в) и общая потеря устойчивости,
связанная с искривлением оси стержня.
Для большинства реальных конструкций недопустима ни та,
ни другая форма потери устойчивости. Развитие местной формы
потери устойчивости обычно вызывает общее искривление оси
стержня, а развитие общей формы потери устойчивости приводит
к местной изгибной деформации стенки стержня.
Проектирование рациональной тонкостенной конструкции
обычно сводится к поиску разумного компромисса между противо-
противоречивыми требованиями по обеспечению ее местной и общей устой-
устойчивости. Рассмотрим, например, стойку с постоянным по длине
тонкостенным квадратным поперечным сечением, нагруженную
силой Р (рис. 3.25, а). Если считать b > t, то площадь поперечного
сечения и момент инерции соответственно будут равны F = 4bt и
§
§
Критическая сила, соответствующая общей потере устойчивости,
очевидно, определяется по формуле:
<
n*EJ
'-3-^ -71-°*»
C.46)
где С — коэффициент, зависящий от граничных условий на торцах
стержня (для шарнирно-опертого стержня С = 1).
Критическая сила, соответствующая местной потере устойчиво-
устойчивости стенки, равна
_
кр -
= Ко
12A—
r3(l-|
T*
C.47)
116
где а"р — критическое сжимающее напряжение стенки, рассма-
рассматриваемой как удлиненная сжатая в одном направлении пластина
(см. § 21). При / > b коэффициент Ка не зависит от способа за-
закрепления торцов стойки. При квадратном поперечном сечении
в силу симметрии каждая стенка теряет устойчивость как шарнир-
но-опертая по длинным сторонам тонкая пластина, поэтому сле-
следует принять Ка = 4.
Для нормальной работы стойки необходимо выполнение усло-
условий Р?р > Р и РкР > Р, а также условия прочности. Например,
если материал обладает резко выраженным пределом текучести,
то можно потребовать выполнение условия а, > а, где а, — пре-
предел текучести материала. (В случае хрупкого материала вместо
предела текучести можно взять предел прочности при сжатии).
Учитывая выражения C.46) и C.47) и ограничение по прочно-
прочности, можно сформулировать задачу выбора рациональных разме-
размеров поперечного сечения стойки: для заданных / и Р найти значе-
значения Ь и I, обеспечивающие минимальный вес стойки при выполне-
выполнении условий:
1) ЬЧ\
C.48)
3 A-
При выбранном материале требование минимального веса, оче-
очевидно, эквивалентно требованию минимальной площади попереч-
поперечного сечения стойки F = 4Ы.
На рис. 3.25, бив показаны кривые C.48), ограничивающие
область допустимых значений размеров поперечного сечения but.
Возможны два случая взаимного расположения этих кривых. Для
относительно длинных и слабо нагруженных стоек кривая 3 про-
проходит ниже точки пересечения двух других кривых. Эта точка соот-
соответствует значениям 6ont и totn, обеспечивающим минимальный
вес стойки. Для относительно коротких и сильно нагруженных
стоек точка пересечения двух первых кривых лежит ниже кривой 3.
Тогда, как нетрудно видеть, существуют различные комбинации
значений Ьоп1 и *ОПт> приводящие к одному и тому же минимальному
весу стойки.
Аналогично зависимость веса тонкостенного стержня от раз-
размеров его поперечного сечения можно исследовать при другой
форме поперечного сечения. Следует подчеркнуть, что чем меньше
внешние нагрузки, тем труднее создать рациональную тонкостен-
тонкостенную конструкцию, работающую на сжатие.
117
§ 17. Закритическое деформирование
упругих стержней
Линеаризованные уравнения, использованные выше при реше-
решении задач устойчивости стержней, дают возможность находить
собственные функции задачи и собственные значения параметра
нагрузки. Наименьшее собственное значение равно критическому
значению нагрузки, а соответствующая ему собственная функция
описывает форму изогнутой оси стержня в окрестностях первой
точки бифуркации. Но однородное линеаризованное уравнение не
может дать никакой информации о характере критической точки
бифуркации и о поведении стержня при конечных прогибах после
потери устойчивости.
Аналогично, решая задачи устойчивости энергетическим мето-
методом и ограничиваясь в выражении для изменения потенциальной
энергии квадратичными по отношению к величинам поперечных
перемещений слагаемыми, находили только критические нагрузки
несоответствующие им собственные функции. Характер критиче-
критической точки бифуркации и поведение стержня при конечных проги-
прогибах после потери устойчивости оставались неизвестными. Для того
чтобы определить их, необходимо рассмотреть задачу устойчивости
стержня в нелинейной постановке.
Задача нелинейного деформирования гибких стержней изучена
достаточно полно; в ряде случаев решение удается получить в табу-
табулированных функциях. Например, для стержня постоянного по-
поперечного сечения, сжатого мертвой силой Р, решение получается
в эллиптических интегралах [19].
Воспользуемся приближенным энергетическим приемом реше-
решения, позволяющим исследовать закритическое поведение любого
произвольно нагруженного стержня, если для него известно реше-
решение линейной задачи. При этом ограничимся малыми по сравнению
с длиной стержня прогибами, поскольку только они представляют
интерес в силовых конструкциях.
Сначала рассмотрим характерный для большинства практиче-
практических задач случай, когда после потери устойчивости один из тор-
торцов стержня может беспрепятст-
беспрепятственно смещаться в продольном
направлении (рис. 3.26). Тогда
закритическое деформирование
состоит в изгибе стержня. При
этом ось стержня можно считать
нерастяжимой. Из условия не-
нерастяжимости оси стержня лег-
легко выразить продольные пере-
перемещения и через угол наклона
РИС 3.26
118
касательной к упругой линии ft. Если, например, на левой опоре
и = 0, то
s
| C.49)
где s — координата, отсчитываемая от левой неподвижной опоры
вдоль деформированной оси стержня.
Внутренний изгибающий момент в изогнутом стержне опреде-
определяется зависимостью
A*--f-=»?/-g-. C.50)
где р — радиус кривизны деформированной оси стержня.
Выражения C.49) и C.50) позволяют подсчитать изменение
полной потенциальной энергии стержня при переходе от прямо-
прямолинейного положения равновесия к искривленному. Так, напри-
например, если стержень нагружен только сжимающей силой
(рис. 3.26, а), то
— P(l-cosO)]ds. C.51)
Для стержня, находящегося под действием распределенной на-
нагрузки типа собственного веса (рис. 3.26, б),
] C.52)
Аналогично можно составить выражение A3 для любого случая
нагружения стержня, когда закритический изгиб происходит без
растяжения оси стержня.
Условие стационарности б (АЭ) = 0 определяет равновесные
состояния изогнутого стержня при конечных прогибах, а исследо-
исследование знака второй вариации б2 (АЭ) позволяет установить, какие
из равновесных состояний устойчивы. ^-|
Приведенные выше зависимости, описывающие закритическое
деформирование стержней с нерастяжимой осью, являются точ-
точными (в рамках теории гибких упругих стержней).
Перейдем к построению приближенного решения методом
Рэлея—Ритца. Полагаем, что решение линейной задачи (точное
или приближенное) получено и, в частности, известна критическая
нагрузка и соответствующая ему первая собственная функция
задачи ft1! (s). Заметим, что при решении задач устойчивости в линей-
линейной постановке различие между координатами х и s исчезает и
собственные функции vn (х) и Ьп (х) можно заменить на vn (s) и
О* (s).
119
При малых, но конечных прогибах стержня естественно пред-
предположить, что в окрестности первой критической точки бифурка-
бифуркации форму изогнутой оси стержня можно аппроксимировать пер-
первой собственной функцией. Поэтому решение нелинейной задачи
в первом приближении будем искать в виде:
d(s)=-c1d1(s), C.53)
где^! — коэффициент, зависящий от внешней нагрузки; ¦&! (s) —
первая собственная функция линейной задачи.
В приближенном решении, когда ограничиваемся исследова-
исследованием малых отклонений стержня от прямолинейного положения
равновесия, в выражении C.49) cos ft целесообразно разложить
в ряд. Тогда получим
s
-J(-f *2-тг#4 + -бг*6 )ds-
о
Подсчитывая с использованием C.53) изменение полной потен-
потенциальной энергии стержня, приходим к простой алгебраической
зависимости АЭ = АЭ (сг). Таким образом, используя метод Рэ-
лея—Ритца, задачу исследования закритического деформирования
стержня можно свести к задаче исследования нелинейной системы
с одной степенью свободы.
Так, например, для стержня, сжатого одной силой, выражение
C.51) с учетом разложения C.54) и аппроксимации C.53) прини-
принимает вид
Условие стационарности АЭ (в данном случае ¦ ^ = 0j
приводит к уравнению
о
I
Поделив все слагаемые на j ft? ds и учитывая, что fti — пер-
о
вая собственная функция задачи и, следовательно,
р
— *кр»
ds
приходим к уравнению
ci [РкР - Р A - с\В2 + с\В4 )] = 0, C.55)
где
1
6
Г 4
_0 . 1
I '
0
4 ~~ 120
J
0
I
J
0
*\ds
b\ds
C.56)
Из уравнения C.55) следует, что при Р < Ркр возможна только
одна прямолинейная форма равновесия стержня, соответствующая
сг = 0. При Р > Ркр становится возможной и изгибная форма рав-
равновесия, описываемая (приближенно) зависимостью C.53), причем
связь между коэффициентом сх и силой Р выражается уравнением
Т- =~, 2/р ! Л„ V • C-57)
"кр 1—q(fi2 — qfi4-(-'--)
Ограничившись в разложении C.54) четвертыми степенями ft и
приняв Р — Ркр = АР С РКр» получим упрощенную формулу
C.58)
кр
Исследуя знак второй производной —Ц-^-, нетрудно установить,
dc,
что изгибная форма равновесия стержня устойчива. Критическая
точка бифуркации является точкой бифуркации первого типа
(см. § 3). Результат проведенного исследования схематично изоб-
изображен на рис. 3.27, а.
Аналогично приближенное решение может быть получено для
стержня, ^находящегося под действием распределенной нагрузки
q (s) = Pq (s), где Р — параметр нагрузки; q (s) — распределе-
распределение нагрузки при Р = 1. Снова воспользуемся аппроксимацией
121
! Неустойчиво
Устойчиво
с.
Рис. 3.27
C.53) и получим упрощенную формулу для приближенного опре-
определения сг:
-, C.59)
где
y\dsds
C.60)
jg(s) Jflfdsds
о о
Анализ устойчивости прямолинейной и изгибной форм равнове-
равновесия аналогичен предыдущему (рис. 3.27, а).
Необходимо подчеркнуть, что полученные формулы, а также
представленный на рис. 3.27, а график справедливы для стержней
переменной жесткости и при произвольных граничных условиях.
При различных законах изменения изгибной жесткости EJ =
= EJ (s) и разных граничных условиях изменяются критические
нагрузки и вид собственных функций \ (s).
Зная как изменяется угол Ф == Ф (s), легко найти поперечные
прогибы стержня на ранней закритической стадии деформирова-
деформирования. При неподвижной левой опоре функция поперечного прогиба
определяется выражением
v{s)= \ skidds,
о
C.61)
Раскладывая в ряд sin ft и используя зависимость C.53), прибли-
приближенно находим
s
i (s) ds. C.62)
122
В построенном приближенном решении функция поперечного
прогиба остается подобной первой собственной функции линеари-
линеаризованной задачи, а амплитуда прогиба растет пропорционально
коэффициенту сх. Поэтому кривая на рис. 3.27, а, также характери-
зует темп роста поперечных прогибов стержня при -р—<? 1.
Полученный результат можно представить в других координа-
координатах. Вместо зависимости нагрузка — амплитуда поперечного
прогиба можно построить, например, зависимость нагрузка —
сближение торцов стержня X. Сближение торцов X складывается из
укорочения стержня под действием сжимающей нагрузки и допол-
дополнительного сближения торцов, вызванного изгибом стержня.
Обозначим X = Хо + Xlt где Хо и Хг — сближения) торцов
стержня соответственно за счет укорочения его оси и за счет из-
изгиба. При известном распределении начальных усилий No =
= No (х) значение Хо определяется элементарно. Значение Хг
можно найти с помощью зависимостей C.53) и C.54)
о
Ограничившись вторыми степенями разложения, получим
Значение 52 определяем в зависимости от вида нагрузки по фор-
формуле C.56) или C.60). Зависимость X от сжимающей нагрузки по-
показана на рис. 3.27, б.
Описанный метод решения может быть использован и в том слу-
случае, когда заданными являются не нагрузки, а сближения торцов
стержня (например, при нагружении стержня в жесткой испыта-
испытательной машине). Тогда расчет следует вести в обратном порядке:
по X определить Р и затем подсчитать амплитуду поперечного пере-
перемещения. При этом все полученные выше расчетные зависимости
справедливы. Аналогично можно вести расчет в тех случаях, когда
задано не сближение торцов стержня, а повышение его темпера-
температуры' при неподвижно зафиксированных торцах.
Напряжения в стержне после потери устойчивости склады-
складываются из напряжений продольного сжатия и напряжений изгиба,
причем, определив форму изогнутой оси стержня, нетрудно подсчи-
подсчитать напряжения изгиба. Окончательно получаем
где W — момент сопротивления поперечного сечения стержня.
123
Схему расчета поясним на двух примерах. Рассмотрим вначале
закритическое поведение шарнирно-опертого стержня постоянного
поперечного сечения, сжатого одной силой Р. Первая собственная
функция линеаризованной задачи известна
По первой из формул C.56) находим
( cos4 Щ- ds _3_
R _ 1 о 1 8
аг--Т~1 Т~Г~
cos* — ds 2
О
Из выражения C.62) получаем зависимость
1/2
Р1
При определении сближения торцов X учитываем, что \ = -рр
По
формуле
C.
63)
1
находим
Jcos*^
0
2В2
ds
/
\
' ДР \
v Лср )
1 ДР
О D
Согласно выражению C.64) получаем
Очевидно, напряжения максимальны при s = -^-.
Считая -S—<С 1. можно записать
г'кр
Omax p ±-jr»--/,- у ^ ркр
где aKD =
[ля квадрат
для определения ошах можно переписать в следующем виде:
Для квадратного поперечного сечения W = ¦—, и формулу
124
Из этого выражения видно, что для тонких стерж-
стержней малейшее превышение критической нагрузки
приводит к появлению значительных напряжений
изгиба. Так, при На = 100 превышение Ркр на
1 % вызывает напряжения изгиба превышающие
более чем в 50 раз критические напряжения ра-
равномерного стержня при Р = Ркр.
Рассмотрим закритическое поведение изобра-
изображенного на рис. 3.28 стержня, теряющего устой-
устойчивость под действием собственного веса. Крити-
Критическая нагрузка для такого стержня равна
EJ
(<70кр = 7,834-j5-, причем форма изогнутой оси
стержня при потере устойчивости описывается функциями Бес-
Бесселя (см. § 13). Но для построения приближенного решения эти
функции не удобны. Закритические перемещения и напряжения
можно оценить, используя для описания формы изогнутой оси
стержня более простые функции, удовлетворяющие заданным
граничным условиям задачи. Например, в данном случае (см. § 13).
Рис. 3.28
где s — координата, отсчитываемая от заделки.
Заметим, что учитывая приближенный характер всего решения,
функцию Ф (s) можно представить в еще более простом виде. На-
Например, в рассматриваемой задаче, ограничившись удовлетворе-
удовлетворением только геометрического граничного условия ¦& @) = 0, при-
примем
-*! (у)-
Тогда получим
'
I о о
JJ(t)'
<?кр
dsds
о о
Максимальный прогиб при s
по формуле
/ приближенно определяется
НЕ
Якр
Для максимального момента М @) непосредственно из условия
равновесия получим приближенную формулу
о о
125
Нетрудно проверить, что при упрощении вида аппроксимирую-
аппроксимирующей функции окончательные результаты изменяются незначительно.
Если закрепления концов стержня в продольном направлении
исключают возможность потери устойчивости без растяжения его
оси (см. § 14), то приведенная выше схема решения не применима,
поскольку она основана на предположении о нерастяжимости оси
стержня. В этом случае при подсчете полной потенциальной энер-
энергии стержня в изогнутом состоянии Эг необходимо учитывать энер-
энергию растяжения
1 1 i
5i = "Г f EJxf2(ix + -Т J EF (во + е,)а dx — J q («о + и3) dx,
0 0 О
где м0, 80 — начальные осевые перемещения и удлинения; ыа,
еа — дополнительные осевые перемещения и удлинения, причем
е2 = «2 + -j" v'2-
Наиболее простое приближенное решение можно получить,
если воспользоваться следующими допущениями: 1) первая соб-
собственная функция i>! (х) линейной задачи с точностью до масштаба
описывает закритические прогибы стержня; 2) осевые дополни-
дополнительные перемещения иа (х) связаны с поперечными прогибами
зависимостью C.20). Тогда изменение полной потенциальной
энергии стержня при переходе в новое отклоненное состояние рав-
равновесия равно
с2 '
ДЭ = 3i - Эо =- -j- j EJ (vI (x)f dx +
о
-J- | EF4 dx-$ qu2 (x) dx,
C.65)
где Ci — коэффициент, зависящий от уровня нагружения; vx (x) —
первая собственная функция линейной задачи, причем, когда
«2 @ = 0, {
е, =
1 о
_o
126
Таким образом, задача о закритических деформациях стержней
опять сведена к нелинейной задаче деформации системы с одной
степенью свободы. Если считать, что внешние нагрузки возрас-
возрастают пропорционально одному параметру Р, то зависимости между
параметром сх и параметром нагрузки Р устанавливаются из усло-
условия б (АЭ) = 0, в данном случае из условия ^ ' = 0. Эта зави-
зависимость будет иметь такую структуру:
где К — коэффициент, зависящий от EF, т. е. от жесткости стерж-
стержня на растяжение.
Характер критической точки бифуркации такой же, как и
в случае потери устойчивости оси стержня без растяжения. Но ко-
количественно закритическое поведение стержня иное: после потери
устойчивости поперечные прогибы растут не так быстро, как при
потере устойчивости стержня без растяжения оси.
§ 18. Влияние начальных неправильностей
на поведение сжатых стержней
Рассмотренные задачи устойчивости стержней базировались
на допущениях, что ось стержня до нагружения — идеально пря-
прямая и все внешние силы и реакции опор действуют строго вдоль
оси. Именно в силу этих допущений при любом уровне нагрузок
была возможна прямолинейная форма равновесия стержня с тож-
тождественно равным нулю поперечным прогибом. И именно эти допу-
допущения приводят к существованию критической нагрузки, т. е.
такой нагрузки, при превышении которой исходная прямолиней-
прямолинейная форма равновесия стержня перестает быть устойчивой. Но ось
реального стержня не является идеально прямой и до нагружения
имеются не равные нулю начальные поперечные прогибы. Рассмо-
Рассмотрим стержень с не равными нулю начальными прогибами и выяс-
выясним, как эти начальные прогибы влияют на поведение стержня при
продольном нагружении.
Критическая точка бифуркации исходной формы равновесия
идеально прямого стержня является точкой бифуркации первого
типа (см. § 3) и изгибная форма равновесия в окрестности крити-
критической точки бифуркации устойчива. В тех случаях, когда иде-
идеально правильная система имеет критическую точку бифуркации
первого типа, влияние начальных неправильностей можно оценить
с помощью линеаризованных неоднородных уравнений.
Общую схему решения покажем на простом примере. Рассмо-
Рассмотрим шарнирно-опертый стержень, сжатый силой Р (рис. 3.29).
До нагружения начальный прогиб стержня равен v0 = v0 (x);
дополнительный прогиб, появляющийся в результате продоль-
продольного нагружения, обозначим v = v (x). Тогда полный прогиб ра-
127
Рис. 3.29
вен va (x) = и о (х) + v (х).
Примем, что полные прогибы
являются величинами малыми
по сравнению с длиной стержня,
а осевое усилие N = —Р не
зависит от поперечных прогибов
стержня. Приравнивая момент
от внешней силы Р внутреннему
изгибающему моменту (см. § 4)
и удерживая только первые сте-
степени поперечных прогибов, за-
запишем
EJxf -f Pva = 0. C.66)
В первое слагаемое входит
дополнительный прогиб v, по-
поскольку возникновение внут-
внутреннего изгибающего момента
связано с дополнительным изгибом стержня. Во второе слагаемое
входит полный прогиб: плечо внешней силы Р определяется пол-
полным прогибом vn (х).
Считая начальный прогиб vo(x) известным, уравнение C.66)
запишем в таком виде:
EJxf + Pv = —Pv0. C.67)
Граничные условия задачи: 1) v @) = 0; 2) v (I) = 0.
Решение уравнения C.G7) можно получить различными спосо-
способами, но в рассматриваемой задаче удобнее воспользоваться мето-
методом разложения по собственным функциям. Собственные функции
однородной задачи известны:
vn (х) = sin
ппх
(п—1, 2, 3, ...)•
Решение неоднородного уравнения C.67) будем искать в виде
разложения по этим собственным функциям:
плх
C.68)
Правую часть уравнения представим в виде ряда по той же системе
собственных функций:
«л
C.69)
Подставив выражения C.68) и C.69) в уравнение C.67) и прирав-
приравняв коэффициенты при каждой из синусоид в левой и правой частях
равенства, получим цепочку независимых алгебраических уравне-
уравнений
128
где
р (nn)*EJ
*п J5 >
откуда находим
сп--р~р=~р^— (п-1. 2, 3, ...)¦ C.70)
р 1
Следовательно,
"ЧГ^ с0
sin—-. " C.71)
Полный прогиб равен
S
1—¦
Как видим из формул C.70), при Р —* Рп амплитуда соответ-
соответствующей гармоники сп —> оо. Но при сжатии стержня может быть
реализована нагрузка Р < — t = Ркр. Следовательно, в этом
диапазоне значений нагрузки может резко расти только амплитуда
первой гармоники. Независимо от соотношения между начальными
амплитудами с°„ при приближении нагрузки к Ркр доминирующей
окажется первая гармоника. Поэтому в приближенном решении
обычно ограничиваются учетом первой гармоники и принимают
с0
v (х)« -~ sin -^; C.73)
1
C.74)
Зависимость ишах = сх от нагрузки показана на рис. 3.29, б.
Определив поперечные прогибы, нетрудно найти максимальные
напряжения изгиба в стержне
- w
>
где Мщп — максимальный изгибающий момент; W — момент со-
сопротивления сечения стержня.
В данном случае
= P (Un)max ~ P
1 —
Ркр
5 Н. А. Алфутов 129
Полное напряжение
C.75)
где F — площадь поперечного сечения стержня.
Например, для стержня прямоугольного поперечного сечения,
ширина и высота которого соответственно равны Ь и h, по-
получим
@ =
Как видно из этой формулы, изгибная составляющая напряже-
напряжения определяется отношением амплитуды начального прогиба
е? Р
к размерам сечения. Если, например, -г- = 0,05, то при -=—= 0,7
ft гкр
г
ft
равны
р
напряжениям осевого
максимальные напряжения изгиба
сжатия.
Приведенное решение можно использовать и в случае произ-
произвольно нагруженного стержня при произвольных граничных усло-
условиях.
Рассмотрим произвольно нагруженный в осевом направлении
стержень (рис. 3.30, а), имеющий начальные неправильности v0 =
= vt (x). Пусть при v0 (x) = 0 потеря устойчивости стержня опи-
описывается линеаризованным однородным уравнением
{EJv")"-P{N ov')' = V.
C.76)
При заданных граничных условиях собственные функции этого
уравнения vn (x) и собственные значения параметра нагрузки Рп
-^. считаем известными, причем
I : ых) (см. приложение I)
р _
\vn(EJv"n)
J
dx
C.77)
Условие равновесия в про-
проекции на ось у элемента стерж-
стержня с начальными неправиль-
неправильностями (рис. 3.30, б) приводит
к уравнению
д' = 0, C.78)
где #, = *( (Jt) + v' {x) — полный угол поворота касательной
к оси стержня, который считаем величиной конечной, но малой.
Как и при выводе уравнения C.4), Q = М'. Внутренний изгиба-
изгибающий момент М возникает в результате дополнительных прогибов
v (х), поэтому М = EJv" (x). Тогда уравнение C.78) принимает
вид
(?Л>")" - Р [Й(Й +и')]'= 0, C.79)
где v = v (х) — малые но конечные дополнительные прогибы.
Если задача продольного нагружения стержня статически
неопределима, то необходимо учитывать взаимное влияние N (х)
и v (х). Но если задача продольного нагружения стержня статиче-
статически определима, то можно считать, что No = PN0 (x) не зависят от
поперечных перемещений. Тогда поведение стержня с начальными
неправильностями будет описываться неоднородным линеаризо-
линеаризованным уравнением
(EJvy - Р (JVofl')' = P (Uov'o)', C.80)
где No = No (x) — распределение внутренних усилий в стержне
без начальных неправильностей при Р = 1.
Исследуем подробнее этот наиболее интересный в практическом
отношении случаи, когда поведение стержня с начальными непра-
неправильностями может быть описано уравнением C.80). Решение этого
уравнения будем строить в виде разложения по собственным функ-
функциям однородного уравнения C.76):
Представим начальные неправильности тоже в виде разложения
»oW= ? c°nvn(x).
Подставив эти разложения в уравнение C.80), получим
S cn(EJvnY-P S
Умножим обе части этого уравнения на собственные функции
vn(x) (п = 1, 2, ...) и проинтегрируем произведения от 0 до /.
В силу свойства обобщенной ортогональности (см. приложение I)
i
jvn(EJv"k)"dx=0;
131
Следовательно,
' ' /
сп J vn {EJvny dx - Pca j vn (Nov'n) 'dx = Pc°n J vn
dx;
Поделим все слагаемые на
1, 2, ... .
j vn (Noo'n)'
dx. С учетом выраже-
выражеяия C.77) получим цепочку независимых уравнений для опре-
определения коэффициентов с„:
Сп == р » tl ^= I, Z, о, ... .
Тогда
-Л.
-5s-!
¦vn(x); n= 1, 2, 3, ... .
Как в приведенном выше примере, приближенно можно принять
fW^-p-^ vKP(x), C.81)
кр
— 1
где vKp (x) = v1 (x) — первая собственная функция однородной
задачи, описывающая форму изогнутой оси идеально правильного
стержня при потере устойчивости.
В приведенном решении предполагалось, что начальные не-
неправильности оси стержня известны. В этом случае, раскладывая
функцию начального прогиба v0 (x) в ряд по собственным функ-
Рис. 3.31
132
циям vn (x), можно найти с% и непосредственно воспользоваться
полученным результатом.
Это обстоятельство снижает практическую ценность приве-
приведенного решения, ибо детальное измерение начальной формы оси
стержия — операция трудиовыполиимая. Однако структура фор-
формул C.73) и C.81) позволяет резко упростить и сократить необхо-
необходимое число измерений при испытании реальных стержней иа
осевое сжатие. Так, например, формулу C.73) для шарнирио-
опертого стержия можно переписать в виде
+ ¦ C-82)
где ^(у) —дополнительный прогиб в среднем сечеиии стержия
Pi
(рис. 3.31, а). Таким образом, между — и Р существует лиией-
"(т)
иая зависимость. Измерив при нескольких значениях Р дополни-
дополнительный прогиб в среднем сечении стержия v (V)> можно экс-
экспериментально построить линейную зависимость, как показано
на рис. 3.31, б. Такой прием обработки экспериментальных дан-
данных предложен Саусвеллом и называется методом Саусвелла.
С помощью этого приема на реальных стержнях можно экспери-
экспериментально'определить значение Ркр, не производя их предвари-
предварительного обмера. Для этого, проведя по иескольким эксперимен-
экспериментально полученным точкам прямую, находят ее пересечение с осью
абсцисс. Прием Саусвелла позволяет по иескольким замерам иа-
ходить ам.литуду начальной неправильности с?. Для этого доста-
достаточно иайти точку пересечения построенной прямой с осью орди-
ординат. Наконец, прием Саусвелла дает возможность проводить ие-
разрушающие испытания стержней иа осевое сжатие, ибо, опре-
определив по начальному этапу иагружеиия Ркр и с?, можно аналити-
аналитически прогнозировать дальнейшее поведение стержия под нагруз-
нагрузкой (включая возможное развитие пластических деформаций).
КОЛОХЗА
НЕ БОЛЕЕ 1Й КНИГИ В
ОДНИ РУКИ И 2ХВДВЕ
Глава 4
Устойчивость пластин
В главе дана постановка задачи устойчивости тонкой упругой
пластины, приведен подробный вывод основного линеаризованного
уравнения теории устойчивости пластин и пояснены некоторые
варианты однородных граничных условий этого уравнения. Рас-
Рассмотрены точные аналитические решения основного уравнения для
прямоугольных и круглых пластин и приближенное интегрирова-
интегрирование этого уравнения методом Галеркина. Эти классические реше-
решения задач устойчивости пластин получены в конце XIX — начале
XX в., однако они не утратили практического значения. Их ре-
результаты широко используются в инженерных расчетах и служат
эталоном для отработки и апробирования всех современных при-
приближенных методов расчета пластин на устойчивость.
§19. Постановка задачи; исходные зависимости
Представим пластину в прямоугольной системе координат так,
чтобы ее срединная плоскость совпадала с координатной пло-
плоскостью ху (рис. 4.1, а). Примем, что толщина пластины h суще-
существенно меньше других размеров пластины в плоскости ху. По-
Поперечные перемещения точек срединной плоскости пластины обо-
обозначим w, перемещения по направлениям осей х, у — соответст-
соответственно и, v. Пластина нагружена в своей плоскости поверхностными
и контурными усилиями рх, ру и qx, qy, поперечные нагрузки от-
отсутствуют (рис. 4.1, б).
Задачу устойчивости такой пластины рассмотрим при следую-
следующих допущениях.
1. До нагружения пластина идеально плоская и в докритиче-
ском состоянии равнодействующие всех внешних нагрузок и
реакций опор действуют строго в срединной плоскости пла-
пластины.
2. Докритическое напряженное состояние описывается соот-
соотношениями линейной теории упругости и изменением размеров
пластины до потери устойчивости пренебрегаем.
3. Все действующие на пластину внешние нагрузки мертвые,
т. е. они не изменяются ни по величине, ни по направлению при
деформациях пластины.
134
Рис. 4.1
4. Изгиб пластины описывается с помощью обычных гипотез
линейной теории изгиба тонких жестких пластин, т. е. гипотезы
о неискривляемости нормали и гипотезы о малости нормаль-
нормальных напряжений в плоскостях, параллельных срединной плос-
плоскости.
В силу первого допущения всегда возможно плоское состояние
равновесия пластины, при котором w (х, у) = 0. Это неискривленное
плоское состояние равновесия будем считать начальным и все
относящиеся к нему величины обозначать индексом «0», напри-
например, и0, v0 и т. д.
Согласно второму допущению в начальном состоянии удли-
удлинения и углы сдвига в срединной плоскости связаны с произ-
производными перемещений м0 и v0 линейными зависимостями
(рис. 4.2, а)
°х — ~дГ'
о даа
0 _ ди^ , dv«_
**у ду ' дх '
У\
D.1)
а)
Рис 4.2
135
Уравнения равновесия элемента пластины в начальном не-
искривленном состоянии имеют вид (рис. 4.2, б)
D.2)
4^ + ^-f/V-o.
дх ду ' у
Входящие в эти уравнения начальные внутренние усилия в сре-
срединной плоскости Тх, Т1, 5° и удлинения и углы сдвига связаны
зависимостями закона Гука
„О 1 ГггО ..тО\. О 1 (ггй .™0\.
или
^ (8 + P8) ^
Eh <4-3>
со __ ?" vn
2A+(i) yw>
где ? и ц — модуль упругости и коэффициент Пуассона материала
пластины.
При заданных граничных условиях на контуре пластины по
приведенным зависимостям можно определить напряжения и де-
деформации в начальном неискривлеином состоянии. На части кон-
контура, на которой действуют внешние нагрузки, граничные условия
имеют вид (рис. 4.1, б)
2slnP=9F. D' )
На другой части контура могут быть заданы геометрические гра-
граничные условия
«о = «о; D5)
В общем случае, когда точки контура пластины упруго за-
закреплены относительно смещений в ее плоскости, граничные усло-
условия формулируются так же, как для упругозакрепленного в про-
продольном направлении торца стержня (см. § 14).
Если внешние нагрузки рх и ри не зависят or координат, то
можно ввести функцию начальных усилий ср° с помощью соотно-
соотношений
136
Тогда определение исходного напряженно-деформированного со-
состояния пластины сведется к решению бигармонического уравне-
уравнения
V2vy = 0, D.7)
где
V2 (*) = -^Р- + ?$- - оператор Лапласа.
Следует отметить, что при сложных очертаниях контура пла-
пластины и при сложных нагрузках (например, при сосредоточенных
контурных нагрузках) определение начального напряженного со-
состояния пластины представляет трудную задачу. Но предположим,
что она решена (точно или приближенно) и распределение внутрен-
внутренних усилий в пластине при начальном неискривленном состоянии
равновесия известно.
Заметим, что задачу устойчивости пластин в рассматриваемой
постановке, когда начальное напряженно-деформированное со-
состояние описывается уравнениями линейной теории упругости,
можно решать, не определяя этого состояния (см. § 10).
В дальнейшем примем, что все внешние нагрузки изменяются
пропорционально параметру Р. Поскольку докритическое напря-
напряженно-деформированное состояние описывается линейными урав-
уравнениями, можно записать
Т°Х = РТ°Х; Т°в = РТЧ,; S?= PS0; <р° = Рф°, D.8)
где Тх = Т° (х, у), Ги = Гу (х, у), 5° = S0 (х, у), ? = ? (х, у) -
функции, соответствующие распределению внутренних начальных
усилий при Р = 1.
При достаточно малых значениях параметра нагрузки Р на-
начальное неискривленное состояние равновесия пластины будет
единственным и устойчивым. С ростом значений параметра Р
у пластины, как и у прямого стержня (см. гл. 3), могут появляться
изгибные' состояния равновесия, смежные с начальным неискрив-
ленным состоянием. Те значения параметра нагрузки Рп, при
которых наряду с начальным неискривленным состоянием суще-
существуют новые изгибные состояния равновесия пластины, опреде-
определяют точки бифуркации начального состояния равновесия. Наи-
Наименьшее из значений параметра Рп будет критическим, т. е. при
его превышении начальное неискривленное состояние перестает
быть устойчивым (см. § 5).
Для определения точек бифуркации начального неискривлен-
ного состояния пластины следует рассмотреть искривленное изгиб-
ное состояние равновесия пластины, бесконечно близкое к исход-
исходному. Такое изгибное состояние равновесия пластины будем опи-
описывать функцией поперечного прогиба точек ее срединной поверх-
поверхности
w = aw1(x, у), D.9)
137
где а — бевконечно малый параметр, не зависящий от координат;
wi (х> У) — некоторая конечная функция координат.
При изгибе пластины нормаль к ее срединной плоскости по-
поворачивается в плоскостях, параллельных координатным пло-
плоскостям хг и уг, соответственно на углы §х и §у; эти углы с точ-
точностью до величин высшего порядка малости относительно пара-
параметра а связаны с поперечным прогибом соотношениями (см. § 8)
о. dw „ dw ,A 1ЛЧ
^ = 1F; *« = w DЛ0)
Изменения углов $х и $у вдоль координатных линий хну
определяют кривизны деформированной срединной плоскости в се-
сечениях, параллельных координатным плоскостям хг и уг:
X
у ~
дЪх
дх
ду
d*w .
дх* '
ду* '
D.11)
IV U ГГ \-J UK/
*У
Изменение угла Ъх вдоль координаты у (равное," очевидно, из-
изменению угла fty вдоль координаты х) дает значение крутки де-
деформированной срединной плоскости
д$х д$у д*ш ,. . п\
ху ду ~ дх ~~ дх ду \ • I
Гауссова кривизна поверхности равна К = » „¦¦, где Rx и Ra
— главные радиусы кривизны поверхности в рассматриваемой
точке. С точностью до величины высшего порядка малости отно-
относительно параметра а гауссова кривизна деформированной сре-
срединной плоскости определяется выражением [19)
Напомним, что при чисто изгибных деформациях поверхности
гауссова кривизна остается неизменной; в частности, при чисто
изгибных деформациях срединной плоскости пластины ее гауссова
кривизна остается тождественно равной нулю.
При изгибе пластины в ней возникают внутренние изгибаю-
изгибающие моменты Мх, Му, скручивающий момент Мху и внутренние
поперечные силы Qx, Qy (рис. 4.3). В соответствии с четвертым
допущением внутренние моменты выражаются через поперечный
прогиб с помощью формул [12]:
D.14)
138
Рис 4.3
Здесь использовано обозначение цилиндрической жесткости
В линейной теории поперечного изгиба пластин уравнения рав-
равновесия формулируются для недеформированного состояния. Усло-
Условия равновесия элемента пластины в недеформированном состоя-
состоянии — уравнения моментов относительно его граней — приводят
к двум зависимостям
О -^ Шх
Чх дх
D.16)
Если на пластину действует нормальная распределенная нагрузка
Рг — Рг (х> У)> т0 независимо от усилий в срединной плоскости
пластины условие равновесия элемента пластины — проекция на
ось г всех приложенных к элементу пластины сил — приводит
к уравнению
D.17)
Используя зависимость D.16), получаем основное уравнение ли-
линейной теории поперечного изгиба пластин. Для пластины по-
постоянной толщины это уравнение имеет вид
D.18)
Не останавливаясь на формулировке граничных условий для
этого уравнения, отметим, что силовые граничные условия выте-
139
Рис. 4.4
кают из уравнений равновесия
прилегающего к контуру беско-
бесконечного малого элемента пласти-
пластины, причем уравнения равновесия
записываются для недеформиро-
ванного состояния [12].
Приведенные выше зависимости
относятся к линейной теории из-
изгиба пластин. Как показано в сле-
следующем параграфе, используя эти
зависимости, можно получить ли-
линеаризованное уравнение, дающее
возможность найти точки бифур-
бифуркации начального неискривленно-
го состояния равновесия пластины и определить изгибные фор-
формы равновесия пластины в окрестностях точек бифуркации. Но
этих зависимостей недостаточно для того, чтобы исследовать пове-
поведение пластины в закритической области при конечных попереч-
поперечных прогибах. Недостаточно их и для исследования устой-
устойчивости пластин энергетическим методом. Для этих целей кроме
приведенных линейных зависимостей необходимо использовать гео-
геометрически нелинейные соотношения теории гибких пластин. Вы-
Выведем эти соотношения.
На рис. 4.4 изображено положение элемента срединной пло-
плоскости пластины до и после деформации (точки CADB переходят
в положение C^xD-Ji^); перемещения и, v в плоскости пластины
пока не учитываем, ограничиваясь рассмотрением деформаций
срединной плоскости, непосредственно связанных с поперечным
прогибом w.
Векторы СХАХ и С1В1 обозначим соответственно а и Ь, их про-
проекции на оси координат равны
Вектор
а
b
X
dx
0
У
0
dy
г
dw ,
—r—dx
dx
dw ,
dy
Модули этих векторов
140
По определению относительные удлинения в направлениях
осей х и у равны
_ ClAl-CA _dxVX + {lu-y-dx -i/ (д*у
"» СВ - dy
D.19)
Ограничившись квадратичными членами разложения, получим
значения удлинений, связанных с поперечным прогибом:
1 / dw \2 I 1 / дш> \2_
D.20)
Определим углы сдвига срединной плоскости, связанные с про-
прогибом w. Прямой угол между отрезками С А и СВ при изгибе пла-
пластины искажается; его новое значение, равное углу между отрез-
отрезками СгАг и С151, обозначим (-^ у), где у — угол сдвига,
связанный с поперечным прогибом до. Скалярное произведение
векторов а и Ь равно произведению модулей этих векторов и
косинуса угла между ними:
-g у) =
D.21)
Скалярное произведение можно подсчитать по формуле
а .Ь = ахЪх + ауЪи + агЬг = ^Ldx^- dy. D.22)
Сравнивая выражения D.22) и D.21) и ограничиваясь квадратич-
квадратичными членами, получаем
dw dw ,л 00\
V=— -ду-- D-23>
Итак, видим, что связанные с поперечным прогибом удлинения
и сдвиги срединной плоскости пластины имеют второй порядок-
малости, поэтому в линейных задачах изгиба пластин ими прене-
пренебрегают.
Если кроме поперечных прогибов до учесть перемещения и, v
в плоскости пластины, то деформации срединной плоскости, вызы-
вызываемые этими перемещениями, можно подсчитать по линейным
141
зависимостям D.1), поскольку при изгибе тонких пластин можно
считать]|ш| > |и|, | v\. Окончательно получим
ди , 1 ( dw
dv
ду
dw
~dy~
dw
~dx
D.24)
ди , dv , dw dw
У ду~ + "IT "+" ~ЬТ ~ду~
Остановимся на условии нерастяжимости срединной плоскости
пластины. Это условие, естественное и законное для линейных
задач изгиба пластин, иногда используют в нелинейных задачах,
например при выводе энергетического условия устойчивости пла-
пластин [37 ]. Перемещения и и v часто выражают через поперечный
прогиб хю из условия равенства нулю значений гх, еу, у, определяе-
определяемых формулами D.24), т. е. из условия
ди 1_ / dw
Тх Т \ дх
_dv _J_ / dw
dy 2 \ ду
D.25)
du , dv dw dw
ду "т" ~дх дх ду
Однако для определения двух функций и и v условие D.25)
дает систему трех уравнений. Поэтому перемещения и и v из этой
системы можно определять только при выполнении некоторого до-
дополнительного условия, которое можно получить, исключая и и v
из системы D.25). Дифференцируя 2 раза первое уравнение си-
системы D.25) по у, второе — 2 раза по х и третье — по х и у, а затем
вычитая два первых результата "из последнего, получаем
= # = 0. D.26)
Отсюда следует, что для определения перемещений иии усло-
условием нерастяжимости можно пользоваться только в том случае,
когда гауссова кривизна деформированной срединной плоскости
пластины остается тождественно равной нулю, т. е. когда пла-
пластина изгибается по так называемой развертывающейся поверх-
поверхности. Например, чисто изгибные деформации, при которых К = О,
возможны для пластины со свободным контуром (лист бумаги
можно свернуть в конус). Но еще раз подчеркнем, что в общем слу-
случае деформирования пластины условием нерастяжимости средин-
срединной плоскости для определения перемещений пик пользоваться
нельзя.
§ 20. Основное линеаризованное уравнение
Для вывода основного линеаризованного уравнения рассмотрим
элемент пластины в состоянии, отклоненном от начального
142
t «ИЗ1*
т.
—»¦ •f /
вх В
с,
МЛп,
о)
Рис. 4.5
(рис. 4.5). Поперечные прогибы w, переводящие пластину из на-
начального состояния в новое отклоненное состояние равновесия,
считаем бесконечно малыми:
w = awx (х, у),
где а — бесконечно малый параметр, не зависящий от координат.
Во всех уравнениях будем сохранять только слагаемые пер-
первого порядка малости относительно параметра а (см. гл. 1). Все
этапы вывода линеаризованного уравнения для пластины анало-
аналогичны соответствующим этапам вывода линеаризованного уравне-
уравнения для стержня (см. § 13). Некоторые усложнения, связанные
с двумерностью задачи, носят не принципиальный, а чисто тех-
технический характер.
В соответствии с четвертым допущением, внутренние моменты,
возникающие в пластине при ее отклонении от начального состоя-
состояния равновесия, выражаются зависимостями D.14)
и-
Очевидно, эти моменты имеют тот же первый порядок малости,
что и поперечный прогиб awi (x, у).
Приравняем нулю сумму моментов относительно оси хг, про-
проходящей через точку Dt параллельно оси х (на рис. 4.5 осталь-
остальные усилия не изображены). Отбросив слагаемые высших поряд-
порядков малости, получим
Qy dx dy + Му dx 4- Mxy dy - (му + ¦^¦dy^j dx —
) dy = (Q, - ™*. -
dx dy = 0. D.27)
143
Как нетрудно убедиться, остальные усилия дают моменты выс-
высших порядков малости относительно оси хи например от усилия Тх
результирующий момент равен (рис. 4.5, б)
D.28)
Сравнивая'выражения D.27) и D.28), видим, что момент от уси-
усилия Тх, действительно, имеет высший порядок малости по сравне-
сравнению с моментами от Qy, My и Мху. Аналогично можно оценить
порядок моментов и от остальных силовых факторов, причем сле-
следует подчеркнуть, что высший порядок малости слагаемых, от-
отброшенных ; в выражении D.27), не связан с линеаризацией
и со значениями поперечных прогибов пластины w, а является
следствием бесконечно малых размеров рассматриваемого элемента.
Те же рассуждения справедливы для суммы моментов относи-
относительно оси, параллельной оси у. Таким образом, для отклоненного
элемента остаются в силе зависимости D.16). Следовательно, по-
поперечные силы Qx, Qy, как и моменты Мх, Му, Мху, имеют пер-
первый порядок малости относительно параметра а.
Приравняем нулю сумму проекций всех сил на оси хну
(рис. 4.5, б). Учитывая повороты граней элемента CADB и отбра-
отбрасывая величины заведомо высших порядков малости, получаем
уравнения (на рис. 4.5 усилия рх и ру не приведены)
йТх , dS
5Г
о.
D.29)
Слагаемые в квадратных скобках имеют второй порядок малости,
так как они содержат произведения величин первого порядка
малости Q и Ф, поэтому их тоже следует отбросить. В результате
получим уравнения равновесия элемента в отклоненном состоя-
состоянии, которые не отличаются от уравнений равновесия элемента
в начальном состоянии D.2). Следовательно, Тх, Ту, S остаются
равными начальным усилиям Т°х, Ту, S0 (с точностью до величин
второго порядка малости).
Приравняем нулю сумму проекций всех сил на ось z (рис. 4.5, б).
При этом учтем повороты граней рассматриваемого элемента.
Грань С1В1 повернута вокруг оси у на угол 0х, а грань A1D1 —
на угол Г0* + -—¦ dx\ . Поэтому результирующая усилий Тх и
\Тх-\- -g^-dxj в проекции на ось z будет
..-I—^- dx) [ 0, -\—з-^- dx)du = -г— (Т^Лdxdy,
dx } \ x ox / ox v ' ^
144
Грань QBj повернута вокруг оси х на угол ®у, а грань А^ —
на угол (fty + —^-dy\ . На грани С^ действует сдвигающее
(ас v.
S + -т— dx \.
Поэтому результирующая сдвигающих усилий с этих граней
в проекции на ось z равна
По аналогии с двумя предыдущими выражениями можно за-
писать, что результирующая от усилий Ту и Ту -f- —gH- dy с граней
•*
СгАг и BlD1 равна -^—(Tyby)dxdy, а результирующая от усилий
S и [S + — dy) с граней СгАх и 5^ составляет -д- (Sfl\<) dx dy.
Собрав эти слагаемые и добавив к ним результирующие от внут-
внутренних поперечных сил Qx и Qy, получим уравнение
-Of (Т%) + 4- E°^) = 0. D.30)
В соответствии со сделанным выше замечанием усилия в средин-
срединной плоскости Тх, Ту, S заменены на начальные усилия 71, Т°у, S0.
Выразив поперечные силы Qx и Qy через внутренние изгибаю-
изгибающие моменты с помощью зависимостей D.16) и воспользовавшись
формулами D.10), можно записать
T + 2i^ + ^-/*-0. D.31)
где
-If
Для пластины постоянной толщины получим
DVV» - pt = 0. D.33)
Если пластина нагружена только контурными внешними усили-
усилиями ^ и qy (в силовых конструкциях обычно собственным весом
пластины можно пренебречь), то выражение D.32) можно преобра-
преобразовать к следующему виду:
Ф ^о д»ш , осо d*w
р1 +гЬ 1Г
J
dx + dy ) дх "т" \ dy ^ dx J dy '
145
Прн\рх = 0 и ру = 0 выражения в скобках в соответствии с урав-
уравнениями равновесия D.2) обращаются в нуль и тогда
^^ 7*.-?. D.34)
Уравнение D.33) является основным линеаризованным урав-
уравнением теории устойчивости пластин постоянной толщины. Это
линейное однородное уравнение, причем в силу первого допуще-
допущения его граничные условия однородны. Если считать, что все дей-
действующие на пластину внешние нагрузки изменяются пропорцио-
пропорционально параметру Р, то уравнение D.33) можно записать в стан-
стандартном виде задачи на собственные значения (см. приложение I):
М [w\ — PL \w\ = 0,
где
М [w] =
1 г,„ 1 д Gрд dw \ . д /-я) dw
L м = [т ) +
д f-^o dw \ , д Gf,Q dw \
"аГ^ If) "*" ~W \ у ~ЩГ)'
Здесь Т°х = Т°х (х, у), S° = S° (x, у), f>y=T, (x, у) — распределение
начальных усилий при Р = 1.
Таким образом, задача определения условий существования
изгибных состояний равновесия первоначально плоской пластины
свелась к типичной задаче на собственные значения: требуется
найти те значения параметра нагрузки Рп, при которых однород-
однородное уравнение имеет отличные от тождественного нуля решения,
удовлетворяющие заданным однородным граничным условиям.
По форме уравнение D.33) совпадает с уравнением попереч-
поперечного изгиба пластины D.18), только вместо поперечной на-
нагрузки Рг, фигурирующей в уравнении D.18), в уравнение D.33)
входит величина Р*. линейно зависящая от поперечного прогиба
и начальных усилий в срединной плоскости пластины. Совпадение
это естественно: вывод линеаризованного уравнения D.33) ана-
аналогичен выводу уравнения поперечного изгиба пластины, но роль
внешней нормальной нагрузки играют проекции внутренних на-
начальных усилий Тх, Ту, S0 на ось г, появляющиеся в результате
учета поворотов граней элемента пластины. Это позволяет трак-
трактовать величину р* как фиктивную поперечную нагрузку.
На этом основан вывод линеаризованных уравнений задач
устойчивости стержней, пластин и оболочек с помощью приема
фиктивной нагрузки. Прием состоит в следующем. Предположим,
что нам известно уравнение поперечного изгиба стержня, пла-
146
стины или оболочки, полученное в обычной линейной постановке
и имеющее, например, вид
М [w] - рг = 0, D.35)
где М [w\ — некоторое дифференциальное выражение; w — по-
поперечный прогиб (или какая-нибудь другая искомая функция);
рг — внешняя поперечная нагрузка.
Тогда для получения линеаризованного уравнения задачи
устойчивости, рассмотрев деформированное состояние элемента,
достаточно найти фиктивную нагрузку р* и заменить поперечную
нагрузку рг в уравнении D.35) на pj. Следует подчеркнуть, что
вопрос о граничных условиях для линеаризованного уравнения
требует дополнительного изучения.
Поскольку основное уравнение имеет четвертый порядок, в каж-
дой'точке контура пластины должны быть заданы два граничных
условия. Для простоты рассуждений ограничимся случаем, когда
участок контура пластины совпадает с одной из координатных ли-
линий. Пусть, например, это будет линия х = 0.
Геометрические граничные условия линеаризованного урав-
уравнения теории устойчивости пластин полностью повторяют гео-
геометрические условия линейной теории изгиба пластин: на краю
пластины (в данном случае при х = 0) может быть запрещен по-
поперечный прогиб w и (или) угол поворота -^-.
Силовые граничные условия выражают условия равновесия
краевых элементов пластины. Если контур пластины свободен от
нагрузок, то силовые граничные условия уравнения D.33), оче-
очевидно, полностью повторяют силовые граничные условия линей-
линейной теории поперечного изгиба пластин. Так, например, для сво-
свободно опертого края (д; = 0) силовое граничное условие будет
Если учесть геометрическое граничное условие w = 0, то для
свободно опертого края при х = 0 окончательно можно записать
граничные условия
1)и/=-0; 2) -|т = 0. D.36)
Если при х — 0 край полностью свободен, то Мх = 0 и Q*x =
Qx-\ ^_?-=i0, т. е. на сво
няются граничные условия
р
= Qx-\ ^_?-=i0, т. е. на свободном ненагруженном краю выпол-
выпол147
Б)
Рис. 4.6
Когда на краю пласти-
пластины прогибы полностью за-
запрещены, внешние контур-
контурные нагрузки никак не
отражаются на граничных
условиях. Например,если
по свободно опертому краю
х = 0 к пластине в ее плос-
плоскости приложены внеш-
внешние распределенные на-
нагрузки qx (у) и qy (у), то
эти нагрузки не внесут никаких изменений в граничные условия
свободного опирания D.36).
Когда край пластины свободен (или упруго оперт), внешние
контурные нагрузки входят в граничные условия линеаризован-
линеаризованного уравнения. Так, например, рассмотрим незакрепленный
край пластины х — а, нагруженный мертвыми распределенными
усилиями qx (у) и qy (у) (рис. 4.6, а). Первое граничное условие,
очевидно, остается таким же, как и для ненагруженного свобод-
свободного края: Мх = 0. Для получения второго граничного условия
рассмотрим равновесие краевого элемента пластины с размерами
dy и dx. Уравнение равновесия такого элемента в проекции на
ось г, сформулированное для отклоненного состояния, имеет вид
Поскольку при х = а из D.4) следует Тх = qx и S0 = qy,
второе граничное условие в рассматриваемом случае будет
D
Все сказанное справедливо и в случае упругозакрепленного
края пластины, причем для ненагруженного края граничные усло-
условия линеаризованного уравнения D.33) полностью повторяют
граничные условия линейной теории поперечного изгиба пластин.
Рассмотрим пластину, край которой при х = 0 подкреплен
упругим стержнем (рис. 4.6, б). Стержень считаем ненагруженным
в продольном направлении и имеющим постоянную изгибную жест-
жесткость EJ в плоскости, перпендикулярной срединной плоскости
пластины; жесткостью стержня на кручение пренебрегаем. Тогда
первое граничное условие, как и для свободного края, будет
Мх = 0. Для формулировки второго граничного условия мысленно
отделим стержень от края пластины. Обозначив прогиб стержня
wc (у), при х = 0 можно записать w = wc (у). Со стороны пластины
на стержень передается контактная нагрузка qk = —Qx- Прогиб
стержня под действием этой нагрузки описывается дифферен-
дифференциальным уравнением
С 7
EJ
dy*
= qk-
148
Поскольку прогиб стержня должен быть равен нормальным
перемещениям края пластины, т. е. при х = и .. = -g~r> вто-
второе граничное условие будет
Если стержень, подкрепляющий край пластины, нагружен
в продольном направлении и внутреннее осевое усилие в стержне
равно № (г/), то граничное условие при х = 0 принимает вид
р, d*w д (т dw
EJN
В частности, когда стержень сжат одной силой Р, N0 = —Р
и при х = О
Аналогично можно сформулировать условия сопряжения двух
пластин различной изгибной жесткости.
Граничные условия линеаризованного уравнения на криволи-
криволинейных участках контура пластины, свободных от контурных на-
нагрузок или закрепленных неподвижно относительно попереч-
поперечного прогиба, не отличаются от граничных условий линейной тео-
теории поперечного изгиба пластин, подробное обоснование которых
можно найти, например, в работе [12 ]. В тех случаях, когда внеш-
внешние контурные нагрузки приложены к незакрепленному относи-
относительно поперечных перемещений криволинейному краю пластины,
силовые граничные условия формулируются из условия равно-
равновесия краевого элемента пластины подобно тому, как это сделано
выше для прямолинейного края.
Основное линеаризованное уравнение для пластины постоян-
постоянной толщины D.33), полученное в декартовой системе координат,
удобно для решения задач устойчивости пластин, контур которых
совпадает с координатными линиями. Для пластин другой формы
может оказаться удобной другая, не декартова система координат.
Так, для круглых пластин основное уравнение удобнее предста-
представить в полярных координатах.
Линеаризованное уравнение в новой системе координат можно
получить двумя способами: путем повторения вывода в новой
системе координат или путем формального преобразования коор-
координат. Воспользуемся вторым способом.
Преобразование линеаризованного уравнения D.33) при пере-
переходе к новой системе координат производится аналогично тому,
как это делается для уравнения поперечного изгиба пластин [17].
Например, при переходе к цилиндрической системе координат
(рис. 4.7, а) внешний вид уравнения D.33) сохраняется
149
Рис. 4.7
Но оператор Лапласа равен
'(•) =
дг*
Для основного случая, когда пластина нагружена только кон-
контурными усилиями,~фйктивная поперечная нагрузка р* в поляр-
полярной системе координат определяется выражением
I dw . 1 d*w \ . осо д ( 1 dw \
+ ) +2S Тг[ТЖ) '
Ф
где T°r, T%, S0 — начальные внутренние усилия в срединной пло-
плоскости пластины в полярной системе координат (рис. 4.7, б).
Для внутренних моментов в полярной системе координат имеем
—^ —^— I I,. I , \
dw
Mo = .
rffldr
Бигармоническое уравнение D.7) сохраняет свой внешний вид
V2V2<p° = 0. В полярной системе координат функция начальных
усилий йф° определяется соотношением
т,о ; 1 5ф° , 1 32ф° ^о 52ср° оО 1/1
5/-
+ ±-
Нетрудно записать граничные условия для линеаризованного
уравнения в^новой системе координат для кругового контура пла-
пластины. Например, для жестко защемленного кругового контура
граничные условия будут:
Для свободно опертого кругового контура:
ау = О; 2) Л4, = 0, т. е.
4^ = о.
1 (
Аналогично уравнение D.33) можно записать в другой произ-
произвольной ортогональной системе координат [12].
В заключение отметим, что основное линеаризованное уравне-
уравнение легко обобщить для пластины, связанной с упругим винкле-
ровским основанием, тогда
DV2V2w + kw - р$ = 0,
D.37)
где k — коэффициент жесткости (коэффициент постели) упругого
основания.
Формулировка граничных условий и величина р* не зависят
от упругого основания.
§ 21. Решение основного уравнения
для прямоугольных пластин
Уравнение в частных производных с переменными коэффи-
коэффициентами не удается проинтегрировать в общем виде, но для не-
нескольких практически важных случаев уравнение D.33) допу-
допускает точное решение.
Сначала рассмотрим простейший из таких случаев — устой-
устойчивость удлиненной пластины, равномерно сжатой в поперечном
направлении (рис. 4.8, а). Граничные условия вдоль удлиненных
сторон произвольны, но неизменны вдоль всей пластины. Раз-
Размеры пластины в продольном направлении считаем настолько боль-
большими, что условия закрепления коротких сторон пластины не
играют никакой роли (ниже дана оценка той длины пластины, на-
начиная с которой можно пренебречь влиянием закреплений корот-
коротких сторон пластины).
Предварительно решим вспомогательную задачу по определе-
определению усилий в срединной плоскости пластины. Если считать, что
на длинных кромках не накладывается никаких ограничений на
перемещения v0, то решение этой задачи
очевидно:
В
t ^
h-
н
:±
Ч\
а)
151
Тогда уравнение D.33) принимает вид
~ / d*w , о 5*ш d*w \
D (-W + 2 )
Для рассматриваемой удлиненной пластины можно предпо-
предположить, что при потере устойчивости изгиб происходит по ци-
цилиндрической поверхности w = w (x). Тогда уравнение в частных
производных переходит в обыкновенное дифференциальное урав-
уравнение
n d*w , d*w Л
С точностью до обозначений оно тождественно линеаризованному
уравнению для прямого стержня постоянной изгибной жест-
жесткости EJ, сжатого продольной силой Р (см. § 13):
Е J ^L + P L = О
CJ dx* ^r dx* u#
Такое совпадение достаточно очевидно: задача об устойчи-
устойчивости пластины в рассматриваемом случае эквивалентна задаче
об устойчивости полоски единичной ширины (рис. 4.8, б)
с изгибной жесткостью EJ = Ш, сжатой продольной силой
Р = \q.
Решения уравнения, полученные для стержня, можно перенести
на рассматриваемую задачу устойчивости удлиненной пластины.
В частности, если продольные края пластины свободно оперты, то
можно записать qn = -^- D. Наименьшее собственное значе-
значение, равное критическому значению нагрузки, получим при
п = 1
4? D.38)
При этом форма изогнутой поверхности пластины при потере устой-
устойчивости описывается (с точностью до масштаба) зависимостью
a/ = i4sin —.
а
При других условиях закрепления продольных сторон пла-
пластины, как и для стержня постоянной изгибной жесткости, по-
получим
где С — коэффициент, который находят из решения соответствую-
соответствующей задачи для стержня (см. § 13). Первая собственная функция
задачи устойчивости стержня дает форму изогнутой поверхности
пластины при потере устойчивости.
В задачах устойчивости пластин результаты принято пред-
представлять в виде не критических нагрузок, а критических напря-
152
жений. Так, в рассматриваемой задаче результат можно выразить
через критические сжимающие напряжения
На эту формулу следует обратить особое внимание, так как из нее
особенно хорошо видно, что потеря устойчивости тонких пластин
при малых значениях отношения (—) может происходить при
низких напряжениях.
Переходя к другим случаям точного интегрирования основ-
основного линеаризованного уравнения, заметим, что решение, полу-
полученное для удлиненной пластины можно использовать и для
пластины конечных размеров с двумя свободными краями
(рис. 4.8, в). В этом случае с достаточной степенью точности можно
принять w — w (х). Однако граничные условия на свободных краях
не будут точно удовлетворены. При — <? 1 это не повлияет на
значения критических нагрузок.
Для прямоугольной пластины с конечным отношением сторон
основное линеаризованное уравнение D.33) допускает точное реше-
решение при следующих условиях.
1. Начальное напряженное состояние однородно:
Т°у = const, Тх = const, S° =. 0.
2. Две противоположные стороны пластины (например, при
х — 0 и х — а) свободно оперты, а граничные условия на двух
других сторонах произвольны, но неизменны вдоль каждой из
сторон.
В этом случае основное линеаризованное уравнение D.33) при-
принимает вид
п / d*w , о d*w , d*w \ rpQ d*w ^o d*w Л ,. лгл
D 1 —т-г -г 2 ттгв -г —5~г — I х -гъ 1 и тт = 0. D.40)
\ dx* дхгдуг ' ду* ) дхг у ду* у '
Граничные условия при х = 0 и х — а: 1) w = 0; 2) -—¦ = 0.
Поэтому решение уравнения D.40) можно найти в следующей
форме:
1
где У„ = У„ (у) — функции одной независимой переменной у.
Подставив этот ряд в уравнение D.40), после сокращения на
sin ^- получим систему обыкновенных независимых дифферен-
дифференциальных уравнений для функций У„
198
Здесь штрихом обозначено дифференцирование по у.
Группируя соответствующие производные, можно записать
D.41)
Решение этого однородного уравнения с постоянными коэффи-
циентами'не составляет принципиальных трудностей. Заметим, что
аналогичное уравнение встречалось при исследовании устойчи-
устойчивости прямых стержней, связанных с упругим основанием
(см. § 15).
Характеристическое уравнение имеет вид
откуда для каждого значения п получаются четыре корня:
4+(¦?)']
+
Общее решение уравнения D.41) для каждого из значений п
будет
4
V — У А ег1у
i п — L. Л(е •
(=1
Подчиняя это решение четырем однородным граничным условиям
(по два граничных условия на каждой из сторон пластины, па-
параллельных оси я), получаем систему четырех однородных линей-
линейных уравнений относительно четырех неизвестных At. Равенство
нулю определителя этой системы приводит к уравнению, дающему
возможность найти собственные значения задачи. Перебирая раз-
различные числа полуволн п, находим то из них, которое приводит
к наименьшему собственному значению задачи. Оно будет крити-
критическим. Рассмотрим подробнее несколько частных случаев.
154
У
—
-«¦
—to
—to
1 Г
i i
1 !
i
I
i
а ж
п
-О
л
Рис. 4.9
Пластина равномерно сжата в одном направлении (рис. 4.9, а).
В этом случае Т% = О, Т% = —q. Учитывая зависимость D.38)
и предполагая, что при закреплении краев пластины у — 0 и
у = b повышается значение qn, получаем неравенство
qn / пп \2
D >\ а ) •
D.42)
Тогда решение уравнения D.41) для каждого п можно предста-
представить в таком виде:
Уп (у) — A sin апу + А2 cos апу + А3 sh р„г/ + Л ch р„у, D.43)
где
Заметим, что неравенство D.42) может не выполняться только
в тех редких случаях, когда края пластины, параллельные оси х,
соединены с более «слабыми» сжатыми элементами. Например, не-
неравенство D.42) может не выполняться для пластины, один край
которой свободен, а другой соединен с более тонкой пластиной,
сжатой в направлении оси х.
Рассмотрим устойчивость прямоугольной пластины, свободно
опертой по всему контуру. Граничные условия при у — 0 и у = Ь:
1) У„@) = 0; 2) У; @) = 0; 3) Yn (Ь) = 0; 4) К (Ь) = 0.
D.44)
155
В данном случае нетрудно предугадать решение уравне-
уравнения D.41), удовлетворяющее граничным условиям свободного
опирания, как это сделано в § 15 для шарнирно-опертого стержня
на упругом основании. Для всех других вариантов граничных ус-
условий такое угадывание невозможно. Поэтому получим решение
задачи устойчивости свободно опертой пластины общим путем,
справедливым для всех других пластин, сжатых в одном направ-
направлении и свободно опертых вдоль краев х = 0 и х = а.
Подчинение общего решения D.43) граничным условиям D.44)
приводит к системе четырех уравнений для каждого п:
Л2 + Л4 = 0;
sin anb -f- Л2 cos anb -f As sh Р„Ь -}- Л4 ch $nb = 0;
i sin аф — a2nA2 cos anb -f $U3 sh $nb + &Ai ch %b = 0.
Для действительных значений ап и р„ два первых уравнения
дают Л 2 = 0; Л4 = 0. Тогда оставшиеся два уравнения прини-
принимают вид
Лх sin аф + Л3 sh р„6 = 0;
— aJUi sin a,,6 + РпЛ3 sh р„6 = 0.
Приравнивая нулю определитель этой системы уравнений, полу-
получаем (а?п + $1) sin anb sh %b = 0.
Поскольку р„ Ф 0 и а„ и р„ — действительные величины, из
этого равенства следует, что sinanfr = 0. Тогда Л3 = 0. Таким
образом, отличные от тождественного нуля и удовлетворяющие
всем граничным условиям решения возможны только при sin anb =
— 0, т. е. при anb = тп; (т = 1,2,...), и имеют вид (для каж-
каждого п — 1, 2, ...)
^ (т=-1,2 3, ...).
Используя формулу для а„, получаем собственные значения на-
нагрузки qmn:
[Ш}2(^У° (я.*=1.2,3,...) D.45)
и находим собственные функции задачи
wnm(x,y) = sin^sin^ (л, m= 1,2,3, ...).
На рис. 4.9, а и б показан вид функций шХ1 (х, у) и ш21 (л-, г/).
Для определения критического значения нагрузки необхо-
необходимо выяснить, при каких п и т по формуле D.45) можно найти
156
\ \
\
w
I
I
1
1
!
.9'
i
i
i
j
V? 2 V6" 3 VI?
6)
РИС 4.10
наименьшее значение ^nm. Так как число полуволн т входит только
в числитель, то, очевидно, наименьшее значение qnm может быть
при т = 1. Учитывая это, перепишем формулу D.45):
Дальнейший анализ удобно проводить с помощью графиков,
аналогичных тем, которые использовались при исследовании за-
задачи устойчивости стержня, связанного с упругим основанием
(стр. 101). Последовательно принимая п = 1, 2, 3 и т. д., получаем
16 о \2. - / 26 а \2 - / 36 а \2
На рис. 4.10, а приведены соответствующие графики. Участки
кривых, лежащие ниже точек пересечения, будут давать наимень-
наименьшие и, следовательно, критические значения qKp. Приравнивая
значения qn и qn+1, нетрудно установить, что соответствующие
им кривые пересекаются при ~ = Уп{п-{-1).
Окончательный результат обычно представляют в виде
Ч*Р = Ко^ D.46)
или через критические сжимающие напряжения
= к ?> — к п*Е (JLY (a af, \
КР Ag f 2й ^в 1 о /1 fl2\ v и I » (т-^Daj
где Ко — коэффициент, зависящий от отношения сторон пла-
пластины (рис. 4.10, а, сплошная линия).
В последних двух формулах в качестве характерного размера
пластины принята ширина Ь, а не длина а, как это сделано в фор-
формуле D.38). Такая запись расчетных формул удобна при а > Ь,
когда размер b существенно влияет на критические значения
157
нагрузки. Если а < Ь (пластина сжата вдоль 'коротких сторон),
то расчетные формулы удобнее представить в виде (при п — 1):
J
а \2-|2
ИЛИ
\2-j2
) j
Из последних зависимостей, в частности, видно, что если
ограничиться точностью порядка 5%, то примерно при -t-<-f-
влиянием закреплений коротких сторон пластины можно прене-
пренебречь и расчет вести по формуле D.38).
При -г- > C-^-4) коэффициент Ко практически перестает из-
изменяться с ростом отношения ~, тогда можно принять Ко = 4.
В этом случае число полуволн п, образующихся при потере
устойчивости пластины на ее поверхности, примерно равно от-
отношению -?-. Таким образом, удлиненная пластина при потере
устойчивости как бы делится на ряд квадратных свободно опертых
по всему контуру пластин (рис. 4.10, б), для каждой из которых
Ко — 4. Тогда становится ясным, что увеличение размера а путем
«наращивания» квадратных пластин не приводит к изменению кри-
критической нагрузки.
В такой же последовательности с использованием зависимости
D.43) решают задачи устойчивости пластин при любых других
вариантах закрепления краев у = 0ну=Ьв том числе и при
упругом закреплении, при условии, что по краям х = 0 и х = а
пластина свободно оперта, выполняется неравенство D.42) и 5° =
= 0» Т% = const, T% — const. Окончательные расчетные формулы
имеют вид D.46), но коэффициенты Ко в этих формулах иные. На
рис. 4.11 приведены зависимости коэффициентов Ко ДДЯ основных
вариантов закрепления краев пластины. Следует отметить, что
нри неподвижно закрепленных относительно поперечного про-
прогиба w краях пластины коэффициент Пуассона |д. не входит в гра-
граничные условия. Поэтому коэффициенты Ка не зависят от (д,. Но
для пластин с одним свободным краем (две нижние кривые на
рис. 4.11) коэффициент Пуассона непосредственно фигурирует
в граничных условиях. Поэтому для пластин со свободным краем
коэффициенты Ка зависят от |д. и, приводя конкретные числовые
значения этих коэффициентов, следует указывать, для каких зна-
значений |Л они получены.
В заключение заметим, что при выполнении граничных усло-
условий свободного опирания по краям х = 0 и х = а аналогичное
решение можно получить и в случае Т° — 0, 1% == — q, S° =¦ 0;
158
Защемление
. Шарнирное
опирание
Свободный
крап
Рис. 4.11
только вместо представления решения в виде D.43) нужно поль-
пользоваться общим решением уравнения D.41).
Рассмотрим прямоугольную пластину, равномерно сжатую
в двух направлениях (рис. 4.12, а). В том случае, когда 5° = О,
Тх = — qx, Т°у = —цу и выполняются граничные условия рас-
рассмотренной сейчас задачи, можно применять намеченную выше
общую схему решения. Для упрощения расчетов ограничимся
решением задачи устойчивости прямоугольной пластины, свободно
опертой по всему контуру. Для такой пластины, равномерно сжа-
сжатой в одном направлении, выше найдена система собственных
функций. В рассматриваемом случае решение уравнения D.40)
можно искать в виде
»„„(*. 0 =
sta
sin
Система найденных собственных функций полная, поэтому,
разыскивая решение в таком виде, можем быть уверены в том,
что получим все собственные функции решаемой задачи. Под-
159
ставив wnm (x, у) в уравнение D.40) и сократив произведение
sin sin—~, входящее во все слагаемые, получим уравнение
Для возможности существования Апт, не равного нулю, вы-
выражение в фигурных скобках должно быть равно нулю. Это усло-
условие дает выражение, определяющее собственные значения задачи
<4-47>
Рассмотрим несколько частных случаев. Например, при цх —
= q,j — q из D.47) получим собственные значения
Очевидно, наименьшее собственное значение, равное крити-
критическому, будет при т — п = 1; следовательно,
Ь \2-
Независимо от отношения сторон пластины она будет терять устой-
устойчивость по форме
В частности, для квадратной пластины при а — b
При сжатии квадратной пластины равными усилиями в двух
направлениях qKV оказывается в 2 раза меньше по сравнению
с qKP в случае сжатия пластины в одном направлении. Если ежи-
Рис 4.12
160
мающие нагрузки qx и qy считать возрастающими пропорцио-
пропорционально одному параметру и обозначить qx — q; q» = vq, где
v з* 0 — фиксированная величина, то из выражения D.47) можно
получить следующие собственные значения задачи:
Чпт
Ь*
При а > b наименьшее значение qnm может быть только при
т = 1. Следовательно,
— к пЮ
Якр Ао ?2 >
где
(*)'+¦
Для каждого отношения сторон -г- и каждого значения v
число полуволн п следует подбирать из условия минимума Ка,
подобно тому, как это делалось для пластины, сжатой в одном
направлении. Для удлиненной пластины при -j- «С 1 сжатие в на-
направлении у не будет влиять на устойчивость пластины. В этом
случае, как при сжатии в одном направлении, получаем п = 1
пЮ
При других граничных условиях решение получается значи-
значительно более громоздким, но результаты качественно аналогичны
полученным выше: для пластины с конечным отношением сторон
при сжатии в одном направлении уменьшаются критические усилия
в другом направлении, а для удлиненных пластин сжатие в про-
продольном направлении не влияет на критические усилия сжатия
в поперечном направлении.
Если прямоугольная пластина равномерно сжата в одном на-
направлении и равномерно растянута в другом направлении, т. е.
если 5° = 0 и Тх ==¦ — qx, T°v = -f qy, то для пластины со сво-
свободно опертым контуром можно воспользоваться результатами
решения предыдущей задачи. Для этого достаточно изменить
знак qg в выражении D.47):
/л\2 / m \2 Г / п \2 / m \2-l2
При qx = qu — q получаем собственные значения
Чпт ( п \2 / т
П. А. Алфутов 161
В частности, для квадратной пластины при а = Ъ
Япт— („8_msS) -p--
Наименьшее значение qnm может быть только при т = 1.
Далее необходимо подобрать значение п, обеспечивающее наи-
наименьшее собственное значение нагрузки. Последовательно при-
принимая п = 1, 2, 3, .... получаем q11 = oo; q21 = Ц-^-\ q3i =
25 пЮ
= — —и т- д-
Следовательно, для квадратной пластины, сжатой в одном на-
направлении и растянутой в другом равными по абсолютной вели-
величине усилиями q,
25
<7 Ч
Потеря устойчивости происходит по форме
(х, у) = А21 sin -^ sin -3L.
Подобный анализ нетрудно провести и для любого другого от-
отношения сторон пластины и при любых соотношениях между
сжимающей и растягивающей нагрузками. Во всех случаях для
пластин с конечным отношением сторон при растяжении в направ-
направлении одной оси увеличиваются критические значения сжимаю-
сжимающей нагрузки в направлении другой оси. Исключение составляет
случай потери устойчивости пластины по развертывающейся по-
поверхности (удлиненная пластина и пластина с двумя свободными
краями). При этом растягивающие усилия Ту не влияют на крити-
критические сжимающие усилия Т% и при любых растягивающих уси-
усилиях можно пользоваться формулой D.38).
Результаты решения двух последних задач можно объединить
одним графиком, дающим критические сочетания как сжимающих,
так и растягивающих усилий qx и qy. Для квадратной пластины
такой график приведен на рис. 4.12, б. Участки прямых, показан-
показанные сплошной линией характеризуют критическое сочетание без-
безразмерных усилий qx и qy, ломаная линия, состоящая из этих
участков, ограничивает область устойчивости рассматриваемой
пластины при комбинированном нагружении усилиями qx и qy
(см. § 6). Величины (qx)KP и (qy)Kp равны критическим нагрузкам
при сжатии в направлении оси х или у и определяются форму-
формулой D.46) при Ко = 4.
Аналогичный график нетрудно построить при любых других
отношениях сторон прямоугольной пластины. В результате полу-
получится ломаная линия, дающая критические сочетания qx и qy и,
следовательно, отделяющая область устойчивости пластины от
области неустойчивости. Начало координат принадлежит, конечно,
к первой из этих областей.
162
§ 22. Решение основного уравнения
для круглых пластин
В случае осесимметричного начального напряженного состоя-
состояния круглой пластины, когда 5° = 0, а начальные усилия Г? ==
= Т°г (г) и Т°в = Г? (г) являются функциями только радиуса г,
интегрирование общего уравнения D.33) сводится к интегрирова-
интегрированию обыкновенных дифференциальных уравнений. В полярной
системе координат основное линеаризованное уравнение для пла-
пластины, нагруженной контурными внешними усилиями, принимает
вид (см. § 20)
_аз_ 1_ _а_ 1_ _^_\ / d*w I dw 1 d*w \
lF5""" г дг + г2 аеа у V 5ra "f" r вг ~т~ г* аег у
D.48,
В это уравнение входят только четные производные по окруж-
окружной координате 0, поэтому решение уравнения D.48) можно найти
в виде ряда
'. в) = ? wn
л=0
cos яв,
D.49)
где wn (г) — некоторые функции координаты г. При этом гранич-
граничные условия могут быть произвольными, но неизменными по всему
контуру пластины.
Подстановка выражения D.49) в уравнение D.48) приводит к
системе обыкновенных независимых дифференциальных уравнений
я2 \ / d*wn I dw яаа>п \
ra / \ dr2 ' r dr ла /
dwn
n2wn
¦ 0
1,2, ...). D.50)
Решения этих уравнений, удовлетворяющие заданным гранич-
граничным условиям, дают собственные функции и собственные значения
задачи; наименьшее из собственных значений параметра нагрузки
будет критическим.
Уравнение D.50) наиболее просто интегрируются при постоян-
постоянных сжимающих начальных усилиях Т°г и Т§ (рис. 4.13):
Т\ = — q = const.
Рис. 4.13
163
Рис 4.14
В этом случае уравнения D.50) будут иметь вид
JLju _!__?._ ill \ /г<Ра>" | ' dw«- я%д \
~dr
D.51)
где k* = ~.
При осесимметричной форме потери устойчивости (при п = 0)
решение уравнения D.51) имеет вид
Щ (г) = ЗД (kr) + C2Y0 (kr) + Cs In kr + C4;
при неосесимметричной форме потери устойчивости, когда п Ф 0,
ш„ (г) = CxJn (kr) + С27„ (ftr) + С/-» + С4г" (я =- 1, 2, 3. ...),
где /„ (kr) и У„ (^г) — функции Бесселя первого и второго рода;
эти функции табулированы. Дальнейшее решение задачи не вызы-
вызывает никаких трудностей. Рассмотрим несколько примеров.
Сплошная пластина равномерно сжата по контуру (рис. 4.14).
Независимо от способа закрепления контура прогибы и углы по-
поворота в центре сплошной пластины не должны обращаться в бес-
бесконечность. Поэтому для осесимметричной и неосесимметричной
форм потери устойчивости необходимо принять С2 = 0 и С3 = 0,
так как Yo (kr) — 00, In kr — 00 и Yn (kr) — 00, r~n — 00 при
г —» 0. Необращающиеся в бесконечность при г — 0 решения для
сплошной пластины как при осесимметричной, так и при неосе-
неосесимметричной форме потери устойчивости имеют вид
Wn (г) = V» W) + V1 (л = 0, 1, 2, ...). D.52)
Если контур пластины защемлен (рис. 14,4, а), то граничные усло-
условия на этом контуре при г = R: 1) w= 0; 2) -^- = 0. Соответ-
Соответственно граничные условия для wn (г): 1) ауп(#) = 0'» 2) 0Уп(#) = 0.
Здесь штрихом обозначено дифференцирование по г.
164
Подчиняя решение D.52) этим граничным условиям, получаем
однородную систему уравнений относительно произвольных по-
постоянных Аг и Л4:
Равенство нулю определителя этой системы дает уравнение
nRn^Jn (kR) - R"J'n (kR) = 0." D.53)
Функции Бесселя первого рода связаны между собой диффе-
дифференциальным соотношением
J'n (X) = -j- /„ — /п_ь
Поэтому
J'n (kr) =~Jn (kT) - kJ(n+l) (kt).
При k ф 0 из уравнения D.53) получим
J(n+n(kR) = 0. D.54)
Корни полученного характеристического уравнения приводят
к собственным значениям параметра k, связанного с внешним уси-
усилием q. Для определения критической нагрузки необходимо вы-
вычислить наименьшее собственное значение параметра k, поэтому
для каждого п достаточно найти первый корень уравнения D.54).
Так, для п = 0 находим (kR)x = 3,832; для п = 1 — первый ко-
корень (kRjx = 5,135 и т. д. Следовательно, для сплошной пластины
с защемленным наружным контуром наименьшее собственное
значение qx дает первый корень уравнения D.54) при п = 0, т. е.
Потеря устойчивости защемленной по контуру пластины про-
происходит по осесимметричной форме и вид изогнутой срединной по-
поверхности (рис. 4.14, а) описывается (с точностью до постоянного
множителя) функцией, получаемой из D.52) при kR = 3,832 и
п = 0:
/,(з,832-?-)
L Jo C,832) J'
поскольку из первого граничного условия при п = О следует >
Л4 = — /Vo (kR) = — /Уо C,832).
165
Если край пластины свободно оперт (рис. 4.14, б), то при г = R
граничные условия: 1)ш = 0; 2) Mr = D Г-^L. -f И (-у^г +
=O приводят к граничным условиям для функций
да' (R)
wn (г): 1) wa(R) = 0; 2) wa(R) + ц-^ = 0.
Подчинение решения D.52) этим граничным условиям снова
приводит к однородной системе уравнений относительно неизвест-
неизвестных А г и At. Несложный анализ, подобный проведенному выше,
показывает, что потеря устойчивости свободно опертой пластины
тоже происходит по осесимметричной форме, поскольку именно
этой форме прогиба пластины соответствует наименьшее собствен-
собственное значение (kR)^ Критическая нагрузка
<7кР=*|г- D.56)
В отличие от случая защемленной пластины для свободно опер-
опертой пластины коэффициент К зависит от коэффициента Пуассона ц,
который входит во второе граничное условие. При ц = 0,3 коэф-
коэффициент К. = 4,2.
Аналогичное решение нетрудно получить и в случае упругого
закрепления контура пластины. Причем окончательную расчет-
расчетную формулу можно привести к виду D.56), где К. изменяется в за-
зависимости от жесткости упругой заделки в пределах от 14,68 (аб-
(абсолютно жесткая заделка) до 4,2 (свободное опирание при ц, = 0,3).
Устойчивость равномерно сжатых кольцевых пластин
(рис. 4.13,6) тоже может быть исследована с помощью уравне-
уравнения D.51). Но в этом случае решение получается значительно более
громоздким: в выражениях для wn (r) остаются все четыре произ-
произвольные постоянные и подчинение этих выражений граничным
условиям на внутреннем и наружном контурах пластины приводит
к системе четырех однородных уравнений. Окончательный резуль-
результат представляется тоже в виде формулы D.56). В этой формуле
для кольцевых пластин коэффициент К зависит не только от гра-
граничных условий, но и от отношения внутреннего и наружного ра-
радиусов. Значения коэффициента К для всех практических интерес-
интересных случаев табулированы [33, 35].
Температурные задачи устойчивости круглых пластин. Лине-
Линеаризованные уравнения дают возможность найти критический
уровень внутренних начальных усилий, независимо от того, ка-
какими причинами эти усилия вызваны (наоборот, в закритической
области поведение пластины определяется характером внешних
причин, приведших к потере устойчивости). Поэтому при осесим-
метричном нагреве круглой пластины исследование устойчивости
плоского состояния равновесия можно проводить с помощью урав-
166
нения D.50). Начальные внутренние усилия Т°г и T'q должны быть
определены с учетом нагрева пластины.
Рассмотрим наиболее простой случай температурной потери
устойчивости пластины. Круглая тонкая пластина равномерно на-
нагревается вместе с массивной обоймой (рис. 4.14, в). Температур-
Температурные коэффициенты линейного расширения материалов пластины
и обоймы соответственно равны ах и а2. Температура At0 отсчиты-
вается от температуры того начального состояния, при котором
радиальный зазор между пластиной и обоймой отсутствует, а кон-
контактное усилие qk равно нулю. Когда ах > а2, при нагреве между
пластиной и обоймой возникает контактное усилие qk, равномерно
сжимающее пластину (если ах <а2, то сжимающее контактное
усилие возникает при охлаждении).
В силу симметрии задачи S° = 0; Т°г=Тв =—qk- В нагре-
нагреваемой пластине
7°=0.
Если обойму считать жесткой и пренебречь ее деформацией от кон-
контактного усилия qk, то, приравнивая температурные окружные
удлинения обоймы окружным удлинениям пластины, получаем
_ (cti — at) M°Eh
где Е и ц — модуль упругости и коэффициент Пуассона мате-
материала пластины, причем в данном случае без усложнения задачи
можно считать их изменяющимися с температурой.
Для определения критического значения А$р можно восполь-
воспользоваться формулой D.56):
(<7к)кр = К -#Г •
Откуда следует, что
д,о _к D(l-|i) 1 К ( h у
^'кр a /?2?A(ai_aij) ai —a2 12 A -h|*) V R ) '
Значение коэффициента К зависит от способа закрепления пла-
пластины в обойме (свободное опирание, защемление, упругая за-
заделка).
Примечательно, что в окончательную формулу для А^кр не
входит модуль упругости материала пластины.
Этот способ используют и для решения более сложных темпера-
температурных задач устойчивости круглых осесимметрично нагретых
167
пластины. Сначала из решения задачи термоупругости опреде-
определяют усилия Т°г и Т%, а затем находят наименьшее собственное
значение уравнения D.50). Однако точные решения подобных за-
задач удается найти в исключительных случаях 1101. В общем слу-
случае решение получают приближенным методом.
В заключение заметим, что решение задач устойчивости осесим-
метричной ортотропной пластины переменной толщины при осесим-
метричном начальном напряженном состоянии тоже можно искать
в виде D.49). В этом случае интегрирование обыкновенных диф-
дифференциальных уравнений, к которым сводится решение основного
линеаризованного уравнения, может быть выполнено методом
начальных параметров [12, 18]. Схема интегрирования анало-
аналогична схеме интегрирования основного линеаризованного урав-
уравнения для прямого стержня, описанной в § 13.
§ 23. Приближенные решения основного
линеаризованного уравнения
Задачи устойчивости пластин решают с помощью тех же при-
приближенных методов, что и задачи поперечного изгиба пластин [11,
17). Одним из наиболее эффективных методов является метод Га-
леркина. Выше этот метод использовали при решении одномер-
одномерных задач устойчивости стержней (см. § 12 и 13). Общая его схема
сохраняется и при решении однородных уравнений в частных
производных.
Пусть имеется однородное линейное уравнение
М [w] — PL [w] = 0, D.57)
где
М [w] = ?)V2V2tt';
Причем Р — параметр нагрузки, пропорционально которому уве-
увеличиваются все внешние усилия, действующие на пластину; Т°х =
= Г° (х, у), S° = S°(at, у), Т°у = Т°у (х, у) — распределение началь-
начальных внутренних усилий в срединной плоскости пластины при
Р = 1. Граничные условия для w, заданные на контуре пластины,
тоже однородны.
Напомним, что до решения задачи устойчивости пластины не-
необходимо определить начальное напряженное состояние пластины,
т. е. найти усилия Т°х, Т°у, S°. При сложных контурных нагрузках
и граничных условиях для пластин сложной формы, многосвязных
пластин и в некоторых других случаях эта задача обычно может
быть решена только с помощью приближенного метода.
168
При решении задачи методом Галеркина функцию попереч-
поперечного прогиба задают в виде ряда
N
w = Yi Cf/J (л;, у), D.58)
где ct — варьируемые параметры; ft (x, у) — базисные функции,
каждая из которых удовлетворяет всем заданным граничным усло-
условиям. Подстановка этого ряда в исходное уравнение D.57) дает
некоторую функцию-ошибку, тождественно не равную нулю:
L(x,y,P,clt ca, ...,cN)=h0
В силу линейности и однородности исходного уравнения функ-
функция-ошибка L будет линейной и однородной относительно варьи-
варьируемых параметров с,-. Для минимизации функции-ошибки тре-
требуют, чтобы она была ортогональна всем базисным функциям
ft (х< У)' т* е- выполнялись условия
\\ft(x,y)L(x, y,P,cltca, ...,cN)dxdy= О (i = 1,2, .... N),
D.59)
где интегрирование производится по всей площади пластины.
Полученная система N уравнений линейна и однородна отно-
относительно варьируемых параметров ct. Для существования нетри-
нетривиальных решений этой системы ее определитель должен быть ра-
равен нулю. Равенство нулю определителя однородной системы
уравнений приводит к характеристическому уравнению, которое
относительно параметра нагрузки Р имеет N-ю степень; N корней
этого характеристического уравнения дают приближенно N пер-
первых собственных значений Рп. Для каждого из этих значений Рп
из системы D.59) все варьируемые параметры можно выразить
через какой-нибудь один (например, /-й) и, используя выражение
D.58), приближенно получить Af первых собственных функций
N
wn (х У) = V, -r-ft (х у).
Если N —* оо и система базисных функций /,- (х, у) полная, то
в^пределе будет получено точное решение, т. е. точно будут най-
найдены все собственные значения и все собственные функции задачи.
Но обычно ограничиваются несколькими первыми членами ряда
D.58), поэтому вопрос о полноте системы базисных функций в дан-
данном случае представляет теоретический, а не практический ин-
интерес.
Намеченную схему решения проиллюстрируем несколькими
примерами.
169
\
я,
шшш
шшш
Рис. 4.15
Прямоугольная пластина, защемленная по всему контуру,
равномерна сжата в двух направлениях (рис 4.15, а). Граничные
условия задачи
при х=0 и л; = а о> = 0; -jr- = 0;
Если на перемещения пластины в ее плоскости не наложено
дополнительных связей, то Тх —— qx; 1% = —qy; S° = 0 и урав-
уравнение D.57) принимает вид
п (^Е. , п &w , d*w\ , _ d*w
и 1"л5Г"Г
\дх*
~дх*ду*
' дуЧ
' Чу ~1й2~ ~~
D.60)
Выбор аппроксимирующих функций — наиболее ответствен-
ответственный этап приближенного решения. Аппроксимирующие функ-
функции, с одной стороны, должны удовлетворять граничным условиям
и физическому смыслу задачи, с другой стороны, должны быть
удобными для математической обработки. В данной задаче, если
считать форму пластины, близкой к квадратной, то учитывая
результаты решенной в § 21 задачи устойчивости свободно опер-
опертой пластины, можно ожидать, что потеря устойчивости защем-
защемленной пластины будет происходить с образованием одной вы-
пучины (рис. 4.15, б). Тригонометрические функции удобны для
операций дифференцирования и интегрирования, поэтому, огра-
ограничившись первым членом ряда D.58), можно принять
w {х, у) =± Cjfx {x, у), D.61)
где
170
Подставив это выражение в уравнение D.60), найдем функцию-
ошибку
Умножив функцию-ошибку L на единственную базисную функ-
функцию /х (я, у) и проинтегрировав по всей площади пластины,
получим уравнение
- = C1 x
б о
X
Для существования отличных от тождественного нуля решений
выражение, стоящее в фигурных скобках, должно обращаться
в нуль. Это условие приводит к уравнению, дающему приближен-
приближенные значения критических соотношений внешних усилий:
а2 \ 4 пЮ /о V1 , о . о
В частности, для квадратной пластины, сжатой в одном направ-
направлении, т. е. при qx = q, qy = 0 и а = b
п — К ПЮ
Чкр Ао ?2 >
где Ко = -у-= 10,67; уточненное решение для квадратной
пластины дает Ко = 10,07. В этом случае для квадратной
пластины даже при сохранении в решении только одного члена
ряда D.58) метод Галеркина приводит к удовлетворительному
результату.
При этим необходимо помнить следующее. Ограничившись
в решении одним членом ряда, предполагаем одну вполне опре-
определенную форму потери устойчивости пластины. Для квадратной
171
пластины эта форма близка к действительной, поэтому найденное
выше приближенное собственное значение достаточно близко
к наименьшему (критическому) точному собственному значению
задачи. С изменением параметров упругой системы может проис-
происходить резкая качественная смена форм потери устойчивости.
Выбранная для приближенного решения функция D.61) не может
отразить такую качественную смену форм потери устойчивости.
Поэтому формула D.62), соответствующая форме потери устой-
устойчивости с образованием одной выпучины, при увеличении отно-
отношения ¦—¦ может приводить к сколь угодно большим погреш-
погрешностям. Для сравнения на рис. 4.16 приведены зависимости коэф-
коэффициента Ко для сжатой в одном направлении защемленной пла-
пластины, построенные по выражению D.62) и результатам уточнен-
уточненного (но приближенного) решения [19]. Из уточненного решения
следует, что при 1,1 <-т- <2 пластина теряет устойчивость
с образованием не одной выпучины, а двух, при 2 < -т-«ч 2,7 —
трех выпучин и т. д. Поэтому при -Ц- > 1,1 точность приведен-
приведенного приближенного решения резко ухудшается.
Если приближенное решение нужно получить для широкого
диапазона изменения параметров пластины, то при выборе ап-
проксирующих функций необходимо предусмотреть возможность
качественной смены форм потери устойчивости. Например, в рас-
рассматриваемой задаче при а > Ъ можно принять
^)
где vt (х) — собственные функции задачи устойчивости защемлен-
защемленного по обоим торцам стержня, сжатого одной силой Р (см. гл. 3).
1
Ш62)
40,67
A0,07
V
1
Рис 4.1 в
Рис. 4.17
172
Свободно опертая по контуру неравномерно сжатая в одном
направлении прямоугольная пластина (рис. 4.17, а). При линейно
изменяющихся внешних сжимающих усилиях qx = q(l — г\ -|-],
где r\ — заданный фиксированный параметр.
При этом Т5 = —?(l-t)-f-); Г2 = О; S°= 0.
(Заметим, что при другом нелинейном законе изменения qx =
= qx (у) определение начальных внутренних усилий в средин-
срединной плоскости пластины резко усложняется.) Основное уравне-
уравнение D.57) принимает вид
d*w d*w\ .Л „ у \ d*w n .. „„.
+)^qr]) 0 D>63)
Граничные условия задачи:
при х=0 и х = а w= 0,
при у = 0 иу = Ь ю-0,
В уравнение D.63) коэффициенты не зависят от х, поэтому
можно найти решение, удовлетворяющее граничным условиям
при х — 0 и х = а:
где Yn = Yn(y) — функция координаты у. Подставив это вы-
nnx
ражение в уравнение D.63) и сократив на sin , получим
D.64)
где штрихом обозначено дифференцирование по у.
Учитывая граничные условия при у = 0 и у = Ь, при реше-
решении методом Галеркина можно задать
N
2?
т=1
Подставив ряд D.65) в уравнение D.64), получим функцию-
ошибку
N
ет=1
173
или
2
т=1
Умножив функцию-ошибку L поочередно на все базисные функ-
функции sin т^у~, проинтегрируем от 0 до Ь:
ь
jsin-^-Ldy^O (m=l,2, ..., N). D.66)
о
Так, ограничившись только одним членом ряда D.65), полу-
получим одно уравнение
<."ЧИ№ Ш7 - < Ш1 ("-^)И
из которого в первом приближении находим
) ¦—ч"- D-67>
1 г
Причем входящее в эту формулу число полуволн п в продоль-
продольном направлении следует подбирать из условия минимума qKP,
как это сделано выше для прямоугольной пластины, равномерно
сжатой в одном направлении.
При г] = 0 результат первого приближения совпадает с по-
полученным в § 21 результатом точного решения для равномерно
сжатой Цпластины. При малых значениях х\ формула первого
приближения D.67) дает удовлетворительные результаты, но
с увеличением значений г\ ее точность резко ухудшается; так,
при г] = 2 формула D.67) приводит к абсурдному результату
(<7кр = оо).
Для получения более точного решения можно учитывать
два первых члена ряда D.65); тогда система D.66) будет состоять
из двух уравнений:
ъ 16
-¦ф" 0
174
Приравнивая нулю определитель этой системы уравнений, полу-
получаем квадратное уравнение для нахождения </кР во втором приб-
приближении:
Т+(т)" Г+[(?)"+(?
Входящее в это уравнение число полуволн в продольном
направлении п для каждого значения г\ и отношения -г- следует
подбирать из условия минимума q.
Отметим, что при г\ > 1 часть пластины оказывается сжатой,
а часть — растянутой. В соответствии с этим при г\ > 1 корни
уравнения D.68) могут иметь разные знаки. Учитывая большое
число членов ряда D.65), можно получать решение в следующих
приближениях.
Окончательный результат представляют в виде
п -к
</кр— Л» у» »
где Ко — коэффициент, зависящий от отношения сторон -г-
и параметра г\. Значения /Со табулированы для всех практически
интересных случаев [19, 33].
Прямоугольная пластина при сдвигающих нагрузках
(рис. 4.17, б). В этом случае Tj? = 0; 7^ == 0; 5° = q и урав-
уравнение D.57) принимает вид
Уравнение D.69) содержит смешанную производную J ,
поэтому даже для свободно опертой по всему контуру пластины
с конечным отношением сторон точное решение получить не
удается. Решение уравнения D.69) в замкнутом виде известно
только для удлиненной пластины при -| >оо [19]. Оконча-
Окончательный результат этого решения обычно записывают в такой
форме:
<7кр=*т^. D.70)
Причем при свободно опертых длинных краях пластины Кт —
= 5,34, а при защемленных длинных краях /Ст == 8,98.
175
Рассмотрим приближенное решение для пластины с конечным
отношением сторон; контур пластины считаем свободно опертым.
Воспользуемся методом Галеркина; функцию поперечного про-
прогиба примем в виде двойного ряда
^^ D.71)
Каждый член этого ряда, очевидно, удовлетворяет всем заданным
граничным условиям задачи.
Для прямоугольной пластины с конечным отношением сторон
дальнейшее решение, несмотря на принципиальную простоту,
оказывается весьма громоздким, ибо точные результаты удается
получить только при учете большого числа членов ряда D.71).
Ограничимся решением в первом приближении для пластины,
близкой к квадратной, т. е. при a^i b. Заметим, что даже в пер-
первом приближении необходимо учитывать два члена ряда D.71),
так как взяв один член ряда, получим условие ортогональности
D.59), не содержащее внешней нагрузки д. Итак, возьмем
Подставив эту функцию в уравнение D.69), найдем функцию-
ошибку
Г я л пх Щ \ 2я 2л 2я* л„ 1щЛ
- Я Iе" — Т cos ~ cos ъ + ^ IT "Г cos — cos -Г j •
Условия ортогональности D.59) приводят к двум уравнениям:
п г/ я \» . / я \»Т» аЬ 32 п
32 , _ Г/ 2я \» . / 2я \*"]а аЬ л /л 7ОЧ
—ТЯСп + D^—) +{—) J —Cn^O. D.72)
Приравнивая нулю определитель этой системы уравнений, на-
находим
или для квадратной пластины при а = b
q^+Kr^, D.73)
где /С, =1^-= 11,1.
176
При этом значении q из уравнений D.72) находим см= ± ^
Следовательно, форма изогнутой срединной поверхности пластины
при потере устойчивости приближенно описывается функцией
Знаки «=t», входящие в полученные выше зависимости, отра-
отражают тот очевидный факт, что изменение направления внешней
контурной нагрузки не влияет на ее критическое значение. Уточ-
Уточненное значение коэффициента в формуле D.73) для квадрат-
квадратной пластины равно Кх = 9,34 [19].
Учтя большее число членов ряда D.71) и выполнив трудо-
трудоемкие вычисления, можной найти значения коэффициента К.%
в формуле D.73) и при других значениях отношения -j-. Ана-
Аналогичные решения получены при иных закреплениях краев
пластины, причем результаты этих решений табулированы [19,
33].
Методом Галеркина могут быть решены (и решены) многие
другие задачи устойчивости прямоугольных и круглых пластин.
Но при всех достоинствах этот метод нельзя считать универ-
универсальным методом решения задач устойчивости пластин. Основ-
Основной недостаток метода Галеркина связан с необходимостью удов-
удовлетворения всех граничных условий при выборе базисных функ-
функций. Геометрические граничные условия можно выполнить срав-
сравнительно легко, но даже для пластин простой формы трудно
выбрать базисные функции, удобные для математической обра-
обработки и удовлетворяющих всем силовым граничным условиям.
Например, в задачах устойчивости прямоугольных пластин с од-
одним свободным краем чрезвычайно трудно подобрать удобную
систему базисных функций, удовлетворяющих граничным ус-
условиям на свободном краю. Это замечание относится и к пласти-
пластинам с упруго закрепленным краем или пластинам с отверстиями.
Во всех такого рода задачах приближенное решение удобнее
получать энергетическим методом.
Глава 5
Энергетический метод
исследования устойчивости пластин
Теория устойчивости упругих пластин первоначально поя-
появилась в энергетическом варианте. В 1890 г. на заседании Лон-
Лондонского математического общества была доложена работа Брай-
Брайана «Об устойчивости пластины, нагруженной в своей плоскости»,
в которой впервые сформулирован и применен к решению кон-
конкретных задач энергетический критерий устойчивости пластин.
С тех пор энергетический подход используют для решения раз-
разных задач устойчивости пластин (и не только пластин) при раз-
различных условиях нагружения и закрепления.
В гл. 5 изложены основы энергетического подхода к иссле-
исследованию устойчивости пластин и рассмотрено использование
энергетического метода для приближенного исследования пове-
поведения пластин после потери устойчивости.
§ 24. Энергетический критерий устойчивости
в форме Брайана
Рассмотрим тонкую упругую пластину, нагруженную в своей
плоскости (рис. 4.1). Устойчивость плоского начального состо-
состояния такой пластины исследуем с помощью энергетического
критерия в форме Брайана при допущениях, которые сформули-
сформулированы в § 19.
В начальном невозмущенном состоянии равновесия в средин-
срединной плоскости пластины действуют усилия Т° = Т°х (х, у), Т°у =
= Т%(х> У)> 50 = 5°(дг, у), которые будем считать известными.
Отклонение пластины от начального состояния равновесия за-
зададим перемещениями точек ее срединной плоскости:
w — aw1(x,y), E.1)
где а — бесконечно малый параметр, не зависящий от координат;
wi (х> У) — конечная функция координат.
В соответствии с намеченной в гл. 2 общей схемой исследо-
исследования устойчивости с помощью энергетического подхода под-
подсчитаем пропорциональное аг изменение полной потенциальной
энергии при отклонениях пластины от начального невозмущенного
178
состояния равновесия. Поперечные прогибы пластины w вызы-
вызывают изменения кривизны и кручение ее срединной плоскости,
определяемые формулами D.11) и D.12):
х; х; Х
Кроме того, срединная плоскость испытывает удлинения и
сдвиги, пропорциональные квадратам производных поперечного
прогиба и подсчитываемые по формулам
1 / дт у . 1 / дш
dw dw /с о\
E'3)
На этих удлинениях и сдвигах начальные усилия Т%, Ту,
5° совершают работу. Дальнейшие этапы вывода аналогичны при-
приведенным в § 9 и здесь не воспроизведены. Окончательно, опу-
опуская множитель а2 и индекс /, получим выражение изменения
полной потенциальной энергии пластины
E.4)
где энергия изгиба пластины V подсчитывается по формуле
,5.5)
Интегрирование в E.4) и E.5) производится по всей поверх-
поверхности пластины.
Точки бифуркации начального состояния равновесия опре-
определяются из условия стационарности АЭ, т. е. из условия
б (ЛЭ) = 0. E.6)
Это условие, при котором изменение полной потенциальной
энергии ДЭ подсчитывается по зависимости E.4), или эквива-
эквивалентное ему условие АЭ = 0 при дополнительном требовании
минимальной нагрузки будем называть энергетическим критерием
устойчивости пластин в форме Брайана.
Условие E.6) можно использовать как для точного решения,
так и для построения приближенного решения задач устойчивости
пластин.
179
Сначала покажем, что из этого условия следут основное линеа-
линеаризованное уравнение D.33). Уравнение Эйлера для функцио-
функционала E.4) имеет вид (см. приложение II)
д* 5Fj . д* dFi . д* dFt
~дх* я ( d»w \ + ду* я( дЧГ\ + дхду TTd*w ^~
У* I
д dF,
дх я I dm \ ду
д\~дТ)
где
2A
= 0, E.7)
дх» + ду* ) ~^Z(l Ml\dxdg) дх*
г i <?o dw dw , ~4 \ / dw
После дифференцирования (при D = const) из уравнения E.7)
следует, что
где
Таким образом, из условия стационарности ДЭ можно полу-
получить однородное линеаризованное уравнение D.33), которое
раньше получено из условий равновесия, составленных для
искривленного элемента пластины. В частности, если пластина
нагружена только контурными внешними усилиями, то началь-
начальные усилия Т°х, Т$, 5° удовлетворяют уравнениям равновесия
дх + дц ~U>
и уравнение E.8) преобразуется к виду
П$ 0. E.10)
Условие б (ДЭ) = 0 можно использовать для построения
приближенного решения задач устойчивости пластин методом
180
Рэлея—Ритца. В этом случае функцию поперечного прогиба
задают, например, в виде ряда
w(x,y)^^cifl(x,y), E.11)
где // (х,у) — координатные функции, удовлетворяющие (каж-
(каждая в отдельности) геометрическим граничным условиям задачи.
Если все действующие на пластину нагрузки изменяются про-
пропорционально параметру Р, то, подставив ряд E.11) в выражение
E.4) и выполнив необходимые операции дифференцирования и
интегрирования, получим
АЭ = АЭ{Р,съ с2, ...,cN). E.12)
Учитывая структуру выражения E.4), нетрудно установить,
что зависимость E.12) будет квадратичной формой от N пара-
параметров d- Поэтому условие стационарности АЭ приводит к системе
N однородных линейных уравнений с неизвестными с(:
= 0, /-1,2 N. E.13)
Равенство нулю определителя этой последней системы урав-
уравнений дает уравнение, из которого можно найти N приближенных
собственных значений параметра нагрузки Рп; наименьшее из
этих собственных значений приближенно равно Ркр.
Заметим, что при численной реализации метода Рэлея—
Ритца вместо условия б (АЭ) = 0 иногда удобнее воспользоваться
другой эквивалентной формулировкой энергетического критерия
устойчивости (см. § 9), положив АЭ — 0 при дополнительном
требовании Р = Лвт> гДе Р — параметр, пропорционально ко-
которому изменяются все приложенные к пластине нагрузки. В этом
случае приходим к следующему соотношению:
(К ]
дх ) +0 дх ду + 2 *У\ ду
где Т* = Т*х (х, у), Т% =- Т\ (х, у), 5е = 5° (х, у) — распределение
начальных усилий в срединной плоскости пластины при
Р = 1; величину V подсчитываем по формуле E.5). Минимизируя
каким-либо численным методом выражение E.14), находим
р р
г min — rw
Прежде чем привести примеры решения задач устойчивости
энергетическим методом, сделаем замечания по изложенному
181
TTTTTTi ТТГТТ
й
9у
f ПИТИИ t t
a) *
Рис. 5.1
выводу энергетического критерия Брайана. Особо необходимо
подчеркнуть, что критерий Брайана выражается через начальные
усилия Тх, Ту, 5°, которые до решения задачи устойчивости
должны быть предварительно найдены из решения плоской за-
задачи (точно или приближенно). В исключительных случаях
критерий Брайана может быть записан непосредственно через
внешние контурные нагрузки. Так, при однородном начальном
напряженном состоянии (рис. 5.1, а) постоянные величины Тх =
= —qx, Т°у = — qy,S° = qx можно вынести за знак интегрирования и
изменение полной потенциальной энергии подсчитывать с по-
помощью зависимости
а Ь
о о
а Ь
а Ь
0 0
Ш
0 0
Для пластины (рис. 5.1, б), нагруженной изменяющимся
по линейному закону погонным усилием <7x = <7(l-|-'4-f-)>
решение плоской задачи очевидно:
Тогда можно записать
Т°х = — дх, Т°у = 0, 5° = 0.
E.16)
В общем случае величину ДЭ следует подсчитывать через
начальные усилия Т%, Ту, S0 по зависимости E.4). Например,
если прямоугольная пластина с закрепленным относительно
поперечных перемещений контуром сжата произвольно изменяю-
изменяющимся вдоль стороны пластины усилием интенсивности qx = qx (у)
182
(рис. 5.2, а), то использование выражений E.15) или E.16) при
определении qK? может привести к сколь угодно большой ошибке.
На рис. 5.2, б показана прямоугольная пластина, сжатая четырьмя
сосредоточенными силами Р. Если для такой пластины попы-
попытаться подсчитать изменение полной потенциальной энергии
по выражению E.15) или E.16), то следует записать
При закрепленных относительно поперечного прогиба w
продольных сторонах пластины два последних интеграла в этом
выражении тождественно равны нулю. Тогда АЭ = V при лю-
любых совместимых с граничными условиями поперечных прогибах,
т. е. в данном случае выражение E.15) приводит к абсурдному
результату: нагруженная сжимающими силами пластина не может
потерять устойчивость ни при каких значениях этих сил [1].
В то же время, предварительно определив Т°х, Т°у, 5° и восполь-
воспользовавшись зависимостью E.4), получим конечное значение PKV.
Поэтому во избежание такого рода недоразумений при исполь-
использовании энергетического критерия в форме Брайана целесообразно
подсчитывать АЭ по зависимости E.4).
Следующее замечание связано с тем, что при выводе выра-
выражения E.4) точкам срединной плоскости пластины сообщались
только поперечные перемещения w = awx (х, у), а перемещения
в плоскости пластины и и v сразу полагались тождественно рав-
равными нулю. При этом может возникнуть вопрос, не приводит ли
такое ограничение перемещений точек срединной плоскости
пластины к завышению критических нагрузок, т. е. не может ли
пластина потерять устойчивость при перемещениях и, v, не рав-
равных нулю, раньше, чем это следует из критерия, полученного
в предположении равенства их нулю.
Для ответа на этот вопрос выясним, как отразится на значе-
значении АЭ введение перемещений и, v того же порядка малости,
как и поперечное перемещение w. Пусть перемещения, переводя-
переводящие пластину в новое состояние равновесия, смежное с началь-
начальным, заданы в виде и = аых (х, у); v=avx (x, у); w=aw1 (x, у),
У
и
1
1
L
а
* \
—У
\
X
У
р
р
р
Г 1
1
1
1
1
i
а
Р
А
б)
Рис. 5.2
183
где а — бесконечно малый параметр, не зависящий от коор-
координат.
Изменение кривизны срединной плоскости по-прежнему опре-
определяется формулами E.2). Удлинения и сдвиги в срединной пло-
плоскости пластины следует подсчитывать не по формулам E.3),
а по формулам D.24), Следовательно, можно записать
¦¦ а&х -f- а ги\ ги = аеу -\-а е/,
где
Величины г"х, ц, у" выражаются через функцию тг (л:, у) по фор-
формулам E.3).
Определив пропорциональное а2 изменение полной потенци-
потенциальной энергии, получим
где, как и ранее, величина V подсчитывается по формуле E.5).
Дополнительное слагаемое Vit зависящее от перемещений ых (л:,
У), »i (х, у), равно
Очевидно, V2 — величина положительно определенная, т. е.
при любых не равных тождественно нулю функциях иг (х, у)
и f! (х, у) всегда V2 > 0. Откуда следует, что для получения ми-
минимальной критической нагрузки функции иг (х, у) и их (л:, у)
необходимо положить тождественно равными нулю (перемещения
пластины как жесткого целого не рассматриваем). Итак, с той
же степенью точности, с которой верны формулы D.24), можно
считать, что при потере устойчивости точки срединной поверх-
поверхности пластины получают только поперечные перемещения до
(перемещения и, v второго порядка малости, сопутствующие
потере устойчивости пластины пока не рассматриваем).
Если удлинения и углы сдвига подсчитывать не по формулам
D.24), а по общим зависимостям B.22), то учет перемещений ult
«! приведет к поправкам в значениях критических нагрузок
порядка вкР по сравнению с единицей (см. § 7).
Следует заметить, что вывод выражения E.4) не зависит от
причин появления начальных усилий Т$, Т°и, 5° в срединной пло-
плоскости пластины. Эти усилия могли возникнуть под действием
контурных или массовых нагрузок, перепада температур, струк-
структурных превращений в материале пластины и т. д. В любом
случае (после того, как начальные усилия определены) критерий
184
и,
в)
6)
Ряс. 5.3
в форме Брайана может быть использован для исследования
устойчивости плоского напряженного состояния тонкой упругой
пластины.
Перейдем к примерам, иллюстрирующим применение прибли-
приближенного энергетического метода исследования устойчивости пла-
пластин. Рассмотрим прямоугольную пластину с одним свободным
краем (рис. 5.3, а). Пусть в направлении оси х пластина сжата
контурными усилиями, действующими по двум противоположным
сторонам, причем
рде т] — фиксированный параметр (ц > —1).
Как отмечалось, при таком нагружении прямоугольной пла-
пластины решение плоской задачи очевидно: Т% = — <7*> Ту = О,
S0 = 0. Выражение E.4) принимает вид
а ь
"-И Ь
о о
Если по трем остальным сторонам пластина свободно оперта,
то функцию поперечного прогиба удобно апроксимировать рядом
N
t
Для пластин со свободным краем обнаруживается основное
преимущество метода Рэлея—Ритца по сравнению с методом
Галеркина: при выборе координатных функций можно не за-
заботиться об удовлетворении силовых граничных условий на
свободном краю пластины. Ограничившись одним членом ряда,
находим
пп
ппх
d2w
плх
—
cos
ппх
d*w
ду*
185
Подставив значения производных в выражение для АЭ и вы-
выполнив несложные операции интегрирования, получим
-«(-?¦)'"D-+-?¦)}•
Собственные значения нагрузки равны
б2 . 6A —ц)
р
При п = 1 наименьшее собственное значение приближенно
равно критическому
E.17)
где
Ьа , 6A—|х)
„ аа "*" я»
Вид пластины, потерявшей устойчивость, схематично изобра-
изображен на рис'. 5.3, б. В частности, при tj = O и —g-—>0 получим
Дд= , 1 что согласуется с результатом, приведенным
в § 21. Взяв большее число членов ряда, <7кр можно определить
с любой степенью точности и при других значениях параметра г\
и отношения сторон пластины —.
В качестве второго примера рассмотрим сплошную круглую
пластину постоянной толщины, равномерно сжатую по контуру
распределенной нагрузкой q (рис. 4.14, а); тогда очевидно Т° =
= -?, П = -Ч. S° = 0.
Исследуем осесимметричную форму потери устойчивости та-
такой пластины. В этом случае изменение кривизны срединной пло-
плоскости определяется формулами
d*w .
1 dw
т dr
186
Удлинения и сдвиги в срединной плоскости равны:
" 1 / dw \2 » п " п
е) ; е 0; v о
Выражение E.4) принимает вид
где
о
Если край пластины защемлен и граничные условия на нем
w (R) = 0 и mJ ' = 0, то для приближенного решения
dr
можно принять, что
1=1
Если для определения критического значения qKP воспользо-
воспользоваться соотношением E.14), которое в данной задаче имеет
вид
R
dw \2 2A — u) dw d*w I
* - -^ I т dr
f E.18)
то ограничившись одним первым слагаемым, в выражении для
wt (r) в случае пластины постоянной жесткости D получим
к D
где К = 16. Точное значение (см. § 22) К = 14,68.
Учитывая большее число членов ряда и минимизируя выра-
выражение E.18) по безразмерным параметрам с(=-^-, нетрудно
получить результат с любой степенью точности. Значения коэф-
коэффициента К, подсчитанные при различном числе членов ряда,
будут следующими:
187
N . . . .
К
0
16
1
14,70
2
14,69
3
14,68
4
14,68
Решенная задача легко обобщается на случай пластины пере-
переменной толщины D = D (г); тогда вместо соотношения E.18)
следует записать, что
R
d?w I dw \ ^ 2 A — иЛ dw dPxs.
где T°r (г) — распределение начальных радиальных усилий при
q = 1, которое необходимо предварительно определить из реше-
решения осесимметричной плоской задачи для круглой пластины пере-
переменной толщины.
§ 25. Энергетический критерий устойчивости
в форме С. П. Тимошенко
Вернемся к общей задаче устойчивости тонкой упругой пла-
пластины (см. рис. 4.1), находящейся под действием контурных
и поверхностных нагрузок в плоском начальном напряженном
состоянии. Начальные внутренние усилия Т°х, Ту, S" считаем
известными. Рассмотрим возмущенное состояние пластины, смеж-
смежное с начальным плоским, причем переход пластины в новое со-
состояние зададим перемещениями точек срединной поверхности
(см. § 10):
и = ош1 (х, у) + а?иг (х, у);
v = аю1 (х, у) -{- а% (х, у); E.19)
w = ои»! (х, у) -|- сАу2 (х, у).
где а — бесконечно малый параметр, не зависящий от координат;
"i (*. У)> vi (*. У)* и>1 (х, у) и т. д. — конечные функции координат.
Изменение кривизны срединной плоскости пластины, удли-
удлинения и сдвиги в срединной плоскости подсчитаем по формулам
D.11) и D.24):
_ Л) . 1 / dw \* _ dv , 1 / <Эш \2
— IF + "Г V aFj ' Zy ~~ ~ду ^ Т \ljf)
ди dv . dw dw
В соответствии с общей схемой, уже неоднократно использо-
использованной, найдем пропорциональное а2 изменение полной потен-
188
циальной энергии ДЭ при переходе пластины в новое состояние,
смежное с исходным. Как показано в предыдущем параграфе,
при потере устойчивости перемещения иг (х, у) и vx (x,y) тожде-
тождественно равны нулю [введение дополнительных слагаемых в вы-
выражениях E.19) не влияет на этот вывод]. Кроме того, как нетруд-
нетрудно проверить, функция м>2 (х, у) не войдет в выражение для кэ.
Поэтому при исследовании устойчивости пластины вместо общих
выражений E.19) достаточно принять, что
и = а?иг (х, у); v = oft>2 (х, у); w = ада, (х, у). E.20)
Тогда, опустив множитель а2, получим
ДЭ = V + J J (Т%: + Т°уеу + SV) dx dy -
— J J (PXU2 + PyV2) dxdy-j) {цхщ + qyv2) ds, E.21)
где px, py и qx, qy — поверхностные и контурные нагрузки;
ди* л. 1 ( аш
„ __ gut . дуг dw1 ашх
' а^ ¦" вх ¦" ал: ay •
вх
Покажем, что выражение E.21) тождественно выражению
E.4) при любых совместимых со связями перемещениях и2 (х, у)
и р2 (х, у)- Для этого в выражении E.21) выделим все слагаемые,
содержащие эти перемещения и их производные:
— J J (P* + Pfi) dxdy ~j> (qxu2 + qyv%) ds.
Последнее выражение представляет собой первую вариацию
полной потенциальной энергии начального напряженного со-
состояния пластины, вычисленную в предположении, что возмож-
возможные перемещения в плоскости пластины совпадают с перемеще-
перемещениями «2 (#> У) и v2 (x, у). Поскольку начальное плоское напря-
напряженное состояние равновесно, А = 0 при любых совместимых
со связями перемещениях «2 (*. У) и t>2 (*> У)- Следовательно,
выражение E.21) тождественно выражению E.4). В частности,
именно поэтому при выводе выражения для ДЭ перемещения
«2 (х, у) и v2 (x, у) можно положить равными нулю.
189
Перемещения «2 (*> У)> ^2 (*» У) можно выбрать так, чтобы
в выражении E.21) обратить в нуль все слагаемые, содержащие
начальные усилия Т%, Ту, S0. Для этого с помощью соотношений
упругости введем величины
=p-& + №*)'* E.22)
Тогда, выразив Тх, Ту, S0 через е?, е?, у0, с помощью тех же со-
соотношений упругости, можно записать
(Т°хгх + 5°Т" + Т°уву) dx dy -
J J (
= J J C
+ ТУУ) dx dy = W.
Начальные удлинения и сдвиги в срединной плоскости ъ%,
By, у0 выразим через начальные перемещения «0, v0 и получим
Используя формулы Грина для интегрирования по частям,
приходим к следующему выражению:
ds -
где обозначено:
qy = S cos P + Т„ sin p.
Для того чтобы в выражении E.21) избавиться от слагаемых,
содержащих начальные усилия Т°х, Т\, S0, достаточно потребо-
потребовать, чтобы Т"х, Ту, S" удовлетворяли уравнениям:
дх ^ ду
К ,ds-
E.24)
При этом на контуре пластины должны выполняться условия
7* = 0; q"y = O. E.25)
190
При выполнении перечисленных условий получим выражение
для АЭ, не содержащее в явном виде начальных усилий Т%, Ту, S0:
ds - \ \ (Рхиг + pfl^ dx dy. E.26)
В этом выражении контурный интеграл'берется по той части
контура пластины, для которой заданы внешние нагрузки qx и qy.
Дальнейшее решение можно вести на основании условия
б (АЭ) = 0 либо АЭ = 0 при дополнительном требовании мини-
минимума параметра нагрузки. Эти условия эквивалентны. В случае,
когда изменение полной потенциальной энергии АЭ подсчиты-
вается по зависимости E.26), указанные условия будем
называть энергетическим критерием устойчивости пластин в форме
С. П. Тимошенко.
Прежде чем изложить схему решения задач устойчивости
с помощью энергетического критерия в форме С. П. Тимошенко,
сделаем несколько общих замечаний.
Напомним, что энергетический критерий в форме Брайана
выражается через начальные усилия Т%, Ту, S0, действующие
в срединной плоскости пластины в докритическом напря-
напряженном состоянии, и позволяет исследовать устойчивость
пластины независимо от того, какими причинами эти усилия
вызваны. Энергетический критерий в форме С. П. Тимошенко
не содержит начальных усилий Т1, Т°у, S" и выражается непо-
непосредственно через внешние нагрузки, которые действуют на пла-
пластину. Поэтому выражение E.4) более общее, чем выражение E.26).
Например, для решения температурной задачи устойчивости
пластины применять выражение E.26) нельзя. В этом случае не-
необходима особая форма записи энергетического критерия в форме
С. П. Тимошенко (см. стр. 198).
Обратим внимание на то, что запись энергетического критерия
в форме С. П. Тимошенко избавляет от необходимости определять
начальные усилия Т%, Ту, S°, но требуется вычислить переме-
перемещения и2 (х, у), 1>2 (х, у), входящие в выражение E.26). Поэтому
трудно выявить преимущества той или иной формы записи энер-
энергетического критерия; иногда удобнее использовать форму Брай-
Брайана, в других случаях (особенно для получения упрощенных
приближенных решений) — форму С. П. Тимошенко.
Наметим путь приближенного решения задач устойчивости
пластин с помощью энергетического критерия в фбрме С. П. Ти-
Тимошенко. Введем функцию усилий <р2 = <р2 (*. У) с помощью
соотношений
Используя зависимости E.22) и выражения для ь'х, е„, у",
можно получить уравнение
-» [(•?&¦)'-¦*&-¦?-]¦ '5-27>
191
которому должна удовлетворять введенная функция ф2 (х, у).
Граничные условия для функции усилий ф2 получим из ус-
условий E.25). Для этого воспользуемся очевидными геометриче-
геометрическими зависимостями (см. рис. 4.1)
dx — — ds sin P; dy = ds cos f5.
Откуда следует, что
Поэтому можно записать
' _ д i аф2 \ - _ д
** ~ ~Ш\~ду~)' Чу~~
Граничные условия для ф2 на контуре односвязной пластины
можно представить либо в виде
^ 2l = 0) E.28)
либо в виде
ф2 = 0; 4^-0, E.29)
где п — нормаль к контуру пластины.
Исходя из граничных условий, заданных относительно нор-
нормального прогиба, выберем функцию w1 (x, у) в виде ряда
Wi(x,y)=IiC,ft(x, у). E.30)
Это позволяет выразить правую часть уравнения E.27) через
функции ft (x, у) и коэффициенты С/. Обратим внимание на следую-
следующее обстоятельство. При известной правой части уравнения E.27)
задача определения функции усилий ф2 (х, у) оказывается экви-
эквивалентной обычной линейной задаче определения поперечного
прогиба защемленной по контуру пластины. Действительно, урав-
уравнение E.27) аналогично обычному уравнению изгиба пластины,
если правую часть, пропорциональную гауссовой кривизне де-
деформированной срединной поверхности пластины, рассматривать
как заданную поперечную нагрузку. Граничные условия E.29)
соответствуют условиям защемления. Поэтому, пользуясь хорошо
разработанными методами линейной теории изгиба пластин,
с любой степенью точности функцию усилий ф2 (х, у) можно вы-
выразить через выбранную функцию и>г (х, у).
Используем соотношения упругости E.22) и получим урав-
уравнения для определения перемещений «2, v2:
d«2 1 / dw1 \a , I I 3*ф2 д*фг \ .
_^_ i ЛЧ\2, _1_/^Ф2._ ^2i\ E>31)
dy ~~ 2 \ду ) + Eh \ dx* ** dy» )'
192
После определения функций и2(х, у) и v2 (х, у) дальнейшее
решение можно вести из условия б (АЭ) = 0 либо A3 = О при
дополнительном требовании минимума параметра нагрузки. От-
Отметим, что для определения критических нагрузок не всегда
следует находить перемещения и2 (х, у), о2 (*¦ У) (см- § 26).
Примеры решения конкретных задач с помощью энергетиче-
энергетического критерия С. П. Тимошенко приведены ниже, здесь отметим
только один частный случай уравнений E.27). Правая часть этого
уравнения пропорциональна гауссовой кривизне деформированной
срединной поверхности пластины (см. § 9):
„ / daw1 \2 _ dtw1 dtw1
А ~ \~дхду~) ~д&~ ду* *
Если при потере устойчивости срединная плоскость пластины
изгибается по развертывающейся поверхности и К — 0, то решению
уравнения E.27) с граничными условиями E.29) соответствуют
г; =0, т; = о, s" = о.
В этом случае для определения перемещений «2 (х, у) и v2 (x, у)
можно использовать уравнения
d«2 1 / дш1 \2 .
~дх Т\~дГ/ '
E<32)
_i__L/iEi
ду - 2 \ду
которые получаются как частный случай уравнений E.31).
§ 26. Формулировка критерия устойчивости
через статически возможные усилия
Энергетический критерий устойчивости в форме Брайана
формулируется через начальные усилия, которые действуют
в упругом теле к моменту, предшествующему потере устойчивости.
Однако некоторые авторы высказывали предположение, что
в критерии устойчивости в форме Брайана вместо действительных
начальных усилий можно использовать любую систему стати-
статически возможных начальных усилий и делали попытки построить
такого рода решения.
При этом определение действительного начального напряжен-
напряженного состояния заменяется значительно более простой задачей
подбора любого статически возможного напряженного состояния.
Кроме того (в отличие от изложенного в предыдущем параграфе
варианта энергетического критерия), не нужно определять до-
дополнительные перемещения «2 (*• #). v2 (x, у). Но этот путь реше-
решения неверен*. В этом нетрудно убедиться на примере, приведен-
приведенном в § 24.
* Верный путь использования статически возможных начальных усилий
впервые указан Л. И. Балабухом.
7 и. а. Алфутов 193
Для изображенной на рис. 5.2, б пластины, нагруженной че-
четырьмя силами Р, в качестве статически возможного начального
напряженного состояния можно взять Т% = 0, 1% = О, Sc = О
по всей площади пластины и Т% = *- (где б —» 0) вдоль двух
сторон при у = 0 и у — Ь. Поскольку вдоль этих сторон о>1 = О,
замена в выражении E.4) начальных усилий статически возмож-
возможными приводит к абсурдному результату: Ркр —» оо. Из этого
не следует, что статически возможные усилия нельзя исполь-
использовать при формулировке энергетического критерия устойчиво-
устойчивости упругих тел; более того, введение в энергетический критерий
статически возможных начальных усилий (если это сделано
правильно) в ряде случаев облегчает получение приближенного
решения задачи.
Покажем, как можно ввести статически возможные начальные
усилия в энергетический критерий устойчивости упругих пла-
пластин, сформулированный в предыдущем параграфе.
Для простоты изложения ограничимся случаем, когда пла-
пластина (рис. 4.1) нагружена только контурными внешними уси-
усилиями qx, qy. Тогда внутренние начальные усилия удовлетворяют
уравнениям равновесия
дт°х . dS° Л.
* E.33)
дх ^ ду ~ и
и подчинены граничным условиям на контуре пластины
S° cos p + Ту sin p = q . E.34)
Уравнения E.33) позволяют ввести функцию начальных уси-
усилий ф0 с помощью соотношений:
ду*
Начальные усилия связаны зависимостями D.3) с удлинениями
и сдвигами zjc, e°, у0 в срединной плоскости, которые с помощью
линейных зависимостей D.1) выражаются через производные
начальных перемещений. Это позволяет свести задачу определе-
определения функции усилий ф0 к решению бигармонического урав-
уравнения
у»^фо = О. E.36)
194
Вместо действительных начальных усилий Т°, Ту, S0 введем
статически возможные начальные усилия Тх, Т%, S°, удовлет-
удовлетворяющие уравнениям равновесия
а5с
дх ^ ду
E.37)
дх ^ ду
и подчиненные граничным условиям задачи: "
Sc cos p 4" Т\ sin p = qy.
В отличие от действительных начальных усилий статически
возможные усилия не связаны с деформациями пластины. Урав-
Уравнения равновесия E.37) позволяют ввести функцию статически
возможных усилий
-ч2 с -.2 г -.2 г
= —Sc. E.39)
В отличие от функции ф0 функция фс не удовлетворяет бигар-
моническому уравнению E.36).
Для рассматриваемой задачи, когда на контуре заданы только
внешние усилия qx, qy и отсутствуют поверхностные нагрузки
рх, ру, выражение E.26) принимает вид
xua + qyva)ds, E.40)
1 и
»>
где V — подсчитывается по формуле E.5).
Для любой системы статически возможных усилий Т%,
S° можно записать тождество
J J L дх х т~ \ ду "¦" дх ) "т" ду у J ^ ^f W* »"Г V» »/
E.41)
В справедливости этого тождества нетрудно убедиться путем
интегрирования по частям:
.с , до<> „
= (j) [(Т$ cos р 4- Sc sin р) Щ 4- (Sc cosp 4- T% sin р) у2] ds —
Tl a5c
195
Интеграл по площади в правой части последнего равенства
обращается в нуль, поскольку статически возможные усилия
удовлетворяют уравнениям равновесия E.37). Контурный ин-
интеграл преобразуется к контурному интегралу в выражении
E.41), поскольку статически возможные усилия подчинены гра-
граничным условиям задачи E.38).
Учитывая тождество E.41), вместо выражения E.40) получим
Эта формула позволяет выразить энергетический критерий
устойчивости S (A3) = 0 через статически возможные начальные
усилия Т%, Tl, Sc.
На первый взгляд задача усложняется. При использовании
энергетического критерия в форме Брайана предварительно
нужно найти начальные усилия Тх, 1%, S0 и затем из условия
S (A3) = 0 определить собственные функции задачи wn (х, у)
и собственные значения параметра нагрузки.
При использовании выражения E.42) также предварительно
находим статически возможные начальные усилия Тх, Г?, Sc,
затем кроме нормальных перемещений wx (х, у) определяем про-
производные перемещений ы2 (х, у), и2 (х, у) входящие в E.42). Но
как следует из приведенной задачи устойчивости пластины,
нагруженной сосредоточенными силами, может оказаться, что
определение статически возможных начальных усилий значительно
проще, чем определение действительных начальных усилий.
В некоторых случаях благодаря простоте построения системы
статически возможных начальных усилий решение задачи об-
облегчается несмотря на необходимость дополнительного опреде-
определения производных перемещений ы2 (*» #)> у2 (*> У) по формулам
E.31).
Выражение E.42) можно преобразовать к более удобному для
практического использования виду. Воспользовавшись соотно-
соотношениями D.24), запишем
1 те / daij \* i се За»! dw, . 1 ,-с / dw, \а "| , .
— J J (Тсхг"х + SV 4- T%) dx dy.
Зависимости E.22) позволяют преобразовать последний ин-
интеграл в этом выражении:
X
196
) dx dy - i±fi. J J (TlT'y - 2S°S' + T\TX) dx dy.
Используя формулы Грина, последний интеграл в правой части
полученного выражения преобразуем к виду
ж«
дх*
где введена функция усилий <р2, связанная с усилиями соотно-
соотношениями
д* д* "б* _ о*
Из граничных условий E.25) следуют граничные условия
для функции ф2 (подробно см. § 25):
дф2 _ п. дфг _ п
-dT-v' ЦТ
Выражение E.43) тождественно равно нулю: контурный ин-
интеграл в правой части этого выражения равен нулю в силу гра-
граничных условий, которым подчинена функция усилий <р2. Ин-
Интеграл по площади обращается в нуль, поскольку статически
возможные начальные усилия Т% Sc, 1% удовлетворяют урав-
уравнениям равновесия E.37).
После преобразований получим
<5-44>
Если статически возможные начальные усилия Т%, Т\
совпадают с действительными начальными усилиями Тх,
го
с
1 У
и выражение E.44) переходит в выражение E.4) энергетического
критерия в форме Брайана.
197
§ 27. Термоупругая задача устойчивости
пластин
Критерий устойчивости в форме Брайана справедлив неза-
независимо от причин появления начальных усилий Т%, Ту, S". В част-
частности, выражением E.4) можно пользоваться и в том случае,
когда эти усилия возникают в результате нагрева или заданных
на контуре пластины перемещений ы0 и и0. При этом общая схема
исследования устойчивости сохраняется. Предварительно из реше-
решения плоской задачи определяют начальные усилия в срединной
плоскости пластины и затем исследуют устойчивость начального
напряженного состояния пластины. Но задачу устойчивости
упругой пластины под действием нагрева или заданных на ее
контуре начальных перемещений ы0 и v0 можно решать, не опре-
определяя начальных усилий Г?, Т°у, S0, а используя критерий устой-
устойчивости в форме С. П. Тимошенко.
Сначала преобразуем критерий в форме С. П. Тимошенко
для того случая, когда на контуре пластины заданы не нагрузки,
а перемещения. Рассмотрим пластину, на части контура sx ко-
которой заданы перемещения ы0 = ы0, v0 = v9; других внешних
воздействий пластина не испытывает. Вывод выражения для из-
изменения полной потенциальной энергии A3, не содержащего
начальных усилий 72, Ту, S0, аналогичен выводу в случае за-
заданных внешних нагрузок. Перемещения, описывающие переход
пластины в новое отклоненное от начального состояния равно-
равновесия, зададим в виде
и = ааи2 (х, у);
v = a%(x, у);
w = аа»! {х, у),
где а — бесконечно малый параметр. Причем функции иг (х, у)
и v2 (x, у) должны обращаться в нуль на тех участках контура
пластины, для которых в явном виде заданы начальные переме-
перемещения ы0, у0. Тогда, вычислив изменение полной потенциальной
энергии пластины, получим
АЭ = V + J J (T%"x + SV + ТУу) dx dy, E.45)
где V и &"х, ty, у" определяются так же, как и в § 25.
Произвол выбора перемещений ы2, и2 и в этом случае поз-
позволяет так распорядиться ими, чтобы избавиться от начальных
усилий TJ, Ту, S® в выражении E.45). Повторив все рассужде-
рассуждения и этапы вывода, проведенные в § 25, получим
A3 = V + § (uq"x + vqy) ds, E.46)
198
где и = и (х, у) и v=*v(x, у) — заданные перемещения контура
пластины. Величины qx и q"y на контуре пластины определяются
зависимостями
Ях — Tx cos p -f- 5 sin p;
q"y = fy sin p + S* cos 0,
причем Т?, 7^ должны удовлетворять уравнениям
E.47)
дТ,
dS"
dS
~ду~
дт"
f
E.48)
где
E.49)
дс2
ду
E.50)
Напомним, что на тех участках контура пластины, для кото-
которых в явном виде заданы начальные перемещения «0 (х, у), у0 (х,
у) перемещения и2 (х, у), v2 (x, у) должны обращаться в нуль:
1*2(х, у) = 0', v2(x,y) = 0. E.51)
Как и в~§ 25," можно ввести функцию <р2 и определить ее с уче-
учетом условий E.51) на тех участках контура, для которых на-
начальные перемещения заданы. Решение можно строить и иначе,
используя уравнения в перемещениях.
Подставляя в уравнения E.48) значения Тх, Т"у, S", опре-
определяемые формулами E.49) и используя зависимости E.50),
199
получаем два уравнения, позволяющие выразить перемещения
«2 (х, у), и2 (х, у) через перемещение о»! (х, у):
д*иг
дх*
а</2
•+•
2 дх ду*
2 ду дх*
2 дхду ' дх дх*
. 1 +|х аа>! д*ш1 __ р..
+ 2 ~ду~~ дхду ~~ '
а*«2 | ate»! d*w1
~ду~~ЩГ
^=0.
2 ал; а* а</
E.52)
При решении этих уравнений необходимо учитывать гранич-
граничные условия E.51) и E.25) на соответствующих участках контура.
Потеря устойчивости упругой пластины может быть вызвана
температурными напряжениями. Задачу термоупругой устой-
устойчивости рассмотрим в следующей постановке. Тонкая пластина
нагревается равномерно по всей толщине <° = Р (х, у); механи-
механические свойства материала пластины считаем не зависящими
от температуры. До потери устойчивости удлинения в срединной
плоскости связаны с начальными усилиями и температурой соот-
соотношениями упругости
E.53)
Eh
где <Zf —¦ температурный коэффициент линейного расширения ма-
материала пластины; Р — температура, отсчитываемая от некоторой
температуры ??ач> при которой в пластине отсутствуют темпера-
температурные напряжения.
Удлинения и углы сдвига определяются по линейным формулам
через производные начальных перемещений:
о дир . о dvo , о ди$ . dvo
х дх ' " ду ' ду дх '
Начальные усилия удовлетворяют уравнениям равновесия:
дГх
dS°
¦ О.
Ири заданных на контуре пластины граничных условиях от-
относительно перемещений ы0 (х, у), v0 (x, у) и усилий Т«, Ту, S",
используя приведенные соотношения, можно определить началь-
начальные усилия Tic, Ту, S0 в срединной плоскости пластины.
200
Когда начальные усилия определены, при решении задачи
устойчивости можно не учитывать, что они вызваны неравномер-
неравномерным нагревом и, подсчитывая изменение полной потенциальной
энергии при отклонениях пластины от исходного состояния,
использовать выражение E.4):
Однако можно не решать термоупругую задачу и перейти
к записи энергетического критерия в форме С. П. Тимо-
Тимошенко.
Путем преобразований аналогичных тем, которые приведены
в § 25, последнее выражение приводим к виду
t?(x, y)(T"x+T'y)dxdy =
= V - J J «,<• {x, у) ( **. + igf.) dx dy. E.54)
Следует помнить, что в этом внешне простом выражении E.54)
необходимо найти значения Т"х и Т"у. При этом можно использо-
использовать схему решения, изложенную в § 25, либо в настоящем пара-
параграфе.
§ 28. Примеры использования
энергетического критерия устойчивости
Сначала рассмотрим классическую задачу устойчивости шар-
нирно-опертой по всем сторонам прямоугольной пластины (при
а^аЬ), равномерно сжатой в двух направлениях. Точное решение
этой задачи известно (см. § 21). При потере устойчивости по-
поперечные перемещения пластины (с точностью до постоянного
множителя) описываются функцией
Щ (х, У) = А sin -^ sin Щ-.
Критическое значение нагрузки q равно (при а = Ь)
_ 4 Ю
<7кР— i+v b»
где v == 3jl, причем qx = q и v > 0.
Цх
201
Подсчитаем изменение полной потенциальной энергии при
отклонениях пластины от начального состояния равновесия
с помощью выражения E.4):
где
При использовании критерия устойчивости в форме Брайана
необходимо предварительно найти начальные усилия т\, Т°в,
S0, действующие в срединной плоскости пластины. В данном
случае решение задачи очевидно: Т% = —q\ Ту — —\q\ S° = 0.
Задавшись функцией поперечного прогиба
w1 = сг sin — sin —r-, E.55)
находим (при D = const)
Окончательно получаем
С учетом условия A3 = 0 (или —^—- = 0J находим точное
значение критической нагрузки, поскольку в качестве функции
Дох (х, у) взято точное решение задачи *.
Для сравнения решим эту задачу с помощью энергетического
критерия в форме С. П. Тимошенко. В этом случае ДЗ опреде-
определяется из выражения E.26), которое в рассматриваемой задаче
при рх = 0 и ру = 0 принимает вид
дэ = V - ф (utqx + Vtfy) ds. E.56)
Учитывая симметрии задачи, начало координат удобнее по-
поместить в центре пластины (рис. 5.4, с). При этом функция по-
поперечного прогиба E.55) запишется так:
ПХ Пи ,г Г-7Ч
mi —. /> рп^ r(Y\ (ri ri/\
1 1 a b v '
* Впервые эта задача была решена таким путем в конце прошлого века Брай-
Брайаном [38].
202
а
7
a)
¦oicv,
Л
1
а
к
в)
Рис. 5.4
При использовании критерия в форме С. П. Тимошенко не-
необходимо решить вспомогательную задачу по определению пере-
перемещений ы2 (х, у), v2 (x, у). Для этого сначала найдем функцию
усилий ф2 (х, у), связанную с поперечным прогибом wy {x, у)
уравнением E.27):
В данном случае, когда функция wx (x, у) взята в виде E.57),
это уравнение имеет вид
= СХЕК (-i)8 (^
E.58)
Из граничных условий E.29) следуют граничные условия
для функции <р2 в рассматриваемой задаче:
При Х== ;?— ф2 =
ь п
при у=±-к- ф2 = О,
дх
¦0;
E.59)
Уравнение E.58) с граничными условиями E.59) описывает
поперечный изгиб защемленной по контуру прямоугольной пла-
пластины. Точное решение этого уравнения получить не удается
и поэтому проинтегрируем его приближенно по методу Галеркина.
Учитывая граничные условия функцию <р2 (х, у) зададим так:
-\- cos —г-1. E.60)
203
Умножив согласно методу Галеркина уравнение E.58) на вы-
выбранную функцию фа (х, у) и проинтегрировав по всей площади
пластины, найдем (при а = Ь)
/ —4?- E-61)
Для определения перемещений ы2 {х, у), v2 (x, у) имеем за-
зависимости (см. § 25)
ди, _ 1 / dwj. \« , 1 / а*ф2 а2
s _ / i У ,
ду — Т\ду ) ^ Eh
В силу симметрии задачи центр пластины, совмещенный
с началом координат, можно считать неподвижным; тогда
0 E.62)
у
В выражение E.56) входят перемещения ы2 (х,у), v2 (x, у)
на контуре пластины. Учитывая симметрию задачи, эти пере-
а Ь
мещения достаточно определить только при х = д" иу— ~-.
При а = b получим
E.63)
На рис. 5.4, б схематично изображены перемещения ы2> V2
контура пластины. Следует отметить, что в углах пластины они
не равны нулю.
Теперь выражение E.56) можно записать так:
= У-2 J qxUi\ ady+ I qyvt\ b dx\ E.64)
Заметим, что интегралы удвоены в силу симметрии рассмат-
рассматриваемой задачи. Условие A3 =0 снова приводит к точному
выражению для qKP.
204
Если в рассматриваемой задаче критерий устойчивости сфор-
сформулируем через статически возможные начальные усилия и
функцию w1 (х, у) оставим в виде E.55), то опять придем к точ-
точному значению критической нагрузки, поскольку выбранная
функция является точным решением задачи.
Когда начальные усилия Т%, Ту, S" определяются элементарно,
использование энергетического критерия в форме С. П. Тимошенко
связано с более громоздкими выкладками, чем критерия в форме
Брайана. Но определив 1 раз перемещения ы2 (х, у), и2 (х, у),
можно легко получить приближенное решение серии других
задач устойчивости пластины, допускающих ту же аппроксима-
аппроксимацию функции поперечного прогиба дох (х, у). Найдем, например,
критическое значение нагрузки для пластины, изображенной
на рис. 5.4, в. Будем считать, что контурная нагрузка изменя-
изменяется по степенному закону (задача симметрична и рассмотрим
только значения дх (у) при у > 0):
Тогда из выражения E.64) получим
Ь/2
Критическое значение нагрузки подсчитаем по формуле (при
а = Ъ)
V
Чкр — Ь/2
Окончательный результат представим в виде безразмерной
суммарной критической силы
Ь/2
КР Я2
Безразмерный параметр Ркр показывает, во сколько раз
суммарная критическая сила при qx = q (r^j превосходит сум-
суммарную критическую силу при qy = q = const. Несложные вы-
выкладки приводят к следующим результатам:
в_ 0 1 2 3 4 5
Ркр 1 1,26 1,42 1,56 1,67 1.73
205
Эти результаты (за исключением Ркр — 1 при z = 0) явля-
являются приближенными, поскольку функции wt (х, у) и <р2 (х, у)
аппроксимировали одночленами. Если эти функции задавать
в виде рядов, то решение можно получить практически с любой
степенью точности, как это показано в § 25 для круглой пластины.
Заметим, что решение с использованием записи энергетиче-
энергетического критерия устойчивости через статически возможные началь-
начальные усилия приводит к тем же значениям критических нагрузок
(при тех же аппроксимирующих функциях).
В качестве следующего примера рассмотрим осесимметрич-
ную задачу устойчивости круглой пластины (рис. 4.13, а). Опи-
Описывая переход пластины в смежное с исходным состояние пере-
перемещениями w {г) = a wx (г); и (г) = а2и2 {г), используя фор-
формулы
- du, \ (d ^
d2w1
"~ "dr5"'
= 0
1 dw1
r dr
E.66)
получим
Д5 = V — 2nqRu2 (R), E.67)
где ы2 (R) — радиальное перемещение на контуре пластины;
V — энергия изгиба пластины, подсчитываемая по формуле
2
Величины Т"г и Те связаны с е" и ее зависимостями закона Гука:
Eh
E.69)
Из условия самоуравновешенности
вытекает уравнение, позволяющее выразить перемещение ы2 (г)
через функцию а>х (г):
r \ dr J dr \ dr* )'
206
Интегрируя это уравнение, находим
тЬг) + -^-г*\|**. E-70>
где Л! и А г — постоянные, определяемые из граничных условий
задачи. Так, для сплошной пластины перемещение в центре
«а @) должно быть ограниченным, поэтому Л2 = 0. В рассмат-
рассматриваемой задаче на контуре пластины задана внешняя нагрузка,
поэтому вторым граничным условием будет Т'г = 0 при г = R
или
Если контур пластины защемлен (при г = R заданы гра-
граничные условия w (R) = 0 и "^ = 0 ), то функцию попе-
поперечного прогиба можно задать в виде ряда
М'-й'Ш' <>
Учитывая одно первое слагаемое и граничное условие E.71), из
выражения E.70) находим (при А2 = 0)
+ 4 E - (г) (^-N - G - ,*) (-1-O ] . E.73)
В частности, при г = R имеем ыа (R) = —2 -^-. Исполь-
зуя^выражение E.67) из условия АЭ — О в первом приближении
находим критическое значение нагрузки
к D
<7«р= А-?г",
где К = 16; точное значение К = 14,68 (см. § 24).
Учитывая большее число слагаемых, в выражении E.72)
можно получить решение практически с любой степенью точно-
точности. Причем значения коэффициента К. при различном числе
членов ряда совпадают с его значениями, найденными ранее
другим способом.
Если сплошная круглая пластина теряет устойчивость в ре-
результате осесимметричного нагрева, то выражение E.54) при-
принимает вид
R
rdr, E.74)
207
где величина V подсчитывается по формуле E.68); at — темпе-
температурный коэффициент линейного расширения материала пла-
пластины; t° — температура пластины, отсчитываемая от той началь-
начальной температуры, при которой внутренние усилия в пластине
равны нулю.
При осесимметричной форме потери устойчивости переме-
перемещение ыа (г) выражается через функцию wx (r) зависимостью
E.70), но функция ы2 (г) должна быть подчинена не граничному
условию E.71), а граничному условию ы2 = 0 при г — R.
Учитывая формулы E.69) и E.66), находим
г" A Tl- ЕН Г "? 1 d I l (dWl \* 1
Jr~\ ie— 1-A [ г -г- dr ¦+¦ 2 ^ dr ) J.
Выражение E.74) перепишем в следующем виде:
Учитывая одно первое слагаемое в выражении E.72), на-
находим (при А 2 = 0)
При t° (г) = const из условия ДЭ = 0 получим
где /С = 16; точное значение К = 14,68 (см. § 22).
Увеличивая число слагаемых в выражении E.72),'можно
найти значение К с любой степенью точности. Но важно подчерк-
подчеркнуть, что зависимость E.75) позволяет приближенно решать
задачу устойчивости не только при t° (r) = const, но и при любом
другом осесимметричном законе распределения температуры Р (г).
При использовании зависимости E.75) не требуется предвари-
предварительно решать термоупругую задачу.
§ 29. Устойчивость пластин
при локальных нагрузках
Задачи устойчивости тонких упругих пластин, нагруженных
в своей плоскости локальными внешними усилиями, имеют боль-
большое практическое значение, а решение таких задач представляет
несомненный методический интерес. Результаты исследования
208
P/2
0
J
0
2
P/2
y>
1
1
1
1
1
0
1
t
I
a
P
X
6)
Рис. 5.5
устойчивости пластин при локальных нагрузках позволяют наи-
наиболее наглядно выявить некоторые общие особенности задач
устойчивости пластин. Например, задача устойчивости прямо-
прямоугольной пластины нагруженной сосредоточенными силами, ис-
использована для доказательства того, что в критерии устойчиво-
устойчивости в форме Брайана нельзя заменять действительные началь-
начальные усилия произвольной системой статически возможных на-
начальных усилий (см. § 26).
Прежде чем перейти к конкретным задачам, отметим, что
при нагружении пластин сосредоточенными силами не очевидно
существование конечных значений критических нагрузок. Действи-
Действительно в окрестностях точек приложения сосредоточенных сил воз-
возникают неограниченно большие напряжения, поэтому бессмысленно
говорить о критических напряжениях в срединной плоскости
пластины. Строго говоря, необходимо доказать, что несмотря
на это потеря устойчивости пластины может произойти только
при превышении внешней нагрузкой некоторого конечного крити-
критического значения. Таким доказательством является возможность
записи энергетического критерия устойчивости в форме С. П. Ти-
Тимошенко. При использовании энергетического критерия в такой
форме задача устойчивости пластин, нагруженных сосредоточен-
сосредоточенными силами, не требует предварительного определения дей-
действительных начальных усилий. В этом случае бесконечно боль-
большие напряжения в решении не фигурируют.
В качестве примера рассмотрим решение задачи устойчивости
шарнирно-опертой прямоугольной пластины, сжатой сосредо-
сосредоточенными силами (рис. 5,5, а). Приближенное решение задачи
получим с помощью энергетического критерия устойчивости,
выраженного через статически возможные начальные усилия
{см. § 26). Изменение полной потенциальной энергии пластины
равно
. E.76)
209
Систему статически возможных начальных усилий Т*, Таиг
Sc выберем следующим образом (при б —»0):
E.77>
== —4-Ж при (с-в)<1»К
1 = 0 при (с-8)>\у\ и {с + 6)<\у\;
по всей пластине.
При такой системе статически возможных начальных усилии
из выражения E.76) следует, что
2 с+6
\ J (_^L-
а с—6
2
-н- J
2 с+б
а с—Ь
2
--т J (т?)ил+ж J
Для дальнейшего решения возьмем функции нормального'
прогиба шх (х, у) и усилий ф2 (х, у) в таком же виде, как в при-
примере, рассмотренном в предыдущем параграфе:
(х, у) = сх cos -22- cos -^;
E.78).
где для квадратной пластины при а= b / = — -gr-Eh.
Тогда
210
Как и в предыдущем параграфе, при а = Ь
После элементарных преобразований условие ДЭ = 0 при-
приводит к выражению для критической силы
<5-79>
Если введем безразмерную критическую силу
то окончательно получим
^р= ,' 2пс. E.80)
В частности, когда одна сжимающая сила Р приложена по
середине стороны пластины (с = 0), имеем РКр = -о~- Если
силы -к- приложены в углах пластины и с = -я-, то Ркр = 2.
Нетрудно убедиться в том, что тот же результат можно полу-
получить, не вводя статически возможных начальных усилий, а оп-
определяя перемещения ы2 (х, у), vt (x, у) и используя критерий
устойчивости в форме С. П. Тимошенко, как это сделано в пре-
предыдущем параграфе. Если вместо одночленных аппроксимаций
выражения для хюг (х,у) и ф2 (х, у) взять в виде рядов, то окон-
окончательный результат можно получить практически с любой
степенью точности как с использованием статически возможных
начальных усилий, так и энергетического критерия устойчивости
в форме С. П. Тимошенко.
Задача устойчивости прямоугольной пластины, сжатой со-
сосредоточенными силами, имеет интересную многолетнюю историю.
В 1906 г. А. Зоммерфельд впервые рассмотрел задачу устой-
устойчивости бесконечно длинной полосы, сжатой в своей плоскости
двумя сосредоточенными силами (рис. 5.5, б). Решение этой
задачи им получено путем интегрирования основного линеаризо-
линеаризованного уравнения устойчивости пластины D.33), причем поле
действительных начальных усилий, входящих в это уравнение,
не определялось, а заменялось системой статически возможных
начальных усилий, выраженных формулами E.77). В резуль-
211
тате для шарнирно-опертой вдоль длинных сторон полосы най-
найдено критическое значение сжимающей силы
Для пластины с конечными размерами эту задачу решал С. П. Ти-
Тимошенко с помощью энергетического метода [37 J. Срединнук>
плоскость пластины при потере устойчивости он считал нерастя-
нерастяжимой и для подсчета изменения полной потенциальной энергии
пластины использовал выражение
E.82)-
Задав функцию поперечного прогиба хюг (х, у) в виде три-
тригонометрического ряда, для шарнирно-опертой пластины
С. П. Тимошенко получил формулу
Ь_
» » -
При -2—> оо эта формула для критической силы сводится
к выражению E.81). Для квадратной пластины при а = Ь из-
формулы E.83) следует, что
4пЮ Ь 1
Откуда для безразмерной критической силы Ркр получим зна-
значение
Ркр = 0,478. E.84>
Как отмечал С. П. Тимошенко, используемый им прием при-
приближенного решения этой задачи можно трактовать, как замену
действительного начального напряженного состояния пластины
статически возможным начальным напряженным состоянием.
Действительно, выражение E.82) получается из энергетического»
критерия, записанного в форме Брайана, если начальные уси-
усилия Г?, Т°у, S" заменить статически возможными усилиями
типа E.77).
Вслед за С. П. Тимошенко многие авторы решали аналогичные
задачи устойчивости пластин, нагруженных сосредоточенными
силами, не определяя действительного начального напряженного
состояния, а фактически заменяя его статически возможным,
начальным напряженным состоянием.
212
о)
6)
Рис. 5.6
В § 26 отмечалось, что ошибка, к которой приводит такая
замена действительных начальных усилий статически возмож-
возможными, может быть сколь угодно большой, причем знак этой
ошибки может быть любым. Например, используя такой под-
подход для рассмотренной выше задачи при а — Ь (рис. 5.5, а) и
ограничиваясь для wx (x, у) одночленной аппроксимацией E.78),
вместо формулы E.80) получаем
1
1 -(-COS
2яс
E.85)
При с = 0 по этой формуле имеем Ркр = 0,5, т. е. занижен-
заниженное значение критической нагрузки. При с =-«- эта формула
приводит к Ркр = оо, т. е. к бесконечно завышенному значению
Ркр. Уточняя решение посредством выбора функции wx (x, у)
в виде ряда при с = 0, получим формулу E.84), дающую более
низкое значение Ркр = 0,478 по сравнению с формулой C.85).
При с = -у независимо от числа членов ряда имеем Ркр = оо.
В последние годы для квадратной шарнирно-опертой пла-
пластины, сжатой двумя сосредоточенными силами, рядом авторов
получены численные решения, дающие примерно Ркр = 2/3.
Выясним физический смысл выражения E.82). Представим,
что вдоль линии действия сосредоточенной силы пластина ар-
армирована нерастяжимой и несжимаемой нитью (рис. 5.6, а).
В этом случае по выражению E.82) действительно получим зна-
значение изменения полной потенциальной энергии при отклоне-
отклонениях пластины от начального плоского состояния равновесия.
Причем, как это следует из приведенных выше значений Ркр,
критическая нагрузка пластины, армированной нерастяжимыми
нитями, оказывается меньше, чем неармированной*.
* В связи с этим необходимо отметить, что известное положение, согласно
которому всякое увеличение жесткости упругой системы либо повышает, либо
не меняет частот собственных колебаний, справедливо только для ненагружениых
систем. Так, в рассмотренном примере частота поперечных колебаний нагружен-
нагруженной сосредоточенными силами пластины с жесткой нитью может быть меньше
частоты колебаний такой же пластины без нити.
213
В реальных конструкциях тонкие пластины обычно подкреп-
подкрепляют ребрами жесткости (рис. 5.6, б). В этом случае часть сжи-
сжимающей нагрузки воспринимает пластина, а часть — ребро жест-
жесткости. Рассмотрим два предельных случая: 1) вся сжимающая
нагрузка передается через ребро жесткости: 2) вся нагрузка
воспринимается пластиной. В первом случае критическая сила
определяется по формуле
+а/2
-=аП "~
1 г / да>1
~2~ J \ дх~
—а/2
во втором — по формуле
+а/
± f
2 J
4 J Ej{^t
р
КР
dx
р _____^_
КР +а/2
1
2
-а/2 ' " -а/2
где EJ — изгибная жесткость подкрепляющего ребра в плоскости,
перпендикулярной срединной плоскости пластины.
Если ограничиться одночленным приближением E.78), то
для шарнирно-опертой пластины получим, что во втором случае
критическая сила в 1,5 раза больше, чем в первом. При уточнении
решения несколько изменяется количественная оценка, но каче-
качественная сохраняется: при прочих равных условиях ребро,
обладающее меньшей жесткостью на сжатие, будет эффективнее,
чем ребро, имеющее большую жесткость на продольное сжатие.
§ 30. Закритическое поведение пластин
С помощью линеаризованных уравнений и энергетического
критерия исследуют устойчивость плоского напряженного со-
состояния тонких упругих пластин. Но ни линеаризованные урав-
уравнения, ни энергетический критерий устойчивости (в какой бы
форме он не был записан) не дают непосредственной информации
о том, как будет деформироваться пластина после потери устой-
устойчивости. Для описания закритического деформирования необ-
необходимо решить задачу изгиба пластины в нелинейной постановке.
Как и для сжатого стержня (см. § 17), для пластины возможны
два основных качественно различных случая закритического
поведения. Если закрепления контура пластины не препятствуют
ее чисто изгибной деформации, т. е. деформации без удлинений
и сдвигов срединной плоскости (рис. 5.7, а), то после потери
214
i
p
-
^НеустойчиЬо
^Устойчиво
6)
устойчивости поведение пластины будет таким же, как и поведе-
поведение стержня с незакрепленными относительно продольных сме-
смещений торцами. Критическая точка бифуркации Аг будет точкой
бифуркации первого типа (рис. 5.7, б). После потери устойчивости
происходит такой быстрый рост поперечных прогибов и изгиб-
ных напряжений, что потерю устойчивости пластины практи-
практически можно считать потерей ее несущей способности. Коли-
Количественные оценки прогибов и напряжений при закритическом
деформировании пластины можно получить таким же путем,
каким это сделано для стержня. Но если для стержней этот
случай закритического поведения основной, то для тонкой пла-
пластины, являющейся элементом силовой конструкции, этот слу-
случай — исключительный.
Как неоднократно отмечалось, пластина с закрепленным
относительно поперечных перемещений контуром не может из-
изгибаться без удлинений и сдвигов срединной плоскости. В этом
случае закритическое поведение пластины будет качественно
отличным от рассмотренного. Как и в случае стержня с закреп-
закрепленными относительно продольных перемещений торцами, после
потери устойчивости такая пластина может продолжать воспри-
воспринимать возрастающую внешнюю нагрузку.
На рис. 5.8, а изображена тонкая пластина, скрепленная
по контуру с жесткой шарнирной рамкой. До потери устойчи-
устойчивости такая пластина будет находиться в состоянии чистого
сдвига. После потери устойчивости (см. § 23) на ее поверхности
образуются наклонные волны. При этом пластина не теряет
несущей способности и продолжает воспринимать возрастающую
внешнюю нагрузку. Аналогично ведет себя закрепленная по кон-
контуру прямоугольная пластина при сжатии (рис1. 5.8, б): после
потери устойчивости она продолжает воспринимать возрастающую
внешнюю нагрузку.
215
нинп
Рис 5.8
Исследуем подробнее
этот основной для тонких
пластин случай закритиче-
ского деформирования,
когда изгиб пластины со-
сопровождается дополни-
дополнительными удлинениями и
сдвигами срединной плос-
плоскости.
Характер критической
точки бифуркации и за-
критическое поведение
пластины при конечных,
но малых отклонениях от
начального плоского состояния равновесия можно установить
с помощью приема, применявшегося при изучении закритических
деформаций стержней (см. § 17).
Будем считать, что задача устойчивости пластины решена энер-
энергетическим методом с использованием энергетического критерия
в форме С. П. Тимошенко, и найдены соответствующие критиче-
критической точке бифуркации функции wt (x, у), ф2,(дс, у), щ (х, у),
V2 (х> у)' удовлетворяющие всемIнеобходимым граничным усло-
условиям задачи. Приближенно примем, что при малых, но конечных
отклонениях пластины ее напряженно-деформированное состоя-
состояние описывается функциями
, у);
, у);
и(х, y) =
где сг — параметр, зависящий от уровня нагружения пластины.
Тогда изменение полной потенциальной энергии пластины
при отклонениях от начального плоского состояния равновесия
будет определяться выражением
<5-86>
— с\ [ J J (рх
+ q,v2) dsj
где Эо — полная потенциальная энергия пластины, не зависящая
от параметра сг.
216
Значение Wt можно подсчитать с помощью либо выражения
. E-87)
либо выражения
W
В этих выражениях
. E.88)
1 / dw, у . ]
E<89>
E.90>
Начальные усилия Т%, Т°у, S0 в срединной плоскости пластины
не входят в слагаемые полной потенциальной энергии, зависящие
от параметра сх: именно от этих условий выше определены функ-
функции и2 и и2.
Поскольку в зависимости E.86) все функции шг (х, у), и2 (л;,
У)> V2 (x' у)> Фг ix, У) считаем известными из решения линейной
задачи устойчивости пластины, закритическое деформирование
пластины в окрестностях критической точки бифуркации опре-
определяется только параметром сх. Таким образом, с помощью при-
приближенного решения задача исследования закритического пове-
поведения пластины сводится к элементарной нелинейной задаче для
системы с одной степенью свободы (см. гл. 1).
Величина Wt является положительно определенной, т. е.
№4 >0при любых способах закрепления и нагружения пластины.
Поэтому критическая точка А1 будет точкой бифуркации первого
типа (рис. 5.9, а).
Зависимость между па-
параметром сх и нагрузкой
при конечных отклонениях
пластины найдем из усло-
условия стационарности пол-
полной потенциальной энер-
гии. Приравняв нулю про-
производную выражения E.86)
по сх получим уравнение
Неустойчибо
Устойчиво
Неустойчив»
Umax
E.91)
Рис. 5.9
217
где
В в 2 Ш (&"» + №) dxdy + ф (qxUt + qjoj ds] E.92)
И
fKp .
E.93)
Здесь р^, pj,, ^, ^ — распределение внешних нагрузок при
Из уравнения E.91) при сг —* 0 получим критическое значение
параметра нагрузки Ркр, поскольку для построения приближен-
приближенного нелинейного решения использовано решение линейной задачи
устойчивости пластины. При сг ф 0 из уравнения E.91) следует,
что
4/^, E.94)
где АР = Р — Ркр и К = Yllr ' пРичем
Определив параметр clt нетрудно вычислить перемещения
и изгибные напряжения в любой точке пластины. Например, в со-
соответствии с зависимостями E.86) перемещение «„и* пластины
при -5— С 1 линейно изменяется с ростом внешней нагрузки
"кр
(рис. 5.9, б). Зависимость между амплитудой поперечного про-
прогиба wma и внешней нагрузкой можно изобразить в виде квадра-
квадратичной параболы (рис. 5.9, а)
Для уточненного определения напряжений и деформации в сре-
срединной плоскости пластины после потери устойчивости необхо-
необходимо решить систему нелинейных уравнений Кармана
где функция усилий ф связана с усилиями в срединной плоскости
пластины соотношениями
218
Систему уравнений Кармана можно получить с помощью при-
приведенных в § 19 геометрически нелинейных зависимостей для ъХУ
еу, у, если поперечный прогиб пластины ы) считать малой, но-
конечной величиной [12, 19]. Для решения системы уравнений
E.95) должны быть заданы граничные условия относительно по-
поперечного прогиба w, усилий и перемещений в срединной пло-
плоскости пластины (подробнее см. [12]). Систему уравнений Кар-
Кармана для практически интересных случаев удается проинтегри-
проинтегрировать только приближенным методом; результаты таких реше-
решений можно найти в работах [19, 33).
Тонкие упругие пластины имеют критические точки бифурка-
бифуркации первого типа, и начальные геометрические неправильности
влияют на их поведение подобно тому, как это изображено на
рис. 1.12,6.
Глава 6
Устойчивость цилиндрических
оболочек
Среди задач устойчивости тонких упругих оболочек задачи
устойчивости цилиндрических оболочек имеют наибольшее прак-
практическое значение. С другой стороны, на примере исследования
устойчивости цилиндрических оболочек можно проследить все
основные особенности задач устойчивости тонких оболочек. По-
Поэтому мы ограничимся изложением основ теории устойчивости
упругих оболочек применительно к задачам устойчивости круго-
круговых цилиндрических оболочек.
Из методических соображений, прежде чем перейти к исследо-
исследованию устойчивости цилиндрической оболочки, детально рассмо-
рассмотрена родственная задача устойчивости упругого кругового
кольца. Затем дан вывод основного линеаризованного уравнения
круговой цилиндрической оболочки, находящейся в неоднород-
неоднородном безмоментном докритическом состоянии, и получено выраже-
выражение для подсчета изменения полной потенциальной энергии такой
оболочки. Приведены решения только двух задач устойчивости
оболочки: при равномерном внешнем давлении и равномерном
осевом сжатии. Многочисленные решения других задач устойчиво-
устойчивости оболочек получены приближенными методами [7,9, 19,22,27].
§ 31. Устойчивость кругового кольца
Рассмотрим круговое кольцо радиуса R, равномерно сжатое
распределенной радиальной нагрузкой q (рис. 6.1). При доста-
достаточно большой внешней нагрузке q круговая форма кольца может
стать неустойчивой. Тогда кольцо изогнется и примет новую не-
некруговую форму, например показанную на рис. 6.1 штриховой
линией. (Пространственные формы равновесия кольца не будем
рассматривать, а ограничимся изучением потери устойчивости
кольца в своей плоскости.)
Прежде чем решить задачу об устойчивости кольца, рассмо-
рассмотрим вспомогательную задачу об изгибе тонкого кругового кольца,
нагруженного в своей плоскости переменными радиальными и ка-
касательными усилиями qz = qz (ф) и qu = qu (ф), приложенными
вдоль оси кольца, и распределенным изгибающим моментом т =
•220
— т (ф) (рис. 6.2, а). Изгиб кольца со-
сопровождается возникновением внутрен-
внутренних нормальных и поперечных усилий
N = ./V (ф) и Q = Q (ф) и изгибаю-
изгибающего момента М = М (ф). Условия
равновесия элемента кольца рассмот-
рассмотрим в обычной линейной постановке,
не учитывая деформаций кольца (рис.
6.2, б).
Спроектировав все приложенные к
элементу АВ усилия на направление ка- Рис. 6.1
¦сательной и нормали к оси кольца в
точке А и приравняв нулю сумму всех действующих на эле-
элемент моментов относительно точки А, получим три уравнения:
dM
dm
F.1)
Исключив из этих уравнений N и Q, можно получить одно
уравнение с одним неизвестным:
dM
М
d<p
¦«•[¦$¦+».+¦*¦(»•;+¦$¦)]• <6-2>
Рассмотрим деформацию кольца в своей плоскости. На
рис. 6.2, в изображен элемент АВ, переходящий в результате из-
изгиба кольца в положение Л1б1. Радиальные и касательные пере-
перемещения точек оси кольца обозначим через w и v, а угол поворота
касательной к осн кольца — через Ф. До деформации кривизна
v+av
Рис 6.2
221
кольца равна -„. Изменение кривизны оси кольца х при деформа-
деформации равно изменению угла Ф по дуге кольца, т. е.
х =
Введем подвижную ортогональную систему координат и на-
направим ось у по касательной к оси кольца в точке А, а ось г —
по нормали к оси кольца, как показано на рис. 6.2, в.
В этой системе координат точки А,В,А1,В1 будут (с точностью
до величин высшего порядка малости) иметь следующие коорди-
координаты:
Координата
У
г
А
0
0
в
Rdy
0
А,
V
W
а,
Rdy + v + dv + wdif
— v dtp -j- w -\- dw
Длину элемента А1В1 подсчитаем по формуле
A^i = /(#s, - УаУ1 + to, - zAlY =
где ув„ Уа^ zBl, гА\ — координаты соответствующих точек.
Удлинение элемента А В
_
8
АВ
т/Г, . Г
dw
Если ограничимся линейными относительно перемещений сла-
слагаемыми, то получим
1 / . do \
R \ d<$ J
Удлинение г ^ 1; тогда угол поворота касательной $ и изме-
изменение кривизны х можно определять без учета влияния удлине-
удлинений е. Проекция элемента AxBx на ось г с точностью до величин
высших порядков малости равна Л^ ¦&= Rd(p&. В то же время
222
эта проекция равна разности соответствующих координат точек
Вг и Ах. Следовательно,
t« - ' ( dw v\w
R \ dtp )'
~~ Rd<P
Итак, можно записать следующие выражения, описывающие
геометрию деформации кольца в его плоскости:
F.3)
1 / d*w dv
)
Если пренебречь влиянием растяжения оси кольца, т. е. по-
положить 8 = 0, то изменение кривизны кольца можно подсчиты-
подсчитывать по любой из следующих зависимостей [29]:
dv
F.4)
Изгибающий момент М в тонком упругом кольце связан с из-
изменением кривизны х соотношением упругости М = EJv., где
EJ — изгибная жесткость кольца в его плоскости.
Используя вышеприведенные зависимости, уравнение F.2)
можно преобразовать к виду
EJ I d4t , d*& \ dqz , _ , 1 /__. , d*m
или
EJ
F.6)
При заданных внешних нагрузках решение этих уравнений
дает возможность определить внутренние силовые факторы и пере-
перемещения кольца. Отметим, что если ось кольца считать нерастя-
нерастяжимой, т. е. положить е = 0, то связь между перемещениями v
и а; определяется зависимостью
Ар '
F.7)
223
Рис. 6.3
Вернемся к задаче
устойчивости кольца, на-
нагруженного равномерным
радиальным усилием ин-
интенсивностью q. Устой-
Устойчивость такого кольца ис-
исследуем при допущениях,
аналогичных допущениям,
использованным при ис-
исследовании устойчивости
прямых стержней (см. § 13).
1. Кольцо имеет идеаль-
идеально правильную круговую
форму и интенсивность рас-
распределенной внешней нагрузки строго постоянна по всему кольцу.
2. Изменением всех геометрических размеров кольца в до-
критическом состоянии можно пренебречь.
3. При потере устойчивости связь между изгибающим момен-
моментом и изменением кривизны оси кольца описывается соотноше-
соотношением, основанным на гипотезе плоских сечений, т. е. М — EJx.
4. Внешняя нагрузка гидростатическая, т. е. при деформации
кольца нагрузка остается направленной по нормали к деформи-
деформированной оси кольца, а ее интенсивность q не меняется.
В силу первого допущения возможна круговая форма равно-
равновесия кольца, при которой No = —qR. Выясним, при каких усло-
условиях становятся возможными изгибные формы равновесия кольца,
смежные с исходной круговой формой. Для этого составим ли-
линеаризованные уравнения равновесия элемента кольца в состоя-
состоянии, отклоненном от исходного. При отклонениях кольца от ис-
исходной круговой формы в нем кроме нормального усилия Л^
возникнут перерезывающие усилие Q и изгибающий момент М.
Все действующие на элемент силы спроектируем на оси у1
и г1У направленные по касательной и по нормали к деформирован-
деформированному кольцу в точке Ах (рис. 6.3). Учитывая, что касательная
в точке Вг составляет с осью ух угол (dq> + dO) и, отбрасывая
величины высших порядков малости, получим (см. § 13, вывод
уравнений для прямого стержня):
Третье уравнение равновесия имеет вид
ИЛ 0_Q
Rd<f ^
224
Поскольку при потере устойчивости М = EJ%, момент М и по-
поперечная сила Q — величины того же порядка малости, что и угол
поворота касательной д. Поэтому в соответствии с основной идеей
линеаризации третье слагаемое в первом уравнении равновесия
следует отбросить, как содержащее произведение двух величин
первого порядка малости.
Нормальное усилие в искривленном кольце представим в виде
суммы N-l = No + N. Тогда второе уравнение равновесия можно
записать так:
"dip" + ^о + ^ ^ No
— N = -qR.
Но поскольку ¦- ° = 0, согласно первому уравнению допол-
дополнительное усилие N имеет тот же порядок малости, что и Q. По-
Поэтому слагаемое N -т— в последнем уравнении тоже следует отбро-
отбросить. Приняв во внимание, что No = —qR, окончательно выпи-
выпишем три линеаризованных уравнения равновесия элемента дефор-
деформированного кольца:
F.8)
Сравнивая полученную систему линеаризованных уравнений
с системой уравнений F.1) линейной задачи изгиба кольца, ви-
видим, что эти системы уравнений будут формально совпадать, если
в F.1) положить qy — 0, m — 0, а в F.8) ввести фиктивную по-
поперечную нагрузку <7* = —W)j— (см. § 20). Поэтому, минуя проме-
промежуточные выкладки, по аналогии с уравнениями F.5) и F.6)
можно записать линеаризованное уравнение задач устойчивости
кольца
EJ ^t
или
EJ d* (#v_ 9&v_
R* dq>* \d<p* -l~Z d<p*
С учетом того, что Л^о = — qR и ¦&==¦ „- (-т-г + о), оконча-
окончательно получим однородное уравнение
EJ
8 н. А. Алфути 225
или
d*v , \ , ( d*v
+ l') + n
Таким образом, задача определения условий существования
изгибных форм равновесия (смежных с исходной круговой) кру-
кругового кольца, находящегося под действием равномерной гидро-
гидростатической нагрузки, свелась к типичной задаче на собственные
значения.
В рассматриваемой задаче, когда на кольцо, сжатое равно-
равномерно распределенной гидростатической нагрузкой, не наложены
дополнительные связи, в решении удобнее использовать уравне-
уравнение F.9), имеющие более низкий (четвертый) порядок. Перепишем
это уравнение в виде
-**тт = О, F.9')
и. пФ
где
по
к2 = 1 + ¦
Решение такого уравнения, совпадающего по форме с уравне-
уравнением устойчивости однопролетного стержня (см. § 13), имеет вид
-С4. F.11)
Для замкнутого кольца начало отсчета ф можно выбрать так,
чтобы О @) = 0. В этом случае необходимо положить С2 = —С4.
Из условия периодичности решения, которое должно соблюдаться
для замкнутого кольца, следует, что С3 = 0 и k = п, где п —
любое целое число. Кроме того, для кольца с нерастяжимой осью
выполняются зависимости
?-*(¦$¦+-)¦
Поэтому, используя решение F.11), можно записать еще два
уравнения:
-j-r + f = — Я (Ci sin пф — C4cos геф + С4);
<Рш '.w = R (Cjn cos лф -f- Ctn sin геф).
Исключив решение v = —i?C4, соответствующее вращению
кольца как жесткого целого, положим С4 = 0. Исключив реше-
решения для ге = 1,
v ==¦ A sin ф -|- В cos ф; а; = A cos ф — В sin ф,
226
соответствующие смещениям кольца как жесткого целого,[получим
следующую систему собственных функций:
ft = sin лф;
о== п%_г sinmp (л = 2, 3,...);
F.12)
и соответствующие им собственные значения q -
(n*-l)EJ
Чп — Р8
F.12')
На рис. 6.4 показан вид кольца при двух значениях числа
волн в окружном направлении п. Значение п = 1, очевидно, со-
соответствует перемещению кольца как жесткого целого (рис. 6.4, а);
qt = 0 для рассматриваемой задачи не представляет интереса.
Наименьшее собственное значение, равное критической нагрузке,
соответствует п — 2:
3EJ /R , „v
(°13>
Соответствующая этому значению форма потери устойчивости
кольца показана на рис. 6.4, б.
т. „ 3EJ
Итак, найдена критическая нагрузка <7кр = —пз~ и сточностью
до общего множителя функции, описывающие деформацию кольца
в момент потери устойчивости:
п an
ftKP = sin 2ф, vKP = -j- sin 2ф, wKp = ^- cos 2ф.
В соответствии с четвертым допущением действующая на
кольцо распределенная нагрузка считается гидростатической.
Но возможен иной характер поведения внешней нагрузки при
деформации кольца.
Рассмотрим случай, когда распределенная нагрузка при де-
деформациях кольца остается направленной к центру кольца, при-
причем ее интенсивность q
не изменяется. (Такое на-
гружение может быть до-
достигнуто, например, с по-
помощью большого числа
независимо натянутых ни-
нитей, сходящихся в центре
кольца.) Если нагрузка ^
остается направленной к
центру кольца (рис. 6.5, а), Рис. 6.4
8* 227
Рис. 6.5
то в линеаризованные уравнения кроме фиктивной нормальной
нагрузки (fi = —<7-д—войдет касательная нагрузка <$ = „-^ х
X -j—. Тогда, используя условие нерастяжимости кольца до =
= —j-, из уравнения F.6) можно получить однородное уравнение
EJ d* I d*v , n dh) , \ , / d*v , d2
Тогда
Откуда получим решение в виде t» = с sin л
EJ (я»-1)« ,_ о о ч
? = „а_2 (п = 2, 3,...).
9 ?У
При п = 2 критическое значение нагрузки <7кр = -g--™-- Если
же считать, что при деформациях кольца внешняя нагрузка в ка-
каждой точке сохраняет свое первоначальное направление
{рис. 6.5, б), то следует положить <$ = -~ -^— и $ = — <7^.
Тогда вместо уравнения F.9) получим
EJ
Найдем решение в виде fr= csinnq> и получим
,„_^. („-2.3,...).
4EJ
При п = 2 критическое значение нагрузки <7кр = -^з~- Воз-
Возможны и другие случаи поведения нагрузки при деформациях
кольца [39].
228
Теперь задачу устойчивости круго-
кругового кольца, находящегося под дейст-
действием гидростатической внешней нагруз-
нагрузки, решим энергетическим методом
(см. гл. 2). Для этого необходимо
вычислить изменение полной потен-
потенциальной энергии АЭ при переходе
системы из начального состояния рав-
равновесия в смежное отклоненное состоя-
состояние. Причем значение A3 должно быть
вычислено с точностью до квадратов
бифуркационных перемещений первого
порядка малости.
Рис. 6.6
Определим деформации кольца с точностью до квадратичных
слагаемых. Рассматривая перемещения элемента кольца (рис. 6.2,а)
и используя таблицу координат точек А, В, Alt Blt нетрудно по-
получить выражения
F.14)
1/ |^у\|1 1 / dw \2 1
R \ Ар / 2 R* \ d<p / '
dv
Подчеркнем, что квадратичные слагаемые вошли только в
выражение для удлинения е. Выражения для угла поворота ка-
касательной к оси кольца ¦& и изменения кривизны кольца и квадра-
квадратичных слагаемых не содержат. Поэтому, в частности, если е< 1,
то и при определении деформаций кольца в квадратичном прибли-
приближении остаются справедливыми формулы F.4).
При гидростатической внешней нагрузке q потенциал внешних
сил с точностью до постоянного слагаемого определяется зависи-
зависимостью П = q AF, где AF — увеличение площади, ограниченной
кольцом. При увеличении площади кольца потенциал внешней
гидростатической нагрузки возрастает, поэтому произведение q AF
положительно. Поскольку изменение полной потенциальной энер-
энергии A3 необходимо знать с точностью до квадратичных слагаемых,
с той же точностью следует определять AF при деформации кольца.
Площадь, ометаемую элементом кольца при деформации,
представим в виде суммы площадей треугольников ABtAi и АВВХ
(рис. 6.6). Зная координаты вершинэтихтреугольников, подсчитаем
их площади Ft и F2 по формулам аналитической геометрии:
Vbi УА1 1 „ / , w* , w dv v dw
zBt г,
229
Таким образом, площадь, ометаемая элементом кольца,
dm.
Ы
Интегрируя это выражение по всему кольцу, находим изме-
изменение площади AF.
Для определения критического значения q воспользуемся
изменением полной потенциальной энергии кольца, записанным
в форме Брайана. Перемещения, переводящие кольцо в новое
отклоненное состояние, представим в виде v = avt (q>); w = aw1 (q>),
где а — бесконечно малый параметр, не зависящий от угла ф;
i»! (ф) и о»! (ф) — конечные функции угла ф.
Используя выражения F.14), запишем
ft = aft'; к —an',
где
dwi dvt
8 - 2 В* Ф
Выражение для d (AF) можно переписать так:
d (AF) = R [<шг + -у- (Wjb' —
Если ось кольца считать нерастяжимой с точностью до первой
степени а, т. е. принять е' = 0иш, = ?*-, то изменение полной
потенциальной энергии кольца (множитель а* опускаем)
2я 2Я 2я
ДЭ = 4" J EJW*R dq> + 4" J ^oe'i? ^ф ^-J qoJVR Лр,
0 0 0
где ?У — изгибная жесткость кольца в своей плоскости; No —
начальное усилие в кольце, причем в данной задаче No = —qR.
2л
Заметим, что интеграл a ] w^dff, как первая вариация пло-
о
щади, ограниченной нерастяжимым кольцом, равен нулю. Как
известно, из всех замкнутых кривых заданной длины максималь-
максимальную площадь ограничивает окружность, поэтому первая вариа-
вариация площади окружности равна нулю.
330
Окончательно ДЭ можно выразить через окружное перемеще-
перемещение Vi (ф). Опустив индекс «1» и учтя, что в рассматриваемой за-
задаче No = —qR, получим
1-я. 2я
EJ ( d?v . dv \2 If /Л , \2 , .
+) *<*J n +V d(f +
—J
о о
2я
If /Л , \2
-тJ n~v" +V
Дальнейшее решение можно вести из условия б (A3) = О
либо ДЗ = 0 при дополнительном требовании минимума q. Под-
Подчеркнем, что выражение F.15) получено для случая, когда на
кольцо действует гидростатическая нагрузка q.
Нетрудно проверить, что условие стационарности б (ДЗ) = О
приводит к уравнению F.10), полученному выше непосредственно
из линеаризованных уравнений равновесия элемента кольца в от-
отклоненном состоянии.
Действительно, для полученного функционала уравнение
Эйлера имеет вид (см. приложение II)
d3 dF d* dF d dF dF __ fl
"i л™2 я^/«„/,?ф») ' (ftp d{dv/dy) ' du '
где через F обозначено подынтегральное выражение в функцио-
функционале F.15). После несложных преобразований получим уравне-
уравнение, совпадающее с уравнением F.10):
EJ ( dGv л d*y d?v \ / d*v d?o \ л
Как неоднократно подчеркивалось, энергетическим методом
можно определять критические нагрузки, не решая дифференци-
дифференциальное уравнение Эйлера. Например, в рассматриваемой задаче
можно задаться функцией перемещения
их = Су sin лф (л = 2, 3,...)
и из условия ДЗ = 0 найти собственные значения qn. Подставив
эту функцию в выражение F.15), затем продифференцировав
и проинтегрировав, получим
A3 = ^-С [-^- (л3 - ri? - <7(л2 - 1) л»] = 0.
Откуда найдем собственные значения параметра нагрузки
(Я» — 1) EJ /„ о о ч
<7п — ?5 (л = 2,3,...),
231
совпадающие с найденными выше. Критическое значение нагруз-
нагрузки, соответствующее п = 2, совпадает с найденным выше точным
значением qKV, поскольку выбранная функция vx является точ-
точным решением задачи.
Для сравнения определим критическую нагрузку, воспользо-
воспользовавшись выражением изменения полной потенциальной энергии
кольца в форме С. П. Тимошенко, что для кольца с нерастяжимой
осью более логично (см. § 10).
Перемещения, переводящие кольцо в новое состояние, примем
в виде
v ==¦ avt (ф) -f a% (ф);
где а — бесконечно малый параметр, не зависящий от угла ф;
"i (ф)> ^г (ф)> u>i (ф). W2 (ф) — конечные функции угла ф.
Учитывая выражения F.14), получаем е = осе' + ос2е"; Ь =
— а#' + а2ф"; и = аи' + а2и", где
dVl
Считая ось кольца нерастяжимой, с точностью до а записы-
записываем выражение изменения полной потенциальной энергии в форме
С. П. Тимошенко (опуская множитель а2):
2я 2я 2я
\ F.16)
Начальное усилие iV0 не входит в это выражение, но для опре-
определения A3 дополнительно нужно найти функцию ад2 = W2 (ф)-
Как показано в § 10, квадратичные перемещения должны быть
определены из условия самоуравновешенности квадратичных
усилий. В данном случае введем квадратичный изгибающий
момент М", связанный си" соотношением упругости М" = EJh".
С учетом решенной выше вспомогательной задачи изгиба кру-
кругового кольца под действием переменных нагрузок вместо урав-
уравнения F.2) можно записать
232
часть этого уравнения равна нулю, поскольку вну-
внутренние квадратичные усилия должны быть самоуравновешены.
Добавив к^этому уравнению условия нерастяжимости оси кольца
с точностью до а1 и выразив М" через »2 и ад2, получим^два|урав-
нения'для определения »2 и до2:
\ йф» йФ
Задавшись функциями для &х (ф) и шх (ф) с учетом условия
периодичности по ф из полученной системы уравнений всегда
можно найти »s (ф) и до2 (ф). Например, при vx = A sin «ф;
шг = — «i4 cos пф имеем систему уравнений
й°тъ arvz aaw2 d*ti2 „
Решения, удовлетворяющие условию периодичности,
_ Л»(и» — 1)» Г, cos2иф ] .
Wi~~ 4R [ + BnJ— I J'
— lJ2n si
°2— 4R Bп)а—1 "
Продифференцировав и проинтегрировав, из выражения F.16)
получим
F.17)
Приравняв А5 нулю, получим прежний результат.
Как видим, решение с использованием выражения АЭ в форме
С. П. Тимошенко является более громоздким, поскольку пришлось
находить ш, (ф) и &2 (ф). Оно имеет и положительные стороны.
Во-первых, в этом решении последовательно проводится условие
нерастяжимости оси кольца. (Напомним, что при решении с ис-
использованием представления АЭ в форме Брайана ось кольца
считали нерастяжимой с точностью до а, но ее растяжение учи-
учитывали с точностью до а2.) Во-вторых, представление ДЗ в форме
С. П. Тимошенко позволяет сравнительно просто получать при-
приближенные решения при других случаях нагружения кольца.
КОЛОХ2А
233
НЕ БОЛЕЕ 1Й КИНГИ В
ОДНИ РУКИ И 2ХВДВЕ
б)
Рис. 6.7
Рассмотрим следующую задачу. Круговое кольцо сжато че-
четырьмя равными радиальными силами Р (рис. 6.7, а). При до-
достаточно малых силах Р четырехлепестковая форма является
единственной и устойчивой формой равновесия кольца. Но при
превышении некоторого значения Ркр эта исходная форма стано-
становится неустойчивой и кольцо переходит в новую форму, лишенную
исходной симметрии.
Решим эту задачу, пренебрегая изменением формы кольца
в докритическом состоянии (см. § 7), причем в первом приближе-
приближении зададим бифуркационные перемещения в виде vx = A sin пер,
a»i = —пА cos тр. Если решение вести с использованием выра-
выражения F.15), то предварительно необходимо определить No =
= N0 (ф). Если для решения задачи воспользоваться выражением
F.16), то необходимость определения No = No (ф) отпадает. Счи-
Считая, что при потере устойчивости кольцо будет деформироваться
по л = 2 волнам (рис. 6.7, б) из F.16) находим
f 2L - 1) я2 + APw, @) =
2L
i — l) Г n*EJ
2 L R3 2nR
С учетом условия A3 = 0 имеем
4Bя)« 1
2я)«-1 J
Bп)
* -
2nREJ
1
F.18)
При п = 2 получим Ркр = 3,75. Перемещения w2 имеют
симметрию такого же типа, как и перемещения до0 (в данном случае
четырехлепестковую).
Аналогично можно построить решение при большем числе
сжимающих сил или распределенной нагрузке переменной интен-
интенсивности q = q (ф). Во всех этих случаях приближенное решение
можно получить, не определяя No (ф).
234
В приведенном решении не учитывали изменение формы кольца
в докритическом состоянии. Но, как нетрудно установить, форма
кольца, нагруженного четырьмя силами, к моменту потери устой-
устойчивости заметно отличается от круговой. Если начальные про-
прогибы кольца найти из обычного линейного решения и ^учесть их
при определении критической нагрузки, то получим Ркр = 3,6.
Как видим, в данном случае, когда начальные перемещения свя-
связаны с изгибом системы, пренебрежение изменением формы кольца
в докритическом состоянии приводит при определении критиче-
критической нагрузки к погрешности порядка 10%, значительно превышаю-
превышающей погрешность порядка е?р по сравнению с единицей (см. § 7).
Рассмотрим закритическое поведение кругового кольца. Выше
определены критические точки бифуркации исходной формы рав-
равновесия кругового кольца при нескольких случаях его нагруже-
ния. Более детальное изучение закритического поведения кольца
в окрестности критической точки бифуркации показывает, что
при потере устойчивости кольцо ведет себя подобно сжатому
стержню, продольные перемещения которого не стеснены (см.
§ 17). Следовательно, критическая точка бифуркации кольца At
оказывается точкой бифуркации первого типа, а малейшее пре-
превышение критической нагрузки приводит к резкому нарастанию
прогибов кольца (рис. 6.8). Если имеется несколько дополнитель-
дополнительных жестких опор, препятствующих перемещениям кольца, то
его поведение после потери устойчивости будет иным. В том слу-
случае, когда число опор четное и они равномерно распределены по
окружности кольца, критическое значение гидростатической внеш-
внешней нагрузки определяется по следующей формуле (в случае не-
нечетного числа опор нельзя пользоваться полученным выше реше-
решением для незакрепленного кольца):
9к (N*-l)EJ ^ F.19)
где 2ЛГ — число опор. На рис. 6.9, а показано кольцо,
имеющее восемь опор; штриховой линией изображена форма
потери устойчивости такого кольца.
§
/Неустойчиво
У
УстойчиВо
п) Ктагдг
S)
Рис. 6.8
235
6)
Рис. 6.9
В случае жестких опор критическая точка бифуркации Аг
является критической точкой первого типа, но при дальнейшем
увеличении внешней нагрузки кольцо ведет себя подобно стержню
с закрепленными относительно продольных смещений концами
(см. § 17). Поведение кольца усложняется тем, что в процессе на-
гружения происходит перестройка формы равновесия кольца от
бифуркационной формы, изображенной штриховой линией на
рис. 6.9, а, к форме равновесия, при которой кольцо «зависает»
на жестких опорах (рис. 6.9, б), продолжая воспринимать воз-
возрастающую внешнюю нагрузку.
В заключение необходимо сказать несколько слов о практиче-
практическом применении формулы для критической гидростатической
нагрузки
q^-Щ-- F-20)
Формула эта широко известна. Она вошла в руководства,
справочники и учебники по сопротивлению материалов. Но для
большинства практических задач, при решении которых сжатое
радиальной нагрузкой круговое кольцо приходится рассчиты-
рассчитывать на устойчивость, эта формула не верна.
На рис. 6.10 приведены типичные схемы нагружения круговых
колец равномерно распределенными радиальными сжимающими
усилиями. Во всех этих случаях исходное докритическое напряжен-
напряженное состояние колец одинаково и совпадает с напряженным со-
состоянием, возникающим в кольце под действием гидростатиче-
гидростатического нагружения.
Круговое кольцо, показанное на рис. 6.10, а, представляет
собой шпангоут, устанавливаемый в месте стыка сферического
днища, радиус кривизны которого Rc, и цилиндрической части
бака радиуса R. Пользуясь безмоментной теорией оболочек,
нетрудно определить интенсивность радиального усилия, сжима-
сжимающего шпангоут при нагружении бака внутренним давлением р:
236
б)
Передаваемая на шпангоут нагрузка не является гидростати-
гидростатической: при изгибе шпангоута она существенно изменяется по
величине и направлению. Поэтому формула F.20) не верна. Кроме
того, в ней не учитывается поддерживающее влияние оболочки.
В результате критическая нагрузка, подсчитываемая по формуле
F.20), оказывается во много раз меньше действительной крити-
критической [29].
На рис. 6.10, б показано тонкое упругое кольцо, сжатое жест-
жесткой обоймой (такого типа нагружение может быть вызвано, на-
например, нагревом кольца). На рис. 6.10, в изображено тонкое
упругое кольцо, стянутое гибкой нитью. В обоих случаях нагрузка,
воспринимаемая кольцом, не гидростатическая, причем поведе-
поведение колец при потере устойчивости даже качественно отлично от
поведения кольца, теряющего устойчивость под действием гидро-
гидростатической нагрузки [39]. Можно привести и другие примеры,
когда по формуле для критической гидростатической нагрузки
получается неверный результат. Значительно труднее указать
практическую задачу, в которой использование формулы F.20)
строго обосновано. Единственный! такой пример — это расчет
на устойчивость длинной цилиндрической трубы под действием
внешнего давления.
Однако задача устойчивости кругового кольца под действием
равномерной гидростатической нагрузки представляет большой
интерес. В методическом отношении эта сравнительно простая
задача помогает лучше понять более сложные задачи устойчи-
устойчивости тонкостенных оболочек вращения при различных схемах
их нагружения.
237
В практическом отношении подкупающе лаконичная оконча-
окончательная расчетная формула тоже полезна, несмотря на сделанные
выше замечания. Она дает возможность оценить снизу критиче-
критическую нагрузку в тех случаях, когда трудно получить точное ре-
решение.
§ 32. Основные исходные зависимости
для цилиндрической оболочки
В задачах устойчивости стержней и пластин, которые рассмо-
рассмотрены в предыдущих параграфах, критические нагрузки пропор-
пропорциональны изгибным жесткостям. Так, для сжатого стержня кри-
критическая сила определена по формуле Ркр = C-^j—, а для прямо-
прямоугольной пластины, сжатой в одном направлении, критическая
интенсивность распределенной нагрузки — по формуле <7кр =
Ко
, где EJ и D — изгибные жесткости стержня и пластины.
В эти формулы не входят значения жесткостей стержня и пласти-
пластины на растяжение — сжатие, поскольку при бесконечно малом из-
изгибе прямого стержня и плоской пластины удлинения оси стерж-
стержня или деформации срединной плоскости пластины имеют второй
порядок малости. Жесткость стержня на растяжение-сжатие вли-
влияет только на закритическое поведение стержня (в том случае,
когда концы стержня закреплены относительно продольных сме-
смещений) так же, как жесткость пластины на растяжение-сжатие
влияет только на закритическое поведение пластины с закреплен-
закрепленным контуром.
Основная геометрическая особенность оболочки состоит в том,
что при надлежащем закреплении ее краев она не допускает даже
6)
бесконечно малых чисто изгибных деформаций без растяжения-
сжатия ее срединной поверхности. Например, замкнутую выпук-
выпуклую оболочку или закрепленную по обоим торцам цилиндриче-
цилиндрическую оболочку нельзя деформировать, не вызывая удлинений
и сдвигов в срединной поверхности, причем эти удлинения и сдвиги
будут иметь тот же порядок, что и поперечные прогибы обо-
оболочки.
Эта геометрическая особенность оболочек приводит, во-пер-
во-первых, к тому, что формулы для критических нагрузок оболочек
имеют более сложную структуру по сравнению с формулами
для критических нагрузок стержней и пластин: в них-входят из-
гибная жесткость оболочки и жесткость на растяжение-сжатие.
Во-вторых, в результате этой особенности закритическое поведе-
поведение оболочек качественно отличается от закритического поведе-
поведения стержней и пластин вблизи критических точек бифур-
бифуркации.
Поместим начало подвижной системы координатxyz на средин-
срединной поверхности цилиндрической оболочки, направив ось х
вдоль образующей, ось у — по касательной, а ось z — по внешней
нормали к срединной поверхности (рис. 6.11, а). Перемещения
точек срединной поверхности по направлениям осей х, у, z обоз-
обозначим соответственно и, v, w. Координаты точек А, В, С, D эле-
элемента срединной поверхности оболочки и координаты точек Аи
Blf Clt Dx этого элемента после деформации оболочки в системе
координат xyz, связанной с точкой А (рис. 6.11, б), приведены
ниже.
Используя выражения для координат и ограничиваясь пока
линейными относительно перемещений и, v, w и их производных
Точка
А
В
С
D
Ах
Сг
О,
X
0
0
dx
dx
и
ди
It —т™ * ' V©
(/CD
ох -4- и -4- dw -^
du dx
g
0
Rdy
Rd<?
0
У
R dq> + у + —- dm + ш^ф
Сф
5y
-i- ¦ QX -|- И7 Дф
OX
,dv.
z
о о о о
ш
¦ dw . .
w -{• -г- Оф — t; Оф
dw ,
, dw , ,
+ -rr— dx — t.1 аш
' dx T
w + ~dx
1 dx
239
слагаемыми, нетрудно найти компоненты деформаций срединной
поверхности:
ди 1 / , до \ ди , да
а также углы поворота нормали к срединной поверхности
и ftj, в плоскостях xz и zy:
dw
д<р
F.22)
Если пренебречь влиянием деформаций срединной поверх-
поверхности на изменение ее кривизн хх, пд и крутку х^, то можно
получить выражения [29J
_2L-
дх* '
~дудх~
дх
1 d*w
~~R~ д(рдх '
F.23)
)
В большинстве случаев потеря устойчивости цилиндрической
* * dw .. I d*w ..
оболочки происходит таким образом, что -^— »ои \~л~г 5>w-
Поэтому в задачах устойчивости часто используют упрощенные
зависимости
F.24)
и
R*d<p*
Rd<?dx
При деформациях в оболочке возникают нормальные усилия
Тх, Тв, сдвигающее усилие S, изгибающие Мх, Му и скручива-
скручивающий Мху моменты. Эти внутренние силовые факторы связаны
с компонентами деформации срединной поверхности оболочки
и изменением ее кривизн соотношениями упругости, основанными
на гипотезе неискривляемости нормали:
F.26)
M, = D(xx
246
, F.27)
где
Eh*
12A-|
Для получения линеаризованных уравнений, описывающих
потерю устойчивости цилиндрической оболочки, выведем линей-
линейные уравнения, описывающие поведение произвольно нагружен-
нагруженной оболочки при малых перемещениях.
Рассматривая равновесие элемента оболочки в недеформиро-
ванном состоянии (рис. 6.12), приходим к следующей системе
уравнений (чтобы не затемнять рисунка внутренние силовые
факторы, связанные с изгибом оболочки, показаны отдельно):
дТх dS
дх
Rd<p ^
R
OS
дх
Оу_
R
Щ
дх
= Рг
F.28)
дМх
дх
дМу
Rdy
Rdy
дх
¦-Qx-O;
— Qu — 0,
F.29)
где рх, рд, рг — интенсивности внешних распределенных нагру-
нагрузок, действующих в направлениях соответствующих осей.
Рис. 6.12 (направление моментов Мху следует считать обратным)
241
Исключив из систем уравнений F.28) и F.29) внутренние по-
поперечные силы Qx и Qy, придем к уравнениям
дТу
Rdy
JJL
R
dS
дх
4--
дТх
дх
д*Мх
дх2
¦ + -
' (
R \
- +
dS
Rdq,
дМу
Rdq
о д*Мл
Z Rdqi
дМх
дх
= 0;
а*му
R*dm* Ргш 1
F.30)
Используя соотношения упругости F.26) и F.27), получаем
систему уравнений равновесия в перемещениях:
где
Eh (
„а \
д*и
1 — ц д*и ,1 + и.
._... _(_. _ ¦ _
Eh
1-й*
1 дш\ D_ Г (Pw
R~*d^) ~~R~
Eh
Eh I' _w_, dv
— li^R \ R ~*~ Rdtf
V2 (*) =
2
= 0;
Rdqdx
F.31)
Для замкнутой в окружном направлении цилиндрической обо-
оболочки на каждом из ее торцов должны быть заданы по четыре
граничных условия:
1) перемещение и либо осевое усилие Тх\
2) перемещение v либо сдвигающее усилие S;
3) угол наклона нормали §х либо изгибающий момент Мх;
4) перемещение w либо приведенное поперечное усилие
дМх
дх
дМ
'w _
дер
В том случае, когда выражения изменения кривизн хх, %уг
хЛ4,берутв упрощенном виде F.25), уравнения равновесия должны
быть также упрощены [29]. Из второго уравнения равновесия
242
F.28) следует отбросить слагаемое -&-. Тогда уравнения равнове-
равновесия F.30) при рх = 0 и рв = 0 принимают вид
дТх , dS
F.32)
Я<ЭФ ^ дх ~V<
ту д*мх д*мху д*му
R "г" дх* ~т~ Rdydx ^
Если ввести функцию усилий Ф, связанную с усилиями со-
соотношениями
то два первых уравнения системы F.32) будут удовлетворены тож-
тождественно. Исключая из системы F.21) перемещения и и v, при-
приходим к уравнению совместности деформаций
д*ех . д*е,у д*у 1 d*w
~т~~~дх* Rdydx ~ ~R ~W'
Используя далее соотношения упругости F.26) и F.27) и
соотношения F.33), получим следующую систему уравнений:
F.34)
Eh
Уравнения, описывающие потерю устойчивости цилиндриче-
цилиндрической оболочки, получим при следующих допущениях, аналогич-
аналогичных допущениям, использованным при выводе линеаризованных
уравнений стержней, пластин и кругового кольца.
1. Оболочка имеет идеально правильную цилиндрическую фор-
форму и ее начальное напряженное состояние безмоментное.
2. Изменением всех геометрических размеров оболочки в до-
критическом состоянии пренебрегаем.
3. При потере устойчивости связь между перемещениями и
внутренними силовыми факторами в оболочке описывается соот-
соотношениями упругости F.26) и F.27).
4. Оболочка нагружена только приложенными к торцам мерт-
мертвыми контурными усилиями и внешним гидростатическим давле-
давлением интенсивности р =р (х, <р).
В соответствии с первым допущением в начальном докрити-
ческом состоянии в оболочке существуют только внутренние
243
усилия Т%, Тд, S', удовлетво-
удовлетворяющие уравнениям равновесия
безмоментной теории оболочек:
dS°
Rdy
+
дх
= 0;
= 0;
R
= — р-
F.35)
Эти уравнения равновесия
вытекают из уравнений F.28)
если в последних положить Qx=
Qg = 0, рх = ру = О И рг= —р.
Рассмотрим условие равно-
равновесия оболочки в отклоненном
состоянии (рис. 6.13). Спроекти-
Спроектируем все действующие на эле-
элемент усилия (на рис. 6.13 показано только усилие 7\р) на направ-
направление нормали z и определим фиктивную нормальную нагрузку
(см. стр. 146 и 225)
_* д I,
Рис 6.13
Учитывая уравнения F.35), получим
*> F.37)
где изменения кривизн ху, хх, ххи связаны с перемещениями обо-
оболочки формулами F.23) или F.25). Как нетрудно проверить, ли-
линеаризованные уравнения равновесия элемента оболочки в от-
отклоненном состоянии можно получить из линейных уравнений F.30)
или F.31), положив в них рх = рд = 0 и рг = р$. Используя,
например, систему уравнений в перемещениях F.31), будем иметь
-1
1 —j
R*d<p*
Rdydx
1-1*
дх*
Г
[
"Г
R дх
1 dw
Rdydx r R* Лр
sai , dw
REh
¦J-0-.
A-Ца
dit \
_ „Ф
F.38)
244
Если воспользуемся упрощенными выражениями кривизн F.25)
и соответствующей им системой уравнений F.34), то получим
F.39)
В задачах устойчивости однородная система уравнений долж-
должна быть подчинена однородным граничным условиям. Так, если
на торце замкнутой цилиндрической оболочки задано w = О,
то остальные три однородных граничных условия на этом торце
будут:
1) ы = 0 либо Тж = 0;
2) v =» 0 либо S = 0;
3) Ъх = 0 либо Мх = 0.
(Другие варианты граничных условий рассмотрены ниже.)
Таким образом, задача устойчивости цилиндрической оболочки
при безмоментном начальном напряженном состоянии сведена
к типичной задаче на собственные значения.
Приведем геометрические нелинейные соотношения, которые
необходимы для исследования закритического поведения обо-
оболочки, и решения задач устойчивости цилиндрической оболочки
энергетическим методом. Во-первых, для исследования устой-
устойчивости оболочки, находящейся в безмоментном начальном
состоянии, удлинения и углы сдвига в срединной поверх-
поверхности следует выражать с точностью до квадратичных сла-
слагаемых относительно бифуркационных перемещений и их произ-
производных.
Используем выражения для координат точек Л, В, С, D эле-
элемента срединной поверхности оболочки до деформации и точек
Ах, Вх, Си Dx этого элемента после деформации и повторим
преобразования, которые проведены при выводе аналогичных
зависимостей для пластины и кольца. Тогда получим выра-
выражения
* — йГ + Т
ди i до
F.40)
где ¦&, и ¦&. — углы поворота нормали, подсчитываемые по фор-
формулам F.22) или F.24).
245
Кроме того, если на оболочку
действует гидростатическое давление,
то изменение объема, ограниченного
оболочкой, тоже нужно вычислять с
точностью до квадратов бифуркацион-
бифуркационных перемещений и их производных.
Для подсчета объема, ометаемого эле-
элементом A BCD, разобьем этот элемен-
элементарный объем на шесть тетраэдров
таким образом, чтобы тетраэдры
смежных элементов имели общие гра-
грани: АСХВХАХ, ADXCXAX, ADCXDX,
АВСХВХ, ADCCU ACBCV Тогда
объем, ометаемый любой конечной
частью оболочки, будет полностью и
без пересечений заполнен элементар-
элементарными тетраэдрами. На рис. 6.14 пока-
показан один такой тетраэдр АСХВХАХ.
Как известно, если одна из вершин тетраэдра совмещена с
началом координат, то его объем вычисляют по формуле
Рис 6.14
*i Ух
X% t/2
Xa Уз
где x{, \ji, zt — координаты остальных трех вершин. Например,
объем тетраэдра ADCXDX
XC\ УС\ ZC\
XDt Уй, Zdi
Значения xD, yD и других координат взяты из таблицы, при-
приведенной на стр. 239.
Суммируя объемы всех шести тетраэдров, находим [2]
d (ДV) = |а> + \ [w (е; + г'„) - vbg — ыдя]| R d9 dx, F.41)
где AV — изменение объема, ограниченного оболочкой; е'х и
t'y — относительные удлинения, подсчитанные по формулам F.21),
т. е. без учета квадратичных слагаемых.
246
Внутренняя потенциальная энергия деформации цилиндриче-
цилиндрической оболочки
U = 4 Я [(х* + %У)г + 2 A - Ji) (xj,
+ 2A-р») JJ (8* + 2fie*8" + &l + ¦LTL^) R d(f
Используя приведенные выше зависимости, нетрудно под-
подсчитать изменение полной потенциальной энергии ДЗ при пере-
ходе оболочки в возмущенное состояние, причем выражение для
ДЗ можно записать в форме Брайана и С. П. Тимошенко.
Для записи энергетического критерия в форме Брайана би-
бифуркационные перемещения точек срединной поверхности ци-
цилиндрической оболочки зададим в виде
и = аи1(х, ф); v = ауг(х, ф); w = aw1(x, ф), F.43)
где а — бесконечно малый параметр, не зависящий от координат-
Действуя в соответствии, с намеченной в § 9 общей схемой
решения, подсчитаем изменение полной потенциальной энергии
оболочки при переходе от начального безмоментного состояния
равновесия к смежному состоянию, описываемому функциями
F.43). Используя зависимости F.42), F.40) и F.41) и опуская
множитель аа, получаем
дЗ = С/е + ?/и + 7+Л/7, F.44)
где
U' = 2A-|г») Я (е;а+ 2^'хЪ'у + г» + "^ V
и*=¦§¦ Я1(х;+^+2 A ~м) (х*а" ~ х^
V = J J (Hfi'x + SY + TV',) P dy dx;
АП = -y J J p [wi (ei + e^) -1»!^ — uib'x\ R dq> dx.
Здесь s'x, e'e, у','б'ж, ^ и %x, x'u, v!xv выражаются через перемещения
u1 (x, у), vy (x, y), Wx (x, у) и их производные с помощью линейных
зависимостей F.21)—F.23), а
el = -j- %¦; е^ = 4- ОУ; Т' = #Ж- F.45)
Заметим, что если для подсчета di и ^^ использовать упро-
упрощенные зависимости F.24), то в выражении F.44) следует опу-
опустить слагаемое АП, пропорциональное изменению объема обо-
247
лочки при переходе ее в новое состояние. Действительно, для обо-
оболочки, нагруженной внешним давлением р, имеем Т% = —pR.
Поэтому подсчитывая входящее в выражение для V слагаемое
"u = —pR-g-Q't по упрощенной зависимости, получим
Таким образом, отбрасываем слагаемые того же порядка, что
и величина АП.
Из этого, в частности, следует, что при использовании упро-
упрощенной теории цилиндрической оболочки в задачах устойчивости
бессмысленно различать мертвую и гидростатическую распределен-
распределенные поверхностные нагрузки.
Дальнейшее решение можно вести из условия б (A3) = 0 либо из
условия A3 = 0 при дополнительном условии минимума критиче-
критической нагрузки. Причем, используя энергетический подход, можно
получать точные и приближенные решения задач устойчивости.
Покажем, например, как из условия 6 (A3) = 0 можно выве-
вывести линеаризованные уравнения устойчивости цилиндрической
оболочки, которые ранее получены непосредственно из условия
равновесия элемента оболочки в отклоненном состоянии.
Воспользовавшись упрощенным вариантом записи выражений
для изменения кривизн срединной поверхности оболочки и учи-
учитывая только что сделанное замечание, представим изменение
полной потенциальной энергии оболочки A3 в виде
АЭ = Ц F (и, v, да) R dtp dx,
где
daw
1\ Eh Г/дв \» . o du ( dv w
J/ + 2 A — Ц») l\dx) + ZP dx \ Rd<p + Я
do w у , 1-ц {до , ди у\ 1 To {dw
dw dw 1 T0 / aw у
Уравнения Эйлера для функционала A3
д 6F , J dF
_ J_
дх д(ди/дх) ' йф д(ди/ду)
JL dF 4- — dF
дх d(dv/dx) + дф о (dv/ду)
dFд dFд dF да dF
== О-
dF ¦
_
dw дх d(dw/dx) dtp d(dw/dc?) + dx1 d (d*w/dxa)
, d* dF 3» dF _Q
"•" дхдф d (d2w/dx ду) ^ дф2 d{daw/dya)
248
После несложных выкладок отсюда получаем упрощенную си-
систему линеаризованных уравнений в перемещениях. Если ввести
функцию усилий Ф и воспользоваться уравнением совместности
деформаций, то эти уравнения можно привести к системе двух
уравнений F.39).*
Напомним, что во всех приведенных выражениях начальные
усилия Тх, Ту, S" считались найденными "из решения уравнений
безмоментной теории оболочек F.35). Воспользовавшись записью
энергетического критерия в форме С. П. Тимошенко (см. § 10),
можно избежать определения начальных усилий в оболочке, на
для этого необходимо найти перемещения точек срединной поверх-
поверхности оболочки второго порядка малости, как это сделано для
кругового кольца и пластин.
§ 33. Определение внешнего
критического давления
Начнем с простейшей задачи устойчивости длинной цилиндри-
цилиндрической оболочки (трубы), нагруженной равномерным внешним
гидростатическим давлением (рис. 6.15). Длину оболочки будем
считать настолько большой, что характер закрепления ее торцов
не влияет на поведение оболочки при потере устойчивости. (Ниже
дана оценка длины оболочки, при которой можно пренебречь
влиянием закреплений ее торцов на критическое давление). Та-
Такая длинная оболочка может деформироваться без удлинений
и сдвигов срединной поверхности; в частности, каждое сечение
оболочки может деформироваться одинаково, как нерастяжимое
кольцо. Поэтому для определения критического внешнего давле-
давления и формы потери устойчивости такой оболочки можно восполь-
воспользоваться решением задачи устойчивости кругового кольца под.
действием равномерной гидростатической нагрузки.
Для кольца собственные значения интенсивности равномер-
равномерной гидростатической нагрузки определяем по формуле
F-46)
Причем, собственные функции, соответствующие этим собствен-
собственным значениям нагрузки, равны:
w = — п cos nq>, F.47)
где п — число волн, по которым кольцо изгибается в своей пло-
плоскости.
* Аналогично линеаризованные уравнения устойчивости можно получить
и в случае неупрощенных выражений изменения кривизн срединной поверх-
поверхности оболочки. Для этого дополнительно необходимо проанализировать ряд
второстепенных слагаемых в иыражении полной потенциальной энергии.
249-
p JL
Рис. 6.15
Мысленно выделив из
оболочки кольцо единич-
единичной ширины (рис. 6.15, а)
и положив для такого
кольца EJ — ID и q = lp,
где D — изгибная жест-
жесткость оболочки, вместо
F.46) можно записать
Рп = Б»—» F.48)
где рп — собственные значения внешнего давления, при которых
у оболочки существуют изгибные формы равновесия, смежные
с исходной круговой формой равновесия. Функции F.47) будут
собственными функциями, соответствующими этим собственным
значениям р„.
Из формулы F.48) при якр = 2 получим значение критического
внешнего давления для рассматриваемой оболочки
3D
#8
4A—
F.49)
где h — толщина оболочки.
Поскольку окружное сжимающее напряжение в оболочке,
нагруженной равномерным внешним давлением, равно а = ^—,
критическое окружное сжимающее напряжение
Eh<t
4A —|
F.50)
Форма потери устойчивости оболочки описывается функциями
(с точностью до общего множителя) икр =sin 2ф; wKV = —2 cos 2ф.
При потере устойчивости поперечное сечение оболочки принимает
эллиптическую форму (рис. 6.15, б).
В данном случае, когда цилиндрическая оболочка теряет устой-
устойчивость без удлинений и сдвигов срединной поверхности, крити-
критическая нагрузка зависит только от изгибной жесткости оболочки,
и структура формулы F.50) для критического окружного напря-
напряжения не отличается от структуры формулы для критического
напряжения равномерно сжатой в одном направлении прямоуголь-
прямоугольной пластины со свободными краями. Полученный результат
можно использовать и для цилиндрической оболочки со свобод-
свободными торцами: она тоже может потерять устойчивость без удли-
удлинений и сдвигов срединной поверхности.
Выясним, как закрепление торцов цилиндрической оболочки
влияет на величину критического давления. Для этого восполь-
воспользуемся сначала упрощенным вариантом теории цилиндрической
оболочки, сводящимся к системе уравнений F.39). Будем считать,
что в докритическом состоянии Т% = 0; Т°у — —pR\ S° = 0.
250
Тогда фиктивная поперечная нагрузка, определяемая зависимо^
стью F.37), равна
рг —
и система уравнений F.39) принимает вид
Напомним, что Ф—функция усилий, определяемая соотно-
соотношениями F.33).
Для оболочки конечной длины система уравнений F.51)
допускает элементарное аналитическое решение только при одной
единственной комбинации граничных условий — при* = 0 их=1:
1) ш = 0; 2) Мх=0; 3) и = 0; 4) 7\=0. F.52>
Как нетрудно проверить, для замкнутой оболочки эти гранич-
граничные условия выполняются, если при х = 0 и х = /
1) ^ = 0; 2) |?-0; 3) -Ц—0; 4) Ф = 0. F.52а)
Заметим, что выписанные граничные условия своеобразны:
это не условия свободного опирания края оболочки, поскольку
о = 0, следовательно, S ф 0, и не условия шарнирного закреп-
закрепления, так как Тх = 0 и и Ф 0.
Решение системы уравнений F.51) при этих граничных усло-
условиях можно разыскивать в виде
F.53)
Подставив функции F.53) в систему уравнений F.51) и сокра-.
тив общий для всех слагаемых множитель sin •—- Sln пЧ>> п0'
лучим однородную систему линейных уравнений
2Б1х
Приравнивая нулю определитель полученной системы уравне-
уравнений, находим собственные значения задачи
Рпт
+
-К ")'¦<¦ (*)']"
F.54)
где 2п и т — число полуволн в окружном и продольном напра-
направлениях, по которым изгибается срединная поверхность оболочки
(рис. 6.16).
Обратим внимание на структуру полученного выражения:
величина рпт зависит от изгибной жесткости оболочки D и жест-
жесткости оболочки на растяжение-сжатие Eh, ибо закрепленная по
обоим торцам цилиндрическая оболочка не может деформироваться
без удлинений и сдвигов срединной поверхности.
Очевидно, что при определении ркр как наименьшего собствен-
собственного значения следует принять т = 1. Тогда из F.54) получим
Eh
-. F.55)
При определении критического значения pKD для конкретной
п> ~~Б~> ~ ) » ВЬ1Ра"
жаемой формулой F.55), подобрать число волн в окружном напра-
направлении пкр, дающее минимальное значение рп. На рис. 6.17, а
дана типичная зависимость безразмерного давления рп = рп1р™
-j- = 500; -^- = 2; ркр = 38,3; пкр = 9 j ,
где
3D
R*
Eh3
4A—
F.56)
п
и
Штриховой линией показана зависимость для ^„, построенная
в предположении непрерывного изменения числа волн п.
Результаты таких рас-
расчетов представлены на
рис. 6.17, б, на котором по
оси абсцисс отложена без-
безразмерная длина оболочки
IIR, по оси ординат — без-
безразмерное критическое да-
давление ркр = ркр/ркр, по-
показывающее, во сколько
раз критическое давление
для оболочки с закреплен-
ттттт
гттп
Рис 6.16
252
60
50
40
?\
\
\
\
\
\
\
и
__^ ^
у
75
V
л
ч
/500
\
1-200
==
Ь 8 9 Ю It п в I 2 3 L
Рнс 6.17
ными торцами превышает критическое давление для бесконечно
длинной оболочки (оболочки со свободными торцами).
Упрощенная система уравнений F.51) получена при условии
j d^w/dy* | ^> w, \dw/dq>\ 3> о. В данном случае, когда попереч-
поперечный прогиб w определяется выражением F.53), оно сводится к усло-
условию п2 3> 1. Следовательно, зависимость F.55) справедлива толь-
только при пг 3> 1. В частности, поэтому при /?//—» О зависимость
F.55) не сходится к формуле F.48) для бесконечно длинной обо-
оболочки. Если не вводить таких упрощающих предположений, то
задача устойчивости цилиндрической оболочки сводится к системе
трех уравнений F.38), которая в рассматриваемом, случае при
вид
Г* "*" Л.
~5 яГ — и»
F.57)
л тлях
и = A cos —-.— cos жр;
Решение этой системы при граничных условиях F.52) можно
найти в виде
F.58)
253
sin ~-cos пц>.
Подстановка этих функций для и, v, w в систему уравнений
F.57) приводит к системе трех однородных алгебраических урав-
уравнений относительно коэффициентов А, В к С. Из условия равен-
равенства нулю определителя этой системы можно найти собственные
значения давления р„т.
Приняв т = 1 и отбросив некоторые второстепенные слагае-
слагаемые, получим
где
„ О Bt . Eh \ i / /R ,
В отличие от F.55) при RII —» 0 зависимость F.59) сводится
к формуле F.48). Приняв па > 1, из F.59) можно получить F.55).
Для определения критического давления ркр в F.59) следует по-
подобрать значение п, соответствующее минимуму р„.
Из несложного анализа выражения F.59) следует, что при
IIR > 2 У Rlh рассмотренное закрепление торцов оболочки прак-
практически не влияет на ркр, и оболочку как бесконечно длинную
можно рассчитывать на устойчивость по формуле F.48).
Полученные зависимости для рп малоудобны для практиче-
практического использования. Определение критического давления ркр
связано с проведением дополнительных расчетов по подбору якр.
Зависимости F.55) и F.59) особенно неудобны для проектиро-
проектировочных расчетов, когда при заданном значении внешнего давления
ркр и известных габаритных размерах оболочки R и / из условия
ее устойчивости нужно подобрать толщину оболочки h или при
известных радиусе оболочки R и толщине обшивки h необходимо
найти расстояние между шпангоутами.
Для оболочек средней длины при 0,3 У Rlh > IIR > Ук/R
эти расчетные зависимости можно существенно упростить. В ука-
указанном диапазоне можно принять п% ^> (-р) »тогда вместо F.55)
и F.59) получим
Минимизируя полученное выражение по п из условия dpjdn =
= 0 находим (при ц= 0,3)
'«. = ^f 36 A - и») У% ~ 7.5-f |/^; <6-60»
384
Последнюю формулу обычно называют формулой П. Ф. Папко-
вича.
Используя F.56), для оболочек средней длины можно записать,
что безразмерное критическое давление
_ ркР _
Х-3'68" У К'
Нетрудно проверить, что формула F.62), являющаяся преоб-
преобразованной формулой П. Ф. Папковича, с большой точностью
описывает все кривые, представленные на рис. 6.17, б.
Для коротких оболочек (находящихся в безмоментном на-
начальном состоянии) при IIR < YhlR общие зависимости тоже
можно значительно упростить. Как показывают расчеты, в этом
случае оболочка теряет устойчивость с образованием такого боль-
большого числа волн в окружном направлении, что вторым слагае-
слагаемым в зависимости F.55) можно пренебречь. Тогда для сжимаю-
сжимающего окружного усилия Т°у получим формулу
1то\ Dn% П i l fnRW пЮ ( 2"Д . 12п V
Ri [i i- „2 ^ , ) J - ,2 [
Значение {Т°у)а будет минимальным при 2/г = -у—• Критичес-
Критическое значение окружного сжимающего усилия
№р.= 4-^. F.63)
В этом предельном случае критическая нагрузка зависит
только от изгибной жесткости оболочки D и не зависит от ее жест-
жесткости на растяжение-сжатие Eh.
Формула F.63) подобна формуле для критической нагрузки
шарнирно-опертой прямоугольной пластины, сжатой в одном
направлении. Следовательно, короткая цилиндрическая оболочка
с опертыми торцами, находящаяся в безмоментном начальном
состоянии Т°у = const, Т°х — О, S" = 0, теряет устойчивость так
же, как и сжатая в продольном направлении удлиненная шар-
нирно-опертая прямоугольная пластина, ширина которой Ъ равна
длине оболочки /, причем число полуволн, очевидно, равно 2п.
Влияние осевого усилия на критическое внешнее давление.
Во всех рассмотренных решениях Т°х = 0, но в большинстве
реальных случаев нагружение цилиндрической оболочки внеш-
внешним давлением сопровождается возникновением в ней осевых
усилий. Так, например, при всестороннем внешнем давлении
Т%=-Щ- (рис. 6.18, а).
Рассмотрим случай, когда в цилиндрической оболочке на-
наряду с окружным начальным сжимающим усилием Т°у = —pR
имеется осевое начальное сжимающее или растягивающее уси-
усилие Т% = \Ту, где v — некоторый фиксированный коэффициент
255
1ПП1НН
а)
6)
Рис. 6.18
при всестороннем давлении v = -2~)- Тогда при использовании
упрощенных уравнений теории цилиндрической оболочки вместо
t ^у необходимо принять
pt ~
-7*.. +7V---
дх*
¦)•
При граничных условиях F.52) все дальнейшее решение пол-
полностью повторяется, но вместо окончательной зависимости F.55)
получим (при /п= 1)
Eh
т
F.64)
Откуда следует, что для оболочек средней длины при абсолютной
величине v порядка единицы осевое начальное усилие незначи-
незначительно влияет на критическое внешнее давление. В частности,
оболочки средней длины, находящиеся под действием всесторон-
всестороннего внешнего давления, можно рассчитывать на устойчивость
но формуле П. Ф. Папковича. Для коротких оболочек влияние
осевого усилия на критическое внешнее давление можно учесть
с помощью зависимости F.64), подбирая при фиксированном v
число волн в окружном направлении якр из условия минимума
р„, причем при абсолютной величине v порядка единицы это вли-
влияние не велико.
Влияние осевого начального усилия оказывается существен-
существенным только для коротких оболочек, рассчитываемых на устой-
устойчивость как пластины по формулам типа F.63) без учета влияния
256
ч.
4
Л
—
Si
м-
=
1,8
1,6
1Л
1,2
" 4 6 8 10
Рис. 6.19
20
а)
40 60 80100 1^2
6 8 10 20 40 6080100 Г
6) -
кривизны оболочки (рис. 618, б). В этом случае расчет сводится
к расчету удлиненной прямоугольной пластины, равномерно на-
нагруженной в двух направлениях.
Расчет на устойчивость цилиндрической оболочки при сжима-
сжимающих осевых усилиях, существенно превосходящих по абсолют-
абсолютной величине окружные сжимающие усилия, рассмотрен в сле-
следующем параграфе.
В заключение напомним, что основное решение, изложенное
в этом параграфе, получено для одной единственной комбинации
граничных условий F.52), а начальное напряженное состояние
оболочки считалось безмоментным. Долгое время это решение,
опубликованное Мизесом в 1914 г., было единственным точным ре-
решением для цилиндрической оболочки, нагруженной внешним
давлением. Сравнительно недавно с помощью ЭЦВМ ряду авто-
авторов удалось получить практически точные решения, свободные
от указанных ограничений.
Результаты решения, полученного методом конечных разно-
разностей для различных вариантов граничных условий с учетом и
без учета моментности докритического состояния оболочки [23],
приведены соответственно на рис. 6.19, а я б. Здесь использованы
следующие обозначения:
где ркР определяется по формуле П. Ф. Папковича.
Приведенные кривые соответствуют следующим вариантам
граничных условий на обоих торцах оболочки:
» w==0> -ir-0' т^0' и=
= 0, -37 = 0,
а = 0, 5 = 0;
Г4 о»-0, -g- = 0,
1/г9 Н. А. Алфутов
25
Гъ
Г6
Г,
Г8
= 0, Мх-=0, и = 0, у = 0;
= 0, Л1, = 0, и = 0, 5 = 0;
= 0, Мл=0, 7^ = 0, S —0.
Как видно из приведенных кривых, формулой П. Ф. Папко-
вича можно "пользоваться для граничных условий Г2, Г4, Ге и
Ге в достаточно широком диапазоне изменения геометрического
параметра Z. Упрощенное аналитическое решение, позволя-
позволяющее учесть влияние граничных условий на ркр, приведено
в § 37 [41.
§ 34. Устойчивость цилиндрической оболочки
при осевом сжатии
Первые теоретические решения задачи по определению кри-
критической нагрузки для сжатой в осевом направлении тонкостен-
тонкостенной цилиндрической оболочки (рис. 6.20, а) были даны Лорен-
цом и С. П. Тимошенко в начале века. Они считали, что оболочка
имеет идеально правильную цилиндрическую форму, а ее началь-
начальное напряженное состояние является безмоментным и однород-
однородным, и определяли наименьшую нагрузку, при которой наряду
с начальным безмоментным состоянием появлялись смежные
изгибные состояния равновесия оболочки. Такую постановку
задачи устойчивости оболочек называют классической.
Рассмотрим решение задачи устойчивости цилиндрической
оболочки в классической постановке при осесимметричной форме
потери устойчивости. Для получения однородного линеаризован-
линеаризованного уравнения, описывающего такую форму потери устойчиво-
устойчивости, воспользуемся широко известным уравнением изгиба цилин-
цилиндрической оболочки при осесимметричной нагрузке. Это уравне-
уравнение нетрудно получить из приведенных в § 32 общих зависимостей
d*w
Eh
F.65)
a)
I I
Рис. 6.20
258
где w = w (x) — поперечный прогиб оболочки; рг = pz (х) —
интенсивность радиальной осесимметричной нагрузки.
Учитывая, что при осесимметричной форме потери устойчи-
. (Рви
вости изменение кривизны срединной поверхности хх = . а ,
находим фиктивную радиальную нагрузку
rf-7-|?. F-66)
Считая, что в начальном состоянии Т% = —q, TQy = О, S° = 0,
и заменяя в уравнении F.65) рг на pf, приходим к однородному
линеаризованному уравнению
,-, d*w , Eh , d?w n ,a „_,
D-d*+-RZW + q'd*r = 0- F>67)
Это уравнение совпадает с линеаризованным уравнением из-
изгиба сжатого прямого стержня, связанного с упругим винклеров-
ским основанием (см. § 15). Роль изгибной жесткости стержня EJ
играет изгибная жесткость оболочки D, а роль упругого основа-
основания — жесткость оболочки на растяжение-сжатие в окружном
направлении.
Решение такого уравнения обсуждалось в § 15; в частности,
если при х = 0 и х = / задано:
то решение имеет вид wm(x) = Amsin-^^-, где m — число полу-
полуволн, по которым изгибается образующая цилиндрической обо-
оболочки (рис. 6.20, б). Соответствующие собственные значения ин-
интенсивности нагрузки равны
mn у Eh 1 . , n ~
-& /яго у1»
Если число полуволн т считать достаточно большим, а вели-
величину (-^—¦) = Л непрерывно изменяющейся, то из условия
минимума
*Ят D Eh I п
находим
mKP =
259
При этом критическое осевое сжимающее напряжение (при
I* = 0,3)
Неосесимметричные формы потери устойчивости цилиндриче-
цилиндрической оболочки, сжатой в осевом направлении, в классической
постановке можно исследовать с помощью системы уравнений
F.39), которая при Т° = —q, Т°у = 0, S" = 0 принимает вид
* ?
__уУФ— — — = 0
Eh V V w R дх* и*
Если для обоих торцов оболочки заданы граничные условия
F.52), то решение системы F.71) можно найти в виде
Ф = В sin-^p-sin mp.
Подставив эти функции в систему уравнений F.71) и сократив
общий для всех слагаемых множитель sin —-.— sin mp, получим
однородную систему алгебраических уравиений
Равенство нулю определителя этой системы приводит к соб-
собственным значениям нагрузки
Eh 1
где
/ I \2 Г/Я1Я \2 , ( П \212
При большом числе полуволн п или m комплекс ц можно рас-
рассматривать как непрерывно изменяющийся параметр. Определяя
условие минимума qnm по этому параметру, снова приходим
к формуле F.69), причем критическое значение комплекса ц
равно
' Eh _ 2lA3(l — |
DR* ~ hR
260
Заметим, что последнее выражение не дает конкретных зна-
значений Лцр и /Пир, а только устанавливает некоторую связь между
ними. Таким образом, критической точке бифуркации соответ-
соответствует целая серия различных комбинаций чисел полуволн, по
которым может происходить потеря устойчивости оболочки, вклю-
включая «кр = 0, т. е. осесимметричную форму потери устойчивости.
Итак, из приведенного решения следует, что начальное без-
моментное напряженное состояние упругой идеально правильной
цилиндрической оболочки с граничными условиями F.52) стано-
становится неустойчивым, когда осевое сжимающее напряжение пре-
превысит значение
U*P- /3A-ц*) T'
Суммарная критическая сжимающая сила
. 2nEh*
не зависит от радиуса оболочки R, а определяется только толщи-
толщиной оболочки h и упругими свойствами материала Е и ц.
Как отмечалось, условия F.52)—единственный вариант гра-
граничных условий, допускающих простое аналитическое решение
задачи устойчивости цилиндрической оболочки. При других гра-
граничных условиях решение системы уравнений F.71) даже при од-
однородном безмоментном напряженном состоянии резко услож-
усложняется.
Долгое время решение Лоренца и Тимошенко оставалось един-
единственным, описывающим потерю устойчивости упругой цилиндри-
цилиндрической оболочки, равномерно сжатой в осевом направлении, и
только недавно с помощью ЭЦВМ удалось сделать следующий шаг—
рассмотреть задачу при произвольных граничных условиях с уче-
учетом неоднородного начального напряженно-деформированного
состояния.
При произвольных граничных условиях и однородном безмо-
ментом начальном состоянии критическую нагрузку можно вы-
вычислить следующим путем [19]. Исключив из системы уравнений
F.71) функцию усилий, эту систему можно свести к одному раз-
разрешающему уравнению относительно нормального прогиба ас
0.
Решение этого уравнения с постоянными коэффициентами най-
найдем в виде w = АеГ* sin mp.
Подстановка этой функции в разрешающее уравнение дает
характеристическое уравнение восьмой степени относительно пара-
параметра г. Определив (для конкретных значений параметров обо-
оболочки, нагрузки и числа волн) восемь корней характеристического
9 Н. А. Алфутов 261
+ fj. ? + *** (-g-)
уравнения /*,-, которые могут быть вещественными, комплексными
или мнимыми, получим выражение для поперечного прогиба
?=8
w = sin mp У A:f?ix.
1=1
Выразив заданные на торцах оболочки однородные граничные
условия (по четыре условия на каждом торце) через функцию w
и подчинив последнее выражение этим граничным условиям,
придем к системе восьми однородных линейных алгебраических
уравнений относительно постоянных А{. Условие обращения в нуль
определителя этой системы уравнений позволяет найти собствен-
собственные значения нагрузки qnm. Перебирая различные значения числа
волн в окружном направлении п, для каждой конкретной оболочки
можно найти «нр, приводящее к наименьшему собственному зна-
значению нагрузки <7кр- В таком решении машинный счет исполь-
используется для определения корней характеристического уравнения
и для раскрытия определителя восьмого порядка.
Как показали вычисления, выполненные рядом авторов, все
варианты граничных условий (см. § 33) за исключением Г7 и Г8
для достаточно длинных оболочек приводят практически к тому же
значению критической нагрузки, что и решение Лоренца и
С. П. Тимошенко (примерно, начиная с Z = 10, где Z =
= -д- ]/-jf V(l — fi2)). При граничных условиях Г7 и Г8 кри-
критическая нагрузка <7кр оказывается в 2 раза меньшей: qKp =
= (для достаточно длинных оболочек). В реальных
2 RV 3 {1 — ц )
конструкциях граничные условия Г7 и Г8 обычно не реализуются,
поэтому полученные для них критические нагрузки большого
практического значения не имеют. Таким образом, можно счи-
считать, что для идеально правильной достаточно длинной цилиндри-
цилиндрической оболочки, находящейся в безмоментном начальном напря-
напряженном состоянии, критическое сжимающее напряжение сгкР =
Eh
= —практически не зависит от граничных условии.
Дальнейшие уточнения задачи устойчивости сжатой в осевом
направлении цилиндрической оболочки связаны с учетом момент-
ности ее начального напряженного состояния. Напомним, что
в классической постановке начальное напряженное состояние
оболочки считалось однородными и безмоментными. Граничные
условия, рассматриваемые в решении, относились только к би-
бифуркационным перемещениям и никак не учитывались в докрити-
ческом состоянии оболочки. При классической постановке как бы
предполагалось, что в докритическом состоянии закрепления
торцов оболочки не стесняют ее радиальных перемещений. Но
в большинстве практических случаев нагружения цилиндриче-
цилиндрической оболочки радиальные перемещения на ее торцах бывают
стеснены шпангоутами, днищами и т. д. Поэтому даже при равно-
262
мерном сжатии реальной оболочки в ней возникает начальное осе-
симметричное моментное напряженное состояние.
При решении задачи в обычной линейной постановке, когда
уравнения равновесия формулируются для недеформированного
элемента оболочки, начальный осесимметричный изгиб цилиндри-
цилиндрической оболочки описывается уравнением F.65) с учетом Т°.
В интересующем нас случае нагружения оболочки рг = 0 и
Тх = —q и это уравнение можно записать в следующем виде:
4= ^, F-72)
где aH = aH(x) — докритический начальный прогиб; k = 1/ -
Eh
4RW *
Решение уравнения F.72) будет
w} = ву0* -|. e~kx(ci sin kx + с-2 cos kx) + e** (c3 sin kx -f c4 cos kx),
где частное решение неоднородного уравнения wl в рассматривае-
рассматриваемом случае равно
Постоянные сг должны определяться из четырех граничных
условий, задаваемых на торцах оболочки (по два на каждом из
них). Но для не очень коротких оболочек решение существенно
упрощается. Так, если -т=->Bн-3) 1/ -к~, то взаимным влиянием
закреплений торцов можно пренебречь и, помещая начало коор-
координат на одном из них, записать решение уравнения F.72) для
зоны вблизи этого торца в виде
w0 = вУо + <Гкх[сг sinkx + с2 cos kx),
где с1нс2 — постоянные, определяемые только из двух граничных
условий при х == 0.
Например, если при х = 0 заданы граничные условия w0 = О
и —р?- — 0, то вблизи этого торца
Аналогичное решение уравнения F.72) получается для зоны
вблизи второго торца оболочки. Стеснение радиальных переме-
перемещений на торцах сжатой в осевом направлении оболочки приводит
не только к изгибу образующих, но вызывает окружные началь-
начальные усилия, определяемые зависимостью
263
Для определения критической осевой нагрузки цилиндриче-
цилиндрической оболочки, находящейся в моментном начальном состоянии,
можно использовать систему уравнений, относящуюся к оболочке
вращения, близкой к цилиндрической [23], и аналогичную си-
системе F.71). В данном случае эту систему уравнений запишем так:
^Ф dw ,„ дЪ дЪ0 дФ
R dxi -f- q dxi '»?25(F2 -&»- R2 d(f»
_LV2VaO> 1 Уа> , 3hva d*w _
Eh V V Я ox2 ^ <te» ?2dq:2 ~U>
где w0 и T^ определяются из решения уравнения F.72).
Полученная система уравнений имеет переменные коэффи-
коэффициенты и ее решение целесообразно строить каким-либо численным
методом. Для этого примем
X ni)«ф; Ф=Хфп(*)sinщ-
п=0 л=0
Таким образом, система уравнений в частных производных
F.73) сводится к системе обыкновенных дифференциальных урав-
уравнений относительно функций wn (x) и Ф„ (х), причем гармоники
оказываются несвязанными, поэтому достаточно исследовать одну
п-ю гармонику.
При заданных на торцах оболочки граничных условиях для
wn (x) и Ф„ (х) численное решение такой системы уравнений ана-
аналогично решению уравнения для стержня на упругом основании
(см. § 15) и не вызывает принципиальных трудностей [12, 23].
Напомним, что выше начальный прогиб w0 — w0 (x) и началь-
начальное окружное усилие Ту = Ту (х) определены с использованием
решения уравнения обычного линейного краевого эффекта. Та-
Такой краевой эффект не оказывает заметного влияния на критиче-
критическую нагрузку, так как зона начального моментного состояния
локализована вблизи закрепленных торцов, а амплитуда началь-
начального прогиба при нагрузках порядка критических невелика.
Однако для сжатой в осевом направлении цилиндрической обо-
оболочки имеется одно обстоятельство, существенно увеличивающее
влияние начального моментного напряженного состояния оболочки
на критические нагрузки. Осевые усилия в цилиндрической обо-
оболочке могут заметно влиять на докритические прогибы w0, если
абсолютные значения осевых усилий имеют порядок <7кр- Для
выявления этого влияния при определении начального прогиба
вместо линейного уравнения осесимметричного изгиба оболочки
F.65) следует использовать так называемое уравнение нелинейного
осесимметричного краевого эффекта
264
Это линеаризованное неоднородное уравнение получается в ре-
результате составления условий равновесия для искривленного
элемента оболочки (как и при выводе однородных линеаризован-
линеаризованных уравнений устойчивости). В рассматриваемом случае Т°х =
= — <7> Рг — О И уравнение F.74) принимает вид
4*4 + 4^ш ^-=A^5-, F.75)
W
Решение полученного уравнения можно записать в следующей
форме:
w о = а>о -f- C\ sin k\x sh &2* -f- Сг cos &i* ch &2* -f-
-f- Сг sin fei* ch k2x + C4 cos k\X sh &2*,
где ^! = k 2 /
Частное решение wl и параметр к определяются по тем форму-
формулам, которые использовались при решении линейного уравнения
F.72).
При малых (по сравнению с единицей) значениях параметра <а
решение уравнения нелинейного краевого эффекта мало отли-
отличается от решения обычного линейного уравнения осесимметрич-
ного изгиба цилиндрической оболочки. Но при приближении
значения параметра со к единице понятие «краевого эффекта»
теряет силу, так как возмущения, возникающие у торцов обо-
оболочки, распространяются на расстояние, значительно превышаю-
превышающее зону обычного линейного краевого эффекта. При со —» 1 эти
возмущения охватывают всю длину оболочки, а их амплитуды
неограниченно возрастают.
Для исследования устойчивости такой осесимметричной изгиб-
ной формы равновесия цилиндрической оболочки можно восполь-
воспользоваться системой уравнений F.73), но величины w0 = w0 (x) и
Ту =' Ту (х) следует определить из решения уравнения нелиней-
нелинейного краевого эффекта.
Как показывают вычисления, до достижения значения со = 1
появляются неосесимметричные формы равновесия оболочки,
смежные с исходной осесимметричной изгибной формой w0 —
= w0 (x). На рис. 6.21 показан график зависимости ©кр от отно-
относительной длины оболочки при различных значениях коэффи-
коэффициента Пуассона ц (при граничных условиях Г6) [23]. В табл. 6.1.
приведены взятые из той же работы значения ©кр для различных
граничных условий при ц = 0,3.
Начальное моментное напряженное состояние снижает клас-
классическое критическое значение осевого сжимающего напряжения
цилиндрической оболочки, причем в зависимости от граничных
условий и коэффициента Пуассона ц. это снижение критической
нагрузки колеблется примерно от 0 до 20%. Таким образом, учет
265
граничных условий при определении начального моментного на-
напряженно-деформированного состояния сжатой в осевом напра-
направлении цилиндрической оболочки вносит некоторую поправку
в классическое решение.
Но решающая корректировка результата решения задачи
устойчивости цилиндрической оболочки в классической поста-
постановке связана с учетом отклонений срединной поверхности реаль-
реальной оболочки от идеально правильной цилиндрической формы,
т. е. с учетом так называемых начальных неправильностей или
начальных несовершенств. Впервые роль начальных неправиль-
неправильностей обсуждалась и оценивалась в работах Флюгге, Доннела
и несколько позже в ряде работ Койтера. Окончательная ясность
в этот вопрос внесена сравнительно недавно благодаря работам
различных авторов, использовавших машинный счет [23].
Наиболее четко прослеживается роль осесимметричных на-
начальных неправильностей. В этом случае с помощью линеаризо-
линеаризованных уравнений F.73) можно найти то значение осевой сжимаю-
сжимающей нагрузки, при превышении которой начальная осесимметрич-
ная^ форма равновесия цилиндрической оболочки перестает быть
устойчивой. Для выявления качественной картины рассмотрим
оболочку, имеющую в ненагруженном состоянии осесимметричный
прогиб
mtix
Если предположить, что ц = 0 и закрепление торцов оболочки не
стесняет докритических осесимметричных радиальных перемеще-
перемещений, то изгиб образующей при осесимметричных формах равновесия
оболочки будет, очевид- Таблица 6.1
но, описываться урав-
уравнением (см. § 17)
, Eh ... ,
= 0,
dx*
dx*
О,9\
0,8
°'7о ю го г
Рис. 6.21
266
i
0,4
/1=0,1
-оъ
0,5
Гранич-
Граничные
условия
к
ft
Гг\
г,
г.
24
25
24
25
20
17
7
*
«е.
0,928
0,910
0,928
0,910
0,865
0,843
0,500
7
5,5
6
2,6
wmin
0,902
0,857
0,902
0,857
0,827
0,785
0,430
Примечание. Z те — значение Z, при
котором критический параметр осевого сжа-
сжатия со* практически остается постоянным и
равным м^; ^ . — значение Z, при котором
достигается абсолютный минимум се*, равный
шт1п-
где wx — w1 (x) — дополнительный осесимметричный прогиб, по-
появляющийся в результате нагружения оболочки осевым сжимаю-
сжимающим усилием д; wn = wna4 + w^ — полный прогиб осесимметрично
нагруженной оболочки.
При граничных условиях Г6 решение уравнения дает
Ят
— 1
где
тлх
~Т~>
Eh
Тогда полный докритический прогиб оболочки
/нач
wa(x) =
sin
тлх
1 —¦
Ят
Причем начальное окружное усилие при докритической осе-
осесимметричной форме равновесия оболочки, связанное с дополни-
дополнительным прогибом w-l (х), равно
гг,п Eh ... ,..ч /„„,, Eh .,_ тлх
Цт_
Я
— 1
R
sin
Подставив эти значения wa (х) = w0 (x) и Т% в систему урав-
уравнений F.73) и решив ее численным методом, можно найти крити-
критическое значение qKP в зависимости от амплитуды начального про-
прогиба. Аналогичный путь решения приводит к qKV и при других
осесимметричных начальных прогибах шнач = шиа, (х).
Многочисленные результаты вычислений, проведенных рядом
авторов, показали, что величина qKp чрезвычайно чувствительна
к амплитуде и форме начальной осесимметричной неправильности
оболочки. На рис. 6.22 показана зона, в которой лежат кривые,
при различных законах шнач (х), ха-
характеризующие снижение критической
нагрузки в зависимости от безразмер-
безразмерной амплитуды начального прогиба
. Для оболочки с начальной не-
неправильностью формы <7кр может ока-
оказаться в несколько раз меньше клас-
классического критического значения q^p —
Eh*
В реальной оболочке начальные" не-
неправильности могут быть различной
формы, причем для тонких оболочек
амплитуды и формы начальных непра-
267
вильностей — факторы трудноконтролируемые. Исследование
влияния таких начальных неправильностей произвольной формы
на критическую нагрузку цилиндрической оболочки, сжатой в
осевом направлении, становится практически неразрешимой про-
проблемой. Причем для цилиндрической оболочки с начальными не-
неправильностями неосесимметричной формы, кроме точек бифурка-
бифуркации, которые можно обнаружить с помощью линеаризованных
уравнений типа F.73), имеется серия различных предельных
критических точек. Теоретическое их определение возможно
только с позиций нелинейной теории.
§ 35. Об исследовании устойчивости
цилиндрических оболочек с позиций
нелинейной теории
В предыдущих главах показано, что критические точки бифур-
бифуркации начальной формы равновесия идеально правильных стерж-
стержней, пластин и круговых колец относятся к точкам бифуркации
первого типа (см. § 3).
При нагрузках, меньших критических, стержень, пластина
или круговое кольцо не имеют других состояний равновесия кроме
невозмущенного устойчивого начального состояния (рис. 6.23, а).
При достижении критической нагрузки наряду с начальным не-
невозмущенным состоянием равновесия становятся возможными
новые возмущенные состояния равновесия. С дальнейшим увели-
увеличением нагрузки начальное состояние равновесия перестает быть
устойчивым, взамен его появляется новое возмущенное состояние
равновесия, в которое переходят стержень, пластинка или круго-
круговое кольцо (кривая АХВ на рис. 6.23, а). При плавном нарастании
нагрузки упругий^стержень, пластина или круговое кольцо иде- '
Рис. 6.23
263
ально правильной формы тоже плавно без перескоков и хлопков
переходят в новое возмущенное устойчивое состояние равновесия.
Если закрепления краев упругой оболочки таковы, что допу-
допускают чисто изгибную деформацию оболочки без удлинений и
сдвигов ее срединной поверхности, то оболочка тоже имеет кри-
критическую точку бифуркации первого типа и при потере устойчи-
устойчивости ведет себя аналогично сжатому стержню или круговому
кольцу. В .этом случае существует тоже только одно критическое
значение нагрузки, при превышении которого оболочка плавно,
без хлопков переходит в новое возмущенное состояние равновесия.
Если закрепления краев оболочки исключают возможность
чисто изгибной деформации, то при потере устойчивости по-
поведение тонких оболочек становится качественно иным. В этом
случае критическая точка бифуркации Вг идеально правильной
оболочки оказывается точкой бифуркации второго типа [3, 19].
Точка бифуркации соответствует неустойчивому начальному со-
состоянию равновесия и в окрестности критической точки бифурка-
бифуркации нет новых устойчивых состояний равновесия. Новые устой-
устойчивые состояния равновесия удалены от начального невозмущен-
невозмущенного состояния на конечные расстояния (рис. 6.23, б). Поэтому
переход в новое возмущенное состояние равновесия происходит
хлопком: переходя в новое устойчивое состояние оболочка «пере-
скакивает> через статически неустойчивые состояния равновесия.
Новые устойчивые состояния равновесия, отделенные от началь-
начального невозмущенного состояния сравнительно небольшим энер-
энергетическим барьером, етановятся возможными до достижения кри-
критической нагрузки.
В результате геометрических несовершенств и не строго осе-
симметричного нагружения реальная оболочка начинает откло-
отклоняться от своей исходной формы. Затем при некотором значении
нагрузки хлопком переходит в новое состояние равновесия (ср.
с поведением упругой системы, рассмотренной в гл. 1).
Поэтому для тонких упругих оболочек характерны три зна-
значения внешней нагрузки:
^ikp — верхняя критическая нагрузка, при превышении кото-
которой начальная форма равновесия 'идеально правильной оболочки
перестает быть устойчивой;
^гкр — нижняя критическая нагрузка, при превышении кото-
которой становятся возможными новые отличные от начального состоя-
состояния равновесия оболочки идеально правильной формы;
Рхл — нагрузка, при которой происходит хлопок реальной обо-
оболочки, т. е. то критическое значение нагрузки, при достижении
которого начальное состояние равновесия реальной оболочки
перестает быть устойчивым.
Значение верхней критической нагрузки определяют с помощью
линеаризованных дифференциальных уравнений; при осесимме-
тричном нагружении решение таких уравнений для цилиндриче-
цилиндрических оболочек не представляет принципиальных трудностей.
269
При определении нижних критических нагрузок необходимо
решать чрезвычайно сложные задачи нелинейной теории оболочек.
Эти уравнения не удается решить точно, поэтому все имеющиеся
результаты получены приближенными методами.
Для реальной оболочки Рхл обычно лежит между верхним и
нижним критическими значениями идеально правильной обо-
оболочки, и чем точнее изготовлена оболочка, тем оно ближе к верх-
верхнему критическому значению. Значение Рхл чрезвычайно чув-
чувствительно к величинам и формам начальных неправильностей.
С одной стороны, это приводит к большому разбросу эксперимен-
экспериментальных значений Рхл, полученных в различных условиях, с дру-
другой стороны, возникают принципиальные трудности и при теоре-
теоретическом определении Рхл> так как для определения Рхл данной
реальной оболочки необходимо с большой точностью знать ее
начальные неправильности, что практически неосуществимо.
Недавно считали, что выходом из такого положения является
расчет конструкций по нижним критическим нагрузкам. Многие
исследователи выполнили трудоемкие вычисления для уточнения
значений нижних критических нагрузок. Но следует согласиться
с авторами работы [24], отметившими следующее: «Усилия, пред-
предпринятые для отыскания нижних критических нагрузок оболочек
не окупились, и эта идея должна быть оставлена».
На практике следует стремиться к созданию таких силовых кон-
конструкций, устойчивость которых не будет зависеть от случайных
и трудно контролируемых факторов. Основные пути создания таких
оболочечных конструкций — это использование подкрепленных
силовым набором оболочек, трехслойных оболочек, гофрирован-
гофрированных оболочек и т. д. В некоторых наиболее ответственных слу-
случаях применяют точеные однослойные оболочки.
Глава 7
Использование полубезмоментной
теории В. 3. Власова
Одна из характерных особенностей тонких упругих оболочек
заключается в том, что значения критических нагрузок чрезвы-
чрезвычайно чувствительны к различного рода случайным, труднокон-
тролируемым возмущениям. Для тонких оболочек только в уни-
уникальных, с особой тщательностью поставленных экспериментах
удается достичь близкого совпадения теоретических и экспери-
экспериментальных значений критических нагрузок. В обычных условиях
всегда наблюдается значительный разброс экспериментальных
данных и заметное отклонение их средних значений от теорети-
теоретически установленных значений критических нагрузок.
Поэтому при проектировании реальных конструкций не так
важно точно знать теоретическое значение критической нагрузки
идеально правильной оболочки, как четко представлять основные
факторы, и их влияние на это значение. В этом отношении прибли-
приближенное аналитическое решение, дающее простую расчетную фор-
формулу и правильно отражающее влияние основных факторов,
может оказаться полезнее точного численного решения. Для
ряда задач устойчивости изотропных и ортотропных оболочек
полубезмоментная теория дает возможность построить такое упро-
упрощенное аналитическое решение, достаточно точно отражающее
существо задачи.
§ 36. Основные зависимости
полубезмоментной теории
Известны две трактовки полубезмоментной теории цилиндри-
цилиндрических оболочек В. 3. Власова. Согласно трактовке В. 3. Власова
уравнения полубезмоментной теории выводят для идеализирован-
идеализированной ортотропной оболочки, наделенной определенными жестко-
стными характеристиками, а затем показывают, что в ряде слу-
случаев эти уравнения достаточно полно описывают поведение реаль-
реальных ортотропных и изотропных оболочек. Общим недостатком
такой трактовки вывода основных уравнений «...является значи-
значительное количество произвольных допущений» [28].
Согласно другой более современной трактовке уравнения полу-
полубезмоментной теории получают из общих уравнений цилиндри-
271
ческой оболочки путем их упрощения, базирующегося на един-
единственном «...более глубоком и общем принципе. Можно показать,
что таким единственным принципом, достаточным для обоснова-
обоснования уравнений полубезмоментной теории, является пренебреже-
пренебрежение -gj»- по сравнению с р8 / г , где / — любая, характерная для
данной задачи функция: перемещение, усилие, момент» [28].
Несмотря на большую общность и стройность, такая трактовка
является менее наглядной; кроме того, она менее удобна при фор-
формулировке граничных условий. Поэтому при выводе основных
зависимостей полубезмоментной теории применительно к задачам
устойчивости воспользуемся трактовкой В. 3. Власова.
Рассмотрим замкнутую круговую цилиндрическую оболочку,
упругие свойства которой заданы соотношениями
Мф = ЦрХф, G.1)
где Вх = Вх (х) — жесткость оболочки на растяжение-сжатие
в осевом направлении, Цр = Dv (x) — изгибная жесткость обо-
оболочки в окружном направлении.
Осевое удлинение гх и изменение кривизны я,, определяются
обычными линейными зависимостями
ди
*
до
Осевые изгибающие моменты Мх и скручивающие моменты Мщ
считают пренебрежимо малыми и в решении не учитывают.
Кроме того, предполагают, что деформация оболочки проис-
происходит без окружных удлинений и сдвигов срединной поверхности,
т. е.
Если такая оболочка нагружена поверхностными усилиями,
интенсивность которых рх, рф, рг, то полная потенциальная энер-
энергия
— J J (pxti + pvv + pzw) R dq> dx. G.4)
272
В положении равновесия полная потенциальная энергия обо-
оболочки стационарна (&9 = 0). Поскольку перемещения и, v, w
не являются независимыми, а связаны условием равенства нулю
окружных удлинений и углов сдвига в срединной поверхности
G.3), для определения условий стационарности полной потенциаль-
потенциальной энергии воспользуемся методом множителей Лагранжа (см.
приложение II). В соответствии с этим методом найдем условия
стационарности вспомогательного функционала
* = ~Т Я
— J J (pxu
p,tv
dx
где ЯЕ и \ — функциональные множители Лагранжа.
Приравнивая нулю первую вариацию вспомогательного функ-
функционала Э* и учитывая зависимости G.2), получим
Используя формулы интегрирования по частям и учитывая
условие замкнутости оболочки в окружном направлении, послед-
последнее выражение преобразуем, причем в соответствии с G.1) в подын-
подынтегральном выражении заменим Вх-?- и Dvkv на Тх и М9.
Тогда
= 0,
Откуда следует система уравнений
+ Рх ~~ 0;
G.5)
273
а также возможные комбинации граничных условий на торцах
оболочки. При х = 0 и х = / может быть задано:
Тх = 0 либо Ьи = 0, т. е. и = й — const;
S = 0 либо 8у = 0, т. е. v = а = const.
В рассматриваемой задаче, как нетрудно заметить, множители
Лагранжа имеют простой физический смысл: А,8 == 7\р и А,7 = 5,
т. е. Яе равно окружному усилию, а Л7 сдвигающему усилию в сре-
срединной поверхности оболочки. Поэтому входящий в граничные
условия множитель Лагранжа Хч можно заменить на 5.
Исключая из системы уравнений G.5) Хг и Ху приходим к од-
одному уравнению
д*Тх , 1 / д*М. ашф ^ _ д*Рг дРч> дРх
дх* "г" R* \ ду* "г" dq>* j ~ Rdy* "г" «дф дх ' ^'ф/'
Условия равенства нулю окружных удлинений е,, и углов
сдвига у будут удовлетворены тождественно, если введем функ-
функцию перемещений Ф с помощью соотношений
Тогда
Из уравнения G.7) получим разрешающее уравнение полубез-
моментной теории
Если функцию перемещений Ф искать в виде произведения Ф =
= XY, где X = X (х) — функция координаты х\ Y = Y (ф) —
функция координаты ср, удовлетворяющая условию замкнутости
оболочки в окружном направлении, то граничные условия G.6)
трансформируются в следующие. При х = 0 и х = / могут быть
заданы
d*X л йХ
-?р- либо -jg-;
-^р- либо X.
Для получения однородного уравнения, описывающего потерю
устойчивости оболочки, воспользуемся приемом фиктивной на-
274
грузки. При нагружении оболочки только внешним гидростати-
гидростатическим давлением р и контурными усилиями поперечная фик-
фиктивная нагрузка (Гф = —pR)
pt = — Р#Иф + 1%х + 2S °х*Ф,
где Тх, S" — начальные осевое и сдвигающее усилия в средин-
срединной поверхности оболочки, которые считаем известными из реше-
решения вспомогательной задачи. Величины хф, кх, Кщ, определяемые
из формул F.23), выразим через функцию перемещений Ф. В ре-
результате этого получим
ф р (д*Ф д*Ф\ го
Положив в разрешающем уравнении G.10) рх = 0, рф = 0
и заменив рг на полученное значение фиктивной нагрузки pt,
придем к однородному уравнению
дх2 V * аде2 ) ' r* \ аф8 Зфв ¦"
R* dip2 \Р \ аФ* ^ Зф2 /J R8 5ф* Vх ду*дх* )\
2 а»
и однородным граничным условиям на торцах: при х = Q к х = I
могут быть заданы
7^ = 0 либо ы = 0;
5 = 0либо w = 0. G.12)
Полубезмоментной теорией можно пользоваться при расчете
на устойчивость произвольно нагруженной цилиндрической обо-
оболочки. Однако эта теория наиболее эффективна при расчете на
устойчивость цилиндрической оболочки при осесимметричном
гидростатическом давлении. Рассмотрим эту задачу детальнее.
Начальное напряженное состояние полубезмоментной цилин-
цилиндрической оболочки, нагруженной осесимметричным внешним
давлением р = р (х), является безмоментным независимо от
закрепления торцов, поскольку схема полубезмоментной обо-
оболочки исключает осесимметричный краевой эффект. Но как отме-
отмечено в § 34, влияние осесимметричного краевого эффекта на кри-
критическое давление обычно невелико.
Разрешающее однородное уравнение G.11) при Т% = 0 и
5° = 0 принимает вид
а» /д а»Ф \ Ар / а8Ф
дх* \°х дх* ) "г" Яв \ d<f ~
¦ _? * ( ^ф |
"г" /?« аф» \ аф* "г- а<р»
275
Решение этого уравнения для замкнутой цилиндрической
оболочки можно искать в виде
Ф = Xsinmp, G.13)
где X = X (х).
Подставив значение Ф в разрешающее уравнение и сократив
общий множитель sin шр, получим дифференциальное уравнение
с переменными коэффициентами
(ЯРП' + -^Г «4(«2- l)»X_-iLn«(«8- 1)* = 0, G.14)
где Вх = Вх (х), Dy = Dy (х), р = р (х); штрихом обозначено
дифференцирование по х.
Однородные граничные условия этого уравнения опреде-
определяются зависимостями G.12). При постоянных жесткостях В„
Dq, и постоянном по длине оболочке давлении р решение уравне-
уравнения G.14) легко получить в аналитическом виде. Если коэффи-
коэффициенты уравнения переменны, то решение можно получить любым
численным методом.
Заметим, что когда функция перемещений Ф взята в виде-
G.13), то в соответствии с зависимостями G.8) н уравнениями G.5)
имеем
и = X' sin'rccp; v = ^-Х cos пц>;
Тх = ВХХ" sin пц>; S = — (ВХХ")' cos «ср.
G.15)
При решении задачи устойчивости методом начальных пара-
параметров, воспользовавшись матричной формой записи уравнения
G.14), получим
у' = Ау, G.16)
где
X
X'
ВХХ"
(вхх*у
0
0
0
1
0
0
0
1
0
0
0
1
tj4 О О О
Здесь
= ^[р-^(п2-1)]п>*-1).
Дальнейшее решение не отличается от решения методом на-
начальных параметров задачи устойчивости прямого стержня (см.
гл. 3).
276
Это основной вариант полубезмоментной теории, когда упругие
свойства ортотропной цилиндрической оболочки описываются
двумя характеристиками: жесткостью оболочки на растяжение-
сжатие в осевом направлении Вх и изгибной жесткостью в окруж-
окружном направлении D9. Для расчета на устойчивость точность этого
варианта обычно достаточна. В тех случаях, когда оболочка
обладает малой жесткостью на сдвиг в срединной поверхности,
для решения задач устойчивости можно воспользоваться уточ-
уточненным вариантом полубезмоментной теории, в котором учиты-
учитываются деформации сдвига в срединной поверхности оболочки.
В этом варианте полубезмоментной теории упругие свойства орто-
ортотропной цилиндрической оболочки вместо соотношений G.1)
задаются соотношениями
где Вф — дополнительно учитываемая жесткость оболочки на
•сдвиг, причем
т-тв? + -к" <7|8>
Не останавливаясь на промежуточных выкладках, которые
.аналогичны приведенным выше, отметим, что вместо одного урав-
уравнения G.7) можно получить систему двух уравнений (при рх = О,
J>9 = 0)
Вх д*и д*и d*j _.
Д*ф дх* "i" R*dqfi "i" dxRdy '
Вх
Однородные граничные условия, как и в основном варианте
полубезмоментной теории, могут быть заданы в следующем виде:
при х = 0 и х = /
Тх = 0 либо ц = 0;
5 = 0 либо v = 0.
Заменив pi на р* = —рЯк^ -j- Txxx -(- 2S°xw, получим си-
систему однородных уравнений, описывающих потерю устойчивости
оболочки. В частности, при Тх = 0, и S° = 0 и р = р (х) решение
этой системы однородных уравнений можно найти в виде
и = U sin лср;
G.20)
0== l/cos/гф,
где U — U (х), V — V (х) — функции координаты х.
277
При постоянных коэффициентах системы уравнений G.19)
и Т% = 0, 5 = 0 дальнейшее решение удобнее вести с помощью
одного разрешающего уравнения
^4yiv _j_ ^2 *• "х . у" faiy __ q G21)
где
1=8 \р
]-
R* 1 В
При переменных коэффициентах решение можно получить по
схеме, которая намечена выше для расчета на устойчивость орто-
тропной оболочки без учета угла сдвига в ее срединной поверх-
поверхности.
Схему полубезмоментной цилиндрической оболочки можно
использовать и в случае конической ортотропной оболочки [32].
§ 37. Устойчивость ортотропной оболочки
при внешнем давлении
В предыдущей главе рассмотрено влияние условий закрепле-
закреплений торцов цилиндрической оболочки на критические нагрузки.
Как подчеркивалось, даже при осесимметричном начальном на-
напряженном состоянии интегрирование общих уравнений устой-
устойчивости оболочек при произвольных граничных условиях требует
машинного счета.
Использование уравнений полубезмоментной теории для основ-
основных вариантов граничных условий позволяет получить элемен-
элементарное аналитическое решение, полностью объясняющее каче-
качественные особенности зависимости критического давления ци-
цилиндрической оболочки от граничных условий и дающее доста-
достаточно надежные количественные результаты для изотропной и
ортотропной оболочек в широком диапазоне изменения их пара-
параметров [4].
При р = const, Вх = const и Dv = const уравнение G.14)
запишем в следующем виде:
*IV ~ -|и- X = 0, G.22)
где
Однородные граничные условия при х = 0 и х = I:
Х' = 0 либо Х' = 0;
G.23)
X1" = 0 либо X = 0.
278
Здесь и далее штрихом обозначено дифференцирование по х.
Обратим внимание на то, что уравнение G.22) и граничные
условия G.23) полностью совпадают с хорошо изученным урав-
уравнением и граничными условиями свободно колеблющейся одно-
однородной балки. Решение уравнения G.22) при Я,4 > 0:
X = Ах sin-^- + А2 cos -^- + А3 sh -^- + Л4 ch -?-. G.24)
Четыре однородных граничных условия (по два на каждом из
торцов оболочки) составляют систему четырех однородных ли-
линейных уравнений относительно постоянных А{. Условие обраще-
обращения в нуль определителя этой алгебраической системы уравне-
уравнений приводит к характеристическому уравнению, наименьший
корень которого Хг позволяет определить собственные значения
давления
*-тН?#пг+-*-&'-1* "-2-3-- G25)
В данном случае %1 не зависит от числа волн в окружном на-
направлении я. (Собственные значения, соответствующие осталь-
остальным корням А,,- характеристического уравнения для определения
критического значения давления, интереса не представляют).
Подбирая число волн пкр из условия минимума рп, приходим
к критическому значению давления ркр (см. § 33). При достаточно
большом числе волн в окружном направлении, когда можно
принять ЯкР ^> 1, выражение для ркр существенно упрощается
(практически это можно сделать при пкр > 3). Рассматривая вели-
величину п2 как непрерывно меняющийся параметр, из условия мини-
минимума рп находим
fRF G-26)
1/4
Рассмотрим несколько вариантов граничных условий, задан-
заданных на торцах цилиндрической оболочки.
1. На обоих торцах оболочки заданы граничные условия
а) X = 0; б) X" = 0. G.28)
В соответствии с зависимостями G.15) это означает, что на
обоих торцах запрещены окружные перемещения v и разрешены
осевые перемещения и. В силу нерастяжимости полубезмоментной
оболочки в окружном направлении G.3) равенство нулю окружных
перемещений v влечет за собой равенство нулю нормальных
перемещений w.
В рассматриваемом случае первой собственной функцией
уравнения G.22) будет (аналог рассматриваемой задачи — сво-
279
бодно колеблющаяся однородная балка с шарнирно-опертыми
концами)
Наименьшее собственное значение %х = —— приводит к выра-
выражению, позволяющему после минимизации по числу волн п под-
подсчитать критическое давление
х {-Г)
В частности, используя формулы G.26) и G.27) для оболочек
средней длины, находим
Если положить
Eh*
Dw
12A—ц2) '
то формула G.30) совпадет с формулой П. Ф. Папковича для
изотропной оболочки средней длины.
2. На обоих торцах оболочки задано
а) X = 0; б) X' = 0.
Таким образом, при х = 0 и х = I запрещены окружные
(следовательно, нормальные) и осевые перемещения оболочки.
Аналог этой задачи — свободные колебания однородной балки
с обоими защемленными концами. Первая собственная функция Хг
и соответствующее наименьшее собственное значение Хг будут:
X1 = sin-^--sh-^--
sin —^ sh
&-(cost-<*-?-)-
т "'
__ ch-^
At == 4,07-7- = 1,5 —7— .
При достаточно большом числе волн п из G.27) получим
Ркр=1,5р°кр, G.31)
280
где pip определяется по формуле G.30). Иначе говоря, при рас-
рассматриваемых граничных условиях критическое давление оболочки
средней длины в полтора раза больше, чем при граничных усло-
условиях G.28).
3. Несимметричные граничные условия:
а)Х@) = 0; б) Х'@) = 0;
в) X" @ = 0; г) Xя @ = 0.
На одном краю оболочки при х = 0 запрещены окружные
(и нормальные) и осевые перемещения; второй край полностью
свободен, т. е. при х = I Тх = 0 и S = 0. Аналог этой задачи —
свободные колебания однородной консольно-защемленной балки.
Первая собственная функция Хх и наименьшее собственное зна-
значение Хг определяются зависимостями
Из формулы G.27) получим (при пгкр > 1)
Ркр = 0,6р0Кр. G.32)
Аналогично можно найти собственные функции Хг и крити-
критические давления при других граничных условиях на торцах
оболочки.
Изложенная схема решения позволяет сравнительно просто
исследовать влияние упругого закрепления краев оболочки на
критические нагрузки. Общее уравнение G.22) и его решение
G.24) остаются справедливыми и в этом случае, а жесткость
упругого закрепления края оболочки входит в граничные усло-
условия. Рассмотрим случай, когда край оболочки упруго закреплен
относительно осевых перемещений и, причем с — жесткость
упругого закрепления. Тогда на краю оболочки можно задать:
1) Тх = си; 2) F = 0 либо S = 0.
Соответственно вместо граничных условий G.23) получим:
1) x" = -_?-X'; 2) Х=0 либо Х" = 0.
10 Н.А.Алфутов 281
Асимптота к,=1,875
4Л
4,2
4,0
Асимптота *,=4, 73
,^%Л ¦ i...t
i I
(
Г1 Н 1 ( М
•
h
10
30
10
30
ЕВ
Рис. 7.1
Рис 7.2
Приведем примеры использования граничных условий упру-
упругого закрепления края оболочки.
X';
4. При х = 0 Х = 0; Х" = -^-
Ох
при х = Z X = 0; X' = 0.
Один край оболочки закреплен жестко относительно окружных
(и нормальных) перемещений и упруго относительно осевых,
другой — жестко относительно всех перемещений. В этом случае
наименьшее собственное значение %1 = k1-r-, где ?х — коэффи-
коэффициент, зависящий (при Вх = Fh) от относительной жесткости
упругого закрепления с = -]г- (рис. 7.1). При известном значе-
значении Л-! критическое давление подсчитывают по формуле G.25)
либо G.27).
5. Прих = 0Х = 0; Х--^-Х';
Это означает, что один край оболочки закреплен жестко отно-
относительно окружного (и нормального) перемещения и упруго
относительно осевого, другой край — полностью свободен. В этом
случае несложные выкладки приводят к характеристическому
уравнению
G.33)
cl
Вх
ch k sin k — sh k cos k
1 + cos k ch k
Зависимость наименьшего корня этого уравнения kx от отно-
относительной жесткоспг упругого закрепления края оболочки с =
приведена на рис. 7.2, причем первое собственное значение
Ы
Вх
282
p
^i — ^i~7~- Как показано на графике, в области малых значений
относительно жесткости упругого основания происходит чрезвы-
чрезвычайно резкое изменение значений коэффициента kx (следовательно,
и первого собственного значения Хг). В этой области при с С 1
правую часть характеристического уравнения G.33) удобнее
разложить в ряд по степеням ku Тогда, оставляя члены, содержа-
содержащие в низших степенях klt получаем
Из выражения G.25) приходим к зависимости
Рп = Т
Т я*(п»—1) "]s" + (« — ^-/гз"»
где число волн лКЕ_ следует подбирать из условия минимума рп.
В частности, при с = и получим пкр = 2, и из последней зави-
зависимости следует, что
ЗА.
^ G.34)
Таким образом, полубезмоментная оболочка с одним свободно
опертым краем, а другим полностью свободным теряет устойчи-
устойчивость так же, как длинная оболочка или оболочка с обоими сво-
свободными краями, т. е. без растяжения срединной поверхности
(см. § 33).
Сравним степень влияния жесткости упругого закрепления
края оболочки на критическое давление в двух последних при-
примерах. В первом из них относительная жесткость порядка с^> \
практически не влияет на критическое давление. Во втором
примере влияние относительной жесткости порядка с = IO^-t-IO"*
оказывается существенным. Причем в первом примере с увеличе-
увеличением относительной жесткости с от нуля до с = B5-^-30) крити-
критическое давление повышается примерно на 25%. При дальнейшем
увеличении относительной жесткости критическое давление прак-
практически не изменяется. В этом случае край оболочки можно счи-
считать закрепленным неподвижно. Во втором примере увеличение
относительной жесткости упругого закрепления может привести
к повышению критического давления в десятки раз. Такая ка-
качественная разница объясняется следующим. В первом из этих
примеров при с = 0 и с ф 0 оболочка с обоими краями, закреп-
закрепленными относительно нормальных перемещений, не может де-
деформироваться без растяжения срединной поверхности. Поэтому
упругое закрепление края оболочки приводит к некоторому
повышению критического давления, не меняя качественно харак-
характера деформирования оболочки при потере устойчивости. Во вто-
10* 283
ром примере при с = 0 оболочка допускает чисто изгибные де-
деформации без растяжений срединной поверхности; критическое
давление зависит только от изгибной жесткости оболочки и опре-
определяется формулой G.34). При упругом закреплении края обо-
оболочки невозможна чисто изгибная деформация. Этим объясняется
тот факт, что даже при сравнительно небольшой относительной
жесткости с качественно изменяется характер деформиро вания
при. потере устойчивости оболочки со свободным краем.
В заключение отметим, что в последнем примере для относи-
относительно коротких оболочек при с = 0 применение схемы полубез-
полубезмоментной оболочки необоснованно. В этом случае при Хх = О
потеря устойчивости происходит по форме, описываемой следу-
следующими функциями перемещений (с точностью до масштаба А):
1 R
w=* Axsinny; v = A — xcosmp; « = — A—r sinwp.
Для изотропной оболочки скручивающий момент Мху ока-
оказывается того же порядка, что и окружной изгибающий момент М9.
Критическое значение внешнего давления не трудно найти
если отказаться от схемы полубезмоментной оболочки и восполь-
воспользоваться общими зависимостями, приведенными в § 32. Подсчи-
Подсчитав изменение полной потенциальной энергии оболочки ДЭ, из
условия б (ДЭ) = 0 можно получить окончательную формулу
(»»-!)?> rt 6A-ц) R* 1
Откуда при лкр = 2 следует, что
п _ 3?> Г. 3A —ц) ЯМ
А'кр «з ['Т 2 I* J •
Как и следовало ожидать, для длинных оболочек эта формула
совпадает с формулой G.34).
§ 38. Устойчивость оболочки,
подкрепленной упругими шпангоутами
Задачу устойчивости оболочки, подкрепленной шпангоутами,
можно решать в двух основных вариантах: с помощью замены
подкрепленной оболочки однородной ортотропной оболочкой (пу-
(путем «размазывания» жесткостеи шпангоутов) или с учетом дискрет-
дискретного расположения подкреплений путем интегрирования урав-
уравнений устойчивости гладкой оболочки и выполнения условий
стыковки ее со шпангоутами. Использование схемы полубезмо-
полубезмоментной оболочки позволяет в обоих случаях получить простые
и надежные приближенные решения [51.
Устойчивость однородной ортотропной оболочки рассмотрена
в предыдущем параграфе. Сейчас решим задачу устойчивости обо-
284
лочки с учетом дискретного расположения подкреплений. Рас-
Рассмотрим цилиндрическую оболочку, подкрепленную несколькими
упругими шпангоутами и нагруженную равномерным внешним
гидростатическим давлением р. Исследуем устойчивость такой
оболочки при следующих допущениях:
1. Поведение обшивки описывается уравнениями полубезмо-
ментной теории.
2. Центры тяжести поперечных сечений шпангоутов лежат
в срединной поверхности обшивки; оси шпангоутов нерастяжимы.
3. В решении учитываем только изгибную жесткость шпан-
шпангоута в своей плоскости; жесткость шпангоута на кручение и из-
изгибную жесткость при деформациях шпангоута из-своей плоскости
считаем пренебрежимо малыми.
4. Ширина шпангоутов пренебрежимо мала по сравнению
с'расстояниями между ними.
При выбранной упрощенной расчетной схеме подкрепленной
оболочки обшивка находится в однородном безмоментном со-
состоянии до потери устойчивости; шпангоуты нагрузки не несут.
При малом числе шпангоутов и постоянном по длине оболочки
внешнем гидростатическом давлении задачу целесообразно ре-
решать аналитически, интегрируя уравнения устойчивости полу-
безмоментной оболочки. Потеря устойчивости обшивки описы-
описывается уравнением
G.35)
где Вх — жесткость обшивки на растяжение в осевом направле-
направлении; D9 — изгибная жесткость обшивки в окружном направлении;
Ф — функция перемещений.
Щ Изгиб кругового шпангоута с нерастяжимой осью под дей-
действием распределенной касательной нагрузки интенсивности qk
описывается уравнением (см. § 31)
^) G.36,
где EJk — изгибная жесткость шпангоута; Vk — окружные пере-
перемещения точек осевой линии шпангоута; k — номер шпангоута.
Передаваемая на &-й шпангоут касательная нагрузка равна
разности сдвигающих усилий на участках обшивки, прилегающих
слева и справа к шпангоуту:
4k = -Vo — s*+o- G-37)
Решение уравнения G.35) для обшивки между подкреплениями
ищем в виде
<D = Xsinmp, G.38)
где X = X {х) — функция осевой координаты х.
285
Тогда получим
v = — X cos ncp;
G.39)
Выражая касательную нагрузку, передаваемую на k-fi шпан-
шпангоут с помощью зависимостей G.37) и G.39) через функцию пере-
перемещений Ф и решая с учетом замкнутости шпангоута уравнение
G.36), находим перемещения точек оси ft-ro шпангоута
Vk ¦¦ ^ (X'klo - Xk+o), G.40)
с*
где
-
Используя приведенные зависимости, составим систему гра-
граничных и стыковочных условий для оболочки с N пролетами,
т. е. для оболочки, подкрепленной (N — 1) промежуточными
шпангоутами.
Для каждого (N — 1) промежуточного шпангоута можно
выписать следующие четыре условия.
1. Равенство окружных перемещений участков обшивки, при-
прилегающих к шпангоуту слева и справа:
vk-o
2. Равенство осевых перемещений
о, т. е. X'k-jo = X'k+й.
3. Равенство осевых усилий в обшивке слева и справа от шпан-
шпангоута (при переходе через шпангоут осевое усилие в обшивке
не изменяется, поскольку жесткость шпангоутов при деформа-
деформациях из плоскости принята пренебрежимо малой)
(Tx)k-n = (Tx)k+o, т. е.
4. Равенство окружных перемещений точек оси шпангоута
соответствующим окружным перемещениям обшивки
Vk = vk, т. е. S- {Х;_о - Xlrf = Xk.
Кроме того, на каждом торце оболочки должны быть дополни-,
тельно заданы граничные условия Тх = bxu\ S = bzv, где Ьг
Ь2 — соответствующие жесткости упругого закрепления торцов,
относительно осевых и окружных перемещений.
Таким образом, для оболочки с N пролетами получается
необходимое число условий: 4 (# — 1) + 2x2 = 4ЛГ.
286
Общая схема определения критического давления подкреп-
ленной*оболочки состоит в следующем.
Используя зависимость G.38) для каждого из N пролетов
оболочки, решение уравнения G.35) записываем в виде
Xft = Akl sin %x -f Аа cos кх -f Aa sh Хх + Aki ch Хх, G.41)
где
л —т& \р
Число волн п должно быть одинаковым для всех пролетов
оболочки из условия стыковки. Поэтому если давление р и жест-
костные характеристики обшивки Вх и ?)ф постоянны по всей
длине оболочки, то значение X будет общим для всех про-
пролетов.
Подчинение решений G.41) всем граничным и стыковочным
условиям приводит к системе 4N линейных однородных уравне-
уравнений относительно неизвестных Аы. Из условия равенства нулю
определителя этой системы получаем характеристическое урав-
уравнение, позволяющее найти X = X (п). Зная X, подсчитываем соб-
собственные значения давления
W , ("'-О А, 742)
В отличие от задач, рассмотренных в предыдущем параграфе
число волн п входит в граничные (стыковочные) условия. Поэтому
величина X = X (п) оказывается зависящей от числа волн п.
Следовательно, при определении критического значения ркр
в рассматриваемой задаче нельзя минимизировать выражение
G.42) по числу волн п. Из характеристического уравнения для
каждого значения п следует находить минимальное значение
^имп = ^шш (п)> затем подсчитывать рп по формуле G.42), повто-
повторяя эту процедуру при различных п до получения наименьшего
(рп)Ша — Аср- При вычислениях следует учитывать, что зависи-
зависимость рп = рп (п) может иметь несколько локальных миниму-
минимумов; за окончательное значение ркр следует принять наименьшее
из них.
Общую схему определения критического давления проиллю-
проиллюстрируем несколькими примерами.
1. Устойчивость свободно опертой по обоим торцам цилиндри-
цилиндрической оболочки длиной 21, подкрепленной одним симметрично
расположенным шпангоутом жесткости EJ (рис. 7.3). Граничные
условия на торцах
V = 0, Гх = 0, т.е. Х = 0, Х" = 0.
287
n*13
На шпангоуте должны выполняться четыре условия стыковки.
Характеристическое уравнение распадается иа два независимых
уравнения
cos -у- = 0;
#>= —(th?-tg?).
где r = ¦
*\
Первое из этих уравнений соответствует так называемой
местной потере устойчивости подкрепленной оболочки, когда
обшивка теряет устойчивость, а шпангоут сохраняет круговую
форму. Наименьший корень этого уравнения дает К = -^р~-
Из выражения G.42) находим
п . \ I ) | Р» (»'-!)
(»_1) ^ R*
В данном частном случае корни первого уравнения не зависят
от числа волн п и критическое давление можно определять мини-
минимизацией рп по п. В частности, при п% > 1 (см. § 37) получим
Критическое давление р"р, соответствующее местной потере
устойчивости обшивки, не зависит от жесткости шпангоута.
Второе из этих уравнений соответствует так называемой общей
потере устойчивости подкрепленной оболочки, когда обшивка
288
теряет устойчивость вместе с подкреплением. Зависимость зна-
значения наименьшего корня этого уравнения от приведенной жест-
жесткости шпангоута с показана на рис. 7.3, а. Критическое давление
Ркр общей потери устойчивости определяется выражением G.42),
но при минимизации этого выражения по числу волн п необхо-
необходимо учитывать, что при изменении п изменяется приведенная
жесткость шпангоута с и, следовательно, значение корня характе-
характеристического уравнения. Типичный график зависимости безраз-
Р06
мерного критического давления ркр = —Р- ох безразмерной
Ркр
EJ
жесткости шпангоута -^ приведен на рис. 7.3, б, здесь р?р —
критическое давление оболочки при EJ = 0. Приведенный график
построен для подкрепленной оболочки с параметрами — = 1,
-г- = 500. Для оболочек средней длины, теряющих устойчивость
с образованием достаточно большого числа волн п, этот график
практически не зависит от абсолютных значений параметров под-
подкрепленной оболочки (изменяются только числа волн п). Заме-
Заметим, что зависимость критического давления от величины жест-
жесткости шпангоута полностью повторяет зависимость критической
силы от жесткости упругой опоры шарнирно-опертого стержня.
Как и в задаче об устойчивости стержня с упругой опорой, смена
форм потери устойчивости происходит при достижении некоторого
значения эффективной жесткости шпангоута ?/Эф« При жест-
жесткости шпангоута, меньшей эффективной, происходит общая по-
потеря устойчивости подкрепленной оболочки, и увеличение жест-
жесткости шпангоута приводит к повышению критического удавле-
удавления [21.
При жесткости шпангоута, большей ?/зф, происходит местная
потеря устойчивости обшивки, и дальнейшее увеличение жесткости
шпангоута не влияет на критическое давление. Для оболочек
средней длины, подкрепленных одним симметрично расположен-
расположенным шпангоутом, такая смена форм потери устойчивости проис-
происходит примерно при ?/зф = 1,5/Д,, где 2/ — длина всей оболочки;
D,, — изгибная жесткость обшивки в окружном направлении.
Аналогично значение эффективной жесткости шпангоутов^?/3ф
можно определить и при большем числе подкреплений свободно
опертой по торцам цилиндрической оболочки. Так, для оболочки
длины 3/, подкрепленной двумя равноотстоящими шпангоутами
одинаковой жесткости, смена форм устойчивости происходит
примерно при ?7Эф = 3,2/D,,.
При этом следует помнить, что разделение потери устойчи-
устойчивости подкрепленной оболочки на местную и общую условны,
поскольку реальная подкрепленная оболочка является единой
упругой системой и всякая потеря устойчивости общая. Термины
289
местная и общая потеря устойчивости подкрепленной оболочки
удобны, так как они отражают качественную сторону задачи.
При местной потере устойчивости оболочки шпангоут практически
сохраняет круговую форму, а деформируется в основном обшивка.
При общей потере устойчивости деформируется вся подкреплен-
подкрепленная оболочка.
2. Устойчивость консольной цилиндрической оболочки с краем,
подкрепленным шпангоутом. Когда край полубезмоментной обо-
оболочки подкреплен упругим шпангоутом, обладающим только
изгибной жесткостью EJ в своей плоскости, то при х = I гранич-
граничные условия будут:
L) Л. = U, Z) —г— -Л ^= Л. у
с
где с — определяется по формуле G.40а).
Рассмотрим два способа закрепления второго края оболочки
при х = 0. Примем, что в первом случае закрепление края пол-
полностью исключает окружные и осевые перемещения, т. е. при
Подчинение общего решения G.41) граничным условиям при-
приводит к системе уравнений, равенство нулю определителя которой
приводит к характеристическому уравнению
— j, l+cos&ch&
~~ cos k sh k — ch k sin k '
KR
где ft = l .
На рис. 7.4 приведена типичная зависимость безразмерного
критического давления ркр — ркр/ркр от относительной жесткости
торцового шпангоута EJIIDV, причем р?р — критическое давление
свободно опертой по обоим торцам оболочки длины Л График по-
построен для оболочки с параметрами RII = 1, Rlh = 500. Просле-
Проследим за изменением числа волн п и формы изгиба образующей при
потере устойчивости оболочки. При EJ = 0 оболочка теряет
устойчивость с образованием пкр = 10, причем максимальные
перемещения возникают на свободном краю оболочки. С увеличе-
увеличением жесткости шпангоута до EJ/ID9 л* 0,45 критическое давле-
давление существенно возрастает, число волн уменьшается до пкр = 9,
а форма изгиба образующей остается качественно такой же, как
у неподкрепленной оболочки.
При ЕЛЮу = 0,45 происходит резкая смена форм потери
устойчивости оболочки: число окружных волн возрастает до
"кр = 14 (потом увеличивается до пкр = 15), а точки, перемеще-
перемещения которых достигают максимума, смещаются с края оболочки
к ее середине. Дальнейшее увеличение жесткости торцового
шпангоута не изменяет существенно ни формы потери устойчи-
устойчивости, ни значения критического давления. Качественная картина
290
Рис 7.4
зависимости критической нагрузки оболочки от жесткости тор-
торцового шпангоута повторяет зависимость критической силы сжа-
сжатого стержня с упруго закрепленным торцом (стр. 105).
В рассмотренной задаче тоже можно ввести понятие эффектив-
эффективной жесткости торцового шпангоута EJ^, при достижении которой
происходит качественная смена картины потери устойчивости.
Хотя график, приведенный на рис. 7.4, построен для оболочки
с конкретными параметрами, расчеты показывают, что зависимость
безразмерного критического давления от относительной жесткости
торцового шпангоута практически остается такой же для других
оболочек средней длины (изменяется только значение пкр).
Поэтому, в частности для оболочек средней длины с одним жестко
закрепленным краем эффективную жесткость торцового шпан-
шпангоута можно считать равной
Рассмотрим второй вариант закрепления края оболочки при
х = 0. Примем, что на этом краю запрещены окружные (следова-
(следовательно, и радиальные) перемещения, но не стеснены осевые пере-
перемещения, т. е. при х = 0 X = 0; X" = 0.
При х = I сохраняются граничные условия первого варианта.
В этом случае характеристическое уравнение принимает вид
Типичная зависимость безразмерного критического давления
от относительной жесткости торцового* шпангоута приведена на
рис. 7.5. Она построена для оболочки с параметрами IIR = 1,
Rlh = 500. В этом случае при значении жесткости торцового
шпангоута EJ^ происходит резкая качественная смена форм
потери устойчивости. При EJ < EJ^ значение наименьшего
корня характеристического уравнения оказывается малым. Разло-
Разложив правую часть этого уравнения в ряд по степеням k, получим
Zc = k*.
291
Тогда, учитывая что Я, = —j—, из выражения G.42) найдем
Причем в этой формуле пкр — 2.
Физический смысл полученной формулы состоит в том, что
при EJ < ?7Эф потеря устойчивости оболочки происходит без
растяжения ее срединной поверхности. Критическое давление
определяется только изгибной жесткостью обшивки и торцового
шпангоута.
Если EJ > ?7Эф, то при потере устойчивости оболочка ведет
себя так же, как оболочка, свободно опертая по обоим торцам,
причем торцовой шпангоут практически сохраняет круговую
форму. Для оценки эффективной жесткости торцового шпангоута
нетрудно получить следующую зависимость:
4 (nR\(Bx у/4 / Ар \-2'4
lD^T\rr)\R) XW)
Причем значение ?/эф существенно выше, чем в предыдущем
примере.
§ 39. Определение критических нагрузок
с помощью критерия устойчивости
в форме С. П. Тимошенко
Полубезмоментная теория в сочетании с энергетическим кри-
критерием в форме С. П. Тимошенко позволяет построить простое
приближенное решение задачи устойчивости цилиндрической обо-
оболочки при произвольном поперечном осесимметричном нагру-
жении.
Рассмотрим цилиндрическую оболочку, на которую действует
осесимметричная радиальная «мертвая» нагрузка интенсивности
Рг — Рг (*) и осесимметричное внешнее гидростатическое давле-
давление р = р (х). Начальное напряженное состояние оболочки счи-
считаем осесимметричным и безмоментным, причем
Т% = 0; Т% = R [рг (х) - р (х)); S0 = 0.
Отклонения оболочки от начального состояния зададим пере-
перемещениями:
и = аы1(х, ф) + а?иг(х, ф);
v^aviix, q>)-\-a%(x, cp); G.43)
w == ахюу (х, ф) + а2иJ (х, ф),
где
(х
динат
292
у (х, ф) + 2 (, ф),
а — независимый от координат бесконечно малый параметр;
х, ф), иг (х, ф), 1>х (х, ф) и т. д. — конечные функции коор-
коорат.
Окружные удлинения и сдвиги тождественно равны нулю
с точностью до первой степени параметра а, если (см. § 36) ввести
функцию перемещений Фг с помощью соотношений
Тогда пропорциональное а2 изменение полной потенциальной
энергии полубезмоментной оболочки при переходе в новое воз-
возмущенное состояние можно выразить следующим образом:
- jl p,(x)w,Rd<fdx+ ]j p(x)w,Rd(fdx +
В этом выражении последнее слагаемое получено с помощью
выведенной в § 32 зависимости для вычисления изменения объема
оболочки с точностью до квадратов перемещений. Заметим, что
при рассматриваемых сейчас нагрузках перемещения ы2 и о2
в выражение G.45) не вошли, поэтому их можно не определять.
Это обстоятельство значительно упрощает решение: перемеще-
перемещение о>2 можно найти не из общих условий самоуравновешенности
квадратичных усилий (см. § 10), а из условия нерастяжимости
полубезмоментной оболочки в окружном направлении, выпол-
выполняемом с точностью до а2.
При осесимметричном начальном напряженном состоянии
функцию бифуркационных перемещений Фг можно найти в виде
G.46)
где F± (х) — функция осевой координаты х.
Пропорциональное а2 окружное удлинение равно
- _ dvt , Щ , 1 ( dwt Vl у
S(f~ Ядер "T" T ~Г Т \TW ~ ~R ) •
Учитывая соотношения G.44) и G.46), из условия &"v = 0
получим
Перемещения i>a, w2 будем искать в виде разложения по три-
тригонометрическим функциям
v2 = Va (x) ? b2l sin 1*ф;
ш2 = W2 (х) A + ? c2l cos щ),
где V2 (x), W2 (х) — функции осевой координаты х.
293
Тогда из равенства G.47) придем к уравнению
При осесимметричном нагружении оболочки коэффициенты сг,-
не влияют на изменение полной потенциальной энергии АЭ,
поэтому их можно не определять (как и коэффициенты Ьгд-
Осесимметричная составляющая перемещения до2, необхо-
необходимая для подсчета изменения полной потенциальной энергии АЭ,
равна
Выражение G.45) можно преобразовать
A W [fiWl'dx - "!5!i^Fii J P W Л WP Ц • G.49)
о о J
Таким образом, задача определения критических нагрузок
сводится к определению одной единственной функции Fх (х),
через которую выражено изменение полной потенциальной энер-
энергии (дЭ. Задавшись (с учетом граничных условий на торцах обо-
оболочки) функцией Oi (х), из условия АЭ = 0 можно получить
приближенные собственные значения нагрузок. Подобрав число
волн в окружном направлении пкр, при котором собственное зна-
значение нагрузки достигает минимума, вычислим приближенное
критическое значение нагрузки.
Приведем несколько примеров использования выражения
G.49).
1. Оболочка со свободными торцами под действием постоян-
постоянной по длине радиальной нагрузки р\ = const и постоянного
гидростатического давления р° = const. В этом случае можно
принять ?х (х) = 1.
Условие АЭ = 0 дает
pon«-p»(n«-l) = n(na-l)-^-, G.50)
где р° — внешнее гидростатическое давление; рг — «мертвая»
распределенная нагрузка, направленная по нормали к недефор-
мированной срединной поверхности оболочки. При этом якр = 2.
294
Из зависимости G.50) можно получить формулы * (см. § 31)
Для частных случаев
где знак минус означает, что потеря устойчивости происходит
при сжимающей «мертвой» нагрузке рг.
Те же результаты получим и для полубезмоментнои оболочки,
один край которой свободно оперт, а другой — свободен. В этом
случае оболочка может деформироваться без растяжения средин-
срединной поверхности. Приняв Ft (x) = х, снова придем к зависимости
G.50).
2. Свободно опертая по обоим торцам оболочка под действием
равномерного гидростатического давления р. Если Fx (x) =
= sin -у^-, то условие АЭ = 0 приводит к точной в рамках полу-
полубезмоментнои теории формуле
Откуда, в частности, при п2 > 1 следует, что
Оболочка малочувствительна к виду функции Ft (x), если это
достаточно гладкая функция, удовлетворяющая всем геометриче-
геометрическим граничным условиям задачи. Так, например, взяв в рас-
рассматриваемой задаче такую заведомо «грубую» функцию
удовлетворяющую геометрическим граничным условиям, из усло-
условия АЭ = 0 получим
Вх 120R* Дф ¦
Рп~ R п*(п%—1I* г
* Если оболочка нагружена внутренним гидростатическим давлением р
и сжимающей «мертвой» нагрузкой, интенсивность которой рг = р, то в началь-
начальном осесимметричном состоянии равновесия Тх = 0, Т9 — 0, S = 0. Однако
оболочка может потерять устойчииость. Действительно, из формулы G.50) сле-
следует, что ркр = п* (п* — 1) -А. при пкр = 2, т. е. ркр = 12 -~.
295
что после минимизации по числу волн п (при па > 1 дает)
Это значение ркр на 5% превышает значение давления, вы-
вычисленное по предыдущей фоомуле для ркр.
3. Оболочка под действием* переменного по длине давления
р (х) = рЧ (*)• В этом случае, задавшись функцией Fx (х) в виде
одночлена, из условия A3 = О можно найти собственные значе-
значения нагрузки Р:
j
U(*)[fi
, G.51)
где «кр и pSp определяем из условия минимума рй.
Если по длине оболочки внешняя нагрузка остается одного
знака, то даже одночленное приближение обеспечивает вполне
приемлемую точность. Возьмем, например, свободно опертую
оболочку под действием радиальной локальной кольцевой на-
нагрузки q. Будем считать, что оболочка теряет устойчивость по
достаточно большому числу волн п и поэтому не будем различать
гидростатические и «мертвые» нагрузки (см. § 32). Взяв функцию
(x) = sin-у- при n2 > 1 получим
_ / Г/Я# \* Bx Dq> .
дп~~Т{\Г) Rn* + R* n
Минимизируя по числу волн п, находим
\3/4
G.52)
Таким образом, если оболочка достаточно длинная, чтобы
при потере устойчивости ее можно было рассматривать как по-
лубезмоментную, то критическая нагрузка qKP не зависит от длины
оболочки. В частности, из G.52) для изотропной оболочки получим
, _ kER ( h \s/2
q™~ A_ц1)»/« \~r) '
где k = 0,42.
Если функцию Ft (x) взять в виде ряда
N
Fi м = 2j °i sin т" *
296
то условие АЭ = 0 дает
где (при п* > 1)
„д.
Необходимые условия минимума q, т. е. условия
приводят к системе уравнений
= О
Из}условия равенства нулю определителя этой системы можно
определить собственные значения qn:
¦^ q +q -q...
+ q Щ—q +<7...
— я +я \—я»»
Простая структура полученного определителя порядка N
позволяет выразить qn в явном виде
_ l 1
Zj pi
Стоящий в знаменателе ряд сходится так быстро, что можно
ограничиться двумя-тремя его членами.
Отметим, что для бесконечно длинной изотропной оболочки
П. И. Балабухом и В. М. Марченко найдено k = 0,38 [191.
.4. Оболочка, подкрепленная упругими шпангоутами. Если
оболочка подкреплена произвольно расположенными шпангоутами
различной жесткости EJk и нагружена переменным по длине
внешним давлением р (х) = p°ty (x), то при выполнении ограни-
ограничений, перечисленных в предыдущем параграфе, для определения
критического давления тоже можно воспользоваться изложенным
оешением.
297
Из условия Д5 = 0 получим
P°n =
где Xk — координата k-vo шпангоута; I — полная длина оболочки.
Задавая функцию F1(x) в виде ряда, путем несложных вычисле-
вычислений можно найти ркР общей потери устойчивости подкрепленной
оболочки практически с любой степенью точности. Для боль-
большинства задач достаточно взять Fx (x) в виде одночлена, удо-
удовлетворяющего геометрическим граничным условиям на торцах
оболочки. В этом случае подсчет р% становится элементарным.
Приведенные в этой главе зависимости справедливы для
гладких и конструктивно ортотропных цилиндрических оболочек.
В каждом конкретном случае расчета нужно найти жесткость
оболочки на растяжение в осевом направлении Вх и изгибную
жесткость в окружном направлении Dv. Для гладкой однослой-
однослойной оболочки можно принять
Г, n Ek* . г, р.
На рис. 7.6 показаны несколько вариантов конструктивно
ортотропных цилиндрических оболочек. Для оболочки, подкреп-
подкрепленной большим числом шпангоутов с изгибной жесткостью EJm,
при расчете по полубезмоментной теории следует положить
(рис. 7.6, а)
Ряс 7.8
298
n Eh* . EJm . n pu
D*a i2(i-|i«)+-5Г» ^ = ?А.
Для оболочки «вафельного» типа (рис. 7.6, б)
где EJ — суммарная изгибная жесткость окружного ребра и при-
прилегающего к нему участка обшивки; tm — шаг окружных ребер;
Fc — площадь поперечного сечения осевых ребер; ?с — шаг осевых
ребер.
Когда оболочка подкреплена кольцевым гофром (рнс. 7.6, в)
можно принять
где EJ — суммарная изгибная жесткость одного гофра и отно-
относящейся к нему части обшивки; t — шаг гофра.
Если при расчете трехслойных оболочек (рис. 7.6, г—ё) не
учитывать сдвиговые деформации пакета (см. § 16), при Я > h
следует принять
В последнем случае при подсчете Dv можно учесть и изгибную
жесткость гофра.
Приложение I
Задачи
на собственные значения
Задача на собственные значения для дифференциального уравнения формули-
формулируется следующим образом: задано однородное уравнение
М [д] - PL [у] -¦-= О,
где М [у], L [у] — однородные линейные дифференциальные выражения, Р —
некоторый параметр; граничные условия, заданные при х = а и х = Ь, одно-
однородны. Требуется найти собственные значения и собственные функции задачи,
т. е. такие значении параметра Рп, прн которых данная задача имеет отличные
от тождественного нуля решения, и с точностью до масштаба определить функ-
функции уп (х), соответствующие этим значениям Рп.
Порядок дифференциального выражения М [у] обозначим 2т и будем счи-
считать, что он выше порядка выражения L [у]. Тогда корректно сформулирован-
сформулированная задача должна иметь 1т линейно независимых граничных условий. Гранич-
Граничные условия, содержащие производные порядка не выше (т — 1), называют
главными граничными условиями (или геометрическими условиями).
Допустимыми функциями задачи называют m-кратно непрерывно дифферен-
дифференцируемые функции, удовлетворяющие главным граничным условиям.
Функциями сравнении задачи называют 2/п-кратно непрерывно дифферен-
дифференцируемые функции, удовлетворяющие всем заданным граничным условиям (функ-
(функция сравнения, удовлетворяющая н дифференциальному уравнению, является
собственной функцией задачи).
Основные результаты в теории задач на собственные значения получены для
самосопряженных и полностью определенных задач. Задачу на собственные
значения называют самосопряженной, если для любых двух функций сравне-
сравнения и н v выполняются условия
ь ъ ъ ь
f uM [v] dx = [ vM [и] dx; j uL [v] dx = f vL [u] dx.
a a a a
Задачу на собственные значения называют полностью определенной, если
для любой функции сравнения выполняются неравенства
6 6
[ иМ [и] dx > 0; [ uL [и] dx>0.
Самосопряженность и полная определенность задачи на собственные зна-
значения в каждом конкретном случае могут быть установлены путем интегриро-
интегрировании по частям.
Самосопряженная полностью определенная задача на собственные значения,
не содержащая параметра Р в граничных условиях, всегда имеет бесконечный
спектр положительных собственных значений, из которых в задачах устойчи-
устойчивости обычно достаточно найти только наименьшее собственное значение, опре-
определяющее критическую нагрузку. Бесконечному спектру собственных значе-
300
ний соответствует бесконечная система собственных функций задачи, обладаю-
обладающих следующими важными свойствами.
Свойство обобщенной ортогональности собственных функций состоит в том,
что для любых двух собственных функций yi (х) и у^ (х), соответствующих двум
различным собственным значениям Pi и Рь, выполняются условия
ь ь
J у.М [yk] dx = 0; ]y.L[yk]dx=0. (i + k)
а а
В частности, если L [у] = у, то система собственных функций ортогональна
в обычном смысле, т. е.
Система собственных функций обладает свойством полноты: любую функцию
сравнения можно разложить в ряд по собственным функциям и этот рад будет
равномерно и абсолютно сходиться в интервале (а, в), для которого сформулиро-
сформулирована данная задача.
Для самосопряженной и полностью определенной задачи на собственные
значения справедлива теорема о минимуме отношения Рэлея. Согласно этой тео-
теореме минимум отношения Рэлея, определяемого выражением
[ иМ [и] dx
uL [и] dx
равен первому собственному значению задачи Plt если функция и пробегает век»
область функций сравнения. Этот минимум реализуется на функции сравнения,
совпадающей с первой собственной функцией задачи уг (х).
Теорема о минимуме отношения Рэлея указывает путь приближенного ре-
решения задач на собственные значения: задаваясь различными функциями срав-
сравнения, вид которых подсказывается физическим смыслом задачи, можно получать
оценки (сверху) для первых собственных значений. Теорема о минимуме отноше-
отношения Рэлея справедлива только для самосопряженных и полностью определенных
задач на собственные значения, поэтому связанные с ней приближенные методы,
строго говоря, применимы только при тех же ограничениях. Все консервативные
задачи теории упругой устойчивости являются самосопряженными, но они не
всегда бывают полностью определенными. Последнее обстоятельство иногда сле-
следует учитывать прн построении приближенных решений.
Все сказанное о задачах на собственные значения для обыкновенных диффе-
дифференциальных уравнений справедливо н в отношении задач на собственные зна-
значения для дифференциальных уравнений в частных производных.
Задачи на собственные значения для матриц состоят в следующем. Пусть
задана система линейных однородных уравнений
= РХ1>
где xi — неизвестные; Р — некоторый параметр.
301
В матричной форме записи эта система имеет вид
Ах —Рх = 0,
где А — квадратная матрица коэффициентов заданной системы; х — вектор-
столбец неизвестных
Условием существования отличных от нуля решеиий системы однородных
линейных уравнений является равенство нулю ее определителя
1
¦ 0.
В матричной записи
det (А — РЕ)
det [atj — Рбц] = О,
где Е — единичная матрица; 6^ = 1 при i = / и 6ц = 0 при / ф «. Уравнение
det [atj — Рв^]=0 степени N называют характеристическим уравнением;
его N корней дадут те значения Рп, при которых возможны отличные от нуля
решения исходной системы.
Такого типа задачу называют частной задачей на собственные значения
для матрицы; найденные N значений Рп — собственными значениями матрицы
А, а соответствующие им векторы Хд — собственными векторами матрицы А.
Кроме частных задач на собственные значения для матриц встречаются и
общие задачи иа собственные значения. В этом случае задается матричное одно-
однородное уравнение
Ах—
где А и4В — квадратные матрицы; Р — некоторый параметр; х — вектор-стол-
вектор-столбец неизвестных.
В этом случае условие существования отличных от нуля решеиий запишется
так:
det (А — РВ) = det [а(/ — Pbtj] = О
или в развернутом виде
= 0.
При решении общей задачи на собственные значения из характеристического
уравнения находят N собственных значений Рл, а из соответствующих решений
уравнения A2) — N собственных иекторов х^. В частной и общей задачах соб-
собственные векторы х„ можно найти только с точностью до постоянного множи-
множителя [25].
302
Приложение II
Стационарные значения
и экстремумы функций и функционалов
Приращение функции нескольких переменных f=f (xlt хг, . . ., хп) может
быть подсчитано по формуле Тейлора
1=1
где Дхх, Ахг, . . ., Ахп — приращения независимых переменных хъ х2, . . ., хп;
частные производные берутся в рассматриваемой точке.
Функция имеет минимум (максимум), если ее значения в рассматриваемой
точке меньше (больше) значений во всех достаточно близких точках. Таким обра-
образом, функция имеет минимум (максимум), если А/ >• О (А/ < 0) при любых до-
достаточно малых приращениях независимых переменных.
Необходимым условием минимума или максимума, т. е. экстремума функции,
является равенство нулю ее первого дифференциала, что эквивалентно равенству
нулю всех ее первых частных производных в рассматриваемой точке
(«-=1.2
n).
Это условие не является достаточным условием экстремума. Так, например,
для того чтобы функция имела минимум, кроме условия A1-2) в рассматриваемой
точке должно еще выполняться условие
я л
У У
Li Lx
ii i
> 0
(H.3)
при любых комбинациях приращений независимых переменных, т. е. условие
положительной определенности второго дифференциала. Это условие выпол-
выполняется тогда и только тогда, когда
дх*
>0;
(II.4)
Если хотя бы одно из неравенств (II.4) обращается в равенство, то для вы-
выяснения характера поведения функции в рассматриваемой точке в разложеиии
(II.1) необходимо учесть и исследовать следующие слагаемые, зависящие от про-
производных более высокого порядка.
Аналогично, для того чтобы функция имела максимум, кроме условия (II.2)
в рассматриваемой точке должно выполняться]условие отрицательной определен-
определенности второго дифференциала.
303
Независимо от знаков второго и высших дифференциалов все точки, в кото-
которых выполняется условие (II.2), называют стационарными точками, а значения
функции в них — стационарными. В стационарной точке второй дифференциал
может оказатьси ии положительно, ни отрицательно определенным, тогда функ-
функция ие имеет ии минимума, ни максимума. Это, так называемая точка мниимакса.
Такие стационарные точки характерны для задач упругой устойчивости.
Условии (II.2) определяют стационарные точки в том случае, когда незави-
независимые переменные х1, х2, . . ., хп не связаны между собой никакими соотноше-
соотношениями. Рассмотрим следующую задачу. Найти необходимое условие экстремума
функции / (xlf x2 хп), если независимые переменные связаны между собой
соотношениями
Ф* (*i,, «а .... ж») = 0 (k = 1, 2, . . . m), (II.5)
где т<<п.
Такого типа задачи называют задачами иа условный экстремум. Условия (II.5)
уменьшают число независимых переменных до (п—/л). Поэтому исключив лиш-
лишние переменные с помощью соотношений (П.5), исследуемую функцию можно
выразить через оставшиеся (п—т) независимых переменных и свести задачу
определении необходимых условий экстремума к рассмотренной выше задаче.
Но такой путь решении ие всегда удобен и возможен.
Задачи на условный экстремум можно решать методом множителей Лагранжа.
Согласно этому методу необходимые условия экстремума функции f (хи х2, . . .
. . ., хп) при дополнительных соотношениях связи (II.5) записываются так:
3F*
ig_ = 0 (i=l, 2 n), (II.6)
где
т
F* = f (xu *,,..., *„) + ? Я*<р* (*i, ч *я). (".7)
Здесь %k — неизвестные параметры, называемые множителями Лагранжа.
Таким образом получается, что для определения (л + т) неизвестных xi
и А* имеем (п + т) уравнений: п уравнений дает система (П.6) и т уравнений —
система (II.5).
Стационарные точки в задачах на условный экстремум, найденные тем или
иным способом, могут соответствовать максимуму, минимуму или миинмаксу.
Для выяснения этого необходимо провести исследование, подобное описанному
выше.
Обобщение задачи нахождении экстремумов функций для случая нахожде-
нахождения экстремумов функционалов дается в вариационном исчислении. Рассмотрим,
например, определенный интеграл
б
Ф= JF(x, у, у\ y*)dx,
где у = у (х). При фиксированных пределах интегрирования и заданном подын-
подынтегральном выражении F (х, у, у', у") значение определенного интеграла зависит
¦от конкретного выбора функции у = у (х), т. е. является функцией от функции.
Зависимости такого типа, обобщающие понятие функции, называют функцио-
функционалами.
Понятие вариации в вариационном исчислении имеет такое же фундамен-
фундаментальное значение, как и понятие дифференциала в дифференциальном исчисле-
исчислении. Вариацией функции у = у (х) называют допустимое по условиям данной
задачи малое изменение этой функции. Вариация функции обозначается 6г/ (х).
Аналогично вводит понятия вариаций первой н высших производных функции:
обозначают их соответственно Ьу' (х), Ьу" (х), и т. д. Заметим, что фу (х))' =
= Ьу' (х), т. е. символ б можно выносить за знак дифференцирования.
304
При варьироваиви функции и ее производных изменяется значение функцио-
функционала Ф. Главную линейную относительно вариации функции составляющую этого
изменения называют первой вариацией функционала и обозначают 6Ф. Первая
вариация функционала (П.8) определяется выражением
=J [%-
Аналогично понятию второго дифференциала функции в вариационном ис-
исчислении вводят понятие второй вариации функционала. Для простоты записи
в дальнейшем ограничимся случаем, когда функционал зависит только от функ-
функции у (х) и ее первых двух производных. Тогда вторая вариация функционала
определяется выражением
AМ0>
Основная задача вариационного исчисления может быть сформулирована
так: среди всех допустимых по условиям данной задачи функция иайти такую
функцию у= у (х), которая доставляет заданному функционалу экстремальное
значение. Необходимым условием экстремума функционала, как и необходимым
условием экстремума функцви, является условие стационарности
Из этого условия может быть получено дифференциальное уравнение Эй-
Эйлера, которому должна удовлетворять искомая функция, а также те граничные
условия, которым она может быть подчинена.
Последовательно интегрируя по частям выражение A1.11), избавимся от ва-
варя аций производных искомой функции под знаком интеграла:
ь /, ь
i dF я
Откуда следует, что условие стационарности 6Ф = 0 выполняется при всех допу-
допустимых Ьу (х) если, во-первых, выражение, стоящее в квадратных скобках под
интегралом, равно нулю
305
и, во-вторых, при х = а и х = Ъ выполняются условия
dF d dF
. . dF d dF
= 0 либо —- — ^-^
= 0 либо
A1.14)
Уравнение A1.13) является уравнением Эйлера. В данном случае, когда
функционал зависит от второй производной искомой функции, это уравнение
имеет четвертый порядок. Условия A1.14) дают четыре граничных условия при
х = а и х = Ъ, причем условия Ьу = 0 и Ьу' = 0 означают, что при х = а
х = Ь могут быть заданы у (а), у' (а) и у (Ь), у' (Ь). В общем случае, когда функ-
функционал зависит от производных до /п-го порядка включительно, уравнение Эй-
Эйлера имеет порядок 2от и соответствующее число граничных условий.
Условие стационарности является необходимым условием максимума или
минимума функционала. Стационарное значение функционала соответствует
минимуму (или максимуму), если вторая вариация функционала 6*Ф является
положительно (отрицательно) определенной, т. е. при любых допустимых
по условиям задачи вариациях выполняется условие
(ИФ>0 F«Ф<0).
A1.15)
Все сказанное выше может быть обобщено для случая функционалов, заии-
сящих от нескольких функций одной или нескольких независимых переменных.
Так, например, если задан функционал
Ь
Ф= f F (х, и, v, и', v', и", v") dx,
(II.16)
где и= и (х), о=о (х), то его первая вариация определяется зависимостью
-. г Г dF . . dF . . dF „ , . dF . , . dF R . . dF .
a A1.17)
Условие стационарности приводит к системе уравнений Эйлера
dF_ d dF d* dF
du dx du'+ dx* du- ~ 0;
dF
dv
d dF
d* dF
l " '
Когда функционал зависит от функций нескольких переменных, условие
-стационарности прииодит к ураииеииям Эйлера в частных производных. Общая
схема получения этих уравнений остается прежней.
Кроме рассмотренных задач на безусловный экстремум для функционалов,
иозможны задачи на условный экстремум. В таких задачах функции, от которых
зависят исследуемые функционалы, связаны некоторыми дополнительными ус-
условиями.
Например, задача может быть сформулироиаиа так: найти функцию у =
= у (х), доставляющую стационарное значение функционалу
-306
если искомая функция подчинена дополнительным интегральным связям вида
,(*. у, у*. ym)dx = gl (i = 1,2,3 ft). A1.20)
где gi —'заданные константы. Решение задачи по определению необходимых
условий экстремума можно получить методом ^множителей Лагранжа, отыскивая
условия стационарности вспомогательного функционала
J*(x. у,
а
Причем здесь
F* (х. У. y'.y*)=F (х, у, у', у-) + 2 UGl (x, у, у1, у"), (Н.22>
где к{ — неизвестные постоянные (множители Лаграижа).
При заданных граничных условиях для определении ft множителей Лаг-
Лагранжа и искомой функции у (х) используют k условий связи A1.20) и уравнение
Эйлера для вспомогательного функционала
dF* d 6F* d* dF*
—у 1х-д?- + -?г-ЗуТ-0- (П-23)
Для функционалов, зависящих от нескольких функций yi = yi(x), возможны
задачи на условный экстремум не только при интегральных, но и дополнитель-
дополнительных конечных или дифференциальных связях, накладываемых на искомые функ-
функции. Так, например, можно поставить задачу: найти условие стационарности
функционала
6
Ф =i J F (х, уи у[, у\, yt, yj, у; ) dx, (II.24)
а
если п неизвестных функций yi = yi (x) дополнительно связаны конечными или
дифференциальными соотношениями
G/ = G,(x, Уи Уи У1, У», Й. Й. • • •) = 0 (/= 1, 2, . . . , k). (II.25)
Число дополнительных связей должно быть меньше числа искомых функций,
т. е. всегда k <J ft.
Эту задачу тоже можно решать методом множителей Лагранжа, отыскивая
условия стационарности вспомогательного функционала A1.21), где теперь
к
F*=F {х, уи у[, yl, у%, у'„ у; ) + ^ *./ (х) Gj. (II.26)
/=i
Здесь Xjj (х) — функциональные множители Лагранжа. Для определения п
искомых функций yi=yi (х) и k функций Ху = К/ (х) достаточно системы п урав-
уравнений Эйлера (вместе с заданными граничными условиями) для вспомогательного
функционала г* и ft условий связи A1.25).
Аналогичные приемы решения, основанные на введении множителей Лаг-
Лагранжа, используют и в тех случаях, когда искомые функции зависят от несколь-
нескольких переменных [41 ].
307
Список литературы
1. Александров А. В., Лащенков Б. Я. О применении энергетического ме-
метода в задачах устойчивости упругих систем. — «Строительная механика и рас-
расчет сооружений», 1965, № 5, с. 28—32
2. Алфутов Н. А. Устойчивость цилиндрической оболочки, подкреплен-
подкрепленной поперечным набором и нагруженной внешним давлением. — «Инженерный
сб. АН ОХР», 1956, т. XXIII, с. 36—46.
3. Алфутов Н. А., Соколов В. Ф. Определение нижнего критического дав-
давления упругой цилиндрической оболочки н поведение оболочки после потери
устойчивости. — «Расчеты на прочность в машиностроении» 1959, № 89, с. 95—
110. [Труды МВТУ].
4. Алфутов Н. А. О влиянии граничных условий на значение верхнего кри-
критического давления цилиндрической оболочки. — В кн.. Расчеты на прочность
Вып. 11. М., «Машиностроение», 1965, с. 349—355
5. Алфутов Н. А. Определение верхнего критического давления для кон-
консольной оболочки с подкрепленным краем. — «Изв. АН СССР. Механика»,
1965, № 5, с. 115—118. ,
6. Алфутов Н. А., Балабух Л. И. Энергетический критерий устойчивости
упругих тел, не требующий определения начального напряженного состоянии. —
«ПММ», 1968, т. XXXII, вып. 1, с. 703—707.
7. Андреев Л. В. Устойчивость цилиндрической оболочки при совместном
действии изгибающего момента и внешнего давления. — «Прикладная меха-
механика», 1968, № 6, с. 129—132.
8. Амбарцумяи С А. Общая теория анизотропных оболочек. М., «Наука»,
1974. 446 с.
9 Амиро И. Ям Заруцкий В. А., Поляков П. С. Ребристые цилиндрические
оболочки. Киев. «Наукова думка», 1973. 248 с.
10. Балабух Л. И., Шаповалов Л. А. Некоторые задачи устойчивости круг-
круглых пластин при неоднородном наприженном состоянии. — «МТТ», 1966, № 5,
с. 60—69.
11. Бидерман В. Л. Устойчивость стержня из неогуковского материала.
«ММТ», 1968. № 3, с. 54—62.
12. Бидерман В. Л. Статика тонкостенных систем. М., «Машиностроение»,
1947. 488 с.
13 Биргер И. А. Круглые пластинки и оболочки вращения. М., «Оборон-
гиз», 1961. 367 с.
14. Болотин В. В. Неконсервативные задачи теории упругой устойчивости.
М., Физматгиз, 1961. 339 с.
15. Болотии В. В. О сведении трехмерных задач теории упругой устойчи-
устойчивости к одномерным и двухмерным задачам. — В кн.: Проблемы устойчивости
в строительной механике. М., Стройиздат, 1965, с. 186—196.
16. Болотин В. В. О вариационных принципах теории упругой устойчи-
устойчивости. В кн.: Проблемы механики твердого деформируемого тела. Л., «Судострое-
«Судостроение», 1973, с. 83—88.
17. Бояршииов С. В. Основы строительной механики машин. М., «Машино-
«Машиностроение», 1973. 456 с.
308
18. Валишвили Н. В. Расчет оболочек вращения на ЭЦВМ. М , «Машино-
«Машиностроение», 1976. 278 с.
19. Вольмир А. С. Устойчивость деформируемых систем. М., «Наука», 1967.
984 с.
20. Григолюк Э. И., Чулков П. П. Устойчввость н колебания трехслойных
оболочек. М., «Машиностроение», 1973. 170 с.
21. Динник А. Н. Устойчивость упругих систем. М., ОНТИ, 1935, 183 с.
22. Кан С. Н. Строительная механика оболочек. М., «Машиностроение»,
1966. 508 с.
23. Кармишин А. В., Мяченков В. И., Фролов А. Н. Статика и динамика
тонкостенных оболочечных конструкций. М., «Машиностроение», 1975. 376 с.
24. Койтер В., Хатчинсон Дж. Теория послекритнческого поведения кон-
конструкций. — В кн.: Механика. Период, сб. переводов. М., «Мир», 1971. 4, 129—
149 с.
25. Коллатц Л. Задачи на собственные значения. М , «Наукам, 1968. 503 с.
26. Лурье А. И. Теория упругости. М., «Наука», 1970. 940 с
27. Механика твердых деформируемых тел. Серия «Механика». М., ВИНИТИ,
1969. 384 с.
28. Новожилои В. В. Основы нелинейной теории упругости. М , Гостехиздат,
1948. 218 с.
29. Основы строительной механики ракет. М., «Высшая школа», 1969.
494 с. Авт.: Л. И. Балабух, К- С. Колесников, В. С. Зарубин и др.
30. Пановко Я. Г., Губанова И. И. Устойчивость и колебания упругих су-
стем. М., «Наука», 1967, 420 с.
31. Папкович П. Ф. Труды по строительной механике корабля. В. 4 т. Т. 4.
Л., «Судостроение», 1963. 552 с.
32. Печников В. П., Щагина С. А. Исследование устойчивости конических
оболочек матричными методами. Л., «Судостроение», 1975, с. 145—148. [Труды
IX Всесоюзной конференции по теории оболочек н пластин].
33. Прочность, устойчивость, колебания. Справочник под ред. И. А. Бнр-
гера, Я. С. Пановко. Т. 3. М., «Машиностроение», 1968. 567 с.
34. Постнов В. А., Хархурим И. Я- Метод конечных элементов. Л., «Судо-
«Судостроение», 1974 342 с.
35. Расчеты на прочность в машиностроении. В 3 т. Под ред. С. Д. Понома-
Пономарева. М., «Машиностроение», 1959. 1118 с.
36 Ржаницин А. Р. Устойчивость равноиесия упругих систем. М., Гостех-
нздат, 1955. 475 с.
37. Тимошенко С. П. Устойчивость упругих систем. М., Гостехиздат, 1946.
532 с.
38. Тимошенко С. П. Устойчивость стержней, пластин н оболочек.
Избранные работы. М., «Наука», 1971. 808 с.
39. Феодосьев В. И. Избранные задачи и вопросы по сопротивлению мате-
материалов. М , «Наука», 1967. 376 с.
40. Циглер Г. Основы теории устойчивости конструкций. М., «Мир», 1971.
192 с.
41. Эльсгольц Л. Э. Дифференциальные уравнения и вариационное исчисле-
исчисление. М., «Наука», 1969. 424 с.
Оглавление
Предисловие 5
Глава 1. Основные понятия теории упругой устойчивости . . Т
§ 1. Неоднозначность состоиний равновесии упругих систем 7
§ 2. Устойчивые и неустойчивые состоянии равновесии 10
" 3. Точки бифуркации, предельные точки и критические нагрузки ... 15
4. Линеаризованные уравнения . .' 21
5. Энергетический подход к определению критических нагрузок .... 26
6. Устойчивость упругих систем при комбинированном нагружении . . 30
7. О постановке задач устойчивости тонкостенных систем 35
Глава 2, Энергетический метод решения задач устойчи-
устойчивости 39
§ 8. Полная потснциальнаи энергия и условия равновесия упругого
тела 39
§ 9. Вариационный принцип теории упругой устойчивости 46
§ 10. Энергетический критерий устойчивости в форме С. П. Тимошенко . . 57
§ 11. Метод Рэлеи—Ритца в задачах устойчивости 64
§ 12. Связь метода Рэлеи—Ритца с методом Галеркина 71
Глава 3. Устойчивость прямых стержней при продольном
сжатий 78
§ 13. Основное линеаризованное уравнение и его решение 78
§ 14. Решение задач устойчивости стержней энергетическим методом ... 90
§ 15. Стержни иа упругом основании и упругих опорах 99
§ 16. Учет деформаций сдвига; общаи и местнаи устойчивость трехслой-
трехслойных и тонкостенных стержней 109
§ 17. Закритическое деформирование упругих стержней 118
§ 18. Влииние начальных неправильностей на поведение сжатых стерж-
стержней 127
Глава 4. Устойчивость пластин 134
§ 19. Постановка задачи; исходные зависимости 134
§ 20. Основное линеаризованное уравнение 142
§ 21. Решение основного уравнении для прямоугольных пластин .... 151
§ 22. Решение основного уравнении дли круглых пластин 163
§ 23. Приближенные решения основного линеаризованного уравнения . . 168
Глава 5. Энергетический метод исследования устойчивости
пластин 178
§ 24 Энергетический критерий устойчивости в форме Брайана 178
§25 Энергетический критерий устойчввости в форме С. П. Тимошенко . . 188
§ 26. Формулировка критерии устойчивости через статически возмож-
возможные усилии 193
§ 27. Термоупругая задача устойчивости пластин 198
310
§ 28. Примеры использования энергетического критерия устойчивости . . 201
§ 29. Устойчивость пластин при локальных нагрузках 208
§ 30. Закритическое поведение пластин 214
Глава 6. Устойчивость цилиндрических оболочек 220
§ 31. Устойчивость кругового кольца 220
§ 32. Основные исходные зависимости дли цилиндрической оболочки . . 238
§ 33. Определение внешнего критического давления 249
§ 34. Устойчивость цилиндрической оболочки прк осевом сжатии .... 258
§35. Об исследовании устойчивости цилиндрических оболочек с позиций
нелинейной теории 268
Глава 7. Использование полубезмомеитной теории В. 3. Вла-
Власова _ 271
§ 36. Основные зависимости полубезмомеитной теории 271
§ 37. Устойчивость ортотропной оболочки при внешнем давлении .... 278
§ 38. Устойчивость оболочки, подкрепленной упругими шпангоутами . . 284
§ 39. Определение критических нагрузок с помощью критерия устойчи-
устойчивости в форме С. П. Тимошенко 292
Приложение I. Задачи иа собственные значения 300
Приложение II. Стационарные значения и экстремумы функций и функ-
функционалов 303
Список литературы 308
ИБ N« 2004
Николай
Анатольевич
А л ф у то в
ОСНОВЫ РАСЧЕТА
НА УСТОЙЧИВОСТЬ
УПРУГИХ СИСТЕМ
просьба
На ccfem- члйющннъ и развматриваи-
щннь ннлги, эстампы фотяграфш и т д.
1) НиквкИхъ подрисовок-ь. раскраши-
раскрашивали и отл-Ьтйкъ не д*пать;
Z) при перелисты ваши страница Гайь-
ц,ы отнюдь не мочйТь;
3J перелистывать иедп^кно И аккуратно,
чтобы нечгягшо углы сгранн цъ и гакпе--
енныхъ рясунновь пе Загнуть пне гмрть,
а тйкже проклавну и?ъ папиросной bywa-
ги мешду рисунками не испортить,
4) при раэсматривалт scTSftiHOBbj фо-
h табач^ымъ дымог^-ь цхъ пе оСдавать,-
чтеннг руии ГщЗтйпьнО мь;ть: потными
рунами танке огнюдь НС брать:
6] къ самому рлсунку на эста^лакъ фо
таграф^я/чъ и т- Д. пальцали не прикскаться;
7) ОСпожку ипи лереглгтг книги пе-
¦б) листы книги ллй яйляги не
э} въ кармапахъ ннигЪ п* носигь I
же употребляв при атомъ особое Гр?/
чтобы пннги не iicnav,ani
Редактор издательства
3. 3. Акчуриия
Технические редакторы:
А. И. Захарова, Л. А. Мака
Корректор
А. А. С iac-тГи'и а
Переплет художника
А. Я. М и х а й л о в'а
Сдано в набора I2/VII 1977 г.
Подписано к печати 23/IX 1977 г.
Т-16234.:,, Форма» 60X90/16
Бумага типографская № I.
Усл. печ. л. 19,5. Уч.-издГл. 19,?
Тираж 13 000 экз. Заказ 377. Цена I p
Издательство «Машиностроение, 107
Москва, Б-78,! 1-й, Басманный пер.,
Ленинградская типография №76
Союзлолиграфпроиа
при Государственном комитете
Совета Министров СССР
по делам издательств, полиграфии
и книжной торговли.
193144, Ленинград, C-I44,
ул. Моисееико, 10