




Author: Бранец В.Н. Шмыглевский И.П.
Tags: авиация и космонавтика летательные аппараты ракетная техника космическая техника междупланетные соединения (междупланетные полеты) космонавтика (аэронавтика) механика
ISBN: 5-02-014284-0
Year: 1992




В. н. БРАНЕЦ
II. II. ШМЫГЛЕВСКИЙ
ВВЕДЕНИЕ
В ТЕОРИЮ
БЕСПЛАТФОРМЕННЫХ
ИНЕРЦИАЛЬНЫХ
НАВИГАЦИОННЫХ
СИСТЕМ
В. Н. БРАНЕЦ, И. П. ШМЫГЛЕВСКИЙ
ВВЕДЕНИЕ В ТЕОРИЮ
БЕСПЛАТФОРМЕННЫХ
ИНЕРЦИАЛЬНЫХ
НАВИГАЦИОННЫХ
СИСТЕМ
МОСКВА «НАУКА»
ГЛАВНАЯ РЕДАКЦИЯ
ФИЗИКО-МАТЕМАТИЧЕСКОЙ ЛИТЕРАТУРЫ
1992
ББК 39.67
Б84
УДК 629.7.072.1
Бранец В. Н., Шмыглевский И. П. Введение в теорию бесплат-
форменных инерциальных навигационных систем.— М.: Наука. Гл. ред.
физ.-мат. лит., 1992.— 280 с.— ISBN 5-02-014284-0.
Рассматриваются общие вопросы теории инерциальных, в частности
бесплатформенных, навигационных систем, с использованием аппарата ква-
тернионов, бикватернцонов и векторных кинематических параметров, а
также методов интегрирования уравнений бесплатформенных систем на
борту подвижного объекта. Особое внимание уделяется корректируемым
системам, в частности — построению системы управления угловым дви-
жением на основе корректируемой бесплатформенной инерциальной на-
вигационной системы. Даются основные формулы алгебры кватернионов.
Для специалистов по механике управляемого движения, системам уп-
равления подвижных объектов, инерциальной навигации, а также студентов
и аспирантов втузов.
Табл. 1. Ил. 43. Библиогр. 119 назв.
Рецензент академик Б. В. Раушенбах
Научное издание
БРАНЕЦ Владимир Николаевич, ШМЫГЛЕВСКИЙ Игорь Петрович
ВВЕДЕНИЕ В ТЕОРИЮ БЕСПЛАТФОРМЕННЫХ
ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ
Заведующий редакцией Л. А. Русаков
Редактор Д. С. Фурманов
Художественный редактор Т. Н. Колъченко
Технический редактор Е. В. Морозова
Корректоры О. А. Бутусова, В. П. Сорокина
ИБ № 41007
Сдано в набор 14.03.91. Подписано к печати 07.10.92. Формат 60X90/16. Бумага
тип. № 2. Гарнитура обыкновенная. Печать высокая. Усл., печ. л. 17,5. Усл. кр.-
отт. 17,5. Уч.-изд. л. 17,95. Тираж 440 экз. Заказ № 728. С—87.
Издательско-производственное и книготорговое объединение «Наука»
Главная редакция физико-математической литературы
117071 Москва В-71 Ленинский проспект, 15
Четвертая типография издательства «Наука»
630077 Новосибирск, 77, Станиславского, 25
В Ц02060000—087 115.92 © н физматлит, 1992
053(02)-92
ISBN 5-02-014284-0
ОГЛАВЛЕНИЕ
Предисловие..................................................... 7
Введение......................................................... 9
ЧАСТЬ I
ЗАДАЧА ИНЕРЦИАЛЬНОГО УПРАВЛЕНИЯ
И ОСНОВНЫЕ УРАВНЕНИЯ ИНС
Глава 1. Общие уравнения ИНС..................................................14
§ 1.1. Кинематические соотношения для векторных величин . . 14
§ 1.2. Уравнения ИНС в инерциальных осях.....................16
§ 1.3. Уравнения ИНС в связанных осях........................19
§ 1.4. Уравнения ИНС. Общий случай (интегрирование в произ-
вольных осях).................................................22
§ 1.5. Обобщенные уравнения ИНС...................25
§ 1.6. Исследование некоторых задач движения. Нетрадиционные
параметры.....................................................27
Глава 2. Уравнения ошибок ИНС.................................35
§ 2.1. О погрешностях ИНС.................................................35
§ 2.2. Ошибки реализации кинематических уравнений ... 37
2.2.1. Ошибки для кинематических уравнений второй формы (37).
2.2.2. Ошибки для кинематических уравнений первой формы (42).
§ 2.3. Соотношения эквивалентности........................................43
§ 2.4. Анализ ошибок обобщенных уравнений ИНС .... 45
§ 2.5. Уравнения ошибок БИНС..............................................51
2.5.1. Уравнения БИНС в инерциальных осях (51). 2.5.2. Уравне-
ния БИНС в связанных осях (52).
2.6. Общий случай ошибок ИНС.............................................55
2.6.1. Уравнения ошибок для интегрирования уравнений ИНС
в произвольных осях (56). 2.6.2. Ошибки кинематических урав-
нений (57). 2.6.3. Ошибки для уравнения скорости движения
(первое интегрирование) (59). 2.6.4. Ошибки для уравнения по-
ложения (второе интегрирование) (64).
Глава 3. Бикватернионы и винтовой метод описания движения твер-
дого тела.......................................................65
§ 3.1. Понятие винта и его приложения в механике .... 65
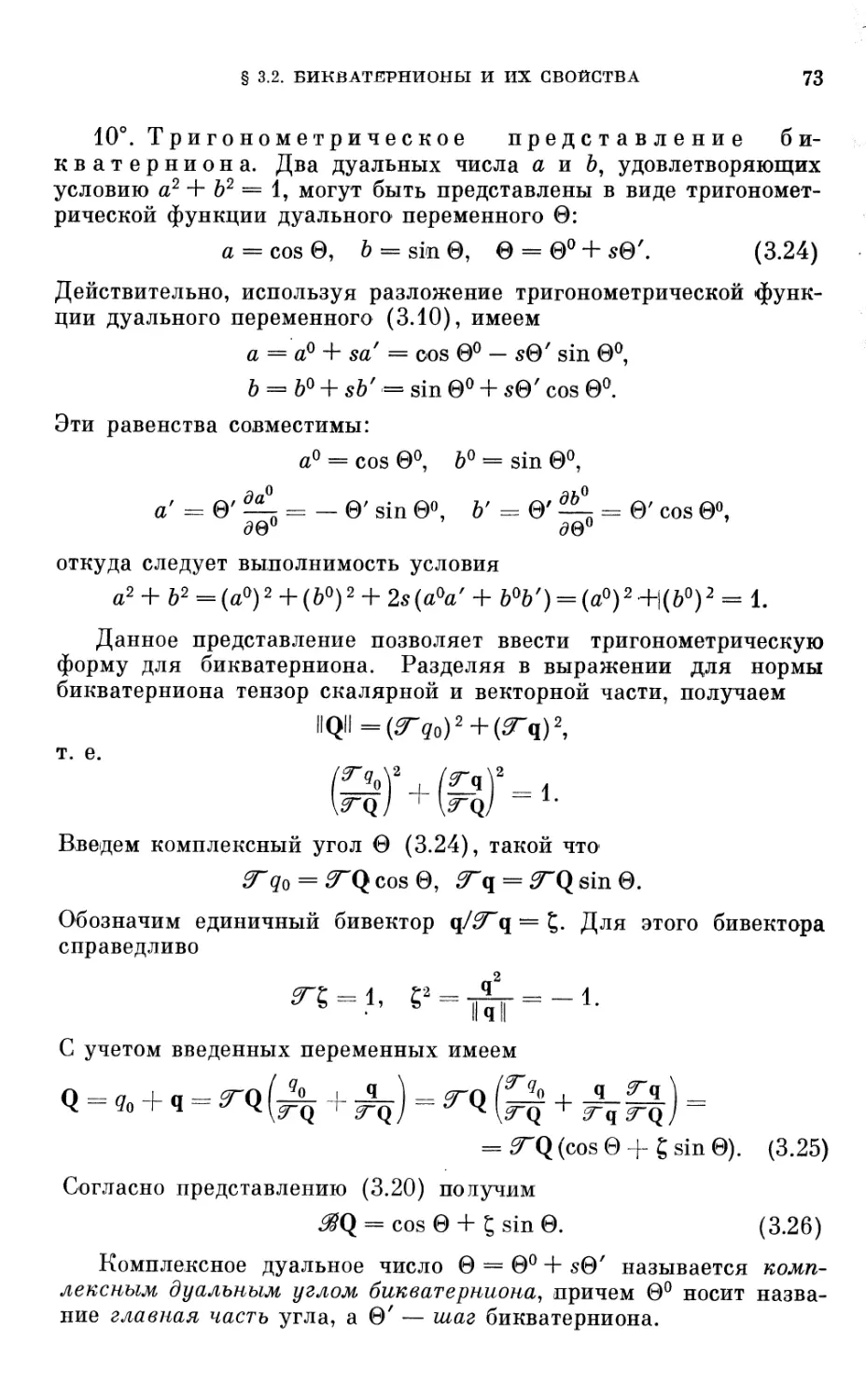
§ 3.2. Бикватернионы и их свойства............................67
3.2.1. Определение бикватерниона Клиффорда (67). 3.2.2. Свойст-
ва комплексных (дуальных) скалярных чисел (68). 3.2.3. Свойст-
ва бикватернионов (70).
§ 3.3. Операция винтового перемещения..........................78
3.3.1. Бикватернион как оператор винтового перемещения (78).
3.3.2. Элементарные бикватернионы (80). 3.3.3. Проекция винта
и бивектора на ось (82). 3.3.4. Фундаментальная операция вин-
тового движения (83). 3.3.5. Принцип перенесения (85).
4
ОГЛАВЛЕНИЕ
§ 3.4. Теория винтового движения с использованием бикватернио-
нов .......................................................86»
3.4.1. Преобразование винтового движения (86). 3.4.1.1. Преоб-
разование базисов (86). 3.4.1.2. Преобразование компонент неиз-
менного бивектора (88). 3.4.1.3. Инвариантность преобразования
винтового движения (89). 3.4.2. Теорема сложения преобразова-
ний (91). 3.4.2.1. Собственный оператор преобразования (91).
3.4.2. 2. Первая (векторная) теорема сложения преобразований
(92). 3.4.2.3. Вторая теорема сложения (94). 3.4.2.4. Сложение пе-
реносов при сложении преобразований (96). 3.4.3. Бесконечно ма-
лые преобразования и кинематические уравнения (99). 3.4.3.1. Бес-
конечно малое преобразование (99). 3.4.3.2. Кинематические урав-
нения (100). 3.4.3.3. Общие свойства кинематических уравнений
(102).
§ 3.5. Уравнения инерциальной навигации в винтовом исчисле-
нии .......................................................104
ЧАСТЬ II
РЕАЛИЗАЦИЯ РЕШЕНИЯ УРАВНЕНИЙ БИНС
Глава 4. Методы интегрирования кинематических уравнений 107
§ 4.1. Представление первичной информации и методы интегриро-
вания .......................................................107
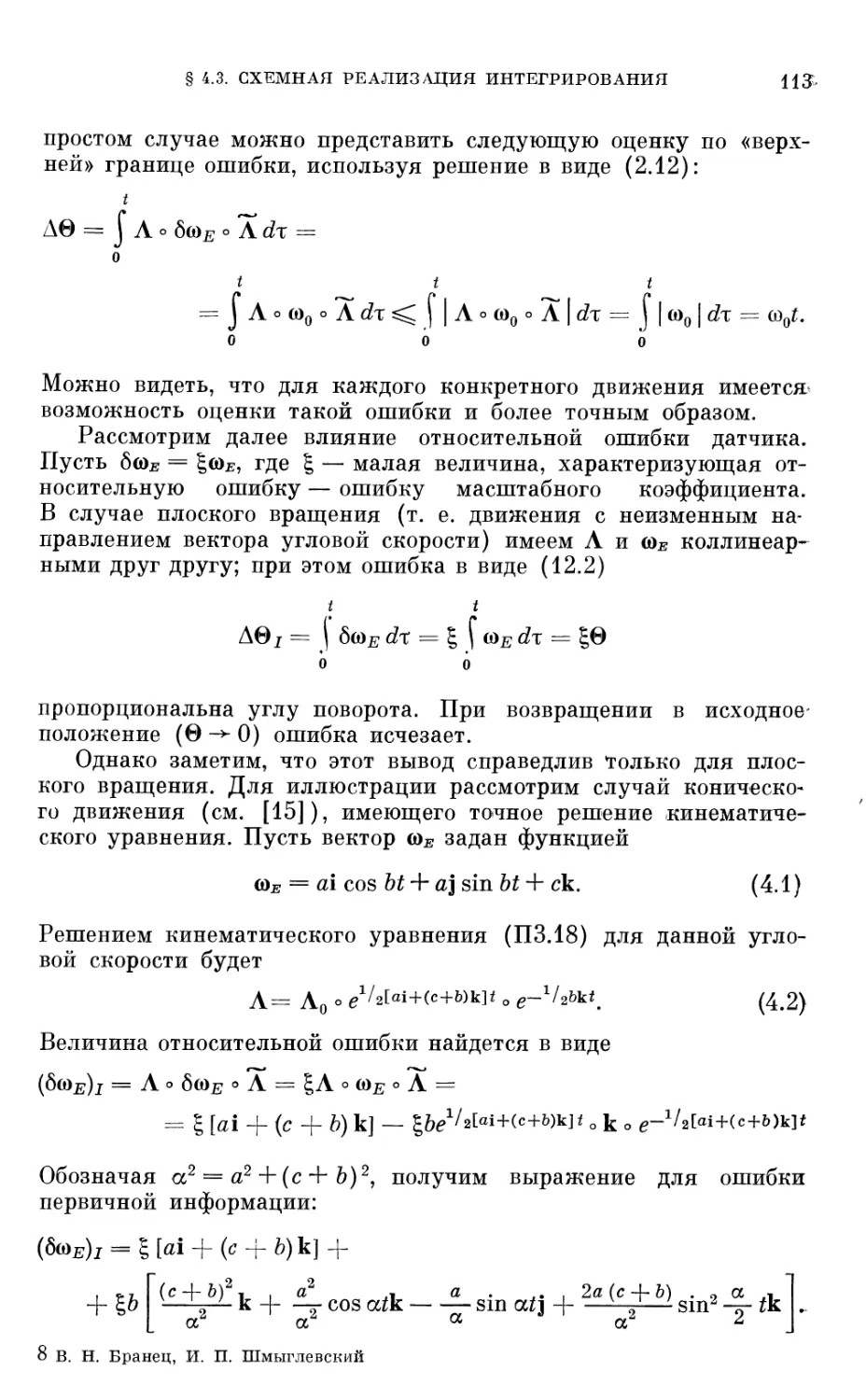
§ 4.2. О точности реализации решения кинематических уравнений 109"
§ 4.3. Схемная реализация интегрирования кинематических урав-
нений. Ошибки интегрирования.................................111
Глава 5. Интегрирование кинемагических уравнений при использовании
первичной информации в виде квазикоординат...................118
§ 5.1. Построение численных методов..........................118
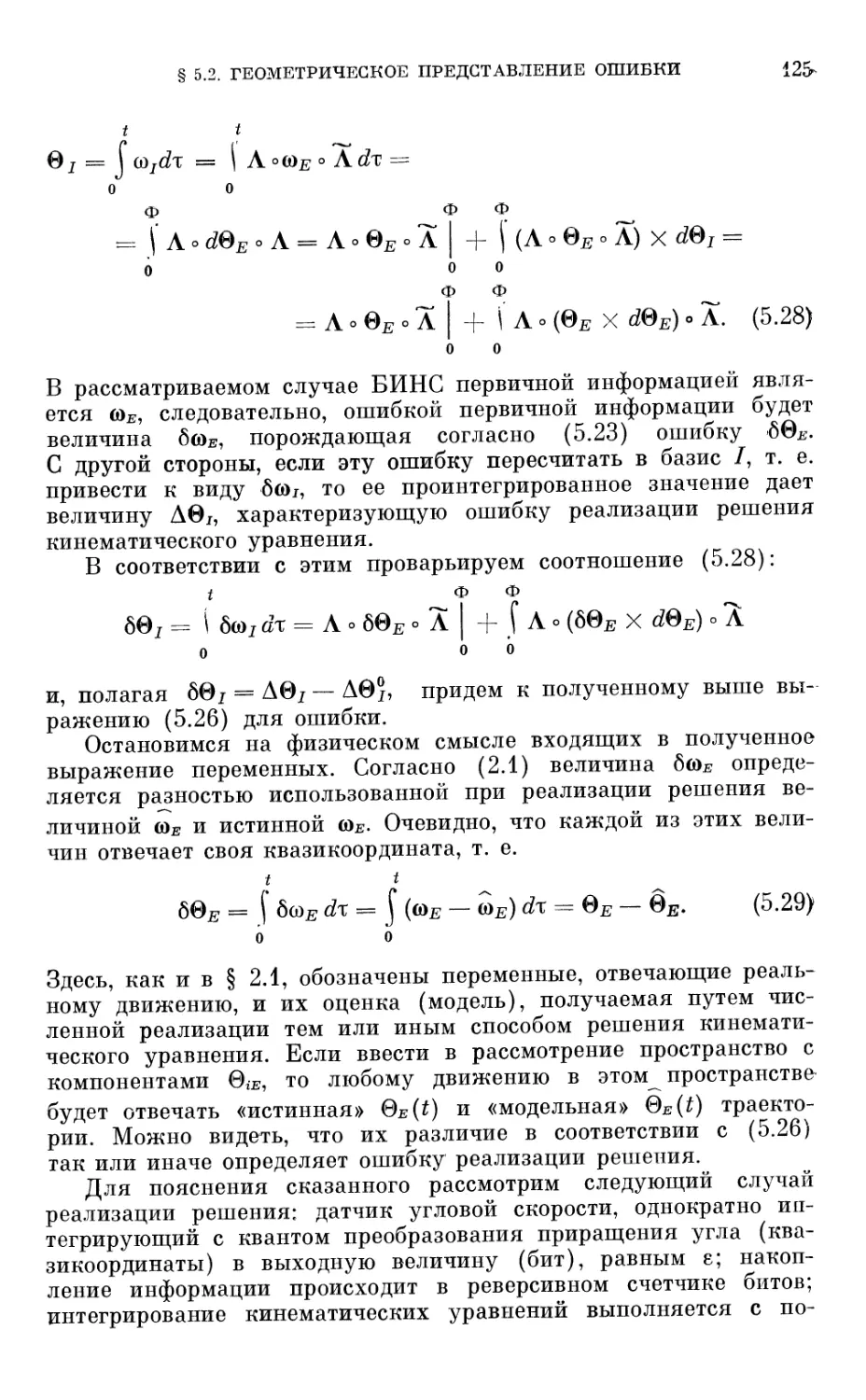
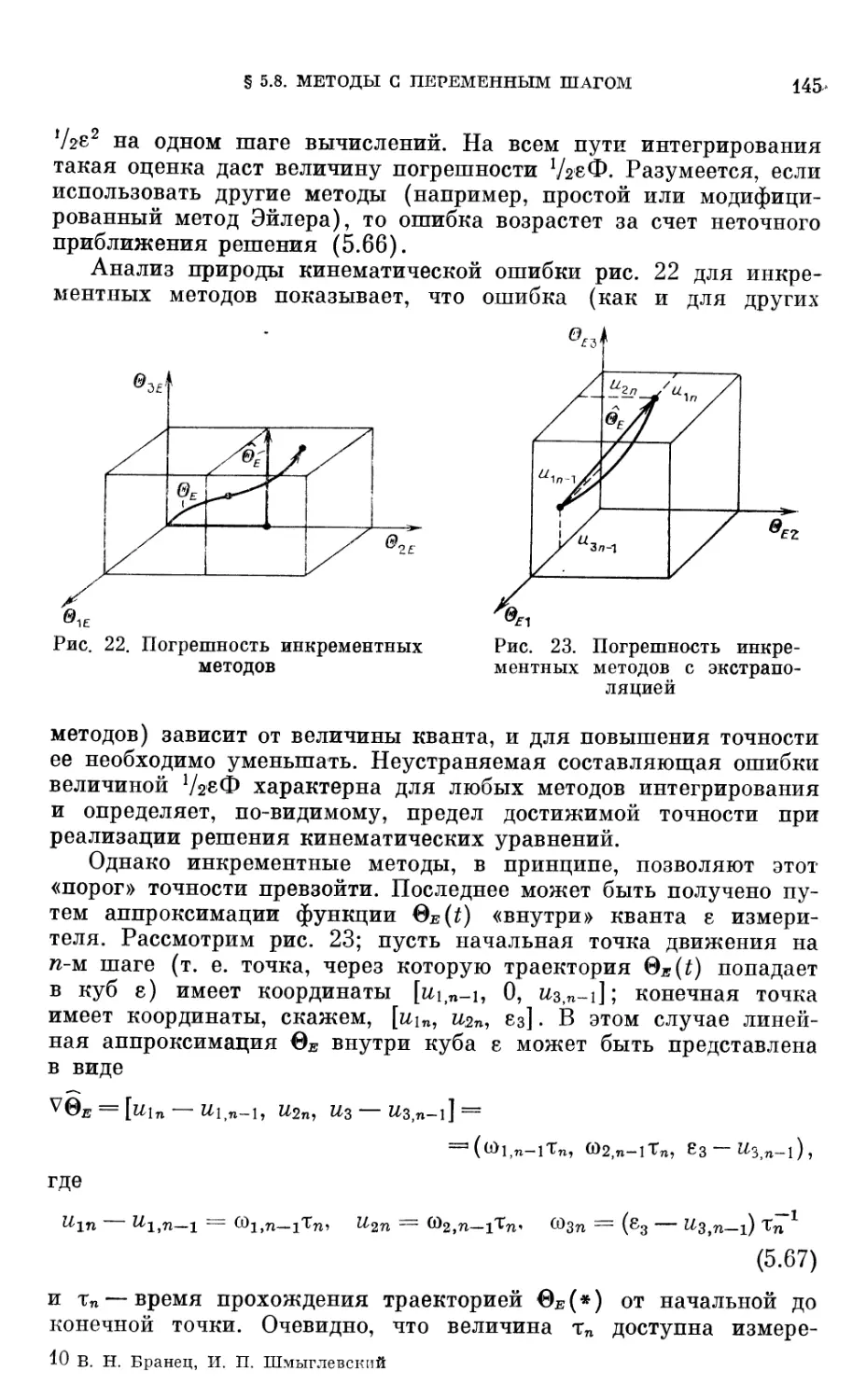
§ 5.2. Геометрическое представление ошибки реализации интег-
рирования ...................................................123
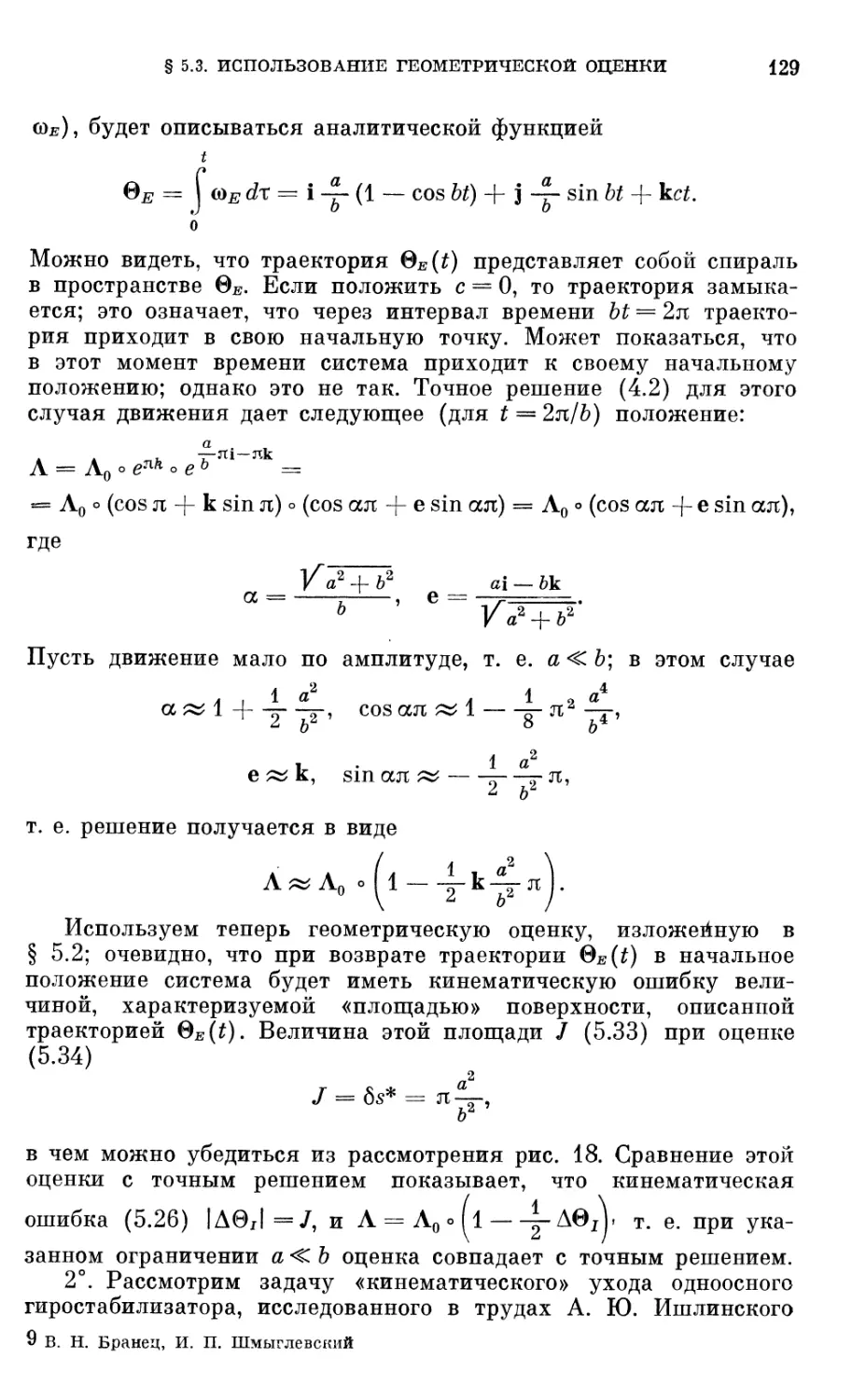
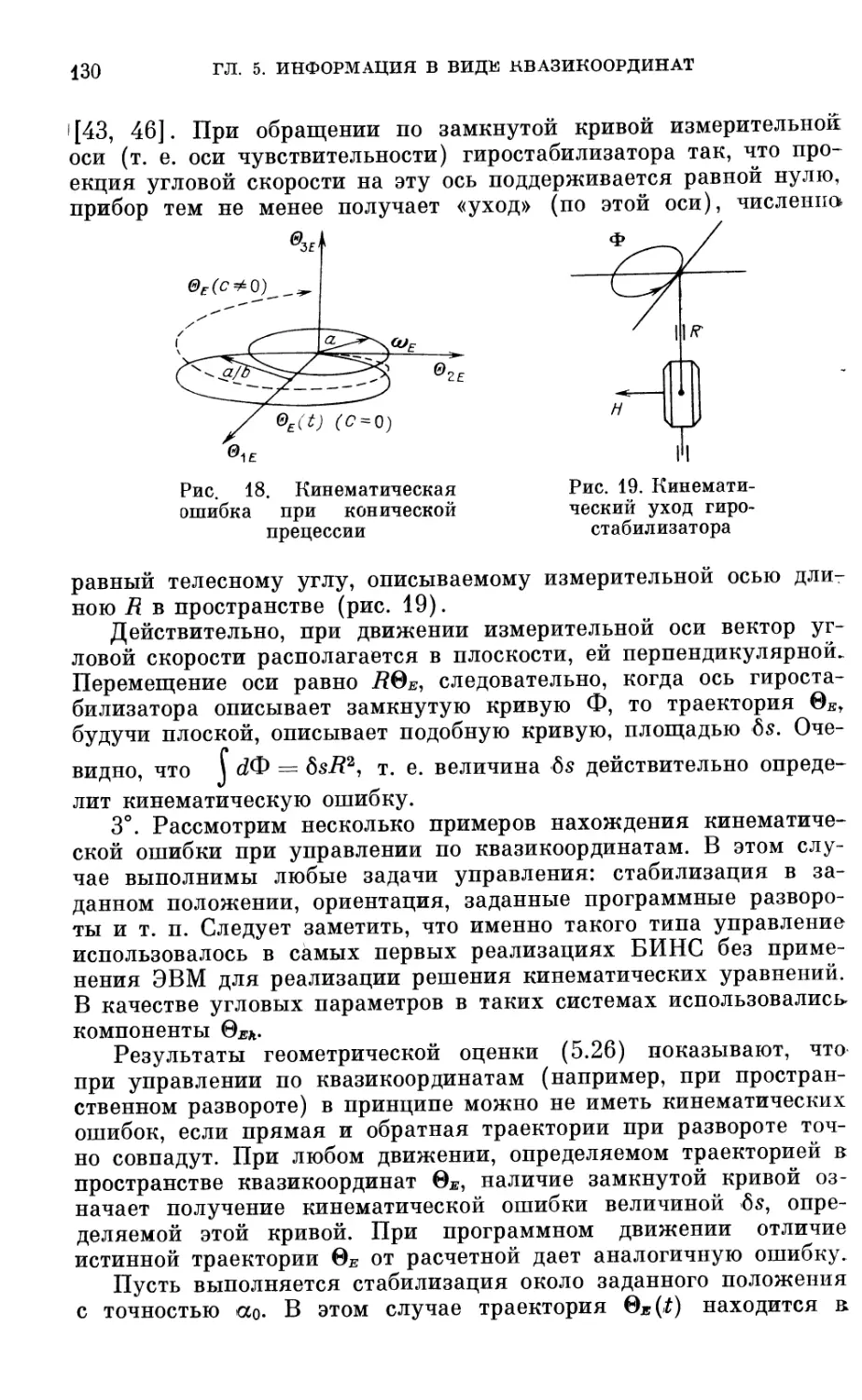
§ 5.3. Примеры использования геометрической оценки . . . 128
§ 5.4. Кинематические уравнения для ненормированных кватер-
нионов. Коррекция нормы......................................131
§ 5.5. Численные методы с коррекцией нормы....................133
§ 5.6. Погрешность, вызванная квантованием первичной инфор-
мации .......................................................138
§ 5.7. Погрешности численных методов при постоянном шаге . 141
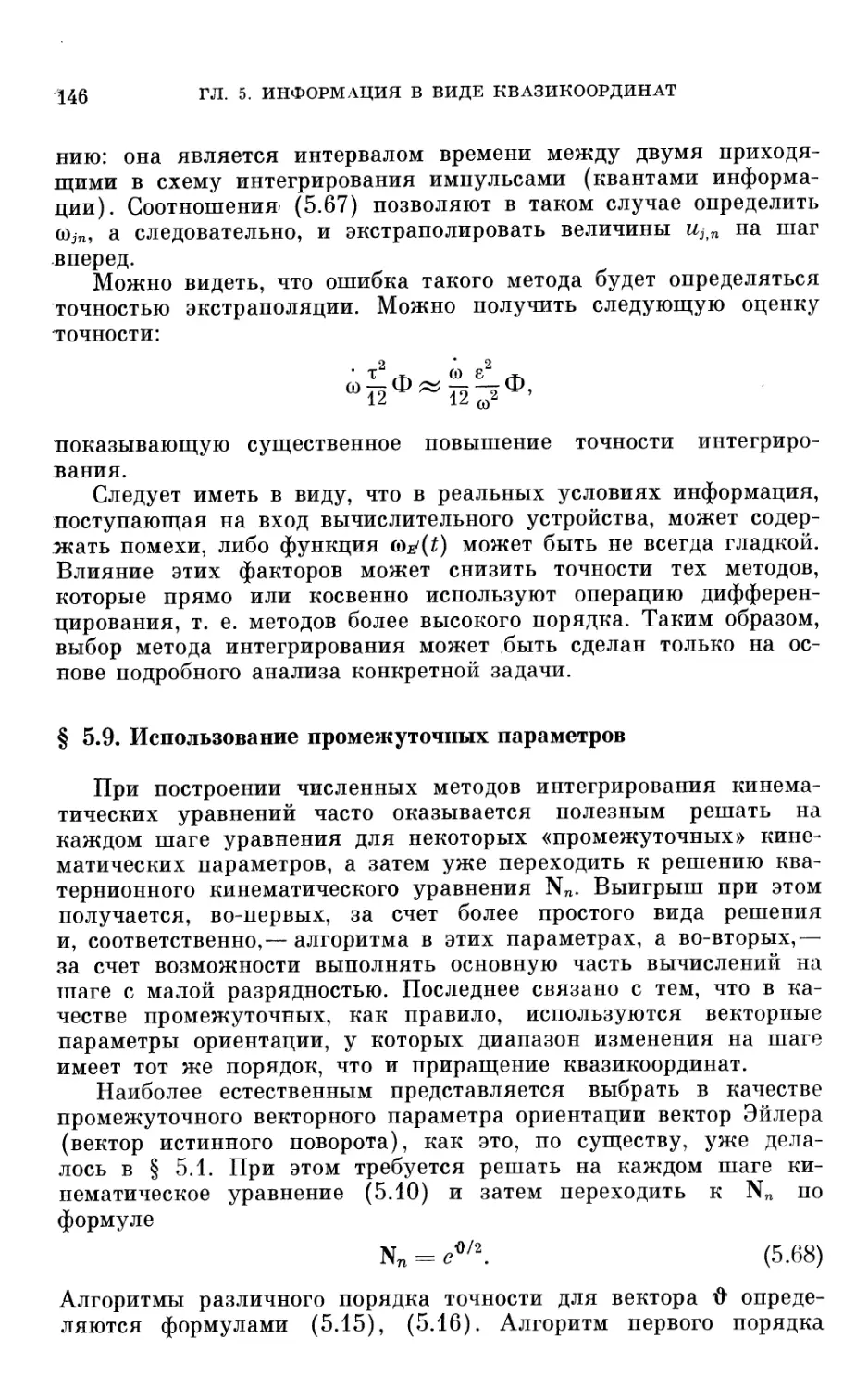
§ 5.8. Численные методы интегрирования с переменным шагом.
Инкрементные методы..........................................142
§ 5.9. Использование промежуточных параметров .... 146
§ 5.10. Численные методы высокого порядка. Использование ин-
формации в промежуточных точках . . ,...............148
§ 5.11. Численное интегрирование кинематических уравнений в
первой и смешанной формах....................................152
Глава 6. Интегрирование уравнений первой группы . . . . 153
§ 6.1. Особенности численного интегрирования кажущейся ско-
рости .......................................................154
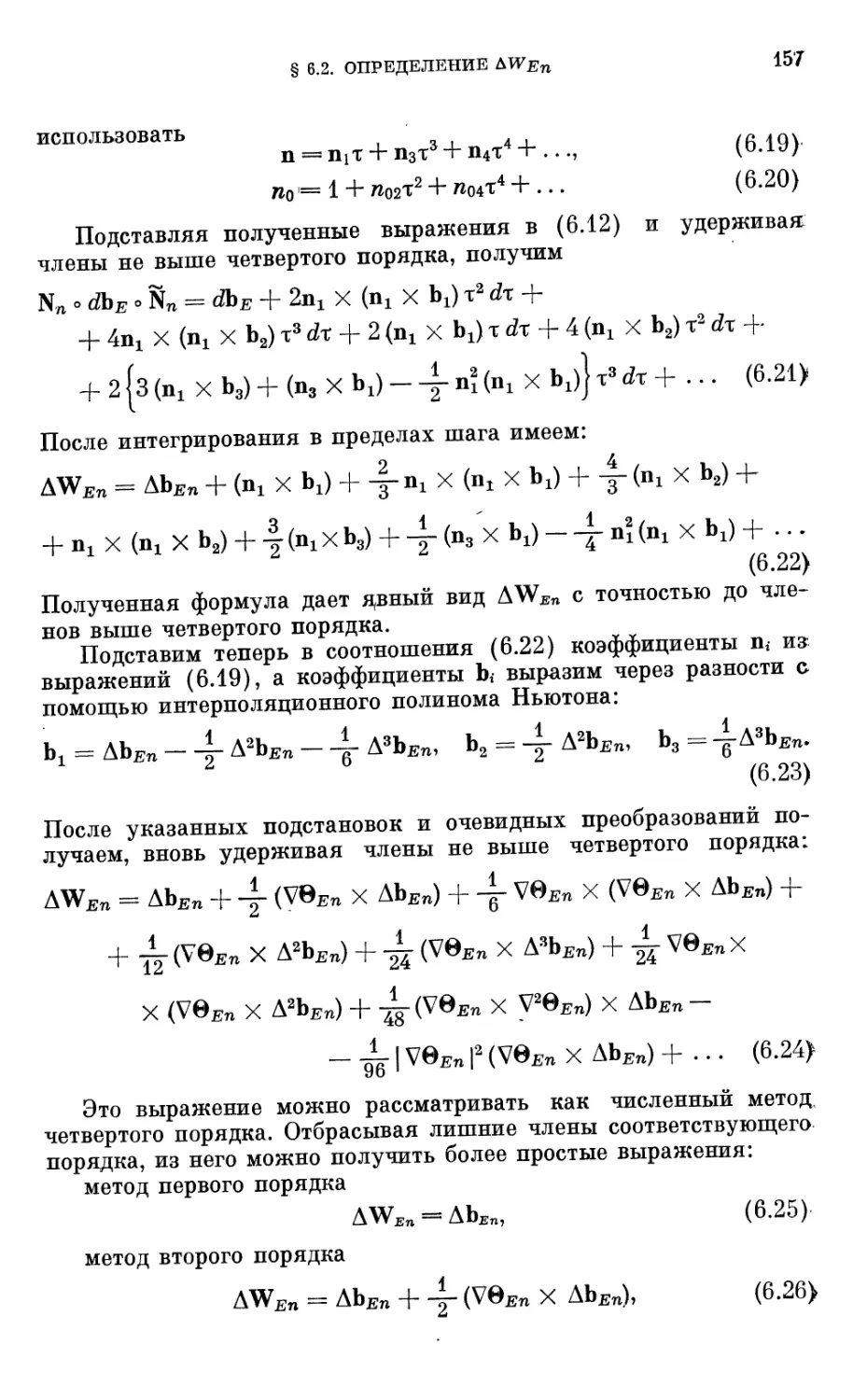
§ 6.2. Определение AW^n через измеряемые величины . . . 156
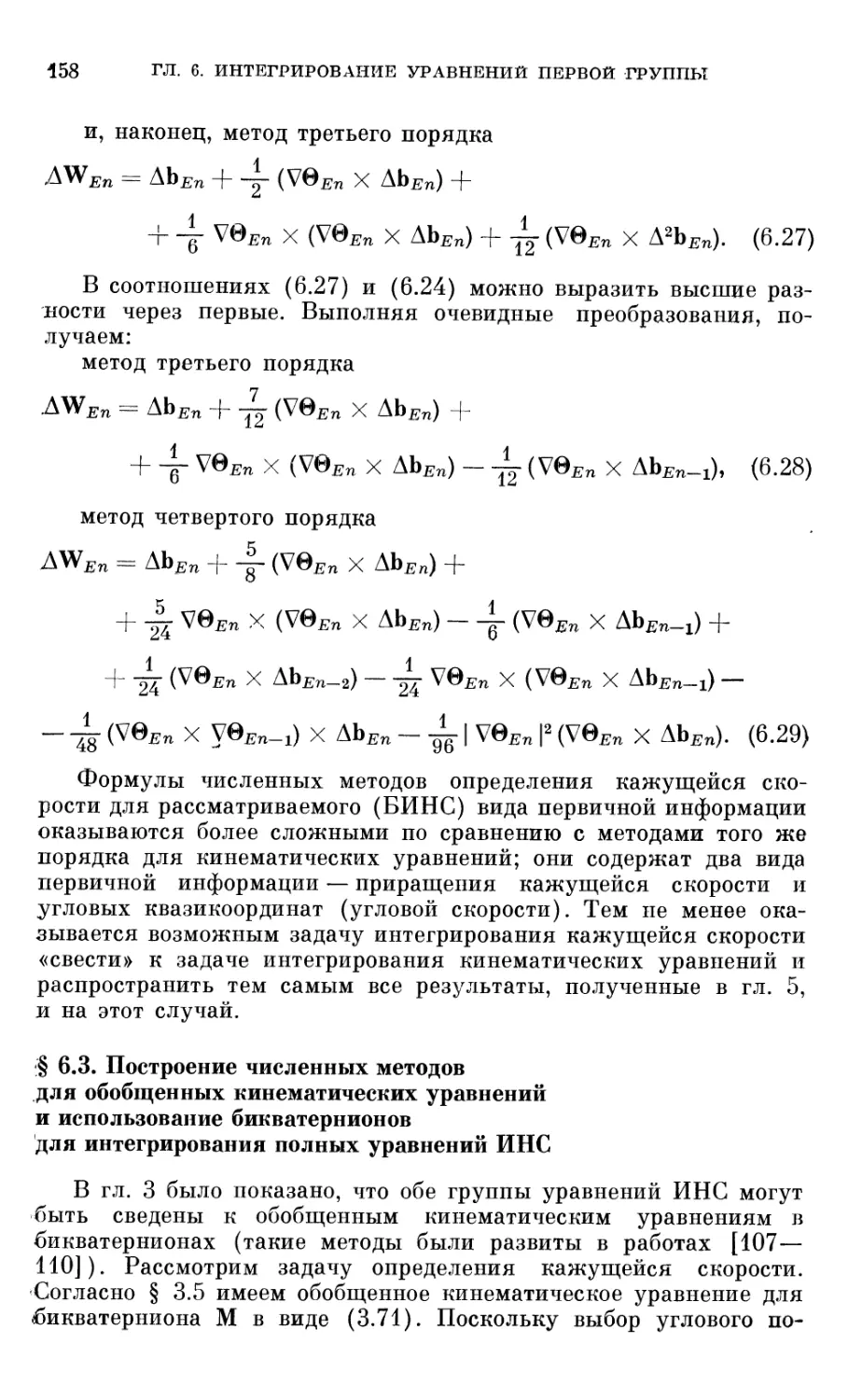
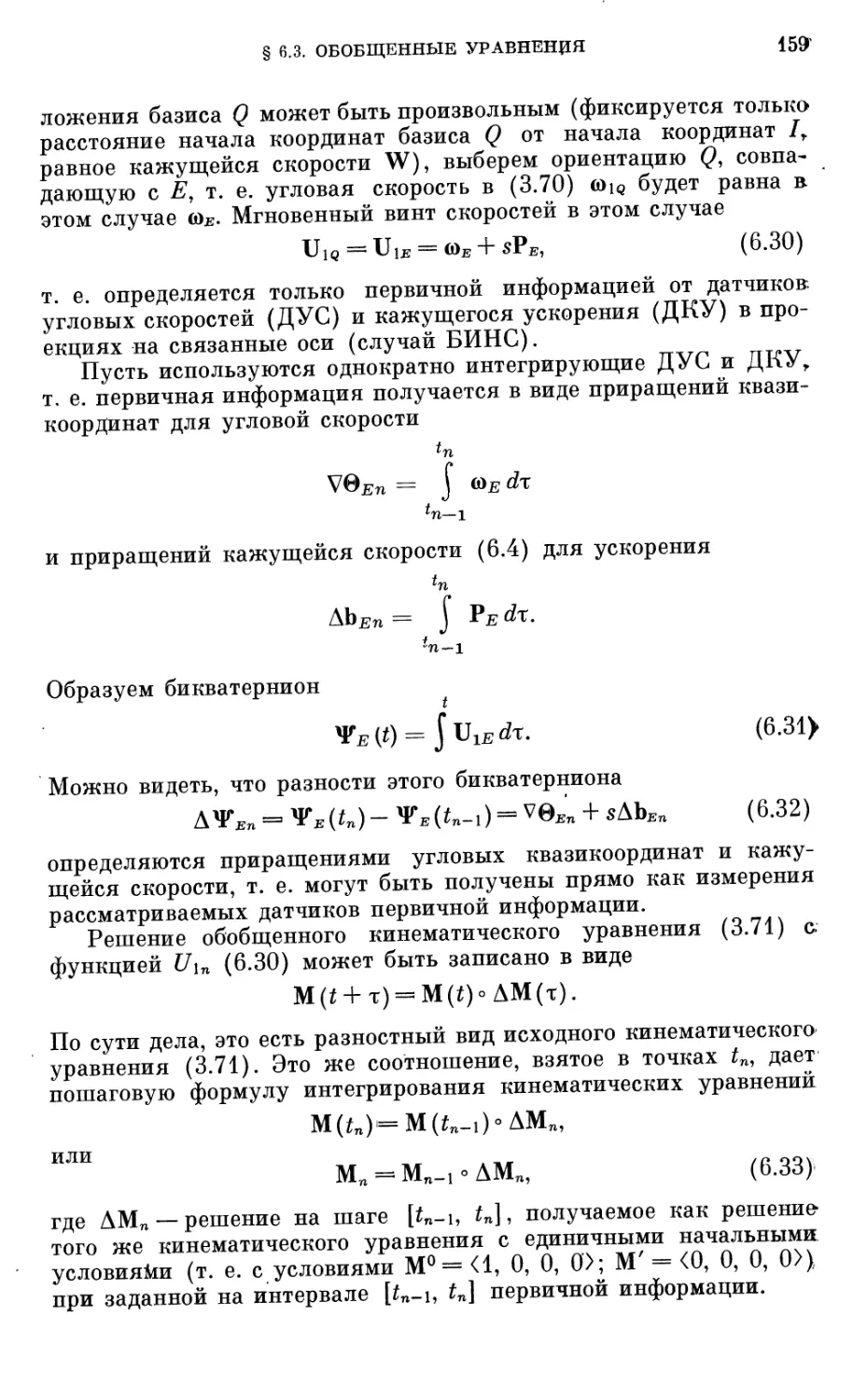
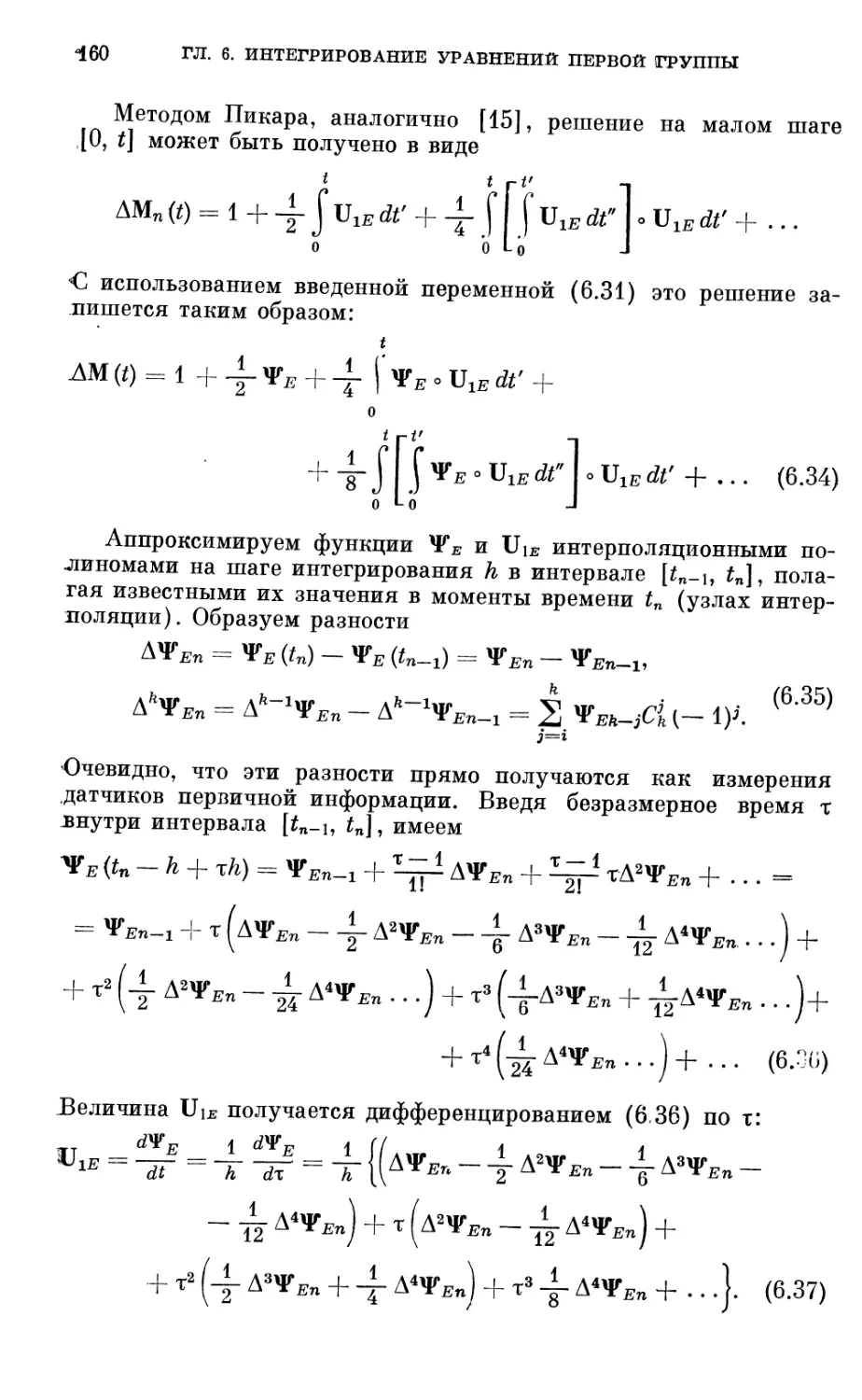
§ 6.3. Построение численных методов для обобщенных кинемати-
ческих уравнений и использование бикватернионов для ин-
тегрирования полных уравнений ИНС.......................... 158
§ 6.4. Получение численных методов интегрирования кажущейся
скорости из обобщенных кинематических уравнений . . 162
§ 6.5. Определение приращения AW^n через измеряемые величины
с помощью решений для обобщенных кинематических урав-
нений .......................................................164
ОГЛАВЛЕНИЕ
5
ЧАСТЬ III
ЗАДАЧА УПРАВЛЕНИЯ (КОРРЕКЦИИ) ДЛЯ КИНЕМАТИЧЕСКИХ
УРАВНЕНИЙ
Глава 7. Управление ориентацией.................................167
§ 7.1. Основные задачи управления ориентацией...............167
§ 7.2. Управление ориентацией с применением бесплатформенных
инерциальных систем.........................................168
Глава 8. Приведение связанного базиса к приборному .... 172
§ 8.1. Динамическая задача. Устойчивость контура стабилизации 172
§ 8.2. Основные уравнения кинематической задачи приведения 174
§ 8.3. Приведение к неподвижному базису. Устойчивость управ-
ления ......................................................174
§ 8.4. Приведение к подвижному базису. Устойчивость управле-
ния ........................................................176
§ 8.5. Приведение к подвижному базису со смещением <о2 .... 178
§ 8.6. Приведение к подвижному базису без смещения. Расшире-
ние класса управлений.......................................179
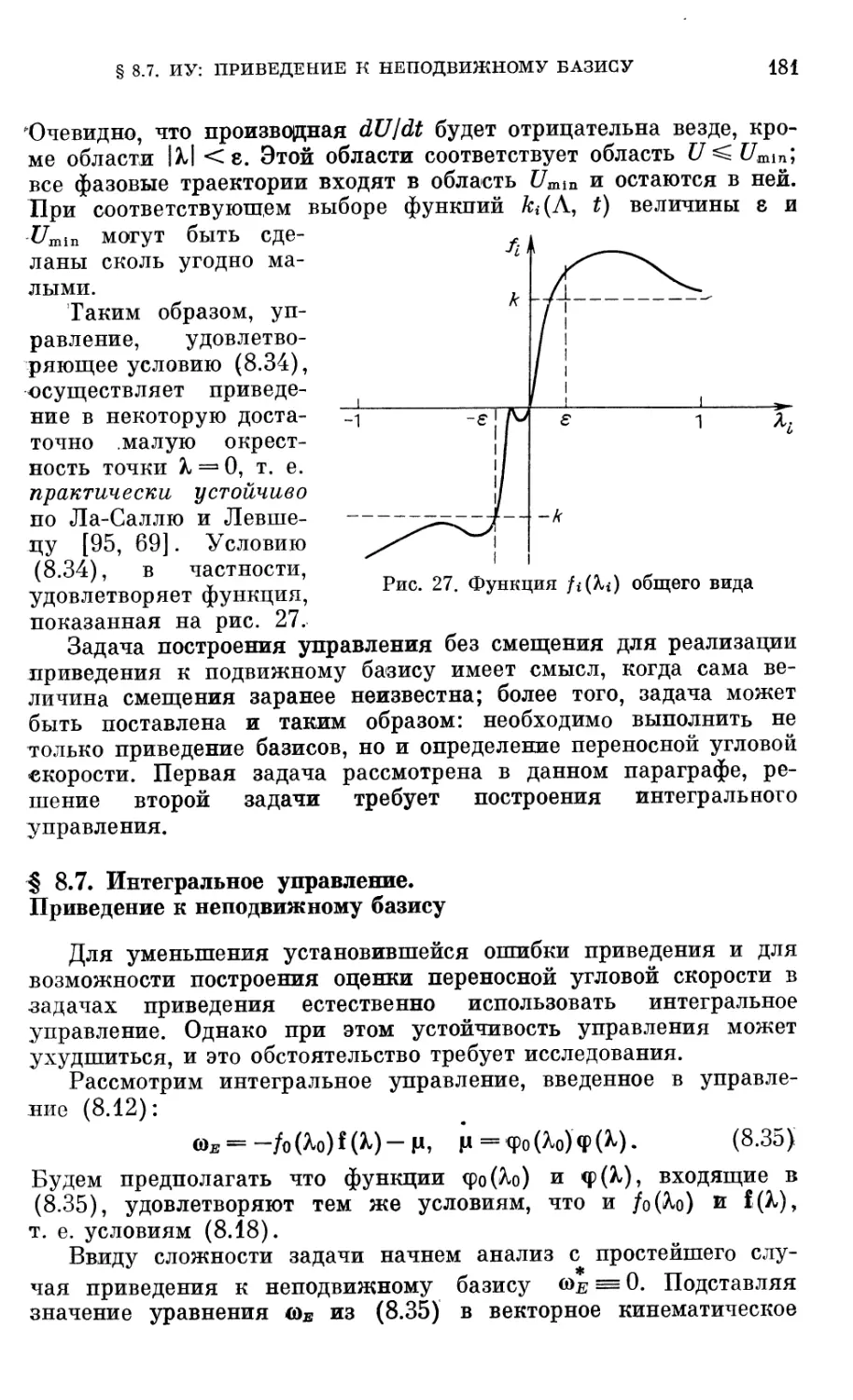
§ 8.7. Интегральное управление. Приведение к неподвижному
базису......................................................181
§ 8.8. Интегральное управление. Приведение к подвижному бази-
су при постоянном смещении ................184
§ 8.9. Интегральное управление. Приведение при переменных
(о*, и Релейных функциях f и ср.......................186
§ 8.10. Общий случай интегрального управления при переменных
«>*,«»* ..........................................187
2L 1
Глава 9. Коррекция приборного базиса по сигналам датчиков уг-
лового положения.............................................191
§ 9.1. Геометрические характеристики датчиков углового положе-
ния ........................................................191
9.1.1. Общие положения (191). 9.1.2. Примеры датчиков углового
положения и их моделей (193). 9.1.3. Упрощенные уравнения иде-
ального датчика (195).
§ 9.2. Основные уравнения корректируемого базиса .... 196
§ 9.3. Орт направления на ориентир и его модель .... 197
§ 9.4. Коррекция приборного базиса по одному неподвижному ори-
ентиру .....................................................199
9.4.1. Построение коррекции в собственном базисе датчика (199).
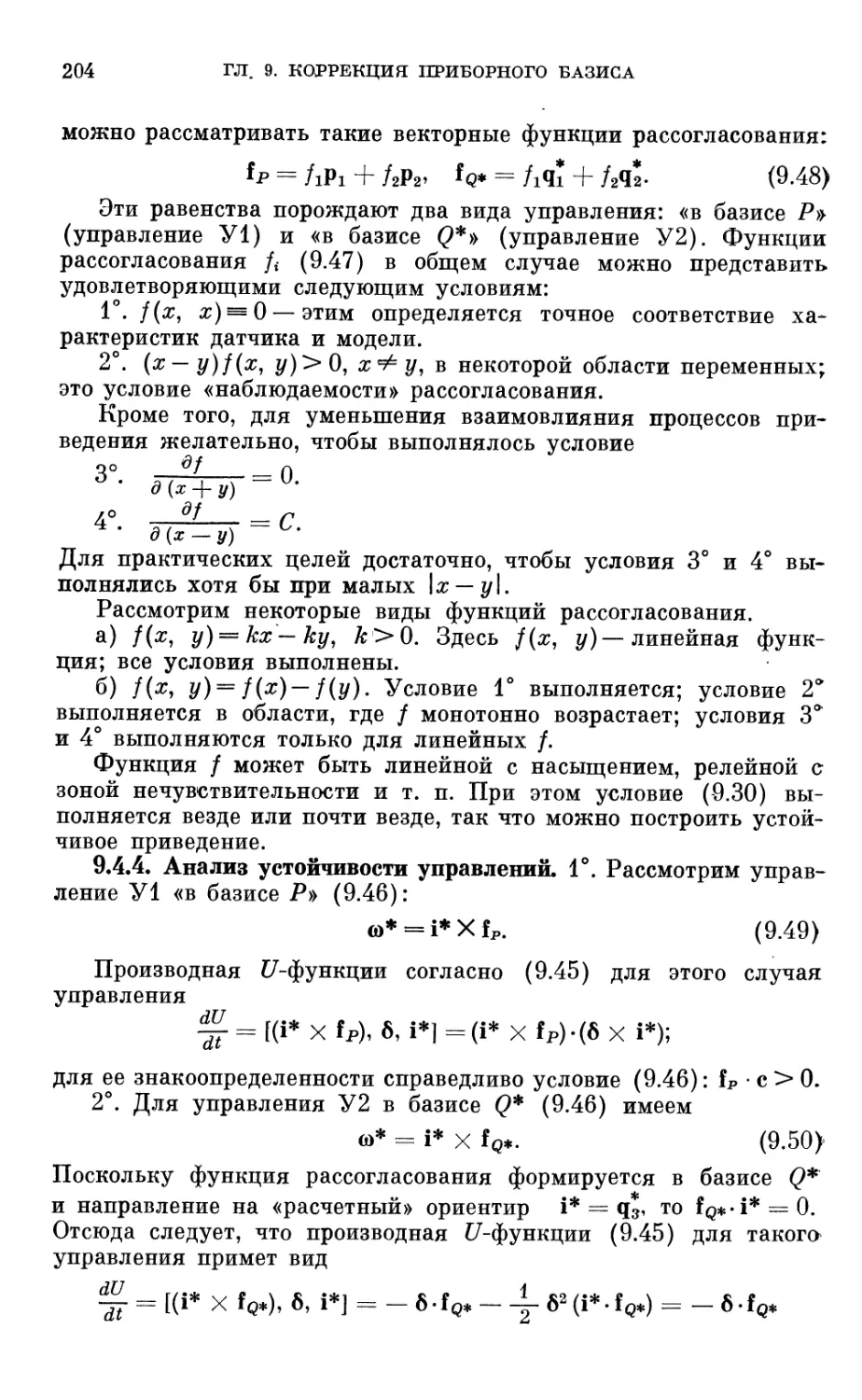
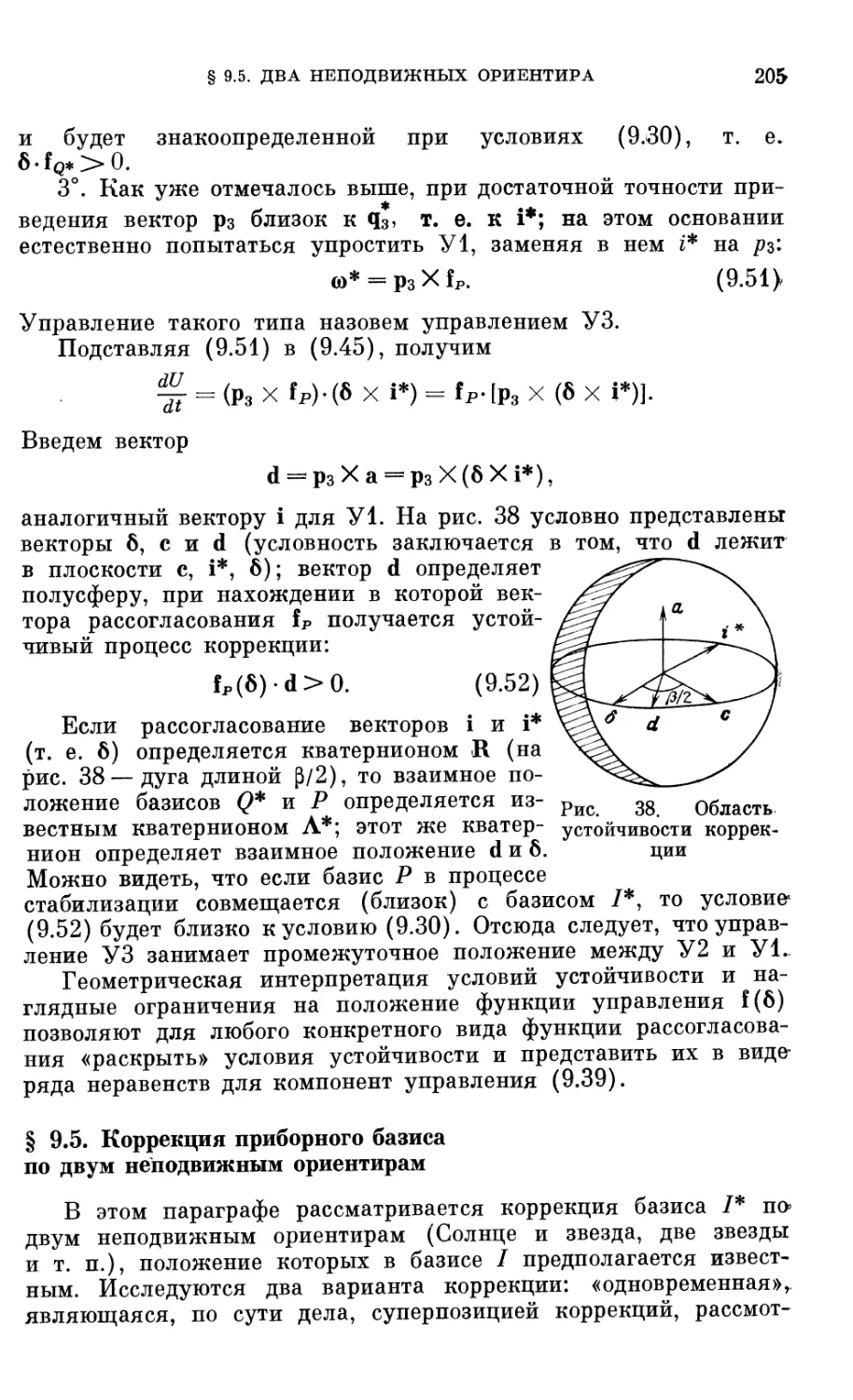
9.4.2. Построение коррекции в векторной форме (201). 9.4.3. По-
строение функции рассогласования (203). 9.4.4. Анализ устойчи-
вости управлений (204).
§ 9.5. Коррекция приборного базиса по двум неподвижным ориен-
тирам ......................................................205
9.5.1. Построение кватерниона R по ортам двух направлений и
их моделям (206). 9.5.2. Построение управления в векторной фор-
ме (207). 9.5.3. Последовательная коррекция по двум ориенти-
рам (210).
§ 9.6. Коррекция приборного базиса по подвижному ориентиру 211
9.6.1. Основные уравнения и условия устойчивости (212). 9.6.2. Кор-
рекция по третьей оси. «Фиксированное» смещение (213).
9.6.3. Перекрестная коррекция. Построение управлений (214).
9.6.4. Перекрестная коррекция без смещения (215).
Приложение 1. Обзор кинематических параметров .... 217
§ П1.1. Направляющие косинусы...............................217
§ П1.2. Углы Эйлера — Крылова...............................227
6
ОГЛАВЛЕНИЕ
§ П1.3. Параметры вектора конечного поворота................
Ш.3.1. Векторная теория конечного поворота (229). П1.3.2. Фор-
мализм дробно-линейных преобразований. Параметры Кэли —
Клейна (232). П1.3.3. Формализм унитарных преобразований. Па-
раметры Кэли — Клейна (233).
Пр иложение 2. Основные кинематические соотношения с исполь-
зованием кватернионов..........................................
§ П2.1. Преобразование базисов..............................
§ П2.2. Преобразование компонент неизменного вектора
§ П2.3. Инвариантность операции преобразования вектора (опе-
рации вращения).............................................
§ П2.4. Собственный оператор преобразования................
§ П2.5. Инвариантная; векторная форма сложения преобразова-
ний ........................................................
§ П2.6. Сложение преобразований для собственных операторов
§ П2.7. Переставимость преобразований.......................
§ П2.8. Оператор бесконечно малого преобразования и связь с
угловой скоростью ..........................................
§ П2.9. Кинематические уравнения............................
§ П2.10. Сложение относительных движений....................
§ П2.11. Производные отображений неизменных векторов
§ П2.12. Производные отображений кватерниона................
§ П2.13. Инвариантная форма кинематического уравнения
। § П2.14. Первая теорема сложения и сложение относительных
вращений............................................
Приложение 3. Кинематические уравнения.......................
§ П3.1. Направляющие косинусы............................
§ П3.2. Углы Эйлера — Крылова............................
§ ПЗ.З. Параметры Родрига — Гамильтона (уравнения в кватер-
нионах) ..................................................
§ П3.4. Параметры Кэли — Клейна (унитарные преобразования)
§ П3.5. Кинематические уравнения для собственного вектора
вращения..................................................
§ П3.6. Кинематические уравнения для различных параметров,
образуемых из эйлерова вектора вращения ....
ПЗ.6.1. Общий вид кинематических параметров и уравнений
(255). ПЗ.6.2. Вектор Эйлера (р = 0е) (256). П3.6.3. Вектор Род-
рига (вектор конечного поворота) (256). ПЗ.6.4. Векторная часть
кватерниона ^р=“= 2 sin-5-е^ (257). ПЗ.6.5. Вектор р = 4 tg —е(257).
ПЗ.6.6. Вектор ---------—----(258).
1 +
Приложение 4. Изоморфизм формализма операций вращения (ки-
нематических преобразований) ................................
Приложение 5. Построение алгоритма численного интегрирова-
ния с промежуточным базисом..................................
§ П5.1. Кинематические уравнения.........................
§ П5.2. Кажущаяся скорость...............................
Список литературы
229
238
238
238
239
239
240
240
240
241
241
241
242
242
242
243
243
244
247
248
250
254
255
260
270
270
271
274
ПРЕДИСЛОВИЕ
Прогресс в области вычислительной техники, микроэлектрони-
ки и приборостроения сделал возможным создание бесплатфор-
менных инерциальных навигационных систем (БИНС) с прием-
лемыми точностными характеристиками. В последние годы
такие системы широко применяются, особенно в авиации, космо-
навтике и ракетной технике, т. е. там, где проявляются их потен-
циальные преимущества: малые масса, габариты и потребление
энергии, отсутствие ограничений на угловые маневры, возмож-
ность одновременной работы в нескольких базисах, удобство
контроля и резервирования и т. п.
В то же время теория таких систем разработана и освещена
в научной литературе явно недостаточно. Основная часть жур-
нальных статей — это либо исследование погрешностей конкрет-
ных численных методов интегрирования кинематических уравне-
ний, либо описание конкретной реализации системы и результатов
ее испытаний.
В монографиях и учебных пособиях по инерциальной навига-
ции бесплатформенные системы или вообще не рассматриваются,.
или рассматриваются бегло и поверхностно. Практически нет ра-
бот по инерциальной навигации в космосе. Не освещена в научной
литературе и теория корректируемых БИНС, в частности, пробле-
мы синтеза устойчивой коррекции и измерения переносной угло-
вой скорости базиса, связанного с подвижным ориентиром.
В программном обеспечении современных бесплатформенных
систем широко применяются кватернионы, бикватернионы, век-
торные кинематические параметры и другие нетрадиционные спо-
собы описания состояния динамической системы. Систематическое
изложение теории таких параметров и особенностей их примене-
ния в БИНС также отсутствует в научной литературе.
Настоящая монография, посвященная теоретическим аспектам
построения БИНС и их использованию в системах ориентации
и управления движением, в определенной степени заполняет этот
пробел. В ней систематически изложены новые научные резуль-
таты, полученные авторами, а также другими советскими и зару-
бежными исследователями. Изложение основано на использова-
нии математического аппарата кватернионов, развитого в книге
авторов «Применение кватернионов в задачах ориентации твер-
дого тела» (М.: Наука, 1973). Рассматриваются общие вопросы
8
ПРЕДИСЛОВИЕ
теории инерциальных, в частности, бесплатформенных систем,
уравнения ошибок и их общие решения. В качестве кинематиче-
ских параметров используются кватернионы, а в качестве пара-
метров состояния — бикватернионы.
Подробно рассмотрены методы интегрирования кинематиче-
ских уравнений на борту подвижного объекта и погрешности этих
методов. Особое внимание уделено корректируемым системам и
построению на их основе систем управления угловым движением.
С помощью обратного метода Ляпунова синтезирован широкий
класс устойчивых управлений процессами коррекции приборного
базиса БИНС по внешней информации и приведения связанного
с объектом базиса к приборному, а также определения переносной
угловой скорости.
В приложениях приведен обзор кинематических параметров
и уравнений для них, основные кинематические соотношения в
кватернионах, а также доказательство изоморфизма различных
способов описания операции вращения.
Авторы надеются, что книга окажется полезной для специа-
листов по механике управляемого движения, инерциальной нави-
гации, системам управления подвижными объектами, студентов
старших курсов и аспирантов соответствующих специальностей
и всех интересующихся общими проблемами механики, винтовым
исчислением, кватернионами и бикватернионами.
Пользуясь случаем, авторы выражают глубокую признатель-
ность академику Б. В. Раушенбаху за обсуждение рукописи и
ценные советы.
ВВЕДЕНИЕ
Следуя работам [25, 30, 1, 72, 84], под навигацией в широком
смысле слова будем понимать теорию и технику вождения дви-
жущегося объекта, которым может быть космический аппарат,
самолет, корабль и т. п., по заданной траектории. При этом суще-
ственным оказывается управление движением центра масс объ-
екта, когда осуществляется регулирование величин трех незави-
симых координат, описывающих поступательное перемещение
объекта в пространстве, и управление тремя координатами, за-
дающими вращательное движение объекта. С этой точки зрения,
т. е. с точки зрения задачи навигации, любой движущийся
объект оказывается подобен твердому телу, Ибо движение твер-
дого тела описывается шестью координатами, соответствующими
шести степеням свободы.
При решении задачи управления движением твердого тела
выполняется регулирование величин координат, характеризую-
щих его движение таким образом, чтобы сделать их равными или
близкими к заданным функциям. Последние определяют так на-
зываемую расчетную, или требуемую траекторию движения.
Вопросам навигации и управления движением посвящено мно-
го работ, например [25, 1, 72, 94]; не имея целью повторять их
содержание, сделаем несколько определений, необходимых для
дальнейшего.
Под собственно задачей навигации в узком смысле слова бу-
дем понимать задачу определения трех координат, описывающих
поступательное движение точки (центра масс) твердого тела,
и трех координат, задающих его угловое положение. Естественно,
что эта задача может решаться, только если определена система
координат, в которой рассматривается (определяется) движение
тела. Указанную систему будем называть навигационной системой
координат. В качестве примера можно указать геоцентрическую
экваториальную географическую систему координат, оси которой
неподвижны относительно Земли; эта система координат чаще
всего используется при исследовании движения у поверхности
Земли (т. е. самолетов, кораблей, искусственных спутников
и т. п.). Для космического аппарата, совершающего перелет по
траектории, например, Земля — Венера, удобно в качестве нави-
гационной системы использовать гелиоцентрическую эклиптиче-
скую систему координат. Независимые переменные, описывающие
10
ВВЕДЕНИЕ
положение тела (центра масс тела) в навигационной системе
координат, будем называть навигационными координатами. Сово-
купность навигационных координат и их производных по времени
определяет навигационные параметры.
Определение трех координат, описывающих вращательное дви-
жение твердого тела, будем называть задачей определения ориен-
тации тела. Аналогично предыдущему решение задачи ориентации
имеет смысл, если задана система координат, относительно кото-
рой определяется ориентация твердого тела. Данную систему ко-
ординат будем называть опорной системой координат-, будем по-
лагать, что начало опорной системы координат расположено в
центре масс тела и перемещается вместе с ним. Оси опорной си-
стемы координат могут быть параллельными осям навигационной
системы, но могут занимать и любое другое положение в про-
странстве. Координаты, описывающие вращательное движение
твердого тела относительно опорной системы координат, будем
называть угловыми переменными, или параметрами ориентации.
В некоторых случаях эти координаты называют пилотажными
или кинематическими параметрами.
В соответствии с определениями, принятыми в работе [25],
при решении навигационной задачи используется навигационная
информация, которая делится на первичную, исходную и началь-
ную информации. Под первичной информацией будем понимать
информацию о поступательном движении центра масс и об угло-
вом движении, получаемую с помощью датчиков или измеритель-
ных приборов.
Все датчики первичной информации могут быть разделены на
два класса: датчики внешней информации и инерциальные
датчики.
Датчики внешней информации используют для своей работы
внешнюю среду: электромагнитные поля и излучения, атмосферу
и т. п. К датчикам такого рода, определяющим движение центра
масс объекта, относятся радиолокационные измерители расстоя-
ния и скорости, оптические датчики измерения скоростей и даль-
ности, датчики скорости потока. Такого же класса датчиками,
определяющими угловое движение объекта, являются, например,
оптические датчики ориентации на Землю, Солнце или звезды,
радиолокационные измерители направления, датчик, определяю-
щий направление набегающего потока, датчики, фиксирующие
инфракрасное излучение планет.
Инерциальные датчики измеряют тем или иным образом уско-
рение и вращение той системы координат, в которой они установ-
лены, т. е. базовой системы координат; инерциальные датчики
делятся на два класса: измерители угловой скорости и измерите-
ли кажущегося ускорения.
Измерители (датчики) угловой скорости определяют либо са-
му величину абсолютной угловой скорости вращения базовой си-
ВВЕДЕНИЕ
11
стемы координат, либо (для однократно интегрирующих датчиков)
величину интеграла от абсолютной угловой скорости, имеющего
размерность угла поворота.
Измерители (датчики) кажущегося ускорения измеряют уско-
рение тела, обусловленное действием всех внешних сил неграви-
тационного происхождения. Такое ускорение принято называть
кажущимся [43, 44]. При этом датчик кажущегося ускорения
измеряет либо величину ускорения от действия внешних сил,
либо — для однократно интегрирующего датчика — интеграл от
ускорения, имеющий смысл кажущейся скорости, либо, наконец,
для двукратно интегрирующего датчика — двойной интеграл от
ускорения.
Мы будем считать, что каждый датчик угловой скорости
(ДУС) и датчик кажущегося ускорения (ДКУ) характеризуется
осью чувствительности, или собственным измерительным направ-
лением датчика. При этом датчик всегда измеряет величину,
являющуюся проекцией угловой скорости или ускорения на ось
чувствительности. Полный вектор ускорения или угловой ско-
рости измеряется тремя датчиками, оси чувствительности которых
образуют трехмерный базис. Датчики, имеющие одну ось чув-
ствительности, называются одноосными измерителями угловой
скорости или ускорения; существуют двухосные, а также про-
странственные инерциальные измерители, однако, как правило,
датчик такого рода полностью эквивалентен двум или трем одно-
осным измерителям ускорения или угловой скорости. В связи
с этим в дальнейшем будем считать инерциальные датчики всегда
одноосными измерителями абсолютной угловой скорости или ка-
жущегося ускорения.
Под исходной информацией при решении навигационной зада-
чи понимают данные по алгоритму решаемой задачи и данные по
гравитационному полю, в котором происходит движение. Исход-
ная информация остается неизменной в течение всего процесса
управления движением; эта информация задаётся заранее перед
циклом навигации и движения.
Начальной информацией будем считать данные о начальном
положении (угловом и пространственном) и начальных скоростях
движения объекта. В одной и той же навигационной задаче на-
чальная информация может быть различной, в то время как ис-
ходная информация неизменна. Весь процесс решения навигаци-
онной задачи можно представить как процесс получения инфор-
мации о навигационных координатах на основе начальной и те-
кущей первичной информации, причем алгоритм вычисления
решения задачи можно рассматривать как исходную информацию.
Среди навигационных систем большое место занимают инер-
циальные навигационные системы (ИНС). В системах такого
рода текущая первичная информация получается от инерциаль-
ных датчиков. Это не означает, что в инерциальных навигацион-
12
ВВЕДЕНИЕ
ных системах не могут использоваться измерения датчиков внеш-
ней информации, однако в этом случае мы имеем дело с коррек-
тируемыми инерциальными системами; такие системы занимают
особое место среди инерциальных навигационных систем. Для
инерциальных систем внешняя информация не является принци-
пиально необходимой, если только не учитывать погрешностей,
возрастающих со временем работы системы.
Инерциальные навигационные системы моделируют уравне-
ния движения объекта, которыми являются уравнения Ньютона
движения материальной точки в инерциальной системе коор-
динат:
r = g + p, (В.1)
где г — радиус-вектор точки в инерциальной системе отсчета, g —
вектор гравитационного ускорения в месте положения точки,
являющийся функцией положения объекта (т. е. имеем g(r)),
и р — вектор ускорения от действия внешних сил, т. е. вектор
кажущегося ускорения. Навигационные координаты получаются
двукратным интегрированием уравнений (1.1):
t t
Г = г0 + У (g + р) dr, г = r0 + j г dr. (В.2)
О о
Алгоритм интегрирования вместе с функциональной зависимостью
g(r) есть исходная информация; р — первичная информация, из-
меряемая датчиками кажущегося ускорения; начальные значения
вектора го и его производной го, необходимые при интегрирова-
нии, есть начальная информация; очевидно, что инерциальной
первичной информации в принципе достаточно для решения на-
вигационной задачи.
Реализация решения навигационной задачи в инерциальной
навигационной системе связана с операциями не над векторными
(В.2), а над скалярными величинами, которыми являются теку-
щие значения первичной информации. Естественно, что и нави-
гационные алгоритмы, реализуемые в вычислительном устройстве
(ЦВМ), также суть скалярные операции. В связи с этим для
разработки навигационного алгоритма необходимо выполнить
замену исходных уравнений инерциальной навигации (В.1)
и (В.2) на систему скалярных уравнений. При этом существен-
ную роль играет вид первичной информации, который зависит
от положения базового трехгранника осей чувствительности инер-
циальных датчиков относительно навигационной системы ко-
ординат.
Базовый трехгранник осей чувствительности инерциальных
датчиков может быть либо неподвижным относительно объекта,
либо расположен на платформе, совершающей некоторое движе-
ние (вращательное) относительно объекта. Соответственно этому
ВВЕДЕНИЕ
13
инерциальные системы управления делятся на бесплатформенные
и платформенные.
Отличительными признаками бесплатформенных инерциаль-
ных систем (БИНС) является то, что, без ограничения общности,
можно считать базовый трехгранник осей чувствительности инер-
циальных датчиков кажущегося ускорения совпадающим с си-
стемой координат объекта. Ввиду того, что в случае БИНС дру-
гих физически реализуемых координатных систем (кроме систем
координат объекта) не имеется, все навигационные системы коор-
динат реализуются вычислительным образом. При этом в БИНС
обязательно решение помимо уравнений (В.1) еще кинематиче-
ских уравнений, т. е. уравнений, которые определяют взаимное
движение различных систем координат.
В качестве первичной информации для решения кинематиче-
ских уравнений является информация об абсолютной угловой
скорости вращения объекта, измеряемой датчиками угловых ско-
ростей. Датчики угловых скоростей в бесплатформенных инерци-
альных системах также жестко связаны с объектом, т. е. в общем
случае можно считать, что базовый трехгранник осей чувстви-
тельности датчиков угловых скоростей совпадает с системой ко-
ординат объекта. Тем самым бесплатформенные системы отличает
следующий вид первичной инерциальной информации: кажущееся
ускорение доступно в виде трех его проекций на связанные оси
объекта, абсолютная угловая скорость вращения объекта также
определяется тремя ее проекциями на эти же оси.
Следует заметить, что некоторые из перечисленных отличи-
тельных признаков БИНС характерны и для платформенных
инерциальных систем; в частности, практически во всех платфор-
менных системах происходит в том или ином виде решение ки-
нематических уравнений и соотношений кинематических преобра-
зований. В этом смысле полученные в данной работе основные
уравнения инерциальных систем навигации являются справедли-
выми для любых инерциальных систем.
Инерциальная навигационная система способна без внешней
информации определить траекторию и угловое движение объекта;
этим объясняются большие возможности, которые представляют-
ся системам управления, построенным на базе ИНС. Комплекси-
рование системы управления, необходимое для расширения объ-
ема решаемых ею задач и функциональных возможностей, осо-
бенно удачно выполняется на основе инерциальных систем уп-
равления. В связи с этим важное значение имеет тот или иной
алгоритм решения навигационной задачи, принятый способ мате-
матического описания или исследования управления.
ЧАСТЬ I
ЗАДАЧА ИНЕРЦИАЛЬНОГО УПРАВЛЕНИЯ
И ОСНОВНЫЕ УРАВНЕНИЯ ИНС
ГЛАВА 1
ОБЩИЕ УРАВНЕНИЯ ИНС
§ 1.1. Кинематические соотношения для векторных величин
В Приложении 1 приведен обзор кинематических параметров.
Показано, что существует три физически различных способа за-
дания преобразований вращения с помощью направляющих ко-
синусов, с помощью последовательности плоских поворотов вокруг
координатных осей на углы Эйлера — Крылова и с помощью па-
раметров, определяющих вектор конечного эквивалентного эйле-
рова поворота. Для группы параметров Кэли — Клейна, Родри-
га — Гамильтона, вектора конечного поворота, вектора ориентации
существует ряд формальных способов задания преобразования,
однако самым удобным из них является формализм операций над
кватернионами.
В проводимых ниже исследованиях в качестве кинематиче-
ских параметров будут использованы параметры Родрига — Га-
мильтона. При выводе уравнений и их исследовании будет при-
меняться формализм кватернионов [15], как наиболее удобный
для формального описания кинематических преобразований и
имеющий ясную физическую интерпретацию. Как показали ис-
следования, этот формализм дает определенные преимущества
в практической реализации: он легко алгоритмизируется и дает
выигрыш при решении задач в управляющих ЭВМ.
Основные соотношения кинематики — преобразования базисов
и компонент вектора при вращении изложены в [15] и Приложе-
нии 2.
Пусть переход от базиса I к связанному базису Е осуществля-
ется операцией вращения кватернионом А (П2.4); в этом случае
гиперкомплексные отображения вектора г на базисы I и Е свя-
заны соотношением (П2.7) {равенство перепроектирования)
Re = A°Ri°A. (1.1)
Соотношения (П2.4), (П2.7) заданы в кватернионной оператор-
ной форме; последняя является одновременно и системой ска-
лярных соотношений, получаемых приравниванием членов при
гиперкомплексных единицах.
§ 1.1. КИНЕМАТИЧЕСКИЕ СООТНОШЕНИЯ
15
Входящие в кинематические соотношения кватернионы полу-
чаются, как правило, путем численного решения кинематических
уравнений первой или второй формы (П3.16), (П3.18). Особое
значение имеет реализация решения кинематического уравнения
в случае БИНС; при этом блок измерителей угловой скорости,
установленный в связанном базисе, измеряет три проекции угло-
вой скорости на связанный базис (coie, о)2е, (Озе). Очевидно, что
в этом случае уравнениями, подлежащими реализации, являются
уравнения (П3.18). Эти уравнения в скалярной форме имеют вид
2Хо = —Х1 (01Е — Лг2<В2е — ХзСОзв, 2^2 == Х0КО2.Е 4“ X3G) 1Е — Х1<ОЗе,
(1-2)
2X1 = Xq(Die 4“ ХзСОзе — Хз<О2е, 2Хз == Х$О)з.е + Х10)2е — X2Q) 1е«
При решении навигационных задач и задач управления воз-
никает необходимость вычислять взаимное положение ряда коор-
динатных систем. Кватернионы, определяющие переходы между
этими базисами, могут быть получены либо путем решения кине-
матических уравнений, либо путем решения конечных соотноше-
ний и вычисления некоторых функциональных зависимостей.
Вид этих зависимостей определяется конечными формулами, за-
дающими движение; в случае задания угловой скорости возникает
необходимость решать кинематическое уравнение. При этом мо-
жет потребоваться решение уравнений как первой (П3.16), так
и второй формы (П3.18). В скалярной форме уравнения (П3.16)
имеют вид:
2Хо = — X рои — Х2Ю21 — ХзО)31, 2X2 — Хоо>214" Xi соз/ — Хзсоц,
(1.3)
2X1 = XqO)1i +Хзй)21 “ Хз'О)Зт, 2Хз — ХфСОЗ! 4" Х2й)1/—• X1C02I-
Рассмотрим далее соотношения Эйлера, связывающие произ-
водные вектора в различных координатных системах. Пусть зада-
ны отображения вектора г на базисы I и Е, связанные равенством
перепроектирования (1.1). Продифференцируем формально это
равенство, используя соотношения кинематических уравнений
(П3.18). Имеем
Rjj Л ° Rj°A А ° В/ ° А -р А ° В/ ° А — (В_^ х Н- А ° Bj ° А.
(1.4)
Аналогичным образом, дифференцируя обратное равенство и ис-
пользуя кинематическое уравнение (П3.16), получаем
El = А ° НЕ ° А А ° ВЕ ° А 4" А ° ВЕ ° А = (соj х Bj) -f- А°В^ ° А.
(1.5)
16
ГЛ. 1. ОБЩИЕ УРАВНЕНИЯ ИНС
Можно проверить, что формулы (1.4) и (1.5) тождественно пере-
ходят друг в друга при взаимной подстановке.
Соотношения (1.4) и (1.5) получены вполне строго; при их
выводе не делалось никаких предположений относительно абсо-
лютного движения базисов I и Е точно так же, как и вектора г.
Отсюда следует, что соотношения (1.4), (1.5) справедливы для
отображений на любые, в том числе и подвижные, базисы.
Представленные здесь кинематические соотношения, исполь-
зующие формализм кватернионов, будут далее применены для
всех исследований, включая вывод уравнений ИНС и их ошибок.
Нам представляется, что этот формализм имеет ряд преимуществ.
Во-первых, все соотношения кинематики представимы в оператор-
ной форме, что упрощает преобразования и сводит их к ал-
гебраическим операциям над скалярными величинами. Иллюстра-
цией этого положения может служить вывод соотношений Эйлера.
Во-вторых, операторы преобразований легко сопоставимы с век-
торными физическими величинами (вектором поворота, вектором
угловой скорости и т. п.), что делает наглядными все получаемые
зависимости. В-третьих, при алгоритмизации любой физической
задачи и ее численном решении (например, с помощью ЭВМ)
важно осуществить переход к скалярным величинам и соотноше-
ниям. В этом смысле кватернионные равенства уже являются ал-
горитмическими соотношениями, пригодными для численного ре-
шения. Наконец, такой подход позволяет вполне строго и просто
получить все основные уравнения ИНС и провести их иссле-
дование.
§ 1.2. Уравнения ИНС в инерциальных осях
Инерциальная навигационная система «моделирует» (воспро-
изводит) уравнения движения (В.1); при этом векторному ра-
венству в ИНС должны соответствовать скалярные соотношения.
Спроектируем указанное равенство на оси инерциальной системы
координат 7; имеем в этом случае три скалярных уравнения:
f'hi — Ski +* Phii й = 1, 2, 3. (1*6)
Эти равенства могут быть представлены в виде соотношения для
кватернионов
Rz = Gz + Pz, \1.7)
где
Rz = ni + r2ij + r3zk, Gz = gizi + grzj + g3/k, Pz = Рц1 + + РзЛ
— кватернионы-отображения векторов г, g и p на базис I. Равен-
ство (1.7) получается из (В.1) естественным путем при совмеще-
нии гиперкомплексного базиса с базисом I. Скалярные уравнения
§ 1.2. УРАВНЕНИЯ ИНС В ИНЕРЦИАЛЬНЫХ ОСЯХ
17
(1.6) или (1.7) могут быть проинтегрированы (например, с по-
мощью вычислительного устройства); при первом интегрировании
имеем:
t t
R2 = R? + J (G, + P,) dx, R, = R? + R?i + J J (G/ + P2) dx*. (1.8)
0 0
Используем понятие кажущейся скорости, под которой будем
понимать интеграл от кажущегося ускорения:
t
Wj = Jp2dT; W2 = P2. (1.9)
О
Кажущаяся скорость имеет физический смысл приращения ско-
рости, полученной за счет действия внешних негравитационных
сил (в частности, сил реактивного двигателя).
Введем далее понятие полной скорости объекта
v7 = ic == Wi + Ci, (i.io)
где С/ — скорость свободного движения:
t t
CI = R?+ J G2 dr = V? + jG/dr; C2 = G2. (1.11)
0 0
С учетом этого соотношение второго интегрирования запишется
в виде
t t
RI = R« + J(CI + WI)dT=R? + JVjdr. (1.12)
О о
В полученных соотношениях первичная информация о кажу-
щемся ускорении должна существовать в виде трех величин PhI.
k = 1, 2, 3,— проекций вектора кажущегося ускорения на инер-
циальные оси. Очевидно, что выполнение такой схемы интегри-
рования возможно, если измерительный трехгранник датчиков
кажущегося ускорения (акселерометров) находится в инерциаль-
ном базисе I. Реализация такой схемы интегрирования осущест-
вима в платформенной системе навигации, при этом оси плат-
формы, несущей измерители кажущегося ускорения, во время
движения должны ориентироваться неизменно относительно выб-
ранных осей инерциальной системы координат.
Скорость (1.10) и положение (1.12) будут навигационными
параметрами; параметры ориентации в системе такого рода су-
ществуют в виде углов отклонения связанной с объектом системы
координат от осей инерциальной платформы (углов карданова
подвеса).
В случае БИНС измерительный трехгранник акселерометров
совпадает со связанной с объектом системой координат. Пусть
2 В. Н. Бранец, И. П. Шмыглевский
18
ГЛ. 1. ОБЩИЕ УРАВНЕНИЯ ИНС
JE — такой связанный базис и пусть взаимное положение базисов
I и Е определяется кватернионом Л. Значение кватерниона в лю-
бой момент времени может быть получено, если известна пер-
вичная информация об абсолютной угловой скорости вращения
базиса Е и начальная информация о взаимном положении бази-
сов I и Е. Пусть измерительный трехгранник датчиков угловых
скоростей совпадает с базисом Е\ в этом случае первичная инфор-
мация может быть получена в виде трех сигналов соце, Ы2е, ызе,
образующих кватернион <оЕ. Значение кватерниона Л(£) получа-
ется путем интегрирования следующих кинематических уравнений
(уравнения 2-го типа (ПЗД8), Приложение 3):
2Л = Л°(0е при A(fo) = Ao.
Интегрирование этих уравнений (т. е. четырех скалярных урав-
нений (1.2)) выполнимо в вычислительном устройстве (вопросы
численного интегрирования кинематических уравнений будут
рассмотрены далее).
Первичная информация о кажущемся ускорении, получаемая
от датчиков кажущегося ускорения ДКУ, установленных жестко
в осях базиса Е, будет существовать в виде трех сигналов: Р\Е,
Ръе, Рзе, образующих кватернион РЕ. Величина кватерниона
может быть вычислена по кватернионам Л и Р£ в соответствии
с соотношениями типа (1.2):
Рг^АоРкоА. (1.13)
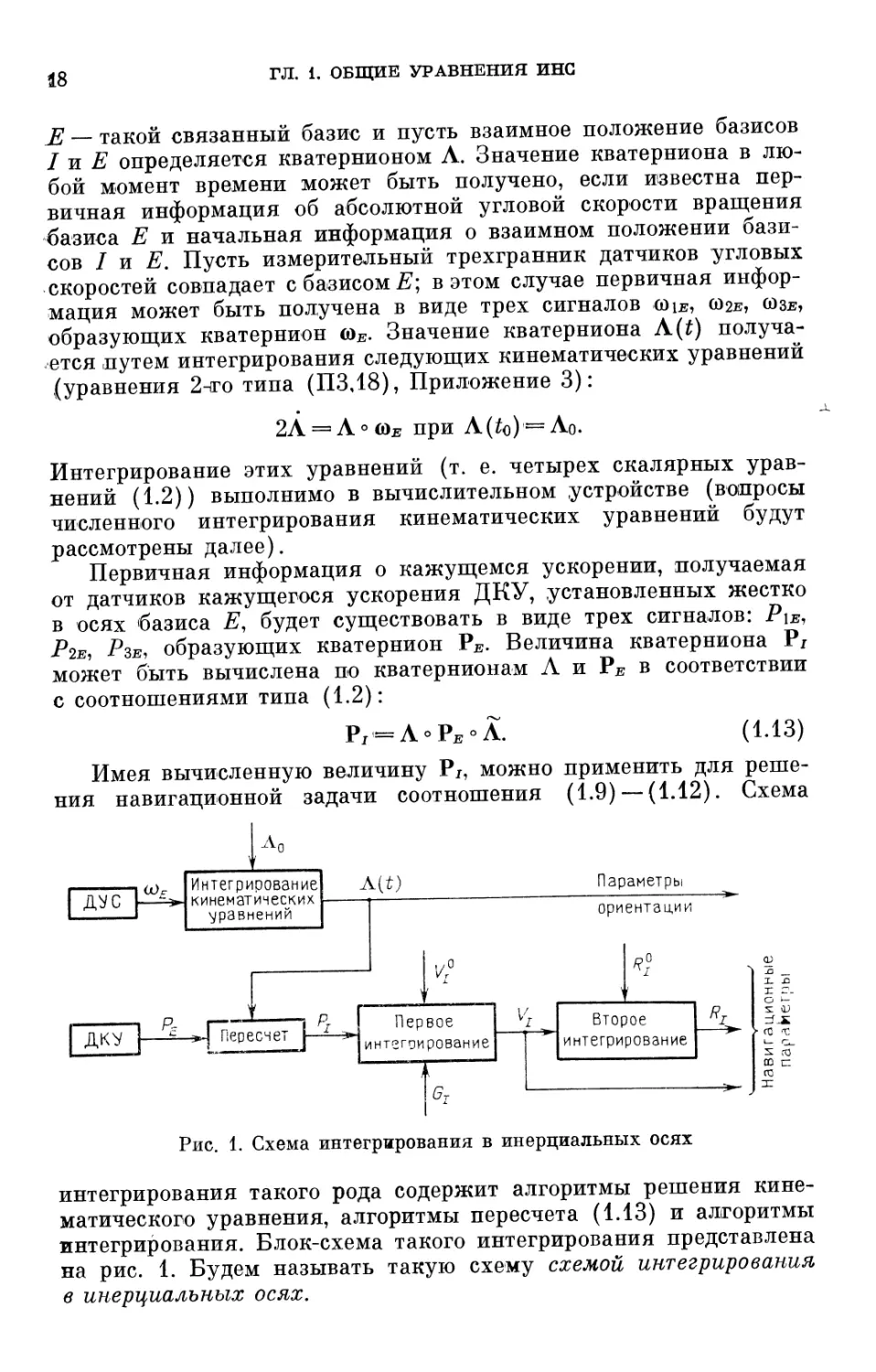
Имея вычисленную величину Pj, можно применить для реше-
ния навигационной задачи соотношения (1.9) — (1.12). Схема
Рис. 1. Схема интегрирования в инерциальных осях
интегрирования такого рода содержит алгоритмы решения кине-
матического уравнения, алгоритмы пересчета (1.13) и алгоритмы
интегрирования. Блок-схема такого интегрирования представлена
на рис. 1. Будем называть такую схему схемой интегрирования
в инерциальных осях.
§ 1.3. УРАВНЕНИЯ ИНС В СВЯЗАННЫХ ОСЯХ
19*
Полученные в результате решения параметры ориентации оп-
ределяют положение навигационной системы координат I отно-
сительно базиса Е. Для случая БИНС этот базис является един-
ственно реально существующим; вектор положения и скорости
определяется в расчетном базисе I.
§ 1.3. Уравнения ИНС в связанных осях
Исходные векторные уравнения инерциальной навигации
(В.1) можно записать в проекциях не только на базис 7, но и на
любой другой базис, в частности на базис Е. Для такой операции
проектирования будем исходить из уравнений навигации в ква-
тернионном виде (1.7) и, полагая, что переход от базиса I к Е
задается кватернионом Л, получим следующие соотношения для
отображений векторных величин:
Rje = Л ° Rj ° Л, Gje = Л ° G/ ° Л, Pjs = Л ° Р/ ° Л.
Аналогично этому можно получить соотношения для отобра-
жений векторов кажущейся скорости, скорости свободного дви-
жения и полной скорости:
W^AoWjoA, Сб = ДоС1оД, V^^AoVjoA. (1.14)
Дифференцируя формально соотношение для вектора полной ско-
рости Vje, получим в силу кинематических уравнений соотноше-
ние Эйлера (см. (1.4)):
Vb'-=A° Vi°A + V£X(de.
Согласно исходным уравнениям навигации (1.7) и (1.10) под-
ставим значение производной Vi в полученное равенство:
V£'=Ao(Gi + Pi)oA + V^X(d£ = G£ + Pe + VeX(d£. (1.15)
Данное соотношение определяет алгоритм первого интегрирова-
ния в связанных осях; его можно представить в интегральной
форме
t
. V£ = V°e + J[GE + Ps + (V£x®£)]dT. (1.16)
О
Алгоритм второго интегрирования, определяющий положение объ-
екта, находится подобным же образом. Дифференцируя (1.1),
получим
Re = (ReX(0£) +До VjoA = (Rex^) + Ve.
2*
20
ГЛ. 1. ОБЩИЕ УРАВНЕНИЯ ИНС
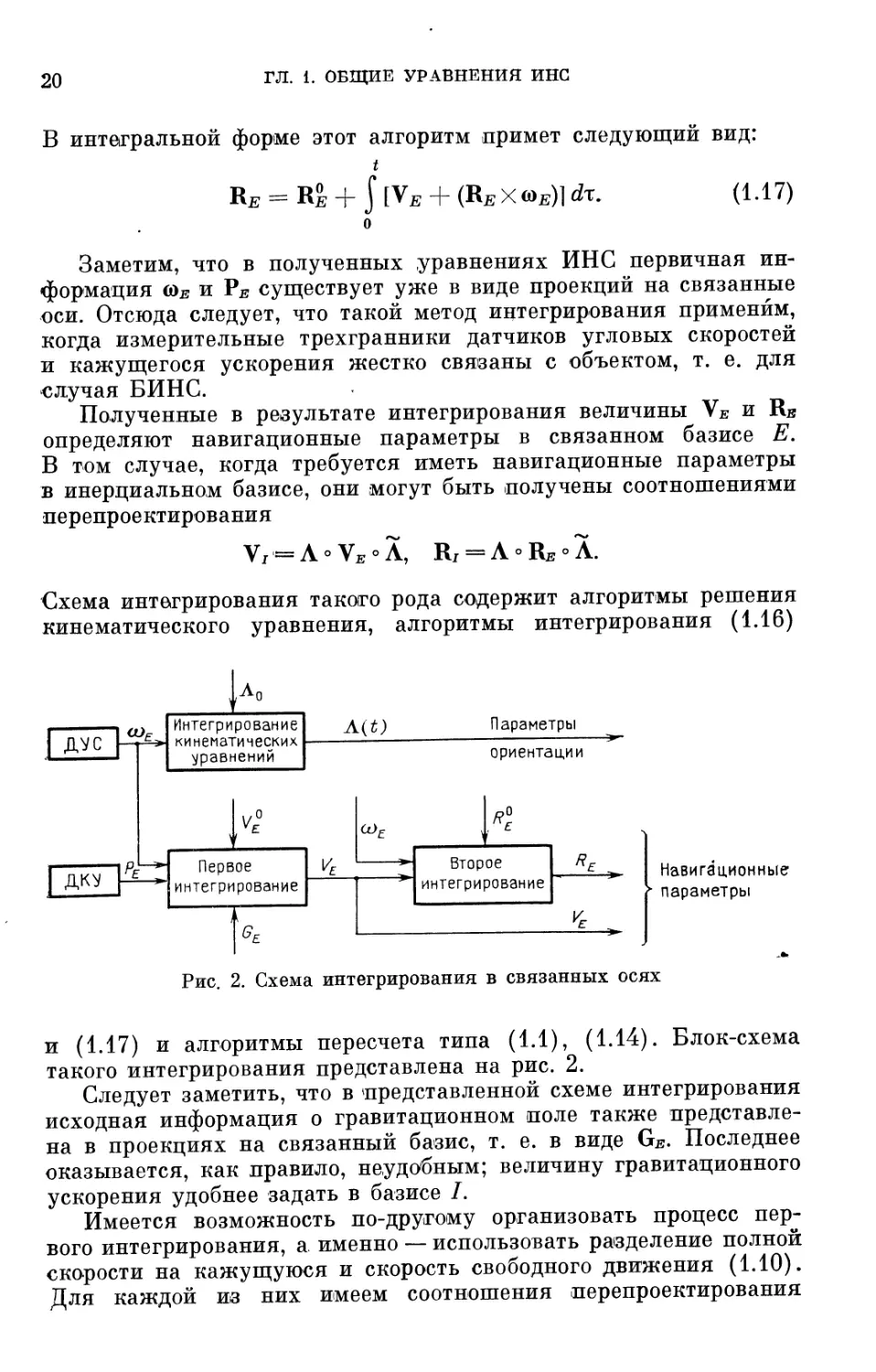
В интегральной форме этот алгоритм примет следующий вид:
t
R# = R# 4" J [V# + (Re X <0я)] йт. (1-17)
о
Заметим, что в полученных уравнениях ИНС первичная ин-
формация (дЕ и Ре существует уже в виде проекций на связанные
оси. Отсюда следует, что такой метод интегрирования применим,
когда измерительные трехгранники датчиков угловых скоростей
и кажущегося ускорения жестко связаны с объектом, т. е. для
случая БИНС.
Полученные в результате интегрирования величины VE и RB
определяют навигационные параметры в связанном базисе Е.
В том случае, когда требуется иметь навигационные параметры
в инерциальном базисе, они могут быть получены соотношениями
перепроектирования
Vi'=AoVeoA, R, = AoRb°A.
Схема интегрирования такого рода содержит алгоритмы решения
кинематического уравнения, алгоритмы интегрирования (1.16)
Навигационные
► параметры
Рис. 2. Схема интегрирования в связанных осях
и (1.17) и алгоритмы пересчета типа (1.1), (1.14). Блок-схема
такого интегрирования представлена на рис. 2.
Следует заметить, что в представленной схеме интегрирования
исходная информация о гравитационном поле также представле-
на в проекциях на связанный базис, т. е. в виде Ge. Последнее
оказывается, как правило, неудобным; величину гравитационного
ускорения удобнее задать в базисе I.
Имеется возможность по-другому организовать процесс пер-
вого интегрирования, а именно — использовать разделение полной
скорости на кажущуюся и скорость свободного движения (1.10).
Для каждой из них имеем соотношения перепроектирования
§ 1.3. УРАВНЕНИЯ ИНС В СВЯЗАННЫХ ОСЯХ
21
(1.14); дифференцируя первое из них, получим
WE = А о W, о Л + ( Wk X (9 Е) .
Учитывая равенство (1.9), определяющее значение кажущегося
ускорения Wf только величиной Ръ получим соотношение первого
интегрирования для кажущейся скорости в связанном базисе:
WE = Л ° Pj ° Л + (Wе X (&е) = + (WE X (в#),
1 (1.18)
WE = J |Pe + (WeX(9e)Nt.
о
Аналогичным образом для скорости свободного движения
имеем
Ce==AoCiOa + (CkXg)k),
и величина С/ определяется (1.11) только гравитационным уско-
рением:
Ск = Л° Gj ° А + (Ск X (Ок) = Gk (Ск X (Ок) •
В интегральной форме
t
СЕ = У°е + J [GB + (СЕХ®Е)] dr. (1.19)
О
Очевидно, что равенства (1.18) и (1.19) вместе эквивалентны
соотношению первого интегрирования (1.16). Однако тот факт,
что интегрирования кажущейся скорости и скорости свободного
движения могут быть выполнены раздельно, дает возможность
каждое интегрирование выполнить как в связанном, так и в
инерциальном базисе. В частности, вычисление скорости свобод-
ного движения можно выполнить согласно соотношениям не толь-
ко (1.19), но и (1.11); в последнем гравитационное ускорение
задано в инерциальном базисе.
Полная скорость может быть получена при использовании
любого алгоритма интегрирования, при этом суммирование ско-
ростей выполняется в одном базисе:
Ут = Wj + С/= Wj + А ° Ск ° А = А ° W£ ° А + Cj = А ° (WE + Ск) ° А,
V^ = Wk + Ck = Wk + A°CioA = AoWioA+Ck = Ao(Wi + Ci)oA.
Второе интегрирование, определяющее положение объекта, может
быть выполнено любым алгоритмом (1.12) или (1.17).
В случае БИНС базис Е — единственно физически определен-
ный базис; вся информация о навигационных параметрах полу-
22
ГЛ. 1. ОБЩИЕ УРАВНЕНИЯ ИНС
чается тем или иным путем относительно этой системы коорди-
нат. Отсюда следует, что векторы навигационных переменных
существуют в виде
V = V 1^1 + V2E^2 + V3e£3 '= VЕ,
г = riEei + г2Ев2 + гз^ез == Rb.
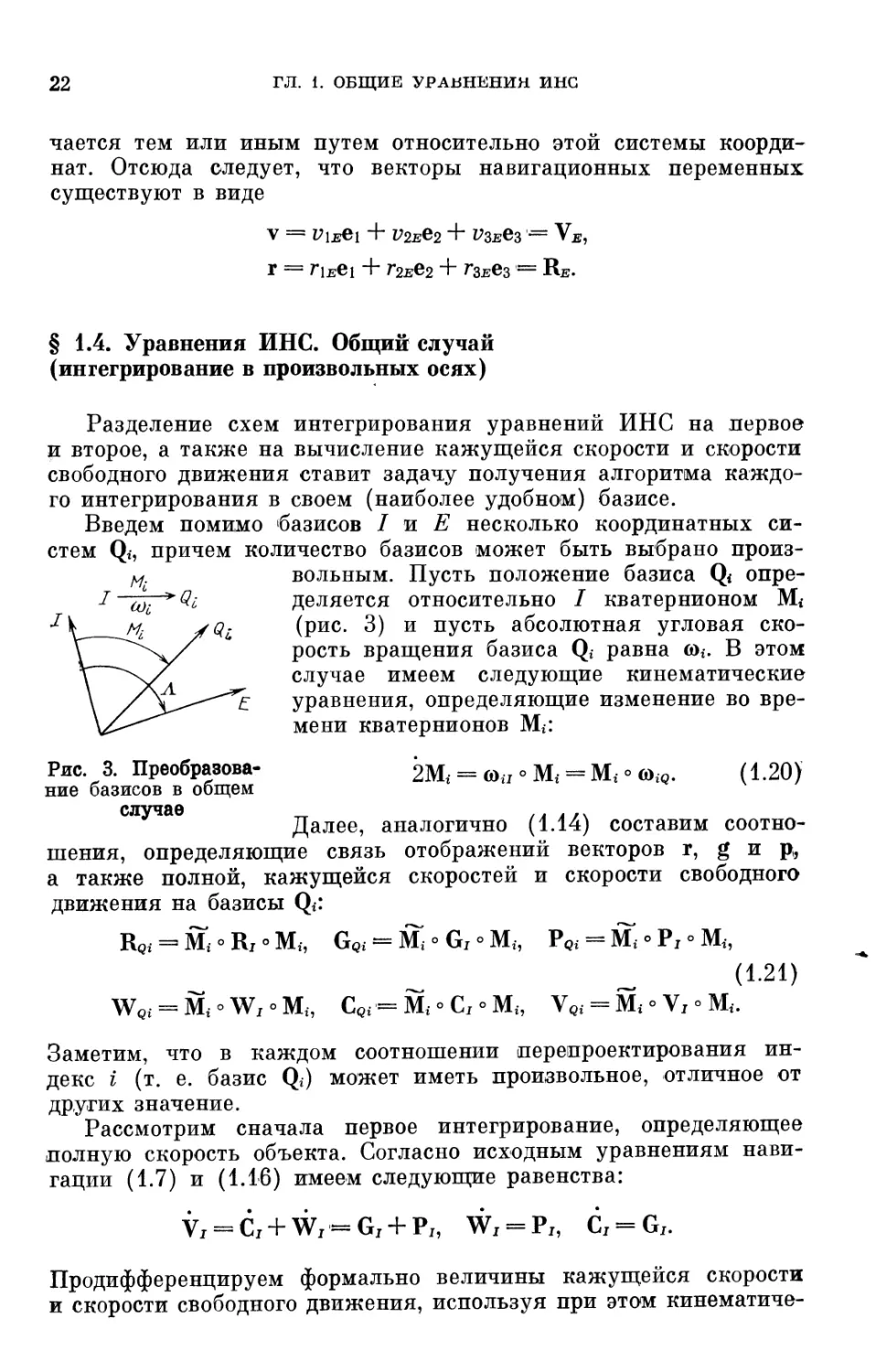
§ 1.4. Уравнения ИНС. Общий случай
(интегрирование в произвольных осях)
Рис. 3. Преобразова-
ние базисов в общем
случае
Разделение схем интегрирования уравнений ИНС на первое
и второе, а также на вычисление кажущейся скорости и скорости
свободного движения ставит задачу получения алгоритма каждо-
го интегрирования в своем (наиболее удобном) базисе.
Введем помимо базисов I и Е несколько координатных си-
стем Qi, причем количество базисов может быть выбрано произ-
вольным. Пусть положение базиса Q< опре-
деляется относительно I кватернионом Mi
(рис. 3) и пусть абсолютная угловая ско-
рость вращения базиса Qi равна <ог. В этом
случае имеем следующие кинематические
уравнения, определяющие изменение во вре-
мени кватернионов Мь
2Mi = (di, о Mi = Mi о (OiQ. (1.20)
Далее, аналогично (1.14) составим соотно-
шения, определяющие связь отображений векторов г, g и р,
а также полной, кажущейся скоростей и скорости свободного
движения на базисы Qt:
RQi = Мг ° Rj ° Mi, GQi - Mi ° Gi ° Mi, PQi = Mi о P, о Mi,
0-21)
CQi = Mf о C, ° Mf, Vei = Mi«VI«Mi.
Заметим, что в каждом соотношении перепроектирования ин-
декс i (т. е. базис Qi) может иметь произвольное, отличное от
других значение.
Рассмотрим сначала первое интегрирование, определяющее
полную скорость объекта. Согласно исходным уравнениям нави-
гации (1.7) и (1.16) имеем следующие равенства:
V^Cz + Wr-Gz + P,, Wj^Pz, С, = Gj.
Продифференцируем формально величины кажущейся скорости
и скорости свободного движения, используя при этом кинематиче-
§ 1.4. УРАВНЕНИЯ ИНС. ОБЩИЙ СЛУЧАЙ
23
ские уравнения (1.20):
Cqi = Mi ° Cj ° Mi 4“ (Cqi X (O2q) *= Gqi 4" (Cqi X (O^q) ,
• (1.22)
WQJ = Mj о p, о M; 4- (WQj X (0№) =3 PQJ 4- (WQJ X ajQ).
Данные соотношения являются соотношениями Эйлера типа
(1.4), (1.5); в этих равенствах появились отображения векторов
g и р на базисы Qi и Qj соответственно. Первое интегрирование
может быть выполнено, исходя из полученных равенств, порознь
для двух составляющих полной скорости движения:
t
Cqi — Vqi + J [Gq£ + (Gqi X ©iq)] dr, (1-23)
о
t
WQj = J + (WQj X °Ъо)1 dx- (1 -24)
0
Эти формулы следует дополнить соотношением, определяющим
полную скорость, скажем, в любом третьем базисе Qft:
^Qk — ° Vj ° MQft —
= MQft ° MQi о CQi ° MQi ° 4- MQft ° MQJ ° WQj о MQj ° MQA. (1.25)
Можно убедиться, что формулы интегрирования (1.23)
и (1.24) совпадают с полученными выше соотношениями инте-
грирования (1.9) — (1.11) в инерциальных осях, если базисы Qi
совместить с Z, или же — с соотношениями (1.16) интегрирова-
ния в связанном базисе, если Qt совместить с Е. Разделение ба-
зисов при интегрировании скорости свободного движения и кажу-
щейся скорости имеет смысл, если исходная информация о гра-
витационном ускорении имеет простое выражение в одной системе
координат (например, геоцентрической), а кажущееся ускорение
измеряется в другом базисе (например, связанном, как это имеет
место в БИНС). В случае БИНС первичная информация суще-
ствует либо в виде Ре, либо, если трехгранник ДКУ развернут
относительно связанной системы,— в виде PQl. В любом случае
эта информация может быть пересчитана к базису Q;:
Pqj := Mqj о Pj ° Mqj = ° A ° Pe ° A ° Mqj = Mqj ° MQi ° PQ; ° MQi ° MqJ.
Обратимся далее к выводу соотношений второго интегрирова-
ния, определяющих положение объекта в некотором базисе, ска-
жем, Qft. Имеем
Rqa = Mfe ° Hi ° Mft,
_ . (1.2b)
R.Qk = Mfe ° Rj ° Мь 4~ (R^ X (o^q) — \qk 4“ (Rq& X (Щ#).
24
ГЛ. 1. ОБЩИЕ УРАВНЕНИЯ ИНС
Данный алгоритм можно записать в интегральной форме:
t
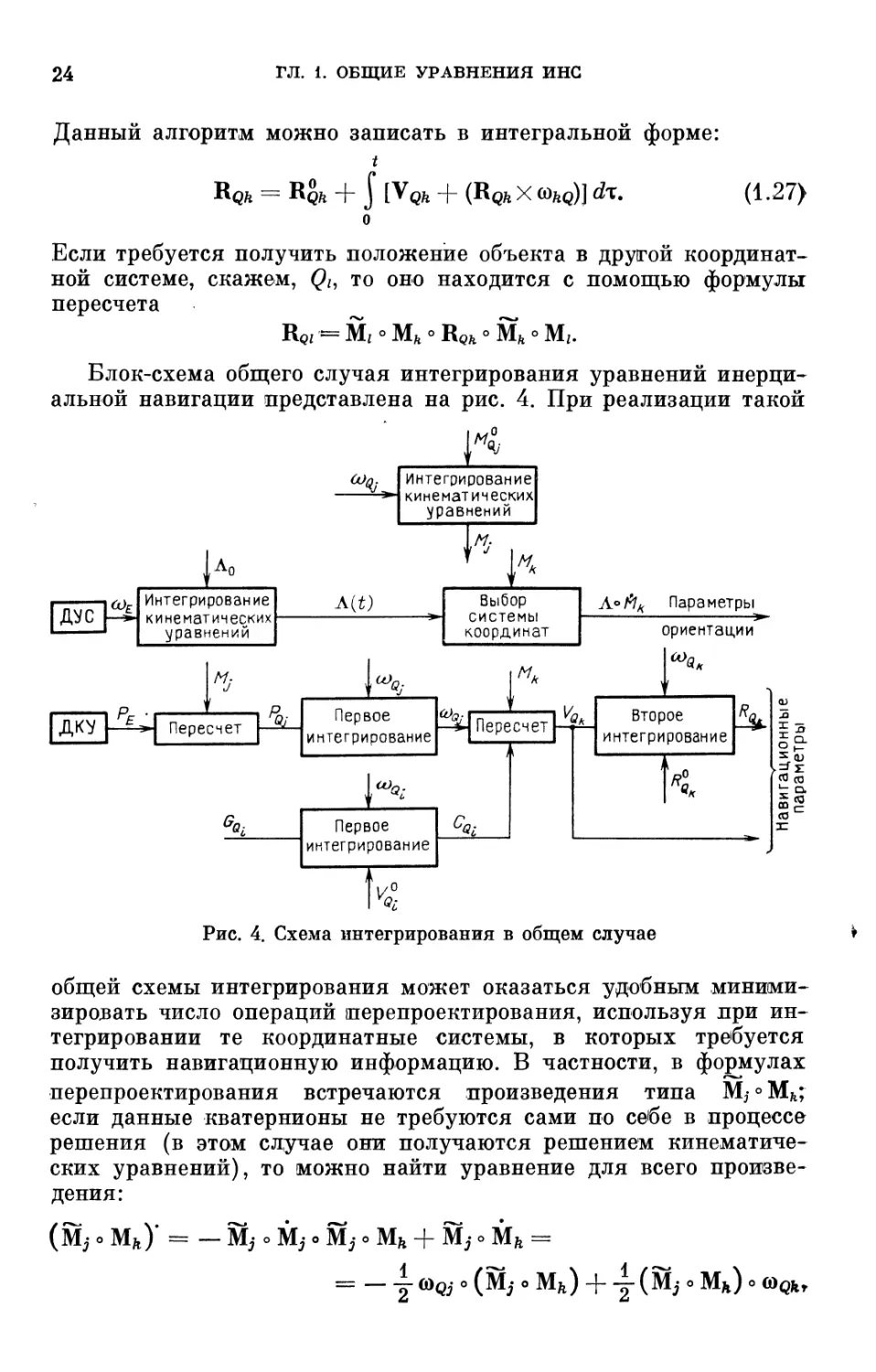
Крь = + J [V(?fe + (R(?feX co&q)] d%. (1.27)
о
Если требуется получить положение объекта в другой координат-
ной системе, скажем, Qh то оно находится с помощью формулы
пересчета
RQz Mz ° ° RQfe ° ° Mz.
Блок-схема общего случая интегрирования уравнений инерци-
альной навигации представлена на рис. 4. При реализации такой
Рис. 4. Схема интегрирования в общем случае
общей схемы интегрирования может оказаться удобным миними-
зировать число операций перепроектирования, используя при ин-
тегрировании те координатные системы, в которых требуется
получить навигационную информацию. В частности, в формулах
перепроектирования встречаются произведения типа Mj ° Mfe;
если данные кватернионы не требуются сами по себе в процессе
решения (в этом случае они получаются решением кинематиче-
ских уравнений), то можно найти уравнение для всего произве-
дения:
(м; ° Mft)‘ = — Mj о м5 о о Mh + М,- о мй =
= — у ° (М; О Mft) + у (М; о МЛ) О d)QkT
§ 1.5. ОБОБЩЕННЫЕ УРАВНЕНИЯ ИНС
25
которое является кинематическим уравнением для относительно-
го движения, и вместо двух может быть проинтегрировано одно
кинематическое уравнение.
Полученные в результате решения навигационных алгорит-
мов величины VQA и RQZ определяют полную скорость и положе-
ние в системах координат Qft и Qz соответственно.
Положение базисов и Qz в случае БИНС находится расчет-
ным путем относительно физически существующего трехгран-
ника Е:
Qfe = Mft ° I ° Mft = ° A ° E ° A ° Mft,
Qz = MzoAo£'oAo Mz.
Исходя из этого получим следующие выражения для векторов
положения и скорости:
Г = rqiqzi + Гд2ф2 + Гдзфз = М; ° А ° RQZ ° А° Mz = Re = гЕ,
v= Vgi<bi + VQ3qft3 = Mfeo A ° VQh° A°Mft = VE = vE
— равенства, аналогичные полученным в § 1.3. Отсюда следует,
что, по существу, навигационные параметры независимо от ме-
тода интегрирования определяются в измерительном базисе, зада-
ваемом инерциальными датчиками кажущегося ускорения.
§ 1.5. Обобщенные уравнения ИНС
Анализ уравнений инерциальной навигации показывает, что
решение задачи ИНС сводится в общем случае к решению только
двух типов уравнений. Первым типом уравнений ИНС являются
кинематические уравнения, определяющие текущее взаимное по-
ложение тех или иных систем координат. Такое уравнение повто-
ряется столько раз, сколько координатных базисов привлекается
при решении навигационной задачи. Для задания обобщенного
уравнения такого типа будем считать, что заданы два базиса:
инерциальный I и связанный Е; их относительное движение оп-
ределяется угловой скоростью (о. Кинематическое уравнение,
определяющее кватернион их текущего взаимного положения,
будет иметь вид (см. (П3.16), (П3.18) Приложения 3)
2А is= А ° (о£ = (О/ ° А. (1.28)
Вторым типом уравнения являются уравнения, связывающие
скорость и ускорение или положение и скорость. Анализ этой
группы уравнений показывает, что в общем виде они сводятся
к двум следующим формам:
— в проекциях на инерциальный базис:
Zz = A,; (1.29)
26
ГЛ. 1. ОБЩИЕ УРАВНЕНИЯ ИНС
— в проекциях на движущийся (вращающийся) базис:
Z£ + (®EXZf)i=A£, (1.30>
где Z — некая обобщенная величина, которую можно считать ско-
ростью или положением, А — обобщенная величина ускорения
или скорости соответственно. По сути дела, уравнения (1.29)
и (1.30) являются кватернионным выражением векторного равен-
ства z = а, спроектированного на базисы I и Е.
Указанные две грдуппы уравнений будем называть обобщен-
ными уравнениями ИНС; их введение позволяет в общем виде*
провести исследование навигационных уравнений и точности их.
реализации (решения).
В данной главе помимо дифференциальной формы уравнений:
ИНС записывалась и интегральная их форма; для уравнения ти-
па (1.29) она имеет вид
t
Zj = Zoj +jAjdr, (1.31).
О
а для уравнения типа (1.30)
t '
Z# = Z# + f [As + (ZEx <оЕ)] йт. (1.32)'
о
Представление (1.31) является действительно решением уравне-
ния (1.29), если величина А/йт существует и может быть полу-
о
чена. Выражение (1.32) является формальным, и решение диф-
ференциального уравнения (1.30), строго говоря, следует пред-
ставить в другой форме.
Действительно, уравнение (1.30) является неоднородным;
однородное уравнение имеет решение ЪЕ = А ° С ° А, С — const,
в чем можно убедиться прямой подстановкой. Применяя метод;
вариации постоянной, получим решение неоднородного уравнения
(1.30) в виде
Zjp — А
J А (т) о АЕ о
_0
А (т) dx
A-f-Z^
(1.33)
В справедливости полученного решения также нетрудно убедить-
ся прямой подстановкой, или же используя то соображение, что*
оба уравнения (1.29) и (1.30) описывают одно и то же движение,
и, следовательно, должны выполняться соотношения
Zj = А ° ° А, А/ = А ° Ajj ° A, ZJ = Ао ° Zg ° Aq.
§1.6. ИССЛЕДОВАНИЕ ЗАДАЧ ДВИЖЕНИЯ
27
Тем не менее «нестрогая» интегральная форма (1.32) также
имеет «право на существование», так как, по сути дела, это со-
отношение есть численный алгоритм интегрирования, т. е. алго-
ритм решения уравнения (1.30).
§ 1.6. Исследование некоторых задач движения.
Нетрадиционные параметры
Как указывалось ранее, интегрирование уравнений ИНС удоб-
но проводить в тех или иных координатных базисах Qi, выбор ко-
торых обусловлен целым рядом соображений. Во-первых, вид
первичной информации, обусловленный расположением датчиков
кажущегося ускорения и угловой скорости, требует соответству-
ющего вида уравнений, как это имеет место в случае БИНС. Во-
вторых, в ряде случаев исходная информация может «удобно»
задаваться в соответствующим образом выбранном базисе.
В-третьих, выбором координатной системы можно ввести нетра-
диционные, но более удобные навигационные переменные.
Рассмотрим несколько примеров решения навигационной за-
дачи, иллюстрирующих данное положение.
1°. В ряде случаев в качестве промежуточной системы коор-
динат Qi для второго интегрирования, определяющего положение
объекта г, удобно использовать систему, одна из осей которой
направлена по вектору г. В этом случае положение объекта будет
в этой системе координат определяться одной скалярной величи-
ной расстояния г и положением базиса Q. Пусть базис Q выбран
таким образом, что его вторая ось направлена по г; в этом слу-
чае отображение г на этот базис будет равно Rq == <0, г, 0> = rj.
Уравнения второго интегрирования (1.26) в этом случае сведутся
к следующим:
Rq = Vq+(RqX«q), (1.34)
или в скалярном виде
KQ1=—rcoQ3, KQ3 = raQi, r = (1.35)
Из этих соотношений первые два являются конечными равен-
ствами, определяющими угловую скорость базиса Q по величинам
проекций полной скорости движения, а третье уравнение явля-
ется соотношением, определяющим расстояние. Очевидно, что
третье уравнение определяет одну степень свободы; две другие
будут определяться при интегрировании кинематических урав-
нений
2M=M°®q, (1.36)
в которых угловая скорость (oQ задана двумя ее проекциями из
(1.35). Третья компонента угловой скорости может быть задана
28
ГЛ. 1. ОБЩИЕ УРАВНЕНИЯ ИНС
из дополнительных условий; в частности, если положить g)Q2 =
то получим свободную в азимуте систему координат Qo.
Описанный алгоритм интегрирования, по сути, приводит урав-
нение (1.34) к уравнениям (1.35) и (1.36), т. е. к другим пере-
менным.
Аналогичным образом при первом интегрировании, определя-
ющем скорость движения объекта, можно ввести так называемую»
скоростную систему координат, одна из осей которой направлена
по полной скорости движения объекта. В этом случае традици-
онные уравнения типа (1.23), (1.24) перейдут в скалярное урав-
нение для модуля скорости и в кинематическое уравнение, опре-
деляющее положение скоростного базиса.
2°. Большое место в теории ИНС имеет исследование движе-
ния в центральном поле сил. К этому случаю сводится задача
навигации кораблей, самолетов, космических аппаратов. Само-
стоятельное значение при этом имеет исследование свободного-
движения, определяемого, по сути, только исходной информацией
(гравитационным полем).
Уравнениями движения в этом случае будут (В.1)«, в которых
р = 0; для их исследования также удобно использовать промежу-
точную систему координат Q, введенную выше. Действительно,,
вектор гравитационного ускорения имеет вид g = — pir/r3 (если
только не учитывать отличия гравитационного поля от централь-
ного, вызванные несферичностью Земли).
Отображение гравитационного ускорения на систему коорди-
нат Q (для этой системы вторая ось направлена по г) будет
иметь вид
r2’0/- г2 ь (1-37)
В случае свободного движения полная скорость совпадает с вве-
денной выше скоростью свободного движения; уравнениями дви-
жения будут уравнения (1.22) и (1.26), т. е.
VQ = Gq-Ь VQ X (dQ, (1.38)
и параметры RQ будут определяться уравнением (1.36). Уравне-
ние (1.38) в скалярном виде для базиса Q, свободного в азимуте,,
будет иметь вид:
• • • ц ,
yQl = pQ2a)Q3, VQ3 = — VQ2 ----2 I VQ3^Q1 — VQ1^Q3-
r
(1.39)
Уравнения (1.39), (1.35) и (1.36) образуют группу навигацион-
ных уравнений^ описывающих движение центра масс объекта к
центральном поле сил.
§ 1.6. ИССЛЕДОВАНИЕ ЗАДАЧ ДВИЖЕНИЯ
29*
Уравнения (1.39) имеют интеграл энергии; для его получения
умножим скалярные равенства на vQi и сложим почленно:
VQ1VQ1 + VQ2Vq2 + Vq3Vq3 = — PQ2 = у (v2).
Используя значение vQ2 в соответствии с (1.35), имеем
т. е.
у v2----- = h = const. (1.40^
Подставим далее в первые два уравнения системы (1.39) вели-
чины coqi и o)q2 согласно (1.35); получим
* vQ1vQ2 vQir • VQ3VQ2 vQ3r
^Q1 -------— =--------^Q3 “----------— --------
Разделяя переменные в полученных уравнениях и интегрируя,
имеем
Vq\T = Cl = —r2(OQ3, VQ3T = Сз = r2(OQl, (1.41)
где ci и сз — постоянные.
Равенства (1.41) являются соотношениями интеграла площа-
дей; они указывают на то, что движение происходит в одной
плоскости. Действительно, величина угловой скорости
= co1Qi + co3Qk = —
7*
постоянна по направлению. В этом случае кинематическое урав-
нение (1.36) имеет решение
t
0 = ft>Q; 0 = 0О + J O)Q dr, М = е’Ч (1.42)
о
Выбором ориентации базиса Q в азимуте можно расположить
вектор угловой скорости (OQ по одной оси, скажем, третьей. В этом
случае получим такое расположение осей базиса Q: первая и вто-
рая его оси лежат в плоскости орбиты, причем вторая направле-
на от центра Земли, первая — по направлению движения; третья
ось нормальна к плоскости орбиты и противоположна вектору
угловой скорости вращения базиса 9. Система координат, опреде-
ленная таким образом, называется орбитальной системой коорди-
нат (ОСК); она играет большую роль в задачах управления дви-
жением космических аппаратов на околоземеных (околопланет-
ных) орбитах.
30
ГЛ. 1. ОБЩИЕ УРАВНЕНИЯ ИНС
В орбитальной системе координат вектор угловой скорости
имеет вид
— coQk = —~к.
Для угла орбитального движения 0 (1.42) из уравнения (1.41)
получим следующее уравнение:
____ с
dt ~ 2-
Постоянные h и с, так же как и Мо, находятся по Начальным
условиям движения и в общем виде задают положение ОСК отно-
сительно инерциальной звездной системы координат (например,
геоцентрической экваториальной системы координат).
Можно выразить навигационные переменные (в данном слу-
чае М, г, vQi, vQ2) в функции времени, т. е. найти аналитические
решения рассматриваемого случая движения. Такими решениями
окажутся известные траектории движения в центральном поле
сил. Тем не менее переменные М, г, vQ\ и z?Q2 являются удобными
в задачах управления как для случая свободного движения
(когда имеется аналитическое решение), так и для произволь-
ного случая движения.
3°. Следуя работе [12], рассмотрим более подробно задачу
описания орбитального движения, скажем, искусственного спут-
ника Земли. Введем геоцентрическую инерциальную экватори-
альную систему координат Ту, орт ii которой направлен в точку
весеннего равноденствия У, орт is направлен к северному полюсу
вдоль оси вращения Земли, орт i2 дополняет систему до правой.
^Уравнениями движения спутника в этом базисе будут уравнения
вида (1.6) или (1.22), которые представим в векторном виде
£ = т>-г4г + р; (1-43)
для свободного движения можно полагать р вектором возмуща-
ющих ускорений. Эти же уравнения в отображениях на базис Ту
запишутся таким образом:
R/ = VZ, + (1.44)
Г
Разделим орбитальные параметры, описывающие движение
спутника, на две группы: внутренние, определяющие форму и
размер орбиты, а также положение спутника на орбите безотно-
сительно к выбранной системе координат, и внешние, определя-
ющие пространственную ориентацию орбиты в выбранной систе-
ме координат. В качестве внешних параметров выберем пара-
метры Родрига — Гамильтона, т. е. компоненты кватерниона
§ 1.6. ИССЛЕДОВАНИЕ ЗАДАЧ ДВИЖЕНИЯ 3f
М = (ро, pi, Ц2, Цз), определяющие положение орбитального ба-
зиса Q относительно базиса/у. Орты орбитальной системы коор-
динат определены выше и равны
qi = (q2xq3), q2= 7, Чз = |777р (1-45)
Матрица Нлг;11 (г, / = 1, 2, 3) ортогонального преобразования ба-
зиса Ту в базис Q, состоящая из направляющих косинусов ортов
qi, q2, qs в базисе Ту, выражается через компоненты кватерниона
М [10]:
Лц = 1 2 (ц2 + Рз)’ ^12 ~ 2 (Р1Р2 РоРз)’ Л13 = 2 (P'lP'S ИоРг)’"
^21 = 2 (Н1Н2 ~Н РоРз)’ *^22 “ 1 2 (pi 4“ Рз)> *^23 2 (р2Рз PoPi)*
л31 = 2 (Р1Рз Р0Р2)’ *^32 ~ (р2Рз ~Ь Р0Р1)’ ^33 “ 1 2 ( РгН- Hi)*
(1.46i>
Обратные формулы преобразования:
Но = У + яи + я22 + Лзз)1'2 - Hi = Я,3~4Т;~23’
Р2 = (Л13 — Л31) /4ро, Рз ==(л;21 — Л12) /4р0.
Изменение во времени кватерниона М описывается кинемати-
ческими уравнениями (1.36). Для невозмущенного кеплерова
движения имеем (см. (1.42)) соотношения
d0 | гх v | /Г7Ч
«q = q3 = <Мз = — L-^— (1 -47)
Для возмущенного движения спутника следует предположить,
что o)q=(coqi, coQ2, со<?з) . Связь компонент <oQ с вектором возму-
щающих ускорений р и его отображением PQ=(PQi, PQ2, Р<&)
определим, введя в рассмотрение производную от момента коли-
чества движения, приведенного к единице массы [14]:
Н = (г XV), Hz = (Rz X Vz), Hq = (Rq X VQ),
Н/ = (r,X v2) + (r,X vz) = Jr,x(- i Rz + = (RzxP2).
Перепроектируем это равенство в базис Q, используя соотноше-
ние Эйлера (1.4):
Hq = (HqXo)q) + MoHz°M=(HqX(oq) + (RqXPq). (1.48)
Учитывая, что RQ = rq2, Pq = A?iqi + A?2q2 + A?3q3 и HQ == — #q3,
равенство (1.48) сведем к скалярным соотношениям
<oQ1 = 0, coQ2 = -^PQ3, H = rPQ1. (1.49)
Изменение во времени внешних орбитальных параметров пол-
32
ГЛ. 1. ОБЩИЕ УРАВНЕНИЯ ИНС
иостыо определяется уравнениями (1.36) совместно с (1.47)
и (1.49).
В качестве трех внутренних орбитальных параметров удобно
принять переменные одной размерности:
v = V.=.-S. V,=g-r. (1.50)
где Vi и V2— проекции скорости спутника V соответственно на
орты qi и q2 базиса Q (т. е. VQi, Vq2), a VQ=(7iqi + 72q2). Изме-
нение V во времени согласно (52.1) описывается следующим
дифференциальным уравнением:
Основное уравнение динамики (1.44) спроектируем на орби-
тальный базис Q, используя обобщенные соотношения Эйлера
(1.4), (1.5):
М ° V/° М =(<oQ X Vq) +VQ,
т. е.
Vq + X Vq — Pq cdq3 — Rq. (1.52)
Переходя к скалярным соотношениям, получим
Vi = cdq372 + Ppi, = G)Q3(v - 70+ Pq2. (1.53)
Теперь выразим coq2 и coq3 через переменные 7, 7Ь 72, исходя из
(1.49), (1.50):
®Q2 = - ©Q3 = - = - JT VVl d -54)
Итак, имеем следующую систему уравнений: для внешних
параметров (1.36) при <oQ, определяемом (1.54); для внутренних
параметров (1.51) и (1.53). Положение и скорость спутника
равны соответственно Rq = rq2, VQ = 7iqi + 72q2 в базисе Q.
Естественно, в базисе 1у этими величинами будут Ri = M°Rq°
оМ, о V/ = MoVqoM.
4°. Окончательный вид уравнений движения определяется
формулами расчета возмущающих ускорений, т. е. принятой ма-
тематической моделью сил, под которой будем понимать формуль-
ные описания гравитационного поля Земли (ГПЗ), силы атмо-
сферного сопротивления, ускорения от двигательной установки.
§ 1.6. ИССЛЕДОВАНИЕ ЗАДАЧ ДВИЖЕНИЯ
33
Ограничимся моделью ГПЗ, известной как поле ЭПАС [50],
когда гравитационный потенциал Земли представляется в виде:
v = -t- 11 — Спо fe) Рпт (sin ф') +
I П—2
+ Р22 (sin ф') х [с22 cos 2% + s22 sin 2Л]|,
где 7?э — экваториальный радиус Земли, ф', л — широта и долгота
соответственно, Рпт — присоединенная функция Лежандра, ц, спо,
С22, 522 — постоянные коэффициенты. Значения констант и точ-
ность их знания приведены в [50]. Гравитационное ускорение
в базисе Q может быть определено как градиент У, спроектиро-
ванный при помощи матрицы IIjtJI из базиса 1у в базис Q. Опу-
ская аналитические выкладки, приведем формулы для расчета
проекций возмущающего ускорения ГПЗ в базисе Q:
Р Q1 ~ ^20*^31*^32 4“ ^30 (1 5^32) 4~ ^4о2ОЛз1Л32 (З 7л32) 4“
4“ ^12 [(^11*^12 ^21*^22) 4" (*^11*^21 4" ^12*^21) ^1’
PQ2 — ^20 (1 Зл 22 ) 4" ^30^32 ( ^Л32 3 )
4“ (З — ЗОл32 4“ 35л|2) 2~ ^22 [(*^12 ^22) L 4“ 2л12л227’];
Pq^ = ^20^32^33 “4 ^зо^^зз (1 5яз2) 4- ^4о2Ол33л32 (3 7л32) 4"
4“ ^22 [(*^13*^12 *^23*^22) L 4~ (*^12*^22 4" ^23*^12) 4^/],
где
k _ 3
^20 — ° ^4~~
n.
oil
1 ^30я|
ь ____________
^30 — 2 ^3
^22 = М^Э’
L = С22 cos 2s 4- S22 sin 2s,
T = C22 sin 2s + 522 cos 2s,
s — часовой угол [5, 73]. Отметим, что для вычисления элемен-
тов матрицы 11дг4 в соответствии с выражением (1.46) необходи-
мы 9 операций умножения и 21 операция сложения.
Возмущающее ускорение, вызываемое силами атмосферного
сопротивления, может быть определено по формуле
WQ = —5бр| AVq! avq,
где s6 — баллистический коэффициент [50], р — плотность атмо-
сферы, AVq — разность между скоростью спутника и скоростью
атмосферы на уровне центра масс спутника, определенная в
3 В. Н. Бранец, И. П. Шмыглевский
34
ГЛ. 1. ОБЩИЕ УРАВНЕНИЯ ИНС
предположении полного «захвата» атмосферы вращающейся Зем-
лей. Формула для расчета AVQ имеет вид
AVq = AFiqi + A V2q2 + A73q3 = Т^Лзз^ВД + V2j — Лз17?со3к,
где соз — величина угловой скорости суточного вращения Земли.
Плотность атмосферы определяется в соответствии с приняты-
ми моделями атмосферы. Высота над условным эллипсоидом оп-
ределяется по формуле
h — R___— ______
~ О + Ч-О172’
где Zcp ==(/?э/&)2 — 1, Ь = 6356,784 км. Плотность верхней атмо-
сферы на высоте h вычисляется как произведение различных
факторов [50], соответствующих тому или иному виду известных
вариаций .плотности, среди которых следует рассмотреть влия-
ние фактора, учитывающего суточный эффект:
к = f(h)cosm гр/2,
где f(h) — известная функция высоты h, гр— угол между векто-
ром г положения спутника и вектором направления на Солнце.
В базисе 1у единичный вектор направления на Солнце имеет
вид
ео = (^1, е2, e3) ==(cos 6 cosa'i + cos 6 sin a'j + sin 6k).
По определению (1.45) имеем
= q2 = М о j о М = л121 4- n22j 4- n32k
и, следовательно, угол гр определяется по формуле
з
cos гр —
г=1
Приведем окончательно систему дифференциальных уравне-
ний движения спутника, определяющих изменение во времени
орбитальных параметров 7, Т2, М:
V = — у- Pqh 2 + Pqsi ^2 — °Q3 У — ^i) + PQ2'
1 (1.55)
^Q3 . Л 1 T7T72'
^Q2 —----WQ3 ~ ~ kVi,
2цо — — <Bq2|L12 — (Oq3|13, 2pi = 0><эзЦ2 — ®Q2p3,
2p2 = (0Q2po — (ВдзНь 2рз ~ ЮдзЦо + а><г2Ц1 •
§ 2.1. О ПОГРЕШНОСТЯХ ИНС 35
ГЛАВА 2
УРАВНЕНИЯ ОШИБОК ИНС
§ 2.1. О погрешностях ИНС
Уравнениями инерциальных навигационных систем являются
исходные уравнения движения объекта в заданном поле сил.
В связи с этим не вызывает сомнения тот факт, что при иде-
альном соответствии уравнений, решаемых ИНС, реальным урав-
нениям движения ИНС будет точно определять движение объ-
екта. Это идеальное соответствие означает, во-первых, что инер-
циальные измерители первичной информации точно определяют
величины кажущегося ускорения и угловой скорости движения
объекта. Во-вторых, это означает также, что исходная инфор-
мация о гравитационном поле и исходные уравнения, интегриро-
вание которых выполняет ИНС, являются идеально точными,
т. е. правильно описывают движение. В-третьих, нужно считать,
что алгоритм интегрирования уравнений навигации выполняется
точно, т. е. нет ошибок численных методов решения задачи.
И, наконец, следует положить, что начальная информация, оп-
ределяющая движение, также задана точно.
Несомненно, что в любой реальной системе такое соответ-
ствие выполняется лишь приближенно; по этой причине весьма
важное значение имеет рассмотрение ошибок (погрешностей)
ИНС. Следуя проведенному выше делению, будем различать в
общем случае ошибки инерциальных измерителей (ДУ С, ДКУ),
ошибки исходной информации (т. е. ошибки в описании грави-
тационных полей и уравнений движения), ошибки начальных
условий и ошибки численных методов интегрирования. Каждая
из указанных причин погрешностей в свою очередь может быть
обусловлена целым рядом факторов, иногда даже весьма раз-
личного свойства. Так, например, если рассматривать ошибки
инерциальных измерителей, то можно указать на такие состав-
ляющие (источники) ошибок: нечувствительность, погрешность
масштабного коэффициента, дрейф нуля выходной характеристи-
ки датчика, уход в пространстве (неопределенность) оси чув-
ствительности, ошибки квантования (для дискретного датчика)
и т. п.
Мы не будем здесь исследовать влияние каждой из перечис-
ленных (или подобных им причин) погрешностей отдельно. Име-
ется возможность получить общий подход к исследованию такой
задачи, так как в любом случае действие всех источников оши-
бок вызывает отличие информации (в упомянутом случае — пер-
вичной информации), получаемой или используемой в ходе ре-
шения задачи инерциальной навигации, от той, которая «иде-
ально» описывает реальное движение объекта. Совершенно ясно,
3*
36
ГЛ. 2. УРАВНЕНИЯ ОШИБОК ИНС
что можно в достаточно общем виде представить разность по-
лучаемой (используемой) и идеальной информации как обоб-
щенную ошибку (погрешность) реализации задачи ИНС. В со-
ответствии с этим мы будем рассматривать обобщенные погреш-
ности инерциальных датчиков кажущегося ускорения и угловой
скорости (погрешности первичной информации), погрешности
знания (задания) гравитационного поля (погрешности исходной
информации), погрешности задания начальных условий (началь-
ной информации).
Несколько особое место занимают погрешности численных
методов интегрирования, которые можно оценить в каждом конк-
ретном случае, когда исходный алгоритм интегрирования реали-
зуется выбранным численным методом. Далее будет показано,
что и ошибки метода интегрирования также могут быть сведены
к обобщенным ошибкам первичной и исходной информации. По-
этому в данной главе будут исследованы общие уравнения оши-
бок в аналитическом виде (без рассмотрения ошибок численных
методов).
Для получения обобщенных уравнений ошибок ИНС будем
рассматривать два типа уравнений. К первому типу отнесем
уравнения, описывающие реальное движение объекта; будем счи-
тать (тоже с известной степенью точности), что такими урав-
нениями являются уравнения (В.1) движения центра масс в
инерциальной навигационной системе координат и уравнения
вращательного движения (П3.16) или (П3.18) (для нас в дан-
ном случае важны только кинематические уравнения). Данные
уравнения движения можно привести к обобщенному виду (1.28)
и (1.29). Будем считать, что эти уравнения идеально точно
описывают движение объекта.
Вторым типом уравнений будем называть уравнения, решае-
мые навигационной системой; эти уравнения будем называть
также модельными уравнениями. Очевидно, что модельные урав-
нения имеют тот же вид, что и обобщенные уравнения ИНС
типа (1.28) и (1.29); однако^ для ^модельных уравнений пере-
менные будем обозначать Л, <о, Z, а и т. п., в отличие от соот-
ветствующих переменных «истинных» уравнений. Ясно, что как
«истинные», так и модельные уравнения могут быть записаны
в различных системах координат. Отличия между соответству-
ющими координатами (параметрами), являющимися решениями
«истинных» уравнений и решениями модельных уравнений, бу-
дут определять ошибки навигационной системы. Естественно,
что задача нахождения ошибок ИНС приводит к задаче полу-
чения уравнений ошибок ИНС; эта задача решается обычным
методом вариации исходных уравнений.
Проведем вывод и исследование уравнений ошибок ИНС
для обобщенных уравнений ИНС. Введем следующие величины
вариаций основных переменных, входящих в обобщенные
§ 2.2. ОШИБКИ РЕАЛИЗАЦИИ УРАВНЕНИЙ
37
уравнения:
— «я, 6<о2 = (о2 — 6А = A — Л (2.1)
— вариации угловой скорости и кватерниона;
fiAj = А/ Aj, бАЕ = А-е А^, 6Z7 = Zj — Z2, 6Z£ = Z# — Z#
(2.2)
— вариации векторов (отображений) а и Z на координатные
базисы I и Е; этими векторами в конкретных случаях могут
быть векторы ускорений, скоростей и положения объекта. Сле-
дует отметить, что именно вид получаемой первичной информа-
ции однозначно определяет и ту вариацию информации, которая
должна быть взята при дальнейшем анализе. Так, если в случае
БИНС первичная информация определяется тем, что оси чувстви-
тельности измерительного базиса связаны (совпадают) с бази-
сом Е, то и исходными ошибками измерителей будут вариации
6Ае и 6(йе. Для платформенных ИНС ошибками первичной ин-
формации могут служить величины 6АЪ бй)ь Можно предпо-
ложить, что от тех или иных ошибок первичной информации
зависят и ошибки в определении навигационных параметров.
§ 2.2. Ошибки реализации кинематических уравнений
2.2.1. Ошибки для кинематических уравнений второй формы.
Уравнение ошибок кинематических уравнений получается как
разность «истинных» и модельных уравнений (1.28). Рассмотрим
сначала кватернионное кинематическое уравнение второго вида,
содержащее величину именно эта форма уравнения соответ-
ствует случаю БИНС.
Используя введенные обозначения вариаций (2.1) кватер-
ниона и угловой скорости, получим, варьируя (1.28), следующее
уравнение ошибок:
2бА = А ° (НЕ — А ° (НЕ —
= 6А ° й)Е + Л ° 6й)Е = бЛ ° + А ° 6й>Е — бА ° бй)Е,
т. е. с учетом первого порядка относительно бЛ, бо£ имеем
26А = бЛ ° (НЕ + Л ° бй)£. (2.3)
Это есть общая форма уравнения ошибок решения кинематиче-
ского уравнения вида (ИЗ.18). Величина боЕ есть ошибка пер-
вичной информации, представленная в кватернионном (опера-
торном) виде. Будем полагать, что эта ошибка, согласно ее оп-
ределению, задается тремя компонентами ошибок датчиков пер-
вичной информации, оси чувствительности которых расположены
в базисе Е (что имеет место в случае БИНС). Очевидно, что
38
ГЛ. 2. УРАВНЕНИЯ ОШИБОК ИНС
эти три компоненты могут определять 6(оЕ как вектор, который
хотя формально и может быть спроектирован на любую коор-
динатную систему, однако в этом случае его нельзя считать со-
ответствующей проекцией вектора ошибки 6(0, так как ошибка
первичной информации зависит от способа ее получения (т. е.
от базиса, где производится измерение).
Уравнение (2.3) для переменной ошибки положения SA яв-
ляется неоднородным линейным уравнением. Соответствующее
однородное уравнение получается отбрасыванием члена Л °
и имеет вид
2бЛ = бАо(д£, (2.4)
т. е. однородное уравнение ошибок подобно исходному кинема*
тическому уравнению (1.28). Согласно теореме об общем реше-
нии кинематического уравнения [15] решение уравнения (2.4)
может быть получено из любого частного решения уравнения
(1.28). Если А(£) — решение уравнения (1.28), то Ao°A(£) (ин-
дексом «О» везде будем отмечать значение переменной в началь-
ный момент движения) — решение того же уравнения с единич-
ными начальными условиями. Отсюда следует, что решением
(2.4) будет
6А(0= бЛо°Ао° А(0.
Используя метод вариации постоянных (6АО), можно найти
решение неоднородного уравнения (2.3). Будем искать это ре-
шение в виде
6А(£)'== С (0 ° Ао ° Л(£), Со = 6АО.
Подставляя это выражение в уравнение (2.3),имеем
2С ° Aq ° Л = А ° 6(0J5?,
т. е.
/ * \
С (t) = 6А0 + -у I J А (т) ° б<о£ о A (t) dx j оАо.
'о '
Отсюда получаем окончательно
6Л (0 = 6Л0 о ло о л (0 + А- [ J л (т) ° ° Л (т) dr I о А (0 =
'о
t
= 6АО ° Ао ° Л (t) -]—8(&ei di ° А (£), (2.5)
о
где было принято обозначение 8(оЕ1 = А ° б(оЕ ° Л в соответствии
с правилами перепроектирования; физически величина 6(dEi оз-
§ 2.2. ОШИБКИ РЕАЛИЗАЦИИ УРАВНЕНИЙ
39
начает ошибку первичной информации 6(&Е, приведенную к осям
базиса Z.
Анализ решения (2.5) показывает, что если ошибка первич-
ной информации определяется (возникает) в связанном базисе,
то ее накопление происходит в том случае, когда существуют
ее систематические составляющие в инерциальной системе ко-
ординат. Начальная ошибка положения 6АО сохраняется, проек-
тируясь при движении также на неподвижную систему коор-
динат.
Вариация кватерниона 6А (2.1) задает аддитивным образом
ошибку в определении кватерниона:
Л = Л + 6Л
(т. е. ошибку положения). При этом физиче»
не соответствует никакому преобразованию; э
няет исследование в интерпретацию решения
(2.5). В связи с этим зададим вариацию по-
ложения системы координат в другом физи-
чески ясном виде:
А-АоДАк, (2.6)
где ЛА# есть кватернион поворота (малого
преобразования), выполняемого при переходе
от вычисленного к реальному базису Е
(рис. 5); по этой причине он берется в про-
екциях на базис Е. Этот кватернион определяет вектор малого
поворота, характеризующего переход от вычисленного к истин-
ному базису; обозначая такой вектор Д0б, имеем
ДА^ = 1 -|—Д0е-
Уравнение для кватерниона ДАк получим из соотношения
(2.6):
ДА# = А ° А;
дифференцируя это равенство по времени, имеем
2ДЛе = ДА_е ° саЕ (дЕ ° ДАд = ДА_е ° (дЕ (дв ° ДА# -Ь &сьЕ ° ЛЛ_е.
Подставим в полученное выражение вектор малого поворота:
1 1
Д0£ = (Д0£ ° ° A0J5;) -р 6(Це -|-2“ бб)_Е о Д0£.
величина 6А
факт затруд-
Рис. 5. Кватерни-
он ошибки в свя-
занных осях
Отсюда, с учетом только членов первого порядка малости от-
носительно А0я и б<оБ, получим уравнение для вектора ошибки:
ДОя + (Юб X Д0£?) = б(ол. (2.7)
40
ГЛ. 2. УРАВНЕНИЯ ОШИБОК ИНС
Уравнение (2.7) можно рассматривать как другую форму
представления (в новых переменных) общего уравнения ошибок
(2.3) кинематического уравнения. Уравнение (2.7) является ли-
нейным неоднородным уравнением относительно Д0Е; однород-
ное уравнение
Д0к + ((ОкХД0к)==О
имеет решение Д0Е = А ° С ° А (в чем можно убедиться непо-
средственной подстановкой).
Применяя метод вариации постоянной, получим решение
(2.7) в виде
Л ° С ° Л = 6(0#, Со = Ло ° Д0# ° Ло,
(t \
Л (т) ° 6о)_е ° А (т) dx j ° А.
о J
(2.8)
Непосредственной подстановкой решения (2.8) в уравнение (2.7)
можно убедиться, что оно удовлетворяется тождественно.
Рассмотрим еще одну интерпретацию уравнения ошибок для
кинематического уравнения. Представим вариацию положения
истинного и вычисленного положений бази-
Рис. 6. Кватернион
ошибки в инерциаль-
ных осях
сов в виде
А = ДА, ° Л. (2.9)
Из рис. 6 следует, что такая интерпрета-
ция определяет ДА, как малый поворот
между реальным и вычисленным базисами
I. Как видно из рис. 6, эта ситуация харак-
терна именно для бесплатформенных ИНС.
Величина кватерниона малого поворота
ДА/ = 1 + -у-
может быть определена вектором малого поворота A0Z. Можно
видеть, что Д0г и Д0Е связаны между собой обычными соот-
ношениями перепроектирования
Д0, = А ° Д0Е ° А, (2.10)
характерными для отображений неизменного вектора. Уравне-
ние для Д0, (т. е. ДА,) может быть получено из равенства
(2.9) формальным дифференцированием:
ДА, = А ° А,
2ДА1 = Л ° (Це ° А — А ° (^е ° А =
= Л о о А = ДА/ ° А ° бо)/; ° А — ДА/ ° А ° 8(&е °
§ 2.2. ОШИБКИ РЕАЛИЗАЦИИ УРАВНЕНИЙ
41
Используя представление АА/ через вектор малого поворота
A0j, получим уравнение для этой переменной
А0/ = Л°6®е°Л. (2.11)1
Решением этого уравнения является
t
A0j = А0? + J Л (т) о 8(ое о Л (т) dr. (2.12)
о
Таким образом, получены уравнения ошибок для кинемати-
ческих уравнений в виде (2.3), (2.7) и (2.11) для трех пере-
менных: 6А, А0е и А0/; получено также решение для каждого
уравнения ошибок.
Приведем связь для вариаций кватерниона положения 6А и
векторов малого поворота А0Е и A0j, характеризующих взаим-
ное положение вычисленного и истинного базисов:
6А - А - А - (АА2 - 1) о А = А о (ДДе - 1) =
= 4 де,»л=^-ДоД0Е,
Д@в = 2Л о 6Л, = 2Л0 о <5Л0 = Ло о А0? о До,
Д0/ = 26Л о л, Д0’ = 2бЛ0 о ло = Ло о Д0^ о ло.
Нетрудно видеть, что все решения (т. е. решения для любой
переменной ошибок) (2.5), (2.8) и (2.12) переходят друг в
друга, в чем можно непосредственно убедиться после их под-
становки в соотношения (2.13).
Найденные решения позволяют интерпретировать уравнение
ошибок кинематического уравнения (П3.18). Наличие ошибок
первичной информации (&Е (т. е. величины бсоЕ) вызывает «уход»
вычисленного положения базиса; этот уход характеризуется век-
тором малого поворота А0, имеющим отображения А0Е и A0j
(см. (2.10)) на базисы Е и I, Величина этого вектора получа-
ется интегрированием ошибки измерения бю# в неподвижном
опорном базисе. Все решения (2.5), (2.8) и (2.12) определяют
эту величину ухода в различных параметрах. Тот факт, что на
величину ухода построенного положения системы координат
влияет не непосредственно ошибка б(оЕ, а ее проекция бсоЕ.
используется на практике для компенсации, например, система-
тической составляющей ухода.
В качестве примера можно привести такой метод: весь путь
движения разбивают на два интервала и на втором интервале
измерители (собственный трехгранник датчиков) разворачивают
на 180°; при этом величина систематической составляющей ухода
(определенная в связанном с измерителями базисе) получает
в инерциальной системе координат обратное направление, чем
42
(ГЛ. 2. УРАВНЕНИЯ ОШИБОК ИНС
t
достигается малость всего интеграла J 6(0/;/ dx на всем пути дви-
о
жения.
2.2.2. Ошибки для кинематических уравнении первой формы.
Подобным же образом можно получить и исследовать ошибки
в том случае, когда в качестве исходного используется кине-
матическое уравнение другой формы, содержащее вектор <о7.
Такой случай соответствует, например, определению взаимного
положения базисов расчетным путем, когда угловая скорость не
изменяется, а задается тем или иным образом.
Пусть дано кинематическое уравнение первой формы (П3.16);
уравнение ошибок для этого случая находится варьированием
исходного уравнения аналогично (2.3):
26А = <о, ° 6А + бо)2 о Д. (2.14)
Следует заметить, что в этом случае ошибка 6(0/ первичной ин-
формации имеет другой, абстрактный, смысл и не соответствует,
как в случае 6(оЕ, физической ошибке измерителей. (Ниже мы
отдельно обсудим вопрос об их соответствии.) Можно видеть,
что однородное уравнение, получаемое отбрасыванием члена
6(о7 ° А, соответствует исходному. Согласно теореме об общем
решении рассматриваемого уравнения [15], имеем его в виде
6А = А ° Ао ° С. Полагая С функцией времени, методом вариации
постоянных найдем
t
2С = Ао ° А ° 6(0/ ° А, С = 6А0 Ао ° J А ° 6(0/ ° A dx.
о
Отсюда получим решение для уравнения ошибок (2.14) кинема-
тического уравнения первой формы:
t
6А = А <> А06А0 + 4-А о | А о бю/о Дек. (2.15)
О
Аналогично предыдущему получим еще две формы уравне-
ния ошибок, содержащих векторы малых поворотов А0Е и AOj,
для чего можно выполнить такие же выкладки, как и в п. 2.2.1
настоящего параграфа. Однако, используя уже введенные выше
величины кватернионов АА^ и AAj, определяемые, по сути, век-
торами АО^ и АО/ (2.6), (2.9), и соотношения (2.13), получим
подстановкой величины
6А = А ° АО/;
в уравнение ошибок (2.14) следующее уравнение:
• * 1
А ° АО/; + А о АО/; = 6(0/ ° А -4- (О/ ° А ° АО/;.
§ 2.3. СООТНОШЕНИЯ ЭКВИВАЛЕНТНОСТИ
43
После преобразований это уравнение приведется к такому виду:
Д0д = Л°6(О/°А. (2.16)
Очевидно, что решением этого уравнения будет
t
Д0Я = + jAoS^o Xdx. (2.17)
О
Аналогично, дифференцируя соотношение
6А = Д02 ° Л
и подставляя его в уравнение (2.14), имеем
ДО/ ° A -j- АО/ ° А = 6(0/ ° А (О/ ° ДО/ ° А,
откуда получим еще одну форму уравнения ошибок:
ДО/ + (ДО/ X (О/) = 6(0/. (2.18)
Решение уравнения (2.18) получается либо с использованием
метода, примененного для нахождения решения (2.7), либо из
решения (2.17) с помощью соотношений (2.13):
ДО/?:::=: А ° Aq ° АО/ ° Ад ° А А °
6(0/°Айт о А. (2.19)
Заметим, что в решениях (2.15), (2.17) и (2.19) присутству-
ет и накапливается величина А°6(0/°А — ошибка «первичной»
информации, перепроектированной на подвижный базис.
Три формы уравнений ошибок 6А, Д0£ и ДО/ для первой
и второй форм кинематических уравнений являются симмет-
ричными; такими же являются и решения этих уравнений оши-
бок. Однако ошибки для первой и второй формы кинематиче-
ского уравнения не совпадают, ибо здесь мы имеем дело с раз-
личной первичной ошибкой: 6(0/ в первом случае и 6(о£ — во
втором.
§ 2.3. Соотношения эквивалентности
Полученные три формы уравнений ошибок и их решения для
двух форм кинематического уравнения позволяют исследовать
ошибки, возникающие при операции перепроектирования вектор-
ных величин. Рассмотрим, как распространяется ошибка в зна-
нии некоторого вектора при пересчете его к другой координат-
ной системе, возникающая за счет неточного знания последней.
Пусть дан произвольный вектор у, имеющий отображения на
два базиса Е и Z, связанные между собой соотношениями пере-
44
ГЛ. 2. УРАВНЕНИЯ ОШИБОК ИНС
проектирования
Yj = Л ° YE ° Л, YE = Л ° YT • Л. (2.20)
Пусть точность знания вектора, заданного его проекциями в ба-
зисе I (или /?), определяется ошибкой 6YZ (или 6YE), харак-
теризуемой ошибками в задании его координат. Выясним, ка-
кова будет эта ошибка после операции пересчета вектора к дру-
гой координатной системе.
Рассмотрим вначале вектор Ye и его ошибку 6YE; если этот
вектор «перепроектировался» операцией (2.20), в Yj, то ошибка
его знания
^ = 6(ЛоУ£о А).
Варьируя это равенство, получим
6YZ = бА ° YE ° Л + Л ° 6Ye °Л-Л ° Ye ° А ° 6Л ° Л,
где было принято, что 6Л = —Л ° 6Л ° Л. Используя введенный
вектор ошибки A0Z (2.10), связанный с 6Л соотношениями
(2.13), представим данное равенство в окончательном виде
6Y, = А ° б Ye ° А + (A0Z X Yz). (2.21)
Аналогичным образом, рассматривая исходный вектор Yz и
его ошибку 6YZ при операции перепроектирования к базису Е,
получим ошибку его знания:
б Ye = б (Л о Yz о А) = -Л о 6А о А о б Yz о А + А о 6YZ о А + А о Yz о 6А.
Используя соотношение для ошибок (2.13), получим следующее
соотношение:
6Ye = Л ° 6Yj ° А + (Ye X А0е) . (2.22)
Соотношения (2.21) и (2.22) будем называть соотношения
эквивалентности-, они связывают исходную ошибку знания век-
тора с ошибкой, получаемой при его перепроектировании из-за
неточного знания взаимного положения систем координат. Эти
соотношения в задачах исследования уравнений ошибок ИНС
играют такую же важную роль, как соотношения Эйлера при
выводе уравнений ИНС.
Можно проверить, что соотношения эквивалентности при под-
становке друг в друга удовлетворяются тождественно; при этом
следует учесть равенства
Ao(A0zXYz)°A=(A0£XYe), Ao(A0eXYe)oA = (A0zXYz).
(2.23)
Физический смысл соотношений эквивалентности очевиден; еле-
§ 2.4. АНАЛИЗ ОШИБОК УРАВНЕНИЙ ИНС
45
дует заметить только, что они получены совершенно формально
из равенств перепроектирования.
В качестве примера, показывающего роль этих соотношений,
рассмотрим интерпретацию двух уравнений ошибок для двух
форм кинематических уравнений, имеющих уравнение ошибок
и их решение, например, в виде (2.7), (2.8) для одной формы
кинематического уравнения и в виде (2.16), (2.17)—для дру-
гой. Для уравнения второй формы исходной ошибкой является
— ошибка получения первичной информации при интегри-
ровании кинематических уравнений (П3.18), что имеет место
в случае БИНС. Уравнения ошибок первой формы кинематиче-
ского уравнения (2.16) определяются величиной 6(Oi и не соот-
ветствуют технически реализуемому случаю (являются абстракт-
ными). Однако кинематические уравнения обеих форм могут
описывать одно и то же движение; в этом смысле, если аб-
страктно заданная величина ошибки 6<ог эквивалентна исходной
ошибке б<оЕ, то уравнения ошибок и их решения должны сов-
пасть.
Покажем, что это имеет место; естественно положить, что
эквивалентная ошибка получается из исходной 6(0Е при по-
мощи соотношения эквивалентности
6(0i = А ° боЕ ° А + (A0J X (ОД
Подставляя это значение в уравнение (2.16), с учетом (2.23)
получим уравнение (2.7); можно проверить, что и решения (2.8)
и (2.17) также переходят друг в друга.
Таким образом, можно сделать следующие выводы:
а) для исследования ошибок вращательного движения двух
координатных систем можно использовать кинематические урав-
нения и уравнения ошибок любой формы;
б) определяющим для нахождения ошибки взаимного поло-
жения является исходная ошибка первичной информации;
в) кинематические уравнения полностью автономны; урав-
нения их ошибок определяются только ошибками начального
положения и первичной информации измерения угловой скорости.
§ 2.4. Анализ ошибок обобщенных уравнений ИНС
Так же как и в случае кинематических уравнений, при ис-
следовании ошибок обобщенных уравнений ИНС существенное
значение имеет вид первичной информации, используемой при
решении задачи ИНС. Он определяет исходную ошибку первич-
ной информации, которая (наряду с ошибками начальной ис-
ходной информации) и вызывает соответствующую ошибку ре-
шения обобщенного уравнения ИНС. При этом, естественно, ис-
ходная ошибка первичной информации характеризует ошибки,
получаемые инерциальными измерителями, и зависит от поло-
46
<ГЛ. 2. УРАВНЕНИЯ ОШИБОК ИНС
жения измерительного базиса относительно навигационных си-
стем координат, т. е. тем самым зависит от типа инерциальной
системы.
Вторым обстоятельством, требующим обсуждения, является
характер используемых уравнений ИНС; как было показано в
гл. 1, в зависимости от выбранной системы координат можно
получить тот или иной тип уравнений (например, в подвижных,
или неподвижных осях). Очевидно, что каждое из этих урав-
нений имеет свое уравнение ошибок и, соответственно, свои ре-
шения этих уравнений. Оказывается (и это будет показано да-
лее), что для анализа ошибок уравнений ИНС (и обобщенных
уравнений) можно использовать любое из уравнений; существен-
ным оказываются только используемые ошибки первичной ин-
формации.
Аналогичным образом, в уравнения ошибок войдут и ошибки
начальной и исходной (последняя, в основном,— в знании гра-
витационного поля) информации. Такого результата следовала
ожидать и заранее, так как разные уравнения могут описывать
один и тот же процесс интегрирования (для получения скоро-
сти и положения) в различных координатных системах. В дан-
ном параграфе будут рассмотрены уравнения ошибок и их ре-
шения для обоих видов обобщенных уравнений интегрирования
(1.29) и (1.30)).
Рассмотрим вначале обобщенное уравнение (1.29); варьируя
это уравнение и используя принятые обозначения (2.2), полу-
чим следующее уравнение ошибок*) для этого типа уравнения:
(2.24)
Решение этого уравнения находится элементарно:
t
6Zj = 6Z? +JfiAjd-r. (2.25)
о
В данном решении присутствует только одна исходная ошиб-
ка первичной и исходной информации 6АЬ Такое решение мо-
жет быть использовано, например, при оценке точности нахож-
дения кажущейся скорости при интегрировании кажущегося ус-
корения, когда измерительный трехгранник ДКУ расположен по
осям базиса I (т. е. установлен на гиростабилизированной плат-
форме). В этом случае ошибки первичной информации имеют
вид 6AZ. Точно так же неточность знания гравитационного поля,
описанного его проекциями в базисе Z, приводит к ошибкам
вида 6А/ и к аналогичному уравнению ошибок. В решении
(2.25) присутствует также ошибка начальной информации 6ZJ.
*) Здесь и далее не учитываются вариации, вызываемые несинхрон-
ностью бортового и реального времени.
§ 2.4. АНАЛИЗ ОШИБОК УРАВНЕНИЙ ИНС
47
Обратимся теперь к другой форме уравнения интегрирова-
ния (1.30) — в подвижных осях. Варьируя это уравнение и
оставляя только члены первого порядка малости относительно
вариации переменных, получим
6ZE + (<о£ X 6Z£) = 6А£ + (ZF X 6(Ое) . (2.26)
Отметим, что это уравнение, в отличие от (2.24), содержит дру-
гие исходные ошибки первичной информации 6А£ и б<оЕ. Такие
ошибки соответствуют, например, случаю, когда трехгранники
инерциальных измерителей ДКУ и ДУС совпадают со связан-
ным базисом Е, что соответствует случаю БИНС. С другой сто-
роны, ошибка определения обобщенной навигационной координа-
ты 6ZF в уравнении (2.26) уже взята в базисе Е, т. е. имеет
другой вид, чем (2.25).
Уравнение (2.26) относительно переменной 8ZE является ли-
нейным неоднородным уравнением, в котором правая часть оп-
ределена только ошибками первичной информации. Соответству-
ющее однородное уравнение
6ZF 4“ ( cOje X 6ZE) = 0
по виду совпадает с (1.30), т. е. с его однородной частью; его
решение находится методом, аналогичным (1.33). Можно про-
верить, что 6ZE = А ° С ° А удовлетворяет решению однородного
уравнения.
Применяя метод вариации постоянных, получим, что для не-
однородного уравнения (2.26) должно выполняться
AoCoA = 8Ak + (ZbX6(0e).
Интегрируя данное уравнение, найдем величину С(т):
t
С = Со + ( А (т) о [6Aj5 + (Zj5 X бш^)] А (т) dx.
о
Таким образом, решением уравнения ошибок (2.26) является
следующее выражение (при соответствующем выборе Со =
= Ао ° 6Ze- ° Ао):
{t
J А [бАе -г (Zk X быЕ)] A dx оА.
о
(2.27)
Прямой подстановкой можно убедиться, что оно удовлетворяет
уравнению (2.26).
Решение (2.27) содержит исходные ошибки первичной ин-
формации 6АЕ и 6<Ое; это решение, в отличие от (2.25), показы-
48
ГЛ. 2. УРАВНЕНИЯ ОШИБОК ИНС
вает, что ошибки измерения угловой скорости 6(дЕ также вносят
свой «вклад» в составляющую ошибок интегрирования. Однаког
как это было показано в п. 2.2.1, ошибки 6(0^ вызывают неточ-
ное знание (рассогласование) систем координат, характеризуе-
мое вектором малого поворота А®; можно вывести другое со-
отношение для ошибки интегрирования 6Z£, содержащее вместо
6(0^ величину А®.
Рассмотрим следующую составляющую в (2.27):
t
J Л ° (Zj£ X 6tt>£;) о A di.
о
Для подынтегрального выражения справедливо
Л о (Zj£ х 6(0#) ° А = -g- А ° (Zj£ о 6(0е — 6(Oj5 ° ZE) ° А =
= -х- (А о Z# о А о А о о А — Л ° ° А ° Л ° Z# о А) =
= -X- (Z/ о Л ° 6(0е ° А — Л ° 6(0е ° Л ° Zj) = [Zj х (Л ° 6(0е ° А)].
Подставляя данное соотношение в интеграл и учитывая, что
согласно уравнению ошибок (2.11) величина А°6(о£°Л опре-
деляет A®j, получим
t t
J А ° (Z# X 6(оЕ) ° A dx = J [Zj х (Л ° 6(0# ° A)] dx =
о о
t t t
= j (Z2 X A©1) dx = (Z2 X A0j) | + J (Д0; X dZJ =
0 0 0
t
= (Zj x A©2) - (Z? x Ав?) + f (A0J x Aj) dx.
0
Здесь было выполнено интегрирование по частям и величина Zi
заменена согласно уравнению (1.29). Используя полученный ре-
зультат, можем записать решение уравнения ошибок (2.27)
в виде
6Z# — Л ° Ло ° 6Z# о Ао ° А -р
+ л
~ t
j* [А ° 6A# о А + (А®/ х A/)] dx
_0
А (ZiE X А®#) —
-(Z^xASU (2.28)
При выводе (2.28) были использованы следующие тождества
§ 2.4. АНАЛИЗ ОШИБОК УРАВНЕНИЙ ИНС
4$
типа (2.23):
А о (Zf X А02)» А = (ZE X А0Е), А ° (Z? х А0^) » Д =
= (Z°E X А0е). (2.29)
Выражение (2.28) содержит только одну величину ошибки
первичной информации 6АВ; однако при этом предполагается,
что 6(Ое уже проинтегрирована и этот результат в виде А0 вхо-
дит в соотношение ошибки.
Покажем теперь, что выражения для ошибки 6ZE (2.28) или
(2.29) полностью эквивалентны соотношениям для ошибки SZT
(2.25), если только принять определенным образом эквивалент-
ность исходных ошибок первичной информации. Пусть исход-
ными ошибками первичной информации будут величины 6АЕ
и 6(оЕ (случай БИНС). В этом случае 6АВ вызовет эквивалент-
ную ошибку в инерциальном базисе, которая найдется согласно
формулам (2.21) соотношений эквивалентности. Имеем
6А/ = А ° 6Ае ° А + (А0, X Ат). (2.30)
С учетом этого выражение для ошибки (2.28) примет вид
$ZE — А ° Ао ° 6Z# ° До о А
' t
j 6А2йт
_о
А + (ZE х А0Е) - (Z^ х А0^). (2.31)
Сама величина 6ZS может быть аналогичным образом приве-
дена к осям инерциального базиса с помощью того же соотно-
шения эквивалентности:
6Z, = А ° 6ZS ° А + (A0J X Zz). (2.32)
Подставляя в (2.32) величину 6ZE из (2.31), получим
6Z, = Ао ° 6Z°E ° д0 А ° ( A0# х Z°E) о А -г
t
-j- J 6А/ -J- А ° (ZE х A0je) ° А-р (А0 / х Z2) —
о
t
= Ao о VZ°e о Ao + (A©? X Z?) + J 6Azdr.
0
Можно видеть, что данное выражение совпадает с решением
(2.25), так как для начальных значений ошибки имеет место
то же соотношение эквивалентности (2.32).
Точно таким же образом можно показать эквивалентность
выражений для ошибки интегрирования, если в качестве ис-
ходной ошибки первичной информации взять величины 6(0/
и 6АТ.
4 В. Н. Бранец, И. И. Шмыглевский
£0
-ГЛ. 2. УРАВНЕНИЯ ОШИБОК ИНС
Приведем на примере иллюстрацию полученного результата.
Пусть первичная информация получается в виде АЕ и что
имеет место в случае БИНС. Исходными ошибками первичной
информации в этом случае являются величины 6АВ и баь. Пусть
далее требуется представить навигационную информацию в ви-
де Z£; в этом случае возможно осуществление процедуры вычис-
ления Zjs двумя способами, представленными на рис. 7. Рас-
смотрим последовательно оба этих способа.
В первом случае первичная информация А£ пересчитывается
к инерциальным осям соотношением типа (1.13); точность зна-
ния величины Aj будет определяться теперь не только ошибкой
Рис. 7. Последовательность вычислений в БИНС
5Ае, но и ошибкой задания вычисления кватерниона А. По этой
причине эквивалентная ошибка определится соотношением
(2.30). Интегрирование навигационного уравнения, определяю-
щего ZT, выполняется в инерциальных осях по формулам (1.8);
соответственно этому ошибка определения 6Z£ подчиняется урав-
нению (2.24) и имеет вид (2.25):
? *
6Z, = 6Z? + J 6Ai dx = 6Z? + J [Л о 6AE о Л + (Д0, х A/)] dx.
о о
Искомый навигационный параметр Z£ находится по ZT обратной
операцией перепроектирования; при этом ошибка знания Z£ на-
ходится соотношением эквивалентности типа (2.22):
6Z# = А ° 6Z/ о A-f (Ze X А0е) ~
{t
[ [А о 6АВ о А + (Д©1 X Ai)] dx »
о
А-p ZE X Д0Е.
Можно видеть, что это соотношение совпадает с выражением
(2.28) для ошибки интегрирования в подвижных осях. Именно
этот случай интегрирования является вторым возможным спо-
собом реализации уравнений ИНС, представленным на рис. 7.
Таким образом, оба метода интегрирования определяют одну
и ту же величину ошибок. Этого и следовало ожидать, так как
§ 2.5. УРАВНЕНИЯ ОШИБОК БИНС 5f
здесь мы исследуем влияние только ошибок исходной первичной
информации, и любой алгоритм, если только не рассматривать
вычислительных ошибок того или иного метода реализации ре-
шения, должен дать один и тот же результат.
Таким образом, можно сделать выводы, аналогичные выводам
предыдущего параграфа:
а) для нахождения ошибок обобщенных уравнений ИНС
можно использовать любое уравнение ошибок (2.24) или (2.26);
б) определяющим для величины ошибки является вид и ха-
рактер исходной ошибки первичной информации;
в) уравнения интегрирования навигационных параметров не
являются, вообще говоря, автономными, а зависят от кинема-
тики. В этом смысле ошибка в определении навигационных
параметров содержит ошибки в знании углового положения на-
вигационных систем координат.
Полученные решения для ошибки обобщенного уравнения
ИНС позволяют провести анализ влияния ошибок первичной, ис-
ходной и начальной информации на точность работы инерциаль-
ной системы. В частности, видно, что к накоплению ошибки из-
мерителя ДКУ (для случая БИНС) 6А^ ведет не сама эта ве-
личина, а ее проекция на инерциальные оси, т. е. величина
Л ° бАя ° Л. Можно проследить также и влияние неточного зна-
ния взаимного положения систем координат, вызываемого пер-
вичной ошибкой б(дБ и характеризуемого вектором углового рас-
согласования А0, на точность решения навигационной задачи.
§ 2.5. Уравнения ошибок БИНС
В главе 1 было показано, что решение полной навигацион-
ной задачи в БИНС может быть осуществлено различными ал-
горитмами интегрирования. Естественно провести вывод урав-
нений ошибок БИНС и найти их решения для каждого из этих
алгоритмов.
Будем считать, что основными составляющими ошибок явля-
ются следующие: ошибки первичной информации о кажущемся
ускорении бРя (ошибки ДКУ, установленных в связанном ба-
зисе Е), ошибки измерения угловой скорости б(0Б (ошибки ДУС,
также установленных в базисе Z?), ошибки исходной информа-
ции 6GT (которые, вообще говоря, могут быть заданы в любой
системе координат) и ошибки начальной информации. В прово-
димом здесь исследовании не будем учитывать вычислительных
ошибок и ошибок, вызванных несинхронностью бортового и ре-
ального времени.
2.5.1. Уравнения БИНС в инерциальных осях. Схема ал-
горитма интегрирования рассмотрена в § 1.2. Процедура интег-
рирования навигационной задачи предусматривает численное ре-
шение кинематического уравнения (1.28), операции пересчета
4*
52
ГЛ. 2. УРАВНЕНИЯ ОШИБОК ИНС
первичной информации (1.13), первого и второго интегрирова-
ния (1.9), (1.11) и (1.12), определяющих скорость и положение
объекта. Получаемые в результате этой процедуры навигацион-
ные параметры V/ и R/ относятся к инерциальному базису. В со-
ответствии с этим ошибками начальной информации в данном
методе интегрирования будут 6V? и 6R? — ошибки соответствен-
но скорости и положения в навигационной системе координат.
Точность решения первой группы навигационных уравне-
ний — кинематических уравнений (1.28) — будет характеризо-
ваться вектором малого поворота А0£ (или A0z) в виде решений
(2.8) или (2.12) для соответствующих уравнений ошибок.
Для вывода уравнений ошибок второй группы навигацион-
ных уравнений, определяющих ошибки в определении скорости
и положения, воспользуемся обобщенными уравнениями ошибок
ИНС. Рассмотрим первое уравнение интегрирования (1.10); урав-
нение ошибок для этого уравнения получается путем его варь-
ирования аналогично тому, как это делалось для обобщенного
уравнения:
6V/ = 6Gz + 6Pz. (2.33)
Величина 6Р7 должна быть выражена через исходную ошибку
первичной информации 6Рб согласно соотношению эквивалент-
ности (2.21):
6Р, = А о 6Ре ° л + (A0Z X Pz),
с учетом чего уравнение ошибки определения скорости (2.33)
для случая БИНС примет вид
6Vz = 6Gz + А о 6РЕ о д + (Д0, X Pz). (2.34)
Решение этого уравнения находится интегрированием:
t t
SV/ = 6V? + f 6Gj dr 4- J [А о 6PE о л + (Д01 X Pj)] dr. (2.35)
0 0
Вариация второго уравнения интегрирования (1.12) дает
уравнение ошибок
6RI = 6Vz. (2.36)
Решение этого уравнения:
t
6Rj = SR? + j 6Vi<R (2.37)
о
Тем самым найдены формально все ошибки определения на-
вигационных параметров.
2.5.2. Уравнения БИНС в связанных осях. Схема решения
навигационной задачи рассмотрена в § 1.3 предыдущей главы.
§ 2.5. УРАВНЕНИЯ ОШИБОК БИНС
53
Первая группа уравнений — кинематические уравнения — анали-
зируются аналогично рассмотренному случаю. Вторая группа
уравнений ИНС определяет положение и скорости в связанном
базисе; варьируя уравнение для полной скорости (1.15), найдем
следующее уравнение ошибок:
бУя = 6G^ + 8Ре + (6Уя X (дЕ) + (УЕ X бюя). (2.38)
Аналогично получаем из уравнения (1.17) уравнение ошибок
для положения:
6RE = бУя + (6R£ X аЕ) + (R£ X бй>я). (2.39)
Если считать, что ошибка исходной информации о гравитацион-
ном поле задана в инерциальных осях, т. е. известна величина
6Gj, то в уравнении (2.38) следует ошибку 6G£ считать опреде-
ляемой через ошибку 6Gj соотношением эквивалентности (2.22)
6G^ = Л о 6G, ° Д + (G£ X Л0я). (2.40)
Соотношения для ошибок 6Уе и 6Rb в интегральной форме,
т. е. решения уравнений (2.38) и (2.39), находятся согласно ре-
шению обобщенного уравнения ошибок (2.26), которое имеет
вид (2.27) или же (2.28). Согласно этому решению имеем
5 VE = Л о До SVb = Ло = Л +
[ t
+ А ° j J Л ° [6G# А + (Vе X 6(0^)] ° A dx •
Io
8Re = А ° Ао ° 6R# ° Ао ° А -|-
{t
j [Л ° (6Ve Re X 6(l>e) о A] dx
6 j
А,
(2.41)
A. (2.42)
Полученное выражение для ошибки полной скорости (2.41)
содержит все определенные выше ошибки; действительно, можно
в (2.41) подставить 6Ge из соотношения (2.40). Если же в ка-
честве навигационного параметра используется У/, то и началь-
ную ошибку 6V# можно выразить через 6V?, так же как и
саму величину ошибки (соотношение эквивалентности):
6УТ = А ° 6У£ ° A+ (A0j X У/).
После необходимых подстановок получим в этом случае
t
.6V; = Ло о 6Vk ° Ло + J [SGj + (Gt х A0j)] dx +
О
t
+ f Л о [6РВ + (VE х 6<0е)] о Л-dx + (Д02 х V,).
О
54
ГЛ. 2. УРАВНЕНИЯ ОШИБОК ИНС
Заменяя далее в полученном выражении начальное значение
ошибки 6V# в соответствии с соотношением
6V? = Ло о 8У°е о ло + ( Д0? X V?),
имеем
6v, = 6V? + (де2 х Vj) - (де? х v?) +
{ t
j [6G2 (G2 x A02)] dx 4“ j* A° [6P# 4~ (Уе X бсо#)] ° Аб/т»
о о
Интегрирование члена
t
[ А о (yE x 6(0^) о Д dx =
о
t t t
= J (V2 x A02) dx - (V2 x A02) I + J [A02 X (G2 4- P2)] dr
0 0 0
показывает, что полученное выражение для ошибки приводится
к виду (2.35). Этот вывод еще раз иллюстрирует результаты,,
полученные при исследовании обобщенных уравнений ошибок.
Рассмотрим далее второе решение (2.42). Если в нем вы-
полнить замену согласно соотношениям эквивалентности
= А ° 6Vj ° Л + (VE X Абл)
и согласно выражению для ошибки начального положения
SRs = Л,, о 6R? о До + (R®, х Д0°Е),
то получим следующее выражение ошибки:
6R£ = Л о 6R? о Л + Л о (R? х Д0?) ° Л +
t 1
+ А о J [SVj + (Vj х Д©1> + Л о (R£ X 6®в) о Л] drl ° Л.
о J
Проводя интегрирование по частям члена
Л о (Rs х 6®в) о A dx = J (Ri х Д02) dx =
6 о
t t
= (Rj x Д©1) | + J (Д01 X Vj) dx,
0 0
имеем
6RB = Л о 6R$ о A -j- Л о (Rj x A©i) <• A + A °
t
j*6V2dr оД.
0
§ 2.6. ОБЩИЙ СЛУЧАЙ УРАВНЕНИЙ ОШИБОК ИНС
55
Можно видеть, что полученное решение с учетом соотноше-
ния эквивалентности
6R; =Ao6R£?oA + (A0iXRz)
переходит в (2.37).
Проведенные преобразования позволили представить навига-
циоппые ошибки в различных видах, содержащих те или иные
величины исходных и начальных ошибок, а также ошибок ре-
шения кинематического уравнения. Эти исследования иллю-
стрируют вывод о том, что ошибки положения и скорости не
зависят от алгоритмов их вычисления и определяются только
ладанными по своему виду ошибками первичной, исходной и
начальной информации. Разумеется, что и выражение ошибки
определяется также видом представления навигационных пара-
метров.
Различные формы представления ошибок позволяют провести
•анализ влияния их составляющих. Ошибки начальной информа-
щии входят аддитивно и в неизменном виде присутствуют только
в проекциях на инерциальные оси; в других случаях эта ошиб-
ка, перепроектируясь, является переменной. Ошибка первичной
информации ДКУ, т. е. величина бР^, ведет к накапливающейся
составляющей, причем здесь определяющими являются также ее
проекции на инерциальные оси. В случае БИНС появляется до-
полнительная составляющая ошибки, вызванная неточным ре-
шением кинематического уравнения (член A©iXPi). Аналогич-
ным образом ведет себя и ошибка исходной информации SGj.
•§ 2.6. Общий случай уравнений ошибок ИНС
2.6.1. Уравнения ошибок для интегрирования уравнений ИНС
в произвольных осях. Реализация алгоритмов интегрирования
уравнений ИНС в произвольных осях рассмотрена в § 1.4; пред-
ставляет интерес исследование точности решения общего случая
уравнений ИНС. Пусть заданы произвольные координатные ба-
зисы Qi и их движение определяется кинематическими уравне-
ниями (1.20); уравнениями, определяющими полную скорость
движения, будут уравнения (1.22), (1.25), а уравнениями для
положения объекта являются равенства (1.26). Совместно с со-
отношениями перепроектирования типа (1.21) эти уравнения
описывают процесс построения (получения) навигационных дан-
ных; этот процесс схематически изображен на рис. 7.
Найдем уравнения ошибок для этого процесса. Уравнениями
ошибок для кватернионов, задающих взаимное положение бази-
сов (ошибок решения кинематических уравнений), будут: для
кватерниона А(£)— уравнения (2.3) или (2.14); для кватернио-
нов Мг, определяемых уравнениями (1.20), уравнения ошибок
получаются варьированием данных уравнений. Выполняя варьи-
56
ГЛ. 2. УРАВНЕНИЯ ОШИБОК ИНС
рование (1.20), получим следующие два типа уравнений ошибок
для двух форм кинематических уравнений:
2бМг- = 6М< ° (diQ + М, ° 6(diQ, (2.43)
26Mf = 6(Оц ° Mi + <дц ° 6М<. (2.44)
Для составляющих полной скорости V, т. е. величин кажу-
щейся скорости W и скорости свободного движения С, уравнения
ошибок получаются варьированием уравнений (1.22) для CQi
и ^Qj (аналогично тому, как это выполнялось в параграфах
§ 2.4 и 2.5 настоящей главы):
6CQi == 6GQt- + 6CQi X (diQ + CQi X 6<oiQ, (2.45)
6WQJ = 6PQJ + 6WQJ X (djQ + WQJ X 6®jQ, (2.46)
6VQft = 6GQA + 6WQfe. (2.47)
Для вектора положения имеем уравнение ошибок, получаемое
варьированием (1.26):
бКрь'== 6 VQk + X (dkQ + Rpft X 6<oftQ. (2.48)
К полученным уравнениям следует добавить соотношения
перепроектирования ошибок в различные системы координат Qu
такими соотношениями будут соотношения эквивалентности, по-
добные (2.21) и (2.22).
2.6.2. Ошибки кинематических уравнений. Взаимное положе-
ние систем координат I и Qi определяется кватернионом Mf;
при этом кватернион М< можно задавать двумя способами.
В первом случае Mi может быть определен как некоторая функ-
ция (времени), определяемая смыслом решаемой задачи. В этом
случае ошибка задания положения бМг будет определяться точ-
ностью соответствия функции Мг реальному движению. Во вто-
ром случае положение системы координат Qi находится в ре-
зультате решения некоторой задачи движения, при этом Mi вы-
числяется путем решения кинематических уравнений. В этом
случае бМг будет подчиняться одному из уравнений ошибок
((2.43) или (2.44)) в зависимости от того, какого вида инфор-
мация, (diQ или (ди, используется для решения кинематических
уравнений.
В соответствии с этим источником ошибок может быть либо
величина 6(diQ, либо 8(дц. Очевидно, что в первом случае 6М<
просто задано, и исследования требует только тот случай, когда
Mi вычисляется по информации об угловой скорости.
1.° Пусть Мг- вычисляется согласно алгоритму (1.20) по ин-
формации <oiQ; в этом случае ошибки в задании (diQ определят,
в конечном счете, и точность знания М$. Уравнениями ошибок
реализации кинематического уравнения будут уравнения (2.43).
§ 2.6. ОБЩИЙ СЛУЧАЙ УРАВНЕНИЙ ОШИБОК ИНС
57
Используя решение (2.5) для аналогичного уравнения ошибок,
получим искомое решение данного уравнения в виде
(t \
J М{ о 6®iQ о Mi dx j oMi. (2.49)
О '
Вводя аналогично (2.13) вектор малого поворота Д0г, соответ-
ствующего ошибке бМг, имеем
Д0г(? = 2Мг ° 6МЙ Д017 = 2SMf о М<. (2.50)
Сделаем несколько замечаний относительно используемых
здесь обозначений и индексов. Отображения вектора на различ-
ные координатные системы Qk обозначаются индексом базиса,
как, например, VQfe, RQfe. Однако отображения векторов малого
поворота и угловой скорости должны иметь два индекса: во-
первых, того базиса, движение которого они определяют, т. е.
Qk, Е и т. п.; во-вторых, индекс базиса, на который выполняется
проектирование. По этой причине вектор, например, ошибки
Д0 положения базиса Qi в проекции на базис Qk должен бы
иметь индексы Qi, Qh. В целях сокращения числа индексов бу-
дем писать в этом случае Д0<е*. Если же этот вектор проекти-
руется на систему координат Qi, то мы будем опускать второй
индекс i, т. е. A0iQis Д0г(?. Аналогичные обозначения будут ис-
пользоваться и для вектора
Уравнения ошибок для векторов Д0г получаются исходя из
соотношений (2.50) формальным дифференцированием Д0{ с уче-
том уравнений (2.43); приведем их в окончательном виде:
Д0г(? + (olQ X Д0г(г = 6(oiQ, (2.51)
Д0Н = М< ° 6®iQ 0 Мг-. (2.52)
Решениями этих уравнений будут следующие соотношения:
/ t \
k@iQ = М|М°|Д©г(?М?Мг + Mi о J Mi о So)iQ о Mi йт оМй (2.53)
\о /
t
Д0п = Д0?1 + J Mi о So)iQ о Mi dx, (2.54)
о
переходящие друг в друга и в решение (2.49) с учетом равенств
перепроектирования и равенств (2.50).
2°. Пусть М/ вычисляется по исходной информации т. е.
исходной ошибкой будет величина 6(0^. Уравнением ошибок в
этом случае будет уравнение (2.44); используя результаты ис-
следования обобщенных ошибок кинематического уравнения
58
ГЛ. 2. УРАВНЕНИЯ ОШИБОК ИНС
(2.15), получим решение в виде
t
6М| = Mi oMi» 6Mi + Mi о J Mi о fiftjij о Mi dr. (2.55>
0
Вводя вектор угловой ошибки А0, получим также уравнения
ошибок для этого вектора формальным дифференцированием ра-
венств (2.50) с учетом уравнения ошибок (2.44):
A0i<? = Mf ° 6<ог1 ° Мъ (2.56)
А0г/ + А0„ X (oiT = 6о)г1. (2.57>
Решением этих уравнений будут следующие соотношения:
t
+ J °6(он о Mj dx, (2.58)^
о
\
J Mi o6d>ir о Mi dr oMi, (2.59>
0 /
получаемые аналогично решениям (2.17) и (2.19).
3°. Рассмотренные в п. 1 и 2 настоящего параграфа уравне-
ния ошибок как для 6МЙ так и для проекции вектора угловой
скорости А0 различны, и их различие определяется тем, какая
берется исходная информация (и ее ошибка): б<ог/ или же 6(o1Q.
Очевидно, что обе группы кинематических уравнений, также как~
и уравнений их ошибок (2.43) и (2.44), могут описывать один
и тот же процесс; при этом какая-то ошибка первичной инфор-
мации должна быть выбрана исходной (что определяется физи-
ческими соображениями). При этом другую ее проекцию (ошиб-
ки первичной информации) можно получить согласно соотно-
шениям эквивалентности. Так, если за исходную взять ошибку
6(Oii, то, пользуясь уравнением (2.44) и его решениями (2.58)
или (2.59), можно найти вызываемую ею ошибку. Эта же ошиб-
ка первичной информации, приведенная к осям базиса Qi, оп-
ределит эквивалентную ошибку
6(OiQ = Мг- ° 6(Оп ° Мг- + (coiQ X A0lQ). (2.60)
Можно видеть, что это соотношение является необходимым
для совпадения уравнений для вектора угловой ошибки 0lQ
(2.51) и (2.56). Точно так же, если исходной является инфор-
мация (diQ и, соответственно, ошибка 8(&iQ, то эквивалентная ей
ошибка знания вектора найдется как
8(дц = М/ 6(djQ ° Mi + (A0ij X con). (2.61 У
Это соотношение эквивалентности также позволяет совместить
уравнения для вектора угловой ошибки А0п в равенствах (2.52)
§ 2.6. ОБЩИЙ СЛУЧАЙ УРАВНЕНИЙ ОШИБОК ИНС
59
и (2.57). Можно проверить далее, что два уравнения для оши-
бок бМг (2.49) и (2.55) совпадают, если связь 6<olf и б(ог<3 осу-
ществляется соотношениями эквивалентности (2.60) и (2.61).
4°. Рассмотрим теперь полную ошибку определения положе-
ния некоторого базиса Qi в случае БИНС. При этом единствен-
ным реально существующим базисом является базис Е; положе-
ние же базиса Qi определяется кватернионом Мг относительно
вычисленного базиса I. Отсюда следует, что базис Qi задан от-
носительно реального базиса Е кватернионом N^A^M;, так
как положение расчетного базиса I задается кватернионом А.
Точность определения базиса Q относительно Е будет, очевидно,
определяться следующей величиной:
6Nf =3 б (А о Мг) = —А ° 6А о А о Мг + А о бМг.
Введем вместо вариаций 6А и 6М; векторы угловой ошибки
А0 и Д0г’, при этом введем также вектор малого поворота, со-
ответствующий ошибки 6N\ согласно следующим соотношениям:
A0zQi = 2Nt- ° 6Nb А02Е = 26Ni ° Ж-.
Для проекции вектора суммарной ошибки на базис Qi имеем
Л02Qi = 2N; о 6N, = -2Мг<бА ° А о Мг + 2Мг ° бМ, =
= А0г<? - Я ° A0J о Mf== А0г<? - A0Q. (2.62)
Точно так же для проекции на базис Е (и I) имеем
А02£ = 2бЯ ° Nf = —2А ° 6А + 2А ° бМг- ° Мг- ° А =
= -А0в + А ° А0н ° А = А0Ш - А0в. (2.63)
Полученный результат является совершенно естественным;
он указывает на то, что векторная ошибка в определении базиса
Q получается суммированием векторных ошибок составляющих
вращений. С другой стороны, полученные соотношения указыва-
ют, что при определении положения любых базисов относитель-
но I в точность определения положения всегда аддитивно входит
ошибка определения самого базиса /.
2.6.3. Ошибки для уравнения скорости движения (первое ин-
тегрирование). Как было показано в § 2.4 настоящей главы, для
нахождения скорости движения (так же как и положения) мож-
но использовать любой алгоритм интегрирования; важным ока-
зывается только вид ошибок исходной, первичной и начальной
информации и конечное представление навигационных пара-
метров.
Будем считать, что исходная информация о векторе грави-
тационного ускорения задана в базисе Qi\ тем самым полагаем,
что ошибкой исходной информации является величина 6GQi.
Ошибку первичной информации о кажущемся ускорении будем
60
ГЛ. 2. УРАВНЕНИЯ ОШИБОК ИНС
считать заданной в виде 6Ря, что соответствует случаю БИНС.
Это предположение не уменьшает общности исследования, так
как всегда имеется возможность перейти к любому другому ба-
зису и, следовательно,— к любой другой заданной ошибке при
интегрировании гравитационного и кажущегося ускорений. При
этом заданные значения ошибок первичной и исходной инфор-
мации вычисляются с помощью соотношения эквивалентности.
Проведем раздельно исследование влияния ошибок исходной
и первичной информации при интегрировании гравитационного
ускорения, дающем согласно (1.11) скорость свободного движе-
ния и кажущегося ускорения (1.9), определяющего кажущуюся
скорость объекта.
1°. Скорость свободного движения. Получим вна-
чале уравнение ошибок для скорости свободного движения.
Варьируя уравнение (1.11), получим
6С,= 6Gb (2.64)
Заметим, что полученное уравнение эквивалентно уравнению-
(2.45). Интегрирование уравнения (2.64) дает следующее ре-
шение:
t t
бс1 = 6С? + J 6Gj dx = 6V° + f SGj dx. (2.65)
0 6
Как указывалось выше, данное решение может быть приведена
к различным его формам, в том числе и к формальному реше-
нию уравнения (2.45). Выполним ряд таких преобразований^
имея целью, во-первых, представить в решении различные виды
ошибок первичной и исходной информации, во-вторых,— раз-
личное представление результирующей ошибки интегрирования
6С (в разных системах координат).
Рассмотрим вначале первую задачу. Выразим ошибку исход-
ной информации с помощью соотношения эквивалентности череа
ее 'значение в заданном базисе Qit
6G. '= Мг- о 6GQi о Mi + (X Gj).
В результате подстановки получаем
t t
6Cj = 6V? + [ Mi о 6Gq{ о 5ii dx + J (AG,/ X Gj) dx (2.66)
b о
— решение, являющееся той формой, которая содержит задан-
ную ошибку исходной информации 6GQi и «проинтегриро-
ванную» ошибку 6fi>i, представленную в виде А0г/. Чтобы
прийти к следующей форме решения, преобразуем с помощью
§ 2.6. ОБЩИЙ СЛУЧАЙ УРАВНЕНИЙ ОШИБОК ИНС
61
интегрирования по частям последний член (2.66):
t t t t
f (A0j2xG2)dx = J (A0uxdCO = (А©л XC2) | + f (CjXdQu).
0 6 0 0
Выражая производную от &u через ошибку первичной инфор-
мации (2.52), получим выражение (2.66) для ошибки первого
интегрирования в форме
t
8Cj = 6V? + J М2»6GQi о Mi dx +
0
t
+ ( [с, x (Mi о 6®Qi oMi)] dx + (A0i2 x Ct) - ( A0?j X V?). (2.67}
0
Обратимся теперь к представлению результирующей ошибки
скорости свободного движения в других системах координат.
Если навигационные параметры требуется представить, скажем,
в системе координат Qk, то интерес представляет ошибка скоро-
сти CQft, т. е. величина 6CQft. Проведенные выше исследования
позволяют сразу же написать выражение для искомой ошибки
$CQh с помощью соотношения эквивалентности:
= Mft ° 6Cj ° МА + CQk X A0ftQ.
Используя решение для 6Cj, например, (2.67), а также оче-
видные равенства:
Oqa “ МА ° С/ ° МА, А0гч?Ь = ° A©ii ° Mft,
А0Л<? = МА ° А0А1 ° МА, 6CT = МА о fiCQft о + (А0А1X CT),
получим решение в виде
= Mfe о М2 о 6V°Qft о м« о Mft +
/ t
+ Mft о I ( М$60фг
\о
t
Mi dx 1° Mft 4-MftC J[Cjx (Mi°6(»iQoMi)]dT °Mft4~
/ о
0
+ [CQftX(A0ftQft - AOjQft)] - [V°QftX(A02Qft - A©U)L (2.68>
Если положить базисы Qk и Qi совпадающими, т. е. АО.^А©^
и Mft = Мг, то решение (2.68) приведется к соотношению, кото-
рое можно получить непосредственным решением уравнения
(2.45).
Полученные соотношения позволяют получить решения для
любого вида ошибок исходной и первичной информации и пред-
ставить ошибку нахождения скорости свободного движения в
любом базисе.
2°. Кажущаяся скорость. Рассмотрим уравнение оши-
бок (2.46) для кажущейся скорости. Очевидно, что аналогична
•62
ГЛ. 2. УРАВНЕНИЯ ОШИБОК ИНС
предыдущему рассмотрению для случая скорости свободного дви-
жения можно было бы получить все формы решений, исходя
из вариаций уравнений для кажущейся скорости в инерциаль-
ных осях. Выполним для примера преобразование форм реше-
ний уравнений ошибок для кажущейся скорости, начиная с не-
посредственного решения для (2.46). По аналогии с решением
обобщенного уравнения ошибок (2.27) можем сразу же написать
это решение в следующем виде:
6WQ; = М; о М? o6W^- оМ? о Mj +
{t
I ° [SPqj —(WQj x S^jq)] ° dt
0 J
Mj.
(2.69)
Рассмотрим в этом решении следующий интеграл, в котором
выполним интегрирование по частям с учетом уравнения ошибок
(2.52):
t t
j Mj о (Wqj X So)jq) о M; dx = j [W7 X (Mj о 6(Ojq о Mj)] dx =
ю 0
t t
= f (W7 X dAQjT) = (W, X Д0Я) - ( w?x + J (Двя X Px) dr.
0 0
С учетом этого соотношение (2.69) для ошибки примет вид
/ t \
= М; о м?» 8<a°Qj °М? о М; + М; о [ Mj» 6Pqj о М,- dx I «Mj +
\о /
/ t \
+ М; О [ ДвдXPjdT »Mi + (Wq;х Дв;<?) - (W&JX Д0?<Д (2.70)
'о /
В случае БИНС ошибка первичной информации о кажущемся
ускорении задана в виде SP£. Согласно соотношениям эквива-
лентности ошибка 6Pqj является производной от SPE:
PQ. = Ц. о Р, о М; = Я ° А о Ря о А о Mj,
6PQJ = Mj о A ° 6Р£ ° А ° М;- + [ ( A0Qj - A0№j) X PQJ], (2.71)
где A0qj — угловая ошибка, определяемая SA (2.13) и взятая в
проекциях на оси Qj, а А0^- — угловая ошибка, определяемая
(2.50), взятая также на оси базиса Qj. Подставляя (2.71)
в (2.70) и учитывая соотношения перепроектирования типа
A0q3- == Mj ° Д0Г о Д0Яз- = Mj ° А0Д ° Mj, PQJ = Mj ° Рт ° Mj,
§ 2.6. ОБЩИЙ СЛУЧАЙ УРАВНЕНИЙ ОШИБОК ИНС
6#’
получим
(f X
J А о 6РЕ о Д йт ! о Mj +
О /
/ t \
+ й, о J де, х Р; di р м,- + (wQj х де^) -(х де?с). (2.72>
\о J
В полученной форме решения можно осуществить 'замену уг-
ловой ошибки A0I через вызывающую ее ошибку первичной ин-
формации используя следующее равенство:
t t
j (Дв2 X Pi) dx = (Д01X W2) - ( Д0® x Wj) + J (W2 X d№j) =
0 0
t
= (Д01X Wi) - ( Д01X w?) + J A о (W£ x 6<»£) ° A dx..
0
Можно, наконец, пересчитать ошибку кажущейся скорости к
инерциальным осям с помощью соотношения эквивалентности:
6WQJ = Я ° 6W, о Mj + (WQJ X A0iQ),
6W, = Mj ° 6WQJ ° Я + (X W,).
Очевидно, такое же равенство имеем и для начальных условий^
Й; о М? о Й? о М; = М; »6W? о М; + М; □ (W® X Д0?) ° М;.
С использованием этих равенств соотношение (2.72) может быть,
преобразовано к виду
t t
6Wj = 6W? + J [ А о 6РЕ о А + (Д01 х Pi)] dx = 6W? + J 6P2 dx.
0 0
(2.73 >
Последнее соотношение является решением уравнения ошибок
для кажущейся скорости в инерциальных осях.
3°. Ошибка полной скорости. Поскольку полная ско-
рость получается векторным суммированием скорости свободного'
движения и кажущейся скорости, то для их ошибок имеем
3v = 6w + 6с в проекциях на любой базис (векторная форма
сложения ошибок). В частности, для базиса Qk имеем 6VQk =
= 6WQft + 6CQft; при этом можно использовать любую из форм
равенств ошибок составляющих скоростей.
Более удобными представляются те формы соотношений оши-
бок, в которые входит величина угловой ошибки А6;, уже «про-
интегрированная» при автономном решении уравнений ошибок
кинематических уравнений. Запишем для примера выражение
<54
ГЛ. 2. УРАВНЕНИЯ ОШИБОК ИНС
для ошибки полной скорости в случае БИНС, используя при
этом различные базисы Е и Qi для ошибок кажущейся скорости
и скорости свободного движения:
— М& ° 6WZ о Mk х AOq/O + Мь °6CjoMfe+(CQfe x A0feQ)=
/ t \
= Mft о (sw? + 6C?) о Mft + Mfe о I f MjSGQj о Mi dx j = Mft +
' о /
/ t \
М/г °l j*A0ij x Gz dx
\o /
]Ао[6Ре + (А0ехРе)1°Лйт oMft+
0
+ [(WQfe + CQ,0xAeftQ] (2.74)
Если положить базисы Qi и E совпадающими, т. е. Мг = А, то
имеем
W = Mfto(6w? + 6c°/)oM,+
+ М,
Г t
j {Ao(6Ge + 6Pe)°A+[A0zx(Gz+Pj)]Mt
о
°M/i+(Vq/1 X A0&q)
— решение, которое при перепроектировании к базису I с по-
мощью соотношения
6VZ = 6VQA ° МА + \0kI X Vz
переходит в очевидное равенство
t
6¥г =-- 6W? + 6С? + f (6Gj + 6Р2) dx. (2.75)
6
2.6.4, Ошибки для уравнения положения (второе интегриро-
вание). Пусть уравнением ошибок второго интегрирования яв-
ляется уравнение (2.48); его решение найдется согласно реше-
нию обобщенного уравнения, например, в форме, аналогичной
(2.28):
SRq/j = о SRZ ° М/г +
/ t \ / t \
+ М/г ° ( У М/г ° SVQk ° М/г ЙТ j о М/г + Mfe J A0feZ X VZ dx j о М/г 4"
+ (RQfexA0^) (2.76)
Б этом решении 6VQA может быть использовано в любом виде
ч(2.74), (2.75). Соотношениями эквивалентности
6VZ = Mfe о SVq, о Mfe + (AGfeZ X Vz),
SRq/l = М/г о 6RZ о М/г + (Rq& х AGfeQfe)
§3.1. ПОНЯТИЕ ВИНТА И ЕГО ПРИЛОЖЕНИЯ
65
равенство может быть приведено к очевидному соотношению для
ошибок положения:
t
6 Rj = 6R,° + f 6V; dx. (2.77)
6
Аналогично предыдущему случаю интегрирования можно за-
писать ряд форм решения, отличающихся, во-первых, способом
задания угловой ошибки (бсо или ДО), во-вторых, представле-
нием ошибок 6V и 6R в различных координатных системах.
Полученные в данной главе соотношения для ошибок поло-
жения и скорости, а также для ошибок решения кинематиче-
ских уравнений могут быть использованы для анализа точности
реализации решения задачи ИНС и БИНС, в частности.
ГЛАВА 3
БИКВАТЕРНИОНЫ И ВИНТОВОЙ МЕТОД
ОПИСАНИЯ ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
§3.1. Понятие винта и его приложения в механике
В кинематике, т. е. описании движения твердого тела, сущест-
вует известная теорема Шаля [24, 28, 66, 71], согласно которой
любое перемещение твердого тела эквивалентно винтовому дви-
жению. Действительно, если обозначить оператором П обобщен-
ное преобразование перемещения, оператором Т — преобразова-
ние параллельного переноса (определяемого переносом р некой
точки О в О') и оператором В — преобразование вращения во-
круг точки О, то имеем П = ВТ, или П = ТВ, т. е. обобщенное
перемещение может быть выполнено переносом (на р) точки О
в О' и вращением вокруг этой (О') точки или вращением вокруг
точки О и переносом (на тот же вектор р). Согласно теореме
Эйлера любое вращение вокруг точки эквивалентно плоскому
вращению, сохраняющему неизменной одну ось (ось эйлеровско-
го вращения, ось конечного поворота). Разлагая перенос Т на
перенос вдоль оси эйлеровского вращения Т° и перенос в плос-
кости вращения Т', мы можем выбором положения центра вра-
щения в плоскости свести преобразование Т' к одному враще-
нию Во. Таким образом, произвольное перемещение сводится к
п = вот° или Т°Во — вращению и перемещению вдоль оси вра-
щения, т. е. винтовому движению.
Кроме винта перемещений Т°Во в механике существует винт
скоростей (со, V), силовой винт (F, М) и т. п. Последнее есть от-
ражение более общего соотношения в механике, согласно кото-
рому любая система векторов сводится (или эквивалентна) к век-
5 в. Н. Бранец, И, П. Шмыглевский
66
ГЛ. 3. БИКВАТЕРНИОНЫ И ВИНТОВОЙ МЕТОД
тору (суммарному, главному) и моменту системы векторов отно-
сительно выбранной точки приведения О. Две системы векторов
эквивалентны друг другу, если равны их главные векторы и мо-
менты относительно одной и той же точки приведения.
Пусть rft —система векторов; тогда главный вектор и моменг
этой системы выразятся как
г° = 2 Гй, г' = 2 (Ph X rft),
fe=l fe=l
причем pft — радиусы векторов, проведенных из точки приведения
О к концам векторов rft. Очевидно, что сами векторы rft могут за-
даваться как векторы, скользящие вдоль своего направления; pfc
при этом могут быть выбраны как кратчайшие направления от
точки приведения до прямой скользящего вектора. Таким обра-
зом, система векторов rft (к = 1, . .., п) может быть описана дву-
мя векторами:
г= <г°, />, (3.1)
т. е. вектором г° и моментом г'. При переходе к новой точке при-
ведения (скажем, О', такой, что 00' = р) вектор г° не меняется,,
момент перейдет в
(г')'=(г')-(рХг°). (3.2)
Можно показать, что для эквивалентных систем моменты бу-
дут равны относительно любой точки приведения [28]. Величи-
на скалярного произведения г° • г' = J — инвариант системы и но
зависит от точки приведения.
Имеем следующие случаи:
1. г° =# 0, г' =# 0; J = 0 — система сводится к вектору и мо-
менту (паре сил).
2. г° =# 0, 7 = 0- вектор.
3. г° = 0; г' =# 0, J = 0 — пара сил (чистый момент).
Величина г (3.1) называется винтом, если вектор г' коллинеа-
рен т°, или же мотором в более общем случае [28]. Нам будет
удобно называть г винтом при произвольной точке приведения.
Скалярная величина
(3-3>
называется параметром винта. Параметр не зависит от точки при-
ведения.
Пусть задана система координат Oiiisis (т. е. базис I) и и т*
имеют в этой системе следующие компоненты (проекции):
г° = (г?, г®, г®), г' = (r'lt r'z, Гд). (3.4)
§ 3.2. БИКВАТЕРНИОНЫ И ИХ СВОЙСТВА
67
Тогда параметр (3.3) получит выражение
() w+w+en2’
и точка приведения, в которой г' параллелен го, имеет координаты
Г2Г3— Г3Г2 Г3Г1— Г3г1 Г1Г2~ Г'1Г2
__ & 3 О Z _ О 1 О 1 __ 1 &___1
Х0 / 0\2 ’ Уь / 0\2 ’ Zo / о\2
Следуя фундаментальным работам А. П. Котельникова [54, 55],
назовем величину <г°, г'> — бивектором, г° — главной частью и
г' — моментной частью бивектора. Координаты и rj (Л, / =
= 1, 2, 3) (3.4) называются плюккеровыми координатами бивек-
тора в базисе I.
Очевидно, что при переходе к другой координатной системе
должны выполняться две операции: перепроектирование компо-
нент г° и г' бивектора к новому базису и изменение моментной
части г' при переходе к новому началу координат — перенос точ-
ки приведения. Бивектор является частным случаем бикватер-
ниона, описание которого приводится далее в соответствии с ра-
ботами А. П. Котельникова [54, 55].
i 3.2. Бикватернионы и их свойства
3.2.1. Определение бикватерниона Клиффорда. Постулируя
правила действий над бивекторами как правила линейной алгеб-
ры, при условии выполнения свойств ассоциативности умноже-
ния и дистрибутивности по отношению к сложению, Клиффорд
пришел к понятию бивектора, бикватерниона и скалярного числа
с комплексной единицей s, такой, что $2 = 0. Бикватернион в
этом случае состоит из суммы бивектора
г = г° + sr' (3.5)
и скалярного числа
г о = го + sri (3.6)
где г0, (г“) — главная часть бивектора (скаляра) и г'(гр) —
комплексная его часть; при этом векторы
Г° = r’i + r°j + г' = гр + r2j + r'3k
представляются в виде гиперкомплексных чисел с единицами
i, j, к Гамильтона *). Таким образом, бикватернион
R = г0 + г = г°0 + г° 4- s(r'o + rQ,
*) Отметим, что бикватернионами называются также и суммы величин
(3.5) и (3.6) при s2 == —1, s2 = 4-1, имеющие другую физическую интер-
претацию.
5*
68
ГЛ. 3. БИКВАТЕРНИОНЫ И ВИНТОВОЙ МЕТОД
с одной стороны, может быть представлен в виде
R = г0 + г = seal R + vect R,
т. е. в виде суммы скалярной и векторной частей
seal R = го, vect R = г,
каждая из которых — комплексное число или комплексный век-
тор (бивектор). С другой стороны, он может быть представлен в
виде
R = R°+sR'.
где R0 и R' — обычные кватернионы, содержащие скалярную и
векторную части:
R0 = гЦ + г° = r°0 + r?i + r£j + Гдк,
R' = Го + г' = 4 + r'i + r'2j + Гдк
Комплексное скалярное число (3.6) называют дуальным числом
(гд — главной и г'о—дуальной составляющей); комплексный век-
тор (3.5) называют бивектором, или дуальным вектором; г° —
главная часть бивектора, г' — моментная (дуальная, комплекс-
ная) его часть.
3.2.2. Свойства комплексных (дуальных) скалярных чисел-
Число такого рода имеет вид а = а0 + sa'. Сложение таких чисел
обладает свойствами ассоциативности и коммутативности; умно-
жение коммутативно, ассоциативно и дистрибутивно:
a±p = a°±p° + s(а/ ± [}'),
оф = [За = а°{3° + 5 (аф' + аф°).
Два дуальных числа равны тогда и только тогда, когда рав-
ны их компоненты. Используя свойства комплексной единицы,
приходим далее к таким соотношениям:
а ос —sol ос । ос р — р ос
Т = ₽04-sp' = ₽° ‘ 5 ’
ап = (а0 + sa)n = а°п + sna'aPn~\ (3.7)
Скалярная функция дуальной переменной /(а) = /(а0 + $а') мо-
жет быть представлена в виде следующего выражения:
/(«) = / (“°) + (3-8)
получаемого при разложении ее в ряд Тейлора относительно зна-
чения а0. Можно видеть, что комплексная (дуальная) перемен-
§ 3.2. БИКВАТЕРНИОНЫ И ИХ СВОЙСТВА
69
ная может рассматриваться как малый параметр, степени кото-
рого выше второй можно не учитывать; при этом разложение в
ряд, например, функции дуального переменного по степеням ду-
альной части аргумента, заканчивается первым числом (условие
52 = 0).
Комплексная (дуальная) функция дуальной переменной име-
ет вид
F(a) =/°(<х)+s/'(а) =/°(а°, «')+$/',(а0, а').
Представляя каждую из составляющих в виде разложения в ряд
относительно главной части аргумента, получим
F («) = /° (а0) + 5 ( + /' (а°)
\ да"
таким образом, имеем для такой функции
г (а«, а') = /о (а0), /' (а% а') = а' + Г (а0)- (3.9)
да
Следуя полученным соотношениям (3.8), имеем, в частности,
sin а == sin а0 + sa' cos а°, cos а = cos а0 — sa' sin а0,
(3.10)
tg а = tg а0 + sa' sec2 а0, ea — ea°( 1 + sa') и т. п.
Параметром дуального числа а называется отношение
= ~ (3.11)
а
Параметр и главная часть дуального числа определяют его сле-
дующим образом:
а = а0 + за' = а0 (1 + S&* (а)) = а°е^(а). (3.12)
Можно показать, что параметр произведения дуальных чисел ра-
вен сумме параметров сомножителей:
^(ар...) = ^(а)+^(|Р)+...
Производная от функции дуальной переменной:
dF (а) = д/° ( г d2f* df (а0) \
да* Ф Л д (а0)2 да* Г
(3.13)
или же
(F)™ = (f)S + s [(П& + а' (Mol-
Интеграл от функции дуальной переменной определяется как
операция, обратная дифференцированию:
(F)<^ = + s [а'/° (а°) + (/14 (3.14)
70
ГЛ. 3. БИКВАТЕРНИОНЫ И ВИНТОВОЙ МЕТОД
т. е.
J F(a) da = J /° (а°) da° + $ [а'/° (а0) + J /' (а°) da° + const].
3.2.3. Свойства бикватернионов. Бикватернион Q будем выра-
жать в следующих видах:
Q = qo + sq;
где Q0 и Q' — кватернионы;
Q = qo + q = seal Q + vect Q,
где qo — дуальное скалярное число, q — бивектор;
Q = ?? + + <A) + dfc + * Go + Qi* + ?2j + £зк) =
Qo + Qi* + M + £зк>
Где q0., q'. — действительные скалярные числа, a q^ — дуальные чис-
ла (/ = 0, 1, 2, 3).
Все приводимые далее свойства бикватернионов получаются
из постулата равенства и свойств гиперкомплексных и дуальных
чисел. Два бикватерниона, имеющие одну точку приведения, рав-
ны, когда равны их главные и моментные (дуальные) части. Если
бикватернион определяется четырьмя дуальными скалярными
числами, то равенство означает покомпонентное равенство дуаль-
ных чисел.
1°. Сложение бикватернионов коммутативно и ассоциативно:
Qi + Q2 = Q2 + Qi, Qi +(Q2+ Q3) = (Qi + Q2)+ Q3.
2°. Умножение бикватернионов ассоциативно и дистрибутив-
но по отношению к сложению:
Qi ° (Q2 + Q3) = Qi ° Q2 + Qi ° Qs,
(Qi + Q2)°Q3 = Qi°Q3 + Q2°Q3,
Qi 0 (Q2 0 Q3) = (Qi0 Q2)0 Q3.
Умножение некоммутативно:
Qi ° Q2 Q2 ° Qi
для произвольных бикватернионов.
3°. Бикватернионом, сопряженным данному (Q), называется
бикватернион ~
Q = qo - q = Q°+ sQz.
4°. Нормой бикватерниона называется скалярное комплексное
число
IIQII = Q° Q = Q°Q = go — (q)2 = q? + <7! + qI + qI-
§ 3.2. БИКВАТЕРНИОНЫ И ИХ СВОЙСТВА
71
5°. Бикватернион, обратный данному, определяется следую-
щим образом:
о-1 = -5.
” II п
Данное определение следует из выражения для нормы бикватер-
ниона. С помощью обратного бикватерниона выполняется опера-
ция деления бикватернионов:
Q-1 о Q = Q о Q1 = £
6°. Произведение двух бикватернионов является также биква-
тернионом: Р = М ° А. Это соотношение развертывается в следую-
щий ряд равенств:
Р° - М° о Л°, Р' = М° ° Л' + М' ° Л°,
или
Ро = рДо — (JUL • X), р == цоХ + Хор +.(р X X),
(р* X) = ~ + Рг^2 + Рз^з +
+ + piXj + р®Х2 + Р2Х2 + РзХ3 + Р3Х3) =
^(р0.Х0) + 5[(р°.Х') + (р'-Х0)],
(р X X) = (р° X X») + $ [(р° X X') + (р' X X0)] - Их
К
j к
Н2 Н3 . (3.15)
%2 Х3
Сомножители М или Л находятся операцией деления с помощью
обратного бикватерниона:
М^РоЛ1, Л^М1?.
7°. Сопряженное от произведения бикватернионов равно про-
изведению сопряженных бикватернионов, взятых в обратном по-
рядке:
Р = Л ° М
Данное равенство доказывается с помощью приведенной выше
формулы умножения. Из него следует равенство
ПРИ = ИМИ иди
— норма произведения равна произведению норм сомножителей.
Отсюда же следует
р-1 = Р — А°М — Д”1
||Р|| ||Л||||М||
т. е. бикватернион, обратный произведению, находится как про-
изведение обратных бикватернионов, взятых в обратном порядке.
72
ГЛ. 3. БИКВАТЕРНИОНЫ И ВИНТОВОЙ МЕТОД
Указанные свойства методом индукции доказываются для лю-
бого количества сомножителей
Q — ° Л-2 ° . . . °Л-п, Q — Л-тг ° ... ° Ар Q — А^ ° . . . °Aj .
8°. Тензор бикватерниона определяется следующим образом:
^"Q = /iiQII = У Чо + q2i + d + qi (3.16)
Очевидно, что тензор бикватерниона есть комплексное (дуальное)
число:
= ^oQ + s^Q,
где ^"0Q = ^"Q<’= ^(t/o)2 + (^i)2 + (?г)2 + (?з)2, a в свою оче-
редь
.7\Q = + = Q (3Л 7)
/(e+w)3+(e+(e
определяет величину называемую параметром бикватерниона.
Используя обозначение для параметра бикватерниона, имеем
^"Q = ^-Q° (1 + s^Q) = ^Q0e’5’Q. (3.18)
Имеем далее
IIQII = ||Q0|| (1 + <^Q).
Верзор бикватерниона определяется как отношение
(ЗЛ9)
Таким образом, бикватернион представим как произведение своего
тензора на верзор:
Q = ^Q^Q. (3.20)
9°. Рассматривая тензор произведения двух бикватернионов,
приходим к равенству
= s^(M оЛ)= да = ямн fiiAii = STM °(3.21)
— тензор произведения равен произведению тензоров сомножите-
лей. Из этого равенства следует, что
^>Р = + ^А (3.22)
— параметр произведения бикватернионов равен сумме парамет-
ров сомножителей (см. аналогичные соотношения для дуальных
чисел (3.11)).
Верзор произведения равен произведению верзоров сомножи-
телей:
= Л = ЛАг = ° (3.23)
§ 3.2. БИКВАТЕРНИОНЫ И ИХ СВОЙСТВА
73
10°. Тригонометрическое представление би-
кватерниона. Два дуальных числа а и 6, удовлетворяющих
условию а2 + Ъ2 = 1, могут быть представлены в виде тригономет-
рической функции дуального переменного 0:
а = cos 0, Ъ = sin 0, 0 = 0° 4-50'. (3.24)
Действительно, используя разложение тригонометрической функ-
ции дуального переменного (3.10), имеем
а = а° + sa = cos 0° — s@' sin 0°,
b = 6° + sb' = sin 0° + s&' cos 0°.
Эти равенства совместимы:
aQ = cos 0°, 6° = sin 0°,
a' = 0' = — 0' sin ©°, b' = 0' = 0' cos 0°,
d0° d6Q
откуда следует выполнимость условия
а2 + Ъ2 = (а0)2 + (6°)2 + 2s (aQa/ + Ь%') = (а0)2 +|(6°)2 = 1.
Данное представление позволяет ввести тригонометрическую
форму для бикватерниона. Разделяя в выражении для нормы
бикватерниона тензор скалярной и векторной части, получаем
IIQH=(^o)2+(^q)2,
т. е.
(ЙЬ(ЯГ=*-
Введем комплексный угол 0 (3.24), такой что
ZTqo = cos 0, STsin 0.
Обозначим единичный бивектор q/£Tq — g. Для этого бивектора
справедливо
„2
С учетом введенных переменных имеем
Q - ч. -\ ч - I- й) “ 3-4 (Й + зШ) =
= (cos 0 + g sin 0). (3.25)
Согласно представлению (3.20) получим
= cos 0 + g sin 0. (3.26)
Комплексное дуальное число 0 = 0°+ s0' называется комп-
лексным дуальным углом бикватерниона, причем 0° носит назва-
ние главная часть угла, а 0х — шаг бикватерниона.
74
ГЛ. 3. БИКВАТЕРНИОНЫ И ВИНТОВОЙ МЕТОД
11°. Аналогично нормированному кватерниону рассмотрим
бикватернион, тензор которого равен единице. Очевидно, что усло-
вие = 1 выполняется, если £FQ° = 1 и = 0 (см. (3.17));
при этом, так как Q == Q° + $Q', условие £TQ° = 1 означает, что
кватернион Q0 нормирован, а равенство нулю параметра биква-
терниона Q позволяет умножать подобные бикватернионы при
сохранении этого их свойства (при умножении бикватернионов
параметры сомножителей суммируются).
Бикватернион, имеющий тензор равный единице, равен его
верзору; в этом случае он может быть представлен в тригономет-
рической форме (3.26): Q = cos 0 + g sin 0. Бикватернион такого
вида также можно условно назвать нормированным. Представляя
дуальный угол бикватерниона 0 = 0° + $0' и его бивектор £ =
= получим следующие соотношения для кватернионов —
компонент бикватерниона:
Q° = cos 0° + g° sin 0°, Q' = —0' sin 0° + £°0' cos 0° + sin 0°.
(3.27)
12°. Рассмотрим как преобразуется бивектор при переносе его
точки приведения. Пусть дан бивектор а0 = а0 + sa', имеющий
точку приведения О. При переносе точки приведения в О', такую,
что 00' = у, имеем (см., например, (3.2))
а0/ = а0 + s [а' + vect (а0 ° у)] — а0 + s [а' + (а0 х у)]. (3.28)
Оба соотношения определяют один и тот же бивектор относи-
тельно точки О (случай «о) и О' (случай aOf) соответственно.
Ось винта а проходит через точку О", находящуюся на рас-
стоянии
% = 7zfervect<a'
о а°) = vect [а' ° (а0)-1],
и для этой точки бивектор определяется одной составляющей а°
(т. е. вектором), умноженным на дуальное число 1 + Пара-
метр бивектора
1
(а0)2
=
seal (а' ° а0) = seal [а' о (а°)-1|.
Тензор бивектора
STа = £Га° (1 4- s^a) = 3ra°es^a.
13°. Аналогичным образом для бикватерниона Q = qo + q, где
до — дуальное скалярное число, a q — бивектор, точка приведе-
ния бивектора тождественно совпадает с точкой приведения би-
кватерниона. Так, если Q задан для точки приведения О, то
при переходе к другой точке приведения, скажем О', такой, что
§ 3.2. БИКВАТЕРНИОНЫ И ИХ СВОЙСТВА
75
00' = у, получим
Q = qo + <1 + s vect(q° ° у). (3.29)
Аналогичным образом находится ось бикватерниона (ось вин-
та бивектора q).
14°. При умножении бивектора на дуальное число происходит
изменение его параметра. Пусть скалярное число а = а0 + sa'
умножается на бивектор а = а° + sa':
аа = а°а° + s (а°а' + а'а°).
Найдем параметр полученного бивектора; согласно п. 12° имеем
, v seal [а°ос° о (а°а' + а'ос0)] а°2 seal (а0 о а')
----------да----------= —лда~ +
a°g' seal («° о а0) _ seal (а0 ° а') а' _
а°2а°2 а»2 а0
т. е. происходит сложение параметров сомножителей. Ось аа бу-
дет параллельна оси а и проходит через точку
vect [(а'а° 4- а'а°) о а°а°] / , п—1\
v =------—:—5—5—-------- =vect(a °а° ),
т. е. через ту же точку, что и ось а. Отсюда следует, что спра-
ведливо такое представление бивектора:
а = £Га$а,
где
— верзор бивектора, который, очевидно, является бивектором па-
раметра нуль. Аналогично этому верзор бикватерниона также
имеет параметр, равный нулю.
15°. Умножение бивектора на бивектор. Исполь-
зуя представление бивектора как дуального комплексного кватер-
ниона, можно получить основные соотношения, определяющие
результат умножения бивектора на бивектор. Пусть даны а ==
— а0 + sa', 3 = ?° + ^3' — два бивектора; выполняя кватернион-
ное умножение, получим (см. (3.15)):
а ° 3 = seal (а ° 3)+ vect (а ° 3),
scal(a ° 3) = - (а0 • 3°) - $ [ (а0 • 3') + (а' • 3°) ],
т. е. скалярная часть произведения есть комплексное дуальное
число, состоящее из скалярного произведения главных частей,
и моментной части, равной относительному моменту бивекторов.
Если ввести дуальный угол между бивекторами 0 = 0° + $0',
где 0° — угол, а 0' — минимальное расстояние между векторами
76
ГЛ. 3. БИКВАТЕРНИОНЫ И ВИНТОВОЙ МЕТОД
а0 и 3°, то скалярная часть произведения бивекторов
seal (а ° 3) = — ?Га£7~3 cos 0 (3.30)
— определяет скалярное произведение бивекторов.
Векторная часть произведения бивекторов имеет вид
vect(а ° 3)= vect(a0 о,3())+ s vect[(а0 ° 3,) + (а/ ° Р°)] =
= (а0 X 3°) + $ [ (а0 X 3') + (а X 3°) ].
Можно показать, что тензор векторной части
ЗГ vect (а ° 3) = ^а^З sin ©»
поскольку
о vect(a ° 3) = ^оа^оЗ sin ©°, /о о j\
^(vect(a ° 3)) = + 5^3 + ©°-
Ось бивектора vect (а ° 3) идет по линии £—линии кратчай-
шего расстояния между осями а и 3*
vect(a ° 3) = ^а^З sin ©5; (3.32)
это выражение определяет векторное произведение бивекторов.
С учетом соотношений (3.30) и (3.32) получаем окончательно
а ° 3 = ^7~а£ГЗ (—cos 0 + 5 sdn 0),
т. е. произведение бивекторов есть бикватернион, тензор которо-
го равен произведению тензоров сомножителей, а верзор опреде-
ляется скалярным и векторным произведением бивекторов.
16°. Деление бивекторов. Определим результат деле-
ния бивекторов 3 и а как следующую операцию:
Q=l_ = poa-l = po_^_ = _(poa)||a||-l =
= — (seal (J ° a + vect a°P) || cz ||~1 = (— seal a ° (J + vect a ° (J) || a||~r.
Используя соотношения (3.30), (3.32), получим
q=4=(cos 0sin 0)- <3-33>
Для данного бикватерниона Q = £7~Q(cos 0 + 5 sin 0) всегда
g- (6)
можно подобрать два бивектора а и 3 так, чтобы =
дуальный угол между ними был 0 и кратчайшее расстояние
определялось направлением 5- Таким образом, частное от деления
бивекторов есть бикватернион, тензор которого есть частное от
деления тензоров делимого и делителя, ось идет по линии крат-
чайшего расстояния между прямыми а и 3? а углом служит
комплексный угол между ними (0 = 0° + 50'); 0°— угол между
пересекающимися прямыми, параллельными а и 3, а 0'—рас-
стояние между прямыми а и 3 по линии кратчайшего расстояния.
§ 3.2. БИКВАТЕРНИОНЫ И ИХ СВОЙСТВА
77
Можно видеть, что одному и тому же бикватерниону удовлетво-
ряет множество бивекторов а и эти бивекторы принадлежат
одной щетке.
17°. Умножение (деление) б и к в а т е р н и о н о в. В ре-
зультате умножения двух бикватернионов получается бикватер-
нион; используя представление бикватерниона как частного от
деления бивекторов, которые можно всегда выбрать соответствую-
щим образом, получим Q = Q' = Q" = т. е.
Q = JL = JL о JL = Q" о Q'.
а у а
Аналогичным образом можно показать, что деление, а также
сложение, вычитание, умножение на скаляр двух бикватернионов
дает бикватернион. Действительно, пусть Q = Q' = Q" =
= Очевидно, что в этом случае
Р
= Y’q" = V то Q = Q"°Q'-1’
Q Q 1qQ'. Если же Q' —
т. е. имеют место правые и
левые делители.
18°. Умножение бикватернионов некоммутативно, перестанов-
ка сомножителей допустима тогда и только тогда, когда один из
сомножителей — скаляр (комплексное число) или же векторные
части верзора бикватерниона параллельны.
Бикватернионы с параллельными векторными частями назы-
ваются одноосными бикватернионами. Используя тригонометриче-
ское представление бикватерниона, имеем
Q = ^Q(cos 01 + g sin 0i), Q' = fFQ' (cos 02 + 5 sin ©2).
Произведение таких бикватернионов
Q ° Q' = ^rQ^~Q/ [(cos ©i + £ sin ©i)0 (cos ©2 + £ sin ©2)] —
= ^Q^Q' [cos (0i + 02) + £ sin (©1 + 02) ].
Совокупность прямых, пересекающих данную под прямым углом,
образует щетку. Бикватернион Q может быть представлен деле-
нием двух бивекторов, оси которых перпендикулярны Так как
последние принадлежат щетке, то однощеточные бикватернионы
эквивалентны коллинеарным кватернионам, расположенным на
одной дуге большого круга. Такие бикватернионы также можно
назвать коллинеарными.
Представляя бикватернион как частное от деления двух би-
векторов, можно доказать законы ассоциативности и дистрибутив-
ности умножения и сложения бикватернионов, а также закон
коммутативности сложения.
В кватернионах умножение эквивалентно сложению дуг на
сфере; ассоциативность умножения эквивалентна ассоциативно-
78
ГЛ. 3. БИКВАТЕРНИОНЫ И ВИНТОВОЙ МЕТОД
сти геометрического сложения дуг. В бикватернионах умножение
эквивалентно сложению винтовых движений. Каждое винтовое
движение может быть определено двумя бивекторами (Q = p/a),
т. е. начальным бивектором а и конечным бивектором р. Очевид-
но, что одному и тому же бикватерниону отвечает совокупность
пар бивекторов р и а, принадлежащих одной щетке. Геометриче-
ски умножению двух бикватернионов отвечает сложение винто-
вых движений, скажем, а -+ р и р -+ у дают в результате пере-
ход а у. Каждое движение характеризуется изменением тензо-
ра и верзором винтового движения.
Естественно, все указанные действия можно распространить
на любое число сомножителей.
Дадим несколько соотношений для произведения бикватернио-
нов, используя различные его представления:
Q = М ° Л, Q = qo + q, М = go + ц, Л = %о + К
qo = Р(До + seal (р ° 1), q = щЛ + Лор + vect (р ° 1);
скалярное и векторное произведения бивекторов берутся в соот-
ветствии с (3.30), (3.32). С другой стороны,
Q = Q° + $Q', М = М° + $М', Л = А°+$А',
Q0 = М° о A0, Q' = М° ° А' + М' ° Л°,
где Q°, Q', М°, М', Л°, А' — обычные кватернионы, Из последних
соотношений легко получить координатные (скалярные) равен-
ства для компонент бикватернионов.
Анализируя свойства 1° — 18°, можно видеть, что все основ-
ные равенства для кватернионов [15, 115, 116] повторяются в
«расширенном» виде для бикватернионов, в частности,— тригоно-
метрическое представление кватерниона, представление его как
частного от деления векторов и т. п. Бикватернион (как и кватер-
нион), являясь бивектором, может играть роль оператора, выпол-
няющего винтовое движение, т. е. вращение вокруг оси (как и
кватернион) и перенос.
§ 3.3. Операция винтового перемещения
3.3.1. Бикватернион как оператор винтового перемещения.
Представление бикватерниона как частного от деления двух би-
векторов позволяет интерпретировать бикватернион как оператор,
который ставит в соответствие бивектору а бивектор В этом
проявляется двойственный характер гиперкомплексных чисел
(кватернионов и бикватернионов), с помощью которых можно,
с одной стороны, представлять векторные физические перемен-
ные, с другой — операторы кинематических преобразований (дви-
жения) . Если кватернион как оператор задает вращение простран-
ства вокруг неподвижной точки (вращение вокруг собственной
§ 3.3. ОПЕРАЦИЯ ВИНТОВОГО ПЕРЕМЕЩЕНИЯ
79
оси), то бикватернион задает вращение и перенос — винтовое
движение.
Рассмотрим сначала соотношение (3.33) для бикватерниона
Q = Abcos 0 + ?sin 0)
и исследуем его, имея в виду представление Q в виде оператора,
переводящего вектор а в вектор р: р = Q оСкалярная и вектор-
ные части бикватерниона Q и его тензор имеют вид
SCaI ("а”) = C0S 0’ VeCt Ga~) = ЯЬ sin 0’
vect f—) = sin 0, seal f—) = 2=^ cos 0.
\ ОС J J ОС \ ОС / J ОС
Параметры этих величин
3 seal — 0' tg 0°, 3 vect (—-j =
= 4~ 0' etg 0°.
Используя эти выражения, представим скалярную и векторную
части Q в виде
seal (cos 0° + s [(^P — ^oc) cos 0°. — 0' sin 0°]),
g~ vect (sin 0° + s [(^0 - ^a) sin 0° +0' cos ©°]).
С учетом полученных соотношений бикватернион Q можно пред-
ставить в виде произведения
Q = [1 4- s (.^р - ^a)] [cos ©° + g sin ©°] [1 + s0'g],
(3.34)
причем сомножители могут располагаться в любом порядке.
Бивекторы а и р отличаются положением осей в пространстве,
длиною векторов а° и р° и величинами параметров За и ^р. По-
этому преобразование а в р представим в виде сложной операции,
состоящей из четырех частей:
1. Изменяем главную часть бивектора а0 по длине, делая ее
равной Р°, т. е. умножим а на 3~$Q/3"aQ. При этом получим би-
вектор р', у которого
О' =О°(1 + s3a).
2. Изменим параметр полученного бивектора, делая его
равным ^р. Для этого к параметру За добавляем разность
80
ГЛ. 3. БИКВАТЕРНИОНЫ И ВИНТОВОЙ МЕТОД
— получим бивектор с тензором
=О°(1 + s^) = ^.
3. Построим линию кратчайшего расстояния между осями а
и Р; обозначим ее £ — винтом параметра нуль. В этом преобра-
зовании изменяется ось так, чтобы она совпала с осью для
чего поворачиваем.по винту £ на угол 0°; получим бивектор
Р"', ось которого параллельна (3 и
4. Не меняя тензора и направления оси, перенесем ее посту-
пательно по направлению винта £ на расстояние 0', после чего
ось совпадет с р.
Итак, бикватернион Q, рассматриваемый как оператор, экви-
валентен, вообще говоря, четырем элементарным операциям. Две
из них меняют тензор бивектора, две меняют положение оси (по-
ворот и перенос). Каждой из таких операций могут отвечать эле-
ментарные бикватернионы.
3.3.2. Элементарные бикватернионы.
1. Пусть оси а и Р совпадают, тогда 0 = 0° + $0' =
= 0 и имеем
_₽_ = £₽ — О'
а — ’
Бикватернион такого типа, являющийся вещественным числом,
изменяет только тензор главной части бивектора а.
Пусть бикватернион Q' переводит а в (Г, т. е. {Г = Q' ° а;
Q' = О
2. Пусть оси аир совпадают и а0 = (3°; тогда а0 == и
0 = 0° + $0' = 0; отношение
-|- = 1 + s(^P-^a)
определит бикватернион, являющийся комплексным скалярным
числом, изменяющим параметр бивектора.
Положим
Q" = ^ = 1 +
г
т. е.
р" — Q,z о р' = Q" о Q' о а,
3. Пусть оси аир пересекаются, Тогда 0 = 0°
(0'— 0). Имеем
JL = COs ©° g sin 0°
а 1
и ось £ перпендикулярна к а и р. Данное отношение определяет
бикватернион, выполняющий вращение вектора на угол 0° вокруг
§ 3.3. ОПЕРАЦИЯ ВИНТОВОГО ПЕРЕМЕЩЕНИЯ
81
оси Обозначим такой бикватернион
Q" = |тг = cos 0° -4- g sin 0°,
т. е. имеем
P'" = Q'"o0" =Q"'oQ" о Q'oa
4. Пусть а и р параллельны и а = тогда 0 — $0
(0° = О). Имеем
4- = 1 +
— бикватернион, выполняющий поступательный перенос по оси
винта £ на расстояние 0'. Обозначим такой бикватернион
QIV = = 1 +
Имеем
Р = QIV ° р"' = QIV ° Q" о Q" - Q' о а?
откуда можно видеть, что произвольный бикватернион Q = QIV °
° Q"' ° Q ° Q' представим в виде разложения на произведение че-
тырех элементарных бикватернионов, два из которых изменяют
длину и параметр бивектора, т. е. изменяют тензор бикватернио-
на, а два определяют вращение и перемещение бивектора, т. е.
определяют верзор бикватерниона.
На этот же результат указывает и соотношение (3.34) пре-
дыдущего пункта; к нему можно прийти и непосредственно пу-
тем следующих преобразований бикватерниона, представленного
в виде Q = £7~Q(cos 0 + g sin 0). Имеем
+ Qi + qI + Qs =
— V\02 I Л702 I Л702 I n02
— Y Qo Qi (h ~r Q3
t ( .^0++ ^2 + ^3
^Q = STQ°(1 + s^Q).
Другая составляющая бикватерниона допускает представление
= cos 0 + £ sin 0 = cos 0° •+ g sin 0° — sQ' sin 0° + cos 0°=
= (cos 0° + g sin 0°)0 (1 + s0'g),
так как ££ = — 1. Таким образом, имеем следующее разложение
бикватерниона на элементарные множители:
Q = ^Q°(1 +^Q) (cos 0U •+£ sin 0°) ° (1 + $0'£); (3.35)
порядок сомножителей может быть произвольным. Можно ви-
деть, что
^Q=^~QO(1 + ^Q), (3.36)
= (cos 0° + £ sin 0°)0 (1 + s©£) = (1 + $0'£) ° (cos 0° + g sin 0°).
6 В. H. Бранец, И. П. Шмыглевский
32
ГЛ. 3. БИКВАТЕРНИОНЫ И ВИНТОВОЙ МЕТОД
Сравнение полученного соотношения с ранее выведенным
(3.34) дает:
= ^р - ^а, ^Q° = = ^"Q0 (1 + s^Q).
ъГ* ОС
Бикватернион Q’1, обратный данному, будет иметь вид
Q-1 = 4 = (^Q0)-1 (1 - ^Q) (cos ©° - g sin 0») (1 - s0'g) =
Соотношение (3.34) может быть интерпретировано следующим
образом: произведение бивектора а на бикватернион Q, ось кото-
рого пересекает а под прямым углом, есть бивектор р, тензор ко-
торого равен произведению £7~Q • STа и ось которого получается
двумя перемещениями: перемещением на 0' по оси £ и поворо-
том вокруг Z на угол 0° (винтовое движение на комплексный
угол бикватерниона). Отсюда — верзор — определяет винтовое
перемещение, a — тензор — изменение длины и параметра.
3.3.3. Проекция винта и бивектора на ось.
1. Пусть имеется прямоугольная система координат с нача-
лом в точке О (Oijk) и два бивектора аир, так что
а = аД + a2j + а3к, р = РД + p2j + Рзк,
и ав и рй — комплексные дуальные числа вида as = a® +
4- s$k (s, к = 1, 2, 3). Рассматривая скалярную часть
произведения а на Р, имеем следующее соотношение, определяю-
щее косинус комплексного угла между прямыми аир.*
= /а® + а| + а|, £Гр = /p? + pl + Pl,
^а^р cos 0 = arPi + а2р2 + азРз,
т. е.
cos 0 =
____а1Р1 а2^2 + аз^3_
+ + /₽Н₽1 + ₽з ’
(3.37)
Другое выражение для косинуса угла между бивекторами а и р*.
cos © = 4 («° Р + р ° «) (^«^РГ1 = (3.38)
Проекцией бивектора а на ось р называется величина
3~a cos 0. Прямоугольные комплексные координаты бивектора в
системе координат Oijk равны соответствующим проекциям на
оси координат.
Всякий бивектор разлагается на сумму трех его проекций ко-
ординат по осям заданного базиса. Пусть а образует углы 01, 02,
0з с соответствующими осями базиса Oijk (углы 0S = 0? + $0S —
комплексные величины). Тогда имеем
ai = STa cos 0i, a2 = £Ta cos 02, аз = cos 03,
§ 3.3. ОПЕРАЦИЯ ВИНТОВОГО ПЕРЕМЕЩЕНИЯ
8&
или же
cos0s = ^, (3.39)
и а = czii + СС2j + ссзк однозначно отвечает соотношениям (3.37)
и (3.38). Можно видеть, что для направляющих косинусов оси в
прямоугольной системе координат оказывается справедливым сле-
дующее равенство:
cos2 01 + cos2 02 + COS203 = 1,
эквивалентное следующим двум:
cos2 0? -f- cos2 02 + cos2 ©з=1,
©1 sin 20? + 02 sin 20? + ©з sin 203° = 0.
2. Бикватернион Q = f7~Q(cos 0 + £ sin 0) имеет ось обра-
зующую с осями системы координат Oijk комплексные углы 1\.
В этом случае бикватернион допускает следующее разложение:
Q = [cos © + (i cos Г1 + j cos Г2 + k cos Г3) sin 0], (3.40)
т. e. векторная часть бикватерниона проектируется на оси пря-
моугольной системы координат как бивектор. Из последнего ра-
венства можно получить следующие скалярные соотношения:
qo = .T'Q cos 0, qk = sin 0 cos I\ (к = 1, 2, 3),
или в развернутом виде
q°0 = ZTqn sin 0°, 4- = — ©' tg 00’
<T0
qk = Tq0 sin 0°cosT®, ~ + 0' ctg 0° — Ц tg Г®. (3.41)
ih
3.3.4. Фундаментальная операция винтового движения.
Теорема 1. Операция Q ° р ° Q-1 не меняет тензора бивек-
тора р и сообщает его оси винтовое перемещение: вращение
вокруг оси бикватерниона Q, определяемое удвоенным углом би-
кватерниона 20°, и поступательное перемещение по направлению
оси, равное двойному шагу бикватерниона Q, т. е. 20'.
Доказательство. Разложим бивектор р на щетку и ось
бикватерниона Q, т. е. р = pi + рг соответственно. Имеем опера-
цию преобразования:
р' = Q ° р ° Q1 = Q ° pj о q-i + Q о р2 о Q-i (3.42)
Так как ось pi и винт £ бикватерниона Q имеют общую ось
(т. е. pi = J~pi£) и Q-1 = (^Q)"1 (cos 0 — g sin 0), для первого и
6*
84 гл. 3. БИКВАТЕРНИОНЫ И ВИНТОВОЙ МЕТОД
второго слагаемых получим
Q ° pi ° Q1 = рь
Q ° р2 ° Q-1 = Р2 COS2 0 — £ ° Р2 ° £ sin2 © + (£ ° Р2 — Р2 ° 5) sin 0 cos 0,
и оси р2 и £ пересекаются под прямым углом; поэтому
Steal £ о р2 = О, S о р2 = ~Р2 ° £ ° Р2 ° £ = Р2.
Таким образом,
Q ° р ° Q-1 = pi + (cos 20 + £ sin 20) ° р2 = рх.
Можно видеть, что р = 3"рх
Компонента pi направлена по оси винтового движения р2, так
как она перпендикулярна £, совершает поворот вокруг оси винта
g на угол 20° и поступательно перемещается вдоль оси на величи-
ну двойного шага бикватерниона Q, т. е. 20'. Отсюда следует, что
операция Q ° р ° Q 1 не меняет тензора бивектора р и сообщает его
оси винтовое перемещение вдоль оси бикватерниона Q на его
удвоенный угол (20°) и шаг (20х).
Рассмотрим теперь, как действует операция Q°( )°Q-1 на
бикватернион. Пусть R = ро + р — бикватернион, имеющий тен-
зор 2Гр и комплексный угол Ф. Имеем
R' = Q о R о Q-1 -- - Q о (р0 : р) о Q-1 =
= Q ° Ро ° Q 1 + Q ° р ° Q 1 = Ро + Р- (3.43)
Очевидно, что р0 = р0, откуда
seal R = ро = ?Г р cos Ф, seal R' = ро = ?Г р' cos Ф', £Гр' = ?Г р,
£Гр° sin Ф = 3~р, STр°х sin Фх — STр .
Из этих равенств имеем Ф = Фх, = £TR, р0 = Ро-
Теорема 2. Операция Q°(-)°Q-1, к какому бы бикватер-
ниону R она ни была применена, не меняет ни его тензора, ни
угла, и сообщает только его оси винтовое перемещение вокруг
оси бикватерниона Q (т. е, %) на двойной угол (0° — вращение)
и шаг (перемещение вдоль оси — 0х) бикватерниона Q.
Можно видеть, что бивекторы, оси которых образуют связку
с центром О, преобразуются операцией Q°(-)OQ-1 в бивекторы
некоторой связки с центром О'. Таким образом, мы можем гово-
рить о преобразовании точек пространства операцией QO(-)°Q~1.
Для определения переноса 00' возьмем р = р° — бивектор па-
раметра нуль и рассмотрим 0 = Q ° р° ° Q'1; так как преобразова-
ние Qo(.)oQ->
не зависит от тензора ^Q, заменим Q его верзо-
ром = г = г° + srx. Тогда а = гор0ог-1, и так как
(£Fr)2 = llrll = Нг°П = 1, г-1 = г = г° + $г',
§ 3.3. ОПЕРАЦИЯ ВИНТОВОГО ПЕРЕМЕЩЕНИЯ
85
то получаем
0 = (Г° + ST') ор° ° (Г° + ST') =
= Г° ° ° Г° + ^(г° о рО О г' + г' о р° ° г°) =
= г° ° р° ° г° + 2s vect (г' ° р° ° г°).
Обозначим через 2% вектор 00' и примем точку О' за точку
приведения бивектора 0; последний при этом преобразуется таким
образом:
0 = г° ° р° ° г° + 2$ [vect (г' ° р° ° г°) — vect(x °г° °р0° г°) ]
— по правилам приведения бивектора к новому центру. Но па-
раметр бивектора 0 равен нулю и точка О' находится на его оси;
следовательно, момент 0 относительно О' должен обратиться в
нуль, т. е.
vect (% ° г° ° р° ° р°) = vect (г' ° р° ° г°),
каков бы ни был вектор р°. Обратно: если некий вектор х Удов-
летворяет этому уравнению, то 2х = 00'. Из этого уравнения
следует, что
% = vect (2L) — r' о г°, (3.44)
Действительно, так как г есть ^Q, то параметр = seal р— 'j
равен нулю и, следовательно,
vect [г' ° (г°)1 ] = г' ° (г°)-1 — т' ° г°,
X = г' ° г° = Q' ° Q0.
Отсюда следует
Теорема 3. Частное от деления момента бикватерниона Q
на его главную часть (Q' ° Q0) есть кватернион, скалярная часть
которого равняется параметру бикватерниона ^Q, а векторная —
половине вектора 00' — переноса винтового движения, опреде-
ляемого операцией Qo( )oQ-i.
3.3.5. Принцип перенесения. В своей фундаментальной рабо-
те [54] А. П. Котельников развил все основные положения опе-
раций над бикватернионами, которые мы изложили. Можно ви-
деть [15, 115], что основные положения, выводы, операции для
кватернионов выполняются и для бикватернионов, причем пер-
вые получаются как частный случай операций для бикватер-
нионов.
Если рассматривать бикватернион как оператор винтового дви-
жения, то эта операция образует группу: имеется тождественное
преобразование; два последовательных преобразования эквива-
86
ГЛ. 3. БИКВАТЕРНИОНЫ И ВИНТОВОЙ МЕТОД
лентны одному преобразованию того же плана; имеется обратное*
преобразование и т. п. В частности, сложению конечных винто-
вых движений, которому отвечают две последовательные опера-
ции Q1o(-)°Q11hQ3°(-)°Q31, эквивалентны операции Q ° (•) ° Q 1
где Q = Q2 ° Qi.
Все это позволило А. П. Котельникову сформулировать.
Основной принцип перенесения (расшире-
ния) [54]. Любое соотношение между кватернионами может
быть получено как аналогичное соотношение между бикватер-
нионами ...Каждая теорема геометрии или механики, которая мо-
жет быть доказана с помощью теории кватернионов, допускает
обобщение в известном направлении. Мы приходим к желаемому
обобщению, если выразим теорему в виде равенств между кватер-
нионами, и затем, заменив кватернионы бикватернионами, будем
интерпретировать их с помощью теории винтов.
Дальнейшее изложение теории винтового движения, будучи
сравнимым с аналогичным изложением для теории конечного по-
ворота, проведенным в [15], служит прекрасной иллюстрацией
принципа перенесения.
§ 3.4. Теория винтового движения
с использованием бикватернионов
3.4.1. Преобразование винтового движения.
3.4.1.1. Преобразование базисов. Рассмотрим базис Д
образуемый тройкой взаимно перпендикулярных ортов ii, i2, is с
началом в точке О, и рассмотрим преобразование типа (3.42) при-
менительно к этой тройке осей. Ввиду того, что преобразование
этого типа переводит связку бивекторов с центром О в связку с
центром в О', можно говорить о получении в результате преобра-
зования базиса Е. Относительно самого оператора преобразования:
без уменьшения общности в качестве такового можно использо-
вать бикватернион, имеющий тензор, равный единице. Это озна-
чает = 1, что в соответствии с (36.3) возможно только, если
£ГА° = 1, &А. = 0. На основании этого можно считать
А = cos 0 + g sin 0.
В этом случае
А-1 = А — cos 0 — g sin 0.
Имеем для ортов базиса Е:
еА = А ° iA ° A, А: = 1, 2, 3, (3.46)
или
Е = А ° I ° А.
Можно показать, что если оси ц образуют ортонормированный
базис, то и еА также являются ортами базиса Е, т. е. если iA • ij =
==6Aj (k, j === 1, 2, 3), то eA-ej==6Aj. Действительно, рассматривая
§ 3.4. ТЕОРИЯ ВИНТОВОГО ДВИЖЕНИЯ
87
Ль как бивекторы параметра нуль, получим, что в силу теоремы
вращения бивекторы efe будут также иметь нулевой параметр,
а их скалярное произведение имеет вид
£k •е; = у (е& ° е;- + ej о eft) = у А о (i& ° i; + i7 ° ц) ° Л = 6^.
Начало координат переносится в точку О', причем согласно
(3.44), (3.45) 00' = 2А' ° Л°, так как £ГЛ = 1, £ГЛ° = 1. Величи-
ну переноса, определяемую бикватернионом Л в соответствии с
операцией преобразования (3.46), обозначим
рЛ = 2Л' ° Л°. (3.47)
Действительная часть бикватерниона Л — Л° + $А', т. е. Л° опре-
деляет преобразование вращения, а А' — перенос начала коорди-
нат, переводящие базис I в Е.
Преобразование (3.46) задано в операторной форме, т. е. в
виде операций над бикватернионами; при этом с базисом I нужно
•совместить гиперкомплексный базис Н (или выразить в нем орты
ife). В координатном скалярном виде это преобразование будет
выглядеть таким образом:
Л = Хо + %ii + X2J + Хзк,
где = К £ + shk, к = 0, 1, 2, 3 — дуальные (комплексные) числа,
е± = Л о о Д = ijx1 2 + X2 - X2 - X2) +
+ 2i2 (Х0Х3 + А^) -j- 2i3 (— X9X2 -j- ХхХ3),
•e2 = Л ° i2 ° A = 2i± ( X0X3 4- ХхХ2) -j-
+ h (^0 + ^2 — — M) 4“ 2i3 (X0Xx -f- \Х3),
— A ° i3 ° A = 21г (X0X2 -j- XjXg) 4~
+ 2i2 (— + ^2^3) + (^o + — M),
и было положено ii = i, i2 = j, is = k. Полученное преобразование
можно записать в матричной форме:
е1
е2
ез
1 2 । л 2 л 2 л 2
^0 * ^2 ^2
2(ХЛ-Ш
2(V2 + V3)
2 (Х0%3 4- W)
л 2 । л 2 л 2 л 2
^0 ~Т“ ^2 'Ц ^3
2(V3-W
2(M3-v2)
2(Vx + M3)
л 2 । л 2 л 2 л 2
^0 ^3 ^2
2
^3
*1
’з
- А
‘1
12
'з
(3.48)
Матрица А — комплексная (дуальная) матрица, задающая про-
извольное движение. Преобразование вида (3.48) можно условно
88
ГЛ. 3. БИКВАТЕРНИОНЫ И ВИНТОВОЙ МЕТОД
записать в виде Е = AI, где под Е и I надо понимать тройку
осей eft и ife.
Нетрудно видеть, что можно получить изоморфное соответ-
ствие двух групп преобразований, задаваемых операциями (3.42)
над бикватернионами операциями и (3.48)—над комплексными
линейными преобразованиями, определяемыми матрицей А.
Рассмотрение всех операций обнаруживает большое сходство
с операциями, изложенными в Приложении 1 для кватернионов
и матриц ортогонального преобразования.
3.4.1.2. Преобразование компонент неизменно-
го бивектора. В соответствии с п. 3.3.3 каждый бивектор
может быть представлен в виде разложения (проекций) на оси
заданной системы координат. Пусть, например, задан бивектор г
в виде суммы его проекций на оси базиса /:
з з
Г = г° + sr' = S rkik = 2 rikik, к = 1, 2. 3,
k=l k=l
где rk = + srk — ортогональные координаты бивектора, т. е.
проекции на базис I. Будем обозначать их rJk — индексом базиса.
Кроме того, очевидно, что этот же бивектор может быть представ-
лен в виде проекций на любой другой базис, скажем, Е:
з
г = 2 rEj«v
5=1
где rEj — проекции (направляющие косинусы) вектора г на оси
базиса Е.
Образуем бикватернионы — бивекторы, составленные из проек-
ций бивектора на оси базиса, которые назовем гиперкомплексные
отображения бивектора. Так, гиперкомплексным отображением
бивектора на базис I назовем следующий бикватернион с нулевой
скалярной частью: Г/ = Г1Д + r2jj + rsik, а его отображением на
базис Е — бикватернион г£ = + r2Ej + r3£k. Можно видеть, что
отображение на базис совпадает с бивектором, если гиперкомп-
лексный базис Н совместить с этим базисом; с другой стороны,
каждый заданный бивектор порождает ряд отображений на те-
пл и иные базисы.
Неизменны!! бивектор г, отражающий некоторое физическое
поле векторов, имеет различные проекции на разные базисы. Най-
дем связь между этими величинами. Пусть заданы два базиса I
и Е, и переход между ними определяется винтовым преобразова-
нием, определяемым бикватернионом Л. Подставим в соотноше-
ние для г равенства для ортов (3.16). Имеем:
3 3 / 3 \ ~
г = 2 rE^j = 2 rEjA о ij о Д = Л о I 2 rEjij I о Л.
j=i j=i \ j=i /
§ 3.4. ТЕОРИЯ ВИНТОВОГО ДВИЖЕНИЯ
89
Совместим с базисом I гиперкомплексный базис Н. В этом случае
полученные соотношения свяжут гиперкомплексные отображения
бивектора г на базисы I и Е\
3 ~
Г = У rIkih = Г/ = Л о гЕ о Л,
k=l
т. е.
гЕ = А ° гт ° Л. (3.49)
Справедлива
Теорема 4. Если преобразование базисов задано операцией
винтового движения (3.46), то компоненты неизменного бивекто-
ра на эти базисы связываются операцией обратного преобразова-
ния, выполняемого над гиперкомплексными отображениями.
Исходя из этой теоремы можно сделать вывод, что если некий
бивектор при преобразовании базисов операцией (3.46) преобра-
зуется обратной операцией винтового движения, то этот бивектор
отвечает некоему неизменному в пространстве бивектору (винту).
3.4.1.3. Инвариантность преобразования вин-
тового движения. Рассмотрим преобразование винтового
движения г' = Q ° г ° Q-1. Совместим с гиперкомплексным бази-
сом Н базис /, и введем гиперкомплексные отображения бивек-
торов г' и г на базис Z; очевидно, что в данном случае они сов-
падут с бикватернионами: Г/ = г', Г/ = г. Рассмотрим далее дру-
гой базис Е, получаемый из I преобразованием винтового движе-
ния (3.46), задаваемым бикватернионом Л. Бивекторы гиг' бу-
дут иметь следующие отображения на базис Е'.
Те — А ° Г/ ° А; Те — А ° Г/ ° А.
Исходя из равенства
г2 - Q о п о Q1 (3.50)
найдем для отображений на базис Е соотношение
Те = А ° Q А ° Те ° А ° Q 1 ° А ~: (А ° Q ° А) ° Те (А ° Q ° А)- Г
Оно дает возможность считать бикватернион — оператор винто-
вого движения Q также неизменным, заданным в пространстве
(винтом), который имеет свои отображения на базисы I и Е:
Q£==AoQro А. (3.51)
При этом соотношение (3.50) в проекции на базис I имеет вид
ri ~ Qi ° Ti ° Qi1
и на базис Е — вид
Ге = Qe в Ге ° Qe1.
90
ГЛ. 3. БИКВАТЕРНИОНЫ И ВИНТОВОЙ МЕТОД
Можно видеть, следуя теореме 2 и п. 3.3.4, что Qj и Qe имеют
одинаковый тензор = ^~Q, т. е. преобразованием:
(3.51) меняется только верзор бикватерниона Q; более того, угол
0 бикватерниона Q также остается неизменным.
Представляя бикватернион
Q = ^q(cos-|- + gsin -у),
можно видеть, что при его проектировании на разные базисы из-
меняется (проектируется) только бивектор оси £ бикватерниона
(см. п. 3.3.2):
Q/ = ^-Q (cossin-у-). Qe = (cos-|- + gBsin-|-)
и T. n„
Отсюда следует
Теорема 5. Операция винтового преобразования инвариант-
на относительно преобразования базисов и имеет одинаковый вид'
в любой координатной системе, при этом переход к другому бази-
су одинаковым образом меняет (перепроектирует) бивектора и
бикватернион преобразования.
Согласно этой теореме операция винтового движения имеет
векторный смысл.
Поскольку в преобразовании винтового движения (3.42) участ-
вует только верзор бикватерниона, то при исследовании интере-
сующих нас операций винтового преобразования удобно исполь-
зовать бикватернионы с единичным тензором. Рассмотрим опера-
цию винтового преобразования, определяемую бикватернионом:
Q == cos (0/2) + £ sin (0/2), имеющим единичный тензор. Введем:
дуальный вектор 0 = 2£tg(0/2). Очевидно, что этот бивектор
определяет в известном смысле бикватернион преобразования.
Рассмотрим далее операцию вращения, представленную с ис-
пользованием этого бивектора:
г' = cos2 (1 + 4" ° Г ° (1 V
Имеем
©2 = e.e = -4tg2^], cos2® =------------J—
\2) \2) 1 — (1/4) е3
г' = -------5 [г + 4-0°Г---т-Г° 0---« Г» ©1.
1- (1/4)в2 [ 2 2 4 J
Так как 0 ° г ° 0 = [—0 ° г + (0Х г)] ° в = — (0 -г) 8+ (8Х г)Х 0,.
получаем
г' = г -]-------X [г + 4-(0 Xг)
1 — (1/4) 02 [ 2 J
— «расширенную» формулу Родрига для винтового движения.
§ 3.4. ТЕОРИЯ ВИНТОВОГО ДВИЖЕНИЯ
91
3.4.2. Теорема сложения преобразований.
З.4.2.1. Собственный оператор преобразования.
Аналогично известным соотношениям для кватернионов [15]
рассмотрим отображения бикватерниона преобразования на пре-
образуемый им базис. Пусть переход от базиса I к Е определя-
ется бикватернионом Л и операцией винтового движения (3.46).
Очевидно, что сам бикватернион Л при совмещении гиперкомп-
лексного базиса Н с I совпадает с его отображением: Л = Ль
При этом его отображение на базис Е будет иметь вид
ЛЕ = Л ° Af ° Л = Ai = Л*, (3.52)
и этот бикватернион может быть назван собственным бикватер-
нионом преобразования. Рассмотрим более подробно это соотноше-
ние, представляя бикватернион в виде Л = А0 + $А', т. е. в виде
суммы двух кватернионов. Очевидно, что имеем
Aj = Aj -|- sAj, А_е = Л.Е + sA#,
и из равенства (3.52) должно следовать, что должны быть рав-
ны между собой главные и дуальные части бикватернионов:
д° = д°£ = д0*, л; = Лв = л'*.
Имеем
Л-е = Ле + sAe ~
= А/ ° А7 ° Л/ = ( Aj -р sAj) ° ( Л? sAj) ° ( Л? -j- sAj) =
= ( Aj + $Aj) о [Л/2 + s(Aj о Aj + Aj ° Aj)] =
= Aj ° Aj2 -|- S ( Aj ° Aj ° Aj -p AjAj ° Aj) -p sAj ° Aj2 —
= A j S ( A j ° A j ° Aj -|- Aj -{- A J ° Aj2) =
= A J -p $Aj 4“ $( A j ° A j 4~ Aj ° Aj) ° Aj.
Для того чтобы обеспечивалось равенство (3.52), необходимо,
чтобы
Aj ° Aj -р Aj ° A J = 0.
Можно видеть, что величина Л? ° Aj = ( Aj ° Л?) и приве-
денное выше равенство выполнимо, если А? ° Aj будет бивек-
тором. Последнее действительно имеет место, так как согласно
^соотношению (3.47) имеем
рд = 2Л' ° А° = 2Aj о Aj ( = 2Aj5 ° А#).
Припишем этому вектору переноса индекс базиса Z; тогда Paj -'
2Aj ° А?, и для отображения этого вектора на базис Е имеем
Рае = Л °рд! ° А = 2Л° ° Л'( =2Aj ° Л/ - 2A# о Л#).
92
ГЛ. 3. БИКВАТЕРНИОНЫ И ВИНТОВОЙ МЕТОД
Таким образом, только при таких равенствах соотношения:
для собственных бикватернионов удовлетворяются; вектор пере-
носа, определяемый бикватернионом преобразования, имеет век-
торный смысл и получает различные проекции на исходный и
преобразованный базисы:
рЛ1 = 2А*'° А*0, рЛЕ = 2Л*°оЛ*'. (3.53)
Рассмотрим далее более подробно операцию преобразования
бикватерниона, скажем, при смене координатного базиса. Пусть,
дан бикватернион Q, и его отображения на базис I и Е опреде-
ляются преобразованием перепроектирования (3.51):
Qe = Л о Qj о л = (Д° + sA') о Qj о (ДО + sA') =
= А0 о Qj о до -I- s(A° о Qj о Д' + а' о Qj о до) = Q« + sQe.
Приравнивая главные и дуальные части бикватернионов,
имеем
Qk = Л° » Q? о Д°г Qe = Л° о Q: о Л» + Д° о Q« о Д' + Д'» Q? о до,
(3.54>
т. е. главная часть бикватерниона Q преобразуется только опе-
рацией вращения; дуальная часть также преобразуется опера-
цией вращения, и добавляется член
Л° о Q? о Д' + а' о Q» , до =
= (л° о Q? о до) о Д° о Д' + Д' о до о ( Д° о Q® о до) =
= у Qe ° Рая — у Рае ° Qe = — (рле X Qe) = — Л° ° (рд/Х Q®) ° Л0,,
который определяет перенос точки приведения бикватерниона Q
на величину вектора переноса бикватерниона Л:
Qe = А0 ° [Qf — (рл/ X Q?)] ° А0.
Таким образом, преобразование винтового движения А°( )°Л
выполняет вращение вокруг оси Х° на двойной угол кватерниона
А0 и перенос на вектор рЛ = 2А' ° А0.
3.4.2.2. Первая (векторная) теорема сложения
преобразований. Два последовательно выполняемых преоб-
разования, скажем, определяющие переходы от базисов I к Е и
от Е к Е', задаваемые бикватернионами Л и М, эквивалентны
одному преобразованию (от I к £"), задаваемому бикватернио-
ном N, причем
N = M°A. (3.55)
Действительно, имеем
Е = Л ° I ° Л, E'==MoEoM,= MoAoIoAoM = NoI°N.
§ 3.4. ТЕОРИЯ ВИНТОВОГО ДВИЖЕНИЯ
93
Совместим гиперкомплексный базис Н с /, тогда равенство
для бикватерниона результирующего преобразования может быть
записано в виде Nj = Mj ° Aj. Найдем, как связаны между собой
проекции бикватернионов на другой базис, скажем, Е:
N, = А о Nz о Л, МЕ = Л ° М; ° А, ЛБ = А ° Aj ° А.
Имеем
Ne = AoNi°A = (Ao Mj ° А) ° (А ° Aj ° А) = М£ ° Лв.
Для любого другого базиса, скажем, Г, заданного бикватер-
нионом Р, имеем Nt = Р ° Nj ° Р, Мт = Р ° Mj ° Р, Ат — Р ° Ат ° Р и
NT = Мг ° Аг. Отсюда следует
Теорема 6 (первая теорема сложения). При сложении
преобразований операторы преобразований перемножаются
(обычным образом). Соотношение, определяющее результирую-
щее преобразование через составляющие, инвариантно относи-
тельно преобразования базисов, т. е. сохраняет свой вид в проек-
циях на любой базис.
Можно видеть, что данная теорема распространяется на лю-
бое количество последовательно выполняемых преобразований.
Инвариантность формы сложения преобразований указывает
на векторный смысл этой операции. Представим каждый биква-
тернион его бивектором, определяющим винт преобразования:
0 0 / 4 \ 0 0
Л = cos-J- + gjSin-gl = 1 + -у ©Jcos-^, ©! = tg -A
di di \ di j di
0 0/4\0 0
M = cos-y + g2sin-y = 1 -f-у©2 cos-Л 02 = 2?2 tg-^r
di di \ di / di di
0 0 / Л \ 0 0
N = cos-?2 + g3siny = 1 + y03 cosy3-, 03 = agatg-^.
di di \ di ] di di
Имеем согласно (3.55)
/ 1 \ 0O / \ \ [ 1 \ 0O
(1 + y ©J cos у = (1 + у ©2j 0 (1 +y ©i)cos-у cos-у.
Из этого равенства получаем
0 / i \ 0 0
COS -у = II — COSCOS—,
0
(©1 + ©2 + у ©2Х©^ =
‘ 1
!-401’02
вх + ^г + у^Х©!
— обобщенную векторную форму сложения винтовых движений.
"94
ГЛ. 3. БИКВАТЕРНИОЯЫ И ВИНТОВОЙ МЕТОД
3.4.2.3. Вторая теорема сложения. Приведенная в
3.4.2.2 теорема сложения обладает тем неудобством, что она не
дает возможности выразить собственный бикватернион результи-
рующего преобразования через собственные бикватернионы со-
ставляющих движений. Рассмотрим два преобразования (рис. 8);
для собственных бикватернионов имеем А*вАт = Ав, М*=МЕ=
= МЕ,, N* = N/ = Nez. Справедлива следующая
Теорема 7 (вторая теорема сложения — для собственных
бикватернионов преобразований). Бикватернион результирующе-
го преобразования получается как результат умножения биква-
тернионов составляющих преобразований, причем сомножители
берутся в прямом порядке*.
N* = A*°M*. (3.56)
Доказательство. Имеем
N* = Nj = Mj ° Aj = Aj ° Aj ° Mj ° Л/ = Aj ° ME = A* ° M*.
Методом индукции данная
любого числа последовательно
теорема легко доказывается для
выполняемых преобразований.
Рис. 8. Сложение преобра-
зований для собственных
бикватернионов
Рис. 9. Последовательность
преобразований «перенос —
вращение»
Используя эту теорему, приведем еще один вывод соотноше-
ний для векторов переносов в исходном и преобразованном бази-
сах. Любое преобразование можно представить как последова-
тельность параллельного переноса точки и вращения вокруг точ-
ки; естественно, что последовательность преобразований может
быть обратной: вращение вокруг точки и перенос. В связи с этим
любой бикватернион представим в виде произведения бикватер-
нионов параллельного переноса и вращения, что, в частности,
следует из разложения бикватерниона на множители, приведен-
ного в п. 3.3.2.
Рассмотрим вначале последовательность перенос — вращение.
На рис. 9 схематично представлена последовательность этих опе-
раций. Имеем
а) для бикватерниона переноса
Р = 1 + sf-i-p),
где р — шаг переноса;
§ 3.4. ТЕОРИЯ ВИНТОВОГО ДВИЖЕНИЯ
9$
б) для бикватерниона вращения
М«Л°,
где Л° — кватернион преобразования вращения.
Используя вторую теорему сложения для собственных биква-
тернионов преобразования, имеем
Л = А0 + sA' = Р ° М = (1 + -~ф) ° (А0) = Л° + 4 $р ° Л°.
Для тождественного выполнения равенства должно быть
Л' = х/2 р ° А0, что всегда может быть получено выбором бивек-
тора (бикватерниона) р: р — 2Л' ° Л°.
Используя результаты теоремы 3 /I
п. 3.3.4, можно видеть, что р дейст- /
вительно является бивектором, т. е. —-----------------
имеет нулевую скалярную состав- \
ляющую, если бикватернион А име- ч.
ет тензор, равный единице (т. е. па-
раметр, равный нулю). Рис. 10 обратная
последова-
Этот же вывод можно получить тельность преобразований
непосредственно, представляя биква-
тернион А в его тригонометрической форме (3.27) г
А 0 , с. . 0
А = cos v + g sin
АО 0° , о . 0°
А0 = cos -£- + g sm -у,
откуда следует, что
. , 0' / . 0° . 0°'
А = -у- — sin -5- + g cos
A'oA° = 4s0'-
£
Ввиду того, что бикватернион переноса Р является собствен-
ным, т. е. Р = Р* = Р/ = Рг, он «берется» в проекциях на оси
базисов I (Г — ему параллельного). Отсюда следует, что мы
должны записать
Р = Р1=1 + |ф/,
и, следовательно, pj==2A'°A0, т. е. получаем первое соотноше-
ние (3.53).
Бикватернион вращения
М = М* = Mr = МЕ - А? = А1 - А0* - А0
одинаков для любой точки.
Рассмотрим далее обратную последовательность преобразова-
ний, схематично представленную на рис. 10. Имеем для собст-
венных бикватернионов:
96
ГЛ. 3. БИКВАТЕРНИОНЫ И ВИНТОВОЙ МЕТОД
а) для бикватерниона вращения
М = Л°, м = м* = М; = мв, = л? = л°Е, = л°Е = л°,
б) для бикватерниона переноса
Р=1+Цр, Р=Р*=Р£, = Р£=1+|зря.
Согласно второй теореме сложения преобразований имеем
Л = А° + sA' = М о р = до» (1 + 1 spE
Очевидно, что это равенство однозначно удовлетворяется выбо-
ром = 2Л° ° Л', т. е. мы приходим к полученному ранее второ-
му соотношению (3.53) для вектора переноса.
3.4.2.4. Сложение переносов при сложении пре-
образований. Рассмотрим операцию умножения бикватер-
нионов, которой отвечает сложение винтовых движений. Пусть
N = М ° Л. Представляя каждый из бикватернионов в виде глав-
ной и дуальной его части: N = № + $N', М = М° + $М', Л =
= Л° + $Л', можем результат умножения выразить в виде двух
равенств, связывающих действительные и комплексные (дуаль-
ные) части:
№ = М° ° Л°, N' = М° ° А' + М' ° А°.
Первому равенству отвечает операция сложения вращатель-
ных движений (имеющих одну неподвижную точку); она до-
статочно хорошо известна [15] и образует замкнутую группу.
Дуальная часть бикватерниона описывает поступательное переме-
щение; из общих соображений — действиям над бикватерниона-
ми изоморфно соответствуют операции сложения винтовых дви-
жений — должно следовать, что результату произведения для
дуальной части должно отвечать векторное сложение перемеще-
ний. Покажем, как это выполняется.
Вторая теорема сложения для собственных бикватернионов
дает возможность непосредственно убедиться в векторном сложе-
нии перемещений, каждое из которых выражается соотношения-
ми (3.53) в проекции на исходный и преобразованный базисы.
Пусть даны два последовательных преобразования (рис. 8); для
собственных бикватернионов имеем соотношение N = А ° М.
Кроме того, в соответствии с (3.53) имеем следующие выраже-
ния для векторов — отображений переносов:
рд/ = 2А' ° А0, Рае — 2Л° ° Az, рмк — 2МЛ ° М°,
рМВ/ = 2М0оМ', pJV/ = 2N'»N°, pNE' = 2N°»N'. (3'5?)
Развернем выражение для бикватерниона N:
№ = Л°°М°, N'= Л° <> М'Н-Л' оМ°
§ 3.4. ТЕОРИЯ ВИНТОВОГО ДВИЖЕНИЯ
97
и подставим эти соотношения в выражение для pNI:
pNI = 2(А° ° М' +А' оМ0)оМ0оА0 = 2А°оМ' оММЧ 2А' <>Л0.
Имея в виду приведенные выше равенства и соотношения пере-
проектирования рмт = А0 ° рМЕ ° Л°, получим Pnj = Pmi + Pai, т. е.
действительно, выполняется векторное сложение перемещений.
Для второй проекции результирующего переноса имеем
pNE, - 2М° о Д° о (до о М' + А' о М°) - 2М° о М' + 2М° о д° о Д' о М°.
Справедливо М° о рАЕ о М° = рЛЕ,, т. е. (рту'Е = Рме' + рлк' — так-
же векторное сложение, соответствующее (3.53).
Можно видеть, что полученный результат легко распростра-
няется на любое число сомножителей (т. е. преобразований).
Первая теорема сложения к такому же результату приводит
существенно более сложным образом. Причиной этого является
тот факт, что соотношения для векторов переноса (3.53) в про-
екциях на исходный и преобразованный базисы справедливы
только для собственных бикватернионов преобразований.
Согласно первой теореме сложения операторы (бикватернио-
ны) проектируются на один выбранный базис; при этом по край-
ней мере один бикватернион обязательно будет несобственным.
Найдем выражение для вектора переноса несобственного биква-
терниона. Пусть имеем последовательность преобразований, изо-
браженную на рис. 8. Поставим задачу найти отображение би-
кватерниона М на базис Z: Mi = Ar°M£oAi. Развертывая это
соотношение, получим
м, - м? + 5м; =
= (А? 4- sA/) ° (MJ? 4- sM#) ° (А? Ц- sAi) — А? ° ° Aj 4~
4~ [ А? ° М_е ° Л? 4- Л/ ° MJ? о AJ 4“ А? ° MJ? ° Л/],
или же
М? - Л? о MJ; о Aj,
Mj = Л? ° Mj£ ° aJ 4~ Aj о MJ; ° aJ 4- Aj о Mj; ° Aj =
= Л? ° Мдо aJ 4- Ai ° A J ° А? ° Mj? ° A J 4- A J ° Mj; ° A J ° A J ° А/ =
= A? ° Mj? ° Ai 4" ~2 (pai ° M? — M? °pAi).
Используя полученные равенства, найдем два выражения:
для проекции pMi и для величины М2 о М?; последняя согласно
теореме 3 п. 3.3.4 должна некоторым образом определять пере-
нос, задаваемый бикватернионом М. Имеем
pMi = А0 ° Рме ° А0 =
- 2Л? ° mJ; о о л? = 2Л? о о л? о л® о mj. о д°.
7 в. Н. Бранец, И. П. Шмыглевский
98
ГЛ. 3. БИКВАТЕРНИОНЫ И ВИНТОВОЙ МЕТОД,
Очевидно, что
Му = Ау о м£ о л«,
Л? ° M# ° Ау = Му + “2“ (Му о рду — Рлт ° Му).
откуда следует
РМ1 = 2 [м; + |(М? о рл/ - рА1 о м?)] о м? =
= 2Му О Му + Му О рду О mJ - рЛГ
и, соответственно,
2 м; о М? = рМу + рЛу - М°у о Рл1 о м°у. (3.58)
Используя полученные равенства, обратимся к первой теоре-
ме сложения преобразований; в качестве базиса проектирования
возьмем базис I; имеем Ny = М2 ° Лъ или, развертывая это соот-
ношение,—
n? - м? - a?, n; = м? о д; + м; о а?.
Поскольку бикватернионы Ny и Ау будут собственными, для
них справедливы соотношения (3.53); найдем вектор суммарно-
го переноса в проекции на базис Z:
PJvy = 2N;oN°y =
- 2(М? о Ау + м; о А?) о д? о М? 2М? о AjoM? + 2М^ □ М?.
Подставим в полученное выражение величину Му ° Му из
(3.58) и pAj из (3.57), получаем
pjVy = М? о рду о Му + рм/ + pAZ — Му ° рду ° Му = $М1 + Pai,
т. е. первая теорема сложения также приводит к векторному сло-
жению перемещений (отображения приводятся к одному бази-
су). Этот результат подтверждает вывод о том, что соотношения
(3.53) для перемещений справедливы только для собственных
бикватернионов.
Аналогичный результат можно получить, проектируя соотно-
шение сложения преобразований на любой базис.
Проведенное рассмотрение показывает, что вторая теорема
сложения преобразований (заметим: не имеющая векторного
смысла) существенно более удобным образом подходит для опи-
сания винтового движения. Еще более существенным оказывает-
ся тот факт, что кинематические уравнения получаются для соб-
ственных бикватернионов именно с помощью этой теоремы (ана-
логичен результат для сложения конечных поворотов и кинема-
тических уравнений для вращательного движения, рассмотрен-
ный в [15]).
§ 3.4. ТЕОРИЯ ВИНТОВОГО ДВИЖЕНИЯ
99
3.4.3. Бесконечно малые преобразования и кинематические
уравнения.
З.4.З.1. Бесконечно малое преобразование. Под
преобразованием такого рода будем понимать малое движение
такое, что различие, например, базисов, мало, так что можно
пренебрегать вторым порядком величин углов вращений и пере-
мещений.
Рассмотрим собственный бикватернион, задающий переход от
базиса I к Е, в форме, представленной в п. 3.4.2.3:
Л = Л? + sA'j = Л? 4- 4 sPz ° Л?,
или же для различных последовательностей П и В:
А = Л-Е + sA-E = Л-Е + sA°e ° рЕ-
Бикватернион бесконечно малого преобразования можно полу-
чить из этих выражений, полагая базисы I и Е близкими, т. е.
полагая, что угол вращения кватерниона Л° мал и справедливо
выражение
а величина перемещения Др также мала. Если пренебречь раз-
личиями Др, и Дрв при близком положении базисов
(Др, = Л° о Дря о ДО = ДрБ + £Д0О Х дрв)?
то ДА' « 1/2Др. Исходя из этих соображений, получим для соб-
ственного бикватерниона малого преобразования
АЛ«1 4-lgA0O4-±sAp.
При этом, естественно, векторы g и Др проектируются на преоб-
разуемый ими базис.
Легко связать величины Д0°£; и Др с физическими величина-
ми угловой и линейной скорости (со и v соответственно): Л0°£ =
= ш At, Др = v At.
Назовем бикватернион (бивектор)
U = gj + sv (3.59)
мгновенным винтом скоростей; можно видеть, что бикватернион
бесконечно малого преобразования
АЛ « 1 + U At (3.60)
Безусловно, переменные А и U в приведенных соотношениях
должны содержать индекс базиса, так как эти бикватернионы
являются собственными.
7*
100
ГЛ. 3. БИКВАТЕРНИОНЫ И ВИНТОВОЙ МЕТОД
3.4.3.2. Кинематические уравнения. По определе-
нию кинематическими уравнениями являются уравнения, связы-
вающие кинематические параметры и их производные с физиче-
скими переменными, т. е. угловыми и линейными скоростями.
Метод вывода кинематических уравнений полностью идентичен
изложенному в [15].
Рассмотрим два базиса I и
жение между ними задается
Е (рис. 11). Пусть взаимное поло-
бикватернионом Л — преобразова-
нием винтового движения. При
движении базиса Е относительно
I бикватернион Л(£) будет функ-
цией времени.
Пусть имеем два положения
базиса Е в моменты времени t и
t + А£; можно видеть, что их по-
ложения относительно базиса I
Рис. 11. Бесконечно малое преоб-
разование
задаются бикватернионами Л(£) и Л(£-ЬА£); взаимное положе-
ние определяется бикватернионом бесконечно малого преобразо-
вания. Применим вторую теорему сложения преобразований; в
этом случае Л(£) и Л(£ + Д£) будут собственными бикватернио-
нами преобразований, а АЛ должен иметь индекс базиса £, т. е.
AAZ. Имеем A(t + А£) = Л(г)° ДЛЯ. Подставляя в эту формулу
значение бикватерниона бесконечно малого преобразования^
получим
Л (t 4- А£) = Л (t) ° (1 + -у U^A^) = Л (£) ° (1 + (^е + 4- sV#] At
\ xu j \ Zu xu J
(3.61)
— разностную форму кинематического уравнения.
Определяя производную от бикватерниона как
Л = lim
Af-*O
A(t + At) —A(t)
получим дифференциальную форму кинематического уравнения:
Л = у AoU£.
(3.62)
По сути дела, это единственная форма кинематических уравне-
ний, так как в ней участвуют собственные бикватернионы, в том
числе и бикватернион бесконечно малого преобразования.
Другой тип кинематического уравнения может быть получен
совершенно формально из уравнения (3.62) перепроектирова-
нием винта скоростей: Uj = Л ° U£ ° Л, либо с использованием
первой теоремы сложения преобразований. В последнем случае
для того, чтобы иметь собственные биквдтернионы преобразова-
ний, в качестве базиса проектирования выберем Л
§ 3.4. ТЕОРИЯ ВИНТОВОГО ДВИЖЕНИЯ
101
Имеем
Л (t + А0 = (1 + 4 U/Ai) ° л (0 (3.63)
— кинематическое уравнение первого типа в разностной форме.
В дифференциальной форме имеем уравнение
А = 4 U/ о А. (3.64)
Однако винт скоростей UT будет несобственным и должен быть
получен операцией перепроектирования. Выполняя эти действия,
получим
и7 = Л о иЕ ° Л =
= Л° ° (Оя ° Л° + s [Л° ° ° Л° + Л° ° (&Е ° Л7 + Д' ° (&Е ° А0] =
= (О, + s [V, + (рЛ1 X Oh) ],
что, естественно, получается при смене координатного базиса и
точки приведения. Указанные уравнения напоминают кинемати-
ческие уравнения в кватернионах для вращательного движения.
Кинематические уравнения (3.62), (3.64) представлены в
операторном (бикватернионном) виде. Каждому из них отвечает
восемь скалярных уравнений для восьми переменных компонент
бикватерниона. Условие равенства единице тензора бикватернио-
на приводит к двум условиям связи: соотношению для нормы
главной части бикватерниона (НА°11 = 1) и равенства нулю пара-
метра, так как
£ГА = ^~Л°(1 + ^Л)= 1,
т. е. ^~А° = 1 и 5^А = 0; тем самым число свободных параметров
сводится к шести.
Запишем развернутые выражения для кинематических урав-
нений; разделяя главную и дуальную части бикватернионов, име-
ем для кинематических уравнений в собственных бикватер-
нионах
Л° = 4 А°о<йе, л' = 4 Л' о в>Е + 4 Л° о VE. I (3.65)
Для кинематического уравнения второго типа получим
Л0 = 4<01° А», л' =4V1° А0 + (РЛ1Х<Й/)О А0+ 4^1° А'. (3.66)
Можно видеть, что кинематические уравнения для винтового
движения «распадаются» на обычные кинематические уравнения
вращательного движения, независимые от остальных, и на урав-
нения для дуальной части бикватерниона. Назовем уравнения
(3.62), (3.64) обобщенными кинематическими уравнениями,
102
ГЛ. 3. БИКВАТЕРНИОНЫ И ВИНТОВОЙ МЕТОД
а первые уравнения (3.65) и (3.66)—собственно кинематиче-
скими уравнениями.
3.4.3.3. Общие свойства кинематических уравне-
ний.
1°. Обобщенные кинематические уравнения в форме (3.62),
(3.64) имеют вид, аналогичный кинематическим уравнениям
[15] и, казалось бы, аналогично последним должны иметь две
симметричные формы, содержащие проекции винта скоростей на
исходный и подвижный базисы. Однако мгновенный винт скоро-
стей, представленный в виде U = со + $V и определяющий опера-
тор бесконечно малого преобразования, имеет физический смысл
только в преобразуемом им подвижном базисе; в этом случае
о = (дЕ есть отображение вектора относительной угловой скоро-
сти и V = \ТЕ — отображение вектора относительной скорости по-
ступательного движения. Этому факту отвечает единственно реаль-
но представимое движение, изображенное на рис. 11, и единст-
венно физически интерпретируемая форма уравнений, содержа-
щая только собственные бикватернионы преобразований (3.62).
Второй тип уравнений (3.64), получаемый формально, содер-
жит винт скоростей (3.66)
Uj — (О/ s (V/ + рЛ1 X (Oj),
который может интерпретироваться как приведение винта скоро-
стей (Oj + svj к началу координат базиса Е.
2°. Рассмотрим условия «замкнутости» формальных соотно-
шений кинематических уравнений для сложных движений.
Пусть имеем два последовательно выполняемых преобразования
(рис. 8) и соотношение сложения преобразований для собствен-
ных бикватернионов: N = Л ° М. Пусть мгновенный винт скоро-
стей движения базиса Е относительно I
UiE = (о 4" sVI#,
а винт скоростей движения базиса Е' относительно Е
U2E' ^ta2E'_4'S>^2E'-
Кинематическими уравнениями для собственных бикватернионов
будут
2A = A°Uu, 2M = M°U2e.
Найдем кинематическое уравнение для результирующего би-
кватерниона N, для чего выполним формальное его дифферен-
цирование:
2N -- 2А о М + 2А о М =
= А ° UiE о М + А о М о U2e = N ° ( А ° ° М U2E').
Очевидно, что U^/= М ° Uje ° М, если Uxe« U^/ считать ото-
§ 3.4. ТЕОРИЯ ВИНТОВОГО ДВИЖЕНИЯ
103
бражениями на базисы Е и Е' неизменного винта. Имеем тем
самым ту же форму кинематического уравнения: 2N ^NoU3£/,
причем винты скоростей ЦзЕU1e' lU2£;'—складываются век-
торным образом (компоненты представлены в одном базисе).
Заметим, что инвариантная (векторная) форма сложения пре-
образований, точно так же как и форма кинематического урав-
нения в отображениях винта скоростей на исходный базис, не
дает таких симметричных соотношений.
3°. Основываясь на одинаковой форме обобщенных кинема-
тических уравнений и кинематических уравнений [15], можно
сформулировать теоремы об общем решении уравнения (3.62) в
следующем виде.
Общим решением уравнения (3.62) будет Л = С°Р, где Р —
любое частное решение уравнения, а С — постоянный бикватер-
нион, выбором которого можно удовлетворить произвольным на-
чальным условиям.
Однако для обобщенных уравнений можно получить несколь-
ко более сильный результат.
Запишем уравнения (3.62) в виде разложения на собственно
кинематическое уравнение и уравнение для дуальной части би-
кватерниона (3.65):
2Л° = Л° ° (дЕ, 2Л' = Л' ° + Л° ° УЕ.
Пусть собственно кинематическое уравнение для заданной функ-
ции угловой скорости aE(t) имеет частное решение Р°. Будем
считать, без уменьшения общности, что начальное значение ква-
терниона Р° равно единице, т. е. Рд И.
Общее решение собственно кинематического уравнения Л° =
= Ао ° Р°, где А°о — начальное значение кватерниона Л°. Рас-
смотрим вторую часть кинематического уравнения для дуальной
части бикватерниона; можно видеть, что относительно перемен-
ной А' уравнение является неоднородным. Однородное уравне-
ние, соответствующее ему, 2Л' = А' ° — подобно кинематиче-
скому уравнению, вследствие чего его решением будет Л' ==
= С ° Р°, где С — постоянный кватернион. Варьируя эту постоян-
ную, найдем решение для неоднородного уравнения:
Д' = CoP0 + CoP° = jC»P°o<b£ + 1-A?»P0» уе,
t
С = 4 Л? о Р°» V£ о р°, с = Со + | л°о J(P°(T) о VS(T)» P°(r))dr.
О
Имеем окончательно
t
Д' = A00oP° + 4a?J(P0» V£op0)dT. (3.67)
О
104
ГЛ. 3. БИКВАТЕРНИОИЫ И ВИНТОВОЙ МЕТОД
Таким образом, общее решение обобщенного кинематического
уравнения находится по любому частному решению собственно
кинематического уравнения. Формально аналогичные соотноше-
ния можно получить и для второй формы кинематических урав-
нений.
4°. Разложение обобщенных кинематических уравнений на
собственно кинематические уравнения и уравнения для дуальной
части дает возможность дополнительного анализа уравнений.
Если собственно кинематические уравнения описывают враща-
тельное движение, имеющее неподвижную точку, то уравнение
для дуальной части бикватерниона описывает поступательное
движение. В качестве переменной поступательного перемещения
можно использовать величину вектора переноса р. Так, если для
бикватерниона Л в соответствии с (3.53) имеем отображения на
исходный (/) и подвижный (Е) базисы, то рА1 = 2А' ° А0, р^Е =
= 2Л° ° Л'.
Продифференцируем формально эти отображения; для рЛг
имеем
рЛ/= 2(А'° А0 — Л'° А0 ° А° ° А0) ==
= (А'° + А0 ° V£)oA°- А'° ° А° = А° ° Vs ° А° = V,. (3.68)
Для второго отображения
рл£. = 2 (— Л° о Л0 е Л° о Д' + Д° о л') =
= — (Ое ° А° ° Л' + А0 ° (Л' ° (&е А0 ° Vе) =
= — Т(дЕ ° °(дЕ + =Vе + РаеХ(о#. (3.69)
Первым уравнением является кинематическое уравнение для по-
ступательного движения в инерциальной, а вторым — во враща-
ющейся системах координат.
§ 3.5. Уравнения инерциальной навигации
в винтовом исчислении
В ряде работ [107—109] обобщенные кинематические урав-
нения, представленные в бикватернионной форме, были исполь-
зованы для построения алгоритмов инерциальной навигации.
Приведем здесь эти уравнения.
Рассмотрим сначала уравнения, связывающие координаты и
скорости движения. Пусть Е — связанная система координат,
I — исходная навигационная система отсчета, и бикватернион А
задает переход от I к Е. Очевидно, что обобщенные кинематиче-
ские уравнения (3.62) 2A = A°Us определяют движение функ-
цией Ue = g)e + sVe мгновенного винта скоростей, где g)e, Ne —
§ 3.5. УРАВНЕНИЯ ИНЕРЦИАЛЬНОЙ НАВИГАЦИИ
105
относительные угловая и поступательная скорости базиса Е. Та-
ким образом, (3.62) дают уравнения «второго интегрирования»,
определяющие связь вектора полной скорости с положением.
Для уравнений «первого интегрирования», определяющих пол-
ную скорость, используем разбиение полной скорости на кажу-
щуюся скорость W и скорость свободного движения С, т. е.
V = W + С.
Введем два базиса Q и 7, положение которых относительно
базиса I определяется бикватернионами М и
(рис. 12). Расстояние начала координат ба-
зиса Q от I выберем равным кажущейся
скорости W; расстояние Т от I пусть будет
равно скорости свободного движения С; ори-
ентация базисов Q и Т относительно исход-
ного базиса I определяется кватернионами
М° и L0 соответственно. Относительно по-
следней предположим, что она может быть
произвольной и выбирается исходя из ряда
соображений, например таких, как удобство
L соответственно
сов для вывода урав-
нений ИНС
задания ускорения, представления величины проинтегрированной
скорости и т. п. Пусть относительные угловые скорости движе-
ния базисов Q и Т (относительно I) равны <01 и СО2-
Образуем мгновенные винты скоростей:
Ui = <Oi + sp, U2 = (О2+ sg,
(3.70)
где р — кажущееся ускорение ng — гравитационное ускорение.
Кинематическим уравнением для кажущейся скорости будет в
этом случае уравнение для бикватерниона М:
2M = MoUiq1, (3.71)
где Uiq = <OiQ + spQ. Это уравнение разделим на собственно кине-
матическое и уравнение для дуальной части бикватерниона М:
2М° = М° ° <оiQ, 2М' = М' ° ©1Q + М° ° pQ;
выражение для кажущейся скорости будет иметь вид
Wj=2M/°М°, Wq = 2M0°M'. (3.72)
Кинематическим уравнением для скорости свободного движения
будет уравнение для бикватерниона L
2L = L ° и2т, (3.73)
где U2T = (д2т + sgT = й>2т + $GT, которое разделяется на следую-
щие два уравнения:
2L° = L0 ° (о2т, 21/ = 1/ ° й)2т + L0 ° gT.
106
ГЛ. 3. БИКВАТЕРНИОНЫ И ВИНТОВОЙ МЕТОД
Величина скорости свободного движения найдется как
С, = 2L' ° L0, Ст = 2L0 ° I/. (3.74)
Выбор базисов Q и Т может диктоваться, как было сказано
ранее, либо удобством задания первичной (pQ) или исходной
(gr) информации, либо удобным представлением проинтегриро-
ванного значения скорости. Полная скорость получается сумми-
рованием в одном базисе отображений кажущейся скорости и
скорости свободного движения; в частности, в базисе I имеем
V/ - Cz + Wz = 2 (L' oL° + M' ° М°). (3.75)
Разумеется, это соотношение может быть перепроектировано в
любой базис и, в частности, в Е:
V£ = Л ° Vf ° Л = 2Л °(L'° L° +М'° М°) ° Л.
Обобщенные кинематические уравнения, содержащие собст-
венно кинематические уравнения, описывающие вращательное
движение базиса, и уравнение для дуальной части бикватернио-
на, задающее поступательное перемещение, можно представить
в иной форме, используя результаты п. 4° 3.4.3.3. Заменяя урав-
нение для дуальной части получающимся из него уравнением
непосредственно для вектора (расстояния между началами коор-
динат базисов) в соответствии с соотношениями (3.68), (3.69),
для бикватерниона М имеем следующую систему эквивалентных
уравнений:
2М° = М° ° (о1(3, Wi = Pi, Wq = Pq + WqX<Diq.
Для бикватерниона L:
2L° ==: L° ° (О2т, С/ ,== gj, Су — gr "Ь Ст X G>2r«
И, наконец, для бикватерниона А:
2A° = A°og)e, Ri = V,, или Re = Ve + ReX<oe, (3.76)
т. е. приходим к системе уравнений, рассмотренных в гл. 1.
Таким образом, уравнения инерциальной навигации, пред-
ставленные в гл. 1, могут быть записаны в виде обобщенных ки-
нематических уравнений. Их использование, на наш взгляд, мо-
жет оказаться оправданным и рациональным в тех случаях, ког-
да формализм кватернионов дает какие-либо удобства либо при
численном интегрировании (что имеет место, например, при спе-
циальных системах счисления), при построении численных мето-
дов интегрирования задач ИНС, либо в задачах аналитического
исследования движения.
ЧАСТЬ II
РЕАЛИЗАЦИЯ РЕШЕНИЯ УРАВНЕНИЙ БИНС
ГЛАВА 4
МЕТОДЫ ИНТЕГРИРОВАНИЯ КИНЕМАТИЧЕСКИХ УРАВНЕНИЙ
§4.1. Представление первичной информации
и методы интегрирования
Кинематические уравнения, или навигационные уравнения
второй группы (см. § 1.1), являются совершенно автономными
уравнениями, не зависящими от других уравнений или парамет-
ров. Соответственно этому решение кинематического уравнения
может реализовываться автономно, если только задано взаимное
угловое движение двух систем координат, т. е. задана угловая
скорость относительного движения. В инерциальных системах
управления, как правило, реализуется одновременно несколько
операций интегрирования кинематических уравнений (т. е. вы-
числяется положение нескольких координатных базисов); при
этом величина угловой скорости получается различными спосо-
бами. Так, например, в случае бесплатформенной ИНС кинема-
тические уравнения, описывающие движение связанного базиса,
решаются для угловой скорости, получаемой как первичная ин-
формация от датчиков угловой скорости БИНС.
При классификации методов реализации решения кинемати-
ческих уравнений (т. е. реализации их интегрирования) в пер-
вую очередь будем различать тип (вид) первичной информации
об угловой скорости. Можно видеть, что первичную информацию
можно разделить на получаемую аналитически и измеряемую
с помощью датчиков (первичной информации).
В первом случае величина угловой скорости может быть за-
дана либо как функция времени, либо как результат решения
некоторой системы дифференциальных уравнений, также описы-
вающих движение. В качестве примера приведем случай интег-
рирования положения орбитальной системы координат, рассмот-
ренный в § 1.4. Если орбитальное движение задано и известно в
явном виде, то, очевидно, может быть задана аналитически и уг-
ловая скорость, и само переменное положение орбитальной сис-
темы координат. С другой стороны, если орбита задается началь-
ными условиями движения, то орбитальное движение получается
как результат решения дифференциальных уравнений движения,
т. е. навигационной задачи (см., например, соотношения (1.35)).
108
ГЛ. 4. ИНТЕГРИРОВАНИЕ КИНЕМАТИЧЕСКИХ УРАВНЕНИЙ
В любом случае в данном примере угловая скорость — вычис-
ляемая информация.
Во втором случае величина угловой скорости измеряется дат-
чиками первичной информации. По виду измеренной информа-
ции датчика угловой скорости могут быть разделены на датчики,
непосредственно измеряющие проекции вектора угловой скорости
на их оси чувствительности, и на так называемые однократно
интегрирующие датчики, сигналы которых соответствуют проин-
тегрированным значениям проекций угловой скорости. При этом
датчики первичной информации измеряют либо непосредственно
величины со» (i = l, 2, 3), либо при однократно интегрирующих
датчиках угловой скорости измеряются величины
t
01 = f (Oj dx,
о
имеющие размерность углов и называемые квазикоординатами.
В случае БИНС оси чувствительности датчиков первичной ин*
формации фиксированы относительно осей изделия (базисом £),
при этом первичная информация об угловой скорости имеет вид
(0£Е и 0гЕ.
Схемы и методы реализации решений кинематических уравнений
Вид первичной информации Схемы и методы решения Применение
1. Аналитическая 1.1. Функция времени 1.2. Результат решения дифференциальных уравнений Цифровая схема ин- тегрирования Традиционные чис- ленные методы Широко используются в задачах ИНС
2. Измеряемая 2.1. Угловая скорость 2.1.1. Непрерывная (аналоговая) 2.1.2. Дискретная Аналоговая, гибрид- ная Цифровая Цифровая Используется в простых схемах управления Возможное использова- ние Не применяется
2.2. Первый интеграл от угловой скорости (квазикоордината, угол кажущегося по- ворота) 2.2.1. Непрерывная (аналоговая) 2.2.2. Дискретная Аналоговая Цифровая схема ин- тегрирования, спе- циальные числен- ные методы Используется в простых схемах управления Преимущественно ис- пользуется в схемах БИНС
§ 4.2. О ТОЧНОСТИ РЕАЛИЗАЦИИ РЕШЕНИЯ
109
Вид первичной информации, характер ее физического пред-
ставления (аналоговый сигнал в виде тока или напряжения,
дискретный сигнал того или иного вида) во многом определяют
реализацию (приборную, аппаратную) схемы интегрирования ки-
нематических уравнений. В таблице представлена классифика-
ция схем и методов реализации решений кинематических урав-
нений в зависимости от вида первичной информации. Вопросы
.анализа схемной реализации интегрирования кинематических
уравнений будут рассмотрены далее (§ 4.3).
Из таблицы видно, что цифровые схемы интегрирования мо-
гут использовать различные численные методы; поскольку эти
схемы имеют наибольшее применение на практике, именно их
исследование представляет особый интерес. При этом для анали-
тически заданной первичной информации могут быть использова-
ны традиционные численные методы, известные достаточно хоро-
шо [7, 19, 48].
Для измеряемой первичной информации наибольшее приме-
нение характерно для дискретного вида информации, получае-
мой от однократно интегрирующих датчиков угловой скорости.
Исследованию численных методов и схем интегрирования для
этого случая посвящена далее глава 5.
§ 4.2. О точности реализации решения кинематических уравнений
Точность реализации решения кинематического уравнения бу-
дет определяться двумя факторами: погрешностями первичной
информации и погрешностями схем и методов реализации
решения.
Первичная информация аналитического типа может быть,
в принципе, сколь угодно точной; однако поскольку эта инфор-
мация получается путем тех или иных вычислительных опера-
ций (вычислением функции, решением дифференциальных урав-
нений), реальная точность ее получения будет определяться кон-
кретным методом используемых вычислений. Для такого вида
первичной информации всегда может быть предложена анали-
тическая оценка точности вычислений, т. е. оценка ошибки пер-
вичной информации.
В том случае, когда первичная информация измеряется, ее
ошибками являются ошибки датчика первичной информации.
Соответственно этому вид ошибки определяется физическими
принципами, используемыми в датчике, и точностью приборной
реализации. Так, например, для гироскопического датчика угло-
вой скорости ошибки первичной информации будут определяться
систематическими и случайными составляющими ухода (не за-
висящими и зависящими от ускорения), ошибками масштабного
коэффициента, нелинейностью выходной характеристики датчика,
ошибками квантования выходной информации и т. п. По аналогии
110
ГЛ. 4. ИНТЕГРИРОВАНИЕ КИНЕМАТИЧЕСКИХ УРАВНЕНИЙ
с этим таким же образом принято определять (или сводить к по-
добным) ошибки датчиков первичной информации, использующих
другие физические принципы (лазерные и волоконно-оптические-
измерители угловой скорости, волновые твердотельные гироско-
пы и т. п.). Характеристика ошибки первичной информации оп-
ределяется конкретным датчиком и его свойствами.
Ошибка метода реализации решения (будем называть эту со-
ставляющую методической погрешностью) получается за счег
ошибок схемной реализации и метода (алгоритма) решения за-
дачи, возникающего при численном интегрировании кинематиче-
ских уравнений. Так, в аналоговых схемах интегрирования
ошибка схемной реализации будет определяться погрешностями
аналоговых операционных усилителей и других схем, выполняю-
щих операции умножения, сложения и интегрирования. В циф-
ровых схемах интегрирования эти составляющие погрешности
отсутствуют (если не считать погрешности, вносимой конечной
разрядной сеткой), однако возникают погрешности приближенно-
го численного алгоритма интегрирования.
Очевидно, что методическую погрешность можно определить
и описать для каждой конкретной схемы интегрирования. Тем
не менее существует общий подход, позволяющий подойти к про-
блеме исследования ошибок реализации решений единым обра-
зом, независимо от того, что ошибки схемной реализации, мето-
да решения и ошибки первичной информации имеют различную*
природу. Основой этого подхода является сведение всех состав-
ляющих ошибок к эквивалентной погрешности первичной инфор-
мации 6(0. Для доказательства этого положения нужно показать,
каким образом ошибки метода интегрирования (в том числе и
схемной реализации) могут быть сведены к ошибке первичной
информации.
Выполним следующую процедуру: осуществим замену при-
ближенного решения, реализованного тем или иным численным
(схемным) методом, точным решением, тождественно совпадаю-
щим с приближенным при соответствующим образом выбранной
величине первичной информации о* (это можно всегда сделать
в силу обратимости кинематических уравнений). Можно видеть,
что при этом в зависимости от метода решения выбирается вели-
чина угловой скорости (о*, отличная от получаемой тем или
иным образом первичной информации (хотя и близкая к ней).
Этим самым может быть определена эквивалентная составляю-
щая 6(0 ошибки первичной информации, свойственная данному
методу решения. С учетом этого имеется возможность свести
проблему исследования точности реализации решения кинемати-
ческого уравнения к анализу точности решения при определен-
ным образом заданной ошибке первичной информации.
Рассмотрение уравнений ошибок для кинематических уравне-
ний, проведенное в гл. 2, показывает, что точность реализации
'§ 4.3. СХЕМНАЯ РЕАЛИЗАЦИЯ ИНТЕГРИРОВАНИЯ
111
решения удобно определять величиной угловой ошибки А0, име-
ющей ясную физическую интерпретацию — уход углового поло-
жения. Для кинематических уравнений второй формы это будут
соотношения (2.7), (2.8), определяющие ошибку А0£, или же
(2.11) и (2.12), задающие величину А0ц аналогичные соотно-
шения имеют место и для первой формы кинематических урав-
нений. Ошибку, например, A0j для случая БИНС (вторая форма
кинематических уравнений) можно интерпретировать как вели-
чину вектора малого угла рассогласования (ухода) положения
.вычисленного базиса.
Указанные соотношения определяют величину угловой ошиб-
ки в зависимости от ошибки первичной информации; можно ви-
деть, что, например, для уравнений первой формы интегрируется
не сама величина ошибки, взятая (для случая БИНС) в проек-
циях на связанный базис, а ее проекция на инерциальный ба-
зис. Действительно, если согласно соотношениям перепроектиро-
вания найти величину ошибки первичной информации в проек-
циях на базис 7, то получим
(6й)Е) i = Л ° 6о)е° Л,
и именно эта величина накапливается (интегрируется) и опреде-
ляет уход вычисленного базиса.
Аналогичным образом при реализации решения второй фор-
мы кинематических уравнений (при заданном Oj) накапливаться
будет величина A°6g)i°A. Это обстоятельство затрудняет общее
исследование влияния эквивалентных ошибок первичной инфор-
мации на точность решения кинематического уравнения. Однако
ясное физическое содержание общего решения уравнений оши-
бок позволяет применить описанный здесь подход к исследова-
нию точности реализации решения кинематических уравнений
для ряда конкретных случаев.
§ 4.3. Схемная реализация интегрирования
кинематических уравнений. Ошибки интегрирования
Приведем краткий анализ схем и методов реализации реше-
ний, представленных в таблице на с. 108.
1°. В том случае, когда первичная информация получается в
аналитическом виде, для реализации решения могут использо-
ваться традиционные численные методы решения с применением
цифровых вычислительных машин [7, 48, 59]. Точность числен-
ного метода также может быть определена традиционными мето-
дами, и в этом смысле задача интегрирования кинематических
уравнений не отличается от любых других задач численного ин-
тегрирования обыкновенных дифференциальных уравнений.
112
ГЛ. 4. ИНТЕГРИРОВАНИЕ КИНЕМАТИЧЕСКИХ УРАВНЕНИЙ
2°. Пусть первичная информация получается от датчика уг-
ловой скорости (ДУС) непосредственно в виде компонент — про-
екций вектора угловой скорости на оси чувствительности ДУС.
В частности, в случае бесплатформенной инерциальной системы,
использующей ДУС с аналоговыми выходными сигналами, соот-
ветствующими измеряемой угловой скорости, будем иметь пер-
вичную информацию в виде со1£ (г = 1, 2, 3), образующую ква-
тернион (дЕ. Схему интегрирования кинематических уравнений
Рис. 13. Аналоговая схема интегрирования кинематических уравнений
(П.3.18) в этом случае можно представить в виде аналоговых
моделирующих устройств, выполняющих умножение и сложение
переменных.
На рис. 13 представлена блок-схема решающего устройства.
Можно видеть, что при таком способе реализации решения кине-
матических уравнений методическая точность решения будет оп-
ределяться точностью выполнения операций умножения, сложе-
ния и интегрирования, т. е. точностью работы аналоговой схемы
интегрирования. Кроме того, на точность решения, естественно,
влияют ошибки получения (измерения) первичной информации.
Влияние составляющих ошибок можно оценить в каждом кон-
кретном случае движения и для каждого вида ошибки.
Рассмотрим, например, влияние систематической составляю-
щей ошибки ДУС (чему соответствует 6(d£ = (do), равной величи-
не «смещения» выходной характеристики прибора. В самом
§ 4.3. СХЕМНАЯ РЕАЛИЗ/ЩИЯ ИНТЕГРИРОВАНИЯ
113
простом случае можно представить следующую оценку по «верх-
ней» границе ошибки, используя решение в виде (2.12):
t
Д0 = J А ° 6юЕ ° д dx =
о
t t t
= J A ° (% о A dx [ | A ° (o0 ° A | dx = j* | (o01 dx = co0t
0 0 0
Можно видеть, что для каждого конкретного движения имеется
возможность оценки такой ошибки и более точным образом.
Рассмотрим далее влияние относительной ошибки датчика.
Пусть 6(0е = £(Ое, где £ — малая величина, характеризующая от-
носительную ошибку — ошибку масштабного коэффициента.
В случае плоского вращения (т. е. движения с неизменным на-
правлением вектора угловой скорости) имеем А и ыЕ коллинеар-
ными друг другу; при этом ошибка в виде (12.2)
! *
Д01 = | 6соЕ dx = Е, [ <оЕdx = £0
о о
пропорциональна углу поворота. При возвращении в исходное*
положение (0 -> 0) ошибка исчезает.
Однако заметим, что этот вывод справедлив только для плос-
кого вращения. Для иллюстрации рассмотрим случай коническо-
го движения (см. [15]), имеющего точное решение кинематиче-
ского уравнения. Пусть вектор ыЕ задан функцией
(&Е = ai cos Ы + aj sin bt + ck. (4.1)
Решением кинематического уравнения (П3.18) для данной угло-
вой скорости будет
А= Ао о e^lai-Hc+Wk]/ о е~г/2Ък1^ ^2)
Величина относительной ошибки найдется в виде
(6(оЕ)/ = А ° 6(ое о А = ^А ° (оЕ ° А =
= g [ai + (с + Ь) k] — gfo^/atai+Cc+^k]/ о к о £_l/2[ai+(c+&)kK
Обозначая а2 = а2 + (с + Ь)2, получим выражение для ошибки
первичной информации:
(б(оЕ)/ = | [ai + (t; + b) к] -|-
. ^7 (c + &)2i , а2 .1 а • , 2а(с + &) . 9 а
+ £>Ь --9 к -|-------------- cos atk----------sm aZj -|-----------Sm2 tk
a a a or *
8 В. H. Бранец, И. П. Шмыглевский
£14 ГЛ 4. ИНТЕГРИРОВАНИЕ КИНЕМАТИЧЕСКИХ УРАВНЕНИЙ
В соответствии с соотношением (2.12) величина проинтегриро-
ванной ошибки
t
Д01 = Д0? У dx = Д0? 4~ В 4~ (^ 4~ ^) к]
о
&(Н-Ь)2
а2
*+
, е. т d • , j । 7 d (С 4“ Ь) • , • i
4 ^-sinaf’k 4- 6 ——4—- sin at* i 4-
а а
d . z , ... d(c 4-b)
— 7 (cos at — 1) + —H—1
a a
= Ae? + Uai+(c + 6)k](l + -b4±V.
\ a
+ lb — sin atk —
fl** —
-i- sin i =
a’
—- sin ati 4- “ j (cos at — 1) .
a a
Из полученного выражения следует, что ошибка накапливается
при движении.
Для примера можно рассмотреть случай, когда через некото-
рый интервал времени система придет к начальному положению;
в соответствии с решением (4.2) этому отвечает, например, усло-
вие bt = 4тгл, а£ = 4пгл (6, a — кратные отношению целых чи-
сел). Из выражения для ошибки видно, что при этом получаем
конечное, не равное нулю значение ошибки.
3°. Рассмотрим цифровую схему интегрирования при непре-
рывной информации от датчиков угловой скорости. Такая схема
интегрирования предполагает, что датчиком первичной информа-
ции (ДУС) измеряется величина угловой скорости в цифровом
виде. Можно себе представить, например, ДУС, имеющий непре-
рывный (аналоговый) выходной сигнал, пропорциональный угло-
вой скорости, преобразуемый далее в цифровой с помощью ана-
лого-цифрового преобразователя. Получаемая цифровая инфор-
мация используется при решении кинематического уравнения в
цифровом вычислительном устройстве; при этом могут быть су-
щественно уменьшены ошибки выполнения арифметических
операций.
Однако данная схема независимо от точности численного ме-
тода будет содержать ошибку квантования первичной информа-
ции. Если разрядность преобразователя равна N, то ошибка в
один дискрет преобразователя 8 = согаах • %~N- Очевидно, что
|6<Ое1=^8, и, таким образом, в любом случае имеем следующую
оценку точности рассматриваемой схемы:
IA0JI ei = сотах2“Л’ • t.
Эта оценка имеет смысл «ухода», определяемого величиной 8.
Для БИНС характерным является требование достаточно боль-
шого диапазона измерений при реально достижимых точностях
§ 4.3. СХЕМНАЯ РЕАЛИЗАЦИЯ ИНТЕГРИРОВАНИЯ
11
преобразователя (10—16 разрядов). Для этих условий получаем
величину е ~ 10-1—10-4 град/с (низкая точность для БИНС).
Этим объясняется отсутствие практической реализации такой
схемы интегрирования кинематических уравнений.
4°. Однократно интегрирующие датчики угловой скорости
оказались наиболее приемлемыми датчиками первичной инфор-
мации для БИНС [10, 11,
41, 75, 113]. В этих датчи-
ках процесс квантования ин-
формации совмещается с
процессом ее накопления, рис Дискретная схема интегрирова-
т. е. «первичного интегриро- ния кинематических уравнений
вания». При этом удается
получить требуемую точность в смысле получения предельно
малой для данного класса датчика составляющей ухода, которая
оказывается в такой схеме, не зависящей от процесса кванто-
вания.
Измерители такого рода определяют величины квазикоорди-
нат; если ДУ С установлен в связанных осях базиса Е, то изме-
ряются величины
t
0гЕ = f «НЕ dx (f = 1,2,3), (4.3)
6
имеющие размерность угла поворота. Три скалярных равенства
(4.3) можно условно записать в виде векторного (кватернионно-
го) соотношения
t
Qe = J ыЕ dx. (4.4)
о
Три компоненты 0г£ будем называть квазикоординатами углово-
го положения или проекциями угла кажущегося поворота. Как
правило, с величинами квазикоординат в датчиках угловой ско-
рости производится операция квантования (превращение непре-
рывной информации в дискретную); при этом на выходе датчи-
ка существует сигнал [0^], являющийся целой частью 0гЕ:
[0гя] = Hi&i, ni&i^ @iE <(fti+ l)Ci, (4.5)
где Пг — целое число квантов величиной ег-, укладывающих-
ся в 0^.
Выходной сигнал такого датчика угловой скорости представ-
ляет собой временную последовательность квантов (импульсов
при унитарном кодовом обмене датчика с ЦВМ). Схема интегри-
рования кинематических уравнений для этого случая представ-
лена на рис. 14. Первичная информация накапливается на ре-
версивных счетчиках, которые опрашиваются ЦВМ через интер-
вал времени, равный шагу интегрирования. По считанному чис-
8*
416
ГЛ. 4. ИНТЕГРИРОВАНИЕ КИНЕМАТИЧЕСКИХ УРАВНЕНИЙ
лу импульсов в соответствии в (4.5) восстанавливается прираще-
ние квазикоординат на шаге. Естественно, что это приращение
определяется с точностью до величины кванта; однако «неучтен-
ная» таким образом составляющая приращения не накапливает-
ся при интегрировании — она «попадает» в следующий шаг ин-
тегрирования.
Такая схема реализации решения кинематических уравнений
является наиболее распространенной для БИНС; исследование
ее точности и методов интегрирования будет рассмотрено в гл. 5.
5°. Рассмотрим гибридную схему интегрирования кинематиче-
ских уравнений, представленную на рис. 15. В этой схеме дат-
чик первичной информации имеет непрерывный (аналоговый)
Рис. 15. Гибридная схема интегрирования кинематических уравнений
выходной сигнал, пропорциональный угловой скорости. Цикл ин-
тегрирования кинематических уравнений разбит на два этапа:
первичное интегрирование выполняется аналоговым интегрирую-
щим устройством; затем информация квантуется (оцифровывает-
ся), и дальнейшее интегрирование производится в ЦВМ.
В данной схеме первый этап интегрирования выполняется
при малых значениях угловых рассогласований. Положим ква-
тернион первичного интегрирования А(т) малым. Это означает,
что Л(т)~{1, Xi, Хг, Хз), где Х<—малые величины Ц = 1, 2, 3).
В этом случае кинематическое уравнение (П3.18) может быть
существенно упрощено:
2X1 = (Щ-Е "Ь Х2О)з.е — Хз0)2е? 2X2 = (^2е "Ь Хзсоцз Х1(Оз.е,
(4.6),
2Хз'= Озе + X1GJ2E — Х2® 1в,
§ 4.3. СХЕМНАЯ РЕАЛИЗАЦИЯ ИНТЕГРИРОВАНИЯ
117
или в векторной форме
2Х== (Од 4“ X X (Ojj.
По достижении угла поворота, характеризуемого величиной
Xi + X2 + Х23, равной -у-02,некоторого порога X2 + X2 = 82, где
е — величина кванта интегрирования, выполняется операция
«шага» решения в ЦВМ. При этом
— определяется величина кватерниона А(т) по компонентам
Х2, Х2, Хз на выходе интеграторов (скажем, А(т)={1*, Xi, Х2, Х3},
где 1* = 1----82^:
— выполняется цикл решения кинематических уравнений
в ЦВМ:
А(£ + t):=A(£)°A(t); (4.7)
— производится «сброс» аналоговых интеграторов в нуль.
Величины Хг(т) могут быть получены в цифровом виде из
аналоговых сигналов с помощью цифрового преобразователя
(АЦП).
Не касаясь, как и в п. 2 настоящего параграфа, влияния точ-
ности выполнения арифметических операций в аналоговой схеме
интегрирования, оценим влияние дискрета преобразования вели-
чин Хг в цифру на точность реализации решения кинематическо-
го уравнения. Пусть N — разрядность преобразователя АЦП;
в этом случае вектор Х(т) будет определяться с точностью до ве-
личины бе = 8 • 2~N. Прибегая к соотношению (2.12) для оценки
погрешности интегрирования «сверху», имеем
|Д€М
м
k—1
t
68 j I (J)E I dx = 08 • 2~n,
0
где 0 — полный угол вращения при движении (т. е. величина
J |(о# | dx j, М—число шагов интегрирования). Как показывает
о )
полученная оценка, на точность реализации не влияет число ша-
гов; выбором же величины кванта 8 при заданной разрядности
преобразователя ошибку можно сделать как угодно малой. На-
пример, при любом движении справедливо 0 2л. Пусть А = 10;
имеем IА0/1 = 2л • 10“3 • 8, т. е. для точности I A©il = 1" следует
взять 8 не более 3'.
Анализируя гибридную схему интегрирования, можно видеть,
что при отбрасывании в аналоговой схеме интегрирования членов
с векторным произведением IX ю и при введении квантования в
каждый канал (Х2^8о) данная схема переходит в схему одно-
кратно интегрирующего датчика первичной информации, рас-
смотренную в п. 4° настоящего параграфа.
118
ГЛ. 5. ИНФОРМАЦИЯ В ВИДЕ КВАЗИКООРДИНАТ
ГЛАВА 5
ИНТЕГРИРОВАНИЕ КИНЕМАТИЧЕСКИХ УРАВНЕНИЙ
ПРИ ИСПОЛЬЗОВАНИИ ПЕРВИЧНОЙ ИНФОРМАЦИИ
В ВИДЕ КВАЗИКООРДИНАТ
§ 5.1. Построение численных методов
Соотношение (4.7) может рассматриваться как универсальное'
соотношение интегрирования кинематических уравнений (см.,
например, разностную форму кинематических уравнений
(П3.17)). Это же соотношение может быть использовано для
формирования пошаговых методов интегрирования; при этом,
естественно, задача интегрирования сводится к получению реше-
ния А(т) на шаге интегрирования длительностью h.
Решение кинематического уравнения в текущий момент вре-
мени t = tk-\ + т получается как произведение
A(£) = A(£n-i + т) = Л(£п-1)°Л(т) = Лп_1 °N,
где А(^п-1) = Лп-1 есть решение на п — 1 шаге и A(t) = N(t) —
решение «внутри» шага. Начальное значение N(t) принимается
равным единице: построение решения N(t) проводится на срав-
нительно коротком интервале времени.
Первая группа численных методов. С учетом?
того, что кватернион N(t) удовлетворяет тому же кинематиче-
скому уравнению и имеет заданное начальное значение, кине-
матическое уравнение может быть записано в интегральной
форме:
т
N (т) = 1 + A- J Л (т') ° И)Е (т') dx'
О
и его решение [15] может быть построено методом последова-
тельных приближений Пикара:
t
N (т) = 1 + A- J <оЕ dx +
о
<йе (т") dx"] о ®Е (т') dx' + ...
(5-1)
Соотношения (5.1) могут быть использованы для построения
численных методов для любого вида первичной информации об
угловой скорости (дЕ. Задача здесь состоит в построении функции
<о£(т) на интервале интегрирования по данным измерений.
Для случая, когда первичная информация получается в виде
квазикоординат (4.4) при использовании однократно интегрирую-
щих датчиков угловой скорости, запишем соотношение (5.1),
заменив в нем интегралы от угловой скорости через введенные
§ 5.1. ПОСТРОЕНИЕ ЧИСЛЕННЫХ МЕТОДОВ
119
гвыше квазикоординаты:
т
n(t) = i+40£+4J0e
о
(&Е dt +
о Lo
(£>е dt o(dEdt' . •
(5.2)
При пошаговом интегрировании первичная информация полу-
чается в виде приращений квазикоординат и «считывается» в
определенные моменты времени th. Для построения решения на
шаге интегрирования (5.2) необходимо на основе измерений зна-
чений eEft = 0jE(^) построить приближенное значение функции
0е(т).
Аппроксимируем функцию (и (дЕ) интерполяционным по-
линомом, опираясь на измеренные значения ®Eh в узлах интер-
поляции th. Особенность [7] используемой интерполяционной
формулы Ньютона состоит в том, что выполняется интерполяция
«внутри» шага, т. е. на интервале [£fe-i, th] по получении послед-
него значения 0^ = @E(tk):
®iE (th — h + th) = @iEk 4-J|— VQiEk + ( 2Г-’ + • • •
• • • + + V"0iEft + Rn, (5.3)
тде @iE — проекция квазикоординаты на оси базиса, г= 1, 2, 3;
t — безразмерное время внутри шага, 0 < t С 1; h — временной
шаг решения th = tk_\ + к, разности взяты «назад»:
— @ik ©ife—1? • • •»
7=0
a Rn — остаточный член. Используя эту формулу, представим
интерполяционный полином в виде ряда по степеням т; при этом,
без уменьшения общности, можно начальное значение квази-
координаты ©гЕк-i принять равным нулю:
0JE + Т) =
= 1' + -д- V0j£fe
- 4V40iEft - 4 -•••] +
+ [4 ^20iEh — 4 "* "5Г + • • • ] +
+[4+ 4 + 4 v5©^ + ...] +
+ [>ъ + 4v50^ + •••] + ••. ^4V50{Bft + •••
(5-4)
120
ГЛ. 5. ИНФОРМАЦИЯ В ВИДЕ КВАЗИКООРДИНАТ
Величина угловой скорости на этом же шаге получается как
производная:
™iE
aiE = —dT
=4 И
'iEk---V20jEft----1 V30iEft — Tn'^QiEk — 4) V60iEft — ... 14-
О 14 I
л 1
V20iEft - V40iEft + VWft +
.2
.3
+ -^з" ~2~ V3©iEfe + ^©iEk + ^5®iEk + • • • +
(5.5>
т3 Г 1 1
+ -g“ + -g" +
Подставляя (5.4) и (5.5) в соотношение (5.2) и учитывая чле-
ны до четвертого порядка малости включительно, получим сле-
дующее выражение для решения А(т) в момент % = h:
Nft (h) = [1 - 4 (V<W + 4 (V2©^)2 + •••] +
+4 v0e* h - 4(V0£fe)2+4 <v2w +
+ 4 (V0Eft- V20Eft)] - 4(VOeO2 V20Eft +
+ 4 V0Eft X V26Eft + -TjT V&Eh x V30Efc + 777 V0Eft X V40Eft + ...
Z4 4o 144
(5.6>
При получении данного соотношения кватернионные произведе-
ния были заменены на операции векторного и скалярного умно-
жений.
Оставляя в полученной формуле члены соответствующего
порядка малости, получаем алгоритмы численных методов:
Nft(^) = l+4veE*’ (5-7>
Nft (h) = 1 + 4 V0Eft - 4 (VW, (5.8)
Nft (h) = i + -L уеЕЬ [i-4 (v w] -
- 4 veift+4V0*ft x V20£ft и т-n- <5*9*
§ 5.1. ПОСТРОЕНИЕ ЧИСЛЕННЫХ МЕТОДОВ
121
Методы (5.7) и (5.8) получили в литературе [15] названия
соответственно обычный и модифицированный метод Эйлера, Со-
отношение (5.9) определяет метод третьего порядка; сама фор-
мула (5.6) может, естественно, рассматриваться как метод чет-
вертого порядка.
Вторая группа численных методов. Эта группа
может быть построена непосредственно для вектора поворота.
Пусть K(l') = e'2ei\ где решение кинематического уравнения за-
дается вектором О = еО, называемым вектор ориентации (вектор
Эйлера, см. Приложение § П3.6). В этом случае необходимо по-
строить решение кинематического уравнения для вектора Эйле-
ра (П3.47):
^ = oB+4-(^xM+-i(i-4-ctg4-)<>x(^хм. (5.Ю)
Решение этого уравнения ищется на ограниченном шаге инте-
грирования методом малого параметра [9, 59]. Считая $ и
[ co# dt = 0 величинами первого порядка малости, представим
решение в виде
«=2#(Ь). (5.11;
Уравнения для получаются подстановкой (5.11) в исходное
уравнение (5.10) и приравниванием членов одинакового порядка
малости:
'0,(1) = соя, #(2) = й(1) X (оЕ,
4-[«М (5.12)
Далее необходимо выполнить интегрирование полученных со-
отношений. Используя равенство для текущего значения кватер-
ниона на n-м шаге, будем искать АДД), т. е. решение для век-
тора Эйлера на этом шаге. Положим без уменьшения общности
й’(^п_1) = 0; тогда в момент th имеем
№ =
С’ = ^-(V0Efe х v20Eh) + ±(veEh х v3©Efe),
= о.
122
ГЛ. 5. ИНФОРМАЦИЯ В ВИДЕ КВАЗИКООРДИНАТ
Окончательно получаем
= V0Eft + A (V0Eft X v20£ft) + A (V0Eft х V30Eft) + ... (5.13)
Удерживая в (5.13) только первый член, получаем численный
метод, который можно назвать методом средней скорости'.
Xk(h) = el2V*Ek (5.14)
Аналогично получаются методы третьего и четвертого по-
рядков:
Nft (h) = е1/2{ v e**+1/12(v @Ek x v 2eEft)} (5 _ 15y
Nk(h) = ^1/2{V0^fe + 1//12(V0^fe+v20Efe) + 1/24(v©^ftX V3©Efe)}. (5.16)
Заметим, что высшие разности в полученных формулах мож-
но выразить через первые разности на предыдущих шагах. В ча-
стности, выражение (5.9) для метода третьего порядка может
быть преобразовано к такому виду:
(h) = 1 + A V0Eh - АI V0Eft I2 -
— -^-(y&Ek x V&Ek-l) — I V0Efc |2 V0Eft.
Точно так же соотношения (5.15) и (5.16) приводятся к виду
Nfe(A) = ^1/2{v©£;ft-1/i2(v©EfeX
Nfe(A) = ^1/ 2{V0Afe~1/Z6( v0£feX v©£/i_1)+1/24(v0EfeX v@Efe_2)}^
Аналогичным образом могут быть построены численные ме-
тоды, использующие другие представления вектора поворота р
(см. Приложение § П3.6), использующие соответственно свои
кинематические уравнения.
Третья группа численных методов. Идея этой
группы основана на использовании разностных схем численного
интегрирования по Стилтьесу [48, 15]; с учетом (4.4) кинема-
тическое уравнение (П3.18) может быть представлено в форме
уравнения Шеннона:
б/Л = АдО(20в. (5.17)'
Можно показать, что соответствующие формулы численного ин-
тегрирования по Стилтьесу для уравнения (5.17) имеют вид*)
л:=л:_1+ал:_1О?0ей, <5.i8>
Ап = Ап—! -|—Ап— 1 ° V0£fe + A VAn о V0Efc, (5.19)
*) Здесь, по аналогии с равенством (4.12), принято обозначение VAn —
5=5 Лп — Ад—j.
§ 5.2. ГЕОМЕТРИЧЕСКОЕ ПРЕДСТАВЛЕНИЕ ОШИБКИ
123
Лп — Ап_i —-- An_i ° VAn ° V0#k +
+ ^{VA:o WEfe-VU^V0EJ (5.20)
и представляют собой, соответственно, интерполяционные фор-
мулы прямоугольников, трапеций и квадратичных парабол. За-
метим, что значения VAn, V2An, входящие в эти формулы, не-
известны к началу вычислений на данном шаге, и их следует
вычислить путем экстраполяции разностей на шаг вперед. Экс-
траполяционная формула для VA» имеет вид
VA: VALi + V2aLx + V^-i. (5.21)
Для формулы квадратичных парабол имеем
va: VALi + v2a:_! + v3aLi + v4aLp v2An
V2ALi + V3An_1 + V4AW. (5.22)
Как и в предыдущих случаях, высшие разности можно выразить
через первые разности на предыдущих шагах. Необходимость
экстраполяции разностей является недостатком этой группы
методов.
В заключение следует сделать одно замечание. Значение
функции 0£ в моменты получения считывания информации, т. е.
в узлах интерполяции при интегрировании, известны с точностью
до 8-кванта дискрета измерителя. При этом в приведенных выше
соотношениях следует использовать не величины 0г-Е, а кванто-
ванные величины [0гя], определяемые соотношениями (4.5).
Очевидно, что такая замена вносит дополнительную ошибку;
оценка этой составляющей ошибки будет проведена далее.
§ 5.2. Геометрическое представление ошибки
реализации интегрирования
Рассмотрим проблему определения точности решения кине-
матических уравнений, в том числе — тем или иным численным
методом, при использовании квазикоординат в качестве первич-
ной информации в свете подхода, развитого в гл. 2. В конечном
итоге нас интересует оценка точности, представленная, скажем,
в виде А0Т (2.12), как, впрочем, и в любом другом эквивалент-
ном виде. Очевидно, что точность решения будет определяться
величиной
(SoE) j = А ° 6й)£ ° А.
Рационально ввести переменную (вариацию квазикоординаты)
t
б©# == ( бс)£- dl, dd&E = dx, (5.23)
о
124
ГЛ. 5. ИНФОРМАЦИЯ В ВИДЕ КВАЗИКООРДИНАТ
которая позволит интеграл в выражении для ошибки (2.12)?
представить в виде
t ф
j А о 6<Ое о A dx = | А о d60E ° А =
о о
ф ф ф
= А ° 60# ° А | — f dA ° 60^ ° А — j А ° SOje ° А^
0 0 о
Заменим в полученном соотношении dA с помощью кинема-
тического уравнения 2А = <0i ° А. Получим
t ф t
j А °6(Оя о A dx = А°60£ о А | + [ [А о d&E ° А] х (О/ dx, (5.24)*
о оо
где
t t
Ф = [ | <яЕ I dx = j* | (О/ | dx
b о
— суммарный угол поворота. Согласно равенствам перепроекти-
рования имеем О/ = А ° (дЕ ° А; кроме того, по определению, ква-
зикоординаты и 01 будут определяться соотношениями
dQE = (djE^T, €Z0j = (djCfr,
t t
Qe = 0» + J (0£ dx, ©I = в? + I <»2 dx. (5.25)
0 0
Подставляя в (5.24) величины ыЕ вместо о)/ и переходя к квази-
координатам в соответствии с (5.25), получим окончательное вы-
ражение для ошибки:
ф
А07 = А0? + Л о 60£ о А | + Ja о [60Е х d0E] о Л. (5.26>
о о
К основному соотношению для ошибки (5.26) можно прийти
еще одним способом. Согласно соотношениям (5.25) квазикоор-
динаты при нулевых начальных условиях (0# = 0? = 0) свя-
заны между собой через равенства перепроектирования для уг-
ловых скоростей, т. е.
/ t
0Е = f (дЕ dx = А ° (О/ о A dx =
о о
ф ф ф
= ( Л ° d02 ° А = Л ° 0Z ° А | + J d®E х (А ° 02 о А) =
О 0 0
ф ф
= А о 02 о Л I + J Л о (d0j X ©i) о А, (5.27)
О о
§ 5.2. ГЕОМЕТРИЧЕСКОЕ ПРЕДСТАВЛЕНИЕ ОШИБКИ
125-
t t
= J (djck = ( A °(Oe ° Айт =
о о
ф ф ф
= i А з d®E ° A = A ° &e ° A | 4~ (A ° 0# ° A) X dQj =
0 0 0
ф Ф
= A ° 0# ° A | j A ° (0^ X d&E) ° A. (5.28)
о 0
В рассматриваемом случае БИНС первичной информацией явля-
ется (йЕ, следовательно, ошибкой первичной информации будет
величина 6<oB, порождающая согласно (5.23) ошибку б0£.
С другой стороны, если эту ошибку пересчитать в базис /, т. е.
привести к виду 6(dj, то ее проинтегрированное значение дает
величину A6j, характеризующую ошибку реализации решения
кинематического уравнения.
В соответствии с этим проварьируем соотношение (5.28):
t ф ф
60/ = ( 6о)2 ах = А ° 60^ о А | + f А о (60# х dQ£) о А
о оо
и, полагая б07 = Д02 — A0j, придем к полученному выше вы-
ражению (5.26) для ошибки.
Остановимся на физическом смысле входящих в полученное
выражение переменных. Согласно (2.1) величина опреде-
ляется разностью использованной при реализации решения ве-
личиной (дЕ и истинной (Оя. Очевидно, что каждой из этих вели-
чин отвечает своя квазикоордината, т. е.
t t
60s = ( 6(ds dx = j* (coe — (ОЕ) dx = — 0E. (5.29)
о 6
Здесь, как ив § 2.1, обозначены переменные, отвечающие реаль-
ному движению, и их оценка (модель), получаемая путем чис-
ленной реализации тем или иным способом решения кинемати-
ческого уравнения. Если ввести в рассмотрение пространство с
компонентами &iE, то любому движению в этом пространстве
будет отвечать «истинная» @E(t) и «модельная» &E(t) траекто-
рии. Можно видеть, что их различие в соответствии с (5.26)
так или иначе определяет ошибку реализации решения.
Для пояснения сказанного рассмотрим следующий случай
реализации решения: датчик угловой скорости, однократно ин-
тегрирующий с квантом преобразования приращения угла (ква-
зикоординаты) в выходную величину (бит), равным е; накоп-
ление информации происходит в реверсивном счетчике битов;
интегрирование кинематических уравнений выполняется с по-
126
ГЛ. 5. ИНФОРМАЦИЯ В ВИДЕ КВАЗИКООРДИНАТ
стоянным временным шагом h методом не выше второго
порядка.
На рис. 16 в пространстве квазикоординат (одной компонен-
ты) представлены траектории движения. Реальному движению
будет отвечать траектория 0Е(^); информация, используемая для
численного интегрирования, будет целой функцией [0£], т. е.
Рис. 16. Траектории движения в пространстве квазикоординат
появление бита информации происходит при достижении 0iE
величины, кратной е (без учета собственных ошибок датчика).
При решении кинематических уравнений методом средней
скорости результат решения соответствует точному решению ки-
нематического уравнения при постоянной угловой скорости (рав-
1
•ной ~[V0E]jiia шаге интегрирования. Величина 60£ (5.29)
для данного примера будет определяться
= -- ®iE = ®iE - [®г#] »
где [©гк] = кг — максимально большое целое число, удовлетво-
ряющее условию кг < ®iE. Анализ соотношения (5.26) показы-
вает, что рассмотренной ошибке отвечает член А ° 60# °А|о; именно
-он определяет ошибку за счет дискрета квантования информации
от датчика угловой скорости. Можно видеть, что эта ошибка
имеет место только в начальной и конечной точках интегри-
рования (движения). При суммировании на всем пути интегри-
рования эта ошибка не накапливается и сохраняет свой вид не-
зависимо от времени интегрирования и численного метода; вслед-
ствие этого справедлива оценка
|Л°60£о А|*<2е,
что легко понять из рассмотренного примера (рис. 16).
Вторая составляющая ошибки (5.26) — ошибка некоммутатив-
ное™. Действительно, при плоском вращении она отсутствует,
^ак как 60е и 0^ параллельны друг другу; кроме того, парал-
§ 5.2. ГЕОМЕТРИЧЕСКОЕ ПРЕДСТАВЛЕНИЕ ОШИБКИ
127
лельны и 0/ и 60*. Эта составляющая ошибки представляет
особый интерес, ибо фактически все методы интегрирования вы-
ше второго порядка направлены на ее устранение. Назовем эту
составляющую ошибки кинематической и проведем ее исследо-
вание.
Рассмотрим выражение типа
о
I X d^E, (5.30)
О
которое, очевидно, является криволинейным интегралом. Пред-
ставим себе, что траектория 0я(£) образует замкнутую кривую
С; в этом случае применим известную теорему Стокса:
0Е X d&E = J 0Е х (ds х V) = 2 f ds = 2s, (5.31)
c s s
где s — поверхность, «натянутая» на контур интегрирования..
(Следует заметить, что ds — векторная величина, характеризуе-
мая нормалью к поверхности; по этой причине величина s также
имеет определенное направление в пространстве.)
Проварьируем теперь интеграл (5.31):
0е X
0 0 0
= J 60Е х d&E + j &Е X dffiE = 2 f 66E
0 0 0
0'
X d0£- X 60e •
0
Если точки начала и конца движения совпадают, то 60Е = 0 в
этих точках. В случае замкнутого контура, варьируя (5.31), по-
лучим
Ф 60е X d©^ = f d 6s = 6s,
ds
где 6s определяется поверхностью, ограниченной траекторией
fbE(t) и ее проварьированным значением (т. е. в нашем случае-
0£(О)- Можно видеть, что и для любой незамкнутой кривой 0К.
получим то же соотношение
0
( X d&E = ds, (5.32)'
о
в чем можно наглядно убедиться из рис. 17, дополняя незамкну-
тую кривую 0£ до замкнутой таким образом, чтобы на дополне-
нии 0я = 0Е, т. е. чтобы вариация была равна нулю..
128
ГЛ. 5. ИНФОРМАЦИЯ В ВИДЕ КВАЗИКООРДИНАТ
Величина 6s является мерой площади, ориентированной (как
вектор) по нормали к поверхности, причем 6s вычисляется как
интеграл от элементарных d8s по всей поверхности.
Обратимся теперь к дальнейшему исследованию соотношения
(5.26) для ошибки реализации решения кинематического урав-
нения. Сравнение члена для ки-
нематической составляющей ошиб-
ки (5.26)
о
J = JAo]60£ х^] = А (5.33)
О
с полученным соотношением (5.32)
показывает, что J так или иначе
определяется мерой площади по-
верхности 6s между траектория-
Рис. 17. Кинематическая ошибка ми &E(t) и BE(t). Однако нали-
при незамкнутой траектории чие в (5.33) операции перепро-
ектирования 6s вдоль траектории
движения (задаваемой результатом решения кинематического
уравнения, т. е. кватернионом А(£)) затрудняет получение ана-
литического выражения для J.
В связи с этим приведем мажорантную оценку J. Можно ви-
деть, что справедливы следующие неравенства:
1Л ° [60s X ° Л| = 160Е X d0J,
о
J|60E X [ d|6s|= 6s*, (5.34)
0 6S
где 6s*— полная поверхность между кривыми &E(t) и ®E(t)
(т. е. «спрямленная» поверхность). Оценка (5.34) является за-
вышенной, так как при интегрировании по поверхности не учи-
тывается «векторный» характер элемента d8s. Оценка будет тем
точнее, чем меньше величина 60Е и чем меньше изменяется ве-
личина кватерниона Л в процессе движения. Тем не менее она
дает хорошие возможности для проведения исследований точно-
сти при реализации решения кинематических уравнений.
§ 5.3. Примеры использования геометрической оценки
В данном параграфе рассмотрим несколько примеров, иллю-
стрирующих полученные выше результаты.
1°. Исследуем случай точно интегрируемого движения — ко-
нической прецессии [15]. Пусть угловая скорость и решение
кинематического уравнения выражаются зависимостями (4.1) и
(4.2); квазикоордината 0Е, отвечающая такому движению (т. е.
§ 5.3. ИСПОЛЬЗОВАНИЕ ГЕОМЕТРИЧЕСКОЙ ОЦЕНКИ
129
<оя), будет описываться аналитической функцией
t
&е = j" dr = i -у (1 — cos bt) + j sin bt + kcZ.
о
Можно видеть, что траектория ®E(t) представляет собой спираль
в пространстве 6К. Если положить с = 0, то траектория замыка-
ется; это означает, что через интервал времени bt = 2л траекто-
рия приходит в свою начальную точку. Может показаться, что
в этот момент времени система приходит к своему начальному
положению; однако это не так. Точное решение (4.2) для этого
случая движения дает следующее (для t = 2n/b) положение:
а .
* a t- —Hi—лк
Л = Ао ° enk о е ъ =
«= Ло ° (cos я + к sin я) ° (cos ап -j- е sin ая) = Ло ° (cos ая -f- е sin ая),
где
V а2 + b2 ai — bk
а =--------- е = .
Ь /а2 + 62
Пусть движение мало по амплитуде, т. е. а < Ъ\ в этом случае
л I 1 а2 4 1 2 а4
а 1 4- -л—cos ая 1----------л/ —г,
2 ъ2 8 64
, . 1а2
е к, sin ая ~-------—т-л,
2 ь2
т. е. решение получается в виде
А А (л 1 1
Л Ло ° II------л I.
Используем теперь геометрическую оценку, изложейную в
§ 5.2; очевидно, что при возврате траектории 0Е(£) в начальное
положение система будет иметь кинематическую ошибку вели-
чиной, характеризуемой «площадью» поверхности, описанной
траекторией 0Е(£). Величина этой площади J (5.33) при оценке
(5.34)
2
J = gs* = я-5-,
ь2
в чем можно убедиться из рассмотрения рис. 18. Сравнение этой
оценки с точным решением показывает, что кинематическая
(1 \
1----— т. е. при ука-
занном ограничении а < Ъ оценка совпадает с точным решением.
2°. Рассмотрим задачу «кинематического» ухода одноосного
гиростабилизатора, исследованного в трудах А. Ю. Ишлинского
9 В. Н. Бранен, И. П. Шмыглевский
130
ГЛ. 5. ИНФОРМАЦИЯ В ВИДЕ КВАЗИКООРДИНАТ
। [43, 46]. При обращении по замкнутой кривой измерительной
оси (т. е. оси чувствительности) гиростабилизатора так, что про-
екция угловой скорости на эту ось поддерживается равной нулю,
прибор тем не менее получает «уход» (по этой оси), численна
Рис. 18. Кинематическая Рис. 19. Кинемати-
ошибка при конической ческий уход гиро-
прецессии стабилизатора
равный телесному углу, описываемому измерительной осью дли-
ною R в пространстве (рис. 19).
Действительно, при движении измерительной оси вектор уг-
ловой скорости располагается в плоскости, ей перпендикулярной.
Перемещение оси равно 7?©^, следовательно, когда ось гироста-
билизатора описывает замкнутую кривую Ф, то траектория 0В,
будучи плоской, описывает подобную кривую, площадью 6s. Оче-
видно, что j (1Ф = 8sR2, т. е. величина 8s действительно опреде-
лит кинематическую ошибку.
3°. Рассмотрим несколько примеров нахождения кинематиче-
ской ошибки при управлении по квазикоординатам. В этом слу-
чае выполнимы любые задачи управления: стабилизация в за-
данном положении, ориентация, заданные программные разворо-
ты и т. п. Следует заметить, что именно такого типа управление
использовалось в самых первых реализациях БИНС без приме-
нения ЭВМ для реализации решения кинематических уравнений.
В качестве угловых параметров в таких системах использовались
компоненты 0ЛА.
Результаты геометрической оценки (5.26) показывают, что
при управлении по квазикоординатам (например, при простран-
ственном развороте) в принципе можно не иметь кинематических
ошибок, если прямая и обратная траектории при развороте точ-
но совпадут. При любом движении, определяемом траекторией в
пространстве квазикоординат 0Е, наличие замкнутой кривой оз-
начает получение кинематической ошибки величиной 6$, опре-
деляемой этой кривой. При программном движении отличие
истинной траектории 0Е от расчетной дает аналогичную ошибку.
Пусть выполняется стабилизация около заданного положения
с точностью ао. В этом случае траектория 0Я(£) находится в
§ 5.4. НЕНОРМИРОВАННЫЕ КВАТЕРНИОНЫ
131
пределах области |0ЕД ао, являющейся кубом с ребром 2ао.
Очевидно, что траектория может в худшем случае описать по-
верхность размером 6s = 4а'о. Цикл стабилизации во времени
определяется скоростью движения при стабилизации ао, время
цикла 7Ц ~ 4ао/ао. Отсюда следует, что средний кинематический
уход при такого рода управлении определится так: Qyx ~ bs/T^ =
= асао. К примеру, при ао = 1 град и ао= 10-2 град/с имеем
~ 0,6 град/ч.
При реализации разворотов предполагается выполнить неко-
торое заданное вращение, т. е. реализовать требуемую програм-
мную траекторию 0Епр(^). Ввиду того, что точность выполнения
движения вблизи 0Епр(Ц в реальной системе определится точ-
ностью стабилизации (ао), реализуемая траектория 0Е располо-
жится вблизи 0£пр с допуском ао. Отсюда кинематическая ошиб-
ка при развороте
А О J 0Е пр max^ZO’
Так, при развороте на 180° и ао=10 имеем ошибку ~3,14°.
§ 5.4. Кинематические уравнения для ненормированных
кватернионов. Коррекция нормы
При численном решении кинематических уравнений возни-
кает специфическая трудность, связанная с уходом нормы ква-
терниона. Дело в том, что в предыдущих главах предполагалось,
что норма кватерниона в точности равна единице, т. е.
Л°Л=1. (5.35)
В частности, в этом предположении были определены операции
над кватернионами, соответствующие ортогональным преобразо-
ваниям.
В то же время условие (5.35) не следует из вида кинемати-
ческого уравнения. В самом деле, умножая (П3.18) справа на
Л, имеем
А ° А = А ° ° Л.
Переходя к сопряженным величинам, получаем
I ~ 1
А ° А = Д о <&Е о Д =---~ Д о о)Е о Д.
Складывая почленно оба выражения, имеемЛ ° А + Л °Л= 0, т. е.
4(Л»Л) = 0. (5.36)
5*
132
ГЛ. 5. ИНФОРМАЦИЯ В ВИДЕ КВАЗИКООРДИНАТ
Таким образом, уравнение (П3.18) имеет первый интеграл
A°A = const, причем конкретное значение константы не следует
из вида самого кинематического уравнения, а определяется лишь
заданием подходящих начальных условий.
На практике из-за методических ошибок и ошибок округле-
ния равенство (5.35) с течением времени перестает выполняться,
если не принять специальных мер. В этой связи представляется
полезным выяснить вид кинематического уравнения для ненор-
мированных кватернионов.
Рассмотрим кватернион А, такой, что А°А=|А|2>0 и ква-
тернион А(п), получающийся из А в результате нормировки,
A(n) = -L- Л. (5.37>
| л |
Пусть кватернион А(п), описывающий движение системы коорди-
нат, удовлетворяет уравнению
А(п)=(5.38>
Дифференцируя (5.37) и подставляя в (5.38), получаем диффе-
ренциальное уравнение для кватерниона Л:
А = Л Н—~ А о (дЕ.
1\. &
Обозначим Л/Л = /(£). Имеем окончательно
Л = / (t) Л + 4- Л ° 6>е. (5.39)
Уравнение (5.39) эквивалентно (П3.18) в том смысле, чт»
результат нормировки решения (5.39) удовлетворяет уравнению
(П3.18). Таким образом, независимо от величины и характера
изменения Л(£)>0, кватернионы Л(п) и А, являющиеся реше-
ниями этих уравнений, описывают одно и то же движение си-
стемы координат, т. е. задают одно и то же преобразование. При
этом, однако, преобразованию Л(п) °(-)°Л(п) для нормированного
кватерниона соответствует преобразование Л°(-)°Л"1 для ненор-
мированного.
Мы видим, что добавление в кинематическое уравнение члена
/(?)Л не меняет физического смысла данного уравнения. Урав-
нение (5.39) является, так же как и (П3.18), кинематическим
уравнением, описывающим то же движение. На вид f(t) не на-
кладывается никаких ограничений; при этом вместо уравнения
для нормы (5.36) имеем в силу соотношения для f(t) уравнение
^ = /(0Л. (5.40)
§ 5.5. МЕТОДЫ С КОРРЕКЦИЕЙ НОРМЫ
133
Используя произвольность выбора вида f(t), можно сделать точ-
ку Л = 1 асимптотически устойчивым положением равновесия
(5.40). Например, можно принять / =—к(1 — Л) или f = —klg А
и т. д., но для практических целей наиболее удобно положить
/ =—Л(А2—1) и решать кинематическое уравнение в форме
л = -L Д о - кА (Л2 - 1). (5.41)
В этом случае (5.40) интегрируется в конечном виде:
( л2 — ! 1~1/2
Л(П = 1------0—^—e-2kt\
Л2
При Ло>О имеет место Л(£)->1 (£->°о). Таким образом,
введение в кинематическое уравнение члена —&Л(Л2—1) обес-
печивает автоматическую коррекцию нормы решения.
§ 5.5. Численные методы с коррекцией нормы
Результаты, полученные в предыдущем параграфе, показы-
вают, что уход нормы от единицы не приводит к ошибке по-
строения системы координат. Тем не менее этот уход весьма не-
желателен, так как может привести к переполнению разрядной
сетки вычислительного устройства, либо, напротив, к ее недо-
использованию и в пределе — к вырождению решения в нуль»
Кроме того, операции ортогонального преобразования, сложения
поворотов и т. п. для ненормированных кватернионов имеют бо-
лее сложный вид по сравнению с соответствующими операциями
для нормированных кватернионов. Все эти обстоятельства при-
водят к необходимости ограничивать уход нормы решения от
единицы.
Для численных методов, рассмотренных в § 5.1, это может
быть достигнуто периодической нормировкой решения. При этом,
однако, требуются достаточно сложные вычислительные опера-
ции — извлечение корня и деление.
В [15] построена группа численных методов с автоматиче-
ской коррекцией нормы на основе решения кинематического
уравнения в форме (5.41). В данном параграфе будет построена
группа численных методов, основанных на решении разностного
кинематического уравнения с автоматической коррекцией нормы.
Рассмотрим сначала разностное уравнение для нормирован-
ных кватернионов:
Л^п) = »N(nn) (5.42)
и перейдем от него к уравнению, связывающему ненормирован-
ные кватернионы An-i и Лп на последовательных шагах. При
этом будем предполагать, что норма кватерниона Nn также мо-
жет отличаться от единицы.
134
ГЛ. 5. ИНФОРМАЦИЯ В ВИДЕ КВАЗИКООРДИНАТ
Подставим в (5.42) следующие соотношения:
Л <п> — 1 Л Л(п)___________1 Л N(n) — 1 N
Лп - | Лп | Л""1" | An_x | - | Nn |
При этом получается
Лп = -г-г j L_ _ An_x о Nn. (5.43)
I 1Yn— I I * I n I
В силу обратимости преобразований, уравнения (5.43) и (5.42)
эквивалентны в смысле предыдущего параграфа при произволь-
ном значении скалярного множителя
Таким образом, разностное кинематическое уравнение для ненор-
мированных кватернионов имеет вид
Ап = CnAn-i ° Nn. (5.44)
Переходя в (5.44) к модулям или нормам, получаем общий
вид функции последования для процесса эволюции, соответствен-
но, модуля или нормы:
| Ап | = Сп | Лп_х | • | Nn|, (5.45)
|| An || = С2п || An_x|| * ||Nn||. (5.46)
При использовании конкретного численного метода нужно
подставить вместо Nn соответствующее Nn. В частности, при
Сп = 1, т. е. без управления нормой, получается
= ||An-i|| • ||N:||. (5.47)
Обозначим || N* || = 1 vn.j Из (5.47) при этом получаем
IIAJI = ПЛп-111 •(! + vn).
В частности, если vn=v, это соотношение свертывается к виду
IIAJI = ПЛоН (1 + v)n. (5.48)
Очевидно, что при любом v, отличном от нуля, возникает на-
капливающийся уход нормы
HAJI -> оо (п -> оо, V > 0) , IIAJI 0 (п оо, v < 0).
Выбором Сп можно наложить на этот процесс управление, стаби-
лизирующее норму Ап. Такое управление не будет, в силу экви-
валентности, вызывать дополнительного ухода приборного базиса,
задаваемого Ап. Прежде всего, разумеется, можно было бы про-
сто положить
§ 5.5. МЕТОДЫ С КОРРЕКЦИЕЙ НОРМЫ
135
В этом случае функция последования имеет вид |АЛ I = 1, и нор-
ма Л„ после первого же шага всегда в точности равна единице.
Это вполне естественно, так как равенство (5.49) есть просто
нормировка Ля, выполняемая на каждом шаге.
Считая lAn-il и \ NX | величинами, мало отличающимися от
единицы, можно существенно упростить вид управления по срав-
нению с (5.49) и тем самым сократить объем вычислений. Обо-
значим HAn-ill = 1 + £п-1. Из (5.49) получаем
Ограничиваясь в этом выражении членами первого порядка ма-
лости, получаем упрощенное управление
cn=i-4-^-i+v")- <5-50>
Построим функцию последования при таком управлении.
Имеем:
[, I2
1 - +vn)j Ип-111-н:и, (5.51)
или
Г 1 I2
1 + In = [1 - -f &п- i + Vn)j (1 + (1 + vn). (5.52)
При постоянном vn = v эта функция имеет неподвижную точку
|| Лп || = Л^о, определяемую уравнением
Г 1 I2
< + £ = [1-4^+^] (1 + в)(1+v),
или
Г 1 I2
1 = [1 - 4 (V + В)] (1+V).
Разрешая это соотношение относительно £, имеем
л 1/|5.ч , 1 . 1 _ 1 1 с.
l-^-(v + g)- ±у—< 1--2-v + y= =-rg,
или, ограничиваясь членами второго порядка малости, получим,
соответственно, с учетом знака в (53.5)
£=2(1 —U+11-----------Г v + — •••]} =
t z l о JJ
{— 3/ v2 4- . . .
Ч/ 9 Гз/ 2 I (5.54)
14 — 2v + 3/4v2 + ...
Кроме того, разумеется, существует неподвижная точка £ =
— —1, т. е. Лоо = 0. Ниже мы покажем, что неподвижная точка,
136
ГЛ. 5., ИНФОРМАЦИЯ В ВИДЕ КВАЗИКООРДИНАТ
определяемая из (5.53), (5.54) при верхнем знаке, устойчива,
и, таким образом, процесс коррекции нормы предотвращает рас-
ходимость и удерживает норму Лп вблизи единицы.
Для анализа устойчивости рассмотрим производную dll Ап II/
/д11Лп-ill и потребуем выполнения условия
л .ЯА"11,, I <1. (5.55)
а11Лп-1|| 1||Лп||=х+Е V ’
Дифференцируя (52.5) и подставляя = £, vn = v, имеем пос-
ле очевидных преобразований
<ф + *п) /л I чЛ 1 t 1 W 3 t 1 /г rm
<?(ИЧп-1) (i + v) 2 2 /\ 2 2 /* (5’56)
При верхнем знаке (5.53) (т. е. при £ = 3/4v2 + ...) получаем с
точностью до членов второго порядка малости
^^п) 1 v
^(l + gn-1) 2 ’
и условие (5.55) заведомо выполнено, т. е. неподвижная точка
£ = 3/4v2 + ф ф ф устойчива.
Другие неподвижные точки неустойчивы. В самом деле, при
g = — 1, т. е. Лоо = 0, имеем
д(1 + £п) 9 z, . J, 1 V 9 (, । 1 л \
т. е. условие (5.55) не выполнено. Аналогично при нижнем зна-
ке (5.53), т. е. при £ = 4 — 2v + ..., получается
и условие (5.55) тоже не выполняется.
Таким образом, при естественном предположении v2 < 1 функ-
ция последования (5.52) имеет единственную устойчивую не-
подвижную точку, определяемую верхним знаком (5.53), т. е.
£M3/4)v2+ AL-l + (3/4)v2+ ....
Рассмотрим явные выражения для vn при использовании чис-
ленных методов, построенных в § 5.1. Очевидно, что
vn = (seal N* )2 + (vect N*)2 — 1.
Для методов, определяемых формулами (5.7) — (5.9), имеем со-
ответственно
vn = A(v0n)2, vn=A(ve„)\ vn = - (V6n)4.
§ 5.5. МЕТОДЫ G КОРРЕКЦИЕЙ НОРМЫ
137
При этом получается соответственно
At1 - (V0„)\ Л1«1, At«1-
Для метода средней скорости и вообще для всех методов, исполь-
зующих экспоненциальное представление, всегда выполнено уп —
= 0 и At = 1.
Рассмотрим теперь ход процесса коррекции нормы при произ-
вольном ограниченном v0n. В этом случае vn=='v(n), <
<v(n)^v+. При каждом фиксированном v из этого диапазона
мы, вообще говоря, получаем свою функцию последования, и эти
функции заполняют некоторую область. Неподвижные точки этих
функций заполняют отрезок £min < S, < gmax, где, соответственно,
^min = (3Д) ^тах? £тах — СД) 'Vmin?
I Vmax = max|v|, Vmin = min|v|.
b v__<v<v+ v_Cv<v+
Можно показать, что при этом процесс коррекции также схо-
дится к некоторому предельному отрезку £+; при этом
^тах» В (^тах? *^тах) •
Отсюда, удерживая члены второго порядка малости, получаем
t 3 2 |
Ь+ — 4" vmin + • • •,
“ (1 ^тах) ^1 'Vminj ^1 £~ ^тах И g“ 1 =
—-----J- vtax + • • • (5.57)
Наибольшую длину, естественно, имеет предельный отрезок
для метода Эйлера. В этом случае vmin = 0, vmax = (х/4) (V0)tax,
и согласно (5.57) имеем
U = o, u = --^(V0)Lx-
Для метода средней скорости и других методов, использую-
щих экспоненциальное представление, и g_, разумеется, равны
нулю.
В заключение отметим, что при использовании цифровых вы-
числительных устройств с фиксированной запятой или аналого-
вых устройств целесообразно прибегать к масштабированию, т. е.
сознательно устанавливать и поддерживать норму кватернионов
отличной от единицы и равной, к примеру, 1/2 или 1/4. В этом
случае все операции с кватернионами должны быть также пре-
образованы к масштабированным переменным. Управление
(5.50) при этом также преобразуется, но все его свойства со-
храняются.
138
ГЛ. 5. ИНФОРМАЦИЯ В ВИДЕ КВАЗИКООРДИНАТ
§ 5.6. Погрешность, вызванная квантованием
первичной информации
Исследуем с помощью развитой геометрической интерпретации
точность реализации решения кинематических уравнений БИНС.
Пусть измерителем является однократно интегрирующий датчик
угловой скорости ДУС с квантом выходной информации, равным
е — одинаковым во всех трех каналах. При использовании по-
шагового метода интегрирования на n-м шаге приращение квази-
координаты V&En будет получено в виде целой функции типа
Рис. 21. Погрешность квантования (двумерный случай)
(4.5), т. е. в виде числа поступивших от ДУС квантов, скажем,
рп, In, тпп по осям измерителя. В пространстве ©к можно пред-
ставить сетку с шагом 8, образующую параллелепипед с гранями
Рп, Шп, истинная траектория (рис. 20) начинается в первом
«кубе £» и заканчивается в последнем, стоящем вне параллеле-
пипеда на его вершине. На рис. 21 представлена упрощенная
двумерная схема, верно отражающая суть дела.
§ 5.6. ПОГРЕШНОСТЬ ОТ КВАНТОВАНИЯ ИНФОРМАЦИИ
139
При реализации интегрирования кинематических уравнений
строится тем или иным способом решение A(t) = N(t) на шаге
интегрирования. Построенное решение определит «реализован-
ную» траекторию &Е в пространстве квазикоординат, причем вид
этой траектории будет определяться использованным методом
решения. Так, например, алгоритм метода средней скорости
(5.14) реализует решение, соответствующее плоскому вращению,
и он будет точным для угловой скорости, определяемой как
{pjh, ln/h, mjh}, т. е. для траектории в пространстве 0Е, являю-
щейся прямой, соединяющей начало координат с вершиной па-
раллелепипеда (рис. 20). Точность решения метода будет опре-
деляться геометрической оценкой — мерой площади между кри-
выми и V@Efe*).
Одной из основных составляющих погрешностей, как следует
из геометрической оценки' рис. 20, 21, будет погрешность, вно-
симая квантованием первичной информации.
Из рассмотрения рис. 20 и 21 можно видеть, что ошибка
квантования приводит к тому, что jie совпадают начальная и
конечная точки траекторий 0#(£) и 0^(0 внутри шага интегри-
рования (характер аппроксимации 0Е движения 0£ определяет-
ся уже порядком метода). Ошибка от несовпадения начальной и
конечной точек 0# и 0# на шаге интегрирования дает, во-первых,
ошибку саму по себе именно в этих точках, во-вторых, приводит
к «удалению» 0Е от 0Ь на всей траектории. Первая составляю-
щая при интегрировании по всем шагам компенсируется и в ко-
нечном итоге будет определяться несовпадением 0£ и 0£ в нача-
ле и конце всей траектории движения; этому отвечает член
Ло60£*Л|Ф в выражении ошибки (5.26). Вторая составляющая
ошибки, будучи проинтегрирована по всем шагам, может быть
оценена как Ф е, т. е. зависит только от «пройденного пути»
и кванта измерителя угловой скорости. Можно видеть, что эта
*) Вообще говоря, погрешность метода будет определяться не только
указанной кинематической составляющей ошибки, но и степенью прибли-
жения функции
mh) = e1/2™Ek.
Так, метод первого и второго порядков (5.7), (5.8) предполагают определен-
ный порядок приближения этого решения на шаге. Действительно, разлагая
N(/z) в ряд, получим:
1
метод первого порядка N (Л) = 1 +“2"
1 1
метод второго порядка N (Л) = 1 + -%- ~ ~8~ | |2 и т- п-
Однако в методах третьего порядка и выше помимо учета большего коли-
чества членов в разложении используются разности на предыдущих
шагах, так как выполняется аппроксимация функции 0Е(£).
140
ГЛ. 5. ИНФОРМАЦИЯ В ВИДЕ КВАЗИКООРДИНАТ
составляющая ошибки не зависит, вообще говоря, от метода чис-
ленного интегрирования и может быть уменьшена только за счет
кванта измерителя.
К оценке влияния погрешности квантования первичной ин-
формации на точность реализации решения можно подойти, рас-
сматривая соотношения для тех или иных численных методов.
Очевидно, что используемая при интегрировании информация
есть целая функция [0яь] (4.5).
Введем ошибку <рЛ = [Оль] — Оль на к-м шаге интегрирования,
одной из составляющих которой будет погрешность квантования.
Используя те или иные формулы для построения решения N*
на шаге интегрирования с использованием GEk и [Ояь], можно
оценить погрешность в вычислении N*, вносимую ошибкой qv
Так, для метода (5.7) имеем
6Nfe = -L V<pft,
для (5.8) соответственно
Ж = A Vq* - 41 V<pft I • I f,
для (5.9)
6Nft = A V<pft — AI V<pA 11V 0fe I + (Vq)ft x VQfe-i + V0ft x v<ph_1) —
- A I v©fe I2 - A Iv<pft| I V0ft I.
Полагая величину ошибки т. e. ее разности, случайной
величиной, можно дать такую оценку погрешностей определения
решения на шаге:
I < 41 Vq>ft |, |6Nk|<A| v<pfe| + A|v<pft|VO, |6Nh|<
^РФ«|Ц^|?Фит.П. (5.58)
Можно видеть, что основная составляющая ошибки V<pfe входит
в выражения (5.58) линейно и при изменении порядка метода
решения она сравнительно мало меняется. При интегрировании
на всем пути движения Ф накопленная ошибка составит, к при-
меру, для метода первого порядка (5.58) величину
I <рФ,
fe=l
где ф — усредненное значение ошибки. Для методов более высо-
кого порядка оценка сохранится, однако наличие в (5.56) и
§ 5.7. ПОГРЕШНОСТИ ПРИ ПОСТОЯННОМ ШАГЕ
141
(5.57) дополнительных членов дает, вообще говоря, увеличение
погрешности с ростом порядка метода численного интегриро-
вания.
Аналогичный результат был получен нами в работе [15].
§ 5.7. Погрешности численных методов
при постоянном шаге
Обозначая через 6Nn = Nn — Nn разность между реализуемым
решением кинематического уравнения на шаге и его точным
значением (соответствующим точному решению), можно постро-
ить оценку величины погрешности того или иного численного
метода. Явные значения 6Nn при различных численных методах
приведены в [15]. Погрешность интегрирования 6Nn приводит к
двоякого рода ошибкам в определении вычисленного кватерниона
Лп: к ошибке его нормировки и ошибке вычисленного положения.
Для оценки погрешности, накопленной на большом интервале
интегрирования, представим Лп в виде Лп = Ло ° Ni °... ° Nn. Ана-
логично представим вычисленное модельное значение этого ква-
терниона:
An=Ao°(Ni + 6N1)o...o(Nn + 6Nn).
Для кватерниона накопленной ошибки Лп относительно Ап имеем
АЛп=ЛпоЛп. (5.59)
Определим сначала ошибку нормировки (ошибку вычисления
модуля кватерниона Лп); для этого найдем норму ошибки АЛП:
п
|| ААП|| = || Ап|| = П ||Nfe|l.
k=l
Обозначая SN* = 1 — || Nfe || в вычислении нормы на к-м шаге,
имеем для суммарной ошибки
N п
8Л* = IIЛп|| - 1 = П (1 + «X) - 1 « 2 8N*. (5.60)
k=l fe=l
Явный вид 67V* для различных численных методов приведен в
[15].
Если учесть, что к-я. разность квазикоординат может быть
представлена в виде
(5.61)
через (к—1)-ю производную от угловой скорости, то соотноше-
ния для накопленной ошибки модуля можно представить в виде
зависимости от угловой скорости. При этом с точностью до чле-
142
ГЛ. 5. ИНФОРМАЦИЯ В ВИДЕ КВАЗИКООРДИНАТ
нов более высокого порядка малости можно заменить сумму н
выражении (5.60) интегралом
t
6Л*« A (5.62).
О
В [15] приведены явные выражения для накопленной по-
грешности модуля 6Л* и скорости ее ухода. Заметим, что по-
грешности нормировки численного решения не приводят к ошиб-
кам в определении системы координат, что и указывалось ранее.
Рассмотрим теперь вторую составляющую накопленной по-
грешности, которая не может быть устранена нормировкой и яв-
ляется ошибкой вычисленного положения. Нормируя (5.59),,
имеем
дл£п) = 4- дл„ = ~ л„ о л„.
Подставляя в это соотношение выражения для кватернионов
и Лп в виде произведений через решения по отдельным шагам
интегрирования, получим
ДЛ^ = Ло» (N, + 6Nln))» ... о (Nn + 6N^n)) .N„o ... 4, '
где
6N£n) = A-(Nfe + 6Nft) — Nft
представляет собой ошибку на шаге, остающуюся после норми-
ровки. Явный вид 6N(n) для различных методов приведен в [15].
Имеем далее по аналогии с предыдущим случаем
ДЛ(ПП) = 1 + s Ло о N, о ... о Nfe-i о 6Nkn) о • • .Nx о A0+O(6N0-
k=i
Заменяя сумму интегралом, имеем
t
ДЛ(П) « 1 + ~ J Л о 6N(n) о л dr. (5.63)
О
Сравнивая соотношение для (5.59) и (5.63) с (2.9) и (2.12),
можно видеть, что АЛ(п) определяет ошибку положения вычис-
ленного базиса в виде угловой ошибки A0j.
В [15] приведены явные выражения для ошибки A@i и ско-
рости ухода.
§ 5.8. Численные методы интегрирования с переменным шагом.
Инкрементные методы
В бесплатформенных инерциальных системах ввод информа-
ции об угловой скорости в цифровое вычислительное устройство
происходит, как правило, в квантованном виде [113]. При этом
§ 5.8. МЕТОДЫ С ПЕРЕМЕННЫМ ШАГОМ
143
элементарное приращение кратно величине кванта 8 и является
целым числом при реализации интегрирования с постоянным
шагом по времени. При достаточном быстродействии вычисли-
тельного устройства можно связать начало очередного шага ин-
тегрирования с моментом поступления очередного элементарного
приращения по любому из каналов измерителя. При этом, есте-
ственно, величина шага интегрирования оказывается переменной,
зависящей от темпа поступления элементарных приращений па
вход вычислительного устройства. Методы реализации интегри-
рования в такого рода схемах получили название инкрементных.
В инкрементных метопах можно применять непосредственно
численные методы, использующие только первые разности, т. е.
обычный н модифицированный методы Эйлера (5.7), (5.8), ме-
тод средне'! скорости (5.14) и соответствующие методы с кор-
рекцией нормы. Формулы оценки погрешности, выведенные вы-
ше, непосредственно неприменимы к данному случаю.
Введем угол суммарного поворота
t
Ф = [ (0 (f) dt' (5.64)
О
в качестве независимой переменной в кинематических уравне-
ниях. Как показано в работе [15], при такой замене переменных
вид кинематических уравнений сохраняется, но роль вектора уг-
ловой скорости (в нашем случае (оЕ) выполняет его орт ew =
= есо3)- Таким образом, обозначая штрихом дифферен-
цирование по Ф, имеем для (П3.18)
Л' = ~ Л о ею.
Аналогично тому, как сохранился вид кинематических урав-
нений, сохраняется вид всех остальных формул для численных
методов и оценок их погрешностей, полученных в данной главе,
только вместо шага по времени h в соответствующих местах вой-
дет шаг по углу суммарного поворота g.
Итак, замена аргумента позволяет распространить формулы
предыдущих параграфов на случай переменного h, но постоян-
ного g. При этом
(5.65)
При работе по каждому элементарному приращению угла g, во-
обще говоря, не остается постоянным, но изменяется в доста-
точно узких пределах:
144
ГЛ. 5. ИНФОРМАЦИЯ В ВИДЕ КВАЗИКООРДИНАТ
Рассмотрим среднее значение шага на некотором интервале
интегрирования. Пусть общее число импульсов элементарных
приращений в i-м канале равно ki. Положим
__ Ф
8сР~ (к1+кз + кз)'
С другой стороны,
t ф
ki^^\ | coi | dt = | | d<p' ж 1 e&i | Ф.
о j j c
о 0
Тогда
8
8cp (I e<ol | + I ea>2 I + I e«>3 I)
или же
gcp = Хе. X = (l^l + l^l + l^l)'
Очевидно
L <>/ < 1
Уз •
Естественно допустить, что %, а вместе с ним и gcp, является
медленно меняющимся переменным. В этом случае по аналогии
с (5.60) и (5.63) можно получить оценку накопленной погреш-
ности при работе по элементарным приращениям:
ф ф
6А* = J SA* = 2 J A’vect (6N(n)) = A^.
О о
Явные выражения 6Л' — погрешности нормы и A0j — величины
ухода и ее скорости для различных численных методов приве-
дены в [15].
Для оценки точности инкрементных методов удобно использо-
вать геометрическую оценку. На рис. 22 представлена в про-
странстве квазикоординат истинная траектория движения 0к и
модельные траектории вя, получаемые при достижении по
какой-либо компоненте величины кванта е. Пусть для вычисле-
ния кватерниона приращения используется метод средней ско-
рости, т. е.
Nft = e1Z2ee. (5.66)
Можно видеть, что модельному движению будут отвечать элемен-
ты траектории расположенные по граням сетки квантования
в пространстве Из рис. 22 следует, что оценкой кинематиче-
ской ошибки метода для этого случая будет служить величина
§ 5.8. МЕТОДЫ С ПЕРЕМЕННЫМ ШАГОМ
145'
V282 на одном шаге вычислений. На всем пути интегрирования
такая оценка даст величину погрешности УзсФ. Разумеется, если
использовать другие методы (например, простой или модифици-
рованный метод Эйлера), то ошибка возрастет за счет неточного
приближения решения (5.66).
Анализ природы кинематической ошибки рис. 22 для инкре-
ментных методов показывает, что ошибка (как и для других
Рис. 22. Погрешность инкрементных
методов
Рис. 23. Погрешность инкре-
ментных методов с экстрапо-
ляцией
методов) зависит от величины кванта, и для повышения точности
ее необходимо уменьшать. Неустраняемая составляющая ошибки
величиной Vs-eO характерна для любых методов интегрирования
и определяет, по-видимому, предел достижимой точности при
реализации решения кинематических уравнений.
Однако инкрементные методы, в принципе, позволяют этот
«порог» точности превзойти. Последнее может быть получено пу-
тем аппроксимации функции QE(t) «внутри» кванта 8 измери-
теля. Рассмотрим рис. 23; пусть начальная точка движения на
n-м шаге (т. е. точка, через которую траектория 0Я(^) попадает
в куб s) имеет координаты 0, из,п-1]; конечная точка
имеет координаты, скажем, \щп, U2n, 83] • В этом случае линей-
ная аппроксимация 0Е внутри куба 8 может быть представлена
в виде
V0E = [^ln — Ui,n-1, U2n, U3 — U3,n-1] =
==3(^l,n— iTn, ^3,n—1),
где
U]n ^T,n—1 ~ U2n — e)2,n—1^71, “ (&з ^3,n—1)
(5.67)
и Tn — время прохождения траекторией 0E(*) от начальной до
конечной точки. Очевидно, что величина тп доступна измере-
10 в. Н. Бранец, И. П. Шмыглевский
146
ГЛ. 5. ИНФОРМАЦИЯ В ВИДЕ КВАЗИКООРДИНАТ
нию: она является интервалом времени между двумя приходя-
щими в схему интегрирования импульсами (квантами информа-
ции). Соотношении (5.67) позволяют в таком случае определить
cojn, а следовательно, и экстраполировать величины щ,п на шаг
вперед.
Можно видеть, что ошибка такого метода будет определяться
точностью экстраполяции. Можно получить следующую оценку
'точности:
’ т2 сП ~ 0)
Ю12Ф~ 12 М2Ф’
показывающую существенное повышение точности интегриро-
вания.
Следует иметь в виду, что в реальных условиях информация,
поступающая на вход вычислительного устройства, может содер-
жать помехи, либо функция ад(0 может быть не всегда гладкой.
Влияние этих факторов может снизить точности тех методов,
которые прямо или косвенно используют операцию дифферен-
цирования, т. е. методов более высокого порядка. Таким образом,
выбор метода интегрирования может быть сделан только на ос-
нове подробного анализа конкретной задачи.
§ 5.9. Использование промежуточных параметров
При построении численных методов интегрирования кинема-
тических уравнений часто оказывается полезным решать на
каждом шаге уравнения для некоторых «промежуточных» кине-
матических параметров, а затем уже переходить к решению ква-
тернионного кинематического уравнения Nn. Выигрыш при этом
получается, во-первых, за счет более простого вида решения
и, соответственно,— алгоритма в этих параметрах, а во-вторых,—
за счет возможности выполнять основную часть вычислений на
шаге с малой разрядностью. Последнее связано с тем, что в ка-
честве промежуточных, как правило, используются векторные
параметры ориентации, у которых диапазон изменения на шаге
имеет тот же порядок, что и приращение квазикоординат.
Наиболее естественным представляется выбрать в качестве
промежуточного векторного параметра ориентации вектор Эйлера
(вектор истинного поворота), как это, по существу, уже дела-
лось в § 5.1. При этом требуется решать на каждом шаге ки-
нематическое уравнение (5.10) и затем переходить к Nn по
формуле
Nn = ев/2. (5.68)
Алгоритмы различного порядка точности для вектора О опреде-
ляются формулами (5.15), (5.16). Алгоритм первого порядка
§ 5.9. ИСПОЛЬЗОВАНИЕ ПРОМЕЖУТОЧНЫХ ПАРАМЕТРОВ.
147*
для О, как это уже отмечалось выше, дает метод средней ско-
рости для кватерниона.
Непосредственная реализация формулы перехода (5.68) или,
что то же, формулы
АТ 6.6.6 /с
Nn = cos — + у sin у, (5.69>
на специализированном вычислителе недостаточно эффективна,
и это вынуждает прибегать к различным методам аппроксима-
ции. В частности, аппроксимация cos 6/2 и sin 6/2 отрезками ряда
Тейлора приводит фактически к формулам типа модифицирован-
ного метода Эйлера (5.8) с заменой V0 на б1.
При реализации алгоритма на СЦВМ с делением можно при-
менять дробно-рациональную аппроксимацию Паде, не вносящую
погрешность нормы [39]. Соответствующая формула имеет вид
Nn
1
1+ 16*2
(1-!> +у*}-
(5.70)
Для уменьшения погрешности, не устраняемой при нормировке,
эти же авторы предложили использовать формулу
+ (5.71)
Эта формула применима и для СЦВМ без деления, однако она
имеет большую погрешность нормы, для уменьшения которой
представляется целесообразным ввести скалярный множитель
11 — 24 ^2/’ что не приводит к заметному росту объема вычис-
лений. При этом получается формула
= + (5-72)
Очень эффективным оказывается последовательное примене-
ние двух типов векторных параметров: вектора Эйлера и «четвер-
тинки» (Приложение 3). При этом вначале определяется век-
тор 6 на шаге, затем выполняется переход к «четвертинке» по
формуле
(5-73>
Для перехода от «четвертинки» к Nn используется формула
Nn==r+A?^-42 + 24}- (5-74)
Для реализации формулы (5.73), разумеется, приходится при-
бегать к аппроксимации. В частности, если просто положить
148
ГЛ. 5. ИНФОРМАЦИЯ В ВИДЕ КВАЗИКООРДИНАТ
то (5.73) перейдет в (5.70). Более точные формулы
имеют вид
(1 + 71Л2') (5.75)
4 \ 48 / '
для СЦВМ без деления и
1 [ d 1
Ч Т й (1 - (5.76)
— для СЦВМ с делением. Наконец, при реализации формулы
(5.74) на СЦВМ без деления можно заменить делитель ,(1 + Ч2)
множителем (1—Ч2), что вызовет только небольшую дополни-
тельную погрешность нормы. Разумеется, методы стабилизации
нормы, рассмотренные в (5.5), применимы и в этом случае.
Анализ полученных формул показывает, что основной объем
вычислений, как это и ожидалось, может выполняться с малой
разрядностью. При этом во избежание накопления погрешности
необходимо использовать сохранение остатков [19, 48].
§ 5.10. Численные методы высокого порядка.
Использование информации в промежуточных точках
Непосредственное применение подхода, изложенного в § 5.1,
к построению решений и синтезу численных методов высокого
порядка приводит к чрезвычайно громоздким выкладкам и не-
обозримо сложным выражениям. Например, уже приближенное
решение пятого порядка для вектора Эйлера имеет в наших обо-
значениях достаточно громоздкий вид [91]
1> = V0+4(01x02)t3 + |(01x03)t4 +
+ {^(®1Х04) + ^(02 х 03)+5^01Х(в1х03) +
+ (®1 X 02) - §б®2 X (0! X 02)} (5.77)
Здесь 0г — коэффициенты полиномиальной аппроксимации 0(т)
внутри шага:
0(т)-= 01Т + 02т2 + 0зт3 + 04т4 + ..., (5.78)
т— безразмерное время внутри шага, 0 1.
В определенной степени положение улучшается, если перей-
ти к симметричным выражениям, т. е. взять за узел аппрокси-
мации 0 не начало, а середину шага интегрирования. При этом
в конце шага исчезают все члены четного порядка. В частности,
решение шестого порядка, полученное в [91], можно привести
§ 5.10. МЕТОДЫ ВЫСОКОГО ПОРЯДКА
149
К виду
О = V0 + 4 (01С х 02С) + 4 (01С х 04С) - (02С х 0зС) +
+ йо 01С х (01С х взС> “ 02С х (®1С х 02с) + зёо 01С х
Х['ё1Сх(в1сХ02с)]. (5.79)
^Здесь 0гС— коэффициенты полиномиальной аппроксимации 0(т):
[ 1 \ I i \2 I i \3
0(т) = 0оС + 01С(т— у^ + 02С(т —yj +03с(т —yj +
/ 4 \4
+ €Цт--^ + ... (5.80)
Чтобы построить численный метод интегрирования на основе
решения (5.79), необходимо выразить коэффициенты 01С через
входные величины, т. е. через приращения квазикоординат. При
этом для сохранения симметрии и точности формул естественно
использовать центральные разности. В свою очередь это приводит
к необходимости считать доступной информацию о приращениях
квазикоординат на подшагах, т. е. в нескольких точках внутри
шага интегрирования, симметрично расположенных относительно
•середины шага.
В этих предположениях А. П. Панову удалось построить це-
лый класс численных методов, которые он называет многошаго-
выми [85—92]. Опуская выкладки, приведем в качестве примера
очень простой метод четвертого порядка, использующий инфор-
мацию в одной промежуточной точке (середине шага):
O=V0 + |(V01/2xV0 ) (5.81)
или, что эквивалентно,
О = V0 + 4 (V01/2 X V0). (5.82)
О
Здесь
V01/2 = 0e/2)-0(O), V02/2 = 0(l)-0(1/2), V0 = 0(1) — 0(0).
Приведем также два варианта метода шестого порядка, ис-
пользующие информацию в трех промежуточных точках:
О = V0 + g {V01/4 X (V02/4 X V04/4) - V04/4 X (V@1/4 x V03/4)} 4-
+ 2 (v02/4 x V03/4)(V02/4 X V03/4) — g (V02/4 X V03/4) -
- 4 (V01/4 X V04/4) + g {V02/4 x V04/4) + (V01/4 X V03/4)}, (5.83)
150
ГЛ. 5. ИНФОРМАЦИЯ В ВИДЕ КВАЗИКООРДИНАТ
й = V0 + § {V01/4 X (V62/4 X V©^) - V04/4 X (V01/4 X ve3/4)} +
+ g (V©2/4 X V03/4) (V02/4 X V03/4) + g (V01/4 + V02/4) X
x (ve3/4 + ve4/4) + g {ve1/4 x ve2/4) + (ve3/4 x V04,4)}. (5.84>
Здесь
V01/4 = 0 (74)-0(0), V02/4 = 0(i/2) - 0(i/4),
v03/4 = 0 (3/4) - 6 (72), v04/4 = 0 (i) - 0 (з/4).
Использование методов высокого порядка позволяет умень-
шить величину шаговой и накопленной погрешности интегриро-
вания либо при заданном уровне погрешности увеличить допусти-
мый шаг интегрирования. Обе эти возможности, в принципе, по-
лезны, однако имеется целый ряд обстоятельств, ограничивающих
реальную эффективность таких методов.
Во-первых, допустимая величина шага ограничена в БИНС
требуемым темпом снятия информации для системы управления.
Нарушение этого ограничения приводит к необходимости экстра-
поляции данных внутри шага, т. е. к дополнительным вычисли-
тельным затратам.
Во-вторых, повышение порядка метода сопровождается услож-
нением формул и увеличением объема вычислений на шаге, при-
чем для исключения дополнительного запаздывания информации
эти вычисления или их основная часть должны выполняться в
начале очередного шага. Таким образом, пиковая загрузка СЦВМ
возрастает с увеличением порядка метода, хотя средняя загрузка
на шаге до определенных пределов (примерно до шестого поряд-
ка) может даже убывать.
В-третьих, увеличение общей точности может быть достигнуто
только, если одновременно с повышением порядка метода умень-
шается величина кванта входной информации. При этом увели-
чивается потребная разрядность СЦВМ и соответственно необ-
ходимые затраты оборудования.
В-четвертых, как уже отмечалось, методы высокого порядка
имеют повышенную чувствительность к случайным ошибкам вход-
ной информации.
Наконец, в-пятых, гипотеза о достаточной гладкости векторов
сов, QE внутри шага заведомо не выполняется в случае управляе-
мых движений с релейно-импульсными характеристиками испол-
нительных органов.
Имеющиеся в литературе [85—91] оценки эффективности ме-
тодов высокого порядка не учитывают этих обстоятельств, и к ним
поэтому следует подходить с осторожностью. Кроме того, в этих
оценках используются конкретные соотношения между длитель-
ностью отдельных арифметических операций, которые могут и не
выполняться в реальной СЦВМ. Так или иначе, целесообразность
§ 5.10. МЕТОДЫ ВЫСОКОГО ПОРЯДКА
151
применения методов выше третьего порядка без использования
информации в промежуточных точках и выше четвертого поряд-
ка с использованием такой информации вызывает сомнение.
При использовании максимально допустимого шага интегриро-
вания и минимально допустимого шага съема информации воз-
можна ситуация, когда количество промежуточных точек оказы-
вается большим, чем это требуется для построения метода задан-
ного порядка. Такой избыточностью можно распорядиться двумя
способами. С одной стороны, можно добиться уменьшения шаговой
и накопленной погрешности для какого-либо достаточно узкого
класса движений, например, конического или регулярной прецес-
сии, характерного для конкретного объекта, использующего БИНС
[65]. С другой стороны, можно попытаться придать численному
методу сглаживающие свойства и тем самым уменьшить его
чувствительность к помехам. Такой подход, естественно, приводит
к аппроксимации 0(т) сглаживающими интерполяционными по-
линомами Чебышева либо к определению 0; по методу наимень-
ших квадратов.
В качестве примера приведем без вывода формулы для сгла-
живающих методов четвертого порядка, полученные по методу
наименьших квадратов. Для трех промежуточных точек имеем
О = V© + Д V© х {3 (V©4/4 - V01/4) + (V©3/4 - V©2/4)}. (5.85)
IO
Здесь
v©1/4 = 0('/4)—0(0), v02/4 = 0(i/2)-©(i/4),
V03/4 = 0 (3/4) - © ( V2), V©4/4 = 0 (1) - © (3/4).
Для пяти промежуточных точек имеем соответственно:
а = V© +1V0 х {5 (V06/6 - V01/6) + 3 (V05/6- V ©2/6) +
+(V04/6-V©3/6)}. (5.86)
Здесь
V01/6 = 0 (7б) -0(0), v02/6 = 0 (7з) - 0 (1/6),
V03/6 = 0 (72) - 0 (7з), v04/6 = 0(2/3) _ 0(1/2) ?
v05/6 = 0 (5/б) - © (7з), ^06/6 = 0 (1) - © (5/6).
Следует указать, что заметный сглаживающий эффект таких
методов проявляется только при большом количестве промежу-
точных точек; поэтому на практике может оказаться предпочти-
тельным предварительное сглаживание приращений квазикоорди-
нат методами цифровой динамической фильтрации.
152
ГЛ. 5. ИНФОРМАЦИЯ В ВИДЕ КВАЗИКООРДИНАТ
§ 5.11. Численное интегрирование кинематических уравнении
в первой и смешанной формах
На практике достаточно часты ситуации, когда угловая ско-
рость вращения базиса относительно исходного задана не в свя-
занном, а в исходном базисе, либо частично в связанном,
а частично — в исходном. В этих случаях справедливы кинемати-
ческие уравнения соответственно в первой и в смешанной формах.
Мы покажем, что численное интегрирование таких уравнений,
так же как и уравнений во второй форме, сводится к использо-
ванию частных решений с единичными начальными условиями.
Пусть, как обычно, Л — кватернион перехода от неподвижного
базиса I к связанному базису Е. Пусть теперь — угловая ско-
рость базиса £, заданная в проекциях на базис I. В этом случае
кинематическое уравнение имеет вид
2Л = ®1оЛ. (5.87)
Ищем решение этого уравнения в виде
2^ = -Т ° Л(0 = R(0 ° Лп_ь (5.88)
где R(£n-i)= 1. Для R(0 получается уравнение
2R = ®IoR. (5.89)
Переходя к сопряженным величинам, имеем
2R = -Ro(dl. (5.90)
Обозначим теперь N=R, <в7. Тогда
2N = N°£J. (5.91)
Таким образом, кватернион N = R удовлетворяет кинематическо-
му уравнению во второй форме с угловой скоростью Й = —(Oj.
Решение этого уравнения, построенное в предыдущих параграфах,
обозначим для краткости N = N{£W. Тогда, очевидно,
R = N{—свЛ (5.92)
Окончательно имеем для кинематических уравнений первой формы
A(f) = N{-(dI}oAn_i (5.93)
внутри шага интегрирования и
A^NJ-wJ-A^ (5.94)
в конце шага. Нетрудно видеть, что явное выражение для N{—юЛ
получается из явного выражения для N{<oz} переменой знаков у
всех векторных произведений.
ГЛ. 6. ИНТЕГРИРОВАНИЕ УРАВНЕНИЙ ПЕРВОЙ ГРУППЫ
153
Пусть теперь наряду с базисами I и Е имеется некоторый ба-
зис Q, например орбитальный (рис. 24). Обозначим кватернион
перехода к этому базису от базиса I через П, а угловую скорость
этого базиса — через SJQ. Для Л и П справед- ливы кинематические уравнения: У i у Q
2Л = Л ° 2П = П ° (5.95) )// /
Рассмотрим теперь кватернион М, задающий переход от Q к Е. Очевидно,
М = ПоД. (5.96) Рис. 24. Базисы и кватернионы в
Дифференцируя это соотношение, получаем смешанном случае
М- По Л П° А, откуда после подстановки (5.95) и очевидных
преобразований имеем
2М = М ° - SJQ ° М. (5.97)
Таким образом, кватернион М удовлетворяет кинематическому
уравнению в смешанной форме.
Оба уравнения (5.95) заданы во второй форме, поэтому их
решение на шаге интегрирования можно записать в виде
Л(0 = Лп_! ° N{o)e}, П(t) = Щ-i ° N{S2q}. (5.98)
Подставляя эти выражения в (5.96), получим
М (t) =» N{S2q} о Пп_{ ° Лп-1 ° N{(Оя),
пли
М(0 - N{JV о Мп_ 1 ° (5.99)
внутри шага интегрирования и
Мп == Nn{£2Q} о Мп_! ° N{oe} (5.100)
в конце шага.
Таким образом, выражения (5.93) и (5.99) определяют закон
изменения кватерниона во времени внутри шага, а (5.94) и
(5.100) — разностные кинематические уравнения для первой и
смешанной форм соответственно. Разумеется, методы стабилиза-
ции нормы, рассмотренные в § 5.5, применимы и в этих случаях.
ГЛАВА 6
ИНТЕГРИРОВАНИЕ УРАВНЕНИЙ ПЕРВОЙ ГРУППЫ
При интегрировании уравнений первой группы ИНС по ин-
формации об ускорении получаются последовательно скорость и
положение движущегося объекта. При этом задача интегрирова-
ния ускорений распадается на интегрирование ускорений, задан-
154
ГЛ. 6. ИНТЕГРИРОВАНИЕ УРАВНЕНИЙ ПЕРВОЙ ГРУППЫ
ных аналитически (гравитационное ускорение и в некоторых
случаях — ускорение от аэродинамического сопротивления и т.п.),
и ускорений, измеряемых бортовыми акселерометрами (кажуще-
еся ускорение). Первая задача может быть решена традиционными
численными методами. Единственное обстоятельство, которое здесь
нужно учитывать, это необходимость сохранения остатков при
интегрировании малых ускорений (как, например, составляющих
от гармоник гравитационного потенциала) во избежание потери
точности. Вторая задача — получение кажущейся скорости —
представляет такой же интерес, как и задача реализации решения
кинематических уравнений.
§ 6.1. Особенности численного
интегрирования кажущейся скорости
Схемы реализации интегрирования кажущейся скорости, ана-
логично тому, как это имеет место в случае кинематических урав-
нений, могут быть определены в зависимости от вида первичной
информации (кажущегося ускорения) и методов реализации ре-
шения уравнений, аналогично тому, как это было проведено в
гл. 5. По определению (см. (1.9)) кажущаяся скорость в базисе I
t
W2(Z)=fp2dT, (6.1)
'о
где Р/ — кажущееся ускорение в базисе I. На основании этого
соотношения могут быть реализованы различные схемы опреде-
ления кажущейся скорости по ускорению. В частности, пошаго-
вые методы интегрирования в инерциальном базисе будут описы-
вать соотношения
tn
w1 (tn) = wjn = Wj„_! + AWln, AWIn = j PjdT. (6.2)
tn— 1
В случае платформы, стабилизируемой в инерциальных осях и
несущей однократно интегрирующие датчики кажущегося уско-
рения, информация с этих датчиков будет получаться в виде
приращений
tn
(АЫз= .( Pi^dx, з = 1,2,3 (6.3)
tn— 1
по трем измерительным осям ИНС, совпадающим с осями базиса
I и измеряющими тем самым вектор приращения AWJn = АЬГп.
В этом случае интегрирование кажущегося ускорения сводится
к суммированию приращений по трем независимым осям, что-
§ 6.1. ИНТЕГРИРОВАНИЕ КАЖУЩЕЙСЯ СКОРОСТИ
155
может быть записано в виде векторного соотношения W/n =
= W/n-i + аь7п.
Опуская детальное рассмотрение всех возможных случаев
реализации интегрирования кажущейся скорости, мы сосредото-
чим внимание на случае БИНС, когда акселерометры измеряют
ускорение в проекциях на связанный базис Е; датчики будем
предполагать однократно интегрирующими, так что па их выходе
образуется поток приращений интеграла от измеряемой величины
(проекции):
(AbEn)s= J PEs<h, s = 1,2,3. (6.4)
^П— 1
Три измеренных компоненты &bEns на /з-м шаге (интервале
[C-i, Лг]) образуют векторную величину
ЛЬ£„ = j PBtZr, (6.5)
ln~ 1
понимаемую как соответствующее отображение вектора кажуще-
гося ускорения (и его интеграл).
Для построения алгоритма численного интегрирования, исполь-
зующего первичную информацию в виде (6.4), (6.5), необходимо
установить связь между AWJn и ДЬЕл. Пусть переход от базиса I
к Е задан кватернионом Л; тогда, очевидно, справедливо Pf =
= Л ° ° Л — соотношение для преобразования компонент векто-
ра. Интегрируя это соотношение в пределах шага и учитывая,
что по определению Ре = dhEldt, получим
AbJn= J А«^"А<Й= (* Ло«7ЬвоЛ. (6.6)
*п— 1 *п— 1
В пределах шага интегрирования можно записать
A(0-An_1ONn(r),
где t' = t — tn, ОС С ^h = tn — tn-X. Подставляя это выражение в
(6.6), имеем
Abjrt —- А^—1 ° j) ) ° ° ) ' 0 ° Аи—ц
или АЬ1п ==з An-i ° AAVem ° An-i, (6.7)
где h AWEn = f (tf) ° dbE ° Nn (t' )• (6.8)
о
156
ГЛ. 6. ИНТЕГРИРОВАНИЕ УРАВНЕНИЙ ПЕРВОЙ ГРУППЫ
Явное выражение &WEn через измеряемые величины (численный:
метод) будет получено в следующем параграфе.
Итак, с учетом (6.7) интегрирование кажущегося ускорения
сводится к формуле
WJn - WJn_! +(ЛП_1 о kWEn о An_j). (6.9)
В некоторых случаях целесообразно иметь алгоритм определе-
ния кажущейся скорости не в инерциальном, а в связанном базисе.
Очевидно
WjEn == Лп ° WJn ° Ап. (6.10)
Умножая соотношение (6.9) справа на An=’An_i°Nn, а слева —
на сопряженное значение An = Nn°An-i, получим
W£n = Ап ° WJn ° Лп =
= Nn о о lNn + Nn о дWzn о Nn = Nn <> (+ Д WKn) о Nn (6.11 >
— искомый алгоритм интегрирования в подвижных осях.
§ 6.2. Определение AWBn через измеряемые величины
Для удобства дальнейших выкладок преобразуем вначале
подынтегральное выражение в (6.8). Полагая Nn = n0 + n и за-
меняя кватернионные операции умножения векторными, имеем
Nn ° dbE ° N i= (и0 + п) ° dbE ° (и0 — п) =
= dbE + 2nX(nXdbE)+2n0(nXdbE). (6.12)
Аппроксимируем Ь£, п и п0 внутри шага следующими полиномами:
Ь = Ь1Т + Ь2т2 + Ь3т3 + Ь4т4 + ..., (6.13)
П = DjT + п2т2 + п3т3 + п4т4 + ..., (6.14)
По = 1 + По1Т + Ио2Т2 + ИозТ3 + По4Т4 + ..., (6.15)
dbjs = bidr + 2Ь2тбй + ЗЬ3т2йт + 4b4r3dr + ...; (6.16)
здесь т — безразмерное время внутри шага 0 т 1. Явные вы-
ражения для коэффициентов пг, nOi следуют из полученных в.
предыдущей главе решений кинематических уравнений:
п=4 +[-^ х у20*а - 41 v0^ i2 V<Mт3+
+ 4 (v0^x v30^>т4+• • • - (6-i7>
no = 1+4 । V<M2r2 + 4lV0£n|4T4+ ... (6.18>
На данном этапе вычислений учтем лишь то обстоятельство,
что П2 = 0, по1 = О, Поз = О, т. е. вместо (6.14), (6.15) будем
§ 6.2. ОПРЕДЕЛЕНИЕ AW#n
15Т
использовать
n = nit + П3Т3 + п4т4 +..., (6.19)’
По'== 1 + Я02Т2 + П04Т4 + ... (6.20)
Подставляя полученные выражения в (6.12) и удерживая
члены не выше четвертого порядка, получим
Nn ° dbE о Nn = dhE + 2пх X (nx X Ьх) т2 dx +
+ 4nx X (nx X Ь2) т3 dx + 2 (пх х Ьх) т dx + 4 (nx X Ь2) т2 dx +
+ 2 ^3 (nx х b3) + (n3 X Ьх)-п2 (nx X bx)J т3 dx + ... (6.21 >
После интегрирования в пределах шага имеем:
AWEn = ДЬЕп + (nx X Ьх) + -g-nx X (nx X Ьх) + у (nx X ъ2) +
+ nx X (nx X ь2) + у (nx X Ь3) + (n3 X Ьх) — —у nx (nx X Ьх)+ ...
(6.22)
Полученная формула дает явный вид AWBn с точностью до чле-
нов выше четвертого порядка.
Подставим теперь в соотношения (6.22) коэффициенты л< из
выражений (6.19), а коэффициенты Ь< выразим через разности с
помощью интерполяционного полинома Ньютона:
Ь2 = ДЬЕп-----i- Д2ЬВп---Д3ЬЕп, Ь2 = -у Д2Ь£п, ьз = -|-Д3Ь£п.
(6.23)
После указанных подстановок и очевидных преобразований по-
лучаем, вновь удерживая члены не выше четвертого порядка:
AW#n = АЬеп + -у (VHpn X АЬЕп) Н—§- V0£n X (V0£n X AbEn)
+ <t(V0£„ X Д2ЬВП) + A (V0En X Дзь£п) + V0E„X
X (V0#n X A2b#n) + '4^~(^7®-En X V20£n) X АЬяп —
- | Wn |2 (V0£n X ЛЪЕп) + ... (6.24>
Это выражение можно рассматривать как численный метод,
четвертого порядка. Отбрасывая лишние члены соответствующего
порядка, из него можно получить более простые выражения:
метод первого порядка
AWEn = AbEn, (6.25)
метод второго порядка
AWЕп = АЬеп Н—у (У®еп X АЬ^п), (6.26)>
158
ГЛ. 6. ИНТЕГРИРОВАНИЕ УРАВНЕНИЙ ПЕРВОЙ ГРУППЫ
и, наконец, метод третьего порядка
-AWЕп = АЬЕп Ч----(N®En х ДЬ-Еи) +
+ 4 v0^ х (V0^ х ЛЬ^) + 4 (v0^ х Л2 W (6.27)
В соотношениях (6.27) и (6.24) можно выразить высшие раз-
ности через первые. Выполняя очевидные преобразования, по-
лучаем:
метод третьего порядка
AWЕп — ДЬеп + "ГЛ (У®Еп х ДЬ#П)
1
+ 4- V0En X (V0En X AbBn) - А- (V0E„ X Ab^n-i), (6.28)
и 14u
метод четвертого порядка
Д^Еп — ДЬ#п + ~8~ (У®Еп X ДЬ-En) +
+ 4 ^®Еп X (V0£n X ДЬЕп)--------(У®Еп X ДЬ^п-!) -}~
+ 4 (У®Еп х ДЬ£п_2)------24 ^®Еп X (V0£n X ДЬеп—].) —
- 4 (У®ЕП X ye^n-i) X ДЬЕп - 41 V0En I2 (Ж X ДЬЕП). (6.29)
Формулы численных методов определения кажущейся ско-
рости для рассматриваемого (БИНС) вида первичной информации
оказываются более сложными по сравнению с методами того же
порядка для кинематических уравнений; они содержат два вида
первичной информации — приращения кажущейся скорости и
угловых квазикоординат (угловой скорости). Тем не менее ока-
зывается возможным задачу интегрирования кажущейся скорости
«свести» к задаче интегрирования кинематических уравнений и
распространить тем самым все результаты, полученные в гл. 5,
и на этот случай.
§ 6.3. Построение численных методов
для обобщенных кинематических уравнений
и использование бикватернионов
для интегрирования полных уравнений ИНС
В гл. 3 было показано, что обе группы уравнений ИНС могут
быть сведены к обобщенным кинематическим уравнениям в
бикватернионах (такие методы были развиты в работах [107—
ПО]). Рассмотрим задачу определения кажущейся скорости.
Согласно § 3.5 имеем обобщенное кинематическое уравнение для
бикватерниона М в виде (3.71). Поскольку выбор углового по-
§ 6.3. ОБОБЩЕННЫЕ УРАВНЕНИЯ
159’
ложения базиса Q может быть произвольным (фиксируется только
расстояние начала координат базиса Q от начала координат /г
равное кажущейся скорости W), выберем ориентацию Q, совпа-
дающую с Е, т. е. угловая скорость в (3.70) (Оц? будет равна в.
этом случае &Е. Мгновенный винт скоростей в этом случае
Ujq = Ице = (дЕ + $РЕ, (6.30)
т. е. определяется только первичной информацией от датчиков,
угловых скоростей (ДУС) и кажущегося ускорения (ДКУ) в про-
екциях на связанные оси (случай БИНС).
Пусть используются однократно интегрирующие ДУС и ДКУГ
т. е. первичная информация получается в виде приращений квази-
координат для угловой скорости
V0£n = J dr
1
и приращений кажущейся скорости (6.4) для ускорения
АЬВп = j РЕ dr.
*п-1
Образуем бикватернион
ТЕ(<) = JlWT. (6.31>
Можно видеть, что разности этого бикватерниона
АТЕп = (tn) - WE(tn_x) = V0En + 5ДЬЕп (6.32)
определяются приращениями угловых квазикоординат и кажу-
щейся скорости, т. е. могут быть получены прямо как измерения
рассматриваемых датчиков первичной информации.
Решение обобщенного кинематического уравнения (3.71) с»
функцией U\n (6.30) может быть записано в виде
M(Hr) = M(i)° АМ(т).
По сути дела, это есть разностный вид исходного кинематического
уравнения (3.71). Это же соотношение, взятое в точках tn, дает
пошаговую формулу интегрирования кинематических уравнений
М(^п) == M(£n-i)o АМП,
или
Мп = МпЧоДМп, (6.33}
где АМП — решение на шаге £п], получаемое как решение-
того же кинематического уравнения с единичными начальными
условиями (т. е. с условиями М°= <1, 0, 0, 0’>; М7 = <0, 0, 0, 0>),
при заданной на интервале [£n-i, £п] первичной информации.
160
ГЛ. 6. ИНТЕГРИРОВАНИЕ УРАВНЕНИЙ ПЕРВОЙ ГРУППЫ
Методом Пикара, аналогично [15], решение на малом шаге
[0, f] может быть получено в виде
t
AMn(t) = 1 + 4 Ju1Edt' + А-
о
и1ЕЛ"
<3 использованием введенной переменной (6.31) это решение за-
пишется таким образом:
t
ЛМ(0 = 1 + 4т^ + 4 1 тЕ°и1Е<й' +
о
и1ЕГ
и1ЕбГ + ... (6.34)
Аппроксимируем функции и Uib интерполяционными по-
линомами на шаге интегрирования h в интервале [in-i, М, пола-
гая известными их значения в моменты времени tn (узлах интер-
поляции). Образуем разности
АЧ'Ъп = 'Fe (^) ~ (^.J = 'Реп - Уеп-ь
А^еп = Aft-1TEn - Afe~1T£n_1 = 5 WEh-iC{ (~ !)'• (6’35)
j=i
Очевидно, что эти разности прямо получаются как измерения
датчиков первичной информации. Введя безразмерное время т
ънутри интервала [£n-i, М, имеем
VE (t„ - h + th) = TE„_X + 44 дтЕп + 44 тД2Те„ +... =
II £1
= Tsn-i + т (аТЕп - 4 А2^еп - 4 А3ТЕп - 12 • • •) +
+т2 (4 - 4 А4Ча • • •)+-г3 (4азтеп+.)+
+ д«РЕп .. j + ••• (6.36)
Величина Uu получается дифференцированием (6 36) по т:
dWF 1 F \ (( 1 1
^=-/=4-^=4- - 4 *чЕп - а азтеп -
- 4 Д<ТЕп) + Т (а2ТЕп - А +
+ Т2 (_1_ ДЗТяп + 4 Д4Теп) + Т3 4 Д^ЕП +•••}• (6.37)
§ 6.3. ОБОБЩЕННЫЕ УРАВНЕНИЯ
161
Подставляя полиномы (6.36) и (6.37) в решение (6.34) и интег-
рируя, получаем следующее решение для бикватерниона прира-
щения в точке tn (т = 1):
ДМП = 1 + 4- Д^Еп + 4 ЛЧ'еп ° ДТЕп +
+ 4 [Л'Гяп ° А2ТЕп - Д2ТЕп ° ДТЕп] +
+ 4 (ДТЕ„ ° Л’Ч'еп - А3ТЕп о Д¥Еп) + 4 дТЕп о ДТЕп о Д^Еп +
+ 4 (АТе„ о Д^Еп » А2ТЕп - A2YEn о ДТЕп о ДЧ*-Еп) -
- X д4ТЕп о ДТЕп - 4 д ° д4чгеп “
0/0 о/и
- 4 (A3,FEn ° ^ЕП + Д2Укп ° А3Те„). (6.38)
0/0
Заменим в этом соотношении вторые и третьи разности через
разности на предыдущих шагах согласно (6.35), опуская ин-
декс Е:
AMn = 1 + 4 АТП + 4 (АТп+1 о ДТП - ДТП о ДЧ^) + ...
PL .. + А ДТП » AYn + 4 A'Fn-j о ДТП + А дтп о ДТП_Х -
8Г- 4 дчгп-х ° дчг«-1+4 дт« ° дт"-2 - А дчг«-* ° дт«+
Н Z4 Zoo Zoo
В + 4б дчгп-з» A'Fn + 4б ° ДТ"-з’+ 5^6 ЛЧГи-2 ° +
+ А АТп-! о лтп_2 + 4 ДТи ° дт« ° дт« +
+ 4 (АТп-1 ° AYn о ЛТп - AYn о ДТП = A^-J. (6^39)
Удерживая члены того или иного порядка относительно степеней
разностей первичной информации, получим численный метод со-
отв етствующего порядка :
а) метод первого порядка
AMn = 1 + 4дЧгЕп; (6.40)
б) метод второго порядка
AMn = 1 + 4 АТЕп + 4 АТВ„ о ДТЕП; (6.41)
г в) метод третьего порядка
ЛМП = 1 + 1ДТЕП 4 ДТ^ ° ДЧГЕП + 4 (дт^ °Д2Т^ -
Z о 4о
-А2ТЕп о ДТЕп). (6.42)
11 в. н. Бранец, И. П. Шмыглевский
162
ГЛ. 6. ИНТЕГРИРОВАНИЕ УРАВНЕНИЙ ПЕРВОЙ ГРУППЫ
Само выражение (6.38) можно, разумеется, рассматривать как
метод более высокого порядка.
Вычисленное значение бикватерниона М определяет сразу и.
кватернион, задающий угловое положение базиса Е (главная
часть М°), и величину кажущейся скорости Wj или W£ в силу
соотношений (3.72).
Сопоставление процедуры построения численных методов для
обобщенных кинематических уравнений, проведенных в этом
параграфе, с построением численных методов для обычных ки-
нематических уравнений (см. гл. 5) показывает их полную анало-
гию. Более того, используя принцип перенесения Котельникова,
можно было сразу выписать соотношения типа (6.38), используя
формулы для численных методов, полученные в гл. 5, и распро-
страняя результаты для кватернионов на бикватернионы. При:
этом следует учесть, что нужно осторожно использовать переход,
от кватернионных произведений к иным (скалярным, векторным),
так как для бикватернионных соотношений требуется запись и
анализ исходного соотношения. Так, член второго порядка в ква-
тернионном алгоритме — VePQznl2 не переходит в —7в1 АТеД2,.
а должен быть записан в виде кватернионного произведения:
ДЧГеп ° ^9еп ~ (У®ЕП + $ДЬЕп) о (V0_En + sAb^n) =
= - 4-1 i2 -2s ° Ab^-
§ 6.4. Получение численных методов
интегрирования кажущейся скорости
из обобщенных кинематических уравнений
Как уже говорилось, бикватернион М, вычисление которого
может быть реализовано по первичной информации ДУС и ДКУ
численным методом того или иного порядка, определяет как ква-
тернион углового положения (М°), так и величину кажущейся
скорости W. Согласно (3.72)
W7 = 2М' ° М°, W£ = (WQ) = 2М° о М'. (6.43)
Поставим задачу получить алгоритмы численного интегрирова-
ния кажущейся скорости по алгоритмам для компонент бикватер-
ниона. Для этого рассмотрим основное соотношение для пошаго-
вого интегрирования (6.33) и разделим главную и дуальную
части. Имеем
(м® + К) = (M«_i + smLJ о (дм® + 5дм;)„
т. е. для главной части
М® = М’_х о дм®
§ 6.4. ИНТЕГРИРОВАНИЕ КАЖУЩЕЙСЯ СКОРОСТИ
163
— соотношение, аналогичное (тождественно совпадающее) кватер-
нионному для кинематических уравнений, и для дуальной части
м; = м;_! о дм° + м°_! о дм; (6.44)
— свою формулу пошагового интегрирования. Можно ожидать, что
последнее соотношение (6.44) может быть использовано для по-
лучения алгоритмов интегрирования для величин W/ или WE.
Согласно (6.43) имеем в моменты времени tn
WIn = 2м; о м°, WEn = 2М° о м;. (6.45)
Используя формулы пошагового интегрирования (6.44) для ве-
личин М£ и Мп, подставим их в (6.45):
WJn = 2м;_х о дм° о м° + 2Mn-i о дм; о м° =
= wln_r + м;_г(2дм;о дм;) ом;_ъ
= 2М» о о ДМ» + М»_х о дм;) = (6.46)
= дм; о wE„_x»дм; + 2дм; <> дм;.
Далее величины приращении ДМ; и ДМП (т. е. решения на
шаге интегрирования) должны определять приращение AW на
этом шаге, причем можно видеть, что определяется отображение
приращения кажущейся скорости на подвижный базис Q (т. е. и
на Е) в момент начала шага tn-\ (в данном случае он эквивален-
тен исходному базису Z) и конца шага tn. Значение на п-м
шаге интегрирования при проектировании на En~i (начало шага)
обозначим
kW'En =2ДМ;О дм;. (6.47)
Это значение находится аналогично (6.43); при проектировании
этой же величины на базис Еп (конец шага интегрирования)
имеем
kWEn - 2дм; о дм;. (6.48)
Используя эти обозначения, алгоритмы интегрирования (6.46)
ъгожно записать в виде
WIn = WIn_1 + M;_1»AWEn»M^1 (6.49)
— лри интегрировании в инерциальных осях и
W£„ = дм; о WEn^ о дм; + \WEn (6.50)
— при интегрировании в связанном базисе. Очевидно, что (6.49)
совпадает с полученной ранее формулой (6.2) или (6.9); здесь
следует учесть, что ДМ£ есть решение на шаге Nn; Лп есть М^
и AWЕп (6.47) должна совпадать с введенной в (6.8) величиной
11*
164
ГЛ. 6. ИНТЕГРИРОВАНИЕ УРАВНЕНИЙ ПЕРВОЙ ГРУППЫ
приращения кажущейся скорости (в чем можно непосредственно»
убедиться). Соотношение же (6.50) совпадает с (6.11), если толь-
ко AW^ заменить на приращение AW£n, соответствующее ис-
пользуемому в § 6.1 приращению (6.8), так как
AW^n = AM® о AW#n о ДМ®. (6.51)
Имеем
WSn = AM«o(WEn_1 + AWk)»AM®. (6.52>
Заметим, что алгоритм интегрирования кажущейся скорости в
неподвижном базисе может быть записан с использованием AWEn
вместо AWEn; подставляя (6.51) в (6.49), имеем
w2n - + М® о AWk о М®. (6.53)
Приведенные соотношения дают ясную интерпретацию алгоритма,
интегрирования кажущейся скорости.
§ 6.5. Определение приращения AWEn
через измеряемые величины с помощью решений
длд обобщенных кинематических уравнений
Полученные алгоритмы численных методов для обобщенных
кинематических уравнений дают возможность определить и при-
ращения AW^ в функции от первичной информации. По сути
дела, здесь речь идет о переходе от переменных AM® и АМП к
переменным AW£n. Таким образом, задача этого параграфа —
интерпретация полученных в § 6.3 численных методов решения
на шаге для величин AM® и АМП и приведение этих решений
к полученным ранее.
Рассмотрим формулу (6.40) для метода первого порядка иг
«развернем» это соотношение:
AMn = 1 + А ДТЕп = дм® + здм; = 1 + 4- + sAb*«)’
т. е.
дм® = 1 + а у©яп, дм; = 4 ЛЬе«- <6-54>
Для метода второго порядка (6.41) имеем с помощью аналогич-
ной подстановки
дм® = 1+4 - 41voEn I2, дм; =
= 4ДЬЕ„- 4 ДЬкп-V0En. (6.55)
Для метода третьего порядка (6.42) также строго формально
§ 6.5. ОПРЕДЕЛЕНИЕ &WEn
165
получаем
ДМ°„ = 1+4 V©£n-----g- |V0£„ I3 + 4 X ™Еп,
, i 1 I (6.56)
AMn = 4 AbBn - 4 Ab£n • y©E„ + A- Ve£n X A2bBn +
+ 4 Ab^n X V20En-
Можно видеть, что получившиеся соотношения для ДМ° пол-
ностью совпадают с соответствующими соотношениями гл. 5 ре-
шений на шаге для кинематических уравнений (Nn), что и долж-
но быть.
Перейдем теперь от переменных ДМ° и ДМП к AWEn сог-
ласно (6.47) и (6.48). Выделяя в соотношении (6.38) основную и
дуальную части при ДЧ^ (6.32), получим (сохраняя члены
вплоть до третьей разности и не выше третьего порядка):
дм»=1+4 v0£n - 41 Wzn I2+4х +
+ 4 X V3©En + 4 V0£n ° V0£n 0 V0£n>
AM' = -g-Ab-En---(y&En-Ab-En) +
4- 4 (АЬеп X V30£n + V0E„ X A2bEn) +
+ 4 (ve*n X А3Ьеп + АЬе» X V30En) - 4 Abs„ | V0Bn I3 -
-4(ve^n-AbB„) veEn.
Подставим эти выражения в (6.47) и удержим только члены до
четвертого порядка разностей первичной информации:
AWk = ДЬЕ„ (1 - 41 I2) + 4 V0£re х АЬеп +
+ 4 V0En(V0£n-АЬеп) + 4 (АЬеп X V20En + ve£n х A2bB„) +
+ 4(V0e„ X V3b£„ + ДЬе„ X v3©sn) +4v©Enx(AbS„x V20En)-
— 4 X (V0En X AbjSn) + 4 V©£n X (V0£n X A2bsn) —
- 4<Увв« x A3b£n) x V0En + 4 (АЬеп x V^En) x V0E«. (6.57)
166
ГЛ. 6. ИНТЕГРИРОВАНИЕ УРАВНЕНИЙ ПЕРВОЙ ГРУППЫ
Аналогичным образом для выражения (6.48) имеем
AWEn = AbEn (1 - 4 I V&En I2) - 4- V0En X АЬЯп +
Н--6~ (V0£n-AbjEn) V0£n + -^(АЬеп X V20En + V0Era X A2bEn) +
4-4(V0E„ X A3bEn -I- AbE„ x V30B„) 4^V0Enx(AbEnxV20E„)-
- 4 x (дь^x v20*«) - 4v@£n x (V0£™x A2b^>- (6-58)
Рассмотрим соотношение (6.57); оставляя члены соответствую-
щего порядка, можем получить выражения для алгоритмов пер-
вого (6.25), второго (6.26), третьего (6.27) порядков. Заметим
еще раз, что именно AW£n фигурирует при выводе алгоритмов
интегрирования в § 6.2.
Таким образом, обобщенные кинематические уравнения позво-
лили, с одной стороны, повторить вывод соотношений пошагового
интегрирования кажущейся скорости, проведенный в § 6.1, 6.2;
с другой стороны, был получен более широкий класс алгоритмов,
использующих приращение AW#n.
Оценивая в целом формализм бикватернионов и обобщенных
кинематических уравнений для интегрирования кажущейся ско-
рости, можно сделать вывод о ряде преимуществ, который он
дает. К их числу следует отнести, во-первых, возможность исполь-
зования всех исследований численной реализации кинематических
уравнений, проведенных в главах 4, 5 для обобщенных кинема-
тических уравнений благодаря принципу перенесения Котельни-
кова. Во-вторых, мы имеем дело с новыми переменными ДМ' и,
соответственно, своим классом алгоритмов интегрирования кажу-
щейся скорости в этих переменных. Эти алгоритмы, базирующие-
ся на использовании соотношений типа (6.44) вместо (6.46), дают
выигрыш в числе используемых арифметических операций, что
особенно заметно для методов более высокого порядка. И, нако-
нец, использование строго формальных методов кватернионных
операций дает возможность удобной алгоритмизации с использо-
ванием ЭВМ, в том числе и при применении непозиционной ариф-
метики [80, 81, 104].
Пример построения алгоритма численного интегрирования
полных уравнений БИНС с использованием первичной информа-
ции в промежуточной точке приведен в приложении 5.
ЧАСТЬ III
ЗАДАЧА УПРАВЛЕНИЯ (КОРРЕКЦИИ)
ДЛЯ КИНЕМАТИЧЕСКИХ УРАВНЕНИЙ
ГЛАВА 7
УПРАВЛЕНИЕ ОРИЕНТАЦИЕЙ
§ 7.1. Основные задачи управления ориентацией
Кинематические уравнения, будучи первой группой уравнений
инерциальной навигации, являются совершенно автономными и
независимыми от остальных навигационных уравнений. Более
того, их реализация (решение) имеет определенный практический
смысл, так как она связана с классом задач управления ориен-
тацией, т. е. управлением вращательным движением твердого
тела. На практике задачи такого типа возникли при управлении
движением космических аппаратов и, в частности, при управле-
нии их ориентацией. Большинство задач космического полета, вы-
полняемого, скажем, по заданной, слабо изменяющейся орбите
свободного полета, требует управления только ориентацией [94, 4].
В связи с этим далее мы рассмотрим основные задачи управле-
ния ориентацией и дадим соответствующие определения.
Рассмотрим базис Е, связанный с корпусом космического ап-
парата (КА), и исходный базис /, который в общем случае может
быть неподвижным в инерциальном пространстве или вращаться
с некоторой переносной угловой скоростью (о0. Пусть угловая
скорость относительного движения базиса Е относительно I равна
<о, а взаимное положение базисов определяется кватернионом А.
Сформулируем следующие задачи:
1°. Ориентация. Выполнение этой задачи заключается в
том, чтобы построить устойчивое управление, задающее КА, т. е.
базису Е, движение (угловую скорость о) таким образом, чтобы
кватернион перехода от I к Е стремился к единичному: А(/)-^ 1.
2°. Разворот (программный разворот). Построить
устойчивое управление, задающее КА (базису Е) угловую скорость
со такую, что кватернион перехода от I к Е будет стремиться к
заданному программному значению (Л(£)->ЛП). В более общем
случае следует положить, что выполняется движение от началь-
ного положения, характеризуемого кватернионом А0, к конечному
терминальному Ат, такое, что АТ°АО = АП.
3°. Измерение переносной угловой скорости.
Построить бортовыми средствами вектор о*, моделирующий ы0
так, чтобы выполнялось -> о0.
168
ГЛ. 7. УПРАВЛЕНИЕ ОРИЕНТАЦИЕЙ
4°. Одноосная ориентация. Построить устойчивое уп-
равление, задающее КА угловую скорость со такую, чтобы орт е
некоторого направления в базисе Е стремился совпасть с ортом i
некоторого направления в базисе Г. е i. В остальном кватер-
нион Л может быть произвольным.
5°. Построение плоскости наведения. Одновре-
менно с одноосной ориентацией добиться того, чтобы орт е' неко-
торого (отличного от е) направления в базисе Е совпадал с век-
тором переносной угловой скорости со0 или хотя бы лежал в плос-
кости i, со0.
6°. Сохранение ориентированного положения
(инерциальная память). Выполнять задачи 1° — 5° в течение не-
которого времени при отсутствии внешней информации об отно-
сительном положении I и Е.
7°. Фильтрация данных измерителей пространственного
углового положения. Выполнять задачи 1° — 5° при наличии по-
мех в информации об относительном положении I и Е.
В ряде задач кватернион Л недоступен для непосредственного
измерения бортовыми средствами либо (в задаче 6°) вообще не-
доступен для измерения. В этом случае общая задача управления
(1° —6°) разбивается на две подзадачи:
8°. Построение приборного базиса. Построить бор-
товыми средствами базис Z*, моделирующий базис I так, чтобы
Z* -> I и соответственно Л* -*• А.
9°. Ориентация КА относительно приборного
базиса. Построить устойчивое управление, обеспечивающее вы-
полнение задач 1° — 5° при замене базиса I на приборный ба-
зис I*.
Задачу 8° можно рассматривать и в более широком смысле,
а именно — как решение задач 1° — 5° для случая построения
приборного базиса. Можно видеть, что во всех этих случаях вы-
полняется либо полное, либо частичное совмещение базисов I и
Z*, такое, как оговорено условиями задач 4°, 5°.
Процесс решения задачи 8° будем называть коррекция при-
борного базиса или просто коррекция, а процесс решения задачи
9° — приведение связанного базиса к приборному или просто при-
ведение. При определенных допущениях эти два процесса можно
рассматривать независимо.
§ 7.2. Управление ориентацией с применением
бесплатформенных инерциальных систем
Рассмотрим задачу управления угловым положением космиче-
ского аппарата для случая, когда последний может быть пред-
ставлен твердым телом [94, 15]. Уравнениями движения тела,
имеющего кинетический момент К и внешний момент М, прило-
женный к нему, в инерциальном базисе I будут следующие урав-
§ 7.2. УПРАВЛЕНИЕ С ПРИМЕНЕНИЕМ БИНС
169
нения, записанные (в векторной форме) в отображениях на этот
базис: Эти же уравнения в проекциях на связанный ба-
зис Е запишутся в виде
Ke 4~ (s)e X Ke = Me, (7.1)
и кинетический момент
Ке ==а /1(01е “Ь JpCOgR “Ь 7з<1)зе
определяется величинами 71, 7г, 7з главных центральных момен-
тов инерции, являющихся постоянными в связанных осях. Урав-
нения (7.1) являются известными уравнениями Эйлера; для опи-
сания вращательного движения твердого тела их следует допол-
нить кинематическими уравнениями
2Л==Ло(0е. (7.2)
Управлением в данной задаче является величина момента МЕ.
Решение задач 1° — 5° при указанных уравнениях движения и
управляющих функциях принадлежащих замкнутому
множеству назовем динамической задачей управления. Этим
задачам соответствует динамическая задача ориентации, разворо-
та, одноосной ориентации и т. п.
При исследовании динамических задач управления вопрос ста-
вится в первую очередь о нахождении класса устойчивых управ-
лений, далее — о нахождении управлений, удовлетворяющих ка-
кому-либо заданному критерию качества, в том числе и оптималь-
ных управлений и т. п. Решение задач 1° — 5° в динамической
постановке выполняется при задании управления МЕ в функции
от углового положения (т. е. компонент Л) и угловой скорости
(компонент (оЕ). Задание углового положения (определение угло-
вого положения) может производиться различными способами
[94] и зависит от типа системы управления и используемых дат-
чиков углового положения. Все множество систем и схем управ-
ления ориентацией [15, 94] будем разделять на схемы так назы-
ваемого прямого управления и двухконтурные схемы управления,
предполагающие для выполнения задач ориентации использова-
ние методов 8° и 9°.
Для пояснения сказанного введем понятие опорного базиса,
под которым будем понимать тот базис I, к которому необходимо
выполнить приведение связанного базиса Е при выполнении той
или иной задачи управления ориентацией. Опорный базис I опре-
деляется в пространстве физическими полями и связан с Землей,
Солнцем, направлением на другой КА и т. п. Благодаря этому
имеется возможность построить датчики первичной информации
170
ГЛ. 7. УПРАВЛЕНИЕ ОРИЕНТАЦИЕЙ
(ДПИ), определяющие угловое положение опорного базиса (по-
ложение относительно опорного базиса), т. е. угловое рассогласо-
вание между связанным и опорным базисами.
В схемах прямого управления предполагается формирование
управляющих функций MiE (Z = 1, 2, 3) непосредственно по уг-
ловым сигналам ДПИ; для устойчивости в управление, естест-
венно, входит и угловая скорость.
Схемы управления такого рода [4, 94] нашли применение в
первых системах управления ориентацией КА благодаря своей
простоте; однако им присущи и существенные недостатки. Эти
схемы теряют работоспособность при перерывах в информации;
в них затруднено решение задач фильтрации помех, идентифика-
ции отказов, выделение ложной информации. В этом смысле си-
стемы такого рода не удовлетворяют ряду требований, предъявля-
емых к современным системам управления.
В двухконтурной схеме инерциальными методами осуществля-
ется построение приборного базиса, и управление строится в
функции углового рассогласования связанного базиса относитель-
но приборного. Задача выполнения управления ориентацией де-
лится тем самым на две задачи: построение приборного базиса
и приведение его к опорному (т. е. решение задачи 8°) и выпол-
нение задачи ориентации, т. е. построение устойчивого управле-
ния MiE, в котором используется информация об угловом положе-
нии связанного базиса относительно приборного (решение за-
дачи 9°).
Мы будем рассматривать системы управления ориентацией
КА, в которых используется бесплатформенная инерциальная
навигационная система, как устройство для построения прибор-
ного базиса. Очевидно, что для рассматриваемой задачи в БИНС
достаточно реализовать интегрирование только кинематических
уравнений при различного рода исходной информации об угловой
скорости. Последняя может быть получена либо от датчиков угло-
вой скорости, либо определенным образом сформирована (вычис-
лена) как скорость коррекции. В бесплатформенной системе мы
будем выделять интегратор [интеграторы) кинематических
уравнений и формирователь угловой скорости коррекции, как
это показано на рис. 25, где в общем виде представлена
блок-схема системы управления ориентацией КА, основанной
на БИНС.
На вход бесплатформенной системы поступает измеренная
абсолютная угловая скопость КА , получаемая от датчиков
угловых скоростей (ДУС); благодаря интегрированию кинемати-
ческих уравнений определяется кватерпион А*, задающий поло-
жение инерциального базиса 7*. Относительно этого базиса может
быть задано положение (движение) того или иного опорного ба-
зиса, которое может быть корректируемым при наличии датчиков
углового положения, измеряющих положение реальной опорной
§ 7.2. УПРАВЛЕНИЕ С ПРИМЕНЕНИЕМ БИНС
171
системы координат. Формирователь угловой скорости коррекции
образует на основе сигналов датчиков углового положения значе-
ния угловой скорости (О*.
Ориентация КА может быть выполнена в любом базисе; при
этом задача контура стабилизации состоит в формировании управ-
ления, т. е. моментов MiE в рассматриваемой динамической задаче
ориентации.
Процесс корректирования базиса будем называть кинемати-
ческой задачей ориентации-, для этой задачи уравнениями движе-
ния будут кинематические уравнения типа (7.2), а функцией
Рис. 25. Блок-схема системы управления ориентацией КА через БИНС
управления — компоненты угловой скорости. Кинематическая за-
дача ориентации играет большую роль во всех задачах ориента-
ции; как будет показано далее, к ней может быть сведена и
динамическая задача управления ориентацией. В частности, при
замене контура стабилизации, формирующего управление MiE,
идеальным звеном достигается совмещение связанного базиса с
приборным, движение же приборного базиса к опорному соответ-
ствует кинематической задаче коррекции.
В этом смысле основные задачи управления ориентацией § 7.1
были сформулированы как поиск управления в виде угловой
скорости Йпотр, реализуемый в формирователе управляющих сиг-
А 4, «л Г»ИЗМ
налов по кватерниону А*, и в виде угловой скорости У# — по
ЛгчИЗМ 4»
Р и угловым скоростям ><£ и (О*.
В динамической задаче ориентации такой подход несколько
условен.
172
ГЛ. 8. ПРИВЕДЕНИЕ БАЗИСА К ПРИБОРНОМУ
ГЛАВА 8
ПРИВЕДЕНИЕ СВЯЗАННОГО БАЗИСА К ПРИБОРНОМУ
§ 8.1. Динамическая задача.
Усгойчивость контура стабилизации
Изучение вращательного движения твердого тела при различ-
ных законах управления представляет предмет задачи управления
ориентацией и стабилизацией в динамической постановке; этой
задаче посвящен ряд работ [4, 94, 68]. Нас в этой задаче будет
интересовать вопрос принципиального доказательства достижи-
мости устойчивого процесса управления и стабилизации и сведе-
ния динамической задачи управления к кинематической.
В качестве некоторого обоснования кинематической постановки
задачи приведения рассмотрим устойчивость контура стабилиза-
ции. Пусть уравнениями движения будут (7.1), (7.2) при дейст-
вующем внешнем моменте, в общем случае равном
Мя M-д упр + Мя воем, ( 8.1)
где М^упр—управляющий момент, задаваемый контуром стаби-
лизации, Mje В03М — возмущающий момент. Рассмотрим следующую
задачу: построить устойчивое управление, при котором выполня-
ется (dE(t) QEk(t), где под S2Bft(f) будем понимать некоторые
требуемые угловые скорости движения, которых следует достичь
при управлении. Пусть Кео — потребный кинетический момент,
т. е.
КеО ==' “р ^2^Е2Л~^~ ^З^ЕЗк) (8*2)
получаемый, когда тело вращается с угловой скоростью &Ек. Пред-
ставим управляющий момент в следующем виде:
Мяупр--Ее(Ке-Кео), (8.3)
где от функции F (управляющей векторной функции) потребуем,
чтобы
Ее (Ке - Кео) • (Ке - Кго) >0 (8.4)
везде, где Ке =/= КЕ0.
Выберем далее положительно определенную функцию U в сле-
дующем виде:
кБ
и= f FE-d(KE - КЕ0), (8.5)
Кео
которая согласно (8.4) положительна везде, где КЕ Ф Кео- Произ-
водная от функции £7, взятая согласно динамическим уравнениям
173
§8.1. УСТОЙЧИВОСТЬ КОНТУРА СТАБИЛИЗАЦИИ
/
движения (7.1),
— Fe • {Me возм 4" Me уПр (&Е X Ке Кео} =
— — Fe + Fe • {Me возм — (дЕ X Ке — Кео}
— Fe + | Fe I (| Мевозм| + | ^еХКе | + | Кео |)« (8-6)
Последнее выражение отрицательно, если
Fje > I Мд возм I + | (оЕ X KjeI + I КеоI • (8.7)
При релейной управляющей функции (8.3) условие (8.7) оп-
ределяет условия устойчивости стабилизации. При этом, естест-
венно, следует потребовать ограниченности функций |(ОяХКЕ| и
|КЕ01. В общем случае процесс стабилизации сходится в некото-
рую область, причем выбором управляющей функции Fe можно
сделать разность |<оя —Йял| достаточно малой.
Условие (8.7) имеет простой физический смысл: располагае-
мый управляющий момент должен превосходить все возмущения
и обеспечивать потребное ускорение (для движения с потребной
угловой скоростью 12еь) . К аналогичному результату можно прий-
ти, если в качестве положительно определенной функции U рас-
сматривать энергию вращательного движения -^Ке-Юе; ее произ-
водная dUldt^^E • МЕ.
При выборе управления в виде
Me упр 2=1 Fe(<Be ^ws) (8.8)
можно получить аналогичные условия устойчивости управления
стабилизацией [15].
Устойчивость контура стабилизации означает, что движение
выполняется таким образом, что (Ое(£) Й^е. Потребную угловую
скорость 14е следует выбирать таким образом, чтобы выполня-
лись заданные конечные условия движения для уравнений (7.2),
т. е. углового положения. Процесс управления можно интерпре-
тировать как динамическое управление движением связанного
базиса Е при приведении его к некоторому приборному базису,
движущемуся с угловой скоростью Одв; такое управление и ха-
рактеризует процесс стабилизации. Движение же приборного
базиса определяется потребной скоростью коррекции <2ае таким
образом, чтобы совместить его с заданным опорным базисом
(процесс приведения).
Таким образом, динамическая задача управления в рассматри-
ваемой двухконтурной схеме управления — контур стабилизации
и контур приведения — может быть сведена к кинематической
задаче приведения.
174
ГЛ. 8. ПРИВЕДЕНИЕ БАЗИСА К ПРИБОРНОМУ
§ 8.2. Основные уравнения кинематической задачи приведения
В данном параграфе рассматривается кинематическая задача
приведения базиса Е к приборному базису /*. Пусть переход от
базиса /* к базису Е определяется кватернионом Л; приборный
базис /* совершает движение с абсолютной угловой скоростью-
ю#, а базис Е имеет абсолютную угловую скорость <оЕ. Кватер-
нион Л удовлетворяет в этом случае следующему кинематическо-
му уравнению:
2Л = Л°((0е — о>к). (8.9)
Если компоненты переносной скорости заданы в базисе /*, то»
соответствующее уравнение имеет вид [15]
2Л = Л ° — <0/ ° А. (8.10)
В кинематической постановке задачи необходимо задать вид
управления
= (л, (О#), (8.11)
обеспечивающего устойчивость процесса управления.
§ 8.3. Приведение к неподвижному базису.
Устойчивость управления
Рассмотрим вначале важный частный случай приведения к
неподвижному базису /*, т. е. случай Тогда управление
(8.11) следует искать в виде (оЕ = <оЕ(Л). Поскольку Л и—Л оп-
ределяют одно и то же относительное положение базисов Е и /*,.
естественно потребовать, чтобы соЕ(Л) == <оЕ(— Л).
Будем искать управление в виде
(oE = -f(X)/0(Xo). (8.12)
Такому виду, в частности, соответствует управление соЕ =
= — кК • sign Хо, широко применяемое на практике. Для анализа
условий устойчивости управления (8.12) введем ^/-функцию
(функцию Ляпунова) вида
£7 = 1-^ = ^ + ^ + ^. (8.13)
Эта функция положительно определена относительно перемен-
ных Xi, Хг, Хз при условии |Л| = 1.
Рассмотрим производную этой функции, взятую в силу урав-
нений движения (8.9):
f=-2V0. (8.14)
Выразим значение этой производной через функцию управления
§ 8.3. ПРИВЕДЕНИЕ К НЕПОДВИЖНОМУ БАЗИСУ
175
<оЕ. С этой целью перейдем в (8.9) к скалярной и векторной пере-
менным для кватерниона Л: Л = Хо + X. Подставляя эти перемен-
ные в кинематическое уравнение и заменяя кватернионное умно-
жение на скалярное и векторное [15], получим
2Хо == —X • 2Х = Хо<Ое “Ь X X (Ое* (8.15)
Подставляя соотношение для скалярной компоненты в выражение
(8.14), имеем
= (8.16)
Для асимптотической устойчивости приведения достаточно
потребовать dUldKft, Таким образом, условие устойчивости при-
ведения к неподвижному базису имеет вид
Х0(Х • (оЕ)< 0. (8.17)
Найдем, какие ограничения эти условия накладывают на функ-
цию управления (8.12). С этой целью подставим управление
(8.12) в неравенство (8.17).
[X • f (Х)]Х0/о(Х0)< 0.
Очевидно, что для выполнения этого неравенства достаточно по-
требовать
Wo(Ao)>0, Uol^l; Vf(l)>0, 1X1^1, (8.18)
везде, кроме точек Ао = 0 и X = 0. В частности, когда векторная
функция управления
f (X) = Л (Xi) ei + h (Х2) е2 + /з (Хз) ез,
имеем
X . f (X) = Л (Xi)Xi + /2(Х2)Х2 + /з(Хз)Хз.
В этом случае для устойчивости управления достаточно потре-
бовать
Хо/о(Хо)>0, Хг/ДХг)>0 (г = 1, 2, 3) (8.19)
везде, кроме точек Хо = 0, Xi = 0, Х2 = 0, Хз = 0. Можно видеть,
что точки, где обращается в нуль производная dUldt, образуют
два множества: Хо = 0 и X = 0; последнее из них является тре-
буемым положением ориентации.
Таким образом, управление (8.12) обеспечивает асимптоти-
чески устойчивое приведение к неподвижному базису при усло-
вии (8.18) или (8.19). Область сходимости охватывает все зна-
чения Л, где Хо 0.
Для расширения области сходимости достаточно потребовать,
чтобы (ов 0 при Хо = 0. В этом случае согласно уравнению
(8.15) Хо = 0 не будет положением равновесия системы, т. е. не
будет содержать целых траекторий движения, и согласно тео-
176
ГЛ. 8. ПРИВЕДЕНИЕ БАЗИСА К ПРИБОРНОМУ
ремам устойчивости [6, 34, 95] процесс будет устойчив в целом,,
хотя производная dUldt и обращается в нуль при Xq = O.
Задача приведения к неподвижному базису может заключать-
ся не только в совмещении базисов Z* и Е, т. е. достижении
Л -> 2, но и в приведении к любому заданному относительно I*
программному базису, т. е. Л->ЛП (задача программного разво-
рота). С этой целью рассмотрим кватернион Л, определяющий
рассогласование базиса Е относительно повернутого положения:
Лр = Лп ° Л. Если кватернион Лп является постоянным, то кине-
матическое уравнение для кватерниона Лр имеет вид 2ЛР ° и
оказывается аналогичным кинематическому уравнению для Аг
т. е. также описывает процесс приведения к неподвижному ба-
зису. Очевидно, что если взять управление в виде, аналогичном
(8.12), т. е.
= —/o(XpO)f (1Р), (8.20)
то при тех же ограничениях на функцию управления можно
получить асимптотическую устойчивость процесса приведения к
повернутому положению: Лр -> 1, т. е. Л -> Лп.
Если же кватернион Лп является переменным, то мы прихо-
дим к другой задаче: приведение к подвижному базису.
§ 8.4. Приведение к подвижному базису.
Устойчивость управления
В общем случае для уравнений движения (8.9) мы будем
по-прежнему рассматривать [7-функцию в виде (8.13), однако
ее производную следует брать в силу уравнений (8.9) при
=# 0. Повторяя выкладки предыдущего параграфа, имеем
^ = X0{l.(<oJ-«>!)}. (8.21)
Правая часть равенства (8.21) получается из правой части (8.16)
заменой на о)#— <0#. Поэтому, повторяя рассуждения пре-
дыдущего параграфа, можно утверждать, что для асимптотиче-
ской устойчивости приведения к подвижному базису в общем
случае достаточно, чтобы управление имело вид
= — fo (\) f
или же
= ю! — / (Л,о) f (X), (8.22)
где функции /о и f должны удовлетворять условиям (8.18) или
(8.19). Этот результат является вполне естественным, так как
именно (&е — ®е является скоростью рассогласования, т. е.
скоростью базиса Е относительно Z*. В частном случае, когда
Z* является орбитальной системой координат, (&е соответствует
§ 8.4. ПРИВЕДЕНИЕ К ПОДВИЖНОМУ БАЗИСУ
177
орбитальной угловой скорости (0°. Величину будем называть
также переносной угловой скоростью; при ее отсутствии в управ-
лении (8.22) положение X = 0 уже не будет положением равно-
весия системы.
Заметим, что если переносная скорость задана в базисе Z*.
как это часто бывает на практике, то = Л ° (Oj ° Л, и управ-
ление (8.22) примет вид
(оЕ = А о «о* о Д - /0 (Хо) f (X). (8.23)
Рассмотрим далее задачу приведения связанного базиса Е к
заданному относительно /* программному базису /п, определяе-
мому кватернионом Лп. Пусть в общем случае кватернион Лп
будет переменным; при этом кинематическим уравнением для
него будет
2ЛП = Й*» Лп = Ап о Йп, (8.24>
где Q* и 12п — отображения вектора 12 относительной угловой
скорости базисов Zn и Z* на базисы Z* и 1а соответственно.
Рассмотрим кватернион рассогласования базисов Е и /п:
Лр = Лп ° Л и найдем его кинематическое уравнение. Дифферен-
цируя формально Лр и используя кинематические уравнения для
составляющих кватернионов (8.9) и (8.24), получим
2ЛР = — 2ЛПЛП ° Лп ° A -j- 2ЛП ° А = — 12п ° Ар Лр (<оЕ — —
= Л®(®е-®е-Йе), (8.25)
где проекция программной угловой скорости на базис Е
12jj = Лр ° 12п ° Лр
определяется в соответствии с правилами перепроектирования
векторов [15]. Поскольку уравнение движения (8.25) аналогич-
но уравнению (8.9), то можно видеть, что устойчивое управле-
ние для приведения к программному базису Zn должно строить-
ся аналогично управлению (8.22), т. е. может быть получено в
виде
О)Е - О)Е + ЙЕ - /0 (Лр0) f (1р) (8.26}
— функции от кватерниона рассогласования и переносных угло-
вых скоростей ю* и 12. Переносные скорости могут быть заданы
в других базисах; скажем, о* может быть определена в опорном
базисе Z*, т. е. в виде а 12 — в программном базисе Zn, т. е.
в виде 12п. В этом случае, используя равенства перепроектирова-
ния векторов, получим управление (8.26) в виде
= Ар ° Ап ° о)/ о Ап ° Ар Ар ° £2д ° Ар — f0 (А,ро) f (Хр). (8.27)
12 В. Н. Бранец, И. П. Шмыглевский
л178
ГЛ. 8. ПРИВЕДЕНИЕ БАЗИСА К ПРИБОРНОМУ
Очевидно, что управление (8.26) можно представить и при
любых других заданных функциях переносных угловых скорос-
тей. С другой стороны, рассмотренные законы управления (8.26),
(8.27) есть естественное расширение закона (8.22) приведения
к подвижному базису.
§ 8.5. Приведение к подвижному базису со смещением о*
В тех случаях, когда переносная скорость со* задана не в
связанном базисе, а в исходном, устойчивое приведение обеспе-
чивается при законе управления (8.23), в котором явно пред-
ставлена соответствующая проекция Этот закон управления
является достаточно сложным, равно как и его «расширения»
(8.26) и (8.27). Естественно попытаться упростить вид смеще-
ния, входящего в (8.22), или совсем исключить его. Устойчи-
вость управлений, которые можно получить, при этом, рассмат-
риваются в данном и следующих параграфах.
При рассмотрении управления типа (8.23) заметим прежде
всего, что в конце процесса приведения имеем Л« 1, и, следо-
вательно,
(дЕ= А о(0* оД^ (О*.
Это обстоятельство дает повод рассматривать следующий вид
управления:
о>е = ^-/0(\Н(Ч (8.28)
в котором прямо используется смещение в проекциях на исход-
ный, а не связанный базис. Исследуем устойчивость такого
управления.
Подставим управление (8.28) в соотношение (8.21); имеем
f = [«)*_(,)* _/0(A0)f(l)]}.
Рассмотрим следующее скалярное произведение, входящее в по-
лученное равенство:
Легко видеть, что
Л о (О* о 2Х0((й*хХ) 2Х(ХоЮ*).
Используя это соотношение, получаем после очевидных преобра-
зований
Z• [ А ° (о/ ° А] = X• (О/, X • (о)/ — ~ О»
Последнее равенство есть отражение того факта, что кватер-
нион А выполняет преобразование вращения вокруг осп X; при
§ 8.6. ПРИВЕДЕНИЕ К БАЗИСУ БЕЗ СМЕЩЕНИЯ
179
этом, естественно, проекции-отображения на ось конечного пово-
рота любого вектора равны, т. е. = Ха)/.
С учетом полученного соотношения имеем
т. е. производная функция Ляпунова для управления (8.28)г
взятая по уравнениям движения, совпадает с аналогичной про-
изводной для управления (8.22). Для устойчивости управления
в целом достаточно условий (8.18) или (8.19).
Таким образом, замена <дЕ на О/ в задаче приведения к под-
вижному базису не сужает области устойчивости приведения и
не накладывает дополнительных условий на вид функций /о(Хо}
и f(X).
§ 8.6. Приведение к подвижному базису без смещения.
Расширение класса управлений
Рассмотрим возможность приведения к подвижному базису
вообще без смещения, используя, скажем, управление типа (8.12).
Производная от {/-функции (8.13) будет в этом случае опреде-
ляться (8.21), т. е. такого управления имеем
g = - (8.29).
Знакопеременность члена 1 • показывает, что в общем случае
асимптотическая устойчивость не достигается.
Рассмотрим релейное управление следующего типа:
/о (Ч) = sign Ч»
з (8.30)
f (1) = У; k^i sign ki, ki > 0.
1=1
dU
dt
Подставляя управление (8.30) в соотношение (8.29), имеем
Так как XosignXo = IXol и sign X, = |Х<1, то значение произ-
водной
з
1=1
(8.31}
Оценим первый член выражения (8.31) следующим образом:
1ч
12*
180
ГЛ. 8. ПРИВЕДЕНИЕ БАЗИСА К ПРИБОРНОМУ
С другой стороны,
3 3
-1412 4|4|<-*1412 |4|<*141Ч
1=1 i=l
где к — наименьшее из чисел кс к = min ki (Z = l, 2, 3). Подстав-
ляя полученные оценки в равенство (8.31), имеем
f <®*|%0||Х|-А|%0||Х|.
Для асимптотической устойчивости достаточно потребовать к > со*
или, что то же,
/сг>со* (/ = 1,2,3). (8.32)
Таким образом, релейное управление типа (8.30) без смеще-
ния обеспечивает устойчивое приведение к подвижному базису
при условии (8.32). Физи-
чески это условие означа-
ет, что скорость коррек-
ции управления должна
превосходить скорость сме-
щения.
Класс управлений, осу-
ществляющих устойчивое
приведение, можно сущес-
твенно расширить по сра-
внению с (8.30). Заметим,
что при доказательстве
устойчивости нигде не
использовалось предполо-
жение, что = const
и = const (Z = l, 2, 3).
Поэтому управление типа
(8.30) останется устойчивым для произвольных функций (Be (t)
и &г = &г(А, £), если только предположить выполнимость усло-
вия (8.32). Это условие можно записать в виде
ki (A, t) > max | а)*Е (01
(8.33)
для всех значений А и что расширяет класс управлений.
В частности, условию (8.33) удовлетворяет функция, показан-
ная на рис. 26.
Дальнейшее расширение класса управлений приведет к то-
му, что точка 1 = 0 уже не будет асимптотически устойчивым
положением равновесия. Пусть условие (8.33) выполняется
везде, кроме некоторой области, окружающей точку 1 = 0:
Ач(А,0>тах|соя(0|, | % | 8. (8.34)
§ 8.7. ИУ: ПРИВЕДЕНИЕ К НЕПОДВИЖНОМУ БАЗИСУ
181
"Очевидно, что производная dUjdt будет отрицательна везде, кро-
ме области 111 <8. Этой области соответствует область U С Umin;
все фазовые траектории входят в область C7mln и остаются в ней.
При соответствующем выборе функпий /сг(Л, t) величины 8 и
77min могут быть сде-
ланы сколь угодно ма-
лыми.
Таким образом, уп-
равление, удовлетво-
ряющее условию (8.34),
осуществляет приведе-
ние в некоторую доста-
точно малую окрест-
ность точки 1 = 0, т. е.
практически устойчиво
по Ла-Саллю и Левше-
цу [95, 69]. Условию
(8.34), в частности,
удовлетворяет функция,
показанная на рис. 27.
Рис. 27. Функция /i (Xi) общего вида
Задача построения управления без смещения для реализации
приведения к подвижному базису имеет смысл, когда сама ве-
личина смещения заранее неизвестна; более того, задача может
быть поставлена и таким образом: необходимо выполнить не
только приведение базисов, но и определение переносной угловой
«скорости. Первая задача рассмотрена в данном параграфе, ре-
шение второй задачи требует построения интегрального
управления.
§ 8.7. Интегральное управление.
Приведение к неподвижному базису
Для уменьшения установившейся ошибки приведения и для
возможности построения оценки переносной угловой скорости в
задачах приведения естественно использовать интегральное
управление. Однако при этом устойчивость управления может
ухудшиться, и это обстоятельство требует исследования.
Рассмотрим интегральное управление, введенное в управле-
ние (8.12):
= -/о (lo) f (1) — р, р = <ро (1о) ф (1). (8.35)
Будем предполагать что функции <ро(1о) и ф(1), входящие в
(8.35), удовлетворяют тем же условиям, что и /о(1о) и £(1),
т. е. условиям (8.18).
Ввиду сложности задачи начнем анализ с простейшего слу-
чая приведения к неподвижному базису (&е = 0. Подставляя
значение уравнения из (8.35) в векторное кинематическое
182
ГЛ. 8. ПРИВЕДЕНИЕ БАЗИСА К ПРИБОРНОМУ
уравнение (8.15) для переменной X
2Х = - Хо/ (Хо)f (X) - Хом - /о (Хо) {X X f (X)} - X X р,
. (8.36)
р — Фо(Хо)ф(Х),
получим уравнения движения системы. Для построения [/-функ-
ции воспользуемся методом Барбашина [6]. Положим в (8.36)
f (X) = 0. При этом следует ожидать, что система окажется на
грани устойчивости. Первый интеграл такой системы, если его
удастся получить, можно принять за [/-функцию. Имеем
2Х = —Хор, р = фо(Хо)ф(Х). (8.37)
Умножая скалярно первое из уравнений (8.37) на
(фо(Хо)ф(Х)/Хо)^£, второе — на pd£ и складывая результаты по-
членно, получим
2 <р (1). dl + ц • dfi = 0.
%
Проинтегрируем полученное выражение, в результате чего полу-
чим первый интеграл:
к
2 = с-
Выражение в левой части данного интеграла для принятых
предположений относительно функций управления является по-
ложительно определенной функцией. Примем его за [/-функцию
для уравнений (8.36):
л
£7 = 2j-^-)<p(l).dl + 4|ji|2.
Производная от этой функции по времени
dU оФ0(Ч) мч i ,
dt^ 2-V + Р
Значение этой производной в силу уравнений движения (8.36)
найдется в виде
и - }
X { Ч /о (Ч) (Ч Чм /о (Ч) X f (Ч — X X (*} -[-
+ Фо (Ч) ф (Ч • м = — Фо (Ч) /о (Ч) ф (Ч • * (Ч —
_ МЧШЧ) [ф f (Х)] _ МЧ) [ф (Х)> х> иЬ
S ло
(8.38)
§ 8.7. ИУ: ПРИВЕДЕНИЕ К НЕПОДВИЖНОМУ БАЗИСУ
183
^содержащем смешанные произведения <р(Х), X на f(X) и g. Если
потребовать, чтобы вектор управления <р(Х) был параллелен X,
то смешанные произведения исчезают, и
? = - Фо Оо) /о (М Ф W • f (М < 0 (8.39)
— производная оказывается знакоопределенной функцией. Тем
самым устойчивость интегрального управления (8.35) по Ляпу-
нову доказана.
Для доказательства асимптотической устойчивости рассмот-
рим множество dUldt = Q. Оно состоит из двух подмножеств Х =
= О и Хо = 0. Первое подмножество X - 0 содержит только одно
положение требуемой ориентации (совпадение базисов) и оно
удовлетворяет уравнениям движения (8.36) тождественно при
да = 0. Второе подмножество Хо = О исчезает, если потребовать
/о(О)Фо(О)>О. (8.40)
Отсюда следует, что управление (8.35) при заданных управле-
ниях типа (8.18) и (8.40) обеспечивает асимптотическую устой-
чивость корректирования процесса приведения.
Полученные результаты можно расширить на случай, когда
в управление вводится нелинейная функция интеграла:
(*>Е = - /o(Xo)f (X)-ф(|1), (8.41)
где на функцию интегрального управления наложим условие
ф(|х)-И>0, g^=0. (8.42)
Повторяя рассуждения, приведенные выше для случая линейной
интегральной коррекции, придем к выводу, что [7-функцию сле-
дует брать в виде
х ц
U = 2 f М^-ф(Х).Л+ fф(>*)• dp.
о 0 о
При сделанных предположениях относительно функций
ления [7-функция (8.43) положительно определена. Ее
водная
= 2 ф (1) • i Ф (ц). ц = - /0 (Хо) Фо (%0) f (1). Ф (%) -
(8.43)
управ-
произ-
\э
[(р (X), %, f (X)] - [<р (1), 1, -ф]
^0
при том же условии параллельности ср (X) и X, что и выше, при-
нимает вид (8.39).
Таким образом, все результаты, полученные для линейной
интегральной коррекции, распространяются на полипент ее ин-
тегральное управление вида (8.41).
184
ГЛ. 8. ПРИВЕДЕНИЕ БАЗИСА К ПРИБОРНОМУ
§ 8.8. Интегральное управление.
Приведение к подвижному базису
при постоянном смещении о>£, (*)/
Применим теперь интегральное управление (8.35) к процес-
су приведения к подвижному базису. Уравнениями движения
этого процесса являются (8.9) или (8.10); выделим управление
для векторной части кватерниона и для его скалярной состав-
ляющей. Для уравнения (8.9) имеем
2Х0 — — X* (<о^ — (&е)? 2Х — Хо (g>e — (&е) -|- X х (о>е — (&е )• (8.44)
Для уравнения (8.10)
2Хр = — X*(gje — 2Х == Хо -|- Xx— <0j). (8.45)
Подставим интегральное управление (8.35) в уравнения дви-
жения (8.44); для векторной части имеем
21 = - %о/о (%0) f (1) - \ ( ц + «£) - /0 (10) [1 х f (1)] -1 х ( ц + <4)-
(8.46)
Возьмем [/-функцию в виде
U = 2
f фр(Ч)
о х0
ф (X) • dX 4" "g" | Ц 4" |2»
(8.47)
Ее производная, взятая в силу уравнений (8.46) с учетом ана-
логичного требования, чтобы <р(Х) была параллельна X, будет
57 = °~ф(^)'^ + (l* + + ©к) =
ak Лр \ /
= - Фо (М /о (Ч) Ф (М • f (*) + (М + , (8.48)
При постоянном смещении = const последний член в (8.48)
исчезает, и производная dUjdt совпадает с аналогичной произ-
водной (8.39) для рассматриваемого случая приведения к не-
подвижному базису.
Тем самым доказывается асимптотическая устойчивость ин-
тегрального управления при приведении к подвижному базису
в случае обычных сделанных выше предположений <р(Х)ХХ = О,
условия (8.40) и заданных функций управления (8.12) и (8.35).
Можно видеть, что положение равновесия (совпадение базисов)
Х = 0 удовлетворяет уравнениям движения (8.46) при jx—хоЕ,
т. е. одновременно в процессе интегральной коррекции получа-
ется оценка и переносной скорости.
Аналогичным образом доказывается устойчивость в более
*
важном для практики случае задания смещения в виде о>/.
§ 8.8. ИУ: ПРИВЕДЕНИЕ К ПОДВИЖНОМУ БАЗИСУ
185
Уравнение движения, описывающее поведение системы, получа-
ется подстановкой управления (8.35) в уравнение (8.45):
.21 = - Wo (W f (1) -10 (1* + ®*) - /о (W [Ь X f (1)] +1X (®*- м).
(8.49)
Повторяя аналогичным образом выкладки, получим
X
и = 2 [ ’’blф(X).dk + 41 р + I2, (8.50)
J ко 2
=-Фо(Х»)/о(Мф(Ч-ПЧ + (|* + ®*)-^ (8.51)
— при тех же предположениях относительно функций управле-
ния. При o)j — const производная (8.51) совпадает с (8.48)
и (8.39); тем самым асимптотическая устойчивость и для этого
случая доказана.
Проделанный анализ может быть обобщен на нелинейное
интегральное управление типа (8.41). В самом деле, подставляя,
например, (8.41) в уравнения движения (8.44), имеем
21 = - 10/0 (10) f (1) - /0 (10) 1 х f (1) - %0 [t (Н) + «Я -
— lx[ip(ju.) + (Од]. (8.52)
Пусть функция ф(н) такова, что для каждого |g>e|<Q су-
ществует единственное ц*, для которого
ф(^*) + <4 -0. (8.53)
Возьмем {/-функцию в следующем виде:
х
С<Ро(Ч)
J Ч
U = 2
ц,
ф(1)-Л4~У [ф(ц) + оЦ-dfi.
ц*
(8.54)
Эта функция будет положительно определенной, если потребо-
вать дополнительно
[ф (м) 4-<»s]’(р — М-*) > о, I (Ое I < Q. (8.55)
Производная от этой функции, взятая согласно уравнениям
(8.52) и (8.35), совпадает с (8.39).
Таким образом, управление (8.41) обеспечивает устойчивое
приведение при (&е = const, если потребовать дополнительно к
обычным условиям выполнение условий (8.53) и (8.55).
Совершенно аналогично в тех же предположениях доказы-
,, * .
вается устойчивость для случая смещения в виде = const.
186
ГЛ. 8. ПРИВЕДЕНИЕ БАЗИСА К ПРИБОРНОМУ
§ 8.9. Интегральное управление. Приведение
при переменных и релейных функциях f и ф
Рассмотрим аналогичную предыдущему параграфу задачу иц-
*
тегральной коррекции при переменных скоростях смещения
или (О/. Для первого случая введем переменную v = у + ыЕ,
имеющую смысл отличия интегральной оценки от скорости сме-
щения. G учетом этой переменной уравнения движения (8.44)
при интегральном управлении (8.35) примут для векторной
части кватерниона вид
2i = -%o/o(Xo)f(X)-/o(Xo)Xxf(X)-Xov-Xxv,
(о. 5b)’
V = Фо(Мф(^) + ®я-
Обозначим производные от смещения (ускорения) следую-
щим образом:
* * ddij
= “5Р £jr = ~dt
и будем полагать их произвольными ограниченными функциями
времени: | гЕ | < | е* | < е. Аналогичным образом, полагая
v = у + 1 уравнение движения (8.45) при интегральном
управлении (8.35) можно привести к виду
2Х ==-X0/o(X0)f (X) - /о (Х0)Х X f (X) - Xov - X X v + 2(X X <о,),
v = To(Xo)T(X) + e*. (8.57)*
Для исследования устойчивости управления рассмотрим:
£7-функцию
U = 2 f^4^<p(l).dX+ 1|V|2. (8.58>
о 4 2
Можно видеть, что эта функция есть (8.47) или же (8.50) и
отличается от них только обозначениями. В предположения
обычных условий на управление (вектор ф(Х) параллелен X),
имеем для обоих видов смещения (со# и (о*):
^ = - Фо (*о) /о (Ч) Ф W-f W + V-8* (8.59>
где е* = гЕ для уравнений (8.56) и е* = е* для уравне-
ний (8.57).
Для анализа устойчивости мы будем считать, что е*(£) ме-
няется во времени наихудшим образом, т. е. так, чтобы макси-
мально препятствовать устойчивости системы. Очевидно, что»
§ 8.10. ОБЩИЙ СЛУЧАЙ ИУ
187
последнее имеет место, когда член v • 8* положителен и имеет
максимальное значение; для этого следует выбрать векторы е*
и v параллельными. В этом случае можно видеть, что
= - Фо (Ч) /о (Ч) <Р W • f (М + e*v.
Пусть функции фо, ф, /о, f носят релейный характер и
удовлетворяют условиям
фо (Хо) /о (Хо) ф (X) • f (X) > С, ф (X) X X = 0 (8.60)
при X 0. Очевидно, что при этом приведение асимптотически
устойчиво в области достаточных условий |v| < С/е.
§ 8.10. Общий случай интегрального управления
при переменных ыЕ, сщ
Если функции /о, f, Фо, ф не удовлетворяют условиям (8.60),
мы, вообще говоря, не можем ожидать асимптотической устой-
чивости по Ляпунову. Можно, однако, полагать, что при доста-
точно малом е процесс будет сходиться к некоторой области, ох-
ватывающей начало координат; при определенных условиях
можно ожидать, что эта область будет малой [6, 38, 95]. По-
скольку С7-функция (8.58) в данном случае непригодна, мы
.займемся построением CZ-функции более общего вида.
Пусть функция Ляпунова
С7=С7(Х, v). (8.61)
Для ее производной имеем в силу уравнений (8.56)
.dU dU 2 dU * dU [ 1 1 4Г /I \ f /1 \ 1-1
Tdt ~ дк'^ dv'V “ dl' [ 2"Мо(ЧН(М~ 2
----1- /о (К) [х X f (1)-1 X v]} + • {Фо (Ч) <Р (Ц + 8*}.
По аналогии с предыдущим параграфом выберем 8* «наихуд-
шим образом», т. е. потребуем 8* • dUldv = &*\dUJdy\ (в этом
случае вектор 8* «параллелен» dU/dv). Тогда
~dt------2"^о/о T?l'()5r‘V 2
1 \dU а 1 , /а ч dU /л \ . * \dU I /Q
- Т k’ “' V| + Фо (Хо) dV • Ф + 6 I дТ |- (8-62)
Будем искать С7-функцию в виде:
К 2
и - 2 f А (X) X • dX + 2Bv • X sign Хо + С (8.63)
188
ГЛ. 8. ПРИВЕДЕНИЕ БАЗИСА К ПРИБОРНОМУ
где А (X) > 0 — пока неизвестная скалярная функция X, В > CL
С > 0 — коэффициенты. Имеем
2АК + 2Bv sign Хо, = 25Х sign Хо + Cv. (8.64>
Подставим соотношения (8.64) в равенство (8.62). Легко видеть,,
что второе смешанное произведение исчезает, а если положить
f(X) параллельным X, то исчезает и первое. Для случая совпа-
дения f(X) и <р(Х) по направлению с X можно, не уменьшая
общности, положить
/о (Хо) f (X) = F (X) X sign Хо, фо (Хо) <р (X) = Ф (X) X sign Хо,
(8.65)
где F > О, Ф > 0 — скалярные функции X. С учетом (8.65) имеем
= - -1- К sign \F (X) X- [2А (X) X + 2Bv sign Xo] -
---Xov • [2A (X) X + 2Bv sign Xo] +
+ sign Х0Ф (X) X • [27?X sign Xo 4- Cv] + 8* | 2SX sign Xo + Cv |...
Представим полученное значение производной в таком виде:.
= -{|Х0|С(Х)Л(Х)-2£Ф(Х)}Х2-
— {B\F (X) 4- Х0Л (X) — СФ (X) sign Хо} X • v —
— В | Хо | v2 4- 8* | 2В'к sign Хо 4- Cv |. (8.66>
Можно проверить, что при управлении (8.65) к такому же виду
производной от [7-функции мы приходим и для уравнений (8.51);
поэтому все дальнейшие рассуждения равно относятся к обоим
видам смещений и <Oj.
Выберем А (X) так, чтобы член с X • v обратился в нуль.
Имеем
ХоЛ (X) 4- BhoF (X) — СФ (X) sign Хо = О
или же
A=C~-BF. (8.67>
I \ I
Заметим, что (8.67) накладывает определенное ограничение на
коэффициенты В и С. Смысл этого ограничения будет рассмот-
рен далее. Пока же, подставляя (8.67) в соотношение (8.66) у
получаем
= - {СРФ-В [2Ф + I Хо|F2]}X2 - 5|Х0|v2+8* 125Х sign X0+Cv|.
Потребуем далее, чтобы в полученном выражении коэффи-
циент при X2 был отрицательным. Тогда
С^Ф>В[2Ф4- IXol^2]. (8.68)
§ 8.10. ОБЩИЙ СЛУЧАЙ ИУ
189
С другой стороны, выбирая все эти ограничения, мы должны
позаботиться, чтобы [7-функция (8.63) была определенно-поло-
жительной. Потребуем для этого, чтобы [7-функция при всех
X и v удовлетворяла условию
[7^[7Ь (8.69 >
и выберем U\ как заведомо положительно определенную функ-
цию вида
Ur = 2 V + 2В sign %ov-1 + С^-. (8.70>
С
Для выполнения неравенства для [7-функции (8.69) нужно,,
чтобы было справедливо неравенство
%
R* 2
Л(Х)Х.6&>=~12,
о
которое может быть приведено к виду
%
l-dl >0. (8.71)
о
Поскольку полученное неравенство» (8.71) должно выполняться
при всех X, то следует потребовать А (1) > 2В2!С, или с учетом*
(8.67)
C-^--BFZ^. (8.72>
Коэффициенты В и С должны быть выбраны так, чтобы при
всех X одновременно выполнялись неравенства (8.18) и (8.72)..
Возможность такого выбора, вообще говоря, может потребовать
некоторых ограничений на вид функций Ф и F: это следует
учесть при дальнейшем анализе. Пока же преобразуем выраже-
ние для производной [7-функции: заменим в нем модуль суммы
при е на сумму модулей:
- {С/’Ф - В [2Ф + I Ao IР2]} I2 - ВI Ао1V2 + 2Ве 111 + Сг | v |.
Не уменьшая общности, можно положить 2?=1; введем, кроме
того, переменные х=|Х| и у = Ivl. Имеем
^<-{С7?Ф-2ФНЧЮ*2-1 W + 2e*+ Сег/. (8.73)
йъ
Вернемся теперь к анализу условий (8.68) и (8.72); с уче-
том того, что В = 1, имеем неравенства
2Ф + |10|/2 с Ф
С> РФ ’ С
1
С ’
(8.74)
490
ГЛ. 8. ПРИВЕДЕНИЕ БАЗИСА К ПРИБОРНОМУ
Очевидно, выбором С всегда можно добиться выполнения этих
неравенств. Таким образом, никаких дополнительных ограниче-
ний на вид функции Ф и F накладывать не потребовалось.
Продолжим анализ условий отрицательности производной
/7-функции (8.73). Пусть
¥ (гг) min {CW — 2Ф — | Ло ] F2}.
В силу (8.68) имеем ¥(^)>0. Тогда
-ду'С — ¥ (х) х2 — У i — х2 у2 7- 2е-г -j- С&у.
Данное выражение имеет смысл рассматривать в полуполосе
у 0, 0 х < 1. Рассмотрим структуру кривых
¥ (х)х2 + У1 + х2у2 — 2ех — С&у = 0.
(8.75)
Прежде всего любая такая кривая проходит через начало коор-
динат. Далее, разрешая (8.75) относительно у, имеем
У1,2 —
1
У i — х2
± \2 — х /1 — ж2 [х'Г (ж) — 2е] I (8.76)
В интересующей нас полуполосе могут оказаться не более двух
значений у = у(я, в); при этом таких значений заведомо нет в
той части полуполосы, где
(^-)2 — ж /1 — [жТ (ж) — 2е] < 0. (8.77)
Иначе говоря, ветви кривых (8.75) расположены в тех частях
рассматриваемой области, где не выполняется приведенное выше
неравенство. Последнее же можно интерпретировать как условие
для параметра 8 > 0; можно видеть, что это неравенство экви-
валентно неравенству 0 < 8 <8кр, где 8кр — положительный ко-
рень соответствующего квадратно-
го уравнения по 8, получаемого
из (8.77), т. е.
еКр = кх У1 — х2 х
При достаточно малом 8 > 0
имеются две изолированные об-
ласти, в которых располагаются ветви кривой (8.75) (рис. 28):
х яд, х > x<i. Поскольку ордината кривой (8.75) задается яв-
ным выражением (8.76), при всех обстоятельствах для первой
области имеем
уСшаху1 = У1, (8.78)
§9.1. ДАТЧИКИ УГЛОВОГО ПОЛОЖЕНИЯ
191’
Соответственно во второй области
у2 = У2,
(8.79)
Х2 X 1.
Можно видеть, что при 8<тах8кр неравенство dUldt<&
заведомо удовлетворяется всюду, кроме областей, ограничиваемых
ветвями кривой (8.75). Первая из этих областей прилегает к на-
чалу координат и лежит
целиком в прямоугольнике
(8.78). Вторая область
удалена от начала коор-
динат, примыкает к гра-
нице полуполосы и лежит
в прямоугольнике (8.79).
Легко видеть, что при е ->
-> 0 первая область стяги-
вается к началу коорди-
нат, вторая—«прижимает-
ся» к прямой х=1
(рис. 29).
Полученные результа-
ты позволяют утверждать,
что при достаточно ма-
лом 8 > 0 процесс приве-
дения будет сходиться в
Рис. 29. Области выполнения условия ус-
тойчивости
некоторую малую окрест-
ность начала координат, содержащую первую область. При этом
начальные условия также должны удовлетворять определен-
ным ограничениям, исключающим попадание во вторую
область.
ГЛАВА 9
КОРРЕКЦИЯ ПРИБОРНОГО БАЗИСА
ПО СИГНАЛАМ ДАТЧИКОВ УГЛОВОГО ПОЛОЖЕНИЯ
§9.1. Геометрические характеристики датчиков
углового положения
9.1.1. Общие положения. В предыдущей главе было показа-
но, каким образом можно решить кинематическую задачу при-
ведения при достаточно общих предположениях о функции
управления. При этом предполагалось, что имеется информация
о взаимном положении базисов (известен кватернион рассогла-
сования). В ряде задач, таких как, йапример, задача коррекции
приведения приборного базиса к опорному, в прямом виде такая
информация отсутствует; при этом предполагается использова-
ние датчиков углового положения, т. е. датчиков внешней ин-
492
ГЛ. 9. КОРРЕКЦИЯ ПРИБОРНОГО БАЗИСА
формации. Датчики такого рода дают в том или ином виде ин-
формацию о взаимном положении базисов, и с их использова-
нием также можно построить устойчивое управление. Однако
прежде всего необходимо дать упрощенное математическое
описание этих датчиков, т. е. описание их математической
модели.
Пусть орт i определяет в базисе I направление на внешний
ориентир (Солнце, звезду, центр Земли, другой космический
аппарат и т. п.). Свяжем с датчиком некоторый трехгранниг
pi, р2, рз и постулируем следующие свойства идеального датчика'.
1°. Датчик получает информацию о положении ориентира,
когда последний находится в • пределах одной или нескольких
Рис. 30. Собственный базис
датчика
диаграмм направленности или поля
зрения. Эта информация имеет харак-
тер некоторого входного сигнала, яв-
ляющегося функцией относительного
положения ориентира i в базисе датчи-
ка Р1, р2, Рз (рис. 30).
2Q. На выходе датчика формируются
2 сигнала углового отклонения и\ и и2,
кроме того, вообще говоря, может фор-
мироваться сигнал наличия ориентира
в пределах диаграмм направленности
ин и сигнал поиска ип при его отсутствии.
3°. В согласованном положении направление на ориентир сов-
падает с равносигнальным (рз = i), и оба сигнала углового откло-
нения обращаются в нуль: щ = и2 = 0.
4°. При повороте из согласованного положения вокруг оси
чувствительности в пределах диаграммы направленности возни-
кает соответствующий сигнал углового отклонения, характеризуе-
мый величиной и и знаком (направления поворота); при этом
другой сигнал углового отклонения равен нулю. Без уменьшения
общности в качестве таких осей чувствительности будем считать
орты pi и р2 и соответствуюшие им сигналы и2.
Пусть относительное положение орта i и трехгранника pi, рг.
рз задано направляющими косинусами: I = i • pi, тп = i • р2, п =
= i • Рз. Свойства 3°, 4° можно сформулировать тогда в виде сле-
дующих условий (в пределах диаграммы направленности):
zziZ>0, Z#=0; щ=0, Z = 0; пгтпХ), тп^О; и2 == 0, тп = 0.
(9.1)
Можно полагать, что в идеальном датчике выходные сигналы
являются детерминированными функциями Z, тп, п (углового по-
ложения), удовлетворяющими условиям (9.1), т. е.
^i=Ui(Z, тп, п), и2 = и2{1, тп, п), (9 9)
ип = ия(1, ТП, ri), Uu — Uu(l, тп, п).
§ 9.1. ДАТЧИКИ УГЛОВОГО ПОЛОЖЕНИЯ
«3
Характеристики реального датчика могут отличаться от но-
минальных (9.2), в частности, иметь сдвиг нуля (нарушение ус-
ловия 3°), связь каналов (нарушение условия 4°). Кроме того,
они могут быть уже не детерминированными, а случайными
функциями времени и реализации, содержать случайные состав-
ляющие (шумы) и т. п. Наконец, реальный датчик обладает
инерционностью, которую
можно учесть некоторой
моделью (фильтром),
в том числе и нели-
нейным.
9.1.2. Примеры датчи-
ков углового положения и
их моделей.
1°. Д атчики с р а з-
ложением сигнала
накомпоненты.К это-
му классу датчиков отно-
сится большинство датчи-
ков с механическим скани-
Рис. 31. Блок-схема сканирующего дат-
чика
рованием, в том числе сол-
нечные, звездные датчики,
датчики ориентации на
Землю, регистрирующие
инфракрасное излучение
Земли, а также радиоло-
кационные и тепловые ко-
ординаторы цели [4, 94].
Для такого типа датчиков
можно построить следую-
щее эквивалентное описа-
ние: единственная диа-
грамма направленности,
причем принимаемый дат-
чиком внешний сигнал р
имеет максимум на равно-
сигнальном направлении
= max при п = 1. Сигнал
s раскладывается на ком-
поненты с помощью фазо-
------ Локатор
—К—#—Оптический датчик ориентира
с малым угловым размером
—*—е— Инфракрасный построитель вертикали
(ориентир с большим угловым размером)
Рис. 32. Функция s(n) для разных типов
датчиков
вых детекторов, в результате чего формируются выходные
сигналы углового отклонения (рис. 31).
В общем случае входной сигнал $ есть функция положения
ориентира, т. е. $(7, т, п); однако если диаграмма направлен-
ности осесимметрична, можно считать s = s(n). Типичный вид
функции s(n) приведен на рис. 32. Путем разложения сигнала
на компоненты (превращения его в выходной сигнал) можно
13 В. Н. Бранец, И. П. Шмыглевский
194
ГЛ. t. КОРРЕКЦИЯ ПРИБОРНОГО БАЗИСА
получить выходные сигналы в виде следующих функций: ;
U\e= U\ (si • pi)= щ ($Z) ч (9 2^
U2==U^(si *P2)= U2(sm).
При этом если существуют сигналы наличия цели и поиска, то
^h = ^h(s), ^n==:wn(s). (9.4)
Типичный вид функций (9.3), (9.4) приведен на рис. 33.
2°. Датчики с частными диаграммами направ-
ленности, развернутыми по осям чувствитель-
ности. К этому классу датчиков относится большая часть дат-
чиков со сравнением сигналов, получаемых от разных диаграмм
РИС. 33. ФуНКЦИИ Ui(Si), ua(s)
направленности; в том числе ионный датчик направления набе-
гающего потока, некоторые моноимпульсные локаторы и т. п.
Для датчика такого типа характерно наличие нескольких (ска-
жем, четырех) перекрывающихся диаграмм направленности,
расположенных симметрично относительно равносильного на-
правления. В этом случае сигналы углового отклонения форми-
руются из разностей соответствующих сигналов, а сигналы
поиска и наличия — в функции всех четырех сигналов.
Ограничимся для простоты случаем, когда все четыре диаграм-
мы направленности одинаковы и осесимметричны, причем их оси
суть орты di, d2, ds, d4. Имеем s(h) = s(nk), nh = dfe • i, к = 1, 2, 3, 4.
По условию положение ортов dA можем представить в базисе дат-
чика таким образом:
di = flipi + Ь1Рз, ds == а2р2 + &2Рз?
d2 == — aipi + &1Р3, d4 = —а2р2 + &2Р3,
где ai, 61, п2, Ь2— соответственно синусы и косинусы углов раз-
ворота диаграмм направленности («1 + = 1, а2 + bl = 1).
Умножая d* скалярно на i, имеем
П1 = а\1+ Ь\п, а2т +Ъ2п,
п2 = ~a\l + bin, п4 == — а2т + Ъ2п.
£ 9.1. ДАТЧИКИ УГЛОВОГО ПОЛОЖЕНИЯ
1Й5
Как уже говорилось, сигналы углового отклонения фофмиру-к
ются из разностей соответствующих сигналов:
щ = и\ (s(1) — s(2)), U2 = иг($(3) — $(4)). (9:5)
В эти соотношения могут входить сигналы наличия и поиска:
ип = un(s(1) + s(2) + s(3) + s(4)),
ип = un (s(1) + s(2) + s(3) + s(4)).
правленности и разностная харак-
теристика
Типичный вид функций (9.5) и $(М в плоскостях измерения при-
веден на рис. 34.
9.1.3. Упрощенные уравнения идеального датчика. Сопостав-
ляя характеристики различных типов датчиков, рассмотренные
в предыдущем параграфе, можно прийти к следующему прибли-
женному представлению функцио-
нальных зависимостей выходных
сигналов:
щ = Хх (I) Y(n), и2 = Х2(т) Y(и),
(9.6)
iZ-н Uh (/г) .
В ряде случаев допустимо еще
более простое представление:
Ui = Xi (Z)uH, и2 = Х2(т)ин.
(9.7)
Соотношения (9.6) и (9.7) со-
ответствуют полной независимо-
сти каналов и сигналов в преде-
лах зоны видимости и совпадению
сигналов в симметричных точ-
ках передней и задней полу-
сферы, т. е. в точках, расположенных симметрично относитель-
но плоскости п = 0. Не уменьшая общности, можно считать, что
для осесимметричной диаграммы
Z7H = i{n — n0
при
при
Пу
(9.8)
П >
п
и Tio определяет «зону» наличия. ,
Поставим в соответствие датчику вектор сигналов и=
= (zzi, U2, Uh). Вектор и в определенной степени моделирует век-
тор i в проекциях на собственный базис датчика pi, рг, р$.
В частности, во многих случаях выполняется 4 .1 : / к
и • i >0.
13*
196
ГЛ. 9. КОРРЕКЦИЯ ПРИБОРНОГО БАЗИСА
§ 9.2. Основные уравнения корректируемого базиса
В данной главе будет рассматриваться задача приведения
приборного базиса 7* к опорному /. При этом предполагается,
что датчики углового положения, измеряющие направления ори-
ентиров опорного базиса 7, расположены так или иначе в свя-
занном ~~
(неподвижными ориен-
быть Солнце и звезды;
в базисе I считаем из-
Рис. 35. Опорные и прибор-
ные базисы
базисе Е. Ориентирами базиса 7
тирами) могут
их положение
вестным.
Именно эта
на вначале. Далее будет исследована
задача коррекции для подвижного опор-
ного базиса.
Для вывода уравнений движения
корректируемого приборного базиса 7*
будем полагать, что базис 7 имеет абсо-
лютную угловую скорость <0°, базис
7* — скорость (о* и базис Е — скорость
(о; взаимное положение базисов будет
определяться кватернионами Л, Л* и R
(рис. 35). Относительное движение приборного и опорного бази-
сов (7 и 7*) описывается кватернионом R, для которого справед-
задача будет рассмотре-
ливо следующее кинематическое уравнение:
2R = Ro(®**-®2*) = R»(»*«-®?»R. (9.9)
Можно видеть, что это уравнение с точностью до обозначений
совпадает с (8.9) или (8.10). Однако в рассмотренной ранее
кинематической задаче приведения функции управления
(в данном случае это <Oj*) строилась как функция углового рас-
согласования Л (в данном случае R), которое предполагалось
известным. В нашем же случае рассогласование R прямо изме-
рению не доступно. Датчики углового положения, расположен-
ные в Е, определяют тем или иным способом компоненты ква-
терниона Л, задающего положение Е относительно 7.
С другой стороны, положение связанного базиса относитель-
но приборного 7* (случай БИНС) известно, т. е. известен ква-
тернион Л*.
Таким образом, в задачах коррекции следует искать устойчи-
вое управление (О* на основе информации о Л в форме сигна-
лов с датчиков углового положения и о Л* в любой удобной
форме.
Для собственного кватерниона R имеем (рис. 34)
R = AoA*. (9.10)
Для отображения этого кватерниона на базис Е\
R® = Л* о Л(=Л* ° (R) ° Л*), (9.11J
§ 9.3. ОРТ НАПРАВЛЕНИЯ НА ОРИЕНТИР
197
Продифференцируем RE (9.11), подставляя значения производ-
ных от кватернионов согласно их собственным кинематическим
уравнениям:
2Re = Re ° — сое ° Re ^е ° — Re °<Ое* (9.12)
Очевидно, что скалярная часть кватернионов RE и R одинакова,
поэтому согласно уравнениям (9.9) и (9.12) для скалярной
компоненты го можем записать
2г0 = — г- (ю* — о)/) = — г-(о)** — о)**) = — Ге-(<»е — о>е). (9.13)
Для векторной компоненты R (т. е. г) согласно (9.9) имеем
2г = г0 (о)** — о)/*) + г X (о)** — о)/*) =
= г0 (ю* —ю°) — г х (<о* —«°). (9.14)
И, наконец, для векторной компоненты RB (т. е. гЕ):
2ге — г0 ((1>е — (Ое ) 2ге X о>е — Ге X (о>е + <»е)« (9.15)
Легко видеть, что (9.14) инвариантно относительно любого
преобразования базисов, так что, например, в некотором базисе
имеем
2го = -ге-(®«-Ч). (9.16)
Соотношение (9.14) при проектировании на другой базис пре-
образуется в соответствии с равенствами Эйлера (§ 1.1), о чем
свидетельствует уравнение (9.15). Заметим, что согласно ра-
венствам (9.10) и (9.11) можем выразить компоненты кватер-
ниона R через компоненты Л и А*:
Го = Х0Х* + X-X*, г = Х*Х — Х0Х* — X X X*,
гЕ = ХоХ - Х0Х* + X х X*. (9Л7)
§ 9.3. Орт направления на ориентир и его модель
Рассмотрим орт направления на ориентир i, имеющий в ба-
зисе I компоненты (ос, tp, Y), и некоторый орт i*, имеющий в ба-
зисе Z* те же компоненты (т. е. «модель» ориентира в вычис-
ленном базисе Z*):
i; = aix + pi2 + yi3, i** = ai* + pi* + yi*. (9.18)
Очевидно, что модель ориентира i* и сам орт i связан соотно-
шением перепроектирования:
ij = Rj ° ° Ri = 2(1/4/) Г/ -j- (2го/ — 1) V + 2r0r(ii X rj). (9.19)
14 В. Н. Бранец, И. П. Шмыглевский
198
ГЛ. 9. КОРРЕКЦИЯ ПРИБОРНОГО БАЗИСА
Приведем некоторые соотношения для векторов i* и вы-
текающие из (9.19):
ij • h = 2го/ — 1 + 2(г/ • ij)2,
1 — ifi* = 2[rj —(rrij)'2] = 2|rr X hl2,
h X i* = 2(r/-ij)(rj X h) + 2r0I(rI-iI)iI — 2r0IrI, (9.20)
[iji’rj] = 2r0I [r2 — (i2. r2)2] = 2rOI | rz X h |2.
Для произвольного вектора <в, заданного в базисе 7, имеем
следующую величину смешанного произведения:
[о2, i7, i7] =
= 2(r7-i7)[w7, i7, r7] + 2ro7(r7-i7)((o7-i7) — 2ro7((d7-r7). (9.21)
Заметим, что скалярные и смешанные произведения инвариант-
ны относительно преобразования базисов, так что
12-12 = 17* •1I*= 1е'*Е —
[й)2, ijr, i7] = [g>2*, i7*, ijr*] = [qe, i#, — [g)q, *qL (9.22)
В качестве меры близости векторов ini* можно взять выра-
жение
U = 1 - (i • i*) = 1 - cos (i, i*), (9.23)
которое, очевидно, положительно везде, где i i*, и обращается
в нуль в положении совпадения векторов.
Дифференцируя U с использованием (9.20) в силу уравне-
ний движения (9.14), имеем
^7 = 2го1 {(о)2 — <о7)-г7} — 2го7(г7«п) (со7 — се?) - Ь +
+ 2 [rz, («* - «?), i J (rz • h). (9.24)
Это выражение с учетом равенств (9.21) преобразуется к виду
f = [(»;- »;),!„ ц]. (9.25)
В силу инвариантности смешанного произведения в равенстве
(9.25) индекс базиса может быть любым или вообще опущен:
dU г/ * о \ • .* 1 dU
~dt = [(©j* — a»!»), i2», ii*J, =
= [(<»£-<4), k, ill, ^ = [(<»*-01°), (9.26)
Полученные соотношения для производной [/-функции до-
пускают хорошую геометрическую интерпретацию: для асимпто-
тической устойчивости процесса коррекции необходимо, чтобы
управление (<о* — а>°) образовывало с ортами i и i*, совпадаю-
§ 9.4. КОРРЕКЦИЯ ПО НЕПОДВИЖНОМУ ОРИЕНТИРУ
199
щими только в положении ориентации, некомпланарную тройку.
При этом, естественно, знак коррекции (<о* — о0) должен быть
выбран таким образом, чтобы обеспечить отрицательную опреде-
ленность производной [/-функции.
§ 9.4. Коррекция приборного базиса
по одному неподвижному ориентиру
При неподвижном базисе <о° == О, и производная от [7-функ-
ции (9.26)
= [о*, i, i*]. (9.27)
Анализ этого выражения показывает, что, во-первых, управле-
ние (угловая скорость ш*) входит в (9.27) линейно, во-вторых,
составляющие о*, лежащие в плоскости векторов i, i*, не влия-
ют на процесс коррекции. Поэтому естественно выбрать управле-
ние вида
<o* = a(i*Xi). (9.28)
Подставляя это управление в (9.27), получим
= a [(i X i*), i, i*] = — a | i X i* |2.
Очевидно, что при a>0 управление (9.28) обеспечивает асимп-
тотическую устойчивость процесса коррекции такую, что i* -> i.
Управление (9.28) дает пример линейной коррекции и
наглядную интерпретацию построения вектора управления. Не-
трудно видеть, что в функции от вектора i* X i может быть
выбрано любое нелинейное управление вида
(o* = f(i*Xi), (9.29)
и единственным требованием, обеспечивающим устойчивость
процесса коррекции, будет следующее:
f(6)-6>0, 6=^0, (9.30)
— требование к векторной функции f от векторного аргумента 6.
Действительно, подставляя управление (9.29) в выражение для
производной С7-функции (9.27), получаем отрицательно опреде-
ленную функцию при условии (9.30).
В связи с тем, что значение вектора i неизвестно и инфор-
мация о его положении получается с помощью датчика углово-
го положения, непосредственно сформулировать управление в
виде (9.28) или (9.29) Не удается. Далее рассмотрим ряд при-
меров построения коррекции по информации от датчиков и про-
ведем исследование устойчивости.
9.4.1. Построение коррекции в собственном базисе датчика.
Пусть имеем датчик положения и связанный с ним базис Р, так
14*
200
ГЛ. 9. КОРРЕКЦИЯ ПРИБОРНОГО БАЗИСА
что равносигнальное направление совпадает о осью рз, а поло-
жение базиса Р задается в связанном базисе кватернионом N.
Рассмотрим также опорный базис Q и его модель Q* такие, что
кватернион N определяет переходы Е -> Р, I -> Q, 7* -> Q. В этом
случае направление на ориентир в базисе Q совпадает с qs, т. е.
ip= qs; соответственно для модели: iQ* = q3. Имеем следующие
соотношения:
iQ = N ° ij ° N, Iq* =-- N ° ij* ° N, ip = N ° ip ° N.
В силу инвариантности (9.26) можем записать
nTJ г ± ste 1 & / ste зк \
~ — [о)р, ip, ip] = Wpi(^P2^P3 — ^Рз^Рг) +
(Lb
+ ®Р2 (<РЗ*Р1 — гР1гРз) + <°РЗ (^Р1гР2 — гР2^Р1)-
Для устойчивости управления достаточно положить
♦ f /. ,* .* \ *
О)Р1 = — J1 \lP2lP3 1Р31Р2)ч 0)Р2 =
= ~ /2 0рз^Р1 — гР1^Рз)> <°РЗ = — /3 ( Wp? — ipzipi), (9.31)
где функции fi должны удовлетворять условию
#А(я)>0, х=^0.
(9.32)
Можно видеть, что эти условия являются частным случаем усло-
вий (9.30); управление (9.31) построено в связанных осях дат-
чика положения.
Вектор ориентира ip и его модель ip могут быть выражены та-
ким образом:
ip = (AoN)°ijo(AoN) = N°AoN°iQ°NoAoN = AQoq3o Aq,
Aq - N о А о N, ip = Aq о q* o Aq, Aq = N о A* ° N, (9.33)
точно так же, как и само управление может быть приведено к
базису Е: ыЕ = N о о)Р о N. Аналогичным образом можно построить
управление в «модельном» базисе Q. Имеем для производной
tZ-функции в этом базисе
~ [®Q*’ 1Q*] “ ^Q*! ZQ*2— <Oq*2^Q*1? (9.34)
1q*= (0, 0, 1), iQ* =(Zq*1t Iq*2, iq*3). Для устойчивости управления
достаточно положить
O)Q1 = — (z’q*2), 0)Q2 = — /2 0q*1)’ (9.35)
полагая, что управляющие функции fi удовлетворяют условиям
(9.32). Очевидно, что
1q* = Rq ° q3 ° Rq = Aq ° ip ° Aq, Rq = N ° R ° N = Aq ° Aq, (9.36)
§ 9.4. КОРРЕКЦИЯ ПО НЕПОДВИЖНОМУ ОРИЕНТИРУ
201
и управление (9.35) может быть приведено к базису Z*:
со** = N ° (Oq# о N. (9.37)
9.4.2. Построение коррекции в векторной форме. Введем век-
тор рассогласования ориентира i и его модели i*:
6 = i —i*. (9.38)
Этот вектор может быть определен, в частности, в собственном
базисе Р: 6Р = £pi + цр2 + £рз по компонентам векторов ip, ip:
ip = 2Pi + ™Р2 + ^Рз> >р = J*Pi + ™*Р2 + ^*Рз (9.39)
в этом базисе. Перепроектирование этого вектора в другие бази-
сы и образование функций управления на основе вектора рассо-
гласования будет проведено далее.
Рассмотрим некоторые свойства вектора 6. Очевидно, что
g2 = (i - i*)2 = 2 (1 - i • i*) = 2U.
Кроме того,
6-1 = 1 —11*== i7, 6 • i* == -6 • i = -1 + i • i* = -U, (9.40)
откуда следует 6 • i = ЧуЪ2, 6 • i* = —7262.
Рассмотрим далее производную от (7-функции (9.27), исклю-
чая в ней вектор i с помощью соотношения (9.38):
= [со*, б + i*, i*] = [со*, 6, i*]. (9.41)
Полученное соотношение показывает, что управление о>* можно
выбирать в виде
G>* = -a(6Xi*), (9.42)
определяющем процесс линейной коррекции. При этом
= - а | 6 X i* |2,
at
и процесс устойчивой коррекции обеспечивается при а > 0.
В более общем случае нелинейного управления можно рас-
сматривать управление
o* = f(6Xi*), (9.43)
которое аналогично (9.29) обеспечивает устойчивость при век-
торных функциях управления, удовлетворяющих условиям типа
(9.30). Однако на практике более удобным оказывается форми-
ровать нелинейное управление в общем случае в виде
G>*-i*Xf(6), (9.44)
где векторная функция f(6) некоторым образом моделирует
вектор рассогласования. Такое описание ближе всего подходит
?02
ГЛ. 9. КОРРЕКЦИЯ ПРИБОРНОГО БАЗИСА
к физической природе формирования сигнала управления по сиг-
налам датчика первичной информации.
Назовем векторную функцию f(6) в управлении (9.44) функ-
цией рассогласования. Подставляя (9.44) в равенство для про-
изводной (9.41), получим
^=[(i*xf(6)), 6, i*J =
= (i* X f(6)).(6x i*)=—6-f(6) —-Afi2(i*-f(6)). (9.45)
В общем виде полученное выражение показывает, что асимпто-
тическая устойчивость достигается при некоторых требованиях
к функции рассогласования. Из условия знакоопределенности
Рис. 36. Орт рассогласования
Рис. 37. Область изменения вектора f
производной необходимо,
очевидно, чтобы векторная
функция f(6) удовлетворя-
ла, как минимум, условию
(9.30). Второй член (9.45)
показывает, что управление
должно быть определенным
образом «расположено» от-
носительно расчетного ори-
ентира — вектора i*.
Используя возможность
геометрической интерпрета-
ции величины производной
[/-функции (9.45), попробу-
ем проанализировать усло-
вия устойчивости. Рассмот-
рим геометрическую картин-
ку формирования единично-
го вектора рассогласования
6Н = 6/161, представленную
на рис. 36. Можно видеть,
что при изменении положе-
ния модели i* относительно ориентира i от обратного до совпа-
дения 6Н меняется от совпадения с i до перпендикулярного ему
значения. Если ввести на сфере угловое расстояние между
i и i*, то имеем
6Hi = 6Hi* = cos(”j,
Расположим (см. рис. 37) векторы 6Н и i*
0<₽<
л.
в плоскости эква-
тора; тогда векторное произведение
6Н X i* = aS sin 31 6 sin31^- > 0
z £
будет направлено по единичному вектору а (северный полюс)
при любых 0.
§ 9.4. КОРРЕКЦИЯ ПО НЕПОДВИЖНОМУ ОРИЕНТИРУ
203
Рассмотрим второе векторное произведение f (6)Х i* = —о*,
входящее в (9.45). Можно видеть, что отрицательно определен-
ной функции dU/dt соответствует нахождение вектора f в полу-
сфере, содержащей вектор i и ограниченной плоскостью, содер-
жащей векторы а и i*; именно в этом случае вектор b — резуль-
тат векторного умножения — лежит в верхней полусфере.
Рассмотренное условие на положение вектора f(6) можно за-
писать в виде
f(6)-c>0. (9.46)
Здесь вектор с должен лежать в плоскости «экватора» перпенди-
кулярно вектору i* в сторону вектора i, г. ,е.
с = i* X а =• i* Х(6Н X i*).
Нетрудно видеть, что условие (9.46) прямо переходит в (9.45).
Отсюда следует, что производная [7-функции знакоопределена в
полусфере с, и при нахождении функции рассогласования в
этой полусфере процесс коррекции асимптотически устойчив.
В том случае, когда вектор i* близок к i, полусфера с совпа-
дает с 6, т. е. условие (9.46) переходит в условие (9.30). По-
падание вектора f в точку, обратную вектору i*, означает вы-
рождение управления, т. е. обращение скорости коррекции В
нуль. Выход вектора f в обратную полусферу (за меридиан на
рис. 37) означает формирование коррекции, «уводящей» i* от i,
т. е. увеличивающей угол [}. Условие устойчивости (9.46) может
быть записано также и в виде
со* а^со* -(6HXi*)< 0.
Для обеспечения устойчивости в целом управление (9.44)
должно быть доопределено в области вырождения (положение i*,
близкое к —i) за счет сигналов «поиска» (наличия). Отметим,
что специфика условия (9.46) в отличие от ранее рассмотрен-
ных управлений и условий типа (9.30), обеспечивающих устой-
чивость процесса коррекции, определяется видом управления
(9.44).
9.4.3. Построение функции рассогласования. Вектор рассогла-
сования б, как и функция рассогласования f(6), должны в об-
щем виде быть сформированы по сигналам датчика углового по-
ложения и его модели. Пусть сигналы датчика задаются равен-
ствами (9.7); образуем, например, следующие функции рассогла-
сования:
А = xi (*) — А (е*), /2 = хг (т) — х\ (т*), (9.47)
где х* (е*) и х% (т*) моделируют сигналы датчика. Естественно
считать /1 и /2 компонентами функции рассогласования f в при-
борном базисе Р или моделируемом базисе Q*. Таким образом,
204
ГЛ. 9. КОРРЕКЦИЯ ПРИБОРНОГО БАЗИСА
можно рассматривать такие векторные функции рассогласования:
Ь = /1Р1 + /2Р2» Jq* = 1141 + Мг- (9.48)
Эти равенства порождают два вида управления: «в базисе Р»
(управление У1) и «в базисе (?*» (управление У2). Функции
рассогласования /г (9.47) в общем случае можно представить
удовлетворяющими следующим условиям:
1°. f(x, х) = 0— этим определяется точное соответствие ха-
рактеристик датчика и модели.
2°. (x-y)f(x, у)>0, х^у, в некоторой области переменных;
это условие «наблюдаемости» рассогласования.
Кроме того, для уменьшения взаимовлияния процессов при-
ведения желательно, чтобы выполнялось условие
Для практических целей достаточно, чтобы условия 3° и 4° вы-
полнялись хотя бы при малых 1х — у1.
Рассмотрим некоторые виды функций рассогласования.
a) f(x, у) — кх— ку, Л>0. Здесь f(x, у)— линейная функ-
ция; все условия выполнены.
б) /(#, y) = f(x)~ f(y)- Условие 1° выполняется; условие 2а
выполняется в области, где / монотонно возрастает; условия 3°
и 4° выполняются только для линейных /.
Функция / может быть линейной с насыщением, релейной с
зоной нечувствительности и т. п. При этом условие (9.30) вы-
полняется везде или почти везде, так что можно построить устой-
чивое приведение.
9.4.4. Анализ устойчивости управлений. 1°. Рассмотрим управ-
ление У1 «в базисе Р» (9.46):
(d* = i*XfP. (9.49)
Производная /7-функции согласно (9.45) для этого случая
управления
= [(i* х fP), 6, i*i = (i* x fp)-(6 x i*);
для ее знакоопределенности справедливо условие (9.46): fP • с > 0.
2°. Для управления У2 в базисе Q* (9.46) имеем
со* = i* X fQ*. (9.50)
Поскольку функция рассогласования формируется в базисе (?*
и направление на «расчетный» ориентир i* q3, то fQ*-i* = O.
Отсюда следует, что производная [/-функции (9.45) для такого
управления примет вид
= [(i* X fo*), 6, i*] = - 6-fQ* - 4- 62(i*-fQ*) = - 6-Jq*
§ 9.5. ДВА НЕПОДВИЖНЫХ ОРИЕНТИРА
205
и будет знакоопределенной при условиях (9.30), т. е.
6.fQ*> 0.
3°. Как уже отмечалось выше, при достаточной точности при-
ведения вектор рз близок к q3, т. е. к i*; на этом основании
естественно попытаться упростить У1, заменяя в нем на
0)* = p3Xfp. (9.51>
в том, что а лежит
Рис. 38. Область
устойчивости коррек-
ции
Управление такого типа назовем управлением УЗ.
Подставляя (9.51) в (9.45), получим
= (Рз X f₽)-(6 X i*) = fp- [р3 X (6 X i*)J.
Введем вектор
d — рз X а = рз X (6 X i*) ?
аналогичный вектору i для У1. На рис. 38 условно представлены
векторы 6, с и d (условность заключается
в плоскости с, i*, 6); вектор d определяет
полусферу, при нахождении в которой век-
тора рассогласования fP получается устой-
чивый процесс коррекции:
fP(6)-d>0. (9.52)
Если рассогласование векторов ini*
(т. е. 6) определяется кватернионом -R (на
рис. 38 — дуга длиной р/2), то взаимное по-
ложение базисов Q* и Р определяется из-
вестным кватернионом Л*; этот же кватер-
нион определяет взаимное положение d и 6.
Можно видеть, что если базис Р в процессе
стабилизации совмещается (близок) с базисом 7*, то условие*
(9.52) будет близко к условию (9.30). Отсюда следует, что управ-
ление УЗ занимает промежуточное положение между У2 и УК
Геометрическая интерпретация условий устойчивости и на-
глядные ограничения на положение функции управления f(6)
позволяют для любого конкретного вида функции рассогласова-
ния «раскрыть» условия устойчивости и представить их в виде'
ряда неравенств для компонент управления (9.39).
§ 9.5. Коррекция приборного базиса
по двум неподвижным ориентирам
В этом параграфе рассматривается коррекция базиса 7* по>
двум неподвижным ориентирам (Солнце и звезда, две звезды
и т. п.), положение которых в базисе 7 предполагается извест-
ным. Исследуются два варианта коррекции: «одновременная»,
являющаяся, по сути дела, суперпозицией коррекций, рассмот-
206
ГЛ. 9. КОРРЕКЦИЯ ПРИБОРНОГО БАЗИСА
ренных в предыдущем параграфе, и «последовательная», состоя-
щая из коррекции сначала по одному ориентиру, а затем по дру-
гому; при этом последняя выполняется как вращение вокруг
оси первого ориентира.
9.5.1. Построение кватерниона R по ортам двух направлении
и их моделям. Пусть направления на два неподвижных ориен-
тира заданы в базисе I ортами i, j, а именно
i = aJi + Э xi2 + Т11з, j = a2ii + Р212 + ^з. (9.53)
Соответствующим образом определены модели этих ортов в ба-
зисе Z*:
i* = аХ + Pit* + ТРз> j* = a2h + P2i* + Т2>з- (9.54)
Очевидно, что связь ортов i, j и их моделей i*, j* определяется
Кватернионом R рассогласования базисов I и Z*:
i = R о i* о r; j = R о j* о R (9.55)
Как отмечалось выше, кватернион R недоступен для измере-
ния. В то же время соотношения (9.55) можно рассматривать
как уравнения, определяющие R через известные векторы i, j,
i*, j*; найдем решение этой задачи. Образуем разности 61 = i —i*,
62 — j — j*. Согласно соотношениям перепроектирования имеем
r*i = r*i*, r*j = r*j*, r.g1 = r.82 = o,
т. e. r-Lfij; г-Ц62; поэтому имеет смысл искать векторную часть
R в виде
г = Л(в1Х 62). (9.56)
Подставим (9.56) в соотношение перепроектирования (9.55),
преобразовав его предварительно к векторному виду:
«1 = i _ i* = -2 (г • i)г + 2Л - 2г0(i X г) =
= -2Л2[61, 62, i] (61 Х62)+2Л2|61Х621^-2г0Л1Х(61X62).
Умножим скалярно полученное равенство на i:
61 -i = —2Л2[61, 62, i]2 + 2Л2|61 Х62|2,
откуда находим
1 0А)
2 |61Хб2|2-[61,б2, i]2’
Заметим, что знаменатель полученного выражения
I6i X 62|2- [61, 62, i] = |iX(6iX62)|2>0,
§ 9.5. ДВА НЕПОДВИЖНЫХ ОРИЕНТИРА
207
если только направления i и j не совпадают. Кроме того, имеют
вместо равенства
i-6i =1— i-1* = 4бг j-62 = 1 — j-j* = у 62’
>*-6i = — 46i- j*-62 = — у 61, (9.57)
i • 62 = -j* • 6i = i • j - i j*, j • 6] = —i* • 62 = i • j - i* • j,
61 • 62 = i • 62 + j • 61 = - (j* • 6j + i* • 62).
Преобразуя выражение для квадратов векторного и смешанного
произведений и используя равенства (9.57), удается привести
выражение для А2 к виду, симметричному относительно 61 и 62
и соответственно i и j:
= Ч(‘А)(гв2)-(*А)аА)}' (9,58)
Для дальнейших выкладок потребуются следующие выраже-
ния для компонент кватерниона R:
[({•62)-(3-6д)]2
Г°2 1 г2 1 Л2|б!Хб2|2 4{(i.61)(j.62)_(i.62)(j.61)}’
ðà = Aro <6>х б2> = (61Х62). (9.59)
Вообще говоря, во втором равенстве (9.58) для тог следует по-
ставить знак ±; однако, подставляя г в равенство для 61 и на-
ходя далее 6?, можно убедиться, что только верхний знак тож-
дественно удовлетворяет равенству.
Можно далее получить следующие варианты соотношений
„для векторной части кватерниона:
ðà = 4{(i-6i)(j1-62)-,(iJ62)(i-61)}(61 х 6г)’
— j*-6,
Г0Г = . ... А - 2-----,. - ----т-ту (6Д X 62), (9.60)
° 4 {(> • в1) ( J • 62) - (> • «2) ( J - 61)}
_Г_ = S1X62 = 61Хб2 = 61Хб2
го (>А)~0-61) 1*-62-3*-6/
Наконец, непосредственным вычислением можно проверить спра-
ведливость равенств
i* • j —i • j* = 4r0[i, j, r] = 4ro/[i*, j*, r] 6iX62=34[i*, j*, r]r.
9.5.2. Построение управления в векторной форме. Для обеспе-
чения приведения приборного базиса I* к опорному I управле-
ние о* следует задать в том или ином виде как функцию ква-
208
ГЛ. 9. КОРРЕКЦИЯ ПРИБОРНОГО БАЗИСА
терниона R. Для неподвижного опорного базиса имеем =
уравнения движения в форме (9.12) или (9.13) — (9.16). Выберем
в качестве [/-функции выражение U = 1 — г%. Производная U-
функции в силу уравнений движения имеет в данном случае вид
= г0г-(<о* — <о°) = г0г-(о*. (9.61)
Подставим соотношения для R вида (9.60) в (9.61); имеем
dt 4 {(i • \) (j А) - (i- e2) (j А)}(б1 2) ’ “
rn
Рассмотрим линейное управление вида
о* = [a(6i X i*) + Ъ (62 X j*) ]. (9.62)
С учетом равенств
(6Х X б2) • (6, X i*) = | б! [(i* • б2) - (j* A)b
(6Х X б2) • (62 X Г) = 4 61 l(i * • б2) - (j* • 6J]
получим значение производной (9.60):
CI*
при а>0, Ь>0. Таким образом, управление (9.62) обеспечивает
асимптотически устойчивую коррекцию при положительных ко-
эффициентах а и Ъ.
В силу равенств
61 X i = i X i* = 6j X i*, 62 X j =- j X j* = 62 X j*
управления вида
co* = — [a(i X i*) + b(jX j*)], о* = - [a(6i X i)+ b (62 X j)]
(9.63)
дают точно такие же условия устойчивости и эквивалентны рас-
смотренному управлению (9.62). Далее, коэффициенты а и Ъ мо-
гут быть произвольными положительными функциями. И, нако-
нец, доказательство устойчивости может быть распространено на
любое число ориентиров, т. е. можно показать, что управление
вида
ю* = — 2 ak(dkxik)
fe=l
при п 2 обеспечивает асимптотически устойчивую коррекцию.
§ 9.5. ДВА НЕПОДВИЖНЫХ ОРИЕНТИРА
209
Рассмотрим теперь нелинейное управление
со* = -f! (gj х i* - f2(62) X j* (9.64)
тде fi (6i) и {2(62)—функции управления, определяемые соответ-
ствующим рассогласованием. Представим эти функции в виде
fi (61) = х. (61) 6Ь f2(62) = *2(62)62, (9.65)
*г. е. в виде нелинейных функций, коллинеарных рассогласова-
нию. В этом случае имеем
(6, X 62) • (f х (6Х) х i*) = 4 Х1 (6Х) 6? [(i* • 62) - (г • 6Х)1,
(6Х X 62). (f2 (62) X j*) = 4 *2 (б2> S2 t(i* • 62) - (j* • 6Х)1.
Подставляя управление (9.64) в выражение для производной
/7-функции (9.61) с учетом (9.65), получим
^ = _4гЦЖ1(61)6? + х2(62)61],
и для асимптотической устойчивости достаточно, чтобы функции
х\ и *2 были положительны.
Произвольные векторные функции f (61) и £2(62), в общем слу-
чае неколлинеарные с рассогласованиями 61 и 62, представим
в виде
fi (61) = *16! + yi X 6Ь f2 (62) = *262 + у2 X 62, (9.66)
тде yi и у2 — некоторые векторные функции, определяемые одно-
значно при заданных функциях fi и f2. Имеем
= (Si X в2) • (жх6х X i*)+ (6Х X 62) • ([ух X «х) X 1*1 =
= 4 [(i* • 62) - (j* • 6Х)] - (6Х X 62)• [ух (6Х • i*) - 6Х (i* • ух)] =
= 4 ^16? [(1 * • б2) - (j*. Sx)] + 4 61 [6Х, 62, ух].
Аналогично
(6Х X 62). [f2(62) X j*] = 4 ^62 [(i*• 62) - (Г • 6J] + 4 62 [6Х, 62, у2]..
Подставляя эти значения в (9.61), получим
dU
dt
r2
2 о
I f61? 62, у J 1 2
4i*A)-(i*A)l 1
[6р62,У2] 1 «2!
(i*^)-(i*A)r2J
210
ГЛ. 9. КОРРЕКЦИЯ ПРИБОРНОГО БАЗИСА
Для устойчивости достаточно, чтобы одновременно выполня-
лись неравенства
г Г ^2 * У2]
Последние неравенства суть условия, ограничивающие неким
образом «отклонения» функции управления от рассогласования.
Действительно, преобразуя полученные выражения, имеем
4[i*, j*,r]r.yfe
(1*.б2)_(р.б1) 4ro[i*, j*,r]
T-?h
Таким образом, условия устойчивости приводятся к
*1>|У1|-|т- »
I о
Х2 > I У2 I'
(9.67)
которые и определяют область достаточных условий устойчиво-
сти управления.
9.5.3. Последовательная коррекция по двум ориентирам. Как
было показано в предыдущем параграфе, процесс приведения
орта i* к i не зависит от составляющей угловой скорости кор-
рекции, параллельной i*. Естественно попытаться распорядиться
этой составляющей таким образом, чтобы она вызывалась кор-
рекцией по другому ориентиру, т. е. приведением j* к j. При
этом процесс корректирования можно по времени разделить на
два: приведение i* к i и затем j* к j. Задача состоит в построе-
нии управления, выполняющего последовательно эти два этапа
коррекции.
Проведенный ранее анализ управления, совмещающего орты
i* с i и, в частности, наиболее его общий вид (9.42), показы-
вает, что поставленная задача должна решаться управлением
©♦ = i*Xf1(6i)+a>i* (9.68)
где со — пака неопределенная функция. В качестве [7-функции
возьмем
и^и{ + и2, C7i = l-i-i*, C72 = l-j.j*. (9.69)
Имеем в силу уравнений коррекции
dU.
—jl = [i, i*, «*] = i*, ю*](Sj) • {i* x (i* X 6J} =
= (61.i*)(i*.f1(61))-f1(61)-61)
dU„
—? = [],]*, w*] = (S2 x j*). (i* x f, (6J) + (0 [62, j*, i*] =
= fi (6i) • ((62 X j*) X i*) + ® [62, j*, i*]. (9.70)
Вид производной от функции U\ совпадает, разумеется,
с рассмотренными случаями коррекции по одному ориентиру; со-
§ 9.6. УРАВНЕНИЯ II УСЛОВИЯ УСТОЙЧИВОСТИ
211
ответственно этому следует выбрать функцию управления fir
обеспечивающую устойчивую коррекцию процесса совмещения
i* с i.
Для выбора второй функции управления со предположим, что
характеристики второго датчика позволяют построить функцию
рассогласования
со = — ср (и), (9.71)
где <р — мера отклонения вектора 62 от плоскости i*, j*. Если
рассмотреть приборный базис Рис направлениями на расчет-
ные ориентиры i* и j* связать орты рз = (0, 0, 1) и pj($i, «2, $з),
то можно представить аргумент функции отклонения, например,,
в виде
U =! [62, Pb Рз] = $2^2 - $1Ц2
и построить саму функцию <р(и)= ф(^2 — 51Ц2) как функцию от
рассогласования 62(^2, т]2, £2).
Потребуем от функции управления выполнения следующего
условия:
zzqj(zz)>0, и=£0. (9.72)
Подставляя управление (9.71) в производную от {/2 (9.70), ш>
лучим
dU
= h (61) ’ [(62 X j*) X i*] ~ Ф (u) [S2, j*, i* 1.
Процесс коррекции можно разделить на два последователь-
ных этапа: первый, на котором выполняется совмещение оси
1*(рз) с первым ориентиром, и второй, на котором производится
совмещение оси j*(pj) со вторым ориентиром. Как показывает
вид производных от {/-функции (9.70), первый процесс при
управлении (9.68) протекает точно так же, как и при одноосной
коррекции. Более того, управляющую функцию на первом этапе
можно выбрать при (р(м)^О. На втором этапе после совмещения
i* с i рассогласование 61 «0, и определяющим членом для
dU^dt будет управление ср (и); можно видеть, что условие (9.72)
в общем случае обеспечивает знакоопределенность dU^dt и dUldt
в целом.
§ 9.6. Коррекция приборного базиса
по подвижному ориентиру
Рассматривается коррекция базиса Z* по одному ориентиру^
положение которого задано в базисе I. Предполагается, что ба-
зис I имеет переносную угловую скорость о0. Задача состоит в
построении коррекции, совмещающей i* с i, а также в построе-
нии «плоскости наведения», т. е. в совмещении модельной пере-
носной скорости (осм базиса Z* со скоростью со0.
212
ГЛ 9. КОРРЕКЦИЯ ПРИБОРНОГО БАЗИСА
9.6.1. Основные уравнения и условия устойчивости. Уравне-
ниями движения корректируемого базиса будут уравнения (9.9);
для их анализа используем [7-функцию (9.23). Согласно уравне-
ниям движения ее производная
= [©*, i, i*] - [<о°, i, i*]. (9.73)
Будем рассматривать управление в виде
(д* = со' + (дсм, (9.74)
где <о' — одно из управлений, выполняющих совмещение оси i*
с i и рассмотренных в § 9.4, а <осм — некая дополнительная ско-
рость, моделирующая переносную скорость <о0. Обозначим Аш =
= (д° — (дсм; тогда
= [со*, i, i*] — [А(о, i, i*].
Область сходимости определяется условием dU/dt<.Q, для вы-
полнения которого управление следует выбрать таким, чтобы
— [to*, i, i*] > | [А<о, i, i*] I. (9.75)
Оценим правую часть в неравенстве (9.75);
I [Аш, i, i*] I = I [Ata, 6, i*] I C I A<o I 21 ®°l.
Рассмотрим последовательно различные виды управлений и усло-
вия, обеспечивающие устойчивый процесс коррекции.
Для управления У1 (в базисе Р) условием устойчивости бу-
дет неравенство типа (9.46), которое, однако, согласно (9.75)
следует записать в виде
f(6)-c> IА<о|, (9.76)
где с — определенный выше вектор. Геометрически условие
(9.76) означает, что область нахождения векторной функции fi
определяется не полусферой, а сегментом, граница которого
определяется зависимостью f(6) и Аю. Кроме того, приведение
выполняется не к положению 6 = 0, а в некоторую область, где
If (6) I = IД(о|.
Управление У2 (в базисе Q) имеет условие устойчивости
(9.30), которое для данного случая превращается в неравенство
f (6) • 6 > I А<о|. (9.77)
И, наконец, для управления УЗ имеем согласно (9.52)
fp(6)-d> IА<о|. (9.78)
Все указанные управления выполняют приведение оси i* в
некоторую близкую окрестность оси i; если эта окрестность до-
статочно мала, то границы ее для всех управлений совпадают и
§ 9.6. УРАВНЕНИЯ И УСЛОВИЯ УСТОЙЧИВОСТИ
213
определяются равенством управляющей функции величине сме-
щения Ао.
Предположим теперь, что f(6) носит релейный характер, т. е.
условия (9.76), (9.77), (9.78) выполняются при всех 6. В этом
случае процесс коррекции асимптотически сходится к 6 = О, т. е.
к i* = i. Как легко видеть, по окончании переходного процесса
выполняются тождества
R Го + i*r, i* X (ю* - ft>°) 0. (9.79)
Смысл этих тождеств достаточно ясен: движение базиса Q* отно-
сительно Q может сводиться к вращению вокруг i*.
Обозначая ft)n и со® — нормальные составляющие скорости
коррекции и переносной скорости (компоненты, перпендикуляр-
ные к i*), из последнего равенства (9.79) получаем
ft)*-ft)t (9.80)
Таким образом, по окончании переходного процесса нормальная
составляющая скорости коррекции измеряет нормальную состав-
ляющую переносной скорости.
9.6.2. Коррекция по третьей оси. «Фиксированное» смещение.
Соотношение (9.80) позволяет построить управление так, что
процесс коррекции будет приводить к совмещению приборного
базиса с исходным, т. е. г 0, а не только 6 -> 0. В рассматри-
ваемом случае из соотношения для производной векторной ком-
поненты кватерниона R (9.10) имеем
^г2 = гог-(<в*-<о«),
или, с учетом (79.9), после совмещения i* с i
г2 = rori* • (©* - (О®). (9.81)
Рассмотрим вектор ft)CM, моделирующий в базисе Q* вектор
переносной скорости ft)Q, заданный в Q:
®cmQ* = (Oi4i + + ^зЧз — ^nQ* + G>3q3,
где выделена нормальная составляющая — ®i4i + f>2q2.
Имеем соотношение <о° = R ° <осм ° R, которое можно преобразо-
вать с учетом (9.79):
Д<в = <в° — <всм =
= 2 (г0<вп X г + г X (г X <вп)) = 2roron X i* + 2г2!* X (i* X e>„) =
== 2ror (<а„ X i*) + 2г2шп,
т. е.
(<о° — фся) • i* == 0, i* X (<о® г-. ссм) = 2гог(в„ + 2r2i* X ®п,
214
ГЛ. 9. КОРРЕКЦИЯ ПРИБОРНОГО БАЗИСА
откуда находим, что
[i, й>см, До] = [i*, осм, ©°] = 2г0г(Оп. -
Используя соотношение (9.79), последнее равенство приведем к
виду
[i*, (осм, (о*] = [i*, (осм, Д(о] 2гопо£, (9.82)
откуда следует, что «установившееся» после переходного процес-
са значение скорости коррекции со* определяет величину рассо-
гласования г (9.79).
Таким образом, можно построить управление вращением по
оси i* так, чтобы рассогласование векторов (ор* и (ocmq* свести
к нулю.
9.6.3. Перекрестная коррекция. Построение управлений. Вве-
дение так называемой «перекрестной» коррекции дает возмож-
ность выполнить коррекцию по третьей оси (i*), что, по сути,
подобно гирокомпасированию в соответствующей задаче [42,
43, 46].
Рассмотрим управление в виде
<о* = ©' + <осм + (9.83)
где (д' — одно из рассмотренных выше управлений, призванных
выполнить совмещение i* с i (п. 4.9), сосм— фиксированное сме-
щение, а (дк — перекрестная коррекция, которую можно задать
в виде
(dh = (9.84)
либо
(ih = P3<0ft. (9.85)
Вид функции (ofe определим в дальнейшем. После приведения
оси i* к i имеем, умножая второе тождество (9.72) векторно
на i*,
со* — <о° = i* [i* • ((о* — £0°) ] = i* [i* • (o' + (осм — ©° + (dh) ].
Для управлений У1 и У2 имеем
(o'i* = 0, i* • (со0 — ©см) = О,
т. е.
со* — ю0 = i* (i* • соА).
Для перекрестной коррекции (9.84) согласно (9.81) имеем
dr2
а для случая (9.85) аналогичным образом —
§ услевая УСТОД^ВОСТИ
Я15
Полагая в соответствии с результатом (9.82) перекрестную
коррекцию в виде
Юл = — <ОСМ> “*]} = — <р (2r0r<0n), (9.86)
где функция ф удовлетворяет условию типа (9.72), получим
асимптотическую устойчивость коррекции везде, кроме неустой-
чивой точки го == 0 (здесь управление следует доопределить логи-
ческим образом; естественно, нужно учесть и постоянную вели-
чину i* -рз = п* для управления У2).
Для управления УЗ имеем to' • рз = 0, и умножая векторно
второе тождество (9.79) на рз, получим
<о* — «о = 21 (р3. (ы* — ю0)) = 21 (р3 • (Oft + р3 • (юсм — (О0)).
Отсюда находим
dr2 Г , 1 / oJ
+ Рз1 (“см-“°) J
для случая (9.84) и аналогично
dr2 1
-at = V (“л + Рз • (“см - “°))
— для случая (9.85). Член рз • (“См — “°) играет роль возму-
щения:
1рз-(<оСм — <0°) | = 12г(г0 [рз, (On, i*])-r(p3 -(On) I ^2|г|йшп,
где h2 = 1 — fe*2.
Взяв перекрестную коррекцию в виде (9.86), получим усло-
вия устойчивости в виде
п*Ф (2гго(Оп) >Л<оп2г
и
Ф ( 2гг0со„ ) > Лсоп2г (9.87)
для случаев (9.84) и (9.85) соответственно. Эти условия, очевид-
но, могут быть выполнены везде, кроме малой окрестности точ-
ки го — 0.
9.6.4. Перекрестная коррекция без смещения. Полученные
условия устойчивости приведения при перекрестной коррекции
(9.87) и наличии «возмущения» указывают на возможность
исключения <оСм из управления (9.83). Можно видеть, что в этом
случае для управлений У1 и У2 имеем аналогично предыдущему
параграфу
(О* — = i*{j* . (о/ + й)А — (0°) }.
Подставляя это выражение в равенство для производной (9.81),
216 ГЛ. 9. КОРРЕКЦИЯ ПРИБОРНОГО БАЗИСА
получим
=-- ror {(1*-<ОЛ) — <00}
и условия сходимости
| <р (2г0г®п) | > | а>° |, | п*<р (2г0гсо£ )| > | ю° |
соответственно для двух видов перекрестных коррекций: (9.84)
и (9.85). Для выполнения этих условий во всей области функ-
ция ф должна носить релейный характер. В противном случае
вокруг точки го = 0 возникает область, в которой указанные
условия не выполняются.
Аналогичным образом для управления УЗ имеем
dr2 1 / пх
^7 = 7* V(p3-(oh-p3.(o°).
Учитывая, ЧТО 1рз • ®°1 С получим условия сходимости,
аналогичные приведенным выше.
ПРИЛОЖЕНИЕ 1
ОБЗОР КИНЕМАТИЧЕСКИХ ПАРАМЕТРОВ
Для описания вращательного движения твердого тела может
быть использован целый ряд кинематических параметров: на-
правляющие косинусы, углы Эйлера — Крылова, параметры Кэ-
ли — Клейна, параметры Родрига — Гамильтона, вектор конеч-
ного поворота, а также квазикоординаты. Все эти параметры
были введены в механику в прошлом столетии; интерес к ним
был вызван надеждой получить интегрируемые решения кине-
матического уравнения или же удобный формализм описания
вращения. Однако с конца прошлого века вплоть до 60-х годов
этого столетия благодаря большим успехам прикладной механи-
ки и в основном теории и практики гироскопов описание угло-
вого движения выполнялось исключительно углами Эйлера —
Крылова.
За последние два десятилетия положение изменилось. Благо-
даря успехам в теории и технике управляемого движения все
большее развитие стали получать нетрадиционные кинематиче-
ские параметры. При этом возникла настоятельная потребность
использования такого формализма, который, с одной стороны,
давал бы четкое соответствие между применяемыми кинематиче-
скими параметрами и физическими величинами, а с другой сто-
роны, позволял бы путем соблюдения строго формальной логики
выполнения операций (что важно при алгоритмизации задач с
использованием ЦВМ) получить любые преобразования и соот-
ношения кинематики.
§ П1.1. Направляющие косинусы
Эти кинематические параметры нашли самое широкое приме-
нение после углов Эйлера — Крылова, тем более, что они дают
пример ортогонального преобразования в линейной алгебре [24,
64, 66]. Не считая необходимым излагать подробно теорию орто-
гональных преобразований (см., например, прекрасные моногра-
фии [24, 71]), приведем кратко описание кинематических опера-
ций, использующих направляющие косинусы. В данном изложе-
нии авторы следуют курсу лекций по теории БИНС, прочитан-
ному ими в Московском физико-техническом институте.
15 в. Н. Бранец, И. П. Шмыглевский
218
ПРИЛОЖЕНИЕ 1. ОБЗОР КИНЕМАТИЧЕСКИХ ПАРАМЕТРОВ
Обозначим
А || aij ||
аи
а21
а31
fl12
а22
а32
а1з
а23
азз
(П1.1)
матрицу ортогонального преобразования. Кинематику вращатель-
ного движения можно представить движением некоторой систе-
мы координат в2, ез), которую будем называть связанной
относительно другой системы координат Z(ii, i2, 13), называемой
исходной. Обе системы координат (или оба базиса) имеют общую
точку — начало координат. Обозначая символами базиса коагу-
лированную матрицу-столбец, элементами которой являются орты
соответствующих базисов
Ч
ч
ei
е2
ез
I -
Е =
(П1.2)
операцию вращения, или ортогонального преобразования, можно
записать в виде следующей матричной операции:
Е = А1. (П1.3)
Обратное преобразование имеет вид
1 = А‘Е,
(П1.4>
причем условие ортогональности преобразования записывается в:
виде
А-1=АТ, АТА = ААТ = 1, (П1.5)
где
о о
1 о
о 1
1
о
о
1Ч1М^
— единичная матрица, соответствующая тождественному преоб-
разованию, а символ «т» означает транспонирование.
Два последовательно выполняемых преобразования образуют
также ортогональное преобразование; так, рассмотрим, например,,
переход (вращение) к базису Е', определяемый матрицей В:
Е'=ВЕ. Используя (3.1), получим Е'=ВА1 = С1, где С = ВА —
матрица также ортогонального преобразования, получаемая как
произведение матриц двух преобразований:
ССТ = BA (ВА)т = В (ААТ) Вт = 1,
СТС = (ВА)ТВА = АТ(ВТВ)А = 1.
Таким образом, операции ортогонального преобразования
(вращения) образуют группу. Условия группы следующие:
§ Ц1.1. НАПРАВЛЯЮЩИЕ КОСИНУСЫ
219
1°. Существует единичное преобразование 1.
2°. Каждому преобразованию А отвечает обратное преобра-
зование Ат.
3°. Произведение двух преобразований определяет преобразо-
вание того же класса: С = ВА.
Следует отметить, что преобразования, вообще говоря, неком-
мутативны: ВА=/=АВ.
Естественно, матричная запись преобразования (П1.3) не яв-
ляется единственной; возможна, например, эквивалентная запись
(координатная):
= (П1.6)
3
однако более удобно пользоваться формализмом матриц.
Рассмотрим теперь неизменный вектор г; очевидно, он может
быть определен своими проекциями в заданных базисах, как,
например в I или в Е:
г = Г1Д1 + Г2Л2 + rsih = + Г2Е^2 + r3Ee3. (П 1.7)
Здесь индексы при проекциях вектора означают номер орта и
базис, на который проектируется вектор. Введем понятие отобра-
жения вектора г на (тот или иной) базис (скажем, I или Е),
под которым будем понимать матрицу-столбец, составленную из
проекции вектора на данный базис. Обозначим отображение век-
тора г на базисы I или Е соответственно символами
гп
Г21
Г31
Re
Г1Е
Г2Е
ГЗЕ
(П1.8)
Используя понятие отображения вектора, представление
(П1.7) можно записать в виде
r = RjI = R^E. (П1.9)
Связь отображений неизменного вектора можно найти из при-
веденного равенства путем несложных формальных операций;
подставляя в равенство (П1.9) преобразование (П1.9), получим
R/I = R^A/, откуда следует, что
RB = ARb (П1.10)
Это — второй вид записи ортогонального преобразования, выпол-
няемого над компонентами неизменного вектора при вращении
системы координат.
Рассмотрим далее вектор г, который жестко связан с движу-
щимся базисом Е; очевидно, что при вращении, если за ним на-
блюдать из исходного базиса Z, он перейдет в вектор г'. При
этом по условию проекции вектора г на базис I и вектора г' на
15*
220
ПРИЛОЖЕНИЕ t ОБЗОР КИНЕМАТИЧЕСКИХ ПАРАМЕТРОВ
базис Е совпадают. Другими словами, если r=RjL то r' = R/E==
= r7i.
Найдем связь г' и г. Подставляя в это соотношение равенство*
преобразования (П1.3), получим
RJAI = R?I, Ri = AtR2 (П1.11>
— соотношение между отображениями векторов г и г7 на один и
тот же базис /. Строгое матричное равенство (П1.11) можно*
условно представить как векторное равенство
г' = Атг, (П1.12)
которое часто применяют в механике. Однако характер услов-
ности представления (П1.12) здесь очевиден; кроме того, здесь
мы имеем третий вид записи ортогонального преобразования.
Ясно, что для задания вращения недостаточно представить
как векторное равенство только матрицу преобразования А; нуж-
но указать также и вид преобразования, определяя тем самым
элементы, над которыми выполняется операция линейного пре-
образования. Такими элементами могут быть орты базисов, ком-
поненты неизменного вектора (как бы наблюдаемого из подвиж-
ного базиса) и компоненты движущегося вектора (наблюдаемого
из неподвижного базиса). Как и следует ожидать, при одном и
том же вращении направление вращения неизменного вектора,
наблюдаемого из движущейся системы координат, и движущего-
ся вектора, наблюдаемого из неподвижной системы координат,
взаимообратны (чему отвечают обратные матрицы преобразова-
ний (П1.10) и (П1.11)).
Заметим далее, что в преобразовании (П1.12) матрицу Ат
можно рассматривать как оператор, ставящий в соответствие
вектору г новый вектор г'; в несколько отличной записи мы
могли бы его записать более абстрактно, например, g = Mf. Про-
ектируя это равенство на базис /, можно прийти к соответствию,
аналогичному тому, которое связывает равенства (П1.12) и
(П1.11). При этом каждый из векторов g и f перейдет в свое
отображение Gz и Fz; условно положим, что и оператор М при-
мет тот же индекс: GI = MIFI.
При смене координатной системы неизменное векторное ра-
венство в новом базисе (скажем, Е) ftyjipv выглядеть аналогично:
Gje = M_eFe.
Если связь базисов I и Е определяется преобразованием
(П1.3), то связь отображений неизменного вектора определяется
точно таким же преобразованием (см. (П1.10)), т. е. Ge = AGi,
F£ = AFz. Отсюда найдем связь между представлениями опера-
тора преобразования в различных базисах:
Me = AMzAt. (П1.13)
Данное преобразование имеет название преобразование подобия*
§ Ш.1. НАПРАВЛЯЮЩИЕ КОСИНУСЫ
221
Основным свойством вращения в трехмерном пространстве
является то, что оно оставляет неизменной одну ось в простран-
стве. Этот результат составляет содержание фундаментальной
теоремы Эйлера: произвольное перемещение твердого тела, имею-
щего неподвижную точку, эквивалентно плоскому вращению во-
круг некоторой оси.
Пусть матрица В задает преобразование в виде преобразова-
ния вектора (типа (П1.12)):
г'=Вг. (П1.14)
Ось эйлеровского вращения определится как решение уравнения
г' — г = Вг, которое есть частный случай более общего уравнения
Вт = Хг.
(П1.15)
Уравнение (П1.15) является характеристическим уравнением,
определяющим собственные значения и собственные векторы мат-
рицы В. Утверждение теоремы Эйлера означает, что одним из
собственных значений матрицы В является значение Х = +1;
этому значению отвечает вектор эйлеровского вращения. Дока-
зательство этой теоремы подробно приведено в монографии [24] •
Определим только собственный вектор матрицы В, соответ-
ствующий Х = +1. Можно было бы решать характеристическое
уравнение (П1.15), однако удобно эту задачу решить другим
образом. Пусть векторное равенство (П1.15) существует в неко-
тором базисе, скажем, I. Изменим координатную систему на Е
так, чтобы вектор собственного эйлеровского вращения оказался
расположенным по оси еь Очевидно, что при смене координат-
ного базиса, определяемого матрицей А, отображение первой
оси базиса Е перейдет в Aei и (по определению преобразо-
вания)
1
О
О
Аех =
(при единичной длине вектора г); отсюда найдем, что
©1
= Ат|о|,
II о II
т. е. вектор эйлеровского поворота найдется как первая строка
матрицы А.
При такой смене базиса матрицы — оператор В подвергнется
подобному преобразованию (П1.13) и примет вид
АВАТ
1 О О
О cos 0 sin 0
О — sin 0 cos 0
т. е. вид матрицы,
задающей вращение вокруг координатной
222
ПРИЛОЖЕНИЕ 1. ОБЗОР КИНЕМАТИЧЕСКИХ. ПАРАМЕТРОВ
оси ei на угол 0. Заметим,
только матрица В:
вЧ6
что в данном равенстве известна
0 ° II
cos 0 sin 0 А,
— sin 0 cos 0 ||
и надлежит определить строку матрицы А и угол 0. Это урав-
нение решается просто почленным приравниванием элементов
двух матриц; выполняя умножение матриц, можно найти элемен-
ты собственного вектора матрицы А:
r = е =а = 623 ~~ 632 г = = = ''31~613
1 11 11 2sin 0 ’ 2 21 12 2 sin 0 ’
Г3 = е31 = a13 = b-^^- (П1.16)
и угол вращения:
1 + 2 cos 0 == Ьп + fe22 + Ьзз. (П1.17)
Обратимся теперь к исследованию бесконечно малого преоб-
разования. Это преобразование характеризуется тем, что вектор
г' = АВг (П1.18)
мало отличается от г и может быть выражен как г' — г + Аг, где
Аг < г. Исходя из этого матрица такого преобразования предста-
вима как
АВ = 1 +е, (П1.19)
где элементы матрицы е = представляют малую величину
(по сравнению с единицей). Из условия ортогональности матри-
цы АВ следует
АВАВТ = (1 + 8) (1 + 8Т) - 1 + 8 + Ет + О (g) = 1,
что может выполняться тогда и только тогда, когда 8 = — 8Т.
Отсюда следует, что матрица е' является кососимметрической
и, по сути, содержит только три независимые компоненты, точно
отвечающие трем вращательным степеням свободы движения
твердого тела. Чтобы пояснить физический смысл этих трех ком-
понент, рассмотрим в качестве примера бесконечно малые пре-
образования в виде вращений по координатным осям. Пусть вы-
полняется поворот по оси ii на малый угол A0i; матрица этого
преобразования
1
О
^1
О cos А 0Х sinA01
О —sinA0x cosA0x
1 О
О 1
О — А0Х
О
Д05
1
0 0 0
= 1 + 0 0 А01
0 — А0г 0
Последнюю кососимметрическую матрицу обозначим
Aj = 1 + A0jOj, где Qj
О 0 0
0 0 1
0—10
§ П1.1. НАПРАВЛЯЮЩИЕ КОСИНУСЫ
223
и 01 дает пример как бы «безразмерного» оператора вращения
по первой координатной оси. Аналогичным образом при враще-
нии вокруг оси i2 на малый угол Д02 имеем
А2
cos Д02 0 — sinA62
О 1 О
sin Д®2 0 cos Д62
1
О
Д62
О — Д62
1 о
О 1
0 0 -Д02
= 1 + 0 0 0
Д02 0 0
— 1
1
о
А2 — 1 А©2^2’
о
о
1
о
о
о
<*2 =
При вращении вокруг третьей оси is на малый угол Д0з по-
лучим матрицу преобразования в виде
cos Д03 sin Д03 0 1 Д03 0 0 А©3 0
А3 — — sinA03 cos Д0д 0 — Д03 1 0 = 1 + — Д03 0 0 ,
0 0 1 0 0 1 0 0 о
0 1 0
А3 = 1 + Д03о 3’ аз — j 0 0 (П1.20)
II о 0 0
Матрицы — кососимметрические, след каждой из них равен
нулю. Они образуют систему трех линейно независимых матриц,
по которым может быть разложена любая кососимметрическая
матрица.
Известно [19, 22], что любую квадратную матрицу можно
представить в виде суммы симметрической и кососимметрической
матриц; такое представление для матрицы ортогонального пре-
образования имеет вид
В=4(В + Вт) + 4-(в-вТ). (П1.21)
Рассмотрим кососимметрическую часть этого представления; мат-
рица В — Вт содержит только три компоненты (как любая трех-
мерная кососимметрическая матрица). Можно видеть, что любая
кососимметрическая трехмерная матрица допускает линейное
разложение по приведенным выше матрицам (Ji (П1.20). Так,
например, для матрицы В имеем
В — Вт = (&23 “ 01 "Р ( Ьз1 — ^13)02 "1“ (^12 “ ^21) 03. (П1.22)
Сравнение (П1.22) с решением для собственного вектора
эйлеровского вращения для матрицы В (П1.16) убеждает в том,
что этот вектор определяется кососимметрической составляющей
матрицы В (тогда как след симметрической составляющей опре-
деляет угол вращения); при этом элементы разложения при а»
совпадают с проекциями вектора поворота на оси базиса I.
Для матрицы бесконечно малого преобразования разложение
(П1.21) является наиболее простым и представимо в виде
224
ПРИЛОЖЕНИЕ 1. ОБЗОР КИНЕМАТИЧЕСКИХ ПАРАМЕТРОВ
(П1.19). Отсюда следует, что
£ = 623<*1 + '63102 + 61203
(П1.23)
и 623, езь 812 суть проекции вектора эйлеровского вращения на
первую, вторую и третью оси координат соответственно. Если
обозначить проекции вектора малого поворота Ав на координат-
ные оси через
Ав = А(Э iii + А0212 + А@з1з, (П1.24)
то можно ожидать, что матрица 8 должна быть пропорциональ-
на матрице
Ав101 + А0202 + А0303. (П1.25)
На самом деле имеет место строгое равенство между соотно-
шениями (П1.23) и (П1.25). Действительно, бесконечно малые
преобразования, т. е. малые повороты, обладают свойством ком-
мутативности. Используя, например, вращения вокруг координат-
ных осей (П1.20), можно видеть, что
А1А2 = (1 + 81) (1 + 62) = 1 + 81 + 82 + 8182,
и, ввиду малости преобразования, произведение 8i82 имеет более
высокий порядок малости, чем 81 и е2. Отсюда следует, что про-
извольное малое преобразование, определяемое матрицей 8 (пред-
ставленной в свою очередь разложением (П1.23)), можно пред-
ставить в виде трех малых вращений по координатным осям:
АВ = 1 + 8 = AiA2A3 ~
« 1 + 81 + е2 + 83 = 1 + А0101 + А0202 + А0з0з-
Таким образом, матрица малого преобразования представима
в виде разложения по матрицам 0£ на три компоненты, чему от-
вечает векторное разложение вектора малого поворота на коор-
динатные оси. Матрицы (Ji по этой причине можно условно на-
звать спиновыми матрицами. Заметим, что эти матрицы ставят
в соответствие элементам кососимметрической матрицы, скажем,
8 (т. е. 8tj), элементы вектора малого (в данном случае) пово-
рота A0ft; в координатной записи такое соответствие определя-
ется символами Леви-Чивита 6,#.
Суммируя сказанное, матрицу бесконечно малого преобразо-
вания можно представить окончательно в виде
1 Д03 -Д02
ДВ = 1 + е = 1 + Д@1О1 + Д02°2 + А®заз = -Д03 1 Д©! .
Д02 — A0r 1
(П1.26)
Этим преобразованием является вращение на малый угол Ав
(П1.24). Преобразование (П1.18) с использованием найденного
выше представления (П1.26) можно записать в матричном виде:
Дг = г' — г = ДВг — г = er;
§ Ш.1. НАПРАВЛЯЮЩИЕ КОСИНУСЫ
225
в координатном виде:
Ari = г2А03 — г3А02, Аг2 = гэА01 — Г1 А0з, Аг3 = п А02 — г2А0!
или в векторных обозначениях:
Аг-тХ Д0.
(Ш.27)
Элементы вектора бесконечно малого вращения определяются
другой физической величиной — вектором угловой скорости.
По определению вектор угловой скорости задается направлением
бесконечно малого вращения, а по величине равен производной
по времени от угла поворота. Исходя из этого имеем
Д0 = <оА£, A0i = toikt (Z== 1,2,3). (П1.28)
Соотношение (П1.26) можно записать теперь, вводя новую пе-
ременную
о
АВ = 1 + —
а>3Д£
О
где через Й обозначена
О
“%
<°2
а>2Дг
матрица
<°з
О
- (1)2
о
= 1 + йАг,
о
= + со2а2 + со3о3
(П1.29)
(П1.30)
Й =
— кососимметрическая матрица угловой скорости.
Исследование бесконечно малого преобразования было прове-
дено исходя из одного вида ортогонального преобразования,
именно — преобразования (П1.18) вектора данным оператором.
Однако можно рассматривать и другие виды ортогональных пре-
образований, как, например, малый поворот системы координат
из положения, скажем, I в Г\ I' = ABI. Из этой записи следует,
что (в матричной записи):
Г = 14-е1 = 1 + Й1А£.
Последнее равенство эквивалентно «координатным» равенствам
Ail == (i2co3 — i3co2) А/, Ai2==(i3(Oi— ir(o3)A£, Ai3 = (iico2—i2(Bi) А/.
Рассматривая координатные базисы и операции над ними,
восстановим индекс базиса при проектировании векторов на ту
или иную координатную систему. Так, анализ разложения
(П1.24) вектора А0 и выражения (П1.28) для со убеждает нас
в том, что в этих равенствах мы имеем дело с проекциями на
базис 7, вследствие чего соотношения (П1.26), (П1.29) и
(П1.30) следует строго записать в виде
ABj = 1 4“ ЙТА£, й/ = (Oi/CFi 4“ co2j(J24“ соз/Од.
226
ПРИЛОЖЕНИЕ 1. ОБЗОР КИНЕМАТИЧЕСКИХ ПАРАМЕТРОВ
При смене базиса оператор ДВ, как и й, подвергается подобно-
му преобразованию. Матричной записи операции малого преоб-
разования соответствует векторная запись, например, (П1.27);
при смене базисов векторное равенство обязано перепроекти-
роваться так, как это полагается для вектора, т. е. его проекции
изменяются как компоненты неизменного вектора, например,
(П1.10).
То, что в векторном равенстве (П1.18) участвуют векторы г'
и г, сомнений не вызывает; однако это равенство было приведе-
но к виду (П1.27), где появился новый вектор Д0 малого по-
ворота. Строго говоря, следует доказать, что это вектор; доказа-
тельством может служить только то, что при смене базисов его
компоненты преобразуются подобно компонентам неизменного
вектора.
Пусть все приведенные выше равенства (П1.18)—(П1.30)
рассматриваются в базисе I; заменим векторные операции
(П1.18) и (П1.27) операциями над матрицами:
R/ = ДВ/R/, ДК2 = eRj = О/П/Дй,
где Rj, Rj и ARi — матрицы-отображения векторов г', г и Дг
соответственно.
Как указывалось выше, при смене базисов (преобразовании,
скажем, от базиса I к базису Е, определяемому матрицей А
(П1.3)) векторный оператор (а именно таким является Й1) пре-
образуется подобным преобразованием (П1.15)
Йе — Ай/Ат, Re = ARj, Re = AR/,
ARe - AAR/. (П1.31)
Известно,) что подобное преобразование не меняет свойства косо-
симметричности матрицы; поэтому как для матрицы £2Т, так и
для вновь полученной матрицы Й£ справедливо разложение
О/ = й)ц(Т1 + СО21П2 + СОзДТз, Й£ = СО + (О2я<*2 + СОзеПз, (П1.32)
где переменными сокЕ обозначим соответствующие элементы мат-
рицы ЙЕ; эти переменные не являются пока еще проекциями
вектора со на базис Е. Однако, если окажется, что
®1Е “п
(г)2Е = А “21 , (П1.33)
°ЗЕ “31
то в этом случае компоненты cow и со;Е определяют неизменный
вектор о (соответственно—и вектор Д0). Можно видеть, что
Йе — Ай/А = А
з "I з
2 ^ki^k Ат = 2 w/i/AofeAT.
_й=1 fe=l
(П1.34)
§ П1.2. УГЛЫ ЭЙЛЕРА — КРЫЛОВА
227
Непосредственным вычислением можно убедиться, что подоб-
ное преобразование над спиновыми матрицами дает также косо-
симметрическую матрицу; если последнюю разложить по матри-
цам щ, то коэффициентами разложения будут соответствующие
столбцы матрицы А:
AgiAt = det А(ацП1 + ^21^2 + ^з1<1з),
Ао2Ат = det А(П12О1 + ^22^2 + Лз2<*з),
Аа3Ат = det A(ai3<Ji + а2з^2 + Язз^з).
Подставляя полученные равенства в (П1.33) и представляя
через разложение (П1.32), после приравнивания членов при
спиновых матрицах придем к соотношению (П1.33) с точностью
до сомножителя det А. При собственных преобразованиях
(detA=l) величина (о действительно является вектором:
з з
(0=2 ^ki^k — 2 (П1.35)
k=l j=l
и связь между отображениями этого вектора дается «правиль-
ным» соотношением (П1.33). При зеркальных отображениях
(несобственных преобразованиях, detA = —1) угловая ско-
рость (о, так же как и сам эйлеров поворот, меняет знак не так,
как вектор; по этой причине они являются псевдовекторами.
§ П1.2. Углы Эйлера — Крылова
Углы Эйлера — Крылова являются наиболее распространен-
ными в механике кинематическими параметрами; их число равно
трем, что соответствует трем степеням свободы вращательного
движения. Каждый параметр является углом плоского вращения,
выполняемого вокруг той или иной оси координатного базиса.
Именно благодаря наглядности и ясному физическому содержа-
нию эти параметры нашли столь широкое применение в механике.
Если в качестве исходной системы координат взять базис I
(>1, 12, 1з) И выполнять последовательно плоские повороты отно-
сительно различных координатных осей (отмечаемых номером
оси), то можно видеть, что все повороты могут быть разбиты на
такие две группы:
1. 12'3", 2ГЗ", 31'2", 13'2", 23'1", 32'1".
(ill. Зо i
2. 1 2'1", 21'2", ЗГЗ", 13'1", 23'2", 32'3".
Здесь штрихом и двумя штрихами отмечены координатные оси
после первого и второго поворотов соответственно (номера осей
промежуточных систем координат); последовательность цифр
означает последовательность координатных осей, вокруг которых
выполняется вращение. Первая группа параметров носит назва-
ние углы Крылова', вторая — углы Эйлера; как видно, всего имеем
228
ПРИЛОЖЕНИЕ 1. ОБЗОР КИНЕМАТИЧЕСКИХ ПАРАМЕТРОВ
по шесть групп таких параметров. Это означает, что каждому за-
данному пространственному вращению отвечают однозначно три
угла, величины которых определяются однозначно заданным
преобразованием и их последовательностью.
Удобно исследование параметров Эйлера — Крылова выпол-
нять с помощью формализма матричных преобразований. Каждо-
му вращению по координатной оси отвечают следующие матрицы
преобразований:
— по первой оси на угол, скажем, ср:
в1 =
О О
cos ф sin ф
— sin ф cos ф
— по второй оси на угол у:
II cos у О
В2 = | 0 1
II sin у О
— sin у
О
cos у
— по третьей оси на угол гр:
|| cos ip sin ip О
BQ = — sin ip cos ip 0
II 0 0 1
Произвольное преобразование, определяемое матрицей А, выра-
зится как
А = В,ВД (j, J, Л = 1, 2, 3) (П1.37)
в зависимости от порядка выполняемых поворотов (П1.36).
Равенство (П1.37) может выразить элементы по заданным
углам, либо может служить уравнением для определения углов
по заданным элементам ау. Последнее уравнение разрешимо не
всегда; для иллюстрации рассмотрим малые преобразования:
в этом случае произведение (П1.37) коммутативно и равно для
последовательности углов Крылова:
А = 1 + qxji + уф + vp^3, (П1.38)
где вк — спиновые матрицы; этому равенству отвечает векторное
разложение малого поворота:
0 = cpii + р2 + ipi3.
Ясно, что углы ср, у и гр находятся по заданному 0 однозначно.
Для малых углов Эйлера имеем (скажем, для первой последова-
тельности (П1.36)):
А == 1 + (<р + гр) щ + уа2
— число свободных параметров равно только двум; уравнение
решено быть не может; этому положению отвечает свойство вы-
рождения системы параметров в одной точке, в данном случае —
в положении тождественного преобразования.
§ П1.3. ВЕКТОР КОНЕЧНОГО ПОВОРОТА
229
Аналогично система углов Крылова вырождается при втором
преобразовании, близком к л/2. Однако именно удобство разло-
жения для малых углов (П1.38), ясный физический смысл углов
определили их широкое применение в механике движения твер-
дого тела.
§ П1.3. Параметры вектора конечного поворота
Параметры, определяющие вектор конечного поворота, явля-
ются третьей группой параметров, физически различным образом
описывающих вращательное движение твердого тела. В соответ-
ствии с известной теоремой Эйлера любое ортогональное преобра-
зование можно представить эквивалентным плоским вращением,
т. е. характеризовать единичным вектором этого вращения е и
углом поворота 0. Все последующие кинематические параметры
так или иначе связаны с этими величинами и определяют вектор
конечного поворота. Однако формализм кинематических преобра-
зований, содержащий указанные параметры, оказывается различ-
ным; по-разному вводятся при этом и сами кинематические пара-
метры. Отсутствие наглядности и возможности легко установить
соответствие с физическими величинами для большинства фор-
мальных операций не позволяло использовать эти, казалось бы,
самые удобные и естественные параметры при исследовании дви-
жения.
П1.3.1. Векторная теория конечного поворота. В монографии
А. И. Лурье [71] излагается векторная теория конечного поворо-
та. Кинематическими параметрами являются элементы вектора
конечного поворота (вектора Родрига), определяемого как
0 = 2е tgA. (П1.39)
В упомянутой работе [71] приводится геометрический вывод фор-
мулы преобразования вектора (перехода г->г'), являющейся со-
отношением Родрига:
г' = г н----@ X
1+4 °2
Аналогичным образом выводится формула сложения преобра-
зований; если последовательно выполняются два конечных пово-
рота 01 и 02, то результирующий поворот будет равен
е, = —J-------(в, + ег + 4-в,хеД (ш.«)
Используя формулу (П1.40), можно построить формальные
соотношения для преобразования базисов, компонент неизменного
вектора и компонент вращающегося вектора. В частности, в ка-
г + 40 X г). (111.40)
230
ПРИЛОЖЕНИЕ 1. ОБЗОР КИНЕМАТИЧЕСКИХ ПАРАМЕТРОВ
честве кинематических параметров можно ввести проекции векто-
ра конечного поворота на преобразуемый им базис, причем задать
эти проекции в виде таких новых переменных:
0ft = 2-X * = 1,2,3. (П1.42)
ло
Для четырех переменных Xj (/ = 0, 1, 2, 3) существует одно урав-
нение связи:
Хд + ^2 4~ ^3 — 1 »
благодаря чему возможно такое представление параметров:
*о = cos = ук sin -у. (П1.43)
Такие параметры носят название параметры Родрига — Гамиль-
тона. Следуя работе [15], под параметрами Родрига — Гамильтона
будем понимать параметры (П1.43), где — направляющие ко-
синусы единичного вектора в преобразуемом им базисе. Только в
этом случае имеем равные величины параметров Xj; именно для
них записываются известные нам кинематические уравнения.
Заметим, что, в принципе, проектирование вектора е (также
как и 0) можно выполнить на любой базис; для получаемых при
этом параметров также можно вывести кинематическое уравнение,,
однако в него (уравнение) будут входить проекции вектора угло-
вой скорости на этот же базис. На практике такие уравнения
применения не нашли.
Векторный формализм преобразований с использованием век-
тора конечного поворота или параметров Родрига — Гамильтона
построить весьма трудно (хотя, в принципе, и можно). Такой
формализм будет существенно нелинейным, с одной стороны,
с другой же — его понимание будет весьма сложным, так как
преобразование (111.40) является векторным, плохо поддающимся
формализации для операций над базисами, отображениями векто-
ров на тот или иной базис, что особенно касается операций, в ко-
торых участвуют параметры Родрига — Гамильтона.
Далее, используя формулу (П1.41), можно вывести кинема-
тические уравнения, однако отсутствие наглядности для беско-
нечно малого преобразования, векторный смысл равенств опять
же затрудняет формализацию действий.
Все соотношения для вектора конечного поворота легко полу-
чаются из кинематических преобразований с использованием
кватернионов.
Помимо вектора Родрига 0, характеризуемого своими проек-
циями вк, 0к = 2yhtg6/2, где ч*. — направляющие косинусы оси е
эквивалентного эйлеровского вращения, существует целый ряд
кинематических параметров, также определяемых величинами е
и 9. Одними из таких параметров являются параметры Родрига —
§ П1.3. ВЕКТОР КОНЕЧНОГО ПОВОРОТА
231
Гамильтона (П1.42), (П1.43) определенные выше; в следующем
разделе будут рассмотрены параметры Кэли — Клейна (см. При-
ложение 3).
Рассмотрим также встречающиеся в ряде исследований сле-
дующие параметры, называемые вектором Эйлера*,
0 = е0, 0* = 1А0. (П1.44)
В ряде работ эти параметры называются иногда параметры
ориентации. Вектор Эйлера интересен тем, что по нему можно
построить кососимметрическую матрицу Ф следующим образом:
О
“02
Ф - 0^! + 02о2 + 03о3 =
- 03 02
О —
°1 0
(П1.45)
где щ — спиновые матрицы (П1.20). Можно видеть, что рассмот-
ренная выше матрица угловой скорости (П1.30) получается как
£} = ЙФIdt, причем производная берется только от угла враще-
ния 0 (составляющие в данном выражении не дифференци-
руются).
Можно показать, что матрица ортогонального преобразования
А выражается через свой собственный вектор и угол вращения
следующим образом:
А = ехр{Ф} = 1 + Ф + ^-Ф2 +Афз + ...,
где Ф — введенная выше матрица параметров Эйлера. Для дока-
зательства рассмотрим характеристическое уравнение для матри-
цы Ф. Имеем
det | Ф - Л1| = - V - (0? + 0| + 0|)% = - X3 _ 02Х = 0.
Согласно теореме Кэли — Гамильтона каждая матрица удовлетво-
ряет своему характеристическому уравнению; благодаря этому
получим рекуррентные соотношения
фЗ==_02ф ф5===04ф. ф7 = _ 06ф
ф4 = _02ф2 фб^^ф2 ф8 = _06ф2
Рассмотрим далее разложение экспоненты в ряд:
Л = 1 + ф + ^-ф2 + ^-фз + ... =(фч-^-фз + ^ф5 + ...) +
+ 1 + ^ф2 +^Ф4+...
Используя рекуррентные соотношения, имеем
л = ф('1_ 1 02+1 04-1 е6+ ...') + ! +
д_ ф2 fX __ 02-р 4“ 0е “ • • • ) = Ф 4“ sin 0 + 1 Ф2 (1 ~ cos 0).
\ 2! 4! 6 / 0 О2
232
ПРИЛОЖЕНИЕ 1. ОБЗОР КИНЕМАТИЧЕСКИХ ПАРАМЕТРОВ
Учитывая далее, что
А ф =
9
о
v3
-v2
-V3 v2
о — ?!
?! О
-v22-v3 V1V2 Vs
4ф2 = е2 Vi Vs
Ыз V3
являются соответственно кососимметрической и симметрической
составляющими рассматриваемой матрицы, получим
А = еф
1—( V2+V3) t1"008 9) V1V2(1—cos 0)—Т3 sin 0 T1V3(1—cos 0)+?2sin0
= T2T1(l+cos0)+y3sin0 1 — (?i + (1 — cos0) T2T3(1— cos 0)—^sinG .
T1Y3(1—cos0)—y2sin0 V2V3(1 — cos0) + y1sin0 1 — (у*+ T2)(l—cos 0)
Это — известное выражение для матрицы поворота А через пара-
метры у и 0 [66].
Вводя тригонометрические функции половинных углов и па-
раметры Родрига — Гамильтона (П1.43), получаем окончательна
еф
Ч + Ч Ч Ч (ЧЧ ЧЧ) (ЧЧ + ЧЧ)
2(ЧЧ + ЧЧ) Ч + Ч Ч Ч 2 (ЧЧ ЧЧ)
2 (х1х3— ЧЧ) (ЧЧ + ЧЧ) Ч + Ч ~ Ч ~ Ч
— известное выражение матрицы А через параметры Родрига —
Гамильтона.
П1.3.2. Формализм дробно-линейных преобразований. Пара-
метры Кэли — Клейна. В той же монографии А. И. Лурье [71] г
а также в изданиях [23, 24, 97] рассматриваются кинематиче-
ские параметры Кэли — Клейна, определяемые как группа четы-
рех комплексных параметров а, 0, 7 и 6, задающих дробно-линей-
ное преобразование комплексной плоскости £ в себя:
(ПЛ.46>
Точкам в плоскости £ во взаимно однозначное соответствие ста-
вятся с помощью стереографического проектирования точки еди-
ной сферы. Условие ортогональности преобразования (т. е. преоб-
разования единичной сферы в себя) приводит к следующим
условиям связи на параметры Кэли — Клейна:
а6-0т = 1, аа* + 00* = 1, а*у +0*6 = 0 (П.1.47)
(звездочкой будем обозначать комплексно-сопряженные вели-
чины).
Эти условия оставляют три независимых параметра, необхо-
димых для задания вращательного движения твердого тела. Связь
этих параметров с компонентами вектора конечного поворота
(точнее, с параметрами Родрига — Гамильтона) устанавливается
путем задания поворота сферы вокруг оси е и вычисления соот-
§ П1.3. ВЕКТОР КОНЕЧНОГО ПОВОРОТА
233
ветствующих этому вращению параметров а, [}, 7 и 6. Оказывается^
что соотношения между ними таковы:
a = Xo + iX3, Р= Хг + iXi (П1 48)
6 Хо — fX3, у = —Х2 Н“ iXi,
т. е. параметры Родрига — Гамильтона являются действительной
и мнимой частями параметров Кэли — Клейна.
Сложению преобразований отвечает суперпозиция дробно-ли-
нейных преобразований (которая также является дробно-линей-
ным преобразованием). Используя соотношения (П1.47) можно,,
в принципе, построить формализм, описывающий все кинемати-
ческие преобразования. Однако отсутствие наглядности и сложная
связь переменных £ с физическими величинами делает такой
формализм крайне неудобным.
П 1.3.3. Формализм унитарных преобразований. Параметры Кэ-
ли— Клейна. Существует более удобный формализм (см. дробно-
линейное преобразование и стереографическое проектирование)
для задания преобразований с помощью параметров Кэли — Клей-
на. Следуя [24], рассмотрим двумерное комплексное пространство
п, v и линейное преобразование в нем
и =au + $v, z/ = ytz + 6z;, (П1.49),
определяемое комплексной двумерной матрицей
Потребуем, чтобы детерминант матрицы был равным единице щ
кроме того, чтобы матрица U была унитарной, т. е.
UU+ = U+U = 1, (П1.50)
где U* —эрмитово сопряженная (т. е. U+ = U*T) матрица U.
Эти условия оказываются эквивалентными условиями ортого-
нальности преобразования в трехмерном пространстве, некоторым
образом связанными с преобразованием (П1.49). Действительно,
первое требование
det U = аб — [3 7 •= 1
совпадает с первым условием (П1.47) (условие унимодуляр-
ности). Унитарность матрицы U означает, что должны выпол-
няться равенства
аа* + [3[3* == 1, + 66* = 1, а*7 + [3*6 = 0.
Эти равенства эквивалентны второй группе равенств (П1.47) и
приводят к следующим условиям связи на параметры а, [3, 7 и 6:
а* = 6, 7* = -р, а6-£7 = 1. (П1.51)
Число этих связей равно пяти, что оставляет три независимых
переменных для данной группы параметров. Элементами матрицы
16 в. н. Бранец, И. П. Шмыглевский
-234
ПРИЛОЖЕНИЕ 1. ОБЗОР КИНЕМАТИЧЕСКИХ ПАРАМЕТРОВ
U при условиях (П1.51) являются параметры Кэли — Клейна.
Связь ортогонального преобразования в трехмерном прост-
ранстве и преобразования (П1.49) устанавливается тем, что векто-
ру г в трехмерном пространстве, имеющему компоненты (гь г2, гз),
^ставится в соответствие следующий оператор в двумерном комп-
лексном пространстве:
Пусть пространство u, v подвергается линейному преобразо-
ванию (П1.49) с помощью унитарной матрицы U. В этом случае
оператор R будет испытывать подобное преобразование и перей-
дет в оператор R' = URU*. Оператор R является эрмитовым
(т. е. самосопряженным: R*= R); это свойство не меняется при
подобном преобразовании:
Rf = (URUf)f - URUf - R'. (П1.52)
Благодаря этому оператор R' имеет вид, аналогичный R. Заме-
тим, что детерминант оператора также не меняется при подобном
преобразовании, осуществляемом унитарной унимодулярной мат-
рицей U, вследствие чего имеем
det R' = — (г\2+ г22 4- г32) = det U det R det U+ = det R =
= -« ,i + rX).
Последнее условие есть одно из условий ортогональности пре-
образования г в г'; вследствие этого можно утверждать, что пре-
образованию (П1.52) отвечает некое ортогональное преобразова-
ние в трехмерном пространстве. Можно показать, что такое
соответствие является изоморфным; действительно, представим,
что преобразование г в г' задано в виде (П1.10) матрицей А и
ему отвечает преобразование (П1.52). Запишем это соответствие-
в виде представления R' = AR, U' = URU*.
Обратное преобразование существует и оно определяется об-
ратным оператором, которым является А* (или U*): R = ATR/,
R = U+R'U, причем АТА = ААТ = 1, U*U = UU+ = 1.
Наконец, произведению двух преобразований соответствует
преобразование того же класса. Например, пусть R' =AR, R" =
-BR'. Тогда R" = CR, С = ВА. Или пусть R =URU\ R" =
= VRV\ тогда R" = WRW+, W-VU.
Это произведение, вообще говоря, не является коммутативным:
ВА =/= АВ, VU ¥= UV. Отсюда следует, что элементам матрицы А
могут быть поставлены во взаимно однозначное соответствие эле-
менты матрицы U. В «одну сторону» это соответствие устанавли-
вается достаточно просто: выполняя операции умножения дву-
мерных матриц (П1.52) и приравнивая элементы матриц R' и
§ Ш.З. ВЕКТОР КОНЕЧНОГО ПОВОРОТА
235
результата умножения URU*, можно найти элементы матрицы А:
|(a2_?2 + fi2_p2)
|(a2 + ?2_₽2-62)
Р6 — ay
|(т2-а2 + б2-₽2)
4 (a2 + T2 + P2 + 62)
i (a? + ₽6)
— ap
— z(ap+y6)
afi + Pv
(П1.53)
Несмотря на то, что параметры Кэли — Клейна являются
комплексными, элементами полученной матрицы А будут дейст-
вительные числа, в чем легко убедиться, учитывая соотношения
(П1.51) между а, р, 7 и б. Обратное соответствие, т. е. определе-
ние параметров матрицы U по заданным элементам матрицы А,
устанавливается существенно сложнее; оказывается, что пара-
метры Кэли — Клейна линейным образом содержат собственные
значения матрицы А, т. е. определяются компонентами эквива-
лентного эйлеровского вращения.
Чтобы установить указанное соответствие, следуя [23], вве-
дем так называемые спиновые матрицы Паули. Этих матриц три
и определяются они следующим образом:
°. Л U ”“1" Л Л
Все эти матрицы эрмитовы, т. е. = щ; все они унитарны и след
каждой из них равен нулю. Вместе с единичной матрицей
они образуют систему четырех линейно независимых матриц, до-
пускающих разложение любой матрицы (2X2) независимо от
величины ее компонент:
I с <r3+4<a+d)1-
(П1.55)
Если след указанной матрицы равен нулю, то исчезает член
с единичной матрицей; если матрица эрмитова, то коэффициенты
при щ — действительные числа.
Матрицы Паули позволяют установить соответствие введенного
выше оператора R и вектора г более наглядным и физически по-
нятным образом:
R = + г2^2 + Г3а3, (П1.56)
благодаря чему матричному оператору R ставится в соответствие
точка с координатами г2 и г3 в трехмерном пространстве, обра-
зованном спиновыми матрицами.
Рассмотрим теперь, как представляется оператор преобразова-
ния U, выраженный в виде разложения по спиновым матрицам,
16*
236
ПРИЛОЖЕНИЕ 1. ОБЗОР КИНЕМАТИЧЕСКИХ ПАРАМЕТРОВ
Используя (П1.55), можно записать
и=|(^ + 6)1+4(₽ + т)О1 + 4(₽-Т)О2 + 4(а-6)а3.
Учитывая условия связи (П1.51), можно видеть, что коэффициент
при единичной матрице действителен, тогда как все коэффициен-
ты при спиновых матрицах — мнимые. Используем представления
параметров Кэли — Клейна (П1.48), не касаясь пока соответствия
их параметрам Родрига — Гамильтона, а просто как разложение
каждого параметра на действительную и мнимую части, выполнен-
ное так, чтобы удовлетворять условиям унитарности и унимоду-
лярности матрицы U. В этом случае имеем
U = Xol 4- Z(%i<Ti + Х2О2 + Х3О3), (П1.57)
т. е. оператор U может быть условно представлен в виде некото-
рой «векторной» части, определяемой компонентами Xi, Л2, Лз
вектора конечного поворота. Оказывается, преобразование (П1.52)
действительно не изменяет вектор, определяемый направлением
s = AziOi +.%2<T2 + ^з<Тз, (П1.58)
т. е. является вращением вокруг оси s.
Вывод этого утверждения получается достаточно просто, если
использовать свойства умножения спиновых матриц. Эти свойства
следующие:
= о| = = = к = 1, 2, 3, (П1.59)
02^3 ~ —03^2 ,== ЙТ1, = —*1*3 ~ &02? 0102 ,== —0201 ~ ^3-
Рассмотрим преобразование
S' = USU+ — [%ol + i + Х202 4“ ^зП3) ] (Xi<Ti 4” Х202 4“ Х303) X
X [^о 1 — (M^i 4“ А/2^2 4” Z303) ],
так как у сопряженного оператора U изменяется только знак
«векторной» части. Выполняя умножение, используя обозначение
«вектора» s и соотношения (П1.59), имеем с учетом того, что
сумма квадратов всех X, равна 1: sz = s.
Итак, элементы kk (& = 1, 2, 3) разложения по спиновым мат-
рицам пропорциональны собственному вектору изоморфной экви-
валентной матрицы А. Коэффициент пропорциональности можно
установить из следующего примера. Пусть матрица А имеет вид
А -
cos 0
— sin 0
0
sin 0 0
cos 0 0
0 1
т. е. определяет вращение по третьей координатной оси. Очевид-
но, что собственный вектор этой матрицы равен (0, 0, 1). Будем
искать эквивалентную матрицу U в виде U = + &303. Рассмот-
рим вектор г с компонентами (и, 0, гз); тогда R' = AR будет
иметь компоненты (п cos 0, —и sin 0, Г3).
§ Ш.З. ВЕКТОР КОНЕЧНОГО ПОВОРОТА
237
Рассмотрим далее эквивалентное преобразование (П1.52), вы-
полняемое «вектором» (П1.56):
R = Г1<Т1 + г3о3,
R' = URUf =(Ы + гЛзОз) (ri®i + r3a3) (Aol - гМз) •
Выполняя умножение приведенных матриц и используя их пра-
вила умножения (П1.59), получим
R' = г± (Ло1 + азо3) о1 (М — гХ3о3) + г3 (\1 + г%3о3) о3 (\1—Л3о3)=
— ri [(^2 ^1) 2%0А,3о2] 4* г3о3.
Приравнивая элементы при спиновых матрицах в полученном
соотношении с компонентами вектора г', получим
2Х0Х3 = sin 0, Л>о — Х3 = cos 0.
Исходя из этого можно ввести тригонометрическое представление
параметров: Хо = cos 0/2, Хз == sin 0/2.
Сравнение данного представления с соотношениями (П1.43)
показывает, что компонентами матрицы U в выражении (П1.57)
являются параметры Родрига — Гамильтона, определяющие век-
тор конечного поворота. Запишем окончательное выражение для
унитарной матрицы преобразования в виде разложения по спи-
новым матрицам:
А А
и = 1 cos у + t (YjOj + у2о2 4- у8о3) sin у, (П1.60)
где Yi — проекция на координатные оси единичного вектора е,
направленного по оси конечного поворота. Таким образом, пара-
метры Кэли — Клейна являются комплексными комбинациями
параметров Родрига — Гамильтона.
Аналогично тому, как это было сделано в случае направляю-
щих косинусов, можно формализм унитарных преобразований
поставить в изоморфное соответствие преобразованию систем ко-
ординат, преобразованию компонент неизменного вектора при
смене базиса или преобразованию вектора в вектор (поворот
вектора). Однако подробно на этом мы останавливаться не будем,
так как аналогичное рассмотрение будет проведено в Приложе-
нии 2 при исследовании формализма кватернионов.
Формализм унитарных преобразований с физической интер-
претацией, использующей спиновые матрицы, показывает, что
оператор преобразования может быть непосредственно представ-
лен элементами конечного поворота, однако при этом он содержит
четыре компоненты. Правила действий над спиновыми матрицами
приводят к алгебре кватернионов.
238
ПРИЛОЖЕНИЕ 2. КИНЕМАТИЧЕСКИЕ СООТНОШЕНИЯ
ПРИЛОЖЕНИЕ 2
ОСНОВНЫЕ КИНЕМАТИЧЕСКИЕ СООТНОШЕНИЯ
С ИСПОЛЬЗОВАНИЕМ КВАТЕРНИОНОВ
Изложим, следуя работе [15], основные кинематические соот-
ношения, а также формализм описания операций вращения с по-
мощью кватернионов. В качестве основных кинематических пара-
метров будем использовать компоненты кватерниона
А = Хо + ХД + X2J + Хзк, (П2.1)
являющиеся в частном случае параметрами Родрига — Гамильто-
на. Кватернион (П2.1) будем считать нормированным, т. е. его
компоненты могут быть представлены в виде
A.0 = cos4, = Л = cos-|-+ е sin 4, (П2.2)
где 0 — угол, a — направляющие косинусы орта е кватерниона.
§ П2.1. Преобразование базисов
Введем координатные системы Z(ii, i2, is) и £’(ei, ег, ез); по-
мимо этих ортонормированных базисов будем рассматривать три
единицы i, j, к, образующие гиперкомплексный базис Я, который
можно совмещать с любой координатной системой. Ортогональное
преобразование, соответствующее вращению твердого тела, будем
задавать операцией перехода от базиса I к базису Е. Этот пере-
ход определяется операцией вращения нормированным кватер-
нионом (П2.1) в виде
eft = A°ift°A, * = 2, 3. (П2.3)
Условно операцию (П2.3) будем записывать также и так:
1^Е, Е = Л°1» Л. (П2.4>
При выполнении операции (П2.4) будем предполагать, что базис
Я совмещен с I.
§ П2.2. Преобразование компонент неизменного вектора
Для любого вектора г, определяемого своими проекциями в
том или ином базисе, скажем, в базисе I или Е:
г = riJij + r2ii2 + r3li3 = r1Eei + г2Ее2 + r3Ee3, (П2.5)
введем понятие гиперкомплексное отображение вектора на соот-
ветствующий базис. Под последним будем понимать кватернионы
Ri = ъ = Тц1 + r2lj + r3lk, Re = Ге = r1Ei + r2E] + ^k. (П2.6)
При преобразовании базисов (П2.4) компоненты неизменного
вектора (П2.5) оказываются связанными обратной операцией вра-
§ П2.4. СОБСТВЕННЫЙ ОПЕРАТОР ПРЕОБРАЗОВАНИЯ
239
щения, выполняемой над гиперкомплексными отображениями
этого вектора на преобразуемый базис:
RE = Л ° Rf оЛ, гЕ = Аог;о А. (П2.7)
§ П2.3. Инвариантность операции преобразования вектора
(операции вращения)
Пусть кватернионом Т задана операция вращения типа
(П2.3), переводящая вектор р в вектор f:
f = ТороТ. (П2.8)
•Вид этой операции сохраняется при отображении равенства
(П2.8) на любой базис. При этом векторы f и р и оператор вра-
лцения — кватернион Т — испытывают однотипное преобразование
типа (П2.7) при смене базиса как неизменные векторы, т. е.
Fe = AoFioA, Ре = А^Р/ОА, Те = АоТ1°А. (П2.9)
Действительно, совмещая базис Н с Z, имеем для отображений
Tj = TjoPjoTj и согласно правилам перепроектирования (П2.9)
получаем
Fe = Ts°PsoTs. (П2.10)
Инвариантность операции (П2.10) свидетельствует о том, что
-операция вращения в виде (П2.8) имеет векторный смысл и из
нее может быть получена формула Родрига (П1.40).
§ П2.4. Собственный оператор преобразования
В предыдущем п. 3 введено понятие отображения кватерниона
т. е. оператора преобразования на тот или иной базис; при этом
установлено, что при смене базиса он преобразуется как неизмен-
ный вектор (П2.9). Очевидно, что для каждого кватерниона-опе-
ратора может быть построен ряд его отображений на заданный
ряд базисов. Так, например, рассмотрим такой ряд базисов и,
соответственно, кватернионов, задающих переход между ними
операцией типа (П2.4) :Т 1 —> Е Q, Совмещая гиперкомплекс-
ный базис Н с Т, имеем S = ST, А = Аг, L = LT.
Для всех последующих отображений кватернионов на рас-
сматриваемые базисы согласно равенствам перепроектирования
липа (П2.9) имеем
Л/ == Sy ° Ау ° Sy, Ajj '= Sy ° Ay ° Ay ° Ay ° Sy ,=== Aj === A*,
A.q 1— Sy ° Ay ° Ly ° Ay ° Ly ° A.y ° Sy,
Sj = Sy ° Sy ° Sy = Sy = S*, SE = Sy ° AT ° Sy ° Ar ° Sy,
240
ПРИЛОЖЕНИЕ 2. КИНЕМАТИЧЕСКИЕ СООТНОШЕНИЯ
SQ = Sr ° Аг ° LT ° ST ° Lr ° Лг ° ST, (П2.11)
Lf1— St 0 Lt ° St, Le === St ° Л-т ° Lt ° Л-т ° St,
Lq — St ° Л-т ° Lt ° Lt ° Lt ° Л-т ° St == Ljs == L*.
Можно видеть, что из всего ряда отображений выделяются
отображения кватернионов на преобразуемые ими базисы. Эти
отображения равны, и их компонентами являются параметры
Родрига — Гамильтона; они имеют смысл собственных операторов
преобразования.
§ П2.5. Инвариантная векторная форма сложения преобразовании
Для двух последовательно выполняемых преобразований Л и
L справедливо следующее правило (теорема сложения преобра-
зований) :
N = L°A. (П2.12)
При этом вид преобразования сохраняется для отображений со-
ставляющих кватернионов на любой базис:
Nt = Lt ° Ат, Ni = Lj°Aj, NE = LE°AE и т. п. (П2.13)
и для любого числа последовательно выполняемых преобразова-
ний. Эта форма сложения преобразований (П2.12), будучи инва-
риантной к преобразованию базисов, имеет векторный смысл,
и из нее может быть получена векторная формула сложения
конечных поворотов.
§ П2.6. Сложение преобразований для собственных операторов
Для собственных операторов преобразования справедливо
второе правило (теорема) сложения преобразований:
N* = A*°L*. (П2.14)
Это правило справедливо для любого числа последовательно вы-
полняемых преобразований. Оно легко может быть получено из
(П2.12), (П2.13) с использованием равенств перепроектирова-
ния (П2.11) кватернионов.
§ П2.7. Переставимость преобразований
Введенные понятия отображений операторов позволяют фор-
мулу сложения преобразований (вращений) N = L ° Л интерпре-
тировать как
N = Ao(AoL°A) = (LoAoL)°L (П2.15)
—- «перестановку» операций при соответствующем преобразовании
§ П2.10. СЛОЖЕНИЕ ОТНОСИТЕЛЬНЫХ ДВИЖЕНИЙ
241
одного из операторов, т. е. преобразовании его вектора поворота.
Данная теорема переставимости преобразований может быть рас-
пространена на любое число последовательно выполняемых пре-
образований.
§ П2. 8. Оператор бесконечно малого преобразования
и связь с угловой скоростью
Этот оператор легко получается с использованием тригоно-
метрического представления кватерниона (П2.2) при введении
малого угла поворота dQ:
А«1+4-d0e=1+^dit< (П2.16)
тде угловая скорость ю = edQ/dt.
§ П2.9. Кинематические уравнения
Они получаются из теорем сложения преобразований. Рассмат-
ривая положение базисов и операторов преобразования в момент
t и t + dt, можно видеть, что результирующее преобразование
(t + dt) есть последовательность конечного (t) и бесконечно ма-
лого (dt) преобразований.
Используя первую (инвариантную) теорему сложения (П2.13),
имеем
2A* = (0/°A* (П2.17)
первую форму кинематических уравнений; аналогично для второй
теоремы сложения (П2.14) получаем
2A* = A*o(oE (П2.18)
— вторую форму кинематических уравнений, записываемых для
собственного оператора преобразования (более подробно вывод
кинематических уравнений см. Приложение 3).
§ П2.10. Сложение относительных движений
Поскольку кинематические уравнения в формах (П2.17) и
(П2.18) существуют для собственных кватернионов, то они долж-
ны иметь тот же вид и для кватерниона-произведения двух и бо-
лее преобразований. Формально дифференцируя оператор N*
(П2.14) и учитывая, что составляющие преобразования удовлет-
воряют своим кинематическим уравнениям:
2А* = (Ou ° Л* == Л* ° (di#; 2L* = (Озе ° L* == L* ° (02р, (П2.19)
242
ПРИЛОЖЕНИЕ 2. КИНЕМАТИЧЕСКИЕ СООТНОШЕНИЯ
получим
2N* = 2А* ° L* + 2А* ° L* = (©и + (02/) ° N* = N* (соiQ + (02q)
(П2.2О>
— две искомые формы уравнений.
Как следует из (П2.20), происходит векторное сложение отно-
сительных угловых скоростей (сложение отображений в одном:
базисе). Эти соотношения справедливы для любого числа после-
довательностей выполняемых преобразований. Первая теорема
сложения дает тот же результат, но для этого должна быть ис-
пользована инвариантная форма кинематических уравнений для
несобственных кватернионов, получаемая далее. В большинстве-
случаев знак «*», отличающий собственные кватернионы,,
опускается.
§ П2.11. Производные отображений неизменных векторов
Формально дифференцируя соотношения перепроектирования
(П2.7) в силу кинематических уравнений, получаем симметрич-
ные равенства (см. более подробно (П1.6), (П1.7)):
Щ = AoR7 оЛ + щХы£, RI = AoR£,oA Н-OjXRj. (П2.21У
Эти равенства являются строгой формулировкой так называемых
соотношений Эйлера, связывающих производные вектора в раз-
личных системах координат, в том числе и «абсолютную», и «ло-
кальную» производную.
§ П2.12. Производные отображений кватерниона
Рассматривая операцию перепроектирования оператора кватер-
ниона (П2.9), (П2.11), получаем аналогично (П2.21) следующие
соотношения для производных оператора:
fЕ = До f J о А + ТБ X аЕ, Т2 = А о ТБ о Д + (dj X Ть (П2.22)
§ П2.13. Инвариантная форма кинематического уравнения
Рассмотрим следующие два последовательных преобразованиям
Кинематические уравнения для собственного кватерниона L сог-
ласно (П2.19) имеют две формы: 2L = <о2£ °L = L° й)2(г. Первая
форма этого уравнения может быть записана в виде
2Lje — о2.е 0 Urg
(П2.23)
ПРИЛОЖЕНИЕ 3. КИНЕМАТИЧЕСКИЕ УРАВНЕНИЯ
•243
(U = L* = L — собственный кватернион). Эта форма сохраняется
для любого базиса, неподвижного относительно Е; так, например,
для базиса 7 имеем
L, = А ° Le ° A? ©2, = А ° (02s ° А, (П2.24)
и очевидно, что при А = const справедливо
21, = юг, ° Li. (П2.25)
Таким образом, первая форма кинематического уравнения
типа (П2.17) в данном случае (П2.23) и (П2.25) является ин-
вариантной (векторной) формой кинематического уравнения; оно
имеет одинаковый вид в проекциях на любой, скажем, неподвиж-
ный, базис.
Это же уравнение может быть «спроектировано» и на подвиж-
ный базис. Действительно, при А ¥= const базисы I и Е имеют
относительное движение; используя соотношения Эйлера (П2.22)
или формально дифференцируя равенство (П2.24), получим
2L, = А ° (й>2в ° LE)° АН" © 1, X L, = ©2г ° И- ©и X L, (П2.26)
— обобщенную форму кинематического уравнения.
§ П2.14. Первая теорема сложения
и сложение относительных вращений
Дифференцируя формально (П2.13) инвариантную форму сло-
жения преобразований, скажем, в базисе 7, получим
2N, = 2L, ° Дт + 2L, ° А,.
Подставляя значения производных в силу обобщенного кинема-
тического уравнения (П2.26) и уравнения (П2.17), имеем
2N, — ©2i ° L, ° А, + (©1, X L,) ° А, + Lj ° ©17 ° А, = (©и + ©2,) ° N,
(П2.27)
— первую форму кинематического уравнения для N; при этом
также происходит векторное сложение угловых скоростей.
ПРИЛОЖЕНИЕ 3
КИНЕМАТИЧЕСКИЕ УРАВНЕНИЯ
Приведем кинематические уравнения последовательно для всех
кинематических параметров. Для вывода кинематических урав-
нений можно применить единый подход, основанный на исследо-
вании поведения во времени оператора преобразования.
244
ПРИЛОЖЕНИЕ 3. КИНЕМАТИЧЕСКИЕ УРАВНЕНИЯ
§ П3.1. Направляющие косинусы
Рассмотрим (рис. 39) положение двух систем координат Е и L
переход между которыми задан операцией (П1.3) и определяется
матрицей А. При относительном движении матрица преобразова-
ния будет функцией от времени: А(£). Рассмотрим два близких
положения базиса E(t) и E(t + At); переход между ними опре-
деляется матрицей бесконечно малого преобразования, причем:
согласно (П1.29) имеем
ДАЛ=1-ЯЛД£, (П3.1)
и элементами матрицы будут проекции вектора угловой ско-
рости со на преобразуемый им базис (т. е. E(t) и E(t + Д£)); этж
Рис. 39. Матрица бесконеч-
но малого преобразования в
связанных осях
Рис. 40. Матрица бесконеч-
но малого преобразования в
неподвижных осях
проекции одинаковы, так как вектор угловой скорости со выпол-
няет малый поворот сэ(Д£) от базиса E(t) к E(t + At).
Согласно правилу сложения преобразований, поворот от I к
E(t + At), определяемый матрицей А(£ + Д£), выразится через»
составляющие преобразования таким образом:
A(t + At) = AAEA(t) = (1 - &ЕМ) A(t). (П3.2):
Данное равенство является кинематическим уравнением в раз-
ностной форме. Чтобы перейти к дифференциальной форме урав-
нения, введем производную от матрицы А
А = lirn А^+4;-А(^
д/->о М
С учетом этого равенство (П3.2) преобразуется к дифференциаль-
ной форме кинематического уравнения:
А = -£2ЛА. (ПЗ.З)
Можно получить другую форму кинематического уравнения,
если переставить повороты, как это показано на рис. 40; в этом
случае оператор бесконечно малого поворота описывает переход,
ot/kZz, и, следовательно, его компонентами являются проекции
вектора угловой скорости на базис I:
AA^i-Q.At. (П3.4>
§ П3.1. НАПРАВЛЯЮЩИЕ КОСИНУСЫ
245
Очевидно, что при таком представлении разностная форма кине-
матического уравнения будет иметь вид
А(^+Д^) = А(ОААЬ (П3.5)
Дифференциальная форма уравнения получается аналогичным
образом:
А = -АЙЬ (П3.6)
Следует заметить, что переход от одной формы кинематичес-
кого уравнения к другой может быть получен с помощью преоб-
разования подобия (П1.13). Уравнения (ПЗ.З) и (П3.6) носят,
название уравнения Пуассона,
Выше мы говорили, что матрицу преобразования можно интер-
претировать как оператор, действующий над векторами. В этом
случае оператору имеет смысл также приписывать индекс базисат
отражая тем самым то свойство, что при смене базиса оператор»
также изменяется преобразованием подобия. Оператор А, преоб-
разующий базис I в Е, выглядит одинаково в обоих базисах (пре-
образование подобия А(А)АТ = А тождественно); этому факту
отвечает то свойство, что вектор эквивалентного эйлеровского вра-
щения имеет одинаковые проекции на преобразуемые им системы
координат. Это свойство использовалось выше при записи проек-
ций оператора бесконечно малого преобразования в формулах
(П3.1) и (П3.4).
Благодаря тому, что матрица преобразования является неосо-
бенной (detA = l), кинематические уравнения являются обрати-
мыми:
-ОК = ААТ, —Й/ = АТА. (П3.7>
Это свойство является очень важным; оно означает, что данные
кинематические параметры не вырождаются при любом движе-
нии (не обращаются в бесконечность ни сами параметры, ни их
производные).
Кинематические уравнения (ПЗ.З) и (П3.6) записаны в опе-
раторном (матричном) виде. В скалярном виде для каждого типа
кинематических уравнений имеем по 9 уравнений, получаемых
почленным приравниванием элементов матриц.
Для уравнений первой формы (ПЗ.З) имеем
—а\\ = 021 СОзе — Дз1'(Й2е, “021 = 031 (О ГЕ — 011 СОзе?
— 03! = 0цСО2Е ~ 021О)1ег.
—012 == 022Юзе — 032'Ю2е? —022 “ 032<О1е — 012<Озе,
—032 == 0Г2<В2е — 022Ю1Е,.
“013 == 023Юзе “ 033Ю2Е, “023 “ 033®1e ~ 013СОзе,
“033 = 013’Ю2Е “ 023Ю1е. (П3.8);«
246
ПРИЛОЖЕНИЕ 3. КИНЕМАТИЧЕСКИЕ УРАВНЕНИЯ
Для уравнений второй формы (П3.6):
—ац = #13<£>2/ — #12(03/,
“~#21 — ^23^21 — #22(*)3/,
~#31 — #33^)21 ~ #32<ВЗ/,
—#12 = #Ц‘(031 ~ #13(01/,
—#22 = #21 СОЗ/ ~ #23(01/,
~#32 — #31'(О31 ~ #33(01/,
—#13 = #12(01/ — #ЦО)2/,
—#23 = #22(01/ — #210)2/,
“#33 = #32(01/— #31(02/. (П3.9)
Каждая группа уравнений имеет по 6 уравнений связи (условия
ортогональности).
В заключение рассмотрим теорему о сложении двух движений.
Пусть согласно рис. 41 имеется два последовательно выполняемых
7 к преобразования, так что С = ВА. Пусть
V----у Е. далее базис Е движется относительно I с
\ 1 угловой скоростью Он а базис К относи-
г тельно Е — со скоростью (о2. В этом слу-
\ чае кинематическими уравнениями для
\ / \ \ матриц В и А будут следующие:
\ / _____х-—к
т» /л р А = —£2ieA = —AQu, В = —Q2eB =
Рис. 41. Сложение угло- ’
вых скоростей = _BQ2£; (П3.10)
здесь матрицы Qi и Q2 содержат элементами проекции угловых
скоростей (01 и (02 на соответствующие системы координат.
Выведем кинематическое уравнение для матрицы С, для чего
выполним формальное дифференцирование: С = ВА + ВА. Под-
ставляя в это равенство соотношения (П3.10), получим
С = —Q2^BA — BAQ^--Q2feC — COij*
при этом, естественно, возможна и такая подстановка:
С •= -ВЙ2/Д - BQUA = -В (Q2e + Qu) А.
Если учесть связь матриц угловых скоростей Q2fe = CQ2/CT, Qu =
= СЛ1/СТ, то первое равенство приведется к двум видам:
С = — (Qu + С, С = -С (Qu + Q2i) . (П3.11)
Анализ полученных соотношений (а все они являются равно-
правными кинематическими уравнениями для С) показывает, что
имеет место векторное сложение относительных угловых ско-
ростей: сложение компонент матриц угловых скоростей всегда
выполняется в одном базисе.
§ П3.2. УГЛЫ ЭЙЛЕРА — КРЫЛОВА
247
§ П3.2. Углы Эйлера — Крылова
Обратимся к кинематическим уравнениям для углов Эйлера —
Крылова. Кинематические уравнения связывают кинематические
параметры и их производные с величинами угловой скорости;
выше были получены две формы таких уравнений для направля-
ющих косинусов (ПЗ.З) и (П3.6). Рассмотрим кинематические
уравнения для составляющих вращений. Каждое вращение явля-
ется поворотом по координатной оси; для вращения по первой
оси (см. (П1.37)), определяемого матрицей Bi, имеем
вхв; = ф 0 0 0 — sin ф 0 — cos ф 0 II COS ф . — si п ф II 1 0 0 cos ф - 0 sin ф 0 — sin ф COS ф —
для второй с В2в* = V )СИ — — sin 7 0 0 0 cos 7 0 — cos 7II ° Г — sin 7 !| cos 7 0 0 1 — sin 7 0 sin 7 0 cos 7 = 7^2 “
для третьей оси —
II — sin гр cos ip 0 cos гр sin гр 0
В3Вз = ф -созф — sin гр 0 . . sin гр — cos гр 0 — — ®3®3
II о 0 0 0 0 1
(П3.12)
Исходя из этих равенств, кинематическое уравнение может быть
получено из (П1.37) формальным дифференцированием матрицы
А в соотношениях (П3.7):
Qe = ААТ = (BfcBjBj + ВьВД + В^ВД) BjBM =
= BhBj + Bft(BiBf)Bfe + ВкВ,(В,В’)В1Вь
(П3.13)
= АТА = BjBlBl(BfcB<Bi + В^В, + B.BiB;) =
= BJBI ( B£Bft ) В4В; + BJ ( B‘B,) Bj + BjBj.
Приравнивая элементы при спиновых матрицах в полученных ра-
венствах, придем к кинематическим уравнениям для углов Эйле-
ра — Крылова.
В качестве примера возьмем последовательность 3 2Z1ZZ; в этом
случае & = 1, i = 2, j = 3; исходя из (П3.13) и (П3.12) имеем
А = В1В2В3;
Йя = <ро1 + Bj (Vo2) BJ + ВгВ2 (гро3) В£В? =
= <ра1 + у cos фо2 — у sin фо3 — гр sin 7^ + гр cos 7 cos фо3 +
+ гр cos 7 sin фп2,
248
ПРИЛОЖЕНИЕ 3. КИНЕМАТИЧЕСКИЕ УРАВНЕНИЯ
12/ — фВзВ^ВзВз +?Вза2®з + Фаз —
= ср sin уо3 + ср cos у sin фа2 + ср cos 7 cos фс^ +
+ 7 cos Tp>€F2 — 7 sin фог + фо3.
Из полученных матричных равенств следуют такие координат-
ные равенства (равенства в проекциях на оси базисов I и Е):
со ив = <р — ф sin у, сои = —7 sin ф + ф cos 7 cos ф,
<022? = 7 cos ср + ф cos 7 sin ф, (O21 = 7 cos ф + ф cos 7 sin ф, (П3.14)
(Озб = —7 sin ф + ф cos 7 cos ф, (o3j = ф + ф sin 7.
Данные равенства разрешимы относительно производных от
углов везде, где cos 7 ¥= 0, так как детерминант алгебраического
уравнения (П3.14) равен cos 7. Область cos 7~ 0 соответствует
вырождению данной системы кинематических параметров (потеря
одной из степеней свободы). В этой области при движении с ко-
нечными угловыми скоростями скорости изменения параметров
становятся бесконечно большими.
§ ПЗ.З. Параметры Родрига — Гамильтона
(уравнения в кватернионах)
Рассмотрим два базиса I и Е, взаимное положение которых
задается кватернионом А и операцией (П2.5); при движении ба-
зиса Е относительно I кватернион будет переменным: Л(£). Рас-
смотрим далее два близких положения базиса Е: E(t) и E(t + Д£),
их положение относительно базиса I определяется кватернионами
Л(£) и А(£+Д£) соответственно. Взаимное положение базисов
E(t) и E(t + At) описывается кватернионом малого преобразова-
ния (П2.14). Ясно, что Л(£ + Д£) выражается через А(£) и ДА
как результат их умножения.
Используем вначале теорему сложения преобразований
(П2.10), (П2.11); при этом составляющие преобразования кватер-
нионы должны проектироваться на любой, один и тот же, базис.
Для того чтобы получить собственные кватернионы преобразова-
ния, т. е. А*(£) и А*(£ +Д£), таким базисом должен быть выбран
только базис I. Имеем
A* (t + At) = ДА/ ° A* (t). (П3.15)
Это — первая форма кинематического уравнения в разностном
виде. Выражая ДА/ согласно (П2.14) и переходя к пределу
(Д£->0), получим дифференциальный вид кинематического урав-
нения:
А* (0 = A (Oj о А* (0.
(П3.16)
§ ПЗ.З. ПАРАМЕТРЫ РОДРИГА — ГАМИЛЬТОНА
249
Эту же теорему сложения можно применить, проектируя со-
отношение (П3.16) на любой, один и тот же, базис, однако в э1ом
случае кватернион преобразования не будет собственным, а про-
екции вектора угловой скорости будут взяты на рассматриваемый
базис.
Для получения второй формы кинематического уравнения ис-
пользуем теорему сложения для собственных кватернионов
(П2.13). Имеем
A* (t + М) = А* (0 ° ДА = A* (t) ° ДАВ. (П3.17)
Переходя к дифференциальной форме, получим
А*(О = |л*(0»й£. (П3.18)
Уравнения (П3.16) и (П3.18) разрешимы относительно угловых
скоростей:
<oz = 2А* ° А*, (дЕ = 2А* ° А*. (П3.19)
В дальнейшем звездочки при кватернионах, обозначающие то,
что кватернион является собственным для рассматриваемого пре-
образования, будем опускать, имея в виду, что кинематические
уравнения записываются только для кватернионов, компонента-
ми которых являются параметры Родрига — Гамильтона.
Кинематические уравнения первой (П3.16) и второй (П3.18)
формы записаны в операторном (кватернионном) виде. Им соот-
ветствуют по четыре скалярных уравнения, получаемых после
выполнения умножения кватернионов и приравнивания членов
при гиперкомплексных единицах. Для уравнений второй формы
(П3.18) имеем
2Хо = — Х1 (0— Х3Ы3Е, 2X1 — Хо<В1я + ХгСОзв — Хз(О2в,
(ПЗ.?0)
2^2 == Хо(Й2е 4“ ХзО1е — ХгШзе, 2Хз = ХфСОЗЕ 4" Xi(Cl)2e — Х2(01е.
Для уравнений первой формы (П3.16)
2Хо == — Xi со 1 z — Х2Ы21 — Х3СО31, 2X1 = Xqcdu 4“ X3CO2Z — Хгсбз/,
(П3.21)
2X2 — XoG)2i 4“ Х1Ш31 — Хз<оц, 2Хз — Xfl(D3i 4- Хгсоп — Xi<O2z.
Обе группы уравнений имеют по одному уравнению связи (на
норму кватерниона).
Рассмотрим в заключение теорему сложения преобразований
(П2.13). Пусть относительное движение базиса Е определяется
угловой скоростью ©1, т. е. имеем кинематические уравнения
(П3.16) и (ПЗ.,18):
2Л = <0цоА, 2А = А°(01Я. (П3.22)
17 в. Н. Бранец, И. П. Шмыглевский
250
ПРИЛОЖЕНИЕ 3. КИНЕМАТИЧЕСКИЕ УРАВНЕНИЯ
Аналогично относительное, движение базиса Е' (относительно Е)
задается угловой скоростью 0)2 и определяется такими же кине-
матическими уравнениями:
2Р = со2я о Р, 2Р - Р о (о2Е,. (П3.23)
Выясним, какому кинематическому уравнению удовлетворяет
кватернион результирующего преобразования N. Выполняя фор-
мальное дифференцирование (П2.13) и используя (П3.22) и
(П3.23), получим
2N = 2А о Р + 2А о Р =
= (Ojj ° А ° Р “j- А ° Р ° (O2jRy = ° N —j— N 0 CO2jg*/„
С другой стороны, имеем соотношения перепроектирования:
(д±Е = А о 0)2/ о А, (&2Е' ~ Р ° °
о1£/ = N о о)17 о N, (д21 = N о (д2Е ° N.
С учетом этого имеем и такие формы кинематического уравнения
для кватерниона N:
2N = (wjj 4~ o)2j) ° N, 2N = N ° (co^/ 4- w2#/),
т. e. уравнения первой и второй формы; при этом происходит
векторное суммирование угловых скоростей (угловые скорости
«складываются» в одном базисе).
§ П3.4. Параметры Кэли — Клейна (унитарные преобразования)
Для вывода кинематических уравнений в параметрах Кэли —
Клейна используем формализм унитарных преобразований, опре-
деляющих операцию вращения вектора в виде (П1.52). Анало-
гично тому, как в Приложении 2 были построены все соотноше-
ния кинематики на основе операции вращения, задаваемой ква-
тернионом А, можно построить адекватный формализм на основе
операции (П1.52). Отображением вектора г на тот или иной базис
будет самосопряженный оператор R (П1.56), содержащий своими
компонентами проекции вектора на этот базис; этому вектору
следует приписать индекс выбранного базиса. Операции преобра-
зования базисов, компонент неизменного вектора, сложения пре-
образований найдутся аналогичными рассмотренным в Прило-
жении 2. Здесь выполним вывод кинематических уравнений.
Оператор бесконечно малого преобразования в функции ма-
лого угла поворота (вектора угловой скорости) может быть легко*
получен из представления (П1.57), выражающего унитарную мат-
рицу преобразования U через параметры Родрига — Гамильтона.
§ ИЗ.4. ПАРАМЕТРЫ КЭЛИ — КЛЕЙНА
251
Используя зависимость (П1.43), имеем
AU = 1 + -J" (Viai + + Ь®э) А9- (П3.24)
Если оператор U задает переход от одного базиса к другому, мож-
но видеть, что его компоненты (которые определяются проекция-
ми вектора эйлеровского поворота е) в обоих базисах будут оди-
наковы. Будем приписывать оператору AU индекс базиса, опреде-
ляемый проекциями получаемыми при задании вектора е.
Введем матричный оператор угловой скорости
II CD CD. — /СО II
|^ + гш<э 2|’ (П3.25)
который аналогично оператору R может интерпретироваться как
образ вектора угловой скорости. Будем приписывать этому опе-
ратору индекс базиса, определяемый теми проекциями вектора о,
которые входят в этот оператор. Анализируя выражение для опе-
ратора бесконечно малого преобразования (П3.24), можно видеть,
что он выражается через угловую скорость (П3.25):
ди = 1 + 4- Й - (П3.26)
Пусть оператор U определяет переход от базиса Г к Е; при
движении базиса Е относительно I оператор U будет функцией
времени. Рассмотрим два близких положения базиса Е\ E(t) и
E(t + At); переход от базиса I к ним определяется операторами
U(7) и U(£ + A£) соответственно. Переход же между E(t) и
E(t+fat) выполняется оператором малого преобразования AU.
Сделаем несколько замечаний об операции перепроектирования
вектора. Согласно определению оператор U выполняет преобразо-
вание двумерного комплексного пространства (П1.49), которому
некоторым образом отвечает вращение в трехмерном пространстве.
При этом компоненты неизменного вектора, представленного эр-
митовым оператором, преобразуются операцией (П1.52); в связи
с этим эту операцию можно однозначно интерпретировать как
операцию перепроектирования вектора. Для рассматриваемого
случая это означает соотношение Re = UR/U*. Очевидно, что и
оператор угловой скорости должен перепроектироваться таким же
образом:
Qk-UQjU1. Z (П3.27)
Рассмотрим теперь (рис. 42) сложение преобразований
U(£ + A£), U(£) и AU; при этом, так как оператор AU осущест-
вляет переход от базиса E(t) к E(t+ А£), он должен содержать
в качестве своих проекций компоненты вектора малого поворота
в базисе Е (одинаковые при проектировании на E(t) и
E(t + А£)). Имеем в результате сложения U(£ + А£) = AUEU(£) —
7*
252
ПРИЛОЖЕНИЕ 3. КИНЕМАТИЧЕСКИЕ УРАВНЕНИЯ
разностное представление кинематического уравнения во второй
форме. Заменяя оператор AUB через согласно (П3.26) и пере-
ходя к пределу (Д£-*•()), получим дифференциальную форму
этого уравнения:
и = 4 й£и.
(П3.28)
Для вывода первой формы этого уравнения представим, что
(рис. 43) переход от Eft) к Eft + \t) выполняется так, что
«замороженный» относительно Eft) базис I поворачивается к по-
ложению Г. В этом случае оператор малого преобразования AU
Рис. 42. Унитарная матрица
бесконечно малого преобразо-
вания в связанных осях
Рис. 43. Унитарная матрица
бесконечно малого преобразо-
вания в неподвижных осях
свяжет положение базисов I и Г\ при этом, естественно, он бу-
дет содержать проекции вектора малого поворота на базис 7, т. е.
AUj, 12j. Имеем для этого случая U(f +A£)=U(£)AU2 — разност-
ный вид кинематического уравнения первой формы. Переходя к
дифференциальному виду, имеем
и = 4- UQb (П3.29>
Уравнения (П3.28) и (П3.29) обратимы благодаря унитарно-
сти матрицы U:
ЙЕ = - 2iTJU*, Qj = - 2iU+U. (ПЗ.ЗО)
Заметим, что кинематические уравнения (П3.28), (П3.29) и
(ПЗ.ЗО) однозначно удовлетворяют соотношениям перепроекти-
рования (П3.27).
Рассмотрим теорему сложения преобразований; пусть U3 =
= U2Uj, где Ui, U2, U3 — преобразования, задающие переходы от
I к £, от Е к Е' и от I к Е' соответственно. Пусть далее Ui
определяет относительное движение базиса Е относительно I,
происходящее с угловой скоростью ©1, т. е. имеем для Ui кине-
матическое уравнение
Ux - -j- Q^ui = 4 UiQib
§ П3.4. ПАРАМЕТРЫ КЭЛИ — КЛЕЙНА
253
Аналогично для матрицы U2, определяющей переход от Е к Е' и
относительное движение с угловой скоростью (02, имеем
U2 — “9- SJ2.E'U2 — U2Q2E-
Для нахождения кинематического уравнения для U3 выпол-
ним формальное дифференцирование U3:
U3 = U2UX + U2UX = -L(Q2E,U2Ux + иДОн) =4<й^'из+изй1')‘
Учитывая соотношения перепроектирования, S22e' — U3O2jU^,
&iE'= U3QXJU^, аналогичные (П3.27), придем к двум формам
кинематического уравнения для результирующего пре-
образования:
из = 4 + Й^') U3’ из = 4 из (Йн + Й21).
Можно видеть, что при этом происходит векторное (т. е. осуще-
ствляемое в одном базисе) сложение компонент относительной
угловой скорости.
Уравнения (П3.28) и (П3.29) являются кинематическими
уравнениями для параметров Кэли — Клейна в операторном
(матричном) виде. Выполняя умножение матриц и приравнивая
их компоненты, придем к координатным уравнениям для пара-
метров Кэли — Клейна:
2а = гасозЕ + y((02e + icon?), 2*у = —/усозЕ — а(й)2Е — моцв),
(П3.31)
2JJ = ф0)ЗЕ + 6(«2е + 10)1е), 26 = —-гбсОзя ~ Р(сО2е — КЩе)
для второй формы кинематического уравнения и
2a = iaco3J— P((02i — icon), 2{J = —ф(о3/+ a(co2j + icon),
(П3.32)
2у = q(03i — 6 (co2j — icon), 26 = —i6co3J + у (co2i + icon)
— для первой его формы.
Заметим, что каждая вторая пара уравнений (для р и б в
случае (П3.31) и у и 6 в случае (П3.32)) является эквивалент-
ной первой паре, так как согласно соотношениям (П1.51) пары
а, 6 и у, р являются взаимно сопряженными величинами. Таким
образом, для параметров Кэли — Клейна следует использовать
в качестве кинематических уравнений любую пару из приведен-
ных выше.
Кроме того, рассматриваемые два уравнения являются комп-
лексными; чтобы перейти к скалярной форме, следует разделить
254
ПРИЛОЖЕНИЕ 3. КИНЕМАТИЧЕСКИЕ УРАВНЕНИЯ
йнимую и действительную части. Используя разложение пара-
метров Кэли — Клейна на действительную и мнимую части
(П1.48), придем к кинематическим уравнениям в параметрах
Родрига — Гамильтона (П3.20) и (П3.21).
§ П3.5. Кинематические уравнения
для собственного вектора вращения
Получим кинематические уравнения для вектора эквивалент-
ного эйлерова поворота е и угла вращения 0. Для этой цели
удобно использовать формализм кватернионов, поскольку кватер-
нион преобразования
А = Zo + X = cos е sin (ПЗ.ЗЗ)
явно содержит требуемые величины. Рассмотрим изменение ква-
терниона во времени; пусть А(£) и А(£ + А£)—два значения
кватерниона в близкие моменты времени (задают, например, пе-
реход от базиса 1 к £т(^)), АА — кватернион бесконечно малого
поворота. Используя первую (векторную) теорему сложения
преобразований, можно утверждать, что A(t + At) = ДА ° A(i),
причем это равенство будет справедливо при его «проектирова-
нии» на любой базис (скажем, Q):
Aq (t + At) = AAq ° Aq (t). (П3.34)
Частным случаем этого соотношения является Q = /, когда ква-
тернионы A(t + At) и A(t) переходят в собственные; при этом
получается первая форма кинематических уравнений (П3.16).
Приведенные выше уравнения (П3.34) записаны в разностной
форме; в дифференциальной форме им отвечают следующие
уравнения
2Aq = o)q ° Aq. (П3.35)
Можно видеть, что уравнения (П3.35) сохраняют свой вид
при отображении на любой базис, т. е. имеют векторный смысл.
Используя представление (ПЗ.ЗЗ) и опуская в силу векторного
характера уравнений индекс базиса, перейдем согласно (П3.35)
к векторному дифференциальному уравнению
2 (cos 44 + е sin ш ° (cos 44 + е sin 44)- (П3.36)
at \ J \ "/
Выполняя дифференцирование, разделяя векторную и скалярную
части и заменяя кватернионное произведение на скалярное и
векторное, получим
0 = <в • е, е = 44 <0 х е + -4 е х (<о X e)ctg (П3.37)
Эти уравнения являются единственными векторными кинемати-
§ ПЗ.6. УРАВНЕНИЯ ДЛЯ ПАРАМЕТРОВ 255
ческими уравнениями, содержащими параметры вектора эйлеро-
ва вращения.
Обратные уравнения, определяющие вектор угловой скорости
по величинам е и 0 и их производным, получаются аналогичным
путем из обращенного кватернионного уравнения (П3.35) о
= 2А ° А в виде
о = 0е + sin0e + 2 sin2 — е х е. (П3.38)
Заметим еще раз, что уравнения (П3.37) и (П3.38) являются
векторными, т. е. могут проектироваться на любой базис.
Представим далее вектор угловой скорости в виде
® = = ® = (П3.39)
где Ф — угол эйлерова вращения для бесконечно малого поворо-
та. Как было показано в работе [15], производную по времени
в кинематических уравнениях (П3.36) можно заменить на про-
изводную по углу вращения. Обозначая эту производную штри-
хом, согласно (П3.39) имеем для кватернионных уравнений век-
торного вида 2А' = V А и для векторных величин е и 0
0'=£-е, 2е'= g X е + е X X e)ctg-|-. (П3.40)
Этим получены кинематические уравнения для единичного по
модулю вектора угловой скорости, где аргументом является угол
вращения
t
Ф = j со du.
о
§ П3.6. Кинематические уравнения для различных параметров,
образуемых из эйлерова вектора вращения
ПЗ.6.1. Общий вид кинематических параметров и уравнений
Из параметров е и 0, определяющих эквивалентный эйлеров по-
ворот, можно образовать ряд кинематических параметров, таких
как вектор конечного поворота (О = 2е tg(0/2)) или вектор ори-
ентации (О = е0) и т. п. Естественно, что кинематические урав-
нения для всех этих параметров будут различны, хотя они опре^-
деляют различным образом одну и ту же физическую величи-
ну — вектор эйлерова поворота.
Введем обобщенные кинематические параметры векторной ве-
личиной
р = /(0)е, (П3.41)
где /(0) может принимать различные значения, и получим обоб-
щенные кинематические уравнения для этого . вектора. Диффе-
256
ПРИЛОЖЕНИЕ 3. КИНЕМАТИЧЕСКИЕ УРАВНЕНИЯ
ренцируя вектор р по времени и подставляя значения для про-
изводных от угла 0 и вектора е согласно (П3.37), получим
Р = /е + /е = p(-i----ctg ®х р +4-/ ctg-5-ffl. (П3.42)
Для другой формы кинематического уравнения в функции
аргумента угла вращения получим согласно (П3.40)
Рф = /®е +. /вф = /el + 1 X р + / ct§ 4---/©} е X Q X е);
(П3.43)
здесь дифференцирование выполняется по углу вращения Ф и 0.
Данный вид кинематического уравнения используется мало, по-
скольку это уравнение не имеет преимуществ перед (П3.42).
Уравнение (П3.43) может быть записано и в виде
Р = /е®+ X р + •^{4’^cts “Г — ^}р х (ш х Р)’ (П3.44)
получаемом с учетом того, что / = /е0 = /е(е,й)). Обратное урав-
нение, выражающее вектор угловой скорости в функции от век-
тора р и его производной, получается аналогичным образом из
соотношения (П3.38):
«) = р-у(1 +/esin0)+ -у-sin 0р +sin2 -|-р X р, (П3.45)
где в свою очередь 0 = р//'е, так как 1~Р-
ПЗ.6.2. Вектор Эйлера (р = 0е). Вектор Эйлера или вектор
ориентации [15] получается, если положить /(0)^0; при этом
/о = 0 = р, р = Ое. (П3.46)
Используя уравнение (П3.44), имеем следующее кинематическое
уравнение для вектора Эйлера:
P = <b + 4"®XPH------------------Р х (Р х “)• (П3.47)
В работе [15] этот вектор обозначен 0.
П3.6.3. Вектор Родрига (вектор конечного поворота). Вектор
Родрига, называемый также вектор конечного поворота [15, 71],
получается при /(0) — 2 tg(0/2), соответственно чему имеем
p = 2tg-|-e. (П3.48)
Можно видеть, что входящие в уравнения (П3.42) или (П3.44)
тригонометрические функции (ctg0/2) прямо выражаются через
§ П3.6. УРАВНЕНИЯ ДЛЯ ПАРАМЕТРОВ
257
вектор р или его модуль:
4. 0 2 / 1 , | 1 2
c,gT = v h-1 + Т"
Используя эти равенства и уравнение (П3.44), получим сле-
дующее кинематическое уравнение для вектора Родрига:
р = <0(1 + -i-Р2) +-у <о X р +-^ р X (р X <й) =
= + х р +-£-р(<»-р). (П3.49)
(О \
р = 2sin "2"el. Рассмат-
ривая уравнение (П3.42) или (П3.44), поставим задачу так вы-
брать функцию /(0), чтобы выражение в фигурных скобках об-
ратилось в нуль, т. е.
/--|-/0ctg-|- = 0, или /е—^-/ctg-y- = 0.
Решением данного дифференциального уравнения является
/(0)= 2 sin 0/2, причем произвольный множитель выбираем, как
и во всех предыдущих случаях, так, чтобы при малом угле 0
функция /(0) переходила в 0. Очевидно, что при этом вектор
р = 2 sin е (П3.50)
является (совпадает с точностью до множителя) с векторной
частью кватерниона А (р = 21).
Подставляя эту функцию в (П3.44), получим следующее ки-
нематическое уравнение для векторной части кватерниона:
I 1 W2 1
р=®^1-------+ (П3.51)
0
ПЗ.6.5. Вектор р = 4tg -^е. Выберем функцию /(0) = 4tg 0/4;
в этом случае при малом угле 0 эта функция переходит в 9,
т. е. вектор
p = 4tg-|-e (П3.52)
при малых углах вращения переходит в вектор Эйлера. С другой
стороны, при данной функции /(0) кинематические уравнения
(П3.44) выражаются рациональным образом через вектор р:
. 0 2 (л 1 2\ Z л < 1 <>
• ctg 2 “ р V1 16 Р J’ “ 1 + 16 ’
258
ПРИЛОЖЕНИЕ 3. КИНЕМАТИЧЕСКИЕ УРАВНЕНИЯ
откуда следуют уравнения для вектора р:
р =®(l + -^-^ + -^-<»xp + -i-PX(PX®) =
= ®(1-4Н + т<йХР + 4-р««-р). (П3.53)
Для данного вектора характерна следующая особенность: вза-
имно однозначная рациональная связь с кватернионом. В самом
деле, непосредственными преобразованиями тригонометрических
функций можно убедиться в справедливости равенств
/ . 0
41 4 sin 2 е 0
р= т+1. = ——5--4‘«те>
1 + COS у
0
etgy
1 + tg т
2 в
1 — tg
Г"0~=
i + tg2T
2р
I п2’
л О
Ад -- COS 2 —
1-р2
d L ^2
0
X = sin у е =
ПЗ.6.6. Вектор р ЗХЦ1 + у Этот вектор имеет функцию
/(0), построенную как рациональная функция от компонент ква-
терниона, и определенным образом приближает вектор Эйлера.
Имеем
/ /т _ 3 sin 0/2 __ о 2 *80/4 _ 4 tg 0/4
“ 1 0 Л 2 0 1 ( 2 0 .1 2 0 ‘
1 +у cos у + tg2 у — tg -yj 1 + у tg у
Если ввести вектор Ф == 4tg-|-e (т. е. вектор р из ПЗ.6.5), то
рассматриваемый здесь вектор р выразится через Ф таким
образом:
р=------. (П3.54)
Из этого равенства можно получить, что
§ П3.6. УРАВНЕНИЯ ДЛЯ ПАРАМЕТРОВ
25?
Кинематическое уравнение для вектора р получим, дифференци-
руя равенство для этого вектора (П3.54):
А(ф.ф)р+(1+^.ф2^р = ф
и используя для производной Ф кинематическое уравнение
(П3.53). Имеем
Р =( 1 — ^2 -и---)<о + у о>хр +A_p(w-p) =
\ J + ls®2/
Ф2
1+4ф2
+- ® + Т ® Х Р + 12 Р Х (Р Х
Выражая далее скобку при <о
получаем окончательно
(о+ у о)\р + ^рх(рхсо) =
1 - 576 Р4 "W Рв -••]« + ТЮ Х Р + 12 РХ(РХ®)-
g
Можно далее рассмотреть вектор вида р = 81££-е;для него
кинематическое уравнение также будет содержать рациональные
функции р.
Как видно, кинематические уравнения для всех приведенных
векторон вращения имеют много общего; семейство параметров,
приведенных здесь (кроме вектора Родрига), не имеет особенно-
стей при угле вращения 0 0 < 2л. Тем самым они могут быть
использованы и для описания углового движения, и для построе-
ния численных методов интегрирования кинематических
уравнений.
260
ПРИЛОЖЕНИЕ 4. ИЗОМОРФИЗМ ОПЕРАЦИЙ ВРАЩЕНИЯ
ПРИЛОЖЕНИЕ 4
ИЗОМОРФИЗМ ФОРМАЛИЗМА ОПЕРАЦИЙ ВРАЩЕНИЯ
(КИНЕМАТИЧЕСКИХ ПРЕОБРАЗОВАНИЙ)
Рассматривая основные положения, изложенные в Приложе-
нии 2 для формализма кватернионных операций, задающих пре-
образование вращения, и, скажем, операции ортогональных пре-
образований для направляющих косинусов (Приложение 1),
можно, на первый взгляд, увидеть существенные различия. Так,
для направляющих косинусов существует одна теорема сложе-
ния преобразования; формы кинематических уравнений (в опе-
раторном виде) отличны от аналогичных кватернионных и т. п.
Аналогичные отличия можно заметить и для других формально
задаваемых операций вращения, как, например, для унитарных
матриц и параметров Кэли — Клейна.
Между тем имеется строгое соответствие (изоморфизм) всех
операций кинематических преобразований, использующих любой
формализм преобразований. Для примера здесь рассмотрим бо-
лее подробно формализм направляющих косинусов.
Как указывалось в Приложении 1, оператор преобразова-
ния — матрица направляющих косинусов — может задавать по-
добным образом три вида преобразований: переход от базиса к
базису (операция (П1.3)), преобразование компонент неизмен-
ного вектора (операция (П1.10)) и преобразование вектора в
вектор (операция (П1.12) или (П1.14)). Последним двум опе-
рациям отвечают:
а) так называемая «пассивная» точка зрения, когда компо-
ненты линейного преобразования можно интерпретировать как
координаты неизменного вектора при смене базиса; ортогональ-
ное преобразование при этом связывает отображения векторов
(П1.10);
б) «активная» точка зрения, когда соотношения преобразова-
ния рассматриваются как компоненты нового вектора (см.
(П1.12)) при наблюдении из одного базиса; в наиболее общем
виде это преобразование можно записать в виде
f = Tp, (П4.1)
где Т — оператор (матрица) ортогонального преобразования. Не-
трудно видеть, что операции вращения, определяемой кватерни-
онным преобразованием
г' = Л ° г ° Л, (П4.2)
изоморфно отвечает «активная» точка зрения, т. е. преобразова-
ние в форме (П1.14) или (П4.1).
Исходя из этого проведем последовательное изложение всех
правил (теорем) кинематических преобразований для формализ-
ма матричных преобразований аналогично тому, как это сделано
в Приложении 2 для кватернионов.
ПРИЛОЖЕНИЕ 4. ИЗОМОРФИЗМ ОПЕРАЦИЙ ВРАЩЕНИЯ
261
1°. Преобразование базисов. Введем матрицу орто-
гонального преобразования В (изоморфную кватерниону А)
и рассмотрим два базиса Z(ii, i2, is) и E(ei, ег, ез) такие, что
переход от базиса I к Е определяется следующим преобра-
зованием:
efe = Bife, * = 1,2,3. (П4.3)
Условно эту операцию будем записывать также и в виде
I^E, Е = BI. (П4.4)
Заметим, что равенства (П4.3) представляют собою три век-
торных равенства, каждое из которых может быть записано
в виде системы трех скалярных соотношений линейного преоб-
разования над проекциями векторов на некий базис. В частно-
сти, таким базисом может быть и сам базис I; в этом случае
111
0 ,
ОII
и согласно (П4.3)
е2 — Bi2
| &зз
Если указанные соотношения превратить в традиционную систе-
му векторных равенств, то получим
ei = Ъ\lii + &21*2 + Ьз11з, в2 = 61211 + 622b + 632I3,
е3 == 61з11 + 623*2 “Ь 6зз1з
— соотношения, отвечающие по форме (П1.3), однако
для А = Вт.
2°. Преобразование компонент неизменного
вектора. Вводя, как это указано в Приложении 1, матрицы-
отображения вектора на базис, получим для рассматриваемого
вектора г:
г = Rll = ITRj - R^E = EtRe, (П4.6)
где матрицы I и Е определены (2.1), a Ri и RE— соотношения-
ми (П1.8). Связь RB и Rz— отображений неизменного вектора
при преобразовании базисов (П4.3)—получим, подставляя
(П4.5), т. е. Е = BTZ, в равенство (П4.6):
RE = BTRb (П4.7)
Этим получено соотношение, аналогичное (П2.7) для кватернио-
нов. Можно полагать, что если при смене базисов (задаваемой
262
ПРИЛОЖЕНИЕ 4. ИЗОМОРФИЗМ ОПЕРАЦИЙ ВРАЩЕНИЯ
соотношениями в форме (П4.3) или (П4.5)) некие величины
преобразуются линейным соотношением типа , (П4.7), то эти ве-
личины суть отображения неизменного вектора на этот базис.
3°. Инвариантность операции преобразования
вектора. Пусть имеем векторное равенство (П4.1) преобразо-
вания вектора в вектор; очевидно, что оно может проектировать-
ся на любую координатную систему и иметь один и тот же вид.
Это означает, что равенству (П4.1) должна отвечать эквивалент-
ная система равенств, записываемая для отображений векторов
f и р на базисы, скажем, I и £, и т. п. Обозначая Fj, FB, Pj, Рк
матрицы-отображения векторов на рассматриваемые базисы, за-
пишем (П4.1) в виде матричных равенств
Fj = TjPj, F£ = T£Pe, (П4.8)
где мы обязаны и оператору преобразования Т приписать индекс
базиса, так как между компонентами Fj, Fe и Pj, Ре должны вы-
полняться соотношения перепроектирования (П4.7). Можно ви-
деть, что равенства (П4.8) и (П4.7) совместимы, если операторы
Tj И Те связаны преобразованием подобия
Te = BtTjB. (П4.9>
Аналогично этому само преобразование базисов как систему
векторных равенств (П4.3) можно представить в виде таких
матричных равенств
EAQ = fc=l, 2, 3, (П4.10)
где Eaq, IftQ — отображения векторов еь и ц соответственно на не-
кий базис Q; при этом сам оператор В также имеет вид соответ-
ствующего отображения на этот базис. В соотношениях (П4.5)
в качестве базиса проектирования ((?) использовался базис I.
4°. Собственный оператор преобразования. По-
лученное выше соотношение, определяющее отображение опера-
тора преобразования на некий базис (выражаемое с помощью
преобразования подобия (П4.9)), позволяет каждый оператор от-
мечать индексом базиса и задать переходы преобразования меж-
ду ними. Так, рассматривая ряд базисов
I^E^Q-^П
для оператора преобразования (П4.1), имеем эквивалентные
записи преобразования (П4.8) и преобразования подобия (П4.9):
Fj = TjPj, Fe = TeP£, Fq = TqPq, Fn = ТпРп,
Ft = BT„ P, = B’PI( Fq = (DB)tF„
Pe=(DB)’P„ Fn=(LDB)FJ? Pn=(LDB)TPj,
TB = BTjB, Tc = BDTJJB, Tn = BtDtLtTjLDB.
ПРИЛОЖЕНИЕМ ИЗОМОРФИЗМ ОПЕРАЦИЙ ВРАЩЕНИЯ
263
Рассмотрим теперь аналогичным образом отображения самих
операторов В, D, L на указанные базиськ Полагая, что все эти
операторы заданы в неком одном исходном базисе, скажем I,
*г. е. B = Bf, D = Di, L = Lf, имеем согласно (П4.11)
ВЕ == ВТВ,В = Bi = В*, BQ = BTDTBDB, Вп = BTDTLTBLDB,
D£ = BTDiB, Dq = BTDTDiDB = De == D*, Dn = BTDTLTDLDB,
(П4.12)
Le = BTLiB, Lq = BTDTLiDB, Ln = BTDTLTLLDB = Lq = L*
Из полученной системы равенств следует:
1. Отображения оператора на преобразуемый им базис (ис-
ходный и конечный) равны; этот оператор имеет смысл собст-
венного оператора преобразования и отмечается звездочкой в
(П4.12). ’ ’’ ' ' “ ' '
2. Исходный базис, в котором задаются операторы, может
€ыть произвольным, так как система соотношений (П4.12) удов-
летворяет преобразованию подобия, одному и тому же для всех
ее элементов.
5°. Инвариантная форма сложения преобразо-
ваний. Пусть даны два последовательно выполняемых преобра-
зования, заданных, скажем, операторами Т (операцией (П4.1))
и М (аналогичной операцией). Тогда их действие эквивалентно
преобразованию, определяемому оператором (тоже ортого-
нальным)
N = MT. (П4.13)
Соотношение для результирующего оператора (П4.13) имеет оди-
наковый вид (инвариантно) в любом базисе; при этом связь ото-
бражений операторов задается преобразованием подобия типа
(П4.9). Действительно, полагая исходным базисом Z, т. е.
N = Ni, М = Mi, Т = Tf, Ni = MfTi, имеем согласно (П4.12)
Ne = BtNiB, Me = BtMiB, Te = BtTiB, Ne-MeTe,
(П4.14)
Nq =(BD)TNi(BD), Mq =(BD)tMi(BD),
Tq = (BD)tTi(BD), Nq = MqTq и t. n.
В этом смысле форма сложения преобразований (4.13) имеет
инвариантный (векторный) смысл и может записываться вооб-
ще без индекса базиса (как это и имеет место в (П4.13)). Ме-
тодом индукции эта форма сложения преобразований может
быть распространена на любое число последовательно выполняе-
мых преобразований.
6°. Вторая форма сложения преобразований.
Преобразования (П4.13) могут задавать переходы не только
между векторами, но и между координатными системами. Рас-
264
ПРИЛОЖЕНИЕ 4. ИЗОМОРФИЗМ ОПЕРАЦИЙ ВРАЩЕНИЯ
смотрим последовательность преобразований I Е ф Очевид-
но, что переход от I к Q задается оператором
Р = DB, (П4.15)
причем согласно п. 5° эта форма сложения преобразований спра-
ведлива при отображении на любой базис (первая форма сложе-
ния преобразований), в частности, PJ = DJBJ. Можно видеть, что
для собственных операторов преобразований P* = Pj = PQ, В* ==
= Bj = Вя, D* = Djg* = Dq, и не существует базиса, проектируя на
который равенство (П4.15), можно получить соотношение для
собственных операторов.
Используя формулы преобразования операторов к различным
базисам (П4.12), получим
PQ = BJDJPjDjBj = PJPjPi = Р*, D* = BjDzBz.
Согласно (П4.15) имеем
Р* - Pj = DjBJ = BjBjDjBj - B*D* (П4.16)
— вторую форму сложения преобразований для собственных опе-
раторов. Очевидно, что методом индукции эта форма может быть
распространена на любое число последовательно выполняемых
преобразований.
7°. Переставимость преобразований. Результирую-
щее преобразование, например, (П4.15), можно представить
в виде
Р7 = D1BJ = = (DjBzDJ) Dj,
т. e. в виде обратной последовательности и Bi или же DT и
Вв. Эта теорема методом математической индукции может быть
расширена на любое число последовательно выполняемых преоб-
разований.
8°. Оператор бесконечно малого преобразова-
ния. Используя результаты Приложения 1, (П1.26) и (П1.30)г
представим такой оператор в виде
ДВ = 1 + е = 1 + О dt. (П4.17)
где £,12 — кососимметричные операторы малого поворота и угло-
вой скорости соответственно.
9°. Кинематические уравнения для собствен-
ных операторов. Первая, векторная (инвариантная) форма
кинематического уравнения получается из первой теоремы сло-
жения преобразований. Рассматривая положение базиса Е отно-
сительно I в два момента времени t и t + dt, задаваемые опера-
торами преобразования В(£) и B(£ + d£), а также учитывая, что
два положения базиса E(t) и E(t + dt) задаются оператором бес-
ПРИЛОЖЕНИЕ 4. ИЗОМОРФИЗМ ОПЕРАЦИЙ ВРАЩЕНИЯ
265
конечно малого поворота (П4.17), согласно (П4.14) имеем
В2 (t + dt) = AB1BJ (t) = (1 + tljdt) В/ (t) (П4.18>
— кинематическое уравнение в разностном виде. Вводя понятно
производная от оператора и используя (П4.17), получаем это же*
уравнение в дифференциальном виде:
Bi = B* = £2iB* (П4.19)
— первая форма кинематического уравнения. Эта форма являет-
ся инвариантной и имеет тот же вид в любом базисе, неподвиж-
ном относительно I (например, Q): Bq = £2qBq, так как BQ ==-
= (DB)TBi(DB) при DB = const, Bq = (DB)tBi(DB) и Qq =
== (DB) тй/ (DB)). Естественно, что для собственного оператора
таким базисом может быть только /, и уравнение имеет вид.
(П4.19).
Вторая форма кинематического уравнения получается также*
для собственного оператора с использованием второй формы сло-
жения преобразований. Рассматривая те же два положения ба-
зиса E(t) и E(t + dt), получаем
В* (t + dt) = В* (t) ДВ£ = В* (1 + QEdt) (П4.20)
— разностный вид кинематического уравнения второй формы.
Переходя к дифференциальной форме, имеем
B* = B*fl£ (П4.21)
вторую форму кинематических уравнений.
10°. Сложение относительных движений для
собственных операторов. Рассмотрим два последователь-
но выполняемых преобразования движения:
В D
Можно видеть, что согласно (П4.19) и (П4.21) кинематиче-
скими уравнениями для составляющих движений будут
В* = ОцВ* = B*fl1£, Ь* = fl2£D* = D*fl2Q. (П4.22)
Оператор результирующего преобразования Р*, находимый
согласно (П4.16), должен удовлетворять аналогичному кинема-
тическому уравнению:
Р* = B*D* + В*Ь* = QnB*D* + B*D*fl2Q =
= (flu + fl2j) P* = P* (fliQ + A2q) , (П4.23)
получаемому с учетом правил перепроектирования операторам
flAQ == P*TflWP*.
18 в. н. Бранец, И. П. Шмыглевский
266
ПРИЛОЖЕНИЕ 4. ИЗОМОРФИЗМ ОПЕРАЦИЙ ВРАЩЕНИЯ
Из полученного результата следует, что при сложении отно-
сительных вращений происходит ведторное сложение векторов
относительных угловых скоростей (сложение матриц выпол-
няется в одном базисе).
11°. Производные отображений неизменных
векторов. Пусть имеем неизменный вектор г и его отображе-
ния на базисы I и Е; их связь определяется (П4.7). Продиф-
ференцируем это равенство формально в силу кинематических
уравнений
Rj = (BRe) = BRje BRe = BRe + 12jRj, /тт/ о/ \
(П4.24)
Ra = (BTRj) = —S2£B*Rj + BTRj = BTRj — QJRe.
Полученные равенства совместны и являются, соотношениями
Эйлера, связывающими производные от вектора в различных
координатных системах (в частности, локальную и абсолютную
производную, получаемую, если I — инерциальный базис, а Е —
подвижный).
12°. Производные отображений операторов.
Пусть отображения операторов на заданные базисы связаны пре-
образованием подобия. Рассмотрим оператор, скажем, Т, и его
отображения на базисы I и Е (П4.9): Те = BjTjBj. Дифференци-
руем это равенство формально:
Т£ = BjT/BI + B/TjBj + BJTjBj.
Используя кинематические уравнения для производной от опе-
ратора В (П4.19), (П4.21), получим (Вт = —£2ЕВТ =—Вт£}т):
Те = BtTjB + Те'Йе — 12еТе, (П4 25)
Tj = ВТеВт + SijTj — TjQj, В = Bj = ВЕ.
Соотношения (П4.25) совместны.
13°. Кинематическое уравнение для оператора
преобразования. Пусть дан оператор Т преобразования,
скажем, (П4.1); так как он является оператором ортогонального
преобразования, то для бесконечно малого преобразования имеем
ДТ = 1 + Z dt, где Z — кососимметричный оператор малого вра-
щения. Используя инвариантную форму сложения преобразова-
ния и рассматривая изменение Т во времени, получим кинемати-
ческое уравнение для этого оператора:
Т = ZT. (П4.26)
Очевидно, что это уравнение сохраняет вид во всех неподвиж-
ных друг относительно друга базисах, например,
Tj = ZjTj, TQ = ZqTq и т. п. (П4.27)
ПРИЛОЖЕНИЕ 4. ИЗОМОРФИЗМ ОПЕРАЦИЙ ВРАЩЕНИЯ
267
Спроектируем теперь это уравнение на подвижный относи-
тельно I базис Е. Имеем согласно (П4.9) Te = BtTjB, ZE =
= BTZjB. Дифференцируя ТЕ и используя (П4.26), или сразу
применяя (П4.25), получим следующее значение для производ-
ной этого оператора в подвижном базисе:
ТЕ - ZETE + ТА - (П4.28)
— кинематическое уравнение для оператора преобразования в
подвижном базисе.
14°. Общая форма кинематического уравнения.
В п. 9° указывалось, что первая форма кинематического уравне-
ния является инвариантной относительно преобразования бази-
сов, если только эти базисы неподвижны относительно друг дру-
га. Рассмотрим преобразования
и кинематическое уравнение для оператора D (П4.22). Имеем
для собственного оператора
D = S22£D = DQ2q; (П4.29)
первая форма этого уравнения: DB = 122ДЬ? — справедлива при
отображении на любой неподвижный относительно Е базис. На-
пример, если В = const, то Dz = BD£BT и Dz = BDEBT; Dz =
= Й2Д>1 и т. п.
Однако если базис Е движется относительно Z, то производ-
ная отображения Dz находится уже таким образом:
Ь, = BD£Bt + BD£Bt + BD£Bt.
Полагая, что оператор В удовлетворяет своему кинематическому
уравнению (П4.19) или (П4.21), получим следующую обобщен-
ную форму кинематического уравнения:
Dj = Q2iDz + £2UDI — Dilin. (П4.30)
Итак, кинематическое уравнение для оператора преобразова-
ния существует либо в первой и второй формах для собственно-
го оператора (П4.29), либо в общей форме — для произвольного
базиса (П4.30).
15°. Сложение относительных движений для
произвольных операторов. В п. 10° рассматривалось
сложение относительных движений для собственных операторов.
Полученная общая форма кинематического уравнения позволяет
рассмотреть первую форму сложения преобразований.
18*
268
ПРИЛОЖЕНИЕ 4. ИЗОМОРФИЗМ ОПЕРАЦИЙ ВРАЩЕНИЯ
Согласно п. 5° имеем следующую инвариантную форму сло-
жения преобразования, скажем, В и D (П4.15): Р == DB, =
= DjBj, РЕ = DeBe и т. п. Для каждого оператора имеем свое
кинематическое уравнение в первой или второй формах (П4.22)
или общее кинематическое уравнение (П4.30). Продифференци-
руем формально, скажем, оператор Pj. Имеем
р, = DjBj + DjBj =
= fi2jDjBj + (Qi jDj — DA j) B, + D A/В, = (Ou + й21) P,
(П4.31)
— первую форму кинематического уравнения для результирую-
щего оператора. Точно так же могут быть получены и другие его
формы; это уравнение показывает, что происходит сложение век-
торов относительных движений (сложение операторов в одном
базисе).
16°. Производные отображений подвижных век-
торов. Пусть дано преобразование вектора в вектор оператором
Т (П4.1), которое можно задать в виде ряда отображений на тот
или иной базис (П4.11). Выполним формальное дифферен-
цирование:
F - TP + TP, Fj = TjPj + TjPj, Fj; - Tj;Pj; + Tj;Pj; И T. П.
Полагая, что оператор перепроектирования неизменен, что имеет
место, в частности, при проектировании на любой неподвижный
базис, согласно уравнениям (П4.27) имеем
F = ZF + TP, Fj - ZjFj + TjPj и т. п. (П4.32)
Если же взять проекцию этого равенства на подвижный базис,
то используя (П4.28) для базиса, например, Е, получим
Fe = ТеРе + ТеРе = ZeTePe + TeQePe ~ ЙеТеРе + ТеРе =
= ZeFe + ТеРе + (ТеЙе - ^Te)Fe. (П4.33)
Это же равенство может быть получено и другим образом»
Согласно соотношениям Эйлера типа (П4.24) имеем:
Fe = B Fj-QeFe, Fj = BFe + QiFj, /гт, о,X
(H4.o4)
Pe = BTPj - ЙеРе, Pi = BPe + fijPj.
Подставляя (П4.34) в уравнение (П4.32), получаем
BFe + fijFj = ZjFj + Tj (BPe + fijPj),
ПРИЛОЖЕНИЕ 4. ИЗОМОРФИЗМ ОПЕРАЦИЙ ВРАЩЕНИЯ
269
откуда
= вт [ZjFj - ад + т, (ад + вр£) ] =
ZJFe — (£2eF£ — ТеОеРе) 4" ТьРе.
Таким образом, соотношения (П4.34) и уравнения (П4.32) и
(114.33) совместны.
17°. Пассивная точка зрения и соответствие
формализма настоящего Приложения Приложе-
нию 1. В качестве такой альтернативной точки зрения следует
рассматривать ортогональные преобразования в форме (П1.3)
или же (П1.9). Из п. 1° ясно, что (П1.3) может соответствовать
только (П4.5), т. е. преобразование
Е = ВТ1 (П4.35)
при А = Вт. Однако если рассматривать отображения операто-
ра В, то можно видеть, что форме (П4.35) может отвечать толь-
ко собственный оператор В. Таким образом, можно утверждать,
что рассмотренный в Приложении 1 формализм имеет дело толь-
ко с собственными операторами преобразований, причем исполь-
зуемый там оператор А является обратным В.
Проследим теперь основные выводы Приложения 1 в свете
полученных здесь результатов. Можно видеть, что формула для
отображений неизменного вектора (П1.10) тождественно совпа-
дает с (П4.7); преобразование подобия (П1.13) аналогично
(П4.9), равно как и соотношениям (П1.31) отвечают аналогич-
ные соотношения. Форма сложения операторов в Приложении 1
€ = ВА является единственной, поскольку ей может соответство-
вать только одна форма сложения для собственных операторов
(П4.16); с учетом обратности «пассивной» и «активной» точки
зрения они совпадают.
Наконец, кинематические уравнения Приложения 3 в первой
и второй формах (ПЗ.З) и (П3.6) тождественно совпадают с
(П4.21) и (П4.19). Аналогичным образом в (П3.11) получается
сложение относительных движений, что соответствует п. 10° на-
стоящего Приложения.
Проведенное исследование показывает, что «пассивная» точ-
ка зрения дает вполне достаточный формальный аппарат для
описания кинематических преобразований; однако можно видетьг
что «активная» точка зрения позволяет сделать это описание бо-
лее полным. Точно так же использование любого другого форма-
лизма описания операций вращения позволяет получить изо-
морфное их соответствие операциям над кватернионами, как это
было показано в настоящем Приложении для направляющих
косинусов.
270
ПРИЛОЖЕНИЕ 5. ПОСТРОЕНИЕ АЛГОРИТМА
ПРИЛОЖЕНИЕ 5
ПОСТРОЕНИЕ АЛГОРИТМА ЧИСЛЕННОГО ИНТЕГРИРОВАНИЯ
С ПРОМЕЖУТОЧНЫМ БАЗИСОМ
В случаях, когда съем информации с датчиков выполняется
как в начале (конце), так и в середине каждого шага, можно*
несколько упростить формулы за счет введения промежуточного
базиса j&vs, совпадающего с базисом Е в середине шага (все пе-
ременные, относящиеся к промежуточной точке, также будем
обозначать индексом 1/2).
§ П5.1. Кинематические уравнения
Обозначим положение базиса Е в начале шага Е_, а в конце
шага Е+ и введем безразмерное время т как отклонение от сере-
дины шага. Тогда, очевидно, кватернион решения внутри шага
A(t) = A11/2oN(t),
где N(t) — решение кватернионного кинематического уравнения
с начальными условиями N(0)= 1.
В начале и конце шага получаем соответственно:
А (-1) = А- = А1/2 ° N (—1) = Ai/2 ° N_,
A(+1) = A+ = A172oN(+1) = Ai/2oN+.
Отсюда следует, что
А* = А- ° (N_ ° N+) = А_ ° N*.
Для построения N(r) внутри шага положим
0 (т) = air + а2т2 + а3т3 + ... (—1 т +1).
Введем в качестве промежуточного параметра вектор Эйлера О
соотношением
КТ 1 о. 0,0.0
N = ехру О = cos -£- + sm у.
Очевидно, что О удовлетворяет векторному кинематическому
уравнению (П3.4) с нулевыми начальными условиями, т. е.
0(0) = 0 (р(0) = 0).
Как известно [85, 87, 88, 91], это решение имеет вид
О (т) = 0 (т) + 4 (ai X а2) т3 + -| (ai X а3) т4+ ...,
§ П5.2. КАЖУЩАЯСЯ СКОРОСТЬ
271
отсюда
0+ = 0( + 1) = 0(1) + -|-(а1ха2) + j (ахха3)—...,
0__ = О (— 1) = 0 (— 1) — 4 (а! Xа2) + -i- (aj Xа3)+ ...,
и тогда
N+ = exp 4 0+; N_ = exp 4 •&_.
Для перехода от Е- к Е+ имеем соотношения
N* = N_ ° N+ = exp (— 4 оА ° ехр4 #+•
I Li I Li
Кроме того, с точностью до четвертого порядка включительно
«справедливо соотношение
О* = 0(4-1) — 0(— l) + 4(aiXa2),
N* = ехр у Ofc-
Подставляя вместо 0(1), 0(—1), ai и аг их выражения через раз-
ности квазикоординат, получаем:
О (г) = 0 (т) + 1 (V01/2 X V02/2) т« + 4 (V0 х а3) + ..
О+ = V02/2 + (V01/aX V02/2) + j (VOха3) + ...,
О- = —V01/2 = 4 (V01/2 х V02/2) + 4 (V0X as) + ..
O^ = V0 + 4(V01/2xV02/2)+ ...
Здесь
©(l) = V©2/2, e(-l) = -V01/2,
ai — ~2 (V®2/2 + V0i/2) = -y ve, a2 = — (V02/2 VOi/j)
все полученные формулы верны до четвертого порядка включи-
тельно.
§ П5.2. Кажущаяся скорость
Предполагая выполнять накопление приращений кажущейся
скорости в базисе Z, имеем:
+i +i
v* = v7 + ду/ = V? + W/йт = v7 + J (Л о WE о Л) dx.
272
ПРИЛОЖЕНИЕ 5. ПОСТРОЕНИЕ АЛГОРИТМА
Здесь Wj, We — кажущееся ускорение в базисах /, Е. Полагая
(Й>е = 1¥еЙт и вводя промежуточный базис £1/2, получаем:
+i
J А о WE о Adr = Ai/2 ° ‘ J N (т) о dbE ° N (т) > « Аг/2,
—г
Vj =?! + Ai/2 о J N (т) ° dbE о N (т)| о Ai/2 =
= v7 + А- о N_ о j N (т) ° dbE о N (т)? oN_ о А__.
Таким образом, задача сводится к вычислению интеграла в фи-
гурных скобках.
Выражая N(t) через вектор Эйлера, получаем:
N(r)odbEoN(T) =
= dbE + (О (т) X dbE) # (т) X (О (т) X dbE) ^а08-?- =
'О* о
= dbE + (G(T)xdbE)(l-102 + l<M-...) +
+ * (т) X (О (т) х dbE) (1 -10* + 1 - .. .
Положим теперь
bE = biT + Ь2т2 + Ьзт3 + Ь4т4 + ...,
в = Э1 т + а2т2 + азт3 + а4Т4 +...,
Ф(т) = @(т) + -|-(а1Ха2)т3 + ^(Э1Ха3)т4 + ...
Подставляя dbE и 0* в подынтегральное выражение, получаем
после достаточно громоздких выкладок и интегрирования
+i
Av1/2 = J N (т) о dbE о N (т) =
—1
= VbE + у {(ajXbi) + 2(aiXb2) + -j а1 х (а2 X bj j + ...
с точностью до четвертого порядка включительно. Заменяя аг-, Ь<
через разности по формулам
ai = |v0, b1 = 4vbE)
а2 = у (Ve2/2 - V01/2), b2 = 1 (Vb2/2 - Vb1/2),
§ П5.2. КАЖУЩАЯСЯ СКОРОСТЬ 273
получаем окончательно:
^Vl/2 = VbjE + -g- (V02/2 — V0i/2) X VbE +
+ 4 ve X (Vb2/2 - Vb1/2) + 1V© x [V© x (Vb2/2 - Vb1/2)J
Приращение кажущейся скорости в базисе I получается в ре-
зультате перепроектирования Avi/2 либо сразу кватернионом Л1/2,
либо последовательно кватернионами N_, Л_, либо, наконец, ква-
тернионами N+, Л-н При этом, разумеется, перепроектирование
кватернионами N_, N+ может выполняться по приближенным
«формулам.
СПИСОК ЛИТЕРАТУРЫ
1. А н д р е е в В. Д. Теория инерциальной навигации. Автономные систе-
мы.— М.: Наука, 1966.— 579 с.
2. Андреев В. Д. Теория инерциальной навигации. Корректируемые’
системы.— М.: Наука, 1967.— 697 с.
3. Андреев В. Д., Д е в я н и н Е. А. Автономные инерциальные нави-
гационные системы: Развитие механики гироскопических и инерциаль-
ных систем.— М.: Наука, 1973.— С. 307—321.
4. А л е к с е е в К. Б., Б е б е н и н Г. Г. Управление космическими лета-
тельными аппаратами.— М.: Машиностроение, 1974.— 343 с.
5. Б а ж и н о в И. К., Я с т р е б о в В. Д. Навигация в совместном полете*
космических кораблей «Союз» и «Аполлон».— М.: Наука, 1978.
6. Б а р б а ш и н Е. А., Т а бу е в а В. А. Динамические системы с цилинд-
рическим фазовым пространством.— М.: Наука, 1969.— 296 с.
7. Бахвалов Н. С., Жидков Н. П., Кобельков Г. М. Численные^
методы.— М.: Наука, 1987.— 600 с.
8. Бесараб П. Н. Численные методы построения параметров ориента-
ции твердого тела // Журнал вычислительной математики и математи-
ческой физики.— 1978.— Т. 18, № 3.— С. 698—708.
9. Боголюбов Н. Н., Митропольский Ю. А. Асимптотические
методы в теории нелинейных колебаний.— М.: Наука, 1974.— 503 с.
10. Б о д а н с к и й Е. Д., Фурман В. Д. О погрешностях численного ин-
тегрирования кинематических уравнений Пуассона Ц Космические ис-
следования.—1970.— Т. 8, вып. 6.
11. Боданский Е. Д. Об ошибках определения ориентации с помощью
идеального интегрирующего трехкомпонентного датчика угловой ско-
рости и цифрового дифференциального анализатора Ц Изв. АН СССР,
МТТ.— 1974.—№ 4.
12. Б par а зин А. Ф., Б ранец В. Н., Шмыглевский И. П. Описа-
ние орбитального движения с использованием кватернионов и скорост-
ных параметров Ц VI всесоюзный съезд по теоретической и приклад-
ной механике. Аннотации докладов.— Ташкент: Изд. АН УзССР, 1986.
13. Б р а н е ц В. Н. О точности решения кинематических уравнений. Урав-
нение ошибок Ц Космические исследования.— 1982.— Т. 20, вып. 2.
14. Б р а н е ц В. Н. О точности решения кинематических уравнений. Ис-
пользование квазикоординат Ц Космические исследования.— 1982.—
Т. 20, вып. 3.
15. Б р а н е ц В. Н., Ш м ы г л е в с к и й И. П. Применение кватернионов
в задачах ориентации твердого тела.— М.: Наука, 1973.— 303 с.
(6. Б р е к с м а й е р И. Ф. Системы инерциальной навигации.— Л.: Судо-
строение, 1967.— 270 с.
17. Бромберг Л. В. Теория инерциальных систем навигации.— М.: Нау-
ка, 1979.— 296 с.
18. Б э т т и н Р. Наведение в космосе.— М.: Машиностроение, 1966.— 426 с.
19. Воеводин В. В., Кузнецов Ю. А. Матрицы и вычисления.— М.:
Наука, 1984.— 320 с.
20. Воротников В. И. Об управлении угловым движением твердого те-
ла Ц Изв. АН СССР, МТТ.— 1986.— № 6.— С. 38-43.
СПИСОК ЛИТЕРАТУРЫ
275
21. Г анке ль Г. Теория комплексных числовых систем, преимуществен-
но обыкновенных мнимых чисел и кватернионов Гамильтона вместе с
их геометрическим толкованием.— Казань; Изд. Казанского ун-та, 1912.
22. Г а н т м а х е р Ф. Р. Теория матриц.— М.: Наука, 1988.— 548 с.
23. Гельфанд И. М., Ш а пир о 3. Я., М ин л о с Р. А. Представление
группы вращений и группы Лоренца.— М.: Физматгиз, 1956.
24. Годунов С. К., Рябенъки й В. С. Разностные схемы. Введение
в теорию.— М.: Наука, 1977.—440 с.
25. Г о л д с т е й н Г. Классическая механика.— М.: Гостехиздат, 1957.
26. Г о р н ш т е й н И. А., Шульман И. А. Инерциальные навигацион-
ные системы.— М.: Машиностроение, 1970.
27. Г р о б о в В. А., Коцюба А. В. О применении параметров Кэли —
Клейна при исследовании квазипрецессионного движения свободного
тела Ц Прикладная механика—1971.—Т. 7, вып. 7.
28. Диментберг Ф. М. Теория винтов и ее приложения.— М.: Наука,
1978.— 328 с.
29. Д м и т р о ч е н к о Л. А., Лопатин В. И. Особенности алгоритмов
БИНС Ц Вопросы управления космическими аппаратами.— М.: Мир,
1975.—С. 95—117.
30. Д е в я н и н Е. А., Парусников Н. А. Основные соотношения инер-
циальной навигации.— М.: Изд. Ин-та механики МГУ, 1972.
31. Де в я нин Е. А. О возможных принципах построения систем инер-
циальной навигации Ц Изв. АН СССР, МТТ.— 1969.— № 6.— С. 10—14.
32. Д е в я н и н Е. А. Об общих уравнениях систем инерциальной навига-
ции Ц Изв. АН СССР. МТТ.— 1973.—№ 4.—С. 80—86.
33. Д е в я н и н Е. А., И ш л и и с к и й А. Ю., Климов Д. М. Механика
гироскопических и навигационных систем Ц Механика в СССР за
50 лет. Общая и прикладная механика.— М.: Наука, 1968.— Т. 1.—
С. 245—264.
34. Д е м и д о в и ч Б. П. Лекции по математической теории устойчиво-
сти.— М.: Наука, 1967.— 472 с.
35. Ж у р а в л е в В. Ф., К л и м о в Д. М. Волновой твердотельный гиро-
скоп.— М.: Наука, 1985.— 126 с.
36. Ж у р а в л е в В. Ф. К динамике упругого твердого тела Ц Изв. АН
СССР, МТТ.— 1983.— № 6.— С. 93—97.
37. Зоммерфельд В. Механика.— М.: ИЛ, 1947.
38. Зубов В. И. Лекции по теории управления.— М.: Наука, 1975.—496 с.
39. 3 а х а р и н М. И., С о к о л В. Ф. Вычисление координат вектора ориен-
тации при переменном шаге получения квазикоординат Ц Кибернетика
и выч. техника.— 1986.— Вып. 69.—,С. 52—57.
40. Икес Б. П. Новый метод выполнения численных расчетов, связан-
ных с работой системы управления ориентацией, основанный на ис-
пользовании кватернионов Ц Ракетная техника и космонавтика.—
1970.— Т. 8, № 1.— С. 13—19.
41. Инерциальные системы без гиростабилйзированной платформы: Обзор/
Пер. с англ. Ц Вопросы ракетной техники.— 1967.— № 1(145).—С. 61—
77.
42. Ишлинский А. Ю. Механика гироскопических систем.— М.: Изд.
АН СССР, 1963.
43. И ш л и нс к и й А. Ю. Ориентация, гироскопы и инерциальная нави-
гация.— М.: Наука, 1976.— 670 с.
44. Ишлинский А. Ю. Механика относительного движения и силы инер-
ции.—М.: Наука. 1981.—191 с.
45. Ишлинский А. Ю. Об автономном определении местоположения
движущегося объекта посредством пространственного гироскопическо-
го компаса, гироскопа направления и интегрирующего устройства Ц
ПММ.— 1959.— Т. 23, вып. 1.
46. Ишлинский А. Ю., Борзов В. И., Степаненко Н. П. Лекции
по теории гироскопов.— М.: Изд. МГУ, 1983.— 246 с.
276
СПИСОК ЛИТЕРАТУРЫ
47. К а л м а н Р., Фа л б П., А р б и б М. Очерки по математической тео-
рий систем.— М.: Мир, 1971.—400 с.
48. К а л я е в А. В. Численные методы интегрирования по Стилтьесу в
цифровых интегрирующих машинах Ц Кибернетика.— 1966,—2.
49. Каляев А. В. Теория цифровых интегрирующих машин и структур.—
М.: Сов. радио, 1970.- 472 с.
50. К л е й н Ф. Элементарная математика с точки зрения высшей/Пер. ст
нем.— М.— Л.: ГТТИ, 1933.
51. Климов Д. М., Рабинович Ю. И. О кинематических ошибках
инерциальной системы навигации Ц Изв. АН СССР. Механика.— 1965.—
№ 6.
52. Климов Д. М. Об интегрировании кинематических уравнений инер-
циальных систем навигации Ц Изв. вузов СССР. Приборостроение.—
1968.- Т. 2, № 7.
53. К л и м о в Д. М. Инерциальная навигация на море — М.: Наука, 1984.—
117 с.
54. К о т е л ь н и к о в А. П. Винтовое счисление и некоторые прило-
жения его к геометрии и механике.— Казань; Изд. Казанского ун-та,
1885.
55. К о т е л ь н и к о в А. П. Винты и комплексные числа.— Казань: Изд.
Казанского ун-та, 1886.
56. К о ш л я к о в В. Н. Об уравнениях местоположения движущегося*
объекта Ц ПММ.— 1964.— Т. 28, вып. 6.
57. К о ш л я к о в В. Н. О применении параметров Родрига — Гамильтона
и Кэли —Клейна в прикладной теории гироскопов Ц ПММ.— 1965.—
Т. 29, вып. 4.
58. К о ш л я к о в В. Н. Задачи динамики твердого тела и прикладной тео-
рии гироскопов. Аналитические методы.— М.: Наука, 1985.— 288 с.
59. Крылов В. Н., Бобков В. В.. Монастырский П. И. Вычи-
слительные методы.— М.: Наука, 1976.
60. К у з о в к о в Н. Т. Модальное управление и наблюдающие устройст-
ва.— М.: Машиностроение, 1976.— 184 с.
61. К у з о в к о в Н. Т., К а р а б а н о в С. В., С а л ы ч е в О. С. Непрерыв-
ные и дискретные системы управления и методы идентификации.— М.:
Машиностроение, 1978.— 222 с.
62. К у з о в к о в Н. Т., С а л ы ч е в О. С. Инерциальная навигация и оп-
тимальная фильтрация.— М.: Машиностроение, 1982.— 216 с.
63. К у н ц е в и ч В. М., Л ы ч а к М. М. Синтез систем автоматического
управления с помощью функций Ляпунова.— М.: Наука, 1977.— 400 с.
64. Л а г а л л и М. Векторное исчисление.— М.: ОНТИ, 1936.
65. Л а р и н В. Б., Науменко К. И. Об определении ориентации твер-
дого тела Ц Изв. АН СССР, МТТ.— 1983.— № 3.— С. 24—32.
66. Леви-Чивита Т., Амальди У. Курс теоретической механики/
Пер. с ит.— М.: ИЛ, 1951.— Т. 2, ч. 2.
67. Л е б е д е в Д. В. Управление ориентацией твердого тела с использова-
нием параметров Родрига — Гамильтона Ц Автоматика.— 1974.— № 4.—
С. 29—32.
68. Летов А. М. Динамика полета и управление.— М.: Наука, 1969.—
359 с.
69. Л е т о в А. М. Устойчивость нелинейных регулируемых систем.— М.:
Физматгиз, 1962.
70. Л и п т о к А. Выставка инерциальных систем на подвижном основа-
нии.— М.: Наука, 1976.— 168 с.
71. Лурье А. И. Аналитическая механика.— М.: Физматгиз. 1961.
72. Мак-Клур К. Теория инерциальной навигации.— М.: Наука, 1964._
73. М а р ь я м о в А. Г., Я с т р е б о в В. Д. Система цилиндрических коор-
динат для описания движения искусственных спутников Ц Космиче-
ские исследования.— 1965.— Т. 4, вып. 5.
СПИСОК ЛИТЕРАТУРЫ
277
74. М о и с е е в Н. Н. Асимптотические методы нелинейной механики.—
М.: Наука, 1981.— 400 с.
75. М э т ь ю с Ф. Б., Т е й л о р Г. Р. Испытания бесплатформенной инер-
циальной системы Ц Вопросы ракетной техники.— 1970.— № 8/188/.—
С. 44-63.
76. Н е с л у х о в с к и й К. С. Цифровые дифференциальные анализаторы.—
М.: Физматгиз, 1963.
77. Некоторые вопросы навигации и управления.— М.: Изд. МГУ, 1980.—
102 с.
78. Навигация и управление движением механических систем.— Киев: Ип-г
математики АН УССР, 1980.— 140 с.
79. Н а у м е н к о К. И. Наблюдение и управление движением динамиче-
ских систем.— Киев: Наукова думка, 1984.— 208 с.
80. О н и щ е н к о С. М. Применение гиперкомплексных чисел в теории
БИНС Ц Сб. научных трудов Ин-та кибернетики АН УССР.—Киев,
1982.— С. 44—62.
81. Онищенко С. М. О применении модулярной арифметики в задачах
БИНС: Системы курсоуказания и инерциальной навигации Ц Сб. на-
учных трудов Ин-та кибернетики АН УССР.—Киев, 1985.—С. 73—96.
82. Оттен. Инерциальные навигационные системы без гиростабилизиро-
ванной платформы Ц Вопросы ракетной техники.— 1967.—№ 12(136).—
С. 68—86.
83. Парусников Н. А., Морозов В М., Борзов В. И. Задачи кор-
рекции в инерциальной навигации.— М.: Изд. МГУ, 1982.— 176 с.
84. Принципы инерциальной навигации.— М.: Мир, 1965.
85. П а н о в А. П. Синтез методов вычисления координат вектора ориен-
тации Ц Кибернетика и выч. техника.— 1979.— Вып. 43.— С. 122—130.
86. Панов А. П. Алгоритмы для вычислений в бортовой цифровой вычи-
слительной машине скорости и координат движущегося объекта Ц Ки-
бернетика и выч. техника.— 1974.— Вып. 23.— С. 123—130.
87. Панов А. П. Кинематические дифференциальные уравнения для соб-
ственных векторов операторов вращения твердого тела Ц Изв. АН
СССР, МТТ.- 1985.— № 4.— С. 26-33.
88. Панов А. П. Асимптотические оценки погрешностей методов вычи-
сления параметров ориентации твердого тела Ц Кибернетика и выч.
техника.— 1980.— Вып. 47.— С. 59—71.
89. П а н о в А. П. О выборе кинематических параметров и уравнений
вращения для численного интегрирования в ЦВМ Ц Кибернетика и выч.
техника.— 1984— Вып. 62.—С. 104—111.
90. Панов А. П. О тождествах алгебры Ли кососимметричных операто-
ров и их применении в задачах вычислений параметров вращения /
Кибернетика и выч. техника.— 1985.— Вып. 65.— С. 69—75.
91. Панов А. П. Методы шестого порядка точности для вычислений ко-
ординат вектора ориентации по квазикоординатам Ц Кибернетика и
выч. техника.— 1986.— Вып. 69.— С. 47—52.
92. П а н о в А. П. Об операторных кинематических уравнениях вращения
твердого тела Ц Изв. АН СССР, МТТ.— 1986.— № 6.— С. 44—50.
93. Плотников П. К., Челноков Ю. Н. Сравнительный анализ точ-
ности алгоритмов определения ориентации объекта в параметрах Род-
рига — Гамильтона и направляющих косинусах Ц Космические иссле-
дования.— 1979.— Т. 17, вып. 3.
94. Р а у ш е н б а х Б. В., Т о к а р ь Е. Н. Управление ориентацией кос-
мических аппаратов.— М.: Наука, 1974.— 600 с.
95. Р у ш Н., А б е т с П., Л а л у а М. Прямой метод Ляпунова в теории
устойчивости.— М.: Мир, 1980.— 300 с.
96. С а в а ж П. Г. Новое решение второго приближения для вычисления
ориентации бескарданной инерциальной системы // Механика/Сб. пе-
рев.— М.: Мир, 1968.—№ 1(107).
278
СПИСОК ЛИТЕРАТУРЫ
97. С и н г Д. Л. Классическая динамика.— М.: Физматгиз, 1963.— 448 с.
98. Тихонов А. Н., А р с е н и н В. Я. Методы решения некорректных за-
дач — М.: Наука, 1974.— 224 с.
99. Т к а ч е в Л. И. О 84-мин. периоде для систем со связанными и свобод-
ными гироскопами Ц ЛПММ.— 1949.— Т. 13, вып. 2.— С. 217—218.
100. Ткаченко А. И. Алгоритм вычисления кажущейся скорости Ц Ки-
бернетика и выч. техника.— 1972.— Вып. 15.— С. 114—1191
101. Ткаченко А. И. Повышение точности вычисления кинематических
параметров // Кибернетика и выч. техника.— 1973.— Вып. 19.— С. 117—
121.
402. Т к а ч е н к о А. И., II а н о в А. П. Вычисление «кажущейся» и «грави-
тационной» скоростей в БИНС // Космические исследования на Украи-
не.— 1977.— Вып. 10.— С. 55—58.
103. Т к а ч е н к о А. И. Определение ориентации и калибровка пространст-
венного измерителя угловой скорости с использованием угловой ин-
формации / Изв. АН СССР, МТТ.— 1983.—№ 3.—С. 19—23.
104. Федоренко А. Д. К вопросу о построении модулярной арифмети-
ки в теории БИНС: Системы курсоуказания и инерциальной навига-
ции Ц Сб. научных трудов Ин-та математики АН УССР.— Киев, 1985.—
С. 96—106.
105. Фридлендер Г. О. Инерциальные системы навигации.— М.: Физ-
матгиз, 1961.
106. Харсика Л. И. О применении экспериментального решения уравне-
ний Пуассона к оценке инструментальных погрешностей определения
ориентации подвижного объекта Ц Кибернетика и выч. техника.—
1977.— Вып. 37.— С. 64—70.
107. Челноков Ю. Н. Об интегрировании кинематических уравнений
винтового движения твердого тела Ц ПММ.— 1980.— Т. 44, вып. 1.—
С. 32—39.
108. Челноков Ю. Н. Об одной форме уравнений инерциальной навига-
ции Ц Изв. АН СССР, МТТ.— 1981.—№ 5.—С. 20—28.
109. Челноков Ю. Н. Кватернионные алгоритмы систем пространствен-
ной инерциальной навигации Ц Изв. АН СССР, МТТ.— 1983.— № 6.—
С. 14—21.
110. Челноков Ю. Н. О регулярных уравнениях пространственной зада-
чи двух тел Ц Изв. АН СССР, МТТ.— 1984.—№ 1.—С. 151—158.
111. Челноков Ю. Н. Кватернионные методы в задачах относительного
движения динамически симметричных материальных систем Ц Изв.
АН СССР, МТТ.— 1986 —№ 6.—С. 30—37;— 1987, № 1.
112. Черноусько Ф. Л., А к у л е н к о Л. Д., Соколов Б. Н. Управ-
ление колебаниями.— М.: Наука, 1980.— 484 с.
113. Эдвардс А. Бесплатформенные инерциальные навигационные си-
стемы // Вопросы ракетной техники.— 1973.— № 5.— С. 47—70.
114. Bortz J. Е. A New Mathematical Formulation for Strap — down. Iner-
tial Navigation // IEEE Trans. Aerosp. and Electr. Systems.— 1971.— V. 1.
115. Brand L. Vector and Tenzor Analysis.— New York: J. Willey.— Lon-
don: Chapman and Hall, 1948.
116. Hamilton W. P. Elements of Quaternions.—New York: Chelsea Pub-
lishing Company, 1969.
117. Mortensen R. A. Globally Stable Linear Attitude Regulator Ц Intern.
J. Control.— 1968.— V. 3, № 8.
118. Brian S. Use of Quaternions in Shuttle Guidance Navigation Control
AIAA Cuid. and Contr. conf., san Diego, calif., 1982. Collect Tech Pap.—
New York, 1982,— P. 753—760.
119. Shi lata T. Error Analysis of Strap-down Inertial Navigation using
Quaternions // J. Guidance, Control and Dyn.— 1986.— V. 9, № 3.—
P. 379—381.
STRAPPED-DOWN INERTIAL NAVIGATION SYSTEMS
(Introduction to the theory)
1. THE AUTHORS
Vladimir N. Branetz is a Doctor of Science (Physics and Mathematics),
State Prize-winner, one of the Russian leading specialists in attitude and
motion control systems of the spacecraft, in the theory of strapped — down
inertial systems, an author of fundamental works on the use of quaternions
for motion control and navigation problems.
Igor P. Shmyglevsky is a Candidate of Science (Engineering)» one of the
Russian leading specialists in motion control of the spacecraft, problems of ren-
dezvous and docking in space« the theory of strapped — down inertial sys-
tems^ an author of fundamental works on the use of quaternions for motion
control and navigation problems.
2. SUMMARY
The book deals with theoretical concepts of strapped-down inertial navi-
gation systems and their implementation in attitude and motion control sys-
tems. The exposition is based on the mathematical apparatus of quaternions,,
previously described in the authors’ monograph “Use of quaternions in rigid
body orientation problems”. General problems of the theory of inertial, patri-
cularly, strapped-down systems, generalized form of the error equations and
their solutions using quaternions as attitude parameters and biquaternions as
state parameters are considered.
Methods of integration of kinematic equations on board the moving object
are considered in detail, their errors are analysed. Special attention is given to
the systems with external correction and the construction of an attitude cont-
rol system based on them.
A wide class of control laws to ensure stability of the instrument reference
system correction according to external information and aligning of the bo-
dy-axis system with that of the instrument, as well as the determination of
the transfer rate of the reference system are constructed by the inverse Lyapu-
nov method.
Strapped-down inertial systems, especially those constructed with the use
of quaternions, vector parameters and other uncommon attitude parameters are
widely used in modern technology. However, the development of their theory
and presentation in scientific publications are obviously inadequate. Many of
the papers deal with either the errors of specific digital methods of integration
of kinematic equations or with the description of a specific system. In the mo-
nographs and textbooks on inertial navigation the scrapped-down systems are
presented superficially or are not considered. And there are practically no pa-
pers dealing with inertial navigation in space, particularly in a satelite orbit.
The theory of strapped-down systems with external correction is not des-
cribed in scientific publications. The monograph presented fills this gap to so-
me extent. It contains new scientific results obtained by both the authors and
other Soviet and foreign investigators.
The previous book of the authors («Use of quaternions in rigid body ori-
entation problems», Moscow, Nauka, 1973) was widely recognized in the sci-
entific world and soon became a bibliographic rarity.
3. CONTENTS
The book consists of three parts, appendices and bibliography. Each part
contains three chapters.
Part One — the problem of inertial control and basic equations of inertial
systems — deals with:
— general equations of inertial navigation systems,
— error equations of inertial navigation systems,
— biquaternions and method of screws for the description of rigid body
motion, equations of inertial navigation systems in a biquaternion form.
Part One contains 100 pages.
Part Two — realization of a solution of strapp6d-down inertial system
equations — deals with:
— methods of integration of kinematic equations,
— integration of kinematic equations with primary information in a qua-
si-coordinate form,
— integration of equations of the first group.
Part Two contains 60 pages.
Part Three — the control and correction problem for kinematic equa-
tions — deals with:
— the statement of the problem,
— alignment of the body-axis system with that of the instrument,
— correction of the instrument reference system according to the signals
of attitude sensors.
Part Three contains 50 pages.
Appendices:
— review of attitude parameters,
— basic formulae of kinematics making use of quaternions,
— kinematic equations,
— isomorphism of the rotation operation/kinematic transformations/
formalism.
The four appendices contain 80 pages.
Bibliography contains 119 entries, including 93 by Soviet authors.
4. RECOMMENDATIONS
«The book presents substantial contribution to the mechanics of cont-
rolled motion and undoubtedly it will be useful for specialists in inertial navi-
gation, control systems for mobile objects, as well as for senior students and
postgraduates».
В. V. Raushenbakh
(Academician Russian Academy of sciences)
«The book by V. N. Branetz and I. P. Shmyglevsky is a result of their
long research and without question in will be of interest to specialists in control
systems for movable objects, inertial navigation, mechanics of controlled mo-
tion, to students and postgraduates».
В. E. Chertok
(Corresponding member, Russian Academy of sciences)