






























































































































































































































































































Author: Ефимов В.В. Козловский В.Б. Пашинцев С.А.
Tags: авиация и космонавтика летательные аппараты ракетная техника космическая техника строительство инженерных сооружений воздушный транспорт авиация и воздушные соединения воздушные линии и аэропорты авиация военная техника авиатехника вертолеты авиастроение издательство машиностроение
ISBN: 978-5-217-03415-4
Year: 2008




n
'«(J
В. Б. Козловский С. А. Паршенцев В. В. Ефимов
-'5
TV
. '’•'VyJ1. h
r
ВЕРТОЛЕТ С ГРУЗОМ НА ВНЕШНЕЙ ПОДВЕСКЕ
УДК 629.735.45:624
БЕК 39.54
К 59
Рецензенты: кафедра аэродинамики В ВИА им. Н.Е. Жуковского и д-р техн, наук, проф. В.Т. Калугин
Козловский В.Б. и др.
К59 Вертолет с грузом на внешней подвеске / В.Б. Козловский, С.Л. Паршенцев, В.В. Ефимов; подред. В.Б. Козловского. М.: Машиностроение / Машиностроение-Полет, 2008. - 304 с.: ил.
ISBN 978-5-217-03415-4
Рассмотрены вопросы летной эксплуатации вертолетов при транспортировке грузов на внешней подвеске и проведении авиационных строительно-монтажных работ. Описаны технические средства и специальное оборудование вертолетов, показана деятельность экипажа как коллективного оператора при проведении таких работ. Рассмотрена математическая модель полета вертолетов с грузом на внешней подвеске, а также отдельные аспекты применения математического моделирования в целях повышения эффективности и безопасности полетов.
Книга предназначена для летного и инженерно-технического состава эксплуатационных предприятий гражданской авиации, инженеров авиационной промышленности, научных работников, занимающихся математическим моделированием динамики полета летательных аппаратов. Может быть полезна курсантам высших летных учебных заведений, студентам и аспирантам вузов, слушателям учебно-тренировочных подразделений гражданской авиации.
ББК 39.54
© В.Б. Козловский, С.А. Паршенцев, В.В. Ефимов, 2008
© ООО "Машиностроение-Полет’’, 2008
© ОАО ’’Издательство "Машиностроение", 2008
ПРЕДИСЛОВИЕ
Несмотря на большие успехи в области разработки и эксплуатации вертолетов в нашей стране перед создателями и эксплуатантами авиационной техники сегодня стоит проблема дальнейшего повышения эффективности ее эксплуатации и уровня безопасности полетов. Высокая эффективность и безопасность полета воздушных судов (ВС) неразрывно связаны друг с другом и непосредственно зависят от свойств ВС и совершенства авиационного комплекса, в составе которого они функционируют. Существенную роль здесь играет квалификация экипажа, которая определяется его теоретической и практической подготовкой, пониманием динамики ВС в различных ситуациях и знанием соответствующих инструкций по его эксплуатации. В связи с этим изучение вопросов устойчивости и управляемости ВС было и остается весьма актуальной задачей, относящейся к числу достаточно сложных проблем. Эти проблемы получили подробное освещение в работах В.С. Пышнова, В.П. Ветчинкина, И.В. Осто-славского, В.А. Федулова, А.С. Бравермана, А.М. Володко и др.
В нашей стране и за рубежом издано большое число монографий, посвященных различным сторонам летной эксплуатации вертолетов. К сожалению, они охватывают далеко не все вопросы применения этого вида ВС на различных по своему целевому назначению и технологическому характеру авиационных работах. Специальной литературы по применению вертолетов на АСМР и транспортных работах с использованием внешней подвески (ВП) явно недостаточно, хотя потребность в ней очень велика.
Настоящая книга представляет собой попытку систематического изложения основ летной эксплуатации вертолета на отдельных видах авиационных работ, а также подходов к решению проблемы повышения их эффективности и безопасности.
В первой главе книги изложены общие сведения о способах и технологических схемах выполнения авиационных строительно-монтажных работ (АСМР), рассмотрены особенности транспортировки грузов на ВП вертолета, подходы к формировании: тактико-технических требований к перспективным вертолетам крановой модификации, обоснована необходимость разработки
новых технических средств (ТС), устройств и приспособлений, позволяющих значительно повысить эффективность таких авиационных работ.
Вторая глава посвящена анализу соответствия современных методов, ТС и специального оборудования для выполнения АСМР существующим технологическим схемам работ этого класса. В ней рассматриваются виды систем внешней подвески грузов, характеристики силовых стропов, строповочной оснастки и грузозахватных приспособлений, системы стабилизации и азимутальной ориентации груза на бифилярной внешней подвеске вертоле-га. Представлены требования, предъявляемые к таким конструкциям, рекомендуемые конструкционные материалы, нагрузки и воздействия. Приведены конструктивные и расчетные схемы различных ТС. Рассмотрены сферы их применения, критерии рационального формообразования, проектирования и расчета.
Сложность и уникальность проведения любой АСМР вызывает необходимость ее представления в виде целостной полиэргатиче-ской транспортной системы "экипаж — вертолет — объект монтажа (груз на ВП)", одним из центральных элементов которой является экипаж. Поэтому третья глава посвящена анализу деятельности экипажа как коллективного оператора при проведении АСМР. В ней приводятся основные методы пилотирования вертолета на АСМР, дается анализ надежности функционирования системы "экипаж — вертолет — объект монтажа (груз на ВП)" в условиях развития различных неблагоприятных факторов.
Для решения задач повышения эффективности эксплуатации и безопасности полета вертолетов с грузом на ВП представляется рациональным перенос центра тяжести исследований в область математических методов как наиболее дешевых и доступных, а гакже в область экспериментальных методов, включающих в себя различные виды испытаний ВС и их моделей. Дорогостоящие летные испытания желательно использовать лишь для уточнения математических моделей (ММ), контроля их точности и непротиворечивости. Конечно, каждый из указанных методов имеет ограниченную область применения, и только совместное их использование позволяет решать большинство задач, возникающих при выполнении указанных видов работ.
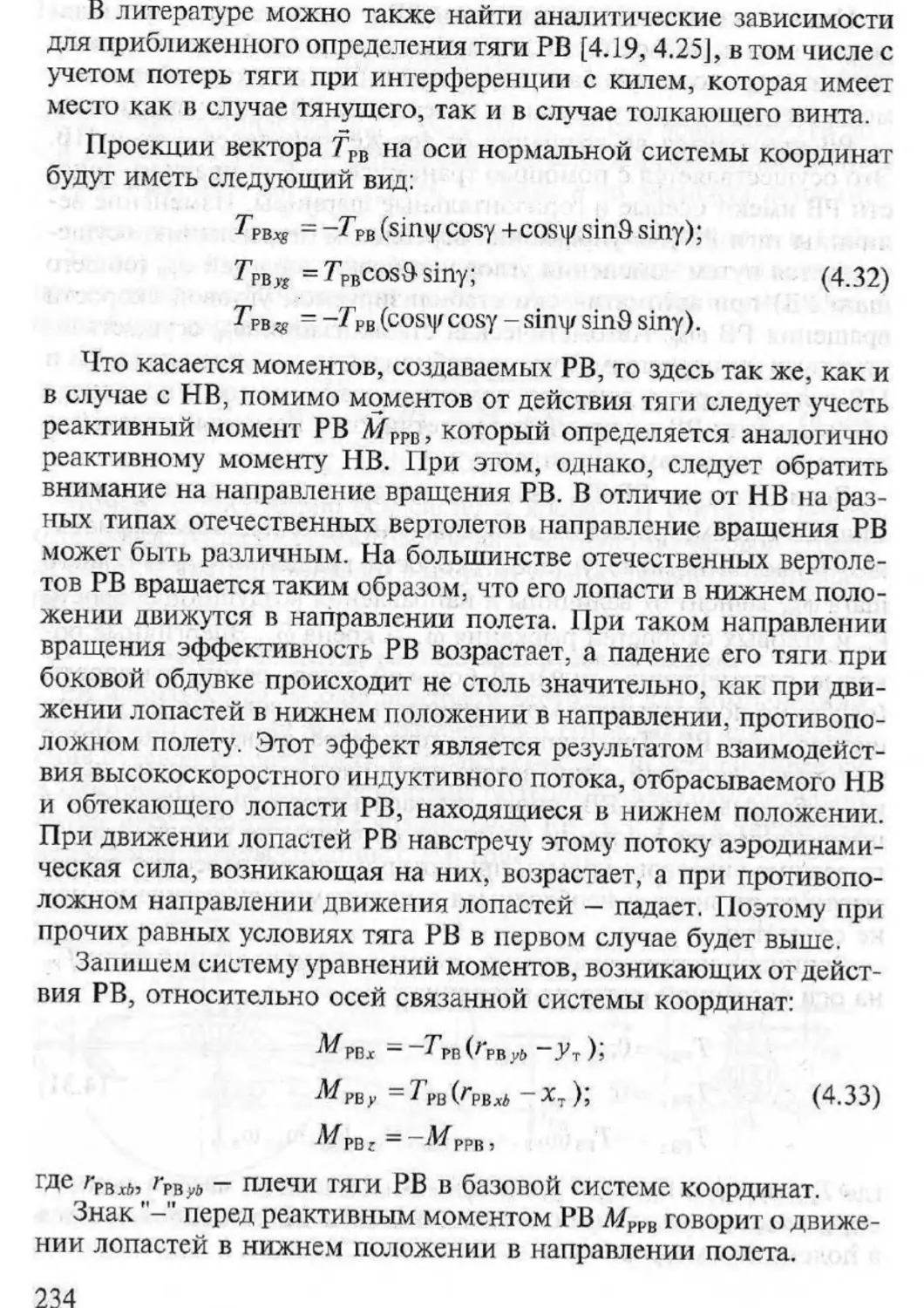
Проблемы повышения эффективности эксплуатации и безопасности полета вертолетов с грузом на ВП рассмотрены в четвертой, заключительной главе монографии. В ней показаны роль и
место математического моделирования в исследовании проблем эксплуатации вертолетов, изложены общие методологические положения построения ММ динамики полета ВС, даются описание ММ полета вертолета с грузом на ВП и подход к решению задач повышения эффективности и безопасности полета вертолета с грузом на ВП с помощью ММ динамики полета.
Материал книги содержит результаты теоретических и экспериментальных исследований, выполненных в различное время е ОАО НПК "ПАНХ", Московском государственном техническом университете гражданской авиации (МГТУ ГА) и других организациях.
Предисловие и введение к настоящей книге написаны В.Б. Козловским, гл. 1,2- С.А. Партпенцевым; гл. 3 — В.Б. Козловским и С.А. Паршенцевым совместно; гл. 4 - В.В. Ефимовым: гл. 5 — С.А. Паршенцевым и В.В. Ефимовым совместно.
Авторский коллектив выражает благодарность доктору технических наук, профессору МГТУ ГА М.С. Кубланову за ряд ценны* замечаний, сделанных им при чтении рукописи книги.
Авторы надеются, что книга заинтересует специалистов летны* специальностей, выполняющих данный вид авиационных работ, г также научных работников, причастных к созданию (конструированию, расчету, проектированию) разнообразных технически; средств для проведения АСМР и использующих методы математического моделирования в своей научной деятельности.
ОСНОВНЫЕ СОКРАЩЕНИЯ
АИ — авиационный инцидент
АП — авиационное происшествие
АС — аварийная ситуация
АСМР — авиационные строительно-монтажные работы
АТ — авиационная техника
ВЛ — высоковольтная линия
ВП — внешняя подвеска
ВПХ — взлетно-посадочные характеристики
ВС — воздушное судно
ВСУ — водосливное устройство
ВЭ — вычислительный эксперимент
ГШ — горизонтальный шарнир
ДИСС — доплеровский измеритель скорости и угла сноса
ИВПП — искусственная взлетно-посадочная полоса
КГТ — крупногабаритный тяжеловесный (груз)
КИ — компасный индикатор
ККС — конструктивно-кинематическая схема
КС — катастрофическая ситуация
КСС — конструктивно-силовая схема
КТВ — контрольная точка висения
ЛА — летательный аппарат
ЛИ — летные испытания
ЛС — ленточный строп
ЛТХ — летно-технические характеристики
МИХ — массово-инерционные характеристики
ММ — математическая модель
MCA — международная стандартная атмосфера
НВ — несущий винт
НП — направление полета
НФ — неблагоприятный фактор
ОВГ — особо важный груз
ОС — особая ситуация
ОШ — общий шаг
ПАНХ — применение авиации в народном хозяйстве
ПЗУ - пылезащитное устройство
ПНП — пилотажно-навигационный прибор
ПО — программное обеспечение
ПОС — противообледенительная система
ППР — проект производства работ
ППУ — продольно-поперечное управление
ПС — путевая скорость
РВ — рулевой винт
РЛЭ — руководство по летной эксплуатации
РП — руководитель полета
РСНВ — режим самовращения несущего винта
РУ — раскаточное устройство
РЦШ — ручка циклического шага
САО — система азимутальной ориентации
САФ — система азимутальной фиксации
СБС — сложная биотехническая система
СВМ — синтетический высокомолекулярный материал
СГФ — строительная горизонталь фюзеляжа
СП — стабилизирующий парашют
СС — сложная ситуация
ТС — техническое средство
УВД — управление воздушным движением
УУП — усложнение условий полета
УШ В — указатель шага винта
ЧР — чрезвычайный режим
ШР — штепсельный разъем
ЭД — эксплуатационная документация ЭД СУ — электродистанционная система управления
ВВЕДЕНИЕ
Впервые вертикальный подъем человека с использованием винтов был осуществлен в 1907 г. на четырехвинтовом вертолете братьев Бреге и профессора Ш. Рише (Франция), а в 1914 г. на вертолете Е. Мумфорда был совершен первый полет с поступательной скоростью. Это положило начало бурному развитию вертолетостроения в промышленных странах.
Уникальные возможности вертолета — способность неподвижно висеть в воздухе, выполнять вертикальное маневрирование и перемещаться с малой поступательной скоростью — обусловили возникновение идеи использовать вертолет для транспортировки и монтажа крупногабаритных и многомодульных объектов.
Первые теоретические и практические исследования возможности применения вертолетов для авиационных строительно-монтажных работ и транспортных операций были проведены в середине 1950-х гг. коллективами ученых в вертолетных конструкторских бюро М.Л. Миля и Н.И. Камова, а также на базе кафедры "Конструкция и проектирование вертолетов" Московского авиационного института (МАИ). В исследованиях принимали участие И.П. Братухин, Н.П. Лесников, Л.С. Вильдгрубе, В.И. Шайдаков, А.Д. Маслов.
В связи с широкими масштабами промышленно-территориального освоения труднодоступных районов Севера, Сибири и Дальнего Востока в 1970-е гг. группой ученых МАИ под руководством В.И. Шайдакова и Ю.С. Богданова была успешно проведена работа по оптимизации параметров вертолетов различного назначения на основе многокритериальной оценки их эффективности. Весомый вклад в разработку современных методов транспортировки грузов на внешней подвеске и проведения АМСР внесли Ю.Г. Логачев, С.А. Исаев, И.П. Бутылкин, В.Ф. Рощин, Р.И. Барон.
Первые попытки практического применения вертолетов на АСМР были предприняты в России уже в конце 1950-х гг. В 1959 г. с помощью вертолета Як-24 на здании Екатерининского дворца в г. Пушкино Ленинградской обл. была выполнена замена деревянных стропильных ферм металлическими. При монтаже приме
нили специальные приспособления — ловители из стальных труб, обеспечившие установку новых конструкций с точностью ±100 мм. Экипаж вертолета, возглавляемый летчиком-испытателем И.С. Григорьевым, затратил на демонтаж 30 деревянных ферм 2 ч, а на установку 11 металлических ферм 55 мин летного времени. В том же году впервые при строительстве троллейбусной трассы Симферополь — Алушта для установки металлических опор массой 1600 кг и высотой 22 м методом их поворота относительно горизонтального шарнира был использован вертолет Ми-4. Экипажем этого вертолета за 22 летных часа на труднодоступном участке строящейся трассы были установлены 62 опоры. Опыт выполнения этих операций показал, что вертолет может быть эффективно использован при проведении строительно-монтажных работ, его применение позволяет значительно сократить общие сроки выполнения работ.
Значительный рост применения вертолетов в строительстве связан с появлением первого отечественного вертолета-крана Ми-ЮК, реальная грузоподъемность которого на монтажных работах составляла 8,5 т. Практика показала, что компоновочное решение вертолета Ми-ЮК в сочетании с системой улавливающих груз приспособлений и новыми технологическими приемами монтажа обеспечивает возможность установки конструкций с крановой точностью.
Для России с ее специфическими географическими, климатическими и экономическими условиями вертолеты уже давно спали естественным компонентом транспортной системы, особенно в труднодоступных, малонаселенных и слабоосвоенных регионах Севера, Сибири и Дальнего Востока. Природные особенности этих регионов, большие расстояния между населенными пунктами, относительно небольшие грузопотоки, специфика очагового освоения сырьевых месторождений и большая экологическая уязвимость северных экосистем резко снижают экономическую целесообразность создания здесь развитой автодорожной или железнодорожной сети. Очевидно, что в таких условиях высокие мобильность и транспортная производительность современных вертолетов должны обеспечить высокую эффективность их применения при решении целого ряда транспортных и специальных задач.
В настоящее время в различных отраслях экономики нашей страны применяются вертолеты Ми-2, Ка-26, Ми-6, Ми-8, Ми-10, Ми-26 и Ка-32. Наиболее технически совершенные из
них. такие как Ми-26, Ка-32 и Ми-8МТВ, имеют хорошие потенциальные возможности удовлетворить запросы заказчиков авиаработ.
Необходимо отметить, что за последние десятилетия доля перевозок грузов на ВП в общем объеме вертолетных работ заметно возросла: в некоторых авиакомпаниях она достигает 50 % и более. С помощью вертолетов решаются такие проблемы, как вывоз леса из труднодоступных горных массивов, ту!пение лесных пожаров, мониторинг окружающей среды, борьба с последствиями стихийных бедствий и экологических катастроф.
Наряду с увеличением объема АСМР изменились качественные и количественные характеристики самих грузов. Возникла потребность в транспортировке и монтаже неделимых грузов большой массы, имеющих повышенную материальную, социальную и другую ценность. Очевидно, что ycnezx в решении таких инженерных задач во многом зависит от перспектив создания современных, мощных и высокоэффективных, адаптированных к специфическим условиям высотного строительства вертолетов, способных не только перевозить крупногабаритные грузы на значительные расстояния, но и выполнять их точную установку на возводимых объектах.
Изменившаяся экономическая ситуация в нашей стране — наличие рыночных отношений, появление различных форм собственности — создали сегодня условия для пересмотра и уточнения существующего подхода к использованию вертолетов при проведении транспортных и строительно-монтажных работ. В этих условиях наиболее приоритетными становятся разработка перспективных технологических методов и технических средств АСМР, проведение опережающих, целенаправленных, проблемно-ориентированных исследований, модернизация существующих и создание новых образцов специальной авиационной техники (АТ), а также получение объективной и всесторонней информации о специфике выполнения данного вида авиационных работ.
Глава 1
ОБЩИЕ СВЕДЕНИЯ О ТЕХНОЛОГИЯХ И СПОСОБАХ ВЫПОЛНЕНИЯ ВЕРТОЛЕТАМИ АВИАЦИОННЫХ СТРОИТЕЛЬНО-МОНТАЖНЫХ И ТРАНСПОРТНЫХ РАБОТ С ИСПОЛЬЗОВАНИЕМ ВНЕШНЕЙ ПОДВЕСКИ
Одной из наиболее трудоемких технологических операций в промышленном строительстве является монтаж в "безопорном” пространстве оборудования на высотных объектах. Он зачастую выполняется в стесненных условиях городской застройки или непрерывно действующего производства, при отсутствии необходимых подъездных путей. При этом не всегда возможно использовать наземную грузоподъемную технику. Для выполнения таких работ наиболее целесообразно применять вертолеты, т.е. осуществлять авиационные строительно-монтажные работы.
В соответствии с существующей классификацией [1.10] к АСМР относятся выполнение монтажа или демонтажа строительных и иных конструкций (оборудования), авиационные работы с гибкими элементами, а также проведение погрузочно-разгрузочных операций с применением ВС, оснащенных специальными техническими средствами.
Применение вертолетов на АСМР характеризуется высокими технической эффективностью и экологической безопасностью и относительно малыми трудозатратами и позволяет при умеренных капиталовложениях значительно сокращать период строительства высотных объектов.
1.1. СПОСОБЫ И ТЕХНОЛОГИЧЕСКИЕ СХЕМЫ ВЫПОЛНЕНИЯ АСМР
АСМР с использованием вертолетов можно разделить по технологии их выполнения и применяемым ТС на отдельные виды и подвиды. Классификация АСМР, разработанная ВНИИ ПАНХ ГА [9, 10], приведена на рис. 1.1. Рассмотрим некоторые виды АСМР.
Рис. 1.1. Классификация авиационных строительно-монтажных работ
1.1.1. Свободный монтаж
Способом свободного монтажа можно устанавливать элементы фундаментов (железобетонные и металлические подножники опор линий электропередачи (ЛЭП), пригрузочные и анкерные плиты); свободностоящие (устойчивые) конструкции и их секции; одностоечные (неустойчивые) конструкции с их последующей фиксацией после установки оттяжек или защемлением в котловане (фундаменте).
Свободный монтаж широко применяется при установке высотных опор, башен, мачт (рис. 1.2, 1.3).
Рис. 1.2. Установка нижней секции опоры ЛЭП-500 на фундамент (трасса Россия—
Турция, 2004 г.)
Рис. 1.3. Монтаж секции радиотелевизионной мачты в Краснодарском крае (2004 г.)
Высотные опоры, башни и мачты — это вертикально-протяженные инженерные сооружения. Их назначение, конструкция и параметры различны. По назначению башни и мачты подразделяются на опоры радиорелейных линий, телевизионные опоры, опоры для подвески антенных сетей, стальные дымовые трубы, вытяжные башни химических предприятий, факельные установки, прожекторные опоры, монументы-обелиски и т.д. В отличие от обычных сооружений их высота намно
го превышает размеры поперечного сечения и основания в плане. Такие конструкции, как правило, используются в объектах связи, навигации, радиолокации, для воздушных линий электропередач и т.д.
В последние годы наметилась тенденция строительства утилитарных опор, т.е. опор широкого применения, для нужд различных операторов мобильной связи. Особенностью утилитарных опор является их высокая унификация для различных высотных сооружений. Современные утилитарные опоры — опоры решетчатой конструкции, а также мачты с оттяжками малого заложения [1.14].
Можно выделить следующие тины утилитарных опор:
башни объектов связи (БОС), трехгранные из одиночных уголков;
башни трубчатые стальные (БТС) трехгранные, выполняемые из горячедеформированных и электросварных прямошовных труб, а также комбинированные, в которых пояса выполняются из труб, а решетка — из уголкового профиля или круглого стального прутка (см. рис. 1.3);
башни из профиля швеллерного сечения с углом наклона полок по отношению к стенке 120°;
мачты с проходом снаружи и внутри ствола из горячедеформированных труб или круглого стального прутка.
Наиболее разнообразны конструкции антенных опор, функциональное назначение которых - установка требуемого оборудования на заданной высоте. Высота таких опор для мобильной связи, как правило, составляет 20...80 м, а опор для радиорелейных антенн — 70... 150 м.
Монтаж секций перечисленных конструкций требует высоты висения вертолета над монтажной площадкой 50 м и более. Его выполняют с помощью специальнььх ТС, размещенных на борту ВС или его ВП, которые исключают ручное ориентирование монтируемых конструкций в момент их установки в проектное положение. При этом возможно использование различных специально устанавливаемых искусственных ориентиров видимости, располагаемых в поле зрения командира вертолета, как правило, слева впереди.
К свободному монтажу относится монтаж различного промышленного оборудования через проемы в крышах зданий и межэтажных перекрытиях, а также монтаж на различные ос-
Технологические схемы выполнения АСМР
Рис. 1.4. Технологические схемы выполнения АСМР методами свободного монтажа и поворота конструкции
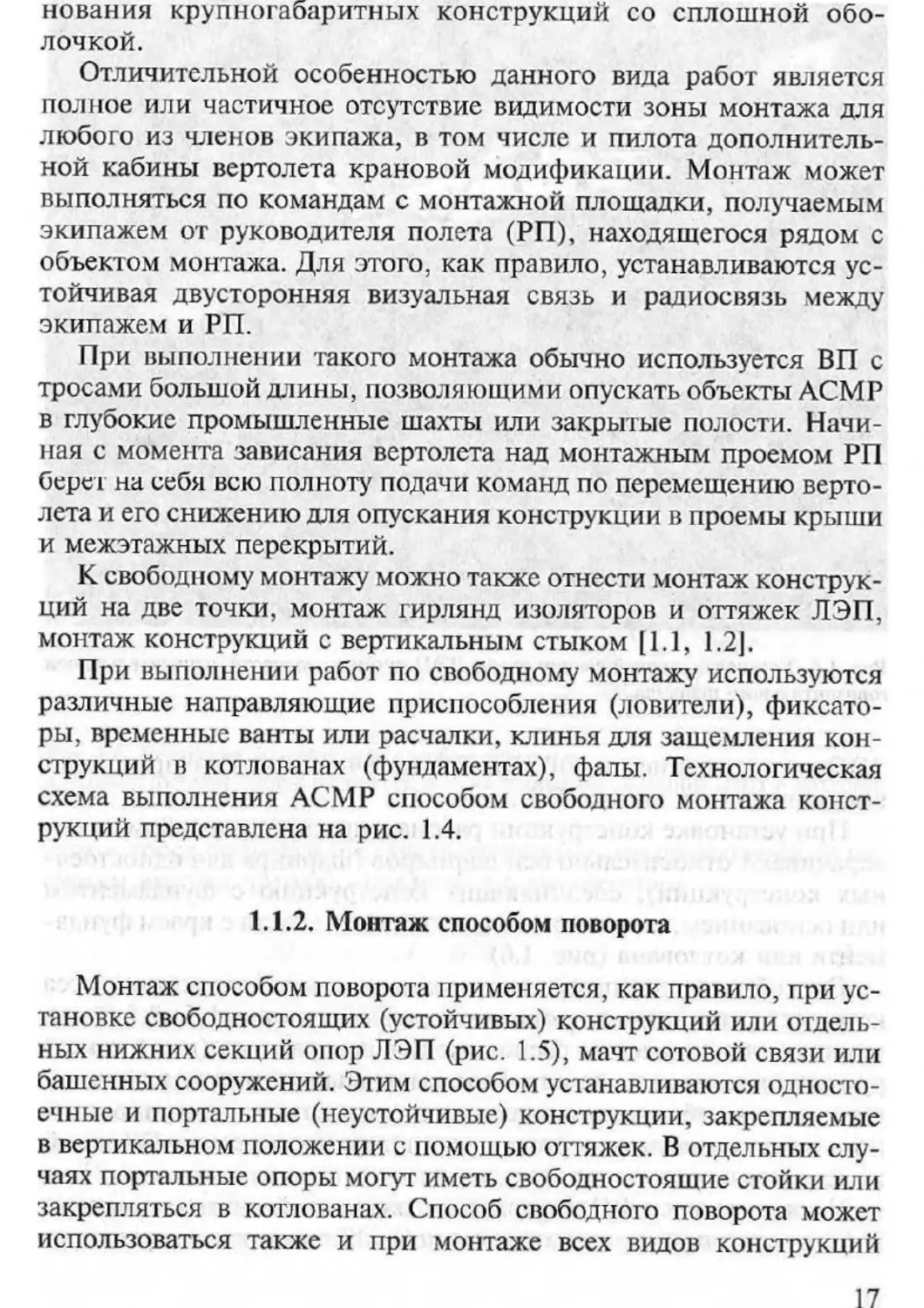
нования крупногабаритных конструкций со сплошной оболочкой.
Отличительной особенностью данного вида работ является полное или частичное отсутствие видимости зоны монтажа для любого из членов экипажа, в том числе и пилота дополнительной кабины вертолета крановой модификации. Монтаж может выполняться по командам с монтажной площадки, получаемым экипажем от руководителя полета (РП), находящегося рядом с объектом монтажа. Для этого, как правило, устанавливаются устойчивая двусторонняя визуальная связь и радиосвязь между экипажем и РП.
При выполнении такого монтажа обычно используется ВП с тросами большой длины, позволяющими опускать объекты АСМР в глубокие промышленные шахты или закрытые полости. Начиная с момента зависания вертолета над монтажным проемом РП берез на себя всю полноту подачи команд по перемещению вертолета и его снижению для опускания конструкции в проемы крыши и межэтажных перекрытий.
К свободному монтажу можно также отнести монтаж конструкций на две точки, монтаж гирлянд изоляторов и оттяжек ЛЭП, монтаж конструкций с вертикальным стыком [1.1, 1.2].
При выполнении работ по свободному монтажу используются различные направляющие приспособления (ловители), фиксаторы, временные ванты или расчалки, клинья для защемления конструкций в котлованах (фундаментах), фалы. Технологическая схема выполнения АСМР способом свободного монтажа конструкций представлена на рис. 1.4.
1.1.2. Монтаж способом поворота
Монтаж способом поворота применяется, как правило, при установке свободностоящих (устойчивых) конструкций или отдельных нижних секций опор ЛЭП (рис. 1.5), мачт сотовой связи или башенных сооружений. Этим способом устанавливаются одностоечные и портальные (неустойчивые) конструкции, закрепляемые в вертикальном положении с помощью оттяжек. В отдельных случаях портальные опоры могут иметь свободностоящие стойки или закрепляться в котлованах. Способ свободного поворота может использоваться также и при монтаже всех видов конструкций
Рис. 1.5. Установка нижней секции опоры ЛЭП путем ее поворота относительно оси горизонтального шарнира
ЛЭП с присоединенными через раскаточные ролики проводами высоковольтных линий (ВЛ).
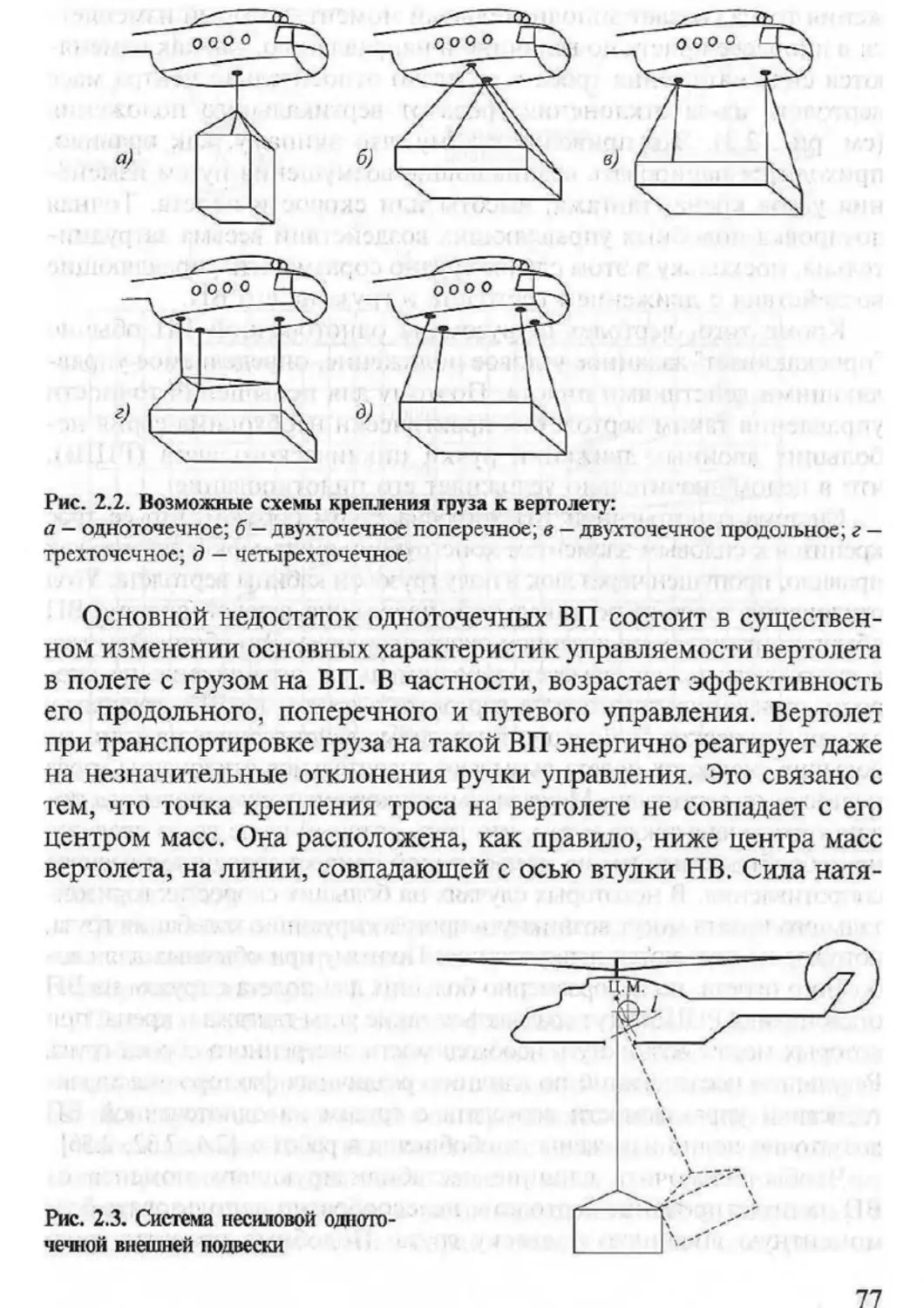
При установке конструкции рассматриваемым способом ее поворачивают относительно оси шарниров (шарнира для одностоечных конструкций), соединяющих конструкцию с фундаментом или основанием, или относительно точки контакта с краем фундамента или котлована (рис. 1.6).
Способ поворота позволяет устанавливать конструкции, масса которых превосходит грузоподъемность вертолета в 1,5...2,5 раза в зависимости от высоты расположения центра масс (ц.м.) конструкции относительно ее основания, начального угла сс наклона к горизонту и избыточного давления потока воздуха, индуцированного несущим винтом вертолета, на поверхность устанавливаемой конструкции.
Усилие в тросе ВП вертолета в начальный момент монтажа конструкции при горизонтальном положении ее оси и вертикаль-
Рис. 1.6. Установка конструкций способом поворота:
а - одностоечной опоры на вантах; б — железобетонной опоры ЛЭП в котлован
ном — троса подвески (без учета нагрузки от индуцированного несущим винтом потока) определяется выражением
А1. и
/ ’
(1-1)
где Т — усилие в тросе ВП, тс; G — вес конструкции, тс; /цм — расстояние от основания конструкции до точки расположения ее центра масс, измеренное вдоль продольной оси конструкции, м; I — расстояние от основания конструкции до точки крепления троса ВП, измеренное вдоль продольной оси конструкции, м.
Из приведенного выражения следует, что чем больше расстояние от основания конструкции до точки крепления троса, тем меньше усилие в тросе ВП. В связи с этим при выполнении АСМР
способем поворота место крепления ВП необходимо выбирать ближе к вершине устанавливаемой конструкции. При выборе значения величины / на стадии подготовки к выполнению АСМР необходимо проверить прочность опасных сечений конструкции с учетом действия на нее веса, усилия в тросе ВП и нагрузки от воздействия индуцированного несущим винтом (НВ) вертолета потока. При монтаже конструкций с присоединенными через раскатомные ролики проводами необходимо учитывать также и вес проводов.
Критический угол наклона акр (угол между продольной осью конструкции и горизонталью) свободностоящих опор в момент прохождения конструкцией точки неустойчивого равновесия, когда ее центр масс находится на одной вертикали с осью шарниров, согласно рекомендациям [1.9] может быть установлен из следующего выражения:
а = arctg , (1.2)
а
где а — разнос стоек свободностоящей опоры, одна из которых закреплена на шарнире.
На рис. 1.7 и 1.8 приведены номограммы для определения приближенных значений усилия в тросе ВП и критического угла наклона конструкции, устанавливаемой способом поворота.
Указанный способ АСМР эффективно применяется при поточно-скоростном строительстве ЛЭП. При этом, как показывает практика, скоростной вертолетный монтаж позволяет существенно устранить недостатки, характерные для обычного строительства линейных объектов. Так, например, в целях ускорения строительства ЛЭП протяженностью 80 км в штате Онтарио (США) были одновременно использованы вертолеты Sikorsky S-58 ’’Choctaw”, Sikorsky S-55 и Bell-47 "Sioux”. Работы по установке опор ЛЭП способом поворота проводились зимой, при температуре наружного воздуха, доходящей до -45 °C, и глубине снежного покрова 0,9... 1,2 м. На опорах высотой 18,3 м предварительно были закреплены траверсы с присоединенными изоляторами для проводов. Навеску проводов на установленные опоры выполняли с помощью вертолетов Sikorsky S-55 и Bell-47, а подъем опор способом поворота — Sikorsky S-58 "Choctaw". Применение вертолетов при групповом монтаже на АСМР позволило строительной компании на три месяца сократить сроки выполнения работ [1.12].
В Пуэрто-Рико один вертолет Sikorsky S-58 "Choctaw” обеспечивал ежедневную установку 60 опор высотой 20 м и массой 1700 кг каждая. Вертолет доставлял собранные на монтажной пло-
Рис. 1.7. Номограмма для определения потребного усилия Т в тросе внешней подвески при установке конструкций способом поворота
Рис. 1.8. Номограмма для определения критического угла акр наклона конструкции при установке способом поворота
щадке опоры с присоединенными изоляторами на расстояние свыше 10 км за 3...5 мин и устанавливал их в заранее подготовленные котлованы. За один летный день полностью сооружался участок ЛЭП протяженностью 1,6 км [1.6].
В нашей стране еще в 1989 г. ВНИИ ПАНХ ГА совместно со специалистами треста "Мегион электросетьстрои ’ в районе г. Нижневартовск Тюменской обл. были успешно проведены первые летные исследования по возможности применения вертолета Ка-32 в электросетевом строительстве с использованием его штатного оборудования с общей длиной тросов ВП от 10 до 40 м, выбираемой в зависимосги от рельефа местности и высоты устанавливаемых опор [6]. В результате этих исследований была отработана технология применения вертолета Ка-32 при сооружении высоковольтных линий путем установки опор на шарниры и горизонтальной стыковки секций массой до 3.5 т, а также технология подъема опор ЛЭП в проектное положение способом поворота. Технологическая схема выполнения АСМР способом поворота конструкции представлена на рис. 1.4.
1.1.3. Демонтаж конструкций
Демонтаж различного по своему назначению и конструкции технологического оборудования, выполняемый при реконструкции объектов, является достаточно трудоемкой операцией промышленного строительства. При таких работах не всегда возможно использовать наземную грузоподъемную технику. Они проводятся в стесненных условиях городской застройки или непрерывно действующего производства, при отсутствии необходимых подъездных путей и грузоподъемных механизмов. Наиболее целесообразно в таких условиях использовать для демонтажа конструкций вертолеты. Однако при кажущейся простоте вертолетный демонтаж имеет свои специфические особенности и сопровождается, как правило, двумя факторами риска:
не обеспечены прочность и жесткость снимаемого оборудования, поскольку в большинстве случаев целью демонтажа является удаление пришедшей в негодность конструкции из-за ее износа или в связи с опасностью дальнейшей эксплуатации;
высока вероятность ошибки при определении реальной массы демонтируемой конструкции ввиду отсутствия возможности проверить ее контрольным взвешиванием.
Эти факторы значительно усложняют технологию проведения демонтажных операций с применением вертолета. Первый фактор предопределяет применение более сложных схем строповки груза и его подцепки к вертолету. Недооценка второго может привести к развитию аварийной ситуации, если окажется недостаточно располагаемой мощности вертолета для переноса освобожденной от звязей (например, фиксирующих оттяжек или вант) демонтируемой конструкции к месту укладки.
В последние годы вертолетный демонтаж проводится двумя основными способами:
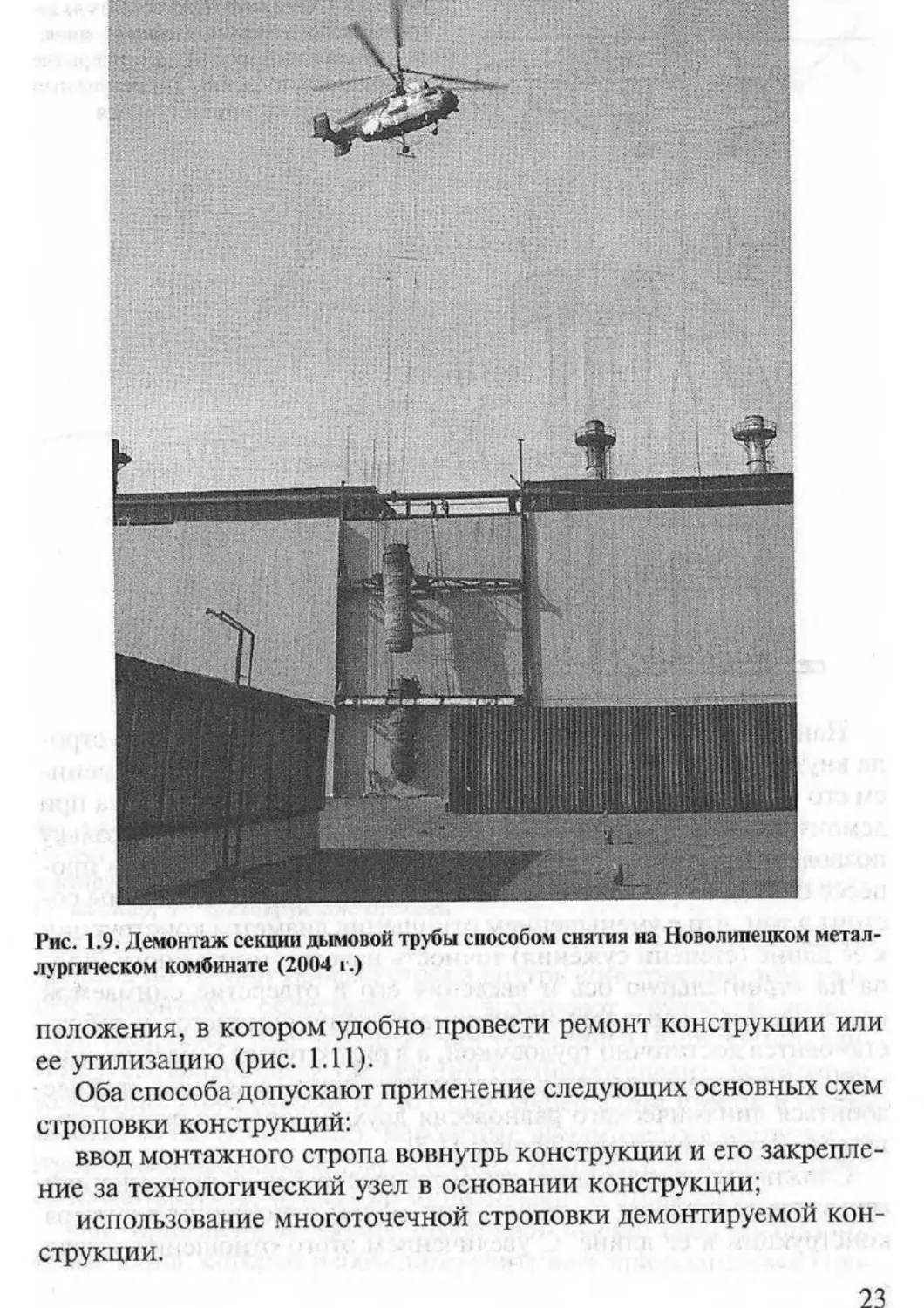
снятием, когда вертолетом выполняются такие основные технологические циклы, как подъем конструкции или ее части с проектной отметки (в том числе и из закрытых полостей промышленных зданий) на безопасную высоту, а также перемещение ее к месту укладки или утилизации (рис. 1.9 и 1.10);
поворотом: при выполнении вертолетом только одного техно-югического цикла — выводом конструкции из эксплуатационного положения путем ее поворота вокруг горизонтального шарнира до
положения, в котором удобно провести ремонт конструкции или ее утилизацию (рис. 1.11).
Оба способа допускают применение следующих основных схем строповки конструкций:
ввод монтажного стропа вовнутрь конструкции и его закрепление за технологический узел в основании конструкции;
использование многоточечной строповки демонтируемой конструкции.
1’исЛ. КГСхёма демонлажа объекта из закрытых полостей промышленного здания: 1 — центральный трос ВП; 2 — покрытие промышленного здания; 3- монтажный строп; 4 — демонтируемая секция
Наиболее надежной является схема с вводом монтажного стропа внутрь конструкции (например, дымовой трубы) и закреплением его в нижней части основания. Эта схема предпочтительна при демонтаже конструкций со скрытыми повреждениями, поскольку позволяет предотвратить се самопроизвольное разрушение в процессе снятия с проектной отметки [1.7, 1.8]. Недостаток схемы состоит в том, что с уменьшением отношения диаметра конструкции к ее длине (степе/ни сужения) точность наводки монтажного стропа на строительную ось и введения его в отверстие снимаемой конструкции с вертолета на режиме висения снижается и работа становится достаточно трудоемкой, а в ряде случаев - невыполнимой. Это вызвано тем, что с увеличением длины маятника труднее добиться динамического равновесия двухмассовой системы ’’вертолет — строп” в заданной точке [1.5].
Сложности выполнения демонтажных работ с применением вертолета возникают не только при малом отношении диаметра конструкции к ее длине. С увеличением этого отношения задача
о
Рис. 1.11. Демонтаж дымовой трубы способом поворота:
7 - трос внешней подвески с крюком; 2 — монтажный строп; 3 — площадка; 4 — демонтируемая труба; 5 — монтажный строп; 6 - строповочный узел; 7 - ложемент;
8 — шарнир; 9 — фиксирующие оттяжки
экипажа по точной укладке стропа внутрь конструкции, подлежащей демонтажу, облегчается, но возникают трудности другого рода. Например, при приближении указанного отношения к единице и его дальнейшем увеличении трудно обеспечить устойчивое положение конструкции на ВП при закреплении стропа в одной нижней точке (ниже ц.м.). Вероятные динамические нагрузки на строп при колебаниях и ударах об него конструкции в полете можно предотвратить, применив многоточечную строповку.
Обе приведенные схемы строповки имеют свои диапазоны применения, которые необходимо учитывать при подготовке Про
екта производства работ (ППР). Этот документ содержит подробные указания по выполнению строительно-монтажных работ на конкретном объекте, технологии их выполнения и порядок применения специальных технических средств. Согласно действующей в ГА нормативной и эксплуатационной документации все виды АСМР разрешается выполнять только при наличии ППР, разработанного для конкретного вида монтажа (демонтажа) и согласованного с разработчиком ВС и ГосНИИ ГА.
Обычно при реконструкции промышленных объектов значительный объем монтажных работ приходится на замену технологических трубопроводов. При работах с трубопроводами большого диаметра возникают ситуации, когда применению грузоподъемных кранов препятствуют' стесненные условия действующего производства. В этом случае разборка и восстановление несущих строительных конструкций влекут за собой существенное удорожание работ и увеличение сроков ввода объектов в эксплуатацию. Поэтому применение вертолетов на этом виде работ весьма эффективно.
Технологическая схема демонтажа объектов в общем случае соответствует набору основных операций по его монтажу, выполняемых в обратном порядке.
1.1.4. Работы с гибкими элементами
Важной задачей в строительстве электросетей и подвесных канатных дорог является повышение степени механизации операций по раскатке проводов высоковольтных линий, грозозащитных тросов, стальных и синтетических технологических канатов. Эффективное использование средств механизации этих операций позволяет на 30 % сократить сроки производства работ и на 25 % снизить их стоимость [1.4, 1.9]. Высоковольтные линии, как правило, характеризуются значительной вариацией нс только конструктивных форм, но и геометрических параметров: длин пролетов, разности отметок фундаментов, стрел провеса и т.д. Анализ существующих и гипотетических технологий по раскатке провода высоковольтных линий вертолетами позволяет выделить три основных способа: раскатка проводов со стандартных деревянных или металлических барабанов на грунт, на траверсы опор или в раскаточные ролики с ловителями, подвешенными к траверсам. Признаком принятой классификации способов раскатки является местоположение барабана с проводом в процессе раскатки (рис. 1.12 и 1.13).
Рис. 1.12. Технологические схемы раскатки гибкого элемента с ТС, размещенного на внешней подвеске ВС, и наземного
Рис. 1.13. Раскаiка гибкого элемеига с устройства на внешней подвеске вертолета: / - раскатка провода на грунт; 2 — раскатка провода на траверсы опор ЛЭП; 3 — раскатка провода на раскаточные ролики, подвешенные к траверсам опор
Достаточно полно обеспеченным техническими средствами яв-пяется способ раскатки провода с приспособления, расположенного на ВП. Данный способ отличается конструктивным многообразием применяемых приспособлений, которые по принципу действия можно разделить на два основных типа:
основанные на инерционном принципе раскатки, при котором в процессе работы барабан вращается вместе с намотанным на него проводом;
основанные на безынерционном принципе, при котором бара-эаи вместе с намотанным на него проводом в процессе раскатки остается неподвижным, а вращается только легкий узел - водило.
В меньшей степени обеспечен ТС способ, при котором раскатка провода производится с барабанов, расположенных на земле. В этом случае используются тележки или монтажные барабаны, которые применяются при традиционном способе раскатки проводов — волочением. Однако эти ТС требуют проведения дополнительных работ по усовершенствованию тормозных устройств в части повышения точности регулирования тормозного момента. /Анализ возможных траекторий полета вертолета при раскатке провода по данному способу показывает, что наиболее рациональна траектория, при которой после подцепки конца провода к тро-
Рис. 1.14. Схема раскатки провода вертолетом с наземного устройства:
7 — положение провода и траектория полета вертолета в процессе раскатки; 2 — укладка провода па грунт и отход вертолета после окончания раскатки
су ВП производится вертикальный набор высоты до ее расчетного значения АХ и на этой высоте выполняется горизонтальный полет вертолета до достижения некоторого расчетного расстояния X (рис. 1.14). Здесь X — горизонтальная проекция провода на участке между точкой А7 его подвеса к вертолету и точкой крепления на наземном раскаточном устройстве.
Затем выполняется снижение с одновременным смещением по курсу раскатки, при этом провод с барабана не сматывается, а его конец, закрепленный на вертолете, после окончания раскатки оказывается в расчетной точке А3 на удалении L от точки начала раскатки. В данном случае L — расстояние, на которое необходимо произвести раскатку провода.
При раскатке часть провода, находящегося в воздухе, принимает форму ’’цепной" линии, концы которой закреплены в двух точках: одна из них расположена на земле, а другая — на вертолете. Примерно такую же форму принимает цепь, провисающая под действием силы тяжести.
На провод действует сила тяжения W, вектор которой направлен по касательной к проводу. В точке касания проводом земли вектор силы тяжения N будет горизонтален, _т.е. будет совпадать по величине и направлению с составляющей Н (см. рис. 1.14), ве
личина которой в данной точке будет складываться из силы трения провода о грунт, пропорциональной погонной плотности раскатываемого провода у и коэффициенту трения провода о грунт /, и силы к — MJr, где Л/т — момент трения раскаточного устройства; г — радиус схода провода с барабана.
Условие равновесия провода, справедливое при любой форме "цепной” линии, соответствует соотношению
(Х-Д¥)у/ + £ = Я. (1.3)
Результаты расчетов, приведенных в работах В.В. Илькуна и В.Я. Фридланда [1.3, 1.11 ], с учетом (1.3) позволяют оценить величину горизонтальной проекции /\Хучастка провода, находящегося в воздухе в процессе его раскатки вертолетом, и технологическую высоту полета вертолета ДУ:
2р
h2p
ДУ =—^------, (1.5)
l+/sh2p
где р — безразмерный параметр, характеризующий форму "цепной” линии; sh — гиперболический синус.
Н 1
Из соотношений JV =----и cosa =----, приведенных в рабо-
cosa ch2p
те [1.3] и справедливых для "цепных" линий, с учетом равенства
ДУ sh2p тт
---= —- получим, что величина силы тяжения 7V определяется ДУ р
зависимостью
N_ Цу+к
cosa +/sina
(1.6)
Соотношения (1.4)...(1.6) при известных а, у,/ L позволяют определить необходимые параметры раскатки в процессе ее выполнения.
Б США для выполнения работ по раскатке провода указанным способом в 1970-х гг. успешно применялся вертолет Sikorsky S-58 "Choctaw”. К грузовому крюку ВП подвешивался противовес массой 550 кг, к которому прикреплялся свободный конец провода. В полете провод сматывался с барабана, установленного на раскатанном устройстве, надежно закрепленном на земле. Максимальная длина провода, прокладываемого за один полет для линии мощностью 135 кВт, составляла примерно 3000 м. Операции по раскатке выполнялись челночно при одновременном размещении раскатанных устройств на противоположных концах участка выполнения работ. Натяжение разложенных таким способом проводов производилось с помощью монтажных лебедок после завершения работы вертолета [1.9].
Вертолетами с использованием раскатанного ролика (блока раскатанных роликов), закрепленного на ВП, можно раскладывать иодгоговленные к монтажу одинарные или сдвоенные провода, а также грозозащитные тросы в анкерных пролетах ЛЭП. Как показали результаты выполненных ВНИИ ПАНХ ГА летных исследований [1.4, 1.6], длина одинарных или сдвоенных проводов на ВП, например, вертолета Ми-8 в каждом монтажном цикле не должна превышать 150 м. Раскладка проводов указанным способом проводится, как правило, в анкерных пролетах с промежуточными опорами ЛЭП. Во всех случаях ширина коридора, в который
Рис. 1.15. Схема раскладки сдвоенного провода вертолетом:
/ — раскаточный ролик; 2 — дополнительный груз; 3 - опора ЛЭП; 4 -траектория полета при заходе на точку начала раскладки; 5 — траектория полета в процессе раскладки
Рис. 1.16. Технологические схемы раскладки, подъема с земли и пепеноса гибких элементов
укладывается провод (просека или створ опор на трассе ЛЭП), должна быть не менее 40 м, чем обеспечивается выполнение требований НПП ГА — 85 по выдерживанию экипажем безопасного расстояния от концов лопастей НВ вертолета до препятствий в процессе производства работ.
Раскладка одинарных проводов на поверхности с уклоном требует от экипажа выдерживания траектории полета вертолета, близкой к прямой линии, а при раскладке сдвоенных проводов — близкой к параболе (рис. 1.15). Это объясняется необходимостью уравновешивания переднего по направлению раскладки участка провода дополнительным грузом при раскладке сдвоенных проводов.
Вертолеты могут быть успешно использованы и на работах, связанных с переносом заранее раскатанных и подготовленных к монтажу проводов через различные препятствия: ущелья в горах, водоемы, электрифицированные железные дороги, трассы действующих ЛЭП и т.д. В одном полете могут переноситься все провода одной фазы для линий высоких напряжений. Перенос проводов вертолетом может выполняться из пролета демонтируемой ЛЭП в пролет строящейся, при изменении направления строительства высоковольтной линии.
Общая технологическая схема переноса проводов вертолетами представлена на рис. 1.16.
1.2. ОСОБЕННОСТИ ТРАНСПОРТИРОВКИ ГРУЗОВ НА ВНЕШНЕЙ ПОДВЕСКЕ ВЕРТОЛЕТА
По существующей в Международной авиационной транспортной ассоциации IATA {International aviation transport association) классификации к категории грузов, перевозимых воздушным транспортом, относится имущество, перевозимое или принятое к перевозке на воздушных судах, за исключением почты и багажа. Основными особенностями воздушной перевозки таких грузов на ВП вертолетов являются:
высокая чувствительность транспортируемого груза к колебательному движению в силу его значительной удаленности от точки подвеса;
повышенный уровень вибрации на режимах разгона и торможения вертолета, когда НВ приближается к вихревой пелене, им образуемой;
влияние на груз аэродинамических сил и моментов от воздействия набегающего и индуктивного (индуцированного НВ вертолета) воздушных потоков;
влияние на груз повышенной эксплуатационной перегрузки (до 3) в полете и воздействие возможных ударных нагрузок в процессе укладки груза на твердую поверхность, приводящее к возникновению как упругих, так и пластических деформаций элементов его конструкции.
В связи с этим многие безопасные в условиях перевозки наземным транспортом вещества и изделия переходят в разряд опасных грузов или грузов других особых категорий, требующих принятия специальных мер при организации их транспортировки по воздуху на внешней подвеске ВС. В зависимости от наличия особых свойств перевозимого груза принято выделять его отдельные категории, которые требуют дополнительных мер (рис. 1.17). Иногда как самостоятельную категорию выделяют самоходные транспортные средства.
Важное место при организации и проведении воздушной перевозки грузов занимает их подготовка к транспортировке на ВП: консолидирование, пакетирование, взвешивание, доставка на загрузочную площадку и строповка. Выбор схем и способов строповки грузов, предназначенных для перевозки на ВП вертолета, зависит от их геометрических и массовых характеристик, а также определяется особенностью поведения груза в полете.
Длинномерные грузы (опоры высоковольтных линий, пакеты труб и лесоматериалов, крупносортный металл и т.д.), длина которых более 1/2 диаметра НВ вертолета при высоте до 1/5 его длины, могут транспортироваться как в горизонтальном, так и в вертикальном положении. Отличительной особенностью этой категории грузов является высокое значение параметра X, опре деляемого как отношение длины груза к максимальной площади его поперечного сечения. Как правило, для длинномерных грузов X > 4.
Наибольшую сложность при транспортировке таких грузов в горизонтальном положении составляет процесс перевода вертолета с режима висения в полет с поступательной скоростью. От летчика в этом случае требуется более плавное отделение груза от земли без его смещения в горизонтальной плоскости, а перевод вертолета в полет с поступательной скоростью в це-
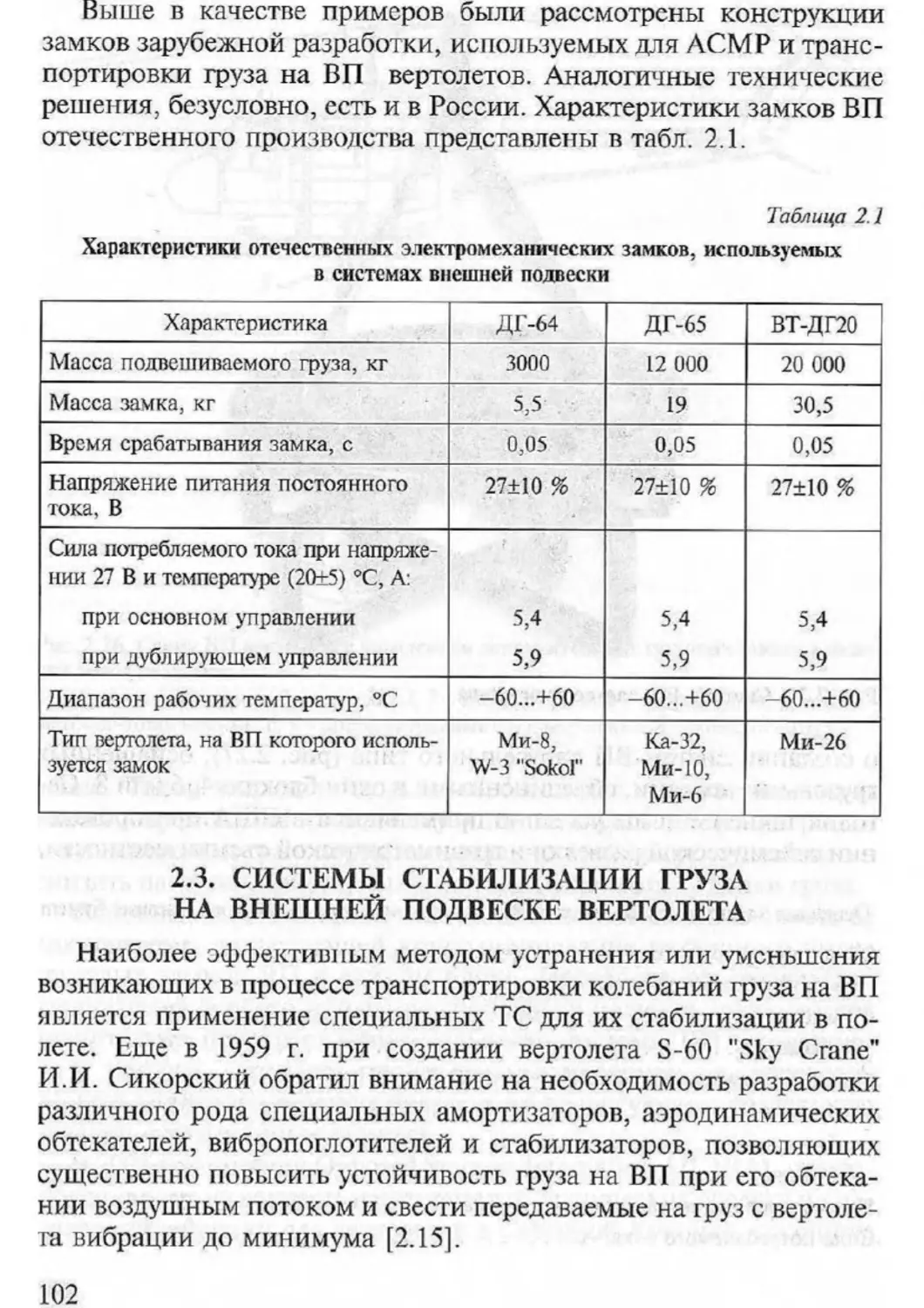
Рис. 1.17. Классификация грузов, транспортируемых иа внешней подвеске вертолетов, по основным признакам
Характеристика Анкерная опора
Y2|C2|+12 Y2K+-12 Y2|C2|+5
Масса, кг 13 790 10210 10 200
Высота А/. м 36,5 36,5 29,5
Базовые размеры, м:
а 12,2 12,2 10,8
b 7,0 7,0 5,0
с 14,2 14,2 11,2
Скорость транспортировки, км/ч 150 150 150
Минимальная длина стропа, м 30,0 30,0 24,0
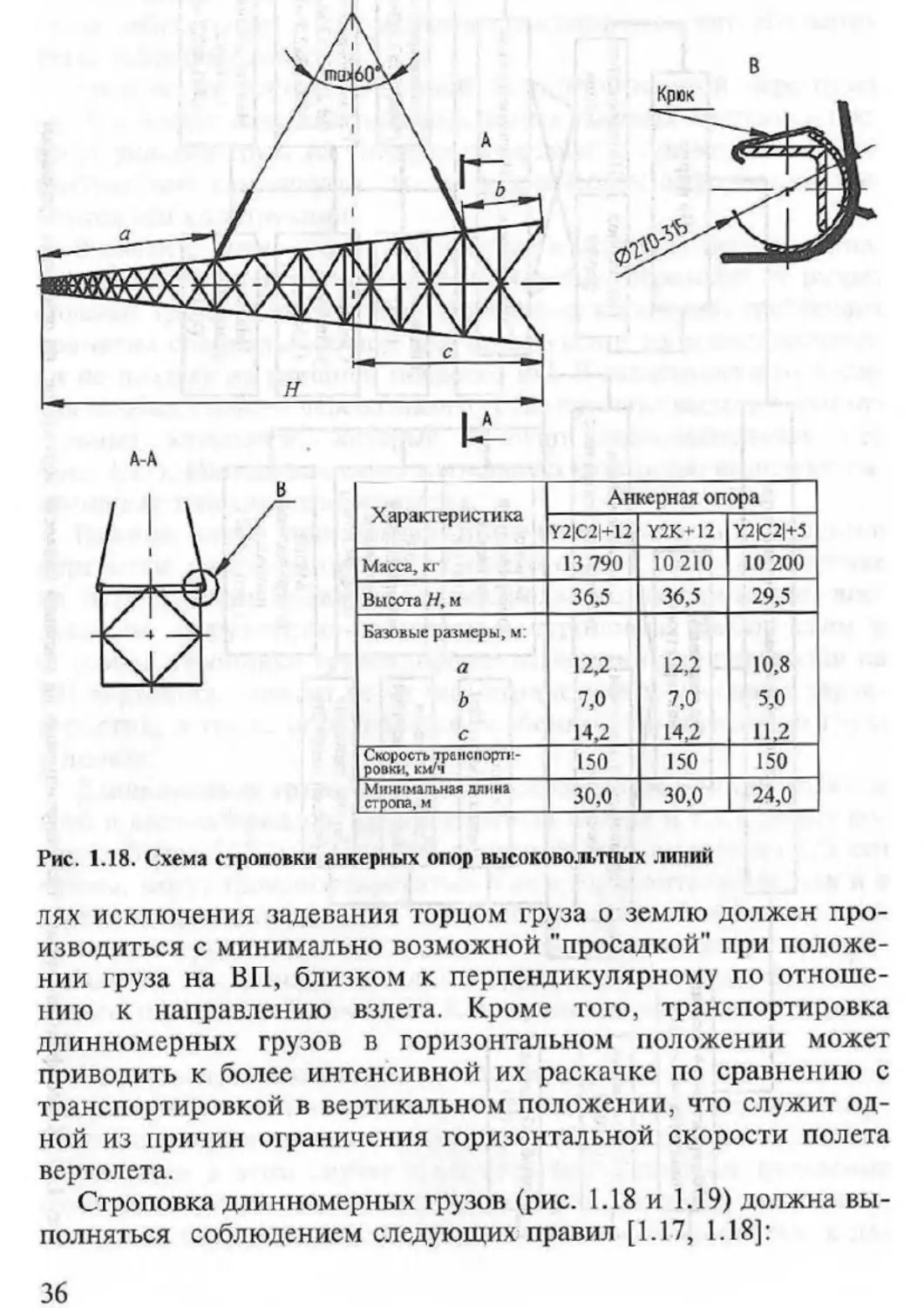
Рис. 1.18. Схема строповки анкерных опор высоковольтных линий
лях исключения задевания торцом груза о землю должен производиться с минимально возможной "просадкой” при положении груза на ВП, близком к перпендикулярному по отношению к направлению взлета. Кроме того, транспортировка длинномерных грузов в горизонтальном положении может приводить к более интенсивной их раскачке по сравнению с транспортировкой в вертикальном положении, что служит одной из причин ограничения горизонтальной скорости полета вертолета.
Строповка длинномерных грузов (рис. 1.18 и 1.19) должна выполняться соблюдением следующих правил [1.17, 1.18]:
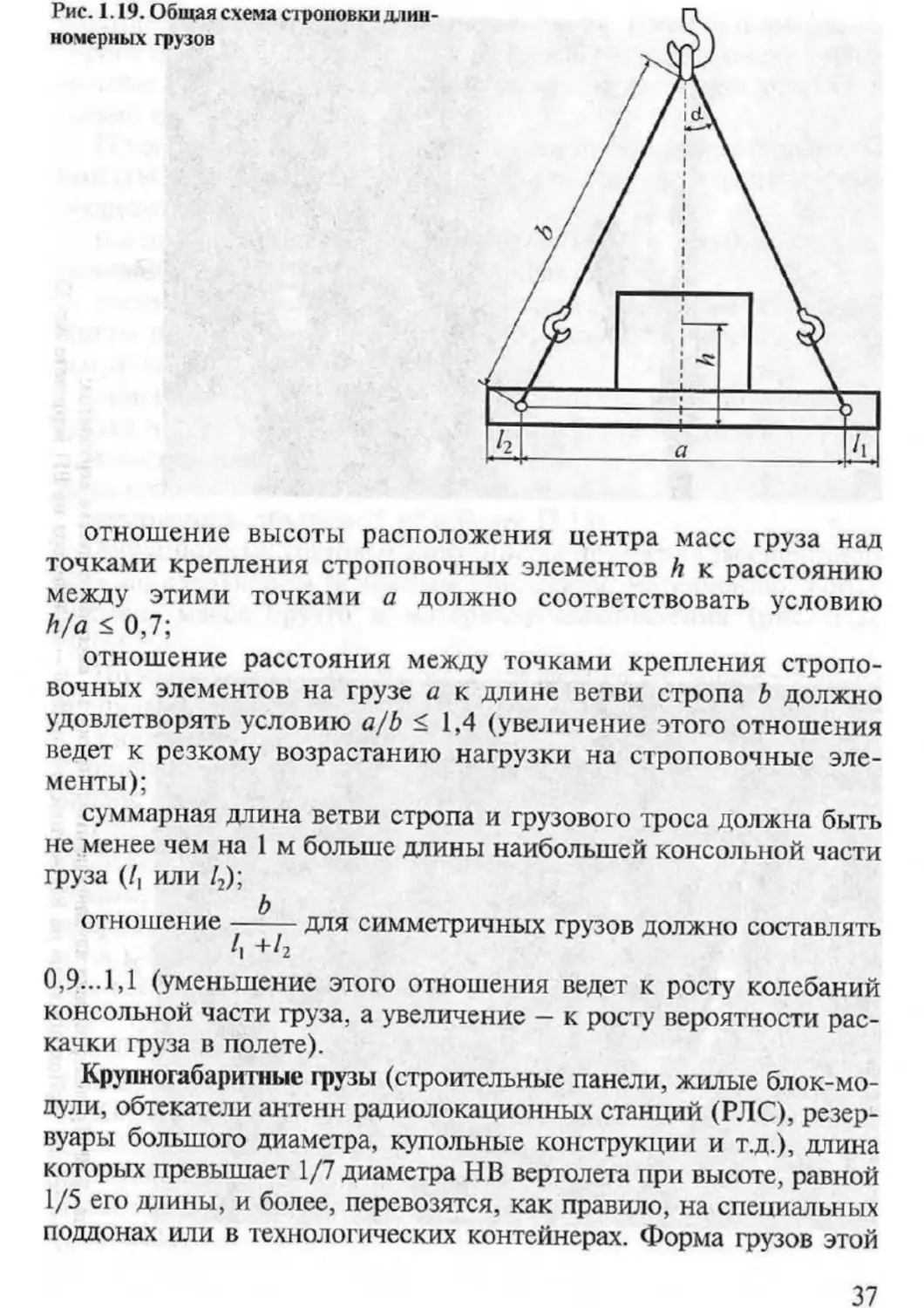
Рис. 1.19. Общая схема строповки длинномерных грузов
отношение высоты расположения центра масс груза над точками крепления строповочных элементов h к расстоянию между этими точками а должно соответствовать условию h/a < 0,7;
отношение расстояния между точками крепления строповочных элементов на грузе а к длине ветви стропа b должно удовлетворять условию а/b < 1,4 (увеличение этого отношения ведет к резкому возрастанию нагрузки на строповочные элементы);
суммарная длина ветви стропа и грузового троса должна быть не менее чем на 1 м больше длины наибольшей консольной части груза (/, или /2);
b
отношение------для симметричных грузов должно составлять
А
0,9...1,1 (уменьшение этого отношения ведет к росту колебаний консольной части груза, а увеличение — к росту вероятности раскачки груза в полете).
Крупногабаритные грузы (строительные панели, жилые блок-мо-дули, обтекатели антенн радиолокационных станций (РЛС), резервуары большого диаметра, купольные конструкции и т.д.), длина которых превышает 1/7 диаметра НВ вертолета при высоте, равной 1/5 его длины, и более, перевозятся, как правило, на специальных поддонах или в технологических контейнерах. Форма грузов этой
ОС
и)
б)
Рис. 1.20. Транспортировка крупногабаритных грузов на внешней подвеске вертолетов:
а - секции зернохранилища на ВП вертолета Ми-26; б - контейнера на ВП вертолета Ка-32
категории близка к параллелепипеду, длина, ширина и высота которого изменяются в широких пределах. Эти грузы имеют значительные габаритные размеры, но их масса, как правило, относительно мала (рис. 1.20).
По определению Международной организации по стандартизации (ISO) грузовым контейнером является элемент транспортного оборудования, обладающий:
постоянной технической характеристикой и прочностью, достаточной для его многократного использования;
специальной конструкцией, обеспечивающей перевозку грузов одним или несколькими видами транспорта без промежуточной выгрузки контейнера;
приспособлениями, обеспечивающими быструю погрузку, разгрузку и перегрузку с одного вида транспорта на другой;
конструкцией, которая позволяет легко загружать и разгружать его;
внутренним объемом 1 м3 и более [1.15].
Авиационные грузовые контейнеры принято классифицировать по следующим основным признакам: назначению, конструкции, массе брутто и материалу изготовления (рис. 1.21) [1.16].
По назначению контейнеры подразделяют на универсальные и специализированные.
Универсальные контейнеры применяются для перевозки обширной номенклатуры тарно-штучных грузов или сыпучих материалов в мелкой таре.
Специализированные контейнеры используются для перевозки отдельных или консолидированных грузов со схожими свойствами, требующих особых условий перевозки (защиты от атмосферных осадков, повышенной влажности, низкой температуры и т.д.). Специализированные контейнеры разрабатываются с учетом технических требований ГА на устройства, предназначенные для транспортировки тяжеловесных грузов (массой более 10 000 кг). Они отличаются хорошей аэродинамической формой и весовым совершенством.
Конструкция авиационных контейнеров, как правило, предусматривает наличие специальных устройств (рымных узлов или угловых фитингов), которые позволяют быстро выполнять их подцепку к системе внешней подвески вертолета (рис. 1.22).
Классификация контейнеров
По конструкции
По назначению
По массе брутто
Универсальные
о
3
У
и 3 х
X X
ё 7.
и о
I g. X s
-ю s =2
По материалу изготовления
о i
5
| 2
О э
а
Рис. 1.21. Классификация контейнеров
Груз массой более 10 000 кг считается тяжеловесным [1.10] Грузы этой категории могут отличаться разнообразием внешних форм и размеров. Тяжеловесные и крупногабаритные грузы могут перевозиться на ВП вертолета, как в упакованное виде, так и без упаковки, если это разрешено техническими условиями на их перевозку. Упаковка таких грузов рассчитывается на нагрузку, равную массе груза, с учетом перегрузок
Рис. 1.22. Общий вид (а) и типовая схема строповки (б) средне тоннажного цельнометаллического контейнера, предназначенного для перевозки геофизического оборудования на внешней подвеске вертолета Ми-26:
1 - контейнер; 2- двухветьевой строп; 3 - серьга; 4- сани; 5- хомут; 6- сгибатель; 7-звенотипаТ или Рт 1; 8— центральный трос системы внешней подвески; 9—балка
возможных при его грубой укладке с вертолета в режиме висения.
Параметры пакетов устанавливаются с учетом характеристик грузов и средств пакетирования при обеспечении максимального использования грузоподъемности соответствующего типа вертолета. Средства пакетирования, как правило, являются принадлежностью грузоотправителя и должны соответствовать государственным стандартам, а также удовлетворять техническим требованиям ГА при транспортировке грузов вертолетами.
Неупакованные тяжеловесные грузы, а также самоходные транспортные средства предъявляются к перевозке смонтированными на поддонах или оборудованными специальными узлами для соединения с грузодержателями ВП (рис. 1.23...1.25). Строповка таких грузов должна обеспечивать надежную и удобную их подцепку к ВС, а также устойчивое висение груза на ВП. Важными условиями надежной строповки являются обеспечение равномерной загрузки всех строповочных элементов и устранение возможности их зацепа за выступающие части транспортируемого груза.
Легкие, парусные грузы (массой менее 2 т), как правило, имеют четыре и более узлов подцепки к ВП вертолета, которые располагаются на равном расстоянии от центра масс в продольном и поперечном направлениях (рис. 1.26). Возможно также осуществлять подцепку за два узла. Дополнительным введением электрозамка в
У
Масса т, кг 11 230
Габариты, м L=7,0; В-2,4; //-3,3
Положение ц.м х=0,31; у=0,5//; з-0,5В
Скорость транспортировки, км/ч 120
Минимальная длина стропа, м 20
Строповка за специальные узлы, предусмотренные на автопогрузчике
Рис. 1.23. Схема строповки автопогрузчика ТО-18Б
нижней точке центрального троса ВП обеспечивается удобная и быстрая подцепка (отцепка) груза к ВП вертолета. Такие грузы перевозятся в специальных контейнерах, на поддонах или в грузовых сетках-гамаках.
Скорость транспортировки длинномерных и парусных грузов вследствие их неустойчивого поведения на ВП значительно ниже крейсерской. Она зависит от характерных особенностей этой категории грузов, влияющих на соотношение инерционных и аэродинамических сил и моментов, и редко превышает 120 км/ч.
Узлы подцепки всех категорий грузов, приведенных на рис. 1.17, рассчитываются из условия обеспечения пятикратного запаса прочности [1.10] и должны отвечать следующим основным требованиям:
располагаться в местах, удобных для соединения с грузодержа-телями ВП и обеспечивающих прямолинейность троса при его натяжении;
a)
Рис. 1.24. Транспортировка тяжеловесного неупакованного груза — автопогрузчика ТО-18Б (а) и автокрана массой 17 т (б) — нц внешней подвеске вертолета Ми-26
б)
55
Рис. 1.25. Схема строповки бульдозеров ДЗ-110А и ДЗ-1711
A
X арак герметика ДЗ-110А ДЗ-1711
Масса, кг 16000...16300 17 200... 19 700
Габариты, м £=5,5;Я=3,1; 5=3,2 £=5,6...6,5;Я=3,15;В=3,2
Положение ц.м. x=0,5£;y=0,2W;z=0,5B x=0,5£;.y=0,2tf;z=0,55
Скорость транспортировки, км/ч 160... 170 160...170
Минимальная длина стропа, м 18 18
Рис. 1.26. Транспортировка легкого, парусного груза на внешней подвеске вертолета Ка-32
находиться симметрично относительно центра масс груза;
обеспечивать надежное соединение с ВП;
быть закрытого контура, без острых кромок;
исключать заедание и заклинивание грузодержателей или элементов специальной оснастки при их самоустановке во время натяжения стропов или тросов ВП.
Максимальное расстояние между узлами подцепки для основных категорий грузов может быть рассчитано по формуле, приведенной в работе [1.4]:
а^(2Т)2-(?’,
(1.7)
где а — расстояние между узлами подцепки, м; b — длина ветви стропа, м; Т - допустимая рабочая нагрузка на строп, тс; G — вес груза, тс.
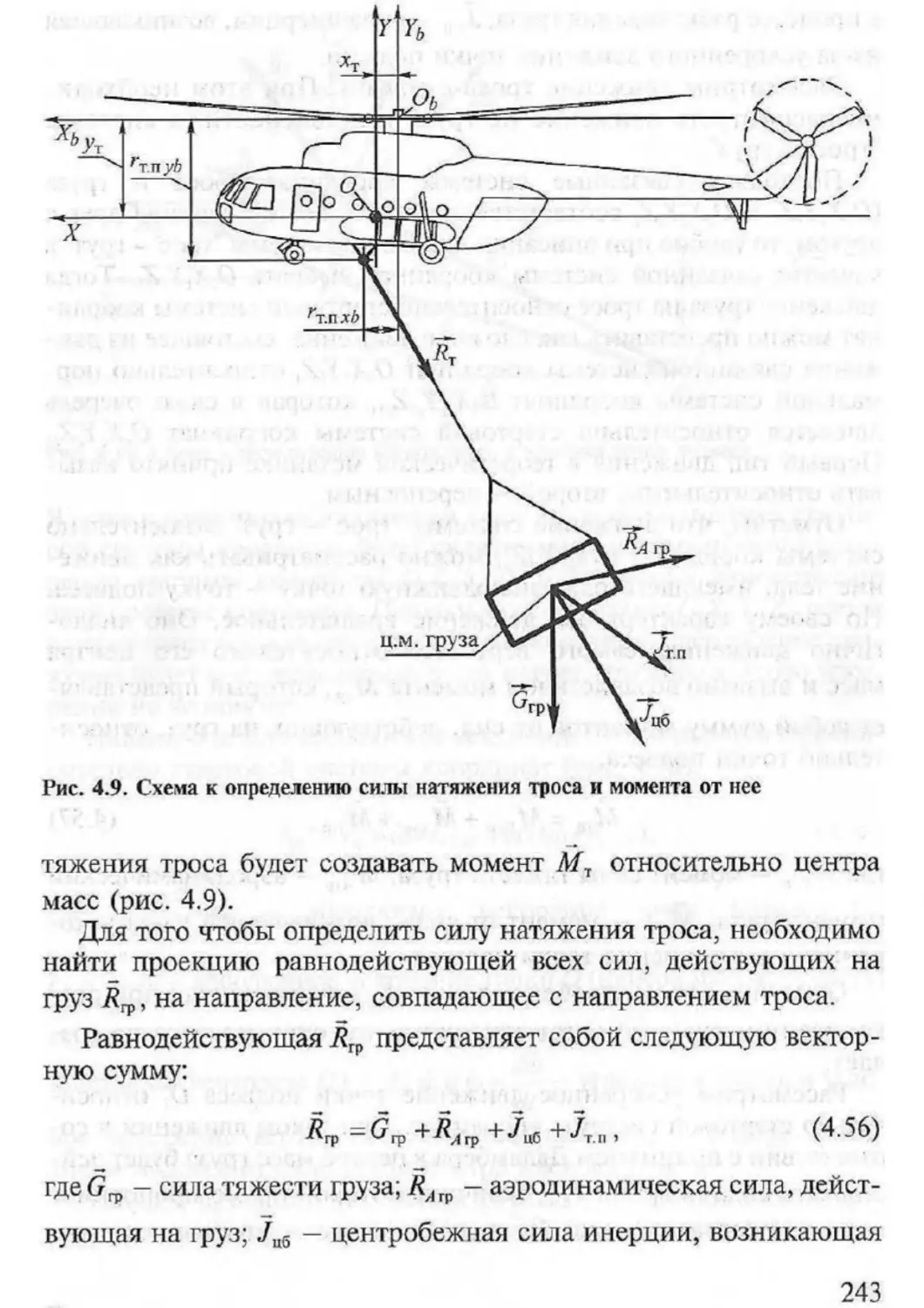
Технологическая схема транспортировки груза на ВП вертолета представлена на рис. 1.27.
Подлет к погрузочной площадке с выпущенным тросом ВП
Снижение в точку подцепки груза и укладка тросов ВП па грунт
т
Подцепка груза к грузодержателям ВП
Подъем груза до отделения его от грунта
Натяжение тросов ВП
Вертикальный набор безопасной высоты ухода с погрузочной площадки
Полет к разгрузочной площадке с грузом на ВП
Снижение в точку укладки груза и установка груза на грунт
ч
Отцепка грузодержателей внешней подвески от груза
Набор высоты для ухода с места укладки груза с целью выполнения захода на посадочную площадку или полета к следующему объекту
Рис. 1.27. Технологическая схема процесса транспортировки груза на внешней подвеске воздушного судна
Грузы всех категорий должны быть подготовлены к перевозке на ВП ВС с учетом их специфических свойств и особенностей таким образом, чтобы при обычном обращении с этими грузами обеспечивалась их сохранность, а также исключалась возможность причинения вреда экипажу, лицам, сопровождающим груз, ВС или имуществу перевозчика.
1.3. ВЛИЯНИЕ ВНЕШНИХ УСЛОВИЙ НА ПРОВЕДЕНИЕ АСМР И ПОЛЕТЫ ВЕРТОЛЕТА С ГРУЗОМ
НА ВНЕШНЕЙ ПОДВЕСКЕ
Функционирование системы "экипаж - вертолет - объект монтажа” происходит во времени и пространстве, что налагает на сис
тему дополнительные связи с пространственно-временными характеристиками окружающей среды. Поэтому информационная модель полета вертолета на АСМ Р формируется из сведений о состоянии среды, авиационной техники, экипажа и пространственного положения вертолета.
Возмущение внешней среды, длительность технологических циклов, необходимость точного выдерживания заданной высоты висения над монтажным объектом, интенсивность ведения радиообмена и внутри вертолетных переговоров оказывают значительное влияние на эффективность выполняемых работ.
Диапазон рабочих высот, в котором функционирует система "экипаж — вертолет — объект монтажа", не превышает 150...200 м над рельефом местности, расположенной обычно в труднодоступных для наземной грузоподъемной техники районах. На этих высотах отмечаются значительные колебания давления, температуры, влажности и других параметров воздуха по времени, происходит интенсивное перемешивание воздушных масс, вызванное вертикальными восходящими и нисходящими потоками, а также непрерывными изменениями скорости и направления ветра, особенно при выполнении работ в горах. Для данных высот характерно образование разорванно-слоистых и разорванно-дождевых облаков, которые располагаются ближе всего к земной поверхности [1.19]. Высота их нижней границы составляет обычно 100...300 м, но в ряде случаев может быть и ниже 50 м.
Рассмотрим основные факторы внешней среды, влияющие на полет вертолета с грузом на ВП и выполнение АСМР.
Облака, осадки и электризация вертолетов
Из слоистых облаков могут выпадать моросящие осадки — мелкие капли дождя (диаметром 0,5 мм), а в холодное время года — очень мелкие снежинки и снежные зерна. Несмотря на то что интенсивность моросящих осадков небольшая, они сильно ухудшают видимость экипажу.
Сложность выполнения полетов вертолета в таких условиях усугубляется наличием подоблачной дымки - неизбежным спутником низких слоистых облаков [1.20]. Связано это со сложной структурой их нижней границы.
Нижняя граница слоистых облаков, как правило, неровная и представляет собой слой переменной оптической плотности, на-
ходяшийся в колебательном движении. Полет в этом слое сопровождается постепенным ухудшением видимости, от легкого помутнения до полной се потери, что приводит к утрате визуальной связи пилота с выбранными ориентирами видимости и возможной потере им контроля над пространственным положением вертолета.
Результаты исследований по определению изменений дальности видимости под слоистыми облаками представлены в работе [1.21]. В ней установлена связь между метеорологической наклонной дальностью видимости 5мнакл и горизонтальной дальностью видимости 5МГ у поверхности земли. В общем виде эта связь определяется соотношением
^м.накл ~ > 0*&)
где к - коэффициент, 0,2 < к < 1. При низких слоистых облаках высотой до 100 м коэффициент к = 0,2... 0,45, а при высоте более 200...300 м величина к = 1.
Экспериментальные исследования, проведенные с неподвижного аэростата [1.19]. показали, что при высоте до 100 м наклонная дальность видимости в зависимости от синоптической обстановки равна 25...45 % от горизонтальной дальности видимости у земли, а при высоте облаков от 100 до 200 м она составляет 40...70 % горизонтальной дальности видимости у земной поверхности. Если высота облаков становится более 200 м, наклонная дальность видимости приближается к горизонтальной. Это обстоятельство необходимо учитывать при оценке состояния облачности в районе выполнения работ при подготовке экипажа к АСМР и полетам с грузом на ВП.
Существующими нормативно-правовыми актами, действующими в гражданской авиации Российской Федерации, установлен метеоминимум для рассматриваемого вида авиационных работ: высота нижней границы облаков не менее 150 м и дальность видимости не менее 2000 м, что вполне оправданно и соответствует необходимому уровню безопасности работ на АСМР [1.22].
Известно, что капли и кристаллы выпадающих из облаков осадков обладают определенными электрическими свойствами. Поэтому при выполнении АСМР в зоне осадков вертолет и груз, размещенный на ВП, приобретают электрический заряд. При этом токи разряда, как следует из работы 11.19], пропорциональны
скорости полета вертолета (окружной скорости вращения НВ на режиме висения), а токи заряда имеют степенную зависимость от этой скорости. В частности, при полете вертолета с грузом на ВП в зоне снегопада его заряд увеличивается пропорционально третьей степени скорости полета [1.23].
Разряд статического электричества при выполнении АСМР и полетах с грузом на ВП происходит, как правило, в момент касания грузом (троса ВП) заземляющей поверхности на месте его установки. Тяжелых исходов такие разряды не вызывают и в основном производят пугающее воздействие на персонал, работающий под вертолетом.
Сила и направление скорости ветра
Существенное влияние на эффективность монтажных операций оказывает ветер на месте выполнения работ. Допустимая скорость ветра при проведении АСМР, как правило, ограничена 10 м/с.
При воздействии на вертолет на режиме висения ветровых порывов различной интенсивности и различного направления возможна его разбалансировка. Основные причины такой разбалансировки рассматриваются в работе А.М. Володко [1.24].
Необходимо особо подчеркнуть, что условия висения вертолета классической одновинтовой схемы с грузом на ВП заметно осложняются при наличии попутного и бокового ветра. При ветре сзади для устранения перемещения вертолета вперед пилоту необходимо отклонять ручку управления "на себя", что вызывает увеличение угла тангажа и, как следствие, опускание хвостовой балки. В таком балансировочном положении возрастает продольная аэродинамическая сила, смещающая вертолет по ветру, и возникает опасность касания рулевым винтом (РВ) земли или объектов, расположенных в непосредственной близости от места монтажа. При скорости ветра сзади 12... 15 м/с запас продольного управления на некоторых вертолетах может оказаться исчерпанным. Поэтому в руководствах по летной эксплуатации (РЛЭ) одновинтовых вертолетов, как правило, содержатся ограничения на ветер рассматриваемого направления на режиме висения 10 м/с.
Аэродинамическое взаимовлияние НВ, РВ и планера вертолета одновинтовой схемы на висении в условиях действия ветра и близости экранирующей поверхности довольно сложно и пока не
поддается четкой формализации.Одна~ко с точки зрения практики важен сам факт уменьшения тяги РВ при боковом ветре. Это объясняется следующими основными причинами:
при ветре слева уменьшаются углы атаки лопастей и тяга РВ;
при ветре справа, направленном навстречу индуктивному потоку от РВ, в определенном диапазоне скоростей ветра (И< = = 5... 10 м/с) РВ понадает в режим вихревого кольца аналогично НВ в условиях вертикального или крутого снижения.
Экспериментальные исследования влияния полей индуктивного потока за НВ на аэродинамические характеристики РВ вертолета типа Ми-8 на режиме висения и малых скоростей полета при воздействии бокового ветра различного направления были проведены в 2003 г. специалистами ЦАГИ в аэродинамической трубе Т-105 на винтовом приборе МВП-8 [1.25].
На рис. 1.28 и 1.29 представлены зависимости общего шага <рРВ РВ от угла между вектором скорости ветра и плоскостью вращения РВ и скорости набегающего потока при наличии и отсутствии поля индуктивных скоростей от потока за НВ. Видно, что увеличение угла азимутального положения плоскости вращения РВ приводит к увеличению общего шага РВ.
Рис. 1.28. Изменение общего шага РВ в зависимости от угла ip между вектором скорости вегра и плоскостью вращения РВ
/ г ТГ 1 1 V 1 ‘ л 1 • *'\ И L _ г X Li 2 —>3 - •
5
1 I1 7 " Ml 4^ UJ Ю «—• 1 1 1 1 1 1 я я я л я л Х5 ТЗ X» Х> Х> X? я я я я я я II II II II II II ООЛОО-Ь о О V» Q О О О 1 с влиянием потока без влияния потока с влиянием потока без влияния потока от НВ от НВ от НВ от НВ
।
10 15 20 F, м/с
Рис. 1.29. Изменение общего шага рулевого винта в зависимости от скорости набегающего потока
Наличие ветра на месте выполнения работ значительно усложняет выполнение разворотов вертолета на режиме висения по сравнению со штилевыми условиями. В некоторых случаях (при предельных значениях полетной массы вертолета, повышенных значениях температуры наружного воздуха и барометрической высоты висения, высокой турбулентности) разворот вертолета на висении может стать неуправляемым.
Самопроизвольное левое вращение вертолета может возникнуть вследствие отсутствия запаса путевого управления по правой педали, что в свою очередь обусловлено:
существенным уменьшением тяги РВ при боковом ветре или интенсивном развороте влево вблизи земли;
увеличением реактивного момента НВ при висении и развороте вертолета с использованием взлетного режима работы двигателей и пониженной частотой вращения НВ.
К этому опасному явлению могут привести и другие причины, в частности вход в глиссаду снижения на площадку ограниченных размеров на повышенной скорости и ошибки экипажа в расчете на посадку с перелетом [1.36].
Самопроизвольное вращение вертолета может происходить с достаточно большой угловой скоростью и сопровождаться его
снижением, а также колебаниями вертолета и груза на ВП по тан-гажу и крену, что при висении на небольшой высоте над точкой монтажа представляет значительную опасность. В связи с этим для обеспечения необходимого запаса путевого управления в РЛЭ одновинтовых вертолетов строго регламентированы ограничения по скорости бокового ветра и угловой скорости разворота вертолета на режиме висения.
У вертолетов соосной схемы благодаря отсутствию РВ и хвостовой трансмиссии, а также слабой зависимости суммарной тяги НВ от угловой скорости рыскания вертолета сод, ограничения по угловой скорости разворота на висении (темпу дачи педалей), присущие одновинтовому вертолету, отсутствуют.
При висении вертолета над точкой монтажа с грузом на ВП с предельной полетной массой в условиях высокой температуры и турбулентности воздуха заметно изменяются и условия работы двигателей по сравнению с обычными полетными условиями.
Во-первых, если висение вертолета выполняется при ветре сбоку-сзади, то высока вероятность попадания в двигатели части выхлопных газов, экранированных поверхностью земли или монтажной площадки, что будет сопровождаться локальным повышением температуры воздуха перед воздухозаборниками на 10...20 °C и изменением состава воздуха. По этим причинам возможно уменьшение эффективной мощности двигателей, особенно при висении вертолета над монтажным стыком с тросами ВП малой длины в условиях повышенных температуры наружного воздуха и барометрической высоты расположения монтажной зоны.
Во-вторых, если объект монтажа расположен на грунтовых площадках с песчаной или супесчаной почвой, то из-за образования пыльного вихря от воздействия на нее индуктивного потока от НВ на вход двигателей вертолета поступает значительное количество пыли и существенно ухудшается обзор экипажу места выполнения монтажа (рис. 1.30).
Значительная часть пыли, отбрасываемой индуктивным потоком от НВ, оказывается в зоне разрежения, создаваемого двигателями, и засасывается в их воздухозаборники, что вызывает эрозионный износ деталей компрессора.
Эффективное применение пылезащитных устройств (ПЗУ) вертолета в процессе выполнения АСМР не всегда возможно, так как установка и включение ПЗУ сопровождается существенным умень-
Рис. 1.30. Образование пылевого вихря от воздушной струи вертолета в зоне выполнения АСМР
шением эффективной мощности двигателей и увеличением удельного расхода топлива. Например, при установке ПЗУ на вертолет типа Ми-8МТВ его предельная взлетная масса, определенная по номограмме РЛЭ для взлета вне зоны влияния земли, должна быть уменьшена на 100 кг, а при включении системы отсоса пыли — на 200 кг. Включение ПЗУ на вертолете типа Ми-26 предполагает снижение предельной взлетной массы вертолета на 700 кг [1.24].
Обледенение
Обледенение — другой важный эксплуатационный фактор, связанный с внешними условиями полета вертолета. Это комплексная проблема в авиации. Возможность обледенения приходится иметь в виду при обеспечении и выполнении любого полета. В повседневной практике АСМР и работ, связанных с пранспортировкой грузов на внешней подвеске, речь идет лишь о вероятности обледенения вертолета и мерах по предотвращению его отрицательных последствий.
Физические основы обледенения рассматриваются во многих работах, в том числе в [1.26], во многом не потерявшей своего значения до настоящего времени. Аспекты влияния обледенения на полеты и борьбы с ним наиболее полно исследованы в ГосНИИ ГА О.К. Труновым [1.27].
Метеорологические условия обледенения вертолетов определяются синоптической обстановкой, вероятностью встречи с облаками на высоте полета, их водностью, температурой воздуха, размерами облачных капель и скоростью их замерзания. Кроме метеорологических условий обледенение зависит от того, какое количество облачной фракции попадает на единицу поверхности в единицу времени, от специфики обтекания воздушным потоком различных частей вертолета и режима его полета. По данным К. Г. Абрамовича, на высоты полета до 3000 м приходится более 42 % всех случаев обледенения ВС [1.28].
Отложение льда на летящем вертолете опасно по ряду причин. Лед, откладываясь на обтекаемых частях вертолета, увеличивает их габаритные размеры и массу и изменяет форму. Связанные с этим падение подъемной силы и рост сопротивления приводят к увеличению потребной тяги или мощности, а значит, к уменьшению избытка последних на всех этапах полета. Другим опасным следствием обледенения является снижение эффективности органов управления. Обледенение винтов вертолетов сопровождается тряской, возникающей вследствие появления дисбаланса лопастей, так как лед образуется на поверхности лопасти неравномерно как во времени, так и по толщине, тем самым изменяя характер обтекания профиля воздушным потоком.
Включение противообледенительной системы (ПОС), действие которой основано на принципе отбора горячего воздуха из двигателя, существенно сказывается на мощности и экономичности силовой установки вертолета. При одновременном включении обогрева обоих двигателей вертолета происходит значительное уменьшение
располагаемой мощности (примерно на 4 %), передаваемой НВ, что, как правило, приводит к резкому уменьшению тяги НВ и потере вертолетом заданной высоты полета, а на режиме висения с максимальной полетной массой над монтажным объектом — к вероятному сбросу груза с внешней подвески. Так, например, при включении ПОС двигателей вертолета типа Ми-8МТВ его взлетная масса, определенная по номограмме РЛЭ для взлета вне зоны влияния земли, должна быть уменьшена на 1000 кг, а предельная взлетная масса вертолета Ми-26 — на 6000...7000 кг, если площадка его взлета расположена на высотах более 1000 м. Это обстоятельство существенно снижает диапазон применения вертолета на АСМР, выполняемых в условиях отрицательных температур наружного воздуха.
РЛЭ современных вертолетов ограничивают экипажу полеты в условиях обледенения интервалом температур наружного воздуха от -12 до -23 °C в зависимости от типа вертолета.
Статистика но авиационным происшествиям (АП) с вертолетами в странах-членах ИКАО свидетельствует, что из-за опасных метеоявлений, ухудшающих видимость ниже установленного минимума, в том числе связанных с облаками и осадками, происходит около 62 % АП, из-за сильной болтанки — около 11 %, а вследствие обледенения — около 7 %. Некоторые статистические данные содержатся также в работе [1.29].
Приведем несколько примеров возникновения особых ситуаций (ОС) в полете вертолетов с грузом на ВП и при выполнении АСМР, которые были вызваны активным воздействием на исследуемую систему факторов внешней среды.
При строительстве объектов, расположенных в труднодоступных районах, вертолеты часто используют для доставки различного рода сыпучих и жидких строительных материалов к месту проведения работ в специально оборудованных устройствах, силовой оболочкой которых является мягкий тканевый контейнер. Эти технические устройства, как правило, имеют двойное назначение и успешно используются также для тушения лесных пожаров с воздуха.
3 мая 2003 г. в Читинской области потерпел катастрофу вертолет Ми-26Т RA 06075 МЧС России. Полет выполнялся с водосливным устройством (ВСУ-15А) на тросовой ВП, выполненной из синтетического высокомолекулярного материала (СВМ), с длиной центрального троса (ленточного стропа ЛС-15) 30 м. Для установления причин этого АП был проведен ряд экспериментальных исследований по определению влияния воздействия восходящих
потоков воздуха на поведение ВСУ и ЛС-15 на внешней подвеске вертолета Ми-26Т [1.30]. Некоторые результаты этих исследований содержатся в работах [1.31, 1.32].
По заключению комиссии вероятной причиной катастрофы явилось разрушение РВ вертолета вследствие попадания в него стропа ЛС-15 внешней подвески из-за воздействия на порожнюю емкость ВСУ сильного вертикального потока воздуха и внезапно возникшего в месте выполнения работ сдвига ветра по вертикали.
11 мая 1990 г. экипажем вертолета Ми-8Т Нижневартовского авиапредприятия в районе населенного пункта Мегион был произведен аварийный сброс груза с ВП с вертолета, находящегося в режиме висения, из-за самовыключения правого двигателя на высоте 20 м. По заключению комиссии, расследовавшей данный инцидент, причиной отказа двигателя ТВ2-117 явилась его газодинамическая неустойчивость при попадании в ливневые осадки (снег).
24 мая 2002 г. экипаж вертолета Ка-32 Нефтеюганского авиапредприятия выполнял транспортно-связной полет с грузом массой 3700 кг на ВП. Через 30 мин после взлета с посадочной площадки Мамонтово, когда вертолет совершал горизонтальный полет на высоте 250 м и скорости 150 км/ч, экипаж увидел вспышку в районе НВ и услышал хлопок. После этого произошла резкая разбалансировка вертолета по крену и тангажу, сопровождавшаяся сильной тряской. Экипаж частично устранил разбалансировку вертолета, сбросил груз с ВП, доложил диспетчеру о случившемся и произвел вынужденную посадку на болотистую местность, находящуюся в 12 км севернее населенного пункта У гут.
При осмотре вертолета обнаружены следующие повреждения: разрушение 1/2 части хвостового отсека № 13 лопасти № 3 верхнего винта (заводской номер 3588УГ);
вспучивание обшивки над нагревательными элементами шины ПОС;
вспучивание лакокрасочного покрытия хвостовых отсеков лопастей;
отставание оковок носка лопасти по всей ее длине;
вынос металла из зазоров между оковками на расстояние до 5 мм;
разрушение и обугливание штепсельного разъема (ШР) лопасти № 3;
разрушение силового жгута ПОС лопасти № 3.
По докладу экипажа, полет выполнялся при следующих метеоусловиях: высота облаков 900... 1000 м, облачность кучевая, в рай
оне работ разбросанные небольшие очаги с осадками, температура +8 °C. Ветер: направление 200...210°, скорость 30 км/ч. В полете наблюдалась слабая турбулентность.
Причиной инцидента явилось повреждение лопасти № 3 верхнего несущего винта электрическим разрядом, обусловленным атмосферной электрической активностью в районе выполнения работ.
Если рассмотреть все случаи, когда метеоусловия нс были прямой причиной АП, но усложнили обстановку и косвенно повлияли на исход события, то, как следует из работ [1.19, 1.33...1.35], примерно каждое третье происшествие является следствием неблагоприятного воздействия погоды. Поэтому указанные выше ограничения вполне оправданны и позволяют обеспечить требуемый уровень безопасности АСМР.
1.4. ФОРМИРОВАНИЕ ТРЕБОВАНИЙ
К ЛЕТНО-ТЕХНИЧЕСКИМ ДАННЫМ ВЕРТОЛЕТОВ ДЛЯ ПРОВЕДЕНИЯ АСМР
1.4.1. Анализ современного состояния отечественного вертолетного парка для проведения АСМР
Основу отечественного вертолетного парка, применяемого на АСМР, в настоящее время составляют машины, созданные до 1970-х гг. Большинство из них, например Ми-6, Ми-8Т, Ми-10, были разработаны в 1950... 1960-е гг. и, как правило, имели военное назначение. В настоящее время состояние этих вертолетов характеризуется высоким физическим износом. Они морально устарели, серийное производство этих ВС прекращено, а ресурс в недалеком будущем будет исчерпан. Из всех эксплуатируемых на АСМР вертолетов "физически" новыми можно назвать лишь Ми-26, Ка-32, Ми-8МТВ и Ми-8АМТ (Ми-171), которые составляют всего околи 15 % численности парка гражданских вертолетов страны.
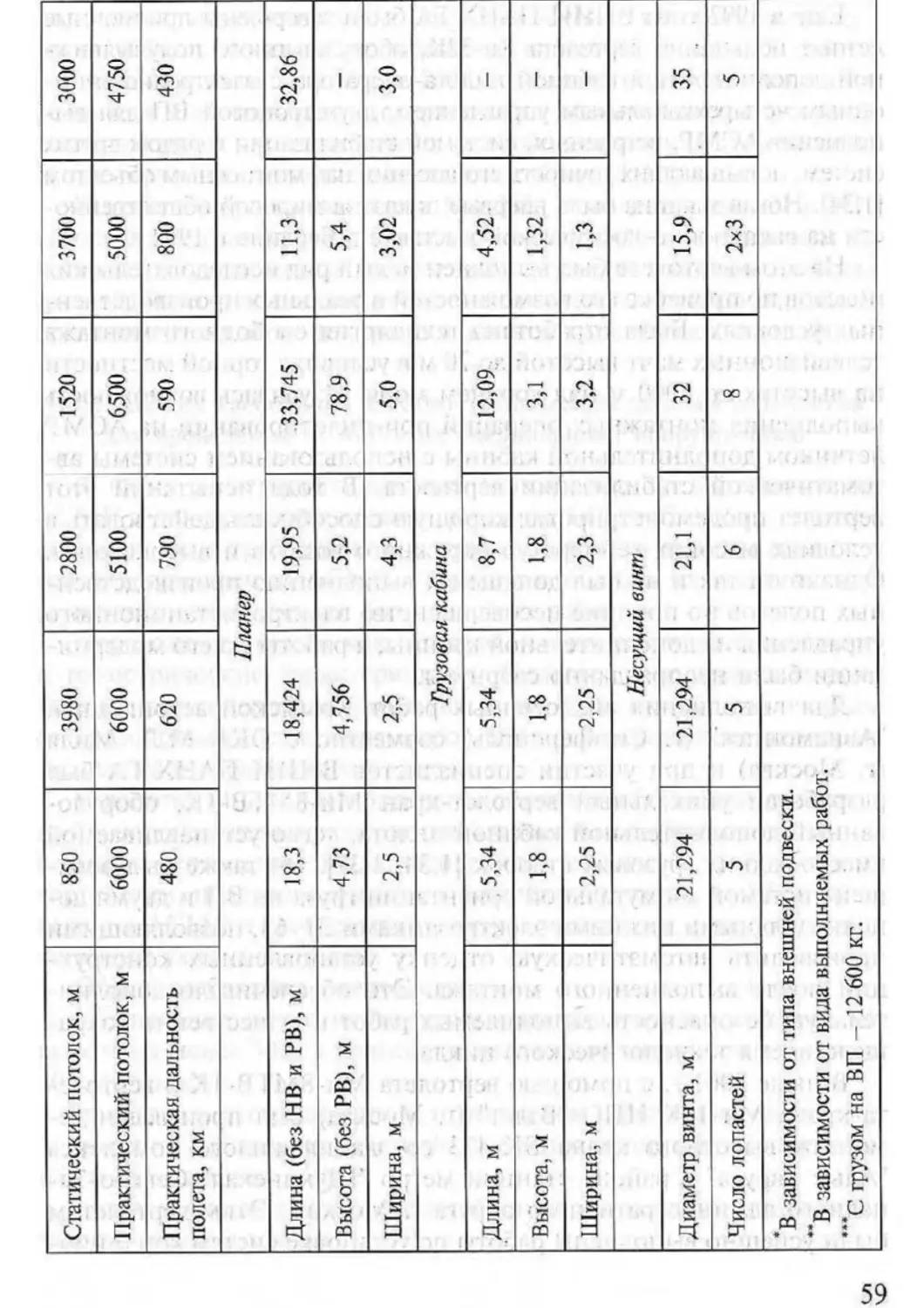
Специализированные вертолеты-краны, применяемые в России на АСМР и оснащенные дополнительными кабинами для пилота-монтажника, представлены еще более скромно. Это в основном вертолеты Ми-ЮК, уже практически отработавшие свой ресурс, и не так давно появившиеся экспериментальные образцы Ми-26ПК, Ми-26ТМ, Ми-8МТВ-1К и Ка-32К, которые так и не дошли до потребителя. Основные летно-тактические характеристики (ЛТХ) этих вертолетов представлены в табл. 1.1.
Летно-технические характеристики основных вертолетов, приспособленных для АСМР
Таблица 1.1
Характеристика Ми-8Т МИ-8МТВ Ми-38 Ми-26 Ка-32 Ми-ЮК
Двигатель (число, тип, марка) 2хГТД ТВ2-117 2хГТД ТВЗ-117ВМ 2xPW-127T/S 2хГТД Д-136 2хГТД ТВЗ-117ВМА 2хД-25В
Взлетная мощность, л.с. 2x1500 2x2100 2x2500 2x11 400 2x2200 2x5500
Удельный расход топлива на взлетном режиме, кг/(л.с.-ч) 275 - 210 213 194 210 278
Численность экипажа 3 3 2 5 1...3" 3...4*
Максимальная взлетная масса, кг 12 000 13 000 15 600 56 000 11 100*** 38 000
Нормальная взлетная масса, кг 11 100 11 100 14 200 49 500 —
Масса пустого вертолета, кг 6625 7200 8300 28 600 5900 25450
Максимальная масса груза на ВП, кг 3000 3000 (5000)* 6000 20 000 5000 11 000
Максимальная скорость полета, км/ч 250 250 285 295 230 250
Крейсерская скорость, км/ч 220 230 275 250 200 220
Статический потолок, м 850 3980 2800 1520 3700 3000
Практический потолок, м 6000 6000 5100 6500 5000 4750
Практическая дальность полета, км 480 620 790 590 800 430
' ' - ст Планер •
Длина (без НВ и РВ), м 18,3 18,424 19,95 33,745 11,3 32,86
Высота (без РВ), м 4,73 4,756 5,2 78,9 5,4 —
Ширина, м 2,5 2,5 4,3 5,0 3,02 3,0
Грузовая кабина
Длина, м 5,34 5,34 8,7 12,09 4,52 —
Высота, м • 1,8 1,8 1,8 3,1 1,32 —
Ширина, м 2,25 2,25 2,3 3,2 1,3
ч Несущий винт z
Диаметр винта, м 21,294 21,294 21,1 32 15,9 35
Число лопастей 5 5 6 8 2x3 5
В зависимости от типа внешней подвески.
**В зависимости от вида выполняемых работ.
***С грузом на ВП - 12 600 кг.
Еще в 1992 г. во ВНИИ ПАНХ ГА были завершень! приемочные летные испытания вертолета Ка-32К, оборудованного полувыдвиж-ной дополнительной кабиной пилота-оператора с электродистанци-онным четырехканальньш управлением, двухстроповой ВП для выполнения АСМР, встроенной системой стабилизации и рядом других систем, повышающих точность его висения над монтажным объектом [1.34]. Новая машина была впервые показана мировой общественности на авиационно-космической выставке в Берлине в 1992 г.
На этом вертолете был выполнен целый ряд исследовательских полетов по проверке его возможностей в реальных производственных условиях. Была отработана технология свободного монтажа телевизионных мачт высотой до 70 м в условиях горной местности на высотах до 2000 м над уровнем моря. Изучалась возможность выполнения монтажных операций при пилотировании на АСМР летчиком дополнительной кабины с использованием системы автоматической стабилизации вертолета. В ходе испытаний этот вертолет продемонстрировал хорошую способность действовать в условиях высоких температур наружного воздуха и высокогорья. Однако он так и не был допущен к выполнению производственных полетов по причине несовершенства электродистанционного управления из дополнительной кабины, а работы по его модернизации были неоправданно свернуты.
Для выполнения аналогичных работ Крымской ассоциацией "Авиамонтаж” (г. Симферополь) совместно с ОКБ М.Л. Миля (г. Москва) и при участии специалистов ВНИИ ПАНХ ГА был разработан уникальный вертолет-кран Ми-8МТВ-1К, оборудованный дополнительной кабиной пилота, легко устанавливаемой вместо задних грузовых створок [1.34, 1.37]. Он также был оснащен системой азимутальной ориентации груза на ВП и двумя дополнительными нижними электрозамками ДГ-63, позволяющими производить автоматическую отцепку установленных копструк ций после выполненного монтажа. Это обеспечивало дополнительную безопасность выполняемых работ и существенно сокращало время технологического цикла.
В июле 2001 г. с помощью вертолета Ми-8МТВ-1К и вертолета-крана Ми-ЮК НПО "Взлет" (г. Москва) был произведен демонтаж высотного крана БК-473 со здания жилого комплекса "Алые паруса" в районе станции метро "Щукинская" Северо-Западного административного округа г. Москвы. Этим вертолетом были успешно выполнены работы по установке систем кондицио
нирования воздуха на крыше Государственного исторического музея в 1992 г. в Москве и строительству канатно-кресельной дороги в Ивано-Франковской обл. в 2002 г. Однако широкое внедрение вертолета в эксплуатацию сдерживается малым запасом ресурса, установленным изготовителями, на оборудование и систему управления вертолетом в дополнительной кабине [1.37].
Разработан проект вертолета Ми-26К — модификации Ми-26Т, который представляет собой тяжелый вертолет-кран с экипажем из 6 человек с увеличенной до 25 т максимальной коммерческой нагрузкой. Однако до настоящего времени отечественной авиационной промышленностью не построен даже опытный образец этого ВС.
1.4.2. Общие требования к легко-техническим данным вертолетов для проведения АСМР и их специальному оборудованию
В связи с перспективностью использования вертолетов на АСМР и для транспортировки грузов на ВП необходимо определить основные требования к летно-техническим данным вертолетов для проведения АСМР и критерии оценки их соответствия технологическим схемам выполняемых работ.
Перевозимые грузы, как правило, имеют различные массовые и геометрические характеристики. Поэтому использование различных типов вертолетов зависит от их ЛТХ, и в первую очередь от грузоподъемности, параметров ВП, геометрических размеров фюзеляжа и характеристик грузов.
В работах [1.4, 1.43] проведены анализ и обобщение требований к перспективным вертолетам-кранам и модификациям транспортных вертолетов. Ниже приводятся основные требования к вертолетам, предназначенным для перевозки грузов на ВП и проведения АСМР и соответствующие рекомендации, предложенные авторами указанных работ.
Общие требования к вертолету:
обеспечение выполнения режима висения в зоне монтажа на высоте не менее 50 м с полной коммерческой нагрузкой в течение 30... 40 мин;
простота в эксплуатации и техническом обслуживании;
наличие специальных устройств для транспортировки груза на ВП и выполнения АСМР;
наличие специальных приспособлений для наблюдения за монтажной зоной и грузом на ВП.
Внешняя подвеска груза:
желательна установка как одно-, так и многоточечной подвесной системы;
тросы ВП должны быть достаточно устойчивыми к перегрузкам и иметь коэффициент запаса прочности по расчетному разрывному усилию не менее 6;
желательно, чтобы подвесная система была силовой, т.е. обеспечивала подъем груза лебедками на режиме висения вертолета;
в конструкции вертолета должна быть предусмотрена система уборки тросов ВП в режиме висения;
система быстрого (аварийного) сброса объекта монтажа с ВП или же ВП (с объектом или без него) должна иметь трехкратное резервирование;
обязательное наличие автоматической системы сброса груза с ВП при недопустимых перегрузках в процессе подъема груза или в момент его укладки;
масса подвесной системы должна быть минимальной;
система ВП должна обеспечивать возможность управляемого изменения азимутального положения груза относительно вертолета на режиме висения;
в целях повышения скорости транспортировки груза система ВП должна допускать значительное угловое отклонение троса подвески от вертикали в горизонтальном полете. Этого можно добиться либо путем применения специальных систем подвески типа "качели", либо увеличением размеров люка для троса внешней подвески в классических системах одноточечной подвески (типа используемой на Ми-ЮК);
конструкция тросов ВП должна исключать возможность поражения вспомогательного персонала разрядами статического электричества в процессе подцепки (отцепки) груза на режиме висения вертолета.
Система индикации внешней подвески
Кроме непосредственного наблюдения за поведением груза из кабины оператора для быстрого, точного и надежного выполнения полетов вертолета в качестве крана требуется дополнительное его оборудование для индикации:
длины подвески;
силы, воздействующей на вертолет со стороны троса ВП;
угла отклонения грузового троса по отношению к продольной оси фюзеляжа.
Приспособления для пёревозкигрузов 1Гпассажиров
Для обеспечения универсального применения вертолета должны быть предусмотрены:
грузовая платформа для перевозки различных грузов с возможностью ее спуска и отцепки;
контейнеры для грузов и пассажиров с возможностью жесткого и быстрого их крепления к вертолету. Такие контейнеры должны быть оборудованы для различшэтх специальных целей, а их размеры должны соответствовать принятым международным стандартам. Пассажирско-грузовой контейнер должен также выполнял, функции подсобного технического помещения при автономном базировании вертолета-крана.
Некоторые специальные требования по системам:
система управления вертолета должна обеспечивать его инвариантную реакцию при изменении взлетной массы, инерционных характеристик и центровки. Это является очень важной задачей при разработке систем управления вертолетов-кранов (особенно тяжелых и сверхтяжелых);
все рабочие места пилотов на вертолете должны быть оборудованы по единой схеме;
должна быть обеспечена хорошая управляемость вертолета при любых комбинациях внешних грузов;
должно обеспечиваться наилучшее сочетание чувствительности и расходов рычагов управления;
должно быть исключено любое нежелательное взаимное влияние каналов системы управления;
при разработке навигационной аппаратуры и систем управления для вертолетов-кранов следует применять перспективную технику, например системы с переменным коэффициентом усиления; стабилизации подвешенных грузов; стабилизации вертолета над точкой висения по высоте и курсу. Данное требование приобретает особую важность с ростом взлетной массы вертолета, так как при этом понижается чувствительность управления и уменьшается демпфирование угловой скорости;
на вертолете-кране необходимо устанавливать бортовую телевизионную установку для обзора монтажной площадки из основной кабины и наблюдения за областью вращения РВ в случае выполнения АСМР на ограниченной площадке;
на вертолете-кране должны быть установлены приборы, обеспечивающие особо точное измерение высоты его висения над площадкой монтажа.
В целях улучшения характеристик управляемости вертолета-крана на режиме висения в зоне монтажа необходимо принимать меры по снижению уровня низкочастотных колебаний крупных элементов конструкции фюзеляжа.
Из приведенных требовании к перспективному вертолету для выполнения АСМР видно, что это высокоспециализированный вертолет и его создание потребует специальной программы. Однако создание такою вертолета-крана позволит значительно повысить эффективность применения вертолетов при транспортировке грузов на ВП и проведении АСМР. Подобный положительный результат может быть достигнут при реализации программ по созданию специальных технических средств для транспортировки грузов на ВП и проведения АСМР, а также соответствующих программ модернизации существующих многоцелевых вертолетов в целях улучшения их характеристик при проведении работ указанных типов.
Результаты летных испытаний при отработке технологий выполнения АСМР на различных объектах с использованием вертолетов [1.44...1.47] показали, что для некоторых видов АСМР в целях повышения безопасности полета и эффективности их проведения необходима модификация транспортного вертолета, связанная с установкой дополнительной кабины для пилота—оператора ВП (рис. 1.31).
Наиболее совершенным с технической точки зрения является вариант вертолета с дополнительной кабиной, установленной внизу носовой части фюзеляжа (рис. 1.31, а), что объясняется осо-
Рис. 1.31. Варианты размещения дополнительной кабины пилота-оператора:
а — передняя одноместная кабина: 7 — фюзеляж; 2— кабина; б- задняя двухместная кабина: / — кабина; 2 — грузовые створки; 3 - хвостовая часть фюзеляжа
бенностями ее компоновки, малой протяженностью элементов проводки системы управления и хорошим обзором пилотом зоны монтажа. Однако расчеты технико-экономических характеристик вертолетов и интегральных показателей прогнозируемых объемов работ, выполненные в работе [1.4], приводят к выводу, что наиболее экономически выгодной оказывается разработка не универсального вертолета для выполнения транспортных и крановых операций, а специализированного вертолета-крана с максимально возможным уровнем унификации с другими серийными ВС.
1.5. ПУТИ РАСШИРЕНИЯ ЭКСПЛУАТАЦИОННОГО ДИАПАЗОНА ПРИ ПРИМЕНЕНИИ ВЕРТОЛЕТОВ ПА АСМР
Рынок АСМР обладает рядом особенностей. Как и рынки многих других направлений высокотехнологичного бизнеса, он характеризуется заметным превышением предложения над спросом, что ужесточает конкурентную борьбу вертолетных компаний за заказы на проведение АСМР и требует повышения деловой активности всех участников этого рынка. В первую очередь речь здесь идет об эффективном и безопасном использовании дорогостоящей авиационной техники и реализации большого и разнообразного спектра услуг, связанных с ее применением. При этом оценка конкурентоспособности авиапредприятий в большей степени определяется имеющимися заделами в технологиях выполнения авиационных работ (АР) и научно-технических разработках.
Не секрет, что многие отечественные авиакомпании, только что вышедшие на рынок АСМР, имеют крайне скромный опыт и знания особенностей эксплуатации вертолетов на этом одном из самых сложных видов АР. Уровень специальной подготовки их персонала в данной области, как правило, невысок, но при этом всегда имеется острая потребность в быстром завоевании своей ниши в существующем рынке.
Сегодня в силу несовершенства действующих нормативно-правовых актов по вопросам использования авиации для проведения АСМР или работ, связанных с транспортировкой грузов на внешней подвеске, отсутствия эффективного механизма государственного регулирования данного вида авиационной деятельности и правил ее осуществления эти работы, как правило, относят к разряду экспериментальных. В таких условиях руководство авианред-приятий, участвуя в тендерах на проведение АСМР, все чаще ста
ло прибегать к услугам лспго-испытательных организацийПшею-щих в своем распоряжении специально модифицированные вертолеты, экспериментальные ТС, эффективные технологии и высококвалифицированных специалистов.
Концептуальную модель возможного расширения эксплуатационного диапазона при применении вертолетов на АСМР можно представить в виде ряда логически связанных компонент (рис. 1.32). Содержание выделенных в этой модели направлений и механизмы
Сертификация объектов ГД, связанных с ор1анизаиней, обеспечением и выполнением АР
Проведение летпой подготовки экипажей ня летаюшнх лабораюрвях, в том числе на вертолетах кряновой модификации
Издание спецнальпоП учебно-методической литерахуры н разработка компьютерных обучающих систем
Создание иорматинио-прявовой базы
Проведение тренажерной подготовки персонала ня функциональных тренажерах нового поколения
Разработка няучно-МС1ОДНЧССКНХ и педагогических принципов подготовки специалисток
Создание эффективной системы менеджмента качества
Совершенствование системы государственного регулировании АСМР
Пузи расширения эксплуатационного диапазона при применении вертолетов на АСМР
Специальная ||роф<Ч'ГИПНЯП|.|<ЯН подготовка авиационного и вспомогательного персонала
Создание единого учсбио-мезодического комплекса для подготовки, переподготовки к повышения квалификации специалистов вобласти АСМР п других АР
Разрабозка нормативной базы применения новых информяпионпо-образова тельных 1санол<ний в процессе специальной подготовки специалистов
Выработка рекомендаций пи conepiiieiicTHonainiio ТС и технологий выполнения АР
Проведение комплексных исследований летной эксплуатации вертолезов на АСМР
Формирование облика спсцкалитиронаннш о верюлега для выполнения транспортных и крановых операций
Разработка перепек) явных технологий и способов выполнения АСМР
Создание ТС и специального оборудования для проведения АСМР
Создание исрголстиых тренажеров с высоким уровнем подобия имитируемых процессов выполнения АСМР
Разработка наиболее рациональных методов пилотирования вер toлетя с «рузом ня ВП. выявление возможности ослабления существующих летных ограничений
Рис. 1.32. Концептуальная модель возможного расширения эксплуатационного диапазона при применении вертолетов на АСМР
их практической реализации сегодня нуждаются в глубоком и комплексном изучении.
Известно, что методология любого научного исследования дает характеристику его компонентов — объекта, задачи исследования, совокупности исследовательских средств, необходимых для решения задачи данного типа, а также формирует представление о комплексе и последовательности определенных видов исследований в процессе решения задачи [ 1.48]. Рассмотрим основные методологические компоненты системных исследований в области изучения особенностей использования вертолетов на АСМР и обеспечения безопасности их выполнения.
Объектом исследований является сложная биотехническая система (СБС) "экипаж — вертолет — объект монтажа", функционирующая в условиях АСМР. Она представляет собой сложную техническую структуру с развитой иерархической организацией, включающую в себя взаимосвязанные по назначению, месту и функционированию составные части и элементы. Системность данного объекта исследования обусловливает дифференцированный анализ: выявление не только причинно-следственных связей, но также общих и специальных предпосылок, внешних и внутренних факторов, условий, опосредующих звеньев.
Конечная цель исследований — обеспечение эксплуатанта авиационной техники некоторой программой, нацеленной на повышение эффективности эксплуатации и обеспечение безопасности применения вертолетов на АСМР, достижение конкурентных преимуществ авиапредприятия, создание устойчивого имиджа и поддержание его торговой марки.
Основные положения этой программы должны быть связаны с решением следующих задач:
разработка методологических основ проведения АСМР с помощью традиционных и нетрадиционных ЛА;
определение рациональных путей улучшения основных аэродинамических характеристик существующих ТС, применяемых для выполнения АР, и разработка предложений но максимальному приближению их значений к теоретически возможным;
разработка перспективных технологий выполнения вертолетами АСМР;
выявление границ безопасных условий полета ВС на АСМР и возможности снижения летных ограничений;
разработка методов летных испытаний ВС, ТС иТлтециального оборудования для экспериментального определения параметров основных режимов функционирования системы "экипаж - вертолет — объект монтажа";
определение методологических основ и подходов к оптимизации режимов полета ВС с грузом на ВП с учетом полного комплекса действующих эксплуатационных ограничений;
формирование системы менеджмента качества выполнения АСМР;
разработка предложений по развитию системы государственного регулирования АР с учетом специфики их выполнения;
формирование оптимального типоразмерного ряда парка ВС для проведения АСМР и разработка рекомендаций по эффективному и безопасному их применению.
Актуальность рассматриваемой темы исследований не вызывает сомнения. Ее слабая разработанность, необходимость формирования целостной методологии, отсутствие эффективных форм и методов практической реализации, острая потребность отечественных авиапредприятий в современном, высокотехнологичном оборудовании вертолетов для выполнения указанных авиационных работ и определяют правильность выбора цели и задач таких системных исследований. Методология в данном случае выступает в роли одного из средств реализации выбранной стратегии.
В соответствии с выбранным подходом разработка концептуальных основ решения широкого спектра практических задач по эффективной и безопасной эксплуатации вертолетов на АСМР и работах, связанных с использованием ВП, предполагает:
создание эффективной нормативно-правовой базы для государственного регулирования деятельности вертолетных авиапредприятий и структурной перестройки их органов управления;
интеграцию мелких авиапредприятий, выполняющих АСМР и другие виды АР, в крупные объединения со специализацией по различным направлениям;
переход авиакомпаний к эксплуатации новой, эффективной и высоконадежной авиационной техники преимущественно отечественного производства на основе лизинга;
создание единого центра профессиональной подготовки и повышения квалификации авиационного и вспомогательного персонала в области АСМР и других наиболее часто выполняемых видов АР;
обеспечение государственной поддержки для сохранения и развития отраслевой науки, концентрацию финансовых ресурсов на наиболее приоритетных направлениях научно-исследовательских работ, в том числе на разработке эффективной нормативно-правовой базы в области использования авиации ПАНХ.
Вполне очевидно, что переход к рыночным отношениям при всей хозяйственной самостоятельности отдельных авиа предприятий сегодня требует выработки единой производственной, коммерческой и научно-технической стратегии, обеспечения устойчивых связей этих предприятий с новыми структурными образованиями заказчиков, а также выработки совместных согласованных действий по защите интересов и прав как разработчиков авиационных технологий, так и их потребителей. Результатами такого сотрудничества должны стать: гибкая организационная структура нового типа; комплексная реализация ремонтных, строительных и монтажных услуг ”иод ключ"; широкое внедрение в строительное производство современных технологий и специального оборудования возведения высотных объектов. Такая кооперация, по нашему мнению, выгодна не только авиапредприятиям-подрядчикам, выполняющим вертолетный монтаж, но, в первую очередь, заказчикам АСМР, поскольку их требования и финансовые возможности могут быть сбалансированы оптимальным образом. Как показывает практика, иногда без подобного сотрудничества практически невозможно обеспечить успешное выполнение монтажных работ, особенно в международном секторе АСМР.
Процесс консолидации компаний, безусловно, позитивен. Такие объединения, пусть даже краткосрочные, направленные на выполнение отдельных, наиболее ответственных и сложных видов АР, являются для авиакомпаний основным способом выжить в современной конкурентной борьбе. Благодаря этому крупные эксплуатанты добиваются интенсификации и диверсификации своего бизнеса, а небольшие предприятия остаются на рынке АР в составе более мощного объединения.
Определенным подспорьем не только для мелких, но и для крупных эксплуатантов вертолетной техники мог бы стать лизинг. Отечественными авиакомпаниями уже предпринимаются некоторые попытки в этом направлении. Однако, как показывает практика, эффективно лизинговые схемы в России все еще не работают.
В 1980-1982 гг. во ВНИИ ПАНХ ГА (г. Краснодар) были разработаны предложения по вертолетам средней и большой грузоподъ
емности (типы и потребное число) для применения на АСМР и работах, связанных с перевозкой грузов на ВП, на период до 2000 г. и целевая программа развития ПАНХ на период до 2015 г. При их разработке оптимизация типоразмерного рада вертолетов проводилась по совокупности критериев эффективности с использованием операционных распределительных моделей, включающих основные параметрические связи ВС. Отличительная особенность и новизна проведенных исследований состояла в том, что оптимизация типоразмерного ряда осуществлялась в комплексе с типизацией грузов и с учетом способов АСМР и организации перевозок как отдельных, так и консолидированных грузов при применении нескольких вертолетов в одной группе. Наибольшую экономическую эффективность при выполнении прогнозируемых объемов АСМР и работ по перевозке грузов на ВП должен был обеспечить парк вертолетов грузоподъемностью: 1000... 1500, 4000...5000, 10000... 12000, 17000...20000 и 45000...55000 кг 11.6, 1.50J. К сожалению, разработанные комплексный прогноз и долгосрочная программа развития авиации ПАНХ так и нс были реализованы.
Очевидно, что сегодня основным и приоритетным направлением в развитии отечественных вертолетных программ должны стать модернизация хорошо зарекомендовавших себя в эксплуатации вертолетов, доукомплектование их новейшим оборудованием и ТС, обеспечивающими значительное повышение эффективности применения этих машин на АСМР за счет сокращения сроков выполнения работ и снижения расходов заказчика по сравнению со сроками и расходами при использовании наземных грузоподъемных и транспортных механизмов.
Представляется целесообразным создание в России и единого координационного центра по подготовке авиационного и вспомогательного персонала для выполнения АСМР и других видов АР (АЦПП "ПАНХ"), который смог бы объединить усилия всех организаций, заинтересованных в совершенствовании этого процесса, независимо от их ведомственной принадлежности. На наш взгляд, эта структура должна основываться на принципе многофункциональности и иметь черты специально ориентированного образовательного учреждения, сертификационного центра, консалтинговой компании, научно-исследовательской организации и рекламно-пропагандистского органа.
Очевидно, что современная подготовка персонала к выполнению АСМР не должна ограничиваться только рамками типовых программ подготовки летного состава вертолетов и изучением дей
ствующих нормативных актов. Для выполнения такогокласса задач необходим комплексный подход, сочетающий глубокую теоретическую подготовку специалистов с применением новых информационно-образовательных технологий и современных технических средств обучения и систематическую тренажерную и летную подготовку экипажей, в том числе и на специально оборудованных для этих целей учебных полигонах. Подготовленные специалисты должны быть знакомы с общепризнанной международной и национальной практикой проведения АР, продуктами и решениями разработчиков современных ТС и технологий АСМР, монтажными свойствами и характеристиками отдельных элементов конструкции типовых монтажных объектов. Такие специалисты должны быть способны решать различные технические задачи в зависимости от стратегии и пожеланий заказчика, требований проекта производства работ, а также особых условий монтажа конкретного объекта.
Таким образом, создание научно-технического задела, освоение ключевых технологий выполнения АР, качественная профессиональная подготовка авиационного и вспомогательного персонала, учет накопленного опыта по проведению исследований, испытаний, внедрению в производство современных ТС АСМР, совершенствование методов организации и управления авиационными работами являются приоритетными направлениями в области расширения сферы применения вертолетов на АСМР.
На наш взгляд, предложенный подход (именно с системных позиций) может стать эффективным инструментом при проведении кардинальных изменений в производственной деятельности вертолетных авиапредприятий, выполняющих АСМР, которые позволят им успешно освоить этот сегмент отечественного и мирового рынков АР, повысить качество выполнения монтажных работ, снизить их себестоимость и обеспечить необходимый уровень безопасности.
СПИСОК ЛИТЕРАТУРЫ К ГЛ. 1
1.1. Бутылкнн И.П., Купцов В.Д., Морозов Е.П. Монтаж стальных высотных опор с помощью грузоподъемных кранов и вертолетов // Монтажные и специальные работы в строительстве. 2001. № 6. С. 2—5.
1.2. Бутылкин И.П., Морозов Е.П., Данюк В.М. Монтаж новых опор радиорелейных линий // Монтажные и специальные работы в строительстве. 2001. № 10. С. 10-13.
1.3. И.тькун В.В. Раскатка провода вертолетом с наземного устройства // Применение авиации в народном хозяйстве. М., ГосНИИ ГА, 1975. Вып. 85. С. 55-63.
1.4. Козловский В.Б. Теоретические и методологические основы эксплуатации летательных аппаратов при выполнении строительно-монтажных работ и транспортировке грузов на внешней подвеске: Дисс. ... докт. техн. наук. Краснодар, 2004. 379 с.
1.5. Козловский В.Б., Паршенцев С.А. Исследование поведения груза на внешней подвеске вертолета и способы его стабилизации в полете // Науч, вестник МГТУ ГА. Сер. Аэромеханика и прочность. 2004. № 72. С. 97—101.
1.6. Деревянко В.С. Применение авиации в отраслях экономики. Краснодар: Сов. Кубань, 2002. 488 с.
1.7. Солуянов Ю.М. Демонтаж дымовых трубе применением вертолетов// Монтажные и специальные работы в строительстве. 2000. № 3. С. 2-8.
1.8. Солуянов Ю.М. Замена технологических трубопроводов с помощью вертолетов // Монтажные и специальные работы в строительстве. 2000. 9. С. 12— 17.
1.9. Технология работ в электросетевом строительстве с применением вертолетов. М., 1982. 103 с.
1.10. Отраслевой стандарт (РД-54-2-24.047-2000). Авиационные работы. Классификация. Термины и определения // ФСВТ. 2000. 9 с.
1.11. Фриндланд В.Я., Илькун В.В. Определение параметров равновесия цепной линии при больших прогибах// Применение авиации в народном хозяйстве. Краснодар, ВНИИ ПАНХ ГА. № 8. С. 5-9.
1.12. Horton D. GulfPower Company upgrades existing power lines with thehelpofthe S-64 .Air-Crane helicopter // An Erickson Air-Crane Release. 2002-www.erickson-aircrane.com/ powcrtine.asp.
1.13. Худоленко O.B. Повышение эффективности авиационных работ в отраслях национальной экономики: Дисс. ... докт. эконом, наук. М., 2005. 305 с.
1.14. Кондра С.М. Опыт проектирования, строительства и эксплуатации утилитарных опор мобильной и радиорелейной связи // Современные металлические конструкции: перспективы развития. Киев: Изд-во "Сталь", 2006. С. 122-128.
1.15. Freight containers - Mechanical seals ISO/PAS 17712: 2006. P. 14.
1.16. Контейнеры, поддоны, строповочные канаты и трубозахваты для транспортировки вертолетами на внешней подвеске и внутри фюзеляжа грузов геологических организаций (Техническиетребования). Утв. зам. министра ГА В.В. Кузькиным 01.02.1983 г.
1.17. Кожевников В.А. Автоматическая стабилизация вертолетов. М.: Машиностроение, 1978. 151 с.
1.18. Составление математической модели, описывающей поведение вертолета при транспортировке груза на внешней подвеске: Отчето НИР (заключительный) / МИИГА; Руководитель В.Ф. Рощин. Тема 12.1.2 плана МГА. М., 1974. 119 с.
1.19. Баранов А.М. Облака и безопасность полетов. Л.: Гидрометеоиздат, 1983. С. 134-137.
1.20. Астапенко П.Д., Баранов А.М., Шварев И.М. Погода и полеты самолетов и вертолетов. Л.: Гидрометеоиздат, 1980. 280 с.
1.21. Рацимор М.Я. Вертикальное распределение горизонтальной видимости под облаками и в облаках // Тр. ЦИП, 1966. Вып. 157. С. 57—70.
1.22. Наставление по производству полетов в гражданской авиации СССР (НПП ГА-85). М.: Воздушный транспорт, 1985. 254 с.
1.23. Трунов О.К. Об условиях поражений летательных аппаратов атмосферным электричеством и некоторых общих требованиях к противомолниевой защите // Тр. ГосНИИ ГА, 1975. Вып. 124. С. 3-19.
1.24. Володко А.М. Основы летной эксплуатации вертолетов. Аэродинамика. М.: Транспорт, 1984. 256 с.
1.25. Расчетно-экспериментальные исследования влияния полей индуктивных скоростей за несущим винтом на аэродинамические характеристики рулевого винта на малых скоростях полета вертолета при боковом ветре / В.А. Анимица, В.А. Головкин, М.В. Крайнов, В.Н. Новак // Сб. науч. тр. VI Форума Российского вертолетного общества. М.: Изд-во МАИ, 2004. Разд. I. С. 49—64.
1.26. Мазин И.П. Физические основы обледенения самолетов. М.: Гидромстео-издат, 1957. 120 с.
1.27. Трунов О.К. Физико-аэродинамическое исследование проблемы обледенения летательных аппаратов // Тр. ГосНИИ ГА, 1981. Вып. 206. С. 3—39.
1.28. Применение информации метеорологических спутников в анализе и прогнозе особых явлений погоды д ля авиации. (Пос. для синоптиков АМСГ, ЗАМЦ и МГАМЦ) / К.Г. Абрамович, Г.С. Бундовский, А.А. Васильев и др. Л.: Гилромстеоиздат, 1974.60 с.
1.29. Астапенко П.Д., Баранов А.М., Шварев И.М. Погода и полеты самолетов и вертолетов. Л.: Гидрометеоиздат, 1980. 280 с.
1.30. Исследование поведения водосливного устройства ВСУ-15 на тросовой подвеске под воздействием ветровых нагрузок: Отчет о НИР / Инет, механики МГУ; Руководитель С.В. Гувернюк. М., 2003. 42 с.
1.31. Паршенцев С.А. Анализ причин катастрофы вертолета Ми-26Т в Читинской области 03.05.2003 г. // Науч, вестник МГТУ ГА. Сер. Аэромеханика и прочность. 2004. № 72. С. 91-96.
1.32. Паршенцев С.А. Трагедия под Читой: комментарий специалиста // Вертолет. 2003. № 2. С. 34-35.
1.33. Васин И.Ф., Прокофьев А.И. Личностный фактор и безопасность полетов // Оптимизация процессов функционирования авиационной транспортной системы: Межвузовский тематический сборник. Л., изд. ОЛАТА. 1980. С. 9-16.
1.34. Паршенцев С.А. Воздушный монтажник. Риск можно исключить// Вертолет. 2003. № 3. С. 16-19.
1.35. Iseler L., and De Maio J. An Analysis of OS Civil Rotorcraft Accidents by Cost and Injury (1990—1996). NASA TM in press.
1.36. Мукменов И. Еще раз о самопроизвольном левом вращении // Вертолет. 2007. № I. С. 19.
1.37. Паршенцев С.А. Новые технологии монтажа // Вертолет. 2004. № 1. С. 30-33.
1.38. Хлебников А.А. Гражданской авиации страны — 80 лет // Вертолет. 2003. №1. С. 4-10.
1.39. Вертолетный мир России. Казань: Изд-во "Вертолет”, 2003. 176 с.
1.40. Асовский В.II., Козловский В.Б., Худоленко О.В. Применение вертолетов в отраслях экономики: состояние, проблемы и перспективы // Сб. науч. тр. VI Форума Российского вертолетного обшества. М.: Изд-во МАИ, 2004. Разд. VII. С. 71-80.
1.41. Козловский В.Б., Худоленко О.В. Как возродить ПАНХ? // Гражданская авиация. 2002. № 12. С. 15-17.
1.42. Ogden М. Picking trough the wreckage // Helicopter world. V. 20, № 4. May 2001. P. 22-25.
1.43. Паршенцев C.A. Разработка комплексных методов исследования летной эксплуатации вертолетов на строительно-монтажных и транспортных работах с использованием внешней подвески: Дисс. ... канд. техн. наук. М., 2005. 297 с.
1.44. Летные испытания системы САО-26-3 для азимутальной ориентации груза на внешней подвеске вертолета Ми-26 в комплексе с отработкой технологии монтажа высотной радиотелевизионной башни Н = 127 м в ст. Кущевской Краснодарского края: Акт по результатам летных испытаний по договору № 19/03 / НПК "ПАНХ"; Руководитель О.В. Худоленко. Краснодар, 2003. 30 с.
1.45. Летные исследования по отработке технологии строительно-монтажных работ с применением вертолета Ка-32, оснащенного системой азимутальной ориентации груза на внешней подвеске, при сооружении опоры высотой 40 м на горе Гебеус: .Акт по результатам летных испытаний по договору № 14/2 / НПК "ПАНХ"; Руководитель В.Б. Козловский. Краснодар. 2002. 27 с.
1.46. Отработка технологии монтажа конструкций через проемы в крышах промышленных зданий: Акт по результатам летных испытаний / НПК "ПАНХ"; Руководитель В.Б. Козловский. № 73.37.63. Краснодар, 1988. 22 с.
1.47. Отработка гехнолиши мин1ажа свобидносюящих высигных объектов методом наращивания вертолетом Ка-32Т на примере дымовой трубы Н = 45 м в г. Новороссийске: Акт по результатам летных испытаний № 410-89 / НПК "ПАНХ"; Руководитель В.Б. Козловский. № ГР 81103863. Краснодар, 1989. 32 с.
1.48. Алексеев П.В., Панин А.В. Философия. М.: "Проспект", 1999. 576 с.
1.49. Костромина Е.В. Экономика авиакомпании в условиях рынка. М.: "НОУ ВКШ "Авиабизнес’’, 2001. 304 с.
1.50. Целевая комплексная программа совершенствования транспортировки грузов на внешней подвеске вертолетов на 1990-1993 гг. (ЦКП "Вертолеты") / В.Б. Козловский, Н А. Сумовский. М., 1990. 15 с.
лава
ТЕХНИЧЕСКИЕ СРЕДСТВА И СПЕЦИАЛЬНОЕ ОБОРУДОВАНИЕ ВЕРТОЛЕТОВ ДЛЯ ТРАНСПОРТИРОВКИ ГРУЗОВ НА ВНЕШНЕЙ ПОДВЕСКЕ И ПРОВЕДЕНИЯ АСМР
Эффективность ВС при выполнении таких сложных видов авиационных работ, как АСМР, во многом определяется их оснащением специальными техническими средствами (ТС), позволяющими значительно сократить время выполнения технологического цикла.
В соответствии с принятой в гражданской авиации номенклатурой к ТС для проведения АСМР (ТС АСМР) относятся технические приспособления, устройства, агрегаты и приборы, размещаемые или уже размещенные на ВС (установленные, подвешенные снаружи или внутри фюзеляжа ВС) или на монтажных объектах и используемые для выполнения АСМР [2.1].
Наземные технические средства АСМР
Г
Я
/
L
L
с
s
ei
g
I S
r
=
2!
O,
c
и
CJ
J
на
Технические средства АСМР ~г
a
I
S x s I
3 x
a
u -
C3 5J
c
§ ?
2 ° c. s
5 £ S S 3^
e
Й.Р «5
3 v g
Й Й I g b Й
o 2 5
5
3
? £ ₽
X Q z-4 Д
S E *
о о § - г. о
См
X
“ £ о й
>х
= S
3
£ — vis h s о
6 g
Технические средства АСМР, размещенные ВС или его внешней подвеске
S
i
s.
H &
s
3 2 и
O G co c
tJ £
В 7. e c-
§.8
i I 2 2
§ 5 a § O
I
• J & ,2
e-g X = &
i §
11
Рис. 2.1. Классификация технических средств для выполнения авиационных строительно-монтажных, демонтажных и транспортных работ с использованием внешней подвески
I*
= Я
p
I p ю к
= ?
К ГС для транспортирования грузов на внешней подвеске воздушного судна (ТС ТГ ВП) относятся технические приспособления, устройства, агрегаты и приборы, размещаемые снаружи ВС и предназначенные для перевозки грузов на ВП (без подъема вовнутрь фюзеляжа ВС) с одного места на другое, в том числе и для транспортировки объектов монтажа (демонтажа) на ВП ВС к месту их установки или утилизации [2.2].
Основные типы таких ТС, систематизированные по месту их размещения (на борту ВС или монтажном объекте), представлены на рис. 2.1.
Как правило, общим критерием оценки целесообразности выбора ТС для выполнения конкретного вида авиационных работ являются их полное соответствие функциональному назначению и удовлетворение выбранным критериям огггимизации (минимальная масса, стоимость производства, надежность и эксплуатационная технологичность).
2.1. ВИДЫ СИСТЕМ ВНЕШНЕЙ ПОДВЕСКИ ГРУЗОВ
В настоящее время существует большое разнообразие систем внешней подвески грузов к ВС. Все они классифицируются по двум основным признакам; по характеру подвески и по числу точек подвески.
По характеру подвески бывают несиловые, полусиловые и силовые. Они различаются принципом работы на режиме висения ВС.
По числу точек подвески разделяют на одно-, двух-, трех- и четырехточечные (рис. 2.2).
Характер и число точек подвески у ВП могут встречаться в любой комбинации. Как правило, с увеличением числа точек подвески возрастает устойчивость груза в горизонтальном полете и вместе с этим приходится увеличивать массу подвесной системы.
В настоящее время как на отечественных, так и на зарубежных вертолетах широкое распространение получили системы одноточечной несиловой ВП (рис. 2.3). Несиловыми они называются потому, что установленные на вертолетах бортовые лебедки предназначены только для подтягивания и выпуска ненагруженного троса ВП, который в рабочем состоянии запирается на специальный замок. Такие системы не позволяют в полете подтягивать груз к фюзеляжу вертолета или опускать его вниз.
Как правило, система одноточечной несиловой ВП имеет относительно малую массу и достаточно проста в эксплуатации. Но у нее есть ряд существенных недостатков.
Рис. 2.2. Возможные схемы крепления груза к вертолету:
а — одноточечное; б — двухточечное поперечное; в — двухточечное продольное; г — трехточечное; д — четырехточечное
Основной недостаток одноточечных ВП состоит в существенном изменении основных характеристик управляемости вертолета в полете с грузом на ВП. В частности, возрастает эффективность его продольного, поперечного и путевого управления. Вертолет при транспортировке груза на такой ВП энергично реагирует даже на незначительные отклонения ручки управления. Это связано с тем, что точка крепления троса на вертолете не совпадает с его центром масс. Она расположена, как правило, ниже центра масс вертолета, на линии, совпадающей с осью втулки НВ. Сила натя-
Рис. 2.3. Система несиловой одноточечной внешней подвески
жения троса создает дополнительный момент, который изменяется в процессе полета по величине и направлению, так как изменяются сила натяжения троса и ее плечо относительно центра масс вертолета из-за отклонения троса от вертикального положения (см. рис. 2.3). Это приводит к тому, что экипажу, как правило, приходится парировать возникающие возмущения путем изменения углов крена, тангажа, высоты или скорости полета. Точная дозировка подобных управляющих воздействий весьма затруднительна, поскольку в этом случае трудно соразмерить управляющие воздействия с движением вертолета и груза на его ВП.
Кроме того, вертолет с грузом на одноточечной ВП обычно ’’проскакивает" заданное угловое положение, определяемое управляющими действиями пилота. Поэтому для повышения точности управления таким вертолетом практически необходима серия небольших двойных движений ручки циклического шага (РЦШ), что в целом значительно усложняет его пилотирование.
Система одноточечной ВП устроена таким образом, что ее трос крепится к силовым элементам конструкции внутри фюзеляжа и, как правило, пропущен через люк в полу грузовой кабины вертолета. Угол отклонения троса от вертикального положения в такой системе ВП обычно ограничен его касанием окантовки люка. Это обстоятельство, в свою очередь, накладывает дополнительное ограничение на скорость горизонтального полета вертолета с грузом на ВП, поскольку аэродинамические и инерционные силы, действующие на груз, на больших скоростях полета вызывают значительное отклонение троса подвески от вертикали. Максимальная скорость горизонтального полета ограничена также и тем, что груз, который чаще всего является нсудобообтекаемым телом, дает большой прирост аэродинамического сопротивления. В некоторых случаях на больших скоростях горизонтального полета могут возникнуть прогрессирующие колебания груза, которые нс поддаются парированию. Поэтому при обычных для сво бодного полета, но несоразмерно больших для полета с грузом на ВП отклонениях РЦШ могут создаваться такие углы тангажа и крена, при которых может возникнуть необходимость эксгренного сброса груза. Результаты исследований по влиянию различных факторов на характеристики управляемости вертолета с грузом на одноточечной ВП достаточно полно изложены и обобщены в работах [2.4, 2.32, 2.36].
Чтобы исключить влияние дестабилизирующего момента oi ВП на пилотирование вертолета, целесообразно использовать без-моментную внешнюю подвеску груза. Подобные проекты были
Рис. 2.4. Схемы компенсации дестабилизирующего момента на серийной и бсзмомент-ной внешних подвесках (штриховкой отмечены предельные значения)
предложены как у нас в стране, так и за рубежом еще в конце 1960-х гг. [2.3].
Отечественная система безмоментной подвески, первоначально испытанная на вертолете Ми-4, состояла из четырех тросов и распорной балки (рис. 2.4).
Подвеска крепилась к бортам фюзеляжа на уровне центра масс. Подобная схема подвески при минимальных доработках вертолета позволяла практически исключить моменты, передаваемые на фюзеляж в случае возникновения поперечных колебаний труза на ВП.
Исследования [2.4], выполненные с помощью математического моделирования и в реальном полете, показали, что применение фрикционных демпферов в узлах крепления ВП к фюзеляжу и подвеска груза к распорной балке (траверсе) с помощью ролико-
Рис. 2.5. Схема транспортировки крупногабаритных тяжелых грузов с помощью двух вертолетов на общей подвесной системе
вого блока позволяют существенно улучшить характеристики устойчивости груза на безмоментной ВП. Испытания показали, что при введении демпфирования поперечные колебания груза затухают значительно быстрее. Так, при моменте демпфирования Ма = 0 амплитуда колебаний уменьшается в два раза примерно за 40 с, а при Мл = 100 кгсм — примерно за 20 с. Еще больший положительный эффект по гашению колебаний 1руза дает применение роликовой подвески. Время уменьшения амплитуды поперечных колебаний груза до допустимого значения при такой ВП сокращается почти в 7 раз и не превышает 5 с.
Применение безмоментных внешних подвесок позволяет выполнять транспортировку крупногабаритных тяжеловесных (КГТ) грузов с помощью двух вертолетов на общей подвесной системе (рис. 2.5), что существенно расширяет возможность увеличения массы и габаритов грузов, перевозимых вертолетами данного типа. Для перевозки указанных грузов была разработана V-образная внешняя
подвесная система (рис. 2.6), состоящая из двух бсзмоментных внешних подвесок, установленных на каждом вертолете, грузового троса, к которому с помощью роликовой подвески крепится транспортируемый фуз, и соединительного кабеля, предназначенного для управления отцепкой фуза с каждого вертолета. При угле раствора V-образного троса, равном 90°, такой метод транспортировки позволяет перевозить фузы массой, составляющей до 180 % от массы фу-за, перевозимого одним вертолетом в данных условиях.
Подвесная система для транспортировки длинномерных грузов двумя вертолетами существенно упрощается, так как в этом случае отпадает необходимость применения V-образного грузового троса и роликового блока. Груз подцепляется за две точки (рис. 2.7) непосредственно к безмоментным подвескам, установленным на каждом вертолете.
Система управления такой внешней подвеской дает возможность произвести как поочередное отцепление груза от каждого вертолета, так и при необходимости синхронный сброс груза с обоих вертолетов.
В США была разработана система подвески типа "качели”, уменьшающая дестабилизирующий момент, воздействующий на вертолет со стороны фуза на внешней подвеске при его отклонении от вертикали [2.3]. Она была испытана на вертолете Vertol Н-21 продольной схемы. В армии США этот вертолет получил на-
Рис. 2.7. Схема транспортировки груза на безмоментной внешней подвеске двумя вертолетами
именование ’’Work Horse" (рабочая лошадь). Основная идея этой конструкции состояла в размещении действительной точки крепления подвески груза (точки приложения силы натяжения троса) как можно ближе к центру масс вертолета (рис. 2.8). Ранее, при использовании стандартной подвески груза, действительная точка подвески отстояла от центра масс вертолета на 3,4 м.
В новой конструкции действительная точка подвеса груза располагалась на одной вертикали с центром масс вертолета и находи
Рис. 2.8. Конструктивные схемы стандартной одноточечной внешней подвески груза к вертолету (а) и подвесной системы типа "качели” (б)
лась ниже него на расстоянии от 66 до 86 см в зависимости от угла бокового отклонения груза относительно вертикали. Следовательно, действительная точка подвески располагалась на 2,5...2,75 м ближе к центру масс вертолета. При этом отмечалось существенное улучше-
нис поперечной устойчивости вертолета из-за уменьшения связи между боковым движением груза и креном вертолета.
С 1958 г. вертолеты Vertol Н-21 с подвеской типа "качели" успешно использовались авиакомпаниями США и Канады для выполнения поисково-спасательных и транспортных операций в арктических
условиях. Известны также случаи успешного применения Н-21 "Work Horse" для эвакуации на внешней подвеске небольших самолетов типа Cessna-180, совершивших вынужденную посадку в труднодоступной местности.
В США была разработана и другая конструкция подвески груза, ориентированная на применение на одновинтовых вертолетах [2.3, 2.4]. Она выполнена по принципу "двойные качели" (рис. 2.9). Летные испытания этой системы подвески проводились на вертолете Sikoibky Н-34 "Choctaw". Данная система подвески должна была способствовать улучшению поперечной и продольной управляемости вертолета при транспортировке неустойчивого груза. Действительная точка подвески при стандартном креплении груза на вертолете Sikorsky Н-34 "Choctaw" примерно на 300 см ниже центра масс вертолета. При использовании подвесной системы типа "двойные качели" это расстояние уменьшается и составляет 77,5...85,5 см в поперечной плоскости и 41,5...47,3 см в продольной, причем диапазон этих изменений зависит от угла отклонения груза от вертикали.
На рис. 2.10 приведены графики изменения расстояния от действительной точки подвески до центра масс вертолета h с изменс-
Рис. 2.9. Система внешней подвески типа "двойные качели"
Рис. 2.10. Изменение расстояния от действительной точки подвески до центра масс вертолета с изменением угла отклонения груза:
7 — стандартная система внешней подвески; 2 — подвесная система типа "качели”
нием угла отклонения груза а для стандартной системы крепления груза и подвесной системы типа "качели". Графики относятся как к продольной, так и к поперечной плоскости.
При испытаниях системы подвески грузов типа "двойные качели" на вертолете Sikorsky Н-34 "Choctaw" грузы подвешивались на тросах, длина которых от грузового крюка до груза составляла 0; 1,5 и 3 м. Было экспериментально доказано, что скорость полета вертолета при транспортировке груза с применением подвесной системы типа "качели" могла быть увеличена на 60...70 %.
Например, скорость вертолета Sikorsky Н-34 "Choctaw", транспортировавшего на подвеске типа "качели" автомобиль-вездеход, составляла 195 км/ч, в то время как тот же вертолет с таким же грузом при стандартной подвеске имел нормальную крейсерскую скорость 120 км/ч. Преимущество подвесной системы типа "качели" состоит в том, что вертолет с грузом на такой ВП способен достаточно активно изменять как траекторию полета, так и свое угловое положение в пространстве, что весьма сильно ограничивалось при стандартном креплении груза. В качественном отношении характеристики пилотирования вертолетов с внешним креплением груза при подвесной системе типа "качели" приближаются к характеристикам пилотирования этих же вертолетов с грузом, расположенным внутри фюзеляжа.
Транспортировка груза на ВП может осуществляться и с использованием многоточечной его подвески к вертолету (см. рис. 2.2). Переход от одноточечной к многоточечной подвеске в значительной степени избавляет экипаж от ограничений, связанных с уменьшением запасов путевого и продольного управления, а также с неустойчивостью вертолета в полете с грузом на ВП. Вместе с тем необходимо отметить, что использование многоточечной подвески ведет к существенному росту массы подвесной системы из-за увеличения числа лебедок на борту вертолета и общей длины тросов системы ВП.
Кроме того, практическая реализация этой модели подвесной системы требует обязательной синхронизации при аварийном сбросе груза и равномерного распределения нагрузки во всех силовых элементах и тросах системы ВП, что в реальном полете осуществить практически невозможно, так как сама подвесная система в горизонтальном полете не может быть
точно сбалансирован а Та груз на ВП в полете может произвольно изменять свое пространственное положение. Так, например, согласно исследованиям [2.4] при использовании четырехточечной подвесной системы (см. рис. 2.2, д) дефицита е запасе путевого, продольного и поперечного управления у экипажа, как правило, не возникает, а ее основным недостатком является невозможность равномерного распределения нагрузки на каждом тросе системы ВП. Трехточечная подвеска (см. рис. 2.2, г) в основном обладает теми же особенностями, что и четырехточечная, но с возможностью более равномерного распределения нагрузки на тросы из-за уменьшения числа связей вертолета и груза.
Двухточечная подвеска, ориентированная в направлении продольной оси вертолета (см. рис. 2.2, в), обеспечивает экипажу достаточную продольно-поперечную и путевую управляемость вертолетом, а также равномерное распределение нагрузки на ее силовых элементах и тросах системы ВП. Такая подвесная система успешно применяется на вертолетах СН-47А ’’Chinook’’ (рис. 2.11) продольной схемы, широко распространенной в авиации США [2.5].
В первоначальном варианте СН-47А имел одну точку подвески груза, размешенную в центральной части фюзеляжа, однако после
Рис. 2.11. Система двухточечной внешней подвески груза к вертолету СН-47А(США)
a)
Рис. 2.12. Вертолет CH-47А’'Chinook" с трехточечной системой подвески груза к вертолету: а — общий вил вертолета; б — центральная часть фюзеляжа и узлы подцепки груза
его модернизации их общее число было увеличено разработчиками до трех (рис. 2.12).
Конструктивно ВП у аппаратов разных типов выполнена различно, но, как правило, на всех отечественных и зарубежных вертолетах она представляет собой тросовую систему, в верхней части которой расположен специальный замок, а в нижней - стропы для закрепления груза. Длину подвески обычно регулируют вставкой стропов-удлинителей [2.6].
2.2. ХАРАКТЕРИСТИКА СИЛОВЫХ СТРОПОВ, СТРОПОВОЧНОЙ ОСНАСТКИ И ГРУЗОЗАХВАТНЫХ
ПРИСПОСОБЛЕНИЙ
Стальные силовые стропы, грузовые тросы и канаты являются сложными и ответственными техническими изделиями. Канат -это крученое или плетеное изделие диаметром 6... 112 мм повышенной прочности; трос - гибкий канат из стали или искусственного волокна; строп - приспособление из канатов, тросов, цепей и т. п. для захвата грузов и подвешивания их к крюку грузоподъемного механизма. Они имеют большое число типов и конструкций и различаются по форме поперечного сечения как самого троса, так и его элементов, а также по физико-механическим характеристикам проволок и сердечников.
Авиационные тросы, обладающие гибкостью и высокой прочностью, изготавливают из холоднотянутых оцинкованных проволок (углеродистые стали марок 50, 60 и 65), которые свиваются в специальные пряди, а пряди — в трос. Конструкция стальных тросов определяется числом прядей троса, проволок в пряди, их диаметром и характером свивки (рис. 2.13). Чтобы увеличить гибкость стального троса, по его оси или по осям прядей пропускают сер-
Внутренний слой пряди
Рис. 2.13. Конструкция стального троса системы внешней подвески
Рис. 2.14. Примеры конструкций стальных тросов и их обозначения:
а - трос стальной двойной свивки типа ТК конструкции 6x19 ГОСТ 3067-88; б -трос стальной конструкционный 6x26 ТУ 14-176-121-93; в - трос стальной двойной свивки типа ТЛК-О конструкции 6x37 ГОСТ 3079-80
дечники - шнуры, которые также поглощают и удерживают смазку, предохраняющую трос от коррозии.
Стальные тросы принято обозначать цифрами, например 6x31; 6x37; 7x7. Первая цифра в этом обозначении соответствует числу прядей в тросе, вторая - числу проволок в каждой пряди (рис. 2.14). Иногда в обозначении троса указывают диаметр проволок, из которых свиты пряди. Например, обозначение 7x19 (0,32-т0,35) указывает на то, что проволоки имеют диаметр 0,32...0,35 мм.
Способ свивания отдельных прядей в трос называют свивкой троса. Тросы бывают одинарной или двойной, а также правой или левой свивки (рис. 2.15).
Трос одинарной свивки представляет собой отдельную прядь из одного или нескольких рядов проволок, обвитых вокруг металлического сердечника.
Трос двойной свивки состоит из прядей, обвитых вокруг металлического сердечника, причем роль сердечника в таком тросе вы-
Рис. 2.15. Направление свивки троса: а — правая; б — левая
Рис. 2.16. Заделка концов троса внешней подвески:
а - заделка конца троса в наконечник; б - заделка в виде петли на конце троса с применением коуша
полняет одна из прядей, которая несколько мягче проволок прядей, обвивающих сердечник.
Концы тросов ВП, как правило, заделывают в наконечники (рис. 2.16, а) или на коуш (рис. 2.16, б). Последние в настоящее время находят наиболее широкое применение при изготовлении стро-повочной оснастки, используемой при перевозке грузов на ВП вертолетов. Заделка в наконечники выполняется на специальных станках, причем усилие, потребное для выхода троса из наконечника, всегда значительно больше разрушающего усилия самого троса.
Каждый тип и конструкция стального троса, применяемого в качестве строповочной оснастки, имеет свои особенности, которые необходимо учитывать при их выборе для конкретных условий эксплуатации. Например, диаметр троса и его длина выбираются, как правило, из условий обеспечения необходимой их динамической прочности, а также с учетом аэродинамических, геометрических и массовых характеристик перевозимого груза или особенностей выполнения определенного вида АСМР.
Следует отметить, что надежность и долговечность стальных тросов во многом зависят от материала сердечника, от используемых защитных металлических покрытий и антикоррозионной смазки.
Все стропы и тросы, применяемые в качестве строповочной оснастки, снабжаются специальными маркировочными бирками (рис. 2.17), на которых предприятием-изготовителем строповочной оснастки указываются;
наименование предприятия-изготовителя или его товарный знак;
заводской номер стропа;
грузоподъемность;
Грузоподъемность
Рис. 2.17. Маркировочная бирка строповочной оснастки
дата испытания троса (месяц и год).
Кроме того, могут быть указаны длина троса и его обозначение.
В соответствии с принятыми стандартами все используемые в строповочной оснастке стальные тросы классифицируются по основным признакам, представленным на рис. 2.18.
В настоящее время на отдельных видах авиационных работ широко используются тросы ВП, выполненные из синтетического высокомолекулярного материала (СВМ).
Еще в 1997 г. при изготовлении строповочной оснастки для лесопожарного оборудования (водосливных устройств ВСУ-5 и ВСУ-15), транспортируемого на ВП вертолетов Ка-32 и Ми-26, специалистами НИИ аэроупругих систем (г. Феодосия) совместно с ОАО НПК "ПАНХ" был разработан, изготовлен и испытан опытный образец силового троса ВП из СВМ (рис. 2.19). Трос содержит несколько отрезков синтетического ленточного стропа (ЛС), помешенных в специальный капроновый чехол, и имеет на одном конце петлю, выполненную с применением коуша, для соединения с механизмом управления ВСУ, а на другом - металлический переходник для соединения с замком системы ВП вертолета [2.7, 2.8].
Определяющими в выборе материала для изготовления силовых тросов ВП стали следующие соображения: трос из СВМ малочувствителен к воздействию агрессивных сред (морской воды, авиационного топлива и масла), а по массе, величине динамического удлинения и времени старения значительно превосходят стальные тросы. Такой грузовой трос в отличие от металлических тросов не раскручивается под действием растягивающих нагрузок, а специально спро-
40
Классификация стальных тросов
Рис. 2.18. Классификация стальных тросов
Рис. 2.19. Водосливное устройство ВСУ-5 с силовым тросом ВП из СВМ
ектированная форма его капронового чехла не создает в полете дестабилизирующих моментов, передаваемых через подвеску на вертолет. Стендовые испытания на прочность тросов из СВМ, проведенные в ЗАО "Техноэкос" (г. Симферополь) для контроля качества серийно выпускаемой продукции, с приложением предельных статических и динамических нагрузок доказали их высокую прочность. Тросы из СВМ имели шестикратный запас прочности и выдерживали нагрузку на разрыв более 100 тс. Сегодня такие синтетические тросы успешно применяются для транспортировки различных грузов на ВП вертолетов в иностранных авиакомпаниях (рис. 2.20). Именно с их внедрением связан переход к системам ВП нового поколения, что существенно влияет на изменение в лучшую сторону показателей и характеристик, определяющих эффективность эксплуатации вертолетов на отдельных видах авиационных работ [2.8].
Большой опыт, накопленный в ОАО НПК "ПАНХ” при испытаниях и эксплуатации вертолетов с силовыми тросами внешней подвески из СВМ, показал, что такие тросы имеют наилучшие эксплуатационные качества (2.9...2.12], важнейшими из которых являются:
Рис. 2.20. Синтетические силовые тросы системы внешней подвески вертолетов, используемые иностранными авиакомпаниями для транспортировки грузов:
а — синтетический трос грузоподъемностью 4000 кг и нижний электрозамок системы внешней подвески вертолета Eurocopter AS 332 "Super Puma" авиакомпании Airlift (Норвегия); б — синтетический трос грузоподъемностью 5000 кг и нижний электрозамок системы внешней подвески вертолета Ка-32А авиакомпании HELISWISS (Швейцария); в — узел подцепки синтетического троса системы внешней подвески вертолета Ка-32А авиакомпании HELISWISS (Швейцария) к центральному электрозамку и к системе электроснабжения
высокая прочность при практически неограниченном ресурсе (тросы, отработавшие под нагрузкой более 350 ч в течение трех лет, не утратили своих первоначальных характеристик и сохранили расчетную прочность);
высокая степень ремонтопригодности. Благодаря ценному свойству СВМ — стойкости к концентраторам напряжений — и низкой скорости разрушения тросов, состоящих из отдельных стропов, достигаются простота и доступность ремонта повреждений в полевых условиях;
высокая стойкость тросов ко всем видам агрессивных веществ: топливам, ядохимикатам, маслам и пр.;
стабильность характеристик в процессе длительной эксплуатации в любых климатических условиях.
Вместе с тем, для эффективной реализации достоинств СВМ в конструкции строповочной оснастки необходимо решение комплекса задач, связанных с выбором взаимно согласованных исходных компонентов, определением рациональной структуры материала, соответствующей характеру внешних нагрузок и других воздействий, с учетом специфических свойств СВМ и технологических ограничений при разработке основных элементов В11.
При транспортировке грузов на ВП вертолетов в качестве съемных грузозахватных приспособлений применяются канатные стропы, серьги, скобы, крюки, карабины, траверсы, специальные захваты, отвечающие требованиям действующих государственных стандартов и имеющие сертификат об их испытаниях. Каждое из перечисленных изделий имеет свое функциональное значение и соответствующие ему эксплуатационные характеристики.
В соответствии с существующими в гражданской авиации правилами [2.13, 2.14] коэффициент запаса прочности стропов, т.е. отношение разрушающего усилия к максимальному усилию, встречающемуся в эксплуатации, должен быть не менее 6, а коэффициент запаса прочности других соединительных элементов (кроме тросов) и захватов стропов - не менее 5. Силовые элементы строповочной оснастки и узлы подцепки на грузе должны также обладать устойчивостью к воздействию возможных вибрационных нагрузок.
Грузозахватные приспособления подлежат обязательному техническому освидетельствованию перед началом работ. Стропы и стальные канаты проверяются на отсутствие узлов, вмятин, петель, обрывов отдельных нитей и прядей (рис. 2.21). Причинами появления указанных дефектов являются нарушение правил эксплуатации ipy-зовых гросов (ошибки в расчетах длины и грузоподъемности тросов, неправильный выбор мест их подцепки к грузу), нарушение технологических процессов при изготовлении (например, недостаточная предварительная вытяжка тросов) и техническом обслуживании.
од
Рис. 2.21. Характерные дефекты тросов системы внешней подвески вертолетов: а — выдавливание сердечника; б — образование петли; в — перегиб троса в зоне концевой заделки; г — сочетание выдавливания пряди троса с разрывом
Для оценки технического состояния стропов и стальных тросов, как правило, применяют следующие основные критерии;
характер и число обрывов проволок, в том числе наличие обрывов у концевых заделок тросов, наличие мест сосредоточения обрывов и их интенсивность;
разрыв пряди;
поверхностный и внутренний износ троса;
поверхностная и внутренняя коррозия;
местное уменьшение диаметра троса, включая разрыв сердечника;
уменьшение площади поперечного сечения проволок троса;
деформация в виде волнистости, выдавливания проволок и прядей, заломов и перегибов, расслоения прядей;
внешние механические повреждения и повреждения в результате температурного воздействия или электрического дугового разряда.
Одним из основных факторов, нарушающих условия эксплуатации тросовых связей, является петлеобразование при их работе. Различают два вида петлеобразования стальных тросов:
1. Петли образуются вследствие несимметрии распределения касательных и нормальных напряжений в поперечном сечении. При развитии таких напряжений первоначальная структура поперечного сечения троса нарушается, и отдельные его пряди могут деформироваться, образуя складки, петли или колышки. Этот процесс может сопровождаться выпучиванием внутренних элементов прядей. Детальное изучение возникновения такой ситуации требует дифференциального подхода — рассмотрения троса как совокупности прядей, закрученных по винтовой линии, а каждой пряди, в свою очередь, как совокупности закрученных проволок. При этом каждая отдельная проволока будет обладать не только кинематическими степенями свободы, но и степенями свободы, связанными с упругостью.
2. Петлеобразование, связанное с возможностью образования петли без изменения дифференциальных геометрических и силовых свойств троса в целом, а также в каждом его поперечном сечении в отдельности. В этом случае трос рассматривается интегрально — как сплошная закрученная нить без выделения прядей и отдельных проволок. Механизмом образования петли в данном случае является уменьшение осевого усилия в отдельных сечениях троса (каната) и изменение угла его закрутки.
Причиной петлеобразования может служить также волнообразный характер изменения продольных напряжений в тросе при его эксплуатации в составе ВП вертолета (знакопеременные нагрузки, порывы ветра и колебания (вибрации) под действием поверхностных сил, рывки, удары по тросу и т.д.). Под условием образования петли обычно понимают изменение знака угла закрутки троса 0, характеризующего качественное различие в крутильных деформациях троса: переход от раскручивания троса к его закручиванию. Необходимо отметить, что при изменении знака угла 0 петлеобразование по второму типу может и не наступить (трос вернется в первоначальное закрученное состояние). Однако вследствие технологических несовершенств, неравномерного распределения касательных и нормальных напряжений в поперечном сечении может произойти петлеобразование по первому типу, когда в процессе закручивания троса произойдет выпучивание одной или нескольких его прядей (проволок).
Серьги, крюки, карабины и скобы проверяются на отсутствие видимых внешних повреждений, срывов резьбы, забоин и деформаций, износа, срыва граней соединительных болтов и гаек. Эти изделия разрушаются обычно в результате чрезмерной затяжки соединительных элементов, несоблюдения условий посадки болтов при сборке, а также из-за возможных значительных перегрузок при эксплуатации. Срыв и потянутость резьбы образуются в основном из-за перекосов при сборке строповочной оснастки, а срыв граней головок болтов и гаек — из-за неверного подбора инструментов для выполнения монтажа или демонтажа оснастки.
Наиболее сложным элементом системы ВП является грузовой замок. Он предназначен для крепления грузового троса к вертолету, удержания груза в процессе его перевозки на ВП и аварийного сброса груза в полете в особых ситуациях. Конструкция грузового замка во многом определяется максимально допустимой массой груза, транспортируемого на ВП данного типа вертолета.
При относительно небольшой массе груза (до 2,5 т) применяется замок электромеханического типа (рис. 2.22), который при подцепке груза закрывается вручную, а при отцепке открывается с помощью электромагнитного пускового механизма через систему
а)
Рис. 2.22. Электромеханические замки для внешней подвески грузов:
а — модель ”1201" грузоподъемностью 5443 кг — разработка компании Mechanical Specialties INC для вертолетов Sikorsky S61, U Н-60 "Black Hawk", American Eurocopter AS-332, Ми-8 и Ka-32; б— модель Keepered Hook грузоподъемностью 2727 кг—разработка компании Onboard Systems International для вертолетов Bell 412
Рис. 2.23. Схема закрытия электромеханического замка Talon МС ’’Keeperless'' (разработка компании Onboard Systems International (США), 1999 г.) при подцепке груза: а - ввод кольца строповочного троса в замок ВП: 1 - корпус замка ВП; 2- несущий рычаг; 3 — кольцо строповочного троса; б — нажатие кольцом на поворотный рычаг механизма закрытия; в — защелкивание несущего рычага в замке
специальных рычагов и качалок (рис. 2.23, 2.24). В таких замках предусмотрено также и ручное открытие.
Для транспортирования тяжелых грузов используется более мощный грузовой замок, открытие и закрытие которого, а также
Рис. 2.24. Основные элементы конструкции электромеханического замка Talon МС ’’Keeperless'’ грузоподъемностью 2777 кг системы ВП вертолетов Bell 212:
а — рычажный механизм: 1 — корпус замка; 2— несущий рычаг; 3 — опорная ось; 4 — корпус спускового электромагнитного механизма; 5 — накладки; 6 — качалка; 7 — шайба; б— спусковой электромагнитный механизм: / — электромагнит; 2 — пружина; 3 - зубчатое кольцо; 4 - втулка
Рис. 2.25. Система несиловой одноточечной ВП груза на вертолете Eurocopter AS 350 с гидравлическим замком Talon LC Hydraulic™ Cargo Hook грузоподъемностью 5250 кг (разработка компании Onboard Systems International (США), 2005 г.):
а — общий вид системы ВП с гидравлическим замком; 1 — ферма внешней подвески; 2—стальной трос; 3 — гидравлический замок; 4— ограничительный трос; 5— гибкий гидравлический шланг; 6 — защитный бампер; б — гидравлический замок; в — независимая гидросистема замка ВП; 1 — гидробак; 2 — хомут крепления гидросистемы к рычагу управления общим шагом винта; 3 — ручка открытия замка; 4 - шток гидроцилиндра; 5 — гибкий гидрошланг; г — гидравлический разъем
удержание груза в полете осуществляются с помощью гидроцилиндра, подключенного к гидросистеме вертолета или к независимой гидравлической системе, соединенной специальными коммуникациями с рычагом отцепки в кабине экипажа (рис. 2.25).
Очевидно, что обеспечение безопасности в процессе выполнения авиационных работ — важнейшая функция системы ВП и элементов ее конструкции. Поэтому наряду с резервированием отдельных элементов в конструкции замков ВП на части отечественных и зарубежных вертолетов предусматривается установка одного или нескольких дополнительных грузовых замков в нижней точке подвески (рис. 2.26). Конструкция такой системы ВП позволяет производить оперативную отцепку груза с нижнего замка без сброса стропов-удлинителей и привлечения персонала, работающего на
Рис. 2.26. Схема ВП вертолета с креплением дополнительных грузовых замков в нижней точке подвески:
1 - центральный замок; 2 - вертлюг; 3, 7 электропровод; 4 - строп-уллинитель; 5-вертлюг-токосъемник; 6, 9 -дополнительные грузовые замки; 8— рама; 10—груз
земле. Такой подход не только обеспечивает сокращение затрат летного времени на соответствующие технологические операции монтажного или транспортного цикла, но и позволяет существенно снизить нагрузки, действующие на экипаж на этапе отцепки груза.
Основным достоинством данной системы является гибкость ее архитектуры, допускающей консолидирование различного числа грузовых замков ВП в едином блоке. Последнее обстоятельство заслуживает особого внимания, поскольку наличие таких замков значительно повышает универсальность системы ВП, позволяющей экипажу вертолета производить одновременную перевозку нескольких грузов в одном полете и их последующую раздельную укладку в намеченных пунктах.
В 2004 г. компания Onboard Systems International (США), являющаяся одним из ведущих изготовителей технических средств и специальной оснастки для вертолетов в Северной Америке, сообщила
Рис. 2.27. Система ВП карусельного типа
о создании систем ВП карусельного типа (рис. 2.27), оснащенных грузовыми замками, объединенными в один блок по 4, 6 или 8. Сегодня такие системы успешно применяются в США при проведении сейсмической разведки и гравиметрической съемки местности.
Основные характеристики системы ВП карусельного типа Multi-hook Carousel System
Общая масса транспортируемого груза, кг................... 2041
Геометрические параметры, мм: высота................................................. 406
диаметр................................................ 737
Масса системы с замками Talon Carousel Cargo Hook, кг: 4 замка............................................... 31,7
6 замков.............................................. 38,5
8 замков.............................................. 45,4
Напряжение питания постоянного тока, В................... 22...28
Сила потребляемого тока, А................................ 13
Выше в качестве примеров были рассмотрены конструкции замков зарубежной разработки, используемых для АСМР и транспортировки груза на ВП вертолетов. Аналогичные технические решения, безусловно, есть и в России. Характеристики замков ВП отечественного производства представлены в табл. 2.1.
Таблица 2.1
Характеристики отечественных электромеханических замков, используемых в системах внешней подвески
Хара ктеристика ДГ-64 ДГ-65 ВТ-ДГ20
Масса подвешиваемого груза, кг 3000 12 000 20 000
Масса замка, кг 5,5 19 30,5
Время срабатывания замка, с 0,05 0,05 0,05
Напряжение питания постоянного тока, В 27±10 % 27±10 % 27+10 %
Сила потребляемого тока при напряжении 27 В и температуре (20±5) °C, А:
при основном управлении 5,4 5,4 5,4
при дублирующем управлении 5,9 5,9 5,9
Диапазон рабочих температур, °C -60...+60 -60...+60 -60...+60
Тип вертолета, на ВП которого используется замок Ми-8, W-3 • Sokol" Ка-32, Ми-10, Ми-6 Ми-26
2.3. СИСТЕМЫ СТАБИЛИЗАЦИИ ГРУЗА НА ВНЕШНЕЙ ПОДВЕСКЕ ВЕРТОЛЕТА
Наиболее эффективным методом устранения или уменьшения возникающих в процессе транспортировки колебаний груза на ВП является применение специальных ТС для их стабилизации в полете. Еще в 1959 г. при создании вертолета S-60 "Sky Crane" И.И. Сикорский обратил внимание на необходимость разработки различного рода специальных амортизаторов, аэродинамических обтекателей, вибропоглотителей и стабилизаторов, позволяющих существенно повысить устойчивость груза на ВП при его обтекании воздушным потоком и свести передаваемые на груз с вертолета вибрации до минимума [2.15].
Рис. 2.28. Классификация технических средств стабилизации груза на ВП
Под стабилизацией груза на ВП понимается обеспечение устойчивости его движения, т.е. придание грузу способности сохранять заданные угловые положения и траекторию движения в пространстве, отклонения от которых возникают из-за воздействия возмущающих факторов. Для этого используются специальные конструкции. Они, как правило, создаются с учетом требования сохранения работоспособности в экстремальных условиях — при ударных и циклических нагрузках, а также высоких статических нагружениях.
В России и за рубежом определилось несколько направлений решения проблемы обеспечения устойчивого поведения грузов на ВП (рис. 2.28). Стабилизировать груз можно, применяя следующие основные типы устройств:
аэродинамические стабилизаторы;
ориентирующие и стабилизирующие подвески;
технические средства, совмещающие первые два типа устройств.
При выборе средств стабилизации необходимо учитывать требование их универсальности, которая выражается в возможности транспортировки различных типов грузов, а также в обеспечении
Рис. 2.29. Аэродинамический стабилизатор, установленный на грузе, подготовленном к перевозке на ВП вертолета
безопасности полета вертолета со стабилизированной подвеской без груза.
Рассмотрим несколько примеров удачных решений в области систем стабилизации груза на ВП вертолета.
Аэродинамические стабилизаторы могут использоваться при применении штатных одностропных подвесок. Возможна установка стабилизатора как на грузе (рис. 2.29), так и на самой подвеске (рис. 2.30).
В качестве простейших и достаточно эффективных средств стабилизации груза на внешней подвеске используются парашюты (рис. 2.31). Однако их применение обладает существенным недостатком — приводит к значительному увеличению аэродинамического сопротивления.
При обтекании парашюта воздухом у его краев образуются вихри, которые затем отрываются и уносятся набегающим потоком. За парашютом образуется зона пониженного давления, которая обусловливает возникновение значительного аэродинамического сопротивления.
Рис. 2.30. Схема устройства аэродинамической стабилизации груза на ВП вертолета:
1 - транспортировочный строп; 2—двухветьевой строп; 3—сетчатый стабилизатор; 4— передняя аэродинамическая надстройка; 5— каретка; 6— узел подцепки; 7— опора
Рис. 2.31. Стабилизация груза на ВП вертолета с помощью парашюта:
а — схема установки стабилизирующего парашюта на грузе: 1 — груз; 2 — узел крепления парашюта; 3 - удлинительное звено; 4 - парашют; б - схема обтекания купола парашюта набегающим потоком воздуха
Картина вихреобразования никогда не бывает симметричной во времени. Вихри возникают и отрываются попеременно то с одной, то с другой стороны, давление у купола парашюта также понижается то с одной, то с другой его стороны. Эти изменения давления раскачивают парашют. Если частота колебаний давления близка к частоте маятниковых колебаний груза, подвешенного на ВП, то размах последних может достигать ±30°. Поэтому стабилизирующие парашюты (СП), как правило, выполни-
Рис. 2.32. Схема транспортировки и выпуска стабилизирующего парашюта:
1 — груз; 2— парашют; 3 — якорь; 4 - удлинительное звено; 5 — вытяжное звено; 6-подвязки; 7— узел крепления стабилизирующего парашюта к грузу; 8- тарированное звено
ются с отверстием в центре купола. Такое отверстие пропускает большую часть набегающего воздушного потока и дает возможность потоку двигаться в направлении центральной оси парашюта. Этот поток и разрушает вихри с наружной стороны купола парашюта, чем достигается приемлемая стабилизация груза на ВП вертолета.
Процесс выпуска СП для стабилизации груза на ВП вертолета (рис. 2.32) можно разбить на несколько основных этапов 12.16]:
введение в действие парашюта 2 при помощи вытяжного звена 5, прикрепленного к якорю 3 на земле;
отход СП от груза после натяжения вытяжного звена;
вытягивание удлинительного звена 4 (см. также рис. 2.31, а, поз. 5);
обрыв тарированного звена 8 и наполнение купола СП.
В процессе наполнения СП изменяются площадь его купола FK и коэффициент сопротивления схк. Произведение этих величин называется эффективной площадью сопротивления СП:
. (2.1)
Анализ результатов экспериментальных исследований процесса наполнения купола в аэродинамической трубе [2.17] и проведенных летных испытаний [2.18...2.20] позволяет найти зависимость эффективной площади СП от времени его наполнения t:
Ф(() = а1к9 0</<т, (2.2)
где а — некоторая постоянная величина, значение которой будет найдено ниже; к — постоянная наполнения, безразмерная величина, определяемая экспериментально; т — время наполнения СП.
Результаты летных испытаний показывают, что в конце наполнения СП (/ = т) коэффициент сопротивления принимает максимальное значение, следовательно, эффективная площадь сопротивления СП будет определяться выражением
— ахк шах ’
откуда
_ max
(2.3)
(2.4)
Подставив (2.4) в (2.2), можно получить зависимость изменения эффективной площади сопротивления СП от времени наполнения купола
(t у
Ф(0 = Ф„„х - , 0<«-с. (2.5)
Стабилизация груза начинается при полном раскрытии купола СП при поступательной скорости движения вертолета, как правило, 40...50 км/ч.
Как показали исследования [2.4], наибольший стабилизирующий эффект достигается при длине удлинительного звена (см. рис. 2.31, а, поз. 5), равной 5...6-кратному максимальному габаритному размеру поперечного сечения груза, ориентированного продольной осью по направлению полета. При этом максимальная скорость полета вертолета с грузом на ВП обычно не превышает 200 км/ч.
Стремление максимально облегчить конструкцию стабилизирующей системы, снизить стоимость и упростить ее эксплуатацию привело к созданию складывающихся стабилизаторов, изготавливаемых из эластичных материалов. Один из перспективных стаби-
Рис. 2.33. Стабилизация груза с помощью гибкого киля
лизаторов данного типа представлен на рис. 2.33. В этом случае система внешней подвески груза к вертолету содержит грузовой трос с крюком, устройство для крепления груза, штангу и закрепленный на штанге киль из эластичного материала. При подъеме груза киль расправляется, при опускании - складывается, что делает конструкцию мобильной, легкой и простой в эксплуатации.
Перспективной является также стабилизация грузов на внешней подвеске ВС с применением комбинированных устройств: хвостовых стабилизаторов и переднего плоского экрана — стабилизатора, который служит генератором срыва потока в лобовой зоне.
В 1990-1993 гг. в Рижском экспериментальном центре (РЭЦ) ГосНИИ ГА в аэродинамической трубе Т-5 совместно с Академией гражданской авиации (г. Санкт-Петербург) были проведены исследования аэродинамических характеристик и динамики свободных колебаний моделей крупногабаритных грузов в форме параллелепипеда, а также характера их поведения в набегающем потоке на свободной подвеске [2.21, 2.22]. Целью исследований был поиск возможных средств стабилизации грузов на ВП вертолета и определение путей снижения их аэродинамического сопротивления. Эти
Рис. 2.34. Схема взаимодействия струи от несущего винта вертолета типа Ми-8 с грузом на
ВП в горизонтальном полете (скорость полета — 60 км/ч; длина тросов ВП — 10 м):
а - вид сбоку; б — вид в плане
исследования показали, что колебания груза относительно точки подвеса, его вращение в горизонтальной плоскости на режиме висения вертолета и в полете с поступательной скоростью вызваны, как правило, изменением силы лобового сопротивления груза при изменении его угла скольжения, а также периодическим сходом вихрей, обусловленных индивидуальной аэродинамической формой груза. С ростом скорости положение груза может меняться самым произвольным образом, и к моменту выхода груза из области струи НВ его продольная ось может находиться практически под любым углом к направлению полета вертолета (рис. 2.34). При этом возрастающие аэродинамические силы приводят к возникновению колебательного движения 1руза относительно точки его подвеса (рис. 2.35). С дальнейшим увеличением скорости возможно развитие незатухающих колебаний груза на ВП, что может явиться источником появления дополнительных нестационарных нагрузок на вертолет и НВ, а также причиной возбуждения автоколебаний в системе "груз - НВ - вертолет". Указанные факторы существенно ограничивают скорость транспортировки рассматриваемых грузов на ВП вертолета. Как показывает практика [2.23], она обычно не превышает 60...90 км/ч, что значительно снижает экономические показатели выполняемых работ.
Рис. 2.35. Формирование процессирующих поперечных колебаний груза (мобильный жилой блок-модуль массой 6500 кг) на ВП вертолета Ми-26Т с ростом поступательной скорости в горизонтальном полете при длине тросов ВП 50 м (стрелками показано направление движения груза на ВП):
а — устойчивое, произвольное по отношению к направлению полета (НП) вертолета, положение груза в набегающем потоке при малых скоростях движения (около 60 км/ч); б — развитие поперечных колебаний груза и отклонение его продольной оси на угол 30° от продольной оси вертолета с увеличением скорости от 60 до 90 км/ч; в — прогрессирующие поперечные колебания (Zip) и начало вращения груза с дальнейшим ростом скорости до 120 км/ч и выше; согр - угловая скорость вращения груза
В ходе экспериментов [2.22] для стабилизации груза в потоке и снижения его лобового сопротивления в передней и задней частях исследуемого груза размещались аэродинамические средства стабилизации. В качестве хвостовых стабилизаторов были использованы две вертикальные прямоугольные пластины. Для снижения сопротивления груза применялся передний стабилизатор, выполненный в виде прямоугольного экрана и прикрепляемый на определенном расстоянии от передней грани параллелепипеда.
Проведенные исследования показали, что завихрения потока в передней части груза при углах атаки и скольжения, не равных нулю, приводят к возникновению аэродинамического момента, способствующего стабилизации груза во время полета [2.24]. Использование хвостовых вертикальных стабилизаторов наиболее эффективно обеспечивает стабилизацию груза в набегающем потоке.
Была разработана расчетная модель груза, обтекаемого воздушным потоком малой скорости, которая основывалась на решении полного уравнения Рейнольдса. Сопоставление результатов расчетов, выполненных при помощи этой математической модели, и экспериментальных данных, полученных в летном эксперименте, продемонстрировало адекватность модельного описания вихревого обтекания груза экспериментальным данным.
На рис. 2.36 приведены схема стабилизации КГТ груза в форме параллелепипеда, транспортируемого в летном эксперименте на ВП вертолета Ми-26Т, и специальное оборудование, использованное для определения параметров полета комплекса "вертолет-груз”.
Графики изменений углов тангажа и крена а также угла рыскания груза \|/1з полученные в ходе летных исследований параметров полета вертолета Ми-26Т с жилым блок-мо-дулем на ВП, оборудованным двойным вертикальным стабилизатором и лобовой пластиной, в диапазоне приборных скоростей полета вертолета Ип от 180 до 235 км/ч, приведены на рис. 2.37. Анализ графиков показывает отсутствие изменений угла у, (Ду, = ±1°) КГТ груза в форме параллелепипеда, размещенного на ВП вертолета, при минимальных значениях углов
и (Д$, = ±2,5°; Avpi = ±3°) на скорости горизонтального полета 235 км/ч.
Рис. 2.36. Схема стабилизации КГГ груза типа мобильный жилой блок-модуль на ВП вертолета Ми-26Т в летном эксперименте:
1 — приемник воздушного давления; 2 — кардан (датчики МУ-615 углового и продольного отклонений); 3 — вертлюг-токосъемник; 4 - осциллограф К-2-20, самописец ЭН-30-01/2, гирокомпас ГКП-52 (рыскание); 5—осциллограф К-2-20; 6—тензодатчики; 7— хвостовые стабилизаторы; 8— передний стабилизатор - плоский экран
На практике при транспортировке таких грузов на ВП вертолета рекомендуется не превышать следующих значений максимальной приборной скорости:
без лобовой пластины и стабилизаторов — 90 км/ч,
без лобовой пластины, но со стабилизаторами — 130 км/ч;
с лобовой пластиной и со стабилизаторами — 140 км/ч.
Эффективность применения вертолета Ми-26Т для транспортировки указанной категории грузов, оборудованных средствами их стабилизации в полете, подтверждает рис. 2.38, где представлены результаты анализа процесса транспортировки КГГ груза на ВП между условными точками А и В без средств стабилизации на скоростях Ип = 60...80 км/ч и со средствами их аэродинамической стабилизации на скоростях Кп = 150... 180 км/ч с запасом топлива,
t,c
Рис. 2.37. Цикло1рамма изменения пространственного положения КГТ груза в форме параллелепипеда на ВП вертолета Ми-26 в диапазоне приборных скоростей Ип от 180 до 235 км/ч
Рис. 2.38. Зависимости числа перевезенных на ВП вертолета Ми-26Т грузов со средствами аэродинамической стабилизации и без них от расстояния и скорости доставки при запасе топлива на 5 ч полета и SOA + S0B = 100 км
Рис. 2.39. Устройство для одновременной транспортировки и стабилизации консолидированных грузов на ВП вертолета [2.25]:
а — конструктивно-силовая схема соединительного узла: 1 — распорка; 2 — кольцо; 3—звено: 4— подкос; 5— груз; 6- скоба; 7—трос; б — соединительный узел: 1 — распорка; 2 — траверса; 3—скоба; 4 — подкос; в — схема подцепки консолидированного груза к ВП вертолета: 1,3- грузы, присоединенные к переднему и заднему узлам системы ВП вертолета соответственно; 2 — соединительный узел
обеспечивающим полет вертолета в течение /„ = 5 ч. Видно, что средства аэродинамической стабилизации KIT груза в форме параллелепипеда позволяют увеличить безопасную скорость его транспортировки примерно в 2,5 раза.
Весьма эффективным представляется устройство для стабилизации груза на ВП вертолета продольной схемы, предложенное в 1990 г. американским изобретателем Ф.К. Йохом (рис. 2.39) [2.25]. В устройстве реализована идея объединения в один замкнутый контур консолидированных грузов, транспортируемых на двухточечной ВП вертолета с продольным расположением винтов типа
CH-47 "Chinook” (см. рис. 2.2, в). Благодаря такой компоновочной схеме разнос / точек А и Б системы ВП подвески грузов 7 и 3 к вертолету достаточно велик (см. рис. 2.39, в), что накладывает существенные ограничения на скорость полета вертолета при одновременном использовании обоих узлов подвески для перевозки нескольких грузов с различными аэродинамическими, геометрическими и весовыми характеристиками. Использовав специальный узел (см. рис. 2.39, б) для соединения грузов, транспортируемых на отдельных узлах системы ВП, конструктор добился существенного повышения жесткости и устойчивости всего контура системы "вертолет — внешняя подвеска — груз" в установившемся полете.
Приведенные выше системы стабилизации отличаются простотой конструкции и позволяют значительно повысить степень устойчивости поведения грузов и скорость их транспортировки вертолетами. Однако они не решают важнейшую проблему, возникающую при АСМР, - необходимую угловую ориентацию груза на ВП вертолета и не обеспечивают его устойчивое поведение при воздействии турбулентных воздушных потоков. Достаточно успешное решение этих проблем обеспечивают специальные ориентирующие подвески, которые являются более сложными по конструкции техническими устройствами.
Сама идея создания таких систем для вертолетов, выполняющие АСМР, не нова. Первые системы азимутальной фиксации (САФ) использовались как устройства, позволяющие фиксировать положение груза на ВП в плоскости, параллельной плоскости вращения несущего винта, под наиболее удобным утлом к месту монтажного стыка При этом вертолет был ориентирован над монтажной плошадког против ветра, а монтируемая конструкция еще перед взлетом фиксировалась на подвеске в необходимом для монтажа положении.
В 1971 г. американская компания Erickson Air-Crane впервые применила систему азимутальной фиксации груза на ВП вертолета S-64E при строительстве высоковольтных линий на северо-западе США [2.26]. В настоящее время S-64E грузоподъемностьк Юти его модификация S-64F грузоподъемностью 12,5 т, оборудованные САФ. успешно применяются американскими компаниями Erickson Air-Crane и Evergreen Helicopters при строительстве электросетей в США, Канаде, Швеции и Южной Корее.
В середине 1980-х гг. ВНИИ ПАНХ ГА была разработана первая отечественная САФ для вертолета Ми-ЮК, которую стали использовать на монтажных работах вместо штатной однотросовой ВП [2.27]
Рис. 2.40. Системы азимутальной фиксации груза на ВП вертолета:
а — кинематическая схема САФ груза на ВП вертолета Ка-32: 1 — пирамида системы внешней подвески; 2—люк в полу транспортной кабины; 3 — пол кабины; 4 — тяга системы внешней подвески; 5, 17- замок ДГ-64; 6 — компенсирующий амортизатор; 7— соединительный блок; 8- стабилизирующий трос; 9-роликовая направляющая; 10— вертлюг; 11,13 - трос САФ; 12 - раздвижная траверса; 14 - шарнирное звено; 15 - грузовой трос; 16— груз; б - кинематическая схема САФ груза на ВП вертолета Ми-8МТВ; 1, 8— замок ДГ-64; 2,6- вертлюг; 3 — компенсирующий амортизатор; 4-раздвижная граверса, 5 — стабилизирующий трос, 7 — грис САФ, 9 — грузовой грос, 10 — груз
Это устройство обеспечило не только стабилизацию груза на ВП в горизонтальном полете, но и ею ориентацию по азимуту на режиме висения вертолета в нескольких фиксированных положениях в диапазоне углов от 0 до 90° с шагом 22,5°. Однако груз на ВП фиксировался в необходимом для монтажа положении на земле, перед началом выполнения работ, без возможности его последующей корректировки по азимуту в полете. Ошибки экипажа в определении направления ветра над местом монтажа, смена ориентиров видимости при висении над
б)
Рис. 2.40 (окончание)
местом установки объекта приводили к необходимости дополнительной посадки вертолета и переподцепки груза с целью установки его на САФ в соответствии с проектным положением осей, а также предполагаемым направлением висения вертолета при выполнении АСМР.
В 1990-х гг. ВНИИ ПАНХ ГА были разработаны САФ для вертолетов Ми-8МТВ и Ка-32, оборудованные замками ДГ-65 и предназначенные для перевозки груза массой до 4500...5000 кг па ВП, а также для выполнения АСМР на высотных объектах
(рис. 2.40). Конструкция таких САФ предусматривала оперативную отцепку грузов с нижних электрозамков ДГ-65 без сброса удлинительных тросов и привлечения наземного персонала. При возникновении аварийной ситуации в полете подвеска сбрасывалась с грузом с верхнего электрозамка, но сигналу, поступающему по основному и резервному каналам от кнопок, расположенных на левой ручке ’’шаг—газ". Контроль текущего значения нагрузки на тросах САФ осуществлялся экипажем по цифровым индикаторам, расположенным на приборной доске в кабине пилотов или специальном блоке оператора, при помощи системы контроля силы по ipocy (СКСТ-В) или системы "Вектор". Одновременно с этим производилась регистрация текущего значения нагрузки на тросе ВП бортовым устройством регистрации параметров полета (БУР-1-2Ж). В процессе выполнения АСМР с использованием таких САФ были определены наиболее рациональные способы строповки, при которых груз вел себя устойчиво на всех режимах от разгона до гашения скорости. Было установлено, что отношение расстояния между точками крепления строповочных элементов на грузе (рис. 2.40, б) к суммарной длине его консольной части для симметричных и длинномерных грузов должно соответствовать условию —-— « 0,9.. .1,1. Уменьшение этого отношения ведет к рос-
Z, +/2
ту частоты колебаний консольной части груза, а увеличение — к росту амплитуды вероятной раскачки груза в полете. При этом усилие Т в каждой ветви стропа САФ определяется выражением
Т = - п> , (2.6)
«cosa
где G,v — вес груза, размещенного на ВП; п — число ветвей стропа САФ; а угол наклона ветви стропа, отсчитываемый от вер гикал и.
Конструктивно САФ была выполнена таким образом, что ее подготовка к работе производилась оперативно, с минимальными трудозатратами.
Эти устройства позволили экипажу значительно повысить точность работ на высотном монтаже и существенно сократить время монтажного цикла [2.27]. С помощью таких САФ долгое время успешно выполнялись самые различные монтажные работы, в том числе и связанные с возведением телеперсдающих мачт высотой до 127 м. Однако в целом они имели те же недостатки, что и САФ
вертолета Ми-IUK, и также не!)беспечивали необходимую азимутальную ориентацию груза в полете. Последнее требует постоянного присутствия наземного персонала в зоне установки объекта для его разворота в проектное положение с помощью фалов или специальных оттяжек, что не всегда возможно из соображений безопасности выполнения работ, особенно при монтаже высотных объектов с большими значениями момента инерции монтажных блоков.
2.4. СИСТЕМЫ ДЛЯ АЗИМУТАЛЬНОЙ ОРИЕНТАЦИИ ГРУЗА НА БИФИЛЯРНОЙ ВНЕШНЕЙ ПОДВЕСКЕ ВЕРТОЛЕТА
Анализ известных технических решений в области разработки способов, технологий и технических средств выполнения АСМР с применением воздушных судов (см. разд. 2.3) показывает, что специальные ВП вертолетов в основном предназначены для стабилизации объекта монтажа (груза) на ВП или его фиксации в плоскости, параллельной плоскости вращения НВ, под наиболее удобным углом к направлению набегающего потока (месту монтажного стыка при выполнении АСМР). Отсутствие на вертолете специальной монтажной оснастки, позволяющей экипажу не только фиксировать положение груза на ВП, но и производить его разворот в полете на необходимый угол, компенсируя возможные отклонения ВС по курсу в момент висения над монтажной площадкой, значительно сужает область использования вертолета на АСМР.
В настоящее время на основе анализа отечественного и зарубежного опыта применения средств стабилизации грузов на внешней подвеске в ОАО НПК "ПАНХ" (г. Краснодар) созданы экспериментальные образцы систем азимутальной ориентации (САО) груза на ВП для вертолетов Ми-26, Ми-8 и Ка-32 (табл. 2.2), удовлетворяющие следующим основным требованиям:
максимальное использование элементов узлов штатной подвески вертолета;
отсутствие необходимости внесения изменений в конструкцию вертолета для установки и использования САО;
возможность взлета и посадки вертолета с установленными на борту системами стабилизации груза.
При разработке этих конструкций проектировщики применили достаточно простую силовую схему САО груза с переходными звеньями от одноточечного крепления на вертолете к бифилярному (двух-
NJ
Таблица 2.2
Характеристики современных САФ и азимутальной ориентации гр)за на ВП отечественных вертолетов
Характеристика системы Ми-8 Ми-ЮК Ка-32 Ми-26Т
Тип системы САО САФ САФ САО САФ 209С-В-370 САО 26-1 САО 26-2 САО 26-3-2
Разработчик ОАО НПК "ПАНХ" Ухтинское авиапредприятие ОАО НПК "ПАНХ" ОАО НПК "ПАНХ" ОАО ’'Роствертол” ОАО НПК ’ПАНХ’' ОАО НН К "ПАНХ" ОАО НПК "ПАНХ"
Год изготовления (испытаний) 1985 1983 1990 1991 1994 1995 1997 2003
Грузоподъемность, кг 3000 10 000 5000 10 000 20 000 20 000 20 000 20 000
Угол установки груза по азимуту перед взлетом, ° *— ±45 ±360 — ±360 — —
Шаг фиксации угла груза по азимуту перед взлетом, ° — 22,5 10 — 10 — — —
Угол поворота груза по азимуту в полете, ° +360 — — ±360 — ±70 ±70 ±70
Максимальный крутящий (стабилизирующий) момент, кгс м 50 272 412 150 90 900 1800 *- 3600
Рис. 2.41. Конструктивно-силовая схема САО груза:
1 - регистратор параметров движения САО; 2, 6— упорный подшипник; 3 — промежуточный вал привода; 4, 5 — зубчатая цилиндрическая передача; 7 — стойка; 8 — выходной вал; 9-переходное звено; 10, 13 -канат; //-траверса; /2-шарнирное звено; 14 - электрозамок внешней подвески; 75 - груз; G - сила тяжести груза; МдИИ - динамический момент на выходном звене; <оу - угловая скорость вращения выходного вала САО; / - длина ветви троса
стройному) на грузе (рис. 2.41). Особенностью данной САО груза является то, что при развороте груза на бифилярной ВП в плоскости, параллельной плоскости вращения НВ, в системе ’’механизм — подвеска — груз" при пуске и торможении возникают крутильные колебания, значительно усложняющие экипажу задачу по точному наве-цению груза на проектные отметки или специальные ловители [2.4]. Источником возникновения и затухания таких колебаний являются
Рис. 2.42. Схема сил, действующих на груз и тросы бифилярной ВП
силы, действующие на груз и тросы ВП, показанные на рис. 2.42. Основные моменты разработки такой системы ориентации груза на бифилярной ВП [2.39] будут рассмотрены ниже.
2.4.1. Усилия, действующие на груз и тросы бифилярной внешней подвески
При теоретическом анализе крутильных колебаний груз представлен в виде звена АВ, подвешенного на нитях (тросах) АС и BD
к траверсе CD — выходному звену, приводимому во вращение от механизма, смонтированного на ферме (стойках ВП) внутри фюзеляжа вертолета (см. рис. 2.42).
Для составления основных расчетных зависимостей введем следующие обозначения: G - сила тяжести груза; Т — усилие в ветви троса; I — длина ветви троса; 1а — расстояние между верхними точками крепления троса; 1Ъ — расстояние между нижними точками крепления троса; X, У, Z — координатные оси; (р — угол закрутки груза на тросах относительно положения равновесия; Тх. — проекция усилия, возникающего в ветви троса, на плоскость, параллельную плоскости вращения НВ; Тг - радиальная составляющая усилия Txz; Tt — касательная составляющая усилия Txz.
Касательные усилия Д, приложенные в точках Л, и Z?15 являются силами, возвращающими груз и тросы ВП в положение равновесия, т.е. восстанавливающими силами. Установлено, что при закрутке груза на угол <р усилие Т, определяется из выражения
Т, = - а8Ц1ф (2.7)
2 -a2 -b1 +2tf£cos(p
Введем обозначения: X = //а -- относительная длина тросов ВП; Р = b/а — относительный разнос точек подцепки груза. И разделим левую и правую части выражения (2.7) на G. В результате получим выражение для определения относительного касательного усилия и (усилия, возвращающего груз)
(2.8)
6 2дД2 -р2 -1+2pcos(p
2.4.2. Влияние геометрических параметров бифилярной подвески на относительное возвращающее груз усилие
Анализ формулы (2.8) и результатов выполненных теоретических расчетов [2.33] относительного возвращающего груз усилия и для различных безразмерных геометрических параметров л и р позволил установить линейную зависимость и = Д<р), представленную на рис. 2.43. Исследование этой зависимости показывает, что с увеличением параметра X бифилярная подвеска становится бо-
Рис. 2.43. Зависимость относительного усилия и от угла закрутки груза и размеров тросов внешней подвески
лее "мягкой" вследствие уменьшения возвращающего груз усилия, а при увеличении параметра р (расстояния между точками крепления тросов к грузу) подвеска становится более "жесткой", так как возвращающая груз сила при прочих равных условиях увеличивается.
Данное обстоятельство необходимо учитывать при выборе длины тросов В ГТ и точек подцепки груза в ходе подготовки к выполнению транспортных, монтажных и других работ, связанных с перевозкой грузов на ВП вертолетов.
2.4.3. Крутильные колебания груза на бифилярной внешней подвеске
Восстанавливающий момент, возвращающий груз на бифилярной подвеске в положение равновесия (см. рис. 2.42), с учетом выражения (2.6) может быть определен по формуле
Ч -OAT =G
Л//2 -а2 -Ь2 +2я/)С08(р
(2.9)
Дифференциальное уравнение крутильных колебаний груза, размещенного на бифилярной внешней подвеске вертолета, будет иметь вид
йРф Gaisin q>
dt' Jp -а2 -Ь2 +2а6со5ф
где Jy - момент инерции груза относительно оси OY.
Ограничиваясь анализом малых колебаний груза на ВП и полагая sincp « ф, собф « 1, уравнение (2.10) после некоторых преобразований можно свести к виду
^+--—аЬ ф = 0 (2.11)
dt Jу Jp ^(а^Ъ)2
или
2 п
—+р ф = 0, dt1
где р — частота собственных крутильных колебаний груза на би-
, [G ab
филярном подвесе, р =--- —.
V, ф2-(а2-Ь)2
Общее решение дифференциального уравнения крутильных колебаний (2.10) может быть записано в следующем виде:
ф- cp0cospr +—sin/)/, (2.12)
Р
где ф0 — начальный угол закрутки в момент времени t = 0; ф0 — начальная угловая скорость груза при крутильных колебаниях при / = 0.
При начальных условиях ф0 = 0; ф0 =о0 при Г = 0, соответствующих случаю остановки выходного вала САО, из уравнения (2.12) находим
Ф = —sinp/ =—sin/rt, (2.13)
Р Р
где со0 - угловая скорость выходного вала САО при установившемся движении.
Решая дифференциальное уравнение крутильных колебаний, после выполнения несложных преобразований можно вычислить наибольший угол закрутки груза:
(2.14)
Из приведенных рассуждений видно, что значения ср1Пах и р главным образом зависят от массы и момента инерции груза относительно вертикальной оси ОУ, частоты вращения выходного вала САО, угла наклона тросов ВП и их геометрических параметров.
2.4.4. Динамические нагрузки в элементах САО
Динамические нагрузки, возникающие в элементах конструкции САО, определяются с учетом рекомендаций [2.36]. При этом расчетный максимальный динамический момент на выходном звене САО при пуске (торможении) системы определяется выражением
Мдин max f ~ ^дмн > (2-15)
где т — масса монтажного блока на ВП;/— приведенный коэффициент трения упорного подшипника качения опорного узла САО, который согласно рекомендациям, приведенным в работе [2.4], следует принять равным 0,003; / — диаметр беговой дорожки упорного подшипника САО; £днн — динамический коэффициент, характеризующий перегрузки, возникающие в элементах САО при пуске (торможении).
Используя зависимость между моментом на валу электродвигателя и током якоря, приведенную в работе [2.37], и сравнивая силу пускового тока /пуск с силой тока при установившемся движении /, находим отношение пускового момента Л/пуск к моменту при установившемся движении Л/ которое представляет собой динамический коэффициент:
(2.16)
2.4.5. Динамический момент на выходном валу САО при пуске или торможении системы
Динамический момент на выходном валу САО при пуске (торможении) системы определяется как
Мти (2.17)
где sv — угловое ускорение вращения груза вокруг оси OYпри пуске (торможении) САО.
Полагая движение при пуске равноускоренным, а при торможении равнозамедленным, величину можно определить из выражения [2.37]
6,=-^, . (2.18)
Л|(т)
где г1|(т) — время пуска (торможения), определяемое экспериментально на конкретном электромеханизме привода выходного вала САО.
В случае неработающего (отключенного) механизма САО динамические нагрузки на выходном валу системы возникают при развороте груза вертолетом вокруг оси ОУ на режиме висения. При этом динамический момент выходного вала определяется также по формуле (2.17), но величина &у представляет собой угловое ускорение вертолета при его вращении вокруг вертикальной оси ОУ при выполнении экипажем режима висения над выбранным объектом:
= -^Ч (2.19)
^п<т>
где cOj — угловая скорость вращения вертолета вокруг оси СУ на режиме висения; /'(т) — время пуска (торможения) при повороте вертолета вокруг оси О У.
Величина г'у определяется по результатам летного эксперимента из анализа записей осциллографа (со^
С учетом того что необходимым условием работоспособности бифилярной ВП вертолета является соблюдение неравенства М, > > Л/Д11Н, при котором обеспечивается сохранение геометрических параметров ВП и ее формы (отсутствие перехлеста тросов АС и BD в процессе разворота груза), расчетным путем были определены
Таблица 2.3
Результаты расчетов восстанавливающего момента в бифилярном подвесе и углового ускорения груза при его закрутке на тросах ВП
/, м а, м х=-а Ь, м <5 | <3 II а, ° Т н Л//> Нм Значения сг 1/с2 (°/с2), при различных моментах инерции Jy груза массой 2600 кг
4 = 3000 кг м2 Л = 24000 кг-м2 •4 = 50000 кг-м2
15 0,67 22,39 0,67 1 0 260 174 0,058 (3,3) 0,007 (0,4) 0,003 (0,2)
2,67 3,99 15 260 694 0,23(13,3) 0,029 (1,7) 0,014 (0,8)
5,67 8,46 40 260 1474 0,49 (28,1) 0,061 (3,5) 0,029 (1,7)
10 0,67 14,92 0,67 1 0 390 261 0,087 (4,99) 0,01 (0,6) 0,005 (0,3)
2,67 3,99 20 390 1041 0,347 (19,9) 0,043 (2,5) 0,021 (1,2)
5,67 8,46 60 390 2211 0,737 (42,2) 0,092 (5,3) 0,044 (2,5)
5 0,67 7,46 0,67 1 0 728 488 0,162 (9,3) 0,02 (1,2) 0,01 (0,6)
2,67 3,99 50 728 1944 0,648 (37,1) 0,081 (4,6) 0,039 (2,2)
4,17 6,22 90 728 3036 1,012 (57,8) 0,126 (7,2) 0,061 (3,5)
значения восстанавливающих моментов Mt и допустимых угловых ускорений еу, действующих на груз. В табл. 2.3 приведены результаты расчетов, на основании которых построены зависимости М =/(а) и гу = /(а) (рис. 2.44), где а — угол между тросами (нитями) бифилярной ВП.
С увеличением угла а от 0 до 90°, как следует из табл. 2.3, пропорционально возрастает от некоторых первоначальных значений 174 Н м (при длине тросов ВП / = 15 м и а = 0) и 488 Н-м (при длине тросов ВП / = 5 м и а = 0) до 3036 Н-м (при длине тросов ВП / = 5 м и а = 90°).
На величину гу наибольшее влияние оказывает момент инерции груза и в меньшей степени его масса. С увеличением угла а между тросами ВП наблюдается тенденция к повышению стабильности поведения груза на бифилярной ВП. Это связано с тем, что для увеличения угла закрутки груза ф на тросах ВП относительно положения равновесия, при котором восстанавливающие силы и моменты равны нулю, требуется повышенное угловое ускорение еу.
Рис. 2.44. Зависимости восстанавливающего момента Mt и углового ускорения груза от угла а между тросами бифилярной внешней подвески
2.4.6. Формирование конструктивно-кинематических схем САО
Необходимо отмстить, что совершенство САО во многом зависит от того, насколько удачно выбраны ее основные параметры. К числу таких параметров для современных конструкций САО прежде всего относятся:
несущая способность системы;
• параметры, характеризующие кинематику САО, т.е. определяющие возможный диапазон углов разворота груза на ВП вертолета в плоскости, параллельной плоскости вращения НВ (азимутальной плоскости), и быстродействие системы по компенсации сил и моментов, дестабилизирующих груз;
уровень напряжений в деталях, подверженных воздействию переменных нагрузок;
ресурс и возможность с го дальнейшего увеличе ния;
эффективность демпферов колебаний груза на ВП вертолета;
аэродинамические, геометрические и массово-инерционные характеристики конструкции;
технологичность узлов и деталей;
простота и удобство обслуживания.
В зависимости от принципа действия различают механические и аэродинамические САО.
Механические САО работают по принципу передачи стабилизируемому грузу крутящего момента от привода, использующего электроэнергию или давление рабочей среды (газы, жидкости и пр.), через некоторый тяговый орган (обычно стальной трос или цепь) и средства управления ориентирующей груз системы.
Аэродинамические САО обеспечивают разворот груза по азимуту и его стабилизацию в полете с использованием кинетической энергии набегающего воздушного потока и воздушного потока, индуцированного несущим винтом вертолета. Эти потоки образуют пару сил, создающую в горизонтальной плоскости момент, необходимый для требуемой азимутальной ориентации или стабилизации груза на ВП вертолета.
Наибольшее распространение в настоящее время получили механические САО, основными достоинствами которых являются:
простота конструкции;
способность при своих относительно малых габаритных размерах выдерживать большие нагрузки и создавать необходимый стабилизирующий момент для ориентации грузов с высокими значениями моментов инерции;
технологичность;
простота эксплуатации и ремонта.
На рис. 2.45 и 2.46 приведены кинематическая и конструктивно-силовая схемы механической САО груза на ВП вертолета Ми-26. Конструкция такой САО предусматривает передачу движения на раздвижную траверсу (звено) от двух бортовых лебсдок, что, однако, требует решения ряда технических и технологических проблем. Эта задача была успешно решена в 2003 г. ОАО НПК "ПАНХ" — основным разработчиком этой модели САО 12.28].
Особенностями САО Ми-26 являются возможность выполнения разворота на ВП в диапазоне углов ±70° по азимуту крупногабаритных и многомодульных объектов с большими момента-
Рис. 2.45. Кинематическая схема механической САО груза на ВП вертолета Ми-26:
1 - бортовая лебедка; 2 — погрузочный блок-ролик; 3 - шасси раздвижной траверсы; 4 - раздвижная траверса; 5 — трос бортовой лебедки; 6 — наконечник с карданом; 7 — люк в полу грузовой кабины; 8 — компенсирующий амортизатор; 9 - блок поворотных роликов
ми инерции и успешное демпфирование различных по форме колебаний груза, возникающих при его транспортировке на ВП вертолета.
В качестве поглотителей кинетической энергии удара в этой САО используются жидкостно-газовые компенсирующие амортизаторы (рис. 2.47, а), которые помимо демпфирования колебаний груза на ВП обеспечивают необходимую вертолету маневренность над монтажным стыком и существенно облегчают экипажу задачу по установке объекта на проектные отметки.
В данной САО энергия ударных или циклических нагрузок, вызванных колебаниями груза на ВП вертолета, воспринимается демпфирующими элементами и передается дальше по так называемым путям перераспределения нагрузки. В результате частота и амплитуда колебаний снижаются, что в сочетании с действием пассивных элементов системы (рис. 2.47, б) обеспечивает макси-
Рис. 2.46. Система азимутальной ориентации ВП вертолета Ми-26:
а — конструктивно-силовая схема САО: 1 - блок поворотных роликов; 2 - верхний замок; 3 -наконечник с карданом; 4,12- вертлюг с токосъемником; 5—треугольная траверса; 6 - трос бортовой электролебедки; /-центральный трос; <?- раздвижная траверса: 9— шлиц-шарнир; 10-шасси раздвижной траверсы; 11 - трос бифилярной подвески; 13 — нижний электрозамок ДГ-65; б — вертолет с грузом на ВП с САО
мально возможную безопасность при соединении сопрягаемых частей объекта монтажа. Как показала практика, амплитуда и частота знакопеременных нагрузок в основном и определяют ресурс основных элементов САО.
В качестве реверсивного привода в рассматриваемой САО используются бортовые лебедки ЛГ-1500, установленные на полу в грузовой кабине вертолета. Они обеспечивают повороты груза через систему тросов и поворотных роликов (рис. 2.47, в) с угловой скоростью до 10 °/с и угловым ускорением до 3,5 °/с2, при которых в элементах конструкции САО отсутствуют критические нагрузки и в то же время обеспечивается оперативное управление грузом
Рис. 2.47. Конструктивные элементы САО груза на ВП вертолета Ми-26:
а — компенсирующий жидкостно-газовый амортизатор; б — правая часть (по полету вертолета) раздвижной траверсы с тросом бифилярной ВП и нижним электрозамком ДГ-65; в — блоки поворотных роликов, закрепленные на грузовой рампе
массой до 15 т с моментом инерции до 106 кг м2 при его наведении на проектные отметки.
Как показали летные исследования [2.29], применение САО позволяет сократить время выполнения монтажных операций более чем на 10 % по сравнению со временем, затрачиваемым на аналогичные работы с использованием штатной системы внешней подвески (рис. 2.48).
77мин:с
Рис. 2.4Х. Распределение летного времени при выполнении монтажа крупногабаритных конструкции вертолетом Ми-26 на высогных объектах с применением штатной ВП (Г) и ВП, оборудованной САО (2):
t — средняя продолжительность монтажного цикла; L — длина тросов ВП
Типовые элементы конструкции САО Ми-26 выбирались разработчиками на основании предварительных расчетов и испытаний основных ее узлов на прочность и долговечность. В ходе поиска оптимальных решений в процессе создания этой модели САО одной из первых подверглась критической оценке ранее разработанная в НИИмонтаж система для вертолета Ми-8 (рис. 2.49) [2.30]. Это устройство размещается на ВП вертолета 1 и включает в себя траверсу 2 с грузовыми тросами 3, которые снизу имеют грузозахватные приспособления 4 — механические крюки-самоот-цепы (рис. 2.50) или электрозамки ДГ-65. Траверса 2 посредством двух сходящихся тросов 5 присоединяется к замку 6 с вертлюгом 7 бифилярной ВП вертолета. В систему ориентации траверсы 2 входит исполнительное звено 8 в виде практически нерастяжимой нити (трос или цепь) либо управляемого силового цилиндра, шарнирно прикрепленное к одному из концов траверсы. Противоположный конец исполнительного звена 8 навит на барабан лебедки 9 с реверсивным электрическим двигателем.
К одному из концов траверсы 2 прикрепляются элементы ее стабилизации — один или несколько эластичных резиновых амортизаторов или пружина 10. В обоих случаях исполнения элементов
Рис. 2.49. Кинематическая схема САО груза на ВП вертолета Ми-8:
1 — вертолет; 2 — траверса; 3 — грузовые тросы; 4 — грузозахватное приспособление; 5- трос ВП; 6- замок; 7- вертлюг; 8-трос управления; 9- лебедка; 10- амортизатор; 11 - груз; 12 - место монтажа; AfVBOCCr - восстанавливающий момент; НП -направление полета
Рис. 2.50. Механический крюк-самоотцеп
Стабилизации силы их упругости меньше усилий, создаваемых исполнительным звеном 8, но в то же время они достаточны для необходимой стабилизации в полете траверсы с прикрепленным к ней грузом 77.
В полете изменением длины исполнительного звена £ траверса 2 разворачивается на вертлюге 7вокруг вертикальной оси на необходимый угол по азимуту для установки груза 11 в требуемое положение.
Недостатком конструктивно-кинематической схемы (ККС) такого устройства является малый угол поворота груза по азимуту, который О1раничен ходом штока жесткого исполнительного звена <?и составляет не более ±45°, а при использовании гибких звеньев — не более ±80°. Кроме того, выбор длины траверсы такой САО ограничен удалением точки крепления корпуса исполнительного звена 8 на фюзеляже вертолета от точки крепления его штока на траверсе 2, что ограничивает плечо приложения стабилизирующего усилия и, как следствие, ограничивает допустимый момент инерции ориентируемого груза (особенно при повороте траверсы на угол, близкий к максимально возможному).
Следующим шагом в развитии систем ориентации груза на ВП вертолета стала разработка похода к созданию устройств, позволяющих осуществлять управляемый в полете поворот груза в горизонтальной плоскости в диапазоне ±360°, полностью обеспечивающий согласование положения груза по азимуту с проектными отметками при любых направлении ветра над местом монтажа и положении груза на ВП. Такая система была разработана в начале 1990-х гг. в ОАО НПК "ПАНХ” для вертолета Ми-ЮК (рис. 2.51, а) [2.31]. Это устройство содержит два основных узла, размещенных на вертолете, — штатную внешнюю подвеску и ориентирующую груз систему.
В состав ВП входит основной замок 2, к которому присоединен наконечник 3 с двумя сходящимися к нему стальными тросами 4. Свободные концы тросов 4 присоединяются к траверсе 5 с помощью имеющихся на ней верхних кронштейнов 6 (рис. 2.51, б). К нижним кронштейнам 7 траверсы 5 присоединяются грузовые тросы 8, которые в нижней своей точке снабжены специальными грузозахватными приспособлениями 9 для соединения с узлами подцепки груза 10.
В ориентирующую систему входят кольцо 11 с канавками 72 на внешней поверхности (см. рис. 2.51, б), бесконечный тяговый ор-
Рис. 2.51. Конструктивно-кинематическая схема САО груза на ВП вертолета Ми-10: а — общий вид системы; б — узел подцепки, ориентирующий груз относительно би-филярной ВП вертолета и грузовых тросов САО; 1 — вертолет; 2 основной замок ВП; 3 - наконечник; 4,16-трос\ 5- траверса; 6, 7- кронштейн; 8-грузовой трос; 9- грузозахватное приспособление; 10- груз; 11 — кольцо; 72- канавка; 13- бесконечный тяговый орган (трос); 14 — блок; 15 — амортизатор; 17— реверсивная лебедка; 18, 19 — ветвь троса
ган 13 в виде троса или цепи, отклоняющиеся блоки 14, резиношнуровые амортизаторы 15, гибкие связи 16 и приводной механизм 77с канатоведущим шкивом. В качестве приводного механизма используется реверсивная лебедка, на барабан которой без защемления навито несколько витков троса 13. Оси отклоняющихся блоков 14 с помощью резиношнуровых амортизаторов 15 прикреплены к основным стойкам шасси вертолета. Число таких амортизаторов подбирается в зависимости от массы и конфигурации груза, транспортируемого на ВП вертолета.
Сходящие с канатоведущего шкива приводного механизма 17 обе ветви - 18 к 19 — троса 13 огибают во встречных направлениях кольцо 77, а затем один из отклоняющихся блоков 14 ориентирующей груз системы. Наличие на внешней поверхности кольца 11 канавок 12, в которые укладываются витки троса 13, натянутого резиношнуровыми амортизаторами 15, обеспечивает удержание в полете кольца 77 на весу в горизонтальной плоскости под фюзеляжем вертолета. Внешняя подвеска связана с ориентирующей системой путем сопряжения концов траверсы 5 с кольцом 77. Для этого подбором длины сходящихся стальных тросов 4 обеспечивается положение траверсы 5 по высоте в плоскости кольца 77 внутри него.
Управление такой системой ориентации груза имеет свои особенности. После взлета и зависания вертолета над грузом экипажу необходимо ориентировать траверсу 5 таким образом, чтобы грузозахватные приспособления 9 совмещались со строповочными узлами на грузе. Это обеспечивается действием приводного механизма 17 в необходимом для ориентации траверсы направлении. За счет сил трения между витками бесконечного троса 13, поверхностью канатовсдущего шкива приводного механизма 17 и поверхностью канавок 12 кольца 11, а также благодаря возможности поворота всей системы ВП в замке 2 кольцо 11 под действием усилия в тянущей ветви бесконечного троса 13 поворачивается в горизонтальной плоскости на необходимый угол по азимуту. Благодаря натяжению троса 13 амортизаторами 15 кольцо 11 работает как ведомый шкив, на котором перематываются обе ветви 18 и 19 троса 13 без изменения числа витков. Изменение направления действия механизма 17 приводит к перематыванию витков на кольце 11 в обратном порядке, чем обеспечивается его вращение в противоположном направлении. При этом крутящий момент от кольца 11 передается на траверсу 5, которая занимает необходимое для установки груза 10 положение по азимуту.
Динамические моменты, действующие в полете на груз в такой САО и стремящиеся вывести его из заданного при подъеме положения, через тросы 8 передаются на траверсу 5, которая через соединительные элементы системы передает их на кольцо 11. Повороту последнего здесь препятствуют силы трения между наружной поверхностью канатоведущего шкива механизма 17, канавок 12 кольца И и витками бесконечного троса 13. В результате положение груза 10 в полете стабилизируется за счет превышения моментом сил трения динамического (возмущающего) момента или их равенства. При увеличении динамического момента в полете сверх расчетного, например при росте внешних возмущений или при резком маневрировании вертолета, возможна пробуксовка кольца 11 относительно витков бесконечного троса 13. В результате груз самоустанавливается в положение, при котором соблюдается равновесие действующих на него сил и моментов без передачи на вертолет нерасчетных нагрузок. Тем самым обеспечивается оптимальное с точки зрения аэродинамического обтекания положение груза в полете.
Устранение рассогласования между фактическим и проектным положениями груза по азимуту в процессе выполнения АСМР
осуществляется включением механизма 77 в необходимом для монтажа направлении.
Однако реализация рассмотренной ККС ориентирующей системы не обеспечивает необходимого стабилизирующего эффекта для ориентации грузов с высокими значениями моментов инерции из-за ограниченного базой шасси вертолета плеча (равного половине диаметра кольца) приложения стабилизирующего усилия. Выбор длины сходящихся в замке внешней подвески звеньев 8 и угла между ними был ограничен условием обеспечения положения траверсы 5 в плоскости кольца ориентирующей системы, расположенной под фюзеляжем в пределах длины стоек шасси с обжатыми амортизаторами, что исключало возможность дополнительной стабилизации груза на внешней подвеске за счет увеличения угла между сходящимися звеньями 4.
Несмотря на разнообразие технического исполнения все механические САО, разрабатываемые для проведения АСМР, имеют единый принцип действия. В таких системах стабилизация груза в полете и его разворот по азимуту в горизонтальной плоскости осуществляются от реверсивного двигателя, который, как правило, имеет ограниченную мощность.
Это, разумеется, чисто концептуальное описание принципа формирования ККС таких устройств, на практике они могут уточняться в соответствии с типом вертолета и технологией выполнения монтажа конкретной конструкции.
Исследование условий работы всех составляющих элементов механической САО привело к появлению идеи использования свободной энергии индуктивного потока воздуха, отбрасываемого несущим винтом вертолета, в качестве дополнительного источника энергии для создания необходимого момента с целью стабилизации груза в полете или его разворота на необходимый угол в процессе проведения монтажных работ. Принципиальная ККС такой САО груза на ВП вертолета соосной схемы приведена на рис. 2.52, где показан один из возможных вариантов исполнения устройства с ориентирующей системой, состоящей из двух радиально расположенных аэродинамических щитков.
Как и другие подобные разработки, данное устройство включает в себя трубчатую траверсу 3 с присоединенными к ней грузовыми тросами 4, которые в нижней своей точке снабжены грузозахватными приспособлениями 5 (крюками или электрозамками).
Рис. 2.52; Копструктивпокипсматичсская схема модели аэродинамический САО груза на ВП вертолета:
/ — трехсекционный аэродинамический щиток; 2 — вертолет; 3 — трубчатая траверса; 4— грузовой трос; 5 — электрозамок; 6 — груз; 7 — трос бифилярной ВП; 8— вертлюг; 9-основной замок ВП; 10-пирамида системы ВП; 11 -стыковочныйузел; 12-механизм управления; 13- вал; 14- поворотное звено; 15- каретка; 16-узлы подцепки; /7— силовой цилиндр механизма уборки и выпуска секций; 18-монорельс; 19, 20 - резиношнуровые амортизаторы; М/воссг — восстанавливающий (стабилизирующий) груз момент; Л/удин — дестабилизирующий момент при развороте груза; М, — момент на исполнительном звене САО при пуске (торможении) ориентирующей системы; G - сила тяжести груза; Тг1, Тл - аэродинамические силы; QA, Qs- компенсирующие усилия амортизаторов; Иинд - скорость индуктивного потока воздуха
Трубчатая траверса 3, состоящая из двух симметрично расположенных относительно оси О Y подвеса груза звеньев 14, с помощью сходящихся тросов 7 и вертлюгов 8 соединяется с основным замком 9 системы внешней подвески 10 вертолета, а через стыковочные узлы (резьбовые стыки) 11 — с силовым корпусом механизма управления 12 ориентирующей системы. Замок 9 системы внешней подвески 10 вертолета так же, как и в механической САО, оборудован вертлюгом.
Внутри каждого звена трубчатой траверсы 3 проходит вал 13, соединенный одним конном с поворотным звеном 14 ориентирующей системы, а другим с соответствующим ему зубчатым колесом дифференциального редуктора механизма управления 12.
Исполнительные звенья системы ориентации траверсы в горизонтальной плоскости САО выполнены в виде радиально расположенных в плоскости кольцевого монорельса 18 двух профилированных аэродинамических щитков 7, синхронно устанавливаемых во взаимно противоположном направлении под разными углами к векторам скоростей индуктивного и набегающего потоков воздуха. Каждый аэродинамический щиток состоит из отдельных секций, крепится к своему поворотному звену714 и снабжен отдельным механизмом уборки и выпуска (рис. 2.53). При необходимости, в условиях транспортировки удобообтекаемого груза на значительное расстояние, аэродинамические щитки могут быть убраны в посадочное положение.
Аэродинамическая компоновка щитков в такой САО выбрана с учетом снижения скорости индуктивного потока в зоне затенения под фюзеляжем вертолета, наличия потерь тяги несущего винта в
Рис. 2.53. Схема механизма уборки и выпуска аэродинамических щитков САО:
15 — редуктор; 16 — трехсекционный аэродинамический щиток; 18 — кронштейн (остальные позиции соответствуют рис. 2.52)
Рис. 2.54. Схема образования восстанавливающего груз момента Му при обтекании аэродинамических щитков системы азимутальной ориентации индуктивным потоком воздуха в следе несущего винта вертолета (позиции соответствуют рис. 2.52)
центральной части и особенности обтекания аэродинамических щитков индуктивным потоком воздуха.
Профиль аэродинамического щитка по форме напоминает несимметричный профиль крыла самолета, одна кромка которого закруглена, а другая — острая. Щитки 1 (рис. 2.54) располагаются на поворотных звеньях 14 выпуклой поверхностью в разные стороны, благодаря чему возникающие на них аэродинамические силы ТгХ и ТГ1 также направлены в разные стороны. Эта пара сил образует восстанавливающий груз момент Af>)B0CCT, необходимый для требуемой азимутальной ориентации или стабилизации груза на ВП вертолета. Следует отметить, что характер обтекания щитков различен, поскольку один из них обтекается со стороны закругленной кромки, а другой — со стороны
острой. У щитка, обтекаемого со стороны острой кромки, на 10... 15 % уменьшается производная коэффициента подъемной силы по углу атаки и почти вдвое увеличивается коэффициент профильного сопротивления [2.32]. Таким образом, силы Тл и Тл не равны по величине. В общем случае размер концевой хорды и длина каждого щитка в аэродинамической САО выбираются из условий обеспечения несущей способности, достаточной для создания потребного восстанавливающего груз момента Л^восст, и зависят от геометрических, массовых и аэродинамических характеристик транспортируемого груза.
Поскольку мерой инертности груза при вращении является его момент инерции относительно оси OY (вертикали), то эффективная его стабилизация может быть обеспечена при условии
у ВОССТ > Му дин у£ у > (2.20)
где Л/у— динамический момент, выводящий систему "груз — устройство" из равновесия; Л — момент инерции груза относительно оси подвеса (вертикали); гу — ускорение вращательного движения груза на оси подвеса.
Установка аэродинамических щитков под разными углами обтекания (атаки) индуктивным потоком воздуха позволяет увеличивать или уменьшать разницу между Мувоссти Муди11 и тем самым осуществлять управление положением груза по азимуту. Груз может поворачиваться вокруг вертикальной оси OY на полный оборот в двух направлениях (±360°) из любого исходного положения. Динамические нагрузки, действующие в полете на груз и стремящиеся вывести его из заданного положения, дополнительно демпфируются упругими связями 7Ри 20 (см. рис. 2.52), выполненными в виде резиношнуровых амортизаторов.
В ориентирующую систему входит кольцевой монорельс, внутренний диаметр dK которого примерно равен диаметру несущего винта 7)нв вертолета. Это позволяет наиболее полно использовать кинетическую энергию воздушного потока, индуцированного НВ вертолета (с учетом поджатия его струи) на расстоянии /2 = DHB/2, для образования восстанавливающих сил Tri и Тг2 на аэродинамических щитках в процессе ориентации груза на ВП вертолета.
Так как скорость воздуха в следе НВ возрастает в направлении, противоположном направлению его тяги, и в дальнем следе, на расстоянии, равном половине диаметра его несущего винта, вдвое больше индуктивной скорости в плоскости вращения его диска
[2.33], то другим условием эффективной работы ориентирующей системы устройства является соблюдение неравенства
^<4 <Д,в, (2.21)
где /2 — расстояние от условной плоскости вращения НВ вертолета до оси вращения поворотного звена 14 (см. рис. 2.54).
Таким образом, кинетическая энергия потока воздуха, индуцированного НВ вертолета, может быть использована для создания необходимого восстанавливающего (стабилизирующего) груз момента Му восст. Кроме того, вынос кольцевого монорельса за пределы опор шасси вертолета позволит экипажу свободно контролировать через открытую сдвижную дверь или блистер кабины пилотов состояние тросов 7 и 4 (см. рис. 2.52) СЛО и своевременно принимать меры к ликвидации возможных их перехлестов на этапах взлета и подцепки груза.
Рассмотренная модель САО пока нс реализована на практике, поскольку в настоящее время еще не решены некоторые технические вопросы обеспечения эффективного управления исполнительными звеньями такой системы в реальном полете. Однако важно на ее примере показать подход к разработке ККС ориентирующих систем, работа которых основана на принципе использования свободной кинетической энергии воздушного потока, индуцированного несущим винтом вертолета.
Рассмотренные направления в создании и использовании средств стабилизации и азимутальной ориентации груза на ВП вертолетов тесно взаимосвязаны. У каждой из рассмотренных ККС САО есть свои преимущества и недостатки. Но наиболее эффективными представляются интеграционные схемы, позволяющие объединить достоинства и нивелировать недостатки каждой их них. Ориентирующая система такой САО может быть выполнена с комбинированным приводом, например от реверсивного электродвигателя, размещенного на внешней подвеске, в сочетании с управляемой аэродинамической компенсацией сил и моментов, дестабилизирующих груз. В общем случае такие устройства должны обеспечивать:
транспортировку груза без ухудшения динамических характеристик вертолета;
возможность эффективного разворота груза на ВП для обеспечения необходимой его ориентации относительно направления полета или места установки на возводимом объекте;
заданный угол атаки груза в полете;
эффективное демпфирование продольно-поперечных маятниковых колебаний и вращения груза в путевом направлении на основных режимах полета вертолета;
транспортировку грузов с максимально допустимыми (разрешенными руководством по летной эксплуатации) скоростями полета вертолета;
удобство эксплуатации и безопасность работы наземного персонала;
минимальные затраты летного времени при подцепке и отцепке груза.
2.5. СИСТЕМЫ РАСКАТКИ (РАСКЛАДКИ), ПОДЪЕМА И ПЕРЕНОСА ГИБКОГО ЭЛЕМЕНТА
Современные раскаточные устройства (РУ) — это сложные и ответственные технические приспособления, от которых зависят эффективность и безопасность работ по раскатке гибкого элемента (синтетических и стальных тросов, проводов ЛЭП и т.д.) вертолетом. Совершенство РУ во многом зависит от того, насколько удачно выбраны его основные параметры, и прежде всего параметры, определяющие и характеризующие:
эксплуатационные, аэродинамические, геометрические и массово-инерционные характеристики конструкции устройства;
кинематику РУ, т.е. скорость вращения барабана с проводом или специального узла, обеспечивающего равномерный и плавный сход провода с устройства, максимальный угол отклонения РУ от вертикали, а также поведение устройства на ВП вертолета в процессе раскатки;
нагруженность подшипниковых узлов;
демпфирующий момент относительно оси вращения барабана (вращающегося узла РУ) в плоскости раскатки провода;
допустимые геометрические и массово-инерционные характеристики гибкого элемента, подлежащего раскатке с РУ;
эффективность тормозного устройства;
возможность одновременной раскатки нескольких проводов одним устройством.
В отечественной практике АСМР раскатка гибких элементов (далее - провода) вертолетом производится с РУ, построенных по инерционному или безынерционному принципу действия [2.34].
Как было отмечено в разд. 1.1.4, у РУ, построенных по инерционному принципу, в процессе работы барабан вращается вместе с намотанным на него проводом. Вследствие большого момента инерции вращающихся частей, особенно в начальной стадии раскатки, для предотвращения самопроизвольного раскручивания барабана и запутывания сходящего с него провода или стального троса на таких приспособлениях устанавливают достаточно мощный тормоз. Основное достоинство этих устройств заключается в том, что они позволяют раскатывать все существующие типы проводов и стальных тросов, применяемых при строительстве ЛЭП. К недостаткам следует отнести сложность и громоздкость тормозных устройств и самих РУ, а следовательно, и их большой вес. Типовая ККС такого устройства приведена на рис. 2.55.
Устройство состоит из силовой рамы 7, выполненной в виде двух изогнутых ферм, сходящихся в узле 2, и двух тендеров 3. К нижним концам изогнутых ферм шарнирно прикреплены тормозные муфты 4, имеющие на внутренних подвижных элементах шипы для соединения с барабаном 5. Для управления тормозным моментом устройство снабжено водилом 6 с выводящим роликовым узлом 7. Затормаживание тормозных муфт 4 при ослаблении силы тяжения в проводе осуществляется с помощью возвратных пружин 8.
Рис. 2.55. Инерционное устройство для раскатки вертолетом гибкого элемента:
7 - силовая рама; 2—узел подцепки к ВП вертолета; 3 — тендер; 4 — тормозная муфта; 5—барабан с проводом; 6 — водило; 7— роликовый узел; 8- возвратная пружина
a) 6)
Рис. 2.56. Инерционные устройства для раскатки нескольких гибких элементов одновременно:
а — устройство для одновременной раскатки двух или более гибких элементов: 7 — стержень; 2 — вращающаяся опора; 3 — барабан; 4 — формирователь; 5 — тяга; 6 — серьга; б — устройство для раскатки трех гибких элементов: 1 — силовая рама: 2 — стыковочный узел; 3 — соединительный трос; 4 - серьга
Такой тип устройств позволяет производить одновременную раскатку вертолетом двух или более проводов (рис. 2.56, а), При этом РУ, установленные на барабаны, соединяют между собой при помоши специального стыковочного узла 2 и соединительных тросов 3, сходящихся в серьге 4 (рис. 2.56, б).
У безынерционных приспособлений в процессе раскатки барабан вместе с навитым на него тросом остается неподвижным, а вращается только его подвижный узел — водило с направляющими кольцами или роликами, через которое пропускается трос. Принципиальная схема безынерционного РУ разработки ОАО НПК ”ПАНХ" приведена на рис. 2.57.
Такое устройство состоит из рамы 7, включающей две серьги для подцепки к тросу ВП вертолета, полой оси с подшипниковым узлом 2, на которую надевается и с помощью специального фиксатора 4 крепится барабан 3. На подшипниковый узел устанавлива-
ет
Рис. 2.57. Схема безынерционного устройства для раскатки вертолетом гибкого элемента: / — рама; 2 — подшипниковый узел; 3 — барабан; 4 — фиксатор; 5 — водило; 6— тормозной узел
•’ * '* •* * • | | } If 1 ' ‘ - Л ' t Г * • ‘ » '•
стоя водило 5, несущее на себе направляющие кольца и тормозной узел 6У состоящий из тормозной колодки, контактирующей с торцевой поверхностью барабана, рычага тормоза, пружины и гайки регулирования тормозного момента.
Основное достоинство такого РУ — малые геометрические и массово-инерционные характеристики конструкции.
Как показала практика, в электросетевом строительстве целесообразно применять оба типа устройств: инерционные вследствие их универсальности и безынерционные вследствие их простоты и малого веса.
Особое внимание при разработке новых моделей РУ уделяется их безопасности, и в первую очередь тормозам, которые должны обеспечить при раскатке тормозной момент, пропорциональный моменту инерции барабана с проводом.
В инерционных РУ MOiyr применяться следующие типы тормозных устройств: с гидравлическим, пневматическим, электрическим, пружинным и гравитационным приводом [2.38].
Достоинствами гидравлического привода являются надежное торможение барабана с проводом и возможность дистанционной регулировки тормозного усилия в полете одним из членов экипа
жа вертолета. Недостаток — сложность конструкции, которая обусловлена необходимостью установки на вертолете индивидуальной гидравлической системы РУ. Все это относится и к пневматическому приводу тормозного устройства.
Применение электрического привода от реверсивного электродвигателя предусматривает прокладку токоведушего кабеля по тросу ВП к РУ и установку пульта дистанционного управления тормозом на рабочем месте одного из членов экипажа вертолета (рис. 2.58, 2.59). Такой привод наиболее предпочтителен, так как несмотря на свою сложность обеспечивает эффективное регули-
Рис. 2.58. Раскаточное устройство с электрическим приводом тормозного устройства ленточною типа:
1 — ленточный тормоз; 2 — электромеханизм; 3, 6 штанга; 4 — узел подцепки к ВП вертолета; 5- траверса; 7- гибкий элемент; 8- направляющий роликовый узел; 9-водило; 10 — барабан
Рис. 2.59. Ленточный тормоз раскаточного устройства:
I — тормозная лента; 2—демпфер; J — обойма; 4 — шарнир; 5—ролики; 6 — фиксатор прижима тормозной ленты
рование тормозного усилия в тормозном устройстве инерционного РУ.
Тормозное устройство с пружинным приводом проще дублируется, обладает меньшей по сравнению с другими типами тормозные устройств массой, проще в изготовлении, занимает меньше места на РУ, облегчая его компоновку. Однако приводы такого типа допускают только наземную установку необходимого тормозного усилия, в процессе раскатки провода оно остается постоянным и не поддается регулировке в полете. Указанное обстоятельство ограничивает и> применение в конструкции тормозных устройств инерционных РУ
В гравитационном приводе тормоза РУ источником энергии торможения является вес участка раскатываемого провода или троса. Возможны два варианта исполнения такого привода [2.34, 2.38].
Первый вариант предусматривает применение длинного рычага, на один конец которого помещается узел схода провода или троса, а другой конец рычага, более короткий, непосредственно связан с тормозом инерционного РУ.
Второй вариант предусматривает установку барабана в РУ с вертикальной осью вращения. В этом случае барабан с проводом опирается одной из двух своих плоских частей на специальные ро-пики, которые в начальный момент раскатки и создают необходимое тормозное усилие. В процессе раскатки по мере схода провода
с барабана уменьшаютсяГего вес и, следовательно, потребныйтор-мозной момент, обеспечивающий равномерный и плавный сход провода с устройства. Величина этого момента определяется размером и числом роликов в РУ.
Мальш момент инерции водила и присоединенной массы раскатываемого троса, а следовательно, и малое потребное тормозное усилие позволяют применять в безынерционных РУ легкие и простые по конструкции типы тормозных устройств. В таких РУ, как правило, применяются два типа привода тормозных устройств: воздушный и пружинно-колодочный.
Воздушный тормоз безынерционного РУ представляет собой две шайбы, установленные на водиле симметрично относительно оси его вращения. Регулировка необходимого для выполнения раскатки провода тормозного усилия в таком устройстве производится установкой шайб под определенным углом к направлению вращения водила.
Основной недостаток воздушного тормоза - его неэффективность на малых скоростях полета вертолета, когда число оборотов водила невелико. Поэтому безынерционные РУ с таким типом привода тормозных устройств имеют ограниченное применение. Их используют, как правило, только для раскатки по земле легких синтетических тросов, так как при раскатке более тяжелых стальных проводов или при их укладке непосредственно на траверсы опор, когда поступательная скорость вертолета снижается до нуля, такой тиг устройства не обеспечивает необходимое тормозное усилие.
Тормозное усилие в пружин но-колодочном тормозе устанавливается перед началом проведения работ путем изменения усилия затяжки пружины и в процессе раскатки провода всегда остается неизменным, что вполне соответствует постоянству момента инерции вращающейся массы водила и массы раскатывасмогс троса. Диапазон применения безынерционных РУ с таким типом тормоза довольно широк. Он включает в себя практически вес виды работ по раскатке проводов и тросов, которые применяются в электросетевом строительстве.
Работы по подъему, переносу и раскладке вертолетом предварительно раскатанного на грунт провода (синтетического троса^ выполняются с помощью стальных, реже бронзовых или пластиковых роликов, закрепленных на тросе ВП вертолета.
Провод, подлежащий подъему вертолетом, закладывается в раскатанный ролик и закрывается откидной планкой 6 (рис. 2.60, а)
2
Рис. 2.60. Приспособления для подъема, переноса и раскладки гибкого элемента: а — раскатанный ролик для подъема привода вертолетом; б — ролик с улавливающим приспособлением; 1 — корпус; 2 — серьга; 3 — ролик; 4 — ось; 5 — подшипниковый узел; 6 - откидная планка; 7— штырь (улавливающее приспособление)
При перемещении вертолета вдоль линии раскладки с раскаточ-ным роликом на ВП производятся подъем провода, укладка его на опоры ЛЭП или в ролики с улавливающим приспособлением 7 (рис. 2.60, 5), предварительно установленные на траверсах этих опор.
В процессе раскатки или укладки провода в улавливающее приспособление экипажу приходится особенно тщательно выдерживать высоту и скорость полета вертолета, так как в это время он находится в непосредственной близости от опоры. Контроль поступательной скорости полета при малых ее значениях (0...15 км/ч) в ходе выполнения таких работ производится экипажем, как правило, по показаниям указателя малых скоростей (МС) и висения, индикатора угла сноса (УС) и путевой скорости (ПС) доплеровских приборов и бортовых систем глобальной навигационной системы GNS (Global Navigation System).
2.6. ВСПОМОГАТЕЛЬНЫЕ НАЗЕМНЫЕ ТЕХНИЧЕСКИЕ СРЕДСТВА ДЛЯ ВЫПОЛНЕНИЯ АСМР
Не менее важным фактором, повышающим эффективность применения вертолетов на АСМР, является использование раз-
личных по назначению и конструкции направляющих приспособ-лений (ловителей), фиксаторов, выносных ориентиров видимости, индикаторов монтажной оси, позволяющих экипажу существенно повысить точность установки монтируемой конструкции и сократить затраты летного времени.
2.6.1. Выбор конструктивно-силовой схемы улавливающих приспособлений
Ловители применяются для установки верхних секций опор ЛЭП и мачт сотовой связи на нижние секции или фундаменты, монтажа различного промышленного оборудования через проемы в крышах зданий и межэтажных перекрытиях, а также для установки крупногабаритных конструкций со сплошной оболочкой на различные основания. Конструкция ловителей должна обеспечивать заданные в проекте производства работ (ППР) способ и технологию монтажа в пределах, которые позволяют эффективно и безопасно эксплуатировать вертолет на АСМ Р с учетом установленных ограничений. Перед установкой ловителя на объекте монтажа прочность его конструкции должна проверяться на совместное действие нагрузок от изгиба в плоскостях наибольшей и наименьшей жесткости, от кручения, а также на воздействие местных ударных и циклических нагрузок.
Возможные конструктивно-силовые схемы типовых ловителей, применяемых для монтажа высотных и многомодульных объектов, показаны на рис. 2.61.
Наибольшее распространение получили трапецеидальные ловители, применяемые для установки секций опор ЛЭП и мачт сотовой связи при монтаже методом наращивания или горизонтальной стыковки (рис. 2.61, а). Такой ловитель выполнен в виде трапеции, а при больших габаритах секции — в виде усеченной трапеции. Он состоит из двух металлических стержней 5, жестко прикрепленных к силовым элементам нижней секции 2 объекта монтажа. Длина этих стержней определяется из условия обеспечения заданной в ППР точности наведения устанавливаемой секции на проектные отметки, при этом обязательно учитывается требование по обеспечению необходимой жесткости и прочности конструкции ловителя.
Если конструктивными приемами не удается обеспечить достаточную жесткость трапецеидального ловителя или по компоно-
Рис. 2.61. Конструктивно-силовые схемы типовых улавливающих приспособлений: а - трапецеидальный ловитель: 1,2- секция объекта монтажа; 3, 4- соединительный фланец; 5 - стержень; 6, 7- усиливающая накладка; б - гибкие направляющие для установки свободностоящих опор: 1 - трое (фал); 2 — объект' монтажа; 3 - фланец; 4 - основание (подножник); в, г- монтажные шарниры для установки свободностоящих опор и одностоечных опор на оттяжках соответственно: 7 — подвижная часть шарнира; 2— неподвижная часть шарнира; 3— фланец; 4— подножник; 5—ось
вочным соображениям исключена возможность его установки на объекте монтажа, то применяют V-образные или купольные улавливающие приспособления (рис. 2.62).
КСС купольного улавливающего приспособления обычно формируется из двух секций: ловителей грубой и точной на-
Рис. 2.62. Улавливающие приспособления: а — V-образного типа; б — купольное
водки (рис. 2.63). Ловитель грубой наводки в такой конструкции представляет собой три или более соединенных между собой трубостоек, образующих купол или пирамиду. Одна из трубостоек ловителя в створе одной вертикали, как правило, окрашивается в виде "зебры’' для индикации экипажу единой ориентации пояса устанавливаемой секции по отношению к мачте.
Функцию ловителя точной наводки выполняют стальной трос, натянутый по периметру в нижней части устанавливаемой секции, и металлические конусы, размещенные на фланцевой плите верхней секции мачты в каждом фланцевом соединении. Трос обеспечивает необходимую ориентацию секции по азимуту после ее попадания на ловитель грубой наводки, а конусы — точную стыковку секции на фланцевых соединениях.
Для придания жесткости в районе соединения секций при необходимости устанавливаются металлические окантовки 7 (см. рис. 2.61, а).
В комплект технологического оборудования при проведении АСМР могут входить регулируемые по длине фалы или растяжки,
Рис. 2.63. Фрагмент двухсекционного купольного ловителя:
I — стойка верхней секции мачты; 2 — фиксатор троса; 3 — трубостойка ловителя грубой наводки; 4 — тросовый ловитель; 5 — поперечная балка; 6 - площадка секции; 7 - стойка нижней секции мачты; 8 - ловитель точной наводки
позволяющие компенсировать толчки и колебания груза на ВП при производстве работ. Такие фалы применяются при установке целиком собранных опор или их нижних секций на металлические и железобетонные основания (подножники, сваи и т.д.) с оголовниками, имеющими фланцевую плиту, ответную соедини
тельным фланцам опоры. Фалыобычно представляют собой пеньковый или синтетический трос диаметром 30...35 мм и длиной 7... 10 м с грузом массой 1,5...2 кг на концах для предотвращения запутывания конпов тросов потоком воздуха, индуцированным НВ вертолета.
Перед выполнением монтажа секции фалы крепятся к ее стойкам, пропускаются в отверстия ее фланцевых соединений, а также в ответные им отверстия в оголовниках основания (см. рис. 2.61, 60 и удерживаются наземным персоналом в заданном ППР положении до момента окончательной установки секции на проектные отметки.
Нижние секции опор ЛЭП и мачт сотовой связи могут быть установлены методом их поворота относительно оси шарниров, соединяющих этот объект монтажа с фундаментом основания. Типовые схемы таких шарниров приведены на рис. 2.61, в и г.
Монтаж конструкций с использованием вертолетов в ограниченные по размерам шахты или проемы перекрытий зданий и цехов, особенно при реконструкции различных промышленных производств, требует от экипажа точного направления груза на строительную ось монтируемого объекта с необходимой его ориентацией по азимуту. Такой монтаж обычно выполняется с использованием внешней подвески с тросами большой длины, позволяющими опускать различные объекты в глубокие или закрытые полости. Для эффективного проведения такого вида работ применяют различные улавливающие устройства и приспособления, одно из которых представлено на рис. 2.64.
Такое устройство содержит два горизонтальных стержня, прикрепленных одним концом к объекту монтажа, и направляющую в виде двух изогнутых элементов для каждого стержня. Нижние части направляющих в вертикальном положении закреплены на месте монтажа параллельно друг другу с зазором, а верхние - выполнены расходящимися для улавливания и направления горизонтального стержня и объекта монтажа, размещенного на ВП вертолета. Для того чтобы горизонтальные стержни не препятствовали монтажу' объекта в проем перекрытия здания, каждый из них имеет ослабленное поперечное сечение, по которому происходит его изгиб в вертикальной плоскости (см. рис. 2.64). Ослабленное сечение расположено на стерж-
2
Рис. 2.64. Устройство для монтажа конструкций в проемы перекрытий или глубокие шахты промышленных зданий и цехов:
7 - объект монтажа; 2— вертолет; 3— горизонтальный стержень; 4- направляющая; 5 — свободные концы горизонтального стержня; 6 — фундамент; 7 - проем; 8 - перекрытие; 9- верхняя часть направляющих; 10- трос; НП - направление полета; L - длина стержня
не на расстоянии с от места крепления стержня на грузе, определяемом по формуле
с=(5-2))/2, (2.22)
где S — ширина проема перекрытия; I) — диаметр (наибольший размер) объекта.
Длина свободных концов каждого горизонтального стержня выбирается достаточной для надежного взаимодействия с верхними частями обеих направляющих при заходе вертолета на монтаж объекта со смешением на расстояние к от строительной оси объекта монтажа, которое определяется наклоном верхних частей направляющих (см. рис. 2.64). Кроме того, длина свободных концов каждого стержня должна обеспечивать надежное взаимодействие с верхними частями соответствующих направляющих и при подходе объекта к месту монтажа с рассогласованием по азимуту (например, с углом а, допускаемым развалом направляющих). Поэтому общая длина L каждого стержня со свободным концом должна определяться как
Ь=к + к + Лк, (2.23)
где к — проекция наклонной части направляющей на горизонтальную плоскость; Лк - дополнительная длина горизонтального стержня, необходимая для гарантированного взаимодействия его свободного конца с верхними частями направляющих при всех возможных рассогласованиях положений груза и места монтажа (в пределах развала и наклона направляющих).
Прочность горизонтального стержня в ослабленном сечении подбирается таким образом, чтобы при входе объекта монтажа в проем здания произошло отсечение свободного конца стержня поперечной силой, несколько меньшей той части веса объекта, которая приходится на данный стержень. Далее объект с укороченными стержнями опускают с помощью вертолета в направляющих до фундамента, подготовленного внутри цеха.
Реконструкция и строительство высотных сооружений требуют длительной предмонтажной подготовки объектов на земле, включающей тщательную подгонку стыковых соединений, установку ловителей, контрольную сборку секций, взвешивание и установку полностью готовых секций на технологической площадке в порядке очередности, необходимой для выполнения монтажных опера-
Рис. 2.65. Секции башни с ловителями купольного типа подготовлены к монтажу
ций (рис. 2.65). Эти работы во многом определяют успех АСМР, скорость сборки и позволяют оценить слаженность действий наземной бригады и экипажа.
2.6.2. Выбор параметров выносного ориентира видимости и метод визуализации строительной оси монтажных объектов
Продолжительность режима позиционирования вертолета над объектом монтажа (демонтажа) для основных типов вертолетов, как правило, ограничена десятью минутами. В условиях дефицита времени, вызванного ограниченным запасом топлива, повышенной концентрации внимания на точном выдерживании заданных режимов полета и высокого эмоционального напряжения при проведении АСМР всегда существует потенциальная вероятность ошибочных действий со стороны пилота-монтажника. Это особенно заметно проявляется при монтаже крупногабаритных конструкций со сплошной оболочкой (рис. 2.66), затеняющих экипажу телесный
Рис. 2.66. Монтаж с помощью вертолета крупногабаритных конструкций со сплошной оболочкой на различные основания:
а — установка вертолетом Ка-32 верхней секции дымовой трубы на монтажный блок; б — установка вертолетом Ми-26 секции зернохранилища
Рис. 2.67. Схема установки крупногабаритного груза вертолетом на основание меньшего диаметра:
1 — строп внешней подвески; 2 — крупногабаритный груз; 3 — ловитель (стыковочный узел); 4 — основание объекта монтажа
угол обзора монтажной зоны. При установке таких объектов на высотных отметках выше 50 м, как правило, отсутствуют естественные ориентиры видимости, относительно которых должен удерживаться вертолет на режиме висения, что значительно усложняет пилоту пилотирование вертолета нал монтажным стыком.
Согласно [2.35] телесный угол обзора а (рис. 2.67) в таких случаях определяется выражением
а = 2arctg(0,5Z)/(^ + Н2)), (2.24)
где D — диаметр конструкции, мм; — расстояние от глаз наблюдателя (бортоператора ВП) до точки подвеса груза к вертолету, мм; Н2 — расстояние между вертолетом и плоскостью верхней кромки конструкции, устанавливаемой на объекте, мм.
Величина Н2 определяется как сумма длины стропов ВП вертолета и высоты верхнего конуса устанавливаемой конструкции.
Размеры затененного грузом пространства на уровне плоскости монтажного стыка могут быть определены из следующего выражения:
Я = (Я, +H1+H3+HA)t^, (2.25)
2
где R — радиус затененного грузом пространства на уровне плоскости монтажного стыка; Я3 - высота устанавливаемой вертолетом конструкции; Я4 - расстояние между нижней точкой конструкции и плоскостью монтажного стыка в момент захода вертолета на объект монтажа.
С учетом (2.24) выражение (2.25) приводится к виду
R = [] + (H. + НА)/(НХ +H2№D, (2.26)
откуда следует, что величина затененного пространства обратно пропорциональна расстоянию от глаз наблюдателя до плоскости верхней кромки устанавливаемой конструкции, т.е. + Нъ основной составляющей которого является выбранная для конкретных условий работы согласно методике [2.1] длина тросов внешней подвески Н2. Чрезмерное увеличение длины тросов приводит к росту вероятности возникновения продольно-поперечных колебаний груза в полете и его вращению в плоскости, параллельной плоскости вращения НВ. Пилотирование вертолета при этом, как правило, осуществляется по командам бортоператора ВП. Такая технология работ непроста и требует особенно четкой организации и повышенного внимания пилота.
В рассматриваемых условиях целесообразно применять метод визуализации строительной оси монтажных объектов, используя один или несколько выносных ориентиров видимости, установленных на объекте в горизонтальной плоскости через 90°. Длина этих ориентиров должна быть больше максимально возможной ошибки пилота-монтажника при подходе вертолета к монтажной площадке, вызванной перекрытием грузом его зоны обзора (см. рис. 2.67). Данные выводы были получены в результате теоретических исследований, выполненных в ОАО НПК "ПАНХ” Ю.М. Солуяновым и Л.П. Мойсовым [2.35].
С учетом выражения (2.26) длина ориентира видимости для борт-оператора ВП определяется по формуле
£. >7?-0,5б? = [1+(Я3 + Я4)/(Я, +Я2)]-0,5/)-0,5<. (2.27)
где ,£1 - длина выносного ориентира видимости для бортопсрато-ра; d — ширина монтажного стыка.
С учетом выноса кресла летчика относительно центра масс вертолета на расстояние С длина ориентира видимости L2 для пилота-монтажника может быть рассчитана с помощью выражения
L7 >R-^5d±X=R-^5d±C[(H3 +НА}1(НХ +Я2)]. (2.28)
Рассматривая в качестве переменной величины Нъ по формулам (2.27) и (2.28) всегда с достаточной степенью точности можно определить требуемые размеры выносных ориентиров видимости для конкретных условий выполнения АСМР.
СПИСОК ЛИТЕРАТУРЫ К ГЛ. 2
2.1. Федеральные авиационные правила "Технические средства для выполнения авиационных работ. Требования и процедуры сертификации", утв. приказом Минтранса России № 202 от 29.10.2003 г. и зарегистрированы Минюстом 02.02.2004 г., регистрационный № 5518.
2.2. Руководство "Технологии выполнения авиационных строительно-монтажных работ. Методы оценки соответствия", утв. ИТУ ФАС России, 1999 г. 45 с.
2.3. Пути улучшения характеристик вертолетов при транспортировке грузов на внешней подвеске// Обзоры, переводы, рефераты ЦАГИ. М., 1968. № 241.60 с.
2.4. Козловский В.Б. Теоретические и методологические основы эксплуатации летательных аппаратов при выполнении строительно-монтажных работ и транспортировке грузов на внешней подвеске: дисс.... докт. техн. наук. Краснодар, 2004.379 с.
2.5. Дональд Д., Лейк Д. Энциклопедия военной авиации // Пер. с англ. А. Бер-дова, И. Мальцева, А. Алексеева и др. СПб.: Омега, 2003. 445 с.
2.6. Опыт применения вертолетов на строительно-монтажных работах // Обзор ЦБНТИ. Вып. 8. М., 1971. 12 с.
2.7. Паршенпев С.А. Анализ причин катастрофы вертолета Ми-26Т в Читинской области 03.05.2003 г. // Науч, вестник МГТУ ГА. Сер. Аэромеханика и прочность. 2004. № 72. С. 91-96.
2.8. Паршенпев С.А. Воздушный монтажник. Риск можно исключить // Вертолет. 2003. № 3. С. 16-19.
2.9. Акт контрольных летных испытаний водосливного устройства ВСУ-5 в комплекте с внешней подвеской из синтетического высокомолекулярного материала на вертолетах Ми-8 и Ка-32/ С.А. Агров, В.В. Гумба, В.В. Илькун и др. Краснодар, НПК "ПАНХ", 1997. 20 с.
2.10. Акт контрольных летных испытаний водосливного устройства ВСУ-5А с удлинителями строп на вертолете Ка-32 / С.А. Агров, В.П. Асовский, В.Б. Козловский и др. Краснодар, НПК "ПАНХ", 2001. 35 с.
2.11. ВСУ на борьбе с огнем / В.В. Илькун, А.Г. Судаков и др. // Вертолет. 2003. № 1. С. 12-15.
2.12. Паршенпев С.А. Трагедия под Читой: комментарий специалиста // Вертолет. 2003. № 2. С. 34-35.
2.13. Правила подготовки стропов и грузов заказчиком для транспортировки грузов на внешней подвеске вертолета. № 26.1.7-498. Утв. начальником ГУАРП МГА Л.В. Ильчуком 17.06.1988 г.
2.14. Технология работ в электросетевом строительстве с применением вертолетов. М., 1982. 103 с.
2.15. Михеев В.Р., Катышев Г.И. Сикорский. СПб.: Политехника, 2003.618 с.
2.16. Инструкция по транспортировке грузов на внешней подвеске вертолетов. № КР-2-р. Утв. распоряжением Минтранса РФ 08.01.2004 г.
2.17. Носарев И.М. Исследование в аэродинамических трубах процесса раскрытия круглого парашюта. М.5 ЦАГИ, 1963. 32 с.
2.18. Исследование условий повышения стабилизации характерных грузов, транспортируемых вертолетами на внешней подвеске; Отчет о НИР / РКИИ ГА; Руководитель Ю.Г. Логачев. Рига, 1983. 62 с.
2.19. Пути улучшения характеристик вертолетов при транспортировке грузов на внешней подвеске//Обзоры, переводы, рефераты ЦАГИ. М., 1968. № 241.60 с.
2.20. Серебряков П.Н. Исследование возможностей повышения стабилизации характерных грузов, транспортируемых вертолетами на внешней подвеске; Дисс.... канд. техн. наук. Рига, 1985. 163 с.
'2.21 . Разработка, расчетно-теоретическое и экспериментальное обоснование прогрессивных способов транспортировки грузов на внешней подвеске вертолета: Отчете НИР (заключительный) / Орд. Ленина Академия гражд. авиации (ОЛАГА); Руководитель Н.А. Широков. № 72.2.24.90. Л., 1991. 68 с.
2.22. Разработка рациональных способов стабилизации и снижения сопротивления типовых грузов, определение оптимальных аэродинамических форм емкостей для транспоргировки на внешней подвеске вертолета и численное моделирование пространственного обтекания грузов: Отчет о НИР (заключительный) / Орд. Ленина Академия гражд. авиации (ОЛАГА); Руководитель В.М. Супрун. № 72.2.32.92. Л., 1992. 66 с.
2.23. Паршегщев С.А. Приоритетные задачи научно-технического обеспечения авиационных строительно-монтажных работ // Монтажные и специальные работы в строительстве. 2006. № 1. С. 2—9.
2.24. Kozlovsky V.B. Flight Research of Mi-26 Helicopter Transportation of External Parallelepiped Cargo with Stabilizing and Aerodynamic Drag Reduction Means // 49th Annual Forum Proceedings (19-21/05/93). USA, American Helicopter Society, 1993. Vol. 2. P. 1481-1483.
2.25. Patent 4913480 USA, В 66 C 13/04, В 64 D 7/00. Cargo Carriers for Helicopters/ Philip K. Yohe; USA as represented by the Secretary of the Army, Washington, D.C. Date of Patent: 03.04.90. 7 c.
2.26. Наршенцев C.A. Новые технологии монтажа// Вертолет. 2004. № 1. С. 30-33.
2.27. Паршенцев С.А. Системы стабилизации и азимутальной ориентации груза на внешней подвеске вертолетов для выполнения АСМР // Полет. 2004. № 12. С. 51-58.
2.28. Паршенцев С.А., Козловский В.Б., Солуянов Ю.М. Система стабилизации и азимутальной ориентации груза на внешней подвеске вертолета Ми-26 // Науч, вестник МГТУ ГА. Сер. Аэромеханика и прочность. 2004. № 72. С. 102—107.
2.29. Акт по результатам летных испытаний системы САО-26-3 для азимутальной ориентации груза на внешней подвеске вертолета Ми-26 в комплексе с отработкой технологии монтажа высотной радиотелевизионной башни Н=1 Т1 м в ст. Кущевской Краснодарского края (дог. № 19/03) / НПК "ПАНХ"; Руководитель О.В. Худоленко. Краснодар, 2003. 30 с.
2.30. Пат. 2196709 РФ, С2 7 В 64 D 9/00. Устройство для монтажа конструкций летательным аппаратом / Ю.М. Солуянов, Л.П. Мойсов; ОАО НИИмонтаж. Приоритет 24.05.00, № 2000113026/28. 14 с.
2.31. Пат. 2209745 РФ, С2 7 В 64 D1/22,9/00. Устройство для азимутальной ориентации и фиксации груза на внешней подвеске летательного аппарата / Ю.М. Солуянов; ОАО НПК "ПАНХ". Приоритет 30.11.00. № 2000130097/28. 16 с.
2.32. Ромасевич В.Ф. Аэродинамика и динамика полета вертолетов. М.: Воениз-дат, 1982. С. 116-119.
2.33. Джонсон У. Теория вертолета: В 2-х книгах / Пер. с англ. М.: Мир, 1983. Кн. 1. С. 47-49.
2.34. Илькун В.В., Сумовский Н.А. Анализ средств и способов раскатки проводов и канатов вертолетами // Сб. тр. ГосНИИ ГА. Вып. 144. М., ГосНИИ ГА, 1975. С. 3-9.
2.35. Солуянов Ю.М., Мойсов Л.П. Монтаж водонапорных резервуаров с помощью вертолетов// Монтажные и специальные работы в строительстве. 2000. № 5. С. 2—5.
2.36. Яблонский А.А., Никифорова В.М. Курс теоретической механики. СПб.: Издательство "Лань", 2002. 768 с.
2.37. Трофимова Т.П. Курс физики. М.: Высш, шк., 1999. 542 с.
2.38. Илькун В.В. Обоснование и разработка средств и способов раскатки проводов вертолетами в электросетевом строительстве: Дисс.... канд. техн. наук. Краснодар, 1983. 145 с.
Глава 3
ДЕЯТЕЛЬНОСТЬ ЭКИПАЖА КАК КОЛЛЕКТИВНОГО ОПЕРАТОРА ПРИ ПРОВЕДЕНИИ АСМР
Деятельность человека — это совокупность его действий и поступков, направленных па достижение определенных целей [3.1].
Деятельность экипажа вертолета при выполнении АСМР определяется технологией работы и состоит из отдельных технологических циклов (операций) с заранее определенным порядком их выполнения. ГГод отдельным технологическим циклом понимается часть действий с заранее определенным порядком их выполнения, рассматриваемая как совокупность логически связанных оперативных единиц (отдельных психофизиологических актов). При выполнении АСМР длительность технологических циклов, точность выдерживания экипажем заданной высоты висения вертолета с грузом на ВП над монтажным объектом, интенсивность ведения радиообмена и внутривертолетных переговоров оказывают основное влияние на их эффективность и безопасность.
Как указывалось ранее, при выполнении АСМР деятельность экипажа вертолета как членов одной операторской группы (команды) характеризуется вынужденно высоким темпом работы нередко при остром дефиците времени, вызванном ограниченным запасом топлива на борту вертолета, при достаточно интенсивных восприятии и переработке поступающей информации.
Пилотирование вертолета в таких условиях осуществляется на основе некоторой исходной информации, которая складывается у экипажа из визуального наблюдения внешней обстановки, наблюдения за приборами, за обстановкой на монтажном объекте, ощущений условий полета по изменению перегрузки, звуков, вибраций, тактильных ощущений и усилий на рычагах управления.
В зависимости от способа получения экипажем этой информации формируются методы пилотирования вертолета па АСМР.
3.1. МЕТОДЫ ПИЛОТИРОВАНИЯ ВЕРТОЛЕТА НА АСМР
В практике выполнения АСМР можно выделить три основных метода пилотирования вертолета [3.2]:
косвенный — по командам, подаваемым одним из членов экипажа вертолета пилоту-монтажнику;
прямой — при непосредственном визуальном контроле пилотом положения объекта монтажа и вертолета относительно монтажного стыка;
комбинированный, сочетающий первый и второй методы.
3.1.1. Косвенный метод
Пилотирование косвенным методом осуществляется по командам бортоператора ВП, наблюдающего положение объекта монтажа относительно места его установки через люк в полу грузовой кабины, открытую сдвижную дверь вертолета или из подвесной кабины, оборудованной рабочим местом бортоператора (рис. 3.1). При таком методе пилотирования пилот контролирует положение вертолета над точкой монтажа, сравнивая собственное восприятие окружающей обстановки с показаниями приборов и информацией о пространственно-временном изменении параметров системы "экипаж—вертолет-объект монтажа", получаемой им от бортоператора ВП или от наземного руководителя работ [3.2, 3.3]. Обрабатывая поступающую информацию о положении вертолета и объекта монтажа над местом его установки, летчик постоянно оценивает ошибку пилотирования и на основании ее знака и величины формирует управ-
Подвесная кабина
Рис. 3.1. Вертолет Ми-26 с подвесной кабиной (проем левой передней двери) для размещения рабочего места бортоператора
ляющийс и гнал. Поскольку этот сигнал реализуется ипередается единственно возможным для ручного управления способом — воздействием па рычаги общего и циклического шага, то реакция каждого летчика на ошибку пилотирования зависит от качества его взаимодействия с экипажем, системой управления вертолета и от основных геометрических, весовых и аэродинамических характеристик объекта монтажа, определяющих его поведение на ВП. Эффективность выполнения монтажа при косвенном методе пилотирования во многом зависит от точности подаваемых пилоту команд на перемещение вертолета в необходимом для установки объекта направлении. Такая технология пилотирования непроста и требует от пилота повышенного внимания. Особенно заметно это проявляется при выполнении монтажа на высотных объектах (высотой от 50 м), когда отсутствуют естественные ориентиры видимости, относительно которых с высокой степенью точности должен удерживаться вертолет на режиме висения.
Наблюдая за воздушной обстановкой в обычном полете при устойчивой визуальной связи с выбранными ориентирами, пилот воспринимает всю информацию о выполняемой им работе в естественном, привычном для него виде. Нагрузка, а также связанное с ней утомление в этих привычных для него условиях минимальны и, следовательно, вероятность ошибок в управляющих действиях достаточно низка. Но когда вследствие значительного увеличения высоты монтажа визуальная связь с выбранными ориентирами нарушается, а цель полета конкретизируется до выдерживания в заданных границах трех и более параметров, нагрузка на летчика заметно возрастает и точность выдерживания им режима висения над монтажным объектом по командам, подаваемым бортоператором или наземным руководителем работ, заметно ухудшается. Утрата визуальной связи с выбранными ориентирами делает движения пилота менее уверенными, что приводит к раскачке груза на ВП, а работу по монтажу конструкций, как правило, невыполнимой.
На рис. 3.2...3.4 в качестве примера показаны изменения по времени t параметров продольно-поперечного управления (ППУ) вертолета Ми-26Т, выполняющего установку секций телепередающей антенны способом свободного монтажа. Полеты выполнялись в Краснодарском крае экипажем ВНИИ ПАНХ ГА в соответствии с программой летных испытаний [3.6] по отработке тех-
Рис. 3.2. Перемещения ручки РЦШ при изменении высоты висения //внс вертолета
Ми-26Т в процессе выполнения АСМР:
Xnp, %попер — продольные и поперечные перемещения соответственно
0:00 0:04 0 08 0:12 0:16 0:20 0:24 0 28 0 32 0:36 0 40 0:44 0:48 0:52 0:56 1:00
Рис. 3.3. Изменение показаний указателя шага винта (УШВ) на режиме висения вертолета Ми-26Т при выполнении АСМР по установке секций антенны на различных высотных отметках
Рис. 3.4. Изменение угла крена на режиме висения вертолета Ми-26Т при выполнении АСМР по установке секций антенны на различных высотных отметках
нологии АСМР вертолетом Ми-26Т на высотных объектах высотой до 127 м. Было выполнено 9 монтажных циклов с различными по массе и моментам инерции секциями антенны при длине тросов внешней подвески от 10 до 15 м, выбираемой в зависимости от способа строповки и размеров секций. Все перемещения вертолета над монтажным стыком, а также его корректировка на режиме висения при закреплении секций на месте их установки выполнялись пилотом-монтажником по командам бортового оператора. В качестве искусственного ориентира видимости была выбрана стрела подъемного крана, верхняя точка которой находилась на высоте 50 м от основания антенны.
Как видно из рис. 3.2 и 3.3, расходы рычагов управления на высотах до 80 м, которые имели место при выполнении монтажа первых секций массой 14 т, достаточно велики. Это объясняется высокими значениями массы и момента инерции груза на ВП (до 1000 000 кг-м2), а также достаточно уверенным пилотированием вертолета при устойчивой визуальной связи пилота с выбранным ориентиром видимости. Темп перемещения ручки циклического шага (РЦШ) составил в продольном направлении ±2,5...±5 мм/с, а в поперечном ±10...±15 мм/с. Интенсивность перемещения пилотом рычага общего шага (ОШ) НВ в соответствии с показаниями указателя шага винта (см. рис. 3.3) в мо
мент висения вертолета над заданной точкой монтажа находилась в пределах ±0,5...±0,8 °/с.
С увеличением высоты монтажной площадки, уменьшением габаритов и массы устанавливаемых секций движение рычагами управления приобрело высокочастотный, неуверенный характер. Перемещение РЦШ при установке заключительной секции массой 9 т на отметке 127 м в продольном направлении осуществлялось с темпом ±0,5 мм/с, а в поперечном направлении — с темпом ±5...±8 мм/с. Высота висения вертолета относительно основания антенны в момент монтажа секции составила 147 м.
От пилота, управляющего вертолетом на режиме висения, в этих условиях требуются более строгие, скоординированные с поступающими от бортового оператора командами перемещения рычага ОШ винта и РЦШ. Все это усложняет технику пилотирования, способствует появлению ошибок, приводящих к разбалансировке вертолета и возможному возникновению его ’’просадки’' перед зависанием, что является небезопасным, особенно при перемещении вертолета с грузом на ВП вблизи монтажного стыка.
Необходимость поиска внешних ориентиров и поддержания заданного режима полета вертолета на АСМР заставляет летчика непрерывно переключать внимание с пилотажно-навигационных приборов (ПНП), установленных на приборной доске, на картину обстановки, наблюдаемую им через остекление кабины. Опыт показывает, что после того как ориентир видимости будет установлен, осознанное управляющее воздействие пилота, направленное на исправление непредвиденных отклонений от заданной точки висения, может быть совершено им лишь по истечении времени, примерно равного 1,7 с. Из этого времени, которое может быть названо временем адаптации, около 0,5 с летчик тратит на выработку решения и примерно 0,3 с на само управляющее воздействие, связанное с начальным перемещением рычагов управления [3.4, 3.5]. За 1,7 с на режиме висения вертолет может сместиться по высоте и направлению на расстояние от 1 до 5 м. Поэтому очевидно, что задача уменьшения времени адаптации пилота на поиск утерянной визуальной связи с выбранным ориентиром видимости или монтажной осью на месте установки объекта монтажа имеет важное практическое значение.
В отечественной практике АСМР с использованием косвенного метода пилотирования вертолета, как правило, выполнялось строительство антенно-башенных сооружений, высотой не более 120...130 м [3.5, 3.7, 3.8].
3.1.2. Прямой метод
В большинстве иностранных авиакомпаний, которые длительное время занимаются выполнением АСМР и перевозкой грузов на ВП, принята технология пилотирования с визуальным контролем пилотом положения груза относительно вертолета и земли (монтажного стыка). В этом случае летчик контролирует угловое положение вертолета и его скорость только боковым зрением, свешиваясь в выпуклый блистер кабины пилотов (рис. 3.5). При этом функция второго пилота сводится к контролю показаний индикаторов работы силовой установки, воздушной обстановки в зоне выполнения работ и ведению радиосвязи с наземным руководителем полетов (load master) или диспетчерским пунктом управления воздушным движением (УВД). Однако и при такой технологии пилотирование вертолета на режиме висения и в диапазоне малых скоростей представляет собой довольно сложную задачу и требует хорошей натренированности летчика. Широкое внедрение этой технологии в России сдерживается конструктивными особенностями отечественных вертолетов, не позволяющими пилоту безопасно осуществлять пилотирование, перевешиваясь через рычаг управления общим шагом НВ, и значительным удалением кресла пилота от выпуклого блистера.
Другой, не менее важной особенностью этой методики является то, что, выполняя монтаж рассмотренным способом, летчик способен контролировать положение только видимой ему из блистера части груза при условии, что этот груз малогабаритный, компактный или имеет решетчатую конструкцию, не затеняющую место ее установки на объекте. Длина тросов ВП обычно составляет не менее 50 м. Только в этом случае пилот-монтажник имеет устойчивую визуальную связь с монтируемой конструкцией и зоной монтажа. Если размеры конструкции превышают размеры монтажного стыка (например, в случае установки крупногабаритных металлических резервуаров на ствол водонапорной башни), а длина тросов ВП уменьшается до 5... 10 м, работа становится малопроизводительной и небезопасной, а в ряде случаев просто невыполнимой [3.2, 3.3, 3.5]. Пилот теряет контакт с перевозимым грузом и местом его установки на объекте из-за недостаточного обзора монтажной зоны из кабины пилотов.
Пилотировать вертолет при АСМР по командам бортоператора, используя слуховое восприятие пространства вокруг места
б)
Рис. 3.5. Пилотирование вертолета на АСМР с контролированием положения через боковой блистер кабины пилотов:
а - положение пилота при пилотировании через боковой блистер; о — боковой блистер кабины вертолета
монтажа, или при недостаточном обзоре через боковой блистер кабины пилотов довольно сложно. При таких технологиях работ пилоту особенно трудно точно выдерживать на режиме висения положение вертолета над заданной точкой.
Косвенное управление местоположением вертолета при проведении АСМР всегда сопряжено с дополнительными нагрузками, вызванными необходимостью преодоления пилотом тенденции к раскачке вертолета и груза на ВП по тангажу и крену. При их возникновении командиру вертолета крайне необходимо иметь устойчивую визуальную связь с монтируемым объектом. Чтобы осознанно принимать решение о выполнении маневра на монтаже, своевременно корректировать возникающие в процессе работ ошибки, связанные с отклонением в технике пилотирования или воздействием на вертолет ветровых возмущений, пилот-монтажник должен сам полностью видеть положение груза над монтажным стыком и, что самое важное, объективно оценивать окружающее его пространство. Наиболее удачным решением этой проблемы является применение комбинированного метода пилотирования вертолета при проведении АСМР, сочетающего в себе оба рассмотренных выше метода.
3.1.3. Комбинированный метод
Общепризнанно, что с позиции эффективности и безопасности выполнения АСМР бесспорное преимущество среди других типов вертолетов принадлежит вертолету крановой модификации. Отличительной особенностью такого вертолета является наличие дополнительной кабины для пилота-монтажника. Находящийся в дополнительной кабине пилот при выполнении АСМР всегда имеет возможность скорректировать подаваемые ему команды (бортоператором или наземным руководителем полетов) с учетом собственных наблюдений за поведением груза на ВП и местом его установки на монтажном стыке и тем самым минимизировать ошибку пилотирования на монтаже.
Основным достоинством этого метода является то, что пилот дополнительной кабины (бортоператор) всегда контролирует процесс выполнения монтажа: внезапное изменение высоты висения вертолета над монтажным стыком, вертикальной скорости снижения с грузом на ВП, выход углов крена и тангажа за пределы до
пустимых эксплуатационных ограничений^ эффективность и безопасность совершаемых действий и т.п.
Теоретической основой пилотирования вертолета комбинированным методом является использование принципа активного наблюдения за поведением груза на ВП с прогнозированием своевременных ответных действий на парирование внезапных отклонений от его устойчивого положения в полете, позволяющего одновременно с повышением точности пилотирования существенно увеличить резервы внимания летчика по сравнению с пилотированием косвенным методом. В этом случае наряду с инструментальными (приборными) сигналами, поступающими от бортовых средств индикации работы систем вертолета, пилот получает от бортоператора подсказки о дополнительных действиях по своевременному парированию ошибок в пилотировании или ответных действиях на внезапные воздействия внешней среды. Такая информация выдается пилоту с учетом времени запаздывания его реакции и скорости приближения к эксплуатационным ограничениям вертолета.
Применение комбинированного метода пилотирования обеспечивает пилоту, выполняющему АСМР, следующие преимущества:
повышение точности пилотирования при одновременном увеличении резервов внимания летчика;
рациональное устранение отклонений от выбранной траектории полета с грузом на ВП, снижения и захода на место установки груза на монтажном объекте;
устойчивую пространственную ориентировку и ситуационную осведомленность летчика в процессе выполнения монтажа;
снижение требований к моторным навыкам пилота и их быстрое восстановление для координированного управления вертолетом;
снижение числа совершаемых ошибок в технике пилотирования и при выборе рациональной траектории полета;
своевременное предупреждение летчика о развитии нештатной ситуации на борту вертолета или объекте монтажа, о возможности столкновения с препятствиями, а также о превышении допустимых эксплуатационных ограничений;
снижение утомляемости летчика.
К сожалению, специализированные вертолеты-краны для АСМР, оснащенные дополнительными кабинами для пилота-мон
тажника, представлены в России более чем скромно. В основном это вертолеты Ми-ЮК, уже практически отработавшие свой ресурс, и не так давно появившиеся экспериментальные образцы Ми-26К, Ми-8МТВ-К, Ка-32К, которые пока не дошли до потребителя.
Выбор рациональных режимов полета вертолета на строительно-монтажных работах, которые в восприятии летчика через управляемость будут оцениваться как оптимальные, а также разработка современных методов и средств стабилизации груза на внешней подвеске представляют значительный интерес для решения задач повышения уровня безопасности и эффективности применения вертолетов на АСМР [3.4].
3.2. АНАЛИЗ НАДЕЖНОСТИ ФУНКЦИОНИРОВАНИЯ СИСТЕМЫ "ЭКИПАЖ—ВЕРТОЛЕТ—ГРУЗ НА ВНЕШНЕЙ
ПОДВЕСКЕ" В УСЛОВИЯХ РАЗВИТИЯ НЕБЛАГОПРИЯТНОГО ФАКТОРА
Изучение всех аспектов деятельности системы ’’экипаж-вертолет—объект монтажа (груз на ВП)" в пилотируемом полете представляет собой чрезвычайно сложную и дорогостоящую задачу. Ее сложность заключается в том, что при проведении исследований приходится использовать широкий спектр оценочных критериев, применяемых в аэромеханике, прочности ЛА, теории летной эксплуатации вертолетов, авиационной медицине и психологии, а также учитывать производствен но-технические и экономические показатели выполняемых работ. При этом оценки, как правило, проводятся специалистами разных специальностей, в каждой из которых применяются свой специфический аппарат понятий, своя система измерений и оценок.
Кроме того, проведение подобных исследований весьма затруднительно из экономических соображений, а также в связи с необходимостью обеспечения высокой безопасности ВС и экипажа в процессе проведения летных испытаний. Поэтому глубокий анализ опыта эксплуатации отечественных и зарубежных вертолетов на работах, связанных с транспортировкой грузов на ВП, является одним из основных направлений при разработке мероприятий, направленных на обеспечение необходимого уровня надежности и безопасности выполнения такого вида авиационных работ.
3.2.1. Анализ характерных отклонении и ошибок в действиях экипажа при выполнении АСМР и в полетах с грузом на внешней подвеске
При исследовании проблемы повышения эффективности летной эксплуатации вертолетов на АСМР принято выделять следующие группы факторов и условий, влияющих на безопасность таких работ [3.2, 3.5р
управление летной деятельностью;
все виды обеспечения полетов;
психофизиологическое состояние авиационного и вспомогательного персонала;
конструктивно-производственные недостатки авиационной техники;
организация выполнения ремонта и технического обслуживания авиационной техники;
профессиональная подготовка авиационного и вспомогательного персонала;
внешние активные воздействия.
Необходимо отметить, что комплексный анализ степени влияния на выполнение АСМР всех приведенных факторов выходит за рамки данных исследований, поскольку пока все еще трудно среди множества факторов выделить определяющие, а среди большого объема противоречивых данных — достоверные. Поэтому можно выделить в первую группу исследование влияния на безопасность выполняемых работ таких факторов, как управление и организация летной деятельности, все виды обеспечения полетов, "биологические отказы” авиационного и вспомогательного персонала и т.д., а во вторую группу — вопросы, требующие анализа более узкого круга факторов и условий, связанных с состоянием ВС, состоянием внешней среды и действиями экипажа, выполняющего вертолетный монтаж [3.2]. Последние три компонента, по мнению авторов, в основном и определяют протекание процесса нормального или особого функционирования системы ’’экипаж—вертолет—объект монтажа (груз на ВП)" в условиях АСМР.
На рис. 3.6 приведены результаты комплексного статистического анализа возникновения особых ситуаций в полете вертолетов с грузом на ВП и их распределение по основным этапам полета и на АСМР [3.4]. В качестве исходного материала использовались статистические данные, полученные автоматизированной
Подцепка Режим
груза висения
с грузом наВП
Взлет, набор Крейсерский высоты, полет (подлет разгон с к месту грузом на ВП монтажа)
Снижение, Установка заход (укладка)
на укладку груза, (установку) отцепка груза тросов ВП
Рис. 3.6. Распределение особых ситуаций по этапам полета вертолета с грузом на ВП и при выполнении АСМР (1990—2003 гг.)
системой обеспечения безопасности полетов (АСО БП) воздушных судов гражданской авиации Российской Федерации за период с 1990 по 2003 г., и материалы летных исследований ОАО НПК "ПАНХ” [3.4, 3.6] по отработке технологий выполнения АСМР с применением вертолетов.
Результаты анализа статистики основных причин особых ситуаций, происшедших в рассматриваемый период, представлены в виде диаграммы, приведенной на рис. 3.7. Видно, что основная часть всех рассматриваемых событий связана с этапами взлета, набора высоты, разгона с грузом на ВП, подлета к месту монтажа (в крейсерском полете с грузом на ВП), снижения для захода на установку (укладкут) груза и выполнения технологических операций, связанных с непосредственной установкой груза на монтажной площадке.
Приведенные на рис. 3.6 данные учитывают все события, в том числе и ставшие следствием отказов техники, недостатков в
Причина Отказ в системе
не установлена Противоречивые требования документов 4%
Вспомогательный
персонал 23%
упрашгения Отказ или
3% разрушение системы ВП 14%
Инженерно-технический персонал 5%
Экипаж 23%
Отказ силовой установки 14%
Винты вертолета 1%
Применение некондиционных ГСМ 1%
Другие системы
Факторы среды 1
7% 1/0
Рис. 3.7. Распределение по группам основных причин (факторов) возникновения особых ситуаций в полете вертолетов с грузом на ВП и при выполнении АСМР (по результатам обработки статистических данных АСО БП РФ за период с 1990 по 2003 г.)
техническом обслуживании ВС, упущений персонала заказчика в организации работ и подготовке объектов к транспортировке на ВП вертолетов, ошибок в пилотировании и эксплуатации систем вертолета со стороны экипажа, а также ряда других причин (см. рис. 3.7).
На рис. 3.8 представлено распределение АП и инцидентов с вертолетами США за 2003—2004 гг. по статистике, приведенной в работе [3.9].
Из-за различий в системе эксплуатации, подготовке кадров, а также по причине практического отсутствия отечественных одно-двигатсльных вертолетов российская статистика происшествий выглядит иначе (рис. 3.9).
Очевидно, что вертолетам разного класса практически невозможно и экономически нецелесообразно обеспечить равный уровень безопасности на данном виде работ. Чем больше полетная масса, число двигателей и коммерческая загрузка вертолета, тем выше требования к безопасности его эксплуатации. Поэтому в отечественных и зарубежных нормах летной годности принято, что к вертолетам разных категорий предъявляются требования разного уровня по летным данным, их конструкции и оборудованию [3.10].
Рис. 3.8. Распределение особых ситуаций с вертолетами США при выполнении АСМР и полетов с грузом па ВП в 2003-2004 гг. [3.9]
Инциденты Серьезные Чрезвычайные Аварии Кагасчрофы
инциденты происшествия
Рис. 3.9. Распределение особых ситуаций с российскими вертолетами при выполнении АСМР и полетов с грузом на ВП в 1990—2003 гг.
Перечислить все неблагоприятные факторы (НФ), влияющие на безопасность полета вертолетов на АСМР, практически невозможно, но этого и не требуется, поскольку степень детализации таких факторов определяется, как правило, тем, насколько конкретизированы условия функционирования исследуемой системы. Поэтому представляется целесообразным выделить из них такую группу, которая раскрывала бы все выбранные НФ как первопричины потенциальной опасности при выполняемых работах, т.с. как главные в цепочке причинно-следственных связей, приводящих к развитию особой ситуации в полете.
Анализ результатов выполненных статистических исследований свидетельствует о том, что большая часть особых ситуаций прямым или косвенным образом связана с человеческим фактором. Из приведенного на рис. 3.7 распределения основных НФ, обусловливающих возникновение особых ситуаций в полете вертолета с грузом на ВП, следует, что 46 % всех событий произошло по причине, сформулированной как действия экипажа и вспомогательного персонала заказчика. Причем собыгия между действиями экипажа и действиями персонала заказчика распределяются в равных долях — по 23 %.
Из-за отказов авиационной техники произошло 34 % всех событий, в том числе по причине разрушений или отказов элементов системы внешней подвески и вследствие несоответствия используемых технических средств и специального оборудования технологическим схемам выполняемых работ — 14 %.
Приведем наиболее характерные ошибки в действиях экипажа на различных этапах полета вертолета с грузом на ВП.
На этапе взлета'.
1. Невыполнение условий по обеспечению вертикального положения центрального троса ВП при отделении груза от земли, что приводит к неравномерной загрузке строповочных элементов, возникновению маятниковых продольно-поперечных колебаний груза на ВП, его вращению в полете и к изменению углов тангажа или крена вертолета на висении.
2. Резкие движения рычагами управления в процессе натяжения тросов ВП и отделения груза от земли, которые приводят к динамическому нагружению фюзеляжа, перегрузке НВ, уменьшению частоты его вращения и тяги, возможному самопроизвольному снижению вертолета и, как следствие, к столкновению его с землей или грузом, особенно при взлете с высокогорных технологических площадок в условиях повышенных температур наружного воздуха.
3. Утрата экипажем визуального контакта с землей или грузом в условиях снежного (пыльного вихря), что ведет к потере контроля над пространственным положением вертолета, вероятной раскачке груза на В ГТ и, как следствие, к его сбросу.
На этапе набора высоты, разгона, подлета к месту монтажа или укладки груза:
1. Перевод вертолета с режима висения в поступательное движение (разгон) при параллельном продольной оси вертолета положении длинномерного груза на ВП, например опоры ЛЭП или трубы, что не исключает возможности задевания торцом груза о землю.
2. Недооценка возникающих погрешностей показаний указателей воздушной скорости из-за переформирования воздушного потока от НВ в процессе перевода вертолета из режима висения в поступательное движение (разгон) с объектом монтажа на ВП.
3. Резкие, несоразмерные действия рычагами управления и выполнение нескоординированных разворотов с превышением указанных в РЛЭ предельно допустимых значений углов крена и тангажа при подлете к месту установки объекта, что приводит к возникновению его длиннопериодических продольно-поперечных колебаний на ВП.
4. Недооценка возможных ошибок в показаниях радиокомпаса, магнитного курса на ПНП и компасном индикаторе (КИ), показаниях доплеровского измерителя скорости и угла сноса (ДИСС) и бортовых радиовысотомеров, возникающих из-за их неустойчивой работы при полетах с грузом на ВП.
На этапе снижения и захода на место монтажа (укладки) груза:
1. Снижение вертолета с большими положительными значениями углов тангажа, существенно ухудшающими пилоту условия обзора монтажной зоны и требующими увеличения потребных скоростей перекладки рычагов управления.
2. Снижение вертолета в процессе захода на точку монтажа с темпом, большим необходимого, что приводит к недолету (перелету) вертолета до монтажного стыка (места укладки груза) и необходимости выполнения экипажем повторного захода на монтажную (технологическую) площадку.
На этапе установки и отцепки груза:
1. Отклонения от заданной высоты висения вертолета над точкой монтажа в процессе азимутальной ориентации груза на ВП до необходимого для его установки проектного положения.
2. Ошибки в определении силы и направления ветра ввиду их резкого изменения на уровне монтажной площадки при строительстве высотных сооружений.
3. Неадекватная реакция пилота на изменения положения вертолета и груза на ВП над монтажным стыком.
4. Несоответствие между отклонением груза на ВП при висении вертолета над местом его установки и воздействиями пилота на рычаги управления для исправления данных отклонений (наиболее характерно для косвенного метода пилотирования).
5. Неправильные распределение внимания пилота и его переключение с выбранных ориентиров видимости на основные пилотажные и контролирующие приборы, что ведет к утрате визуальной связи с ориентирами и снижает точность висения вертолета над монтажным стыком.
6. Потеря экипажем пространственной ориентации над монтажным стыком при внезапном попадании в условия снежного (пыльного) вихря.
7. Установка конструкций способом поворота относительно технологических шарниров, закрепленных на фундаменте, при отклонении вертолета от вертикальной плоскости подъема, что приводит к срыву конструкции с фундамента, разрушению шарниров или к динамическому нагружению узлов ВП вертолета.
8. Резкие гашения или увеличения скорости полета в процессе раскатки (раскладки) гибкого элемента с раскаточиого устройства, закрепленного на ВП вертолета, что приводит к возникновению продольно-поперечных колебаний устройства на ВП, снижает точность раскатки (раскладки) гибкого элемента и способствует возникновению его стопорения в выводящем роликовом узле.
9. Несвоевременное снижение общего шага НВ с целью уменьшения высоты висения вертолета для отцепки тросов ВП после выполненной установки объекта на месте монтажа, что приводит к рывку троса, повышенным динамическим нагрузкам на узлы ВП и, как следствие, к срыву конструкции с монтажного стыка.
Анализ характерных ошибок, допускаемых экипажем на различных этапах полета вертолета при выполнении АСМР и полетах с грузом на ВП, позволяет сформулировать основные причины (факторы) ошибочных действий экипажа, обусловивших события, представленные на рис. 3.6:
недостатки в организации подготовки, выполнении и обеспе-чении полетов на АСМР и работах, связанных с транспортировкой грузов на ВП;
незнание экипажем основных принципов пилотирования вертолета на АСМР;
нарушение технологии работы и неудовлетворительное взаимодействие в экипаже;
ошибки и нарушения, связанные с потерей экипажем контроля над пространственным положением при попадании в снежный (пыльный) вихрь, а также ошибки в пилотировании вертолета при маневрировании вблизи препятствий;
превышение установленных РЛЭ предельных ограничений; ошибки экипажей при работе с системами воздушных судов; недостаточная скорость реакции пилота на команды, подаваемые ему бортовым оператором ВП или наземным руководителем полетов на АСМР при косвенном методе пилотирования вертолета;
ошибки при оценке скорости и направления ветра при взлете (посадке) вертолета с грузом на ВП и маневрировании вертолета над монтажным стыком.
Безусловно, все летчики пилотируют вертолет по-разному, и каждый из них имеет свой "почерк". Но в то же время нельзя не согласиться, что их объединяют одни и те же желания: во-первых, минимизировать ошибку пилотирования на АСМР (чтобы обеспечить безопасность и эффективность выполняемых работ); во-вторых, по возможности экономить энергию на физической реализации самого процесса управления (чтобы располагать резервом времени и внимания для решения других задач). Поэтому есть основание считать, что летчики, фильтруя помехи с целью увеличения точности пилотирования вертолета при висении над точкой монтажа и минимизируя механическую работу' по перемещению ручки управления циклическим и общим шагом, тем самым наделяют контур управления вертолетом свойствами простейшего оп-гимального фильтра [3.11]. Перемещая рычаги управления в соответствии с выбранным методом пилотирования, пилот-монтажник вырабатывает управляющие воздействия строго в зависимости от условий, целей полета и поступающей к нему информации э состоянии системы "эки паж-вертолет-объект монтажа".
В результате восприятия и переработки такой информации у пилота формируется информационная модель полета (образ поле-га) как совокупность информации о пространственно-временном
положении вертолета и объекта монтажа на ВП. Этот процесс все время сопровождается восприятием непосредственной информации, поступающей к пилоту прямым или косвенным образом в зависимости от выбранного метода пилотирования. Таким образом, для того чтобы успешно управлять вертолетом на АСМР с использованием информационной модели, пилоту необходимо уметь оперативно объединять поступающие, иногда разрозненные данные в единое представление о состоянии системы "экипаж-верто-лет-объект монтажа" и тенденциях в ее изменениях. Для такого объединения командиру вертолета, как и всему экипажу в целом, требуются соответствующие знания, навыки и умения. Их недостаток приводит к возникновению ошибок в пилотировании вертолета, а в ряде случаев — к развитию аварийных ситуаций в полете.
3.2.2. Характерные отклонения и ошибки в действиях вспомогательного персонала при выполнении АСМР
Деятельность вспомогательного персонала по подготовке объекта монтажа к транспортировке на ВП вертолета и связанная с ней деятельность экипажа неотделимы от содержания решаемой ими задачи. Поэтому отклонения в работе и ошибки, допускаемые персоналом монтажной организации, непосредственно связаны с эффективностью и безопасностью функционирования всей сложной системы "экипаж—вертолет-объект монтажа". Наиболее характерными отклонениями в работе, ошибками и нарушениями, допускаемыми вспомогательным персоналом при производстве АСМР, являются:
применение неисправных грузозахватных приспособлений, ТС монтажа, тросов, канатов и строповочных элементов;
нарушение правил и схем строповки объекта монтажа и грузов, подлежащих перевозке на ВП вертолета;
невыполнение требований ППР по взвешиванию и контрольной сборке секций (укрупненных блоков) объекта монтажа, подлежащих подъему и установке вертолетом, перед началом работ.
К основным причинам (факторам) приведенных выше ошибок и нарушений вспомогательного персонала на АСМР можно отнести:
недостатки в организации работ и контроле над их выполнением со стороны руководящего состава персонала строительной организации;
использование неисправного оборудования, ТС, устройств и приспособлений, применяемых на АСМР;
невыполнение требований руководителя работ и экипажа в процессе выполнения АСМР;
нарушение технологии выполнения работ;
отсутствие опыта выполнения АСМР и низкие профессиональные качества персонала.
Из анализа рассмотренных выше ошибок и отклонений в работе экипажа и вспомогательного персонала следует, что безопасное функционирование системы "экипаж—вертолет—объект монтажа" во многом зависит от уровня профессиональной подготовки основного и вспомогательного персонала, связанной с организацией, выполнением и обеспечением полетов на АСМР, его психофизиологических особенностей и согласованности потоков информации, поступающих в систему, а также от возможностей экипажа по их приему, переработке и реализации ответных действий. Состояние коллективной готовности персонала к решению такою класса задач (особенно в экстремальных условиях) может быть достигнуто только методами совместной подготовки экипажа и специалистов строительно-монтажной организации с обязательным моделированием вероятных проблемных ситуаций, которые могут возникнуть в ходе монтажа конкретной конструкции.
3.2.3. Модели возможных действий экипажа в условиях развития неблагоприятного фактора в полете с грузом на внешней подвеске
Сложность пилотирования вертолета на АСМР различна для каждого этапа полета. Она возрастает по мере приближения вертолета к завершающему циклу — установке объекта монтажа в проектное положение. Примерно в такой же зависимости растет и число ошибочных действий экипажа.
В целом деятельность экипажа на борту вертолета, выполняющего АСМР или перевозку груза на ВП, можно классифицировать по характеру как формализованную, т.е. заранее предписанную РЛЭ или другими регламентирующими документами, и эвристическую, связанную с принятием нестандартных решений в условиях возникновения НФ или их сочетаний в полете [3.12].
Формализованная деятельность, подчиненная сформированным решениям, в основном зависит от их качества. Экипаж в этом случае должен выполнять перечень действий, предписанный технологией данного вида работ.
Эвристическая деятельность предполагает отыскание верного решения путем выявления его вариантов с последующими их переоценкой и опробованием, т.е. осуществляется в соответствии с логикой принятия нестандартных решений.
Оба вида деятельности при переработке поступающей информации и последующем выборе воздействий на ВС (управления его системами) отнесены к управляющему типу.
Некоторые задачи при выполнении таких работ позволяют экипажу сразу найти правильное решение, но иногда возникают задачи, для решения которых вся деятельность экипажа вначале направлена на поиск возможных вариантов, а затем на ограничение их числа и выбор оптимального варианта деятельности.
Успешность действий экипажа при парировании воздействия НФ и допущенных собственных ошибок зависит от его располагаемых возможностей в условиях особых ситуаций (ОС) [3.13]. Эти ситуации создают для экипажа в общем случае стрессовые условия, отличительными признаками которых являются:
внезапность возникновения НФ;
неопределенность информации о создавшейся ситуации; лимит времени на принятие решений о необходимых действиях. Деятельность каждого члена экипажа как оператора вертолета в контуре парирования ОС включает пять основных этапов, приведенных на рис. 3.10.
Этап обнаружения ОС начинается с момента восприятия первого нештатного сигнала. На этапе ситуационной оценки ОС при проведении АСМР оператор не стремится сразу опознать, что именно произошло, а контролирует те параметры полета, которые, по его мнению, позволят определить, насколько ситуация подошла к критической отметке. Процесс идентификации ситуации можно представить как процесс принятия решения на опознавательном уровне. При этом способ идентификации зависит от индивидуальных психологических характеристик каждого оператора и степени определен-
Рис. ЗЛО. Деятельность экипажа в контуре парирования особом ситуации
ности информации, содержащейся в воспринятом аварийном сигнале. Следующий этап в парировании ОС — принятие решения, включающее в себя формирование цели действия и определение способа ее достижения с учетом условий и обстоятельств полета. В общем случае эту задачу можно рассматривать как процесс принятия решения на основе активного синтеза поступающей информации.
Для каждого члена экипажа построение плана деятельности должно основываться на принципе ситуационной избирательности. Выполнение принятого решения и его контроль — завершающий этап деятельности в ОС. Здесь критериями оценки являются своевременность и правильность выполнения действий.
Для полной оценки надежности функционирования системы "эк и паж-вертолет—объект монтажа (груз на ВП)" в условиях возникновения НФ, например при развитии колебаний груза на ВП или отказе одного двигателя в полете, а также их совокупности, необходимо располагать моделью действий экипажа (далее пилота), представляющей в формализованном виде его возможности по парированию последствий воздействия НФ.
Рассмотрим структуру модели возможных действий пилота и ее характеристики для особой ситуации (возникновения прогрессирующих маятниковых колебаний груза на ВП вертолета Ка-32), при которых наблюдается быстрое изменение параметров движения вертолета и при этом не исключена возможность в случае неудачных действий выхода одного или нескольких параметров за установленные эксплуатационные ограничения.
Пусть до появления НФ (самопроизвольного снижения вертолета, вызванного неисправностью одного двигателя или автоматическим срабатыванием ПОС) некоторый параметр полета х; (перегрузка, число оборотов НВ и т.д.) имел начальное значение х/0 (рис. 3.11). В процессе развития НФ без вмешательства пилота значения параметра х, будут нарастать (для числа оборотов НВ -уменьшаться) и в некоторый момент времени Гпр достигнут своего предельного значения х/пр, выход за пределы которого означает наступление авиационного происшествия.
Пилот, обнаружив отклонение параметра х; от заданного условиями полета значения, вмешивается в управление (для рассматриваемого случая производит сброс груза с ВП) с целью не допустить его выхода за предельное значение, обусловленное безопасностью продолжения или завершения полета. Исход события зависит от времени /в запаздывания с вмешательством пилота в управление вертолетом и ха-
Рис. 3.11. Изменение определяющего параметра при воздействии на вертолет неблагоприятного фактора:
7 - развитие НФ в полете; 2 — наступление авиационного происшествия; 3 — парирование НФ; 4 — нормальный полет
ракгера его действии. Неравенство Гв > tP характеризует развитие аварийной ситуации, при котором параметр х, выходит за свои предельно допустимые значения, a tn < соответствует условиям парирования последствий воздействия НФ. Здесь tp — располагаемое время вмешательства пилота. По своей сути это тот максимальный отрезок времени, которым располагает экипаж вертолета от момента возникновения НФ до начала действий по парированию последствий его воздействия. Реальные значения времени вмешательства пилота в управление вертолетом tB и характер этого вмешательства случайны. Поэтому кривые 2...4, изображенные на рис. 3.11, необходимо рассматривать как отдельные реализации случайного процесса.
В процессе развития НФ одновременно могут изменяться многие параметры нормального функционирования системы "экипаж-вертолет—объект монтажа", ограниченные условиями безопасного выполнения полета. Они называются определяющими параметрами. Один из них, первый достигающий своего предельного значения, называется критическим параметром.
В рассматриваемом примере частота вращениявинга янв — кри-тический параметр, а высота полета вертолета II, частоты вращения турбокомпрессоров двигателей ятк и время включения ПОС двигателей — определяющие параметры.
Если последствия воздействия НФ проявляются только на начальном этапе его развития, то достаточным условием парируемо-сти будет выполнение неравенства х,- < х,-пр, I — 1, п. Следовательно, вероятность парирования последствий НФ г0 = pQ(x} < х1пр, х2 < х2пР» •••, хп < хяпр), а Д-чя случая одного определяющего парамет-ра - г0 = р„(х < хпр).'
Так как вероятность невыхода определяющего параметра за свое предельное значение определяется вероятностью своевременного вмешательства пилота (при заданном характере его воздействия на органы управления), то
r0 =A)U< *пР) = Ро(С<^Р). (3.1)
Для приближенной оценки вероятности парирования экипажем последствий возникновения в полете НФ можно воспользоваться теми средними значениями х(-, которые приводятся в технической документации на вертолет.
В реальном полете равновероятен и такой случай, когда последствия воздействия НФ могут неоднократно проявляться и на последующих этапах полета, например возникновение колебаний груза па ВП, вызванных его аэродинамическим несовершенством.
Если полет разбить на ряд этапов, для которых характерны примерно постоянные значения основных параметров, влияющих на поведение вертолета при наличии НФ, то событие парирования можно рассматривать как сложное, состоящее из событий парирования НФ на всех этапах полета. При условии независимости этих событий будет справедливо утверждение
г = г0г1г2.,.г1...г„, (3.2)
где гк — вероятность того, что ни один из определяющих параметров на к-м этапе режима полета не выйдет за предельное значение.
Очевидно, что при любом гк = 0 и г = 0, т.е. НФ не парируем и на £-м этапе полета он приводит к авиационному происшествию.
В ряде случаев, когда вертолет резко изменяет заданный режим полета, например при изменении высоты полета или углового положения вертолета с грузом на ВП, пилот рефлекторно энергичне отклоняет рычаги управления с максимальной скоростью на угол
практически соответствующий балансировочному положению вертолета, т.е. его действия в известной мере детерминированы [3.15]. Для парирования последствий воздействия НФ требуется не только своевременное вмешательство пилота в управление, но и в ряде случаев успешная стабилизация им возмущенного движения вертолета. В действиях пилота в сложившейся ситуации можно выделить три этапа:
первый этап — запаздывание по времени с вмешательством в управление (пилот вмешивается в управление отклонением РЦШ спустя время после возникновения НФ, которое, как правило, равно 0,3 с);
второй этап — парирование нарастания параметров движения — угловой скорости сох и угла крена у (отклонив РЦШ, пилот выдерживает ее в выбранном положении до тех пор, пока угол крена не начнет приближаться к исходному значению);
третий этап — стабилизация параметров движения (корректирующие движения органов управления вертолета, направленные на стабилизацию нулевых значений и у).
Указанным закономерностям в двигательных реакциях пилота соответствует модель действий (рис. 3.12), подробное описание которой приведено в работах [3.15, 3.17].
Рис. 3.12. Схема возможной модели действий пилота по парированию прогрессирующих колебаний груза на внешней подвеске вертолета
Входом модели является отклонение Ах параметра движения от заданного значения. В рассматриваемом случае это отклонение от заданного угла тангажа или заданного утла крена, вызванное прогрессирующими колебаниями груза на ВП. Выход модели — отклонение Хп ручки циклического шага. Модель включает три звена:
звено 1 учитывает запаздывание с вмешательством пилота в управление гв;
звено 2 учитывает параметры первой двигательной реакции пилота (отклонение РЦШ ХГ1 и скорость ее отклонения Хп). направленной на прекращение изменения параметров движения;
звено 3 отражает динамические свойства пилота при стабилизации им заданных параметров движения и представляется передаточной функцией Bzn(D), определяемой в обшем случае как отношение выходного параметра системы к входному сигналу.
В одной из самых простейших схем управления ВС пилот представляется усилительным звеном с передаточной функцией вида [3.12]
W„(D) = k^-, (3.3)
1+т2р
где Т[ — постоянная времени сенсорной реакции пилота, равная в среднем 0,25 с; т2 — постоянная времени, характеризующая инерцию в формировании моторного действия, равная в среднем 0,125 с; к — коэффициент усиления; е - основание натурального логарифма; р — оператор Лапласа.
В приведенной на рис. 3.12 схеме пилот стремится компенсировать свою инерционность путем создания форсирующих, упреждающих сигналов. Этим и объясняется наличие динамического звена с передаточной функцией вида + 1. Поэтому передаточную функцию звена 3 пилота согласно работам [3.12, 3.16] можно представить в виде
Wn (D) = fc0(3.4)
W + 1
где к^ — коэффициент усиления пилота; тф - постоянная времени форсирующего звена пилота; т0 - постоянная времени инерционного апериодического звена пилота.
Отсюда следует, что чем больше информации поступает пилоту по различным информационным каналам в системе ”экипаж-вер
толет—ооъект монтажа (груз)” и чем ниже техническое совершенство оборудования вертолета, выполняющего АСМР или транспортировку груза на ВП, тем инерционнее будет звено.
К выходу звена 3 приложен шум модели пилота Ап(/), являющийся той частью его двигательной реакции, которая не определяется передаточной функцией Wn(D)\
Лп(Г) = Хп(/)-%п0(/), (3.5)
где Ап0 - отклонение ручки управления, определяемое передаточной функцией.
Шум в модели учитывает нестационарность, дискретность и нелинейность моторных действий пилота.
Переключение модели со звена 1 на звено 2 происходит в момент времени t = tRy со звена 2 на звено 3 — в момент времени t -= t3 + Д71, где АГ — время отклонения РЦШ при первой двигательной реакции пилота, АГ = АП/АП.
В соответствии с моментами переключения звеньев в модели соотношения ’’вход"—"выход" могут быть следующими:
Х(/)=0 при t<t3't
Xn(t) = Ara(<-G) при ?,</</„+ДГ;
(О = W„(D)bx(t) + hu(f) при Г>ГВ+ДГ.
Одним из важных требований, которое должно быть реализовано при создании модели действий пилота, является учет случайного характера его моторных действий при парировании воздействий НФ на исследуемую систему. Механизм случайностей проявляется как в разбросе характеристик реакций пилотов, так и в вариации данных характеристик конкретного пилота в зависимости от его состояния.
На рис. 3.13 в качестве примера показаны изменения параметров реального полета вертолета Ка-32 при аварийном сбросе груза массой 3200 кг с ВП, вызванном потерей располагаемой мощности в процессе захода на укладку груза на площадку, расположенную в горах на высоте 1700 м.
Как следует из рис. 3.13, в процессе гашения поступательной скорости командир вертолета развернул вертолет вправо против ветра и продолжил заход для укладки груза с левым скольжением. С уменьшением скорости до 50 км/ч и увеличением общего шага до 9° (по УШ В) произошло падение числа оборотов несущих вин-
Рис. 3.13. Изменение параметров полета вертолета Ка-32 при аварийном сбросе груза с внешней подвески:
Лтклев? wtk прав “ частоты вращения турбокомпрессоров левого и правого двигателей; пн в - частота вращения несущего винта; Н- высота полета; V — скорость полета; t — время
тов до минимально допустимых значений — 87 % и сработала предупреждающая звуковая и световая сигнализация минимального предельного числа оборотов НВ при положении рычага общего шага, близкого к положению, соответствующему взлетному режиму. Несмотря на неоднократные попытки восстановить число оборотов НВ экипажу не удалось. В целях избежания столкновения груза с людьми, находящимися на разгрузочной площадке, и ухода на второй круг экипаж перевел вертолет в разгон по его курсу. Ввиду продолжавшегося самопроизвольного снижения вертолета, вызванного неисправностями в насосе-регуляторе правого двигателя и автоматическим срабатыванием ПОС, число оборотов НВ упало до 82,76 %, в результате чего командир вертолета был вынужден произвести аварийный сброс груза с ВП.
Вследствие образовавшегося от сброса груза избытка тяги вертолет в течение 5 с увеличил высоту на 30 м и, выполнив предпосадочный маневр, благополучно произвел посадку на посадочную площадку в районе сброса груза с ВП.
Л,(0 г
*п(О
Рис. 3.14. Схемы возможных моделей действий экипажа вертолета
Таким образом, для парирования подобных эволюций необходимы соответствующие запасы управления, что предусмотрено ограничениями на массу груза, перевозимого на ВП, и параметры элементов подвески, а также применение современных методов и средств стабилизации груза на внешней подвеске.
На рис. 3.14 показаны возможные модификации рассматриваемой модели действий пилота в зависимости от варианта ее использования.
196
Модель а учитывает только временнбе запаздывание пилота 7П. В момент времени t = te он мгновенно устанавливает органы управления в положение, соответствующее полной компенсации возмущающего момента.
Модель б учитывает временнбе запаздывание пилота и параметры его первого вмешательства Хп, АТ (или Хп). В целом модель б приближенно может быть представлена моделью а, но только с другими параметрами: временным запаздыванием Г = Гн + А 7/2 и параметром первого вмешательства.
Модели в и г формируют моторные действия пилота, которые полностью определяются передаточной функцией и шумами. При этом в модели в передаточная функция Wn(D) стационарная, т.е. ее коэффициенты постоянны во времени, а в модели г передаточная функция JFn(D, Г) нестационарная, так как ее коэффициенты зависят от времени [3.12].
В рассмотренных моделях случайность двигательных реакций пилота адекватно отображается случайностью времени запаздывания /в, параметров первой двигательной реакции Уп, Х„, коэффициентов передаточной функции пилота и его шумов.
СПИСОК ЛИТЕРАТУРЫ К ГЛ. 3
3.1. Алексеев П.В., Панин А.В. Философия. М.: Проспект, 1999. 576 с.
3.2. Паршенцев С.А. Надежность функционирования системы ’’экипаж-вертолет-груз на внешней подвеске'' в условиях развития неблагоприятного фактора // Полет. 2005. № 4. С. 34-41.
3.3. Козловский В.Б., Паршенцев С.А. Исследование поведения груза на внешней подвеске вертолета и способы его стабилизации в полете // Науч, вестник МГТУ ГА. Сер. Аэромеханика и прочность. 2004. № 72. С. 97-101.
3.4. Паршенцев С.А. Разработка комплексных методов исследования летной эксплуатации вертолетов на строительно-монтажных и транспортных работах с использованием внешней подвески: Дисс. ... канд. техн. наук. М., 2005. 297 с.
3.5. Паршенцев С.А. Новые авиационные технологии строительства высотных сооружений // Монтажные и специальные работы в строительстве. 2005. № 8. С. 11-17.
3.6. Акт по результатам летных испытаний системы САО-26-3 для азимутальной ориентации груза на внешней подвеске вертолета Ми-26 в комплексе с отработкой технологии монтажа высотной радиотелевизионной башни Н = 127 м в ст. Кущевской Краснодарского края (дог. N? 19/03) / НПК ’ПАНХ"; Руководитель О.В. Худо-ленко. Краснодар, 2003. 30 с.
। ЗГ7. Бутылки» И.П., Морозов Е.П., Данюк В.М. Монтаж новых опор радиорелейных линий f/ Монтажные и специальные работы в строительстве. 2001. № 10. С. 10-13.
3.8. Бутылкин И.П., Купцов В.Д., Морозов Е.П. Монтаж стальных высотных опор с помощью грузоподъемных кранов и вертолетов // Монтажные и специальные работы в строительстве. 2001. № 6. С. 2—5.
3.9. Safety report questions pilot skill//HAT Convention News. February 6,2005. P. 18.
3.10. Нормы летной годности транспортной категории винтокрылых аппаратов. Авиационные правила. Ч. 29. Межгосударственный авиационный комитет, 1995.
3.11. Динамика управляемого движения вертолета // С.Н. Колоколов и др. М.: Машиностроение, 1987. 144 с.
3.12. Микинелов АЛ., Чепига В.Е., ПТахвердов В.Г. Летная эксплуатация воздушных судов. М.: Машиностроение, 1986. 216 с.
3.13. Володко А.М. Вертолет в особой ситуации. М.; Транспорт, 1992. 262 с.
3.14. Паршенцев С.А. Об одном способе оценки безопасности полета вертолета с грузом на внешней подвеске при воздействии неблагоприятного фактора // Науч, вестник МГТУ ГА. Сер. Аэромеханика и прочность. 2006. № 97. С. 124—128.
3.15. Натальин В.М., Матвеев Ю.И. Аэродинамические особенности возникновения автоколебаний на вертолете Ми-8 и методы их уезранения / Сб. науч. тр. аспирантов и молодых ученых. СПб., АГА, 1998. Т. 1.
3.16. Акимов А.И. Аэродинамика и летные характеристики вертолетов. М.: Машиностроение, 1988. 144 с.
3.17. Натальин В.М. Физические условия возникновения полетного резонанса вертолета Ми-8 и способы его устранения: Дисс. ... канд. техн. наук. СПб., 1998. 268 с.
Глава 4
ПРИМЕНЕНИЕ МАТЕМАТИЧЕСКОГО МОДЕЛИРОВАНИЯ ДЛЯ РЕШЕНИЯ ЗАДАЧ ПОВЫШЕНИЯ БЕЗОПАСНОСТИ И ЭФФЕКТИВНОСТИ ЛЕТНОЙ ЭКСПЛУАТАЦИИ ВЕРТОЛЕТОВ ПРИ ВЫПОЛНЕНИИ АВИАЦИОННЫХ РАБОТ С ИСПОЛЬЗОВАНИЕМ ВНЕШНЕЙ ПОДВЕСКИ
4.1. РОЛЬ И МЕСТО МАТЕМАТИЧЕСКОГО МОДЕЛИРОВАНИЯ В ИССЛЕДОВАНИИ ПРОБЛЕМ
ЭКСПЛУАТАЦИИ ВЕРТОЛЕТОВ
Эффективное использование вертолетов для выполнения АСМР и транспортировки грузов на ВП стало возможным благодаря проведению глубоких научно-технических исследований, посвященных решению широкого круга вопросов, связанных с повышением уровня безопасной эксплуатации этих ВС и их технико-экономических показателей.
Существует множество методов исследования проблем функционирования ВС. Их можно разделить на экспериментальные и теоретические [4.1...4.3].
Экспериментальные методы включают в себя различные виды испытаний ВС и их моделей. В общем случае испытание системы — это комплекс работ по оценке каких-либо свойств системы, а задачей испытаний является подтверждение нахождения контролируемых параметров в заданных пределах в течение требуемого промежутка времени. Контроль испытаний — это комплекс работ по измерению, регистрации и оценке параметров системы - величин, характеризующих физические, геометрические и какие-либо другие свойства системы в исходном или рабочем состоянии.
Обычно испытания ВС разделяют на три группы: лабораторные исследования, стендовые и летные испытания.
Лабораторные исследования, как правило, ориентированы на тщательное и всестороннее изучение физических и технических свойств исследуемого объекта. Они проводятся на малоразмерных моделях с помощью приборов и аэродинамических установок при
дозированном воздействии факторов, характерных для эксплуатационных условий, в том числе экстремальных. Несомненным достоинством лабораторных исследований является возможность многократного их повторения при относительно небольших финансовых затратах. Проблемы же таких исследований связаны с необходимостью использования моделей строго определенной формы и размеров, отсутствием требуемых эталонов для всего спектра эксплуатационных воздействий, а также с необходимостью сохранения основных критериев подобия. Так как одновременно должно обеспечиваться подобие по нескольким критериям (геометрическое подобие, по числам Маха и Рейнольдса и др.), то приходится существенно увеличивать объем экспериментальных исследований. Но и это не позволяет в полной мере решить проблему доказательства адекватности эксперимента натурному поведению объекта.
Стендовые испытания проводятся с натурными образцами ВС, технических средств, объектов монтажа или их макетами, масштабно уменьшенными моделями в условиях, имитирующих реальные эксплуатационные. Стендовые испытания позволяют оценивать работоспособность исследуемой конструкции, а также проверять математические модели (ММ), если таковые были разработаны. Такие испытания занимают ведущее положение при экспериментальном изучении всех технических систем ВС или объектов, размещенных на его ВП, благодаря высокой информационной отдаче, безопасности и относительно небольшой стоимости проведения эксперимента. Их слабыми сторонами являются не всегда достаточная теоретическая обоснованность режимов испытаний и приближенность анализа проведенных измерений. Серьезные трудности в переносе результатов моделирования на функционирование натурных образцов возникают в тех случаях, когда механизмы воспроизведения характеристик изучаемых объектов качественно отличаются от реальных.
Стенды, предназначенные для испытаний ВС, разделяются па исследовательские и отработочные. Принципиальным различием между ними является то, что на исследовательских стендах, как правило, не соблюдается геометрическое подобие модели натурным ВС и режимы испытаний могут значительно отличаться от натурных условий.
Летные испытания (ЛИ) представляют собой различные варианты физического моделирования функционирования ВС в иссле
дуемых условиях, венчающего процесс создания новых технических систем. Основное их назначение — оптимизация эксплуатационно-технических характеристик изучаемого объекта и доведение его эффективности до заданного уровня. Объектом исследования здесь служат опытные образцы натурных ВС, ТС и оборудования, которые испытываются в реальных эксплуатационных или вероятных экстремальных условиях. Неоспоримым достоинством ЛИ является возможность комплексного моделирования всех характеристик, нагрузок и внешних связей ВС, включая те, что не воспроизводятся на стенде.
Однако чем сложнее техническая система, тем выше ее стоимость и стоимость испытаний, тем меньше экспериментов удается провести до ввода системы в эксплуатацию. Очевидно, что в полете несмотря на развитие методов и средств ЛИ все же нельзя смоделировать все возможные варианты особых ситуаций из-за большой опасности и сложности некоторых экспериментов (например, посадки на режиме авторотации вертолета с особо ценным грузом на ВП). Кроме того, пилотируемый полет вертолета является довольно сложным процессом функционирования такой комплексной системы, как "человек — машина — внешняя среда", и от согласованности характеристик человека и техники в такой системе зависят безопасность и эффективность использования вертолета на этом виде авиационных работ. Комплексное исследование работы системы "человек — машина - внешняя среда" в полете представляет собой довольно сложную многопараметрическую задачу. Проведение таких исследований все еще является достаточно дорогостоящим мероприятием, особенно если учитывать статистический характер рассматриваемой проблемы.
Следует отметить, что при проведении ЛИ важное место занимают вопросы обеспечения безопасности персонала и населения, охраны окружающей среды и защиты технической информации. Недостатком ЛИ, проводимых на движущихся технических системах, является также частая утрата полезной информации из-за невысокой надежности датчиков и систем телеметрии.
Некоторые из упомянутых выше проблем решаются с помощью теоретических методов. В теоретических (расчетных) исследованиях летных характеристик и характеристик устойчивости, управляемости, балансировки вертолета с грузом на ВП и в изучении вопросов обеспечения безопасности выполнения им АСМР
сегодня можно выделить два основных взаимодополняющих направления:
исследования с помощью аналитических методов;
моделирование на ЭВМ.
Достоинством аналитических методов является возможность простыми средствами установить основные закономерности движения ВС, определить влияние различных факторов на его летные характеристики и характеристики устойчивости, управляемости и балансировки. Однако эти методы основаны на существенных упрощениях исследуемых объектов и явлений с целью их формализации, что ведет к ограниченности применения результатов таких исследований. Кроме того, нелинейный характер аэродинамических характеристик ВС, сложные законы работы автоматических систем, включенных в контур управления ВС, и т.п. в большинстве случаев не позволяют получить аналитические выражения, адекватно описывающие особенности движения ВС. Именно поэтому большое развитие получили методы исследования полета ВС с помощью вычислительной техники, основанные на математическом моделировании.
Как показывает практика, математическое моделирование полета вертолета является наиболее перспективным методом предварительного определения его характеристик, еше до начала ЛИ. То же самое можно сказать и о применении математического моделирования в процессе проведения ЛИ и по их окончании для распространения полученных данных на весь объем ожидаемых условий эксплуатации. Наконец, некоторые результаты исследования поведения ВС можно получить исключительно с помощью математического моделирования [4.4, 4.5]. Главная трудность при этом заключается в достоверном задании аэродинамических характеристик вертолета [4.6, 4.7], так как полученные в аэродинамических трубах характеристики вертолета часто не позволяют добиться удовлетворительного совпадения результатов расчетов и ЛИ. В связи с этим сейчас интенсивно развиваются методы идентификации аэродинамических характеристик на основе ЛИ [4.8, 4.9].
Однако следует заметить, что ни один из рассмотренных методов исследования не позволяет с требуемой степенью адекватности охватить и решить весь круг проблем функционирования ВС, в том числе связанных с повышением эффективности и безопасности транспортировки вертолетами грузов на ВП и проведения ими АСМР. Только разумное сочетание этих методов и их разви
тие под конкретные задачи обеспечивают решение указанных проблем с достаточной степенью полноты и достоверности. Кроме того, применение методов комплексного исследования решения задач повышения уровня безопасности и эффективности летной эксплуатации вертолетов при выполнении АСМР позволит быстрее и с меньшими затратами решать возникающие технологические, эксплуатационные и другие проблемы, обусловленные применением тех или иных ТС или специального оборудования на АСМР, оценивать эффективность новых технических решений, определять наиболее рациональные пути и область их применения, а главное, приобрести опыт, создать научный и экспериментальные заделы, необходимые для решения аналогичных задач при выполнении других видов авиационных работ с использованием ВП вертолетов.
4.2. ОБЩИЕ МЕТОДОЛОГИЧЕСКИЕ ПОЛОЖЕНИЯ ПОСТРОЕНИЯ МАТЕМАТИЧЕСКОЙ МОДЕЛИ ДИНАМИКИ ПОЛЕТА ВОЗДУШНЫХ СУДОВ
Любая наука, исследующая те или иные явления, вынуждена использовать в своем арсенале средств познания абстрактные модели этих явлений. В широком смысле слова моделью называется любой образ объекта исследования, используемый в качестве его ’’заместителя’' и позволяющий изучить некоторые его свойства в определенных условиях [4.4, 4.10].
Применение моделей вызвано тем, что сам объект исследования и его внешние связи с другими объектами чаше всего настолько сложны, что описать их в полном объеме не представляется возможным. К счастью, как правило, этого и не требуется. Достаточно того, чтобы было обеспечено сходство объекта и его модели по тем свойствам, которые являются предметом изучения. При этом, однако, результаты, полученные с помощью модели, должны соответствовать реальному поведению исследуемого объекта. Иначе возможно появление ошибок, которые могут привести к неверным выводам. Чтобы избежать этого при математическом описании объекта - математическом моделировании - необходимо, чтобы ММ обеспечивала выполнение определенных принципов и состояла из необходимых элементов (описания основных допущений, замкнутого математического описания, включающего в себя уравнения движения, уравнения свя
зей, Числовые и функциональные характеристики ВС и его систем управления) [4.4, 4.10, 4.11].
Для задач моделирования полета ВС главными принципами математического моделирования следует считать адекватность ММ и состоятельность результатов. Под адекватностью ММ понимают соответствие результатов вычислительного эксперимента (ВЭ) поведению реального объекта. ММ механических систем и процессов считают адекватной, если она обладает достаточной точностью и непротиворечивостью по отношению к поведению оригинала. Проверка этих свойств модели основана, как правило, на использовании методов математической статистики, что будет показано ниже.
Состоятельность результатов ВЭ — это статистический термин, означающий стремление по вероятности результатов ВЭ к истинным значениям параметров исследуемого явления при увеличении объема информации. Этот принцип требует предельной математической строгости, что достигается использованием вычислительных методов, обладающих одновременно свойствами устойчивости, сходимости и однозначности.
Важным принципом математического моделирования является также принцип опережающей математической строгости и глубины феноменологического описания явления. В соответствии с этим принципом при синтезе М М необходимо построение физических закономерностей явлений, на порядок более строгих и глубоких, чем это требуется в конкретной задаче. Это связано с тем, что на практике ММ часто применяются в несколько более широкой области, чем та, которая использовалась при оценке адекватности. Поэтому во избежание серьезных ошибок необходимо иметь запас для некоторой экстраполяции результатов ВЭ. Такая экстраполяция возможна только в том случае, когда основу феноменологического описания явления составляют физически обоснованные закономерности.
Необходимо также соблюдать принцип конкретизации условий и области применения разрабатываемой ММ. Следование этому принципу помогает избежать пустой траты времени и средств на попытки создания универсальной ММ, пригодной на все случаи жизни, когда рациональнее произвести декомпозицию сложного явления или системы и создать ряд ММ, решающих с достаточной степенью адекватности частные задачи.
При моделировании не следует также забывать об удобстве работы исследователя, что достигается обеспечением простоты об-
ращешГя с программным обеспечением (ПО), например, благодаря применению диалогового режима работы, графического представления результатов ВЭ, унификации всего ПО и др.
Вернемся, однако, к важнейшему принципу математического моделирования — адекватности. Рассмотрим его подробнее, так как в теории математического моделирования принято называть моделью только такое математическое описание объекта, которое успешно прошло проверку на адекватность.
Для механической системы, каковой является вертолет с грузом па ВП, чтобы подтвердить адекватность ММ, достаточно убедиться в наличии двух свойств: точности и непротиворечивости.
В задачах механики ММ считают достаточно точной, если обобщенная характеристика рассогласования соответствующего параметра модели и оригинала не превышает заранее заданной погрешности. В качестве такой характеристики может быть использовано, например, наибольшее по модулю значение рассогласования, среднее значение рассогласования или некоторая статистическая оценка (доверительный интервал для математического ожидания рассогласования, диапазон практически наблюдаемых значений рассогласования и др.).
На практике, однако, возможно возникновение существенных систематических погрешностей, связанных не с ошибками моделирования, а с нерегистрируемыми воздействиями, например при ручной настройке летчиком начала отсчета угла тангажа. Поэтому при оценке адекватности следует уделять внимание не только точности, но и непротиворечивости, под которой подразумевают идентичность характера изменения соответствующих параметров ММ и оригинала, т.е. совпадение вида функциональных зависимостей на одних и тех же участках (возрастание, убывание, экстремумы, выпуклость и т.п.). При этом ММ можно считать не противоречащей оригиналу, если имеющееся рассогласование се параметров не подчиняется какой-либо закономерности, а имеет случайную природу.
Методика проверки адекватности должна учитывать как особенности модели, так и область ее применимости, а именно:
ограниченность допустимого диапазона изменения параметров из-за того, что ММ, как правило, не может функционировать при любых возможных значениях параметров;
идентичность граничных условий реального и вычислительного экспериментов;
возможную неоднозначность решенийв ВЭ, например наличие нескольких корней уравнений, только один из которых имеет физический смысл, а остальные должны быть отброшены;
точность самого ВЭ, определяющуюся наличием погрешностей, обусловленных неточностью физических законов из-за отсутствия учета некоторых факторов, неточностью формализации физических закономерностей, т.е. приближенностью уравнений, неточностью расчетов из-за использования приближенных методов, округления результатов и др.
Таким образом, очевидно, что для проверки адекватности ММ необходимо иметь:
исчерпывающую информацию о поведении объекта исследования в конкретном случае;
исчерпывающие результаты ВЭ, воспроизводящего тот же случай поведения объекта;
методику оценки непротиворечивости ММ;
методику оценки точности ММ.
Очевидно, что для ММ движения ВС, в том числе вертолета с грузом на ВП, исчерпывающую информацию о поведении объекта исследования в конкретном случае собрать практически невозможно. Так, например, в каждый момент времени в каждой точке траектории невозможно зафиксировать скорость и направление ветра.
Кроме этого, множество характеристик самого ВС определяется с невысокой точностью, например масса, моменты инерции, тяга и расход топлива, аэродинамические характеристики вертолета и груза.
Отсюда следует, что не все данные ЛИ могут быть использованы для оценки адекватности, а методы ее оценки необходимо выбирать сообразно точности имеющейся информации. С этой точки зрения для оценки адекватности следует использовать только те данные ЛИ, которые достаточно полно описывают движение хотя бы в одном канале управления и в которых не обнаруживаются внутренние рассогласования данных в результате внешних незарегистрированных воздействий и погрешностей регистрирующей аппаратуры.
Для оценки адекватности ММ движения ВС применяются два подхода, подробно описанных ниже [4.4, 4.10]:
обобщенная проверка адекватности с помощью статистических критериев;
эвристическая проверка адекватности.
В обоих этих подходах учитывается, что уравнения движения не нуждаются в проверке, так как реальное ВС подчиняется именно им, а правильность этих уравнений подтверждена многолетней практикой.
Рассмотрим сначала основные положения методики обобщенной проверки адекватности с помощью статистических критериев.
Для оценки адекватности выбранной ММ динамики полета ВС необходимо сравнивать отдельные параметры движения. К ним относятся такие параметры, как координаты, скорости, угол атаки, перегрузка, угол крена, угловые скорости, которые получаются при ВЭ и регистрируются в ЛИ при тех же условиях полета. Как указывалось выше, при таком сравнении необходимо убедиться в достаточной точности и непротиворечивости ММ. Эти два условия можно проверить с помощью статистических критериев по следующему алгоритму, предварительно задав допустимую погрешность исходя из целей исследования.
На первом шаге выбирается один из параметров движения ВС, для которого есть полетная запись U(f) в точках (/и /2,..., /л) и соответствующий параметр и(1), вычисленный с помощью ММ в тех же точках. Далее вычисляются разности Aw,- = w(Z,) - U(t) и вся область значений Aw разбивается на г интервалов таким образом, чтобы в каждый из них попало не менее пяти значений Aw,. После этого производится расчет числа попаданий Aw,- в каждый/-й интервал — частот nj: а затем определяются статистические оценки параметров распределения случайной величины Aw:
а) выборочное среднее
где Aw; — середина /-го интервала;
6) несмещенная оценка дисперсии
,5=_!_Уи.(Дму-М3. (4-2)
ЛГ-1#
Для того чтобы убедиться в непротиворечивости, необходимо показать, что рассогласование результатов ВЭ и ЛИ подчиняется нормальному закону распределения, который характеризует отсутствие закономерности рассогласования, так как описывает поведение простой ошибки измерений. Для этого применяется кри-
терии согласия Пирсона %2. Вычисленное (наблюдавшееся в опыте) значение этого критерия, представляющее собой
(4.3)
где/л — вероятность попадания нормально распределенной случайной величины с математическим ожиданием т = 0 и среднеквадратическим отклонением s в у-й интервал, сравнивается с критическим значением критерия Пирсона %2рит (а; г -2), определенным по специальным таблицам. Здесь а - вероятность того, что за счет чисто случайных причин % 2абл < % ^ит. Если это условие выполняется, то распределение Aw несущественно отличается от нормального, т.е. результаты, полученные с помощью ММ, можно считать не противоречащими ЛИ. Если % >ХкРИТ ,то значимое отличие распределения Aw от нормального свидетельствует о противоречии М М данным ЛИ и исследования адекватности следует прекратить.
В целях определения наличия или отсутствия систематической погрешности проверяется гипотеза о равенстве нулю математического ожидания (т = 0) рассогласования Aw с помощью критерия Фишера Г, для чего вычисляется наблюдавшееся значение этой величины:
(4.4)
которое сравнивается с критическим /крит (1 - Р; N- 1), определяемым с помощью таблицы распределения Стьюдента в зависимости от уровня значимости I - р (где р — доверительная вероятность) и числа степеней свободы N 1. Уровень значимости рекомендуется брать от 0,001 до 0,05. Если |/,ибл| > /криг, то дальнейшие исследования адекватности нужно прекратить, так как это означает существование систематической погрешности между ММ и данными ЛИ. Если |/1>абл| < /крит, то систематическая погрешность отсутствует и можно продолжать исследования.
Для оценки точности ММ строится доверительный интервал для математического ожидания рассогласования при заданной доверительной вероятности р’ (от 0,8 до 0,999):
Aw-8< /д< Aw+8, (4.5)
s z(P*;jV-1)5 где 8 = __ .
VTV
Величина t (р’; N - 1) определяется по таблице распределения Стыодента. Если 6 не превосходит допустимой погрешности, то ММ можно считать достаточно точной по отношению к ЛИ.
Если в результате ММ оказалась не противоречащей ЛИ и достаточно точной, то ее можно считать адекватной поведению ВС. Если же точность ММ получилась во много раз выше требуемой (иными словами, погрешность практически неразличима), то даже в отсутствие непротиворечивости ММ можно признать адекватной.
Однако при отсугствии полных и достоверных данных ЛИ или в случае их собственной противоречивости применение описанной выше методики не только затруднительно, но и не имеет смысла. В такой ситуации прежде всего необходимо идентифицировать (уточнить или определить) искаженные или недостающие параметры. Как правило, это приходится делать одновременно с идентификацией параметров модели пилота, что значительно усложняет задачу и может сделать ее вообще неразрешимой.
Помочь здесь может только эвристический подход, использующий подробный физический анализ качественной взаимосвязи управляющих воздействий и параметров движения в целях получения наиболее близких к ЛИ результатов расчетов. Этот подход должен учитывать конкретные требования к результатам, а не преследовать цель ответить на все бесчисленное множество возможных вопросов. Он основывается на приоритете "физичности" данных ВЭ и ЛИ над их числовыми значениями. Последний аспект нуждается в более детальном рассмотрении.
При оценке адекватности результатов ВЭ данным ЛИ необходимо иметь, прежде всего, исчерпывающую информацию о ЛИ, которое следует воспроизвести. Это означает, что кроме регистрируемой (с погрешностями) полетной информации необходимо достаточно точно знать и внешние условия, и состояние летательного аппарата. По именно эта информация чаще всего отсутствует — невозможно зарегистрировать пространственно-временные характеристики атмосферы, включая порывы ветра, невозможно точно знать характеристики летательного аппарата. Поэтому браться за идентификацию ММ для всех возможных случаев бессмысленно. Можно пытаться решить эту задачу лишь для частных случаев ММ, описывающих отдельные этапы полета в отдельных полностью известных условиях. Первые успехи в идентификации ММ были достигнуты только после внедрения устойчивых вычис
лительных методов^ [4712], строгой формулировки требовании к конкретным ММ и детального анализа подлежащих идентификации величин, с одной стороны, и данных ЛИ - с другой [4.13, 4.14].
Например, попытка воспроизвести полет с зарегистрированными отклонениями органов управления априорно обречена на неудачу, так как погрешности регистрации параметров полета и неизвестные внешние воздействия приводят к их рассогласованию — такая совокупность параметров движения нарушает уравнения динамики полета. Кроме того, на отдельных этапах пилотирование в ЛИ подчинено различным целям, и в ВЭ решающее значение приобретает правильный выбор модели пилотирования. Наконец, некоторые параметры полета в процессе проведения ЛИ регистрируются весьма приближенно. В такой сложной ситуации может помочь лишь строгое следование требованиям теории математического моделирования: любая задача, в том числе и задача идентификации ММ полета ВС, должна быть сформулирована с точки зрения задачи исследований.
Детальный анализ практических задач, решенных на ранних стадиях применения ММ, дает возможность выявить некоторые существенные моменты, позволяющие сделать разрешимой задачу идентификации:
1. Согласно работам [4.4, 4.10] любая детерминированная (без имитации случайных явлений) ММ содержит в себе:
уравнения движения;
кинематические соотношения;
другие функциональные зависимости;
числовые данные (параметры объекта, начальные, конечные, граничные условия);
методы вычислений.
Уравнения движения, описывающие фундаментальные законы природы, а также кинематические соотношения сами по себе в идентификации (уточнении) нс нуждаются. Чаще всего нет необходимости уточнять и краевые условия. Наибольшую трудность при разработке ММ представляет описание недостоверно известных характеристик объекта, как функциональных, так и числовых. Таким образом, идентификация ММ динамики полета ВС сводится к "интерпретации" исходного приближенного числового материала и моделей тех отдельных элементов, которые не описываются законами природы [4.15].
Для решения практических задач, т.е. летной эксплуатации готового ВС, не следует подвергать сомнению утвержденные изготовителем ВС аэродинамические характеристики, характеристики силовой установки, шасси и систем управления, основные требования РЛЭ. Лишь три группы параметров могут нуждаться в идентификации:
исходные эксплуатационные параметры состояния объекта (весовые, центровочные и т.п. характеристики ВС);
параметры описания внешней среды (отклонения от стандартной атмосферы, ветер, дождь, состояние ВПП);
параметры модели управления об1>ектом (манера пилотирования конкретным летчиком или параметры системы автоматического управления во всех каналах управления: значения отслеживаемых параметров, коэффициентов реакции (усиления), интервалов времени между очередными моментами наблюдения и вмешательства, периодов задержки реакции, размеров зон нечувствительности).
Однако их вполне достаточно, чтобы сделать задачу неразрешимой однозначно. Для отыскания хотя бы одного частного решения необходимо прибегать к методу проверки гипотез, выдвигаемых по результатам каждого отдельного ЛИ.
3. В целях разработки рекомендаций по летной эксплуатации и выявления особенностей пилотирования ВС в усложненных условиях требуется решить такую важнейшую задачу, как оценка его динамических и пилотажных качеств. Это означает необходимость иметь данные ЛИ в сугубо нестационарных условиях полета, например в процессе маневрирования вертолета с грузом на ВП над местом его установки на монтажном объекте. Эти данные должны иметь высокую точность, достоверность и быть согласованными. Не всякие данные ЛИ удовлетворяют этим требованиям — их выполнение еле-' дует проверять на предварительной стадии исследований.
4. В качестве факторов, по которым требуется обеспечить адекватность ММ движения ВС, могут быть приняты медленно изменяющиеся параметры полета (скорость, высота, дальность), а также характерные действия органами управления, в том числе в ответ на известные внешние воздействия (отрыв от взлетно-посадочной полосы, создание крена, парирование ветрового воздействия или отклонения от заданной траектории). При этом необходимо осознавать, что абсолютного соответствия отклонения органов управления в ММ и в ЛИ быть не может, прежде всего, по причине погрешностей регистрации этих параметров контрольно-записываю-
щей аппаратурой в ЛИ, а также вследствие наличия ^регистрируемых внешних воздействий. Именно для уменьшения их влияния с целью оценки адекватности результатов ММ данным ЛИ последние должны проводиться в установившихся и однородных внешних условиях. Таким образом, следует оценивать в первую очередь качественное согласование результатов ВЭ с данными ЛИ.
5. Для обеспечения возможности раздельного анализа продольного и бокового, поступательного и вращательного движений ВС в ЛИ должны быть соблюдены некоторые требования, а также применены глубокие знания аэродинамики и динамики полета.
Исходя из изложенного, методика эвристической проверки адекватности ММ экспериментальным данным сводится к следующей процедуре [4.4]:
разделение задачи идентификации для различных степеней свободы (продольного и бокового, поступательного и вращательного движения);
выбор ЛИ, соответствующих рассматриваемому виду движения;
выявление и устранение возможных внутренних несогласованностей в данных ЛИ;
выявление особенностей выполнения исследуемого этапа реального полета (характерных моментов времени и действий);
выбор факторов ЛИ, служащих в качестве факторов адекватности (с их изменением по траектории должны быть качественно согласованы результаты расчетов);
выдвижение гипотез об идентифицируемых параметрах (возможных причинах их отклонения от штатных или зарегистрированных);
проведение ВЭ (подбор идентифицируемых параметров методом последовательных приближений).
Таким образом, рассмотрены основные принципы математического моделирования применительно к функционированию механических систем. Теперь перейдем к Непосредственному описанию ММ динамики полета вертолета с грузом на ВП.
4.3. ОПИСАНИЕ МАТЕМАТИЧЕСКОЙ МОДЕЛИ ПОЛЕТА ВЕРТОЛЕТА С ГРУЗОМ НА ВНЕШНЕЙ ПОДВЕСКЕ
Известно большое число работ, посвященных математическому описанию движения груза на ВП вертолета и движения всей
системы "вертолет - груз", например [4.16...4.23]. Однако в работах [4.16...4.20] взаимодействие вертолета и груза рассматривается либо в статике, когда груз находится в некоем равновесном отклоненном положении, либо в динамике, но без учета сил инерции, действующих на груз в результате ускоренного перемещения точки подвеса груза. Допущение об отсутствии указанных сил инерции не позволяет построить ММ, достаточно адекватно отражающую поведение груза на ВП на этапах ускоренного движения вертолета. Кроме того, при малых скоростях полета, когда аэродинамические силы очень малы, определяющую роль в раскачивании груза играют как раз силы инерции, вызванные ускоренным перемещением точки подвеса груза. Конечно, эти силы инерции и вызванные ими отклонения груза сравнительно невелики, но при моделировании, например, выполнения АСМР не учитывать их нельзя.
В работах [4.21...4.23] сделана попытка учета влияния ускоренного движения точки подвеса на колебания груза на ВП вертолета, но принятые в этих работах ограничения и допущения не позволяют построить достаточно полную модель явления. В работе [4.24] предложена ММ движения груза на ВП гибридного летательного аппарата — вертостата, в которой, однако, принято допущение, что точка подвеса груза совпадает с центром масс ВС. Но это условие выполняется далеко не всегда.
Ниже предлагается подход, позволяющий достаточно полно описать колебания груза на ВП вертолета и движение всей системы "вертолет — груз".
4.3.1. Основные ограничения и допущения
Любая ММ сложного явления предполагает наличие некоторых ограничений и допущений, в рамках которых возможно использование определенных научных достижений и применимы результаты, получаемые с помощью моделей. Не является исключением и ММ движения вертолета с грузом на ВП. В связи с этим сформулируем основные ограничения и допущения, используемые в такой модели.
В настоящее время известно несколько схем вертолетов. Но при описании данной ММ ограничимся рассмотрением вертолета одновинтовой схемы, т.е. вертолета с одним НВ и одним РВ. Основное внимание сосредоточим на моделировании движения сис
темы "вертолет — груз”, оставив за его рамками моделирование работы функциональных систем вертолета, в том числе силовой установки.
Что касается допущений, то часть из них связана с тем, что система "вертолет — груз” выходит за рамки понятия абсолютно твердого тела, которое обычно используется при моделировании динамики полета ВС. Реальный вертолет, а также груз и трос, их связывающий, не являются абсолютно твердыми телами. Учесть это обстоятельство в ММ достаточно сложно, а насколько значительно оно влияет на адекватность — неясно. Поэтому в описываемой ниже модели все составляющие системы "вертолет — груз" считаются абсолютно твердыми телами.
Другая часть допущений связана с пренебрежением неинерци-альностью перемещений некоторых систем отсчета. В тех случаях, когда ускорения одной системы отсчета относительно другой — инерциальной — невелики, эту малую неинерциальность можно не учитывать. Конкретные допущения, связанные с неинерциаль-ностью, описаны в разд. 4.3.2.
Итак, перечислим основные допущения:
вертолет и груз рассматриваются как абсолютно твердые тела;
аэродинамические характеристики вертолета и груза считаются заданными и неизменными;
нестационарные аэродинамические эффекты не учитываются;
массово-инерционные характеристики (МИХ) вертолета и груза (массы и моменты инерции) считаются заданными и неизменными;
подвеска груза к вертолету осуществлена с помощью единственного невесомого троса, прикрепленного в одной точке к вертолету с помощью идеального сферического шарнира (это позволяет рассматривать взаимодействие груза с вертолетом в виде одной только силы натяжения троса).
4.3.2. Используемые системы координат
Для вывода уравнений и определения параметров движения вертолета и груза необходимо ввести системы координат.
Стартовая система координат
Начало стартовой системы координат расположено на поверхности Земли в точке взлета вертолета. Ось OJQ направлена на север вдоль географического меридиана, ось OCYC параллельна вектору силы тяжести, но противоположна ему по направлению, ось OCZC дополняет систему до правой (положительное направление — на восток). Эта система координат вращается вместе с Землей и, строго говоря, является неинерциальной, однако при моделировании полета вертолета этой нсинерциалыю-стыо можно пренебречь.
Стартовая система координат служит системой отсчета, относительно которой определяется положение центра масс вертолета в пространстве.
Базовая система координат
За начало базовой системы координат ObXbYbZb (рис. 4.1) принята точка пересечения оси вала НВ с плоскостью вращения горизонтальных шарниров крепления лопастей НВ. Ось ObYb сов-
Рис. 4.1. Базовая и связанная системы координат
падает с осью вала НВ. Ось О^ХЬ лежит в плоскости, проходящей через ось ObYb и строительную горизонталь фюзеляжа (СГФ), и направлена вперед. Ось 0^ дополняет систему координат до правой.
Данная система координат используется для описания геометрических характеристик вертолета и определения положения его центра масс, которое задается значениями координат хт, ут и вдоль соответствующих осей.
Связанная система координат OXYZ
Оси связанной системы координат OXYZ (см. рис. 4.1) параллельны соответствующим осям базовой системы координат и совпадают с ними по направлению. Начало отсчета связанной системы координат совпадает с положением центра масс вертолета.
Данная система координат не является инерциальной и используется для описания углового положения вертолета в пространстве относительно других систем координат, применяемых в динамике полета.
Нормальная система координат OX^Y^
Начало нормальной системы координат OX^Y^ совпадает с центром масс вертолета. Вертикальная ось нормальной системы координат OYf. параллельна вектору силы тяжести, но противоположна ему по направлению. Плоскость 0Xs7y проходит через точку О и перпендикулярна оси OY^. Ось ОХК направлена на север вдоль географического меридиана, ось 0Z, расположена параллельно касательной к географической параллели и направлена на восток. При движении вертолета нормальная система координат из-за кривизны поверхности Земли будет поворачиваться относительно стартовой, однако этим пиворогим мы пренебрежем и будем считать, что нормальная система координат перемещается относительно стартовой поступательно, но инерциальной она не будет, так как может перемещаться с ускорением.
Взаимное положение осей нормальной OXgY^Zg и связанной OXYZ систем координат определяет угловое положение вертолета в пространстве. Ориентация осей связанной системы координат относительно нормальной характеризуется углами крена у, тангажа Э и рыскания у (рис. 4.2).
плоскость, содср-, жащая ось ОХ
Вертикальная
Проекция оси ОХ на плоскость
Рис. 4.2. Взаимная ориентация связанной и нормальной систем координат
Угол рыскания у — это угол между осью ОХ* и проекцией продольной оси ОХ на горизонтальную плоскость OX*Z*.
Угол тангажа 3 — это угол между продольной осью ОХ и горизонтальной плоскостью OX*ZS.
Угол крена у — это угол между поперечной осью OZ и осью OZ& смещенной в горизонтальной плоскости OX*Z* в положение, соответствующее нулевому углу рыскания.
Будем считать, что в момент начала движения оси нормальной системы координат совпадают по направлению с соответствующими осями стартовой системы координат.
Скоростная система координат OXoY£o
Начало скоростной системы координат расположено в центре масс вертолета. Скоростная ось ОХа направлена вдоль вектора воздушной скорости вертолета Va и совпадает с ним по направлению (рис. 4.3). Ось подъемной силы OYa расположена в плоскости OXY и направлена вверх. Боковая ось OZa образует с осями ОХа и ОYa правую систему координат.
Рис. 4.3. Взаимная ориентация связанной и скоростной систем координат
Эта система координат используется для описания аэродинамических характеристик, сил и моментов, действующих на вертолет, а также для описания положения вертолета относительно набегающего потока, что осуществляется с помощью двух углов: угла атаки а и угла скольжения р.
Угол атаки а — это угол между продольной осью ОХ вертолета и проекцией вектора его воздушной скорости на плоскость OXY — вектором
Угол скольжения р — это угол между вектором воздушной скорости вертолета Va и плоскостью OXY.
Нормальная система координат точки подвеса 0^ YgiZgi
На вертолете трос закреплен в некоторой точке б),, не совпадающей с центром масс вертолета, — в точке подвеса (рис. 4.4). Поместим в эту точку начало системы координат OJC^Y^Z^. Оси этой системы координат всегда совпадают по направлению с соответствующими осями нормальной системы координат OX^YJZr Таким образом, нормальная система координат точки подвеса дви-
Рис. 4.4. Системы координат троса и груза
жстся поступательно относительно стартовой системы координат и нормальной системы координат вертолета.
Связанная система координат троса OlXi YXZX
Связанная система координат троса 0}X}Y}Z} имеет начало также в точке подвеса (см. рис. 4.4). Оси этой системы координат жестко связаны с тросом подобно осям связанной системы координат вертолета OXYZ. При этом ось О, У, всегда направлена вдоль троса вверх.
Поскольку, как было принято выше, трос закреплен в точке подвеса с помощью сферического шарнира, положение троса (по
ложение связанной системы координат троса OjAi/jZi) относительно нормальной системы координат точки подвеса 0}XgXY^ZRX можно описать таким же образом, как это сделано выше, при описании взаимного положения систем координат вертолета OXYZ и OX^Y^Z^ т.е. с помощью углов рыскания у,, тангажа и крена у,. Эти углы определяются по правилам, аналогичным тем, которые были приведены выше при определении углов рыскания, тангажа и крена вертолета.
Связанная система координат груза O2X2Y2Z2
Связанная система координат груза имеет начало в центре масс груза (точка О2) (см. рис. 4.4). Этим, собственно, и исчерпывается ее отличие от связанной системы координат троса 0}Х^Х}. Таким образом, связанная система координат груза O2X2Y2Z2 жестко связана не только с самим грузом, но и с тросом. Ее оси всегда параллельны осям связанной системы координат троса 0{Х} Y}Z{ и совпадают с ними по направлению.
Скоростная система координат груза O2Xa2Ya2Za2
Эта система координат груза по своей сути аналогична соответствующей системе координат вертолета. Ее начало находится в центре масс груза О2 (см. рис. 4.4), ось О2Ха2 направлена вдоль вектора воздушной скорости груза и совпадает с ним по направлению, ось О2Уа2 расположена в плоскости в O2X2Y2 и направлена вверх, ось 02Zo2 образует с осями О2Ха2 и O2Ya2 правую систему координат.
Угловое положение данной системы координат относительно связанной системы координат груза O2X2Y2Z2 задается с помощью углов атаки а2 и скольжения р2> которые определяются по правилам, аналогичным тем, которые были приведены выше, при определении углов атаки и скольжения вертолета.
4.3.3. Уравнения движения
При изучении движения любого материального тела имеется в виду, что это тело перемешается относительно некоторой системы отсчета, обычно связанной с каким-то другим телом. В качестве такой системы отсчета выберем стартовую систему координат OJ^Y^ связанную с Землей. При описании этой системы координат было принято допущение о том, что данная система являет-
сяинерциальной.Такое допущение существенно упрощает составление уравнений движения.
Напомним, что система отсчета называется инерциальной, если она находится в состоянии покоя или равномерного прямолинейного поступательного движения. Неинерциальныс системы отсчета перемещаются ускоренно. Любое ВС, в том числе вертолет, может перемещаться ускоренно, поэтому все системы координат, начало отсчета которых связано с вертолетом, являются неинерциальными.
Составление уравнений движения системы "вертолет — груз" является весьма сложной и трудоемкой задачей. Это связано прежде всего с тем, что данная система имеет большое число степеней свободы. Только из-за того, что лопасти НВ имеют горизонтальные, вертикальные и осевые шарниры, порядок системы уравнений движения даже одновинтового вертолета может достигать нескольких десятков. Наличие груза на ВП увеличивает и без того большое число степеней свободы.
Кроме того, существуют определенные трудности в описании работы НВ и РВ при их обтекании набегающим потоком с учетом их интерференции между собой, а также с планером вертолета и грузом на ВП.
В связи с наличием этих и других трудностей при моделировании движения вертолета применяют упрощающие подходы. Так, например, широко используется допущение о замене НВ с его сложной динамикой равнодействующей силой. При этом предполагается, что маховое движение лопастей изменяется мгновенно при изменениях параметров движения вертолета и углов общего и циклического шага лопастей [4.25], а сам НВ представляется в виде конуса, который описывают лопасти при вращении.
Данный подход используется и в описанной ниже ММ. Отметим, что и РВ также заменяется создаваемой им силой.
Рассмотрим допущения, касающиеся подвески груза к вертолету. Пусть трос закреплен на грузе таким образом, что он не изменяет своего углового положения относительно груза (он всегда направлен вдоль оси O2Y2 связанной системы координат груза, т.е. оси 0}У} и О2У2 всегда находятся на одной линии и совпадают по направлению). К вертолету же трос крепится с помощью идеального сферического шарнира. Тогда можно считать, что трос и груз являются одним телом. Это позволяет рассматривать систему "вертолет — груз" как систему двух тел, связанных шарнирно. По
скольку сферический шарнир передает только силу, то данную связь можно заменить единственной реакцией. Линия действия этой реакции будет совпадать с осью Уь а по величине она будет равна силе натяжения троса.
Реакцию связи в точке подвеса на вертолете, которую в дальнейшем будем называть силой натяжения троса, можно считать внешней силой по отношению как к вертолету, так и к грузу с той лишь разницей, что в первом случае ее направление будет противоположно направлению оси О,У|, а во втором — будет с ним совпадать.
При выводе уравнений движения и определении действующих сил будем считать, что вертолет и груз с тросом являются абсолютно твердыми телами, хотя учесть, например, упругость троса можно достаточно просто, если груз с тросом представить как механическую систему с одной степенью свободы в виде упругомассового осциллятора с демпфером вязкого трения [4.26].
Уравнения движения абсолютно твердого тела, каким мы условились считать вертолет, выводятся из основных положений теоретической механики [4.27]. Поэтому движение вертолета описывается уравнениями сил, приложенных в его центре масс, и моментов относительно центра масс. В самом общем виде в векторной форме эти уравнения выглядят следующим образом:
уравнение сил:
dV -
n^- = F, (4.6)
dt
где т — масса вертолета; V — вектор скорости центра масс вертолета относительно стартовой системы координат; F — равнодействующая всех внешних сил, действующих на вертолет;
уравнение моментов:
^ = Л7, (4.7)
dt
где К — кинетический момент (или главный момент количества движения) относительно центра масс вертолета; М — главный момент внешних сил (векторная сумма моментов внешних сил), действующих на вертолет, относительно центра масс вертолета.
Рассмотрим левые части этих уравнений, перейдя к их скалярной форме.
ВыведемДлчачала скалярные уравнения сил в проекциях на оси связанной системы координат OXYZ. Эта система координат может не только перемешаться поступательно, но и вращаться относительно стартовой системы координат O^XCYCZC. В связи с этим проекции любого вектора R, определенного относительно стартовой системы координат, на оси подвижной системы OXYZ будут зависеть от углов, которые оси этой системы составляют с осями системы O^XCYCZC. А проекции производной этого вектора по времени, кроме того, будут зависеть от составляющих угловой скорости to системы OXYZотносительно системы O^Y^. Это вытекает из известной в теоретической механике формулы Бура
dR dR 1л о\
— = —+(toxA), (4.8)
dt dt
dR
где — означает дифференцирование по времени проекций векто-dt
pa R на оси подвижной системы координат OXYZ.
Если в качестве рассматриваемого вектора взять вектор скорости центра масс вертолета относительно стартовой системы координат И, то с учетом (4.8) и правила определения проекций векторного произведения из выражения (4.6) получим следующую систему дифференциальных уравнений сил в проекциях на оси связанной системы координат OXYZ.
т(У„ +<o,Vz-azVy) = Fx;
т(Уу +a.Vx -сохК.)= Fy; (4.9)
т(Гг +а1УУ -a>yVx) = Fz,
где К, К - проекции скорости движения центра масс вертоле-dVx dFy . dVz
та; Vx = —V = —V. = —- — проекции ускорения центра масс dt dt ‘ dt
вертолета; сох, соу, <ог — проекции вектора угловой скорости вращения вертолета; Д, Fy, Fz — проекции равнодействующей всех внешних сил, действующих на вертолет.
Систему уравнений (4.9) используют обычно при одновременном исследовании поступательного и вращательного движений вертолета. Для решения же задачи определения положения центра масс вертолета относительно стартовой системы координат удоб
нее использовать систему скалярных уравнении сил в проекциях на оси нормальной системы координат OXgY^ оси которой всегда параллельны осям стартовой системы координат и совпадают с ними по направлению [4.28]:
mV = F • r xg 1 xg ч
mVK=F„-,. (4.10)
/и V ,
где Vxg, Vyg, V7y — проекции ускорения центра масс вертолета на оси нормальной системы координат; F^, Fyg, F^ — проекции равнодействующей всех внешних сил, действующих на вертолет, на оси нормальной системы координат.
Теперь рассмотрим уравнение моментов. В теоретической механике вводится понятие кинетического момента точки и твердого тела. Напомним, что для материальной точки массой т, движущейся со скоростью V, кинетическим моментом к относительно какого-либо центра называют момент количества движения относительно этого центра:
k=r*mV, (4.11)
где г — радиус-вектор рассматриваемой материальной точки относительно некоторого центра.
Твердое тело можно представить в виде системы, состоящей из п частей. Тогда кинетический момент этого тела относительно его центра масс будет определяться как
£ = 1ппУг„ х/и„Й„ =ИтУт„(г„ хИ„). (4.12)
«->00 Я —>00
я я
Используя правило определения проекций векторного произведения, найдем проекции кинетического момента на оси связанной системы координат OXYZ;
Я—>00 п
К, = -x„Vnz)-, (4.13)
п ->» Х““< п
Кz = lmYm„(x,V -у„Кт), п->*> п
где х„ yni zn — координаты w-й точки в связанной системе координат.
Заменим проекции скорости Vn их выражениями, полученными по формулам Эйлера,
Vnx = ®yZn -<огуя;
— (Dx j (4.14)
Ущ ~®хУп — п ,
тогда для проекции Кх получим
Кх = ПтУгя„[у„(соЛ>’„ -<ozx„)-г„(«>гх„ -<oxz„)] = , ч->»
п
= Пт У т„ (соху2 -о>ух„у„ -<&,x„z„ +®xzl') = л->оо
Л
= ых Jim У m„(yl +zi)-a>ylimy'm„x„y„-<di\imy'm„x„z„. (4-15) П—>0С Л—>00 Л—>00
л п п
В уравнении (4.15) слагаемые представляют собой произведения проекций вектора угловой скорости вращения тела па моменты инерции тела. Приведем известные из теоретической механики выражения для осевых и центробежных моментов инерции тела соответственно:
А = Hm (у2 + г„2); п >00 л
Iу = lim (х2 + Z2„); (4.16)
/»->оо л
Iz = lim£m„(x2 +у’),
Л-»а:
П
= lim£w„x„y„;
Л—>00 п
1хг =\тУт„х„г„; (4.17)
Н—->ГГ П
Л->00 п
Проведя преобразования, аналогичные (4.15), для проекций кинетического момента Ку и Kv учитывая при этом (4.16) и (4.17), получим
^Х^Х 1 Х)№ У ^XZ^Zf
Ку IXy(S)x 4” IуСОу 7^С0г,
Kz =-1^ -Iyz(f)y А. ✓» J 4. yr A. 4»
(4.18)
Применяя к вектору кинетического момента К формулу Бура (4.8), получим следующую систему дифференциальных уравнений моментов в проекциях на оси связанной системы координат OXYZ:
Кх +<&VK7 -М*
У л, 4 У -л. >
Ку+а>гКх-в>хКг=Му; (4.19)
К, +а>,А\. -а.К. = М,, 4 У J л 4 х
dKx * dKy . dKz
где Кх - —-, К„ = —К ? = —- — производные по времени про-dt dt dt
екций кинетического момента; Мх, Му, М. — проекции главного
момента внешних сил М.
Отсюда с учетом (4.18) получим
^х^х ^ху^у ^XZ^Z XZ^X^у + ху^х^ z +
+1п(&\ -со0+(/г-1у)&уа. = Му, -1ху<лх +1уау1у.ауах +
+4г(®х “®г)+(4 — ~ Му,
-I„со.. +1,со. -I„о>;со. +/„оз,«),. +
л. ✓ 4 4 4 У 4 4 **4 4 j
+/xv(co2 -(В2) + (/у-/х)юх(0„ =Мг.
(4.20)
В целях некоторого упрощения левых частей уравнений этой системы можно принять следующее допущение. Поскольку чаще всего отклонение центра масс вертолета по оси ObZb базовой системы координат невелико, а вертолет с некоторой долей условности можно считать симметричным телом относительно плоскости ObXbYb, то это значит, что плоскость OXYсвязанной системы координат совпадает с плоскостью симметрии вертолета. В этом случае центробежные моменты инерции, содержащие индекс г, будут равны нулю: Ixz = lyz = 0. С учетом этого допущения система уравнений моментов относительно осей связанной системы координат OXYZ запишется в виде
- Д®, +4,<»х®г +(Д - Л)«,,«>: = Мх;
Iху^х у ху^ у^ Z ~^^Х Z Му, (4.21)
Л® Z + Л, (® V )+(/,- Л )®Х®, = М z .
Таким образом, раскрыв левые части уравнений (4.6) и (4.7), мы получили системы скалярных дифференциальных уравнений движения, описывающих перемещения центра масс вертолета (4.9) и (4.10), а также перемещения фюзеляжа вертолета вокруг центра масс (4.21).
4.3.4. Силы и моменты, действующие на вертолет
Перейдем к подробному рассмотрению правых частей уравнений движения (4.6) и (4.7).
Вертолет в полете движется в поле сил тяготения Земли при воздействии сил и моментов, создаваемых НВ, РВ и набегающим потоком воздуха. Для вертолета с грузом на ВП добавляется еще сила натяжения троса и момент от нее. В соответствии с этим вектор равнодействующей всех внешних сил, действующих на вертолет, F можно представить в виде векторной суммы:
F=RHJS+fPB+RA+G+R,, (4.22)
где Анв - равнодействующая сила НВ; ТРВ — тяга РВ; Ал — равнодействующая аэродинамических сил, действующих на планер вертолета; G - сила тяжести; Д - сила натяжения троса.
Главный момент внешних сил М также представляет собой векторную сумму:
М = Л?нв + МРВ + Л/, + Л/т , (4.23)
где Л/нв — момент, создаваемый НВ; М вв — момент, создаваемый РВ; МА — аэродинамический момент планера вертолета; М1 — момент от силы натяжения троса.
Рассмотрим последовательно каждую составляющую, входящую в уравнения (4.22) и (4.23).
Силы и моменты, создаваемые несущим винтом
На вертолете НВ является основным средством как для создания сил, которые обеспечивают поступательный полет вертолета (перемещение его центра масс), так и для создания моментов относительно центра масс, необходимых для управления вокруг продольной ОХ и поперечной OZ осей. Управление вертолетом обеспечивается благодаря изменению величины и направления
равнодействующей силы 7?нв. Для того чтобы описать воздействие сил и моментов, создаваемых НВ, на планер вертолета, необходимо знать, от каких параметров и как зависят величина и направление равнодействующей /?нв [4.19, 4.29...4.33].
Величина /?11В при заданных и неизменных аэродинамических, геометрических и массово-инерционных характеристиках лопастей НВ зависит от угловой скорости вращения НВ сонв (которая, как правило, поддерживается постоянной с помощью автоматики), угла установки лопастей (или общего шага ф0), а также от величины и направления скорости набегающего потока, обдувающего НВ,
(4.24)
где W — вектор скорости ветра.
Управление величиной Анв производится с помощью изменения общего шага ф0, который задается летчиком с помощью рычага ’’шаг — газ”.
На величину равнодействующей силы Янв также оказывает влияние угловая скорость рыскания оу Это происходит из-за того, что при возникновении у, изменяется угловая скорость вращения НВ соНВо относительно воздушной среды. Так, при развороте вертолета вправо (соу < 0) соНВо = (оНв + а при развороте влево (су > 0) соНВо = сонв - cov. Однако это влияние проявляется только при очень резких разворотах, так как сонв >> оу
Направление равнодействующей Лнв зависит от множества факторов. Прежде всего, это продольное и поперечное отклонение кольца автомата перекоса, при котором происходит изменение циклического шага НВ сри. В продольном направлении угол отклонения кольца автомата перекоса и считается положительным при наклоне кольца назад, в поперечном направлении угол отклонения кольца г| положителен при наклоне влево. При этом угол наклона равнодействующей Янв прямо пропорционален углу наклона кольца автомата перекоса, а значит, происходит в ту же сторону. Кольцо автомата перекоса отклоняется по командам летчика, приходящим от ручки управления, а также по командам автопилота.
При отклонении вектора Анв от оси втулки НВ возникнут его проекции, параллельные осям связанной системы координат
Рис. 4.5. Проекции равнодействующей силы несущего винта на оси связанной системы координат
(рис. 4.5): на ось ОХ — продольная сила Н; на ось OY — тяга Т; на ось OZ - поперечная сила S.
В динамике, однако, процесс управления наклоном равнодействующей выглядит сложнее. Конус лопастей НВ при отклонении кольца автомата перекоса изменяет свое положение нс мгновенно, а с некоторым запаздыванием. При этом он отклоняется не только в заданной, например, продольной плоскости, но и в поперечной плоскости, т.с. имеется перекрестная связь. Перекрестное отклонение, как правило, невелико, не превышает 20 % от прямого отклонения и практически устраняется за время одного оборота НВ [4.19]. Поэтому столь скоротечные и незначительные процессы мы учитывать нс будем.
На наклон вектора Лнв влияет не только наклон кольца автомата перекоса. Например, при полете с поступательной скоростью из-за того, что лопасти винта на различных азимутах обтекаются с различными скоростями и по этой причине проворачиваются в горизонтальных шарнирах (ГШ), совершая маховые движения, конус лопастей НВ, а с ним и равнодействующая Анв отклоняются назад и вбок (в сторону наступающей лопасти). На отечественных одновинтовых вертолетах НВ вращается по часовой стрелке, если смотреть на вертолет сверху. Поэтому равнодействующая Анв отклоняется относительно вертолета (если смотреть по направлению полета) влево, как это показано на рис. 4.5. Следует отметить, что точно такое же влияние на НВ оказывает и ветер, поэтому при учете данного явления в модели необходимо брать скорость вертолета относительно воздушной среды Va (формула (4.24)).
На направление равнодействующей Анв оказывают также влияние угловые перемещения фюзеляжа вертолета вокруг продольной ОХ и поперечной OZ осей. При этом на лопасти НВ действуют дополнительные аэродинамические и инерционные силы, вызванные этими перемещениями. Вследствие шарнирной подвески лопастей конус лопастей несколько отстает в движении от оси втулки НВ, а также отклоняется вбок. Так, при кабрировании вертолета (coz > 0) конус лопастей НВ, а с ним и равнодействующая Анв отклоняются вперед и вправо. При кренении вертолета вправо (<ох > 0) равнодействующая Лнв отклоняется влево и вперед.
Учитывая изложенное, для описания проекций равнодействующей Лнв на оси связанной системы координат необходимо иметь следующие функциональные зависимости:
Т ~ , фо 5 ах , ay > az ’ П> ® у J )>
Я = Я(о)нв,ф0,Ках,Га7,7дгз и,г|,сох,соу,ш?); (4.25)
S = К, П,й)х,(й/5СОг)3
где Vay, Vaz — проекции вектора воздушной скорости Va на оси связанной системы координат.
При записи зависимостей, входящих в систему (4.25), учитывались только те параметры, которые могут изменяться в течение полета; аэродинамические, геометрические и массово-инерционные параметры лопастей НВ, как указывалось выше, считаются заданными и неизменными.
Данные зависимости очень сложны, и для их аналитического описания принимается большое число допущений и ограничений [4.19, 4.25]. При численном же моделировании частично используются аналитические зависимости, а частично — многомерные массивы данных, полученные при различных видах испытаний. Результатами испытаний обычно являются функциональные зависимости. Они представлены в виде таблиц, где значения функций и их параметров даны с определенным шагом. Для получения промежуточных значений используются различные методы интерполяции.
Для перехода к нормальной системе координат, т.е. нахождения проекций равнодействующей Янв на оси этой системы, можно воспользоваться таблицей направляющих косинусов
для преобразования составляющих векторов, приведенной в ГОСТ 20058—80:
= //cosy cosS + Т (siny siny - cosy sin&cosy) +
+5(siny cosy + cosy sinG siny);
/?НВж = #sin3+Fcos3 cosy-5cos3 siny; (4.26)
7?HB = -//siny cos-0 + T (cosy siny + siny sinOcosy) +
+5(cosy cosy - siny sin S siny).
Теперь перейдем к рассмотрению моментов, возникающих от НВ. Из рис. 4.5 видно, что в общем случае проекции равнодействующей Лнв на оси связанной системы координат OXYZ будут создавать моменты относительно всех трех ее осей. Кроме того, от Н В на фюзеляж вертолета будет передаваться реактивный момент
Л/шв = = Мк+1а (4.27)
at
где А/вр — вращающий момент двигателей, Л/вр =—— NekNi Ne — WHB
суммарная эффективная мощность двигателей (мощность на выходном валу), kN — коэффициент использования мощности; Мк — крутящий момент, который создается силами аэродинамического сопротивления лопастей и задается с помощью многомерных массивов, Мк = Мк (сонв, ф0, Г^, Vav х, тц со,); /и - момент
инерции всех вращающихся частей НВ относительно оси вала НВ.
Необходимо также учесть и тот факт, что из-за разноса ГШ (наличия расстояния от оси вращения НВ до оси ГШ) при отклонении равнодействующей Янв в плоскости ее наклона будет возникать дополнительный момент. Он создается центробежными силами лопастей на плече, пропорциональном величине разноса ГШ. Эго обстоятельство может быть учтено, если принять, что равнодействующая приложена не в центре втулки в плоскости вращения ГШ, а в некоторой фиктивной точке на оси НВ, находящейся над плоскостью вращения ГШ на расстоянии Ху от нее. Обычно Ду составляет 50...80 % от у, [4.19]. В связи с этим моменты сил от действия НВ должны быть определены с учетом так называемой эффективной высоты тулки НВ
уэ =ут +Ду. (4.28)
Здесь
Ду = 'Мгш^дЮнв « (4.29)
где пл — число лопастей; /гш - расстояние от оси вращения НВ до оси ГШ; 5Л — массовый статический момент лопасти относительно оси ГШ, S, =limV/w4r„, тп — масса л-го элемента лопасти, Л-УОО
гп — радиус-вектор л-го элемента лопасти относительно оси ГШ.
Таким образом, система уравнений для моментов, возникающих от действия НВ, относительно осей связанной системы координат будет иметь вид
^нвх =7zT -5уэ;
МНву =-Ягт +5хт +Л/рнв; (430)
=Яуэ -7хт.
Момент относительно оси системы координат считается положительным, когда он стремится вращать вертолет по часовой стрелке, если смотреть на вертолет в сторону положительного направления этой оси.
Силы и моменты, создаваемые рулевым винтом
РВ используется на_одновинтовом вертолете для компенсации реактивного момента МРНВ, создаваемого НВ, а также для обеспечения путевой устойчивости и управляемости. Он устанавливается на хвостовой балке для обеспечения большого плеча относительно центра масс вертолета для создаваемой РВ тяги ТРЪ, а также для уменьшения интерференции с НВ (рис. 4.6).
Рис. 4.6. Схема уравновешивания реактивного момента несущего винта моментом тяги рулевого винта
На большинстве типов вертолетов РВ — тол кающий, он устанавливается на концевой балке справа по полету, чтобы не нагружать киль и саму хвостовую балку пульсирующим потоком отбрасываемого воздуха, а также уменьшить потери тяги РВ на обдувку киля.
РВ приводится во вращение от тех же двигателей, что и НВ. Это осуществляется с помощью трансмиссии. Как правило, лопасти РВ имеют осевые и горизонтальные шарниры. Изменение величины тяги РВ для управления вертолетом по рысканию осуществляется путем изменения углов установки лопастей срРВ (общего шага РВ) при автоматически стабилизируемой угловой скорости вращения РВ соРВ. Автоматическая стабилизация соРВ осуществляется теми же средствами, что и стабилизация сонв, поскольку РВ и НВ связаны друг с другом с помощью трансмиссии. Управление общим шагом РВ осуществляется летчиком с помошью педалей, а также по командам автопилота.
Величина тяги РВ 7’РВ при заданных и неизменных аэродинамических, геометрических и массово-инерционных характеристиках лопастей помимо угловой скорости вращения соРВ и общего шага (рРВ зависит от величины и направления воздушной скорости Va и угловых скоростей рыскания и крена сщ. Энергичные боковые перемещения, сильный боковой ветер, резкие развороты (особенно по рысканию) могут привести к существенному уменьшению тяги РВ. Так, например, при ветре слева уменьшаются углы атаки лопастей, а при ветре справа часть индуктивного потока, отбрасываемого РВ, вновь им засасывается и вовлекается в циркуляционное движение вплоть до образования так называемого режима вихревого кольца, при котором воздух перестает отбрасываться от винта и необходимая аэродинамическая сила на нем не создается.
Запишем систему скалярных уравнений для проекций силы на оси связанной системы координат:
ГРВу =0; (4.31)
Грв I —^"рв РВ э ФрВ > ^ах > ^ау » ^az > )>
где ТРВ(соРВ, (рРВ, /ях, сох, Ыу) - многомерный массив данных, определяющий зависимость величины тяги РВ от изменяющихся в полете параметров.
В литературе можно также найти аналитические зависимости для приближенного определения тяги РВ [4.19, 4.25], в том числе с учетом потерь тяги при интерференции с килем, которая имеет место как в случае тянущего, так и в случае толкающего винта.
Проекции вектора ГРВ на оси нормальной системы координат будут иметь следующий вид:
ТРВ^ = ~7рв (siny cosy +cosy sinB siny);
TPB7g =^pBcos^siny; (4.32)
TPB^ = “?pb (cosy cosy - siny sinB siny).
Что касается моментов, создаваемых РВ, то здесь так же, как и в случае с НВ, помимо моментов от действия тяги следует учесть реактивный момент РВ Л/РРВ, который определяется аналогично реактивному моменту НВ. При этом, однако, следует обратить внимание на направление вращения РВ. В отличие от НВ на разных типах отечественных вертолетов направление вращения РВ может быть различным. На большинстве отечественных вертолетов РВ вращается таким образом, что его лопасти в нижнем положении движутся в направлении полета. При таком направлении вращения эффективность РВ возрастает, а падение его тяги при боковой обдувке происходит не столь значительно, как при движении лопастей в нижнем положении в направлении, противоположном полету. Этот эффект является результатом взаимодействия высокоскоростного индуктивного потока, отбрасываемого НВ и обтекающего лопасти РВ, находящиеся в нижнем положении. При движении лопастей РВ навстречу этому потоку аэродинамическая сила, возникающая на них, возрастает, а при противоположном направлении движения лопастей — падает. Поэтому при прочих равных условиях тяга РВ в нервом случае будет выше.
Запишем систему уравнений моментов, возникающих от действия РВ, относительно осей связанной системы координат:
— “7\>в(ГРВу£> “Ут)?
^РВу = ^Рв(ГРВхЛ “ *т (4.33)
Л/ РВ г ~М РРВ ,
где гРВх6, гРВуЬ — плечи тяги РВ в базовой системе координат.
Знакперед реактивным моментом РВ Л/РРВ говорит о движении лопастей в нижнем положении в направлении полета.
Аэродинамические силы и моменты, действующие на планер вертолета
Планер вертолета вместе с несущей системой и системой компенсации реактивного момента определяет облик вертолета. Аэродинамические формы и компоновки планера вертолета достаточно разнообразны. Они зависят от назначения вертолета, его схемы и эксплуатационных особенностей и, в свою очередь, сами влияют на аэродинамическое совершенство вертолета. Основными составными частями планера вертолета являются фюзеляж, горизонтальное оперение, вертикальное оперение и гондолы двигателей.
Фюзеляж вертолета предназначен для размещения полезной нагрузки, а также силовой установки, различных функциональных систем, другого необходимого оборудования, топлива, экипажа, к нему крепится неубирающееся или убирающееся шасси, НВ и РВ, т.е. фюзеляж является конструктивной основой вертолета. С аэродинамической точки зрения фюзеляж вертолета чаще всего является неудобообтекаемым телом, которое обдувается набегающим потоком при любых углах атаки а и скольжения р. Фюзеляж одновинтового вертолета имеет хвостовую балку, на которой устанавливаются РВ, стабилизатор и киль.
Стабилизатор предназначен для улучшения характеристик продольной устойчивости и управляемости вертолета. Он может быть как неуправляемым, так и управляемым. Стабилизатор устанавливается на хвостовой балке вертолета с целью создания наибольшего плеча аэродинамической силы, приложенной к нему, а также уменьшения вредного влияния индуктивного потока от НВ, выражающегося в основном в потере тяги НВ.
Киль предназначен для улучшения характеристик путевой устойчивости и управляемости вертолета. По компоновочным соображениям он выполняется стреловидным. На больших скоростях полета киль разгружает РВ, благодаря чему увеличиваются запасы по управлению в канале рыскания.
Планер вертолета может иметь крыло, которое па больших скоростях полета разгружает НВ и благодаря этому позволяет добиться увеличения максимальной горизонтальной скорости. Однако применяется крыло редко, поскольку на малых скоростях полета и
режиме висения это уменьшает весовую отдачу вертолета, а также увеличивает потери тяги НВ на обдувку планера. Поэтому далее крыло рассматриваться не будет.
Итак, аэродинамическую силу, действующую на планер вертолета, можно представить в виде суммы сил:
^=^+^4-^+^, (4.34)
гдеЛФ,ДТ ,RK — аэродинамические силы фюзеляжа, стабилизатора и киля соответственно; Ro6a — сила, вызванная обдувкой индуктивным потоком от НВ.
Аэродинамический момент планера вертолета представляет собой сумму моментов:
Л/ = М ф + Мсг + +Мо6ц> (4.35)
где Мф, , Мк — аэродинамические моменты фюзеляжа, стабилизатора и киля соответственно; Л/Обд — момент, вызванный обдувкой индуктивным потоком от НВ.
В общем виде формула для расчета величины аэродинамической силы, как известно из аэродинамики, выглядит следующим образом:
RA=cK^-S, (4.36)
где - коэффициент аэродинамической силы; р - плотность воздуха на данной высоте полета; Va — скорость набегающего потока; 5 - характерная площадь.
Величина аэродинамического момента вычисляется по формуле
(4.37)
где тА — коэффициент аэродинамического момента; / — характерный линейный размер.
Запишем проекции аэродинамической силы фюзеляжа R$ на оси скоростной системы координат OXaYaZc вертолета, поскольку именно в этой системе координат чаще всего определяются коэф-
фициенты аэродинамических сил при продувках моделей в аэродинамических трубах:
аф
(4.38)
где Хф3 ~ сила лобового сопротивления, подъемная и
боковая силы фюзеляжа соответственно; схоф, суаф, cza$ - коэффициенты сил Хф, Уяф, 7дф соответственно, являющиеся функциями углов атаки аф и скольжения рф фюзеляжа и представляемые в виде двумерных массивов данных, полученных в результате продувок.
Обычно угол атаки фюзеляжа при продувках измеряется относительно его СГФ. При этом, как правило, угол атаки вертолета не совпадает с углом атаки фюзеляжа: а * аф. Это связано с тем, что ось вала НВ имеет некоторый угол заклинения относительно СГФ — £ф, а это значит, что и продольная ось связанной системы координат OXYZ вертолета также находится под утлом к СГФ (см. рис. 4.1). Здесь можно также учесть угол скоса потока Аа, вызванный индуктивным потоком от НВ. Средний угол скоса потока можно приближенно определить как отношение индуктивной скорости vHB к скорости набегающего потока:
да «Унв.«----1---
Va
(4.39)
где Т — тяга НВ; FHB — площадь, ометаемая НВ.
В связи с этим углы атаки и скольжения при вычислении проекций аэродинамической силы фюзеляжа на оси скоростной системы координат вертолета OXaYaZaдолжны браться в соответствии с условием
аф = а +еф -Аа;
РФ=Р.
(4.40)
Аэродинамические силы фюзеляжа, определенные в скоростной системе координат вертолета OXaYaZa в соответствии с
ГОСТ 20058—80, дадут следующие проекции на оси связанной системы координат OXYZ:
А"ф = Ztf<1)cosa cosp-rT64)sina -Za4)cosa sinp;
Уо =-Artf(J)sinoccosp+ya(|)cosa +Zfl(1>sina sinP; (4.41) = Xfl<J)sinp+Za<t)cosp,
где Хф, Уф, Хф — продольная, нормальная и поперечная аэродинамические силы фюзеляжа соответственно.
Текущие значения углов атаки а и скольжения р находятся следующим образом. Зная проекции скорости центра масс вертолета V на оси связанной системы координат, которые находятся в процессе интегрирования уравнений движения, и скорости ветра W на те же оси, которые задаются в исходных данных, найдем проекции воздушной скириши вертолета на оси связанной системы координат:
^=-К+Жх; Voy=~Vy+]Vy\ (4.42)
voz=-vz+wz.
Углы аир найдем, решая следующую систему уравнений:
=Kflcosacosp;
Vay = ~va sina cosp; (4.43)
Vaz =r„sinp,
me = 7^+^+^.
Аэродинамические моменты фюзеляжа определяются относительно осей связанной системы координат:
АД, =ифЛ^у-5/;
М*, = тф, ^-si-, (4.44)
Мф1=т^-51,
где МфХ, МфУ, M^z - моменты крена, рыскания и тангажа фюзеляжа соответственно; тфх, тфу, тфг — коэффициенты моментов
Мф х, v,Л/ф т соответствен н о, я вл я юшиеся функциями углов атаки аф и скольжения рф фюзеляжа и представляемые в виде двумерных массивов данных, получаемых в результате продувок.
Силовое воздействие стабилизатора на вертолет в основном сводится к созданию им нормальной аэродинамической силы YCT (продольную силу можно не учитывать) и ее момента относительно оси OZ связанной системы координат Мстг:
X ~ О* Л СТ V, К„=С^Р^-5СТ; (4.45)
где с> ст — коэффициент нормальной аэродинамической силы стабилизатора, который является функцией углов атаки аст и скольжения рст стабилизатора (может задаваться в виде двумерного массива, получаемого в результате продувок модели стабилизатора); 5СГ - площадь стабилизатора.
При этом необходимо учесть, что угол атаки стабилизатора определяется следующим образом:
а ст = а+еф+срст -Даст, (4.46)
где (рст - угол установки стабилизатора относительно СГФ; Ааст -суммарный угол скоса потока в районе стабилизатора, обусловленного влиянием НВ и фюзеляжа.
Как правило, в горизонтальном полете сила Кст отрицательна и поэтому создает кабрирующий момент (рис. 4.7).
Рис. 4.7. Схема действия аэродинамической силы стабилизатора
П^Гомент аэродинамической силы стабилизатора определяется следующим образом:
«0;
(4.47)
М =Y (г а -х ) 1 ст г ст V ст д о Лт /5
где гстхй — плечо аэродинамической силы стабилизатора в базовой системе координат.
Силовое воздействие киля на вертолет можно представить в виде поперечной аэродинамической силы ZK, а также аэродинамических моментов Мкх и путевого Мку от этой силы. В соответствии с этим будем считать, что
ZK «0;.
П «0; (4.48)
где с.к — коэффициент поперечной аэродинамической силы киля, являющийся функцией углов атаки ак и скольжения рк киля (может задаваться в виде двумерного массива, полученного в результате продувок модели стабилизатора); 5К — площадь киля.
Моменты относительно осей связанной системы координат от действия силы ZK вычисляются следующим образом:
кх ~^к(ГкуЬ ~Уг)> .
Afк у = -ZK (rKxb - хт); (4.49)
«о,
где гкхЬ, гкуЬ — плечи аэродинамической силы киля вдоль соответствующих осей базовой системы координат (рис. 4.8).
Аэродинамическая сила Аобд, связанная с обдувкой планера вертолета (а именно, фюзеляжа и стабилизатора) индуктивным потоком от НВ, является силой сопротивления, которую нужно преодолеть с помощью НВ. Поэтому она выражается в виде потерь тяги Л Г на обдувку планера. В соответствии с этим проекции аэродинамической силы Асбд на оси связанной системы координат будут определяться как
Гис. 4.8. Схема действия аэродинамической силы киля
^обд **
Уо6д=Д7’=Л„5лГ; (4.50)
^«0,
где кМ11 — коэффициент пропорциональности, определяемый по результатам испытаний, ^6а = к^ (сонв, со,, vHB, Vay).
Можно принять, что составляющие аэродинамического момента , возникающего по той же причине, что и сила Ао6д) относительно осей связанной системы координат определяются выражениями
^облх
Мобду^0; (4.51)
„ _ p[^+(^,+vHB)2] ,
М ОбД г ^ОбД z 2 усл * уел 5
где /ио6д. — коэффициент момента тангажа, возникающего из-за обдувки планера, который определяется по результатам продувок; 5усл, /усл “ Условные характерные площадь и размер соответственно, относительно которых определен коэффициент /лобдг
Просуммируем аэродинамические силы и моменты, действующие на планер вертолета. Сначала найдем суммы проекций сил на оси связанной системы координат:
Эти силы дадут следующие проекции на оси нормальной системы координат:
XAs = A^cosy cosB + ¥а (siny siny -cosy sin&cosy) +
+ZA (siny cosy -t-cosy sin& siny);
= XA sin# +y4cosGcosy -Z^cosS siny; (4.53)
ZAs - -XA siny cosVе) + Ya (cosy siny + siny sinGcosy) + +Z4 (cosy cosy - siny sinS siny).
Выражения для суммарных аэродинамических моментов относительно осей связанной системы координат будут иметь вид
=^фх+^кх;
=М^у + Мку\ (4.54)
Az ~ М ф z + Мж z + Мобд г. ♦ • , Сила тяжести
При определении силы тяжести в расчет берется масса вертолета т без учета массы груза, расположенного на ВП. Вектор силы тяжести G всегда совпадает с отрицательным направлением оси OYg нормальной системы координат:
Gxg =0;
(4.55) (7^=0.
Сила тяжести не создает момента относительно центра масс вертолета, поэтому нет смысла приводить ее проекции на оси связанной системы координат.
Силы и моменты от натяжения троса
Сила натяжения троса Rr, на котором подвешен груз, зависит от силы тяжести груза, аэродинамической силы, действующей на груз, а также от инерционных сил, возникающих при раскачивании груза относительно точки подвеса и из-за ускоренного перемещения самой точки подвеса. При этом, поскольку в общем случае точка подвеса не совпадает с центром масс вертолета, сила на-
Рис. 4.9. Схема к определению силы натяжения троса и момента от нее
тяжения троса будет создавать момент Мт относительно центра масс (рис. 4.9).
Для того чтобы определить силу натяжения троса, необходимо найти проекцию равнодействующей всех сил, действующих на груз Арр, на направление, совпадающее с направлением троса.
Равнодействующая Агр представляет собой следующую векторную сумму:
^гр =^rp +^1rp +Лб +Л.п > (4.56)
*
где Grp — сила тяжести груза; Я/)гр — аэродинамическая сила, действующая на груз; ./ц5 — центробежная сила инерции, возникающая
в процессе раскачивания груза; /тп — сила инерции, возникающая из-за ускоренного движения точки подвеса.
Рассмотрим движение троса с грузом. При этом необходимо рассмотреть движение не груза в отдельности, а системы "трос - груз".
Поскольку связанные системы координат троса и груза (O^KjZ] и O2X2Y2Z2 соответственно) сами жестко связаны друг с другом, то удобно при описании динамики системы "трос - груз" в качестве связанной системы координат выбрать Тогда
движение груза на тросе относительно стартовой системы координат можно представить как сложное движение, состоящее из движения связанной системы координат О.Х\ YXZ{ относительно нормальной системы координат которая в свою очередь
движется относительно стартовой системы координат ()zXzY^Zz. Первый тип движения в теоретической механике принято называть относительным, второй — переносным.
Отметим, что движение системы "трос — груз" относительно системы координат OjXglYglZgl можно рассматривать как движение тела, имеющего одну неподвижную точку — точку подвеса. По своему характеру это движение вращательное. Оно аналогично движению самого вертолета относительно его центра масс и вызвано воздействием момента Мф, который представляет собой сумму моментов от сил, действующих на груз, относительно точки подвеса:
ЛЛр =Маг? +МАгр + МГ.„, (4.57)
где Л/Сгр — момент силы тяжести груза; Л/Л[р — аэродинамический момент груза; Мг п — момент от силы, возникающей из-за ускоренного перемещения точки подвеса.
Отметим, что центробежная сила /ц6, возникающая при раскачивании груза, момента относительно точки подвеса не создает.
Рассмотрим ускоренное движение точки подвеса О} относительно стартовой системы координат. При таком движении в соответствии с принципом Даламбера в центре масс груза будет действовать сила инерции 7Т П, величина которой прямо пропорциональна ускорению точки О,, а направление — противоположно.
Рис. 4.10. Схема к определению абсолютного ускорения точки подвеса
В этом случае ускорение центра масс груза относительно стартовой системы координат будет складываться из переносного ускорения системы координат 0}X^YsXZiX и ускорения относительно этой системы координат. Поскольку оси системы 0}X^Y^Zgl всегда параллельны осям стартовой системы координат, переносное движение будет поступательным, а это значит, что кориолисово ускорение не возникнет.
Найдем сначала абсолютное ускорение точки подвеса относительно стартовой системы координат (рис. 4.10):
'Ъ, = ГО +«ХГт п0 4-сох (сох Гтп0),
(4.58)
- абсолютное ускорение точки подвеса О,;
.. d2 г
г0 = -—- — абсолютное ускорение точки О (центра масс вертолета) dt2
при поступательном переносном движении нормальной системы
_ д с/оо
координат вертолета OXyY^Z^ со и со =--угловая скорость и угло-
, dt
вое ускорение вертолета соответственно; гтпО — радиус-вектор
точки подвеса относительно центра масс вертолета.
Найдем проекции ускорений точки возникающих от вращательного движения, на направления, параллельные осям свя
занной системы координат OXYZ. Для этого найдем проекции вращательного =<охгтпО и осестремительного j„ = сох(сохгтп(9) ускорений на оси связанной системы координат вертолета OXYZ. Сначала определим положение точки подвеса в этой системе координат;
'т.пх ^t.nxb ~ -^т ,
'т.п у ~~ 'т.ПуЛ "Л » (4.59 )
'т.п 2 'т.п zb £т >
где гтпхЬ, ггпу6, гТЛ1г6 — координаты точки подвеса в базовой системе координат.
Проекции вращательного ускорения на оси системы координат OXYZ [4.28]:
Jxx ~ ^у 'т.п z ~~
л, =<ьл.Пх-<VT.nt; (4.60)
JxZ ®х'т.пу —®у'т.ПХ9
где сох,6)у, (Ь, - угловые ускорения вертолета относительно соответствующих осей связанной системы координат OXYZ.
Проекции осестремительного ускорения на оси той же системы координат [4.28]:
Jnx “®х®у'т.пу + ®х®г'т.п« —+®г)'т.пх»
jny = пх(ьугхпх +ю7соггтл|, -(coj +ш2г)гт.п/ (4.61)
Ул г “^х^г'т.пх ^‘®у®с'т.п у ~~ (®х +®у)'т.пг»
где (о„ сог сот - угловые скорости вертолета относительно осей связанной системы координат.
Просуммируем полученные ускорения вдоль осей связанной системы координат:
J X ~ JXX + Jпх >
J,=J,,+Jn,', (462)
J z ~ J х z J п z •
На оси нормальной системы координат точки подвеса 0,Xsl YglZgl эти ускорения дадут следующие проекции:
J\s\ - AcosycosB + j . (siny siny -cos\|/sinBcosy) +
+/.(siny cosy +cosy si n3 siny);
= AsinO + j;,cos3cosy -j \cos9 siny; (4.63)
j ж1 = -jx siny cos$ + jy (cosy siny + siny sinBcosy) +
+j.(cosy cosy - siny sin3 siny).
Теперь, зная проекции ускорения центра масс вертолета на оси нормальной системы координат OXgYgZg при поступательном движении этой системы, можно найти проекции абсолютного ускорения точки подвеса Ох на оси нормальной системы координат OjX^Y^Z^, а значит и проекции силы инерции /тп, приложенной в центре масс груза, на эти оси. При этом необходимо учесть, что направления проекций силы инерции «7ТП будут противоположны направлениям проекций абсолютного ускорения точки подвеса:
Л.пх,! =-^(*\+4gi);
Л.пяп =-^гр(у; ); (4.64)
•Л-.ngjl ^гр(^5 "*”7*581 )>
где Югр - масса груза на ВП; xR ,yR, zg — проекции ускорения центра масс вертолета на соответствующие оси нормальной системы координат OXgYgZg при поступательном движении.
Далее силу JT п будем рассматривать как внешнюю по отношению к грузу, а точку подвеса будем считать неподвижной.
Относительно точки подвеса Ох сила /тп создает момент Л/тп.Для того чтобы определить этот момент, найдем проекции данной силы на оси связанной системы координат троса
4nzi =4n41cosv,cos&l + /T.n„,sin9, -Jr„s,siny, cos»,;
=/rn^i(sinVi siny, -cosy, sin», cosy,)+Jrn)g,cos9, cosy, +
+ JTn5ffl(cosyt siny, +siny, sinB,cosy,); (4.65)
And =Anz,l(sin'l'|Cosy, +cosy, sin9, siny,)-JT„,t,cos», siny, +
+ A.n«i (cosy, cosy, -siny, sinB, siny,).
Относительно осей связанной системы координат троса сила /тп создает моменты
^T.nxl А.пД^Т»
^т.пм =0;
(4.66)
^r.nzl 'Ar.nxl^TJ
где rr - расстояние от точки подвеса до центра масс груза.
Знаки моментов в выражениях (4.66) расставлены с учетом того, что л берется с соответствующим знаком. В связанной системе координат груза гт < 0.
Аэродинамическая сила груза Я1гр возникает как из-за воздействия набегающего на вертолет со скоростью Va потока, так и из-за раскачивания груза. Полому для груза воздушная скорость будет определяться выражением
fl гр
= V -V
(4.67)
где — вектор трансверсальной скорости, возникающей при раскачивании груза, т.е. его вращении на тросе относительно точки подвеса.
На оси связанной системы координат троса вектор дает следующие проекции:
Karl ~~ 5
К,,, =0; (4.68)
где <ох„ — угловые скорости движения системы "трос — груз" относительно соответствующих осей системы координат
Проекции аэродинамической силы груза на оси скоростной системы координат груза O7Xll7Yll2Zal определяются аналогично проекциям аэродинамической силы фюзеляжа на оси скоростной системы координат вертолета OXaYaZa (4.38):
пИ-
< =e p flrP c .
1 a rp L xcj rp гр з
pK2
' _ c grP c .
a rp L ya rp rP ’
r =c P^Qrp 5
' a rp c' zo rp - ° rp >
(4.69)
где Zarp, Удгр, Zarp - сила лобового сопротивления, подъемная и боковая силы груза соответственно; схогр, с/Л1.р, сетгр — коэффициенты сил ХЙГР, Уагр, Zarp соответственно, являющиеся функциями углов атаки а2 и скольжения р2 груза и представляемые в виде двумерных массивов данных, полученных в результате продувок; 5^ — характерная площадь груза.
На оси связанной системы координат груза сила RAr? дает следующие проекции:
Zrp =Zerpcosa2cosp2 +yflrp sina 2 -Zflrpcosa2 sinp2;
Угр = -Zarp sina2cosp2 +Zarpcosa2 +Zelp sina 2 sin02; (4.70)
Zrp = Xarp sinp2 +Zfirpcosp2,
где Xw, Krp, ZrP — продольная, нормальная и поперечная аэродинамические силы груза соответственно.
Что касается аэродинамического момента груза Мл ф, то он будет складываться из аэродинамических моментов груза относительно осей связанной системы координат груза O2X2Y2Z2, а также из моментов проекций аэродинамической силы на оси этой же системы координат относительно осей связанной системы координат троса OlXlY1Zi:
М Агру \
М 1V1 Лгрх1
= т
"'гр у
(4.71)
Мд гр Ц
где Л1грл, /игр>,, /ягрг — коэффициенты аэродинамических моментов груза относительно осей его связанной системы координат являющиеся функциями углов атаки а2 и скольжения р2 груза и
представляемые в виде двумерных массивов данных, полученных в результате продувок; /гр — характерный линейный размер груза.
Рассмотрим действие силы тяжести груза G^. Найдем проекции этой силы на оси связанной системы координат троса:
Grpxi = -/nrpgsin9l; =-mrpgcos9lcosyl; (4.72)
= wtpgcos&,sinyl.
Относительно точки подвеса сила тяжести груза G^ создает момент MGrp. Проекции этого момента на оси связанной системы координат троса:
V =G г
1V1 Gvpx\ '“'rpzl гт >
^,1 =0; (4.73)
^Grpzl ^rpjcl^r*
Осталось рассмотреть действие центробежной силы Ju6, возникающей в процессе раскачивания груза. Проекции этой силы на оси связанной системы координат троса:
Ai6xi =о»
Аб,1 = '»п,гт(м2| +со2(); (4.74)
Asa =0-
Относительно точки подвеса, как указывалось выше, сила Ju6 момента не создает, так как действует всегда вдоль троса.
Найдем суммарные силы, действующие вдоль осей связанной системы координат троса:
^Грл! ~ (^Гр х1 + ^п> *^т.пх1 >
^гр>'1 “^гру! + + +*^Т.П.у1 ’ (4.75)
^rpzl ~~ ^грЦ +*^т.пг1*
Сила /?ГРУ| действует вдоль оси У] связанной системы координат троса, т.е. вдоль троса, поэтому именно она и является искомой силой натяжения троса:
R. =^у1. (4.76)
Для того чтобы найти ее величину и направление, пока не хватает некоторых данных, а именно: углов атаки а2 и скольжения |32 груза, угловых скоростей сох1 и сог1 относительно осей связанной системы координат троса, а также углов крена уь тангажа 3, и рыскания vpi системы трос — груз".
Углы атаки ос2 и скольжения 02 груза определяются исходя из условий, аналогичных (4.43). Для нахождения же остальных параметров необходимо составить систему уравнений моментов, подобную (4.20). Здесь следует обратить внимание на то, что моменты инерции груза необходимо вычислять относительно осей связанной системы координат троса 0{Хх ¥{Z с началом в точке подвеса.
В правых частях этих уравнений будут стоять моменты относительно осей системы 0}X}Y{ZXi действующие на подвешенный на тросе груз, а именно:
^rpxl G'rpxl + ^Лгрх1 "*”^т.пх1 ’ ^гру\ ~ Лгру{ ’
(4.77)
Решая совместно уравнения, входящие в систему уравнений моментов для груза, при наличии определенных начальных условий найдем угловые ускорения относительно осей связанной системы координат груза, а именно: cbxl, cb>t| и со.,. С помощью методов численного интегрирования можно найти угловые скорости coxi, со>г) и cod. Для того чтобы перейти к угловым скоростям рыскания, тангажа и крена груза, воспользуемся следующими кинематическими соотношениями:
V, =sec3, (coylcosyt -codsiny,);
=mylsiny, T-m^cosy,;
Yi =°>xl -tgS]((%.,cosyj -co^siny,).
(4.7g)
Значения углов крена yb тангажа и рыскания ц/j системы "трос — груз" получим в результате численного интегрирования. Знание этих углов дает возможность определить как величину и направление силы натяжения троса /?т, так и положение системы "трос — груз" в пространстве. Величину силы Я рассчитаем по приведенным выше формулам, а направление получим, найдя ее проекции на оси нормальной системы координат точки подвеса:
= ЛТ (siny,siny, -cosy ,5413, cosy,);
=^rcos9Icosy1; (4.79)
Rr = RT (cosy, siny , + siny, sin3, cosy,).
Положение же груза определим по проекциям на те же оси радиус-вектора гт, который имеет начало в точке подвеса:
гТЛХ1 = rT(siny, siny, -cosy.sin3,cosy,);
rr^i ^cosOjCosy, ; (4.80)
rTzg, = rr (cosy, siny, + siny, sin3,cosy,).
Теперь найдем проекции вектора Ry на оси связанной системы координат вертолета:
RTX = cosy cos 3 +RiyR} sin3-RTzgl sinyuos3;
=^7xgi (sinysiny-cosy sin 3 cosy)+ tfT^j cos3cosy +
+7?T.?I (cosy siny + siny sin 3 cosy); (4.81)
Rvz =J^X?1 (sinycosy +cosy sin3siny)-R } cos3siny + +RT (cosy cosy - sin у sin 3 sin y),
а затем — составляющие момента My, возникающего от действия силы А, относительно центра масс, по осям той же системы координат:
г* # я I >' 11
Af г х ~ у Zi + R-[ z (^т. п yb ~ У т ) j
Мту ~ ^х Zt ~ R z^x.iixb ~ *^т)> (4.82)
ЛЛг =-КтЛГт„уЬ -Ут)+Дг(гт.п^ -хт).
Итак, определены составляющие всех сил и моментов, входящих соответственно в уравнения (4.22) и (4.23), которые можно переписать теперь в скалярной форме, спроецировав на оси систем координат вертолета:
~ ^HB.xg +7pBxi» + +Rxxg\ >
^yg “*^HByg ^~^PByg + ~ mg + RT yg 1 > (4.83)
zg ~ ^HB T’PB ig ZAg ’
Мх = М НВх + МРйх + МАх + М „;
Му — МНВ ), +МРВ), + Мл у + Мту;
М, =Л/НВг +-Л/РБг +МЛх +МТ..
(4.84)
Таким образом, раскрыты левые и правые части уравнений движения (4.6) и (4.7). Теперь можно перейти к их интегрированию с целью определения скоростей и перемещений.
4.3.5. Численное интегрирование уравнений движения
Скорости движения центра масс вертолета и его положение относительно стартовой системы координат найдем, численно интегрируя уравнения сил
Fxg,
(4.85) — ^zg •
Существует множество методов численного интегрирования дифференциальных уравнений. Наиболее простым из них, а также обеспечивающим максимальное быстродействие программного обеспечения является метод Эйлера. Недостаток этого метода — относительно невысокая точность, и она тем ниже, чем сильнее реальная зависимость отступает от линейной. Иногда эту проблему можно решить, уменьшая шаг интегрирования. При этом, однако, следует иметь в виду, что общее увеличение числа шагов приводит к росту погрешности вычисления, поэтому величина шага должна оптимизироваться. При необходимости увеличить точность вычислений можно воспользоваться другими методами интегрирования (например, методом Рунге—Кутта), которые описаны в соответствующей литературе [4.28, 4.34].
Скорости и координаты центра масс вертолета на каждом п-м шаге интегрирования найдем по следующим формулам:
X ~ gll-\ +
Уgn ~ Уgn-i ~^У
(4.86)
ySn =>'g„-1 +У>.-1Д<+тУ8ПЛ^; (4.87)
Zgn ~ Zgn~\ + Zgn-\ At + ~ Zgn ,
L-f
где ДГ — интервал времени (шаг интегрирования).
Найти угловые скорости и перемещения несколько сложнее, поскольку, как видно из уравнений (4.20), движения вертолета вокруг осей его связанной системы координат связаны друг с другом. Поэтому перед интегрированием необходимо решить систему линейных дифференциальных уравнений (4.20) (или упрощенную (4.21)) с целью определения угловых ускорений.
Введем обозначения:
Ах =-Л,от ок +/tvcotcoz +1VX<&\ -co2) + (/. - / Jgkok;
Ay =-IxyG)yG)z +IyzO)y(i)x + Z^(a>2 -со2)+(Л (4.88)
Аг =-/угС0г(0х +ЛгСОгСОу + 7^ (co2 -®2)+(/у -fx)wxMy.
Тогда систему уравнений (4.20) можно переписать в виде
Ix6\ - /rv®.. - Л.сЬ. + Ах = Мх;
-ДЖ +/Ж -ДЖ +А., = Мv; (4.89)
~^xz^X yz^y ^z Мz
или
1а&х -1^6)v - Z„cb. = Мх - Ах;
-Zx>.cbx +Zyd)y -lyz^z =МУ -Ау’, (4.90)
-/х.сЬ„ -1 vr<^v + Лео, = M, - A..
Такую систему уравнений можно решить, используя, например, правило Крамера. Для этого нужно последовательно составить и вычислить, считая угловые скорости известными, следующие определители:
Z
(4.91)
(^М х Аху I ху
(Му-АуУ I,
XL
= (Mx-Ax)IyIz+IxyI„(M Z-AZ) +
(M.-Az) -1п
+Ix.(My-Ay')In + IxzIi\Mz-A.')-{Mx-Ax)I7n+Ixy(My-Ay)Iz,
(4.92)
D, = -!xy
-Д
(МХ-А,У
(Mz-Azy
* xz
-In 11
= Ix {My -Ay)Iz+ (Mx - Ax )IK Ix. +
+/«Ш-Az)-Il (M,-Ay)+IxIn(Mz-AZ)+(MX-А^Ц,
(4.93)
Л
^xy л -л.
(АЛ - A)
(My-Ay) (Mz-Az)
- IxIy(Mz -Az)+Ixy{My -Ay)!^ +
+(MX -Ax)IxyIyz +(Mx-Ax)IyIx^Ix(My -Ay)!^ -J^M.-A,).
(4.94)
Теперь легко найдем угловые ускорения относительно осей связанной системы координат вертолета при условии, что D Ф 0:
A =Dx/D\
&y=Dy/D\ (4.95)
d>t = DJD.
Для определения угловых скоростей вертолета относительно осей связанной системы координат на каждом я-м шаге интегрирования применим метод Эйлера:
л л-1 + И At 5
— СОУЛ_1 +сЬуЛД/, (4.96)
«гл =«г«-1 +«глАЛ
Однако для того чтобы определить угловое положение вертолета в пространстве, необходимо знать углы рыскания \|/,
тангажа 3 и крена у. Найдем сначала угловые скоросттГрыска3 ния, тангажа и крена, используя кинематические соотношения Эйлера;
V» = secS„_,(соу„cosy-co^siny^);
Э„ =co,.„siny„_l+coz„cosyrjl; (4.97)
У, +tg9„_l(®„siny„_l -w,„cosy„_,),
а также соответствующие угловые ускорения. При численном интегрировании угловые ускорения можно вычислить, приняв допущение о том, что движение на шаге интегрирования (между расчетными точками) является равноускоренным, с помощью следующих выражений:
™ л.-к., дг ’
э„ ; (4.98)
Д/
v _ Ул -Y.-i
Ь Д/ ’
Для определения углов рыскания, тангажа и крена используем следующие известные формулы:
1 .. ,
V» =v»-i ;
Э,=9„.1+9„.1Д/+1&„Д/2; (4.99)
1. 1
Y« = Y„-i +У»-1Д'+тУлД' •
С учетом (4.98) окончательно получим
V. =4'„-i +|(v,-i +VJA7;
Э. +1(9 +Э„)дг; (4.100)
Y. = Y»-i +l(Y„-i +Y.W-
4-»
Таким образом, полностью определено положение вертолета в пространстве (относительно стартовой системы координат) в некоторый заданный момент времени, для которого также известны параметры движения вертолета, а именно: скорости и ускорения поступательного движения центра масс вертолета, а также угловые скорости и угловые ускорения вращательного движения вертолета вокруг его центра масс. Кроме того, имеются информация о положении груза на ВП и параметры его движения.
4.3.6. Моделирование управляющих воздействий
Для того чтобы вертолет мог выполнять управляемый полет, необходимо иметь возможность целенаправленно изменять параметры его движения, т.е. вертолет должен надлежащим образом реагировать на управляющие воздействия, формируемые летчиком и автопилотом. Более того, на режиме висения и малых поступательных скоростях полета вертолет, как правило, динамически неустойчив по тангажу и крену, поэтому без управляющих воздействий он не в состоянии поддерживать установившийся режим полета. В связи с этим в ММ движения вертолета должна быть обязательно включена и модель управляющих воздействий.
Управление вертолетом осуществляется путем изменения действующих на него сил и моментов в соответствии с управляющими воздействиями, формируемыми летчиком и автопилотом. Так, например, автопилот вертолета Ми-8 обеспечивает стабилизацию заданных экипажем углов крена, тангажа и рыскания. а также высоты полета (путем изменения общего шага НВ) [4.35].
Перечислим управляющие параметры для одновинтового вертолета:
общий шаг НВ <р0;
угол отклонения кольца автомата перекоса в продольном направлении х;
угол отклонения кольца автомата перекоса в поперечном направлении ц;
общий шаг РВ <рЕВ.
Каждый из этих параметров складывается из величины, задаваемой летчиком, и величины, задаваемой автопилотом. Автопи
лот применяется практически на каждом вертолете с целью улучшения характеристик устойчивости и управляемости. Как правило, он включается в проводку управления по так называемой дифференциальной схеме. В этом случае исполнительные механизмы системы управления получают сигнал, являющийся суммой сигналов, идущих от рычагов управления, расположенных в кабине пилота, и сигналов, вырабатываемых автопилотом. При этом работа автопилота не вызывает отклонения рычагов управления. В целях обеспечения безопасности полета ход исполнительных механизмов системы управления, задаваемый автопилотом, ограничивают. Как правило, он не превышает 20...25 % от полного хода. Это связано с тем, что отказ автопилота может выражаться в выдаче ложного управляющего воздействия, и летчик должен иметь возможность его компенсировать.
Таким образом, управляющие параметры определяются выражениями
Фо — фол +фодп j
* = +хАП;
(4.101)
П = Пл +Пап;
фрв — фрв л + фрв АП >
где параметры с индексом "л” относятся к задаваемым летчиком, а с индексом "АП" — к задаваемым автопилотом.
Рассмотрим принцип формирования управляющих воздействий автопилотом на примере работы автопилота АП-34Б, установленного на вертолете Ми-8 [4.35]. Данный автопилот является четырехканальным и служит для автоматической стабилизации вертолета в полете по каналам рыскания, тангажа, крена и высоты. Стабилизация заданного углового положения вертолета основана на принципе регулирования по углу и угловой скорости. Стабилизация высоты полета осуществляется по барометрическому давлению.
Датчиком углов крена и тангажа является авиагоризонт, а датчиком угла рыскания — курсовая система. Датчиком высоты служит корректор высоты, вырабатывающий сигналы, пропорциональные изменению барометрического давления. Кроме того, имеются датчики угловых скоростей вертолета относительно осей связанной системы координат.
Силовыми исполнительными элементами автопилота, воздействующими на органы управления, служат комбинированные гид
роусилители, которые также воспринимают сигналы от рычагов управления, находящихся в кабине пилота, и, таким образом, формируют суммарное отклонение органов управления. Комбинированные гидроусилители имеют датчики обратной связи, которые выдают электрические сигналы в агрегат управления автопилота, пропорциональные ходу исполнительного штока.
При включенном автопилоте осуществляется автоматическая стабилизация вертолета, причем летчик может управлять вертолетом, не выключая автопилота, т.е. автопилот работает в режиме дифференциального управления.
Когда летчик с целью изменить режим полета перемещает ручку управления вертолетом при включенном автопилоте, необходимо исключить воздействие на комбинированные гидроусилители сигналов от датчиков угловых скоростей. Для этого в каналах тангажа и крена предусмотрены компенсационные датчики, которые кинематически связаны с проводкой управления и выдают сигналы, равные по величине и противоположные по знаку сигналам, поступающим от датчиков угловой скорости.
Чтобы летчик мог управлять вертолетом по рысканию при включенном автопилоте, на педалях ножного управления имеются гашетки с концевыми выключателями, при нажатии на которые происходит отключение датчиков угла и угловой скорости. После снятия ног с гашеток канал рыскания у автопилота автоматически включается.
Для того чтобы переместить ручку ’’шаг — газ" с целью изменения общего шага НВ, необходимо нажать на кнопку выключения фрикциона, с помошью которого данная ручка удерживается в заданном положении. При этом канал высоты у автопилота отключается. После перевода ручки "шаг — газ" в новое положение канал высоты можно включить с помощью специальной кнопки, расположенной на пульте управления автопилота.
Автопилот можно выключить, переведя его в так называемый режим согласования. Это осушсствляется с помощью кнопок, при нажатии на которые можно отключить одновременно все четыре канала, а также отдельно каналы рыскания и высоты.
В последнее время в мировой практике всртолетостроения наметилась тенденция к применению распространенной на сверхзвуковых истребителях электродистанционной системы управления (ЭДСУ). Интерес к ЭДСУ вызван стремлением преодолеть ряд недостатков, которыми обладает классическая схема управления, и в первую очередь эксплуатационных. Такой системой сего
дня оснащены вертолеты NH-90, ЕС-135, "Comanche", "Ансат". Ми-26 ГМ и Ка-32К. Одним из преимуществ ЭДСУ является возможность относительно просто (с помощью правильно заданных алгоритмов) обеспечить потребные запасы управления во всех диапазонах расчетных центровок и полетной массы вертолета.
Основным недостатком, ограничивающим применение ЭДСУ на вертолетах, является недостаточный уровень надежности и отказобезопасности такой системы. В отличие от самолетных ЭДСУ на вертолете нет возможности зарезервировать рулевые приводы, поэтому для вертолетных систем автоматического управления необходимо наличие рулевого привода, который был бы надежен при работе в 100 % диапазона управления [4.46]. Основными препятствиями на пути повышения полной автоматизации управления вертолетом являются увеличение стоимости и усложнение его конструкции. Эти причины в какой-то мере объясняют тот факт, что существующие бортовые системы автоматического управления вертолета при его висении над заданной точкой монтажа пока еще не в полной мере отвечают необходимому для этого вида работ уровню точности.
При математическом моделировании работы автопилота необходимо описать реализуемые им законы управления. На основе приведенного описания работы автопилота вертолета Ми-8 можно составить следующие законы управления:
Фо АП
^АП — А) 102)
Пап = г;Ду+/со®х;
ФРВ АП Дф ^ыу^у i
где ЛЯ, АЭ, Ду, Ац/ — разности между заданными и текущими значениями высоты, углов тангажа, крена и рыскания соответственно; /я, ir — передаточные числа автопилота по высоте и углам тангажа, крена и рыскания соответственно; /(11Х, /(1)у, iwz — передаточные числа автопилота по угловым скоростям относительно соответствующих осей связанной системы координат вертолета.
Данными зависимостями можно ограничиться, если ММ создается для обеспечения функционирования пилотажного стенда или тренажера, поскольку в этом случае в формировании управляющих параметров (4.102) принимает непосредственное участие
человек-оператор. Однако если ММ предназначена для создания на ее основе программного обеспечения, которое будет работать на ЭВМ автономно, то в ее состав необходимо включить ММ человека-оператора. В этом случае необходимо использовать математическое представление работы человека-оператора в качестве элемента замкнутой системы автоматического регулирования. Теоретической основой при решении данной задачи является теория автоматического регулирования [4.36, 4.37]. Математическое описание работы летчика представлено в гл. 3. Его также можно найти в соответствующей литературе, например в работе [4.38].
4.4. РЕШЕНИЕ ЗДДДЧ ПОВЫШЕНИЯ ЭФФЕКТИВНОСТИ И БЕЗОПАСНОСТИ ПОЛЕТА ВЕРТОЛЕТА С ГРУЗОМ НА ВНЕШНЕЙ ПОДВЕСКЕ С ПОМОЩЬЮ МАТЕМАТИЧЕСКОЙ МОДЕЛИ ДИНАМИКИ ПОЛЕТА
4.4.1. Взаимосвязь эффективности и безопасности эксплуатации вертолетов
Рассмотрим некоторые аспекты применения математического моделирования для повышения эффективности и безопасности операций по транспортировке вертолетами грузов на ВП и проведения АСМР.
Вначале следует сказать несколько слов о самих понятиях эффективности и безопасности.
Под эффективностью функционирующей системы обычно понимается ее способность создавать положительный эффект, результативность [4.39]. Чтобы оценить эту способность, необходимо знать не только положительный эффект, но и эффект отрицательный, который возникает всегда при функционировании любой системы. Соотношение положительного и отрицательного эффектов служит мерой эффективности. На этой идее основан любой критерий эффективности, которых существует великое множество.
Наиболее общим критерием является критерий экономической эффективности. Экономическая эффективность ВС — это его свойство при эксплуатации создавать экономический эффект. Мерой экономической эффективности является соотношение положительного эффекта за данный период эксплуатации и полных затрат (отрицательного эффекта) для достижения указанного положительного эффекта за тот же срок [4.39]. Легко видеть, что для
повышения эффективности необходимо стремиться кГповышенйю положительного эффекта и снижению отрицательного.
Математически в общем виде эффективность эксплуатации ВС можно описать следующим образом [4.40]:
Е = Е«Р, (4.103)
где Е — обобщенный показатель эффективности ВС; Ео — исходная эффективность ВС; Р — вероятность достижения исходной эффективности в эксплуатации.
Исходная эффективность воздушного судна £0 зависит в основном от его функциональных свойств: крейсерской скорости, дальности полета, максимальной массы коммерческой нагрузки и др., а также от экономических параметров. Она может представлять собой, например, комплексный показатель целевой производительности ВС при выполнении им транспортных операций. Тогда Eq можно выразить в виде величины, обратной такому широко используемому критерию, как себестоимость перевозок [4.41]:
Eq = , (4.104)
А
где кктл — коэффициент коммерческой загрузки, учитывающий среднегодовую неполную загрузку ВС из-за сезонности перевозок; /иком — максимальная масса коммерческой нагрузки; Ирейс — рейсовая скорость ВС; А — расходы на эксплуатацию ВС в течение летного часа.
Если речь идет не о транспортной операции, а об АСМР, то в числителе формулы (4.104) может стоять, например, доход, приходящийся на час налета. Тогда критерий Ео будет чисто экономическим.
Однако исходная эффективность ВС Ео рассчитывается без учета того, насколько хорошо это ВС приспособлено к эксплуатации и насколько в целом совершенен тот авиационный комплекс, в составе которого оно функционирует. Для того чтобы все это учесть, показатель Ео умножается на вероятность того, что его величина будет достигнута в эксплуатации. Таким образом, обобщенный показатель эффективности воздушного судна Е является математическим ожиданием его исходной эффективности.
Рассмотрим, что собой представляет вероятность Р. Известно, что годовой фонд времени воздушного судна ТГФ (8760 ч) можно разделить на годовой налет Тн, простои в исправном состоянии по
различным причинам Тп, а также затраты времени на техническое обслуживание и ремонт ГТОиР [4.42]:
^гф = Гк +^п +Люир- (4.105)
ВС сможет выполнить полетное задание только в том случае, если совместно произойдут следующие события [4.43]. Во-первых, ВС исправно и находится в состоянии готовности к выполнению полетного задания (ВС находится на земле или выполняет полет). Вероятность этого события называется коэффициентом эксплуатационной готовности [4.44] и определяется по формуле
Т + Т
Р, (4-106)
ГФ
Во-вторых, при условии, что ВС исправно и готово к полету, оно находится в состоянии выполнения полетного задания. Условная вероятность данного события
= -^-. (4.107)
-* н ' * п
В-третьих, начатый полег должен быть выполнен безопасно, т.е. без авиационных происшествий. Вероятность безопасного завершения полета [4.42]:
т
Рбп =*'7ап, (4.108)
где Т — средняя продолжительность полета ВС рассматриваемого типа; 7\п = Тп/п^п — налет на авиационное происшествие, иАП -число авиационных происшествий за год с участием ВС рассматриваемого типа.
Вероятности Рг и Ри характеризуют надежность и эксплуатационную технологичность ВС, а также совершенство наземных служб, проводящих техническое обслуживание и ремонт авиационной техники. Вероятность РБП характеризует безопасность полетов на данном типе ВС, которая также зависит от его надежности, живучести, квалификации экипажа и совершенства всех служб, обеспечивающих полет.
Таким образом, эффективность эксплуатации и безопасность полетов тесно связаны друг с другом, а именно: эффективность напрямую зависит от безопасности, т.е. низкая безопасность полетов при-
водиткнизком эффективности эксплуатации ВС, в том числе экономической. Кроме того, безопасность полетов имеет самостоятельное значение, поскольку от нее зависят здоровье и жизнь людей.
4.4.2. Применение математической модели динамики полета вертолета для оценки возможности и безопасности проведения операций с грузом на внешней подвеске
Для успешной экономическом деятельности в условиях конкурентной борьбы авиационному предприятию необходимо постоянно заботиться о повышении эффективности эксплуатации тех воздушных судов, которые находятся в его распоряжении, не забывая о безопасности полетов. Для этого существует множество путей и мероприятий. Рассмотрим некоторые из них, основанные на использовании результатов математического моделирования динамики полета ВС.
Как указывалось выше, ММ динамики полета ВС используются при разработке программного обеспечения для тренажеров и пилотажных стендов.
Тренажеры вертолетов позволяют проводить первоначальное обучение летчиков, периодические тренировки с целью поддержания и повышения их квалификации. При этом производится отработка действий экипажа в особых ситуациях. Тренажеры позволяют существенно экономить топливо и ресурс учебных ВС. При их использовании исключены авиационные происшествия.
В настоящее время для исследования различных задач динамики полета и пилотажных характеристик вертолета широко применяются различные пилотажные стенды [4.45]. Поскольку пилотирование вертолета по своей сути является случайным процессом, то его результаты нуждаются в статистической обработке. Но для того чтобы статистическая обработка эксперимента позволяла получить необходимые данные, требуется, чтобы по основным параметрам и режимам полета при многократных исследованиях была обеспечена хорошая повторяемость, что в полете осуществить практически невозможно. Решить эту задачу позволяют исследования на пилотажных стендах. Особо важную роль играют эти исследования для оценки поведения системы "вертолет — пилот” в сложных условиях полета.
Рост эффективности эксплуатации вертолетов, связанный с применением тренажеров и пилотажных стендов, происходит
вследствие повышения квалификации экипажа, что выражается, прежде всего, в повышении безопасности полетов, а также в сокращении времени выполнения полетного задания, влекущих за собой экономию топлива и ресурса вертолетов. Однако в настоящее время вертолетные тренажеры и пилотажные стенды, позволяющие производить исследования и отработку операций с грузом на ВП, только начинают появляться. Лежащие в основе их программного обеспечения ММ еше нуждаются в проверке адекватности.
Для оценки возможности и безопасности проведения операций с грузом на ВП могут быть также использованы различные исследовательские компьютерные программы, которые могут функционировать на ЭВМ автономно, т.е. без участия пилота. При этом обычно рассматриваются типовые участки полета, на которых оцениваются параметры движения вертолета и груза при определенных внешних воздействиях. Так, например, программа "УегСоГ, созданная сотрудниками кафедры аэродинамики, конструкции и прочности МГТУ ГА на базе описанной выше ММ, позволяет рассмотреть движение вертолета и груза.
В качестве примера рассмотрим виртуальный полет вертолета с водосливным устройством (ВСУ), используемым для тушения пожаров с воздуха, массой 3 т на ВП (длина троса составляет 30 м). Циклограмма полета выглядит следующим образом:
0.,.20-я секунды — вертикальный взлет и зависание над грузом на высоте 4 м;
20...50-я секунды - вертикальный подъем на высоту 35 м с отрывом груза от земли;
50...70-я секунды — зависание с грузом;
70... 100-я секунды — горизонтальный разгон;
100...250-я секунды — продолжение разгона с набором высоты 150 м и последующий горизонтальный полет со скоростью 65 км/ч.
Результаты ВЭ, выполненных с использованием программы "Vcrtor в соответствии с данной циклограммой, представлены на рис. 4.11...4.15. Необходимо отметить, что эту циклограмму не следует рассматривать как реальную типовую.
Программа ’’Vertol” позволяет в диалоговом режиме изменять параметры груза и вертолета, задавать скорость и направление ветра, что дает возможность проводить ВЭ и получать результаты, аналогичные приведенным на рис. 4.11...4.15. Благодаря этому можно оценить техническую реализуемость и безопасность проведения планируемых операций с грузом на ВП. Можно также ре-
Рис. 4.11. Изменение положения центра масс вертолета относительно стартовой систе мы координат
Рис. 4.12. Измепешю углового положения вертолета относительно нормальной систе мы координат
0,246 0,205
S 0,164
pJ 0,123 s 0,082 = 0,041
1 o V
5 -0,041 V 2 -0,082
6 _0,123 -0,164
-0,205
-0,246
-0,287
-3 -2 -1 0
Отклонение вдоль оси <?iXg], M
Рис. 4.14. Проекция траектории движения центра масс груза на горизонтальную плоскость
шить и обратную задачу, т.е. подобрать параметры груза и вертолета для того, чтобы обеспечить выполнение и безопасность авиационных работ.
Таким образом, математическое моделирование в целом позволяет экономить материальные и финансовые средства, а также время на подготовку и проведение операций по транспортировке грузов на ВП вертолетов и АСМР. При этом также повышается безопасность полетов. Все это вместе повышает эффективность и безопасность эксплуатации вертолетов.
СПИСОК ЛИТЕРАТУРЫ К ГЛ. 4
4.1. Белоцерковский С.М., Качанов Б.О., Кулифеев Ю.Б., Морозов В.И. Создание и применение математических моделей самолетов. М.: Наука, 1984. 140 с.
4.2. Вопросы кибернетики. Проблемы создания и применения математических моделей в авиации/под ред. С.М. Белоцерковского. М.: Кибернетика, 1983.168 с.
4.3. Касьянов В.А., Ударцев Е.П., Теймуразов Р.А. Развитие и применение методов математического моделирования полета при решении задач совершенствования летной эксплуатации. Киев: Знание, 1983. С. 1-20.
4.4. Кубланов М.С. Разработка теории и методов повышения уровня адекватности математических моделей на основе идентификации параметров движения для обеспечения летной эксплуатации самолетов гражданской авиации: Дисс.... докт. техн. наук. М., 2000. 429 с.
4.5. Ципенко В.Г. Применение математического моделирования и теоретических методов при анализе особых случаев взлета и посадки воздушных судов: Дисс.... докт. техн. наук. М., 1987. 438 с.
4.6. Белоцерковский С.М., Локтев Б.Е., НиштМ.И. Исследование на ЭВМ аэродинамических и аэроупругих характеристик винтов вертолетов. М.: Машиностроение, 1992. 224 с.
4.7. НиштМ.И. Вычислительная аэродинамика. Иркутск, И ВАМИ. 2001.41 с.
4.8. Основы идентификации и проектирования тепловых процессов и систем / О.М. Алифанов, П.Н. Вабищевич, В.В. Михайлов и др. М.: Логос, 2001. 395 с.
4.9. Васильченко К.К., Кочетков Ю.А., Леонов В.А., Поплавский Б.К. Структурная идентификация математической модели движения самолетов. М.: Машиностроение, 1993. 352 с.
4.10. Кубланов М.С. Математическое моделирование. Методология и методы разработки математических моделей механических систем и процессов. Ч. I. Моделирование систем и процессов. М., МГТУ ГА, 2004. 108 с.
4.11. Лебедев А.Н. Моделирование в научно-технических исследованиях. М.. Радио и связь, 1989. 224 с.
4.12. Кубланов М.С. Устойчивый алгоритм моделирования работы шасси // Обеспечение безопасности полетов при эксплуатации гражданских воздушных судов. М., МИИГА, 1991. С. 54-59.
4.13. Кубланов М.С. Идентификация математической модели по данным летных испытаний самолета Ил-96-300 // Решение прикладных задач летной эксплуатации ВС методами математического моделирования. М., МГТУ ГА, 1993. С. 3—10.
4.14. Кубланов М.С. Идентификация математической модели посадки самолета Ту-154Б по данным летных испытаний // Науч, вестник МГТУ ГА. Сер. Аэромеханика и прочность. 1999. № 15. С. 27—36.
4.15. Тихонов А.Н., Кальнер В.Д., Гласко В.Б. Математическое моделирование технологических процессов и метод обратных задач в машиностроении. М.: Машиностроение, 1990. 264 с.
4.16. Математическая модель движения вертолета с грузом на одноточечной подвеске. Отчет о НИР (заключительный) / МИИГА; Руководитель В.Ф. Рощин. М., 1973. 32 с.
4.17. Составление математической модели, описывающей поведение вертолета при транспортировке груза на внешней подвеске: Отчет о НИР (заключительный). Тема 12.1.2 плана МГА / МИИГА; Руководитель В.Ф. Рощин. М., 1974. 119 с.
4.18. Изучение и анализ работы вертолетов с грузом на внешней подвеске на различных режимах полета: Отчет о НИР (заключительный) / МИИГА; Руководитель В.Ф. Рощин. № ГР 01900001863. М., 1983. 35 с.
4.19. Володко А.М. Основы аэродинамики и динамики полета вертолетов. М.: Транспорт, 1988. 342 с.
4.20. Козловский В.Б., Кубланов М.С. Математическая модель полета вертолета с грузом на внешней подвеске // Науч, вестник МГТУ ГА. Сер. Аэромеханика и прочность. 2004. № 72. С. 5-9.
4.21. Павлов С.С. Колебания груза при его транспортировке на внешней подвеске вертолета // Науч, вестник Университета гражданской авиации. Сер. Проблемы безопасности полетов и эксплуатации воздушного транспорта. СПб. Университет ГА, 2005. С. 46-53.
4.22. Павлов С.С. Влияние маневрирования вертолета в вертикальной плоскости на кинематические характеристики колебаний груза, транспортируемого на внешней подвеске вертолета // Науч, вестник Университета гражданской авиации: Сер. Проблемы безопасности полетов и эксплуатации воздушного транспорта. СПб. Университет ГА, 2005. С. 54-60.
4.23. Логачев Ю.Г. Математическое моделирование стабилизации грузов на внешней подвеске в полете // Моделирование полета воздушных судов гражданской авиации: Сб. науч. тр. Киев, КНИГА, 1986. С. 69—75.
4.24. Ефимов В.В., Ефимова М.Г., Козловский В.Б. Математическая модель полета вертостата с грузом на внешней подвеске // Науч, вестник МГТУ ГА. Сер. Аэромеханика и прочность. 2004. № 72. С. 10—17.
4.25. Есаулов С.Ю., Бахов О.П., Дмитриев И.С. Вертолет как объект управления. М.: Машиностроение, 1977. 192 с.
4.26. Строительная механика летательных аппаратов / И.Ф. Образцов, Л.А. Булычев, В.В. Васильев и др.; подред. И.Ф. Образцова. М.: Машиностроение, 1986.536 с.
4.27. Добронравов В.В., Никитин Н.Н., Дворников АЛ. Курс теоретической механики. М.: Высш, шк., 1974. 528 с.
4.28. Остославский И.В., Страже на И.В. Динамика полета. Траектории летательных аппаратов. М.: Машиностроение, 1969. 492 с.
4.29. Ромасевич В.Ф., Самойлов Г.А Практическая аэродинамика вертолетов. М., МО СССР. 1980. 384 с.
4.30. Пейн П.Р. Динамика и аэродинамика вертолета. М.: Оборонгиз, 1963. 535 с.
4.31. Базов Д.И. Аэродинамика вертолетов. М.: Транспорт, 1972. 184 и.
4.32. Вильдгрубе Л.С. Вертолеты. М.: Машиностроение, 1977. 152 с.
4.33. Вертолеты. Расчет и проектирование. Кн. 1. Аэродинамика / М.Л. Миль, А.В. Некрасов, А.С. Браверман и др. М.: Машиностроение, 1966. 456 с.
4.34. Бронштейн И.Н., Семендяев К.А. Справочник по математике для инженеров и учащихся втузов. М.: Наука, 1980. 976 с.
4.35. Вертолет Ми-8. Техническое описание. Кн. И. Конструкция. М.: Внеш-торгиздат, 1968. 229 с.
4.36. Лернер А.Я. Введение в теорию автоматического регулирования. М.: Маш-гиз, 1958. 352 с.
4.37. Воронов А.А. Элементы теории автоматического регулирования. М.: Воен-издат, 1954. 471 с.
4.38. Дмитриев И.С., Есаулов С.Ю. Системы управления одновинтовых вертолетов. М.: Машиностроение, 1969. 219 с.
4.39. Управление качеством продукции. Справочник / под ред. В.В. Бойцова и А.В. Гличева. М.: Издательство стандартов, 1985. 464 с.
4.40. Анцелиович Л.Л. Надежность, безопасность и живучесть самолета. М.: Машиностроение, 1985. 296 с.
4.41. Проектирование самолетов / С.М. Егер, В.Ф. Мишин, Н.К. Лисейцев и др.; под ред. С.М. Егера. М.: Машиностроение, 1983. 616 с.
4.42. Техническая эксплуатация летательных аппаратов / под ред. А. И. Пугачева. М.: Транспорт, 1977. 440 с.
4.43. Ефимов В.В. Разработка методики определения технического уровня легких самолетов авиации общего назначения с учетом особенностей их эксплуатации: Дисс. ... канд. техн. наук. М., 1998. 171с.
4.44. КаиурК., ЛамберсонЛ. Надежность и проектирование систем. М.: Мир, 1980.
4.45. Миль М.Л. Как создать вертолет, нужный людям. М.: Машиностроение, 1989. 168 с.
4.46. Далин В.Н., Михеев С.В. Конструкция вертолетов. М.: Изд-во МАИ, 2001. 352 с.
Глава 5
ОСОБЫЕ СИТУАЦИИ В ПОЛЕТЕ ВЕРТОЛЕТА С ГРУЗОМ НА ВНЕШНЕЙ ПОДВЕСКЕ И ПРИ ПРОВЕДЕНИИ АСМР
Деятельность экипажа вертолета на АСМР и при транспортировке грузов на ВП во многом усложняется с возникновением особых ситуаций в полете.
Особая ситуация (ОС) полета ВС — это совокупность условий, связанных с потенциальным снижением уровня безопасности полета ВС [5.1]. Она возникает, как только появляется какое-либо отклонение от ожидаемых условий эксплуатации или в результате воздействия на систему "экипаж — ВС" различных НФ. а в ряде случаев и их сочетаний в полете. От того, что именно произошло на АСМР, и в зависимости от действий авиационного или вспомогательного персонала, участвующего в выполнении этих работ, зависит характер развития ОС.
ОС является источником авиационных происшествий и инцидентов с ВС. В соответствии с Правилами расследования авиационных происшествий и инцидентов с гражданскими ВС в РФ, утвержденными Постановлением Правительства РФ № 609 от 18 июня 1998 г. (ПРАПИ-98), авиационным происшествием (АП) называется событие, связанное с использованием ВС, которое имело место в период нахождения на его борту какого-либо липа с целью выполнения полета и в течение которого какое-либо лицо из находившихся на борту получило телесное повреждение со смертельным исходом (в течение 30 дней с момента АП), ВС получило серьезное повреждение, требующее крупного ремонта, пропало без вести или находится в таком месте, где доступ к нему невозможен.
Авиационный инцидент (АИ) — это событие, связанное с использованием ВС, которое имело место в период нахождения на его борту какого-либо лица, вступившего на борт ВС с целью выполнения полета, и обусловленное отклонениями от нормального функционирования ВС, экипажа, служб управления и обеспечения полетов, воздействием внешней среды, могущее оказать влияние на безопасность полета, но нс закончившееся АП.
Особая ситуация
Рис. 5.1. Классификация особых ситуаций полета воздушных судов но степени опасности
Таким образом, ОС приводит либо к АИ, либо к АП. Классификация ОС полета ВС по степени их опасности представлена на рис. 5.1.
Усложнение условий полета (УУП) — особая ситуация, характеризующаяся незначительным ухудшением характеристик ВС шли незначительным увеличением нагрузки на его экипаж, например при внезапном воздействии на вертолет ветровых порывов различной интенсивности в процессе выполнения АСМР.
Сложная ситуация (СС) — особая ситуация, характеризующаяся заметным ухудшением характеристик ВС и (или) выходом одного или нескольких параметров полета за действующие эксплуатационные ограничения, но без достижения предельных ограничений. СС может быть связана со снижением способности экипажа справиться с возникшей ситуацией в полете как из-за увеличения рабочей нагрузки на экипаж, так и из-за условий, понижающих эффективность его действий по парированию воздействия развивающегося НФ.
Аварийная ситуация (АС) — особая ситуация, характеризующаяся значительным ухудшением характеристик ВС или достижением предельных эксплуатационных ограничений, а также физическим утомлением экипажа.
Катастрофическая ситуация (КС) — особая ситуация, при возникновении которой предотвращение гибели людей практически невозможно.
Типовой перечень ОС, возникающих в полете вертолета с грузом на ВП, а также действия экипажа по их парированию подробно изложены РЛЭ конкретного типа вертолета. В таких ситуациях каждый член экипажа выполняет в определенной последовательности строго установленные действия по управлению системами и оборудованием вертолета. Поэтому они относятся к разряду формализованных действий и выполняются экипажем "на память".
Однако, в практике летной эксплуатации вертолетов возможен ряд явлений и неблагоприятных событий, которые ввиду сложности их природы не подвержены математической и нормативной формализации. ОС, с которыми экипаж может встретиться на АСМР или при выполнении полетов с грузом на ВП, могут выходить за рамки предусмотренных РЛЭ вертолета. В подобных случаях для выработки качественных интуитивно-логических решений неизбежно использование экипажем эвристических методов деятельности в ОС на АСМР, а также опыта и знаний широкого крута специалистов в области летной эксплуатации вертолетов на этом виде авиационных работ.
Рассмотрим некоторые примеры эвристического подхода к парированию экипажем последствий развития НФ в полете вертолета с грузом на ВП.
5.1. АВАРИЙНЫЙ СБРОС ГРУЗА С ВНЕШНЕЙ ПОДВЕСКИ
Для каждого вертолета в РЛЭ приведены зоны опасного сочетания высоты и приборной скорости полета: зоны А и Б на рис. 5.2. Выполняя монтаж конструкций на высотном объекте, вертолет, как правило, находится в опасной зоне А, что накладывает определенные ограничения на его использование на таких работах.
Выделение этой зоны как опасной обусловлено необходимостью обеспечения вертолету некоторого запаса высоты Ябез £ 80 м для своевременного обнаружения экипажем возможного отказа силовой установки, последующего торможения вертолета и выполнения аварийной посадки на подобранную посадочную площадку [5.2].
Кроме того, режимы уменьшения горизонтальной скорости полета и вертикальной скорости снижения, характерные для выполнения АСМР, сопровождаются нарастанием вибраций. Природа такого явления связана с формированием мощной вихревой структуры вблизи НВ вертолета. Она изменяется в пространстве и времени и оказывает определенное влияние на аэродинамические характеристики как вертолета, так и груза, размещенного на его ВП. При этом аэродинамические характеристики этих объектов становятся нестационарными.
На малых скоростях горизонтального полета и на режиме висения вертолета, характерных для выполнения АСМР, при
определенной совокупности внешних условий в воздушном потоке, геометрических и массовых характеристик транспортируемого груза, последний может занимать относительно вектора скорости произвольное положение [5.3], зачастую располагаясь на ВП самым неблагоприятным для его установки образом (рис. 5.3).
Особенности такого поведения груза на ВП можно классифицировать следующим образом:
боковая раскачка (поперечные колебания), характеризующаяся увеличением амплитуды боковых колебаний с возникновением незначительных вращательных (крутильных) колебаний относительно вертикальной оси;
вращательные колебания, сопровождающиеся незначительными поперечными и продольными колебаниями;
непрерывное вращение груза вокруг точки подцепки;
продольные колебания, которые при определенных условиях могут привести к упругим колебаниям;
сочетание перечисленных выше случаев.
Рис. 5.3. Траектория движения груза на ВП в горизонтальной плоскости относительно узла подцепки грузодержате.тя при воздействии бокового ветра на режиме висения вертолета (по результатам математического моделирования)
Характер колебаний груза на ВП определяется соотношением соответствующих частот. Обычно какой-то из видов колебаний явно преобладает над другим. Как показывает практика, на режимах висения и вертикального маневрирования вертолета над монтажным объектом чаще наблюдаются вращательные колебания груза.
Колебания груза на ВП относительно точки подвеса, его раскачка, вращение в горизонтальном полете и на режиме висения вертолета могут служить источником возникновения периодических сил, действующих на вертолет в направлении троса ВП. Изменение силы натяжения троса по времени при взлете и зависании вертолета на высоте 35 м с последующим набором высоты 150 м и разгоном до скорости горизонтального полета 120 км/ч показано на рис. 4.15. Масса груза состав-
Сброс груза с ВП вертолета
Рис. 5.4. Нормативные ситуации сброса груза с ВП вертолета
ляла 3000 кг, длина троса — 30 м. Изменение величины силы натяжения троса вызвано в основном изменением силы лобового сопротивления груза при увеличении скорости полета, а также силами инерции груза.
Продольно-поперечные колебания груза, усложняющие пилотирование вертолета, могут успешно парироваться экипажем путем ускоренного изменения высоты полета и снижения скорости.
Вращение груза относительно точки его подцепки на ВП, которое практически не оказывает влияния на пилотирование вертолета в горизонтальном полете, при выполнении АСМР может быть устранено предварительной укладкой (установкой) груза на площадку, расположенную в непосредственной близости от места монтажа.
В ряде случаев компенсация поперечных колебаний груза на ВП может быть достигнута кратковременным смешением вертолета в сторону отклонения груза от вертикальной оси таким образом, чтобы угловые колебания груза на ВП и перемещения вертолета в горизонтальной плоскости примерно совпадали по фазе и амплитуде. Однако такая техника пилотирования сложна и требует специальной подготовки пилота.
При развитии колебаний груза на ВП или их сочетаний с другими НФ в полете нормативные документы, действующие в ГА, РЛЭ основных типов вертолетов и технологии выполнения авиационных работ предписывают экипажу производить сброс груза с ВП (рис. 5.4) [5.4...5.7]. Действия по сбросу груза выполняются экипажем заученно ("на память"). Однако заученные высокоавто
матизированные действия могут оказаться неэффективными и нерациональными, поскольку для парирования таких ОС часто требуются нестандартное мышление и отход от динамических стереотипов.
Пилот, управляющий вертолетом на АСМР или в полете с грузом на ВП, не может быть просто звеном передачи поступающей к нему некоторой исходной информации к рычагам управления, он должен действовать избирательно исходя из развития конкретной ОС в полете, а также иметь свое личное отношение к выполняемым действиям всего экипажа.
Параметры полета вертолета при аварийном сбросе груза с внешней подвески
В целях определения параметров ВП в момент аварийного сброса груза и оценки его влияния на безопасность выполнения отдельных видов авиационных работ ВНИИ ПАНХ ГА были проведены специальные летные испытания по сбросу груза на режиме висения и в горизонтальном полете вертолета Ми-8Т при различных массовых и аэродинамических характеристиках груза, размещенного на ВП [5.3, 5.8]. В качестве груза, подлежащего сбросу с ВП вертолета, были использованы пять железобетонных и пять металлических свай, три из которых представляли собой два сваренных по нижней полке восьмиметровых рельса, а две — одиночные металлические сваи длиной 8 м. Масса железобетонных свай составляла 1,3...1,4 т. Их нижняя часть имела оживальную форму, а в верхней части к арматуре сваи были приварены крестообразный стабилизатор и скоба для кольца, с помощью которого осуществлялась подцепка сваи к электрозамку ВП вертолета.
Масса блоков из металлических сварных свай составляла 800 кг. В верхней части каждого блока устанавливался крестообразный стабилизатор и кольцо для подцепки тросов ВП. Сваи, выполненные в виде одного восьми метрового рельса, имели массу 400 кг, но стабилизатором не оборудовались.
В момент сброса железобетонной сваи в результате мгновенного уменьшения полетной массы вертолета происходило кратковременное увеличение числа оборотов НВ на 1,5...2 % и высоты полета на 10... 15 м, а в результате снятия нагрузки с центрального троса ВП нижний электрозамок ДГ-64 массой 16 кг подбрасывался на высоту до 0,7 м от исходного положения (рис. 5.5), что явля-
Рис. 5.5. Момент сброса груза с нижнего электрозамка ВП вертолета Ми-8
Рис. 5.6. Изменение параметров продольного возмущенного движения вертолета при аварийном сбросе груза с ВП:
V— воздушная скорость; t — время полета; 3 — угол тангажа; утр — угол отклонения троса от вертикали r поперечном направлении; — геометрическая высота о
ется приемлемым по условиям обеспечения безопасности полета в случае аварийного или непреднамеренного сброса груза с ВП, например, при выполнении АСМР. Эти результаты были получены при сбросе железобетонных свай с высоты 100 м, а металлических — с высоты 80 м. Увеличение высоты сброса приводило к отклонению металлических свай от вертикали к моменту соприкосновения с грунтом.
Исследования показали, что возмущенное движение при аварийном сбросе груза с ВП в горизонтальном полете характеризуется энергичным подъемом вертолета вверх вследствие образовавшегося избытка тяги НВ, а также интенсивной продольной и поперечной раскачкой, вызванной исчезновением моментов сил, действовавших на вертолет при транспортировке и колебаниях груза (рис. 5.6).
Очевидно, что эффективность функционирования системы "экипаж - вертолет — объект монтажа (груз на ВП)" может быть достаточно высока, если в ней обеспечены оптимальное соответствие и сбалансированность всех составляющих эту систему частей. Это предполагает, с одной стороны, высокую квалификацию пилота-оператора ВП, с другой — такие технические характеристики вертолета и специальных ТС стабилизации груза на его ВП, которые будут находиться в полном соответствии с психофизиологическими данными пилота.
5.2. ОТКАЗ ОДНОГО ДВИГАТЕЛЯ В ПОЛЕТЕ ВЕРТОЛЕТА С ГРУЗОМ НА ВНЕШНЕЙ ПОДВЕСКЕ
В практике выполнения АСМ Р и других работ с использованием вертолетов все возрастающее значение приобретают перевозка на ВП и монтаж особо важных грузов (ОВГ), имеющих повышенную материальную, социальную и другую ценность. Особое внимание уделяется безопасности транспортировки таких грузов на ВП. Предусмотренный нормативной и эксплуатационной документацией вертолета сброс подвески при развитии ОС в полете сопряжен со значительным ущербом и крайне нежелателен.
В отечественных и зарубежных нормах летной годности вертолетов в качестве одного из основных нормируемых случаев возникновения ОС в полете принят отказ одного двигателя, так как такой отказ является причиной значительной части всех АП, вызывая существенное ухудшение летных и взлетно-посадочных характеристик (ВПХ) вертолета [5.9].
Очевидно, что при подготовке к выполнению АСМР должны быть реализованы все необходимые условия, обеспечивающие безопасность полета вертолета и высокую степень защиты ОВГ, перевозимого на его ВП.
К сожалению, данные условия в настоящее время не отражены в РЛЭ отечественных вертолетов, что серьезно сужает их эксплуатационный диапазон и снижает эффективность проведения строительно-монтажных, аварийно-спасательных и мсдико-эвакуационных работ с их использованием. Следует заметить, что действующими нормативными документами, в частности НПП ГА-85, возможность продолжения полета вертолета с грузом на ВП при отказе одного двигателя крайне ограничена, хотя нормы летной годности вертолетов транспортной категории (АП-29) при определенных условиях допускают продолжение полета в такой ситуации.
В целях расширения эксплуатационного диапазона при применении вертолетов на АСМР и повышения их конкурентоспособности на рынке авиационных работ в ОАО НПК "ПАНХ" в 2003 г. были проведены экспериментальные исследования по оценке предельных технических возможностей вертолета Ми-8АМТ (Ми-8МТВ) с грузом на ВП в случае отказа одного двигателя [5.10]. В процессе этих экспериментов были определены основные условия, при которых обеспечиваются требования АП-29 к ВПХ и характеристикам полета по маршруту вертолета с грузом на ВП в процессе развития такой
ОС. Сложность решения задачи усугублялась отсутствием удовлетворительной ММ движения вертолета на этих режимах. Поэтому параметры полета вертолета в случае частичной потери располагаемой мощности, вызванной отказом одного двигателя на этапах горизонтального полета, вертикального снижения (набора высоты) и на режиме висения вертолета, характерных для проведения АСМР, были установлены в ходе летных испытаний, выполненных на серийном вертолете Ми-8АМ Г при метеоусловиях, близких к стандартным.
Известно, что возможность продолжения полета вертолета с одним отказавшим двигателем определяется сочетанием энерговооруженности (отношения максимальной мощности работающего двигателя к полетной массе вертолета), параметров режима его полета и атмосферных условий в момент отказа (выключения) двигателя. Поэтому на предварительном этапе исследований были проведены уточненные расчеты полетной массы вертолета и сформированы расчетные процедуры оценки основных параметров исследовательских полетов по методикам, изложенным в работах [5.10, 5.11] и РЛЭ вертолета [5.5].
В соответствии с выполненными расчетами максимальная полетная масса вертолета /иПалтах на режиме висения вне зоны влияния эффекта воздушной подушки при использовании максимальной мощности одного работающего двигателя составляла 9250 кг. При этом предполагалось, что в случае высокой сходимости результатов расчетов /л1ЮЛ с ее значением в условиях реального полета в летном эксперименте будет обеспечена нормальная управляемость вертолета с грузом на ВП при значениях вертикальной скорости снижения Vy < 0,5...0,6 м/с, приемлемых с точки зрения безопасного завершения полета.
Отметим, что величина /иПоЛтах> рассчитанная по номограммам РЛЭ Ми-8АМТ [5.5], в условиях, близких к MCA, не должна превышать 13 000 кг. Это обстоятельство позволило сделать вывод о возможности безопасного продолжения вертолетом с полетной массой до 13 000 кг горизонтального полета со скоростью Кгп < 120 км/ч в течение 1 ч при использовании чрезвычайного режима работы одного двигателя и соблюдении ограничений РЛЭ по времени работы этого двигателя с максимально допустимой температурой газов перед турбиной 990 °C.
С учетом массовых характеристик вертолета, представленных в РЛЭ, полетную массу для типового полета при выполнении исследовательских полетов с ОВГ на ВП, включающую в себя и массу
целевой нагрузки wonr « 1400 кг, ограничили значением 9800 кг, при котором согласно выполненным расчетам обеспечивались возможность перехода вертолета от режима горизонтального полета к снижению по пологой глиссаде и его уверенное зависание в течение 10... 15 с на высоте 50 м, характерной для безопасной укладки (установки) груза, перевозимого на ВП длиной 45 м, а также сохранялась возможность продолжать горизонтальный полет в случае частичной потери располагаемой мощности в маршрутном полете или на режиме висения.
Установленная таким образом полетная масса позволила в летном эксперименте обеспечить запас тяги несущего винта ДТ= 3200 кгс, достаточный для безопасного продолжения полета вертолета в стандартных атмосферных условиях при отказе одного двигателя в горизонтальном полете.
Исследовательская часть полетов по имитации отказа двигателя на режимах, характерных для укладки (установки) груза, размещенного на ВП вертолета, выполнялась в следующей последовательности.
При подходе к контрольной точке висения (КТВ) на высоте горизонтального полета 150...200 м и скорости полета 120 км/ч экипаж в первых двух полетах дросселировал один из работающих двигателей вертолета до режима малого газа, а в последующих полетах выключал его, выполняя при этом необходимую стабилизацию вертолета по скорости и высоте горизонтального полета, связанную с частичной потерей располагаемой мощности силовой установки.
При постепенном гашении поступательной скорости полета и согласованном увеличении мощности работающего двигателя вплоть до чрезвычайного режима минимальная вертикальная скорость снижения вертолета = 0,2 м/с должна была быть достигнута в КТВ на высоте не менее 50 м.
При выходе работающего двигателя на чрезвычайный режим экипажем проводилась оценка возможности висения вертолета на заданной высоте, после чего задросселированный двигатель выводился на режим согласованной работы обоих двигателей и выполнялась посадка вертолета.
Темп дросселирования двигателя варьировался в двух предварительных заходах на искусственную взлетно-посадочную полосу (ИВПП) с целью оценки возможности выполнения посадки вертолета с режима прямолинейного снижения в условиях созданного дефицита располагаемой мощности.
Полеты с имитацией отказа одного двигателя на режимах, характерных для подъема груза, размещенного на ВП (режимы вертикального маневрирования), выполнялись с полетным весом, несколько большим свободной тяги вертолета с одним работающим двигателем, определенной расчетным путем при теоретическом исследовании (m.IOJ] « 9800 кг).
При этом с режима горизонтального полета на высоте 140... 150 м производился выход вертолета в КТВ, над которой в течение 10... 15 с было необходимо выполнить режим висения вертолета на высоте не менее 50 м с одновременным дросселированием двигателя до режима малого газа. Все полеты выполнялись с отключенными ПЗУ и ПОС двигателей.
Параметры полета вертолета с грузом на внешней подвеске при отказе одного двигателя
Изменения основных параметров полета вертолета Ми-8АМТ и работы его силовой установки при имитации отказа (дросселировании) одного двигателя на режиме горизонтального полета, полученные в ходе экспериментов, представлены на рис. 5.7...5.11.
Результаты исследований показали, что падение располагаемой мощности силовой установки на режиме горизонтального полета, вызванное имитацией отказа (дросселированием) одного двигателя при заданной условиями летных испытаний полетной массе тЛО1 « 9800 кг, обеспечивает возможность продолжения горизонтального полета вертолета с приемлемыми значениями Игп = 120... 130 км/ч при работе двигателя на режиме номинальной мощности.
При дросселировании в горизонтальном полете одного двигателя до режима малого газа запас мощности силовой установки позволил сохранить нормальную управляемость полетом вертолета на режиме снижения по наклонной траектории с постепенным торможением до Игп = 50...60 км/ч и последующим перемещением вертолета над ИВПП с Игп = 40...50 км/ч на высоте hg = 55...60 м с использованием взлетной мощности второго двигателя.
Параметры полета вертолета с грузом на ВП при полном выключении одного двигателя в горизонтальном полете представлены на рис. 5.12...5.15.
Полет сопровождался уменьшением частоты вращения НВ по сравнению с номинальным стабилизированным значением
Рис. 5.7. Профиль полета вертолета при имитации отказа (дросселировании) одного двигателя в горизонтальном полете:
h,, — геометрическая высота; V — воздушная скорость; I — время полета о
Рис. 5.8. Изменение вертикальной скорости при торможении вертолета на этане имитации отказа (дросселирования) одного двигателя в горизонтальном полете:
V — вертикальная скорость; V — воздушная скорость
на 1...2 %, что не выходило за ограничения, рекомендованные РЛЭ.
После выключения двигателя на высоте hR = 130 м и скорости Кгп = 127 км/ч при стабильных значениях янв = 95,1 %, Фон. = 3,8° и параметрах работы правого двигателя ятк = 92,6... 92,8 %, Тг = 720...730 °C в течение 15 с была выполнена кон-
100,00
95,00
L 90,00
*| 85,00
80.00
{J 75,00
70,00
f 65,00
60,00
1г 55,00
50,00
45,00
0:00 0:20 0:40 1:00 1:20 1:40 2:00 2:20 2:40 3:00 3:20 3:40 4:00 4:20 4:40 5:00 5:20
/, МИНХ
Рис. 5.9. Параметры работы силовой установки вертолета Ми-8АМТ при имитации отказа (дросселировании) одного двигателя в горизонтальном полете:
янв — частота вращения несущего винта; иТ1С — частота вращения турбокомпрессора; Тг — температура газов перед турбиной компрессора
трольная горизонтальная площадка, что позволило установить возможность продолжения устойчивого горизонтального полета вертолетом с /япол » 9780 кг с одним отказавшим двигателем.
Как показано на рис. 5.12, установившееся снижение вертолета с hg = 130 м до контрольной отметки hg = 50 м с одним работающим на крейсерском режиме двигателем .(ятк = 91,8...92,5 %, Тг = 710...730 °C, Лдс = 1080...1150 л.с.) выполнялось по пологой глиссаде с Vy — 0,8... 1,8 м/с при значениях лнв = 95,0...95,3 % и Фош = 3,5...3,8°, что обеспечило необходимую управляемость вертолета.
Выравнивание вертолета на А., = 50...55 м, торможение и переход на режим висения выполнялись при плавном (в течение 55 с) выводе двигателя на повышенный режим работы до достижения лтк = = 97,4 %, Тх = 900...910 °C, соответствующих чрезвычайному режиму работы силовой установки. Этот режим сопровождался кратковременным падением частоты вращения НВ до значений rcHD = = 93,1...93,3 %, а в процессе разгона при уходе с КТВ для выполнения маневра захода на посадку лнв = 92,1 %.
t, мин:с
Рис. 5.10. Параметры полета вертолета (с временным шагом 50 с) при имитации отказа одного двигателя в горизонтальном полете:
Vy — вертикальная скорость; hg — геометрическая высота; V — воздушная скорость; лнв — частота вращения несущего винта; дтк — частота вращения турбокомпрессора; t - время полета
t, минх
Рис. 5.11. Изменение параметров продольно-поперечного управления (углов тангажа 9, крена у, шага винта 1рош) при имитации отказа (дросселировании) одного двигателя в горизонтальном полете
Рис. 5.12. Профиль полета вертолета при имитации отказа (выключении) одного двигателя в горизонтальном полете и заходе на посадку с фиксацией режима висения на геометрической высоте //, = 50 м:
hR — геометрическая высота; V — воздушная скорость; t — время полета
Рис. 5.13. Изменение вертикальной скорости при торможении вертолета на этапе имитации отказа (выключении) одного двигателя в горизонтальном полете:
Vy - вертикальная скорость; V — воздушная скорость
Рис. 5.14. Параметры полета вертолета и работы его силовой установки при имитации отказа (выключении) одного двигателя в горизонтальном полете
t. мин:с
Рис. 5.15. Параметры полета вертолета на режиме висения на высоте 50 м при имитации отказа (выключении) одного двигателя в горизонтальном полете
Параметры полета вертолета на режиме висения с одним работающим на чрезвычайном режиме двигателем, представленные на рис. 5.15, позволили сделать вывод о возможности выполнения режима висения вертолета Ми-8АМТ с тпол « 9780 кг на hs = 50...55 м, а также безопасного выхода с указанного режима в режим разгона (в условиях эксперимента до Кгп = = 50...60 км/ч с Vy - 0,1...0,2 м/с) с целью подбора необходимой для посадки посадочной (разгрузочной) площадки.
Таким образом, результаты летных испытаний показали, что при нолегной массе 9,8 т запас располагаемой мощности одного двигателя, работающего на чрезвычайном режиме, обеспечивает возможность контролируемого и управляемого перехода вертолета Ми-8МТВ из режима горизонтального полета к снижению по пологой глиссаде и его стабильное зависание в течение 10... 15 с на высоте 50 м, характерной для безопасной укладки со скоростью снижения Vy = 0,1...0,2 м/с груза, перевозимого на внешней подвеске с общей длиной тросов 45 м. Полученные результаты дают возможность обеспечить безопасное расширение зоны ограничений на управление вертолетом Ми-8МТВ в горизонтальном полете, на режимах висения и вертикального маневрирования, а также оптимизировать действия экипажа
при непроизвольном выходе за пределы этих ограничений в случае отказа критического двигателя в полете с ОВГ на внешней подвеске.
5.3. ПОЛЕТ В УСЛОВИЯХ ПОВЫШЕННОЙ ТУРБУЛЕНТНОСТИ ВОЗДУХА
В общем случае вертолет с грузом на ВП при полете в условиях повышенной турбулентности воздуха можно рассматривать как систему движущихся тел, связанных между собой. Движение отдельных элементов этой системы определяется как внешней нагрузкой, так и внутренними силовыми воздействиями. Определение точности функционирования этой системы, т.е. способности обеспечивать программные, расчетные параметры, а также исследования по выбору и обоснованности оптимальных режимов функционирования тесно связаны с исследованиями в области аэродинамики и динамики полета.
Исходя из аэродинамических представлений все виды воздействия внешней среды на исследуемую систему можно рассматривать как существенно нестационарные и периодические, что обусловливает наличие колебаний вертолета и груза на его ВП. Анализ такого поведения груза, транспортируемого на ВП к месту установки на объекте, позволяет систематизировать процессы динамики его поведения на ВП, которая во многом определяется скоростью транспортировки, формой, распределением массы, относительной плотностью груза, а также видом используемой подвески.
При разработке ППР монтажа конструкций с использованием вертолетов, создании специальных ТС, разработке способов крепления грузов на ВП, для обеспечения эффективной стабилизации и азимутальной ориентации груза в полете требуется определять действующие на систему силы и моменты. Необходимо иметь в виду, что с точки зрения аэродинамики система "вертолет — груз на ВП" является достаточно сложной. Грузы, как правило, имеют всевозможные решетки, проточки, выступающие части, влияние которых на аэродинамические характеристики аналитически определить достаточно сложно, и относятся к классу плохообтекаемых тел, характеризующихся отрывным течением при обтекании.
Отрывное обтекание часто сопровождается интенсивными пульсациями давления и других параметров набегающего потока и может как вызывать изменение аэродинамических конфигураций транспортируемого груза в полете, так и служить причиной его прогресси
рующих колебаний на ВП [5.12]. Все это делает весьма актуальным детальное изучение обтекания и аэродинамических характеристик таких компоновок груза, аргументирует необходимость создания управляемой стабилизирующей силы, а также разработки методов и средств их эффективной азимутальной ориентации в полете.
Важную роль в решении указанных задач играет математическое моделирование, которое позволяет проводить исследования развития особых ситуаций без угрозы жизни и здоровью людей, а также без причинения ущерба материальной части. При этом успех использования математического моделирования во многом связан с возможностью построения таких нелинейных ММ аэродинамики, которые позволяли бы представлять зависимости нелинейных аэродинамических нагрузок от кинематических параметров в виде известных функций, если речь идет об установившемся обтекании вертолета с грузом на ВП.
Примером использования таких ММ является программа "Vertol", упомянутая гл. 4 настоящей монографии, позволяющая проводить вычислительный эксперимент по исследованию динамики системы "вертолет — груз на ВП" при воздействии ветра любых направления и скорости при условии, что аэродинамические характеристики вертолета и груза являются стационарными. С помощью данной программы были выполнены исследования поведения порожнего водосливного устройства на ВП вертолета при воздействии ветра.
Известен случай возникновения особой ситуации, приведшей к катастрофе вертолета Ми-26 под Читой (см. гл. 1), когда при тушении пожара после сброса воды из ВСУ во время полета к месту забора воды произошло попадание троса ВП, на котором было подвешено ВСУ, в РВ вертолета с последующим разрушением РВ. Это привело к потере управляемости вертолета и, как следствие, к катастрофе. Одной из вероятных причин данного авиационного происшествия является воздействие на порожнее, легкое, ВСУ сильного порыва негра.
Программа "Vertol" позволяет провести вычислительный эксперимент с целью определения скорости ветра заданного направления и параметров полета вертолета, при которых возможно попадание троса подвески ВСУ в РВ вертолета. Серия таких экспериментов показала, что наиболее опасным является вертикальный восходящий порыв ветра.
Программа виртуального полета вертолета троилась следующим образом. Вертолет выполняет взлет с набором высоты 150 м и разгоном до заданной скорости горизонтального полета, затем, на
Жпах
О
Рис. 5.16. Профиль порыва ветра: W — скорость порыва; t — время
150-й секунде полета, начинается воздействие ветра. Профиль порыва показан на рис. 5.16. Таким образом, скорость ветра достигает своего максимального значения 1Утах за время t = 2 с и остается постоянной до окончания вычислительного эксперимента.
При этом трос подвески ВСУ изменит свой начальный угол отклонения от вертикали, который зависит в числе прочего и от скорости полета вертолета, т.е. от скорости набегающего потока. Причем процесс изменения этого угла, очевидно, будет колебательным с некоторым перерегулированием, которое и представляет наибольшую опасность, так как угол отклонения троса от вертикали в момент перерегулирования будет наибольшим. На рис. 5.17 показан процесс изменения во времени угла отклонения
Рис. 5.17. График изменения во времени угла отклонения троса от вертикали
троса от вертикали при скорости горизонтального полета 100 км/ч и скорости порыва ветра 20 м/с.
Однако одно лишь изменение во времени угла отклонения троса от вертикали не дает достаточной информации об опасности попадания троса в РВ вертолета. Для этого необходимо знать взаимное положение вертолета и троса.
При вертикальном восходящем порыве ветра угол атаки вертолета увеличивается. Статически устойчивый вертолет должен начать движение вокруг поперечной оси на уменьшение угла атаки, т.е. на пикирование. При этом, очевидно, будет уменьшаться и угол тангажа вертолета. Таким образом, хвостовая балка вертолета с расположенным на ней РВ должна двигаться в ту же сторону, что и трос подвески ВСУ. Это является положительным фактором, так как расстояние между тросом и РВ будет сокращаться медленнее.
Однако при воздействии на ВСУ вертикального восходящего порыва ветра в начальный момент времени уменьшается сила натяжения троса подвески (рис. 5.18), создававшая до этого значительный пикирующий момент. В результате после встречи с рассматриваемым порывом ветра вертолет из-за резкого уменьшения пикирующего момента будет не уменьшать угол тангажа, как ожидалось, а наоборот, увеличивать его (рис. 5.19). Спустя некоторое время угол тангажа вертолета начнет уменьшаться, но к этому времени уже может произойти попадание троса подвески в РВ.
Рис. 5.19. Угловые перемещения вертолета
В связи с этим более информативным будет рассмотрение процесса изменения угла между тросом и плоскостью 0X7 связанной системы координат вертолета. Этот процесс при описанных выше условиях показан на рис. 5.20.
Рис. 5.21. Зависимость минимального угла между плоскостью OXZ вертолета и тросом от скорости горизонтального полета Игп и скорости вертикального восходящего порыва ветра
Серия вычислительных экспериментов позволила выявить зависимость минимального угла между плоскостью ОXZ вертолета и тросом от скорости горизонтального полета Кгп и скорости вертикального восходящего порыва ветра На рис. 5.21 представлены результаты данного исследования. Видно, что, как и следовало ожидать, при увеличении скорости порыва ветра при прочих равных условиях минимальный угол между плоскостью OXZ вертолета и тросом сокращается.
Однако реальная зависимость минимального угла между плоскостью OXZ вертолета и тросом от скорости горизонтального полета при прочих равных условиях не столь очевидна.
При сравнительно небольших скоростях порыва ветра (до 20 м/с) минимальный угол между плоскостью OXZ вертолета и тросом с увеличением скорости горизонтального полета сначала уменьшается, затем в некотором диапазоне скоростей остается практически неизменным, а потом начинает монотонно возрастать. Здесь играет роль взаимодействие двух соперничающих тенденций. С одной стороны, при увеличении скорости полета растет максимальный угол отклонения троса от вертикали, а с другой - растет сила натяжения троса
Рис. 5.22. Зависимость максимального угла отклонения троса от вертикали от скорости горизонтального полета и скорости вертикального восходящего порыва ветра
и, соответственно, пикирующий момент, увеличивающий угол между плоскостью OXZ вертолета и тросом. На малых скоростях полета преобладает первая тенденция, а на больших - вторая.
При больших скоростях порыва ветра картина несколько иная. Прежде всего, необходимо отметить, что при скоростях порыва свыше 20 м/с увеличение скорости горизонтального полета приводит к уменьшению максимального угла отклонения троса от вертикали, в то время как при меньших скоростях порыва наблюдается обратная картина (рис. 5.22).
Это связано с изменением угла атаки а ВСУ, а значит, и с изменением коэффициентов его аэродинамических сил. Слабый порыв ветра в меньшей степени влияет на угол атаки ВСУ, чем сильный (рис. 5.23). Это означает, что значение максимального угла отклонения троса от вертикали в случае слабого порыва определяется в большей степени скоростным напором. Поэтому с ростом скорости горизонтального полета максимальный угол от-
a, 50
0
-50
Рис. 5.23. Изменение угла атаки ВСУ во времени при горизонтальной скорости полета 60 км/ч и скоростях порыва ветра В710 и 30 м/с
клонения троса увеличивается. Влияние же порыва ветра на данный угол по мере роста скорости горизонтального полета постепенно ослабевает, так как доля скорости, которую привносит порыв, постепенно уменьшается.
Сильный порыв ветра влияет не только на скоростной напор, но и в значительной степени изменяет угол атаки ВСУ. На малых скоростях горизонтального полета угол атаки ВСУ меняет знак с отрицательного на положительный и уходит далеко в область положительных значений. В результате коэффициент подъемной силы ВСУ, а значит, и сама подъемная сила ВСУ также становятся положительными, что способствует увеличению угла отклонения троса от вертикали. С ростом же скорости горизонтального полета максимальный угол атаки ВСУ уменьшается и постепенно переходит в область отрицательных значений (рис. 5.24). Все это в целом приводит к тому, что при сильных порывах ветра с ростом скорости горизонтального полета максимальный угол отклонения троса подвески ВСУ от вертикали уменьшается.
Рассмотренные процессы объясняют изменение характера зависимостей минимального угла между плоскостью OXZ вертолета и тросом при переходе от малых скоростей порыва к большим (см. рис. 5.21).
Рис. 5.24. Изменение угла атаки груза во времени при скорости порыва ветра 30 м/с и скорости горизонтального полета Ига 80, 100, 120 и 150 км/ч
При этом, однако, нельзя однозначно утверждать, что для уменьшения возможности попадания троса подвески в РВ вертолета при транспортировке порожнего ВСУ нужно стремиться увеличить горизонтальную скорость полета, поскольку используемая ММ нс учитывает всех аспектов обтекания ВСУ. Так, например, не учитывается влияние на ВСУ индуктивного потока от НВ вертолета, а также нет учета нестационарности аэродинамических характеристик ВСУ. Тем не менее, математическое моделирование в данном случае позволило выявить основные закономерности движения груза на внешней подвеске вертолета.
СПИСОК ЛИТЕРАТУРЫ К ГЛ. 5
5.1. Микинелов А.Л., Чепига В.Е., Шахвердов В.Г. Летная эксплуатация воздушных судов. М.: Машиностроение, 1986. 216 с.
5.2. Акимов А.И. Аэродинамика и летные характеристики вертолетов. М.: Машиностроение, 1988. 144 с.
5.3. Козловский В.Б., Паршенцев С.А. Исследование поведения груза на внешней подвеске вертолета и способы его стабилизации в полете // Науч, вестник МГТУ ГА. Сер. Аэромеханика и прочность. 2004. № 72. С. 97—101.
5.4. Наставление по производству полетов в гражданской авиации СССР (НПП ГА—85). М.: Воздушный транспорт, 1985. 254 с.
5.5. Ми-8АМТ. Руководство по летной эксплуатации (с дополнениями и изменениями). Изд. № 63915/4. М., МГА, 1994.
5.6. Руководство по транспортированию грузов на внешней подвеске вертолетов. Утв. зам. директора ДВТ С.Н. Овчаренко 29.06.1993 г.
5.7. Руководство ио трелевке (вывозу) древесины с горных лесосек вертолетами Ми-8 и Ка-32. Утв. МГА, 1989 г.
5.8. Применение авиации в отраслях экономики / Автор-сост. В.С. Деревянко. Краснодар: Сов. Кубань, 2002. 488 с.
5.9. Паршенцев С.А., Ас о вс кий В.П., Худоленко О.В. Исследование возможности безопасного завершения полета вертолета с грузом на внешней подвеске при отказе одного двигателя // Науч, вестник МГТУ ГА. Сер. Аэромеханика и прочность. М., 2004. № 72. С. 23-27.
5.10. Паршенцев С.А., Асовский В.П., Худоленко О.В. Проблемы и особенности использования вертолетов для спасения людей // Сб. науч. тр. VI Форум Российского вертолетного общества. М.: Изд-во МАИ, 2004. Разд. VII. С. 81—85.
5.11. Паршенцев С.А. Разработка комплексных методов исследования летной эксплуатации вертолетов на строительно-монтажных и транспортных работах с использованием внешней подвески: Дисс. ... канд. техн. наук. М., 2005. 297 с.
5.12. Паршенцев С.А. Надежность функционирования системы "экипаж - вертолет груз па внешней подвеске’’ в условиях развития неблагоприятного фактора // Полет. 2005. № 4. С. 34-41.
Оглавление
Предисловие .............................................3
Основные сокращения .....................................6
Введение ................................................8
Глава 1
ОБЩИЕ СВЕДЕНИЯ О ТЕХНОЛОГИЯХ И СПОСОБАХ
ВЫПОЛНЕНИЯ ВЕРТОЛЕТАМИ АВИАЦИОННЫХ
СТРОИТЕЛЬНО-МОНТАЖНЫХ И ТРАНСПОРТНЫХ РАБОТ С ИСПОЛЬЗОВАНИЕМ ВНЕШНЕЙ ПОДВЕСКИ.......................11
1.1. Способы и технологические схемы выполнения АСМР.... 11
1.1.1. Свободный монтаж ........................... 13
1.1.2. Монтаж способом поворота.................... 17
1.1.3. Демонтаж конструкций ........................22
1.1.4. Работы с гибкими элементами..................26
1.2. Особенности транспортировки грузов на внешней подвеске вертолета.............................................. 33
1.3. Влияние внешних условий на проведение АСМР и полеты вертолета с грузом на внешней подвеске..................46
1.4. Формирование требований к летно-техническим данным вертолетов для проведения АСМР..........................57
1.4.1. Анализ современного состояния отечественного вертолетного парка для проведения АСМР............. 57
1.4.2. Общие требования к летно-техническим данным вертолетов
для проведения АСМР и их специальному оборудованию ... 61
1.5. Пути расширения эксплуатационного диапазона при применении вертолетов на АСМР...........................65
Список литературы к гл. 1...............................71
Глава 2
ТЕХНИЧЕСКИЕ СРЕДСТВА И СПЕЦИАЛЬНОЕ ОБОРУДОВАНИЕ
ВЕРТОЛЕТОВ ДЛЯ ТРАНСПОРТИРОВКИ ГРУЗОВ НА ВНЕШНЕЙ
ПОДВЕСКЕ И ПРОВЕДЕНИЯ АСМР..............................75
2.1. Виды систем внешней подвески грузов................76
2.2. Характеристика силовых стропов, строповочной оснастки и грузозахватных приспособлений........................ 87
2.3. Системы стабилизации груза на внешней подвеске вертолета ... 102
2.4. Системы для азимутальной ориентации груза на бифилярной внешней подвеске вертолета ........................... 119
2.4.1. Усилия, действующие на груз и тросы бифилярной внешней подвески ................................. 122
2.4.2. Влияние геометрических параметров бифилярной подвески на относительное возвращающее груз усилие......... 123
2.4.3. Крутильные колебания груза на бифилярной внешней подвеске .................... 124
2.4.4. Динамические нагрузки в элементах САО....... 126
2.4.5. Динамический момент на выходном валу САО
при пуске или торможении системы.............. 127
2.4.6. Формирование конструктивно-кинематических схем САО........................................... 129
2.5. Системы раскатки (раскладки), подъема и переноса гибкого элемента............................................... 145
2.6. Вспомогательные наземные технические средства для выполнения АСМР........................................ 152
2.6.1. Выбор конструктивно-силовой схемы улавливающих приспособлений ................................... 153
2.6.2. Выбор парамегров выносного ориентира видимости и метод визуализации строительной оси монтажных объектов.... 161
Список литературы к гл. 2.............................. 164
Глава 3
ДЕЯТЕЛЬНОСТЬ ЭКИПАЖА КАК КОЛЛЕКТИВНОГО ОПЕРАТОРА ПРИ ПРОВЕДЕНИИ АСМР.....................................167
3.1. Методы пилотирования вертолета на АСМР ........... 167
3.1.1. Косвенный метод............................ 168
3.1.2. Прямой метод ............................. 173
3.1.3. Комбинированный метод...................... 175
3.2. Анализ надежности функционирования системы "экипаж-вертолет—груз на внешней подвеске" в условиях развития неблагоприятного фактора .............................. 177
3.2.1. Анализ характерных отклонений и ошибок в действиях экипажа при выполнении АСМР и в полетах с грузом на внешней подвеске............................... 178
3.2.2. Характерные отклонения и ошибки в действиях
вспомогательного персонала при выполнении АСМР . . 186
3.2.3. Модели возможных действий экипажа в условиях развития неблагоприятного фактора в полете с грузом на внешней подвеске......................................... 187
Список литературы к гл. 3 ............................ 197
Глава 4
ПРИМЕНЕНИЕ МАТЕМАТИЧЕСКОГО МОДЕЛИРОВАНИЯ ДЛЯ РЕШЕНИЯ ЗАДАЧ ПОВЫШЕНИЯ БЕЗОПАСНОСТИ
И ЭФФЕКТИВНОСТИ ЛЕТНОЙ ЭКСПЛУАТАЦИИ ВЕРТОЛЕТОВ ПРИ ВЫПОЛНЕНИИ АВИАЦИОННЫХ РАБОТ
С ИСПОЛЬЗОВАНИЕМ ВНЕШНЕЙ ПОДВЕСКИ.......................199
4.1. Роль и место математического моделирования в исследовании проблем эксплуатации вертолетов .. .................... 199
4.2. Общие методологические положения построения математической модели динамики полета воздушных судов . . 203
4.3. Описание математической модели полета вертолета с грузом на внешней подвеске.............................212
4.3.1. Основные ограничения и допущения ..............213
4.3.2. Используемые системы координат ................214
4.3.3. Уравнения движения ............................220
4.3.4. Силы и моменты, действующие на вертолет .......227
4.3.5. Численное интегрирование уравнений движения....253
4.3.6. Моделирование управляющих воздействий .........257
4.4. Решение задач повышения эффективности и безопасности полета вертолета с грузом на внешней подвеске с помощью математической модели динамики полета ...................261
4.4.1. Взаимосвязь эффективности и безопасности эксплуатации вертолетов ..............................261
4.4.2. Применение математической модели динамики полета вертолета для оценки возможности и безопасности проведения операций с грузом на внешней подвеске . . . 264
Список литературы к гл. 4.................................268
Глава 5
ОСОБЫЕ СИТУАЦИИ В ПОЛЕТЕ ВЕРТОЛЕТА С ГРУЗОМ
НА ВНЕШНЕЙ ПОДВЕСКЕ И ПРИ ПРОВЕДЕНИИ АСМР.................272
5.1. Аварийный сброс груза с внешней подвески .......... 274
5.2. Отказ одного двигателя в полете вертолета с грузом на внешней подвеске ......................................281
5.3. Полет в условиях повышенной турбулентности воздуха ..291
Список литературы к гл. 5.................................300