/









































































































































































































































































































































































































































Author: Кловский Д.Д. Зюко А.Г. Назаров М.В. Коржик В.И.
Tags: электротехника кибернетика радиотехника
ISBN: 5-256-01288-6
Year: 1999




Text
ТЕОРИЯ
ЭЛЕКТРИЧЕСКОЙ
связи
Под редакцией профессора Д.Д.Кловского
Рекомендовано Государственным комитетом РФ
по связи и информатизации
в качестве учебника для студентов вузов
по специальностям
"Сети связи и системы коммутации",
"Многоканальные телекоммуникационные системы",
"Радиосвязь, радиовещание и телевидение ",
а также для бакалавров
по направлению "Телекоммуникации"
МОСКВА
"РАДИО и СВЯЗЬ"
1999
УДК 621.391 (075)
ББК 32.81
ТЗЗ
Федеральная целевая программа книгоиздания России
Авторы:ГА.Г.ЗюкоДД.Д.Кловский, В.И.Коржик, М.В.Назаров
Рецензенты: кафедра радиоприемных устройств ПИИРС;
кафедра радиотехнических систем СибГАТИ
Теория электрической связи: Учебник для вузов /|А.Г.Зюко,|
ТЗЗ ДД.Кловский, В.И.Коржик, М.В.Назаров; Под род. ДД.Клов-
ского. - М.: Радио и связь, 1999. - 432 с.: 204 ил.
ISBN 5-256-01288-6.
Излагаются основные закономерности и методы передачи сообщений но
каналам связи. Рассматриваются способы математического представления
сообщений, сигналов и помех, методы формирования и преобразования
сигналов в системах (каналах) электрической связи, вопросы
помехоустойчивости и пропускной способности систем электросвязи, методы
экономного и помехоустойчивого кодирования, оптимального приема
сообщений, принципы многоканальной передачи н распределения информации
в сетях связи, основы цифровой обработки сигналов, вопросы оптимизации
систем связи.
Для студентов вузов, обучающихся по специальностям “Сети и системы
коммутации”, “Многоканальные телекоммуникационные системы”,
“Радиосвязь, радиовещание и телевидение”, а также для бакалавров ио
направлению “Телекоммуникации”.
ББК 32.81
Учебное издание
| Зюко Андрей Глебович |
Кловский Даниил Давидович
Коржик Валерий Иванович
Назаров Михаил Васильевич
ТЕОРИЯ ЭЛЕКТРИЧЕСКОЙ СВЯЗИ
Ведущий редактор В.П.Вялъцев
Обложка художника В. Г. Ситникова
Художественный и технический редактор И.Л. Ткаченко
И Б № 23790
ЛР 010164 от 29.01.97 г.
Подписано в печать с готового оригинал-макета 16.04.98 Формат 60x84/8 Бумага газетная Печать
Усл. псч. л. 50,22 Усл. кр.-отт. 51,38 Уч.-изд. л. 39,2 Тираж 3000 экз. Изд. № 23790 Зак. № 33
Издательство “Радио и связь”, 103473, Москва, 2-й Щемиловский пер., д. 4/5
Типография издательства “Радио и связь”, 103473, Москва, 2-й Щемиловский пер., д. 4/5
ISBN5-256-01288-6
© Зюко А.Г., Кловский Д.Д., Коржик
Назаров М.В., 1999
Посвящается светлой памяти
Льва Матвеевича Финка,
внесшего значительный вклад
в формирование современной
теории электрической связи
и курса ТЭС
ПРЕДИСЛОВИЕ
Системы связи играют всё большую роль в жизни людей, объединяя и
сближая отдельные страны, континенты и объекты космоса. Последние годы
отмечены не только интенсивным развитием проводных и оптико-волоконных
систем связи, но и заметным развитием систем радиосвязи. Помимо традици-
онных релейных и спутниковых систем радиосвязи быстро развиваются сети
мобильных цифровых сотовых систем радиосвязи.
Разработки систем связи последнего времени используют не только воз-
можности современных технологий, но и достижения современной теории свя-
зи, позволяющие повысить не только объёмы передаваемой информации, но и
качество передачи сообщений (верность связи).
Современная теория связи использует как детерминированные модели сиг-
налов, так и вероятностные модели для передаваемых сообщений, соответст-
вующих им сигналов и помех (шумов) в канале. Вероятностный подход учиты-
вает случайный (для получателя) характер передачи сообщений и помех в ка-
нале и позволяет определить оптимальные приёмные устройства
(обеспечивающие максимально возможное качество) и предельные показатели
систем передачи сообщений (систем связи).
Основы современной (статистической) теории связи были заложены в фун-
даментальных работах В.А. Котельникова по теории потенциальной помехо-
устойчивости (1947 г.) и К. Шеннона по теории информации (1948 г.). От-
дельные вопросы теории рассматривались в более ранних работах
X. Найквиста (1928 г.) и В.А. Котельникова (1933 г.), в которых была сформу-
лирована и доказана теорема отсчётов, в работе Р. Хартли (1928 г.), в которой
введена логарифмическая мера количества информации, в работе Д.В. Агеева
(1935 г.) по теории линейного разделения каналов. В создании и развитии ста-
тистической теории связи большую роль сыграли работы А.Я. Хинчина
(1938 г.) по корреляционной теории стационарных случайных процессов,
А.Н. Колмогорова (1941 г.) и Н. Винера (1943 г.) по интерполированию и экс-
траполированию стационарных случайных последовательностей, А. Вальда
(1950 г.) по теории статистических решений. Дальнейшее развитие теория по-
лучила в работах Р. Райса, А.А. Харкевича, В.И. Сифорова, Р. Галлагера,
X. Хелстрома, Р. Фано, Л.М. Финка, Д. Витерби и многих других отечествен-
ных и зарубежных учёных.
Курс ТЭС относится к числу фундаментальных дисциплин подготовки вы-
сококвалифицированных инженеров, владеющих современными методами ана-
лиза и синтеза систем и устройств связи различного назначения.
Целью курса является изучение основных закономерностей и методов пе-
редачи сообщений по каналам связи, для чего в курсе решаются задачи анали-
3
за и синтеза систем связи. В курсе рассматриваются способы математического
представления сообщений сигналов и помех, методы формирования и преобра-
зования сигналов в электрических цепях, вопросы анализа помехоустойчивости
и пропускной способности систем электросвязи, методы экономного и поме-
хоустойчивого кодирования, оптимального приёма сообщений, принципы мно-
гоканальной передачи и распределения информации в сетях связи, основы
цифровой обработки сигналов, вопросы оптимизации систем связи.
Курс ТЭС предназначен для подготовки инженеров-связистов широкого
профиля по специальностям 200900, 201000, 201100, а также бакалавров по на-
правлению телекоммуникаций (550400) и соответствует программе дисципли-
ны ТЭС для вузов связи.
Выводы содержат итоговый анализ основных положений и результатов со-
ответствующих глав. Вопросы, задачи и упражнения направлены на закрепле-
ние материала и более глубокое его осмысление. Текст, набранный петитом,
предназначен для углубления и пояснения основного материала, но в некото-
рых случаях он напоминает читателю материал, известный из курсов высшей
математики и ТЭЦ. По содержанию и методическому изложению учебник рас-
считан на студентов дневного и заочного обучения. В основу учебника поло-
жены лекции, читаемые авторами на протяжении ряда лет.
Главы 1, 8 (кроме § 8.9 — 8.11), 11 написаны А.Г. Зюко, гл. 3, 4, 5, 10 —
Д.Д. Кловским, гл. 6, 7 — В.И. Коржиком, гл. 2, § 8.9 - 8.11, гл. 9 —
М.В. Назаровым, предисловие и заключение — Д.Д. Кловским. Редактирование
всех глав учебника выполнено Д.Д. Кловским.
Авторы выражают признательность Б.И. Николаеву за помощь при подго-
товке части материала § 2.3, 2.7, 3.5, а также за тщательное критическое про-
чтение всего материала учебника. Они также признательны С.А. Белоусу за
помощь при подготовке части материала § 7.3. Авторы выражают особую при-
знательность Ю.В. Алышеву, взявшему на себя весьма ответственную, тяжёлую
и трудоёмкую работу по компьютерной вёрстке учебника. Они также благодар-
ны его помощникам А.В. Небогину, С.В. Рыбак, А.Г. Буранову,
Д.Ю. Андронову, С.Г. Мусиенко, А.В. Семёнову и А.М. Ступаченко.
Авторы признательны коллективам кафедры РПУ ПГАТИ (зав. каф.
А И. Тяжев) и кафедры радиотехнических систем СибГАТИ (зав. каф.
Т.А. Чернецкий, проф. А.А. Макаров) за ряд замечаний, способствовавших
улучшению книги.
Отзывы по книге просим направлять в издательство "Радио и связь" по ад-
ресу: 101000, Москва, Почтамт, а/я 693.
4
СПИСОК СОКРАЩЕНИЙ
АВ — алгоритм Витерби
АКН — алгоритм Кловского-Николаева
AM — амплитудная модуляция
АМП — алгоритм максимального правдоподобия
АЧХ — амплитудно-частотная характеристика
БГШ — белый гауссовский шум
БПФ — быстрое преобразование Фурье
ВАХ — вольтамперная характеристика
ДК — дискретный канал
ДНК — дискретно-непрерывный канал
ДПФ — дискретное преобразование Фурье
ИФР — интегральная функция распределения
ИХ — импульсная характеристика
ММС — модуляция минимальным (частотным) сдвигом
МО — математическое ожидание
МПО — максимально правдоподобная оценка
МСИ — межсимвольная интерференция
НК — непрерывный канал
ОДПФ — обратное дискретное преобразование Фурье
ОСП — отношение сигнал-помеха (отношение средних мощностей сигнала
и помехи)
ПГ — преобразование (преобразователь) Гильберта
ПФ — полосовой фильтр
ПВ — плотность вероятности
СКК — сигнально-кодовые конструкции
СКО — среднеквадратическая ошибка
СКП — среднеквадратическая погрешность
СПМ — спектральная плотность мощности
СПЭ — спектральная плотность энергии
СФ — согласованный фильтр
СВ — случайная величина
СП — случайный процесс
УМ — угловая модуляция
ФК — функция корреляции, фильтр Калмана
ФКВ — фильтр Колмогорова-Винера
ФМ — фазовая модуляция
ФНЧ — фильтр нижних частот
ФЧХ — фазочастотная характеристика
ЦОС — цифровая обработка сигналов
ЦФ — цифровой фильтр
ЧМ — частотная модуляция
ЧМНФ — частотная модуляция с непрерывной фазой
ЧХ — частотная характеристика
ЭВК — энергетический выигрыш кода
ЭВС — энергетический выигрыш системы
5
ОСНОВНЫЕ ОБОЗНАЧЕНИЯ
А а — ансамбль (множество) сообщений — реализация вектора (цепочки символов) сообщения
а — реализация элемента сообщения
В — ансамбль (множество) первичных сигналов
5(0 — случайный первичный сигнал
B=1FT — база сигнала
5(4 Л); 5(t) — функция корреляции процесса(сигнала)
ь — реализация вектора (цепочки) кодовых символов
b(t) — реализация первичного сигнала
b,(i) — элемент первичного цифрового сигнала (кодовый символ) z-й
позиции, переданный в момент времени t=lT
с — пропускная способность канала (бит/символ или бит/отсчёт)
с — пропускная способность канала (бит/с)
Л) — дисперсия случайной величины или процесса
d — расстояние между сигнальными точками, расстояние по
Хеммингу между двоичными последовательностями, мини-
мальное расстояние по Хеммингу между комбинациями ли-
нейного блокового кода
Е — энергия принимаемого сигнала
F{ ) — интегральная функция распределения
F — полоса частот сигнала (канала)
F = — д Л — частота дискретизации непрерывного сигнала
— частота
G(/) — спектральная плотность мощности
— односторонняя спектральная плотность мощностей (на поло-
жительных частотах)
G(0, — случайная импульсная характеристика линейной цепи
5(0, 5(^) — детерминированная импульсная характеристика линейной
цепи
5,5' — выигрыш и обобщённый выигрыш системы модуляции
Я(А), нт — энтропия и условная энтропия дискретной случайной вели-
чины (дискретного источника)
Н\Х) — производительность дискретного источника
Н(А), НЛА) — соответственно эпсилон-энтропия и эпсилон-
производительность непрерывного источника
h(x), й(х|у) — дифференциальная энтропия и условная дифференциальная
77 энтропия непрерывной случайной величины
Лг= — — отношение энергии элемента сигнала на входе демодулятора
к односторонней спектральной плотности мощности белого
шума
6
r.2 P *2 I £l
К = = —---------нормированная энергия \h = —
ъ N0R„ tflog2 m I NJ
сигнала на 1 бит ин-
адп
J
К
K(f), *(jco)
4/Ж/)1
к
М
М{Х)
т
т\
N(t)
No
«(О
п
Р
Р{},РХ
РьМ
Р
Род.
Рз
формации (битовая энергия)
— взаимная информация между X и Y (информация, содержа-
щаяся в Y относительно X или в X относительно Y)
— скорость передачи информации от X к Y
— знак мнимой единицы,' j = л/ч .
— объём алфавита дискретного источника
— частотная характеристика (передаточная функция или ком-
плексный коэффициент передачи)
— амплитудно-частотная характеристика (АЧХ)
— число информационных символов в кодой комбинации
— индекс угловой модуляции
— математическое ожидание случайной величины (процесса)
— основание кода (объём алфавита кода), коэффициент глуби-
ны амплитудной модуляции
— математическое ожидание случайной величины (или процес-
са)
— случайная аддитивная помеха в непрерывном канале
— односторонняя (на положительных частотах) спектральная
плотность мощности квазибелого и белого шума
— реализация случайного процесса (СП) А(/)
— длина (общее число символов) кодовой комбинации
— средняя мощность сигнала
— вероятность события, указанного в скобках или обозначенно-
го индексом
— вероятность ошибки на один информационный бит
(эквивалентная вероятность ошибки)
— вероятность ошибочного приёма символа
— вероятность ошибочного декодирования блока символов
— заданная (допустимая) вероятность ошибки
б(х) =
J е_?/2 di - дополнительная функция ошибок
я=- п fllog2 т R~- Т — скорость кода — максимальная производительность при 1 (информационная скорость) дискретного источника (бит/с), скорость передачи информации
г = п-к — число проверочных символов в кодовых комбинациях блоко- вого кода
— нормированная функция корреляции, коэффициент корре- ляции
5(0 — случайный сигнал на входе приёмника (детектора) без учёта аддитивных помех
7
Ш) — спектральная плотность по Фурье сигнала x(t) — спектральная плотность по Фурье на положительных часто- тах
— амплитудный спектр сигнала x(f)
s(0 — реализация случайного сигнала на входе приёмника (детектора) без учёта аддитивных помех
т — длительность тактового интервала, длительность финитного сигнала, знак транспонирования матрицы
к — интервал анализа принимаемого колебания (сигнал плюс помеха)
t u(t) — текущее время — случайный сигнал на выходе модулятора — реализация случайного сигнала на выходе модулятора
И(0, IF(I), Х($, Y(f) — случайные процессы с реализациями (выборочными
И/) »;(/) w(x,0 функциями), соответственно v(f), w(0, x(t), y(f); v ~ скорость передачи (число символов в секунду) дискретного источника (канала), число отсчётов в одну секунду непрерывного сигнала — спектральная плотность энергии — односторонняя спектральная плотность энергии — одномерная плотность вероятности случайной величины (случайного процесса)
w(*b х2, .. t2, ..., tn) — л-мерная плотность вероятности совокупности случайных величин (случайного процесса)
X, Y X, у — алфавит сообщений на входе и выходе дискретного канала — вектор (цепочка символов) сообщений на входе и выходе
ДО дискретного канала — сумма сигнала и аддитивной помехи на входе приёмника (детектора)
z(0 — реализация суммы сигнала и аддитивной помехи на входе
5() Е(0 приёмника (детектора) — энергетическая эффективность системы — дельта-функция — ошибка в оценивании случайного параметра или СП, шум наблюдения или квантования
е(0, е — реализация СП Е(/)
у Z F У д — частотная эффективность системы — коэффициент передачи канала — шаг дискретизации непрерывного сигнала во времени
9 ®кан — коэффициент информационной эффективности системы — фазовый сдвиг, текущее безразмерное время — фазовый сдвиг в канале
8
эе
Л
X
v
п
р
а2
а
т
ф(0
\|/(/) = СО(/ + ф(О
ф(/) = argX:(/)
v, ф
vM фД*)
а
/л
— избыточность источника, кода
— отношение правдоподобия
— информационный параметр
— кодовое ограничение свёрточного кода
— пик-фактор сообщения или сигнала (отношение максималь-
ного значения к среднеквадратическому)
— отношение средних мощностей сигнала и шума
— дисперсия случайной величины (процесса)
— среднеквадратическое отклонение
— интервал между двумя сечениями процесса (t2- /1); задержка
— фаза сигнала при угловой модуляции
— полная фаза сигнала
— фазочастотная характеристика (ФЧХ)
— фазовый сдвиг, фаза сигнала
— функции ортогонального (или ортонормированного) базиса
— угловая частота, вес кодовой комбинации блокового кода
— мгновенная частота сигнала
Точка сверху означает комплексное выражение.
Знак * сверху выражения означает комплексное сопряжение.
Конкретный смысл обозначений уточняется индексами и поясняется в тексте.
Матрицы и векторы обозначены жирным шрифтом.
Прямая черта над символом или формулой означает статистическое усредне-
ние (по ансамблю), волнистая - по времени.
Знак л над символом означает оценку, выдаваемую демодулятором, декодером
или фильтром.
Знак п означает преобразование Гильберта.
Знак ® означает свёртку двух функций.
Знак Ф означает сложение по модулю 2.
(п, к) — обозначение линейного блокового кода длины п с к информационны-
ми символами.
9
ГЛАВА 1. ОБЩИЕ СВЕДЕНИЯ О СИСТЕМАХ
ЭЛЕКТРОСВЯЗИ
1.1. ИНФОРМАЦИЯ, СООБЩЕНИЯ, СИГНАЛЫ
Понятия информации и сообщения употребляются довольно часто. Эти близ-
кие по смыслу понятия сложны и дать их точное определение через более про-
стые нелегко. Слово информация происходит от латинского informatio — разъ-
яснение, ознакомление, осведомлённость. Обычно под информацией понима-
ют совокупность сведений, данных о каких-либо событиях, явлениях или
предметах. Мы живем в информационном мире. Всё, что мы видим, слышим,
помним, знаем, переживаем, — всё это различные формы информации. Сово-
купность сведений, данных становится знанием лишь после их интерпретации
с учётом ценности и содержания этих сведений. Следовательно, информацию в
широком смысле можно определить как совокупность знаний об окружающем
нас мире. В таком понимании информация является важнейшим ресурсом на-
учно-технического и социально-экономического развития общества. В отличие
от материального и энергетического ресурсов, информационный ресурс не
уменьшается при потреблении, накапливается со временем, сравнительно лег-
ко и просто с помощью технических средств обрабатывается, хранится и пере-
даётся на значительные расстояния.
Для передачи или хранения информации используют различные знаки
(символы), позволяющие выразить (представить) её в некоторой форме. Этими
знаками могут быть слова и фразы в человеческой речи, жесты и рисунки,
формы колебаний, математические знаки и т.п. Совокупность знаков, отобра-
жающих ту или Иную информацию, называют сообщением. Так, при телеграф-
ной передаче сообщением является текст телеграммы, представляющий собой
последовательность отдельных знаков — букв и цифр. При разговоре по теле-
фону сообщением является непрерывное изменение во времени звукового дав-
ления, отображающее не только содержание, но и интонацию, тембр, ритм и
иные свойства речи. При передаче движущихся изображений в телевизионных
системах сообщение представляет собой изменение во времени яркости эле-
ментов изображения.
Передача сообщений (а следовательно, и информации) на расстояние осу-
ществляется с помощью какого-либо материального носителя (бумаги, магнит-
ной ленты и т.д.) или физического процесса (звуковых или электромагнитных
волн, тока и т.д.). Физический процесс, отображающий (несущий) передавае-
мое сообщение, называется сигналом.
В качестве сигнала можно использовать любой физический процесс, изме-
няющийся в соответствии с переносимым сообщением. В современных систе-
мах управления и связи чаще всего используют электрические сигналы. Физи-
ческой величиной, определяющей такой сигнал, является ток или напряжение.
Сигналы формируются путём изменения тех или иных параметров физического
носителя в соответствии с передаваемым сообщением. Этот процесс
(изменения параметров носителя) принято называть модуляцией.
Сообщения могут быть функциями времени, например речь при передаче
телефонных разговоров, температура или давление при передаче телеметриче-
ских данных, спектакль при передаче по телевидению и т.п. В других случаях
10
сообщение не является функцией времени (например, текст телеграммы, не-
подвижное изображение и т.д.).
Сигнал передаёт (развёртывает) сообщение во времени. Следовательно, он
всегда является функцией времени, даже если сообщение (например, непод-
вижное изображение) таковым не является. Если сигнал представляет собой
функцию х(/), принимающую только определённые дискретные значения х
(например, 1 и 0), то его называют дискретным или дискретным по уровню
(амплитуде). Точно так же и сообщение, принимающее только некоторые оп-
ределённые уровни, называют дискретным. Если же сигнал (или сообщение)
может принимать любые уровни в некотором интервале, то они называются
непрерывными или аналоговыми.
В некоторых случаях сообщение или сигнал задают не на всей оси време-
ни, а в определённые моменты t. Такие сообщения (сигналы) называют дис-
кретными по времени в отличие от непрерывных по времени, заданных на всей
оси t. Например, речь является сообщением непрерывным как по уровню, так
и по времени, а датчик температуры, выдающий её значения через каждые
5 мин, служит источником сообщений, непрерывных по величине, но дис-
кретных по времени. На рис. 1.1 наглядно проиллюстрированы различные ви-
ды сигналов. Сигнал с конечным числом дискретных уровней часто называют
цифровым, поскольку уровни можно пронумеровать числами с конечным чис-
лом разрядов.
Не следует думать, что дискретные сообщения обязательно преобразуются в
дискретные сигналы, а непрерывные сообщения — в непрерывные сигналы.
Чаще всего именно непрерывные сигналы используют для передачи дискрет-
ных сообщений (в качестве их переносчиков, несущей). Дискретные же сигна-
лы могут использоваться для передачи непрерывных сообщений (после их дис-
кретизации).
Сообщение с помощью специальных устройств (датчиков) обычно преобра-
зуется в электрическую величину b(t) — первичный сигнал. При передаче речи
такое преобразование выполняет микрофон, при передаче изображения — теле-
визионная камера. В большинстве случаев первичный сигнал является низко-
частотным1) колебанием, которое отображает передаваемое сообщение.
В некоторых случаях первичный сигнал непосредственно передают по ли-
нии. Так поступают, например, при обычной городской телефонной связи. Для
передачи на большие расстояния (по кабелю или радиоканалу) первичный
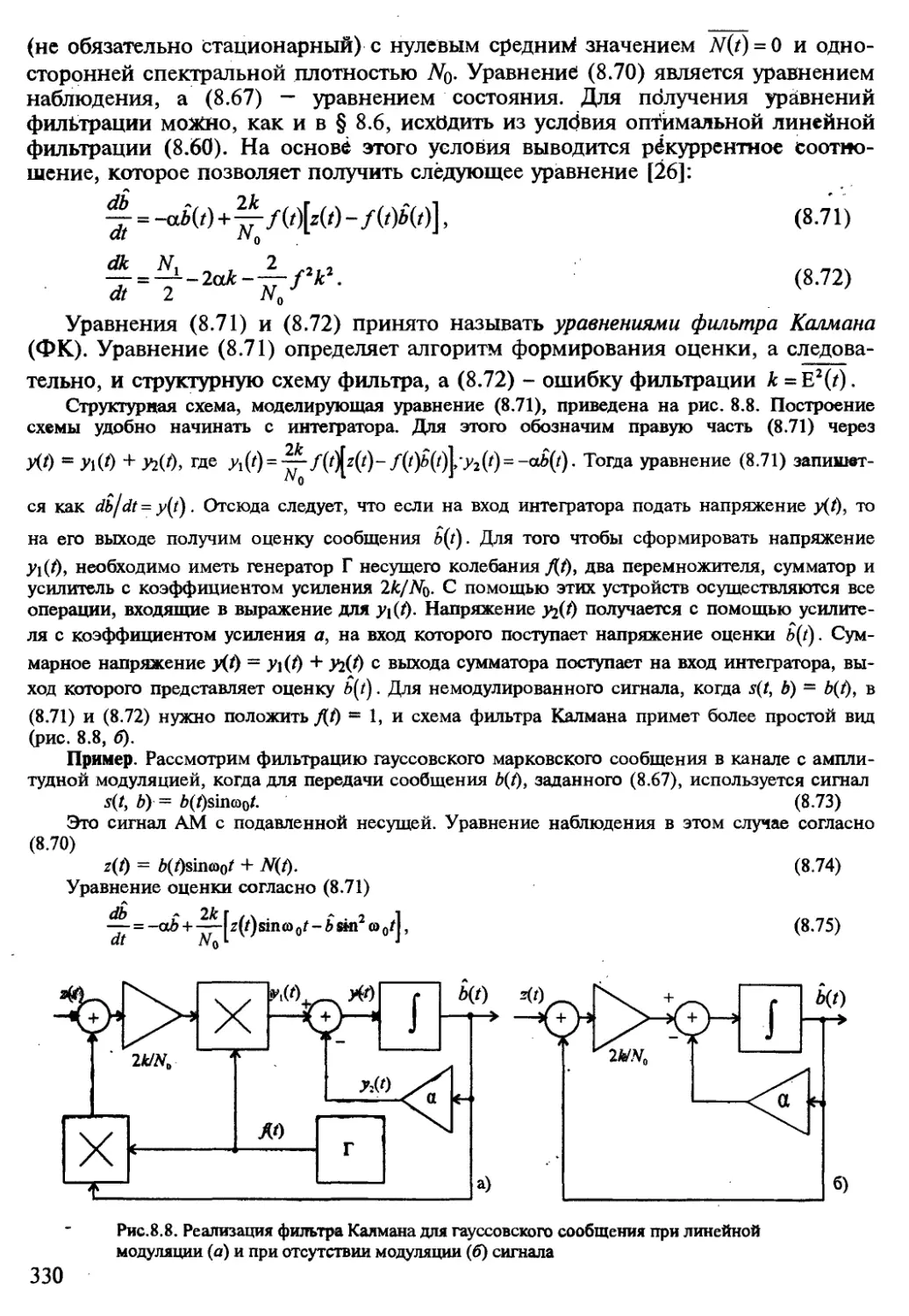
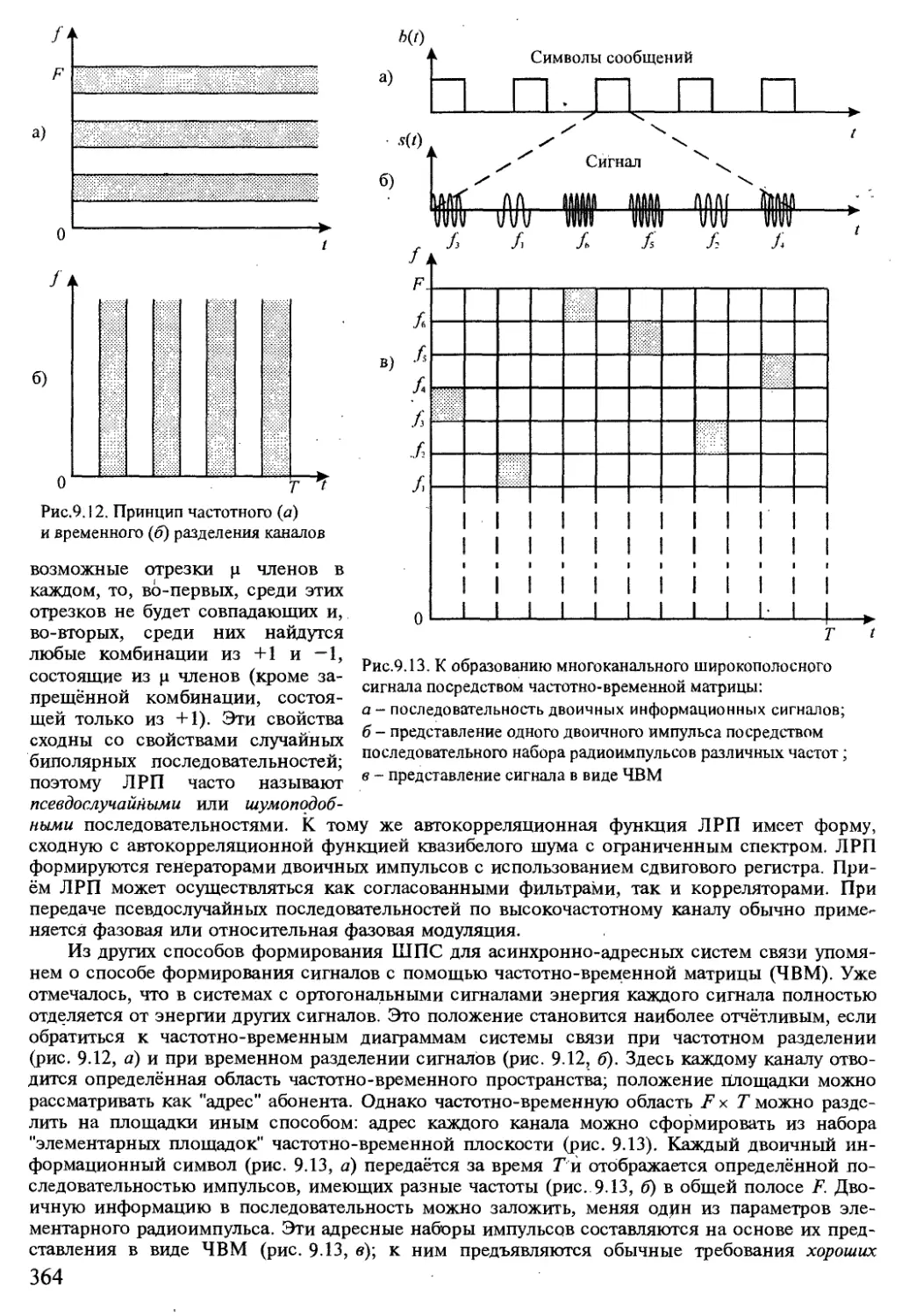
Рис. 1.1. Виды сигналов: (а) непрерывный сигнал; (б) дискретный по времени
сигнал; (в) сигнал, квантованный по уровню; (г) цифровой сигнал
Следует оговорить условность этого термина. Первичный телевизионный сигнал, напри-
мер, занимает область частот от нуля до 6 МГц.
11
сигнал преобразуют в высокочастотный.
Если бы передаваемое сообщение было детерминированным, т.е. заранее из-
вестным с полной достоверностью, то передача его не имела бы смысла. Такое
детерминированное сообщение не содержит информации. Поэтому сообщения
следует рассматривать как случайные события (или случайные величины, случай-
ные функции). Другими словами, должно существовать некоторое множество
вариантов сообщения (например, множество различных значений температуры,
выдаваемых датчиком), из которых реализуется с определённой вероятностью
одно. Поэтому и сигнал является случайной функцией. Детерминированный
сигнал не может быть носителем информации. Его можно использовать лишь
для испытаний системы связи или отдельных её элементов.
Случайный характер сообщений, сигналов, а также помех обусловил важ-
нейшее значение теории вероятностей в построении теории связи. Как будет
показано в последующих главах, вероятностные свойства сигналов и сообще-
ний, а также среды, в которой передаётся сигнал, позволяют определить количе-
ство передаваемой информации и её потери.
Описанием конкретного сигнала может быть некоторая функция времени
х(0- Определив так или иначе эту функцию, определяем и сигнал. Однако та-
кое полное описание сигнала не всегда требуется. Для решения ряда вопросов
достаточно более общего описания в виде нескольких параметров, характери-
зующих основные свойства сигнала, подобно тому, как это делается в системах
транспортирования. Указывая габаритные размеры и массу, характеризуем ос-
новные свойства предмета с точки зрения условий его перевозки; другие свой-
ства (например, цвет) с этой точки зрения являются несущественными.
Сигнал также является объектом транспортировки, а техника связи по су-
ществу техникой транспортирования (передачи) сигналов по каналам связи.
Поэтому целесообразно определить параметры сигнала, которые являются ос-
новными с точки зрения его передачи. Такими параметрами являются длитель-
ность сигнала Т, его динамический диапазон D и ширина спектра F. Всякий сиг-
нал, рассматриваемый как временной процесс, имеет начало и конец. Поэтому
длительность сигнала Т является естественным его параметром, определяющим
интервал времени, в пределах которого сигнал существует.
Динамический диапазон — это отношение наибольшей мгновенной мощ-
ности сигнала к той наименьшей мощности, которую необходимо отличать от
нуля при заданном качестве передачи. Он выражается обычно в децибелах.
Динамический диапазон речи диктора, например, равен 25...30 дБ, небольшого
вокального ансамбля 45...65 дБ, симфонического оркестра 70...95 дБ. Во избе-
жание перегрузок канала в радиовещании динамический диапазон часто со-
кращают до 35...45 дБ.
И наконец, ширина спектра сигнала F. Этот параметр даёт представление о
скорости изменения сигнала внутри интервала его существования. Спектр сиг-
нала в принципе может быть неограниченным. Однако для любого сигнала
можно указать диапазон частот, в пределах которого сосредоточена его основ-
ная энергия. Этим диапазоном и определяется ширина спектра сигнала.
В технике связи спектр сигнала часто сознательно сокращают. Это обусловлено тем, что
аппаратура и линия связи имеют ограниченную полосу пропускаемых частот. Сокращение
спектра осуществляется исходя из допустимых искажений сигнала. Например, при телефон-
ной связи требуется, чтобы речь была разборчива и чтобы корреспонденты могли узнать друг
друга по голосу. Для выполнения этих условий достаточно передать речевой сигнал в полосе
12
от 300 до 3400 Гц. Передача более широкого спектра речи в этом случае нецелесообразна,
так как ведёт к техническим усложнениям и увеличению затрат. Аналогично необходимая
ширина спектра телевизионного сигнала определяется требуемой чёткостью изображения.
При стандарте в 625 строк верхняя частота сигнала достигает 6 МГц. Спектр сигнала изобра-
жения много шире спектра сигнала звукового сопровождения. Это существенно усложняет
построение систем-телевизионного вещания по сравнению с системами звукового вещания.
Ширина спектра телеграфного сигнала зависит от скорости передачи и обычно принимается
равной Fa l,5v, где v — скорость передачи (телеграфирования) в Бодах, т.е. число символов,
передаваемых в секунду. Так, при телетайпной передаче v — 50 Бод и Fa 75 Гц. Спектр моду-
лированного сигнала обычно шире спектра передаваемого сообщения (первичного сигнала) и
зависит от вида модуляции.
Можно ввести более общую и наглядную характеристику — объём сигнала:
Кс = Гс Fc Dc. ' (1.1)
Объём сигнала Vc даёт общее представление о возможностях данного множест-
ва сигналов как переносчиков сообщений. Чем больше объём сигнала, тем
больше информации можно "вложить" в этот объём и тем труднее передать та-
кой сигнал по каналу связи с требуемым качеством.
1.2. СИСТЕМЫ, КАНАЛЫ И СЕТИ СВЯЗИ
На рис. 1.2 изображена структурная схема простейшей одноканальной сис-
темы связи. Рассмотрим назначение отдельных элементов этой схемы. Источ-
ником сообщений и получателем в одних системах связи может быть человек, в
других — различного рода устройства (автомат, вычислительная машина и т.д.).
Устройство, преобразующее сообщение в сигнал, называют передающим, а уст-
ройство, преобразующее принятый сигнал в сообщение, — приёмным. С помо-
щью первичного преобразователя в передающем устройстве сообщение а, ко-
торое может иметь любую физическую природу (изображение, звуковое коле-
бание и т.п.), преобразуется в первичный электрический сигнал b(t). В телефо-
нии, например, эта операция сводится к превращению акустических колебаний
в пропорционально изменяющееся электрическое напряжение на выходе мик-
рофона. В телеграфии с помощью телеграфного аппарата последовательность
элементов сообщения (букв) заменяется последовательностью кодовых симво-
лов (0, 1 или точка, тире), которая одновременно преобразуется в последова-
тельность электрических импульсов постоянного тока. В передатчике первич-
ный сигнал b(t) (обычно низкочастотный) превращается во вторичный
(высокочастотный) сигнал u(t), пригодный для передачи по используемому ка-
налу. Это осуществляется посредством модуляции.
Преобразование сообщения в сигнал должно быть обратимым. В этом слу-
чае по выходному сигналу можно восстановить входной первичный сигнал, т.е.
получить всю информацию, содержащуюся в переданном сообщении. В про-
тивном случае часть информации будет,потеряна при передаче.
Рис.1.2. Структурная схема простейшей одноканальной системы связи
13
Линией связи называется физическая среда и совокупность аппаратных
средств, используемых для передачи сигналов от передатчика к приёмнику. В
системах электрической связи — это прежде всего кабель или волновод, в сис-
темах радиосвязи — область пространства, в котором распространяются элек-
тромагнитные волны от передатчика к приёмнику. При передаче канальный
сигнал u(f) может искажаться и на него могут накладываться помехи n(t). При-
ёмное устройство обрабатывает принятое колебание z(t) = s(i) + n(t), представ-
ляющее собой сумму пришедшего искажённого сигнала s(t) и помехи n(t), и
восстанавливает по нему сообщение а, которое с некоторой погрешностью
отображает переданное сообщение а. Другими словами, приёмник должен на
основе анализа колебания z(Z) определить, какое из возможных сообщений пе-
редавалось. Поэтому приёмное устройство является одним из наиболее ответ-
ственных и сложных элементов системы связи.
Совокупность технических средств для передачи сообщений от источника к
потребителю называется системой связи. Этими средствами являются передаю-
щее устройство, линия связи и приёмное устройство. Иногда в понятие систе-
ма связи включается источник и потребитель сообщений. По виду передавае-
мых сообщений различают следующие системы связи: передача речи
(телефония); передача текста (телеграфия); передача неподвижных изображе-
ний (фототелеграфия); передача подвижных изображений (телевидение), теле-
измерение, телеуправление и передача данных. По назначению телефонные и
телевизионные системы делят на вещательные, отличающиеся высокой степе-
нью художественности воспроизведения сообщений, и профессиональные,
имеющие специальное применение (служебная связь, промышленное телеви-
дение и т.п.). В системе телеизмерения физическая величина, подлежащая из-
мерению (температура, давление, скорость и т.п.), с помощью датчиков преоб-
разуется в первичный электрический сигнал, поступающий на передатчик. На
приёмном конце переданную физическую величину или её изменения выделя-
ют из сигнала и наблюдают или регистрируют с помощью записывающих при-
боров. В системе телеуправления осуществляется передача команд для автома-
тического выполнения определённых действий. Нередко эти команды форми-
руют автоматически на основании результатов измерения, переданных теле-
метрической системой.
Внедрение высокоэффективных ЭВМ привело к необходимости быстрого
развития систем передачи данных, обеспечивающих обмен информацией между
вычислительными средствами и объектами автоматизированных систем управ-
ления. Этот вид электросвязи по сравнению с телеграфной отличается более
высокими требованиями к скорости и верности передачи информации.
Каналом связи называется совокупность средств, обеспечивающих передачу
сигнала от некоторой точки А системы до точки Б (рис. 1.3). Точки А и Б мо-
гут быть выбраны произвольно, лишь бы между ними проходил сигнал. Часть
системы связи, расположенная до точки А, является источником сигнала для
этого канала. Если сигналы, поступающие на вход канала и снимаемые с его
выхода, являются дискретными (по уровням), то канал называется дискретным.
Рис. 1.3. Структурная схема канала связи
Если входные и выходные
сигналы канала являются
непрерывными (по уров-
ню), то и канал называет-
ся непрерывным. Встреча-
14
ются также дискретно-непрерывные и непрерывно-дискретные каналы, на вход
которых поступают дискретные сигналы, а с выхода снимаются непрерывные,
или наоборот. Из сказанного видно, что канал может быть дискретным или
непрерывным независимо от характера передаваемых сообщений. Более того, в
одной и той же системе связи можно выделить как дискретный, так и непре-
рывный канал. Всё зависит от того, каким образом выбраны точки А и Б входа
и выхода канала.
Канал связи можно характеризовать так же, как и сигнал, тремя парамет-
рами: временем Гк, в течение которого по каналу возможна передача, динами-
ческим диапазоном DK и полосой пропускания канала FK. Под динамическим
диапазоном канала понимают отношение допустимой мощности передаваемого
сигнала к мощности неизбежно присутствующей в канале помехи, выраженное
в децибелах.
Типы каналов, по которым передаются сигналы, многочисленны и разнообразны. Разли-
чают каналы проводной связи (воздушные, кабельные, световодные и др.) и каналы радио-
связи. Кабельные линии связи являются основой магистральных сетей дальней связи, по ним
осуществляется передача сигналов в диапазоне частот от десятков кГц до сотен МГц. Весьма
перспективными являются волоконно-оптические линии связи. Они позволяют в диапазоне
600...900 ТГц (0,5...0,3 мкм) обеспечить очень большую пропускную способность (сотни ТВ
или сотни тысяч ТФ каналов). Наряду с проводными линиями связи широко используются
радиолинии различных диапазонов (от сотен кГц до десятков ГГц). Эти линии более эконо-
мичны и незаменимы для связи с подвижными объектами. Наибольшее распространение для
многоканальной радиосвязи получили радиорелейные линии (РРЛ) метрового, дециметрового
и сантиметрового диапазонов на частотах от 60 МГц до 15 ГГц. Разновидностью РРЛ являют-
ся тропосферные линии с использованием отражений от неоднородностей тропосферы. Всё
большее применение находят спутниковые линии связи — РРЛ с ретранслятором на ИСЗ.
Для этих линий (систем) связи отведены диапазоны частот 4...6 и 11...275 ГГц. Большая даль-
ность при одном ретрансляторе на спутнике, гибкость и возможность организации глобаль-
ной связи — важные преимущества спутниковых систем.
Общими признаками непрерывных каналов являются следующие. Во-
первых, большинство каналов можно считать линейными. В таких каналах вы-
ходной сигнал является суммой откликов отдельных входных сигналов и помех
(применим принцип суперпозиции), а продукты нелинейных преобразований в
канале малы по сравнению с выходными сигналами. Во-вторых, на выходе ка-
нала даже в отсутствие полезного сигнала всегда имеются помехи. В-третьих,
сигнал при передаче по каналу претерпевает задержку по времени и затухание
по уровню. И наконец, в реальных каналах всегда имеют место искажения
сигнала, обусловленные несовершенством характеристик канала и нередко из-
менениями параметров канала во времени. Обобщённой характеристикой ка-
нала является его ёмкость (объём)
VK=TKFKDK. (1.2)
Необходимым условием неискажённой передачи по каналу сигналов с объёмом
Ис, очевидно, должно быть
Ис< Гк. (1.3)
Преобразование первичного сигнала в высокочастотный сигнал часто и пре-
следует цель согласования сигнала с каналом. В простейшем случае сигнал со-
гласуют с каналом по всем трём параметрам, т.е. добиваются выполнения ус-
ловий:
Гс < Гк, Fc < FK, Dc < DK. (1*4)
При этих условиях объём сигнала полностью "вписывается" в объём канала.
15
Однако неравенство (1.3) может выполняться и тогда, когда одно или два из неравенств
(1.4) не выполнены. Это означает, что можно производить "обмен" длительности на ширину
спектра или ширину спектра на динамический диапазон и т.д. Пусть, например, записанный
на плёнку телефонный сигнал, имеющий ширину спектра 3 кГц, необходимо передать через
канал, полоса пропускания которого 300 Гц. Это можно осуществить, воспроизводя сигнал со
скоростью, в 10 раз меньшей той, с которой он был записан. При этом все частоты исходного
сигнала уменьшатся в 10 раз и во столько же раз увеличится время передачи. Принятый сиг-
нал также записывается на плёнку, а затем, воспроизведя его со скоростью, в 10 раз большей,
можно восстановить исходный сигнал. Аналогично можно передать сигнал быстрее, если по-
лоса пропускания канала шире спектра сигнала.
Значительно больший интерес представляет возможность обмена динамического диапа-
зона на полосу пропускания. Так, используя широкополосные помехоустойчивые виды моду-
ляции (см. гл.8), можно передать сообщение с динамическим диапазоном, например 60 дБ,
по каналу, в котором сигнал превышает помеху всего лишь на 20 дБ. При этом используется
полоса пропускания канала в несколько раз более широкая, чем спектр сообщения.
В системе связи, представленной на рис. 1.1, передача сообщений осущест-
вляется в одном направлении от источника к получателю. Такой режим связи
называется симплексным. Режим, при котором обеспечивается возможность од-
новременной передачи сообщений в прямом и обратном направлении, называ-
ется дуплексным. Возможен и полудуплексный режим, когда обмен сообщений
осуществляется поочередно.
Система связи называется многоканальной, если она обеспечивает передачу
нескольких сообщений по одной общей линии связи. Структурная схема про-
стейшей многоканальной системы связи изображена на рис. 1.4. Здесь первич-
ные сигналы b\(i), b2(t), bn(f), подлежащие передаче, преобразуются посред-
ством модуляторов ЛГ1, М2, ..., Мп в электрические сигналы u\(t}, U2(t), ..., un(f),
а затем смешиваются в аппаратуре уплотнения. Полученный таким образом
групповой сигнал u(t) передаётся по линии связи. Приёмник из принятого коле-
бания z(t} = s(J} + n(t) с помощью устройства разделения (фильтров Ф/) выде-
ляет индивидуальные сигналы st(t), преобразуемые посредством демодуляторов
(детекторов) Д- в соответствующие первичные сигналы ^(/), b2(t}, ..., bn{t}. Для
разделения сигналов на приёмном конце, очевидно, необходимо, чтобы они
различались между собой по некоторому признаку. В практике многоканаль-
ной связи преимущественно применяют частотный и временной способы раз-
деления.
Для обмена сообщениями между многими территориально разнесёнными
пользователями {абонентами} создаются сети связи, обеспечивающие передачу и
распределение сообщений по заданным адресам (в заданное время и с установ-
ленным качеством). Распределение потоков сообщений по заданным адресам
Рис. 1.4. Структурная схема простейшей многоканальной системы передачи
16
способу распределения сообщений сети делятся на некоммутируемые и комму-
тируемые. В первом случае связь между абонентами осуществляется по посто-
янно закреплённым каналам по принципу "каждый с каждым". Во втором слу-
чае абоненты связываются между собой не непосредственно, а через узлы ком-
мутации. Сеть связи представляет собой совокупность оконечных (абонентских)
устройств, каналов связи (соединительных линий) и узлов коммутации. В зави-
симости от числа абонентов и размеров обслуживаемой территории сети могут
иметь различную структуру: линейную, радиальную, кольцевую, радиально-узловую
и т.п. Задача оптимального построения сетей связи является одной из важней-
ших задач теории и техники связи. Решается эта задача с помощью теории
графов и теории массового обслуживания.
1.3. ПОМЕХИ И ИСКАЖЕНИЯ В КАНАЛЕ
В реальном канале сигнал при передаче искажается и сообщение воспроиз-
водится с некоторой ошибкой. Причиной таких ошибок являются как искаже-
ния, вносимые самим каналом, так и помехи, воздействующие на сигнал. Час-
тотные и временные характеристики канала определяют так называемые ли-
нейные искажения. Кроме того, канал может вносить и нелинейные искаже-
ния, обусловленные нелинейностью тех или иных звеньев канала. Если линей-
ные и нелинейные искажения обусловлены известными характеристиками ка-
нала, то они, по крайней мере в принципе, могут быть устранены надлежащей
коррекцией. Следует отличать искажения от помех, имеющих случайный ха-
рактер. Помехи заранее не известны и поэтому не могут быть полностью уст-
ранены.
Помехой называется любое случайное воздействие на сигнал, которое ухуд-
шает верность воспроизведения передаваемых сообщений. Помехи весьма разно-
образны как по своему происхождению, так и по физическим свойствам. В ра-
диоканалах часто встречаются атмосферные помехи, обусловленные электриче-
скими процессами в атмосфере, и прежде всего грозовыми разрядами. Энергия
этих помех сосредоточена главным образом в области длинных и средних волн.
Сильные помехи создаются также промышленными установками. Это так на-
зываемые индустриальные помехи, возникающие из-за резких изменений тока в
электрических цепях всевозможных электроустройств. Сюда относятся помехи
от электротранспорта, электрических двигателей, медицинских установок, сис-
тем зажигания двигателей и т.п. Распространенным видом помех являются по-
мехи от посторонних радиостанций и каналов. Они обусловлены нарушением
регламента распределения рабочих частот, недостаточной стабильностью частот
и плохой фильтрацией гармоник сигнала, а также нелинейными процессами в
каналах, ведущими к перекрестным искажениям.
В проводных каналах связи основным видом помех являются импульсные
шумы и прерывания связи. Появление импульсных помех часто связано с авто-
матической коммутацией и перекрестными наводками. Прерывание связи есть
явление, при котором сигнал в линии резко затухает или исчезает.
Практически в любом диапазоне частот имеют место внутренние шумы ап-
паратуры, обусловленные хаотическим движением носителей заряда в усили-
тельных приборах, резисторах и других элементах аппаратуры. Эти помехи
особенно сказываются при радиосвязи в диапазоне ультракоротких волн, где
другие помехи невелики. В этом диапазоне имеют значение и космические по-
мехи, связанные с электромагнитными процессами, происходящими на
17
Солнце, звёздах и других внеземных объектах. В общем виде влияние помехи
n(t) на полезный сигнал «(/) можно выразить оператором
z(t) = L[s(u(t)), n(/)]. (1.5)
В частном случае, когда оператор вырождается в сумму
z(/) = s(t) + «(О, (1.6)
помеха называется аддитивной. Если же оператор может быть представлен в
виде произведения
z(/) = k(i)u(f), (1.7)
то помеху называют мультипликативной. Здесь k(t) - случайный процесс. В ре-
альных каналах обычно имеют место и аддитивные, и мультипликативные по-
мехи, и поэтому
z(t) = k(f)u(t) + n(t). (1.8)
Среди аддитивных помех различного происхождения выделяют сосредото-
ченные по спектру (узкополосные) помехи, сосредоточенные во времени
(импульсные) помехи и так называемую флуктуационную помеху, не ограни-
ченную во времени и спектру. Флуктуационная помеха (флуктуационный шум)
представляет собой случайный процесс с нормальным распределением
(гауссовский процесс). Такая помеха наиболее изучена и представляет наи-
больший интерес как в теоретическом, так и в практическом отношении. Этот
вид помех практически имеет место во всех реальных каналах. В диапазоне оп-
тических частот существенное значение имеет квантовый шум, вызванный дис-
кретной природой сигнала. Мультипликативные помехи обусловлены случай-
ными изменениями параметров канала связи. В частности, эти помехи прояв-
ляются в изменении уровня сигнала.
Следует заметить, что между сигналом и помехой отсутствует принципи-
альное различие. Более того, они существуют в единстве, хотя и противопо-
ложны по своему действию. Так излучение радиопередатчика является полез-
ным сигналом для приёмника, которому предназначено это излучение, и по-
мехой для всех других приёмников. Электромагнитное излучение звёзд являет-
ся одной из причин космического шума в диапазоне сверхвысоких частот и
поэтому является помехой для систем радиосвязи. С другой стороны, это излу-
чение является полезным сигналом, по которому определяют некоторые физи-
ко-химические свойства звёзд.
1.4. КОДИРОВАНИЕ И МОДУЛЯЦИЯ
Преобразование дискретного сообщения в сигнал обычно осуществляется в
виде двух операций — кодирования и модуляции. Кодирование представляет со-
бой преобразование сообщения в последовательность кодовых символов, а мо-
дуляция — преобразование этих символов в сигналы, пригодные для передачи
по каналу. С помощью кодирования и модуляции источник сообщений согла-
суется с каналом.
Простейшим примером дискретного сообщения является текст. Любой
текст состоит из конечного числа элементов: букв, цифр, знаков препинания.
Их совокупность называется алфавитом источника сообщения. Так как число
элементов в алфавите конечно, то их можно пронумеровать и тем самым све-
сти передачу сообщения к передаче последовательности чисел.
Так, для передачи заглавных букв русского алфавита (их 32) необходимо передать числа
от 0 до 31. Для передачи любого числа, записанного в десятичной форме, требуется передача
18
десяти цифр — от 0 до 9. Практически для этого нужны десять сигналов, соответствующих
различным цифрам. Систему передачи дискретных сообщений можно существенно упро-
стить, если воспользоваться при кодировании двоичной системой счисления.
В десятичной системе основанием счисления является число 10. Поэтому любое целое
число К можно представить в виде
К = ди10"+...+д2102 +^10* +ао1О° , (1.9)
где ао> аь --> ап ~ коэффициенты, принимающие значение от 0 до 9. Так, число 265 можно
записать как 2-102+6-101+5-10°. Очевидно, в качестве основания счисления можно принять
любое целое число т и представить число N как
К= апт"+ ... + а2т2 + аут1 + aQitfi, (1-Ю)
где oq, о1} .ап — коэффициенты, принимающие значения от 0 до т - 1. Задаваясь величи-
ной т, можно построить любую систему счисления.
При т = 2 получим двоичную систему, в которой числа записываются с помощью двух
цифр — 0 и 1. Например, число 13 в двоичной системе записывается 1101, что соответствует
выражению 1-23 +1-22 + 0-21+ 1-2°. Арифметические действия в двоичной системе весьма про-
сты. Так, сложение осуществляется по следующим правилам: 0 + 0 = 0; 0 + 1 = 1; 1+0=1;
1 + 1 = 10. Различают ещё поразрядное сложение без переноса в старший разряд, так назы-
ваемое "сложение по модулю два". Правила этого сложения следующие: 0Ф0 = 0; 0Ф1 = 1;
1 Ф 0 = 1; 1 Ф 1 = 0.
Если преобразовать последовательность элементов сообщения в последовательность дво-
ичных чисел, то для передачи последних по каналу связи достаточно передавать всего лишь
два различных сигнала. Например, символы 0 и 1 могут передаваться колебаниями с различ-
ными частотами или импульсами тока разной полярности. Благодаря своей простоте двоич-
ная система счисления широко применяется при кодировании дискретных сообщений.
При кодировании происходит процесс преобразования элементов сообще-
ния в соответствующие им числа (кодовые символы). Каждому элементу сооб-
щения присваивается определённая совокупность кодовых символов, которая
называется кодовой комбинацией. Совокупность кодовых комбинаций, отобра-
жающих дискретные сообщения, образует код. Правило кодирования может
быть выражено кодовой таблицей, в которой приводятся алфавит кодируемых
сообщений и соответствующие им кодовые комбинации. Множество возмож-
ных кодовых символов называется кодовым алфавитом, а их количество т —
основанием кода. В общем случае при основании кода т правила кодирования
К элементов сообщения сводятся к правилам записи К различных чисел в т-
ичной системе счисления. Число разрядов п, образующих кодовую комбина-
цию, называется разрядностью кода или длиной кодовой комбинации. В зависи-
мости от системы счисления, используемой при кодировании, различают дво-
ичные и т-ичные (недвоичные) коды.
Коды, у которых все комбинации имеют одинаковую длину, называют равномерными. Для
равномерного кода число возможных комбинаций равно тп. Примером такого кода является
пятизначный код Бодо, содержащий пять двоичных элементов (т = 2, п = 5). Число возмож-
ных кодовых комбинаций равно 25 = 32, что достаточно, для кодирования всех букв русского
алфавита. Однако этого недостаточно для передачи сообщения, содержащего буквы, цифры,
различные условные знаки (точка, запятая, сложение, умножение и т.п.). Поэтому в настоя-
щее время используется "Международный код №2" (МТК-2). В коде МТК-2 используется
регистровый принцип, согласно которому одна и та же пятиэлементная кодовая комбинация
может использоваться до трёх раз в 'зависимости от положения регистра: русский, латинский,
цифровой. Общее число различных знаков при этом равно 84, что достаточно для кодирова-
ния телеграммы. Для передачи данных рекомендован семиэлементный код МТК-5. Кдды
МТК-2 и МТК-5 являются первичными (простыми). Основными параметрами кодов являются:
основание кода т, длина кодовой комбинации п, расстояние между кодовыми комбинациями dy
и вес кодовой комбинации со. Расстояние dy характеризует различие между двумя кодовыми
19
комбинациями и определяется по Хеммингу числом несовпадающих в них разрядов, т.е.
числом единиц в сумме двух комбинаций по модулю 2. Число ненулевых элементов в кодовой
комбинации определяет её вес со. Применение равномерных кодов упрощает построение ав-
томатических буквопечатающих устройств и не требует передачи разделительных символов
между кодовыми комбинациями.
Неравномерные коды характерны тем, что у них кодовые комбинации отличаются друг от
друга не только взаимным расположением символов, но и их количеством. Это приводит к
тому, что различные комбинации имеют различную длительность. Такие коды требуют либо
специальных разделительных знаков, указывающих конец одной и начало другой кодовой
комбинации, либо же должны строиться так, чтобы никакая кодовая комбинация не являлась
началом другой. Коды, удовлетворяющие этому условию, называются неприводимыми или
префиксными. Заметим, что равномерный код также является неприводимым. Строение кода
удобно представлять в виде графа (кодового дерева), в котором из каждого узла исходит число
ветвей, равное основанию кода (для двоичного кода, например, шаг вверх означает 0, шаг
вниз — 1).
Типичным примером неравномерных кодов является код Морзе, в котором символы 0 и
1 используются только в двух сочетаниях — как одиночные (1 и 0) или как тройные (111 и
ООО). Сигнал, соответствующий одной единице, называется точкой, трём единицам — тире.
Символ 0 используется как знак, отделяющий точку от тире, точку от точки и тире от тире.
Совокупность ООО используется как разделительный знак между кодовыми комбинациями.
По признаку помехозащищённости коды делят на примитивные (первичные)
и корректирующие. Коды, у которых все возможные кодовые комбинации ис-
пользуются для передачи информации, называются простыми или кодами без
избыточности (примитивными). В простых равномерных кодах превращение
одного символа комбинации в другой, например 1 в 0 или 0 в 1, приводит к
появлению новой разрешённой комбинации, т.е. к ошибке. Корректирующие коды
строятся так, что для передачи сообщения используются не все кодовые ком-
бинации, а лишь некоторая их часть (разрешённые кодовые комбинации). Тем
самым создаётся возможность обнаружения и исправления ошибки при непра-
вильном воспроизведении некоторого числа символов. Корректирующие свой-
ства кодов достигаются введением в кодовые комбинации дополнительных
(избыточных) символов (см. гл. 7).
Декодирование состоит в восстановлении сообщения по принимаемым ко-
довым символам. Устройства, осуществляющие кодирование и декодирование,
называют соответственно кодером и декодером. Как правило, это логические
устройства. На рис. 1.5 изображена структурная схема системы передачи дис-
кретных сообщений, а на рис. 1.6 поясняется процесс преобразования дис-
кретного сообщения в сигнал. Передаваемое сообщение обозначено буквой а^,
кодированное сообщение (или первичный цифровой сигнал) — bn(t), его ком-
поненты (I — номер последовательно передаваемого символа, i —номер по-
зиции кода, i = Q,m-1). Сигнал, поступающий в линию связи обозначен u(t),
принятое колебание — z(t), восстановленная последовательность кодовых сим-
волов — bn(t) (её Компоненты b,J)) и декодированное (восстановленное) сооб-
щение — av. Обозначения принятых сигналов, кодовых символов и восстанов-
ленного сообщения выбраны иными, чем передаваемых. Этим подчеркивается
то обстоятельство, что из-за влияния помех принятый сигнал отличается от пе-
реданного, а восстановленное сообщение может не совпадать с исходным.
В современных системах передачи дискретных сообщений принято разли-
чать две группы относительно самостоятельных устройств: кодеки и модемы.
Кодеком называются устройства, преобразующие сообщение в код (кодер) и
20
Рис. 1.5. Структурная схема системы передачи дискретных сообщений
Сообщение > ак Код Первичный сигнал Вторичный (ВЧ) сигнал он»! j—1_п -Щ-W
Принятый ВЧ сигнал Принятый Регенерированный код Сообщение первичный сигнал сигнал
а —> —> J ЦП —> 01Ю1 > м(/) bk{t)
Рис. 1.6. Процесс преобразования дискретного сообщения в сигнал и сигнала в дискретное сообщение
код в сообщение (декодер), а модемом — устройства, преобразующие код в
сигнал (модулятор) и сигнал в код (демодулятор). Канальные устройства
(полосовые усилители передатчика и приёмника, корректоры и т.п.) вместе с
линией связи образуют непрерывный канал, а последний вместе с модемом —
дискретный канал. Непрерывный канал обозначен на рис. 1.2 и 1.4 блоком
"линия связи".
Следует иметь в виду, что в системах радиосвязи после передатчика посредством пере-
дающих антенн образуется пространственно-временной сигнал u{t, г) (электромагнитная вол-
на), который зависит не только от времени t, но и пространственных координат точки на-
блюдения г = х, у, z Сигнал, зависящий от многих координат, называют полем* 2). В месте
приёма (на выходе радиоканала) для анализа поступает поле или пространственно-временной
сигнал z(t, г) = s{t, г) + n(t, г). Чаще всего оно сначала посредством приёмной антенны пре-
вращается в чисто временной сигнал z(t), который в дальнейшем подвергается чисто времен-
ной обработке. Вопросы формирования и обработки пространственно-временных сигналов в
настоящем учебнике не рассматриваются, т.е. будем считать, что устройства преобразования
временной сигнал — поле на передаче и поле — временной сигнал на приёме включены внут-
ри заданной "линии связи". Эти вопросы рассматриваются в специальных курсах.
При передаче непрерывного сообщения (рис. 1.6) а его сначала преобразу-
ют в непрерывный первичный электрический сигнал b(f), а затем, как правило,
с помощью модулятора формируют канальный сигнал «(/), который и посыла-
ют в линию связи. Принятое колебание z(f) подвергается обратным преобразо-
ваниям, в результате которых выделяется первичный сигнал b (/). По нему за-
тем восстанавливается с той или иной точностью сообщение а.
Общий принцип модуляции состоит в изменении одного или нескольких
параметров несущего колебания {переносчика) f{t, а, 0, ...) в соответствии с пе-
редаваемым сообщением. Так если в качестве переносчика выбрано гармони-
Помимо декартовых, можно ввести иные пространственные координаты, например, поляр-
ные координаты.
2) Поле u{t,r) следует, вообще говоря, рассматривать как векторное поле u(/,r), если учесть
поляризацию электромагнитной волны [14].
21
Код 10011011 1
“ Ж WM :
~ Ш/тшв/ц?
"“MWWWWWVW,’
ческое колебание fit) = f/cos(co()Z + <р), то
можно образовать три вида модуляции:
амплитудную (AM), частотную (ЧМ) и
фазовую (ФМ).
Если переносчиком является перио-
дическая последовательность импульсов
во
-tQ), то при заданной
/=-оо
форме импульсов v(t) можно образовать
четыре основных вида импульсной мо-
дуляции: амплитудно-импульсную
(АИМ), широтно-импульсную (ШИМ),
время-импулъсную (ВИМ, ФИМ) и час-
тотно-импульсную (ЧИМ). Применение
Рис. 1.7. Формы сигналов при двоичном коде радиоимпульсов позволяет ПОЛУЧИТЬ
для различных видов дискретной модуляции ещё два вида модуляции: по частоте и
по фазе высокочастотного заполнения.
При дискретной (цифровой) модуляции закодированное сообщение а,
представляющее собой последовательность кодовых символов {/>/}, преобразует-
ся в последовательность элементов (посылок) сигнала {и//)} путём воздействия
кодовых символов на переносчик f (t). Посредством модуляции один из пара-
метров переносчика изменяется по закону, определяемому кодом. При непо-
средственной передаче переносчиком может быть постоянный ток, изменяю-
щимися параметрами которого являются величина и направление тока. Обыч-
но в качестве переносчика, как и в непрерывной модуляции, используют пере-
менный ток (гармоническое колебание). В этом случае можно Получить AM,
ЧМ и ФМ.
На рис. 1.7 приведены формы сигнала при двоичном коде для различных
видов дискретной или цифровой модуляции (манипуляции). При AM символу 1
соответствует передача несущего колебания в течение времени Т (посылка),
символу 0 — отсутствие колебания (пауза). При ЧМ передача несущего колеба-
ния с частотой /1 соответствует символу 1, а передача колебания с частотой
соответствует 0. При двоичной ФМ меняется фаза несущей на тс при каждом
переходе от 1 к 0 и от 0 к 1.
Наконец, на практике применяют систему относительной фазовой модуляции (ОФМ). В
отличие от ФМ, при ОФМ фазу сигналов отсчитывают не от некоторого эталона, а от фазы
предыдущего элемента сигнала. Например, симйол 0 передаётся отрезком синусоиды с на-
чальной фазой предшествующего элемента сигнала, а символ 1 — таким же отрезком с на-
чальной фазой, отличающейся от начальной фазы предшествующего элемента сигнала на л.
При ОФМ передача начинается с посылки одного не несущего информации элемента, кото-
рый служит опорным сигналом для сравнения фазы последующего элемента. Подробнее о
приёме таких сигналов и особенностях относительного метода модуляции будет сказано в
гл. 5.
В более общем случае дискретную модуляцию следует рассматривать как
преобразование кодовых символов 0, 1, ..., т - 1 в определённые отрезки сиг-
нала Uj(t), где i = 0, 1, ..., т - 1 — передаваемый символ. При этом вид сигнала
щ((), в принципе, может быть произволен. В действительности его выбирают
так, чтобы удовлетворить требованиям, предъявляемым к системе связи
22
(в частности, по скорости передачи и по занимаемой полосе частот), и чтобы
сигналы хорошо различались с учётом воздействующих помех.
Длительность посылки первичного сигнала ЬЦ(Г) при дискретной передаче
определяет скорость передачи посылок (техническую скорость или скорость мо-
дуляции). Эта скорость v выражается числом посылок, передаваемых за едини-
цу времени. Измеряется техническая скорость в Бодах. Один Бод — это ско-
рость, при которой за 1 с передаётся одна посылка. Если длительность посыл-
ки Т выражена в секундах, то скорость модуляции у — 1/Т в Бодах. Если поло-
су частот ограничить третьей гармоникой, то ширина спектра первичного сиг-
нала F = l,5v, Гц.
1.5. ДЕМОДУЛЯЦИЯ И ДЕКОДИРОВАНИЕ
Переданное сообщение в приёмнике обычно восстанавливается в такой по-
следовательности. Сначала сигнал демодулируется. В системах передачи непре-
рывных сообщений в результате демодуляции восстанавливается первичный
сигнал, отображающий переданное сообщение. Этот сигнал затем поступает на
воспроизводящее или записывающее устройство. В радиовещании таким уст-
ройством может быть громкоговоритель или магнитофон. В системах передачи
дискретных сообщений обычно в результате демодуляции последовательность
элементов сигнала превращается в последовательность кодовых символов. За-
тем по ним восстанавливаются сообщения, выдаваемые получателю. Последнее
преобразование называется декодированием.
Не следует думать, что демодуляция и декодирование — это просто опера-
ции, обратные модуляции и кодированию, выполняемые над пришедшим из
канала сигналом. В результате различных искажений и воздействия помех
пришедший сигнал может существенно отличаться от переданного. Поэтому
всегда можно высказать ряд предположений {гипотез) о том, какое сообщение
передавалось. Задачей приёмного устройства является принятие решения о том,
какое из возможных сообщений действительно передавалось источником. Для
этого принятый сигнал подвергается анализу с учётом всех сведений об источ-
нике (например, о вероятностях, с которыми источник посылает то или иное
сообщение), о применяемом коде и методе модуляции, а также о свойствах ка-
нала. В результате анализа обычно можно определить условные
(апостериорные) вероятности возможных гипотез и на основании этих вероят-
ностей принять решение, которое и поступает к получателю. Та часть приём-
ного устройства, которая осуществляет анализ приходящего сигнала и прини-
мает решение о переданном сообщении, называется решающей схемой.
' В системах передачи непрерывных сообщений при аналоговой модуляции
решающая схема определяет по пришедшему искажённому канальному
(вторичному) сигналу наиболее вероятный переданный первичный сигнал и
восстанавливает его. Здесь решающей схемой является демодулятор. В систе-
мах передачи дискретных сообщений решающая схема чаще всего состоит из
двух частей: первой решающей схемы — демодулятора и второй решающей
схемы — декодера.
Иногда при передаче дискретных сообщенйй операции демодуляции и де-
кодирования выполняет одно устройство, которое приходящую последователь-
ность элементов сигнала преобразует сразу в последовательность символов
(букв) сообщения. Такой метод приёма называют совместной демодуляцией-
декодированием или приёмом в целом, в отличие от поэлементного приёма
23
с двумя решающими схемами. В первом случае анализируется целиком отрезок
сигнала, соответствующий кодовой комбинации, и на основании того или ино-
го критерия восстанавливается переданный элемент сообщения (буква). Во
втором случае сначала анализируются отдельные элементы сигнала, соответст-
вующие кодовым символам, а затем восстановленная кодовая комбинация де-
кодируется, т.е. преобразуется в элемент (букву) сообщения.
В некоторых случаях роль решающей схемы выполняет полностью или частично человек.
Так при приёме телеграфных сигналов на слух оператор решает, какой сигнал ("точка" или
"тире") был передан. Он же выполняет и операцию декодирования. В приёмниках дискретных
сообщений, предназначенных для записи информации, все указанные операции выполняются
автоматически. В простейшем случае первая решающая схема представляет собой пороговое
устройство в форме реле, триггера, работающих по принципу "да" или "нет". Если принятый
элемент сигнала выше порога, выдаётся один символ кода (например, 1), если ниже — другой
(0). В некоторых случаях применяют решающие схемы с двумя порогами. При попадании
уровня сигнала между двумя порогами решение не принимается — вместо сомнительного
элемента сигнала выдаётся специальный символ стирания. Введение такого стирающего сим-
вола облегчает возможность правильного декодирования принятой кодовой комбинации.
Для принятия решения о том, какое сообщение передавалось, необходимо
проанализировать пришедший сигнал. Для этого он подвергается различным
преобразованиям, которые называют обработкой сигнала. Одной из задач тео-
рии связи является отыскание правил оптимальной обработки сигнала, при ко-
торой решение о переданном сообщении оказывается наиболее достоверным.
Эти правила зависят от свойств канала и методов передачи (кодирования и
модуляции). Иногда оптимальные правила обработки оказываются сложными
и для упрощения аппаратуры используют другую, не оптимальную обработку.
Наконец, качество приёма и обработки сигналов существенно зависит от точ-
ности синхронизации переданных и принятых сигналов. Различают синхрониза-
цию тактовую (определение границ единичных элементов сигнала), цикловую
синхронизацию (правильное разделение кодовых комбинаций), синхронизацию
несущих частот и др. Погрешности синхронизации приводят к снижению дос-
товерности приёма сообщений, а в ряде случаев — к неправильному приёму
всего сообщения или части его.
Простейшим методом, позволяющим на приёме отделить одну кодовую комбинацию от
другой, является стартстопный режим передачи, когда в начале и конце каждой комбинации
передаётся специальный сигнал ("старт" и "стоп"). Такой метод передачи относится к асин-
хронным, так как передачу любой кодовой комбинации можно начинать в любой момент вре-
мени после окончания предыдущей комбинации. При синхронных способах передачи элемен-
ты сигнала передаются непрерывно через одинаковые промежутки времени. Разделение ко-
довых комбинаций осуществляется в этом случае с помощью цикловой синхронизации. Во-
просы синхронизации не рассматриваются в настоящем учебнике. Они изучаются в специ-
альных курсах.
1.6. ЦИФРОВОЕ КОДИРОВАНИЕ НЕПРЕРЫВНЫХ СООБЩЕНИЙ
В настоящее время широкое применение находят цифровые системы переда-
чи (ЦСП), в которых непрерывные сообщения передаются дискретными сиг-
налами. Преобразование непрерывного сообщения в цифровую форму осуще-
ствляется путём операций дискретизации и квантования.
Дискретизация по времени выполняется путём взятия отсчётов первичного
сигнала b(t) в определённые дискретные моменты t. В результате непрерывную
функцию &(/) заменяют совокупностью мгновенных значений (отсчётов) {b(k}}
24
или {Ь(^)}. Обычно моменты отсчётов выбираются на оси времени равномер-
но, т.е. {/£= АД}, где А — шаг дискретизации.
Операция квантования сводится к тому, что вместо данного мгновенного
значения (уровня) передаваемого сообщения b(tk) передают ближайшие значе-
ния по установленной цифровой шкале дискретных уровней £кв(4)- Дискрет-
ные значения по шкале уровней чаще всего выбираются равномерно:
где — шаг квантования, 1=0, 1, ..., L - 1. Само собой разумеет-
ся, что при квантовании вносится погрешность, так как истинное значение
b(tk) заменяют округлённым значением bK3(t^. Величина этой погрешности
е = b(tk) - b^itk) не превосходит половины шага квантования и может быть
сведена до допустимого уровня. Погрешность £ является случайной функцией
и проявляется на выходе как дополнительный шум (шум квантования), нало-
женный на передаваемое сообщение. Дискретизация по времени позволяет
преобразовать непрерывные сообщения в дискретный (во времени) сигнал, ко-
торый после квантования превращается в цифровой. Достоинством цифровых
способов передачи является возможность применения кодов как для повыше-
ния помехоустойчивости, так и для сокращения избыточности источника. В
настоящее время наибольшее применение находит система с импульсно-кодовой
модуляцией (ИКМ). В этой системе непрерывное сообщение сначала подверга-
ется дискретизации по времени и квантованию по уровню, а затем полученная
последовательность L уровней (цифр) кодируется (обычно двоичным кодом).
При этом каждому уровню присваивается кодовая комбинация, состоящая из п
символов 1 и 0. Полученная последовательность двоичных символов передаёт-
ся по каналу связи одним из методов дискретной модуляции. Обычно исполь-
зуется частотная (ИКМ-ЧМ) или фазовая (ИКМ-ФМ) модуляция.
1.7. ОСНОВНЫЕ ХАРАКТЕРИСТИКИ СИСТЕМЫ СВЯЗИ
При оценке работы системы связи необходимо прежде всего учесть, какую
точность передачи сообщения обеспечивает система и с какой скоростью пере-
даётся информация. Первое определяет качество передачи, второе — количест-
во. В реальной системе связи качество передачи зависит от степени искажений
принятого сообщения. Эти искажения, зависят от свойств и технического со-
стояния системы, а также от интенсивности и характера помех. В правильно
спроектированной и технически исправной системе связи необратимые иска-
жения сообщений обусловлены лишь воздействием помех. В этом случае качест-
во передачи полностью определяется помехоустойчивостью системы. Под поме-
хоустойчивостью обычно понимают способность системы противостоять вред-
ному влиянию помех на передачу сообщений. Так как действие помех прояв-
ляется в том, что принятое сообщение отличается от переданного, то количест-
венно помехоустойчивость при заданной помехе можно характеризовать степе-
нью соответствия принятого сообщения переданному. Назовем эту величину об-
щим термином — верность. Количественную меру верности приходится выби-
рать по-разному, в зависимости от характера сообщения и требований получа-
теля. Пусть сообщение представляет собой дискретную последовательность
элементов из некоторого конечного множества. Влияние помехи на передачу
такого сообщения проявляется в том, что вместо фактически переданного эле-
мента может быть принят какой-либо другой, такое событие называет-
25
ся ошибкой. В качестве количественной меры верности можно взять вероят-
ность ошибки р или любую монотонную функцию этой вероятности.
При передаче непрерывных сообщений степенью соответствия принятого
сообщения B(t) (с реализацией b(t)) переданному B(t) (с реализацией £»(/))
может служить некоторая величина, представляющая собой "расстояние" между
b(t) и b(t). Часто принимают критерий квадратичного отклонения
Ё1Й = [в(/)-в(/)]2, (1.11)
где прямая черта сверху означает усреднение по ансамблю случайных величин.
Количественную меру верности можно также определить как вероятность того,
что уклонение Е не превзойдёт некоторой заранее заданной величины eg:
е=р[|Е|<Е(,]. (1.12)
Как будет показано в последующих главах, верность передачи зависит от
отношения средних мощностей сигнала и помехи (ОСП). При данной интен-
сивности помехи вероятность ошибки тем меньше, чем сильнее различаются
между собой сигналы, соответствующие разным сообщениям. Задача состоит в
том, чтобы выбрать для передачи сигналы с большим различием. Наконец,
верность передачи зависит и от способа приёма. Необходимо выбрать такой
способ приёма, который наилучшим образом реализует различие между сигна-
лами при данном отношении сигнала к помехе. Обратим внимание на сущест-
венное различие между аналоговыми и дискретными системами передачи со-
общений. В аналоговых системах всякое, даже сколь угодно малое мешающее
воздействие на сигнал, вызывающее искажение модулируемого параметра, все-
гда влечёт за собой внесение соответствующей погрешности в сообщение. По-
этому абсолютно точное восстановление переданного сообщения невозможно.
В дискретных системах ошибка при передаче сообщений возникает только то-
гда, когда сигнал опознается неправильно, а это происходит лишь при иска-
жениях, превышающих некоторый порог.
В теории помехоустойчивости, разработанной В.А. Котельниковым, показа-
но, что при выбранном критерии и заданном множестве сигналов, принимае-
мых при аддитивном белом гауссовском шуме (БГШ), существует предельная
(потенциальная) помехоустойчивость, которая ни при каком способе приёма не
может быть превзойдена. Приёмное устройство, реализующее потенциальную
помехоустойчивость, называется оптимальным (наилучшим) по данному крите-
рию.
Наряду с верностью важнейшим показателем работы системы связи являет-
ся скорость передачи. В системах передачи дискретных сообщений скорость
измеряется числом передаваемых символов в единицу времени v, Бод. Количе-
ство передаваемой информации принято измерять в битах (двоичных едини-
цах). Как будет показано в гл. 6, максимальное количество информации, кото-
рое можно передать двоичным символом, равно 1 биту. Там же будет показано,
что при использовании не двоичных, а /и-ичных символов максимальное ко-
личество информации, которое можно передать, равно log2?n бит. Поэтому
дискретный источник может обеспечить максимальную скорость выдачи ин-
формации (максимальную производительность)
= бит/с, (1.13)
26
где Т — длительность посылки; m — основание кода. При m = 2,
RK = 1/Тбит/с, скорость передачи информации 7?и численно равна техниче-
ской скорости v. При m > 2 возможно,, что скорость передачи информации
7?и > v. Однако нередко в дискретных системах связи скорость передачи ин-
формации 7?и < V. Это бывает, когда не все посылки используются для переда-
чи информации, например если часть из них служит для синхронизации или
для обнаружения и исправления ошибок (при использовании корректирующе-
го кода).
Вводится также характеристика средней скорости передачи информации по
заданному каналу в единицу времени с заданной верностью. Существует мак-
симально возможная (предельная) скорость передачи, которая называется про-
пускной способностью канала С. Это фундаментальное понятие определяет по-
тенциальные возможности системы связи, использующей данный канал. В ре-
альной системе средняя скорость передачи информации всегда меньше пропу-
скной способности канала С. В теории информации К. Шенноном доказана
теорема, согласно которой для источника без избыточности (см. гл. 6) при
7?и < С' можно найти такой способ кодирования-декодирования, при котором
возможна передача сообщений по каналу с помехами со сколь угодно малой
ошибкой.
Универсальным показателем эффективности системы связи является коэф-
фициент л, характеризующий использование системой пропускной способно-
сти канала т] = К^/С (информационная эффективность).
Своевременность передачи сообщений определяется допустимой задержкой, обусловлен-
ной преобразованием сообщений и сигналов, а также конечным временем распространения
сигнала по каналу связи. Она зависит, во-первых, от характера и протяжённости канала, во-
вторых, от длительности обработки сигнала в передающем и приёмном устройствах. Скорость
передачи и задержка являются независимыми характеристиками, практически не связанными
друг с другом.
Существуют и многие другие параметры, характеризующие с различных точек зрения ка-
чества системы связи. К ним, в частности, относятся скрытность связи, надёжность системы,
габаритные размеры и масса аппаратуры, стоимость оборудования, эксплуатационные расходы и
т.п. Эти характеристики в курсе "Теория электрической связи" не рассматриваются. Им по-
священы отдельные разделы других специальных курсов.
ВЫВОДЫ
1. Передача сообщений по каналам связи осуществляется с помощью сигналов, которые яв-
ляются материальными носителями сообщений, отображающих ту или иную информацию.
Характерной особенностью сообщений (сигналов) является их непредсказуемость. О лю-
бом сообщении можно говорить лишь как о возможном с некоторой вероятностью собы-
тии. Сообщение об известном событии информации не несет. Процесс передачи сообще-
ний всегда является вероятностным (стохастическим).
2. Сообщения и соответствующие им сигналы могут быть дискретными и непрерывными.
Непрерывный канальный сигнал формируется с помощью модуляции, а дискретный — с
помощью кодирования и модуляции. Кодирование определяет закон построения сигнала, а
модуляция — вид сигнала, который передаётся по каналу.
3. Непрерывное сообщение (сигнал) в цифровых системах связи преобразуется в цифровой
сигнал с помощью трёх операций: дискретизации по времени, квантования по уровню и
кодирования.
4. Основными устройствами системы передачи дискретных сообщений являются кодек и мо-
дем. Канальные устройства вместе с линией связи образуют непрерывный канал, а по-
следний вместе с модемом — дискретный канал.
27
5. Причинами появления ошибок при передаче сообщений по каналу связи являются иска-
жения, вносимые самим каналом, и помехи, воздействующие на сигнал. Помехи могут
быть аддитивными и мультипликативными. Среди аддитивных помех наиболее распро-
страненными являются флуктуационные, сосредоточенные по спектру и импульсные.
6. Важнейшими характеристиками системы связи являются верность и скорость передачи
сообщений. Первая определяет качество передачи, а второе — количество. При передаче
дискретных сообщений верность (помехоустойчивость) определяется вероятностью ошиб-
ки, а при передаче непрерывных сообщений — среднеквадратической ошибкой. Скорость
измеряется чаще всего числом передаваемых двоичных единиц информации в единицу
времени (бит/с).
7. Современная теория связи интенсивно развивается как статистическая теория, основы ко-
торой составляют теория сигналов, теория помехоустойчивости и теория кодирования.
ВОПРОСЫ, ЗАДАЧИ И УПРАЖНЕНИЯ
1.1. Задана таблица трёх кодов
"'''^сообщение №кода а б в г д. е ж 3
1 000 001 010 011 100 101 110 111
2 0 1 00 01 10 11 110 111
3 00 01 100 101 1100 1101 1110 1111
Необходимо: 1) определить вид кода; 2) определить, какие из этих кодов не требуют раз-
делительных знаков; почему? 3) закодировать слова: звезда, вега, база; 4) расшифровать
последовательности кодовых комбинаций: а) кода 1: 111000001000010000; 001101100000;
б) кода 3: 0100101001110; 01110110100; 10000111100.
1.2. Стартстопный телеграфный аппарат передаёт одну букву семью посылками: одной стар-
товой (20 мс), пятью кодовыми (20 мс каждая) и одной стоповой (30 мс). Определить
скорость модуляции v в Бодах и максимальную скорость передачи информации 7?и в би-
тах на секунду.
1.3. В чём отличие между дискретной и непрерывной модуляцией несущей?
1.4. Что понимают под решающей схемой при приёме дискретных сообщений?
1.5. Практически верность передачи дискретных сообщений определяют коэффициентом
ошибок — относительным числом ошибочно принятых элементов сообщения. Вычислите
этот коэффициент для случая передачи букв кодом МТК-2 со скоростью 50 Бод, если за
2 ч непрерывной передачи было зафиксировано 10 ошибочно принятых букв.
1.6. Запишите кодовые слова (комбинации), соответствующие числу 45, при основании кода
т = 2, 3, 4, 8, 10. Как изменяется число разрядов и число используемых цифр в слове с
изменением основания кода?
1.7. Какое число разрядов должен иметь равномерный код, предназначенный для первичного
кодирования 32-буквенного алфавита, при основании кода т = 2, 8, 16, 32 ?
1.8. По данным, приведённым в § 1.1, вычислите и сраЬните объёмы первичных сигналов:
речевого, радиовещательного и телевизионного (при одинаковой их длительности).
1.9. Текст из 180 букв передаётся по телефонному каналу в течение 30 с. Тот же текст за то
же время передаётся по телеграфу кодом МТК-2. Сравните объёмы телефонного и теле-
графного сигналов (при одинаковых динамических диапазонах).
1.10. Покажите, как за счёт кодирования можно осуществить обмен полосы частот и отноше-
ние сигнал-помеха в канале при неизменном объёме сигнала.
28
ГЛАВА 2. МАТЕМАТИЧЕСКИЕ МОДЕЛИ СООБЩЕНИЙ,
СИГНАЛОВ И ПОМЕХ
2.1. КЛАССИФИКАЦИЯ СООБЩЕНИЙ, СИГНАЛОВ И ПОМЕХ
Математические модели, отображающие основные свойства сообщений,
сигналов и помех с точки зрения решения задач электрической связи, являют-
ся фундаментом ТЭС. Поскольку сообщения, сигналы и помехи прежде всего
представляются электрическими колебаниями, меняющимися во времени, то
их базовой математической моделью является некоторая функция (временной
процесс) х(/), значение которой меняется во времени. По своим физическим и
математическим свойствам процессы x(i) делятся на детерминированные и
случайные.
Детерминированными или регулярными называются такие процессы х(/), те-
чение которых во времени можно полностью предопределить заранее. Иначе
говоря, для любого наперед заданного момента времени t может быть одно-
значно определено значение функции x(t). Детерминированные функции ши-
роко применяются при изучении электрических цепей. Так, при анализе пере-
ходных процессов в линейных цепях часто используют детерминированные ис-
пытательные сигналы v(/,A) и т](/,А), формы которых показаны на
рис. 2.1, а и б. Если параметр А -> О, то сигнал v(/,A) переходит в единичную
функцию включения
/ч z ч fl, t>0;
1(/) = limv(/,A) = S
л—>о [0, t < 0.
а сигнал n(M) в 5-функцию (функцию Дирака, рис. 2.1, в)
8(/) = ltanM) = {”’ 'J' р>(1)Л = 1.
Можно считать, что 8(0 = и 1(0 = J 8(z)dz.
—ао
Поскольку 8-функция часто используется в теории связи, отметим некото-
рые её полезные свойства. Для произвольного непрерывного сигнала x(t) спра-
ведливо соотношение
J х(/)8(? - tk)dt = x(/J J 8</ - tk)dt = x(tk).
—OO “OO
Это соотношение называют стробирующим (или фильтрующим) свойством
8-функции.
v(/,A)
А О A t
. 1 2
8(0
в)
б)
А о А
2 2
Рис.2.1. Испытательный сигнал (a) v(/,a)= д)<&,
z ч dv(t, А)
(о) Т](/,А) =——— - прямоугольный импульс с единичной площадью, (в) 8-импульс
dt
о t
29
Дельта-функцию часто представляют как предел определённых последова-
тельностей, например
1 -—
8(х) = Inn , е 2’2, (2.1)
° -»° v27to
sin(ax)
8(х) = lim---. (2-2)
тс
Можно 8-функцию представить и в интегральном виде
8(х) = J Q^df. (2.3)
Меняя в (2.3) местами /их, получаем соотношение
§(/)= f e“j2"A^- (2-4)
При определении АЧХ и ФЧХ линейных стационарных (с постоянными
параметрами) четырёхполюсников (цепей) часто в качестве испытательных ис-
пользуют гармонические сигналы
x(t) = i/cos(oZ + ф), -оо < t < +оо.
При анализе, настройке и регулировке различных импульсных устройств и
усилителей используются последовательности импульсов прямоугольной или
иной формы. Детерминированные колебания различной формы широко при-
меняются в качестве переносчиков при формировании модулированных сигна-
лов.
Случайными называются такие процессы X(t), реализации которых в каждом
опыте точно предсказать невозможно. Они отличаются от детерминированных
тем, что нельзя заранее утверждать, что X(t) в некоторый момент t будет иметь
определённое значение; например, для непрерывного случайного процесса
можно лишь говорить о некоторой вероятности того, что в этот момент значе-
ние X(fy окажется в интервале между значениями х и х + Дх. Иначе говоря, ес-
ли X(t) есть случайная функция, то её значения при фиксированном значении
аргумента представляют собой случайные величины X(ti) = JQ. Случайные про-
цессы и их основные свойства обстоятельно рассматриваются в § 2.5.
В зависимости от вида передаваемых сообщений и сигналов, а также харак-
тера помех соответствующие им функции могут быть непрерывными или дис-
кретными как по аргументу (времени /), так и по значениям. Об этом уже го-
ворилось в гл. 1 (см. рис. 1.1).
2.2. ФУНКЦИОНАЛЬНЫЕ ПРОСТРАНСТВА И ИХ БАЗИСЫ
Аналогия между сигналами и векторами. Любая задача легче воспринимает-
ся, если её можно связать с каким-либо известным явлением. При математиче-
ском описании сигналы удобно рассматривать как векторы или точки в неко-
тором функциональном пространстве — пространстве сигналов.
Электрические сигналы сложной формы по своей физической природе да-
леко не всегда сходны с привычными нам представлениями векторов как на-
правленных отрезков. Тем не менее практический интерес имеет обобщение
операций над векторами на сигналы (функции), описывающие различные ко-
лебания. Дело в том, что среди различных математических приёмов, исполь-
зуемых при исследовании электрических цепей ц сигналов наиболее широко
30
применяется представление произвольной функции в виде суммы более про-
стых ("элементарных") функций. Такой подход лежит в основе принципа неза-
висимости действия (суперпозиции) при изучении преобразований сигналов в
линейных электрических цепях. Наглядные геометрические представления,
связанные с отображением функций в качестве векторов пространства сигна-
лов, помогают часто уяснить физическую сущность процессов формирования,
передачи и разделения сигналов, синтеза оптимальных сигналов и устройств
обработки сигналов при наличии помех.
Задача разложения сигнала сложной формы на простейшие составляющие
сходна с разложением обычного вектора х трёхмерного пространства на его со-
ставляющие по координатному базису единичных ортогональных векторов i, j, k
(рис. 2.2). Такое представление можно записать как
х = i + Х2 j + хз к. (2.5)
Составляющими вектора х по базису (i, j, к) будут векторы Xi i, x2j, хзк. Ко-
эффициенты %i, Х2, %з представляют собой проекции вектора х на координат-
ные оси i, j, к и называются координатами вектора х. Иначе говоря, вектор х в
трёхмерном пространстве полностью определяется совокупностью его коорди-
нат X = (хь Х2, Хз).
Чтобы перейти к обобщению понятия вектора трёхмерного пространства
для случая п-мерного пространства, обратимся к примеру. Некоторое прибли-
жённое представление о функции (сигнале) х(/) можно составить по её отобра-
жению последовательностью прямоугольных импульсов, имеющих на интерва-
лах zA значения х(/Л) (рис. 2.3). Если теперь условно представить функцию х(/)
на интервале (0; Т) "вектором", то для его определения потребуется п = Т/Ь.
координат Xf = x(zA). Это означает, что функцию х(/) по аналогии с (2.5) можно
представить в виде суммы
= (2.6)
i=0
fl, t e[0;A];
где \|/z(0 = \|/(/ - zA) — элементарные базисные функции; \|/(z) = 4
[0, t £[0;А];
1 д
- [ \|/2(/)Л = 1
А о
Вектор х, соответствующий функции х(/), в «-мерном пространстве еди-
ничных ортов \|/z будет полностью определяться его координатами
Рис.2.2. Представление вектора х в трёхмерной Рис.2.3. Отображение непрерывной функции
ортогональной системе координат последовательностью прямоугольных импульсов
31
х = (л<), хц x„-i). Таким образом, сигнал x(t) произвольной формы представ-
ляется суммой п простейших элементарных сигналов, в данном случае в виде
импульсов прямоугольной формы. Слово пространство используется здесь,
чтобы придать множеству сигналов геометрический смысл и тем самым на-
глядность. Наиболее простой и в то же время физически достаточно содержа-
тельной является трактовка сигналов как элементов нормированного линейного
метрического пространства.
Основные определения, относящиеся к функциональным пространствам Евк-
лида, Гильберта, Хэмминга. Линейным или векторным называется пространство
сигналов, для элементов которого выполняются правила сложения и умноже-
ния на любое число из некоторого множества {X},называемое множеством ска-
ляров1). Сложение векторов производится покоординатно, т.е. суммой векторов
х (функции х(/)) и у (функции >’(0) называется вектор
х + у = (х<) + jo, Xi + у\, ..., хп + уп), принадлежащий данному пространству, а
произведение Ах вектора х на число X даёт вектор Ах = (Ахо, Axi, ..., Ax„-i),
также принадлежащий данному пространству. В линейном пространстве суще-
ствует нулевой элемент 0, такой, что х + 0 = х и каждому элементу х соответ-
ствует противоположный элемент -х, так что х + (-х) = 0. Вектор, образован-
ный суммированием п линейно независимых (базисных) векторов у,- со ска-
п-1
лярными коэффициентами х, называется их линейной комбинацией х = .
J=O
Множество векторов {у/} называется линейно независимым (базисом), если условие
п-1
(2.7)
/=о
выполняется лишь тогда, когда все xt— 0. Иначе говоря, линейно независимым называется
' множество {у,}, для которого ни одна из его компонент не может быть образована линейной
комбинацией других. Размерность линейного пространства определяется числом любых ли-
нейно независимых базисных векторов {у;}, образующих это пространство. Линейно незави-
симые векторы {у;} можно рассматривать как координатные оси пространства.
Метрическим называется линейное пространство, в котором определено расстояние меж-
ду элементами (векторами) пространства (метрика), т.е. каждой паре элементов, скажем, х и
у может быть поставлено в соответствие некоторое вещественное неотрицательное число
с?(х, у) и способ, в соответствии с которым находится это число. Расстояние удовлетворяет
следующим правилам:
1. с?(х, у) = 0, если х = у
2. rf(x, у) = rf(y, х);
3. d(x, у) < d(x, z) + d(z, у),
где х, у, z — элементы (точки) пространства. Смысл первых двух условий очевиден. Третье
условие называют неравенством треугольника-, длина стороны треугольника меньше (или
равна) суммы длин двух других сторон.
Нормированные пространства. Среди линейных метрических пространств важное место
занимают нормированные пространства. Этот вид пространства определяется заданием нор-
мы ||х||, удовлетворяющей следующим аксиомам:
1- И > 0;
2- IMI = W-IMI;
3. ||х + у|| < ||х|| + ||у||.
Множество {X} должно быть полем, т.е. на нём должны быть определены операции сложе-
ния и умножения с коммутативными и дистрибутивными свойствами и оно должно содер-
жать элементы нуль и единицу. Примерами полей являются множества всех целых чисел,
всех действительных чисел, всех комплексных чисел и др.
32
Первая аксиома устанавливает, что норма есть положительное вещественное число, рав-
ное нулю только для нулевого вектора, во второй аксиоме X — любое число (скаляр), третья
аксиома — аксиома треугольника.
Начнём с перечисления терминов и определений, относящихся к п-
мерному вещественному евклидову пространству Rn. Любой вектор х в этом
пространстве определяется совокупностью его координат: х = (х0, х0,хп_^.
Совокупность п линейно независимых векторов образует n-мерное евклидово
пространство, обозначаемое Rn. Пространство Rn можно определить как мно-
жество точек, представленных концами векторов, для которых норма
ы=Жг
V <=о
Как видим, норма есть обобщение длины вектора в двухмерном и трёхмерном
пространстве. Расстояние между двумя векторами х и у определяется как нор-
ма разности векторов:
с?(х,у) = ||х-у|| = -у{)2 .
Для пространства Евклида Rn можно ввести понятие скалярного произве-
дения двух векторов х и у:
п-1
(х,у) = 2х.^ =IWI-||y||c°s(p, (2.8)
.1=0
где ф — угол между двумя векторами. Для проекций х на у и обратно, у на х,
имеем
III II (х>у) II II (х>у)
IМ СО8ф = -ц- , ||у|| СО8ф = -у- .
Координаты вектора представляют собой проекции вектора на координат-
ные оси, аналогично (2.5). Из соотношения (2.8) вытекает очевидное неравен-
ство
||(х,у)|| < ||х||-||у||., (2.9)
известное в литературе как неравенство Буняковского-Шварца. Знак равенства
Имеет место лишь тогда, когда
у = кх (2.10)
(к — скаляр), т.е. когда векторы х и у коллинеарны. Для соответствующих сиг-
налов x(f) и у(1) это означает, что они совпадают по форме у(/) = kx(f). Квадрат
выше определённой нормы вектора х можно найти как скалярное произведе-
ние вектора на самого, себя:
М2 = (X, х) .
При п -> оо пространство Rn переходит в бесконечномерное пространство
Гильберта, обозначаемое L^. Гильбертовым пространством является, в частно-
сти, пространство всех непрерывных комплексных функций аргумента t, за-
( Т Т\
данных на интервале > в котором скалярное произведение определено
соотношением
Z
2
(х,у)= f x(t)y(t)dt,
-f
(2.11)
33
а квадрат нормы
f 5
||х||2 = j x(t)x(f)dt = ||х(/)|\&. (2.12)
_Z _Z
2 2
Норма (2.12) имеет не только геометрический, но и отчётливый физический
смысл. Так, если сигнал x(z) — вещественный электрический ток в единичном
сопротивлении 1 Ом, то квадрат нормы
Z
Ы2 = j х2(/)<* - Е,
_Z
2
определяет энергию сигнала. Элементы гильбертова пространства £2 характе-
ризуются интегрируемым квадратом, т.е. если элементы этого пространства —
вещественные сигналы x(f), определённые на интервале
( ТТ}
I” 2 ’ 2 J
то выполня-
ется условие
z
2
Ех = jx2{f)dt <00. (2.13)
_z
2
Гильбертово пространство обозначается при этом £г(7)- При Т —> со получаем
пространство ^С00)- Для некоторых сигналов (функций) пространства Т^С00)
условие (2.13) при Т —> со может не выполняться, но выполняется условие
Г
Рх = Um <°° . (2-14)
~2
В этом случае можно вместо (2.11) ввести скалярное произведение с размерно-
стью мощности (для токов и напряжений на единичном сопротивлении)
1 f
(x,y)p = -f (2.15)
_z
2
Квадрат нормы вектора х в этом случае
Z
IWIp = 7 J 1*(')1М = Л • (2-16)
_z
2
При выполнении условия (2.14) в пространстве Т/Д00) определены и соотноше-
ния (2.15) и (2.16) при Т -> оо.
В дальнейшем, говоря о функции с интегрируемым квадратом в простран-
стве 1/2(со), имеем в виду выполнение условия (2.13) или условия (2.14) при
Т —> оо. Квадрат расстояния между двумя векторами в вещественном простран-
стве L2(T) определяется соотношением
Z
б/2 (х, у) = ||х - у|2 = j (х(0 - у(0)2 dt (2.17)
2
или
z
rf2(x,y) = ||x-y||2 \(x{t)-y(t))2dt. (2.18)
1 -f
34
Форму (2.18) можно использовать и при Т -> оо для сигналов с конечной сред-
ней мощностью.
Пространство представляет собой естественное обобщение пространства
Rn, получаемое путём перехода от дискретизированной функции к функции
непрерывного аргумента. В курсе ТЭС пространство Li имеет особое значение,
ибо оно позволяет применить общие геометрические представления к сообще-
ниям, сигналам и помехам, определённые как функции непрерывного аргу-
мента. Устремляя в (2.6) п -> оо, получаем представление непрерывной функ-
ции x(t) в пространстве Гильберта:
х(г) = 2x^(0 . (2.19)
/=0
Операторы и функционалы. В задачах преобразования сообщений и сигна-
лов нам потребуются некоторые обобщения функциональных зависимостей.
Величина у называется функцией независимой переменной х, если каждому
значению х (из множества его возможных значений) соответствует определён-
ное значение у. Иначе говоря, функциональная зависимость у — Дх) устанав-
ливает соответствие между некоторым множеством чисел х и множеством чи-
сел у или, что то же, функция устанавливает зависимость одного числа от дру-
гого.
Более общим понятием является понятие функционала. Функционал уста-
навливает соответствие между множеством чисел, с одной стороны, и некото-
рым множеством функций — с другой. Можно сказать, что функционал Ф ус-
танавливает зависимость числа от функции: у = ф(/(х)). Примером функцио-
нала является определённый интеграл, величина которого (при неизменных
пределах) зависит от вида подынтегральной функции.
Очень полезным является понятие функционального оператора, устанавли-
вающего соответствие между двумя множествами функций, т.е. с помощью
оператора L устанавливается зависимость функции от функции: у(/) = £[%(/)].
Так как функции могут быть представлены векторами и множество функций
определяется как векторное пространство, то действие оператора может быть
описано в геометрических терминах как преобразование пространства X векто-
ров х в пространство Y векторов у. Обратное преобразование Y в X обозначают
I"1. В задачах преобразования сообщений и сигналов используются наряду с
линейными операторами также нелинейные и параметрические операторы.
Векторное представление цифровых сигналов в пространстве Хэмминга. Если
функция x(f) на каждом интервале/А может принимать одно из tn возможных
значений (к = 0,т-1), то на отрезке длительностью Т она будет полностью
Т
определена п = — значениями х,(А) или, что то же, совокупностью коэффициен-
тов Xj7),х^2 } (к, I, v е0,яг-1), называемой «-набором. В частности, при
тп = 2 коэффициент х((Л) принимает значение 0 или 1, «-набор представляет со-
бой просто кодовую комбинацию «-значного двоичного (иг = 2) кода, отобра-
жающую символ (букву, цифру) передаваемого сообщения. Двоичные «-
наборы отображаются векторами (точками) в пространстве Хэмминга 2п. Ска-
лярное произведение в этом пространстве удобно задать функцией
35
где Z
.*=0
— сумма в обычном смысле. Отсюда норма двоичного вектора
Ы=Х** =Х**
к=0 к—0
Можно видеть, что норма двоичного вектора определяется количеством содер-
жащихся в нём единиц. Эту норму называют также весом вектора (кодовой
комбинации) и обозначают о. Расстояние в пространстве Хэмминга
л-1 л-1
4x>y)=llx-y||=Z |**-л|=Х
*=0 *=0
где знак Ф означает операцию суммирования по модулю 2 (mod 2): 0 Ф 0 = 0,
0Ф1 = 1, 1 ФО = 1, 1 Ф 1 = 0. Приведём пример суммирования по mod 2 двух
векторов:
х = {1001011}
Фу = {0101101}
хфу = {1100110} ’
Суммирование и вычитание по mod 2 эквивалентны. В пространстве Хэмминга
расстояние между двоичными векторами определяется по числу позиций в ко-
довой комбинации, в которых векторы х и у имеют различающиеся символы.
В рассмотренном примере rf(x, у) = 4 единицам. В более общем случае, если
число различимых значений равно т, используется разность по модулю т.
2.3. РАЗЛОЖЕНИЕ СИГНАЛОВ В ОБОБЩЁННЫЙ РЯД ФУРЬЕ
Важным понятием в пространствах Евклида, Гильберта и Хэмминга явля-
ется ортогональность векторов. Два вектора х и у ортогональны, если
(х, у) = 0. (2.20)
Легко показать, что если векторы V/ и цгу при j ф i взаимно ортогональны, то
они также линейно независимы. Поэтому совокупность ортогональных векто-
ров можно использовать в качестве базиса линейных пространств.
Представим непрерывную (во времени и по уровню) функцию x(f) с интег-
рируемым квадратом в пространстве L^T) через произвольную ортонормиро-
ванную систему базисных функций {\|/Х0)> ДО4 которых
г .. .. Со, j*t,
1.
(2.21)
(2.22)
_z
2
Вместо (2.19) имеем представление
со
J=o
где Ci — коэффициенты (координаты) разложения в ортонормированном бази-
се {уХО}- Представление (2.22) называют обобщённым рядом Фурье. Для опре-
деления коэффициентов С, найдём скалярное произведение
Z
М _Z
2
С учётом (2.21) следует
36
1
(2.23)
-f
Таким образом, коэффициенты обобщённого ряда Фурье С, являются про-
екциями вектора х на ортогональные оси (единичные орты) у,. С учётом (2.21)
и (2.22) можно получить1)
х2 (t}dt =
-Z
2
2
Xc.vW dt^Xcf-
L*=o
(2.24) является частным случаем равенства Парсеваля (см. ниже). С учётом ор-
тонормированного базиса {\|/Z(z)} легко видеть, что скалярное произведение и
норма в пространстве Rn можно находить по формулам (2.11) и (2.12).
Е,
(2.24)
i=0
Представим теперь приближённо функцию x(f) разложением в усечённый ряд
нормированным базисным функциям {\уХО}
и-1
Xs(0 = SY'V|/'(f)
1=0
и определим коэффициенты у,
ность (СКП):
^(0 = 7
так, чтобы минимизировать среднеквадратическую
_ [x(0-*s(0] л
Z
п-1 2
п-1
= rf xW“Sb'l',(O dt =
* т - л
= yf x2(T)dt- +
-f — .
С учётом (2.23)
~ i=0 _г
можно записать
п-1
1 п-1
/=о
по орто-
(2.25)
погреш-
е2(/)=^ [х2(0Л + -^
i J 1
т
”1
и-1
(2.26)
i=0
Z
2
Погрешность s2(f) принимает минимальное значение, если у,= С(, т.е. если коэффициенты
разложения в усечённом представлении (2.25) являются коэффициентами обобщённого ряда
Фурье. Обозначив s2(/) = Д„, можно написать исходя из (2.26)
5 1 п-1
А„=-р(0Л- ¥£С,2>О
1 _Т 1 1«0
ИЛИ
Z
2 и-1
]х2(/)Л^С2 . (2.27)
_Г 1=0
Неравенство (2.27) называют неравенством Бесселя. С ростом п величина Дл уменьшает-
ся. Если при п -> оо СКП стремится к нулю, то систему базисных функций {\уХО} называют
полной. Имея ввиду, что при п -> оо справедливо (2.24), можно утверждать, что в пространст-
ве Гильберта система базисных функций {уХ01 является полной. Эта система функций явля-
ется также замкнутой, так как для любой функции х(/) из Li(T) неравенство (2.27) переходит
при л-юо в равенство.
ОО
Если С, = (х, у/)р , то SC2 определяет среднюю мощность сигнала x(f).
i=0
37
Спектральное представление периодических колебаний. При формировании
и обработке сигналов часто приходится иметь дело с периодическими колеба-
ниями сложной формы. Периодическую функцию х(/) = x(t - пТ) (Т — период
повторения) можно представить разложением в обобщённый ряд Фурье (2.22)
по базисным функциям основной тригонометрической системы
1, cos®./, cos2®/, ... , cosA®/, ...
< . 1 . ‘ , 1 (2.28)
sin®/, sin2®/, ... , sin A®/, ...J
Все функции системы (2.28) попарно ортогональны на интервале (—7/2; Т/2).
Обобщённый ряд Фурье по базисным функциям (2.28) можно записать
x(t) = ~г + ^(ак cosA®/ +bk sin А®/), (2.29)
2 f f
ak = — jx(/)cos(коkt)dt, bk = — jx(/)sin(A®/)dr. (2.30)
-i T-i
Представление (2.29) называют рядом Фурье. Ряд (2.29) можно записать в виде
00
х(/) = 24сов(Л®/-ф*), (2.31)
*=0
где
4 =у} Ак=у)а2+Ь2к, = arctg^~.
2 ак
(2.32)
Рис.2.4. Амплитудный спектр периодического
I
сигнала с периодом следования Т = —
2Z kf, nf,
Согласно формуле (2.31) периодическую функцию x(f) можно представить
суммой гармонических колебаний с час-
тотами, кратными основной частоте
/1 = 1/Т с амплитудами и начальными
фазами ф^. Совокупность амплитуд Ак
(к = 0, 1, 2, ...) образует амплитудный
спектр сигнала, а совокупность фаз ф^
(к = 0, 1, 2, ...) — фазовый спектр сигна-
ла. Линейчатый амплитудный спектр пе-
риодического сигнала %(/) изображён на
рис. 2.4. Ряд Фурье (2.31) часто пред-
ставляется в комплексной форме
*W- Zc.e*'
(2.33)
где Ск — комплексная амплитуда, определяемая по формуле
(2.34)
Следует обратить внимание на то, что сумма в (2.33) охватывает не только по-
ложительные значения к, но и отрицательные (появляются "отрицательные
частоты").
Для перехода из (2.31) к (2.33) можно воспользоваться формулой Эйлера
j(tat> ,/-<₽* ) _ -j( *а> )
соа(л®1/-ф*) = --------------. (2.35)
38
Выражение (2.35) можно интерпретировать как представление гармонического
сигнала единичной амплитуды с положительной частотой k©i в виде суммы
двух гармонических колебаний (половинной амплитуды) на положительной
частоте ke>i и отрицательной частоте -к©]. Для вещественных функций x(t), как
следует из (2.30) и (2.32), ак = Ьк = -Ь-к, Ак = А-к, <р& — -ф-£ (амплитудный
спектр — чётная функция частоты, фазовый — нечётная функция частоты). Как
следствие С_к = а~к &~к = -к-+^-к- =Ск, у- = |С*| = |С_*|, argC* = -<р* - -argC.*.
Комплексное представление ряда Фурье оказывается очень удобным при вы-
полнении различных расчётов.
Спектральное представление непериодических функций. Разложение в три-
гонометрический ряд Фурье (2.33) может быть обобщено на случай непериоди-
ческих функций x(z) путём устремления Т —> со или f\ = 1/Г—> 0. Для этого за-
пишем (2.33) так:
х(/)= ^С.Т-е^'Д/, (2.36)
Л=-00
где A/ = /i= 1/ Т — частотный разнос между линиями спектра периодического
сигнала.
Введём в рассмотрение текущую частоту спектра k©] = © (kfa = f) и оп-
ределим спектральную плотность (СП) по Фурье непериодического сигнала:
s(f) = lim~r = limCr. (2.37)
V ' bf->0 \f Т-Х»
Тогда из (2.36) при A/-> 0 следует представление
со
*(/)= (2.38)
—со
а из (2.34) и (2.37) следует формула для определения СП
$(/) = |х(().е-*"Л. (2.39)
Согласно (2.38) непериодическая функция x(f) представляется суммой гармо-
нических компонент е'“' (на положительных и отрицательных частотах) с бес-
конечно малыми амплитудами s(f)df. Модуль |5(/)| определяет .сплошной
(непрерывный) спектр непериодического сигнала, a arg5(/) = <p(/)= — сплош-
ной (непрерывный) фазовый спектр непериодического сигнала. Спектр по Фу-
рье можно записать в виде
5(Л=4/)->в(г)=,
где
со
Л(/) = j x(t)cosdt
—со
— чётная функция частоты;
2?(/) = | x(Z)smd?
— нечётная функция частоты.
(2.40)
Из (2.40) видно, что для вещественных функций x(t) амплитудный спектр
является четной функцией частоты, фазовый спектр
39
<p(/) = -arctg-^yj
— нечётная функция частоты. Дискретный (линейчатый)
спектр амплитуд Ск периодического сигнала х(/) = x(t + пТ) можно найти по
формуле
С. = Нт). (2-41)
Пара преобразований Фурье x(/)->s(/) {прямое) и s(/)->x(/) (обратное)
описывается, как видно из (2.38) и (2.39), линейным оператором. Поэтому для
этих преобразований справедлив принцип суперпозиции (наложения): СП для
сигнала x(i) = ^xk(t) определяется суммой СП слагаемых x^t). Следует под-
черкнуть, что, строго говоря, СП (2.39) существует для функций x(t), удовле-
творяющих условию абсолютной интегрируемости
J|x(/)|dif <оо. (2.42)
-о©
Тем не менее можно определить СП и для сигналов х(/), не удовлетворяющих условию
(2.42), если воспользоваться введённой выше обобщённой 8-функцией. Например, пусть
x(r) = ej“°/. СП по Фурье такого сигнала по определению
s(f) = |e_j2"^"/oU. (2.43)
Воспользовавшись интегральным определением 8-функции (2.4), из (2.43) получим результат
S(/)=8(/-/o). Аналогично можно показать, что СП для сигнала xO) = CJ<0o/ равна
S(/) = 8(/ + /0). Как следствие, СП для сигнала cos<o0f =--------------------- равна
gj“0' _ g“j“0'
плотности сигнала sin<oof =---—---- по-
U О 1
S(/) = 0^-8(/-/0) + O^-8(/ + /0). Для спектральной
лучаем
Я я
$(/)=о^2з(/-/0)+ 0^е'"28(/+/0).
Скалярное произведение функций x(t) и Я0 (в общем случае комплексных)
в пространстве Гильберта /^(7) можно выразить и через их СП по Фурье:
I °°
(х,у) = f ад-да = f $.(/)•$,</)# • (2-44)
-2 •°0
Соотношение (2.44) называют обобщённой формулой Рэлея (или соотношени-
ем Парсеваля).
40
Докажем её. Для этого в первом интеграле представим yit) обратным преобразованием
Z
ОО 90 00 2
Фурье Тогда y(t)= jsy(f)e~}<0>df и (х,у)= jX (f)df jxO)e ** dt =
—оо —co —во —у
co
Если в (2.44) положить y(t) = x(/), то для вещественного сигнала x(f)
\ 00 00
(x,x) = £=fx’WA=J^(/)S,(/)# = J^(/)^ (2.45Г
-ОО “00
Характеристика *$*(/) = И'Д/) имеет смысл СП энергии, и (2.45) можно напи-
сать
I
2 СО
(x,x) = £=fx’(/>* ={»;(/)#• (W
—£ -оо
Можно также ввести СП мощности (СПМ) сигнала длительностью Т:
1 S2( /I
= г т°гда
X
(x,x)„ = /> = |jx2W<*= Jc,(/)rf/. (2.47)
”2
Характеристики Wx(f) и G*(f) играют важную роль в ТЭС. Из их определения
ясно, что эти характеристики являются чётными функциями частоты. Тогда
можно написать
00 оо
E = 2jw,(f)df = j^(f)df; (2.48)
О о
«о оо
P=2jG,(/)# = fG„(/)#, (2.49)
О о
где И/0л(/) = 2И^(/) и G0^(f) = 2Gx(f) - СП энергии и мощности, определённые
на положительных частотах.
Соотношение (2.44) полезно обобщить. Определим скалярное произведение
Т/2
(х,ут)=
-Т/2
С учётом того, что спектр Фурье для задержанного на время т сигнала
л(0 = Я*-т) равен Sy(f)e~i<m, а для сигнала у(*-т) спектр Фурье равен
5_y(/)ejmT, получаем вместо (2.44) соотношение
X
2 со
(х,у,)=|х(/)де-т)<й={5ж(/)5,(/)е»“^. (2.50)
41
Если в (2.50) положить y(t) = x{f) и ввести обозначение ВБДт) для функции
корреляции (ФК) сигнала x(t) с размерностью энергии, то из (2.50) следует
Z Z
1 2 со
ч ч »
Вводя обозначение Вх(у) = (х, xj для ФК сигнала х(/) с размерностью мощно-
сти, получаем соотношение
Z
1 2 OO X
В,« = -|х(0^-т)</г=(с,(/)е*# = (с.Д/)со8Ит^ (2.52)
1 -I -о 0
и, как следствие,
оо
—ОО
оо
G,(/) = f B,(t)e-”A. (2.53)
—°°
Таким образом, ФК Вх(у) сигнала x(f) и его СП мощности бД/) (аналогично
ФК сигнала ВБх(т) и его СП энергии И^(/)) образуют пару преобразований
Фурье.
В качестве иллюстраций в табл. 2.1 приведены примеры спектров некото-
рых импульсов (непериодических функций) й даны графики их амплитудных
спектров в области положительных частот. Из приведённых примеров видно,
что импульсы ограниченной длительности теоретически имеют бесконечный
спектр. Практически под шириной спектра будем понимать эффективную об-
ласть частот F3, в пределах которой сконцентрировано 90...99% энергии. Для
колокольного (гауссовского, см. ниже) и экспоненциального импульсов,
имеющих теоретически бесконечную длительность, для удобства расчётов так-
же вводят понятие эффективной длительности тэ, понимая под этим интервал
времени, в пределах которого сосредоточена основная доля энергии сигнала.
Если принять за основную часть энергии Е, = уЕ (у=0,9 ... 0,99), то эффектив-
ная ширина спектра и эффективная длительность находятся из выражений1)
31 17
2 оо гэ оо
£, = f Х2(()Л=У Jх’(г)л И £,=f«;.,(/)#=гJ•
-оо 0 0
Для сравнения в табл. 2.2 представлены значения произведений F3t3 при
у = 0,9 для импульсов из табл. 2.1. Для импульсов с "плавными" фронтами, на-
пример гауссовского и косинусоидального, произведение F3x3 оказывается
меньше, чем у импульсов со скачкообразными фронтами, например, прямо-
угольного и экспоненциального. Характерная особенность в том, что для всех
импульсов (простых сигналов)2)
7ътэ«1, (2.54)
Для сигналов, определённых при t > 0, следует интегрирование во времени проводить от 0
до тэ.
2) Для сложных сигналов (с большой базой) произведение F3x3 значительно больше 1 (см.
гл. 9).
42
т.е. произведение F3~i3 — величина порядка единицы. Соотношение (2.54) укг
зывает на явную связь между шириной спектра и длительностью импульса: че.
короче импульс, тем шире его спектр.
Разложение сигналов с использованием базисных функций Радемахера и Уолша. В п<
следние годы успешно развиваются цифровые методы передачи и обработки сигналов ь
Таблица 2.2
№ п/п Импульс Тэ Л тэ
1 Прямоугольный 0,90 т 0,81 1/т 0,73
2 Треугольный 0,541 т 0,84 1/т 0,46
3 Косинусоидальный 0,596 т 0,73 1/т 0,43
4 Колокольный 0,825 1/р 0,26 р 0,22
5 Экс понен циал ьн ый 1,155 1/р 6,98 р 1,13
1, i = к,
0, i * к.
основе дискретных ортогональных последовательностей в виде функций Радемахера, Уолша и
др. Функции Радемахера образуются из синусоидальных функций с помощью соотношения
гД0) — sign [sin(2*л0)], 0 < 0 <, 1,
где аргумент 0 = i/Т — безразмерное время; Т — период функции, а положительное целое
число к = 0, 1, 2, ... — порядок функции; sign(x) — знак действительного числа х, (sign(x) = +1
при х > 0 и sign(x) = —1 при х < 0). Иначе говоря, функции Радемахера, принимающие зна-
чения ±1, можно трактовать как функции "прямоугольного синуса". На рис. 2.5 приведены в
качестве примера графики первых четырёх функций Радемахера гД0) для к = 0, 1, 2, 3. Легко
1
видеть, что функции гД0) ортонормированны на интервале О<0<1 J п(0)г*(0)с?0 =
о
Дальнейшим развитием систем функций, имеющих форму "прямоугольной волны" явля-
ется система функций Уолша {wal(m, 0)}. Она образуется следующим образом. По определе-
нию вводятся функция w/(0, 0) = 1 при m = 0. Для получения функции wal(m, 0) при m > 1
достаточно записать число m в двоичной системе счисления, т.е. представить суммой
?и = 2И1 + 2Цг+...+2'1р , где pi < Ц2 < < Ир — положительные целые числа. При этом функция
Уолша 0) = гИ1+1 (0)гИ2+1 (0)...+1(0). На рис. 2.6. приведены графики первых восьми функ-
ций Уолша wa/(0, 0), w/(l, 0), ..., wal(7, 0), построенных по четырём функциям Радемахера.
Функции Уолша не только ортогональны, они обладают и свойством мультипликативно-
сти. Это означает, что произведение любых двух функций Уолша также является функцией
Уолша: wal(i, Q)wal(k, 0) = wal(p, 0), где р = i ф к. В связи с возможностью применения к
функциям Уолша логических операций, они находят применение при разработке устройств
формирования и преобразования сигналов на базе микропроцессорной техники. Сигналы на
основе функций Уолша используются в цифровых многоканальных системах передачи ин-
формации.
В теории связи, особенно в задачах аппроксимации, находят применение и другие ан-
самбли ортогональных функций. Среди них функции Лежандра, функции Лагерра, функции
Эрмита [9].
2.4. ДИСКРЕТИЗАЦИЯ СИГНАЛОВ ВО ВРЕМЕНИ
Представление непрерывной функции дискретной последовательностью от-
счётов её мгновенных значений. Для точного представления произвольной не-
прерывной функции x(t) на конечном интервале времени Т необходимо распо-
лагать данными о мгновенных значениях (отсчётах) этой функции во всех
Рис.2.5. Графики функций
Радемахера 0, 1,2 и 3-го порядков
44
“ wa/(4,0)=r3(0)
ф wal(5,B)=rJ&)r3(Q)
Рис.2.6. Графики первых восьми функций Уолша
Рис.2.7, Дискретизация непрерывной
функции времени посредством
периодической коммутации
с частотой дискретизации F=\H±
точках интервала, т.е. непрерывным множеством отсчётов, отстоящих друг от
друга на бесконечно малые интервалы. Некоторое приближённое представле-
ние о функции x(t) можно составить по её отображению в виде дискретной по-
следовательности импульсов, имеющих на интервалах Д значения х(/Д), назы-
ваемых отсчётами (рис.2.3).
Операция замены непрерывной функции последовательностью отсчётов её
мгновенных значений называется дискретизацией. В качестве простейшей фи-
зической модели дискретизации рассмотрим коммутационное устройство
(рис. 2.7, а). С помощью ключа Кл обеспечивается периодическое с частотой
дискретизации fa — 1/А подключение к источнику непрерывного сигнала x(t)
(рис. 2.7, б) на время т, т.е. производится замена непрерывной функции x(t)
последовательностью хд(0 на интервалах т (рис. 2.7, в). Последовательность от-
счётов хд(0 можно трактовать как произведение x(f) на периодическую после-
довательность импульсов дискретизации (рис. 2.8):
Хд(0 = х(0/д(0 = х(/) 2 >
где импульсы дискретизации \|/T(z) =
Множитель 1/т нор-
0, t е
мирует функцию \|/т(0 к единичной площади. Для этого в схёме рис. 2.7, а по-
сле ключа Кл введено масштабное звено. Чтобы перейти к отсчётам мгновен-
ных значений x(f) в точках
*(0
Хд(0=х(0-/4(0
Zw
/Ж
t — кД, необходимо рассмотреть особенности пе-
риодической функции fa(f) при т -> 0. Нетрудно
видеть, что при т -> 0 эта периодическая функция
заменяется решётчатой функцией
ОО
/р(0 = £ 8(f - ЛД). Дискретный сигнал
д(0=х(0./р(')=х(')£8('-*л)=
т
t
Спектральная трактовка дискретизации. Как было по-
казано, процедура дискретизации сводится к образованию
произведения дискретизируемой функции x(f) на последо-
вательность импульсов дискретизации В спектральной
области произведению функций времени соответствует
свёртка их спектров (см. подробнее гл. 10). Пусть спектр
функции х(0 финитен и имеет вид, представленный на рис. 2.9, а, где — верхняя
(граничная) частота. Спектр периодической последовательности импульсов дискретиза-
Рис.2.8. Дискретизация непрерывной
функции x(t) путём её умножения на
периодическую последовательность
импульсов fjt)
45
Рис.2.9. Спектр (а) непрерывного сигнала х(г); (б) линейчатый
1
решётчатой функции с периодом Д = —; (в) дискретного
сигнала при Fa= 2FB, (г) при Fa> 2Fa, (д) при Fa< 2Fa
изображения и равна FB = 6,5 МГц.
ции является линейчатым (рис.2.9, 6);
частота дискретизации определяется
интервалом дискретизации .Гд= 1/А*>.
Спектры дискретизированного сигнала
представлены для случаев, когда
Fa = 2FB (рис.2.9, в), Fa > 2FB (рис.2.9, г)
и Fa < 2FB (рис.2.9, д). Для неискажён-
ного воспроизведения функции x(Z) по
последовательности отсчётов посредст-
вом идеального фильтра низких частот
необходимо выбирать частоту дискре-
тизации так, чтобы спектральные ком-
поненты свёртки Sx(f) с каждой из
дискретных составляющих периодиче-
ской функции pFa (р=0, ±1, ±2, ...) рас-
полагались в неперекрывающихся об-
ластях (рис. 2.9). Этому соответствуют
значения Fa > 2FB. При Fa < 2FB спек-
тральные области перекрываются, в
полосу частот (~FB, FB) дискретизируе-
мого сигнала попадут спектральные
компоненты смежных областей и воз-
никнут искажения при восстановлении
функции по отсчётам. Далее будет по-
казано, что для точного воспроизведе-
ния непрерывной функции с ограничен-
ным (финитным) спектром достаточно
располагать значениями функции
(отсчётами) лишь в отдельных точках.
Модели сигналов с ограниченным
спектром часто используются в технике
связи. В частности, в стандартном те-
лефонном канале за верхнюю гранич-
ную частоту принимают FB = 3400 Гц,
при телевизионной передаче граничная частота определяется числом различимых элементов
Теорема отсчётов. Фундаментальное значение для решения многих задач
теории передачи сигналов имеет следующая теорема отсчётов* 2) Котельникова:
непрерывная функция x(t), не содержащая частот выше граничной FB, полно-
стью определяется отсчётами мгновенных значений х(кЛ) в точках, отстоящих
друг от друга на интервалы Д < 1 /2ГВ. Интервал Д называется интервалом Ко-
тельникова3). Эта теорема позволяет представить непрерывную функцию x(t) в
виде ряда
оо
*(о = Z *(*д)
*=-»
ап<в,(/-ДД)
(2.55)
Спектр периодической последовательности fp(t) можно рассматривать как совокупность
поднесущих, разнесённых на интервалы, кратные Гд.
2> В иностранной литературе эту теорему связывают с именами Найквиста и Шеннона.
3> В зарубежной литературе — интервалом Найквиста.
46
Из сопоставления ряда (2.55) с общим видом обобщённого ряда Фурье в пространстве
Гильберта следует, что элементарными базисными функциями в разложении Котельникова
являются отсчётные функции1 >
(2.56)
Сй B(t - АД)
Для коэффициентов разложения х(/) по элементарным функциям (2.56) в соответствии с
(2.17) можем записать
(2.57)
Д <oB(z-AA)
где постоянная а вводится с учётом нормировки функций (2.56). Докажем, что коэффициен-
ты Ск соответствуют мгновенным значениям функции х(/) в точках t = кА. Пусть S(f) — пре-
образование Фурье функции x(f), тогда
оо
Х0= p(/)ej“'#> (2.58)
—оо
где
оо
М/)= (2.59)
Если x(f) имеет ограниченный спектр с наивысшей частотой FB, то 5(/) вне полосы ±FB рав-
но нулю, а выражение (2.58) принимает вид x(t)~ s(f)eia>t df. Пусть t-кА, тогда
р.
х(АД) = J 5(/) eJmAA df или после подстановки в последнее выражение вместо 5(/) его значе-
-F,
ОО
ния из (2.59) и изменения порядка интегрирования получим х(АД) = j*x(Z)- J е j“(/ ^df dt.
—оо —
„ _ Г „ ив sin<aB(r- кА)
После вычисления интеграла в квадратных скобках I е df -•------,—-г- получаем
-р '
—оо
Сравнение (2.60) с (2.57) при а =т/<ов/тс показывает, что коэффициентами обобщённого ряда
Фурье Ск разложения (2.16) по ортогональным функциям (2.56) являются отсчёты x(kTf
мгновенных значений функции x(f) в моменты t — кА.
а.
Восстановление непрерывной функции по отсчётам. Процедура восстановле-
ния непрерывной функции х(0 по отсчётам её мгновенных значений х(к&) вы-
текает непосредственно из (2.55): нужно перемножить значения отсчётов х(кЛ)
На соответствующие отсчётные функции (2.56) и просуммировать полученные
^произведения. Эти операции иллюстрирует рис. 2.10. Спектральная трактовка
процесса восстановления x(t) следует из рис. 2.9.
£
Ортогональность функций (2.56) следует из соотношения
япшв(г-/А)
шв(г-/А)
япш„(г-АД)
«>В(Г-*А)
1
2FB
О,
i Ф к,
i Ф к.
47
Для полного восстановления необходимо просуммировать бесконечное
множество членов ряда (2.55). Однако если функция с ограниченным спектром
х(/) рассматривается на конечном интервале Т (рис. 2.10, а), то точное разло-
жение (2.55) можно заменить следующим приближённым разложением:
(0 = L • (2-61)
-и/2 ФДГ-АД)
Конечное число отсчётов п, определяющее x^f), равно (при Д = 1/2Гв)
п = Т/Ь + 1 = 2ГВГ + 1.
Параметр В = 2FRT, играющий важную роль в ТЭС, называют базой сигнала.
Очевидно, что погрешность представления сигнала при ограничении числа его
отсчётов будет тем больше, чем меньшее число слагаемых учитывается при
суммировании.
Оценим качественно погрешность |s(Z)| = |х(/) — яД/)!- Поскольку все слагаемые ряда (2.55)
обращаются при t = /А в нуль во всех точках, за исключением слагаемого с номером к - i, то
в этих сечениях значения xJJ) совпадают с x(f), т.е. погрешность е(£Д) равна нулю; погреш-
ность достигнет наибольшей величины внутри промежутка между отсчётами. Кроме того, ве-
личина погрешности нарастает к краям рассматриваемого интервала.
Другая причина погрешностей обусловлена тем, что спектры реальных финитных сигна-
лов не обращаются в нуль за пределами граничной частоты. Хотя основная энергия сигналов
расположена на частотах от нуля до fB, некоторая часть приходится на частоты выше гранич-
ной. Относительная среднеквадратическая погрешность определяется соотношением
s2G)_£= А£
о
(2.62)
где Е — полная энергия сигнала x(f), а А£ — та часть энергии, которая оказывается за преде-
лами полосы частот [0, fB] и не учитывается при восстановлении сигнала. Таким образом,
при заданной погрешности (2.62) можно определить необходимую граничную частоту fB, а
следовательно, и интервалы между отсчётами А = 1/27^. Детальное исследование показывает,
что погрешности за счёт неучитываемой части спектра сигнала будут тем больше, чем мед-
леннее убывает спектр за пределами граничной частоты.
Третьей причиной погрешностей являются неидеальные характеристики фильтра, фор-
мирующего отсчётные функции. Колебания, имеющие форму отсчётной функции вида (2.56),
можно получить на выходе идеального фильтра нижних частот (ФНЧ) с граничной частотой
fB при действии на его входе дельта-импульса S(Z). АЧХ идеального ФНЧ равномерна
(рис. 2.11)
0<f<F,
в а ФЧХ — линейна: ср(/)=-шт.
f
Импульсная характеристика g(/) фильтра определяется обратным преобразованием Фурье
оо
от комплексного коэффициента передачи £(/) (см. § 4.4): g(/) = I k(f)e3<s>tdf. Для рассмат-
риваемого случая идеального ФНЧ1)
г,
I ,\ f.X'-t) ,z- „ г, 8ШШ,0-т)
gW-Je
(2.63)
й При достаточно больших значениях задержки т характеристика (2.63) может быть реализо-
вана (см. гл. 4).
48
Рис.2.10. Иллюстрация принципа восстанов-
ления непрерывной функции по её отсчётам
Рис.2.11. АЧХ и ФЧХ фильтра,
формирующего отсчётные функции:
(1) идеального ФНЧ; (2) неидеального ФНЧ
Рис.2.12. Импульсная характеристика: (У) для идеального ФНЧ, (2) для неидеального ФНЧ
Характеристики реальных фильтров £(/) и <р(/) отличаются от идеальных
(пунктирные кривые 2 на рис. 2.11), что приводит к отклонению реальной функции отсчё-
тов от идеальной (кривая 2 на рис. 2.12) и, как следствие, к появлению дополнительных
погрешностей восстановления функции x(f) по отсчётам.
2.5. СЛУЧАЙНЫЕ ПРОЦЕССЫ И ИХ ОСНОВНЫЕ
ХАРАКТЕРИСТИКИ
Понятие случайного процесса. В основе большинства методов исследования
общей теории связи лежит представление о процессе передачи сообщения как
некоторого случайного процесса, развивающегося (чаще всего) во времени.
Словом случайный подчеркивается то обстоятельство, что предопределить зара-
нее точное протекание процесса невозможно. Типичным примером случайного
процесса может служить напряжение Z(f) = s(f) + N(t) на входе приёмника.
Наблюдая напряжение в данный момент, мы не можем с полной определённо-
стью предсказать, каково будет его значение в последующие моменты времени.
Это объясняется тем, что параметры формируемого передатчиком канального
сигнала s(f) (амплитуда, частота, фаза) изменяются случайным образом в соот-
ветствии с передаваемым сообщением a(t). Кроме того, в процессе передачи
сигнал подвергается воздействию различных аддитивных помех N(t), имеющих
49
случайный характер, например в виде электрических разрядов в атмосфере,
помех от электрического транспорта, помех от других радиостанций и т.д.
Случайность процесса X(f) проявляется в том, что вид наблюдаемой функ-
ции случайным образом меняется от одного наблюдения к другому. Однако
получаемая в результате каждого отдельного опыта функция x(t) не случайна.
Её называют реализацией случайной функции. Совокупность всех возможных
реализаций {х(г)(/)} и образует случайный процесс (или случайную функцию)
X(t) = {х(г)(/)}. Для непрерывного случайного процесса число реализаций обра-
зует несчётное множество.
На рис.2.13 показаны четыре реализации случайного процесса. Наличие
случайности результатов многократных наблюдений одного и того же процесса
не означает, что в этом процессе нет никаких закономерностей. Оказывается,
что средние результаты, найденные по большому числу наблюдений, устойчи-
вы. Иными словами, случайные явления и процессы подчиняются определён-
ным статистическим закономерностям.
Если на графике множества реализаций случайной функции Х(|) (рис.2.13)
выбрать момент (сечение) t^, то множество {x(r)(f1)| значений реализаций в
этот момент образует случайную величину X. Значения этой случайной вели-
чины заранее неизвестны. Но можно установить некоторые закономерности,
по которым можно судить о том, что в данном сечении случайная величина с
вероятностью Р будет принимать значение в определённых пределах
[х, х + Дх].
Плотность вероятности и интегральная функция распределения (ИФР). Для непрерывных
процессов X(f) распределение вероятностей в заданном сечении Ц характеризуется одномер-
ной плотностью вероятностей (ПВ)
, . Р(х^Х < х+Дх)
w(x) = lim — --:—:------ 0,
v ’ ДХ-+0 |Ax|
выражающей отношение вероятности того, что случайная величина X(f) примет значения в
интервале х < X < х + Ах, к величине интервала Ах. На рис. 2.14, а изображён типовой график
одномерной ПВ.
Вероятность того, что случайная величина X примет значение в интервале (х^ Xj) опреде-
ляется выражением
*2
р(х, < < х2) = J w(x)dx.
Рис.2.13. Задание случайного процесса •
через совокупность его реализаций
Рис.2.14. Типовой график (<я) одно-
мерной ПВ и (б) одномерной ИФР
50
Интеграл в бесконечных пределах от функции w(x) равен единице 1 (условие нормировки для
достоверного события)
1.
Другой важной характеристикой случайных величин X является ИФР F(x), определяемая
как вероятность того, что случайная величина X не превзойдёт некоторого значения х:
X
F(x) = Р( X < х) = J w(x)dx.
ИФР имеет следующие свойства:
1) F (-оо) = 0;
2) F (оо) = 1;
3) F (х) — неубывающая функция, т.е. F (х2) > F (х0 при х2 > х^
4) Р [xi < X < х2] = F (х2) - F (xt).
График ИФР Дх) приведён на рис. 2.14, б.
В прикладных задачах часто предполагают, что ИФР являются дифференцируемыми
функциями и определяют w(x) как производную от ИФР:
Цх) = ^ (2.64)
ах
Для более полного описания случайного процесса нужно располагать его «-мерной плотно-
стью вероятности w(xb х2, ..., хй; tx, ti, ..., tn) или «-мерной ИФР F(x\, х2, ..., хй; t\, t2, ..., tn),
выражающих- свойства случайного процесса в произвольных сечениях t\, t^, , tn. В общем
случае «-мерная ПВ определяется аналогично (2.64) как
аи(х;, х2,..., хп, tt, t2,..., ;„)
дх । дх2 ... дх^
Для полного описания непрерывного во времени СП приходится п -> оо. Подобно тому, как
при одномерном распределении вероятность того, что СВ попадает в заданный интервал на
оси, равна площади под кривой w(x), ограниченной указанным интервалом (рис.2.14,а), при
двумерной ПВ вероятность того, что СВ попадает в заданную область S плоскости, равна
Р(5) = JJ w(x,y)dxdy , X, у — координаты точки.
s
Нахождение «-мерной ПВ, равно как и «-мерной ИФР — трудная задача, которую удаёт-
ся решить далеко не всегда.
*1, х2, .... х„, tx, t2
Числовые характеристики. На практике часто ограничиваются рассмотре-
нием хотя и менее полных, но зато более простых характеристик случайных
величин (процессов), называемых числовыми характеристиками или момента-
ми. Числовой характеристикой случайной величины может служить момент
/с-го порядка, определяемый как
mk(t) = Xk(t) = Л/(Хк(/)) = J х* w(x,t)dx .
—00
В частности, момент первого порядка, называемый математическим ожи-
данием (МО) СВ определяет среднее значение случайной величины
= X(t) = M(X(t))= J xw{x,t)dx, (2.65)
— 00
где черта сверху означает усреднение по множеству реализаций. Аналогично
вводится момент второго порядка
«2^(0 = X2(t) = M[x2(t)) = jx2 w(x,t)dx (2.66)
51
Разность между случайной величиной X и её МО X - X = X представляет собой
отклонение СВ от среднего значения. Она называется центрированным значе-
нием СВ. МО квадрата этого отклонения называется дисперсией или цен-
тральным моментом второго порядка
Z)(Ar(z)) = o2(z) = A/lx2 (/)! = j [х-ти/о] w(x,t)dx.
(2-67)
Величину о = y/D(X) называют стандартным или среднеквадратическим откло-
нением. С учётом (2.65) и (2.66) выражение (2.67) приводится к результату
а2(/) = = ^(/) - zh2(/) = X2(t)-X2(t).
Дисперсия характеризует разброс случайной величины относительно её средне-
го значения. МО ГЩ и дисперсия о2 являются важными характеристиками слу-
чайной величины, однако они не дают достаточного представления о изменчи-
вости случайного процесса во времени. При совместном изучении центриро-
ванных случайных величин Хх = х($ и X2 = x(t^ сечений t\ и t2 центриро-
ванного случайного процесса X(t) = X(t)-mx(t) вводится понятие смешанного
момента второго порядка, называемого функцией корреляции (ФК):
в(^2) = М ХгХ2
оо оо
—оо—оо
где и'(хь х2, t\, t2) — двумерная плотность вероятности. Функция корреляции
характеризует степень статистической взаимосвязи значений Xj и Х2 случайно-
го процесса X(f) в моменты t\ и t2, разделённые интервалом т = t2 - t\ (см.
рис. 2.15). Убывание ФК с увеличением т свидетельствует об ослаблении связи
между мгновенными значениями процесса. Если ФК при каких-либо значени-
ях т имеет отрицательное значение, это свидетельствует о том, что положи-
тельным отклонениям процесса в одном сечении соответствуют преимущест-
венно отрицательные отклонения в другом сечении и наоборот. Если случай-
ные величины Xi и Х2 статистически независимы, то их двумерные ПВ опреде-
ляется произведением одномерных ПВ: и'(Х], х2, t\, t2) = w(xi; /i)w(%2; (2)?
между двумя такими сечениями, как следует из (2.68), равна нулю1).
Нормальное (гауссовское) распределение. В качестве примеров рассмотрим некоторые ти-
повые ПВ и ИФР непрерывных случайных величин. Многие случайные величины, с которы-
ми приходится встречаться в задачах практики, описываются так называемым двухпараметри-
ческим нормальным или гауссовским распределением (рис. 2.16), для которого плотность
Рис.2.15. График зависимости двух ФК
от расстояния между сечениями т=/,-^.
Рис.2.16. Гауссовское распределение цри заданной
дисперсии ст2 и двух значениях МО
Математическое ожидание центрированной СВ всегда равно нулю.
52
вероятности представляется формулой
Г Г / \12
1
(2.69)
2<f«
Как следует из (2.69), гауссовское распределение полностью определяется двумя параметрами
mi и ст2. Непосредственным вычислением интегралов легко убедиться в том, что эти парамет-
ры имеют смысл соответственно МО и дисперсии:
„ оо /
\2лст2
J хехр- -
2ст2
dx=
СО ^2
J (crf + WJ^exp- -4# = ^
^2nc2
2ст2
со 2
J t2 exp- -dt = xs2 .
.2
у2тг
График ПВ w(x, f) нормально распределённой случайной величины симметричен относи-
тельно ординаты в точке х = т\. Нормальный закон распределения имеет место практически
во всех случаях, когда. случайная величина образуется в результате суммирования очень
большого числа случайных величин одного порядка малости (см. § 4.7). Если т\ — 0, то плот-
,2
1
=ехр<------— >.
ст2(/) 2o2(/)J
рис. 2.16 следует, что наиболее вероятным значением гауссовской случайной величины X яв-
ляется её МО.
Преобразованием и = (х - Wi)/ct нормальное распределение с произвольными параметра-
ми mi и ст приводится к стандартной нормальной плотности вероятности с параметрами
mi = 0, ст = 1
7 ч 1
ность вероятности описывается выражением И
Из графиков
и2
ехгк---->, -оо < и < +оо.
' ' V27T [ 2
Имеются таблицы для ИФР стандартного нормального распределения (Функция Лапласа)
w2 .
2
J exp - — \du .
(2.70)
1
2
1
2 '
(F(x) называется интегралом вероятности.) В литературе приводится и ряд других функций,
00 / *9 \
1 Г I и I
связанных с F(x), например <2(х) = —= I ехр----\du = 1- F(x). С помощью функции Дх) мож-
л/2тт * \ 2 J
X
но вычислить вероятность попадания гауссовской случайной величины X в любой интервал
(х1; х2):
(2.71)
р(х, йх2) = /' —----- -Я -1-----
' \ СТ 7 \ СТ
В частности, вероятность того, что случайная величина X превысит некоторый пороговый
уровень Хлор, можно определить, положив в (2.71) х2 = да и Xi = хпор;
Р(х>х1юр) = 1-^^^У
Равномерное распределение. Наиболее простым является равномерное распределение
(рис. 2.17), для которого плотность вероятности постоянна для данного интервала (Х], х2) и
равна нулю за его пределами, т.е.
_________________1___ V / V V \
w
X2-Xj '
О, х g(xj,x2).
Если, например, измерение какой-либо величины производится с точностью до целого
числа делений шкалы измерительного прибора, так что ошибки, превосходящие по абсолют-
ному значению половину деления (или половину шага квантования в приборах с цифровым
53
,_____________( 1
I I Х2~Х>
I I
I I
--1------------- 1------>
X, 0 х2 х
Рис.2.17. Плотность вероятности
при равномерном распределении
Рис.2.18. Гармонический сигнал со случайной фазой,
его (а) реализация и (б) плотность вероятности
отсчётом), практически невозможны, то ошибка измерений е представляет собой равномерно
распределённую СВ. Возможными значениями е являются в этом смысле действительные
числа, не превосходящие по абсолютной величине половину деления шкалы.
Распределение вероятностей мгновенных значений гармонического колебания. Пусть
U(f) = Лосо8(фо^ + Ф), (2.72)
где амплитуда Ад и частота о0 известны, а фаза Ф — случайна и принимает с равной вероят-
ности w(<p) = 1/2я любые значения в интервале (-я; +я). Набор реализаций процесса (2.72) дан
на рис. 2.18, а; а на рис. 2.18, б изображён график ПВ процесса (2.72). Аналитическое выра-
жение этой плотности имеет вид
1
w(w) = <
^А20-и
О,
|«| < Ао
Iм! > Ао
(2.73)
Наибольшую плотность, стремящуюся к бесконечности, имеет мгновенное значение U, рав-
ное по величине амплитудному Ад. Среднее значение U =mx=Q, дисперсия = Ад /2. Спра-
ведливость формулы (2.73) доказывается путём вычисления плотности вероятности СВ У, свя-
занной с другой случайной величиной X функциональной зависимостью у = Дх). Если эта
II || wJ/XyjlW
связь взаимно однозначна, то w),(y)|rfy|=wx(x)|dx:| и wv(y) =—;—г-*—. Если каждому у
И
соответствует множество значений х, (/= 1, , то wv w, (xf )|<Zxf | и
i=l
(2.74)
Обозначим в (2.72) U/Ao = К и а>0/ + Ф = X. Если Ф имеет равномерное распределение на
интервале (-п; +я) с плотностью Ц<р) = 1/2я, то и X имеет равномерное распределение на ин-
тервале (со0/ - тс; <> + я) с той же плотностью. Для каждой отдельной реализации у = cos х
следует х = arccos у; Последняя зависимость (на основном интервале периодичности х от -я
до +я) дана на рис. 2.19. Из рисунка видно, что
Согласно формуле (2.74), учитывая, что
каждому у соответствуют два значения х.
= |sinx| =
ах
cos2 х
имеем,
и>(Д = • 27С <j\-y2
о,
Для случайной
величины U=AgY получаем ПВ:
1 2
wu{ul = wy\^-
и | dy = J_
du
_ I I и j_ 1
А А А/ Пу/Ад - U2
Распределения вероятностей дискретных случайных величин. "Пусть некоторая случайная
величина X может принимать одно из т возможных значений {хд, хь ..., xt, ..., хт_г}; i — по-
рядковый номер соответствующего дискретного значения. Обозначим через Р(Х = х,) = Дх,)
вероятность того, что случайная величина. X примет конкретное значение хЛ Пример закона
54
Рис.2.19. Зависимость х = arccosy
P(x,)f
Рис.2.20. Дискретная случайная величина её (а) рас-
пределение вероятностей и (б) интегральная функция
распределения этой случайной величины показан в виде трафика на рис. 2.20, а. Сумма веро-
ятностей всех возможных значений СВ всегда равна единице, поскольку совокупность собы-
тий {х/} образует полную труппу. Выберем на оси абсцисс рис.2.20,а некоторую произвольную
точку х, которую будем рассматривать как независимую переменную. Одномерная ИФР слу-
чайной величины X
F(x)=PU<x)=^p(x,.)1(x-X.) (2.75)
(/)
для дискретного распределения дана на рис.2.20,6; 1(х — X/) - единичная функция, начинаю-
щаяся в точке х/. Суммирование в (2.75) проводится по всем х, < х. Таким образом, ИФР дис-
кретной случайной величины имеет ступенчатый вид со скачками в точках возможных значе-
ний случайной величины. Если использовать 8-функцию, то можно определить ПВ для дис-
кретного распределения:
Нх-)5(х~ х/) •
(«)
Распределение Пуассона. В ряде телекоммуникационных задач мы встречаемся со слу-
чайным точечным процессом (потоком), который представляет собой последовательность то-
чек, расположенных случайным образом, например, на оси времени. Такие точки могут соот-
ветствовать различным событиям, например моментам времени поступления заявок на об-
служивание, моментам времени наступления отказов в какой-либо системе и др. С точечным
случайным потоком мы встречаемся и в задаче распределения вызовов на телефонной стан-
ции в течение суток (рис. 2.21). Общее число вызовов в те-
чение суток — величина случайная. Для каждого временного
интервала Т путём наблюдений можно установить среднее
число вызовов vT (математическое ожидание). Коэффици-
ент пропорциональности v характеризует интенсивность
вызовов (среднее число вызовов в единицу времени). Веро-
ятность появления к вызовов Рк(Т) на интервале (0, Т) чаще
всего определяется формулой Пуассона
Вызовы
Рис.2.21. Появление вызовов
в случайных точках интервала Т
(2.76)
Из (2.76) видно, что вероятность появления на этом интервале 0 вызовов (вероятность отсут-
ствия вызовов)
(2.77)
Докажем эти формулы. Разобьём единичный интервал времени (например, 1 секунду) на
#= 1/ДГподынтервалов величины ДТи будем считать, что в пределах малого интервала ДТс
определённой вероятностью появляется лишь один вызов (вероятность появления более
одного вызова пренебрежимо мала), а вызовы на отдельных интервалах ДТ появляются
55
независимо. Тогда имеем N независимых опытов, и по определению РАТ = ~ = vAT4 • Вероят-
ность отсутствия вызова на интервале А Т равна 1- Рд7 = 1- vAT1 .
Пусть Pq(T) — это вероятность не иметь вызовов на интервале (0, 7). Тогда вероятность
Pq(T + АТ) не иметь вызовов на интервале (О, Т + Д7) равна вероятности совместного собы-
тия: нет вызовов на интервале (0; 7) и нет вызовов на интервале (Т, Т + АТ):
Р0(7 + ДГ)=Р0(г)(1-уДГ). (2.78)
Выражение (2.78) можно записать - -уР0(Г) . Устремляя Д7’->0, получаем
дифференциальное уравнение
^^ = -vP0(7). (2.79)
Начальное условие Pq(0) = 1- Решение уравнения (2.79) приводит к (2.77). Аналогичными рас-
суждениями найдём вероятность получения к > 1 вызовов на интервале (0, 7). Пусть Р*(7) —
вероятность появления к вызовов на интервале (0, Т). Тогда вероятность получения к вызовов
Рк(Т + Д7) на интервале (0, Т+АТ) равна РЛ(7’+Д7’) = (Г)( 1 - vA7) + Pk_x(T)vAT . Устремляя
Д7’-> 0, получаем дифференциальное уравнение
^Д^-уР^^ + уР^Дг) (2.80)
с начальным условием P*ai(0)= 0. Выражение (2.76) и является решением уравнения (2.80). На
рис. 2.22 дана зависимость Рк(Т) от к при заданном параметре v.
Экспоненциальное распределение. Оказывается, что для случайных точечных процессов с
пуассоновским распределением (2.76) величина т, представляющая собой интервал между вы-
зовами (рис.2.21), описывается экспоненциальным распределением с ПВ (рис. 2.23, а):
Wi(t) = ке~Гх ,т>0, . (2.81)
а ИФР при этом имеет вид (рис.2.23,б)
т
р/т) = = 1-е-Хт. (2.82)
о
С помощью формул (2.81) и (2.82) можно найти, например, вероятность того, что интервал
между соседними вызовами окажется равным или меньше некоторого значения tq. Аналогич-
ные формулы используются при определении ПВ интервала между двумя отказами
(неисправностями) в работе аппаратуры. Обширные сведения об ИФР и ПВ можно найти в
литературе по статистической радиотехнике, например в [18, 22].
Стационарные случайные процессы. Случайные процессы можно разделить
на стационарные и нестационарные. Стационарным случайным процессом в
строгом смысле называется такой случайный процесс, для которого ПВ (или
ИФР) любого порядка не зависит от сдвига процесса во времени на произ-
вольную величину т. Это означает, что для любых пит справедливо равенство
Рис.2.22. Пуассоновское распределение
дискретной случайной величины
56
Рис.2.23. Экспоненциальное распределение, его
(«) плотность вероятности и (б) интегральная функция
w(xb x2, xn; Zb Z2, tn) = w(xb x2, Xn; t\ - t, Z2- t, ..., tn- t).
Отсюда следует, что все одномерные плотности вероятности должны быть
идентичными, т.е. не должны зависеть от времени
w(x, Z) = w(x, t - т) = w(x). (2.83)
Все двумерные плотности вероятности могут зависеть только от интервала
Т = h ~ h-
w2(xb х2; Zb Z2) = w2(xb x2; - t, Z2- t) = w(xb x2, t) (2.84)
и не зависят от положения этого интервала во времени.
В дальнейшем будут рассматриваться только стационарные в широком
смысле случайные процессы, свойства которых описываются только одномер-
ной плотностью вероятности, удовлетворяющей условию (2.83) и двумерной
плотностью вероятности, удовлетворяющей условию (2.84). Соответственно для
СП, стационарного в широком смысле параметры тп,\ и о* 1 2 на зависят от време-
ни, а ФК зависит только от т. Из определения стационарности в широком
смысле СП следует, что его ФК — чётная функция от т: В(т) = В(-т).
Кроме того, легко показать, что для стационарного процесса
В(т) < В(0) = о2. (2.85)
Для доказательства рассмотрим очевидное неравенство:
[(Дг)-т,)-(^-т) -n/j)] >0. Раскрывая левую часть этого неравенства, полу-
чаем 2[x(z)-mJ2 - 2(x(z)-m])(x(/= 2[о2-2?(т)]>0. Отсюда следует
(2.85). Теория, охватывающая случайные процессы, стационарные в широком
смысле, называется корреляционной. Очевидно, что процессы, стационарные в
узком смысле, стационарны и в широком, но не наоборот.
Эргодические процессы. Стационарные в широком смысле процессы в
большинстве практически важных ситуаций обладают так называемым эргоди-
ческим свойством: усреднение по множеству реализаций случайного процесса
X(t) даёт примерно тот же результат, что и усреднение по времени одной реа-
лизации x(Z), если время усреднения Т достаточно велико. Достаточное условие
(условие Слуцкого) эргодичности стационарного (в широком смысле) случай-
ного процесса можно записать в виде
1 г
Нт — [ В(т)Л = 0.
т^° Т {
Математическое ожидание для эргодического СП можно определить путём ус-
реднения во времени (обозначается волнистой чертой) единственной реализа-
ции x(Z):
т
1 Г
п\ = x(z) = — J x(t)dt.
* -Г
2
Следовательно, для эргодического процесса нахождение МО сводится к
простому интегрированию. Среднее значение квадрата центрированного эрго-
дического СП можно найти так:
______ г
ст2 =[x(z)-x]2 ==-M[x(z)-x]2rfZ.
* т
57
Рис.2.24. Схема для измерения функции корреляции
эргодического случайного процесса
Рис.2.25. Функция корреляции случайного
процесса с (7) медленно убывающими
и (2) быстроубывающими связями
Эта величина есть не что иное, как средняя мощность переменной составляю-
щей процесса х~(г) = х(/)-х (если х имеет размерность тока или напряжения).
В данном случае операция определения о* 1 2 сводится к обычным операциям
возведения в квадрат переменной составляющей процесса и интегрирования.
Функцию корреляции эргодического СП также можно получить усреднением
во времени:
т
---------- ! т
В(т) - “ т) = — J х~(/)х_(г -т)Л. (2.86)
2
Ясно, что о2 = В(0). Схема измерения функции корреляции согласно алгорит-
му (2.86) изображена на рис. 2.24, а графики типовых ФК — на рис. 2.25 (1 —
корреляционные связи медленно убывают, 2 — корреляционные связи быстро
убывают). Определим нормированную функцию корреляции
а также интервал корреляции
оо
t„=J|«(t)|A. (2.87)
О
Определение интервала корреляции согласно (2.87) /?(т)Ф
называют методом равновеликого прямоугольника: j____
интервал корреляции равен основанию прямоуголь- / \!
ника с высотой, равной 1, площадь которого равна s'
площади под кривой |А(т)| при т > 0 (см. рис. 2.26).
Пусть случайный процесс Z(/) образуется сумми- о ?
рованием двух стационарных центрированных эрго- Рис.2.26. Определение интервала
дических вещественных СП Z(t) = %(/) + У(7). КФ корреляции методом равновели-
процесса Z(t) определяется соотношением кого прямоугольника
В2(д= [х~(0+к(')][х~(/ - т)+у_(7 - т)] =
= xjj)xjj - т) + к(0к(г - т) + x^dyAt - т) + kG)x~(7 - т) = В,(т) +В/т) +2В,/т),
1 f
где Вх(т) и В/т) - КФ процессов X(f) и Г(0, а В^(т) = — J xA.t)-yJt-i:)dt -
* -Z
2
взаимно-корреляционная функция (Дд,(т) = В^(т)). Случайные процессы %(/) ц
У(0 называют коррелированными при заданном т, если их взаимная корреля-
58
ционная функция Вх>,(т) отлична от нуля. Если Д^(т) = 0, процессы X(t) и Y(t)
считаются некоррелированными при данном т.
Спектральная плотность мощности случайного процесса. Для описания слу-
чайных процессов наряду с корреляционными функциями В(т) широко ис-
пользуются спектральные характеристики, в частности спектральная плотность
мощности g(/). Между В(т) и ,g(/) существует пара преобразований Фурье,
аналогичных (2.52) и (2.53). Для случайных стационарных процессов эти соот-
ношения строго установлены А.Я. Хинчиным и Н. Винером.
Поясним физический смысл спектральной плотности мощности G(/) для случайного
процесса X(t). Рассмотрим функцию x^f), совпадающую на интервале (-Т/2; Т/2) с реализа-
цией случайного процесса x(r\t), заданной, вообще говоря, в бесконечных пределах. Опреде-
лим среднюю мощность сигнала x^t) при Т -> оо с учётом (2.47):
т
2 эо
Р lim — [ = lim [ GT(f)df. (2.88)
T—1 J T-+<£ J
“2 -3C
Предел функции под интегралом (2.88) и определяет СПМ — спектральную плотность мощ-
ности СП G(/) = lim Gr(/). Строго говоря, приведённое определение СПМ случайного про-
цесса справедливо лишь для эргодических процессов, поскольку оно характеризует распреде-
ление мощности по частоте единственной реализации x(t). Для определения СПМ для сово-
купности реализаций следовало бы провести усреднение по ансамблю возможных
значений Gr(/), т.е. A/{Gr(/)} .
Дисперсию (среднюю мощность) СП можно найти путём интегрирования
G(/) по частоте
ОС 00
s а’ =' 5(0) = J G(f)df - f G.(/)# ,
-ОС г О
где Go(/) — СПМ, определённая на положительных частотах. Методом равно-
великого прямоугольника (или по иному критерию) можно найти не только
интервал корреляции СП ("ширину" В(т)), но и эффективную ширину его
спектра F3 ("ширину" Go(/)). Произведение этих параметров удовлетворяет ус-
ловию ткорЛ, ~ К, где К — константа, имеющая порядок единицы. Здесь про-
сматривается аналогия с табл. 2.2, иллюстрирующей соотношение между дли-
тельностью сигнала и шириной его спектра.
Имеются случайные процессы, у которых параметры ткор и F3 принимают крайние значе-
ния (0 или да). Гармонический сигнал со случайной равномерно распределённой фазой (2.72)
является примером такого стационарного эргодического СП. Его ФК
_______________ Л 2
В(т) = ~G^7Jt7(7^T)'~ = -у-cosco от,
кор
Л2
^-8(/-/о),Гэ=0.
Для случайного процесса (2.72) СПМ на положительных частотах: Go(/) =
Другой пример случайного процесса (белого шума) с параметрами ткор = О, F3 — оо дан ниже.
59
Рис.2.27. Спектральные плотности средней Рис.2.28.Функции корреляции
мощности («) белого и (б) квазибелого шума (а) квазибелого и (б) белого шума
Функция корреляции случайного процесса с ограниченным спектром. Слу-
чайный процесс, характеризуемый СПМ Ga(f)=N0, равномерной на всех час-
тотах (рис. 2.27, а), называют белым шумом (по аналогии с белым светом в оп-
тике). Если спектр Со(/) ограничен сверху частотой FB (рис. 2.27, б), то про-
цесс называется квазибелым шумом. Его дисперсия о2 = В(0) = NqFb. Найдём
ФК квазибелого шума:
г,
5(т) = J Go(/) cosot# = No-F* (2.89)
Полученная ФК отображена на рис. 2.28, а. Обратим внимание на то, что при
значениях, кратных 1/2FB, значения 5(т) проходят через нуль. Это означает,
что сечения процесса, разделённые интервалом k/lF^ (к — целое число), не
коррелированы между собой. Если беспредельно увеличивать граничную часто-
ту FB, то от квазибелого шума придём к абсолютно случайному процессу
(белому шуму), у которого два несовпадающих сечения не коррелированы; КФ
белого шума выражается 5-функцией (рис. 2.28, б):
N
ВЫ = -Мт). (2.90)
Результат (2.90) следует из (2.89), если воспользоваться определением 5-
функции (2.2). Белый шум является математической идеализацией реального
процесса, так как средняя мощность (5(0)), необходимая для создания такого
процесса, оказывается бесконечно большой. Вместе с тем случаи, когда реаль-
ный спектр помехи можно аппроксимировать белым шумом, встречаются в
практике достаточно часто. Примером помехи типа белого шума является теп-
ловой шум резисторов, имеющий практически равномерную спектральную
плотность на частотах вплоть до 6 1012 Гц.
2.6. ПРЕДСТАВЛЕНИЕ СЛУЧАЙНЫХ ПРОЦЕССОВ РЯДАМИ И
ДИФФЕРЕНЦИАЛЬНЫМИ УРАВНЕНИЯМИ
Каноническое разложение. В § 2.5 показано, что непрерывный случайный процесс X(f)
является математическим объектом большой сложности: его можно трактовать как несчётное
множество случайных величин. Естественно, возникает желание представить случайную
функцию X(f) через счётное множество случайных величин, что упрощает анализ. В § 2.3 по-
казано, что сколь угодно сложные детерминированные сигналы с интегрируемым квадратом
(элементы в пространстве Гильберта 2^(7)) могут быть предстарлены обобщённым рядом Фу-
рье (2.22). Эти идеи можно распространить на представление случайного процесса, непре-
60
рывного в среднеквадратическом смысле1). Для такого центрированного случайного процесса
° ( т т\
X(t), t el—I, можно найти такую ортонормированную систему базисных функций {\|/,(/)},
которая обеспечит разложение X(t) на некоррелированные слагаемые. Такое разложение,
называемое разложением Карунена-Лоэва, имеет вид
«о
1(0 = 2 W'), (2.91)
1*0
т
2
где v, = X(t) ^i(t)dt — коэффициенты разложения, которые являются попарно некоррелиро-
Г
~2
ванными случайными величинами. Разложение вида (2.91) случайного процесса на некорре-
лированные слагаемые называется его каноническим разложением. Функции {vp//)} в канони-
ческом разложении называются координатными функциями. Они образуют базис разложения
и находятся как собственные функции интегрального оператора
Г
J - Xj \|/,О),
“Т
где B(t,и) — ФК случайного процесса, Х; — собственные числа. Докажем, что v, и vk при
i * к некоррелированы:
v-v* = =
=JJ v, =4 = °-
Здесь учтено, что \|/Д0 и \|/д(/) при i*k взаимно ортогональны.
Для вычисления ФК случайного процесса X(t) дадим аргументу t в формуле (2.91) два значе-
ния ti и ?2- Тогда
iW-Zv.v.f,,). xfe) -
f-0 i=0
Эти формулы выражают значения Xi и Хг случайного процесса X(t) в виде линейных
функций одних и тех же некоррелированных случайных величин v0, vi, ..., v/, i = 0, 1, 2, ... В
этом случае корреляционная функция случайного процесса X(t) определяется выражением
————— ао
= x(t1)x(t2) =2 АчЖЫ'г)» (2.92)
i=0
где Dt - дисперсия величин v, (v = 0, 1, 2, ...). Поскольку дисперсия СП X(t} равна значе-
нию ФК при = t2 = t, то
СО
Д(') = B(t,t) = ^D^t). (2.93)
i=0
Разложение по гармоническим функциям- Для стационарных непрерывных в среднеквад-
ратическом смысле, периодических случайных процессов А'(/) е
функций
г. L
2’+ 2
базисных
11 Когда выполняется условие limM (аг(/-7’)-Х(0)2
= 0.
61
coso,Г, о,- c достаточно простым является его разложение по ортонорми-
рованной системе некоррелированными координатами:
со
X(t) = (у,cosco ,7 + у,- . sinco, (2.94)
»=о
где A/Jv/C]= A/[vis] = 0, а Л/р, J= A/[v/s] = ст* = Dt — дисперсия i-й гармоники. В соответствии
с (2.92) корреляционная функция центрированного процесса (2.94)
СО СО
В(т) = Df(costo,72 costal +sinco/2 sinco^j ) = У, Dj Coston , (2.95)
i=0 i=Q
является периодической функцией с периодом Т, где т = Г2-^1, те (-оо; +оо). Дисперсия ста-
ОО
ционарного СП (2.94) равна D = В(о) = Dt . Это означает, что мощность центрированного
i=0
случайного процесса X(t) равна сумме мощностей всех гармоник. Поскольку (2.95) является
разложением В(т) в обобщённый ряд Фурье по ортонормированной системе базисных функ-
ций ^V2cos<b/t| с координатами С, = -^=, можно с учётом (2.23) написать
СО
Dt = 2 J B(t)cos(c)/t)Jt, i = 0,1, 2,...
-СО
Разложение в ряд Котельникова. Требованиям канонического разложения (2.91) удовле-
творяет разложение непрерывного в среднеквадратическом и стационарного в широком
смысле случайного процесса X(t), спектр плотности мощности которого G(/) равномерен и
ограничен областью частот |/| < FB. Для такого случайного процесса справедливо разложение
в ряд Котельникова
Следовательно, непрерывный стационарный СП с ограниченным спектром полностью опре-
деляется счётным множеством некоррелированных случайных величин
у* =Х(кД), к = 0, ±1, ±2, ...
Для гауссовского случайного процесса (процесса с нормальным распределением,
см. ниже) коэффициенты канонического разложения (2.91) являются статистически незави-
симыми гауссовскими случайными величинами. Именно в этом случае разложение Карунена-
Лоэва особо проявляет свои преимущества и существенно облегчает решение многих задач.
Случайные процессы, определяемые двумерной плотностью вероятности.
Среди различных типов случайных процессов можно выделить некоторые про-
цессы, которые полностью характеризуются простейшими плотностями веро-
ятности. В качестве примера случайного процесса, который полностью опреде-
ляется одномерной плотностью вероятности, можно привести так называемый
абсолютно случайный процесс или белый шум. В этом процессе значения
Xlf Х2,..., Х„, взятые в различные моменты /2, —, статистически незави-
симы друг от друга, как бы близко эти моменты ни располагались друг от дру-
га. Иначе говоря, возникающие в белом шуме всплески затухают за бесконечно
малые промежутки времени. Поскольку значения X] и Х2 в моменты t\ и t2 не-
зависимы, их совместная (двумерная) плотность вероятности равна произведе-
нию одномерных плотностей:
Нхъ *25 h, /1М*2;
62
Аналогично
п
x1,x2,...,xn;tl,t2,.
*=i
Это означает, что в рассматриваемом случае все л-мерные плотности вероятно-
сти определяются одномерной плотностью вероятности.
Следующий по сложности процесс получается, когда вся информация о
нём содержится в двумерной плотности вероятности w(x1} х2; t\, t2). Такими яв-
ляются гауссовские СП или простые марковские СП; л-мерная ПВ гауссовско-
го случайного процесса определяется формулой
1
1
Xj, х2,..., xn, Zj, Z2,.
2|Л|
я, Дх7 -т}
, (2.97)
где mi, о г — соответственно МО и дисперсии значений СП в отдельных сече-
ниях процесса; | А | — определитель корреляционной матрицы
Л
T?12 ... Rln
п
R =
Ry — коэффициент корреляции между значениями СП в z-м и j-m сечении;
Ау — алгебраическое дополнение в определителе | А | элемента Ry
Для определения ФК, МО и дисперсии гауссовского СП требуется знание
лишь двумерной плотности вероятности. Если все сечения гауссовского СП не
коррелированы, то матрица R является диагональной (R^ =0, к * I), и (2.97)
принимает вид
Xj, х2,..., хп, Zj, t2,.
(2.98)
^T 1 Vх/ m
Ho (2.98) определяет условие статистической независимости отдельных сече-
ний СП. Итак, если гауссовские случайные величины А/ при различных z не
коррелированы, то они также статистически независимы.
Отличительной особенностью простого марковского СП является мини-
мальное последействие: для него вероятность нахождения X в заданном интер-
вале значений в момент tn зависит только от состояния в предшествующий
момент tn-\.
w(xM, tn t\, Х2, t2, ..., Хд-i, 4j-1) Ч«л, tfi I Xn-1, 4r-l)"
Иначе говоря, л-мерная ПВ простого марковского СП при t\ < /2 </3 < ... < tn
w(x,, x2,..., x„; Z1, t2,..., tn) = w(xj, t, )w(x2, t21 Xj, tY )w(x3, t3 |x2, t2)... w(xn, tn [х^, tn_x)
полностью определяется двумерной плотностью вероятности. Теория марков-
ских процессов хорошо разработана , и широко используется в современной
теории связи. В частности при некоторых дополнительных условиях переход-
ная плотность вероятности при t2 > t\ удовлетворяет дифференциальному урав-
нению 2-го порядка в частных производных:
dt2
дх2
+ 0,5
дх22
(2.99)
63
при начальном условии =s(x2-xj. Здесь Л1(х2, ti) ~ коэффициент
сноса, а А2(х2, t2) — коэффициент диффузии. Уравнение (2.99) называют урав-
нением Фоккера-Планка-Колмогорова. Марковские процессы, удовлетворяю-
щие этому уравнению, называют диффузионными. В зависимости от вида коэф-
фициентов Ai и А2 диффузионный марковский процесс может иметь различ-
ные распределения вероятностей.
К марковским процессам относятся также процессы с независимыми приращениями.
Эти процессы обладают тем свойством, что для любой совокупности моментов времени
t\ < ?2 < ••• <tn (п - 3) разности значений процесса X(t2) - X(fy) - X(t2), ... , X(t„) - X(tn-i)
взаимно независимы. Для того, чтобы определить функцию распределения любого порядка
для процесса с независимыми приращениями, достаточно знать только одномерные распре-
деления X(t) и X(tk) - X(tk-i), т.е. одномерную и двумерную функции распределения процесса.
Если распределение приращений X(f) - X(t - т) зависит лишь от т, то процесс с независимы-
ми приращениями называется однородным.
Рассмотрим процесс, введённый Н. Винером в качестве простой модели броуновского
движения частицы, передвигающейся под воздействием множества соударений таких же час-
тиц. Винеровский процесс H(t) определяется как интеграл от нормального белого шума N(f):
t
H(t) = j ^(r)^! (2.100)
0
или с помощью стохастического дифференциального уравнения = N(r), где - гаус-
совский стационарный СП с
нулевым МО и 3-корреляцией: ЛДЛГ(/)]=0, B(t2 -^) = -у-8(г2 -tj .
Поскольку преобразование (2.100) является линейным, то винеровский процесс остается гаус-
совским. Для математического ожидания, дисперсии и корреляционной функции процесса
Я(0 имеем соответственно
/ /
Л/(я(0) = 0; DH(t) = Jf ;
о о
Л h.
= J J = y-min(/i,/2).
о 0
П2
/*0.
Одномерная плотность вероятности винеровского процесса w(t],t) = exp
Винеровский процесс является нестационарным с дисперсией , пропорциональной вре-
мени; его реализации оказываются своеобразными, с возрастающим во времени разбросом
траекторий. Для винеровского процесса коэффициент сноса ЛДц, f) в (2.99) равен нулю, а
коэффициент диффузии А2(т\, f) = Nq/2 = const; поэтому винеровский процесс часто называ-
ют диффузионным, он играет основополагающую роль при формировании более сложных
марковских процессов. Важной особенностью винеровского процесса является то, что его
реализации нигде не дифференцируемы, хотя являются непрерывными с вероятностью еди-
ницы. Это следствие особых свойств винеровского процесса H(t), производная от которого
N(f), если её понимать в обычном смысле, не существует, поскольку lim - оо. Действи-
' д»-м> д/
h
телъно, принимая во внимание равенство ДЯ = я(/2)~я(^)=|?Дт)Л, для дисперсии прира-
Л
щений имеем
64
Г2 Г2
м(лН2 (t)) = J J ./V(t1)V(t2)c/t1(/t2 =-^-Д/. (2.101)
' t, •
Порядок величины приращения I ДЯ| = I H(tq) - Я(Л) I определяется из (2.101) как
|Д//| ~ л/д7-> 0 при А/—> 0, а отношение ~-J=-> оо. Скорость изменения обращается в
11 д, VaF
бесконечность, что свидетельствует о недифференцируемости процесса. Вместе с тем марков-
ские диффузионные процессы являются во многих случаях удобной математической моделью
сообщений, сигналов и помех.
Представление случайных процессов дифференциальными уравнениями. Для
описания сообщений, сигналов и помех можно воспользоваться их представ-
лением в пространстве состояний (подробнее см. гл. 4). В зависимости от вида
воздействий дифференциальные уравнения, определяющие поведение процесса
в пространстве состояний, могут быть детерминированными либо стохастиче-
скими.
Для непрерывного времени задание состояния процесса (или системы) во вре-
мени означает задание функции (вектора состояния):
х(/) = [хД/), %2(0» •••> хл(01 Т2 где Т- знак транспонирования матрицы.
Поведение многих реальных динамических систем хорошо описывается
стохастическим векторным дифференциальным уравнением вида (подробнее
см. гл. 4)
^ = f(/,xW)+50,xW), (2.102)
at
где F {t, х(0] ~ «-мерная неслучайная вектор-функция своих аргументов;
х(Г)] — «-мерный случайный процесс с известными вероятностными харак-
теристиками, которые могут зависеть от вектора х. В частности, как будет по-
казано в § 2.8, если в (2.102) £[/, х(/)] является белым гауссовским шумом, то
вектор состояния х(/) представляет собой простой марковский процесс соот-
ветствующей размерности. Важнейшим свойством такого процесса, как отме-
чалось выше, является то, что при фиксированном настоящем (сечении Zb), его
будущее состояние не зависит от прошлого (значений процесса при t < Zq).
Представление случайных процессов стохастическими дифференциальными
уравнениями весьма плодотворно и будет использовано в последующих главах.
2.7. ОГИБАЮЩАЯ И ФАЗА СИГНАЛА. АНАЛИТИЧЕСКИЙ СИГНАЛ.
КВАДРАТУРНЫЕ КОМПОНЕНТЫ УЗКОПОЛОСНОГО СИГНАЛА
Для многих практических приложений бывает полезно представить сигнал
x(t) в виде процесса с изменяющейся амплитудой {огибающей) A{t) и полной фа-
зой \р(0:
x(t) = >l(z)cos\|j(?). (2.103)
Так, при амплитудной модуляции информация закладывается в A(f), при
угловой — в \y{t). Представление (2.103) в общем случае неоднозначно, т.е.
один и тот же сигнал х(/) может быть представлен бесконечным множеством
пар (Л(0, \|>(0}- Из каждой такой пары может быть образован новый сигнал
х'(/) = yl(/)sin\|j(/), в некотором смысле сопряжённый с сигналом x(Z). Очевидно,
-------------------------— Xf
х2(0 + [х'(0]2 , = arctg-yy. Комплексный сигнал
65
x(/) = x(/) + jx'(/) = Л(/)е^(,) является удобным отображением вещественного сиг-
нала х(г) = Re(x(0) •
Из соотношения x'(f) = Л(/‘)8т\|/(/) = Л(1)со$[\|/(/) - л/2] не следует (при про-
извольных функциях A(t), у/(0), что амплитудные спектры х(г) и х(/) одинако-
вы, а фазовые спектры различаются сдвигом на к/2.
Представим сигнал x(f) (без постоянной составляющей) в виде конечной
или бесконечной суммы гармонических составляющих:
xW = Za*M°*? + (P*) = S^[ej(“‘'+<l>‘)+e’j(“‘'+<₽‘)], со*>0 (2.104)
(*) (*) 2 1 J
и потребуем, чтобы в сопряжённом с ним сигнале х(г) все частотные состав-
ляющие имели те же амплитуды а^, но фазы получили сдвиг -л/2:
x'W = 2>* codot/ + 94-^J=£atsm(®t/+<p4) =
(*) 4 27 (*)
-е
(*) 2J
Из сопоставления (2.104) и (2.105) вытека-
ет, что в области положительных частой спек-
тры сигналов х(/) и х(/) различаются множи-
телем -j, а в области отрицательных частот —
множителем j. Процесс х(г) называют сигна-
лом, сопряженным по Гильберту с x(t). Пере-
даточная функция цепи, преобразующей x(f) в
x(t) (т.е. преобразователя Гильберта (ПГ),
см. рис. 2.29), имеет вид
£(7) =-Г sign (у),
(2.105)
Рис.2.29. Преобразователь Гйльберта
(2.106)
— знаковая функция.
Г *0.
(2.107)
где sign(/) =
Импульсная характеристика цепи определяется обратным преобразованием
Фурье от к(/):
g(>) = J^(/)e*<// = 2jsm(W/)rf/ =2taje-*sinfoO# = 2^*®^ =^,
Итак, импульсная характеристика ПГ
, . 1
gV) =--, -оо <t <+OO .
Tit
Спектральная плотность 5г(/) для сопряжённого сигнала х(/) связана со спек-
тром Фурье 5Л(/) сигнала х(/) соотношением
= = (2.108)
Выражение (2.108) можно записать и так: 5,(/) = jsign(/) 5S(/). Отсюда
следует, что передаточная функция или импульсная характеристика цепи, вы-
дающей на своем выходе сигнал x(t) при подаче ко входу х(г) (цепи, осуществ-
ляющей обратное преобразование Гильберта) обратны по знаку характеристи
66
кам, указанным на рис. 2.29. Отклик линейного стационарного ПГ x(t) можно
определить как свёртку функций x(i) и g(t) (см. гл. 4):
x(z) = x(z)®g(z) = 1 х(х) g(t - x)dx = — (2.109)
7Г I — Т
—ОО —ОО
Аналогично
х(/) = х(/)® f-—-1 [ —~—dx . (2.110)
\ Tit у Я J t-x
—оо
(2.109) называют прямым, а (2.110) — обратным преобразованием Гильберта.
Совместно их называют парой преобразований Гильберта.
Отметим, что для произвольных сигналов х(/) (х(/)) преобразование Гиль-
берта (2.109) (также обратное преобразование Гильберта (2.110) нереализуемо,
так как оно требует импульсную характеристику цепи, определённую не только
при t > 0, но при t < 0 (см. 2.107). Как будет показано в гл. 4, для реализуемой
цепи g(Z) = 0 при t < 0. Если всё же ПГ таких сигналов необходимо, его реали-
зуют приближённо, с некоторой задержкой t$, заведомо отбрасывая ветви g(t),
располагающиеся*левее точки t — -1q и правее точки t = /q. Задержка сигнала
должна быть учтена в других устройствах, работающих синхронно с ПГ. Следу-
ет отметить, что погрешность преобразования, связанная с усечением им-
пульсной характеристики ПГ, может оказаться недопустимо большой. ПГ лег-
ко реализуется, если сигнал x(f) можно представить через узкополосные квад-
ратурные компоненты (см. ниже).
Комплексный сигнал x(t) = x(z)+jx(z), полученный на основе ПГ, называет-
ся аналитическим. Рассмотрим его основные свойства.
1. Аналитический сигнал является естественным обобщением комплексного
представления гармонического сигнала на случай сигнала общего вида. В
самом деле, если x(f) = Лсо§(со/ + ср), то x(z) = Jcos((oZ + (p)+jJsm((o/+(p) =
= J(z)eJ(<a'+<₽). При этом полная фаза у(/) = at + ср, а мгновенная частота
/а
со(/) =------= СО .
dt
2. В спектре аналитического сигнала x(/) = x(z) + jx(z) содержатся только поло-
жительные частоты. Действительно, из (2.104) и (2.105) видно, что
х(/) = х(/) + jx(/) = /, ak e , ak>0. (2.111)
(*)
В общем случае, когда спектр Sx(f) сигнала x(t) — сплошной, имеем.с учётом
(2.108)
^(/) = 5,(/)+,4(/) = ^мдд (2.112)
Аналогично в спектре комплексно-сопряжённого аналитического сигнала
x = x(z)-jx(z) содержатся только отрицательные частоты:
• / \ [°’ />0
S (/) = ) • / \ (2.113)
• (2S,(/), /<о
3. Скалярное произведение сигналов x(t) и x(t) в 1^(7) равно нулю (сигналы
ортогональны):
67
(х, х) = J x(t) x(t)dt = J Sx (f)ss(f)df = J Sx (/) sign(/)# = 0. (2.114)
—oo —oo —oo
4. При общем фазовом сдвиге всех частотных компонент сигнала x(t) на угол 0
аналитический сигнал умножается на eJ0. В этом легко убедиться, добавив в
(2.111) в каждом слагаемом общий фазовый сдвиг 0:
z ч ж—. i(co >t +Ф* +б) i0 z ч
хв(0 = 2а*е =е (2.115)
(*)
Из (2.115) естественным образом вытекает алгоритм общего фазового сдвига
всех частотных компонент вещественного сигнала x(z):
x0(z) = Re[x0(/)] = Re[ej x(z)j = Re[(cos0 +jян0)(x(O + j*(*))]= x(z)cos0-x(z)ян0. (2.116)
5. Преобразование частоты (транспонирование спектра, см. гл.З) сигнала x(t)
, \ jA<" .
сводится к умножению аналитического сигнала ад на е , где Аи<0 -
величина частотного сдвига. Это видно из (2.111):
*..(') = =е x(r). (2.117)
(*)
Из (2.117) вытекает алгоритм транспонирования спектра вещественного
сигнала х(/):
хДи (/) = Re[xA(i) (/)] = x(z) cosAatf - x(z) ян Аса/. (2.118)
Алгоритм (2.117) используется при фазобалансном методе однополосной
модуляции (когда Асо — а>о — частота несущей), при коррекции частотных сдви-
гов, обусловленных неточным сопряжением синтезаторов частот на передаче и
на приёме или доплеровскими сдвигами (тогда Асо^О мало), и при демодуля-
ции сигнала (тогда Асо < 0). Вопросы однополосной модуляции и демодуляции
мы рассмотрим в гл. 3.
Операции, связанные с ПГ, становятся реализуемыми и существенно уп-
рощаются, если сигнал x(Z) можно представить через квадратурные компонен-
ты Ac(f), As(i) при заданной частоте (обычно в спектре сигнала) а>о:
x(t) — Ac(t)cosoQt - /^(^sincooZ, (2.119)
причём верхняя частота в спектре сигналов A^f), A^t] (или A(t) = Ac(t)+jAs(t))
Ъ</о- (2-120)
Условие (2.120) будем называть условием "узкойолосности в расширенном
смысле". Чаще всего канальные сигналы в системах связи обладают свойством
узкополосности
^«/о- - (2-121)
Это означает, что квадратурные компоненты Ac(t), As(t) меняются медленно (по
сравнению с coscooZ или с sinoo/) и сигнал (2.119) имеет вид квазигармониче-
ского сигнала (рис. 2.30). Именно в этом случае обработка сигнала (через об-
работку низкочастотных квадратурных компонент) технйчески проще и реали-
зуется точнее.
Очевидно, что (2.119) можно записать
x(z) = /l(z)co^co0z +ср(/)] = ReJ A(t)e- ,
68
х(Г)
О
сигнала с переменной огибающей A(t)
и переменной мгновенной частотой <в(Г) =
Рис.2.30. Характерный вид узкополосного
процесса (сигнала)
где Л(^) = Л(0е‘,Ф( )= 4(0+j4(0 " комплексная амплитуда^. Поскольку умноже-
ние Л(г) на eJ<M означает перенос спектра сигнала A(t) вверх на величину fo,
то очевидно, что при выполнении условия (2.120) спектр сигнала x(t) = A(t)e *
содержит только положительные частоты (Anin > 0, 7max</+ Fs) и может рас-
сматриваться как аналитический. Тогда сопряжённый по Гильберту сигнал
x(t) = Imp(r)eJ °Г]= Лс(/)яп©0г + 4(^)ео8©0г. (2.122)
Из сравнения (2.119) и (2.122) видно, что преобразование Гильберта сигна-
ла ЛС(О cos© oz
//[ Ас (t) cos© or] = 4 (0 sin © ot,
а преобразование Гильберта сигнала 4(0 sin ©0^
Z/[4(0 sin © (/] = -4 (0 cos© Qt. (2.124)
Формально (2.123) и (2.124) можно интерпретировать так, что преобразование
Гильберта осуществляется над cos©oZ и sin©o£
//[cos© oz] = cos^© 0/ - = sin © 0/, 7/[sin © 0/] = si
при неизменности 4(0 и 4(0-
Из (2.119) и (2.122) видно, что огибающая сигнала
ли=mi=7х2о)+г2»=д 2и+л/н,
(2.123)
Я 1
= -cosco0/
(2.125)
а полная фаза
А (0
v(0 = © ot + arg A(t) = © ot + arctgy^y.
Мгновенная частота сигнала (скорость изменения фазы)
dy(t) d
©U) = —Г-= “0+37 arctg
dt dt
комплексной
j[a>o<+4>(f)]
(2.126)
4(01
. 4'ИЛ(')-4'(>)4(>)
“ю° л.2И+л,2И '
На комплексной плоскости (рис. 2.31) аналитический
x(z) = Д/) е в общем случае отображается вращающимся вектором с пе-
ременной длиной Л(/). Его угловая скорость вращения ©(/) меняется во време-
ни.
При представлении узкополосного в расширенном смысле сигнала через
квадратурные компоненты алгоритм (2.116) реализуется достаточно просто:
(2.127)
сигнал-
Й Следует отметить, что 4(0 и As(f) сопряжены по Гильберту лишь при условии, что ком-
плексный сигнал A(t) содержит только положительные частоты.
69
x0W = лсв(г) cosco ot- 4eWsm<o0r,
где A,eW = 4(Ocos0-/le(r)sm0; A,eW = AWcos0-A(Osin0.
Алгоритм преобразования частоты (2.118) можно представить в виде
хД(В W = А.д® W cos©/ “ А,д® W sin<V->
где Ад. (О = A(0cosA©/ - A(0sinAco/; Ад® W = A0)cosA©/ - A(0smAa>/.
Используя понятие сопряжённого по Гильберту сигнала, Л.М. Финк ввёл
очень важное для теории и практики электросвязи понятие ортогональности в
усиленном смысле пары сигналов x(t) и y(f) [27].
Сигналы x(f) и y(t) ортогональны в усиленном смысле в пространстве L2,
если одновременно
со °о
(х, у) = J x(t)y(t)dt = 0, (х, у) = J x(t)y(t)dt = 0, (2.128)
—во —во
Полезность понятая ортогональности в усиленном смысле объясняется тем,
что сигналы х(/) (у(0), пройдя через канал связи, часто получают случайные
фазовые сдвиги 0Х, 0Г При выполнении условий (2.128) ортогональность сиг-
налов сохраняется при произвольных фазовых сдвигах 0Х и 0у.
Действительно, представим сигналы x(t) и y(t) через огибающую A(t) и пол-
ную фазу:
х(/) = A(0cos\y,(0, y(t) = Ay(t) cosy y(i).
Сигналы, получившие фазовые сдвиги 0Х и 0у, запишем с учётом (2.116):
Хед (0 = COS0, х(0 - sin©, x(t), (2.129)
Ув> (г) = cos0y у(0 - sin0y y(t). (2.130)
Ортогональность сигналов х0 (/) и у0 (/)
(4 > Уе,) = f V (') Уе, № = 0 (2.131)
—во
будет обеспечена только в том случае, если сигналы x(f) и y(t) ортогональны в
усиленном смысле (условие (2.128)). Этот результат очевиден, если выполнить
операцию (2.131) с учётом (2.129), (2.130) и условия (2.128). Как будет показа-
но в гл. 5, при наличии случайного фазового сдвига в канале система сигна-
лов, ортогональных в усиленном смысле, обеспечивает наибольшую помехо-
устойчивость.
Часто используемая в технике связи система ортогональных в усиленном
смысле сигналов, определённых на интервале (-772; Т/2), строится на основе
тригонометрических функций кратных частот
{cos©/, cos2©/, ..., costa)/, ... }. (2:132)
Обычно в ансамбле (2.132) удерживается конечное число компонент JV. Если
ансамбль (2.132) дополнить элементами sin(AxoiZ), то получаем ансамбль орто-
гональных сигналов размерности 2N. Если каждый элемент последнего ан-
самбля дополнить противоположным элементом (-costa)it, -sinta)/), то получа-
ем часто используемый при передаче дискретных сообщений ансамбль сигна-
лов, называемый биортогональным. Число элементов этого ансамбля AN.
Вероятностные характеристики огибающей и фазы узкополосного случайного гауссовского
процесса. Для определения ПВ огибающей А и фазы <р узкополосного случайного процесса
будем исходить из совместной плотности вероятности w(Ac, As) квадратурных компонент Ас и
4S в фиксированных сечениях СП. Считая процесс гауссовским, представим эту ПВ
(А'-тс)2 ч (А,-т,)2
},Aa)=w(Ac)v\As) = -r=^G 2а‘
5/2ЛС2
где пгс, ms, °с, — МО и дисперсии квадратурных компонент. Представление (2.133) пред-
полагает, что квадратурные компоненты Ас, А^ — независимые случайные величины, что все-
гда можно обеспечить. Действительно, известно, что гауссовский вектор комплексной оги-
бающей А можно так расположить в декартовой системе координат1 \ что его проекции
(Ac, As) оказываются некоррелированными (значит; и статистически независимыми при гаус-
совском распределении).
Для упрощения анализа ограничимся случаем, когда дисперсии квадратурных компонент
равны с2 - ст2 = ст2 . Тогда из (2.133) следует
Л2 + Д? /п2 + /п2 + А.т.
2а2 2а2 о2
wi
(2.133)
w(4,4) = —-ехр-
2лс
(2.134)
Перейдём от декартовых координат Ас, 4S к полярным координатам А = ^А^ + А^ ,
ср = аге^(4,/4е) . Тогда Ас = Xcoscp, As = Xsincp. Элементарная площадка в декартовых координа-
тах равна dAxdAc (см. рис. 2.32, а). Площадку той же величины в полярных координатах мож-
но выразить формулой AdtpdA^ (см. рис. 2.32, б). Приравнивая вероятности элементарных со-
бытий в двух системах координат, получаем
w(Ac, As)dAcdAs = w(Ac, As)Ad<pdA = w(A, <p)dAd<p и w(A, <p) = w(4coscp, 4sin<p)4.
С учётом (2.134) следует результат
Л2 т2+т,2 A i . \
А
2лс2
Одномерную плотность вероятности огибающей получим, интегрируя (2.135) по
ным значениям ср на интервале периодичности гармонической функции (-л; +л)
л А2 т2+т2
w(A) = Р(Д(р)<Лр =
-71
(2.135)
всевозмож-
П
-71
+т,2 cos(<p—9) т
dtp, 0 = arctg— ,
/Ид
(2.136)
Интегрирование можно выполнить при помощи табличного интеграла
1 г Ccos(<p-e)
—-Je d<p = i0(c),
Z7C *
-п
где /0(О — модифицированная функция Бесселя нулевого порядка (при
С = 0 имеем
Рис.2.32. Определение элементарных площадок в декартовых (а) и полярных (б) координатах
б)
1 р 2oi
1! Поворот системы координат, при которой обеспечивается некоррелированность Ас и As, не
влияет на модуль А— | А |, следовательно, и на его ПВ.
21 Говорят, что якобиан преобразования из декартовой системы координат в полярную равен
А.
71
Iq(C) = 1, с ростом | С| функция непрерывно возрастает). После интегрирования следует ре-
зультат
Аг+т,+т% , _______
w(a) = ^Q 2°г /о +/”s2 )• (2.137)
СТ \СТ Z
Формула (2.137) выражает обобщённый закон Рэлея или закон Райса.
Узкополосный случайный процесс X(f) с регулярной частью Xp(f) (с отличным от нуля
МО) можно представить, как
%(/) = ^Лс + /пс^со8ш0/-^Л8+/п^8тш0/ = %(1) + %р(/). (2.138)
Отсюда видно, что амплитуда регулярной части сигнала
Ар=^т2+т2 . (2.139)
С учётом (2.139) представим распределение Райса
, . А (ААЛ
w(a)=— е 20 /0—г-,Л^0. (2.140)
СУ \ СУ J
Эта зависимость при различных параметрах — дана на рис. 2.33, а. Одномерную плотность
ст
вероятности фазы получим, интегрируя (2.135) по всевозможным значениям А (от 0 до оо).
Следует результат
! \ 1 w Л Cos(cp-
i-е
Ар cos((p - б)
2ст2
- Лр sin z
е 20
(2.141)
Л
График этой функции дан на рис.2.33,б при различных параметрах — . При отсутствии регу-
ст
лярной части сигнала1) (тс= ms = Ар = 0), учитывая, что Jq(O) = 1, получаем из (2.140) рэлеев-
ское распределение амплитуды
wU)=-4-e 2°2, azo.
ст
Фаза сигнала в этом
_1_
w(cp) = 2тг ’
0,
случае имеет равномерное распределение
(2.142)
д
От (2.141) часто переходят к распределению безразмерной величины у- —. Из условия
ст
w(y)dy = w(A)dA находим рэлеевское распределение для нормированной амплитуды
"VWe ,у*0. (2.143)
Распределение (2.143) дано на рис. 2.34. МО огибающей, распределённой по Рэлею (2.141)
Рис.2.33. Распределение амплитуд (а)
и фаз (б) райсовского вектора
Рис.2.34. Распределение амплитуды
безразмерного рэлеевского вектора
*) Можно показать, что только в этом случае СП (2.128) стационарен в широком смысле.
72
-F, OF, f
Рис.2.35. Графики СПМ (а) узкополосного
квазибелого шума на положительных частотах и
(б) низкочастотного квазибелого шума
Рис.2.36. Вид функции корреляции
узкополосного квазибелого шума
А = $Aw(A)dA = ст
о
_______________________________ ОО
Среднее значение квадрата огибающей А2 = J A2 w(A)dA = 2ст2 . Дисперсия рэлеевской оги-
о
бающей (средняя мощность флуктуаций) ст2 = А2 - А2 = —-ст2.
Корреляционная функция узкополосного случайного процесса. Пусть СПМ
узкополосного СП X(t) на положительных частотах [/о - fo + Гв] является
равномерной G0[f) = No и равна нулю вне. этой полосы (рис. 2.35, «). ФК тако-
го СП
fo+P,
В(т)= jG0(/)cos®T^f-
fo~F,
N . /o+F.
-----sin СОТ
2дт f0-Ft
sin(co0 +сов)т -sin(a>0 -®b)t
Используя формулу
sina - sinP
(2.144)
получаем
В(т) = 50(t) coscoqt, (2.145)
где
, . sinQ т
В0(т) = 2ад—(2.146)
£2BT
Выражение (2.146) определяет ФК низкочастотного квазибелого шума
(рис. 2.35, б). График ФК, определяемый формулой (2.145), дан на рис. 2.36.
Отметим, что дисперсия узкополосного процесса (равная дисперсии низкочас-
тотного квазибелого шума)
ст2 = Б(0) = во(О) = 2FrNq.
2.8. НЕКОТОРЫЕ МОДЕЛИ НЕПРЕРЫВНЫХ И ДИСКРЕТНЫХ
ИСТОЧНИКОВ (СООБЩЕНИЙ, СИГНАЛОВ И ПОМЕХ)
Прямое и косвенное описание процессов. Способы представления как слу-
чайных, так и детерминированных процессов можно разделить на прямые и
косвенные. К прямым способам описания относится аналитическое представ-
73
ление реализаций процесса временными функциями на основе функциональ-
ной связи значений сигнала в данный момент с его значениями в прошлом. То
же относится к различным функциональным преобразованиям, отображаемым
алгебраическими, разностными, интегро-дифференциальными уравнениями, в
которых функциями времени являются детерминированные или случайные
процессы. Так, задача исследования переходного процесса в линейной стацио-
нарной системе классическим методом с использованием дифференциального
уравнения системы является типичной для прямого способа описания сигна-
лов. Спектральное описание колебаний — характерный пример косвенного
описания. К. косвенным способам описания процесса можно отнести такие па-
раметры сигналов, как эквивалентная ширина спектра, эквивалентная дли-
тельность. При описании случайных процессов в предыдущих параграфах мы
пользовались косвенными характеристиками случайного процесса: интеграль-
ной функцией распределения, плотностью вероятностей, моментами первого и
второго порядка, дисперсией, функцией корреляции, интервалом корреляции и
другими усредненными статистическими характеристиками. При косвенных
способах описания вероятностные закономерности отражают устойчивость
средних результатов. Косвенное описание СП находит основное применение в
задачах анализа.
В задачах синтеза СП прямой способ сводится к определению алгоритма
воспроизведения его реализаций по заданным вероятностным характеристикам
(косвенному описанию). При этом СП можно представить на основе описания
поведения динамической порождающей системы (рис. 2.37, а), на вход кото-
рой воздействует белый шум N(t), а на выходе формируется процесс Х(1) с тре-
буемыми характеристиками. Иначе говоря, прямой способ задаёт алгоритм ге-
нерирования процесса, а косвенный — вероятностные характеристики процес-
са. Как прямые, так и косвенные способы описания случайных процессов ши-
роко применяются в задачах теории связи.
Некоторые модели источников (сообщений, сигналов, помех). Пусть выход
источника представляет собой непрерывную функцию х(/), являющуюся реали-
зацией некоторого случайного процесса X(t\ Для описания X(f) воспользуемся
динамической порождающей системой (рис. 2.37, а), на вход которой подаётся
стационарный белый гауссовский шум N(t) со спектральной плотностью мощ-
ности No. Случайный процесс X(t) на выходе простейшей динамической систе-
мы (интегрирующей ЛС-цепочки) первого порядка (рис. 2.37, 6) определяется
стохастическим дифференциальным уравнением состояния.
dx(t) ,. .. dx(t) ,. _
—— = -ccx(0+cgV(z) или —-—+ax(t) = aN(t), (2.147)
at at
где a = l/RC — известная постоянная величина; N(t) — стационарный белый
гауссовский шум с известными статистическими характеристиками:
М(Ш) = 0, M(N(t)N(t-i)) = ^-d(i). (2.148)
Общее решение линейного уравнения (2.147), состоящее из решения одно-
родного уравнения (определяющего свободные колебания) и частного решения
(при заданной реализации «(/))> имеет вид
74
N(t)
э ПС
6) «(О
Рис.2.37. Порождающая система (фильтр) (а) и
динамическая система 1 -го порядка под
действием реализации БГШ n(f) (б)
Рис.2.38. Зависимость СПМ на выходе
динамической системы 1 -го порядка (а) и
ФК (б) случайного процесса процесса X(t)
= x(t0) е RC+^f e RC n^dz >
где jc(4)) — начальное условие. Можно показать, что рассматриваемый СП X(t)
является гауссовским и марковским, а его СПМ (см, гл. 4)
сД/) = уМ
a1 N,
а2 +со2) ’
(2.149)
гяе =
— передаточная функция интегрирующей RC цепочки.
На рис.2.38, а изображён график СПМ, определяемый согласно (2.149) на
положительных частотах. Спектру (2.149) соответствует КФ экспоненциально-
затухающего типа (рис. 2.38, б)
B,(T)=fG,(/)eja"d/ = o2e-“w
(2.150)
где дисперсия о2 = Вх(0) = o.Nq/4. График зависимости (2.150) при т > 0 пока-
зан на рис. 2.38, б. На основе уравнения состояния (2.147) можно составить
схему устройства (вычислителя) для формирования случайного процесса с за-
данными КФ и СПМ (рис. 2.39).
В качестве модели источника, порождающего узкополосный случайный
сигнал, можно использовать случайный процесс X(f) на выходе колебательного
контура (рис. 2.40) при действии на его входе белого шума с теми же характе-
ристиками, что и в предыдущем примере. ФК и СПМ случайного процесса
X(f) (который является гауссовским и марковским) определяются теперь на ос-
нове системы стохастических уравнений состояния
Рис.2.40. Последовательный
колебательный контур под
воздействием реализации БГШ и(Г)
75
Рис.2.39. Схема вычислителя для формирования
СП на выходе динамической системы 1-го порядка
при подаче на вход гауссовского белого шума
соответствующих дифференциальному уравнению 2-го порядка (контура), где
2а = R/L, со2 =77; (для контура с малым затуханием считаем со2 » а2); ФК
процесса X(Z) имеет экспоненциально-косинусную форму
а ।
COS(00T+--------------------Sm(O0|T| ,
® О '
—оС°° . СПМ определяется выражением
8а
(2.152)
Вх(х) = ст2е
где дисперсия процесса ст2
G,(_/) =
(2.153)
Гауссовские и марковские СП, сформированные на основе стохастических
дифференциальных уравнений (2.147) и (2.151), часто используются в качестве
типовых моделей телеметрических сообщений, телевизионных и речевых со-
общений. На модели речевого сообщения целесообразно остановиться более
подробно.
Модели речевого сообщения. Под речевым сообщением b(f) будем понимать электриче-
ское колебание, наблюдаемое на выходе электроакустического преобразователя при действии
на его входе акустической речевой волны. К преобразователю отнесем микрофон вместе с
фильтром, формирующим спектр выходного колебания в заданной полосе частот, а также
устройство регулировки уровня. b(f) является речевым сообщением (первичным сигналом) в
непрерывном времени /, его спектр сосредоточен в определённой полосе частот, например,
для стандартного телефонного канала 300...3400 Гц.
Смысловое содержание акустической речевой волны априорно неизвестно в общем слу-
чае одному смысловому содержанию в разных экспериментах могут соответствовать различ-
ные электрические колебания, отличающиеся временной структурой, длительностью, формой
и т.д. Поэтому речевое сообщение следует рассматривать как случайный процесс, реализации
которого наблюдаются на выходе формирующего источника — источника речевых сообщений
(сигналов). Случайный процесс как совокупность случайных величин задаётся вероятностны-
ми характеристиками — функциями распределения Вероятностей, плотности вероятностей,
моментными характеристиками. Эти характеристики часто включаются в состав вероятност-
ных моделей речевых сигналов.
На практике априорные сведения о речевом сигнале не всегда оказываются достаточно
полными, чтобы можно было явно задать его вероятностную модель. Поэтому приходится
описывать процесс статистическими характеристиками, которые определяются опытным пу-
тём. Оценки интегральных функций распределения вероятностей, плотности вероятностей,
КФ, СПМ дают приближённое представление о речевом сигнале. Они получаются усредне-
нием за сравнительно большой промежуток времени в предположении стационарности и эр-
годичности речевого сигнала и вследствие этого не дают полного представления о его мгно-
венных свойствах.
Экспериментальные данные показывают, что если исключить паузы длительностью свы-
ше 350 мс, то одномерная плотность речевого сигнала хорошо аппроксимируется двусторон-
ним гамма-распределением
г ( IaIY-1 г !*!
е ’’ <2Л54>
где ст — среднеквадратическое значение; Ка = +1) ; Г(а) — Гамма-функция; а > 0 — пара-
метр, зависящий от качества (главным образом, полосы пропускания) абонентского тракта, в
основном от качества микрофона — для высококачественного микрофона а — 0,5 и более.
При а = 1 (2.154) переходит в распределение Лапласа (экспоненциальное распределение)
76
Рис.2.41. Спектральная плотность мощности (а)
и нормированная корреляционная функция (б) речевого сигнала
1
w(M = —-е ° .
Распределение сигнала речи в паузах с учётом шумовых напряжений аппроксимируется
гауссовским распределением
' 1
w(b) = —r=Q , ст2=а2ст2, (2.155) /
у2тгст2
где 0 < а < 1 — параметр, характеризующий поведение функции плотности вероятности (при
а —> 0, см. (2.155), он стремится к 8-функции). Распределение речевого сигнала в целом мо-
жет аппроксимироваться взвешенной суммой распределений (2.154) и (2.155) с учётом веро-
ятности появления пауз речи.
На рис. 2.41, а показана экспериментальная зависимость нормированной спектральной
плотности мощности речевого сигнала
П2
УдБ =101g—
где 772(/) — спектральная плотность среднего квадрата звукового давления речи; По = 20 Па
— порог слышимости (минимальное звуковое давление, которое начинает ощущаться челове-
ком с нормальным слухом на частотах 600...800 Гц). На рис. 2.41, б дана зависимость коэф-
в(%\
фициента корреляции речи Я(т) = —от т, соответствующая СПМ на рис. 2.41, а.
(У
В последние годы всё большее распространение находят модели речевых сигналов в виде
динамических порождающих систем. Например, выбирая в качестве динамической системы
последовательно соединенные АС-фильтры нижних и верхних частот (рис. 2.42, а), получают
описание речевого сигнала двухкомпонентным марковским процессом. В этом случае СП
представляется системой стохастических уравнений состояния
Рис.2.42. Вариант порождающей системы (фильтра) для речевого сигнала (а) и
график СПМ (на положительных частотах) процесса на выходе порождающего фильтра (б)
77
-^-=-ал(0 + «1А0-
^- = -а2х2(г) + ^[-оцх,^) + оцЛ^)],
(2.156)
где Х1(/) и х2(/) = й(О ~ соответственно напряжение на ёмкости С] и на нагрузке Л2; Kq — ко-
эффициент передачи устройства развязки; N(f) обладает свойством (2.148); aj = l/AiQ,
a2 = 1/Я2С2 — постоянные коэффициенты. СПМ и ФК случайного процесса £(?); определяе-
мые на основе решения (2.156), будут:.
(2.157)
2(ш +af До +а21
«(«i-Ч)1
(2.158)
Для частного случая, когда а! = а2, на рис. 2.42, б изображён график СПМ.
Модель стохастического дискретного источника. В качестве модели многих
двоичных источников сообщений (например, данных на выходе ЭВМ) можно
использовать модель случайного стационарного синхронного двоичного сигна-
ла JQB(Z). Будем полагать, что процесс X№(t) с вероятностью 0,5 принимает в
дискретных точках, кратных Т, значения ±/г (сохраняя эти значения на интер-
вале Т) независимо от значений процесса на предыдущих тактовых интервалах.
Две реализации рассматриваемого процесса показаны на рис. 2.43. Очевидно,
что
М^дв(0] = 0,5(-А) + 0,5/1 = 0, 2>[Хда(/)] = 0,5(-А)2 + 0,5Л2 = h2.
Зафиксируем момент 4) (см. рис. 2.43). Интервал А, отделяющий точку to от
ближайшей точки, в которой может произойти изменение знака процесса
Лдв(/)> распределён в нашей модели равномерно на отрезке [0, 7]:
w(A) =
О , Т < t < 0.
Возьмём сечение процесса Х№($ в моменты to и to + т (т>0). Если т < А, то
усредненное значение произведения рассматриваемых сечений равно /12, если
т > А, оно равно 0,25(/i2 - /12) = 0 (произведение (~h)h получается, если знаки
посылок в отдельных сечениях не совпадают, /12 — если знаки этих посылок
совпадают. Поэтому ФК процесса Хц$(1)
т ( \
Ат) = АД > т)Л2 + АД < т) О = h2 f ^(A)dA = - yj
X
Ввиду чётности ФК по аргументу т окончательно запишем выражение для ФК:
Ат) -
h2 1-^ , |
к Т)
(2.159)
О, И >Т.
Зависимость (2.159) при т > 0 дана на рис. 2.44, а. Взяв прямое преобразование
Фурье от (2.159),, получаем СПМ для процесса X№(t):
НА ,2Tsm2(<o7’/2) /э
С(/) = Л Г"(шГ/2)“ ' <2'160)
График зависимости (2.160) (на положительных частотах) дан на рис. 2.44, б.
78
Рис.2.44. ФК (а) и СПМ (б)
случайного процесса XJf)
Рис.2.43. Две реализации случайного стационарного
синхронного двоичного сигнала
ВЫВОДЫ
1. Сообщения, сигналы и помехи в системах электрической связи прежде всего описываются
некоторыми функциями времени (процессами), которые являются детерминированными
или случайными.
2. Сообщения, сигналы и помехи как векторы (точки) в линейном пространстве можно опи-
сать через набор координат в заданном базисе (совокупности линейно независимых еди-
ничных векторов). Чаще всего базис является ортонормированным.
3. Для ТЭС наибольший интерес при отображении сигналов представляет л-мерное про-
странство Евклида Rn, бесконечномерное пространство Гильберта /^(Т) ЕГдискретное про-
странство Хэмминга 2Л. В этих пространствах вводится понятие скалярного произведения
двух векторов (х, у).
4. Любую непрерывную функцию времени как элемент Li можно представить обобщённым
рядом Фурье по заданному ортонормированному базису. Усечённый обобщённый ряд Фу-
рье даёт описание непрерывной функции времени с определённой погрешностью.
5. Частным случаем обобщённого ряда Фурье является обычный ряд Фурье для периодиче-
ских функций, когда в качестве базисных используются гармонические функции кратных
частот. Ряд Фурье можно представить в действительной и комплексной форме, вводя в
рассмотрение отрицательные частоты. Периодическая функция характеризуется линейча-
тым спектром.
6. Спектр по Фурье непериодической функции времени x(t) является сплошным. Он опреде-
ляется спектральной плотностью (СП) 5Ж(/). Функция х(?) й СП <$,(/) связаны линейно
парой преобразований Фурье. Модуль рж(/)| = определяет амплитудный спектр сиг-
нала х(0, a argSx(/) определяет фазовый спектр.
7. Временная ФК детерминированного сигнала с размерностью энергии связана со
спектральной плотностью энергии (СПЭ) И'Д/) парой преобразований Фурье. Аналогично
связаны временная ФК сигнала В(т) с размерностью мощности и спектральная плотность
средней мощности (СПМ) Сж(/). ^0) определяет энергию сигнала, а В(0) — его среднюю
мощность.
8. Произведение эффективной длительности простого сигнала тэ и эффективной полосы его
Частот Fj — величина порядка единицы.
9. Сигнал х(?) с финитным спектром FB представляется в обобщённый ряд Фурье по базисной
sincoB(z-М)
гов(/-М)
системе функций
>. Координатами разложения являются временные отсчёты
х(А:Д) в сечениях, кратных интервалу дискретизации A<l/2f’B. Приближённое представление
79
такого сигнала на интервале Т определяется усечённым рядом с числом координат х(ЛД),
равным базе сигнала В = 2FBT.
10. Случайные процессы (СП) чаще всего описываются косвенным путём через плотности ве-
роятности (ПВ) и интегральную функцию распределения (ИФР). Более грубыми характе-
ристиками СП являются его математическое ожидание «!](/) = X(z), дисперсия cs2(t) = X2 и
ФК B(t) = Y(0^-t).
11. В теорйи и практике электросвязи большую роль играют стационарные в широком смысле
СП, определяемые не зависящей от времени одномерной ПВ и двумерной ПВ, зависящей
от разности выбранных сечений т. Такие процессы часто обладают свойствами эргодично-
сти: характеристики, полученные усреднением во времени одной реализации, приближён-
но равны характеристикам, полученным усреднением по реализациям СП.
12. ФК и СПМ случайного процесса связаны парой преобразований Фурье. Эффективная ши-
рина спектра СП F3 обратно пропорциональна интервалу корреляции СП ткор.
13. Представление центрированного СП в обобщённый ряд Фурье с некоррелированными ко-
ординатами (разложение Карунена-Лоэва) называется каноническим разложением. Для
СП с финитным спектром каноническое разложение определяется рядом Котельникова.
14. Двумерной плотностью вероятности полностью определяются гауссовский и простой мар-
ковский случайные процессы. Некоррелированность сечений гауссовского СП означает и
их независимость.
15. Узкополосные вещественные процессы x(f) (как детерминированные, так и случайные)
удобно представить через квадратурные составляющие, огибающую и фазу, через ком-
плексную огибающую. Мнимая x(z) и вещественная x(f) части, комплексного
(аналитического) узкополосного сигнала x(z) связаны парой преобразований Гильберта.
16. Спектр аналитического (комплексного) сигнала x(z) = x(z) + jx(z) лежит полностью в области
положительных частот, а сигнала x(t) = х(г)-jx(z) — в области отрицательных частот.
17. Огибающая узкополосного гауссовского СП при равной дисперсии квадратурных компо-
нент распределена по обобщённому закону Рэлея (или закону Райса). У стационарного
(центрированного) гауссовского СП огибающая распределена по закону Рэлея, а фаза —
равномерно на отрезке [-тс/2; тс/2].
18. Непрерывные и дискретные источники сообщений, сигналов и помех (процессов, разви-
вающихся во времени) можно описать или прямым способом (через временные функции
их реализаций) или косвенным способом (через различные спектральные характеристики,
а для СП — через функции распределения).
19. Непрерывные источники случайных сигналов (сообщений), например, речи и телевидения,
часто описываются не только косвенным способом (через функции распределения и мо-
ментные функции), но и прямым способом (через стохастические дифференциальные
уравнения состояния).
20. Удобной моделью для исследования дискретных источников является модель случайного
стационарного синхронного двоичного сигнала с нулевым МО и треугольной ФК.
ВОПРОСЫ, ЗАДАЧИ И УПРАЖНЕНИЯ
2.1. Заданные на интервале (-Т/2;Т/2) сигналы x(z) = л/2соз(2п//7’) и y(t) = >/2cos(4nt/T) трак-
туются как элементы пространства Гильберта 1о.(Т). Докажите, что: а) нормы этих сигна-
лов равны 1; б) их скалярное произведение равно 0; в) расстояние между ними равно ^2 .
2.2. Докажите, что в «-мерном пространстве Хэмминга 2Л существует лишь один ортонорми-
рованный базис, образованный п векторами: (1, 0, 0, ..., 0), (0, 1, 0, ..., 0), ..., (0, 0, 0, ..., 1).
2.3. Докажите, что функции Уолша wal(3,Q) и wal(5,&) ортогональны на интервале (-1;+1).
2.4. Как определяется погрешность представления сигнала х(?) как элемента пространства
^2(7) усечённым обобщённым рядом Фурье?
2.5. Найдите спектральные компоненты периодической последовательности прямоугольных
видеоимпульсов длительностью т с периодом следования 7= 2т по спектральной плот-
ности Фурье одиночного импульса. .
80
2.6. Покажите, что если спектральная плотность по Фурье Sy(f) = Sx(f')Sg(f') сигнала ХО
равна произведению спектральных плотностей сигналов x(t) и g(f), то сам сигнал ХО оп-
ределяется временной свёрткой сигналов x(t) и g(0: ХО ~ х(0 ® S(t)- Аналогично если
хо = то 5Д/) = s,(/)®s,(/).
2.7. Пользуясь определением 8-функции, найдите спектральную плотность по Фурье посто-
янной составляющей x(t) = а.
2.8. Дан прямоугольный импульс x(f) — A, t е[-Ти/2; Ти/2]. Найдите его ФК ВХТ) (с размерно-
стью энергии) и В(т) (с размерностью мощности), а также СПЭ ^(У) и СПМ <?,(/).
2.9. Чему равен максимальный интервал дискретизации речевого и телевизионного сигнала,
если верхнюю частоту в спектре сигнала принять равной соответственно 4 кГц и 6,5 Мгц.
2.10. Из каких соображений интервал дискретизации А непрерывной функции времени с фи-
нитным спектром на отрезке [~7В; +7В] часто выбирают меньше, чем 1/27в ?
2.11. Имеется экспоненциальный импульс х(/) = l(t)e-<u. Какова относительная погрешность
при восстановлении этого сигнала по его дискретным отсчётам при шаге дискретизации
А= WB?
2.12. Дискретный стационарный двоичный источник описывается простой цепью Маркова с
матрицей переходных вероятностей
вероятность появле-
ния символа at при условии, что ему предшествует символ a'j. Пусть р(1|1') = 0,9;
р(1|0') = 0,7 . Определить: вероятности Р(о|Г), Р(о|О'); безусловные вероятности передачи
символов ДО) и Д1); вероятности передачи цепочек из трёх символов (1, 1, 0) и (0, 1, 0).
2.13. Дискретный случайный процесс принимает три значения с вероятностями р(а\) = 0,3;
р(а2) = 0,2; р(аз) = 0,5. Написать выражение для плотности вероятности процесса, по-
строить график ИФР.
2.14. Покажите, что случайный узкополосный процесс X(t) = Ac(t)cosa0t-с незави-
симыми квадратурными компонентами Лс(/) и Д(/) стационарен лишь тогда, когда
Лс(/) = Д(/) = 0 и Л2 = Л2 = с2 = const.
2.15. СП X(t) = Acos(a>o/+ Ф) с равномерно распределённой фазой эргодичен. Найдите его
МО. Напишите аналитическое выражение для ФК и СПМ.
2.16. СП, определённый на отрезке [—7/2; +7/2], имеет экспоненциальную функцию корре-
ляции В(т) = ехр|-|т|/ткор|. Найти каноническое разложение этой функции по ортонор-
мированной системе базисных функций {-^2cos(2ra7/7’)}, /=0, 1, 2, ...
2.17. Напишите двумерную плотность вероятности Цх^хз.т) стационарного гауссовского
случайного процесса с корреляционной матрицей R =
1
-<Ф1
-а|т|
е
1
МО пц — 0 и диспер-
сией ст2. Определите условную ПВ этого процесса
2.18. Сигнал x(t) является суммой двух гармонических компонент: x(f) = i/jcosoy + t/2coso>2Z.
Найти: сопряжённый по Гильберту сигнал х(/), аналитический сигнал x(t), огибающую
Л(/) = /х2(/) + х2(/) , полную
фазу Т( /) = arctg(x( t )/x(t)),
мгновенную частоту
«>(') =
x'(/)x(t) - x'(/)x(t)
dt x2(/) + x2(/).
2.19. Найти единое дифференциальное уравнение колебаний в контуре по заданной системе
уравнений состояния (2.151).
2.20. Найти интервал корреляции ткор по методу равновеликого прямоугольника для случай-
ного стационарного синхронного двоичного сигнала Ац(/). Чему равна эффективная ши-
рина спектра 7Э ?
81
ГЛАВА 3. ОСНОВЫ ТЕОРИИ МОДУЛЯЦИИ И
ДЕТЕКТИРОВАНИЯ
3.1. ПРЕОБРАЗОВАНИЕ КОЛЕБАНИЙ В ПАРАМЕТРИЧЕСКИХ И
НЕЛИНЕЙНЫХ ЦЕПЯХ
Как следует из гл. 1, в системе электрической связи имеют место различ-
ные преобразования сигналов. Одним из важнейших преобразований является
модуляция — изменение параметров некоторого переносчика ("несущей") по за-
кону первичного сигнала />(/). Так образуется сигнал на выходе модулятора
«(/), который способен передаваться по данной линии связи. Проходя от моду-
лятора передатчика до детектора приёмника1), сигнал u(f) претерпевает различ-
ные изменения (обусловленные, главным образом, полосовой фильтрацией в
выходных каскадах передатчика и входных каскадах приёмника, а также изме-
нениями в линии связи (см. гл. 4)) и превращается в сигнал на входе детектора
$(/). Из анализируемого колебания z(t) = s(t) + n(t) — аддитивный шум в
канале) надлежит получить оценку 6(/).
Преобразование сигналов в модуляторе и детекторе связано с трансформа-
цией спектра входного сигнала, т.е. появлением в выходном продукте частот-
ных составляющих, которых нет на входе. Действительно, спектры сигналов
6(/) и b(t) находятся в области низких частот, в то время как спектры сигналов
u(t) и 5(0 являются полосовыми в границах от У] до /2, причём f\ > 7^, FB —
верхняя частота в спектре первичного сигнала.
В системах электрической связи встречаются и другие преобразования сигналов, связан-
ные с трансформацией спектра. К ним относятся:
а) генерация сигналов определённой формы, например гармонических с частотой fo, исполь-
зуемых в качестве несущих при модуляции. Поскольку генератор питается за счёт источника
постоянного тока (напряжения), здесь имеет место типичная ситуация с трансформацией
спектра;
б) преобразование частоты. В этом случае сигнал на входе устройства
мвх(0 ~ ЦОСОМЮ0^ + ф(0] с переменной амплитудой U(t) и (или) фазой ф(/), сосредоточен-
ный по спектру около частоты fo, превращается на выходе устройства в сигнал
«выхСО = KU(t)cos[a>npt + <p(z) + фо], имеющий ту же форму {К и фо ~ константы), но сосредо-
точенный по спектру около частоты /пр- При преобразовании частоты вверх /„р > fo, при
преобразовании вниз /пр < fo- Преобразование частоты часто используется в современных
устройствах при приёме сигналов как с амплитудной, так и угловой модуляцией;
в) умножение и деление частоты, когда входной гармонический сигнал «Вх(0 = С/осо8[юо^ + Фо]
превращается В сигнал «вых(/) = KUocos[(a>om/n)t + ф1], где тип — целые числа. Такие уст-
ройства часто используются на практике при генерации заданной сетки частот.
Линейные системы с постоянными параметрами (стационарные системы)
не могут трансформировать спектр входного сигнала мвх(0-
Действительно, любой входной сигнал можно представить суммой гармо-
нических компонент. Гармоническое же входное колебание йвх = eJ<w является
собственной функцией системного оператора L линейной стационарной сис-
11 В технике часто используется многоступенчатая модуляция (см. ниже). В этом случае при-
ходится реализовать и многоступенчатую демодуляцию. Последнюю ступень демодуляции, вы-
дающую оценку b(t), называют детектированием. Именно эта ступень демодуляции рассмат-
ривается в дальнейшем.
82
темы, т.е. таким входным колебанием, которое на выходе не меняет свою фор-
му: мВых(0 = Д«вх(0] = ^«вх(0,-^ — собственное значение оператора. На самом
деле, согласно интегралу Дюамеля при заданной импульсной характеристике
системы g(?) (см. гл. 4):
Q0 00 00
“выхМ = J g(T)wBX(? -T)t/r = j g(T)eJ(o('“TWr = eJ“' J .
—oo —oo —oo
Таким образом, собственным значением системного оператора L является
оо
комплексное число X = K(/)=fg(T)e-j“TcZT, которое определяет частотную ха-
—оо
рактеристику (ЧХ) системы (см. гл. 4).
Для трансформации спектра можно использовать или линейную систему с
переменными параметрами (параметрическую систему), или нелинейную сис-
тему. Ограничим анализ параметрической системой нулевого порядка (без ре-
активностей) и нелинейной системой нулевого порядка. На рис. 3.1 изображён
резистивный параметрический двухполюсник. Пусть входное напряжение ме-
няется по гармоническому закону с частотой f\. = (7] cos (со ] Г + q>]), а пара-
метрическая проводимость (крутизна характеристики) меняется по гармониче-
скому закону с частотой управления fy: S(f) = 5q + 5'icos(oyr + фу). Согласно
закону Ома ток в цепи
/(О — «1(05(0 = [/i5bcos(oj]/ + (pi) + t/]5icos(a>i/ + ф])со8(оу/ + фу).
Воспользовавшись известной из тригонометрии формулой
cosa-cosp = 0,5cos(a + Р) + 0,5cos(a - Р), (3.1)
получаем
i(t) = UlS0 со^ю^ + ф^+О^С/^ cos^Qj + а>у)г + ф] +ФУ} +
+ 0,5^5] cos^aij -оу^ + ф] -фу| •
Таким образом, ток (выходной сигнал) содержит компоненты на частотах
/1 ± fy, которых нет во входном сигнале, т.е. произошла трансформация спек-
тра. Полезные (при решении тех или иных задач) частотные составляющие то-
ка iff) выделяются линейной фильтрацией.
На практике параметрит .й резистивный элемент Rft) получают путём внешнего
управления нелинейным сопротивлением. Рассмотрим нелинейный резистивный двухполюс-
ник с вольт-амперной характеристикой (ВАХ) i = flu) (рис. 3.2), на который действуют на-
пряжения сигнала uflt) и управления «2(0- Ток в нелинейной цепи
i~flu\+ <*!) (3.2)
Предположим, что сигнал управления существенно превышает входной сигнал: |w2| » |wj| .
Разлагая (3.2) в ряд Тейлора по малому сигналу W] и удерживая два члена ряда, получаем
Рис.3.1. Параметрическая система
нулевого порядка
Рис.3.2. Нелинейный резистивный двухполюсник
под воздействием двух напряжений
83
Рис.3.3. Схема
перемножения
двух сигналов
Рис.3.4. Графическое изображение вольт-амперной характеристики (а),
входного переменного напряжения в рабочей точке (координаты E,i„) (б)
и изменения тока во времени (в)
z(z) = /(w2) + — w,(/). Обозначим через S(u2) = — . дифференциальную крутизну не-
' du и = w2 du и-и2
линейного резистора в точке и = и^. Тогда сигнальная составляющая тока
(3-3)
Следовательно, описанным образом можно реализовать цепь с параметрическим сопро-
тивлением Л~(и2)=1/б'~(и2)1).
Согласно (3.3) параметрический резистивный (безынерционный) элемент
функционирует как перемножитель входного сигнала мвх(/) и управляющего
колебания что показано на рис. 3.3. Знаком "х" обозначен блок, осущест-
вляющий перемножение двух сигналов. Через Ф обозначен блок, осуществ-
ляющий фильтрацию для выделения полезного выходного сигнала.
Рассмотрим нелинейную схему рис. 3.2 при произвольных соотношениях
сигналов щ и м2- Вольтамперную характеристику нелинейного i — /(м) (см.
рис. 3.4, а) очень часто аппроксимируют (относительно рабочей точки, опреде-
ляемой напряжением смещения Е) полиномом п-й степени:
i — Oq + «1(м - Е) + «2(м _ -Е)* 2 + аз(и ~ -Ё)3 + + ап(и Е)п- (3-4)
Чем выше степень полинома п, тем точ’ ее (в заданных пределах изменения
входного напряжения) можно описать изм ление тока. При малых переменных
входных напряжениях (3.4) можно ограничиться квадратичной аппроксимаци-
ей2) .
Предположим, что (см. рис. 3.4, б)
и= Е + щ — Е + U\ cos(<B]/ + <pi)
(гармоническое воздействие). Тогда, воспользовавшись формулами кратных дуг
^Аналогично можно реализовать цепь с параметрической ёмкостью С~(м>) = — , если
' ’ du и -и^
на нелинейную ёмкость с вольт-кулонной характеристикой q = Дм) воздействовать суммой
напряжений сигнала и управления «ДО + ^(О- Можно также реализовать цепь с параметри-
ческой индуктивностью ДДм = — , если на нелинейную индуктивность с ампер-
' di i = i2
веберной характеристикой Ф = Дг) воздействует сумма токов сигнала и управления zf(/) + i^t).
2) Если переменные входные напряжения настолько малы, что (3.4) можно ограничить ли-
нейной аппроксимацией i = ао + a\(U — Е). — трансформация спектра входного сигнала не-
возможна.
84
cos2 a = (1 + cos2a) / 2
cos3 a = (3 cosa + cos3a) / 4
cos4 a = (3+4 cos2a + cos4a) / 8
cos5 a — (lOcosa +5cos3a + cos5a)/16
(3.5)
получим для тока (рис 3.4,в), содержащего гармоники входного воздействия,
выражение
i — Iq + Zjcos^]/ + (pi) + 72cos(2a>i/ + 2q>i) + Гзсоз(3®]/ + 3q>j) +...
... + Z„cos(na)i/ + «(pi), (3.6)
1 3
где постоянная составляющая тока z0 =aQ + -а2и? +-a4uf+...;
2 8
амплитуда первой гармоники1) /, = (цЩ + -|а3(73 +|а5£Л5+... ;
амплитуда второй гармоники i2 = -a2uf +-a4Ui+...;
2 8 '
амплитуда третьей гармоники /3 = -а3и} +—а5[/15+... и т.д.
4 16
Предположим, что
и = Е + щ + U2 — Е + U\ cos(®iZ + ф]) + U2 cos(®2^ + Ф2)
(бигармоническое воздействие). Тогда, воспользовавшись формулами (3.1),
(3.5) и формулой бинома Ньютона
+6)* = S C*a* 'Ъ' ’ С* = U = (*-/)!/! ’
можно видеть, что при бигармоническом воздействии в составе тока имеются
частоты /= kf\ ± mf2, к = 0,п, т=0,п, (к + т) < п. Гармоники частоты f] соот-
ветствуют значениям т = 0 (k*Q), гармоники частоты /2 — значениям к = О
(аи*0). Частоты, получаемые при значениях т и к, не равных нулю одновре-
Рис.3.5. Аппроксимация нелинейного элемента
ломаной прямой
менно, называют комбинационными.
При этом число (к + т) называют по-
рядком комбинационной частоты.
Очень часто при исследовании
схем с нелинейными элементами при
гармонических воздействиях цДО с
большими амплитудами ВАХ аппрок-
симируют ломаной линией (кусочно-
линейная аппроксимация (см.
рис. 3.5)). Аналитическая запись для
ломаной прямой имеет вид
При исследовании нелинейных систем, когда полезный продукт определяется только пер-
вой гармоникой , часто вводят понятие средней крутизны \р(^)=Л/^1 > т.е. вводится по-
нятие линеаризации при данном значении Ц нелинейной системы по первой гармонике (так
3 5
как Д =Scp([/)t/1). В нашем случае Scp(u) = al + -a3[/,2 +
85
I = Z \ ' >
Syu-Une), u^U^, u = E+Ucosat,
где E — напряжение смещения, определяющее рабочую точку; t/0TC - напряже-
ние отсечки. График тока имеет вид косинусоидальных импульсов с отсечкой.
Под углом отсечки имеют в виду безразмерное время at, в пределах которого
ток меняется от максимума до нуля или в пределах которого входное напряже-
ние меняется от максимального значения до f/0Tc. Следовательно, можно напи-
сать Е + t/cosO = U0TC. Откуда
cose = ^~£. (3.8)
Угол отсечки может принимать значения от нуля (ток не проходит) до л
(линейный режим работы схемы). При Е = U0TC имеем 0 = л/2 (проходят по-
ложительные полупериоды входного сигнала). Постоянная составляющая тока
I тп
определяется формулой Io = — j i(t)dt.
* -тп
Вводя безразмерную переменную х — at, имеем
1 Г . . SU г, ч SU , .
10 =—J i(x)dx =---J (cosx- cosQfdx --(sin©-0cos0).
2л 2л л
—U —v
Вводя коэффициент yo(0) = (1/л)(зт0 - 0cos0), называемый коэффициен-
том Берга [1] для постоянной составляющей, можно написать
/0 = SUy0(Q\ (3.9)
С учётом (3.7) и (3.8) получаем формулу для максимального значения тока:
«шах = s (Е + U-U07C) = SU (1-COS0).
Тогда
А) ~ 4пахао(в)> (3.10)
где ао(0) = yo(0)/(l-cos0). Если в ходе исследования фиксируются U, S и 0, то
для расчётов используется формула (3.9); если фиксируются zmax и 0 — исполь-
зуется формула (3.10).
Аналогично находим амплитуду первой гармоники тока:
1 0
Z] =-fz(x)cosxa5c = 5t/y1(O) = znuxa1(0), (3.11)
71 -е
где yi(0) = (1/л)(0 - sinOcosO), ai(0) = yi(0)/(l - cosO).
Для п-й гармоники тока (при п - 2, 3, ...) имеем
1 8
4 = - ( г(х)cos(nx)<fr = SUy„(0) - /шах a„(0), (3.12)
71 -e
, . 2 sm(z?0)cos0-z?cos(z?0)sm0 .. y„(0) , ,
где у (0) =-----------т——ч--------- и a„(0) = ——- - коэффициенты Берга
л пуп -1) 1-COS0
по п-й гармонике.
Отметим, что для часто используемого режима 0 = л/2 имеем
Уо(л/2) = а0(я/2) = 1/л, уДл/2) = аДл/2) = 1/2.
При приближённом расчёте постоянной составляющей тока Iq, первой гармоники /[ и
второй гармоники Е лля произвольных нелинейных характеристик пользуются методом трёх
ординат. В этом случае задают три точки на нелинейной характеристике (см. рис. 3.4): макси-
86
мальное значение тока /’max, минимальное значение тока и среднее значение тока /0
(полученное при отсутствии переменного воздействия на входе). Расчётные значения полу-
чим, воспользовавшись приближением
i = /0 + /|Cos(a>iZ + ф|) + /эсоя2(Ш1^ + (pj. (3.13)
Из рис. 3.4 видно, что точку /тах получим при + (pi = 0. Тогда из (3.13) следует
Алах = 4) + 4 + h (3.14)
Точку /'о получим при <D|Z + ф| = я/2. Тогда из (3.13)
'о = /о - /2- (3.15)
Точку /‘min получим при <D|Z + ф| = л. Из (3.13) следует
Anin = 4) ~ Л + h- (3-16)
Решая совместно уравнения (3.14)—(3.16), получаем
4) — 0,25 (/щах + /min + 2/q), 1\ ~ 0,5 (/щах Anin), -4 — 0,25 (/щах + /min — 2/'o).
Эти формулы дают точные значения амплитуд гармоник, если точна аппроксимация по-
линомом второй степени.
В технике связи посредством нелинейных схем часто решается задача ум-
ножения частоты (например, для получения высокостабильных гармонических
колебаний высокой частоты nf\ при наличии высокостабильного гармониче-
ского сигнала частоты j\).
Рассмотрим умножитель частоты на биполярном п-р-п транзисторе
(рис. 3.6). В цепь базы помимо постоянного смещения Е подано гармониче-
ское колебание
«и, =t/1cos(®1 + ф,).
Резонансный
контур в цепи коллектора настроен на частоту
Пусть амплитуда Щ достаточно большая для того, чтобы
можно было пользоваться кусочно-линейной аппроксимацией характеристики
/к =Л^бэ)- Тогда л-я гармоника тока коллектора
~ 1^^lYn(0) ~~ zmaxan(0)-
Коэффициенты Берга у„(0) и ал(0) были введены выше. Для максимизации
1п надо при заданном параметре SU\ найти такой оптимальный угол отсечки 0,
который максимизирует коэффициент ул(0). Из полученных выше соотноше-
ний следует
®опт ~~ П.
Значит, для умножения частоты в 2 и 3 раза в оговоренных условиях надо
выбрать угол отсечки соответственно л/2 и я/З. Для выходных каскадов пере-
датчика, где желательно поддерживать максимальный импульс /тах, оптималь-
ный угол отсечки 0 надо найти из условия максимизации ал(0). В этом случае
для 0ОПТ можно найти приближённую
формулу
е
от Зп
Значит, для умножения частоты в 2 и 3
раза при zmax = const надо выбирать угол
отсечки я/3 и 2 я/9. Получить существен-
ное значение 1п при п > 3 затруднительно,
поэтому для увеличения кратности умно-
жения частоты прибегают к последова-
тельному соединению отдельных каскадов
Рис.3.6. Нелинейная схема умножения частоты умножения. Если амплитуда ВХОДНОГО гар-
87
монического сигнала Ц мала, характеристику zK = следует аппроксими-
ровать полиномом второй степени, что означает, что в этом случае можно по-
лучить лишь умножение частоты в 2 раза.
Если резонансный контур в схеме рис. 3.6 настроен на частоту Д, схема ра-
ботает в режиме резонансного усиления. Нелинейный режим резонансного
усиления энергетически более выгоден, чем режим линейного усиления
(0 — л), что имеет особое значение для мощных выходных каскадов передатчи-
ка.
Определим коэффициент полезного действия каскада усиления как отношение средней
мощности полезного продукта Р\ = (первой гармоники) к мощности, потребляемой
схемой Ро = Ч =
Коэффициент использования напряжения источника питания — <1. Тогда
й'о 2Z0
При заданной амплитуде усиливаемого сигнала в цепи базы
< Yi(®) _ O-COS0 sin0
2уо(0) 2(sin0-0cos0)
Анализ показывает, что эта величина тем ближе к 1, чем меньше 0. При часто исполь-
зуемом нелинейном режиме 0 = тг/2 имеем т] « 78 %. При'линейном режиме усиления (0 = л)
И = 50%.
3.2. ФОРМИРОВАНИЕ И ДЕТЕКТИРОВАНИЕ СИГНАЛОВ
АМПЛИТУДНОЙ МОДУЛЯЦИИ
Используем в качестве несущей (переносчика сообщений) гармонический
сигнал
*4 =Ц) COSTCO 0/ + ф0).
Он характеризуется тремя параметрами: амплитудой Uq, фазой <ро и посто-
янной мгновенной частотой оо- Меняя эти параметры во времени по закону
первичного сигнала b(t), получаем соответственно сигналы амплитудной (AM),
фазовой (ФМ) и частотной (ЧМ) модуляции. Зависимость меняющихся пара-
метров несущей от первичного сигнала называют модуляционной характеристи-
кой.
Рассмотрим сначала линейную амплитудную модуляцию. Её можно запи-
сать
«ам(0 = ЦО cos(®0^ + Фо) = Ш + ^АМ-Ц01 cos(ro0^ + Фо), (3.17)
где U{t) > 0 — огибающая (амплитуда) AM сигнала; Адм — крутизна характери-
стики модулятора. Сигнал (3.17) можно записать в виде
«дм(0 = Ц [1 + mx(0] cos(®0^ + Фо),
где т =-----——— - коэффициент глубины амплитудной модуляции,
U о
.. z>(0 I I
=|&(0|— ~ ноРмиРованныи моДУлИрующий сигнал, |х(01^1. Величина
At/ = mU0 определяет девиацию (максимальное отклонение) амплитуды в ходе
модуляции.
88
и.
Рис.3.7. Векторная
диаграмма AM сигнала
Рис.3.8. Временные диаграммы при AM
На рис. 3.7. приведена векторная диаграмма AM сигнала. Направление это-
го вектора неизменно, а его длина меняется при изменении b(t). На рис. 3.8
даны временные диаграммы: а) первичного сигнала b(f) (отрезок синусоиды);
б) изменения огибающей [/(/); в) AM сигнала при т < 1; г) AM
т > 1 ("перемодуляция")1).
При тональной модуляции b{t) — UQcos(Q.t + <pQ) получаем
«АМ(0 = 1^0 + СО8(Ш + (pn)]cos(o0/‘ + Фо) =
= Uq [ 1 + mcos(O/ + фо)] cos(®o^ + Фо)-
С учётом (3.2) сигнал (3.18) можно представить
МАМ (0 = cos(® (/ + ф о) + Г^~ COSTCO 0 + п)? + ф0 + фп) +
/Z Х ^—СО^о-^+Фо-Фо)
Этот сигнал содержит компоненты на частоте несущей (/0) и
частотах: верхней (/0+f) и нижней (/0-F), F- Q/(2tc). Амплитудные спектры
(на положительных частотах) первичного и AM сигнала (3.19) даны на рис. 3.9.
сигнал при
(3-18)
(3.19)
+ COI
на боковых
На рис. 3.10 показан амплитудный спектр первичного сигнала 5й(у), определённый на
положительных и отрицательных частотах и амплитудный спектр AM сигнала 50ЛМ (/), оп-
ределённый на положительных частотах. Видно, что последний получается (на боковых час-
тотах) из спектра путём переноса начала координат в точку fo и изменения интенсив-
ности в 0,5 Адм раз.
Неискажённое детектирование простым детектором в этом случае невозможно (см. ниже).
89
Рис.ЗЛО. Амплитудные спектры тонального первичного сигнала на положительных и
отрицательных частотах и AM сигнала на положительных частотах
и2
Из (3.19) видно, что средняя мощность несущей в AM сигнале Рн=-^-, в
то время как средняя мощность двух боковых компонент составляет
6 “ 8 Н 2 ’
(7И2 I
l + -y I .
Таким образом, полезная мощность AM сигнала (определяемая боковыми
составляющими, дающими информацию о частоте первичного сигнала и его
(т2
интенсивности) составляет лишь-------100 % от мощности несущей и
т2
-—Т100
2+т
% от общей средней мощности. При т = 1 эти доли составляют
соответственно 50 и 33 %. На практике (во избежание перемодуляции и для
уменьшения искажений при модуляции и детектировании) т берут не более
0,5...0,7. Приведённые энергетические соотношения для AM сигналов объяс-
няют интерес к получению сигналов AM без несущей1). Такую систему назы-
вают балансной амплитудной модуляцией (БАМ).
На рис. 3.11 даны амплитудные спектры первичного и AM сигналов при
непериодическом изменении b(t). Сплошной амплитудный спектр первичного
сигнала 5Ь(/) дан на положительных и отрицательных частотах, а спектр AM
сигнала — лишь на положительных частотах. Последний (на боковых частотах)
имеет форму спектра Sb(f) (смещённого из точки 0 в точку То)-
Рис.3.11. Амплитудные спектры первичного непериодического сигнала на положительных и
отрицательных частотах и AM сигнала на положительных частотах
90
С учётом (3.17) следует, что если спектр первичного сигнала равен 5S(/), то спектр AM
сигнала на положительных частотах
s0>AM(/)=t/0ej4,o8(/-/0)+/:AMss(/-/0)ej4,o. (3.20)
Дельта-функция определяет дискретную компоненту спектра (на частоте fo), а спектр бо-
ковых частот учитывает результат умножения K^b^f) на cos(a»o* + фо)-
Ширина спектра AM сигнала
Vam = 2Fb, (3.21)
где FB — верхняя (максимальная) частота в спектре первичного сигнала.
Очевидно, что если в составе b(t) имеются гармонические компоненты на положительных
частотах Fk с амплитудами Ак и начальной фазой 0^, в составе спектра (3.20) появятся компо-
ненты
Рассмотрим пути осуществления AM. Отметим прежде всего, что реализацию AM можно
рассматривать как частный случай операции преобразования частоты.
При рассмотрении параметрической реализации преобразования частоты можно исхо-
дить из схемы рис. 3.3, взяв в качестве входного сигнала в общем случае сигнал с амплитуд-
ной (по закону U(f)) и угловой (по закону <р(/)) модуляцией:
«вх(0 = U(f) cos[G)0r + ф(Г)], ' '
а в качестве управляющего — гармонический сигнал
fy(t) = Uy cos(oyZ + q>y).
Для сигнала на выходе перемножителя получаем
. . t ч \ \ U!{ \ , ч \
«вх(')/у(0 =-2--C0S((Q о + ® у + ф(0 + Фу )+-j-COS((® 0 - <0 у )г + ф(г) - фу ) .
Если фильтр на выходе перемножителя пропускает с одинаковым коэффициентом пере-
дачи К лишь первое слагаемое, мы имеем преобразование вверх
“вых (0 = ^(0 C0S((“ О + ® у )' + ф(') + фу ) •
При преобразовании вниз выходной продукт
“вых(') = ^уМ')СО8((Ш0-®у)' + ф(')-Ч>у)
Отметим, что при преобразовании частоты (вверх или вниз) выходной продукт пропор-
ционален амплитуде входного сигнала и сигнала управления. Форма сигналов на входе и вы-
ходе параметрического преобразователя частоты совпадает. Преобразователи частоты
(перемножители двух функций) используют в приёмных и передающих устройствах при фор-
мировании и обработке сигналов амплитудной и угловой модуляции.
На рис. 3.12 дана структурная схема реализации операций AM на передаче
и детектирования AM сигналов на приёме посредством перемножителей. Для
Рис.3.12. Структурная схема реализации формирования и детектирования сигналов AM
посредством перемножителей
й Для облегчения решения задач синхронизации передающего и приёмного устройств по час-
тоте несущей часто работают с частично подавленной несущей, играющей роль специального
пилот-сигнала.
91
отдельных блоков в схемы введены обозначения: ГШо - генератор сигнала гар-
монической несущей; ЛС — линия связи; ФНЧ — фильтр нижних частот;
Г в — генеРат°Р опорного сигнала на приёме, учитывающий фазовый сдвиг
Окан в канале.
Метод детектирования схемой рис. 3.12 (посредством перемножения при-
нимаемого и опорного сигналов) называют когерентным, поскольку предпола-
гается знание в месте приёма не только частоты используемой несущей /0, но
и фазы, вносимой каналом 0^ в сигнал $(/). Детектор при этом называют
синхронным.
В неискажающем (однолучевом) канале s(f) = yl7(/)cos(a»o* + 6Кан) (см. гл. 4), где у — ко-
эффициент передачи канала; 6^ = -юот (т — время запаздывания сигнала в канале)Р. Если
опорный сигнал на приёме cos(a»o* + 0кан + А), то сигнал на выходе ФНЧ Z>(f) = A2>(f)cosA, где
К — константа. От погрешности фазирования Д существенно зависит результат синхронного
детектирования. При Д = л/2 выходной результат равен нулю. Знание в месте приёма пара-
метров )о и ®кан обеспечивается специальным устройством их оценивания, входящего в общую
систему синхронизации работы передающего и приёмного устройств. (В этой книге вопросы
синхронизации не рассматриваются. Они изучаются в специальных курсах.)
Если в системе рис. 3.12 считать, что входной сигнал «вх(0 не содержит постоянную со-
ставляющую 17о и пропорционален b(f), то модулятор (умножитель) выдаёт сигнал БАМ, а
синхронный детектор обеспечивает его неискажённое детектирование.
На рис. 3.13 дана квадратурная схема формирования канального сигнала БАМ
«(f) = bi(t) cos<o0f + sina»o* (3.22)
при передаче сообщений от двух независимых источников и квадратурная схема детектирова-
ния для этого случая. В квадратурной схеме рис. 3.13 первичные сигналы bi(t) и bz(f) подают-
ся на перемножители с опорными сигналами, находящимися в квадратуре [cos(coof)>sin(c9of)].
Суммарный (групповой) сигнал в месте приёма подаётся (для получения оценок ^(f) и ft2(f))
на два синхронных детектора с опорными сигналами, находящихся в квадратуре
[cos(c£>of + Окан), sin(coo^ + 0кан)1- Качество работы квадратурной схемы предполагает когерент-
ность опорных сигналов на приёме.
Рассмотрим пути осуществления операции преобразования частоты, в част-
ности для получения AM сигналов, посредством нелинейных схем. На
*Рис.3.13. Квадратурная схема формирования и детектирования сигналов БАМ
при передаче сообщений двух независимых источников
*) В искажающем (многолучевом) канале соотношения между s(f) и «(f) более сложные. Мето-
ды приёма (демодуляции) для этого случая, см. гл. 5.
92
рис. 3.14 дана однотактная схема преобразования частоты на базе биполярного
п-р-п транзистора. Пользуясь полиномиальной аппроксимацией (3.4) для ха-
рактеристики zK = /(м6э), можно написать
»* =а0 +<?,(«, ч-а^ч-аДц ч-^)2 +0^ ч-^/ч-... . (3.23)
Так как
аД^Ч-м,) =ед2+а2^+2о2а1и2
то за счёт квадратичного члена в составе тока имеется слагаемое, определяю-
щее идеальный продукт преобразования частоты:
= 2a2ul(t)u2(t). (3.24)
Будем считать, что резонансный контур в коллекторной цепи выделяет по-
лезные продукты преобразования частоты (амплитудной модуляции). Если
удовлетворительная аппроксимация характеристики zK = /(«&) возможна лишь
полиномом выше второй степени, то найдутся слагаемые тока, которые поми-
мо полезного продукта из (3.24) создают заметное падение напряжения на ре-
зонансном контуре. Это может привести к неприемлемым искажениям.
Проведём анализ при аппроксимации нелинейной характеристики полино-
мом третьей степени. В этом случае
4 = ао +aiui +aiu2 +2a2MiM2 +a2ui +а2и1 +ази1 +«з“2 + 3a3w2«2 + 3a3w^. (3.25)
При осуществлении AM положим: w/z) = U0 coscoot — сигнал несущей,
u2(t) = UncosOi — b(t) — первичный сигнал. С учётом формул кратных дут (3.5)
(3.26)
можно записать ток коллектора в виде
=70 +Il(t)cos<d0t+I2(t)cos2c}0t+I3(t)cos3G)0t.
На резонансной нагрузке, настроенной на частоту несущей fo, заметное па-
дение напряжения создаёт лишь компонента тока /н = I^coso^t . С учётом
(3.25) получаем
3
Д(0 = zZjt/g + 2a2u2U0 + 3a3u2U0 = aj£70 +
3 3 3
+ 2a2U0Un cosQ/ + -а/Л3 + ~aJJ2nUa +—a3UJJ2n cos2Qz
Z U h* A J V Q J ki J У kt
Таким образом, закон изменения амплитуды первой гармоники тока
который при идеальной AM должен быть пропорционален b(t) = «2(0, теперь
искажён. Коэффициент нелинейных искажений Kw (отношение амплитуд со-
ставляющих Iqp/Iq) в составе (3.26)
к _ З|<фп _з|о,
“ 2-2|Я1|1/п 4
Если аз = 0 (справедлива аппроксимация полиномом второй степени), то
из (3.26) получаем
/1(0 = + 2a2UoUn cosQZ = aiUo [1 + mj cosQf],
а2
(3.27)
где ntj = 2
Pi
Ua — коэффициент AM по току.
93
Рис.3.14. Однотактная нелинейная
схема преобразования частоты
Рис.3.15. Двухтактная нелинейная схема
преобразования частоты
Для параллельного колебательного контура в коллекторной цепи входное
сопротивление = =
В области малых расстроек, учитывая, что резонансное сопротивление па-
„ -, IZ
раллельного контура = pQ (p = J~ ~ характеристическое сопротивление;
— добротность контура), получаем при резонансной частоте, со
Z(®) = —----------V’ <3-28>
1+JTk(o-®o)
где постоянная времени контура тк = 20/соо- Амплитуда напряжения на конту-
ре
Ui(i) = ai ^рез [i + mu cos(Q/ - arctgnTK)],
где коэффициент AM по напряжению на контуре
<т1.
=~1----:
(3.29)
Амплитудную модуляцию без несущей (БАМ) можно реализовать в двухтактной нелиней-
ной схеме преобразования частоты, показанной на рис. 3.15. В этой схеме благодаря транс-
форматору со средней точкой напряжение «2(0 поступает на базы двух транзисторов в проти-
вофазе, напряжение же «1(0 поступает на базы транзисторов в фазе. Если считать, что ток в
верхнем транзисторе i\ определяется формулой (3.25), то ток в нижнем транзисторе 0 при
одинаковых параметрах двух плеч (балансе) определяется (3.25), если «2 заменить на -ы21, т.е.
;2 = а0 + «!«! - + a2uf + а2и% + а3их - а3и2 - За3ихи2 + 3a3ufa.
Выходное напряжение пропорционально разностному току
/1 - i2 = 2ai«2 + 4a2Mi«2 + 2а3и% + .
Для первой гармоники несущей в составе тока (3.29) получаем
Ix(t) = 4a2U0Un cosQZ = 4«2I70Z>(f),
что соответствует неискажённой балансной модуляции.
Для оптимального выбора рабочей точки на характеристике /ж = /(ufo) при осуществле-
нии нелинейной AM часто определяют статическую модуляционную характеристику — зави-
симость 71 от смещения Е в цепи базы при заданной амплитуде несущей Uq. Для этого в схе-
ме рис. 3.14 положим «2=0, а их= U0cosa>gt. Найдём ток коллектора при аппроксимации ха
ракгеристики /ж = полиномом четвёртой степени
94
iK = a0+a^E + Uo cosco0/) + d2(E + Uo coso0r)2 +a3(£ + 170 cosco or)3 + a4(E + Uo cosco 0/)4.
Амплитуда первой гармоники несущей в составе этого тока
Л(0 = fajC/o+ljaj^ + (2а2 170+|3a4 U ’)е + 3a3U0E2 + 4a4U0E3 .
Построив зависимость 1\(Е) при заданных параметрах а1> а2, аз (рис. 3.16) можно вы-
брать рабочую точку на середине линейной части характеристики. По рис. 3.16 можно также
определить допустимые значения пределов изменения смещения (для неискажённой модуля-
ции) и, следовательно, возможное значение J7n, т = .
Перейдём к рассмотрению нелинейных (некогерентных, так как они не
требуют знания фазы 0кан) схем детектирования AM сигналов. На рис. 3.17 да-
на однотактная схема коллекторного детектора. Для того, чтобы нагрузка в
коллекторной цепи выполняла роль ФНЧ (для выделения полезного продукта
детектирования), должны выполняться условия:
При этом для полезного продукта с низкой частотой Q сопротивление на-
грузки практически равно R, а для ненужных высокочастотных компонент оно
близко к нулю.
Будем считать, что за счёт додетекторного усиления AM сигнал в цепи ба-
зы достаточно интенсивен для того, чтобы можно было использовать кусочно-
линейную аппроксимацию ВАХ \ = /(ибэ), при напряжении смещения Е = t/orc
(см. рис. 3.5). Тогда угол отсечки 0 = я/2 независимо от изменения во времени
амплитуды AM сигнала £/(/)cos(ciV + 0Кан) в цепи базы (U(t) = Uq + Адм^СО)*
Ток постоянной составляющей в цепи коллектора
/o0 = W0To(k/2) = №0/k.
SR
Напряжение на нагрузке коллекторной цепи UH(t) = I0(t)R = —U(t). Зависи-
мость полезного продукта на выходе детектора от модулированного сообщени-
ем параметра несущей называют характеристикой детектирования. В нашем
случае - она линейная, а коэффициент передачи детектора (отношение выход-
ного напряжения к амплитуде входного) Ка =
Рис.3.16. Статическая модуляционная
характеристика
U(t) п
Рис.3.17. Схема нелинейного (некогерентного)
детектора AM сигналов
95
Отметим, что полезный сигнал на выходе детектора повторяет форму ам-
плитуды входного сигнала. Такой детектор называют "линейным", он не вносит
искажений в передаваемое сообщение. Напряжение на выходе разделительной
ёмкости Ср (см. рис. 3.17)
CD
7t ’
Очевидно, что и "линейный" детектор при перемодуляции (рис. 3.8, г), выделяя сигнал,
пропорциональный огибающей, не может восстановить неискажённый первичный сигнал.
Если на вход рассмотренного "линейного" детектора подать AM сигнал без несущей
(сигнал БАМ), то выходной сигнал не будет воспроизводить форму первичного сигнала. На
рис. 3.18 изображена форма огибающей БАМ сигнала при модуляции тональной частотой F.
Первая гармоника этого сигнала равна 2F. "Линейный" детектор воспроизводит форму оги-
бающей рис. 3.18. Во избежание искажений при детектировании сигнала БАМ надо в цепь
базы схемы рис. 3.17 включить помимо смещения Е два источника: принимаемого сигнала
БАМ и восстановленного сигнала несущей [7Шо.
Если на входе нелинейного детектора имеется слабый сигнал, то характе-
ристику zK = /(иб) придется аппроксимировать квадратичной зависимостью
/к =a2(t/6-£)2. При U6 = E + KU(t)coscoot имеем zK = K2U2(/)(o,5 + 0,5cos2co0z).
Напряжение на коллекторной нагрузке UK{t) = Q,5RK2U2{t) не повторяет
форму амплитуды AM сигнала, следовательно, возникают искажения при де-
тектировании. Так при модуляции одним тоном (U(t) = Uq + Xam^cosQz) в
составе сигнала UH(f) имеются как полезная составляющая частоты Q, так и
вторая гармоника этой частоты 2Q, т.е. имеют место нелинейные искажения.
3.3. ФОРМИРОВАНИЕ И ДЕТЕКТИРОВАНИЕ СИГНАЛОВ
УГЛОВОЙ МОДУЛЯЦИИ
Сигнал угловой модуляции (УМ) при гармонической несущей можно пред-
ставить так:
MyMG) = t/0cos(v(z)) = t/0cos(o0z+9G)), (3.30)
где ф(0 = соо* + ф(0 “ полная фаза сигнала; ф(0 - фаза, которая несет в себе
информацию о первичном сигнале b(i). Амплитуда сигнала УМ, а следователь-
но, и его средняя мощность неизменны, что облегчает режим работы выходных
каскадов передатчика.
Сигнал (3.30) можно представить в виде вектора постоянной длины-Uq, ме-
няющего свое направление в зависимости от фазы ф(0 (рис. 3.19). Поскольку
ф(0 принимает (в зависимости от b(t)) как положительные, так и отрицатель-
ные значения, то можно считать, что вектор на рис. 3.19 качается относитель
Рис.3.18. Форма огибающей сигнала БАМ
при модуляции одним тоном
Рис.3.19. Векторная диаграмма
угловой модуляции
96
но некоторого среднего положения с максимальным отклонением (девиацией
фазы) Дф.
На практике различают два вида УМ: фазовая модуляция (ФМ) и частотная
модуляция (ЧМ). При ФМ изменения фазы ф(?) прямо пропорциональны пер-
вичному сигналу:
Ффм(') = ^фм(О+фо, ’ (3.31)
где фо — начальная фаза.
При ЧМ мгновенная частота сигнала прямо пропорциональна первичному
сигналу1)
ючМ(0 = ^^ = ю0+^^ = со0+/Гчм(/ЖО- (3.32)
at at
Мгновенной частоте co(Z) соответствует полная фаза
ф(0 = J®(t)dt = со ot + Jb(t)dt. (3.33)
На рис. 3.20 даны графики ФМ и ЧМ сигнала при треугольном изменении
b(f). Формы сигналов ФМ и ЧМ не отличаются друг от друга, если производ-
ная первичного сигнала во времени имеет тот же вид, что и сам первичный
сигнал. Это, в частности, выполняется при синусоидальном первичном сигна-
ле
b(t) = (3.34)
Сигнал УМ в этом случае можно записать в виде2)
мум(0 = Uо cos(co ot + Л/smQf), (3.35)
где М — так называемый индекс модуляции, который имеет смысл максималь-
ного приращения (девиации) фазы Дф. С учётом (3.31) и (3.34) индекс фазовой
модуляции
^ФМ = Аф = K^Ua .
С учётом (3.32) и (3.34) индекс ЧМ
Мчм = ^ = Кчмип/С1
причём девиация частоты
До = KJJQ.
Следовательно, индекс частотной модуляции
= M)/Q. = &f/F.
Найдём спектр при угловой модуляции одним тоном. Представим сигнал
при угловой модуляции одним тоном (3.35) выражением
wyM(0 = t/0Re[ej“o,ejA/sinn'], (3.36)
Из курса высшей математики известно разложение
eJMsinx = ? (3.37)
Л=-СО
где Jk{M) — функция Бесселя k-го порядка от аргумента М (М — любое вещест-
венное число).
На рис. 3.21 показаны графики функции Бесселя ЩМ), 7з(Л/) при положи-
тельном аргументе М. Следует подчеркнуть, что при некоторых значениях аргумента функции
Бесселя равны нулю, в том числе и Справедливо соотношение
Угловая скорость перемещения вектора на рис. 3.19 равна a(f) - а>о = Kv^b(t).
2> Постоянную начальную фазу <ро (не имеющую существенного значения) считаем нулевой.
97
Рис.3.20. Изменение во времени сигналов ФМ и ЧМ Рис.3.21. Графики функций Бесселя
(3.38)
(3.39)
Подставляя (3.37) в (3.36), получим
“ум
(f)=t/0Re 2 Jt(A/)ej(“o+*n)' =U0 ^Jt(A/)cos(cOo+^
Из свойств функции Бесселя известно, что чем больше порядок функции
Бесселя, тем протяжённее область значений аргумента, при которых модуль
этой функции очень мал. Обычно считают, что можно пренебречь спектраль-
ными составляющими с номером к > (М + 1). Таким образом, практически
ширину полосы частот при тональной угловой модуляции находят из соотно-
шения
Афум = 2Q(1 +Л/) или А/ум = 2F(1+M). (3.40)
На рис. 3.22 показан амплитудный спектр сигнала (3.39) на положительных
частотах при некотором значении М и Uq = 1. Практическая ширина полосы
частот при УМ шире, чем при AM, в М + 1 раз.
Если М « 1, то Д/ум = 2F, т.е. в спектре сигнала УМ имеется, вообще говоря, только
несущая и две боковые составляющие (как при AM). Этот результат следует из общей форму-
лы (3.39) при М с 1. Действительно, из свойств функции Бесселя известно, что при малых
индексах Jq(M) » 1, J\(M) = M/2, Jk{M) = 0 при к > 2. Но тогда из (3.38) и (3.39) следует
Мум(^) = U0cosa>0t+-^t/0cos(<B0 +^--y-t/ocos(<Bo•
Если M » 1 (этот случай представляет основной практический интерес, так
как при больших М помехоустойчивость УМ существенно выше, чем AM (см.
ниже)), то из (3.40) имеем
AfVM«2FM. (3.41)
Л(1И)
J/M)
W) т
ДА/)
/B+(A^1)F
0 /0-(ltfH)F
/0+F /0+2F
Рис.3.22. Амплитудный спектр при угловой модуляции одним тоном (на положительных частотах)
98
Поскольку при частотной модуляции то из (3.41) получаем,
что при больших индексах модуляции
А/ЧМ«2А/, (3.42)
т.е. ширина полосы частот при ЧМ равна удвоенной величине девиации часто-
ты и не зависит от частоты модуляции F. Спектр УМ при негармоническом
первичном сигнале определить трудно. Но он всегда сложнее, чем при AM при
том же первичном сигнале b(t).
Рассмотрим пути осуществления УМ. Сначала рассмотрим нелинейную
схему, содержащую перемножители. Используя формулу
соs(a+₽) = cosacosP-snasinP, (3.43)
представим (3.30) в виде
мум(/) = cos<p(/,6(0)cos®0/-UQ япф(/,6(/))япсоо/. (3.44)
На рис. 3.23 представлена структурная схема, реализующая УМ согласно
формуле (3.44). На схеме нелинейный блок Б] реализует преобразование сиг-
нала b(t) в сигнал cos <р[/, 6(0]. Блок Б2 реализует преобразование сигнала b(t)
в сигнал sin <р[/, 6(0] • В блоке ГШо генерируется несущая <7ocos ©о*- В блоке
Ф_я/2 осуществляется поворот фазы на -тс/2. На рис. 3.24 дана структурная схе-
ма получения ФМ из БАМ. На выходе блока БАМ образуется сигнал
Aq6(0cos(coof + Фо)- На выходе сумматора получаем сигнал
мвых(0 ~ ^i6(/)cos(co 0/ + <р0) + кг sin(<B ot + <p0) = ^2Z»2(/)+^2 sin^co ot + arctg(&iZ>(/)/£2)) (3.45)
Если считать, что усилительный блок в схеме рис. 3.24 обеспечивает такое
усиление, что
• (3.46)
то сигнал (3.45) можно записать в виде
= k2 sin ® J 4-^4 . (3.47)
Формула (3.47) определяет ФМ сигнал с малой девиацией фазы (вследствие
неравенства (3.46). Для увеличения девиации фазы можно осуществить опера-
цию умножения частоты (см. выше). При «-кратном умножении частоты де-
виация фазы сигнала возрастает в п раз. Схему рис. 3.24 можно использовать и
Рис.3.23. Структурная схема реализации УМ Рис.3.24. Схема получения ФМ из БАМ
посредством нелинейных блоков и умножителей
99
для получения ЧМ, если на блок БАМ в качестве управляющего подавать сиг-
нал
На рис. 3.25 дана схема получения ЧМ, основанная на изменении ёмкости
(или индуктивности) контура, определяющего частоту генерации генератора
гармонических колебаний, посредством присоединения к нему реактивного
двухполюсника, управляемого первичным сигналом b(f).
Известно, что частота генерации ZC-генератор гармонических колебаний равна резо-
нансной частоте контура: а»г = а»р. Резонансная частота а»р меняется, если параллельно конту-
ру включить реактивное сопротивление X, управляемое первичным сигналом b(f). Проще
всего реализуется параллельное подключение к контуру управляемой ёмкости С. (&(/)). Дос-
тигается это при помощи варикапа — управляемого полупроводникового диода, работающего
в запертом состоянии. При подаче внешнего воздействия на диод меняется заряд q на полу-
проводниковом переходе. При этом дифференциальную ёмкость варикапа — = можно
du
найти, если известна вольткулонная характеристика варикапа q(u). При параллельном под-
ключении ёмкости С_(&(/)) = С0 + ДС(й(/)) к контуру его резонансная частота (а следовательно,
и частота генерации) определяется формулой
1
со р = ....... .
у ({-н + О» + АС)
Обозначим суммарную начальную ёмкость контура Сн + Со через С*. Тогда
“р =
(3.48)
Построив зависимость a»p(Z>(/)) согласно (3.48) (рис. 3.26), можно выбрать рабочий
(линейный) участок характеристики, на котором справедлива аппроксимация
“р =®o + ^^/’(0> <3-49)
где a0 = l/y/L„C*. При гармоническом модулирующем сигнале b(f) = L4jSin£M имеем
Да» = . Максимально допустимые значения Ua (следовательно, и максимально допусти^
мые значения Да») определяются протяжённостью линейного участка кривой а»р(/»(?)) (см.
рис. 3.26). Для увеличения девиации частоты пользуются умножением частоты.
Рассмотренная схема может использоваться и для получения ФМ, если управление диф-
„ .. . . db(t) „
ференциальнои емкостью варикапа осуществляется сигналом u(/j = —. Тогда мгновенная
резонансная частота генератора меняется по закону а»р(/) = о0 + Л——, где к — константа.
Рис.3.25. Схема получения ЧМ на основе
генератора гармонических колебаний
Рис.3.26. Зависимость резонансной частоты
контура от сигнала b(t)
100
Мгновенная фаза колебания <у(/) = рР(')Л = со ot + А?ФМ6(/) + ср0, что соответствует фазовой мо-
дуляции.
Перейдём к методам детектирования сигналов УМ. Сначала рассмотрим
синхронное (параметрическое) детектирование по схеме рис. 3.3. Пусть на пе-
ремножитель поступает входной сигнал
Ывх(0 = 1ио соз((й ot + фО, &(*))),
а опорное колебание
fy(t) = A cos(gj0? + 71/2).
Тогда выходной сигнал (после ФНЧ с коэффициентом передачи К)
“выхМ = #cos^y - = £sin(/,Z>W),
где В = . Если |ф[?Ж]1 мало, то
wBUXW = Вф(/,6(/)).
Следовательно, обеспечено неискаженное детектирование фазы. При детек-
тировании ЧМ сигнала, поскольку <p(t) = K^b(t)dt, то схема синхронного де-
тектора должна быть дополнена блоком дифференцирования.
Рассмотрим некоторые нелинейные схемы детектирования при УМ и в
первую очередь — схему фазового детектора. Он может быть построен по схеме
детектора (рис. 3.17) с тремя источниками в цепи базы (смещения Е, сигнала
ыФМ(?) = yt70 cos(©0r + КФМЬ(^) и опорного колебания uq(/) = Acosfaot + я/2)) при
условии, что характеристику /к = /(мбэ) можно аппроксимировать квадратичной
зависимостью (рис. 3.27). Тогда
4 = ~ 2<22MoW“<I>mW (0 ”^^2^ФМ^) .
Полезный продукт на коллекторной нагрузке определяется первым слагае-
мым
“вых W = k cos(^ - = к ы^КФЫЬ(?)),
где k — константа. При малой девиации фазы (индексе модуляции) имеем
“вых(/) = М/Х ^=^фм.
Если в цепь базы схемы рис. 3.27 подан вместо сигнала иФМ(0 сигнал
, то сигнал на коллекторной нагрузке придется подвергнуть дифференци-
рованию. Есть и другая возможность детектирования ЧМ сигнала: превратить
ЧМ сигнал в ФМ сигнал и последний подать в цепь базы схем рис. 3.27, взяв в
качестве опорного исходный ЧМ сигнал с полной фазой фчм(/). Тогда диффе-
ренцирование выходного продукта не понадобится. Для получения ФМ сигна-
ла подадим ЧМ сигнал на колебательный контур, настроенный на частоту не-
сущей ©о- Фазовая характеристика такого контура в окрестности точки резо-
нанса ©р — ©о
ф(со) = -(о - ©о)тф, (3.50)
где тф — групповое время запаздывания. Подставив в (3.50) выражение для
мгновенной частоты со(/) = соо + , получим следующее выражение для
101
Рис.3.27. Схема нелинейного фазового , ▼ (
детектора Рис.3.28. Иллюстрация преобразования ЧМ в AM
полной фазы узкополосного сигнала на выходе контура, определяющее ФМ
сигнал:
Ч'(0 = 'Рчи(0-^(0гп>^). (3.51)
Другой способ детектирования ЧМ сигнала основан на его предваритель-
ном превращении в сигнал амплитудно-частотной модуляции (АЧМ) с помо-
щью расстроенного колебательного контура. Рисунок 3.28 иллюстрирует это
преобразование. Если точка То соответствует середине прямолинейного участка
АЧХ колебательного контура, а при качании частоты сигнал остаётся в преде-
лах этого участка, то амплитуда полученного AM сигнала меняется пропор-
ционально изменению частоты. Сигнал с выхода расстроенной© колебательно-
го контура подаётся на обычный амплитудный детектор.
3.4. ФОРМИРОВАНИЕ И ДЕТЕКТИРОВАНИЕ СИГНАЛОВ
ОДНОПОЛОСНОЙ МОДУЛЯЦИИ
Под сигналами однополосной модуляции (ОМ) понимают сигналы, получен-
ные при модуляции гармонической несущей частоты и отличающиеся тем, что
их спектр (на положительных частотах) располагается по одну сторону (слева
или справа) от точки со = ©о- Сигналы однополосной амплитудной модуляции за-
нимают полосу частот первичного сигнала FB, т.е. в 2 раза более узкую, чем
сигнал AM. Это обстоятельство обусловливает большой интерес к системам
связи с ОМ в тех случаях, когда экономия полосы частот канала является ре-
шающим фактором выбора системы сигналов.
Из гл. 2 следует, что аналитический сигнал b(t) = b(t) + ]b(t) имеет спек-
тральную плотность 54(/) = 254(/) лишь на положительных частотах (от 0 до
FB), 6(z)ew определяет комплексный сигнал, спектр которого расположен
справа от точки © = ©о (верхняя боковая полоса), так как умножение на eJtt’y
означает перенос спектра 54(/) (с сохранением его формы) вправо на величи-
ну ©о- Действительный сигнал ОМ с верхней боковой полосой
MoMKSpXHW = Re(^)eJ“</) = Z’WCOS(0o?-^Wsm©0?. (3.52)
102
Из гл. 2 также следует, что аналитический сигнал = имеет
спектральную плотность 5.(/) = 254(/) лишь на отрицательных частотах (от О
ь
до -Гв). Поэтому сигнал ОМ с нижней боковой полосой (расположенной слева
от точки о = ©о) можно записать в виде
«омнижнМ = Re(£(/)eJtt,°4 = />(*) cos© 0/-£(/)sm©0/. (3.53)
Поскольку сигналы ОМ (3.52) и (3.53) являются частными случаями сиг-
нала квадратурной модуляции (3.22), их можно формировать и детектировать
по схеме рис. 3.13. ОМ сигнал можно получить также из сигнала AM путём
выделения (фильтрации) одной боковой полосы частот. Такой метод Нашёл
применение в практике формирования сигнала AM с частично подавленной
боковой полосой.
Согласно (3.52), (3.53) сигнал ОМ можно представить
«ом (0 = 4b2(t)+b2(t)
cos ©0/±arctg
(3.54)
т.е.
его можно рассматривать как сигнал с AM по закону U(t) = ylb2(t) + b2(t) и
ФМ по закону ф(/) = ±arctg777 или же с ЧМ с мгновенной частотой
b(t)
h(Adb(t) k(Adb^
ZX db(t) b^~dT~b^~dT
©W-©0Z+ -©0Z± b2(t)+b2(t)
3.5. ФОРМИРОВАНИЕ И ДЕТЕКТИРОВАНИЕ СИГНАЛОВ,
МОДУЛИРОВАННЫХ ДИСКРЕТНЫМИ СООБЩЕНИЯМИ
Первичный сигнал при последовательной передаче кодовых символов Ь^к)
(п — порядковый номер символа в последовательности, к е0,ти-1 — номер по-
зиции кода, т — основание (число различных элементов) кода) можно запи-
сать в виде
*Ц(') = Е v(z-z„,^),
п=0
где tn — момент появления и-го символа; — форма импульсного сигна-
ла, представленного символом Ь(к}. Сигнал b^t) будем называть цифровым.
Этот сигнал чаще всего (что будем предполагать в дальнейшем) является изо-
хронным, т.е. отдельные кодовые символы появляются с равным тактовым ин-
тервалом Т. В этом случае можно написать
00
bJ<t) = ^v(t-nT,b^. (3.55)
и=0
Обычно >J{t,b(k}} = bwv(t), т.е. цифровой сигнал (3.55) образуется как линей-
ная комбинация одинаковых элементов v(/) [4]:
00
b^ = Ybn^-nT). (3.56)
n=0
103
Как правило, в системах передачи дискретных сообщений используются
двоичные коды (т = 2). Однако повышение основания кода позволяет в прин-
ципе поднять эффективность системы (см. гл. 11).
Элементарные сигналы v(t) имеют вид прямоугольных импульсов или им-
пульсов другой формы, выбираемой из соображения ограниченности полосы
частот канала передачи. Сигнал (3.56) можно рассматривать как результат про-
хождения порождающей решётчатой функции
и®0
(3.57)
через формирователь первичного сигнала — линейную систему с постоянными
параметрами (стационарную систему) с импульсной характеристикой
g{t} = v(0- Но сигнал (3.57) можно считать и частной моделью (3.56) при
v(0 = 5(0, т.е. с носителями сообщения, имеющими нулевую длительность.
Они требуют бесконечную полосу частот и не могут быть реализованы. Если
потребовать, чтобы амплитудный спектр сигнала v(Z) был равномерным на от-
резке [-FB; +FB], а его СП равна
О,
(3.58)
то
v(0 = 2S0FB
(3.59)
Теоретическая длительность элемента сигнала (3.59) неограниченна. Прак-
тически ввиду быстрого убывания функции (sinx)/x с увеличением х, можно
говорить о конечной протяжённости сигнала (3.59) во времени. Если в качест-
ве v(0 выбрать прямоугольный импульс с длительностью Т и амплитудой А, то
его спектр будет определяться формулой
s(f) = AT
sin(co7’/2)
&Т/2
т.е. теоретически он неограничен. Часто в качестве сигнала v(Z) выбирают сиг-
нал гауссовской формы v(t) = Ае~м , тогда и его спектр по Фурье также имеет
гауссовскую форму s(f) = Be . Такой сигнал наиболее компактно размещает-
ся в частотно-временной области.
Представим (3.56) в виде
*.0) = - try +Sb,wv(t-пТ)~ b<‘>v(l-,7) +М') • (3.60)
и==0
n*i
При анализе bu(t) в месте приёма с целью извлечения информации об
z-м по порядку следования символе сумма в правой части (3.60) может рас-
сматриваться как сигнал межсимвольной интерференции (МСИ) b^t). Если
решения о символе принимать в отсчётной точке t = iT, то сигнал ^(z)
не окажет влияния на это решение, если v(Z) удовлетворяет свойству
"отсчётности"
104
vWS8(^-^) = 8W. (3.61)
Ии-00
которое называют первым условием Найквиста.1) Оно означает, что сигнал v(f)
лишь в одной отсчётной точке отличен от нуля. Очевидно, что сигнал (3.59)
при тактовом интервале передачи Т — 1/2Гв (у него равномерный спектр в по-
лосе Найквиста [-1/2Г;1/2Т]) удовлетворяет условию (3.61), т.е. обладает свой-
ством отсчётности. Этим свойством обладают и другие сигналы, не обязатель-
но имеющие равномерный спектр. Установим, каким требованиям при этом
должен удовлетворять спектр сигнала.
Периодическую решётчатую функцию можно представить комплексным рядом Фурье
(з.б2)
Л—-со
так как коэффициенты рассматриваемого ряда Фурье
Г/2
1 * 1
-Т/2
С учётом (3.62) запишем (3.61) следующим образом:
£е^\(/)=л>(г). (3.63)
Л=-<ю
Возьмём преобразование Фурье от левой и правой части (3.63). Тогда
=0 Г/2 ( Г) Г/2
2 f 'Мь1 т dt = T j8и)е_>,л = т. (3.64)
.*=-« —Г/2 -Г/2
Учитывая, что СП Фурье сигнала v(f) равна
00
?,(/)= Jv(f)e-J<0'^, (3.65)
из (3.64) следует результат
“ ( 1Л
Л=-со
(3.66)
Соотношение (3.66) называют вторым условием Найквиста. Условию (3.66) удовлетворяет
широкий класс сигналов, в частности, сигнал v(/) с амплитудным спектром вида
"приподнятого косинуса” [4]. Сигнал, удовлетворяющий условию (3.66) при перекрытии от-
дельных компонент ряда, имеет эффективную ширину спектра F3, превышающую полосу
Найквиста:
Л > Гн = 1/27. (3.67)
При этом удельная скорость передачи двоичных символов (на 1 Гц полосы частот)
1 1 (бит
Y-TFf<7’FH (с Гц] ’ '
При использовании сигналов (3.59) с полосой Найквиста (/н = 1/27) по-
лучаем • ' .
у = 2 биг/(с Гц). (3.69)
Для передачи цифрового первичного сигнала по каналу используют раз-
лйчные несущие ДО- Здесь мы рассмотрим только гармоническую несущую.
Цифровая амплитудная модуляция (ЦАМ). Канальный сигнал при ЦАМ
(линейной модуляции) можно записать как
]) Его представляют и в другом ввде.
105
«ЦАм(^) ~ cos(co0/+(p0). (3.70)
и=0 '
Спектр этого сигнала содержит несущую и две боковые полосы, каждая из
которых повторяет спектр первичного сигнала 6ц(0- Формирование сигнала
(3.70) и его детектирование можно осуществить параметрическими и нелиней-
ными схемами, рассмотренными выше для сигналов AM. Однако из получен-
ной оценки первичного сигнала bu(i) надо извлечь на отдельных тактовых ин-
тервалах Т оценки кодовых символов Ь. Для этого надо иметь решающее уст-
ройство, которое находит эти оценки (рис.
На рис. 3.29 для отдельных блоков
введены обозначения: АД — амплитуд-
ный детектор (когерентный или некоге-
рентный), РУ — решающее устройство,
которое с тактовым интервалом Т при-
нимает решения о кодовых символах
Ь(к}. Эти решения фиксируются в запо-
минающем устройстве ЗУ.
3.29).
Рис.3.29. Схема детектирования сигнала ЦАМ
и вынесения решения о кодовом символе
Отметим, что для приёма дискретных сообщений надо обеспечить не только синхрониза-
цию по частоте несущей too и по фазе сигнала (при когерентном детектировании), но и такто-
вую, а также цикловую (с учётом методов передачи дискретных сообщений по реальным ка-
налам) синхронизацию. С учётом наличия аддитивного шума в канале приём сообщений по
схеме рис. 3.29 не является наилучшим. В гл. 5 анализируются оптимальные схемы приёма
дискретных сообщений (при различных видах модуляции), в которых по принимаемым коле-
баниям z(Z) выносятся решения Ьп без восстановления цифрового сигнала .
Если в (3.70) Uq = 0, то имеем сигнал ЦАМ без несущей (ЦБАМ). В этом
случае возможно или синхронное (когерентное) детектирование, или некоге-
рентное детектирование с восстановлением несущей в месте приёма. Методы
ЦАМ позволяют по квадратурной схеме рис. 3.13 организовать передачу и при-
ём двух независимых дискретных сообщений.
Передаваемый сигнал в цифровой КАМ (ЦКАМ)
«цкам(0 = Z>m(0cos(a>o* + Фо) + &U2(Osin(a>of + Фо)- (3.71)
Приём в этом случае может быть только когерентным. Если положить в
(3.71) bia(j) ~b^t), то можно по квадратурной схеме организовать и однопо-
лосную ЦАМ.
Цифровая фазовая модуляция (ЦФМ). Канальный сигнал при ЦФМ в этом
случае можно записать в виде
«цфмW = ит со/©0/ + £фМЭД*’v(/ - пТ)| = Um со/£ФМ-пТ)| coscoot -
X n-Q ' \ n^Q J
(оо Д
K^b^t-nT) smGV, (3.72)
»=0 '
где Um — амплитуда канального сигнала. Вид этого сигнала, реализация моду-
лятора и детектора существенно упрощаются при использовании прямоуголь-
ных импульсов v(f) с единичной амплитудой и длительностью Т. В этом случае
отсутствует МСИ и вместо (3.72) при Ьп = ±1
106
“цфм W = ит со/COS©ot - Um 2b(nk}v(t - пТ) sm( J sin ©ot, (3.73)
где Л0 = 2Хфм “ разность фаз для двух позиций кода1). Спектральный состав
сигнала (3.73) по существу не отличается от сигнала (3.70). Следовательно,
ЦФМ и когерентное детектирование в рассмотренном случае реализуются так
же, как для ЦАМ, в частности по квадратурной схеме (ЦКАМ). Отметим, что
если разность фаз при двухпозиционном коде ДО = тс (используются противо-
положные сигналы), несущая в спектре сигнала ЦФМ исчезает, когда символы
с различными значениями появляются с равной вероятностью.
В гл. 5 рассматриваются также методы относительной (разностной) ЦФМ. В этом случае
можно кроме когерентного использовать и некогерентный демодулятор. На практике широко
используются многопозиционные системы ЦФМ, когда начальная фаза несущей принимает
не два, а т значений. В технике передачи данных широко используются как многопозицион-
ные (т > 2) системы ЦАМ (многоуровневые системы с линейной модуляцией), многопозици-
онные системы ЦФМ (с нелинейной модуляцией), так и их смешанные варианты (ЦАФМ).
Амплитудно-фазовые диаграммы некоторых таких систем сигналов даны на рис. 3.30.
(Знаком "+" обозначается начало координат). Для повышения качества передачи
(минимизации средней вероятности ошибочного приёма в канале с шумом) стремятся подоб-
рать такую сигнально-кодовую конструкцию, чтобы сигнальные точки разрешённых кодовых
комбинаций (см. гл. 11) находились друг от друга на максимально возможном расстоянии.
Часто конструкция рис. 3.30, б (четырёхпозиционная ЦФМ или система ФМ-4), имеющая
широкое распространение в технике связи, реализуется посредством двоичной КАМ. Это
можно сделать следующее перекодирование: нечётные тактовые посылки длительности Т
двоичной входной последовательности подают на один вход квадратурного модулятора; на
другой вход квадратурного модулятора подают чётные посылки входной двоичной последова-
тельности; посылки передают по каналу в течение интервала Тк = 2Т. Сохранив скорость пе-
редачи информации 7?и =
log2 4 = 2 = 1
Тк 2Т Т ’
можно повысить помехоустойчивость системы, ис-
пользуя некоторые методы кодирования.
Цифровая частотная модуляция (ЦЧМ). Если частотная модуляция реали-
зуется посредством выбора одного из m независимых гармонических сигналов,
то в общем случае при каждом переключении (с /-й на у-ю позицию;
i,J е 1,т-1 ) происходит разрыв фазы канального сигнала. Действительно, если
z-й гармонический сигнал
Рис.3.30. Расположение сигнальных точек в 5-позиционной ЦАМ (а),
в 4-позиционной ЦФМ (ФМ-4) (б), в 8-позиционной ЦФМ (в), в 12-позиционной ЦАФМ (г)
1 > Девиация фазы при этом Д<р = Д0/2.
107
Ui(t) = Um cos(©i t + фг), (3.74)
то в момент коммутации 4 = kT имеем
Щ^к) = Um cos(©i kT + ф/), = ai кТ + ф/
При коммутации J-го генератора
tyW = Umcos(a)jkT + фу), yj(tk) = ojkT + фу
Если (как обычно бывает на практике) после модулятора (в данном случае
электронного коммутатора) включён полосовой фильтр, ограничивающий Ши-
рину спектра сигнала, то скачки фазы приводят к переходному процессу в
фильтре. В результате этого возникает паразитная амплитудная модуляция сиг-
нала, и пик-фактор сигнала (отношение его пиковой и средней мощностей)
увеличивается. Кроме того, при использовании m независимых генераторов для
обеспечения ортогональности системы сигналов требуется разнос частот
А/ = i/T (i = 1, 2, ...), т.е. минимальный разнос = 1/Т.
С целью сужения спектра и сохранения минимального пик-фактора сигна-
ла необходимо обеспечить непрерывность изменения мгновенной фазы сигна-
ла при ещё меньших значениях А/т1П.
Частотную модуляцию с непрерывной фазой сокращённо обозначают
ЧМНФ. В системах ЧМНФ мгновенная частота сигнала меняется по закону
©(О=©о +^£Х*М'-«7’)>
п=0
а канальный сигнал
(оо \
cos(»0t+K^b^t-nT)+<p0 ’
и=0 '
где v4(0 — "частотный” импульс;
v(/) = “ "фазовый" импульс; Фо — начальная фаза.
(3.75)
(3-76)
Если v4(Z) — прямоугольный импульс единичной высоты, то фазовый импульс
v(/) = Jj/1 = Z, /е[0,7].
о
Для обеспечения более "гладкого" изменения фазы и частоты (соответственно сужения
спектра сигнала) на практике (например, в цифровых системах мобильной сотовой связи по
общеевропейскому стандарту GSM) используют гауссовскую форму "частотного импульса"
v4(Z) и, соответственно, интегральную гауссовскую форму "фазового импульса"
\ /
где ти — величина пропорциональная эффективной длительности частотного импульса.
В дальнейшем для упрощения анализа будем считать, что "частотный им-
пульс" v4(0 является прямоугольным с единичной амплитудой и длительностью
Т.
Запишем сигнал (3.76) на отрезке [0,7] при передаче z-й позиции символа:
«/(0 = cos(©X + ф0Л), к = 1, 2, 3, ..., (3.77)
2л
где со. =соо +-уЛ Фо,* “ начальная фаза к данному (£-му) тактовому интервалу.
При осуществлении МНФ можно обеспечить ортогональность сигналов
(3.77) при частотном сдвиге:
108
А^„ия = = J_
2тс' 7niin 2Т ‘
Действительно,
т
(u,.,иу) = иг0 J cosfco/ + Фо к)cos((o J + Фо k)dt.
0
Используя тригонометрическую формулу (3.1), получаем
/ \ U* 2 *0T sin(m,.-(o7.)r
(3.78)
(3.79)
(СО, -COj/
При получении этого результата учтено, что слагаемое, обязанное суммар-
ной частоте со/ + соу, мало. Минимальный разнос частот, при котором правая
часть (3.79) обращается в нуль, находится из соотношения 'ISfitT— тс. Откуда
следует (3.78).
Цифровую ЧМ с непрерывной фазой и параметром (3.78) называют моду-
ляцией с минимальным (частотным) сдвигом - ММС (minimum shift keying -
MSK). Покажем, что индекс модуляции в этой системе М = 0,5. Определим
индекс частотной модуляции М как отношение девиации частоты А?чм = Лсо/2
(максимальное отклонение от средней частоты) к частоте модулирующего сиг-
нала типа "точка" Q = п/Т (F = 1/27):
Z\(D Т
(3.80)
С учётом (3.78) и (3.80) получаем, что для ММС индекс модуляции дейст-
вительно равен 0,51\ При использовании для ЧМ сигналов (3.74), ортогональ-
ных в усиленном смысле, минимальный индекс М ~ 1. Отсутствие скачков фа-
зы в системах МНФ благоприятно сказывается на форме амплитудного спек-
тра сигнала. При М= 0,5 амплитудный спектр сигнала МНФ весьма узок и
сосредоточен вблизи частоты несущей. При значениях М> 1 амплитудный
спектр сигналов МНФ становится широким.
Цифровую частотную модуляцию можно реализовать различными способа-
ми, например управлением частоты генератора гармонических сигналов по за-
кону (3.75). При этом начальная фаза на л-м тактовом интервале
н-1
Фо^^Х^+Фо-
/=0
Для систем ММС с индексом М = 0,5 широко используется квадратурный метод модуля-
ции со сдвигом модулирующих функций. Для обоснования такой модуляции представим сиг-
нал (3.76) при ММС (Ацм = тг/27) на Л-м и (к + 1)-м тактовых интервалах2) как
м(')ммс*.*+1 = L™ cos + + + =
(3.81)
(3.82)
где
Фо,*=у£6/-
2 /=о
(3.83)
б При М < 0,5 ортогональность сигналов (3.77) даже при непрерывной фазе нельзя обеспе-
чить.
2) На к-м тактовом интервале сигнал (3:82) имеет мгновенную частоту со(Г) = coy ± Q
(Q = тг/27), что соответствует ЧМ с минимальным частотным сдвигом.
109
Квадратурные компоненты
[7СG) = cos <р0* + ~;bkv(t-кТ) +~bk+iv\
(3.84)
Us(t)=Umsin (f>ok+^bl[v(t-kT)+~;bMv[t-(k + l)T] .
Разобьём информационный поток {bk} на два потока, соответствующих чётным и нечёт-
ным индексам к: {Т>2/} и {^2/+ J. С учётом (3.83) видно, что при к = 21 имеем ср02, = п-~2т = пт
(т — целое число). Тогда, пользуясь формулами косинуса и синуса суммы углов, можно на-
писать
71
7t I
+ ^Ь2М^
На
На <
7Г ,
равно —b2i,
ит cosTunsin
отрезке [2/7] (2/ +1)7] формула (3.85) принимает вид
М') = ит cosnmb2l sin - 21Т) .
отрезке [(2/ + 1)7](2/ + 2)7], имея в виду, что первое слагаемое под знаком синуса
и используя формулу sin(±7t/2 + +) = ±cos+, получаем:
(3.85)
1/,Z(/) = cosnmb2I cos
Обозначим C2i = cosnmbu (что можно интерпретировать как некоторую перекодировку)
Таким образом, на отрезке [2/7](21 + 2)7] для Usj(f) имеем единое выражение
c2l sin •^•(/-2/7’) - 21Т) + cos
1, ie[0,T
О, ig[0,7
где Х(г) =
пактно:
(3.86)
— срезающая функция. Формулу (3.86) можно представить более ком-
t-2.IT
< 2 .
и^) = итс2, sin^-2/7)l|
Рассмотрим случай к = 21 + 1. Тогда с учётом (3.83) следует
Ф0.2/+1 =ТйП + ^Ь21 .
Подставив в Uc i (?) значение к = 21 + 1, получим
£/<,,»(/) = Umsir^nm + ^b2l
(3.87)
sin^ b2l+i v[/ - (2/ +1)7] + ^b2l+2 v[i - (21 + 2)T] .
На отрезке [(2/ + 1)7] (21 + 2)7] последнее выражение принимает вид
6^0) = -U„ cosnm-b2lb2M sin^G -(2/ + l)7j) .
На отрезке [(2/ + 2)7] (21 +3)7] получаем
UeJ(t) = ~um cosnm-b2lb2l+l cos^-^G -(2/ + 2)t)} .
Обозначим:
—cosTtm-b2ib2l+l = — c2lb2i+1 = c2l+l,
что можно интерпретировать как некоторую перекодировку. Тогда
[(2/ + 1)7] (21 +3)7] для Ucj(f) получаем единое выражение
UcJ(t)=-U^,c.
7Г г / Г/ — (2/ +1)7
\»с2Ш sin—[/-(27 + 1)7’1 %
С учётом (3.87) и (3.88) весь сигнал ММС можно записать
на отрезке
(3.88)
2
НО
МММс(О~
1=0
С21
t-2.IT
2
sin со ot +
ЭД
+ UmjLjC2l+l
1=0
sin^[r-(2Z+l)r] X
t-(2l+l)T
2
cosro ot.
(3.89)
sia~(t-2lT)
На рис. 3.31 дана квадратурная схема, формирующая сигнал ММС согласно (3.89). Вве-
дены обозначения для отдельных блоков: К — кодер, превращающий информационный поток
{Ьк,1} двоичных символов, следующих с тактовым интервалом Т (Ь^ е [-1; 11), в два информа-
ционных потока двоичных символов {с2/,2т1 и {С2/+ 1,2г), следующих с тактовым интервалом 2Т
(с/ е [-1; 1]); Гп — генератор гармонического сигнала с частотой F= 1/47; <р_п/2 — фазовра-
щатель на -я/2; БОМ — блок определения модуля; ГИо — генератор гармонического сигнала
(несущей) с частотой со0. При реализации схемы учтено, что
sin
Существуют различные способы демодуляции сигнала ММС.
1. Частотное детектирование без учёта непрерывности фазы. При таком способе производит-
ся оценивание частоты сигнала на протяжении одного тактового интервала Т. Поскольку
начальная фаза <po,w ПРИ этом не определяется, возможен лишь некогерентный приём.
2. Когерентное детектирование с отслеживанием фазы сигнала. Если предыдущие символы
демодулированы без ошибок, возможно предсказание начальной фазы в соответствии с
(3.81). При этом возможен когерентный приём, и вероятность ошибки соответствует приё-
му двоичных ортогональных сигналов (см. гл. 5) с поправкой на точность оценки началь-
ной фазы.
3. Квадратурная когерентная демодуляция на протяжении двух тактовых интервалов 27’
(рис. 3.32). Возможность такой демодуляции вытекает из представления (3.89). Демодуля-
ция элемента сигнала с номером п = 21 ведется на интервале (2/7;2(/ + 1)7) по синусной
ветви. Демодуляция элемента сигнала с номером п — 21 + 1 ведется на интервале
((2/ + 1)71(2/ + 3)7) по косинусной ветви.
На рис. 3.32 введены обозначения: РУ — решающие устройства; ДК — декодер, осуществ-
ляющий объединение символов {c2Z2TJ и {c2z+i,2t} в единый поток, их декодирование и выда-
чу информационного потока ; J — блок интегрирования. Соседние элементы информа-
ционной последовательности выделяются в двух ветвях обработки, при этом интегрирование
в обеих ветвях осуществляется со сдвигом на Т. Интегратор верхней ветви осуществляет ин-
тегрирование в пределах (кТ,(к + 2)Т), интегратор нижней ветви — в пределах
((к + 1)71(к + 3)7). После выявления знака напряжений в блоках РУ интеграторы приводятся
к нулевым начальным условиям. Входные полезные сигналы в каждой из ветвей обработки
•5цум(01 = ± 7 IsinQZ | cos(coqZ + 0кан),
*$ЦУм(0п = =*= 7 I COSQZ | sin(co0Z + 0кан),
Рис.3.31. Квадратурная схема формирования двоичного сигнала ММС
111
Рис.3.32. Квадратурная схема детектирования сигналов ММС
где у И 0кан — коэффициент передачи и фазовый сдвиг в канале. Таким образом, в каждой из
ветвей на интервале 2Танализируется (с целью принятия решения об информационном сим-
воле C2i или С21+ О система противоположных сигналов. Энергия принимаемого сигнала по
каждой ветви обработки
2T 2Т 2тт2
Е = J(8тГ2/со8со0/)2Л =y2^m j(cosn/sinco0/)2*=^-—Т ,
о о
т.е. совпадает с энергией гармонического сигнала амплитуды yUm на интервале (0;7). В ре-
зультате (см. гл. 5) вероятность ошибки получается такой же, как при оптимальном когерент-
ном приёме двоичных противоположных сигналов с тактовым интервалом Т (ФМ2 — двухпо-
зиционная фазовая модуляция). Но для системы ФМ2 из-за скачков фазы в начале тактовых
интервалов требуется большая полоса частот, чем для ММС.
3.6. МОДУЛЯЦИЯ И ДЕТЕКТИРОВАНИЕ ПРИ ИМПУЛЬСНОМ
ПЕРЕНОСЧИКЕ
В импульсных системах передачи энергия сигнала излучается не непрерывно (как при гар-
моническом переносчике), а в виде коротких импульсов. Это позволяет при той же общей
энергии излучения, что и при непрерывном переносчике, увеличить пиковую (максимальную)
мощность в импульсе и тем самым повышать помехоустойчивость приёма. В качестве пере-
носчика первичного сигнала b(i) в импульсных системах связи используют периодическую
последовательность видео- и радиоимпульсов.
оо
Периодическая последовательность видеоимпульсов /(/) = Уду(/-иГ), где v(/) — форма
«в-оо
одиночного импульса, характеризуется следующими параметрами: высотой (амплитудой) Л;
длительностью (шириной) ти; частотой следования _РИ = 1/Т (Г — период следования); поло-
жением импульсов во времени относительно тактовых точек1). Изменяя один из перечислен-
ных параметров в соответствии с изменением модулирующего сигнала b(fy, можно получить
четыре основных вида импульсной модуляции (ИМ) видеоимпульсов: амплитудно-
импульсную модуляцию (АИМ), модуляцию импульсов по длительности или ширине (ДИМ
или ШИМ), частотно-импульсную модуляцию (ЧИМ), времяимпульсную модуляцию (ВИМ).
На рис. 3.33, а изображена периодическая прямоугольная импульсная последовательность
/(/)• На рис. 3.33, б изображён передаваемый первичный сигнал b(t) (для простоты этот сигнал
принимает на интервале анализа лишь три значения). На рис.З. 33 (в, г, д, е) показаны сигна-
лы АИМ, ШИМ, ЧИМ, ВИМ. Вертикальными штриховыми линиями отмечены положения
смодулированных импульсов во времени (тактовые точки). Предполагается, что при всех
видах ИМ изменения соответствующего параметра пропорциональны значениям модулирую-
щей функции.
*) Если видеоимпульсы имеют не прямоугольную форму, появляется ряд дополнительных па-
раметров.
112
At)
a)
6)
АИМ
в)
ШИМ
r)
ЧИМ
Д)
ВИМ
e)
АИМ-АМ
ж)
ВИМ-АМ
з)
ВЧИМ
и)
ЕФИМ
к)
Рис.3.33. Временные диаграммы различных видов импульсной модуляции -f-
Частота следования импульсов FK в импульсных системах связи определяется максималь-
ной частотой первичного сигнала FB: FH > 2FB. Действительно, в импульсных системах связи
передаются лишь дискретные (во времени) отсчёты первичного сигнала b(t). Согласно теоре-
ме отсчётов частота дискретизации Fa > 2FB. Частоту Fa и можно выбрать в качестве частоты
следования импульсов. Сигнал АИМ можно определить выражением «аим(0 ~ ^(ОЛО-
Спектр этого сигнала легко найти как сумму спектров AM сигналов. Для этого надо периоди-
оо
ческую функцию переносчика представить рядом Фурье f{t) - cos(2kFh^+<pt). Спектр
*=о
AM сигнала на отдельной поднесущей kFn находим так, как описано в § 3.3.
На рис. 3.34, б показан амплитудный спектр АИМ (на положительных частотах) при мо-
дуляции первичным сигналом со спектром, показанным на рис. 3.34, а. Из рис. 3.34, б следу-
ет метод детектирования АИМ сигнала: детектирование посредством детектора AM сигнала
113
можно ввести на любой из поднесущих kFK (к = 0, 1, 2, ...). Проще всего выполнить детекти-
рование посредством линейного ФНЧ, АЧХ которого отмечена на рис. 3.34, б штриховой ли-
нией. Отфильтровка нежелательных частотных составляющих выполняется тем проще, чем
лучше выполняется неравенство (F„ — FB) > FB или F„ > 2FB (т.е. чем меньше интервал дис-
кретизации первичного сигнала). Ограничив ширину спектра АИМ сигнала первым лепест-
ком штриховой огибающей кривой на рис. 3.34, получаем
А/аим w Vth • (3.90)
Обычно выбирают скважность импульсов переносчика достаточно большой, т.е.
у = Т/хи » 1. (3.91)
Большие временные интервалы между импульсами используют для передачи рабочих им-
пульсов от других источников, т.е. для осуществления многоканальной передачи с временным
разделением каналов (см. гл. 9). С учётом (3.90) и (3.91) можно видеть, что
А/аим = * 2YF» » 2F. >
т.е. сигнал при АИМ (это справедливо и при других видах ИМ) занимает значительно более
широкую полосу частот, чем первичный сигнал b(f).
Для импульсной передачи сообщений по реальным линиям связи обычно сигналом на
выходе импульсного модулятора «^(Г) осуществляется вторичная модуляция гармонической
несущей. Структурная схема системы связи для этого случая дана на рис. 3.35. Введены сле-
дующие обозначения для отдельных блоков: ИМ — импульсный модулятор; ГИН — генератор
импульсной несущей; ДЕМ — демодулятор канального сигнала, выдающий оценку сигнала
ИМ («„,(/)); ИД — импульсный детектор; b(t) — оценка первичного сигнала, получаемая на
выходе ФНЧ.
На рис. 3.33, ж показан сигнал АИМ после вторичной модуляции высокочастотной гар-
монической несущей по амплитуде. Такая двойная модуляция обозначается АИМ-АМ. На
рис. 3.33, з показан сигнал ВИМ после вторичной модуляции гармонической несущей по ам-
плитуде (ВИМ-АМ).
При использовании в качестве несущей периодической последовательности радиоим-
пульсов можно получить ещё два вида импульсной модуляции: высокочастотную импульсную
модуляцию по частоте (ВЧИМ) и высокочастотную импульсную модуляцию по фазе
Рис.3.35. Двухступенчатая схема передачи сообщений: на первой ступени - импульсная несущая,
на второй ступени - гармоническая несущая
114
(ВФИМ). Сигнал при этих видах модуляции показан на рис. 3.33, и и рис. 3.33, к. Отметим,
что сигнал ВИМ-АМ называют также сигналом высокочастотной, временной импульсной мо-
дуляции (ВВИМ).
Детектирование сигналов ВИМ (или детектирование сигналов ВИМ-АМ на второй сту-
пени демодуляции), которые часто используются на практике, можно проводить различными
методами. Один из них — превращение ВИМ в АИМ. Для этого интегрирующее устройство
включается при нулевых начальных условиях в тактовый интервал и выключается при появ-
лении переднего фронта импульса сигнала ВИМ. Уровни сигнала на интеграторе определяют
сигнал АИМ. Последний детектируется обычным образом.
3.7. ФУНКЦИЯ КОРРЕЛЯЦИИ И СПЕКТРАЛЬНАЯ ПЛОТНОСТЬ
МОЩНОСТИ МОДУЛИРОВАННЫХ СИГНАЛОВ ПРИ
МОДУЛЯЦИИ СЛУЧАЙНЫМ ПРОЦЕССОМ
Рассмотрим особенности ФК и СП средней мощности модулированных колебаний на
примере гармонической несущей. Модулирующий процесс (первичный сигнал) B(f) будем
предполагать стационарным с нулевым математическим ожиданием и корреляционной функ-
цией В(х). Модулированное колебание в этом случае также является случайным процессом.
Однако, как показано ниже, при стационарном модулирующем процессе модулированный
процесс оказывается нестационарным. Тем не менее можно определить СП средней мощно-
сти таких процессов как преобразование Фурье от усреднённой во времени ФК процесса.
Полученная СП средней мощности вполне соответствует физическому представлению о СП
средней мощности модулированного колебания.
Чтобы найти аналитическое выражение для СП средней мощности модулированного ко-
лебания, нужно, исходя из распределения и корреляционной функции модулирующего про-
цесса найти корреляционную функцию модулированного процесса. Сначала решим эту задачу
для AM. В этом случае модулированный процесс
cos(<B0+<p0),
(3.92)
где B(z) — центрированный стационарный случайный процесс с корреляционной функцией
В(х). Будем считать вероятность того, что значения случайного процесса Х’дм^О/^о выходят
за пределы отрезка [-1;1], пренебрежимо малой. На практике этого можно достичь соответст-
вующим ослаблением модулирующего сигнала на входе модулятора. Раскрыв в (3.92) скобки,
получим
^AM(^) = ^AM^(/)eos(a>o/ + (Po) + ^oCos(<0o^ + <Po), (3-93)
откуда видно, что процесс С7дм(0 имеет переменное математическое ожидание
1/осо8(<в0* + фо)- Этому слагаемому соответствуют дискретная составляющая СПМ на частоте f0
величиной U^/2 и корреляционная функция Wq/2)cos<b0t . Первое слагаемое в правой части
(3.93) представляет собой нестационарный центрированный случайный процесс Сдм(/), по-
лученный умножением стационарного процесса В(г) на неслучайную функцию времени
А\мсо8(шо* + фо)- В соответствии с формулами гл. 2 для корреляционной функции процесса
Сам(/) имеем В. (t,t-т) = cos(co0/ + <p0)cos(co0(/-t)+<p0)b(t).
илм
Усреднив это выражение по переменной /, получим
В. (r^O^B^cosmo-r. (3.94)
U лм
Из (3.94) заклю"чаем, что при AM усреднённая корреляционная функция центриро-
ванного модулированного процесса получается умножением корреляционной функции моду-
лирующего процесса на множитель 0,5/^ cos(coor), где jRT — крутизна характеристики мо-
дулятора при AM. Корреляционной функции (3.94) соответствует СПМ
115
G, (/) = 0,5^^ JB(t)cos(<ot)cos(<oot)c/t =
_Uam
Z oo oo
= 0,25^ fs(t)COSTCO +<oo)t^t+ Jb(t)co
где G(/) — СПМ модулирующего процесса 5(/), определённая как по положительным, так и
по отрицательным частотам; G(/ + /o) — спектр G(/), сдвинутый соответственно вправо и
влево (в область отрицательных частот) на величину То. Суммарная усреднённая СПМ, соот-
ветствующая процессу (3.93), определяется на положительных частотах формулой
Go(/) = 0,5i/028O) + О,5Хам2С(Г-/о). (3-95)
Рассматривая (3.95), делаем вывод, что сплошная часть СПМ для AM процесса состоит
из двух боковых полос, являющихся "зеркальным отражением" друг друга относительно час-
тоты То- На сплошную часть спектра приходится средняя мощность 0,5Адм 5(0) (где 5(0) —
2
мощность модулирующего процесса), а на дискретную составляющую — мощность 0,5-Uq .
Полная средняя мощность процесса равна 0,5Uq2 [1 + B(G)/U02], где Uq — амплитуда не-
сущей. Таким образом, теоретико-вероятностный подход в случае AM целиком согласуется с
выводами, полученными ранее для AM при детерминированном первичном сигнале.
Заметим, что, как следует из (3.94) и (3.95), усреднённые во времени ФК и СПМ AM ко-
лебания совершенно не зависят от распределения модулирующего процесса 5(/), а опреде-
ляются полностью его корреляционной функцией или, что то же, его СПМ. Это одно из
главных свойств амплитудной модуляции. Иначе обстоит дело в случае угловой модуляции,
которую сейчас рассмотрим..
Случайным образом модулированную по углу гармоническую несущую запишем в виде
г/ум(0 = Um cosfao' + Ф(0 + фо], (3.96)
где Ф(/) — случайный процесс, связанный с модулирующим процессом В(/) соотношениями
Ф(0 = ^фм #(0 ПРИ ФМ;
t
ф(/)= Кчмпри ЧМ. (3.97)
°
Процесс (3.97) нестационарен даже при стационарности B(t) (см. гл. 2). Поскольку цен-
трирование процесса (3.96) в общем случае затруднено, определим функцию корреляции
этого процесса без его центрирования:
^ум(М-т) = ^ум(^)^ум(^-т)= z
= 0,5?7^со5(2<о0/-<о0т + 2<р0 + Ф(/)+ф(г-т))+со5(а>0т+ф(/)-ф(/-т)^ . (3.98)
Выполним теперь усреднение (3.98) по времени. Слагаемое, содержащее косинус двой-
ного угла, при этом обращается в нуль, и получаем
ВУМ(т) = 0,5^ cos(<ooT + 0(f,-t)) -0,5U^cos(o0t)cos6(z,t)-O^G^sin(<Do-t)sin0(z,-t) . (3.99)
Здесь обозначено
6(Г,т) - Ф(0 - Ф(Г - т). (3.100)
Обратим внимание на то, что в отличие от AM при угловой модуляции синусоидального
переносчика ФК модулированного колебания и его СПМ зависят от распределения случай-
ного процесса (3.100), а следовательно, и распределения модулирующего процесса 5(/). Если
одномерное распределение w(Q) выражается чётной функцией своего аргумента, то
00 ___
sin0 = Jsin0-w(0)fi?0 = 0 и Вум(т) = 0,5Gj; cos(co от) cos0 . (3.101)
116
Если модулирующий процесс В(/) стационарен и распределён нормально, тогда и 0(/,т),
как линейное преобразование этого процесса, представляет собой нормальный процесс с ну-
левым средним значением, но в случае преобразования (3.97) он нестационарен. Следова-
2
тельно, дисперсия этого процесса ств [В(т)] в общем случае зависит не только от корреляци-
онной функции процесса й(т), но и от времени. Используя табличный интеграл, получаем
для математического ожидания cos0 в рассматриваемом случае
оо
J COS0 w(0)cZ0 = 1
72лсте
и вместо (3.101) можно написать
( ст2
Яум(г) = 0,517 2 cos(co от)ехр1—^5-
г ( еИ
J cosOexp с70 = ехр --у-
_2>
сте
2 J
(3.102)
Сравнивая (3.102) с (3.94), можно заметить, что если иметь в виду лишь вид корреляци-
онной функции модулированного сигнала (следовательно, и его СПМ), то угловая модуляция
нормальным случайным процессом с корреляционной функцией В(т) эквивалентна модуля-
ции амплитуды случайным процессом, корреляционная функция которого
Вэ(т) = ехр-
(3.103)
Можно показать, что сказанное остаётся справедливым и при другом (не нормальном)
распределении модулирующего сигнала как для ФМ, так и для ЧМ, только зависимость
Вэ(т) = /(В(т)) меняет вид.
Зависимость (3.103) косвенно отражает тот факт, что при одном и том же модулирующем
сигнале спектр AM колебания не шире, чем при угловой модуляции. В самом деле, характер
этой зависимости (для всех представляющих практический интерес случаев) такой, что Вэ(т)
всегда не шире (т.е. убывает быстрее), чем В(т). Но более "узкой" корреляционной функции
соответствует более "широкий" спектр.
Благодаря множителю cos coqt в корреляционной функции (3.102) сплошная часть СПМ
гармонического переносчика, модулированного стационарным случайным процессом, имеет
локальный экстремум на частоте /0. Поскольку Вум(т) — это усреднённая корреляционная
функция некоторого случайного процесса, a cos coqt — чётная функция от т, то чётной же
функцией от т оказывается и множитель Вэ(т) = Дв(т)). Последнему соответствует чётное же
со
преобразование Фурье б3(/)= | B3.(t)coscot6/t , всегда имеющее при /= 0 экстремум. Множи-
тель cos соот, как уже отмечалось при рассмотрении AM, соответствует переносу спектра в об-
ласть частоты fa так, что экстремум оказывается на этой же частоте.
Для случая модуляции по фазе
6(Лт)- £ФМ
(3.104)
_2 __
сте _ лфм
В2(/-т)+В2(/)-2В(/)В(1-т) = 2А^фМВ(0)(1-В(т)),
(3.105)
где В(т) = В(т)/В(0) — коэффициент корреляции модулирующего процесса В(/). В этом случае
усреднённая корреляционная функция модулированного сигнала
5®M(T) = °.5f7mcos(a>Oi:)eXp(~^®MjB(0))(l + ^(,t)) (3.106)
ФК (3.106) соответствует СПМ
СФМ(/) = °Л172 Jсов(со0т)с08(сот)ехр(- ^mB(oX1-/?G)))^t: • (3.107)
117
К сожалению, интегрирование (3.107) в общем виде затруднено. Поэтому рассмотрим
решение при двух крайних значениях параметра А?фМВ(0), зависящего как от мощности моду-
лирующего сигнала B(Q), так и от крутизны характеристики модулятора АфМ.
Если А"фМВ(0) « 1, то, разлагая ехр^АГфмВ(о)7?(т)) в ряд и ограничиваясь двумя первыми
членами, имеем
5ФМ (г) = 0,5t/2 cps(co от)ехр(- КфМ5(о))(1 + ^м^(г)). (3.108)
ФК (3.108) соответствует СПМ на положительных частотах
Со,фм W = °>5^ ех₽(- Кфм5(0)>(/ - /0)+0^™^фм ехр(~ К2ФМ В(о))б(/ - /0 ), (3.109)
который похож на спектр при AM (3.95). Дискретная составляющая спектра на частоте /0
имеет среднюю мощность 0,5С2ехр^-АГфМВ(0)), а две зеркальные относительно /0 полосы,
образующие сплошную часть спектра, имеют суммарную среднюю мощность
О,5[7^Х'фМВ(о)е~/:*мВ(о). Общая средняя мощность О,5С2е^“/:',мЛ(о^1+/:',мЛ(о^ « O^U2, как и должна
быть при ФМ. Доля мощности "полезной" сплошной части спектра очень мала, так что рас-
сматриваемый случай имеет малый практический интерес.
Если А"фМВ(0) » 1, то /?(т) целесообразно разложить в ряд Маклорена:
я(,)=1+^!^И+^!2Ж+.„, (злю,
где 7?W(0) — k-я производная /?(т) по т при аргументе 0. Компоненты с нечётными степенями
отсутствуют в этом ряду, так как /?(т) является чётной функцией т. Видно также, что вторая
производная от /?(т) при т = 0
Я(2)(0) = -а2; (3.111)
(3.112)
Поскольку при А"фМВ(0) » 1 весомые значения экспоненты в (3.106) лежат в областях, где
7?(т) близок к 1, т.е. т мало, то можно ограничиться первыми двумя членами ряда (3.110) и
получить соотношение
5Фм(т) = с°£(сйот)ехр(-О,5А'фМВ(о)а2т2). (3.113)
Корреляционной функции гауссовской формы В1(т) = ехр(-0^А^фМВ(0)а2т2) соответствует
и СПМ той же формы
Г~2^ ( f2(2n)2
У^фм"(0)° \ 2лфмВ(0)а J
(З.П4)
а умножение корреляционной функции БДт) на cos ©о* соответствует, как известно, переносу
спектра G\(f) вправо и влево (в область отрицательных частот) на величину fa. Таким образом,
корреляционной функции (3.113) соответствует СПМ на положительных частотах
G<.,»m(/) = 0,5uJ
У а-фм о{0)а
Я 2АГфМВ(0)л2 J
(3.115)
При Х'фМВ(0)->0 выражение (3.115) стремится к дельта-функции О,5С28(/-/о). Итак,
можем утверждать, что, если A^MB(0)» 1, СПМ ФМ колебания имеет только сплошную
часть, форма которого гауссовская независимо от формы спектра модулирующего процесса
G(/)-
Спектральная плотность мощности ЧМ колебания ввиду нестационарности (3.97) легче
всего получить не путём вычисления усреднённой корреляционной функции Дчм(т)> а путём
сопоставления с процессом (3.97) стационарного случайного процесса (3.96), у которого
спектр средней мощности такой же, как усреднённый во времени спектр средней мощности
118
процесса ф(/) = J . Усреднённая СПМ такого процесса бф(/) = АГ2чм——, ибо коэффи-
о
2
циент передачи по мощности идеального интегратора равен 1/со . С учётом сказанного ре-
зультаты для ЧМ следуют из результатов для ФМ, если в них заменить Афм на Лцм, а
00 °0, f’/ f\ 7
В(т) = Jg(/)cos(cot)6//' на 5э(т)= J —Ц-^-со^сот)^ . При этом В(0) = jG(f)df заменяется на
—со —со —со-
00 С( f\
Г д df и считается, что этот интеграл существует.
J со2
—со
Рассмотрим теперь особенности спектров средней мощности при цифровой модуляции
(манипуляции) гармонической несущей частоты fo синхронным двоичным случайным процес-
сом. Спектр при AM определяется, очевидно, так же, как при модуляции непрерывным слу-
чайным процессом. Если в (3.92) считать, что В(/) - это синхронный двоичный случайный
процесс с корреляционной функцией В(т) = й2 1-— , |т|^ Т, и СПМ G(f) = h2T——*—(см.
гл. 2), а = U0/h , то усреднённая ФК
Вцам (т) = QfU2 cos(co от) + 0,5J7q (1 - |т|/2)cos(co от), (3.116)
а соответствующий спектр средней мощности на положительных частотах
, , sin2[(со -со(Лг/21
Со,цам(/) = О,5С23(/-/о)+ОХ7—(3.117)
[(со -со0)7/2]
Графики, соответствующие второй компоненте формулы (3.116) и формуле (3.117), пока-
заны на рис. 3.36, а и б.
Для нахождения усреднённых корреляционной функции и спектра средней мощности
при двоичной фазовой') модуляции (ЦФМ) воспользуемся результатами, полученными при
цифровой AM. Будем рассматривать ФМ с противоположными сигналами, представляющими
наибольший практический интерес. При модулирующем двоичном сигнале рис. 3.37, а сигнал
ФМ с амплитудой Um при манипуляции фазы несущей на угловую величину п имеет вид
рис. 3.37, б. Его можно представить как наложение двух сигналов AM, модулированных взаи-
мообратно (рис. 3.37, в и рис. 3.37,г), причём фазы несущих в них противоположны. Если мо-
дулирующий случайный процесс (рис; 3.37, а) стационарен, то усреднённые ФК и СПМ сиг-
нала ФМ определяются учетверением соответствующих характеристик сигнала AM, однако
дискретная составляющая на частоте несущей при манипуляции на л в спектре ФМ отсутст-
и и2 и2 Р
вует. Поскольку при рассмотренной выше ЦАМ Uo =.™*х , то , где Р] — сред-
няя мощность AM сигнала при передаче 1. Полагая, что символы 1 и 0 передаются равнове-
Рис.3.36. Усреднённая во времени ФК боковых составляющих при AM гармонической
несущей случайным синхронным двоичным сигналом (а) и усреднённая во времени СПМ
при AM гармонической несущей случайным синхронным двоичным сигналом (б)
') Аналогичные результаты можно получить и при относительной фазовой модуляции.
119
a)
'б)
в)
Г)
Рис.3.37. Представление сигнала ЦФМ как суперпозиции двух сигналов ЦАМ
роятно, имеем для средней мощности при ЦАМ. Рср = ^/2 и иЦ1 = Рср/2 .
Два рассмотренных AM сигнала, модулированных взаимообратно, дают суммарную сред-
2 • U2 U2
нюю мощность боковых -------— = ——,
L 2-2 2
которую считаем равной Рср. Таким образом,
Дцфм(т) = 2[7q(1-|t|/7’)cos(coot) , (ЗП8)
ч , sin2[(co-со0)772]
Ооцфм(/) = 2[702Г—li-(3-119)
[(“-“oW2j
Графики (3.118) и (3.119) отображены на рис. 3.35, а и б, если ординаты увеличить
в 4 раза.
При цифровой двоичной модуляции частоты с разрывом фазы (переключением цифро-
вым первичным сигналом 6Ц(/) двух независимых генераторов с частотами соi и ©2) усреднён-
ные во времени ФК и СПМ ЧМ сигнала можно найти как сумму соответствующих характе-
ристик Двух AM сигналов с несущими частотами coi и ©2-
Анализ показывает, что при цифровой частотной модуляции с непрерывной фазой (ЧМ-
НФ) спектр при определённых индексах модуляции заметно сужается по сравнению со случа-
ем ЧМ с разрывом фазы. Для системы ММС (модуляция с минимальным сдвигом) спектр
оказывается уже, чем спектр при ЦАМ (или ЦФМ).
3.8. ПОМЕХОУСТОЙЧИВОСТЬ АМПЛИТУДНОЙ И УГЛОВОЙ
МОДУЛЯЦИИ
Предельно достижимая (потенциальная) помехоустойчивость систем пере-
дачи дискретных и непрерывных сообщений (достигаемая при оптимальных
методах приёма) будет рассмотрена в гл. 5 и 8. Здесь определим лишь сравни-
тельную помехоустойчивость передачи непрерывных Сообщений при AM и
УМ, если для детектирования AM сигнала используется некогерентная неоп-
тимальная, но широко распространённая схема "линейного" детектора, а для
детектирования сигнала УМ используется фазовый детектор.
Запишем узкополосное колебание на входе AM детектора (сигнал плюс
шум):
Z(t) = s(t) + N(t)=y (u0 + KMb(ty cos(g) ot + 0) + Xn(t) cos(o ot + б) + Fn(/) sin(o ot + б), (3.120)
где у, 0 — коэффициент передачи и фазовый сдвиг сигнала в канале; Хп(?) и
Уп(0 “ случайные квадратурные компоненты помехи «(/), которые считаются
120
независимыми и с нулевыми МО. Если аддитивная помеха N(t) является ста-
ционарным случайным процессом, то mx=my=0, = Уг2(0 =№(?) = о2.
Запишем колебание (3.120) через суммарную огибающую
W=4? (w. + W]2+ТО; (3.121)
Z(0 = t4(z)cos(co0r-®(z) + 0), (3.122)
Y (t)
где Ф(/) = агс1е—7--
r(tf.+WW)+x„W
На выходе ФНЧ линейного детектора полезный сигнал um(t) пропорцио-
нален огибающей сигнала (3.122)
«mW = ill? (U„ + Х«Д0)+ XnW]’ + TO =
= jr2(u,+K„Mttf +2Л'п(<)г(у0+ЛГам4(/))+Л-„2(/) + !;!« (3.123)
Будем оценивать помехоустойчивость системы отношением средних мощ-
ностей сигнала и помехи (ОСП) на выходе детектора:
Р
______ с вых
Рвых ^,2
Найти этот параметр из (3.123) в общем случае затруднительно. Поэтому
сначала рассмотрим режим сильного сигнала, когда
(3.124)
с вероятностью, близкой к 1. Тогда с учётом (3.123) можно написать
““’(')=у (с/’+”
“rt/.+rWW+TO-
(3.125)
В рассматриваемом случае мешающее воздействие оказывает только син-
фазная составляющая помехи Tn(Z). Исходя из (3.125) определим ОСП на вы-
ходе детектора, полагая, что b(t) = Un sinQ/:
у2/Г2м£/2
Рвых = ..“ • (3.126)
Как видно из (3.120), ОСП на входе детектора1)
у2/С2 £/2
Р.к = Л g (3.127)
Можно видеть, что в режиме сильного сигнала "линейный" детектор увели-
чивает ОСП в 2 раза (рВЫх/Рвх = 2).
Теперь рассмотрим режим слабого сигнала, когда огибающая входной по-
мехи
и St) = K’W + TO » y(ut +Мй) (3.128)
с вероятностью, близкой к единице. Тогда исходя из (3.123) получаем
Р Несущая исключена из полезных сигнальных составляющих.
121
Mm(O = Un(r)Jl +
»t/n(0 1 +
u*(t)
(3.129)
и Выражение (3.129) не содержит чистой сигналь-
ной составляющей (рвых = 0). Более того, в услови-
/ ях неравенства (3.128) wH4(0 « Цх(О, т.е. сильная
/ / " помеха полностью подавила сигнал, что характерно
/ /для нелинейных преобразований смеси сигнала и
\Фп / / помехи.
'Х<// Рассмотрим помехоустойчивость ФД, включён-
ного после ограничителя амплитуд, снимающего
паразитную AM. Анализ при произвольных отно-
--------------- шениях сигнал/шум на входе детектора затруднен.
Рис.3.38. Сложение сигнала УМ Рассмотрим ситуацию, когда амплитуда ФМ сигна-
и аддитивной помехи на входе ла Цт с верОЯТНОСТЬЮ, 6ЛИЗКОЙ К еДИНИЦе, сущест-
ограничителя амплитуд венно превышает огибающую помехи Un(t):
Um » Un(t) или Um »|Уп(г)| (3.130)
Рисунок 3.38 иллюстрирует сложение вектора сигнала УМ
5ум(0 ~ £4)cos[®0^ + Фс(0] с вектором помехи Un на входе ограничителя ампли-
туд. На рисунке обозначено: <рс(/) — угол полезной модуляции, отсчитанный от
начального положения (штриховая линия); <рп(/) ~ угол шумовой модуляции,
создаваемой проекцией Yn вектора Un. Очевидно, что проекция Хп
(совпадающая с сигнальным вектором) не создаёт угловую модуляцию. Коле-
бание, соответствующее суммарному вектору Us, можно записать в виде
t4(0 cos[co0r + Фс(0 + ФпО)]- (3.131)
Из рис. 3.38 с учётом условия (3.130) для угла шумовой модуляции получа-
ем
<Pn(t) = arctg
U.
(3.132)
Полагая, что
<рс(0 = КфмЮ) = Кфмиа$т£И= М sinQf,
запишем НЧ сигнал на выходе неискажающего фазового детектора при вход-
ном сигнале (3.131):
(3.133)
WH4<JM
У (/)
(г) = *(фе(0+фпМ) = * A/smQr + -^—
к — коэффициент передачи детектора. Средняя мощность полезного выходного
сигнала
(3.134)
Чтобы найти среднюю мощность (дисперсию) шумовой компоненты
у (Л
= (3.135)
122
сначала найдём СПМ случайного процесса N(f) на входе детектора. Будем счи-
тать, что помеха
N(t) = Xn.(f) coscoo* + Yn(f) sincoo^ (3.136)
с дисперсией о2 является квазибелым шумом в полосе положительных частот
сигнала [оо_(ЛГ + 1)Ф <оо + (ЛГ + 1)Н]. Но (3.136) можно рассматривать как
результат амплитудной модуляции гармонической несущей первичным сигна-
лом ^(О1) (его дисперсия Y2 = о2). Это означает, что СПМ процесса Уп(г)
(злз7>
Для СПМ шума 7УВЫх(0 в соответствии с (3.135) имеем
2 Л2
G°’™^~ U2m(M + l)F' (3.138)
Дисперсия выходного шума в полосе (0;П)
F а2 к2
< = (3.139)
Отношение ОСП на выходе фазового детектора с учётом (3.134)
Учитывая, что ОСП на входе
U2
Рвх=г±, (3.141)
2°п
можно видеть, что в режиме сильного сигнала фазовый детектор увеличивает
ОСП в
^=Л/2(1 + Л/)
Рвх
раз.
Проанализируем помехоустойчивость при ЧМ. Сигнал на выходе детектора
ЧМ пропорционален производной от (3.133) (т.е. мгновенной частоте)
«нч ЧМ(0 = ^(фсW +Фп(0) = к WcosQz1 +
(3.142)
Y
Средняя мощность полезного выходного сигнала
М2П2к2
р =----------•
С,ВЫХ 2 5
СПМ случайного процесса Уп(0 с учётом (3.137)
2 2
СПМ выходного шума частотного детектора
/ со2о2Л2
Дисперсия выходного шума в полосе (0,f)
dt
(3.143)
(3.144)
(3.145)
(3.146)
Р То же относится и к компоненте Xn(f), которая здесь нас не интересует.
123
(3.147)
Оу
•'* вых
(3.148)
F
- f (f)df = 3^2^ + jJq = 3U^M + l)
ОСП на выходе частотного детектора с учётом (3.144)
Л/23£/2(Л/+1)
Рвых “ 2о2
Учитывая, что ОСП на входе детектора определяется формулой (3.141), по-
лучаем, что в режиме сильного сигнала частотный детектор увеличивает ОСП в
^ = ЗЛ/2(1 + Л/) (3.149)
Рвх
раз.
Можно показать, что в режиме слабого сигнала и в неискажающем фазо-
вом (частотном) детекторе происходит подавление сигнала сильной помехой.
ВЫВОДЫ
1. Много преобразований сигналов в системах электрической связи (преобразование и умно-
жение частоты, генерация колебаний, модуляция и демодуляция, выпрямление и др.) свя-
зано с трансформацией спектра, следовательно, они могут быть выполнены либо в линей-
ных системах (цепях) с переменными параметрами (параметрические цепи), либо в нели-
нейных цепях.
2. Вследствие линейности амплитудной модуляции спектр ДМ сигнала повторяет форму
спектра сообщения и занимает полосу, в два раза превышающую максимальную частоту
спектра первичного (модулирующего) сигнала.
3. Из энергетических соображений и соображений экономии полосы частот канала представ-
ляют интерес системы с балансной модуляцией (AM без несущей) или системы с одной
боковой полосой (ОБП).
4. Квадратурная схема передачи и приёма сигналов позволяет на одной несущей передавать
сообщение от двух независимых источников.
5. Фазовая и частотная Модуляция является разновидностями угловой модуляции.
6. Спектр сигналов с УМ при больших индексах модуляции М шире и сложнее спектра AM.
7. Сигналы ОБП можно формировать путём модуляции двух гармонических несущих, сдви-
нутых по фазе на л/2, посредством первичного сигнала и его преобразования по Гильбер-
ту.
8. Временные и спектральные характеристики цифрового первичного сигнала существенно
зависят от выбора аналогового переносчика дискретных сообщений.
9. Система двоичной частотной модуляции с минимальным сдвигом (ММС) (с индексом мо-
дуляции 0,5) позволяет достичь помехоустойчивость системы с противоположными сигна-
лами (ФМ-2), но занимает более узкую полосу частот.
10. Модулированный сигнал при импульсном переносчике занимает более широкую полосу
частот, чем при гармонической несущей.
И.Спектр средней мощности AM сигнала при модуляции случайным процессом повторяет
форму спектра средней мощности первичного сигнала, но не зависит от плотности веро-
ятности модулирующего процесса.
12. Спектр средней мощности сигнала УМ при модуляции случайным процессом имеет более
сложный характер, чем при AM, и зависит от плотности вероятности модулирующего про-
цесса.
13. В режиме сильного сигнала помехоустойчивость УМ при больших индексах модуляции
значительно больше, чем при AM.
ВОПРОСЫ, ЗАДАЧИ И УПРАЖНЕНИЯ
3.1. Дифференциальная крутизна параметрического элемента меняется по закону
S_(t) = So + 5icosa)y/, а входной сигнал. мвх(0 = U(t)cos(o>ct + <рс)- Найти крутизну преоб-
124
разования частоты 5^ как отношение амплитуды тока частоты юпр = юу - юс к амплиту-
де входного сигнала.
На нелинейный элемент с ВАХ i = + а\ (и-Е) + (и-Е) действует напряжение
и = Е + costa j/ + t/2coso)2?. Найти амплитуды всех частотных составляющих тока.
На нелинейный элемент с вольт-амперной характеристикой, аппроксимируемой лома-
ной прямой, подаётся (при угле отсечки л/2) гармонический сигнал с амплитудой 2 В.
Крутизна ВАХ S= 10 мА/B. Найти амплитуды постоянной составляющей тока Iq, пер~
вой и второй гармоник /1 и /г- Для сравнения найти величины Iq, /ь 1г методом трёх
ординат.
Прямоугольный импульс длительностью 1 мс модулирует по амплитуде гармоническую
несущую частоты /> = 1 МГц и амплитуды 1 В. Найти спектр первичного и модулиро-
ванного сигнал.
Найти статическую модуляционную характеристику при AM смещением в цепи базы
транзистора при аппроксимации характеристики /к =/(^бэ) ломаной прямой.
На "линейный" детектор при угле отсечки 0 = тг/2 подаётся AM сигнал
£/дм(0 = [1 + 0,5cos(5103/)] cos(5106(). Крутизна характеристики нелинейного элемента
5= 10 мА/B. Найти напряжение на нагрузке, образованной параллельным соединением
сопротивления R = 10 кОм и ёмкости С, удовлетворяющей требуемым условиям работы
детектора.
В чём разница между двумя разновидностями угловой модуляции: фазовой и частотной?
Спектр переносчика первичного цифрового сигнала определяется на положительных
о</<— (1-А
2ТЛ ’
A,
выражением
частотах
А
2
1 + СО!
0 < г < 1 — коэффициент сглаживания. Нарисуйте зависимость 5Ь(/) от частоты при
г =0,5 и г=0 (прямоугольная форма спектра). Покажите, что спектр по закону
"приподнятого косинуса" удовлетворяет второму условию Найквиста. Найти форму пе-
реносчика v(0 с указанным спектром и убедиться, что она удовлетворяет первому усло-
вию Найквиста.
В чём особенности систем цифровой частотной модуляции с непрерывной фазой, в ча-
стности системы ММС ?
В качестве импульсной несущей используется периодическая последовательность пря-
моугольных импульсов длительностью т = 10 мкс и с периодом следования Т = 125 мкс.
Эта несущая модулируется по амплитуде речевым сигналом с верхней частотой спектра
Гв = 3400 Гц. Какую ширину спектра занимает сигнал АИМ? Сколько речевых сигналов
можно передать на импульсной несущей путём временного разделения каналов?
Двоичная частотная модуляция реализуется путём поочередного выбора одного из двух
независимых гармонических сигналов с частотами fo и/j. Модель первичного сигнала -
случайная стационарная двоичная синхронная последовательность. Найти функцию
корреляции и спектральную плотность средней мощности ЧМ сигнала.
На вход "линейного" детектора при угле отсечки п/2 подан однотональный AM сигнал
mam(z) - ^(l+msin^^cos^ol) и стационарный квазибелый (в полосе сигнала) гауссов-
ский шум с дисперсией стп2. Найти:
а) МО и дисперсию суммарного входного колебания;
б) ПВ суммарного входного колебания;
в) ПВ огибающей входного колебания;
г) ПВ НЧ сигнала на выходе детектора при большом ОСП;
д) вероятность того, что выходной НЧ сигнал (при большом ОСП) превышает средне-
квадратическое значение шума ст .
125
ГЛАВА 4. МАТЕМАТИЧЕСКИЕ МОДЕЛИ КАНАЛОВ
СВЯЗИ. ПРЕОБРАЗОВАНИЕ СИГНАЛОВ В КАНАЛАХ
СВЯЗИ
4.1. ОБЩИЕ СВЕДЕНИЯ О КАНАЛАХ СВЯЗИ
В гл. 1 канал связи определён как совокупность средств, предназначенных
для передачи сигналов (сообщений) между различными точками системы свя-
зи. Под "средством" понимают и технические устройства, и линию связи — фи-
зическую среду, в которой распространяется сигнал между пунктами связи.
Канал связи можно представить как последовательное соединение устройств
(блоков), выполняющих различные функции в общей системе связи.
Такое объяснение применительно к дискретной системе связи показано на
рис. 1.5, и при необходимости анализа отдельных её блоков схему можно дета-
лизировать. Например, можно учесть ряд устройств (реализуемых электриче-
скими цепями), размещённых в промежуточных пунктах линии связи между
передатчиком и приёмником (например, усилительную и фильтровую аппара-
туру вдоль линий дальней проводной связи или ретрансляторы радиорелейных
линий связи).
В данном курсе не рассматриваются вопросы электрического сопряжения
отдельных блоков, образующих канал связи. В первую очередь изучается выбор
функциональных блоков канала, при котором была бы обеспечена наибольшая
эффективность передачи сообщений (информации). В зависимости от решае-
мых задач под каналом связи можно понимать различную совокупность бло-
ков, которая в ходе решения задачи считается заданной (см. § 1.2, рис. 1.3).
Классификация каналов связи возможна с использованием различных при-
знаков. В зависимости от назначения систем каналы связи делят на телеграф-
ные, фототелеграфные, телефонные, звукового вещания, передачи данных, те-
левизионные, телеметрические, смешанные и т.п. В зависимости от того, рас-
пространяются ли сигналы между пунктами связи в свободном пространстве
или по направляющим линиям выделяют каналы радио- (в частности, косми-
ческие каналы) и проводной связи (воздушные, кабельные, волоконно-
оптические линии связи, волноводные СВЧ тракты и т.п.) В зависимости от
характера связи между сигналами на входе и выходе канала различают каналы
(звенья, цепи) линейные и нелинейные.
Различают каналы чисто временные (с сосредоточенными параметрами), в
которых сигналы на входе и выходе описываются функциями одного скаляр-
ного параметра (времени Z), и пространственно-временные каналы (с распре-
делёнными параметрами), в которых сигналы на входе и (или) выходе описы-
ваются функциями более одного скалярного параметра (например, времени t и
пространственных координат х, у, z). Такие сигналы называют полями.
Более существенна классификация каналов электрической связи по диапа-
зону используемых ими частот. Так, на современных симметричных кабельных
линиях связи применяют сигналы, занимающие полосы частот в диапазоне,
ограниченном сверху частотой в несколько сотен килогерц. Дополнительные
мероприятия по увеличению симметрии кабельных пар позволяют увеличить
верхний предел используемого диапазона частот до тысячи килогерц. Коакси-
альные кабели, являющиеся основой сетей магистральной дальней связи, про-
пускают в настоящее время диапазон частот до сотен мегагерц. На воздушных
126
проводных линиях используют частоты не выше 150 кГц, так как на более вы-
соких частотах в этих линиях сильно сказывается мешающее действие адди-
тивных помех и резко возрастает затухание в линии.
Радиосвязь осуществляется с помощью электромагнитных волн, распро-
страняющихся в частично ограниченном (например, землей и ионосферой)
пространстве. В настоящее время в радиосвязи применяют частоты примерно
от З Ю3 до З Ю12 Гц. Этот диапазон принято в соответствии с десятичной клас-
сификацией подразделять следующим образом (см. табл. 4.1).
В таблице в скобках указаны нестандартные, но используемые названия
Таблица 4.1.
Наименование волн Диапазон волн Наименование частот Диапазон частот
Декакилометровые . (сверхдлинные, СВД) 100...10 км ОНЧ очень низкие 3...30 кГц
Километровые (длинные, ДВ) 10...1 км НЧ низкие 30...300 кГц
Г ектаметровые (средние, СВ) 1000...100 м СЧ средние 300...3000 кГц
Декаметровые (короткие, КВ) 100...10 м ВЧ высокие 3...30 Мгц
Метровые (ультракороткие, УКВ) 10...1 м ОВЧ очень высокие 30...300 Мгц
Дециметровые 100...10 см УВЧ ультравысокие 300...3000 Мгц
Сантиметровые 10...1 см СВЧ сверхвысокие 3...30 Ггц
Миллиметровые 10...1 мм КВЧ крайневысокие 30...300 Ггц
Децимиллиметровые 1...0,1 мм ГПЧ гипервысокие 300...3000 ГГц
диапазонов волн. Диапазон децимиллиметровых волн уже вплотную подходит
к диапазону инфракрасных волн. В настоящее время благодаря созданию и
широкому внедрению квантовых генераторов (лазеров) освоен и диапазон све-
товых волн (оптический диапазон). Практически в оптико-волоконных линиях
связи используются частоты порядка 1014 Гц (длины волн 1,55; 1,35; 0,85 мкм).
Для современного этапа развития техники связи характерна тенденция к
переходу на всё более высокие частоты. Это вызвано рядом причин, в частно-
сти необходимостью повышать скорость передачи сообщений, возможностью
получить остронаправленное излучение при небольших размерах излучателей,
меньшей интенсивностью атмосферных и многих видов промышленных помех
в более высокочастотных диапазонах, возможностью применения помехоустой-
чивых широкополосных систем модуляции и т.п.
Для теории электрической связи большой интерес представляет классифи-
кация каналов связи по характеру сигналов на входе и выходе канала. Разли-
чают каналы:
127
а) непрерывные (по уровням), на входе и выходе которых сигналы непрерыв-
ны. Примером может служить канал, заданный между выходом модулятора и
входом демодулятора в любой системе связи;
б) дискретные (по уровням), на входе и выходе которых сигналы дискретны.
Таковы каналы, заданные между точками а-а и b-b на схеме рис. 1.5;
в) дискретные со стороны входа и непрерывные со стороны выхода или наобо-
рот. Такие каналы называются дискретно-непрерывными или полунепрерывными
(например, каналы, заданные между точками a -z, b — z (см. рис. 1.5).
Всякий дискретный или полунепрерывный канал содержит внутри себя не-
прерывный канал. Следует помнить, что дискретность и непрерывность канала
не связана с характером передаваемых сообщений: можно передавать дискрет-
ные сообщения по непрерывному каналу (см. гл. 5) и непрерывные сообщения
по дискретному (см. гл. 8). В ТЭС анализируются каналы (сигналы) с непре-
рывным и дискретным временем (см. гл. 10).
4.2. ЛИНЕЙНЫЕ И НЕЛИНЕЙНЫЕ МОДЕЛИ КАНАЛОВ СВЯЗИ
Для построения теории электрической связи необходимо прежде всего рас-
полагать математической моделью канала, описывающей реальный канал с
нужной степенью приближения. Такая модель (если не интересоваться внут-
ренними процессами в системе) сводится к заданию математической модели
сигналов на входе и выходе канала (или образующих его электрических цепей)
и связей между ними. Будем рассматривать только чисто временные каналы,
задавая связь сигналов (в общем случае многомерных, векторных) на входе x(f)
и выходе y(f) (последние называют также откликом или реакцией системы)
системным оператором
у(0 = £{х(0}.
Чтобы полностью определить задачу, решаемую в теории связи, следует за-
дать область Vx некоторого функционального пространства, которая называется
областью допустимых входных воздействий. Указание этой области описывает
характер входных сигналов, которые могут быть непрерывными, дискретными,
цифровыми детерминированными или случайными. Аналогично должна быть
определена область Vy допустимых выходных сигналов. В настоящей главе рас-
сматриваются главным образом системы с аналоговыми сигналами
(непрерывные по уровням и времени) на входе и выходе (непрерывные кана-
лы).
Математической моделью системы (канала) называют совокупность систем-
ного оператора L и областей допустимых сигналов Vx и 7у. Классификацию
систем (каналов) можно проводить на основании характерных свойств их ма-
тематических моделей. Говорят, что система стационарна, если её отклик на
выходе не зависит от того, в какой момент времени поступает входной сигнал.
Стационарные системы называют системами с постоянными во времени пара-
метрами. Если свойства системы зависят от того, в какой момент времени по-
ступает входной сигнал, систему называют нестационарной (системой с пере-
менными во времени параметрами или параметрической системой).
Важнейший принцип классификации систем (каналов) основан на том, что
различные системы по-разному реагируют на сумму нескольких сигналов. Ес-
ли оператор системы удовлетворяет принципу суперпозиции:
128
L[xi +x2] = LtxJ + L[x2], 1
£[ax] = a£[x], J ( ‘ '
где a — произвольное число, то система называется линейной. Если условия
(4.1) не удовлетворяются^— система называется нелинейной.
Пример. Вход и выход канала (системы) связаны дифференциальным оператором
Я')= ^г+2<х(')^+ш» *W-
Проверкой убеждаемся, что условия (4.1) выполняются. Данная система линейная с пе-
ременным параметром <х(/)> т.е. параметрическая.
Пример. Вход и выход безынерционного канала связаны соотношением
у(0 = Ах2(0-
Если на вход канала действует суммарный сигнал + х2 (/), то
^) = /a?(r) + /af(f) + 2foci(r)x2(/).
Условия (4.1) не выполняются, следовательно, система нелинейна.
Строго говоря, все физические каналы связи и составляющие их звенья
(цепи) в той или иной степени нелинейны. Однако очень много каналов
(цепей) весьма точно описываются линейными моделями. Так, практически
всегда можно пренебречь нелинейностью обычных резисторов, конденсаторов,
некоторых индуктивных элементов, среды распространения электромагнитных
волн при обычных мощностях передатчиков и т.д. Нелинейные каналы (цепи)
содержат в себе обычно такие элементы, как полупроводниковые диоды и
транзисторы, имеющие сложные вольт-амперные характеристики. Нелинейные
каналы характерны также для некоторых сред распространения радио- и опти-
ческих волн при повышенной мощности передатчиков.
Построить общие математические модели и анализировать нелинейные ка-
налы (цепи) ввиду того, что не работает принцип наложения, значительно
сложнее, чем анализировать линейные каналы (цепи). В этой связи мы огра-
ничим рассмотрение нелинейных каналов только детерминированной безы-
нерционной одномерной нелинейной моделью, когда сигналы на выходе у(/) и
входе канала x{t) связаны соотношением
ЯО = ф[*0] • (4.2)
Соотношением (4.2) достаточно точно может быть охарактеризована работа
ряда звеньев реальных каналов связи, например входящих в состав модулято-
ров и демодуляторов (см. гл. 3), ограничителей и т.п.
4.3. ПРЕОБРАЗОВАНИЯ СИГНАЛОВ В ЛИНЕЙНЫХ И
НЕЛИНЕЙНЫХ КАНАЛАХ
Передача сигналов по реальным каналам связи всегда сопровождается из-
менениями (преобразованиями) этих сигналов, в результате чего принятые
сигналы отличаются от переданных. Отличия эти обусловлены прежде всего
линейными и нелинейными преобразованиями входных сигналов, а также на-
личием аддитивных шумов в канале, существующих чаще всего независимо от
передаваемых сигналов. С точки зрения передачи информации по каналу важ-
но подразделение преобразований сигнала на обратимые и необратимые. Обра-
тимые преобразования не влекут за собой потери информации (см. гл. 6).
129
При необратимых преобразованиях потери информации неизбежны. Для обра-
тимых преобразований сигнала часто используется термин искажение, а необ-
ратимые преобразования называют помехами (аддитивными и неаддитивными).
4.3.1. ПРЕОБРАЗОВАНИЕ ДЕТЕРМИНИРОВАННЫХ СИГНАЛОВ
В ДЕТЕРМИНИРОВАННЫХ ЛИНЕЙНЫХ КАНАЛАХ
Пользуясь фильтрующим свойством 5-функции, запишем
x{t) = j х(т) 5(/ - x)dx.. (4.3)
-СО
Выражение (4.3) можно рассматривать как динамическую модель сигнала,
показывающую ход его развития от -оо до точки t.
Поскольку b(t — т) = 0 при т > t, то (4.3) можно записать как
х(/) = Jx(t)5(/-t)A . (4.4)
Введём в рассмотрение импульсную характеристику (ИХ) #(/) линейного
стационарного канала как его отклик в момент времени t на 5-импульс, по-
данный в момент времени 0. Тогда отклик такого канала на элементарное воз-
действие х(т)<й5(^ — т) равен x(x)dxg(t — т), а отклик на сигнал (4.3) в соответ-
ствии с принципом суперпозиции
У(0 = J x(x)g(t - x)dx = j x(x)g(t - x)dx. (4.5)
-00 -00
Верхнюю переменную t в интеграле можно заменить на оо, так как из усло-
вия реализуемости системы (отклик системы не может появиться раньше воз-
действия) gUt — т) = 0, при t. — х < 0 или х > t.
Выражение (4.5) называют интегралом Дюамеля. Он определяет отклик ли-
нейной стационарной системы y(f) как свёртку сигналов x(t) и gKfy.
ЯО = х(0 ® ХО- (4.6)
Формула (4.5) имеет наглядный физический смысл: линейная стационар-
ная система выполняет над входным сигналом операцию взвешенного сумми-
рования всех его мгновенных значений, существовавших в прошлом при —
оо < т < t. Роль весовой функции играет ИХ.
Физически реализуемая система должна быть также устойчивой: возни-
кающие от внешнего толчка (воздействия 5(Z)) собственные колебания должны
с течением времени затухать, что требует выполнения условия абсолютной ин-
тегрируемости:
< °о •
Формулу (4.5) можно обобщить на случай, линейного нестационарного
(параметрического) канала:
(4-7)
если учесть, что ИХ g(t, т) — это отклик канала (системы) в момент t на 8-импульс, поданный
ко входу в момент t - т. Для стационарной системы g(t, т) = g(x).
Если канал (система) имеет т входов и и выходов, можно ввести в рассмотрение матрицу
импульсных характеристик g(/, т) с парциальными импульсными характеристиками
130
и обобщить (4.7) для многомерного случая
у(0= fx(T)g('>T)<fc >
где х(0 ~ /и-мерный вектор; у(/) — л-мерный вектор.
Преобразование Фурье от #(/,т) по переменной т
оо
—оо
определяет передаточную функцию линейного канала с переменными параметрами, которая
является функцией не только частоты, но и времени.
Для стационарных линейных каналов (систем) передаточная функция
(комплексный коэффициент передачи или частотная характеристика - ЧХ) не
зависит от времени, поскольку
Ьо
. (4.8)
-ОО
Импульсную характеристику^/) можно найти из Хг(/) обратным преобра-
зованием Фурье:
оо
g(t) = JЛГ(/)е-*# . (4.9)
Спектр Фурье свёртки (4.6) равен (см. задачу 2.6.)
£,(/)=$,(/ИД. (4.Ю)
где •?,(/). £,(/)- спектральные плотности входного и выходного сигналов.
Зная спектральную плотность выходного сигнала (4.10), можно найти вы-
ходной сигнал y(t) обратным преобразованием Фурье:
оо
У«=1^(/ИД*#- (4.11)
Соотношения (4.10) и (4.11) определяют спектральный (частотный) метод
анализа линейной стационарной системы, в то время как соотношение (4.4)
определяет временной метод анализа этой системы.
Спектральный метод анализа линейных стационарных систем можно
обобщить, если от преобразований Фурье входного х(/) и выходного у(/) сигна-
лов перейти к их преобразованиям Лапласа.
Предположим, что x(f) — вещественный или комплексный сигнал, опреде-
лённый при t > 0 и равный нулю при t < 0. Преобразование Лапласа этого сиг-
нала — это функция комплексной переменной
p = o+jco, (4.12)
определяемая интегралом
ао
F,(p) = fx(/)e-''rf/; (4.13)
О
F(p) называют изображением для сигнала х(/). Интеграл (4.13) существует
(абсолютно сходится) при |х(/)| < Ле" (А, а — положительные числа), если
Re р > а. (4.14)
131
Число а называют абсциссой абсолютной сходимости.
Выражение (4.13) можно рассматривать как обобщение преобразования
Фурье (для сигналов, определённых при t > 0) на случай комплексной частоты
(4.12). В литературе имеются таблицы большого числа функций x(t)
(оригиналов) и их изображений Fx(p), что часто делает излишним выполнение
операции обратного преобразования Лапласа. Так, для функции
= 4 ел‘ 1(0, р, = at + jo,,
о P~Pi
Учитывая линейность преобразования Лапласа, можно утверждать, что изо-
бражению (сумме простых дробей)
N A N
F(p) = S—~ соответствует оригинал х(0 = ^Дел'1(/) .
«=1 Р~ Pi «=1
Оригинал х(/) по заданному изображению Fx(jp] можно в общем случае на-
ходить обратным преобразованием Лапласа. Для этого в формуле обратного
преобразования Фурье
х(г) = J•S'(jco)е
£ /и
(4.15)
следует осуществить аналитическое продолжение, перейдя от мнимой пере-
менной jo к комплексной переменной р = о + jco. Так как da = dp/\, то из (4.15)
следует
Рис.4.1. Образование замкнутого
контура интегрирования
(4.16)
Из соображений сходимости надо, чтобы вы-
полнялось условие с > а (см. (4.14)). Изображения
по Лапласу оказываются в точках комплексной
плоскости р (за исключением счётного числа так
называемых особых точек, которые, как правило,
полюсы, однократные или многократные) анали-
тическими функциями (непрерывные функции с
производными любого порядка). Это позволяет
для вычисления интегралов типа (4.16) пользо-
ваться достаточно простым и отработанным мето-
дом теории вычетов.
Чтобы использовать методы теории вычетов
для интегрирования (4.16), надо сначала от этого
интеграла перейти к интегралу по замкнутому
контуру
(4.17)
Контур интегрирования в (4.17) образован добавлением к прямой о = а ду-
ги бесконечно большого радиуса R (рис. 4.1). Для того чтобы добавление этой
дуги не изменило значение интеграла (4.17), надо, как доказывается в теории
функции комплексной переменной р: при положительных значениях t
132
располагать дугу с радиусом R в левой полуплоскости и вести интегрирование
по замкнутому контуру против часовой стрелки (рис. 4.1); при отрицательных
значениях t располагать дугу с радиусом 7? -> оо в правой полуплоскости и вес-
ти интегрирование по замкнутому контуру по часовой стрелке (рис. 4.1, штри-
ховая линия).
Согласно теореме Коши о вычетах, интеграл по замкнутому контуру
N
f Fx(p) Q^dp = 2ig£ Re s„[f, (p) ex ], (4.18)
И=1
где Res„[F,(p)ex] — вычет подынтегральной функции относительно её
л-го полюса, который лежит внутри контура интегрирования. Вводя вместо пе-
редаточной функции линейной стационарной системы A?(jco) её операторный
коэффициент передачи К(р) (т.е. формально, перейдя от мнимой частоты j® к
комплексной частоте р), получаем для изображения Fy(p) (преобразование Ла-
пласа) отклик системы y(f) на воздействие x(f):
Fy(p) = F,(p)K(p).
Функция y(f) определяется аналогично (4.17):
(4.19)
(4.20)
2тд
Анализ цепи посредством формул (4.19) и (4.20) называют операторным.
Для интегрирования (4.20) методом теории вычетов надо прежде всего
знать полюса функции F(p)A?(p)ex (т.е. значения р, при которых эта функция
обращается в бесконечность). Представим эту функцию в виде
(4.21)
где pi — i-й полюс функции. Вычет рассматриваемой функции, имеющей в точ-
ке Pi простой полюс (первой кратности),
с(и)е”'(р~д) _ с(р,)ел'
Res, =
Если функция
с(р)е*
D(p)
dK~l
dD(p)'
(4-22)
имеет в точке pt полюс кратности К, то её вычет
с(р^"(р-р^
dp)
(4.23)
Если интеграл в (4.20) берется при t > 0 (контур замыкается в левой полу-
плоскости), то согласно теореме о вычетах он не равен нулю, так как все по-
люса подынтегральной функции попадают внутрь контура интегрирования.
Действительно, полюса Fx(p) лежат внутри этого контура, что обусловлено вы-
полнением условия .с > а. Полюса р^ операторного коэффициента передачи
К(р) устойчивой линейной стационарной системы лежат в левой полуплоско-
сти переменной р, так как свободное колебание в системе (существующее при
133
отсутствии внешнего воздействия) совершается по закону еА'. Эти колебания
стремятся к нулю с ростом t (условие устойчивости) лишь при Re[pjt] < 0.
Если интеграл в (4.20) берется при t < 0 (контур замыкается в правой по-
луплоскости), то он равен нулю, так как при Re[p] > с нет полюсов внутри
контура интегрирования. Этот результат очевиден, поскольку входное воздей-
ствие начинается лишь при t — 0.
Пример. Найдём операторным методом ИХ интегрирующей цепочки с операторным ко-
эффициентом передачи Л(р) =--------• Изображение Лапласа для 5-функции
Fx (р) = J 8(7)е ^dt = 1. Тогда изображение отклика
о
1 1
(Г
V RC.
Оригинал
ИО = НО = 2njpc f p + X/RC QPt<ip ’
Подынтегральная функция имеет один простой полюс р\ = -Х/RC. Вычет в этом полюсе
ReSjC^ - q~*Irc при />0и используя теорему о вычетах, имеем g(t) = —~е-Г/7?с1(/).
RC
Линейный стационарный канал (цепь) является неискажающим (не меняет
форму входного сигнала), если
gO) = yS(<-(„), (4.24)
где у — масштабный коэффициент; 4) “ постоянная задержка в канале. Дейст-
вительно, подставив (4.24) в (4.4) и учтя фильтрующее свойство 3-функции,
получаем
y(t) = yx(t-tQ\ (4.25)
Импульсной характеристике (4.24) соответствует согласно (4.9) передаточ-
ная функция канала
k(f} = ^(/)ej<₽W=ye-jra\
т.е. АЧХ не зависит от частоты, а ФЧХ ф(/) = -2теД линейно меняется с часто-
той. В реальных каналах связи, даже когда можно пренебречь аддитивным шу-
мом, преобразование сигналов имеет сложный характер и обычно приводит к
отличию формы выходного сигнала от входного.
4.3.2. ПРЕОБРАЗОВАНИЕ УЗКОПОЛОСНЫХ СИГНАЛОВ
В УЗКОПОЛОСНЫХ ЛИНЕЙНЫХ СТАЦИОНАРНЫХ КАНАЛАХ
Многие каналы (цепи) можно считать узкополосными, когда модули их
передаточных функций К( jco) имеют существенные значения лишь в малой ок-
рестности частоты ±о0- В то же время и входные сигналы x(f) можно чаще все-
го в линиях связи считать узкополосными (квазигармоническими, см. § 2.2).
Поэтому представляет интерес упрощённый метод расчёта преобразований та-
ких сигналов, вводящий в рассмотрение низкочастотный эквивалент канала с
передаточной функцией r(jQ) или l\F).
134
Спектральную плотность узкополосного входного сигнала x(t) со средней
частотой спектра Jo на положительных частотах (-fo — на отрицательных часто-
тах) можно представить в виде1)
<S';t(j(o)= 0,55^ (j(o-шо)) + О,55лд(-j(® +©0)), (4.26)
где Ах — комплексная огибающая входного аналитического сигнала:
х(0 = Х(Ое***.
Докажем (4.26). Учитывая, что
х(/) = Re(x(/)) = 0,5 (х(/) + х(/)) = 0,5^Л,(0е>|/ + Л(/)е’1в,°^,
имеем
ео оо оо
5,(j©) = J Re(x(r))e-j“'^ = 0,5 J Ax(t)e^'dt + 0,5 J A^e^'dt. (4.27)
—co —oo —eo
oo
Введём обозначение SA (j(a -©<,))= f Ax(t)e~^u~a^dt.
Заменяя переменную (в области положительных частот) о - ©о — запи-
сываем
оо
•^0П)=/Л(Ое-^. (4.28)
-оо
Выражение (4.28) определяет спектр по Фурье комплексной амплитуды
Ax(t) , который расположен в области низких частот. С учётом (4.28) из (4.27)
следует (4.26). Из (4.26) следует, что спектр Ax(t) (4.28) можно получить как
удвоенное значение ^(j®) в области положительных частот при замене ®-©о
на Q.
Аналогично, полагая что средняя частота в полосе пропускания канала с
характеристикой A(j©) на положительных частотах равна ©0 (на отрицательных
—©о) можно записать
оо
к(>) = J Re[g(?) + jg(t) = =
оо оо
= 0,5fу(/)е’х*—у(/)е’**—= r(j(©-©0))+f(-j(© +a0))2>,(4.29)
—co -<0
где g(?) — сигнал, сопряжённый c g(f) по Гильберту, y(t) — комплексная оги-
бающая ИХ узкополосного канала g(f), а
ос
r(jQ) = 0,5jy(/)e"jn^ (4.30)
-00
— передаточная функция низкочастотного эквивалента канала с ИХ
g Ji) = 0,5у(?), имеющая существенные значения лишь в области низких частот.
О Очевидно, что с учётом узкополосности сигнала два слагаемых (4.26) не перекрываются по
спектру.
2) Два слагаемых в правой части (4.29) не перекрываются по спектру.
135
Из формулы (4.29) следует, что характеристику Г(]П) можно получить из
Д]®) в области положительных частот, полагая в ней о ~ ®о = Q. Действитель-
ную ИХ узкополосной системы можно выразить через частотную характери-
стику низкочастотного эквивалента с учётом (4.30) так:
g(t) = Re[y(f)ejra°'] = Re е*”'
- J r(jn)ejnzdQ
—oo
(4.31).
Пример. Одноконтурный резонансный усилитель имеет на положительных частотах пере-
К
даточную функцию (ЧХ) X’(jo) =---2—г—, гдет* = 2Q/ta0 — постоянная времени контура.
1+j(<o - <о0)т*
Найти ИХ#(Л. Передаточная функция низкочастотного эквивалента r(jo) =-------2;
1 + jQr*
затем согласно (4.30) определим комплексную огибающую ИХ
оо
*(') = £ (4.32)
It J 1 +
—оо
Интегрирование выполняется просто при помощи теоремы о вычетах, если считать в ин-
теграле, что Q = а + jb является комплексной переменной. Замыкая вещественную ось дугой
бесконечно большого радиуса в верхней полуплоскости (при t > 0), перейдём от (4.32) к рав-
Кй х ejnr
ному по величине интегралу по замкнутому контуру: т---- ———dQ..
Подынтегральное выражение имеет единственный полюс в точке = -l/(j-r*). Вычет в
- 2 А? —
этой точке согласно (4.22) Re.yt =ejn'. Используя (4.18), получаем у(/) = —-е т* 1(f), где 1(0 —
т*
единичная функция.
Согласно (4.31) ИХ
g(i) - Re
_—
^е Ve^’o'lG)
2Л?0 Т / ч
-----е * COSCO 0/ • 1(0 .
По (4.10) определяем спектральную плотность выходного сигнала 5^0®),
как произведение правых частей (4.26) и (4.29). Учитывая сноски на двух пре-
дыдущих страницах получаем
Sy (jо) = 0,5 SЛ [ j(® - о 0)]г[j(® - о 0)] + 0,5 5 лД- j(® + ® о)] г[- X® + ® о)] • (4-33)
Спектральную плотность ЛЦ]®) можно аналогично (4.26) представить через
спектр по Фурье комплексной амплитуды Ау выходного сигнала:
5y(j®) = 0,5^ [Х®-®о)] + О,55лД-Х®+®о)]- (4-34)
Приравнивая правые части (4.33) и (4.34) и обозначая ® — ®о = £1, находим
низкочастотный эквивалент соотношения (4.10):
^,[j«] = ^.[j«]r(j«)- (4.35)
Исходя из (4.35) и учитывая (4.30), комплексную огибающую выходного
сигнала можно найти и посредством свёртки:
Ay(t) = 0,5 j Ах(т)у(t - т)Л. (4.36)
-оо
Сам выходной сигнал
у(0 = Re[^(f)ej<°0']. (4.37)
136
Пример. На входе одноконтурного резонансного усилителя из предыдущего примера дей-
ствует амплитудно-модулированный сигнал x(t) = е"“ cosco ot -1(f), а > 0.
Найти отклик усилителя. Здесь Ax(t) = e-“'l(f).
Согласно (4.36) Av(t) = — [е “ б к й?т1(/) = --
' т J 1-ат.
* о 1
е_а/-е
ко.
К
Согласно (4.37) отклик усилителя y(t) =
Q ш-Q COS(00f-lG).
Отметим, что в некоторых задачах комплексную огибающую Ay(t) можно
найти без формул (4.35) или (4.36), пользуясь обычными методами комплекс-
ных амплитуд из теории цепей. Реализовать комплексную фильтрацию (4.35)
или (4.36) можно посредством квадратурной обработки сигнала [11].
4.3.3. ПРЕОБРАЗОВАНИЯ ЭНЕРГЕТИЧЕСКИХ ХАРАКТЕРИСТИК
ДЕТЕРМИНИРОВАННЫХ СИГНАЛОВ
Рассмотрим преобразования энергетических характеристик детерминиро-
ванных сигналов длительности Т в линейных стационарных системах
(каналах). Учитывая определение СПМ, данное в § 2.5, можно выразить связь
между этими характеристиками на выходе и входе детерминированного линей-
ного стационарного канала:
G,(/) = 7^(/) = (4.38)
Средние мощности сигналов на входе и выходе системы определяются со-
отношениями Рх = jGxРу =
—оо —оо
В § 2.5 было также показано, что ФК В,(т) сигнала x(t) и его СПМ
Gx (/) связаны парой преобразований Фурье. Если ввести в рассмотрение ФК
00
для ИХ системы (канала): 5*(т)= JgWgC/-T)cfr, то, используя обобщённую
—оО
формулу Рэлея (2.137) и соотношение (4.8), можно получить
оо оо
В,(т)= jK2(f)e^df и №(/)= {вг(т)е-*"А,
—со —со
т.е. ФК системной характеристики g{t) и коэффициент передачи системы по
мощности К2 (/) связаны парой преобразований Фурье. Используя спектраль-
ное соотношение (4.38), можно утверждать, что ФК выходного сигнала у(/) оп-
ределяется свёрткой ФК входного сигнала x(f) и ФК импульсной характери-
стики системы
со
' В,(т) = В,(т)®В,(т) = \Bx(z)Bg^-Z)dz.
Пример. На, вход интегрирующей цепочки с коэффициентом передачи K(j<o) =
поступает прямоугольный видеоимпульс с единичной амплитудой длительностью Т:
x(t) = 1(/) - 1(/ — 7). Найти ФК, СПМ и средние мощности сигналов на входе и выходе цепи.
137
г |Т|
5Д*)=7р(')*('-т)л = Г“
Ч О
М 2 т>
|т|>Г.
Характеристику G,(/) легче вычислять по формуле
1
Г.Х-Л2 '
чем по формуле прямого преобразования Фурье от В’,(т). Средняя мощность входного сигна-
ла Л =.8,(0)= 1 Вт.
Спектральная плотность мощности выходного сигнала
. 2(<&И
sin I —1
C,(/) = G.(/Wj»)|2 = 7-—-Ц-
I — I
\Т)
. йэТЛ
« sin2 — ,
г \ 2 / 1
Тогда В,Ы-Г J ——.
Средняя мощность выходного сигнала
1 2fsin2x 1
/ \2 ~ I 2 / х 2
1+(<аЛС) *1 х , (2RCV 2
v ' 0 1+ ----- х
\ Т )
ас 2 г-
„ , Г Sin X 1 . п , а/, _-2/а
Используя табличный интеграл —-----------------------x-rdx-— 1—11-е
J х2 1 + а2х2 2[_ 2'
получаем
При TfRC-^va имеем Ру = 1 (это максимальное значение при вариации параметра
RCjT). При —«1, разлагая экспоненту в ряд
q-t/RC я1__£.+1
RC 2 \RC,
получаем
(ТУ
р>=0’5' -Ы
у \RC)
4.3.4. ПРЕОБРАЗОВАНИЕ СЛУЧАЙНЫХ СИГНАЛОВ
В ДЕТЕРМИНИРОВАННЫХ ЛИНЕЙНЫХ КАНАЛАХ
Исследование преобразований случайных процессов при их прохождении
через динамические системы (как с регулярными, так и со случайно меняю-
щимися параметрами) связано с решением задач двух типов: определение кор-
реляционной функции (спектральной плотности мощности) отклика Y(t) на
выходе системы, заданной своими характеристиками, по данной корреляцион-
ной функции (или спектральной плотности мощности) входного воздействия
У(0; определение многомерного распределения вероятностей отклика Y(fy на
выходе системы по многомерному распределению входного воздействия X(t).
Вторая из указанных задач является более общей. Из её решения, очевид-
но, может быть получено решение первой задачи. Однако в дальнейшем огра-
138
ничимся рассмотрением только первой задачи и лишь укажем пути решения
второй, более сложной задачи. Так, можно утверждать, что если полоса частот
Fx, занимаемая входным случайным процессом X{f), много шире полосы про-
пускания AF данной линейной системы, то распределение выходного случай-
ного процесса Г(0 имеет тенденцию приближаться к гауссовскому.
Действительно, в стационарной детерминированной линейной системе с
финитной т.е. ограниченной во времени пределами О...тп ИХ g(f) отклик
У(0 = [g(r)X(t - = lim y\g(k&x)X(t - kbx)bx. (4.39)
о Лт^° *=1
Шаг дискретизации Дт можно выбрать равным интервалу корреляции
входного процесса \/Fx. Допустим, что входной процесс центрирован X(t) = 0,
тогда центрирован и выходной процесс. Узкая полоса пропускания AF означа-
ет, что длительность импульсной характеристики тп велика по сравнению с Дт.
Сечение выходного процесса У(7) в любой момент времени t определяется со-
гласно (4.39) N слагаемыми суммы. В эту сумму входит много некоррелиро-
ванных между собой сечений процесса X(f). Распределение вероятностей такой
суммы согласно центральной предельной теореме теории вероятности близко к
гауссовскому (тем ближе, чем больше N, определяемое отношением Fx/bF). В
предельном случае, если на вход канала воздействует белый шум, у которого
ширина спектра бесконечна (не совпадающие во времени отсчёты не коррели-
рованы), а канал имеет ограниченную полосу пропускания, то N -> оо и выход-
ной процесс будет строго гауссовским. Отмеченное свойство линейного канала
сохраняется и при изменении параметров канала.
Используя правила нахождения законов распределения для функций от
случайных величин (случайных процессов), можно в принципе находить и
распределение выходного процесса любого порядка, если известно распределе-
ние входного процесса. Однако определение многомерных вероятностных ха-
рактеристик отклика линейных систем оказывается весьма громоздким и
сложным, несмотря на то, что для решения этой задачи разработан ряд специ-
альных приёмов.
Далее займемся определением функции корреляции выходного процесса.
Мы показали в § 2.5, что для стационарных случайных процессов существует
пара преобразований Фурье между ФК Вх(т),Ву(т) процессов Д/) и Г(/) и их
СПМ Gx(f\ G (f). Поскольку для стационарной линейной системы и при слу-
чайных стационарных воздействиях справедливо соотношение (4.38), то ФК
выходного стационарного процесса Y(t)
оо
В,(/)№(/>*#.
-оо
Можно показать [15], что ФК отклика детерминированной параметриче-
ской системы на стационарные входные воздействия X(f) определяется форму-
лой
оо
в, (м) = jG,(/)x(jo,/H-jo,/ + T)e>’<//( (4.40)
—оо
т.е. в данном случае выходной процесс, вообще говоря, нестационарен.
139
Пример. Линейный канал осуществляет переменную во времени задержку входного ста-
ционарного случайного процесса ДО: К(/) = арг(/-Д(0)] • Найти функцию корреляции Ву(/,т).
Передаточная фунюдия канала A^j<o,z) = , а корреляционная функция выходного
оо
процесса Ву(г,т)= «2 J<3,(/)e_j<BA(,)+j®A(,+T)+j‘"d/. Если Д(0 = kt (например, доплеровское сме-
-ео
щение частоты, когда |Л| = \vr\/c « 1, vr — радиальная составляющая скорости взаимного пере-
. оо
мещения передатчика и приёмника), то Ву(х) = а2 = й2В,[т(1+Л)] ,
—со
т.е. в этом случае выходной процесс стационарен, а его спектральная плотность мощности
«о 2 / f \
°,И = о2 J в.1-(1 * *)]е-*л=J.
-оо
4.3.5. ПРЕОБРАЗОВАНИЕ СЛУЧАЙНЫХ СИГНАЛОВ
В ДЕТЕРМИНИРОВАННЫХ НЕЛИНЕЙНЫХ КАНАЛАХ
Ограничив рассмотрение нелинейных преобразований моделью (4.2)
У(0 — ф[х(О], заметим, что преобразование х -> у, как правило, однозначно, что
не всегда можно сказать об обратном преобразовании у -> х (например, квад-
ратичная цепь с характеристикой у = кх2).
При нелинейных преобразованиях возникает трансформация (изменение)
спектра входного воздействия. Так, если на вход нелинейной системы воздей-
ствует смесь регулярного сигнала и аддитивного шума X(f) = S(f) + N(t~) в уз-
кой полосе частот Fe, группирующейся около средней частоты /0, то в общем
случае на выходе будут присутствовать составляющие комбинационных частот
трёх видов, группирующихся около частот nfQ (и = 0, 1, ...): продукты взаимо-
действия составляющих входного сигнала между собой (с х с), продукты взаи-
модействия составляющих входного шума (ш х ш); продукты взаимодействия
сигнала и шума (с х ш). Разделить их на выходе системы обычно невозможно.
Если известна характеристика у = ср(х) нелинейной системы и двухмерная
функция распределения входного воздействия w(xi, Х2; ti, *2), то основные ха-
рактеристики выходного процесса (МО и ФК) в принципе всегда можно опре-
______________________________________________________________ ао
делить. Так, математическое ожидание отклика Y(t) = <p(x(t))= |<p(x)w(x,r)c6c, а
—ао
его корреляционная функция
ос оо
J J[ф(»1)—F(0]-[<p(x2)~^F(/‘+T)]w(x1,x2;i1,^+т)с*с1<*с2.
—оо—оо
Прямым преобразованием Фурье можно по ФК найти и спектральную
плотность мощности процесса Y(f).
Анализ прохождения случайных воздействий через нелинейные цепи силь-
но упрощается для узкополосных воздействий, если воспользоваться их квази-
гармоническим представлением.
Пример. Прохождение через квадратичный детектор суммы гармонического сигнала
s(f) = Uffiosaot и стационарного квазибелого узкополосного шума
N(f) = Ac(Ocosa>of + >Vs(0sin<oo^ где 2^ (f), (Q — некоррелированные квадратурные гауссовские
140
компоненты шума, у которых тХс = = 0, Вх (т) = Вх>(т) = В(т), а СПМ равномерна и ограни-
чена полосой Fn « f0. Дисперсия входного шуъ<а g2n = В(0).
Суммарное входное колебание можно представить в виде
Z(/) = Л(')cos(coo' - 9(0) > 40 = а/^о + ^ДО+^М’ 0(О = •
Как известно, огибающая Л(/) имеет обобщённое распределение Рэлея (см. (2.137)). ОСП
на входе приёмника (детектора): рвх =
Суммарное колебание на выходе ФНЧ с единичным коэффициентом передачи
к(0=- <ф2 +л2(0+*2(0+2^(0] •
Первое слагаемое у„(') = 0,517g определяет сигнал, остальные — помеху:
yn(0 = o,5[jvc2(0+xs2(0]+coJvc(0 •
2В(0) ’
Математическое ожидание помехи Уп(г) = 0,5 X2(t} + X2(t) = В(0).
Дисперсия помехи £>(УП)= Оп(0~40)Г = #2(0)~t/g£(O).
Здесь учтено, что для центрированных гауссовских величин
У4=< = ЗЯ2(0), X* = X2 = X2 = 5(0);
ОСП на выходе квадратичного детектора
= К2 _ Pt
Рвьк £>(ГП) 4р2(0) + 17240)] 1 + 2Рвх '
При значениях рвх » 1 имеем рвых = 0,5рвх, а при малых значениях рвх « 1 следует
Рвых ® Рвх > ОСП на выходе детектора (приёмника) в этой области резко уменьшается с
уменьшением рвх (сильный шум "подавляет" сигнал)
4.3.6. ПРОХОЖДЕНИЕ СИГНАЛОВ ЧЕРЕЗ СЛУЧАЙНЫЕ КАНАЛЫ
СВЯЗИ
Помимо рассмотренных детерминированных преобразований сигнала в от-
дельных звеньях канала (в частности, в линии связи или среде распростране-
ния волны) имеют место и случайные преобразования сигнала. В простейшем
случае это преобразование сводится к суммированию сигнала с независимым
от него случайным процессом, называемым аддитивной помехой или аддитив-
ным шумом. В более сложных каналах к этому добавляются случайные изме-
нения параметров канала, в результате которых даже в отсутствие аддитивных
помех принимаемый сигнал не определяется однозначно передаваемым.
Рассмотрим в общих чертах характерные преобразования сигнала в случай-
ных линейных каналах (цепях).
Случайный линейный канал. В самом общем виде линейную систему (или
линейный канал) можно описать случайной ИХ 6(/,т), имеющей тот же смысл,
что. и #(/,т) в (4.7), но представляющей случайную функцию двух аргументов: t
(момента наблюдения реакции) и т (времени, прошедшего с момента подачи 5-
импульса на вход цепи). Такова, например, ИХ любой линейной системы, па-
раметры которой подвергаются воздействию случайных внешних влияний, на-
пример температуры, давления, влажности и т.д.
141
Случайный линейный канал можно характеризовать также случайной пере-
даточной функцией переменных о и t
fG(r,T)e’j<OTrfv. (4.41)
—оо
Можно показать [15], что функция корреляции процесса У(/) на выходе
случайного канала с характеристикой (4.41) при подаче на вход стационарного
процесса определяется выражением
- J G,(/)nK(/,T,<)e*rf/(4.42)
—оо
где Пк(/,т,г) =/r(jo,/)/r(-]о,Г-т) - системная характеристика случайного кана-
ла. Для детерминированного канала Пк(/,т,г) =]о,/ + т), и из (4.42)
следует (4.40).
Остановимся подробнее на моделях, с которыми чаще всего приходится
встречаться. Обобщая модель (4.25) для случайного входного воздействия X(t},
получаем
У (г) = уДг-т), (4.43)
где параметры т и (или) у флуктуируют.
Обычно такие флуктуации в проводных линиях связи вызываются измене-
ниями внешних условий и происходят чрезвычайно медленно1) и в очень не-
больших относительных пределах. В радиоканалах при многолучевом распро-
странении волн, в гидроакустических каналах и других флуктуации выражены
более заметно.
Если входной сигнал узкополосный, его удобно представить в квазигармо-
нической форме: X(t) = Xr)cos[oo/+0(r)], где A(t) и Ф(?) — медленно меняю-
щиеся функции. Поэтому при достаточно малой задержке т можно в первом
приближении считать A(t — т) » A(f) и Ф(/ — т) ~ Ф(г), а выходной сигнал (4.43)
записать следующим образом:
Y (t) = уЛ(^-т)соз[а)0(^-т) + Ф(/-т)]« уЛ(/)соз[®о/ + Ф(О + 0] =
= у cos0Z(/)-y sia0Z(O,
где 0 = -©от — фазовый сдвиг в канале, a X(t) — процесс, сопряжённый с X(i)
по Гильберту.
Таким образом, при узкополосном сигнале малая задержка сводится к не-
которому сдвигу фазы. Важно отметить, что даже при очень малых относи-
тельных флуктуациях времени задержки т фазовый сдвиг 0 (из-за больших зна-
чений ©о) может изменяться в очень больших пределах. Для этого достаточно
выполнения условия Дт » 1//0, где Дт — среднеквадратическое отклонение за-
держки, То ~ средняя частота спектра сигнала. Это условие в радиоканалах
обычно выполняется.
Более сложный случай имеет место, когда сигнал проходит по параллель-
ным путям от входа Канала к его выходу (рис. 4.2), так что на выходе каждого
пути сигнал имеет вид (4.44), но значения у и т для разных путей различны и к
й Это значит, что за время длительности отсчётного интервала А = 1/2F, где F — ширина
спектра сигнала, параметры канала не успевают заметно изменяться.
142
т тому же в небольших пределах
/-----------ГТ-----------\ флуктуируют. Такого рода мно-
s(f) гопутевое распространение
----------------------------------—&+)-----* сигнала характерно для боль-
-------------------------//----------шинства радио-, гидроакусти-
'------------------------------------:' ческих и некоторых других ка-
Рис.4.2. Многопутевое распространение сигнала НЭЛОВ (в ТОМ ЧИСЛе проводных).
Энергия волны распространяется обычно в неоднородной среде и испытывает
отражение от различных неоднородностей. Эти неоднородности могут быть
распределены внутри относительно небольшого отражающего (рассеивающего)
объёма. В этом случае разности хода (разности значений т) для отдельных пу-
тей невелики. Если по такому каналу направить очень короткий импульс, то и
на его выходе импульс будет довольно коротким. Такой канал принято назы-
вать однолучевым. Наличие разных путей ("подлучей", как их часто называют
[14]) не вызывает в этом случае существенного рассеяния (растяжения) сигна-
ла во времени, но приводит к возникновению явления замираний, которое за-
ключается в более или менее быстрых случайных изменениях передаточной
функции канала (мультипликативная помеха).
Для пояснения замираний рассмотрим передачу по каналу (см. рис. 4.2)
гармонического сигнала с единичной амплитудой u(t) = Re(eJ'“)-
На выходе сигнал
s(t) = Re| ) = Re(yej<BZ), (4.45)
М=1 /
где L — число путей (подлучей, попадающих в точку приёма); у/ — коэффици-
ент передачи по /-му подлучу; т/ — время распространения /-го подлуча;
L
Yi =Yi e’j<OT' — комплексный коэффициент передачи по /-му лучу; у = 22у;е'>т'
i=i
— комплексная амплитуда выходного сигнала, которая в данном случае по оп-
ределению равна передаточной функции канала.
Передаточная функция в общем случае зависит от частоты. Если учесть,
что вследствие хаотических перемещений отражателей значения у/ и т/ флук-
туируют, то у зависит также от времени, представляя собой случайную функ-
цию (мультипликативную помеху) у(/,ш). Во многих случаях эта функция
флуктуирует значительно быстрее, чем величины у/И т/.
Важной характеристикой канала с замираниями является распределение
вероятностей комплексной передаточной функции y(/,jco) и в первую очередь
её модуля у. Для определения этого распределения представим у в следующем
виде:
У = yej0 = z(/,(o)+jy(/,a)),
где у = |у| и 0 — соответственно модуль и аргумент передаточной функции, ко-
торые также являются случайными функциями t и о, а X = ycos0 и Y = ysin0
— квадратурные составляющие.
С другой стороны, согласно (4.45)
У = 2Л/е’]шт' = SY/eJ0' = £у, COS0, + j£y, sm0, ,
i=i i=i i=i
143
откуда X(t,&) = 2b cos0j, К(^,(о) = •
Поскольку X и Y образуются в результате сложения большого числа слабо
коррелированных величин с ограниченными дисперсиями, к ним обычно
можно применить центральную предельную теорему теории вероятности и счи-
тать их нормально распределёнными.
Для случая, когда все у( одного порядка и фазовые сдвиги достаточно ве-
лики, легко показать, что Хи Yимеют одинаковые дисперсии а2 = а2 = а2, а их
математические ожидания тх = ту = 0. Здесь одномерное распределение веро-
Это доказывается так же, как в § 2.6. Фаза результирующего сигнала 0 при
этом распределена равномерно на интервале (- я,+я). Дисперсия квадратурных
составляющих о2 равна средней мощности приходящего сигнала. Такие зами-
рания, как и каналы, в которых они проявляются, называются рэлеевскими.
Во многих каналах замирания отличаются от рэлеевских. Иногда в одном
из подлучей коэффициент передачи у, значительно больше, чем в других, и
можно сказать, что помимо диффузно отражённых подлучей в место приёма
приходит и регулярный (не замирающий) луч. В этом случае коэффициент пе-
редачи канала у = у/X2 +Y2 подчиняется обобщённому распределению Рэлея
(см. §2.6) w(y) = -^-exp|--^?-72 10
,У^0.
У о 7
2 2
гп +т:
Здесь q2 = 2 у — отношение средних мощностей регулярной и флуктуи-
2(5
рующих составляющих.
В общем случае, когда а2 * а2 и тх * 0, ту * 0, получается так называемое
четырёхпараметрическое распределение модуля и фазы замирающего сигнала
(общая гауссовская модель канала). Соответствующие плотности вероятности
даны в [14].
Если по однолучевому каналу с замираниями передаётся относительно уз-
кополосный сигнал, а среднеквадратическое отклонение запаздывания Ат в от-
дельных подлучах удовлетворяет условию
1
Ат « —,
(4.46)
где Fc — ширина спектра сигнала, то изменения начальных фаз на разных час-
тотах о в спектре сигнала, равные со Ат, почти одинаковы. При этом все состав-
ляющие спектра сигнала замирают "дружно", т.е. их амплитуды и фазы изме-
няются одинаково. Такие замирания называются общими или гладкими1). Ес-
ли же условие (4.46) не выполнено, то в разных областях спектра сигнала про-
цессы замираний не совпадают (селективные по частоте замирания). При этом
наблюдаются существенные изменения формы сигнала, что характерно для
многолучевых каналов радиосвязи (приходящие в точку приёма сигналы обра-
0 Заметим, что условие (4.46) может выполниться при Дт » 1//0 , т.к. в радиоканалах /0 » Fc.
144
зованы отражением от сильно разнесённых в пространстве рассеивающих объ-
ёмов).
Быстрота изменений во времени комплексного случайного процесса
(при фиксированной частотё) или, как говорят, скорость замираний сигнала
характеризуется временем корреляции ткор квадратурных компонент X(t, о) и
Y(t, со) или шйриной спектра замираний Д/зам « —.
Ткор
4.3.7. АДДИТИВНЫЕ ПОМЕХИ В КАНАЛЕ
В каналах связи аддитивные помехи вызываются различными причинами и
могут принимать различные формы, индивидуальные реализации которых
трудно учесть. Именно эти помехи чаще вызывают необратимые преобразова-
ния передаваемых сигналов. Несмотря на большое разнообразие, аддитивные
помехи по их электрической и статистической структуре разделяют на три ос-
новных класса: флуктуационные (распределённые по частоте и времени), со-
средоточенные по частоте (квазигармонические) и сосредоточенные во време-
ни (импульсные).
В отсутствие аддитивных помех детерминированные линейные преобразо-
вания сигнала чаще всего обратимы1). В присутствии даже очень слабой адди-
тивной помехи линейные преобразования оказываются необратимыми.
Флуктуационные помехи. С физической точки зрения аддитивные флуктуа-
ционные помехи порождаются в системах связи различного рода флуктуация-
ми, т.е. случайными отклонениями тех или иных физических величин
(параметров) от их средних значений. Так, источником шума в электрических
цепях могут быть флуктуации тока, обусловленные дискретной природой носи-
телей заряда (электронов, ионов). Дискретная природа электрического тока
проявляется в электронных лампах и полупроводйиковых приборах в виде дро-
бового эффекта (при заданном режиме питания схем случайно меняется число
создаваемых носителей заряда).
Флуктуационные помехи могут считаться гауссовскими случайными про-
цессами (см. гл. 2), которые чаще всего считаются стационарными с нулевыми
средними значениями (по крайней мере на определённых временных проме-
жутках, называемых интервалами стационарности).
Сумма большого числа любых помех от различных источников вследствие
условий центральной предельной теоремы теории вероятностей также имеет
характер флуктуационной помехи. Многие помехи при прохождении через
приёмное устройство часто приобретают свойства нормальной флуктуационной
помехи (см. 4.39).
Наиболее распространённой причиной шума в аппаратуре связи являются
флуктуации, обусловленные тепловым движением. Случайное тепловое движе-
ние носителей заряда в любом проводнике вызывает случайную разность по-
тенциалов (напряжения) на его концах. Среднее значение такого напряжения
равно нулю, а переменная составляющая проявляется как шум. Тепловой шум
на входе приёмника представляет собой гауссовский случайный процесс с ну-
левым средним и спектральной плотностью мощности:
Об особенностях в оптико-волоконных каналах с квантовым шумом речь пойдет ниже.
145
(4-47)
где h = 6,624-10-34 Дж-с — постоянная Планка; к = 1,38-10~23 Дж/град — по-
стоянная Больцмана; Т — абсолютная температура источника шума; f — теку-
щая частота.
В диапазоне звуковых и радиочастот hf «кТ, и поэтому, разлагая в (4-47)
экспоненту в ряд, получаем
Величина Nq является односторонней (на положительных частотах) спек-
тральной плотностью шума. Специфическим для полупроводниковых приборов
является шум, называемый фликер-шумом, который возникает в результате
разного рода поверхностных явлений. Его спектральная плотность в широком
диапазоне частот подчиняется гиперболическому закону (она пропорциональна
1//). Обычно на частотах выше 10 кГц фликер-шумами пренебрегают.
Космические помехи в системах радиосвязи, вызванные радиоизлучением
солнца и других космических объектов, имеют характер флуктуационных шу-
мов.
Сосредоточенные по спектру помехи. К сосредоточенным по спектру адди-
тивным помехам принято относить сигналы посторонних радиостанций, пред-
намеренные помехи, излучения генераторов высокой частоты различного на-
значения (промышленных, медицинских) и т.п. В общем случае это модулиро-
ванные колебания, т.е. квазигармонические колебания с изменяющимися па-
раметрами. В одних случаях эти колебания являются непрерывными
(например, сигналы вещательных и телевизионных радиостанций), в других —
они носят импульсный характер (сигналы радиотелеграфных станций и систем
передачи данных). В отлйчие от флуктуационных ширина спектра сосредото-
ченной помехи в большинстве случаев не превышает полосы пропускания
приёмника, а в некоторых случаях она намного уже этой полосы. В диапазоне
коротких волн сосредоточенные по спектру помехи являются основными, оп-
ределяющими качество связи, и считаются случайными колебаниями с флук-
туациями фаз и амплитуд (замираниями), распределение которых такое же, как
у полезных сигналов.
Импульсные помехи. К импульсным (сосредоточенным во времени) адди-
тивным помехам принято относить помехи в виде одиночных импульсов, сле-
дующих один за другим через такие большие промежутки времени, что пере-
ходные явления в приёмнике от одного импульса успевают практически затух-
нуть к моменту прихода следующего импульса. К таким помехам относят мно-
гие виды атмосферных и индустриальных помех. Заметим, что
"флуктуационная помеха" и "импульсная помеха" являются понятиями относи-
тельными. В зависимости от частоты следования импульсов одна и та же поме-
ха может воздействовать как импульсная на приёмник с широкой полосой
пропускания и как флуктуационная на приёмник с относительной узкой поло-
сой пропускания. На практике импульсные помехи приходится рассматривать
как случайный, относительно широкополосный (тем шире, чем короче им-
пульсы помехи) процесс, состоящий из отдельных редких^ случайно распреде-
лённых во времени и по амплитуде импульсов. Вероятностные свойства таких
помех с достаточной для практических целей полнотой описываются распреде-
146
лением вероятностей амплитуд импульсов и распределением временных интер-
валов между этими импульсами. Для последних часто применяют модель Пу-
ассона.
Распределение амплитуды импульсных помех часто описывается логнор-
мальным законом
1 (р-а)2 , (1п4-о)2
2₽2 w(y$) = -==-e гр2
V 7 727ФА
где а, р2 — МО и дисперсия преобразованного СП р = 1пЛ. Для этого закона
характерно наличие существенных значений в области больших амплитуд, что
соответствует реальной модели импульсной помехи.
. Заметим, что логнормальным законом часто описывают медленные
(суточные, сезонные) флуктуации амплитуд радиосигналов, обусловленные не
интерференционными явлениями, а поглощениями сигнала в среде распро-
странения.
4.3.8. КВАНТОВЫЙ ШУМ
В диапазоне оптических частот hf » кТ тепловой шум оказывается очень
слабым. Однако в этом диапазоне при слабых сигналах существенное значение
имеет "квантовый шум", вызванный дискретной природой светового излучения.
Согласно квантовой теории электромагнитного поля его энергия сигнала излу-
чается и поглощается квантами, причём энергия одного такого кванта (фотона)
равна hf. В элементарном сигнале длительности Т с высокостабильной несу-
щей частотой f (когерентное одномодовое1) излучение) и амплитудой U детер-
минированной может быть только средняя энергия (пропорциональная U2)
£сР = mhf (пг ~ среднее число фотонов на интервале Т). Конкретная же реали-
зация элементарного сигнала имеет энергию Е = nhf, где п — случайное число
регистрируемых фотонов.
В современных системах оптической связи в основном используется AM
оптического несущего колебания по амплитуде или интенсивности
(мощности).
Идеальная система оптической связи при изохронной передаче двоичных
сообщений (1 и 0) имеет следующие характеристики:
1. Время передачи бита (тактовый интервал) постоянен и равен Т, следова-
тельно, скорость передачи информации 7?и = 1/Гбит/с.
2. При передаче 1 оптическая энергия, излучаемая в виде импульсов за время
передачи одного бита, £иер = пЕф , где п — число излучённых фотонов, Еф = hf
— энергия одного фотона (кванта), а оптическая энергия при передаче 0
равна нулю. Оптическая энергия в месте приёма равна на тактовом интерва-
ле Т величине £’пр1 при передаче 1 и нулю при передаче 0 соответственно.
3. Вероятности передачи 1 и 0 /?(1) =/>(0) = 0,5. В этом случае усреднённую за
продолжительное время принимаемую мощность Р11р можно выразить через
среднюю мощность , принимаемую за время передачи бита при посыл-
ке 1. Таким образом, Рпр = 0,5 Рпр] = 0,5^1р1(1/7> = 0,5£^р17?и.
Современные оптические квантовые генераторы являются одномодовыми (излучают один
тип волны).
147
Реальная система оптической связи отличается от идеальной следующим
[9]:
1. Время передачи бита информации не остаётся постоянным — этот эффект
называют фазовым дрожанием цифрового сигнала.
2. Излучаемая оптическая энергия не остаётся строго одной и той же. При пе-
редаче как кодовой 1, так и кодового 0 имеет место шум передатчика, при-
водящий к случайным изменениям амплитуды от импульса к импульсу.
Кроме того, имеет место "шум лазера", обусловленный статистической при-
родой взаимодействия между возбуждением лазера и создаваемым потоком
фотонов. Флуктуации принимаемой энергии увеличиваются ещё больше из-
за изменений затухания в канале связи. Кроме того, появляются флуктуации
энергии на отдельных тактовых интервалах в месте приёма, обусловленные
статистической природой взаимодействия потока фотонов (оптический сиг-
нал) и создаваемого фотодетектором (обычно это фотодиод) потока элек-
тронНо-дырочных пар. Условно будем говорить в этом случае о шуме фото-
детектора.
3. Весьма вероятно, что при передаче 0 излучается малый, но вполне опреде-
лённый уровень энергии (шум лазера), не считая шума передатчика и кана-
ла. Отношение средней энергии, принимаемой при передаче 0, к средней
энергии при передаче 1 характеризуется коэффициентом г3 = Дтро/^npi-
Полагают, что в идеальной системе г3 = 0, однако обычно это не так, осо-
бенно если лазерный источник излучения смещён вблизи порога генерации.
4. Конечная длительность излучаемых импульсов и дополнительная временная
дисперсия (рассеяние) при их передаче по каналу приводят к тому, что в
практических системах связи происходит наложение соседних посылок, т.е.
проявляется межсимвольная интерференция.
Шум лазера, о котором говорилось выше, имеет квантовую природу. Веро-
ятность появления точно п фотонов на интервале Т на передающей стороне
определяется распределением- Пуассона (см. § 2.76):
Р(Т) = — e-m, п = 0,1, 2, ..., m = vT, v — интенсивность потока.
И!
Таким образом, шум лазера — это "квантовый шум", так как проявляется во
флуктуациях параметров сигнала, детерминированного по классическим пред-
ставлениям. Этот шум не является аддитивным, так как зависит от самого по-
лезного сигнала. С учётом этого в приведённой формуле следует считать, что
при передаче 1 m = mi, а при передаче 0 m = hiq. Как указывалось выше, при
передаче 0 (отсутствие возбуждения лазера) может наблюдаться определённый,
хотя и малый уровень энергии, обусловленный тем, что вероятность непоявле-
ния фотонов на этом интервале р(0) = е"”° * 1, где тй — среднее число шумовых
фотонов на интервале Т при отсутствии возбуждения лазера. По мере увеличе-
ния средней мощности излучаемого сигнала Рп&р вклад квантового шума по
сравнению с другими шумами тракта передачи падает.
Шум фотодетектора имеет природу, аналогичную шуму лазера, так как па-
дающий на фотодиод стационарный световой поток генерирует электронно-
дырочные пары носителей заряда как независимые случайные события. Если
за отрезок времени Т на фотодиод падает оптическая энергия, равная в сред-
нем Епр, то следует ожидать, что будет создано в среднем N пар носителей за-
ряда, причём [9]
148
Ет X
где т| — квантовая эффективность взаимодействия, показывающая среднее от-
ношение числа рождаемых фотодетектором электронно-дырочных пар к числу
падающих фотонов (ц < 1).
Вследствие стохастической природы взаимодействия фотонов с фотодетек-
тором истинное число пар носителей заряда, генерируемых каждым оптиче-
ским импульсом, будет флуктуировать вокруг среднего значения N. Вероят-
ность того, что число созданных пар носителей заряда на интервале Т равно К,
определяется пуассоновским распределением
Х'=°,1,2..
Следует отметить, что в реальных оптических линиях связи помимо кван-
тового шума существуют и другие мешающие факторы (в том числе аддитив-
ные помехи), что приводит к необходимости увеличения мощности оптическо-
го сигнала.
4.4. МОДЕЛИ НЕПРЕРЫВНЫХ КАНАЛОВ СВЯЗИ
Для того чтобы дать математическое описание канала, необходимо и доста-
точно указать множество сигналов, которые могут быть поданы на его вход, и
для любого допустимого входного сигнала задать случайный процесс (сигнал)
на его выходе. Задать случайный процесс можно в той или иной форме его
распределения вероятностей. Так, в непрерывном канале надо задать априор-
ную плотность (многомерную) w[u] входного процесса U(t) на интервале ана-
лиза 7а и многомерную переходную плотность w[z/u], т.е. плотность реализа-
ции принимаемого случайного колебания Z(0 (сигнал + шум) при условии пе-
редачи реализации U(t).
Точное математическое описание любого реального канала обычно весьма
сложное. Вместо этого используют упрощённые математические модели, кото-
рые позволяют выявить все важнейшие закономерности реального канала, если
при построении модели учтены наиболее существенные особенности канала и
отброшены второстепенные детали, мало влияющие на ход связи.
Рассмотрим наиболее простые и широко используемые математические мо-
дели каналов, начав с непрерывных каналов, поскольку они во многом предо-
пределяют и характер дискретных каналов.
4.4.1. ИДЕАЛЬНЫЙ КАНАЛ БЕЗ ПОМЕХ
Канал отображается линейной цепью с постоянной передаточной функци-
ей, обычно сосредоточенной в ограниченной полосе частот. Допустимы любые
входные сигналы, спектр которых лежит в определённой полосе частот Fc,
имеющие ограниченную среднюю мощность Рс (либо пиковую мощность
Рййк)- Эти ограничения характерны для всех непрерывных каналов, и в даль-
нейшем о них не говорится.
В идеальном канале выходной сигнал $(/) при заданном входном w(/) де-
терминирован и определяется согласно (4.25): = yu(t - т), где у - постоян-
ный коэффициент передачи канала, т - постоянная задержка. Эту модель ино-
гда используют для описания кабельных каналов. Однако, строго говоря, она
149
не пригодна для реальных каналов, в которых неизбежно присутствуют, хотя
бы и очень слабые, аддитивные помехи.
4.4.2. КАНАЛ С АДДИТИВНЫМ ГАУССОВСКИМ ШУМОМ
Сигнал на выходе такого канала
Z(t) = у u(t - т) + N(t) = s(t) + N(t), (4.48)
где N(t) — гауссовский аддитивный шум с нулевым математическим ожидани-
ем и заданной корреляционной функцией. Чаще всего рассматривается белый
гауссовский шум (БГШ) либо квазибелый (с равномерной спектральной плот-
ностью в полосе спектра сигнала Часто при анализе можно т не учиты-
вать, что соответствует изменению начала отсчёта времени на выходе канала.
Некоторое усложнение модели (4.48) получается, если коэффициенты передачи
у и запаздывания т считать известными функциями времени:
Z(z) = у(/) и [/ - т(/)] + N(t).
Такая модель удовлетворительно описывает многие проводные каналы, ра-
диоканалы при связи в пределах прямой видимости, а также радиоканалы с
медленными общими замираниями, при которых можно надёжно предсказать
значения у и т.
4.4.3. КАНАЛ С НЕОПРЕДЕЛЁННОЙ ФАЗОЙ СИГНАЛА
И АДДИТИВНЫМ ШУМОМ
Эта модель отличается от модели (4.48) тем, что в ней запаздывание явля-
ется случайной величиной. Для узкополосных сигналов с учётом (4.44) выра-
жение (4.48) при постоянном у и случайных т можно представить в виде
Z(/) = y cos0w(/)-sm0w(/)] + jV(/),
где w(/) — преобразование Гильберта от u(f); 0 = — coqt — случайная фаза. Рас-
пределение вероятностей 0 предполагается заданным, чаще всего равномерным
на интервале от 0 до 2я. Эта модель удовлетворительно описывает те же кана-
лы, что и предыдущая, если фаза сигнала в них флуктуирует. Такая флуктуа-
ция вызывается небольшими изменениями протяжённости канала, свойств
среды, в которой проходит сигнал, а также фазовой нестабильностью опорных
генераторов.
Однолучевой гауссовский канал с общими замираниями (флуктуациями
амплитуд и фаз сигнала) также описывается формулой (4.48), но множитель у,
как и фаза 0, считаются случайными процессами. Иными словами, случайны-
ми будут квадратурные компоненты
^V = ycos0, T = ysm0.
При изменении квадратурных компонент X, Y во времени принимаемое ко-
лебание
Z(t) = X(t)u{i) - Y(t)u(t) + N(t) = y(/)[cos0(/)w(/) - sin0(/)w(/)] + N(t). (4.49)
Как отмечалось выше, одномерное распределение коэффициента передачи
канала у может быть рэлеевским или обобщённым рэлеевским. Такие каналы
называют соответственно каналами с рэлеевскими или обобщёнными рэлеев-
скими (или райсовскими) замираниями. В рамках общей гауссовской модели
канала [14] у имеет четырёхпараметрическое распределение. Модель однолуче-
150
вого канала с замираниями достаточно хорошо описывает многие каналы ра-
диосвязи в различных диапазонах волн, а также некоторые другие каналы.
Многолучевой гауссовский канал с селективными по частоте замираниями
обобщает модель (4.49):
Z(d = SyJO[coseJ/)«(/-Tj-smeJ/)M(/-Tj] + WQ),
(4.50)
где N — число лучей в канале; т„ — среднее время задержки для л-го луча.
Многолучевая общая гауссовская модель хорошо описывает многие каналы ра-
диосвязи. Для модели (4.50) условия (4.46) не выполняется, если под Лт пони-
мать запаздывания между лучами.
4.4.4. КАНАЛ С МЕЖСИМВОЛЬНОЙ ИНТЕРФЕРЕНЦИЕЙ (МСИ)
И АДДИТИВНЫМ ШУМОМ
Эта модель является частным случаем (4.41), когда G{ty т) от t не зависит
(или меняется очень медленно), так что рассеяние по частоте практически не
наблюдается. Межсимвольная интерференция вызывается рассеянием сигнала
во времени при его прохождении по каналу связи. В частности, на выходе
многолучевого канала полезный сигнал оказывается деформированным так,
что одновременно присутствуют отклики канала на отрезки входного сигнала,
относящиеся к довольно отдалённым моментам времени. При передаче дис-
кретных сообщений это приводит к тому, что при приёме одного символа на
вход приёмного устройства воздействуют также отклики на более ранние (а
иногда и более поздние) символы, которые в этих случаях могут (при неопти-
мальных методах приёма) проявлять себя как помехи.
Межсимвольная интерференция вызывается нелинейностью ФЧХ канала и
ограниченностью его полосы пропускания. В радиоканалах причиной МСИ
чаще всего является многолучевое распространение радиоволн1).
Пусть передатчик передаёт синхронно с тактовым интервалом Т последова-
тельность элементарных сигналов, соответствующих цепочке символов
Z>_2, , • • •, b_x, b0, Z>j,..., bD_Y ,bD , причём каждый из символов последовательности
выбирают из возможного для данного кода набора 0, 1, ..., m — 1 (m — основа-
ние кода).
Обозначим отклик линейного канала на элементарный сигнал, соответст-
вующий символу Ьг, через s/?)2-1 , rT< t < (Q + г + Г)Т, где Q =
относи-
тельная память канала, определяемая целой частью от деления времени рас-
сеяния канала Лт (длительности переходного процесса в канале) на Т. Тогда
принимаемое колебание z(t) в месте приёма на интервале анализа
Та = (D + 1)Т3) при поиске решения о символе Ь$ можно записать в виде
Использование сигналов с большой базой В = 2FT » 1 позволяет в месте приёма разделить
сигналы отдельных лучей.
2> При использовании двоичных противоположных сигналов и постоянных параметрах канала
х/7) = где s(t) — отклик канала на элементарный сигнал, соответствующий символу 1,
сг = ±1.
3> При поэлементном приёме D определяет задержку (выраженную в числе символов) приня-
тия решения о передаваемом символе. С ростом D возрастает качество связи при оптималь-
ном приёме. Обычно выбирают D > Q.
151
z(/) = so(/) + gMIl(O+n(O, (4.51)
где Sq(0 — сигнал, обусловленный анализируемым символом Ь§,
gMHW = gOCTW + gc„(0=
r=-S,r*0
— сигнал межсимвольной интерференции, обусловленный символами, пере-
данными до и после анализируемого символа; n(t) — аддитивный шум в кана-
ле;
goCT(0=
l=-Q
— сигнал, который определяет остаточный сигнал МСИ, обусловленный сим-
волами, переданными до анализируемого;
gM(0 = S-sr0-r7’)1)
/=1
— сигнал, который определяет сигнал МСИ, обусловленный символами, пере-
данными после анализируемого. Чем больше скорость передачи символов \/Т
в каждом частотном канале при заданной его полосе пропускания, тем больше
число соседних с анализируемым символов определяет сигнал
В некоторых случаях в модели (4.51) можно считать, что элементарные
сигналы на приёме s^t) и передаче «ХО связаны детерминированным (как пра-
вило, линейным) отношением. Тогда при незначительном уровне шумов n(t) в
канале можно в принципе осуществить его коррекцию, т.е. перейти к модели
неискажающего канала. Однако при значительных уровнях шумов в канале с
МСИ предельное качество может обеспечить лишь оптимальный приём [14].
При случайных изменениях параметров канала функции s/О становятся слу-
чайными и модель (4.51) усложняется.
4.5. МОДЕЛИ ДИСКРЕТНЫХ КАНАЛОВ СВЯЗИ
Полезно напомнить, что внутри дискретного канала всегда содержится не-
прерывный канал. Преобразование непрерывного канала в дискретный осуще-
ствляет модем. Поэтому в принципе можно вывести математическую модель
дискретного канала из моделей непрерывного канала при заданном модеме.
Такой подход часто является плодотворным, однако он приводит к сложным
моделям.
Рассмотрим простые модели дискретного канала, при построении которых
свойства непрерывного канала и модема не учитывались. Следует, однако,
помнить, что при проектировании системы связи имеется возможность варьи-
ровать в довольно широких пределах модель дискретного канала при заданной
модели непрерывного канала изменением модема.
Модель дискретного канала содержит задание множества возможных сиг-
налов на его входе и распределение условных вероятностей выходного сигнала
при заданном входном. Здесь входным и выходным сигналами являются по-
следовательности п кодовых символов. Поэтому для определения возможных
входных сигналов достаточно указать число иг различных символов (основание
кода), а также длительность Т передачи каждого символа. Будем считать зна-
чение Т одинаковым для всех символов, что выполняется в большинстве со
*) При Та = T(D = 0) это слагаемое сигнала МСИ обращается в нуль.
152
временных каналов. Величина v = 1/7’ определяет количество символов, пере-
даваемых в единицу времени. Как указывалось в гл. 1, она называется техниче-
ской скоростью и измеряется в бодах. Каждый символ, поступивший на вход
канала, вызывает появление одного символа на выходе, так что техническая
скорость на входе и выходе канала одинакова1).
В общем случае для любых п должна быть указана вероятность того, что
при подаче на вход канала любой заданной последовательности Bw кодовых
символов на выходе появится некоторая реализация случайной пбследователь-
ности В1"1. Кодовые символы обозначим числами от 0 до т~ 1, что позволит
производить над ними арифметические операции. При этом все и-
последовательности (векторы), число которых равно тп, образуют п — мерное
конечное векторное пространство, если "сложение" понимать как поразрядное
суммирование по модулю т и аналогично определить умножение на скаляр.
Для частного случая т = 2 такое пространство было рассмотрено в гл. 2.
Введём ещё одно полезное определение. Будем называть вектором ошибок
поразрядную разность (разумеется, по модулю т) между принятым и передан-
ным векторами. Это значит, что прохождение дискретного сигнала через канал
можно рассматривать как сложение входного вектора с вектором ошибки. Век-
тор ошибки играет в дискретном канале примерно ту же роль, что и помеха в
непрерывном канале. Таким образом, для любой модели дискретного канала
можно записать, пользуясь сложением в векторном пространстве
(поразрядным, по модулю т):
В'"1 = В1"1+Е1"1,
где В1л1 и В[и] — случайные последовательности из п символов на входе и вы-
ходе канала; ЕМ — случайный вектор ошибки, который в общем случае зави-
сит от В И. Различные модели отличаются распределением вероятностей векто-
ра ЕМ. Смысл вектора ошибки особенно прост в случае двоичных каналов
(т = 2), когда его компоненты принимают значения 0 и 1. Всякая единица в
векторе ошибок означает, что в соответствующем месте передаваемой последо-
вательности символ принят ошибочно, а всякий нуль означает безошибочный
приём символа. Число ненулевых символов в векторе ошибок называется его
весом. Образно говоря, модем, осуществляющий переход от непрерывного ка-
нала к дискретному, преобразует помехи и искажения непрерывного канала в
поток ошибок. Перечислим наиболее важные и достаточно простые модели
дискретных каналов.
Постоянный симметричный канал без памяти определяется как дискрет-
ный канал, в котором каждый переданный кодовый символ может быть при-
нят ошибочно с фиксированной вероятностью р и правильно с вероятностью
1 — р, причём в случае ошибки вместо переданного символа bfl может быть с
равной вероятностью принят любой другой символ. Таким образом, вероят-
ность того, что принят символ bj, если был передан Ь,,
В реальных каналах это не всегда выполняется, так как при нарушении тактовой синхрони-
зации модема число символов на выходе канала может оказаться больше или меньше, чем на
входе. В данном курсе это обстоятельство не учитывается и синхронизация считается идеаль-
ной.
2) Здесь и в гл. 5 для упрощения записи индекс у символа означает номер позиции кода.
153
р
m-Г
J-p,
i*j,
i=j-
(4.52)
Термин "без памяти" означает, что вероятность ошибочного приёма симво-
ла не зависит от предыстории, т.е. от того, какие символы передавались до не-
го и как они были приняты. В дальнейшем, для сокращения, вместо
"вероятность ошибочного приёма символа" будем говорить "вероятность ошиб-
ки".
Очевидно, что вероятность любого «-мерного вектора ошибки в таком ка-
нале
где / — число ненулевых символов в векторе ошибки (вес вектора ошибки)1) .
Вероятность того, что произошло / ошибок, расположенных как угодно на про-
тяжении последовательности длины п, определяется формулой Бернулли
<4-53>
и!
где С =—7-------г-
" /!(«-/)!
— биномиальный коэффициент, равный числу различных со-
четаний / ошибок в блоке длиной п.
Эту модель называют также биномиальным каналом. Она удовлетворительно
описывает канал, возникающий при определённом выборе модема, если в не-
прерывном канале отсутствуют замирания, а аддитивный шум белый (или по
крайней мере квазибелый). Нетрудно видеть, что вероятность появления оши-
бок в двоичной кодовой комбинации длины п (кратному l> 1) согласно моде-
ли (4.53) при р <k 1
И
р(> 1,л) = £ с1пр'(1 -р)п~' = 1 -(1 -р)" «пр.
Вероятности переходов в двоичном симметричном канале схематически
показаны в виде графа на рис. 4.3.
Постоянный симметричный канал без памяти со стиранием отличается от
предыдущего тем, что алфавит на выходе канала содержит дополнительный
(т + 1)-й символ, часто обозначаемый знаком "?". Этот символ появляется то-
гда, когда 1-я решающая схема (демодулятор) не может надёжно опознать пе-
реданный символ. Вероятность такого отказа от решения или стирания симво-
ла рс в данной модели постоянна и не зависит от передаваемого символа. За
счёт введения стирания удаётся значительно снизить вероятность ошибки, ино-
гда её даже считают равной нулю. На рис. 4.4 схематически показаны вероят-
ности переходов в такой модели.
Несимметричный канал без памяти характеризуется, как и предыдущие мо-
дели, тем, что ошибки возникают в нём независимо друг от друга, однако ве-
роятности ошибок зависят от того, какой символ передаётся. Так, в двоичном
несимметричном канале вероятность р(1|о) приёма символа 1 при переда-
*) В двоичном канале вес вектора совпадает с его нормой, определяемой в § 2.2.
154
Рис.4.3. Переходные
вероятности в двоичном
симметричном канале
Рис.4.4. Переходные вероятности
в двоичном симметричном канале
со стиранием
р(1|1) = 1-р(д|1)
Рис.4.5. Переходные
вероятности в двоичном
несимметричном канале
че символа 0 не равна вероятности Р(6|1) приёма 0 при передаче 1 (рис. 4.5). В
этой модели вероятность вектора ошибки зависит от того, какая последова-
тельность символов передаётся.
4.5.1. НЕКОТОРЫЕ МОДЕЛИ ДИСКРЕТНЫХ КАНАЛОВ
С ПАМЯТЬЮ
Если в постоянном симметричном канале без памяти условная вероятность
ошибочного приёма (/ + г)-го символа при условии, что z-й символ принят
ошибочно, равна безусловной вероятности ошибки, то в канале с памятью она
может быть больше или меньше этой величины.
Отклонение распределения ошибок от биномиального (канала без памяти)
в реальных каналах вызывается различными причинами. Так, дискретным ото-
бражением большинства радиоканалов является канал с памятью вследствие
замираний, которые мы рассмотрели выше. Другой причиной могут являться
атмосферные и взаимные помехи. Иногда отклонение от биномиального рас-
пределения вызывается особенностями метода модуляции и демодуляции (см.,
например, гл. 5 о сдвоении ошибок при использовании относительной фазовой
модуляции — ОФМ). В уплотнённых кабельных линиях связи причиной памя-
ти считают коммутационные помехи, возникающие при переключениях от-
дельных элементов канала и по существу выводящих его на короткое время из
строя.
Простейшей моделью двоичного канала с памятью является марковская,
определяемая матрицей переходных вероятностей
Р_М р>'
L р,
где Pi — условная вероятность принять (z + 1)-й символ ошибочно, если пре-
дыдущий принят правильно; 1 — Pi — условная вероятность принять (z + 1)-й
символ правильно, если предыдущий принят правильно; Р2 — условная веро-
ятность принять (z + 1)-й символ ошибочно, если предыдущий принят оши-
бочно; 1 — Р2 ~ условная вероятность принять (z + 1)-й символ правильно, ес-
ли предыдущий принят ошибочно.
• ' Безусловная (средняя) вероятность ошибки в рассматриваемом канале р
должна удовлетворять уравнению ^ = /’2/’(г0ШИб)+/’1Р(/прав) = Р2^ + Р1(1-^). Откуда
1 + Л-Р2
Эта модель очень проста для использования, однако она весьма
неточно воспроизводит свойства реальных каналов.
155
Несколько более успешно для дискретного канала с памятью используется
модель Гильберта. Согласно этой модели канал может находиться в двух со-
стояниях 51 и 52- В состоянии 5] ошибок не происходит, в состоянии
ошибки возникают независимо с вероятностью р2- Переходы из одного состоя-
ния в другое образуют простую марковскую цепь с матрицей переходов
Г1-р(зд) р(зд)'
Изд)
где P(52|5i) — вероятность перехода из состояния б) в 52J 1*%) ~ вероят-
ность перехода из состояния $2 в 5р
Вероятности нахождения канала в состоянии 5] и S2 соответственно
, '’И 4-1$. -v (4.54)
'17 р(зд)+р(зд)’ v 17 р(ад)+р(ад)
Безусловная вероятность ошибки
Р-Л^Р1 . .
При использовании модели Гильберта обычно полагают рэ — 0,5 (т.е. это
состояние рассматривается как полный обрыв связи). Это хорошо согласуется
с представлением о канале, в котором на некоторых временных интервалах из-
за плохих условий прохождения или действия мощных помех связь
"пропадает", или с представлением о проводном канале на интервале, где дей-
ствуют сильные коммутационные помехи или всплески импульсных помех.
Модель Гильберта можно обобщить, введя в рассмотрение вместо двух N со-
стояний канала. Но тогда и усложняется её использование.
Относительно простую модель дискретного канала с группированием оши-
бок (с памятью) предложил Пуртов. В этой модели лишь два параметра: веро-
ятность ошибок р и показатель группирования а. В модели Пуртова зависи-
мость вероятности Р[>1, п] появления искажённой комбинации (с числом ис-
кажённых элементов >1) длины п характеризуется как отношение числа иска-
жённых комбинаций 7VHck(«) к общему числу переданных комбинаций N(riy.
Вероятность Р[>1, п] является неубывающей функцией от п. Согласно мо-
дели Пуртова
Р[> 1, я]
Если а = 0, то Р{>1,п}&пр, что соответствует биномиальной модели
(дискретному каналу без памяти). В этом случае нет пакетировал
(группирования) ошибок.
Наибольшее значение а (от 0,5 до 0,7) наблюдается на кабельных линих
связи (кратковременное прерывание связи). В радиорелейных линиях (где бы-
вают интервалы с большой интенсивностью ошибок и интервалы с редкими
ошибками) а = 0,3...0,5; для некоторых линий коротковолновой радиосвязи
а = 0,3...0,4.
Согласно модели Пуртова-Попова вероятность наличия комбинации дли-
ной п с t и более ошибками
156
флл] = 1ип^^1®(-) р. (4.55)
Анализируя (4.55), можно делать вывод, что при заданном п чем больше
группирование ошибок (больше Z), тем меньше число искажённых кодовых
комбинаций. Это очевидно, ибо при одном и том же числе ошибок пакетиро-
вание приводит к их сосредоточению на отдельных комбинациях (кратность t
возрастает), а число искажённых комбинаций уменьшается.
Иногда в качестве модели канала с памятью используют модель, в которой
вероятность вектора ошибки Е^ не зависит от передаваемой последовательно-
сти. Вероятность каждого вектора ошибки считается заданной и, вообще гово-
ря, не определяется его весом. Во многих каналах из двух векторов ошибки с
одинаковым весом более вероятным оказывается такой, в котором единицы
расположены близко друг к другу, т.е. имеется тенденция к группированию
ошибок.
Безусловный интерес представляют модели дискретного канала, построен-
ные на основе заданной модели непрерывного канала и задания способов мо-
дуляции-демодуляции и кодирования-декодирования. Однако в общем виде
построить такую модель затруднительно.
4.5.2. МОДЕЛЬ ДИСКРЕТНО-НЕПРЕРЫВНОГО КАНАЛА
Дискретно-непрерывный канал с независимыми символами b-t на входе и
непрерывным сигналом z(f) на выходе описывается априорными вероятностя-
ми входных символов P(bj) и переходными (условными) плотностями w[z|Az]
принимаемой реализации z(i) (на заданном интервале Т) при условии передачи
символа bi. Эту плотность называют функцией правдоподобия (см. гл. 5). Вместо
функций правдоподобия дискретно-непрерывный канал можно описать апо-
стериорными вероятностями P(bi\z) передачи символа А,- при фиксации на
приёме колебания z(t). Согласно формуле Байеса
v 7 w(z)
где плотность принимаемого колебания
т-1
w[z] = £p(Z>,.)w[z|Z>z].
/=0
Непрерывно-дискретный канал описывается аналогично.
4.6. МОДЕЛИ НЕПРЕРЫВНЫХ КАНАЛОВ СВЯЗИ, ЗАДАННЫЕ
ДИФФЕРЕНЦИАЛЬНЫМИ УРАВНЕНИМИ
Рассмотрим другой подход к построению математических моделей каналов
(сигналов), который частично был затронут в гл. 2. Выше соотношения между
входным и выходным сигналами задавались интегральными преобразованиями
(например, интегралом Дюамеля). При этом для нахождения выходного сигна-
ла требуется знать помимо характеристик цепи (канала) также входной сигнал,
действовавший на всем промежутке его существования до текущего момента t.
Во многих случаях более гибким является такое описание, при котором вся
предыстория до некоторого фиксированного момента времени 4) заменятся за-
данием некоторого начального состояния цепи. Зная характеристику цепи
157
Рис.4.6. Последовательный колебательный контур
(канала), начальное состояние и сигнал,
действующий только на промежутке от Zb
до Z, можно последовательно определить
как сигнал на выходе, так и новое со-
стояние цепи в любой момент времени
^ib-
Подобный подход известен из тео-
рии дифференциальных уравнений, в
которой искомая функция определяется как самим уравнением, так и опреде-
лёнными начальными условиями, число которых равно порядку уравнения.
Излагаемый здесь метод переменных состояния иллюстрируется примерами
систем, описываемых с помощью линейных дифференциальных уравнений.
Множество величин, однозначно определяющих поведение систем в неко-
торый момент t, содержащее минимальное число элементов п, называют со-
стоянием, а сами элементы этого множества — переменными состояния. Каж-
дую из этих переменных обычно рассматривают как составляющую «-мерного
вектора состояний. Для любой заданной системы можно составить два уравне-
ния, позволяющих по состоянию в момент zb и сигналу, поступающему на
вход, найти состояние в момент t > Zb и выходной сигнал. Первое из них назы-
вается уравнением состояния, а второе — уравнением наблюдения.
Для иллюстрации основных положений метода переменных состояния рас-
смотрим простой пример — линейную Л£С-цепь (рис. 4.6), в которой выходное
напряжение y(Z) связано с входным напряжением zz(Z) дифференциальным
уравнением
dy{t) 2 2
2а ~dT °оУ^ = ° °U^ ’
(4-56)
где 2а = ©о = 1/(TQ. Ток в цепи z(z) = .
at
Состояние этой цепи в любой момент времени Zb характеризуется двумя
параметрами: z(zb) — током, протекающим через индуктивность L, и y(zb) — па-
дением напряжения на ёмкости С. Значения z(zb) и у (zb) содержат достаточную
информацию о предыстории цепи, связанной с прошлыми воздействиями zz(Z),
t < to, которая необходима для определения будущих значений выходного про-
ф(/)
цесса y(t), t > to при заданных воздействиях zz(Z), t> to- Таким образом, —— и
at
y(t) можно интерпретировать как переменные состояния, а дифференциальное
уравнение (4.56) — как уравнение состояния, которое обычно приводят к фор-
ме векторного дифференциального уравнения первого порядка. При замене
переменных
Xi(z) = y(z), x2(z) = ^7jT, (4.57)
a\t)
уравнение (4.56) эквивалентно системе дифференциальных уравнений первого
порядка:
at
ох» (Z) - 2«х2 (Z) + (О цМ(/),
at
(4.58)
158
которая с учётом правил векторно-матричных преобразований допускает ком-
пактное представление
2
( о
U2(0z к-® о
блюдения имеет вид (4.57) или в
где х(/) =
-2а/
(4.59)
2 ; u = (o,w(O). При этом уравнение на-
к®07
векторной форме
G =
у(/) = Н-х(/), н =
1
0
0
0 ’
(4.60)
Заметим, что выбранный вектор состояния x(Z) не является единственно
возможным. Любое обратимое линейное преобразование вектора х(/) приводит
к другому вектору состояния.
Важной особенностью метода переменных состояния является возможность
непосредственного моделирования систем, описываемых уравнениями состоя-
ния с помощью аналогового или цифрового вычислительного устройства. На
рис. 4.7 показана модель системы уравнений (4.58). При построении такой
схемы удобно рассуждать следующим образом. Пусть в некоторых точках при-
сутствуют входной сигнал u(t) и переменные состояния Х](?) и x2(f). Соединим
эти точки сумматорами, усилителями и интеграторами так, чтобы соотношения
между ними соответствовали уравнениям (4.58). Из первого уравнения следует,
что, подав на вход интегратора ^(0, получим с точностью до постоянной -МО-
Эта постоянная определяется начальным условием и равна x\(t0). Затем осуще-
ствляют операции, записанные в правой части второго уравнения: умножим
u(t) и xi(0 на Од, а Х2(0 на 2a (с помощью усилителей с соответствующими
коэффициентами усиления) и сложим полученные результаты с учетом знаков.
Проинтегрировав полученную сумму и прибавив к ней постоянную x2(to)
(начальное условие), получим x2(i). Таким образом, все точки в схеме соеди-
нились в соответствии с уравнениями (4.58) (или (4.59)).
Если на такую схему-модель подать входной сигнал u(t), то на выходе по-
лучится выходной сигнал y(t). Однако это не представляет большого интереса,
поскольку то же самое можно сделать без моделирования, исследуя экспери-
ментально исходную систему (в данном случае рис. 4.6). Значительно важнее
то, что с помощью модели можно решить обратную задачу — по выходному
(наблюдаемому) сигналу найти входной, даже если выходной сигнал наблюда-
ется на фоне шума (см. гл. 8).
Рис.4.7. Моделирование уравнений состояния линейной системы
2-го порядка (последовательного колебательного контура)
В более общем слу-
чае аналогичные мат-
ричные уравнения в
форме (4.59) и (4.60)
можно построить для
систем более высокого
порядка, в том числе
нелинейных и с пере-
менными параметрами.
Отличие будет лишь в
размерности матриц и в
том, что они могут быть
159
функциями времени (для систем с переменными параметрами) и состояния
(для нелинейных цепей). Если на систему воздействует несколько входных и
несколько выходных сигналов, то их также рассматривают как компоненты
вектор-функции. В самом общем случае уравнения состояния и наблюдения
процесса принимают в векторной форме следующий вид:
= F(/, х)х(/) + G(t, x)u(/); (4.61)
at
Z(t) = н(/,х)х(/) +N(/), t > t0, x(/0) = x0, (4.62)
где N(Z) — шум наблюдения. Каждое из матричных уравнений представляет в
сущности, систему дифференциальных уравнений, число которых для уравне-
ний состояния равно количеству переменных состояния (порядку системы), а
для уравнения наблюдения — количеству выходов системы1).
Одно из приложений метода переменных состояния связано с возможно-
стью конструктивного описания случайных процессов. Оно состоит в том, что
случайный процесс Х(?) с заданными вероятностными характеристиками пред-
ставляют как выход некоторой динамической системы, возбуждаемой другим
случайным процессом (вообще говоря, многомерным) с более простой вероят-
ностной структурой U(Z). Обычно в качестве порождающего используют ста-
ционарный гауссовский процесс U(t) типа белого шума с нулевым средним и
корреляционной функцией
В„(м +т) = м{и(/),иг(/-т)} = Q5(t) , (4.63)
где Q — симметричная, неотрицательно определённая матрица.
Пусть случайный процесс U(t), удовлетворяющий (4.63), воздействует на
схему, описываемую (4.61) и (4.62), где некоторые функции F, Н, G удовлетво-
ряют условиям непрерывности и ограниченности. Тогда процессы Х(/), а также
{Х(/), Y(Z) = НХ(/)} являются марковскими, переходные плотности вероятно-
стей которых w(x, /|хо, to) и w(x, у, /| xq, уо, to) подчинены соответствующим
дифференциальным уравнениям в частных производных Колмогорова-
Фоккера-Планка (см. (2.99)). Если гауссовский порождающий процесс U(Z)
воздействует на линейную систему, то и выходной процесс X(t) будет гауссов-
ским. Он будет также стационарным, если формирующая система является ли-
нейной с постоянными параметрами. Распределение вероятностей процесса
Х(0 будет негауссовским, если он сформирован нелинейной системой. В част-
ности, если на вход цепи рис. 2.37, б поступает БГШ, то выходной процесс бу-
дет марковский гауссовский процесс с корреляционной функцией (2.150).
Метод переменных состояния с успехом применяют и для описания стохас-
тических цепей (каналов) со случайно изменяющимися параметрами. Для это-
го некоторые элементы системных функций (матриц) F, G, Н следует рассмат-
ривать как случайные функции. Этот метод даёт универсальный подход для
моделирования (в рамках весьма широкой марковской модели) каналов пере-
дачи информации (систем связи) для самых различных сообщений, способов
кодирования и модуляции (как линейной, так и нелинейной), линии связи с
детерминированными и случайными параметрами, рассеянием сигналов, адди-
тивными шумами (как гауссовскими, так и негауссовскими). Более существен-
*> Описание систем с дискретным временем в основном аналогично описанию систем с не-
прерывным временем; при этом дифференциальные уравнения состояний сводятся к уравне-
ниям в конечных разностях (см. гл. 10).
160
но то обстоятельство, что, представляя наблюдаемые (анализируемые в месте
приёма) случайные марковские процессы с помощью дифференциальных
уравнений, как уже отмечалось, можно решить обратную задачу, т.е. получить
дифференциальные уравнения для оценки сообщений, заключённых в этих
процессах. Такие оценки, получаемые с помощью аналоговой или цифровой
техники, найти значительно проще, чем оценки, вытекающие из интегральных
уравнений (см. гл. 8). * 1
ВЫВОДЫ
1. Каналы связи и реализующие их электрические цепи можно разделить по характеру сигна-
лов, действующих на входе и выходе, на: непрерывные, дискретные (цифровые) и дис-
кретно-непрерывные (цифро-непрерывные) или непрерывно-дискретные (непрерывно-
цифровые).
2. Классификация каналов (систем, цепей) основана на свойствах системных операторов,
связывающих вход и выход. Различают линейные и нелинейные, стационарные и неста-
ционарные, сосредоточенные системы и системы с распределёнными параметрами.
3. В качестве интегральных системных характеристик линейных цепей чаще всего использу-
ют импульсную характеристику и передаточную функцию системы, связанные парой пре-
образований Фурье.
4. Спектральная плотность по Фурье или Лапласу сигнала на выходе линейной стационарной
системы определяется произведением спектральной плотности входа и передаточной
функции системы. Выходной сигнал можно найти по его спектральной плотности обрат-
ным преобразованием Фурье или Лапласа (спектральный метод анализа). Его же можно
найти свёрткой входного сигнала и импульсной характеристики системы (временной метод
анализа).
5. Расчёт прохождения узкополосных сигналов через узкополосные системы (каналы) суще-
ственно упрощается, если воспользоваться понятиями комплексной огибающей входного
сигнала и низкочастотного эквивалента передаточной функции системы.
6. Как при детерминированном, так и при стационарном случайном воздействии спектраль-
ная плотность средней мощности на выходе линейной стационарной системы равна про-
изведению спектральной плотности средней мощности входного процесса на квадрат мо-
дуля передаточной функции системы. Соответственно функция корреляции выходного
процесса определяется свёрткой функции корреляции входного процесса и временной ав-
токорреляционной функции системы.
7. Нахождение корреляционной функции (спектральной плотности мощности) на выходе
произвольной линейной системы, как детерминированной, так и случайной, при стацио-
нарных случайных входных воздействиях существенно упрощается, если ввести системную
характеристику AT(ja>,/)AT(-ja>,r + T), где A"(jco, t) — случайная передаточная функция линей-
ной стохастической системы.
8. При прохождении случайных процессов через узкополосные линейные системы выходной
процесс имеет тенденцию к нормализации, независимо от распределения входного про-
цесса.
9. Расчёт прохождения узкополосных случайных процессов через нелинейные (даже безы-
нерционные) системы существенно упрощается, если воспользоваться квазигармоническим
представлением входного процесса.
10. В теории и инженерной практике чаще всего пользуются следующими моделями линей-
ного непрерывного канала: неискажающий канал с аддитивным шумом, канал с неопреде-
лённой (случайной) фазой и аддитивным шумом, однолучевой канал со случайной фазой и
амплитудой (с замираниями) и аддитивным шумом, многолучевой канал с аддитивным
шумом, канал с межсимвольной интерференцией (памятью) и аддитивным шумом.
11. Для любой модели дискретного канала можно ввести понятие случайного вектора ошибки
как поразрядную разность между последовательностями входа и выхода. В двоичном кана-
ле элементы вектора ошибки принимают значения 0 и 1. Различные модели каналов отли-
чаются распределением вектора ошибки.
161
12. Простейшая модель дискретного канала — симметричный канал без памяти
(биномиальный канал). Модель несколько усложняется введением символа стирания.
13. Простейшая модель дискретного канала с памятью — марковская модель, когда ошибки
образуют простую цепь Маркова, т.е. зависят от того, правильно или ошибочно принят
предыдущий символ, но не зависят от того, какой символ передаётся.
14. Дискретно-непрерывный канал характеризуется априорной вероятностью входных симво-
лов и функциями правдоподобия (условными плотностями выходного сигнала) или апо-
стериорными вероятностями входных символов.
15. Множество величин, однозначно определяющих поведение канала (системы, цепи) в неко-
торый момент t, содержащее минимальное число элементов п, называют состоянием, а са-
ми элементы этого множества (вектор состояния) — переменными состояния. Для любой
заданной цепи можно составить два уравнения, позволяющих по состоянию в момент /о и
сигналу, поступающему на вход, найти состояние в момент t > to и выходной сигнал. Пер-
вое из них называется уравнением состояния, а второе — уравнением наблюдения. Урав-
нение состояния обычно задают в виде системы дифференциальных уравнений первого
порядка (векторного уравнения первого порядка).
16. Важной особенностью метода переменных состояния является возможность непосредст-
венного моделирования систем, описываемых уравнениями состояния с помощью анало-
гового или цифрового вычислительного устройства (т.е. можно получить решение форма-
лизируемой задачи). Но более важно, что метод позволяет по наблюдаемому процессу оце-
нить сообщение, передаваемое сигналом.
17. Одно из приложений метода переменных состояния — возможность смоделировать любой
случайный процесс (на выходе источника сообщений, отдельных звеньев канала и т.д.) как
отклик некоторой динамической системы (описываемой системой дифференциальных
уравнений), на вход которой воздействует стационарный центрированный гауссовский 5-
коррелированный процесс. Смоделированный процесс оказывается марковским.
ВОПРОСЫ, ЗАДАЧИ И УПРАЖНЕНИЯ
4.1. По каким признакам можно классифицировать каналы связи ?
4.2. Какой канал называется непрерывным, дискретным и дискретно-непрерывным?
4.3. Как связаны между собой импульсная и передаточная характеристики линейной систе-
мы?
4.4. Линейный канал характеризуется импульсной характеристикой g(/,T) = g(/)e”“Tl(/-T).
Найти отклик канала y(f), если на вход подан прямоугольный видеоимпульс с амплиту-
дой А и длительностью Т: = я[1(/) -1(/ - Т)].
4.5. Линейный стационарный канал имеет импульсную характеристику
£0 = л(1-е-а')cosco0/ l(/). Обладает ли канал устойчивостью?
4.6. Двухлучевой канал имеет импульсную характеристику g(t) = y18(t-T1) + y28(t-T2) • Найти
модуль его передаточной функции (АЧХ канала). На каких частотах АЧХ имеет нулевые
значения при yi = у2 — у t
4.7. Найти импульсную характеристику и передаточную функцию трёхлучевого канала, не
искажающего сигнал в каждом из лучей.
4.8. Найти импульсную характеристику интегрирующей цепочки (динамическая система
первого порядка) спектральным методом. При вычислении обратного преобразования
Фурье от спектральной плотности отклика системы воспользоваться теоремой о выче-
тах, полагая о комплексной переменной (o = a + ji>) и замыкая контур радиуса R в верх-
ней полуплоскости.
4.9. Одноконтурный усилитель имеет передаточную функцию AT(ja>) = АГ0Д1 +j(a>-ш0)тк). На
его вход поступает сигнал x(/) = exp^-a/2jcosa>0/ .Найти спектр комплексной огибающей
выхода , саму огибающую ДД/) и отклик усилителя.
162
4.10. На входе одноконтурного усилителя задачи 9 действует AM сигнал
х(/) = L/0(l+m1cosQ1/-i-w2 cosQj/jcescoo/. Найти отклик фильтра методом низкочастотного
эквивалента.
4.11. Написать интеграл свёртки (4.36) через квадратурные компоненты комплексных оги-
бающих входа, выхода и канала. Нарисовать квадратурную электрическую схему, реали-
зующую низкочастотную фидьтрацию огибающей входного сигнала.
4.12. Отрезок гармонического сигнала х(?) = [/qcos а>о? длительностью Т поступает на вход од-
ноконтурного усилителя задачи 9. Найти энергию сигнала на входе и выходе при ко-
нечном Т и при Т —».оо. Напишите формулу для спектральной плотности мощности.
4.13. Какие два типа задач решаются при рассмотрении прохождения случайных воздействий
через канал связи и его звенья ?
4.14. На выходе параметрической цепи имеется AM сигнал K(/) = [t70 + kX(t^ соз(ш0/ + ф0). Мо-
дулирующий процесс X(t) гауссовский, центрирован и имеет функцию корреляции
В(т) = е"“^. Найти одномерную плотность центрированного процесса F(z), функцию
корреляции и спектральную плотность мощности процесса Y(f).
4.15. На вход синхронного детектора с опорным напряжением won(/) = acos(<»0/ + (p) поступает
смесь AM сигнала и стационарного гауссовского узкополосного флуктуационого шума
X(t) = (t/0(l+m6(/)) + Д(/))со8со0/ + JVs(r)sinoooZ (b(f) — первичный сигнал). Найти: одномер-
ное распределение процесса на выходе ФНЧ, его функцию корреляции (если
спектр входного шума равномерен в пределах полосы частот fQ-Fc< f <. fQ + Fc), отно-
шение сигнал-шум на выходе ФНЧ и на входе детектора.
4.16. На усилительный каскад с передаточной функцией задачи 9 действует стационарный
белый шум со спектральной плотностью No (на положительных частотах). Найти спек-
тральную плотность мощности, функцию корреляции и дисперсию выходного процесса.
4.17. На вход нелинейной схемы с характеристикой у = х2 поступает стационарный стан-
дартный гауссовский процесс с коэффициентом корреляции 2?(т) = е“а^. Найти: одно-
мерное распределение выходного процесса, его математическое ожидание, дисперсию,
функцию корреляции и спектральную плотность мощности.
4.18. На вход перемножителя со случайной передаточной функцией Д/) и функцией корре-
ляции Д/)Д/ + т) = ст2е”“^ поступает стационарный квазибелый (в пределах полосы час-
тот —Fc, /’с) низкочастотный шум со спектральной плотностью No. Найти функцию
корреляции выходного процесса, его дисперсию и сравнить с дисперсией входного шу-
ма.
4.19. Случайный принимаемый сигнал X(t) = Д(/)cosco+ А,(/)sinceявляется центрирован-
ным гауссовским с независимыми квадратурными компонентами, у которых
ст2 = ст2 = ст2. Каков одномерный закон распределения случайной амплитуды
у = -^Х2 +Х2 ? Чему равен параметр глубины замираний m =
модели.
4.20. Случайная амплитуда принимаемого сигнала у распределена по закону Рэлея со сред-
ним квадратом у2 . Будем считать, что качественная связь имеет место, если у превы-
шает пороговый уровень 1/пор. Найти вероятность обеспечения качественной связи, если
. , UmJ^= 0,001; 0,1; 1.
4.21. Случайный принимаемый сигнал К(/) = JV(/)cos(co0/ + <p0) является центрированным гаус-
совским, с дисперсией ст2/2 . Найти закон распределения случайной амплитуды А = |JV(/)|.
Чему равен параметр глубины замираний m =
----|2
у2 -у2
для этой модели?
163
4.22. Что понимают под квантовым шумом в оптических линиях связи ?
4.23. Найдите отношение вероятности появления п фотоэлектронов на интервале анализа Т
на выходе фотодетектора при условии, что на входе имеется полезный сигнал, к веро-
ятности появления на том же интервале п фотоэлектронов при условии отсутствия по-
лезного сигнала. Как меняется параметр х = Рп>с+ш(Т)/ Рпш(Т) в зависимости от p = mjmm
(отношение среднего числа сигнальных фотоэлектронов к среднему числу шумовых фо-
тоэлектронов).
4.24. Вероятность попадания сосредоточенной помехи в полосе сигнала Рп = 0,01. Связь счи-
тается некачественной, если амплитуда помехи Un превышает пороговую амплитуду
[/пор. Найти вероятность некачественной связи, если амплитуда помехи распределена по
Рэлею и U^/u^ = 0,1; 1; 10 .
4.25. Вероятность наложения импульсной помехи на полезный сигнал Рп = 0,01. Связь счи-
тается некачественной, если амплитуда помехи [/п превышает пороговую амплитуду
t/nop. Найти вероятность некачественной связи, если амплитуда импульсной помехи
имеет экспоненциальное распределение ^(е/п)= ae-aU", (7П > 0, о) и
= 0,1; 1; 10 .
4.26. Что понимают под каналом с межсимвольной интерференцией, чем определяется па-
мягь этого канала ?
4.27. Память канала с МСИ Q — 5, а задержка в принятии решения при поэлементном
приёме D = 6. Какое различное число цепочек двоичных символов при простом коди-
ровании (без избыточности) определяет сигнал на интервале анализа?
4.28. Для симметричного канала без памяти найти зависимость вероятности любого шести-
мерного вектора ошибки р(е,6^ от веса вектора ошибки I при вероятности ошибочного
приёма элементарного символа р = 0,01. Пусть в некотором дискретном канале
= ptt~v, где v — число нулей между соседними ошибочными разрядами. Что мо-
жете сказать о таком канале ?
4.29. Покажите, что при равновероятной передаче символов на входе канала Р(Ь^ = 1/т вы-
ходные символы дискретного симметричного канала также имеют равную вероятность,
независимо от переходных вероятностей канала.
4.30. Докажите что вероятности состояний в модели Гильберта P(S\) и Р($2) определяются
соотношениями (4.54).
4.31. В модели Пуртова-Попова безусловная вероятность
ошибочного приёма символа р =10-3. Найдите ве-
роятность ошибочного искажения семиразрядной
(л = 7) кодовой комбинации Р[^1, я] при а = 0 и
а = 0,5. Найдите вероятность наличия в семираз-
Рис.4.8. Нелинейная /?С-цепь
4.32.
рядной кодовой комбинации ошибки кратности не
меньше t = 1,2,3 при a = 0 и a = 0,5.
На нелинейную цепь 1-го порядка (рис. 4.8) при нулевых начальных условиях поступает
сигнал «(/). Написать уравнение состояния относительно переменной х(/) = иЛ(/)
(напряжение на нелинейном сопротивлении) и уравнение Наблюдения, считая, что на-
блюдаемым является напряжение на ёмкости y(f) = uc(f). Вольтамперная характеристика
— квадратичная: i = . Нарисовать аналоговую схему, моделирующую уравнения со-
стояния и наблюдения.
4.33. Стационарный случайный процесс описывается уравнением состояния
^^^ = -aA'(/)+aC/(/),A'(/0) = 0 и наблюдения Z(t) = KX(t} + N(t\ U(t),N{t) — независи-
мые, центрированные гауссовские дельта-коррелированные стационарные случайные
процессы со спектральной плотностью Ny и N^, а и К — константы. Нарисовать ана-
логовую схему, моделирующую уравнения состояния и наблюдения. Найти спектраль-
ные плотности мощности процессов 2(0 и их корреляционные функции. Каковы
распределения этих процессов ?
164
ГЛАВА 5. ТЕОРИЯ ПОМЕХОУСТОЙЧИВОСТИ СИСТЕМ
ПЕРЕДАЧИ ДИСКРЕТНЫХ СООБЩЕНИЙ
5.1. ЗАДАЧИ СИНТЕЗА ОПТИМАЛЬНЫХ ДЕМОДУЛЯТОРОВ
Системы и методы передачи дискретных сообщений занимают основное
место в современных системах электрической связи, что объясняется не только
наличием множества источников дискретных сообщений (данные с выхода
ЭВМ, телеграфные источники и др.), но и передачей сообщений непрерывных
источников (речь, музыка, телевидение, факсимильная передача и др.) более
помехоустойчивыми дискретными цифровыми методами.
На выходе модулятора в изохронных системах передачи происходит преоб-
разование цифрового сигнала 6Ц(/), рассмотренного в § 3.6, в последователь-
ность u(t) элементарных сигналов несущей f{t-kT,b^ заданной формы1):
u{t) = Yf(t-kT,bk}, (5.1)
*=0
где Т - тактовый интервал передачи в канале, определяющий техническую
скорость передачи V= 1/Т, измеряемую в бодах; Ь^е В - множество элементов
кода.
Элементарный сигнал f(t-kT,bk} может формироваться по-разному. Так, в
зависимости от того, выполняются ли модуляция и кодирование последова-
тельно друг за другом или совместно, он может иметь различные частотно-
временные свойства. Наиболее простую форму принимает (5.1) при линейной
(многоуровневой) модуляции:
(5-2)
А=0
Для сжатия сигнала f(t- кТ,Ьк} во времени и одновременно уменьшения
пик-фактора сигнала u(t) (отношение пиковой и средней мощности) можно в
качестве f(t-kT,bk^ выбрать прямоугольные радиоимпульсы длительностью Т.
Но тогда ширина полосы частот сигнала теоретически не ограничена. Если же
формировать сигналы с равномерным спектром в предельно узкой
полосе частот, то возрастает пик-фактор сигнала u(t) и, кроме того, сигналы
f(t- кТ,Ь^ теоретически не ограничены во времени. Ясно, что в этом случае
элементарные сигналы, соответствующие различным символам накладыва-
ются друг на друга, т.е. имеет место межсимвольная интерференция (МСИ)
уже на передаче. Однако это обстоятельство не препятствует безошибочному
выделению информации из сигнала u(f), если выполняются свойства отсчёт-
ности сигнала f(t-кТ,Ьк^, о которых говорилось в гл. 3.
Запись (5.1) справедлива лишь для систем модуляции без памяти (прямых систем модуля-
ции), когда к-й элемент канального сигнала fit - кТ, Ь%) зависит лишь от символа Ьк- Для сис-
тем модуляции с памятью (интегральных систем модуляции), например ЧМНФ, к-й элемент
канального сигнала зависит не только от Ь^, но и символов с меньшими номерами
'f{t -кТ,bk,bk_Xibk_2,bk_3,..^. Структура частной разновидности сигналов ЧМНФ, а именно
сигналов ММС, рассматривалась в § 3.5.
165
Разумеется, на практике находят разумный компромисс между двумя ука-
занными крайними случаями формирования элементарных сигналов
Здесь мы не будем обсуждать способы формирования сигнально-кодовых
конструкций {f[t-кТ,Ь^)} или сигнала w(l), а сосредоточим внимание на демо-
дуляторе - наиболее сложной части модема (или устройства преобразования
сигналов УПС).
На вход демодулятора при передаче сигнала (5.2) поступает колебание
(сигнал + шум)
z(t) = Y4s(t-kT,bk)+r^t), (5.3)
*=0
где s(t-kT,bk) — отклик канала на элементарный сигнал f(t-kT,bk); n(t) — ад-
дитивный шум в канале.
При линейной (многоуровневой) модуляции
z(0 = S bks(t - kt)+n(t), , (5.4)
*=0
где s(t) — отклик канала на несущую/(/).
Для упрощения дальнейшего анализа будем считать, что элементарный
сигнал на передаче f(t-kT,bk} локализован в пределах тактового интервала1).
Тогда в канале с относительной памятью Q (см. § 4.4) реакция s{t-kT,b^ су-
ществует на интервале длительностью Та = (1 + Q)T.
Сначала будем анализировать демодулятор для канала без памяти
(Q= 0, Та = Т), а затем в § 5.6 будем обсуждать демодулятор в канале с
МСИ2).
Обозначим анализируемый элемент колебания (сигнал + шум) на входе
демодулятора в канале без МСИ:
z(t) = s(t, bi) + n{t), te[0,7] ______
где s(t, Ь,) — сигнал, соответствующий символу Z><3), i ; n{t) — аддитив-
ный шум на интервале анализа4).
На выходе демодулятора возникает дискретный сигнал, т.е. последователь-
ность кодовых символов. Чаще всего элемент длительностью Т непрерывного
сигнала преобразуется демодулятором в один кодовый символ (поэлементный
приём). Если бы этот кодовый символ всегда совпадал с передаваемым
(поступившим на вход модулятора), то связь была бы безошибочной. Но, как
известно, помехи приводят к невозможности с абсолютной достоверностью
восстановить по принятому сигналу переданный кодовый символ.
Если это условие не выполнено, но сигнал в (5.4) сохраняет свойства отсчётности, все ре-
зультаты, получаемые ниже для каналов без памяти сохраняются при расширении интервала
временного анализа элемента сигнала.
2) Следует отличать МСИ на передаче (при которой сохраняются свойства отсчётности сигна-
ла) от МСИ в канале с памятью, разрушающей это свойство.
3) Здесь и далее, если не будет определено обратное, нижний индекс, для упрощения записи,
соответствует позиции кода !
4) Обычно в приёмных устройствах демодулятору предшествуют усилители и преобразователи
частоты. Здесь все они считаются включёнными в состав канала. В ряде случаев именно они
являются основными источниками аддитивных помех канала.
166
Каждый демодулятор описывается законом, по которому поступивший на
его вход непрерывный сигнал превращается в кодовый символ. Этот закон на-
зывается правилом решения, а реализующая его схема — решающей. Демодулято-
ры с различными правилами решения будут выдавать, вообще говоря, различ-
ные решения, из которых одни верные, а другие — ошибочные.
В любом демодуляторе дискретных сообщений перед непосредственным принятием ре-
шения приходящий сигнал подвергается той или иной обработке, целью которой является
наилучшее использование различия между реализациями сигналов, соответствующих разным
символам, а также отличия сигналов от помех. Всякую линейную обработку сигнала можно
описать операцией интегрирования с весом <р(/, т) в течение тактового интервала (О, Т):
т т т
у(Т)= = J х(т,й1)<р(Т’,т)<7т + J«(t)cp(7’,t)<7t . (5-5)
0 0 о
Таким образом, на выходе устройства обработки существуют сигнальная и шумовая со-
ставляющие. В простейшем случае <р(7’, т) = 5(т - /0), 0 < /0 < Т. Тогда у(Т) = z(?o) и обработка
сводится к взятию одного отсчёта приходящего сигнала в момент /о- Очевидно, при этом не
используется энергия сигнала и содержащаяся в нём информация на протяжении всей ос-
тальной части тактового интервала.
к к
При весовой функции <р(7’,т) = 0<tk < Т имеем "У, z(/t) . Если моменты
*=i *=i
времени 4 надлежащим образом согласовать с формой сигнала, то можно накопить энергию
в отсчётах и лучше использовать информацию, содержащуюся в сигнале. Для случая, когда
сигнал s(t, bi) = сь т.е. остается постоянным на протяжении тактового интервала, выбор
т
ср(Т, т) = 1 даёт у(Т) = Jz(t)^t . Это случай интегрального приёма - предел накопления при
о
К -> оо. Очень часто линейная обработка сигнала осуществляется с помощью стационарных
линейных фильтров. В этом случае <р(/, т) = g(t - т) - импульсная характеристика фильтра.
Помимо операции (5.5) сигнал нередко подвергают нелинейной обработке - возведению в
степень, детектированию и т.д.
На ранних этапах развития техники связи способы обработки сигналов вы-
бирались разработчиками аппаратуры интуитивно, исходя из общих идей о пу-
тях выделения сигнала из помехи и различия передаваемых сигналов. Выбором
различных видов реализации сигналов s(t, bf) и способов обработки в ряде слу-
чаев удавалось повысить помехоустойчивость системы передачи дискретных
сообщений, т.е. увеличить верность оценки передаваемого символа b-t при на-
личии помех.
Современная статистическая теория связи позволяет отыскать наилучшую
операцию обработки входного сигнала z(/), обеспечивающую максимальное ка-
чество оценки Ьь Будем полагать, что свойства источника сообщения и кодера
известны. Кроме того, известен модулятор, т.е. задано, какая реализация эле-
мента сигнала соответствует тому или иному кодовому символу, а также задана
математическая модель непрерывного канала. Требуется определить, каков
должен быть оптимальный демодулятор (правило решения), чтобы обеспечить
наилучшее качество приёма.
Такая задача была впервые поставлена и решена (для гауссовского неиска-
жающего канала с БГШ) В.А. Котельниковым. В этой постановке качество
оценивалось вероятностью правильного приёма символа. Максимум этой веро-
ятности при заданном виде модуляции В.А. Котельников назвал потенциаль-
ной помехоустойчивостью, а демодулятор, обеспечивающий этот максимум, —
167
идеальным приёмником. Из этого определения следует, что ни в одном реаль-
ном демодуляторе средняя вероятность правильного приёма символа не может
быть больше, чем в идеальном приёмнике.
На первый взгляд принцип оценки качества приёма вероятностью пра-
вильного приёма символа кажется вполне естественным и даже единственно
возможным. Ниже будет показано, что это не всегда так и что существуют и
другие критерии качества, применимые в тех или иных частных случаях.
Ознакомимся подробнее со статистическим подходом к задаче приёма дис-
кретных сообщений на фоне шумов. Пусть при передаче дискретных сообще-
ний, закодированных кодом с основанием т в месте приёма ожидаются сигна-
лы /е[0, 71, соответствующие кодовым символам bt (z = О, 1,2,3,...,
т - I)1). В течение отрезка времени [0, 71]2) на вход приёмного устройства по-
ступает колебание z(t), которое вследствие искажений и помех в канале не сов-
падает в точности ни с одним из элементов сигнала на передаче Следова-
тельно, в этом случае приёмное устройство должно выбрать одну из т возмож-
ных взаимоисключающих (альтернативных) гипотез: передавался кодовый сим-
вол bQ, т.е. ожидается сигнал Sq(1); передавался кодовый символ by т.е. ожида-
ется сигнал ... передавался кодовый символ bm_t, т.е. ожидается сигнал
. Для двоичной системы (т = 2) приёмное устройство выбирает одну из
двух альтернативных гипотез о передаче символа 1 или 0.
Совокупность всех возможных реализаций z(t) можно интерпретировать
точками в пространстве Z принимаемых финитных сигналов. Обычно оно яв-
ляется бесконечномерным пространством Гильберта или, с некоторыми
(приемлемыми для практики) оговорками, многомерным пространством Евк-
лида. Простоты ради будем графически изображать реализации принимаемых
сигналов Si(t) и помех n(t) (длительностью 7) точками на плоскости (рис. 5.1)
или соответствующими векторами на плоскости, откладываемыми от начала
координат 0. Если правило решения выбрано, то это означает, что каждой точ-
ке пространства принимаемых колебаний (концу вектора z = s + п) приписы-
вается одна из т гипотез, т.е. определённый переда-
ваемый кодовый символ Ь[. Пространство прини-
маемых сигналов окажется при этом разбитым на т
непересекающихся областей Д, каждая из которых
соответствует принятию определённой гипотезы. В
такой трактовке различные приёмные устройства
отличаются друг от друга способом разбиения про-
странства сигналов на области Д., т.е. правилом
принятия решения3). Возможное разбиение схема-
тически показано на рис. 5.1.
Рис.5.1. Разбиения пространтства
принимаемых колебаний
на непересекающиеся области
б Без потери общности можно, когда это удобно, считать bj=i.
2) Начало этого отрезка для удобства совместим с началом координат. В принципе интервал
анализа на приёме не всегда совпадает с тактовым интервалом Т (см. ниже). Сигналы на так-
товом интервале часто будем называть элементом сигнала.
3> В математической теории связи это разбиение и называют решающей схемой. Заметим, что
в некоторых случаях пользуются решающей схемой со стиранием, или отказом от решения.
Это значит, что т областей не охватывают всего пространства сигналов и если приходящий
сигнал не попадает ни в одну из этих областей, то принимается решение о стирании либо о
невозможности определить передаваемый символ.
168
В двоичной системе пространство Z разбивают на две непересекающиеся
области Вй и Д. Пусть на отрезке [0, 7] принимается колебание
z(/) = 5Z(/) + n(f),
где Si(t) — полезный сигнал в месте приёма, прошедший канал связи, a n{t)
— реализация аддитивной помехи.
Если помехи отсутствуют, возможные значения z(t) изображаются точками
Si (i = 0, 1, 2, ..., т — 1). При наличии помехи и передаче сигнала с номером I
точка принимаемого колебания z отклоняется от точки sz. На рис. 5.1 это по-
казано для сигналов 5Z(/) и Sk(t). Область Д содержит точку sz. В тех случаях,
когда помеха не выводит точку z за пределы области Д, решение оказывается
верным при сигнале 5Z. В противном случае возникает ошибка. Очевидно, из-
меняя границы между областями, можно влиять на вероятность ошибочного
приёма отдельных передаваемых символов. Например, если в разбиении, пока-
занном на рис. 5.1, расширить область Д за счёт области Вк, то уменьшится
вероятность ошибочного приёма символа Ьк вместо передаваемого символа Z>z
Однако в этом случае возрастает вероятность ошибочного приёма 6, при пере-
даваемом Ьк. Очевидно, всегда существует такое расположение областей, кото-
рое в определённом смысле лучше всякого другого.
Если задан критерий качества, то наилучшее разбиение пространства при-
нимаемых сигналов (оптимальная решающая схема приёмного устройства)
достигается методами теории статистических решений.
5.2. КРИТЕРИИ КАЧЕСТВА И ПРАВИЛА ПРИЁМА ДИСКРЕТНЫХ
СООБЩЕНИЙ
Рассмотрим сначала широко распространённый критерий Котельникова
или критерий идеального наблюдателя, согласно которому качество демодуля-
тора оценивают безусловной (средней) вероятностью правильного приёма сим-
вола. Будем сначала полагать, что пространство передаваемых и принимаемых
сигналов является конечномерным евклидовым. Это может быть, например,
пространство финитных сигналов, представляемых конечной тригонометриче-
ской суммой. В дальнейшем это ограничение будет снято.
В «-мерном пространстве случайный сигнал z(t) характеризуется «-мерной
плотностью вероятностей вектора z: w(z). Её можно рассматривать как плот-
ность вероятности коэффициентов разложения z(t) по любому ортонормиро-
ванному базису. Если передаётся некоторый символ Z>z, т.е. принимается сигнал
5z(0, то можно определить условную «-мерную плотность вероятности
w(z|Z>z) = w(z|sz) — функцию правдоподобия /-й гипотезы (z = 0,«i-l).
Пусть на вход демодулятора в течение отрезка [0, 7] приходит некоторый
элемент сигнала z(t). Предположим, что демодулятор принимает при этом ре-
шение, что передан символ bt, т.е. выдаёт оценку bt. Вероятность того, что это
решение правильно, очевидно, равна условной вероятности P(6z|z(^)) того, что
действительно передавался символ Ь» при условии прихода реализации эле-
мента сигнала z(/). Её называют апостериорной вероятностью символа bi (т.е. ве-
роятностью, определённой после опыта, заключающегося в наблюдении и ана-
лизе сигнала z(/)).
169
Очевидно/что вероятность правильного приёма будет
г 1=0
достигает максимума, если для каждой конкретной реализации z(t) сумма
i=0 . 1=0
максимальна. Здесь Р(б|г) ~ апостериорная вероятность передачи bt, а р(б,|г)
в совокупности образуют решающее правило демодулятора. Так как
т— 1
£p(4|z) = 1, то наилучшим решающим правилом будет такое, при котором
1=0
p(^|z) = 1 для / соответствующего максимальной Р(б,|г).
Другими словами, критерий идеального Наблюдателя обеспечивается ре-
шающей схемой, построенной по правилу максимума апостериорной вероятно-
сти — решение Ь. принимается в том случае, если выполняется система из
т - 1 неравенств:
/’(ftjz)> , j е0,m-1,7*1. (5.6)
Для сокращения запишем это правило в такой форме:
1f= Arg max|/>(z>I|z)j , (5.7)
где под Arg max {4} понимается то значение i, при котором А, максимально.
Для двоичной системы сигналов упомянутое правило сводится к проверке не-
равенства
P(l|z) > Л0|г). (5.8)
При выполнении неравенства (5.8) регистрируется символ 1, в противном
случае — 0.
Согласно известной формуле Байеса
где P(bj) — априорная вероятность передачи символа bi (т.е. та вероятность, ко-
торая имеет место до наблюдения и анализа, и определяемая статистикой ис-
точника сообщения и правилом кодирования).
Подставив (5.9) в (5.6) и учитывая, что w(z) — безусловная плотность веро-
ятности, не являющаяся функцией i, можно записать правило решения по кри-
терию идеального наблюдателя в следующей форме:
,7 = 0,1,..., т-1, j i,
или сокращённо:
1 = Argmax{p(6f)w(z|6f)}. (5.10)
Приёмник, реализующий алгоритм (5.10), называют приёмником Котель-
никова. Для двоичной системы правило (5.10) сводится к проверке неравенства
Al)w(z|l) > P(0)w(z|0), (5.11)
при выполнении которого регистрируется символ 1, а при невыполнении - 0.
170
Для построения решающей схемы по правилу (5.10) необходимо знать ап-
риорные вероятности символов P(bj), а также свойства модулятора и канала,
определяющие условные плотности — функции правдоподобия.
Правило (5.10) можно записать иначе. Решение о том, что передавался
символ bi, должно приниматься, если для всех j * i выполняются т — 1 нера-
венств
Отношение в левой части этого неравенства называется отношением прав-
доподобия двух гипотез: о том, что передавался символ Ь^ и о том, что переда-
вался символ bj. Его обозначают Агу.
В случае, когда все т символов передаются равновероятно, т.е. Р(Ь[) = \/т,
правило (5.12) упрощается:
Л/у > 1 ,i е0,т-1 ,j!*i:. (5.13)
Иногда вводят в рассмотрение помимо т гипотез о передаче символов
6,(z = 0,w-l) ещё дополнительную ("шумовую") гипотезу о том, что никакой
сигнал не передавался, т.е. z(f) = n(i) — чистая помеха1). Отношение правдопо-
добия / । < = Л.ш обычно обозначают просто Л,. Тогда правило (5.13) можно
W(Z|6m)
записать так:
Л, > A.J при всех j , (5.14)
или короче: i = Arg тах[л,]. Такое правило максимума правдоподобия реализу-
ет критерий идеального наблюдателя при том условии, что все символы пере-
даются равновероятно2 * * *).
Для двоичной системы правило (5.14) сводится к проверке неравенства
Aj>A0. (5.15)
Как отмечалось, критерий идеального наблюдателя не является единствен-
ным разумным критерием оптимальности решающей схемы. Дело в том, что Во
многих случаях различные ошибки приводят к различным последствиям. На-
пример, в системе автоматической пожарной сигнализации опаснее не обна-
ружить сигнал о пожаре, нежели объявить "ложную тревогу", когда в действи-
тельности пожара нет.
Учёт последствий ошибок различного рода (связанных с передачей различных символов)
приводит к обобщению критерия идеального наблюдателя, известного под названием крите-
рия минимального среднего риска (или байесовского критерия). Введём некоторые понятия.
Следует иметь в виду, что в системах с AM дополнительная гипотеза может соответствовать
одной из позиций сигнала.
2) Вместо неравенств (5.14) можно было бы просто записать Сравнение отно-
шений правдоподобия вместо сравнения условных плотностей вероятностей вызвано тем, что
понятие отношения правдоподобия можно распространить и на сигналы из бесконечномер-
ного гильбертова пространства, для которых понятие плотностей вероятности w(2|i>)
теряет смысл. Как это делается, будет показано в § 5.3.
171
Если при передаче символа Ь, принят символ bj, то при J ф i имеет место ошибка. Чтобы
учесть неравноценность различных ошибок, будем с каждой парой символов bt и bj связы-
вать некоторую численную величину, называемую "потерей", обозначив её Ly. Величина
"потери" зависит, таким образом, от того, какой символ bj принят вместо переданного й,
Правильному приёму при этом обычно приписывается нулевая "потеря". Значения Ly опреде-
ляются в каждом конкретном случае важностью “правильного приёма данного элемента сиг-
нала и величиной опасности различных ошибок.
Так как при передаче символа bt символы Д появляются с определёнными вероятностя-
ми как реализации некоторой дискретной случайной величины, можно говорить об условном
математическом ожидании величины "потери" при передаче конкретного символа Z»,. Назовем
это условное математическое ожидание условным риском:
/и-1 /п-1
r,=Z J • (5Л6)
7 = 0 J=O Bj
Интеграл в (5.16) берется по области Bj решающей схемы и представляет вероятность
того, что сигнал z(t) попал в эту область, если передавался символ bt Усреднив условный риск
Ri по всем символам Ьь получим величину, называемую средним риском:
т-1 т-1
Лс₽ТАФу (5Л7)
,=о 7=0 в.
Критерий минимального среднего риска заключается в том, что оптимальной считается
решающая схема, обеспечивающая наименьшее значение среднего риска Rcp. Приёмник, ра-
ботающий по такому критерию, называют байесовским.
Из (5.17) видно, что при использовании этого критерия нужно, помимо априорных веро-
ятностей p(bj) передачи отдельных символов знать и величины потерь Ly. Заметим, что если
считать все ошибки равноценными (Ly = const при j * i и Lti = 0 ), то критерий минималь-
ного среднего риска совпадает с критерием идеального наблюдателя, а байесовский приёмник
совпадает с идеальным приёмником Котельникова. В общем же случае в оптимальном байе-
совском приёмнике чаще будут возникать ошибки, связанные с малыми потерями, и реже — с
большими потерями.
Ситуация, в которой практически невозможно определить априорную вероятность пере-
дачи отдельных элементарных сообщений, а последствия ошибок разного рода неодинаковы,
типична для радиолокации, когда приёмник, анализируя принимаемое колебание z(t)
(отражённый сигнал плюс помеха), должен определить, имеется в данном направлении и на
данном расстоянии объект наблюдения (цель) или нет. Как правило, априорная вероятность
наличия отражённого от цели сигнала (передачи 1). заранее не известна. Последствия двух
родов ошибок — ложной тревоги (приёмник фиксирует, что цель существует, в то время как в
действительности её нет) и пропуска цели (приёмник отмечает отсутствие цели, в то время
как фактически она имеется) — неравноценны.
В этой и других сходных ситуациях чаще всего пользуются критерием приёма, известным
под названием критерия Неймана-Пирсона. Суть его заключается в том, что решающая схема
считается оптимальной, если при заданной вероятности ложной тревоги рт обеспечивается
минимальная вероятность пропуска цели рпрц. Введём в рассмотрение функции правдоподо-
бия гипотезы об отсутствии цели w[z|o] и о наличии цели 1].
Очевидно, что можно различными способами разбить пространство принимаемых коле-
баний z(t) на две области: Во (область решения об отсутствии цели) и Д (о наличии цели) —
так, чтобы вероятность ложной тревоги
Рлг = |w(z|o)rfz (5.18)
А
равнялась заданной величине. Поскольку в локации символ 0 (отсутствие цели) передаётся
паузой, то и-Ыо] — это плотность распределения помехи. Следовательно, вероятность ложной
172
тревоги определяется вероятностными характеристиками помехи и выбором области . Но
от выбора этой области зависит и вероятность правильного обнаружения цели:
Рпро = jw(z|l)c?Z=l-pnp4 = l-jw(z|l)6/z, (5-19)
А в0 .
Рпрц - вероятность пропуска цели.
Интегралы в (5.18), (5.19) и в аналогичных других формулах, взятые по векторной пере-
менной, очевидно, многократные.
Максимизация (5.19) при заданной величине (5.18) достигается, если решение о наличии
цели принимается при выполнении неравенства
где X — пороговый уровень, определяемый заданной вероятностью ложной тревоги рт.
Существуют и другие критерии качества приёма, не требующие знания априорных веро-
ятностей символов.
В технике связи преимущественно применяют правило максимального
правдоподобия (5.14), (5.15). В том случае, когда все символы передаются рав-
новероятно, правило максимального правдоподобия реализует критерий иде-
ального наблюдателя. ОдНако очень часто это правило решения применяют и
при неизвестных или известных, но не одинаковых априорных вероятностях
символов. Конечно, оно не обеспечивает в этих случаях максимума вероятно-
сти правильного приёма. Изменив решающую схему на схему, построенную по
правилу максимальной апостериорной вероятности (5.8), реализующему крите-
рий идеального наблюдателя, можно было бы уменьшить вероятность ошибок.
При этом, очевидно, пришлось бы сократить области приёма маловероятных и
расширить области высоковероятных символов. В результате редко передавае-
мые символы принимались бы менее надёжно, нежели часто передаваемые. Но
редкие символы несут больше информации, чем частые (см. § 6.3). Поэтому
переход от правила максимального правдоподобия к правилу максимальной
апостериорной вероятности, хотя и уменьшает безусловную вероятность ошиб-
ки, может привести к увеличению потери информации при демодуляции. Лег-
ко показать, что правило максимального правдоподобия реализует критерий
минимума среднего риска (5.17), если положить Ly = 0 при i =j и Ly =
при i *j.
Вследствие сказанного будем в дальнейшем пользоваться, если не оговоре-
но обратное, правилом максимального правдоподобия и решающую схему,
реализующую правило (5.14), называть оптимальной.
5.3. ОПТИМАЛЬНЫЕ АЛГОРИТМЫ ПРИЁМА ПРИ ПОЛНОСТЬЮ
ИЗВЕСТНЫХ СИГНАЛАХ (КОГЕРЕНТНЫЙ ПРИЁМ)
Предположим, что все искажения в канале строго детерминированы и слу-
чайным является только гауссовский аддитивный шум n(f), который вначале
полагаем белым, со спектральной плотностью Nq. Это значит, что при передаче
символа bi (i = 0, 1, ..., т — 1) принимаемое колебание можно описать моде-
лью (4.48):
z(t) = st(t)+n(t), Q<t<T, (5.21)
173
где все .$//) = уf(t-x-kT$})=TUt(t-x) известны. Не известна лишь реализация
помехи и позиция (индекс /) действительно переданного сигнала, который и
должна определить решающая схема.
Будем также считать, что все s, являются финитными сигналами, длитель-
ность которых Т. Это имеет место, если передаваемые сигналы мг(/) финитны и
имеют одинаковую длительность (система синхронная), а в канале нет ни мно-
голучевого распространения, ни линейных искажений, вызывающих увеличе-
ние длительности сигнала (либо они скорректированы).
В дальнейшем будем везде полагать, что в системе обеспечена надёжная
тактовая синхронизация, т.е. границы тактового интервала, на котором прихо-
дит сигнал известны точно. Вопросы синхронизации весьма существенны
при реализации оптимальных демодуляторов и синхронных систем связи во-
обще, но они выходят за пределы данного курса. Момент начала посылки Sj(t)
примем за нуль.
Определим в этих условиях алгоритм работы оптимального (т.е. основанно-
го на правиле максимального правдоподобия) демодулятора, анализирующего
сигнал на тактовом интервале 0...Г. Для этого необходимо найти отношения
правдоподобия для всех m возможных сигналов относительно нулевой гипоте-
зы (z(t) =
Задача затрудняется тем, что ширина спектра сигнала бесконечна
(поскольку он финитный), а поэтому пространство сигналов бесконечномер-
ное 4, (Г). Для таких сигналов (или бесконечномерных векторов) не существу-
ют плотности вероятностей. Однако существуют «-мерные плотности вероятно-
стей для любых п сечений сигнала.
Заменим вначале белый шум квазибелым, имеющим ту же одностороннюю
спектральную плотность мощности Nq, но только в некоторой полосе частот
F= п/ТТ, где и»1. Рассмотрим дополнительную гипотезу, т.е. будем считать,
что z(fy — стационарный шум с нулевым МО. Возьмём на тактовом интервале п
равноотстоящих сечений через Д/= 1/22*’ = Т/п. Отсчёты zi,...,zn в этих сечени-
ях для квазибелого гауссовского шума независимы в соответствии с (2.89). По-
этому «-мерная плотность вероятности для взятых отсчётов
1 ' 1 п
4Z1’г2,Z„;Z2,t„\z(i) = «(/)] = , --vexp^-—
\л12пс>2) I 20 *=1 J
(5.22)
где о2 = Nq F — дисперсия (мощность) квазибелого шума.
При гипотезе, что передавался символ bj, согласно (5.21)
n(f) = z(t) — Следовательно, условная «-мерная плотность вероятности се-
чений z(t) определится такой же формулой, как и (5.22), если z(t^) заменить
разностью z(tk) — Si(tk), представляющей при этой гипотезе шум:
^,z2,...,zn,tx,t2,...,tn\b\ = -r—exp- ’•
П/2жГ I 2<т *=i J
Отношение правдоподобия для сигнала Si (относительно дополнительной
гипотезы), вычисленное для п сечений,
Zl’ Z2’ Zn’> ^1» ^2>
/1’ z2 ’ • • • > Zn->h‘> ^2 » h > •
= ехрч -
2о2
2о2
Заменим дисперсию о2 её выражением: о2 = NqF = Ао/2Д?
W
п
2
п
174
Тогда
Л1,"' = ехр-
А/+тг1>2МА/
-,vo *=1 -“’о *=1
По правилу максимума правдоподобия в случае квазибелого шума решаю-
щая схема должна выбирать значение i, обеспечивающее максимум Л1®]. Вме-
сто Л1”1 можно отыскивать максимум его логарифма:
2
Ь Л'г1 =-^£Н*)-л(**)] (5.23)
“’о *=1 -“’о *=1
Вернёмся к исходной задаче для белого шума. Для этого будем расширять
полосу F, тогда число сечений п стремится к бесконечности, а А/ - к нулю.
Суммы в (5.23) обращаются в интегралы, и после раскрытия квадрата в первом
слагаемом правило решения (выбора оценки bt) можно написать следующим
образом:
2 г 1г
Arg maxi—J z(t)st (f) dt -—J s2 (/) dt ►.
1 ft Л 2V л л
О о о
Правило приёма (5.24) сводится к проверке системы неравенств
т т
jг(г)-У,(0dt -0,5Е{ > jz(t)Sj(t)dt-0,5Е}, j*i,
о о
(5.24)
(5.25)
т
где Et- |л,2(/)Л ~ энергия ожидаемого сигнала s//)- Выражение (5.25) опреде-
О
ляет те операции (алгоритм приёма), которые должен совершать оптимальный
приёмник над входным колебанием.
Для двоичной системы алгоритм (5.25) сводится к проверке одного нера-
венства
т т
jz(t)sx(t)dt - O,5Ej > jz(t)sa(t)dt - O,5£0. (5.26)
0 0
При выполнении неравенства (5.26) регистрируется символ "1", в против-
ном случае "О".
Устройство, непосредственно вычисляющее скалярное произведение (или
корреляционный интеграл):
т
(z,sf) = (5.27)
О
называют активным фильтром или коррелятором, поэтому приёмник, реали-
зующий алгоритм (5.25), называют корреляционным.
На рис. 5.2 показана структурная схема приёмного устройства, работающе-
го в соответствии с (5.26). Здесь блоки "х" - перемножители; Го, П — генера-
торы опорных сигналов so(0> s\{t)\ f — интеграторы; " — вычитающие устрой-
ства;- РУ — решающее устройство, определяющее в моменты времени, кратные
Т (при замыкании ключа), номер /-ветви с максимальным сигналом
175
Рис.5.2. Оптимальный демодулятор при точно известных сигналах,
построенный по корреляционной схеме
(z = О, 1). При т > 2 в схеме рис. 5.2 и других нижеприведённых схемах растет
соответственно число ветвей обработки сигнала, попадающих на РУ.1)
Если сигналы и,-(0 выбраны таким образом, что все их реализации (а сле-
довательно, и все реализации s;(z)) имеют одинаковые энергии2) (Е/ = const),
алгоритм приёма (5.25) (и соответственно его реализация) упрощается
(отпадает необходимость в вычитающих устройствах) и принимает вид
Т т
j*i, (5.28)
О о
ИЛИ
Из (5.28) видно, что правило решения не изменится, если сигнал z(0, по-
ступающий на вход демодулятора, умножить на любое число. Поэтому систе-
ма, в которой все реализации сигнала имеют равную энергию, отличается тем,
что оптимальный алгоритм приёма в ней не требует знания "масштаба" прихо-
дящего сигнала или, другими словами, знания коэффициента передачи у кана-
ла. Эта особенность обусловила широкое распространение систем сигналов с
равной энергией, что важно для каналов с замираниями, в которых коэффици-
ент передачи флуктуирует.
Заметим, что для двоичной системы неравенство (5.26) можно представить
в более простом виде:
т
, (5.29)
О
При реализации этого и всех других алгоритмов оптимального (субоптимального) приёма
дискретных сообщений предполагается, что к началу обработки сигнала на данном тактовом
интервале схема очищена от переходного процесса.
2) Такие системы часто называют системы с активной паузой. Двоичную систему, у которой
один сигнал нулевой (нет излучения), называют системы с пассивной паузой.
176
где s^(t) = sl(t)-s0(t) — разностный сигнал; X = 0,5(£i — Eq) — пороговый уровень.
Для системы сигналов с равной энергией X = 0, что значительно облегчает
реализацию оптимальной схемы.
Для реализации (5.29) в схеме рис. 5.2 требуется лишь одна ветвь.
На рис. 5.3, а показана схема, реализующая алгоритм (5.29) для двоичной системы пере-
дачи однополярными импульсами (с пассивной паузой): 5i(/) = a, s0(f) = 0. При этих сигналах
т
•уд(0 = 'у1(0 = а> — а2Т, Eq = 0, Х = а2— и (5.29) примет следующий вид:
г ,, , аТ
о
На схеме пороговый уровень с учётом постоянной RC цепи
£ _ X _ аТ
~~RC~~2RC
Рассмотренную систему двоичных сигналов используют в простейших устройствах про-
водной связи. В радиоканалах, а также в современных кабельных каналах применяют высо-
кочастотные сигналы. Наиболее простыми двоичными системами с гармоническими сигнала-
ми являются системы с амплитудной (AM), фазовой (ФМ) и частотной (ЧМ) манипуляцией.
В двоичной AM 5i(t) = acos(ct>o/ + <р), 5о(0 = 0- Все входящие сюда постоянные (а,®о,ф) в
этом параграфе полагаем известными. Поскольку здесь sA(f) = $1(/), Ei = (P-T/l и Eq= 0, пра-
вило (5.29) запишем в виде
г
J z(/) cos(a> ot + <p)dt > — .
о
Оно реализуется схемой рис. 5.3, б, которая отличается от рис. 5.3, а блоком перемноже-
ния приходящего сигнала с опорным сигналом cos(coq/ + <р). Пороговый уровень £ в этом
случае равен аТ .
ARC
При двоичной ФМ с противоположными сигналами1)
$1(/) = acos(oof + <р), $о(О = ocos(oof + <р + тс) = — Ji(l)-
Это — система с равной энергией сигналов, и поэтому в (5.29) X = 0. Легко убедиться, что
К декодеру
------>
аТ
2RC
б)
Рис.5.3, реализация оптимального приёма двоичных прямоугольных
импульсов {а) и реализация оптимального приёма в двоичной системе
AM, ФМ при точно известном сигнале (б)
*) О реализации демодулятора двоичной ЧМ с непрерывной фазой и минимальным частот-
ным сдвигом (ММС) говорилось в гл. 3.
177
т
правило решения сводится при этом к следующему: |z(z)cos(a>0z + <p)cft>0 и реализуется той
о
же схемой рис. 5.3, б при X = 0. В этом случае РУ играет роль дискриминатора полярностей.
Чтобы придать алгоритму оптимального приёма (5.25) наглядный геомет-
рический смысл, прибавим в обоих частях неравенства одинаковую величину
г
0,5 jz2 (/)*#• Тогда алгоритм принимает вид
О
- O,5j[z(/) - ,$;.(/)] dt > -O,5j[z(/) - $,(/)] dt, J .
о 0
Умножая левую и правую часть неравенства на —2, отчего знак неравенства
меняется на обратный, получаем интересующий нас алгоритм приёма, эквива-
лентный (5.25):
; т т
J [ХО - -У,(О]2 dt < j [z(0 - s/o] dt ,j*i. (5.30)
0 0
Отметим, что именно в таком виде впервые получил алгоритм оптимально-
го приёма В.А. Котельников [18].
На рис. 5.4 для m = 2 показана структурная схема приёмного устройства,
работающего в соответствии с алгоритмом (5.30).
Здесь " — вычитающие устройства; Го,Г1 — генераторы опорных сигналов
£о(О> ^1(0; С)2 “ квадраторы; I — интеграторы; РУ — решающее устройство, оп-
ределяющее в моменты времени, кратные Т (при замыкании ключей), номер
ветви с минимальным сигналом.
определяет норму разности
В пространстве Гильберта
j[z(O-^(O]2^
V о >
Рис.5.4. Структурная схема отимального приёмного устройства при
точно известных сигналах, содержащая квадраторы
векторов г и s, или рас-
стояние между ними2) .
Поэтому алгоритм (5.30)
можно записать в виде
||z-s,.||<||z-s7.||, j*i,
и придать ему простую
геометрическую интерпре-
тацию: оптимальный де-
модулятор должен регист-
рировать тот из сигналов
Si(f) (соответствующий
СИМВОЛУ bi), который
"ближе" к принятому ко-
2) Для «-мерного пространства Евклида эта норма
178
о
лебанию z(f). В качестве примера на
рис. 5.5 показано оптимальное разбиение
двумерного пространства принимаемых
сигналов z(fy при передаче сигналов $i(/) и
5о(О- Области принятия решения в пользу
символов 0 и 1 расположены по обе сторо-
ны от прямой 0-0’, перпендикулярной от-
резку, соединяющему точки сигналов и де-
лящему его пополам.
Наличие в схеме рис. 5.4 квадраторов,
призванных обеспечить квадратическое
преобразование мгновенных значений
входных сигналов во всем их динамиче-
ском диапазоне, часто затрудняет её реали-
зацию.
Рассмотрим вкратце случай, когда гауссовский
Рис.5.5. Оптимальное разбиение пространства
принимаемых колебаний при двоичном коде и
точно известных сигналах
шум в канале не белый и не квазибелый, а окрашенный, т.е. имеет неравномерную плотность
мощности G(/) в полосе спектра сигнала. Пропустим приходящую на вход демодулятора
сумму сигнала и шума через фильтр с передаточной функцией К[ j2Tt/), такой, чтобы в полосе
спектра сигнала произведение G(/)|x(j27t/)|2 было постоянной величиной N. Из всех возмож-
ных фильтров с АЧХ, удовлетворяющих этому условию и различающихся только фазо-
частотной характеристикой, можно выбрать минимально фазовый, у которого <р(ю) связана с
натуральным логарифмом АЧХ 1пХ(ш) парой преобразований Гильберта [3]:
-оо -оо
Очевидно, что на выходе фильтра шум окажется квазибелым: GBbIX(/) = N . Поэтому такой
фильтр называется обеляющим.
Сигнал после прохождения через обеляющий фильтр превратится в некоторый
другой сигнал, который обозначим Вид его можно определить, зная s^t) и AT(j27t/). Если
теперь подать колебания с выхода обеляющего фильтра на демодулятор, являющийся опти-
мальным для приёма сигналов s/(/) (f = 0,/п-1), то получим схему рис. 5.6, которая, очевидно,
является оптимальной для сигналов s//) при окрашенном шуме.
Следует обратить внимание на то, что в схемах рис. 5.3 и 5.4 опорные сиг-
налы должны иметь те же начальные фазы, что и ожидаемые приходящие сиг-
налы или, другими словами, должны быть когерентными с приходящими сиг-
налами. Это требование обычно затрудняет реализацию демодулятора и требует
введения в него помимо указанных на рисунках блоков дополнительных уст-
ройств, предназначенных для регулировки фаз опорных сигналов.
Окрашеный шум Белый шум +
+ сигнал s(t) —к Обеляющий фильтр сигнал 5'(/) Оптимальный демодулятор для /(/) Решение ;
Рис.5.6. Оптимальный демодулятор с обеляющим фильтром при гауссовском "окрашенном шуме"
179
Все методы приёма, для реализации которых необходимо точное априорное
знание начальных фаз приходящих сигналов, называют когерентными. В тех
случаях, когда сведения о начальных фазах ожидаемых сигналов извлекаются
из самого принимаемого сигнала (например, если фаза флуктуирует, но на-
столько медленно, что может быть предсказана по предыдущим элементам
сигнала), приём называют квазикогерентным. Если же сведения о начальных
фазах приходящих сигналов отсутствуют или по каким-либо соображениям их
не используют, то приём называют некогерентным (см. § 5.7).
5.4. ОПТИМАЛЬНЫЙ ПРИЁМНИК С СОГЛАСОВАННЫМ
ФИЛЬТРОМ
Скалярное произведение (5.27) можно вычислить не только с помощью ак-
тивного фильтра (коррелятора), описанного в предыдущем параграфе, но и с
помощью пассивного линейного фильтра с постоянными параметрами. Если
на вход фильтра подать принимаемый сигнал z(/), то напряжение на выходе
Т
фильтра в момент времени t-T у(Т) = ^z(x)g(T-x)dx, где #(т) — импульсная
О
характеристика фильтра. Выберем её такой, чтобы в момент t = Т получить
значение у(Т), равное скалярному произведению (5.27). Легко видеть, что это
будет выполнено при следующем согласовании g( Т - т) = Sj(x) или
g(f) = Sj(T-х). (5.31)
В более общем случае согласованным фильтром для сигнала s(f) называют
линейный пассивный фильтр с постоянными параметрами и ИХ
g(0 = as(r0 - t), (5.32)
где a, t — постоянные. Функция g(t) является зеркальным отображением s(t)
относительно оси, проведённой через точку t^/2 (рис. 5.7). Для физической
реализуемости фильтра необходимо и достаточно, чтобы g(i) = 0 при t < 0. В
частности, для финитного сигнала $(/), поступающего на вход фильтра в мо-
мент t = 0 и заканчивающегося в момент Г, условие физической реализуемо-
сти согласованного фильтра заведомо выполняется, как видно из рис. 5.7, если
постоянная t (момент отсчёта) удовлетворяет условию
tQ~ Т> 0 или tQ> Т. (5.33)
Передаточная функция (частотная характеристика) согласованного фильтра
с ИХ (5.32) определяется преобразованием Фурье
Рис.5.7. Сигнал s(f) и импульсная характеристика g(f)
линейного фильтра, согласованного с этим сигналом
180
= f gi^dt =4 X'o - fy^dt =
, . . (5.34)
= a js^e^^dr = a *s{jco)e~J<o,° 4
—o° t
где £(j®) — функция, комплексно-сопряжённая cd спектральной плотностью
сигнала s(t). Следовательно, с точностью до коэффициента а АЧХ согласован-
ного фильтра определяется амплитудным спектром сигнала s(t) (т.е. фильтр
лучше передаёт те частоты, которые дают больший вклад в энергию сигнала), а
его фазо-частотная характеристика (без учёта слагаемого — определяемого
задержкой /Ь) обратна по знаку фазовому спектру сигнала s(t). Благодаря этому
в момент /Ь все составляющие спектра принимаемого сигнала складываются в
фазе и дают максимальный отклик.
Согласно (5.31) в момент времени Г напряжение на выходе согласованного
фильтра пропорционально сигналу на выходе интегратора активного фильтра в
схеме рис. 5.2. Поэтому демодулятор, реализующий алгоритм (5.26), может
быть выполнен и на базе согласованных фильтров. Структурная схема такого
демодулятора для двоичной системы показана на рис. 5.8, где СФ, — фильтр,
согласованный с сигналом
Отклик согласованного фильтра на финитный сигнал длительностью Т,
поданный ко входу в момент времени 0, существует лишь на финитном интер-
вале протяжённостью 2Т. Действительно, если на вход фильтра подан сигнал, с
которым он согласован, то сигнальная составляющая на выходе согласованно-
го фильтра
t t
ye(t) = $s(t- T)g(r)dT = af s(t - t)X*o ~= aBv(t0-t), (5.35)
0 0
где Bs(Jo — t) — ФК сигнала s(t) при аргументе t$-t. Для финитного сигнала она
определена на интервале (0,27) и имеет максимум в точке t = /q = Т. Подчерк-
нём, что формы полезного сигнала на входе и выходе согласованного фильтра,
как правило, существенно отличаются друг от друга. Задачей согласованного
фильтра является не восстановление формы сигнала, искажённой шумом, а
получение одного отсчёта, по которому можно судить о присутствии или от-
сутствии на входе фильтра сигнала известной формы.
Докажем, что произвольный линейный стационарный фильтр с импульс-
Рис.5.8. Оптимальный демодулятор на основе согласованных фильтров
181
ной характеристикой g(Z) даёт на своём выходе в момент времени t$> Т значе-
ние отношения пиковой мощности сигнала к дисперсии шума:
(5.36)
где 2А2 — значение РпикС^) Для согласованного фильтра (А2 = E/Nq — отноше-
ние энергии сигнала длительности Т к спектральной плотности шума на поло-
жительных частотах).
Действительно, пусть на вход фильтра в момент t = 0 при нулевых начальных условиях
подаётся смесь z(t) = s(f) + N(f). Тогда сигнальная составляющая выхода
*0 *0
уД'о) = J, а шумовая составляющая у„(/0) = jл(т)^(/0 -т)с/т .
о о
Если шум л(т) центрирован, стационарен и 8-коррелирован, то у„(^0) = о и
__ U U уу * и * и
°? = Л2('о) = J J"(т1Мъ>('о - т2)л Аг=-у-jf 5(т1 - т2)я('о -Т1Ж -
0 0 0 0
Учитывая фильтрующее свойство 5-функции, имеем
°”2 =^fg2('o-T)‘/T='yA ,Eg=jg2(t)dt.
о
2
2 fsWgGo-т)^
Гпикуо/ NqE*
Согласно неравенству Буняковского-Шварца (2.9)
2
ЛЛ гл ЛЛ.
/Хт)^о-Т)л р2(т)</т jg2(f0-т)А ,
(5-37)
(5.38)
причём равенство имеет место лишь при выполнении условия (5.32), т.е. для согласованного
фильтра. С учётом (5.37) и (5.38) следует результат (5.36).
Рассмотрим возможности реализации согласованных фильтров. Согласо-
ванный фильтр для финитного сигнала произвольного вида s(f) можно в прин-
ципе построить на основе неискажающей длинной линии, обеспечивающей за-
держку сигнала на время Т, с бесконечной плотностью отводов. Практически
можно брать отводы в дискретных точках с разносом Д = 0,5/jF, где F — эф-
фективная ширина спектра сигнала.
Действительно, с помощью схемы, показанной на рис. 5.9, можно с задан-
ной точностью синтезировать любой сигнал s(t), представленный усечённым
рядом Котельникова (2.61):
где ak = $(АД); Д = 1/(2F); F — ширина спектра сигнала. Как следует из в § 2.4,
такой сигнал можно получить на выходе идеального ФНЧ с полосой пропус-
кания F, подавая на его вход последовательность 8-импульсов с весами
182
Рис.5.9. Реализация фильтра, согласованного с произвольным непрерывным
сигналом на основе линии задержки с отводами и блоками взвешивания
ак = акЛ через интервалы времени Д. Это осуществляется с известным прибли-
жением в схеме рис. 5.9. Если на вход линии в начальный момент подаётся
один короткий импульс, аппроксимирующий 3-функцию, то с отводов снима-
ются такие же импульсы, разнесённые на интервалы Д, которые, пройдя через
взвешивающие блоки ак, поступают поочередно на вход ФНЧ. Взвешивающие
блоки содержат аттенюаторы или усилители с коэффициентом усиления |<я*|, а
также при отрицательных а'к — инверторы.
Схема рис. 5.9 представляет собой линейный фильтр, называемый транс-
версальным. (см. гл. 10), с импульсной реакцией $(0- Легко видеть, что если
входной импульс подать не в точку Дав точку В, то будет синтезирован сиг-
нал, представляющий зеркальное отображение s(t). Поэтому та же схема со
входом в точке В оказывается фильтром, согласованным с s(f).
Существуют и другие способы реализации фильтра, точно или приближённо согласован-
ного с сигналом заданной формы.
Так, вариант фильтра, согласованного с прямоугольным радиоимпульсом s(f) — а
cos(©q/ + Фо)> заданным на интервале (0, 7), причём = 2теп, п - целое, показан на рис. 5.10.
Он состоит из идеального колебательного контура без потерь1 \ настроенного на частоту ©о и
фазовращателя, сдвигающего фазу колебаний контура на —фо- Линия задержки на Тв схеме и
инвертор обеспечивают гашение колебаний фильтра вне интервала (0, 7), импульсная же
Рис.5.10. Реализация фильтра, согласованного с прямоугольным радиоимпульсом
D В реальном фильтре всегда имеются потери, но если затухание контура достаточно мало
(аГ «: 1), то импульсная характеристика контура а С~аТ cos© 0/ на интервале анализа практиче-
ски не отличается от acosa>o^ Для уменьшения а применяют электромеханические фильтры
(кварцевые и др.) или используют схемы с положительной обратной связью.
183
реакция фильтра на этом интервале с учётом фазовращателя g(/) = acos(a>0(/-7’)-<p0) =
= асоs(<o 0(Т- /) + фо) = Ц?1 - 0 , что и обеспечивает согласованно (5.32).
Схема с согласованными фильтрами на первый взгляд кажется проще схе-
мы с активными фильтрами, поскольку в ней нет опорных генераторов и не
возникает проблемы обеспечения их когерентности (согласования по фазе с
приходящим сигналом). Однако и в схеме с согласованными фильтрами име-
ются свои практические трудности. В этом можно убедиться, сравнив, напри-
мер, эпюры напряжений (без учёта помех в канале) на выходе фильтра
(рис. 5.11, б), согласованного с прямоугольным радиоимпульсом (рис. 5.11, а),
и на выходе интегратора активного фильтра (рис. 5.11, в). Отметим, что всюду,
за исключением точки t= Т, напряжения на выходах обоих фильтров отлича-
ются друг от друга.
Из рисунков видно, что допустимая неточность во времени At снятия от-
счёта максимума сигнала на выходе активного фильтра значительно больше,
чем при снятии отсчёта максимума сигнала на выходе согласованного фильтра.
При активном фильтре достаточно потребовать, чтобы неточность взятия от-
счёта была мала по сравнению с тактовым интервалом, а при согласованном
фильтре — по сравнению с периодом высокочастотного заполнения радиоим-
пульса (так называемый когерентный отсчёт). Трудность обеспечения коге-
рентного отсчёта в согласованном фильтре вполне соизмерима с трудностью
реализации когерентных опорных генераторов в активном фильтре.
Отметим одно важное обстоятельство, свойственное согласованному
фильтру. Пусть на его вход поступает колебание z(t), а фильтр согласован с
финитным сигналом s(f). Тогда сигнал на его выходе в момент времени t
Рис.5.11. Сигналы на выходе согласованного фильтра и корреляционной схемы при подаче на
вход прямоугольного радиоимпульса:(а) импульс на входе; (б) импульс на выходе согласованного
фильтра; (в) напряжение на выходе интегратора активного фильтра
184
ys(t) = Iz(t)s(t - (t - Z0))a. (5.39)
0
Спектральная плотность по Фурье этого сигнала 5Л(/) = 5',(/)5,(/)е"^0. На
выходе фильтра, согласованного с сопряжённым сигналом s(t), колебание z(Z)
даёт отклик
t
ys(t) = f z(t)s(t - (z - /0))с?т. (5.40)
о
Спектральная плотность по Фурье этого сигнала
Sy}(f) = j-sign(/)5.s(/)Sz(/)e“'0)'0. Таким образом, сигналы (5.39) и (5.40) сопря-
жены по Гильберту с точностью до знака. Огибающая на выходе фильтра, со-
гласованного с сигналом s(t) (или s(t)),
=/>?(<)+>£(<). (5.41)
Если сигнал s(t) получает фазовый сдвиг 0, то с учётом соотношений
(2.116) имеем
Л,еW = Л Wcos6 “У? W sin0, Л'.е(0 = У&)cos0 +х(0sin 0 •
Огибающая от 0 не зависит:
• (5.42)
Если колебание z(i) ортогонально s(J) на интервале (0, 7), но не ортого-
нально на этом интервале то _у5(7)=0, .£(7) *0 и Г(7)*0. Огибающая на
выходе фильтра равна нулю, если z(t) и s(t) ортогональны в усиленном смысле
(см. (2.128)).
В технике связи для фильтрации сигнала на фоне шума часто вместо согласованных ис-
пользуют фильтры, характеристики которых лишь частично согласованы с характеристиками
сигнала. Такие фильтры называют квазиоптимальными. Так, в практике радиоприёма исполь-
зуются так называемые квазиоптимальные линейные фильтры, форма частотных характери-
стик которых заранее задана и максимум параметра р1ТИК обеспечивается лишь соответствую-
щим подбором ширины полосы пропускания фильтра. Квазиоптимальный фильтр такого ти-
па исследовался В.И. Сифоровым, который рассматривал прохождение одиночного радиоим-
пульса с прямоугольной огибающей через идеальный полосовой фильтр с полосой пропуска-
ния Д/на фоне квазибелого шума. В.И. Сифоров показал, что при Д/ = \,У1/Т отношение Рпик
достигает максимума:
Рпик= 1,64#. (5.43)
Сравнив (5.36) и (5.43), можно видеть, что при приёме одиночного импульса энергетиче-
ский выигрыш оптимального (согласованного) фильтра по сравнению с квазиоптимальным
невелик (не превышает 1 дБ).
Таким образом, при приёме одиночных радиоимпульсов вполне допустимо ограничиться
квазиоптимальной фильтрацией. Положение, однако, существенно меняется, если надлежит
принимать информационные импульсы, следующие друг за другом с таким интервалом, на
котором переходные процессы в квазиоптимальном фильтре не успевают затухать. В этих ус-
ловиях качество приёма с квазиоптимальной фильтрацией резко падает, в то время как при
использовании оптимального согласованного фильтра качество остается прежним, так как
сигнал на его выходе концентрируется на ограниченном временном интервале и к моменту
отсчёта для одного импульса реакция на все предыдущие импульсы равна нулю (см., напри-
мер, рис. 5.11, б).
185
5.5. ПОМЕХОУСТОЙЧИВОСТЬ ОПТИМАЛЬНОГО
КОГЕРЕНТНОГО ПРИЁМА
Определим потенциальную помехоустойчивость для двоичной системы с
аддитивным БГШ в канале, когда при приёме точно известны оба ожидаемых
сигнала: ^(г) и so(i), полагая, что априорные вероятности этих сигналов одина-
ковы. Приходящий сигнал z(t) является случайным, так как, во-первых, зара-
нее не известна реализация передаваемого сигнала, во-вторых, он содержит
случайную помеху N(f).
В этом случае согласно (5.26) алгоритм оптимального приёма
fz(0[^(0~^0(ф>0,5^-Ео), Et =P,W, * = 0,1. (5.44)
о о
При выполнении неравенства (5.44) оптимальный приёмник регистрирует
символ 1, соответствующий сигналу si(0, в противном случае — символ 0, со-
ответствующий сигналу Л'о(0- Если действительно передаётся символ 1, то
z(t) — + N(t). При этом вероятность ошибки определяется вероятностью
того, что неравенство (5.44) не выполнено, т.е. вероятностью выполнения об-
ратного неравенства
J (ф1 W ~ -s0 (*)}* + f МфХО ~ < 0,5 (/) - s20 (/)]df,
0 0 0
которое легко привести к следующему виду:
J У(*)[^(0 < -0,5f [.SiW-50(/)]2^. (5.45)
о о
Аналогичное соотношение получается, если предположить, что передаётся
символ 0. Следовательно, в обоих случаях вероятности ошибки
p(0l 1) =р(1|0) = р и сформированный модемом двоичный дискретный канал
симметричен.
Запишем (5.45) в виде
£<-0,5£э, (5.46)
т т
где £ = Е3 = J^(/)^/; 5d(/) = ^(O-^W • Если N(t) — нормальный ста-
fl о
ционарный белый шум с нулевым средним и односторонней спектральной
плотностью мощности Nq, то — нормально распределённая величина (так
как она определяется линейной операцией над нормальным же случайным
процессом). Её математическое ожидание
$ = ^(фд(й=о,
о
а дисперсия
т т_______________________
Nrr 00 Nr (5-46а)
=“гИ 50> - = -у R W*#=о,5Уо£э.
z о о z о
Поэтому вероятность выполнения неравенства (5.46), т.е. вероятность
ошибки,
186
.2^).
2n J
a
и введено обозначение
(5.47)
(5.48)
-0.5Я, j -0,52?,
р- w 1
где произведена замена переменной t = - ^/М)
0,5Д, I Е, '
д/Б(ё) vn. '
1 7 --
Функция (Xх) =-г=| е 2dt табулирована и называется дополнительной
V27C jx
функцией ошибок* 1). Через (^-функцию можно (5.47) записать в виде
2
Е3
2N0
(5.49)
При заданной интенсивности помехи Nq потенциальная помехоустойчи-
вость двоичной системы зависит только от так называемой эквивалентной
энергии сигналов
Т *
О
(5.50)
которая равна квадрату расстояния между сигнальными точками в пространст-
ве Гильберта. Помехоустойчивость выше (вероятность ошибки меньше) у той
системы, у которой больше эквивалентная энергия используемых сигналов, не-
зависимо от формы используемых сигналов. Последние, в частности, могут
быть как простыми (отрезками синусоиды с малой базой), так и сложными
(шумоподобными, с большой базой).
На рис. 5.12 в двумерном пространстве показаны точки сигналов для дво-
т
ичной системы: рис. 5.12, а — AM при so(t) = 0, fs\(t)dt = Е; рис. 5.12, б — ЧМ с
о
т т т
ортогональными сигналами j\(/)so(/)<* = O , ^sl(t)dt = j$(t)dt = E', рис. 5.12, в —
О 0 0
ФМ с противоположными сигналами s^t) = -s0(t).
Из рисунка видно, что по сравнению с двоичной AM для двоичной ЧМ2)
В литературе часто встречаются: функция Крампа Ф(х) = -т=|е 2 dt; очевидно,
л/2те J
о
<2(х) = 0,5(1-Ф(х)); функция ошибок F(x)=l-Q(x) =
1 JC [2
е 2 dt. Иногда в справочниках табу-
27: J
. 2 г
лируется функция erf(x) = ~y=J &~,г dt. Нетрудно видеть, что erf(x) = ф(хД/2). Встречается так-
л/т: о
же дополнение erf(x)до единицы: erfc(x) = -^= f е ,гdt = l~erf(x).
X
2) Здесь имеется в виду ЧМ с разрывом фазы.
187
Рис.5.12. К определению эквивалентной энергии двоичных систем AM, ЧМ, ФМ
12 _ _
в 2 раза больше, а для двоичной
ФМ - в 4 раза больше.
Соотношение (5.50) позволяет осуществлять оптимальный выбор сигналов
s^t) и 5о(О или соответственно u^t) и u0(t), обеспечивающих максимально
возможную помехоустойчивость при заданной энергии сигналов Е. В самом
деле, для такой оптимальной системы величина Е^ должна быть максимальной
при условии, что
т т
Е, = J s2(t)dt <Е,Е2=\s2(t)dt < Е. (5.51)
о о
т
Можно написать Е3 = 2Е{ +2Е0 - |(s,(O+so(O)2<*. Для получения максимума
о
этого выражения нужно сделать Д и Eq возможно большими, а интеграл в
правой части — как можно меньшим. Максимально возможные значения Д и
Eq получатся, если, учитывая условия (5.51), положить
E]=Eq=E. (5.52)
т
Интеграл {(s/O+s0(t))2dt принимает только неотрицательные значения, по-
о
этому его минимум равен нулю и достигается при условии Л] (z) = — SQ<t), кото-
рое не противоречит условию (5.52). Таким образом, в двоичном канале с по-
стоянными параметрами и аддитивным БГШ оптимальной оказывается систе-
ма с противоположными сигналами. Этому условию удовлетворяют, например,
двуполярные импульсы, сигналы двоичной фазовой модуляции (ФМ), если
разность фаз сигналов Дф = п и т. п.1) .
Для всех таких систем Eq = 4Е и вероятность ошибки
( [IE} / г- Ч
P = Q .hr (5.53)
,2 E
где h = — — отношение энергии сигнала на входе демодулятора к спектраль-
но
ной плотности мощности флуктуационной помехи.
Напомним (см. гл. 3), что этому же условию удовлетворяет на интервале 2Т двоичная сис-
тема с непрерывной фазой и минимальным сдвигом (ММС). Её помехоустойчивость опреде-
ляется формулой (5.53).
188
Для системы с ортогональными сигналами равной энергии (например, при
т
известных условиях для системы двоичной ЧМ), когда |s1(/)so(/)tft = O, Еэ = 2Е
О
и минимальная вероятность ошибки
Р = Q(h\. (5.54)
Сравнивая (5.54) и (5.55), приходим к выводу, что переход от системы с
ортогональными сигналами к системе с оптимальными (противоположными)
сигналами позволяет в рассматриваемом канале обеспечить неизменное каче-
ство связи (вероятность ошибки) при понижении средней мощности передат-
чика в 2 раза, т.е. даёт энергетический выигрыш в 2 раза (или на 3 дБ). Этот
вывод следует также из рис. 5.12.
т
В двоичной системе с пассивной паузой, полагая Sg(0 = 0 и |s’(/)tft = E,
О
получаем для минимальной вероятности ошибки1)
Р = (5-55)
Отсюда видно, что при переходе от системы AM к системе ЧМ энергетиче-
ский выигрыш по максимальной мощности равен 2, а при переходе к системе
ФМ — 4. Если же сравнение вести не по пиковой, а по средней мощности, то
переход от AM к ЧМ не даёт энергетического выигрыша, поскольку при ЧМ
средняя мощность равна максимальной, а при AM — вдвое меньше макси-
мальной (если Si и so передаются с одинаковой вероятностью).
Тем не менее, когда в начале 40-х годов в радиосвязи стали применять ЧМ, помехо-
устойчивость значительно возросла по сравнению с ранее используемой системой AM. Это
объясняется не увеличением потенциальной помехоустойчивости, которая для обеих систем
одинакова (при равной скорости передачи и средней мощности передатчика), а главным об-
разом тем, что оптимальная решающая схема для ЧМ реализуется с довольно большой точно-
стью, а при AM этому препятствует невозможность обеспечить точное оптимальное значение
ненулевого порогового уровня (см. рис. 5.3, б). Поэтому реальная помехоустойчивость при
ЧМ близка к потенциальной, а при AM значительно ниже её.
Система ФМ, как и другие системы с противоположными сигналами,
обеспечивает максимальную для двоичной системы потенциальную помехо-
устойчивость. Однако реализация демодулятора для когерентного приёма ФМ
встречает определённые трудности. При построении демодулятора с активным
фильтром (см. рис. 5.3, б) возникает проблема поддержания равенства фаз
опорного генератора и приходящего сигнала. Если пытаться строить его на ос-
нове согласованного фильтра (см. рис. 5.8), то возникает не менее трудная за-
дача взятия когерентного отсчёта.
В практических схемах опорный сигнал si(z) формируется из принимаемого
колебания. Для этого необходимо по принимаемому сигналу восстановить не-
модулированный гармонический сигнал cos(cV + Фо)-
При оптимальном когерентном приёме можно пользоваться общей формулой для вероят-
ности ошибки приёма двоичных символов
2 для противоположных сигналов,
где а = (1 ‘ для ортогональных сигналов равной энергии,
0,5 для сигналов с пассивной паузой.
189
Задача выделения опорного сигнала особенно затрудняется при ФМ, так как если эле-
менты $1(/) и $о(О = -*!(/) передаются равновероятно, то спектр сигнала ФМ вообще не со-
держит составляющей на частоте ©о- Для его получения приходится использовать нелинейные
устройства снятия модуляции. Это достигается различными схемами, например схемой, пред-
ложенной А.А. Пистолькорсом. Схема содержит умножитель частоты на 2, выходной сигнал
которого через узкополосный фильтр, настроенный на частоту 2wq, поступает на делитель
частоты на 2. Если сигнал на входе умножителя записать в виде щ = cos(©q/ + fat + <ро), к = 0
или к = 1, то сигнал на выходе умножителя «2 = cos(2©q/ + 2<ро), а сигнал на выходе делителя
«з = cos(a>0/ + фо).
Однако все схемы формирования опорного сигнала таковы, что вследствие
различных неконтролируемых факторов возможны случайные изменения знака
опорного сигнала. Это, в частности, относится и к делителю частоты на 2 в
схеме А.А. Пистолькорса, поскольку эта операция неоднозначна — фаза вы-
ходного сигнала делителя может принять любое из двух значений: 2фо/2 = сро
или (2ср0 + 2л)/2 = фо + it. Это означает, что символы, регистрируемые на вы-
ходе приёмника, даже при отсутствии аддитивной помехи в канале \z(f) = s//)]
после случайного перескока фазы опорного сигнала инвертируются (нули бу-
дут записаны как 1, а 1 — как 0). Это будет-продолжаться до следующего пере-
скока фазы опорного сигнала. Возникает так называемое явление обратной ра-
боты, вследствие которого практическое внедрение системы с двоичной фазо-
вой модуляцией оказалось затруднительным1).
Эффективный метод устранения этого явления был найден путём перехода
к относительным методам модуляции, предложенным Н.Т. Петровичем. Они
сводятся к модуляции информационного параметра передаваемой посылки
элемента сигнала относительно того же параметра предшествующей посылки.
При относительной фазовой манипуляции (ОФМ) сообщение содержится не в
абсолютном значении фазы элемента сигнала, а в разности фаз двух соседних
элементов, при этом символ 1 передаётся повторением той реализации сигна-
ла, которая имела место в качестве предыдущего элемента, а символ 0 — реа-
лизацией с обратной фазой, либо наоборот.
Сигналы ОФМ могут приниматься различными методами/Здесь рассмот-
рим квазикогерентный приём сигналов ОФМ (называемый методом сравнения
полярностей). Заметим сначала, что систему ОФМ можно рассматривать как
обычную систему с фазовой модуляцией (ФМ), но со специальным перекоди-
рованием символов. Это означает, что оптимальный приём сигналов ОФМ
можно осуществить, например, схемой рис. 5.3, б, но с перекодированием
принятых символов. Перекодирование выполняется сравнением полярностей
напряжений на выходе интегратора для двух соседних элементов, для чего, ес-
тественно, требуется задержка выходных символов в ячейке памяти (ЯП) на
время Т. Такая схема демодулятора показана на рис. 5.13 (без устройства под-
стройки фазы опорного генератора Г, которое может быть выполнено, напри-
мер, по схеме Пистолькорса). Так как ОФМ — система с равной энергией от-
дельных позиций, то пороговый уровень в демодуляторе нулевой — и решаю-
щее устройство превращается в дискриминатор полярности (ДП). Полярности
соседних элементов сравниваются в схеме сравнения полярностей (ССП).
Символ 1 регистрируется на выходе приёмника, например, при совпадении
полярностей двух соседних посылок, символ 0 — если эти полярности различ
О В современных системах связи с периодическим зондированием канала пилот-сигналом
(испытательным импульсом [14]) реализация ФМ не вызывает затруднений.
190
К декодеру
Рис.5.13. Схема оптимального приёма сигналов ОФМ методом
сравнения полярностей (когерентный приём)
ны, либо наоборот. При таком методе приёма перескок фазы опорного сигнала
(при отсутствии помехи в канале) вызывает ошибку только в одном символе.
Последующие же символы регистрируются правильно, т.е. явление "обратной
работы" не возникает.
Определим вероятность ошибки в системе ОФМ при учёте флуктуационной
помехи в канале при когерентном приёме. Очевидно, что ошибочная регистра-
ция символа при приёме методом сравнения полярностей возможна в результа-
те одного из двух несовместных событий:
а) знак данного элемента принят ошибочно, а знак предыдущего — верно;
б) знак данного элемента принят верно, а знак предыдущего — ошибочно.
Каждое из этих событий имеет вероятность рФМ(1_РФм)- Таким образом,
Рофм = 2рФм(1 ~ Рфм) • (5.56)
В нормальных условиях эксплуатации, когда требуется рФМ « 1,
Рофм. = 2рФм = .
Таким образом, "платой" за устранение обратной работы является удвоение
вероятности ошибки, обусловленной шумом в канале.
Очевидно, что при рассматриваемом методе приёма сигналов ОФМ обра-
зующийся дискретный канал является марковским (см. § 2.6). Вероятность
ошибки в нём зависит от того, правильно или ошибочно приняты предыдущие
символы. Подавляющее большинство ошибок группируется по две.
Для недвоичных систем (т > 2) нахождение вероятности ошибочного
приёма рт в общем случае затрудняется, так как теперь приходится анализиро-
вать совокупность из (т — 1) неравенства (5.25).
Вероятность ошибки в /и-ичной системе при передаче символа bt определя-
ется вероятностью объединения событий:
Рт =
т \ । i j
При оптимальном когерентном приёме в канале с БГШ
Т
Aj = J(МД+s№)sj(t)dt - 0,5Ej.
о
Для ортогональной системы сигналов с равной энергией (система оказыва-
ется также эквидистантной — все сигнальные точки находятся на одинаковом
расстоянии друг от друга) вероятность ошибки рт (одинаковая при передаче
любого символа) выражается следующим интегралом [27]:
191
Pm = l-“7^=/[1-2(м)Г ' ехр[-0,5(и-72Л)2рм. (5.57)
л/2Я _оо L J
Согласно (5.57) вероятность ошибки монотонно падает с ростом энергети-
ческого параметра /г2. При т = 2 из (5.57) следует (5.54).
В детерминированном неискажающем канале с БГШ оптимальной
(обеспечивающей минимальную вероятность ошибки при заданном значении
А2) оказывается эквидистантная система [27], сигнальные точки которой обра-
зуют многомерный симплекс (они лежат на одинаковом расстоянии друг от друга
в (т-1) -мерной гиперсфере). Вероятность ошибки для этой оптимальной сис-
темы сигналов можно в области малых ошибок также определить формулой
(5.57).
Учтём, что вероятность объединения событий (в общем случае совместных)
равна сумме вероятностей отдельных событий минус вероятности совмещения
событий, можно получить простую формулу {аддитивную верхнюю границу для
вероятности ошибки или неравенство Буля)
р.(ош|й() < Z f\Aj> 4], , (5.58)
J=0
где P[Aj > АД — это вероятность ошибки в двоичной системе с сигналами $/(/) и
Для систем равновероятных ортогональных сигналов равной энергии канал
симметричен и можно оценить вероятность ошибки простым неравенством
ри<й-1)6(7^). (5.59)
5.6. ОБРАБОТКА СИГНАЛОВ В КАНАЛАХ С МЕЖСИМВОЛЬНОЙ
ИНТЕРФЕРЕНЦИЕЙ
Для каналов с МСИ разработано большое количество алгоритмов приёма.
Многие из них основаны на идее измерения характеристики линейного канала
g{t, т) с последующей коррекцией канала. Поскольку это надо делать в услови-
ях меняющихся свойств канала, то такие корректоры называют адаптивными.
Даже если получена удовлетворительная оценка системной характеристики ка-
нала g(t,i) или jC(j<o,z), адаптивные корректоры не всегда качественно работа-
ют в многолучевых каналах с селективными замираниями, характеризуемых
наличием точек на оси частот с нулевыми значениями модуля передаточной
функции. Линейный корректор (выравниватель), стремясь дополнить частотную
характеристику канала до идеальной, даёт на этих частотах сомножитель
"бесконечность", что приводит к характерным всплескам шума. Поэтому рас-
смотрим подход к построению оптимального демодулятора для каналов с
МСИ.
В каналах с МСИ (памятью) приём в целом может оказаться по сравнению
с поэлементным приёмом ещё более эффективным, чем в каналах без памяти,
так как здесь имеются дополнительные связи между символами, которые мож-
но использовать для повышения качества. Однако практически такую обработ-
ку порой трудно реализовать. Поэтому будем здесь обсуждать главным образом
оптимальный поэлементный приём в каналах с МСИ.
192
Запишем принимаемое колебание (5.4) на временном интервале существо-
вания сигналов, которые могут влиять на приём символа с задержкой при-
нятия решения т3 = DT (см. (4.47)): z(t) = 4°(0(0(0 +л(0 ,
где 4° (г) “ сигнал, обусловленный анализируемым символом Ь%\ /е0,/и-1;
5ь (t) = goeT(t) — сигнал, который определяет остаточный сигнал МСИ, обуслов-
ленный символами, переданными до анализируемого. Вектор Ьг определяется це-
почкой символов, предшествующих анализируемому, г = 1, 2, ..., т@;
5j) (/) = gcn(z) — сигнал, который определяет сигнал МСИ, обусловленный символа-
ми, переданными после анализируемого. Вектор bz определяется цепочкой симво-
лов, следующих после анализируемого, или сопровождающих символов,
Z = 1, 2, ..., mD.
Введём в рассмотрение отношение правдоподобия на интервале
Ta=(l + D)T
ч
(5.60)
Оптимальный поэлементный приёмник по правилу максимального правдо-
подобия должен выполнить усреднение (5.60) по всевозможным цепочкам
символов br, bz, которые могут оказать влияние на интервале анализа Ь04, а
затем выбрать максимум b0J по i. Алгоритм его работы можно записать сле-
дующим образом:
i.
(5.61)
где
Алгоритм (5.61) для каналов с МСИ впервые предложил К. Хелстром. Его
реализация достаточно сложна. Так, при стационарном квазибелом гауссов-
ском шуме и равной вероятности цепочек символов br, bz
Га • Т
пР п/>
|2
' r=i/=i /vo;1 J
Здесь требуется сложная нелинейная обработка с перебором пР¥£м гипотез.
Сигналы считаются при этом известными точно в месте приё-
ма, например, на основе изучения реакции канала на периодически переда-
ваемый испытательный сигнал [14] или пилот-сигнал.
Существенное упрощение наступает, если воспользоваться в условиях каче-
ственной связи идеей обратной связи по решению. Она сводится к тому, что
оценки, полученные в приёмнике до анализируемого символа {b_Q, счи-
таются достоверными, т.е. известна надёжная оценка МСИ g^t). В этом слу-
чае алгоритм (5.61) можно свести к виду
193
i0 =Arg max
(5.62)
т.е. обработке подвергается разностный сигнал zW_gocrW-
Число перебираемых гипотез теперь и/*1. При нулевой задержке принятия
решения (D = 0), sbi(t) = O, и оптимальный алгоритм поэлементного приёма
(5.62) в канале с МСИ и квазибелом стационарном гауссовском шуме можно
записать как
)т
j[z(f)-goer(f)-So')W] dt
о
(5.63)
Оптимальные алгоритмы приёма с обратной связью по решению в канале с
МСИ впервые предложил Д.Д. Кловский (1960 г.).
Алгоритм (5.63) учитывает энергию сигнала лишь на одном тактовом ин-
тервале. Чтобы полностью использовать энергию сигнала и вместе с тем упро-
стить реализацию, можно вместо (5.62) использовать почти оптимальный
(субоптимальный) алгоритм
flJXO-gocrWl^’b/]
i0 = argmaxs Lf A ......1 J f, (5.64)
который относится к алгоритмам обобщённого максимального правдоподобия
(см. § 5.7). При обосновании этого алгоритма bz считается на интервале ана-
лиза 7^e[0, (D + 1)7] символа вектором сопровождающих параметров, пе-
ребор гипотез идёт по всем цепочкам bn =(bo'),bz), п = \,пР¥Х, а в качестве реше-
ния выбирается первый символ оценки Ь„. Решение о символе прини-
мается на интервале анализа Тй е [ Т, (D + 2) 7] и т.д.
Алгоритм (5.64), предложенный в конце 60-х годов, именуют в литературе
алгоритмом Кловского-Николаева (АКН) или алгоритмом приёма в целом с
поэлементным принятием решения [14]. При D = Q1) и стационарном квази-
белом гауссовском шуме в канале АКН можно записать в виде
(5.65)
Число перебираемых гипотез при реализации этого алгоритма равно пР*,
обработка достаточно простая.
В начале 70-х годов Д. Форни предложил использовать для демодуляции
сигналов в каналах с МСИ алгоритм Витерби (АВ,[6]), который обеспечивает
примерно ту же помехоустойчивость, что и АКН. До этого АВ использовался
для декодирования свёрточных кодов (см. § 7.3).
Отличие АВ от АКН заключается в количестве отсчётов входного сигнала, используемого
для вынесения решения о и, как следствие, — в задержке решения. Это наглядно иллюст-
Как показывает анализ, строить демодулятор с D > Q практически нецелесообразно.
194
рируется при помощи направленного графа
рис. 5.14, построенного для двухпозиционного
кода (т = 2) и памяти канала, простирающей-
ся на 2 элемента сигнала (Q =2). Подробнее
ориентированный граф в виде решётки, пояс-
няющей свёрточное кодирование и работу АВ,
рассматривается в § 7.3.
На рис. 5.14 показаны траектории (пути),
отображающие формирование сигналов
sz>t),b;W при передаче последовательности дво-
ичных символов (цепочки) &0,bz. Передача 1
отображается движением в соответствующем
узле (обозначается точкой) решётки вниз, а
передача символа 0 — движением вверх. Ребра
решётки имеют длительность тактового ин-
тервала Т. Будем считать, что в момент t = О
начинается передача символа Ьо. Узлы
А, В, С, D в сечении 2Т, узлы А\, В\, €\, D\ в
сечении ЗТ и т.д. определяют отдельные со-
стояния канала' с памятью. В нашем примере
их число равно L — mQ = 22 = 4.
Понятие состояние канала непосредст-
венно связано с МСИ и характеризует её
конкретное проявление. Если фиксированы Q
Рис.5.14. Направленный граф, поясняющий элементов, предшествующих передаче эле-
отличие АКН и АВ в канале с МСИ мента bk, то это означает, что к моменту на-
чала отклика канала на bk канал находится в
одном из L = т® состояний (по числу возможных реализаций цепочек на Q тактовых интер-
валах). При известной системной характеристике канала (импульсной характеристике или
передаточной функции канала) это означает также, что известна подставка (сигнал
(0), на которой начинает развиваться отклик на bk. По прошествии одного тактового
интервала Т элемент сообщения b^-Q перестает влиять на ход анализируемого процесса z(Z),
но начинает влиять новый элемент bk. Число состояний канала L = т® при этом сохраняется.
При памяти канала Q — 2 АКН принимает решение в сечении ЗТ решётки относительно
символа Ьо, сравнивая 2Q+1 = 8 метрик Гильберта1) (квадратов "расстояний"):
ЗТ
^АДД) = J[Ж) -%ДД w] Л • (5-66)
о
Если решение b0=G, то в дальнейшем АКН оперирует только графом, расположенным
выше штриховой линии 0 - О’; если решение b0 = 1 — только с графом, расположенным ниже
этой линии.
По Ьо формируется сигнал goer(/) и в сечении 4Т выносится решение о символе Ь[ путём
сравнения восьми метрик:
л2
Кост ’^1^2 £з
XO-gocrW-fy^fr) dt.
т
11 При некоторых условиях (например, при обработке в дискретном времени) следует гово-
рить о евклидовой метрике. Здесь учтено, что goer(/) = 0, так как Ьо считается начальным сим-
волом на передаче.
195
Так процесс демодуляции продолжается и дальше. Таким образом, АКН характеризуется
постоянной задержкой решения QT для элемента сигнала и постоянной глубиной принятия
решения (времени анализа элемента).
Согласно АВ в сечении ЗТ учитывается, что в каждое состояние (А\, В\, Q, D]) ведут m
траекторий, определяемых различными символами . Одна из них имеет минимальную
метрику (5.66). Она и должна быть оставлена ("выживает”) для дальнейшего выбора решений
(оценок). Остальные (m — 1) траекторий отбрасываются. На рис. 5.14 отбрасываемые траекто-
рии отмечены на интервале (2Т, ЗТ) штриховой линией. (Заметим, что в сечении ЗТточки' 1 и
Г означают один и тот же узел ("состояние"), если не учитывать элемент Ьц, то же можно ска-
зать о точках 2 — 2', 3 — 3’, 4 — 4').
В сечении (п — 1)Т снова из m траекторий, ведущих в новое состояние (а„ q к,В„ Q ь
С„ q 1, Dn Q i) f оставляют одну, имеющую наибольший вес или минимальную метрику
о
Выжившие траектории могут отличаться определёнными символами Ь$. Поэтому процесс
поиска наилучшего решения в АВ продолжается до тех пор, пока на некотором шаге (на
рис. 5.14 в сечении пТ) уцелевшие траектории не сольются по символу Z>o (условно это ото-
бражено расположением узлов (д, Q,c„ Q,D„ выше штриховой линии). На этом шаге
и определяется решение (на рис. 5.14 Ьо = 0). Аналогично процесс демодуляции по АВ про-
должается и дальше: на некотором шаге сольются траектории по символу Ь[ (по нему прини-
мается решение) и т.д. В общем случае АВ характеризуется переменной задержкой решения и
различной глубиной принятия решения для различных элементов сигнала.
Для компенсации переменной задержки в АВ используют буферный накопитель. Его
роль может выполнить сам алгоритм, если зафиксировать задержку решения на какой-либо
величине, не меньшей максимальной задержки. При этом не нарушается изохронность вы-
ходного потока сообщений, однако общая задержка в системе связи может оказаться недо-
пустимо большой. В связи с этим чаще всего задержку принудительно уменьшают до некото-
рой заданной величины тзад = DT(D>Q). При этом для некоторых элементов сообщения ре-
шение выдаётся получателю до того, как сольются уцелевшие траектории на единственной
позиции этого элемента. Критерием выбора в пользу той или иной позиции при этом служит
минимальная метрика, т.е. по существу решение выносится по АКН при Т, =(/>+1)Г. Однако
в дальнейшем возможны 2 варианта: вынесенное решение Ьк} считается наиболее правдопо-
добным и сохраняются лишь траектории, содержащие Ьк - ; вынесенное решение счи-
тается окончательным лишь для получателя, а в работе сохраняются все траектории, в том
числе содержащие Ьк^Ь^.
Строгий анализ помехоустойчивости АКН или АВ затруднён, однако, используя аддитив-
ную верхнюю границу (5.58), можно получить достаточно плотную оценку для вероятности
ошибочного приёма равновероятных независимых двоичных сигналов в многолучевом детер-
минированном радиоканале с МСИ в области малых ошибок [14];
Мы рассмотрели поэлементный приём дискретных сообщений. Однако обработка сигна-
ла даже при отсутствии МСИ на интервале ТА> пТ1^ (п — длина кодовой комбинации) и при-
ём решения в пользу той или иной разрешённой кодовой комбинации (приём в целом) может
повысить качество передачи, если используется избыточный код и, следовательно, кодовые
При наличии МСИ совместная демодуляция-декодирование тоже может быть реализована,
но при Та >(n+D + 1)Т. При перемежении символов на передаче (см. гл. 7) интервал анализа
кодовой комбинации соответственно возрастает.
196
символы взаимосвязаны (даже в канале без памяти). Действительно, такая обработка учиты-
вает информацию о непрерывном сигнале z(f) при принятии решения о кодовой комбинации
(сообщении первичного алфавита). Если же на декодер поступают дискретные решения де-
модулятора Ьк (а часть из них могут быть ошибочными) и он принимает решение о кодовой
комбинации, не используя информацию о z(0 (такое решение называют жёстким), то часть
возможной информации оказывается потерянной, что ведёт к понижению качества.
Приём в целом, когда учитывается при декодировании информация о z(f) (можно гово-
рить о совместной демодуляции — декодировании или о "мягком декодировании") может, вообще
говоря, потребовать существенное усложнение приёмника, однако при использовании свёр-
точного кодирования и АКН иди АВ усложнение определяется только свойством кода.
5.7. ПРИЁМ СИГНАЛОВ С НЕОПРЕДЕЛЁННОЙ ФАЗОЙ
(НЕКОГЕРЕНТНЫЙ ПРИЁМ)
Как показано в § 4.4, многие каналы можно описать моделью (4.43) с
флуктуирующей фазой. Естественно, если фаза (или какой-либо другой пара-
метр, определяющий априорную информацию, требуемую для когерентного
приёма) принимаемого сигнала флуктуирует настолько медленно, что путём
измерения (оценивания) её можно достаточно надёжно предсказать, оптималь-
ный приём в основном реализуется так же, как при точно известном сигнале
(с добавлением блоков оценивания). Такая ситуация характерна для многих
каналов проводной и реже радиосвязи. Однако нередко фаза флуктуирует до-
вольно быстро, и точную её оценку получить не удаётся. Кроме того, оценка
фазы требует иногда применения сложных устройств. Поэтому даже в тех слу-
чаях, когда принципиально можно оценить начальную фазу приходящего сиг-
нала, порой от этого отказываются и используют алгоритм, построенный в
предположении, что начальная фаза приходящего сигнала не известна и может
принимать любое значение на интервале (0, 2л). Такой метод приёма называ-
ется некогерентным. Алгоритм оптимального некогерентного приёма впервые
получен Л.М. Финком.
Для вывода правила оптимального некогерентного приёма будем исходить
из логарифма отношения правдоподобия /лА; для сигнала которое при
точно известной начальной фазе выражается формулой (5.23). Используя пред-
ставление для сигнала (4.44), где у — известный коэффициент передачи канала,
а 0 — случайный сдвиг в канале, формулу для 7иА/ можно (после устремления в
(5.23) А/ -> 0) записать так:
у г 2 Г
1лАг = ^Jz(O[cos0wXO-sin0wXf)]6fr-^— J[cos0Mf(O- япОи//)]2dt. (5.67)
-'’о о Ао 0
Здесь InXi является случайной величиной, принимающей различные значе-
ния при различных 0. Правило максимума правдоподобия в такой ситуации
заключается в выборе такого решения, для которого математическое ожидание
А, будет наибольшим. Такое правило оценки символа bt, если сдвиг фазы 0
равномерно распределён на интервале (0-2л), кратко записывается так:
2я
i = Argmax{A.(0)] = Arg max
2я I 1 2"
f A.(0)w(0)d0 = Arg max-1 — f A;(0)d9 ,
. о ' 12я 0
где w(0) = 1/2л при 0 < 0 < 2л — плотность распределения вероятности 0.
При нахождении А;.(0) заметим, что второй интеграл в правой части (5.67)
от 0 не зависит и равен энергии ЕП1 сигнала Uj(f) на входе канала (на передат-
197
чике). Это ясно из того, что подынтегральной функцией является квадрат сиг-
нала сдвинутого по фазе на 0, что, как известно, не влияет на его энер-
у2£„
гию. Таким образом, учитывая, что ——— = Л2, получаем
2
1 Z 2.
Лу(0) = ехр(-й,2)—- j exp- — [cosOy, - sin0yj ,
n Jn a
о
" 0
где введено обозначение
т
yt = у Jz(/)w,(/)^ ; J, = 7\z(t)ut(t)dt.
о о
Обозначив
и 0( = arctg — ,
<ytJ
(5.68)
можно записать
1 2
где /0(х) = —- |exp[xcos((p+0)]d(p - модифицированная функция Бесселя нулево-
2я О
го порядка.
Вместо того чтобы сравнивать отношения правдоподобия, можно сравнить
их логарифмы, что приводит к следующему правилу (алгоритму):
( 214
i = Argmaxsln/0 —Ч-Л2 >.
Для двоичной системы сигналов правило оптимального некогерентного
приёма выражается неравенством
fay} ('2V'\
(5.70)
(5.71)
При выполнении этого неравенства регистрируется 1, в противном случае
- 0.
Величины yi и £. можно получить в момент отсчёта Т на выходе активного
фильтра с опорными сигналами, равными соответственно Uj(t) и /7(0. С учётом
сказанного понятно построение на основе активных фильтров схемы, называе-
мой квадратурной и реализующей алгоритм (5.71) (рис. 5.15). Здесь Го, П —
соответственно генераторы опорных сигналов «о(/), zzi(0i Ф /2 “фазовращатель
всех сигнальных компонент на -л/2 (преобразователь Гильберта); БОМ —
блок определения модуля вектора Vt = + jj/.| по ортогональным компонентам;
НУ — нелинейные безынерционные устройства с характеристикой
( 2
иъых = 1п/0 —— w .
ШмЛ V t Д I UA
V J V о /
Подчеркнём, что величины V] не зависят от начальной фазы сигналов ufct)
и, как видно из (5.68), пропорциональны огибающей (в моменты отсчёта,
кратные Г) на выходе фильтра, согласованного с сигналом «/(/). Таким обра-
198
Рис.5.15. Квадратурная схема реализации оптимального приёма
дискретных сообщений при неопределённой фазе сигнала
зом, алгоритм (5.71) можно реализовать и на базе согласованных фильтров,
как показано на рис. 5.16. Идеальный детектор выделяет огибающую напряже-
ния на выходе согласованного фильтра.
Для двоичной системы с пассивной паузой, полагая, что символ 0 переда-
ётся сигналом u$(t) = 0, правило (5.70) можно записать в виде
И > X, (5.72)
где пороговый уровень
Рис.5.16. Схема реализации оптимального приёма дискретных сообшенйй на базе
согласованных фильтров при неопределённой фазе сигнала
199
а функция x = fly) обратна функции у = 1п/0(х). При выполнении неравенства
(5.72) (превышение Kj над порогом) регистрируется символ 1, в противном
случае — символ 0.
Алгоритм (5.70) и соответственно его реализация существенно упрощаются
для системы сигналов с равной энергией (Ej = £)..Для них с учётом монотон-
ного характера функции 1п7о(х) алгоритм оптимального некогерентного приёма
можно записать так:
или i = Aigmax{^] ,i = Q,m-1. (5.73)
Для двоичной системы правило (5.73) сводится к проверке одного неравен-
ства
> Ио. (5.74)
При его выполнении регистрируется 1, в противном случае — 0.
При реализации алгоритма (5.74) в схемах рис. 5.15 и 5.16 не нужны блоки
НУ и блоки вычитания. Более того, алгоритм при этом условии инвариантен
относительно коэффициента передачи канала и спектральной плотности шума
Nq, поскольку V] не зависит от Nq, а с изменением у все значения Vt изменяют-
ся пропорционально, что не влияет на (5.72). Именно это является основным
преимуществом систем с равной энергией сигналов, определившим их широ-
кое применение.
При выводе правила решения (5.70) предполагалось, что случайная начальная фаза рас-
пределена равномерно на интервале (0,2л). Однако в некоторых случаях распределение на-
чальной фазы неравномерно, а ещё чаще это распределение при построении системы связи
не известно. В этих условиях возможны два подхода: а) построение адаптивной квазикоге-
рентной системы, в которой путём анализа принимаемого сигнала определяется приближён-
ная оценка фазы, используемая вместо недостающих априорных сведений (априорной ин-
формации);
б) принятие решения в предположении, что начальная фаза представляет собой некоторый
неизвестный параметр, который так же, как и передаваемый символ, можно оценить по мак-
симуму правдоподобия. Второй подход называют приёмом по правилу обобщённого макси-
мальногощравдоподобия. Мы его уже использовали в § 5.6.
Сущность этого правила в ситуации неизвестной фазы заключается в следующем; 0 рас-
сматривается как сопровождающий (неинформационный) параметр. Отношение правдоподо-
бия для сигнала «Х0 ПРИ известном сдвиге фазы 0 в канале записано в формуле (5.66). Най-
дём для данного i то значение сопровождающего параметра 0, которое обеспечивает макси-
мум отношения правдоподобия тахА( (или его логарифма), а затем сравним полученные зна-
чения для всех i и выберем из них наибольшее. Таким образом, приходим к правилу обоб-
щённого максимального правдоподобия b{ = Aigmax{lnA,} .
Для отыскания максимума (5.66) по 0 учтём, что, как уже говорилось, второй интеграл в
показателе экспоненты от 0 не зависит. Максимум же первого интеграла найдём обычным
способом, продифференцировав его по параметру 0 и приравняв производную нулю. Это
приводит к уравнению у, sin0+y/cos0 = 0, где у,- и yt определены формулами (5.67). Решая это
уравнение, получаем максимально правдоподобное значение 0 = arctgl - — , откуда
A ytJ
~ у. ~ у
sin0 = —. ' , cos0 = -p- Подставив эти значения (конечно, различные для разных
ilrf+yt у1У?+У?
гипотез) в (5.66), после простых преобразований получим алгоритм приёма по правилу обоб-
щённого максимального правдоподобия [27]:
200
i - Argmax{lnA,(6)} » Argmax[f< - Q,5Ef ].
Для систем с равной энергией сигналов (Ei=- Е — const) это правило совпадает с (5.73), а
для двоичных систем — с (5.74). В этом случае алгоритм, полученный при неизвестной фазе,
оцениваемой по максимуму правдоподобия, совпадает с алгоритмом, полученным в предпо-
ложении, что фаза распределена равномерно.
Заметим попутно, что одной из актуальных проблем теории связи является отыскание
алгоритмов решения для демодулятора, применимых при недостаточной априорной инфор-
мации о канале и об источнике сообщения, например об априорных вероятностях различных
сигналов, о распределениях вероятностей амплитуд и фаз, о некоторых параметрах, входящих
в описание сигнала, и т.Ь. В этом направлении сделано уже очень много. В частности, пред-
ложено много алгоритмов приёма дискретных сообщений, инвариантных к тем или иным не-
информационным параметрам сигнала, а также целый ряд робастных алгоритмов, устойчивых
к отклонениям характеристик сигналов и помех [25, 26]. Конечно, чем больше объём априор-
ной информации, тем достовернее можно принимать сообщение, иапример, применяя коге-
рентный приём. Однако если сама априорная информация ненадёжна, то, применяя алго-
ритм, учитывающий эту ненадёжную информацию, можно получить результат хуже, чем при
использовании алгоритма, построенного в предположении отсутствия данной априорной ин-
формации.
Исследование вероятности ошибок в канале с неопределённой фазой и ад-
дитивным гауссовским шумом при поэлементном приёме показало [27], что
минимальную вероятность ошибки обеспечивает система сигналов с равной
энергией, которая удовлетворяет условиям ортогональности в усиленном
смысле:
Т т
J= 0 ,i * j , J= 0 при i, j = 0, 1, ..., tn - 1. (5.75)
о 0
Это можно объяснить тем, что при отсутствии шума и передаче сигнала
«/(/), удовлетворяющего условиям (5.75), правые части (Vj) в алгоритме (5.73)
принимают минимально возможные значения, равные нулю, в то время как
Vj = Е (см. ниже формулы (5.76) и (5.77)). Если шум стационарный и гауссов-
ский, то наиболее вероятны малые отклонения Vj и Р/ от указанных значений.
А это означает, что для системы сигналов (5.75) неравенства (5.73) при переда-
че сигнала u&f) выполняются почти всегда, что приводит к минимизации веро-
ятности ошибки.
Определим вероятность ошибки при приёме по алгоритму (5.74) двоичных
сигналов, удовлетворяющих условиям (5.75). Если передаётся символ 1, то с
учётом (5.21), (5.67) и (5.68) имеем
Et=^t +£cos0)2 +(|t ч-Еялв)2 , (5.76)
Го = 7^7+Го2 , (5-77)
где
г т
^f=y^N(f)Hj(f)dt ;ij=yjN(t)Hj(t)dt = (5.78)
о о
Рассуждая так же, как при выводе (5.46) и (5.46 а), легко убедиться, что ве-
личины распределены нормально с нулевым средним значением и дис-
персией Q,5NqE.
Легко также показать, что коэффициенты корреляции и при
системе сигналов, ортогональной в усиленном смысле, равны нулю. Некорре-
201
лированность гауссовских величин обеспечивает и их независимость. Как
следствие, случайные величины и Кд независимы, причём в соответствии с
(2..141) для Ко имеем распределение Рэлея
7 Ч 2К ( К2
wv°) = V?exp ~ лГа7) ’Го-0’
TV q/S \ 7V 0Л/
(5.79)
а К] в соответствии с (2.140) имеет обобщённое распределение Рэлея (Райса)
2Уг
#0EeXPl" N0E Жм»
Л>0.
(5.80)
Вероятность приёма символа 0 при передаче символа 1 определится веро-
ятностью выполнения неравенства
= j4ri)j Viexpr^rw = J w(r')x
or; о о v 7Vo-c'' о
(5.81)
xexp
n„e)
dV = 0,5 exp
В получёЙЯой формуле интеграл легко вычислить с помощью теории веро-
ятностей. Если заменить переменную, положив 2Pj = х, то окажется, что это
интеграл от плотности вероятностей случайной величины А > 0, имеющей
обобщёнИо^ распределение Рэлея, с параметрами а = Е и о2 = NqE. Так как
интеграл берется по всей области определения А, то он равен 1. Окончательно
Р(0|1) = 0,5ехр(- 0,5/г2) , (5.82)
где, как и раньше, h2 = E/Nq — отношение энергии элемента принимаемого
сигнала к спектральной плотности мощности шума. Из соображений симмет-
рии ясно, что такова же будет вероятность приёма символа 1 при передаче 0.
Поэтому вероятность ошибки не зависит от передаваемого символа. Она оди-
накова для всех двоичных систем, ортогональных в усиленном смысле (при
одинаковых энергиях сигнала), и определяется (5.82). В частности, эта форму-
ла справедлива для систем: ЧМ, систем с временной манипуляцией и любых
других, для которых выполняется (5.75).
На рис. 5.17 показана зависимость р(А2) согласно (5.82) (кривая 2). Там же
для сравнения приведена кривая, характеризующая потенциальную помехо-
устойчивость той же системы при когерентном приёме и определяемая (5.55)
(кривая I)1). Величина А2 для удобства выражена в децибелах, а вероятности
ошибок отложены в логарифмическом масштабе.
Сравнение кривых показывает, что для рассматриваемой системы сигналов
(ортогональной в усиленном смысле с равной энергией) априорное знание фа-
зы и когерентный приём дают лишь очень небольшой энергетический выиг-
рыш по' сравнению со случаем некогерентного приёма. Этот выигрыш тем
меньше, чем ниже допустимая вероятность ошибки.
Систему ФМ так же, как и другие системы с противоположными сигнала-
ми, отличающимися сдвигом фаз на п, при некогерентном приёме применять
нельзя, так как при неизвестной начальной фазе такие сигналы неразличимы.
Однако если сдвиг фазы в канале изменяется достаточно медленно, то разно-
сти фаз между соседними элементами практически сохраняются и могут быть
*> Об остальных кривых на этом рисунке будет сказано ниже.
202
А2,дБ
о
10
20
30
Рис.5.17. Зависимости вероятности ошибки в двоичной
системе, ортогональной в усиленном смысле, с активной
паузой (например, ЧМ) при оптимальном приёме
и различных параметрах каиала;( Г) канал с постоянными
параметрами (когерентный приём); (2) канал
с неопределённой фазой без замираний (некогерентный
приём); (3) обобщённые рэлеевские замирания;
(4) рэлеевские замирания; (5) односторонние нормальные
замирания
измерены в приёмнике. Поэтому вполне возможен некогерентный приём при
ОФМ.
Поскольку при ОФМ информационный параметр сигнала определяется
двумя соседними элементами на (л - \}-Минтервале (~Т, 0) и на л-м интерва-
ле (0, 7), то оптимальный алгоритм (5.74) можно записать в виде
z = 0,1.
(5.83)
Приходящий сигнал s(t) на двух тактовых интервалах при ОФМ можно
представить в зависимости от символа, передаваемого л-м элементом, так:
31(0 = acos(©o* + у), -7’ < * < Т (при передаче символа 1);
acos(©0? + \|/), -T<t<0
-acos^^ + vi/), 0<t<T
(при передаче символа 0),
(5.84)
=
где \|/ — случайная начальная фаза, неизвестная при приёме, зависящая, в ча-
стности, от символа, передававшегося (л - 2)-м элементом.
Нетрудно видеть, что (5.84) представляет собой двоичную систему сигналов
с равной энергией, ортогональную в усиленном смысле на интервале длитель-
ностью 2Т, а не Т Поэтому вероятность ошибки при приёме сигналов ОФМ
по алгоритму (5.83) определяется на основании (5.82), но с учётом того, что
энергия сигнала на интервале (-Г; Т) равна 2£:* 1)
р = 0,5ехр(-А2), (5.85)
где параметр А2 — отношение энергии сигнала на интервале длительностью Т к
спектральной плотности мощности шума. Как и следовало ожидать, в$роят-
При некогерентном оптимальном приёме можно пользоваться общей формулой для веро-
ятности ошибочного приёма двоичных символов р = 0,56"^* ,
1 для сигналов ОФМ,
где Р = 0,5 для ортогональных в усиленном смысле сигналов равной энергии,
0,25 для сигналов с пассивной паузой.
203
ность ошибки (5.85) несколько больше, чем вычисленная для когерентного
приёма двоичной ОФМ (5.56), однако различие между ними очень мало.
Для схемной реализации алгоритм (5.83) можно упростить. Для этого подставим систему
сигналов (5.84) в (5.83) и после сокращения одинаковых слагаемых приведём алгоритм приё-
ма К виду
XaXb + Y0Yb >0, 0 т Ха = j z(/)cos(coot + Хь = jz(t)cos(<aot + y)dt', (5.86)
т 0 где о т (5.87)
Ya = j z(/)sin(co ot + Yb = J z(z)sin(co ot + ц/)Л. T 0
Полагая фазу ц/ хотя и случайной, но постоянной на интервале (-Т; Т), можно легко по-
казать, что левая часть (5.86) инвариантна к значению этой фазы.
На рис. 5.18 показана корреляционная схема, реализующая алгоритм приёма (5.86) на ос-
нове активных фильтров. Величины Хо, Xb, Ya, Yb получаются путём интегрирования произве-
дения элемента принимаемого колебания на опорные сигналы cos(wq/ + \у) и sin(a>o/ + \у) на
интервале длительностью Т.
В моменты времени, кратные Т, величины Хь и Yb снимаются непосредственно с инте-
гратора, а Ха и Ya — с выхода цепи задержки на время Т. На рис. 5.18 не показаны цепи, осу-
ществляющие сброс интегратора к концу интервала интегрирования и ввод накопленного на
нём результата в перемнржитель и цепь задержки на время Т.
Некогерентный приём ОФМ можно реализовать также в схеме с согласованным фильт-
ром и линией задержки (рис. 5.19). Приходящий сигнал поступает на фильтр СФ, согласо-
ванный с элементом сигнала «ДО = cos(®q/ + \у) длительностью Т. Отклик фильтра поступает
на два входа перемножителя, на один из них непосредственно, а на другой — через линию
задержки (ЛЗ), обеспечивающую задержку на время Т. Таким образом, вблизи момента отсчё-
Рис.5.18. Схема оптимального некогерентного приёма сигналов ОФМ на базе активных фильтров
Рис.5.19. Схема оптимального некргерентного.приёма с согласованным фильтром и линией
задержки для сигналов ОФМ
204
Рис.5.20. Схема неоптимального приёма сигналов AM методом сравнения огибающей
с пороговым уровнем
Рис.5.21. Схема неоптимального некорентного приёма сигналов ЧМ с разделительными
полосовыми фильтрами
та на перемножитель поступают напряжения, соответствующие двум соседним элементам
сигнала — только что закончившемуся и предыдущему, прошедшему через линию задержки.
Можно показать, что первое из этих ' напряжений выражается формулой
«1(0 — -YaCosoo^ + J^sincooA а второе «2(0 = A*cos<do/ + y^sinmo^ После их перемножения и
фильтрации результата в ФНЧ получаем напряжение ХаХь + ^а^ь, которое в РУ сравнивается
с нулевым порогом, т.е. реализуется алгоритм (5.86). Описанную схему называют схемой срав-
нения фаз.
Остановимся кратко на некоторых схемах неоптимального приёма при неопределённой
фазе сигнала, широко используемых в современной аппаратуре связи. При приёме сигналов
двоичной AM распространена схема рис. 5.20. Здесь амплитудный детектор (Д) и фильтр
нижних частот (ФНЧ) выделяют огибающую r(f) принимаемого колебания, прошедшего вход-
ной избирательный блок — полосовой фильтр (ПФ) с эффективной полосой пропускания F3,
достаточной для получения всех наиболее существенных компонент сигнала. Огибающая r(t)
с выхода ФНЧ в определённые моменты времени (например, в середине посылки) сравнива-
ется в РУ с некоторым пороговым уровнем X. При выполнении неравенства
г>1 (5.88)
регистрируется символ 1, в противном случае — 0. Сравнивая (5.88) с алгоритмом (5.72) и их
схемные реализации, можно видеть, что схема рис. 5.20 отличается от оптимальной некоге-
рентной схемы использованием ПФ и последетекторного ФНЧ вместо одного согласованного
фильтра до детектора.
При приёме сигналов двоичной ЧМ распространена схема рис. 5.21, где ПФ! и ПФ0 —
разделительные полосовые фильтры, пропускающие без существенных искажений соответст-
венно сигналы $i(/) и jq(0, Д — амплитудный детектор. Разностный сигнал двух детекторов
подвергается фильтрации в ФНЧ, а результат для выбора решения сравнивается с нулевым
порогом.
Анализ такой системы приводит к следующим результатам. Вероятность ошибок в схеме
рис. 5.21 больше, чем при оптимальном некогерентном приёме, причём её возрастание обу-
словливается двумя основными факторами:
а) уменьшением отношения мощности сигнала к мощности шума по сравнению с согласо-
ванным фильтром;
б) межсимвольными помехами, создаваемыми переходными процессами в фильтрах
(остаточными собственными колебаниями, возникшими в результате воздействия преды-
дущих элементов сигнала).
-Как указывалось в § 5.4 (см.(5.43)), первый из этих факторов вызывает наименьшую по-
терю помехоустойчивости, если полоса пропускания полосового фильтра Д/ = 1,37/Т. Однако
при такой полосе пропускания весьма существенные погрешности вносятся за счёт второго
фактора — межсимвольной интерференции. Поэтому наименьшая вероятность ошибок в схе-
ме с полосовыми разделительными фильтрами при отсутствии ФНЧ достигается при более
широкой полосе пропускания — примерно Д/~ 3/Т. Можно показать, что для получения оди-
наковой вероятности ошибок в схеме с полосовыми разделительными фильтрами требуется в
205
Af T раз (в данном примере в 3 раза) большая мощность сигнала, чем в схеме оптимального
некогерент-ного приёма, что и определяет энергетический проигрыш при замене согласован-
ных фильтров полосовыми.
Схему приёмников с неоптимальной фильтрацией до и после детектора широко использу-
ют на практике в тех случаях, когда частотная стабильность недостаточна, т.е. неточность
частоты сигнала 18/1 > 1/Т и, следовательно, реализации оптимального приёма с согласован-
ной фильтрацией фактически невозможна. Это имеет место, например, вследствие эффекта
Доплера при связи с движущимися объектами или при использовании движущегося спутника
для ретрансляции при больших нестабильностях частот автогенераторов и т.д.
Если полосы пропускания входных фильтров А/ в схемах рис. 5.20 и 5.21 удовлетворяют
условию А/ > 218/1, то сигнал останется в полосе пропускания фильтра при всевозможных
флуктуациях частот. При этом значение А/ Т может оказаться значительно больше 1, и не
будь фильтрации сигнала после детектора, энергетический проигрыш (по сравнению с опти-
мальным приёмом при стабильной частоте сигнала) был бы весьма существен. Однако есть
возможность значительно уменьшить этот проигрыш, применив фильтрацию напряжения,
снимаемого с выхода детектора. При 7’ »1 полосовой фильтр почти не искажает оги-
бающую входного сигнала, поэтому при отсутствии помех напряжение на выходе детектора в
схеме рис. 5.20 представляет собой однополярные импульсы, а на выходе блока вычитания
схемы рис. 5.21 — двухполярные. При небольшом уровне шума на входе детектора условия на
его выходе приближённо такие же, как при приёме прямоугольных импульсов на фоне белого
гауссовского шума. Поэтому естественно включить после детектора фильтр, согласованный с
прямоугольным импульсом (см. рис. 5.10, а). На практике часто применяют и несогласован-
ный последовательный фильтр нижних частот, как это показано в схемах рис. 5.20 и 5.21.
5.8. ПРИЁМ ДИСКРЕТНЫХ СООБЩЕНИЙ В УСЛОВИЯХ
ФЛУКТУАЦИИ ФАЗ И АМПЛИТУД СИГНАЛОВ
В большей части радиоканалов, а также в некоторых других каналах флук-
туирует не только начальная фаза, но и амплитуда ожидаемых сигналов 5,(0
(коэффициент у). При относительно быстрых (по сравнению с длительностью
посылки 7) замираниях сигнала1) нельзя сколь-нибудь определённо судить по
результатам приёма предыдущих элементов о значениях амплитуд и. фаз после-
дующих элементов. Найдём оптимальный алгоритм приёма при этих условиях.
Пусть канал описывается моделью (4,44), т.е. является однолучевым гаус-
совским с общими замираниями. Алгоритм оптимального приёма в условиях
флуктуации как фазы, так и амплитуды сигнала можно (на основе правила
максимального правдоподобия) получить, вычисляя математическое ожидание
(5.69) по у:
А, = j Ajyjwfy)^ (5.89)
о
и сравнивая между собой отношения правдоподобия А/ с различными индек-
сами /. Однако для систем с равной энергией сигналов результат легко указать
и без дополнительных выкладок он определяется соотношением (5.73). Это
очевидно, так как (5.73), являясь алгоритмом приёма при неопределённой фа-
зе, не зависит от амплитуды (коэффициента у), следовательно, этот алгоритм
остается оптимальным при любой амплитуде (при любом законе распределе-
ния амплитуд). При этом, однако, помехоустойчивость приёма существенно
зависит от распределения у.
б В реальных радиоканалах при этом амплитуда и фаза сигнала на протяжении некоторого
количества тактовых интервалов могут считаться неизменными.
206
Определим, например, вероятность ошибки для двоичной системы, ортого-
нальной в усиленном смысле, с одинаковой энергией сигналов при условии,
что замирания в канале медленные, т.е. когда у можно считать неизменным на
протяжении элемента сигнала Т и мало меняющимся от посылки к посылке.
Если условную вероятность ошибки при некотором фиксированном значе-
нии у обозначить />(у), то безусловная вероятность ошибки при медленных за-
мираниях
оо
р=f ИуМуИ •
о
В данном случае условная вероятность ошибки определяется формулой
(5.82), в которой величина h2 = у2Е'п/Лг0
пропорциональна у2. Здесь ЕТ1 — энергия сигнала на входе канала (на переда-
че).
Пусть, например, у имеет распределение Рэлея, которое можно представить
в следующей форме:
-у2
2
(5.90)
(5.91)
w(y) = —ехр
У
Подставив это в (5.90) и обозначив у2/у2 =х2, с учётом (5.82) и (5.91) най-
дём вероятность ошибки для двоичных ортогональных в усиленном смысле
сигналов при рэлеевских замираниях: ,5
2^
7
Г 2А2 2у
p = J0,5exp -0,5у — -
- — exp -— dy =
Y* J У к у 7
о
(5.92)
= /хехр[-х2(1 + 0,5Л2)]г& = ^Лт, Л2=у2^-.
Эта зависимость представлена на рис. 5.17 кривой 4.
Аналогично определяется вероятность ошибок и при других законах зами-
раний. Так, если распределение вероятностей — обобщённое рэлеевское, то
[14]
h2q2
(5.93)
1+<Л _ _
P~2 + 2q2+h2eXP[ 2 + 2q2+h2\’
где q2 — отношение мощностей регулярной и флуктуирующей составляющих.
На рис. 5.17 (кривые 3) показана эта зависимость при q = 1, 5 и ]0. Легко
проверить, что при q -> оо (отсутствие замираний) формула (5.93) переходит в
(5.82), а при д2 = 0(отсутствие регулярной составляющей) — в формулу (5.92).
Приведём ещё результат для случая, когда случайная величина у распреде-
лена по одностороннему гауссовскому закону (это самый "плохой" радиоканал
в рамках общей гауссовской модели [14]):
•' w(y)=-7=2=exp
У^
2у\
При этом
1
Р~ 2д/1+Л2 '
(5.94)
(см. рис. 5.17, кривая 5). Для общего гауссовского канала формулы для веро-
ятности ошибок можно найти в [14].
. Заметим, что все полученные для двоичных систем выражения вероятно-
стей ошибок при А2 (или Л2), стремящемся к нулю, принимают значение 0,5.
Это и следовало ожидать, так как при р — 0,5 по двоичному каналу никакая
информация не передаётся (см. рис. 6.2 и относящиеся к нему пояснения).
При А2-*® вероятность ошибок стремится к нулю. Это значит, что во всех
рассмотренных каналах можно получить сколь угодно малую вероятность
ошибки, увеличивая мощность сигнала. Однако степень этого увеличения раз-
лична для разных каналов. Сравнение кривых на рис. 5.17 показывает, что при
замираниях сигнала помехоустойчивость систем связи значительно ниже, чем в
канале без замираний при той же средней мощности передатчика. Для поддер-
жания заданного качества связи в этих условиях приходится иметь определён-
ный запас мощности передатчика.
Вероятность ошибок при приёме дискретных сообщений можно сущест-
венно уменьшить с помощью разнесённого приёма, сущность которого заключа-
ется в том, что демодулятор принимает решение о переданном символе не по
одному, а по двум или более сигналам, несущим одну и ту же информацию.
Разнесённый приём является одним из основных способов повышения поме-
хоустойчивости связи при замираниях сигнала.
В радиосвязи применяются различные способы разнесённого приёма: по
времени (он сводится к повторению сигнала несколько раз на передаче к на-
коплению на приёме); по частоте (сигнал дублируется по многим частотным
каналам); приём сигнала на различные антенны, разнесённые в пространстве;
поляризационное разнесение (приём на антенны, расположенные в одном мес-
те, но принимающие электромагнитные волны разной поляризации); разнесе-
ние по отдельным лучам в многолучевом канале. В последнем случае лучи раз-
деляются либо остро направленными антеннами по углу прихода в горизон-
тальной или вертикальной плоскости (такой способ применяется главным об-
разом на УКВ), либо по времени прихода (времени запаздывания). Можно по-
казать, что полное разделение лучей по времени прихода требует применения
шумоподобных сигналов.
Из перечисленных методов в радиосвязи наиболее распространён приём на
разнесённые в пространстве антенны. На втором месте — разнесённый приём по
частоте, используемый в различных каналах. Остальные методы разнесения
также применяются, но значительно реже. В каналах без замираний разнесён-
ный приём повышает верность, если имеется возможность сложить пришедшие
по п ветвям сигналы когерентна, т.е. свести имеющиеся между ними разности
фаз к пренебрежимо малому значению.
При когерентном сложении одинаковых сигналов суммарный сигнал будет
иметь в п раз большую "амплитуду", т.е. в я2 раз большую мощность, чем от-
дельный сигнал. При этом помехи, которые обычно в различных ветвях неза-
висимы, складываются некогерентно, так что мощность суммарной помехи бу-
дет только в п раз больше мощности помехи в одной ветви. В результате отно-
шение мощности сигнала к мощности помехи увеличивается в п раз.
Можно показать [27], что если по п ветвям принимаются сигналы с раз-
личными мощностями, а помехи, присутствующие в них, имеют различную
интенсивность, то наилучшие результаты получаются при когерентном сложе-
208
нии сигналов, умноженных на весовые коэффициенты, пропорциональные
(5.95)
Л'=и.?
где Ег — энергия элемента приходящего сигнала, NOr — спектральная плот-
ность шума в r-й ветви (г = 1, ..., п). При этом в суммарном сигнале отноше-
ние h\ энергии сигнала к спектральной плотности шума
h\ = •
В каналах с замираниями имеется и другой, более эффективный механизм
повышения верности при разнесённом приёме. Он основывается на том, что
при одиночном приёме ошибки возникают главным образом тогда, когда уро-
вень сигнала упадёт ниже некоторого порогового значения, а при разнесённом
приёме — когда уровень сигнала окажется ниже порогового во всех ветвях. Ес-
ли замирания в ветвях слабо коррелированы, то вероятность одновременного
падения уровней сигнала во всех ветвях очень мала.
Существуют различные способы комбинирования (сложения) сигналов от-
дельных ветвей при разнесённом приёме. Не останавливаясь на исследовании
оптимальных способов сложения в каналах с замираниями, отметим наиболее
простой, достаточно эффективный и широко распространённый способ авто-
выбора ветви с наиболее сильным сигналом (см. рис. 5.22). В этой схеме по-
стоянно измеряется коэффициент передачи канала (или мощности принимае-
мого сигнала) по отдельным ветвям (приёмникам), а к демодулятору подклю-
чается приёмник с наиболее сильным сигналом.
На рис. 5.23 показана зависимость вероятности ошибок при некогерентном
разнесённом приёме. Здесь п — число ветвей разнесения.
Приёмники
Рис.5.22. Схема разнесенного приёма при автовыборе ветви с наиболее сильным сигналом
209
Рис.5.23.
Зависимость вероятности ошибки при разнесен-
ном приеме в канале с рэлеевскими замираниями
от Л2 (двоичная система с активной паузой, орто-
гональная в усиленном смысле при автовыборе
ветви с наиболее сильным сигналом),
п - число ветвей разнесения
5.9. ПРИЁМ ДИСКРЕТНЫХ СООБЩЕНИЙ В КАНАЛАХ
С СОСРЕДОТОЧЕННЫМИ ПО СПЕКТРУ И ИМПУЛЬСНЫМИ
ПОМЕХАМИ
Выше помехоустойчивость дискретных систем связи определялась с учётом неизбежного
аддитивного флуктуационного гауссовского шума. Однако на практике приходится учитывать
и действие в канале иных аддитивных помех, порождаемых внешними источниками, и преж-
де всего относящихся к классу сосредоточенных по спектру ("гармонических") и импульсных.
Заметим, что если на вход приёмного устройства поступает большое число слабо корре-
лированных помех от различных источников сравнимой мощности, то их сумма, согласно
центральной предельной теореме представляет процесс, близкий к гауссовскому. Прибавляясь
к флуктуационному шуму аппаратуры, он может существенно увеличить спектральную плот-
ность гауссовской помехи, что потребует соответствующего увеличения мощности сигнала.
Однако нередко среди множества маломощных помех на вход приёмника поступают отдель-
ные мощные импульсы или сосредоточенные помехи. В таком канале, если не принимать
специальных мер, приём дискретных сообщений сопровождается дополнительными ошибка-
ми и связь может быть полностью нарушена.
Все мероприятия по защите от внешних помех можно разбить на три группы. К первой
относят те, которые направлены на подавление помех в месте их возникновения, в частности
экранирование источников промышленных помех, применение искрогасящих конденсаторов,
снижение уровня побочных излучений радиопередатчиков и т.п. Эти мероприятия регулиру-
ются специальными законоположениями и стандартами. Вторая группа — это мероприятия,
цель которых воспрепятствовать проникновению помех на вход демодулятора. Для этого в
системах проводной связи скрещивают провода воздушных линий, совершенствуют конст-
рукцию кабелей для уменьшения взаимных влияний и т.д. В радиосвязи для этого устанавли-
вается рациональное распределение частот между отдельными службами и каналами с учётом
размещения передатчиков и приёмников и условий распространения радиоволн. При выпол-
нении мероприятий первых двух групп важную роль играют международные органы, выраба-
тывающие допустимые нормы и контролирующие их соблюдение — международные консуль-
тативные комитеты по телеграфии и телефонии (МККТТ) и по радиосвязи (МККР).
Третья группа мероприятий (непосредственно относится к данному курсу) охватывает
выбор ансамбля сигналов и построение приёмного устройства с целью предупредить попада-
ние внешних помех непосредственно в решающее устройство (демодулятор) и минимизиро-
вать вероятность вызванных ими ошибок, если они всё же проникнут в него. Вопросы, свя-
занные с взаимным влиянием различных систем передачи сообщений (связи) друг на друга,
за последние годы интенсивно изучаются теорией электромагнитной совместимости (ЭМС).
Сосредоточенные помехи наблюдаются почти исключительно в радиоканалах. Защита
демодулятора от их попадания осуществляется обычно линейными цепями специальных бло-
210
ков (входные избирательные цепи, преобразователи частоты, резонансные и полосовые уси-
лители и т.п.) различных приёмных устройств. Способность ослабить сосредоточенную поме-
ху на входе решающей схемы приёмника определяет его избирательность. Частотная избира-
тельность обеспечивается тем, что до подачи сигнала на вход демодулятора он фильтруется в
упомянутых выше линейных цепях, полоса пропускания которых достаточна для того, чтобы
сигнал прошёл без существенных искажений, а сосредоточенные помехи, лежащие вне поло-
сы пропускания, при этом подавляются. Помимо частотной избирательности широко исполь-
зуют также пространственную избирательность, основанную на применении узконаправлен-
ных приёмных антенн. Важно отметить, что воздействие сосредоточенных помех возрастает
при увеличении нелинейности входных каскадов приёмника, поскольку возникающие при
этом комбинационные частоты (даже если помеха на входе приёмника непосредственно и не
попала в полосу пропускания) могут оказаться в полезной области частот. Вопросы защиты
радиоприёмника от сосредоточенных помех составляют основное содержание курса радио-
приёмных устройств.
Очевидно, для уменьшения вероятности попадания сосредоточенной помехи в полосу
частот спектра сигнала желательно использовать как можно более узкополосные сигналы.
Именно поэтому в течение многих десятилетий для передачи дискретных сообщений по ра-
диоканалам применялись (применяются успешно и сегодня) только простые узкополосные
сигналы (AM, ЧМ, ОФМ), элементы которых являются отрезками синусоиды. Однако за по-
следние 30-35 лет наметился и другой подход, связанный с существенным расширением
спектра сигнала усложнением его формы или с использованием шумоподобных сигналов. Как
можно показать (см., например, [5]), шумоподобные сигналы позволяют успешно передавать
сообщения в многолучевых каналах. Но, как это ни парадоксально, применение шумоподоб-
ных сигналов оказалось полезным и для защиты от узкополосных сосредоточенных помех.
Дело в том, что если спектр узкополосного сигнала перекрывается мощной сосредоточенной
помехой, то практически не удаётся избежать возникновения ошибок. Если же такая помеха
окажется в полосе широкополосного сигнала, то в принципе существует возможность
"вырезать" её режекторным фильтром (или другими способами) и по оставшейся части спек-
тра широкополосного сигнала восстановить переданную информацию. Поэтому, хотя вероят-
ность попадания сосредоточенной помехи в спектр широкополосного сигнала больше, чем в
спектр узкополосного, вероятность ошибок, создаваемых такой помехой, при широкополос-
ном сигнале (и рационально построенном приёмнике) может оказаться значительно меньше.
Простейшим способом построения широкополосного сигнала для защиты от- сосредото-
ченных помех является объединение нескольких узкополосных сигналов, передающих одина-
ковую информацию, на смежных полосах частот с осуществлением частотно-разнесённого
приёма. При этом схема автовыбора строится так, что к решающему устройству подключают-
ся только ветви, не поражённые сосредоточенными помехами. Более сложнее системы часто
строятся с использованием "блока защиты от сосредоточенных помех", который представляет
собой ряд параллельно включённых узкополосных фильтров со смежными полосами пропус-
кания, рассчитанных так, что вместе они пропускают без существенных искажений весь ши-
рокополосный сигнал. Этот блок включается на вход демодулятора и управляется устройст-
вом, анализирующим напряжение на выходе каждого фильтра и запирающим те из них, в ко-
торых обнаруживаются мощные сосредоточенные помехи. Для защиты от импульсных помех
предложены различные способы, наиболее эффективные из которых основаны на амплитуд-
ном ограничении входного сигнала до его фильтрации или на мгновенном запирании приём-
ника на время действия помехи. А.Н. Щукин показал, что, применяя ограничитель в широ-
кополосном тракте приёмника и пропуская ограниченный сигнал через узкополосный
фильтр,.можно при надлежащем выборе полос пропускания подавить импульсные помехи без
заметного ухудшения помехоустойчивости относительно сосредоточенных и флуктуационных
помех. Такая система получила название ШОУ (широкополосный фильтр, ограничитель, уз-
кополосный фильтр). В современных устройствах роль узкополосного фильтра выполняют
обычно согласованные фильтры демодулятора.
Пусть входной сигнал приёмника подаётся на двусторонний амплитудный ограничитель.
Если уровень ограничения Uq выбран несколько выше напряжения полезного сигнала, то при
отсутствии импульсной помехи схема приёмника остается линейной. Если же появится им-
пульсная помеха с уровнем большим, чем Uo, она будет ограничена. Таким образом, им-
пульсная помеха длительностью ти со сколь угодно большой амплитудой на входе, трансфор-
мируется в импульс с площадью тиЦ>. Амплитуда этого импульса примерно равна амплитуде
211
сигнала, а спектр его сильно отличается от спектра сигнала. Поэтому после прохождения че-
рез узкопо-лосный (или согласованный) фильтр подавляющая часть энергии импульсной по-
мехи отсеивается и она не вызывает ошибок.
Однако в реальных условиях уровень Uq достигается и сосредоточенной помехой, а из-за
нелинейного элемента в схеме (ограничителя) образуются комбинационные частоты сосредо-
точенной помехи, которые в дальнейшем трудно отфильтровать. Установка ограничителя по-
сле узкополосного фильтра, устраняющего влияние сосредоточенной помехи, неэффективна,
ибо на выходе такого фильтра длительность импульсной помехи возрастает и условие « Т
не может быть выполнено.
Метод мгновенного запирания приёмника на время действия импульсной помехи также
не лишён недостатков. Во-первых, во время запирания и отпирания возникают переходные
процессы, искажающие работу демодулятора; во-вторых, суммарное входное колебание
(сигнал плюс сосредоточенная и флуктационная помехи) оказывается при этом промодулиро-
ванным импульсом запирания, из-за чего появляются дополнительные частотные составляю-
щие, которые могут попасть в полосу сигнала.
Можно отметить частотно-временную дуальность между гармонической и импульсной
помехами (спектральные характеристики сосредоточенной по спектру помехи напоминают
временные характеристики импульсной, и наоборот). Это обстоятельство объясняет, почему
меры борьбы с импульсной и сосредоточенной помехами в приёмном устройстве взаимно
противоположны. Упомянутые выше шумоподобные сигналы можно с успехом использовать
и для борьбы с импульсными помехами вследствие их различия по форме. Фильтр приёмни-
ка, согласованный с таким шумоподобным сигналом, преобразует сигнал в короткий интен-
сивный (в зависимости от энергии сигнала) импульс, длительность которого обратно пропор-
циональна полосе частот сигнала. Импульсная же помеха превращается этим фильтром в ко-
лебание малой интенсивности, имеющее характер шума, слабо маскирующего сигнал.
За последние годы предложены схемы защиты от сосредоточенных и импульсных помех,
основанные на оценивании этих помех и вычитании сигнала оценки из принимаемого коле-
бания (компенсационные методы). При этом такие схемы в условиях изменения характери-
стик помех становятся адаптивными. Эффективной мерой защиты от сосредоточенных и им-
пульсных помех является разнесённый приём одновременно по частоте и времени. Из ветвей
частотного разнесения следует выбирать те, в которых меньше (или нет совсем) сосредото-
ченных помех, а из ветвей разнесения во времени те, где нет импульсной помехи. Весьма
эффективны также методы защиты от различных помех, основанные на помехоустойчивом
кодировании, которое рассматривается в гл. 7.
5.10. ПОМЕХОУСТОЙЧИВОСТЬ ПРИЁМА ДИСКРЕТНЫХ
СООБЩЕНИЙ В ОПТИЧЕСКОМ ДИАПАЗОНЕ ВОЛН
Обобщённая структурная схема оптического приёмника приведена на
рис. 5.24. Фотодетектор (обычно это фотодиод) преобразует принимаемый
оптический сигнал в электрический ток, пропорциональный мощности оптиче-
ского сигнала. Следующий за фотодиодом усилитель усиливает полученный
токовый сигнал и преобразует его в напряжение. Последнее поступает на де-
модулятор, в котором принимаются решения (оценки) о передаче 1 или 0. В
оптическом приёмнике имеются различные источники шумов, определяющие
помехоустойчивость передачи.
Прежде всего это шум фотодиода — квантовый шум, порождённый случай-
ным квантовым процессом детектирования оптического сигнала, о чём говори-
лось в § 4.3. Этот шум можно назвать дробовым. Далее следует учитывать не-
\ / ' * Оптический Фото- детектор > Ток Усил1ъ\ тель Напряжение Демодулятор Оценки £
сигнал
Рис.5.24. Обобщённая структурная схема оптического приёмника
212
минуемые тепловые (флуктуационные) шумы в оптическом приёмнике и шум
усилителя. Рассмотрим сначала влияние на помехоустойчивость дробового
(квантового) шума. Согласно § 4.3.8 вероятность того, что на интервале анали-
за Т число созданных фотодетектором пар носителей заряда равно К,
(5.96)
Заметим, что у случайной величины, распределённой по Пуассону (5.96),
математическое ожидание равно дисперсии К - о* = N. В идеальной системе
связи изменение числа генерируемых пар носителей заряда (дробовой шум) —
единственный источник шума. В такой системе оптическая энергия принима-
ется, а носители заряда генерируются лишь тогда, когда передаётся 1. Если
приёмник достаточно чувствителен, чтобы обнаружить единственную элек-
тронно-дырочную пару, созданную светом, то порог может быть установлен на
этом уровне. Нет ошибки при передаче 0, поскольку не принимается никакая
энергия и не генерируется никакой сигнал. Только когда упавшая на фотопри-
ёмник оптическая энергия, соответствующая 1, вообще не генерирует какие-
либо носители заряда, вместо 1 фиксируется 0 — т.е. имеет место ошибка.
С учётом равной вероятности передачи 1 и 0 в идеальной системе средняя
вероятность ошибки
р = 0,5
(5.97)
Для получения р < 10-9 (современные требования для цифровых систем пе-
редачи) надо, как следует из (5.97), N> 20. Учитывая материал § 4.3.8, получа-
ем оценку для минимальной средней мощности на входе фотоприёмника:
Р, = 0,5 ЕЯ = 0,5 Л.-------1 > 10Е. .
пр ’ пр *и ф
(5.98)
Величина 10£ф(Ри/т|) характеризует абсолютный квантовый предел детек-
тируемости. При г|=::1и?1 = 0,9 мкм получаем
—= 2,2.10"19Вт-с и >2,2пВт/(Мбиг/с).
И Л.
(5.99)
Мы рассмотрели помехоустойчивость оптического приёмника при учёте
только дробового шума. Рассмотрим другой крайний случай, когда дробовым
шумом можно пренебречь по сравнению с тепловым шумом и шумом усилите-
ля в приёмнике. Обычно полагают, что случайные флуктуации напряжения и
тока подчиняются гауссовскому распределению. Для анализа удобнее отнести
флуктуации, наблюдающиеся на входе решающего устройства демодулятора
(рис. 5.24), к эквивалентному числу пар носителей заряда, которые следовало
бы создать в фотодиоде, чтобы получить тот же самый результат на входе РУ
демодулятора. В случае теплового шума и шума усилителя этим действитель-
ным числам приходится предписывать гауссовское распределение относитель-
но среднего N. Таким образом, вероятность того, что на входе РУ общее на-
пряжение в точке отсчёта1) (сигнал + шум ус(*о) + Ул(*о)) соответствует к парам
Обычно в оптическом приёмнике в демодуляторе решение принимается по одному отсчёту.
Однако при использовании согласованного фильтра помехоустойчивость можно повысить. В
том и другом случае справедливы нижеследующие формулы, меняется только параметр
213
p(k\m)= , 1 , exp
(5.100)
носителей заряда, созданным в фотодиоде, равно в гауссовском приближений
(к-nV
2<£
где дисперсия шумового отсчёта уй(гЬ). Как и ранее предполагаем, что
среднее число генерируемых пар носителей равно N при приёме 1 и нулю при
приёме 0. Оптимальный порог для принятия решения в РУ для системы с пас-
сивной паузой (см.(5.26)) равен , что соответствует N/2 парам носите-
лей заряда.
Средняя вероятность ошибки
ЛГ/2
Р = 0,5[ р(0|1) + Р(1]О)] = 0,5 £ Р(К\ N) + И*1°) •
* 2
Для дальнейшего расчёта надо в (5.101) подставить гауссовское распределе-
ние (5.100). При N » 1 легче выполнить вычисления, заменив суммирование в
(5.101) интегрированием
N/2
J ехр -
О
(5.101)
(K-N)2
В силу симметрии два интеграла равны между собой и
1
Г 1*1
dK+ J exp г
N/2 2°ш'
dK
г к
J ехр "^7
N/2 2<7и
Из таблицы функции Q(x) следует, что для р < 10-9 необходимо
N
иметь---->6. Это означает, что необходимо эквивалентное значение
2<ТШ
Уэ > 12сгш, что существенно больше (при реальных значениях ош), чем кванто-
вый предел детектирования N > 20. .
Учёт совместного действия дробового шума, тепловых шумов и шумов уси-
лителя приводит к тому [9], что требуемый уровень принимаемой мощности в
оптическом приёмнике на два порядка выше, чем предел (5.99):
Рпр > 0,22 нВт/(Мбит/с).
«—7= Je 2<й = б(лг/2аж).
V271 AT/2 _
(5.102)
(5.103)
1
P=Q,5~r=
5.11. СРАВНЕНИЕ ПОМЕХОУСТОЙЧИВОСТИ СИСТЕМ
ПЕРЕДАЧИ ДИСКРЕТНЫХ СООБЩЕНИЙ
Объективное сравнение различных систем передачи дискретных сообщений
при оптимальном приёме и заданной модели непрерывного канала возможно,
если воспользоваться понятием эквивалентной вероятности ошибки рэ, введён-
ным Л.М. Финком [27]. Под рэ понимают вероятность ошибки в симметрич-
ном двоичном канале без памяти с постоянными параметрами, в котором сис-
тема с примитивным кодированием оказывается эквивалентной рассматривае-
мой системе (передаёт равное количество информации I бит и обеспечивает
одинаковую вероятность правильного приёма блока символов, несущих эту
информацию в заданном канале).
214
Из определения следует, что вероятность правильного приёма блока симво-
лов1)
2.
/?пр.вбл=(1-/?э)/ = 1-/?ошбл ИЛИ 1-рэ =(1-рошбЛ)/
где рош бЛ — вероятность ошибочного приёма блока символов2).
В условиях качественной связи рошбл«1, воспользовавшись формулой
бинома Ньютона (1-Д0Шбл)7 «1-^бл , получаем
(5.104)
Таким образом, рэ приближённо определяет (в любом канале) вероятность
ошибки на бит. При прочих равных условиях та система лучше, для которой рэ
меньше.
Введём в рассмотрение энергетический параметр системы
1 Рв Е h2 2 Е
N0R„ N0Rlog2m RlOg2m’ Т'
где Рс, Nq — средняя мощность сигнала на входе приёмника и спектральная
log, mR (бшЛ -
плотность БГШ в канале; R* =—-— I-----1 — скорость передачи информации;
1 \ С X
(5.105)
m — основание кода; Т — длительность канальной посылки (тактовый интервал
передачи); R = к/п — скорость кода (см. гл. 7) — отношение числа информаци-
онных элементов кодовой комбинации к их общему числу.
, , Е
Параметр А, определяет нормированную энергию h = — на 1 бит инфор-
мации (битовую энергию). Для z-й системы
h2
или h2 = % log2 m.R., (5.106)
log2 mt К,
Р.Т.
где h2 = -тгг- — энергетический параметр, введённый выше. Имея в виду, что
“0
для i-й системы рОШбл является функцией от /£, т.е. рошбл,
, можно на-
писать p3i =
при = А,2 = const.
(5.107)
4
Определим выигрыш t-й системы над у-й по эквивалентной вероятности
ошибки (ВЭВО):
ВЭВО.Н = —
Можно также определить энергетический выигрыш /-Й системы над у-й
(ЭВС), представляющий основной практический интерес:
3BCitJ = 101g = 101g
'J и
пРи p3i = р3 = const.
(5.108)
О Для непрерывных (свёрточных) кодов (см. гл. 7) в последующих формулах надо /-> оо.
2> Эта вероятность в гл. 6 и 7 обозначается род - вероятность ошибочного декодирования.
215
Помимо энергетической характеристики i-я система определяется также
частотной эффективностью yt =~|г (/} — занимаемая системой полоса частот).
Л
Всестороннее исследование зависимости энергетической эффективности раз-
личных систем передачи дискретных сообщений Р,
от у/ выполнено
А. Г. Зюко. Эти зависимости (Ру-номограммы) подробно рассматриваются в
гл. 11.
Энергетический выигрыш за счёт кодирования (ЭВК) обсуждается в гл. 6
при оптимальном кодировании и в гл. 7 при реальном помехоустойчивом ко-
дировании.
Здесь рассмотрим пример использования формул (5.107) и (5.108) при
примитивном кодировании (R = 1).
Пример. Найдём ВЭВО и ЭВС перехода от двухпозиционной (/-й) системы с ортогональ-
ными в усиленном смысле сигналами равной энергии в канале с неопределённой фазой к т-
позиционной (z-й) системе таких же сигналов.
0 5Л?
Для двухпозиционной системы p3j = О^е ’
Для /и-позиционной системы
Рт т-1 т-1 п,.2„
р = « -----р = ------о,5е °-5h*1082m
log2 т log2 т log2 т
,2 2- f т-1 'l
log2w k2pa/log2w;
_ P3jQ 1 1 log, m
Тогда B3BOifi - — =-----------------.
13 P3i m-1
или h3j
так как h3t
h}
log2 m
Значения ВЭВО i/j могут быть в нашем примере весьма существенными. Так, если в дво-
ичной системе p3j = р = 0,5 10-6, то = 27,6 и при т — 8 имеем ВЭВО,/;« 4-Ю11. В условиях
качественной связи, когда —»——- имеем ЭВС/л= 101g[log2/nJ. При т = 8 следует
2р3 1п2 т '
ЭВС0 = 4,7 дБ
ВЫВОДЫ
1. При изохронной передаче дискретных сообщений решётчатая функция сообщений преоб-
разуется модулятором в изохронную последовательность элементарных сигналов. Они за-
нимают различную частотно-временную область, но переносят сообщения с неизменным
тактовым интервалом, который определяет техническую скорость передачи.
2. При использовании в качестве переносчиков сообщений на тактовом интервале прямо-
угольных радиоимпульсов обеспечивается предельное сжатие сигнала во времени, но его
спектр неограничен. Наоборот, при использовании переносчиков с ограниченным равно-
мерным спектром время элементарной посылки не ограничено (межсимвольная интерфе-
ренция на передаче), однако сохраняется свойство отчётности, позволяющее безошибочно
выделять информационную последовательность. Это свойство теряется в канале с памятью
(с рассеянием).
216
3. Каждый демодулятор, описывается законом (правилом решения), по которому поступаю-
щий на его вход непрерывный сигнал превращается в кодовый символ.
4. В системах связи в качестве критерия оптимального приёма сообщений используют глав-
ным образом критерий максимума средней вероятности правильного приёма символа. Это
критерий идеального наблюдателя. Оптимальный приёмник обеспечивает потенциальную
помехоустойчивость для заданной системы сигналов.
5. При равновероятной передаче различных символов критерий идеального наблюдателя реа-
лизуется правилом максимального правдоподобия.
6. Оптимальный приёмник при точно известном сигнале является когерентным и реализуется
корреляционной схемой или схемой с согласованными фильтрами.
7. Вероятность ошибки при оптимальном когерентном приёме двоичных сигналов в канале
со стационарным гауссовским белым шумом • зависит только от эквивалентной энергии
сигналов (квадрата расстояния между сигнальными точками) и спектральной плотности
шума. Минимальную вероятность ошибки обеспечивает двоичная система с противопо-
ложными сигналами.
8. В каналах с МСИ (памятью) используются адаптивные корректоры канала, однако пре-
дельную помехоустойчивость обеспечивает оптимальный приём.
9. В канале с МСИ большой практический интерес вызывает субоптимальный алгоритм по-
элементного приёма (с обратной связью по решению) Кловского-Николаева и алгоритм
Витерби.
10.Оптимальный приёмник при неопределённой (случайной) фазе сигнала является некоге-
рентным и реализуется квадратурной схемой или схемой с согласованными фильтрами и
детектором огибающей.
11. При неопределённой фазе оптимальный приёмник существенно упрощается для систем с
одинаковой энергией сигналов. Минимальную вероятность ошибки обеспечивает система
сигналов, ортогональных в усиленном смысле.
12.Для системы с одинаковой энергией сигналов схема оптимального некогерентного приёма
не зависит от амплитуды сигнала и, следовательно, не меняется при случайных изменени-
ях амплитуд сигнала (замираниях в канале). Однако средняя вероятность ошибки сущест-
венно зависит от закона распределения амплитуд сигнала.
13.Эффективным средством повышения помехоустойчивости систем связи (в том числе при
наличии в канале сосредоточенных по спектру и импульсных помех) является разнесённый
приём.
14. В идеальной оптико-волоконной линии связи с модуляцией мощности оптического несу-
щего колебания единственным источником шума является квантовый (дробовой) шум фо-
тодетектора. Для обеспечения вероятности ошибки 10-9 при равновероятной передаче 1 и
0 требуется пороговая мощность (абсолютный квантовый предел детекгируемости) на вхо-
де фотодетектора на один бит информации в секунду Ртр = Вт/(Мбиг/с). При
X = 0,9 мкм РПор = 2,2 пВт/(Мбит/с).
15.Учёт тепловых шумов приёмника и шумов усилителя после фотодетектора приводит к по-
вышению пороговой мощности, определяемой квантовым пределом, на два порядка.
16.Эквивалентная вероятность ошибки, т.е. вероятность ошибочного приёма символа в экви-
валентном 2СК без памяти, с постоянными параметрами и примитивным кодом, при ко-
тором обеспечивается передача того же количества двоичных единиц информации и та же
вероятность ошибочного приёма блока символов, что и в рассматриваемой системе (с за-
данным способом модуляции и кодирования, модели канала и т.п.) является удобной ха-
рактеристикой сравнения различных систем передачи дискретных сообщений между со-
бой. При заданной рэ можно найти энергетический выигрыш системы (ЭВС), сравнивая их
энергетические параметры h* = .
ВОПРОСЫ, ЗАДАЧИ И УПРАЖНЕНИЯ
5.1. Переносчиком сообщений служит сигнал с равномерным амплитудным спектром в об-
ласти положительных частот в интервале (fo — Д//2, fo + Д//2), где Д/ « /0. Написать
аналитическое выражение для сигнала на выходе модулятора при изохронной последо-
217
вательной передаче кодовых символов с тактовым интервалом Т и частотной модуляци-
ей несущей.
Кодовая последовательность модулирует изохронно несущую из задачи 1 по фазе. На-
писать аналитическое выражение для сигнала на выходе модулятора.
Переносчиком сообщений на каждом тактовом интервале служат прямоугольные ра-
диоимпульсы со средней частотой спектра /q. Написать аналитическое выражение для
сигнала на выходе модулятора при линейной амплитудной (многоуровневой) модуля-
ции. ' *
5.2.
5.3.
5.4.
5.5.
5.6.
5.7.
5.8.
5.9.
5.10.
5.11.
5.12.
5.13.
5.14.
5.15.
5.16.
Написать аналитическое выражение для сигнала на входе демодулятора при передаче
сигнала из задачи 3 при известной импульсной характеристике линейного канала.
При заданной реализации принимаемого колебания апостериорные вероятности пере-
даваемых символов 1 и 0 равны p(l|z) = 0,6 и p(0|z) = 0,4. Какой символ зарегистрирует
приёмник, оптимальный по критерию идеального наблюдателя?
Какое правило приёма преимущественно применяют в технике связи и почему?
Показать, что при неравновероятной передаче символов p(bj) алгоритм оптимального
приёма по критерию идеального наблюдателя при детерминированных сигналах
<, t < 7) и аддитивном стационарном БГШ в канале с односторонней спекграль-
т
iax Jz(^)s/(^-O,5[£/ + yolnP(6J)j •.
1 I о
ной плотностью Ло можно записать в виде i = Arg max
Какие основные блоки содержит корреляционная схема оптимального когерентного
приёма в канале с аддитивным стационарным БГШ?
Что понимают под согласованным фильтром? В какой момент времени на выходе СФ
обеспечивается максимальное отношение сигнал-шум и чему оно равно?
Найти передаточную функцию фильтра, согласованного с прямоугольным видеоимпуль-
сом и на её основе построить структурную схему фильтра.
Фильтр согласован с пачкой из N периодически передаваемых (с периодом 7) импуль-
сов. Первый импульс имеет спектральную плотность 5i( jo). Найти передаточную функ-
цию СФ и на её основе построить структурную схему фильтра.
г |1пХ(/)|
Воспользовавшись критерием Пейли-Винера I --------±df <оо (необходимым, но не дос-
J <х + f
таточным условием реализации линейного стационарного фильтра), показать, что АЧХ
СФ может принимать нулевые значения лишь в дискретных точках оси частот.
Показать, что АЧХ линейного стационарного фильтра с нереализуемой импульсной ха-
рактеристикой = Ае 1'1, -оо < t <+оо, удовлетворяет условию Пейли-Винера.
Показать, что АЧХ фильтра с импульсной характеристикой гауссовской формы
g(t) = Ae ,г, -оо < г < +оо, не удовлетворяет условию Пейли-Винера.
Фильтр согласован с биполярным сигналом кода Баркера (1, 1, 1, —1, 1). Нарисовать
сигнал на выходе фильтра.
Сигнал от цели s(f) (0 < t <, 7) детерминирован и обнаруживается на фоне аддитивного
стационарного БГШ со спектральной плотностью Nq посредством сравнения отсчёта в
момент времени t = Т на выходе согласованного фильтра с порогом Хп. Найти: вероят-
ность ложной тревоги рт, вероятность правильного обнаружения J9no, зависимость рпо
от параметра h2 = E/No при заданной величине рт (кривую обнаружения сигнала); зна-
чение /г£,р при котором />п0 = 0,9. Найти связь между порогом Хп и величиной порога 1,
определяющей алгоритм Неймана-Пирсона (5.20).
5.17. Двоичные сообщения передаются биполярными импульсами амплитуды Un и принима-
ются приёмником в дискретном времени на фоне стационарного гауссовского квазибе-
лого шума с дисперсией ст* путём обработки четырёх отсчётов на тактовом интервале.
Написать алгоритм приёма по правилу максимального правдоподобия, найти вероят-
ность ошибки. При каком отношении сигнал-шум р = и2/с2п обеспечивается вероят-
ность ошибки 10~6.
218
При оптимальном когерентном приёме двоичных сигналов корреляционной схемой ге-
нераторы опорных сигналов допустили фазовую расстройку Д<р. Найти величину рас-
стройки, при которой энергетический проигрыш по отношению к схеме с идеальной
фазовой когерентностью не превышает 1,1 (повышение мощности передатчика состав-
ляет 10 %).
Принимаемый сигнал при, передаче символа 1 в канале с памятью (2=1)
si(t) = gl(t)h(t)+g2(t)h(t-T), 0<t<2T, где Т — тактовый интервал передачи,
0 < х <. Т,
Т<х<0.
— срезающая функция, g\(f) и gift) — две части реакции канала на
передачу элемента сигнала, соответствующего символу 1. Используется двоичная систе-
ма противоположных сигналов. Написать алгоритм оптимального поэлементного коге-
рентного приёма по правилу максимального правдоподобия (5.63) (Та = 7) при наличии
идеальной обратной связи по решению. Нарисовать структурную схему приёмника. На-
писать формулу для вероятности ошибки.
В условиях задачи 19 запишите АКН с Та = 2Т. Нарисуйте схему приёмника.
Чем объяснить практические достоинства систем связи с одинаковой энергией сигналов
при когерентном и некогерентном приёме?
Найдите энергетический проигрыш двоичной системы, ортогональный в усиленном
смысле, в канале с рэлеевскими замираниями по отношению к каналу без замираний
при вероятности ошибки р = 10~3.
В чём смысл разнесённого приёма сигналов и какие виды разнесения вы знаете?
Найдите алгоритм оптимального когерентного разнесённого приёма по п ветвям, если
аддитивные стационарные БГШ (со спектральной плотностью No,г в отдельных ветвях
разнесения) независимы. Найдите формулу для вероятности ошибки.
Разнесённый некогерентный приём в канале с рэлеевскими замираниями осуществляет-
ся методом выбора ветви с наиболее сильным сигналом. Пусть у^ — максимальное
значение коэффициентов передачи канала уг по всем ветвям (г = 1,и). Докажите, что
( г YT”1
1-ехр
плотность вероятности для утох при независимых сигналах в отдельных ветвях
f У2
ехр
А У2
^ЯУ пах
У2
w
Средняя вероятность ошибки двоичной системы, ортогональной в усиленном смысле,
при разнесённом приёме с автовыбором и медленными рэлеевскими замираниями
“ ЧТпахИУ
где No — спектральная плотность шума; Ел — энер-
гия сигнала на передаче; у^,х£п — энергия элемента сигнала в выбранной ветви с
У = Утят Найдите р, воспользовавшись плотностью w (утЯу) из задачи 25.
Какие методы борьбы с сосредоточенными (по спектру) и импульсными
(сосредоточенными во времени) помехами вы знаете?
Связь может считаться качественной, если в полосе частот полезного сигнала нет со-
средоточенной помехи или при её появлении амплитуда полезного сигнала превышает
амплитуду помехи. Найти выражение для вероятности качественной связи, если ампли-
туды сигнала и помехи распределены по Рэлею со средним квадратом yj и yj, а веро-
ятность появления сосредоточенной помехи рсп = 0,2. При каких соотношениях пара-
метров у* и у* вероятность качественной связи не меньше 0,8 ?
Связь может считаться качественной, если на временном интервале анализа сигнала нет
импульсной помехи или при её появлении энергия сигнала Е превышает энергию поме-
хи. Найти выражение для вероятности качественной связи, если импульсная помеха
имеет форму прямоугольного радиоимпульса длительности ти с амплитудой Ua, распре-
делённой по экспоненциальному закону wUn (и) = ае-аа, и > 0.
219
ГЛАВА 6. ПОТЕНЦИАЛЬНЫЕ ВОЗМОЖНОСТИ
ПЕРЕДАЧИ СООБЩЕНИЙ ПО КАНАЛАМ СВЯЗИ
(ОСНОВЫ ТЕОРИИ ИНФОРМАЦИИ)
6.1. ПРОБЛЕМА ОБЕСПЕЧЕНИЯ СКОЛЬ УГОДНО ВЫСОКОЙ
ВЕРНОСТИ ПЕРЕДАЧИ ДИСКРЕТНЫХ СООБЩЕНИЙ В КАНАЛАХ
С ПОМЕХАМИ
Ранее в гл. 5 был синтезирован оптимальный приёмник дискретных сооб-
щений для канала с полностью известными сигналами и аддитивной помехой
в виде белого шума. Там же было показано, что вероятность ошибки т-ичного
символа (определяющая верность приёма) минимизируется при выборе систе-
мы сигналов в виде m-мерного симплекса. (В действительности при достаточно
большой величине т почти такую же вероятность ошибки будет давать система
из т взаимно ортогональных сигналов.) Как для симплексных, так и для орто-
гональных сигналов величина вероятности ошибки при оптимальном приёме
однозначно определяется числом этих сигналов т и параметром А2 = E/Nq, где
Е — энергия элемента сигнала, a Nq — спектральная плотность белого шума на
положительных частотах. Отсюда, казалось бы, можно однозначно сделать вы-
вод, что неограниченное повышение верности передачи сообщений (т.е. убы-
вание вероятности ошибки р к нулю) может быть получено только за счёт не-
ограниченного возрастания энергетического параметра h2. В частности, если
спектральная плотность мощности белого шума Nq, а также средняя мощность
сигнала Рс заданы, то это может происходить только при стремлении к нулю
скорости передачи (символов) v, поскольку Е = Рс Т, а Т — 1/v..
Вопрос о том, можно ли в таком канале обеспечить р -> 0 при Nq = const,
Рс = const, v = const > 0, представляется поэтому, на первый взгляд, не имею-
щим смысла. Тем не менее оказывается, что ответ на него положителен, одна-
ко лишь при выполнении определённых условий. Ключевым моментом реше-
ния этой проблемы является увеличение числа возможных симплексных (или
ортогональных) сигналов ш.
Пусть используются взаимно-ортогональные сигналы и их количество
ш = 2к, где к — целое положительное число. Тогда при помощи каждого такого
ортогонального сигнала длительности Т можно передать к двоичных сигналов
или (если каждый из них несет максимальное количество информации 1 бит
(см. ниже)) к бит. Если какой-либо двоичный источник сообщений подключён
к такому модулятору, то он может без растущей во времени задержки переда-
вать эти сообщения с информационной скоростью v = к/Т б мт/с. Используя
аддитивную границу для вероятности ошибки ортогональных m-ичных сигна-
лов (см. (5.59)), получаем
l)G(A), (6.1)
1 г -
где <2(х) = -r^= J е 2 dt.
X
Можно показать, что для любого х > 0 справедливо следующее неравенство:
1 —
Л)<-е> (6.2)
220
Подставляя (6.2) в (6.1) и проделывая элементарные преобразования, нахо-
дим (при 2* » 1), что
1 Р*Т 1 1 ЛГ 1 Л Рс .
р<-2*е 2ЛГ° =-2vZe 2ЛГ° = -evnn2e’2"0 =-е ‘2ЛГ° ' (6.3)
г 2 2.2 2 V 7
Анализируя (6.3), получаем, что р -> 0 при Nq = const, Рс = const, v = const,
Г->оо, если выполнено условие отрицательности показателя экспоненты, что
эквивалентно следующему неравенству:
(6.4)
Итак, мы совершенно строго вывели достаточное условие для положитель-
ного ответа на сформулированный ранее вопрос, что на первый взгляд каза-
лось невозможным.
Первым человеком, "удивившим" инженеров-связистов такой возможно-
стью — абсолютно надёжно передавать информацию по каналам связи с поме-
хами не за счёт увеличения мощности сигнала или уменьшения скорости пере-
дачи, а за счёт усложнения методов модуляции-демодуляции, был американ-
ский учёный Клод Эльвуд Шеннон. Сделал он это в своей замечательной ра-
боте "Математическая теория связи", опубликованной в 1948 г. Мы по сущест-
ву доказали "сильно ослабленный" вариант так называемой теоремы кодирова-
ния Шеннона, поскольку нашли лишь достаточные условия и причём только
для одной модели непрерывного канала связи — с неограниченной полосой
частот, поскольку при Г->оо и v = const имеем £->оо. Следовательно, количе-
ство сигналов и полоса частот, занимаемая такими сигналами, тоже всегда
стремятся к оо. Шеннон же нашёл необходимые и достаточные условия убыва-
ния вероятности ошибки до нуля. (В дальнейшем мы покажем, что правая
часть неравенства (6.4) может быть увеличена в 2 раза.) Кроме того, он сделал
это для различных моделей каналов, в частности с ограниченной полосой час-
тот, для фиксированного числа форм сигналов т, для источников с неравнове-
роятными или с зависимыми символами (так называемых избыточных источ-
ников), для источников непрерывных сообщений, для критериев верности
приёма дискретных сообщений, отличных от вероятности ошибки символа р, и
т.д. Всё это и составило сущность теории информации.
Заметим, что теория информации является также своего рода философией
связи. Понятия, введённые в рамках этой теории, нашли применение и вне
проблем связи, например в искусстве и медицине. Однако для инженера-
связиста важно не столько понимать определения теории информации, сколь-
ко уметь при необходимости пользоваться теоремами кодирования, которые
определяют потенциальные возможности каналов связи, заданных, в свою оче-
редь, некоторыми ограничениями. Последующие разделы этой главы и будут в
основном ориентированы на данную проблематику.
221
6.2. ПОТЕНЦИАЛЬНЫЕ ВОЗМОЖНОСТИ ДИСКРЕТНЫХ
КАНАЛОВ СВЯЗИ
6.2.1. ОПРЕДЕЛЕНИЕ ИСТОЧНИКА ДИСКРЕТНЫХ
СООБЩЕНИЙ, ДИСКРЕТНОГО КАНАЛА СВЯЗИ, КОДИРОВАНИЯ
И ДЕКОДИРОВАНИЯ
В гл. 1 уже были определены такие понятия, как сообщение, сигнал, коди-
рование и декодирование, а в,гл. 4 описаны некоторые модели дискретных и
непрерывных каналов связи. Поэтому в данном разделе мы напомним лишь
некоторые из этих определений, которые непосредственно понадобятся нам
для изложения материала по теории информации.
Итак, формально источник дискретных сообщений полностью определяет-
ся алфавитом A = (a0,al,...,aK J используемых символов заданного объёма К и
распределением вероятностей Р(л), заданным на последовательностях
а = («1, az, ..., ап), а, g А произвольной длины п, составленных из символов
данного алфавита А. Если источник имеет фиксированную скорость, в отличие
от источника с регулируемой скоростью, определяемой кодером, то дополни-
тельно задаётся скорость источника ти как число символов, генерируемых та-
ким источником за 1 с. (Мы не будем здесь рассматривать более общий слу-
чай, когда длительности различных символов отличаются друг от друга.)
Говорят, что источник не имеет памяти, если последовательно выдаваемые
им символы взаимно независимы друг от друга. Для полного описания такого
источника достаточно задать лишь распределение вероятностей на отдельных
символах, т.е. P(ai), ai g А, если источник является стационарным, т.е. распре-
деления Р(а) не зависят от временных сдвигов.
В качестве простого примера источника сообщений можно рассматривать печатный текст
на каком-либо языке. Тогда объём алфавита К будет совпадать с объёмом алфавита выбран-
ного языка (26 — для английского, 32 — для русского), а распределение вероятностей будет
определяться вероятностями различных словосочетаний. Очевидно, что это пример источни-
ка с памятью, так как буквы в любом языке не следуют как попало, а подчинены детермини-
рованной или вероятностной зависимости. Так, в английском языке всегда после буквы "q"
следует "и", в русском "ь" не может идти после гласной, а три "е" подряд встречаются лишь в
достаточно редких словах "длинношеее" и "змееед".
Формальное описание дискретного канала связи сводится к заданию двух
алфавитов на входе и выходе канала X = (хо, ..., x/-i), Y = (уо, Ут-1), вообще
говоря, разных объёмов / и т, и условного распределения вероятностей Р(у|х),
где х— (xi, ..., хп), у = (yi, ..., у„) - последовательности символов из соответст-
вующих алфавитов, имеющие произвольную, но одинаковую длину п. Для ка-
нала связи также может дополнительно задаваться скорость передачи как
число символов передаваемых по каналу связи за 1 с. Канал не обладает памя-
тью, если последовательные символы принимаются по нему взаимно незави-
симо друг от друга. В этом случае достаточно знать условное распределение
P(yy|xz), Xi g X, уу g Y, для полного описания такого канала связи.
Рассмотрим некоторые важные частные случаи дискретного канала.
1. т-ичный симметричный канал без памяти (сокращённо — шСК). Это канал с совпадающими
объёмами входного и выходного алфавитов и с условным распределением
222
рЬ1х<)=
1-р, yj = xi’
р/(т-1), yj^X/.
(6-5)
Наглядно равенство (6.5) означает, что все символы, передаваемые по такому каналу свя-
зи, принимаются правильно с одинаковыми вероятностями (1 — р) и каждый символ мо-
жет перейти в любой другой, отличный от переданного, также с одной и той же вероятно-
стью р/(т — 1). (Напомним (см. гл. 5), что при оптимальном когерентном приёме /п-ичных
ортогональных сигналов в детерминированном канале с белым шумом мы как раз и полу-
чим /пСК).
2. Двоичный симметричный канал без памяти (сокращённо ДСК или 2СК). Это частный случай
/пСК при т = 2.
3. Двоичный по входу симметричный канал без памяти со стираниями символов. Это канал
без памяти с двоичным входным алфавитом X = (хь, xi) и троичным выходным алфавитом
Y = (уо, yi, Уг) с условным распределением
1-Рс,
Л»
i = j,
(6-6)
О,
где pc — вероятность стирания (или вероятность приёма ненадёжного символа). Этот при-
мер показывает, что не обязательно объемы входного и выходного алфавитов должны сов-
падать. В данном случае третий выходной символ у2 сформирован "искусственно" как не-
надёжно принятый символ -Xq или х\. (При когерентном оптимальном приёме сигналов
равной энергии решение о нём может приниматься, если абсолютная величина корреля-
ционного интеграла в (5.27) меньше некоторого заданного порога).
4. Двоичный канал с аддитивным шумом. Это канал с двоичными алфавитами на входе и вы-
ходе, обладающий в общем случае памятью. Условные распределения в таком канале связи
имеют вид
Лу1х) = Р(е = у Ф х), (6.7)
где Ф — означает попарное сложение по mod2 всех элементов последовательности х и у
(напомним, что правила сложения по mod2 имеют вид О Ф 0 = О, О Ф 1 = 1, 1 Ф 0 = 1,
1 Ф 1 = 0); Р(е)~ распределение вероятностей, заданное на произвольных двоичных после-
довательностях. Наглядно равенство (6.7) означает, что переход некоторой входной после-
довательности х в выходную у однозначно определяется так называемым образцом (или
вектором) ошибок е, который имеет единицы в тех позициях, где х и у отличаются, и нули
в остальных позициях.
Определим формально кодирование в дискретном канале как однозначное
отображение последовательностей, составленных из символов источника, в по-
следовательности, составленные из входных символов канала связи. Декодиро-
ванием будем называть однозначное отображение последовательностей, состав-
ленных из выходных символов канала в последовательности, составленные из
символов источника. Здесь мы полагаем, что алфавиты символов источника и
получателя информации совпадают. Длины последовательностей на входе ка-
нала, соответствующие различным последовательностям символов источника,
могут быть, вообще говоря, различными. Тогда кодирование называется нерав-
номерным.
Примером неравномерного кодирования может служить известный код Морзе. Действи-
тельно, в этом коде букве "е" соответствует последовательность из одной точки а букве
"щ" — последовательность из четырёх тире "-". Заметим, что код Морзе - это кодирова-
ние не с двоичным входным алфавитом (точка и тире), как может показаться на первый
взгляд, а с троичным алфавитом: точка, тире и пробел.
Если длины всех последовательностей одинаковы, то кодирование называ-
ется равномерным. Легко определить первую функцию кодирования и декоди-
рования. Она, очевидно, состоит в том, чтобы согласовать алфавит источника
223
сообщений с алфавитом входа канала и соответственно алфавит выхода канала
с алфавитом источника получателя сообщений. Такое согласование действи-
тельно обеспечивает принципиальную возможность передавать последователь-
ность символов источника сообщений к получателю через заданный дискрет-
ный канал связи. Однако произвольно выбранное "согласование"
(кодирование-декодирование) не гарантирует ещё надёжной и быстрой переда-
чи таких сообщений. Задача настоящей главы как раз и будет состоять в том,
чтобы найти потенциальные возможности кодирования и декодирования (при
отсутствии ограничений на их сложность), когда информация может быть пе-
редана со сколь угодно высокой верностью при максимально возможной ско-
рости её передачи от источника к получателю. В следующей главе мы рассмот-
рим регулярные способы кодирования-декодирования с учётом сложности их
реализации на практике. Для формулировки и доказательства теорем кодиро-
вания теории информации нам потребуется изложить некоторые новые поня-
тия, которые имеют и самостоятельное значение.
6.2.2. ОСНОВНОЙ ПОНЯТИЙНЫЙ АППАРАТ ТЕОРИИ
ИНФОРМАЦИИ
Частное количество информации. Пусть дискретный источник сообщений,
описанный в § 6.2.1, выдал некоторую последовательность символов а. Дадим
формальное определение частного количества информации i(a), содержащейся в
этом сообщении, исходя из следующих естественных требований.
1. Количество информации z(a) должно быть аддитивной функцией, т.е. для
пары взаимно независимых сообщений а\, аг оно должно равняться сумме
количества информации в каждом из них, т.е. z(«i, л2) = /'(«]) + z(«2).
2. Количество информации, содержащейся в достоверном сообщении
(имеющем вероятность Р(а) =1), равно нулю.
3. Количество информации должно зависеть только от вероятности переданно-
го сообщения, т.е. /(«) =ДР(л)).
4. Количество информации должно быть непрерывной функцией от Р(а).
Можно показать, что единственная функция, удовлетворяющая всем этим
условиям, имеет вид
i(a) = -logP(«) >0. (6.8)
Основание логарифма в (6.8) может быть выбрано произвольным, что
влияет лишь на единицу измерения количества информации. Если в качестве
основания выбрано 2, то информация измеряется в двоичных единицах или в
битах, а если е (как в натуральных логарифмах), то информация будет изме-
ряться в натуральных единицах или в натах. (В дальнейшем мы увидим, что
выбор основания логарифма никак не повлияет на основные результаты тео-
рии информации, а именно на теоремы кодирования.) Из соотношения (6.8)
видно, что количество информации, содержащейся в сообщении, тем больше,
чем меньше вероятность его появления, причём количество информации, со-
держащейся в сообщении о "невозможном" событии, равно бесконечности.
(Образно говоря, количество информации пропорционально "удивлению" от
того, что оно произошло, причём "чудо", имеющее вероятность своего появле-
ния, близкую к нулю, даёт количество информации, близкое к бесконечности.)
Можно предвидеть возражения читателя, состоящее в том, что некоторые
маловероятные, но не значимые для нас события (например, то, что муха села
именно в данную точку потолка) не несут для нас информации, по крайней
224
мере в утилитарно понимаемом смысле этого слова. Поэтому следует сразу же
подчеркнуть, что в теории информации, относящейся к связным проблемам,
не рассматривается вопрос о полезности информации1). Мы всегда выступаем
здесь в роли связистов — "служащих", задача которых передать по каналам свя-
зи выданную нам источником информацию, не рассуждая о её полезности.
Посмотрев же на проблему именно под этим углом зрения, можно интуитивно
согласиться, что передать по каналу связи сообщение о расположении мухи в
определённом месте потолка труднее, чем, например, сообщение отцу о рож-
дении долгожданного сына, а не дочери.
Энтропия источника сообщений. Выше мы определили частное количество
информации, содержащееся в некоторой последовательности а, выданной ис-
точником сообщений. Однако сам факт генерирования именно этой последо-
вательности является случайным событием, имеющим вероятность Р(а), а, сле-
довательно, случайной величиной оказывается и количество информации z(a).
Поэтому можно поставить вопрос о среднем количестве информации, выда-
ваемом некоторым источником сообщений, которое можно определить как ма-
тематическое ожидание случайной величины z(a). Если пока ограничиться
лишь последовательностями длины п, обозначив их aW, то в соответствии с
известной формулой для математического ожидания дискретной случайной ве-
личины, мы получаем
к"
A/{z(a1"’)} = A/{-logP(aw)} = (6.9)
1=1
где суммирование, как видно, производится во всем возможным последова-
тельностям длины п с элементами, взятыми из алфавита объёма К. Для того,
чтобы получить исчерпывающую информационную характеристику источника
сообщений, который, вообще говоря, может выдавать последовательности не-
ограниченной длины, нужно вычислить предел среднего количества информа-
ции z(al"l), отнесённый к одному символу последовательности. Полученная ве-
личина, которую мы, следуя ещё установленной Шенноном традиции [29],
обозначим через #(А), называется энтропией источника сообщений, т.е.
1 к"
Я(А) = -Нт-^р(а'л1)^р(л'л1). (6.10)
Если берется логарифм по основанию 2, то Н(А) измеряется в битах на
символ. Выражение (6.10), очевидно, будет иметь смысл лишь тогда, когда
предел в его правой части существует. .Это свойство выполняется для стацио-
нарных источников. Заметим, что буква А в обозначении энтропии Я(А) ука-
зывает на определённый источник с алфавитом А, причём для краткости опус-
кается вид вероятностного распределения р(а). Если источник не обладает па-
мятью, то, используя свойство логарифмической функции, легко показать, что
его энтропия будет
Я(А)—SP(e,)logP(e,), (6.11)
i=0
где* P(«z), z = 0, 1, ..., К— 1, — вероятности выдачи источником символов
aj е А, причём они не зависят от номера элемента последовательности, так как 11
11 Это не исключает возможности применения аппарата теории информации для оценки ее
полезности в других дисциплинах.
225
источник является стационарным. Прежде чем пояснить наглядный смысл но-
вого понятия энтропии, опишем её основные свойства.
1. Я(А) > 0, причём Я(А) = 0 тогда и только тогда, когда одна из последова-
тельностей имеет единичную вероятность, а все остальные — нулевую. (Это
свойство очевидно из определения энтропии.)
2. Для любого стационарного источника сообщений (
Я(А) < -S P(«,)log Р(л,) • (6.12)
i о
Поскольку выражение в правой части (6.12) - это энтропия источника без
памяти, то данное свойство означает, что память уменьшает энтропию источ-
ника. Данное свойство, хотя очевидное, требует специального доказательства
[16], которое здесь не приводим.
3. Для любого стационарного источника сообщений
Я(А) < log* = Ятах(А); (6.13)
причём равенство имеет место тогда, и только тогда, когда источник не имеет
свойства 3
памяти и все его символы равновероятны.
Из свойства 2 следует, что при доказательстве неравенств (6.13) мы сразу
можем ограничиться источниками без памяти. Для доказательства
рассмотрим разность
1
Р(Ч)
1
i о
Н( А) - log К = Р fa ) log
i О
Далее воспользуемся известным неравенством Inx < х - 1, х > 0.
Тогда
К 1
Я(А)-log* «Hoge •£/>(«,)
i О
1
-r-v-1
К 1
= loge- X
(6.14)
(6.15)
К 1
i О
Равенство в (6.15) будет иметь место только при p(«z) = 1/К, что и доказы-
вает данное свойство.
Воспользовавшись свойствами 1-3, можно наглядно пояснить смысл поня-
тия энтропии — это средняя информативность источника на один символ, оп-
ределяющая "неожиданность" или "непредсказуемость" выдаваемых им сооб-
щений. Полностью детерминированный источник, выдающий лишь одну, за-
ранее известную последовательность, обладает нулевой информативностью.
Наоборот, наиболее "хаотический" источник, выдающий взаимно независимые
и равновероятные символы, обладает максимальной информативностью.
Здесь уместно привести пример с обезьяной, сидящей за пишущей машинкой (в более
современном варианте — за клавиатурой компьютера). Если она обучена ударять по клави-
шам, но, очевидно, не знает грамоты, то "обезьяний" текст окажется примером текста с вза-
имно независимыми и равновероятными символами. Поэтому он будет обладать наибольшей
энтропией, превосходящей энтропию осмысленного текста на каком-либо языке. Несмотря
на бесполезность обезьяньего текста, как мы увидим в дальнейшем, передавать его по кана-
лам связи сложнее, чем какой-либо смысловой текст.
Энтропия источника сообщений тесно связана с понятием его избыточно-
сти, которое формально определяется следующим образом:
226
эе =
log£-#(A)
log/C
•100%= 1-
я(аГ|
log/J
•100% >0.
(6.16)
Как видно из выражения (6.16), чем больше энтропия источника, тем
меньше его избыточность и наоборот.
Известно, что избыточность естественных языков является весьма важным
свойством, позволяющим воспринимать рукописный или искажённый текст,
слышать речь в больших акустических помехах и т.д. Теория информации, как
мы убедимся в дальнейшем, позволяет количественно оценить эти возможно-
сти. Для экспериментального вычисления энтропии или избыточности естест-
венных языков используются статистические данные о частости, с которой
встречаются буквы текста и их сочетания (биграммы, триграммы и т.д.). Так,
если воспользоваться так называемой статистикой английского языка 1-го по-
рядка (т.е. частостью отдельных букв), то энтропия оказывается равной 4,03
бит/букву, а если статистикой порядка, то 3.32 бит/букву. В то же время более
точную оценку энтропии можно получить, воспользовавшись, например, пред-
ложенным ещё К. Шенноном "методом случайного угадывания" [29]. Такой
подход даёт верхнюю оценку энтропии английского языка 2 бит/букву и ниж-
нюю 1 бит/букву. Это позволяет сделать вывод, что основная избыточность ес-
тественного языка определяется многомерными
зависимостями между буквами (корреляцией тек-
ста), и для её_ использования необходимо знать эти
зависимости. Аналогичные выводы можно сделать
и относительно русского и других языков, хотя их
энтропии и несколько отличаются друг от друга.
(Известно, например, что одна и та же пьеса
В. Шекспира идёт в Берлине дольше, чем в Лон-
доне.)
Наиболее простую форму принимает энтропия
в случае двоичного источника сообщений без па-
мяти. Если для краткости обозначить Р(ао) = Л0)
и P(ai) = Р(1), то
Рис.6.1. Энтропия двоичного
источника без памяти
Я(А) = -[ P(o)log Р(о) + P(l)log Р(1)] = -[P(o)log Р(0) +(1 - P(o))log(l - Р(о))] (6.17)
Вид этой функции показан на рис. 6.1 для основания логарифма, равного
двум.
Если источник сообщений имеет фиксированную скорость уи=-~г симв/с,
‘и
то определим производительность источника Я'(А) как энтропию в единицу
времени, (секунду):
Я'(А) = уиЯ(А). (6.18)
Максимум (6.18) R* - (бит/с) обычно называют информационной ско-
ростью источника.
Количество информации, передаваемой по каналу связи (взаимная информа-
ция). Рассмотрим некоторый дискретный канал связи, заданный алфавитом
227
входа и выхода (X,Y) и условным распределением Р(у]х), х еХ", yeY"1), и
предположим, что на вход канала непосредственно поступают сообщения от
некоторого дискретного источника сообщений с алфавитом А, совпадающим с
входным алфавитом канала X. Это предположение эквивалентно условию, что
сам вход канала представляет собой дискретный источник сообщений с алфа-
витом X и распределением вероятностей последовательностей, составленных из
символов этого алфавита. Пусть этот источник имеет некоторую энтропию
ЩХ) и выдаёт последовательность х. Тогда, если на выходе канала появилась
некоторая последовательность у, то можно поставить следующий вопрос: как
рассчитать количество информации z(x|y), содержащейся в х, при условии, что
на выходе появилась последовательность у? Ответ на него легко получить, вос-
пользовавшись определением частного количества информации (6.8), но при
замене безусловного распределения вероятностей на условное, т.е.
*СФ) = -logP(x|y) > 0. (6.19)
Определим условную энтропию #(X|Y) входа канала X при известном выходе
Y как МО (6.19) аналогично тому, как это было сделано при нахождении эн-
тропии источника из выражения (6.10),
1п тп
Н(х&)= > (6-20)
где, как и раньше, верхний индекс п в квадратных скобках означает длину
входных и выходных последовательностей.
В частном случае канала без памяти легко получить из (6.20)
/1ml, ,
я(х|¥) = -SZ Hwjlog Р(х,|у,). (6.21)
i 0 J 0
Условная энтропия обладает следующими свойствами:
1. Я(Х|У)>0.
(Доказывается по определению Я(Х|У)).
2. Если вход и выход канала связаны взаимно однозначно, т.е.
Р(х\ ) = Р’ у = у(х)е¥п,
\ХУ) [0, у*у(х), у(х>М4 ПРИ Xj X; ,
то H(X/Y) = 0 (Это свойство очевидно.)
3. Я(Х|У) < (X). (6.22)
(Требует специального доказательства (см.[16]).)
4. Я(Х|У) = Я(Х) (6.23)
тогда, и только тогда, когда Р(х|у) = Р(х) при всех х еХ", у gY" , т.е. когда х
и у взаимно независимы. (Проверяется непосредственно.) Приведённые вы-
ше свойства позволяют наглядно пояснить смысл понятия условной энтро-
пии Я(Х|У). Это средняя информация, теряемая с каждым символом в кана-
ле связи из-за помех. Действительно, так как Я(Х|У)>0, то информация из-за
помех всегда теряется, но никогда не приобретается. Если ошибки в канале
отсутствуют, т.е. каждая входная последовательность переходит в одну, и
только в одну выходную последовательность, то Я(Х|У) = 0, то потери ин-
формации отсутствуют. (Не исключена ситуация, когда входная последова-
Здесь и далее X" и Y" означает пространство (множество) всех векторов входа и выхода
канала длины п, элементы которых берутся из алфавитов X и Y соответственно..
228
тельность переходит с некоторыми вероятностями в разные выходные, но
всё же по выходной последовательности можно однозначно определить
входную. Тогда по-прежнему 7/(X|Y) = 0 и потери информации будут отсут-
ствовать.)
Наконец, если выход канала не зависит от входа, а именно это и означает
совпадение условных и безусловных вероятностей, то по каналу связи не будет
передаваться никакой информации, а поскольку на вход канала поступает ин-
формация Я(Х), то вся она оказывается потерянной из-за помех, т.е.
Я(Х|У) = Я(Х).
Определим количество информации, передаваемой по каналу связи /(X,Y),
или взаимную информацию между выходом Y и входом X как разность между
количеством информации, поступающей на вход (которое, как мы знаем, рав-
но энтропии входа Я(Х)), и количеством информации, потерянным в канале
связи (которое, как мы только что выяснили, равно условной энтропии
Я(Х|У)). Поэтому
Z(X,Y) = Я(Х) - Я(Х|У). (6.24)
Эта величина обладает следующими свойствами:
1. Z(X,Y) = Z(Y,X) = tf(Y) - Я(У|Х),
где энтропия выхода //(Y) и условная энтропия выхода при известном входе
7/(Y|X) определяются совершенно аналогично (6.10) и (6.20), с той лишь
разницей, что имеющиеся там распределения Р(а,?"1) = и р[х?и1|уУ’1)
должны быть заменены на /’(yj"1) и соответственно. Это свойство
требует доказательства (см.[16]).
2. Z(X,Y) > 0
(Следует непосредственно из свойства 3 условной энтропии.)
3. /(X,Y) = 0, тогда и только тогда, когда вход и выход канала статистически
независимы, т.е. Р(у|х) = р(у) при всех х еХ", yeY". (Следует непосредст-
венно из свойства 4 условной энтропии.)
4. Z(X,Y) < (X)
(Следует из определения Z(X,Y) и свойства 1 условной энтропии.)
5. Если в канале связи отсутствуют помехи, то
Z(X,Y) = Я(Х)
(Следует из свойства 2 условной энтропии.)
6. Z(X,Y) < Я(У).
(Следует из свойства 1 для количества переданной по каналу информации и
свойства 1 для условной энтропии.)
7. ДХ,Х) = Я(Х).
(Получается формально непосредственно из определения, если положить
х = у, X = Y.)
8. Любые детерминированные или случайные преобразования выходных после-
довательностей канала, в том числе и группировка наблюдений, т е. объеди-
нение нескольких последовательностей, принадлежащих определённому
подмножеству в. один символ, не могут увеличить количество информации.
В случае, если эти преобразования взаимно однозначные — количество ин-
формации не меняется. Отмеченное свойство следует из того, что, пройдя по
каналу (преобразователю) информация или теряется (при наличии неод-
229
позначных преобразований) или не изменяется (при однозначных преобра-
зованиях). Это свойство доказывается, например, в [16].
Формула (6.24) для взаимной информации может быть преобразована так-
же к следующему виду, который иногда более удобен для расчётов:
/(x,Y) = lim-
и п
В частном случае канала без памяти получаем
Z(X,y) = / \ (\ (6-25)
i ° j °
Формула (6.25) подтверждает первоначальное определение /(X,Y) как коли-
чества информации, передаваемой по каналу связи с помехами. Действительно,
если имеется обрыв канала, соответствующий отсутствию статистической связи
между входом и выходом, то информация по каналу не
передаётся (свойство 3). Если в канале помехи отсутствуют,
то информация передаётся полностью (свойство 5).
Свойство 1 оказывается менее очевидным. Оно показывает, что количество
информации, передаваемой со входа на выход и "как бы" с выхода на вход,
оказывается одним и тем же. По существу это свойство и позволяет определить
величину /(X,Y), задаваемую соотношением (6.24), как взаимную информацию
между X и Y (или, что то же самое, между Y и X). Таким образом, величина
/(X,Y) подобно коэффициенту корреляции для гауссовских случайных величин
выступает здесь как мера статистической зависимости между входом X и выхо-
дом Y канада связи. Свойство 1 упрощает расчёт /(X,Y) в некоторых случаях,
что определяется следующим свойством условной энтропии.
9. Для двоичного канала с аддитивным шумом (§ 4.5)
Я(У|Х) = Я(Е),
где Я(Е) — энтропия помехи, задаваемая соотношением (6.10), в котором
распределение p(ai[”1) заменено на распределение образцов ошибок p(ej”]).
(Данное свойство требует специального доказательства — см., например,
[16].) Объединив свойство 9 для условной энтропии в канале с аддитивным
шумом и свойство 1 для количества передаваемой информации, получаем
следующее представление:
Z(X,Y) = ад - ад. (6.26)
Определение взаимной информации наглядно иллюстрируется рис. 6.2.
230
ДХ.У)
Рис.6.2. Иллюстрация передачи информации по каналу с помехами
Если для канала связи задана скорость передачи vK [симв/с], то аналогично
определению производительности источника можно определить скорость пере-
дачи информации по каналу связи /'(X,Y):
/'(X,Y) = vK /(X,Y) [бит/с]. (6.27)
Определим пропускную способность С дискретного канала связи с помехами
как максимум количества информации /(X,Y) по всевозможным распределени-
ям р(х) входа канала, т.е.
С = шах/(Х,У). (6.28)
Из определения видно, что пропускная способность канала связи зависит
только от свойств самого канала, т.е. входного и выходного алфавитов X, Y и
заданного на них условного распределения вероятностей р(у|х), х еХ", yeY",
и не зависит от того источника, который подключён ко входу канала.
Пропускная способность канала имеет следующие свойства:
1. С = max
(Следует из свойства 1 количества информации.)
2. С> 0.
(Следует из свойства 2 количества информации.)
3. С= 0
тогда и только тогда, когда вход и выход канала статистически независимы,
т.е. имеет место "обрыв канала". (Следует из свойства 3 количества инфор-
мации.)
4. С < log/n.
(Следует из свойства 4 количества информации и свойства 3 для энтропии, в
данном случае К = т.)
5. С = log/n при отсутствии помех в канале связи. (Следует из свойства 5 коли-
чества информации и свойства 3 для энтропии.)
6. С < max{/7(Y)} < max{/7(Y)}.
Р(Л) Р(у)
(Следует из свойства 6 для количества информации.)
Представляет значительный интерес вычисление пропускной способности
для различных каналов связи с помехами. В общем случае это достаточно
сложная, а иногда и просто необозримая задача. Однако для некоторых рас-
смотренных ранее моделей каналов это оказывается вполне возможным.
1. /пСК без памяти.
Воспользуемся для расчёта пропускной способности такого канала форму-
лой, определяемой свойством Г.
C = max{/Z(Y)-ZZ(Y|X)}. (6.29)
231
-2Xx,)s
/О J о
Покажем, что условная энтропия Я(У|Х) в тСК не зависит от входного
распределения Р(х). Действительно, по её определению для канала без памяти
получаем из преобразованного для Я(У|Х) (6.21)
яМх)=-ZZ =
ml ml
p
(6.30)
=-Ep(x/)(plog-£-+(i-p)iog(i-p)j =
f 0 \ m L z
= -(p log + (1 - p) log(l -
Поэтому (6.29) можно переписать следующим образом:
C = imx{^(Y)}+plog^^+(l-p)log(l-p). (6.31)
По свойству 3 энтропии Я(У) < log/n, но если выбрать равномерное распре-
деление на входе, т.е. p(xj) = \/т, i = 0, 1,..., т~ 1, то получим
= S р WP(X/|X') = “S PUh)= (6,32)
/о "* i О 111
и, следовательно,
тах{Я(У)} = log/и, (6.33)
Р(у)
причём максимум достигается на равномерном входном распределении. Под-
ставляя (6.33) в (6.31), окончательно получаем
С = log т+р log + (1 - р) 1 og( 1 - р). (6.34)
2. 2СК без памяти.
Это частный случай /иСК при т = 2. Подставляя т = 2 в (6.34), находим
(для основания логарифмов 2)
С = l+plog2p+(l-p)log2(l-р) (бит/символ). (6.35)
3. Двоичный по входу стирающий канал
С = 1 - рст (бит/символ). (6.36)
(Получение этого выражения требует доказательства, хотя оно и является
достаточно простым (см., например [16].)
4. Двоичный канал с памятью и аддитивным шумом.
Из свойства 1 для количества информации и свойства 5 условной энтропии
получаем
С = max{H( Y)} - Я(Е). (6.37)
Р(у)
Аналогично тому, как это было доказано в (6.32), получаем, что при выбо-
ре взаимно независимых и равновероятных символов х, символы у, на выходе
также оказываются взаимно независимыми и равновероятными. Поэтому вы-
полняется (6.33), подставляя которое в (6.37) находим
С = 1 - Я(Е) (бит/символ). (6.38)
Отметим, что энтропия источника помехи Е в виде последовательности
двоичных символов с вероятностями р и 1 — р удовлетворяет неравенству
Я(Е) < -plog2P - (1 - p)log2( 1 - р) (бит/символ),
232
причём равенство наступает лишь для источника помех без памяти.
Таким образом, пропускная способность двоичного канала с памятью
(6.38) больше пропускной способности 2СК без памяти (6.35), что является
любопытным фактом.
Из формулы (6.34) видно, что С= 0 для /пСК при р = ——1-р = —. Это
т т
как раз и соответствует случаю "обрыва канала связи", поскольку каждый из
входных символов с равной вероятностью переходит в любой из выходных.
Наблюдая выходные символы, нельзя отдать предпочтение ни одному из вход-
ных символов, а это и соответствует понятию обрыва канала, когда передача
информации по нему оказывается совершенно бесполезной, поскольку тот же
результат может быть получен при случайном угадывании входных символов в
точке приёма.
На рис. 6.3 показана зависимость пропускной способности 2СК без памяти
от вероятности ошибки символа р в канале связи. Как и следовало ожидать,
пропускная способность равна нулю при р = 1/2. Несколько неожиданным на
первый взгляд может показаться то, что С = 1 также и при р = 1. Однако в
действительности случай, когда р = 1, - это отнюдь не состояние канала с
наибольшими помехами, а состояние с так называемой обратной работой, ко-
гда все нули переходят в единицы, а единицы — в нули. Однако поскольку это
свойство канала предполагается заранее известным (так как нам известно, что
р = 1), то мы можем осуществлять декодирование по правилу 0 —> 1, 1 —> 0.
Тогда все входные символы будут приниматься абсолютно верно, и поэтому
вполне естественно, что пропускная способность такого канала равна макси-
мальной величине.
Заметим, что эта ситуация отличается от "обратной работы", описанной в гл. 5 и являю-
щейся следствием квазикогерентного приёма ФМ сигналов. Дело в том, что скачки фазы там
возникают в случайные моменты времени, приводя к участкам то правильной, то "обратной
работы". Мы не знаем моментов скачков и поэтому не можем скорректировать их обратным
декодированием. Модель такого канала отнюдь не эквивалентна 2СК, имеющему вероятность
ошибки р = 1.
Подчеркнём, что формула для пропускной способности 2СК имеет наибо-
лее простой вид при выборе двоичного основания логарифма, когда пропуск-
ная способность канала связи измеряется в дв. ед./символ или, что то же са-
мое, — в бит/символ.
Рис.6.3. Зависимость пропускной
способности 2СК без памяти
от вероятности ошибки символа
Можно определить пропускную способность
канала С в единицу времени как
С = vKC, -
где vK — скорость передачи символов по каналу свя-
зи (число символов в 1 с). Если при определении
использован двоичный логарифм, то С будет изме-
ряться в бит/с.
Аналогично условной энтропии можно ввести
понятие средней условной взаимной информации.
Ограничиваясь" для простоты случаем канала без
памяти, получаем
233
/(x, Y|z) = S S S P (x,y,z) log ’ 7 pc.
xeXytfzeZ
Однако в отличие от условной энтропии, для которой всегда справедливо
неравенство (6.22), условная взаимная информация /(Z,X|Y) может быть мень-
ше, больше или равна безусловной взаимной информации /(X,Y).
Помимо средней условной взаимной информации можно определить также
среднюю взаимную информацию между парой X,Y и Z:
хеХуе¥:ё1 r\X,yjp\Z)
Между данными величинами существуют следующие соотношения [16]:
/(X,Y;Z) = /(X,Z) + 7(Y,Z|X) = /(Y,Z) + /(X,Z|Y). (6.39)
Для того чтобы наглядно пояснить разницу между величинами /(X,Y;Z) и
jT(X,Z|Y), которые на первый взгляд могут показаться одинаковыми, рассмот-
рим следующую модель канала связи:
х = z Ф у Ф е,
где Ф — означает суммирование по mod2, а х, у, е — некоторые двоичные слу-
чайные величины, причём наглядно z означает вход канала, х — выход канала,
е — помеху в канале, а у — дополнительную преобразующую последователь-
ность на передаче.
Тогда если у не зависит от г, то /(Z,Y) = 0 и в соответствии с (6.39)
/(Z, X; Y) = /(Z, X|Y) = 1 - Я(Е), где Я(Е) - энтропия помехи Е. Если же z и у
взаимно зависимы, то /(Z, Y) > 0 и поэтому /(Z, X; Y) > /(Z, X|Y). В частном
случае, если х = у, то /(Z, X|Y) = 0, a /(Z, X; Y) = 1.
Теоретико-информационные понятия, приведённые в данном* разделе, можно рассматри-
вать в двух аспектах: как развитие математического аппарата, примыкающего к теории веро-
ятностей, и как характеристику, поясняющую процесс передачи информации по каналам свя-
зи с помехами. Действительно, мы знаем теперь, что средняя информативность источника
может быть количественно оценена его энтропией, а каждому источнику, соединённому с
каналом связи, можно приписать некоторое число, которое выражает количество информа-
ции, переданной по этому каналу. Более того, каждому каналу соответствует некоторое пре-
дельное количество информации, называемое его пропускной способностью, больше кото-
рого данный канал связи не может пёредать ни от какого из источников сообщений. Эта
пропускная способность максимальна при отсутствии помех и равна нулю при потере стати-
стической связи между входом и выходом канала. Казалось бы, мы получили сведения, по-
зволяющие нам значительно продвинуться вперед в направлении понимания процессов пере-
дачи сообщений по каналам с помехами. Однако это ещё лишь некоторое "предвосхищение
результатов". Действительно, как мы можем использовать значение энтропии источника для
чего-либо большего, чем тавтология, утверждающая, что он генерирует среднюю информа-
цию, равную энтропии? Как превратить наше определение пропускной способности канала в
более реальные в практическом отношении характеристики процесса передачи информации
— надёжность и скорость передачи символов источника? Много это или мало, что пропуск-
ная способность одного канала больше другой на 5 %, на 50 %, в 10 раз? Важный факт гово-
рит о том, что обрыв канала (С = 0) возникает при отсутствии статистической связи входа и
выхода, т.е. легко получается и без использования информационного аппарата. Итак, мы ис-
пытываем пока некоторое разочарование в теории информации. Нам начинает казаться, что
"гора родила мышь". Однако это происходит лишь потому; что мы не затронули пока самого
важного аспекта теории информации — теорем кодирования. Именно они и позволяют отве-
тить на все сформулированные выше, а также и на многие другие вопросы. Заметим, что для
доказательства и наглядной трактовки теорем кодирования совершенно не требуется интуи-
тивного понимания энтропии, условной энтропии, количества информации и т.д. Вполне
234
достаточным оказывается рассматри-вать данный раздел именно как развитие некоторого ма-
тематического аппарата, доказывающего свойства этих специфических функций вероятност-
ных распределений.
6.2.3. ТЕОРЕМЫ КОДИРОВАНИЯ ШЕННОНА ДЛЯ
ДИСКРЕТНОГО КАНАЛА СВЯЗИ
Рассмотрим сначала теорему кодирования в канале без помех, который,
очевидно, является частным случаем канала с помехами. Наилучшее кодирова-
ние состоит в том, что при заданном канале связи, который определяется объ-
ёмом алфавита т и скоростью передачи канальных символов vK, а также при
заданном источнике информации, определяемом вероятностным распределе-
нием р(а) последовательностей, составленных из символов, принадлежащих
алфавиту источника А, обеспечить наибольшую возможную скорость передачи
символов источника уи. Заметим, что содержательность проблемы кодирования
в канале без помех определяется не только несовпадением объёмов алфавитов
источника и канала, но также и тем обстоятельством, что если источник обла-
дает памятью или (и) его символы не равновероятны, то эти особенности
можно существенно использовать для увеличения скорости передачи информа-
ции от данного источника. Конструктивные методы такого кодирования будут
рассмотрены в следующей главе, а сейчас мы изучим асимптотические резуль-
таты, т.е. кодирование при неограниченных последовательностях символов ис-
точника и канала связи, сопоставляемых друг с другом. Для этого нам понадо-
бится одна теорема, которая по существу является некоторой версией закона
больших чисел, известного в теории вероятностей.
Теорема о свойстве асимптотической равновероятности (САР). Для любых
заданных сколь угодно малых положительных чисел е и 8 можно найти такое чис-
ло п (зависящее от е, 8 и свойств источника), что с вероятностью большей, чем
1—5, источник сообщений выдаёт последовательность длины п, которая име-
ет вероятность p(aw}, удовлетворяющую неравенству
^°8йЙ’Я(А)
(6.40)
< £
где Я(А) — энтропия данного источника.
Эскиз доказательства для стационарных источников без памяти имеет сле-
дующий вид. Согласно закону больших чисел при достаточно большом п час-
тота пДп события, состоящего в появлении символа az в последовательности
длины п, стремится к вероятности P(az), т.е.
. nJn-> P(at). (6.41)
С другой стороны, если некоторая последовательность содержит п0
символов а0, символов ах и т.д. пк_х символов ак_х, то вероятность её появ-
ления
Р (в1”1) = (а0) • Рп' (aj.. ,Рп^
Тогда
n10gp(a[nl)
(6.42)
235
Подставляя (6.41) в (6.42), получаем, что величина —log—7-7-^ будет стре-
п P\aw)
миться по вероятности к
- S ^(^)log p(at) = Я(а).
i О
(Аналогично, хотя и более громоздко, доказывается данная теорема и для .ста-
ционарных источников с памятью).
По существу теорема САР означает, что при достаточно большой величине
п все последовательности, выдаваемые источником разбиваются на две группы,
называемые соответственно типичными и нетипичными. Первые последователь-
ности примерно равновероятны, и количество их приблизительно
"-Ж2*1’ <6'43)
Что же касается нетипичных последовательностей, то они могут иметь раз-
ные вероятности, но вероятность появления хотя бы одной из них стремится к
нулю при л->оо. Заметим, что число типичных последовательностей опреде-
лённой длины оказывается значительно меньше общего возможного числа по-
следовательностей такой же длины. Например, общее число последовательно-
стей букв русского языка длины п = 10 равно 3210« 1015, в то время как число
типичных последовательностей такой же длины, если положить энтропию рус-
ского языка равной 1,5 бит/символ, оказывается всего лишь 2101’5 «ЗЗООО, что
примерно соответствует объёму типичного словаря.
Теорема САР оказывается справедливой и для пар последовательностей
уМ, относительно которых утверждается, что при достаточно больших п с ве-
роятностью 1-5 источник выдаёт пару последовательностей, для которых их ус-
ловные вероятности будут удовлетворять неравенствам
-log / Д [Л-Я(Х|у)
п p(x[nl|y[nl)
(6.44)
(6-45)
где с - сколь угодно малая величина. Теперь мы подготовлены к формулиров-
ке и доказательству теорем кодирования.
ТЕОРЕМА 1. О кодировании источника.
Существует способ кодирования, при котором средняя длина последовательно-
сти канальных символов п , приходящаяся на один символ источника сообщений,
_ vK Я(А)
П =----------= ~----+ £,
vH log т
(6.46)
u _ //(А)
Не существует способа кодирования, при котором п меньше, чем -------.
log т
Доказательство данной теоремы для источника без памяти будет дано в
следующей главе. Прикладной смысл этой теоремы состоит в том, что при
наилучшем кодировании в канале без помех мы можем передавать сообщения
источника сообщений со скоростью уи, сколь угодно близкой к величине
236
v=v^. (6.47)
и к Я(А) v 7
и невозможно передавать сообщения со скоростью ги большей, чем (6.47).
Видно, что скорость передачи оказывается тем большей, чем меньше энтропия
источника или чем больше его избыточность, что очевидно соответствует наей
интуиции, подсказывающей возможность более быстрой передачи сообщений
за счёт устранения содержащейся в них избыточности. Такой метод кодирова-
ния называется также кодированием источников сообщений или иногда — ста-
тистическим или экономным- кодированием (сжатием) сообщений.
Поскольку теорема 1 даёт условие лишь для средней длины блока каналь-
ных символов, то очевидно, что в отдельные моменты времени эти длины мо-
гут оказаться значительно больше средней длины, а это потребует для источ-
ников с фиксированной скоростью использования специального буферного
устройства для поглощения задержки поступающих сообщений. Можно пока-
зать, что с вероятностью единица накопитель любой конечной ёмкости рано
или поздно будет переполнен, т.е. произойдёт потеря информации. Заметим,
что указанное выше кодирование является обычно неравномерным. Поэтому
для источников сообщений с фиксированной скоростью имеет смысл следую-
щее видоизменение теоремы 1, в котором используется равномерное кодирова-
ние.
ТЕОРЕМА 2. О кодировании в канале без помех.
Существует способ кодирования и декодирования в канале без помех, при ко-
тором для длины п последовательности канальных символов, приходящихся на один
символ источника, будет выполняться соотношение (6.46), причём вероятность
ошибки не превосходит любой сколь угодно малой величины 8 > 0.
Заметим, что здесь под вероятностью ошибки понимается вероятность того,
что последовательность символов, выданная получателю, будет отличаться от
соответствующей ей последовательности символов, переданной источником
сообщений. Несмотря на то, что мы имеем здесь дело с каналом без помех,
ошибки в принятом сообщении появляются вследствие специального способа
кодирования.
Доказательство. Как следует из (6.43), число типичных последовательностей источника
длиной «и будет асимптотически (при больших ли) равно Условимся кодировать ка-
нальными символами только эти типичные последовательности, а любую нетипичную после-
довательность передавать при помощи одной и той же последовательности, что, очевидно,
при декодировании на приёме и будет приводить к ошибкам. Однако поскольку при ии -> оо
вероятность появления нетипичной последовательности будет стремиться к нулю, то это и
означает, что вероятность ошибки может быть сделана сколь угодно малой величиной.
Все типичные последовательности длины пк будем кодировать последовательностями
длины «к, составленными из канальных символов. Для обеспечения однозначности декодиро-
вания (отсутствия ошибок в этом случае) необходимо выполнение условия 2""н^ = т"* -1,
откуда при больших значениях ни и пк получаем
Д(А),
. - ии log, m ’
что и завершает доказательство теоремы.
Интерпретация этой теоремы для заданных скоростей источника и канала приводит так-
же к соотношению (6.47). Разница состоит лишь в том, что возможна ошибка с некоторой
малой вероятностью 8, но зато кодирование оказывается равномерным, что не приводит к
переполнению буферной памяти кодера.
237
Перейдём к рассмотрению теорем кодирования Шеннона в канале с поме-
хами.
Пусть сообщения некоторого источника информации передаются по каналу
с помехами, заданному входным X и выходным Y алфавитами, условным рас-
пределением Р(у|х) и скоростью передачи vK. Будем осуществлять кодирование,
сопоставляя с различными последовательностями символов источника различ-
ные последовательности (комбинации) символов канала длины п. Назовем по-
следние разрешёнными кодовыми комбинациями блочного кода, обозначив их
через х,1"1, i = 1,2,..., М, где М - полное число таких комбинаций. Если бы в
канале не было помех, то принятые комбинации совпадали бы в точности с
разрешёнными кодовыми комбинациями. В канале же с помехами принятая
комбинация может стать с некоторой вероятностью любой из тп последова-
тельностей длины п, составленных из выходных канальных символов. Разобьём
всё множество таких последовательностей Y" на М непересекающихся под-
множеств Y", Y”,..., YnM и установим следующее правило декодирования. Если
принятая последовательность у1”1 &Y", то принимается решение о том, что пе-
редавалась кодовая комбинация х,1”1. Такое разбиение будем называть также
(см. гл. 5) решающей схемой. В этом случае можно определить вероятность
правильного приёма (или правильного декодирования) как вероятность
p{y[nl elT’l*,1”1} того, что при передаче комбинации х'”1 принятая комбинация
у1”1 попадает в соответствующее подмножество Y". Кратко будем записывать
эту вероятность как Теперь мы в состоянии сформулировать теорему
кодирования для канала с помехами.
Теорема кодирования в дискретном канале с помехами. Если канал имеет
пропускную способность С бит/симв. и заданы любые числа 8 > О, Н < С, то все-
гда найдется такое целое число по, что при всяком п> по существует блочный
код х{я],х'я1, ...,х£] длиной п, состоящий из М = 2пН комбинаций, и решающая схе-
ма Y" ,У£, ...,Ym, которые обеспечивают выполнение неравенств
р(};”|х/[я1)>1-5,/ = 1, 2, ...,М. (6.48)
Если Н > С, то неравенство (6.48) при произвольном 8 не выполняется, как бы
ни было велико По- Данная теорема, вообще говоря, справедлива для достаточно
широкого класса (хотя и не для всех) каналов с памятью, но мы её докажем
лишь для канала без памяти и для совпадающих входных и выходных алфави-
тов канала, поскольку в противном случае доказательство заметно усложняется
(см., например, [16]).
Доказательство. Докажем сначала прямую часть теоремы, т.е. факт, что (6.48) выполняет-
ся при М - 2”^, где пН< С. Пусть пропускная способность канала достигается при некотором
распределении вероятностей входных символов Р(х0) = Ро,..., Р(хт i) = Pm г Будем тогда назы-
вать последовательность длиной п, составленную из входных символов канала, s-типичной,
если неравенство (6.40) (с очевидной заменой на и Ц(А) на Н(Х)) выполняется для нее
при входном распределении Р0,...,Рт г Аналогично будем называть последовательность вы-
ходных символов s-условной типичной последовательностью для s-типичной входной после-
довательности, если для нее выполняется неравенство (6.45), в котором входное распределе-
ние задаётся как Ро, ...,Рт и а переходные вероятности определяются каналом связи. Предпо-
238
ложим, что уже построены блочный код и решающая схема Y", Y", , Y^,
удовлетворяющие следующим условиям:
1. Все комбинации кода являются s-типичными последовательностями.
2. Множества Y”, / = 1, 2,М содержат все s-условные типичные последовательности для
каждого из х|п), которые не входят в объединение предыдущих множеств, т.е. в
ГГиГ2”.:.иУЛ •
3. Вероятности правильного декодирования при выборе данного кода и данной решающей
схемы ограничены снизу неравенствами
р(к/”|х!”))> 1-8, i = 1, 2, ...,Л/
4. Выбранный код не может быть расширен путём присоединения к нему ещё одной комби-
нации х$+1 и множества Y^+1, для которых выполняется условие 1-3.
Покажем, что при достаточно большом п число комбинаций такого кода, удовлетворяю-
щего условиям 1-4, оказывается больше, чем 2nIi, где Л1”Я<С (см. рис. 6.4).
• Заметим прежде всего, что существует такой код и решающая схема хотя бы для М— 1.
Действительно, для этого достаточно выбрать одну s-типичную последовательность х}”1 и
1. Для любой е-типичной (относительно Ро, ..., РтЛ) входной последовательности Xм:
2
>а
3. Р (у - е-условная типичная выходная последовательности)^
4.
5?
6.
м
иг
>а82"(я(¥)-е)
y,„|>2n(w(Y|X>-e)
a§2"(H(v)~e)
М ~ 9и(/7(¥|Х>е).
а52и(//(¥)-/7(¥|Х)-е)
Рис.6.4. Пояснение доказательства теоремы кодирования
239
такое п, чтобы неравенство (6.48) выполнялось с вероятностью, большей 1 — 8.
Пусть j - любая s-типичная последовательность, не входящая в код, тогда вероят-
ность того, что при передаче j на выходе появится s-типичная условная последователь-
ность Y1”1, которая попадает в будет не меньше 8. Действительно, если это не
так, тр j можно присоединить к коду и выбрать j как множество выходных s-
условных типичных последовательностей для j, не вошедших в • Ulj/ В этом слу-
чае 1-8, т.е. расширенный код удовлетворяет условиям 1-3, что противоречит
условию 4. Если же передаётся кодовая комбинация л:,1”1, то из условий 1-3 видно, что веро-
ятность появления на выходе s-типичной условной последовательности, попадающей в
будет не менее чем 1 — 8 и, таким образом, при достаточно больших п (малых
8) также не менее чем 8. Следовательно, какая бы s-типичная последовательность относи-
тельного входного распределения Р0,...,Рт j ни передавалась, вероятность того, что на выходе
канала появится последовательность, принадлежащая XfUl^ - UXjn, будет не меньше 8.
В соответствии с теоремой САР с увеличением длин блоков п вероятность появления s-
типичной входной последовательности приближается к единице и, таким образом, начиная с
некоторого п> по, становится не меньше постоянной а > 0. Поэтому при достаточно больших
п безусловная вероятность появления на выходе последовательности, попадающей в
будет не меньше чем а8. Для выходных последовательностей будет также спра-
ведлива теорема САР, согласно которой при достаточно больших п вероятность появления
определённой типичной выходной последовательности оказывается не больше чем 2 .
Множество Y" UX2”-UX^ состоит именно из s-типичных выходных последовательностей, по-
этому число элементов
м
Ur,1”1
aS ) f-,
не меньше чем —z . = а82 v v ’. С другой стороны, чис-
2 ”\Н\Т) )
ло
s-условных типичных выходных последовательностей при заданной s-типичной
входной последовательности не превосходит 2П^Н'Г,Х^ . Отсюда следует, что число М должно
д82 ) п(н(у) н(г|х) 2 )
удовлетворять неравенству М > —т——г-г- = аЗ • 2™ ' ' ' 7 7.
2»(н(г|х) )
. Так как входное распределение Рй,...,Рт j реализует пропускную способность канала, то
#(y)-77(Y|X)= С и М>аЬ2п(с 2 > = 2 ” " . Учитывая, что аиЗ фиксированы, a s может
быть выбрано произвольно малым, получим утверждение прямой теоремы. Докажем обрат-
ную теорему. Для этого рассмотрим код х}”1,*!”1,..., и решающую схему Y”, Y2”,.... Y^, для
которых
Род
М-\’
ч=1-рад,
i.*j,
i = J,
(6.49)
где род вероятность ошибки декодирования блока символов. (Если условие (6.49) не выпол-
няется, то всегда можно изменить решающую схему так, чтобы уменьшить максимальную ве-
роятность ошибки и выполнить это условие для некоторой величины р-од ). Теперь код вместе
с решающей схемой можно рассматривать как расширенный /wCK с вероятностями переходов
(6.49) и объёмами входного и выходного алфавитов равными М. Тогда количество информа-
ции, передаваемой по такому каналу, не может превосходить его пропускной способности,
равной log м +qiogq+ р log />°д • Если это количество информации отнести к одному симво-
М — 1
лу п, то оно, очевидно, не может превзойти пропускной способности С исходного канала, так
240
как любые преобразования не увеличивают количества информации (см. свойство 8 количе-
ства информации). Поэтому получаем неравенство
— | log М + qlogq + />од log—| < С • (6.50)
п \ М. — 1/
Предположим, что Н>С, т.е. М = 2пН>2пС, тогда, подставляя это значение М в (6.50), по-
лучаем неравенство
-qlogq + ^logP^--^-1о8(2"Я<0 • (6.51)
п п П ' ' I
Отсюда видно, что при и->а> левая часть (6.51) всегда стремится к нулю, если Рвл -> о.
Однако это невозможно, поскольку правая часть ограничена отрицательной постоянной.
Итак, если М = 2лЯ, где Н> С, то достижение сколь угодно малой ошибки декодирования
(рОд °) путём увеличения длин блоков п ->ао при любом выборе кода и решающей схемы ока-
зывается невозможным. Это и завершает доказательство обратной теоремы.
Рассмотрим интерпретацию теоремы кодирования. Пусть имеется дискрет-
ный источник с объёмом алфавита К и распределением вероятностей его сим-
волов, которое мы не знаем или не хотим использовать при кодировании со-
общений источника. Тогда, сопоставляя каждой кодовой комбинации длины п
последовательность символов источника длины п, удовлетворяющих очевидно-
му условию взаимной однозначности кодирования и декодирования
К" = М = 2nIi
и по условию отсутствия задержек во времени:
пТи = пТ*
где Та и Тк — длительности символов источника и канала, соответственно, по-
лучаем, что
1
vh = 7
*и
п Vk log2 К
Как следует из доказанной теоремы кодирования, Род -> 0 при п -> оо, когда
Н < С и поэтому получаем условие на максимально возможную скорость пере-
дачи символов в следующем виде:
(6.52)
и log2/T log2*
В частном случае двоичного источника получаем из (6.52) скорость переда-
чи символов (бит/с):
ти<С'.
Предположим, что будет учитываться статистика источника сообщений, т.е.
производится дополнительно и кодирование источника сообщений. Тогда, как
следует из теоремы 1 о кодировании источника, средняя длина последователь-
ности канальных символов, приходящаяся на один символ источника сообще-
ний, будет определяться соотношением (6.46). Будем полагать, что в нашем
случае символами канала являются кодовые комбинации длины п, число кото-
рых равно М = 2пН — т. Тогда в (6.46) необходимо положить log2m = пН. Ус-
ловие отсутствия задержек во времени примет в этом случае следующий вид (в
пренебрежении величиной g в (6.46)):
_ _ т Н(Л)п Н(Л)
т-=ппТ‘=~м~т^~1ГТ‘-
241
Поскольку для обеспечения Род -> 0 при п -> оо согласно доказанной тео-
реме с кодированием в канале с помехами необходимо обеспечить выполнение
неравенства Н < С, то из предыдущего выражения находим
= = (6.53)
'к
Неравенство (6.53) составляет основную теорему Шеннона, которая форму-
лируется следующим образом.
Теорема 2. Основная теорема Шеннона.
Если производительность источника Н'(А) меньше пропускной способности С
в единицу времени дискретного канала с помехами, то при любом 5 > 0 существу-
ет способ кодирования и декодирования источника и канала, при котором сообще-
ния передаются получателю с вероятностью ошибки меньшей, чем 8, и в среднем
без растущих задержек во времени. Если Н'(А) > С, то такого способа кодирова-
ния не существует.
Заметим, что хотя неравенство (6.53) и является более сильным, чем (6.52),
но это не означает, что всегда следует использовать как канальное кодирова-
ние, так и кодирование источника. Последнее для достижения заметного эф-
фекта может оказаться нереализуемо сложным.
Важной особенностью теорем кодирования Шеннона является то обстоя-
тельство, что они носят характер теорем существования и почти ничего не го-
ворят о практических способах реализации процедур кодирования и декодиро-
вания. (Этим вопросам будет специально посвящено содержание следующей
главы.)
До сих пор в данной главе мы всюду рассматривали так называемый дискретный канал
связи с помехами. В действительности таких каналов не существует и можно говорить лишь о
модели отображения непрерывного канала связи в дискретный. По существу это означает,
что мы в рамках рассмотрения данного дискретного канала фиксируем определённый способ
модуляции и демодуляции. Если нам дополнительно известно, какой именно выбран способ
модуляции и демодуляции, то может быть известна и вероятность ошибки р(й2) как функция
РТ
параметра h2 ~-s-^, уже упоминавшегося в § 6.1. Предположение о том, что при фиксиро-
N°
ванных значениях Рс и No мы мож^м изменять длительность канальных символов Т*, что эк-
вивалентно изменению канальной скорости передачи , открывает новые возможности для
оптимизации системы связи. Так можно поставить вопрос об оптимизации величины с
целью обеспечения наибольшей пропускной способности канала связи в единицу времени С',
что согласно теореме кодирования обеспечит наибольшую скорость передачи vK сообщений
источника при сколь угодно высокой верности приёма. Эта задача для 2СК сводится к нахо-
ждению максимума функции:
nmC'(vJ=max{vK[l + p(vK)logp(vK) + (l-p(vK))log(l-jp(vK))]|, (6.54)
/ \ f Рс . 2 Р,
где р и») = р ° , поскольку h = .
Приведём (6.54) к более удобному виду для нахождения максимума
max С (max (1 + Р (^2) log р (h2)+(1 - р (h2)) 1 og(l - р [h2 ))j j (6.55)
В гл. 5 было показано, что при оптимальном когерентном приёме двоичных сигналов в
детерминированном канале с БГШ вероятность ошибки как функция h2 определяется выра-
жением
p = Q^a.h2^ , (6.56)
242
для противоположных сигналов,
для ортогональных сигналов равной энергии,
где
где
ми
₽ =
2,
а = - 1,
, для системы сигналов с пассивной паузой.
При оптимальном некогерентном приёме в том же самом канале мы получили в гл.5
^е-₽й2, (6.57)
для ОФМ сигналов,
для сигналов равной энергии, ортогональных в усиленном смысле,
1,
1/
/2’
, для системы сигналов с пассивной паузой.
Подставляя (6.56) и (6.57) в (6.55) и находя экстремум функции обычными аналитически-
и численными методами [26], получаем, что для когерентного приёма максимум достига-
CkP '
ется при и.-»да и оказывается равным 0,46—-. При некогерентном приёме максимум С
No
достигается при Т = —« 1,551-^- и оказывается равным 0,33£— .
vK а?с No
Таким образом, максимум при когерентном приёме двоичных сигналов достигается при
неограниченной полосе пропускания приёмника F, поскольку F -» да при -> да, в то время
как при некогерентном приёме максимум С реализуется при ограниченной полосе частот
канала связи. (Очевидно, однако, что при любой скорости передачи и одних и тех же зна-
чениях Рс и Nq когерентный приём всегда обеспечит большее значение С, чем некогерент-
ный).
Допустимость изменения длительностей канальных символов при фиксированном спосо-
бе модуляции и демодуляции приводит к возможности необычной интерпретации теоремы
кодирования. Предположим, что информационная скорость передачи двоичного источника
ни бит/с задана так же, как Рс и Nq. Возникает вопрос, можно ли при этих условиях обеспе-
чить род -> о при каком-либо, пусть сколь угодно сложном кодировании (т.е. при и -> оо) и
наилучшем выборе длительности канального символа? Как было показано раньше, макси-
мальное значение С'при оптимальном когерентном приёме двоичных сигналов достигается
ос/^ 1
при vK ->да и равно 0,46—-. Поскольку согласно теореме кодирования vH < С', то T«>7F и’
No С
следовательно,
РТ р
й2=м >77^7’ (6-58)
Nq NqC
где h2 — отношение сигнал-шум при заданной информационной скорости передачи. Подстав-
осР 217
ляя в (6.58) максимальное значение С'= 0,46—- , получаем, что h2 >——, а тогда по формуле
Nq а
(6.56) максимально допустимая вероятность ошибки (для заданной информационной скоро-
сти передачи), при которой кодирование ещё может обеспечить сколь угодно высокую вер-
ность приёма, оказывается
р = 2(72Д7) «0,072. (6.59)
Если же оказалось, что для требуемой информационной скорости передачи вероятность
ошибки равна или больше этой величины, то всякое кодирование с целью повышения поме-
хоустойчивости оказывается бесполезным. (Для повышения надёжности необходимо или из-
менить вид модуляции, или улучшать параметры канала Рс и Nq). Проделывая аналогичные
выкладки для оптимального некогерентного приёма двоичных ОФМ сигналов, можно пока-
зать, что минимальная величина h2 оказывается равной 3/р, а вероятность ошибки 0,025.
В реальных системах связи обычно задаются ограниченными значениями
(рз) вероятности ошибки, не требуя выполнения условия дз -> 0. Поэтому при
243
заданной информационной скорости передачи vH и фиксированном параметре
Nq всегда можно обеспечить требуемую верность приёма при помощи выбора
необходимого значения мощности сигнала Рс. Использование кодирования
может позволить снизить необходимое значение мощности сигнала до некото-
рой величины Рск при сохранении тех же самых значений No и vH. Выражен-
ное в децибеллах отношение этих двух мощностей называется энергетическим
выигрышем кодирования (ЭВК) по сравнению с использованием какого-либо
метода модуляции-демодуляции без кодирования, т.е.
П = 101g^, (6.60)
*СК
где Рс — мощность сигнала в системе связи без кодирования; Рск — мощность
сигнала в той же системе связи, но с кодированием.
В данной главе мы оцениваем ЭВК при неограниченной сложности кодирования, т.е.
при п -> оо, тогда как в следующей главе мы будем оценивать его для кодов с конечными
длинами блоков. Очевидно, что ЭВК в последнем случае всегда будет меньше, чем при
и -> оо. Поэтому здесь мы получим наилучшие возможные результаты. Определим скорость
блочного кода как отношение логарифма числа разрешённых кодовых комби-
наций М к логарифму всевозможного числа комбинаций длины п, образуемых /л-ичным ко-
дом
R_ log2M
log2 тп
Для обеспечения той же самой заданной информационной скорости передачи vK дли-
тельности канальных символов при отсутствии кодирования Тк и при наличии кодирования
Ткк будут связаны соотношением
^КК =
Поэтому для расчёта ЭВК при использовании кода с заданной скоростью (в том числе и
в асимптотическом случае, когда R - lim 10Sz ) соотношение (6.60) может быть представле-
« log2 тп
но в следующей форме:
Ц = 101g —R ,
(6.61)
где h\ - отношение сигнал-шум в канале связи, обеспечивающее требуемую величину ве-
роятности ошибочного приёма символа без кодирования; h2K - отношение сигнал-шум в ка-
нале связи, обеспечивающее требуемую величину при использовании данного кода.
Величина h2 в этом соотношении может быть найдена как решение уравнения
Рз = р(^с), гДе р(^с) — вероятность ошибки для заданного способа модуляции-демодуляции
и модели канала связи, как функции параметра h2 . Величина Л2СК согласно теореме кодиро-
вания Шеннона может быть найдена как решение уравнения
log^
где C\h2K) — пропускная способность дискретного канала связи, представленная как функция
параметра h2*.
В частном случае 2СК получаем уравнение
/?= l + p(/72CK)log2 p(h 2К)+(1-p(h 2K))log2'(l - р(/4)) • (6-62)
244
Если скорость кода не задана, то мы можем её оптимизировать, добиваясь максимизации
ц в (6.61) при выполнении условия (6.62).
Это, в свою очередь, реализуется при максимизации по R величины
R = C(h2„)
Как было показано раньше, эта величина при оптимальном когерентном приёме достига-
ет максимума, когда vK -ню, а следовательно при, R -» 0 и оказывается равной 0,46а.
При оптимальном некогерентном приёме эта величина максимизируется при
v
Topt = 1,551—-, что соответствует оптимальному значению A„opt = 1,551/р и "оптимальной" ве-
роятности ошибки символа в канале связи popt = 0,5е’₽А“’‘ = О,5е'1,551 ® 0,106 . При оптимальном
значении вероятности ошибки пропускная способность 2СК становится примерно равной
0,51, что и совпадает с оптимальной скоростью кода. В этом случае, как было показано ра-
нее, максимальное значение R/h2^ оказывается равным 0,33р.
Так, если задаться величиной рз = 10-6, то ЭВК при когерентном приёме и оптимальном
выборе скорости кода (R = 0) составит 10,2 дБ, а при-оптимальном некогерентном приёме
ЭВК при оптимальном выборе скорости будет равен примерно 6,3 дБ.
Зная величины потенциальных выигрышей при оптимальном кодировании,
мы можем сделать предварительный вывод о том, целесообразно ли пытаться
применять регулярное кодирование, т.е. "обменивать" эти децибелы на услож-
нение оборудования или программного обеспечения. Заметим, что выбор фик-
сированной скорости кода R позволяет контролировать расширение полосы
частот сигналов по сравнению с некодированной передачей сообщений.
6.3. ПОТЕНЦИАЛЬНЫЕ ВОЗМОЖНОСТИ НЕПРЕРЫВНЫХ
КАНАЛОВ СВЯЗИ ПРИ ПЕРЕДАЧЕ ДИСКРЕТНЫХ СООБЩЕНИЙ
6.3.1. ОПРЕДЕЛЕНИЕ НЕПРЕРЫВНОГО КАНАЛА СВЯЗИ,
КОДИРОВАНИЯ И ДЕКОДИРОВАНИЯ В НЁМ
Переходя от дискретного канала связи к непрерывному, мы фактически от-
казываемся от некоторых ограничений, а точнее говоря — от выбора фиксиро-
ванных способов модуляции и демодуляции, которые определяют условные ве-
роятности переходов p(j|x) в дискретном канале связи с помехами. Поэтому мы
вправе ожидать увеличения пропускной способности непрерывного канала по
сравнению с любым отображением его дискретным каналом. Однако и при за-
дании непрерывного канала также должны существовать определённые огра-
ничения, которые накладываются на входные и выходные непрерывные сигна-
лы.
Определим формально непрерывный канал связи с помехами как пару про-
странств ST= {s(t)} и Zr = {z(0} соответственно входных з(0, /е(0, Т), и вы-
ходных z(Z), /е(0, 7), непрерывных сигналов и заданного на них условного ве-
роятностного распределения P(z|s), z g Zr, s e ST. Простым, но достаточно
важным для приложения частным случаем непрерывного канала связи являет-
ся непрерывный канал с аддитивным шумом, для которого пространство вы-
ходных сигналов задаётся следующим образом:
z(t) = s(t) + n(t), (6.63)
245
где n(t) — случайный сигнал (аддитивная помеха), не зависящий от входного
сигнала s(f). Для полного описания такого канала достаточно задать ограниче-
ние на допустимое множество входных сигналов 8ги вероятностные распреде-
ления Р(п) для аддитивной помехи. Существуют различные способы задания
ограничений на входные сигналы. Чаще всего для этого используются такие
понятия, как средняя или пиковая мощности сигналов, занимаемая полоса час-
тот, форма спектра сигналов. В данном разделе мы так же, как и в предыду-
щих разделах этой главы, изучаем дискретные источники сообщений, и потому
под кодированием в непрерывном канале будем понимать сопоставление после-
довательностей, составленных из символов источника сообщений , с непре-
рывными сигналами длительности Т, принадлежащими пространству ST, а под
декодированием в непрерывном канале - сопоставление любого непрерывного
сигнала длительности Т, принадлежащего пространству 7J, последовательно-
стям символов источника. Будем множество таких выбранных непрерывных
сигналов 51(0, .., -УлХО называть Т-кодом, а разбиение 7J на М подмножеств
z[, z2r,zTM, соответствующее декодированию, — решающей схемой. Очевидно,
что задание Г-кода, решающей схемы и канала связи будет полностью опреде-
лять вероятность ошибочного декодирования р0Л. В этом случае процедуры ко-
дирования и декодирования называют также модуляцией и демодуляцией
(см. гл. 5). Так же как и в случае дискретного канала, задача кодирования и
декодирования состоит: во-первых, в согласовании различных алфавитов ис-
точника и канала; во-вторых, в обеспечении максимально возможной скорости
передачи сообщений источника при одновременном достижении сколь угодно
высокой верности приёма, понимаемой как вероятность ошибочного декоди-
рования род. Ниже мы покажем, как рассчитать пропускную способность не-
прерывного канала и сформулировать теорему кодирования, из которой будет
следовать, что максимальная скорость передачи сообщений источника R* мо-
жет быть сколь угодно приближена к этой пропускной способности.
6.3.2. КОЛИЧЕСТВО ИНФОРМАЦИИ, ПЕРЕДАВАЕМОЙ
ПО НЕПРЕРЫВНОМУ КАНАЛУ СВЯЗИ, РАСЧЁТ ЕГО ПРОПУСК-
НОЙ СПОСОБНОСТИ
Взаимная информация пары отсчётов для аддитивной гауссовской помехи.
Рассмотрим сначала канал связи с сигналами, имеющими дискретное время и
непрерывную амплитуду на входе и выходе. Предположим, что каждый такой
"импульс" передаётся независимо от всех других, т.е. в канале отсутствует па-
мять и задана условная плотность вероятности w(z|5), где z е Z, s е S, a Z Й S -
пространства допустимых значений амплитуд соответственно выходных и
входных сигналов. Пусть известна также плотность вероятности w(5), s е S,
входных амплитуд. Тогда такой непрерывный канал можно преобразовать к
дискретному, производя квантование множеств S и Z с интервалами А5 и Az
соответственно. В этом случае входное распределение вероятностей будет иметь
вид
P(sj) = P{sj< S<st + А5} « w(sj)As, i = 0, 1, ..., (6.64)
а условные вероятности переходов входных символов в выходные
P(Zj/Sj) = P{zj< Z< Zj + Az|5/} « w(zy|5/)Az. (6.65)
246
Совместная вероятность появления входных s, и выходных Zj символов в
таком дискретизированном канале будет равна
P(sj, zj) = P{Si < S < Si + As, zj< Z< !zj + Az} » w(si, zj)&skz. (6.66)
Для расчёта количества информации /ЛуЛ.(8,г), передаваемого по такому
каналу, воспользуемся полученным ранее выражением (6.25), которое преобра-
зуем следующим образом:
^.Az(S,z) = jAzlog—X, (6.67)
причём суммирование в (6.67) распространяется на все Sf е 5”, z/ е Z. Устремив
As1 и Az в (6.67) к нулю, перейдём от дискретного по амплитуде канала к каналу
с непрерывной амплитудой. Тогда количество информации, передаваемое по
такому каналу, будет
оо оо / / \ \
7(S,Z) = lira Z^(S,Z) = f f w(s,z)loJ =
a»-*» * J VM'iJiM'iziy
Az—ню -co-oo
oo 1 co 00 1
-00 ' ' -00-00 1 '
(6.68)
Для количества информации /(s,z), передаваемого по такому каналу с не-
прерывной амплитудой, будут справедливы следующие свойства:
1. /(s,z)>0, причём /(S,Z) = O тогда, и только тогда, когда вход и выход канала
статистически независимы, т.е. w(s, z) = w(s)w(z). (Это свойство следует из
(6.68) и свойств 2 и 3 количества информации для дискретного канала.)
2. /(S,Z) = /(Z,S), что позволяет назвать j(S,z) взаимной информацией пары
случайных величин. (Вытекает из (6.68).)
3. /(S,Z) = oo, если помехи в канале отсутствуют, т.е. когда z = s.
Действительно, при отсутствии помех /(S,Z)= lim77Av(S), где энтро-
пия источника, полученного после квантования входных сигналов с интерва-
лом As, т.е.
#a,(S) = £w(sjAslog = S^^log^-j As4-log-^22w(sf)As. (6.69)
Устремляя As к нулю, получаем, что первый член в правой части (6.69)
стремится к конечной величине
7Т<*, (6.70)
v)
h(S) = j w(s)log
а второй всегда стремится к бесконечности независимо от вида плотности рас-
пределения вероятностей w(s) входного сигнала. Наглядный смысл этого свой-
ства состоит в том, что канал связи, позволяющий сколь угодно точно переда-
вать бесконечное множество значений амплитуды, передаёт бесконечное коли-
чество информации. (Действительно, как бы ни было велико значение энтро-
пии Н(А) некоторого дискретного источника сообщений, эти сообщения всегда
можно закодировать непрерывным сигналом в виде одного импульса и
247
абсолютно точно передать по непрерывному каналу связи, если в нем полно-
стью отсутствуют помехи.)
Величина A(S), определяемая (6.70), называется дифференциальной энтропи-
ей. Она совпадает с первым слагаемым в (6.68). Второе слагаемое называется
условной дифференциальной энтропией и обозначается A(S|Z). Поэтому количест-
во информации, передаваемое по непрерывному каналу, равно разности этих
дифференциальных энтропий:
Z(S,Z) = A(S) - A(S|Z) = A(Z) - A(Z|S), (6.71)
причём последнее равенство в (6.71) следует из свойства 2 количества инфор-
мации, где A(Z) и A(Z|S) - дифференциальная энтропия выхода канала и диф-
ференциальная условная энтропия выхода при известном входе соответственно.
Рассмотрим частный случай непрерывного по амплитуде канала с дискрет-
ным временем — канала с аддитивным непрерывным шумом, для которого
z = 5 + п, (6.7'2)
где 5 — реализация случайной величины S, п — реализация случайной величи-
ны N, которая не зависит от £ Используя (6.71), легко показать, что для рас-
сматриваемого канала
Z(S,Z) = A(Z)-A(N), (6.73)
где A(N) — дифференциальная энтропия аддитивной помехи. Найдём диффе-
ренциальную энтропию гауссовского аддитивного шума с нулевым средним и
дисперсией о2 = Рт:
Г _____ _пП _____ 1о е
/i(N) = jw(w)log у]2пРте2Рш dn = log(5/27tPni) jw(n)dnjn2w(n)dn =
. ш (6.74)
= log(727cPm) + = log(A/27cePm)
Дифференциальная энтропия произвольной случайной величины N с за-
данной дисперсией о2 не может превосходить дифференциальной энтропии
гауссовской случайной величины с той же дисперсией, т.е.
/i(N) = jw(n) dn < logA/27tePni. (6.75)
Для доказательства рассмотрим интеграл
_______ п . .
f w(«)log ^2па2 2 г dn = lea-fan ст2)
Следовательно,
= j w(w)log
ri
2
w(w)v27tcr2
______ n
;лст2 2
dn -
(6.76)
dn .
Используем неравенство Inx < х - 1, причём точное равенство будет достигаться только
при х = 1. Отсюда, переходя к двоичным логарифмам, получаем
log2x<(x-l)log2 .
Поэтому
248
1о&
n
e”2®2
w(w)V27tcr2
<1о&е-
(6.77)
n
e"2^
и)л/2лст2
/
причём равенство имеет место, если только
1
w(h)= / -е 2’2 .
\2лст2
Подставляя (6.77) в (6.76), получаем
' ______ +оо
A(N)-log(V2KeCT2)^ J w(w)
п
е 2®2
иХ/2лст2
dn - J w(n)dn lofe e =
е = о,
откуда и следует (6.75).
Ранее уже отмечалось, что на пространство допустимых входных сигналов
должны быть наложены некоторые ограничения. Рассмотрим наиболее важный
частный случай, когда ограничена средняя мощность (дисперсия) сигнала Рс.
Тогда для каналов без памяти с дискретным временем это ограничение требует
использования только таких входных плотностей вероятностей vu(.s), для котот
рых выполнено условие
jw(5)(5-S)26fc<Pc , (6.78)
+оо
где S = fsw(s)ds.
Будем называть пропускной способностью С такого канала максимальное
значение количества информации Z(S,Z) по всем плотностям вероятности w(5),
удовлетворяющим (6.78), т.е.
С= max{/(s,Z)}, (6.79)
w(j) eir'- 7
где IF — множество плотностей вероятности, удовлетворяющих (6.78). Рассчи-
таем пропускную способность для канала с дискретным временем и с аддитив-
ным БГШ мощности Рш. Используя (6.73) и (6.74), получаем
С = max lh(z) - log JlneP ). (6.80)
w(5) eW V * >
Для данного канала дисперсия выхода равна сумме дисперсий входа и ад-
дитивного шума, т.е.
D{z} = ВД + D{n} = Рс + Лп.
Поэтому согласно доказанному выше свойству получаем, что дифференци-
альная энтропия выхода A(Z) будет максимальна для гауссовского распределе-
ния^, а следовательно, и для гауссовского распределения S и она равна пра-
вой части (6.75), если Рш заменить на о2 =Ре+Рш> Подставляя это значение в
(6.80), находим, что
249
С = toggle (Рс+Рш) -log^n Рш = -уlogf 1+7Н • (6-81)
V Пи'
Выражение (6.81) даёт значение пропускной способности канала, имеющее
при двоичном логарифме размерность бит/отсчёт (импульс). Если скорость
выдачи отсчётов (импульсов) в секунду равна vK, то пропускная способность в
единицу времени будет определяться соотношением
v ( Р
C'=vKC = ^log 1+-^ . (6.82)
\ ‘ттт/
Полученное выражение позволяет легко перейти к пропускной способности
непрерывного канала с непрерывным временем, у которого входные сигналы
имеют ограниченную полосу частот F и ограниченную среднюю мощность Рс.
Кроме того, будем предполагать, что помехой в нём является квазибелый шум
со спектральной плотностью Nq в полосе частот F, т.е. гауссовский шум с рав-
номерным спектром и средней мощностью Рш = NqF. Поскольку полезные
сигналы ограничены полосой частот F, то на выходе такого канала связи мож-
но поставить идеальный фильтр, пропускающий только частоты в этой полосе,
не потеряв при этом никакой информации. По теореме отсчётов
(Котельникова) сигналы на входе и выходе такого канала будут полностью оп-
ределяться отсчётными значениями в точках tK = кА, где А = 1/2 Г. Следова-
тельно, вся информация, передаваемая по такому каналу, будет содержаться в
этих отсчётных значениях. Поскольку энергетический спектр помехи на выходе
равномерен в полосе частот F, то отсчёты помехи оказываются статистически
независимыми и задача сводится к расчёту пропускной способности непре-
рывного канала без памяти с дискретным временем. Используя полученное для
этого соотношение (6.82) при vK = -^ = 2F, находим
I Р
С'= Plod 14-тг-
A PJ
( р 1
= Plog 1+——
A N0F)
(6.83)
Соотношение (6.83) известно как формула Шеннона для пропускной спо-
собности непрерывного гауссовского канала с ограниченной полосой частот и
ограниченной средней мощностью сигнала.
Проведём анализ формулы Шеннона (6.83). Если F= const, а Рс/Рш возрас-
тает, то, как видно из этого соотношения, С будет также возрастать, но её рост
оказывается весьма медленным, так как он подчиняется логарифмическому за-
кону. Поэтому если, например, при полосе частот 100 Гц и отношении
PjPm = 103 = 30 дБ пропускная способность С» 1000 бит/с, а её нужно увели-
чить примерно в два раза при сохранении прежней полосы частот 100 Гц, то
этого можно достигнуть, лишь увеличив отношение сигнал/шум до
106 = 60 дБ.
Рассмотрим теперь зависимость пропускной способности канала С от по-
лосы частот F при фиксированных значениях Рс и TVq- График зависимости
/ FV
нормированной пропускной способности C'Nq/Pc от ——х показан на рис. 6.5.
С'(Р), как следует из (6.83) - это монотонно возрастающая функция, которая
при F -> оо асимптотически приближается к величине
250
C,N±
р.
Рис.6.5. Зависимость нормированной пропускной способности
непрерывного канала с БГШ от полосы пропускания
С'х = lim C'(F) = 10g2e• lim F In 1+-£-] =
F-w F-+*> V NaF)
(6.84)
P P
= —Mog, e»—7-1,44 биг /с.
No No
которая может быть названа пропускной способностью непрерывного канала
связи с неограниченной полосой частот при аддитивной помехе в виде БГШ.
Таким образом, хотя с ростом полосы пропускания возможности непрерывного
канала по передаче информации увеличиваются, однако в полосе пропускания
не заключены неограниченные возможности увеличения С. (Уже при выборе
полосы F = 3PJNO реализуется примерно 86 % от СД, (см. рис. 6.5).)
Хотя определение понятия пропускной способности для непрерывного ка-
нала связи и позволяет судить о его возможностях по передаче информации,
но для того, чтобы определить эти возможности в более конкретных терминах
верности и скорости передачи, необходимо сформулировать теоремы кодиро-
вания Шеннона для непрерывного канала связи. Однако перед этим опреде-
лим ещё одно понятие.
8-энтропия непрерывного источника. Иногда в ТЭС вводится мера информативности
(непредсказуемости) непрерывного источника seS, называемая г-энтропией. Эпсилон-
энтропия He(S) определяется как минимальное количество информации, содержащейся в
Z(f) = S(f) + Е(/) относительно сигнала S(t), при котором Z(f) и S(f) эквивалентны. Эквивалент-
ность принимается как близость в среднеквадратическом смысле:
(z(t)-S(ttf =Е2 <8q— допустимое значение среднего квадрата шума наблюдения.
Итак, по определению
Я8(5) = min[/z(5)-A(5|z)] = h(S)~ max/z(5|z),
где минимум берется по всем условным распределениям w(s|z), для которых Е2 < О. Так как
S(t) = Z(/)-E(z), то условная дифференциальная энтропия A(5|Z) при заданном сигнале z(t)
полностью определяется шумом воспроизведения Е(0- Если шум воспроизведения имеет
фиксированную дисперсию ст2 = Е2(г), то дифференциальная энтропия й(Е) максимальна, как
было показано выше, при гауссовском распределении и равна Л(Е) = log-^2iteo2 .
D В дальнейшем предполагается, что средняя мощность (дисперсия) сигнала существенна
превышает дисперсию шума воспроизведения of..
251
Если источник S(t) является гауссовским, то при заданной дисперсии ст2 его дифферен-
циальная энтропия й(5) = log-^2 л бег2 . Таким образом, в рассматриваемом случае
Н (5) = log^TtCcr2 -log^TtCa2 = 0,5 log—у .
Величина ^- = —
ст2 Р
характеризует минимальное отношение сигнал-шум, при котором сиг-
нал 5(1) и процесс Z(0 ещё эквивалентны ("похожи"). Обозначим это отношение р0, тогда
Н (5) = O,51ogp0. Можно ввести понятие ^.-производительность непрерывного источника
#'(s) = уЛ (s) >
где vH — число отсчётов в единицу времени. Для е-производительности непрерывного гаус-
совского источника непрерывного времени без памяти
tf'(s) = F,lgp0,
где Fs — полоса частот сигнала, в пределах которой СПМ процесса 5(/) считается равномер-
ной.
6.3.3. ТЕОРЕМА КОДИРОВАНИЯ ДЛЯ НЕПРЕРЫВНОГО КАНАЛА
СВЯЗИ
Пусть имеется некоторый непрерывный канал связи, для которого в § 6.3.1
определены понятия Г-кода и решающей схемы. Тогда можно сформулировать
следующую теорему кодирования для непрерывного канала, которая является
аналогом теоремы кодирования для дискретного канала с помехами.
Теорема о кодировании в непрерывном канале с помехами. Если непрерывный
канал имеет пропускную способность С и заданы любые числа Ь > 0 и Н' < С, то
всегда найдется такое То, что при всяком Т> Tq существует Т-код, состоящий
из М = 2ТН' сигналов, и решающая схема, которые обеспечивают выполнение не-
равенств
1-8, i = 1, 2,..., М, zf =st(t)+n(t). (6.85)
Если Н' >С\ то неравенство (6.85) не выполняется, как бы ни было велико
значение То- (Доказательство данной теоремы можно найти в [16]).
Интерпретация данной теоремы мало отличается от интерпретации соот-
ветствующей теоремы для дискретного канала. Действительно, если мы имеем
некоторый двоичный источник информации, то блоки длины п данного ис-
точника можно согласовать с Г-кодом без задержек во времени при выполне-
нии следующих очевидных условий
2« = 2^', пТ* = Т, (6.86)
где Ги — длительность символов источника. Преобразуя (6.86), получаем необ-
ходимые и достаточные условия убывания ошибки к нулю при кодировании в
непрерывном канале связи:
vH = Н' < С. (6.87)
Видно, что это условие отличается от условия (6.52), полученного для ко-
дирования в дискретном канале, только тем, что пропускная способность дис-
кретного канала заменяется на пропускную способность непрерывного канала.
Поскольку, как уже отмечалось ранее, непрерывный канал всегда обладает
большей пропускной способностью, чем любой отображающий его дискретный
канал, то кодирование в непрерывном канале обеспечивает всегда большую
информационную скорость передачи, чем в дискретном. Это свойство
252
вполне очевидно, так как кодирование и декодирование в непрерывном канале
являются более общими процедурами, чем в дискретном.
Далее можно снова обратиться к достаточному условию (6.4) для убывания
вероятности ошибки к нулю при использовании ортогональных сигналов, ко-
торое было получено ранее. Этому случаю соответствует непрерывный канал
связи с бесконечной полосой пропускания, для которого пропускная способ-
ность определяется выражением (6.84). Поэтому необходимое и достаточное
условие обеспечения высокой надёжности передачи в таком канале в действи-
тельности будет иметь вид
v< 1,44PC/7VO. (6.88)
Сравнение (6.4) и (6.86) показывает, что простой вывод достаточного усло-
вия (6.4) даёт в 2 раза меньшую скорость, чем действительно достижимая ско-
рость передачи.
Для непрерывного канала остается справедливой также и основная теорема
Шеннона, если в ней понимать под С пропускную способность непрерывного
канала.
Для канала с пропускной способностью С' на вход которого подключён непрерывный
источник, обладающий 8-производительностью H'e(S), К. Шеннон доказал следующую теоре-
му [27]: если при заданном критерии эквивалентности сообщений источника его е-
производительность меньше пропускной способности канала С, то существует способ
кодирования и декодирования (преобразования сообщения в канальный сигнал и обратно — каналь-
ного сигнала в сообщение'), при котором неточность воспроизведения сколь угодно близко к s2 .
При H^s)>C такого способа не существует.
Для гауссовского непрерывного канала первую часть теоремы можно записать в виде
/f'(^)<FKlog(l + pK),
рс гг
где рк = —— — отношение сигнал-помеха в канале. При гауссовском источнике условие
Дп
"Неискажённой передачи" в гауссовском канале можно записать как
/^logpo <FKlog(l + pK)
или при рк » 1
F,logPo</;iogpK. (6.89)
Умножая левую и правую часть (6.89) на Т, получаем неравенство
Гш< Гик, (6.90)
где = ТТУёро ~ информационный объём сигнала; = TFKlgpK — информационный объём
канала. Неравенство (6.90) совпадает с условием неискажённой передачи, выраженной в тер-
минах физического объёма сигнала и канала1 > [см. § 1.2].
Формула Шеннона (6.83) может быть использована для оценки потенци-
альных возможностей непрерывного канала связи не только относительно его
энергетики, но и занимаемого им спектра.
Действительно, используем два важнейших показателя системы связи, ко-
торое уже определены в § 5.8: энергетический параметр Л2 = PQ/(NQRli) и час-
тотную эффективность у = RJF.
Разумеется, что, удовлетворяя неравенство можно иметь различные величины для
длительности сигнала Ts и времени использования канала Тк при вариации других парамет-
ров.
253
В соответствии с теоремой Шеннона, полагая при оптимальном согласова-
нии дискретного источника и непрерывного гауссовского канала = С, из
(6.83) имеем
С , Г
у= —= log2 1 +
27-1
У
(6.91)
N0FC
На рис. 11.1 построена выраженная в децибеллах зависимость энергетиче-
ской эффективности Р = как функция от у (Ру-номограмма), соответствую-
щая (6.91).
Невозможно построить систему связи, которая имела бы пару чисел
I Р = -у,у , лежащую выше указанной кривой на рис. 11.1. При у = 1 получаем
Р = — = 1 (0 дБ), а при у -> 0, т.е. когда на полосу частот канала не накладыва-
ется никаких ограничений, h* ->1п2«-1,6 дБ, Р-> 1/1п2. В то же время при
у->оо, как видно из (6.91),
27
Л>2-----eYln2-lnY,
У
т.е. минимально необходимая битовая энергия экспоненциально возрастает
при возрастании спектральной эффективности.
Если говорить о реальных системах связи, то, используя, например, т-
ичные ортогональные сигналы (ЧМ) для т = 8, 16, 32, можно получить при
вероятности ошибки на бит pb = 10-5 Ру-номограммы, соответствующие точкам,
указанным на рис. 11.1 (у < 0 дБ). Чтобы в этой области приблизиться к пре-
дельной кривой, необходимо использовать помехоустойчивое кодирование, ко-
торое описано в следующей главе.
Что же касается области Ру-номограмм при у > 0 и вблизи предельной
кривой, то она оказывается весьма трудно достижимой для реальных систем
связи. Даже для того, чтобы получить у > (2-4) и /г2 < (10-12) [дБ], приходится
использовать комбинированные методы многократной фазовой и амплитудной
модуляции. Дальнейшее же приближение к предельной кривой в данной об-
ласти возможно только при совмещении кодирования и модуляции, т.е. в так
называемых системах связи с кодированной модуляцией. О принципах их по-
строения говорится в гл. 7 и 11.
6.3.4. ПОТЕНЦИАЛЬНЫЕ ВОЗМОЖНОСТИ КАНАЛОВ
СО МНОГИМИ ПОЛЬЗОВАТЕЛЯМИ
В предыдущем разделе данной главы рассматривалась модель системы связи, в которой
имеется один источник и один получатель, а передача сообщений производится по единому
каналу связи.
В последнее время значительное внимание уделяется так называемым сетям связи, реа-
лизующим обмен информацией между большим количеством абонентов, которые соединены
между собой при помощи множества разделённых или общих каналов связи. Общая структура
такой системы со многими пользователями показана на рис. 6.6. Здесь имеется: множество
источников сообщений ИСЬ ИСг, ..., ИС#; множество передающих устройств ПУь ПУ^;
множество приёмных устройств ПрУь ..., ПрУ^, множество получателей Щ, ..., Пд и сеть ка-
254
Рис.6.6. Структура системы связи со многими пользователями
налов, соединяющих пере-
дающие и приёмные устройст-
ва. В общем случае каждому
источнику доступно некоторое
подмножество передающих
устройств, а получателям со-
общений доступны' выходы
некоторого подмножества
приёмных устройств. Основ-
ная задача передачи сообще-
ний в такой системе связи ос-
тается прежней — необходимо максимизировать скорости передачи сообщений при сколь
угодно высокой верности приёма. Однако в отличие от случая с одним источником и получа-
телем здесь возникает множество допустимых скоростей передачи между определёнными ис-
точниками и получателями. Такая постановка задачи приводит к понятию области допусти-
мых скоростей передачи, приводящих к надёжной передаче сообщений.
Наиболее частыми случаями такой системы связи является канал с множественным дос-
тупом, когда один и тот же канал связи используется для передачи сообщений от нескольких
источников к одному и тому же получателю, и так называемый широковещательный канал,
когда одно и то же сообщение передаётся нескольким получателям.
В [16] рассмотрено обобщение теоретико-информационных понятий для данной системы
связи и доказаны теоремы кодирования, определяющие области достижимых скоростей пере-
дачи при сколь угодно малых вероятностях ошибок.
Существует и иная постановка задачи, когда один из получателей является недружествен-
ным (иначе говоря, он соответствует каналу подслушивания). Тогда задача кодирования со-
стоит в минимизации количества информации, поступающей к недружественному получателю
при максимизации скорости передачи информации для дружественного получателя.
В настоящее время достаточно разработаны и конструктивные методы кодирования и де-
кодирования для каналов со многими пользователями, однако изложение этого материала
выходит за рамки данного учебника.
ВЫВОДЫ
1. Сообщения источника с избыточностью могут быть "сжаты", т.е. закодированы более эко-
номно посредством согласования алфавитов источника и канала связи. Предельные воз-
можности сжатия определяются такой характеристикой источника сообщений, как энтро-
пия, зависящая от статистических свойств сообщений.
2. Потенциальные возможностй по скорости для передачи достоверной информации по ка-
налам связи с помехами определяются пропускной способностью каналов связи. Эта ха-
рактеристика зависит от распределений помех и параметров каналов связи.
3. Пропускная способность 2СК. без памяти зависит только от вероятности ошибки символа
р в канале связи. Она максимальна при р — 0 или р = 1 и равна нулю при р = 1/2, когда
наступает обрыв канала связи.
4. Пропускная способность непрерывного гауссовского канала связи зависит от отношения
сигнал-шум и полосы частот канала. При неограниченном расширении полосы частот ка-
нала пропускная способность стремится к конечной величине.
ВОПРОСЫ, ЗАДАЧИ И УПРАЖНЕНИЯ
6.1. Если в /и-ичной системе связи с ортогональными сигналами средняя мощность сигна-
лов и спектральная плотность шума постоянны, то что нужно сделать, чтобы обеспе-
чить стремление к нулю вероятности ошибки при сохранении постоянной информаци-
' * онной скорости передачи?
6.2. Что такое кодирование и декодирование в дискретном и непрерывном каналах связи?
Что у них общего и чем они отличаются друг от друга?
6.3. Какие виды модуляции-демодуляции приводят к модели двоичного симметричного ка-
нала, а какие к модели несимметричного канала?
255
6.4. Что изменится, если при определении всех информационных понятий изменить осно-
вание логарифма? Повлияет ли это на основные результаты, которые даёт теория ин-
формации?
6.5. Свойства энтропии, условной энтропии, количества информации могут быть пояснены
интуитивно. Однако если бы это было не так, то сохранились ли бы основные результа-
ты теории информации?
6.6. Чем хорош или плох источник информации, обладающий большой энтропией?
6.7. Во сколько раз можно сжать русский текст, передаваемый заглавными буквами
(К= 32), если считать, что энтропия источника, выдающего этот текст, Н(А) = 1,5
бит/символ.
6.8. Можно ли при помощи взаимной информации I(X, Y) измерять степень зависимости
случайных величин X и У? Если это так, то чем это лучше оценки степени зависимости
при помощи коэффициента корреляции?
6.9. Энтропия дискретного источника на входе канала Н(Х} — 5 бит/символ, потери в дис-
кретном канале без памяти Я(Х|У) = 0,2 бит/символ. Найдите энтропию шума в канале,
если энтропия символов на выходе канала H(f) = 5,5 бит/символ.
6.10. Имеет ли смысл понятие пропускной способности канала без его использования в тео-
ремах кодирования?
6.11. Докажите, что для двоичного по входу стирающего канала с вероятностями переходов
(6.6) пропускная способность (бит на символ) С = (1 — рс)
6.12. Поясните наглядно смысл того факта, что при одном и том же значении рс = р пропу-
скная способность 2СК без памяти будет всегда меньше, чем пропускная способность
двоичного по входу стирающего канала.
6.13. Каково назначение кодирования в канале без помех?
6.14. Соотношение (6.46) выполняется как в теореме 1, так и в теореме 2 для каналов без
помех. В чём состоит отличие выполнения этого соотношения в данных теоремах?
6.15. Какое практическое значение имеет теорема кодирования в канале с помехами? Можно
ли, используя доказательство этой теоремы, строить реальные схемы кодирования и де-
кодирования?
6.16. Во сколько раз уменьшается дифференциальная энтропия равномерно распределённой
случайной величины (с нулевым МО) по сравнению со случаем гауссовского распреде-
ления, если фиксирована дисперсия случайной величины?
6.17. Является ли гауссовская помеха наихудшей (и если да, то в каком смысле) среди всех
аддитивных помех одинаковой мощности?
6.18. Из графика рис. 6.4 следует, что при расширении полосы частот канала связи пропуск-
ная способность всегда остается меньше, чем С . Имеет ли тогда практический смысл
расширять полосу частот линий связи (например, кабельных) сверх такого значения Fo,
при котором C'(F0) и С ?
256
ГЛАВА 7. КОДИРОВАНИЕ ИСТОЧНИКОВ И КАНАЛОВ
СВЯЗИ
В предыдущей главе были установлены потенциальные возможности коди-
рования источников и каналов, которые определялись теоремами кодирования
Шеннона. Однако ни формулировки, ни доказательства этих теорем не указы-
вали прямо на способы кодирования и декодирования, которые обеспечивают
эти потенциальные возможности. (Исключением было лишь кодирование в не-
прерывном канале с неограниченной полосой частот, когда постоянная ско-
рость передачи при сколь угодно малой вероятности ошибок могла быть обес-
печена при выборе ортогональных сигналов).
Хотя исторически некоторые способы кодирования источников и каналов
появились даже раньше теории Шеннона, она явилась мощным стимулом для
поиска многйх других, более эффективных методов, приближающихся к по-
тенциально возможным. Это обстоятельство вызвало большой поток работ, по-
свящённых тематике конструктивных методов кодирования. В данной главе бу-
дут описаны основные подходы к кодированию источников и каналов связи,
причём в отличие от математической теории кодирования мы остановимся
здесь не столько на деталях доказательств различных свойств кодов, сколько на
демонстрации энергетических, скоростных или спектральных выигрышей, ко-
торые обеспечивают данные методы по сравнению с "некодированной" переда-
чей сообщений.
Под кодированием в широком смысле понимают отображение сообщения в
сигнал для передачи его по каналу.
Под кодированием в узком смысле понимают преобразование сообщений
дискретного источника для передачи их по дискретному каналу. Если иное не
указано, под словом кодирование далее будет подразумеваться кодирование в
узком смысле.
Реализация кодирования на передающей стороне всегда предполагает при-
менение обратной процедуры — декодирования — для восстановления принятого
сообщения. Устройства, осуществляющие кодирование и декодирование, назы-
ваются соответственно кодер и декодер. Вместе их называют кодеком.
7.1. КЛАССИФИКАЦИЯ МЕТОДОВ КОДИРОВАНИЯ
Классификация рассматриваемых в данной главе методов кодирования
приведена на рис. 7.1. Эта классификация не является исчерпывающей. В нее
включены лишь некоторые методы, которые широко используются в совре-
менных системах связи. По своему назначению кодирование подразделяется на
примитивное, экономное и помехоустойчивое.
Примитивное, или безызбыточное, кодирование применяется для согласова-
ния алфавита источника и алфавита канала.
Пример, приведённый в табл. 7.1, показывает, как сообщения дискретного
источника с объёмом алфавита К= 4 могут быть преобразованы для передачи
по. дискретному двоичному каналу. Отличительное свойство примитивного ко-
дирования состоит в том, что избыточность дискретного источника, образован-
ного выходом примитивного кодера, равна избыточности источника на входе
кодера.
257
Примитивное кодирование используется также в целях шифрования пере-
даваемой информации и повышения устойчивости работы системы синхрони-
зации. В последнем случае правило кодирования выбирается так, чтобы веро-
ятность появления на выходе кодера длинной последовательности, состоящей
только из нулей или только из единиц, была минимальной. Подобный кодер
называется также скремблером (от английского слова "scramble" — перемеши-
вать). Особенности систем шифрования и синхронизации изучаются в специ-
альных курсах и здесь не рассматриваются.
Таблица 7.1
Сообщения дискретного источника Выход кодера
“о 00
«1 01
«2 10
11
Экономное кодирование, или сжатие данных, применяется для уменьшения
времени передачи информации или требуемого объёма памяти при её хране-
нии. Отличительное свойство экономного кодирования состоит в том, что из-
быточность источника, образованного выходом кодера, меньше, чем избыточ-
ность источника на входе кодера. Экономное кодирование применяется в
ЭВМ. Так, последние версии операционных систем обязательно содержат в
своём составе программы сжатия данных (динамические компрессоры и архи-
ваторы), а новый стандарт V.42bis на модемы для связи между ЭВМ по теле-
фонным сетям общего пользования включает сжатие в число процедур обра-
ботки данных.
Помехоустойчивое, или избыточное, кодирование применяется для обнару-
жения и(или) исправления ошибок, возникающих при передаче по дискретно-
му каналу. Отличительное свойство помехоустойчивого кодирования состоит в
том, что избыточность источника, образованного выходом кодера, больше, чем
избыточность источника на входе кодера. Помехоустойчивое кодирование ис-
пользуется в различных системах связи, при хранении и передаче данных
258
в сетях ЭВМ, в бытовой и профессиональной аудио- и видеотехнике, основан-
ной на цифровой записи.
7.2. КОНСТРУКТИВНЫЕ МЕТОДЫ КОДИРОВАНИЯ
ИСТОЧНИКОВ СООБЩЕНИЙ
Существует множество способов кодирования источников сообщений.
Многие способы реализованы на практике, особенно для сжатия сообщений с
большой избыточностью, например факсимильных и телевизионных, где они
позволяют увеличить скорость передачи сообщений в десятки раз (см.гл. 11). В
данном параграфе мы рассмотрим сначала кодирование источников с извест-
ной статистикой сообщений. Общая идея построения такого кода подсказыва-
ется теоремой кодирования 1 для каналов без помех. Поскольку минимизиру-
ется средняя длина кодовой последовательности, то код должен быть неравно-
мерным. Очевидно, что средняя длина неравномерного кода будет минимизи-
роваться тогда, когда с более вероятными сообщениями источника будут со-
поставляться более короткие комбинации канальных символов. Проблема, од-
нако, состоит в том, что у неравномерного кода на приёмной стороне оказы-
ваются неизвестными границы этих комбинаций. Если же мы попытаемся их
выделить, используя известный способ кодирования, то декодирование может
оказаться неоднозначным. (Действительно, если, например, с буквой А сопос-
тавлена комбинация 0, с буквой Б — 1, а с буквой С — 10, то невозможно оп-
ределить по принятой комбинации 10, передавались ли буква С или пара букв
А и Б). Для того чтобы используемый код обладал свойством однозначной де-
кодируемое™, он, очевидно, должен удовлетворять некоторым условиям. Од-
нозначное декодирование- будет обеспечено, если ни одно кодовое слово не яв-
ляется началом другого кодового слова. Такие коды называются префиксными.
Необходимые и достаточные условия существования префиксного кода определяются не-
равенством Крафта, которое мы сформулируем в виде теоремы.
Теорема 7.1. Пусть т - объём алфавита дискретного канала без помех, a nb i = 1, 2, М, *
есть конечное множество положительных целых чисел. Для существования семейства М последо-
вательностей с длинами ni, п% пм, обладающего свойством префиксного кода, необходимо и
достаточно выполнение следующего неравенства',
м
Х™"' < 1. (7.1)
/=1
Докажем достаточность. Пусть множество п\, П2,..., пм удовлетворяет неравенству (7.1).
Перепишем это неравенство в виде
<1,
7=1
где Wj — число последовательностей длины j и и = шахи,-.
Далее преобразуем это неравенство, раскрыв сумму
< тп - Wj/тг"-1 -.. . (7.2)
Поскольку все wj неотрицательны, то из (7.2) последовательно получим систему нера-
венств
259
w„_t <mn~' -щтГ2-...-wn_2m
w„_2 <m"~2 -w2m"~3-...-w„_3m
^32 V '
, w3<m - w2m - w2m
w2 < m2 -
v\<m.
Эта система неравенств и определяет способ построения кода с данным набором кодовых
длин. Сначала выберем w\ слов длиной 1, используя для этого различные буквы из алфавита
объёма т. Остаётся т — w\ неиспользованных символов, и поэтому мы можем построить
(т - wi)m слов длиной 2, добавляя к ним по символу из алфавита объёма т. Из этих слов
длины 2 выберем wi произвольных слов, что составляет /и2 - м\т — w2 "свободных" префиксов
длины 2. Добавляя к этим префиксам разные символы алфавита, получаем (т2 -M\m-yv2)m
слов длиной 3, из которых выберем произвольных слов и т.д. Продолжая таким образом,
мы построим префиксный код, длина комбинаций которого удовлетворяет неравенству Краф-
та (7.1).
Рассмотрим теперь некоторый источник дискретных сообщений без памя-
ти, который согласно § 6.1 однозначно определяется своим алфавитом А объё-
ма А" и вероятностями появления символов *=0, 1, —> К— Тогда если
последовательности символов, выдаваемые этим источником, разбить на блоки
длины п, то каждый из таких блоков можно рассматривать как символ нового
источника с укрупнённым алфавитом Ау объёма Ку = Кп и вероятностями по-
явления символов р{ау^, i — 0> 1, ..., Ку- 1, определяемыми как произведение
вероятностей первичных символов, входящих в данные блоки. Определим дли-
ны блоков nt неравномерного кода, описанного в теореме 7.1, следующим об-
разом:
logP(ay() logP(a ()
- , _ X / +1} i = о, 1,
log т log/и
Тогда из (7.4) получаем, что
£у-1.
(7.4)
и поэтому по теореме 7.1 можно символами источника с укрупнённым алфави-
том сопоставить последовательности символов /и-ичного канала без помех,
имеющие длины п,. Тогда для средней длины такой последовательности
« = 2^
f-0
jnf выполняются неравенства '
Учитывая тот факт, что для источника без памяти 7Л Ау) = пЯ(А) и, кроме
того, относя эту величину к одному символу источника, получаем
.. п Я(А)
lim—=------.
«-ио П log/И
' (7.5)
260
Фактически мы доказали теорему кодирования для каналов без помех и ис-
точника без памяти. Более того, было доказано, что предельное значение сред-
ней длины п/п может быть получено при кодировании при помощи неравно-
мерного префиксного кода с длинами последовательностей, выбранными в со-
ответствии с (7.4). Остаётся показать, как может быть построен такой пре-
фиксный код. Существует несколько алгоритмов построения неравномерных
кодов с префиксным свойством. Среди них оптимальным, т.е. позволяющим
сколь угодно приближаться к пределу (7.5), является алгоритм Хаффмена [8].
Однако рассмотрим здесь более простой алгоритм Шеннона-Фано, который в
большинстве случаев приводит к тем же результатам.
Алгоритм Шеннона-Фано заключается в следующем. Символы алфавита
источника (первичного или укрупнённого) записываются в порядке не возрас-
тающих вероятностей. Затем они разделяются на две части так, чтобы суммы
вероятностей символов, входящих в каждую из таких частей, были примерно
одинаковыми. Всем символам первой части приписывается в качестве первого
символа комбинации неравномерного кода ноль, а символам второй части —
единица. Затем каждая из этих частей (если она содержит более одного сооб-
щения) делится в свою очередь на две, по возможности равновероятные части
и к ним применяется то же самое правило кодирования. Этот процесс повторя-
ется до тех пор, пока в каждой из полученных частей не останется по одному
сообщению.
Пример. Пусть алфавит А источника состоит из шести символов а0> «1» а2, аз, а4> а5 с ве-
роятностями Лао) ~ 0,4; Ла1) ~ 0,3; Р(а2) = 0,1; Р(аз) = 0,08; Р{а^ = 0,07; Р(а^) = 0,05. Про-
цедура построения неравномерного кода без укрупнения алфавита (п = 1) задаётся табл. 7.2.
На первом этапе производится деление на два множества ао и ai, а2, аз, ац, а$; на втором — а,
и а2, as, а4, а$, на третьем — а2, аз и а^, а$, на четвёртом — а2 и аз, а4 и а$. Легко проверить,
что данный код оказывается префиксным и средняя длина кодовой комбинации
5
п = P(at)nf« 2,2, что менее чем на 2 % превышает энтропию данного источника, равную
/=о
2,16.
Таблица 7.2
А Р(.Р) Выбор символов неравномерного кода
1 2 3 4
а,. 0,4 0 1
а 0,3 1 0 2
а, 0,1 1 1 0 0 4
а, 0,08 1 1 0 1 4
0,07 1 1 1 0 4
а. 0,05 1 1 1 1 4
Заметим, что хотя деление на части с
"примерно равными вероятностями" не яв-
ляется однозначной процедурой, но при
увеличении длин блоков п укрупнённого
источника сообщений эти погрешности бу-
дут сглаживаться, а средняя длина п/п при-
ближаться к предельному значению (7.5).
Неравномерное префиксное кодирование уст-
раняет избыточность источника, вызванную неоди-
наковой вероятностью сообщений. Если источник
имеет память, то вероятность появления очеред-
ного сообщения зависит от того, какое сообщение
появилось перед ним.
На первом этапе устранения избыточности дискретного источника с памятью заданный
источник заменяют эквивалентным источником без памяти с помощью метода укрупнения
алфавита. Представим, например, дискретный источник с алфавитом {а,}, 1 = 0,5, как новый
источник с алфавитом |a,',a7j, i, j = 0,5, т.е. в качестве одного укрупнённого сообщения на вы-
ходе источника теперь рассматривается два последовательных сообщения. Если источник не
261
имеет памяти, то = .Если же исходный источник имеет память, то, напри-
мер, P(ai,a2)* P(a2,ai), что будет учтено при последующем оптимальном префиксном кодиро-
вании для нового источника с укрупнённым алфавитом. При такой схеме кодирования оста-
ётся неучтенной статистическая зависимость между укрупнёнными сообщениями. Поэтому
алфавит необходимо укрупнять до тех пор, пока избыточность, вызванная статистическими
связями между укрупнёнными сообщениями, не станет достаточно малой.
Более реалистичной является, конечно, ситуация, когда о некотором избыточном источ-
нике известен лишь его алфавит А, но не известно распределение вероятностей последова-
тельностей символов этого источника. Например, необходимо сконструировать двоичный
префиксный код для передачи текста на различных языках, имеющих общий алфавит. Каза-
лось бы, эта задача является неразрешимой, но в действительности удаётся сконструировать
некоторый универсальный сжимающий код.
Рассмотрим кратко метод сжатия подобного типа, известный как алгоритм Зива-Лемпела
и широко применяемый в ЭВМ для архивирования файлов. Общая идея данного метода со-
стоит в том, что последовательность символов источника разбивается на кратчайшие разли-
чимые цепочки, которые не встречались раньше, а затем эти цепочки кодируются равномер-
ным кодом. Например, если последовательность имела вид 1011010100010, то она будет разби-
та на цепочки следующим образом: 1, 0, 11, 01, 010, 00, 10. При таком способе разбиения все
префиксы данной цепочки могут находиться лишь слева от нее. В частности, цепочка, кото-
рая отличается от данной лишь в последнем символе (бите), всегда будет располагаться слева.
Если с(п) означает число различных цепочек разбиения для данной последовательности дли-
ны п, то необходимо log2 с(и) бит, чтобы закодировать номер префикса к данной цепочке и
ещё один бит для описания последнего элемента этой цепочки. Так, для рассмотренной выше
последовательности и её разбиений мы получим следующий равномерный код: (000, 1)
(000, 0) (001, 1) (010, 1) (011, 0) (010, 0) (001, 0), где первые три бита определяют номер пре-
фикса к очередной цепочке, а последний бит даёт значение последнего символа этой цепоч-
ки. Очевидно, что декодирование такого кода производится однозначным образом.
Рассмотренный пример даёт фактически не сжатие, а "растяжение" сообщений, посколь-
ку вместо 13 исходных бит мы получаем 28 бит. Однако для длинных последовательностей
сообщений эффективность алгоритма увеличивается, и в асимптотике, т.е. при п -> оо, сжатие
сообщений приближается к предельно возможному, определяемому теоремой кодирования в
канале без помех, а именно доказывается, что для любого стационарного эргодического ис-
точника сообщений
|1тФ)(ьеф)+1) = я(А)
и—>оо
Заметим, что фактически для сжатия файлов используется модифицированный алгоритм,
называемый алгоритмом сжатия Зива-Лемпела-Велча, на основе этого алгоритма построены
наиболее эффективные программы архивирования файлов, такие как PKARC, PKZIP, ICE и
ДР-
7.3. ПОМЕХОУСТОЙЧИВОЕ (КАНАЛЬНОЕ) КОДИРОВАНИЕ
Если экономное кодирование сокращает избыточность источника сообще-
ний, то помехоустойчивое кодирование, напротив, состоит в целенаправленном
введении избыточности для того, чтобы появилась возможность обнаруживать
и(или) исправлять ошибки, возникающие при передаче по каналу связи.
В дальнейшем будем рассматривать только чйсто канальное
(помехоустойчивое) кодирование, хотя общий подход также возможен и, более
того, даёт весьма значительный эффект, особенно при передаче преобразован-
ных к дискретному виду непрерывных сигналов (см. гл. 8).
Переходим к изложению общей теории блоковых кодов. Будем называть
канальным (помехоустойчивым) блоковым кодом V любое множество из М раз-
личных последовательностей (комбинаций, слов) xj, Х2, хз, ..., х^/ длины л,
262
каждая позиция которых может принимать любое из т значений входного ал-
фавита X, если
М < тп. (7.6)
Такой код называют также избыточным. При выполнении равенства М = тп
код называется примитивным. Будем называть скоростью кода величину
7? = 1°ё2 ; если М = 2к и т = 2, то R = —. (7.7)
nlog2 т п
Очевидно, избыточные коды имеют R < 1, а для примитивного кода R = 1.
Теорема кодирования Шеннона, доказанная в предыдущей главе, утвержда-
ет, что существует такая последовательность блоковых избыточных кодов с
фиксированной скоростью R < C/log^n, где С — пропускная способность дис-
кретного канала связи, что при неограниченном увеличении длин этих блоков
п вероятность ошибки после оптимального декодирования в заданном канале
будет стремиться к нулю. Однако в данной главе мы имеем дело с неасимпто-
тическим случаем, т.е. с кодами фиксированной длины п, и поэтому возникает
ряд новых проблем, которые имеют важное практическое значение:
Г. Выразить вероятность ошибки при использовании наилучшего кода и опти-
мального декодирования как функцию длины кодового блока п, скорости
кода R и распределения вероятностей ошибок, определяемых каналом связи.
2. Найти оптимальный алгоритм декодирования с исправлением или обнару-
жением ошибок для заданного кода и канала.
3. Найти метод выбора наилучшего кода при оптимальном декодировании в
заданном канале.
4. Разработать практически реализуемые алгоритмы кодирования и декодиро-
вания.
До сих пор речь шла только о блоковых кодах, для которых передаваемая
по каналу связи последовательность символов может быть разделена на одина-
ковые отрезки (блоки), формируемые кодирующим устройством независимо
друг от друга. Такой способ является не единственно возможным. Поэтому во
второй части этой главы будут описаны так называемые непрерывные
(свёрточные) коды. В конце первой части, посвящённой исключительно блоко-
вым кодам, будет пояснено, почему и когда именно непрерывные коды могут
иметь определённые преимущества перед блоковыми.
7.3.1. ВЕРОЯТНОСТЬ ОШИБКИ ОПТИМАЛЬНОГО
ДЕКОДИРОВАНИЯ ДЛЯ КОДОВ С ФИКСИРОВАННОЙ ДЛИНОЙ
БЛОКОВ (ЭКСПОНЕНТЫ ВЕРОЯТНОСТЕЙ ОШИБОК)
Пусть имеется некоторый, канал связи, который описывается условными
переходными вероятностями р(у|х), хеХ", yeY", где X и Y - его входной и
выходной алфавиты, а Х" и Y” означают всевозможные последовательности
длины п из алфавитов X и Y соответственно. Обозначим через род( V,S) вероят-
ность ошибочного декодирования в таком канале при использовании некото-
рого кода V, состоящего из М комбинаций, и алгоритма декодирования по
максимуму правдоподобия, если передаётся сообщение S, 1 < S < М. Достаточ-
но общая верхняя граница для рОд( ПРИ наилучшем выборе кода V была
получена Р. Галлагером [8]. Сформулируем её в виде теоремы.
263
Теорема 7.2. Существует блоковый код V длины п, состоящий из М комбина-
ций, для которого при передаче произвольного сообщения S, 1 < S < М,
1+р
,1/(1+р)
(7-8)
У eV'
LieX" J
где р(у|х) — переходная условная вероятность для блоков длины п в заданном ка-
нале связи; Q(x) — произвольное вероятностное распределение на входных блоках
длины п.
Для доказательства теоремы потребуется следующая простая лемма.
Лемма. Пусть Р(А\), ..., Р(Ам) - вероятности событий ..., Ам. Тогда при любом р
(0 < р < 1) вероятность объединения событий имеет границу
м Пр
' M
(7.9)
м
(7.Ю)
(7.11)
Доказательство леммы. Используя известную аддитивную границу (неравенство Буля) и
тривйальную границу для вероятности любого события, получаем
м
1=1
1.
м
Если
оказывается меньше 1, то эта величина лишь
увеличивается при возведе-
нии в степень р, и
м
(7.9) следует из (7.10). Если же V
М "IP
^Р(д) >1, и тогда (7.9)
помощью рассмотрения так
следует из (7.11).
Доказательство теоремы. Верхняя граница (7.8) выводится с
называемого ансамбля кодов, а не одного "хорошего" кода. Ансамбль блоковых кодов задаётся
следующим образом. Определим сначала произвольное распределение вероятностей <2(х) на
всех блоках длины п, составленных из входных символов канала связи, и будем считать, что
все кодовые слова выбираются независимо друг от друга с этими вероятностями. Таким обра-
зом, вероятность выбора некоторого частного кода х^ х2,хм в этом ансамбле равна
м
IW)- Каждый код из ансамбля имеет свою вероятность ошибочного декодирования при
(7-12)
декодировании по максимуму правдоподобия. Если рассчитать среднюю по всему ансамблю
кодов вероятность ошибочного декодирования, то она даст верхнюю границу роа для наилуч-
шего кода (т.е. кода с минимальной величиной роп).
Среднюю по ансамблю кодов величину РОд(^) при передаче 5-го сообщения можно тогда
определить следующим образом:
Л>д(5) = 22^Иу1х) *s> у} >
У
где Р{од|.У, xs, у) — вероятность ошибочного декодирования при условии, что, во-первых,
передаётся сообщение S, во-вторых, что для передачи этого сообщения была случайно выбра-
на комбинация кода xs, в-третьих, что была принята последовательность у. Суммирование в
(7.12) производится по всем входным и выходным последовательностям длины п.
При заданных S, xs, у определим событие As. для каждого S' *S как событие, состоящее
в том, что выбирается такое кодовое слово х^., соответствующее сообщению S', для кото-
рого
Р(у|х,>Р(у|х,).
(7.13)
264
Если в (7.13) имеет место строгое неравенство, то декодер максимального правдоподобия
примет решение о передаче сообщения S'*S, т.е. сделает ошибку. (При наличии равенства в
(7.13) ошибка произойдёт не обязательно.) Поэтому, используя лемму, получаем
(Г 1₽
2^') ^p^l. (7.14)
S'*S
Согласно определению события As, имеем
ф,)» SeW- <715>
s 1,:Р(у|х7Му1ъ)
Легко убедиться, что правую часть (7.15) можно ограничить сверху, если умножить каж-
дое слагаемое в нём на |p(y|xz)/p(y|xi)]’1 при любом ц>0, распространяя суммирование на все
xs.. Это даёт верхнюю границу для Р{Л5,}
(7.16)
Видно, что S' является "глухой" переменной суммирования в (7.16), и поэтому эта грани-
ца фактически не зависит от S'. Подставляя (7.16) в (7.14), получаем
Р(од|5, х, у) <(Л/- 1)^<2(х)
Далее, подставляя (7.17
РОД(5)<(Л/-1)Р £
У
Р(у|ху)
в (7.12), будем иметь
*.s L х
(7.17)
(7.18)
Подставляя ц = 1/(1+р)
в (7.18) и замечая, что xs является также "глухой" переменной
суммирования, получаем утверждение теоремы в виде неравенства (7.8).
Используем неравенство (7.8) для оценки род(5) в дискретных каналах без
памяти, описываемых переходными вероятностями P^Jx,.), где у}-е¥, х(еХ.
Определим в этом случае вероятность случайного выбора кодового слова х как
п
2(х) = ПсМ-
Тогда (7.8) преобразуется к виду
1+р
pjs)<(M-irs...z Z.. sfle(x.H>',ix,),/M- -
>1 Уп *1 *п /=1
" “ 1+р
=(м-1)’ПЕ =
’“1 Уу ]_
где 1 и т — объёмы алфавитов входа и выхода канала соответственно.
Границу (7.19) можно представить в экспоненциальной форме, заменив
род(5) на среднюю по сообщениям вероятность ошибки родпри произвольном
наборе вероятностей этих сообщений:
265
Род - ехР {- п [£0 (р> с) - рЯо]} ,
т—1 Г /—1 К \“р+Р
где Е0(р>2) = -1*Ё ₽ > ^0 =
J-oLf=O
(7.20)
Чтобы найти наилучшую верхнюю границу, необходимо максимизировать
£0(р,С) по 0(х) и 0 < р < 1.
Решение этой задачи для произвольных дискретных каналов представляет
определённые трудности. Однако для 2СК без памяти с вероятностью ошибки
символа р получается решение в замкнутом виде
~ < 2-»£(Л)
Г од ’
(7.21)
где
(7.22)
при
р log2A/
Я- п <R.r
И
Р
8 / \ 1 - 8
E(R) = 8 log2 — + (1 - 8)log2 —-
при C>R>Rcr,
(7.23)
где 8 удовлетворяет уравнению
Я=1-Л(8), С=1-Л(р). (7.24)
Неравенство (7.21) позволяет сделать важный вывод, что при R< С
(E(R) > 0) вероятность ошибки при выборе наилучшего кода не только убывает
к нулю при л —> оо, но убывает и как экспонента от п. Именно поэтому грани-
цы подобного типа называются экспонентами вероятностей ошибок. Это факти-
чески доказывает прямую часть теоремы кодирования Шеннона.
Для доказательства обратной части теоремы кодирования, очевидно, необходимо исполь-
зовать нижнюю границу раа для наилучшего кода. Этот вопрос не будем здесь обсуждать, по-
скольку нижняя граница не имеет большого прикладного значения.
Экспоненты вероятностей (7.20), (7.21) позволяют рассчитать энергетиче-
ский выигрыш от применения кодирования (ЭВК) как функцию заданной вер-
ности р3, скорости кода R и длины кодового блока п. Однако в отличие от
асимптотического случая здесь возникает одна дополнительная сложность.
Пусть, например, два кода с одинаковыми скоростями R, длинами п = 10 и
п = 10000 имеют одинаковые вероятности род. Можно ли считать, что в обоих
случаях обеспечивается действительно одинаковая верность передачи сообще-
ний? Интуиция подсказывает нам, что во втором случае надёжность передачи
будет, наверное, больше, чем в первом. Постараемся облечь теперь наши ин-
туитивные ощущения в более строгую форму. Пусть передаётся информация
такого типа, что количество ошибок на сеансе связи, состоящем из N инфор-
мационных бит, не играет существенной роли для оценивания качества пере-
дачи. Критерием верности тогда служит вероятность Q(N) абсолютно правиль-
ного приёма всех элементов. Очевидно, что при использовании двоичного кода
266
длины п, состоящего из М комбинаций, эта вероятность в канале связи без па-
мяти может быть рассчитана по формуле
e(W) = (l-p„)‘, (7.25)
где L = 7V/log2Af — число кодовых комбинаций на интервале анализа.
Теперь ясно, что если два кода имеют одинаковые скорости, но разные
длины, то код с большей длиной блока будет иметь большее число кодовых
комбинаций М и поэтому для него Q(N) оказывается больше при равных зна-
чениях N и роа. (Для канала с памятью можно при род « 1 использовать адди-
тивную границу
N
<7'26»
для которой сделанный выше вывод также оказывается справедливым.)
Для того чтобы сравнивать коды различной мощности, воспользуемся по-
нятием эквивалентной вероятности ошибки рэ. Напомним читателю (см.
§ 5.11), что рэ - это такая вероятность ошибки символа в 2СК без памяти, с
постоянными параметрами и при отсутствии кодирования, которая обеспечива-
ет ту же вероятность правильного приёма Q(N) информационных символов,
что и данный код в данном канале. Очевидно, что можно написать
(1-А)" =(1-р„)*^. (7.27)
Преобразуя (7.27), получаем
Р3 = 1-(1-Лд)^ • (7.28)
(Видно, что р3 оказалось не зависящей от N.)
Если род « 1, то для рэ справедливо следующее приближённое выражение:
(7.29)
Рз log2A/
Величину род (соответственно рэ) для наилучшего кода можно найти из
(7.21).
Расчёт энергетического выигрыша одной дискретной системы передачи над
другой (ЭВС) можно в общем случае вычислить при р, = const, по формуле
(5.108), ЭВК для заданного кода можно находить при заданной вероятности
Рз = Рэ и по формуле (6.61).
Предположение о том, что получатель сообщений не является критичным к
количеству ошибок, типично для передачи данных, но вряд ли оправдано для
таких сообщений, как оцифрованная речь, печатный текст или факсимильные
сообщения. Для этих источников более естественно оценивать качество переда-
чи сообщений средним числом ошибочных бит или средним числом ошибоч-
ных передач некоторых элементов сообщений.
Экспоненты вероятностей ошибок являются значительным продвижением в
теории кодирования по сравнению с теоремами кодирования, поскольку они
определяют верхнюю границу для наилучшего кода как функцию длины кодо-
вого блока. Однако это верно лишь для наилучшего кода, тогда как способ его
построения является пока неизвестным. Можно, правда, попытаться действи-
тельно случайно выбрать некоторый код и зафиксировать его для работы по
данному каналу связи. (При неудачном выборе можно повторить эксперимент.
267
проверяя эффективность кода при помощи расчёта реализуемой им частости
ошибочного декодирования.) Однако, как будет показано в дальнейшем, слож-
ность алгоритма декодирования для случайно выбранного кода также экспо-
ненциально возрастает с ростом длины кодового блока и поэтому целесообраз-
но указать некоторый регулярный выбор если не наилучшего кода, то по край-
ней мере кода, гарантирующего определённую величину род в заданном канале
связи. Такие классы кодов рассматриваются в следующем разделе. . .
7.3.2. КОДЫ С ГАРАНТИРОВАННЫМ ОБНАРУЖЕНИЕМ И
ИСПРАВЛЕНИЕМ ОШИБОК
Пусть задан некоторый блоковый код длины п, состоящий из М комбина-
ций (блоков, слов, векторов) X], Х2, • ••, Хл/- Для упрощения определений и до-
казательств будем всюду считать, что входной X и выходной У алфавиты канала
совпадают. В общем случае канал может иметь память и задаваться вероятно-
стями р(х|у) переходов входных блоков х в выходные у.
Определение 1. Расстоянием Хэмминга р(х,х') между двумя комбинациями
хе!" и х' еХп будем называть число позиций этих комбинаций, в которых
отдельные кодовые символы х и х' не совпадают. Очевидно, что 1<р(х,х')<и
для любых х' # х и что р(х,х) = 0 для любых х е X".
Определение 2. Образцом ошибки е будем называть двоичный блок длины п,
который имеет единицы в тех позициях, в которых символы переданного х и
принятого у блоков отличаются друг от друга, и нули — в остальных позициях.
Ранее в гл. 2 были сформулированы аксиомы, которым должно удовлетворять абстракт-
ное определение понятия расстояния в функциональных пространствах сигналов. Покажем,
что расстояние Хэмминга удовлетворяет этим аксиомам на пространстве /п-ичных последова-
тельностей произвольной длины п. Первые требования: р(х, у) > 0, р(х, х) = 0, р(х, у) = р(у, х)
удовлетворяются очевидным образом. Остаётся проверить лишь справедливость "неравенства
треугольника": /
p(x,y)<p(x,z) + p(y,z). (7.30)
Предположим, что х и z отличаются друг от друга в позициях q, i2,i, где =p(x,z), а
у и z — в позициях j], j2,j , где s2 = p(y,z). Тогда легко убедиться, что х и у не могут раз-
личаться в каких-либо позициях, отличных от Ji - A2)> а если ik = J,, то в этой позиции
они могут и совпадать. Поэтому р(х,у) + s2 > что и эквивалентно неравенству (7.30).
Определение 3. Весом Хэмминга |х| блока (вектора) х (аналогично для у и е)
будем называть число ненулевых символов этих блоков.
Определение 4. Кратностью образца ошибки е (или короче — кратностью
ошибки) будем называть его вес Хэмминга |е|. (По существу это число ошибок,
которое произошло при передаче блока х.)
Декодирование в заданном канале связи ио максимуму правдоподобия - это
принятие решения о передаче такого кодового блока х, е V, для которого ус-
ловная вероятность р(у|х,) максимальна, где у — Принятый блок. Это правило
получения оценки можно записать в следующей компактной форме:
268
х, = Argmax р(у|х,). (7-31)
Как понятно из гл. 5, такое правило' приводит к максимально возможной
средней вероятности правильного приёма кодовых блоков при равновероятной
посылке этих блоков по каналу связи. (Если последнее условие не выполняет-
ся, то оптимальное декодирование должно соответствовать правилу максималь-
ной апостериорной вероятности.)
Определение 5. Декодированием по минимуму расстояния Хэмминга будем
называть следующее правило (алгоритм) принятия решения:
х( = Argmmp^y.x,). (7.32)
(По существу, правило (7.32) означает, что считается переданной та кодовая
комбинация, которая отличается от принятой в наименьшем числе позиций.)
Покажем, что для тСК без памяти правила (7.31) и (7.32) совпадают, т.е.
декодирование по минимуму расстояния Хэмминга совпадает с декодировани-
ем по максимуму правдоподобия. Действительно, в соответствии с определени-
ем тСК без памяти
<7зз)
где п — длина блоков у и х. Легко убедиться, что (7.33) является монотонно
убывающей функцией р(у,х,) при р<——-, что и доказывает эквивалентность
(7.31) и (7.32) для данного канала связи.
В случае использования произвольного канала связи, например несимметричного или с
памятью, декодирование по минимуму расстояния Хэмминга не обязательно будет оптималь-
ной процедурой, однако ввиду простоты (7.32) этот алгоритм часто используется и в данных
случаях.
Если канал симметричен, но имеет память, то он может быть преобразован в /иСК без
памяти, а следовательно, для него окажется оптимальным хэмминговский алгоритм декодиро-
вания после следующего преобразования канала связи, который называют перемежением сим-
волов или декорреляцией. Как показано на рис. 7.2, кодовые блоки, содержащие п символов,
номера которых отмечены верхними индексами 1, 2, ..., L, после их формирования предвари-
тельно заносятся в буферную память. После окончания формирования последнего L-го блока
начинается передача символов этих блоков в канал связи "по столбцам" матрицы, находящей-
ся в буферной памяти, т.е. последовательно передаются символы
1U), V2\ ..., 1W, 2<Ч ..., ..., »й), ..., г№. На приёме эти символы запоминаются в виде по-
следовательных строк матрицы. После заполнения всех таких строк начинается декодирова-
ние по столбцам последовательных кодовых блоков с номерами (1), (2), ..., (£). Видно, что
каждая пара смежных символов в любом из кодовых блоков передаётся в канале связи с раз-
несением во времени LT\, где Тк — длительность канального символа. Если параметр L вы-
бран достаточно большим, а зависимость между ошибками (память канала) убывает при раз-
несении передаваемых символов, то после такой процедуры можно практически полностью
устранить память в канале связи.
Г11 2°’
г2) 2е-> л'2’
1<Г) Г2’
2“’ 2'2’
г7-’ п'и
(I । п пс‘‘ n,L'1
Рис.7.2. Процедура перемежения символов
269
Определение в. Минимальным кодовым расстоянием d для заданного кода V
будем называть минимальное расстояние по Хэммингу между всеми парами его
несовпадающих кодовых комбинаций, т.е.
б? = minp(x,,x,). (7.34)
Избыточный код V может использоваться в канале связи с помехами не
только для декодирования (распознавания) действительно передававшихся со-
общений, т.ё. фактически для исправления ошибок, но и для обнаружения
ошибок. Естественным алгоритмом декодирования с обнаружением ошибок
является принятие решения об отсутствии ошибок, когда принятая комбинация
у совпадает с одной из разрешённых кодовых комбинациях, т.е. у = х(еИ, и
обнаружение ошибок, если у*хг для всех х,. &У. Очевидно, что в этом случае
возможны ошибки декодирования, а именно принятие решения об отсутствии
ошибки, в то время как они в действительности имеют место. Будем называть
это событие необнаруженной ошибкой, а его вероятность — вероятностью необ-
наруженной ошибки, обозначая её через рн0 или рно( Ю для заданного кода V.
При рассмотренном выше алгоритме обнаружения ошибок необнаруженная
ошибка может появиться тогда, и только тогда, когда передаваемая по каналу
связи кодовая комбинация под воздействием помех перейдёт на выходе в ка-
кую-либо другую кодовую (разрешённую) комбинацию. Поэтому при равнове-
роятном выборе кодовых комбинаций
1 м
p»(o=^Z р(уеГ’У*х<1хД <7-35)
Определение 7. Будем говорить, что код V гарантированно обнаруживает или
исправляет ошибки кратности не больше t при использовании некоторого ал-
горитма обнаружения или исправления ошибок, если кодовые слова после
применения этих алгоритмов не будут содержать необнаруженных или неис-
правленных ошибок, когда кратность ошибки в канале связи не превосходит t.
(Данный код может исправлять или обнаруживать ошибки и большей кратно-
сти, но это может иметь место не для всех образцов ошибок). Возможности ко-
да обнаруживать ошибки определяются следующей теоремой.
Теорема 7.3. Если код имеет минимальное расстояние d, то он гарантированно
обнаруживает ошибки кратности не более чем t0-d-\
Доказательство. Как было отмечено ранее, ошибка оказывается необнаруженной тогда, и
только тогда, когда под воздействием помех в канале связи передававшаяся кодовая комбина-
ция переходит в какую-либо другую кодовую комбинацию. Но для этого необходимо, чтобы
образец ошибок имел кратность не меньше d, поскольку все кодовые комбинации по опреде-
лению понятия минимального кодового расстояния отличаются друг от друга не меньше, чем
в d позициях.
Определение 8. Будем называть функцией кратности ошибки P(n,v) в дан-
ном канале связи вероятность появления v ошибок на кодовом блоке длины п.
В частном случае т С К без памяти
= (7.36)
Теорема 7.3 позволяет получить верхнюю границу для вероятности необна-
руженной ошибки кодом И с минимальным расстоянием d;
270
(7.37)
v=«Z
(Неравенство в (7.37) возникает потому, что код с минимальным расстоянием
d может, вообще говоря, обнаруживать ошибки и кратности большей, чем
of — 1.) Подставляя (7.36) в (7.37), получаем, что для /пСК (в частном случае
2СК) без памяти
(7.38)
v=d В * * * * * * * * 17
Возможности кода по исправлению ошибок определяются следующей тео-
ремой.
Теорема 7.4. Если код имеет минимальное расстояние d, то при декодировании
по минимуму расстояния Хэмминга он гарантированно исправляет ошибки кратно-
сти не более, чем
2
, где [х] означает целую часть х.
Доказательство. Пусть передавалось кодовое слово х, и принято слово у, причём по усло-
вию теоремы р(у,х)
дится от принятого слова у на расстоянии Хэмминга не большим, чем слово X/, и, следова-
тельно, может произойти ошибочное декодирование этого слова вместо слова х,-. Этот факт
. Применяя неравенство треугольника (7.30) к словам х/5 х7, у,
означает, что
d-1
2
d-1
2
. Предположим, что существует кодовое слово ху, которое нахо-
получаем
d-1
2
d-1
2
(7.39)
С другой стороны, выполнение (7.39) невозможно, поскольку по определению d для дан-
ного кода р(х,,Ху)> d. Следовательно, действительно передававшееся кодовое слово xt будет
декодировано верно, и теорема доказана.
Теорема 7.4 позволяет построить верхнюю границу вероятности ошибочно-
го декодирования при использовании алгоритма Хэмминга в произвольном ка-
нале связи:
п
(7.40)
Г <л-11
4т]+1
В частном случае /пСК без памяти получаем из (7.36) и (7.40)
и / „ \
(7.41)
t'oB. ~ '-'П I
v=[ —]+1
Определение 9. Будем называть алгоритмом совместного исправления оши-
бок кратности до tn и обнаружения ошибок при использовании кода V с мини-
мальным расстоянием d > 2tH +1 алгоритм, который по принятому слову у деко-
дирует кодовое слово xz, если р(у,х,)</и, и обнаруживает наличие ошибки, если
р(у,х,)>/и для всех кодовых слов xz-, i = 1, 2, ..., М.
Свойства кода с заданными параметрами d и tn по совместному исправле-
нию и обнаружению ошибок определяются следующей теоремой.
271
Теорема 7.5. Если код имеет минимальное расстояние d>2tw + \, то использо-
вание алгоритма совместного исправления ошибок кратности до включительно
и обнаружения ошибок, обеспечивает гарантированное исправление ошибок крат-
ности не больше tK и обнаруживает число ошибок кратности не более d — 1 — /и.
Доказательство утверждения о гарантированном исправлении ошибок оче-
видно, а доказательство утверждения о гарантированном обнаружении ошибок
производится аналогично доказательству теорем 7.3 и 7.4.
Теорема 7.5 позволяет получить верхнюю границу для вероятности необна-
руженной ошибки /?но(к,/и), и нижнюю границу для вероятности правильного
декодирования рвд(и,/и) при использовании кодов с данным алгоритмом со-
вместного исправления и обнаружения ошибок
п
S/’W (7.42)
v=d-/H
Р.(г,ф EW (7.43)
v=0
(Подставляя (7.36) в эти неравенства, получаем соответствующие границы для
частного случая канала тСК без памяти.)
В некоторых случаях на выходе канала могут появляться дополнительные
пометки о ненадёжности принятых символов, что приводит к их стиранию. Это
может происходить из-за низкого отношения сигнал-шум, соответствующего
данному тактовому интервалу.
В качестве признака отсутствия стирания символа на z-м тактовом интервале при опти-
мальном когерентном приёме противоположных сигналов {$(/),—s(OJ на фоне белого шума
можно использовать превышение некоторого порога абсолютным значением корреляцион-
ЙГ
ного интеграла J z(t)s(t)dt, где z(t) — принимаемый непрерывный сигнал, а Т — длительность
(/-1)Т
элемента сигнала (тактовый интервал, см. гл. 5).
Определение 10. Будем называть алгоритмом исправления стираний и оши-
бок такой метод декодирования, который измеряет расстояние Хэмминга меж-
ду принятым блоком у и всеми кодовыми словами в нестёртых позициях и де-
кодирует то кодовое слово, для которого это расстояние минимально.
Исправляющая способность алгоритма совместного исправления стираний
и ошибок определяется теоремой.
Теорема 7.6. Если код имеет минимальное расстояние d, то он может одно-
временно исправить tc стираний и ошибок при выполнении следующего условия'.
d>2tK+tc+\. (7.44)
Доказательство производится совершенно аналогично доказательству тео-
ремы 7.4 с учётом того очевидного факта, что код К, с длиной блоков п — s,
образованный из комбинаций исходного кода V при вычеркивании у стёртых
позиций, имеет минимальное расстояние не менее, чем d — s.
Зная совместные функции кратности ошибок и стираний в канале связи,
можно рассчитать верхнюю границу для род(и,/и,/с), используя (7.44).
272
Заметим, что алгоритм исправления ошибок и стираний является промежуточным вари-
антом между так называемым жёстким декодированием (в дискретном канале) и мягким де-
кодированием (в полунепрерывном канале). Более подробно эта проблема обсуждается в
п.7.3.10.
Полученные границы для рно( И) и род( И показывают, что желательно иметь
код с наибольшим возможном значением минимального расстояния d. Однако
интуиция подсказывает нам, что мы можем добиться увеличения d при фикси-
рованной длине блока п, только уменьшая скорость кода R. Хотелось бы иметь
точные формулы, определяющие d как функцию R и п или хотя бы верхние и
нижние границы для этого параметра. Кроме того, для обеспечения рол -> 0,
что было обещано теоремой кодирования Шеннона, придется увеличивать и
длины кодовых блоков п, но при этом количество комбинаций кода М экспо-
ненциально возрастает. Это неизбежно вызовет большие трудности при реали-
зации процедур кодирования и декодирования. (Действительно, при кодирова-
нии нужно запомнить М комбинаций и извлекать из памяти каждый раз новую
комбинацию, соответствующую поступившему сообщению, а при декодирова-
нии вычислить М хэмминговских расстояний и находить среди них минималь-
ное.) Поэтому мы нуждаемся в более конструктивном (регулярном) задании
кода, чем его описание таблицей кодовых комбинаций. Эту проблему удаётся
решить при переходе к специальному классу так называемых линейных кодов,
который описан в следующем разделе.
Однако, прежде чем перейти к его рассмотрению, сделаем ещё одно замечание. Сравне-
ние границ (7.37) и (7.40) показывает, что в любых каналах связи и для любых кодов
рно( V) < роа( V), причём это неравенство справедливо не только для границ, но и для точных
значений соответствующих вероятностей ошибок. Однако этот факт ещё не означает, что
всегда целесообразно использовать обнаружение ошибок, а не их исправление. Действитель-
но, после обнаружения ошибок в блоке он оказывается стёртым, а следовательно, не может
быть выдан получателю. Обычно его доставка осуществляется при помощи повторной переда-
чи, что требует затрат дополнительного времени.
К вопросам получения более точных оценок для рно(1) и А>д(И, а также к сравнению
систем с обнаружением и исправлением ошибок мы ещё вернёмся в следующем разделе.
7.3.3. ЛИНЕЙНЫЕ ДВОИЧНЫЕ КОДЫ ДЛЯ ОБНАРУЖЕНИЯ И
ИСПРАВЛЕНИЯ ОШИБОК
Здесь мы ограничимся описанием только двоичных кодов, поскольку это
не потребует пока использования в качестве математического аппарата такого
достаточно сложного раздела современной алгебры, как теория конечных по-
лей. Мы отметим, однако, в конце главы, как все определённые здесь понятия
и свойства могут быть распространены на случай m-ичных кодов.
Определение 11. Линейным блочным двоичным кодом длины п называется лю-
бое множество двоичных последовательностей длины п, которое содержит чис-
то нулевую последовательность, и для каждой пары последовательностей, при-
надлежащих этому множеству, их поразрядная сумма по mod 2 также является
элементом этого множества. (Последнее свойство’Можно назвать замкнутостью
относительно поразрядного сложения по mod2.)
Пример. Множество последовательностей длины 5: 00000, 11101, 01010, 10111, образует
линейный код, что проверяется непосредственно. Поразрядная сумма по mod2 2-й и 3-ей
комбинации даёт 4-ю комбинацию, сумма 3 и 4 даёт 2-ю, а сумма 2 и 4 даёт 3-ю комбинацию.
273
Очевидно, что линейный код удовлетворяет определению линейного подпространства V для
пространства Vя всех, двоичных последовательностей длины п. (Или иначе — это подгруппа
для группы всех двоичных «-последовательностей относительно групповой операции пораз-
рядного сложения по mod 2. Поэтому двоичные линейные коды называются также и группо-
выми.)
Из алгебры известно, что всякое fc-мерное линейное подпространство п-
мерного пространства, состоящего из конечного числа (2") элементов, содер-
жит базис, т.е. совокупность к линейно независимых элементов, из которых пу-
тём поразрядного суммирования по mod 2 можно образовать любые элементы
данного подпространства, т.е. в данном случае комбинации линейного кода.
Доказывается, что все базисы такого подпространства состоят из одного и того
же числа элементов к, которое и определяет размерность подпространства. Об-
щее число комбинаций линейного кода М = 2к, поскольку таким будет общее
число возможных поразрядных сумм из к элементов базиса, причём среди них
не может найтись двух одинаковых сумм ввиду линейной независимости эле-
ментов базиса.
Совокупность элементов базиса, записанная в виде линейно независимых
строк, образует к х п двоичную матрицу G, которая называется порождающей
матрицей кода:
Sil S12 Sin
G- g" g2n . (7.45)
\Skl Sk2 ... Skn^
Множество всех кодовых слов, порождённых G, может быть представлено
как
x = bG, (7.46)
где х — вектор-строка кодовой комбинации размерности п; Ь — вектор-строка
информационных символов длины к. В (7.46) выполняется умножение вектора
на матрицу, а все действия осуществлены по mod 2. Очевидно, что в качестве
вектора Ь можно использовать к последовательных элементов сообщения, вы-
даваемых двоичным источником. Переход от избыточных кодов общего вида к
линейным кодам практически решает проблему сложности кодирования. Дейст-
вительно, вместо запоминания М = 2к комбинаций длины п, т.е. п2к бит в об-
щем случае, нам достаточно запомнить лишь порождающую матрицу, состоя-
щую из «^ = «log2M бит. Сама же процедура кодирования потребует выполне-
ния не более чем 2кп элементарных операций.
Переход к линейным кодам значительно упрощает анализ (а следовательно,
и задание) их обнаруживающей и исправляющей способности. Действительно,
пусть V— линейный двоичный код, содержащий комбинации(х0, х15 ..., x2*_J,
где х0 — нулевая комбинация. Тогда по свойству замкнутости линейного кода
для любой пары ненулевых комбинаций (х,., xj расстояние Хэмминга между
ними p^xjssjx, Фх7| будет равно весу Хэмминга |х/| некоторой третьей ком-
бинации, принадлежащей этому же коду, кроме нулевой. Поэтому получаем
важный вывод, что для любого линейного кода минимальное кодовое
274
расстояние d равно минимальному весу Хэмминга, которым обладает слово ко-
да, за исключением нулевого, т.е.
d = min |xl (7.47)
1фях{*0
Таким образом, для всех линейных кодов изучение списка хэмминговских
расстояний между парами комбинаций эквивалентно изучению списка хэм-
минговских весов, что, очевидно, значительно проще.
Для любого линейного кода, заданного некоторой порождающей матрицей
G, очевидно также следующее свойство: любые перестановки столбцов и эле-
ментарные преобразования строк,-заключающиеся в их перестановках или в
суммировании друг с другом, не изменяют список весов данного кода. С дру-
гой стороны, можно показать, что при помощи таких преобразований любая
(к х п) двоичная матрица G с линейно-независимыми строками может быть
приведена к каноническому виду Рп • Р12 •• Ръ,-к " Pi„-k =d!P), (7.48)
G = Ч 0 ••• 0 1 ••• 0 0 1 Р11 1 1 -
ч0 0 ••• 1 1 Pki Pei • " Pkn-k;
где {ру} — некоторые двоичные элементы; — единичная к х к матрица (с еди-
ницами на главной диагонали и нулями в других местах); Р — матрица
к х (п — к), состоящая} из двоичных элементов; (AJB) означает последователь-
ную запись матриц А и В.
Используя представление (7.46) с матрицей G в виде (7.48), получаем
х=(Ь’с), (7.49)
где с = ЬР.
По правилу матричного умножения получаем для с = (сц ..., сп-кд
cj =S4Po(mod2)» У = 1> 2’ •••’ п~к- (7.50)
/=1
Из выражений (7.49) и (7.50) следует, что процедура кодирования линей-
ным кодом, определённым канонической матрицей вида (7.48), сводится к
формированию кодового слова, состоящего из двух последовательных подслов,
причём первое подслово совпадает с информационной последовательностью
длины к, выданной источником сообщений, а второе образовано путём линей-
ной комбинации строк матрицы Р.
Определение 12. Линейные коды, слова которых представимы в виде (7.49),
называются систематическими.
Мы фактически показали ранее, что всякий линейный код эквивалентен
некоторому систематическому в смысле сохранения списка весов, а следова-
тельно, и расстояний Хэмминга. Первые к символов кодовых слов, совпадаю-
щих с символами источника, называются информационными, а последние п — к
символов — проверочными. Скорость кода R, определённая ранее как log2-A4/n,
для-линейного кода будет равна к/п, т.е. для систематического — отношению
числа информационных символов к к длине кодового блока п. Систематиче-
ские коды с длиной блока лис числом информационных символов к будем
кратко называть (п, £)-кодами. Иногда такой код обозначают тремя параметра-
ми (п, к, d), где d — минимальное кодовое расстояние.
275
В линейной алгебре существует понятие ортогонального пространства или
нуль-пространства для заданного линейного пространства V. Это по определе-
нию такое множество И* векторов х* длины п, для которых (х*, х) = 0 при лю-
бом хе V, где (, ) означает скалярное произведение соответствующих векторов.
(В нашем случае все операции производятся по mod2). Доказывается, что это
множество всегда является линейным пространством, причём если код V имеет
размерность к, то код К* будет иметь размерность п — к, т.е. содержать 2"~*
комбинаций. Код И*, совпадающий с ортогональным пространством, называет-
ся дуальным к коду V. Он, очевидно, также может быть задан своей порождаю-
щей матрицей G*=H размерностью (п — к) х п. Тогда комбинации исходного
кода V могут быть определены как решения векторно-матричного уравнения
К = {х:хНг = о}, (7.51)
где Т означает символ транспонирования матрицы Н, т.е. взаимную замену
строк и столбцов. Матрица Н, которая является порождающей для кода V*,
называется проверочной матрицей для исходного кода , К Матрица Н так же, как
и G, может быть представлена в канонической форме, причём можно показать
[21], что
Н=( (7-52)
где Р — та же самая матрица, что и в представлении (7.48).
В теории линейных кодов найдены границы для минимального рас-
стояния d.
Теорема 7.7. Верхняя граница Плоткина.
Если длина кодового блока п > 2d -1, то число проверочных символов г = п — к, необхо-
димых для того, чтобы минимальное расстояние линейного кода достигало значения d, равно
самое меньшее 2d - 2-log2 d. (Доказательство можно найти в [21].) Как следствие,
2rf-2-log2rf
К S 1-----------.
п
Теорема 7.8. Нижняя граница Варшамова-Гильберта.
Существует (п, к)-код с минимальным расстоянием по меньшей мере d, которое удовлетворя-
ет следующему неравенству.
d—2
^^>2-*. (7.53)
1=0
Доказательство. Пусть Н — проверочная матрица кода V. Тогда из (7.51) следует, что для
любого слова х е V хэмминговского веса |х| = <о существует такой набор из <о столбцов мат-
рицы Н, элементы которой при покоординатном сложении по mod 2 дадут нулевой столбец.
Верно и обратное, а именно, что если для некоторой проверочной матрицы Н любые d — 1 и
меньшее число столбцов всегда является линейно независимым (т.е. в сумме не дают нулевых
столбцов), то соответствующий ей линейный код имеет минимальное расстояние, самое
меньшее d. Построим проверочную матрицу, обладающую таким свойством. В качестве её
первого столбца возьмём любой двоичный набор длины г = п - к. Затем возьмём также любой
двоичный набор длины г, не совпадающий с первым, далее — третий набор, не равный их
сумме и так далее до столбца длиной г, который не является суммой d — 2 и меньшего числа
предыдущих столбцов. Очевидно, что очередной столбец может быть присоединён к матрице
в том случае, если совокупность всех сумм из d — 2 или меньшего числа предыдущих столб-
цов матрицы не исчерпывает всех наборов длины г. В наихудшем случае все такие суммы бу-
дут различными. Поскольку общее число таких сумм при выборе из общего числа j — 1 столб-
rf-2
цов равно , а число различных вариантов двоичных ненулевых столбцов длины г равно
1=1
2Г — 1, то достаточное условие существования кода с длиной блока у, имеющего самое боль-
шее г проверочных символов, принимает вид
276
d-2
(7.54)
i=l
Пусть теперь n — наибольшее значение j, для которого справедливо (7.54). Прибавив к
обеим частям неравенства (7.54) С^ч = 1, получаем (7.53). Это завершает доказательство тео-
ремы.
Если длина блока п достаточно велика, то неравенство (7.54) можно преобразовать к следую-
щему виду:
(d-2\ (d-2\
г <nh\---- илиЛ>1-Л--------], (7.55)
где /г(х) = -(х log2 х + (1 - х) log2 (1 - х)).
На рис. 7.3 построены кривые, соответствующие верхней границе Плоткина и нижней
границе Варшамова-Гильберта, как функции скорости кода R=k/n от аргумента d/ln. В отли-
чие от границы Плоткина граница Варшамова-Гильберта означает, что всегда существуют ко-
ды, которые имеют скорость, лежащую на соответствующей кривой, а возможно, и выше этой
кривой.
Заметим, что верхняя граница строилась по соотношению, определяемому теоремой 7.7
при достаточно больших d, когда вторым и третьим слагаемым в выражении для оценки числа
проверочных символов можно было пренебречь. Нижняя граница была получена из соотно-
шения (7.55), где также в качестве аргумента функции использовалось d/n, что верно для
больших п. Параметры наилучших реализуемых кодов могут лежать только в заштрихованной
области между верхней и нижней границами. (В действительности получен и целый ряд дру-
гих границ, которые уточняют значение d, т.е. сужают данную область при некоторых значе-
ниях аргументов.)
Заметим, что хотя теорема 7.7 и описывает, казалось бы, конструктивный метод построе-
ния кода с заданной величиной d, однако его практическое использование оказывается не-
возможным, поскольку при больших значениях п и г требуется перебор огромного количества
возможных вариантов столбцов проверочной матрицы Н.
Нижняя граница Варшамова-Гильберта позволяет оценить асимптотические возможности
линейных двоичных кодов по исправлению ошибок гарантированной кратности. Действи-
тельно, среднее число ошибок в блоке длины п для 2СК. без памяти будет равно пр, где р —
вероятность ошибки символа в данном канале. Для того чтобы после использования кода
lim род = 0, очевидно, необходимо, чтобы код имел d не меньше, чем 2пр, и тогда при
277
больших d получаем d/n = 2p, а неравенство (7.55) можно переписать в следующей форме:
7?^1-Л(2р).
Интересно сопоставить нижнюю границу Варшамова-Гильберта 7?вг =1- h(2p) с верхней
границей для скорости кода, установленной теоремой Шеннона для 2СК:
С(р) =1 - h(p). Ясно, что при р = 0 эти границы совпадают. При р к 0,25 нижняя граница
Варшамова-Гильберта 7?вг - 0, в то время как верхняя граница Шеннона С(р) > 0 (см.
рис. 6.3). В области р > 10-2 граница Шеннона существенно выше, чем граница Варшамова-
Гильберта. Эта разница объясняется тем, что нижняя граница Варшамова-Гильберта соответ-
ствует алгоритму исправления ошибок только гарантированной кратности, в то время как
граница Шеннона определена при оптимальном, сколь угодно сложном декодировании. Од-
нако, хотя скорость кода R, получаемая из границы Варшамова-Гильберта, меньше, чем зна-
чение, следующее из теоремы оптимального кодирования,. она является гарантированной и
реально достижимой.
Исследование линейных кодов позволяет также упростить алгоритм декодирования по
минимуму расстояния Хэмминга, расчёт род для этого алгоритма и ближе подойти к проблеме
оптимизации выбора кодов. Для этого - рассмотрим конструкцию, которая называется стан-
дартным расположением по заданному коду V. -В качестве первой строки такого расположения
(таблицы) выберем кодовые комбинации х, самого кода V. Далее возьмём произвольное дво-
ичное слово gi длины п, которое не принадлежит коду V, и образуем М = 2к слов следующей
строки по правилу yu = x,. ®gp / = 1, 2, ..., 2*, где Ф означает поразрядное суммирование по
mod 2. Затем возьмём двоичное слово g2 длины п так, чтобы g2*x„ g2*yh> » = 1> 2, .... 2*, и
построим третью строку у2/ = х, Ф g2, и так далее вплоть до исчерпания всех двоичных векто-
ров длины п, не входящих в предыдущие строки. Легко проверить, что в каждой строке мат-
рицы будут содержаться лишь различные слова и в строках не будет содержать повторения
слов. Данная таблица будет содержать все 2" двоичных слов длины л. Поэтому число строк
_ 2я
таблицы всегда в точности —г=
2г
ливости следующих свойств для данной расстановки: поразрядная сумма по mod 2 любой па-
ры слов, находящихся в одной строке, всегда даёт кодовое слово, а лежащих в разных строках
— слово в некоторой строке, отличной от взятых, но не принадлежащих первой строке (т.е.
коду). Замена слова g/( формирующего /-ю строку, на какое-либо слово в этой же строке не
изменяет полной совокупности слов, образующих данную строку, а производит лишь их пере-
становку в строке. В алгебре такие строки, полученные по некоторой группе (коду), называ-
ются смежными классами, а слова gp-.g^,, называются образующими или лидерами смежных
классов. После построения стандартного расположения по некоторому коду V определим спо-
соб декодирования, соответствующий этой таблице, следующим образом: если принято неко-
торое слово у, то декодируется кодовое слово X/, находящееся в том же столбце, что и у. То-
гда вероятность перехода 7>(у|х/) для любого двоичного канала связи с аддитивным шумом
будет равна вероятности появления образца ошибки е, совпадающего с лидером смежного
класса g, к которому принадлежит у. Поэтому для того, чтобы сделать декодирование опти-
мальным по критерию максимума правдоподобия, достаточно выбрать в качестве лидеров об-
разцы ошибок, имеющие максимальные вероятности в каждом смежном классе. (Если не-
сколько слов имеют в некотором смежном классе одинаковые вероятности, то можно в каче-
стве лидера выбрать любое из них.)
Определение 13. Синдромом по коду И для любого принятого на выходе ка-
нала связи двоичного слова у длины п будем называть двоичный вектор-строку
длины п- к:
s = yHr, (7.56)
где Н — Проверочная матрица кода V.
Легко убедиться, что для всех слов, принадлежащих одному и тому же
смежному классу кода V, синдромы оказываются одинаковыми, а для
278
2я *, а число столбцов 2к. Можно убедиться также в
Регистр сдвига из к ячеек
Регистр сдвига из и ячеек
различных смежных классов синдромы различны. Поэтому с каждым смежным
классом можно сопоставить один, и только один синдром. Оптимальное деко-
дирование в 2СК без памяти можно тогда производить, отыскивая слово ми-
нимального веса, синдром которого совпадает с синдромом, полученным по
принятому слову. Такой алгоритм декодирования называется синдромным. Таб-
личный способ синдромного декодирования состоит в запоминании таблицы,
связывающей различные синдромы с лидерами соответствующих им смежных
классов.
Схемы кодирования и вычисления синдрома для произвольного линейного
кода приведены на рис. 7.4 и рис. 7.5. Элемент порождающей матрицы Ру оп-
ределяет характер связи z-й ячейки регистра с у-м сумматором: если ру — 1 —
связь есть, если Ру = 0 — связь отсутствует. Кодирование происходит следую-
щим образом: вектор b записывается в регистр, после чего с выходов суммато-
ров считывается вектор с. Для кодирования систематического кода необходимо
лишь п-к сумматоров, связи которых с регистром задаются матрицей Р. При
этом вектор х образуется из вектора Ь и выходов п-к сумматоров (вектора с).
На рис. 7.5 элемент проверочной матрицы ht J определяет характер связи z-й
ячейки регистра с у-м сумматором: если hjJ=i — связь есть, если ht J = 0 — связь
отсутствует. Для вычисления синдрома вектор у записывается в регистр, после
чего с выходов сумматоров считывается S.
При использовании линейных кодов выраженная числом двоичных сложе-
ний сложность процедуры кодирования и процедуры вычисления синдрома
(декодирование с обнаружением ошибок) не превышает п. Это значительно
меньше, чем при табличном кодировании и декодировании. '
Для конкретизации алгоритма декодирования с исправлением ошибок уч-
тем, что принятый вектор у можно записать в виде у = хфе, где е — вектор
ошибок в канале (размерностью п). Если конкретная реализация е имеет вес о
(о ненулевых компонент) и о меньше /и для заданного кода, то ошибки в у мо-
гут быть исправлены. Вектор е входит в выражение для синдрома (7.56), и с
учётом (7.54)
S = уНг = хНг + еНг = еНг. (7.57)
Вероятность род правильного декодирования кодового слова в любом канале связи при
использовании табличного способа синдромного декодирования (по алгоритму максимального
правдоподобия) будет определяться следующим соотношением:
279
P^= 2Xe = S/)> <7-58)
i=0
где go — означает нулевое слово, и, следовательно, Р(е - go) соответствует вероятности без-
ошибочного приёма кодового слова. (Очевидно, что роа = 1 — рОД)- Для 2СК. без памяти стан-
дартное расположение даёт правило декодирования по максимуму правдоподобия, если каж-
дый лидер выбирается как слово минимального веса в своём смежном классе. Тогда для веро-
ятности правильного декодирования получаем следующую точную формулу
' 2"~*-1
Аи=2Х1-рГ<Ч (7-59)
/=о
где го/ — минимальный вес слова в i-м смежном классе.
К. сожалению, использование (7.59) для мощных кодов оказывается затруднительным, по-
скольку требует построения необходимой таблицы стандартного расположения или знания
так называемого спектра смежных классов, т.е. распределения весов Хэмминга для слов, вхо-
дящих в каждый из смежных классов кода, что удаётся сделать лишь для некоторых частных
случаев.
Соотношение (7.59) показывает, что некоторый (л, А)-код будет оптимальным в 2СК. без
памяти, т.е. обеспечит максимальную величину рщ, если все его лидеры минимального веса
совпадут с набором образцов ошибок от 0 до некоторой кратности t. Поскольку полное число
t
таких образцов ошибок равно , а число смежных классов равно 2п~к, то это требует вы-
1=0
полнен ия условия
2"-* = £с;, (7.60)
/=о
где t — некоторое целое число. Очевидно, соотношение (7.60) выполняется не для всех
(л, &)-кодов. Напротив, его выполнение - это редчайший случай. Коды, которые удовлетво-
ряют этому условию, называются совершенными. Известно лишь два нетривиальных двоичных
(л, &)-кода с параметрами, удовлетворяющими (7.60), — это код Хэмминга и код Голея (23,12).
(Они будут определены несколько позже.) Максимум в (7.59) может обеспечить и так назы-
ваемый квазисовершенный код, среди образующих смежных классов которого при некотором t
содержатся все последовательности веса t или меньше, часть последовательностей веса t + 1 и
нет ни одной последовательности большого веса. К сожалению, квазисовершенные коды так-
же встречаются достаточно редко.
Даже если некоторый линейный код имеет известное значение d, расчёт
рно(К) или Род(И) в 2СК без памяти по границам (7.38), (7.41) или (7.43) мо-
жет привести к достаточно грубым оценкам. Это особенно относится к расчёту
обнаруживающей способности кода для больших вероятностей ошибок р. По-
скольку для линейных кодов необнаруженная ошибка происходит тогда, и
только тогда, когда образец ошибки совпадает с одним из ненулевых кодовых
слов, то можно привести точную формулу для расчёта рно( V) в 2СК без памяти:
п
Рно(П = ЕмХ(1-р)" \ (7.61)
/=ч/
где N, — число слов кода веса i, т.е. так называемый весовой спектр кода.
Если, в частности, положить в (7.61) р = 1/2, то для любого (л, к) кода по-
2* -1 1 "
лучаем =~ " ~, что, как правило, значительно меньше, чем ~^С‘п, полу-
2 2 l=d
чаемую по (7.38) для этого же значения вероятности ошибки символа в канале
связи. (Заметим, что ситуация, соответствующая случаю "обрыва канала", явля-
ется отнюдь не бессмысленной для, обнаружения ошибок, поскольку канал
280
может лишь временно перейти в состояние обрыва и мы должны обеспечить
практическое отсутствие ошибок у получателя и в таком состоянии.)
Можно доказать, что при любой вероятности ошибки р, 0 < р < 1/2 в 2СК (это верно и для
любых двоичных каналов с памятью), существует такой (п, &)-код V, что
(7-62)
Однако не обязательно для всех (п, к) наборов существует один и тот же (п, к)-код, кото-
рый обеспечивает выполнение (7..62) для всех 0 < р < 1/2. Если такой код существует, то он
называется хорошим кодом. Неравенство (7.62) может быть обеспечено в любом канале связи,
если (п, А)-код используется совместно со стохастическими преобразованиями канала на пе-
редаче и приёме. Эти преобразования сохраняют вероятности безошибочного приёма «-блока
и делают равновероятными все другие образцы ошибок. Однако такой подход требует обеспе-
чения синхронизации между приёмом и передачей для выполнения взаимообратных преобра-
зований, что делает их в действительности псевдослучайными.
Известные спектры имеют достаточно редкие классы линейных кодов, однако часто уда-
ётся в точности рассчитать эти спектры путём перебора всех 2к комбинаций данного И кода
или 2п~к комбинаций дуального к нему кода. Действительно, согласно лемме Мак Вильяма
[21] Рно(И) может быть рассчитана по спектру дуального кода N* следующим образом:
рЛУ) = 2*-"Хлг;(1-2р)'-(1-р)" ,
>•=</*
(7.63)
где d* — минимальное расстояние для дуального кода V* ,N* — спектр дуального кода.
Если (и, А)-код V используется для совместного исправления ошибок кратности до /и и
обнаружения ошибок в соответствии с определением 9, то
Ph>CVh)= 7 ’ (7-64)
Г'я+<-Л
L 2 J
где А= ~‘ci <7-65)
>=J-/K r=max(o,i-j)
Если для данного кода И в 2СК без памяти для любых р, 0 < р < 1 выполняется неравен-
ство
1 -уИ 1
Рно(^. 1/2) = -^к^С1П >
2 1=0
то он называется t — хорошим кодом.
(Существуют необходимые и достаточные условия, при которых код оказывается t — хо-
рошим, но они также требуют знания спектра кода. Если (л, А)-код V с известным спектром
{Ns} используется для исправления ошибок по максимуму правдоподобия, а не только гаран-
тированной кратности до ——- , то р0Д(К) будет иметь следующую верхнюю границу, кото-
рую легко вывести, используя аддитивную верхнюю границу:
Род ic^Pi(l~P}n 7
s=d <$+11
7=Ы
(7.66)
Если нас интересует не безошибочная передача всего сообщения, а среднее
число ошибочных информационных символов после декодирования, то в об-
щем случае это требует весьма громоздких расчётов. При малой вероятности
ошибки символа для средней битовой ошибки ръ получено для симметричного
канала без памяти приближённое выражение [13]
281
Рък^р^- (7-67)
Действительно, если код с расстоянием d—2t + 1 используется для исправления случай-
ных ошибок, то наибольшую роль будет играть неисправленная ошибка, соответствующая
комбинации t + 1 ошибочных символов. В этом случае при реализации алгоритма декодиро-
вания выносится ошибочное решение о том, что принятое слово содержит t ошибок и эти t
символов меняются, так что последовательность будет содержать 2/ + 1 = d ошибочных сим-
волов. Поскольку эти ошибки могут появиться в любых местах последовательности длиной п,
вероятность ошибочного бита при условии, что последовательность содержит ошибки, равна
d/n, а вероятность средней битовой ошибки определяется (7.67). Заметим, что рэ —
эквивалентная вероятность ошибки согласно (7.28) даёт результат, близкий к (7.67).
Полученные формулы (7.61)-(7.66) могут оказаться значительно более точ-
ными, чем (7.38), (7.41), (7.43) при расчёте род или рно. Однако остаётся откры-
тым вопрос о построении кодов с достаточно большим значением минималь-
ного расстояния d, поскольку и в этих формулах данный параметр имеет весь-
ма важное значение, а граница Варшамова-Гильберта является неконструктив-
ной. Для решения данной проблемы необходимо обратиться к некоторым под-
классам линейных систематических кодов.
7.3.4. ВАЖНЫЕ ПОДКЛАССЫ ЛИНЕЙНЫХ ДВОИЧНЫХ КОДОВ
1. Коды с общей проверкой на чётность. Это класс кодов с параметрами
(п, л) = (^ + 1, &), к = 1, 2, ..., когда имеется лишь один проверочный символ, ко-
торый образуется как сумма по mod 2 всех информационных символов. Оче-
видно, что минимальное расстояние d для данных кодов всегда равно 2 и по-
этому они могут гарантированно обнаруживать лишь одну ошибку. Комбина-
ции данного кода имеют лишь чётные веса.
2. Коды Хэмминга. Данный класс кодов имеет параметры
(п,к) = (2 s -1, 2* -1 - s), s — целое. Он определяется проверочной матрицей Н, ко-
торая должна содержать все Is — 1 ненулевых двоичных векторов. Используя
подход, изложенный в доказательстве теоремы 7.7, легко видеть, что данный
класс кодов имеет при любых s минимальное кодовое расстояние, равное 3.
Это пример совершенного кода, исправляющего все однократные ошибки и
ничего более. Коды Хэмминга могут гарантированно обнаруживать ошибки
кратности 1 и 2.
Число кодовых слов веса i (спектр кода Хэмминга длины п) можно найти
как коэффициент при следующего многочлена:
1 / и-1 «+1\
= —1(1 + Dy + п (D + i)T (1 - D\r I.
Если к кодам Хэмминга добавить ещё один проверочный символ (путём
общей проверки на чётность), то получатся коды с параметрами (2 s, Т у
которых d = 4, а спектр их определяется многочленом
/(d)=а+dy +а-Dr +2 (п - i)(i - .
З. М-последовательности. Это класс кодов с параметрами (/?,&) = (2'-1, Дs —
целое, которые определяются как дуальные к кодам Хэмминга той же самой
282
длины. Данный класс кодов может быть определён также иначе, как совокуп-
ность выходных последовательностей при различных начальных заполнениях
линейного регистра длины 5 со связями, выбранными так, чтобы период вы-
ходной последовательности оказался равным 2s -1. Поэтому они получили на-
звание последовательностей максимальной длины или М-последовательностей.
Все комбинации данного кода, кроме нулевой, имеют одинаковый вес 2'~‘ и,
следовательно, для такого кода d = 2лЧ. Коды Хэмминга и М-
последовательности являются крайними случаями кодов с малой и большой
величиной минимального кодового расстояния. Они не всегда удобны для
практического использования, поскольку исправление только однократных
ошибок обычно оказывается недостаточным для обеспечения высокой верно-
сти передачи, а высокая исправляющая способность ^-последовательностей
покупается за счёт их весьма низкой кодовой скорости R. Поэтому необходимо
иметь класс кодов с промежуточными значениями R. Это может быть достиг-
нуто при переходе к определённым подклассам циклических кодов.
Полиномиальные коды. Циклические коды. Коды Боуза-Чоудхури-
Хоквингема (БЧХ). Кодовые слова двоичного линейного кода могут быть пред-
ставлены в виде полиномов x(D) = х0 +x1D + x2D2+...+xn_1Dn~1 степени и-1 от не-
которой формальной переменной D, причём двоичные коэффициенты х. за-
дают символы кодового слова. Полиномиальный код определяется как множест-
во полиномов (кодовых слов) степени п -1, получаемых умножением инфор-
мационного полинома b(D) степени к -1 на порождающий полином кода g(D)
степени п-к:
x(D) = &(D)g(D). (7.68)
Уравнение (7.68) задаёт процедуру кодирования полиномиального кода: со-
общение дискретного источника кодируется примитивным кодом длины к,
символы примитивного кода становятся коэффициентами информационного
полинома b(D) = b0 +b1D+...+bk_lDk~1', последний умножается на порождающий
полином кода g(D) = g0+ gxD+...+gn_kDn~k, и после приведения подобных членов
определяются п коэффициентов полинома x(D), являющихся символами кодо-
вого слова.
Из уравнения (7.68) видно, что любой из полиномов х(£>), соответствую-
щих кодовым словам полиномиального кода, должен делиться без остатка на
порождающий полином g(Z)). Остаток от деления полинома y(D), соответст-
вующего принятой из канала комбинации, на порождающий полином кода
g(D) называется синдромным полиномом s(D). Если синдромный полином равен
нулю (т.е. деление произошло без остатка), то принятая комбинация является
кодовым словом. В противном случае принятая комбинация не является кодо-
вым словом. Таким образом, для полиномиальных кодов процедура обнаруже-
ния ошибок (вычисление синдрома) состоит в делении принятой комбинации
на порождающий многочлен.
На практике находят применение циклические коды, являющиеся частным
случаем полиномиальных кодов.
Пусть х = (х0, хр ..., xn_J — произвольный двоичный блок длины п. Будем
называть циклическим сдвигом Sx вправо данного блока преобразование сле-
дующего вида:
283
Определение 14. Линейный двоичный (п, £)-код V называется циклическим
кодом, если в результате циклического сдвига любой из его комбинаций полу-
ченная комбинация снова принадлежит коду, т.е. Sx еК, если х еК.
Теорема 7.9. Для любого двоичного циклического (п, к)-кода существует такой
многочлен g(D) степени r = n-k с двоичными коэффициентами, который делит
без остатка многочлен Dn +1, и при этом любое кодовое слово может быть пред-
ставлено как многочлен x(D) степени п — 1 следующего вида:
x(D) = g(D)b(D),
где b(Z>) — произвольный многочлен с двоичными коэффициентами степени не выше
k- 1 [21].
Многочлен g(D), о котором идёт речь в данной теореме, называется порож-
дающим многочленом циклического кода. Многочлен h(D) = (Dn +1)/?(о) называ-
ется проверочным многочленом. Можно доказать, что многочлен h(D) является
порождающим многочленом для дуального кода.
Циклические коды значительно упрощают описание линейного кода, по-
скольку для них вместо задания к х (п — к) элементов двоичной матрицы Р в
представлении (7.48) требуется задать (п — к + 1) двоичных коэффициентов
многочлена g(Z>). Кроме того, они упрощают процедуру кодирования и декоди-
рования для обнаружения ошибок. Действительно, для осуществления кодиро-
вания достаточно выполнить перемножение полиномов, что реализуется с по-
мощью линейного регистра, содержащего к ячеек памяти и имеющего обрат-
ные связи, соответствующие многочлену h(D) [21]. Для обнаружения ошибок
достаточно разделить многочлен, соответствующий принятому слову y(D), на
порождающий многочлен g(D) и проверить, будет ли остаток от деления равен
нулю. Эта процедура также осуществляется на линейных сдвиговых регистрах с
обратными связями. Однако более важное преимущество циклических кодов
состоит в том, что они могут быть сконструированы как коды с некоторым га-
рантированным значением минимального кодового расстояния. Для этого не-
обходимо определённым образом выбрать порождающий многочлен кода g(D).
Циклические коды, которые имеют порождающий многочлен, заданный свои-
ми определёнными корнями, называются кодами Боуза-Чоудхури-Хоквингема
(кратко БЧХ-кодами). Однако корни этого многочлена ищутся не среди веще-
ственных или комплексных чисел, а как элементы так называемых конечных
полей Галуа.
Для того чтобы пояснить методы построения таких кодов и в дальнейшем рассматривать
конструктивные методы исправления ошибок при помощи данных кодов, нам необходимо
вкратце рассмотреть основы теории конечных полей.
Полем ^"(не обязательно конечным) называется множество элементов, для которого вы-
полняются следующие свойства:
1. Для любой пары элементов поля а е b е ^определены операции а + b и а х Ь, называе-
мые, соответственно, сложением и умножением, отображающие пару (а, Ь) в какой-либо
элемент поля Я
2. Поле содержит нулевой элемент 0 и единичный 1, такие что а + 0 = a, axl — а для любого
а е ж
3. Для любого а е & существует противоположный (аддитивно обратный) элемент —а такой,
что (—а) + а = 0, и для любого а е а * 0, существует мультипликативно обратный эле-
мент а~х такой, что ааГх = 1.
284
4. Для операций с элементами поля ^выполняются законы:
а) ассоциативный а + (Ь + с) = (а + Ь) + с, а(Ьс) = (ab)c;
б) коммутативный а + b = b + a, ab = Ьа;
в) дистрибутивный а(Ь + с) = ab + ас.
Поле называется конечным (или полем Галуа, в память об открывшем его французском
ученом), если оно состоит из конечного числа элементов. Число элементов поля q называется
его порядком, а само поле обозначается как <7F(g).
Из определения поля видно, что фактически для любых пар элементов определена также
и операция вычитания: а - b = а + (-/>), а для пар а, b * 0 — и операция деления a/b = ab~l.
Доказывается, что в поле существует единственный элемент 0 и единственный элемент 1. В
алгебре доказывается важная теорема о том, что порядок поля q всегда является степенью
простого числа р, т.е. q — pn, где п — натуральное число. Если и = 1, то поле (7F(g) = (zF(p)
называется простым. Для каждого допустимого значения q правила сложения и умножения,
удовлетворяющие заданным требованиям, можно определить только одним способом. Все
элементы простого поля могут быть заданы как множество чисел (0, 1, р — 1), а операции
над ними — как действия по модулю р (mod р), т.е. как числа, равные остатку от деления на р.
В качестве примера в табл. 7.3 даны правила умножения и сложения для поля GT(5). Таб-
лица умножения позволяет находить обратные элементы; так, 4-1 = 4, поскольку 4-4 = 1. Таб-
лица сложения позволит определить обратный элемент -а на пересечении а и 0. При вычита-
нии или делении необходимо, используя таблицы, найти обратный элемент для вычитаемого
или делителя, а затем выполнить сложение или умножение обычным образом.
Например, 3-4=3 + (-4)=3 + 1=4; 3/4 = 3-4-1 = 3-4 = 2.
X 0 1 2 3 4 + 0 Таблица 7.3
1 2 3 4
0 0 0 0 0 0 0 0 1 2 3 4
1 0 1 2 3 4 1 1 2 3 4 0
2 0 2 4 1 3 2 2 3 4 0 1
3 0 3 1 4 2 3 3 4 0 1 2
4 0 4 3 2 1 4 4 0 1 2 3
Возведение в степень также возможно с учётом формулы ат = а а-...-а.. Например,
2°=1, 2* = 2, 22=2-2=4, 23 = 22-2 = 4-2= 3, 24 = 23-2 = 3-2 = 1.
Определим операции в расширенном поле GF(pn), которые не задаются уже как операции
по mod р".
Поле GT/t?) при q = р" и п 1 называется расширением поля GF(p}, а поля такого вида —
расширенными полями. Все элементы расширенного поля (7F(p") можно представить как все-
возможные последовательности длины п с элементами из поля GF(p).Например, поле <7F(23)
состоит из элементов: ООО, 001, 010, 011, 100, 101, 110, 111.
Определение. Многочлен p(D) с коэффициентами из поля <7F(g) называется неприводи-
мым над этим полем, если он не может быть представлен как произведение двух и более
многочленов с коэффициентами из этого поля, когда степени этих многочленов больше нуля.
При проверке этого условия действия над коэффициентами многочленов должны произво-
диться в поле GF(q).
Пример. Многочлен х2 + 1 приводим над (7F(2), так как х2 + 1 = (х + 1)(х + 1); много-
член х3 + х + 1 не приводим над (7F(2), так как его нельзя представить как произведение ка-
ких-либо из следующих многочленов степени меньше 3, но больше нуля над полем. GF(2).
X, X + 1, X2, X2 + 1, X2 + X, X2 + X + 1.
Разработаны регулярные методы генерирования неприводимых многочленов. В литерату-
ре (см., например, [21]) имеются таблицы некоторых неприводимых многочленов различных
степеней. (В действительности имеется много неприводимых многочленов любой степени.)
'. 'Теперь мы можем описать операции над элементами конечного поля GF(p") как операции
над последовательностями длины л над полем бТ(р). Прежде всего отметим, что любую такую
последовательность Ь = (б0, 1\, bn_^, bte GF(p), i= 0, 1, ..., л - 1, можно
285
представить полиномом степени п — 1 с коэффициентами над полем GF(p) как
w-1
= Тогда сумму двух элементов поля а + b можно получить как сумму соответст-
1=0
вующих им многочленов, а произведение ab — как произведение соответствующих многочле-
нов по модулю неприводимого полинома y(D) степени п.
Пример: а =010, b = 111, fa(x) = D, Уь(Д) = IP- + D + 1, y(D) — IP + D + 1,
ab~/a(P)/b(P) = IP + IP + P(mod P3 + P+l) = (P3 + P2 + P)xl + P2 + l(mod Z>3 + Z) + 1) =
= P2 + 1 ~ 101
Поскольку существует несколько неприводимых многочленов степени п, то, казалось бы,
могут существовать различные операции умножения для поля однако в алгебре [21]
доказывается важная теорема о том, что все конечные поля бТ'(^), простые или расширен-
ные, являются изоморфными. Это означает, что они фактически тождественны с точностью до
переобозначения элементов. Поэтому не имеет значения, какой именно неприводимый мно-
гочлен y(D) степени п с коэффициентами из GF(p) был выбран для задания поля GT7^).
Определение. Элемент ае 6F(^) называется примитивным, если все его степени
a', i — 0, 1, ..., q — 2 различны и дают все элементы конечного поля GF(^), кроме нулевого.
Доказывается [21], что в любом конечном поле всегда существует примитивный элемент. (В
действительности в каждом поле имеется несколько примитивных элементов.) Использование
понятия примитивного элемента значительно упрощает описание таблицы умножения эле-
ментов поля. Действительно, если а=<Р, b=aJ, то аЬ=<РЫ — ai+->. Легко определяются и обрат-
ные элементы, поскольку если а — а1, то a~l = aq~l~‘ (Однако таблица сложения не упрощается
при использовании примитивного элемента.)
Пусть имеется некоторый многочлен ДР) степени п с коэффициентами из конечного по-
ля 6F(p). Согласно основной теореме алгебры этот многочлен может иметь в поле (7F(p) не
более чем п корней, но он может не иметь и одного корня.
Определение. Неприводимый многочлен степени п над полем 6F(p) называется примитив-
ным многочленом, если хотя бы один из его корней является примитивным элементом поля
бТ7^).
Можно доказать [21], что у примитивного многочлена все корни являются примитивны-
ми элементами, причём если a — один из корней этого многочлена, то а, ар, ар1, ..., ар"~1
образуют совокупность всех корней этого многочлена. (В действительности последнее свойст-
во справедливо для любого неприводимого многочлена.) Существует и другое (эквиралентное)
определение примитивного многочлена - это такой неприводимый многочлен степени п, что
он делит многочлен Dp"~l -1 и не делит многочлены вида Р"' -1, если и' < рп -1. В литературе
приводятся таблицы примитивных элементов [21]. Число примитивных многочленов N(n) сте-
пени п определяется по формуле
W(h) = ^(2" -1)/и ,
где Sp(/) — функция Эйлера, которая определяется как количество чисел ряда 0, 1, ..., I — 1,
взаимно простых с I. Если 2" - 1 - простое число, то ^2"-lj = 2"-2.
Рассмотрим частный случай блоковых циклических кодов, позволяющих гарантировать
определённую величину минимального кодового расстояния и реализовать конструктивный
алгоритм исправления ошибок гарантированной кратности.
Определение. Двоичный циклический код длины 21 — 1, где I - неотрицательное целое
число, называемое кодом Боуза-Чоудхури-Хоквингема (или сокращённо БЧХ-кодом) в узком
смысле, если слово х принадлежит коду тогда, и только тогда, когда а, а2,..., а2/, где а — при-
митивный элемент поля 6Т7(2/), являются корнями многочлена f^D).
Это определение эквивалентно следующему матричному уравнению:
хНг = 0, (7.68а)
286
Все действия в (7.68а) выполняются в поле б!3?'(2/).
Рассмотрим определитель D, составленный из любого набора 2/ столбцов матрицы Н;
Вынося из каждого Z-го столбца множитель aJt, получаем
(7-69)
Поскольку в правой части (7.69) стоит определитель Ван-дер-Монда, то он всегда будет
отличен от нуля, и, следовательно, не существует линейно зависимых комбинаций из 2t или
меньшего числа столбцов матрицы Н. Поэтому аналогично выводу границы Варшамова-
Гильберта получим, что код, определяемый уравнением (7.68а), будет иметь минимальное ко-
довое расстояние d = 2t + 1.
Можно доказать [21], что степень порождающего многочлены g(D) такого циклического
кода не превосходит It и поэтому такой код содержит не более чем It проверочных символов.
Этот факт может быть сформулирован в виде следующей теоремы.
Теорема 7.10. Всегда можно построить двоичный БЧХ-код с длиной блока п = 2; — 1 (/ — лю-
бое натуральное число), который имеет k> п — It информационных символов (t < 2/-1 — натураль-
ное число) и гарантированно исправляет ошибки кратности не меньше, чем t.
Этот код в отличие от неконструктивного метода, который мы использовали при выводе
границы Варшамова-Гильберта, весьма просто определяется своим порождающим многочле-
ном g(D). Имеются достаточно подробные таблицы, которые дают для всевозможных наборов
(п,к) виды порождающих многочленов и соответствующие им значения минимальных кодо-
вых расстояний d.
73.5. КОНСТРУКТИВНЫЕ АЛГОРИТМЫ ИСПРАВЛЕНИЯ
ОШИБОК ЛИНЕЙНЫМИ КОДАМИ
Подытоживая сказанное ранее, можно сделать вывод, что переход к линей-
ным кодам и к их частным случаям — циклическим и БЧХ-кодам практически
полностью решает проблему кодирования-декодирования с обнаружением
ошибок и построения кодов с большим Минимальным расстоянием. Однако
проблема исправления ошибок по-прежнему остаётся открытой. Действитель-
но, даже при наиболее экономном способе синдромного декодирования необ-
ходимо произвести запоминание таблицы, содержащей 2”-* различных синдро-
мов и поиск по этой таблице. (Сложность декодирования экспоненциально за-
висит от к или от п ~к.) Переход к циклическим кодам лишь несколько уп-
рощает вычисление самого синдрома, но не исключает необходимость запоми-
нания 2”~* векторов. В современной теории кодирования разработан ряд кон-
структивных методов декодирования, которые позволяют перейти от экспонен-
циальной сложности декодирования к полиномиальной. Это прежде всего:
1. Алгебраические методы декодирования для БЧХ- и родственных им кодов.
2. Мажоритарные методы декодирования.
287
При втором подходе выбираются специальные подклассы линейных кодов,
имеющих так называемые "разделённые проверки". Каждый из символов блока
такого кода входит только в одну из проверок для любого символа блока. На-
пример, для кода (7, 3), дуального к коду Хэмминга, первый символ х; блока
связан проверочными соотношениями Xi = Х2 ® х$ = Х5 ® xq = хз Ф Х4. После
приёма кодового блока можно вычислить все эти проверки, включая и триви-
альную х = Xi, и принять решение о том, равен Xi нулю или единице в зависи-
мости от того, оказывается ли больше среди данных проверок нулей или еди-
ниц. Такой метод декодирования называется мажоритарным. Он обобщается и
на другие циклические коды, хотя возможен далеко не для всех из них.
Мажоритарная процедура декодирования допускает итеративное обобщение, когда на
первой итерации с использованием проверочных соотношений вычисляются апостериорные
вероятности символов кодового блока в предположении, что априорные вероятности всех
символов имеют равномерное распределение. Затем на второй итерации вычисляются новые
апостериорные вероятности в предположении, что априорными вероятностями в этом случае
оказываются апостериорные вероятности, полученные на 1-й итерации, и т.д. При опреде-
лённых условиях итеративная процедура сходится к действительно передававшемуся кодовому
слову, т.е. происходит исправление ошибок.
Рассмотрим более подробно первый подход. Пусть передаётся произвольное кодовое сло-
во х = (х0,x„_i) и принято слово у=хФе, где e = (e^,e1,...ee_1)> et eGF(2) - это образец оши-
бок, а Ф означает поэлементное суммирование в 6Р(2). Найдём синдром s для принятого сло-
ва у по известной матрице Н:
8=уНГ.
Поскольку у = х + е, а хНг = 0, то из (7.70) находим
s = eHr. (7.71)
В действительности можно показать, что в матрице Н можно ограничиться лишь нечёт-
ными степенями а, т.е. рассматривать в (7.71) матрицу Н следующего вида:
(7.70)
а0
а
а3
а"’2
г\"-2
a
H =
а2'"1
Тогда, если s = (si, ..., s2,_^, то из (7.71) получим
J = K 3, ..., 2f—1, (7.72)
где fe(p) — многочлен, соответствующий образцу ошибки е. Предположим; что вес вектора
ошибки равен о и его ненулевыми компонентами являются е^, е^, .... , т.е. вектор у содер-
жит ошибки в координатах iit i2,..., im .
Определим локаторы ошибок как величины в поле 6Т'(2Л)
Xj = aJ, i = 1, 2, ..., о .
и многочлен локаторов ошибок
CT(Z) = fK1_XiZ) = SCT/J •
>1 >0
Из (7.72) и (7.73) получим, что
(7.73)
(7-74)
(7-75)
288
Покажем, как можно найти коэффициенты многочлена локаторов ошибки ст^по
известным координатам синдрома
Положим z = — в выражении (7.74), что даёт равенство
XJ
1+СТ1 ьст2—+...+стш — = О. (7.76)
XJ xj XJ
Умножим (7.76) на х'4®
„/+<0 , _ „7+а>-1 , _ I+a-2 , 1 _ Л
Xj +G]Xj . +02%j “г... + uqjXj — U
и просуммируем по всем 1 = 1, 2,..., ш . Тогда получим
Л+ш +СТ1Л+а>-1+ст2А+ш-2+ "+стшА = 0, A/=Sf, 1 = 1, ...» 2/— 1 . (7.77)
Система уравнений (7.77) является линейной, и поэтому если её решение существует, то
оно может быть легко найдено. Доказывается [21], что если число действительно произошед-
ших ошибок не превосходит t, то система (7.77) имеет решение. После нахождения неизвест-
ных о,, ..., можно по (7.74) вычислить многочлен локаторов ошибок. Затем находятся
корни этого многочлена е2, ..., еш и, наконец, локаторы ошибок xj = sj1. Очевидно, что
нахождение локаторов ошибок позволяет найти положения самих ошибок etj на кодовом
блоке, т.е. произвести исправление ошибок.
Как видно, при использовании алгебраических методов декодирования
процедура исправления ошибок имеет полиномиальную сложность в зависимо-
сти от числа ошибок о, чем она существенно отличается от экспоненциально
сложной процедуры декодирования методом перебора всех образцов ошибок.
"Платой" за это преимущество является сужение класса всех линейных кодов
до БЧХ. Кроме того, доказывается, что достаточно длинные БЧХ-коды имеют
минимальное кодовое расстояние значительно худшее, чем то, которое гаран-
тируется границей Варшамова-Гильберта. Впрочем, существуют такие классы
кодов, как, например, коды Гоппы1)» обладающие как хорошим d, так и конст-
руктивным алгебраическим алгоритмом декодирования.
7.3.6. ОБОБЩЕНИЕ ТЕОРИИ КОДИРОВАНИЯ НА НЕДВОИЧНЫЕ
КОДЫ
До сих пор мы рассматривали только двоичные линейные коды. Однако это делалось
лишь для простоты. На самом деле теория линейных кодов обычно излагается сразу для т-
ичных кодов, где т = р', р — простое число, I — натуральное число, т.е. для случая, когда сим-
волы кода образуют конечное поле Галуа GSF(q) и над ними могут быть осуществлены все
арифметические действия, которые существуют над вещественными или комплексными чис-
лами. Для таких ти-ичных кодов могут быть определены все понятия и доказаны все свойства,
полученные ранее для двоичных кодов, а именно — порождающая и проверочная матрицы,
систематические коды, дуальные коды, границы минимальных расстояний, стандартные рас-
положения, синдромы, весовые спектры и границы для рж и род, циклические и БЧХ-коды,
алгебраические и мажоритарные алгоритмы декодирования. Наиболее важным классом т-
ичных кодов являются коды Рида-Соломона (кратко PC-коды). Они могут быть построены
как .систематические циклические (л, А)-коды при п = q - 1, п - к = 2t, t — число исправляе-
мых ошибок. Коды РС являются частью стандарта цифровой записи на компакт-диски.
О Мак Вильямс Ф. Дж, Слоэн Н. Дж- Теория кодов, исправляющих ошибки/ Пер. с англ.;
Под ред. Л.А. Бассалыго — М.: Связь, 1979.
289
По определению вектор х является словом /и-ичного (п, Л)-кода РС, если соответствую-
щий ему многочлен fx(D)имеет корни равные элементам поля GSf(q)\ а, а2, а"-*, где а-
примитивный элемент этого поля. Порождающий многочлен кода РС имеет вид
g(D) = (D-a)(D-a2)...(£>-a"-*). (7.78)
Как видно из определения PC-кода, он является частным случаем
/л-ичных БЧХ-кодов, и согласно доказанному ранее, минимальное кодовое расстояние таких
кодов будет в точности равно d = п — к + 1.
Легко показать, что никакой линейный систематический /л-ичный (т > 2) код не может
иметь d > п — к + 1. Действительно, если выбрать значения к минус одного информацион-
ного символа равными нулю, то это даст ненулевое кодовое слово веса не более чем п —
к + 1, что по свойству линейного кода и определяет верхнюю границу для d как п - к + 1.
Поскольку PC-код реализует верхнюю границу для минимального кодового расстояния, то он
оказывается оптимальным среди всех /л-ичных (п, £)-кодов в смысле исправления и обнару-
жения ошибок гарантированной кратности.
Можно дать простые описания PC-кода в несистематическом представлении. Тогда кодо-
вый вектор определяется как
х = [f(1), F(a), F(a2 ),..., F(a9-2 )], (7.79)
где F(Z>) =b0 + b1D+...+bk_lDk~1, (ft0, t\, ..., - значения информационных /л-ичных симво-
лов.
Выбор длины кода п = q — 1 является достаточно сильным ограничением, особенно при
большом порядке поля. Поэтому можно строить так называемые укороченные коды РС,
имеющие произвольную длину п < q - 1. Их можно получить из полных РС кодов, имеющих
длину п — q — 1, если положить часть информационных символов равными нулю и выбросить
их из кодовых блоков. Легко видеть, что укорочение кода не может уменьшить минимального
кодового расстояния, и поэтому (п, А:)-код при п < q — 1 будет по-прежнему иметь
d = п — к + 1.
Коды РС, являясь частным случаем БЧХ кодов, имеют алгебраический алгоритм исправ-
ления ошибок с полиномиальной сложностью. Коды т могут быть использованы совместно с
двоичными кодами для построения так называемых каскадных кодов.
7.3.7 ИТЕРАТИВНЫЕ И КАСКАДНЫЕ КОДЫ
Мощные коды (т.е. коды с длинными блоками й большим кодовым расстоянием d) при
сравнительно простой процедуре декодирования можно строить, объединяя несколько корот-
ких кодов. Так строится, например, итеративный код из двух линейных систематических ко-
дов (пь к]) и («2, кг) — см. табл. 7.4. Вначале сообщение кодируется кодом 1-й ступени
(«ь к\). Пусть кг блоков кода 1-й ступени записаны в виде строк матрицы. Её столбцы содер-
жат по кг символов, которые будем считать информационными для кода 2-й ступени (пг,кг) и
подпишем к ним пг ~ кг проверочных символов. В результате получится блок (матрица
П\ х пг), содержащий «i«2 символов, из которых к\кг являются информационными. Процесс
построения кода можно продолжить в 3-м измерении и т.д.
При декодировании каждого блока 1-й ступени обнаруживают и исправляют ошибки.
После того как принят весь двумерный блок, вновь исправляют ошибки и стирания, но уже
по столбцам, кодом 2-й ступени, причём приходится исправлять только те ошибки, которые
не были исправлены (или были ложно "исправлены") кодом 1-й ступени. Легко убедиться, что
минимальное кодовое расстояние для двумерного итеративного кода d — d^, где d\ и^ —
соответственно минимальные кодовые расстояния для кодон 1-й и 2-й ступени.
Весьма эффективная разновидность мощных, кодов — каскадные коды. Двухкаскадный
код (рис. 7.6) строится следующим образом: сначала к\ двоичных символов источника
(^Л) (ИрЛ;)
т>2 т=2
Рис.7.6. Схема каскадного кодирования и декодирования
290
Покажем, как можно найти коэффициенты многочлена локаторов ошибки по
известным координатам синдрома .$•], .
Положим z = — в выражении (7.74), что даёт равенство
1+G1—+с2-Т+-+С®“Т = ®- (7-76)
XJ XJ XJ
Умножим (7.76) на х'4®
х'+“ + Ojx'4®"1 + Озх'4®-2 +...+ошх' = О
и просуммируем по всем I = 1, 2,..., © . Тогда получим
^4/+ш+о1Л;+(В_1+ст2Л/+ш_2+...+стшЛ; = О, Л, =51г 1 = 1.2/-1. (7.77)
Система уравнений (7.77) является линейной, и поэтому если её решение существует, то
оно может быть легко найдено. Доказывается [21], что если число действительно произошед-
ших ошибок не превосходит t, то система (7ЛТ) имеет решение. После нахождения неизвест-
ных Стр стт можно по (7.74) вычислить многочлен локаторов ошибок. Затем находятся
корни этого многочлена e1s е2, ..., бш и, наконец, локаторы ошибок x7 = sj1. Очевидно, что
нахождение локаторов ошибок позволяет найти положения самих ошибок etj на кодовом
блоке, т.е. произвести исправление ошибок.
Как видно, при использовании алгебраических методов декодирования
процедура исправления ошибок имеет полиномиальную сложность в зависимо-
сти от числа ошибок со, чем она существенно отличается от экспоненциально
сложной процедуры декодирования методом перебора всех образцов ошибок.
"Платой" за это преимущество является сужение класса всех линейных кодов
до БЧХ. Кроме того, доказывается, что достаточно длинные БЧХ-коды имеют
минимальное кодовое расстояние значительно худшее, чем то, которое гаран-
тируется границей Варшамова-Гильберта. Впрочем, существуют такие классы
кодов, как, например, коды Гоппы1)- обладающие как хорошим d, так и конст-
руктивным алгебраическим алгоритмом декодирования.
7.3.6. ОБОБЩЕНИЕ ТЕОРИИ КОДИРОВАНИЯ НА НЕДВОИЧНЫЕ
КОДЫ
До сих пор мы рассматривали только двоичные линейные коды. Однако это делалось
лишь для простоты. На самом деле теория линейных кодов обычно излагается сразу для т-
ичных кодов, где т = р1, р — простое число, I — натуральное число, т.е. для случая, когда сим-
волы кода образуют конечное поле Галуа GSF(q) и над ними могут быть осуществлены все
арифметические действия, которые существуют над вещественными или комплексными чис-
лами. Для таких m-ичных кодов могут быть определены все понятия и доказаны все свойства,
полученные ранее для двоичных кодов, а именно — порождающая и проверочная матрицы,
систематические коды, дуальные коды, границы минимальных расстояний, стандартные рас-
положения, синдромы, весовые спектры и границы для рт и род, циклические и БЧХ-коды,
алгебраические и мажоритарные алгоритмы декодирования. Наиболее важным классом т-
ичных кодов являются коды Рида-Соломона (кратко PC-коды). Они могут быть построены
как-систематические циклические (л, £)-коды при п = q- п- k = 2t, t — число исправляе-
мых ошибок. Коды РС являются частью стандарта цифровой записи на компакт-диски.
Мак Вильямс Ф. Дж, Слоэн Н. Дж. Теория кодов, исправляющих ошибки/ Пер. с англ.;
Под ред. Л.А. Бассалыго — М.: Связь, 1979.
289
Реальные физические каналы связи обладают, как правило, памятью, что
может объясняться корреляцией случайных помех и параметров каналов связи.
Типичными примерами каналов с памятью являются каналы с замираниями
(см. § 5.7). Универсальным методом сведения каналов с памятью к каналам без
памяти являются, как отмечено в § 7.3 (см. рис. 7.2), перемежение символов на
передаче и их деперемежение на приёме. После перемежения символов можно
использовать алгоритмы исправления ошибок для каналов без памяти. Платой
за данное преимущество являются задержки декодирования, дополнительная
память, а также упомянутое ранее уменьшение пропускной способности канала
связи. Последнее обстоятельство может быть "смягчено" переходом к алгоритму
кодирования-декодирования с перемежением и оценкой вероятности ошибок.
В этом случае память канала используется для оценки вероятностей ошибок
символов в кодовых блоках, которые затем учитываются при исправлении
ошибок (см. ниже § 7.3.10 "Мягкое декодирование").
Если память канала проявляется в появлении чётко выраженных пачек ошибок, т.е. груп-
пы подряд следующих друг за другом ошибочных символов, то можно использовать специ-
альные коды, ориентированные на исправление ошибок именно такой конфигурации, а не
независимых ошибок (см. более подробно коды Файра в [21]). Эффективными оказываются в
каналах с памятью и. каскадные коды, если внутренние коды в них используются в основном
для обнаружения пачек ошибок и стирания блоков, на которых эти пачки обнаружены, а
внешний код используется для исправления стёртых блоков.
В последнее время обсуждаются возможности использования в каналах с памятью метода
адаптивного кодирования (декодирования), когда при отсутствии перемежения символов на
передаче декодер в режиме исправления пачек ошибок запускается лишь тогда, когда зафик-
сировано группирование ошибок в канале. В остальное время декодер работает в режиме ис-
правления одиночных ошибок. Метод адаптивного кодирования (декодирования) существен-
но уменьшает задержку в принятии решения по сравнению с методом перемежения символов
на передаче и их деперемежения на приёме.
7.3.9. СИСТЕМЫ С ОБРАТНОЙ СВЯЗЬЮ
При обнаружении ошибки в принятом блоке он может быть, вообще гово-
ря, передан получателю с пометкой о ненадёжности, но чаще всего при нали-
чии дуплексного канала связи используется другой подход. По обратному ка-
налу связи посылается запрос на данный блок, и тогда он передаётся повторно.
Так продолжается до тех пор, пока данный блок не будет принят без обнару-
женной ошибки. Такая система называется системой с решающей обратной
связью (РОС), поскольку решение о приёме блока или о его повторной переда-
че производится на приёмной стороне.
Возможен и другой подход, при котором решение об этом производится на
передающей стороне. Признаком, требующим повторной передачи, может быть
несовпадение ретранслированного с приёмной стороны по обратному каналу
информационного блока с действительно передававшимися или несовпадение
проверочных символов кода, сформированных по переданным информацион-
ным на приёмной стороне и переданных на передающую сторону, с истинны-
ми проверочными символами. Такая система называется системой с информа-
ционной обратной связью (ИОС).
Поскольку наибольшее распространение получила система РОС, то рассмотрим далее
кратко лишь её характеристики. Описанный алгоритм функционирования РОС относится к
так называемой системе с ожиданием, когда'каждая'последующая комбинация начинает пе-
редаваться только после отсутствия запроса на предыдущую комбинацию. Такой протокол
292
обмена данными является неэффективным, поскольку канал связи не используется для пере-
дачи информации, пока ожидается запрос или подтверждение на данную переданную комби-
нацию. Наиболее эффективным является протокол с непрерывной передачей кодовых блоков,
снабжённых адресами, что позволяет повторять ранее переданные блоки с теми адресами,
которые были переданы по обратному каналу как адреса блоков с обнаруженными ошибками.
Система с обратной связью может достаточно полно характеризоваться двумя величина-
ми:
— остаточной вероятностью ошибки рост, которая определяется как предел отношения числа
блоков с необнаруженными ошибками к общему числу блоков, принятому получателем при
неограниченном увеличении числа переданных блоков;
— сквозной эффективностью ц, которая определяется как предел отношения числа принятых
информационных символов к полному числу символов, переданных по каналу связи для
обеспечения их приёма при неограниченном увеличении числа переданных блоков.
Для так называемой идеальной адресной системы, когда не учитывается избыточность,
вносимая адресами и возможность переполнения буферных запоминающих устройств, кото-
рые всегда необходимы для запоминания ранее переданных и ранее принятых блоков, эти
величины при дуплексной передаче по 2СК. без памяти с одинаковыми вероятностями оши-
бок символов могут быть рассчитаны по следующим формулам:
ц = ^(1-р)2в, (7.81)
где рно(К) — вероятность необнаруживаемой ошибки при использовании (п, Л)-кода V, р —
вероятность ошибочного приёма символа в 2СК. Эквивалентная вероятность ошибки рэ мо-
жет быть при рост « 1 рассчитана как р3 « Ра„1к , а рно(К) может быть оценена по одной из
формул, приведённых в 7.3.2 и 7.3.3. (При бесшумном обратном канале в формуле (7.81) пока-
затель степени 2п должен быть изменён на п.) При практической реализации протокол с ад-
ресным подтверждением требует значительных усложнений для исключения вставок и выпа-
дений блоков при ошибках в обратном канале связи, особенно если время распространения
сигналов в канале связи не является в точности известным. Тогда используется менее эффек-
тивный, но более устойчивый протокол системы РОС, который называется протоколом с бло-
кировкой. Сущность такого протокола состоит в том, что при обнаружении ошибки в блоке
или приёме сигнала “запрос” приёмное устройство закрывается (блокируется) на время, соот-
ветствующее передаче L блоков, а на передаче осуществляются посылка сигнала “запрос” и
повторная передача L блоков, предшествовавших текущему передаваемому блоку. Такой алго-
ритм обеспечивает отсутствие вставок и выпадений с вероятностями порядка рно(И) и требует
для выбора L только знания верхней границы времени запаздывания сигналов в канале связи.
Для 2СК без памяти при одинаковых вероятностях ошибок символов в прямом и обратном
каналах можно получить следующую формулу для расчёта сквозной эффективности при ис-
пользовании данного протокола.
(1-/02" к
7=-----• (7-82)
Видно, что в частном случае L = 1 (7.82) совпадает с (7.81). Для расчёта расг в системе с
блокировкой можно использовать формулу (7.80).
Помимо описанных здесь трёх основных протоколов функционирования системы РОС
существует также много других вариантов1).
Заметим, что важным положительным свойством систем с обратной связью
является их адаптивность. Действительно, как это следует из (7.62), pHO(V) мо-
жет быть сделана весьма малой для любых состояний канала в отличие от
11 Kloev Т., Korzhik V. Error detecting codes. Kluwer Academic Publ. — 1995. — 250 p.
293
рад(У) при использовании лишь исправления ошибок. Поэтому если состояние
канала связи (например, р в 2СК) изменяется, причём иногда вплоть до обрыва
(р = 1/2), то рно(И всё равно оказывается достаточно малой, а скорость переда-
чи будет значительно изменяться в соответствии с (7.81) или (7.82), подстраи-
ваясь (адаптируясь) к состоянию канала и обеспечивая достаточно высокую
среднюю скорость передачи. В системах с обратной связью можно использо-
вать также и частичное исправление ошибок, что может существенно увеличить
сквозную эффективность, но приведёт к неизбежному усложнению аппаратно-
го или программного обеспечения.
7.3.10. ЗАКЛЮЧЕНИЕ ПО § 7.3. ОБЪЕДИНЕНИЕ ОПЕРАЦИЙ
ДЕМОДУЛЯЦИИ И ДЕКОДИРОВАНИЯ. ДЕКОДИРОВАНИЕ
С МЯГКИМ РЕШЕНИЕМ
Подводя итоги § 7.3, можно сделать вывод, что изложенные в нём результа-
ты позволяют в значительной мере решить проблемы 1 — 4, сформулированные
в начале этого раздела для 2СК или /иСК без памяти или в случае произволь-
ных каналов, но при использовании случайного перемежения символов на пе-
редаче и обратного их деперемежения на приёме или использовании стохасти-
ческих преобразований каналов^. (В теории кодирования изучаются также коды,
которые специально ориентированы на исправление ошибок в виде пачек, т.е.
конфигураций, вероятность появления которых зависит лишь от протяжённо-
сти участка кодового блока, поражённого ошибками, но не зависит от числа
ошибок на этом участке.)
Однако мы не рассмотрели ещё случай, когда в системе связи используются
некоторые помехоустойчивые (например линейные блоковые) коды и для де-
кодирования используются не значения дискретных символов, полученные по-
сле демодулятора, а значения элементов непрерывных сигналов, соответствую-
щих переданным символам, или адекватные им достаточные статистики, на-
пример отсчёты на выходах согласованных фильтров (см. гл. 5).
Разделение операций демодуляции и декодирования на приёмной стороне носит услов-
ный характер. Действительно, при использовании помехоустойчивого двоичного блочного ко-
да с длиной блока п можно рассматривать п последовательных канальных сигналов (которые
не являются независимыми и равновероятными, так как они связаны проверочными соотно-
шениями кода) как один "составной" или "сложный" сигнал длительностью пТ .
Таким образом, получим систему, в которой для передачи 2* сообщений используется 2*
"сложных" сигналов длительностью пТ каждый. Для указанных сигналов можно построить
оптимальный приёмник (как описано в гл. 5), который обеспечивает минимально возможную
вероятность ошибочного приёма сообщения, совмещая в себе функции демодулятора и деко-
дера (объединяя операции демодуляции и декодирования). Он отображает каждую реализа-
цию длительностью пТ на выходе канала в одно из 2* сообщений, т.е. реализует декодирова-
ние в широком смысле. Точно так же можно последовательно включённые кодер и модулятор
заменить одним устройством, которое будет с каждым из 2* сообщений сопоставлять слож-
ный сигнал для передачи по каналу. Такое устройство выполняет кодирование в широком смыс-
ле.
Рассмотрим алгоритм работы оптимального приёмника кодированных сигналов. Будем
считать, что элементарные двоичные сигналы на передаче противоположны и имеется канал с
постоянными параметрами и БГШ. Тогда учитывая, что энергии всех 2* сложных сигналов
одинаковы, получаем (см.(5.28))
Коржик В.И., Финк Л.М. Помехоустойчивое кодирование дискретных сообщений в каналах
со случайной структурой. - М: Связь. - 1975. - 271 с.
294
Рис.7.7. Объединение операций демодуляции и декодирования
где t е[0, иТ’], j = 0,..., 2* — 1, — сложный сигнал, соответствующий у-й кодовой комбина-
ции; si J(t) = xiJs(t-iT), t е[/Т, (/ + 1)7’], iF = 1, ..., п, — один из двух противоположных сигналов,
передаваемый в составе у-го сложного сигнала на z-й позиции и определяемый /-м кодовым
символом xtJ, Xj j е{-1, 1} ; s(t) задан на интервале длительностью Т. В соответствии с пред-
ставленной формулой сначала по z(r) вычисляется вектор Х = (Х0, ..., X„_j), компоненты кото-
рого могут быть получены как отсчёты (в моменты, кратные Т) с выхода фильтра, согласо-
ванного с элементарным сигналом s(t); затем вычисляется скалярное произведение вектора X
с каждым возможным кодовым вектором х7 = (xOj, и принимается решение в пользу
того кодового вектора, который обеспечивает максимальное значение скалярного произведе-
ния. Скалярное произведение (х(, X) может быть найдено с помощью цифрового фильтра (см.
гл. 10), как показано на рис. 7.7.
Таким образом, оптимальный приёмник кодированных сигналсд (которой использует
информацию о входном непрерывном сигнале) можно 'редставить как последовательное со-
единение демодулятора с мягким решением и декодера v мягким решением.
Из рис. 7.8 видно, что разница между декодированием с мягким решением и декодирова-
Рис.7.8. Различие между декодированием с мягким и жёстким решением
295
нием с жёстким решением состоит в том, что жёсткий декодер работает только с вектором
у = (уо, yn_j); yt =sign(XJ), а мягкий декодер использует дополнительную информацию о
надёжности компонент вектора у, которую можно получить на основе анализа величин |1(|:
чем больше величина |Х,|, тем надёжнее принятое в выходном блоке демодулятора жёсткое
решение у,. Демодулятор, выдающий на выход дополнительную информацию о надёжности
своих решений, называется демодулятором с мягким решением (выходом), рис. 7.8.
Декодирование с мягким решением устраняет потери, связанные с принятием промежу-
точного решения в выходном блоке демодулятора (т.е. с заменой X, на yt). Оптимальным по
помехоустойчивости алгоритмом мягкого декодирования является объединение операций де-
модуляции и декодирования (см. рис. 7.7). С другой стороны, сложность декодера рис. 7.7
значительна, поэтому предложено много алгоритмов декодирования с более простой реализа-
цией, способных в той или иной мере учитывать информацию о надёжности решений, при-
нимаемых демодулятором.
Поскольку при мягком декодировании используется более полная инфор-
мация о принятых символах, то следует ожидать получения меньших вероятно-
стей ошибок для того же самого кода, чем при жёстком декодировании. Оче-
видно, что для рассмотренной выше модели постоянного канала с аддитивной
помехой в виде БГШ мы получаем алгоритм максимума правдоподобия, экви-
валентный декодированию по минимуму евклидова расстояния. Причём если
при передаче двоичных противоположных сигналов в таком канале связи оп-
тимизация кода по-прежнему будет соответствовать максимизации минималь-
ного расстояния d, то для /и-ичных кодов требуется максимизация минималь-
ного евклидова расстояния, что необязательно будет адекватно максимизации
d.
Для мягкого декодирования также существуют экспоненты вероятностей ошибок и гра-
ницы ошибок при известном спектре кодов. В последнем случае для двоичных противопо-
ложных сигналов в неискажающем канале с БГШ оптимальный алгоритм мягкого декодиро-
вания может обеспечить следующую границу для вероятности ошибки:
п
(1.ЪЪ)
i~d
,2 EJ „
где п =~гг- ~ отношение энергии элемента сигнала к спектральной плотности белого шума
М)
в канале связи; [N,] — спектр весов кода.
Для мягкого декодирования также можно рассчитать ЭВК от применения
кодирования, который будет, очевидно, превосходить ЭВК для жёсткого деко-
дирования, причём для каналов с постоянными параметрами типичный выиг-
рыш имеет порядок 2 дБ.
Для конструктивной реализации мягкого декодирования невозможно в чис-
том виде использовать алгебраические методы, хотя имеются некоторые их мо-
дификации приемлемые в этом случае, такие, например, как декодирование по
минимуму обобщённого расстояния или мажоритарное декодирование^. Наиболее
перспективным для реализации мягкого декодирования (совместной демодуля-
ции-декодирования), в том числе и для каналов е памятью, оказалось приме-
нение свёрточных кодов, которые допускают использование оптимального, но
вместе с тем практически реализуемого алгоритма Витерби. Этот подход изло-
жен в следующем параграфе данной главы.
Блейхут Р. Теория и практика кодов, контролирующих ошибки / Пер. с англ. Под ред.
К..Ш. Зигангирова. - М.: Мир. - 1986. - 576 с.
296
7 А. СВЁРТОЧНЫЕ (РЕШЁТЧАТЫЕ) КОДЫ
Выше рассматривались блоковые коды, когда значения элементов, входя-;
щих в различные блоки, оказывались независимыми друг от друга.
Для систематических двоичных блоковых (п, к)-кодов последовательность
информационных символов источника разбивается на блоки длиной к бит и
затем в кодере к каждому такому блоку добавляется г=п-к проверочных сим-
волов, после чего блоки длиной п символов передаются в канал связи. Декоди-
рование блоков также производится независимо друг от друга.
Однако возможен и другой, непрерывный принцип кодирования и декодиро-
вания, когда на вход кодера поступает непрерывная последовательность ин-
формационных символов источника, а с выхода кодера также снимается не-
прерывная последовательность символов, являющихся функцией входных сим-
волов и структуры кодера. В декодере такого типа на вход поступает непрерыв-
ная последовательность символов из канала связи (возможно, искажённая
ошибками), а на выходе восстанавливается (возможно, с ошибками, но, как
правило, меньшими чем канальные) последовательность информационных
символов. Наиболее распространённым классом непрерывных кодов являются
так называемые свёрточные коды, для которых операция формирования выход-
ной последовательности по заданной входной последовательности является ли-
нейной. Свёрточные коды были впервые открыты Л. Финком и П. Элайесом,
вскоре Возенкрафт разработал метод последовательного декодирования свёр-
точного кода [13]. В 1967 г. появился алгоритм Витерби для оптимального де-
кодирования свёрточных кодов [6].
Структура двоичного свёрточного кода со скоростью R = — показана на рис. 7.9. Свёр-
точный кодер состоит из сдвигового регистра, включающего v ячеек памяти, блока суммато-
ров по mod 2, входы каждого из которых связаны с некоторыми выходами ячеек памяти реги-
стра, опре 1яемыми коэффициентами й,? =(0, 1). Выходы сумматоров считываются при по-
мощи коммутатора К и подаются в канал связи. Таким образом, на каждом такте в регистр
сдвига последовательно поступает очередной блок из к информационных символов источника
и одновременно он освобождается от к символов, содержащихся в его крайних правых ячей-
ках памяти. На этом же такте формируются п выходных символов, которце последовательно
считываются в канал связи. Таким образом, если ги — скорость поступления символов в ко-
дер, то для отсутствия растущих задержек во времени скорость передачи символов по каналу
откуда видно, что отношение к/п действительно
п
связи должна быть не меньше чем vk= — vK,
К
Рис.7.9. Структура свёрточного кодера со скоростью к/п
определяет скорость свёрточного кода. Ве-
личина v (или длина регистра) обычно на-
зывается длиной кодового ограничения.^
(Возможно и другое, более общее
представление свёрточного кодера в виде
схемы с к регистрами сдвига с кодовыми
ограничениями v, (i = 1, 2, ..., к.) На вход
каждого из них подаётся один информаци-
онный символ за время одного такта [13].)
На рис. 7.10 показан частный случай
свёрточного кода со скоростью 1/2 и
О В некоторых работах длина кодового ограничения определяется числом ячеек сдвитого ре-
гистра минус 1.
297
длиной кодового ограничения у = 3. При нулевой информационной последовательности вы-
ходная кодовая последовательность также равна нулю. В табл. 7.5 приведён пример формиро-
вания выходной последовательности для кодера, показанного на рис. 7.10. Выходная последо-
вательность кодера может быть представлена как цифровая свёртка входной информационной
последовательности и импульсного отклика кодера (отсюда название кодов — свёрточные).
Таблица 7.5
Вход 0 0 1 0 0 0 1 1 .0 0 0
Выход 11 10 11 00 11 01 01 11 00
Свёрточный код характеризуется следующими параметрами: относительной скоростью ко-
да R = k/n и избыточностью зе=1-Л, где к и п — число информационных и кодовых символов,
соответствующих одному такту работы кодера (для кодера рис. 7.10 R-1/2); длиной кодового
ограничения v (длина регистра кодера); порождающим полиномом кода, коэффициенты которых
описывают связи сумматоров с ячейками регистра кодера (для верхнего сумматора
gW = l+£>+£>2, для нижнего сумматора g^-1+D2). Полиномы обычно записывают сокра-
щённо, обозначая каждые три отвода (двоичных коэффициента) как одну восьмеричную циф-
ру (код рис. 7.10 обозначается (7,5)).
Кроме перечисленных выше параметров свёрточный код характеризуется свободным рас-
стоянием dCB, под которым понимают расстояние по Хемминту между двумя полубесконеч-
ными кодовыми последовательностями. Если две одинаковые информационные последова-
тельности кодировать с помощью кодера, изображённого на рис. 7.10, то соответствующие им
кодовые последовательности будут совпадать друг с другом. Если в некоторый момент в од-
ной информационной последовательности окажется символ 0, а в другой 1, то с этого момен-
та кодовые последовательности будут отличаться друг от друга независимо от дальнейшего
содержания информационных последовательностей. Минимальное расстояние по Хемминту
между любыми двумя полубесконечными кодовыми последовательностями с того момента,
как соответствующие им информационные последовательности начинают различаться, назы-
вается свободным расстоянием свёрточного кода <7СВ.
Свободное расстояние rfCB характеризует помехозащитные свойства свёрточного кода
(аналогично тому как минимальное расстояние d характеризует помехозащитные свойства
блочных кодов). Оно показывает, какое наименьшее число ошибок должно произойти в кана-
ле для того, чтобы одна кодовая последовательность перешла в другую и ошибки не были об-
наружены. Для кода, приведённого в нашем примере, свободное расстояние <7СВ = 5 .
Поиск хороших свёрточных кодов (с наибольшим <7СВ при заданных R и v) обычно осу-
ществляется методом перебора всех порождающих полиномов на ЭВМ. Таблицы хороших ко-
дов приведены в [13].
Свёрточные коды являются частным случаем (линейной реализацией) так
называемых решётчатых кодов. Можно также полагать, что решётка является
просто другим (иногда более удобным) способом представления и обычных
Рис.7.10. Свёрточный кодер со скоростью Я=1/2
следующими правилами (6J:
сверточных кодов.
Решёткой называется ориентирован-
ный граф с периодически повторяющейся
структурой "ячеек". Каждая ячейка содер-
жит колонки из одинакового числа вер-
шин (узлов), соединённых ребрами. Меж-
ду процедурой кодирования свёрточным
кодом и решёткой имеется взаимно одно-
значное соответствие, которое задаётся
298
— каждая вершина (узел) соответствует внутреннему состоянию кодера;
— ребро, исходящее из каждой вершины, соответствует одному из возможных
символов источника (для двоичного источника из каждой вершины выходит
два ребра — верхнее для 0 и нижнее для 1);
— над каждым ребром отмечены значения символов, передаваемых в канал
связи, если кодер находился-в состоянии, соответствующем данной вершине и
источник выдал символ, соответствующий данному ребру;
— последовательность ребер (путь на решётке) — это последовательность сим-
волов, выданных источником.
Так, если под состоянием кодера по-
нимать содержимое двух последних ячеек
памяти (2, 3) в регистре сдвига на
рис. 7.10, то решётка с четырьмя состоя-
ниями, соответствующая данному кодеру,
будет иметь вид, показанный на рис. 7.11
(решётка может отражать и нелинейный
кодер, когда выходные символы не яв-
ляются линейной функцией входных).
Так же как и блоковые коды, свёрточные
допускают представление в виде полу-
бесконечных порождающих или прове-
Рис.7.11. Решётка кодера, показанного на рис.7.10
рочных матриц, однако представление в
виде решётки оказывается более удобным
для описания алгоритмов декодирования.
Свёрточные коды имеют следующие основные преимущества перед блоко-
выми при их использовании для исправления ошибок.
1. Они не требуют синхронизации по блокам, а лишь синхронизации коммута-
торов К (на передаче и приёме).
2. Если кодовое ограничение v выбр хь равным длине блокового кода, то ис-
правляющая способность свёрточного кода оказывается больше, чем исправ-
ляющая способность такого блокового кода (при наилучшем выборе обоих
кодов).
3. Алгоритм декодирования свёрточных кодов допускает простое обобщение на
случай мягкого декодирования, что обеспечивает дополнительный энергети-
ческий выигрыш.
4. Свёрточные коды допускают простое объединение кодирования и модуляции
(так называемая кодированная модуляция или сигнально-кодовые конструкции),
что особенно важно при построении энергетически эффективных систем
связи для каналов с ограниченной полосой частот.
Для оптимального декодирования свёрточных кодов в каналах без памяти
часто используется рекуррентный алгоритм декодирования Витерби (АВ). Рас-
смотрим его на примере мягкого декодирования в постоянном канале с адди-
тивным белым гауссовским шумом.
Поскольку принимаемый сигнал на k-м тактовом интервале нам известен,
то можно вычислить евклидовы (или гильбертовы) расстояния между приня-
тым сигналом и всеми возможными сигналами:
Т
=П2*(/)~4,)(0)2<#, z = О, 1,..., т-1, к = 0, 1, ...,
о
299
где sk}(t) — ожидаемый в месте приёма сигнал, соответствующий f-му символу
(для двоичных сигналов i = 0,1); zk(t) — сигнал, принятый на к-м тактовом ин-
тервале.
Теперь можно каждому ребру решётки последовательно приписывать на к-х
её звеньях значения Afe. Оптимальное по правилу максимального правдоподо-
бия декодирование будет тогда соответствовать выбору такого пути на решётке
(т.е. последовательности непрерывно продолжающихся ребер), что ока-
*
жется минимальной. Казалось бы, для решётки длины п (т.е. для последова-
тельности переданных символов длиной и) нужно для этого перебрать 2” воз-
можных вариантов, но в действительности это не так. Ключевой момент АВ
состоит в том, что для каждой вершин на данном шаге (такте) имеется множе-
ство метрик, соответствующих соединённым с ней ребрами вершинам на пре-
дыдущем шаге можно оставить только одно ребро, которое минимизирует сум-
му метрик на всех предыдущих шагах.
Проще всего можно пояснить данный алгоритм на простом примере. Пусть решётка име-
ет всего два состояния и структуру, показанную на рис. 7.12, где над ребрами подписаны со-
ответствующие метрики. Полагаем, что первый информационный символ 0. Тогда пути, ос-
тавленные ("выжившие") на различных шагах, показаны на рис. 7.13. Видно, что на 4-м шаге
получаем выживший путь, который в условиях наших обозначений (ориентация ребра вниз —
1, вверх — 0) соответствует информационной последовательности 0100.
Сложность АВ определяется на каждом шаге числом сравнений метрик, со-
единяющих все вершины, и оно ограничено величиной М2, где М — число со-
стояний решётки. Поскольку из схемы свёрточного кодера получаем, что
M = 2v~l, где v — число ячеек памяти регистра сдвига кодера, то видим, что
сложность АВ экспоненциально зависит от длины кодовых ограничений, но
линейно зависит от длины передаваемой последовательности. Поэтому длина
кодовых ограничений v при использовании АВ в качестве алгоритма декодиро-
вания обычно выбирается не более 10... 15, что, впрочем, оказывается вполне
достаточным для получения большого энергетического выигрыша. АВ требует
обработки всей последовательности сигналов для оптимального декодирования
даже первого информационного символа. Такая процедура требует значитель-
Рис.7.13. Построение "выжившего" пути по АВ
300
ной памяти на приёме и задержки для декодирования элементов сообщения.
Для исключения этих недостатков используется модификация АВ в виде усе-
чённого алгоритма, когда решение об информационном символе на z-м такте
принимается по результатам обработки по АВ последовательности символов на
данном z-м и L последующих тактовых интервалах. Теория и эксперимент по-
казывают, что если L выбраТь порядка нескольких длин кодовых ограничений,
то энергетические потери при использовании такой модификации окажутся
небольшими.
Заметим, что в действительности АВ является эффективным методом решения значи-
тельно более общей оптимизационной задачи. Пусть требуется найти такой дискретный век-
тор Ху =(х15 ..., Ху), х( еХ, |Х| = г , который максимизирует (минимизирует) функцию Л(ху).
Тогда прямой метод требует перебора rN различных векторов. Однако, если функция Л(ху)
допускает представление
N
Л(хлг)= ’
*=1
где XK(ot) — произвольные функции векторных аргументов вида
_ -> Z*)> k>V>
OjL — S / ч
k^v,
то можно доказать, что максимум такой функции находится при помощи следующего обоб-
щённого АВ (ОАВ):
Шаг 1. Найти xv+1) = ArgmaxAv+1 (при xv+1). (Поскольку | = г , то для каждого
*1
значения аргумента (х2,xv+1) это потребует не более чем г вычислений.)
Шаг 2. Найти х2(х3,xv+2) = Argmax Л v+2 (при xv+2), где xv+2 - (хр х2,..., xv+2), а х, было
х2
найдено на 1-м шаге и т.д.
Шаг 5. Найти х,(х,+1, .... xv+s) = ArgmaxAv+j (при xv+t.), где xv+.t. = (хр х2,х,_г, х„xv+.t.),
Xs
а х1; х2,х,-! были найдены на предыдущих шагах и т.д.
IUar./V-v. Найти (xy_v,Ху) = Arg max A.N (при \N), где
Xy =(x1;x2, ...,xy_v_1,Xy_v.Xy), a Xj, X2, ..., xy_v_j были найдены на всех предыдущих
шагах.
Таким образом, ОАВ имеет полиномиальную сложность от длины последовательности N
в отличие от экспоненциальной сложности при прямом методе перебора всех альтернативных
гипотез.
Выбирая различные формы функций Ак(сга) , можно получить достаточно простые мето-
ды решения оптимизационных задач, а следовательно, и оптимальные алгоритмы обработки
сигналов не только для свёрточных кодов, но и для других моделей каналов, например для
канала с межсимвольной интерференцией, описанного в § 5.8.
Универсальность АВ состоит в том, что он может быть использован для различных рас-
пределений сигналов и помех, неоднородных каналов, для совмещения декодирования и де-
модуляции и не только для независимых распределений, но и для случаев зависимости, опи-
сываемых марковскими последовательностями.
. - В § 5.6 было отмечено, что в каналах с МСИ алгоритм Кловского-Николаева (АКН) с об-
ратной связью по решению при фиксированной задержке принятия решения D = Q (Q — па-,
мять канала) практически не уступает по помехоустойчивости АВ с той же задержкой реше-
ния, но реализуется проще. АКН, полученный первоначально для субоптимального поэле-
ментного приёма дискретных сообщений в каналах с рассеянием (МСИ), можно использовать
и для совместной демодуляции-декодирования при свёрточном кодировании, так как свёр-
точный кодер является аналогом некоторого канала с рассеянием. Естественно, что в этом
301
случае задержка в принятии решения L должна учитывать не только память канала (Q), но и
длину кодового ограничения1^.
Свёрточные коды могут декодироваться и другими алгоритмами (например, последова-
тельного декодирования и синдромного декодирования ), не являющимися, вообще говоря,
оптимальными.
Последовательное декодирование было впервые введено Возенкрафтом, однако наиболее
широко используемый в настоящее время алгоритм принадлежит Фано [13].
В то время, когда согласно алгоритму Витерби производится продвижение и обновление
метрики для всех путей, которые могут казаться нам лучшими, последовательный декодер
существенно ограничивает число путей, которые фактически обновляются. Основная идея
последовательного декодирования состоит в том, что использоваться должен лишь тот путь,
который имеет вид наиболее вероятного. Ввиду ограниченности поиска при декодировании
никогда нельзя быть полностью уверенным, что этот путь является наилучшим. Этот подход
может рассматриваться как метод проб и ошибок для поиска правильного пути на кодовом
дереве. Такой поиск осуществляется последовательно, так что в каждый момент происходит
обработка лишь одного пути. Однако декодер имеет возможность вернуться назад при поиске
наилучшего решения.
Два наиболее часто используемых метода синдромного декодирования — декодирование
путём табличного поиска и пороговое декодирование — применяются при декодировании как
свёрточных, так и блоковых кодов. О табличном методе синдромного декодирования мы уже
говорили. Пороговое декодирование — это разработанный Месси метод, в основе которого
лежит специальный выбор порождающих многочленов кода, допускающих решение прове-
рочных уравнений с помощью мажоритарного выбора символа ошибки по некоторым оцен-
кам. Последние получаются суммированием одного или нескольких символов синдрома.
Для оценки качества мягкого декодирования при помощи АВ воспользуемся определени-
ем: минимальным евклидовым расстоянием d& свёрточного кода при выбранном методе модуля-
ции называется минимальная сумма евклидовых метрик ошибочных путей на решетке, начи-
нающихся и заканчивающихся на правильном пути.
Тогда для вероятности ошибки ре в первом символе в детерминированном канале без па-
мяти с БГШ при декодировании по АВ будет справедлива следующая граница:
где N{d^ — число путей с евклидовым расстоянием da, начинающихся и заканчивающихся
на правильном пути; Л'о — спектральная плотность БГШ.
Используя более полно структуру решётки свёрточного кода, можно оценить также и
среднюю вероятность ошибки на бит ръ, причём эта величина будет также экспоненциально
зависеть от d2. .
Для получения наибольшей энергетической эффективности, особенно в ка-
налах с памятью, целесообразно использовать каскадные коды с внутренними
свёрточными кодами и мягким декодированием по АВ (или АКН) и внешними
PC-кодами с использованием алгебраических методов декодирования. Такая
конструкция позволяет получить энергетический выигрыш, достигающий 5 дБ
при эквивалентной вероятности ошибки рз = 10“5 и приемлемой сложности де-
кодирования. Заметим, что АВ может быть использован и для декодирования
блоковых кодов, если эти коды могут быть описаны при помощи решёток.
Для того, чтобы получить одновременно наилучшую энергетическую и час-
тотную эффективность, используется, как уже упоминалось ранее, кодированная
модуляция или — в другой терминологии — используются определённые сигналь-
но-кодовые конструкции (СКК). Общую идею такого метода иллюстрирует
б Кловский Д.Д., Белоус С.А., Карташевский В.Г. Приём сигналов со свёрточным кодирова-
нием в канале с межсимвольной интерференцией // Проблемы передачи информации. — Т. 7.
- Вып. 2. - 1991, с. 97-100.
302
Отображение двоичных «-последовательностей
на множество сигналов (w„, и„ ...,
Рис.7.14. Система с кодированной модуляцией
рис. 7.14, где индексом I обозначается номер такта. В этом случае кодер свёр-
точного кода со скоростью к/п удобнее представлять в виде параллельного на-
бора к регистров сдвига с различными длинами кодовых ограничений v,-. На
выходе такого кодера, в каждый момент времени появляется «-мерный двоич-
ный вектор, который отображается в один из 2й непрерывных сигналов, пере-
даваемых в канал связи. Для каналов с ограниченной полосой типичными яв-
ляется использование сигналов с многократной фазовой или амплитудно-
фазовой модуляцией, причём ключевым моментом здесь является разбиение
множества сигналов на созвездия.
Пример такого разбиения для 8-ричной ФМ показан на рис. 7.15. Созвездия находятся в
нижнем ряду рисунка. На рис. 7.16 представлена схема кодирования Унгербоека, использую-
щая представление сигналов в виде созвездий.
Здесь двоичная последовательность символов источника разбивается на блоки по к бит, и
первые к бит этих блоков подаются на вход свёрточного кодера, а оставшиеся поступают на
модулятор в некодированном виде. Общий принцип состоит в том, что некодированные биты
выбирают сигнал в созвездии, а кодированные биты определяют выбор созвездия. (Так, на-
пример, для схемы разбиения, показанной на рис. 7.15, кодер Унгербоека, изображённый на
рис. 7.16, будет иметь параметры: к = 2, к = 1, R = 1/2)
Поскольку, как видно
из рис. 7.15, сигналы
Рис.7.15. Разбиение 8-ричных ФМ сигналов на созвездия
в каждом из созвездий удалены на значи-
тельное евклидово расстояние, а мини-
мальное евклидово расстояние между сиг-
налами различных созвездий может быть
мало, то использование рассмотренного
выше принципа позволяет максимизиро-
вать евклидово расстояние между после-
довательностями кодированных сигналов
при сохранении высокой спектральной
эффективности.
Разработана специальная техника, по-
зволяющая объединить свёрточные коды и
амплитудно-фазовую модуляцию сигнала
для обеспечения высокой энергетической
и спектральной эффективности
При практическом использова-
нии помехоустойчивых кодов глав-
ным ограничением является слож-
ность устройства декодирования,
которая может быть выражена либо
*) Biglieri Е, Divsalar D, Simon M.N. Introduction to trellis — coded Modulation with Applications.
- Publ. Me. Millan. 1. - 1991. - 548 p.
303
Рис.7.16. Кодер Унгербоека
числом логических схем в декодере, либо числом вычислительных операций,
необходимых для декодирования. Поэтому среди кодов, обеспечивающих за-
данный выигрыш, следует выбирать те, которые допускают менее сложную
реализацию, либо наоборот, при заданной сложности декодирования следует
выбирать коды, обеспечивающие наибольший выигрыш.
ВЫВОДЫ
1. По своему назначению кодирование подразделяется на примитивное, экономное и поме-
хоустойчивое. Примитивное кодирование согласует алфавит источника с алфавитом дис-
кретного канала, а в некоторых случаях используется для шифрования передаваемых дан-
ных или обеспечения устойчивой работы системы синхронизации. Экономное кодирование
позволяет уменьшить время передачи длинной последовательности сообщений источника
по дискретному каналу. Помехоустойчивое кодирование позволяет обнаруживать или ис-
правлять ошибки в принятых из канала сообщениях источника.
2. Экономное кодирование сообщений источника без памяти обеспечивается неравномерным
префиксным кодом, который строится оптимальным образом методом Хаффмена, а при-
ближённо — методом Шеннона-Фэно. При экономном кодировании сообщений источника
с памятью перед использованием неравномерного префиксного кода необходимо приме-
нить метод укрупнения алфавита для преобразования заданного источника в эквивалент-
ный источник без памяти. Предельные возможности экономного кодирования определя-
ются первой теоремой Шеннона (см. гл. 6). При неизвестной статистике источника можно
использовать универсальный сжимающий алгоритм Зива-Лемпела.
3. Для расчёта вероятности ошибочного декодирования при использовании блоковых кодов
можно использовать верхнюю границу для этой величины, называемой экспонентой веро-
ятности ошибок. ,
4. ЭВК можно рассчитать, пользуясь понятием эквивалентной вероятности ошибки рэ с учё-
том скорости используемого кода R.
5. При помехоустойчивом кодировании обнаружение и исправление ошибок возможно пото-
му, что большая часть из 2" двоичных комбинаций длины и не используется для передачи
сообщений источника (запрещённые комбинации). Появление запрещённой комбинации
на приёмном конце однозначно свидетельствует об ошибке в канале.
6. Кодовые (разрешённые) комбинации должны удовлетворять некоторой системе проверок
(задающей код), что позволяет отличать их от запрещённых комбинаций. Результатом вы-
числения проверок для принятой из канала комбинации является синдром. Если синдром
нулевой, то принята кодовая комбинация (ошибок нет). При обнаружении ошибок декодер
отбрасывает те принятые комбинации, которые имеют ненулевой синдром. При исправле-
нии ошибок декодер по синдрому определяет положение ошибочных символов в принятой
комбинации и инвертирует их.
304
7. Важнейшими параметрами помехоустойчивого кода являются избыточность и минималь-
ное расстояние. Избыточность численно равна относительной доле проверочных символов
в кодовой комбинации. При увеличении избыточности расширяется полоса частот, зани-
маемая канальным сигналом, или уменьшается скорость передачи информации. Одновре-
менно растет корректирующая способность кода (число обнаруживаемых или исправляе-
мых ошибок). Минимальное расстояние кода d равно наименьшему числу ошибок, которое
может превратить одну кодовую комбинацию в другую (и которое не будет обнаружено ко-
дом).
8. Для конструктивной реализации процедуру кодирования можно использовать линейные
блоковые коды, в частности циклические коды. Для этих кодов можно оценить величину
минимального кодового расстояния (а следовательно, и энергетический выигрыш (ЭВК) от
применения кодирования), достаточно просто реализовать устройство кодирования и деко-
дирования с обнаружением ошибок.
9. Для конструктивной реализации процедуры декодирования с исправлением ошибок, в том
числе и в каналах с группированием ошибок, можно использовать подкласс линейных ко-
дов, таких как БЧХ-коды или мажоритарные коды. Весьма перспективным является ис-
пользование в таких каналах каскадных кодов, где в качестве внешних кодов используются
РС-коды.
10. Использование свёрточных кодов и АВ или АКН позволяет достаточно конструктивно реа-
лизовать операции совместной демодуляции-декодирования (мягкое декодирование).
11. Для построения ансамбля сигналов, передаваемых в ограниченной полосе частот или в ка-
налах с МСИ, целесообразно использовать решётчатые коды с многократной амплитудно-
фазовой модуляцией, а совместную демодуляцию-декодирование реализовать с помощью
АКН или АВ.
12. При практическом использовании помехоустойчивых кодов главным ограничением являет-
ся сложность устройства декодирования, которая может быть выражена либо числом логи-
ческих схем в декодере, либо числом вычислительных операций, необходимых для декоди-
рования. Поэтому среди кодов, обеспечивающих заданный выигрыш, следует выбирать те,
которые допускают менее сложную реализацию, либо, наоборот, при заданной сложности
декодирования следует выбирать коды, обеспечивающие наибольший выигрыш.
ВОПРОСЫ, ЗАДАЧИ И УПРАЖНЕНИЯ
7.1. Какие классы кодов (по назначению) Вы знаете?
7.2. Закодируйте сообщения источника с объёмом алфавита АГ = 16 примитивным кодом.
7.3. Постройте оптимальный префиксный код для источника с объёмом алфавита АГ = 6, ес-
ли вероятности сообщений Р(а0) = 0,05; Р(й!) = 0,45; Р(й2) = 0,01; Р(й3) = 0,09; Р(й4) = 0,15;
р(й5) = 0,25. Какова средняя длина кодовой комбинации полученного койа? Какова наи-
меньшая средняя длина кодовой комбинации, предсказываемая первой теоремой Шен-
нона?
7.4. В чём заключается метод укрупнения алфавита?
7.5. Поясните различие между равномерным и неравномерным кодированием.
7.6. Дайте определение префиксного кода.
7.7. Как с помощью кодового дерева проверить, является ли код префиксным?
7.8. Поясните различие между линейным и нелинейным кодом.
7.9. Дайте определение систематического кода.
7.10. Что такое избыточность помехоустойчивого кода?
7.11. Что такое относительная скорость помехоустойчивого кода?
7.12. Закодируйте кодом с общей проверкой на чётность сообщения дискретного источника с
объёмом алфавита К= 8.
7.13. Закодируйте кодом Хэмминга сообщения дискретного источника с объёмом алфавита
К=16.
7.14. Докажите, что код с общей проверкой на чётность и код Хэмминга являются линейны-
ми.
7.15. Что такое расстояние по Хэммингу и вес кодовой комбинации?
7.16. Чему равна избыточность и относительная скорость кода с общей проверкой на чёт-
ность (4, 3) и кода Хэмминга (7, 4)?
305
7.17. Что такое минимальное расстояние кода?
7.18. Как упрощается процедура отыскания минимального расстояния для линейного кода?
7.19. Как связаны минимальное расстояние кода, число исправляемых и число обнаруживае-
мых ошибок?
7.20. Чему равны минимальное расстояние, число обнаруживаемых и число исправляемых
ошибок для кода Хэмминга (7, 4) и кода с общей проверкой на чётность (4, 3)?
7.21. Что такое декодирование по максимуму правдоподобия и по минимуму хэммингова рас-
стояния.? Когда эти правила совпадают?
7.22. Найдите выигрыш по вероятности ошибочного приёма сообщения при использовании
кода Хэмминга в 2СК с вероятностью ошибки р = 5-10~2.
7.23. Что такое энергетический выигрыш кода (ЭВК) и как он определяется?
7.24. Найдите энергетический выигрыш кода Хэмминга (7, 4) в канале без памяти с рэлеев-
скими замираниями для двоичной системы сигналов, ортогональных в усиленном смыс-
ле при заданной эквивалентной вероятности рэ.
7.25. В чём состоит табличный метод кодирования, декодирования с обнаружением ошибок,
декодирования с исправлением ошибок? Почему табличные процедуры не пригодны для
длинных кодов?
7.26. Вероятность ошибки в 2СК равна р = 0,01. Чему равна вероятность необнаруженной
ошибки при использовании кода Хэмминга (7, 4) и кода с общей проверкой на чётность
(5.4)?
7.27. В чём состоит метод перемежения канальных символов для кодирования в каналах с
памятью? Нарисуйте схемы перемежителя и деперемежителя для использования совме-
стно с кодом (5,4).
7.28. Как использовать помехоустойчивый код в системе, с обратной связью? От чего зависит
остаточная вероятность ошибки и сквозная эффективность и-
7.29. Что такое синдром? Как он используется при декодировании с обнаружением ошибок и
при декодировании с исправлением ошибок?
7.30. Как в матричной форме задать процедуры кодирования и вычисления синдрома для ли-
нейного кода?
7.31. Как задаются процедуры кодирования и вычисления синдрома для полиномиальных ко-
дов?
7.32. Дайте определение циклического кода.
7.33. При кодовом ограничении v = 4 и скорости кода R = 1/2 нарисуйте кодер свёрточного
кода (13,10). Задайте порождающие полиномы кода.
306
ГЛАВА 8. ТЕОРИЯ ПОМЕХОУСТОЙЧИВОСТИ НЕРЕДА-
ЧИ НЕПРЕРЫВНЫХ СООБЩЕНИЙ
8.1. КРИТЕРИИ ПОМЕХОУСТОЙЧИВОСТИ ПРИЁМА
НЕПРЕРЫВНЫХ СООБЩЕНИЙ
Непрерывные сообщения того или иного источника (речь, музыка и др.)
могут передаваться через линию связи непосредственно или с помощью моду-
ляции. В первом случае передаваемый сигнал пропорционален передаваемому
сообщению u(t) = kb(t), где к - постоянный множитель. Во втором - сигнал
u(t, b(t)) является некоторой функцией передаваемого сообщения i(Z). При ЧМ
и ФМ, например, эта функция нелинейна, а при AM и балансной модуляции
(БМ) - линейна. Отсюда происходят названия линейные и нелинейные виды
модуляций.
Сигнал на входе приёмника представляет собой суммарное колебание по-
лезного сигнала s(t, b(t)) и шума N(t):
Z(t) = s(t, b(t)) + N(t). (8.1)
Шум N(t) будем здесь предполагать стационарным гауссовским процессом с
односторонней спектральной плотностью мощности Ао-
Задача состоит в том, чтобы из входного колебания Z(Z) получить
(восстановить) выходной первичный сигнал b(t), наименее отличающийся, в
смысле некоторого критерия, от переданного сообщения b(f). Воспроизводимое
с некоторой погрешностью сообщение b(t) называют оценкой сообщения
(процесса). Таким образом, задачу приёма непрерывных сообщений можно
рассматривать как задачу получения оценки процесса. В частном случае, когда
s(t, X) есть функция некоторого параметра X, не зависящего от времени, задача
сводится к оценке параметра сигнала s(t, X). При непосредственной передаче в
неискажающем канале (с коэффициентом передачи у) s(t, b) = yb(t), что соот-
ветствует линейной связи между сигналом и сообщением, вычисление оценки
b(t) сводится к линейной фильтрации сигнала s(t, b). При передаче с помощью
модулированных сигналов s(t, b) оценка сообщения b(t) в приёмнике опреде-
ляется (вычисляется) демодулятором. Во многих случаях эта обработка сводит-
ся к тем или иным методам фильтрации и может осуществляться как до детек-
тора, так и после него. В обычном приёмнике (например, радиовещательном)
додетекторная обработка производится с помощью полосовых усилителей,
обеспечивающих необходимую частотную избирательность сигналов на входе.
Функцию же последетекторной обработки выполняют усилители низкой часто-
ты, которые усиливают и фильтруют низкочастотный первичный сигнал b(t),
поступающий на вход оконечных устройств (громкоговорителя, магнитофона и
т. п.).
Оптимальный демодулятор в общем случае представляет собой нелинейное
устройство (нелинейный фильтр), обеспечивающее наилучшее (по заданному
критерию) выделение сообщения b(t) из принятого сигнала Z(t). Теория опти-
мального приёма непрерывных сообщений впервые была разработана В. А. Ко-
тельниковым.
307
Мерой помехоустойчивости при передаче непрерывных сообщений может
быть степень "отклонения" полученной оценки £(/) от переданного сообщения
b(f). Обычно применяется среднеквадратическое отклонение или средний квад-
рат ошибки:
ЁЧО = |В(Г)-В(Г)|2, (8.2)
где усреднение берется по всем возможным реализациям b(t) и b(t) с учётом
совместного распределения w(b,b). Разность е(/) = b(t)-b(t) можно рассматри-
вать как реализацию помехи Е(0 на выходе приёмника. Величина Е2(/) = Ре -
мощность помехи на выходе приёмника. Мощность передаваемого сообщения
B(f) считается заданной Pb =B2(t). Тогда можно определить отношение сигнал-
помеха (ОСП) на выходе приёмника = Рь/Ре. ОСП на входе приёмника
Рвх = ^/Рш. Во многих случаях в качестве критерия помехоустойчивости при-
нимают не средний квадрат ошибки Е2(0, а ОСП рвых. Отношение сигнал-
помеха в канале, как уже отмечалось, может быть улучшено приёмником. Это
улучшение зависит не только от способа приёма, но и от вида модуляции. По-
этому помехоустойчивость систем передачи непрерывных сообщений удобно
(8.3)
оценивать выигрышем
Р Л / Р
Рвх Л / Рш
При g > 1 отношение сигнал-помеха при демодуляции улучшается. В неко-
торых случаях g < 1, что означает, что система модуляции даёт не выигрыш, а
проигрыш. В различных системах сигналы могут иметь различную ширину
спектра, и поэтому при сравнительной оценке систем связи следует определять
реальный или "обобщённый выигрыш системы" через отношение мощностей
сигнала не к мощностям помехи, а к их средним спектральным плотностям:
f
' _ Р вых _ Р вых _
8 р'вх арвх а
(8.4)
где
Рвых PIP ’ Рвх р Iр ц Р«х^ > ® >
F — ширина спектра сигнала; Fc — ширина спектра сообщения. Заметим, что в
системе непосредственной передачи, в которой сигнал пропорционален пере-
даваемому сообщению s(t, b) = уb(f), F= Fc и рвых = рвх, выигрыш (7.3) и
обобщённый выигрыш (7.4) одинаковы: g = g' = l. Это означает, что введённый
критерий выигрыша сводится к сравнению систем передачи модулированных
сигналов с системой непосредственной передачи. На практике используют и
другие критерии верности передачи непрерывных сообщений, например крите-
рий разборчивости при передаче речевых сообщений, критерий максимальной
ошибки 5 = |&(/)- Ь(0| в телеметрии и др.
308
8.2. ОПТИМАЛЬНАЯ ОЦЕНКА ОТДЕЛЬНЫХ ПАРАМЕТРОВ
СИГНАЛА
Задача оценки параметров сигнала возникает во многих практических слу-
чаях. Так, часто требуется определить (измерить) частоту или фазу сигнала,
оценить амплитуду сигнала при его передаче по каналу и т.д.. В телеметрии и
телеуправлении необходимо оценивать большое число параметров, характери-
зующих состояние объекта. Таким объектом может быть технологический про-
цесс, нефтепровод, летательный аппарат, экипаж и т. п. В этом случае переда-
ваемыми сообщениями являются контролируемые параметры, представляющие
собой случайные величины, не зависящие от времени. Модуляция при этом
сводится к установлению некоторого параметра А сигнала s(t) в соответствии с
переданным сообщением, а демодуляция - к выявлению (оценке) этого пара-
метра с возможно большей точностью.
В простейшем случае, когда оценивают один параметр сигнала заданной
формы, задачу ставят следующим образом. Пусть принимаемое на интервале
(0,7) колебание Z(z) представляет собой аддитивную смесь сигнала зави-
сящего от одного неизвестного параметра А, с шумом N(t):
Z(i) = s(/,A) + N(t), 0<t<T. (8.5)
Полагаем, что параметр X имеет постоянное значение на интервале наблю-
дения (0,7) и известна априорная плотность вероятности этого параметра со(Х).
Требуется определить оператор системы, гарантирующий получение наилучшей
оценки параметра и рассчитать точность этой оценки.
Из-за шума в канале и случайного характера параметра X точное измерение
его невозможно. Можно лишь указать его приближённую оценку.
Качество оценки параметра, называемой точечной, обычно проверяется на выполнение
трёх условий:
— состоятельности, состоящего в том, что оценка X сходится по вероятности к оцениваемо-
му параметру % при неограниченном увеличении времени анализа (или объёма выборки), т.е.
при £ > 0 lim Р< Х-Х = 0 . При этом, естественно, дисперсия ошибки стремится к нулю:
Г-»=о (I I J
lim D(E)= lim Z>(x-x) = 0 .
T->=o v ' Г->оо \ /
— несмещённости оценки, состоящего в том, что условное МО ошибки при всех А должно
равняться нулю: Ё = X - X = 0 или X = X;
— эффективности оценки, состоящего в том, что дисперсия ошибки 7>(Е) должна, при задан-
ном времени анализа или объёме выборки быть минимальной в классе всех возможных оце-
7--
нок: £)(E) = (X-Xl =min.
Очевидно, вся информация о переданном параметре (сообщении) А после
приёма колебания (8.5) содержится в апостериорном распределении co(X|z), ко-
торое согласно формуле Байеса (5.5)
w(x|z) = w(l)w(z|l)w(z). (8.6)
На основании анализа апостериорного распределения (8.6) принимается
решение об оценке передаваемого параметра А. При больших отношениях сиг-
нал-шум апостериорная плотность вероятности имеет наибольший максимум в
окрестности истинного значения параметра А. Это обстоятельство указывает на
309
то, что в качестве оценки целесообразно взять то значение X , которое обра-
щает в максимум функцию w(x|z).
Во многих практических случаях априорная плотность вероятности и>(Х)
оказывается неизвестной и её полагают равномерной: w(X) = const на всём воз-
можном интервале Л. При этом координата максимума апостериорной вероят-
ности будет совпадать с соответствующей координатой условного распределе-
ния M'(zfX), которое определяет функцию правдоподобия. В этом случае прави-
ло максимума апостериорной плотности вероятности переходит в правило мак-
симального правдоподобия. Здесь оценка параметра X определяется из условия
Ж». (8.7)
ак
Оценку параметра, получаемую по этому критерию, называют максимально
правдоподобной. Уравнение правдоподобия (8.7) можно записать в эквивалент-
ном виде:
о, (8.8)
ак
поскольку In х — монотонная функция своего аргумента и, следовательно, кор-
ни (8.7) и (8.8) совпадают. Оценка определяется тем корнем уравнения (8.8),
который соответствует максимуму функции правдоподобия. Другим весьма
распространённым критерием оценки параметров сигнала является оценка по
минимуму среднеквадратической ошибки. При этом критерий минимизируется
по X:
Е2(х) = J(x-x)2w(x|z)dX. (8.9)
Л
с?Е2(х)
Оптимальная оценка к находится из условия------= 0.
dk
После дифференцирования выражения (8.9) по £ с учётом того, что
Jw(x|z)dk = 1, получаем 2к - 2 jXw(X| z]dk = 0, откуда
Л Л
k = jkw(k\z)dk, (8.10)
Л
т.е. оптимальной оценкой параметра является в данном случае математическое
ожидание апостериорного распределения.
Критерий среднеквадратической ошибки является частным случаем более
общего критерия, когда минимизируется МО некоторой функции потерь
b(k - х), т.е.
z(x-x) = Jz(x-x)w(X|z)c?X. (8.11)
Л
Оценку, минимизирующую эту величину, называют байесовской оценкой, а
критерий, основанный на минимизации (8.11), как и в дискретном случае [см.
(5.17)], — критерием среднего риска. При lik - х) = (х - х)2 критерий минимума
310
среднего риска (8.11) переходит в критерий среднеквадратической ошибки
(8.9). В этом случае байесовская оценка определяется выражением (8.10).
Если co(X|z) симметрична относительно Xopt, что имеет место при большом
отношении сигнал-шум, то критерий максимума апостериорной вероятности и
максимума функции правдоподобия совпадает с критерием минимума средне-
квадратической ошибки.
Если значение параметра X постоянно на интервале наблюдения и приня-
тое колебание представляет собой аддитивную смесь (8.5) полезного сигнала
s(/,X) и БГШ N(f) со спектральной плотностью N0/2, то вектор z, определяю-
щий принимаемое колебание в функциональном пространстве, является слу-
чайным гауссовским вектором, среднее значение которого s(/,X), а дисперсия
совпадает с дисперсией шума.
Рассуждая так же, как в § 5.3, получаем
/ j т >
w(z|X) = cexp [[z(/)-.y(/,X)]2<* ,
k Vo 7
где с — постоянный коэффициент, а согласно (8.6) и (8.12)
/ j т \
w(z|X) = Aw(X)w(z|X) = Aw(X)exp — —— J [z(/) — .s(/, X)] dt ,
\ Д'О Q 2
(8.12)
(8.13)
где к - некоторая постоянная, которая может быть вычислена из условия нор-
мирования Jw(X|z)dX = l. Упростим это выражение, преобразовав показатель
Л
экспоненты
w(z|x) = Aw(X)exp -
1 т \ /
-fz2(t)dt ехр -
М) о 2 '
( Г, Т
UoJo
\ У0 о
В правой части этого равенства первый экспоненциальный множитель не
зависит от X и его можно включить в постоянную. Второй множитель равен
ехр(-£/Уо)5 гДе Е - энергия сигнала. В тех случаях, когда параметр X неэнерге-
тический, т.е. энергия сигнала не зависит от X, этот член также можно вклю-
чить в постоянную к. При этом условии последнее выражение можно записать
так:
w(z| х) = Aw(X) exp(g(X)J, (8.14)
где
т
<?(Х) = Jz(t)s(t,k)dt. (8.15)
-'*0 о
Нетрудно убедиться, что для сигнала s(t), зависящего от нескольких пара-
метров, функция правдоподобия w(z)X) и апостериорная плотность вероятности
w(z|X) будут определяться аналогичными выражениями, в которых
X-=(Xj, Х2,х„).
Отсюда следует, что при известной априорной плотности вероятности опре-
деление апостериорной плотности вероятности сводится к вычислению функ-
ции <?(Х). Эта функция с точностью до коэффициента равна скалярному произ-
ведению пришедшего сигнала с ожидаемым вариантом сигнала s(t, X). Её
311
часто называют корреляционным интегралом. Она определяет те существенные
операции, которые нужно выполнить над z(0, чтобы извлечь всю доступную
информацию о переданном сообщении X. Оптимальный приёмник максималь-
ного правдоподобия воспроизводит то сообщение X, для которого функция д(Х)
максимальна.
Пример. Найти оптимальную оценку коэффициента передачи канала у(амплитуду сигнала,
прошедшего через канал), полагая, что принимаемый сигнал Z(f) — ys(f) + N(f), где s(t) - точно
известно на приёме, a N(f) - БГШ со спектральной плотностью No.- Функция правдоподобия
для этого случая согласно (8.12)
( Т \
w(z|X) = cexp -
(8.16)
\ и 0 z
Уравнение (8.8) максимального правдоподобия принимает вид
^Н^1=-А|[г(()_ЗДИ()л=о,
ду А 0 J
или после преобразований
- у- f z(t)s(t)dt+J s2 (t)dt = 0 .
0 о 0 о
Отсюда искомая оценка
г г
У = - j z(t)s(t)dt =у + -j N(t)s(t)dt.
о о
Измеритель для получения такой оценки может быть реализован фильтром, согласован-
ным с сигналом s(t)/E или с эквивалентной корреляционной схемой. Определим качество
найденной оценки. Из (8.16) видно, что при Т -> оо (Е -> оо) погрешность оценки
1 Т
у -у = — JN(t)s(t)dt стремится к нулю, т.е. данная оценка является состоятельной, несмещён-
о
ной (поскольку У0 = О). Она является также эффективной при гауссовском шуме N(t). Дис-
персия ошибки (имеющая гауссовское распределение) с учётом (5.46а) будет D(E) = —.
IE
8.3. ОПТИМАЛЬНАЯ ДЕМОДУЛЯЦИЯ НЕПРЕРЫВНЫХ
СИГНАЛОВ
Определим условия оптимального приёма непрерывных сообщений. Пусть
сообщение представляет собой некоторый стационарный процесс (первичный
сигнал) с реализацией &(/). Он может непрерывно изменяться во времени и
принимать любую форму.
Для простоты анализа будем считать, что функция b(t) принимает значения
от —1 до + 1, что реализации сообщения имеют конечную длительность Т и что
их спектр практически ограничен частотами от 0 до Fc. При этих условиях
функция b(t) может быть разложена по ортонормированному базису и
представлена в виде усечённого ряда
в
4W-SM>.W. . (8.17)
где Х^ - случайные коэффициенты, определяющие передаваемое сообщение.
При разложении в тригонометрический ряд Фурье X* пропорциональны со
312
ставляющим спектра, а при разложении в ряд Котельникова - отсчётным зна-
чениям Ь(к&) функции b(fy. Здесь Д = 1/(2/^), В = Т/Д = 2TFC. Таким образом,
при известной системе базисных функций {w(0 передача непрерывных сооб-
щений b(f) эквивалентна передаче В значений коэффициентов (параметров) А*.
Для передачи по каналу колебание b(t) преобразуется в сигнал s(t, b). Посколь-
ку колебание (8.17) определяется параметрами А^ (к = 1, 2, ..., В), то и сигнал
зависит от этих параметров. Принятое колебание с учётом наложения помехи
z(f) = s(t, b) + n(f) = s(t, A) + n(t). (8.18)
Влияние помех приводит к тому, что каждый параметр А^ будет принят с
некоторой погрешностью ДА^. В результате оценка сообщения
в
b{t) = £(а* + ДХ*)\и*(z) = b(t)+e(t), (8.19)
в
где б(/) = Д/> = ^ДА*\|/*(0 - погрешность воспроизведения сообщения b(f) (шум
*=1
на выходе приёмника).
Таким образом, задача оптимального приёма непрерывного сообщения b(t)
сводится к задаче совместного оптимального приёма совокупности многих па-
раметров А = (а15 А2,Ав). Эта задача является обобщением рассмотренной в
§8.2 задачи оптимальной оценки одного параметра.
Итак, по реализации z(f) необходимо восстановить переданное сообщение
b(t) с возможно большей точностью, хотя бы при слабых помехах. Для этого
необходимо на основе анализа принятого колебания z(f) найти максимум апо-
стериорного распределения w(b|z), которое на основе формулы Байеса может
быть представлено в виде
w(b|z) = bv(b)w(z|b), (8.20)
где к - постоянный коэффициент. Функция правдоподобия w(z|b), входящая в
выражение (8.20), известна (для рассматриваемого гауссовского канала - это
гауссовское распределение). Априорное распределение w(b) зависит от вида и
характеристик передаваемых сообщений b(t).
Выбор конкретной модели априорного распределения w(b) является не
столь существенным [26]. Роль начальных, априорных сведений уменьшается с
увеличением объёма наблюдений. При большом объёме наблюдений алгорит-
мы обработки сигналов получаются асимптотически одинаковыми, т.е. мало
чувствительными к априорному распределению. Поэтому ограничимся рас-
смотрением модели равномерного распределения w(b) = const. В этом случае
решение задачи упрощается, так как согласно (8.20) апостериорное распреде-
ление M’(blz) будет полностью определяться функцией правдоподобия w(z|b),
которая для гауссовского канала определяется выражением, аналогичным
(8.12):
Т
4 0 о 7
Согласно этому выражению максимуму функции правдоподобия w(z|b), а
следовательно, и функции w(b|z) соответствует минимум по b(t) интеграла
т
min j[z(/) - s(t, />(/))]2 dt.
(8.21)
313
Значит, оптимальный приёмник должен воспроизводить сообщение b(t),
которое соответствует, как и при передаче дискретных сообщений, тому из
возможных сигналов который меньше других отличается в среднеквадра-
тическом смысле от реализации сигнала z(t) на входе приёмника.
При отсутствии помех такой приёмник воспроизводит сообщение без иска-
жений (без ошибок): z(f) = s(t, b(t) = b(t) и E2(/) = 0, а при наличии помех
ошибка минимальна.
Запишем (8.20) в другом виде, подобном (8.15):
w(b|z) = bv(b)exp[#(b)], (8.22)
где
q(b) = ~~j z(t)s(t,b(t))dt. (8.23)
-'’о О
Отсюда следует, что при известной априорной вероятности определение
апостериорной вероятности сводится к вычислению функции <?(Ь), т.е. скаляр-
ного произведения принятого колебания z(t) на переданные (ожидаемые) сиг-
налы
Во многих случаях для приближённого нахождения q(b) целесообразно применение про-
стых следящих устройств. Рассмотрим принципиальную возможность построения таких уст-
ройств. Подробное и более строгое обоснование на основе теории нелинейной фильтрации
приводится в § 8.8.
При передаче непрерывных сообщений сигнал s(t,b(t)) не является полностью известным.
Однако обычно имеется некоторая априорная информация об этом сигнале. Известны, на-
пример, несущая частота, вид модуляции, ширина спектра сигнала и т.п. Часть информации
можно получить в результате наблюдения над принятой реализацией сигнала z(f) за предшест-
вующий промежуток времени. В результате имеется возможность определить оценку сигнала
s(t,b(tty и вычислить функцию <?(b) для этой оценки:
2 г
q(b) = —-$z(t)s[tj>(t))dt. (8.24)
-'*0 0
Функцию q (b) можно найти с помощью фильтра с переменными параметрами
(рис. 8.1) или схемы следящего коррелятора (рис. 8.2). Каждая из этих схем имеет основной
информационный канал, на выходе которого получается оценочное значение b(t) передавае-
мого сообщения, и канал обратной связи, с помощью которого в схеме рис. 8.2 формируется
опорный сигнал s{t,b{t^, а в схеме рис. 8.1 с помощью управляющего элемента (УЭ) произ-
водятся изменения параметров фильтра СФ так, чтобы он был согласован с непрерывно из-
меняющимся ожидаемым сигналом В схеме рис. 8.2 с помощью УЭ изменяется мо-
дулируемый параметр несущего колебания, формируемого генератором (Г). При частотной
Рис 8.1. Структурная схема демодулятора
со следящим фильтром
Рис.8.2. Структурная схема следящего
корреляционного демодулятора
314
модуляции, например, этим параметром будет частота, при временной импульсной модуляции
— сдвиг импульсов во времени и т.п. Фильтр нижних частот ФНЧ в этой схеме выполняет
роль интегратора на интервале наблюдения Т, который связан с максимальной частотой Fc в
спектре передаваемого сообщения соотношением Т = 1/(2FC).
Рассмотренные схемы являются квазиоптимальными, поскольку получаемая оценка
не является наилучшей возможной. При различных видах модуляции принцип сле-
дящего приёма остаётся одним и тем же. Вид модуляции определяет параметр, за которым
должно осуществляться слежение. Иначе говоря, оптимальный приёмник должен с наимень-
шей ошибкой следить за передаваемым случайным колебанием b(t). Схемы следящего приёма
позволяют практически реализовать помехоустойчивость, близкую к потенциальной. При ли-
нейной модуляции, когда s(t,b(t)) = f(f)b(t), где Д/) - известная функция (несущее колебание),
оптимальный демодулятор можно реализовать разомкнутой схемой с синхронным детектором
(рис. 8.3).
Перейдём к определению помехоустойчивости систем связи при оптималь-
ном приёме. Заметим, что эту потенциальную помехоустойчивость можно вы-
числить, не уточняя структуры оптимального демодулятора. Для этого доста-
точно знать, что он выдаёт решение b(t), соответствующее минимуму (8.21).
Прежде чем приступить к выводу формул, определяющих потенциальную
помехоустойчивость, напомним основные принципы классификации видов мо-
дуляции при передаче непрерывных сообщений. В общем случае модуляция за-
ключается в том, что множество сообщений (первичных сигналов) B(t) преоб-
разуется (отображается) в множество вторичных сигналов S{t) — 5]t,2?(/)]. Этой
записью подчеркивается, что значение сигнала £ в некоторый момент t опреде-
ляется в общем случае всем поведением сообщения B(f) на всей оси времени.
В частном случае, если сигнал S(t) в любой момент t зависит не от всего
хода сигнала B(f), а только от его значения в момент t, то система модуляции
называется прямой. В этом случае сообщение b(f) входит непосредственно в вы-
ражение сигнала s(f). К прямым относится подавляющее большинство приме-
няемых методов модуляции, например AM, БАМ и ФМ. Остальные системы
модуляции, в которых S(f) зависит от общего поведения сигнала B(t), называ-
ются непрямыми. Среди них особый интерес представляют интегральные систе-
мы, в которых B(f) входит в выражение S(t) под интегралом.
Система модуляции называется линейной, если S(t) можно получить из B(i)
с помощью линейных операций. Линейные системы могут быть прямыми
(например, амплитудная - AM) и непрямыми (например, однополосная - ОМ).
Геометрически модуляцию можно рассматривать как отображение про-
странства В сообщений в пространство сигналов S, а демодуляцию - как об-
ратное отображение. При демодуляции помеха «(/) на входе приёмника ото-
бражается в погрешность оценки сообщения (шум воспроизведения или шум
на выходе приёмника) б(0-
Рассмотрим приём непрерывного сообщения на фоне БГШ со спектраль-
ной плотностью Nq. При достаточно слабом шуме n(t) погрешность
g(z) = b(t) - b(t) (шум на выходе приёмника) представляет собой также гауссов-
ский процесс со спектральной плотностью Gs(j), которую и будем определять.
Для. -этого удобно воспользоваться геометрическим представлением. В про-
странстве сигналов каждой реализации сигнала s(t,b(t)) при различных b{t) со-
ответствует точка. Если s(b) зависит непрерывно от b (что имеет место во всех
аналоговых системах связи), то все эти точки образуют некоторую кривую
315
Рйс.8.3. Структурная схема демодулятора с Рис.8.4. Геометрическое представление
синхронным детектором сигнала и шума
(рис. 8.4). Принятый сигнал z(t) является также точкой в пространстве сигна-
лов, как правило, не лежащей на кривой s(b). Максимально правдоподобная
оценка b(t) соответствует тому сигналу который изображается на сиг-
нальной кривой точкой, ближайшей к точке z. Обозначим As = s(t,b(t)}-s(t,b(t)) ,
где b(f) - действительно переданное сообщение. При малой помехе и, следова-
тельно, малом отклонении As отрезок между s(b) и s(b) можно аппроксимиро-
вать прямой линией, которая является касательной к линии сигнала в точке
s(b). Тогда As представляет проекцию вектора п на эту прямую. В этом случае
справедливо представление1)
ds
= «,(/). (8.25)
дЬ
Здесь /1](0 - составляющая (координата) шумового вектора в пространстве
сигналов, представляющая низкочастотный гауссовский эргодический процесс
с нулевым МО и со спектральной плотностью Nq в полосе частот от 0 до Fc,
Ab = b(t) -b(t). Тогда с учётом (8.25) в единичной полосе частот
(8.26)
Поскольку процесс Ab(t) (компонента шума на выходе приёмника) меняет-
аХО
ся значительно медленнее процесса , то
К.2(Л(_ А,2/а (dX*)Y _ Лг
Из (8.27) следует, что односторонняя СПМ шума на выходе приёмника:
(8.27)
G0,e(f) = N0
(8.28)
!) При линейных методах модуляции представление (8.25) справедливо для любой интенсив-
ности помех.
316
Г
= s(\|/(/),f), где \|/(/) = jВ(т)Л. Так как
о
_ (ds\ _
При прямых системах модуляции — не зависит от частоты. Таким обра-
\obJ
зом, при прямых системах модуляции шум на выходе приёмника квазибелый,
т.е. имеет равномерный спектр в полосе частот Fc.
В случае интегральных систем сообщение входит в выражения сигнала
" t
под знаком интеграла: S(B,i) = S j
„О
t t
B(t)-B(t) + E(t), то ф(/) = |в(/)сй + |е(/)сй = • Следовательно СПМ шума
о о
на выходе приёмника для интегральных систем можно определить как СПМ
производной £,'(0- На основании известной теоремы о спектре производной
GQ.(/) = (2lt/)2Goe(/)> где G05(/) определяется по формуле (8.28), если в послед-
ней вместо 5s/5b подставить 5s/5\|/. Таким образом, для интегральных систем
СПМ шума на выходе приёмника
(8.29)
оеШ~ (as/av)2 ’
т.е. СПМ помехи на выходе приёмника в интегральных системах пропорциона-
лен квадрату частоты.
Все эти результаты справедливы для линейной модуляции или при произ-
ds
вольной модуляции для слабых помех, когда можно считать As «Ад—. Они ха-
ао
рактеризуют так называемые нормальные ошибки (см.§ 8.5).
Очевидно, мощность шума на выходе приёмника в полосе частот от нуля
Fc
до Fc будет РЕ = JGOc(f)df.
о
С другой стороны, мощность Рь сообщения на выходе приёмника, равная
— W0|
можно выразить через пик-фактор сообщения П =....г—. Полагая, что
сообщение нормировано и = 1 > получаем
B2(t) = РЬ= 1/П2. (8.30)
Тогда отношение мощностей сигнала и шума на выходе приёмника
= --------------- <8-31*
о
а выражение для выигрыша g и обобщённого выигрыша g' в соответствии с оп-
ределениями (8.3) и (8.4) можно
j Р.ых NoF
р„
записать так:
. g
g ~ ~ Fc
о
П = л/2 , а для телефонного сообщения Пя 3.
(8.32)
n!PjG0,(/)d/
О
Для гармонического сигнала
317
Используя теорему Шеннона (см. § 6.7), можно найти максимальные воз-
можные значения выигрыша и обобщённого выигрыша при заданных парамет-
рах системы связи. Рассмотрим этот вопрос для наиболее простого случая, ко-
гда непрерывное сообщение представляет гауссовский процесс с равномерным
спектром в полосе частот Fc (квазибелый шум), а в канале существует аддитив-
ная помеха в виде квазибелого шума в полосе F с односторонней спектральной
плотностью Nq. Согласно теореме Шеннона передача сообщения с заданным
значением Рь/Ре = ро возможна в случае, когда < С. Здесь Н'е{В) - эп-
силон-производительность источника, которая в данном случае согласно
(§ 6.3.2) равна Fc log ро, а С - пропускная способность гауссовского канала,
равная согласно (6.83)
( р \
F 10gV + ~N^F)=F 10g^ + Рв J ’
где F - полоса пропускания канала и в общем случае F * Fc.
В гипотетической идеальной системе связи, в которой полностью использу-
ется пропускная способность канала и рвых = ро
^’ogp^ = Flog(l + pBX) (8.33)
В реальных системах связи обычно удаётся лишь частично использовать
пропускную способность канала. Назовем эффективностью т] системы связи
отношение эпсилон-производительности источника к пропускной способности
канала, при которой обеспечивается заданная верность, т.е. рвых = ро- Для та-
кой реальной системы вместо (8.33) имеем
Fc bgpBbK = Ti^log(l+pBX). (8.34)
Из выражений (8.33) и (8.34) видно, что при x\F > Fc можно обеспечить вы-
сокую верность (большое значение рвых) при относительно малых рвх, т.е. по-
лучить большой выигрыш g.
Таким образом, выигрыш достигается в результате обмена ширины спектра
на динамический диапазон, о чём говорилось в § 1.2. Большой выигрыш мож-
к F Q Л
но получить только при большом отношении а = —. Заметим, что большой
Л
выигрыш может иметь место и при малой эффективности т], и наоборот. Сле-
довательно, при оценке различных систем связи необходимо учитывать по
крайней мере два показателя: эффективность и помехоустойчивость. Совокуп-
ность этих двух показателей составляет достаточно полную характеристику сис-
темы.
Наилучшей считается система, которая обеспечивает наибольшую помехо-
устойчивость при заданной эффективности либо наибольшую эффективность
при заданной помехоустойчивости.
Для идеальной системы т] = 1, и из (8.33) следует
Рвых ~ (1 Рвх) • (8.35)
Отсюда при рвх » 1 получаем
«'»^р«‘- <8-36)
Таким образом, в идеальной системе выигрыш g возрастает с увеличением
а по экспоненциальному закону. Никакая реальная система не может обеспе-
чить при заданном а более высокую помехоустойчивость, чем идеальная.
318
8.4. ПОМЕХОУСТОЙЧИВОСТЬ СИСТЕМ ПЕРЕДАЧИ
НЕПРЕРЫВНЫХ СООБЩЕНИЙ ПРИ СЛАБЫХ ПОМЕХАХ
Для передачи непрерывных сообщений по каналу связи применяют различ-
ные виды модуляции. При синусоидальном переносчике на практике исполь-
зуют амплитудную модуляции? (AM), балансную модуляцию (БМ), однополос-
ную модуляцию (ОМ), фазовую модуляцию (ФМ) и частотную модуляцию
(ЧМ). Определим потенциальную и реальную помехоустойчивость этих систем.
Амплитудная модуляция формирует сигнал вида S(t,B) = I70(l+/nB(f))cos<o0f, где /п£1. То-
гда
' = m[j coscoof; f—1 1 dt = — (m2U2 cos2 co </<# = — m2U^ [fl+cos2co0flcZf = — m2U2
db 0°’ vafej TJVdbJ TJ 2T J1 °r 2 °'
0 0 0
Согласно (8.28) СПМ шума на выходе приёмника AM
<8'37>
Мощность сигнала на входе приёмника1)
Р„ = S2 (t, В) = J [1+/пД^)]2 cos2 к> +2/яВ(0+т2 В2 (z)j • [1+cos 2со of]cft .
о о
Поскольку сообщение центрированный процесс, в(/) = 0, а вследствие принятой норми-
---- 1 Т ( „Л'
ровки = —1+— .
П Z \ П 7
Здесь и далее полагаем, что coqT»!, и поэтому значением [cos2<оotdt_ sin2<aо£_1_
J 2<о о 2<о0
можно пренебречь по сравнению с Т.
На основании (8.32) с учётом того, что при AM F = 2FC, получаем следующее выражение
для выигрыша и обобщённого выигрыша при оптимальном приёме:
_ ат2 _ 2т2 , _ т2
gAM ^Тп2 "’8,м
(8.38)
Предельное значение выигрыша при AM равно 1. Оно достигается тогда, когда т — 1 и
П = 1. Практически всегда т < 1, а П > 1, и поэтому f < 1 и jf < 0,5, т.е. система AM
AM AM
даёт проигрыш. Так, при передаче речи П » 3, и тогда при т = 0,7 g = 0,103 и g' = 0,051.
AM AM
Малые значения выигрыша при AM обусловлены тем, что лишь небольшая часть мощности
сигнала заключена в боковых полосах, несущих полезную информацию. Следовательно, уст-
ранение несущей в сигнале AM может привести к увеличению выигрыша, что и имеет место
при балансной и однополосной модуляции (без несущей).
При балансной модуляции (AM с подавленной несущей) сигнал формируется путём про-
стого перемножения первичного сигнала B(f) и колебания переносчиков Uffiosaot:
S(t,B) = B(i)U(fiosaot.
1 11 J ( Qg । • J
Средняя мощность такого сигнала Рс=— U2 B2(f) а =^^о- С учётом этих
соотношений имеем (при а = 2) geM = 2, g’6M = 1. Отсюда видно, что выигрыш при БМ не за-
висит от пик-факгора сообщения.
*) Модулированный сигнал является нестационарным процессом, и поэтому для нахождения
его средней мощности необходимо усреднять квадрат сигнала по ансамблю и по времени.
319
Однополосная модуляция, как известно, представляет собой просто перенос спектра пер-
вичного сигнала вверх на частоту а»0. Это линейная операция, при которой не изменяется
ширина спектра, а также соотношения между мощностями составляющих. Поэтому при де-
модуляции входная помеха преобразуется в выходную таким же образом, как и сигнал. Из
этих соображений можно, не прибегая к громоздким вычислениям, записать g0M = g'0M = 1.
Таким образом, обобщённый выигрыш при БМ и ОМ одинаков. Однако полоса частот, зани-
маемая сигналом при ОМ, в 2 раза меньше, чем при БМ.
Системы AM, БМ и ОМ — линейные, поэтому полученные выше соотношения для опти-
мального приёмника справедливы как при слабых, так и при сильных помехах на входе. Эти
соотношения определяют предельную (потенциальную) помехоустойчивость систем.
Выясним, реализуется ли эта помехоустойчивость при обычных способах приёма, исполь-
зуемых в реальных приёмниках. При "линейном" детектировании, как следует из § 3.8 пре-
дельные значения ~ 1 достигаются лишь при большом отношении сигнал-шум. Легко
показать, что при синхронном же детектировании AM колебания потенциальная помехо-
устойчивость реализуется при произвольном отношении сигнал-шум в канале. Можно пока-
зать, что при детектировании сигналов БМ и ОМ синхронным детектором потенциальная по-
мехоустойчивость также реализуется при любом уровне шума на входе приёмника.
Фазовая модуляция также относится к прямым системам модуляции, однако к нелиней-
ным. При фазовой модуляции сигнал можно записать в виде S(t, В) = U0cos[a0t + AZjB(Z)], где
М - девиация фазы или индекс фазовой модуляции. Для такого сигнала
ЙУ <8й>
При больших индексах модуляции М » а/2
3 2
Яфм^^'фм^- (8.40)
Как видно, при ФМ выигрыш зависит от индекса модуляции и пик-фактора сообщения.
Так как М может быть больше единицы, то и выигрыш в этой системе можно получить зна-
чительно больше единицы. Платой за этот выигрыш является расширение полосы частот, за-
нимаемой сигналом. Полученные соотношения справедливы для малого уровня шума на вхо-
де приёмника, так как сигнал S(t, В) при ФМ нелинейно зависит от B(f).
Частотная модуляция относится к интегральным системам модуляции, потенциальная
помехоустойчивость которой определяется на основании соотношения (8.29). Сигнал при ЧМ
можно представить в виде S(t, В) = t7ocos[a»o/ + Aa»T(Z)], где Да» - девиация часто-
t
ты, у(г) = j В(т)</т . Для такого сигнала
о
-^- = -Aa»t70sinla»0r+Aa»v|/(r)l; I— j = О,5Да»2[7о .
Тогда на основании (8.29) СПМ шума на выходе приёмника ЧМ
,84!'
а на основании (8.32) получаем выражения для выигрыша и обобщённого выигрыша:
= ЗМ2а За3 , ЗМ2 3 а2
£чм- п2 ~ 4 П2 ’ 8 чм" П2 Я4П2 ’ ( }
Здесь учтено, что при большом индексе модуляции М = bf/F,. , а полоса сигнала
Fa 2MFC. При ЧМ так же, как и при ФМ, выигрыш может быть значительно больше едини-
цы, и достигается это за счёт расширения полосы частот сигнала (увеличения индекса моду-
ляции). Частотная и фазовая модуляции являются примерами систем, в которых верность пе-
редачи сообщений при данном уровне помех может быть повышена не только за счёт увели-
чения мощности сигнала, как это имеет место при линейных видах модуляции, но и за счёт
расширения полосы частот, занимаемой сигналом. Все эти выводы и полученные выше
320
соотношения для ЧМ, так же как и для ФМ, справедливы лишь при малом уровне помех. Эти
системы, как будет показано ниже, имеют ярко выраженный пороговый эффект.
Системы с поднесущими.В технике связи нередко применяют двойную модуляцию (см.
§ 3.6). При этом передаваемым сообщением (первичным сигналом) модулируется вспомога-
тельное колебание (поднесущая) с частотой fm, а затем полученным модулированным колеба-
нием модулируется другое колебание (несущая) с частотой /н » В многоканальных сис-
темах двойная модуляция позволяет осуществить частотное разделение каналов. В однока-
нальных системах с поднесущей двойная модуляция позволяет снизить требования к стабиль-
ности несущей частоты, заменив его более легко выполнимым требованием к стабильности
поднесущей частоты. Кроме того, такие системы, как ЧМ-АМ или ФМ-АМ применяют в тех
случаях, когда нельзя использовать непосредственно ЧМ или ФМ из-за селективных замира-
ний в канале.
Разнообразие систем модуляции позволяет осуществить большое число систем с подне-
сущими. Практически применяют системы ОМ-АМ, ФМ-АМ, ЧМ-АМ, ЧМ-ОМ, ОМ-ЧМ,
ЧМ-ЧМ и др. При малом уровне помех выигрыш систем с поднесущими определяется таким
же методом, что и при обычной однократной модуляции с помощью формул (8.32). Рассмот-
рим для примера систему ФМ-АМ. В этой системе сигнал
5’(/,В) = i70(l + wHcos[conH/ + A/nHB(/)])cos(coH/ + cp). (8.43)
Так как система ФМ-АМ относится к прямым системам модуляции, то выигрыш можно
определить по формулам (8.32) с учётом выражения (8.28).
Для сигнала (8.43) имеем = — С/о^н-^пн i = ^2(0 =т^о 1 + ~2’
\dbJ 2 2 \ Пу
Тогда обобщённый выигрыш в системе ФМ-АМ
ъг 2
= = (844)
П 2+
Из (8.44) следует, что обобщённый выигрыш равен произведению выигрышей при ФМ и
AM. Легко убедиться, что при любой системе с поднесущей, в которой модуляция несущей
является прямой, обобщённый выигрыш g' равен произведению выигрышей первой и
второй g'H ступеней модуляции, т.е. g'=g'
Системы с импульсной модуляцией.. Согласно теореме Котельникова непрерывное колеба-
ние B(f) может быть передано по линии связи с необходимой точностью путём передачи его
отдельных мгновенных значений:
..., В(-2Д), В(-Д), В(0), В(Д), В(2Д), ..., (8.45)
взятых для моментов времени, отстоящих друг от друга на величину Д < 1/2Гс, где Fc- наи-
высшая частота, содержащаяся в колебании B(f).
В системах связи, основанных на этом принципе (импульсных системах), для передачи
колебания B(t) используется (см. § 5.7) периодическая последовательность импульсов
оо
/п(0= (8-46>
Л=—оо
При этом один из параметров этой последовательности изменяется в соответствии с из-
менением мгновенных значений (8.45) передаваемого колебания. Таким параметром может
быть, например, амплитуда импульса, момент его прихода (фаза), его ширина и частота сле-
дования импульсов. Соответственно виды импульсной модуляции называются АИМ, ШИМ,
ЧИМ.
Модулированная последовательность импульсов на выходе первой ступени модуляции
(8.47)
*=^>
Здесь v(f) - форма импульса, причём v(f) = 0 при t < 0 и t > то, где то- длительность им-
пульса.
Для передачи колебания ДВ, f) по радиоканалу необходимо применить ещё одну ступень
модуляции. При этом может быть использована любая из систем модуляции, рассмотренных
выше. Однако чаще всего во второй ступени модуляции модулированная последовательность
321
импульсов ДВ, /) перемножается с гармоническим напряжением несущей, в результате чего
получается сигнал
S(t,B) = f(B,t)a cosco Ht -а У.у[^А), r-AA]coscoHZ .
(8.48)
Эту операцию перемножения часто называют амплитудной модуляцией (хотя правильнее
использовать термин БАМ) и обозначают соответствующие системы сокращениями типа
АИМ-АМ, ФИМ-АМ, ШИМ-АМ и т.д.
Из всех систем импульсной модуляции наиболее помехоустойчивыми являются ФИМ и
ЧИМ. Так как первая из них несколько проще, то для передачи сигналов по каналам связи
используется почти исключительно ФИМ-АМ. Модуляцию АИМ и ШИМ в каналах связи
практически не используют и применяют лишь в процессе обработки сигналов. Поэтому при-
ведём только сведения о помехоустойчивости системы ФИМ-АМ [12].
Обобщённый выигрыш в системе ФИМ-АМ
1 Г Ат42
где кф - коэффициент, зависящий от формы импульса; Ат - максимальная девиация положе-
ния импульса.
Как видим, помехоустойчивость системы ФИМ зависит от формы импульса. При опти-
мальном выборе параметров системы ФИМ-АМ: Fvj~ 1, Ат = l/4f’c:
= а2
gopt 16П2*2’
, 1
При кф-—, что соответствует треугольной форме импульсов,
3 0,2
gopt-4n2 ’
Это совпадает с (8.42) для системы с частотной модуляцией. Следовательно, потенциаль-
ная помехоустойчивость системы ФИМ-АМ при оптимальном выборе параметров и системы
ЧМ при том же значении а одинакова.
(8.49)
(8.50)
(8.51)
8.5. ПОРОГ ПОМЕХОУСТОЙЧИВОСТИ. АНОМАЛЬНЫЕ ОШИБКИ
Все широкополосные системы модуляции обеспечивают высокую помехо-
устойчивость при условии, что отношение сигнала к помехе рвх на входе при-
ёмника больше некоторого предельного (порогового) значения рпр. При
Рвх < Рпор широкополосные системы теряют свои преимущества (резко снижает-
ся помехоустойчивость) и связь становится практически невозможной. Значе-
ние порога определяет предельную дальность связи при заданной мощности
передатчика. Поэтому важно определить это значение и установить закон из-
менения отношения сигнала к помехе на выходе приёмника за порогом
(Рвх < Рпор)- Для идеальной системы (т| = 1), согласно (8.35) при ри » 1
Рвых ~~ Р вх- (8.52)
Для реальной системы согласно (8.3)
Рвых ~ £Рвх- (8.53)
Графически этим уравнениям в логарифмическом масштабе соответствует
семейство прямых. Для идеальной системы на рис. 8.5 они изображены
сплошными линиями. По оси абсцисс отложены не рвх, а р'вх = арвх = PcINqFc,
т.е. отношение мощности сигнала на входе приёмника к мощности той части
шума, которая лежит в полосе частот, равной ширине спектра сообщений Fc (а
не в полосе спектра сигнала F). Равенство F = Fc имеет место непосредствен-
но при передаче, а также при однополосной модуляции. Для а=1 прямая
322
Рис.8.5. Зависимость p,ux от р,ч для идеальной системы связи
проходит через начало координат
под углом те/4; для а = 1 эти
прямые идут круче и пересекают
ось абсцисс правее начала коор-
динат. Для реальных систем со-
ответствующие зависимости
(8.53) представляют собой пря-
мые, параллельные прямой, про-
ходящей через начало координат
под углом л/4, но сдвинутые на
величину обобщённого выигры-
ша g = g/a (на рис. 8.5 одна из
таких кривых для ЧМ изображе-
на штриховой линией). Если бы
кривые для реальных и идеаль-
ных систем пересекались, то это
бы означало, что реальная система стала лучше идеальной. Очевидно, что это
невозможно, и кривые для реальных систем располагаются всегда не выше со-
ответствующих кривых для идеальных систем. Отсюда можно сделать вывод,
что системы, дающие выигрыш при больших рвх, не могут сохранять его посто-
янным с уменьшением рвх. Начиная с некоторого порогового значения этого
отношения рвх, выигрыш системы резко уменьшается. Более того, выигрыш
может стать отрицательным (проигрышем), если р'вх<а. Чем больше а, тем
сильнее сказывается пороговый эффект. Системы с а < 1 вообще не подверже-
ны пороговым явлениям, но они и при больших рвх не дают выигрыша. Зато
они позволяют передавать сообщения по каналу с полосой пропускания, рав-
ной или меньшей ширины спектра сообщения. Для этого сообщение должно
быть преобразовано в сигнал, спектг которого уже спектра сообщения. Чтобы
получить высокую верность передачи в такой системе, необходимо иметь дос-
таточно большое отношение мощности сигнала к мощности помехи в канале,
поскольку при а<1 рвых<рвх. На практике системы с а < Г применения пока
не находят. Для определения предельных (пороговых) значений рвхпор и рвыхпор
необходимо совместно решить два уравнения (8.52) и (8.53), т.е. найти точку
пересечения кривых для идеальной и реальной систем. В результате получаем
Рвхпор = ga~l ; Рвыхпор = ga~l • (8.54)
Как видим, выигрыш g и, соответственно, пороговые значения р11р зависят
от параметра а, определяемых видом и параметрами модуляции, а также пик-
фактором передаваемых сообщений.
Поясним теперь явление порога геометрически. Для этого воспользуемся понятиями про-
странства сообщений и пространства сигналов, введёнными в § 2.5. Каждому сигналу s(t), оп-
ределяемому конечным числом координат, соответствует точка в «-мерном пространстве, где
В = 2TF - база сигнала, а ансамблю возможных сигналов — некоторая область в этом про-
странстве сигналов. При фиксированной мощности область возможных сигналов представля-
ет собой гиперсферу с радиусом rc = ^BPQ = ^2TFPe , а область принятых колебаний
Z(/) = 5(/) + N(f) - сферу с радиусом гг = ^2TF(Pc + Рш) Вокруг каждой точки переданного
323
сигнала образуется область неопределённости, обусловленная помехой. Если помехой являет-
ся гауссовский шум, то эта область имеет сферическую форму с радиусом
гш = 72г/рш . (8.55)
Как отмечалось, модуляция является отображением пространства сообщений на про-
странство сигналов, а демодуляция - обратным отображением пространства принятых сигна-
лов в пространство принятых сообщений (оценок). В общем случае размерность (база) про-
странства сообщений 2FCTотличается от размерности пространства сигналов 2 FT.
Рассмотрим некоторый отрезок прямой в области пространства возможных сообщений
(эта область определяется с учётом нормировки сообщения). При модуляции этот отрезок
отобразится в некоторую линию в пространстве сигналов, каждая точка которой соответствует
определённой реализации сообщения. Форма и длина этой линии зависят от вида модуляции.
Помеха, наложившаяся на сигнал, вызовет смещение точки s в некоторую точку s = s +As, со-
ответствующую другому сообщению 5(/) = й+Дй, аналогично тому, как было показано на
рис. 8.4. Очевидно, чем больше te/tib, тем меньше ошибка в принятом сообщении при той
же помехе.
Для увеличения помехоустойчивости (отношения Дз/АЬ) необходимо увеличивать длину
линии сигналов, соответствующей данному отрезку в пространстве сообщений. Это можно
сделать, расширяя используемую область сигналов (радиус гс). Но поскольку мощность сигна-
ла ограничена, для этого нужно увеличивать базу сигнала, расширяя его спектр. При этом
линия сигнала может приобретать сложную извилистую форму.
На рис. 8.6 показан пример такой линии сигналов, причём для наглядности использовано
двумерное пространство сигналов (при одномерном пространстве сообщений). Заметим, что
при линейной модуляции линии сигнала и сообщений подобны и поэтому выигрыш в них
невозможен. В случае широкополосных систем (например, ЧМ) линия сигналов имеет слож-
ную извилистую форму. Длина линии увеличивается с увеличением полосы частот сигнала.
Однако при ограниченной мощности сигнала это удлинение ведёт к сближению различных
витков линии сигнала. Пока помеха "мала" (например, п на рис. 8.6), точка принятого коле-
бания z = s + п с большой вероятностью попадает в окрестность точки передаваемого сигнала s
и воспроизводится сообщение b , соответствующее ближайшей точке s, находящейся на рас-
сматриваемом витке линии сигнала. Сдвиг Д5 вдоль линии сигнала мал и определяет нормаль-
ную ошибку Д/> и соответственно е2(?) (8.2). Такие ошибки ухудшают лишь качество оценки
сообщения. Сильная помеха (п' или п" на рис. 8.6) может перевести точку принимаемого ко-
лебания на другой виток линии сигнала (точки s' и s"). Такие "перескоки” связаны с появле-
нием так называемых аномальных ошибок, которые не только ухудшают качество оценки со-
общения, но делают её совершенно ошибочной. Появление аномальных ошибок резко ухуд-
шает помехоустойчивость связи и является причиной возникновения порога помехоустойчи-
вости в широкополосных системах Модуляции (ЧМ, ФМ, ФИМ и т.п.). Очевидно, в области
порога помехоустойчивость передачи непрерывных сообщений можно характеризовать веро-
ятностью аномальных ошибок рт (ошибок неоднозначности оценки). Можно сказать, что ве-
роятность аномальной ошибки pw определяет верность оценки сообщения, а среднеквадрати-
ческая ошибка е2 (/) определяет точность (качество) этой оценки.
Вычисленные на основе более точной теории зависимости рвых от рвх для
ОМ, AM и ЧМ представлены на рис. 8.7, из которого видно отсутствие порога
при ОМ и зависимость порога при ЧМ от индекса модуляции. Существует оп-
тимальное значение индекса модуляции, при котором для обеспечения задан-
ной верности приёма рвых затрачивается минимальная мощность сигнала Рс min,
равная пороговой мощности Рспор. Это значение можно найти из условия
Рвых = Рвыхпор = Рвхпорg- Так, для ЧМ согласно (8.42), g = За3/4П2 = 6Л/3/П2, и
тогда = 6М3/Т12 = pKuatf. Отсюда получаем
П2 р„„
(8-56)
У Нвх пор
324
аномальных ошибок
для ЧМ (М= 1,2,4, 8), AM и ОМ
Таким образом, оптимальный индекс модуляции тем больше, чем выше
требуемая верность передачи (рВых)-
Полученные теоретические значения порога для различных видов модуля-
ции являются предельными, которые в реальных приёмниках могут быть дос-
тигнуты, но не могут быть превзойдены. По экспериментальным данным порог
в системе ЧМ при обычном способе приёма наступает примерно при равенстве
пиковых значений сигнала и помехи, что соответствует рвх существенно выше
теоретического. Это означает, что при большом уровне помех реальная помехо-
устойчивость приёмника ЧМ значительно меньше потенциальной. Следова-
тельно, имеется возможность усовершенствованием схемы приёмника снизить
порог помехоустойчивости и тем самым увеличить дальность связи при той же
мощности передатчика; Эта задача особенно актуальна для спутниковых и
космических систем связи.
Для снижения порога при ЧМ применяют различные схемы следящих де-
модуляторов, в частности схему с обратной связью по частоте, синхронно-
фазовый демодулятор и демодулятор со следящим фильтром [12]. Минималь-
ный (предельный) порог помехоустойчивости достигается в схеме оптимально-
го демодулятора (см. § 8.8).
8.6. ОПТИМАЛЬНАЯ ЛИНЕЙНАЯ ФИЛЬТРАЦИЯ НЕПРЕРЫВНЫХ
СИГНАЛОВ. ФИЛЬТР КОЛМОГОРОВА-ВИНЕРА
Линейную фильтрацию широко используют в системах передачи информа-
ции ДЛЯ обработки СИГНаЛОВ, Несмотря на то, ЧТО ВО МНОГИХ случаях необходи-
ма нелинейная обработка. Объясняется это прежде всего простотой реализации
линейных фильтров, которые сравнительно легко синтезируются, и существо-
ванием развитой теории их построения, чего нельзя сказать о нелинейных
фильтрах.
Линейные фильтры являются неотъемлемой частью любого приёмного уст-
ройства. С их помощью осуществляется как додетекторная, так и последетек-
торная обработка сигналов. С помощью линейных фильтров сигналы часто
разделяются в многоканальных системах передачи. Требования к- этим
325
фильтрам могут быть весьма различными в зависимости от их назначения.
Здесь рассмотрим теорию оптимальной линейной фильтрации.
Пусть сигнал на входе линейного фильтра с импульсной характеристикой
g(Z) представляет сумму переданного сигнала S(t) и помехи N(t):
Z(f) = S{f) + N(f). (8.57)
Требуется найти такую функцию g(Z), которая минимизирует среднеквадра-
тическую ошибку
ЁЧО = [£(/)-S(z)]2, (8.58)
где S(t) - оценка сигнала на выходе фильтра. Здесь считаем, что время запаз-
дывания сигнала в фильтре to = 0, а среднее значение берется по ансамблям
сигналов S и помех N. Будем полагать, что S(t) и N(t) - стационарные взаимно
некоррелированные процессы с известными СПМ Gs(/) и G„(/). В такой по-
становке задача была решена независимо друг от друга А.Н. Колмогоровым
(1939 г.) и Н. Винером (1942 г.), и поэтому оптимальный (в указанном смысле)
линейный фильтр называют фильтром Колмогорова-Винера (ФКВ). Требова-
ние физической реализуемости фильтра, как известно, сводится к тому, что
импульсная характеристика фильтра должна удовлетворять условию g(/) = 0 для
всех t = 0. Это ограничение учитывается в записи
S(t) = jz(t - T)g(x)c?r , (8.59)
7
где область интегрирования у для физически реализуемого фильтра есть интер-
вал (0, оо), а для нереализуемых фильтров - (-оо, оо). Иногда задача фильтрации
решается в более общей постановке: найти оптимальную оценку сигнала
S(t + т) при нахождении колебания Z(t) = S(t) + N(t) на текущем интервале
(0, Т). Тогда при т = 0 будем иметь задачу текущей фильтрации, при т > 0 - за-
дачу экстраполяции (фильтрацию с упреждением или предсказанием), а при
т < 0 — задачу интерполяции (фильтрацию с запаздыванием).
Можно доказать, что необходимым и достаточным условием оптимальной
линейной текущей фильтрации является условие
E(/)Z(/-t) = 0 для всех т из у. (8.60)
Это означает, что фильтр нужно выбрать так, чтобы ошибка Е(/) = S(t)-S(t)
была не коррелирована со входным сигналом Z(t) во все моменты времени в
области у. Если бы имела место корреляция между ошибкой и принимаемым
сигналом, то при последующей обработке можно было бы получить лучшую
оценку.
Докажем справедливость условия (8.60). Пусть gi(/) - импульсная характеристика опти-
мального фильтра, удовлетворяющего условию (8.60), g2(0 - импульсная характеристика лю-
бого другого линейного фильтра. Отклики фильтров соответственно обозначим через ^(г) и
S2(t)- Тогда
[^(/)-52(/)]2 =[^/)-SI(r) + 51(0-S2(r)]2 =[5(Г)-51(Г)]2 +[51(0-S2(0]2 +2[^)-S1(/)p1(0-52(/)].
S(/) -5j(/) = E(r), и если справедливо (8.60), то
[s(0—А(0] •[‘^1(/1)—-Szfr)] = E(')f 26 - t)[gi (?)- g2 (?)]</? = j E(t)z(t - ?)[g1 (?) - g2 (?)]d? = 0
у у
Следовательно,
326
Ho-^w]2=E2w+pi(/)-^(/)]2 •
Очевидно, что последнее выражение будет минимальным, когда S2(t) - SY(t), что и дока-
зывает справедливость условия (8.60) для оптимальной фильтрации. Геометрический смысл
этого условия состоит в том, что случайный вектор S должен быть строго ортогональной
проекцией S на линейное подпространство, порождаемое случайным вектором Z .
Представим условие (8.60) в виде £(/)-£(/•) -Z(/-t) = 0 для всех т из у. От-
сюда с учётом (8.59) S{t)Z(t-x) = S{t)Z(f-x) = ^Z(t-x)Z(t-x)g(x)dx или
Bsz(t) = $Bz(x - x)g(x)dx. (8.61)
7
В том случае, когда сигнал S(t) и помеха N(f) некоррелированы, (8.61) при-
нимает вид
Bs(i) = |[вя(т-х) + ^(т-х)]Дх)бйс. (8.62)
у
Это основное интегральное уравнение теории линейной фильтрации назы-
вается уравнением Винера-Хопфа. Его решением является искомая функция
g(z), минимизирующая средний квадрат ошибки Е2(/).
Не следует путать оптимальные линейные фильтры, определяемые (8.61) или (8.62), с
согласованными фильтрами, рассмотренными в § 5.4. Если основное назначение рассматри-
ваемых здесь фильтров состоит в наилучшем воспроизведении неизвестной формы сигнала, то за-
дача согласованных фильтров заключается в формировании максимально возможного пика сиг-
нала известной формы в момент отсчёта на фоне шума.
Уравнение (8.62) легко решается для нереализуемых фильтров, т.е. когда
у е(-оо,оо). Для этого случая, применив преобразование Фурье к обеим частям
(8.62), получим в частотной области
Gs(/) = (gj(/) + G„(/))x'(/). (8.63)
Отсюда коэффициент передачи оптимального линейного ФКВ
к(Л= . . (8.64)
Докажем, что дисперсия ошибки Е(/) = 5(/)-5(/ + т) при оптимальной нереа-
лизуемой линейной фильтрации в общей постановке 1
(8-б5)
СПМ для случайного процесса
Е(/) = S(t) - S(t + т) = |[5(т) + У(т)]Дт)с?/-5(/+ т)
G.(/) = r(/)G„(/)+^(/)-ej“|2Gs(/), где £(/) = 8Г(/)е^>.
• Записав G,(/) = 7f2(/)G„(/)+Gs(/)[№(/)+l-2^(/)cos(<p -от)], можно видеть,
что CEmin(/) обеспечивается лишь при ФЧХ оптимального фильтра ср = at и,
стало быть, при передаточной функции фильтра А?(/) = —( \ ( \е>т
327
Нетрудно видеть, что G6(/) . =—/' \ , а минимальная дисперсия
ошибки
(8бб)
Легко заметить, что ошибка = 0 только в том случае, когда
G,(/)gw(/) = 0, т.е. когда спектры сигнала и помехи не перекрываются. Во всех
других случаях оптимальный фильтр пропускает различные частоты с тем
меньшим весом, чем больше отношение GN(f)/Ga(f) при данной частоте.
Мы не будем здесь обсуждать вопросы реализации фильтра, характеристики
которого приближаются к характеристике нереализуемого ФКВ, поскольку из-
вестен всегда реализуемый вариант фильтра, оптимальный по среднеквадрати-
ческому критерию, определяемый методом переменных состояния (см. ниже
§ 8.7).
Результаты оптимальной фильтрации можно существенно улучшить, если применить так
называемое предыскажение сигнала с последующей его коррекцией на приёме. Сущность ме-
тода предыскажения состоит в том, что на передающей стороне сигнал s(t~) пропускается через
фильтр с коэффициентом передачи Полученный таким образом видоизменённый сиг-
нал передаётся по каналу. На приёмной стороне включён другой фильтр K2(f) Характери-
стики фильтров и K2(f) выбираются так, чтобы обеспечить минимум среднеквадрати-
ческой ошибки. Расчёты показывают, что предыскажение даёт тем больший выигрыш, чем
меньше относительная ширина полосы перекрытия спектров сигнала и помехи. Предыскаже-
ние позволяет перераспределить мощность полезного сигнала в полосе частот канала так,
чтобы обеспечить лучшие условия согласования источника сигнала с каналом (в общем случае
полезно стремиться к тому, чтобы сумма спектральных плотностей мощности сигнала и мощ-
ности помехи была постоянной в пределах полосы частот канала). Это означает, что предыс-
кажение можно рассматривать как некоторое "линейное кодирование" непрерывного сигнала,
позволяющее уменьшить ошибку и улучшить использование пропускной способности канала.
Линейное предыскажение широко используется в современных системах связи. Харак-
терными в этом отношении являются системы, в которых используется частотная модуляция.
Согласно (8.41) плотность мощности шума на выходе ЧМ демодулятора увеличивается про-
порционально квадрату частоты, так что верхние частотные составляющие сообщения под-
вержены шумам сильнее, чем нижние. Метод предыскажения и последующая коррекция по-
зволяют снизить шум на верхних частотах и тем самым создать примерно одинаковые условия
для передачи как нижних, так и верхних частот сообщения.
Следует отметить, что в результате предыскажений формируется новый сигнал с необхо-
димыми свойствами. Так в радиовещании и многоканальной радиорелейной и спутниковой
связи с частотной модуляцией несущей используется предыскажение, близкое к дифференци-
рованию. В этом случае на вход частотного модулятора поступает не первичный сигнал b(t),
как это делается при ЧМ без предыскажений, а его производная db/dt. Поэтому пропорцио-
нально b(t) изменяется не мгновенная частота, а мгновенная начальная фаза несущего коле-
бания, т.е. формируется не ЧМ, а ФМ сигнал. Так как спектр шума на выходе демодулятора
ФМ сигнала равномерный (8.39), то тем самым в многоканальных системах обеспечивается
одинаковая помехоустойчивость во всех частотных каналах, а в случае радиовещания - более
качественное воспроизведение речевых и музыкальных передач [23].
328
8.7. ОПТИМАЛЬНАЯ ЛИНЕЙНАЯ ФИЛЬТРАЦИЯ НЕПРЕРЫВНЫХ
СООБЩЕНИЙ. ФИЛЬТР КАЛМАНА
Из предыдущего параграфа следует, что нереализуемый фильтр Колмогоро-
ва-Винера является оптимальным для выделения (оценки) стационарного сиг-
нала. Модулированные же сигналы имеют конечную длительность и не явля-
ются стационарными.
На основе метода переменных состояния (см. § 4.5) возможен другой под-
ход, при котором определяют не сами характеристики оптимального фильтра, а
дифференциальные уравнения, моделирующие этот фильтр. В теории нелиней-
ной фильтрации такой подход был применён Р.Л. Стратоновичем (1959 г.), а в
теории линейной фильтрации — Калманом и Бьюси (1960 г.). Метод, перемен-
ных состояния (дифференциальных уравнений) позволяет решить более общую
задачу - выделение с наименьшей погрешностью k(t) = Е2(/) = сооб-
щения b(f) из наблюдаемого на конечном интервале времени сигнала
Z(0 = s(t, b) + N(t). Условие стационарности сигнала и помехи в рамках этого
метода не является обязательным. Относительно фильтруемого сообщения B(t)
дополнительно предполагают, что оно порождается линейным стохастическим
дифференциальным уравнением. В частном случае используется уравнение,
рассмотренное в § 2.9:
^ = -а6(0+аУ1(/), (8.67)
at
где 7Vi(0 - БГШ (порождающий процесс) с нулевым средним значением
У,(/) = 0 и односторонней СПМ N\. Физически это означает, что сообщение
рассматривают как результат прохождения стационарного белого шума N\(i)
через линейную цепь, в данном случае через интегрирующую цепочку RС. Для
такой цепи постоянная а = 1/(7?С). Сформированное таким образом сообще-
ние B(t) является гауссовским марковским процессом1) с функцией корреляции
= (8.68>
Спектральная плотность мощности такого сообщения
. z <8-69)
В более общем случае сообщение описывается системой линейных диффе-
ренциальных уравнений. Большой практический интерес представляет тот
факт, что методы дифференциальных уравнений позволяют синтезировать оп-
тимальный фильтр рекуррентным способом, обеспечивая удобство его реализа-
ции при использовании современных ЭВМ или микропроцессоров.
Рассмотрим случай линейной фильтрации, когда наблюдаемый процесс на
входе фильтра задан уравнением
Z(t) = b(t)M + tf(/), 0 < t < Т, (8.70)
а сообщение b(j) - уравнением (8.67). Здесь J{f) - известная функция (несущее
колебание); b(t)flj) = s(t, b) - полезный сигнал; N(t) - белый гауссовский шум
Реальные сообщения, как правило, не являются марковскими, поскольку зависимость меж-
ду отдельными сечениями более сложная. Тем не менее, марковская аппроксимация описыва-
ет реальное сообщение лучше, чем аппроксимация процессом с финитным спектром, у кото-
рого сечения, разделенные котельниковским интервалом, вовсе не коррелированы.
329
(не обязательно стационарный) с нулевым средний значением #(/) = 0 и одно-
сторонней спектральной плотностью Nq. Уравнение! (8.70) является уравнением
наблюдения, а (8.67) — уравнением состояния. Для получения уравнений
фильтрации можно, как и в § 8.6, исходить из условия оптимальной линейной
фильтрации (8.60). На основе этого условия выводится рекуррентное соотно-
шение, которое позволяет получить следующее уравнение [26]:
^ = -а4(О+^/(ф0-/О>‘(/)], (8.71)
2 v q
dt ~ 2
2
-2а*-—f2k2.
'’о
(8.72)
Уравнения (8.71) и (8.72) принято называть уравнениями фильтра Колмана
(ФК). Уравнение (8.71) определяет алгоритм формирования оценки, а следова-
тельно, и структурную схему фильтра, а (8.72) - ошибку фильтрации к = Е2(г).
Структурная схема, моделирующая уравнение (8.71), приведена на рис. 8.8. Построение
схемы удобно начинать с интегратора. Для этого обозначим правую часть (8.71) через
Х0 = У1(0 + №(0, где л(г) = у-/(ф(/)-/(/)&(/)], у2(г) = -ад(/). Тогда
уравнение (8.71) запишет-
ся как db/dt = y(t). Отсюда следует, что если на вход интегратора подать напряжение y(f), то
на его выходе получим оценку сообщения b(t). Для того чтобы сформировать напряжение
У1(0, необходимо иметь генератор Г несущего колебания f(t), два перемножителя, сумматор и
усилитель с коэффициентом усиления 2k/N$. С помощью этих устройств осуществляются все
операции, входящие в выражение для y^t). Напряжение yi(t) получается с помощью усилите-
ля с коэффициентом усиления а, на вход которого поступает напряжение оценки b(t). Сум-
марное напряжение y(t) — У1(0 + Уг(0 с выхода сумматора поступает на вход интегратора, вы-
ход которого представляет оценку й(/). Для немодулированного сигнала, когда s(t, b) = b(t), в
(8.71) и (8.72) нужно положить ДО = 1, и схема фильтра Калмана примет более простой вид
(рис. 8.8, б).
Пример. Рассмотрим фильтрацию гауссовского марковского сообщения в канале с ампли-
тудной модуляцией, когда для передачи сообщения b(t), заданного (8.67), используется сигнал
s(t, b) = b(t)&iamQt. (8.73)
Это сигнал AM с подавленной несущей. Уравнение наблюдения в этом случае согласно
(8.70)
z(0 = б(/)8шс>о^ + МО- (8-74)
Уравнение оценки согласно (8.71)
^- = -ab + — [z(/)sino0r-hsin2®0/l, (8.75)
Рис.8.8. Реализация фильтра Калмана для гауссовского сообщения при линейной
модуляции (а) и при отсутствии модуляции (б) сигнала
330
или
— = -aft + -^-l2z(/)sin<o0/-6(l-cos2(o0/)l.
dt А/ q i* *
(8.76)
Практически период колебания несущей Т= 2тг/а>о « тк ~ 1/«, т.е. a « coq, где тк - интер-
вал корреляции сообщения b(t). При этих условиях слагаемым, пропорциональным cos2a>0/,
можно пренебречь. Тогда имеем ’
^• = -afe + -^-j22(/)sin<oo/-6] = -^a + -^-^6 + 2-^-2(/)sin(oo/. (8.77)
Уравнение (8.77) можно моделировать линейным
фильтром разомкнутого типа (рис. 8.9) с постоянной
времени RC = 7/(a + k/No). Постоянная к, равная
ошибке фильтрации, определяется из уравнения (8.72).
Как видим, оптимальный фильтр (демодулятор) для
сигналов (8.73) представляет собой схему когерентного
Рис.8.9 Структурная схема оптимального (синхронного) детектора с интегрирующим RC-
демодулятора AM сигналов фильтром. В случае обычной AM с несущей, когда
s(t, b) = L70[l + /w6(/)]sin<oo^ синхронный детектор вы-
деляет огибающую |[70 + /и7/0й(/)|, и поэтому для получения на выходе оценки сообщения в
схему включены разделительный конденсатор, устраняющий постоянную составляющую t/o, и
аттенюатор А с коэффициентом затухания 1/(/и?7о)- Для немодулированного сигнала, когда
ДО. — 1 и s(t) = b(t), уравнение оценки (8.76) принимает вид
<76 г 2.к г , ч -1 ( 2к Y- 2к , .
Это уравнение моделируется интегрирующим фильтром с постоянной времени
RC = l/(a + 1k/No) и усилителем с коэффициентом усиления 2k/N$. Можно показать, что в
этом случае, когда сигнал s(t) и шум N(f) стационарны, ФК совершенно эквивалентен ФКВ.
Однако для решения многих практических задач обработки сигналов и, в частности, данных
телеизмерений, фильтры Калмана по вычислительной структуре оказались более удобными,
чем реализуемые варианты фильтров Колмогорова-Винера.
8.8. ТЕОРИЯ НЕЛИНЕЙНОЙ ФИЛЬТРАЦИИ
Во многих случаях сигнал s(t,b) (например, при ЧМ, ФМ, ФИМ) является
нелинейной функцией передаваемого сообщения, и уравнение наблюдения
становится нелинейным. Может быть нелинейным и уравнение состояния. Ос-
новополагающие результаты по теории нелинейной фильтрации, из которой, в
частности, следуют и результаты линейной теории, получены
Р.Л. Стратоновичем. Дальнейшее развитие эта теория получила в работах
В.И. Тихонова, Н.К. Кульмана, Ю.Г. Сосулина и многих других авторов [26]. В
настоящее время теория нелинейной фильтрации наиболее разработана для
двух случаев: сообщение b(t) моделируется гауссовским случайным процессом
или представляет собой марковский процесс. Здесь остановимся лишь на тео-
рии фильтрации одномерных марковских гауссовских процессов, порождаемых
линейным дифференциальным уравнением (8.67). Уравнение наблюдения за-
дано в виде
Z(t) = s(t, b) + N(f), 0 < t< T, (8.79)
где s(/, b) - нелинейная функция b(t). Как и в предыдущем случае, шум N(f)
считается белым гауссовским с нулевым средним значением и односторонней
СПМ Nq.
Не нарушая общности в уравнении (8.67), можно положить N\ = 4/a. Тогда b(f) будет
нормированным безразмерным процессом с единичной дисперсией (мощностью), а измене-
331
ния глубины модуляции того или иного параметра скажутся лишь на коэффициенте (индексе)
модуляции.
Поскольку процесс, описываемый стохастическим уравнением (8.67), является марков-
ским (диффузионным), изменения во времени его плотности вероятности a(b, t) определяют-
ся уравнением Колмогорова-Фокера-Планка (2.30), которое в данном случае имеет вид
= -|-[aftw(&,z)]+w(b,t) . (8.80)
Для большей общности можно рассматривать передачу сигнала в канале с флуктуирую-
щей фазой <p(Z), которую часто представляют процессом с независимыми приращениями, опи-
сываемым дифференциальным уравнением
d<p/dt = N2(t), (8.81)
где Nitf) - белый гауссовский шум с нулевым средним значением и односторонней спек-
тральной плотностью мощности N2. Все белые шумы, фигурирующие в рассматриваемой за-
даче, взаимно независимы. Располагая этими априорными данными, нужно найти устройство,
которое бы с наименьшей погрешностью воспроизводило изменяющееся во времени случай-
ное колебание b(t).
Если в качестве критерия оптимальности используется критерий среднеквадратической
ошибки
E2(/) = min[B(/)-B(/)]2 (8.82)
то, как известно (см. § 8.2), оптимальной оценкой является МО апостериорного распределе-
ния
&(0 = м[Цй|г)] = jZw(6|z)j& (8.83)
в
При этом погрешность оценки можно характеризовать апостериорной дисперсией
= (8.84)
в
Таким образом, для вычисления оптимальной оценки и её погрешности необходимо
знать плотность апостериорного распределени w(6|z), которая согласно формуле Байеса (8.6)
определяется двумя множителями w(b) и w(z|b) (см. (8.20)). Плотность вероятности w(b)
фильтруемого процесса b(t), удовлетворяющего (8.67), определяется из (8.80). Условная плот-
ность вероятности w(zlb) (функция правдоподобия) легко находится из уравнения наблюде-
ния (8.79). Так как сигнал s(t, b) является известной функцией аргументов t и Ь, а шум имеет
гауссовское распределение, то и w(z|b) также будет гауссовским. При этом оценка b(t) явля-
ется оптимальной не только по критерию минимума среднеквадратической ошибки, но и по
критерию максимума апостериорной вероятности.
Апостериорная вероятность содержит всю информацию о передаваемом сообщении b(t),
которую можно извлечь из наблюдаемого сигнала z(t) на интервале (0, 7) и априорных сведе-
ний о b(t). В работах Р.Л. Стратоновича показано, что апостериорная плотность вероятности
w(z| b) реализации b(t) в конечный момент времени наблюдения определяется следующим не-
линейным дифференциальным уравнением [26]:
+ [f(z,6)-F(/,6
Здесь А[ и А% - соответственно коэффициенты сноса и диффузии; F(t, b) - производная
по времени от логарифма функции правдоподобия:
F(f,0 = ^lnw(z|&). (8.86)
В общем случае с точностью до постоянных
^) = --Ц-[г('М'Х> (8-87)
;vo
а применительно к неэнергетическим параметрам сигнала (например, для частоты и фазы)
о
= • (8.88)
—w(ft|z) = —[^0,&)w(&|z)]+|—5-[^(f,&)w(&|z)]
)Ш). (8.85)
332
Уравнение (8.85) определяет полную процедуру фильтрации сообщения на фоне белого
шума. Оптимальное приёмное устройство должно моделировать уравнение (8.85) и определять
оценку b(t), соответствующую максимуму апостериорной вероятности. В общем случае ана-
литическое решение этого уравнения оказывается трудной задачей. Схемы оптимального при-
ёмника при этом весьма сложные. Для получения более простых схем целесообразно исполь-
зовать приближённые решения. Прй достаточно больших отношениях сигнал-шум и большом
времени наблюдения есть основания считать, что апостериорная плотность вероятности при-
ближённо гауссовская:
2
=т=ехр
(8.89)
Такую аппроксимацию w(ilz) в теории нелинейной фильтрации принято называть гаус-
совским приближением, а получающийся при этом алгоритм обработки колебания z(t) - ква-
зиоптимальным. Решение задачи в этом случае существенно упрощается, так как апостериор-
ная плотность вероятности (8.89) определяется всего двумя параметрами: средним значением
b(t), определяющим оптимальную оценку передаваемого сообщения b(f), и дисперсией ol(t),
характеризующей ошибку фильтрации.
Если считать коэффициент сноса A\(b, f) линейной функцией Ь, а коэффициент диффу-
зии Ai(b, г) = const, то после подстановки (8.89) в (8.85) и несложных вычислений получим
для определения b(t) и сг*(г) = £(г) систему из двух обыкновенных нелинейных дифференци-
альных уравнений:
дЬ
(8.90)
СИ, Г,О „ ОPlt,DI
— k(t) = 2fc(t)-kr—- + к2 (t)-L—-+^2 .
dt V 7 V 7 db U db2 j
Таким образом, задача оптимальной фильтрации в гауссовском приближении сводится к
совместному решению или моделированию уравнений (8.90). Система, моделирующая эти
уравнения (нелинейный фильтр), будет воспроизводить переданное сообщение b(t) с мини-
мальной среднеквадратической ошибкой (по крайней мере, в случае слабых помех, когда оп-
равдано гауссовское приближение).
Для марковского гауссовского процесса, описываемого стохастическим дифференциаль-
ным уравнением (8.67): = =
уравнения (8.90) запишутся так:
dt db
(8-91)
J 1 „ с р г,о
at 2 Ob )
Если сигнал s(t, b) = й(/)Д/) линейно зависит от передаваемого сообщения b(t), то соглас-
но (8.87) F(t,6) = --^-[z(t)-/(t)&(t)l2 и уравнения (8.91) переходят в уравнения (8.71), (8.72),
описывающие линейный оптимальный ФК.
Рассмотренная теория нелинейной фильтрации может быть обобщена и на случай, когда
передаваемое сообщение описывается негауссовским марковским процессом. При этом вме-
сто уравнения (8.67) фигурирует нелинейное стохастическое дифференциальное уравнение.
Другим обобщением является передача сигнала, модулированного сообщением b(t), кото-
рое можно аппроксимировать компонентой многомерного марковского процесса [19].
Пример. Рассмотрим применение теории нелинейной фильтрации для синтеза оптималь-
ных приёмников в системах с фазовой и частотной модуляцией.
Сигнал при ФМ
s(t,b) = t/ocos[a>ot + ®(0]> ®(0 = Mb(t) + <р(/), (8.92)
333
где Uq и а>о - априорно известные значения амплитуды и частоты; М - индекс фазовой моду-
ляции; <р(0 - процесс, описывающий флуктуацию начальной фазы; СП B(f) с реализацией b(f)
положим нормированным одномерным марковским гауссовским процессом.
Для нахождения уравнения оценки определим функцию F^bj. Согласно (8.88)
F^,ft) = -^-z(z)^Z,6) = ^-z(z)cosJ<Ooz + 6(0] (8-93)
Запишем уравнение оценки, полагая вначале, что флуктуации начальной фазы отсутству-
ют: ф(/) = <ро- Подставляя (8.93) в уравнение (8.91), получаем
2k^Uf> z(/)sin|co0Г + 8(r)j, (8.94)
где 6(z) = M>(z)+<p0
Построим структурную схему фильтра, выделяющего из наблюдаемого колебания z(Z) оп-
тимальную оценку b(t). Для этого обозначим z(/)sinf<o ot + 0(z)l = y(t) и перепишем (8.94)
в виде
Я0 = ^) + 1^- (8-95)
a dt
Легко убедиться, что если подать напряжение у(?) на интегрирующую ЯС-цепь, где
RC = 1/а, то напряжение на конденсаторе будет равно b(t). Для того чтобы сформировать
напряжение y(f), достаточно иметь автогенератор с частотой fo, моделируемый по фазе сигна-
лом b(t) с индексом модуляции М, и перемножитель, осуществляющий умножение напряже-
ния автогенератора на входное колебание z(f). Амплитуда автогенератора Ur — 2kMUo/(aNo).
Коэффициент к определяют решением нелинейного дифференциального уравнения (8.91). В
данном случае для установившегося режима
(8.96)
-1 .
оУ0
/.-=44 .
Таким образом, определяем один из возможных вариантов схемы для получения опти-
мальной оценки 6(0, изображённой на рис. 8.10. Здесь ПГ - подстраиваемый генератор, фаза
которого модулируется с помощью управляющего элемента (УЭ). Это не что иное, как схема
автоподстройки фазы автогенератора по входному колебанию z(f). Благодаря этому она обла-
дает в известной степени свойствами саморегулиро-
вания, в частности малочувствительна к точности
установки начальной фазы <ро автогенератора и его
амплитуды. Однако, если начальная фаза подвержена
значительным (по величине и скорости) флуктуаци-
ям, схема рис. 8.10 становится далеко не оптималь-
ной.
Если фаза <р(/) флуктуирует, то приходится ре-
шать уравнение совместной оценки б(/) и ф(/). В
этом случае структурная схема оптимального демоду-
лятора ФМ сигнала несколько усложняется по срав-
нению со схемой рис. 8.10, так как теперь надо мо-
дулировать управляемый генератор сигналом
0(t)= ЛЛ(О+ф0.
Рис.8.10. Структурная схема оптимального
демодулятора ФМ сигнала с постоянной фазой
характер всех соотношений сохраняет-
При ЧМ в (8.92) 0(/) = Дю J"+ ф(/). В остальном
о
ся. Схема оптимального нелинейного фильтра по структуре такая же, как и для ФМ. Отличие
заключается в том, что в подстраиваемом генераторе модулируется не фаза, а частота.
334
Несколько отличаются также коэффициенты усиления. Полученный фильтр представляет со
бой схему фазовой автоподстройки частоты (ФАПЧ). Заметим, что она аналогична схеме
рис. 8.2.
Аналогично определяют схемы оптимальной нелинейной фильтрации для других видов
модуляции и для более сложных каналов.
8.9. ОБЩИЕ СВЕДЕНИЯ О ЦИФРОВОЙ ПЕРЕДАЧЕ
НЕПРЕРЫВНЫХ СООБЩЕНИЙ
Для передачи непрерывных сообщений можно воспользоваться дискретным
каналом. При этом необходимо преобразовать непрерывное сообщение в циф-
ровой сигнал, т.е. в последовательность символов, сохранив содержащуюся в
сообщении существенную часть информации, определяемую его эпсилон-
энтропией. Типичными примерами цифровых систем передачи непрерывных
сообщений являются системы с импульсно-кодовой модуляцией (ИКМ) и
дельта-модуляцией (ДМ).
Как отмечалось в § 1.6, для преобразования непрерывного сообщения в
цифровую форму используются операции дискретизации и квантования. Полу-
ченная таким образом последовательность квантованных отсчётов кодируется и
передаётся по дискретному каналу как всякое дискретное сообщение. На при-
ёмной стороне непрерывное сообщение после декодирования восстанавливает-
ся (с той или иной точностью).
Основное техническое преимущество цифровых систем передачи перед не-
прерывными системами состоит в их высокой помехоустойчивости. Это пре-
имущество наиболее сильно проявляется в системах передачи с многократной
ретрансляцией (переприёмом) сигналов. Типичные системы подобного типа —
кабельные и радиорелейные линии большой протяжённости. В них сигналы
передаются по цепи ретрансляторов, расположенных на таких расстояниях друг
от друга, которые обеспечивают надёжную связь. В таких системах помехи и
искажения, возникающие в отдельных звеньях, как правило, накапливаются.
Допустим для простоты, что сигнал в каждом ретрансляторе только усиливает-
ся. Тогда, если аддитивные помехи в каждом звене статистически независимы,
их мощность на входе последнего звена равна сумме мощностей помех всех
звеньев.
Если система состоит из к одинаковых звеньев, для обеспечения заданной
верности связи необходимо обеспечить на входе каждого ретранслятора отно-
шение сигнал-помеха в к раз больше, чем при передаче без ретрансляций. В
реальных системах число ретрансляций к может достигать несколько десятков,
а иногда и сотен; накопление помех вдоль тракта передачи становится основ-
ным фактором, ограничивающим протяжённость линии связи.
При цифровых системах передачи для ослабления эффекта накопления по-
мех при передаче с ретрансляциями наряду с усилением применяют регенера-
цию импульсов, т.е. демодуляцию с восстановлением переданных кодовых сим-
волов и повторную модуляцию на переприёмном пункте. При использовании
регенерации аддитивная помеха со входа ретранслятора не поступает на его
выход. Однако она вызывает ошибки при демодуляции. Ошибочно принятые в
одном регенераторе символы в таком виде передаются и на следующие регене-
раторы, так что ошибки всё же накапливаются. При использовании к регенера-
торов и допустимой вероятности ошибки р«к 1 необходимо в демодуляторе
каждого регенератора обеспечить вероятность ошибки р\ не более чем
335
p/к. Однако в отличие от предыдущего случая для этого вовсе не нужно увели-
чивать отношение сигнал-помеха на входе регенератора в к раз. Так при пере-
даче двоичных символов в канале с аддитивным гауссовским шумом и некоге-
рентном приёме двоичных ортогональных сигналов ошибки определяются
формулой (5.82). Если требуется обеспечить р < 10~5, то в системе без пере-
приёма для этого необходимо иметь А2 = -21и(2р) = 21,64. При использовании
к = 1000 регенераторов следует обеспечить на каждом из них Р\ < 10'8 или
Л2 = 21п(2р)-1« 35,45. Для этого достаточно поднять мощность сигнала в
1,64 раза, а не в 1000 раз.
При цифровой системе передачи непрерывных сообщений можно, кроме
того, повысить верность применением помехоустойчивого кодирования. Высо-
кая помехоустойчивость цифровых систем передачи позволяет осуществить
практически неограниченную по дальностй связь при использовании каналов
сравнительно невысокого качества.
Другим существенным преимуществом цифровых систем передачи инфор-
мации является широкое использование в аппаратуре преобразования сигналов
современной элементной базы цифровой вычислительной техники и микро-
процессоров. Совокупность устройств, выполняющих преобразования входных
цифровых сигналов в выходные цифровые сигналы на основе заданного алго-
ритма цифрового преобразования, называют цифровыми фильтрами (см. гл. 10).
По существу цифровой фильтр является специализированной ЭВМ или мик-
ропроцессором1). Больше того, на цифровой основе могут быть объединены в
единой системе сигналы передачи данных с сигналами передачи речи и теле-
видения. Возможность приведения всех видов передаваемой информации к
цифровой форме позволяет осуществить интеграцию систем передачи и систем
коммутации. Простота сочленения цифрового канала с ЭВМ позволяет сущест-
венно расширить область использования вычислительной техники при по-
строении аппаратур^ связи и автоматизации управления сетями связи.
Отмеченные и другие преимущества цифровых систем передачи непрерыв-
ных сообщений позволяют предположить, что в ближайшие годы эти системы
найдут более широкое применение, чем непрерывные (аналоговые) системы
связи. Перейдём к рассмотрению структурной схемы цифрового канала переда-
чи непрерывных сообщений (рис. 8.11). В отличие от непрерывного канала
Рис.8.11. Структурная схема системы цифровой передачи непрерывных сообщений
Техника цифровой фильтрации и схемы цифровых фильтров на базе микропроцессоров
рассматриваются в курсе "Основы цифровой техники и микропроцессоры”.
336
Рис.8.12. Преобразование непрерывного сообщения
в последовательность двоичных импульсов
передачи в составе циф-
рового канала преду-
смотрены устройства
для преобразования не-
прерывного сообщения
в цифровую форму -
аналого-цифровой пре-
образователь (АЦП) на
передающей стороне и
устройства преобразова-
ния цифрового сигнала
в непрерывной - циф-
ро-аналоговый преобра-
зователь (ЦАП) на при-
ёмной стороне.
Преобразование
аналог - цифра состоит
из трёх операций
(рис. 8.12): сначала не-
прерывное сообщение
подвергается дискрети-
зации по времени через
интервалы Д
(рис. 8.12, а); получен-
ные отсчёты мгновен-
ных значений Ь(кЛ)
квантуются
(рис. 8.12, б); наконец,
полученная последова-
тельность квантованных
значений ЬКЪ(кЛ) пере-
даваемого сообщения
представляется посред-
ством кодирования в
виде последовательно-
сти m-ичных кодовых
комбинаций
(рис. 8.12, в). Такое
преобразование называ-
ется импульсно-кодовой
модуляцией (ИКМ). Ча-
ще всего кодирование
здесь сводится к записи
номера уровня в двоич-
ной системе счисления.
В дальнейшем будем рассматривать цифровые системы, в которых непрерыв-
ное сообщение преобразовано в последовательность кодовых комбинаций, со-
ставленных из двоичных символов.
337
Полученный с выхода АЦП сигнал И КМ поступает или непосредственно в
линию связи, или на вход передатчика (модулятора), где последовательность
двоичных импульсов преобразуется в радиоимпульсы.
На приёмной стороне линии связи последовательность импульсов после
демодуляции и регенерации в приёмнике поступает на цифро-аналоговый пре-
образователь ЦАП, назначение которого состоит в обратном преобразовании
(восстановлении) непрерывного сообщения по принятой последовательности
кодовых комбинаций. В состав ЦАП входят декодирующее устройство, предна-
значенное для преобразования кодовых комбинаций в квантованную последо-
вательность отсчётов, и сглаживающий фильтр, восстанавливающий непрерыв-
ное сообщение по квантованным значениям.
Преобразование непрерывных сообщений в цифровую форму в системах
И КМ сопровождается округлением мгновенных значений до ближайших разре-
шённых уровней квантования. Возникающая при этом погрешность s(Z)
(рис. 8.12, в) представления является неустранимой, но контролируемой (так
как не превышает половины шага квантования) (рис. 8.12, б). Выбрав малый
шаг квантования, можно обеспечить эквивалентность по заданному е-критерию
(см. § 6.7) исходного и квантованного сообщений. Погрешность (ошибку)
квантования, представляющую собой разность между исходным сообщением и
сообщением, восстановленным по квантованным отсчётам, называют шумом
квантования.
8.10. ПОМЕХОУСТОЙЧИВОСТЬ ИМПУЛЬСНО-КОДОВОЙ
МОДУЛЯЦИИ
Одной из причин, приводящих к отличию принятого сообщения от пере-
данного в системе с И КМ, является шум квантования, другой - помехи в ка-
нале, которые накладываются на передаваемые сигналы кодовых комбинаций
и могут вызвать ошибки. Ошибки в символах (при отсутствии избыточности)
приводят к ошибочному декодированию всей кодовой комбинации.
В результате ошибочного декодирования символа действительно переданное
дискретное значение сообщения заменяется другим возможным (не обязатель-
но ближайшим); погрешность зависит от того, какие из символов кодовой
комбинации приняты с ошибкой. Назовем эту составляющую шума шумом
ложных импульсов. Таким образом, при оценке помехоустойчивости необходимо
учитывать суммарный шум как за счёт квантования, так и за счёт ложных им-
пульсов при декодировании.
Шум квантования не связан с помехами в канале и целиком определяется
выбором числа уровней квантования. Его можно сделать сколь угодно малым,
увеличивая число уровней. При этом придется увеличивать число кодовых
символов, приходящихся на каждый отсчёт, а следовательно, сокращать дли-
тельность символа и расширять спектр сигнала в канале. Таким образом, так
же как и при помехоустойчивых аналоговых видах модуляции, снижение этого
шума достигается за счёт расширения спектра сигнала.
Шум ложных импульсов является аномальным (см. § 8.5). Он полностью
определяется помехами в канале и видом модуляции несущей. При расшире-
нии спектра сигнала мощность аномального шума, как правило, возрастает.
338
Мощность шума квантования. Будем считать, что шум квантования пред-
ставляет собой стационарный случайный процесс E(Z)1) с независимыми значе-
ниями отдельных отсчётов г(к) = ЬКЪ(кД)-Ь(кД). Если в качестве квантованного
(округлённого) значения Ь(кЛ) принимается ближайший дискретный уровень,
то шум квантования Е(£) при равномерном квантовании с шагом Ай находится
в пределах
. При большом числе уровней квантования L можно при-
2 2
нять, что шум квантования имеет равномерное распределение
1 .. дй •
Дй 1 1 2
Л I । Ай
О, £ >---.
1 1 2
Тогда Е(/) = 0, а дисперсия шума квантования (средняя мощность)
дь
Е2(/) = Ре = J e2w(e)Je = .
ЛЬ
"Т
Отношение средних мощностей сообщения и шума
pt/p. = B4t\/ём = 12^-.
Выразим Ай через число уровней квантования L,
нормировано, т.е. -1 < B(t) < + 1. Тогда
В -В . 2
_ шах___шт_______
квантования
(8.97)
(8.98)
полагая, что сообщение
(8.99)
И
С другой стороны, согласно (8.30) B2(t)-Pb
общения. Тогда
Рь _ 12 _ 3(2,-1)2 _ 3(2" -1)2
Ре”П2(Дй)2' П2 " П2 ’
где П - пик-фактор со-
(8.100)
где п - число символов на отсчёт (разрядность кода) при безызбыточном дво-
ичном коде. Из (8.100) следует, что верность квантованного сообщения зависит
от числа уровней квантования. Выбирая его достаточно большим, можно
уменьшить относительное значение шума квантования до любого допустимого
значения. В табл. 8.1 приведена зависимость отношения Рь1Ре от числа уров-
ней квантования при равномерном распределении сообщения
w(Z>) = 0,5(-1 < й < 1), когда П = д/з .
Из табл. 8.1 следует, что добавление каждого двоичного символа в кодовой
комбинации (увеличение разрядности кода) улучшает отношение Рв1Ре при-
близительно на 6 дБ. С другой стороны, увеличение разрядности требует по-
вышения быстродействия многоразрядных кодирующих устройству также со-
ответствующего расширения полосы частот канала передачи.
Если шум квантования Е(/) нестационарен, то полученное значение Е2(г) следует дополни-
тельно усреднять во времени.
339
Таблица 8.1
Число уровней квантования L 8 16 32 64 128 256 512 1024 2048
Число символов в кодовой ком- бинации п 3 4 5 6 7 8 9 10 И
Относительная мощность шума квантования, дБ, -201g(Z - 1) -16,9 -23,5 -29,8 -36,0 -42,1 -48,1 -54,2 -60,2 -66,2-
Чаще всего распределение сообщения не является равномерным, и в полу-
ченные здесь цифры необходимо внести поправку. Для этого данные таблицы
следует уменьшить по модулю на 201g(n/V3) дБ. При П = 3 (телефонные со-
общения) это составляет 4,8 дБ, а при П — 10 (симфоническая музыка) 15,2 дБ.
Важной особенностью шума квантования, отличающей его от аддитивных
шумов, является то, что он возникает одновременно с появлением сообщения
B(f). С технической точки зрения шум квантования можно трактовать как раз-
новидность нелинейных искажений, возникающих в процессе квантования.
Шум квантования не изменяется при ретрансляции сигналов, т.е. не накапли-
вается. Его непосредственное измерение затруднительно, и поэтому для коли-
чественной оценки используют расчётные приёмы, один из которых рассмот-
рен выше.
Воздействие шума квантования на принимаемые сообщения можно заметно
уменьшить, применяя неравномерное квантование, при котором большие
уровни сообщения квантуются с большим шагом, а низкие уровни - с мень-
шим (рис. 8.13). Очевидно, что шум квантования при этом коррелирован с со-
общением и имеет тем меньшую мгновенную мощность, чем меньше уровень
сообщения. Это позволяет при том же числе уровней лучше различать слабые
отрезки сообщения. Если распределение вероятностей сообщения такое, что
большие уровни встречаются значительно реже, чем малые (что имеет место,
например, при передаче речи), то неравномерное квантование сводится к тому,
что часто возникающие значения B(f) передаются с меньшей ошибкой кванто-
вания, а редко возникающие значения B{t) - с большей ошибкой квантования.
В результате усреднения по всем значениям дисперсия ошибки квантования
будет уменьшена.
Одним из распространённых способов неравномерного квантования являет-
ся квантование с компандированием сигнала.
Компандерная система представляет собой ком-
плекс из двух нелинейных преобразователей с
взаимно обратными характеристиками - ком-
прессора и экспандера (рис. 8.14). Динамический
диапазон входного сигнала "сжимается" с помо-
щью компрессора на передающей стороне, затем
сигнал равномерно квантуется. Комбинация этих
операций эквивалентна неравномерному кванто-
ванию, причём закон изменения шага квантова-
ния определяется нелинейной характеристикой
компрессора. После кодирования и передачи по
линии связи на приёмной стороне производится
обратное преобразование, восстанавливаются
340
Рис.8.13. Характеристика квантователя
с неравномерным шагом
Рис.8.14. Схема, поясняющая принцип компандирования
отсчёты с равномерным шагом квантования. Затем они подвергаются экспанди-
рованию, при котором восстанавливается исходный динамический диапазон. В
настоящее время чаще всего применяется компандирование в цифровой форме,
т.е. непосредственное неравномерное квантование.
Шум ложных импульсов при декодировании. Обозначим вероятность оши-
бочного приёма одного символа кодовой комбинации через р. Эта вероятность
зависит от вида модуляции и находится по формулам гл. 5. Предполагая ошиб-
ки при приёме символов независимыми (канал без памяти), запишем выраже-
ние для P(t) - вероятности того, что кратность сочетания ошибок составит t:
= (8.101)
Вероятность того, что кодовая комбинация принимается хотя бы с одной
ошибкой при пр « 1,
[1 - (1 -р)л] « пр. (8.102)
При декодировании каждый символ кодовой комбинации в зависимости от
занимаемого им места даёт определённый "вклад" в декодируемое сообщение.
Если используется двоичный код, то ошибка в младшем разряде кодовой ком-
бинации вызывает погрешность в выходном сообщении, равную шагу кванто-
вания AZ>; ошибка во втором символе приводит к появлению в выходном сооб-
щении погрешности 2Д/> и т.д. При этом средняя мощность шума, обусловлен-
ного действием ложных импульсов,
. (8.103)
1 п ,=1 ,=1
Сумма определяет возрастающую геометрическую прогрессию с показате-
лем q = 2 2 = 4 и первым членом а = 1. Поскольку значение этой суммы равно
a(qn -1) 4” -1
—ь----- =-----, то вместо (8.103) можно написать
— 1 3
/>„ = р(Л4)’-(4"-1)/з. (8.104)
При фиксированном значении п — logZ шум ложных импульсов зависит
только от вероятности ошибок р, которая, в свою очередь, определяется отно-
шением мощностей сигнала и помехи в канале и видом модуляции.
Как отмечалось, в отличие от шума квантования шум ложных импульсов
накапливается при ретрансляции. Однако в правильно спроектированных сис-
темах с ИКМ мощность сигнала превышает пороговую, при которой аномаль-
ным шумом ложных импульсов по сравнению с шумом квантования можно
пренебречь. При этом условии верность приёма практически определяется шу-
мом квантования и может быть сколь угодно большой, если число уровней
достаточно велико.
341
В системах с И КМ так же, как и в других помехоустойчивых (или широко-
полосных) системах передачи непрерывных сообщений, имеет место порог по-
мехоустойчивости, т.е. верность приёма резко ухудшается, если мощность сиг-
нала упадёт ниже пороговой. Из сказанного выше ясно, что эта пороговая
мощность увеличивается с ростом числа ретрансляторов, впрочем, очень мед-
ленно. При этом пороговая мощность увеличивается и с ростом числа уровней
квантования. Основная причина этого заключается в том, что чем больше чис-
ло уровней, тем больше кодовых символов должно приходиться на один отсчёт
и, следовательно, тем меньше длительность передачи одного символа.
Поскольку вероятность ошибки определяется энергией элемента сигнала,
то при сокращении его длительности приходится увеличивать его мощность.
Впрочем, это увеличение пороговой мощности также невелико по сравнению с
соответствующим уменьшением шума квантования. Так, с переходом от 128
уровней квантования к 256 шум квантования уменьшается на 6 дБ
(см. табл. 8.1). При этом вместо семи символов в кодовой комбинации прихо-
дится передавать восемь, так что длительность импульса уменьшится в
8/7 » 1,14 раза. Для того чтобы сохранить прежнюю вероятность ошибки, нуж-
но увеличить мощность сигнала в 1,14 раза, т.е. всего лишь на 0,6 дБ.
Следует отметить, что слабый шум ложных импульсов, имеющий место при
работе над порогом помехоустойчивости, воспринимается (в телефонных сис-
темах) как более или менее редкие отдельные щелчки. Если мощность сигнала
упадёт и окажется ниже порога, эти щелчки становятся частыми и сливаются в
сплошной шумовой фон. Аналогичная картина имеет место и для аномального
шума в аналоговых системах (например, ЧМ).
Высокая помехоустойчивость И КМ систем достигается за счёт расширения
спектра И КМ сигнала по сравнению со спектром исходного сообщения. Най-
дём вначале минимальную ширину спектра И КМ сигнала при основании кода
т = 2. Если ширина спектра исходного сообщения равна Fc, то минимальная
частота дискретизации в соответствии с теоремой Котельникова равна 2FC. Ка-
ждый отсчёт после квантования может принимать L = 2Bmax/kb + 1 возможных
дискретных значений и заменяется при кодировании комбинацией из п — log£
двоичных импульсов. Следовательно, длительность каждого импульса не может
быть больше, чем ти = l/[2Fclog£], а необходимая полоса частот определяется
как F я 1/(2ти) = £’clog£. При двухполосной AM сигнал ИКМ-АМ будет зани-
мать полосу частот
£’=2£’clog£. (8.105)
Поскольку при И КМ верность передачи определяется числом уровней
квантования, то увеличение верности сопровождается расширением спектра
И КМ сигнала по логарифмическому закону. Так, увеличение £ в 2 раза приво-
дит к увеличению ширины спектра сигнала в log2 2£/log2 £ = (l + l/log2 £) раз.
Ширина спектра И КМ сигнала зависит от основания кода т: при т = 2 шири-
на спектра ИКМ сигнала наибольшая; при увеличении т ширина спектра
уменьшается.
Из изложенного следует, что в системе передачи с ИКМ, как и в помехо-
устойчивых аналоговых системах модуляции, производится "обмен" мощности
сигнала на полосу частот. Принципиальная возможность такого обмена была
показана в гл. 1. Однако в системе с ИКМ этот обмен осуществляется значи-
тельно эффективнее, чем в системах с аналоговой модуляцией. Действительно,
342
как было показано на ряде примеров в этой главе выше, в помехоустойчивых
системах модуляции, таких как ЧМ, ФМ, ВИМ, отношение мощности сооб-
щения к мощности шума на выходе растет пропорционально квадрату ширины
спектра сигнала (если мощность сигнала выше пороговой). В системе с ИКМ
имеет место значительно более быстрый, экспоненциальный рост этого отно-
шения. Действительно, ширина спектра пропорциональна числу п символов в
кодовой комбинации, тогда как мощность шума квантования уменьшается в
соответствии с (8.100) почти пропорционально 22". Другими словами, пропор-
ционально ширине спектра растет выигрыш системы, выраженный в децибе-
лах.
Как было показано в § 8.4, такой же характер зависимости верности от ши-
рины спектра должен быть в идеальной системе модуляции, так что в этом от-
ношении ИКМ ведёт себя как идеальная система. Более подробный анализ
приводит к выводу, что при одинаковой ширине спектра выигрыш в ИКМ
приблизительно на 8 дБ меньше, чем в теоретически идеальной системе. В на-
стоящее время не существует систем модуляции, более близких к идеальной,
если спектр передаваемого сообщения равномерный. Поэтому система с ИКМ
широко используется в тех случаях, когда высокую верность необходимо обес-
печить с минимальной затратой мощности передатчика, например в спутнико-
вых системах. Более полное сравнение различных систем связи по их эффек-
тивности будет дано в гл. 11.
8.11. КОДИРОВАНИЕ С ПРЕДСКАЗАНИЕМ
В ряде важных случаев, например при передаче речи, телевизионных изо-
бражений, данных телеметрии, между отсчётами передаваемых сообщений
имеются статистические, в частности, корреляционные связи. Наличие таких
взаимосвязей позволяет повысить эффективность систем передачи информа-
ции1). Рассмотрим один из распространённых способов эффективной передачи
непрерывных сообщений - способ передачи с предсказанием (рис. 8.15). По-
следовательность коррелированных отсчётов Z»(M) = Ь(к) исходного сигнала
подают на один из входов вычитающего устройства, а на его другой вход по-
ступает сигнал предсказания Ьпр(к), сформированный из предыдущих отсчётов.
Полученный таким образом сигнал ошибки предсказания г(к) поступает в
тракт передачи. Поскольку в сигнале ошибки как раз и содержатся новые све-
дения, представляющие разность между истинным и предсказанным значени-
ем, то такой способ передачи называется передачей с предсказанием. Для упро-
щения считаем, что помехи в канале ошибок не создают. На приёмном конце
Рис.8.15. Структурная схема системы связи с предсказанием
Как было показано в § 2.2, значения отсчётов, взятых через интервал Котельникова, взаим-
но некоррелированы, если спектр сообщения в занимаемой им полосе частот равномерен. Но
на практике приходится часто передавать сообщения с неравномерным спектром (например,
343
имеется такой же предсказатель, как и на передающем. Поскольку он опериру-
ет теми же предыдущими отсчётами, предсказанное им значение нового отсчё-
та Ьт(к) будет таким же, как и на передатчике. Добавив к нему принятое зна-
чение ошибки предсказания е(Л) , можно восстановить истинный отсчёт:
b(k) = Ьт (к) + е(Л) = йпр (к) + е(Л) = b(k) (8.106)
Очевидно, что чем сильнее корреляционные связи, тем точнее можно
сформировать сигнал предсказания и, следовательно, тем меньшая энергия по-
требуется для передачи сигнала ошибки по сравнению с исходным сигналом.
При сильных корреляционных связях, а также при марковских сообщениях
значение Ьт(к) может быть предсказано по одному предыдущему отсчёту:
M*)=/W-i)L (8.107)
Обычно можно получить достаточно малую ошибку предсказания, положив
bm(k) = b(k-\), (8.108)
откуда
е(£) =/>(£)-/>(£-1). (8.109)
В этом случае для средней энергии сигнала ошибки по ансамблю
ее = [ад - в(к -1)]2 = вад+в2а -1) - 2в(к)в(к -1) = по)
= 2вад - 2В(к)В(к-\) = 2ЕЬ (1 - R),
где Я = [В(£)В(£-1)]/Х - коэффициент корреляции между отсчётами. Из (8.110)
следует, что при R > 0,5 энергия сигнала ошибки Ее меньше энергии исходного
сигнала £),. При R — 0,9 имеем Ее = 0,2Е/>.
При цифровых системах передачи отсчёты сигнала ошибки подвергаются
обычным операциям квантования и кодирования. Результатом такого преобра-
зования на передающей стороне является импульсно-кодовое представление
сигнала ошибки или сигнала дифференциальной импульсно -кодовой модуляции
(ДИКМ). В настоящее время известно большое число вариантов технического
осуществления кодирования с предсказанием. Основное их различие сводится
к различию операций формирования сигнала ошибки: в одних системах сигнал
ошибки формируется в аналоговой форме, а затем кодируется, в других - вна-
чале кодируется исходный аналоговый сигнал, а затем формируется сигнал
ошибки.
В системах с ДИКМ обычно применяют неравномерное квантование сиг-
нала ошибки, так как наиболее вероятны малые ошибки. Поскольку мощность
шума квантования составляет определённую долю мощности квантуемого про-
цесса, а мощность ошибки предсказания, как правило, существенно меньше
мощности сообщения, шум квантования при ДИКМ меньше, чем при обычной
ИКМ при том же числе уровней. Как показывает анализ, система ДИКМ
обеспечивает одинаковое с ИКМ качество передачи при меньшем числе сим-
волов в кодовой комбинации (на один-два и более символов в зависимости от
степени корреляции отсчётов и алгоритма предсказания).
Шум ложных импульсов также имеет место при ДИКМ, причём он ухудша-
ет верность приёма в большей мере, чем при обычной ИКМ. Дело в том, что
ошибочный приём кодовой комбинации ведёт к ошибочному приёму не только
речь, телевидение), да к тому же частоту отсчётов по ряду соображений выбирают несколько
выше, чем по Котельникову. Поэтому корреляция между отсчётами обычно не равна нулю.
344
одного отсчёта сообщения, но и ряда последующих отсчётов, поскольку пред-
сказанные значения на приёмной стороне будут отличаться от предсказанных
на передатчике. Поэтому допустимая вероятность ошибок при ДИ КМ меньше,
чем при ИКМ, и, следовательно, пороговая мощность сигнала выше. Сущест-
вуют различные способы уменьшения влияния "размножения" ошибок.
Корреляция между отсчётами возрастает по мере сокращения интервала
между ними. Поэтому при большой частоте дискретизации число уровней
квантования сигнала ошибки можно уменьшить до двух и перейти к однораз-
рядным системам. Такой способ кодирования называют дельта-модуляцией
(ДМ).
Квантованный сигнал ошибки при ДМ
екв(£) = №)ЬЬ, где. у(Л) = •
е(Л) > О,
с(Л) < 0.
(8.111)
По существу сигнал на выходе дельта-модулятора содержит лишь сведения
о полярности (знаке) сигнала ошибки. На приёмной стороне интегратор при-
бавляет или вычитает величину шага дискретизации, обеспечивая таким обра-
зом уменьшение погрешности между исходными значениями отсчётов и вос-
становленными значениями. Принцип формирования сигнала ДМ показан на
рис. 8.16. Отсчёты передаваемого сообщения сравниваются с предсказанным
квантованным отсчётом, полученным в результате суммирования всех преды-
п-1 п-1
дущих квантованных сигналов ошибки: ^пркв(^ -1) = = AZ>^y(z)
/=0 i=0
Если Ь(к')>Ьиркв(к-1) (рис. 8.17, а), квантователь формирует значение
у(к) = 1, в противном случае у(к) = -1. Полученные символы у передаются по
тракту связи (рис. 8.17, 6). Одновременно импульсы Д6у(0 поступают на сумма-
тор (интегратор) для формирования квантованного отсчёта ^^(z), который,
как указывалось выше, сравнивается с очередным отсчётом сообщения. На вы-
ходе сумматора квантованный сигнал имеет вид ступенчатой функции
(рис. 8.17, а). Каждый импульс + 1 увеличивает, а каждый импульс -1 умень-
шает ступенчатую функцию на один шаг квантования, т.е. при ДМ соседние
значения ступенчатой функции различаются обязательно на один шаг кванто-
вания.
Операцию декодирования сигнала ДМ на приёмной стороне выполняет
сумматор (интегратор), такой же, как и на передающей стороне, на выходе ко-
торого (при отсутствии ложных импульсов) получается ступенчатое напряжение
^прквМ- После его сглаживания с помощью ФНЧ получим функцию b(t), дос-
таточно близкую к b(f). Разность b(t)-b(t) представляет шум квантования. Его
значение тем меньше, чем выше частота дискретизации и чем меньше шаг Д/>.
Однако шаг квантования Д/> нельзя выбирать слишком малым. В противном
случае возникают дополнительные искажения, называемые перегрузкой по
Рис.8.16. Структурная схема системы с дельта-модуляцией
345
Аф,кв(О
Рис.8.17. Графики, поясняющие принцип формирования сигналов дельта-модуляции
наклону, вызванные тем, что ступенчатая функция не успевает следить за быст-
рыми изменениями сообщения b(t) (рис. 8.18). Если принять, что максималь-
ное значение крутизны изменения сообщения составляет |^*(0|тах» то для неис-
кажённой передачи необходимо выполнить условие <Д£. Если прак-
тически максимальное значение сообщения по модулю не превышает I b(f) I max,
а число различных уровней квантования, определяющее шум квантования,
равно L, то
2 |б(01
(8Л12>
По сравнению с ИКМ и ДИ КМ сигналы ДМ имеют значительно более вы-
сокую частоту следования отсчётов. Однако на каждый отсчёт при ДМ переда-
ётся один импульс, а при ИКМ — несколько, в зависимости от числа уровней.
Как показывает анализ, при одинаковой верности передачи частота следования
импульсов при ИКМ и ДМ также примерно одинакова. Поэтому обе эти сис-
темы занимают приблизительно одинаковую полосу частот. Существенным
преимуществом систем передачи с ДМ является сравнительная простота коди-
рующих и декодирующих устройств. Кроме того, шум ложных импульсов при
Рис.8.18. График, поясняющий возникновение искажений
из-за перегрузки по наклону при дельта-модуляции
ДМ меньше, чем при ИКМ (при
той же вероятности ошибки в
канале), поскольку при ДМ каж-
дая ошибка изменяет уровень
сигнала только на ±2Д/>. К недос-
таткам ДМ можно отнести явле-
ние размножения ошибок, созда-
ваемых ложными импульсами
(такое же, как при ДИКМ), а
также возможность перегрузки по
наклону.
346 •
Рис.8.19. Структурная схема кодера адаптивной ДМ (а), изменение шага квантования при адаптивной ДМ (б)
Отметим, что в последние годы успешно разрабатываются многочисленные
разновидности ДИКМ и ДМ, в частности адаптивные системы, в которых для
уменьшения шумов квантования используют переменный шаг квантования в
зависимости от текущих статистических характеристик передаваемого сообще-
ния.
В качестве примера на рис. 8.19, а приведена структурная схема кодера
адаптивной ДМ. Характерной особенностью является наличие в цепи обратной
связи решающего устройства, управляющего величиной шага квантования ДЛ>.
Если знак приращений у(£) остаётся неизменным в течение трёх-четырёх ин-
тервалов дискретизации, то это означает наличие перегрузки (рис. 8.19, б). Ре-
шающее устройство удваивает амплитуду импульсов, поступающих на вход ин-
тегратора 1. Если и в этом случае знак приращения (сигнала ошибки) не изме-
нится, то размер шага Дд снова удваивается и т.д. При изменении знака при-
ращения размер шага квантования уменьшается. Нетрудно понять, что в состав
устройства управления размером шага квантования должен входить анализатор
плотности единиц и импульсный усилитель с управляемым коэффициентом
усиления. На выходе интегратора 2 при изменении коэффициента усиления в
зависимости от плотности единиц будет формироваться ступенчатое напряже-
ние с адаптивно изменяющимся шагом квантования (рис. 8.19, б).
ВЫВОДЫ
1. Оптимальную оценку непрерывного параметра часто находят по критерию минимума
среднеквадратической ошибки или максимума апостериорного распределения. Часто эти
критерии приводят к оценке по алгоритму максимального правдоподобия.
2. В системах передачи непрерывных сообщений для обработки сигналов широко использует-
ся фильтрация (в общем случае нелинейная) с целью получения наилучшей (по заданному
критерию) оценки передаваемых сообщений.
3. Качество оценки сообщений обычно определяется среднеквадратической ошибкой или от-
ношением мощности сигнала и помехи на выходе приёмника two,. При сравнительном
анализе удобными показателями являются выигрыш g и обобщённый выигрыш g* системы.
4. Квазиоптимальным приёмником (демодулятором) непрерывных сообщений является сле-
дящее корреляционное устройство (нелинейный фильтр), которое может быть реализовано
с помощью фильтра с переменными параметрами.
347
5. В системах с линейными видами модуляции (AM, ОМ, БМ) оптимальным демодулятором
является синхронный детектор с оптимальным линейным фильтром.
6. Помехоустойчивость систем передачи непрерывных сообщений существенно зависит от
способа модуляции. Так, при ЧМ обобщённый выигрыш £ пропорционален квадрату ин-
декса модуляции М и может быть много больше единицы. При ОМ и БМ этот выигрыш
равен единице, а при AM - меньше единицы.
7. Широкополосные системы модуляции обеспечивают высокую помехоустойчивость лишь
при отношении сигнала к шуму на входе приёмника рвх, большем некоторого предельного
(порогового) значения рпР. При Рвх < Рпр помехоустойчивость этих систем резко снижается.
8. Для стационарных сигнала и шума фильтр Колмогорова-Винера эквивалентен фильтру
Калмана. Однако реализация фильтра Калмана по вычислительной структуре удобнее и
проще.
9. Теория нелинейной фильтрации является наиболее общей теорией оценивания процессов
и широко используется при синтезе и анализе устройств и систем связи.
10. Цифровые методы передачи непрерывных сообщений обеспечивают более высокие харак-
теристики качества по сравнению с аналоговыми методами.
11. Среди цифровых систем передачи непрерывных сообщений (речь, музыка, телевидение и
т.д.) наибольшее распространение получила ИКМ, ДИКМ, ДМ, адаптивные системы
ДИКМ и ДМ.
12. Качество цифровых систем передачи непрерывных сообщений характеризуется как средне-
квадратической ошибкой квантования, так и среднеквадратической ошибкой ложных им-
пульсов.
ВОПРОСЫ, ЗАДАЧИ И УПРАЖНЕНИЯ
8.1. Найти оптимальную оценку амплитуды сигнала у, если принимаемый сигнал представ-
лен в виде yS(t, 0), где 0 - фаза сигнала, случайна и может считаться равномерно рас-
пределённой на интервале (-л, л).
8.2. Каким условиям удовлетворяет хорошая оценка непрерывного параметра?
8.3. Как объяснить, что оптимальный приём непрерывных сообщений сводится к совмест-
ной оптимальной оценке многих параметров.
8.4. Чем отличается шум на выходе оптимального приёмника для прямых и непрямых сис-
тем модуляции?
8.5. Как зависит отношение сигнал-помеха на входе и выходе оптимального приёмника для
идеальной системы передачи непрерывных сообщений и в случае передачи этих сооб-
щений посредством ИКМ?
8.6. В чём причина появления порогового эффекта в широкополосных системах связи?
8.7. Определить пороговое значение амплитуды ЧМ сигнала исходя из условия, что лишь с
вероятностью 0,001 она превышается амплитудой стационарного гауссовского шума с
дисперсией ст2 = 0,1 Вт.
8.8. Выведите соотношение, определяющее выигрыш по помехоустойчивости ЧМ по срав-
нению с AM рвыхчм/рвыхАм ПРЙ одинаковых условиях оптимального приёма: равенстве
средних мощностей модулированных сигналов и СПМ шумов на входах приёмников.
Вычислите этот выигрыш, если пик-фактор передаваемых сообщений П = 10, коэффи-
циент модуляции AM сигнала т = 0,8, индекс модуляции ЧМ сигнала М = 10.
8.9. На вход когерентного приёмника (рис. 8.3) поступает аддитивная смесь
Z(t) = S(f) + N{t), где N(t) - белый гауссовский шум со спектральной плотностью No,
S(t) = yB(f)sinaot - сигнал AM с подавленной несущей, a B(f) - случайный модулирую-
щий процесс со спектральной плотностью мощности Gft(co) = 2аДа2 + со2 j, -а>< о <а>.
Опорное колебание _/"(/) = V2sinco 0/. Определите передаточную функцию оптимального
(по среднеквадратическому критерию) ФНЧ К(/) и вычислите величину среднеквадра-
тической ошибки .
8.10. В чём суть кодирования непрерывных сообщений с предсказанием и в чём особенности
системы с ДМ?
8.11. В чём причина возникновения искажений при ДМ из-за "перегрузки по наклону"?
348
ГЛАВА 9. ПРИНЦИПЫ МНОГОКАНАЛЬНОЙ СВЯЗИ И
РАСПРЕДЕЛЕНИЯ ИНФОРМАЦИИ
9.1. ОСНОВЫ ТЕОРИИ РАЗДЕЛЕНИЯ СИГНАЛОВ
Структурная схема системы многоканальной передачи информации. Практи-
ка построения современных телекоммуникационных систем и сетей показыва-
ет, что наиболее дорогостоящими звеньями трактов передачи являются линии
связи (кабельные, волоконно-оптические, сотовой мобильной радиосвязи, ра-
диорелейной и спутниковой связи и др.). Поскольку экономически нецелесо-
образно использовать дорогостоящую линию связи для передачи информации
единственной пары абонентов (от источника к получателю сообщений и об-
ратно при дуплексной связи), то возникает задача построения многоканальных
систем передачи, обеспечивающих передачу большого числа сообщений раз-
личных источников информации по общей линии связи. Разумеется, многока-
нальная передача возможна в тех случаях, когда пропускная способность ли-
нии С' не меньше суммарной производительности источников информации:
у
С'>^Нк, где Нк — производительность к-го источника, a N — число каналов
*=i
(независимых источников информации). Многоканальные системы так же, как
и одноканальные, могут быть аналоговыми и цифровыми. Для унификации
аналоговых многоканальных систем за основной или стандартный канал при-
нимают канал тональной частоты (канал ТЧ), обеспечивающий передачу со-
общений с эффективно передаваемой полосой частот 300...3400 Гц, соответст-
вующей основному спектру телефонного сигнала. В цифровых системах пере-
дачи наибольшее распространение получили основные цифровые каналы со
скоростью 64 кбит/с. Многоканальные аналоговые системы формируются пу-
тём объединения Каналов ТЧ в группы, обычно кратные 12 каналам. Цифро-
вые системы передачи (ЦСП), используемые на сетях связи, формируются в
соответствии с принятыми иерархическими структурами. Европейская иерархия
основывается на первичной ЦСП типа ИКМ-30 со скоростью передачи груп-
пового сигнала 2048 кбит/с; в основу северо-американской системы положена
первичная система ИКМ-24 со скоростью группового сигнала 1544кбит/с. Раз-
работанные в нашей стране ЦСП соответствуют европейской Иерархии.
Общий принцип построения системы многоканальной передачи поясняется
с помощью структурной схемы рис. 9.1. Здесь первичные сигналы каждого ис-
точника />1(0, bj (f),..., bff (/) с помощью индивидуальных передатчиков
(модуляторов) М\, Мъ—, М»..., преобразуются в соответствующие каналь-
ные сигналы u\(i), U2(f),..., Uj(f),..., Utf(f). Совокупность канальных сигналов на
выходе устройства объединения образует групповой сигнал ur(t), связанный с
сигналами и,(/) оператором объединения J}: иГ(/) = Е{и,(f)}. В случае раздель-
ной системы уплотнения это объединение сводится к обычному суммированию:
N
= Наконец, с учётом частотного диапазона направляющей системы
(линии связи) сигнал uT(t) с помощью группового передатчика М преобразуется
в линейный сигнал un(t), который и поступает в линию связи (ЛС). Сначала
349
AOK
АРК
Рис.9.1. Структурная схема многоканальной передачи сообщений
будем считать, что помеха в канале отсутствует, а канал не вносит искажения в
сигнал, т.е. принимаемый линейный сигнал1) sn(t) = у ujj) ,где у — коэффици-
ент передачи канала, который без ущерба для общности изложения можно счи-
тать равным 1. Тогда на приёмном конце ЛС линейный сигнал sn(t) с помо-
щью группового приёмника П может быть вновь преобразован в групповой сиг-
нал sT(t) = у uT(t). Канальными или индивидуальными приёмниками
П\, П2, ..., Пк, ..., /Тдг из группового сигнала выделяются соответствующие ка-
нальные сигналы si(t) = y uf(t), i = l,N, которые посредством детектирования
преобразуются в предназначенные индивидуальным получателям сигналы
*i(A b2(t), b^t), bN(t).
Канальные передатчики вместе с устройством объединения образуют аппа-
ратуру объединения (уплотнения) каналов АОК.
Групповой передатчик, линия связи ЛС и групповой приёмник П состав-
ляют групповой тракт передачи, который вместо с аппаратурой объединения и
разделения каналов составляет систему многоканальной связи.
Индивидуальные приёмники П, системы наряду с выполнением обычной
операции преобразования канальных сигналов st(i) в соответствующие первич-
ные сигналы bt(t) должны обеспечить выделение сигналов st(t) из группового
сигнала sT(t) с допустимыми искажениями. Аппаратуру индивидуальных при-
ёмников, обеспечивающую эту операцию, называют аппаратурой разделения ка-
налов (АРК).
Основные положения линейной теории разделения сигналов. Рассмотрим те-
перь основные свойства сигналов, пригодных для независимой передачи ин-
формации в системах многоканальной связи. Чтобы разделяющие устройства
были в состоянии различать сигналы отдельных каналов, должны существовать
определённые признаки, присущие только сигналу данного канала. Такими
признаками в общем случае могут быть параметры переносчика, например ам-
плитуда, частота или фаза в случае модуляции синусоидального переносчика,
временное положение, длительность или форма сигнала при модуляции
Считаем, что запаздывание в канале учтено системой синхронизации.
350
(9.2)
импульсных переносчиков. Соответственно будут различаться и способы разде-
ления сигналов: частотный, временной, фазовый, разделение по форме сигна-
лов и др.
Пусть необходимо организовать одновременную работу N индивидуальных
каналов по общему групповому тракту. Будем считать, что групповой тракт
пригоден для передачи сигналов любого z-ro канала w,.(z). Предположим, что
сигнал z-ro канала
zz/« = Cj%W, (9.1)
где Ч'Д/) — функция переносчика; Cf — некоторый коэффициент, отображаю-
щий передаваемое сообщение. Для суммы всех канальных сигналов
(группового сигнала) имеем
MrW = Z4W = ZcI.^(/)..
i=i i=i
После преобразования группового сигнала в линейный un(t) последний по-
ступает в тракт передачи. На приёмном конце sn(t) вновь преобразуется в
групповой 5Г(/).
Для разделения N канальных сигналов на приёмной стороне потребуется
соответствующее число N разделяющих устройств, причём каждое к-е разде-
ляющее устройство должно выполнять операцию выделения £-го сигнала. Дей-
ствие приёмного устройства £-го канала будем обозначать оператором разделе-
ния 7tk. В идеальном случае fc-e приёмное устройство должно реагировать
("откликаться") только на сигнал sk(t) и давать нулевые отклики на сигналы
всех других каналов. Дополнительным требованиям к оператору будем считать
его линейность, т.е. он должен удовлетворять принципу независимости дейст-
вия (суперпозиции):
= W>)+7l*W- (9-3)
Далее можно сформулировать операцию разделения сигналов в математиче-
ском виде. Обозначим через sk(t) отклик, т.е. результат воздействия оператора
тс* приёмного устройства к-го канала на групповой сигнал sr(f): 7i*{sr(/)} = sk(t).
На входе каждого А-г о приёмника действует сумма сигналов всех N каналов.
Чтобы приёмное устройство было "чувствительным" только
sk{t), необходимо:
г
к
сигналам
sk{t\ i = k,
О, i к.
Иначе говоря, для всех i и к должно выполняться условие
i=k:
J о, 1*к.
5*(/) = 71л'
Подставляя (9.1) в (9.5), получаем кк
(9.4)
(9.5)
C*4\W, i = k,
О, i * к,
и, следовательно, sk(/) = СЛТД/).
Полученные результаты могут быть обобщены также на случай, когда от-
клик разделяющего устройства на сигнал sk(t) будет иметь иную форму; важно,
чтобы величина отклика была однозначно связана с передаваемым сигналом.
351
В частном случае, откликом на сигнал sk(t) может быть просто некоторое чис-
ло у к, однозначно связанное с коэффициентом Ск:
•s*W = RW} = J Ёс/рХО > = = у
(9.6)
ИЛИ 7С* {СЛ0} =
У к, i =
О, / * к.
Физический смысл полученных выражений (9.5) и (9.6) сводится к тому,
что приёмник Пк обладает избирательными свойствами по отношению к сиг-
налам sk(t). Поскольку действие приёмников Пк в (9.5) и (9.6) описывается
линейным оператором пк, то соответствующие устройства разделения реализу-
ются в классе линейных цепей, а теорию разделения называют линейной.
Мы рассмотрели случай идеального разделения. В реальных условиях при.
разделении сигналов возникают переходные помехи, которые будут обсуждены
ниже при анализе конкретных примеров разделения сигналов.
Условие линейного разделения сигналов. Воздействие линейного оператора
7t* на функцию sT(t) можно представить в виде скалярного произведения:
рг(т)п*(лт)Л>
(9.7)
где т]А(/,т) — некоторая весовая функция, соответствующая оператору те*.
Впервые определение избирательных свойств приёмника (9.5) и (9.6) было
предложено в 1935 г. Д.В. Агеевым, который доказал, что необходимым и дос-
таточным условием разделимости сигналов (9.2) линейными устройствами яв-
ляется условие линейной независимости. Напомним, что оно заключается в
том, что тождество
С1^(/) + С2^(/)+...+С*^*(/)+...+СуТД/)^0
(9.8)
может выполняться в том единственном случае, когда все коэффициенты одно-
временно равны нулю.
Действительно, в соответствии с определением избирательных свойств (9.5)
и (9.6) подлежащие разделению сигналы и приёмные устройства должны удов-
летворять условию линейного разделения
It.tyWbr,,, >,* = 1,2,..., ЛГ,
(9-9)
где yik — отклик разделяющего устройства на сигнал s.(t), причём у,* = 0 при
i*k и у** 5*0. Если подействовать оператором тт* на обе части тождества (9.8),
то, принимая во внимание (9.9) и принцип суперпозиции, получаем
(9.Ю)
Но у** не равны тождественно нулю, следовательно, равны нулю все
С*, к = 1, 2,..., N. Иначе говоря, условие линейного разделения (9.5) будет вы-
полняться лишь тогда, когда канальные сигналы линейно независимы. Част-
ным случаем линейно независимых сигналов являются ортогональные сигналы.
В общем случае необходимым и достаточным условием линейной независимости ансамб-
ля сигналов является отличие от нуля определителя Грама:
352
(чг^) (Ч'рЧ'з) ... (Ч^)
(ч^) (ч>2,ч>2) ... (ч^ч^)
(ч^) (ч/у,ч/2) ... (ч^.ч^)
(9.П)
где (4х,-,Ч\) — скалярное произведение сигналов 4<(f) и Ч^). Определитель (9.11) равен ну-
лю, если функции (чх1'(/), Чх2(/),..., Чху0) линейно зависимы, и положителен для линейно неза-
висимых функций. Он равен произведению квадратов норм функций 4х;(f), если они попарно
ортогональны. Ортонормированная система всегда линейно независима, для нее определитель
Грама равен единице.
Напомним, что в л-мерном евклидовом пространстве, в частности в про-
странстве сигналов, представимых усечённым рядом Котельникова, когда
n = B = 2FT (В — база сигнала), можно выбрать не более В линейно независи-
мых сигналов. Вышеизложенная теория линейного разделения построена без
учёта аддитивных помех в канале. В этих условиях теоретически безразлично,
выбирать ли систему переносчиков {тД/)} ортогональных или просто линейно
независимых сигналов, в любом случае их максимальное число не превышает
базы сигнала В. Однако если учесть влияние помех, то преимущество ортого-
нальных сигналов становится неоспоримым, так как только в этом случае
энергия сигнала используется полностью. Частным случаем ортогональных
сигналов являются сигналы с неперекрывающимися спектрами, а также не пе-
рекрывающиеся во времени сигналы.
9.2. ЧАСТОТНОЕ, ВРЕМЕННОЕ И ФАЗОВОЕ РАЗДЕЛЕНИЕ
СИГНАЛОВ
Частотное разделение сигналов. Проследим основные этапы преобразования
сигналов, спектры которых занимают неперекрывающиеся полосы частот
(рис. 9.2). Сначала в соответствии с передаваемыми сообщениями первичные
Рис.9.2 Образование спектра группового сигнала при многоканальной
передачи сообщений с частотным разделением каналов
353
индивидуальные сигналы bj(t), b2(t), bN(t) co спектрами 5j(/), S2(f),SN(f)
модулируют переносчики - поднесущие частоты fK каждого канала. Эта опера-
ция выполняется с помощью модуляторов Мх, М2,MN канальных передат-
чиков. Полученные на выходе частотных фильтров Фр Ф2,ФЛ, спектры £*(/)
канальных сигналов занимают соответственно полосы частот Д/р Д/2,..., ДД,,
которые для упрощения будем считать равными ширине спектра сообщений
bfk = F (используется однополосная модуляция). Будем считать, что спектры
сообщений финитны. Тогда можно выбрать поднесущие частоты fk так, что
полосы Л/, Д/2,..., bfN попарно не перекрываются. При этом условии сигналы
sk(t) (& = 1, 2,..., ТУ) взаимно ортогональны. Спектры S,(/), S2 SN (/) сум-
мируются в 1-м устройстве объединения сигналов, и их совокупность 5Г(/) по-
ступает на 2-й групповой модулятор М. Суммарная полоса частот группового
сигнала bft = NF. В групповом модуляторе спектр 5Г(/) с помощью колебания
несущей частоты То переносится в область частот, отведённую для передачи
данной группы каналов, таким образом групповой сигнал sr(t) преобразуется в
линейный сигнал sn(t). При этом может использоваться любой вид модуляции,
обеспечивающий необходимую помехоустойчивость передачи.
На приёмной стороне тракта линейный сигнал поступает на групповой де-
модулятор (приёмник 77), который преобразует спектр линейного сигнала в
спектр группового сигнала 5Г(/). Спектр группового сигнала затем с помощью
канальных приёмников Пк и входящих в них частотных фильтров Фк вновь
разделяется на отдельные полосы Д/Л и затем с помощью демодуляторов Дк
Wf)
SLf)
F f
Рис.9.3 Выделение сигналов отдельных
каналов частотной фильтрацией
СО
sk(t)= ^sT(x)gk(t-x)(h,
преобразуется в спектры сообщений
Sbk(f), предназначенных получателям.
Чтобы без взаимных помех разделить
сигналы при частотном разделении, каж-
дый из фильтров Фк должен пропускать
без ослабления лишь те частоты f e&fk,
которые принадлежат сигналу данного ка-
нала; частоты сигналов всех других кана-
лов f eAfk фильтр должен подавлять.
Математически частотное разделение
идеальными полосовыми фильтрами по
аналогии с (9.7) можно представить выра-
жением
(9.12)
где <§*(?) ~ импульсная характеристика идеального полосового фильтра, про-
пускающего без искажений сигнал с шириной спектра ДД. Выражение (9.12)
совпадает с (9.7) при весовой функции ц*(лт) = £Л(г-т). Свёртке (9.12) в час-
тотной области соответствует перемножение спектра группового сигнала ^Д/)
на П— образную передаточную функцию z-го фильтра (рис. 9.3).
354
Sr(/)
Рис.9.4 Введение защитных частотных интервалов
между отдельными каналами
Итак, для идеального выделения
сигналов при частотном разделении
необходимо выполнение двух усло-
вий: полное сосредоточение энергии
сигналов sk(t) в пределах отведён-
ных полос Д/Л и идеальность харак-
теристик разделительных полосовых
фильтров. Однако ни одно из этих
условий принципиально не выполнимо,
помехи при разделении, к которым мы
Результатом этого являются взаимные
вернёмся ниже. Для снижения взаим-
ных переходных помех между каналами до допустимого уровня приходится
вводить защитные частотные интервалы Д/защ (рис. 9.4). Так, в современных
системах многоканальной телефонной связи каждому каналу выделяется поло-
са частот 4 кГц, хотя частотный спектр передаваемых речевых сигналов огра-
ничивается полосой от 300 до 3400 Гц, т.е. ширина спектра составляет 3,1 кГц.
Между полосами частот соседних каналов предусмотрены интервалы шириной
по 0,9 кГц, предназначенные для снижения уровня взаимных помех при рас-
фильтровке сигналов. Это означает, что в многоканальных системах с частот-
ным разделением каналов (ЧРК) эффективно используется лишь около 80 %
полосы пропускания тракта передачи. Кроме того, необходимо обеспечить
очень высокую степень линейности всего тракта группового сигнала.
Временной способ разделения каналов. При временном разделении каналов
(ВРК) групповой тракт с помощью коммутатора Knep предоставляется пооче-
редно для передачи сигналов каждого канала многоканальной системы
(рис. 9.5). Сначала передаётся сигнал 1-го канала, затем следующего, и так да-
лее до последнего канала с номером N, после чего опять подключается 1-й ка-
нал, и процесс периодически повторяется с частотой дискретизации /д. На
приёмном конце устанавливается аналогичный коммутатор Knp, который под-
ключает групповой канал поочередно к приёмникам различных каналов. При-
ёмник /-го канала подключается только на время передачи z-го сигнала и от-
ключается на всё остальное время, пока передаются сигналы других каналов.
Для нормальной работы системы необходимо обеспечить синхронное и
Рис.9.5. Структурная схема многоканальной передачи сообщений с временным разделением каналов
355
синфазное переключение каналов на передающей и приёмной сторонах. Часто
для синхронизации занимают один из информационных каналов.
В качестве канальных сигналов в системах ВРК используются неперекры-
вающиеся во времени последовательности модулированных импульсов
(например, по амплитуде на рис. 9.6) яД/), Si (t),..., s# (/). Совокупность
канальных сигналов образует групповой сигнал sr(/). На рис. 9.6 для упроще-
ния представлены только сигналы i = 1-го и к = 2-го каналов. Групповой сиг-
нал sr(t) поступает на коммутатор Кпр, действие которого можно отождествлять
с "временным фильтром" (и ключом), передаточный коэффициент которого
(рис. 9.6, б) равен единице только на интервалах действия импульсов избирае-
мого канала:
, ч 1 t E.&L,
= \ А (9-13)
' [0 t tty. v 7
В результате временной фильтрации на выходе /-приёмника выделятся
лишь импульсы /-го канала (рис 9.6, в). Полученные после демодуляции сооб-
щения Д(/) поступают к /-му получателю.
При временном разделении взаимные помехи в основном обусловлены
двумя причинами. Первая состоит в том, что линейные искажения, возникаю-
щие за счёт ограничения полосы частот и неидеальности АЧХ и ФЧХ всякой
физически осуществимой системы связи, нарушают форму импульсов сигна-
лов. Действительно, если при передаче модулированных импульсов конечной
Рис.9.6. Образование группового сигнала
при временном разделении канала
длительности ограничить
спектр, 70 импульсы
"расплывутся" и вместо импуль-
сов конечной длительности по-
лучим процессы, бесконечно
протяжённые во времени. При
ВРК это приведёт к тому, что
импульсы одного канала будут
накладываться на импульсы
других каналов (рис. 9.7). Ина-
че говоря, между каналами
возникают взаимные переход-
ные помехи. Возможны такие
помехи и за счёт нарушения
синхронизации.
Для снижения уровня вза-
имных помех приходится вво-
дить "защитные" временные ин-
тервалы. Это требует уменьше-
ния длительности импульса ка-
ждого канала и, как следствие,
расширения спектра сигналов.
Так, в многоканальных систе-
мах телефонии полоса эффек-
тивно используемых частот
FB = 3100 Гц; в соответствии
356
a)
б)
Рис.9.7. Искажение группового сигнала, приводящее4 к взаимным помехам между каналами при ВРК
(9.14)
с теоремой отсчётов минимальное значение частоты дискретизации
/д = = 2FB = 6200 Гц. Однако в реальных системах частоту следования импуль-
сов выбирают несколько большей (с некоторым запасом): /д = 8 кГц. Для пере-
дачи таких импульсов в одноканальном режиме потребуется полоса частот не
менее FB = 4 кГц. При ВРК сигнал, каждого канала занимает одинаковый ин-
тервал времени ? определяемый в идеальных условиях согласно теореме отсчё-
тов из соотношения (без учёта канала синхронизации)
_ Д____1_____1
4" “ N ~ 2NF, ~ 2F^
где Fo6ta = NFB равно общей полосе частот системы с ЧРК. Хотя теоретически
ВКР и ЧРК позволяют получить одинаковую эффективность использования
частотного спектра, тем не менее в реальных условиях системы ВРК несколько
уступают системам ЧРК по этому показателю.
-Однако системы ВРК имеют неоспоримое преимущество, связанное с тем,
что благодаря разновременности передачи сигналов различных каналов в них
отсутствуют переходные помехи нелинейного происхождения. Кроме того, ап-
паратура ВРК значительно проще, чем при ЧРК, где для каждого индивиду-
ального канала требуются свой модулятор на передаче и разделительный поло-
совой фильтр на приёме. Немаловажным преимуществом систем ВРК является
357
меньший пик-фактор. Системы ВРК находят применение при передаче непре-
рывных сообщений с помощью аналоговых видов импульсной модуляции
(ФИМ, ШИМ), но особенно в цифровых системах с ИКМ.
Полезно заметить также, что суммарная мощность Ро6щ принимаемого сиг-
нала s(f), необходимая для обеспечения заданной верности при наличии флук-
туационных помех (как при ЧРК, так и при ВРК), в идеальном случае в N раз
больше, чем мощность при одноканальной передаче с тем же видом модуля-
ции: Р^ = NP. Это легко понять, поскольку при сложении независимых сигна-
лов мощности складываются. В действительности же из-за переходных помех
верность приёма в многоканальных системах при выполнении этого условия
несколько ниже, чем в одноканальной. Увеличивая мощность сигнала в много-
канальной системе с частотным разделением, нельзя снизить уровень переход-
ных помех, поскольку при этом возрастает и мощность последних, а в ряде
случаев мощность помех нелинейного происхождения растет даже быстрее, чем
мощность сигнала.
Разделение сигналов по фазе. Рассмотрим множество сигналов
{.у, (?) = Aj sin(co ot + / Дф)}, i = 1, N ,
(9.15)
где A, — коэффициенты, отображающие передаваемые сообщения; Дф = — — разность фаз
N
между сигналами соседних каналов. Сигналы (9.15) различаются по фазе и, казалось бы, мо-
гут быть использованы для построения многоканальной передачи на одной несущей частоте
со 0 нескольких сообщений. Однако оказывается, что среди N переносчиков вида
(ч<(/) = sin(coot + /Дф)}, i = \,N , (9.16)
лишь два любых Ч<(/) и Ч'Д/) линейно независимы. Чтобы убедиться в этом, достаточно вос-
пользоваться определителем Грама (9.11). Пусть N= 2, т.е.
4'i(/) = sin(co0Z + Дф), Т20 =sin(cooz+ 2Дф). (9.17)
Скалярные произведения (Ч'1,Ч'1) = (Ч'2,Ч'2) = -^; (Ч'1,4'2) = (Ч'2,Ч'1) = -^со8ф, и, следовательно,
для определителя Грама имеем
Г(%,4>2) =
(%,4>1) (Ч>1,4>2)
(4'2,4'1) (4'2,4'2)
“(1 “ cos2 дф)= ~ sin2 Дф * 0.
(9.18)
Из (9.18) следует, что при любом Дф* 0 или л сигналы s^t) и j2(z) могут быть разделены.
Этого не произойдёт при N = 3:
4/1(/) = sin(cooZ +Дф), 4'2(/) = sin(cooZ+ 2Дф), Ч'3(/) = 8т(соо/ + ЗДф). (9.19)
Для скалярных произведений имеем
(Ч>1,Ч>1) = (Т2,Т2) = (Ч>3,%) = 1;
(Tj,%) = (%,Т1) = (Т2,%) = (%,’Р2) = 1совДф,;
(Ч'1,Ч'з) = (Ч'3,Ч'1) = ±С082Дф.
Подставив значения скалярных произведений в определитель Грама для N= 3, получим
Г(Ч'1,Ч'2,Ч'3) = |(1- (sin2 Дф+cos2 Дф))(1 - cos 2Дф) = 0 .
Из множества различающихся по фазе сигналов (9.15) линейно независимы только любые
два сигнала. Поэтому на одной несущей частоте <х>0 при произвольных значениях амплитуд
Л, и Ak и фаз ф, и фЛ можно обеспечить лишь двухканальную передачу. Возвращаясь к
358
определителю Грама для двух переносчиков Т, и 4\, находим, что переносчики (9.17) орто-
гональны при разности фаз Д<р = л/2. Ортогональные переносчики используются, в частности,
в квадратурной системе передачи двух независимых каналов (§ 3.10).
9.3. РАЗДЕЛЕНИЕ СИГНАЛОВ ПО ФОРМЕ. СИСТЕМЫ
ПЕРЕДАЧИ С ШУМОПОДОБНЫМИ СИГНАЛАМИ
Общий подход к разделению линейно независимых сигналов. Для разделения
сигналов могут использоваться не только такие очевидные признаки, как час-
тота (ЧРК) и время (ВРК). Наиболее общим признаком может служить форма
сигналов. Различающиеся по форме сигналы могут передаваться одновременно,
иметь перекрывающиеся частотные спектры, и тем не менее такие сигналы
можно разделить, если выполняется условие их линейной независимости или
условие ортогональности.
Пусть в качестве переносчиков выбраны импульсы, последовательность которых образует,
например, степенной ряд
{*1(0 = 1, %(0 = /, *3(0 = ^, •••}, (9.20)
Для группового сигнала в предположении, что передаваемая информация содержится в
коэффициентах С), Сг, ..., можно записать
5г(г) = [с1 + С2г+...+Сугу-1], 0<t<T. (9.21)
Члены ряда (9.20) линейно независимы, и, следовательно, ни один из канальных сигна-
лов С/’"1 не может быть образован линейными комбинациями всех других сигналов. Это лег-
ко понять, обратив внимание на то, что многочлен вида (9.21) может быть тождественно ра-
вен нулю только в том случае, когда все его коэффициенты Сг равны нулю.
Для разделения таких сигналов можно применить общий метод в соответствии с услови-
ем линейной независимости переносчиков (9.20). Так, при двухканальной передаче имеем для
интервала 0 < t <, Т .
5г(0 - ^(0+^(0=G+C2t = с^о+с2ч>2(0.
Если весовые функции в (9.7) выбрать так:
41(0=eii*i(0+«12*2(0=т~6~р
42 (0 = «21*1 (0 + «22*2 (0 = - у + 1,
(9.22)
то в результате операций проектирования вектора sr на направления координатных осей и
т}2 получим (при Т= 1)
т
*1(*г) = j s(t) тцОИ = 4Ci (*1, *1)-6С1(Т1, Ч*2) + 4С2(Т2, Т1)-6С1(Т2, Т2) = С„
’ (9-23)
7Г2(5Г) = /ХОтъОИ = ^Cif*!. *2)-6С1(Т1, TJ + 12С2(Ч*2, Т2)-6С1(Т2, Т,) = С2,
О
где (Тр4*0 = 1, (*2,*2) = ± (Т1,'Р2) = (Т2,Т1) = |.
Операции (9.23) выполняются разделяющим устройством, изображённым на рис. 9.8. В
отличие от устройства разделения ортогональных сигналов здесь добавляется устройство фор-
мирования весовых функций ц, и ц2, которое из функций ТД/) и Ч*2(0 образует линейные
комбинации вида (9.22). В общем случае используется итеративный метод ортогонализации
Грама-Шмидта,, состоящий в построении ортонормированной системы {ч/(0} по заданной
линейно независимой системе {*,(f)j с помощью вспомогательных ортогональных векторов в
соответствии с соотношением
359
e/W = %W-g('P/,Tl*)n*W, гдет1*(0 = -^р > = 1,2,...
Перестановка исходных
векторов {Ч<} приводит к раз-
личным ортонормированным
системам {п/(г)} > а в СИЛУ ите-
ративности процедуры она
применима для построения как
конечномерных ортогональных
базисов, так и счётных орто-
нормированных систем в бес-
конечномерных функциональ-
ных пространствах /^(т).
В качестве переносчи-г
ков при формировании
различающихся по форме
Рис.9.8. Структурная схема линейного разделения сигналов по форме
сигналов находят применение различные ортогональные функции, полученные
на основе ортогонализации степенного ряда (9.20). Основным недостатком по-
лученных таким образом классических полиномов является их континуальный
характер, что сопряжено с необходимостью использования аналоговой техники
для формирования таких сигналов.
Совершенно по-иному обстоит дело с формированием ортогональных сигналов на основе
дискретных ортогональных последовательностей в виде функций Уолша, Радемахера, рас-
смотренных в § 2.3.
В связи с возможностью применения к функциям Уолша логических операций они явля-
ются весьма перспективными при разработке многоканальных цифровых систем передачи с
разделением по форме, а также в аппаратуре формирования и преобразования сигналов на
базе микропроцессорной техники. В современной технике многоканальной связи при переда-
че дискретных сообщений широкое применение находят системы с ортогональными индиви-
дуальными сигналами, перекрывающимися во времени и по частоте, разделяемыми в месте
приёма посредством согласованных пассивных фильтров или эквивалентных им активных
корреляционных схем (см. § 5.5). Они же и обеспечивают оптимальный приём на фоне шума.
Системы передачи с шумоподобными сигналами (ШПС). Рассмотренные
выше системы многоканальной передачи с ортогональными и линейно незави-
симыми сигналами требуют для нормальной работы той или иной синхрониза-
ции: точного совпадения спектра сигнала с полосой пропускания при ЧРК;
точного совпадения временных интервалов передачи сигналов отдельных кана-
лов при ВРК; точного определения моментов начала и конца тактового интер-
вала в системах с разделением сигналов по форме активными фильтрами; точ-
ной установки момента отсчёта в системе с согласованными фильтрами.
В ряде случаев осуществить точную синхронизацию затруднительно. С по-
добными ситуациями приходится сталкиваться, например, при организации
оперативной связи между подвижными объектами (автомобилями, самолета-
ми). Такая задача возникает при организации оперативной связи с использова-
нием искусственных спутников Земли в качестве ретрансляторов. Во всех этих
случаях могут быть использованы системы асинхронной многоканальной свя-
зи, когда сигналы всех абонентов передаются в общей полосе частот, а каналы
не синхронизированы между собой во времени. Поскольку в таких системах за
каналами не закреплены ни частотные полосы, ни временные интервалы и
время работы каждого канала произвольно, то такие системы называют систе-
мами со свободным доступом к линии связи или системами с незакреплёнными
360
каналами. В системах со свободным доступом каждому каналу (абоненту) при-
сваиваются определённая форма сигнала, которая и является отличительным
признаком, "адресом" данного абонента. В отличие от обычного разделения по
форме, где условие ортогональности сигналов выполняется лишь тогда, когда
тактовые интервалы всех каналов жёстко синхронизированы, для возможности
полного линейного разделения сигналов в системах со свободным доступом
ортогональность или линейная независимость должны сохраняться при любых
временных сдвигах сигналов. Это значит, что для любой пары сигналов s,(z) и
sk(t) должно выполняться условие
(9.24)
Г
при 0 < т < Т, где Т — длительность элементарного сигнала, а интегрирование
производится на любом интервале от t до t + Т. Строго говоря, условие (9.24)
выполняется только в случае, когда сигналы sk(t} представляют собой белый
шум, т.е. имеют неограниченную ширину спектра и бесконечную дисперсию;
для реальных сигналов оно невыполнимо. Вместе с тем можно сформировать
такие сигналы, для которых (9.24) выполняется приближённо в том смысле,
что
Гsfysjj -т) «||s,.|| при 0 < т < Т, (9.24а)
т.е. скалярные произведения сигналов при любом сдвиге по времени много
меньше энергии элементарного сигнала. Такие сигналы можно назвать почти
ортогональными. По своим свойствам почти ортогональные сигналы прибли-
жаются к белому шуму, поэтому их часто называют шумоподобными: их кор-
реляционные функции и спектры плотности мощности близки к аналогичным
характеристикам квазибелого шума. Шумоподобные сигналы относятся к клас-
су сложных сигналов, база которых В = 2FT » 1, и являются дальнейшим раз-
витием сигналов, различающихся по форме. Теории шумоподобных сигналов и
вопросам их использования в различных системах связи посвящены работы
Л.Е. Варакина [5].
Наиболее распространённым примером технической реализации почти ор-
тогональных шумоподобных сигналов могут служить определённым образом
сформированные псевдослучайные последовательности дискретных, в частно-
сти, двоичных радиоимпульсов. База сигналов при этом определяется числом
импульсов в последовательности. Каждому каналу присваивается одна из мно-
жества почти ортогональных двоичных последовательностей, которая служит
"адресом" канала. Это приводит к названию "асинхронные адресные системы
связи" (ААСС).
Важным достоинством ААСС является то, что нет необходимости в цен-
тральной коммутационной станции; все абоненты имеют прямой доступ друг к
другу без частотной перестройки приёмных и передающих устройств (рис. 9.9).
Здесь достаточно набрать "адрес" вызываемого абонента, т.е. изменить "форму"
импульсной адресной последовательности.
В системах с закреплёнными каналами ЧРК и ВРК добавление хо'тя бы одного нового
абонента оказывается возможным лишь при исключении одного из имевшихся в системе.
Значительно проще эта задача решается в системах ААСС. Здесь вследствие свободного дос-
тупа к линии связи могут вести передачу любые Na активных абонентов из общего числа N
абонентов системы связи. При определении числа Na нужно учитывать, что вследствие
361
Рис.9.9. Структурная схема многоканальной асинхронно-адресной системы связи
неполной ортогональности каналов в ААСС неизбежны переходные помехи ("шумы неорто-
гональности"), уровень которых растет по мере увеличения N&. Поэтому число одновременно
работающих абонентов должно быть ограничено. Допустимое значение возрастает по мере
увеличения базы сигнала, так как чем больше база, тем точнее выполняется условие (9.24, а).
В зависимости от времени активности абонентов (т.е. от доли времени, занимаемого
&-м каналом для передачи сообщений) можно организовать, например, 1000-канальную сис-
тему связи, в которой одновременно ведут передачу любые 50 абонентов из тысячи. В таких
системах легко реализуются резервы пропускной способности, возникающие за счёт малоак-
тивных абонентов. Изучив статистику сообщений, передаваемых по каждому каналу, можно
установить допустимое число каналов в системе N, при котором обеспечивается нормальная
работа активных каналов.
Примеры шумоподобных сигналов. В настоящее время усиленно разрабатываются методы
синтеза сигналов с заданными автокорреляционными и взаимно корреляционными свойства-
ми. Если рассматривать последовательности из п импульсов прямоугольной формы, которые
могут принимать значения ±1, то простым перебором можно найти такие последовательности,
В(0) тах|в(т 0)| 1
для которых —= ----1-----L = —, Е— пЕ{, Е - энергия всего сигнала, Е\ — энергия од-
Ех Е п
ного элемента. Среди них назовем прежде всего последовательности Баркера (табл.9.1).
Таблица 9.1
Число импуль- сов Номер импульса Максимум нормирован- ного модуля АКФ
0 1 .2 3 4 5 6 7 8 9 10 11 12 Основ- ной Побочные
2 +1 -1 1 1/2
3 +1 +1 -1 1 V3
4 +1 +1 -1 +1 1 ' 1/4
5 +1 +1 +1 -1 +1 1 1/5
7 +1 +1 +1 -1 -1 +1 -1 1 1/7
11 +1 -1 +1 +1 -1 +1 +1 +1 -1 -1 -1 1 VII
13 +1 +1 +1 +1 +1 -1 -1 +1 ч-1 -1 +1 -1 +1 1 VI3
362
+1-1+1+1-1+1+1+1-1-1-1
Рис.9.10. Реализация последовательности Баркера (а)
и её автокорреляционная функция (б)
Последовательности Баркера имеют близ-
кую к идеальной форме автокорреляционную
функцию: абсолютное значение боковых лепе-
стков не превышает 1/и основного. На
рис. 9.10, а приведены последовательность
(называемая также кодом) Баркера для п = 11
и её автокорреляционная функция
(рис. 9.10, б). Приём последовательности s\(f)
("адрес" 1 канала) рис. 9.10, а выполняется
согласованным трансверсальным фильтром
рис. 9.11. Импульсы последовательности Бар-
кера с числом знаков п = 11 поступают снача-
ла на фильтр СФпи, согласованный с единичт
ным прямоугольным импульсом (см. § 5.7), а
затем в линию задержки (ЛЗ), имеющую отво-
ды через промежутки А, далее на фазоинверс-
ные (—) и фазосохраняющие (+) каскады с
одинаковыми коэффициентами передачи, схе-
му суммирования и решающее устройство РУ.
Фазоинверсные и фазосохраняющие каскады
включены в порядке, соответствующем обрат-
ному порядку чередования биполярных им-
пульсов «-последовательности (рис. 9.10, а):
число этих каскадов равно числу элементов последовательности. Первый каскад включён до
линии задержки, последний — на её конце. При приёме «-последовательность продвигается
по ЛЗ, и в момент, когда все импульсы последовательности совпадут по знаку с весами,
включёнными между отводами ЛЗ и суммирующим устройством, все импульсы сложатся син-
фазно, на выходе РУ появится наибольший импульс — согласованный фильтр зафиксирует
адрес 1-го канала. При всех других сдвигах суммирование производится не в фазе (с разными
знаками), и на выходе РУ появляются уровни, не превышающие по модулю 1/п от макси-
мального значения. Поскольку функции взаимной корреляции между последовательностями
также имеют наибольшие значения, не превышающие 1/п, то последовательность адреса чу-
жого канала не может вызвать ложного срабатывания решающего устройства 1-го канала.
Исследования показывают, что последовательностей с "остатками" величины 1/п для
п > 13 не существует. Поэтому для больших п приходится довольствоваться последовательно-
стями, имеющими "остатки" большие, чем 1/и.
Несколько худшие автокорреляционные функции по сравнению с баркеровскими после-
довательностями, но всё же достаточно подходящие для использования в качестве адресных
сигналов имеют линейные рекуррентные ^-последовательности (ЛРП) или, как их ещё назы-
вают, линейные последовательности сдвигового регистра максимальной длительности (см.
§ 7.3.4). Для ЛРП отношение главного максимума к максимальному боковому лепестку авто-
корреляционной функции растет приближённо как 4п , где п — число импульсов в последова-
тельности.
Линейные рекуррентные последовательности обладают свойством хаотичности, которое
363
и временного (б) разделения каналов
возможные отрезки р членов в
каждом, то, во-первых, среди этих
отрезков не будет совпадающих и,
во-вторых, среди них найдутся
любые комбинации из +1 и —1,
состоящие из р членов (кроме за-
прещённой комбинации, состоя-
щей только из +1). Эти свойства
сходны со свойствами случайных
биполярных последовательностей;
поэтому ЛРП часто называют
псевдослучайными или шумоподоб-
Рис.9.13. К образованию многоканального широкополосного
сигнала посредством частотно-временной матрицы:
а - последовательность двоичных информационных сигналов;
б - представление одного двоичного импульса посредством
последовательного набора радиоимпульсов различных частот;
в - представление сигнала в виде ЧВМ
ными последовательностями. К тому же автокорреляционная функция ЛРП имеет форму,
сходную с автокорреляционной функцией квазибелого шума с ограниченным спектром. ЛРП
формируются генераторами двоичных импульсов с использованием сдвигового регистра. При-
ём ЛРП может осуществляться как согласованными фильтрами, так и корреляторами. При
передаче псевдослучайных последовательностей по высокочастотному каналу обычно приме-
няется фазовая или относительная фазовая модуляция.
Из других способов формирования ШПС для асинхронно-адресных систем связи упомя-
нем о способе формирования сигналов с помощью частотно-временной матрицы (ЧВМ). Уже
отмечалось, что в системах с ортогональными сигналами энергия каждого сигнала полностью
отделяется от энергии других сигналов. Это положение становится наиболее отчётливым, если
обратиться к частотно-временным диаграммам системы связи при частотном разделении
(рис. 9.12, а) и при временном разделении сигналов (рис. 9.12, б). Здесь каждому каналу отво-
дится определённая область частотно-временного пространства; положение площадки можно
рассматривать как "адрес" абонента. Однако частотно-временную область F х Т можно разде-
лить на площадки иным способом: адрес каждого канала можно сформировать из набора
"элементарных площадок" частотно-временной плоскости (рис. 9.13). Каждый двоичный ин-
формационный символ (рис. 9.13, а) передаётся за время Т и отображается определённой по-
следовательностью импульсов, имеющих разные частоты (рис. 9.13, б) в общей полосе F. Дво-
ичную информацию в последовательность можно заложить, меняя один из параметров эле-
ментарного радиоимпульса. Эти адресные наборы импульсов составляются на основе их пред-
ставления в виде ЧВМ (рис. 913, в); к ним предъявляются обычные требования хороших
364
(с малыми боковыми лепестками) автокорреляционных функций и малых значений взаимной
корреляции. Изменение временного положения импульсов и различие в их частотах позволя-
ют сравнительно простыми техническими средствами получить несколько тысяч частотно-
временных колебаний (адресов). Разумеется, не все комбинации ЧВМ используют в качестве
адресных сигналов; среди них встречаются и такие, которые не обладают необходимыми кор-
реляционными свойствами. Максимальное количество адресов, для которых уровень боковых
лепестков корреляционных функций не превышает 1Д/Т*7, приближается к FT. Сигналы
ЧВМ также являются разновидностью сигналов, различающихся по форме. Их также можно
разделить как согласованными фильтрами, так и корреляторами.
Отметим в заключение, что в технической литературе имеется описание большого числа
различных систем связи со свободным доступом. Наиболее характерными из них являются
системы на 1000...1500 каналов с 50...100 активными абонентами.
9.4. КОМБИНАЦИОННОЕ РАЗДЕЛЕНИЕ СИГНАЛОВ
Принцип комбинационного уплотнения. При многоканальной передаче дис-
кретных сообщений наряду с ЧРК, ВРК и разделения сигналов по форме ис-
пользуется комбинационный способ формирования группового сигнала. Сущ-
ность этого способа состоит в следующем. .
Пусть необходимо организовать передачу N независимых дискретных сооб-
щений по общему групповому тракту. Если элемент z-го сообщения может
принимать одно из т, возможных значений (/ = 1, 2, ..., N), то общее число
значений, которое может принимать элемент TV-канального источника, объеди-
няющего исходные N источников, будет равно M = . При одинаковых зна-
чениях mt = т имеем
M = mN. (9.25)
Таким образом, при комбинационном уплотнении каждое сочетание ка-
нальных сообщений отображается элементом группового сообщения с основа-
нием кода (9.25), т.е. используя осног ние кода М = mN, можно одновременно
передавать информацию от N индивидуальных источников, работающих с ос-
нованием кода т. Если, в частности, т = 2 (двоичные коды), а число каналов
N - 2, то групповое сообщение Ьг может принимать четыре возможных значе-
ния, соответствующих различным комбинациям нулей и единиц в обоих кана-
лах, при TV = 3 число различных комбинаций будет равно М = 8 и т.д. Задача
теперь сводится к передаче некоторых чисел ЬТ, определяющих номер комби-
нации. Эти числа могут передаваться посредством сигналов дискретной моду-
ляции любого вида. Разделение сигналов, основанное на различии в комбина-
циях сигналов разных каналов, называется комбинационным. Структурная схема
многоканальной системы с комбинационным (кодовым) разделением
(уплотнением) представлена на рис. 9.14. Здесь первичные сообщения
b\t\ b2(t), ..., bN(t) от N источников поступают на вход кодера, выполняющего
АО)
'' AjO)
АО)
AvO)
Рис.9.14. Структурная схема многоканальной системы с комбинационным уплотнением
365
функции устройства объединения каналов. Полученное групповое сообщение
б(г) преобразуется с помощью группового модулятора ГМ в групповой сигнал
uT(t), поступающий в групповой тракт. На приёмной стороне после демодуля-
ции и декодирования формируются канальные сообщения, соответствующие N
первичным сообщениям.
Примеры комбинационного разделения сигналов. Типич-
ным примером комбинационного уплотнения является сис-
тема двукратной частотной модуляции (ДЧМ)1), в которой
для передачи четырёх комбинаций сигналов двух источников
(каналов) используют четыре разные частоты: /j, f2, f3, f4 .
При двукратной фазовой модуляции (ДФМ) каждой комби-
нации сообщений 1-го и 2-го источника соответствует опре-
делённое значение фазы группового сигнала «щ, <р2, ф3 или <р4
Таблица 9.2
Канал 1 0 1 0. 1.
Канал 2 0 0 1 1
Номер комбинации 1 2 3 4
ДЧМ Z Л /з Л
ДФМ <р> <Р2 Фз ф<
(табл. 9.2).
В качестве иллюстрации принципа комбинационного разделения рассмотрим пример
разделения каналов при ДЧМ (рис. 9.15). Здесь принятый сигнал подаётся на фильтры
Ф15Ф2,Ф3,Ф4, подключённые к диодам Д1 , ..., Д8> выполняющим функции детекторов, по-
парно работающих на общие нагрузки. При передаче частоты f\ напряжение с выхода Ф1 под-
водится через диоды Д1 и Д2 к входным зажимам 01 и Oj аппаратов 1-го и 2-го каналов в со-
ответствии с табл. 9.2. При передаче частоты /3 напряжение с фильтра Ф3 подключается через
диоды Д5 и Де соответственно к зажимам 01 и О2. Все остальные соединения на схеме
рис. 9.14. выполнены также в соответствии с табл. 9.2. При оптимальном приёме для разделе-
ния сигналов на частотах /ь f2, f3, f4 используют вместо полосовых фильтров согласованные.
Сравнение системы ДЧМ с обычной двухканальной ЧМ системой с ЧРК
показывает, что обе системы занимают практически одинаковую полосу частот,
однако мощность сигнала, требуемая для обеспечения заданной вероятности
ошибки при ДЧМ, почти вдвое меньше, чем при ЧРК. Существенно меньше
оказывается и пиковая мощность при ДЧМ. Поэтому в системах с ограничен-
ной энергетикой комбинационное уплотнение по методу ДЧМ находит широ-
кое применение.
*) В принятых здесь аббревиатурах ДЧМ и ДФМ первые буквы означают "двукратные".
366
Комбинационные системы ДФМ на практике реализуются в виде двойной
относительной фазовой модуляции ДОФМ по тем же принципам, по которым
вместо абсолютных систем ФМ используются относительные — ОФМ.
Аналогично можно формировать сигналы комбинационного уплотнения
для большого числа каналов - многократную частотную модуляцию (МЧМ),
многократную относительную фазовую модуляцию (МОФМ) и др.
В случае МЧМ при выборе частот, обеспечивающих ортогональность системы передавае-
мых сигналов, занимаемая полоса частот с ростом 7V увеличивается экспоненциально. Веро-
ятность ошибки в каждом канале с увеличением А также возрастает, но очень медленно. По-
этому такие системы применяют в тех случаях, когда используемый канал обладает большими
частотными ресурсами, но его энергетические возможности ограничены.
В случае МОФМ, наоборот, занимаемая полоса частот с ростом А почти не увеличивает-
ся, но вероятность ошибки увеличивается очень быстро и для сохранения требуемой верности
необходимо увеличивать мощность сигнала. Такие системы пригодны в тех ситуациях, когда
существуют жёсткие ограничения полосы пропускания канала, а мощность сигнала практиче-
ски не лимитирована.
Рассмотренные примеры систем комбинационного уплотнения на основе сигналов МЧМ
и МФМ по существу являются частными случаями систем передачи с многопозиционными
сигналами. При МЧМ получаем многочастотные сигналы, а при МФМ — многофазные. Вме-
сте с тем можно модулировать одновременно несколько параметров переносчика, например
амплитуду и фазу, частоту и фазу и т.д.
В последнее время большой интерес проявляется к сигналам амплитудно-фазовой моду-
ляции (АФМ), которые можно реализовать схемой квадратурной модуляции. В системах АФМ
в течение интервала передачи одного элементарного сигнала его фаза и амплитуда принима-
ют значения, выбранные из ряда возможных дискретных значений амплитуд й фаз. Каждая
комбинация значений амплитуды и фазы отображает один из многопозиционных сигналов
группового сигнала с основанием кода Л/ = 2Л' . Сигналы АФМ можно формировать, напри-
мер, путём многоуровневой амплитудной и фазовой модуляции двух квадратурных (сдвинутых
по фазе на тг/2) колебаний несущей частоты. Если для модуляции синфазной (ей присвоен
номер 1) и квадратурной (ей присвоен номер 2) составляющих использовать значения уров-
ней С12 =±1, то полученный сигнал КАФМ-4 (рис. 9.16) будет соответствовать ДФМ. Если же
для модуляции как в синфазном, так и в кю .ратурном канале используются четырёхуровне-
вые сигналы С12=±1,+3, то при этом получается 16-позиционная КАФМ, которую можно
представить выражением
^КАФМ-1б(0 = {Л cos(® oz + ' = I-,6'
Расположение сигнальных точек 16-позиционной КАФМ на амплитудно-фазовой плоско-
сти изображено на рис. 9.17, где точками показаны положения концов вектора А, при различ-
ных значениях Q и В принципе для каждого числа М можно строить различные ансамбли
сигналов. Так, кроме представленной на рис. 9.16 и 9.17 квадратурной сети, разрабатываются
Рис.9.16. Расположение сигнальных точек
сигналов КАФМ-4 или ДФМ
Рис.9.17. Расположение сигнальных точек
при 16-позиционной КАФМ
367
ансамбли сигналов на основе треугольной сети, различные варианты круговых расположений
сигнальных точек и др. (см. гл. 11).
В последние годы успешно развивается теория сигнально-кодовых конструкций (СКК),
направленная на повышение скорости передачи и помехоустойчивости при существенных ог-
раничениях на энергетику и занимаемую полосу частот. Подробнее Вопросы СКК рассмотре-
ны в гл. 11.
9.5. ПРОПУСКНАЯ СПОСОБНОСТЬ СИСТЕМ
МНОГОКАНАЛЬНОЙ СВЯЗИ
Математическая модель многоканального сигнала. Для анализа переходных
помех, возникающих при прохождении сигналов многоканальной связи через
групповой тракт передачи, необходимо иметь математическую модель этих сиг-
налов. Формирование такой модели рассмотрим на примере многоканальной
телефонии с ЧРК. В этом случае многоканальный сигнал представляет собой
сумму преобразованных по частоте соответствующих первичных сигналов (см.
рис. 9.2). В качестве модели многоканального сигнала в соответствии с реко-
мендациями МККТТ принимается гауссовский стационарный процесс U(t) с
нулевым средним значением U(t) = 0 и дисперсией а2. Дело в том, что соглас-
но предельной теореме теории вероятностей вероятностные характеристики
суммы большого числа речевых сигналов независимых источников приближа-
ются к характеристикам гауссовского шума. Гауссовская аппроксимация весьма
точна при числе каналов N > 24. С ростом числа каналов пик-фактор группо-
вого сигнала имеет тенденцию к снижению, приближаясь к 13 дБ, что соответ-
ствует величине пик-фактора белого шума1). Предположение о стационарности
процесса справедливо для часа наибольшей нагрузки (ЧНН), когда загрузка
максимальна и постоянна.
СПМ группового сигнала G,j (/) обычно принимается равномерной в пре-
делах полосы частот от fi до (без учета защитных полос между каналами и
неравномерности спектра индивидуального телефонного канала):
,f2<f<fv (9‘2 }
Средняя мощность на единичном сопротивлении нагрузки
Л=ед=а:=лг.(д-/.). (9.27)
где = — дисперсия процесса (7Г(/).
Функция корреляции многоканального сигнала со СПМ (9.26)
~ \ М . (о, -о. Гео-? +®i
ви (т) = —sin \ *т соя --Г .
г тгс \ 2 7 Л 2 /
При определении Рс в (9.27) предполагалось, что канал непрерывно занят
сигналом. Однако это не типично для телефонии, когда в среднем каждый из
говорящих тратит примерно одинаковое время на разговор и слушание. Име-
ются периоды, когда ни один из абонентов не говорит, ожидая ответа или об-
думывая, что сказать. Эти факторы оцениваются коэффициентами активности
и учитываются при проектировании многоканальных систем.
11 В качестве порога перегрузки здесь принят уровень, превышаемый в течение 0,001% време-
ни.
368 ’
Влияние взаимных помех при разделении сигналов на пропускную способ-
ность многоканальных систем. Предельная пропускная способность системы
передачи (бит/с) с равномерной АЧХ и линейной ФЧХ в пределах полосы
пропускания тракта передачи при наличии стационарного гауссовского шума
средней мощностью Рш и сигналов со средней мощностью Рс определяется по
формуле Шеннона
C = FlogJl+£l (9.28)
При многоканальной передаче, как уже отмечалось, возникают специфиче-
ские переходные помехи между каналами, обусловленные неидеальностью раз-
деляющих устройств на приёмной стороне и устройств формирования сигналов
на передающей, линейными и нелинейными искажениями в групповом тракте
передачи. Качество многоканальной системы с точки зрения переходных помех
можно охарактеризовать величиной затухания (дБ) между влияющим z-м кана-
лом и подверженным влиянию к-м каналом:
4 = 101Л , (9.29)
где Pt и Рл — мощности на входе влияющего и выходе подверженного влия-
нию каналов; затухание A:/t называют также защищённостью канала от пере-
ходных помех. При большом числе каналов можно считать, что плотность ве-
роятности помех подчиняется нормальному закону, а спектральная плотность
мощности является равномерной. Иначе говоря, результирующую помеху, обу-
словленную действием шумов и переходных помех, можно считать гауссовской
и квазибелой.
В соответствии с (9.29) для мощности помех, наводимых z-м каналом на
выходе Л-го канала, имеем
а общая мощность переходных помех
Pn = VPc, (9.30)
где ц = ^1О"о,1Л,‘ (i*k) — коэффициент взаимных переходных помех между ка-
i=i
налами.
Если формулу Шеннона (9.28) переписать с учётом действия переходных
помех (9.30), то
C' = Flog2 1 +
Поскольку обычно Рт « цРс, то для пропускной способности системы мно-
гоканальной связи можно записать
.. C' = Flog2(j+|^ (9.31)
Из (9.31) следует, что переходные помехи ограничивают пропускную спо-
собность системы многоканальной связи. Расчёты показывают, что при
ц<0,01 (дх >20 дБ) увеличение мощности сигнала Рс приводит к повышению
369
пропускной способности, если > ц. При дальнейшем увеличении мощности
сигнала пропускная способность практически не возрастает и определяется
(9.31). Например, для систем многоканальной связи, работающих при отношё-
Р
нии сигнал-шум 40 дБ, или ~ = 10-4, коэффициент ц должен быть меньше
этого отношения. Практика проектирования аппаратуры многоканальной свйзи
показывает, что для снижения уровня взаимных помех в системах ЧРК прихо-
дится вводить защитные частотные интервалы между каналами, занимающие
до 20 % общей полосы пропускания системы связи. Кроме того, предъявляют-
ся жёсткие требования к линейным и нелинейным искажениям во всех звеньях
тракта передачи.
9.6. ПРИНЦИПЫ ПОСТРОЕНИЯ СЕТЕЙ СВЯЗИ
9.6.1. СЕТЬ РАСПРЕДЕЛЕНИЯ ИНФОРМАЦИИ И ЕЁ ЭЛЕМЕНТЫ
С целью организации обмена информацией между многими источниками и
получателями информации каналы и системы передачи объединяются в сети
связи — системы передачи и распределения информации (СПРИ), иначе говоря,
под системой связи в широком смысле следует понимать организованные в
единый комплекс системы передачи и распределения информации. При этом
отправителей и получателей информации называют пользователями или або-
нентами. Понятие распределения информации охватывает задачи распределе-
ния маршрутов передачи информации и связанные с этим задачи анализа и
синтеза сетей связи и узлов коммутации. Задача распределения информации
возникла сразу же вслед за созданием устройств для её передачи.
Примером простейшей СПРИ является полносвязная сеть (рис. 9.18), где
абонентные (оконечные) пункты (ОП) соединены друг с другом по принципу
"каждый с каждым". Такие сети относятся к некоммутируемым сетям, здесь
связь между N пользователями осуществляется по закреплённым некоммути-
руеМым каналам. В каждом ОП необходимо лишь располагать переключателем
на N— 1 положений, обеспечивающим подключение ОП к нужному каналу
как при исходящей, так и при входящей связи.
К достоинствам некоммутируемых сетей отно-
сится то, что в них информация передаётся без по-
терь времени на ожидание соединения с ОП полу-
чателя и нет необходимости в передаче адреса вы-
зываемого ОП. Вместе с тем при увеличении числа
ОП резко возрастает число необходимых соедини-
тельных каналов. Например, если число ОП равно
N, то потребуется N(N-t)/2 каналов.
С целью сокращения числа необходимых кана-
лов используют коммутируемые СПРИ, где ОП со-
единяются между собой не непосредственно, а че-
рез один или несколько узлов коммутации (УК).
При коммутации каналов по переданному адресу
ОП получателя отыскивается путь со свободными
Рис.9.18. Структура полносвязной
сети передачи информации
370
в данный момент каналами. Сформированный таким образом составной канал
предоставляется пользователям ОП (источника) и ОП (получателя) на время,
необходимое для обмена информацией.
Короче говоря, коммутируемая СПРИ представляет собой совокупность
ОП, УК и соединяющих их каналов (линий). На рис. 9.19 в качестве примера
представлена структура коммутируемой телефонной сети. Назначение системы
коммутации состоит в обеспечении возможности прохождения информации от
любого ОП к любому другому ОП, выбранному пользователем. В данном слу-
чае в качестве УК служат телефонные станции (ТС). Телефонные аппараты
(ТА) выполняют функции ОП и подключаются к ТС с помощью абонентских
линий (АЛ). Телефонные станции между собой связываются многоканальными
(межстанционными) соединительными линиями (МЛ). Телефонные аппараты
ТА1 и ТА2 пользователей соединены между собой с помощью составного ком-
мутируемого канала по цепи от ТА1 через TCI, ТС4, ТСЗ, ТС6 к ТА2. Такой
способ соединения носит название коммутации каналов (КК). Здесь сформиро-
ванный канал предоставляется в полное распоряжение пользователей ТА1 и
ТА2 вне зависимости от того, передаётся ли информация по каналу или нет.
При большой загрузке сети может случиться, что некоторый пользователь
(абонент) может получить отказ на запрос об установлении связи с другим
пользователем. Поэтому системы передачи и распределения информации про-
ектируются так, чтобы вероятность отказа в обслуживании была меньше неко-
торой допустимой величины, однако полностью исключить такую ситуацию
невозможно.
В дальнейшем будем считать, что в функции оконечного пункта (ОП) вхо-
дит преобразование передаваемой информации в электрический сигнал и об-
ратное преобразование электрического сигнала в соответствующим образом
отображаемую информацию, а также формирование и передача управляющих
сигналов, указывающих, в частности, адрес ОП получателя информации. Ис-
точниками и получателями могут б1 ib различные терминалы пользователей,
компьютеры, принтеры или любые другие устройства передачи и (или) обра-
ботки данных.
Представленный на рис. 9.19 способ КК нашёл широкое применение
Рис.9.19. Структура коммутируемой телефонной сети
371
в сетях телефонной связи на короткие расстояния, когда телефонные аппараты
соединяются между собой низкочастотными линиями передачи. Способ КК
является далеко не единственным. Во многих случаях (в особенности при од-
носторонней передаче информации) можно использовать способ коммутации
сообщений (КС). В таких системах, построенных на базе ЭВМ, передаваемые
сообщения, сопровождаемые адресом, принимаются на ОП отправителя без от-
каза, обрабатываются и накапливаются в памяти центра коммутации. Передача
информации в адрес ОП получателя производится по мере освобождения необ-
ходимых каналов. При этом, естественно, возникает задержка, затрудняющая
передачу информации в реальном масштабе времени, например, при телефон-
ном разговоре.
С целью сокращения времени задержки в современных СПРИ используется
разновидность способа КС, называемая коммутацией пакетов (КП). В сетях с
КП от источника к получателю передаются короткие блоки данных, называе-
мые пакетами. Наиболее типичные виды нагрузки создаёт передача данных в
интерактивном диалоговом режиме, когда между терминалами (сюда относятся
и компьютеры) передаются короткие пачки сообщений, содержащие 100-200
знаков. Под пакетом понимается при этом часть сообщения, представленная в
виде блока с заголовками, имеющего установленный формат (структуру дан-
ных) и ограниченную длину передаваемая по сети как часть единого целого. К
настоящему времени успешно разрабатываются и внедряются пакетные методы
передачи речевых сигналов.
Анализ способов коммутации показывает, что коммутация каналов оправ-
дана в том случае, если передача управляющих сигналов занимает значительно
меньше времени, чем передача полезной информации (например, в телефон-
ной связи время разговора исчисляется минутами, а время соединения — мил-
лисекундами). Наоборот, если передача данных продолжается доли секунды, то
установление двустороннего канала для этой цели не оправдано. При передаче
коротких пакетов (дейтаграмм) никакого начального соединения не устанавли-
вается, выбор маршрута в промежуточных узлах выполняется на основе адреса
ОП получателя, содержащегося в каждой дейтаграмме. Блокировка (отказ) при
коммутации пакетов происходит гораздо реже, чем блокировка в сети с комму-
тацией каналов.
Из приведённого краткого анализа очевидно, что функции и требования к
коммутационным узлам с КК и КП совершенно различны. Однако по мере
развития интегральных сетей, в которых обрабатываются речь, данные и другие
виды сообщений, в которых используется техника КП, КК и гибридная техни-
ка, функции и требования к коммутационным узлам становятся сходными.
Например, в цифровых СПРИ узлы Коммутации строятся в расчёте и на обра-
ботку пакетов, и на обработку вызовов с коммутацией каналов. Аналогично
подходят к построению систем коммутации пакетов, которые позволяют до-
полнительно осуществить интеграцию обработки речевых сигналов для их пе-
редачи в пакетном режиме. Другая возможность — осуществлять коммутацию
каналов при передаче сигналов в цифровой форме.
При увеличении числа ОП и их территориальной разобщённости возникает
задача выбора структуры сети, размещения узлов коммутации, определения
числа соединительных каналов. Оптимизация затрат за счёт выбора предпочти-
тельного соотношения между средствами передачи и коммутации является од-
ной из главных задач проектирования, сетей связи.
372
9.6.2. МЕТОДЫ КОММУТАЦИИ В СЕТЯХ СВЯЗИ
Требования к коммутационным устройствам. В течение многих лет работы по созданию
техники коммутации в электрической связи (ЭС) были направлены преимущественно на раз-
работку автоматических телефонных станций (АТС), поскольку телефонная связь являлась
наиболее массовым видом ЭС. Нагрузка телефонной сети зависит от количества, времени
возникновения и продолжительности телефонных разговоров. Под интенсивностью нагрузки
v понимается в телефонии среднее число вызовов в один час. За единицу нагрузки А = vT (Т
— среднее время занятия станции при одном вызове) принимается один Эрланг (1 часо-
занятие в час). В течение суток нагрузка изменяется, достигая максимума в ЧНН. Каждый
абонент в среднем даёт нагрузку в диапазоне 0,06... 0,15 Эрл. По этим значениям рассчиты-
ваются телефонная сеть и её коммутационные системы.
Если в пучке, который обслуживает без ожиданий (без очереди) любое число п источни-
ков нагрузки, создающих пуассоновский поток вызовов с интенсивностью X, имеется m < п
каналов, каждый из которых занимается вызовом в среднем на время Т, то вероятность по-
терь сообщения (блокировки, т.е. вероятность того, что все каналы будут заняты) находится
по формуле Эрланга [30]
где Л = ХТ интенсивность нагрузки, Эрл. Таким образом, в часто используемой на практике
системе без ожиданий обеспечиваются многие, но не все возможные соединения. Это приво-
дит к появлению потерь (отказов), допустимая вероятность которых лежит в пределах
0,001...0,01.
При сравнительно небольших значениях А (5 < А < 50) полезны некоторые приближения
с помощью которых можно выразить при заданной вероятности блокировки Ръ величину ми-
нимального необходимого числа каналов m как линейную функцию А:
Рь = 1°/о, м«5,5 + 1,17Л, 5<А<50,
РА = 0,1%, m«7,8 + 1,28А, 5<А<50.
Статистические характеристики потока вызовов без ожиданий и с ожиданиями изучаются
на основе методов теории телетрафика. Эта теория позволяет установить требования к уст-
ройствам коммутации и числу линий, при к^ орых гарантируется удовлетворительное качест-
во связи при заданном проценте отказов или времени ожидания.
Пространственная коммутация. Основным функциональным блоком АТС как узла комму-
тации является коммутационное поле, от структуры которого зависит вся схема организации
узла. К первой группе относятся структуры пространственных коммутационных полей, харак-
терных для аналоговых систем коммутации; Вторую группу составляют коммутационные поля
как с пространственной, так и с временной коммутацией. В упрощённом виде блок-схема
коммутационной станции представлена на рис. 9.20. Здесь КП — коммутационное поле, пред-
назначенное для входящих и исходящих линий на время передачи; СУ - система управления
установлением соединения и разъединения; ПО — периферийное оборудований для сопряже-
ния приёмо-передающей аппаратуры и коммутационного поля аппаратуры сигнализации и
контроля.
Коммутационное поле ёмкостью п х m представляет собой многополюсник (матрицу) с п
входами и m выходами, обеспечивающий необходимые соединения. При электрическом со-
единении физически раздельных линий, не имеющих общих точек и могущих в любой мо-
Рис.9.20. Блок-схема коммутационной станции
мент использоваться только для од-
ного соединения, коммутацию назы-
вают пространственной, В случае, если
входящие и исходящие каналы соеди-
нены в общую цепь через электрон-
ные контакты, замыкаемые в соответ-
ствии с методом временного уплотне-
ния лишь на короткие интервалы Д/,
коммутацию называют временной.
Под пропускной способностью
373
б)
пхт
Рис.9,21. Коммутационная
матрица размером тхп (а) и
изображение узла коммутации (б)
КП понимают максимальное число одновременно устанав-
ливаемых соединений С^п- При т — п и Скп т2 простран-
ственное коммутационное поле позволяет соединить любой
свободный вход с любым свободным выходом независимо от
наличия в данный момент других соединений
(неблокирующее КП). Для пространственных схем коммута-
ции при п > т и Скп= т2 возможны блокировки (потери),
если все выходы заняты. По мере роста п и т растет слож-
ность КП, измеряемая числом точек коммутации. Тем‘ не
менее с целью сокращения числа точек, коммутации на
практике используют коммутационные системы с п > т, ко-
торые, как уже отмечалось выше, обеспечивают при отсутст-
вии очереди многие, но не все возможные соединения. Для
уменьшения сложности коммутационной схемы при про-
странственной коммутации часто прибегают к последова-
тельной {многозвеньевой) коммутационной схеме [30].
На рис. 9.21, а показана коммутационная матрица раз-
мером п х т, где п горизонтальных линий (цепей) имеют
доступ к т вертикальным через лх/и точек коммутации
(изображены крестиками). В каждой точке пересечения на-
ходится коммутационный элемент, который может быть
замкнут или разомкнут1). Впервые изложенный принцип
был реализован в механических многократных координатных соединителях. На схемах узлы
коммутации КП изображают (рис. 9.21, б) в форме прямоугольника (если п = т) и трапеции
(если п*т).
Цифровая коммутация канальных интервалов. Более перспективными являются электрон-
ные узлы коммутации на основе использования техники ИКМ, которые позволяют повысить
эффективность использования трактов передачи, так как точки коммутации между входящей
и исходящей уплотнёнными линиями занимаются только на время канального интервала,
тогда как в рассмотренном способе пространственной коммутации тракт занимается на всё
время передачи сообщения. Это позволяет значительно уменьшить сложность коммутацион-
ного поля.
Поясним принцип распределения информации на основе цифровой коммутации каналь-
ных интервалов. Будем считать, что речевой сигнал каждого канала (источника) дискретизи-
руется с частотой дискретизации FR = 8 -103 Гц, т.е. длительность цикла (интервала дискретиза-
ции) составляет Tv = А = \/Fa = 125 мкс. При 8-разрядном двоичном кодировании типовой канал
ИКМ требует пропускную способность 64 кбит/с. Каждому 8-разрядному слову при времен-
ном уплотнении N ИКМ сигналов отводится канальный интервал Тш = Tv/N . Международ-
ными стандартами предусматривается объединение 30 ИКМ каналов, а также двух таких же
каналов для управления и синхронизации; необходимая при этом пропускная способность
составляет (ЗО+2)-64-1О3 =2,048 Мбит/с. Разумеется, такая система может быть применена и
для передачи неречевых сигналов.
Как же осуществляется цифровая коммутация, если сегменты сообщений различных ка-
налов занимают соответствующие им канальные интервалы в цикле? Простейшая процедура
очевидна. Каждый цикл при поступлении по входящей линии в систему коммутации записы-
вается в память. После этого коммутация выполняется просто путём считывания в любом
требуемом (скоммутированном) порядке. Устройство, выполняющее указанную операцию,
называется коммутатором канальных интервалов (ККИ).
Многозвеньевые коммутационные системы. С целью уменьшения сложности систем ком-
мутации применяется каскадное включение временных и пространственных коммутаторов.
Например, в коммутационной схеме В-П-В (время-пространство-время) в качестве первой
ступени коммутации используется ККИ, на второй ступени — пространственный коммутатор,
наконец, на третьей ступени — снова ККИ. Предположим, что N = 960 каналов на входе
*) В реальных условиях этот принцип обобщается на целую совокупность контактов, выпол-
няющих одновременное переключение групп проводов (двух, четырёх, а иногда и больше).
374
должны соединяться с таким же числом каналов на выходе. Для пространственного коммута-
тора одной ступени это потребовало бы 960 х 960 точек коммутации. В случае же схемы В-П-
В пусть во входных ККИ применяются п - 120 входящих канальных интервалов. Тогда требу-
ется — = 8 ККИ на входе и такое же количество на выходе. Для неблокирующей работы в
и
точке пространственного коммутатора потребуется обеспечить К = 2п -1 = 239 различных со-
N
единений. Поскольку — = 8, необходим пространственный коммутатор ёмкостью 8x8. Оче-
п '
видно, что приведённое решение обеспечивает огромное уменьшение размеров схемы по
сравнению с одноступенным коммутатором (960 х 960). Если бы была применена трёхступен-
ная пространственная схема, то в нашем примере можно было обойтись 168000 точками ком-
мутации [30].
Выбор путей установления соединений носит случайный характер: соединения возникают
в случайные моменты времени, между случайными линиями и занимают коммутационное по-
ле в течение случайного времени. Поэтому в теории структур систем коммутации важное ме-
сто уделяется поискам оптимального выбора путей установления соединений, при которых
можно добиться упрощения структуры коммутационного поля (в частности, уменьшения чис-
ла точек коммутации) за счёт некоторого усложнения процессов управления.
Ограничимся кратким упоминанием о схеме организации взаимодействия между двумя
ОП через коммутируемую сеть связи. Если один из ОП инициирует передачу сообщения (ОП
источника), то по абонентской линии (АЛ) он посылает сигнал вызова на УК источника. Этот
узел обеспечивает процесс установления соединения с ОП — получателем. Отсутствие требуе-
мых ресурсов для организации информационного обмена между ОПц и ОПп в сети приводит
к отказу в соединении. Если же соединение между ОПц и УК — получателем установлено, а
ОПп готов принимать информацию и послал к ОПи соответствующий сигнал, начинается
фаза передачи. Для её окончания ОПи или ОПп посылают в сеть сигнал, разрывающий ин-
формационный канал.
Рассмотренный выше принцип КК удобен при передаче длинных сообщений, когда про-
должительность передачи сообщений существенно превышает время установления соедине-
ния [туе « Т,,). Метод КК широко применяется в телефонных сетях, предоставляющих поль-
зователям возможность диалоговой связи.
Сети с коммутацией сообщений (КС) и к .мутацией пакетов (КП). Такие сети ориентиро-
ваны на передачу данных. Основным достоинством таких сетей помимо эффективного ис-
пользования ресурсов связи является возможность преобразования скоростей, форматов и
кодов сообщений, позволяющего взаимодействовать разным ОП, и проверки правильности
передачи сообщений, обеспечивающей контроль верности. При этом сообщение или пакет
помимо содержательной части включает и служебные данные (поля начала сообщения, адре-
са, символы коррекции ошибок, конца сообщения и др.). Поэтому сообщения должны накап-
ливаться в памяти узла КС (КП) и предварительно обрабатываться перед передачей. Это оз-
начает, что структура УК должна базироваться на специализированной ЭВМ с многопро-
граммным управлением. Для определения характеристик и расчёта узла КС (КП) разрабаты-
ваются математические модели на основе методов теории массового обслуживания.
9.6.3. МНОГОУРОВНЕВАЯ АРХИТЕКТУРА СВЯЗИ И ПРОТОКОЛЫ
Эталонная модель взаимодействия открытых систем. До сих пор обсуждались вопросы по-
строения сетей, но не оговаривались требования к форме представления передаваемых дан-
ных. Оказывается, что для эффективной реализации пропускной способности каналов пере-
дачи и коммутационных узлов необходимо соблюдение определённого набора стандартных
правил, которые должны быть построены по принципу некоторой иерархии, т.е. разделены на
определённые уровни. Набор стандартных процедур взаимодействия и программных средств,
обеспечивающих установление связи, прерывание связи при необходимости и т.п., обычно
реализуется программно.
В основу многоуровневой архитектуры связи положена концепция эталонной модели
взаимодействия открытых систем (ВОС), обеспечивающей введение стандартов на междуна-
родном уровне для вновь создаваемых информационных сетей. Эталонная модель ВОС разра-
ботана Международной организацией по стандартизации (МОС) и ориентирована на
375
выполнение следующих функций: представления данных в стандартной форме, связи между
процессами информационного обмена и синхронизации их работы, управления информаци-
онно-вычислительными ресурсами, контроля ошибок и сохранности данных, управления ба-
зами данных и запоминающими устройствами, поддержки программ, обеспечивающих техно-
логию передачи и обработки данных, тестирования и др.
Для упрощения разработки и реализации сетевой архитектуры каждая система разбивает-
ся на ряд квазинезависимых функциональных уровней. При этом взаимодействие систем в
сети представляется в виде взаимодействия между элементами (логическими объектами) -Сис-
тем одного функционального уровня. Эталонная модель ВОС использует семь уровней, пока-
занных на рис. 9.22. Четыре нижних уровня предоставляют сетевые услуги; три верхних уров-
ня предоставляют услуги самим оконечным пользователям.
Уровень канала передачи данных и находящийся под ним физический уровень обеспечи-
вают канал безошибочной связи передачи между двумя узлами в сети. Функция сетевого
уровня состоит в том, чтобы установить адрес и маршрут для передачи пакета данных по сети
от узла передачи до узла назначения. Пакет может содержать все сообщения или только часть
его.
Нижний из верхних уровней ВОС, транспортный уровень, обеспечивает сквозную пере-
дачу данных между абонентами сети с заданным, качеством обслуживания, которое является
составным параметром, определяющим характеристики взаимодействия абонентов: макси-
мальное время установления соединения, пропускная способность, время задержки, вероят-
ность ошибки при передаче сообщений и т.п. Уровень сеанса обеспечивает организацию диа-
лога между абонентами сети, т.е. управление очередностью передачи данных, их приоритетом,
процедурой восстановления и т.д. Уровень представления управляет и преобразует синтаксис
блоков данных, которыми обмениваются оконечные пользователи (коды, форматы данных,
сжатие данных, машинные языки и т.п.). Наконец, прикладной уровень служит для выполне-
ния всех информационно-вычислительных процессов, предоставляемых пользователям через
транспортную сеть: электронная почта, телетекст, факс, электронный перевод денежных
средств, пакетная передача речевых сообщений и др.
Понятие о протоколах. Правила взаимодействия объектов одного уровня, называемые
протоколами, определяют логическое взаимодействие. В эталонной модели ВОС принята
концепция, в соответствии с которой взаимодействие объектов одного уровня обеспечивается
предоставлением ему услуг смежным нижним уровнем. Правила взаимодействия объектов
смежных уровней в одной системе, а также межсетевого обмена называются интерфейсами. В
настоящее время наиболее проработанными являются основные стандарты Международного
консультативного комитета по телефонии и телеграфии (МККТТ) и МОС, на них ориентиро-
ваны проекты крупных сетей.
Широкое распространение получили сети передачи данных с коммутацией пакетов в со-
ответствии со стандартом Х.25 МККТТ. Эти сети являются сетями передачи данных общего
пользования, предоставляющими услуги трёх нижних уровней эталонной модели ВОС.
Рекомендация МККТТ Х.25 охватывает соединение терминалов передачи данных
Верхние
уровни
Нижние
(сетевые)
уровни
Оконечный
пользователь В
Оконечный
пользователь А .
I Прикладной уровень Функции оконечного t пользователя , Прикладной уровень
( .Уровень представления Уровень представления
1 Уровень сеанса Уровень сеанса
Транспортный уровень Функции сети Транспортный уровень
Сетевой уровень Сетевой уровень
/ Уровень канала Уровень канала
Физический уровень Физический уровень
Физическая среда
Рис.9.22. Эталонная модель взаимодействия открытых систем (ВОС)
376
Архитектура ВОС
Рис.9.23. Взаимосвязь между архитектурами ВОС и Х.25 Рис.9.24. Типовой формат кадра
(компьютеров и других систем и приборов пользователей) с сетью передачи данных. Общим
для любых устройств пользователя является название оконечное устройство передачи данных
(ОУПД). Соединение этого устройства с сетью осуществляется через специальное линейное
оборудование, называемое линейным устройством передачи данных (ЛУПД). Обычно ОУПД
требует установления соединения с другим ОУПД с помощью сети.Доступом ОУПД к сети
управляет ЛУПД, с которым это ОУПД соединяется. Сеть обеспечивает управление соедине-
нием между устройствами ЛУПД. Протокол Х.25 управляет только обменом данных между
ОУПД и ЛУПД на каждом конце.
Таким образом, протокол Х.25 является протоколом сопряжения, он управляет взаимо-
действием между ОУПД и ЛУПД. Протокол Х.25 организован по трёхуровневой архитектуре,
соответствующей трем нижним уровням модели ВОС (рис. 9.23). Как и в архитектуре ВОС
рис. 9.22, нижний физический уровень обеспечивает необходимое физическое соединение
между ОУПД и ЛУПД. Блоку уровня канала присвоено специальное название "кадр". Типовой
формат кадра показан на рис. 9.24. Начало и конец кадра обозначаются специальной восьми-
разрядной комбинацией символов 01111110, обозначенной буквой Ф. Буквой. А обозначено
’Тюле адреса, У — поле управляющих символов, а ПС — поле проверочных символов, служа-
щих для обнаружения ошибок. Буквой И обозначено информационное поле, в котором рас-
полагаются данные, полученные от вышестоящего сетевого уровня (пакет). Сетевому уровню
ВОС в протоколе сопряжения Х.25 соответствует уровень пакетов. Между ОУПД и ЛУПД, с
которым оно соединяется, может быть установлено до 4096 каналов. С этой целью применя-
ется 12-разрядное адресное поле. Каждый пакет данных от ОУПД при установлении соедине-
ния несет свой 12-разрвдный номер логического канала. Очередной задачей уровня пакетов
протокола Х.25 является предоставление процедур для реализации каждой услуги, включая
процедуры установления соединения и разъединения, защиты от ошибок. Подробности про-
цедур уровня пакетов, а также различные форматы пакетов, механизмы управления потоком в
протоколе Х.25 описаны в специальной литературе [30]. Имеются также описания протоколов
других уровней архитектуры ВОС.
9.6.4. ПЕРСПЕКТИВЫ РАЗВИТИЯ СЕТЕЙ СВЯЗИ
Комплекс электросвязи является составной частью инфраструктуры любой
страны. Взаимосвязная сеть связи РФ (ВСС РФ), обеспечивающая предостав-
ление пользователям услуг ЭС на всей территории страны и за её пределами,
включает в себя сети общего пользования (ОП, открытые для любых физиче-
ских и юридических лиц) и ведомственные сети (ВС для производственных и
специальных нужд, для управления обороны, безопасности и охраны порядка)
с общим централизованным управлением, независимо от ведомственной при-
надлежности и форм собственности.
Основой при построении ВСС является первичная сеть, состоящая из сово-
купности оконечных пунктов, линий передачи и узлов коммутации, образую-
щих сеть типовых каналов и типовых групповых трактов, обеспечивающих
377
передачу любых видов информации. Первичная сеть объединяет магистраль-
ные, а также зоновые и местные (городские и сельские) первичные сети. Зоно-
вые первичные сети — это сети областного, краевого или республиканского
значения, связывающие местные сети с центром зоны и между собой. Зоновые
сети с помощью магистральных линий объединяются во ВСС страны.
На базе типовых каналов и трактов первичной сети образуются вторичные
сети, которые в зависимости от вида передаваемой информации подразделяет-
ся на телефонные, телеграфные, сети передачи данных, звукового и телевизи-
онного вещания, факсимильной связи, различные ведомственные сети
(транспорта, морского и воздушного флота, сети связи для газопроводов и
нефтепроводов, банковских структур и др.). Каждая вторичная сеть состоит из
ОП, абонентских линий, коммутационных станций и узлов и соответствующих
каналов или трактов, полученных от первичной сети. Иначе говоря, первичные
сети обеспечивают передачу любых видов информации; вторичные сети
"специализированы" по типу передаваемой информации.
Основным направлением развития первичной сети ВСС является внедрение
Цифровых систем передачи (ЦСП на металлическом кабеле, волоконно-
оптические СП, спутниковые СП, цифровые РРЛ). Целью цифровизации
должно стать создание цифровой первичной сети, предназначенной для пре-
доставления цифровых каналов вторичным сетям и потребителям. При по-
строении ВСС реализуется принцип организационного и технического единст-
ва: проведение единой технической политики, применение единого комплекса
максимально унифицированных технических средств, единой номенклатуры
типовых каналов и сетевых трактов, построение единой для первичных и вто-
ричных сетей системы технической эксплуатации.
Очередной этап развития ЦСП связан с внедрением систем синхронной
цифровой иерархии (СЦИ или в английской литературе SDH). Применение
СЦИ оказывается весьма эффективным, ибо они позволяет организовать дос-
туп к отдельно взятому первичному потоку без ряда преобразований (как в
ЦСП плезиохроцной иерархии, где цифровой поток формируется в последова-
тельно соединённых мультиплексорах). Исходя из техноэкономических сооб-
ражений минимальная пропускная способность ЦСП первого уровня, по опре-
делению МСЭ, должна быть равной 155,520 Мбит/с1). Эта скорость соответст-
вует модулю STM1.
Применение СЦИ стимулировало поиск новых структур первичной сети. В
результате сформировался подход, основанный на широком применении коль-
цевых первичных сетей. В кольцевой сети для реализации заданных структур
вторичных сетей (телефонной, передачи данных, кабельного телевидения,
арендованных каналов) используются цифровые кроссовые узлы (ЦКУ).
Известно, что до 90 % всей информации человек получает благодаря орга-
нам зрения. Сегодня адресная передача видеоинформации, в том числе группе
абонентов, стала с технической и экономической точки зрения, реальностью.
Создавать отдельную сеть для интерактивного обмена такой видеоинформацией
вряд ли экономично. Появилась идея создания широкополосной цифровой
Базовый доступ 2В + D — два цифровых канала В со скоростью передачи 64 кбит/с и один
канал D со скоростью передачи 16 кбит/с. Каналы В используются для передачи речевых со-
общений и данных, канал D — для передачи данных в режиме пакетной коммутации и для
управления. С помощью указанных каналов можно задействовать до 8 терминалов: цифровой
многофункциональный телефон, персональные компьютеры и др.
378
сети интегрального обслуживания (Ш-ЦСИО) или В-ISDN (в англоязычной
литературе).
Существенная особенность широкополосной ЦСИО заключается в качест-
венно новом перечне предоставляемых пользователям услуг и в применении
асинхронного режима переноса информации — метода ATM (Asynchronous
Transfer Mode).
Перспективным направлением развития современных сетей связи являются
интеллектуальные сети (ИС) или JN (в англоязычной литературе). Это направ-
ление экономически весьма эффективно и основано на интеллектуальной на-
стройке к коммутационной сети связи в виде баз данных, хранящих всю слу-
жебную информацию, необходимую для реализации услуг. Логическим завер-
шением работ по созданию ИС станет цифровой доступ к сети всей совокупно-
сти абонентских терминалов, что в первую очередь позволит повысить и уде-
шевить потребительские качества предоставляемых услуг.
Возникновение технологии мультимедиа на основе цифровой сети ЭС
представляет собой новый (третий) этап интеграции в системе телекоммуника-
ций. Первый этап был связан с интеграцией (объединением) систем передачи и
коммутации на базе цифровой техники. Его следствием стало создание интег-
рированных цифровых сетей (ИЦС) или IDN (в англоязычной литературе).
Второй этап интеграции привел к реализации цифровых сетей интегрального
обслуживания (ЦСИО), или ISDN (Integrated Service Digital Networks). Третий
этап — интеграция терминального оборудования — привел к появлению техни-
ки мультимедиа.
Для взаимосвязи коммутируемых сетей общего пользования с международ-
ными сетями мирового сообщества Международный Союз Электросвязи
(МСЭ) выделяет этим сетям международные коды страны, определяет стыко-
вые параметры. Активно обсуждаются вопросы глобализации связи — создания
Всемирной сети связи, т.е. единой сети, охватывающей все страны. Важными
компонентами Всемирной сети связи будут Глобальная сеть мобильной цифро-
вой1) связи, обеспечивающая доступ в сеть в любой точке Земли, а также Гло-
бальное цифровое кольцо связи на базе трансокеанских и трансконтиненталь-
ных ВОЛС и спутниковых линий связи. Глобальные, национальные, регио-
нальные и абонентские сети связи обеспечат абонента любыми услугами в лю-
бом мебте земного шара, в любое время по его персональному номеру
(который он может получить с момента рождения во всемирной сети связи) —
такова в общих чертах концепция Универсальной персональной связи.
ВЫВОДЫ
1. Основной проблемой многоканальной передачи сообщений является повышение эффек-
тивности использования дорогостоящих трактов передачи (линий связи). С этой целью
тракт передачи предоставляется для одновременной и независимой передачи сигналов от
большого числа источников сообщений к такому же числу получателей. Передаваемый по
тракту передачи групповой сигнал формируется из канальных сигналов, удовлетворяющих,
как правило, условию линейной независимости или ортогональности.
*> Наибольшее распространение получили цифровые сотовые системы мобильной связи с
временным разделением каналов (TDMA — Time Division Multiplexing Access, множественный
доступ на основе временного разделения), построенные по общеевропейскому стандарту
GSM с использованием двоичных канальных сигналов с ММС. В последнее время намечается
использование цифровых сотовых систем мобильной связи с кодовым (адресным) разделени-
ем каналов (CDMA — Code Division Multiplexing Access) отдельных пользователей.
379
2. К основным способам разделения канальных сигналов относятся частотное и временное
разделение, по фазе и по форме, кодовое разделение. Предельное число каналов в много-
канальной системе при одновременной независимой передаче определяется базой группо-
вого сигнала.
3. Пропускная способность систем многоканальной связи ограничивается не только мощно-
стью шума в канале, но также мощностью взаимных помех между каналами. Поэтому уве-
личить пропускную способность многоканальной системы за счёт увеличения мощности
канальных сигналов нельзя. Для снижения уровня взаимных помех приходится вводить
защитные промежутки, что приводит к снижению эффективности использования многока-
нальных трактов.
4. Наиболее перспективными являются цифровые многоканальные системы с временным
разделением в сочетании со статистическим кодированием и увеличением числа пользова-
телей.
5. С целью организации обмена информацией между территориально разобщёнными пользо-
вателями системы передачи и каналы объединяются в сети связи — системы передачи и
распределения информации (СПРИ). В состав СПРИ входят оконечные пункты (ОП), уз-
лы коммутации (УК) и каналы передачи, взаимодействующие между собой по определён-
ному регламенту, определяемому протоколом многоуровневой архитектуры сетей передачи
информации.
6. Перспективным направлением развития современных сетей связи является: создание ин-
тегральных цифровых сетей (ИЦС), внедрение систем синхронной цифровой иерархии
(СЦИ), внедрение цифровых систем интегрального обслуживания (ЦСИО) и широкопо-
лосных цифровых систем интегрального обслуживания (Ш-ЦСИО), создание интеллекту-
альных сетей (ИС).
ВОПРОСЫ, ЗАДАЧИ И УПРАЖНЕНИЯ
9.1. Сформулируйте основные преимущества многоканальной передачи и поясните её струк-
турную схему.
9.2. Каким требованиям должны удовлетворять канальные сигналы при формировании
группового сигнала системы многоканальной передачи?
9.3. Запишите условия линейной независимости сигналов и поясните её физическую сущ-
ность.
9.4. В чём состоит различие между ортогональными и линейно независимыми сигналами?
9.5. Приведите геометрическую трактовку условия линейного разделения сигналов при
многоканальной передаче.
9.6. Определите ширину спектра группового сигнала 12-канальной системы однополосной
ЧРК при условии, что каждое из канальных сообщений занимает полосу частот
300...3400 Гц, а защитный промежуток А/3 составляет 30 % от разноса между поднесу-
щими частотами.
9.7. Сформулируйте принципы построения коммутационных систем на основе коммутации
каналов, коммутации сообщений и коммутации пакетов.
9.8. Перечислите основные цели и функции, реализуемые уровнями эталонной модели ВОС;
укажите возможные ошибки на каждом из уровней и причины их возникновения.
9.9. В систему с коммутацией каналов (КК) поступают входящие потоки с интенсивностью
вызова %=1 за 3 с. Средняя продолжительность соединения Т= 30 с. Пользуясь форму-
лой Эрланга, найдите минимальное число каналов т, необходимых для поддержания
вероятности блокировки в пределах 1 %.
380
ГЛАВА 10. ОСНОВЫ ЦИФРОВОЙ ОБРАБОТКИ
СИГНАЛОВ
Под цифровой обработкой сигналов (ЦОС) понимают операции над дискрет-
ными во времени величинами (отсчётами сигналов). Дискретную величину,
поступающую на вход устройства ЦОС в и-й момент времени (п = 0, 1,2, ...),
обозначим х(п). Дискретную величину, получаемую на выходе устройства ЦОС
в л-й момент времени, обозначим у(п).
Обычно входные величины поступают на устройство ЦОС и выдаются этим
устройством с неизменным шагом Д. Тогда можно написать
х(п) = х(лД), у(п) = у(«А)-
Чаще всего Д < —- является шагом равномерной дискретизации во времени
непрерывного сигнала x(t), поступающего на обработку.
Сигналы на входе и выходе современных ЦОС дискретны не только во
времени (их обычно и называют дискретными), но и по уровню, т.е. являются
цифровыми сигналами. Однако в дальнейшем в этой главе (для простоты и на-
глядности) мы рассмотрим работу ЦОС только с дискретными сигналами и в
конце вкратце обсудим погрешности, возникающие в устройствах ЦОС из-за
квантования (округления) дискретных сигналов по уровню.
Устройства ЦОС широко внедряются в последние годы в технике связи.
Это объясняется тем, что ЦОС имеет ряд существенных преимуществ перед
аналоговой обработкой сигналов:
а) достигается значительно более высокая точность обработки сигналов по
сложным алгоритмам;
б) возможна гибкая оперативная перестройка алгоритмов обработки сигналов,
обеспечивающая как создание многорежимных устройств, так и реализацию
адаптивных (подстраивающихся) систем;
в) достигается высокая технологичность изготовления устройств ЦОС, связан-
ная с отсутствием необходимости настройки при изготовлении и регулировки
при эксплуатации;
г) обеспечивается высокая степень совпадения и повторяемости характеристик
реализованных устройств с расчётными характеристиками;
д) существуют большие возможности автоматизации проектирования устройств
ЦОС;
е) обеспечиваются высокостабильные эксплуатационные характеристики уст-
ройств ЦОС.
На рис. 10.1 дана структурная схема одноканальной системы передачи со-
общений (как непрерывных, так и дискретных) с использованием устройств
ЦОС на передаче и приёме.
Для отдельных блоков схемы введены следующие обозначения:
Рис. 10.1. Структурная схема системы передачи сообщений с использованием устройств ЦОС
381
х(и) ПГЧкЬ Я«)
Рис. 10.2. Структурная схема
линейного стационарного ЦФ
ЦФПС — цифровой формирователь первичного сигнала; .
ЦМ — цифровой модулятор;
ЦПФ — цифровой полосовой фильтр;
ЦД ~ цифровой детектор (демодулятор);
ЦФНЧ — цифровой фильтр нижних частот.
В системах передачи непрерывных сообщений (в том числе и цифровыми
методами, см. гл. 8), помимо отмеченных на рис. 10.1 решаются и задачи циф-
рового компандирования первичного сигнала на входе модулятора (сжатия ди-
намического диапазона) и цифрового экспандирования (расширения динами-
ческого диапазона) сигналов на выходе детектора.
Наиболее широкое применение нашли линейные устройства ЦОС, в кото-
рых сигналы входа и выхода связаны линейными соотношениями. Такими яв-
ляются все фильтры в схеме рис. 10.1, а также в большинстве случаев схемы
ЦМ и ЦД, построенные на основе перемножения двух
функций. Напомним читателю, что такой метод мож-
но использовать и при получении и детектировании
также сигналов ОБП и угловой модуляции (см. § 3.6).
В дальнейшем мы коснёмся лишь основ теории ли-
нейных стационарных цифровых фильтров (ЛСЦФ,
рис. 10.2)
10.1 . СПЕКТР ДИСКРЕТНОГО СИГНАЛА
Определим дискретный сигнал хд(/) через совокупность отсчётов непре-
рывной функции хЦ):
{%(£) =x(t= кА)}. (10.1)
Тогда сам дискретный сигнал можно записать в виде модели
х,й = х0/„«, (10.2)
СО
где /п(/) = А ^8(/-&А) — безразмерная периодическая (с периодом А) решётча-
тая функция.
Покажем, более строго, чем в гл. 2, что дискретный сигнал (10.1) имеет спектр по Фурье
\(/) = <10-3)
*=-<ю
где Sx(f) — спектр Фурье исходного непрерывного сигнала x(f) (см. заштрихованную область
на рис. 10.3), т.е. спектр дискретного сигнала повторяется с периодом частоты дискретизации
F& (см. рис. 10.3).
Как известно (см. задачу 2.6), спектр Фурье произведения двух функций времени (10.2)
определяется свёрткой спектров сомножителей
^д(/) = J^)5/n(/-^)^, ' (10.4)
Рис. 10.3. Амплитудный спектр первичного дискретного сигнала
382
где Sfa(f) — спектр по Фурье периодической функции fn(f) с периодом Д, которую предста-
д
□о '2п^ 1 '2я^ 1
вим комплексным рядом Фурье: /п(у) = Д Ске Л , Ск = — J 8(Z)e 3 hdt = —
к=-<п - Д
(учтено фильтрующее свойство 8-функции).
«о
Спектральная плотность периодической функции fn(t)= У^-е Л определяется с учётом
Л=-<о
(2.43) суммой 8-функций:
Л=-оо
С учётом (10.5) интегрирование (10.4) даёт результат (10.3). Напомним, что из спектра
(10.3) можно без искажений восстановить спектр $x(f) (следовательно, и сам непрерывный
сигнал х(0) только при условии, если отдельные копии спектра Sx(f-kFa] взаимно не пере-
крываются (см. рис. 10.3). Это возможно, если 7Д > 2FB (Д < 1/27в) ). Восстановление осущест-
вляют фильтром нижних частот, АЧХ которого показана штриховой линией на рис. 10.3. Реа-
лизация такого фильтра тем проще, чем сильнее выполняется неравенство Fa > 2FB.
Спектр дискретного сигнала (10.1) можно определить не только формулой
(10.3), но и путём непосредственного нахождения преобразования Фурье от
(10.1), что даёт результат О
оо . -j<o*A
<У,(/) = ДЁ^)е • (Ю-6)
Найдём теперь спектр Фурье дискретного финитного сигнала, определённо-
го на интервале (О, Т). Такой финитный сигнал можно записать:
хдф(0 = А^ х(Л)5(г-ЛА), 2V = у. (Ю.7)
*=0
Спектр сигнала (10.7) можно легко найти, если его периодически продол-
жить (направо и налево) с периодом Т. Тогда получаем периодический сигнал
хДпер(0> совпадающий с хДф(7) на интервале (0,7), для которого комплексные
амплитуды Сп можно получить из (10.6) при о=и27г/Т суммированием от
k = 0fl,ok=N- 1 ис учётом множителя 1/7:
]2лл j2nkn
а лг-i —г~*д , лг-i —
С„^=—2х(Л)е =т;2х^)е • (10.8)
7 *=о 7V *=0
Формула (10.8) определяет коэффициенты дискретного преобразования Фурье
(ДПФ).
Из (10.8) нетрудно видеть, что при заданных N отсчётах х(к) существует N
| (V-1
коэффициентов ДПФ (л = 0, 1, ..., N - 1). Коэффициент С0= — ^х(к) опреде-
N *=0
ляет постоянную составляющую. При чётном N из (10.8) следует для вещест-
венных х(к)
i tf-i * N
с» С„ -С„ ,п = 1,2,...--1, (10.9)
“ ™ к-С\ —+л ~^~п
2 2 2
Равенство выражений (10.6) и (10.3) называют формулой суммирования Пуассона.
383
т.е. коэффициенты ДПФ, номера которых располагаются симметрично относи-
тельно N/2, образуют комплексно-сопряжённые пары. Можно считать, что ко-
эффициенты CN ,CN соответствуют отрицательным частотам, число
±-+1 т+* 2
2 2
же амплитуд |СП|, образующих спектр ДПФ, равно N/2X\
При заданных С„ (л = 0,1,...,7V — 1) можно найти х(к) обратным дискрет-
ным преобразованием Фурье (ОДПФ). Прежде всего это можно получить, пред-
ставляя периодическую функцию хпер(7) с периодом Т рядом Фурье:
j2ttn/
(V-l ~y~
*„(') = S С.е . ’ (10.10)
n=0
Положив в (10.10) t= kA, получаем ОДПФ:
j2nkn
. (10.11)
и=0
Отметим, что ДПФ и ОДПФ удовлетворяют условию линейности.
Пример. Пусть дискретный финитный сигнал на интервале своей периодичности опреде-
ляется четырьмя отсчётами. 1, —1, 0, 0. Тогда согласно (10.8)
Со= 0; Q = 0,25(1+j); С2 = 0,5; С3 = 0,25(1-j) и согласно (10.10) на интервале периодичности
х( 0 = 2|С, | cos^-y+arg q)+|С21 cos(^+aig С2) =
г— (2ict nr. (4t:A
= 0,5V2cos---+— +0,5cos--- .
Л T 42 \ T )
При вычислении N коэффициентов ДПФ согласно (10.8) или ОДПФ со-
гласно (10.11) надо выполнить N2 наиболее трудоёмких операций умножения.
При больших массивах N (порядка 1000 и более) использование таких алго-
ритмов ДПФ и ОДПФ в реальном масштабе времени затруднительно из-за ог-
раниченного быстродействия вычислительных устройств. Положение сущест-
венно изменилось, начиная с 60-х годов, с разработкой алгоритмов быстрого
преобразования Фурье (БПФ), которые сводят обработку заданного массива
данных к обработке массивов с меньшим числом членов, и тем самым сущест-
венно уменьшается (при больших N) требуемое число Операций умножения.
10.2. АЛГОРИТМ БЫСТРОГО ПРЕОБРАЗОВАНИЯ ФУРЬЕ
Объясним суть одного из алгоритмов БПФ для вычисления коэффициентов Сп для мас-
сива вещественных2^ данных {х(/)} объёма N = 2Г, г — целое число.
Разобьём исходный массив данных {х(/)} на две части с чётными и нечётными номерами
{х!ч(/) — х\2к)} и {х1нч(/) = х\2к + 1)), к = 0, 1, ..., N/2 — 1.
Согласно (10.8) коэффициенты С„ N равны на первом этапе разбиения:
^/2-1 _ ,4я и * ,4ли(2*+1)
CnN = 2 xI(2)t)eJ N +x1(2£ + l)e’J "
*=o_
= ^чет + ^пС^ч,И = 0,1,2,..., N/2-i, где WN = e’J" .
(V/2-1 ,2nnk 2 1 2nnk
= S X4erU)e +
л=о л=о
(10.12)
*) Это следует из теоремы отсчётов при A=l/2fB. Действительно, число амплитуд, опреде-
ляющих в этом случае спектр хд пер0), равна 1/7)= 7/24=77/2.
2) Обработка комплексно-значных данных принципиально не меняет алгоритм БПФ.
384
Из (10.12) видно, что последовательности коэффициентов С^чет и С^ч обладают свойст-
вом периодичности с периодом N/2:
Смет = ^-n+N/2 чет ’ ^ткч ~ ^n+N/2 неч > « — 0, 1,- 2, N/2 ~ 1. (10.13)
Кроме того, для п > N/2 множитель W// в (10.12) можно представить
х
= e"j’W^ = -W”,n = 0, 1, 2, ..., N/2 - 1. (10.14)
С учётом (10.12), (10.13) и (10.14) можно написать для всех п — 0,1,2,...,2V — 1
СЛ = С^„±^С^ч, (10.15)
причём знак соответствует значениям п = N/2, N/2 + 1, ..., 7V-1. Подсчитаем, сколько тре-
буется операций умножений при вычислении всех значений CnN по алгоритму (10.15). Для
вычисления всех С'чет по (10.12) требуется (ЛГ/2)2 умножений. Столько же умножений потре-
буется для вычисления всех С*№4 . Кроме того, потребуется N умножений С^жч на числа ±W<”.
Следовательно, всего потребуется 2-(Y/2)2 + Y умножений. При больших N требуемое число
умножений -^- = Wlog2 W (при N = 4), что в 2 раза меньше, чем по алгоритму (10.8).
Чётные отсчёты исходной последовательности х1Чёт(к) (их всего N/2) разобьём далее на
втором этапе разбиения на чётные и нечётные компоненты хп(2£) и dl(2k + 1) (их число рав-
но N/4). ДПФ последних обозначим С“чет и С^жч . Тогда можно написать
CL4 = Cnn„4±^/2Ci„4,W = O,l,2,...,2V-l. (10.16)
Аналогичное разбиение выполняется над нечётными отсчётами исходной последователь-
ности х1неч(Л). Для вычисления всех С „ N согласно формулам типа (10.16) ( по массиву дан-
ных хПчёт(^) и хпнеч(£)) понадобится число умножений 2-
2 J 4
(при
N = 8).
Процесс разбиений можно продолжить г раз до тех пор, пока не получится последова-
тельность из одного элемента, ДПФ которого совпадает с самим элементом. Далее надо со-
брать результаты отдельных разбиений для вычисления суммарных значений CnN. Анализ
показывает, что число операций умножения, необходимых для выполнения БПФ, не больше
чем jVx г = jVlog^jV, что при больших N существенно меньше, чем .V2. БПФ по рассмотрен-
ному методу (его называют методом прореживания отсчётов во времени) осуществляют, как
правило, в следующем порядке. Сначала для получения желательного при обработке сигнала
порядка следования отсчётов х(Л), к - 0, 1, ..., N— 1, выполняется двоично-инверсная пере-
становка элементов исходной последовательности х(/), Z = 0, 1, ..., JV— 1. Для этого записы-
ваю^ порядковые номера элементов х(/) в двоичном коде и инвертируют порядок следования
разрядов. Новый порядок следования элементов х(к) определяется номерами, полученными
после инверсии разрядов.
Приме р при N = 4
х(0 x(fc)
0-> 00-> 00-> 0->
1-> 01-> 10-> 2->
2-> 10-> 01-> 1->
3-> 11—> 11-> 3->
Новый порядок следования элементов: х(0), х(2), х(1), х(3). После этого поступают так.
На. первом этапе вычислений определяют 2 точечные ДПФ "новой" последовательности х(к),
объединяя попарно элементы этой последовательности. На втором этапе из 2 точечных ДПФ
получают 4 точечные ДПФ, пользуясь основной базовой операцией данного метода (см. ни-
же). Затем 4 точечные ДПФ объединяют в 8 точечное и т.д.
Базовые операции показывают, как два входных числа А и В объединяются для получения
двух выходных чисел X и Y. Для метода прореживания во времени базовая операция имеет
вид
385
A •< j*X = A+WkNB
В N Y= A—Wk-B
Рис. 10.4. Операция "бабочка", используемая
при реализации алгоритма БПФ
Рис. 10.5. Граф для вычисления БПФ при N=4
X = A + W^B,
Y = A-W^B.'
Базовая операция (10.17) изображается на рисунке "бабочкой" (см. рис. 10.4)
Надпись Wk у стрелки, идущей вверх, означает умножение Wk на величину В.
(10.17)
При вычислении 2 точечного ДПФ к = 0 и выходные числа X и Y определяются без опе-
рации умножения Х= А + В, У = А - В.
Пример. Построим граф вычисления БДПФ с прореживанием во времени для N - 4
(рис. 10.5)
Учитывая, что И^0 = 1, И^1 = е 2 = -j, получаем согласно приведённому графу
4С(0) = х(0) + х(2) + х(1) + х(з);
4C(l) = x(0)-x(2)-j(x(l)-x(3));
4С(2) = х(0) + х(2) - х(1) + x(3);
4C(3)=x(0)-x(2) + 4x(1)-x(3)).
На рис. 10.6 дан граф вычисления БДПФ с прореживанием во времени для N= 8.
Чтобы воспользоваться рассмотренной процедурой БДПФ для выполнения ОДПФ, запи-
шем (10.11) в виде
(10.18)
Вводя массив данных Сп (вместо х(и)), можно найти сумму в (10.18) по изложенной вы-
ше методике БДПФ, а затем для нахождения х(к) найти комплексно-сопряжённое значение
полученного результата. Существуют и другие методы вычисления БДПФ (другие методы
группирования исходных данных х(к) [24,10]).
Рис. 10.6. Граф для вычисления БДПФ при У=8
386
10.3. ВРЕМЕННЫЕ И СПЕКТРАЛЬНЫЕ МЕТОДЫ
ИССЛЕДОВАНИЯ ЛИНЕЙНЫХ СТАЦИОНАРНЫХ ЦИФРОВЫХ
ФИЛЬТРОВ
Подобно тому как отклик аналоговой линейной стационарной системы y(t)
на произвольное внешнее воздействие x(f) можно найти или через временную
(импульсную g(t)) характеристику системы (т.е. интегралом Дюамеля или
свёрткой функций x(t) и g(f) )
оо
y(t}= |x(t)g(/-T)cft, (10.19)
или спектральным методом (см. § 4.5), и отклик линейного стационарного ЦФ
у(п) на произвольное внешнее воздействие х(п) можно найти или через им-
пульсную характеристику ЦФ g(ri), или спектральным методом.
Выполнив в (10.19) дискретизацию по переменным т и t, положив т = ЛА,
t = тк, получаем цифровой аналог свёртки (10.19):
оо
= (10.20)
Л=-оо
где g(/), 1= 0, 1, 2, ..., L, — отсчёты импульсной характеристики ЦФ, т.е. от-
клика на единичный импульс (1, 0, 0, 0, 0, ...), поступающий на вход фильтра в
момент t = 0. Из условий реализуемости ЦФ надо принять
g(-/) = 0, 7=1,2, ... (10.21)
Если входные отсчёты х(к) начинают поступать в момент t = 0, то (10.20)
можно написать:
у(т) = А^х(Л)g(m-к) = A^g(k)x(m-к). (10.22)
*=0 *=0
С учётом условия реализуемости ЦФ (10.21) ясно, что суммирование в
(10.22) фактически выполняется для к < т:
т
у(т) = \^х(к')^<т-к'). (10.23)
*=о
Если число входных отсчётов х(0), х(1), ..., x(N - 1) равно N, а число отсчё-
тов импульсной характеристики ЦФ (g(0), g(l), ..., g(L)) равно £ + 1, то в
(10.23) т принимает значения 0,1, 2,..., Nz -1 (nz = N + l}.
Для нахождения одного значения у(т) в соответствии с (10.23) надо выпол-
нить не более чем L + 1 операций умножения, для нахождения всех значений
у(т) надо выполнить примерно 7V2(£ + 1) операций умножения.
Число операций можно существенно сократить, если использовать спектральный метод
расчёта ЦФ и методы БПФ. Чтобы это показать, напишем сначала дискретную свёртку (10.23)
в нормированном виде:
= (10.24)
*=о
Дополнив последовательность из N входных отсчётов х(к) L нулями, представим х(к) че-
рез'ОДПФ:
,2тк
x(k)=^Cx^N^ . (10.25)
я=0
Дополнив последовательность из L + 1 отсчётов импульсной характеристики ЦФ N- 1
нулями, определим ОДПФ:
387
.2яГ .
1=0
где CgJ — коэффициенты ДПФ для импульсной характеристики ЦФ.
Подставив (10.25) и (10.26) в (10.24), получим
. NT-1NT-1 »« Nr-1 .2nk(n~l)
*=0
(10.26)
п = I,
пФ1.‘
(10.27)
(10.28)
„=0 1=0
Справедливо условие
Д'-l ,2л k(n-l) r » r
у eJ N = ’
o,
*-o I ’
Равенство суммы N при n = l очевидно. Равенство же суммы нулю при объясняется
тем, что в этом случае имеем векторную сумму единичных векторов, образующих в совокуп-
ности замкнутый правильный TV-угольник. Сумма эта, естественно, равна нулю1).
С учётом (10.28) формула (10.27) принимает вид
ЛГЕ-1 .2томя
= V с с е? Nz
(Ю.29)
л=О
Уравнение (10.29) определяет ОДПФ выходных отсчётов ЦФ, если ДПФ над этими отсчё-
тами определяется произведением ДПФ входных отсчётов и отсчётов импульсной характери-
стики фильтра:
С,л = С,Лл- (10-3°)
Если методами БПФ найти спектральные компоненты Сх п и Cg п, а затем и ОДПФ от их
произведения Су „ - Cx„Cg„, то можно при больших N существенно экономить в вычисли-
тельных операциях по сравнению с непосредственными вычислениями у(т) по формуле дис-
кретной свёртки.
10.4. ИСПОЛЬЗОВАНИЕ z-ПРЕОБРАЗОВАНИЯ В ТЕОРИИ
СТАЦИОНАРНЫХ ЛИНЕЙНЫХ ЦИФРОВЫХ ФИЛЬТРОВ
Это преобразование можно получить из преобразования Лапласа или Фурье
дискретного сигнала хд(/).
Определим одностороннее преобразование Лапласа (для сигналов, опреде-
лённых при t > 0) для дискретного сигнала (10.1):
F (р) = J хд(/)е-'Л .if хЩе’* . (10.31)
0 *“0
При р = jo из (10.31) следует преобразование Фурье дискретного сигнала.
Если обозначить
z = e*, (10.32)
то преобразование Лапласа (10.31) переходит в z-преобразование дискретного
сигнала хд(/):
X{z)^x{k)z~k. (10.33)
*=0
Очевидно, что из преобразования Фурье дискретного сигнала хд(?) при
z = ejfflA (10.34)
следует также ^-преобразование X(z).
11 При чётном N можно утверждать, что при'и * / для каждого слагаемого суммы (10.28) суще-
ствует противоположная компонента.
388
Справедливо и обратное утверждение: из z-преобразования X(z) дискретного
сигнала (10.33) при з = ерЛ следует его преобразование Лапласа. (Или из X(z)
при z = ej0>A следует преобразование ФурЬе сигнала).
Если дискретный сигнал хд(/) определён и при Z<0, то вместо (10.33) можно
ввести более общее ^-преобразование для такого сигнала:
%(z)= (10.35)
*=-»
Следует оговорить сходимость X(z) при неограниченном числе слагаемых в
сумме (10.ЗЗ)1). Отсчёты х(к) всегда удовлетворяют условию |х(к)|<CR*, к>0,
где С > 0, R > 0 — постоянные вещественные числа. Тогда ряд (10.33) сходится
при всех z, для которых |z| > R, т.е. в кольцевой области с радиусом R (R — ра-
диус сходимости). В области сходимости X(z) представляет собой аналитиче-
скую функцию переменной z, не имеющую в этой области ни полюсов, ни су-
щественно особых точек.
Пример. Пусть х(к) = е~“*Л, к > 0 (т.е. имеем отсчёты сигнала x(r) = e~“'l(f)). Тогда
«> /^-адЛ*
X(z) = ----1 . При |г| > е-аЛ =R сумма определяет бесконечно убывающую геометрическую
2 '
е-«д 1 z 1
прогрессию со знаменателем q =--. Тогда X(z) = -— = —•
Эта функция имеет нуль в точке z = 0 и полюс в точке z = е-аЛ , т.е. вне области сходи-
мости.
Для нахождения x(k) по X(z) (обратного z-преобразования) умножим левую
и правую часть (10.33) на z"-1:
X(z)zn~l = £ x(k) zn-'-k. (10.36)
*-0
Возьмём от левой и правой части (10.36) интеграл по z по замкнутому кон-
туру в области аналитичности, охватывающей все полюсы функции X(z)zH~l.
Получим результат2)
x(») = ^^X(z)z“-,«fe. (10.37)
Он следует, если при интегрировании левой части (10.36) использовать со-
отношение (вытекающее из теоремы Коши при интегрировании функций ком-
плексного переменного z):
г (2т, п = -1,
9zndz=\ /
I 0, п* -1.
Важное свойство z-преобразования связано со сдвигом сигнала во времени:
Y(z)=z~lX(z), если у(к) = х(к — 1). (10.39)
(10.38)
^Аналогично можно определить сходимость ряда (10.35).
2) Этот результат следует также из теоремы Коши об интегрировании функции X(z)zn~l по
замкнутому контуру, охватывающему все полюса функции. Напомним (см. § 4.3.1), что ре-
зультат такого интегрирования равен 2тд, умноженному на сумму всех вычетов подынтеграль-
ной функции относительно полюсов, попадающих внутри контура интегрирования. Единст-
венный вычет ряда Лорана в правой части (10.36) относительно полюса в точке z = 0 равен
коэффициенту при множителе z-1, т.е. х(л).
389
Таким образом, ^-преобразование дискретного сигнала у(0, У которого все
отсчёты смещены на один такт (в строну запаздывания) относительно дискрет-
ного сигнала хд(/), равно произведению z-1 на X(z). Можно сказать, что z~! яв-
ляется оператором сдвига (на один такт в сторону запаздывания). Для доказа-
тельства (10.39) запишем z-преобразование последовательности {yU) = х(к -1)}:
Г(г) = Е4Ы)г-* • (ЮЛО)
*=i
Вводя переменную fc-1 = л, из (10.40) получим (10.39). Очевидно, если
у(к) = х(к - л), то 7(z) = z~nX(z).
Рассмотрим дискретную свёртку1)
со оо •
у(/) = s x(k)g(l-k)= £g(&)x(&-/). (10-41).
*=-»
Найдём z-преобразование этой свёртки:
Y(z) = S S х(к)^1-к)г~' = ^х(к)z~kg(l - к)z~<'~ky =
= X x{k~)z~k £ g(n)z- = X(z)G(z). (10.42)
Jt=—=O M=—=o
Таким образом, свёртка двух дискретных сигналов соответствует произведе-
нию их ^-преобразований.
Покажем, что импульсная характеристика ЦФ (g(0), g(l), •£>(£)) является
его откликом на единичный импульс (1, 0, 0, 0, ...). Действительно, при воз-
действии единичного импульса (10.41) принимает вид
Я0 = «(/), /=0,1,2,... (10.43)
Если импульсная характеристика ЦФ финитна, то
у(/) = 0 при/> L + 1, (10.44)
где L + 1 — число тактовых отрезков на интервале финитности.
Рассмотрим прохождение через линейный ЦФ гармонической последова-
тельности, когда2)
х(Л) = ej^*4+<pL (10.45)
Согласно формуле свёртки (10.41) с учётом (10.45) находим выходной сиг-
нал:
y(Z) = е* ejffl*4g(Z- к) = ej(ffl'4+<₽) ^g(Z- л)е’1<й(/'*)4.
к=-<*> к=-х
Введём под знаком суммы новый индекс суммирования Z — к = л и учтём,
что из соображений реализуемости ХЛ) = 0 при л < 0. Тогда
^(Й = е*м*’>Х1<,(/)1 . (10.46)
где £„.(/) = SgWe-*". (10.47)
л «0
Последняя формула определяет частотную характеристику (ЧХ или переда-
точную функцию) ЦФ, которая зависит от частоты со, шага дискретизации А и
импульсной характеристики ЦФ:
И Верхний индекс в сумме можно заменить на /.
2> В непрерывном времени x(t) = е^“г+ч>^.
390
= S (10.48)
*=°
£цф(/) является преобразованием Фурье дискретного сигнала (10.48).
Как следует из (10.47), ЧХ ЦФ является периодической функцией частоты
дискретизации FR = 1/А (как и спектр дискретного сигнала).
Если в (10.47) ввести переменную z = ejmA, то получим ^-преобразование
импульсной характеристики ЦФ:
Mz) = Sga)z-*; (10.49)
*=0
H(z) называют системной функцией стационарного линейного ЦФ.
Из (10.42) при замене G(z) на H(z) видно, что системная функция ЦФ оп-
ределяется как отношение ^-преобразования выходного сигнала фильтра к z-
преобразованию входного сигнала:
(10-50>
Если в системной функции ЦФ положить z = е]иД, получим ЧХ ЦФ
= = (Ю-51)
10.5. ОСНОВЫ РЕАЛИЗАЦИИ ЦИФРОВЫХ ФИЛЬТРОВ
В общем случае в линейном стационарном ЦФ к-й выходной отсчёт у(к) (в
момент времени t = кЛ ) линейно зависит от £-го входного отсчёта х(к) и неко-
торого количества предшествующих отсчётов x(l) (I < к), а также от некоторого
количества выходных отсчётов у(Г) (I < k)V
y(k) = aox(k)+aix(k-l)+...+aLx(k-L)+biy(k-lL) + ... +bMy(k- М). (10.52)
Числа £ и Мв разностном уравнении (10.52) называют соответственно па-
мятью (относительной) ЦФ по входу и выходу. ЦФ с памятью по выходу назы-
вают рекурсивным, а без такой памяти — нерекурсивным [24].
Алгоритмы работы различных ЦФ отличаются параметрами £ и Ми набо-
ром коэффициентов {«/} и {£/}. Рассмотрим сначала реализацию нерекурсивных
ЦФ, когда все Ь, = 0 (М = 0).
В этом случае разностное уравнение (10.52) принимает вид
. у(к) = «ох(А)+«1х(Л-1)+...+а£х(Л-£). (10.53)
На рис. 10.7 дана структурная
схема ЦФ, реализующего алго-
ритм (10.53).
Основными элементами ЦФ
являются блоки задержки отсчёт-
ных значений на один тактовый
интервал (условно они обозначе-
ны символом f1 ), а также мас-
штабные блоки. Сигналы с по-
следних собираются в сумматор,
Рис.10.7. Структурная схема построения нерекурсивного
(трансверсального) фильтра
Разностное уравнение М-то порядка (по выходной переменной) (10.52) можно представить
через систему М уравнений 1-го порядка (или через векторное уравнение 1-го порядка), как
принято в методе переменных состояния.
391
образуя выходной отчёт. Вид представленной схемы объясняет название фильт-
ра "трансверсальный" (от английского слова transverse — поперечный).
Подчеркнём, что посредством разностного уравнения (10.53) можно по-
строить лишь ЦФ с финитной (конечной) импульсной характеристикой
(g(0), g(l), g(2), ..., g(L)). Если на вход схемы рис. 10.7 подать единичный им-
пульс (1, 0, 0, 0, ...), то по определению отклик ЦФ есть его импульсная харак-
теристика g(t). Это возможно лишь при условии, что в нерекурсивном фильтре
отсчёты импульсной характеристики g(J) совпадают с коэффициентами аь
/=0, 1, ...,£.
Взяв ^-преобразование от левой и правой части (10.53), имеем
Y (z) = Jf(z)[ao + oiz"1 + ... +a&~L].
Следовательно, системная функция трансверсального фильтра ,
у к Y(z) clz1 +a,zL~} +.. а,
------L------ (10-54)
Л \Z) 4=0 Z
Равенство (10.54) определяет дробно-рациональную функцию от z. Она
имеет Z-кратный полюс при z = 0 и L нулей, определяемых корнями полинома
числителя (10.54). Последние зависят от отсчётов импульсной характеристики
ЦФ g(/) = aj. ЧХ трансверсального фильтра
< »(/) =
4=0
На рис. 10.8 дана структурная схема ЦФ, работающего по общему алгорит-
му (10.52).
Взяв ^-преобразование от левой и правой части (10.52), получим
Y (z) = X(z)(a0 +alz~l+...+aLz~L} + Y(z){b^~l +b2z~2+...+bMz~M}.
Отсюда следует выражение для системной функции рекурсивного ЦФ:
ajM-\zL+^zL-'+..^
И(Л _ й _ I g°
n\z) — М ~ М г „М-l г
i-Е ' и
Л=1
В реализуемых цифровых фильтрах М> Ц Дробно-рациональная функция
(10.56) имеет на z-плоскости: L нулей, определяемых корнями 'z0J уравнения
(10.55)
(10.56)
Рис. 10.8. Структурная схема построения рекурсивного ЦФ
392
т а. т . а,, а,
z +—ZL 1+...+-AJ-z+—= 0;
dlfl Л0
М - L-кратный нуль в точке z = 0;
М полюсов, определяемых корнями хп/ уравнения
(10.57)
Если коэффициенты bi (/ = 1,AY) вещественны, то корни уравнения (10.57)
(т.е. полюса H(z)) лежат либо на вещественной оси, либо образуют комплекс-
но-сопряжённые пары.
Системной функции (10.56) соответствует ЧХ ЦФ:
м
где Rq t = ej<BA -z0,, = е*д -z*.
АЧХ фильтра (в децибелах) определяется формулой
Г I , , м ,
За счёт наличия обратной связи (с выхода на вход) схема рис. 10.8 характе-
ризуется нефинитной (длящейся неограниченно) импульсной характеристикой
(откликом на единичный импульс (1, 0, 0, 0, 0, ...)).
Система с обратной связью нуждается в исследовании на устойчивость. ЦФ
устойчив, если |уя| при п -> оо не превышает некоторого положительного числа
А, независимо от выбора начальных условий в схеме. Чтобы исследовать устой-
чивость схемы, надо исследовать поведение свободных колебаний, т.е. уравне-
ния (10.52) при отсутствии внешнего воздействия:
у(Л) - Ьгу(к - \)-Ьгу{к - 2)-...-Ьму(к - Л/) = 0. (10.58)
Известно, что отдельное свободное колебание в линейной стационарной
системе определяется выражением ел', т.е. при t- кЛ имеем (елЛ)*. Обозначив
елЛ = X, можем искать решение (10.58) в виде
у(Л) = Х*. (10.59)
Поставив (10.59) в (10.58), получим характеристическое уравнение, опреде-
ляющее X:
ХЛ/-6ДЛ/-1-...-6д/ = 0. (10.60)
Уравнение (10.60) совпадает с уравнением (10.57), которому удовлетворяют
полюсы системной функции рекурсивного ЦФ.
При найденных корнях уравнения (10.60) или (10.57) кь = zk> к = 1,м , об-
щее решение уравнения (10.58) можно представить в виде
у(к)= Axzk + A2zk+...+ AMzkM , (10.61)
где. ограниченные коэффициенты Аг, А?,Ам определяются начальными ус-
ловиями.
Для момента времени с номером к + 1 из (10.61) следует
у(Л + 1) = A^+i + A2zk+}+...+AMz^. (10.62)
Если все полосы системной функции (10.56) удовлетворяют условию
393
\zk\<\,k = \M, (10.63)
т.е. они лежат внутри единичного круга с центром в точке z = 0, то на основа-
нии (10.61) и (10.62) можно прийти к заключению, что все свободные колеба-
ния во времени определяются членами бесконечно убывающей геометрической
прогрессии и фильтр будет устойчив.
Недостаток схемы рис. 10.8 — наличие отдельных элементов задержки для входных и вы-
ходных отсчётов. На рис. 10.9 дана так называемая каноническая схема рекурсивного ЦФ,
использующего общие элементы задержки для входных и выходных отсчётов, при М = L.
Схема рис. 10.9 идентична схеме рис. 10.8. Чтобы это доказать, определим системную
функцию ЦФ по схеме рис. 10.9. Обозначим значение дискретного отсчёта в к-й момент вре-
мени на выходе первого сумматора через ЙК(Л). Из схемы видна справедливость уравнения
W(k) = x(k)+b1W(k-l)+b2W(k-2)+...+bMW(k-M). (10.64)
Дискретный сигнал на выходе второго сумматора в к-й момент времени
у(к) = a0W(k) +a,W(k - \)+...+aLW(k - L). (10.65)
Выполним z-преобразование над правой и левой частью (10.64) и (10.65), получим
lF(z)[l- b^z~l - b2z~2-...-bMz-M] = Дг), (10.66)
Y(z) = lF(z)[a0 +ajZ-1 +a2z~2+...+aLz~LJ. (10.67)
Приравняв значение W[z) из уравнений (10.66) и (10.67), имеем
X(z) _ Y(z)
l-b.z~l-...-bMz~M *an +a.z~'+...+arz'L
I M U 1 L
Полученный результат не отличается от (10.56), что доказывает идентич-
ность схем рис. 10.8 и 10.9.
Большое практическое значение имеют методы синтеза ЦФ с требуемыми
свойствами, например с требуемым видом импульсной или частотной характе-
ристики ЦФ.
Рассмотрим некоторые приёмы синтеза ЦФ по заданным характеристикам
их аналоговых прототипов.
а) Синтез по заданной импульсной характеристике аналогового прототипа g(f).
ЦФ строится-с импульсной характеристикой, которая является результатом дискретиза-
ции g(f), т.е. её k-й отсчёт g(k) = g(k&). Если в импульсной характеристике ЦФ ограничиться
конечным числом слагаемых, получаем реализацию в виде трансверсального фильтра. При
неограниченном числе компонент g(k) следует реализация в виде рекурсивного ЦФ.
Рис.10.9. Каноническая схема реализации рекурсивного ЦФ
394
Пример. Пусть аналоговый фильтр представляет собой интегратор (звено 1-го порядка) с
импульсной характеристикой g(/) = ae-c“ (a > 0, / 2: 0).
Частотная характеристика этого фильтра £(jco)= • ^сли трансверсальный ЦФ
строить по двум отсчётам а, ае-**4, то его системная функция H(z) = а + ae^z-1, а ЧХ
£цф(>)=а+ae^e-j®4.
Если построить рекурсивный фильтр по всем отсчётам ае~а&к (к = 0, 1, 2, 3, ...), то его
системная функция Я(г)=а^е““4*г_* . Этот ряд сходится при |z| > е-"4 и равен
*-о
H(z) =----i ’ ЧХ полученного рекурсивного ЦФ первого порядка (с памятью М = 1)
1—е z
(10.68)
“о
ХцфО®) ’
б) Синтез ЦФ путём дискретизации дифференциального уравнения аналоговой системы.
Построение ЦФ сводится к переходу от заданного дифференциального уравнения к раз-
ностному уравнению.
Пример. Пусть аналоговая система описывается уравнением
5^^+2а^ + <ф(') = *(0.
Для £-го момента времени входное воздействие равно x(fc), а отклик фильтра у(к). Заме-
ним производные в (10.68) конечными разностями:
у(к)-у(к-1) d2y у(к) -у(к-1)- [y(fe -1) - у(к - 2)]
dt Д ’ dt2 Д2
Тогда разностное уравнение для (10.68) принимает вид
у(к) = а0 х(к)+1\ у(к -1)+Ь2 у(к - 2),
Д2 _ 2(1+аД) -1
где а0=---------о,=---------5----°2 =-------------ГТ-
1 + 2аД + о2Д2 1+2аД + ю2Д2 1 + 2аД + о2Д2
Полученное уравнение реализуется рекурсивным ЦФ второго порядка (М = 2) с систем-
ной функцией H(z) = 1 -2 ’
ЧХ полученного ЦФ
ХцфО®) - i-^e_jm4-&2e"2jw4 ‘
в) Синтез ЦФ по заданной частотной характеристике аналогового прототипа AQo) (или опера-
торного коэффициента передачи К(р)).
Принципиально нельзя создать ЦФ, частотная характеристика которого Ацф(]со) повто-
ряла бы частотную характеристику аналогового прототипа ^(jco,), так как Л7ЦФ()со) является
периодической функцией частоты дискретизации сод. Однако можно потребовать, чтобы весь
интервал частот <ва, характеризующий аналоговую цепь, был преобразован в отрезок частот соц
цифрового фильтра, на котором сохраняется форма характеристики ^(jco,), причём
“д “д
----<ю„<—
2 4 2
Если для перехода от ^-плоскости (отображающей аналоговый прототип) к z-плоскости
(отображающий цифровой фильтр) воспользоваться соотношением
z = ep4 или р = —Inz,
д
(10.69)
395
то формально мы от частотной характеристики аналогового эквивалента переходим к систем-
ной функции ЦФ. Однако, если р = — Inz подставить в выражение для передаточной функции
Д
аналогового прототипа К(р), которая для цепей с сосредоточенными параметрами представля-
ет собой отношение двух полиномов от р (дробно-рациональную функцию), получим физиче-
ски нереализуемую системную функцию ЦФ, так как она не выражается отношением двух
полиномов от z.
Надо найти такое преобразование р в z, которое привело бы к реализуемому фильтру, но
вместе с тем сохранило бы основное свойство преобразования (10.69): переводило бы точки
мнимой оси на плоскости р (точки jco) в точки единичной окружности в z-плоскости.
Для синтеза ЦФ получило распространение билинейное преобразование [24]:
2 z-1
(10.70)
Д z + 1
Для пояснения сути преобразования (10.70) положим z = е,<ВцЛ, т.е. комплексно-значные
точки z лежат на единичной окружности и характеризуются аргументом (угловым сдвигом)
ицД. Тогда правая часть (10.70) принимает вид
2 z-l_ 2 1-cosl
Д z + 1 Д
(10.71)
1+cost
Воспользовавшись формулой 1 - cos a = 2sin2a/2,
arctg ctg a - it/2 - arctg tg a = n/2 - a, можно (10.71) представить так:
м
2
1 + cos a — 2cos2a/2,
eJ2=j4tg
д
2 z-1 2
Д z + l~ Д tg
Последнему соотношению соответствует согласно (10.70) мнимая аналоговая часть joa,
следовательно,
2
д
<0цД
2
ЮцД
2
При выполнении неравенства
и цД «1
следует
(10.72)
(10.73)
иа»Иц. (10.74)
В общем случае надо учесть изменение масштаба по оси частот цифрового фильтра.
10.6. УЧЁТ ПОГРЕШНОСТИ ЦИФРОВОЙ ФИЛЬТРАЦИИ ИЗ-ЗА
КВАНТОВАНИЯ СИГНАЛОВ ПО УРОВНЯМ
Появление в последние годы быстродействующих широкополосных многоразрядных про-
цессоров цифровой обработки сигналов (сигнальных процессоров) самых различных типов
практически сделало возможным цифровую обработку не только сигналов речи и вещания, но
и телевидения. Тем не менее необходимо учитывать погрешности работы ЦФ, обусловленные
квантованием уровней сигналов.
Пусть Хщах и Хпцд — наибольшее и наименьшее значения сигнала на входе схемы аналого-
вого-цифрового преобразователя (АЦП). Если для квантования сигналов используется L
уровней, то при равномерном квантовании шаг квантования
д _ *m»x ~ -*min
х~ L
Квантованные отсчёты х^(к) описывают мгновенные значения аналогового дискретного
сигнала х(к) с определённой погрешностью (с шумом квантования): s(k)- ха(к)-х(к),
которая уменьшается (по модулю) с уменьшением Дх. Будем считать, что квантователь работа-
ет по следующему правилу: в качестве дискретного принимается уровень, ближайший к ис-
тинному. Если действительный входной уровень х(к) находится в середине между дискретны-
ми уровнями с номерами I и (/ + 1) — выбирается любой из них. Ясно, что при оговоренных
условиях погрешность евх(Л) лежит в границах
396
Д . Д>
---— < £ < —— .
2 вх 2
Чаще всего считается, что случайная погрешность Е^ (при различных fc) равномерно pac-
д. Д
пределена на отрезке
- ___________________________________________
,—я~ . Тогда её МО равно нулю, а дисперсия ст2х = Е2Х = .
2 2 _ 12
Определим погрешность работы линейного стационарного ЦФ, обусловленную шумом
квантования. Дискретный выходной отсчёт ЦФ, обусловленный шумом квантования EBX(fc),
согласно (10.41) равен sBHX(/)= 2jg(*)8“(/_*) ’
*-о
Математическое ожидание, выходного шума = 0. Для нахождения дисперсии выход-
ного шума ст2вых предположим, что отдельные отсчёты входного шума EBX(fc) — независимые
Д2
случайные величины с равномерным распределением и дисперсией o^(fc) = . Тогда
2 ®
1Z *=0
Выходной шум ЦФ, обусловленный квантованием сигнала, тем меньше, чем быстрее
убывают отсчёты импульсной характеристики фильтра.
Относительную погрешность ЦФ, обусловленную шумом квантования, можно опреде-
лить:
(10.75)
Оценим влияние шума квантования на работу Цифрового пе-
ремножителя (рис. 10.10)
Из-за шума квантования квантованные отсчёты входного и
опорного сигналов можно записать в виде
M*) = x(*)+8»(4 /KB(fc) = /(fc)+e/(fc). Тогда
*КВ (*)Ав (к) = Х(к)Дк) + X(k)S f (к) + f(k)S* (к) + (k)S f (к)
Ошибка цифрового перемножителя из-за шума квантования
EBMX(fc) = x(fc)Ey(fc)+/(fc)Ex(fc) + Ex(fc)E y(fc).
Xfc)
Рис. 10.10. Схема цифрового
перемножителя
При сделанных выше предположениях о шуме квантования МО Eaux(fc) = 0. Предполагая
шумы квантования сигналов x(t) и ДО независимыми стационарными случайными процесса-
ми, получаем для дисперсии выходного шума перемножителя:
= E2aux(fc) = x2(fc)E} +f2(k№ .
Если сигналы хЦ) и ДО квантуются с одинаковым шагом Дх -\f=q, то
2
1+-----------------
12(x2(fc)+ /2(fc))
Относительная погрешность работы цифрового перемножителя, обусловленная шумом
квантования,
5 _ CTnep _ g2 x2(fc) + /2(fc) q2 ll2
x(fc)/(fc)' 12 x2(fc)/2(fc) [ l2(x2(fc) + /2(fc))]
ВЫВОДЫ
1. Устройство ЦОС обладает рядом преимуществ перед устройствами обработки сигналов в
непрерывном времени и широко применяется на практике в системах передачи как дис-
кретных, так и непрерывных сообщений.
397
2. Особенно широко применяются в системах связи линейные стационарные ЦФ и цифровые
перемножители.
3. Спектр Фурье дискретного сигнала является периодической функцией частоты дискрети-
зации.
4. Линейчатый спектр дискретного финитного (периодического) сигнала с числом отчётов N
определяется дискретным преобразованием Фурье (ДПФ). Число компонент такого спек-
тра С„ равно N, а число амплитуд N/2. По спектральным компонентам С„ дискретные от-
счёты сигнала х(к) определяются через ОДПФ.
5. Существуют методы быстрого преобразования Фурье (БПФ), позволяющие существенно
сократить число операций, выполняемых при расчёте ЦФ спектральными методами.
6. При анализе и синтезе ЦФ широко используется z-преобразование для получения спек-
тральных характеристик входного и выходного сигналов и самого цифрового фильтра (его
системной функцией H(z)). Обратным z-преобразованием определяются временные харак-
теристики входных и выходных сигналов, а также ЦФ.
7. Частотный коэффициент передачи ЦФ определяется системной функцией фильтра при
z=eP\ '
8. Линейные стационарные цифровые фильтры с финитной импульсной характеристикой
реализуются трансверсальной схемой, а с неограниченной импульсной характеристикой —
рекурсивной схемы (с обратной связью с выхода на вход).
9. Рекурсивные цифровые фильтры устойчивы, если все корни полинома знаменателя сис-
темной функции H(z) лежат внутри единичного круга с центром в начале координат.
10. ЦФ часто строятся по аналоговому эквиваленту. Находят применение методы синтеза ЦФ
по заданной импульсной характеристике аналогового эквивалента, по заданному диффе-
ренциальному уравнению аналогового эквивалента, по заданной частотной характеристике
аналогового эквивалента.
11. Выходной шум ЦФ, обусловленный квантованием, тем меньше, чем быстрее убывают
отсчёты импульсной характеристики фильтра.
12. Выходной шум цифрового перемножителя зависит как от значений отсчётов перемножае-
мых сигналов, так и от их шумовых компонент.
ВОПРОСЫ, ЗАДАЧИ И УПРАЖНЕНИЯ
10.1. Дискретный сигнал определяется на интервале своей периодичности Т шестью равно-
стоящими отсчётами {%(&)} = (1, —1, —1, 0, 0, 0). Найти коэффициенты ДПФ. Восстано-
вить по ним сигнал x(f) и построить его график.
10.2. Во сколько раз ц можно сократить число операций (умножений) при осуществлении
ДПФ методом БПФ? Найдите значение ц при массиве N = 1000 и N= 10000.
10.3. На вход цифрового фильтра поступает дискретный сигнал хд(/) = {1, 0, 1}. Импульсная
характеристика ЦФ g(f) — {1, —1}. Найдите отклик фильтра методом дискретной свёртки
и методом z-преобразования.
10.4. Задано z-преобразование X(z)=l + l/z-1/z2. Найти отсчёты дискретного сигнала {*(&)},
соответствующие X(z).
10.5. Трансверсальный фильтр построен по трем первым отсчётам функции х(/) = ае~“г
(а > 0, t > 0) в точках t = 0, t - Д, t = 2Д. Найти АЧХ трансверсального фильтра, по-
стройте его график. Сравните с АЧХ рекурсивного фильтра, использующего все отсчёты
функции х(0-
10.6. Покажите, что область устойчивости рекурсивного ЦФ второго порядка с системной
функцией H(z) =------(до, Ьг — вещественные
1—t\z -b2z
числа) лежит внутри треугольника рис. 10.11.
10.7. Для рекурсивного фильтра предыдущей задачи найдите
обратным z-преобразованием все отсчёты импульсной ха-
рактеристики.
10.8. Задана передаточная функция ФНЧ Баттерворда 2-го по-
ш2
рядка с частотой среза шс: К(р) = —т—Мето-
р +'V2a>(,p+a>2
Рис. 10.11. Область устойчивости
рекурсивного ЦФ 2-го порядка
398
дом билинейного преобразования найдите системную функцию эквивалентного ЦФ, а
затем ЧХ ЦФ. Сравните АЧХ ЦФ и аналогового прототипа при шс = 104(с-1).
10.9. Интерпретируя запись ЧХ стационарного ЦФ (при нормированной частоте v = шД)
£цФ(Я=я(е*)= (Ю.76)
Л=я-00
как представление периодической функции (с периодом 2я) в ряд Фурье, покажите, что
коэффициенты разложения g(ri) (определяющие ИХ фильтра) можно найти из соотно-
шения
(10.77)
-л
10.10. Выполнив преобразование Переменной eiv-z, покажите, что (10.77) совпадает с резуль-
татом (10.38). Контур интегрирования в (10.38) по переменной z-окружность единич-
ного радиуса с центром в начале координат.
10.11. Нормированная ЧХ ЦФ Ацф(]у) = £(v)ej<₽^ задана на периоде (-7t<v<+?t) соотношени-
ем (Хо и К\ - константы)
Согласно (10.77) найдите значения g(n) при п = -3, -2, -1, 0,-1, 2, 3 (число отсчётов ИХ
N = 7). Найдите согласно (10.76) аппроксимацию ЧХ фильтра и постройте его АЧХ.
Убедитесь в существовании выбросов и пульсаций в полученной характеристике до и
после точек разрыва (известное из курса высшей математики явление Гиббса).
10.12. Используя функцию взвешивания у(л,У)= , найдите сглаженные коэффициен-
nn/N
ты g(n) для задачи (10.11) по формуле g(«)=g(«)v(«,y). По сглаженным коэффициентам
найдите ЧХ ЦФ, постройте его АЧХ и убедитесь, что явление Гиббса ослаблено.
10.13. Методом инвариантной импульсной характеристики ЦФ и аналогового прототипа по-
кажите, что если передаточная функция аналогового фильтра представима в виде суммы
L-l L-1
H{z) =
1=0 ' Ч 1=0 1 w
суйте схему реализации ЦФ с найденной системной функцией.
10.14. Системная функция цифрового фильтра имеет два нуля в точках z12 = 1± j и три полюса
52----£л—Г • Нари-
простых дробей К(р) = /7—-—, то системная функция ЦФ
в точках z, = -0,3, z2 3 = 0,5 ± j 0,2 , а коэффициент а0 = 1. Найдите АЧХ фильтра в децибе-
лах.
10.15. Найдите относительную погрешность рекурсивного ЦФ из задачи 10.7 при bi= b? = 0,5,
ао= 1, обусловленную шумом квантования, если выходной сигнальный отсчёт
y(k) = 1 В, а шаг квантования Дх = 0,001 В.
10.16. Найдите относительную погрешность цифрового перемножителя, обусловленную шумом
квантования, если отсчёты входного и опорного сигналов x(k) = flk) = 1 В, а шаг кванто-
вания q = 0,01 В.
399
ГЛАВА 11. АНАЛИЗ ЭФФЕКТИВНОСТИ И
ОПТИМИЗАЦИЯ СИСТЕМ СВЯЗИ
11.1. ПРИНЦИПЫ СИСТЕМНОГО АНАЛИЗА
Современные системы передачи информации (СПИ) представляют собой
сложные комплексы, состоящие из различных функционально зависимых, эле-
ментов. Эти системы характеризуются не только большим числом элементов,
но и иерархичностью структуры, наличием между элементами прямых, обрат-
ных и перекрестных связей. В предыдущих главах мы изучали отдельные уст-
ройства (элементы) СПИ и процессы, происходящие в них. В результате по-
элементного анализа получены алгоритмы функционирования отдельно моду-
лятора и демодулятора, соответственно кодера и декодера. Синтезирован опти-
мальный приёмник для приёма как дискретных, так и непрерывных сигналов.
Рассмотрены основы многоканальной связи и распределения информации, ос-
новы цифровой обработки сигналов. Теперь необходимо рассмотреть работу
системы в целом. Определить алгоритмы её функционирования с учётом взаи-
модействия и свойств входящих в нее элементов. Дать оценку эффективности
работы системы в целом и определить пути её оптимизации. Для решения та-
ких задач необходим системный подход (системный анализ).
Принцип системного подхода базируется на представлении объекта как
сложной системы с учётом её специфических связей и свойств. Система опре-
деляется как целостное образование, состоящее из связанных между собой
элементов. Поэтому система обладает собственными свойствами, не вытекаю-
щими непосредственно из свойств её элементов. Главное свойство системы —
её законченность, которая рассматривается как целостность. Концепция целост-
ности является основой методологии системного подхода. Специфика сложной
системы не исчерпывается особенностями составляющих её элементов, а свя-
зана прежде всего с характером взаимосвязей между элементами. Совокупность
устойчивых связей между элементами, определяющих целостность и основные
свойства системы, образует структуру системы.
При системном подходе любой объект рассматривается как некоторая сис-
тема, которую можно разделить на подсистемы. Каждая из этих подсистем мо-
жет быть разделена на подсистемы более нйзкого уровня и т.д. Система, как
говорят, имеет иерархическую структуру. Так, передающее и приёмное устрой-
ства являются подсистемами СПИ, а кодер и модулятор — подсистемами пере-
дающего устройства и т.п.
Свойства системы прежде всего определяются её целевым назначением
(целями функционирования'), которое трактуется как совокупность задач, решае-
мых данной системой. Для получения желаемого результата необходимо со-
вершить определённую совокупность операций, направленных на достижение
поставленной задачи. Эти операции реализуются за счёт использования неко-
торых ресурсов системы. В СПИ такими операциями являются кодирование,
модуляция, усиление сигнала, демодуляция, декодирование, селекция сигналов
и т.п., а ресурсами системы являются мощность сигнала и полоса частот кана-
ла. Все признаки сложной системы имеет и СПИ. Однако СПИ как техниче-
ская система имеет ряд специфических особенностей. Наиболее существенны-
ми из них являются объект (продукт) передачи и среда (условия). Объектом
400
передачи в СПИ является информация, природа которой чрезвычайно сложна,
и наши знания о ней пока лишь самые общие. Определить количественную
меру информации с учётом её ценности, а тем более семантики весьма затруд-
нительно. В гл. 6 была определена количественная мера информации по Шен-
нону как мера непредсказуемости {неопределённости). Известны и другие коли-
чественные оценки информации — мера разнообразия по Хартли, алгоритмиче-
ская мера Колмогорова. В работах А.А. Харкевича и Р.Л. Стратоновича сделана
попытка определить ценность информации [27].
Среда в СПИ - это не только линия (среда распространения сигнала), ис-
пользуемая для передачи сигналов от передатчика к приёмнику, но и другие
системы естественного и искусственного происхождения, оказывающие опре-
делённые воздействия на СПИ. Обычно это мешающие воздействия (помехи и
искажения), затрудняющие качественную передачу информации по каналу свя-
зи. Необходимость борьбы с вредными воздействиями помех существенно ус-
ложняет СПИ.
Для исследования того или иного явления или технического объекта (в на-
шем случае — СПИ) создаётся модель объекта, в которой отображены наиболее
существенные свойства и признаки объекта. Модель представляет собой отра-
жение системы, её образ, используемый для решения задач анализа и синтеза
реальной системы. В зависимости от задач и целей моделирования оно может
производиться на различных уровнях абстракции. Модель используется для по-
следующих теоретических и экспериментальных исследований системы. В про-
цессе этих исследований модель может совершенствоваться с целью более пол-
ного отражения свойств реальной системы.
Модель — это частичное или полное описание системы, представленное в
виде схем, чертежей, математических формул (соотношений), имитационных
программ для ЭВМ и т.п. Математическая модель технической системы пред-
ставляет собой совокупность математических соотношений, отображающих
структуру системы, алгоритмы её функционирования, статистические характе-
ристики канала, сигнала и помех, технические и экономические показатели
системы.
Стохастический характер помех и непредсказуемость сообщений и сигналов
обусловливают широкое использование вероятностных моделей.
Простой и удобной для математического анализа является модель СПИ (см. рис. 1.2), в
которой канал полагается гауссовским (канал без искажений при наличий только аддитивного
гауссовского белого шума). Эта модель позволяет описать систему в самом общем виде и ус-
тановить общие закономерности передачи информации по каналу связи. Передающее устрой-
ство преобразует сообщение а, выдаваемое источником, в сигнал u(t): u = v(a) (v — оператор
формирования сигнала). В канале на сигнал воздействует помеха n(f), образуя принимаемый
сигнал z(f) = J(«(/),n(0) (J — оператор взаимодействия сигнала с помехой, в частном случае
J — и + л). Приёмник по принятому колебанию z{f) формирует оценку а переданного сооб-
щения а\
а = W(z) = w{j[v(a),«]}.
Здесь W — оператор приёма (восстановления) переданного сообщения. В теории инфор-
мации (Гл. 6) установлено, что операторы V и W выполняют соответственно операции коди-
рования (в широком смысле) и декодирования, Показана важнейшая роль кодирования как
средства, с помощью которого возможно построение высокоэффективных СПИ. Фундамен-
тальными понятиями, определяющими потенциальные возможности кодирования источника
и кодирования канала, являются энтропия источника и пропускная способность канала. Энтро-
пия источника Н(А) определяет минимальное количество двоичных единиц (бит), необходи-
мое для кодирования (представления) источника, а пропускная способность канала С
401
определяет максимальную скорость, при которой ещё возможна передача сообщений по ка-
налу с шумами со сколь угодно малой ошибкой (теорема Шеннона). Однако теоремы Шен-
нона не являются конструктивными. Они устанавливают лишь общие закономерности пере-
дачи информации по каналу с шумами, определяют предельные возможности такой передачи.
Для разработки алгоритмов функционирования СПИ потребовалась модель, которая
представлена на рис. 1.5. Эта модель получена путём декомпозиции обобщённой модели
рис. 1.2. В ней выделены блоки, связанные с кодированием и модуляцией, введены понятия
непрерывного (НК) и дискретного (ДК) канала. Непрерывный канал включает в себя не
только линию (канал в узком смысле), но и канальные устройства КУ (полосовые фильтры,
усилители, корректоры, компенсаторы помех и т.п.). Такая модель позволяет рассматривать
независимо процесс кодирования-декодирования (кодек) и процесс модуляции-демодуляции
(модем). На этой основе развивались теория кодирования и теория помехоустойчивости. В
результате оказалось возможным разрабатывать алгоритмы работы различных кодеков и мо-
демов, осуществить их раздельную оптимизацию.- При этом широко используются методы как
анализа, так и синтеза. Поиск наилучшего кода, например, осуществляется чаще всего путём
анализа (перебора) возможных вариантов, В то время как оптимизация приёмника (методов
обработки сигнала) решена методом синтеза. В теории потенциальной помехоустойчивости
Котельникова использовались оба метода — методом синтеза определяются алгоритмы опти-
мальной обработки сигнала, а методом анализа (сравнения) определены оптимальные сигна-
лы. В частности, показано, что в детерминированном, неискажённом канале с БГШ среди
бинарных сигналов оптимальными являются противоположные, а среди многопозиционных —
эквидистантные симплексные или близкие к ним по качеству ортогональные сигналы. Ана-
логичные задачи решаются для аналоговых систем. Методы анализа широко используются
при исследовании цифровых и многоканальных систем.
Следует подчеркнуть, что раздельная оптимизация элементов системы не гарантирует оп-
тимизации системы в целом. Для системного анализа характерен переход от анализа отдель-
ных элементов (блоков) к анализу альтернативных вариантов-построения системы как еди-
ного целого с интеграционной оценкой их эффективности.
11.2. ХАРАКТЕРИСТИКИ И ПОКАЗАТЕЛИ ЭФФЕКТИВНОСТИ
СИСТЕМ ПЕРЕДАЧИ ИНФОРМАЦИИ
В настоящее время используются самые разнообразные системы передачи
информации. На основе современной теории можно предложить огромное ко-
личество возможных вариантов построения систем. Как из этого множества ва-
риантов выбрать наиболее целесообразный при заданных условиях? По каким
критериям следует делать этот выбор? Насколько оправдано применение тех
или иных новых систем и как совершенствовать существующие системы? Ре-
шение этих вопросов в конечном итоге сводится к решению задач оптимиза-
ции СПИ по тем или иным критериям. На современном этапе развития теории
связи оптимизация осуществляется раздельно для модемов и кодеков. Совмест-
ная оптимизация даёт возможность получить лучшие результаты, нежели раз-
дельная оптимизация. Однако решить эту задачу в общем случае пока не удаёт-
ся. Поэтому оптимизацию отдельных блоков системы осуществляют чаще всего
с учётом взаимодействия и свойств других блоков, добиваясь максимальной
эффективности системы в целом. Такая многошаговая процедура позволяет по-
лучить результаты, близкие к оптимальным.
В качестве критерия качества (верности) систем передачи дискретных со-
общений обычно используется критерий минимума средней вероятности
ошибки. Этот критерий является удобным, когда речь идёт об оптимизации
СПИ без кодирования. В таких системах задача минимизации вероятностей
ошибки сводится к оптимизации модема при заданной скорости передачи. В
системах, в которых используется кодирование источника с целью сокращения
избыточности, или помехоустойчивое кодирование в канале, или то и другое
402
вместе, оптимизация системы на основе традиционного критерия минимума
средней вероятности ошибки становится затруднительной.
В общем случае эффективность любой системы определяется количеством
и качеством выдаваемой продукции. В СПИ такой продукцией является пере-
даваемая информация. Количество её определяется средней скоростью переда-
чи 7?и (бит/с), а качество — величиной ошибки. Согласно теореме оптимально-
го кодирования можно в принципе всегда обеспечить вероятность ошибки
р < рдол, где рдоа — её допустимое значение. Скорость же передачи информации
7?и не может быть больше пропускной способности канала С. Отсюда следует,
что важнейшим показателем эффективности СПИ является скорость 7?и, при
которой обеспечивается заданная верность (ошибка рдоа) передачи.
Скорость передачи информации целесообразно оценивать не в абсолютных,
а в относительных единицах:
n = (ill)
Показатель д называется информационной эффективностью системы — он
определяет степень использования пропускной способности канала. Очевидно,
д всегда меньше единицы (д< 1); чем ближе д к единице, тем совершеннее сис-
тема.
Необходимые скорость и верность передачи достигаются определёнными
затратами мощности сигнала Рс и полосы частот канала F. Поэтому вводятся
(см. § 5.11) ещё два показателя: р = -у — показатель, характеризующий исполь-
К
зование канала по мощности (энергетическая эффективность), и у — показа-
тель, характеризующий использование канала по полосе частот (частотная эф-
фективность):
У=^,
(11.3)
где Nq ~ спектральная плотность шума на положительных частотах. Как видим,
показатели 0 и у имеют смысл удельных скоростей (количество бит/с, прихо-
дящихся на 1 Вт мощности сигнала, отнесённое к спектральной плотности
шума и количество бит/с, приходящееся на 1 Гц полосы частот канала). Об-
ратные величины h2 = и 0 = /Р определяют количество ватт, отнесённое к Nq
и, соответственно, количество герц, затрачиваемых на передачу 1 бит/с инфор-
мации.
Легко установить связь между введёнными показателями эффективности д,
Р и у. Для гауссовского непрерывного канала (ГНК) согласно (6.83)
р
С'= Flog2(p + 1), где р = —— отношение средних мощностей сигнала и шума,
- ш
для квазибелого шума Pm = NGF. Тогда в соответствии с Выражением (11.1),
(11.2) и (11.3) имеем
У
log2(y/P + l)’
(И.4)
403
У=РЗ- (И.5)
Согласно теореме Шеннона при соответствующих способах передачи
(кодирования и модуляции) и приёма (демодуляции и декодирования) величи-
на т] (при сколь угодно малой ошибке) может быть сколь угодно близкой к
единице. При т] = I получаем предельную зависимость между 0 и у, уже встре-
чавшуюся в гл. 6:
3 = ^1- (11.6)
Эту зависимость удобно представить в виде кривой на плоскости 0у
(рис. 11.1). Полученная кривая является предельной и отражает наилучший
обмен между 0 и у в непрерывном канале .(НК). Следует подчеркнуть, что час-
тотная эффективность у изменяется в пределах от 0 до оо, в то время как энер-
гетическая эффективность ограничена сверху (соответственно показатель /? = —
ограничен снизу):
РП11Х = limp = lim—г— = » 1,443.
2^ -1 1ц 2
Аналогичные пределы зависимости р = /(у) можно получить и для других
моделей канала, если использовать формулу для пропускной способности соот-
ветствующего канала. Например, для дискретно-непрерывного канала (ДНК),
вход которого определяет выход кодера на передаче, а выход — непрерывный
сигнал вместе с гауссовским шумом на выходе согласованного фильтра на
приёме; для /nCK-канала, образованного расширением непрерывного канала за
счёт включения на входе модулятора, а на выходе демодулятора.
Рис. 11.1. Кривые энергетической и частотной эффективности цифровых систем связи
404
Эффективность систем передачи дискретных сообщений. В системах переда-
чи дискретных сообщений (СПДС) сигнал формируется с помощью кодирова-
ния и модуляции. При этом кодирование осуществляется обычно в два этапа:
кодирование источника с целью сокращения его избыточности жи и кодирова-
ние канала с целью уменьшения ошибки (за счёт введения избыточности кода
зек). Соответственно кодек на схеме рис. 1.5 состоит из двух кодеков: источни-
ка и канала. Тогда выражение (11.1) для информационной эффективности
СПДС можно представить в. виде произведения
П = “- = ПкиПккПм, (11-7)
где Л™ = 1 “ хи — эффективность кодера источника; t|„ = 1-зек — эффективность
кодера канала, т}м — эффективность модема, зависящая от вида модуляции и
способу обработки сигнала в канале.
Средняя скорость передачи информации в системе при использовании
_ log,™
многопозиционных сигналов длительностью Т равна 7^ = —-—R (бит/с), где
R=kfn — скорость кода. Тогда
П_ Rte&m _ 1
Р PJN. EJN. Eb/N0’
(11.8)
R _log2 m
F = 7F ’
(П.9)
где Ee = PcT=EbRlog2m - энергия сигнала Eb =
E
T?log2m
энергия, затрачивае-
мая на передачу одного бита информации (битовая энергия). Значения
Л’ = Eb/N0 вычисляются в заданном канале по формулам или соответствующим
графикам для вероятности ошибки р = f(h2 = h2Rlog2 m) (см. гл. 5).
На рис. 11.1 приведены предельные кривые для симметричных /и-ичных
каналов (/иСК) и ДНК1) Р = /(у) -каналов при /и = 2и/и = 4и примитивном
кодировании (R = 1). Ограничение объёма алфавита канальных сигналов, как
видно, прежде всего ведёт к ограничению частотной эффективности. Для кана-
ла с минимально необходимой полосой Найквиста F= \/7.Т согласно (11.9),
Ym»x = 21og2m. Для двоичного канала {ш = 2) утах = 2 бит/с Гц предел Найкви-
ста). В ДНК при у->0 кривая энергетической эффективности 0 асимптотически
приближается к предельной кривой гауссовского непрерывного канала (ГНК).
При логарифмическом масштабе в соответствии с соотношением у = рР
(см.(11.5)) зависимости р от у при одинаковых значениях превышения сигна-
лов над шумом р отображаются прямыми с углом наклона л/4.
В реальных системах ошибка всегда имеет конечное значение и t] < 1. В
этих случаях при заданной вероятности ошибки можно определить отдельно Р
и у и построить кривые р = Ду). В координатах Р и у каждому варианту реаль-
ной системы будет соответствовать точка на плоскости. Все эти точки (кривые)
11 Выходом ДНК считается согласованный фильтр в оптимальной схеме приёма дискретных
сообщений (см. гл. 5).
405
располагаются ниже предельной кривой Шеннона и ниже предельных кривых
т С К и ДНК. Ход этих кривых зависит от вида сигналов (модуляции), кода и
способа обработки сигналов.
Цифры на кривых рис. 11.1 указывают число позиций дискретного сигнала.
Кривые рассчитаны на основании (11.8), (11.9) и формул гл. 5 для оптималь-
ного приёма сигналов при равной априорной вероятности их передачи и веро-
ятности ошибки на бит (или эквивалентной вероятности ошибки, см. 5,1.1)
рь = 10~5. При этом принималось: занимаемая полоса частот F = m/(Tlog2m) для
ЧМ и F = l/(nog2w) для ФМ. Для расчёта энергетической эффективности
удобно пользоваться кривыми помехоустойчивости для неискажающих каналов
с БГШ рь = /(/?), которые приведены на рис. 11.2 для некоторых ансамблей
сигналов.
Из рис. 11.1 следует, что в системах с ЧМ при увеличении числа позиций т
энергетическая эффективность р увеличивается, а частотная эффективность у
уменьшается. В системах с ФМ и ОФМ, наоборот, с увеличением т коэффи-
циент Р уменьшается, а у — увеличивается. Таким образом, условия обмена Р
на у за сдёт изменения числа сигналов с ЧМ и ФМ различные. При частотно-
фазовой модуляции (ЧФМ) достигается некоторый компромисс в получении
необходимых значений р и у. Элементарным сигналом при ЧФМ является ко-
лебание одной из п частот, фаза которого принимает одно из тф фиксирован-
ных значений. Общее число сигналов в ансамбле равно т = птф. На кривой
для ЧФМ первая цифра указывает число частотных позиций, а вторая — число
позиций фазы.
Полученные таким образом Ру-номограммы позволяют определить системы,
удовлетворяющие заданным требованиям по энергетической и частотной эф-
фективности, и установить, насколько эти показатели близки к предельным.
Анализ предельных кривых показывает, что эффективность дискретных систем
передачи можно существенно по-
высить, если в месте приёма при-
нять решения о переданных сим-
волах с использованием знания
непрерывного сигнала на выходе
СФ (обработка в ДНК канале) и
вместо двоичных применить мно-
гопозиционные сигналы (т > 2).
Совокупность кривых р =Ду)
позволяет выбрать наилучшую
систему при заданных ограниче-
ниях на верность передачи. После
того как выбрана система по по-
казателям р и у, по формуле
(11.4) можно вычислить инфор-
мационную эффективность. Так,
по данным рис. 11.1 имеем:
Ч « 0,23 для АМ-2; 0,15 для ЧМ-2;
0,25 для ФМ-2 и 0,47 для ФМ-4.
В § 5.11 мы ввели понятие
406
энергетического выигрыша (проигрыша) одной системы над другой. Энергети-
ческий выигрыш системы (ЭВС) при переходе от z-й системы к у-й при
рь= рз= const определяется как
f/г2 Л ГрД
эвс = 1оЦлЛ =д^=Л5л-л’уд1 = 1(>Ц^ = др,ь=0;д1-р,дЬ. (п.ю)
Введём также в рассмотрение выигрыш по удельной скорости (частотной
эффективности)
При R* = const выигрыш по удельной скорости равен выигрышу по полосе частот F:
AYдБ = i°ig
Эффективность аналоговых систем передачи и отдельных разновидностей систем разделе-
ния сигналов. В системах передачи непрерывных сообщений скорость R„ определяется эпси-
лон-производительностью источника Я'. Для гауссовского источника - согласно (6.84)
/?и = щ = Fe log2 рвых. Тогда формулу (11.1) для информационной эффективности можно запи-
сать в следующем виде:
И
10&Рвых вых
—7------у. «=—.
alogj^ + l S'
Таблица 11.1
Система модуляции и 8 Рвых £=— Рвх 0q_ II Р |оч j и
AM 2 0,2 0,1 0,42
БМ 2 2 1 0,50
ОМ 1 1 1 1
ФМ 20 222 11,1 0,12
ЧМ 20 666 33,3 0,17
ФИМ-АМ 20 666 33,3 0,17
ИКМ-АМ 20 250 12,5 0,23
ИКМ-ЧМ 20 500 25 0,32
ИКМ-ФМ 20 1000 50 0,48
ИС 20 6310 315 1
В табл. 11.1 приведены результаты .расчёта выигрыша g, обобщённого выигрыша g' и ин-
формационной эффективности т| для некоторых систем передачи непрерывных сообщений
при заданном значении рвых = 40дБ. Выигрыш g и обобщённый выигрыш g' рассчитывались
по соответствующим формулам гл.8 для оптимального приёма сигналов. При этом полагалось,
что во всех системах передаётся одно и то же сообщение с наивысшей частотой Fc и пик-
фактором П — 3. Для сравнения приведены также результаты для идеальной системы (ИС).
Анализ полученных данных показывает, что наибольшая информационная эффектив-
ность достигается в однополосной системе. Однако помехоустойчивость этой системы
(величина выигрыша), так же как и систем БМ и AM, сравнительно низкая и верность пере-
дачи может быть повышена лишь за счёт увеличения мощности сигнала. Напомним читателю,
что порог помехоустойчивости в системе ОМ отсутствует, а в системе AM он выражен слабо.
Одноканальные системы ЧМ и ФИМ примерно равноценны. В этих системах, а также в
цифровых системах передачи непрерывных сообщений с ИКМ высокая помехоустойчивость
407
достигается за счёт увеличения ширины спектра сигнала, т.е. за счёт частотной избыточности.
Во всех этих системах резко выражен порог помехоустойчивости (см. рис. 8.4).
На рис. 11.3 приведены кривые эффективности р = Ду) для аналоговых и цифровых сис-
тем передачи непрерывных сообщений. Эти кривые рассчитывались по формулам
p_glOg2PMJx. .. _ 10g2 Рвых
аРвых ’ а
Для аналоговых систем цифры на кривых ука-
зывают значения а = F/Fe , а цифры в скобках —
значения рвых. В пороговой области кривые для
ЧМ изображены пунктиром. Работу в этой облас-
ти можно реализовать при следящем приёме (см.
§ 8.7).
Для цифровых систем передачи непрерывных
сообщений расчёты производились для случая
минимально необходимых полос канала F. Прак-
тически это соответствует каналу, в котором меж-
символьные помехи полностью скорректированы.
Здесь цифры на кривых указывают основание ко-
да. Кривые рассчитаны для вероятности ошибки
ръ = 10“5, что соответствует отношению сигнала к
шуму рвых~36дБ при равенстве мощностей шума
квантования и шума ложных импульсов Е^ = Е2та .
Из рис. 11.3 видно, что эффективность реаль-
ных систем существенно ниже предела Шеннона.
Характер обмена между р и у (ход кривых эффек-
тивности) зависит от вида модуляции (сигнала) и
(1113)
-8 -4 0 4 8 У, дБ
Рис. 11.3. Кривые энергетической
и частотной эффективности аналоговых
и цифровых систем связи
кода.
В системах космической связи определяющим
является требование, согласно которому необхо-
димо обеспечить наилучшее использование мощ-
ности сигнала при заданной верности передачи.
Этому условию наиболее полно удовлетворяют цифровые системы с ФМ и ОФМ. Эффектив-
ность этих систем, как будет показано в следующем параграфе, можно существенно повысить
за счёт корректирующих кодов. В системах проводной связи важнейшим показателем являет-
ся частотная эффективность у. Здесь определяющим является требование, согласно которому
необходимо добиться наилучшего использования полосы частот канала при заданной верно-
сти передачи. Этому условию наиболее полно отвечает однополосная модуляция (ОМ).
Аналоговые системы ОМ, AM и узкополосная ЧМ обеспечивают высокую частотную эф-
фективность у при сравнительно низкой энергетической эффективности р. Применение этих
систем целесообразно в каналах с хорошей энергетикой (при больших значениях рвх) или в
тех случаях, когда требуемое значение рвых мало. Цифровые системы обеспечивают высокую
Р-эффективность при достаточно хорошей у-эффекгивности. В' каналах с ограниченной
энергетикой (при малых значениях рвх) преимущества цифровых систем особенно заметны.
При высоком качестве передачи, когда требуемые значения рвых велики, широкополосная
ЧМ и цифровые системы обеспечивают примерно одинаковую эффективность.
В многоканальных системах эффективность связи снижается за счёт несовершенства сис-
темы разделения сигналов. Для таких систем можно пользоваться расчётными формулами
(Н-14)
п
n = nMnp = 2X>7c’
1=1
— усреднённая эффективность методов модуляции по всем каналам
408
Рис. 11.4. Кривые информационной эффективности методов разделения сигналов
(отношение средней скорости передачи информации в парциальном канале к средней пропу-
" С 1 "
скной способности парциального канала); т)р = =—У, С/
1=1 i=i
— эффективность метода разделения, которая определяется как сумма отношений пропускной
способности парциальных каналов к пропускной способности общего канала, а С' и С'( опре-
деляются для гауссовских каналов по формуле Шеннона. В общем случае зависит не толь-
ко от числа каналов п, но и от отношения сигнал-шум в канале р. Поэтому сравнивать раз-
ные методы разделения следует при одинаковых значениях р. На рис. 11.4 представлены ре-
зультаты расчётов для г\р при р = 10 дБ, пик-факгоре группового сигнала П = VI? и П = 4п .
Эти расчёты показывают, что наиболее эффективным является метод временного разделения-
(ВРК), менее эффективны — метод частотного разделения (ЧРК) и метод разделения по фор-
ме (РФК). При временном разделении в каждый момент времени передаётся один сигнал, и
поэтому пропускная способность не зависит от числа каналов. В такой системе при отсутст-
вии защитных промежутков между каналами т^— 1. При ЧРК пропускная способность канала
с ограниченной средней мощностью сигнала также не зависит от числа каналов и при отсут-
ствии защитных полос т\р = 1. Однако при ограничении пиковой мощности сигнала картина
резко меняется, и величина т\р падает с ростом п. При разделении по форме между парциаль-
ными каналами делится только мощность, полоса частот и время передачи используются од-
новременно всеми сигналами. В этом случае уменьшается с увеличением п, причём ампли-
тудное ограничение сигнала слабо влияет на эту зависимость.
11.3. ВЫБОР СИГНАЛОВ И ПОМЕХОУСТОЙЧИВЫХ кодов
Эффективность систем передачи дискретных сообщений можно существен-
но повысить путём применения многопозиционных сигналов и корректирую-
щих кодов. Выбор сигналов и кодов в этих случаях является определяющим
для построения высокоэффективных кодемов (согласованных между собой ко-
деков и модемов).
409
Многопозиционные сигналы. Ансамбль сигналов {^(0)# ео5П на отРезке t®» можно пред-
ставить в виде
(11.15)
j-i
здесь {<Pi(/)} — система базисных ортонормированных функций
Ч . . [о, <j,
j<p,.(%(/)*= j ,=
—Т/2 I- ’ .
где п — число измерений (отсчётов) на интервале Т (для финитных сигналов, энергия которых
почти полностью сосредоточена в полосе F, п = В ~ 2TF). Коэффициенты разложения в
(11.15) определяются как проекции вектора s,- на координатные оси <р^ :
т
о
Геометрически каждому сигналу ансамбля st(t) соответствует точка (или вектор) в п-
мерном пространстве с координатами (ад, ад, ..., а/Л), / = 0,/и-1. Энергия сигнала равна квад-
рату нормы:
т
ММ2>
о 7=1
а расстояние между сигналами
JT
J(s,(O-^(O) dt =
О
+ Ej 2Ry^E^E^
где
1 T
% =~TE^iSi^Sj(t)dt
(11.16)
(П-17)
s
(11.18)
— коэффициент взаимной корреляции рассматриваемых сигналов. В дальнейшем будем рас-
сматривать ансамбли сигналов с равной энергией Et = Е. Примером сигналов у которых сиг-
нальные точки (векторы) располагаются на прямой, являются двоичные противоположные
сигналы. Им соответствует две симметрично расположенные относительно начала координат
точки на прямой с координатами и (о,—/Ёj. Расстояние между сигналами dl2 = 2-у/Ё, а
коэффициент корреляции Лц = — Г. Двоичные ортогональные сигналы являются примером
сигналов, у которых сигнальные точки располагаются в плоскости. Им соответствуют два ор-
тогональных вектора на плоскости с координатами (jEfij и . Расстояние между сигна-
лами di2 = 41Ё, а коэффициент корреляции Т?12 = 0. —
Наиболее распространёнными многопозиционными сигналами являются ортогональные,
биортогональные и симплексные. Если сигнальные точки выбрать на линиях, совпадающих с
ортами q>7 на расстояниях 4Ё от начала координат, то получим систему ортогональных сиг-
налов. Число сигналов в таком ансамбле m = п.
Так, если принять
то согласно (11.6) sk(t) = ^— sino*/, 0 < t < Т, k =
т.е. сигналы являются отрезками гармонических колебаний разных частот ®i, ©2, •••, “m,
410
удовлетворяющих условию ортогональности. Это известные сигналы многочастотной модуля-
ции (МЧМ). Ортогональные сигналы образуют эквидистантную систему: расстояния между
любыми двумя сигнальными точками одинаковы и согласно выражению (11.17) равны
dy=j2E . Перспективным вариантом ЧМ сигналов являются частотно-манипулированные
сигналы с непрерывной фазой (ЧМ-НФ), которые мы рассмотрели в гл.З.
Биортогональные сигналы образуются по следующему правилу: к каждому ортогонально-
му сигналу добавляется противоположный. Здесь число сигналов т — 2п. Простейшим из
биортогональных является ансамбль с т = 4. Сигналы имеют одинаковые энергии, а сигналь-
ные точки располагаются на одинаковом расстоянии от начала координат. На амплитудно-
фазовой плоскости они образуют, квадратную сеть (на рис. 11.5 знаками "+" обозначено нача-
ло координат). При выборе в качестве базисных функций
Ф1(/) = 5/2£’/7’ cosco0Z и <p2(z) = -yjlE/T sin<o0t
сигналы этого ансамбля
52(z) = ^2Е/Т cos(co0Z + rt/4),
s2 (/) = ^2E/T cos^co ot+,
<s30 = 5/2£'/7' cos(o0Z-37t/4),
54(r) = ^2E/T cos^co
отличаются только начальными фазами. Это широко используемые сигналы с фазовой моду-
ляцией и числом позиций т = 4 (ФМ-4). Расстояние между ближайшими сигнальными точ-
ками этого ансамбля равно J2E , а между противоположными сигналами — 24Ё
Известные сигналы с амплитудно-фазовой модуляцией (АФМ —4) образуют круговую
сеть: три сигнала равномерно распределены по окружности, а четвёртый расположен в центре
окружности (рис. 11.5). В том же базисе они могут быть представлены так:
51(0 = 5/2Ж COS<W0f ,
s2 (/) = ^2Е/Т cos(a>0t + 2я/з),
(t) = ^2Е/Т cos(co0t + 4тг/з),
54(0=О.
Симплексные сигналы отстоят друг от друга на одинаковом расстоянии. В «-мерном про-
странстве они образуют правильный симплекс с числом вершин m = п + 1. В двумерном про-
странстве сигнальные точки лежат в вершинах равностороннего треугольника (рис. 11.5). Рас-
стояние между сигнальными точками симплексного ансамбля d = ^2(п + 1)Е/п . При и = 1 сим-
плексные сигналы совпадают с противоположными. Для ансамблей с большим объёмом m
(п »1) симплексные сигналы по своим свойствам и в частности по помехоустойчивости
близки к ортогональным [d« -J2E^. Многопозиционные сигналы с фазовой модуляцией (ФМ)
образуют круговую сеть с равномерным распределением точек по окружности (рис. 11.5). На
рис. 11.5 показано также расположение сигнальных точек в 8 позиционной системе с ампли-
тудно-фазовой модуляцией (АФМ-8).
S,(10) s,(00)
АФМ-8
АФМ-4 СИМПЛЕКС-3 ФМ-8
Рис. 11.5. Примеры ансамблей сигналов, отображаемых на амплитудно-фазовой плоскости
411
Построение ансамблей многопозиционных сигналов можно осуществить и на основе
двоичных последовательностей. Для этого обычно используют элементарную матрицу Адамара
(А), повторением которой трижды в позитивной и один раз в негативной форме можно уве-
личить размеры матрицы каждый раз вдвое и получить матрицу Б, которая представляет ан-
самбль ортогональных сигналов с т = 4:
'11 1 Г
1-11-1
11-1-1
Д -1 .-1 1,
' 1 1 1 Г
1-11-1
1 1 -1 -1
-11-11
-1 -1 1 1
<-11 1 ь
Каждая строка этой матрицы (последовательность двоичных символов) образует один
сигнал. Нетрудно проверить, что эти строки (сигналы) взаимно ортогональны. Дополняя мат-
рицу Б инверсиями строк, получаем матрицу В, представляющую ансамбль т — 8 биортого-
нальных сигналов. Аналогично строятся ансамбли с большим числом сигналов т. Симплекс-
ные сигналы также могут быть получены на основе двоичных последовательностей.
В асинхронно-адресных системах широко используются ансамбли "почти ортогональных"
сигналов, которые также формируются на основе двоичных последовательностей. Это извест-
ные рекуррентные псевдослучайные Af-последовательности, которые рассматривались в § 9.4.
> В § 5.5 получены главным образом выражения для вероятности ошибки при т = 2. Для
недвоичных систем (т > 2) получить такие простые выражения не удаётся. Для некоторых
ансамблей сигналов путём численного интегрирования получены графики зависимости
р = /(^э) ’ которые приведены на рис. 11.2. Для приближённых вычислений можно воспользо-
ваться верхней оценкой (5.60): рт < (т - 1)^2, где р^ ~ вероятность ошибки в двоичной систе-
ме, использующей сигналы so(O и ^(О.
Следует напомнить, что рт — это вероятность ошибочного приёма сигнала, а не символа
кода. Каждый многопозиционный сигнал содержит информацию о блоке, содержащем опре-
делённое число (v) двоичных сомволов. Так, при v = 2 (случай ФМ-4) будет четыре блока
01, 10, 00, И. Многопозиционные сигналы, соответствующие этим блокам, выбираются так,
чтобы минимизировать вероятность ошибки на двоичный символ (на бит) рь- Очевидно,
ошибки чаще будут происходить за счёт переходов в области соседних сигналов. Поэтому
блоки, соответствующие соседним сигналам, должны отличаться наименьшим числом двоич-
ных символов. Этому условию удовлетворяет манипуляционный код Грэя, пример которого
для ФМ-4 приведён на рис. 11.5. Здесь противоположным сигналам присвоены противопо-
ложные блоки 11 и 00, а соседним (ближайшим) 10 и 01. В этом случае переход из любой сиг-
нальной точки в соседнюю область приводит к ошибке в одном двоичном символе [2]. При
равновероятных ортогональных многопозиционных сигналах вероятность ошибки на бит вы-
числяется по следующей формуле:
2V-1 -•
Ръ=-^Рт> '' <П19)
2 х.-;..
где рт — вероятность ошибочного приёма многопозиционного сигнала ортогонального ан-
самбля.
При одном и том же способе приёма различные ансамбли сигналов будут
обеспечивать разную помехоустойчивость. Объясняется это особенностями
расположения границ областей правильного приёма, окружающих каждый сиг-
нал (рис. 5.1). Минимум средней вероятности ошибки достигается при разме-
щении границ на равных расстояниях от соседнцх сигнальных точек. Поиск
наилучшего ансамбля сводится к нахождению такого расположения сигналь-
ных точек, при котором области сигналов имеют наибольшую величину, наи-
более близки одна к другой по размерам и приближаются по форме к сферам.
Это известная в многомерной геометрии задача плотнейшей укладки одинако-
412
вых шаров в заданном объёме. Такое расположение обеспечивает одинаковую
вероятность ошибки любого сигнала (области сигналов одинаковы) и мини-
мальную среднюю энергию сигналов (области наиболее плотно упакованы).
На рис. 11.6 приведены Ру-диаграммы для некоторых ансамблей многопо-
зиционных сигналов. Значения энергетической эффективности определялись
по кривым помехоустойчивости рис. 11.2 для заданного значения вероятности
ошибки на бит рь = 10-5, а частотная эффективность определялась согласно
(П.9):
log^log;™
TF п ' '
Можно выделить два класса многопозиционных сигналов. К первому отне-
сем так называемые плотные сигналы, когда с ростом объёма ансамбля т при
фиксированной мерности п расстояние между сигнальными точками уменьша-
ется, а удельная скорость у согласно (11.20) возрастает при соответствующем
снижении энергетической эффективности р. py-номограммы таких сигналов
(многопозиционные ФМ и АФМ) приведены на рис. 11.6.
Ко второму классу отнесем биортогональные (БС), симплексные (СС) и
ортогональные (ОС) сигналы - это примеры "разнесённых" сигналов, когда с
увеличением т расстояние между сигнальными точками увеличивается и соот-
ветственно увеличивается энергетическая эффективность за счёт снижения час-
тотной эффективности у. Центральное место на диаграмме рис. 11.6 занимает
система с сигналами ФМ-4, которые относятся к классу биортогональных при
т = 4. Из простых систем — это наиболее эффективная система (у = 2,
р = —9,6 дБ, т] ® 0,47). В цифровых сетях система ФМ-4 является наиболее
Рис. 11.6. Кривые энергетической и частотной эффективности систем
с многопозиционными сигналами, корректирующими кодами
распространённой и приня-
та в качестве стандарта.
Поэтому при сравнитель-
ной оценке эффективности
систем целесообразно при-
нять за эталон систему с
ФМ-4. Если начало коор-
динат перенести в точку,
соответствующую ФМ-4, то
в новой системе координат
по вертикальной оси будет
отсчитываться энергетиче-
ский выигрыш Др рассмат-
риваемых систем по срав-
нению с ФМ-4, а по гори-
зонтальной оси — выигрыш
Ду по удельной скорости. В
этой системе координат все
возможные системы связи
можно условно разделить
на четыре группы, соответ-
ствующие четырём квад-
рантам на плоскости: 1)
малоэффективные системы
413
(Ill квадрант), имеющие относительно ФМ-4 проигрыш по р и у (например,
АМ-2, ЧМ-2); 2) системы с высокой энергетической эффективностью (II квад-
рант), обеспечивающие выигрыш по р и проигрыш по у (системы с корректи-
рующими кодами); 3) системы с высокой частотной эффективностью (IV квад-
рант), обеспечивающие выигрыш по у и проигрыш по р (системы с многопо-
зиционными ФМ и АФМ сигналами) и 4) высокоэффективные системы (I
квадрант), позволяющие получить одновременно выигрыш по обоим показате-
лям р и у (сложные сигнально-кодовые конструкции).
Приведённые на рис. 11.6 номограммы позволяют количественно оценить
обменный выигрыш (проигрыш) различных систем. Так применение биортого-
нальных сигналов с т = 16 позволяет получить энергетический выигрыш
Др = 2,4дБ в обмен на снижение удельной скорости р й у в 2 раза (3 дБ). Обмен
энергетической эффективности на частотную можно осуществить с помощью
многопозиционных сигналов с ФМ. Однако более эффективными являются
АФМ сигналы.
Корректирующие коды. Наряду с многопозиционными сигналами для по-
вышения эффективности СПИ широко используются помехоустойчивые коды.
Применение корректирующих кодов позволяет повысить верность передачи со-
общений или при заданной верности повысить энергетическую эффективность
системы. Последнее особенно важно для систем с малой энергетикой (систем
спутниковой и космической связи).
На практике используются как блоковые, так и непрерывные решётчатые коды. Среди
блоковых кодов наибольший интерес представляют циклические коды (в частности, коды
БЧХ), а среди непрерывных — свёрточные коды. Расчёт энергетической эффективности кода
(ЭВК) определяется по формулам, приведённым в гл. 7. При этом вероятность ошибки на бит
для данных сигналов в данном канале можно определить или как рэ или для симметричного
двоичного канала по формуле (7.67): рь = . В биномиальном двоичном канале (без памя-
п
ти) кратность исправляемой ошибки t = ——-. Отсюда для вероятности ошибочного декодиро-
2
вания рол » С'+1р'+1, где р — вероятность ошибочного приёма символа.
На рис. 11.6 приведены py-номограммы для циклического кода (БЧХ) и для
свёрточного кода (СК) с декодированием по алгоритму Витерби. Как видим,
применение циклического кода позволяет получить энергетический выигрыш
Др = 2...3 дБ, а свёрточного кода — Др = 5...6 дБ в обмен на снижение частотной
эффективности в 2 раза (3 дБ). Применение каскадных кодов, как показывают
расчёты, позволяет получить ещё больший энергетический выигрыш и сущест-
венно приблизиться к предельной кривой для двоичных систем. Энергетиче-
ский выигрыш Др от применения помехоустойчивого кодирования тем боль-
ше, чем выше требуемая верность передачи. Для непрерывного постоянного
канала с белым гауссовским шумом при требуемой вероятности ошибки
рь = 10"5 предельный энергетический выигрыш кодирования Др по сравнению
с ФМ без кодирования и при оптимальном когерентном приёме составляет
примерно 10 дБ. При современной элементной базе затраты на реализацию ко-
дирующих и декодирующих устройств значительно сократились. В то же время
стоимость энергетики канала практически не изменилась. Таким образом,
414
"цена" выигрыша Др за счёт кодирования может быть существенно меньше це-
ны того же выигрыша, полученного за счёт увеличения энергетики канала
(мощности сигнала или размеров антенн).
Отметим, что выбор способов кодирования и модуляции зависит от характеристик кана-
ла. Улучшение этих характеристик .(например, путём измерения помех и искажений сигнала и
их последующей компенсации) снижает потери в канале и создаёт лучшие условия для при-
менения корректирующих кодов.
Наиболее разработанными являются коды для тяСК. с независимыми ошибками. Для лю-
бого другого канала эти коды малоэффективны. В частности, при передаче дискретных сооб-
щений по каналу с медленными замираниями возникает группирование ошибок. Дискретный
канал в этом случае будет существенно отличаться от /яСК — он будет каналом с памятью. В
этих условиях можно пойти по пути выбора кода, исправляющего пачки ошибок.
Для каналов с изменяющимися параметрами этот код должен быть адаптивным. В этих
случаях перед кодированием (либо только перед декодированием) производится измерение
параметров канала и в соответствии с их результатами изменяется алгоритм кодирования (или
декодирования). Измерение параметров канала может осуществляться, например, с помощью
специального испытательного (зондирующего) сигнала [14] или на основании результатов об-
работки предыдущих отрезков сигнала. В некоторых условиях возможны методы кодирова-
ния, оптимальные или близкие к оптимальным для широкого класса каналов.
Другой путь заключается в том, что исходные каналы с памятью преобразуются к некото-
рому "стандартному" дискретному каналу, для которого оптимальные коды известны. Про-
стейшим примером этого является метод декорреляции ошибок путём разнесения символов,
входящих в один кодовый блок (метод перемежения рассмотрен в гл. 7, 8). Этот метод позво-
ляет преобразовать самые различные дискретные каналы приблизительно в /иСК. Поэтому во
многих случаях для эффективного использования кодирования может оказаться целесообраз-
ным с помощью модема и канальных устройств преобразовывать исходные реальные каналы в
канал, близкий к /яСК. Аналогично тому как для эффективного использования автотранспор-
та нужны хорошие дороги, так и для эффективного использования кодирования нужны хо-
рошие каналы, согласованные с кодом. Согласующим устройством может быть модем, а хо-
рошим каналом — тиСК.
Помимо разнесения (перемежения) символов можно осуществлять и другие преобразова-
ния, имеющие целью придать потоку символов свойства, похожие на случайную последова-
тельность равновероятных и независимых двоичных символов. Такая операция называется
скремблированием. Её осуществляют пропуская поток символов через регистр сдвига с обрат-
ными связями, в котором эти символы "перемешиваются" и преобразуются. Разумеется; ха-
рактеристика склемблера должна быть обратимой. Тогда принятые после демодулятора сим-
волы подвергаются обратной операции — дескремблированию для восстановления исходной
последовательности.
Скремблирование часто применяют для повышения надёжности системы синхронизации.
Но оно также улучшает работу декодера, особенно в системах с обратной связью.
В каналах с замираниями часто используют сигналы сложной структуры, такие, напри-
мер, как многочастотные, частотно-временные, шумоподобные и др. Так, при использовании
частотно-временных сигналов с помощью многочастотных модемов образуется двумерный
канал. Передаваемые и принимаемые символы в таком канале размещаются в виде матрицы,
в которой строки соответствуют различным интервалам времени, а столбцы - различным час-
тотам. Варьируя параметры модема, можно, не изменяя общей скорости передачи информа-
ции, перераспределять память в дискретном канале, например увеличить корреляцию между
символами по времени и уменьшить корреляцию между символами, близкими по частоте. В
таких каналах удобно применять каскадные коды при различных алгоритмах декодирования.
Применение модемов, создающих двумерный дискретный канал, оказывается полезным и для
непрерывных каналов, в которых имеют место сосредоточенные и импульсные помехи боль-
шой интенсивности. В этих случаях ошибки имеют тенденцию поражать символы, передавае-
мые на одной поднесущей (при сосредоточенных помехах) либо в одном интервале времени
(при импульсных помехах). Известны коды, которые позволяют успешно исправлять такие
решётчатые конфигурации ошибок. Примером согласованного подхода к кодированию и мо-
дуляции с учётом свойств непрерывного канала являются системы с обратной связью.
415
Неотъемлемым элементом этих систем является кодирование с обнаружением ошибок. Прак-
тически почти все действующие системы передачи данных по каналам с переменными пара-
метрами используют решающую обратную связь. В этом случае по результатам "измерения"
состояния канала с помощью кода автоматически осуществляется изменение режима работы
системы путём переспроса. Как уже отмечалось, кодирование и декодирование с обнаружени-
ем ошибок в канале с переменными параметрами осуществляется значительно эффективнее,
чем непосредственное исправление ошибок. Одной из причин этого является тот факт, что
оптимальный алгоритм декодирования с обнаружением ошибок совершенно не зависит от
характеристик канала, вероятность необнаруженной ошибки мало зависит от этих характери-
стик и определяется главным образом структурой кода.
Важнейшей проблемой на пути создания высокоэффективных систем пере-
дачи информации является проблема согласования модемов и кодеков с учётом
статистических свойств непрерывного канала. Кодирование и модуляцию необ-
ходимо рассматривать как единый процесс формирования наилучшего сигнала,
а демодуляцию и декодирование — как процесс наилучшей обработки сигна-
лов.
Сигнально-кодовые конструкции (СКК). Многопозиционные сигналы с
плотной упаковкой (например, ФМ, АФМ) обеспечивают высокую удельную
скорость у за счёт снижения энергетической эффективности р. С другой сторо-
ны, корректирующие коды позволяют повысить энергетическую эффективность
при определённом снижении удельной скорости. Каждый из этих способов да-
ёт выигрыш по одному показателю в обмен на ухудшение другого. Вместе с тем
во многих случаях важным является одновременное повышение как энергети-
ческой, так и частотной эффективности. Решение этой задачи возможно при
использовании ансамблей многопозиционных сигналов совместно с помехо-
устойчивым кодированием. При этом, очевидно, необходимо сформировать та-
кие сигнальные последовательности, точки котррых в многомерном простран-
стве плотно упакованы (чтобы обеспечить высокую частотную эффективность)
и достаточно разнесены (чтобы обеспечить достаточно высокую энергетиче-
скую эффективность). Такие сигнальные последовательности, построенные на
базе помехоустойчивых кодов и многопозиционных сигналов, называются сиг-
нально-кодовыми конструкциями (см. гл. 7). В качестве помехоустойчивых кодов
обычно используются в СКК свёрточные и каскадные коды, а в качестве мно-
гопозиционных сигналов — сигналы ФМ, АФМ и ЧМНФ.
Устройство, реализующее СКК, состоит из кодека, модема и согласующих
устройств. Для согласования кодека двоичного помехоустойчивого кода и мо-
дема m-позиционных сигналов часто используется манипуляционный код Грэя,
при котором большему расстоянию по Хэммингу между блоками кодовых сим-
волов соответствует большее расстояние по Евклиду между соответствующими
им сигналами. Код Грэя, включённый между помехоустойчивым кодеком и
модемом, преобразует m-позиционный канал без памяти в двоичный канал с
памятью длиной v = log2«i символов. Однако код Грэя не является оптималь-
ным. Двоичное представление канальных символов требует, как правило, не-
равной защиты с помощью корректирующего кода. Это обусловлено тем, что
используемые в каналах ансамбли многопозиционных сигналов в большинстве
случаев оказываются в месте приёма неэквидиетантными. Неэквидистантны
также и соответствующие им наборы двоичных символов манипуляционного
кода. В настоящее время известны и другие способы согласования источников
сообщений и каналов. В частности, способы, основанные на иерархическом
416
(11.21)
разбиении ансамбля сигналов на набор вложенных подансамблей с монотон-
но-возрастающими расстояниями между ними и подбором кодов для каждого
уровня иерархии так, чтобы выровнять результирующие расстояния. Более пло-
дотворным в этом направлении является способ построения СКК на основе,
обобщённого каскадного кодирования. В этом случае внешние помехоустойчи-
вые коды согласуются с внутренними кодами, в качестве которых используют-
ся вложенные подансамбли сигналов [2]. Пример построения сигнально-
кодовой конструкции (комбинированной модуляции) с использованием решёт-
чатых кодов Ангербоека приведён в § 7.3.
Возможно построение СКК и на основе многомерных сигналов, позво-
ляющих увеличить число позиций сигнала без существенного уменьшения рас-
стояния между ними. Однако следует помнить, что построение более совер-
шенных СКК связано с неизбежным усложнением их реализации.
Показатели эффективности СКК определяются следующими соотношения-
ми:
МЛ,
27?1°g™ mw
7=7м7к=-------> (11.22)
где рм и ум~ показатели эффективности системы модуляции (модема); Дркк —
энергетический выигрыш кодирования (кодека); ук - частотная эффективность
кодека.
Результаты расчётов показывают (рис. 11.6), что применение СКК позволя-
ет получить одновременно выигрыш как по энергетической, так и по частотной
эффективности и, во всяком случае, выигрыш по одному показателю, не ухуд-
шая другой. Так, система ФМ-8-СК при использовании перфорированного
свёрточного кода [2] со скоростью R = 2/3 обеспечивает энергетический выиг-
рыш Др = 2,8 дБ без снижения удельной скорости у, а система АФМ-16-СК
при R = 1/2 и кодовом ограничении v = 3 — выигрыш по удельной скорости
Ду = 2 дБ без снижения энергетической эффективности р. Информационная
эффективность этих систем т| ® 0,6...0,7.
Значительный интерес представляют сигнально-кодовые конструкции
ЧМ1 НФ-СК, построенные на основе ЧМНФ сигналов и свёрточных кодов.
Фазовые изменения ЧМНФ сигналов имеют вид регулярной решётки анало-
гично решётчатой диаграмме СК. Это позволяет совместить в системе ЧМНФ-
СК процедуры демодуляции и декодирования путём обработки сигналов на
приёме по единой сигнально-кодовой решётке с использованием алгоритма
Витерби (АВ) или алгоритма Кловского-Николаева (АКН).
11.4. КОМПЕНСАЦИЯ ПОМЕХ И ИСКАЖЕНИЙ В КАНАЛЕ
До сих пор в гл. 11 мы определяли эффективность систем связи, в которых используется
гауссовский канал без искажений с оптимальной обработкой сигнала в месте приёма. В ре-
альных условиях эффективность может снижаться по целому ряду причин, основными из ко-
торых являются межсимвольные и межканальные помехи, неточность формирования и син-
хронизации сигнала, нестабильность тактовых и несущих частот. Случайные изменения пара-
метров канала, наличие сосредоточенных и импульсных (чаще всего негауссовских) помех
также могут существенно увеличить потери информации в канале.
Что касается межсимвольной интерференции в канале, обусловленной, например, много-
лучевым распространением волн или ограничением полосы пропускания, то уже сегодня ис-
пользуются оптимальные приёмные устройства, которые обеспечивают для узкополосных
417
сигналов помехоустойчивость более высокую, чем в однолучевом канале [14]. Это понятно,
если учесть, что многолучёвость в принципе образует дополнительные пути передачи полез-
ной информации. Такие оптимальные приёмные устройства, построенные по алгоритму
Кловского-Николаева или Витерби, рассмотрены в § 5.6. Они находят применение, например
в цифровых сотовых системах мобильной радиосвязи, построенных на основе временного
разделения сигналов отдельных пользователей по общеевропейскому стандарту GSM.
Другой путь преодоления многолучёвости канала (МСИ) — переход к широкополосным
(шумоподобным) сигналам с большой базой. Если использование оптимальных приёмных
устройств в канале с МСИ нецелесообразно (уровень флуктуационных шумов мал), как и не-
целесообразен (вследствие уменьшения частотной эффективности) переход к сигналам с
большой базой, то приходится, естественно, думать о компенсации искажений, порождённых
МСИ.
Энергетическую эффективность (дБ) реальной системы (канала) при выбранных способах
модуляции и кодирования можно определить с учётом выражения (11.21):
р = рм+дркк-дрпк, (11.23)
где ДР™ — энергетические потери, обусловленные действием негауссовских помех и искаже-
ний в канале.
Энергетические потери (ЭП) показывают, насколько необходимо увеличить отношение
сигнал-шум на входе реального канала по сравнению с идеальным гауссовским, чтобы веро-
ятность ошибки осталась прежней. Аналогичным соотношением в соответствии с (11.22) оп-
ределяется частотная эффективность (дБ) реальной системы:
У = Ум-дУкк-дУпк> (11.24)
где Ду иж — потери (проигрыш) частотной эффективности (удельной скорости) за счёт приме-
нения корректирующего кода; Ау^ — потери в канале. Величина Дукк полностью определя-
ется скоростью кода R. Потери в канале Ду^ зависят от многих факторов, которые приводят
к расширению полосы частот реального канала по сравнению с теоретически необходимой
для данного сигнала. Такое расширение полосы требуется, в частности, для снижения уровня
межканальных и межсимвольных (при отсутствии оптимального приёма) помех. Полоса кана-
ла также зависит от формы сигнала, от плавности изменения его фазы и огибающей
(особенно нежелательны скачкообразные изменения).
Корректирующие коды, как уже отмечалось, наиболее эффективны в каналах с малыми
ошибками. Поэтому, по-видимому, целесообразно сначала принять определённые меры для
уменьшения влияния помех и искажений в канале, а затем для дальнейшего повышения вер-
ности или эффективности связи применять корректирующие коды.
Для уменьшения межсимвольных искажений (МСИ) используются устройства, позво-
ляющие корректировать АЧХ и ФЧХ канала или компенсировать переходной процесс в кана-
ле. В общем случае такие корректоры должны быть адаптивными. При небольших уровнях
МСИ широко используются линейные методы коррекции, которые реализуются в виде вы-
равнивающих фильтров, компенсирующих МСИ в отчётные моменты времени. Такие фильт-
ры (корректоры) обычно выполняются в виде трансверсальных фильтров — линий задержки с
отводами и весовым сложением снимаемых напряжений. В канале с гауссовским шумом и
МСИ, близким к оптимальному приёмнику (в классе линейных), является приёмник в виде
каскадного устройства, состоящего из согласованного фильтра и трансверсального фильтра
[17]. При большом уровне искажений в канале качество работы линейного корректора ухуд-
шается. В этих условиях целесообразно использование методов нелинейной коррекции МСИ,
в частности коррекции с обратной связью по решению [17].
Для борьбы с сосредоточенными по спектру и импульсными помехами часто используют-
ся компенсационные методы, позволяющие существенно ослабить их влияние на качество
передачи. Исследования показывают, что квазиоптимальный приёмник в каналах с сосредо-
точенными и импульсными помехами и флуктуационными шумами должен содержать анали-
затор и компенсатор помехи и согласованный фильтр для полезного сигнала [26].
Существуют разные способы формирования оценки п&мехи на основе наблюдения и из-
мерения параметров помехи как на интервалах времени, предшествующих интервалу реше-
ния, так и непосредственно на интервале вынесения решения. Чем точнее оценка помехи,
тем ближе приёмник с компенсатором к оптимальному. В простейших случаях роль компен-
сатора в определённой мере могут выполнять режекторные фильтры при сосредоточенных по
418
спектру помехах или устройства запирания приёмника на время действия импульсной помехи
(см. § 5.9).
Осуществить обработку сигналов, при которой устраняются влияния любых помех и ис-
кажений в канале, — задача практически неразрешимая. Гауссовский флуктуационный шум
принципиально неустраним, его можно лишь ослабить до определённого предела, определяе-
мого. потенциальной помехоустойчивостью при заданном виде сигнала. Влияния же таких по-
мех как сосредоточенные, импульсные, могут быть полностью устранены. В принципе могут
быть устранены также линейные и нелинейные искажения, межсимвольные и межканальные
помехи. Для каждого отдельного вида помех и искажений задача их компенсации разрешима.
Задача компенсации помех и искажений сильно усложняется при одновременном действии
совокупности различных помех и искажений. Приёмник в этих условиях должен быть слож-
ным адаптивным устройством, выполняющим большее число операций. При всей сложности
такого приёмника его основными блоками будут устройства компенсации (коррекции) негаус-
совских помех и искажений и корреляционные устройства, осуществляющие оптимальную
обработку сигнала при гауссовском шуме. Таким образом, с помощью модема и устройств об-
работки сигнала потери в канале за счёт негауссовских помех и искажений можно в принципе
свести до минимума и тем самым реальный канал преобразовать в канал, близкий к идеаль-
ному гауссовскому, который отображается в /«СК без памяти. При этом будут созданы усло-
вия для наиболее эффективного использования корректирующего кода в канале. А это в свою
очередь позволяет достигнуть высокой эффективности СПИ в целом. Современные элемент-
ная база и вычислительные средства позволяют внедрять цифровые методы обработки сигна-
лов, на основе которых создаются сложные алгоритмы оптимального приёма в условиях дей-
ствия в канале различных помех и искажений. Для этого используются программные методы
построения аппаратуры с помощью универсальных и специализированных микропроцессоров.
11.5. СОКРАЩЕНИЕ ИЗБЫТОЧНОСТИ. СЖАТИЕ ДАННЫХ
Дальнейшее повышение эффективности СПИ связано с кодированием источника. Эф-
фективность кодирования источника полностью определяется его избыточностью эеи:
Ли = 1-эеи Избыточность источника дискретных сообщений эеи обусловлена тем, что элементы
сообщения (например, буквы в тексте) не равновероятны и что между буквами имеется стати-
стическая связь (корреляция). Обозначим эти составляющие избыточности, соответственно
через эе} и эе2 . Полная избыточность источни а будет
ЭСц “Ь^2 *
Расчёты показывают, что для текста на русском языке эе(» 0,13, эе2 » 0,73 и эеи « 0,75 • Отсю-
да следует, что основная избыточность обусловлена не распределением вероятностей, а стати-
стической связью между буквами. Аналогичная картина имеет место и при цифровой переда-
че речи: большая избыточность речевого сигнала обусловлена прежде всего наличием сильных
корреляционных связей между отсчётами. Это означает, что наиболее эффективными метода-
ми сокращения избыточности источника будут те, которые основаны на декорреляции сооб-
щений. К таким методам относятся при телеграфии методы укрупнения алфавита, а при циф-
ровой передачи речи — методы дифференциального кодирования (методы с предсказанием).
Кодирование с учётом только распределения вероятностей (код Шеннона-Фано, код Хаф-
фмэна) малоэффективно. Коды же, учитывающие статистические связи между буквами, ока-
зываются сложными и требуют значительной задержки передачи при кодировании и декоди-
ровании длинных последовательностей сообщений источника. Поэтому в системах телеграф-
ной связи эти методы кодирования не нашли практического применения — их Техническая
реализация пока оказывается экономически нецелесообразной.
Иначе обстоит дело с устранением избыточности в непрерывных сообщениях, в частно-
сти в телефонии и телевидении. Избыточность речевого сигнала очень велика. Об этом мож-
но -судить хотя бы потому, что для передачи какого-нибудь текста по телефону применяется
канал с пропускной способностью в десятки раз большей, чем для его передачи по телеграфу.
Было предложено много методов обработки телефонного сообщения с целью устранения
его избыточности. Некоторые устройства, осуществляющие такую обработку, называют воко-
дерами, которые строятся на различных принципах. Одни из них (формантные вокодеры) пе-
редают в кодированном виде значения амплитуд составляющих речевого сигнала в отдельных
полосах частот, определяющих разборчивость речи. Другие (гармонические вокодеры)
419
осуществляют измерения текущего энергетического спектра речи, разлагают спектральную
плотность в ряд Фурье и передают в кодированной форме несколько первых коэффициентов
этого ряда. В приёмнике на основе этих данных синтезируется речевой сигнал, аналогичный
исходному. Такие системы синтетической телефонии позволяют примерно в 10 раз сократить
полосу частот при достаточно хорошей разборчивости речи.
Имеется ещё одна возможность повышения эффективности связи при передаче телефон-
ных сообщений. Она основана на том, что при двусторонней телефонной связи каждый або-
нент говорит в среднем не более половины времени, а остальное время слушает ответ. Кроме
того, речь всегда содержит определённые паузы между словами и фразами. Сюда следует до-
бавить время ожидания, пока подойдёт абонент к телефону, и различные перерывы в разго-
воре, во время которых канал В остаётся занятым, а информация не передаётся. В настоящее
время известен целый ряд систем связи, в которых телефонные паузы используются для пере-
дачи дополнительной информации. Передача данных, например, в паузах телефонного сигна-
ла позволяет в 2...3 раза повысить эффективность использования каналов тональной частоты.
Ещё более остро стоит проблема устранения избыточности телевизионного сообщения.
Эта избыточность чрезвычайно велика, что, в частности, выражается в широкой полосе про-
пускания, необходимой для телевизионного канала. В вещательных системах телевидения с
целью плавного воспроизведения движения приходится, как и в кино, передавать последова-
тельность кадров, весьма мало отличающихся друг от друга. Соседние строки внутри кадра,
так же как и соседние элементы изображения на одной строке, тоже очень сильно коррели-
рованы. Всё это порождает огромную избыточность; которую можно было бы устранить, на-
пример, передавая значительно меньшее число элементов в секунду и производя соответст-
вующую интерполяцию.
При цифровой передаче непрерывных сообщений необходимая полоса частот канала уве-
личивается примерно в 10...15 раз по сравнению с аналоговой передачей. Таким образом, к
естественной избыточности сообщения добавляется частотная избыточность сигнала. Для та-
ких систем задача сокращения избыточности стоит особенно остро. Для решения этой задачи
широко используются системы с предсказанием АДИКМ (адаптивная дифференциальная им-
пульсно-кодовая модуляция) и АДМ (адаптивная дельта-модуляция), которые были рассмот-
рены в гл. 8. Эти системы рекомендованы МККТТ для цифровой передачи со скоростью
32 кбит/с. В сочетании с интерполяцией речи АДИКМ позволяет снизить скорость цифрового
потока до 16 и даже 9,6 кбит/с при том же качестве передачи речевой информации, что и в
ИКМ, при стандарте 64 кбит/с.
Метод предсказания широко используется и в вокодерных системах. В этих системах, в
отличие от систем ДИ КМ, в которых кодируются отсчёты первичного сигнала, в вокодерах
кодируются отдельные параметры сигнала. В сочетании с вокодерами АДИКМ позволяет сни-
зить скорость цифрового потока до 2,4 кбит/с1).
Наряду с предсказанием для сокращения избыточности непрерывных сообщений также
используются методы декорреляции, основанные на аппроксимации непрерывных сигналов с
помощью различных базисных функций. Чаще всего в качестве таких функций используются
степенные полиномы нулевого и первого порядка. Отмечен интерес к интерполяционным ме-
тодам сжатия данных с применением кусочно-полиномиальной интерполяции на основе
сплайн-функций.
Высокая эффективность цифровых систем со сжатием данных, очевидно, будет дости-
гаться в том случае, когда кодек источника согласован с цифровым каналом, включающим в
себя кодек канала, модем и непрерывный канал. При этом необходимо учитывать то обстоя-
тельство,. что символы сжатой кодовой последовательности имеют более высокую информа-
тивность и различный вес в воспроизведении передаваемых отсчётов первичного сигнала. В
ряде случаев в канале используется помехоустойчивое кодирование с учётом веса символов
(неравная защита). В общем же для передачи сжатых данных требуется хороший цифровой
канал, обеспечивающий достаточно малую вероятность ошибки передаваемых кодовых сим-
волов. Наиболее полное согласование, очевидно, возможно при совместном кодировании ис-
точника и канала.
Кодирование источника и помехоустойчивое кодирование канала связаны между собой.
Уменьшение избыточности источника жи влечёт за собой необходимость увеличения избы
*) В последнее время разработаны вокодеры для цифровой передачи речи с удовлетворитель-
ным качеством, требующие передачу 1200 бит/с.
420
точности эек корректирующего кода с целью обеспечения допустимой ошибки в канале. Эф-
фективность всей системы кодирования т]к = т]= 1-ж, (где и - соответственно
эффективности, обусловленные кодированием источника и корректирующим кодом) опреде-
ляется общей избыточностью эек=эеи+эек-эеиэек. Следовательно, задачу сокращения избыточно-
сти источника и задачу корректирования ошибок в канале желательно рассматривать как еди-
ную задачу наилучшего кодирования сообщений, при котором обеспечивается наибольшая
эффективность системы при заданной верности передачи.
11.6. ОПТИМИЗАЦИЯ СИСТЕМ СВЯЗИ
Общая методология оптимизации. Качество работы систем передачи инфор-
мации характеризуется совокупностью большого числа показателей, основны-
ми из которых являются помехоустойчивость, скорость, пропускная способ-
ность, дальность действия, электромагнитная совместимость, масса и габариты
аппаратуры, стоимость, экологическая совместимость.
Совокупность показателей качества системы можно записать в виде вектора
Q = (11.25)
Наилучшей (оптимальной) считается такая система S, которой соответству-
ет наибольшее (наименьшее) значение некоторой функции [22]
ф(й>&>•••,&,) (11.26)
от частных показателей качества qx, q2,qn. Величина Q называется эффек-
тивностью или обобщённым показателем качества системы, а функция
<р(<7,, <7») — Целевой функцией системы (критерием качества).
Одним из центральных моментов методики оптимального проектирования
или сравнения систем является формирование оценок эффективности — целе-
вых функций системы. Такие оценки совершенно необходимы при системных
исследованиях, связанных с такими задачами, как выбор лучшей системы из
числа существующих, оценка уровн,'. разработки системы по отношению к со-
временным мировым образцам, определение оптимального варианта новой
(проектируемой) системы и т.д.
В простейших случаях эффективность систем оценивают по отдельным
наиболее существенным параметрам, например по скорости, по ширине поло-
сы частот канала, по отношению сигнала к шуму и т.д.
В общем случае необходим системный подход, при котором эффективность
оценивается в целом по совокупности параметров. При этом прежде всего не-
обходимо учесть все наиболее существенные параметры систем. Стремление
учесть все параметры, в том числе мелкие и второстепенные, приводит к ус-
ложнению целевой функции (критерия качества) и делает труднообозримыми
результаты оценки. Вместе с тем чрезмерное ограничение числа учитываемых
параметров может привести к тому, что критерий окажется слишком грубым.
Любая оценка эффективности систем производится с целью принятия оп-
ределённого решения. Так, при проектировании требуется определить совокуп-
ность параметров системы, при которых достигается наибольшая эффектив-
ность.
Количественная оценка эффективности должна удовлетворять определён-
ным требованиям. Она должна достаточно полно характеризовать систему в
целом и иметь ясный физический смысл, обладать необходимой гибкостью и
универсальностью. Оценка эффективности системы должны быть конструктив-
421
ной — пригодной как для анализа, так и для синтеза систем. Наконец, оценка
эффективности должна быть достаточно простой для вычисления и удобной
для практического использования. Распространённой является оценка эффек-
тивности в виде линейной функции
Т = 2}Х,.а,., - (11.27)
1=1
где п — число учитываемых параметров (показателей); X, — весовые коэффици-
енты; а,. — относительные значения учитываемых параметров.
При таком определении параметров, входящих в сумму (11.27), величину НИ
можно определить в пределах от 0 до 1. Наилучшей будет та система, для кото-
рой величина Т больше.
Выбор весовых коэффициентов X,. в определённой мере является произ-
вольным. То же самое относится и к числу учитываемых параметров п. Однако
доля произвола может быть доведена до минимума путём разработки рацио-
нальной методики нахождения этих коэффициентов (например, методики экс-
пертных оценок). Абсолютные значения весов не имеют значения; существен-
ны только относительные веса.
Современные сложные системы связи не всегда могут быть исчерпываю-
щим образом охарактеризованы одним единственным показателем. Оценка по
нескольким показателям может быть более полной и вместе с тем более пред-
метной, позволяющей охарактеризовать различные свойства системы. Совер-
шенно очевидно, что большое число показателей неприемлемо. Нужно иметь
несколько показателей, характеризующих основные наиболее существенные
свойства системы: информационные, технические, экономические и т.п. Во
многих случаях достаточно ограничиться двумя показателями, например поме-
хоустойчивостью и скоростью передачи, частотной и энергетической эффек-
тивностью, техническим эффектом и затратами.
Окончательное решение, как правило, основывается не только на количест-
венных данных расчёта, но и на опыте, интуиции и других эвристических кате-
гориях, а также на дополнительных соображениях, которые не могли быть уч-
тены при построении математической модели.
В общем случае задача оптимизации СПИ сводится к нахождению макси-
мума целевой функции Ч^З1) = maxcp^, q2,qn} при вариации системы S (ее
структуры или значений её параметров) с учётом исходных данных и ограниче-
ний на структуру и параметры системы.
Если задана целевая функция Ч'(5) и Определена совокупность допустимых
систем (или их вариантов) Sr, S2,SN , то оптимизация сводится к задаче дис-
кретного выбора из конечного числа N заданных систем, т.е. к выбору систе-
мы, которой соответствует наибольшее (наименьшее) из значений
*,= 9(4^ =<₽(«,),...,
Более сложной задачей является задача оптимизации (синтеза) структуры
системы. Если структура системы может быть достаточно полно описана из-
вестными функциями с конечным числом параметров, то задача сводится к оп-
тимизации этих параметров. В частном случае, когда целевая функция и все
функции, определяющие ограничения, линейно зависят от параметров
хр х2,хт, задача сводится к линейному программированию. В некоторых
422
случаях удаётся решить задачу аналитически на основании методов функцио-
нального анализа. '
В общем виде решение задачи оптимизации СПИ может оказаться слож-
ным и мало пригодным для принятия решения. Поэтому обычно прибегают к •
поэтапной процедуре оптимизации. Сначала, например, осуществляется опти-
мизация по информационным параметрам, а затем — по технико-
экономическим показателям. На первом этапе определяется структурная схема
системы, позволяющая оценить её основные потенциальные характеристики,
выбрать способы модуляции и кодирования, метод обработки сигнала в при-
ёмнике. Затем определяются алгоритмы функционирования и параметры от-
дельных блоков системы (модема, кодека канала, кодека источника и т.п.). За-
вершающим этапом является конструирование системы.
Технико-экономический анализ базируется как минимум на двух показате-
лях: эффекте и затратах [22]. При этом в качестве основных принципов опре-
деления эффективности СПИ может быть принцип максимума эффекта Т или
принцип минимума затрат Ж
В качестве затрат обычно принимаются приведённые годовые затраты на
единицу продукции (в нашем случае — стоимость передачи одного бита в се-
кунду).
Оптимизация СПИ. Полезным эффектом (продуктом) в СПИ является ко-
личество информации, доставляемое потребителю в единицу времени (скорость
передачи) при заданной верности передачи, т.е. средняя скорость передачи по
каналу в сети связи при вероятности ошибки р < рдоп. Эту скорость принято на-
зывать пропускной способностью системы и обозначать Сс', в отличие от шен-
ноновской пропускной способности канала С. Если С — понятие теоретиче-
ское, характеризующее предельные возможности канала, то С' — есть характе-
ристика техническая, зависящая от реальных характеристик и аппаратуры дан-
ной системы.
По определению
С.'=у = лС'=т1.Л.П.С". (11.28)
Здесь I — количество бит информации, переданное по каналу в сети связи
за время Тп = Те + Т3, где Тс — время передачи (длительность) сообщения; Т3 —
время задержки, включая время ожидания; р№ = 1-эеи ~ эффективность кодека
источника, зеи — избыточность сообщения (источника), т}к=т\а.х]ы= R^/C — эф-
фективность канала, вычисленная с учётом корректирующего кода, вида моду-
ляции и потерь в канале, — эффективность кодека канала, г|м — эффектив-
ность модуляции, т| с = Тс/Тп — эффективность сети.
С учётом выражений (11.4) и (11.28) имеем
... (11-29)
где согласно (11.23) и (11.24)
Р = Рм+ЛР„-ДРга[,
у = Гм+дГкк-дГпк; . '
С„' — это то реальное количество информации, которое доставляется потре-
бителю в единицу времени при заданном качестве передачи р < р№П.
423 •
При оптимизации СПИ выражение (11.29) для Сс' можно принять в качест-
ве целевой функции Т = С' = <р(эеи, 0, у, т]с, р, С'). Тогда задача будет состоять в
том, чтобы найти такую систему связи, которая доставляет максимум этой
функции при заданных условиях и ограничениях. Математически — это задача
нелинейного, а в ряде случаев линейного программирования. В некоторых ча-
стных случаях задача решается аналитически, как задачи поиска экстремума
функционала, В тех случаях, когда требуется обеспечить заданную достаточно
высокую величину С', выбор системы осуществляется путём анализа
(сравнения) возможных вариантов, удовлетворяющих заданным требованиям.
Необходимая величина С„' в этих случаях достигается путём компромиссного
выбора показателей, входящих в выражение (11.29), с учётом технико-
экономических требований.
Задача оптимизации СПИ возникает как при разработке новых, так и при
усовершенствовании существующих систем. Во многих случаях она ставится
как задача повышения эффективности СПИ. Решение такой задачи не являет-
ся однозначным. Высокое (или необходимое) значение Сс' согласно (11.29)
может быть достигнуто различными путями.
Рассмотрим это на примере системы передачи дискретных сообщений
(СПДС). Будем считать, что сеть связи, в которой должна работать рассматри-
ваемая СПДС, известна (задана её эффективность tic ). Известен обычно и ис-
точник сообщений (задана его избыточность зеи). Заданной является и требуе-
мая верность (ошибка) передачи р < /?доп.
Пропускная способность канала С является информационным ресурсом
системы. Он обычно задаётся или выбирается на основе существующих стан-
дартов. Здесь при выборе возможны варианты. Согласно формуле Шеннона ве-
личина С = Flog(p + 1) полностью определяется энергетическим ресурсом
p=PjPm и частотным ресурсом F. Выбор полосы частот канала F весьма огра-
ничен и регламентируется международными соглашениями. Что касается энер-
гетического ресурса р, то он зависит от мощности передатчика р и шумовой
температуры Т3 приёмника, а в радиосистемах и от коэффициента усиления
антенн G. р = AP^G/T, где А — постоянный коэффициент. Отсюда следует воз-
можность варьирования величинами Р^, G и Тэ для получения необходимого
значения С . Так, применение узконаправленных антенн позволяет существен-
но улучшить энергетику канала при заданных передатчике и приёмнике.
При выбранном значении С и заданных значениях т\. и зеи повышение
эффективности СПИ сводится к повышению эффективности канала т]к. Со-
гласно (11.4) информационная эффективность т]к зависит от энергетической
эффективности 0 и удельной скорости у, которые можно рассчитать по форму-
лам (11.8) и (11.9). Тогда для заданной вероятности ошибки /?доп и рассчитан-
ной величины энергетики канала р по обменным 0у-номограммам (рис. 11.6)
можно выбрать вид модуляции и способ кодирования.
Однако такой выбор системы модуляции и кодирования по 0у-
номограммам не является окончательным. Его необходимо уточнить с учётом
424
потерь в канале на основе формул (11.23) и (11.24). При этом необходимо учи-
тывать, что высокие показатели эффективности 0 и у могут быть достигнуты
либо за счёт выбора высокоэффективных систем модуляции и кодирования,
либо за счёт снижения потерь в канале. Практически это означает либо услож-
нение сигнально-кодовых систем (кодеков и кодемов), либо усложнение ка-
нальных устройств, включая систему обработки сигналов (компенсаторов по-
мех, оптимальных приёмников и т.д.). Встаёт вопрос: какой из этих путей
предпочтительнее? Код для канала или канал для кода? Очевидно, в реальных
условиях необходимо искать компромиссные решения.
После того как выбрана система, по показателям 0 и у по формуле (11.29)
вычисляется С'. Определив таким образом приемлемые варианты систем по
техническому эффекту Т = С', рассчитаем затраты W для этих вариантов. По-
лученные варианты расчёта Сс',. и Wt позволяют осуществить технико-
экономический анализ по принципу минимума затрат W или максимума эф-
фекта С'.
Следует иметь в виду, что при анализе систем по двум показателям (в на-
шем случае по Q и И) решение, обращающее в максимум (минимум) один
показатель, не обращает в максимум (минимум) другой показатель. Поэтому
лучшей считается такая система, которая обеспечивает максимум (минимум)
одного показателя при заданном значении второго показателя.
Для более подробного анализа удобно результаты расчётов представить
графически. Пусть нам предстоит сделать выбор из нескольких вариантов сис-
тем At, Дг,..., Аг, руководствуясь двумя показателями: С’ и И< Каждому вари-
анту системы соответствует точка на плоскости с координатами С', и Wt
(рис. 11.7). Легко видеть, что условию максимума Q при заданном значении
W и соответственно условию минимума W при заданном значении С' удовле-
творяют системы, лежащие на левой и верхней границах области возможных
(приемлемых) вариантов (штриховая линия на рис. 11.7). Остальные варианты,
лежащие ниже и правее штриховой кривой, этому условию не удовлетворяют и
могут быть сразу отброшены. Остаётся проанализировать только три варианта:
Ах, А3, Аб. Вариант А6 обеспечивает наи-
большую эффективность С„', но требует
больших затрат И< Варианты А3, А6 мало от-
личаются по эффективности. Затраты при
реализации варианта А3 значительно мень-
ше, и поэтому, по-видимому, следует отдать
предпочтение варианту А3.
Для принятия окончательного решения
необходимо учитывать не только результаты
расчёта, но и целый ряд других требований,
связанных с надёжностью, экологичностью,
технологичностью и т.д.
Рис. 11.7. Графическое представление
зависимости эффекта системы С'с от затрат W
425
выводы
1. Характерной особенностью системного анализа является переход от анализа отдельных
частей (устройств) системы к анализу альтернативных вариантов построения системы как
единого целого.
2. В общем случае эффективность любой технической системы определяется количеством и
качеством выдаваемой продукции. В системах связи такой продукцией является передавае-
мая информация, количество которой определяется средней скоростью передачи бит/с, а
качество — величиной ошибки.
3. Важнейшим показателем эффективности систем связи является информационная эффек-
тивность т| = RKIC , определяющая степень использования системой пропускной способно-
/ Р
сти канала, а также показатели р = 7?и/ —- и у = RfjF , характеризующие соответственно
/ Nq
использование канала по мощности (энергетическая эффективность) и по частоте
(частотная эффективность).
4. Зависимости между показателями р и у носят обменный характер: увеличение одного пока-
зателя связано с уменьшением другого и наоборот. Существует предельная зависимость
между р и у при г, = 1 (предел Шеннона). Эта зависимость отражает наилучший обмен ме-
жду показателями р и у в непрерывном канале. В реальных системах (г, < 1) обмен между р
и у зависит от способов модуляции и кодирования.
5. Обменные ру -диаграммы позволяют сравнить системы между собой и оценить степень их
приближения к идеальной шенноновской системе, позволяют сделать выбор способа моду-
ляции и кодирования при заданных условиях, определить энергетический и частотный вы-
игрыш по сравнению с "эталонной" системой (например, ФМ-4).
6. Аналоговые системы ОМ, AM и узкополосная ЧМ обеспечивают высокую частотную эф-
фективность у при сравнительно низкой энергетической эффективности р. Цифровые сис-
темы обеспечивают высокую энергетическую эффективность при сравнительно хорошей
частотной эффективности. При высоком качестве передачи цифровые системы и широко-
полосная ЧМ обеспечивают примерно одинаковую эффективность. В многоканальных сис-
темах наиболее эффективным является метод временного разделения сигналов, затем сле-
дует метод частотного разделения и метод разделения сигналов по форме.
7- В системах передачи дискретных сообщений энергетическую эффективность можно суще-
ственно повысить путём применения корректирующих кодов, а за счёт применения много-
позиционных сигналов повысить частотную эффективность. Применение каскадных сиг-
нально-кодовых конструкций на основе корректирующих кодов и многопозиционных сиг-
налов позволяет повысить одновременно как энергетическую, так и частотную эффектив-
ность. Эффективными, в частности, являются конструкции на основе свёрточных кодов и
многопозиционных сигналов с ФМ, АФМ, ЧМНФ.
8. Для сокращения избыточности источника непрерывных сообщений широко используется
дифференциальное кодирование (кодирование с предсказанием), позволяющее существен-
но повысить эффективность ЦСП. Так, АДИКМ в сочетании с интерполяцией речи позво-
ляет снизить скорость цифрового потока с 64 кбит/с при ИКМ до 16 и даже 9,6 кбит/с, а в
сочетании с вокодерами — до 2,4 кбит/с. Наибольшая эффективность ЦСП достигается
при совместном кодировании источника и канала.
9. В высокоэффективных СПИ (г, > 0,6) кодек источника, кодек канала и модем должны
быть хорошо согласованы между собой с учётом характеристик непрерывного канала. Ко-
дирование и модуляцию следует рассматривать как единый процесс построения наилуч-
шего сигнала, а демодуляцию и декодирование — как наилучший способ обработки сигна-
ла.
10. Задача оптимизации СПИ сводится к нахождению такого варианта системы, при котором
потребителю в единицу времени доставляется максимальное количество бит информации
при заданной верности передачи. Экономическим показателем при этом являются приве-
дённые годовые затраты или стоимость передачи од й ого бита’ в секунду. Сопоставление
эффекта и затрат позволяет выбрать наилучший вариант системы при заданных условиях и
ограничениях.
426
ВОПРОСЫ, ЗАДАЧИ И УПРАЖНЕНИЯ
11.1. Как определяется количество и качество продукции в системах связи?
11.2. Как определяются показатели информационной, энергетической и частотной эффек-
тивности системы связи?
11.3. Что понимают под py-диаграммой при оптимальном и реальном кодировании? Как они
зависят от модели канала?
11.4. Докажите, что энергетическая эффективность р при р = const для ФМ-2 и ФМ-4 одина-
кова, а частотная эффективность у отличается в два раза (3 дБ).
11.5. Покажите, что при переходе от симплексных сигналов к ортогональным проигрыш по
энергетической и частотной эффективности сравнительно небольшой. Как этот проиг-
рыш зависит от числа сигналов т ?
11.6. Определите энергетический выигрыш идеальной системы по сравнению с ФМ-2 при
у = 1. Как зависит этот выигрыш от допустимой вероятности ошибки р ? Указание: вос-
°о I2 а1
1 f 1
пользуйтесь приближённым выражением для интеграла 2(a) = -7= |е 2dx& — е 2 , где
л/2тгJ 2
a
для ФМ-2 а2 = —.
11.7. В гауссовском канале с ФМ-2 используется корректирующий код БЧХ (127, 84). Опре-
делите по кривым рис. 11.2 энергетический выигрыш кодирования ДРкк при вероятности
ошибки рь =10-5 и вычислите величину проигрыша по частотной эффективности Дукк-
11.8. Определите по кривым рис. 11.1 энергетическую и частотную эффективность сигнально-
кодовой конструкции ФМ-16 (R - 2/3). Вычислите информационную эффективность ц
для этой системы, если потери в канале Дркк = 2 дБ.
11.9. По обменным py-диаграммам рис. 11.6 выберите три7четыре приемлемых варианта
СКК, обеспечивающих в гауссовском канале р « 1 дБ и у « 4 дБ. Вычислите для этой
системы значение информационной эффективности ц.
11.10. Докажите, что при использовании широкополосных сигналов с базой 2TF »1 влияние
сосредоточенных по спектру помех уменьшается пропорционально базе сигнала.
11.11. Одним из способов повышения эффективности связи при наличии замираний является
разнесённый приём. Определите энергетический выигрыш при переходе от одиночного
к сдвоенному и строенному приёму в канале с медленными рэлеевскими замираниями
(рис. 5.22).
11.12. В гауссовском канале с неопределённой фазой и ортогональными в усиленном смысле
сигналами используется код (3, 1) с кодовыми комбинациями ООО и 111. Определите
энергетический выигрыш при переходе от поэлементного приёма к приёму в целом.
11.13. В системах с поднесущими обобщённый выигрыш g' равен произведению выигрышей
первой g'^ и второй ступеней модуляции, т.е. g^g'^g^- В соответствии с методи-
кой и условиями § 11.3 определите информационную эффективность ц для систем ОМ-
АМ, ФМ-АМ и ЧМ-АМ.
11.14. Информационная эффективность ц аналоговой ЧМ достигает наибольшего значения в
районе порога р « 10 дБ (рис. 11.3). Вычислите значение Лтах, а также соответствующие
значения р и у при рн^ = 40 дБ.
11.15. На основе общего определения эффективности систем разделения сигналов (11.5) полу-
чите соотношения для цр с учётом защитных полос при частотном разделении сигналов
и защитных временных интервалов при временном разделении сигналов.
11.16. Пользуясь графиками рис. 11.3, вычислите информационную эффективность систем
ИКМ-ФМ и ИКМ-ЧМ при основании кода т = 4 и сравните частотную эффективность
• ' этих систем.
427
ЗАКЛЮЧЕНИЕ
Перевернута последняя страница учебника по курсу "Теория электрической
связи" и полезно подвести некоторые итоги.
Как мог убедиться читатель, современная теория электрической связи ис-
пользует понятия и методы из различных научных областей и прежде всего —
математики, физики, теории цепей, вычислительной техники. Все понятия .и
методы из этих областей образуют в курсе ТЭС определённое единство' и
должны рассматриваться как одно целое в рамках системного подхода, приня-
того на вооружение современной науки. Основное понятие, использованное в
курсе ТЭС, - понятие математической модели сообщений, сигналов, помех и
каналов в системах связи. Все эти модели таковы, что позволяют с той или
иной степенью полноты и точности осуществить две взаимосвязанные опера-
ции - анализ и синтез устройств преобразования сигналов. ТЭС развивалась
так, что методы анализа часто обгоняли методы синтеза. Однако в последнее
время эта ситуация меняется коренным образом под влиянием широкого вне-
дрения ЭВМ в практику научного поиска. Практическая разработка новых сис-
тем сегодня всё больше базируется на подходе, включающем этапы: модель-
алгоритм-программа. Переход к цифровым методам передачи различных сооб-
щений и цифровой обработке сигналов на большей части тракта передачи при
широком использовании микропроцессорной техники обеспечивает интегра-
цию средств связи и средств вычислительной техники. На этой основе созда-
ются интегральные цифровые сети, в которых достигается не только наиболее
полная интеграция по видам связи и услуг, но и интеграция технических
средств передачи, обработки, коммутации, управления и контроля. Интеграль-
ные сети, объединяющие в единый комплекс вычислительные и информаци-
онные системы на базе современных ЭВМ, включая персональные компьюте-
ры, образуют единую информационно-коммуникационную сеть. Информаци-
онно-коммуникационные сети являются технической основой современных
информационных технологий, обеспечивающих информатизацию отрасли, ре-
гиона, страны, всего мирового сообщества. Информатизация всё больше и
больше охватывает все отрасли народного хозяйства и обеспечивает прежде
всего автоматизацию и управление как производством, так и другими служба-
ми. Для этой цели создаются базы и банки данных, которые с помощью
средств связи обеспечивают доступ к любой информации любому пользовате-
лю. В современных условиях требуется интенсивное развитие как новых, так и
традиционных систем связи, создание локальных и многотерминальных ин-
формационно-справочных сетей массового обслуживания.
Информация как совокупность знаний является главнейшим стратегиче-
ским ресурсом общества, его основным богатством, определяющим уровень
развития общества, его цивилизованность.
Проблемы информатизации предъявляют весьма высокие требования как к
вычислительной технике, так и к технике связи. Для техники связи - это преж-
де всего требования: высоких скоростей (порядка Гигабит и более в секунду);
малых коэффициентов ошибок (порядка 10-1О...10-11); больших дальностей пе-
редачи (около 100 млн. км в системах космической связи); малых масс и энер-
гопотребления аппаратуры.
На основе современной теории связи представляется возможным создать
весьма совершенные системы связи, близкие по своим показателям к идеаль-
428
ной шенновской системе. Однако даже при использовании современных тех-
нологий, в том числе и высокоскоростной микропроцессорной техники, повы-
шение эффективности существующих и вновь создаваемых систем связи с вы-
шеназванными показателями ставят перед ТЭС ряд новых нерешённых задач и
проблем, которые, по-видимому, возникли и у пытливого читателя этой книги.
Теорию электрической связи нельзя считать завершённой, она находится в по-
стоянном движении и обновлении.
Авторы учебника надеются, что для внимательного читателя книга послу-
жит трамплином к изучению дополнительной литературы по вопросам, вы-
звавшим его интерес, и базой для освоения специальных курсов, формирую-
щих современного специалиста в Области телекоммуникаций.
429
СПИСОК ЛИТЕРАТУРЫ
1. Андреев В.С. Теория нелинейных электрических цепей. Учеб, пособие для вузов. — М.:
Радио и связь, 1982. — 280 с.
2. Банкет В.Л., Дорофеев В.М. Цифровые методы в спутниковой связи. — М.: Радио и
связь, 1988. — 240 с.
3. Баскаков С.И. Радиотехнические цепи и сигналы. Учебник для вузов. — М.: Высшая
школа, 1988. — 448 с.
4. Бокер П. Передача данных. Техника связи в системах телеобработки данных / Пер. с Нем.
под ред. Д.Д.Кловского. — М.: Связь, 1980. — т. 1. — 263 с.; т. 2. — 253 с.
5. Варакин Л.Е. Системы связи с шумоподобными сигналами. — М.: Радио и связь, 1985. —
384 с.
6. Витерби А.Д., Омура Д.К. Принципы цифровой связи и кодирование / Пер. с англ, под
ред. К.Ш.Зигангирова. — М.: Радио и связь, 1982. — 526 с.
7. Возенкрафт Дж., Джекобс И. Теоретические основы техники связи / Пер. с англ, под ред.
Р.Л.Добрушина. — М.: Мир, 1969. — 640 с.
8. Галлагер Р. Теория инфомации и надёжная связь / Пер. с англ, под ред. М.С.Пинскера и
Б.С.Цыбакова. — М.: Сов. радио, 1974. — 720 с.
9. Гауэр Дж. Оптические системы связи / Пер. о англ, под ред. А.И.Ларкина. — М.: Радио и
связь, 1989. — 501 с.
10. Гоноровский И.С. Радиотехнические цепи и сигналы / Учебник для вузов. — М.: Радио и
связь, 1986. — 512 с.
11. ' Зюко А.Г., Кловский Д.Д., Назаров М.В., Финк Л.М. Теория передачи сигналов. Учебник
для вузов. — М.: Радио и связь, 1986. — 302 с.
12. Зюко А.Г. Помехоустойчивость и эффективность систем связи. — М.: Связь, 1972. — 359 с.
13. Кларк Дж. мл., Кейн Дж. Кодирование с исправлением ошибок в системах цифровой свя-
зи / Пер. с англ, под ред. Б.С.Цыбакова. — М.: Радио и связь, 1987. — 392 с.
14. Кловский Д.Д. Передача дискретных сообщений по радиоканалам; 2-е Изд. — М.: Радио и
вязь, 1982. — 304 с.
15. Кловский Д.Д., Шилкин В.А. Теория электрической связи: Сб. задач и упражнений. — М.:
Радио и связь, 1990. — 280 с.
16. Колесник В.Д., Полтырев Г.Ш. Курс теории информации. — М.: Наука, 1982. — 416 с.
17. Коржик В.И., Финк Л.М., Щелкунов К.Н. Расчёт помехоустойчивости передачи дискрет-
ных сообщений: Справочник. — М.: Радио и связь, 1981. — 231 с.
18. Котельников В.А. Теория потенциальной помехоустойчивости. — М. ~ Л.: Госэнергоиздат,
1956.- 152 с.
19. Левин Б.Р. Теоретические основы статистической радиотехники. — М.: Радио и связь,
1989. - 653 с.
20. Назаров М.В., Прохоров Ю.Н. Методы цифровой обработки и передачи речевых сигна-
лов. — М.: Радио и связь, 1985. — 176 с.
21. Питерсон У., Уэлдон Э. Коды, исправляющие ошибки / Пер. с англ, под ред.
РЛДобрушина и С.И.Самойленко. — М.: Мир, 1976. — 596 с.
22. Перегудов Ф.И., Тарасенко Ф.П. Введение в системный анализ / Учеб, пособие для вузов.
- М.: Высшая школа, 1989. — 368 с.
23. Помехоустойчивость и эффективность систем передачи информации / Под ред. А.Г.Зюко.
— М.: Радио и связь, 1985. — 279 с.
24. Рабинер Л., Гоулд Б. Теория и применение цифровой обработки сигналов / Пер.с англ,
под ред. Ю.Н.Александрова. — М.: Мир, 1978. — 350 с.
25. Тихонов В.И. Статистическая радиотехника. — М.: Радио и связь, 1982. — 624 с.
26. Тихонов В.И., Харисов В.Н. Статистический анализ и синтез радиотехнических устройств
и систем: Учеб, пособие для вузов. — М.: Радио и связь, 1991. — 608 с.
27. Финк Л.М. Теория передачи дискретных сообщений. — М.: Сов. радио, 1970. — 727 с.
28. Харкевич А.А. Избранные труды. Т. 3. Теория информации. Опознание образов. — М.:
Наука, 1972. — 524 с.
29- Шеннон К. Работы по теории информации и кибернетике / Пер. с англ, под ред.
Н.А. Железнова. — М.: ИЛ. 1963. — 829 с.
30. Шварц М. Сети связи. Протоколы. Моделирование и анализ. — 4.1, 4.2. — Пер. с англ,
под ред. В.И. Неймана. — М.: Наука, 1992; Ч.1.—336 с.; 4.2 — 272 с.
430
ОГЛАВЛЕНИЕ
Предисловие.........................’..................................3
Список сокращений..................................................... 5
Основные обозначения....................................................7
Глава 1. Общие сведения о системах Электросвязи........................................LD
1.1. Информация, сообщения, сигналы.................................................. Л О
1.2. Системы, каналы и сети связи....................................................13
1.3. Помехи и искажения в канале..;..;............................................. 17
1.4. Кодирование и модуляция,....................................................... 18
1.5. Демодуляция и декодирование................................................... 23
1.6. Цифровое кодирование непрерывных сообщений.................................... 24
1.7. Основные характеристики системы связи...........................................25
Выводы.......................................................................... 27
Вопросы, задачи и упражнения..................................................... 28
Глава 2. Математические модели сообщений, сигналов и помех.............................29
2.1. Классификация сообщений, сигналов и помех...................................... 29
2.2. Функциональные пространства и их базисы.........................................30
2.3. Разложение сигналов в обобщённый ряд Фурье......................................36
2.4. Дискретизация сигналов во времени...............................................44
2.5. Случайные процессы и их основные характеристики............................... 49
2.6. Представление случайных процессов рядами и дифференциальными уравнениями...60
2.7. Огибающая и фаза сигнала. Аналитический сигнал. Квадратурные компоненты
узкополосного сигнала..........................................................65
2.8. Некоторые модели непрерывных и дискретных щеточников (сообщений,
сигналов и помех)..............................................................73
Выводы...............................................................................79
Вопросы, задачи и упражнения........................................................ 80
Глава 3. Основы теории модуляции и детектирования......................................82
3.1. Преобразование колебаний в параметрических и нелинейных цепях ..................82
3.2. Формирование и детектирование сигналов амплитудной модуляции....................88
3.3. Формирование и детектирование сигналов угловой модуляции...................... 96
3.4. Формирование и детектирование сигналов однополосной модуляции..................102
3.5. Формирование и детектирование сигналов, модулированных дискретными
сообщениями...................................................... ,.............103
3.6. Модуляция и детектирование при импульсном переносчике.....................112
3.7. Функция корреляции и спектральная плотность мощности модулированных
сигналов при модуляции случайным процессом....................................115
3.8. Помехоустойчивость амплитудной и угловой модуляции.............................120
Выводы..............................................................................124
Вопросы, задачи и упражнения........................................................124
Глава 4. Математические модели каналов связи. Преобразование сигналов в каналах связи ... 126
4.1. Общие сведения о каналах связи ...........................................126
4.2. Линейные и нелинейные модели каналов связи.....................................128
4.3. Преобразования сигналов в линейных и нелинейных каналах........................129
4.3.1. Преобразование детерминированных сигналов в детерминированных линейных
каналах.....................................................................130
4.3.2. Преобразование узкополосных сигналов в узкополосных линейных
стационарных каналах........................................................134
4.3.3. Преобразования энергетических характеристик детерминированных сигналов.....137
4.3.4. Преобразование случайных сигналов в детерминированных линейных каналах.138
4.3.5. Преобразование случайных сигналов в детерминированных нелинейных каналах.. 140
' 4.3.6. Прохождение сигналов через случайные каналы связи..........................141
4.3.7. Аддитивные помехи в канале.................................................145
4.3.8. Квантовый шум......................................................147
4.4. Модели непрерывных каналов связи...............................................149
4.4.1. Идеальный канал без помех..................................................149
4.4.2. Канал с аддитивным гауссовским шумом.......................................150
431
4.4.3. Канал с неопределённой фазой сигнала и аддитивным шумом......л...........150
4.4.4. Канал с межсимвольной интерференцией (МСИ) и аддитивным шумом.......151
4.5. Модели дискретных каналов связи.........................................152
4.5.1. Некоторые модели дискретных каналов с памятью.......................155
4.5.2. Модель дискретно-непрерывного канала............................... 157
, 4.6. Модели непрерывных каналов связи, заданные дифференциальными уравненими......157
Выводы....................................................................... 161
Вопросы, задачи и упражнения................................................,Л62
Глава 5. Теория помехоустойчивости систем передачи дискретных сообщений........165
5.1. Задачи синтеза оптимальных демодуляторов................................165
5.2. Критерии качества и правила приёма дискретных сообщений.................169
5.3. Оптимальные алгоритмы приёма при полностью известных сигналах
(когерентный приём)..........................................................173
5.4. Оптимальный приёмник с согласованным фильтром...........................180
5.5. Помехоустойчивость оптимального когерентного приёма.....................186
5.6. Обработка сигналов в каналах с межсимвольной интерференцией.............192
5.7. Приём сигналов с неопределённой фазой (некогерентный приём).............197
5.8. Приём дискретных сообщений в условиях флуктуации фаз и амплитуд сигналов.....206
5.9. Приём дискретных сообщений в каналах с сосредоточенными по спектру
и импульсными помехами.......................................................210
5.10. Помехоустойчивость приёма дискретных сообщений в оптическом диапазоне волн.... 212
5.11. Сравнение помехоустойчивости систем передачи дискретных сообщений......214
Выводы ..................................................................... 216
Вопросы, задачи и упражнения.................................................217
Глава 6. Потенциальные возможности передачи сообщений по каналам связи
(основы теории информации)...............................................220
6.1. Проблема обеспечения сколь угодно высокой верности передачи дискретных
сообщений в каналах с помехами................................................220
6.2. Потенциальные возможности дискретных каналов связи..................... 222
6.2.1. Определение источника дискретных сообщений, дискретного канала связи,
кодирования и декодирования.................................................222
6.2.2. Основной понятийный аппарат теории информации............................224
6.2.3. Теоремы кодирования шеннона для дискретного канала связи............235
6.3. Потенциальные возможности непрерывных каналов связи при передаче дискретных
сообщений.................................................................. 245
6.3.1. Определение непрерывного канала связи, кодирования и декодирования в нём.245
6.3.2. Количество информации, передаваемой по непрерывному каналу связи,
расчёт его пропускной способности........................................ 246
6.3.3. Теорема кодирования для непрерывного канала связи...................252
6.3.4. Потенциальные возможности каналов со многими пользователями.........254
Выводы.......................................................................255
Вопросы, задачи и упражнения.................................................255
Глава 7. Кодирование источников и каналов связи................................257
7.1. Классификация методов кодирования.......................................257
7.2. Конструктивные методы кодирования источников сообщений..................259
7.3. Помехоустойчивое (канальное) кодирование................................262
7.3.1. Вероятность ошибки оптимального декодирования для кодов с фиксированной
длиной блоков (экспоненты вероятностей ошибок).........;....;..............263
7.3.2. Коды с гарантированным обнаружением и исправлением ошибок...........268
7.3.3. Линейные двоичные коды для обнаружения и исправления ошибок.........273
7.3.4. Важные подклассы линейных двоичных кодов............................282
7.3.5. Конструктивные алгоритмы исправления ошибок линейными кодами........287
7.3.6. Обобщение теории кодирования на недвоичные коды................... 289
7.3.7 Итеративные и каскадные коды....................................... 290
7.3.8. Кодирование в каналах с памятью.................................... 291
7.3.9. Системы с обратной связью...........................................292
7.3.10. Заключение по § 7.3. Объединение операций демодуляции и декодирования.
Декодирование с мягким решением............................................294
7.4. Свёрточные (решётчатые) коды............................................297
432
Выводы.......................................................................304
Вопросы, задачи и упражнения.................................................305
Глава 8. Теория помехоустойчивости передачи непрерывных сообщений..............307
8.1 Критерии помехоустойчивости приёма непрерывных сообщений.................307
8.2. Оптимальная оценка отдельных параметров сигнала............309
8.3 Оптимальная демодуляция непрерывных сигналов.............................312
8.4. Помехоустойчивость систем передачи непрерывных сообщений при слабых помехах... 319
8.5 Порог помехоустойчивости. Аномальные ошибки..................................322
8.6. Оптимальная линейная фильтрация непрерывных сигналов.
Фильтр Колмогорова-Винера.....................................................325
8.7. Оптимальная линейная фильтрация непрерывных сообщений. Фильтр Калмана.......329
8.8. Теория нелинейной фильтрации............................................331
8.9. Общие сведения о цифровой передаче непрерывных сообщений................335
8 10. Помехоустойчивость импульсно-кодовой модуляции........................338
8.1 1 Кодирование с предсказанием............................................343
Выводы.......................................................................347
Вопросы, задачи и упражнения.....................................................348
Глава 9. Принципы многоканальной связи и распределения информации..............349
9 1. Основы теории разделения сигналов......................................349
9.2. Частотное, временное и фазовое разделение сигналов......................353
9.3. Разделение сигналов по форме. Системы передачи с шумоподобными сигналами....359
9.4. Комбинационное разделение сигналов......................................365
9.5. Пропускная способность систем многоканальной связи......................368
9.6. Принципы построения сетей связи.............................................370
9.6.1. Сеть распределения информации и ее элементы.........................370
9.6.2. Методы коммутации в сетях связи.....................................373
9.6.3. Многоуровневая архитектура связи и протоколы........................375
9.6.4. Перспективы развития сетей связи....................................377
Выводы.......................................................................379
Вопросы, задачи и упражнения.................................................380
Глава 10. Основы цифровой обработки сигналов...................................381
10.1. Спектр дискретного сигнала.............................................382
10 2. .Алгоритм быстрого преобразования Фурье................................384
10.3. Временные и спектральные методы исследования линейных стационарных
цифровых фильтров........................................................387
10 4. Использование Z-преобразования в теории стационарных линейных цифровых
фильтров.................................................................388
10.5. Основы реализации цифровых фильтров....................................391
10.6. Учёт погрешности цифровой фильтрации из-за квантования сигналов по уровням.396
Выводы.......................................................................397
Вопросы, задачи и упражнения.................................................398
Глава 1 1. Анализ эффективности и оптимизация систем связи.....................400
11.1. Принципы системного анализа............................................400
1 1.2. Характеристики и показатели эффективности систем передачи информации..402
1 1.3. Выбор сигналов и помехоустойчивых кодов...............................409
1 1.4. Компенсация помех и искажений в канале................................417
11.5. Сокращение избыточности. Сжатие данных.................................419
11.6. Оптимизация систем связи...............................................421
Выводы.......................................................................426
Вопросы, задачи и упражнения.................................................427
Заключение.....................................................................428
Список литературы..............................................................430