/






























































































































































































































































Author: Новицкий П.В. Левшина Е.С.
Tags: электротехника электрические и магнитные измерения физика электричество измерения
Year: 1983




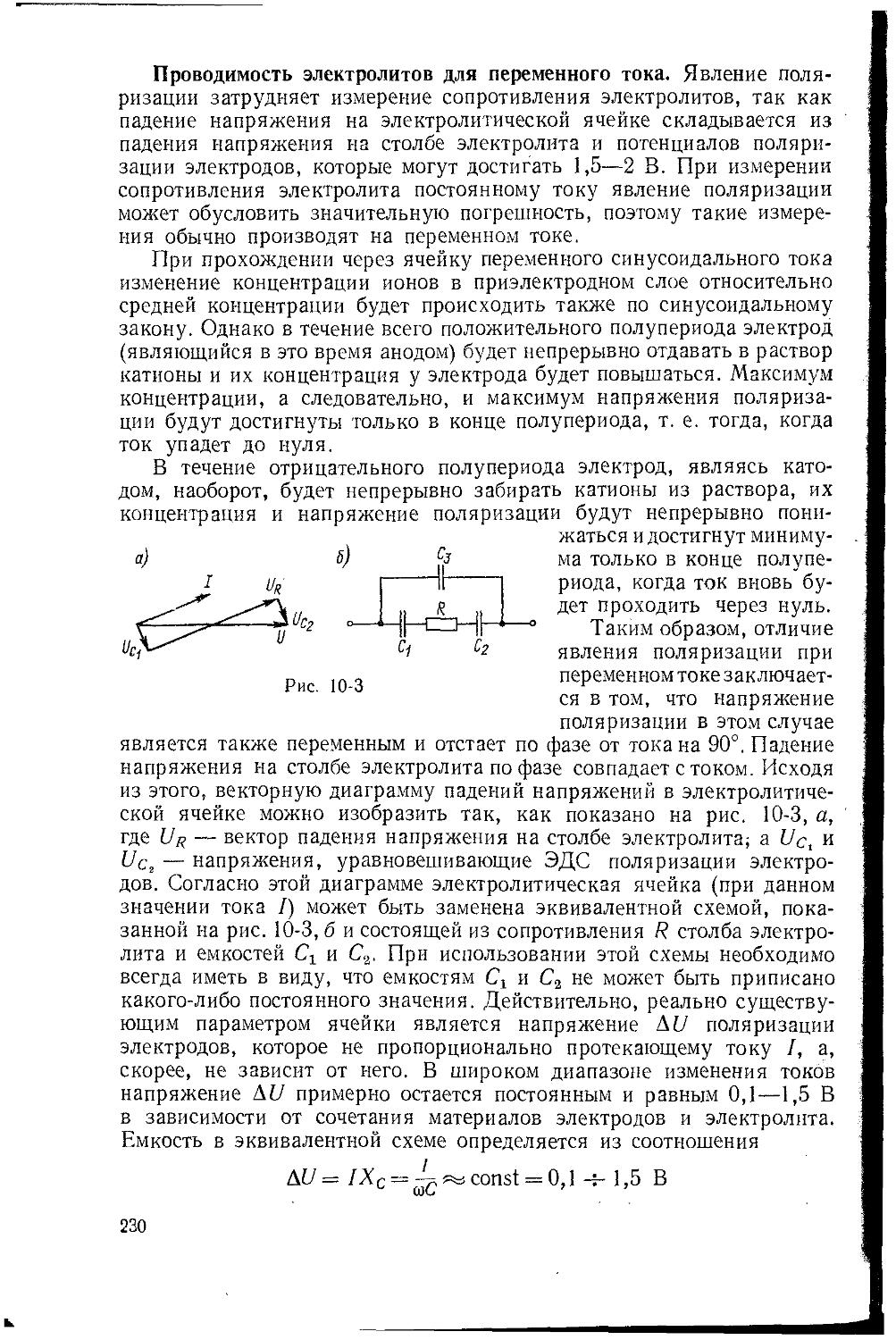
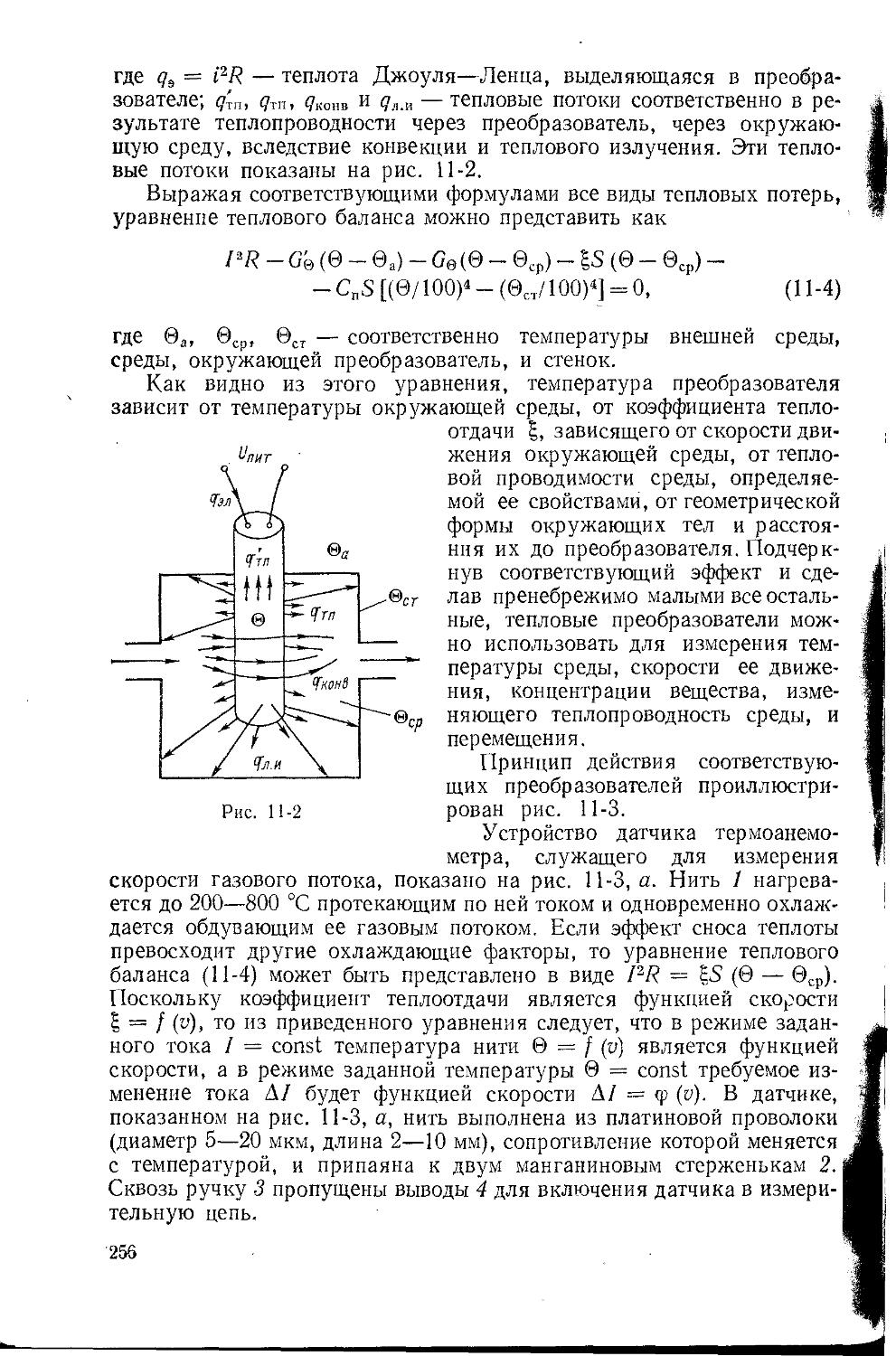
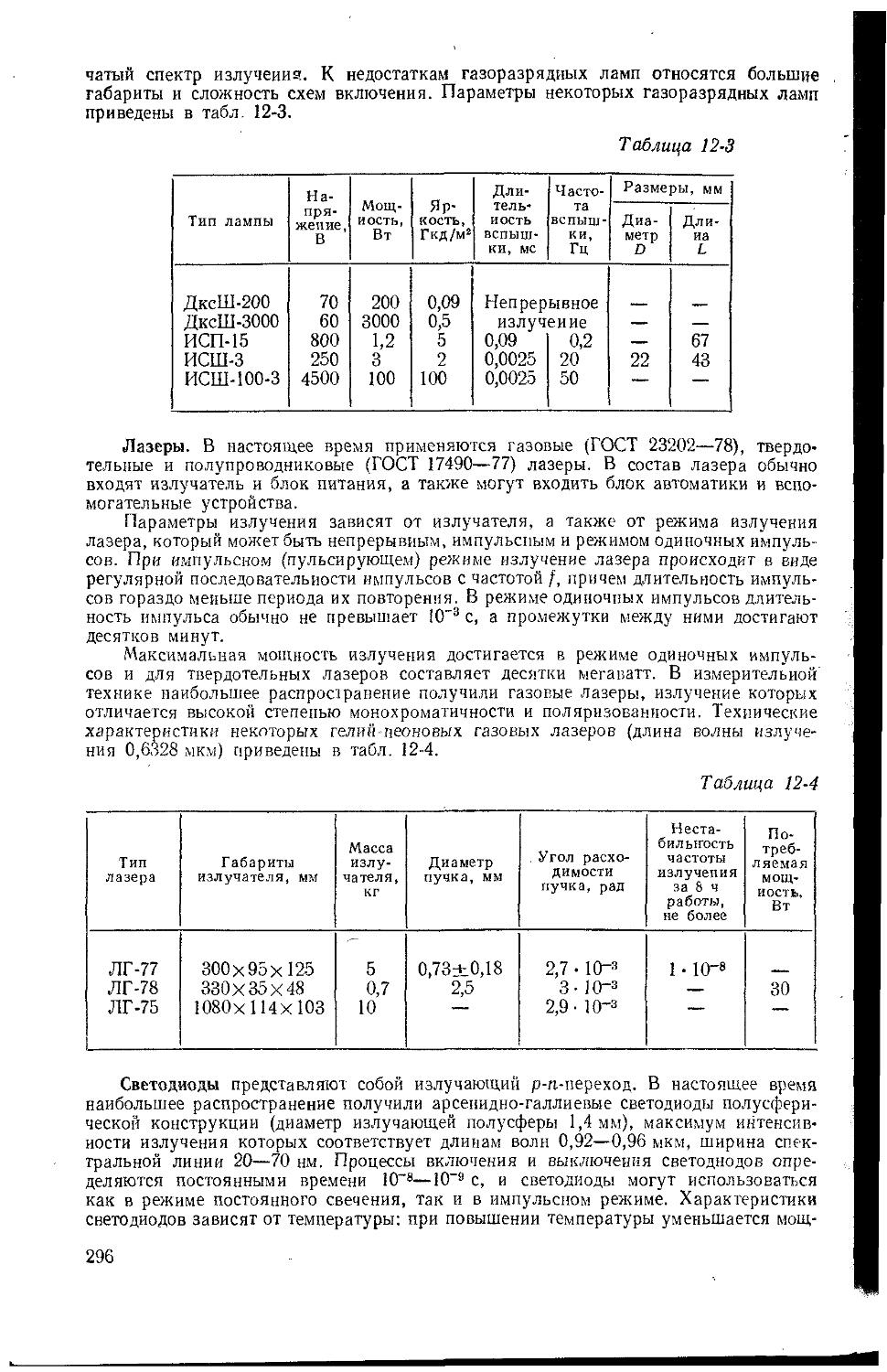
Text
- ЭЛЕКТРИЧЕСКИЕ ИЗМЕРЕНИЯ ФИЗИЧЕСКИХ ВЕЛИЧИН
д
Е.С.ЛЕВШИНА.
П.В.НОВИЦКИЙ
ИЗМЙИЙГЕЛЬНЫЕ
для студентов вузов
ЭНЕРГО-АТОМ-ИЗДАТ
I
\
Е.С.ЛЕВШИНА
П.В.НОВИЦКИЙ
J3?
ЭЛЕКТРИЧЕСКИЕ ИЗМЕРЕНИЯ ФИЗИЧЕСКИХ ВЕЛИЧИН
ИЗМЕРИТЕЛЬНЫЕ
ПРЕОБРАЗОВАТЕЛИ
Допущено Министерством высшего
и среднего специального образования СССР в качестве учебного пособия для студентов вузов, обучающихся по специальности
’’Информационно-измерительная техника”
Ленинград
ЭНЕРГОАТОМИЗДАТ
Ленинградское отделение 19 8 3
ББК 31.22
Л 37
УДК 621.317.39(075.8)
Рецензенты: кафедра информационно-измерительной техники Л ЭТИ имени В. И. Ульянова (Ленина) (зав. кафедрой Е. А. Чернявский) и А. М. Мелик-Шахназаров
Левшина Е. С., Новицкий П. В.
Л37 Электрические измерения физических величин: (Измерительные преобразователи). Учеб, пособие для вузов. — Лл Энергоатомиздат. Ленингр. отд-ние, 1983. — 320 с., ил.
В пер.: 1 р. 10 к.
Рассмотрены вопросы общей теории, теории погрешностей, измерительных цепей и динамики измерительных преобразователей, а также физические основы, теория, методы расчета и проектирования основных видов измерительных преобразователей (датчиков), систематизированных по общности физического принципа действия.
Для студентов вузов по программе курса «Измерительные преобразователи», для инженерно-технических и научных работников.
2302010000—113 „ „„
Л 051(01)—83 182—83
BWFJTWYFFva |
Невм»вми' - - ' *илиа^^ l!
СтПИ
ББК 31,22 6П2.1.083
© Энергоатомиздат, 1983
ПРЕДИСЛОВИЕ
Содержание предлагаемой книги соответствует программе курса «Измерительные преобразователи», читаемого в высших учебных заведениях для специальности 0642 «Информационно-измерительная техника». Современная информационно-измерительная техника располагает средствами измерения около двухсот различных физических величин — электрических, магнитных, тепловых, акустических, механических и т. д. Подавляющее большинство этих величин в процессе измерения преобразуется в величины электрические, как наиболее удобные для передачи, усиления, математической обработки и точного измерения. Поэтому в современной измерительной технике находят широкое применение преобразователи разного рода физических величин в электрические величины.
Термин «измерительный преобразователь» (ИП) употребляется в настоящее время достаточно широко и в разных смыслах. В данной книге под измерительным преобразователем понимается элементарный измерительный преобразователь, выполненный на основе определенного физического принципа: емкостный, магнитоупругий, пьезоэлектрический преобразователь и т. д.
Для обозначения совокупности измерительных преобразователей, объединенных в один конструктивный узел, выносимый на объект измерения, сохранен укоренившийся в практике термин «датчик».
Подбор излагаемого материала базируется на многолетнем опыте чтения лекций в Ленинградском политехническом институте имени М. И. Калинина.
Описать в книге небольшого объема все известные типы измерительных преобразователей, а также изложить вопросы теории и методы расчета этих преобразователей не представляется возможным, да и вряд ли это целесообразно. Поэтому основное внимание при написании книги было направлено на систематизацию физических явлений, положенных в основу построения преобразователей, и систематизацию вопросов теории, используемых для их описания. В соответствии с этим вопросы динамики ЙП и теории погрешностей, общие для всех ИП, сосредоточены в первой и второй главах книги.
Общим элементом любых измерительных-устройств, ..использующих ИП, являются измерительные цепи, связывающие ИП-с последующей аппаратурой. Без рассмотрения измерительных цепей це рред-
1*
ставляется возможным расчет и проектирование ИП. Поэтому измерительным цепям посвящена отдельная глава.
Существенная часть описываемых в книге преобразователей предназначена для измерения механических величин. Общими для преобразователей механических величин являются упругие элементы, рассматриваемые в главе четвертой.
Остальные главы книги посвящены отдельным типам преобразователей. При этом, излагая вопросы теории и расчета преобразователей, которые стали уже классическими (тензорезистивные, индуктивные,. емкостные и др.), авторы рассматривают также преобразователи, получившие распространение в последние годы (пьезорезонансные, гальваномагнитные, преобразователи с использованием поверхностных акустических волн, магнитомодуляционные и т. д.). В то же время некоторые широко применяемые преобразователи, достаточно подробно описанные в специальной литературе, в настоящей книге не рассматриваются (акустические, преобразователи с радиоактивным излучением, электронно-лучевые и др.).
Авторы старались уделить больше внимания методам расчета измерительных преобразователей с иллюстрацией их достаточным числом примеров.
В работе над рукописью и в написании некоторых глав приняли участие д-р техн, наук, профессор Дрезденского технического университета А. Ленк (гл. 4 и 5), сотрудники Ленинградского политехнического института имени М. И. Калинина — канд. техн, наук, доцент С. А. Спектор (§ 8-10 и 8-11), канд. техн, наук, доцент В. С. Гут-ников (§ 7-4 и 11-5), канд. техн, наук Л. Н. Кнорринг (§ 8-12), канд. техн, наук А. В. Клементьев (§ 5-5), канд. техн, наук, доцент Омского политехнического института Ю. Н. Кликушин (гл. 12). Главы 9 и 10 написаны С. А. Спектором.
Авторы выражают особую признательность председателю методического совета Министерства ВиССО СССР — заслуженному деятелю науки и техники РСФСР, д-ру техн, наук, профессору Е. Г. Шрам-кову, явившемуся инициатором создания курса «Измерительные преобразователи» и введения его в учебные планы. Авторы считают своим долгом отметить, что, излагаемый материал в значительной мере учитывает результаты обсуждений и дискуссий, проводимых в коллективе кафедры информационно-измерительной техники, а также обязан своим созданием лекторам, ранее работавшим над этим курсом: А. М. Туричину, М. М. Фетисову, Д. И. Зорину.
Авторы благодарны коллективу кафедры информационно-измерительной техники Ленинградского электротехнического института имени В. И. Ульянова (Ленина), а также д-ру техн, наук, профессору А. М. Мелик-Шахназарову за полезные замечания, сделанные ими при рецензировании рукописи настоящей книги.
Замечания и пожелания по книге просьба направлять по адресу: 191041, Ленинград, Марсово поле, 1, Ленинградское отделение Энер-гоатомиздата.
Авторы
ГЛАВА ПЕРВАЯ
ОБЩИЕ СВОЙСТВА И ВОПРОСЫ ТЕОРИИ ПОГРЕШНОСТЕЙ ' ИЗМЕРИТЕЛЬНЫХ ПРЕОБРАЗОВАТЕЛЕЙ
1-1. ОСНОВНЫЕ ПОНЯТИЯ и ОПРЕДЕЛЕНИЯ
Измерительное преобразование представляет собой отражение размера одной физической величины размером другой физической величины, функционально с ней связанной.
Применение измерительных преобразований является единственным методом практического построения любых измерительных устройств.
Измерительный преобразователь — это техническое устройство, построенное на определенном физическом принципе действия, выполняющее одно частное измерительное преобразование. Работа измерительных преобразователей протекает в сложных условиях, так как объект измерения — это, как правило, сложный, многогрйнный процесс, характеризующийся множеством параметров, каждый из которых действует на измерительный преобразователь совместно с остальными параметрами. Нас же интересует только один параметр, который называем измеряемой величиной, а все остальные параметры процесса считаем помехами. Поэтому у каждого измерительного преобразователя целесообразно установить его естественную входную величину, которая лучше всего воспринимается им на фоне помех. Подобным образом можно выделить естественную выходную величину преобразователя. По виду естественной выходной электрической величины преобразователи подразделяются на две большие группы: генераторные (с выходной величиной е = f (х) или i = f (х) и внутренним сопротивлением ZBH = const) и параметрические (с ЭДС е = О и выходной величиной в виде изменения /?, L или С в функции х).
Функция преобразования измерительного преобразователя — это функциональная зависимость выходной величины от входной, описываемая аналитическим выражением или графиком. Чаще всего стремятся иметь линейную характеристику преобразования, т. е. прямую пропорциональность между изменением входной величины и соответствующим приращением выходной величины преобразователя.
Для описания линейной характеристики преобразования а = — ф (х) = а0 + SAX достаточно двух параметров: начального значения выходной величины а0 (нулевого уровня), соответствующего нулевому (или какому-либо другому характерному) значению входной величины х, и показателя относительного наклона характеристики S ~ Аа/Ах, называемого чувствительностью преобразователя.
5
Чувствительность преобразователя — это, как правило, именованная величина с разнообразными единицами, зависящими от природы входной и выходной величин. Для реостатного преобразователя единица чувствительности — Ом/мм, для термопары — мВ/K, для фотоэлемента— мкА/лм, для двигателя — об/(с-В) или Гц/В, для гальванометра — мм/мкА и т. д.
Чувствительность измерительного прибора, состоящего из последовательного ряда измерительных преобразователей, определяется произведением чувствительностей всех преобразователей, образующих канал передачи информации. Чтобы это наглядно пояснить, рассмотрим прибор (рис. 1-1) для измерения и регистрации быстрых линейных перемещений, состоящий из датчика, измерительного неравновесного моста, усилителя и вибратора магнитоэлектрического осциллографа. Пусть датчик при воздействии на него измеряемого перемещения I мм изменяет свое сопротивление на 1 % начального значения. Тогда его чувствительность 5Д = 1%/мм. Датчик включен в мост, который при X — 0 уравновешен. При отклонении X от 0 мост выхо-
ВииратС'р
Усилитель
Мост
Датчик
Рис. 1-1
дит из равновесия, и на его выходе возникает напряжение. Если при изменении сопротивления датчика на 1 % на выходе моста появляется ‘ напряжение 10 мВ, то чувствительность моста равна SM = 10 мВ/%. Выходное напряжение моста подается на выход усилителя, и если чувствительнс-сть усилителя составляет Syc = 10 мА/мВ, то выходной ток усилителя, поступающий в вибратор осциллографа, будет равен 100 мА. При чувствительности вибратора SB = 1 мм/мА этот ток вызовет отклонение луча вибратора на 100 мм. Таким образом, результирующая чувствительность прибора будет равна S = SsSMSycSB = = I %/мм-10 мВ/%-10 мА мВ-1 мм/мА = 100 мм/мм.
Понятия реальной и номинальной характеристик и погрешности измерительного преобразователя. При градуировке серии однотипных преобразователей оказывается, что их характеристики несколько отличаются друг от друга, занимая некоторую полосу. Поэтому в паспорте измерительного преобразователя приводится некоторая средняя характеристика, называемая номинальной. Разности между номинальной (паспортной) и реальной характеристиками преобразователя рассматриваются как его погрешности.
Систематические, прогрессирующие и случайные погрешности измерительных преобразователей. Систематическими называются погрешности, не изменяющиеся с течением времени или являющиеся не изменяющимися во времени функциями определенных параметров. Основное свойство систематических погрешностей состоит в том, что они могут быть почти полностью устранены введением соответствующих поправок.
6
Особая опасность постоянных систематических погрешностей заключается в том, что их присутствие чрезвычайно трудно обнаружить. В отличие от случайных, прогрессирующих или являющихся функциями определенных параметров погрешностей постоянные систематические погрешности внешне себя никак не проявляют и могут долгое время оставаться незамеченными. Единственный способ их обнаружения состоит в поверке нуля и чувствительности путем повторной аттестации прибора по образцовым мерам.
Примером второго вида систематических погрешностей служит большинство дополнительных погрешностей, являющихся не изменяющимися во времени функциями вызывающих их влияющих величин (температура, частота, напряжение и т. п.). Эти погрешности благодаря постоянству во времени функций влияния также могут быть скорректированы введением дополнительных корректирующих преобразователей, воспринимающих влияющую величину и вводящих соответствующую поправку в результат преобразования основного преобразователя.
Прегрессирующими называются погрешности, медленно изменяющиеся с течением времени. Эти погрешности, как правило, вызываются процессами старения тех или иных деталей аппаратуры (разрядка источников питания, старение резисторов, конденсаторов, деформация механических деталей, усадка бумажной ленты в самопишущих приборах и т. д.). Особенностью прогрессирующих погрешностей является то обстоятельство, что они могут быть скорректированы без выяснения вызвавших их причин введением поправки, но лишь в данный момент времени, а далее вновь монотонно возрастают. Поэтому в отличие от систематических погрешностей прогрессирующие погрешности требуют непрерывного повторения коррекции, и тем более частого, чем менее желательно их остаточное значение. Другая особенность прогрессирующих погрешностей состоит в том, что с точки зрения теории вероятностей их изменение во времени представляет собой нестационарный процесс и не может быть описано в рамках хорошо разработанной теории стационарных процессов.
Случайными называются неопределенные по своему значению или недостаточно изученные погрешности, в появлении различных значений которых нам не удается установить какой-либо закономерности. Они определяются сложной совокупностью причин, трудно поддающихся анализу. Их частные значения не могут быть предсказаны, а для всей их совокупности может быть установлена закономерность лишь для частот появления их различных значений. Присутствие случайных погрешностей (в отличие от систематических) легко обнаруживается при повторных измерениях в виде некоторого разброса ре-зультатов. В подавляющем большинстве случаев процесс появления случайных погрешностей есть стационарный случайный процесс. Поэтому размер случайных погрешностей характеризуют указанием закона распределения их вероятностей или указанием параметров этого закона, разработанных в теории вероятностей и теории информации.
Так как большинство составляющих погрешности реальных прибо
7
ров проявляется именно как случайные, то их вероятностное описание, а на его основе и информационное описание служат основным научным методом теории погрешностей.
Однако всегда надо иметь в виду, что разделение погрешностей на систематические, прогрессирующие и случайные представляет собой лишь прием их анализа. В действительности же все эти три составляющие проявляются совместно и образуют единый нестационарный случайный процесс.
1-2. ОЦЕНКИ СЛУЧАЙНЫХ ПОГРЕШНОСТЕЙ
ИЗМЕРИТЕЛЬНЫХ ПРЕОБРАЗОВАТЕЛЕЙ (НЕОБХОДИМЫЕ СВЕДЕНИЯ ИЗ ТЕОРИИ ВЕРОЯТНОСТЕЙ)'
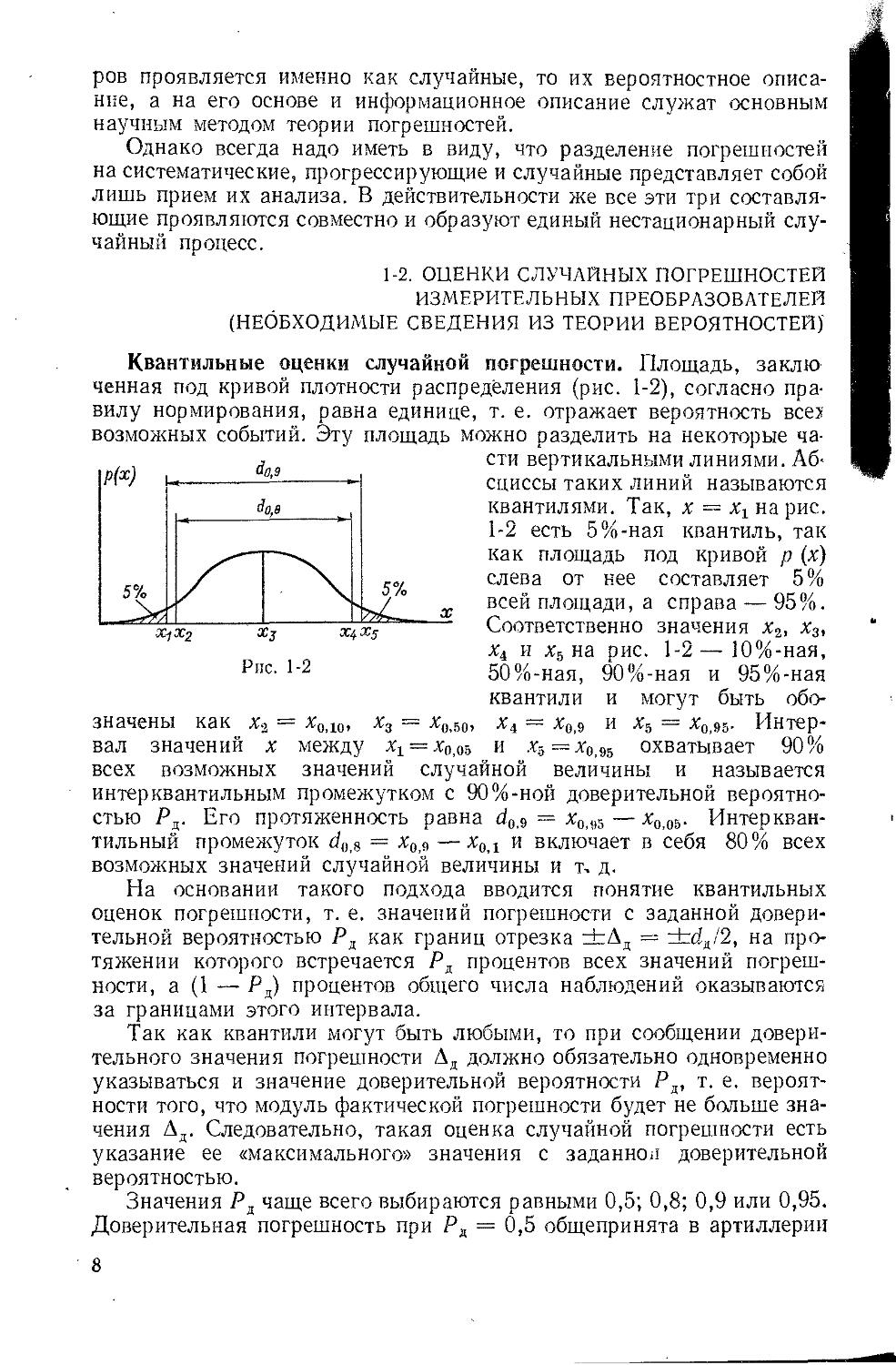
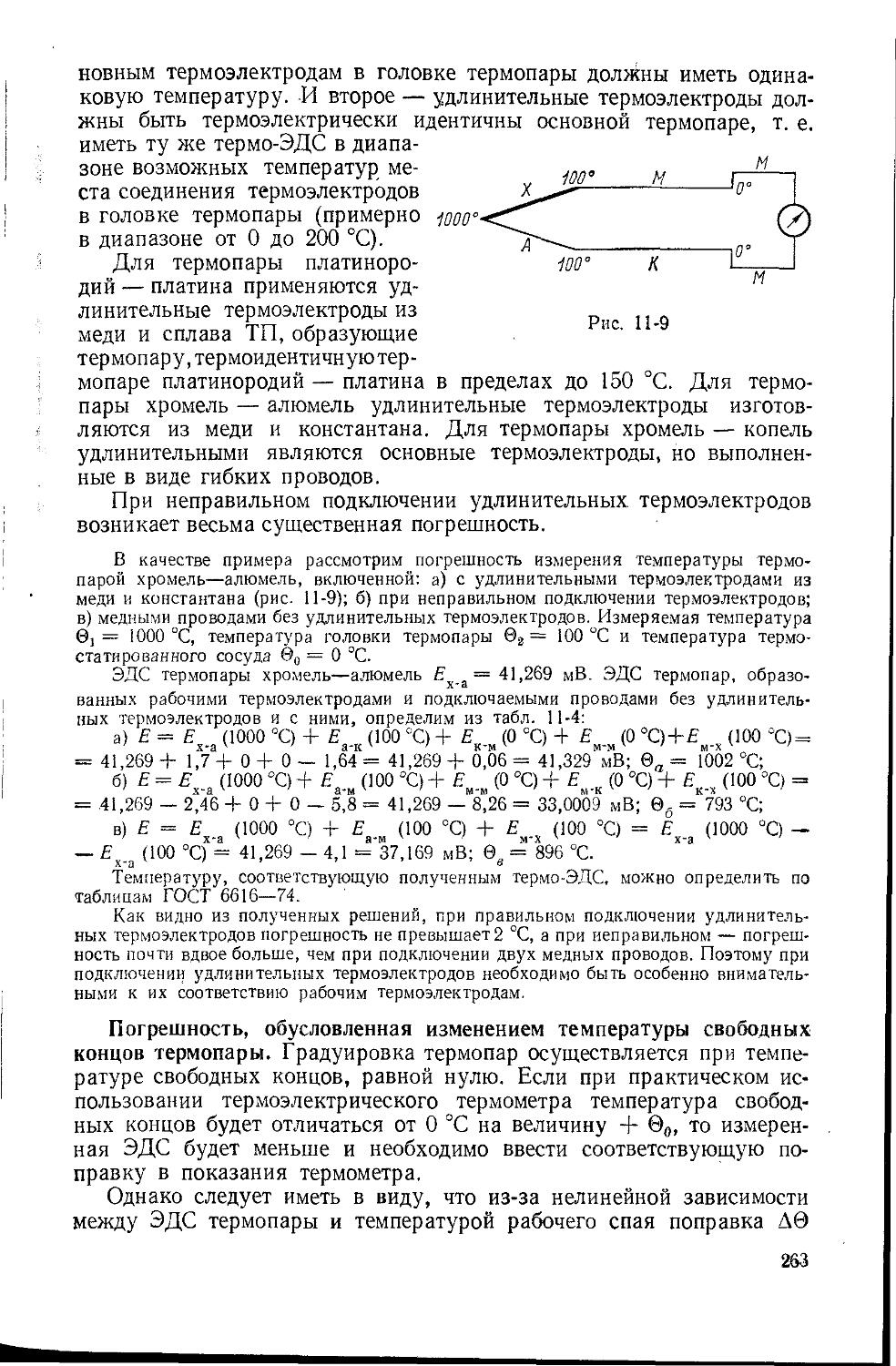
Квантильные оценки случайной погрешности. Площадь, заклю ченная под кривой плотности распределения (рис. 1-2), согласно правилу нормирования, равна единице, т. е. отражает вероятность всех возможных событий. Эту площадь
можно разделить на некоторые части вертикальными линиями. Абсциссы таких линий называются квантилями. Так, х = х4 на рис. 1-2 есть 5%-ная квантиль, так как площадь под кривой р (х) слева от нее составляет 5% всей площади, а справа — 95%. Соответственно значения х2, х3, х4 и xs на рис. 1-2 — 10%-ная, 50%-ная, квантили = х019 и х8 = х0,98
90%-ная и 95%-ная и могут быть обо-и х5 = х0,95. Интер-охватывает 90%
и называется
значены как х, = х0,10, х3 = х0.60, вал значений х между х1 = х0105 всех возможных значений случайной величины интерквантильным промежутком с 90%-ной доверительной вероятностью Ря. Его протяженность равна do9 = х0>95 — х0 05. Интерквантильный промежуток dOfS — х0;9 — хол и включает в себя 80% всех возможных значений случайной величины и т, д.
На основании такого подхода вводится понятие квантильных оценок погрешности, т. е. значений погрешности с заданной доверительной вероятностью Р:1 как границ отрезка ±АД = ±йд/2, на протяжении которого встречается Рд процентов всех значений погрешности, а (1 — Рд) процентов общего числа наблюдений оказываются за границами этого интервала.
Так как квантили могут быть любыми, то при сообщении доверительного значения погрешности Ад должно обязательно одновременно указываться и значение доверительной вероятности Рд, т. е. вероятности того, что модуль фактической погрешности будет не больше значения Ад. Следовательно, такая оценка случайной погрешности есть указание ее «максимального» значения с заданной доверительной вероятностью.
Значения Рд чаще всего выбираются равными 0,5; 0,8; 0,9 или 0,95. Доверительная погрешность при Рд = 0,5 общепринята в артиллерии
8
и называется срединной ошибкой, доверительная вероятность Рх — 0,8 общепринята во всех стандартах и расчетах надежности средств электроники, автоматики и измерительной техники, а значения Р, = 0,9 и Рд = 0,95 являются предпочтительными (см. § 1-6) значениями доверительной вероятности при нормировании соответственно случайной и результирующей погрешностей средств измерений.
Достоинство доверительной погрешности состоит в том, что ее значение может быть оценено по экспериментальным данным очень простым путем. Пусть проведена серия из п измерений. Из п погрешностей образуют вариационный ряд, расположив их в порядке возрастания. Слева условно приписывают значение —оо, а справа — значение + оо, так что вариационный ряд —оо, Д(1), Д(2), ..., Д(„;, Ц-оо состоит из (и + 2) членов. Индексы в скобках означают, что в вариационном ряду Д(1) А(2) • •• А(«)- Утверждается, что каждый
из членов вариационного ряда является оценкой соответствующих квантилей, которые делят интервал (0, 1) на (п + 1) частей с равными значениями вероятностей, т. е. в среднем вероятности попадания значений погрешностей в каждый из интервалов (—оо, Д(1)), (А(11, А!2)), ... ..., (Afn.j), А(Я)), (А(иЬ +оо) одинаковы и равны 1/(и + 1). Следовательно, значение А/ является оценкой д- 100%-ной квантили.
Поясним сказанное примером. Пусть при исследовании преобразователя наблюдались следующие девять значений его случайной погрешности: —1; 0; +2; —3; +1; +4; —2; —4; +3. После расстановки в порядке возрастания они образуют вариационный ряд —4; —3; —2; —1; 0; +1; +2; +3; +4. Эти наблюдения и являются оценками соответствующих квантилей, так как мы вынуждены считать, что при дальнейшем продолжении наблюдений вероятность Pt попадания их в каждый из (п + 1) интервалов (—оо, —4), (—4, —3), (—3, —2), ... ..., (+4, +°о) одинакова и равна l/(n + 1), поскольку полученные наблюдения разбивают ось х на (и + 1) интервалов (в нашем случае п + 1 = 10 и вероятность попадания в каждый из интервалов Pz = = l/(n + 1) = 0,1 = 10%).
Естественно, на практике распределение отдельных наблюдений будет не столь равномерным, как в нашем примере. Так, наблюдения «—2» могут встретиться два раза, а «—1» — ни разу и т. д. Однако при п = 9 крайние из наблюдений (в нашем примере —4 и +4) всегда будут охватывать 8 интервалов из 10 возможных. Поэтому указание, что погрешность данного преобразователя не более А = ±4 должно сопровождаться добавлением «с доверительной вероятностью Рд — = 0,8», так как в 0,2 всех случаев погрешность может попасть в интервалы (—оо, —4) и (+4, +оо), т. е. оказаться за пределами А = = ±4. При п = 19 наибольшее А(я) и наименьшее А(1) значения дают оценки 95%-ной и 5%-ной квантилей, а половина их разности — оценку доверительной погрешности при Ря = 0,9. Если при п = 19 отбросить крайние значения А(я) и А(1) и взять половину разности крайних членов A(„_1( и А(2) оставшегося ряда, то получится оценка доверительной погрешности при Рд = 0,8 и т. д.
Таким образом, практическое определение Ад сводится к тому, что
9
из результатов наблюдений отбрасываются интервалы, ограниченные наибольшими по модулю, а следовательно, самыми неустойчивыми, близкими к промахам наблюдениями. Если при. переменном п отбрасывается одна и та же часть всех интервалов, например 10%, то определяемое значение Ад не зависит от длины п серии наблюдений и оказывается тем более устойчивым, чем больше серия наблюдений.
При этом следует иметь в виду, что по ограниченным эксперимен-
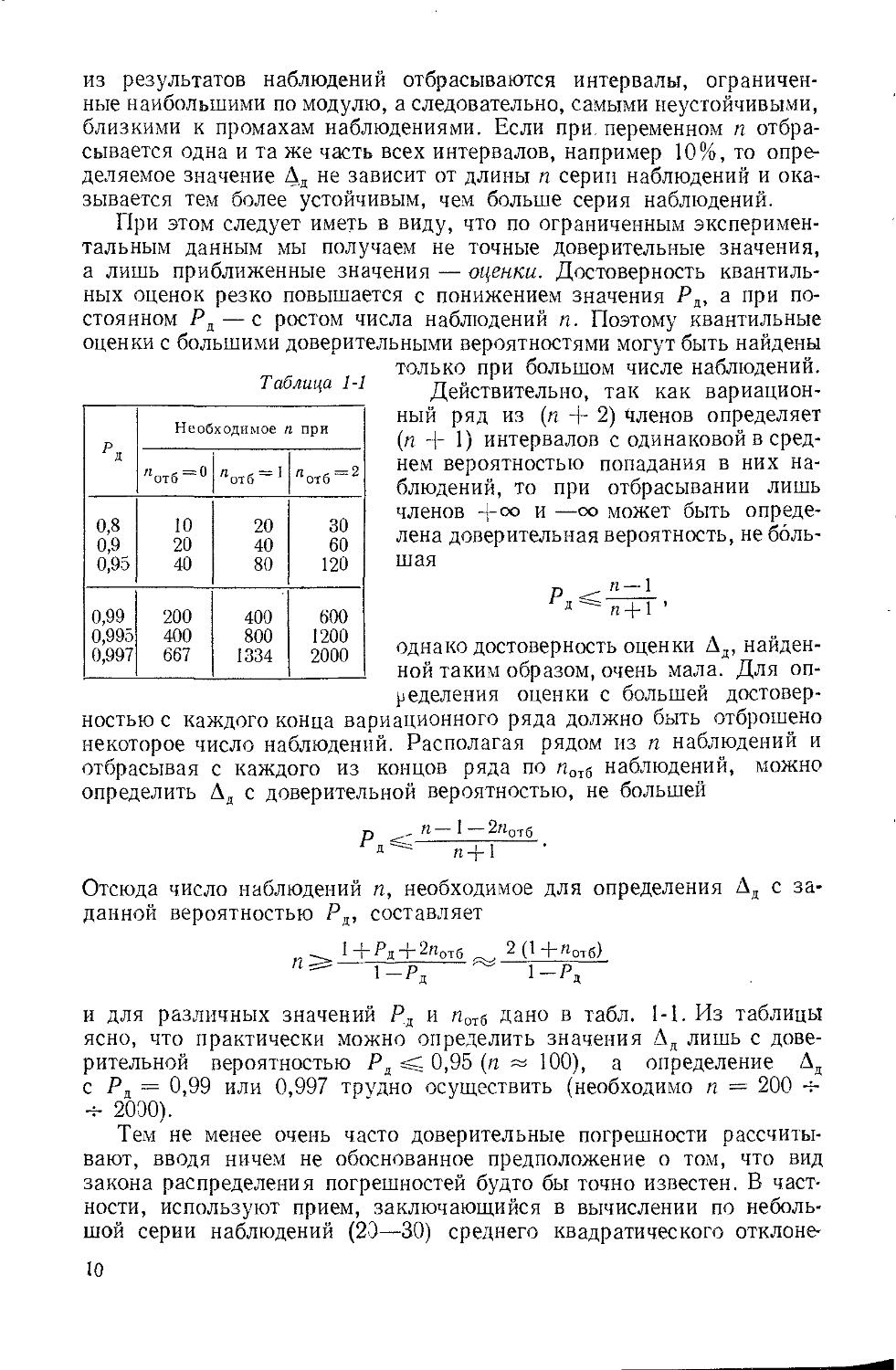
тальным данным мы получаем не точные доверительные значения, а лишь приближенные значения — оценки. Достоверность квантиль-
ных оценок резко повышается с понижением значения Рд, а при постоянном Рл— с ростом числа наблюдений п. Поэтому квантильные оценки с большими доверительными вероятностями могут быть найдены
Таблица 1-1
% Необходимое п при
потб = 0 %T6 = 1 "отб 73=2
0,8 10 20 30
0,9 20 40 60
0,95 40 80 120
0,99 200 400 600
0,995 400 800 1200
0,997 667 1334 2000
только при большом числе наблюдений.
Действительно, так как вариационный ряд из (п + 2) Членов определяет (/1 + 1) интервалов с одинаковой в среднем вероятностью попадания в них наблюдений, то при отбрасывании лишь членов +°° и —00 может быть определена доверительная вероятность, не большая
р —1
д=1; п + 1
однако достоверность оценки Ад, найденной таким образом, очень мала. Для оп-
ределения оценки с большей достоверностью с каждого конца вариационного ряда должно быть отброшено некоторое число наблюдений. Располагая рядом из п наблюдений и отбрасывая с каждого из концов ряда по потб наблюдений, можно определить Ад с доверительной вероятностью, не большей
р П I 2потб
д~~~ п+1
Отсюда число наблюдений п, необходимое для определения Ад с за' данной вероятностью Рд, составляет
„ 1+^д + 2потб 2(l+n0Tg)
1-Рд ~ 1-/Д
и для различных значений Рд и потб дано в табл. 1-1. Из таблицы ясно, что практически можно определить значения Ад лишь с доверительной вероятностью Р. £+ 0,95 (п ~ 100), а определение Ад с Рд = 0,99 или 0,997 трудно осуществить (необходимо п = 200 -э <- 2000).
Тем не менее очень часто доверительные погрешности рассчитывают, вводя ничем не обоснованное предположение о том, что вид закона распределения погрешностей будто бы точно известен. В частности, используют прием, заключающийся в вычислении по небольшой серии наблюдений (20—30) среднего квадратического отклоне-10
ния <7, а затем указывают «максимальную» погрешность Лд — За с доверительной вероятностью Рд = 0,997 на основании предположения о нормальном законе распределения.
Из приведенного выше анализа ясно, что такой прием является «научно» замаскированным обманом вне зависимости от того, допускается ли он сознательно или неосознанно. Дело заключается в том, что реальные законы распределения погрешностей приборов весьма разнообразны и часто очень далеки от нормального. (Это далее будет рассмотрено.) Для установления действительного хода кривой распределения на ее краях необходимо проведение испытаний, число которых должно быть тем больше, чем большим выбирается значение доверительной вероятности (см. табл. 1-1). При малом числе испытаний (20—30) какие-либо сведения о ходе кривой в районе квантилей, соответствующих Рд = 0,95 -г- 0,99 (не говоря уже о Рд = 0,997), отсутствуют и утверждения о ходе кривой распределения в этом неисследованном районе лишены оснований.
Основным недостатком оценки погрешности доверительным значением Дд при произвольно выбираемых Рд является невозможность суммирования Дд.
Среднее квадратическое значение о случайной величины X — это ее действующее (эффективное) значение, подобное действующему (в энергетическом смысле) значению токэе (t) со сложной формой кривой:
о= + УД=+1/ (х — Х)г р (pc) (Ьс, г —со
где D —дисперсия, или второй центральный момент, случайной величины, а р (х) — плотность распределения.
Основным достоинством оценки случайных величин их действующим (т. е. средним квадратическим) значением а является возможность определения действующего значения суммы статистически независимых величин как
Ds = У, Di или os = У at i — 1 i — 1
безотносительно к разнообразию законов распределения каждой из суммируемых величин и деформации законов при образовании композиций *.
Энтропийное значение случайной величины. Анализ дезинформационного действия случайных помех с различными законами распределения вероятностей привел К. Шеннона к выводу, что вносимая помехой дезинформация определяется не только мощностью этой помехи, т. е. ее средним квадратическим значением а, но еще зависит и от вида закона распределения этой помехи.
Это положение К- Шеннон сформулировал в виде своей 16-й теоремы, которая утверждает, что если помеха в вероятностном смысле
* Закон распределения суммы случайных величин является композицией законов распределения составляющих.
11
не зависит от сигнала, то независимо от закона распределения и мощности сигнала дезинформационное действие помехи определяется ее энтропией
со
Н (X) = — \ р (х) In р (х) dx.
Согласно К. Шеннону количество информации I определяется как разность энтропий I = Н (X) — Н (Х/Хп) — энтропии Н (X) значений измеряемой величины до измерения и энтропии Н (Х/Хп) неопределенности действительного значения X в интервале неопределенности вокруг полученного после измерения показания Хп, т. е. энтропии погрешности. Например, при равномерном распределении измеряемой величины в пределах от Х3 до Х2 и равномерном распределении погрешности в интервале неопределенности d = 2Д энтропия Н (X) = = In (Х2 — Xj), а энтропия Н (Х/Хп) = In d = In 2Д и количество информации
I = In (Х2 - Xt) - In d = In = In N.
Последнее соотношение I = In N, если N — (X2 — X^/dg, справедливо при любом законе распределения вероятностей погрешности. Поэтому В. И. Рабинович и М. П. Цапенко предложили называть число N числом эквивалентных делений, различимых в диапазоне Х2 — Xt при данном законе р (х) распределения погрешности, a d3 — эквивалентным (в энтропийном смысле) делением. Мы же будем называть N числом различимых градаций измеряемой величины, a d3 — эквивалентным (по энтропии) интервалом неопределенности. Значение эквивалентного интервала неопределенности можно математически строго определить для любого закона распределения как величину, стоящую под знаком логарифма в выражении для /7 (Х/Хп).
При практическом использовании приведенных соотношений удобнее оперировать с половиной интервала d3, именуемой энтропийным значением погрешности Дэ. Формальным определением энтропийного значения погрешности являются соотношения:
Я (Х/Хп) = In <7Э = In 2ДЭ; г1э=2дэ=г(х/хп) и дэ=1г(х/хп).
Отношение энтропийного значения Дэ случайной величины к ее среднему квадратическому значению а называется энтропийным коэффициентом k — Дэ/а, несколько изменяющимся в зависимости от вида закона распределения. Так, для равномерного закона распределения Д9 = р^Зст = 1,73ст и k — 1,73, для симметричного экспоненциального распределения k = 1,92, для треугольного закона (распределение Симпсона) k = УЗе/2 — 2,02 и для нормального распределения k — У"ле/2 ~ 2,066 2,07.
Практически используемая оценка погрешности в виде максимального значения из серии 20—30 наблюдений наиболее близка именно
12
к энтропийному значению погрешности, так как Лэ — Дд для симметричного экспоненциального распределения при Рд = 0,935, для нормального распределения — при Рд = 0,961 и для равномерного распределения — при Рд = 1.
Использование энтропийного значения погрешности Дэ и энтропийного коэффициента k закона распределения позволяет получить простую и строгую связь мощности помехи о2 с вносимой ею дезинформацией Н (Х/Х„) или с получаемым при измерении количеством информации I в виде
Дэ = /го; И (Х/Хп) = In ф, = 1п2/го;
М^Ха-Ххдаа); 7 = ln/V.
1-3. ОПРЕДЕЛЕНИЕ ОЦЕНОК СЛУЧАЙНЫХ ПОГРЕШНОСТЕЙ
ПО ЭКСПЕРИМЕНТАЛЬНЫМ ДАННЫМ (НЕОБХОДИМЫЕ СВЕДЕНИЯ ИЗ СТАТИСТИКИ)
Полный набор всех значений (в том числе и совпадающих между собой), которые может принять случайная величина при бесконечном числе испытаний, в статистике принято называть генеральной совокупностью. Проводя эксперимент, получаем лишь некоторое число п этих значений, называемое выборкой объема п. Определяя по данным этой выборки характеристики закона распределения, получаем не истинные значения дисперсии D, среднего квадратического отклонения (с. к. о.) о, контрэксцесса и и т. д., характерные для всей генеральной совокупности, а лишь некоторые, случайно отклоняющиеся от истинных значения D*, о*, и*, называемые в статистике оценками соответствующих характеристик, найденными по выборке.
Особенность экспериментально полученных значений случайной величины состоит в том, что они оказываются естественно квантованными (округленными). Поэтому, даже произведя п -> ос наблюдений, мы не сможем построить по этим экспериментальным данным плавные кривые функции распределения F (х) или плотности р (х), а получим график р (х) лишь в виде столбцов, называемый гистограммой. К этому же приводит объединение (группирование) более мелко квантованных экспериментальных значений в более крупные с целью упрощения вычислений, когда для последующих вычислений за X; для всего столбца принимается координата центра столбца.
Число т интервалов группирования должно выбираться исходя из имеющегося объема п выборки экспериментальных данных с учетом эксцесса (s = р4/о4) распределения. Оптимальное значение т
g,[ I 5
определяется соотношением т = ’ ц0-4 (или приближенно
соотношением т — 1g , где и = l/Уs), с округлением до ближайшего большего нечетного числа.
Трудность использования этого соотношения заключается в том, что оптимальное число столбцов гистограммы необходимо выбрать в начале обработки, когда еще не известен вид распределения и оценка
13
контрэксцесса х. Выход из этого положения состоит в использовании того обстоятельства, что значения контрэксцесса х распределений погрешностей, как правило, находятся в пределах от 0,4 до 0,7. Поэтому следует выбирать т нечетным в пределах
0,55н°’4<т< 1,25п0л. (1-1)
При большем числе столбцов в гистограмме получается много провалов, а при меньшем — искажается вид распределения.
Оценка математического ожидания М (X) случайной величины есть среднее арифметическое X всех полученных результатов наблюдений. Разброс X относительно Л4 (X) при объеме выборки п оценивается значением дисперсии X, которая равна D (X) = D (Хц)/п, и о (X) = а (х,)/]/п, где D (х;) и а (х;) — дисперсия и с. к. о. генеральной СОВОКУПНОСТИ Xt.
Оценка дисперсии D* (х;), т. е. второго центрального момента, вычисленная по определению как
п
D* (Xi) = и? (Xi) = (1 -2)
i
оказывается смещенной. Это значит, что кроме разброса она имеет систематическую (в-данном случае отрицательную) погрешность, возрастающую в среднем по мере уменьшения п. Для исключения этой погрешности значение D* (х,), найденное по выражению (1-2), необходимо умножить на поправочный множитель Бесселя А = п/(п — 1). Поэтому под выборочной дисперсией с поправкой Бесселя понимают величину
п т
£(*<—X)2 £(Х,—X)*nz
D* (Xi) = -----:--№ --------:----, (1-3)
4 " п — 1 п — 1 ’ ' •
а под оценкой среднего квадратического отклонения о* (х,) с поправкой Бесселя — корень из этой величины.
Дисперсия значения дисперсии, найденной по выборке, зависит от вида закона распределения генеральной совокупности Xt и от объема выборки п как
где ц., = о2 и tij — второй и четвертый центральные моменты генеральной совокупности. Это соотношение при п^> 8 приводит к приближенным соотношениям:
D(D*)^^L и = !/-*-_ 1,
п 2с ) п 2 )/ п г х2
где х — контрэксцесс распределения.
Для практического определения D (D*) и о (о*) приходится пользоваться оценками о* и pt, хотя они тем менее достоверны, чем меньше объем выборки.
14
Относительная случайная погрешность определения оценки о* равна
у(о*) = -^1 = —L-l/J— 1, ' V ' S* 2/n r Z2
t. e. не зависит от о, и поэтому не может быть уменьшена использованием для измерений более точной аппаратуры, а определяется только объемом выборки (я) и видом распределения (х). Для определения оценки о*, например, с относительной погрешностью у (о*) = 0,1 = = 10% при равномерном распределении (контрэксцесс х = 0,74) достаточно п — 20, при нормальном (х = 0,577) нужно п = 50, а при экспоненциальном распределении (х = 0,408) необходимо уже п = = 125 наблюдений.
Оценка четвертого центрального момента может быть определена (без поправки на смещение) как
п
3
Относительная погрешность оценки контрэксцесса и, найденной как и = о2/У по выборке объемом п, приближенно (с погрешностью 10—20%) для распределений с х = 0,4 -ъ 0,75 равна
____ 1/7TZ
. /Г>(х) V \х4
V и*) =----У1
х* у 31п
Отсюда для определения оценки и с относительной погрешностью у (х*) — 0,1 = 10% при равномерном распределении достаточно п = 11, при нормальном нужно п = 73, а при экспоненциальном распределении необходимо уже п = 757 наблюдений.
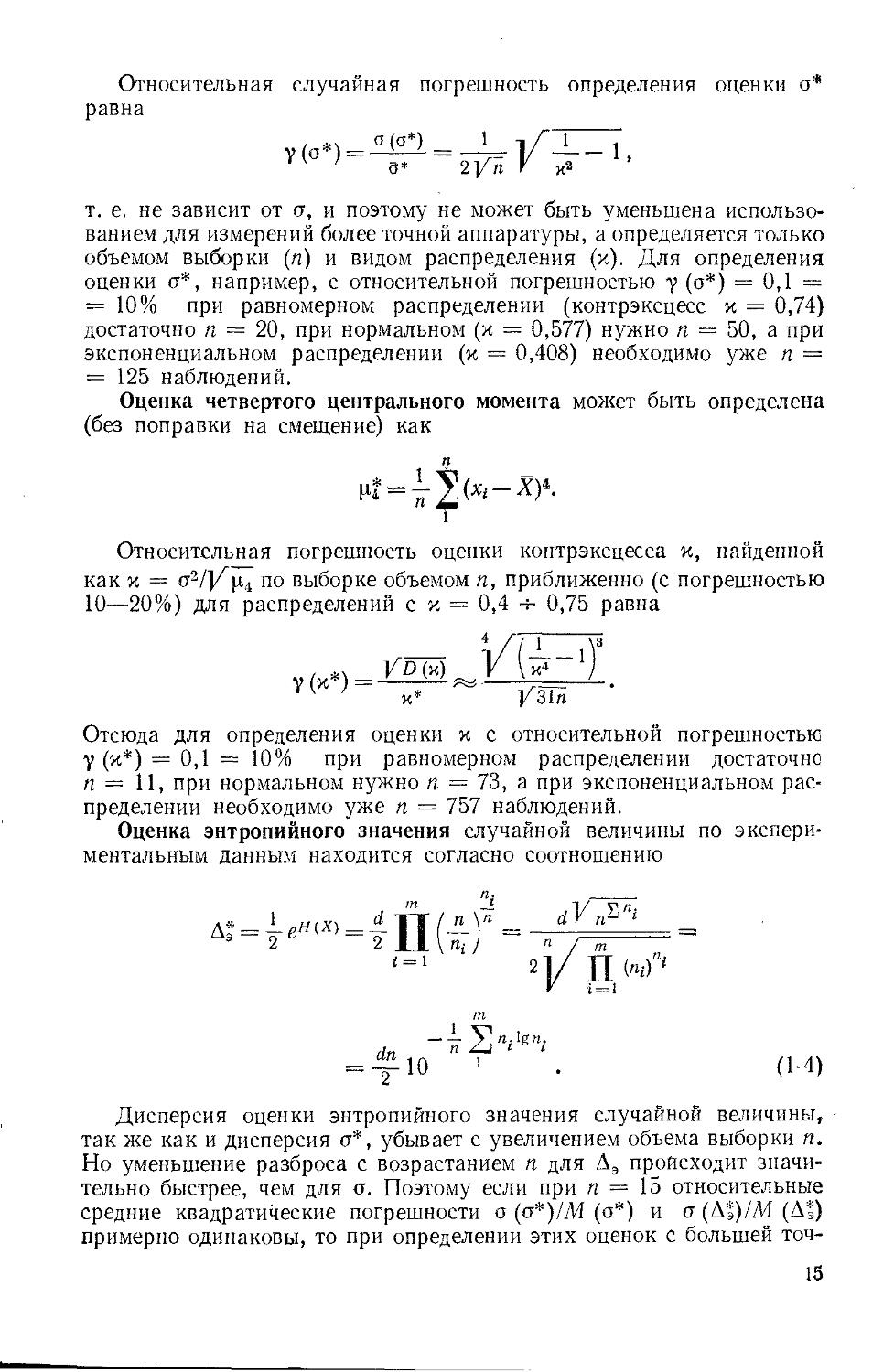
Оценка энтропийного значения случайной величины по экспериментальным данным находится согласно соотношению
1П — 1/ у п.
АЧ. 1 d. ТТ / п \п dr 1
Д; = — еН(Х.) —
3 2 2
2
(1-4)
= ^10
Дисперсия оценки энтропийного значения случайной величины, так же как и дисперсия о*, убывает с увеличением объема выборки п. Но уменьшение разброса с возрастанием п для Дэ происходит значительно быстрее, чем для о. Поэтому если при п = 15 относительные средние квадратические погрешности о (о*)//И (о*) и а (Д|)/Л4 (Дэ) примерно одинаковы, то при определении этих оценок с большей точ
15
ностью (например, с погрешностью 7,5% для равномерного распределения) для нахождения значения о необходимо п = 30 наблюдений, а для вычисления Дэ с той же относительной погрешностью (7,5%) достаточен объем выборки п = 20 наблюдений.
Правильное округление результатов расчета оценок параметров распределения погрешностей особенно важно при использовании ЭВМ или электронного калькулятора, так как машина выдает их с заранее заданной разрядностью (5 или 9 десятичных знаков) и они гипнотизируют своей кажущейся точностью. Однако исходными данными, как правило, являются или малая выборка наблюдений, или нормируемые значения погрешностей с одной-двумя значащими цифрами. Поэтому при любых расчетах следует всегда находить погрешности полученной оценки и оставлять в округленном результате лишь 1—2 недостоверных десятичных знака. Однако при оценке погрешности может оказаться недостоверной даже первая значащая цифра. В этом случае приходится учитывать следующее обстоятельство. Если первая значащая цифра есть 1 или 2, то отбрасывание второго десятичного знака приводит к слишком большой ошибке (до 30—50%). Но если первая значащая цифра, например, 9, то сохранение второго знака (т. е. указание оценки, например, в виде 0,94 вместо 0,9) является дезинформацией, так как исходные данные не обеспечивают такой достоверности.
Исходя из этого на практике установилось следующее правило. Если первая недостоверная цифра есть 1 или 2, то сохраняется и второй недостоверный знак; если же она 3 и более, то второй недостоверный знак опускается. В соответствии с этим правилом установлены и нормируемые значения погрешностей средств измерений: в числах 1,5 и 2,5% указываются два десятичных знака, но в числах 0,5; 4; 6% — лишь один знак.
Изложенные правила округления можно сформулировать следующим образом.
1. Округление любого результата расчета или измерения должно производиться в соответствии с его погрешностью, для чего одновременно с самим результатом должна быть оценена и его погрешность.
2. Результат округляется До того же десятичного знака, которым оканчивается округленное значение его абсолютной погрешности.
3. Если в полученной оценке недостоверна даже первая значащая цифра, то оценка указывается с двумя знаками, если первый из них есть 1 или 2, и с одним десятичным знаком, если он есть 3 или более.
4. Округление производится лишь в окончательном ответе, а все предварительные расчеты выполняются не менее чем с одним лишним знаком.
Пример. Пусть на ЭВМ было получено X = 456,78; о (X) = 1,4768 и о (о) = = 0,47118. Решение; Д0,9 (о) = 1,6 о (о) = 1,6-0,47118 = 0,75389 « 0,8 (так как 7 > 2). Отсюда следует, что значение о (X) находится в пределах от 1,5 — 0,8= 0,7 до 1,5+ 0,8= 2,3, т. е. в значении о (X) = 1,5 оба знака недостоверны, однако оба должны быть сохранены. Погрешность оценки X равна До,9 (X) — 1,6 а (Х) = = 1,6-1,4768 — 2,36288 « 2,4, и X заключено в пределах от 456,8 — 2,4 — 454,4 до 456,8 + 2,4 = 459,2, т. е. в оценке X достоверны лишь первые два знака. Поэтому окончательно результаты должны быть представлены как X = 456,6 ±2,4; о (X)’ = 1,5± 0,8 и а (о) — 0,5.
16 .
В заключение необходимо отметить, что наряду с записью результата в виде, например, о = 1,5 ±0,8 очень полезно представить его в виде 0,7 < и < 2,3. Дело в том, что первый вид записи маскирует интервал неопределенности и создает ложное впечатление благополучия, тогда как второй вид записи подчеркивает протяженность интервала неопределенности.
1-4. РАЗНОВИДНОСТИ АНАЛИТИЧЕСКОГО ОПИСАНИЯ ЗАКОНОВ РАСПРЕДЕЛЕНИЯ ПОГРЕШНОСТИ
Как было указано выше, знание вида закона распределения важно при экспериментальном определении размера случайных погрешностей, так как при одних распределениях достаточна выборка, состоящая из 10—20 наблюдений, тогда как при других оказывается недостаточным и п = 100 4- 500 наблюдений. Выбор вида распределения для каждой из составляющих погрешности нужен и при расчетном суммировании погрешностей при проектировании средств измерений (см. § 1-6). ГОСТ 8.011—72 предусматривает указание вида закона распределения при сообщении погрешности результатов измерений. Поэтому необходимо знать, какие виды законов распределения могут встретиться при рассмотрении случайных погрешностей, какие из них близки друг к другу и при необходимости могут быть заменены один другим, а какие, наоборот, резко отличаются друг от друга.
По признаку симметрии законы распределения подразделяются на симметричные, когда случайные погрешности, равные по значению, но различные по знаку, встречаются одинаково часто, и несимметрич-ные — скошенные. Погрешности, как правило, распределены при-V* близительно симметрично. По числу максимумов в кривой распределения (называемых модами) законы распределения погрешностей подразделяются на безмодальные (не имеющие моды), одномодальные и двухмодальные. С позиций теории вероятностей форма закона распределения численно характеризуется его относительным четвертым моментом или его обратной величиной в виде контрэксцесса и = = ФД/щ, а с позиций теории информации — значением энтропийного коэффициента k = Дэ/а. Поэтому топографическую классификацию законов распределения удобно производить в плоскости этих двух координат.
.Для всех возможных законов распределения и изменяется от 0 до 1, a k — от 0 до 2,066, поэтому каждый закон может характеризоваться некоторой точкой с определенной долготой и широтой в прямоугольнике, представленном на рис. 1-3. Фактические законы распределения погрешностей занимают на рис. 1-3 область, очерченную штриховым овалом. Для суждения о том, какими математическими выражениями эти законы могут быть аппроксимированы, рассмотрим ряд законов распределения, описываемых простейшими математическими зависимостями.
Экстремальные законы распределения — это дискретное двузначное распределение и семейство законов, распределения Стьюдента; ~
Т БИБЛИОТЕКА
. Невинюмысског» филий-| ОгПИ
Дискретное двузначное распределение вида р (х) ~ ~ 8 (а) 4- у а) показано на рис. 1-4, а и состоит из двух 6-функций при х = а и
х = —а, под каждой из которых заключена площадь, т. е. вероятность Рг = Р2 = 0,5. Это такое распределение, когда наблюдаются лишь равновероятные погрешности и —а.
Такое распределение легко оценивается вероятностными критериями, для него о = a, D = а2, = а4 и и = 1. Однако его энтро-
пия Н — In 2 не зависит от а, и его энтропийный коэффициент при возрастании а стремится к нулю. Поэтому соответствующая ему точ
18
ка 1 на рис. 1-3 занимает крайнее правое положение с координатами k = 0 и v. = 1.
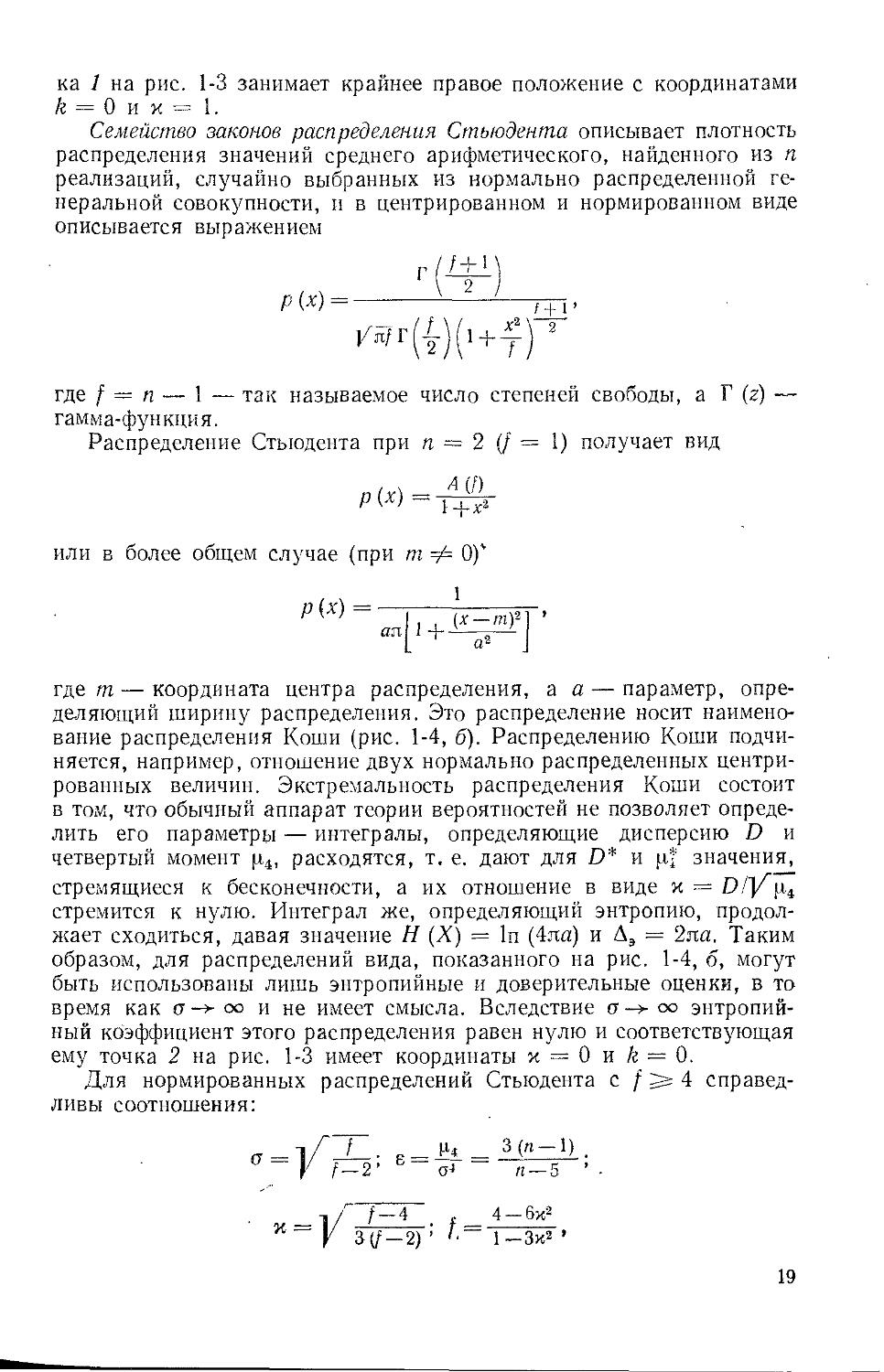
Семейство законов распределения Стьюдента описывает плотность распределения значений среднего арифметического, найденного из п реализаций, случайно выбранных из нормально распределенной генеральной совокупности, и в центрированном и нормированном виде описывается выражением
р(Х) =
г I ?
\ 2
где f — п — 1 — так называемое число степеней свободы, а Г (г) — гамма-функция.
Распределение Стьюдента при п = 2 (/ = 1) получает вид
или в более общем случае (при т Ф 0)
1
ал 1+дсдд
где т — координата центра распределения, а а — параметр, определяющий ширину распределения. Это распределение носит наименование распределения Коши (рис. 1-4, б). Распределению Коши подчиняется, например, отношение двух нормально распределенных центрированных величин. Экстремальность распределения Коши состоит в том, что обычный аппарат теории вероятностей не позволяет определить его параметры — интегралы, определяющие дисперсию D и четвертый момент р4, расходятся, т. е. дают для D* и р* значения, стремящиеся к бесконечности, а их отношение в виде и = D/]/"р4 стремится к нулю. Интеграл же, определяющий энтропию, продолжает сходиться, давая значение Н (X) = 1п (4ла) и Аэ = 2ла. Таким образом, для распределений вида, показанного на рис. 1-4, б, могут быть использованы лишь энтропийные и доверительные оценки, в то время как а -> оо и не имеет смысла. Вследствие о -> ос энтропийный коэффициент этого распределения равен нулю и соответствующая ему точка 2 на рис. 1-3 имеет координаты х = 0 и k = 0.
Для нормированных распределений Стьюдента с f 4 справедливы соотношения:
о
f . р _ _ 3 ("-В .
— 2 ’ п — 5 ’
/ — 4 3(/-2)
4-би2
1 —Зи2 ’
19
а изменение k и и в зависимости
от f имеет следующий вид;
f k X
4 1,9003 0
5 1,9717 0,3333
6 2,0053 0,4082
7 2,023 0,4472
10 2,047 0,5000
Оо '2,066 0,57735
Таким образом, точки, соответствующие распределениям Стью-дента до f -С 4, располагаются на рис. 1-3 на оси при х = 0, а при f от 4 до бесконечности — по кривой, соединяющей точки 3 и 4. При f — оо распределение Стьюдента совпадает с нормальным распределением Гаусса, которому на рис. 1-3 соответствует точка 4.
Сопоставляя линию 2—3—4 с контуром штрихового овала, ограничивающего реально встречающиеся распределения погрешностей, ясно, что распределения Стьюдента непригодны для описания распределений погрешностей, за исключением участка с /> 10, когда они мало отличаются от нормального распределения.
Симметричные экспоненциальные законы распределения, вид кривых которых изображен на рис. 1-5, могут быть описаны выражением
|х-х 1“
л ( >0 — -—---р Хо
Р™ 2кГ(1/а)е
, 1 ГГ (1/а)
где л = I/ г , а о — среднее квадратическое отклонение.
При х = 0 и Xor = 1 выражение приводится к виду
Р W = 1FW = А 'Х1“
с нормирующим множителем А (а), зависящим от закона распределения, т. е. от значения а. При а -> со это выражение описывает равномерный закон (рис. 1-5, г), при а > 2 — плавные, близкие к трапецеидальным законы формы «шапо» (рис. 1-5, в), а при а = 2 — нормальный закон Гаусса (рис. 1-5, б) с
PW =-4=-е-1Л12 и Д9 = о1/"у, У Л г Z
20
энтропийным коэффициентом k = 2,066 и к = 1/J/3 = 0,577. В координатах рис. 1-3 нормальный закон характеризуется точкой 4.
При а, равном 1; 2/3; 1/2; 1/3, эти законы
р(х) =Ле-%|!/2; р(х)=А.е-|х|1/3
имеют вид, показанный на рис. 1-5, а, и характеризуются на рис. 1-3 соответственно точками 5, 6, 7 и 8 с координатами k — 1,92; 1,64; 1,35 и 0,83 и к = 0,408; 0,286; 0,2; 0,094.
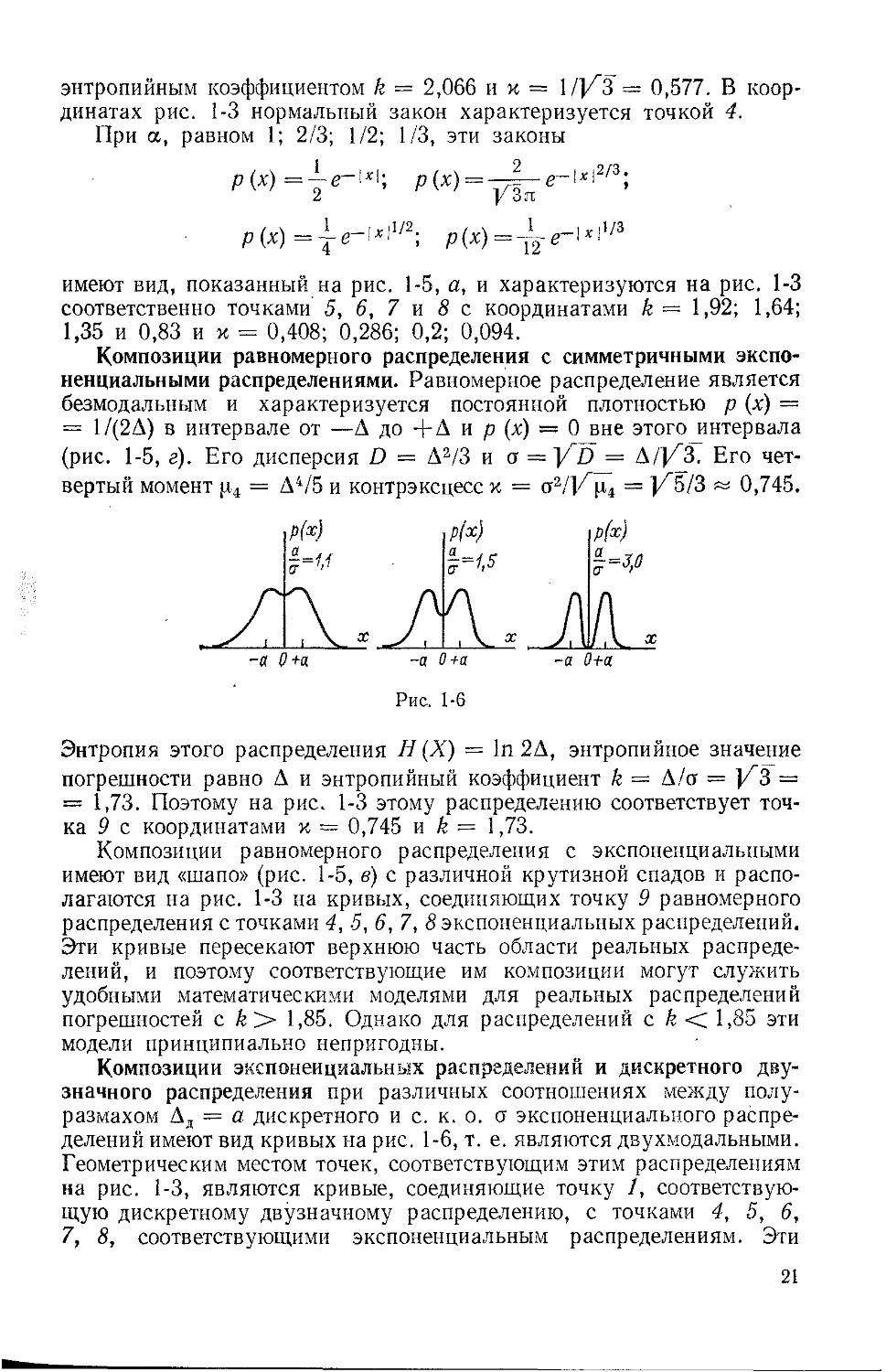
Композиции равномерного распределения с симметричными экспоненциальными распределениями. Равномерное распределение является безмодальным и характеризуется постоянной плотностью р (х) = = 1/(2Д) в интервале от —Д до +Д и р (х) = 0 вне этого интервала (рис. 1-5, г). Его дисперсия D — Д2/3 и а = ]/£) = Д/]/3. Его четвертый момент = Д4/5 и контрэксцесс к — ст2/]/”= V5/3 ~ 0,745.
Рис. 1-6
pfc) а
Энтропия этого распределения И (X) = In 2Д, энтропийное значение погрешности равно Д и энтропийный коэффициент k = Д/ст = |/3 = — 1,73. Поэтому на рис. 1-3 этому распределению соответствует точка 9 с координатами х = 0,745 и k — 1,73.
Композиции равномерного распределения с экспоненциальными имеют вид «шапо» (рис. 1-5, в) с различной крутизной спадов и располагаются на рис. 1-3 на кривых, соединяющих точку 9 равномерного распределения с точками 4, 5, 6, 7, 8 экспоненциальных распределений. Эти кривые пересекают верхнюю часть области реальных распределений, и поэтому соответствующие им композиции могут служить удобными математическими моделями для реальных распределений погрешностей с k> 1,85. Однако для распределений с k < 1,85 эти модели принципиально непригодны.
Композиции экспоненциальных распределений и дискретного двузначного распределения при различных соотношениях между полуразмахом Дд = а дискретного и с. к. о. о экспоненциального распределений имеют вид кривых на рис. 1-6, т. е. являются двухмодальными. Геометрическим местом точек, соответствующим этим распределениям на рис. 1-3, являются кривые, соединяющие точку 1, соответствующую дискретному двузначному распределению, с точками 4, 5, 6, 7, 8, соответствующими экспоненциальным распределениям. Эти
21
кривые на рис. 1-3 помечены значениями показателя степени а соответствующих экспоненциальных распределений, являющегося характеристикой крутизны спадов.
Относительное содержание дискретной составляющей удобно характеризовать отношением с = a/о, называемым глубиной антимодальности (линии равных с также нанесены на рис. 1-3). Композиции дискретного двузначного и экспоненциальных распределений являются удобными моделями для распределений с /г < 1,85.
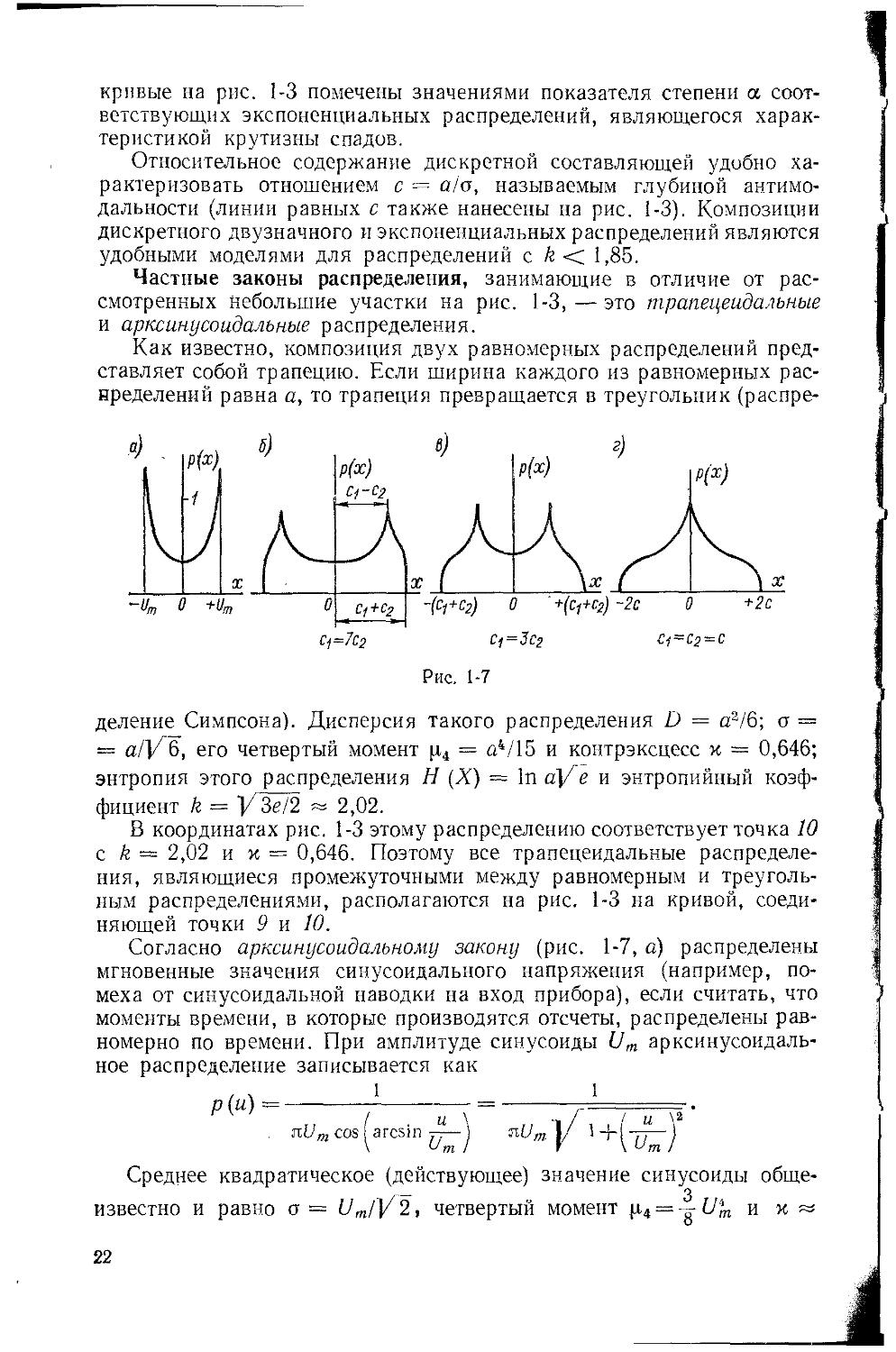
Частные законы распределения, занимающие в отличие от рассмотренных небольшие участки на рис. 1-3,—это трапецеидальные и арксинусоидальные распределения.
Как известно, композиция двух равномерных распределений представляет собой трапецию. Если ширина каждого из равномерных рас-иределений равна а, то трапеция превращается в треугольник (распре-
q=7C2
Cf = 3C2
Рис. 1-7
деление Симпсона). Дисперсия такого распределения D = аР/б; о = = а/]/б, его четвертый момент р4 = ц4/15 и контрэксцесс к — 0,646; энтропия этого распределения И (X) = In а]/е и энтропийный коэффициент k = Т/1ё72 «а 2,02.
В координатах рис. 1-3 этому распределению соответствует точка 10 с k — 2,02 и к = 0,646. Поэтому все трапецеидальные распределения, являющиеся промежуточными между равномерным и треугольным распределениями, располагаются на рис. 1-3 на кривой, соединяющей точки 9 и 10.
Согласно арксинусоидальному закону (рис. 1-7, а) распределены мгновенные значения синусоидального напряжения (например, помеха от синусоидальной наводки на вход прибора), если считать, что моменты времени, в которые производятся отсчеты, распределены равномерно по времени. При амплитуде синусоиды Um арксинусоидаль-ное распределение записывается как
. cos ^arcsin
Среднее квадратическое (действующее) значение синусоиды обще-/— 3
известно и равно о= Um/]/2, четвертый момент = и и ~
22
~ 0,816; энтропийное значение A = yt/m и энтропийный коэффициент k = л/(2/2) «= 1,11. Поэтому на рис. 1-3 этому распределению соответствует точка 11 с k = 1,11 их = 0,816.
При искаженной форме кривой, например при наличии небольшой составляющей в виде 3-й или 6-й гармоники, распределение представляет собой композицию двух арксинусоидальных распределений (рис. 1-7, б). В зависимости от соотношения q и с2 — ширины составляющих — оно принимает вид кривых на рис. 1-7, б, в, г. При сг = с2 (рис. 1-7, г) эта композиция имеет k = 1,88 и х = 0,667, т. е. характеризуется на рис. 1-3 точкой 12. Поэтому все промежуточные композиции (рис. 1-7) располагаются на рис. 1-3 по кривой, соединяющей точки 11 и 12.
Топографическая классификация распределений (см. рис. 1-3) позволяет заключить, что основными разновидностями законов распределения случайных погрешностей являются: уплощенные распределения типа «шапо», занимающие пространство между точками 5, 4, 10 и 9 на рис. 1-3 при k> 1,85, экспоненциальные (линия 6—5—4), нормальное (точка 4) и трапецеидальные (линия 10—9) распределения, располагающиеся на границе этой области, а также двухмодальные распределения, занимающие пространство штрихового овала между точками 6 и 9 при k от 1,2 до 1,85. Что же касается распределений Стьюдента (линия 3—4) или так называемых антимодальных распределений с k = 1,16, х = 0,87 и k = 0,35, х = 0,92 (точки 13 и 14 на рис. 1-3), введенных ГОСТ 8.011—72, то они непригодны для описания реально встречающихся распределений.
Классификация позволяет наглядно видеть близость или удаленность законов между собой. Так, нормальный (4) и треугольный (10) законы достаточно близки, а экспоненциальные (5 или 6) и равномерный (9) — далеки друг от друга и т. д. И, наконец, классификация дает возможность установить вид распределения чисто формальным путем — путем вычисления на ЭВМ по экспериментальным данным оценок k и х и нанесения точки с этими координатами на график рис. 1-3.
1-5. ЗАКОНЫ РАСПРЕДЕЛЕНИЯ ОТДЕЛЬНЫХ СОСТАВЛЯЮЩИХ ПОГРЕШНОСТИ ИЗМЕРИТЕЛЬНЫХ ПРЕОБРАЗОВАТЕЛЕЙ
Эти законы еще мало изучены, поэтому укажем распределения лишь для тех погрешностей, для которых они известны.
Погрешность от зазора в кинематической цепи распределена по дискретному двузначному закону (см. рис. 1-4, а), так как принимает лишь значения +а и —а. Погрешность от гистерезиса в общем случае отличается от погрешности от зазора в кинематической цепи тем, что сосредоточение погрешностей вокруг +а и —а может быть более или менее размытым и распределение погрешности приобретает вид кривых на рис. 1-6.
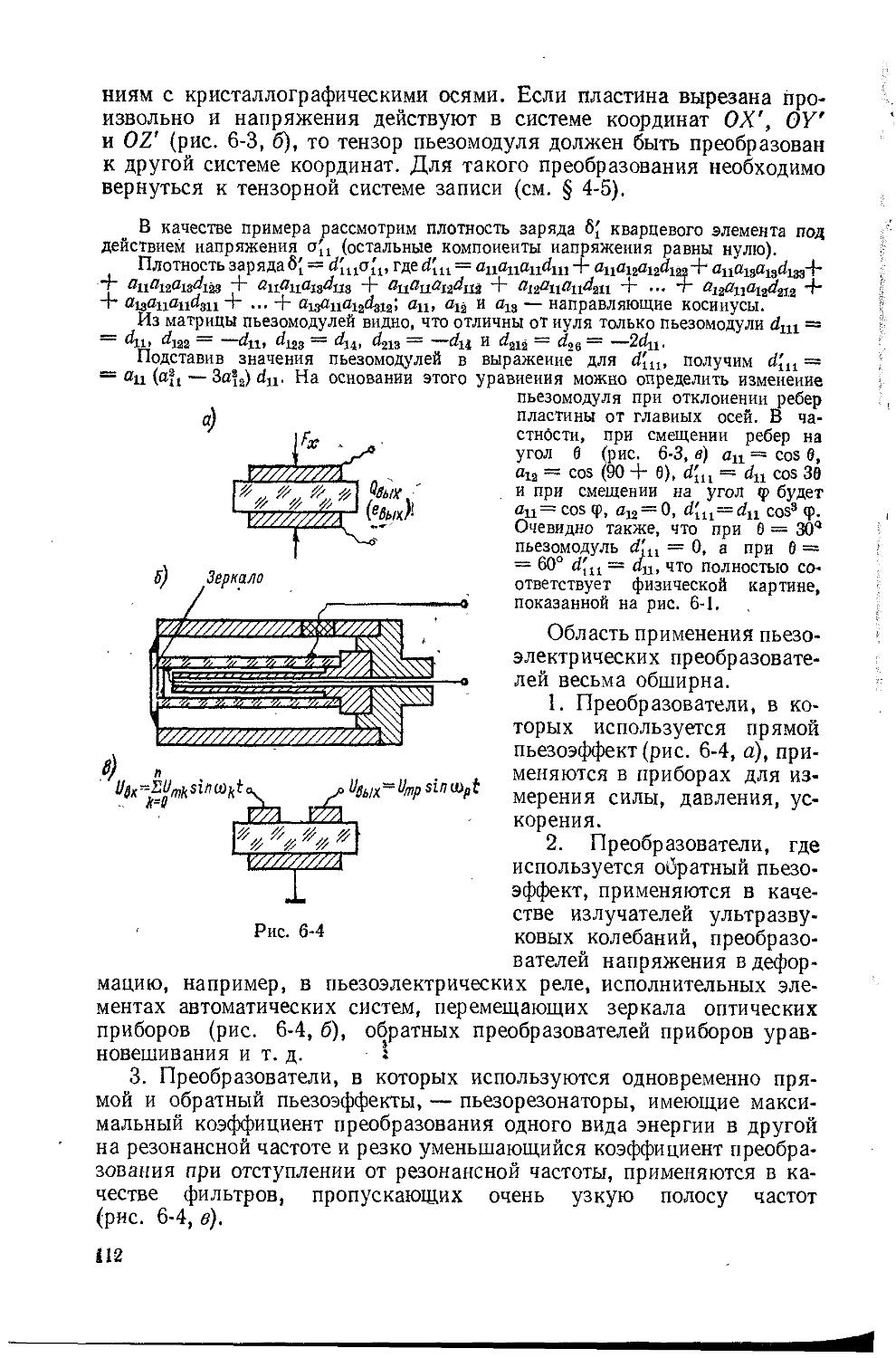
Погрешность от наводки синусоидального напряжения распределена по арксинусоидальному закону (рис. 1-7, а).
23
Погрешности от квантования распределены по равномерному закону, так как погрешностей больше + А и меньше —Л не встречается, а внутри этого интервала они равновероятны. Таково же распределение погрешностей и от трения — внутри зоны застоя подвижная часть может с равной вероятностью остановиться в любом положении.
Погрешность градуировки. Погрешности, допускаемые в процессе градуировки, для каждого проградуированного деления остаются впоследствии неизменными, т. е. являются систематическими. Однако по совокупности всех делений шкалы они являются случайными, так как для различных делений могут быть как положительными, так и отрицательными и равными нулю. Распределение погрешности градуировки было изучено доц. 3. Таушановым (Варна, Болгария) для при-
Рис 1.-8
боров, изготовленных в ГДР, ЧССР, СССР и НРБ. Закон распределения этих погрешностей оказался одним и тем же. Он имеет вид, показанный на рис. 1-5, в, си = 0,72 и k = 1,87, что соответствует распределению вида
р (х) = Ле-ш “
с а = 7 или композиции равномерного и экспоненциального (с а = = 0,5) распределений с оравн = 5озксп.
Распределение дополнительных погрешностей от влияющих факторов определяется распределением значений самого этого фактора и значением коэффициента влияния. Так как функции влияния принимаются, как правило, линейными, а коэффициенты влияния — постоянными, то распределение дополнительной погрешности А как неслучайной (систематической) линейной функции случайного аргумента х повторяет с масштабом (по оси А = +х) в виде коэффициента влияния Т закон распределения вероятностей влияющей величины х.
Погрешность от температуры для приборов, работающих в цеховых или лабораторных условиях при односменной работе, определяется кривой циклического изменения температуры 0° (/). За ночь помещение остывает, например, до +18 °C, а за рабочий день нагревается до +24 °C. Поэтому распределение температуры оказывается равномерным, например, с математическим ожиданием 0 = +21 °C и максимальным значением отклонения А = ±3 °C. Умножая эти значения на соответствующий коэффициент влияния, получаем параметры
24
распределения возникающей в этих условиях температурной погрей^ ности.
При работе приборов вне помещений такое же влияние имеет распределение температур атмосферного воздуха. Распределение этих температур согласно ГОСТ 16350—70 имеет вид несколько асимметричной кривой (рис. 1-8, а) с двумя максимумами. Энтропийный коэффициент этого распределения в среднем равен k = 1,95, а энтропийное значение отклонений от математического ожидания для европейской части СССР устойчиво сохраняется равным 20 °C ±(1 -е 2) °C.
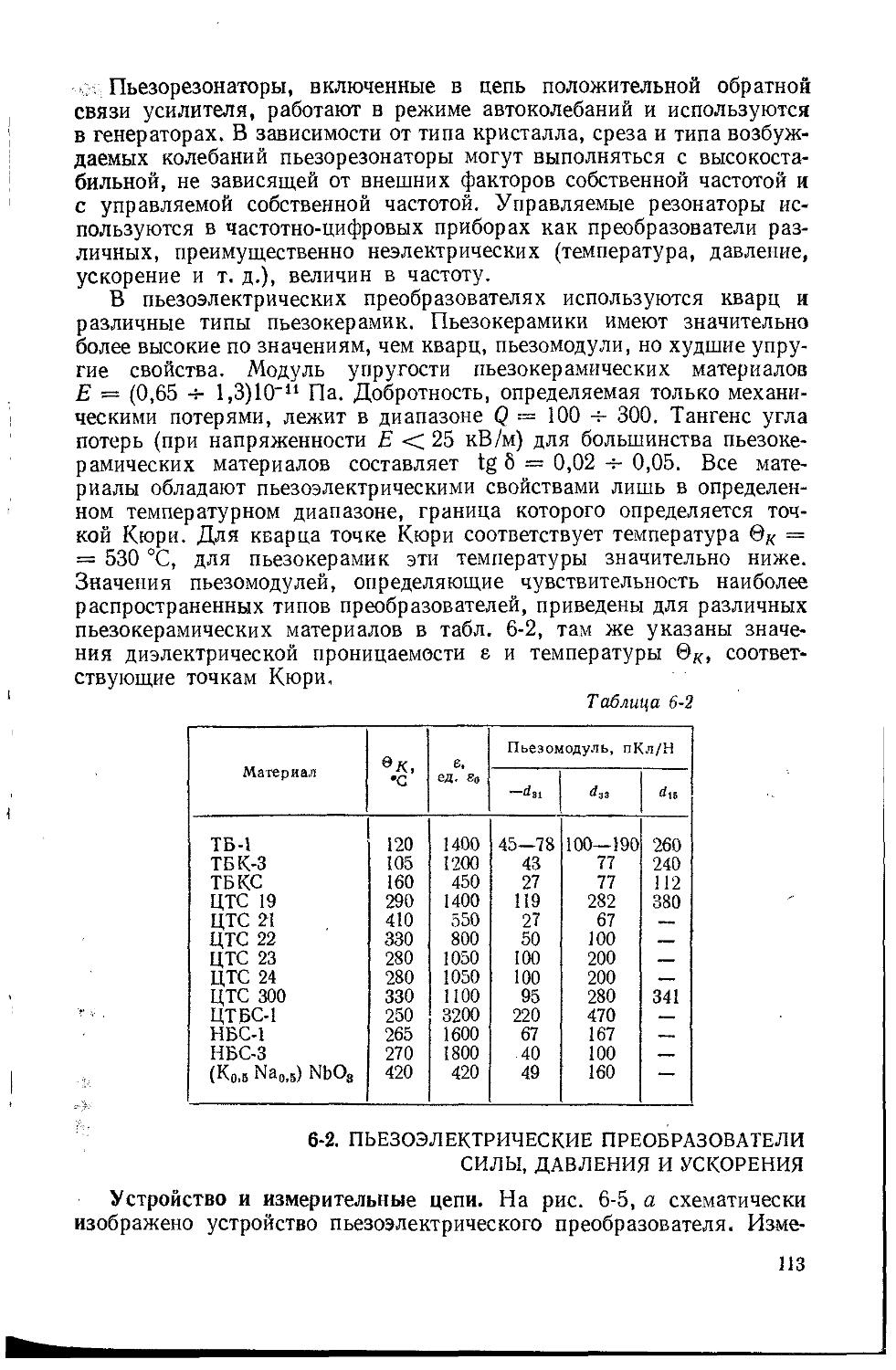
Распределение погрешности от колебаний напряжения питания повторяет распределение вероятностей колебаний питающего напряжения с учетом соответствующего коэффициента влияния. Экспериментально определенное распределение вероятностей значения напряжения сети Ленэнерго приведено на рис. 1-8, б. Оно может быть приближенно принято треугольным.
1-6. ОСНОВЫ ТЕОРИИ СУММИРОВАНИЯ ПОГРЕШНОСТЕЙ
Задача определения расчетным путем значения результирующей погрешности по известным значениям ряда ее составляющих, называемая обычно задачей суммирования погрешностей, возникает во многих случаях практики. Так, для определения погрешности отдельного измерительного преобразователя необходимо найти результат суммарного действия отдельных составляющих его погрешности. Определение погрешности прибора или канала информационно-измерительной системы (ИИС) также сводится к определению суммарного действия погрешностей всех его преобразователей. Таким образом, задача суммирования погрешностей — это одна из основных задач как при проектировании средств измерений, так и при постановке и проведении измерений.
Трудность проведения такого суммирования заключается в том, что все составляющие погрешности в общем случае должны рассматриваться как случайные величины, принимающие в каждой частной реализации самые разнообразные значения. С точки зрения теории вероятностей они могут быть описаны своими законами распределения, а их совместное действие — соответствующим многомерным законом распределения. В такой постановке эта задача практически не разрешима уже для 3—4 составляющих (не говоря уже о 30—40 составляющих), так как операции с такими многомерными законами непреодолимо сложны. Поэтому задача состоит в том, чтобы подобрать для характеристики составляющих такие числовые оценки (например, среднее квадратическое значение, контрэксцесс, энтропийный коэффициент и т. д.), оперируя с которыми, можно было бы найти соответствующие числовые оценки результирующей погрешности без определения многомерных или результирующих одномерных законов распределения рассматриваемых случайных величин.
При этом необходимо учитывать следующее: а) числовые характеристики законов распределения составляющих (например, сг и k) могут не оставаться постоянными при изменении измеряемой величины,
25
L
т. е. могут изменяться в диапазоне ее изменения; б) отдельные составляющие погрешности могут быть коррелированы между ' собой и в) при суммировании случайных величин законы их распределения резко деформируются.
Первое из этих обстоятельств требует разделения рассматриваемых составляющих на аддитивные и мультипликативные, суммирование которых производится раздельно для определения соответственно аддитивной и мультипликативной составляющих результирующей погрешности.
Второе обстоятельство, т. е. возможность взаимных корреляционных связей составляющих, учитывается путем использования для характеристики суммируемых составляющих погрешности их числовых оценок в виде среднего квадратического значения и коэффициентов взаимной корреляции.
Третье обстоятельство, т. е. деформация формы законов распределения при суммировании случайных величин, не может быть учтено при использовании оценки погрешности в виде ее среднего квадратического значения, так как эта оценка не отражает деформации формы законов распределения. Это может быть сделано путем определения параметров формы образующейся композиции и будет рассмотрено ниже.
Дисперсия суммы коррелированных и некоррелированных величин. Согласно теории вероятностей дисперсия суммы двух величин в общем случае
D (х + у) = D (х) + D (у) 2kxy,
где D (х) — дисперсия х; D (у) — дисперсия у, kxy — per (х) о (у) — их взаимный корреляционный момент. Отсюда среднее квадратическое значение о2 отклонения суммы этих величин от ее математического ожидания
Os = 4- Vof + SpojOj 4 of,
где р — коэффициент корреляции. Если эти величины между собой некоррелированы, то р = 0 и <г2 = ]/'а1! + а}.
Однако если х и у жестко и положительно ( р = 41) коррелированы между собой, т. е. Аг/ принимает значения, лишы строго пропорциональные Ах, то всякое положительное отклонение 4Ах сопровождается также положительным отклонением 4 Аг/ и отклонение А (х 4 у) складывается как Ах + Аг/. Это формально следует и из формулы для 02 При р = + 1 , Ибо ffv = 4 yu'i 4- 20x0-2 4 О2 — СГ1 4- 0-2-
Если же при возрастании х значения у, наоборот, линейно убывают, то р = —1 и
ох = 4 У 0} — 2охО% oj = j 01 — !•
Таким образом, оценки жестко коррелированных погрешностей (р =±1) должны суммироваться не геометрически, а алгебраически с учетом их знаков, т. е. складываться, когда их знаки совпадают, и вычитаться, когда их знаки оказываются противоположными.
26
Это правило теории вероятностей в совершенно равной степени относится как к чисто случайным погрешностям, так и к систематическим погрешностям, возникающим от случайного изменения влияющих факторов. Так, например, погрешности измерительных преобразователей от изменения их температуры хорошо воспроизводятся от опыта к опыту и поэтому обычно классифицируются как систематические. Однако при суммировании температурных погрешностей ряда преобразователей они могут оказаться как коррелированными, так и некоррелированными между собой и складываться как алгебраически, так и геометрически.
Практические правила определения результирующей погрешности сложных измерительных устройств.
1. Для определения значения оценки результирующей погрешности всего измерительного устройства должны учитываться взаимные корреляционные связи различных составляющих погрешности отдельных преобразователей, поэтому исходными данными для более точного расчета должны служить значения соответствующих оценок именно отдельных составляющих, а не значение оценки суммарных погрешностей преобразователей.
Эти составляющие прежде всего разделяются на аддитивные и мультипликативные для их последующего раздельного суммирования.
2. Так как суммировать с учетом корреляционных связей можно лишь средние квадратические значения составляющих, то для каждой составляющей должны быть по исходным данным найдены ее средние квадратические значения.
3. Далее должны быть выделены группы сильно коррелированных между собой составляющих погрешности и внутри этих групп произведено алгебраическое суммирование. К ним, как правило, относят погрешности, вызванные одной общей причиной (общий источник питания, примерно одинаковые изменения температуры и т. д.), когда тесные корреляционные связи определяются логически, и для них принимают р равным +1 или —1. Погрешности же, между которыми такие взаимосвязи не обнаруживаются, относят к некоррелированным и для них принимают р = 0.
4. После того как все группы сильно коррелированных погрешностей выделены и внутри их произведено алгебраическое суммирование, суммарные по группам и оставшиеся вне группы погрешности можно считать уже некоррелированными и складывать по правилу 01 = 2 of.
Таким образом, находятся лишь средние квадратические значения аддитивной и мультипликативной составляющих результирующей погрешности, которые не учитывают деформации законов распределения при образовании композиций, и остаются неизвестными параметры формы закона распределения результирующей погрешности.
Расчетное суммирование погрешностей с определением параметров формы образующихся композиций. Наиболее полным методом расчетного суммирования погрешностей является определение при суммировании не только среднего квадратического значения результирующей погрешности, но и параметров формы образующейся композиции
27
распределений в виде оценок значений ее контрэксцесса к и энтропийного коэффициента k.
Полагая распределения двух суммируемых случайных погрешностей симметричными и центрированными (т. е. X = 0, р! = 0 и р3 = 0), четвертый момент композиции можно найти как
Р-42 = Psi + 6O4O2 + Р42' Тогда
О; _ + __ -gf-W
Х2 V"m42 1/Й41+6ст!ст2+Н12 1/£l_L6oM2+21
г X® 1 2 х5
Таким образом, для определения контрэксцесса распределения суммарной погрешности необходимы данные о значениях контрэксцесса хх и и, суммируемых распределений и их с. к. о. ох и сг2. Следует заметить, что не зависит от самих значений оу и аг2, а определяется лишь их соотношением. Поэтому вместо Oj и о2 в формулу для и% можно ввести относительный вес р дисперсии а| в суммарной дисперсии оу + arg:
тогда
1
% у —— . . ф
l/^r^+W-rt + 5
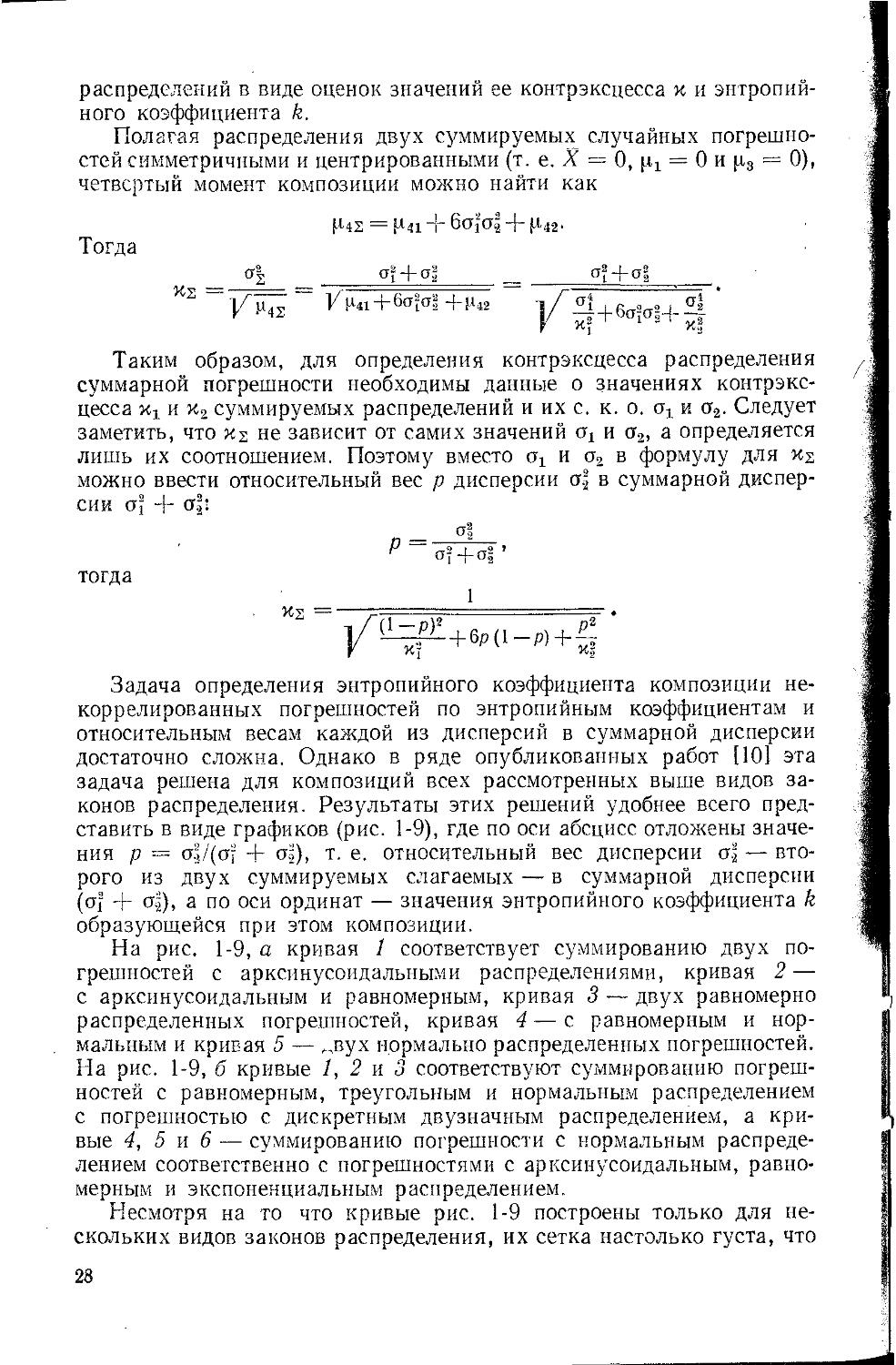
Задача определения энтропийного коэффициента композиции некоррелированных погрешностей по энтропийным коэффициентам и относительным весам каждой из дисперсий в суммарной дисперсии достаточно сложна. Однако в ряде опубликованных работ [101 эта задача решена для композиций всех рассмотренных выше видов законов распределения. Результаты этих решений удобнее всего представить в виде графиков (рис. 1-9), где по оси абсцисс отложены значения р — + 05), т. е. относительный вес дисперсии о.) — вто-
рого из двух суммируемых слагаемых — в суммарной дисперсии (of + о.1), а по оси ординат — значения энтропийного коэффициента k образующейся при этом композиции.
На рис. 1-9, а кривая 1 соответствует суммированию двух погрешностей с арксинусоидальными распределениями, кривая 2 — с арксинусоидальным и равномерным, кривая 3 — двух равномерно распределенных погрешностей, кривая 4 — с равномерным и нормальным и кривая 5 — ,,вух нормально распределенных погрешностей. На рис. 1-9, б кривые /, 2 и 3 соответствуют суммированию погрешностей с равномерным, треугольным и нормальным распределением с погрешностью с дискретным двузначным распределением, а кривые 4, 5 и 6 — суммированию погрешности с нормальным распределением соответственно с погрешностями с арксинусоидальным, равномерным и экспоненциальным распределением.
Несмотря на то что кривые рис. 1-9 построены только для нескольких видов законов распределения, их сетка настолько густа, что 28
позволяет на глаз интерполировать значения k для композиций любых законов распределения с известным энтропийным коэффициентом, тем более, что значения энтропийного коэффициента точнее чем до 0,1 (т. е. примерно 5%) уточнять не имеет смысла.
Суммирование доверительных значений погрешностей. Преимущество доверительного значения погрешностей состоит в том, что оно в отличие от среднего квадратического (которое не существует для распределений Коши и близких к нему) и энтропийного (которое не существует для двузначного дискретного распределения и близких к нему) существует для любых законов распределений.
Основной недостаток доверительного значения погрешности состоит в невозможности его расчетного определения для суммы не-
Однако из этого правила есть одно счастливое исключение. Оказывается, что интегральные Кривые для широкого класса симметричных высокоэнтропийных (k > 1,7) распределений: равномерного, треугольного, трапецеидальных, нормального, экспоненциальных (с у- 2/3) и двухмодальных с небольшой глубиной антимодальности (с = = а/а 1,5) — в районе 0,05-й и 0,95-й квантилей (рис. 1-10) пересекаются между собой в очень узком интервале значений х/о = 1,6± ± 0,05. Поэтому с погрешностью 0,05о можно считать, что 0,05-я и 0,95-я квантили для любых из этих распределений могут быть определены как
Хо,ов = fn — 1,6о и Xo>98 = m-J-1,6о,
где т — координата центра распределения. Отсюда значение погрешности, определенное как AOi9 = 1,6о, для любых из этих распределений является погрешностью с 90%-ной доверительной вероятностью.
Так как при суммировании погрешностей любого сочетания распределений этого класса результирующее распределение также будет принадлежать этому классу, то и для него справедливо соотношение До,92 = 1,6О2.
Это обстоятельство открывает возможность очень простого расчетного метода суммирования погрешностей. Так, если заданы значения
29
суммируемых составляющих А0#г, то
и Ао,92 = 1,6а2
i = i
или просто
Рис. 1-10
Исходя из изложенного предпочтительным значением доверительной вероятности при нормировании случайных погрешностей является Рд = 0,9, тем более, что оценка AOt9 определяется с гораздо большей точностью, чем, например, Ло,97 или Ло,99.
Используя доверительные границы ±АД погрешности, необходимо иметь в виду следующее обстоятельство. Эти границы располагаются симметрично относительно нуля лишь при отсутствии у прибора или преобразователя систематической составляющей погрешности т. Если т ±0, то границы погрешности оказываются несимметричными. Так, например, если ±уд = ±0,4%, а т = 4-0,1 %, то одна граница оказывается равной —0,4 + 0,1 = —0,3%, а другая
4-0,4 4- 0,1 = 4-0,5%. Пользоваться при дальнейших расчетах такими несимметричными границами погрешностей крайне неудобно. Поэтому на практике вместо несимметричных границ всегда указывают симметричные границы, равные по модулю большей из несимметричных, т. е. вместо «погрешность находится в пределах от —0,3 до 4-0,5%» указывают «погрешность находится в пределах ±0,5%». Вероятностьвыхода погрешности за такие симметричные границы, естественно, в два раза меньше, так как такой выход происходит практически только с одной стороны, а не с обеих. В результате, если уд = ±0,4% была определена с Рд = 0,9, то Уд = ±0,5% есть погрешность с доверительной вероятностью Рд = 0,95. Таким образом, при т ± 0, а точнее, при т 4> 0,5а
Ао,05 = ± (j т \ 4- Д0,9) = ± (I т : + 1,6а), т. е. результирующая погрешность Afl95 очень просто определяется через т и оценку Д0,9 случайной составляющей.
30
В тех случаях, когда можно с уверенностью предполагать достаточную близость закона распределения погрешностей к нормальному распределению, для определения симметричных границ доверительной погрешности с доверительной вероятностью Рл = 0,95 (при т = 0) можно использовать теоретическое соотношение для нормального распределения Д0,95 = 1,96с.
Пример расчетного определения погрешности прибора по известным погрешностям его отдельных преобразователей. Пусть подлежит расчетному определению погрешность прибора, выполненного по схеме рис. 1-11, по известным составляющим погрешностей входящих в него измерительных преобразователей. ^Прибор состоит из реостатного датчика Д, усилителя Ус и указателя Ук. Реостатный дат-
Рис.
1-11
чик имеет аддитивную погрешность, нормированную предельным значением улт = = 0,15%. Датчик питается через стабилизатор Ст от общего с усилителем Ус блока питания БП. Операционный усилитель Ус предназначен для обеспечения линейной характеристики всего прибора и имеет входное сопротивление, намного большее сопротивления датчика. Выходным указателем Ук служит магнитоэлектрический прибор класса 0,5.
Прежде всего, как указывалось вы
ше, все составляющие погрешности необ-
ходимо подразделить на аддитивные и мультипликативные, приписать каждой из иих соответствующий закон распределения и найти с. к. о. Все расчеты будем
вести в относительных приведенных значениях и сохранять при промежуточных округлениях один лишний недостоверный десятичный знак в их значениях. Пусть аддитивная погрешность прибора обусловлена аддитивными погрешностями датчика Д и указателя Ук, а мультипликативная — колебаниями напряжений питания датчика и усилителя и зависимостью от температуры чувствителыюстей усилителя и указателя.
Закон распределения погрешности реостатного датчика можно принять равномерным, а так как чаще всего датчики нормируются без существенного запаса погрешности на старение, то улт = 0,15% можно считать половиной ширины распределения. Отсюда с. к. о. Од = = 0,087%.
Погрешность электроизмерительных приборов по стандарту указывается с запасом на старение. Поэтому предельную погрешность указателя можно оценить как уук т = 0,8ук, где ук — основная погрешность, соответствующая классу точности. Отсюда УуК т = 0,8-0,5 = 0,40%. Закон распределения погрешностей стрелочных электромеханических приборов близок к трапецеидальному с контрэксцессом х = 0,7 и энтропийным коэффициентом k = 1,9. Доверительное значение погрешности с Рл = 0,9 для такого распределения равно приблизительно у0,9 = = 0,75',>т. Поэтому yVK 0,9 = 0,75-0,40 — 0,30%. Отсюда ауК — YVK 0>8/1,6 = = 0,30/1,6 = 0,188%.
Аддитивная погрешность прибора будет образована суммой двух рассмотренных составляющих. Поэтому с. к. о. погрешности нуля прибора составит
ш, = ]/о2 -J- о 2К = /0,0872 %- 0,188* = 0,207 %.
Равномерное распределение погрешности датчика имеет энтропийный коэффициент = 1,73, а для трапецеидального распределения погрешности указателя йук = 1,9. Для определения энтропийного коэффициента суммы этих погрешностей необходимо обратиться к рис. 1-9, б и нанести на нем кривую, выходящую при р = 0 из точки k = 1,73, идущую выше кривой 1 и при подходе к р= 1 сливающуюся с кривой 6. Относительный вес дисперсии трапецеидального распределения в суммарной дисперсии составляет р = = 0,1882/0,2072 = 0,82. При этом зна-
чении р нанесенная кривая проходит через значение ka = 2,00. Отсюда энтропийное значение погрешности нуля прибора составляет ун = йнон— 2,00-0,207 = 0,41%.
31
„^холимо обратить внимание читателя иа то обстоятельство, что хотя рис. 1-9 проводится на глаз, т. е. весьма произвольно, ошибка определе-
нней получается ничтожной. Так, если в нашем примере вместо йн = 2,00 принять kn= 1,98, после округления результата мы все равно получили бы ун = = 0,41%.)
Переходя к суммированию мультипликативных составляющих погрешности, примем следующие исходные данные. Пусть коэффициент влияния температуры на чувствительность указателя равен +=>ук----0,2 /о/10 К и усилителя Y0yc—
_ —[ %/ю К. Если усилитель располагается в корпусе указателя, то оба они находятся всегда при одной и той же температуре и, следовательно, их температурные погрешности достаточно жестко коррелированы между собой и должны суммироваться не геометрически, а алгебраически. Отсюда результирующий коэффициент влияния температуры равен +о = —0,2+ 0,1 = —0,1%/10 К. Пусть прибор предназначен для работы в цеховых условиях при температуре от +5 до +35 °C, т. е. при температуре (20 ± 15) °C, и все значения температур равновероятны. Тогда температурная составляющая мультипликативной погрешности имеет равномерное распределение с увт — 0,1-15/10 = 0,15 % и а0 = у0от/]/3= 0,15/^3 = 0,087%.
Пусть колебания напряжения в сети, от которой питается рассматриваемый прибор, находятся в пределах ± 10% и имеют треугольный закон распределения вероятности. Датчик Д питается через стабилизатор с коэффициентом стабилизации k = 25. Тогда колебания напряжения питания датчика, а следовательно, и мультипликативная погрешность его выходного напряжения имеют также треугольное распределение в пределах удт = 10/25 = 0,40% с с. к. о.
= 0,40//6 = 0,163%.
Усилитель Ус питается нестабилизированным напряжением, но благодаря глубокой отрицательной обратной связи коэффициент влияния питающего напряжения на коэффициент усиления усилителя снижен до значения +вуС = = 0,3/ [10 (Ау/Й)], Поэтому мультипликативная погрешность прибора, вызванная случайными колебаниями напряжения питания, будет распределена также по треугольному закону в пределах ?ус т = ± 0,3%, с с. к. о, оусот = = Туе «//6=0,3/6 =0,122%.
Так как обе погрешности от колебания напряжения вызываются одной и той же причиной, то они коррелированы между собой и складываются алгебраически, а не геометрически, хотя каждая из них случайна. Поэтому Уут = у т + уят = = 0,3+0,4=0,70% и Оу = Оу = 0,122 + 0,163 — 0,285%. Суммар-
ные погрешности от колебаний температуры и колебаний напряжения независимы в поэтому складываются геометрически, т. е. с. к. о. мультипликативной составляющей ом = |/ с%. % с% — )Л),2852 + 0,0872 = 0,298%. Распределение суммарной мультипликативной составляющей есть композиция равномерного распределения погрешности от колебаний температуры с ов = 0,087% и #в = 1,73 и треугольного распределения погрешности от колебаний напряжения питания с о,.; = = 0,285% и ku = 2,02. Относительный вес дисперсии равномерно распределенной составляющей в суммарной дисперсии р — о^/о^ = 0,0872,0,29+ = 0,08-Поэтому энтропийный коэффициент этой композиции по кривым рис. 1-9, б равен ka = 2,04. И энтропийное значение мультипликативной составляющей погрешности равно ум = #ыом = 2,04-0,298 = 0,61%.
Результирующая погрешность в конце шкалы прибора складывается из аддитивной и мультипликативной погрешностей по правилам суммирования независимых погрешностей:
= /RR = V 0,2072 + 0,2982 = 0,36 %.
Энтропийные коэффициенты суммируемых погрешностей ka = 2,00 и А,= 2,04 достаточно велики, а их с. к. о. близки между собой (он = 0,207% и ом = 0,298%), поэтому результирующее распределение достаточно близко к нормальному с kK = = 2,066. Отсюда энтропийное значение погрешности в конце шкалы прибора равно = 2,066-0,36 = 0,74%.
32
Таким образом, при испытаниях такого прибора следует ожидать изменения погрешности от ун = 0,41% в начале шкалы до ук = 0,74% в конце шкалы. Однако при нормировании погрешности такого прибора по стандарту необходимо иметь запас на старение не менее 25% фактической погрешности, а нормируемые значения погрешности в начале и конце шкалы должны быть выбраны из ряда предпочтительных чисел, предусмотренных ГОСТ 8.401—80, т. е, должны быть указаны ;ун= 0,41/0,8= 0,5% и ук = 0,74/0,8 = 1%, т. е. класс прибора указан как 1,0/0,5.
Несмотря на наличие рассмотренного выше достаточно точного метода суммирования погрешностей, на практике очень часто встречается потребность в использовании быстрых, приближенных методов определения суммарной погрешности, когда недостаток времени или исходных данных не позволяет использовать точный метод. В этих случаях пренебрегают частью тех правил суммирования погрешностей, которые выше были изложены, и прибегают к заведомо нестрогим, упрощенным методам. В этой связи полезно четко отдавать себе отчет в том, к каким ошибкам приводит несоблюдение того или иного требования правил суммирования.
Для этого рассмотрим упрощенные варианты расчета, используя данные приведенного выше примера суммирования составляющих погрешности. Одним из таких упрощений может быть использование приближенного соотношения у019 = 1,6а для большого класса высокоэнтропийных распределений. В этом случае каждой из составляющих также должен быть приписан определенный закон распределения и определены значения о,-, путем суммирования которых находятся значения аи, ом и ок. Однако далее композиции и их энтропийные коэффициенты не определяются, а ун и 7К находятся как у0,9 = 1,6а. В нашем примере это даст
у019н= 1,6ан= 1 >6 • 0,207 = 0,33%; у0,9к= 1,6ак = 1,6 • 0,36 = 0,58%.
Если результирующее распределение близко к нормальному, то подобным же образом может быть определена погрешность не только с Рл — 0,9, но и с Рл — 0,95 согласно соотношениям:
То,95н = I >96он = 1,96 - 0,207 = 0,4%; у0,9Вк = 1,96ок = 1,96 0,36 = 0,7 %.
При назначении 25%-ного запаса на старение и округлении нормируемых значений Ун и ук в соответствии с ГОСТ 8.401—80 и тот и другой путь в нашем примере приведут к одним и тем же нормируемым значениям 1,0 и 0,5.
Наиболее трудоемкими при подобных расчетах являются назначение законов распределения составляющих и расчет а;. При крайней нехватке времени или исходных данных можно пойти на то, чтобы считать для всех составляющих соотношение между максимальным значением погрешности и с. к. о. постоянной величиной и вычислять ys по формуле
В нашем примере (удт — 0,15%, уук т = 0,4%, увт = 0,15% и yUm — 0,7%) такой расчет привел бы к
Тн = /Тдт + Туюп = /0,152 + 0,4^ = 0,43%;
Тк -= V Y^ + YyKm+Y&m+Y’i/m = /0,152 + 0,424-0,152 + 0,72= 0,83,
т. е. погрешность прибора с 25%-ным запасом на старение чуть-чуть бы не уложилась в нормируемые значения 1,0 и 0,5 и прибор надо было бы отнести к классу 1,5/1,0. Однако неточность такого приближенного расчета, как видно из приведенных цифр, не столь велика, и при необходимости и соответствующих оговорках в неответственных случаях такой метод может широко использоваться.
Что же касается пренебрежения учетом корреляционных связей и использования арифметического суммирования всех составляющих, то это недопустимо во всех случаях, так как может привести к тому, что будут складываться те погрешности, которые в действительности вычитаются друг из друга, и результат будет существенно завышен. Так, в нашем примере сумма всех составляющих равна 0,15 + + 0,5+ 0,45+ 0,7 = 1,8% и прибор будет ошибочно отнесен к классу 2,5.
2 Е. С. Левшина, П. В. Новицкий
33
ГЛАВА ВТОРАЯ
ДИНАМИЧЕСКИЕ СВОЙСТВА
ИЗМЕРИТЕЛЬНЫХ ПРЕОБРАЗОВАТЕЛЕЙ
2-1. ДИНАМИЧЕСКИЕ СВОЙСТВА ПРЕОБРАЗОВАТЕЛЕЙ С ТЕПЛОВОЙ ИНЕРЦИОННОСТЬЮ
Необходимость в решении задачи о тепловой инерционности чаще всего возникает в двух случаях, схематически изображенных на рис. 2-1. В первом случае (рис. 2-1, а) датчик, имеющий массу т и удельную теплоемкость с и находящийся в среде с постоянной температурой 0Ь в некоторый момент времени включается в работу.
Рис. 2-1
В результате этого внутри его начинает выделяться мощность Р и температура датчика 02 (0 начинает нарастать, стремясь к некоторому установившемуся значению. Приближенное уравнение преобразования
Р = (02 - 0^ + тсd(02 = ei) ,
или, приводя его к табличной форме, получим
W) = (02 - 0Х) + ~ ,
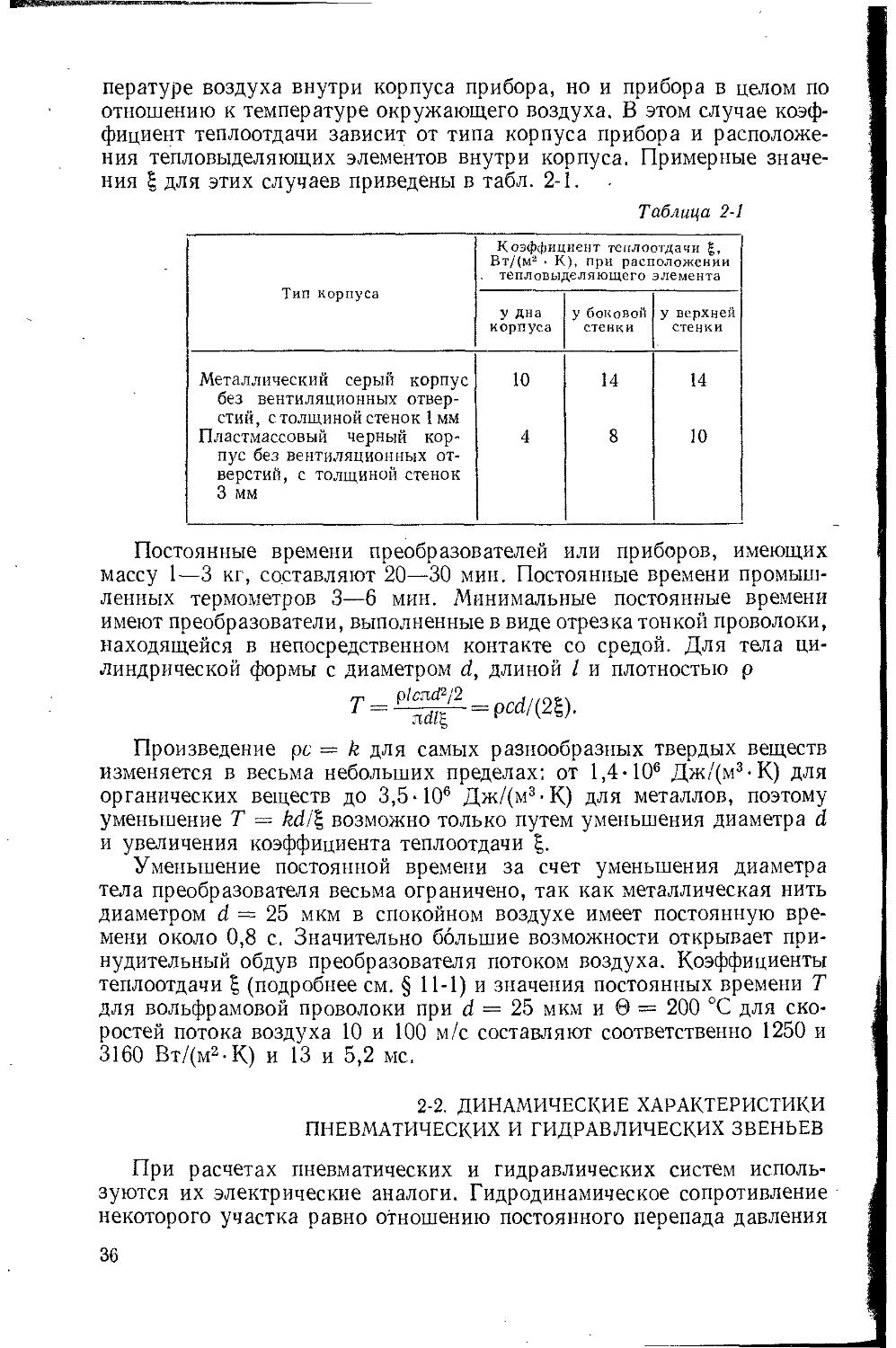
где 5 — поверхность теплообмена, называемая также поверхностью охлаждения преобразователя; £ — коэффициент теплоотдачи.
Приведенное уравнение соответствует уравнению апериодического звена PS0 = (02 — 0J + Td (02 — QJ/dt. Статическая чувствительность преобразователя So = (02 — 0J/P = 1/(^5), постоянная времени Т — тс! (£5).
Во втором случае (рис. 2-1,6) прибор или датчик с массой т и теплоемкостью с, имеющий температуру 02, в момент времени помещается в среду с температурой 01( и в результате теплообмена со средой его температур., начинает стремиться к значению 0Х. Уравнение
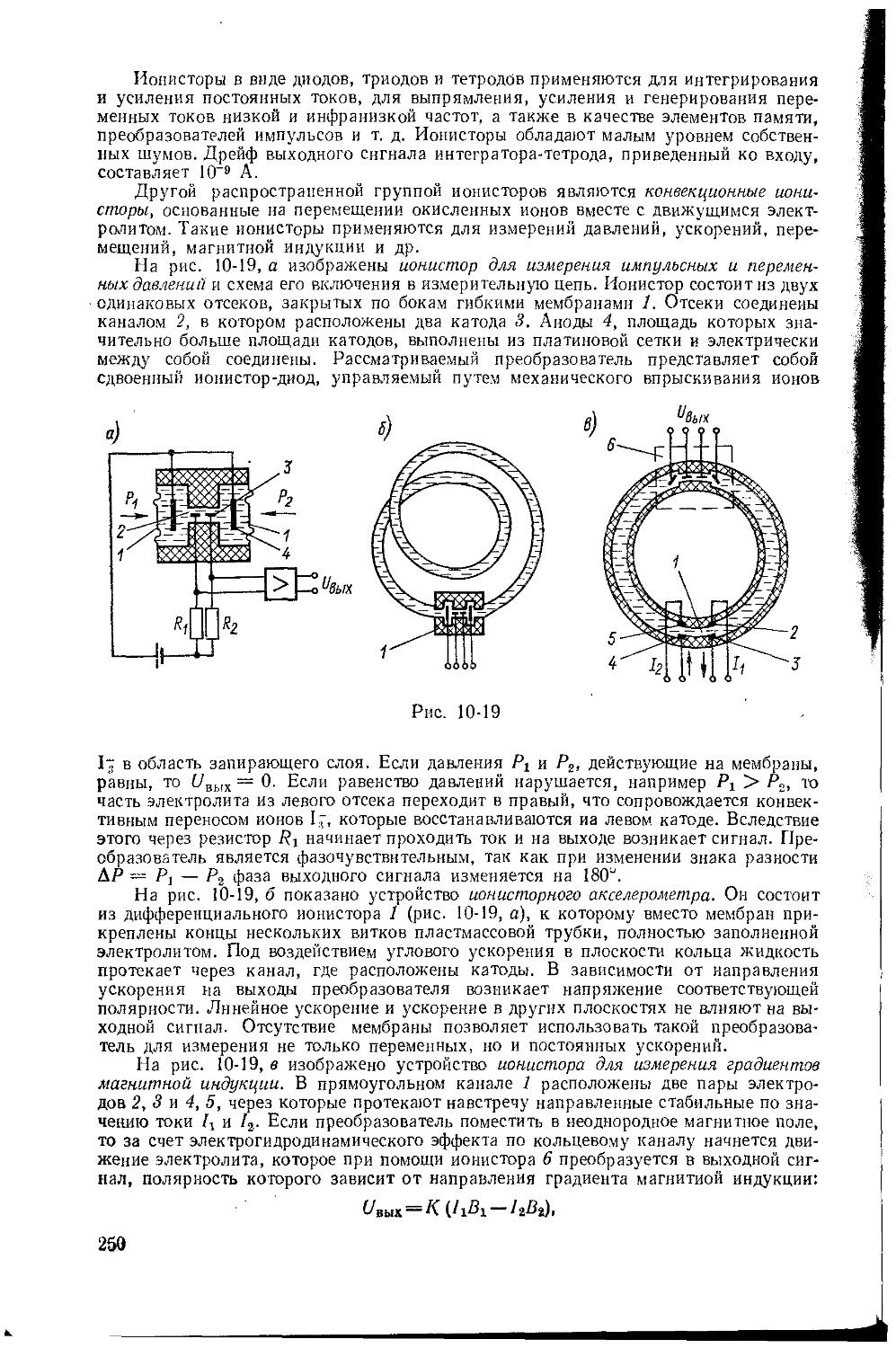
34
преобразования в этом случае
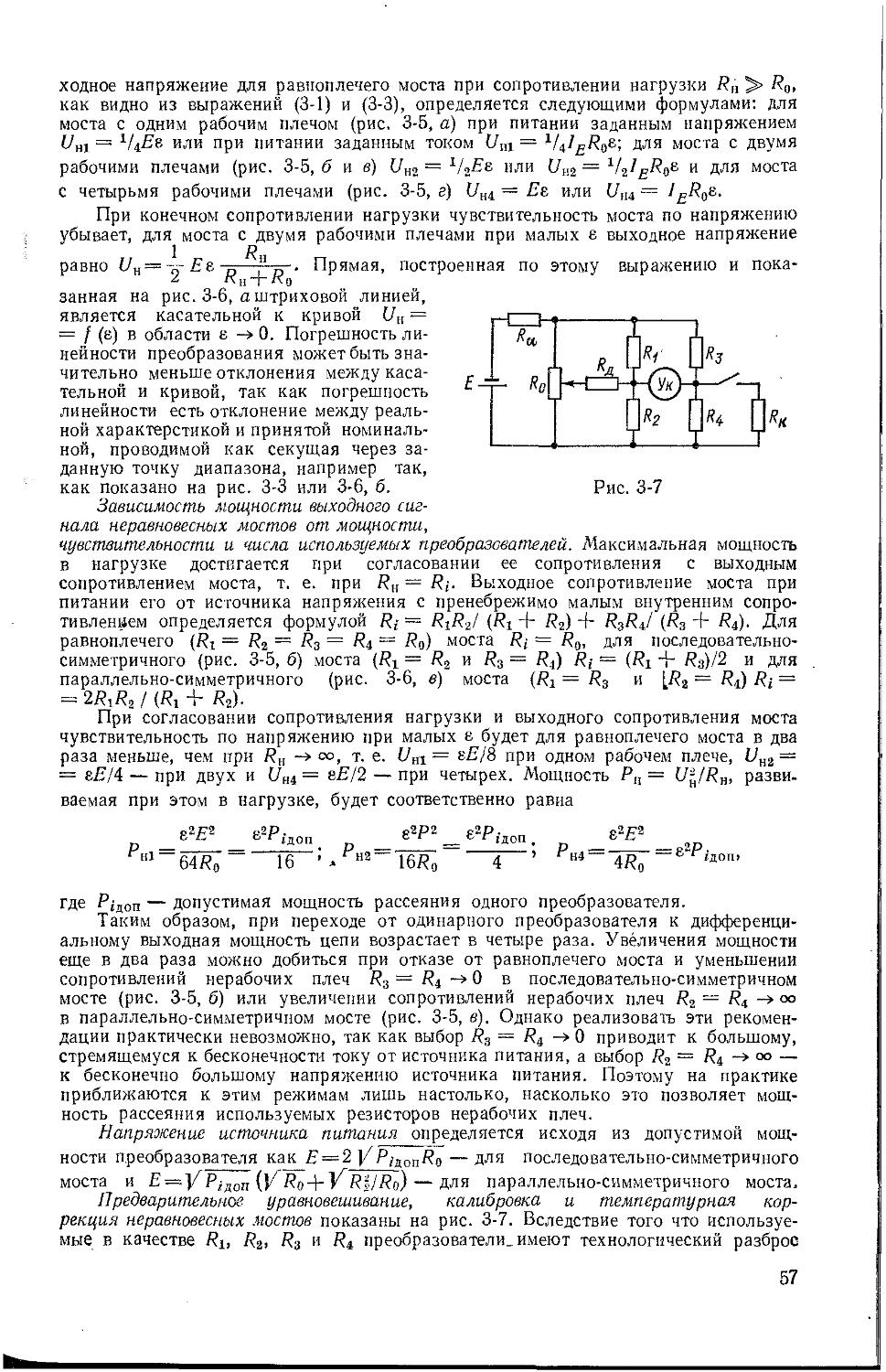
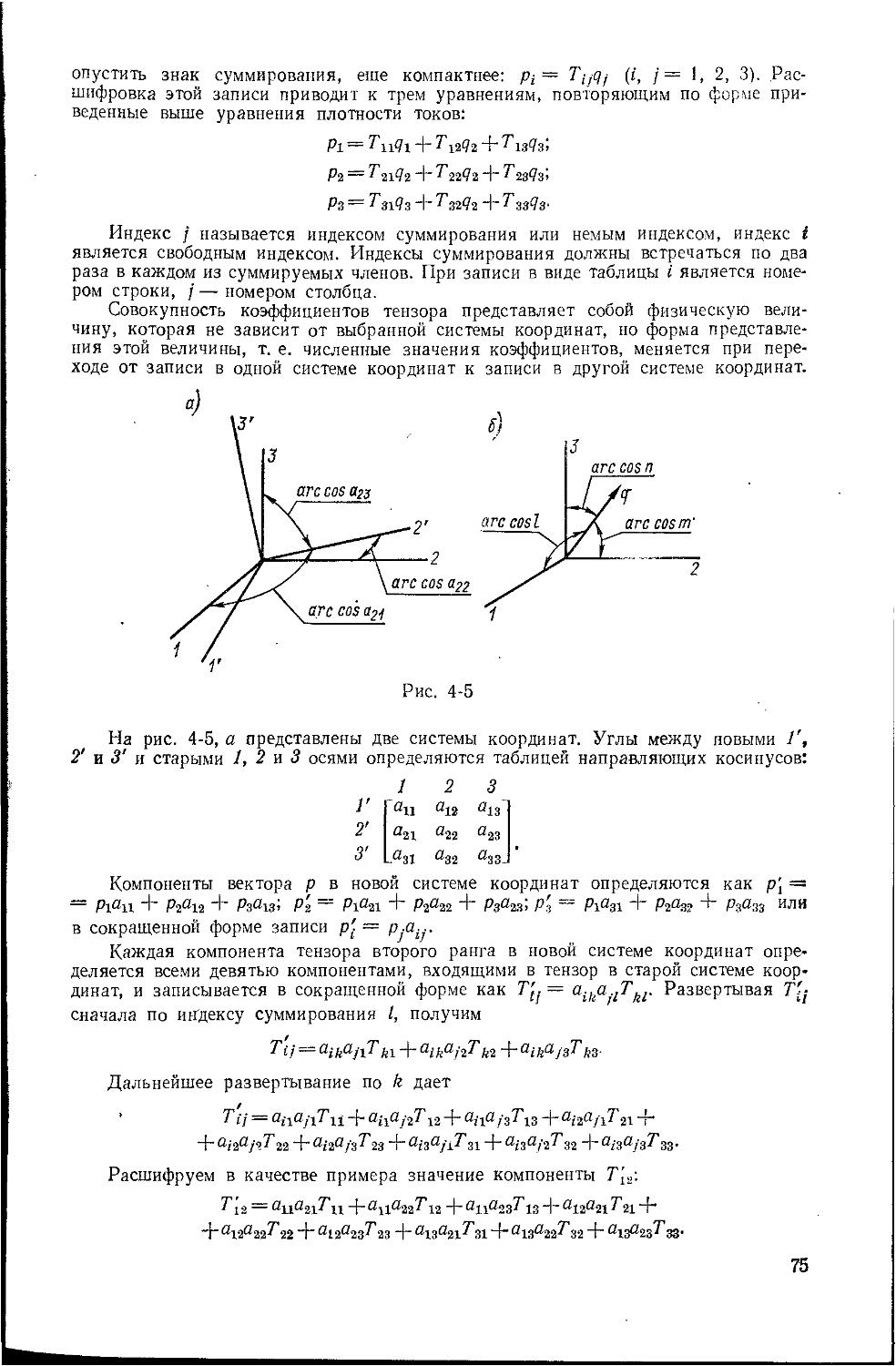
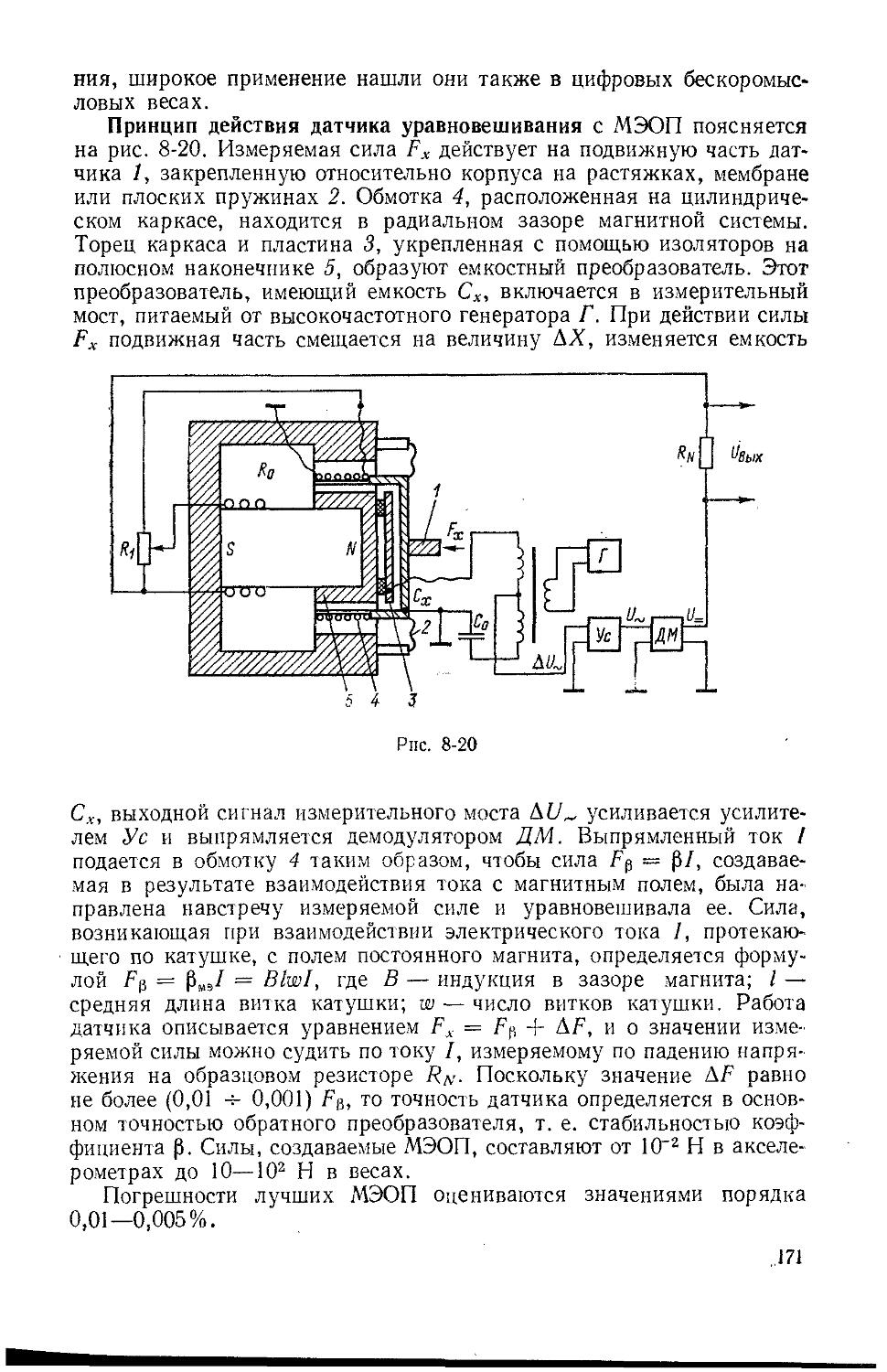
или в операторной фсфме 02 = ©1/(1 + Тр).
На рис. 2-1,в показана экспериментальная кривая переходного процесса теплового преобразователя. Отличие этой кривой от типовой кривой переходного процесса апериодического преобразователя заключается в том, что на участке t2 — имеет место так называемый дорегулярный режим (не учтенный при выводе вышеприведенных уравнений), объясняемый тем, что за это время происходит перераспределение температур в толще самого тела и установление градиентов температуры, соответствующих однонаправленному тепловому потоку. На участке t3 — t2 протекает так называемый регулярный режим установления температуры, а после t3 наступает установившийся режим теплового равновесия. В измерительных преобразователях дорегулярный режим чаще всего занимает относительно малое время, поэтому для оценки динамических свойств преобразователя применимы все расчетные соотношения, полученные для апериодического преобразователя.
Следует обратить внимание на то обстоятельство, что тепловая постоянная времени Т = me /(^S) определяется полной теплоемкостью преобразователя и условиями его теплообмена с окружающей средой, поэтому один и тот же преобразователь имеет разные постоянные времени в зависимости от условий теплообмена.
Для расчета постоянной времени необходимо найти общую теплоемкость деталей прибора или датчика, что может быть выполнено весьма приближенно. Так, для всех тяжелых металлов (медь, латунь, железо) можно принимать с = 400 Дж/(кг-К), для более легких материалов (алюминий, фарфор, слюда) с — 800 Дж/(кг-К), а для органических материалов (текстолит, гетинакс, оргстекло) с — = 1300 Дж/(кг-К).
Коэффициент теплоотдачи зависит от среды, в которой находится преобразователь, от состояния его поверхности, от конвекции газа или жидкости вокруг него (см. § 11-1) и лишь приближенно поддается расчету. Ниже приведены экспериментально полученные значения g в ваттах на квадратный метр-кельвин для некоторых типичных деталей:
Одиночная деталь (резистор, транзистор, конденсатор) и одиночная плата из изоляционного материала с тепловыделяющими деталями, расположенная вертикально....................................... 15
Несколько близко расположенных вертикальных плат ............ 11 — 12,5
Несколько близко расположенных горизонтальных плат (за поверхность охлаждения принимается поверхность, огибающая снаружи всю группу плат)..................................................... 6—7
Одиночная металлическая пластина (шунт с тонкими наконечниками, пластина радиатора охлаждения) ............................. 18 — 20
Катушка в узком зазоре железного сердечника ................. 30
По приведенным формулам может производиться расчет установившегося перегрева не только отдельных деталей по отношению к тем
2* 35
пературе воздуха внутри корпуса прибора, но и прибора в целом по отношению к температуре окружающего воздуха. В этом случае коэффициент теплоотдачи зависит от типа корпуса прибора и расположения тепловыделяющих элементов внутри корпуса. Примерные значения £ для этих случаев приведены в табл. 2-1.
Таблица 2-1
Тип корпуса Коэффициент теплоотдачи Вт/(м2 • К), при расположении . тепловыделяющего элемента
У Дна корпуса у боковой стенки у верхней стенки
Металлический серый корпус без вентиляционных отверстий, с толщиной стенок 1 мм Пластмассовый черный корпус без вентиляционных отверстий, с толщиной стенок 3 мм 10 14 14
4 8 10
Постоянные времени преобразователей или приборов, имеющих массу 1—3 кг, составляют 20—30 мин. Постоянные времени промышленных термометров 3—6 мин. Минимальные постоянные времени имеют преобразователи, выполненные в виде отрезка тонкой проволоки, находящейся в непосредственном контакте со средой. Для тела цилиндрической формы с диаметром d, длиной I и плотностью р
Произведение pt = k для самых разнообразных твердых веществ изменяется в весьма небольших пределах: от 1,4-106 Дж/(м3-К) для органических веществ до 3,5-10® Дж/(м3-К) для металлов, поэтому уменьшение Т = kd/% возможно только путем уменьшения диаметра d и увеличения коэффициента теплоотдачи
Уменьшение постоянной времени за счет уменьшения диаметра тела преобразователя весьма ограничено, так как металлическая нить диаметром d = 25 мкм в спокойном воздухе имеет постоянную времени около 0,8 с. Значительно большие возможности открывает принудительный обдув преобразователя потоком воздуха. Коэффициенты теплоотдачи £ (подробнее см. § 11-1) и значения постоянных времени Т для вольфрамовой проволоки при d — 25 мкм и 0 = 200 °C для скоростей потока воздуха 10 и 100 м/с составляют соответственно 1250 и 3160 Вт/(м2-К) и 13 и 5,2 мс.
2-2. ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ ПНЕВМАТИЧЕСКИХ И ГИДРАВЛИЧЕСКИХ ЗВЕНЬЕВ
При расчетах пневматических и гидравлических систем используются их электрические аналоги. Гидродинамическое сопротивление некоторого участка равно отношению постоянного перепада давления
36
\Р на этом участке к потоку (секундному объемному расходу) вещества Q, т. е. R = АР/Q, и измеряется в ньютонах-секундах на метр в пятой степени (Н-с/м5). Гидродинамическая индуктивность L = = \P/(dQ/dt) выражается отношением массы вещества т к квадрату площади S сечения, через которое вещество протекает: L — mlS2, измеряется в килограммах на метр в четвертой степени (кг/м4). Гидродинамическая емкость некоторого объема равна отношению потока Q, притекающего в этот объем, к вызванной этим потоком скорости изменения давления С = Q!(dPIdt) и измеряется в метрах в пятой степени на ньютон (ms/H).
Рассмотрим выражения сопротивления, емкости и индуктивности для некоторых пневматических элементов, наиболее часто встречающихся в измерительных системах.
1. Сосуд объемом V, заполненный газом (рис. 2-2, а). Емкость С, являющаяся электрическим аналогом объема сосуда, при отсутствии теплообмена с окружающей средой (адиабатный процесс) определяется формулой С — V/(yP) = W(pc2), где Р — абсолютное давление в сосуде; у — сР/су — отношение теплоемкостей при постоянном давлении и при постоянном объеме; р — плотность газа; с — скорость звука.
При теплообмене между стенками сосуда и окружающей средой, обеспечивающем постоянную температуру во всем объеме сосуда (изотермический про-
цесс), гидродинамическая емкость определяется формулой Со = V/P. Очевидно, что изотермический процесс будет иметь место только при очень медленном изменении давления, т. е. на низких частотах. Для воздуха граничная частота, ниже которой следует использовать формулу для Со, определяется из выражения /гр — 25-Ю-8 Л2/Г2, где А — поверхность сосуда объемом V; в частности, для кубика с ребром I — 0,01 м /гр = 0,16 Гц.
2. Трубка длиной I с поперечным сечением 5 (рис. 2-2, б). Гидро-
„ , п 32ц I 40,8ц/
динамическое сопротивление круглой трубки =—а*’
где ц —динамическая вязкость, Па-с. Гидродинамическая индуктивность L = p//S. Емкость канала при частотах выше граничной С = Г/(рс2), т. е. для круглой трубки С = nd2//(4 ре2).
3. «Местные сопротивления» — расширение или сужение потока, отверстие в стенке (рис. 2-2, в, г, д'). Отличительной особенностью этих сопротивлений является их зависимость от абсолютного значения потока Q. Местное сопротивление определяется по формуле R = bQ. Для наиболее простых случаев коэффициент b равен:
а) при внезапном расширении потока (52 > Sj — рис. 2-2, в)
b = 0,5(l-S1/S2)p/(2Si);
Рис. 2-2
37
б) при внезапном сужении потока (S1>S2 — рис. 2-2, г)
Ь = 0,5 (1 — S2/Sx) p/(2S|);
в) при малом отверстии с сечением / в тонкой стенке (рис. 2-2, д)
& = 2,5p/(2f2).
Для переменной составляющей потока местное сопротивление = 0,87bQm, где Qm — амплитуда составляющей потока основной частоты.
Амплитуда потока определяется формулой Q,„ = соС (Рвых)ст, где со — частота пульсаций потока; С — емкость системы, находящейся
Рис. 2-3
ваны для расчета лишь при
2. Приведенные формулы мо:
за местным сопротивлением; (^вых)т — амплитуда пульсирующего давления за местным сопротивлением.
Приведенными формулами можно пользоваться с весьма существенными ограничениями:
1. Эквивалентные схемы с сосредоточенными параметрами могут быть использованы только для линий, длина которых существенно меньше длины волны X, а именно 1Я < 0,1 'К. Длины акустических волн относительно невелики, поэтому необходимо оценить соотношение IJ'K. В частности, при атмосферном давлении и частоте пульсации 100 Гц длина волны в воздухе составляет X = VIf = 3 м, и, следовательно, приведенные формулы могут быть использо-длине канала, меньшей 0,3 м. но применять только в том случае,
если амплитуда переменной составляющей пульсирующего давления не превышает 10—20% постоянной составляющей, т. е. Рт (0,1 -ь 0,2) Р.
3. Формулы для гидродинамических сопротивлений позволяют рассчитывать значения сопротивлений с достаточной точностью лишь при отношении длины канала к диаметру не менее 25—50, при более коротких каналах значения сопротивлений определяются профилем распределения скоростей потока в канале. При коротких каналах для приближенной оценки вносимой инерционности определяется лишь собственная частота системы ®0 = )%l/(LC).
Определение инерционности, вносимой каналами передачи давления от объекта измерения к измерительному преобразователю, рас-
смотрим на двух примерах.
38
(л - 42/4) 10-®
40,8-2 - 10“5 • 0,1 4«. ю-12
0,31 • 10® Н -с/м»;
Пример 1. Схематическая конструкция датчика избыточного давления изображена на рис. 2-3, а. Датчик предназначен для измерения пульсирующего давления воздуха в камере 1, постоянная составляющая давления Р(1 = 106 Па, амплитуда переменной составляющей давления Рт = 105 Па. Диаметр подмембранной камеры 2 D = 30 мм, высота ее h = 10 мм. Длина и диаметр подводящей трубки 3 1=0,1 м и d = 4 мм.
Определить частотную характеристику канала передачи давления в диапазоне частот 0—200 Гц.
Эквивалентная схема пневматической системы показана на рис. 2-3, б, где Ri — местное сопротивление входа в канал; R — сопротивление канала; L — индуктивность канала; С — емкость канала; R2 — местное сопротивление выхода из канала; Ск — емкость подмембранной камеры.
Принимая плотность воздуха р = 1,25 кг/м3, вязкость ц = 2-10'5 Па-с, отношение теплоемкостей у = 1,4, рассчитаем соответствующие параметры;
емкость камеры
уР 1,4 • 106
емкость канала
С = ~ ' 4*/4) °’Гт 10~6=0,88 • 10-12 м5/Н;
уР 1,4-10®
индуктивность канала
, pl 1,25-0,1 . lnd
о
сопротивление канала г, 40,8ц/
местное сопротивление
0,5р 0,5-1,25
2 (л<Р/4)2 — 2 (л - 42/4)2 • 10'12 Х
х0,87 • 105- • 5 • 10-122л/ = 0,5 • Wf Н • с/м5.
Сопротивление R2 Рл.
Из расчетов видно, что емкостью канала С можно пренебречь и упростить эквивалентную схему так, как показано на рис. 2-3, в. Передаточная функция канала передачи давления определяется формулой
Рг (Р)________1/(рСк)________________1_________
(р) ~ 1/(рСк) + Д2 +pL l+pCKRx +P2CKL-
Амплитудно-частотная характеристика канала определяется из формулы р _______________1
2т lmj/p_M2CJ,)2 + <02(CKtf£)2'
Отсюда, например, на частоте 200 Гц давление Р2т составляет
Pirn —
=Р1т-.................................. 1 ' - =
у (1 —4л2 • 2002 5 • 10-12. !. 1()4)2+ 4Я2.2002 • 25 • Ю'2*(0,31 • 106+ 200 • 104)2
= Р\т ...... l,09Plm
]/(1-0,08)2+ 0,0004
Пример 2. Оценим динамические свойства тензорезистивного датчика давления (рис. 2-4), представляющего собой закрепленную в титановую втулку 1 сапфировую мембрану с выращенными на ней кремниевыми тензорезисторами
39
см. § 5-5). Давление подается в подмембранную камеру через штуцер 2, который служит и для крепления датчика к объекту измерения. В качестве дополнительного элемента крепления может быть использован уголь-
Рис. 2-4
пик 3.
Динамическая чувствительность датчика может быть определена как
S (р) = S, (р) S2 (р) KgSi (р),
где S, (р) — коэффициент преобразования измеряемого давления РИзм в давление в подмембранной камере Рх; (р) — коэффициент преобразования давления Рх в деформацию мембраны; К.. — коэффициент преобразования деформации е в напряжение на выходе тензомоста и S4 (р) — коэффициент усиления усилителя, размещаемого в верхней части корпуса датчика.
Частота собственных колебаний мембраны при толщине 2,25 мм и диаметре 12 мм составляет 33 кГц. Полоса пропускания усилителя, очевидно, может быть значительно выше. Таким образом, видимо, наиболее
инерционным является канал передачи давления.
ZTp — 55 мм, диаметр канала d = 4 мм, объем подмем-
Пусть длина
штуцера
бранной камеры Г = 480 мм®Т
11 _ Го 5тр/тр. экв
Собственная частота канала f0 =---, где С = С& + Стр = --- -------;
2л у LC Рс "с
, , ^тр. экв ..
L = LTp = p—-——-с — скорость звука в газе; р — плотность газа; Ьтр = ла/4 — *8тр
сечение трубки; ZTp экв = &ZTp — эквивалентная длина трубки.
Таким образом, собственная частота канала
2л kl + Г/5тр)
' В том случае, если объем камеры относительно велик, т. е. r/STp ZTp, то коэффициент й= 1; если Г/5тр < ZTp, то собственная частота трубки /тр = с/ (4ZTp), т. е. коэффициент k = 2/л. В данном случае Г/5тр = 40 мм, ZTp = 55 мм. Таким образом, коэффициент k лежит в диапазоне k = 1 0,65, приближенно можно счи-
тать k = 0,8. При давлении Р = 105 Па скорость звука в воздухе с = 334 м/с и собственная частота
334
f0 = --г ...—.... =870 Гц.
2л /0,8 • 55 (0,8 • 55 + 40) 10~6
Таким образом, датчик может быть использован для измерения переменной составляющей пульсирующих давлений при частоте пульсаций, значительно меньшей 900 Гц. Погрешность измерения переменной составляющей у/ =» (//870)2.
2-3. РАСЧЕТ ЧАСТОТНЫХ ХАРАКТЕРИСТИК МЕХАНИЧЕСКИХ И АКУСТИЧЕСКИХ ЗВЕНЬЕВ С СОСРЕДОТОЧЕННЫМИ И РАСПРЕДЕЛЕННЫМИ ПАРАМЕТРАМИ
Для построения частотной характеристики колебательного звена второго порядка необходимо и достаточно знать собственную частоту о)0 (или соответствующий ей период То) и коэффициент, характеризующий потери энергии в системе. В практических расчетах- измерительных преобразователей потери энергии обычно характеризуются степенью успокоения |3 или добротностью Q. Однако встречаются и другие показатели потерь: d — затухание контура, б — декремент 40
затухающих колебаний, h — коэффициент затухания, с"1. Все перечисленные показатели однозначно связаны между собой, и их соотношения имеют вид
₽ = 1/(2Q) = d/2 = 6/юо = Л/(2соо); Q = 1 /(2р) = <о0/(2б) = a0/h. \
Значения Q или р, как правило, не поддаются точному расчету, однако они сохраняются постоянными для однотипных систем и поэтому могут быть установлены заранее на основе предыдущего опыта. Так, известно, что добротность электрических АС-контуров на низких звуковых частотах (50—500 Гц) составляет 10, а для высокочастотных контуров (на радиочастотах) не превосходит 200.
Внутреннее трение в металлах ограничивает степень успокоения механических резонансных систем (не имеющих специальных успокоителей) обычно значениями Р = 0,06 -ь 0,04, а их добротность, следовательно, составляет Q = 8 -г- 12.
Рис 2-5
Значения собственной частоты механических систем, наоборот, могут быть весьма разнообразны (например, от долей герца до 50 кГц — см. § 4-4) и поэтому всегда должны рассчитываться. Основными формулами для расчета собственной частоты при поступательном движении являются
f =___L_. f =JLi/‘Z
0 2яУтп ’ ° 2л г т ’ а при вращательном движении
'°“2лУ J ’
где т — масса системы, кг; W — жесткость, Н/м; п — податливость, м/Н; М — удельный устанавливающий момент, Н-м (на 1 радиан); J—момент инерции, кг-м2.
Момент инерции J для конструкций, совершающих крутильные колебания и представленных на рис. 2-5, а, б, в, определяется следующими соотношениями: J = ml2-, J — т (//УЗ)2; J — т (MJ/2)2. Вопросы расчета податливостей и жесткостей упругих элементов рас-личных видов подробно рассмотрены ниже, в главе четвертой.
Расчет собственной частоты звена с сосредоточенными параметрами покажем на примере расчета собственной частоты акселерометра с тензорезисторами (рис. 2-6, а). Представляя упругий элемент акселе
41
рометра как балку длиной I, шириной b и толщиной h, определим ее 4/з
податливость (см. § 4-2) как п = и собственную частоту как
х 1 1 Л 1 Г Ebh е -
/о =----= =------I/ —. Однако подобный расчет является весь-
2л у тп 4л I г ml
ма приближенным. Фактором, который может вызвать отклонение частотной характеристики датчика от рассчитанной, является неучтенная податливость в месте заделки неподвижного конца упругого элемента в основание. Если изобразить механическую схему датчика с учетом этой податливости пя, как это показано на рис. 2-6, б, то становится ясно, что податливости п и пя суммируются и собственная частота оказывается ниже рассчитанной. Вторым фактором, вызывающим отклонение собственной частоты от рассчитанной, является то обстоятельство, что в любой реальной конструкции упругий элемент и закрепленная на нем масса имеют конечные размеры. Рассматривая систему с сосредоточенными параметрами, предполагаем, что упругий
Рис. 2-6
ш1рш„ ш2р
элемент — балка —имеет пренебрежимо малую массу по сравнению с массой т, а масса т имеет пренебрежимо малые размеры по сравнению с размерами балки, т. е. является материальной точкой.
Отступление от этих условий приводит к весьма существенному изменению частотной характеристики, так как в системе появляются резонансы на двух частотах (рис. 2-6, в) и частота первого из них оказывается ниже рассчитанной выше. В частности, если инерционную массу представить в виде цилиндра радиусом R = lV 2/3 0,82/,
где I — длина балки, то частота <oip = О,73ю0, а ю2р = 2,7ю0.
Собственная частота столба газа, заключенного в трубе с жесткими стенками и представляющего собой резонатор с равномерно распределенной по длине / массой и жесткостью, определяется скоростью распространения возмущения, т. е. скоростью звука в среде, заполняющей резонатор, и длиной последнего.
Скорость звука в газе определяется соотношением
С = ]/Я0Т/М =/уР/р,
где R —универсальная газовая постоянная, равная 8,314 Дж/(моль • К); 0 — абсолютная температура, К; у = сР1су — отношение теплоемкостей при постоянном давлении и постоянном объеме; М — молекулярная масса газа; Р — давление газа, Па; р — плотность газа, кг/м3.
42
Рис. 2-7
Акустический резонанс наступает на такой частоте, при которой звуковая волна за период То успевает пройти длину I в одном направлении, отразиться от противоположной стенки и пройти длину I в обратном направлении. При распространении волны со скоростью с на это требуется время То = 21/с. Отсюда собственная частота такого резонатора
с _ _1_ _ _ 11/W _ 1 -\fyP_ '° То 21 21 V М 21 Г S'
Собственная частота продольных колебаний стержня, подвешенного теоретически в пространстве за центр тяжести, или столба жидкости в трубчатом резонаторе как системы с равномерно распределенными по длине параметрами определяется аналогичным образом и равна /0 = с/(2/), где с — скорость звука в стержне или жидкости; I — длина стержня или столба жидкости.
Собственная частота стержня, заделанного одним концом в тело с бесконечно большой массой, например пьезо
электрического акселерометра, схематически представленного на рис.2-7, а, находится аналогично. Для приведения этой задачи к предыдущей реальной, заделанный одним концом стержень длиной I мысленно дополним его зеркальным изображением, как это показано на рис. 2-7,6. Для такого закрепленного в центре тяжести стержня длиной 21 собственная частота в соответствии с приведенной выше формулой равна f0 = с/(4/).
Приближенный расчет сложных колебательных систем удобно производить путем замены их отдельных элементов с распределенными параметрами эквивалентными им по значению собственной частоты элементами с сосредоточенными параметрами. Покажем возможность такой замены на примере заделанного стержня.
Скорость звука в твердом теле с = У Е/р, где Е — модуль упругости материала тела, Н/м2; р — плотность материала, кг/м3. Отсюда для свободно подвешенного стержня длиной I
f — — ~
1й~~21 21 V р ’
а для стержня, заделанного одним концом в тело с бесконечной массой,
Полная масса такого стержня длиной I, площадью S и плотностью материала р равна m = Sip. Изменение б его длины I под действием силы F равно б = lo/E = IF/(SE). Отсюда полная податливость стержня п — 8/F = l/(SE). Поэтому собственная частота системы, которая имела бы массу tn, равную массе заделанного стержня, и податли-
43
вость п, также равную податливости этого стержня, была бы равна f=____________________L= = ±-|/l£: = li/I.
° 2л Утп 2л V Slpl 2л/ Т р
Отсюда действительное значение собственной частоты заделанного стержня может быть выражено через его полные массу т и податливость п как
ft 1 1 1
° 2 ° 2 2л Утп п 1 4 2л У0,405mn
' 2л I/ —тп ' ’ f п1
Различие частот f0 и /о обусловлено тем, что нижний торец стержня (рис. 2-7) не совершает колебаний и поэтому в колебаниях участвует не вся масса стержня, а лишь некоторая ее часть. Отсюда произведение 0,4m, входящее в формулу для f0, можно трактовать как некоторую эквивалентную массу. тэкв = 0,4т, используя значение которой, собственную частоту стержня можно определить по обычной формуле
2л у т9Квп
Аналогично этому можно говорить и об эквивалентной податливости пдКа — 0,4л, ибо верхний конец стержня (рис. 2-7, а) не испытывает при колебаниях сжатия и растяжения, в которых участвует лишь нижняя часть стержня. С использованием значения пэка собственная частота равна
2лУ mnSKa
Поэтому в общем виде можно считать, что собственная частота всегда может быть найдена как
fo = —-7=L=,
2зх у /^экв^экв
но в первом случае тэкв = 0,4т, а пэкв = п, а во втором тЭКа = т, 3 0,4ц.
Подобные эквивалентные параметры могут быть найдены и для других колебательных систем. Например, для мембраны на рис. 2-8, а, заделанной по контуру (если в качестве пэкв принять податливость ее центра), тэка = 0,32т. Для балки, лежащей на двух шарнирных опорах, тэка = 0,485т, а при заделанных концах тэкв = 0,371т при расчете их податливости для центра балки. Для консольной балки постоянного сечения тэкв = 0,236т, а для балки равного сопротивления тэкв = 0,067т при использовании в расчете податливости свободного конца балки. Для натянутой ленты (см. рис. 4-3, в) при использовании податливости от силы по ее центру, как и для стержня, тэкв — (4/л2)т — 0,405т.
Такая эквивалентная замена позволяет достаточно просто получить расчетные формулы для собственной частоты разнообразных и достаточно сложных конструкций преобразователей. Так, например, 44
преобразователь пьезоэлектрического акселерометра (рис. 2-8, б) состоит из инерционной массы 1, пластин пьезокерамики 2 и основания 3, соединенных между собой клеем или пайкой. Благодаря тому что модуль упругости керамики близок к модулю металлов, детали 1 и 2 можно рассматривать как единый мдссой, равной массе стержня т„, и эквивалентной податливостью, равной 0,4 податливости всего стержня пст. Основание 3 можно рассматривать как мембрану, заделанную по контуру и нагруженную в центре массой стержня.
Так как в колебаниях всей системы масса стержня участвует полностью, а масса мембраны —
стержень длиной l с эквивалентной
лишь .частично, то эквивалентная масса всей системы тэкв = т„ + + 0,32тосн. Податливость же мембраны, наоборот, используется полностью, в то время как податливость стержня участвует лишь частично. Поэтому эквивалентная податливость системы «экв = /госн + 4-0,4пст. Отсюда собственная частота всей системы равна
f0 = 1 = _^_=_==============.
2л F тэквяэкв 2л V{т„ + 0,32-тосн) (яосн + 0,4я„) ' -
2-4. ЭКВИВАЛЕНТНЫЕ ЭЛЕКТРИЧЕСКИЕ СХЕМЫ МЕХАНО-ЭЛЕКТРИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ
В измерительной технике часто используются такие преобразователи, частотные характеристики которых определяются частично электрическими, а частично механическими (или акустическими) параметрами. В подобных случаях удобнее все параметры привести к какому-то единому (лучше электрическому) виду и весь преобразователь изобразить в виде некоторой эквивалентной (т. е. обладающей теми же частотными свойствами) электрической цепи, которая отразила бы как электрические, так и механические элементы. Это может быть достигнуто методом, который получил название метода эквивалентных схем или электрических схем замещения и основывается на общности дифференциальных уравнений электрических и механических систем.
На рис. 2-9 показаны механическая колебательная система и ее электрический аналог в виде последовательного и параллельного контуров.
Дифференциальное уравнение механической системы может быть записано в виде
m^~dp+P ~dt~ + nX=F (2'0
или в виде
-j- п J vd.t-—Ft (2-2)
45
где F — приложенная сила; tn — масса подвижной части; Р — коэффициент успокоения, характеризующий вязкое трение; п — податливость пружины; х — перемещение подвижной части; v = dx/dt — скорость движения подвижной части.
Рис. 2-9
Дифференциальное уравнение последовательного контура может быть записано в виде
'->+« т + ^=е- <2’э>
Дифференциальное уравнение параллельного контура
+ l + = (2‘4)
ш 1\ V
Сравнение дифференциальных уравнений (2-1), (2-3) и (2-2), (2-4) показывает, что механическая система может быть заменена как последовательным, так и параллельным электрическим контуром. В табл. 2-2 представлены электрические аналоги механических параметров для того и другого контура.
Таблица 2-2
Механическая величина Электрическая величина
последовательного контура параллельного контура
Сила F Скорость V Перемещение х Количество движения р Коэффициент успокоения Р Масса т Податливость я ЭДС е Ток i Заряд q Магнитный поток Ф Сопротивление R Индуктивность L Емкость С Ток i ЭДС е Магнитный поток Ф Заряд q Проводимость 1/R Емкость С Индуктивность L
Метод электромеханических аналогий широко применяется при расчете измерительных преобразователей (см., например, работу [2]). Для сопоставления эквивалентной схемы нужно выбрать электрический аналог механической системы и определить коэффициент электромеханической связи kS№, равный kw = F/v — —i/v для последователь
46
ной схемы электрического аналога и kati = F/i = —U/v для параллельной схемы. Элемент связи между реальной электрической цепью и электрическим аналогом механической системы представляет собой идеальный трансформатор с коэффициентом трансформации, равным kas. Особенностью трансформатора является то, что его коэффициент трансформации измеряется в ньютонах на вольт или на ампер. Приведя все сопротивления и проводимости к первичной обмотке трансформатора, можно составить окончательную эквивалентную схему — электрическую схему замещения, которая отражает действительные свойства системы со стороны электрических зажимов.
Сущность метода эквивалентных схем, или электрических схем замещения, рассмотрим на примере преобразователей с электромаг-
Рис. 2-10
нитной и электростатической связью механической и электрической систем, наиболее распространенных в измерительной технике.
Эквивалентные схемы электромеханических преобразователей с электромагнитной связью. Примерами таких преобразователей могут служить магнитоэлектрический преобразователь тока / в силу F, схематически показанный на рис. 2-10, а, или магнитоэлектрический измерительный механизм. Механическая система преобразователя обладает массой т, подвешенной на пружине с жесткостью W, и имеет успокоение Р, обусловленное внутренним трением в элементах подвески и сопротивлением воздуха движению катушки в зазоре магнита. Электрическая система обладает сопротивлением Ro и индуктивностью Lo катушки преобразователя.
При измерении сопротивления такого преобразователя на постоянном токе обнаруживаем лишь сопротивление Rg его катушки. При повышении частоты питающего тока можно было бы ожидать повышения сопротивления по штриховой кривой на рис. 2-10, б, соответствующей Z = VRg + co2L|. Однако фактически наблюдаем повышение
47
сопротивления преобразователя в виде резонансного пика на частоте fp, соответствующей резонансу механической системы преобразователя и близкой к
Физически это явление объясняется так, В области механического резонанса резко нарастает амплитуда механических колебаний катушки в зазоре постоянного магнита, наводимая в катушке ЭДС направлена встречно внешнему возбуждающему напряжению, вычитается из него, и ток, проходящий через преобразователь, падает, что формально мы и воспринимаем как возрастание Z2 преобразователя. Это возрастание Z2 преобразователя можно представить как появление Некоторого дополнительного электрического сопротивления ZBH, вносимого механической системой и называемого вносимым сопротивлением.
Для установления вида связи электрических и механических параметров преобразователя уточним, как возникают механическая сила и встречная ЭДС в катушке преобразователя. Как известно, механическая сила F, возникающая от протекания по катушке тока i, равна F = iBl — k3lti, где В — индукция в зазоре магнита; I — длина проводника катушки; Дм — В1 — так называемый коэффициент электромагнитной связи.
ЭДС, наводимая в катушке при ее движении в магнитном поле постоянного магнита, равна е = —dfbldt — —vBl — —k3ttv, где k3M — = Bl — тот же коэффициент электромагнитной связи, a v — скорость движения катушки.
Для составления йолной системы уравнений обозначим Ro + jaL = = Zo, а отношение механической силы F к механической скорости v назовем комплексным механическим сопротивлением ZMX — F/v. Тогда полная система уравнений, описывающая преобразователь, будет
J И ~ ZOl
I F = Z„v + k3Xi,
ибо напряжение и на зажимах преобразователя складывается из падения напряжения от тока i на элементе Zo и ЭДС е = —k3av, наводимой в катушке, а сила, развиваемая катушкой, — из силы ZMXu, обусловленной ее движением, и силы k3Mi, создаваемой током.
Если внешняя сила F, развиваемая катушкой, равна нулю (преобразователь не нагружен на внешние устройства), то из второго уравнения следует, что
Полное электрическое сопротивление преобразователя
7 . 7 kavP
2 ~ i ~ i ~ 0 [ »
а после подстановки значения о
Zs = Zo &эм/2МХ — Zo + ZBH,
48
т. е. складывается обычным образом из электрического Zo и вносимого ZBH — сопротивлений преобразователя.
Особенностью связи ZBH и Z„x является их обратная пропорциональность друг другу: чем больше ZMX, тем меньше ZBH. В этом легко убедиться, сделав ZMX = оо, т. е. застопорив катушку, лишив ее возможности двигаться. При этом будет Z? = Zo, ZBH = 0, т. е. влияние механических параметров на Zs исчезнет.
Для того чтобы уяснить, из каких электрических элементов может быть смоделировано в электрической цепи вносимое сопротивление ZBH, обусловленное влиянием механических элементов преобразователя, воспользуемся вместо жесткости обратной ей величиной — податливостью п — 1 tW и представим механическое сопротивление ZMX в виде
7 F , ( 1 \
^мх • Лмх Т / { ) •
V \ <йП/
Тогда
у ___ 1 __ ^мх __ гмх . . т ,1
т. е. результирующая проводимость У„и = 1/ZBH складывается из параллельно соединенных трех проводимостей, первая из которых не зависит от текущего значения частоты со и, следовательно, может быть смоделирована как
Гмх/^эм —
вторая пропорциональна частоте со, т. е. в электрической цепи должна быть представлена емкостью с проводимостью
/wCi =
а третья, обратно пропорциональная частоте, может быть смоделирована индуктивностью с проводимостью
1/(/(оЛ1) = 1/(/(0^мп).
Таким образом, результирующая эквивалентная схема преобразователя с массой т, податливостью п и активным механическим сопротивлением гмх для воспроизведения частотной характеристики, показанной на рис. 2-10, б, должна состоять из элементов, изображенных на рис. 2-10, в или 2-10, г, где R1 = kla/rKK‘, Ci = m/Мм! = - kiun = fesM/F.
В результате выбранный путь приводит к эквивалентной параллельной схеме и коэффициенту k3№ = FH = Bl.
В том, что полученная эквивалентная схема (рис. 2-10, г) действительно соответствует фактической частотной характеристике преобразователя, приведенной на рис. 2-10, б, легко убедиться, просматривая характерные точки этой характеристики. В самом деле, при со = 0 сопротивления катушек 1.0 и равны нулю и Zs = Ra. Резонансный пик характеристики (если пренебречь влиянием Ло) определяется ре
49
зонансом контура CrLt и рассматривается вблизи собственной частоты
f = =_
° 2 л УЦС,
J 1 1 -i/'w
,.. т 2л 1Лпт 2л г т
ki«n
*ЭМ
sin iot
Рис. 2-11
а при дальнейшем повышении частоты сопротивление конденсатора (Д стремится к нулю и Zs = Ro + ja>L0.
Поляризованный электромагнитный преобразователь (рис. 2-11), Постоянное подмагничивание создается током /0 и МДС подмагничивания FM = Iow или постоянным магнитом, имеющим МДС FM = Н1„, где Н — напряженность и 1Я — длина магнита. Поскольку электромагнитная сила определяется током, то, как и в предыдущем примере, удобнее выбрать параллельную эквивалентную схему. Электромагнитная сила F3iS = ~-~- (tw)2, где б — длина зазора; S — площадь за-аемость и i = /0 + Im sin <ot — ток
через преобразователь. Составляющая силы, имеющая частоту со, определяется как FSM = -^- w (Iow) lm sin at. Отсюда находим коэффициент электромеханической связи k3M — -^-w(Iow) — -^-wFK, или
— магнитная
Рис. 2-12
если этот коэффициент выразить через подмагничивающий поток Фо = Р
— -о,, ” , то = Фпсо/б. Эквивалентная схема остается той же, 0/(HoS) эм и
что и представленная на рис. 2-10, г.
Поляризованный электростатический преобразователь (рис. 2-12, а). Электростатическая сила между пластинами определяется напряжением между ними, поэтому удобнее выбрать последовательную эквивалентную схему. Электростатическая сила Fx= 2-^«2, где 80 —-диэлектрическая проницаемость; S — площадь обкладок; б — зазор между обкладками; и — Ua + Um sin at — приложенное напряжение.
50
Составляющая силы, имеющая частоту ®, определяется как Fgc = ^~-^-Umsino)t, и коэффициент электромеханической связи ъ =^-^- — С0Е, где Со — емкость преобразователя; Е — напря-
Э..1 й р
женность постоянного электростатического поля между пластинами.
Эквивалентная схема преобразователя с трансформатором представлена на рис. 2-12, б и без трансформатора — на рис. 2-12, в.
ГЛАВА ТРЕТЬЯ
ИЗМЕРИТЕЛЬНЫЕ ЦЕПИ
3-1. ИЗМЕРИТЕЛЬНЫЕ ЦЕПИ ГЕНЕРАТОРНЫХ ПРЕОБРАЗОВАТЕЛЕЙ
Генераторный преобразователь характеризуется выходной ЭДС Е (х), являющейся функцией входной величины х, и внутренним сопротивлением Zf. Эти две величины определяют мощность Рм - E2/Zit развиваемую преобразователем в режиме короткого замыкания, т. е. расходуе
мую лишь на внутреннем сопротивлении. Мощность Рп, отдаваемая генераторным преобразователем последующему преобразователю (рис. 3-1), имеющему сопротивление ZH, определяется мощностью короткого замыкания Рк 3 и некоторым безразмерным коэффициентом £, характеризующим эффективность использования возможностей генераторного преобразователя, или кратко эффективностью преобразования, которая зависит только от
Рис. 3-1
соотношения сопротивлений Z; и ZH. Действительно, полагая сопротивления преобразователя и нагрузки чисто активными, получим
р __[2р________E-Rti ____Е2 RjRn __ tр
н н (R/+R,,)2 RilRi+R^ к-3’
R-R а
где £= -=—~ —- является функцией отношения а = RH/Ri и не за-
(^г“Г Кв)’ U ~гС1Г
висит от абсолютных значений R,- и RH.
Изменение § в виде функции а при изменении а от 10-3 до 103 представлено в логарифмическом масштабе на рис. 3-2 и имеет максимум Втах = 1/4 при а = 1, т. е. при RH = Rp
В том случае, когда согласуемые сопротивления есть комплексные величины Zj и ZH, под § = Рн/Рк.з следует понимать отношение полных мощностей. Прн этом для значений а= | ZB |/i Z,-,, далеких от единицы, кривая £ практически не отличается от полученной выше, но значение максимума зависит от соотношения аргументов (р; и фн комплексов Z; и ZH. При одинаковом характере сопротивлений (оба индуктивные или оба емкостные) и фг- = фн кривые полностью совпадают; при ф, = = (фа ±90°) максимум 5 составляет £тах = 1/2 вместо 1/4 (для RH и R,). При ф; = —фн, т. е. при одном — емкостном, а другом — индуктивном сопротивлениях,
51
кривая имеет вид резонансной кривой. Поэтому при проектировании преобразователей можно ориентироваться на общее правило, гласящее, что максимальная мощность в нагрузке Рн генераторного преобразователя, а следовательно, и максимум эффективности преобразования £ достигается при согласовании модулей нагрузки и внутреннего сопротивления преобразователя, т. е. при а — 1 или гн = г,. При этом необходимо обратить внимание на то, что максимальную мощность желательно получить именно в нагрузке (рис. 3-1), поэтому сопротивления подводящих проводов должны быть отнесены к а не к Ra. Следует иметь в виду, что правило
согласования отнюдь не требует равенства R, и Ra с какой-либо высокой степенью точности. Максимум кривой на рис. 3-2 весьма пологий, поэтому практически согласование обеспечивается при а = 0,2 ч- 5 и лишь при а > 10 или а < 0,1, мощность в нагрузке Ра уменьшается соответственно в а или 1/а раз.
В ряде случаев приходится сознательно отступать от условий согласования. Чаще всего это делается ради уменьшения тех или иных погрешностей измеритель
Рис. 3-2
ной аппаратуры. Для термоэлектрического термометра, например, условием согласования является равенство сопротивлений RTn + R., — RH, где RTn — сопротивление термопары; R;l — сопротивление соединительных проводов (линии) и RH — сопротивление нагрузки (милливольтметр). Однако при соблюдении этого условия термометр будет иметь большую погрешность от изменения сопротивления линии Rx и термопары RTn (см. § 11-3), которая может быть сведена к пренебрежимо малой величине при Ru > RT„ + Ra.
В подобном же положении оказываются цепи, работающие с гальваническими преобразователями (см. § 10-3). Прохождение относительно больших токов (больше 1 мкА) через электролит гальванического преобразователя или нормального элемента вызывает явления поляризации на их электродах и тем самым изменяет результирующую ЭДС. Поэтому входные сопротивления цепей, работающих с такими преобразователями, выбирают равными RH > 1000 R>.
Пьезоэлектрический преобразователь (см. § 6-1) и индукционный преобразователь (см. § 8-10) имеют реактивные внутренние сопротивления, что приводит к зависимости выходного сигнала от частоты й изменения входной величины х, так как Е (х) ~ SapXm sin Qt, где Snp — чувствительность преобразователя. При этом для пьезоэлектрических преобразователей характерна частотная погрешность в области низких частот, а для индукционных — в области высоких частот. Уменьшение частотных погрешностей в том и другом случае достигается при RH
52
3-2. ИЗМЕРИТЕЛЬНЫЕ ЦЕПИ
ПАРАМЕТРИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ
Для работы с параметрическими преобразователями используются измерительные цепи с питанием как переменным, так и постоянным током. В дальнейшем будем рассматривать свойства всех измерительных цепей на примерах цепей постоянного тока, имея в виду, что Полученные соотношения в равной степени справедливы и для цепей переменного тока. В тех же случаях, когда цепи переменного тока имеют какие-либо специфические особенности, они будут рассмотрены отдельно.
Сопротивление параметрического преобразователя является функцией измеряемой величины R = f (х) и может быть выражено как R = Ro + AR (х).
Источники питания преобразователей, как правило, обладают достаточным запасом мощности, и мощность, которая прикладывается к преобразователю, ограничивается не возможностями источника, а условиями работы преобразователя, т. е. его допустимой мощностью рассеяния Р,- доп. Таким образом, характеристиками параметрического преобразователя являются допустимая мощность рассеяния Р( доП, начальное сопротивление Ro и относительное изменение сопротивлении е = AR/R0. С параметрическими преобразователями используются три вида измерительных цепей: цепи последовательного включения, цепи в виде делителей и цепи в виде мостов. Формулы для выходного напряжения на сопротивлении нагрузки 1/вых, начального напряжения С/о ПРИ е = 0 и изменения напряжения А(/Вых= = f (е) в зависимости от е и а = RH/R0 для цепи последовательного включения и цепей в виде делителя с одинарным и дифференциальным преобразователями представлены в табл. 3-1.
Условием согласования сопротивлений преобразователя и нагрузки для цепи последовательного включения будет а= 1/3 или RH = При выполнении
условия согласования мощность сигнала, получаемого указателем с сопротивлением RH, составляет Рн = = ?/1вР< доп®2-
Зависимость эффективности преобразования fc = = Рн/ (Р/ д0пе2) от а для параметрических преобразователей показана на рис. 3-2. Максимум кривой получается гораздо более острым, и условия согласования для параметрических преобразователей должны выполняться строже, чем для генераторных.
Измерительные цепи последовательного включения и цепи в виде делителей характеризуются нелинейной зависимостью между А(/вых и е, причем погрешность линейности будет тем больше, чем больше е. При включении в цепь делителя дифференциального преобразова
теля погрешность линейности может быть уменьшена
при увеличении а и становится равной нулю при а -> оо (RH ->оо). Кривые &UBUX/E = / (е) для различных значений а представлены на рис. 3-3. Для обеспе-
чения линейности приходится значительно отступать от согласованного значения нагрузки. При работе же с указателями малого сопротивления (при а < 10) некоторое уменьшение нелинейности может быть достигнуто при работе на начальном участке характеристик (рис. 3-3). Основным недостатком как цепей последовательного включения, так и цепей в виде делителей является то, что значению х = 0
соответствует выходное напряжение 1/вых ¥= 0. Этот недостаток при измерении переменных величин устраняется использованием измерительных цепей с разделительным конденсатором. Пример такой цепи с тепзорезистором при измерении переменной составляющей силы показан на рис. 3-4.
Измерительные цепи в виде неравновесных мостов. Основная идея построения неравновесных мостовых цепей состоит в исходной компенсации начального значения выходного сигнала, чтобы при х = 0 он был равен нулю. Для этого к делителю R1( R2 (рис. 3-5, а), содержащему преобразователь Rb добавляется еще один делитель R3, R4, с тем чтобы напряжение 1/н на нагрузке RH и ток /н через нее при х = 0 отсутствовали. При отклонении х от 0 и Ri = Ro ± AR мост выходит из состояния равновесия, вследствие чего /н = fi (х) и 1/н = /а (х)- Такую структуру
53
Таблица I-1
Вид измерительной цепи Формула для напряжений
^ВЬ/Х u. Л^вых
Е . Rh+Ro±AR £ I 4- a £ a ~^е 1 +a 14»£e
фф Р (Ro ± AR) RH Ro (Ro + AR + Rh) + (Ro ± AR)Rh £ E 2a+l £ ± ae 2 24-2a+l/(2a)_tg [3/2 + a+l/(2a)|
ф 2R0- L R p A/?) RH R? + 2RcRh-AR2 2a 4-1 F a ± 8 (1 + 2a) + e2 2a 4-1 1 4- 2a — e2
измерительной цепи имеют не только электрические, но и магнитные, оптические и другие мосты, где подобная ситуация создается не для электрических токов, а магнитных, световых и других потоков.
Цепь неравновесного моста имеет больше возможностей, чем цепь в виде делителя, так как параметрические преобразователи могут быть включены в качестве одного (рис. 3-5, а), двух (рис. 3-5, бив) или всех четырех (рис. 3-5, е) плеч моста. Для уяснения этих возможностей рассмотрим
основные свойства мостовых неравновесных цепей. рис. 3.4
Состояние равновесия, т. е. состояние, когда
/н = о, устанавливается перед началом измерений
при х = 0. Условием достижения равновесия является R2/Ri — Rt/Rs или R2R3 —
= RtRi-
Выходной ток мостовой цепи определяется выражением
I _ р__________________R1R4 R2R3 ___________________ (3-1)
" /?н(«1+Я2)(/?з + /?4) + ^2(/?з + Я4) + ^4(«1+%)’
где Е — напряжение питания моста, или
г _/ ________ R1R*—R2R3___________________ /3.2)
н Е RH(,R, + Rt+R3+Ri) + (Ri+Ri)(.R3+Ry
где Zg — ток питания моста. Наибольший интерес представляет мостовая цепь с дифференциальным преобразователем, при этом возможны следующие варианты: включение половин пре-
Рис. 3 5
образователя в плечи R± и R2 или R, и R3, питание моста от источника заданного напряжения или от источника заданного тока и использование преобразователей с функцией преобразования вида R = Ro + k,x или Y = Yg + k2X.
Функция преобразования неравновесного моста с дифференциальным преобразователем (рис. 3-5, б) при условии, что в состоянии равновесия сопротивления всех плеч равны Ro, при заданном напряжении питания Е = const определяется выражением
— 2
________1_______
1+*£. (1_62/2) Г<н
Линейность функции преобразования соблюдается, так же как и для цепи в виде делителя, лишь при RH = «>. Кривые Дн = f (в) приведены на рис. 3-6.
Если задан ток питания моста IE = const, то функция преобразования линейна при любых RH и определяется выражением ^н=4г Ij ' ФУНК" ция преобразования моста с дифференциальным преобразователем, включенным
55
в плечи 7?! и R3 (рис. 3-5, в), в режиме заданного напряжения питания Е = const принципиально нелинейна при любых Ra:
UH = ±-Ez
(1_82/4) + ф (1-е2/2)’ Кн
а в режиме заданного тока питания 1Ё == const линейна лишь при /?н °°J
Un==2 !Ее ‘
(1-62/4) Кн
Несколько иная картина получается в том случае, если в преобразователе линейно с входной величиной х изменяется не сопротивление, а проводимость, например, как в индуктивных преобразователях с переменным зазором (см. § 8-6) или в емкостных с переменной площадью (см. § 7-3).
Рис.
В общем виде выходной ток моста, выраженный через проводимости плеч и указателя, определяется выражениями:
I ру _____________^2^3 У) У 4____________ /о о\
'и- В (У1 + Уг) (У3 + У4) + Ун (Y^ + Yz + Yt + YJ
или
] _/ У ____________________^3-^4______________________ ,3.4)
в “ Е н Ун (Ух + YJ (У3 + У4) + У4У2 (У3 + У4) + У3У4 (У4 + у2)• v
В этом случае принципиально линейным при любом /?н оказывается работающий в режиме заданного напряжения мост (рис. 3-5, б), у которого преобразователи с линейно изменяющейся проводимостью У] = Уо + ДУ и У — Уо —> ДУ включены в плечи /Ф и R2. Его выходной ток определяется выражением
I - 1 рр 1
” 2 £ЬГ1/Ун-|-1/У0-
Тот же мост, работающий в режиме заданного тока, оказывается линейным при Ун -»оо, т. е. при Ra — 0. Мост, в котором дифференциальный преобразователь включен в плечи /?, и R3, линеен в режиме заданного напряжения при Ra -> 0 и принципиально нелинеен при любых R„ в режиме заданного тока.
Чувствительность мостовой цепи по напряжению при малых изменениях сопротивлений плеч (е — AR/R 1) можно считать приближенно постоянной. Вы-
56
ходное напряжение для равноплечего моста при сопротивлении нагрузки RH Ro, как видно из выражений (3-1) и (3-3), определяется следующими формулами: для моста с одним рабочим плечом (рис. 3-5, а) при питании заданным напряжением ?7Н] = 1/1£е или при питании заданным током Unl = HjERifi', для моста с двумя рабочими плечами (рис. 3-5, бив) UH2 = 1/гЕе, или (7Н, = 1/2/£Roe и для моста
с четырьмя рабочими плечами (рис. 3-5, e) (7н4 = Ее или UH4 = 1 ERge.
При конечном сопротивлении нагрузки чувствительность моста по напряжению убывает, для моста с двумя рабочими плечами при малых е выходное напряжение 1 R
равно ?7Н = 8-д—г~п~- Прямая, построенная по этому выражению и пока-
2 Кн + ло
занная на рис. 3-6, а штриховой линией, является касательной к кривой UH = = f (е) в области е -> 0. Погрешность линейности преобразования может быть значительно меньше отклонения между касательной и кривой, так как погрешность линейности есть отклонение между реальной характерстикой и принятой номинальной, проводимой как секущая через за
Рис. 3-7
данную точку диапазона, например так, как показано на рис. 3-3 или 3-6, б.
Зависимость мощности выходного сиг-
нала неравновесных мостов от мощности, чувствительности и числа используемых преобразователей. Максимальная мощность
в нагрузке достигается при согласовании ее сопротивления с выходным сопротивлением моста, т. е. при RK = R,. Выходное сопротивление моста при питании его от источника напряжения с пренебрежимо малым внутренним сопротивлением определяется формулой R; = R4R2/ (R; + R2) + R3RJ (R3 + Ra)- Для равноплечего (R1 = R2 = R3 = Rt = Ra) моста R, = Ro, для последовательносимметричного (рис. 3-5, б) моста (Rt = R, и R3 = R4) R, = (R4 + R3)/2 и для параллельно-симметричного (рис. 3-6, в) моста (R4 = R3 и [R2 = R4) R; — = 2RtR2 / (Rx 4- R2).
При согласовании сопротивления нагрузки и выходного сопротивления моста чувствительность по напряжению при малых 8 будет для равноплечего моста в два раза меньше, чем при RH -* «>, т. е. UH1 = гЕ/8 при одном рабочем плече, (7Н2 = — &ЕЦ — при двух и (7Н4 = еЕ/2 — при четырех. Мощность Рп — U^/Rn, развиваемая при этом в нагрузке, будет соответственно равна
№ 8*Р,-ДОП ^ = ^Ргдоп.
64R.J 16 нг 16R0 4 ’ ^н4 4R0 8'wn,
где Р(дОп — допустимая мощность рассеяния одного преобразователя.
Таким образом, при переходе от одинарного преобразователя к дифференциальному выходная мощность цепи возрастает в четыре раза. Увеличения мощности еще в два раза можно добиться при отказе от равноплечего моста и уменьшении сопротивлений нерабочих плеч R3 = R4 -»0 в последовательно-симметричном мосте (рис. 3-5, б) или увеличении сопротивлений нерабочих плеч R2 = R4 -> оо в параллельно-симметричном мосте (рис. 3-5, в). Однако реализовать эти рекомендации практически невозможно, так как выбор R3 = R4 -> 0 приводит к большому, стремящемуся к бесконечности току от источника питания, а выбор R2 = R4 -> 00 — к бесконечно большому напряжению источника питания. Поэтому на практике приближаются к этим режимам лишь настолько, насколько это позволяет мощность рассеяния используемых резисторов нерабочих плеч.
Напряжение источника питания определяется исходя из допустимой мощности преобразователя как Е — 2 У Pi^onRg —для последовательно-симметричного моста и E~yPixon (/R0 + KRi/Ro) — для параллельно-симметричного моста.
Предварительное уравновешивание, калибровка и температурная коррекция неравновесных мостов показаны на рис. 3-7. Вследствие того что используемые в качестве Ri, R2, Rs и R4 преобразователи, имеют технологический разброс
57
начального сопротивления, составленный из них мост должен быть предварительно (при х = 0) приведен в состояние равновесия. Для этого служит резистор Ro. При положении его движка в крайнем верхнем положении резистор R, оказывается включенным параллельно Rlt а в крайнем нижнем — параллельно R2. Этим достигается возможность устранения неравновесия любого знака. Значение проводимости резистора R„ определяется значением технологического разброса Rlt R2, йз, R4.
Резистор RK предназначен для калибровки чувствительности моста, так как его подключение параллельно R,t вызывает неравновесие моста на совершенно опре-
деленную величину. Так, например, если при X = Хном относительное изменение сопротивления преобразователей Rt = R2 = = R3 — R4 составляет е, = —е2 = —83 = = е4 = 1%, то для получения такого же сигнала на выходе моста при х = 0 необходимо, чтобы проводимость резистора RK была равна 4% проводимости резистора Rt. Резистор RIC должен быть, естественно, высокостабильным.
Наконец, резистор Ra служит для температурной коррекции чувствительности. Его сопротивление должно быть рассчитано исходя из результирующей температурной погрешности всего датчика. Так, например, если датчик в целом обладает положительной температурной погрешностью, то резистор Ra, выполненный из меди и находящийся при той же температуре, что и датчик, будет повышать свое сопротивление с ростом температуры и тем самым уменьшать ток питания моста.
Измерительные цепи в виде равновесных мостов. В последнее время в связи с развитием операционных интегральных усилителей для параметрических преобразователей начали применяться мостовые цепи с автоматическим статическим уравновешиванием.
Схема моста со статическим уравновешиванием приведена на рис. 3-8. Здесь Ri — медный терморезистор, предназначенный для измерения температуры, а остальные плечи моста образованы резисторами R2, Rt и (R3 + RK).
Пусть при измеряемой температуре 6=0 сопротивления Ri = Rs + RM и R.2 = тогда напряжение на диагонали Ua6, подаваемое на вход усилителя Ус, также равно нулю и ток указателя 7ук = 0. При возрастании 0 и сопротивления RL усилитель будет давать на выходе такой ток /ук> чтобы падение напряжения на резисторе RM полностью уравновешивало прирост напряжения на резисторе Rt. Таким образом, мост будет оставаться в равновесии и шкала прибора будет линейна при любых приращениях Rt, а сопротивление RM определит масштаб соотношения между AR, и ZyK.
58
На рис. 3-9 приведена схема моста с питанием заданным током от стабилизатора тока в отличие от обычно используемого источника заданного напряжения. При этом операционный усилитель Ус1 служит для непрерывного поддержания нулевого потенциала точки а, а операционный усилитель Ус2 поддерживает равновесие самого моста, подавая через резистор R.. в точку б ток такого значения и полярности, чтобы напряжение на измерительной диагонали моста было равно нулю. Такая цепь обеспечивает строго линейную зависимость между 8 и /вых, если рабочими плечами моста являются резисторы Ri и R2 с изменяющимися с противоположными знаками сопротивлениями. Действительно, если до воздействия измеряемой величины в ветвях моста протекали токи /0, а затем резисторы получили приращение сопротивлений -j-eRt и —eR2, то при Ri = R3 и R2 = R4 будет
/qR1 (1 4~ 8) = Rg (% 4- Л’ %^2 (1 “ ^4 (%
и / = 13 + /4 = 2е/0 при любом е.
Резистор RM является масштабным, так как определяет 1/ВЬ!Х — Ri/bmx-
Для получения строго линейной шкалы при четырех рабочих плечах добавляется еще операционный усилитель УсЗ, обеспечивающий равный по значению и противоположный по знаку ток, поступающий в другую вершину измерительной диагонали моста.
3-3. ОСОБЕННОСТИ НЕРАВНОВЕСНЫХ МОСТОВ ПЕРЕМЕННОГО ТОКА
Неравновесные мосты переменного тока из-за присущих им особенностей несколько сложнее рассмотренных выше мостов постоянного тока. Однако ряд измерительных преобразователей не может использоваться при питании постоянным током, а в ряде случаев мосты переменного тока обладают возможностями, не до-
Рис. 3-10
стижимыми в мостах постоянного тока. Поэтому очень часто неравновесные мосты переменного тока используют даже с теми преобразователями (например, с тензо-резисторами, терморезисторами или фоторезисторами и т. п.), которые могли бы работать и на постоянном токе.
Предварительное уравновешивание мостов переменного тока отличается тем, что оно должно производиться по двум составляющим, так как реально изготовленные преобразователи всегда имеют некоторый разброс как активной, так и реактивной составляющих сопротивления.
Это уравновешивание осуществляется цепями, показанными на рис. 3-10. Резистор Rj (рис. 3-10, а) при перемещении'движка в крайнее верхнее положение позволяет присоединить конденсатор параллельно преобразователю Z1( а при перемещении в крайнее нижнее — параллельно Z2. Если технологический разброс реактивного сопротивления преобразователей не превосходит ± 5%, то для, достижения равновесия для любых случайно выбранных преобразователей достаточно взять конденсатор Са с проводимостью, равной 10% реактивной проводимости преобразователей Z, и Z2. Аналогично рассчитывается и значение сопротивления резистора Ro, обеспечивающего совместно с переменным резистором R2 уравновешивание моста по активной составляющей. Шунтирование преобразователей Z, и Z2 Цепями уравновешивания приводит к понижению их чувствительности. Поэтому,
59
когда возможно, для этой же цели используют другой вариант такой цепи, изображенный на рис. 3-10, б. Здесь цепи уравновешивания располагаются в пассивных плечах моста и не шунтируют рабочие преобразователи С, и С2.
Использование в неравновесных мостах переменного тока фазочувствительных выходных указателей. Очень важной особенностью неравновесных мостов переменного тока по сравнению с неравновесными мостами постоянного тока является совершенно различный характер изменения показаний фазонечувствительнрро указателя в районе точки равновесия.
Так, в неравновесном мосте постоянного тока при изменении R} от Ri = 0 до Rt — Rn, при котором наблюдается 1/н = 0, и далее до Ri -> °° напряжение Ua изменяется по кривой U„ = f (Rj) (рис. 3-11, а) При R, > Ro напряжение имеет один знак, при Rt = Ro оно становится равным нулю, а при Ri < Ro получает другой знак, и это изменение вблизи Ri — Ro можно считать линейно зависящим от AR = Ri — Rg.
У моста же переменного тока выходное напряжение U„ = f (Z,j изменяется в принципе так же, т. е. по кривой 1 (рис. 3-11, б), однако в точке Zt = Zo на 180° изменяется фаза этого напряжения. Поэтому при использовании фазонечувствитель-
ных указателей переменного тока (транзисторный вольтметр, выпрямительный, электромагнитный, электростатический и другие приборы) их показания должны были бы изменяться по штриховой кривой 2 (рис. 3-11,6), т. е. сначала убывать до нуля, а затем вновь возрастать. Однако вследствие ряда обстоятельств (некоторая нелинейность сопротивлений плеч моста, недостаточно строго синусоидальная форма кривой питающего напряжения и др.) в выходном напряжении моста всегда присутствуют более высокие гармоники питающего напряжения. Поэтому в тот момент, когда Z, — Z2 и мост уравновешен по основной волне, он оказывается неуравновешенным по более высоким гармоникам (второй, третьей и т. д.) и его выходное напряжение 1/н, а следовательно, и показание фазонечувствительного указателя будут отличными от нуля. В результате этого изменение 1/н = f (ZT) происходит по сплошной кривой 3 (рис. 3-11, б), которая при Zx — Zo не достигает Ua = 0, а лишь имеет достаточно пологий минимум.
В результате этого: а) нет возможности определить по показаниям указателя знак отклонения AZ = ZL — Zo,\6) чувствительность моста при Zx = Zo оказывается равной нулю, из-за чего предварительное уравновешивание моста удается выполнить лишь приближенно и точка, от которой начинается отсчет показаний, «расплывается» в область и, наконец, в) характеристика моста (кривая 3) получается нелинейной и не проходит через нуль.
Избавиться от всех этих недостатков позволяет использование фазочу ветви тельных указателей. Такие указатели нечувствительны к напряжениям иных частот, кроме частоты основной волны, а при изменении фазы основной волны на противоположную меняют знак отклонения, т. е. практически полностью воспроизводят характеристику рис. 3-11, а, аналогичную характеристике мостов постоянного тока. Поэтому неравновесные мосты переменного тока чаще всего используются в сочетании с фазочувствительными указателями.
60
3-4. УМЕНЬШЕНИЕ ПОГРЕШНОСТЕЙ ОТ ВЛИЯНИЯ ПАРАЗИТНЫХ СОПРОТИВЛЕНИИ И ПОМЕХ В ИЗМЕРИТЕЛЬНЫХ ЦЕПЯХ
индуктивную состав-
Рис. 3-12
Влияние сопротивления линии н утечек. Измерительный преобразователь и элементы измерительной цепи в большинстве случаев пространственно разделены между собой и соединены линией в виде проводов или кабеля.
Таким образом, при включении преобразователя последовательно с его сопротивлением Z; включается сопротивление соединительных проводов и контактов Z,,, а параллельно — сопротивление, определяемое токами утечки ZyT. Сопротивление Z, имеет обычно последовательно включенные активную и ляющие, а сопротивление ZyT — параллельно включенные активную и емкостную составляющие. При включении генераторного преобразователя (рис. 3-12) наличие сопротивлений Z, и ZyT приводит к уменьшению выходного напряжения на сопротивлении /?н измерительной цепи по сравнению с ЭДС Ех, так как
г- / \ ^н-2ут/(Дн+ -2ут)
^ВЬ,Х = ^ + Хл+адут/(Ян+2ут)'
Погрешность от наличия ZT 0 должна учитываться для преобразователей, обладающих относительно малым Z(-(например, термопары), при работе с измерительной цепью с противлением. Погрешность исключается при Дн-»оо. Погрешность от наличия ZyT оо должна учитываться для преобразователей, обладающих большим внутренним сопротивлением (например, пьезоэлектрические и гальванические преобразователи).
При включении параметрического преобразователя, выходной величиной которого является Z (х), сопротивление, включаемое в измерительную цепь, из-за наличия и Zyl отличается от сопротивления преобразователя и составляет
малым входным со-
Z =
[Z (х) Z,, [ ZyT
Z(x)+Z„+ZyT-
Уменьшение влияния сопротивления соединительных проводов и контактов достигается в схеме четырехзажимного включения (рис. 3-13). При такой схеме ток подводится к токовым зажимам 1 и 2, а падение напряжения на сопротивлении снимается с потенциальных зажимов 3 и 4. Токи /т и /п, текущие в токовой и потенциальной цепях, различаются па несколько
порядков, и во столько же раз уменьшается падение напряжения на сопротивлениях проводов 3' и 4' по сравнению с проводами Г и 2'.
Уменьшение влияния токов утечки достигается применением схемы эквипотенциальной защиты. Для этих целей изолятор, через который проходит проводник, разделяютдополнительным металлическим электродом, который присоединяют к точке измерительной цепи, имеющей потенциал, возможно близкий к потен-
Рис. 3-13
циалу провода, проходящего через изолятор. В качестве примера рассмотрим схему включения микроамперметра (рис. 3-14) для измерения тока через высокоомный резистор R[. При отсутствии защитного электрода ток через микроамперметр больше тока через резистор на величину А/ =» ZyT = ValRH3, где Ua = R0I — падение напряжения на резисторе, Ra3 — сопротивление изоляции. Таким образом, относительная погрешность измерения тока составляет = Д0/Диз. Для уменьшения этой погрешности изолятор разделяется защитным электродом Э, который присоединяется к точке б. Тогда ток через микроамперметр отличается от тока через резистор на величину Д/' = (1Уб_— Ua) /Д'13, где (Йб — ЦД — падение напряжения на микроамперметре, а Диз — сопротивление изоляции между проводом и защитным электродом. В результате применения эквипотенциальной защиты погрешность измерения тока удается уменьшить в k — ЕЦЕГ ~ Ua! (Uo — Ua) раз.
61
Схема эквипотенциальной защиты широко применяется для уменьшения влияния емкости между кабелем и экраном, шунтирующей сопротивление преобразователя, подключаемого экранированным кабелем (см. § 7-4).
Термо-ЭДС и электрохимическая ЭДС. Контур, образованный измерительны-.! преобразователем, соединительными проводами и входом измерительной цепи, „ обычно оказывается составленным
Рис. 3-14
из разнородных материалов, между которыми при наличии температурного градиента возникает термо-ЭДС.
В качестве примера на рис. 3-15 показан резистор А, выполненный из константана и подключенный медными соединительными проводами В к измерительному прибору ИП, во внутренних соединениях которого, кроме меди В, использован манганин С. Контакты
резистивного преобразователя До находятся при температурах 0t и 02, остальная часть цепи — при температуре 0О. Термо-ЭДС цепи е = еАВ (6^ + евс (0О) + + «св (®о) + еВА (®з)- Если 02 #= ©1, т. е. на резисторе имеется градиент температур, то е = еАВ (02 — ©i). Влияние термо-ЭДС должно учитываться при пи-
Рис. 3-15
тании измерительных цепей постоянным током.
В преобразователях с переключающимся или скользящим контактом, например в реостатном преобразователе, где контакт перемещается по проводу, в преобразователях информационно-измерительных систем, опрашиваемых коммутатором, необходимо считаться и с возможностью появления электрохимической ЭДС. Атмосферная влага, растворяя пленки окислов на поверхности контакта, образует электролит,
и в месте контакта возникает источник ЭДС, значение которой зависит от количества и природы электролита и материала контактов. Значение этой ЭДС может быть значительно снижено выбором материала контактов, в особенности их золочением, и сведено к нулю вакуумированием контактной группы.
Защита от влияния магнитных полей. Любая измерительная цепь с включенным в нее преобразователем образует контур. Если этот контур находится в переменном магнитном поле В = Вт sin со/, то в нем индуктируется ЭДС еинд = ~—<£>Вт s cos со/, где s—площадь контура. Чтобы уменьшить эту ЭДС, нужно свести к минимуму площадь контура, например, как показано на рис. 3-16, а, и, если возможно, участки контура, находящиеся в магнитном поле, экранировать. Экраном для преобразователя служит стальной корпус, толщина d которого, чтобы создать эффективную защиту, должна быть не менее d > 2г0.05 (см. § 8-2). Индуктируемую в рабочем контуре ЭДС еинд можно компенсировать, включив навстречу
62
ей ЭДС ек, наводимую в специально сделанной компенсационной петле или обмотке (рис. 3-16, б); однако непременным условием при этом является крепление всех проводов измерительного контура, чтобы площадь контура оставалась неизменной. Жесткое крепление контура и окружающих его элементов необходимо также потому, что при движении элементов в магнитных полях может изменяться потокосцепление Yr с измерительным контуром, что приводит к появлению ЭДС даже в постоянном магнитном поле. Например, при движении провода в магнитном поле
в . нем, как известно, индуктируется ЭДС е — [vB] 1, где В — индукция, 1 — длина провода и v — скорость его движения. При вибрации отдельных участков контура эта помеха может оказаться весьма существенной.
Защита от влияния электрических полей. Электрическое поле, создаваемое посторонними источниками энергии, как показано на рис. 3-17, а, наводит токи в проводах измерительного контура. Эти токи через сопротивления связи Z', Z", Z'" и Zlv замыкаются на землю. Поскольку паразитные сопротивления, как правило, значительно больше сопротивлений измерительного контура, то источник помехи для рассматриваемого контура можно считать источником заданного тока Д.
Рис. 3-17
ZR
Тогда наведенная в контуре ЭДС еэ= Д у 1 ” - Ток 1Э будет тем больше, чем больше длина линии (антенны), соединяющей преобразователь и измерительную цепь, и чем выше частота источника помехи, так как сопротивления связи, задающие ток, как правило, определяются паразитными емкостями и, следовательно, уменьшаются с ростом частоты. ЭДС еэ при прочих равных условиях будет тем больше, чем больше сопротивление параллельного соединения Z; и Ди; поэтому наведенная ЭДС — наводка — проявляется обычно в цепях с относительно высокоомными преобразователями. Для уменьшения наводок все соединительные провода, сам преобразователь и измерительная цепь защищаются электростатическими экранами, как показано на рис. 3-17, б.
При использовании экранированных проводов следует иметь в виду, что они имеют относительно большую емкость между жилой и экраном (70—150 пФ/м), вследствие чего уменьшаются сопротивления Z13 и Z29 между жилами 1 и 2 и точкой,
63
к которой присоединяется экран. Кроме того, экран вследствие протяженности линии имеет весьма существенную связь с землей, при присоединении экрана к корпусу преобразователя или измерительной цепи емкость экран — земля Сэ 3 шунтирует соответствующее сопротивление связи. Поэтому вопрос о присоединении экрана к корпусу преобразователя или измерительной цепи решается исходя из конкретных условий так, чтобы влияние шунтирующих емкостей было минимальным. Однако чаще экран присоединяется к корпусу измерительной цепи. Корпус преобразователя и корпус измерительной цепи имеют обычно относительно небольшие сопротивления связи Znp#3 и ZH3M3 относительно земли. В ряде случаев по условиям эксперимента или по соображениям техники безопасности один из корпусов или оба должны быть заземлены, тогда сопротивления связи определяются сопротивлениями заземляющих проводников и очень малы. Однако даже при отсутствии искусственного заземления корпус преобразователя почти всегда связан с землей через проводящие детали объекта, на котором он монтируется, а корпус измеритель-
ной цепи, включающей усилитель, — через емкостные связи и источники питания.
Эквивалентная схема цепи (рис. 3-17, б) показана на рис. 3-17, в. В этой схеме учтены сопротивления связи Z^p и Z"p преобразователя с корпусом, сопротивления связи Z'3M и Z"3M измерительной цепи с корпусом, проводов с окружающим их экраном, сопротивления
э.з
0^
«i/2
Рис. 3-18
Z,
4/2
сопротивления связи Z19 и Z29 связи Znp з, Z9 3 и ZH3M_3 с землей, сопротивления проводов /у и г2 и шины гш, соединяющей экраны,и сопротивление г0 земли между точками а и б.
Помеха общего вида. Наличие сопротивлений связи с землей приводит к появлению на входе измерительной цепи составляющей помехи общего вида, называемой также продольной помехой. Механизм действия продольной помехи поясняется рис. 3-17, б и в. Из-за блуждающих токов и токов заземленных силовых установок потенциалы точек а и б оказываются различными, причем эта разница может достигать 10—15 В. Разность потенциалов Ua6 в эквивалентной схеме (рис. 3-17, в) учитывается включением источника продольной помехи (7П.
По эквивалентной схеме можно найти составляющую помехи (7ВХ п, попадающую на вход измерительной цепи, т. е. на сопротивление 7?н. Очевидно, худшим будет случай, когда сопротивления связи с землей Znp 3 и ZH3M 3 будут равны нулю. Поэтому, рассматривая действие помехи,^обычно вводят источник (7П прямо в общую шину гш, условно называя ее «землей».
Помеху, действующую на входе измерительной цепи, рассмотрим на примере термоэлектрического термометра (рис. 3-18, а), состоящего из термопары, линии связи и усилителя с входным сопротивлением /?н. Экран линии связи соединен с корпусом усилителя, вход усилителя заземлен. Эквивалентная схема термометра представлена на рис. 3-18, б. Учитывая, что сопротивления Znp и Znp намного больше сопротивления термопары 7?t- и эквивалентного сопротивления «земли» г0, и заменив параллельное соединение сопротивлений /?„ и ZHsm сопротивлением 7?н, эквивалентную схему можно упростить, как показано на рис. 3-18, в. По этой схеме легко определить составляющую помехи, попадающей на вход, как
II = Гг + /?'
М'П 2П₽«н + ^+'1 + '2
64
Из этого выражения видно, что помеха будет тем меньше, чем больше сопротивление связи Znp между корпусом и преобразователем и чем меньше сопротивление линии и внутреннее сопротивление преобразователя.
Весьма эффективное действие на уменьшение помехи, особенно для преобразователей с большим внутренним сопротивлением, оказывает симметрирование входной цепи. Симметричная входная цепь показана на рис. 3-19, а, эквивалентная схема цепи — на рис. 3-19, б. Если учесть, что сопротивления А?! и Zhsm и R2 и ZHsm соединены параллельно и заменить их сопротивлениями Z( и Z2 соответственно, а соединение сопротивлений Z;, Znp и Znp треугольником заменить соединением звездой, то эквивалентную схему можно представить так, как показано на рис. 3-19, в.
Рис. 3-19
Как видно из этой схемы, напряжение помехи подается на диагональ аб мостовой цепи, входное напряжение снимается с диагонали вг. При выполнении условия равновесия моста (Zd + гг) Z2 — (Ze + r2) Z{ = 0 составляющая напряжения U,Xf создаваемая источником U„, равна нулю и помеха полностью подавляется. Подставив значения сопротивлений Z,; и Z. и перегруппировав члены последнего уравнения, получим условие равновесия в виде
Z/ (ZnpZa — ZnpZi) -|-(Znp -1- Znp) (riZ3—r2Zi) = 0.
Полного помехоподавления можно добиться при идеальной симметрии схемы, т. е. при Z'p = Z'p, Z'3M = Z"3M, ri = r2 и Ri = R2. При несимметрии схемы уменьшают продольную помеху регулировкой сопротивлений. Однако при этом следует иметь в виду, что уравнение равновесия в общем виде включает в себя как действительную, так и мнимую части (сопротивления Z'p, Z"p, Z'3M и Z "зм имеют обычно емкостную составляющую) и добиться его выполнения, т. е. полного помехоподавления, регулировкой лишь одного сопротивления не удается.
3 Е. С. Левшина, П. В. Новицкий 65
ГЛАВА ЧЕТВЕРТАЯ
УПРУГИЕ ЭЛЕМЕНТЫ
ИЗМЕРИТЕЛЬНЫХ ПРЕОБРАЗОВАТЕЛЕЙ
4-1. РАЗНОВИДНОСТИ УПРУГИХ ЭЛЕМЕНТОВ
Входной величиной измерительных преобразователей механических величин может быть сосредоточенная сила, крутящий момент (пара сил), давление газа или жидкости. Эта величина воздействует на упругий элемент и вызывает его деформацию. Деформация воспринимается или непосредственно наблюдателем (как это имеет место в механических показывающих приборах), или последующим измерительным преобразователем с естественной входной величиной в виде механического перемещения (реостатные, емкостные, индуктивные, фото- и другие преобразователи), скорости этого перемещения (индукционные) или механического напряжения (деформации) в некоторой области упругого элемента (тензорезистивные) [7].
Рис 4-1
Конструкции упругих элементов весьма разнообразны. В динамометрах на большие усилия (больше 10 кН) используются сплошные стержни, работающие на сжатие (рис. 4-1, а) или сдвиг (рис. 4-1, в); для меньших усилий (10—1 кН) используют кольца (рис. 4-1, г), а для малых усилий — тонкостенные цилиндры (рис. 4-1, б) и плоские пружины в виде балок (рис, 4-1, д, е). При этом наиболее эффективными оказываются конструкции в виде тонкостенного цилиндра или балки равного сопротивления, когда по всей поверхности упругого элемента механическое напряжение одинаково и материал используется наиболее рационально.
66
На рис. 4-2 показаны часто применяемые преобразователи крутящего мо мента М в угловое перемещение <р. Это спиральные пружины (рис. 4 2, а, б), сплоит ные, полые и плоские торсиоиы (рис. 4-2, в, г, е), подвесы и растяжки (рис 4-2, 3).
Особенно разнообразны упругие элементы, применяемые для измерения давлений. Это плоские и гофрированные мембраны и мембранные коробки, исполь зующие собственную жесткость или опирающиеся на внешнюю плоскую пружину
илн полый тонкостенный цилиндр, на которые наклеены или напылены тензорези-сторы. Для получения больших линейных перемещений применяются сильфоны и трубки Бурдона, а для получения больших угловых перемещений — спираль ные и винтовые трубки с внутренним давлением. Расчет таких упругих элементов имеется в специальных справочниках. Для более простых из этих элементов расчетные соотношения приведены в следующем параграфе.
4-2. ОСНОВЫ РАСЧЕТА УПРУГИХ ЭЛЕМЕНТОВ
При расчете упругих элементов стремятся обеспечить их максимальную чувствительность. Однако препятствием к этому является возникновение в опасных точках конструкции недопустимо больших напряжений. Поэтому исходным для расчета упругих элементов является описание их с помощью уравнений, которые связывают значения сил, механических деформаций и возникающих напряжений.
Здесь рассматривается использование лишь изотропных материалов (применение анизотропных материалов будет рассмотрено ниже, в § 4-5). Свойства изотропных материалов описываются лишь двумя независимыми параметрами; модулем упругости Е и коэффициентом Пуассона ц, При расчете элементов, испытывающих чистый сдвиг или скручивание, используют модуль сдвига G, который равен G — = 0,5 Е/ (1 4- hJ-
Hs трех постоянных Е, G и р независимыми являются лишь две, а третья всегда может быть выражена через две другие.
Конкретные формулы для расчета упругих элементов различной формы приведены ниже, где используются следующие обозначения: F — сила; — началь-
3» • 67
ное натяжение; M — крутящий момент; Р — давление; 6 — прогиб, абсолютное удлинение; е — относительное удлинение; ъг — то же в направлении радиуса; е7? — то же перпендикулярно радиусу; а1>2 — механическое напряжение в точке 1, 2; о0 — начальное напряжение; аг — напряжение в направлении радиуса; av — то же перпендикулярно радиусу; т — касательное напряжение; I — длина; х — текущая координата; b — ширина; h — толщина; R, г — радиус; S — площадь поперечного сечения; — момент сопротивления; J — момент инерции; Jр — полярный момент инерции; Е — модуль упругости; р — коэффициент Пуассона; О — модуль сдвига; п — податливость; т — масса; g — ускорение силы тяжести.
Стержень (рис. 4-1, а) и полый цилиндр (рис. 4-1, б) с площадью поперечного сечения S имеют
Ъ—1<з/Е', <3 = F/S; п — Ь/F = l/(SE);
gj = F/(SE) = a/E; e2 = e8 = — pej.
Консольный выступ (рис. 4-1, в) испытывает деформации чистого сдвига и изгиба одновременно. При этом
6ИЗГ = 4Fl3/(Ebhs), а бсдв = 2 (1 -f-p) Flf(Ebh),
т. е. 6сдв/бизг = 0,5 (1 + р) Л2//2. Отсюда условие преобладания сдвига есть I < < h (1 -f-pi)/2. Относительная деформация на всей поверхности боковых гранен от сдвига е = бсдв/ (21), а от изгиба ё = 0. Допустимое усилие F определяется на« пряжением в заделке выступа, равным от изгиба а — GIF/ (ЬЛ2), а от чистого сдвига т = 2 (1 + р) F/ (bh).
У кольца (рис. 4-1, г) прямоугольного сечения сила F ограничена допустимыми напряжениями =+0,318г£/1Р'; —0,182 rF/W, где W — bh2/6. Про-
гиб по вертикали бв = —0,149 г3/7/ (EJ) и по горизонтали 6Г = + 0,137 г3/7/ (EJ), где J — bh3/\2.
Консольная
балка постоянного сечения (рис. 4-1, д) имеет
при х— I
/ЗР
6/==чр7 и nz = 6z/F = Z3/(3£J), ОС J
где J — ЬЛ8/12;
где W7 = йй2/6;
o(x)~lF (l—x/l)/W,
8(х) = а (x)/E = GFl (1 —x/l)l(Eb№).
Консольная
балка равного сопротивления (рис. 4-1, е):
. , ч GF13 ( х \2
S W~£W\ I ) :
при х= I
„ GF ( I \з 6 / I \з
bl~Eb U/ И П‘^ F = Eb\hJ !
<з (х) = const =
e(x) = const
б(х) =
Плоская спиральная пружина с числом витков W, толщиной и шириной витка соответственно h и Ь, с жестко заделанным наружным концом (рис. 4-2, а) имеет
<р—Ml/(EJ)', 1 =л (rH-j-rBH)a>; J = bh3/12 и n = q>/M— l/(EJ).
То же, но с шарнирной заделкой наружного конца (рис. 4-2, б):
<р= 1,25Л1//(£7); п = <р/Л1 = 1,25l/(EJ).
68
Сплошной круглый вал (рис. 4-2, в) или подвес круглого сечения:
<p = Ml/(GJp); О = 0,5£/(1+ц); /р = л/?«/2;
п = <р/Л4 =//(G/p); x — MR/Jp = 2M/(nRs) = GR<f/l-t e.=x/G = Rq>Jl.
Полый круглый вал (рис. 4-2, г):
. п „ 2М1
<₽- о„ (Ri—r*}’
_ G7?<p 2Л47? . /?<р
Т~~ I -л(7?4—г*)’ Е~ I •
Растяжка на Двух нитях радиуса R (рис. 4-2, д):
n — M/q—nR2 (o0a2 + 2G/?2)/Z;
o = o’o + m5/(2't£2); x=GR<p/(,
где mg—вес подвижной части; о0 — начальное напряжение в растяжках.
Торсион прямоугольного сечения (рис. 4-2, е): при h b п-^-- x-^k- г-^k ф зьлад’ зоьлз’ I £> I ke”
где kn и k& зависят от отношения h/b так, как показано в табл. 4-1.
Мембраны, изображенные на рис. 4-3, при расчете подразделяют на пластины и пленки. Под пласти-
ной понимают упругую перегородку, сопротивляющуюся изгибу благодаря своей собственной жесткости. Перегородка же из пленки не имеет собственной изгиб-ной жесткости и приобретает упругие свойства только благодаря предварительному натяжению.
Отличие расчета пластин (рис. 4-3) со сложным напряженным состоянием состоит в том, что в этом случае относительная деформация 8 и напряжение о уже не связаны простейшим соотношением о — е£. Так, для заделанной по контуру пластины (рис. 4-3, а) при воздействии на ее центр сосредоточенной силы F и отсутствии распределенного давления Р прогиб ее ра, деформации и напряжения в пластине равны:
Таблица 4-1
h/b kn
0 1 1
0,1 1,067 1,000
0,3 1,233 1,009
1,0 2,370 1,481
центра, податливость цент-
; . 3 /?2(l-p2) г 3 7?2(1-|т-).
ц 4 nh3E ц 4 nh3E '
б (г) = пц£ [1 — (г/7?>а — 2 (г/7?)2 In R/г];
ez (г) = пц£ (In R/r— 1) (2h/R2)\ s,v(r) = nllF (2h/R2)\n R/ri
, . 3 / 7?\2 F Г., . ,, R ,1
. 3 / 7?\2 F Г . \ 1 Я
^(г)=тЫ 5[(1+и)1пТ~Ц]’
где S = nR2.
При воздействии давления Р и F = О
6 (r) = O,25nuPS [1 — (r/R)2]2-, где пц = О,757?2 (1 - ^/(лй^);
1 h Г ! г \21 1 h Г / г \2Л
б/(г) J; 8P(r) = ynuPS J!
{ \ 3 + |Л / г \
фу) г+нк^/]Р’
, ч 3 (R\2/1 Ji 3P+1/rVlp
69
Для пленки с жестким центром и предварительным всесторонним натяжением а0 (рис. 4-3, б) при воздействии сосредоточенной силы F (Р — 0)
Рис. 4-3
Для пластины (рис. 4-3, в), заделанной по концам размера 21 без предварительного натяжения, податливость при воздействии сосредоточенной силы F в центре равна
nu=12P/(£W) при
и
пц= 12(3 (1 — ц2)/(£4>Л3) при b I.
Прогиб и относительная деформация при воздействии сосредоточенной силы F равны
[1_3(т)!+2(т)’];
70
а при действии давления Р (F = 0)
б(х)=^
, ч Pn-ubh
127
Для пленки (рис. прогиб под действием
4-3, в) при натяжении вдоль размера 21 усилием Fo = aabh давления Р составляет
а при действии силы
F, сосредоточенной по линии х = О,
х, . IF (. х \ 20obh \ I )
Приведенные соотношения справедливы и для натянутой ленточной струны. При одновременном действии как сосредоточенной силы, так и распределенного давления зависимости б (х) и е (х) получаются в результате сложения частных отклонений и растяжений.
Приведенные соотношения для мембран с предварительным напряжением о0 справедливы лишь до некоторого минимального предела о() min, когда упругость
элемента при предпосылке «натянутая пленка без изгибной жесткости» равна упру-
гости при предпосылке «упругая на изгиб пластина без предварительного напря жения». Например, для ленточной пленки (рис. 4-3, в) податливость равна п„ = = И (20obh), а для пластины (балки) с заделками на обоих концах ng = Р (1 —
— ft2) / (2ЕЫР). Приравнивая эти податливости, получаем
CT0min -]_р,2 I//J
т. е. для напряжений о„ < о0 min мембрану следует рассматривать как пластину,
а для напряжений о0 > о() min — как пленку.
При использовании мембран (рис. 4-3) в датчиках давления или акустических микрофонах для расчета динамики необходимо учитывать связи между параметрами механического возбуждения в центре мембраны (F, б0, v) и параметрами возбуждаемого акустического поля — давлением Р и объемным расходом q = dV/dt в замембранном пространстве (где V — объем, заштрихованный на рис. 4-3). Для этого мембрана может быть представлена эквивалентной механической схемой (рис. 4-3, а) и схемой аналога (рис. 4-3, д), где часть входного усилия F посредством податливости п передается на корпус (через заделку), а другая часть посредством акустической податливости пак приводит в движение жесткий поршень без массы.
4-3. НЕЛИНЕЙНОСТЬ УПРУГИХ ЭЛЕМЕНТОВ
Все соотношения между входной силой или давлением и выходной величиной в виде относительной деформации е, прогиба б пли напряжения в материале о, приведенные в предыдущем параграфе, описывают строго линейную связь этих величин. Это справедливо, однако, лишь с некоторым приближением, чем обусловлены погрешности линейности таких преобразователей.
Большим диапазоном линейности обладают конструкции, в которых возникающие напряжения одинаковы во всем объеме или по всей поверхности упругого элемента (см. рис. 4-1, а, б, в, е; рис. 4-2, а, б, в, г). В конструкциях с неравномерным распределением напряжений (см. рис. 4-1, г, д; рис. 4-2, е) деформация материала в опасных точках превышает допустимое значение уже тогда, когда в других точках конструкции она еще далека от этого значения. Это вызывает появление гистерезиса и нелинейности намного раньше, чем в конструкциях с одинаковыми напряжениями по всей поверхности упругого элемента.
У заделанных по концам или по контуру пластин или мембран прогиб сопровождается удлинением нейтральной линии. Это приводит к появлению дополнительного механического напряжения, пропорционального не первой, а второй
71
степени давления. Возникающая вследствие этого нелинейность не связана со свойствами материала, а определяется чисто геометрическими соотношениями и существенно ограничивает использование таких преобразователей в качестве измерительных.
Так, при воздействии давления Р газа или жидкости на прямоугольную мембрану (рис. 4-3, в) дополнительное растягивающее напряжение составляет в центре пластины (при х — 0)
СТд“~420 \ h ] Е ’
а дополнительная относительная деформация '
____1/21\ъ(Р\2
6д~420 \ 1г J \EJ '
Относительная деформация в центре от прогиба равна
Отсюда суммарная деформация, воспринимаемая наклеенным в центре тензорези-сТором, будет
, 1 /2М2 рг 1 /2/\4 Р]
82-£+ед- 4 ( h / Е L + 105 ( h У £]•
Второй член в квадратных скобках представляет собой относительную погрешность линейности, равную
_16 /М4_Р
7л “1051./J Е"
Прогиб центра прямоугольной мембраны с учетом удлинения нейтральной линии
„ 1 Р Р Г 256 / I \8 / Р \2"|
° - 2 Л« Е [ 1400\Л И Я ) J
Для случая, когда b •< I, вместо Е необходимо подставить El (1 — р2). Для центра круглой мембраны (рис. 4-3, а) с учетом удлинения нейтральной линии
о.
1
17,2
а прогиб центра мембраны
3 (1-р2) Д' г
16 Е /Р Г
1 — ц2
256 Л 242 I R I Р VI
15 400 \h ) \Ej ]'
р 4 (hl
Эти уравнения справедливы с погрешностью не более 20% до-g-
, _0/ Р _ 2 (A/Z?)4
и с погрешностью не более 5% до у < у ' .
Пример расчета датчика давления с учетом погрешности линейности. Пусть упругий элемент датчика давления выполнен в виде стальной круглой, заделанной по контуру пластины (рис. 4-3, а) с наклеенными (или напыленными) на нее двумя тензорезисторами и предназначен для измерения давлений от нуля до Рном = = 10? Па. Необходимо выбрать размеры пластины так, чтобы погрешность линейности преобразования не превышала 1%; рассчитать радиус г0 размещения второго тензорезистора, обеспечивающий равную по значению и противоположную по знаку деформацию по сравнению с деформацией тензорезистора, расположенного в центре пластины; рассчитать собственную частоту подвижной части датчика.
Нелинейность преобразования, как было указано выше, определяется тем, что
1 / R V Р 1
17,2 \h J Е J'
72
Отсюда относительная погрешность линейности ул = . _ -=- ( -г-1 и при заданных 1 /,2 л \ л )
уЛ, Рн, М Е однозначно определяет отношение R/h = Y\7,2EyJP- При Р — = 104 Па, Е — 21 • 1010 Па и ул = 1 % = 10'2 это приводит к значению R/h = 25, т. е. конструктивно толщина пластины должна быть в 25 раз меньше ее радиуса.
Это соответствует совершенно определенному значению относительной дефор-3 / R р
мации материала мембраны е = -5-[ -=г , что в нашем случае дает е= 10~4. Для
о \ п / Е
получения большей чувствительности необходима более тонкая мембрана и больший прогиб, но тогда будет н большая нелинейность.
Для определения радиуса г0 размещения центра второго тензорезистора воспользуемся зависимостью
е (г) =8 (0) [1 -3 (Г/Д)2].
Желательно, чтобы е (г0) =—е (0), т. е. 3 (г0/Д)2 = 2 или г0 = Д]/2/3 = = 0,816/?.
Таким образом, исходно заданные нами условия определяют лишь относительную чувствительность датчика (е = Ю-4 при Р = 104 Па) и соотношения размеров (R/h — 25 и r,JR = 0,816), но не определяют самих размеров. Поэтому размер пластины может быть выбран исходя из размеров тензорезисторов или исходя из собственной частоты датчика.
Если, например, положить h = 0,5 мм, то R = 12,5 мм и тензорезисторы должны иметь размер не более 4X4 мм. Собственная частота пластины составит при этом ).-ода1АрГ__А__ИкГц, а прогиб центра пластины
6 = JL ( Я V hP = 0 fi29h = 1 4,5 мкм.
16 Е \ h )
4-4. МАТЕРИАЛЫ ДЛЯ ИЗГОТОВЛЕНИЯ УПРУГИХ ЭЛЕМЕНТОВ
Погрешности упругих элементов прежде всего определяются свойствами материала. Например, даже для элементов из лучших сортов упругих материалов погрешность от гистерезиса составляет 0,2—0,05%. Поскольку возникновение заметных пластичных деформаций измерительных упругих элементов недопустимо, .значение рабочих напряжений о в них должно всегда оставаться меньше адоп. Значения основных параметров материалов, необходимых при расчете и конструировании упругих элементов, приведены в работе [7].
В тех случаях, когда упругие элементы должны обладать малой жесткостью, их изготовляют из неметаллических материалов: резины, органического стекла, кварцевых нитей и т. д. Если же при расчете преобразователя ставится задача получения возможно более высокой собственной частоты, то полезно иметь в виду следующее обстоятельство. Для обеспечения высокого значения собственной частоты /0 упругий элемент приходится' выполнять более толстым и коротким. А это, в свою очередь, приводит к тому, что при заданном значении прогиба <53 в нем возникают недопустимо высокие механические напряжения а, а при заданном усилии получаем слишком малые для последующего преобразования перемещения 6.
Ограничивая при заданном прогибе 63 возникающие напряжения допустимым значением од0п, мы тем самым однозначно задаем для данной конструкции упругого элемента произведение /0б3, равное, например, для балки (рис. 4-1, д) /р/л:-= = адоп/ (Зл]/Е), а для мембраны (рис. 4-3, a) f063 = OjOn/(7,8/Др), где £ и р — соответственно модуль упругости и плотность используемого материала. Поэтому максимально жесткий упругий элемент, в котором при 63 = 10 мкм (меньшие перемещения трудно точно воспринять последующим электрическим преобразователем индуктивным, емкостным и т. д.) уже достигается адоп, при изготовлении из алюминиевого сплава АМгб в виде балки (рис. 4-1, д) имеет собственную частоту 50 кГц
73
и в виде мембраны (рис. 4-3, а) — 60 кГц. При использовании титана ВТ-1 эти частоты достигают соответственно 63,5 и 80 кГц, берилловой бронзы БрБ2 — 73,5 и 90 кГц, сплава К40НХМВ — 82 и 100 кГц, а стали 60С2А — 91 и НО кГц. Таким образом, достижение собственных частот упругих измерительных элементов 50— 100 кГц является пределом возможностей при использовании любых конструкционных материалов.
4-5. ОСОБЕННОСТИ РАСЧЕТА УПРУГИХ ЭЛЕМЕНТОВ ИЗ АНИЗОТРОПНЫХ МАТЕРИАЛОВ
При расчете упругих элементов из кристаллических материалов необходимо учитывать анизотропные свойства последних. Некоторые свойства материалов, например плотность, влажность, удельная теплоемкость и т. д., определяются одним числом и являются скалярными величинами. Ряд других свойств, таких, как электропроводность, магнитная проницаемость, теплопроводность, упругость, зависят от направления воздействия и структуры используемого материала и лишь для изотропных материалов могут выражаться одним числом; для анизотропных материалов эти свойства определяются таблицей чисел или тензором соответствующего ранга. Прежде чем перейти к рассмотрению упругости, являющейся тензором четвертого ранга, рассмотрим некоторые общие свойства тензоров на примере тензоров младших рангов.
Общие свойства тензоров. Тензор нулевого ранга, т. е. скаляр, полностью определяется заданием одного числа.
Тензор первого ранга, т. е. вектор, задается тремя компонентами, которые являются проекциями вектора на соответствующие оси. Например, вектор электрической напряженности Е = [51( Е2, Е3].
Тензоры второго ранга, например электропроводность анизотропного проводника, содержат уже 9 компонент. На рис. 4-4 показаны векторы плотности тока и напряженности электрического поля в изотропном и анизотропном проводниках. В первом случае (рис. 4-4, а) компоненты плотности тока: А = уЕ3; J2 — уЕ3 и J-. = уЕ3, во втором случае (рис. 4-4, б) = TnEi + + 71з^У ^2 ” 4"
4" Т22Е2 4~ Таз-^з! А = Tsi-Ei у..,А2 4“ 7ззД;-
Каждая компонента J теперь зависит от всех трех компонент Е. Если допустить, что Е = [EJ, то Ji = Тн-Еу, /2 = у21Е3 и /3 = узгЕ3.
Электропроводность анизотропного проводника задается в виде таблицы, содержащей 9 компонент и называемой тензором второго ранга:
Гн 712 713
721 722 723 7ai 7зг 733-
Число индексов у компоненты соответствует рангу тензора. Тензорное соот-3
ношение можно записать в сокращенном виде: р(-= У] Ь 2> 3) или, если
/=1
74
опустить знак суммирования, еще компактнее: pt— (t, / = 1, 2, 3). Расшифровка этой записи приводит к трем уравнениям, повторяющим по форме приведенные выше уравнения плотности токов:
Pi = Т 4~ Т 12q2 + T13qs;
P2 — T2iq2-\-T22q2-\-T 23173;
Рз=Т31Яз~\- T32q2 + T 33q3.
Индекс j называется индексом суммирования или немым индексом, индекс I является свободным индексом. Индексы суммирования должны встречаться по два раза в каждом из суммируемых членов. При записи в виде таблицы i является номером строки, /— номером столбца.
Совокупность коэффициентов тензора представляет собой физическую величину, которая не зависит от выбранной системы координат, но форма представления этой величины, т. е. численные значения коэффициентов, меняется при переходе от записи в одной системе координат к записи в другой системе координат.
На рис. 4-5, а представлены две системы координат. Углы между новыми Г, 2' и 3' и старыми 1, 2 и 3 осями определяются таблицей направляющих косинусов:
12 3
Г а12 #13~
2 #21 ^22 ^23
5 L«31 ^32 ^33J
Компоненты вектора р в новой системе координат определяются как pj = — Р1аи “1" Рга1г “1" Рз°13> Ра ~ Pia2i “1" Рга22 “1" Рза2з! Рз ~ Pia3i 4~ Рг^з? 4- Рз°зз или в сокращенной форме записи р' = Pjatj-
Каждая компонента тензора второго ранга в новой системе координат определяется всеми девятью компонентами, входящими в тензор в старой системе координат, и записывается в сокращенной форме как Тц — aikafi^kr Развертывая Гц сначала по индексу суммирования I, получим
Гij — auflj-iTki -r-Uii.Uj'J'/(2 -!га1ка/зТhs-
Дальнейшее развертывание по k дает
' Т tj — aixaцТ 12 4~аг1а/з^13 4_ai2a/iP 214*
4-ог2а/?Р22 4~а/2а/3^23 '\~ai3a]lT31 + ai3aj2T32 -\~а13а)зТ33-
Расшифруем в качестве примера значение компоненты Т[2:
Т i а = аиа21Г и 4~ 12 + аиа2зТ -ф- <2j2a2i Тц4*
+ й-12а22Т22 + dl2d23T23 + а13апТ31 4*а13а22^32 4~ а1зР2зГзз-
75
Бели тензор относительно некоторых
осей может быть преобразован к виду
гти О О 1
О 7*22 О
О О Т33
то эти оси называются главными.
При произвольном направлении воздействия q относительно главных осей $ис. 4-5, б) компонента, параллельная вектору q, определяется как р — (PTti ~h m2T2i + п2Т33) q.
Тензор механических напряжений. Под действием внешних сил тело находится в напряженном состоянии. Напряжение называется однородным, если силы, воздействующие на поверхность элемента определенной формы и ориентации, не зависят от положения этого элемента в теле.
На рис. 4-6, а показаны силы, действующие на грани единичного куба, т. е. напряжения в однородно напряженном теле: аи, агг и а33 — компоненты напряжения
Рис. 4-6
растяжения — сжатия, а12, o2i, о23 и т. д.—сдвиговые компоненты напряжения. Напряжения, действующие на задней, левой боковой и нижней гранях куба, равны и противоположны по знаку напряжениям, показанным на рис. 4-6, а и действующим на передней, правой боковой и верхней гранях куба. Деформации, которые испытывает свободный, незажатый элемент под действием сжимающих напряже-. ний ои и под действием сдвиговых напряжений о32, показаны на рис. 4-6, бив.
Условно принято считать положительными деформациями деформации растяжения, а отрицательными — деформации сжатия. Деформация сдвига считается положительной, если прямоугольник деформируется так, что его удлиняемая диагональ лежит между двумя осями, имеющими направления одного знака; деформация сдвига отрицательна, если удлиняемая диагональ лежит между осями разных знаков. В примерах, приведенных на рис. 4-6, бив, напряжение Оц < 0, напряжение а32 > 0.
Статическое равновесие сил в единичном элементе налагает определенные условия на величины а,у, а именно: а,/ = Оу/, т. е. о23 = а32, а12 - а21 и а31 = <Д3,
Это условие сокращает число независимых компонент тензора напряжений с девяти до шести, хотя теизор напряжений является тензором второго ранга и в принципе определяется девятью компонентами. Наличие лишь шести независимых компонент вместо девяти позволяет перейти к замене индексов и тем самым упростить запись, как показано в следующих выражениях:
Оц а12
°21 О22
А1 а32
О1з
°23
012
012 ° 22
O33J IAS Сгз
013 Огз
О33-
01
-О8
Ов os' о2 а4 о4 о3_
Схема замены индексов: 11—1, 22—2, 33—3, 23 и 32—4, 31 н 13—5, 12 и 21—6.
76
• •• На рис. 4-7 приведены примеры некоторых простейших напряженных состояний: а — линейное растяжение; б — плоское растяжение; в — гидростатическое сжатие; г — кручение или чистый сдвиг. Тензоры, описывающие в указанной на
Рис. 4-7
рис. 4-7 системе координат поле механических напряжений, для случаев а, б я в выглядят следующим образом:
О О О
О о 0 ;
О О О
а)
б) Га О
О а
.0 0
О' 0 0.
в) Г —а
0 0“
—а 0
0 —а
0
0
При скручивании в зависимости могут быть заданы в форме г' и г":
от
выбранной системы координат напряжения
г')
' 0 — г О'
—г 0 0
0 0 0
г")
—а 0 О'
0 а 0
0 0 0_
где г — касательное напряжение; а — нормальное напряжение; для рассматриваемого примера значения тиа совпадают: т = а.
Упругие свойства тела. При воздействии на тело механического напряжения (меньшего по значению, чем предел упругости) его деформация определяется законом Гука:
е = 5а или е = а/£.
Для анизотропного по своим упругим свойствам тела податливость S = 1/5 или модуль упругости Е являются тензорами четвертого ранга, т. е. тензорами, содержащими 81 компоненту. Соответствующая компонента деформации, например вц, находится как = Sihi^h -ф- ^шз^тз *-^1121^21 + ‘5ц22С,22"Ь
^'иззО-гз 4* Si131a31 + S1132a32 + S1133a33.
Однако, если учесть, что, как было сказано выше, напряжения o-tj= opt и, кроме того, деформации еу = еу, число независимых констант тензора упругости
77
сокращается до 36, что позволяет перейти к другой форме записи, а именно:
~Sn S12 •^>13 S14 £15 s16 ~£n £12 £1з £14 £15 £l6"
S2i S22 *$23 S24 S2 5 £23 £21 £22 £23 £24 £25 £26
5 = S31 G32 S42 S33 £,3 S34 S44 S35 S45 £33 £43 ; £ = tq tq £* . w £32 £42 £33 £43 £34 £44 £35 £45 £36 £43
S51 S52 £.53 £54 s65 £.53 £51 £52 £53 £54 £55 £53
Sei 5б2 *$63 £б4 £35 See _£6i £б2 £бз £ei £35 £33 _
Деформация и напряжение определяются соответственно формулами:
e(- = S,7o/(Z, /=1, 2...6); o; = £17e/(t, / = 1, 2, 6).
Напряжения и деформации в изотропных средах. Упругие свойства изотропных материалов характеризуются всего двумя независимыми константами. Эти константы имеют специальные названия: модуль Юнга Е и модуль сдвига G, Эти два модуля связываются через коэффициент Пуассона формулой G = Е/ [2 (1 + р.)]. Таким образом, второй независимой константой наравне с модулем сдвига G можно считать и коэффициент Пуассона ц.
Форма записи матрицы податливости изотропного материала приведена на рис. 4-8, а. Принятые обозначения: 1 — компонента, равная 0; 2 — компонента,
хи::
•2 °—4 . ®5 *5
Рис. 4-8
отличная от нуля; 3 — равные компоненты; 4 — равные, но противоположные по знаку компоненты; 5 — удвоение компоненты, обозначенной жирной точкой, 6 — компонента, равная 2 (S14 — 512).
Поскольку матрица симметрична относительно главной диагонали, то записывается обычно ее правая половина; принятая форма записи показана на
рис. 4-8, б. В буквенных обозначениях матрица податливости имеет вид
- 1/£ — и/£ — [1/£ 0 0 0 -
— и/£ 1/£ — ц/£ 0 0 0
— н/£ — ц/£ 1/£ 0 0 0
5 = 0 0 0 1/G 0 0
0 0 0 0 1/G 0
0 0 0 0 0 1/G_ •
Соответствующие деформации определяются уравнениями:
е1 = [о1 —p (о2+о3)]/£; е2 = [о2 — р (o3+oi)]/£;
е3 = [т3 —р (вх + ог)]^; e4 = o4/G; e5 = cr5/G; e6 = o6/G.
Напряжения и деформации в анизотропных телах. Поскольку структуры кристаллических тел обладают определенного вида симметрией, то число независимых компонент, связывающих напряжения и деформации в кристаллических телах, оказывается значительно меньше 36. Вид матрицы определяется симметрией структуры.
На рис. 4-8, в приведена матрица упругости кварца в системе координат, совпадающей с кристаллографическими осями, т. е. элемента, вырезанного так, что его ребра совпадают с кристаллографическими осями, Упругость кварца опреде-78
ляется шестью независимыми компонентами (в паскалях в минус первой степени)
5П= 1,27 • 10~11; 512 = —0,17 • 10”Ц. $13 = _ 0,15 10-Ч;
5ц = — 0,43 • 10-И; 533 = 0,97 • 10"11; 544 = 2,01 • 10'11.
На рис. 4-8, г приведена матрица упругости кремния, содержащая три независимые компоненты (в паскалях в минус первой степени):
5u=0,762- IO”11; 5!2 = — 0,214 • Ю"11; 5М = 1,255 • Ю"11.
Из кристаллического материала может быть вырезан элемент, произвольно ориентированный относительно кристаллографических осей 1, 2 и 3, например так, как показано на рис. 4-9, а. Если такой элемент подвергается механическим воздей-
ствиям в направлении одной из осей, по которым он вырезан, то связь между деформацией и напряжением может быть определена модулем Юнга, задаваемым для данного материала и данного направления. Величина 1/Е" для любого направления, заданного направляющими косинусами I, т и п, определяется из уравнения
\/Е’ — 12 /5ц 4-т2512 -|-и251з4-ttitiS^-^-tilS^ -|-би5]б)4-
4- щ2 (Z25214- Щ25'22 4- ^2528 4- Щ^5-21 4- п(525 4- 4-
4- п2 /5314- м2532 4- n25334- tnnSSi 4- и/535 4-Zm536) 4-
4- (Z254l 4- щ2542 4- ^543 4- щи 5'и ~{~tilStf, 4- Z/7254g) 4-
4- til (/2561 4- щ25д2 4- ^5gg4“ ttitiS^^ 4- ^Z5gg 4- Z^i5gg) 4-
4- Itti (/25614-Щ25624-га25634-тп5614-га(5654-(^566). (4-1)
В качестве примера рассчитаем значения модуля Е' и коэффициента Пуассона / для пластинки В кремния, вырезанной в плоскости 1—2 (рис. 4-9, б). Составим таблицы углов и направляющих косинусов йежду осями:
135° 45° 90°-
135° 135° 90°
- 90° 90° 0° .
-—/2/2 /2/2 О'
— /2/2 —/2/2 0 • 0 0 1.
Для определения 5^ = 1/Е" воспользуемся уравнением (4-1). Направляющие косинусы: I — — /2/2, т = /2/2, п — 0. Исключив из (4-1) все члены, содержащие п, получим 5j i= Z2 (/25п 4- т25,2 4- ImS'.j 4- т2 (/2521 4~ т2522 4- lmS2S) + 4- Itn (PSa 4- m2562 4- lmSee). Из матрицы кремния, приведенной на рис. 4-8, г, видно, что 516 — 0, 526 = 0, 561 = 0 и 562 = 0. Таким образом, 5^ = /2 (/25п / 4- /п2512) + т2 /S21 -f- /п2522) 4- Рт256в. Подставляя в полученную формулу зна
79
чения направляющих косинусов и константы упругости, получим
S'u = {(—0,7)2 [(—0,7)2 0,762 + (0,7)2 (—0,214)] + (0,7)2 [(—0,7)2 0)762
+ (0,7)2 (—0,214)] + (—0,7)2 (0,7)2 1,255} 10-11 = 0,588- 10-11 Па~1.
Модуль упругости Е' = 1,70-1011 Па.
Для определения коэффициента Пуассона определим коистаиту упругости S(2 и найдем отношение р/ = —ef./ej, = —S^/SJ,. Тензор упругости является тензором четвертого ранга, и его компонента S'12 = S[122 с переходом в новую систему координат выражается как S[122 = auaija2ka2l^ijkl- Развертывая эту запись поочередно по индексам суммирования i, j, k и I (см. стр. 175) и исключая при этом все члены, в которые входят косинусы а13 = 0 и о23 = 0, получим
122 ~ aiiaiia2ia2iSnn + + ОиОыОгх+аЗша + <2r2ai202i°9i‘5’22ii +
+ ai2ai2a22a22S2222 + ai2ar202i°22 82212 + °iiai2a2i<22i 8]21] + “Т
+ °lla12°21a22'S1212-
Подставим значения направляющих косинусов ац = —J/2/2; а12 = ]Л2/2; a2i = —]/2/2 и а22= —и заменим индексы в константах упругости: S[2 = — 0,25 (8ц + 8)2 + Sis + S2i + <822 “Ь 823 — ^ei — 8g2 — ^ee)- Исключив константы, равные нулю, и подставив численные значения констант упругости, получим
SJa = 0,25 (811 + 812 + S2i + S22 — S6e) =
— 0,25 (0,762 — 0,214 — 0,214 + 0,162—1,255) 10-п = —0,04- Ю'11 Па-1,
Коэффициент Пуассона р/ = 0,04/0,588 = 0,0676.
ГЛАВА ПЯТАЯ
РЕЗИСТИВНЫЕ ПРЕОБРАЗОВАТЕЛИ
5-1. Принцип действия, общие свойства, ОБЛАСТЬ ПРИМЕНЕНИЯ РЕЗИСТИВНЫХ ПРЕОБРАЗОВАТЕЛЕЙ
Сопротивление постоянному току одноэлементного резистивного преобразователя зависит от его длины I, поперечного сечения S и удель-i ! /
ного сопротивления материала р как R0 = p \dl/S. Если сечение ре-J о
зистора постоянно по его длине^ то R = pZ/S. Применяемые в настоящее время пленочные резисторы, толщина которых определяется технологией нанесения пленки, а ширина и длина сравнимы по значению, характеризуются сопротивлением площадки, имеющей равные ширину и длину. Таким образом, сопротивление /?0 резистора, имеющего длину I и ширину Ь, определяется формулой Ro = Ral/b (например, при I = 3 мм и b = 1 мм Ro = 3T?D).
Мощность, выделяемая на резисторе при включении его в измерительную цепь, определяется формулой Р = PR или Р — IP/R, где I и U — ток и падение напряжения на резисторе. Значение допустимой мощности Рдоп для резистора задается, как правило, допустимым
80
перегревом, и поэтому ограничивают ток через преобразователь i^ylyjR max ИЛИ Напряжение На нем U где Rmax
и /?min — границы диапазона, в которых может изменяться сопротивление преобразователя в процессе работы. Значение допустимой мощности определяется площадью поверхности S0XJ1> условиями охлаждения и допустимой температурой перегрева 0ДОП, а именно Рдоп = ,= £5ОХЛ0ДОП, где g — коэффициент теплоотдачи поверхности, или удельная мощность, при выделении которой на единице поверхности охлаждения температура преобразователя повышается на один градус по отношению к окружающей среде. Значения g для ряда типовых преобразователей приведены в § 2-1. В отдельных случаях среди технических характеристик преобразователей указывается допустимая плотность тока и по ней определяется ток.
Эквивалентная схема резистивного преобразователя учитывает, что при включении резистора в цепь последовательно с его сопротивле-
Рис. 5-1
нием Ro оказывается включенным сопротивление соединительных проводов и контактов /?, = 2/?пр 4* 2RK, а параллельно — сопротивление изоляции между контактами и сопротивление утечек на корпус или на землю, вместе образующих сопротивление RyT (рис. 5-1, а и б). Таким образом, эквивалентное сопротивление определится как R = = (Ro + RJ /?у[/(/?0 4~ /?л 4~ RyT). Разность между сопротивлениями R и Ra равна AR — R — Re = (R^y? — R0R„ — Rti)/(Re + + R, + RyT) ~ R, — R0/RyT, и относительная погрешность сопротивления — J\R/Ro — RJRo — Ro/Ry-t- Очевидно, что при малых сопротивлениях Rn погрешность определяется сопротивлением R.,, а при больших сопротивлениях Ro — сопротивлением RyT. При Ro <Z <yR,Ry^ погрешность yR > 0, а при R0>yРлРуу значение уд<0.
Для уменьшения влияния сопротивления соединительных проводов и контактов применяются схемы включения, описанные в § 3-4.
При включении резистора в цепь переменного тока необходимо учитывать его индуктивность и емкость. Емкость С может быть образована межвитковыми емкостями и емкостями между резистором и близлежащими элементами. Индуктивность прямолинейного участка провода радиусом г0 и длиной I определяется формулой L — ~ р0/ [In (2Z/r0) — 1]/ (2л). Индуктивность одновиткового контура радиусом г равна L — por [In (8г/г0 — 2].
Индуктивность особенно велика у многовитковых проволочных резисторов. Чтобы ее уменьшить, применяют бифилярную обмотку,
-81
показанную на рис. 5-2, а. При бифилярной обмотке можно пренебречь индуктивностью, но существенно возрастает емкость между проводами при их сближении. Компромиссным решением является применение бифилярной секционной обмотки, показанной на рис. 5-2, б. Индуктивность L и емкость С являются распределенными параметрами, однако в большинстве случаев их можно учесть как сосредоточенные L3KB и Сэкв. Наличие индуктивности и емкости приводит как к появлению реактивной составляющей сопротивления, так и к некоторому изменению активной составляющей. Эквивалентная схема (рис. 5-2, в)
может быть представлена в виде последовательного или параллельного включения активного и реактивного сопротивлений, определяемых при малых Кэкв и СЭКЕ приближенными формулами:
^посл — Ro [1 + ®2СЭКВ (2АЭКВ — Сэкв/?5)];
“^ПОСЛ (^ЭКВ ^SKfiRo)
RnaP = Ro[i (WRo)2];
Y 1 _____L_
пар~ “(Сэкв-чл юС;кв'
Сопротивление переменному току можно характеризовать постоянной времени т, равной т = L'3WJR или т = C3KSR. Лучшие с этой точки зрения резистивные преобразователи характеризуются т ~ ~ 1Сг6 -г- 10"7 с. Для преобразователя с т = 10'6 с изменение модуля сопротивления на 0,01 % происходит при частоте напряжения питания 1000 Гц.
Активное сопротивление переменному току R на высокой частоте из-за поверхностного эффекта больше сопротивления постоянному
82
току Ro. Для медного провода диаметром 1 мм увеличение сопротивления на 0,01 % соответствует частоте 10 кГц.
Во всяком сопротивлении R присутствуют тепловые шумы, средняя мощность которых определяется формулой Найквиста: Рш — = ikTkf, гдей — постоянная Больцмана, равная k = 1,38-10-23 Дж/К; Т — абсолютная температура; А/ — полоса частот, к которой относится мощность. _
Действующее шумовое напряжение = PmR зависит от значения сопротивления и определяется как Дш = 4kTR&f.
В полной эквивалентной схеме резистивного преобразователя (рис._5-2, г) напряжение шума учитывается в виде источника ЭДС иц1.
В зависимости от условий работы преобразователя должны быть учтены те или иные составляющие эквивалентной схемы, однако всегда приходится учитывать сопротивление соединительных проводов и контактов и сопротивление изоляции, поэтому устранению их влияний уделяется особое внимание. Кроме того, при включении преобразователя в измерительную цепь приходится учитывать электрохимическую ЭДС еэх, термо-ЭДС и ЭДС наводок еинд и еэ, подробно рассмотренные в § 3-4.
Чувствительность преобразователя и влияние внешних факторов. В общем случае на резистивный преобразователь влияют различные по физической природе величины: электрические (Хэ), магнитные (Хм), механические (Хмх), тепловые (Хт), световые (Хс) и т. д. Полное изменение сопротивления составляет
dR ,v . dR ,v dR ,Y
дХэ + dX„ аХ* + • • • + dXc
Частные производные в правой части уравнения являются чувстви-тельностями к различным входным величинам. Функциональные зависимости между сопротивлением резистивного преобразователя и воздействующим фактором используются для построения соответствующих преобразователей (см. § 5-5, 9-2, 11-5, 12-3), но в то же время приводят к нестабильности сопротивления и появлению погрешностей. Поэтому при построении преобразователя стремятся к тому, чтобы изменение сопротивления происходило под действием лишь одной измеряемой величины; для этого влияние остальных величин сводят к минимуму конструктивным путем или применением компенсирующих устройств.
Одним из наиболее существенно влияющих факторов является температура. Для чистых металлов и большинства сплавов сопротивление повышается с ростом температуры и приближенно определяется формулой R2 = [1 + ав (02 — 0J], где R2 и Рг — сопротивления
при температурах 02 и 0Х; ав— температурный коэффициент сопротивления (ТКС), составляющий для большинства металлов приблизительно 0,004 К"1. Исключение составляют лишь специально разработанные термостабильные сплавы (манганин, константан); Температурная зависимость сопротивления манганина в диапазоне температур
83
10—35 °C определяется формулой
Re = Я20 [ 1+ а (0 - 20) + ₽ (© - 20)2],
где а ~ (1 - 1,5)1CTS К"1 и р ~ (3 + 6)Г0"в К'2.
В более широком диапазоне температур (от —100 до +300 °C) изменение сопротивления достигает ±0,5%. Удельное сопротивление полупроводников с ростом температуры падает, зависимость сопротивления от температуры нелинейная, но в диапазоне температур 10—30 °C можно приближенно считать ТКС равным 0,03 К"1. Для уменьшения температурных погрешностей применяется термостатиро-вание преобразователей и различные схемы температурной коррекции.
Изменение сопротивлений под действием однонаправленного механического напряжения о, вызывающего относительную деформацию Е/ — AZ/Z = о/Е, характеризуется коэффициентом тензочувствитель-ности /Ст — Для металлических резисторов 7(т = 2 н- 2,5, для полупроводниковых Кт = 100 4- 200. Чувствительность проводниковых и полупроводниковых материалов к давлению окружающей среды характеризуется барическим коэффициентом Rp Этот эффект
для металлов сказывается лишь при очень высоких давлениях (больше 108 Па).
Для измерения высоких и сверхвысоких давлений (до 30-Ю8 Па) используются манганиновые преобразователи. Барический коэффициент манганина Кр — 2,5-10"11 Па-1. Для работы в активных средах применяются сплавы золота с хромом (Кр ~ 1,05-Ю"11 Па"1). Ведется также исследование полупроводниковых материалов, барические коэффициенты которых значительно выше.
Влияние внешнего магнитного поля заметно лишь в преобразователях из специальных материалов (см. гл. 9), поэтому в большинстве случаев влияние магнитного поля на стабильность резисторов не учитывается. Для измерения индукции магнитных полей разработан специальный тип преобразователей — магниторезисторы, чувстви-
„ /о
дельность лм = —— которых в сильных магнитных полях (В ~ ~ 1 Тл) достигает 20—50 Тл"1.
Освещенность существенно влияет на сопротивление полупроводниковых резисторов. В специально разработанных фоторезисторах сопротивление при переходе от темноты к полной освещенности уменьшается в 100—1000 раз. На другие полупроводниковые резисторы (терморезисторы, тензорезисторы и т. д.) освещенность влияет, безусловно, меньше, однако может привести к заметной нестабильности их характеристик; поэтому они должны быть экранированы от световых потоков.
Радиоактивное излучение влияет на металлические и полупроводниковые резисторы, вызывая при больших дозах даже необратимые изменения, определяемые как изменениями самого сопротивления, так и ухудшениями свойств изоляции и нарушением герметичности. На основе селенистого кадмия и сернистого кадмия выпускаются 84
специальные резисторы, чувствительные к радиоактивному излучению.
Удельная проводимость некоторых полупроводниковых материалов существенно зависит от напряженности электрического поля. На основе этих материалов (тирит, тервит, винит и т. д.) разработаны и выпускаются нелинейные полупроводниковые резисторы, называемые варисторами. Сопротивление варистора падает при увеличении напряжения на нем, коэффициент чувствительности к напряжению достигает 0,1—1 ЕС1 при напряжении питания до 10—20 В. Варисторы находят применение в схемах регулирования и стабилизации электрических величин, а также в схемах защиты от перенапряжений.
5-2. РЕЗИСТИВНЫЕ ДЕЛИТЕЛИ ТОКА И НАПРЯЖЕНИЯ
Резистивные делители широко применяются в электрических цепях приборов. Схемы простейших делителей тока и напряжения приведены на рис. 5-3, а, б. Коэффициенты передачи, или коэффициенты
Рис. 5-3
деления, делителей соответственно равны + #а); Ц/ =
= + /?2) и определяются отношением сопротивлений входящих
в них резисторов, поэтому точность коэффициента деления определяется не точностью самих сопротивлений резисторов, а лишь точностью поддержания их отношения. Приведенные выражения справедливы для случая, когда можно пренебречь внутренними сопротивлениями источников и нагрузок, полагая, что для делителя напряжения /?н = = оо, а для делителя тока /?н 0. С учетом сопротивлений источни
85
ков и нагрузок выходной ток и выходное напряжение определяются формулами:
I _ J ______R1_____ , Т J ___ р____Rj ЯИ___
вых «,+^ + Д, ’ ,,,JX с Ri + R. + R^Rn'
Коэффициент деления тока не зависит от сопротивления цепи, включенной последовательно с делителем, т. е. от сопротивления источника. При постоянных сопротивлениях делителя и нагрузки изменение коэффициента деления учитывается формулами:
Н/ = Ц/(1 - Ri + ^ + Raj’ Вц = Р-У[ 1 + 1 + /?Н(7?1 + R2)/[R1R.2)J• (S’1)
Или, учитывая, что выходные сопротивления делителей составляют Явь,х/ = Ri + Ri °°) и RBbSxU = RxR2/(Ri + R2) (Ri = 0), коэффициенты деления можно представить в виде
= М1 ~ ЯДГ Т+ RH/RBbJ ’ = 1 + явых/я;)-
Из приведенных формул легко определить погрешность делителей при изменении сопротивления нагрузки или выходных сопротивлений делителей. Однако, даже если нагрузки остаются неизменными, включение нагрузок, имеющих сопротивления, сравнимые с выходными сопротивлениями делителей, крайне нежелательно, так как это приводит к существенному возрастанию погрешностей делителей под влиянием внешних факторов.
Для ненагруженных делителей погрешности от влияния внешних факторов пренебрежимо малы, так как используемые в них резисторы идентичны и отношение их сопротивлений является инвариантной величиной. По-разному влияют внешние воздействия на сопротивления делителя и нагрузки, так как последние выполняются из различных материалов, и поэтому возрастают соответствующие погрешности. Полагая, что под действием температуры относительная погрешность резисторов делителя составляет yR, а относительная погрешность сопротивления нагрузки уд , можно написать следующие выражения для погрешностей коэффициентов деления:
Ун/ (Yk - Y«H) RH/RBb.x; Yu,; «=> - (y« ” Ykh) Rbux/Rh-
Если на вход резистивного делителя подается переменное напряжение достаточно высокой частоты или напряжение, содержащее высокочастотные гармоники, то необходимо учитывать реактивные составляющие сопротивлений входящих в делитель резисторов.
Для того чтобы избежать частотной погрешности, должно выполняться следующее условие: R-jRt — L-JL2 = С2/С^, где L1; Ь2, Сх и С2 — параметры эквивалентной схемы резисторов (рис. 5-3, в).
Влияние индуктивной составляющей комплексного сопротивления обычно невелико, что объясняется соответствующей конструкцией непроволочных резисторов и бифилярной намоткой высокочастотных проволочных резисторов. Емкостная же составляющая сопротивления может вносить заметную погрешность. Эту погрешность можно исклю
86
чить, выравнивая постоянные времени резисторов делителя, для чего подбирают небольшие конденсаторы, включаемые параллельно резисторам. Использование подобной емкостной коррекции позволяет снизить частотную погрешность делителей до десятых долей процента для частот звукового диапазона при применении микропроволочных резисторов типа МВСГ и для частот вплоть до нескольких десятков мегагерц при использовании непроволочных резисторов.
Дальнейшее снижение частотной погрешности возможно при применении более сложных схем частотной коррекции.
Существенно увеличиваются частотные погрешности делителей при включении сопротивления нагрузки. В рабочем диапазоне частот,
400R 200R 200 R 100R Ш 20R 20R 10R 4R 2R 2R 1R
Uex
400R 200R 200R 100R 40R 20R 20R 10R 4R 2R 2R 1R
Рис. 5-4
где резисторы делителя имеют чисто активные сопротивления, частотные погрешности, вызванные реактивными составляющими сопротивлений нагрузок, определяются формулами:
2 ^1 + 7?, + 7?н; ; 2 L СЯн-НЯ1 + Т?2)/(ЯЛ) J ’
если считать, как это и бывает в большинстве случаев, что нагрузка делителя тока имеет индуктивную составляющую, а нагрузка делителя напряжения — емкостную.
Многоступенчатые резистивные делители напряжения и тока приведены на рис. 5-3, гид, где в качестве примеров указаны значения сопротивлений. Подобные схемы используются для переключения пределов амперметров и аналоговых электронных вольтметров. Осо
87
бую роль играют многоступенчатые делители с многозначными регулируемыми коэффициентами деления, используемые в современных цифровых приборах и компенсаторах ручного уравновешивания. В качестве примера на рис. 5-4 показан трехзначный делитель, который может выполняться как с ручным, так и с автоматическим изменением коэффициента деления. Принцип действия делителя поясняется рис. 5-4, а. Делитель состоит из идентичных резисторов, по который перемещаются два механически соединенных, но электрически изолированных движка. Часть резистора, к которой приложено напряжение, показана штриховкой; та часть резистора, с которой снимается напряжение, показана более густой штриховкой. На рис. 5-4, б, в
Рис. 5-5
представлены построенные на этом принципе соответственно делитель с ручным управлением (при указанном положении движков USblll — — 0,120t/BX) и с автоматическим управлением путем замыкания и размыкания соответствующих контактов реле (при указанном положении контактов ивых = 0,538[/вх).
Число знаков коэффициента деления определяется возможным диапазоном сопротивлений резисторов, поскольку, как видно из рис. 5-4, в, для того чтобы не сказывались остаточные параметры ключей, меньшее сопротивление должно быть на 1—2 порядка больше сопротивления гк замкнутого ключа, а большее сопротивление — на 2—3 порядка меньше сопротивления RK разомкнутого ключа.
Если предположить, что гк = 0,01 Ом, a RK = 108 Ом, то можно реализовать пятизначный делитель, в котором коэффициент деления
88
будет иметь погрешность, не превышающую последнего знака. Анализируя различные схемы делителей, следует обратить внимание на следующие характеристики: постоянство входного сопротивления, постоянство выходного сопротивления, наличие общей шины между цепями входного и выходного напряжения, влияние остаточных параметров ключей, число используемых в делителе номиналов резисторов. В,современных цифровых приборах применяются лестничные делители тока и напряжения на выполненных по интегральной технологии матрицах резисторов, содержащих всего два номинала резисторов R и 2R. Схемы таких делителей показаны на рис. 5-5.
В делителе напряжения (рис. 5-5, а) используется один источник напряжения и усилитель с бесконечно большим входным сопротивлением, с выхода которого снимается нужная часть входного сигнала. В делителе тока (рис. 5-5, в) используется несколько идентичных источников тока и суммирующий усилитель с бесконечно малым входным сопротивлением. На рис. 5-5, биг показаны эквивалентные схемы того и другого делителя при замыкании (п — 2)-го ключа в положение /.
Резистивная матрица имеет постоянное выходное сопротивление Л?вых = R- Коэффициенты деления делителя тока и делителя напряжения составляют
р/ = (1/2") а<2‘; ру = (0,5/2") £ а(21,
где а; принимают значения 0 и 1 в зависимости от положения ключей.
При подключении к выходу делителей конечных сопротивлений нагрузок коэффициенты деления меняются в соответствии с формулами (5-1). i
Лучшие делители имеют до 16 разрядов, погрешность линейнрсти ±0,002%, температурную погрешность ±0,0007% на 1 К. ;
5-3. КОНТАКТНЫЕ ПРЕОБРАЗОВАТЕЛИ И ПРЕОБРАЗОВАТЕЛИ КОНТАКТНОГО СОПРОТИВЛЕНИЯ
Контактными называются измерительные преобразователи неэлектрических величин, в которых измеряемое механическое перемещение преобразуется в замкнутое или разомкнутое состояние контактов, управляющих электрической цепью. Таким образом, естественной входной величиной контактных преобразователей является перемещение.
Однопредельный контактный преобразователь показан на рис. 5-6, а и имеет одну пару контактов 4 и 5, замыкание которых происходит в функции измеряемого перемещения, например изменения размера изделия 1. При увеличении размера изделия шток 3 переместится в направляющих 2 и укрепленный на нем контакт 4 войдет в соприкосновение с контактом 5. При этом сопротивление между контактами 4 и 5 изменится от бесконечности до малого значения, определяемого значением контактного сопротивления.
В измерительной технике в цепях коммутации широко применяются магнитоуправляемые контакты, называемые герконами. В стек
89
лянном баллоне, имеющем диаметр около 3 мм и длину около 20 мм, помещаются контактные пластины. Переключаемые токи составляют 5-Кг6 — 0,5 А при напряжениях до 220 В. Исследования, проведенные Я. В. Петерсоном, показали, что сопротивление между контактами в замкнутом состоянии не превышает 0,1 Ом, в разомкнутом состоянии — не менее 109 Ом, емкость между контактами 0,4 пФ, индуктивность 0,5—1,5 мкГн. При замыкании контактов наблюдается в среднем шесть отскоков и время дребезга контактов составляет 100— 120 мкс. Дребезг контактов приводит к возникновению дополнительного шума. Кроме того, при наличии разницы температур между выводами контакта приходится учитывать термо-ЭДС, которая составляет около 40 мкВ при температурном градиенте 1 К.
Преобразователи контактного сопротивления основаны на изменении под действием давления сопротивления между проводящими эле
Рис. 5-6
ментами, разделенными слоями полупроводящего материала. Преобразователь может быть выполнен в виде столбика из ряда слоев электропроводящей бумаги, электропроводящей резины или металлических пластин, на которые путем напыления нанесен высокоомный резистивный слой. Преобразователи контактного сопротивления имеют большие погрешности гистерезиса и линейности (до 10%), но очень просты конструктивно, имеют высокую надежность и достаточную выходную мощность. На рис. 5-6, б показана схематическая конструкция преобразователя, применяемого в биоэлектрическом протезе, где 1 — электрод; 2 — электропроводящая пластина; 3 — клей; 4 — изолятор из резины. При изменении давления от 0 до 105 Па сопротивление изменяется от 100 до 2 кОм при деформации чувствительного элемента до 50%, допустимая мощность рассеяния 0,5 Вт. Подобные преобразователи используются в тактильных датчиках роботов и манипуляторов.
5-4. РЕОСТАТНЫЕ ПРЕОБРАЗОВАТЕЛИ
Реостатным преобразователем называют реостат, движок которого перемещается под действием измеряемой неэлектрической величины.
90
Естественной входной величиной реостатных преобразователей является перемещение движка, а выходной величиной — сопротивление.
На рис. 5-7, а показано устройство реостатного преобразователя. На каркас / из изоляционного материала намотана с равномерным шагом проволока 2. Изоляция проволоки на верхней грани каркаса зачищается, и по металлу проволоки скользит щетка 3. Добавочная щетка 5 скользит по токосъемному кольцу 4. Обе щетки изолированы от приводного валика 6.
Реостатные преобразователи выполняются как с проводом, намотанным на каркас, так и реохордного типа. Чаще всего используется провод из различных сплавов платины, обладающих повышенной кор-
Рис. 5-7
розионной стойкостью и износостойкостью; применяется также манганин, константан, фехраль. Микропровод позволяет выполнять миниатюрные преобразователи, имеющие габариты до 5 X 5 мм.
Формы каркасов очень разнообразны: они могут быть в виде пластины, цилиндра, кольца и т. д. Выбирая форму каркаса, можно получить определенную функциональную зависимость между перемещением и выходным сопротивлением, как показано в качестве примера на рис. 5-7, б. Выходное сопротивление реостатного преобразователя, периметр каркаса р и входное перемещение х связаны между собой X
зависимостью R — § rwop dx, где г — сопротивление 1 м провода; — о
число витков на единицу длины преобразователя. Из заданной зависимости R — ср (х) можно определить зависимость р — f (х).
Реостатные преобразователи аналогично контактным являются ступенчатыми (дискретными) преобразователями (за исключением преоб
91
разователей реохордного типа), поскольку непрерывному изменению входной величины соответствует ступенчатое изменение сопротивления. При перемещении движка преобразователя на расстояние I, соответствующее w виткам, будут иметь место 2w ступенек, однако эти ступеньки неодинаковы по длине преобразователя.
Рассмотрим в качестве примера выходную характеристику преобразователя, , включенного в режиме делителя напряжения, как показано на рис. 5-7, в. В положении 1 движок, имеющий ширину 2d, где d — диаметр витка, замыкает накоротко витки а и Ь, и выходное напряжение U^blK = nU/ (ш0 — 2) = Un/w, где — полное число витков и п — число витков до витка а. При смещении движка на расстояние d/2, т. е. в положение 2, движок замыкает накоротко трн витка а, b и с, и выходное напряжение <7"ых = Un/ (w — 1); при смещении движка еще на d/2 выходное напряжение U^x = U (п + 1) '/w. Размер ступенек напряжения при. перемещении движка на расстояние d/2 будет зависеть отп: первая ступенька с увеличением п увеличивается, а вторая — уменьшается, сумма остается постоянной: \ A£7j + Д{72 = U/w. Выходное напряжение преобразователя показано на рис. 5-7, в.
Дополнительное расширение полосы неопределенности происходит за счет шума, «генерируемого» движком при его движении (вариации контактного сопротивления, временное разъединение движка и контактной дорожки, ЭДС трения и т. д.). Поэтому в целом погрешность нуля реостатных преобразователей оценивается значением ± (2/® ч-4- 1/®).
Измерительные цепи, в которые включаются реостатные преобразователи, питаются преимущественно постоянным напряжением, но могут питаться и переменным напряжением. Напряжение питания преобразователя определяется его допустимой мощностью (для самых малогабаритных преобразователей допустимая мощность составляет не менее 0,1 Вт) и сопротивлением. Напряжение питания, как правило, стабилизируется. Наиболее распространенным является включение преобразователя в виде управляемого делителя напряжения йли включение преобразователя в измерительный мост. Номинальное изменение сопротивления реостатного преобразователя достигает 90%, поэтому необходимо учитывать нелинейность, вносимую измерительной схемой (см. § 3-2), и, исходя из допустимой погрешности линейности, выбирать сопротивление измерительного прибора.
5-5. ТЕНЗОРЕЗИСТОРЫ
Физические основы тензорезистивного эффекта. В основе работы тензорезисторов лежит явление тензоэффекта, заключающееся в изменении сопротивления проводников и полупроводников при их механической деформации. Относительное изменение сопротивления R — — pl/S при деформации резистора определяется как е# = A.R/R — = Др/р + AZ/Z + &S/S. Учитывая, что в твердом теле в зоне упругих деформаций величины поперечных и продольной деформаций связаны через коэффициент Пуассона ц как е6 = —[xez (ег = AZ/Z, == = ДЬ/Ь), где b — поперечный размер проводника, выражение для е# можно представить в виде e.R — Д р/ р + (1 + 2ц) ez.
92
Для жидких и текучих материалов (ртуть, электролиты в эластичной изоляционной оболочке, пластически деформируемые металлы), в которых напряжения отсутствуют, Др/р = 0, р = 0,5, так как объем материала при деформации сохраняется постоянным, и е# = — 28/. В металлах удельное сопротивление зависит только от напряжения растяжения или сжатия (рис. 5-8, а), не зависит от сдвиговых напряжений и определяется как
EjJi = pi = ро ( 1 + ЛцО^ Л12О2 + л130з) = Ро [1 + ЛцО; 4- л12 (о2 4-°з)1> где а1( о2 и а3 — механические напряжения в трех взаимно перпендикулярных направлениях; ли и л12 = Л13 — тензорезистивные коэффициенты, называемые соответственно продольным и поперечным; £i и — напряженность поля и плотность тока в направлении 1, совпадающем с направлением действия напряжения Gj (рис. 5-8, 6).
Для металлического тензоэлемента лп = л22 = л33 и лн = лм = = ли — л23 = л32.
Для константана, из которого чаще всего делаются тензорезисторы, ли = 1,5- 1СГ12 Па-‘; ли = 2,25 • 10"12 Па’1.
При линейно напряженном состоянии Oi = о; о2 = о3 = 0; А р/р = = лпо; zR ~ ЛцО + (1 + 2ц) 8;. Учитывая, что в зоне упругих деформаций о = Ег;, где Е — модуль упругости, получим zR = [лпЕ 4-+ (1 + 2ц)1 8г. Величина /Ст = zRhi — коэффициент тензочувстви-тельности. Значения коэффициента тензочувствительности для ряда металлов приведены ниже, в табл. 5-2.
При гидростатическом сжатии изменения сопротивления и давления связаны формулой eR = —[ли + 2лн — (1 — 2ц)/Е]Р. Коэффициент /СР = 8р/Р — барический коэффициент резисторов. Барический коэффициент константана К.Р = 4,5-10"12 Па-1, манганина /Ср = = 27-10"12 Па"1.
Из полупроводниковых материалов для тензорезисторов используется кремний р и n-проводимости. Кремний является анизотропным материалом, и для него при одновременном воздействии электрического поля и механических напряжений растяжения—сжатия и сдвига каждая из компонент Еи Е2 и Е3 напряженности электрического поля
93
(рис. 5-8, б) является функцией плотности токов, текущих во всех трех направлениях, т. е. = <р (Jlt J2 и J3). Мэзоном и Тарстоном было показано, что для материала, обладающего симметрией кремния, компоненты электрического поля представляются следующими выражениями:
El/Р» = Jl (1 4* JljJllOu + ЛЦ22°22 + Л1133О33) + J2^1212012 4" J3^1313^131
Е2/р0 = A U 4" Л2211Оц + ^2222^22 4" л2233СТ3.з) 4" J1Л1212СТ12 4~ АЛ>2323°23:
Eg/Po— Л (1 + ПззцО'ц + Л3322°22 4* ЛЗЗЗзСзз) 4* J 1ЛШзС13 4~ J2Л2323С23-
Переходя к замене индексов (см. § 4-5) и учитывая, что вследствие симметрии для кремния равны коэффициенты лп = л22 = л33; л]2 = = л23 = л13 и л44 = л55 — л66, приведенные выражения можно записать в виде
Е1/р0 = Л [1 4- ли°’1 4* л12 (Сг + Оз)] 4~ л44 (^aOe -ф J3a5);
Д/Ро = J Ч [ 1 + л11О2 4* Л12 (О1 4* Оз)] 4- Л44 (J 1О<5 4- j3O4);
Д3/Ро — Jg [ 1 4- лцОз 4- л>12 (oi 4- о2)] 4- л44 (У2о 4 4~ J1О5).
Коэффициенты лп, л12 и л44 называются соответственно продольным, поперечным и сдвиговым тензорезистивными коэффициентами. Если тензоэлемент вырезан вдоль одной из кристаллографических осей, например вдоль оси 1, и напряжение приложено вдоль той же оси, то Е-Jро = </j (1 4* лпО1)- Если тензоэлемент ориентирован произвольно относительно кристаллографических осей (см. рис. 4-9), то для него продольный коэффициент определяется формулой
пФ = лп 4*2 (л444- л12 — лп) (1гт2 + 12пг т2п2),
где I, т и п — направляющие косинусы.
Таким образом, тензорезистивный коэффициент лф определяется не только коэффициентами ли, л12 и л44, но и ориентацией тензоэле-мента относительно кристаллографических осей.
Значения тензорезистивных коэффициентов зависят от концентрации примесей в кремнии и однозначно связаны с удельным сопротивлением кремния. Для р-кремния(р = 0,02 Ом-см) л44 = 94,5-10"11 Па"1; П11 = 0,048 л44 = 4,53-10"11 Па'1; л12 = —0,008 л44 = 0,75 -10"11 Па"1; для n-кремния (р = 0,02 Ом-см) ли — —72,6-Ю"11 Па"1; л12 ~
0,52ли = 38-Ю"11 Па"1 и л44 = 0,13 л„ = —9,5-Ю"11 Па"1.
Тензоэлемент из кремния n-типа вырезается обычно, как показано на рис. 5-9, а, в направлении кристаллографической оси /, т. е. в направлении, обозначаемом [100]. (Символ любого вектора или оси определяется заключенными в квадратные скобки величинами проекций вектора на соответствующие кристаллографические оси, расположенные в порядке 1, 2 и 3 и называемые хъ х2, х3 или X, Y, Z.) Тензо-элементы из кремния p-типа (рис. 5-9,6) в направлении оси [111] имеют максимальную чувствительность, тензоэлементы в направлении оси [НО] имеют одинаковые по значению, но противоположные по знаку тензорезистивные коэффициенты и л[2, у тензоэлементов,
84
в ыполненных в плоскости D, независимые от углового положения т ензорезистивные коэффициенты, у тензоэлементов, расположенных вдоль оси [100] или [010], минимальные тензорезистивные коэффициенты.
Значения тензорезистивных коэффициентов приведены в табл. 5-1.
Таблица t>-l
Тензоэлемент Значение коэффициентов
10-и Па-i 10-11 Па-1 Кт-Кр = = £Д1 Кр, 10'11 Па-1
n-Si р = 0,02 Ом • см А [100] -72,6 37,6 -95,3 -2,9
p-Si р = 0,02 Ом • см л44 = 94,5 х X 10-11 Па"1 В [НО] 49,14 -45,3 83,5 —3,0
С [111] 64,0 —30,5 94,2
D 49,1 —15,6 92,7
А [100] 4,5 —0,75 —
'При линейно напряженном состоянии чувствительность полупроводникового тензоэлемента, так же как и металлического, оценивается коэффициентом тензочувствительности Ks — Vr/s-i, однако значение этого коэффициента почти полностью определяется тензорезистивным эффектом, т. е. Дт /Ср. Действительно, К-, = я'пЕ' + 1 + 2р. Для оси [111] ME' = 64,0-Ю-11 Па’1; гф = 6,85- 1СГ12 Па'1; р = 0,256;
= 94,2 + 1,5 = 95,7, что мало отличается от /<р = 94,2.
Значения коэффициентов тензочувствительности /<, и барических коэффициентов Кр также приведены в табл. 5-1. Тензорезистивные
95
коэффициенты полупроводниковых тензорезисторов зависят от значений приложенных механических напряжений, что приводит к погрешности линейности зависимости еЛ от е;.
На рис. 5 10 в качестве примера приведены зависимости относи-
тельного изменения
ствием температуры
сопротивления от деформации для элементов из р и «-кремния, из которых видно что рабочий диапазон деформаций должен быть ограничен значениями ±0,1%.
Температурные погрешности тензорезисторов. При изменении температуры изменяется начальное сопротивление тензорезистора и коэффициент тензочувствительности. Таким образом, для тензорезисторов характерна температурная погрешность нуля и температурная погрешность чувствительности. Изменение начального сопротивления наклеенного тензорезистора определяется двумя факторами: изменением удельного сопротивления материала р непосредственно под дей-и изменением р под действием дополнительного
механического напряжения, появляющегося в тензорезисторе, если коэффициенты линейного расширения детали и тензорезистора не равны. Величина «кажущейся» деформации при воздействии температуры определяется формулой
Деэ=[а0/Кт + (₽д-₽т)]0,
где а® — температурный коэффициент сопротивления (ТКС); Рд и — коэффициенты линейного расширения (КЛР) материалов детали и тензорезистора.
ТКС константана в зависимости от примесей в сплаве может иметь любое значение в пределах ±30-10~6 К'\ причем в относительно небольшом интервале температур заданное значениеТКС обеспечивается с погрешностью ±(0,5 4- 1)10-в К'1. Это позволяет для многих материалов объектов измерения (сталь, нержавеющая сталь, сплавы алюминия) изготовлять термокомпенсированные тензорезисторы. Кажущаяся деформация изменяется с температурой примерно так, как показано на рис. 5-11 для термокомпенсированных тензорезисторов, наклеенных на сталь (кривая /), алюминий (кривая 2) и нержавеющую сталь (кривая 3); здесь же для сравнения приведена кривая 4 температурной погрешности тензорезистора, предназначенного для наклейки на нержавеющую сталь, а наклеенного на сталь. Для термокомпенсированных тензорезисторов величина кажущейся деформации в диапазоне температур 20—100 °C не превышает Де® — 1,5- Ю'0 К-1, что при измеряемой деформации ег = 10-2 приводит к температурной погрешности нуля 0,00015 К-1.
Подобная самокомпенсация кажущейся деформации невозможна для дискретных полупроводниковых тензорезисторов. Действительно, КЛР кремния очень мал (около 2,5- 1СГ6 К"1) по сравнению с КЛР металлов (сталь — П-10'6 К'1, алюминий — 22,5-1О-0 К"1), ТКС тензорезистора из кремния p-типа положителен (а® = 0,7ДО-3 К-1)-
96
1. Такой
слоем лака
Таким образом, кажущаяся деформация тензорезистора, наклеенного на сталь, составляет примерно Де® = (7,4 + 8,5)10"® « 16-10"® К'1, что приводит при максимальной измеряемой деформации ez — 10"3 к температурной погрешности нуля у® = 0,016 К'1.
Температурный коэффициент чувствительности (ТКЧ) определяется изменением коэффициентов тензочувствительности под действием температуры. Как видно из приводимой ниже табл. 5-2, для константановых тензорезисторов ТКЧ очень мал и составляет у$ = —0,00003 К-1, для полупроводниковых тензорезисторов из кремния p-типа ТКЧ достигает у5 — —0,0016 К-1.
Конструкции и технические характеристики дискретных металлических и полупроводниковых тензорезисторов. Устройство наиболее распространенного типа наклеиваемого проволочного тензорезистора изображено на рис. 5-12, а. На полоску тонкой бумаги или лаковую пленку 2 наклеивается так называемая решетка из зигзагообразно уложенной тонкой проволоки 3 диаметром 0,02— 0,05 мм. К концам проволоки присоединяются (пайкой или сваркой) выводные медные проводники 4. Сверху преобразователь покрывается
будучи приклеенным к испытуемой детали, воспринимает деформации ее поверхностного слоя. Измерительной базой преобразователя является длина детали, занимаемая проволокой. Наиболее часто используются преобразователи с базами 5—20 мм, обладающие сопротивлением 30—500 Ом.
Фольговые преобразователи представляют собой ленту из фольги толщиной 4—12 мкм, на которой часть металла выбрана травлением таким образом, что оставшаяся его часть образует решетку с выводами. Фольговые преобразователи имеют меньшие габариты, чем проволочные; известны тензорезисторы с базой до 0,8 мм.
Металлические пленочные тензорезисторы изготовляются путем вакуумной возгонки тензочувствительного материала с последующим осаждением его на основу (подложку). Форма тензорезистора задается маской, через которую производится напыление. Пленочные тензорезисторы имеют толщину меньше 1 мкм.
Весьма важным параметром тензочувствительной решетки является расстояние между витками. Это расстояние определяет при заданных габаритах резистора число витков и, следовательно, сопротивление, а также допустимый ток, который ограничивается само-нагревом и будет тем меньше, чем меньше расстояние между витками.
4 £ С. Левшина, П, В. Новицкий
97
Кроме того, наличие поперечных участков длиной b (рис. 5-12, й) вызывает изменение сопротивления тензорезистора за счет деформации этих участков при действии на деталь напряжения, перпендикулярного оси чувствительности тензорезистора. Для проволочных тензорезисторов отношение поперечной и продольной чувствительно-стей определяется отношением Ь/l. У фольговых тензорезисторов поперечная чувствительность значительно меньше за счет расширения поперечных участков (рис. 5-12, б).
Характерные типы фольговых преобразователей показаны на рис. 5-12, в, г, д. На рис. 5-12, в изображен элемент, состоящий из
Рис. 5-12
в)
четырех тензорезисторов, образующих четыре плеча моста. Этот элемент наклеивается на мембрану Тензорезисторы, расположенные в центре, испытывают растяжение, на периферии — сжатие. К выводам 1 и 3 подводится питание, выводы 2, 4' и 4" образуют измерительную диагональ. Выводы 4' и 4" разомкнуты для того, чтобы можно было включить добавочный резистор R в нужное плечо и добиться подбором R равновесия моста. Розетка из трех тензорезисторов, показанная на рис. 5-12, г, применяется при измерении напряжений детали, находящейся в плосконапряженном состоянии, в том случае, когда направления действия напряжений неизвестны. По изменениям сопротивлений трех тензорезисторов определяются направления главных напряжений и их значения. Элемент, показанный на рис. 5-12, д, состоит из двух тензорезисторов и используется при измерении деформации валов при их скручивании.
Для тензорезисторов, работающих в диапазоне температур до 180 °C, в качестве тензочувствительного материала используется константан. Для более высоких температур (200—1000 °C) применяются
98
специальные сплавы. Характеристики тензочувствительных материалов приведены в табл. 5-2. Материалы разбиты по группам, наиболее распространенные сплавы выделены полужирным шрифтом.
Таблица 5-2
Материал Коэффициент тензочувстви-: тел ьности /С т i Удельное сопро-I тивление р, мкОм • м TKG а0 10—6 к->’ 8—01 ‘®0 dlTM ТКЧ V0, 10-» к-' Температурный диапазон, ®С Критическая температура, *С Примечание
Медно-никелевые сплавы (45% Ni, 55% Си): Константан, эдванс, ев- 2.0 0,46—0,50 -t-30 17 —30 —270—260 315
рика, купрон, ферри Манганин 2,0 0.40—0,45 4-10 18 — — —.
Никель-хромовые сплавы (80% Ni, 20% Сг); Нихром, тофет А 2.0 1,30 + 100 13 —5 до 400 ' 450 Для измерения при высоких температурах
Н икель-хромоалюминие-вые сплавы (74% Ni, 20% Сг, 3% А1)5 Карма, званом 2.1—2,2 — 150 до 400 450
Платиновольфрамовый 2.7-3.3 — 4,7 — — до 550 —
сплав Платнносеребряный 0.8—1,4 — 2.2 — — до 450 —
сплав Никель-хроможелезистые сплавы (52% Fe, 36% Ni, 8% Сг): Изоэластик, инвар 3.6 1.40 - - - - Для измерения динамических деформаций
Основа тензорезистора (рис. 5-12, а) представляет собой тонкую полоску пропитанной клеем бумаги или лаковую пленку, из этого же материала выполняется обычно и покрышка. При высокой температуре (до 400 °C) может быть применена стеклоткань, пропитанная высокотемпературным цементом.
Для крепления тензорезистора к детали чаще всего используется клей. Креплению должно уделяться очень большое внимание, так как именно через пленку клея происходит передача деформации с детали на тензорезистор и теплоотдача в деталь.
Нарушение технологии может привести к весьма существенным погрешностям, вызываемым ползучестью клея. В результате ползучести измеряемая деформация уменьшается по абсолютной величине. Значение погрешности зависит от технологии приклейки, температуры, величины деформации и в лучшем случае составляет 0,05—0,2%. Типичные кривые ползучести приведены на рис. 5-13 для проволочных тензорезисторов на бумажной основе, наклеенных целлюлозным клеем (рис. 5-13, а), и проволочных тензорезисторов на бакелитовой основе, наклеенных полиэфирным клеем (рис. 5-13, б), при деформации 8/ = 10~3.
Из сравнения температурных возможностей тензочувствительного материала и клея видно, что ограничение температурного диапазона обусловливается прежде всего клеями. Поэтому для крепления высо
4*
99
котемпературных тензорезисторов применяют неорганические фосфатные цементы и жаростойкие окислы алюминия, наносимые на деталь методом газопламенного напыления. При таком креплении температурный диапазон ограничивается не ползучестью крепления с повышением температуры, а ухудшением изоляционных свойств цемента или окиси алюминия. Рабочий диапазон тензорезисторов ограничен температурой 350—600 °C при статических деформациях и 600—800 °C при динамических деформациях. В случае измерения динамических деформаций в диапазоне температур до 1000 °C применяется крепление с помощью контактной сварки.
Полупроводниковые тензорезисторы дискретного типа . редстав-ляют собой тонкие полоски из кремния p-типа, вырезанные в направлении оси [111], или из кремния n-типа, вырезанные в направлении оси [100]; применяется также германий р и n-типов. На концах по
лоски расположены контактные площадки, к которым припаиваются выводы; длина контактной площадки 0,25—0,6 мм. Полупроводниковые тензорезисторы имеют длину 2—12 мм, ширину 0,15—0,5 мм. Начальные сопротивления тензорезисторов лежат в диапазоне 50— 10 000 Ом, коэффициент тензочувствительности Кт = 50 4- 200.
Вследствие очень больших температурных погрешностей дискретные полупроводниковые тензорезисторы находят применение только для измерения очень малых динамических деформаций, где решающим фактором является коэффициент тен-
зочу вств ител ьности.
Рис. 5-13 Конструкции интегральных
полупроводниковых тензорезисторов. В последние годы благодаря широкому развитию планарной тех-
нологии появилась возможность изготовлять датчики с полупроводниковыми тензорезисторами, выращивая последние непосредственно на упругом элементе, выполненном из кремния или сапфира. Упругие элементы из кристаллических материалов обладают упругими свойствами, близкими к идеальным, и существенно меньшими погрешностями гистерезиса и линейности по сравнению с металлическими. Тензорезистор «сцепляется» с материалом упругого элемента за счет внутримолекулярных сил, что исключает все погрешности, связанные с передачей деформации от упругого элемента к тензорезистору. На одном упругом элементе выращивается обычно не один тензорезистор, а структура в виде полумоста или даже целый мост и, кроме того, термокомпенсирующие элементы. Благодаря применяемой технологии два тензорезистора, входящие в полумост, обладают значительно большей идентичностью, чем дискретные резисторы; кроме того, благодаря малым габаритам тензорезисторов обеспечивается большая идентичность внешних условий и, таким образом, существенно снижаются погрешности нуля. Все это ведет к широкому развитию в последние годы датчиков с так называемыми интегральными тензорези-
100
стоками, выполняемых в виде КНК-структур (кремний на кремнии) й КНС-структур (кремний на сапфире). В КНК-структурах электрическая изоляция осуществляется р-п-переходом, несовершенство изоляционных свойств которого ограничивает надежность датчиков; датчики с КНС-структурами обладают большей стабильностью характеристик. КНС-структура положена, например, в основу датчиков давления, входящих в приборный комплекс «Сапфир-22», разработанный НИИ «Теплоприбор».
В качестве примера иа рис. 5-14, а приведен миниатюрный датчик, разработанный в Дрезденском техническом университете и предназначенный для измерения
Рис. 5-14
давления крови в сосудах. Пластина 2 из кремния, показанная в разрезе датчика приклеивается специальным клеем к кремниевой подложке 4. Этот узел из двуа кремниевых пластин крепится к корпусу 1 при помощи силиконового каучука 3. Материал корпуса должен быть индифферентен к физиологическому раствору и иметь КЛР, близкий к КЛР кремния. В описываемой конструкции корпус изготовлен из сплава никеля, кобальта и кремния. Датчик крепится на конце полиэтиленового катетера и находится непосредственно в кровеносном сосуде. Через катетер выводятся провода измерительной цепи и крепежный тросик диаметром 200 мкм; кроме того, через катетер полость между кремниевыми пластинами связана с внешней средой; таким образом, в этой полости действует атмосферное давление. На внешние стороны пластин действует измеряемое давление.
На рис. 5-14, б изображена в укрупненном масштабе кремниевая пластинка /, в центре которой вытравлена до толщины 15 мкм мембрана площадью 3 X 1 мм8. На том же рисунке показана кремниевая подложка 2, лежащая под пластиной 1. На нижней стороне пластины 1 (на мембране) расположены тензорезисторы 3, Тен-
101
зорезисторы на элементе из высокоомного кремния и-тип а получаются методом диффузии так, как показано на рис. 5-14, в. Изоляцией в этом случае служит сопротивление р-п-перехода. На рис. 5-14, г дана ориентация пластины 1 с диффундирован-ными тензорезисторами относительно кристаллографических осей. Размеры тензорезисторов I = 320 мкм, Ь = 60 мкм, удельное сопротивление р = 3,8-10‘2 Ом-см, тензорезистнвный коэффициент л44 = 97-10'11 Па-1.
Как видно из рис. 5-14, д, диффундированная структура представляет собой мост, тензорезисторы R3 и /?! ориентированы по оси [ИО], а тензорезисторы R2 и Rt — по оси [Г10]. Тензорезистивные коэффициенты вэтом случае равны (см. табл. 5-1) n[t=n44/2 и л[2 = —л44/2. Относительные изменения сопротивлений е/?з=е;?1=л[1а44-+ л[2а2 и eRs = = л(2о" + где и а" — механические напряжения в на-
правлениях, параллельных оси [ПО]; о2 и о" — механические напряжения в направлениях, параллельных оси [110].
При условии Ьо > 10 напряжение определяется как для балки, заделанной с двух сторон (см. § 4-2), и усредненное напряжение в области тензорезисторов /?4 и R3 составляет о[ = {lalh)2 (1 — [//(2/0)]2} Р, где h= 15 мкм — толщина мембраны, а в области тензорезисторов R, и Rt равно о" = (Ig/h.)2 [1 — 0,75 (I — b)2/Zg]. Напряжения о2 и о2 равны о2 = и о2 = ц'о», коэффициент ц' = 0,067 (см. § 4-5).
Таким образом, относительные изменения сопротивлений при Р = 0,4-10^ Па равны
—Р-') (VW —1?/(2М]2} ? ~
= 0,5-97.10-11 (1—0,067) (500/15)2 [1—(320/1 000)2] 0,4- 105 = 1,8- 10~а;
6^ = 8^ = —0,5-97 - 10-11 (1—0,067) (500/15)2%
X [1 —0,75 (320 —60)2/5002] 0,4- 105 = — 1,6- 10~2.
Среднее значение ТКС составляете^ =s 1,2-10-3 К-1, разброс ТКС относительно среднего значения лежит в пределах у = зЬ (10 -ь 2,5) %. Таким образом, погрешность нуля в худшем случае равна
0,1-1,2-Ю-з Y»=-^=-TJ7KH- = 0,007 K-1. г\
Погрешность чувствительности составляет 0,001 К-1. Сопротивление тензорезисторов R яг 800 Ом, ток питания моста 2 мА, выходной сигнал 23,6 мВ
Измерительные цепи тензорезисторов. Мощность Р, рассеиваемая в тензорезисторе, ограничена его нагревом, вызывающим появление повышенных значений погрешности. Перегрев 0 тензорезистора по сравнению с температурой детали, на которую он наклеен (см. § 2-2), равен
0 = Р/(Ш = -Руд/5,
где So — площадь поверхности теплоотдачи резистора, м2; | — коэффициент теплоотдачи, Вт/(м2-К); Руя — P/So — удельная тепловая нагрузка, Вт/м2.
При тепловом контакте тензорезистора с деталью через слой клея в подложку отводится в 200—300 раз больший тепловой поток, чем в окружающий воздух. Это объясняется тем, что коэффициент теплоотдачи в воздух равен | = 10 Вт/(м2-К), а коэффициент теплоотдачи в металл через слой клея составляет с = 2 -г- 3 кВт/(м2-К). Поэтому можно считать, что практически весь тепловой поток от тензорезистора отводится через слой клея в деталь, на которую он наклеен. Отсюда площадью So поверхности теплоотдачи для пленочных и фольговых тензорезисторов следует считать площадь поверхности рези
102
стора, обращенной к детали, а для проволочных — с достаточно точным приближением половину площади цилиндрической поверхности их проволоки.
При наклейке на сталь значения Руд для большинства используемых сейчас проволочных, фольговых и полупроводниковых тензорезисторов (с мощностью. 25—630 мВт и полной площадью, занимаемой решеткой, 0,9—240 мм2) колеблются в очень узких пределах: Руд = = 26 4-28 кВт/м2 (или мВт/мм2). При наклейке на медь и сплавы алюминия Руд = 50 мВт/мм2, при наклейке на пластмассы Рул ~ « 3 мВт/мм2.
Допустимое значение тока 7ДОП через тензорезистор определяется из соотношения Р = 72Р = Руд50. Так, например, для проволочных тензорезисторов с базой длиной /, из п проводов в решетке с диаметром d, изготовленных из материала с удельным сопротивлением р, S0 = ^-nl, R = 4n/p/(nd2) и допустимое значение тока
ЛоП = V PyaS0/R = V P^nWl(W).
Для константановой проволоки р = 0,46-10'6 Ом-ми при температуре перегрева 1 К и Руд = 27 кВт/м2 допустимое значение тока /доп = /7,3-10^.
Наиболее распространенной измерительной цепью для тензорезисторов является мостовая измерительная цепь. Напряжение питания цепи определяется допустимым током (5—20 мА) и сопротивлением тензорезисторов и равно 2—12 В. Выходной сигнал моста с проволочными тензорезисторами составляет не более 10—50 мВ при деформации ю = 1%, выходной сигнал моста с полупроводниковыми резисторами имеет тот же порядок, но при деформации ег = 0,1%.
Повысить напряжение питания и, следовательно, при прочих равных условиях увеличить выходной сигнал удается при питании тензорезисторов импульсным током. При условии, что постоянная т времени нагрева тензорезистора намного больше периода Т следования импульсов, амплитуда импульсов по сравнению с действующим током может быть увеличена в N = YTRo раз, где t0 — длительность импульсов. Минимально допустимая длительность импульсов t0 ограничивается переходными процессами установления токов в измерительной цепи, которые, очевидно, должны закончиться за время, намного меньшее t0, и составляет не менее 5—50 мкс. Таким образом, диапазон возможного увеличения напряжения оказывается не слишком большим. Так, чтобы обеспечить N = 10, частота следования импульсов должна быть не выше 200—2000 Гц, и практически импульсное напряжение питания может быть рекомендовано только при измерении статических или относительно низкочастотных (20—200 Гц) деформаций.
Основным фактором, определяющим выбор измерительной цепи тензорезисторов, является возможность коррекции температурных погрешностей нуля и чувствительности. При дифференциальном включении тензорезисторов в два соседних плеча моста удается понизить
ЮЗ
температурную погрешность нуля в 10—20 раз по сравнению с температурной погрешностью тензорезистора. В мостовой цепи удается в отдельных случаях скомпенсировать также температурную погреш-
ность чувствительности.
Действительно, из рассмотрения приведенных в § 3-2 мостовых схем видно, что при питании моста от источника напряжения выходной сигнал моста ре зависит от входного сопротивления моста: Пвых — = ипи[^/2 (при' RVK > 7?вых.м), при питании моста от источника тока выходной сигнал зависит от входного сопротивления моста: Пвых = le^R^R'/(Ro + R') = 7е^/?вх/2, и при изменении сопротивления тензорезистора Ro в зависимости от температуры удается за счет изменения Rm скомпенсировать изменение eR — /(^ от воздействия температуры, если ТКЧ и ТКС имеют разные знаки. Такой метод кор-
рекции используется для полупроводниковых тензорезисторов. В частности, термокомпенсированным по чувствительности будет мост из четырех идентичных тензорезисторов p-типа с концентрацией примесей N = С (рис. 5-15). При ТКС > ТКЧ коррекцию чувствительности можно получить подбором сопротивления источника питания.
Для проволочных и фольговых тензорезисторов относительные изменения сопротивления ед не превышают 2%, поэтому нелинейности, вносимые мосто-
вой цепью, относительно малы. Для полупроводниковых тензорезисторов достигает 10% и при рассмотрении погрешности линейности выходного сигнала моста следует учитывать как нелинейность коэффициента тензочувствительно-сти, так и нелинейность, вносимую мостовой схемой (см. § 3-2).
Вследствие малого изменения сопротивления рабочих плеч особого рассмотрения требуют вопросы уравновешивания мостовой цепи. Для уравновешивания последней до значения начального сигнала, соответствующего кажущейся деформации ег = 10"5 (при этом погрешность нуля будет 0,1 % при (ег)изм ~ 1%), требуется изменять сопротивление одного из нерабочих плеч с порогом 4-Ю"5 полного сопротивления плеча. Стабильность сопротивлений нерабочих плеч должна обеспечиваться в пределах ± 10*6.
Схема измерительного моста с дифференциально включенными
проволочными тензорезисторами и уравновешивающими элементами при питании постоянным током показана на рис. 5-16, а. При питании схемы переменным током необходимо учитывать наличие относительно больших емкостей (10—100 пФ) между проводящими элемен-
тами тензорезисторов и деталью, на которую они наклеиваются. Поскольку одна из точек измерительной схемы, как правило, зазем
104
ляется и соединена, таким образом, с металлической деталью, эти емкости оказываются включенными в схему, например, так, как показано на рис. 5-16, б, и измерительный мост может быть уравновешен теперь только при введении дополнительных элементов.
В настоящее время в связи с широким внедрением микроэлектроники наиболее универсальными являются цепи на постоянном токе.
Рис. 5-16
В качестве источника питания в этих схемах используются стабилизаторы напряжения или тока. Выходное напряжение моста усиливается с помощью дифференциального усилителя с высоким входным сопротивлением. Элементы регулирования начального выходного сигнала, показанные на рис. 5-16, весьма громоздки, нерациональны при использовании полного мо-
ста, т. е. при включении четырех рабочих тензорезисторов, и приводят, кроме того, к изменению чувствительности схемы вследствие изменения сопротивлений плеч моста при его балансировке (см. § 3-2).
Вариант измерительной цепи со специальным устройством балансировки представлен на рис. 5-17. Балансировочное устрой-
ство выполнено в виде делителя напряжения (резистор /?б) с дифференциальным усилителем ДУ1 на выходе и подключено к источнику питания моста (стабилизатор напряжения); выходное напряжение усилителя ДУ1 суммируется с выходным напряжением моста, усиленным с помощью предварительного усилителя ДУ2, на входе усилителя ДУЗ.
В настоящее время получают также распространение цепи, в которых выходной ток тензомоста уравновешивается током дополнительного источника, т. е. выполняется условие (7ВЬ1Х.М = 0; при этом выходной величиной является уравновешивающий ток. Такие цепи,
105
называемые квазиуравн свешенными мостами, подробно проанализированы А. В. Клементьевым.
На рис. 5-18 представлена ная на принципе квазиуравновешенного
схема измерительной цепи, построен-моста. Питание тензомоста Ri, Яз, Ri осуществляется от стабилизатора тока ИТ. Операционный усилитель Ус1, охваченный цепью параллельной отрицательной обратной связи, уравновешивает мост за счет подачи тока 7ВЫХ в узел а выходной диагонали моста. Дополнительный усилитель Ус2 реализует «плавающее» питание моста таким образом, что потенциал узла b оказывается близким к нулю. В этом случае выходное напряжение преобразователя будет равным = IBblxR6, где 7ВЫХ = Км (1 + Цепь
из резисторов Re, R7 предна-Рис- 5'18 значена для установки началь-
ного уровня. В данной схеме удается в значительной степени снизить влияние сопротивления проводов линий связи с датчиком. Практически сказывается влияние
лишь сопротивления гд провода, по которому протекает ток 7ВЬ1Х, но
это влияние относительно невелико, поскольку величина гл обычно
много меньше сопротивления R6, задающего коэффициент передачи устройства.
Область применения тензорезисторов. При всем многообразии задач, решаемых с помощью тензорезисторов, можно выделить две основные области их использования.
К первой области относятся исследования физических свойств материалов, деформаций и напряжений в деталях и конструкциях. Для этих задач характерны значительное число точек тензометрирования, широкие диапазоны изменения параметров окружаю
щей среды, а также невозможность градуиров-
ки измерительных каналов. Основной причиной погрешности в этих
случаях является разброс параметров тензорезисторов R и К, вокруг средних для данной партии значений, и погрешность измерения составляет 2—10%.
Вторая область — применение тензорезисторов для измерения механических величин, преобразуемых в деформацию упругого элемента. В этом случае датчики градуируются по измеряемой величине и погрешности измерений лежат в диапазоне 0,5—0,05%.
Тензорезисторы используются для измерения статических и дина
106
мических деформации, верхняя граница частотного диапазона определяется соотношением между длиной волны л и базой I тензорезистора. Для того чтобы не было искажения результата измерения из-за усреднения деформации (рис. 5-19), принимается отношение /А 0,1. В частности, для измерения в стальных деталях динамических деформаций с частотой до 50 кГц должны применяться тензорезисторы с базой, не большей 10 мм, так как скорость распространения ультразвука в стали v — 5000 м/с и длина волны h = v/f — 100 мм.
При измерении динамических деформаций величина максимальной деформации для проволочных тензорезисторов не должна превышать 8г 0,1 %, для полупроводни-
ковых ег С 0,02%, так как при больших деформациях резко понижается надежность тензорезисторов.
Для повышения точности и чувствительности тензорезисторов, а также измерительных цепей к ним представляет интерес установление предельных возможностей тензорезисторов, определяемых термодинамическими флюктуациями. Тензорези-стор является параметрическим преобразователем с внутренним сопротивлением 7? и может быть представлен в виде эквивалент
ного генератора с мощностью
короткого замыкания Рк з = = Рт (/^еД2, где Рт — мощность,
потребляемая тензорезистором. Средняя мощность термодинамического шума равна Рш = 4kTAf, где k = 1,38-10-23 Дж/К — постоянная Больцмана; Т — абсолютная температура; А/ — полоса частот. Отсюда средняя квадратическая погрешность находится в виде
б==утПр- = ^-|/^1
V у рт
На рис. 5-20 представлены графики, отражающие зависимость погрешности б от величины деформации et для Рт = 0,1 Вт и различных частотных полос при температуре Т — 300 К.
ГЛАВА ШЕСТАЯ
ПЬЕЗОЭЛЕКТРИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ
6-1. ФИЗИЧЕСКИЕ ОСНОВЫ И ОБЛАСТЬ ПРИМЕНЕНИЯ ПЬЕЗОЭЛЕКТРИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ
Пьезоэлектрическими называются кристаллы и текстуры, электризующиеся под действием механических напряжений (прямой пьезоэффект) и деформирующиеся в электрическом поле (обратный пьезо-
107
эффект). Пьезбэффект обладает знанечувствительностью, т. е. происходит изменение знаков заряда при замене сжатия растяжением и изменение знака деформации при изменении направления поля. Пьезоэлектрическими свойствами обладают многие кристаллические вещества: кварц, турмалин, ниобат лития, сегнетова соль и др., а также искусственно
создаваемые и
специально поляризуемые в электрическом поле пьезокерамики: титанат бария, титанат свинца, цирконат свинца и т. д.
Физическую природу пьезоэффекта рассмотрим на примере наиболее известного пьезоэлектрического кристалла— кварца. На рис. 6-1, а показана форма элементарной ячейки кристаллической структуры кварца. Ячейка в целом электрически нейтральна, однако в ней можно выделить три направления, проходящие через центр и соединяющие два разнополярных иона. Эти
X
полярные направления
Рис. 6-1
называются электрическими осями или осями X, и по ним направлены векторы поляризации Р1, Р2 и Р3. Если к кристаллу кварца вдоль оси приложена сила Fx, равномерно распределенная по грани, перпендикулярной оси X, то в результате деформации элементарной ячейки ее электрическая нейтральность нарушается. При этом, как показано на рис. 6-1,6, в деформированном состоянии ячейки сумма проекций векторов Р2 и Р3 на ось X становится меньше (при сжатии) или больше (при растяжении) вектора Pt. В результате появляется равнодействующая вектора поляризации, ей соответствуют поляризационные заряды на гранях, знаки которых для сжатия показаны на рис. 6-1, б. Нетрудно видеть, что деформация ячейки не влияет на
108
электрическое состояние вдоль оси Y. Здесь сумма проекций векторов равна нулю, ибо Р2Я = Рзу.
Образование поляризационных зарядов на гранях, перпендикулярных оси X, при действии силы по оси X называется продольным пьезоэффектом.
При механических напряжениях, приложенных вдоль одной из осей V (их называют механическими осями), геометрическая сумма проекций векторов Р2 и Р8 на ось V равна нулю, и на гранях пьезоэлемента, перпендикулярных оси Y, заряды не образуются. Однако сумма проекций векторов Р2 и Р3 на ось X оказывается не равной вектору Рг. Так, при сжатии пьезоэлемента, как изображено на рис. 6-1, в, указанная сумма превышает Ри в результате на нижней грани образуются положительные заряды, а на верхней — отрицательные. Рассмотренный эффект образования зарядов на гранях, перпендикулярных нагружаемым граням, называется поперечным. При равномерном нагружении со всех сторон (например, гидростатическое сжатие) кристалл кварца остается электрически нейтральным. При нагружении по оси Z, перпендикулярной осям X и Y и называемой оптической осью кристалла, кристалл кварца также остается электрически нейтральным. При механическом напряжении сдвига, деформирующем ячейку так, как показано на рис. 6-1, в, геометрическая сумма проекций векторов Р2 и Р3 на ось X равна вектору Ри направленному по оси X, и на гранях, перпендикулярных оси X, заряд не возникает. Однако проекции векторов Р2 и Р3 на ось Y не равны, и на гранях, перпендикулярных оси Y, возникает заряд.
Рассмотрение физической природы пьезоэффекта показывает, что при напряженном состоянии материала заряды принципиально могут возникать между тремя парами граней. Таким образом, поляризационный заряд является вектором и описывается тремя компонентами. Напряженное состояние характеризуется тензором второго ранга с девятью компонентами (см. § 4-5).
Пьезоэлектрический модуль, определяющий зависимости заряда от напряженного состояния, является тензором третьего ранга и определяется 27 компонентами.
Однако, как было сказано в § 4-5, тензор механических напряжений содержит только шесть независимых компонент, которые обозначаются так: (Гц = Oj, о22 = ^2> ^зз ~ ^з> ^гз = ^1з ~ и о12 = ^в-
Это позволяет перейти к упрощенной форме записи пьезомодуля, представив его в виде таблицы, содержащей 18 компонент:
^11 ^12 ^13 ^14 ^15 dig
dtj — d^i d22 d23 d3t d%s dig •
.... Ldgi d32 d33 d3i d33 d3e.
По таблице пьезомодулей можно рассчитать плотность заряда на всех трех гранях при действии любого напряжения. При сжатии по оси X (рис. 6-2, а) на грани, перпендикулярной этой оси, возникает заряд, плотность которого = duOi; при сжатии по оси Y
109
(рис. 6-2, б) — заряд 6Г = d12a2, при всестороннем сжатии (рис. 6-2, в)— заряд = d11o1 + d12o2 + d13o3, наконец, при сдвиге (рис. 6-2, г)
При продольном пьезоэффекте заряд не зависит от размера пьезоэлементов. Так, при сжатии по оси X заряд qr = 6^ = SrduFrISr = ~ duF^
При поперечном пьезоэффекте заряд может быть увеличен соответствующим выбором
относительных размеров пьезоэлемента, т. е. длин ребер х и у : =
= 61S1 = 8^12Рг/8г — = d12F2zy/(zx) = d^Fyylx.
В общем виде плотность заряда определяется формулой 6, = dijOj (i = 1, 2, 3; / = 1, 2, 3, 4, 5, 6).
Индекс пьезомодуля d[, означает, что рассматривается заряд на грани i при действии напряжения вдоль оси у. При определении знаков заряда за положительное направление поля принимается направление поля вне пьезоэлемента, совпадающее с положи-
тельным направлением соответствующей оси. Знаки механических напряжений определены в § 4-5. Обратный пьезоэффект также определяется по матрице пьезомодулей. При приложении электрического поля напряженностью между гранями 1—1, или х—х, происходит деформация элемента в направлении оси X, равная t'i = dnE^
Удобно привести следующую схему, объединяющую пьезоэлектрические уравнения:
81 е2 8з е4 ез Sg
Ег Ъ
Е2 б2
Е3 63
-О1 О2 О3 О4 Од о6 du d12 d13 du du dle d2i d22 d23 d2i d25 d26 d3i d32 d33 d3<i d№ d3e.
Симметрия структуры веществ приводит к сокращению числа независимых компонент в матрицах пьезомодулей, большая часть компонент оказывается равной нулю. Значения пьезомодулей d,7 в единицах 10'12 Кл/Н для кварца и титаната бария приведены в табл. 6-1.
110
Таблица 6-1
Материал Значение пьезомодулей йц, 10_,г Кл/Н
Кварц —2,31 0 0 +2,31 0 0 0 0 0 —0,67 0 0 0 0,67 0 0 4,62 0
Титанат бария 0 0 -78 0 0 -78 0 0 190 0 250 0 250 0 0 0 0 0
Наличие полярных направлений в пьезоэлектриках (см. рис. 6-1, а) объясняет важность определенной ориентации граней пьезоэлемента относительно кристаллографических осей кристалла X, Y и Z. Форма
матрицы и значения пьезомодулей, приведенные в табл. 6-1, заданы относительно осей координат, совпадающих с кристаллографическими осями кристалла. Это значит, что ребра пьезоэлемента должны быть ориентированы по осям X, У и Z. Возможные варианты таких срезов для пьезоэлементов в виде пластин показаны на рис. 6-3, а. Эти срезы называются соответственно осям X, Y и Z-срезами. Для них механические напряжения, действующие на грани, совпадают по направле-
111
ниям с кристаллографическими осями. Если пластина вырезана произвольно и напряжения действуют в системе координат OX', ОУ и 0Z' (рис. 6-3, б), то тензор пьезомодуля должен быть преобразован к другой системе координат. Для такого преобразования необходимо вернуться к тензорной системе записи (см. § 4-5).
В качестве примера рассмотрим плотность заряда 6[ кварцевого элемента под действием напряжения a'Ll (остальные компоненты напряжения равны нулю).
Плотность заряда== dujoj,, где d(u — -г аи^1за1з^1зз~1~
4" 4- ЛиОцац^цз -р 4” ^12^11^11^211 4” ••• 4* ^гга11а1г^212 4-
4- ацОцац^зи + ... + Oi3a11a12d3i2; йц, als и а13 — направляющие косинусы.
Из матрицы пьезомодулей видно, что отличны от нуля только пьезомодули dul = ~ 4н> ^122 —dii> ^123 = rfii, d2i3 — —du и d2ia = d2e = —2dn.
Подставив значения пьезомодулей в выражение для d(u, получим — == au (a|t—3of2) 4ц. На основании этого уравнения можно определить изменение пьезомодуля при отклонении ребер пластины от главных осей. В частности, при смещении ребер на угол 0 (рис. 6-3, в) аи = cos 0, 012 = cos (90 4- 0), d'nl = du cos 30 и при смещении на угол ф будет Оц= cos <р, 012= 0, dlu—^ii cos3 ф. Очевидно также, что при 0 = 30’ пьезомодуль d'tll = 0, а при 0 == = 60° d(lt = du, что полностью соответствует физической картине, показанной на рис. 6-1.
Область применения пьезоэлектрических преобразователей весьма обширна.
1. Преобразователи, в которых используется прямой пьезоэффект (рис. 6-4, а), применяются в приборах для измерения силы, давления, ускорения.
2. Преобразователи, где используется обратный пьезоэффект, применяются в качестве излучателей ультразвуковых колебаний, преобразователей напряжения в дефор
мацию, например, в пьезоэлектрических реле, исполнительных элементах автоматических систем, перемещающих зеркала оптических приборов (рис. 6-4, б), обратных преобразователей приборов уравновешивания и т. д. 1
3. Преобразователи, в которых используются одновременно прямой и обратный пьезоэффекты, — пьезорезонаторы, имеющие максимальный коэффициент преобразования одного вида энергии в другой на резонансной частоте и резко уменьшающийся коэффициент преобразования при отступлении от резонансной частоты, применяются в качестве фильтров, пропускающих очень узкую полосу частот (рис. 6-4, в).
112
г- Пьезорезонаторы, включенные в цепь положительной обратной связи усилителя, работают в режиме автоколебаний и используются в генераторах. В зависимости от типа кристалла, среза и типа возбуждаемых колебаний пьезорезонаторы могут выполняться с высокостабильной, не зависящей от внешних факторов собственной частотой и с управляемой собственной частотой. Управляемые резонаторы используются в частотно-цифровых приборах как преобразователи различных, преимущественно неэлектрических (температура, давление, ускорение и т. д.), величин в частоту.
В пьезоэлектрических преобразователях используются кварц и различные типы пьезокерамик. Пьезокерамики имеют значительно более высокие по значениям, чем кварц, пьезомодули, но худшие упругие свойства. Модуль упругости пьезокерамических материалов Е = (0,65 -5- 1,3)10“и Па. Добротность, определяемая только механическими потерями, лежит в диапазоне Q — 100 -ь 300. Тангенс угла потерь (при напряженности Е < 25 кВ/м) для большинства пьезокерамических материалов составляет tg б = 0,02 -ь 0,05. Все материалы обладают пьезоэлектрическими свойствами лишь в определенном температурном диапазоне, граница которого определяется точкой Кюри. Для кварца точке Кюри соответствует температура QK — = 530 °C, для пьезокерамик эти температуры значительно ниже. Значения пьезомодулей, определяющие чувствительность наиболее распространенных типов преобразователей, приведены для различных пьезокерамических материалов в табл. 6-2, там же указаны значения диэлектрической проницаемости е и температуры соответствующие точкам Кюри.
Таблица 6-2
Материал •с е, ед. «о Пьезомодуль, пКл/Н
d31 ^33 die
ТБ-1 120 1400 45—78 100—190 260
ТБ К-3 105 1200 43 77 240
ТБ КС 160 450 27 77 112
ЦТС 19 290 1400 119 282 380
ЦТС 21 410 550 27 67
ЦТС 22 330 800 50 100
ЦТС 23 280 1050 100 200
ЦТС 24 280 1050 100 200
ЦТС 300 330 1100 95 280 341
ЦТБС-1 250 3200 220 470 —
НБС-1 265 1600 67 167
НБС-3 270 1800 40 100
(Ко,в Na0l5) NbOs 420 420 49 160 —
6-2. ПЬЕЗОЭЛЕКТРИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ СИЛЫ, ДАВЛЕНИЯ И УСКОРЕНИЯ
Устройство и измерительные цепи. На рис. 6-5, а схематически изображено устройство пьезоэлектрического преобразователя. Изме-
113
ряемое давление Р действует на мембрану 1, представляющую собой дно корпуса преобразователя. Наружные обкладки кварцевых пластин заземляются, а средняя обкладка (латунная фольга 3) изолируется относительно корпуса самим кварцем, имеющим очень высокое удельное сопротивление. Кварцевые пластины Х-среза 2 соединены параллельно. Сигнал с кварцевых пластин снимается экранированным кабелем 5. Для удобства соединения вывода от фольги с внутренней жилой кабеля в корпусе преобразователя предусмотрено отверстие, закрываемое пробкой 4.
Выходная мощность пьезоэлектрических преобразователей очень мала, поэтому на выходе преобразователя должен быть включен усилитель с возможно большим
| Преобразователь
входным сопротивлением.
Эквивалентная схема преобразователя, соединенного кабелем с измерительной цепью, представлена на рис. 6-5, б, на котором
С о — емкость между
К aS ель Мзм.цепь
Увых
Ср— /Ш ' C# — %8х
гранями пьезоэлектрика (емкость преобразователя); Ск — емкость кабеля между жилой и экраном и Свх — входная емкость измерительной цепи; Ro—сопротивление преобразователя; RK— сопротивление изоляции кабеля; Явх — входное сопротивление измерительной цепи.
Эквивалентную схему можно упростить согласно рис.6-5, в, где сопротивление R равно сопротивлению параллельного соединения Ro, R« и Rbx и емкость С= Со + Ск+ Свх.
При синусоидальной силе f = Fm sin со/ мгновенный ток i = = dq/dt = d (t/lxFmsin a>f)ldt. Выходное напряжение преобразователя
Н4
с подключенной к нему измерительной цепью- составляет йвьк — = 1 [ятшИ -где 1 = °—=
Как видно из последнего выражения, амплитуда напряжения и сдвиг фаз между напряжением и измеряемой силой зависят от частоты: уТ“^: Ф-л/2 + arctguRC. (6-1)
Амплитудно-частотная и фазо-частотная характеристики преобразователя, включенного в измерительную цепь, представлены на рис. 6-5, г. Из приведенных выражений следует, что напряжение на входе усилителя не будет зависеть от частоты только при высоких частотах со > 1/(Л?С) и будет равно С/вых = duFlC.
Из этого выражения видно, что выходное напряжение преобразователя зависит от емкости входной цепи. Поэтому если в характеристиках преобразователя указывается его чувствительность по напряжению, то обязательно должна быть указана и емкость, соответствующая этой чувствительности. В ряде случаев указывается чувствительность по заряду Sq = q/F и собственная емкость преобразователя Со или напряжение холостого хода t/x.x = driF/Со и также собственная емкость преобразователя. Во всех случаях, зная суммарную емкость С, можно рассчитать выходное напряжение преобразователя.
Для расширения частотного диапазона измеряемых величин в сторону низких частот, очевидно, следует увеличить постоянную времени цепи т = RC. Для того чтобы получить представление о значениях сопротивлений и емкостей, на рис. 6-5, д приведены кривые 1 и 2 чувствительности пьезоэлектрического акселерометра в функции частоты для различных сочетаний R и С. Расширение частотного диапазона путем увеличения емкости С (кривая 2) легко осуществляется включением параллельно преобразователю конденсаторов, однако, как видно из формулы (6-1), это приводит к уменьшению выходного напряжения преобразователя. Увеличение сопротивления R приводит к расширению частотного диапазона без потери чувствительности, однако повысить сопротивление можно только путем улучшения качества изоляции и применения усилителей с высокоомным входом.
Собственное сопротивление пьезоэлемента R(, определяется удельным сопротивлением материала пластин и их поверхностным сопротивлением. Первая составляющая, в особенности для кварца (1015 — 1016 Ом), как правило, значительно больше второй, поэтому определяющим является поверхностное сопротивление, для повышения которого до R = 109 н- 1010 Ом преобразователь приходится герметизировать, защищая его поверхности от влажности и загрязнения.
До недавнего времени измерительные цепи пьезодатчиков выполнялись в виде усилителей напряжения с высокоомным входом. Пример такой измерительной цепи показан на рис. 6-6, а. В этой цепи используется неинвертирующий усилитель на основе операционного усилителя с входным каскадом на полевом транзисторе. Напряже-г 1 я jwRC ние, поступающее на вход усилителя, равно UBX — 7? , . . р„,
G 1 “р / (О/\С
115
выходное напряжение усилителя UBbn — j , где
с = с0 + ск + сР 1Ы
Основным недостатком схемы с усилителем напряжения является зависимость выходного напряжения и чувствительности датчика от емкости кабеля Ск (70—150 пФ на каждый метр длины кабеля), которая может существенно изменяться в зависимости от положения кабеля и таких внешних факторов, как температура и влажность. Емкость пьезокварцевого датчика Со весьма стабильна, однако не превышает 5—50 пФ. Емкость пьезокерамических пластин может достигать 103 пФ, однако значение емкости в этом случае менее стабильно,
Рис. 6-6
чем для кварцевых пластин, и может изменяться под действием температуры. Для того чтобы уменьшить нестабильность чувствительности, параллельно входу усилителя включается дополнительная стабильная емкость Clt значение которой определяется допустимой погрешностью чувствительности у$ = (ДС0 + &СК)1(СО + Ск + Сх). Таким образом, входное напряжение усилителя и чувствительность преобразователя S = UmIF при заданной нестабильности емкости определяются допустимой погрешностью.
Так, например, для пьезоэлектрического датчика, состоящего из двух параллельно включенных пластин, при допустимой погрешности чувствительности ys = = ±1 % и нестабильности емкости кабеля ДСК = ±20 пФ максимальная чувствительность составляет S = UIF = 2du/C, где С > &CK/ys — 20/0,01 — 2000 пФ; S = 2-2,1 • 10"хг/(2000- IO"»2) = 2,1 мВ/Н.
Выходное напряжение усилителя увеличивается за счет увеличения его коэффициента усиления k — (1 + RJRi), однако, лишь 116
до известных пределов, так как с ростом коэффициента усиления усилителя и уменьшением глубины обратной связи возрастают погрешности усилителя.
Важной характеристикой измерительной цепи является постоянная времени т = RC. Для измерительной цепи с усилителем напряжения сопротивление R определяется параллельно соединенными сопротивлениями изоляции датчика, кабеля, входным сопротивлением усилителя и сопротивлением R3. Наиболее высокое входное сопротивление (до 1013 — 101а Ом) обеспечивают МДП-транзисторы, однако они имеют значительно более высокий уровень шумов, чем полевые транзисторы с р-п-переходом; поэтому с высокочувствительными датчиками чаще применяются последние, например транзистор КПЗОЗГ, входное сопротивление которого составляет не менее 10“ Ом.
Сопротивление R3 стабилизирует уровень выходного напряжения усилителя, определяемый входным током усилителя. Полагая, что входной ток Isx не превышает 10'11 А, и допуская уровень постоянного напряжения на выходе усилителя до 1 В, можно определить значение R3 10й Ом.
Анализ отдельных составляющих сопротивления R показывает, что определяющим сопротивлением является, как правило, сопротивление поверхностной утечки датчика и значение R обычно не превышает 10е Ом. Таким образом, даже при емкости С — 1000 пФ постоянная времени 1 с.
В настоящее время наряду с усилителями напряжения с пьезоэлектрическими датчиками применяются также преобразователи заряда в напряжение, называемые усилителями заряда. Схема усилителя заряда показана на рис. 6-6, б.
Выходное напряжение усилителя заряда определяется формулой
Г I __ Я ___________________/«^0. с^о, с____________
вь,х-С0.с 1 Г с Л,Со + Ск\ Яо.с1’
I -f- с^о. С I t, /®А0. С^О. С 1 * Т* Р J Т * Т П I
к L \ '-'О. С / ^ВХ J
где С0.с и Rox — емкость и сопротивление в цепи обратной связи; k= 104 105 — коэффициент усиления усилителя; RBX = 1010 -ь
т- 1011 Ом — входное сопротивление усилителя.
В области частот со 1 /т, где т — /?о с Со с,
вых Со. с + С0. <# + (С04-Ск)/£ ’
Основным достоинством схемы является независимость выходного напряжения от емкости (Со + Ск) и возможность увеличения чувствительности при уменьшении емкости Сос, однако применять емкости, меньшие 50—100 пФ, нецелесообразно, так как при этом заметное влияние начинают оказывать паразитные емкости. Вторым достоинством схемы является возможность обеспечения больших постоянных времени. Постоянные времени лучших конденсаторов, определяемые емкостью и сопротивлением изоляции конденсаторов, составляют 104—105 с.
117
Однако реализовать такую постоянную времени трудно из-за наличия входного тока усилителя. Входные токи усилителей лежат в диапазоне 10"11 — 10'14 А; таким образом, дрейф усилителя по заряду составляет 10—10~2 пКл/с, что при емкости обратной связи Сос = = 100 пФ приводит к дрейфу по напряжению 100—0,1 мВ/с. При дрейфе 100 мВ/с усилитель выходит из режима через 10—100 с. Резистор обратной связи /?ох включается для того, чтобы обеспечить режим работы усилителя. Если допускается смещение нуля в пределах 100 мВ, то при /вх = 10"“ А сопротивление 7?ох должно быть не больше 1010 Ом. Реальные постоянные времени датчиков с усилителями заряда составляют 10—100 с. Однако уже при таких постоянных времени оказывается возможным проводить квазистатическую градуировку пьезоэлектрических датчиков, что является огромным достоинством измерительной цепи с усилителем заряда.
Ключ KJ, включенный параллельно конденсатору Сох (рис. 6-6, б), служит для быстрой установки нулевого начального напряжения на выходе. Замыкая этот ключ, оператор осуществляет разряд конденсатора Сох, который при больших значениях т = Со.с/?о.с протекает весьма медленно. Если произвести начальную установку при нагруженном датчике, то тем самым мы как бы сместим нулевой уровень градуировочной характеристики на значение этой нагрузки. Это может оказаться весьма удобным при работе, например, с пьезоэлектрическими весами, когда требуется исключить из общего результата измерения вес тары. Конденсатор Сох и резистор 7?ох, как правило, выполняются в виде переключаемых наборов элементов (рис. 6-6, в), чтобы иметь возможность изменять коэффициент усиления усилителя путем изменения С и нижнюю границу полосы пропускания изменением R. Чувствительность большинства усилителей заряда лежит в диапазоне 0,1—10 мВ/пКл, однако известны усилители с чувствительностью 1 В/пКл.
В качестве вспомогательной цепи в усилитель заряда может быть введена цепь проверки чувствительности. Подобная цепь в усилителе по схеме рис. 6-6, в образована источником опорного напряжения UN, резистором ключом К2 и конденсатором CN. При замыкании ключа /<2 на вход усилителя подается опорный заряд qN = UNCN. Отношение изменения выходного напряжения АС/ВЫХ/^ определяет чувствительность усилителя.
Конструкции пьезоэлектрических преобразователей. Достоинствами пьезоэлектрических преобразователей являются малые габариты, простота конструкции, надежность в работе, возможность измерения быстропеременных величин, очень высокая точность преобразования механических напряжений в электрический заряд. Для кварца, который по своим упругим свойствам близок к идеальному телу, преобразование механического напряжения в электрический заряд осуществляется с погрешностью 10"4—10"6. В последние годы в связи с развитием высокоточной электроники появилась возможность реализовать эту точность в широком частотном диапазоне и в измерительных цепях, преобразующих заряд. Таким образом, пьезоэлектрические
118
преобразователи в перспективе являются наиболее точными преобразователями для датчиков давлений, ускорений, сил.
На рис. 6-7, а представлена конструкция пьезоэлектрического датчика ускорений. Все элементы датчика крепятся к основанию 1, выполненному из титана. Преобразователь 2 состоит из двух включенных параллельно пьезоэлементов из кварца Х-среза. Инерционная масса 3 для уменьшения габаритов датчика изготовлена из легко-обрабатываемого сплава ВНМЗ-2 с высокой плотностью 18 Мг/м3 (18 г/см3). Сигнал с кварцевых пластин снимается при помощи вывода из латунной фольги 4, соединенного с кабелем 6. Кабель крепится к основанию при помощи пайки. Датчик закрывается крышкой 5, навинчиваемой на основание. На основании 1 нарезана резьба для крепления датчика на объекте. Масса датчика 35 г, рабочий диапазон 1—150 м/с2.
При конструировании датчика акселерометра одним из основных вопросов является крепление пьезочувствительных пластин к основанию и инерционной массе. Сочленение пластин с основанием и инерционной массой в датчике, представленном на рис. 6-7, а, осуществляется посредством пайки. К кабелю, соединяющему датчик акселерометра с усилителем, предъявляются следующие требования: большое сопротивление изоляции, малая емкость между жилой и экраном, гибкость и антивибрационность. Последнее означает, что при вибрации кабель не должен наводить на вход усилителя ЭДС, возникающую в результате трения изоляции об экран при тряске кабеля. Лучшим является кабель типа АВ К-3, емкость этого кабеля составляет 70—80 пФ/м.
При длинных линиях связи между датчиком и усилителем для уменьшения помехи необходимо симметрирование измерительной цепи (см. § 3-4). В датчике, показанном на рис. 6-7, а, сопротивления связи между выводами и корпусом резко несимметричны, так как вывод 4 от внутренних пластин изолирован от корпуса, а внешние пластины и вывод от них, которым является экран кабеля, непосредственно соединены с корпусом. Для обеспечения симметрии сопротивлений связи датчик выполняется из нечетного числа пластин, соединенных так,
119
как показано на рис, 6-7, б. Сквозь центральные отверстия пластины Перез изоляторы винтом прижимаются к корпусу. Выводы пластин подключаются к усилителю с симметричным входом.
Для повышения чувствительности датчиков используются пьёзо-элементы из пьезокерамики, имеющей пьезомодуль значительно выше
Рис. 6-8
по сравнению с кварцем. Пьезоэлемент выполняется в виде ряда па-раллельно соединенных при помощи металлических прокладок 2 пластин / (рис. 6-8, а). В этом случае чувствительность преобразователя определяется формулой S — dnti (Свх + пС0), где п — число параллельно соединенных пластин; Со — емкость одной пластины.
120
М,. И. Субботин предложил использовать в пьезоэлектрических преобразователях фольгированную с двух сторон пьезоэлектрическую пленку, складывая и после этого запекая ее так, как показано на рис. 6-8, б.
Увеличение чувствительности достигается и при использовании поперечного пьезоэффекта, однако в этом случае тонкая пластина, нагружаемая вдоль, может потерять устойчивость. Для повышения устойчивости может быть применена схема нагружения, показанная на рис. 6-8, в. Преобразователь состоит из трех вертикальных пластин Х-среза, все внутренние и все внешние обкладки которых соединены.
Высокую чувствительность имеют также преобразователи с пьезоэлементами, работающими на изгиб. Пьезоэлемент, называемый би-морфным, составлен из двух пластин. При действии силы F пьезоэлемент прогибается, верхняя пластина испытывает растяжение, нижняя — сжатие и на пластинах наводятся заряды. Пластины в зависимости от направления положительных осей в них (оси указаны стрелками) могут соединяться как параллельно, так и последовательно, как это и показано на рис. 6-8, г и д', там же даны и знаки зарядов. Кроме этого, в качестве одной из пластин может быть использован не пьезоэлемент, а металлическая накладка такой толщины, чтобы пьезопластина лежала выше нейтрального слоя (рис. 6-8, е).
Для повышения чувствительности используются также пьезоэлементы, работающие на сдвиг. Схематическая конструкция пьезоакселерометра с цилиндрическим пьезоэлементом, работающим на сдвиг, показана на рис. 6-8, ж.
Выпускаемые в настоящее время фирмой Брюль и Къер пьезоакселерометры перекрывают диапазон ускорений 2-Ю'5 — 10е м/с2. Наиболее высокочастотные акселерометры имеют собственную частоту до 200 кГц при чувствительности 0,004 пКл/(м-с“2). Наиболее высокочувствительные пьезоакселерометры имеют чувствительность до 1000 пКл/(м-с~2), но их собственные частоты не превышают 1 кГц.
6-3. ПЬЕЗОРЕЗОНАНСНЫЕ ПРЕОБРАЗОВАТЕЛИ
В пьезоэлектрическом резонаторе происходит преобразование электрического напряжения между электродами в деформацию и механические напряжения в пьезоэлементе, которые вызывают ответную реакцию по выходу в виде зарядов на электродах, возникающих под действием механических напряжений. Обратимость пьезоэлектрического эффекта позволяет выполнять пьезорезонатор в виде двухполюсника, объединяющего системы электрического возбуждения механических колебаний и съема электрического сигнала. Резонансные колебания в пьезоэлементе возникают в результате установления в нем стоячих ультразвуковых волн. Длина волны X = v/f, где v — скорость распространения ультразвука; f — частота излучения. Скорость распространения ультразвука в материале определяется как v = yrEtj/p, где Е у—константа упругости; р— плотность материала. Следовательно, длина волны Z = —.
121
Если длина волны X такова, что на отрезке h между гранями, от которых отражаются волны, укладывается целое число полуволн, то в пьезоэлементе устанавливаются стоячие волны. Таким образом, стоячим волнам соответствует частота возбуждающего напряжения п -> Г Ejj
'nii~2h г (Г’ где п — число уложившихся полуволн. Частота колебаний, при которых на длине h укладывается одна полуволна, явля-1 1/W
ется основной частотой и равна fK = ^i1 У — .При частотах, значительно меньших fK, ток в цепи возбуждающих электродов (рис. 6-9, а) мал и определяется в основном межэлектродной емкостью Со и сопротивлением изоляции между электродами Ro.
По мере приближения частоты возбуждающего напряжения к частоте /к амплитуда механических колебаний растет. Пропорционально амплитуде колебаний увеличивается заряд на электродах, и в цепи возрастает составляющая переменного тока, вызываемая деформациями пьезоэлемента.
На рис. 6-9, б представлена эквивалентная схема (см. § 2-4) пьезорезонатора. В этой схеме введены эквивалентные параметры: индуктивность LK = mlkltt, емкость Ск — nklM и сопротивление Лк, образующие динамический контур эквивалентной схемы. Схема рис. 6-9, б соответствует свободно колеблющемуся, т. е. механически не нагруженному, пьезорезонатору (режим короткого замыкания, при котором усилия на поверхностях пьезоэлемента от внешних сил равны нулю). Схема рис. 6-9, в учитывает влияние внешних нагрузок в виде включенного сопротивления Za, которое может иметь как чисто активный (например, если существуют потери на акустическое излучение во внешнюю среду), так и реактивный (например, при присоединении к пьезоэлементу дополнительной массы) характер. В заторможенном состоянии, когда скорости смещений поверхностей пьезоэлемента равны нулю, сопротивление Za равно бесконечности (режим холостого хода). В режиме, близком к холостому ходу, работают пьезоэлектрические датчики давлений и ускорений, в которых используется прямой пьезоэффект. Поэтому в эквивалентной схеме этих датчиков динамическая ветвь обычно не учитывается.
122
Проводимость эквивалентной схемы (рис. 6-9, б) определяется формулой
У = Д,+ + 1-W2LKCK+/®CK7?K =
__ 1__/0)С I ~Ь/ О 6)2^кСк) СО^к
~ Ro ° (l-co2LKCK)2 + M2C2J?3K
Для идеального пьезорезонатора (7?0 = оо, 7?к == 0) проводимость бесконечно возрастает при условии 1 — co2LKCK = 0, т. е. при частоте ®К = 1/УГЬКСК, называемой частотой последовательного резонанса. Эта частота определяется исключительно параметрами введенного динамического контура и поэтому совпадает с определенной ранее как л 1 /" Eif
сок = 2щк---д- у — частотой механического резонанса.
Проводимость идеального пьезорезонатора бесконечно падает при условии /<вС0 + с = °’ т' е’ при частоте ®р = ]/" на"
зываемой частотой параллельного резонанса (а иногда частотой антирезонанса).
Относительная разность между частотами последовательного и параллельного резонансов составляет (<я — ®к)/®к = Ск/(2 Сп). Для пьезорезонаторов из кварца емкостное отношение не превышает Ск/С0 = — 10"2 -> 10'3 и частота ор может быть выше частоты <ок не более чем на 0,5%. Соответственно и изменение частоты параллельного резонанса путем подключения параллельно резонатору добавочной емкости С'о и увеличения таким образом емкости Со возможно не более чем на 0,1 —0,01%.
В реальном пьезорезонаторе при частотах юк и сор проводимости контура не равны соответственно бесконечности и нулю, они имеют некоторое конечное значение, включающее в себя, кроме активной, и небольшую реактивную составляющую. Поэтому для характеристики пьезорезонатора вводятся еще две частоты, при которых проводимость чисто активная. Одна из этих частот сщ называется частотой резонанса и оказывается чуть больше частоты сок, вторая (иа) называется частотой антирезонанса и оказывается чуть ниже частоты ир. Векторная диаграмма проводимости контура с указанием характерных точек показана на рис. 6-9, г.
Важной характеристикой контура является его добротность Q — = coKLK/7?K, определяемая потерями энергии при колебаниях. В состав потерь входят: потери собственно в кварце, потери в материалах электродов, потери на акустическое излучение в окружающую среду, потери на границе колеблющегося элемента и неподвижных элементов крепления, потери во входном элементе присоединяемой электрической схемы. Теоретическая добротность кварцевых резонаторов, если учитывать только потери в кварце, может достигать значения, определяемого из соотношения Qfr = 1,2-1013; реальные добротности зависят от конструкции резонаторов.
Основой пьезорезонансного частотного датчика является пьезорезонатор, частота которого изменяется под действием измеряемой
123
величины. Изменение частоты может происходить: а) при воздействии температуры, которая влияет на геометрические размеры, плотность и, главным образом, на упругие свойства кварца; б) под действием механических напряжений в резонаторе или его деформации, также вызывающих изменение h, р и п; в) при присоединении дополнительной массы к резонатору, изменяющей его толщину h и среднюю плотность р. Соответственно различают термочувствительные, тензочувствительные и массочувствительные пьезорезонаторы. Кроме этого, используются пьезорезонансные датчики с амплитудным выходом. В этих датчиках, работающих на частоте, близкой к резонансной, при изменении акустических потерь изменяется амплитуда колебаний. Вопросы теории и расчета, а также ряд конструкций пьезорезонансных частотных датчиков разработаны группой сотрудников под руководством В. В. Малова [31.
При построении пьезорезонансного датчика очевидны требования, предъявляемые к пьезорезонатору: высокая добротность, высокая чувствительность к измеряемой величине, малая чувствительность к дестабилизирующим факторам и возможность возбуждения колебаний только на одной частоте, т. е. моночастотность. Эти требования обеспечиваются в первую очередь выбором типа среза пьезоэлемента и типа возбуждаемых в пьезоэлементе колебаний. Действительно, если рассмотрим пластину У-среза, то при приложении поля в направлении оси Y в ней (см. матрицу пьезомодулей) возникают деформации 85 и е0, деформирующие пьезоэлемент в плоскости хг (деформация сдвига вдоль грани) и в плоскости ху (деформация сдвига по толщине). Однако геометрические размеры, определяющие резонансную частоту, в этих случаях различны. Собственная частота колебаний сдвига вдоль грани значительно ниже частоты колебаний сдвига по толщине, и благодаря этому условие моночастотности соблюдается удовлетворительно. В управляемых пьезорезонаторах чаще всего используются именно колебания сдвига по толщине (хотя возможный другие типы колебаний), так как при этом типе колебаний колебательная энергия концентрируется в подэлектродной области пьезоэлемента. Безэлектродные периферийные области оказываются практически свободными от упругих колебаний, что позволяет осуществлять крепление пьезоэлемента без заметного ухудшения добротностей. Ослабление амплитуды колебаний при p'h'l(ph) = 0,02 (р- и h' — плотность и толщина электрода, р и h — плотность и толщина пьезоэлемента) в точке, удаленной от края электрода на 15/i, составляет не менее 40 дБ. Еще большего эффекта локализации энергии можно добиться при применении линзового резонатора.
Изменением ориентации среза добиваются определенных свойств пьезорезона-.-тора. Рассмотрим это на примере термостабильных срезов. Для резонатора г-среза с колебаниями сдвига по толщине частота резонанса определяется как f =
= где свв — компонента упругости, равная отношению сдвигового «ао
2п ’
пряжения о6 к вызываемой им деформации сдвига е6, т. е. с66 = о6/ев. Если повернуть У-срез относительно кристаллографических осей, то компонента упругости с'м будет иной, нежели компонента с8в. Упругость является тензором четвертого ранга, и компонента с'6в может быть определена аналогично тому, как выше определялся пьезомодуль при повороте Х-среза кварца.
124
Коэффициент «J,, = cw cos2 ф + cu sin2 ф + с14 sin 2ф, где в = (90 — ф)— угол между осью Z и нормалью N к плоскости пьезоэлемевта (рие. 6-10, а). Температурные коэффициенты модулей упругости, входящие в выражение для вследствие анизотропии кварца имеют разные значения и знаки, а именно Кс — 178-10*’ К*л;
А' = — 177-Ю*6 К'1; К = 101-10-6 К*1.
еи
Можно, таким образом, найти ориентацию ф, при которой коэффициент *=* = Кс, — K0-l- На Рио- «'Ю, б представлена кривая зависимости К*=
= Ф (ф). Срезы, которым соответствует = 0 (ф= —49° и ф = +35°), получили название ВТ- и АТ-срезов. В рассмотренном примере предполагалось, что модули упругости линейно зависят от температуры На самом деле это не так, поэтому равенство Кг •= 0 имеет место только в относительно узком диапазоне температур.
Рис. 6-11
Термочувствительные пьезорезонансные датчики. Конструкция кварцевого термодатчика приведена на рис. 6-11, а. В миниатюрном металлическом герметизированном баллоне (диаметр 6—8 мм) размещен линзовый кварцевый резонатор 1, укрепленный, как на растяжках, на токоподводах 2 и 3. Для уменьшения тепловой инерционности баллон заполнен гелием, обладающим хорошей теплопроводностью. Выпускаются также датчики с резонаторами в стеклянных вакуумированных баллонах. Эти датчики имеют большую инерционность, но более высокую временною стабильность и разрешающую способность.
125
На рис. 6-11, б представлена структурная схема датчика, она включает в себя генератор Г1 с кварцевым термочувствительным резонатором, генератор стабильной частоты Г2, цепь разности частот РЧ, делитель частоты ДЧ и счетчик Сч с цифровой индикацией. Рабочий температурный диапазон датчиков составляет от —80 до +250 °C и может быть расширен при увеличении погрешности линейности.
Рабочие частоты термочувствительных резонаторов лежат в диапазоне 1—30 МГц, используются колебания как на основной частоте (1—10 МГц), так и на третьей и пятой гармониках (5—30 МГц).
В качестве термочувствительных резонаторов применяются резонаторы У-среза, ЛС-среза и LC-среза. Коэффициенты термочувстви-тельности для этих срезов, соответствующие уравнению преобразования
f = f0 [1 + К1 (0 - 0») + (0 - ©о)2 + Кз (0 - ©о)3Ъ
приведены в табл. 6-3.
В зависимости от собственной частоты резонатора f0 и типа среза термочувствительность датчиков составляет S@ — Af/Д0 = 20 +-4- 2850 Гц/К.
Порог чувствительности датчиков в основном определяется кратковременной нестабильностью резонаторов и построенных на их
Таблица 6-3 основе генераторов и по приводимым в литературе данным составляет 10'4—10'6 К при измерениях в области низких температур.
Тип среза Ki. /и 10-9 К3, 10-12 к-я
Y -срез +92,5 57,5 +5,8 Основными причинами погрешности термодатчиков являются временная нестабильность, «гистерезис», выражающийся в «неприходе» на на-
ЛС-срез +20 +23 + 116
LC-срез +33,78+0,12 ±0,14 +0,23 чальную частоту после температурного цикла и оцениваемый значением порядка 10'2 К при циклах, соответ-
ствующих рабочему диапазону, и повышение температуры (перегрев) резонатора, зависящее от мощности, выделяемой^ в цепи возбуждающих электродов. Для разных типов датчиков повышение температуры на единицу мощности колеблется в пределах 0,05—1 К/мВт. Для уменьшения систематической составляющей погрешности пере-рева необходимо уменьшить мощность возбуждения, для уменьшения случайной составляющей мощность возбуждения должна стаби-
лизироваться. _
I Подогревные термочувствительные резонаторы конструктивно объединяют пьезоэлектрический резонатор и дополнительный электронагреватель и могут быть принципиально использованы как для преобразования в температуру и измерения непосредственно мощности нагревателя, так и для измерения любой из величин, определяющих температуру при постоянной мощности нагревателя, т. е. могут приме
126
няться в преобразователях тока, напряжения или мощности, а также в датчиках газоанализаторов, термоанемометров, вакуумметров (см. гл. 11).
Конструкция подогревного пьезорезонатора, предложенного Э. А. Кудряшовым и использованного им в высокоточных квадраторах цифровых ваттметров и вольтметров, показана на рис. 6-11, в. В центре дискового резонатора У-среза диаметром 5 мм и толщиной 75 мкм напылены на нижней и верхней стороне золотые электроды возбуждения 1 и 2, а по периферии напылены электроды нагревателей 3 и 4 из нихрома. Сопротивление нагревателей 100 Ом, номинальный
Рис. 6-12
ток подогрева 15—30 мА. Крутизна преобразования мощности в частоту 1,5 МГц/Вт, рабочая частота 30 МГц. j
Тензочувствительные пьезорезонансные датчики. В качестве тензочувствительных резонаторов применяются пьезоэлементы температурно-независимого АТ-среза, в которых используются колебания сдвига по толщине и колебания изгиба, так как только для этих типов колебаний удается решить проблему развязки между колеблющейся частью резонатора и конструктивными элементами, через которые передается механическая нагрузка. Схематические конструкции и схемы нагружения тензочувствительных пьезорезонаторов показаны на рис. 6-12.
В резонаторах (рис. 6-12, а и б) используются колебания сдвига по толщине, поэтому закрепление резонатора и передача усилий могут осуществляться по свободной от колебаний периферии. Резонаторы подобного типа реализуются на диапазон частот 0,3—100 МГц, имеют толщину 0,05—5 мм при поперечных размерах 3—30 мм, относительное изменение частоты при номинальной входной величине А/// = 0,1-1--f- 1%.
127
В резонаторах (рис. 6-12, в) используются изгибные колебания, которые возбуждаются системой из четырех электродов, обеспечивающей противоположные по знаку сдвиговые деформации так, как показано на рис. 6-12, г. Так, если при положительном потенциале на верхнем электроде происходит в надэлектродной области сдвиг «вправо», то при отрицательном потенциале — «влево» и пластина изгибается. Деформации, вызываемые в ножках «камертона» колебаниями верхней и нижней пластин, взаимно гасятся, так как пластины перемещаются в противофазе. Резонаторы с изгибными колебаниями реализуются на диапазон частот 1—100 кГц, но имеют меньшую жесткость и, следовательно, большую чувствительность, чем резонаторы с колебаниями сдвига; относительное изменение частоты достигает значений А/// =10-ь 20%.
Метрологические возможности датчиков сил, давлений, ускорений в значительной степени определяются гистерезисом и ползучестью, вызванными неидеальностью самого упругого элемента, соединительных элементов и элементов передачи силы, а также дополнительными механическими напряжениями, которые могут возникнуть в материале резонатора при изменении температуры вследствие неравных температурных коэффициентов линейного расширения материалов. Проблема решается наилучшим образом, если датчик представляет собой монолитный кристаллический блок, однако такая конструкция приводит к технологическим трудностям. Монолитная конструкция датчика гидростатического давления в диапазоне до 70 МПа фирмы «Хьюлетт—Паккард» показана на рис. 6-12,9.
Основу датчика составляет линзовый резонатор, выполненный в виде перемычки 1 в кварцевом цилиндре 2. Для герметизации применены крышки 3 и 4 также из кварца, ориентированного относительно кристаллографических осей идентично с цилиндром, что позволяет полностью устранить термонапряжение. Измеряемое давление создает всестороннее сжатие цилиндра и плоское сжатие перемычки. Кварцевый блок расположен в цилиндре, заполненном жидкостью, на которую через мягкую мембрану передается давление внешней среды. Применяется двойное термостатирование блока, обеспечивающее стабилизацию температуры ± 0,05 °C. Начальная частота резонатора 5 МГц (третья гармоника), добротность Q = 10®, чувствительность S = 2-10'4 Гц/Па. В приборе предусмотрен умножитель частоты на 66, порог чувствительности при времени измерения 10 с АР = 7 Па (10-7 предела измерения).
В заключение следует сказать, что лучшие линзовые тензочувстви-тельные резонаторы характеризуются следующими параметрами: номинальным изменением частоты А)// = (0,5 ч- 10) 10'3, годичной нестабильностью частоты 10"7—10~в, кратковременной нестабильностью частоты 10~9—10"10, температурным коэффициентом частоты 10~®—10~8 К*1, температурным коэффициентом тензочувствительности 10-s К-1, что позволяет прогнозировать разработку на их базе датчиков акселерометров, манометров, динамометров с погрешностью, оцениваемой значениями порядка 10"4, что значительно превышает точность современных приборов. . .
128
• Масс-чувствительные пьезорезонансные датчики. Масс-чувстви-тельные резонаторы выполняются из тонких пластин или линз кварца температурно-независимого АТ-среза. В резонаторах возбуждаются колебания сдвига по толщине. Присоединяемая масса может наноситься с одной или с двух сторон как на электроды, так и на периферию резонатора. Наращивание массы, т. е. процесс сорбции вещества, может происходить по-разному и носить как необратимый, так и обратимый характер. Например, при отработке технологии процессов напыления в установке заподлицо с поверхностью, на которую производится напыление, помещается пьезорезонатор-толщиномер, позволяющий непрерывно контролировать процесс по изменению частоты пьезорезонатора в зависимости от толщины напыленной на него пленки. В гигрометрах и газоанализаторах пьезорезонаторы покрываются специальными сорбционными покрытиями, удерживающими исследуемое вещество. Так, измерительный резонатор гигрометра покрывается тонкой (3-Ю-7 мкм) пленкой окислов кремния. После измерения резонатор может быть «высушен», т. е. происходит десорбция вещества.
Связь частоты с толщиной h' и плотностью р' присоединяемого материала определяется в первом приближении формулой А/// = ——p'h'l(ph), где р и h — плотность и толщина пьезоэлемента. Если предположить, что исследуемые вещества сорбируются по всей поверхности дискового резонатора, то из этой формулы следует А/// — = —Am/m, где т — масса резонатора, и очевидно, что относительное приращение массы может регистрироваться с тем же разрешением, что и относительное изменение частоты, т. е. 10"в—КГ7. Для кварцевых резонаторов толщиной /1 = 0,1 мм минимальные регистрируемые приращения массы на единицу поверхности Ат = (КГ® ч- ПУ’') ph — = (1О‘в ч- КГ7) 2,65-0,01 = 2,65 (10*8 ч-. 10'9) г/см2. Однако такая высокая разрешающая способность может быть реализована только при термостабилизации резонаторов на уровне ±0,1 °C, так как для резонаторов АТ-среза ТКЧ составляет примерно 2 • 1(Гв К"1. Максимальная присоединяемая масса не должна превышать 2 1(Г3 г/см2, и толщина пленок должна быть не более 1—2 мкм, в противном случае резко падает добротность резонатора, что приводит к нестабильности и большой погрешности измерения.
6-4. ИЗМЕРИТЕЛЬНЫЕ ПРЕОБРАЗОВАТЕЛИ, ОСНОВАННЫЕ НА ИСПОЛЬЗОВАНИИ
I ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛН
Поверхностные акустические волны (ПАВ) находят широкое применение при разработке фильтров и линий задержек, применяемых в радиотехнических устройствах. В последнее время ПАВ используются также при разработке измерительных преобразователей.
Известно несколько видов ПАВ, наиболее часто на практике применяют волны Релея. Смещение частиц твердого тела при распространении волны Релея в направлении оси X иллюстрируется рис. 6-13, а. Как видно из рис. 6-13, а, волны распространяются вблизи границы твердого тела и затухают почти полностью на расстоянии г от поверхности, примерно равном длине волны X. Одной из основных причин возрастающего интереса к ПАВ является именно сосредоточенность энергии в тон-
б Е. С. Левшина, П. В, Новицкий
129
ком слое, так как благодаря этому к технологии изготовления ПАВ-элемента предъявляется лишь одно требование — тщательная обработка рабочей поверхности, по которой распространяется акустическая волна.
Для возбуждения ПАВ на поверхность пьезоэлемента наносятся гребенки встречно включенных электродов (рис. 6-13, б), представляющие собой встречноштыревой преобразователь (ВШП), имеющий шаг /0 = X. При подключении напряжения к электродам ВШП под ними вследствие обратного пьезоэффекта происходят смещения частиц и возникает ПАВ, распространяющаяся в обе стороны. Если при этом длина волны совпадает с шагом ВШП, то вследствие суперпозиции колебаний, возникающих под каждой парой электродов, суммарная энергия ПАВ достигает максимума; если длина волны не совпадаете шагом ВШП, энергия ПАВ уменьшается и при определенном соотношении между Л и волна за пределами ВШП может пол
ностью погаситься.
Для приема энергии ПАВ используется второй ВШП, также имеющий шаг, равный длине волны. На электродах приемного ВШП вследствие прямого пьезоэффекта возникают заряды и появляется напряжение. Линия задержки состоит из входного и выходного ВШП. В первом приближении оба ВШП можно рассматривать
как локальные электроды, расположенные на расстоянии L, равном расстоянию между геометрическими центрами ВШП. Время задержки т равно времени прохождения акустической волны между ВШП, т. е. т = L/v, где v = УЕ^/р — скорость распространения ПАВ; £;, — константа упругости и р — плотность материала.
В кварце /-среза скорость распространения ПАВ равна v= 3159 м/с; таким образом, при 1=10 мм время задержки составляет около 3 мкс. Длина волны X определяется скоростью распространения v и частотой возбуждения волн и составляет
А, = v/f. Современная технология обеспечивает возможности создания ВШП с шагом до /0 = 10 мкм; таким образом, рабочие частоты ПАВ могут лежать в диапазоне до 300 МГц.
ПАВ-структура может быть использована в качестве частотозадающего элемента автогенератора (рис. 6-13, в); при этом, как следует из условия баланса фаз (фазовыми сдвигами в электрических цепях пренебрегаем), на длине L должно укладываться целое число волн. Фазочастотная характеристика линии задержки определяется как ер (ш) = —шт. Значение эквивалентной добротности определяется как Фэкв = -д=г I | и составляет Q3KB — лшот£/(220. Длина L ограничена раз-
2 I ОСО |а> =
мерами ПАВ-структуры и затуханием энергии ПАВ и не превышает L = 500 X; таким образом, добротность равна Q31(B 103.
Изменение времени задержки ПАВ-структуры под воздействием внешних факторов используется в измерительных преобразователях с частотным выходом/ При изменении т относительное изменение частоты генератора составляет Дсо/шо = = — Дт/т0.
Изменение времени задержки т = L/v определяется изменением длины L и фазовой скорости v и равно Дт/т = ДЬ/L — ДЁ';/7(2Е'(-/) + Др/(2р).
130
1 2 3
35
SSSSSSSSSSSSSSSS\
Изменение времени задержки может происходить при механических деформациях ПАВ-структуры, под воздействием температуры, при нагружении поверхности тонкими пленками (толщина пленки h' < 0,1 X), при изменении зазора 6 между поверхностью распространения ПАВ и токопроводящим экраном (6 < к). Соответственно на базе ПАВ-структур могут быть созданы преобразователи для измерения механических величин (Дт/т — до 1%), температуры (Дт/т — до 1%), микроперемещений, для микровзвешивания и исследования параметров тонких пленок (Дт/т — до 10%). При бесконтактной системе возбуждения ПАВ-пре-образователи могут быть использованы также для измерения перемещения объекта, вызывающего перемещение одного из ВШП и приводящего к изменению L.
Возможности построения на ПАВ-структурах преобразователей для измерения механических величин подробно исследованы в МИФИ В. М. Макаровым и В. В. Маловым, ими же разработан ряд преобразователей для измерения сил, давлений и ускорений. Схематическая конструкция акселеро-
метра на ПАВ-структуре показана на рис. 6-14. Рис. 6-14
На консольной балке 2 закреплена инерционная
масса 3. Балка выполнена из кварца, и на верхней поверхности балки методами планарной технологии нанесены ВШП с числом электродов Мвозб = 150 и А%рпем= 50. На пластине 1 размещены электронные элементы измерительной цепи. Собственная частота балки f0 ~~ 750 Гц, чувствительность акселерометра S 0,1 (кГц-с2)/м, предел измерения до 350 м/с2, погрешность у « 0,5’о.
ГЛАВА СЕДЬМАЯ
ЭЛЕКТРОСТАТИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ
7-1. ПРИНЦИП ДЕЙСТВИЯ И ОБЛАСТЬ ПРИМЕНЕНИЯ ЭЛЕКТРОСТАТИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ
Простейший электростатический (ЭС) преобразователь содержит два электрода площадью S, параллельно расположенных на расстоянии 6 в среде с диэлектрической проницаемостью 8.
С электрической стороны преобразователь характеризуется напряжением U между пластинами, зарядом q = CU, где С — емкость, равная при плоскопараллельном расположении пластин С = eS/6 (без учета краевого эффекта), током i = dqldt, энергией электрического поля W3 = qU/2 — Cl)2/2. Если одна из пластин (или диэлектрик между ними) имеет возможность перемещаться, то с механической стороны преобразователь характеризуется жесткостью подвеса подвижной пластины w, перемещением ее х, скоростью перемещения v — dxldt и электростатической силой притяжения Дс = dWJdx.
Взаимосвязь механической и электрической сторон преобразователя отражается уравнениями:
dq = EqCqx + CqU.
5*
131
Эти уравнения даны в линеаризованной форме, т. е. в предположении, что и и х малы по сравнению с начальными напряжением и зазором и, следовательно, емкость Со и напряженность поля Ео постоянны. Из приведенных уравнений видно, что любое воздействие с механической стороны меняет электрическое состояние преобразователя и, наоборот, изменение электрического поля приводит к изменению механических характеристик. Коэффициент электромеханиче-.' ской связи (см. § 2-4) k.w = Е0С0. Эта взаимосвязь должна учитываться при любых применениях ЭС преобразователей. Например, из первого уравнения следует, что если напряжение и зависит от перемещения х, то эквивалентная жесткость включенного в цепь преобразователя отличается от жесткости подвеса. Из второго уравнения видно, что ток через преобразователь определяется не только составляющей ii — (dqldfR = Crfiuldt, но и не всегда учитываемой составляющей, обусловленной перемещением электродов: i2 = (dq/dt)2 = EoCodx/dt.
Выходной величиной электростатического преобразователя может быть: а) изменение емкости С, б) сила Дс, в) ЭДС, генерируемая при взаимном перемещении электродов, находящихся в электрическом поле.
Для ЭС преобразователей, в которых изменяется емкость, входными величинами могут быть механическое перемещение, изменяющее зазор или площадь, или изменение диэлектрической проницаемости 8 под действием изменения температуры или состава диэлектрика.
ЭС преобразователи с изменяющейся емкостью (называемые в этом случае емкостными) используются в различных датчиках прямого преобразования, а также как преобразователи неравновесия в датчиках уравновешивания. Емкостные преобразователи работают на переменном токе несущей частоты со, которая должна значительно превышать наибольшую частоту Q изменения емкости под действием измеряемой величины. В качестве емкостных преобразователей используются также запертые р-п-переходы: р и «-области играют роль пластин, разделенных обедненным слоем, ширина которого 6, а соответственно и емкость р-п-перехода изменяются под действием приложенного напряжения. Эти полупроводниковые элементы называются варикапами.
Для ЭС преобразователей с выходной величиной в виде силы входной величиной является напряжение. Эти преобразователи используются в электростатических вольтметрах, а также в датчиках уравновешивания в качестве обратных преобразователей давления.
При емкости, принудительно изменяемой по известному закону, например С = Со AC sin Qi, ЭС преобразователь работает в емкостных модуляторах и измерителях поверхностных зарядов (генераторный режим). ЭС преобразователь емкостного модулятора в зависимости от постоянной времени 7?С-цепи (рис. 7-1) может работать в режиме заданного заряда при QRC ;> 1 и заданного напряжения при QRC 1. В первом случае
q=CUc = const;
-f- ZAG bill til \ G /
132
Т|| xmsin&t
U~ - =-l[=COnSt U- £-]—//=CT/7St
Рис. 7-1
т. е. выходной величиной является переменная составляющая напряжения Uc (или Un). Во втором случае Uc = Uх = const; q = (Ce + + AC sin QZ) Ux, т. е. выходной величиной модулятора, пропорциональной постоянному напряжению Ux, является ток i — dq/dt — = UXQAC cos Qt.
В том же генераторном режиме работают и конденсаторные микрофоны, преобразующие энергию акустических колебаний в электрическую. В этом случае Ux = Uo задается от стабильного источника и переменная составляющая напряжения пропорциональна в зависимо?, сти от режима перемещению пластины конденсатора или скорости ее перемещения.
Эквивалентная схема ЗС преобразователя, схематическая конструкция которого показана на рис. 7-2, а, приведена на рис. 7-2, б. В эквивалентной схеме учитываются емкость Со между электродами 1 и 2, сопротивление /?ут изоляции между электродами, сопротивление г и индуктивность L кабеля К, а также паразитная емкость Са между электродами и заземленными деталями конструкции и между жилой кабеля К и его заземленным экраном Э.
Влияние отдельных элементов схемы учитывается в зависимости от конкретных обстоятельств. Так, при работе на низкой частоте
сопротивление конденсатора велико и влияние индуктивности и сопротивления ввода не сказывается. При работе на высоких частотах сопротивление конденсатора падает и большую роль начинают играть индуктивность и сопротивление ввода, в то время как шунтирующее действие сопротивления утечки перестает сказываться. В этом случае удобнее последовательная эквивалентная схема преобразователя (рис. 7-2, в), где гэкв = г и С9КВ = Со + Сп. Влияние сопротивления утечки может быть учтено соответствующей добавкой в сопротивлении г9КВ = г ф- 1/ (и2СэКВ/?ут)- Действие индуктивности токопод-водов начинает сказываться обычно на частотах свыше 10 МГц.
В эквивалентной схеме ЭС преобразователя с диэлектриком должны быть учтены потери в последнем. Из-за потерь в ЭС преобразователе сдвиг фаз между напряжением и током оказывается меньше л/2 на угол потерь б. Последовательная и параллельная схемы, учитывающие потери в диэлектрике, представлены на рис. 7-2, г. Эквивалентные сопротивления для этих схем выражают часто через приводимый в справочных данных тангенс угла потерь б как г19КВ = tg б/ (соС19К1!) или Д2экв = ПДсо-гэкв tg б). Емкости С19КВ и С2экв связаны между собой зависимостью С29КВ — С19КВ/ (1 + tg б), и, так как обычно tg б 1, их можно считать приблизительно равными: С1ЭКВ ~ ~ Саэкв Сэкв- В образцовых воздушных конденсаторах tg б не превышает 5-10~5, так как определяется только потерями в изоляции между электродами и в материале электродов.
В конденсаторах с диэлектриком угол потерь значительно больше и, кроме того, может зависеть от напряжения на конденсаторе, ча
133
стоты, температуры и влажности. В частности, зависимость от влажности настолько существенна, что на этом принципе строятся измерители влажности зерна и некоторых других сыпучих материалов.
В некоторых случаях при наличии диэлектрика между электродами преобразователя приходится считаться с тем, что после поляризации диэлектрики еще в течение какого-то времени (0,1—2 с) сохраняют заряд (абсорбция), что приводит к остаточным напряжениям, достигающим нескольких процентов от значения приложенного напряжения. Влияние абсорбции в эквивалентной схеме конденсатора в первом приближении можно учесть включением параллельно емкости Со цепочки, состоящей из емкости Ся и сопротивления Ra. Поэтому полная эквивалентная схема ЭС преобразователя может быть представлена в виде рис. 7-2, д.
Г1ЭКВ
CjBKB
Рис. 7-2
При работе ЭС преобразователей на постоянном токе нужно учитывать существующую между электродами контактную разность потенциалов (КРП), включаемую в эквивалентной схеме последовательно с емкостью. КРП зависит от природы материалов, свойств и чистоты поверхности и существует даже между электродами, выполненными из одного и того же материала. Так, между электродами, выполненными из алюминия высокой чистоты, КРП может достигать I В. Лишь применение специальных мер позволяет снизить КРП до значения 10—20 мВ.
Допустимое напряжение на конденсаторе определяется значением напряженности, при которой наступает пробой воздушного промежутка. Для воздуха при нормальном давлении и зазорах между пластинами 0,1—10 мм эта напряженность составляет 2—3 кВ/мм. При зазорах, меньших 0,1 мм, можно не снижать напряжения, так как при напряжениях, меньших 350 В, воздушный промежуток вообще не пробивается независимо от длины зазора.
134
В ряде случаев напряжение питания ограничивается допустимыми силами электростатического притяжения между пластинами. В одинарном преобразователе при диаметре пластины d = 25 мм, зазоре б = 0,1 мм и напряжении U = 50 В значение электростатической силы достигает f9t = U2e,S/ (2б)2 = 6-Ю*4 Н.
В дифференциальном преобразователе с переменным зазором (см. рис. 7-9, д), силы, действующие между парами пластин, направлены встречно и компенсируют друг друга. Однако полная компенсация возможна только, если входное сопротивление цепи, включенной в диагональ моста, бесконечно велико и рабочие емкости ничем не шунтируются. В этом случае уменьшение или увеличение зазора вызывает
пропорциональное уменьшение или увеличение напряжения между соответствующими пластинами; сила, действующая между ними, оста-
ется неизменной, т. е. разность сил равна нулю независимо от перемещения средней пластины.
Зависимость емкости от внешних условий. Относительное изме-
нение емкости С = eS/б определяется щадь S, как правило, определяется линейными размерами, составляющими 10—100 мм, и изменение этих размеров на 0,1—1 мкм вызывает пренебрежимо малое изменение площади S и емкости С.
Зазор б в ЭС преобразователях составляет 10 мкм — 1 мм, и его изменения даже на 0,1 мкм могут вы
как ус = уЕ + у5 — ув. Пло-
Рис. 7-3
звать существенную погрешность.
Поэтому при конструировании ЭС преобразователей должны быть
тщательно продуманы вопросы крепления электродов и защиты от выпадения на рабочих плоскостях электродов каких-либо осадков (герметизация, вакуумирование и т. д.). Одной из основных причин изменения зазора является изменение геометрических размеров, вызываемых линейным расширением материалов под действием температуры.
В качестве примера на рис. 7-3 показан емкостный преобразователь для измерения давления. Подвижной пластиной 1 преобразователя служит мембрана, припаянная к латунному корпусу, который ввинчивается в полость, где измеряется давление. Неподвижная пластина 2 выполнена в виде тонкой медной фольги, наклеенной на кварцевый изолятор. Зазор между пластинами составляет 20 мкм. Толщина кварцевой пластины 3 мм. Коэффициент линейного расширения (КЛР) для латуни равен 18,9-10'6 К-1, для кварца 0,5- 10~s К"1- Увеличение зазора при увеличении температуры на один градус составляет Дб = (18,9 -г- 0,5) 1О'в-3-10~? = 55,2-10~9 м = = 0,05 мкм. Полагая, что изменение зазора при действии номинального давления равно 10 мкм, можно оценить приведенную температурную погрешность значением 0,005 К'1.
Очевидно, что эта погрешность слишком велика и конструкцию датчика, несмотря на ее простоту, нельзя признать удачной.
Диэлектрическая проницаемость воздуха весьма стабильна и мало меняется под действием внешних условий: при изменении температуры на 10 °C уе = 0,002%, при изменении влажности от 30 до 40%
135
Ye = 0,..01%, при изменении давления на 10® Н/м2 уе = 0,06%. Стабильными диэлектриками являются также плавленый кварц (уе = = 5-Ю-6 К-1) и стекло.
Диэлектрическая проницаемость ряда керамик, в особенности сегнетокерамик, наоборот, сильно зависит от напряженности приложенного электрического поля, температуры и гидростатического давления. На основе сегйетокерамических материалов выпускаются различные типы варикондов — переменных конденсаторов с нелинейной зависимостью емкости от приложенного напряжения, используемых в схемах допускового контроля напряжения, а также сегнетокерамические преобразователи реле контроля температуры. Достоинства сегнетокерамических преобразователей — малое потребление мощности (сопротивление между электродами на постоянном токе 108—109 Ом) и, следовательно, малый самонагрев. Недостатками, мешающими пока их широкому использованию в измерительных цепях, являются плохая воспроизводимость характеристик у различных образцов и критичность к влиянию внешних факторов. Например, характеристики варикондов зависят от температуры, а температурные характеристики реле контроля температуры зависят от напряженности поля.
7-2. ЭЛЕКТРОСТАТИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ В ВОЛЬТМЕТРАХ И ДАТЧИКАХ УРАВНОВЕШИВАНИЯ
Силы, создаваемые ЭС преобразователями, чрезвычайно малы н на несколько порядков меньше сил, которые можно получить в электромагнитных преобразователях. Однако ЭС преобразователи обладают рядом ценных качеств, которые обусловливают их применение в вольтметрах.
Во-первых, как видно из формулы вращающего момента ЭС преобразователя Мвр = J/2(/2dC/da, вращающий момент пропорционален квадрату напряжения как постоянного, так и переменного тока. Уменьшение напряжения на пластинах преобразователя (см. рис. 7-2) и, следовательно, частотная погрешность начнут проявляться только на частотах, при которых заметно падает напряжение на сопротивлении ввода г = |/г2 ф- со2/?.
Сопротивление г незначительно, и им обычно можно пренебречь. Поэтому частотная погрешность может быть оценена формулой = = уууу = ®2LC. Обозначив 1/J/7.C = ю0, выражение для погрешности приведем к виду = (а>/й0)2 = (/7/0)2. Частота /0 лежит обычно в пределах 30—100 МГц. Соответственно при у = 1% верхняя граница частотного диапазона ЭС преобразователей составляет 3—1 /МГц, и эти преобразователи используются в вольтметрах с широким частотным диапазоном.
Во-вторых, ЭС преобразователь, обладая высоким входным сопротивлением, потребляет исключительно малую мощность: на постоянном токе его входное сопротивление /?вх = 10”-т-10й Ом, на переменном токе ZBX ~ 1/(/йС). Если учесть, что входная емкость преобразователя не превышает 10—100 пФ, его сопротивление даже при частоте / — 1 МГц составляет не менее 10—1 кОм.
Наконец, в уравнение преобразования напряжения в силу или вращающий момент входят только стабильные величины — диэлектрическая проницаемость воздуха е0 и геометрические размеры, по-
J36
этому принципиально ЭС преобразователь обладает очень высокой точностью. Эти ценные качества обусловили, несмотря на малость
создаваемых вращающих моментов, широкое применение электростатических вольтметров с пределами измерения 10 В — 100 кВ.
Схематическая конструкция механизма электростатического вольтметра С95 приведена на рис. 7-4. На стойке 2 укреплен на изоляционной колонке 11 неподвижный электрод 10, представляющий собой камеру из двух параллельных пластин. Между этими пластинами находится подвижный электрод 9. Подвижный электрод монтируется на оси 7, на этой же оси прикреплено зеркало 8. Подвижная часть крепится на двух растяжках 1. Растяжки кре
Рис. 7-4
пятся к амортизацион-
ным пружинам со втулками 5. На стойке укреплен поводок корректора 4, ограничитель смещения подвижной части 6 и магнит успокои-.теля 3.
Вращающий момент Л4вр = у Д2-у. Противодействующий мо-
мент 7Ипр = W, где W — удельный противодействующий момент растяжек. Таким образом, угол поворота подвижной части
U2 е0 dS a—2W~d~da‘
Шкала электростатических приборов принципиально нелинейна, линеаризации шкалы добиваются выбором специальной формы электродов. Для приборов с меняющейся площадью шкала будет близка к линейной, если удастся выбрать форму электродов так, что в рабочем диапазоне dS/da k/a.
Вследствие того что вращающие моменты электростатических измерительных механизмов очень малы, для всех конструкций характерен световой отсчет (стрелка в виде луча света) и крепление подвижной части на растяжках, причем одна из растяжек используется как токоподвод к подвижному электроду. В приборах применяются как
137
воздушные, так и магнитоиндукционные успокоители, хотя в отдель-
ных случаях достаточное успокоение создается уже самим подвиж
ным электродом при движении его в узком зазоре между неподвижными электродами. Очень большое внимание при конструировании уделяется стабильности размеров, которые определяют геометрические
параметры, входящие в выражение
для вращающего момента. Наконец, ЭС преобразователь должен быть защищен от внешних электрических полей, поэтому в электростатических приборах применяется либо специальный экран, либо металлический корпус.
Форма электродов, приведенная на рис. 7-4, используется в вольтметрах с пределами измерения до 1 кВ.
Совершенно особую конструкцию имеют ЭС преобразователи, к которым подается напряжение 10—100 кВ. Внешний вид такого прибора и схематическая конструкция механизма показаны на рис. 7-5.
Высоковольтный потенциальный электрод 1, размеры и форма которого рассчитываются из условий электрической прочности, закреплен на опорном изоляторе и находится на некотором расстоянии от второго электрода 2 (рис. 7-5, а). В электроде 2, который служит экраном, расположена подвижная часть и шкала измерительного механизма. Экран 2 электрически
Рис. 7-5 соединен с подвижным электро-
дом 3, закрепленным на растяжках 4 (рис. 7-5, б). В экране, в области электрода 3, сделаны окна, форма и размер которых определяют шкалу измерительного прибо-
ра, так как только через эти окна электростатическое поле электрода 1 проникает через экран 2 и взаимодействует с подвижным электродом 3, создавая вращающий момент.
Электрометры. Схематическая конструкция и эквивалентная схема электрометра, называемого бисквитным, показаны на рис. 7-6, а, б. ЭС преобразователь электрометра состоит из четырех попарно соединенных неподвижных электродов 2 и 3 и находящегося между ними подвижного электрода 1. Система электродов окружена экраном 4. Измеряемое напряжение Ux подключается между электродом 1
138
и экраном 4. Источники дополнительного напряжения подключаются к неподвижным электродам 2 и 3 и общей шине, соединенной с экраном. Емкостные связи между отдельными элементами системы электродов показаны на рис. 7-6, б. Энергия электрического поля такой системы определяется формулой
= 0,5 {[C14t/14 + Си (t/14 — С24) + С13 (Uu — C34)] Uи +
+ [С 11JJ24 + С21 — U14) + С-23 (С23 — С34)] С-24 4-
Ф [Сз4С34 4-С31 (С34 — Ci4) -}- С32 (С34 — С.24)] С34}.
Учитывая, что емкости между неподвижными электродами С23 и С32, а также между неподвижными электродами и корпусом С24
Рис. 7-6
и С34 остаются неизменными, вращающий момент можно выразить формулой
дС-^2 j 1 । дСъ да 24 ' да
дСм । дС13 \ „
~д^ + ~^ГГ^~
\ । дС12 J ™ | дС19 г Г2 1
Емкость между подвижным электродом и экраном С14 пренебрежимо мала, так как они разделены неподвижными электродами. Производные dC12/da и dCls/da противоположны по знаку, но равны . I дС,2 I I dC13 I ,z
по значению с погрешностью Д = — Ida ‘ ^читывая эти
обстоятельства, получим для случая t/24 = (— U3i ± бу) формулу
'И = 2 (/14С24 ± А (С14 + U24)2 ±
± 6^ (П24 4- С714) = Мо ± AM.
Из этой формулы видно, что а) электрометр может быть использован в качестве множительного преобразователя X и Y, если за-
139
дать Uu = ktY и U2i = k2X-, б) в электрометре можно обеспечить линейную зависимость между Л40 и Ux = Uu, если использовать вспомогательный источник с заданным напряжением Uo = UM', в) чувствительность электрометра к напряжению Ux можно повышать путем увеличения напряжения Uo, однако при этом при заданных несимметриях ’ Р~°и^ и Ux < UQ возра-
стает погрешность электрометра у = ДЛ1/Л40 = Uo(± m ± 2р) / (4(/л).
Электростатические обратные преобразователи. Принцип действия электростатического обратного преобразователя (ЭСОП) основан на
возникновении силы между электрически заряженными телами. Сила взаимодействия между двумя пластинами конденсатора (рис. 7-7) F = eSU2/ (26о), где U — напряжение между пластинами; 60 — зазор; S — площадь пластин; е — диэлектрическая проницаемость
среды.
ЭСОП нашли применение в приборах уравновешивания для измерения давления. Давление, создаваемое ЭСОП, составляет Р$ = — e,U2/ (26d). Отношение (7/б0 ограничено возможностью пробоя (см. § 7-1), соответственно ограничено и давление, создаваемое ЭСОП, максимальное значение давления Др = 100 Па.
Динамические конденсаторы, или емкостные вибрационные преобразователи, применяются при измерении мало меняющихся во вре-
мени малых токов или напряжений от источников с большим внутренним сопротивлением.
Схематическая конструкция динамического конденсатора мембранного типа' с электростатическим возбуждением приведена на рис. 7-8. Неподвиж-
ные электроды 1 и 2 укреплены на изоляторах 3. Мембрана 4 служит подвижным электродом. К электроду / через резистор подводится измеряемое напряжение U х. К электроду 2 подводится возбуждающее переменное напряжение U~ = Um sin со/, под действием которого между электродом 2 и мембраной 4 возникает электростатическая сила
г, dW3 _ 3(CJ2/2) _ иг дС t “ дб — дб ~~ 2 дб
= 1 Um sin2 at = 1 Um (1 - cos 2(0/).
Эта сила вызывает постоянное смещение мембраны и ее вибрацию с частотой 2(0. Таким образом, зазор между электродом 1 и мембраной 4 также изменяется с частотой 2 со и может быть определен формулой = б01 + дт cos 2со/, где 601 — средний зазор. Емкость конденсатора, образованного электродом 1 и мембраной 4, меняется как Ci—cos2(o//6 При включении конденсатора в режиме заданного заряда (см. рис. 7-1), т. е. при обеспечении условия
140
CoiRiRJ (Ri + RH)^> l/(2w), напряжение на обкладках конденсатора меняется как UCi — UxCni/C\ = Ux (1 + 6m cos 2w//601).
Конденсатор C3 отфильтровывает постоянную составляющую, и выходное напряжение динамического конденсатора пропорционально Ux и изменяется с частотой 2со, UBbSX = kUx cos 2wt
Коэффициент преобразования k — Um B№JUX составляет обычно не более 0,1—0,2.
Мощность, потребляемая динамическим конденсатором от источника измеряемого напряжения, определяется сопротивлением изо
ляции конденсатора, т. е. 7?ут. В качестве изоляторов применяется алундовая и цель-зеиновая керамика. Сопротивление /?ут составляет 1014— 1017 Ом.
В качестве систем возбуждения используются системы электромагнитного, электростатического и пьезоэлектрического типов. Технологически трудно исключить все паразитные связи и добиться полной развязки между электрической цепью системы возбуждения и выходной цепью преобразователя. Поэтому в выходном напряжении преобразователя присутствует помеха, частота которой равна частоте напряжения возбуждения. Для уменьшения этой помехи путем
Рис. 7-8 фильтрации необхо-
димо, чтобы частоты выходного сигнала и возбуждающего напря-
жения не совпадали. В рассматриваемом преобразователе, например,
эти частоты отличаются в два раза.
Наиболее существенной погрешностью преобразователя является дрейф напряжения между электродами конденсатора, называемый дрейфом нуля. На величину дрейфа наибольшее влияние оказывает нестабильность контактной разности потенциалов (см. § 7-1), которая даже при применении всех мер стабилизации составляет 50—200 мкВ в сутки.
В качестве примера приведем технические характеристики преобразователя типа ДРК-3: Со = (15± 5) пФ; /?ут = Юм Ом; k = 0,2; f„ = 285 Гц; Рвоз6 = = 15 мВт; (7Др (/) = 250 мкВ/сут; (0) = 40 мкВ/К.
, 7-3. ЕМКОСТНЫЕ ПРЕОБРАЗОВАТЕЛИ
Конструкции емкостных преобразователей. На рис. 7-9, а показано устройство емкостного преобразователя для измерения уровня. Преобразователь состоит из двух параллельно соединенных конденсаторов: конденсатор Сх образован частью электродов и диэлектриком — жидкостью, уровень которой измеряется; конденсатор Со — остальной частью электродов и диэлектриком — воздухом. Емкость 2jt
преобразователя С — Сх ф- Со = [/еф-(/0 — /)е0] . , где /0 — пол-
пая длина цилиндра; I — длина, на которую цилиндр заполнен
141
жидкостью; е — диэлектрическая проницаемость жидкости; Rj и R2 — радиусы внешнего и внутреннего цилиндров.
На рис. 7-9, б изображен емкостный зонд для измерения уровня проводящей жидкости. Емкостный зонд был предложен для измерения высоты волн и представляет собой остеклованный электрод 1. Электродом 2 служит проводящая жидкость, которая присоединяется к измерительной цепи при помощи электрода 3.
2л8
Емкость С = / 1п у, где I — глубина погружения; е — диэлектрическая проницаемость стекла; Rt и R2 — внешний и внутрен-
Рис. 7-9
ний радиусы стеклянного покрытия. Вместо специального электрода может быть использован кусок провода, покрытого изоляцией, не смачиваемой жидкостью.
На рис. 7-9, в показан принцип устройства емкостного преобразователя для измерения толщины ленты из диэлектрика. Испытуемая - лента 1 протягивается с помощью роликов 2 между обкладками 3 конденсатора. Если длину зазора между обкладками конденсатора обозначить б, площадь обкладок S, толщину ленты бл и ее диэлектрическую проницаемость ел, то емкость С можно выразить какС =
_______S
(6 — 6;:) /Ео+бл/Вл
На рис. 7-9, г показан принцип устройства емкостных преобразователей с переменной площадью пластин, используемых для измерения угла поворота вала. Пластина 1, жестко скрепленная с валом, перемещается относительно пластины 2 так, что длина зазора между ними сохраняется неизменной. Достоинством емкостных преобразо-142
вателей с переменной площадью пластин является возможность соответствующим выбором формы подвижной 1 и неподвижной 2 пластин получить заданную функциональную зависимость между изменением емкости и входным угловым или линейным перемещением. Преобразователи с переменной площадью применяются для измерения перемещений, больших 1 мм.
Для измерения малых перемещений (10'® — 10'3 м) получили применение преобразователи с переменным зазором. Принцип устройства подобного дифференциального преобразо-вателя изображен на рис. 7-9, д. Обкладка 2 за-креплена на пружинах и перемещается поступа-тельно под воздействием измеряемой силы F. Об- ] Я
кладки 1 и 3 неподвижны. Емкость между обклад- uk д ками 2 и 3 увеличивается, а между обкладками 1 и З д/ 2 — уменьшается. И
На рис. 7-10 показана конструкция одной по- AgOs) Д ловины дифференциального емкостного преобра- 7 \\( \\4 зователя, используемого в качестве преобразова- й
теля неравновесия в датчике уравновешивания.
Подвижная пластина 1 крепится к корпусу 2 на растяжках 3, жесткость которых при перемеще- р 7 10 нии в направлении оси X — X очень мала. При действии силы F подвижная пластина перемещается, и зазор между подвижной и неподвижной пластинами изменяется. Обе пласти
ны тщательно изолированы от корпуса специальными прокладками 4 и стеклянными «слезками» 5.
На рис. 7-11 представлена конструкция высокочувствительного емкостного датчика давления, предназначенного для работы в области низких температур. Основными узлами датчика являются корпус 1, выполненный совместно с мембраной 2, пробка 7, припаиваемая к корпусу через каналы 8 серебряным припоем, и фланец 3. Корпус и фланец изготовляются из берилловой бронзы, пробка — из красной меди. Измеряемое давление «подается» через капилляр 9 в пробке в надмембранную камеру. К выступу мембраны через изолирующую пленку прикреплена подвижная пластина 4 емкостного преобразователя. Неподвижная пластина 5 загоняется во фланец в виде конусной пробки, обернутой изолирующей пленкой. Таким образом, обе пла-яосительно корпуса. Сопрягающиеся плоско
сти корпуса и фланца обрабатываются совместно с электродами емкостного преобразователя после закрепления электродов на мембране и во фланце. Благодаря такой обработке зазор между электродами обеспечивается прокладкой 6, имеющей толщину 15—20 мкм. Диаметр электродов около 10 мм. Изменение зазора при номинальном давлении Д6 = 8 мкм. Емкость преобразователя Со = 30 пФ.
143
. Как видно из приведенных примеров, область применения емкостных преобразователей весьма разнообразна, однако наиболее широко они используются для измерения малых перемещений и величин, легко преобразуемых в перемещение, например давлений.
При современной технологии изготовления датчиков начальный зазор может быть доведен до 5—10 мкм и порог чувствительности по перемещению оценивается значениями порядка 10'14 м. Огромным достоинством емкостного элемента является также принципиальное отсутствие шумов в отличие от резистивных и индуктивных элементов и отсутствие самонагрева. Все это приводит к тому, что в настоящее время в качестве наиболее высокочувствительных преобразователей в научных исследованиях используются емкостные преобразователи. Наблюдается также тенденция к применению емкостных преобразователей для всех измерений, проводимых в области сверхнизких температур.
7-4. ИЗМЕРИТЕЛЬНЫЕ ЦЕПИ ЕМКОСТНЫХ ПРЕОБРАЗОВАТЕЛЕЙ
Емкости большинства преобразователей составляют 10—100 пФ, и поэтому даже при относительно высоких частотах напряжения питания (105—107 Гц) их выходные сопротивления велики и равны Хс = = 1/ (wC) = 103 -г 107 Ом. Выходные мощности емкостных преобразователей малы (см. § 3-3), и в измерительных цепях необходимо применение усилителей. Допустимые значения напряжения питания емкостных преобразователей достаточно велики (см. § 7-1), и напряжение питания, как правило, ограничивается не возможностями преобразователя, а условиями реализации измерительной цепи.
Основной трудностью построения измерительных цепей с емкостными преобразователями является защита их от наводок (см. § 3-5). Для этих целей как сами преобразователи, так и все соединительные линии тщательно экранируются. Однако экранированный провод имеет емкость Сжл между жилой и экраном (С 50 пФ/м), которая при неудачном выборе точки присоединения экрана может оказаться включенной параллельно емкости преобразователя (см., например, рис. 7-2). При этом падает чувствительность преобразователя, так как относительное изменение емкости уменьшается на величину х = АС0/С0 — АС0/ (Со + Сж.э), и появляется весьма существенная по значению погрешность, вызываемая нестабильностью емкости Сж.э, поскольку любые изменения этой емкости воспринимаются как изменение рабочей емкости АС0. Поэтому при построении измерительной цепи с емкостными преобразователями в первую очередь обращается внимание на включение так называемых паразитных емкостей.
Кроме этого, следует обращать внимание на линейность зависимости выходного параметра измерительной цепи от измеряемой величины (см. § 3-3), имея в виду, что емкостные преобразователи являются преобразователями высокоомными, а измеряемая величина может быть связана линейной зависимостью как с сопротивлением преобразователя (при изменении зазора б), так и с его проводимостью 144
(при изменении площади S или диэлектрической проницаемости е).
Для работы с емкостными преобразователями применяют измерительные цепи, в основу которых положены различные структуры— делители напряжения, измерительные мосты, емкостно-диодные цепи, резонансные контуры.
Очень часто в состав современных измерительных цепей включают также операционные усилители (ОУ).
На рис. 7-12 показана схема цепи с ОУ, построенная по принципу делителя напряжения. В данном случае (/вых = и~С^Сг. Как видим, с помощью такой цепи удобно преобразовывать в напряжение изменение зазора между обкладками конденсатора Са = — или изменение площади конденсатора Ci (ивых = U~ .
В обоих случаях зависимость выходного напряжения от измеряемой величины будет линейной.
В схеме 7-12 емкости экранированных проводов Сэ1, С92, Сэ3 практически не влияют на работу измерительного устройства. Это объясняется тем, что емкости СЭ1 и Сэ3 включены параллельно источнику сигнала U~ и ОУ, имеющим низкие выходные сопротивления. Емкость же Сэ2 включена параллельно входам ОУ, и напряжение на ней близко к нулю.
Дифференциальные емкостные преобразователи включаются преимущественно в мостовые измерительные цепи. На рис. 7-13 даны примеры таких цепей, содержащих мосты с индуктивно-связанными плечами.
Выходной сигнал в цепи (рис. 7-13, а) подан на вход повторителя
напряжения, выполненного на ОУ. Если принять, что напряжение на каждой половине вторичной обмотки трансформатора равно U то выходное напряжение равно UBblx = U~ (Ct — С2) / (С\ + С2).
Емкости СЭ1 и Сэ2 экранированных проводов, соединяющих датчик с трансформатором, включены параллельно полуобмоткам трансформаторов и роли не играют. Для уменьшения влияния емкости экранированного провода, соединяющего датчик с усилителем, применяется схема эквипотенциальной защиты (см. § 3-5). Для этой цели используется провод с двойным экраном. Наружный экран присоединяется к земле, а внутренний — к выходу повторителя напряжения. Токе центрального проводника на внутренний экран отсутствует, так как равны между собой напряжения в точках а и б относительно земли. Ток между внутренним и внешним экраном не сказывается на работе устройства, поскольку нагружает низкоомный выход повторителя напряжения.
Необходимость в двух экранах отпадает при подсоединении выхода моста к инвертирующему входу ОУ (рис. 7-13, б). Поскольку
: 145
потенциал на этом входе усилителя весьма близок к нулю, то ток между проводом, подсоединенным к этому входу, и окружающим его экраном будет практически равен нулю. Для цепи (рис. 7-13, б) верно соотношение ДВЬ1Х = (С\ — С2) /С3.
На рис. 7-13, в показана модификация мостовой цепи при емкостном токосъеме с подвижной пластины. Экраны и паразитные емкости на схеме рис. 7-13, в и на последующих схемах не показаны с целью упрощения рисунков.
Обозначим емкости между неподвижными и подвижной пластинами индексом, соответствующим номеру неподвижной пластины.
Рис. 7-13
В плечо моста входят емкости Сг + С5 и С2 + С6. Через емкость С3 + С4 подключена вершина измерительной диагонали моста к выходу ОУ. В результате выходное напряжение £/вь„ определится формулой
t] tj _______(61 + С5) ~ (С2 + С») 634-С4
вых Cj + Ca + Cg + Ci + Cj-pCe Со с
При перемещении пластины в направлении, указанном стрелкой, емкость С4 + С5 увеличивается, емкость С2 4- С6 уменьшается, а емкость токосъема С3 + С4 остается почти неизменной, так как емкость С3 увеличивается, а емкость С4 уменьшается.
В схеме, приведенной на рис. 7-13, г, показано, как с помощью охранных электродов улучшить характеристики емкостных преобразователей. Здесь емкостные преобразователи образованы пластинами 1, 4 и 2, 6. Пластины же 3, 5, 7 служат охранными электродами. Поскольку пластины 4 и 6 присоединены к инвентирующему входу ОУ, то напряжение на них весьма близко к нулю. Поэтому поле между пластинами 1 и 3, 4, 5, а также между пластинами 2 и 5, 6, 7 будет практически однородным. Благодаря этому исключается влияние краевого эффекта на работу преобразователей (краевые
146
искажения поля теперь будут наблюдаться между пластинами 1, 2 и 3, 5, 7).
Общим недостатком схем, приведенных на рис. 7-12 и 7-13, является то, что они могут быть рекомендованы только для датчиков, у которых все пластины изолированы от корпуса, что иногда бывает трудно реализовать конструктивно. При заземлении одной из пластин (обычно общей подвижной пластины) желательно элементы измерительной цепи располагать в одном корпусе с датчиком, например так, как показано на рис. 7-14, а. Тогда провода, идущие к вер-
Рис. 7-14
шинам а и б, могут быть без экранов, а емкость Сж.э провода, подходящего к вершине в, подключается параллельно источнику питания. В аналогичной цепи (рис. 7-14, б) использован недифференциальный усилитель, что стало возможным благодаря предварительному выпрямлению с разными знаками переменных напряжений, присутствующих на вершинах выходной диагонали моста.
На рис. 7-15 представлена емкостно-диодная измерительная цепь дифференциального датчика с заземленной пластиной. Емкости датчика и С2 подсоединены к источнику переменного напряжения с помощью четырех диодов и двух дополнительных конденсаторов С3. В каждом полупериоде переменного напряжения открывается соответствующая пара диодов (ДУ, Д4 или Д2, ДЗ). При этом каждый из конденсаторов С3 соединяется последовательно то с емкостью Сь то с емкостью С2. При неравенстве емкостей С± и С2 токи через конденсаторы С3, текущие в положительном и отрицательном направлениях, будут не равны между собой. Вследствие этого на конденса-
147
торах С3 появится постоянное напряжение, которое и является выходным. Если пренебречь падениями напряжения на диодах, то значение (/вьк определится приближенным соотношением
Ci — С2
С, + С2 + 2С, С2/С3
Нестабильность выходного напряжения определяется неидентич-ностью падения напряжения на диодах, поэтому диоды должны тща-
Рпс. 7-15
тельно подбираться. Чтобы избежать шунтирования емкостей датчика паразитными емкостями, диодная сборка помещается в корпусе датчика. Неравенство паразитных емкостей проводов, подходящих к точкам а и б, приводит к изменению переменной составляющей напряжения на выходе; на постоянную составляющую напряжения эти емкости не влияют.
Рис. 7-16
Возможный вариант цепи (рис. 7-15, а), предназначенный для телеизмерений, показан на рис. 7-15, б. Здесь по одному коаксиальному кабелю передается переменное напряжение от источника на датчик и постоянное напряжение [/вых — с датчика. Внутри датчика монтируются четыре диода, конденсатор С3 и резистор Показанные на схеме (рис. 7-15, б) значения параметров элементов рассчитаны на частоту питающего напряжения, примерно равную 1 МГц.
На рис. 7-16 приведены измерительные цепи с резонансными контурами. Цепи питаются от источников со стабильной частотой ю0. 148
При изменении емкости С преобразователя (рис. 7-16, а) сопротивление контура изменяется по резонансной кривой (рис. 7-16, б) и при \/]^LC = w0 достигает максимума.
На склонах резонансной кривой может быть выбран участок, более или менее приближающийся к линейному. Пренебрегая сопротивлением R2 по сравнению с сопротивлениями <dL и Ri и полагая С = Со± АС, соо = klV~ 1 l(LC), Q = <i>0L/Ri и p = yrL/C, напряжение на контуре можно выразить соотношением
Uk = _________1_________
бпит Vi + 1/Q41+^(1 Ч-ДС/Со)]®'
Зависимости Ск/Спит представлены на рис. 7-16, б.
ГЛАВА ВОСЬМАЯ
ЭЛЕКТРОМАГНИТНЫЕ ПРЕОБРАЗОВАТЕЛИ
8-1. ПРИНЦИП действия и область применения ЭЛЕКТРОМАГНИТНЫХ ПРЕОБРАЗОВАТЕЛЕЙ
Электромагнитный (ЭМ) преобразователь представляет собой один или несколько контуров, находящихся в магнитном поле, которое может быть создано как токами, протекающими по контурам, так и внешним источником.
Одноконтурный ЭМ преобразователь характеризуется током I через контур, потокосцеплением У = Ы, противо-ЭДС е = —dT /dt, энергией электромагнитного поля Й7М = ЧЦ/2 = Lizl2, индуктивностью L. Выходной величиной одноконтурного ЭМ преобразователя может быть: индуктивность L, электромагнитная сила и индуктируемая в контуре ЭДС еинл.
Индуктивность L — wz (Re Zm/Zm), где w — число витков контура; Re Z№ и zM — действительная часть и модуль полного магнитного сопротивления ZM = ф 61M/(pSM) пути 1„, по которому замыкается поток; Зм — поперечное сечение потока; ц — магнитная проницаемость среды, по которой замыкается поток. Индуктивность преобразователя увеличивается, если в магнитное поле контура вводится ферромагнитный материал.
ЭМ преобразователь с ферромагнитным сердечником показан на рис. 8-1, а, изменение его индуктивности происходит при изменении положения сердечника. Таким образом, входной величиной преобразователя является перемещение. Такой преобразователь называется индуктивным. Изменение индуктивности происходит также при изменении магнитной •проницаемости сердечника. Магнитная проницаемость ферромагнитных материалов зависит от значения
149
напряженности магнитного поля в материале. Соответственно индуктивность L зависит от тока, текущего через преобразователь и создающего собственное магнитное поле, и от параметров внешнего магнитного поля. Преобразователи, принцип действия которых основан на использовании зависимости L = f (В), называются магнитомодуляционными. При деформации ферромагнетиков также изменяете? их магнитная проницаемость. Этот эффект, называемый магнитоупругим, используется в преобразователях для измерения сил и давлений. Принцип действия магнитоупругого преобразователя показан на рис. 8-1, б.
°) S)
"'С , г
Рис. 8-1
Электромагнитная сила действует на контур с током, находящийся во внешнем магнитном поле, стремясь сместить или развернуть его так, чтобы суммарная индукция магнитного поля была максимальной. Эта сила пропорциональна току i и индукции В. Если ток через контур поддерживать постоянным i — const, то по значению электромагнитной силы можно определить индукцию магнитного поля В.
Такие преобразователи иногда применяются для измерения магнитной индукции. Если, используя постоянный магнит, создать магнитное поле с постоянной индукцией В = const, то преобразователь может быть применен для преобразования тока в силу и измерения тока (рис. 8-1, в). Такие преобразователи называются магнитоэлектрическими и широко используются в измерительных механизмах электромеханических приборов.
Ферромагнитный сердечник втягивается в контур с током так, чтобы индуктивность контура была максимальной (рис. 8-1, г). В этом
150
случае электромагнитная сила пропорциональна квадрату тока. Подобные преобразователи используются в электромагнитных измерительных механизмах электромеханических приборов.
Индуктированная ЭД,С еинд возникает в контуре, находящемся во внешнем магнитном поле, при изменении потокосцепления. Для преобразователя, взаимосвязь которого с внешним магнитным полем характеризуется некоторым обобщенным параметром k при однородном внешнем магнитном поле с индукцией В, потокосцепление ’F = = kB и индуктируемая в контуре ЭДС еиия = —dW/dt = — (kdBtdt + *Т Bdk/dt). При неподвижном контуре (dkjdt = 0) ЭДС будет индуктироваться только в переменном магнитном поле. Для контура без сердечника при В = Вт sin at ЭДС е — wSaBm cos at, где w — число витков и S — площадь контура. Преобразователь, представляющий собой неподвижную катушку (рис. 8-1, д), может быть использован
Рис. 8-2
для измерения переменной магнитной индукции. В постоянном магнитном поле ЭДС индуктируется только в движущемся контуре, и для измерения индукции В контуру задают принудительное движение, например вращение с постоянной скоростью, как показано на рис. 8-1, е. Можно использовать преобразователь и для решения обратной задачи — определения по значению выходной ЭДС скорости при движении контура в поле с известной индукцией BN. Преобразователи, выходной величиной которых является ЭДС еиид, называются индукционными.
ЭМ преобразователи строятся таким образом, чтобы выделить зависимость между входной величиной и одной из перечисленных выходных величин, однако учитывать в большинстве преобразователей приходится проявление всех взаимосвязей. Так, на сердечник преобразователя (рис. 8-1, а) действует электромагнитная сила, которая может вызвать дополнительное перемещение сердечника, т. е. помеху, искажающую входную величину. На контур, в котором наводится ЭДС еиид (рис. 8-1, д), если он замкйут на конечное сопротивление и по нему протекает ток, действует сила, стремящаяся определенным образом ориентировать его относительно поля. Поворот
.151
контура под действием этой силы вызовет изменение индуктируемой ЭДС. Взаимосвязь электрической и механической сторон в ЭМ пре--образователе подробно рассмотрена в § 2-4.
Эквивалентная схема одноконтурного ЭМ преобразователя. Преобразователь с контуром в виде обмотки, содержащей w витков, показан на рис. 8-2, а. Основной поток Фх контура пронизывает всю обмотку и сцепляется со всеми витками. Однако некоторая частй потока Фо, называемая потоком рассеяния, замыкается, не пронизывая ряд витков. Соответственно полная индуктивность контура имеет две составляющие: основную индуктивность L = uP/Z,, и индуктивность рассеяния Грас = w!Z'„, где ZM и Z'„., — магнитные сопротивления основного потока и потока рассеяния. Если в обмотку преобразователя введем ферромагнитный сердечник, в котором концентрируется магнитный поток, то доля потоков рассеяния в общем потоке уменьшается и отношение L/Lpac увеличивается. Наименьшую индуктивность рассеяния имеет обмотка, выполненная на тороидальном сердечнике.
Однако при введении ферромагнетика появляются зависящие от частоты потери мощности на перемагничивание магнитопровода. Эти потери учитываются сопротивлением Дпот, включенным параллельно индуктивности L. Кроме того, в эквивалентной схеме должны быть учтены также межвитковые емкости; в области частот до 103— 104 Гц они учитываются в виде сосредоточенной емкости.
Эквивалентная схема преобразователя, в которой учтены сопротивление обмотки постоянному току /?п, основная индуктивность L, индуктивность рассеяния Лрас, емкость С и сопротивление потерь 2?П0Т) приведена на рис. 8-2, б. В ней учтены также источники ЭДС еинд и Um, которые характерны для ЭМ преобразователей. ЭДС еипд индуктируется в контуре, находящемся во внешнем магнитном поле. Эта ЭДС может быть информативной, как в индукционном преобразователе, но может являться и помехой. Для того чтобы уменьшить ту составляющую винд, которая является помехой, преобразователи экранируются от внешнего магнитного поля, соединительные провода подводятся таким образом, чтобы не образовывать дополнительных контуров (см. рис. 8-1, д). Преобразователи, находящиеся в магнитных полях, защищаются от механических помех (вибрации, акустические воздействия), вызывающих колебания частей преобразователя и наведение ЭДС.
Уменьшить составляющую помехи е„нд можно, применяя в преобразователях симметричные магнитные цепи и симметричные обмотки. В качестве примера на рис. 8-2, в показана магнитная цепь в виде тороидального сердечника. При равномерной обмотке для каждого витка есть симметрично расположенный по отношению к магнитному потоку, пронизывающему тор, парный виток (например, витки б и в или а и г). ЭДС, наводимые в «парных» витках, компенсируют друг друга, и суммарная ЭДС е'аил при идеальной симметрии равна нулю.
В высокочувствительных ЭМ преобразователях с ферромагнитным сердечником иногда приходится считаться с напряжением шума, 152
обусловленным в области средних частот главным образом эффектом Баркгаузена, т. е. импульсами ЭДС, вызываемыми скачкообразными смещениями доменных границ при перемагничивании ферромагнетика. Эффект Баркгаузена используется также при построении ряда преобразователей, описанных в § 8-12. Известно, что ферромагнетики состоят из большого числа элементарных областей (доменов), объем которых для разных типов ферромагнетиков составляет 10~3 — 10"6 мм3. Векторы намагниченности доменов ориентированы таким образом, что при отсутствии внешнего магнитного поля намагниченность образца в целом равна нулю. При наложении внешнего магнитного поля элементарные области перемагничиваются. ” скачками, при этом
переориентация доменов может происходить в витках обмотки индуктируются импульсы ЭДС е = — ДФ/т, где ДФ — приращение магнитного потока, вызванное скачком Баркгаузена; т — длительность скачка. Длительность скачков Баркгаузенасоставляет для разных материалов 10~3—1СГ7 с.
На рис. 8-3, а показан гистерезисный цикл со скачками Баркгаузена (масштаб скач-
Рис.
ков сильно увеличен, и они характеризуют процесс лишь с качественной стороны), на рис. 8-3, б изображена кривая магнитного потока Ф = / (/) и кривая ЭДС е = ср (/). Ступеньки на кривой намагничивания неодинаковы по величине и меняют свое положение от цикла к циклу перемагничивания, магнитный шум является случайным процессом. Верхняя граница распределения /2 определяется длительностью скачков Баркгаузена и составляет 102— 105 Гц, в ферритах f2 может достигать 107 Гц. Нижняя граница Д зависит от частоты перемагничивания f0 и составляет не менее Д = — %fo-
ЭДС, вызываемая магнитным шумом, включается в эквивалентную схему ЭМ преобразователя (рис. 8-2, б). Однако, как правило, ЭДС Um оказывается значительно меньше других помех, в частности е„нд; поэтому с наличием Ulu приходится считаться только в высокочувствительных преобразователях магнитных величин (феррозонды), в магнитных и параметрических усилителях.
Двухконтурный ЭМ преобразователь схематично показан на рис. 8-4. Преобразователи, содержащие два или несколько контуров, называют трансформаторными или взаимоиндуктивными. Если пропустить переменный ток через контур 1, то в контуре 2 будет индуктироваться ЭДС, зависящая от угла а между плоскостями контуров
153
и максимальная при совпадении этих плоскостей (рис. 8-4, а). Поток, с которым сцепляется контур 2 при прохождении тока по контуру 1, равен Ф2 = A412ilt где Л412 = wrw2 Re ZJz^ — взаимоин-дуктивность контуров; и щ2 — числа витков контуров; ZM — магнитное сопротивление пути, по которому замыкается поток между контурами.
Рис. 8-4
При пропускании токов и i2 через оба контура между ними возникает механический электромагнитный момент М, стремящийся развернуть их так, чтобы магнитное поле было максимальным, т. е. чтобы плоскости Контуров совпали (рис. 8-4, б). При этом если токи и i2 переменные, то в образовании момента могут участвовать не только токи, создаваемые внешними источниками, но и токи t12
и t21, наводимые в каждом из контуров потоком соседнего контура.
При чисто активном сопротивлении контура момент равен нулю,
так как между наводящим
дит переменный ток,
потоком и наведенным током фазовый сдвиг составляет 90°. Если же контур замкнуть на индуктивное или емкостное сопротивление, то развиваемый момент будет максимальным и контур будет стремиться развернуться так, как показано на рис. 8-4, виг.
Для того чтобы усилить электромагнитное поле и сконцентрировать его в определенной области, применяют ферромагнитные магнитопроводы. Пример двухконтурного преобразователя с ферромагнитным сердечником показан на
рис. 8-5. Если через обмотку 1 прохо-то в рамке 2 наводится ЭДС, зависящая
от угла поворота рамки и максимальная, когда плоскость рамки перпендикулярна линии а — а. Если ток пропустить и через рамку 2, то на рамку будет воздействовать момент Л4фд, стремящийся повернуть ее так, чтобы магнитное поле рамки совпало с магнитным полем обмотки. На короткозамкнутую рамку также воздействует момент Л4ИНД, вызываемый индуктированным в рамке током. Кроме того, между обмотками и ферромагнитным магнитопроводом действует электро
154
магнитная сила или момент, стремящиеся расположить их так, чтобы магнитный поток, создаваемый соответствующей обмоткой, был максимальным. В примере на рис. 8-5 обмотка 1 оптимальным образом расположена относительно магнитопровода, поэтому между ней и магнитопроводом такая сила не возникает; рамка 2 должна быть развернута так, чтобы ее плоскость была перпендикулярна линии а — а. Однако момент Л4ЭМ, направление которого показано на рис. 8-5, очень мал по значению, так как изменение магнитного поля рамки 2 мало зависит от ее поворота относительно магнитопровода.
Энергия электромагнитного поля определяется формулой п
«?.=4 2,Л-4 = 1
Учитывая, как показано выше, что в преобразователе могут действовать, кроме потоков самоиндукции +/. = цЬр, потоки взаимоиндукции 'P'vi = ipMkp и потоки внешнего поля +Авнеш, а токи в каждом из контуров, кроме составляющей тока от внешнего источника i/0, могут содержать еще и ток ikV, наведенный потоком выражение для энергии первого контура можно представить состоящим из нескольких членов:
Л п п
+ 1 + У +42 k = 2 р = 2
т =2
Электромагнитная сила, действующая на первый контур, в соответствии с выражением энергии может иметь четыре составляющие /мэ, Дм, /эд и /ияд, называемые соответственно магнитоэлектрической, электромагнитной, электродинамической и индукционной:
f 1 • дЧ'внешн . f 1 уз ^L] .
/»— 2 11 dg > /эм — 2 Ч dg > г __ дМ12 г .__ 1 . &Чгт
/эд —hl2 dg , /инд— 2 dg •
Характер изменения соответствующих сил во времени при синусоидальном входном токе показан на рис. 8-6, а — д. Из рисунка видно, что при постоянном потоке Твнешн сила /мэ пропорциональна мгновенному току, сила /эм имеет постоянную составляющую, пропорциональную квадрату действующего тока, Рэм = у/2-^- и переменную составляющую, являющуюся второй гармоникой. Сила /эд имеет постоянную составляющую Г9Д = 7i/2cos , про-
порциональную произведению токов и косинусу угла между их векторами, и переменную составляющую, также зависящую от угла сдвига между токами. На рис. 8-6, г показан характер силы /зд, если токи имеют разную частоту.
Характер силы /инд зависит от сдвига между током в контуре и взаимодействующим с ним потоком Чт,и. Сила /инд также имеет
155
постоянную и переменную составляющие, особенностью которых является зависимость от частоты потока Тр, наводящего ток в контуре; '
л . 1
так как чем выше частота, тем больше ток г,® — 3. .
’ р dt Zj
Область применения электромагнитных преобразователей. В соответствии с принципом действия и исходными уравнениями электромагнитные преобразователи могут быть подразделены на следующий1 большие группы:
Рис. 8-6
1. Преобразователи масштаба тока и напряжения (измерительные трансформаторы тока и напряжения и индуктивные делители . напряжения).
2. Электромеханические преобразователи электрического тока в электромагнитную силу. Эти преобразователи используются в электромеханических приборах: амперметрах, вольтметрах, ваттметрах, частотометрах, фазометрах и в качестве обратных преобразователей датчиков уравновешивающего преобразования.
3. Индукционные преобразователи, основанные на законе электромагнитной индукции е = —dx¥ldt и используемые для измерения 156
индукции постоянного и переменного магнитных полей, а также скорости.
4. Индуктивные и взаимоиндуктивные преобразователи для измерения неэлектрических величин, влияющих на изменение положения отдельных частей преобразователя.
, 5. Магнитоулругие преобразователи, в которых используется зависимость магнитной проницаемости ферромагнитных материалов от механических напряжений в материале. Применяются для измерения сил и давлений.
6. Магнитомодуляционные преобразователи, в которых используются нелинейные свойства магнитной цепи.
7. Преобразователи, использующие эффект Баркгаузена. Выходной величиной этих преобразователей является ЭДС магнитного шума.
8-2. ТЕОРЕТИЧЕСКИЕ ОСНОВЫ РАСЧЕТА ЭЛЕКТРОМАГНИТНЫХ ПРЕОБРАЗОВАТЕЛЕЙ
Расчет преобразователя складывается из определения его полного магнитного сопротивления и последующего вычисления его электрических параметров (L, М или £).
Рис. 8-7
На рис. 8-7, а изображена магнитная цель электромагнитного преобразователя с обмоткой W1, число витков которой равно wx. Полное сопротивление обмотки W1, пренебрегая утечками магнитного потока, можно записать в виде
Z = Ко -j- /ф -=- = -j- /И у-- Гп~ ~
- Ro + (Яв + + XI + (R6 + RH)2 - R’KB +
где /?0 — сопротивление обмотки постоянному току; ZM Fe — магнитное сопротивление ферромагнитной части магнитной цепи, которое при работе преобразователя на переменном токе следует считать комплексным: ZM Fe = Дм + }Х„ отражает потери в стали на гистерезис и вихревые токи); Де = 26/ (p0S) — сопротивление
157
воздушного зазора; ро = 4п-1О~7 Гн/м— магнитная проницаемость воздуха; 6 и S — длина и площадь зазора.
Расчет магнитной цепи электромагнитного преобразователя с учетом сопротивления утечек производится на основе эквивалентной схемы магнитной цепи (рис. 8-7, б). Для упрощения расчета в боль
шинстве случаев можно предположить сосредоточенными комплексные магнитные сопротивления отдельных участков стальной цепи Zj — Z4, магнитные сопротивления воздушных зазоров Де, и Де, и проводимости путей утечек Уп и У22.
Расчет сопротивления каждого из стальных участков зависит
от значения индукции в материале, определяющего значение ц (рис. 8-8), и от степени проявления поверхностного эффекта в мате
риале.
Поверхностный эффект необходимо учитывать, если толщина листа или сплошного магнитопровода а > 2г0.05, где г0,05 — глу-
бина проникновения электромагнитной волны в материал (т. е. глубина затухания ее на 95%); г0,05 уменьшается с увеличением частоты
как z0,05 = й/'Ко). Для стали, например, при частоте 50 Гц г0>05 = 1<-2 мм.
В постоянном магнитном поле магнитное сопротивление каждого участка рассчитывается как Дм,- = где Ц, р,- и S; — дли-
на, магнитная проницаемость и площадь поперечного сечения i-го участка.
В переменном магнитном поле при отсутствии или слабом проявлении поверхностного эффекта (когда напряженность поля уменьшается по сечению от периферии к
центру, но потоком заполнено еще все сечение стали) активная и реактивная Xwi составляющие сопротивления каждого участка це-
пи рассчитываются по формулам:
Дмг = /;/(цА); Хмг = Рст/(о)Ф!),
где Фг — действующий поток; Р„ — мощность потерь на гистерезис и вихревые токи.
Значения мощности потерь для различных марок электротехнической листовой стали, которые наиболее часто употребляются в измерительных преобразователях, приведены в ГОСТ 21427.0—75 — ГОСТ 21427.3 —75 «Сталь электротехническая тонколистовая».
При сильном проявлении поверхностного эффекта магнитные сопротивления определяются не площадями S,-, а периметрами и{ сечений ферромагнитных участков:
R^i = pli/Ui< X№i = v.lilUi, где р и х — удельные поверхностные сопротивления, зависящие от свойств материала, частоты и линейной плотности магнитного потока Ф(/п;. На рис. "8-9 приведены экспериментальные кривые р и х в функции Ф/ц для мягкой стали при f = 50 Гц (образец испы-
158
тывался в режиме синусоидального потока). Кривыми можно пользоваться и при других частотах, принимая
P/ = Pso У//50 и xz = x60K//50; (Ф/«)/= (Ф/н)8в КбО//.
Расчет магнитных проводимостей зазоров и путей утечек через воздух (см. рис. 8-7) производится по обычным формулам, применяе-
мым при расчете магнитных цепей постоянного тока. Магнитное сопротивление зазора при поперечных размерах зазора, много больших его длины 6, определяется формулой /?г — 6/ (p0S), где п0 = 4л-10-7 Гн/м— магнитная проницаемость воздуха и S — площадь поперечного сечения зазора. Однако в большинстве случаев приходится учитывать, что параллельно проводимости зазора включаются проводимости утечек с боковых поверхностей и ребер полюсов. При этом относительная величина Gxyy/Ge и, следовательно, значение потока, идущего мимо рабочего зазора, будут тем больше, чем больше отношение 8/а, где а — сторона полюса. Равномерность распределения
Рис. 8-9
индукции в зазоре также зависит от
относительных размеров полюса и зазора. На рис. 8-10 приведена
кривая распределения индукции в зазоре под полюсами при усло-
вии, что все сечение полюса занято магнитным потоком, т. е. поверхностный эффект отсутствует. Из кривой видно, что у краев за-
Рис. 8-10
зора, на расстоянии от края, примерно равном 6, начинается спад индукции.
Кривая спада индукции меняет свою кривизну,точка перегиба соответствует координате (0,5а40,46). Чтобы обеспечить равномерность индукции в зазоре, рекомендуется выбирать а не менее (8-5-10)6,
При резко выраженном поверхностном эффекте магнитный поток вытесняется
по периферии полюса, индукция в зазоре распределяется неравномерно и при увеличении зазора сопротивление его растет незначительно, так как увеличение 6 влечет за собой распространение силовых линий к центральной части полюса, т. е. увеличение эффективной площади полюса, замед-
159
Лающее рост Поэтому при резко выраженном поверхностном эффекте рекомендуется сужать поперечные размеры торца полюса до величины а = 2г0,05.
Выбор МДС и числа витков катушки электромагнитного преобразователя. МДС преобразователя определяет ряд величин, от которых зависят такие важные характеристики преобразователей, как чувствительность, точность, потребление мощности и габариты. Рассмотрим это обстоятельство на приведенных выше примерах. На рис. 8-1,6 показан магнитоупругий преобразователь. Очевидно, что чем больше число витков обмотки и соответственно ее индуктивность L = wzIZM и чем больше ток через обмотку, тем больший при прочих равных условиях выходной сигнал (например, в виде изменения напряжения на преобразователе) сумеем получить с этого преобразователя. Однако увеличение числа витков приведет к увеличению габаритов обмотки или при заданных габаритах потребуется намотка более тонким проводом и увеличится активное сопротивление обмотки. Увеличение МДС приведет также к увеличению активной мощности, выделяющейся в преобразователе и вызывающей его нагрев, что, в свою очередь, может привести к появлению погрешностей. На рис. 8-5 было показано принципиальное устройство фер-р одинами чес кого измерительного механизма. Характеристики механизма в значительной степени определяются МДС обмотки 1. Увеличение МДС обмотки 1 приведет к увеличению индукции в зазоре, в котором находится рамка, и соответственно к увеличению вращающего момента Л4фд, что позволит при прочих равных условиях повысить качество механизма. Однако увеличение МДС приведет к увеличению мощности, потребляемой механизмом из измерительной цепи, в которую он включен. Увеличение потребления прибора существенно снижает его эксплуатационно-технические характеристики.
Таким образом, выбор МДС и числа витков обмотки ЭМ преобразователя должен производиться при комплексном учете ряда факторов. Связь некоторых из них с МДС и числом витков рассмотрена ниже.
1. Полная мощность преобразователя, которую в первом приближении можно принять равной его реактивной мощности, определяется как Рр = «РФ, где F — МДС; Ф — магнитный поток. Мощность преобразователя Рр должна быть в десятки-сотни раз больше требуемой выходной мощности (см. § 3-2).
2. Температура нагрева катушки 0 определяется удельной тепловой нагрузкой преобразователя, равной £0 = РА$0ХЛ, где Р — = = /2 (Ро + сощ2Хм/Хм) — активная мощность преобразова-
теля; 50ХЛ — поверхность охлаждения катушки (подробнее см. § 2-2).
3. Сопротивление обмотки постоянному току R0 = p
яйп/4 ’
где
Dcp — средний диаметр витков катушки; dn — диаметр проволоки. При заданной площади S0KH окна катушки и коэффициенте укладки /гу число витков определяется из выражения w = 4S0KHfey/ (nd„)- Найдя отсюда dn и подставив в уравнение Ro, получим Ro (S0Raky).
160
4. Активная мощность, выделяемая в преобразователе, равна
D ,2 0 / лр_Оср W-VM\
Р =/2/Дки =| — + —Г- Ь
^ОКН^у /
или учитывая, что / = U/Z и пренебрегая при расчете Z сопротивлением постоянному току Ро> получим то же выражение в несколько ином виде:
р=(£.у 1 zs (npDc? + —
Aw) co2 M\S0KHfey + Zl )' -
Активная мощность P должна быть меньше допустимой по нагреву: Р =с |5ОХЛ©ДОП. Величину | рекомендуется ограничить значением 50—100 Вт/м2 (50—100 мкВт/мм2).
5. Электромеханическая сила притяжения якоря к сердечнику равна = = ?•
г эм ' > 6а со2 \ /
6. Магнитный поток равен Ф = IwlZ*. Если пренебречь падением напряжения на сопротивлении /?0, значение потока можно определить из формулы Ф = [// (сош). Допустимое значение потока определяется по выбранному значению индукции В или при резком проявлении поверхностного эффекта по выбранному значению Ф/ы.
Приведенные выше формулы позволяют определить допустимую МДС обмотки, т. е. произведение Iw, или, что чаще бывает удобнее, отношение U/w. В малогабаритных преобразователях выбор МДС ограничивается нагревом катушки собственным током. В измерительных механизмах выбор МДС определяется допустимым потреблением механизма, а также допустимым значением индукции в магнитопроводе, так как увеличение индукции приводит к появлению погрешности, вызываемой магнитным гистерезисом.
В индуктивных и магнитоупругих преобразователях желательно создать такую индукцию в магнитопроводе, чтобы магнитная проницаемость стальных участков была максимальной, или при резко выраженном поверхностном эффекте обеспечить такое значение Ф/и, чтобы удельные магнитные сопротивления р и х были минимальными (см. рис. 8-9). При этом сопротивление преобразователя Z практически не зависит от колебания напряжения источника питания. В индуктивных преобразователях, используемых в приборах для измерения малых сил и давлений, где якорь преобразователя выполнен в виде мембраны или закреплен слабой пружиной, МДС ограничивается допустимой силой притяжения Рэм, которая должна быть намного меньше измеряемой.
При заданном напряжении на обмотке преобразователя или токе через нее число витков обмотки определяется однозначно. Однако в ряде случаев, в особенности для преобразователей неэлектрических величин, напряжение питания можно выбирать произвольно, используя трансформатор. В этом случае число витков выбирается по требуемому сопротивлению преобразователя Z ~ aw2/ZM. Если
6 Е. С. Левшина, П. В. Новицкий 161
преобразователь работает с усилителем, имеющим большое входное сопротивление, число витков берется возможно большим. При необходимости получения максимальной выходной мощности нужно выполнить условие согласования сопротивления преобразователя с последующей измерительной цепью и отсюда найти число витков (см. гл. 3). При выборе числа витков в любом случае нужно кроме вышесказанного иметь в виду следующее: напряжение питания по технике безопасности не должно превышать 200—300 В, диаметр провода по технологическим соображениям нежелательно брать слишком малым и при большом числе витков (w > 100) диаметр выбирается не менее 0,07 мм. '
Выбор частоты источника питания. При измерении динамических величин частота источника питания должна быть больше ча
стоты измеряемого процесса, чтобы измеряемая величина воспроизводилась без заметных искажений. Если же частота измеряемого процесса невелика, то можно питать преобразователь от сети переменного тока частоты 50 Гц. Однако, как видно из приведенных выше формул, повышение частоты при заданной активной мощности, а также при заданных МДС или магнитном потоке позволяет повысить напряжение питания преобразователя. Повышение напряжения питания позволяет увеличить выходной сигнал преобразователя. Однако увеличение выходного сигнала будет пропорционально повышению напряжения питания лишь до тех пор, пока при возрастании частоты не происходит резкого возрастания магнитного сопротивления и магнитных потерь в магнитопроводе из-за поверхностного эффекта. Возрастание магнитного сопротивления ферромагнитных участков приводит, с одной стороны, к уменьшению относительного изменения полного магнитного сопротивления под действием измеряемой величины и, с другой, как видно из приведенных выше формул, — к ограничению напряжения питания. Поэтому при использовании магнитопроводов из сплошного материала не рекомендуется выбирать частоту выше 100—200 Гц. При использовании сердечника из листового материала можно увеличить частоту питания до 1 — 10 кГц, а при использовании ферритовых сердечников — до 100— 300 кГц.
162
Выбор материала и габаритов постоянных магнитов. Расчет цепей с постоянными магнитами затрудняется тем обстоятельством, что
внутреннее сопротивление источника МДС, т. е. магнита, сравнимо по значению с сопротивлениями внешней цепи и зависит от проходящего через магнит потока, т. е. оно нелинейно. Зависимость потока через магнит и магнитную цепь от МДС, падающей на внутреннем сопротивлении магнита (F; = ФДМ) и во внешней магнитной цепи (^sHeinH ФЯМ. ввешн)» ПОКДЗана на рис. 8-11, а. При коротком замыкании магнита (Явче.пн = 0) ВСЯ МДС FM = = ЯД., где Нс — коэрцитивная сила; /м — длина магнита, падает на внутреннем со
Л
Рис, 8-13
противлении магнита и по-
ток магнита максимален и равен Фг = Bj-S^, т. е. остаточной индукции материала магнита Вг, умноженной на площадь магнита SM. Если внешняя цепь имеет конечное сопротивление, то координаты точки b на кривой определяются отношением
Ф/^виешв = 1/^?м.внешн Ди. внеш».
Для того чтобы абстрагироваться от размеров конкретного магнита, при расчетах используются кривые магнитных материалов В = f (Н). Для этих кривых положение точки а' (рис. 8-11, б) определяется отношением BJHK = GM. внет1, /М/5Н, поток магнита и его МДС рассчитываются как Фм = B..S,. и F>,= Кривые некоторых магнитных материалов приведены на рис. 8-12.
В качестве примера приведен расчет индукции в зазоре магнитной системы (рис. 8-13), если известно, что магнит выполнен из материала ЮНДК24, имеет диаметр DM= 15 мм и длину /м = 15 мм, длину зазора 6 = 1,2 мм, площадь зазора Sj = 400 мм2, проводимость зазора Gj = 4,2-10~7 Гн, проводимость путей утечек GyT = 1,0-10-7 Гн; сопротивлением стальных участков магнптопровода можно пренебречь.
Полная проводимость внешней цепи составляет бм.внешн = G<3 + GyT = 5,2 X X 10"? Гн. Отношение
Вм/н№ = GM. внешЛ/5м = 5,2 • 10-7 (я.1155;/14)7о^-°’039 10-3 Не-
прямую, соответствующую полученному отношению BIH, удобно провести на рис 8-12 через точку с координатами В = 0,78 Тл, Н = 20 кА/м. Точка а пересе
6
403
чения полученной прямой с кривой для материала ЮНДК24 определит индукцию в магните как В., = 1,07 Тл. Поток магнита ФМ = 5М5М = 1,07 —-— 10~6= 189 мкВб. Часть потока идет через сопротивление утечки, поэтому поток через рабочий зазор составляет
ф‘-®“ 189 43ТПГ-153
Индукция в зазоре
В6 = Фб/56 = 2§^ = 0,38Тл.
При расчете постоянных магнитов, как правило, требуется по заданной проводимости внешней цепи выбрать материал и размеры магнита так, чтобы обеспечить в зазоре требуемую индукцию. В частности, в рассмотренном примере, как видно из рис. 8-12, индукция в материале магнита и соответственно в зазоре была бы выше, если бы магнит был выполнен из материала ЮНДК 25БА, и ниже — для материала ЮНДК 35Т5БА.
Кривая размагничивания каждого из материалов имеет некоторую экстремальную точку (эти точки на кривых рис. 8-12 помечены кружками) с координатами Bd и Hd, характерную тем, что для нее произведение ВН максимально. В измерительных преобразователях размеры магнита выбираются так, чтобы обеспечивалась индукция в магните Вм Bd. При Вм = Bd обеспечивается наименьший объем магнита при заданном материале и заданной энергии магнитного поля в зазоре. Однако от этого правила часто отступают, чтобы увеличить индукцию в зазоре и таким образом за счет увеличения объема магнита увеличить чувствительность преобразователя или улучшить какие-либо другие его технические характеристики. Повысить индукцию в зазоре при заданном материале магнита можно увеличением размеров магнита. Увеличение длины магнита всегда приводит к увеличению индукции в магните, но это увеличение после того, как достигнута индукция Вм > Bd, не превышает 10—20%. Увеличение площади магнита при неизменной длине магнита приводит к уменьшению индукции в магните. Но пока рабочая точка находится на плоской части кривой, поток магнита Фм = все же возрастает, так как относительное уменьшение индукции меньше, чем относительное увеличение площади, и, следовательно, возрастает индукция в зазоре.
В процессе проектирования магнитной системы при отсутствии прототипа и соответствующего опыта проектант испытывает затруднения, так как размеры магнитной системы в известной степени обусловлены неизвестными в начале расчета размерами магнита. Это приводит к необходимости просчитывать много вариантов. Для того чтобы сократить объем работы, можно рекомендовать методику приближенного расчета, показанную на следующем примере.
Требуется рассчитать магнитную систему преобразователя, показанного на рис. 8-13, при условии, что длина зазора б = 1,5 мм, диаметр входящей в него обмотки Dg = 25 мм и ширина обмотки h = 8 мм. Индукция в зазоре должна быть не менее == 0,6 Тл.
При первом приближенном расчете можно пренебречь сопротивлением стальных участков и считать, что все проводимости путей утечек включены параллельно зазору и полная проводимость утечки GyT = kG^. В правильно сконструированной
164
магнитной системе GyT = (0,25 4- 0,5) Gg. Индукция в зазоре Sg = Og/Sg, где Фа =? = $MGg/(Gg + GyT) — поток в зазоре и Sg — площадь зазора.
Учитывая, что Фм = SMSM и GyT = AGg, можно определить соотношение, свя-
S 1 зывающее индукцию в зазоре и индукцию в магните: Sg = SM-~ .....
Sg 1 +*
Величина Вя определяется кривой магнитного материала и соотношением
В« г. !» . п. PoSg ,, м 1Я ,, м Sg ZM
77-----=- = Gg-----------=-----= —о— (1 +«) о- = Ио(1 4-Л) —
*->м и *->m *^м °
Определим по заданным размерам возможное значение S„/Sg. Из рис. 8-13 очевидно, что DK меньше £>g на а миллиметров. Таким образом, SM/Sg = n(Dg — - a)a/(4nDgft) = (P*~a)0.^£/P.gl . При а = 2 мм SM/S6 = {1 =0,7.
Примем k = 0,3. Тогда Sg = Вя • 0,7/1,3.
Чтобы обеспечить Sg > 0,6 Тл, должно выполняться условие Вм 0,6‘ 1,3/0,7 5=
1,1 Тл. Из кривых магнитных материалов (рис. 8-12) видно, что в этом случае лучше использовать материал ЮНДК 25БА, причем при индукциях в магните выше 1,1 Тл, как видно из кривой для этого материала, отношение Вм/Ня 1,1/(45-103) = = 2,4-10-§.
Таким образом, можно сказать, что длина магнита должна быть выбрана так, Sg I
чтобы удовлетворялось условие р(1(1-i-/?) „-^ “->: 2,4 Ю"?. Из этого соотношения •8м о
находим длину магнита:
4л • КГ’ 44 =s 2,4 • 10 -->; 4 11, т. е. /м 17 мм.
0,7 о о
Теперь можно составить схему магнитной системы и произвести ее точный расчет, учитывая сопротивление стальных участков и проводимости отдельных путей утечек. После такого расчета или в процессе его должны быть соответствующим образом скорректированы размеры магнитной системы.
Свойства магнитных материалов. В качестве материалов постоян
ных магнитов в настоящее время используются литые сплавы, основ-
ными компонентами кото-
рых являются железо, никель и кобальт; порошковые материалы с наполнителями в виде пластмасс, ферриты с добавками бария или кобальта и сплавы кобальта с добавками редкоземельных элементов (ин-терметаллиды). В измерительных преобразователях используются в основном магниты первой группы благодаря их высокостабильным свойствам. Ферритовые магниты и магниты на основе РЗМ (ред-
Рис. 8-14
поземельные металлы) имеют очень высокую коэрцитивную силу (рис. 8-14) и могут обеспечить относительно высокие индукции (0,2—0,6 Тл)
при большом магнитном сопротивлении внешней цепи, т. е. в разомк-
165
нутых цепях и при малых габаритах магнитов, однако по стабильности значительно уступают литым магнитам. Температурные коэффициенты индукции (ТКИ) составляют в области температур 20—100 °C примерно 0,002 К'1 для ферритов и 0,0004 К"1 для сплавов на основе РЗМ.
ТКИ некоторых литых материалов в зависимости от температуры, полученные Т. И. Булыгиной и В. В. Сергеевым, приведены на рис. 8-15. Положение на температурной оси области, в которой ТКИ а в = 0, зависит от выбора рабочей точки магнита. Рабочие точки магнитов, результаты исследования которых приведены на рис. 8-15, соответствуют точкам Вм = Ва. При Вм > кривые смещаются влево и наклон их меняется.
Таким образом, значение ТКИ для одного и того же магнита может быть разным в зависимости от степени его размагничивания, т. е. зависит от магнитной цепи, в которой магнит используется. Однако можно сказать, что наибольшей температурной стабильностью обладает материал ЮНДК 35Т5 и его температурный коэффициент в области 20—40 °C может быть даже равен нулю, другие материалы характеризуются значениями ад — —(1 -ь 2) 10'4 К’1.
8-3. ИЗМЕРИТЕЛЬНЫЕ ТРАНСФОРМАТОРЫ И ИНДУКТИВНЫЕ ДЕЛИТЕЛИ НАПРЯЖЕНИЯ
Схема включения измерительных трансформаторов тока (ИТТ) и напряжения (ИТН) в цепь показана на рис. 8-16.
Измерительные трансформаторы позволяют расширить пределы измерения приборов, уменьшая в определенном соотношении ток и напряжение, и, кроме того, отделить и хорошо изолировать цепи измерительных приборов от силовой цепи, что дает возможность заземлить вторичные цепи и предохранить от опасности обслуживающий их персонал. Первичная цепь ИТН включается через предохранители, чтобы при неисправности трансформатора он не оказался причиной аварии. Предохранители, установленные во вторичной цепи, служат для защиты трансформатора от замыканий в нагрузке. Вторичный ток ИТТ равен 5 А, для специальных целей выпускаются трансформаторы на 1 и 2 А, вторичное напряжение ИТН может быть 100, ЮО/’КЗ и 150 В.
Точность измерительного трансформатора характеризуется двумя величинами: погрешностью коэффициента трансформации, определяющей отличие действительных вторичных токов и напряжений от номи-166
•7/
о-
Рис. 8-16
нальных, у/ = (/ном — 7)/7ном и yrJ == (7/ном — U)/UHOa и угловой погрешностью ф/ или фу, определяющей фазовый сдвиг между векторами токов или напряжений в первичной и вторичной об- (ф Г мотках. Угловая погрешность т [] должна учитываться при включении во вторичную цепь фазочувствительных приборов, например ваттметра, так как их показания, в частности ваттметра Р' = U2/2 cos [ф + + (фу + ф/)1, зависят от алгебраической СУММЫ (фу + ф/). При включении фазочувствительных приборов важно также не изменить направление одного из векторов на 180° неправильным включением обмоток, поэтому концы первичных и вторичных обмоток показано на рис. 8-16.
По точности ИТТ и ИТН подразделяются на несколько классов. Характеристики наиболее точных лабораторных измерительных трансформаторов (ГОСТ 23624—79 и ГОСТ 23625—79) приведены в качестве примера в табл. 8-1.
трансформаторов маркируются, как
Таблица 8-1
Тип трансформатора Класс точности Предел допускаемой погрешности Нормальная область значений вторичной нагрузки, %
Трансформатор тока 0,01 0,05 тока, % угла, ... ® 95—100 50—100
± [0,01+0,002 (/нои//-1)] + [0,05 + 0,005 (ZH0„/Z — 1)1 ± [1 +0,1 (ZH0M/Z — 1)1 ± [3 + 0,3 (ZH0H/Z- 1)]
Трансформатор напряжения 0,05 напряжения, % угла, ... * 0—100
—0,05(7нои/(/ —3(7 ном/^
Причины погрешностей измерительных трансформаторов легко объяснимы из рассмотрения их эквивалентной схемы. Приведенная к первичной обмотке эквивалентная схема (см. рис. 8-2, б) для диапазона частот, в котором еще можно пренебречь межвитковыми емкостями, представлена на рис. 8-17. При рассмотрении погрешностей
167
в данном случае не учитываются также ЭДС помех еинд и шумовое напряжение 6/ш.
Для эквивалентной схемы (рис. 8-17) отношение токов
/1 Zx x+Z-i + Ztt j j Zj-{-Zn (8-1)
C ^x. x 2X x
отношение напряжений
й\ __ £ , zx x(Zt-f-Zg)! zx x-j-Zi-j-Zg z^-j-Zg
U[ . Zx 1 2X. x (Z-24*Zh) Zh
Для идеальных трансформаторов приведенный коэффициент транс-
е. Таким образом, вторые члены уравнений (8-1) и (8-2) характеризуют погрешность. Как видно из уравнений, значение погрешности зависит от сопротивления, включенного во вторичную цепь, и для ИТТ будет минимально при Z', = 0, т. е. в режиме короткого замыкания, а для ИТН — при Zh =
формации должен равняться
т. е. в режиме холостого хода. Значения погрешностей зависят также от Zx x — сопротивления холостого хода трансформатора и будут тем меньше, чем больше ZXJi, т. е. чем меньше ток холостого хода трансформатора.
Если возможно скомпенсировать ток холостого хода, т. е. добиться 70 = 0, например, с помощью операционного усилителя, то принципиально погрешности ИТТ можно свести к нулю; таким же методом можно понизить погрешность ИТН.
Требования к конструкциям ИТ определяются в первую очередь необходимостью обеспечения возможно большего сопротивления Zxx. Это сопротивление равно
7 — -- -
^х.х I /WCWj .
/о Hl/Wy IH
2 s . 2 S i 4
— ](awi — № = cow, 2
(8-3)
и зависит от магнитной проницаемости материала сердечника. ИТН работает при относительно больших индукциях (В 0,8 ч- 1,5 Тл) и желательно выбрать индукцию так, чтобы магнитная цепь работала в режиме а = Umax- ИТТ почти полностью размагничены, так как МДС первичной и вторичной обмоток направлены навстречу друг другу, индукция в сердечнике В 0,02 ч- 0,15 Тл. В этой области (см. рис. 8-8) магнитные проницаемости относительно невелики, и увеличения Zx.x добиваются за счет увеличения площади сердечника S.
168
Аварийный режим, связанный с разрывом вторичной цепи ИТТ при включенной первичной, приводит к намагничиванию сердечника, изменению р и соответственно изменению коэффициента трансформации. Поэтому ИТТ необходимо специально размагничивать, постепенно увеличивая ток в его вторичной обмотке изменением сопротивления от Z' -> оо до Z'„ -> 0.
Как видно из выражения (8-3), сопротивление Zx.s при прочих равных условиях зависит от магнитного потока через сердечник, который изменяется при изменении преобразуемого тока или напряжения. Поэтому погрешности ИТ зависят от отношений 7/7ном и
Для того чтобы разделить погрешности трансформации и угловые погрешности, удобно представить соответствующие сопротивления в виде Z = Ze'4 В этой форме коэффициент трансформации ИТТ запишется в виде
,, ,
—Г~ 7
^х. х
, 2аСО8(ф2—<Po)+ZhCos(<Ph—ф0)
‘ 7
^х. х
sin (Ф2-Ф0)+г; sin (фн-ф0)
' Zx.x
Погрешности реального ИТТ относительно идеального ИТТ соответственно равны
Z' cos (ф2 - ф0) + Za cos (фн - ф0)
V' =------------- --------------;
^-х. X
ф] e ardg 2asin (Фг-Фо)+гн sin (Фн-Ф>)
Аналогично полученные погрешности ИТН составляют
Z1C0S(q5i — фн+7'С08(ф2 — ф„) ,
VU = ---------------------------1-
Z1ZH cos (ф! - Фо) + Z1Z2 sin (Ф1 + Ф2- фо- ф8)
Z'A.x 1
(Ри = агсЬ?
Л sin (th—фн) + 2а s'n (4'2 —Фн)
sin (Ф1~Фо)+гЛ sin (Ф1 + Ф,-ФО~ФН)
Z'Z
Зависимости коэффициента трансформации ИТТ от значения нагрузки и относительного значения тока 7/7ноч представлены на рис. 8-18. Как видно из рис. 8-18, токовая погрешность (аналогично и погрешность напряжения для ИТН) может быть уменьшена, если приписать ИТТ номинальный коэффициент трансформации, несколько больший отношения витков, т. е. пг > пт = w.Jw,.
Индуктивные делители напряжения (ИДИ) в настоящее время широко применяются в измерительных устройствах. Лучшие индук-
169
поэтому ИДН принци-
Рпс. 8-19
тивные делители имеют погрешность коэффициента деления 10*3— 10"4?'о при фиксированной частоте. Частотный диапазон ИДН достигает /верх^/нижн ~ Ю4» однако в этом диапазоне погрешности существенно возрастают. Наиболее широко распространенная схема ИДН, схема Кельвина — Барлея, представлена на рис. 8-19. ИДН с регулируемым в десятичной системе счисления коэффициентом деления т составлен из нескольких ступеней, каждая ступень состоит из 10 сек
ций. Для показанного на рис. 8-19 трехступенчатого делителя выходное напряжение U2 = (0,1 /Их + 0,01 т2 + 0,001 т3) Ut. Одним из основных достоинств ИДН является то, что на его коэффициент деления мало влияет подключаемое к выходным зажимам сопротивление нагрузки.
Для идеально выполненного ИДН коэффициент деления определяется только отношением числа витков, и пиально может обладать меньшей погрешностью, чем резистивный делитель. Как видно из эквивалентной схемы (см. рис. 8-2, б), чтобы обеспечить это условие, коэффициент деления в каждой ступени должен определяться основными индуктивностями L каждой секции. В соответствии с этим к выполнению ИДН предъявляются следующие требования: возможно большая основная индуктивность, малая индуктивность рассеяния, малые меж-витковые и межсекционные емкости, малые потери в сердечнике и в обмотке, т. е. боль
шое /?пот и малое г, и, наконец, идентичность всех перечисленных параметров для всех секций. Высокой идентичности добиваются применением жгутовой обмотки с равномерным расположением витков жгута на тороидальном сердечнике. Концы жгута соединяются последовательно, при 10 проводах в жгуте получается ступень ИДН с 10 секциями.
Применение тороидального сердечника обеспечивает относительно большую индуктивность L и высокую помехозащищенность ИДН.
8-4. МАГНИТОЭЛЕКТРИЧЕСКИЕ И МАГНИТОГИДРОДИНАМИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ ДАТЧИКОВ УРАВНОВЕШИВАНИЯ
Магнитоэлектрические обратные преобразователи (МЭОП) используются в наиболее точных приборах для измерения давления и ускоре-
но
ния, широкое применение нашли они также в цифровых бескоромыс* ловых весах.
Принцип действия датчика уравновешивания с МЭОП поясняется на рис. 8-20. Измеряемая сила Fx действует на подвижную часть датчика /, закрепленную относительно корпуса на растяжках, мембране или плоских пружинах 2. Обмотка 4, расположенная на цилиндрическом каркасе, находится в радиальном зазоре магнитной системы. Торец каркаса и пластина 3, укрепленная с помощью изоляторов на полюсном наконечнике 5, образуют емкостный преобразователь. Этот преобразователь, имеющий емкость Сх, включается в измерительный мост, питаемый от высокочастотного генератора Г. При действии силы Fx подвижная часть смещается на величину ДХ, изменяется емкость
Рис. 8-20
Сх, выходной сигнал измерительного моста ДС/^ усиливается усилителем Ус и выпрямляется демодулятором ДМ. Выпрямленный ток / подается в обмотку 4 таким образом, чтобы сила Fp — р/, создаваемая в результате взаимодействия тока с магнитным полем, была направлена навстречу измеряемой силе и уравновешивала ее. Сила, возникающая при взаимодействии электрического тока I, протекающего по катушке, с полем постоянного магнита, определяется формулой Fp = рмэ/ — ВЫ, где В — индукция в зазоре магнита; I — средняя длина витка катушки; w — число витков катушки. Работа датчика описывается уравнением Fx = Fp + AF, и о значении измеряемой силы можно судить по току I, измеряемому по падению напряжения на образцовом резисторе RN. Поскольку значение AF равно не более (0,01 -ь 0,001) Fp, то точность датчика определяется в основном точностью обратного преобразователя, т. е. стабильностью коэффициента р. Силы, создаваемые МЭОП, составляют от ICC2 Н в акселерометрах до 10—102 Н в весах.
Погрешности лучших МЭОП оцениваются значениями порядка 0,01—0,005%.
.171
Основными причинами возникновения погрешности (при условии, что температура внешней среды неизменна) являются: а) нестабильность свойств магнита магнитной системы; б) неоднородность магнитного поля в диапазоне перемещения катушки; в) изменение индукции магнита вследствие воздействия на него МДС, создаваемой при прохождении тока через катушку; г) наличие электромагнитной составляющей силы F9M — 0,5 PdL/dAX, возникающей в случае, если индуктивность катушки изменяется при ее переме-. щении АХ; д) нагрев катушки собственным током.
Для уменьшения погрешности от нестабильности следует при конструировании магнитной системы особое внимание уделить жесткости соединения магнита с магнитопроводом и после сборки подвергнуть преобразователь старению путем много
кратных изменений температуры. Чтобы избежать влияния близости ферромагнитных масс, преобразователь надо выполнять с внутренним магнитом; в этом случае внешний магнитопровод служит до статочно хорошим экраном.
Погрешность от неравномерного распределения индукции в зазоре появляется из-за того, что при смещении катушки на расстояние А (рис. 8-21) часть ее витков с левой стороны (на рисунке зачернены) переместится из области магнитного поля со средней индукцией В'> в область со средней индукцией В', + &Blt а правые витки — в область В', — АВ,.
Погрешность определяется формулой
ABj —АВ> А
где АВ! и АВ2 — средние изменения индукции на соответствующих участках при перемещении катушки на расстояние А; / — длина катушки; Во — средняя индукция в области расположения катушки.
Погрешность будет тем меньше, чем меньше перемещение катушки, и поскольку в приборах уравновешивания перемещение подвижной части не превышает 0,01—0,1 мм, то эта погрешность достаточно мала. Однако для ее уменьшения размеры катушки должны быть выбраны таким образом, чтобы катушка при перемещении не приближалась к краю зазора ближе, чем на его длину б. При необходимости увеличения габаритов катушки можно сделать ее длину I больше ширины зазора /0 на величину I — Zo = 0,8 6 (см. § 8-2). Тогда при небольшом смещении катушки (А <0,1 6) изменения индукции ABt и АВ2 будут иметь разные знаки и примерно одинаковое значение.
Существенное уменьшение погрешностей от воздействия Л1ДС катушки достигается использованием симметричной магнитной системы. Например, в магнитной системе (рис. 8-22) один из магнитов подмагничивается током катушки, в то время как другой размагничивается.
172
Погрешность, вызываемая гистерезисом, для такой магнитной системы не превышает 0,03% при МДС катушки до 100 А и длине магнитов (ЮНДК24) 20 мм.
В конструкциях с одним магнитом следует предусмотреть специальную обмотку, МДС которой компенсирует МДС катушки, например, так, как это показано на рис. 8-20 (обмотка /?0). Ток в обмотке /?0 и, следовательно, создаваемую им дополнительную МДС можно регулировать перемещением движка на резисторе /?! таким образом, чтобы погрешности гистерезиса и линейности были минимальными во всем рабочем диапазоне прибора.
Самой существенной погрешностью МЭОП, определяющей, в случае если габариты и масса датчика ограничены, предел измерения прибора, является погрешность от нагрева катушки собственным током. Эта погрешность тем более неприятна, что зависит не только от измеряемой величины и от времени ее действия, но и от величины, действовавшей в предшествующий измерению отрезок времени, так как постоянная времени нагрева датчика обычно составляет минуты и даже десятки минут.
Предел измерения датчика F$ — lBlnv ограничивается допустимой мощностью Р = 72/?кат, выделяемой в катушке обратного преобразователя. Учитывая, что сопротивление катушки /?кат = p/np/Snp, предел измерения датчика находим как Fp = В ]/7npSnp/p, и, как видно из этого выражения, он зависит от объема провода Упр = — l„vSnv и не зависит от сечения провода. Объем, занимаемый обмоткой, можно выразить следующим образом: Упр = ^зап^о5кат, где SK„ — боковая поверхность катушки; 60 — активная длина зазора, занимаемая обмоткой; k3!m — коэффициент заполнения медью.
Значение допустимой мощности Р — Рул8к„@ зависит от боковой поверхности катушки SKaT, допустимой температуры перегрева 0 и удельной мощности Руд, определяемой условиями охлаждения (см. § 2-2).
На основании экспериментальных исследований ряда датчиков с МЭОП значение Руд может быть принято равным Руд = 100 Вт/(м2- К).
Учитывая приведенные формулы, предел измерения датчика можно выразить так:
Рр = BSKiiT V Руд660/гзап/р.
Однако чаще при конструировании датчиков возникает обратная задача: при заданном пределе измерения найти оптимальные размеры датчика. Как видно из последней формулы, предел измерения датчика зависит от индукции в зазоре, боковой поверхности катушки и активной длины зазора. Возрастание одной из этих величин при сохранении двух других неизменными неизбежно приводит к увеличению объема
173
магнита, поэтому для определения оптимальных размеров датчика необходимо связать предел измерения непосредственно с объемом магнита Ум. Формула, связывающая эти величины:
1/2 Г 2 Р_____Им______46к
м 6 руд0(5м//м)тахда^зап>
где Вм и /7М — индукция и напряженность в материале магнита, размеры которого выбираются таким образом, чтобы В., = Ва и Ня = На, т. е. соответствовали координатам экстремальной точки кривой размагничивания, определяющей для данного материала максимум произведения ВН-, рм = В„/Н„-, 6К — конструктивная длина зазора, определяемая толщиной каркаса и двумя технологическими зазорами и выбираемая минимально возможной (длина активного зазора 60 для получения минимального объема Ум выбирается равной 6К); kn = — SKaT/S„ и ku = Sn/SM — коэффициенты, определяемые как отношения площадей боковой поверхности катушки SKaT, полюса Sn и магнита S, и в первом приближении близкие к единице.
Допустимая температура перегрева 0 определяется допустимой погрешностью, возникающей в результате нагрева катушки и магнита и изменения его индукции при действии больших входных величин, и обычно принимается равной 0 = 1 -ь 3 °C.
В тех случаях, когда габариты МЭОП не ограничены строгими требованиями минимальной массы датчика, например в весах, габариты которых определяются в первую очередь размерами платформы под груз, мощность МЭОП ограничивается не его нагревом, а выходной мощностью электронной схемы, и соотношения размеров получаются иными.
При заданном на обмотке напряжении U06„ и индукции в зазоре В сила, создаваемая МЭОП, определяется формулой
= “ ^^пр^обм/^пр = обм^Пр/(4р),
где dnp — диаметр провода и р — его удельное сопротивление.
При индукции в зазоре В — 0,5 Тл, Uo6„ = 5 В и требуемой силе 5 Н диаметр провода должен быть не менее апр = 0,2 мм.
Если кроме напряжения задан и ток через обмотку, то можно определить и примерные размеры зазора датчика, необходимого для размещения обмотки.
Действительно, учитывая, что /пр = nDw и w — I8o/w', где D — средний диаметр обмотки; I — длина обмотки; 60 — часть зазора, занятого обмоткой, и w' — плотность намотки, т. е. число витков на единицу площади, получим, что размеры обмотки связаны с силой формулой Dlb0 х F&/(n,BIw'). В частности, для рассмотренного выше примера при допустимом токе 100 мА D18O 5,0/(л-0,5-0,1 • 1640 х X 104) = 1,9-КГ6 м3; если принять 60 = 1 мм, I — 25 мм, то D = = 75 мм.
Компенсация жесткости подвески. Конструкция магнитоэлектрического преобразователя позволяет относительно просто дополнить его устройством, вносящим в датчик дополнительную «электрическую» жесткость, которая может как увеличивать, так и уменьшать жест
174
кость подвески. Реализация устройства «отрицательной» жесткости поясняется на рис. 8-23, а.
Для этой цели на каркасе катушки, кроме основной обмотки /, располагаются две полуобмотки 2 и 2'. Эти полуобмотки симметричны, расположены в области, где еще действует магнитное поле (см. рис. 8-10), и включены встречно. Через полуобмотки пропускается
Рис. 8-23
ток 70 от стабилизатора тока в таком направлении, чтобы силы взаи
модействия полуобмоток с магнитным полем стремились втянуть ка-
ждую из них под полюс. При отсутствии входной величины и симметричном начальном положении подвижной части силы взаимодействия полуобмоток с магнитным полем, направленные встречно, компен
сируют друг друга. При смещении подвижной части вправо сила F2 увеличивается, а сила уменьшается, разность сил F2 — F,2 прибли-
зительно линейно зависит от перемещения и направлена в ту же сторону, что и механическая сила, вызывающая смещение подвижной части. В результате достигается эффект снижения жесткости подвески, т. е. вносится «отрицательная» жесткость.
Значение дополнительной жесткости, созданной в таком устройстве, составляет IF д ~ 2InlnBw"g/£>, где /0 — ток стабилизатора; 1й — длина витка; §76 — отношение
ширины обмотки к длине зазора; w"—линей-
ная плотность намотки. При необходимости компенсации электриче-
ским путем больших жесткостей подвески приходится занимать под это устройство часть рабочего зазора и располагать полуобмотки так, как показано на рис. 8-23, б; в этом случае 117 д = 2IoloBw". Подробно вопросы, связанные с созданием устройства «электрической» жесткости, исследованы В. С. Моисейченко.
Магнитоэлектрогидродинамические обратные преобразователи (МЭГДОП) основаны на использовании явления взаимодействия, проте
175
кающего в электропроводящей жидкости электрического тока с магнитным полем.
На рис. 8-24 показано устройство камеры МЭГД преобразователя манометра. Камера преобразователя образована двумя профилированными пластинами 1 и 2 из изоляционного или покрытого изолирующим слоем материала и двумя пластинами токопроводов 3 и 4. Камера размещается в зазоре магнитной системы таким образом, чтобы направление индукции соответствовало указанному на рис. 8-24. В торцевых частях камеры имеются отверстия, в которых закреплены выводные трубки. Камера полностью, а трубки частично заполнены рабочей жидкостью.
Сила, создаваемая в элементарном объеме жидкости, определяется формулой dE — [BJJ dV, и если допустить, что индукция В и плотность тока J равномерно распределены в рабочей зоне преобразователя и взаимно перпендикулярны, то выходное давление определяется формулой Р — BHh, где h — высока канала. Минимальная высота составляет h = 0,1 -ь 1,0 мм, а максимальное выходное давление при 5 = 1,0 Тл и / = 5 А равно Р = (5^- 0,5) 104 Па. МЭГДОП подробно исследованы В. Я. Ложниковым и ф. М. Фетисовым, ими предложен также ряд оригинальных конструкций манометров и акселерометров с МЭГДОП. £
8-5. ЭЛЕКТРОМАГНИТНЫЕ ПРЕОБРАЗОВАТЕЛИ , ИЗМЕРИТЕЛЬНЫХ МЕХАНИЗМОВ ЭЛЕКТРОМЕХАНИЧЕСКИХ ПРИБОРОВ
В аналоговых электроизмерительных приборах прямого преобразования широко используются электромеханические измерительные преобразователи, входной величиной которых является ток, а выходной — перемещение указателя отсчетного устройства. Эти преобразователи получили название измерительных механизмов (ИМ).
Устройство электромеханического прибора и назначение отдельных конструктивных элементов рассмотрим на примере амперметра с электромагнитным ИМ, схематически показанным на рис. 8-25, а. Основным элементом неподвижной части электромагнитного ИМ, участвующим в создании вращающего момента, является катушка 1, а основным элементом подвижной части — сердечник 2 из ферромагнитного материала, закрепленный на оси 3.
На рис. 8-25, показаны принципиальные устройства ИМ и других типов — электродинамического (ЭД), ферродинамического (ФД) и магнитоэлектрического (МЭ).
В ЭД, ФД и МЭ измерительных механизмах элементом подвижной части, участвующим в создании вращающего момента А4вр, является рамка 2 (рис. 8-25, б, в, г), намотанная тонким проводом. На осях 3 укреплены подвижные части ЭМ, ЭД и ФД механизмов. Ось 3 снабжена на концах кернами и может поворачиваться в подпятниках 4. Подвижная часть МЭ измерительного механизма (рис. 8-25, г) укреплена на двух растяжках 3 (на рис. 8-25, г показана оборванная рас
176
тяжка). С подвижной частью жестко связана стрелка 5, которая при повороте подвижной части перемещается над неподвижно укрепленной шкалой 6. На шкале установлены упоры 7, чтобы уберечь стрелку и подвижную часть от повреждений.
При включении электромагнитного ИМ в электрическую цепь магнитное поле, создаваемое протекающим по катушке током 1 (входная величина), втягивает сердечник внутрь катушки, в результате чего возникает вращающий момент Л4Вр. Зависимость момента Л1вр1 при токе от угла отклонения подвижной части приведена на рис. 8-26. Если ток имеет большее значение, то тогда вращающий момент возрастает (ток /2, момент Л4вра),
Рис. 8-25, а, б
подвижная часть поворачивается и закручивает пружину 9 (рис. 8-25, а). Внутренний конец пружины закреплен на оси, а наружный — на неподвижной части ИМ. Момент спиральной пружины возрастает прямо пропорционально углу а поворота подвижной части, т. е. М1Пр = №а, где W — удельный противодействующий момент. Поэтому при токе подвижная часть отклонится на угол (рис. 8-26), при котором Л4вр1 = Л4пр, а при токе /2 — на угол а2 > ах.
В магнитоэлектрических ИМ противодействующий момент создается двумя растяжками 3, которые выполняют одновременно две функции, заменяя пружину и ось.
177
5
Подвижная часть любого ИМ представляет собой колебательную систему (см. § 2-4, 2-5), вследствие чего после включения ИМ, а также при изменениях входной величины подвижная часть будет совершать затухающие колебания около положения равновесия. Чтобы увеличить затухание и уменьшить время установления показаний, в ИМ применяются специальные устройства — успокоители. В электромагнитном ИМ, приведенном на рис. 8-25, а, в качестве успокоителя применено крыло 12, которое при повороте подвижной части расходует энергию, перегоняя воздух в камере 13 из одной части в другую. Такой же воздушный успокоитель использован в электродинамическом ИМ. В ферродинамическом механизме применен магнитоиндукционный успокоитель, представляющий собой тонкое крыло 12 нз алю
178
миния, перемещающееся в зазоре постоянного магнита 13, показанного дополнительным видом (рис. 8-25, в). В крыле индуктируются токи, которые, взаимодействуя с полем постоянного магнита, тормозят движение крыла.
В магнитоэлектрическом ИМ успокоителем служит каркас рамки и, кроме того, сама обмотка, если она включена в измерительную цепь с конечным сопротивлением; поэтому специального успокоителя не требуется.
К вспомогательным деталям ИМ относятся токоподводы к рамке, противовесы, пружинящие стрелочные упоры, корректор. Токопод-водами обычно служат пружины или растяжки, поэтому, по крайней мере, одна из них должна быть изолирована от корпуса. Противовесы 8 в виде стержней с гайками предназначены для уравновешивания подвижной части, т. е. для перемещения ее центра тяжести на ось вращения, так как в противном случае возникает дополнительный момент, вызывающий погрешность механизма. Пружинящие упоры служат для ограничения перемещений подвижной части при ее отклонении за пределы шкалы. Корректор, предназначенный для установки подвижной части в нулевое положение, состоит из поводка 10, к которому прикреплен внешний конец пружины 9, и винта Нс эксцентрично расположенным пальцем, который входит в прорезь поводка.
Как видно из рассмотрения конструкций, ИМ содержит следующие основные узлы: устройство, создающее вращающий момент, зависящий от электрической вели
щее противодействующий момент, зависящий от угла отклонения; отсчетное устройство, успокоитель и ряд вспомогательных деталей.
Погрешности ИМ. В измерительном механизме осуществляются этапы преобразования: преобразование тока во вращающий момент, преобразование момента в угол поворота подвижной части и преобразование угла поворота в отсчет по шкале прибора.
Каждый из этапов преобразования характеризуется своими погрешностями, совокупность которых определяет погрешность ИМ. Погрешность измерительного прибора обычно больше погрешности ИМ (исключение составляют миллиамперметры и ЭМ амперметры, для которых = уи м), так как в приборе имеется еще преобразователь измеряемой величины (напряжение, мощность, частота и т. д.) в ток.
Структурная схема ИМ представлена на рис. 8-27, а. На этой схеме указаны также основные составляющие погрешности нуля ИМ и основные причины погрешности чувствительности.
Погрешность преобразования угла поворота а в отсчет N по шкале, характеризуемого коэффициентом Кшк, определяется погрешностью отсчета (Ааотсч), погрешностью градуировки шкалы (Аагр), погрешностью от смещения градуированной шкалы при ее установке (Аа ) и погрешностью опрокидывания (Ааопр) для приборов, подвижная
; устройство, создаю-
179
часть которых закреплена на оси в кернах. Последняя составляющая иллюстрируется рис. 8-27, б, из которого видно, что при наличии зазора (около 20 мкм), необходимого, чтобы ось не защемило при температурных деформациях, ось при нормальной температуре занимает одно из двух крайних положений, наклоняясь от гипотетического среднего положения на угол е^з±-р|/ — длина оси;
Д — зазор и R — радиус закругления подпятника. При этом стрелка, условно показанная на рис. 8-27, б точкой и направленная перпенди-
соЪстёенное магнитное усталость от нагрузок^
поле старение^-
Рис. 8-27
кулярно плоскости чертежа, смещается по шкале. Смещение равно Да = ±еа, где а — расстояние от нижней опоры до стрелки. Соответствующий этому смещению угол поворота Даопр = 7геа/7стр. где /стр — длина стрелки.
Погрешность преобразования вращающего момента определяется как возможной нестабильностью противодействующего момента W, так и действием «паразитных» моментов. Эти моменты вызываются трением в опорах (ДЛ4тр), если прибор на кернах; неуравновешенностью подвижной части (ДМНеуравн), если центр тяжести горизонтально расположенной подвижной части не совпадает с осью прибора, как показано на рис. 8-27, в (эта составляющая меняется при повороте подвижной части, т. е. вдоль шкалы прибора, так как центр тяжести перемещается из точки Л в Д'), и дополнительными электромагнитными силами, которые можно определить для каждого конкретного случая на основании уравнений, приведенных в § 8-1. Например, для
180
ферродинамического ИМ, кроме основного момента, могут действовать следующие составляющие сил: электромагнитная, стремящаяся развернуть рамку так, чтобы ее индуктивность была максимальной, индукционная — при работе механизма на переменном токе и наличии индуктивного сопротивления и емкости в цепи рамки, магнитоэлектрическая, вызванная воздействием магнита успокоителя на ферромагнитные элементы подвижной части. Погрешность, вызванная S ДЛ4, будет, очевидно, тем больше, чем меньше вращающий момент механизма.
Точность преобразования тока во вращающий момент определяется-главным образом стабильностью характеристик магнитной цепи преобразователя, эта погрешность для МЭ преобразователя подробно рассмотрена в § 8-4.
Динамические свойства измерительных механизмов определяются собственной частотой подвижной части K — W/J, где J — момент инерции подвижной части. Время установления показаний даже при оптимальном успокоении не может быть меньше периода собственной частоты, и поэтому оно тем меньше, чем выше собственная частота.
Вращающий момент ЭМ, ЭД и ФД измерительных механизмов содержит, кроме постоянной составляющей (см. рис. 8-6), переменную составляющую, частота которой в два раза выше частоты входного тока. ИМ должен быть фильтром для этой составляющей, поэтому рабочий частотный диапазон ИМ ограничен снизу частотой Длзм ^(5 -г 10) Дл.м. При меньших частотах стрелка заметно колеблется вокруг некоторого среднего положения.
Вращающий момент магнитоэлектрических ИМ пропорционален току. В этом случае угол а (имеется в виду шкала с нулем посредине) пропорционален мгновенному току, пока частота изменения тока намного меньше собственной частоты ИМ, т. е. fH3M sc 0,1 /и.м. Если частота измеряемого тока повышается, отклонение подвижной части увеличивается до максимального при /изм = /и„ (при степени успокоения меньше единицы), а затем уменьшается и, наконец, при /изм наблюдается просто дрожание стрелки, стоящей на нулевой отметке.
Область применения и технические характеристики различных типов ИМ представлены в табл. 8-2. Электромагнитный ИМ (см. рис. 8-25, а) не имеет токоведущих частей на подвижной части, что повышает технологичность и надежность прибора. Неподвижная катушка может быть намотана достаточно толстым проводом, и поэтому ЭМ амперметры не содержат шунтов. Угол отклонения а =—Р принципиально нелинейно зависит от тока. Некоторая линеаризация шкалы достигается специальным выбором формы сердечника. Магнитное поле электромагнитного ИМ относительно слабое, так как силовые линии замыкаются в основном по воздуху. Поэтому ЭМ преобразователь обычно помещается в экран, защищающий его от внешних магнитных полей. Вращающий момент ЭМ преобразователя также сравнительно мал, так как мала его индуктивность L = ®2/(ZMn0M -j-~Ь 2м.серд) и ее производная dL/da-, поэтому увеличение момента до
181
Таблица 8-2
Разновидность ИМ Род тока и частота Уравнение преобразования Максимальная чувствительность, рад/А Минимальный предел измерения, А Высший класс точности Область применения
Электромагнитный Постоянный, переменный 40 Гц—8 кГц J cL ,о ГУ —— / 2 2№ да 0,15- 10= Ю-з 0.2 Амперметры, вольтметры
Электро-динами-ческий То же 40 Гц—20 кГц J дМ12 , а = -у? c°s Д 0,15 • 103 10-2 0,1 Амперметры, вольтметры, ваттметры, фазометры
Ферроди-иамиче-ский То же 40 Гн—1,5 кГц 1 t>Mt2 , а~ W да 0,3 • 103 0,5 • IO-2 0,5 Само пишущие и щитовые амперметры, вольтметры, ваттметры
Магнитоэлектрический Постоянный 1 ЙФм О = -ч-5- 1 W да 1Л • 10’ 10- ’ 0.1 Амперметры, вольтметры, гальванометры
Индукционный Переменный 50 Г и ь а — ^1^2 sin ф - - 0,5 Счетчики
Примечание. В формулах для переменного тока / — действующий ток, ф — угол сдвига между токами Л и /2.
нужного значения (5—20 мкН -м) достигается увеличением тока и числа витков, т. е. потребляемой мощности. Электромагнитные ИМ применяются главным образом в щитовых амперметрах.
Электродинамический ИМ вообще не содержит ферромагнитных элементов. Благодаря этому его момент Л4вр = Zj/.jd/Wjj/da определяется чисто геометрическими параметрами катушек и преобразование тока в момент осуществляется с очень высокой точностью. Но момент, создаваемый электродинамическим ИМ, очень мал по значению, по-этОхму существенно сказываются на точности преобразования все «паразитные» моменты (рис. 8-27, а). Для того чтобы их свести к минимуму, все детали ИМ выполняют из неферромагнитных материалов, а детали крепления катушек — даже из непроводящих материалов, чтобы исключить их влияние на взаимоиндуктивность. Подвижная часть крепится, как правило, на растяжках. Для защиты от внешних магнитных полей ЭД механизм закрывается экраном, который должен быть достаточно удален от катушек, чтобы не влиять на их взаимоиндуктивность. Приборы с ЭД механизмами имеют большие габариты и потребляют большую мощность. ЭД механизмы применяются в лабораторных высокочастотных приборах переменного тока.
Ферродинамические ИМ, не отличаясь по принципу действия от электродинамических, имеют совершенно другое конструктивное вы-182
полнение, так как в них магнитная цепь выполняется из ферромагнитного материала. Введение ферромагнетиков увеличивает погрешность преобразования токов в момент, но позволяет существенно увеличить при том же потреблении мощности сам момент и тем самым снизить погрешности от «паразитных» моментов. Ферродинамические ИМ применяются в щитовых и самопишущих приборах, где моменты трения в опорах особенно велики.
ЭД и ФД механизмы являются множительными преобразователями и могут в зависимости от схемы включения их обмоток измерять ряд электрических величин: ток, напряжение, мощность, частоту, угол сдвига между двумя напряжениями.
м г 2
Яш +%р
2ВМ12 ' да
Мвр UIcos(Ul) g^2
Рис. 8-28
Некоторые схемы включения и формулы, связывающие вращающий момент с измеряемой величиной, приведены на рис. 8-28.
Магнитоэлектрический ИМ обладает рядом преимуществ по сравнению с другими ИМ, а именно: сильное магнитное поле, создаваемое постоянным магнитом, и, следовательно, относительно большие вращающие моменты, малое потребление и инвариантность к внешним магнитным полям, отсутствие успокоителя в виде специального конструктивного элемента и, следовательно, при световом отсчете почти симметричная подвижная часть, линейная зависимость между углом поворота и током и, наконец, высокая точность.
В развитии современного приборостроения намечается тенденция к унификации электромеханических измерительных приборов путем использования во всех приборах одного типа механизма — магнитоэлектрического с дополнением его соответствующим электронным преобразователем измеряемой величины в постоянный ток.
183-
8-6. ИНДУКТИВНЫЕ ПРЕОБРАЗОВАТЕЛИ
Типы индуктивных преобразователей. На рис. 8-29, а изображен наиболее распространенный преобразователь с малым воздушным зазором б, который изменяется под действием измеряемой величины Р. Рабочее перемещение в преобразователях с переменным зазором составляет 0,01—10 мм. В этих преобразователях могут быть использованы ферритовые элементы 2 (рис. 8-29, б), выпускаемые промышленностью; для изготовления подвижного сердечника 1 используется основание такого же элемента 2, стенки которого сошлифовываются. На рис. 8-29, в изображен преобразователь с разомкнутой магнитной цепью. Он представляет собой катушку /, внутри которой помещен стальной сердечник 2. Перемещение сердечника вызывает изменение индуктивности катушки. Этот тип преобразователя применяется для измерения значительных перемещений сердечника (10—100 мм).
Рис. 8-29
Одним из основных достоинств индуктивных преобразователей является возможность получения большой мощности преобразователя (до 1—5 В-А), что позволяет пользоваться сравнительно малочувствительным указателем на выходе измерительной цепи и регистрировать измеряемую переменную величину самописцем или вибратором осциллографа без предварительного усиления. Лишь при малогабаритных преобразователях приходится прибегать к включению усилителя .
~ Электрическое сопротивление индуктивного преобразователя (рис. 8-29, а), если считать, что все сопротивление утечки /?ут включено параллельно зазору, выразится формулой
Z = Ro + j
ИЮ2
^м + ?Ам+ R& । Ryt
Ro + /
(ОЗУ2
Ям+/*« +-JU Яут jl
д (оа>гХм
(Rm + R6IIRvt)2 +
/ ft я \
RM + 7—5 ;i R ут j j \_____Я ~ /
HRM+Re'Ryi)2+XM ’
Из этой формулы видно, что Z связано с длиной б воздушного зазора зависимостью, близкой к гиперболической. С увеличением зазора и, следовательно, сопротивления R., полное электрическое сопротивление уменьшается так, как показано на рис. 8-30, а: от2тах — = jRo + /wio2/(RM + /A'.Jl при бесконечно малом зазоре до Zmin —
184
—'I Ro + /®®2/(RM +/Л’,,-!-RyT) | при бесконечно большом зазоре. Линейный участок характеристики преобразователя с начальным зазором б0 ограничен значением Дб, равным (0,1 -ь 0,15) б0. Относительное изменение сопротивления \ZIZ из-за наличия активного сопротивления обмотки, потока утечки и магнитного сопротивления магнитопровода в 2—5 раз меньше относительного изменения зазора
= Дб/б0. Кроме того, следует обратить внимание на то, что при изменении сопротивления зазора R& изменяется не только реактивная X = ®пу2 (Ra Ra |j 7?ут)/2м, но и активная R = Ro + (owzX„/Zii составляющая сопротивления Z, и вектор сопротивления изменяется так, как показано на рис. 8-30, б.
Рис. 8-30
Расширения линейного участка характеристики можно добиться, если выбрать в качестве выходной величины преобразователя не сопротивление Z, а проводимость Y, которая (если пренебречь сопротивлением R) связана с изменением зазора как
Y = 4- = • = J-JRM + iXw + А || R ).
Z /«к;2 /<ою2 \ м г 1 м 1 li()S И 5 /
Изменение проводимости при относительном изменении зазора е6 = = Дб/б0 составит
R, ел 1
ДУ — ----------------------------
/W (1 +Рво1| А-ут) [1 +(1+М (tfdlMl
и будет почти линейно связано с изменением зазора, в особенности при RyT ;> R&- Уравнение можно представить как
wk)2 ак?2 ’ аю2 ’
и очевидно, что в векторной диаграмме (рис. 8-30, в) приращению проводимости ХЬ в комплексной плоскости соответствует вектор, параллельный мнимой оси и сохраняющий свое направление независимо ни от размера рабочего зазора б, ни от частоты питающего напряжения (при изменении и одинаково изменяются обе составляющие проводимости).
Существенно уменьшить погрешности и увеличить линейный участок характеристики позволяет применение дифференциальных пре
185
распространеннои измерительной
образователен (см. § 3-2). Поэтому в практике индуктивные преобразователи всегда выполняются дифференциальными. На рис. 8-31, а показана схематическая конструкция преобразователя для измерения малых перемещений, на рис. 8-31,6 — для измерения больших перемещений. В том и другом преобразователе происходит перемещение сердечника 1 и при перемещении в направлении стрелки — увеличение сопротивления Z2 и уменьшение сопротивления Zx.
Измерительные цепи индуктивных преобразователей. Наиболее ) является неравновесный измерительный мост, в два плеча которого включены две половины дифференциального преобразователя (рис. 8-31). Как было показано выше, с измеряемой величиной линейно связана проводимость преобразователя. Поэтому оптимальным (см. § 3-2) является включение преобразователей параллельно источнику и питание моста от источника напряжения. Уравновешивание моста в начальном положе-
нии, т. е. при отсутствии входной величины (техноло-
гически трудно получить точное равенство сопротивлений двух половин преобразователя), производится по двум составляющим — изменением сопротивления нерабочего плеча Z3 или Z4 и изменением сопротивления г0, включаемого в плечо, имеющее меньшее активное сопротивление. Частота и напряжение питания моста выбираются на основании соображений, изложенных в § 8-2. Если при Аб — 0 цепь была уравновешена, то при Аб Ф 0 через указатель потечет ток, равный /ук — UАУ, где АУ — приращение электрической проводимости преобразователя.
Ток /ук сдвинут по фазе относительно напряжения питания. Угол сдвига <р = 90°, если 7?ук-> 0, и <р = 0 при 7?ук—>- <»; при согласовании сопротивления указателя с выходным сопротивлением моста Ф = 45°. Это обстоятельство необходимо учитывать при наличии в измерительной цепи фазочувствительных устройств.
8-7. ТРАНСФОРМАТОРНЫЕ (ВЗАИМОИНДУКТИВНЫЕ)
ПРЕОБРАЗОВАТЕЛИ
На рис. 8-32, а показан дифференциальный трансформаторный преобразователь с подвижным сердечником. Как видно из сравнения рис. 8-31, а и 8-32, а, конструкции магнитной цепи индуктивного и взаимоиндуктивного преобразователей одинаковы, отличаются они только числом обмоток. При центральном расположении сердечника ЭДС вторичных обмоток равны между собой и суммарная выходная
186
ЭДС Е2 равна нулю, так как обмотки включены встречно. При смещении сердечника ЭДС £2 определяется по формуле
р ___р ____р_____itari!2 I — 11W1\ — /^а^хЛ /у____________у \
С2 — Х-о — Сб — /соо1 -у у — --у у (Амо — Ама/.
\ мб / мб
Полагая, что ZM6 = £м 4- AZM, a ZMO = ZM — AZM, можно упростить это выражение:
р ____ 9; И'г®! AZM
С 2 — ^/(0 у у
На рис. 8-32, б показан преобразователь угла поворота. Напряжение питания подводится к обмотке 1. Обмотка 2 в этом преобразователе выполнена в виде рамки, имеющей возможность поворачиваться в кольцевом зазоре магнитной цепи 4. При крайних положениях рамки (а2 и а2) индуктированная в ней ЭДС £2 имеет максимальное значение.
Рис. 8-32
По мере поворота рамки в горизонтальное положение ЭДС Е2 линейно уменьшается до нуля (рис. 8-32, в). При переходе рамки через горизонтальное положение фаза ЭДС £2 изменяется на 180°. В тех случаях, когда хотят получить изменение ЭДС преобразователя от нуля до максимума при повороте рамки из одного крайнего положения аг в другое а2, последовательно с рамкой включают дополнительную обмотку 3. Зависимость ЭДС £2, £3 и (£2 + £3) от угла отклонения рамки приведена на рис. 8-32, в. Преобразователи подобного типа можно применять для измерения больших угловых перемещений, и конструктивно для этих целей можно использовать измерительные механизмы ферродинамических приборов. Поэтому и сами преобразователи иногда называют ферродинамическими.
Преобразователь (рис. 8-33, а) с распределенными магнитными параметрами предназначен для измерения больших линейных перемещений и состоит из магнитопровода 4 с рабочей частью в виде двух параллельных полос, обмотки возбуждения 1 и подвижной обмотки 2. При перемещении обмотки 2 от положения 3 до положения 5 индуктированная в обмотке 2 ЭДС возрастает, причем зависимость приращения ЭДС от перемещения обмотки 2 оказывается практически линей
187
ной, если магнитное сопротивление участка 3—5 магнитопровода мало по сравнению с магнитным сопротивлением зазора. Преобразователи подобного типа относительно просто выполнить и с требуемой функциональной зависимостью, применив для этого профилированный магнитопровод (рис. 8-33, б). Неподвижные обмотки преобразователя соединены так, чтобы их потоки в магнитопроводе были направлены встречно. Тогда в положении 0—О ЭДС подвижной обмотки будет равна нулю. При смещении обмотки вправо или влево от нейтрали в ней наводится ЭДС, фаза которой отличается на 180°. Подробно вопросы расчета и конструирования преобразователей с распределенными параметрами и функциональных преобразователей рассмотрены в работах Л. Ф. Куликовского и его учеников.
Рис. 8-33
В трансформаторном преобразователе с подвижным сердечником необходимо обеспечить такой режим питания, чтобы МДС первичной обмотки, а следовательно, и ток Д первичной цепи не изменялись при перемещении сердечника. Для этого в одинарных преобразователях необходимо включить в первичную цепь высокоомный добавочный резистор, а в дифференциальных преобразователях — последовательно соединить первичные обмотки, сопротивления которых изменяются с обратным знаком.
Индуктосины. Для точного измерения угла поворота применяются круговые индуктосины с печатными обмотками. Принцип действия кругового индуктосина иллюстрируется рис. 8-34. На торцевых поверхностях, обращенных друг к другу и разделенных малым воздуш-ным зазором (0,1—0,2 мм) (рис. 8-34, а), ротор и статор несут печатные обмотки, имеющие вид радиального растра. Обмотка статора, к которой подводится напряжение питания высокой частоты (около 10 кГц), показана на рис. 8-34, б; обмотка ротора, в которой наводится ЭДС евых, — на рис. 8'34, в. На рис. 8-34, г изображено сечение обмоток и магнитное поле статора, напряженность которого HtJ меняется вдоль оси х. Максимальная ЭДС наводится в обмотке ротора, когда ее витки находятся под витками статора. При смещении обмотки на
188
угол фдг — л/р, где р — число полюсных шагов статорной обмотки, угол сдвига индуктированной ЭДС изменяется на 180°. Симметрия ЭДС, наводимых в обмотке ротора в положениях а и б, нарушается из-за того, что электромагнитную связь имеют не только радиально расположенные проводники обмоток, но и их лобовые части, расположенные по окружности. ЭДС, индуктируемая в лобовых частях обмоток, не зависит от углового перемещения обмоток и дает постоянное смещение. Для того чтобы это смещение исключить, применяется секционная обмотка, отдельные секции которой смещены относительно друг друга на угол л/р и включены встречно, как показано на рис. 8-34, в. При таком включении ЭДС радиальных участков обмотки складываются, а ЭДС дуговых участков вычитаются.
Рис. 8-34
Для однозначного определения направления поворота подвижного диска в пределах одного периода повторения кривой ЭДС вторичная обмотка выполняется многофазной, в простейшем случае — двухфазной, как показано на рис. 8-34, в. Фазовые обмотки смещаются относительно друг друга на угол (2п + 1) л/(2р). Тогда при смещении ротора относительно некоторого положения, в котором ЭДС обмотки 1 считаем условно положительной, ЭДС ег и е2 в обмотках 1 и 2 вдоль угла поворота диска будут меняться так, как показано на рис. 8-34, д. Значение е1 определяет угол поворота, а угол сдвига г2 относительно ех определяет направление угла поворота. Выходной величиной индуктосина может служить как ЭДС, индуктируемая во вторичной обмотке, так и ее фаза. Однако в том и другом случае измеряемое угловое перемещение не должно превышать полюсного деления, т. е. срЛ, = = ±л/р. Для того чтобы измерять большие углы поворота, индукто
189
син дополняется датчиком грубого отсчета угла, который также может быть выполнен с применением печатных обмоток.
Технологически представляется достаточно сложным выполнить печатную обмотку так, как показано на рис. 8-34, в, поскольку в ней шаг между проводниками неравномерный. Для того чтобы избежать этих технологических трудностей, обе обмотки ротора и статора выполняются с равномерным шагом, но с разным числом витков. Причем эта разность подбирается таким образом, чтобы на части ротора, занимаемой одной секцией обмотки первой фазы, набегало угловое смещение между обмотками ротора и статора, равное л/(2р). Тогда ЭДС следующей секции, которая принадлежит второй фазе, будет сдвинута относительно ЭДС первой секции на электрический угол л/2, ЭДС третьей секции, включаемая встречно с ЭДС первой, будет сдвинута относительно первой секции на угол л и т. д. Таким образом, осуществляются те же сдвиги, что и в обмотках, показанных на рис. 8-34, в. Вследствие веерного разнесения векторов ЭДС, индуктируемых в радиальных проводниках каждой секции, в пределах угла л/2 их суммарная ЭДС падает на 10%.
Полюсный шаг в существующих индуктосинах составляет 0,5— 1,5 мм, сопротивление обмоток небольшое (0,5—5 Ом), ток питания статорной обмотки 0,1—0,5 А, выходная ЭДС 5—10 мВ.
Основными источниками погрешностей индуктосинов являются неточность выполнения обмоток по углу, неплоскостность токопроводящих слоев ротора и статора и радиальные эксцентриситеты обмоток, вызванные несовпадением геометрических осей вращения обмоток с реальной осью вращения. Суммарная погрешность измерения углов с помощью индуктосинов составляет 3—10".
Подробно вопросы расчета и конструкции индуктосинов, а также анализ их погрешностей рассматриваются в работе [6].
8-8. ВИХРЕТОКОВЫЕ ИНДУКТИВНЫЕ ПРЕОБРАЗОВАТЕЛИ
Принцип действия вихретокового преобразователя основан на
изменении индуктивности и взаимоиндуктивности катушек при при-
ближении к ним проводящего тела. Как было сказано выше, глубина проникновения электромагнитной волны в материал определяется формулой Zo.05 = ^/(wpy). Н а низ-
Рис. 8-35
ких частотах (50 Гц) для
меди и алюминия значение
Zo.os составляет около 10 мм, на высоких частотах (500 кГц) глубина проникновения уменьшается до 0,1 мм. На рис. 8-35 показано, как искажается магнитное поле катушки при приближении проводящей пластины. Присутствие вблизи витка с переменным током проводящей среды приводит к изменению
его первоначального поля и электрических параметров витка, т. е.
190
его активного и реактивного сопротивления: активное сопротивление витка увеличивается за счет роста потерь в проводящей среде, а
индуктивное сопротивление уменьшается.
Значение вносимых сопротивлений /?вн и Хвн зависит при постоянной частоте питания и геометрических размерах обмотки от расстояния б от обмотки до пластины, электрической проводимости и толщины пластины, пока толщина не превышает величины d = 2Z0>06.
В качестве примера на рис. 8-36 приведены зависимости относительного изменения активного и индуктивного сопротивлений витка радиусом R, находящегося над проводящим полупространством, от а = 26/7? и Р = J/2 Rlz^5.
Вихретоковые преобразователи находят самое широкое применение в области бесконтактного контроля линейных размеров тонких пластин и толщины покрытий (индукционная тол-щинометрия) и обнаружения дефектов — поверхностных царапин и трещин. Для этих целей используются накладные (рис. 8-37, а), экранные (рис. 8-37, б) и щелевые (рис. 8-37, в) датчики.
Применять вихретоковые датчики для измерения перемещения, очевидно, имеет смысл толь
шЬ
Рис. 8-36
ко в тех случаях, когда датчик не должен
иметь ферромагнитных включений, так как чувствительность вихретокового преобразователя к перемещению в 5—20 раз меньше чувствительности такого же по габаритам индуктивного преобразователя с ка
Рпс. 8-37
тушкой, помещенной в магнитопровод с перемещающимся сердечником. Кроме того, вихретоковые преобразователи имеют большие погрешности, обусловленные главным образом температурными изменениями электрической проводимости проводящего тела.
8-9. МАГНИТОУПРУГИЕ ПРЕОБРАЗОВАТЕЛИ
Принцип действия магнитоупругих преобразователей основан на изменении магнитной проницаемости ц ферромагнитных тел в зави-
191
симости от возникающих в них механических напряжений (магнитоупругий эффект), обусловленных воздействием на ферромагнитные тела механических сил Р (растягивающие, сжимающие, изгибающие, скручивающие). Изменение магнитной проницаемости Ар/р для различных материалов составляет 0,5—3% при изменении а на 1 МПа.
Типы магнитоупругих преобразователей можно разбить на две основные группы. К первой группе относятся преобразователи, в которых используются изменения магнитной проницаемости чувствительного элемента в одном направлении; магнитный поток в них направлен в большей части магнитной цепи вдоль линии действия уси-
W2 Wf
Рис. 8-38
лия. В преобразователях этой группы под действием измеряемой силы изменяется индуктивность обмотки (рис. 8-38, а) или индуктивность между обмотками (рис. 8-38, б). В первом случае реализуется цепь преобразований Р о р ZM L Z, во втором —Р а -*
р -> ZM М -> Ег.
Ко второй группе относятся преобразователи, в которых используется изменение магнитной проницаемости одновременно в двух взаимно перпендикулярных направлениях или, иначе говоря, магнитная анизотропия материала чувствительного элемента. В этих преобразователях магнитный поток направлен под углом 45° к линии действия измеряемого усилия (рис. 8-38, в). В ненагруженном состоянии преобразователя силовые линии первичной обмотки (рис. 8-38, г) располагаются симметрично и не сцепляются со вторичной обмоткой, в результате этого ЭДС вторичной обмотки равна нулю. После приложения усилия вследствие изменения магнитной проницаемости материала магнитные силовые линии (рис. 8-38, д) «вытягиваются» в направлении большей проницаемости, «сокращаются» в направлении
192
меньшей проницаемости и, сцепляясь со вторичной обмоткой, индуктируют в ней ЭДС, пропорциональную приложенному к преобразователю усилию. При изменении знака нагрузки изменяется и фаза выходной ЭДС. Из-за начальной магнитной анизотропии материала при отсутствии нагрузки уже существует некоторая ЭДС. Для ее уменьшения в датчиках из листового материала чередуют листы с взаимно
Рис. 8-39 продольном магнитном поле (рис. 8-39, б),
перпендикулярными направлениями проката, кроме этого, специальным образом располагают отверстия, выбирая угол между обмотками; используют дополнительную обмотку или магнитный шунт.
Магнитоанизртропные свойства проявляются и при скручивании ферромагнитных тел. Этот эффект, называемый эффектом Видемана, заключается в том, что при прохождении тока через стержень, на который воздействует крутящий момент, в стержне, кроме кругового магнитного потока, возникает продольный магнитный поток, наводящий в обмотке, намотанной на стержень (рис. 8-39, а), ЭДС, пропорциональную крутящему моменту. При скручивании ферромагнитного стержня', находящегося в
в стержне появляется винтовая составляющая потока, которую можно считать результатом суперпозиции продольного и кругового потоков. Круговой поток наводит в контуре, образованном стержнем и подключенным к нему милливольтметром, ЭДС, пропорциональную потоку и зависящую от крутящего момента. Датчики, основанные на эффекте Видемана, подробно исследованы Е. Ф. Фурмаковым. Приводятся следующие экспериментальные данные: при диаметре скручиваемой проволоки из стали марки «Э» 1,5 мм и длине активного участка 30 мм поле возбуждения частотой 1000 Гц и напряженностью Н — 500 А/м наводит ЭДС е = 20 мВ при крутящем моменте Л4,.р = = IO’2 Н-м.
Основы расчета магнитоупругих датчиков. Характеристики магнитоупругого датчика определяются в первую очередь магнитоупругой чувствительностью Su материала, из которого изготовлена магнитная цепь датчика. Величина — зависит от типа материала,
характера его термической обработки, характера напряжений (растяжение или сжатие), режима работы магнитной цепи (режим заданной индукции В или режим заданной напряженности Н), значения индукции В. Информация о магнитоупругих свойствах ферромагнитных материалов пока весьма ограниченна. Кроме того, имеющиеся данные, приводимые разными исследователями, трудно сопоставимы, так как зависят от слишком многих факторов, не всегда оговориваемых авторами. Эти обстоятельства существенно затрудняют расчет. Наиболее
7 Е. С. Левшина, П. В. Новицкий
193
подробные характеристики магнитоупругих свойств приводятся в работах П. Б. Гинзбурга, М. И. Столбуна и Г. И. Шевченко.
Ориентировочные значения магнитоупругой чувствительности в процентах на мегапаскаль для некоторых сталей приведены ниже:
Растяжение Сжатие
12Ю +2,5 —1,8
50Н +2,8 —2,8
Ст. 3 +0,6 —1,1
Допустимые механические напряжения в рабочей части магнитной цепи определяются погрешностью линейности и гистерезиса. Максимальные напряжения не должны превышать 0,2—0,1 предела упругости данного материала. Таким образом, полное изменение магнитной проницаемости может составлять 20—40%. Расчет сопротивления магнитному потоку в сердечнике и полного электрического сопротивления катушки преобразователя выполняется, как это было изложено выше в § 8-2. При слабом проявлении поверхностного эффекта относительное изменение магнитного сопротивления участка, подвергающегося деформации, AZM/ZM = Др/р. При резко выраженном поверхностном эффекте магнитное сопротивление пропорционально "Кр и вследствие этого относительное изменение магнитного сопротивления AZM/ZM = 0,5 Др/р. Если учесть, что в магнитопроводе преобразователей не все участки подвергаются деформации (см. рис. 8-38) и, следовательно, изменяют сопротивление, а также то, что полное сопротивление преобразователя определяется не только изменяющейся индуктивной составляющей, но и активным сопротивлением обмотки, относительное изменение сопротивления может составлять AZ/Z а* а> 0,5 SMo при отсутствии поверхностного эффекта и KLIT ~ 0,25 Suo при резко выраженном поверхностном эффекте.
При выборе напряжения питания датчика руководствуются соображениями о допустимом нагреве, как это было рассмотрено в § 8-2, и обеспечении в магнитной цепи режима, соответствующего максимуму магнитоупругой чувствительности. Для большинства материалов максимуму SIL соответствуют примерно те же диапазоны В и Н, что и максимуму р. В магнитоанизотропных датчиках в рабочей части диагонального сечения рекомендуется выбирать индукцию В = 1,5 Тл.
В конструкции магнитной цепи датчика чрезвычайно нежелательны стыки отдельных частей, так как магнитное сопротивление стыков изменяется при механической нагрузке магнитной цепи и это изменение может внести существенную погрешность. Поэтому, несмотря на технологические трудности, магнитные цепи датчиков желательно выполнять так, как показано на рис. 8-38, а и б.
Погрешности магнитоупругих преобразователей. Магнитоупругая погрешность выражает невоспроизводимость магнитного состояния сердечника преобразователя при нагрузке и разгрузке. По своему значению погрешность у, обычно превышает остальные составляющие и равна 1—4%. Для получения возможно меньшей погрешности магнитная цепь датчика, работающая как упругий элемент, должна
194
в первую очередь удовлетворять требованиям, предъявляемым к упругим элементам, т. е. элемент должен быть монолитным, выполнен из материала с высоким пределом упругости, рабочая часть элемента должна быть удалена от точек приложения силы. Так, для датчика с магнитной цепью, показанной на рис. 8-38, в, погрешность при переходе от листового материала к сплошному уменьшается от 1,5—4 до 0,3%. Однако при этом значительно снижается чувствительность
датчика, так как магнитная анизотропия сплошного материала меньше, чем листового. Хорошие результаты показал магнитоупругий датчик с комбинированным сердечником (рис. 8-40).
Существенной может оказаться также погрешность линейности, определяемая как преобразованием о-> ц, так и дальнейшим преобразованием Ар, -> AZM -> AZ -> UyK или Ац -> AZM -> Л4 -> е. Выбором индукции В в материале преоб-
разователя, созданием предварительно напряженного состояния его, а также взаимной коррекцией нелинейностей удается снизить суммарную погрешность линейности до 1—2%.
В процессе старения материала происходит изменение его магнитной проницаемости и внутренних напряжений в нем. Это приводит к нестабильности магнитоупругой чувствительности, со- : ставляющей после искусственного старения (термообработка, нагружение— “ примерно 104 циклов) неболее0,5% для преобразователей из сплошного материала и не более 2% для преобразователей из листового материала. При изменении меняется как начальное значение магнитной
«б 1
Рис. 8-40 напряжения питания проницаемости, так и
магнитоупругая чувствительность, поэтому стабилизация напряжения питания необходима для всех типов преобразователей. Уменьшение погрешности достигается также применением дифференциальных преобразователей. Однако при их конструировании встречается ряд трудностей, обусловленных необходимостью такой передачи измеряемой силы на преобразователи, чтобы один из них испытывал деформацию сжатия, а другой — растяжения.
На рис. 8-41 показана в качестве примера конструкция дифференциального трансформаторного датчика, в котором измеряемая сила через подпятник 1 сжимает наружный цилиндр 2 верхнего преобразователя. Усилие через цилиндр 2 передается на опору 3, и нижний цилиндр 4 остается ненагруженным. Внутренние части магнитопроводов 5 и 8 набраны из пакетов листовой стали, армированных цилиндрическими сердечниками 6 и 7 из сплошной стали. Внутренние части магнитопроводов короче внешних цилиндров 2 и 4, благодаря чему пакеты листовой стали не подвергаются деформации. На каждом из магнитопроводов размещаются по две обмотки: намагничивающая (u»i = 700 витков) и измерительная (w2 = 1000 витков). Как указы-
7*
195
вает П. Б. Гинзбург, погрешность нестабильности и погрешность
гистерезиса датчика с цилиндрами 2 и 4, выполненными из стали 12Ю,
не превышают 0,5% при нагрузках до 64 МПа, погрешность линей-
ности не превышает 1% в
диапазоне изменения о от 6 до 25 МПа, выходное напряжение датчика UBba — = 6,5 В при (/aa)i = 28 А.
Весьма перспективной представляется конструкция дифференциального трансформаторного датчика, работающего на изгиб. Схематическое изображение датчика показано на рис. 8-42. Отверстия по нейтральной линии балки позволяют намотать измерительные обмотки так, чтобы они охватывали части магнитопровода, в которых магнитные проницаемости изменяются с разными знаками. При нагрузке балки через верхнюю часть магнитопровода, испытывающую растяжение, пойдет большая часть намагничивающего потока, создаваемого обмоткой W1, чем через нижнюю,
испытывающую сжатие, и на выходе по-
Рис. 8-41 явится ЭДС е~~е1 — ^.Идентичность
двух половин датчика в этой конструкции безусловно выше, чем в конструкции на рис. 8-41; поэтому можно предположить, что погрешность будет меньше.
Наименьшими погрешностями обладают магнитоанизотропные преобразователи, в которых используется как бы дифференциальный эффект и самого материала и, следовательно, обеспечивается наиболее
полная идентичность внешних условии и собственных свойств.
Область применения магнитоупругих преобразователей. Магнитоупругие датчики применяются для измерения сил, давлений, крутящих моментов. Мощность, развиваемая датчиком, как правило, достаточна для непосредственного включения указателя без предварительного усиления. Датчик обладает высокой надежностью, так как не имеет
Рис. 8-42
Рнзм
подвижной части, перемещающейся под
действием входной величины. Датчик представляет собой жесткий элемент, имеющий собственную частоту колебаний в диапазоне 1— 10 кГц и позволяющий измерять как статические, так и высокочастотные динамические величины. Механическое напряжение в материале датчика составляет 10—50 МПа. Учитывая, что рабочее сечение магнитопровода обычно не менее 25 мм2, можно оценить минимальный диапазон измерения датчика по силе значением 250 Н, по давлению — примерно 107 Па.
196
8-10. ИНДУКЦИОННЫЕ ПРЕОБРАЗОВАТЕЛИ
' Индукционные преобразователи основаны на использовании явления электромагнитной индукции. Согласно закону электромагнитной индукции, ЭДС в контуре определяется формулой е = —dW/dt, где ¥ — потокосцепление с контуром. Таким образом, выходной величиной индукционного преобразователя является ЭДС, а входной — скорость изменения потокосцепления.
В общем случае индукционный преобразователь представляет собой катушку с сердечником, которая характеризуется некоторым обобщенным параметром Y и ЭДС в которой может индуктироваться как в результате изменения во времени внешнего магнитного поля, так и в результате изменения во времени параметра У преобразователя. Если преобразователь находится в однородном магнитном поле с индукцией В, то в его обмотке, имеющей w витков, наводится ЭДС
d¥ - d® /„dfi . r}dY\ ,Q ..
e = ~-.-г = —w= —w (Y ^7 + В(8-4) dt dt \ at ‘ at /
Обобщенный параметр преобразователя У = t cos а яв-
ляется функцией четырех частных параметров a, S, it' и А/, где а — угол между магнитной осью преобразователя, совпадающей с нормалью к плоскости обмотки, и вектором магнитной индукции; S — площадь поперечного сечения катушки; р/ — магнитная проницаемость среды в единицах it0; N — коэффициент размагничивания сердечника, определяемый формой и соотношением размеров сердечника.
Обычно в преобразователе изменяется один из параметров при постоянных значениях остальных, и из уравнения (8-4) можно получить пять частных уравнений преобразования индукционных преобразователей.
При У — const
е[В(0] = -ш5тттЯ.^ео5с.(|; (8-5)
при В — const
е[а(0]=щ5Гр^—jjsina (8-6)
е [Л; (()] = wSB cos а (1 ; (8-8)
е [и (()] = — WSB cos а Ц _j_ _ 1)]2 • (8-9)
Для катушек без сердечников уравнения преобразования существенно упрощаются и для основных видов преобразователей сводятся к следующим:
а) для неподвижной катушки в переменном магнитном поле (В = = Вт cos со/, а = 0)
e = ®wSBmsin®t',
197
б) для катушки, вращающейся с частотой Q в постоянном магнитном поле с индукцией Во
е = QwSB0 sin QZ;
в) для контура, отдельные участки которого линейно перемещаются в магнитном поле, изменяя площадь потока сцепления с контуром,
e = $[vB]dl;
i
г) для отрезка длиной /, движущегося в однородном магнитном поле со скоростью v так, что направления векторов 1, В и v взаимно пер пенди ку л яр ны,
e = vBl.
Индукционные преобразователи широко применяются для измерения параметров магнитных полей, частоты вращения, параметров вибрации и сейсмических колебаний, расхода жидких веществ.
Индукционные преобразователи для измерения параметров магнитных полей. Для измерения магнитной индукции переменного магнитного поля применяются преобразователи со стационарными (неподвижными) обмотками. Функция преобразования преобразователя соответствует уравнению (8-5). Коэффициент преобразования, связывающий действующее значение индуктируемой ЭДС с амплитудным значением индукции периодически симметрично меняющегося магнитного поля, определяется выражением
Кв = Е!Вт = Мг^юВ coscqi'/[l 4-Л/ (р/ — 1)], где йф — коэффициент формы кривой; f — частота переменного магнитного поля. При искаженной форме кривой обычно измеряют среднее значение индуктируемой ЭДС £ср = Elk$.
Для измерения индукции постоянного магнитного поля могут быть использованы как преобразователи с условно стационарной обмоткой, так и преобразователи с принудительным движением обмотки. В преобразователях со стационарной обмоткой изменение магнитного потока, сцепляющегося с витками обмотки, может происходить в результате изменения самого измеряемого поля, например при измерениях магнитного поля, вызываемого включением какого-то агрегата, или в результате однократного изменения положения самого преобразователя — удаления преобразователя из магнитного поля или поворота в поле на 90 или 180°.
Выходным сигналом такого преобразователя является импульс тока или импульс ЭДС, которые возникают при изменении полного магнитного потока. Изменение потока А¥ связано с ЭДС и током как
^2 ^2
№=^edt = r $ idt~rQ, tt и
где г — полное сопротивление измерительной цепи с учетом сопротивления преобразователя; Q — количество электричества.
198
В качестве интеграторов используются баллистический гальванометр (при интегрировании тока) или магнитоэлектрические, фото-гальванометрические и электронные веберметры с операционными усилителями, применяемые для интегрирования ЭДС.
Индукционные преобразователи для измерения параметров магнитных полей в воздушном пространстве обычно выполняются в виде измерительных катушек различной формы, начало и конец обмотки которых находятся в одном месте, чтобы не создавались дополнительные контуры за счет подводящих проводов.
Для измерения напряженности магнитного поля при испытании ферромагнитных материалов используются плоские измерительные катушки (рис. 8-43, а), помещаемые на поверхности испытуемого образца; при этом измеренная в воздухе напряженность поля принимается равной напряженности поля на поверхности образца.
Для измерения магнитной индукции и напряженности неоднородных магнитных полей целесообразно использовать шаровые индукционные преобразователи (рис. 8-43, б). Магнитный поток, сцепляющийся с такой катушкой, равен Ф = 4nzW30/3, где Во — индукция в центре преобразователя; г — радиус сферы; w — число витков на единицу длины оси zz', которая должна совпадать с вектором й0.
Для измерения МДС используются индукционные преобразователи, называемые магнитными потенциалометрами, обычно выполняемые в виде равномерной обмотки на гибком изоляционном каркасе. Обмотка выполняется с четным числом слоев так, чтобы выводы находились в середине обмотки (рис. 8-43, в). Магнитный потенциалометр помещается в магнитное поле таким образом, чтобы его концы находились в точках А и В, между которыми измеряется МДС. Магнитный поток, сцепляющийся с витками потенциалометра, равен ¥ = в
= Sa'po = Swp.aFx.
А
Порог чувствительности средств измерений со стационарными индукционными преобразователями определяется главным образом механическими помехами (вибрации, сейсмические и акустические воздействия), которые приводят к колебаниям преобразователя и наведению дополнительной ЭДС, а также дрейфом интегрирующего выходного преобразователя. Наиболее чувствительные магнитоэлектриче
199
ские веберметры имеют цену деления 5 • 10~6 Вб, а фотогадьванометри-ческие веберметры — 4-10~8 Вб.
Индукционные преобразователи с вращающимися или вибрирующими чувствительными элементами имеют функции преобразования, которым соответствуют уравнения (8-6)—(8-8).
На рис. 8-44, а показана схема а-преобразователя (так называемого измерительного генератора), который состоит из рамки 1 с числом витков w и вращается при помощи двигателя 2 с угловой частотой Q = dajdt, где — угол между магнитной осью преобразователя и поперечной компонентой вектора магнитной индукции В01 = Во sin а±, где а± — угол между осью вращения преобразователя и вектором Во.
При р/ = 1 из уравнения (8-6) получаем е [а (/)] = NSB0 sin at X Xsina^dajdt. Учитывая, что а2=Ш, имеем e[a (Z)]=Qu>Bosina1sinQt
Рис. 8-44
Коэффициент преобразования преобразователя кв = Ет/В0 = QwS, где Ет — амплитудное значение генерируемой ЭДС.
Преобразователи с вращающейся катушкой отличаются высокой чувствительностью (до 300 В/Тл). Порог чувствительности ограничен уровнем шума коллектора и наводками от электродвигателя и цепи питания. Для снижения порога чувствительности используются бес-коллекторные токосъемы, а вращение генератора осуществляется через редуктор, с тем чтобы частота выходного сигнала отличалась от частоты сети и не была кратной частоте вращения двигателя.
На рис. 8-44, б изображен четногармонический преобразователь. В качестве вращающегося элемента используется короткозамкнутое кольцо 1, которое вращается двигателем 2 в неподвижной обмотке 3. Магнитное поле, создаваемое током, индуктированным в короткозамкнутом кольце при его вращении во внешнем поле с индукцией Во, изменяется с одинаковой частотой как по модулю, так и по направлению. Вследствие этого проекция вектора магнитной индукции поля на ось неподвижной обмотки, совпадающей с вектором измеряемой
200
магнитной индукции Во, будет изменяться пропорционально cos2 Qi. Суммарный поток, пронизывающий неподвижную катушку (активным сопротивлением кольца пренебрегаем), равен Ф2 = = SB0 _— SB0 cos2 Qi = Q,5SB0 (1—cos 2QZ), и ЭДС, наводимая в неподвижной обмотке, е = QwSB0 sin 2QC
Разнесение частот напряжения питания и полезного сигнала позволяет отфильтровать наводки и создать на рассмотренном принципе индукционные преобразователи с порогом чувствительности 1СГ11’ Тл.
На рис. 8-44, в показан S-преобразователь с радиальными колебаниями, возбуждаемыми электрострикционным вибратором. Вибратором является тонкостенный цилиндр 1 из сегнетокерамики PbZrO3 с металлизированными внутренней 2 и внешней 3 поверхностями, куда подводится переменное управляющее напряжение Uf. Внутренний электрод имеет продольный разрез 4, а внешний представляет собой короткозамкнутый виток, на котором находится вторичная многовит-ковая обмотка 5. Вследствие радиальных электрострикционных коле-
Рис. 8-45
баний периодически изменяется площадь поперечного сечения короткозамкнутого витка, и при наличии постоянного магнитного поля, вектор магнитной индукции которого направлен по оси цилиндра, в наружном короткозамкнутом витке возникает переменный ток, который вызывает во вторичной обмотке ЭДС, пропорциональную индукции Вд. Частота электрострикционных колебаний и выходной ЭДС равна удвоенной частоте управляющего напряжения.
Индукционные преобразователи для измерения частоты вращения. Для измерения частоты вращения используются а - и ДСцреобразо-ватели. Конструктивно они отличаются от преобразователей магнитной индукции тем, что дополняются устройством (обычно постоянный магнит), создающим магнитное поле с заданной индукцией, а вращение подвижных элементов осуществляется объектом, частота вращения которого измеряется. На рис. 8-45, а показано принципиальное устройство тахогенератора, выходная ЭДС которого е = QBKwS sin Qi, где Q — частота вращения катушки.
Для измерения частоты вращения используются также ДСпреобра-зователи с неподвижной обмоткой. Принцип действия такого преобразователя показан на рис. 8-45, б. В этом преобразователе, постоянный магнит и катушка, содержащая две полуобмотки с числом витков w, неподвижны. При вращении ротора происходит перераспределение
201
магнитного потока постоянного магнита: увеличивается поток через полюс магнитопровода, под которым проходит зубец ротора, и уменьшается поток через полюс, под которым проходит паз ротора. Поток постоянного магнита остается при этом неизменным, так как полное магнитное сопротивление для суммарного потока остается почти постоянным. Таким образом, в части магнитопровода, образованной полюсами 1 и 2 и ротором, за счет изменения размагничивания полюсов при вращении ротора появляется переменная составляющая магнитного потока, и в катушке индуктируется ЭДС, частота й которой определяется частотой вращения ймх и числом п зубцов ротора: й = пймх, а амплитуда Ет = 2ЙАФмш, где АФМ — амплитуда переменной составляющей потока. В подобных преобразователях в качестве выходной величины чаще используется не ЭДС, а частота.
Рис. 8-46
Индукционные преобразователи параметров вибрации. Принцип действия преобразователя виброскорости поясняется рис. 8-46, а. В катушке, колеблющейся в зазоре, индуктируется ЭДС е — — &XmBNwlcp sin й/, где ЙХт sin й/ = х' — скорость катушки, совершающей колебания х = Хт cos й/; Вл- — индукция в зазоре; w и /ср — число витков и средняя длина витка.
Если индукция в зазоре преобразователя составляет = 0,5 Тл, диаметр обмотки d = 20 мм, площадь окна, заполняемого проводом, S0K„ = (1 X 5) мм, то, выбрав провод диаметром 0,05 мм (си' = 180 витков/мм2), можно получить коэффициент преобразования kv = 10 В/(м/с), и амплитуда выходного напряжения преобразователя, подвижная часть которого совершает колебания с амплитудой Хт = = 1 мм и частотой f= 10 Гц, составляет 0,630 В.
Чтобы получить значение виброперемещения или виброускорения, выходной сигнал подается соответственно на интегрирующий или дифференцирующий усилитель. Во избежание нелинейных искажений 202
выходного электрического сигнала, повторяющего по форме входной механический сигнал, усредненное по всем виткам значение индукции при колебаниях катушки должно оставаться постоянным. Для этих целей длина катушки I выбирается или меньше ширины зазора 10 так, чтобы при колебаниях катушка не доходила до его краев, или больше ширины зазора так, чтобы края катушки были всегда за пределами зазора (см. § 8-2 и 8-4). Обычно индукционные преобразователи применяются для измерения параметров вибраций в диапазоне частот 1—50 Гц при амплитуде вибраций не более 1—5 мм. Чувствительность индукционных преобразователей сейсмоприемников достигает 140 В/(м/с) (например, для СК-1П).
Устройство датчика виброметра показано на рис. 8-46, б. По измерительной оси хх расположена подвижная часть, представляющая
Рис. 8-47
собой магнит 1 и полюсные наконечники 2. Подвижная часть крепится в подшипниках 8, ограничивающих ее перемещения по осям, перпендикулярным измерительной, и поджимается пружинами 3. Измерительная обмотка, состоящая из двух половин, намотана на медный каркас 4 и укреплена в стальной обойме 5, которая одновременно служит корпусом. Датчик закрывается крышками 6 и при помощи фланца 7 крепится к объекту измерения. Магнитные поля в рабочих зазорах, в которых расположены измерительные полуобмотки, направлены встречно; благодаря этому уменьшается погрешность от влияния внешнего магнитного поля. Медный каркас за счет наводимых в нем при движении магнита токов служит для увеличения коэффициента успокоения (см. § 8-5).
Индукционные преобразователи расходомеров. Принцип действия индукционного преобразователя расходомера поясняется рис. 8-47, а. В потоке жидкости, движущейся в трубопроводе 1 из немагнитного материала между полюсами магнита, возникает ЭДС, значение которой пропорционально скорости движения потока: е = BDv, где В — магнитная индукция; D — диаметр трубы; v — скорость движения жидкости. Эта ЭДС снимается с помощью электродов 2 и 3, изолированных от трубопровода.
Как видно из приведенного уравнения, генерируемая в преобразователе ЭДС не зависит от свойств жидкости, и поэтому индукционные расходомеры принципиально могут быть применены для самого широ-
203
кого класса жидкостей. Однако свойства жидкостей определяют внутреннее сопротивление преобразователя и возможности дальнейшего точного преобразования и измерения ЭДС, поэтому в технических характеристиках расходомера всегда указывается минимальная электрическая проводимость жидкости, для измерения расхода которой он может быть применен.
Индукционные расходомеры используются для измерения скоростей жидких металлов (жидкости с электронной проводимостью), водных растворов (жидкости с ионной проводимостью), и, кроме того, делаются попытки применить их для измерения скоростей диэлектрических жидкостей. Индукционные преобразователи расходомеров промышленного назначения имеют чувствительность 0,5—1,5 мВ/(м/с). Диаметр трубопроводов может быть весьма значительным, и поэтому для создания магнитного поля используются обычно не постоянные магниты, а электромагниты. В расходомерах для жидких металлов применяются электромагниты, питаемые постоянным током. В расходомерах для воды и электролитов используются электромагниты (рис. 8-47, б), питаемые для исключения напряжения поляризации только переменным током (частота 10—1000 Гц). В этом случае выходной сигнал е = BmDv sin a>t также является переменной ЭДС и из него легко могут быть исключены гальванические и термо-ЭДС. Однако в переменном магнитном поле, кроме ЭДС, обусловленной движением контура, будет индуктироваться ЭДС етр = —d^/dt = = cos со/, называемая трансформаторной.
Для того чтобы уменьшить трансформаторную ЭДС, провода вторичного контура стремятся расположить так, чтобы площадь SK сцепления контура с переменным потоком была минимальной. Положение проводников, находящихся в поле, должно быть строго фиксировано, чтобы величина SK не изменялась. В контур вводятся специальные компенсационные петли (обмотка W] на рис. 8-47, б), в которых наводится ЭДС ВтР, включаемая встречно с ЭДС етр и регулируемая так, чтобы етр — e'rvR!R0 ~ 0.
Кроме того, помеха в виде трансформаторной ЭДС и полезная ЭДС, пропорциональная скорости движения, как видно из приведенных выражений, сдвинуты по фазе на угол л/2 н могут быть разделены на выходе фазочувствительным усилителем.
8-11. МАГНИТОМОДУЛЯЦИОННЫЕ ПРЕОБРАЗОВАТЕЛИ
Магнитомодуляционными называются преобразователи, действие которых основано на изменении магнитного состояния ферромагнитного материала при одновременном намагничивании в постоянном и переменном полях. Модуляция магнитным потоком возможна за счет нелинейных свойств магнитной цепи (см. § 8-1 и 8-2).
Магнитомодуляционные преобразователи (ММП) широко используются в счетно-решающей технике в качестве логических элементов и запоминающих устройств. В измерительной технике ММП применяются для измерения напряженности постоянного магнитного поля (феррозонды), для преобразования постоянного тока в переменный 204
с уменьшением абсолютного значения тока (измерительные трансформаторы постоянного тока), для преобразования постоянного тока в переменный с увеличением абсолютного значения тока (магнитные усилители), для измерения перемещения объекта, с которым связывается подвижная часть преобразователя, несущая постоянный магнит (магнитомодуляционные преобразователи перемещения).
На рис. 8-48, а представлена упрощенно в виде ломаной линии 1 основная кривая намагничивания В = f (И) ферромагнитного материала; там же показана кривая 2 магнитной проницаемости и (Н) — = В!Н и кривая 3 дифференциальной магнитной проницаемости
t
Рис. 8-48
рд (/7) = dB/dH. На этом же рисунке даны кривые 4, 5, и 6 напряженностей переменного магнитного поля Н — Нт sin tat, наложенного на постоянное с напряженностью Н_. При этом напряженность переменного поля может быть много меньше напряженности постоянного поля (кривая 4), сравнима с ней по значению (кривая 5) или больше ее (кривая 6), а напряженность постоянного магнитного поля Я_ может быть как меньше, так и больше напряженности насыщения /7нас.
Для магнитной цепи ММП характерны три различных режима работы: а) Нт~ и меньше /7нас; б) >= /7нас, Нт^ Н„', в) И,,,-* > Ннас, Н„ Н,п^,. В первом режиме, показанном на рис. 8-48, а, магнитное сопротивление переменному потоку зависит от величины HL и при Нт^ <; /7_ может быть определено дифференциальной магнитной проницаемостью рд. При сравнимых величинах Нт^ и для анализа работы магнитной цепи используются характеристики двойного намагничивания Вт — f (Нт, В2), приводимые ниже на рис. 8-49.
205
Во втором режиме (рис. 8-48, б) модулирующим является постоянное поле, сердечник находится в режиме насыщения и выходит из него лишь в те полупериоды переменного напряжения, когда напряженность Н~, направлена навстречу Н_ и достигает такого значения, что результирующая напряженность оказывается меньше напряженности насыщения. Таким образом, для переменного магнитного поля сердечник работает в ключевом режиме^ включаясь на отрезке времени аб, когда Н_ + 0. Всю остальную часть периода магнитная
проницаемость сердечника, показанная на рис. 8-48, б кривой у (t), мала; обмотка, по которой проходит переменный ток, имеет малую индуктивность L — w4Za = рж25//м, и лишь на участке аб магнитная Проницаемость и индуктивность резко возрастают.
В третьем режиме модулирующим является переменное поле. Для постоянного магнитного поля сердечник работает в ключевом режиме,
включаясь дважды за каждый период, когда напряженность переменного поля находится в диапазоне, ограниченном штриховыми прямыми (рис. 8-48, в). Действительно, в ту часть периода, когда < Днас, магнитная проницаемость сердечника велика и он является для постоянного потока нормальным ферромагнетиком с магнитной проницаемостью у = (103 -е 105) р0, а в ту часть периода, когда
> Днас, магнитная проницаемость сердечника падает до значения р = (10 -г 1) п0 и он как бы отсутствует для постоянного магнитного поля. Кривая р = f (0 также показана на рис. 8-48, в.
Магнитомодуляционные преобразователи перемещения. Принцип действия преобразователя показан на рис. 8-49, а. Между двумя сердечниками 1 и 2 из листовой стали расположен постоянный магнит 3. Поток, создаваемый магнитом, замыкается через сердечники. При симметричном положении магнита потоки через сердечники равны и, следовательно, в каждом из сердечников действуют одинаковые индукции постоянного подмагничивания, равные В = 0,5оФ_/(25серд), где Ф_ — поток магнита; о — коэффициент рассеяния и 5серд — площадь сечения сердечника. На сердечник 1 намотана обмотка с числом витков w, а сердечник 2 служит магнитным шунтом. Обмотка через резистор подключена к источнику переменного тока 50 Гц. При переме
206
щении магнита влево индукция в сердечнике 1 увеличивается и магнитная проницаемость материала падает. Магнитное сопротивление переменному потоку возрастает, индуктивность обмотки падает, ток и падение напряжения на резисторе Rti увеличиваются. Таким образом, входной величиной преобразователя является перемещение магнита, а выходной — падение напряжения на резисторе RH. Характеристики двойного подмагничивания для листовой стали приведены на рис. 8-49,5.
В том случае, если сердечник 1 находится по переменному потоку в режиме заданной индукции, т. е. R = RH + Rw = 0 (Rw — активное сопротивление обмотки) и все напряжение питания уравновешивается противо-ЭДС обмотки, напряженность в материале и, следовательно, определяющий ее ток характеризуются при изменении точками пересечения прямой 1 с семейством приведенных характеристик. Если сердечник 1 находится в режиме заданной напряженности, т. е. RH coL и ток через обмотку не зависит от изменения ее противо-ЭДС, то переменная индукция в сердечнике и связанная с ней противо-ЭДС определяются точками пересечения прямой 2 с семейством характеристик. В реальном случае нагрузочная кривая описывается уравнением эллипса
(вт/в^)2+(дт/д;)2=1,
где В:„=1/2 Д/(иа>Дссрд); H'm = V2 Iwll^ = V2Uwl{l^Ry, В'т — амплитудное значение индукции в режиме заданного напряжения; Н'т — амплитудное значение напряженности в режиме заданного тока; U — действующее напряжение питания; w — число витков обмотки; со — частота; Всерд и /серд — площадь поперечного сечения сердечника и длина магнитной линии по сердечнику.
В качестве примера построим эллипс нагрузки и рассчитаем изменение тока при изменении индукции в сердечнике от В_ = 0,8 Тл до В_ = 1,2 Тл. Размеры преобразователя: толщина сердечника h = 3 мм, ширина b = 10 мм, периметр 50 мм. Число витков в обмотке w = 200, сопротивление R = 25 Ом. Получим
R' • 2-° _ 1 4 Тп-
т 0)wScepx 2л-50-200-3-10-Ю”» ’ ’
, Уч №_/2~-200-2,0
т 50-10^-25—448 АМ
Точки а, б и в эллипса нагрузки соответствуют напряженностям На = 242 А/м, Нб = 288 А/м и Нв = 325 А/м. Эти напряженности соответствуют токам, определяемым формулой I = Нт1серл/(УЧ ш) и равным
у 220^50402 = 4з мд; / =49 мА и /в=58мА.
а \ГЧ -200
Вопросы расчета и проектирования ММП перемещения подробно рассмотрены Л. Ф. Куликовским и В. Г. Жировым.
Измерительные трансформаторы постоянного тока (ИТПТ) применяются для измерения больших постоянных токов, а также токов и напряжений в высоковольтных цепях постоянного тока.
207
ИТПТ (рис. 8-50, а) состоит из двух одинаковых замкнутых ферромагнитных сердечников из магнитомягкого материала с прямоугольной кривой намагничивания, которые имеют общую первичную обмотку с числом витков wr — 1, представляющую собой шину, по которой проходит измеряемый постоянный ток, и отдельные вторичные обмотки с числом витков w2, равномерно намотанные на свои сердечники. Вторичные обмотки включаются последовательно-встречно к вспомогательному источнику переменного тока, а протекающий по ним ток t2 обычно выпрямляется и измеряется магнитоэлектрическим амперметром.
Магнитная цепь ИТПТ работает в режиме насыщения по постоянному магнитному потоку и выходит из этого режима, только когда
Рис. 8-50
напряженность встречно направленного переменного магнитного поля компенсирует напряженность постоянного магнитного поля (рис.8-48,в).
На рис. 8-50, б изображена идеализированная прямоугольная кривая намагничивания сердечников и показаны МДС, действующие в сердечниках. Под действием МДС оба сердечника насыщаются. Току Д соответствует начальная рабочая точка А на участке насыщения кривой намагничивания. Если ток Ц увеличивается, точка А смещается вправо (Д"); при уменьшении Д точка А смещается влево (Д'). Ось времени для переменной МДС i2w2 совмещена с вертикальной линией, проходящей через точку А.
Рассмотрим полупериод тока, когда в сердечнике I первичная IJw1 и вторичная i2w2 МДС вычитаются, а в сердечнике II — суммируются. При суммировании МДС индукция в сердечнике остается неизменной, равной индукции насыщения Внас. При вычитании МДС индукция остается неизменной, лишь пока i2w2 < 1^. При равенстве МДС происходит изменение индукции и в обмотке сердечника I индуктируется ЭДС, встречная приложенному напряжению и уравновешивающая его. Таким образом, во вторичной обмотке ток не может превысить значения Д = I^dJw^. Если допустить, что активные сопротивления полуобмоток, надетых на сердечники I и II, равны нулю, то ток
208
независимо от значения приложенного напряжения мгновенно возрастает до значения i2 = IjwJwz, при котором «включается» противо-ЭДС, и кривая вторичного тока, как и показано на рис. 8-50, б, имеет прямоугольную форму. В следующий полупериод вследствие встречного включения вторичных обмоток вычитание МДС происходит в сердечнике II, в обмотке которого индуктируется ЭДС, уравновешивающая приложенное напряжение.
Как видно из принципа действия ИТПТ, никакой трансформации энергии не происходит, а имеет место уравновешивание МДС. Среднее значение выпрямленного тока /2ср, протекающего через амперметр, определяется из равенства МДС: /2ср = Irwrlw2.
Форма вторичного тока не зависит от формы и частоты вспомогательного напряжения, а также от его значения, если оно выбрано таким образом, чтобы изменение магнитной индукции АВ в сердечниках было меньше двойного значения, индукции насыщения Внас. Последнее эквивалентно условию Вт < Внас, где Вт — амплитуда переменной индукции в сердечниках при Д = 0, определяемая из выражения Вт = ]/2 {72/(4л/&у25серд), где 5серд — площадь сечения сердечника; t/2 — действующее напряжение вспомогательного источника.
Если АВ > 2Внас, может произойти повторное насыщение работающего сердечника в нижней части цикла перемагничивания и оба сердечника окажутся в состоянии насыщения. При этом вторичный ток перестает зависеть от измеряемого первичного тока и ограничивается только сопротивлением вторичных обмоток. Обычно t/2 выбирают из условия Вт = (0,9 4- 0,75) Внас.
Погрешности ИТПТ с последовательным соединением вторичных обмоток главным образом обусловлены отличием реальной петли перемагничивания сердечников от идеальной прямоугольной петли и в меньшей степени конечным значением сопротивления вторичной цепи ИТПТ.
Для работы в низковольтных цепях до 1000 В в СССР выпускаются ИТПТ с номинальным первичным током 5; 7,5; 10; 15; 25 и 35 кА, с основной погрешностью 0,5%. Номинальный вторичный ток 5 А. Для измерения постоянных токов в высоковольтных цепях выпускаются ИТПТ с номинальным первичным током 1; 2 и 4 кА. Известны также ИТПТ с пределами измерений до 100 кА и разъемным магнитопроводом, что дает возможность производить их монтаж без разрыва цепи измеряемого тока.
Феррозонды. На рис. 8-51 изображена схема дифференциального феррозонда, состоящего из двух ферромагнитных сердечников 1 и 2 из железоникелевого сплава, на каждом из которых имеется модулирующая обмотка с числом витков w1. Обмотки питаются от источника переменного тока. Обмотки включены последовательно, но встречно, так что создаваемые ими переменные магнитные потоки сдвинуты на 180°. Оба сердечника с модулирующими обмотками охватывает измерительная обмотка с числом витков w2. При идентичности сердечников вследствие встречного включения модулирующих обмоток в измерительной обмотке не будет индуктироваться ЭДС. Напряженность переменного магнитного поля Н1т = (3 -н 5)Дпас. Таким образом, мате
209
риал сердечников работает в режиме, соответствующем рис. 8-48, в. Магнитная проницаемость обоих сердечников изменяется одинаково и, как видно из рис. 8-48, в, два раза за период возрастает до максимального значения.
Если феррозонд поместить в постоянное магнитное поле с индукцией Вх, то условно можно считать, что в это поле дважды за период
вносится концентратор поля и возникающие импульсы индукции наводят ЭДС в измерительной обмотке.
На рис. 8-52 показаны кривые, поясняющие работу четногармонического феррозонда. Из рисунка видно,что Цд периодически изменяется от максимального (при Н1т < /7нас) до минимального (при Н1т > > /7нас) значения. Проницаемость сердечников меняется с удвоенной частотой, в результате чего в
измерительной обмотке возникает ЭДС удвоенной частоты, пропорциональная индукции Вх и скорости изменения pj. При изменении полярности Вх выходная ЭДС изменяет фазу на 180°.
Обычно в качестве информативного параметра используется амплитуда второй гармоники выходной ЭДС.
Наиболее широкое применение получили феррозонды с продольным возбуждением с разомкнутой (рис. 8-51, а) или замкнутой (рис. 8-51, б) магнитной цепью.
На рис. 8-53 показана структурная схема измерительной цепи феррозондового тесламетра. Феррозонд ФЗ питается от генератора переменного тока Г с частотой f = 500 -г 5000 Гц. Для снижения уровня четных гармоник в токе возбуждения между генератором и феррозондом включен фильтр нижних частот Ф, имеющий наибольшее затухание на частоте второй гармоники, для выделения сигнала второй гармоники используется избирательный усилитель Ус, настроенный на частоту 2/, и фазочувствительный выпрямитель ФЧВ, на выходе которого включен показывающий или регистрирующий прибор. В тесламетрах на низкие пределы измерения (10 нТл) коэффициент
210
усиления по второй гармонике составляет 105, а ослабление первой и третьей гармоник в избирательном усилителе должно быть не менее 60 дБ. Для расширения диапазона измерений и улучшения метрологических характеристик (уменьшение нелинейности и инерционности и др.) в тесламетре используется цепь обратной связи, сигнал с которой подается на обмотку обратной связи феррозонда и создает магнитное поле с индукцией Вк, компенсирующее измеряемое.
Основной проблемой при построении высокочувствительных тесла-
метров является снижение наводок и шума. Для этой цели приме-
няются хорошо защищенные от наводок измерительные цепи, облада-
ющие высокой избирательностью, датчики феррозондов специальным образом симметрируются, чтобы ИСКЛЮЧИТЬ ЭДС взаимоиндук-тивности между первичной и вторичной обмотками. Источниками шумов феррозондов являются несимметрия петли гистерезиса и магнитный
Рис. 8-53
шум Баркгаузена (см. § 8-1 и 8-12). Феррозонд представляет собой один из наиболее чувствительных магнитоизмерительных преобразователей.
Нижний предел измерения в лучших преобразователях составляет 0,05—0,1 нТл. Верхний предел измерения ограничен нарушением линейности функции преобразования и обычно не превышает 5-Ю"4 Тл. Для измерений более сильных полей применяется метод уравновешивания, при котором феррозонд используется в качестве преобразова-
теля неравновесия.
Феррозонды применяются для измерения магнитной индукции ела- -бых постоянных и медленно изменяющихся (с частотой не более 100 Гц) магнитных полей, для измерения углов между какими-либо осями объекта и вектором магнитной индукции, для обнаружения ферромагнитных объектов, для измерения магнитной восприимчивости и магнитного момента слабомагнитных веществ. Благодаря высокой чувствительности, простоте конструкции, малым габаритам и высокой надежности феррозондовые преобразователи широко исполь-
зуются в качестве портативных авиационных и ракетных тесламетров, градиентометров и угломеров при исследовании магнитного поля Земли, космического пространства, в магнитных системах навигации и ориентации, в магнитной дефектоскопии и при поиске полезных ископаемых.
8-12. ПРЕОБРАЗОВАТЕЛИ НА ОСНОВЕ
ЭФФЕКТА БАРКГАУЗЕНА
Неоднородность структуры ферромагнитного образца обусловлена немагнитными включениями или локальными механическими включениями и вызывает скачки намагниченности при изменении внешнего магнитного поля или наличии меха-
211
нических воздействий. Схематическое изображение доменных границ и некоторого включения показано па рис. 8-54, а. Граница между двумя доменами с противоположным направлением векторов намагниченности под воздействием внешнего магнитного поля сначала обратимо изменяет свое положение (рис. 8-54, б), а затем скачком переходит в новое положение (рис. 8-54, в). Заштрихованная часть представляет собой область, скачком изменившую свою намагниченность.
Экспериментальные исследования скачков Баркгаузена (СБ) показали, что в железном образце средний объем перемагничивающейся области лежит в диапазоне 2.1(Г2— 2'10'7 мм3.
Рис. 8-54
Вклад СБ в общее изменение намагниченности по данным различных авторов составляет 30—50%. Длительность СБ лежит в диапазоне 0,1—1 мс. При скачках Баркгаузена в измерительной катушке возникают импульсы ЭДС. Таким образом, перемагничивание образца сопровождается появлением в измерительной обмотке сигнала, имеющего характер случайного процесса.
Очень важной для проектирования преобразователей на основе эффекта Барк-гаузепа является зависимость этого эффекта от скорости перемагничивания. С увеличением скорости перемагничивания от 0,01 до 0,24 А/(м-с) число скачков падает примерно на 45%. Этот факт указывает на возможность слияния нескольких скачков, что приводит к зависимости характеристик преобразования от скорости или
Рис. 8-55
скоростью vx ферромагнитный образец 2. Участок
частоты перемагничивания.
В зависимости от скорости перемагничивания измерительные преобразователи с использованием эффекта Баркгаузена могут быть разбиты на две группы: с пространственным перемагничиванием ферромагнетика и с перемагничиванием ферромагнетика изменяющимся во времени магнитным полем.
Принцип действия преобразователя с пространственным перемагничиванием ферромагнетика показан на рис. 8-55, а. Мимо постоянного магнита 1 движется со образца, находящийся вблизи
магнита, намагничен, и границы этого участка смещаются со скоростью их. В проходной или накладной измерительной катушке 3, установленной неподвижно, индуктируются импульсы ЭДС, вызываемые скачками Баркгаузена (см. рис. 8-3). Индуктируемая ЭДС представляет собой стационарный случайный процесс (рис. 8-55, б}., В качестве информативных параметров этого процесса используются средняя ча-| стота выбросов, превышающих заданный уровень, или дисперсия, которые зависят! от скорости перемагничивания, т. е. от скорости движения образца. Сигнал измери-1 тельной обмотки 3 (рис. 8-55, а) усиливается и подается на полосовый фильтр
212
подавляющий низкочастотную и высокочастотную части спектра для выделения полезного сигнала. Амплитудный дискриминатор АД выделяет импульсы, амплитуда которых превышает заданный уровень, и сигнал поступает на частотомер Ч, показания которого пропорциональны скорости.
Преобразователь тахометра, основанный на эффекте Баркгаузена, показан на рис. 8-56, а. На вращающемся валу закреплен ротор 1 из ферромагнитного материала. На статоре 2 укреплены магниты 3, под каждым магнитом помещены измерительные катушки 4, На рис. 8-56, б показаны схематически система магнит—на-
Рис. 8-56
Рис. 8-57
кладная измерительная катушка, распределение магнитного потока в ферромагнитном роторе и импульс ЭДС в катушке. Амплитуда импульса может быть оценена как е = —о/ДФ/т, где w — число витков обмотки; АФ — приращение магнитного потока, вызванное скачком Баркгаузена; т — длительность скачка. Измерительные катушки располагаются в области максимального градиента магнитного поля и соединяются последовательно, при этом дисперсия выходного сигнала увеличивается в п раз, где п — число установленных систем.
Тахометр позволяет измерять угловые скорости в диапазоне 10~3—10-1 рад/с (10~2—1 об/мин) с погрешностью не более 1%. Приболев высоких скоростях происходит захват доменов, т. е. увеличение размера естественной метки, и уменьшение чувствительности преобразователя.
Принцип действия преобразователя с ферромагнетиком, перемагничиваемым переменным магнитным полем,
показан на рис. 8-57, а. Устройство 1 служит для
создания циклически меняющегося во времени магнитного потока, перемагничивающего неподвижный ферромагнетик 2. В измерительной обмотке 3 наводятся импульсы ЭДС, для измерения информативных параметров которых используются те же узлы, что и в схеме, показанной на рис. 8-55, а. Характер ЭДС, наводимой в обмотке 3, показан на рис. 8-57, б. При циклическом прохождении петли гистерезиса наибольшее число скачков приходится на крутую часть гистерезисной петли, на по-
213
логой части они практически отсутствуют. Этим определяется периодически нестационарный характер магнитного шума и индуктируемой им ЭДС. Так же как в случае стационарного процесса, математическое ожидание периодически нестационарного случайного процесса (ПНСП) постоянно и равно нулю, средняя за период перемагничивания Т частота выбросов, превышающих заданный уровень, а также усредненная за период и текущая дисперсия являются информативными параметрами при измерении характеристик внешнего магнитного поля, а также при измерении тока и напряжения, определяющих напряженность поля.
При постоянстве функции, описывающей изменение магнитного поля в течение цикла, параметр магнитного шума зависит от объема образца и структурных свойств ферромагнетика, и эффект Баркгаузена может быть положен в основу преобразователя неразрушающего контроля для измерения толщины гальванических покрытий и содержания в них ферромагнетика.
Конструктивно преобразователь представляет собой соленоид, длина которого для обеспечения равномерности магнитного поля в 5—10 раз превышает средний диаметр. В центре соленоида помещается измерительная обмотка, в которую вводится исследуемый образец.
Мощность магнитного шума в преобразователе зависит от числа доменных областей, участвующих в перемагничивании образца при постоянном режиме перемагничивания. Число доменных областей определяется как толщиной покрытия, так и содержанием ферромагнетика в нем. Влияние толщины выражается в изменении дисперсии случайного процесса без изменения вида ПНСП. Изменение состава гальванического покрытия приводит к изменению вида петли гистерезиса (при уменьшении содержания ферромагнетика петля становится уже и прямоугольное) и, следовательно, характера ПНСП.
Можно выбрать такое сочетание режима перемагничивания образца и регистрации информативных параметров, при котором разделяется информация о толщине покрытия и о.содержании в нем ферромагнетика.
ГЛАВА ДЕВЯТАЯ
ГАЛЬВАНОМАГНИТНЫЕ ПРЕОБРАЗОВАТЕЛИ
9-1. ПРЕОБРАЗОВАТЕЛИ ХОЛЛА
Гальваномагнитные преобразователи (ГМП) основаны на физических эффектах, возникающих в находящихся в магнитном поле твердых телах при движении в них заряженных частиц. В качестве измерительных преобразователей практическое применение получили главным образом полупроводниковые ГМП, основанные на использовании эффектов Холла и Гаусса. Эффект Холла заключается в возникновении поперечной разности потенциалов (ЭДС Холла) на боковых гранях пластины, а эффект Гаусса, или магниторезистивный эффект, проявляется в изменении электрического сопротивления пластины. Оба эффекта обусловлены изменением траектории движения заряженных частиц в магнитном поле, возникают одновременно и связаны между собой так, что каждый из них приводит к ослаблению другого. Выбирая определенным образом конструкцию и состав материала преобразователя, можно усилить один из эффектов и ослабить другой, создавая таким образом преобразователи Холла, или магнито резистивные преобразователи.
Преобразователь Холла представляет собой четырехполюсник, обычно выполняемый в виде тонкой пластинки или пленки из полупроводникового материала. Токовые электроды 1 и 2 (рис. 9-1) выполняются по всей ширине поперечных граней, что обеспечивает равномерное распределение входного тока по сечению преобразователя. Потенциальные (Холловые) электроды 3 и 4 расположены в центральной части продольных граней.
214
В магнитном поле носители заряда под действием сил Лоренца F ~ еиВ изменяют свою траекторию, вследствие чего на одной из боковых граней концентрация зарядов одного знака увеличивается, в то время как на противоположной грани — уменьшается. Возникающая при этом разность потенциалов (ЭДС Холла) определяется выражением
£хл = Яхл<Р (Кгеом> 0) IB cosa/d, (9-1)
где Rx„ — постоянная Холла, зависящая от свойств материала преобразователя; ф (Агеом, 0) — функция, зависящая от геометрии преобразователя и так называемого угла Холла 6 между векторами плотности тока и напряженности вызывающего
его электрического поля, определяемого подвижностью носителей зарядов и значением магнитной индукции (при //6=2 и аЦ 0,1 функция <р = 1); а — угол между вектором магнитной индукции н магнитной осью преобразователя, совпадающей в первом приближении с нормалью к плоскости преобразователя.
Особенно сильно эффект Холла проявляется в германии (Ge), кремнии (Si) и
в полупроводниках, состоя-
щих нз элементов III и V групп периодической системы. Постоянные Холла для полупроводниковых материалов имеют порядок 10"2—10-4 м3/(А-с|, в то время как для чистых металлов, например для меди, Дхл = 6-10'11 м3/(А-с).
Кристаллические преобразователи Холла выполняются в виде тонких пластинок (d = 0,01 4- 0,2 мм), которые вырезаются из монокристаллов и шлифовкой доводятся до необходимой толщины. Выводы укрепляются на боковых гранях путем пайки или сварки. Пластин-
ки наклеиваются на подложки из радиотехнической слюды, ультрафарфора или си-талла.
Хорошими метрологическими характеристиками отличаются пленочные преобразователи Холла из тонких поликристаллических пленок InAs и InSb на стеклянных подложках и преобразователи на основе гетероэпнтак-снальных структур InSb и GaAs на подложках нз полу-
р „2 изолирующего арсенида гал-
Иис' лия. Чувствительный элемент
преобразователя выполняется в виде тонкой пленки (5—10 мкм) способом фотолитографии. Такне преобразователи можно выполнять сложной формы с малой площадью чувствительной зоны (0,2 X 0,05 мм и менее). На рис. 9-2 показано устройство серийно выпускаемых преобразователей Холла типа ПХЭ, где 1 и 2 — токовые, а 3 и 4 — потенциальные выводы.
Выходная величина преобразователя Холла, как видно нз выражения (9-1), пропорциональна произведению двух входных величин — тока и магнитной индукции. Таким образом, преобразователь Холла является множительным преобразователем. При постоянных во времени / и В ЭДС Холла является постоянной величиной. Если одна из входных величин (В или /) постоянная, а другая — переменная, то ЭДС Холла будет переменной величиной той же частоты, что и частота входной
215
величины. В случае если обе входные величины имеют одну и ту же частоту и сдвинуты по фазе на угол <р, ЭДС Холла будет состоять из постоянной и переменной двойной частоты составляющих:
Ехл =-(р BI cosq> + ^p Bl cos (2й/ + <р).
Если ток изменяется с частотой w1; а магнитная индукция — с частотой w2, то ЭДС Холла содержит две составляющие, одна из которых имеет частоту о>г — <о2, а другая «ц + <о2.
Входное сопротивление R,,x преобразователя Холла определяется как сопротивление между токовыми электродами, а выходное сопротивление Двых равно сопротивлению между Холловыми электродами. У серийно выпускаемых преобразователей Холла Двх и 7?вых близки по значению и лежат в пределах от 0,5 Ом до нескольких килоом. Вследствие магниторезистивного эффекта Явх и Двых увеличиваются с ростом магнитной индукции.
Гальваномагнитная чувствительность преобразователя Холла при а — 0 определяется выражением
Sn, = E /(B1) = R а>( К , 6\/d
Bl хл'' ’ хлт >. 'геом’ /'
и для различных типов преобразователей составляет 0,3—10 В/(А-Тл).
Чувствительноеть к магнитной индукции SB определяется при номинальном значении входного тока 7 = const как SB = Яхд/ном<р/^ и для серийно выпускае-
мых преобразователей составляет 0,03—1 В/Тл. Значение тока 7НОМ ограничено допустимой температурой перегрева преобразователя. Для высокоомных преобразователей допустимые значения токов составляют 5—50 мА, для низкоомных 100— 200 мА. Гальваномагнитная чувствительность SBI и чувствительность к магнитной индукции SB зависят от магнитной индукции В, так как 7? = /1 (В) и <р = /2 (®)-Эти зависимости главным образом определяют нелинейность характеристик преобразователей Холла в сильных полях.
Чувствительность к току S, определяется при постоянном значении магнитной индукции В = const как Sf=-RBq>/d. При индукции В = 1 Тл чувствительность к току для различных типов преобразователей составляет 0,3—50 В/А.
Характеристики серийно выпускаемых преобразователей Холла приведены в табл. 9-1 и 9-2. Лучшими метрологическими характеристиками обладают преобразователи Холла типа ПХЭ па основе гетероэпитаксиальных структур антимонида индия, которые в зависимости от метрологических характеристик разделяются на классы А, Б и В. Некоторые разновидности этих преобразователей характеризуются очень малым температурным коэффициентом чувствительности (5 4- 10) 10"? К'1, малым остаточным напряжением (10—70 мкВ), малой погрешностью линейности при магнитных индукциях до 15 Тл и широким диапазоном рабочих температур (от —271,5 до +100 °C). Для работы при повышенных температурах (до 127—327 °C) наиболее пригодны преобразователи Холла из арсенида галлия, которые имеют относительно малые температурные коэффициенты постоянной Холла и удельные сопротивления.
Остаточным напряжением преобразователя Холла называется напряжение, которое возникает между Холловыми электродами при прохождении через преобразователь тока в отсутствии магнитного поля. Причиной остаточного напряжения в первую очередь является расположение Холловых электродов в неэквипотенциальных точках пластины.
При наличии температурного градиента между Холловыми контактами, каждый из которых является соединением медного вывода с полупроводниковым материалом, в цепи возникает термо-ЭДС. При разности температур между контактами 0,1 °C возникает термо-ЭДС ет = 10 4- 100 мкВ. Для уменьшения градиента температур преобразователь следует укреплять на подложке из материала с хорошей теплопроводностью. Суммарное остаточное напряжение может составлять от единиц микровольт до десятков милливольт. У серийно выпускаемых преобразователей значения (70СТ/7 лежат в пределах 10~с—0,4 Ом.
Схемы коррекции остаточного напряжения приведены иа рис. 9-3, а, б. Сопротивления резисторов 7?! и Т?2 должны быть на два порядка больше входного сопро-216
Таблица 9-1
Тип преобразователя Номинальный ток, мА Чувствительность при номинальном токе, В/Тл Входное сопротивление, Ом Температурный коэффициент сопротивления, к-1 Температурный коэффициент чувствительности, К-1 Диапазон рабочих температур, °C , Размеры преобразователя, мм Материал
ХИ 1 Х210 10 100 0,45—0,2 0,06—0,12 30—180 0,5—5 0,005 0,002 0,003—0,005 0,0015 —40...+80 —60...+80 1,5х0,8х0,2 0,85x0,55x0,2 Германий
Х211 Х213 Х221 Х222 Х224 100 160 120 180 210 0,06—0,15 0,09—0,32 0,07—0,18 0,1—0,32 0,12—0,48 0,5—5 0,5—5 0,5—5 0,5—5 0,5—9 0,002 0,0015 —60...+90 —60...+100 + 40...+80 —60...-+100 —60...+120 1,5 х 0,8 х 0,2 5x3x0,2 1,5x1x0,2 . 4x2x0,2 8X4X0,2 Арсенид индия (InAs)
Х510 Х511 90 100 0,036—0,2 0,04—0,32 1—6 0,0004 0,0009 — 100... +60 — 100... +80 0,85x0,56x0,2 1,5х 1 ХО,15 Арсенид-фосфид индия (InAsP)
ДХГ-2 ДХГ-2С ДХГ-2М ДХГ-0,5 ДХГ-0,5М 13—15 20—23 6—8 25—30 10—12 0,45 0,8 0,2 0,25 0,12 220—320 220—360 200—350 40—90 40—120 0,004 0,004 0,004 0,006 0,006 0,002 0,002 0,002 0,0002 0,0002 —60... +70 —60...+70 —60...+70 • —60...+90 0...—70 6x3x0,15 12x6x0,16 2,6x1,6x0,15 1,8x0,6x0,16 6x3x0,15 Германий
ДХК-7 ДХК-14 13—15 6—9 0,5 0,6 500—1000 0,013 0,0008 — 156...+200 6x3x0,15 6x3x0,2 Кремний
Тип преобразователя Чувствительность при токе 100 мА, В/Тл Остаточное напряжение, мкВ Температур коэффици чувствительности,
Класс преобразова
А Б В А Б В А Б
ПХЭ 602 117 0,5 0,3 0,2 ПО 50 20 ±0,002 ±0,001
ПХЭ 602 817 ПХЭ 605 817 ПХЭ 606 817 0,1 0,08 0,06 30 30 50 20 20 30 10 10 20 ±0,0003 ±0,0002
ПХЭ 602 118 ПХЭ 605 118. 0,075 0,05 0,03 30 20 10 ±0,0002 ±0,0001
ПХЭ 603 118 ПХЭ 606 118 100 50 75 30 50 20
тивления преобразователя. Коррекцию остаточного напряжения также можно осуществить при совместном использовании преобразователя Холла и операционного усилителя с дифференциаль-а) $ g) , ным входом (рис. 9-4). Особенно
q о пригодны для этой цели операцион-
ные усилители типа К551УД1, к°-
Рис. 9-3
торые имеют малый температурный дрейф (менее 1 мкВ/K) и независимую цепь коррекции выходного смещения, при помощи которой осуществляется компенсация остаточного напряжения.
Погрешность нуля, обусловленная дрейфом остаточного напряжения, является одной из наиболее
трудно устраняемых составляющих погрешности преобразователей Холла. Дрейф главным образом связан с колебаниями температуры преобразователя и наличием градиента температур между его электродами. Одной из причин возникновения
градиента температур является эффект Пельтье (см. § 13-2), который имеет место при питании преобразователя постоянным током.
Погрешность нуля является, основной характеристикой, определяющей применимость преобразователей Холла для измерения слабых магнитных полей.
Погрешность линейности у различных типов преобразователей при изменении магнитной индукции от 0 до 10 Тл составляет 1—10%. Хорошей линейностью характеристик отличают-
ся преобразователи Холла из антимонида индия, у которых погрешность линейности составляет 0,1—1 % в диапазоне В = 0 -£- 2 Тл и 1% при В =0,1-s-Ю Тл. Малую погрешность линейности (0,2%) при магнитной индукции до 1 Тл имеют преобразователи из арсенида-фосфида индия (InAsP).
Погрешность от собственного магнитного поля преобразователя. При прохождении через преобразователь тока возникает магнитное поле. Если это поле асим-
218
Таблица 9-2
ный ент к-1 Погрешность линейности при В = 0 4- 2 Тл, % Температурный коэффициент остаточного напряжения, мкВ/К Размеры преобразователя, мм Размеры чувствительной зоны, мм Входное и выходное сопротивления, Ом
теля
В А Б В
+0,0005 — — — 5 5x3x0,8 2x0,5 10
+0,0001 +2 1+ | !+ О Ът о +11 ?| 2 5x3x0,8 3x2x0,8 2 х 1,5 х 0,8 2x0,5 1X0,25 0,5x0,15 3
+0,00005 + 1 +0,5 +0,3 1 5x3x0,8 3x2x0,8 2x0,5 2x0,25 2
+2 +1,0 + 0,5 +0,05 2 2X3X0,8 2X1,5x0,8 0,2x0,05 0,5x1,15
метрично, то интегральное по площади пластины значение индукции не будет равна нулю, а составит некоторую величину Вас. Асимметрия поля может иметь место, если обратный провод токового вывода расположен вблизи преобразователя н асимметрично по отношению к нему (рис. 9-5, а). Возникающая в результате взаимодействия индукции Вас и тока / дополнитель-
ная ЭДС Холла пропорциональна квадрату тока /. Правильное расположение выводов показано на рис. 9-5, б. Если преобразователь находится на значительном расстоянии от ферромагнитных деталей, то магнитная индукция собственного поля преобразователя обычно не превышает 10-6—10“4 Тл. При нахождении преобразователя вблизи полюсных наконечников индукция этого поля может достигать 5-10~4— ИГ3 Тл, что приводит к существенной погрешности. Основной путь уменьшения влияния собственного магнитного поля — правильный монтаж преоб-
3 14 2 • 3 124
Рис. 9-5
разователя.
Погрешность направленности обуслов-
лена зависимостью выходного сигнала
преобразователя Холла от его пространственного расположения по отношению к вектору магнитной индукции. Напряжение Холла имеет максимальное значение, когда вектор магнитной индукции направлен параллельно магнитной оси преобразователя, указывающей направление наибольшей чувствительности. В идеальном случае магнитная ось совпадает с нормалью к плоскости преобразователя [9].
Вопросы стабильности преобразователей Холла еще недостаточно изучены. По имеющимся данным, нестабильность чувствительности у некоторых типов преобразователей составляет 0,1—1% в год. Существенное влияние на стабильность
могут оказать механические напряжения, возникающие в процессе изготовления преобразователя н при его монтаже в датчике, а также температурные деформации. Преобразователи без подложки более стабильны, чем наклеенные на подложку.
Температурная погрешность преобразователей Холла обусловлена зависимостью от температуры постоянной Холла, сопротивления преобразователя н остаточного напряжения. Температурный коэффициент чувствительности у лучших типов
219
преобразователей составляет (5 4- 10) 10"5 К-1. Малые значения температурной погрешности характерны для преобразователей на основе гетероэпитаксильных структур InSb тройного соединения InAs0,8P0.2 (yQ sg 0,0003 К-1), из арсенида галлия (у0 0,0006 К-1 в диапазонах температур 20—300 °C), а также для некоторых типов
преобразователей из германия (у0 sg 0,0003 1С1), предназначенных для работы в относительно узком диапазоне температур.
Если температурные коэффициенты постоянной Холла и сопротивления имеют одинаковые знаки и близки по значению, коррекцию температурной погрешности можно осуществить при питании преобразователя от источника стабильного напряжения. Такой режим питания целесообразно применять для преобразователей Холла из антимонида индия. Уменьшение температурной погрешности достигается также при применении схем коррекции с использованием терморезисторов (см. § 11-4). Одиако, поскольку напряжение Холла сложным образом зависит от ряда температурно-зависимых параметров, осуществить точную коррекцию температурной погрешности практически невозможно, особенно для широкого диапазона рабочих температур.
Динамические характеристики преобразователей Холла. Время установления ЭДС Холла характеризуется временем релаксации т = е/у, где е — диэлектрическая проницаемость, а у — удельная проводимость материала преобразователя. Для обычно используемых материалов т = 10-11 4- 10~13 с, поэтому постоянная Холла частотно-независима при частотах до 1011 Гц. Межэлектродные емкости у преобразователей Холла составляют единицы пикофарадов, поэтому их влияние сказывается при частотах порядка десятков и сотен мегагерц.
Динамические свойства непосредственно преобразователя Холла, казалось бы, позволяют использовать его при измерениях индукции в переменных магнитных полях очень высокой частоты. Однако при работе в переменных магнитных полях возникают ограничения несколько иного рода. В переменном магнитном ноле в выходной цепи преобразователя появляется дополнительная ЭДС, индуктируемая переменным магнитным полем, еиид = <^BmS cos со/, где со — частота; Вт — амплитуда индукции и S — площадь контура, пронизываемого магнитным потоком. Индуктируемая ЭДС сдвинута по отношению к ЭДС Холла на 90°. Уменьшение индуктируемых ЭДС осуществляется рациональным расположением выводов преобразователя и включением дополнительных компенсационных обмоток (см. § 3-5). Возможно также питание преобразователя переменным током, частота которого значительно больше частоты переменного магнитного поля, и использование узкополосных усилителей для усиления выходного напряжения. Кроме того, в переменном магнитном поле в пластине преобразователя возникают вихревые токи, магнитное поле которых изменяет основное поле и тем самым ЭДС Холла. Вектор наведенной магнитной индукции сдвинут относительно вектора индукции внешнего поля примерно на 90°, и поэтому изменение ЭДС Холла происходит не только по значению, но и по фазе. Вихревые токи приводят также к дополнительному разогреву преобразователя. Прн питании преобразователя Холла постоянным током и нахождении его в переменном магнитном поле с частотой до 1,5 МГц и индукцией до 0,5 Тл зависимость ЭДС Холла от частоты имеет вид
Ехд = КХЛВ/ /1 + (сору W8 е'<ш' + 'f)M
где у — электрическая проводимость материала преобразователя; р — магнитная проницаемость среды, окружающей преобразователь; <р = arctg сору&2/8 — фазовый сдвиг.
Как видно, характеристика ЭДС Холла сильно зависит от ширины преобразователя Ь. Так, например, при расположении преобразователя Холла толщиной 100 мкм и шириной 6 мм между двумя ферритовыми наконечниками (р « 2000 р0) ЭДС Холла увеличивается в 1,5 раза при изменении частоты магнитного поля от 0 до'1,5 МГц, а сдвиг фазы между ЭДС Холла и магнитной индукцией достигает 57°. При уменьшении ширины преобразователя в два раза (Ь — 3 мм) и неизменных прочих условиях увеличение ЭДС Холла составляет всего 3%.
При питании преобразователей током высокой частоты имеет место поверхностный эффект, который приводит к уменьшению эффективной толщины преобразователя и к увеличению его чувствительности. Для серийно выпускаемых преобразова-
220
телец поверхностный эффект мало сказывается при частотах до 107 Гц. Для работы при более высоких частотах питающего тока необходимо использовать пленочные преобразователи толщиной 5—10 мкм.
Анализ основных метрологических характеристик преобразователей Холла показывает, что основная погрешность большинства приборов, в которых используются преобразователи Холла, составляет 0,5—1,0 % и более. Только при применении сложных методов коррекции можно снизить погрешность измерения до 0,1— 0,2 % при работе в узком диапазоне температур.
Наиболее широкое применение преобразователи Холла получили для измерений параметров постоянных, переменных и импульсных магнитных полей и для определения характеристик ферромагнитных материалов. Кроме этого, они используются для измерений ряда других физических величин, которые легко преобразуются в изменение магнитной индукции (электрические токи, угловые и линейные перемещения и др.) [8].
9-2. МАГНИТОРЕЗИСТИВНЫЕ ПРЕОБРАЗОВАТЕЛИ
Сопротивление проводящего канала при наличии носителей заряда двух знаков определяется выражением
R = l/[Se (пи„+рив)],
где е — заряд электрона; п и ип — соответственно средняя концентрация и подвижность электронов (анионов); р и Up — средняя концентрация и подвижность дырок (катионов); I и S — соответственно длина и сечение проводящего канала.
При воздействии на канал магнитного поля изменяется его электрическое сопротивление вследствие изменения подвижности носителей заряда, их средней концентрации и изменения соотношения размеров проводящего канала. Магниторезистивный эффект можно наблюдать в чистых металлах, в полупроводниках, а также в электролитах.
К магниторезистивным преобразователям относятся магниторезисторы, магнитодиоды, биполярные магнитотранзисторы, гальваномагниторекомбинацнонные преобразователи и полевые магнитотриоды. В настоящее время для создания средств измерений практическое применение нашли магниторезисторы и гальваномагнито-рекомбинационные преобразователи. Остальные типы магниторезистивных преобразователей, за исключением магнитодиодов, находятся еще в стадии развития. Магнитодиоды применяются главным образом в качестве бесконтактных переменных резисторов.
Магниторезисторы представляют собой гальваномагнитные преобразователи (ГМП), изменение сопротивления которых обусловлено изменением подвижности носителей заряда. Под действием магнитного поля траектории носителей искривляются, вследствие чего скорость их движения в направлении электрического поля уменьшается. Уравнение преобразования магниторезистора имеет вид RB = = ^в=о [1 + А | иВ |m], где и — подвижность носителей заряда; RB=B—сопротивление преобразователя при В = 0; А — магниторезистивный коэффициент, зависящий от свойств материала и формы преобразователя; т — показатель степени, равный 2 в слабых магнитных полях (В <0,2 4-0,5 Тл), для которых иВ sg 1, и равный 1 в сильных магнитных полях, для которых uB >= 1.
Как видно из рис. 9-6, а, функция преобразования магниторезисторов является четной, поэтому как в постоянном магнитном поле любой полярности, так и в переменном магнитном поле их сопротивление увеличивается. Максимум приращения сопротивления при данном значении магнитной индукции имеет место, если угол между вектором магнитной индукции и осью направленности магниторезистора равен 0 или 180°.
Первые магниторезисторы выполнялись из висмута (висмутовые спирали). В настоящее время магниторезисторы изготовляются из полупроводниковых материалов группы AlnBv — антимонида индия (InSb), арсенида индия (1пАз)и др., в которых сильно проявляется магниторезистивный эффект вследствие большой подвижности носителей заряда.
221
Магниторезистивный коэффициент А зависит от формы магниторезистора. Чем меньше отношение длины резистора к площади его сечения, тем больше коэффи-циеитА. В этом отношении оптимальна конструкция в виде диска Корбино (рис.9-6, б),
Рис. 9-6
у которой один электрод укреплен в центре, а другой — в виде обода на окружности. У такого преобразователя нет граней для концентрации носителей заряда, вслед-
ствие чего уменьшается влияние эффекта Холла. Недостатком магниторезисторов в виде дисков Корбино и коротких прямоугольных пластинок является их малое начальное сопротивление. Для увеличения этого сопротивления магниторезисторы выполняются в виде ряда коротких полупроводниковых резисторов, соединенных последовательно проводящими слоями (растрами) (рис. 9-6, в). Это позволяет создавать магниторезисторы с сопротивлением несколько килоом при сохранении большого значения коэффициента А.
В последнее время магниторезисторы выполняют из эвтектического сплава, в котором методом направ
ленной кристаллизации образуются тонкие (d = 1 мкм) иглы из антимонида никеля (NiSb), которые равномерно располагаются параллельно друг к другу на расстоянии 20—400 мкм в толще полупроводника. Поскольку удельная проводимость NiSb на 2—3 порядка больше, чем у InSb, то эти иглы выполняют роль проводящих растров высокоомных магниторези-
сторов.
Основными метрологическими характеристиками магниторезисторов являются начальное сопротивление А'„, которое лежит в пределах от долей ома до десятков килоом, и магниторезистивная чувствительность = dR/dB. Обычно для характеристики магниторезистивных преобразователей используют зависимости АДВ/ДО = = F (В), где АДд = RB — Ro, На рис. 9-7 показано семейство таких зависимостей
для четырех магниторезисторов, отличающихся отношением длины резистора к площади его сечения. Наибольшую чувствительность имеет магниторезистор в виде диска Корбино (кривая 4). Ток питания магниторезистора, находящегося в магнитном поле с индукцией Blt должен выбираться значительно меньше (см. § 5-1) начального допустимого тока /0 (при В = 0), указываемого в таблицах. Значение допустимого тока 1В1 определятся по формуле =Начальный ток 10 для разных типов магниторезисторов лежит в диапазоне 1—100 мА. Рабочий диапазон температур магниторезисторов составляет от —271 до +327 °C. Для работы при низких температурах весьма перспективны магниторезисторы нз антимонида индия.
222
Температурный коэффициент сопротивления магниторезисторов (ТКС) зависит от состава материала, магнитной индукции и температуры. Чем больше чувствительность магниторезистора, тем больше его ТКС. Значения ТКС различных типов магниторезисторов имеют пределы 0,0002—0,012 К-1.
Частотные характеристики магниторезисторов в основном определяются межэлектродными емкостями. У дисков Корбино частотная погрешность меньше, чем у прямоугольных преобразователей, для которых при изменении частоты от 0 до 10 МГц магниторезистивная чувствительность уменьшается на 5—10%.
Магниторезистивные преобразователи находят применение в качестве бесконтактных переменных резисторов и делителей напряжения с плавно регулируемым коэффициентом деления, модуляторов ма- тая
лых постоянных токов и напряжений, Таблица 9-3
используются для создания тесламетров для работы при сверхнизких температурах и датчиков для измерения ряда неэлектрических величин, легко преобразуемых в изменение магнитной индукции, и бесконтактного измерения токов [8].
Магнитодиоды представляют собой диоды с несимметричным р-ге-переходом, в котором под действием магнитного поля уменьшается подвижность и концентрация носителей зарядов, вследствие чего увеличивается прямое сопротивление перехода и при заданном токе увеличивается падение напряжения на р-ге-переходе. Характеристики выпускаемых магнитодиодов
Тип магнитодиода Параметр
и, в (при 7=3 мА, В = 0) S, В/Тл (при 1 == = 3" мА)
КД 301А 6—7,5 15
КД 301Б 7,5—9 15
КД 301В 9—10,5 30
КД 301Г 10,5—12 30
КД 301Д 12—13,5 45
КД 301Е 13,5—15 45
КД 301Ж 15—20 60
приведены в табл. 9-3. Допустимая мощ-
ность для всех приведенных в табл. 9-3 диодов составляет 0,2 Вт при температуре окружающей среды 0окр = 25 °C, допустимый диапазон температур от —60 до +85 °C, частотный диапазон по электрическому и магнитному полям 0—1 кГц.
Очевидным преимуществом магнитодиодов является их высокая чувствитель-
ность, однако пока метрологические характеристики магнитодиодов, такие, как нелинейность и разброс характеристик, чувствительность к температуре, трудность ориентации в магнитном поле, затрудняют их применение для измерения параметров магнитных полей. Магнитодиоды применяются в качестве бесконтактных потенциометров, переключателей и реле.
9-3. ГАЛЬВАНОМАГНИТОРЕКОМБИНАЦИОННЫЕ
ПРЕОБРАЗОВАТЕЛИ
проявляющемся в проводниках,
Гальваномагниторекомбинационные преобразователи (ГМРП) основаны на изменении средней концентрации носителей заряда под действием магнитного поля, которые имеют поверхности с разной скоростью рекомбинации носителей зарядов. ГМРП обычно представляет собой тонкую полупроводниковую пластинку (рис. 9-8), у которой одна из боковых поверхностей (/) грубо обработана (пескоструйка, грубая шлифовка), а другая (2) — отполирована. Вследствие этого у поверхности 1 скорость рекомбинации носителей зарядов на 2—3 порядка больше, чем у поверхности 2.
Если ГМРП находится в магнитном по-
ле так, что вектор магнитной индукции направлен перпендикулярно вектору плотности тока через ГМРП и параллельно плоскостям рекомбинации, то под действием силы Лоренца произойдет смещение носителей зарядов к одной из боковых поверхностей. Если направление магнитного поля таково, что заряды перемещаются к поверхности 1, то общая концентрация
223
Таблица 9-4
Тип ГМРП «г-кОм /1, мА ss, В/Тл V0, к-. Ликом Размеры, мм
Дли-на Ширина Высота
ГМР-1 20 1,о 60 0,002 8 11 0,5 0,20
ГМР-2 ГМР-3 15 5 0,8 38 16 6 2 6 3 0,15
ГМР-4 ГМР-5 50 25 1,0 75 45 20 10 и 7 1,5
носителей зарядов уменьшается и соответственно возрастает сопротивление ГМРП. При обратном направлении вектора магнитной индукции изменяется направление силы Лоренца, что приведет к перемещению зарядов к поверхности 2, у которой малая скорость рекомбинации, и к общему увеличению концентрации зарядов, т. е. к уменьшению сопротивления ГМРП,
Таким образом, в отличие от магниторезисторов, у которых изменение сопротивления не зависит от полярности магнитной индукции, у ГМРП изменение сопро-
тивления зависит от направления вектора магнитной индукции. При неизменном направлении магнитной индукции изменения знака приращения сопротивления можно достигнуть изменением направления тока через ГМРП. Следовательно, в магнитном поле ГМРП имеет свойства, аналогичные свойствам диода.
В табл. 9-4 приведены параметры некоторых типов ГМРП, разработанных Институтом физики полупроводников АН ЛССР.
ГМРП обычно включается последователь-
Рис. 9-9
но с сопротивлением нагрузки в цепь, питаемую от стабилизированного источника постоянного или переменного напряжения. При питании ГМРП переменным током (рнс. 9-9, а) и воздействии постоянного
магнитного поля происходит модуляция сопротивления ГМРП 7?г, обусловливающая
переход цепи в режим квадратичного детектирования, что приводит к появлению
Рис. 9-10
на зажимах ГМРП постоянной составляющей, пропорциональной значению магнитной индукции.
При питании ГМРП постоянным током и воздействии переменного магнитного поля (рис. 9-9, б) на зажимах ГМРП возникает переменная составляющая падения
224
,напря?кения. На рис. 9-10 приведены зависимости выходного напряжения от магнитной индукции (а), тока (б) и температуры (в) для ГМРП типа ГМР-1.
Как видно из табл. 9-4 и рис. 9-10, а, чувствительность к магнитной индукции ГМРП SB = Д[/вых/ДВ на 2—3 порядка больше чувствительности преобразователей Холла.
Однако порог чувствительности ГМРП из-за сильной зависимости сопротивления ГМРП от температуры, влияния шумов и выпрямляющего действия контактов такого же порядка, как у преобразователей Холла. Частотный диапазон указанных типов ГМРП составляет 0—1014 Гц. В переменных магнитных полях достигнут порог чувствительности ГМРП 5-10'7 Тл. ГМРП применяются для измерений магнитной индукции переменных и постоянных магнитных полей, бесконтактного измерения токов, малых перемещений и других величин.
ГЛАВА ДЕСЯТАЯ
ЭЛЕКТРОХИМИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ
10-1. ОБЩИЕ ТЕОРЕТИЧЕСКИЕ ОСНОВЫ ЭЛЕКТРОХИМИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ
В общем случае электрохимический преобразователь состоит из заполненной электролитом ячейки и электродной системы из двух или нескольких электродов, включаемых в измерительную цепь.
Как элемент электрической цепи электролитическая ячейка может характеризоваться развиваемой ею ЭДС, падением напряжения от проходящего тока, электрическим зарядом, сопротивлением, емкостью и индуктивностью. Выделяя зависимость между одним из этих электрических параметров и измеряемой величиной и подавляя действие других факторов, можно создать электрохимические преобразователи для измерения состава и концентрации веществ, количества электричества, времени, давления, перемещения, скорости, ускорения и ряда других физических величин.
Электрические параметры ячейки зависят от природы и состава электролита и электродов, химических превращений в ячейке, температуры, скорости перемещения раствора и других величин.Связи между этими величинами и электрическими параметрами электрохимических преобразователей определяются законами электрохимии.
Диссоциация. При растворении солей, кислот и оснований в воде и в ряде других растворителей (спирт, этиленгликоль, ди мети лформ амид и др.) происходит диссоциация — расщепление молекул на положительные ионы (катионы) и отрицательные ионы (анионы). Такиеэлектро-проводящие растворы называются электролитами или проводниками второго рода. К электролитам относятся также многие твердые вещества и расплавленные соли. Разработаны твердые электролиты (иодид серебра — рубидий, бета-глиноземы и др.), обладающие большой проводимостью при температурах от —55 до +75 °C.
8 Е. С. Левшина, П. В. Новицкий
225
Перемещение ионов может происходить за счет диффузии, обусловленной различной концентрацией ионов в отдельных частях электролита, конвекции — переноса ионов вместе с потоком движущейся жидкости и миграции (электропроводности) — движения заряженных частиц под действием электрического поля.
Миграционный ток подчиняется закону Ома J = уЕ, где J — плотность тока; Е — напряженность электрического поля; у — электри
ческая проводимость.
Зависимость проводимости электролитов от концентрации. Проводимость чистой, тщательно дистиллированной воды близка к нулю
и возрастает по мере повышения концентрации растворенных в ней веществ.
Растворы характеризуются весовой концентрацией р, измеряемой в граммах на литр, эквивалентной или молярной концентрацией с, измеряемой соответственно в грамм-эквивалентах (г-экв) или грамм-молекулах (г-моль) на литр, и химической активностью а.
Раствор с эквивалентной концентрацией 1 г-экв растворенного вещества на 1 л раствора называется нормальным (н) раствором.
Химическая активность а равна произведению эквивалентной концентрации с на коэффициент активности f, равный единице для растворов бесконечного разбавления и уменьшающийся по мере повышения концентрации, так как химическая активность растворенно
го вещества падает с ростом концентрации из-за уменьшения сте-
пени диссоциации и подвижности ионов.
Удельная проводимость раствора пропорциональна его химической активности:
у — 'К[с = Ха.
(Ю-1)
Коэффициент А называется эквивалентной электропроводимостью.
Удельная проводимость зависит от концентрации нелинейно (рис. 10-1).
Зависимость проводимости электролитов от значения химической активности а, не имеющего в общем случае однозначной связи с концентрацией, позволяет создавать измерительные преобразователи для контроля параметров реальных химико-технологических процессов, так как они наиболее точно характеризуются именно значением химической активности а.
Зависимость проводимости электролитов от температуры. Подвижность ионов сильно зависит от температуры раствора, и поэтому с увеличением температуры проводимость возрастает. Температурная зависимость проводимости водных растворов при небольших концентра-
226
днях (до 0,05н) можно определить как
V© = Yo [1 +(0-©о) ₽],
(Ю-2)
где р — температурный коэффициент проводимости.
Примерные значения 0 равны: 0,016 К"1 для кислот, 0,019 К'1 для оснований и 0,024 К-1 для солей.
Электродные и граничные потенциалы. Между двумя электродами, опущенными в электролит, возникает разность потенциалов, т. е. электролитическая ячейка является источником гальванической ЭДС.
Возникновение ЭДС между металлом электрода и раствором при малой его концентрации объясняется тем, что металл частично растворяется, т. е. в раствор переходят положительно заряженные ионы металла, и раствор заряжается положительно, а на электроде остаются избыточные электроны и он заряжается отрицательно относительно раствора. При больших концентрациях раствора, наоборот, положи-
Рис. 10-2
тельные ионы могут выделяться на электроде, заряжая его положительно относительно раствора. Потенциал электрода относительно раствора, в который он опущен, называется электродным потенциалом. Практически могут быть измерены не абсолютные значения электродных потенциалов отдельных электродов, а лишь разности потенциалов различных пар электродов. В электрохимии за начало отсчета (условный нуль) принят потенциал «водородного электрода» относительно раствора с нормальной активностью (а = 1 г-экв/л) водородных ионов. Изготовить электрод из газообразного водорода не представляется возможным, поэтому практически водородный электрод выполняется в виде пластинки из губчатой платины, которая частично погружается в раствор, содержащий ионы водорода Н+. Через раствор непрерывно пропускается газообразный водород (рис. 10-2), и на электроде 1 происходит реакция
Н2 = 2Н+ + 2е.
Платина электрода в реакции не участвует и является лишь проводником электронов и носителем водорода, который хорошо адсорбируется на поверхности платины.
Значения электродных потенциалов различных веществ, отсчитанные относительно водородного электрода, лежат в пределах ±3 В. Так, электродный потенциал калия равен £0 = —2,92 В, цинка £0 = —0,76 В, меди £0 — +0,34 В и т. д. Приведенные значения потенциалов Ео называются нормальными потенциалами электрода, так как они измерены при нормальной температуре (18° С) и нормальной концентрации электролита. При других температурах и концентрациях зависимость между электродным потенциалом в вольтах и кон
8*
227
центрацией раствора определяется уравнением Нернста
£ = £о+51п^> (Ю-З)
где R = 8,317 Дж/К — универсальная газовая постоянная; Т — абсолютная температура, К; п — валентность ионов; F — — 96 552 Кл/г-экв — постоянная Фарадея; с — концентрация ионов, г-экв/л; f — коэффициент активности раствора. Переходя к десятичным логарифмам и заменяя R и F их численными значениями, получаем выражение для электродного потенциала при температуре 18 °C
£ = £o+^lg/c- (10-4)
В общем случае электролитическая ячейка может быть составлена из разных электродов, помещенных в разные растворы, как это показано на рис. 10-2. Каждая половина такого гальванического элемента называется полуэлементом. ЭДС между двумя полуэлементами, содержащими растворы разных эквивалентных концентраций, равна
Д12 = Д>1 + 1пДС1 — Е02 —In fiCi — Е01 — Em In (10-5)
Таким образом, разность потенциалов, развиваемая двумя полуэлементами, определяется не только материалом электродов, но и отношением активностей /1С1/(/?2с2) растворов.
Если же используемые электроды одинаковы и погружены в растворы тех же ионов, отличающиеся только концентрацией, то концентрационная ЭДС такой цепи будет
£ = ^1п^-. (10-6)
Разность потенциалов возникает также на границе двух растворов. Граничная ЭДС может возникнуть в результате разной подвижности ионов в растворах и, следовательно, разной скорости диффузии. В зависимости от вида и концентрации соприкасающихся растворов эта, так называемая диффузионная, ЭДС составляет от нескольких единиц до десятков милливольт. Для ее уменьшения между растворами включают промежуточный концентрированный раствор с возможно близкими подвижностями катионов и анионов, например КО или KNO3 (электролитический ключ). На рис. 10-2 показано соединение двух полуэлементов в гальваническую цепь при помощи электролитического ключа 2. Концы электролитического ключа закрываются полунепро-ницаемыми пробками 3.
Граничная ЭДС возникает также на границе двух растворов, разделенных полупроницаемой перегородкой (мембраной), которая про-, пускает одни ионы и задерживает другие (например, из-за слишком больших их размеров по сравнению с диаметром пор). Мембранные ЭДС представляют большой интерес для медицинских и биологических исследований, так как они имеют место в животных и растительных тканях.
228.
Электролиз, поляризация и потенциалы выделения. Прохождение электрического тока через электролиты сопровождается электролизом— химическими превращениями и выделением вещества из раствора. Для электрохимического превращения 1 г-экв любого вещества необходимо одно и то же количество электричества, равное произведению числа Авогадро N на заряд электрона и называемое постоянной Фарадея F = Ne — 96 552 Кл/г-экв.
Таким образом, прохождение через электролит любого сколь угодно малого количества электричества всегда сопровождается выделением на одном электроде и растворением на другом соответствующего, совершенно определенного количества вещества. В результате этого концентрация ионов вблизи электродов оказывается не такой, как в остальном растворе.
Явление поляризации заключается в изменении электродных потенциалов вследствие изменения приэлектродной концентрации при протекании через электролитическую ячейку электрического тока от внешнего источника. Вследствие этого внешнее напряжение, приложенное к электролитической ячейке, должно уравновешивать не только падение напряжения на столбе электролита,, но еще и сумму потенциалов поляризации электродов.
'Зависимость суммарного напряжения поляризации А(7 от изменения плотности тока на электродах различна для разных сочетаний растворов и электродов. Общий характер этих зависимостей заключается в том, что напряжение поляризации А(7 быстро возрастает при очень малых плотностях тока, а затем остается почти постоянным, слабо изменяясь с дальнейшим ростом плотности тока. Поэтому в первом приближении при достаточно большой плотности тока значение &U можно считать не зависящим от плотности тока, а только от сочетания материалов электрода и электролита.
Вследствие конечной скорости диффузии при данной концентрации электролита к катоду в единицу времени может подходить только конечное число носителей заряда — ионов вещества. Поэтому, если пытаться беспредельно увеличивать электрический ток через ячейку, то при каком-то токе будут использованы все ионы, приносимые к катоду диффузией, и дальнейший рост тока прекратится. Предельный ток диффузии можно определить из приближенного выражения
7пр = nFDSc0/8, (Ю-7)
где D — коэффициент диффузии; с0 — концентрация реагирующих ионов в толще электролита; S — площадь электрода; б — толщина диффузионного слоя. ;
Потенциал, при котором в процесс электролиза вступает основная масса ионов данного вида, называется потенциалом выделения данного иона. Если в растворе содержатся разные виды ионов, то зависимость I — f ((/) имеет форму ступенчатой кривой. Потенциал выделения, при котором начинается очередной рост тока, зависит от вида иона, а высота ступеней тока пропорциональна концентрации этих ионов. На использовании этого явления основан полярографический метод качественного и количественного анализа растворов (см. § 10-5).
229
Проводимость электролитов для переменного тока. Явление поляризации затрудняет измерение сопротивления электролитов, так как падение напряжения на электролитической ячейке складывается из падения напряжения на столбе электролита и потенциалов поляризации электродов, которые могут достигать 1,5—2 В. При измерении сопротивления электролита постоянному току явление поляризации может обусловить значительную погрешность, поэтому такие измерения обычно производят на переменном токе.
При прохождении через ячейку переменного синусоидального тока изменение концентрации ионов в приэлектродном слое относительно средней концентрации будет происходить также по синусоидальному закону. Однако в течение всего положительного полупериода электрод (являющийся в это время анодом) будет непрерывно отдавать в раствор катионы и их концентрация у электрода будет повышаться. Максимум концентрации, а следовательно, и максимум напряжения поляризации будут достигнуты только в конце полупериода, т. е. тогда, когда ток упадет до нуля.
В течение отрицательного полупериода электрод, являясь катодом, наоборот, будет непрерывно забирать катионы из раствора, их концентрация и напряжение поляризации будут непрерывно понижаться и достигнут минимума только в конце полупериода, когда ток вновь будет проходить через нуль.
Таким образом, отличие явления поляризации при переменном токе заключается в том, что напряжение поляризации в этом случае является также переменным и отстает по фазе от тока на 90°. Падение напряжения на столбе электролита по фазе совпадает с током. Исходя из этого, векторную диаграмму падений напряжений в электролитической ячейке можно изобразить так, как показано на рис. 10-3, а, где UR — вектор падения напряжения на столбе электролита; a Uct и Uc2 — напряжения, уравновешивающие ЭДС поляризации электродов. Согласно этой диаграмме электролитическая ячейка (при данном значении тока /) может быть заменена эквивалентной схемой, показанной на рис. 10-3, б и состоящей из сопротивления R столба электролита и емкостей Сг и С2. При использовании этой схемы необходимо всегда иметь в виду, что емкостям С\ и С2 не может быть приписано какого-либо постоянного значения. Действительно, реально существующим параметром ячейки является напряжение Д[/ поляризации электродов, которое не пропорционально протекающему току I, а, скорее, не зависит от него. В широком диапазоне изменения токов напряжение Д£7 примерно остается постоянным и равным 0,1—1,5 В в зависимости от сочетания материалов электродов и электролита. Емкость в эквивалентной схеме определяется из соотношения
д[/=/Хс = 4s «з const = 0,11,5 В сое 7
230
и равна
(0,1 4-1,5) <о*
Каждому значению тока и частоты соответствует свое значение емкости С. Вследствие малого падения напряжения ЛИ при значительных токах емкость С достигает больших значений (до 0,1—0,5 Ф на 1 м2 поверхности электродов).
Кроме емкостей С\ и С2, иногда необходимо учитывать и емкость С3, обусловленную размерами электролитической ячейки как конденсатора и диэлектрической постоянной раствора. Значения С3 обычно лежат в пределах 10'10—10'12 Ф.
Преимущество измерения сопротивления электролитической ячейки переменному току заключается в том, что благодаря 90-градусному углу сдвига между падением напряжения на столбе электролита и напряжением поляризации эти напряжения суммируются не арифметически (как при постоянном токе), а геометрически. При A.U «5 U погрешность равна
о 1 /Д(/\2
и может быть в значительной степени устранена при применении фазочувствительных указателей, в то время как при измерении на постоянном токе она составляет б = &.UIU.
Электрокинетические явления. Как было показано выше, на границе твердого тела и электролита происходит скачок потенциала. Заряженный слой жидкости имеет диффузное строение, при котором плотность зарядов быстро убывает с их удалением от поверхности твердого тела. Скачок потенциала в диффузионном слое жидкости называется электрокинетическим потенциалом. В случае если твердое тело является диэлектриком, образование электрокинетического потенциала обусловлено неодинаковой адсорбцией ионов обоих знаков.
Если на концах капилляра или пористой перегородки поместить электроды и создать электрическое поле, то возникнет движение жидкости в капилляре. Это явление называется электроосмосом. Скорость течения жидкости в результате электроосмоса определяется выражением
v = Q/S = £еЕ/(4лц.), (10-8)
где Е — напряженность электрического поля в капилляре, В/м; S — сечение капилляра (или сумма сечений пор), м2; е — диэлектрическая постоянная жидкости, Ф/м; р. — динамическая вязкость жидкости, Па-с; — электрокинетический потенциал, В; Q — расход жидкости, м3/с.
Если твердая фаза образована частицами, взвешенными в жидкости, то эти частицы, получив тот или иной заряд, движутся от одного электрода к другому в неподвижной жидкости. Такое движение частиц называется электрофорезом или катафорезом.
Явление электроосмоса обратимо. При принудительном протекании жидкости через капилляр или пористую перегородку между элек
231
тродами возникает разность потенциалов — так называемый потенциал течения
i/ = geP/(pY), (10-9)
где Р — гидростатическое давление (перепад давления), Па; у — удельная проводимость жидкости, См/м.
10-2. ЭЛЕКТРОХИМИЧЕСКИЕ РЕЗИСТИВНЫЕ ПРЕОБРАЗОВАТЕЛИ
Электрохимические резистивные преобразователи, часто называемые кондуктометрическими, основаны на зависимости сопротивления преобразователя R от его формы и размеров и от состава и концентрации используемого электролита:
R = (10-10)
где /'(геом — коэффициент преобразования, зависящий от соотношения геометрических размеров преобразователя и определяемый обычно экспериментально путем использования стандартных растворов с известными значениями проводимости у.
Рис. 10-4
Кондуктометрические преобразователи для измерения концентрации (проводимости) растворов разделяются на контактные, электроды которых помещаются в контролируемый раствор, и бесконтактные. Диапазон проводимостей, подлежащих измерению, достаточно широк: от 1СГ6 См/м (разбавленные водные растворы, неводные среды) до 100 См/м (сильные электролиты, расплавленные соли).
В контактных преобразователях используются плоскопараллельные, коаксиальные или точечные электроды, изготовляемые из платины, графита, нержавеющей стали или других материалов, химически не взаимодействующих с раствором. Для уменьшения погрешности от поляризации и загрязнения электродов иногда используются четырехэлектродные преобразователи (рис. 10-4, а) с двумя токовыми 1 и двумя потенциальными 2 выводами, с которых снимается измеряемое напряжение.
232
На рис. 10-4, б показан контактный преобразователь для измерения среднего и пульсирующего значений электрической проводимости при исследовании топографии неоднородного поля электропроводимости, например при исследовании океана. Преобразователь состоит из обтекаемого стеклянного корпуса 1 и двух платиновых электродов 2 и 3. Диаметр центрального электрода 2 в зоне контакта с жидкостью выбирается равным 20—500 мкм, что позволяет сконцентрировать 90% измеряемого сопротивления в очень малом объеме вблизи этого электрода и измерять локальные неоднородности поля электропроводимости. Погрешность измерения среднего значения электропроводимости 5%, а ее переменных составляющих 20% в частотном диапазоне 0—1000 Гц. Объем усреднения в зависимости от размеров микроэлектрода состав
Рис. 10-5
ляет 1—3 мм3. Недостатками преобразователя являются невысокая чувствительность и нестабильность коэффициента преобразования из-за загрязнения микроэлектрода.
Для измерения числа микрочастиц в жидкости, например эритроцитов в крови, используются проточные контактные преобразователи с капиллярным отверстием, по сторонам которого находятся электроды. Диаметр отверстия в 10—20 раз больше размера частиц. При прохождении частицы через отверстие импульсно возрастает сопротивление между электродами и в счетчик поступает очередной импульс. Общее число импульсов равно числу частиц, прошедших через преобразователь. По амплитуде импульсов можно определять размеры частиц. ... Измерение электропроводимости с использованием контактных преобразователей обычно осуществляется мостами переменного тока при частоте питания 50—5000 Гц. Применение трансформаторных мостов с индуктивно-связанными плечами и метода замещения позволяет измерять электропроводимость в лабораторных условиях с погрешностью 0,05—0,5%.
233
Бесконтактные преобразователи не имеют контакта металлических электродов с электролитом, что исключает поляризацию и другие нежелательные взаимодействия электрода и раствора. Они разделяются на низкочастотные (/ 40 4- 50 кГц) и высокочастотные. На рис. 10-5, а
показана схема низкочастотного трансформаторного преобразователя с короткозамкнутой жидкостной вторичной обмоткой.
Изменение электропроводимости раствора приводит к изменению сопротивления вторичной обмотки и, следовательно, сопротивления первичной обмотки (см. § 8-1 и 8-3). При уменьшении электропроводимости уменьшается ток через указатель. На рис. 10-5, бив показаны преобразователи с жидкостным витком, являющимся вторичной обмоткой входного 1 и первичной обмоткой выходного 2 трансформаторов. В короткозамкнутом витке (рис. 10-5, б) наводится ЭДС Ек з = = где Zml — магнитное сопротивление первого сердечника,
и течет ток /к 3 = EK.3/RK.3, под действием которого наводится ЭДС Е2 во вторичной обмотке второго трансформатора, равная Е., = = jco&y2ZK-3/Zffl2, где Zm2 — магнитное сопротивление второго сердечника. Таким образом, зависимость между Е2 и электропроводимостью жидкости у может быть определена из уравнения
р __ J 1Z
С 2 ^77 ^Х^геомТ»
где /(ГСом — коэффициент связи между электропроводимостью раствора и проводимостью витка.
При начальной проводимости раствора указатель Ук (рис. 10-5, б) регулировкой реостата R устанавливается на нуль. Такие преобразователи позволяют измерять концентрации растворов при температуре до 100 °C, удельная электропроводимость которых равна 10'4—• 10 См/м.
На рис. 10-5, в изображен капиллярно-трансформаторный преобразователь с жидкостным витком, предназначенный, как и преобразователь на рис. 10-4, б, для исследования топографии поля электропроводимости. Входной Тр1 и выходной Тр2 трансформаторы выполнены на тороидальных ферритовых сердечниках и помещены в герметичный пластмассовый корпус 1 со стеклянной насадкой 2, имеющей капиллярное отверстие 3. Жидкостный виток, связывающий трансформаторы Тр1 и Тр2, образуется жидкостью в капилляре и канале корпуса 4 и жидкостью,.омывающей преобразователь снаружи. Сопротивление жидкости в капилляре на порядок больше сопротивления остальной части жидкостного витка связи. Малые диаметр и длина капилляра обеспечивают высокую пространственную разрешающую способность преобразователя (объем осреднения 0,5—1 мм3), а большая плотность тока в капилляре — высокую чувствительность. По сравнению с контактным преобразователем (рис. 10-4, б) рассматриваемый бесконтактный преобразователь характеризуется большей точностью измерений. Погрешность измерения среднего значения электропроводимости составляет ±0,5%, а переменных составляющих ±10%.
Высокочастотные бесконтактные преобразователи разделяются на емкостные (рис. 10-6, а, б), которые применяются для измерения кон-2&
центраций растворов с малой электропроводимостью (10~6 — 1 См/м), и индуктивные (рис. 10-6, в) — для растворов с электропроводимостью 10-2—100 См/м. Электроды располагаются снаружи тонкостенной изоляционной трубки с контролируемым раствором. У погружных преобразователей они находятся внутри закрытой трубки, которая помещается в раствор.
На рис. 10-6, г дана эквивалентная электрическая схема емкостного бесконтактного преобразователя, где R — активное сопротивление электролита; С} — емкость, обусловленная диэлектрическими свойствами стенок преобразователя; С2 — емкость, обусловленная диэлектрическими свойствами электролита.
На рис. 10-6, д показаны кривые зависимости активной составляющей g комплексной проводимости преобразователя на высокой частоте от удельной проводимости электролита у. Зависимость g = f (у)
Рис. 10-6
при постоянной частоте наиболее часто используется для определения у и, следовательно, концентрации растворов. Высокочастотные преобразователи обычно включаются в резонансный контур, питаемый от генератора с частотой несколько десятков мегагерц. Измерение концентрации при этом сводится к измерению добротности контура. Высокочастотные преобразователи используются также в частотных датчиках на основе LC, RC и /^/.-генераторов.
Кондуктометрические преобразователи для измерения механических величин. При постоянной концентрации электролита изменение сопротивления преобразователя может быть вызвано изменением расстояния между электродами или изменением сечения электролита.
На рис. 10-7 показаны кондуктометрические преобразователи углового перемещения и схемы их включения в мостовую измерительную цепь. Два плеча моста (рис. 10-7, а) образованы сопротивлениями дифференциального преобразователя, имеющего один подвижный электрод 1 и два неподвижных 2 и 3. Аналогично строятся кондуктометрические преобразователи для линейных перемещений. Их достоинством является незначительность усилия, необходимого для перемещения электрода. Это усилие пропорционально скорости перемещения и становится заметным лишь при высокочастотных колебаниях подвижного электрода. ...
235
На рис. 10-7, б показан преобразователь угла отклонения , от вертикального направления. Преобразователь имеет четыре изолированных друг от друга цилиндрических электрода 1, установленных
по окружности в крышке преобразователя 2. Герметический корпус преобразователя, образуемый крышкой из изоляционного материала и сферическим основанием 3, полностью заполняется электролитом,
часть объема занята воздушным пузырьком 4. При горизонтальном расположении преобразователя воздушный пузырек располагается в центре и покрывает около половины площади каждого из четырех электродов. При этом проводимости между основанием корпуса и каждым из электродов одинаковы. При наклоне преобразователя воздушный пузырек
смещается от центра, равен-
Рис. 10-7
ство проводимостей нарушается и на выходе измерительной цепи появляется сигнал, пропорциональный углу наклона а.
Схема включения преобразователя в измерительную цепь показана на рис. 10-7, в. Выходные напряжения UA и U2 на вторичных обмотках трансформаторов Тр1 и Тр2 пропорциональны углам отклонения оси преобразователя от вертикали в двух взаимно перпендикулярных плоскостях. Порог чувствительности преобразователя составляет 1—2 угловые минуты.
Для измерения механических деформаций применяются кондуктометрические тензопреобразователи. Они представляют собой каучуковую трубку диаметром 1—2 мм, заполненную электролитом, с двумя
236
электродами, плотно вставленными в концы трубки таким образом, чтобы ее внутренний объем был заполнен электролитом. Преобразователь крепится к объекту при помощи зажимов или наклеивается непосредственно на исследуемую поверхность. В зависимости от состава электролита и размеров канала трубки можно изготовить преобразователи с начальным сопротивлением от сотен ом до нескольких килоом. Такие преобразователи позволяют измерять очень большие относительные деформации (до Д///о = 0,6), их коэффициент тензочувствительности Кт= = Частотная характеристика преобразователей £14/4q
практически равномерна до частот 500—700 Гц [10].
Достоинством* таких тензопреобразователей является возможность использования больших напряжений питания (до 500 В) и высокие
Рис. 10-8
изоляционные свойства. Их можно применять при измерении деформации деталей, находящихся в воде и других жидких средах, не разрушающих каучук.
Коррекция температурной погрешности кондуктометрических преобразователей осуществляется в основном термостатированием раствора и измерительного преобразователя и цепями автоматической коррекции с использованием медных, никелевых, полупроводниковых и электролитических терморезисторов, помещаемых в контролируемый раствор вместе с измерительным преобразователем.
На рис. 10-8 показаны схемы температурной коррекции с применением медного (рис. 10-8, а) и полупроводникового (рис. 10-8, б) терморезисторов. Медный терморезистор обычно соединяется последовательно с измерительным преобразователем Rx. Полупроводниковые и электролитические терморезисторы, которые имеют отрицательный ТКС, включаются в плечо моста, смежное с Rx. Для выравнивания ТКС терморезистора и раствора параллельно элементу цепи с большим ТКС включается резистор из манганина R±.
237
10-3. ГАЛЬВАНИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ
Гальванические преобразователи основаны на зависимости ЭДС гальванической цепи от концентрации ионов в электролите и окислительно-восстановительных процессов, происходящих на электродах. Они используются для определения концентрации ионов в различных растворах, а также в качестве образцовых мер ЭДС — нормальных элементов.
Наиболее широкое применение гальванические преобразователи получили в качестве преобразователей рН-метров — приборов для измерения активности (концентрации) водородных ионов.
Молекулы воды частично диссоциируют на ионы водорода и ионы гидроксила ОН", чем обусловлена вполне определенная, хотя и очень малая электропроводность воды. Диссоциация воды происходит по схеме
H2O,= H+ + OH-.
При этом остается постоянной так называемая константа диссоциации, равная
_ ан+аон-
ан,0
где ан+, «он- и йн2о — соответственно активности ионов Н+, ОН" и воды.
В разбавленных растворах активность воды ан2о можно считать постоянной, и тогда произведение /<ан2о становится новой постоянной, которую называют ионным произведением воды: Кнго = ан+аон~-Установлено,- что при 22 °C ионное произведение воды Днг0 = = 10"14 (г-ион/л)2. В чистой воде или в нейтральном растворе активности Н+ и ОН" равны:
ан+ = аон- = 1/"/Сн2о=10-7 г-ион/л.
Ионное произведение воды Лн2о = ан+аон- при данной температуре остается постоянной величиной не только для воды, но и для любого водного раствора, включая растворы кислот с избытком ионов Н+ или оснований с избытком ионов ОН". .
Если в воде растворить кислоту, то ионов Н+ станет больше, а ионов ОН" — меньше (за счет воссоединения части образовавшихся ионов Н+ с ионами ОН"), но произведение ац+аон- останется равным ионному произведению воды. У кислых растворов ан+ > аон-, а У щелочных растворов йон- > ан+.
Таким образом, для характеристики раствора достаточно знать активность водородных ионов, которую для удобства записи и вычислений численно характеризуют отрицательным логарифмом активности ионов водорода — водородным показателем pH:
pH = — 1§ан+ = — 1§/н+Сн+- (10-11)
Приборы для измерения этого показателя получили название рН-метров.
Диапазон изменения pH водных растворов обычно составляет 0—14 ед. В растворах других растворителей (неводных) диапазоны
238
изменения pH другие, например в аммиаке 0 — 32,7 ед., в муравьиной кислоте 0—6,1 ед. и т. д.
Наиболее точный и универсальный метод измерения pH основан на определении электродных потенциалов различных электродов, помещаемых в исследуемый раствор. Следовательно, гальванические преобразователи, являющиеся датчиками pH-метров, в качестве естественной входной величины имеют концентрацию водородных ионов, выражаемую в единицах pH, а в качестве выходной величины — разность электродных потенциалов.
Гальванический преобразователь состоит из двух полуэлементов: измерительного электрода, помещаемого в исследуемый раствор, и вспомогательного полуэлемента, электродный потенциал которого должен оставаться постоянным.
На рис. 10-9 показан гальванический преобразователь, состоящий из двух водородных полуэлементов. Один из водородных электродов (измерительный) помещается в исследуемый раствор /, который при помощи электролитического ключа 2 соединяется с нормальным водородным полуэлементом (вспомогательным) 3, содержащим электролит с активностью водородных ионов а(н+)2 — 1 г-ион/л. ЭДС между электродами полученной концентрационной цепи в соответствии с формулой (10-6) равна
RT а,н+,
£в = —1п-^, (10-12)
f “(Н+Ц
где — активность водородных ионов в исследуемом растворе; й(Н+)2 — активность водородных ионов в нормальном водородном полуэлементе.
Переходя к десятичным логарифмам и учитывая, что 1g а(н+)1== —pH, получаем
„ 2,3037?Т u
£в =----р—pH. (10-13)
Для температуры 18 °C
£3 = —0,058 pH. (10-14)
При использовании водородного электрода в рабочем (измерительном) полуэлементе им можно измерять pH во всем диапазоне измерения (от 0 до 14). Однако вследствие неудобства применения, связанного
239
с необходимостью непрерывно подавать к электроду газообразный водород, водородный электрод используется главным образом как образцовый электрод для лабораторных исследований.
Вспомогательные полуэлементы. В гальванических преобразователях используются каломельный, хлорсеребряный, бромсеребряный и другие вспомогательные полуэлементы.
Каломельный полуэлемент. Потенциал Еп нормального каломельного полуэлемента относительно потенциала нормального водородного полуэлемента при температурах 15, 18, 20, 25 и 30 °C соответственно составляет 0,2852; 0,2845; 0,2840; 0,2828 и 0,2816 В.
Гальванический преобразователь, состоящий из водородного электрода, помещенного в исследуемый раствор, и нормального каломельного полуэлемента, будет при 18 °C развивать ЭДС
Ек = 0,2845+ 0,058 pH. (10-15)
Недостатками каломельных полуэлементов являются возможность попадания ртути в контролируемый раствор и ограниченный сверху до +70 °C диапазон рабочих температур.
Хлорсеребряный полуэлемент представляет собой платиновую проволоку, покрытую слоем хлористого серебра и погруженную в раствор НС1. Нормальный потенциал хлорсеребряного полуэлемента равен 0,222 В при 25 °C. Достоинствами такого полуэлемента является простота и компактность конструкции, хорошая воспроизводимость потенциала электрода, возможность применения при температурах до 150—250 °C, а также в условиях тряски и вибраций.
Измерительные электроды гальванических преобразователей. В качестве измерительных электродов в рН-метрах, кроме водородного, применяются хингидронный, сурьмяный и получивший наибольшее распространение стеклянный электроды.
Стеклянный электрод 1 (рис. 10-10) представляет собой тонкостенную (0,05— 0,1 мм) колбу (мембрану), выдуваемую на конце трубки из специальных сортов стекла. При помещении колбы в раствор на границе стекло—раствор появляется разность потенциалов, завися
щая от активности водородных ионов раствора. Это объясняется процессами ионного обмена. Щелочные ионы стекла (Na или Li) переходят в раствор, а их места занимают более подвижные ионы водорода из раствора. В результате этого поверхностный слой стекла оказывается насыщенным водородными ионами и стеклянный электрод приобретает свойства водородного электрода.
Это относится как к внутренней, так и к внешней поверхностям колбы, которые нужно рассматривать как два водородных электрода,
240
один из которых должен иметь постоянный потенциал. Слой стекла между обеими поверхностями, по существу, является проводником с большим сопротивлением, соединяющим оба электрода.
Гальванический преобразователь со стеклянным электродом обычно состоит из стеклянного электрода и двух вспомогательных полуэлементов, которые используются для снятия потенциала с внутренней и внешней поверхностей стеклянного электрода (рис. 10-10).
Стеклянный электрод 1 и каломельный полуэлемент 3 помещаются в исследуемый раствор. Внутрь стеклянного электрода, заполненного образцовым раствором с известным значением рНдг, вставлен вспомогательный хлорсеребряный электрод 2.
ЭДС на выводах преобразователя является алгебраической суммой потенциалов хлорсеребряного полуэлемента, внутренней и наружной поверхности стеклянного электрода и потенциала каломельного полуэлемента.
При изменении рН_г исследуемого раствора изменяется только потенциал наружной поверхности электрода, который зависит от активности водородных ионов в растворе. Все же остальные составляющие ЭДС остаются неизменными (при постоянной температуре). Поэтому, измеряя ЭДС на выводах преобразователя со стеклянным электродом, можно определить рН.г исследуемого раствора.
Стеклянный электрод может применяться для измерения pH не только в водных, но в неводных и смешанных средах. Однако для каждого растворителя необходимо устанавливать соответствующую зависимость Е = f (pH).
Характерной особенностью гальванических преобразователей со стеклянными электродами является их большое внутреннее сопротивление, так как в него входит сопротивление стеклянной мембраны. В зависимости от химического состава и толщины стеклянного электрода его сопротивление составляет 0,5—1000 МОм. При уменьшении температуры сопротивление стеклянных электродов резко возрастает, что препятствует их использованию при температурах ниже 0 °C.
Другой особенностью стеклянного электрода является наличие потенциала асимметрии, который проявляется в том, что при помещении внутрь и снаружи электрода одинаковых растворов на выводах гальванического преобразователя со стеклянным электродом возникает ЭДС, которая может достигать 1—2 мВ. Постоянные времени стеклянных электродов пропорциональны толщине мембраны и обычно лежат в пределах 1—10 с.
Конструкции стеклянных электродов весьма разнообразны. Для измерения pH кожи, бумаги применяются стеклянные электроды с плоской мембраной, для измерений в вязких средах и для медицинских целей — копьевидные и игольчатые электроды.
Гальванические преобразователи используются для измерения активности не только водородных ионов, но и ионов ряда других элементов: калия, натрия, хлора, меди, цианида, серы и т. д. В качестве измерительных применяются различные ионоселективные электроды из стекла, меди, золота, серебра, олова, ионообменных смол, кремнистой резины и др. Избирательность электродов к тому или другому
241
иону зависит от состава и ионообменных свойств материала электрода. Весьма перспективны электроды из ионообменных смол, поскольку один тип ионов в смоле может быть полностью заменен другим. Они
имеют малое сопротивление и низкий потенциал асимметрии.
Требования к измерительной цепи и методы коррекции температурной погрешности. Измерение ЭДС гальванических преобразователей должно производиться таким образом, чтобы через преобразователь не проходил ток, вызывающий погрешности от поляризации электродов и падения напряжения на внутреннем сопротивлении преобразователя, которое при использовании стеклянных электродов составляет 107—109 Ом. Поэтому основное требование к измерительной цепи — это очень большое входное сопротивление, которое достигается за счет применения электрометрических усилителей. При использовании усилителя с динамическим конденсатором (см. § 7-2)
можно получить входное сопротивление до 1015—1016 Ом. Для измерения ЭДС гальванических преобразователей наибольшее распространение получили компенсационные измерительные цепи с автоматической коррекцией температурной погрешности преобразователя.
Зависимость ЭДС от значения pH и температуры раствора 0 можно представить семейством прямых, пересекающихся в одной, так называемой изопотенциальной точке И (рис. 10-11). Это означает, что при определенном значении рН„ раствора, соответствующем координате изопотенциальной точки, ЭДС преобразователя не зависит от температуры. Координаты изопотенциальной точки (£в и рНк) зависят от типа используемых электродов и обычно определяются экспериментально. Представленные на рис. 10-11 зависимости с координатами изопотенциальной точки Би = 203 мВ, рНи = 4,13 ед.
можно описать уравнением
Ех = [—203 - (54,Ц-0,1980) (pH - 4,13)], (10-16)
где Ех — в милливольтах.
В этом уравнении не учитываются гистерезис и флуктуации электродных потенциалов, а также нелинейность, которая имеет место при изменении температуры в широком диапазоне.
На рис. 10-12 показана схема коррекции температурной погрешности гальванического преобразователя при его включении на вход высокоомного усилителя с глубокой отрицательной обратной связью. Постоянная составляющая ЭДС преобразователя, соответствующая координате изопотенциальной точки, компенсируется падением на
242
пряжения Ua, создаваемого током от вспомогательного источника Еъ на резисторе
В качестве элемента обратной связи используется терморезистор Дт, помещенный в контролируемый раствор совместно с гальваническим преобразователем. ЭДС гальванического преобразователя (Ех — Ua) почти полностью уравновешивается падением напряжения UK — Если сопротивление терморезистора изменяется с температурой по такому же закону, что и крутизна характеристики
гальванического преобразователя, то ток /вых будет определяться только значением pH раствора независимо от его температуры.
Известны pH-метры с цифровым отсчетом со встроенными микропроцессорами, обеспечивающие измерение с абсолютной погрешностью 0,001 pH.
Градуировку рН-метров производят по образцовым буферным растворам с точно известным и стабильным значением pH. Значения pH буферных растворов лежат в основе стандартизации шкал pH.
Нормальные элементы. При неизменной концентрации эле-
Рис. 10-12
ктролита и постоянной темпе-
ратуре ЭДС гальванической цепи может быть весьма стабильной, что используется для создания нормальных элементов (н. э.), применяемых в качестве мер ЭДС, а также для осуществления эталона вольта.
В зависимости от концентрации электролита н. э. разделяются на насыщенные и ненасыщенные.
Основные параметры н. э. приведены в табл. 10-1.
Таблица 10-1
Класс точности н. э. Де й ств н те л ь н ое значение ЭДС при 20 ®С, В Допускаемое изменение ЭДС, мкВ Температура применения, °C .
за год за 3 суток
0,001 1,01859—1,01863 10 5 20+0,5
0,002 1,01856—1,01866 20 10 20+2
0,005 1,01850—1,01870 50 30 10—40
0,02 1,0186—1,0194 200 70 5—55
243
Насыщенные н. э. характеризуются высокой воспроизводимостью и стабильностью ЭДС во времени, но относительно большим температурным коэффициентом ЭДС (около 50 мкВ/K). Действительное значение ЭДС (в вольтах) насыщенных н. э. при температуре 0 определяется по формуле
Ее = EV} - 0,0000406 (0 - 20) - 0,00000095 (0 - 20)2 + + 0,00000001 (0 —20)3,
где £20 — действительное значение ЭДС при температуре 20 °C, указанное в аттестате н. э.
Для быстрого расчета ЭДС нормального элемента класса 0,005 можно пользоваться приближенной формулой 3. И. Зеликовского
£0 = [£20-(0 + 20) (0-20)],
где Ее — в микровольтах.
Для определения температуры н. э. в его корпусе имеется отверстие для термометра. Ненасыщенные н. э. характеризуются малым температурным коэффициентом ЭДС (около 2—3 мкВ/K), но относительно большой нестабильностью ЭДС во времени. Внутреннее сопротивление Ri вновь изготовленных насыщенных н. э. не превышает 1000 Ом, а ненасыщенных — 600 Ом. Со временем Rt возрастает иногда в десятки раз, что, однако, не влияет на значение ЭДС нормального элемента.
Насыщенные н. э. нельзя даже кратковременно нагружать током более 1 мкА, а ненасыщенные — более 10 мкА.
10-4. КУЛОНОМЕТРИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ
Кулонометрические преобразователи основаны на явлении электролиза. Связь между выделившимся веществом и количеством электричества, пропущенным через преобразователь, определяется уравнением
Q—^idt — ~^mdt — MnFlA, (10-17)
ц Н
где М — масса вещества; п — валентность ионов; F — постоянная Фарадея; А — молекулярная масса вещества.
Кулонометрические преобразователи получили наиболее широкое применение для интегрирования токов и напряжений, а также для измерения времени работы различных электротехнических устройств в качестве счетчиков машинного времени. Наряду с этим кулонометрические преобразователи используются для измерения влажности газов, толщины покрытий, в качестве генераторов инфранизких частот, реле времени, бесконтактных управляемых резисторов, ячеек памяти. На рис. 10-13 изображен ртутно-капиллярный кулонометрический преобразователь, состоящий из капиллярной трубки 1 диаметром 0,2—0,3 мм, заполненной двумя столбиками ртути 2 и 3, разделенными каплей раствора 4 солей ртути (например, Hgl2). При про
244
хождении через преобразователь постоянного тока происходит электролиз, в результате которого на аноде ртуть растворяется (окисляется)
Hg + 4I--»-HgIr + 2e,
а на катоде — восстанавливается:
HgI4 + 2e->-Hg + 4I.
В результате электролиза ртуть с анода переносится на катод, что приводит к перемещению капли электролита вдоль капилляра на длину А/, пропорциональную интегралу от тока за время интегрирования. Состав электролита при этом остается неизменным. Уравнение преобразования преобразователя можно представить в виде \ \ \ /
Д/ = 4k f idt — KQ,
Z| 01 23456789 10 -
л I । I । I I I । I । I । I i I > I I I । t
где A, y, n — соответственно молекулярная масса, плотность и „ ш ю
валентность ртути; 5 — площадь капилляра; Д/ = t2— 1г— время интегрирования. Значение интегрируемого тока должно быть меньше предельного значения диффузионного тока и обычно лежит в пределах 0,001 — 50 мкА. При использовании преобразователя в качестве счетчика машинного времени через него пропускается неизменный постоянный ток. В зависимости от значения тока и размеров капилляра время интегрирования составляет 100—5000 ч. Установка указателя (капли электролита) в нулевое положение производится изменением направления тока через преобразователь. Считывание показаний производится визуально по переднему или заднему менискам капли или при помощи оптоэлектронных, емкостных, индуктивных или резистивных считывающих устройств.
Погрешности ртутно-капиллярных преобразователей определяются точностью изготовления капилляров, способом снятия информации, а также влиянием внешних факторов, особенно температуры и механических воздействий вдоль оси капилляра.
На рис. 10-14 показано устройство водородного кулонометрического преобразователя, применяемого для интегрирования токов и напряжений. Интегратор представляет собой герметичный стеклянный сосуд 1, разделенный на две части пористой стеклянной перегородкой 2, пропитанной электролитом. По обе стороны перегородки укреплены сетчатые электроды 3 из платины. В горизонтальной трубке .^ходится капля электролита 4, которая является указателем и разделяет преобразователь на две части, заполненные водородом. Ток, протекающий между электродами, вызывает выделение водорода на катоде (2Н+ + 2е-+- Н2) и поглощение такого же количества водорода на аноде (Н2-> 2Н+ + 2е). Это приводит к разности давлений в камерах и перемещению указателя 4.
245
Такие кулонометрические интеграторы (X-I5 и Х-603) обеспечивают интегрирование токов от 10“8 до 10~2 А с погрешностью 0,5—1 % и напряжений от 10“5 до 4-Ю"2 В с погрешностью 1,5—2%. Рабочий диапазон температур от —30 до +80 °C. Температурная погрешность при интегрировании токов составляет 0,01—0,05 %/К, а при инте-
грировании напряжений 1,5 % /К. Предел измерения по количеству электричества равен 18 Кл.
Кулонометрический управляемый резистор (мимистор) (рис. 10-15) представляет собой герметичный корпус 2, заполненный электролитом 3, содержащим ионы металла, из которого изготовлен управляющий электрод (анод) 4. являющийся катодом, выполнен
Рис. 10-14
Собственно резистивный элемент 5,
в виде тонкой пленки из инертного металла или угля. Он имеет два вывода 1 и 6, сопротивление между которыми измеряется на переменном токе. При включении постоянного тока между анодом и като-
дом металл анода растворяется в электролите и такое же количество
металла осаждается на катоде, уменьшая сопротивление между выводами I и 6. Из выражения (10-17) можно получить уравнение преобразователя управляемого резистора
1 1 , А 1‘ .
R ~ Ro + RpynF J 1 й ’
Ь
где R — сопротивление резистора; Ro и I — соответственно начальное сопротивление и длина резистора; у и р — плотность и удельное сопротивление осажденного металла. Такие резисторы имеют следующие характеристики: /?0 = 2-г- 100Ом;
RJR = 20 ч- 100; ток управления / = 0,05 ч- 10 мА; время изменения сопротивления от Ro до R равно AZ = 1 ч- 103 с; температурный коэффициент 0,001—0,004 К-1. Рассматриваемые резисторы используются в качестве интеграторов, ячеек памяти, элементов коррекции медленных дрейфов токов и для построения генераторов инфранизких частот.
Для измерения толщины металлических покрытий применяется ку
лонометрический преобразователь (рис. 10-16), выполненный в виде резервуара 2 с электролитом 3. На конце резервуара имеется резиновая присоска с отверстием 4, которая укрепляется на контролируемой детали 5. Принцип действия преобразователя основан на электрохи-
246
мическом растворении (электролизе) небольшого участка 1 покрытия и измерении количества электричества или времени электролиза (при неизменном значении тока), которые пропорциональны толщине покрытия при условии постоянства площади растворяемого участка. Момент окончания электролиза металла покрытия фиксируется по
изменению катодного потенциала при достижении электролитом границы покрытие — основа. Созданы кулонометрические толщиномеры, обеспечивающие измерение покрытий в диапазоне 5—500 мкм с погрешностью 1,5—10%.
10-5. ПОЛЯРОГРАФИЧЕСКИЕ
ПРЕОБРАЗОВАТЕЛИ
Полярографические преобразователи применяются для качественного и коли- 1С’
чественного химического анализа. Принцип действия их основан на использовании явления поляризации на одном из электродов электролитической ячейки при электролизе исследуемого вещества. Полярографический преобразователь представляет собой ячейку, заполненную раствором анализируемого вещества, с двумя электродами, к которым подводится медленно нарастающее напряжение U от внешнего источника питания.
Ток, проходящий через ячейку, определяется выражением
/ = Р-(еа-ек)]//?,
где R — сопротивление ячейки; еа — потенциал анода; ек — потенциал катода.
Для того чтобы поляризация происходила только на одном электроде, его площадь выбирается в несколько сотен раз меньше площади другого электрода. Полагая потенциал неполяризующегося электрода, например еа, достаточно малым, а падение напряжения IR(R = 1000 Ом; / = 10“6 А) намного меньшим приложенного напряжения U, можно определить потенциал ек для разных токов как ек - t/.
Для воспроизводимости результатов измерения необходимо, чтобы поляризующийся электрод обладал однородной и непрерывно обновляющейся поверхностью и обеспечивалась стационарность процесса диффузии ионов к электроду. Лучше всего этим требованиям удовлетворяет преобразователь с непрерывно обновляющимся капающим ртутным электродом (рис. 10-17, а). Анодом является ртуть, заполняющая дно сосуда, катодом — капля ртути, образующаяся на конце капиллярной трубки, наполняемой ртутью из резервуара. Под влиянием собственной тяжести капля ртути падает на дно сосуда, после чего образуется следующая капля, и т. д. Период от начала образования капли до ее отрыва от капилляра обычно составляет 1—6 с. Для создания ртутного капающего электрода используются капиллярные трубки с диаметром капилляра 0,1 мм и длиной 150—200 мм.
247
На рис. 10-17, б показаны вольт-амперные характеристики (поляро-
Рис. 10-17
тех же ионов, полученные при различной концентрации их в растворе. Как видно из кривых, потенциал, при котором выделяются ионы, при прочих равных условиях зависит от их концентрации. Поэтому для качественного анализа используют не потенциал, при котором начинается резкое возрастание тока, а потенциал, соответствующий середине участка повышения тока, — потенциал «полуволны», который не зависит от концентрации ионов и параметров преобразователя. Если продифференцировать кривые I = f (U), то максимумы кривых dl/dU = f (U) (рис. 10-17, в) будут при одном и том же потенциале, также соответствующем потенциалу «полуволны» исследуемых ионов, а высоты максимумов — пропорциональны концентрациям.
Если в исследуемом растворе содержатся ионы нескольких видов (например, Pb++, Cd++, Zn++), то каждый вид ионов дает свой прирост тока — свою «волну», в результате чего получается многоступенчатая полярограмма, показанная на рис. 10-17, г.
При подаче на преобразователь возрастающего напряжения вначале через него идет только остаточный ток /0, обусловленный разрядом небольшого числа ионов всех видов. При достижении напряжением значения потенциала разряда ионов РЬ++ (—0,45 В) ток через преобразователь резко возрастает и достигает значения 7П1, определяемого концентрацией ионов РЬ++ в растворе. При дальнейшем росте напряжения ток остается равйй’й
7П1 до тех пор, пока не будет достигнут потенциал разряда ионов Cd++ (—0,6 В), и затем ток снова резко возрастет до значения /п2. При этом разность токов /п2 — /П1 соответствует концентрации в растворе ионов Cd++ и т. д.
248
’’Потенциалы «полуволн» различных элементов образуют так называемый полярографический спектр, и- их значения приведены в специальных таблицах. Сравнивая потенциалы «полуволн», полученные при исследовании неизвестного раствора, с табличными данными, можно установить химический состав исследуемого раствора, а по скачкам тока — концентрацию отдельных компонентов.
К недостаткам ртутного электрода относятся: ядовитость ртути, невозможность исследования расплавленных солей, небольшое допустимое напряжение анодной поляризации (до +0,4 В). Последнее обусловлено электрохимической реакцией растворения ртути (окисление ртути), что не дает возможности производить анализ веществ, окисляющихся труднее ртути, т. е. при положительных потенциалах больше +0,4 В. По этим причинам начинают применяться полярографические преобразователи с твердыми электродами из платины, золота, серебра, никеля и др. Для получения тонкого диффузионного слоя электролита у электрода и обновления этого слоя используются вращающиеся по окружности или вибрирующие твердые электроды. При этом также увеличивается чувствительность преобразователя вследствие усиления диффузии вещества к электроду.
10-6. ИОНИСТОРЫ
Ионисторы — это разновидность электрохимических преобразователей, основанных, подобно полупроводниковым транзисторам, на использовании запирающего слоя, обедненного носителями электрических зарядов. Такой слой можно получить в электролитах, содержащих как окисленные, так и восстановленные формы определенных ионов, например 1у/1", Fe+++/Fe++ и др.
На рис. 10-18, a Hi£j показаны устройство и статическая вольт-амперная характеристика электрохимического диода. Диод состоит из герметичного корпуса 1, заполненного водным раствором KI с небольшой добавкой иода, который в присутствии ионов I" может существовать в растворе только в виде трехиодных ионов 1у. При этом концентрация ионов на два-три порядка меньше концентрации ионов I". Такой электролит совместно с инертными электродами 2 и 3 образует обратную окислительно-восстановительную систему. Одним из электродов является торец тонкой платиновой проволоки 2 (микроэлектрод), а другим — цилиндр из платиновой фольги 3. При отрицательной полярности микроэлектрода, когда он является катодом, на нем восстанавливаются окисленные ионы (1у + 2е -»ЗГ), концентрация которых мала, и у этого электрода образуется запирающий слой, поэтому диод закрыт. При положительной полярности микроэлектрода, когда он является анодом, на нем происходит окисление ионов I-(ЗТ'у -» Ij + 2е), концентрация которых велика, вследствие чего сопротивление перехода микроэлектрод — раствор уменьшается и диод открывается. Пороговое напряжение у таких диодов составляет десятки милливольт, а обратный ток 10"8 А. Напряжение, прикладываемое к ионисто-рам, не должно превышать — 0,9 В, так как при больших напряжениях может произойти электролиз воды и «пробой» ионистора.
249
Ионисторы в виде диодов, триодов и тетродов применяются для интегрирования и усиления постоянных токов, для выпрямления, усиления и генерирования переменных токов низкой и инфранизкой частот, а также в качестве элементов памяти, преобразователей импульсов и т. д. Ионисторы обладают малым уровнем собственных шумов. Дрейф выходного сигнала интегратора-тетрода, приведенный ко входу, составляет 10~9 А.
Другой распространенной группой ионисторов являются конвекционные ионисторы, основанные на перемещении окисленных ионов вместе с движущимся электролитом. Такие ионисторы применяются для измерений давлений, ускорений, перемещений, магнитной индукции и др.
На рис. 10-19, а изображены ионистор для измерения импульсных и переменных давлений и схема его включения в измерительную цепь. Ионистор состоит нз двух одинаковых отсеков, закрытых по бокам гибкими мембранами 1. Отсеки соединены каналом 2, в котором расположены два катода 3. Аноды 4, площадь которых значительно больше площади катодов, выполнены из платиновой сетки и электрически между собой соединены. Рассматриваемый преобразователь представляет собой сдвоенный ионистор-диод, управляемый путем механического впрыскивания ионов
Рис. 10-19
1т в область запирающего слоя. Если давления и Рг, действующие на мембраны, равны, то £/вых — 0. Если равенство давлений нарушается, например Рг > Р2, то часть электролита из левого отсека переходит в правый, что сопровождается конвективным переносом ионов I,, которые восстанавливаются иа левом катоде. Вследствие этого через резистор Rt начинает проходить ток и на выходе возникает сигнал. Преобразователь является фазочувствнтельным, так как при изменении знака разности ДР — Pj — Р2 фаза выходного сигнала изменяется на 180“.
На рис. 10-19, б показано устройство ионисторного акселерометра. Он состоит из дифференциального ионистора 1 (рис. 10-19, а~), к которому вместо мембран прикреплены концы нескольких витков пластмассовой трубки, полностью заполненной электролитом. Под воздействием углового ускорения в плоскости кольца жидкость протекает через канал, где расположены катоды. В зависимости от направления ускорения на выходы преобразователя возникает напряжение соответствующей полярности. Линейное ускорение и ускорение в других плоскостях не влияют на выходной сигнал. Отсутствие мембраны позволяет использовать такой преобразователь для измерения не только переменных, но и постоянных ускорений.
На рис. 10-19, в изображено устройство ионистора для измерения градиентов магнитной индукции. В прямоугольном канале 1 расположены две пары электродов 2, 3 и 4, 5, через которые протекают навстречу направленные стабильные по значению токи и /2. Если преобразователь поместить в неоднородное магнитное поле, то за счет электрогидродинамического эффекта по кольцевому каналу начнется движение электролита, которое при помощи ионистора 6 преобразуется в выходной сигнал, полярность которого зависит от направления градиента магнитной индукции:
С/выж=/<(/1В1-/2В»).
259
где К — коэффициент, зависящий от параметров преобразователя; В-, и В.2 — соответственно значения магнитной индукции в местах расположения электродов 2, 3 и 4, 5.
При /, = /2 прибор работает как градиентометр, а при равенстве нулю одного из токов /, или /2 — как тесламетр.
Ионисторы отличаются высокой чувствительностью и широким диапазоном измерений. Известны ионисторы с чувствительностью к давлению 60 мкА/Па. Один и тот же преобразователь можно использовать без дополнительных регулировок и переключения пределов для измерения ускорений в диапазоне 0,01—10 м/с2. Частотный диапазон ионисторов главным образом определяется скоростью диффузии ионов, жесткостью мембран и гидродинамическим сопротивлением. Практически частотный диапазон ионисторов лежит в пределах 0,001—200 Гц.
10-7. ЭЛЕКТРОКИНЕТИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ
Электрокинетические преобразователи (ЭКП) основаны па использовании разности потенциалов, возникающих при протекании полярной жидкости через пористую перегородку (см. § 10-1) или при деформации границы раздела двух жидкостей, различающихся физическими свойствами. На рис. 10-20, а показан ЭКП давления, со-
Рис. 10-20
стоящий из изоляционной пористой перегородки 1 с диаметром пор 10—100 мкм, по бокам которой расположены сетчатые электроды 2. Корпус преобразователя, закрытый по бокам мембранами 3, заполняется полярной жидкостью (вода, спирт, ацетон и др.). ЭКП такого типа отличаются широким диапазоном измерения (0,1 Па — 1 МПа). Чувствительность к ускорениям составляет 1 мВ/(м/с2).
На рис. 10-20, б изображен капиллярный ЭКП для измерений параметров вибраций. Он состоит из стеклянного капилляра 1, заполненного электролитом 2 и ртутью 3, с которыми контактируют выводы 4. На концах капилляра имеются воздушные пузырьки 5, являющиеся упругими элементами преобразователя. При вибрации, направленной вдоль оси капилляра, возникает возвратно-поступательное движение ртути и электролита, приводящее к деформации границы раздела между ними, поскольку плотности и коэффициенты кинематической вязкости ртути и электролита отличаются на порядок Возникающая при этом периодическая конвективная диффузия ионов на границе раздела приводит к появлению переменных токов через преобразователь. Частотный диапазон преобразователя в режиме акселерометра 0,1— 10* Гц, диапазон измерений 10-5—10 м/с2, чувствительность 0,1—1 мВ/(м/с2).
На рис. 10-20, в показан частотный ЭКП для измерений медленно меняющихся механических величин (перемещения, давления, силы). Капилляр 1, в котором находятся два столбика электролита 2, разделенные каплей ртути 3, и два воздушных пузырька 4, представляет собой резонатор, один конец которого герметически закрыт, а на другом установлена мембрана 5. Резонатор с помощью электродов б, 7 и 8 подключен к усилителю 9. При подаче напряжения на электроды 6 и 7 происходит деформация границ раздела ртуть — электролит, что приводит к возвратно-поступательному движению ртути и электролита и самовозбуждению автогенератора, колебательным контуром которого является электрокинетический резонатор. Частота автогенератора при отсутствии внешних воздействий определяется парамет
251
рами резонатора (жесткость мембраны, масса ртути и электролита, объем воздушных пузырьков). Перемещение мембраны под воздействием внешнего давления приводит к изменению объема воздушных пузырьков и собственной частоты резонатора, которая определяет частоту автогенератора. Изменение давления на мембрану в пределах 10—Ю5- Па или перемещение мембраны в пределах 10~3— 1 мм вызывает изменение частоты автогенератора в пределах 0,5—103 Гц. Чувствительность преобразователя давления 0,1 Гц/Па, преобразователя перемещения 1 Гц/мкм.
Частотные свойства ЭКП определяются гидродинамической инерционностью самого электрокинетического эффекта, гидродинамической инерционностью движения жидкости в капиллярах с учетом вязкости и жидкости, механической инерционностью, обусловленной жесткостью мембран и массой движущейся жидкости. В зависимости от вида и конструкции ЭКП их частотный диапазон составляет от сотых долей герца до нескольких килогерц.
ГЛАВА ОДИННАДЦАТАЯ
ТЕПЛОВЫЕ ПРЕОБРАЗОВАТЕЛИ
11-1. ТЕОРЕТИЧЕСКИЕ ОСНОВЫ РАСЧЕТА ТЕПЛОВЫХ ПРЕОБРАЗОВАТЕЛЕЙ
Основным уравнением теплового преобразования является уравнение теплового баланса, физический смысл которого заключается в том, что вся теплота, поступающая к преобразователю, идет на повышение его теплосодержания QTC и, следовательно, если теплосодержание преобразователя остается неизменным (не меняется температура и агрегатное состояние), то количество поступающей в единицу времени теплоты равно количеству отдаваемой теплоты. Теплота, поступающая к преобразователю, является суммой количества теплоты Q3, создаваемой в результате выделения в нем электрической мощности и количества теплоты QT 0, поступающей в преобразователь или отдаваемой им в результате теплообмена с окружающей средой.
Теплосодержание при неизменном агрегатном состоянии вещества зависит от массы т и удельной теплоемкости с материала преобразователя и связано с температурой 0 преобразователя формулой QTC — mcQ.
Теплообмен осуществляется тремя различными способами.
При теплообмене посредством теплопроводности перенос тепловой энергии происходит только путем взаимодействия частиц, находящихся в непосредственном соприкосновении друг с другом и имеющих различную температуру. Теплообмен путем теплопроводности в чистом виде имеет место только в твердых телах.
Теплообмен посредством конвекции совершается путем перемещен) ния материальных частиц и может иметь место только в жидкостях или газах. Если причиной движения потоков жидкости или газа является неодинаковая плотность среды, вызванная разностью температур, то говорят о естественной конвекции. Движение потоков под действием внешних причин вызывает вынужденную конвекцию.
252
Третьим способом теплообмена является теплообмен посредством излучения. Тепловое излучение представляет собой поток электромагнитных волн (см. § 12-1), излучаемых телом за счет его тепловой энергии и полностью или частично поглощаемых другими телами.
На практике обычно имеет место комбинация различных способов теплообмена, которые могут быть учтены приводимыми ниже формулами.
Теплопроводность. Распространение теплоты путем теплопроводности определяется законом Фурье q — —X grad 0, где q — тепловой поток, представляющий собой количество теплоты, переданной в единицу времени через единицу поверхности, Вт/м2; grad 0 = = dQ/dl — градиент температуры; X — теплопроводность, Вт/(м-К).
Теплопроводность зависит от природы и физического состояния вещества. В анизотропных телах она зависит, кроме того, от направления распространения теплоты. Лучшими проводниками теплоты являются металлы. Наименьшей теплопроводностью обладают газы. Для газов теплопроводность зависит не только от состава газа, но и от температуры и при большом разрежении — от давления.
Полный тепловой поток, создаваемый разностью температур, определяется формулой
7т.п==СбЛ0 = Д0/^о> (Н-1)
где Ge — тепловая проводимость среды; Re — тепловое (или термическое) сопротивление среды.
Тепловая проводимость среды зависит от теплопроводности, определяемой по справочным данным из геометрических соотношений, и для ее расчета можно использовать аналогичные формулы электрической проводимости, заменив удельную проводимость теплопроводностью.
Тепловая проводимость плоской стенки Ge = A.S/3, где S — площадь стенки; 3 — толщина стенки.
2л/
Тепловая проводимость цилиндрической стенки Ge = Z у , где I — длина цилиндра; d1( d2 — диаметры соответственно внешней и внутренней стенок цилиндра.
Конвекция. Полный тепловой поток в результате теплоотдачи определяется формулой Ньютона
<7TO = £SA0, (11-2)
где В— коэффициент теплоотдачи, Вт/(м2-К); S — поверхность тела; А0 — разность температур окружающей среды и тела. Коэффициент теплоотдачи при естественной и вынужденной конвекции рассчитывается на основании теорий теплового и геометрического подобий.q
При искусственной конвекции при поперечном омывании цилиндра (р'йс. 11-1, а) коэффициент теплоотдачи для газов выражается формулой
=4Re"’ <п-3)
где d — диаметр цилиндра; v — скорость движения газа; v — кинематическая вязкость, равная абсолютной вязкости, отнесенной к плот-
253
ности вещества; “k — теплопроводность газа; сип являются функциями скорости газа и размеров цилиндра и определяются по предвари-
Рис. 11-1
тельно рассчитанной величине, Re — vd/v, из табл. 11-1.
Таблица 11-1
называемой критерием Рейнольдса
Re С п
5—80 0,93 0,40
80-5- IO» 0,715 0,46
5- 103 0,226 0,60
Таблица 11-2
9, °C V, Ы0~в м2/с А, 1-10-2 Вт/(м-К)
0 13,70 2,33
20 15,70 2,56
100 23,78 3,02
500 80,40 5,46
При расчете коэффициента теплоотдачи для жидкости в формулу (11-3) входит критерий Прандтля Рг:
? = — Re" Рг0-4
Ьжидк *''с 1 1
Критерий Прандтля Рг = v/a зависит от кинематической вязкости v и температуропроводности а, физический смысл которой состоит в том, что она является мерой скорости выравнивания температур различных точек жидкости. Температуропроводность зависит от теплопроводности X, плотности у и удельной теплоемкости вещества с и определяется формулой а — Х/(су).
Приведенные формулы для теплоотдачи цилиндра в поперечном потоке справедливы только для случая, когда угол ф, составленный осью цилиндра и направлением потока и называемый углом атаки, равен 90°. Зависимость коэффициента теплоотдачи от угла атаки представлена на рис. 11-1, б.
В табл. 11-2 и 11-3 приведены основные параметры соответственно сухого воздуха при Р = 105 Па и воды, необходимые для расчета коэффициентов теплоотдачи. Температура, при которой определены параметры в табл. 11-2 и 11-3, считается как среднеарифметическая температура тела и среды.
Тепловое излучение свойственно всем телам, и каждое из них непрерывно излучает и поглощает энергию. Разность между излучае
254
учетом относительной излучательной
Таблица 11-3
мой и поглощаемой телом лучистой энергией отлична от нуля, если температура тел, участвующих во взаимном обмене лучистой энергией, различна. По закону Стефана — Больцмана полное количество энергии, излучаемой в единицу времени единицей поверхности, имеющей температуру 0, равно Ео = <т0®4. где <?о = 5,7-10*8 Вт/(м2-К4) — константа излучения абсолютно черного тела.
В технических расчетах этот закон применяется в более удобной форме: Ео — Со (0/1ОО)4, где Со — коэффициент лучеиспускания абсолютно черного тела: Со = 5,7 Вт/(м2-К4). Закон Стефана — Больцмана применим и к реальным серым телам, но их коэффициент лучеиспускания С рассчитывается способности или степени черноты тела 8, т. е. С — Со8. Значение 8 изменяется в пределах от нуля до единицы и приводится в таблицах [5].
Количество поглощаемой телом лучистой энергии также зависит от степени черноты тела и определяется формулой Е = 8Ёэф, где £Эф — извне падающее эффективное воде формул лучистого теплообмена между телами необходимо учитывать, кроме лучеиспускательной, поглощательной и отражательной способности тел, их размеры и направление излучений. Относительно простые формулы могут быть приведены только для теплообмена
О, °C v, Ы0“6 м2/с А, Вт/(м-К) а, 1.10-’ м2/с
20 1,0 0,6 1,42
60 0,479 0,66 1,61
80 0,366 0,69 1,64
излучение окружающих тел. При вы-
между плоскими параллельными поверхностями и между двумя поверхностями в замкнутом пространстве, когда одна из поверхностей охватывает другую, обязательно выпуклую поверхность (рис. 11-1, в).
В первом случае количество теплоты на 1 м2 площади в одну секунду равно
„ _ Со \1 е, V ( 02 ?]
Ю‘2 l/Si+1/82— 1 L\ 100 / \ юо / ]•
Во втором случае количество теплоты, получаемой или отдаваемой в одну секунду меньшим телом с поверхностью Slt составляет
п _ Со 17 01 V _ ( 02 V I е = 712 ± , 51 Л L\ юо / ( юо У J 1
£1 *$2 \ е2 У
ч - У &2 УЧ ЧУ юо / \ юо У ]•
Для уменьшения лучеиспускания тела при заданных температурах уменьшают его степень черноты и применяют экран.
Уравнение теплового баланса преобразователей при неизменном агрегатном состоянии среды и постоянной температуре тел определяется как
4~ ^тп ~Ь <7тп 4~ 7конв ~Ь ^л.и
255
где qs = i2R — теплота Джоуля—Ленца, выделяющаяся в преобразователе; 7та, 7Тп, <7К0НВ и <?л.и — тепловые потоки соответственно в результате теплопроводности через преобразователь, через окружающую среду, вследствие конвекции и теплового излучения. Эти тепловые потоки показаны на рис. 11-2.
Выражая соответствующими формулами все виды тепловых потерь, уравнение теплового баланса можно представить как
PR -G'e(Q- 0а) - Ge(0 - 0ср) - BS (0 - 0ср) -
- CnS [(0/1 ОО)4 - (0СТ/100)4] = 0, (11-4)
где 0а, 0ср, 0СТ — соответственно температуры внешней среды, среды, окружающей преобразователь, и стенок.
Как видно из этого уравнения, температура преобразователя зависит от температуры окружающей среды, от коэффициента теплоотдачи £, зависящего от скорости движения окружающей среды, от тепловой проводимости среды, определяемой ее свойствами, от геометрической формы окружающих тел и расстояния их до преобразователя. Подчерк- , нув соответствующий эффект и еде- 1 лав пренебрежимо малыми все осталь- ж ные, тепловые преобразователи мож- Я но использовать для измерения тем- Я пературы среды, скорости ее движе- Я ния, концентрации вещества, изме- Я няющего теплопроводность среды, и Я перемещения. Я
Принцип действия соответствую- Я щих преобразователей проиллюстри- 1 рован рис. 11-3. I
Устройство датчика термоанемо- j метра, служащего для измерения * скорости газового потока, показано на рис. 11-3, а. Нить 1 нагревается до 200—800 °C протекающим по ней током и одновременно охлаж- ! дается обдувающим ее газовым потоком. Если эффект сноса теплоты превосходит другие охлаждающие факторы, то уравнение теплового баланса (11-4) может быть представлено в виде I2R = LS (0 — 0ср). Поскольку коэффициент теплоотдачи является функцией скорости I В — f (и), то из приведенного уравнения следует, что в режиме задан- J ного тока / = const температура нити 0 = f (у) является функцией Я скорости, а в режиме заданной температуры 0 = const требуемое из- Я менение тока А/ будет функцией скорости А/ — <р (v). В датчике, Я показанном на рис. 11-3, а, нить выполнена из платиновой проволоки Я (диаметр 5—20 мкм, длина 2—10 мм), сопротивление которой меняется <Я с температурой, и припаяна к двум манганиновым стерженькам 2. |^Я Сквозь ручку 3 пропущены выводы 4 для включения датчика в измери- ^Я тельную цепь. ^Я
256
На рис. 11-3, б дано принципиальное устройство преобразователя газоанализатора. Платиновая проволока 1, подогреваемая протекающим по ней током до температуры 0 = 100 ч- 200 °C, натянута по оси камеры. В камеру через канал поступает с очень малой скоростью исследуемая газовая смесь. Размеры камеры и проволоки и скорость протекания газа выбраны таким образом, чтобы можно было пренебречь всеми тепловыми потерями, кроме тепловых потерь в результате теплопроводности окружающей среды. Тогда уравнение (11-4) может быть представлено в виде I2R = Ge (0 — 0ср). Коэффициент теплопроводности газа зависит от состава газа, и, следовательно, при токе I = const температура проволоки и ее сопротивление зависят от состава газа. В частности, для смеси воздуха с углекислым газом, теплопроводность которого меньше теплопроводности воздуха, температура нити будет тем выше, чем больше концентрация углекислого газа.
Рис. 11-3
На рис. 11-3, в показан принцип действия вакуумметра. В герметичной колбе помещены нагреватель 2 и термопара /, измеряющая температуру нагревателя. Колба присоединяется к полости, вакуум в которой измеряется. Через нагреватель пропускается ток. В диапазоне давлений 1—10'4 Па теплопроводность газа уменьшается с уменьшением давления, поэтому при заданном токе температура нагревателя будет тем выше, чем выше вакуум.
На рис. 11-3, г представлено принципиальное устройство сигнализатора уровня. Датчик представляет собой платиновую нить 2 диаметром 25 мкм и длиной 2 мм, закрепленную между двумя держателями 1 и спущенную на заданную глубину. В воздухе нить нагревается пропускаемым по ней током до 250 °C. При соприкосновении с жидкостью теплоотдача с нити увеличивается и температура и сопротивление нити резко уменьшаются.
Переходный процесс нагревания или охлаждения тела описывается уравнением теплового баланса. В стадии регулярного теплового режима в уравнении (11-4) появляется член, учитывающий допол-
9 Е. С. Левшина, П. В. Новицкий 257
нительную теплоту, идущую на повышение теплосодержания тела:
PR - Ge (0 - 0а) - G0(6 - 0ср) - gS (0 - 0ср) -
- C„S [(0/100)4 - (0„/100)4] - тс dQ/dt = 0. (11-5)
Если пренебречь потерями на излучение, то из уравнения (11-5) видно, что тепловой преобразователь является апериодическим преобразователем с постоянной времени Т — mc/%s, где — G'e 4-+ Ge + cS — суммарный коэффициент теплопередачи, определяемый теплопроводностью и конвекцией. Необходимо обратить внимание на то, что постоянная времени теплового преобразователя зависит от условий охлаждения и будет различной для одного и того же преобразователя, находящегося в воздухе и в жидкости, в спокойной жидкости и в движущейся жидкости и т. д. Чем больше |s, тем быстрее протекает переходный процесс. При больших и малых постоянных времени Т необходимо учитывать стадию дорегулярного режима, которой при описании переходного процесса обычно можно пренебречь. В этом случае для оценки переходного процесса нельзя пользоваться уравнением (11-5) и нужно прибегать к специальной литературе. В стадии регулярного теплового режима температура преобразователя в операторной форме определяется уравнением
е (р) = /^+б^а+б8еср+^еср
(G'e + Gе + (1 + Р)
Переходный процесс в преобразователе при внезапном скачкообразном изменении температуры на величину Д0ср описывается уравнением
0 = 00 + 1+с^/(С0-Щ) А0^е'~'/Г-
где 0О — начальная температура преобразователя.
В большинстве случаев при описании переходного процесса пренебрегают статической погрешностью из-за наличия теплопроводности через преобразователь G« и выражают переходный процесс уравнением
0 = 0о4-Д0сре-^; Д0 = Д0сре-^_ (11-6)
Переходный процесс при внезапном изменении одного из коэффициентов теплоотдачи, например при изменении вследствие изменения скорости движения окружающей среды, описывается уравнением
fi) __ I______b cp p—t/T'
" + G^ + G0(g + ^s)Se
где rp, me
“ G'0+G0+a+Aas •
258
11-2. ТЕРМОЭЛЕКТРИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ, ИХ ПРИНЦИП ДЕЙСТВИЯ И ПРИМЕНЯЕМЫЕ МАТЕРИАЛЫ
Явление термоэлектричества было открыто в 1823 г. Зеебеком и заключается в следующем. Если составить цепь из двух различных проводников (или полупроводников) А и В, соединив их между собой концами (рис. 11-4, а), причем температуру 0Х одного места соединения сделать отличной от температуры 0О другого, то в цепи потечет ток под действием ЭДС, называемой термоэлектродвижущей силой (термо-ЭДС) и представляющей собой разность функций температур мест соединения проводников:
Eab(®i, <9o) = f(0i)-f(0o).
Подобная цепь называется термоэлектрическим преобразователем или иначе термопарой; проводники, составляющие термопару, — термоэлектродами, а места,их соединения — спаями.
Термо-ЭДС при небольшом перепаде температур между спаями можно считать пропорциональной разности температур: ЕАВ = 5ДВА0.
Опыт показывает, что у любой пары однородных проводников, значение термо-ЭДС зависит только от природы проводников и от температуры спаев и не зависит от распределения температуры вдоль проводников. Термоэлектричес
кий контур можно разомкнуть в любом месте и включить в него один или несколько разнородных проводников. Если все появившиеся при этом места соединений находятся при одинаковой температуре, то не возникает никаких паразитных термо-ЭДС.
Можно разомкнуть контур в месте контактирования термоэлектродов Л и В и вставить дополнительный проводник С между ними (рис. 11-4,6). Значение термо-ЭДС в этом случае определится как Е = Еав (0t) + Евс (0О) + Еса (©о) = ЕАВ (0Х) + ЕВА (0О) = = Еав (0J — Еав (0о), так как если два любых проводника Л и В имеют по отношению к третьему С термо-ЭДС ЕАс и ЕВс, то термо-ЭДС термопары АВ — Еав — ЕАС + Есв-
Можно разорвать также один из термоэлектродов и вставить дополнительный проводник в место разрыва (рис. 11-4, в). Значение термо-ЭДС в этом случае будет тем же, что и в предыдущем. Действительно, Е = EAB (0J + Евс (02) + Есв (02) + ЕВА (0О) = = Еав (0J - Еав (0о).
Таким образом, прибор для измерения термо-ЭДС может быть включен как между свободными концами термопары, так и в разрыв одного из термоэлектродов.
9*
259
Явление термоэлектричества принадлежит к числу обратимых явлений, обратный эффект был открыт в 1834 г. Жаном Пельтье и назван его именем. Если через цепь, состоящую из двух различных проводников или полупроводников, пропустить электрический ток, то теплота выделяется в одном спае и поглощается в другом. Теплота ~ с силой тока линейной зависимостью в отличие от
теплоты Джоуля, и нагревание или охлаждение спая зависит от направления тока через спай.
Во второй половине XIX в. Томсоном был открыт эффект, заключающийся в установлении на концах однородного проводника, имеющего температурный градиент, некоторой разности потенциалов и в выделении дополнительной тепловой мощности при прохождении тока по этому проводнику. Однако ЭДС Томсона и дополнительная тепловая мощность настолько малы, что в практических расчетах ими обычно пренебрегают.
На рис. 11-5 показана принципиальная схема термоэлектрического преобразователя, который в зависимости от положения переключателя К может работать в режиме генератора электрической энергии (положение /) и в режиме переноса теплоты между спаями (положение 2).
КПД термоэлектрического генератора зависит от разности температур и свойств материалов и для существующих материалов очень мал (при Д0 = 300 °C не превышает ц = 13%, а при А© — 100 °C г] = 5%).
КПД термоэлектрического подогревателя или холодильника также очень мал: для холодильника КПД при температурном перепаде 5 °C составляет 9%, а при перепаде 40 °C — только 0,6%.
Тепловой баланс охлаждаемого в результате эффекта Пельтье спая определяется уравнением
П12/ - kPR - G'e (0Harp - 0ОХЛ) - Сб>(0Окр - ©ox J = 0,
где П12/ — теплота, поглощаемая в спае за счет эффекта Пельтье; I — ток через спай; П12 — коэффициент Пельтье, зависящий от материалов спая; PR — выделяющаяся в термоэлементе теплота Джоуля, часть которой поступает на холодный спай; G'e (0нагр — 0ОХЛ) — тепловой поток, обусловленный разностью температур нагреваемого и охлаждаемого спаев; G'e — тепловая проводимость термоэлемента; Ge (0ОКр — ®Охл) — тепловой поток, возникающий в результате теплообмена между окружающей средой и охлаждаемым спаем.
Как видно из приведенного уравнения, температура холодного спая будет уменьшаться при увеличении тока за счет эффекта Пельтье, в то же время с увеличением тока увеличивается теплота Джоуля, и эффект нагревания при больших токах снижает эффект охлаждения. Поэтому минимальная температура холодного спая достигается при некотором оптимальном токе.
260
В измерительной технике термопары получили широкое распространение для измерения температур. Кроме того, полупроводниковые термоэлементы используются как обратные тепловые преобразователи, преобразующие электрический ток в тепловой поток.
Таблица 11-4
Материал Термо-ЭДС, мВ Материал Термо-ЭДС, мВ
Кремний 1-44,8 Свинец +0,44
Сурьма -4,7 Олово +0,42
Хромель -2,4 Алюминий +0,40
Нихром (-2,2 Графит +0,32
Железо -1,8 Уголь +0,30
Сплав (90% Pt+10% 1г) -1,3 Ртуть 0,00
Молибден -1,2 Палладий —0,57
Вольфрам 1-0,8 Никель —1,5
Манганин -0,76 Алюмель —1,7
Медь -0,76 Сплав (60%Аи + —2,31
Золото -0,75 + 30%Pd+10%Pt)
Серебро -0,72 Константан —3,4
Иридий -0,65 Копель —4,5
Родий 1-0,64 Пирит -12,1
Сплав (90% Pt + 10 %Rh) -0,64 Молибденит От —69 до —104
Материалы, применяемые для термопар. В табл. 11-4 приведены термо-ЭДС, которые развиваются различными термоэлектродами в паре с платиной при температуре рабочего
спая ©! = 100 С и температуре свободных концов 0О = 0 °C. Зависимость термо-ЭДС от температуры в широком диапазоне температур обычно нелинейна, поэтому данные таблицы нельзя распространить на более высокие температуры. В качестве примера на рис. 11-6 приведена зависимость Е — f (0) для одной из наиболее распространенных термопар пла-тинородий — платина.
При конструировании термопар, естественно, стремятся сочетать термоэлектроды, один из которых развивает с платиной положительную, а другой — отрицательную термо-ЭДС. При этом необходимо учитывать так-
же пригодность того или иного термоэлектрода для применения в заданных условиях измерения (влияние на термоэлектрод среды, температуры и т. д.).
Материалы, применяемые в промышленных термопарах (см. § 11-7), обусловлены ГОСТ 6616—74. Однако используется и ряд специальных термопар, например при измерениях тепловой радиации, для измере-
261
Рис. 11-7
ний температуры нагревателей в термоанемометрах и вакуумметрах (см. § 11-1), в термоэлементах термоэлектрических амперметров, вольтметров и ваттметров. Термопары этого типа работают при сравнительно небольших температурах, но для повышения чувствительности преобразователей мощности в температуру должны обладать минимальной теплоемкостью и минимальным коэффициентом теплоотдачи. Поэтому такие термопары выполняются из тонкой проволоки диаметром d ~ 5 -т-~ 10 мкм.
Для повышения выходной ЭДС используется несколько термопар, образующих термобатарею. На рис. 11-7 показан чувствительный элемент радиационного пирометра. Рабочие спаи термопар располо
жены на черненом лепестке, поглощающем излучение; свободные концы — на массивном медном кольце, служащем токоотводом и прикрытом экраном. Благодаря массивности и хорошей теплоотдаче кольца температуру свободных концов можно считать постоянной и равной комнатной.
11-3. УДЛИНИТЕЛЬНЫЕ ТЕРМОЭЛЕКТРОДЫ, ИЗМЕРИТЕЛЬНЫЕ ЦЕПИ, ПОГРЕШНОСТИ ТЕРМОПАР
Удлинительные термоэлектроды. Свободные концы термопары должны находиться при постоянной температуре (рис. 11-8). Однако не всегда возможно сделать термоэлектроды термопары настолько длинными и гибкими, чтобы ее свободные концы размещались в достаточном удалении от рабочего спая. Кроме того, при использовании благородных металлов делать длинные термоэлектроды экономически невыгодно, поэтому приходится применять провода из другого материала. Соединительные провода и В, (рис. 11-8), идущие от зажимов в головке термопары до сосуда объемом V, температуру в котором желательно поддерживать постоянной, называют удлинительными термоэлектродами. Далее для соединения с измерительным прибором можно использовать обычные провода.
Чтобы при включении удлинительных термоэлектродов из мате
риалов, отличных от материалов основных термоэлектродов, не изменилась термо-ЭДС термопары, необходимо выполнить два условия. Первое — места присоединения удлинительных термоэлектродов к ос-
262
новным термоэлектродам в головке термопары должны иметь одинаковую температуру. И второе — удлинительные термоэлектроды должны быть термоэлектрически идентичны основной термопаре, т. е. иметь ту же термо-ЭДС в диапазоне возможных температур ме- .—И—.
ста соединения термоэлектродов -------------° ° X
в головке термопары (примерно iooo°-<^ С^)
в диапазоне от 0 до 200 °C). _________________|
Для термопары платиноро- уж К и----------------1
дий — платина применяются уд- м
линительные термоэлектроды из меди и сплава ТП, образующие ис’
термопару, термоидентичную термопаре платинородий — платина в пределах до 150 °C. Для термопары хромель — алюмель удлинительные термоэлектроды изготовляются из меди и константана. Для термопары хромель — копель удлинительными являются основные термоэлектроды, но выполненные в виде гибких проводов.
При неправильном подключении удлинительных термоэлектродов возникает весьма существенная погрешность.
В качестве примера рассмотрим погрешность измерения температуры термопарой хромель—алюмель, включенной: а) с удлинительными термоэлектродами из меди и константана (рис. 11-9); б) при неправильном подключении термоэлектродов; в) медными проводами без удлинительных термоэлектродов. Измеряемая температура 0j = 1000 °C, температура головки термопары 02 = 100 °C и температура термостатированного сосуда 0О = 0 °C.
ЭДС термопары хромель—алюмель £ = 41,269 мВ. ЭДС термопар, образо-
ванных рабочими термоэлектродами и подключаемыми проводами без удлинительных термоэлектродов и с ними, определим из табл. 11-4:
а) £ = £х.а (1000 °C) + £а.к (100 °C) + £к.м (0 °C) + £м.м (0 °С)+£м.х (100 °С) = = 41,269+ 1,7+ 0 + 0 —1,64 = 41,269+ 0,06 = 41,329 мВ; 0 = 1002 °C;
б) £ = £ (1000 °C) + Е (100 °C) + £ (0 °C) + Е (0 °C) + £ (100 °C) = X а а М ММ МЛ К л
= .41,269 — 2,46 + 0 + 0 — 5,8 = 41,269 — 8,26 = 33,0009 мВ; 0б = 793 °C;
в) £ = £ . (1000 °C) + £ . (100 °C) + £ . (100 °C) = £ (1000 °C) —
х з а м м х ха
— £х.а (100 °C) = 41,269 - 4,1 = 37,169 мВ; 6., = 896 °C.
Температуру, соответствующую полученным термо-ЭДС, можно определить по таблицам ГОСТ 6616—74.
Как видно из полученных решений, при правильном подключении удлинительных термоэлектродов погрешность не превышает2 °C, а при неправильном — погрешность почти вдвое больше, чем при подключении двух медных проводов. Поэтому при подключении удлинительных термоэлектродов необходимо быть особенно внимательными к их соответствию рабочим термоэлектродам.
Погрешность, обусловленная изменением температуры свободных концов термопары. Градуировка термопар осуществляется при температуре свободных концов, равной нулю. Если при практическом использовании термоэлектрического термометра температура свободных концов будет отличаться от 0 °C на величину + Qo, то измеренная ЭДС будет меньше и необходимо ввести соответствующую поправку в показания термометра.
Однако следует иметь в виду, что из-за нелинейной зависимости между ЭДС термопары и температурой рабочего спая поправка А0
263
к показаниям указателя 0', градуированного непосредственно в градусах, не будет равна температуре 0О свободных концов, что очевидно из рис. 11-10.
Для определения температуры необходимо воспользоваться градуировочной таблицей для данной термопары, определить ЭДС Е как Е = Екз„ + АД (0О) и затем по скорректированному таким образом значению Е найти 0. Приближенно значение погрешности может
быть определено как А0 = й0о, где k — поправочный коэффициент на температуру свободных концов. Значение k различно для каждого участка кривой, поэтому градуировочную кривую разделяют на участки по 100 °C и для каждого участка определяют значение k.
В качестве примера устройства автоматического введения поправки на температуру свободных концов на рис.
11-11 схематично показано устройство типа КТ-0,8. В цепь термопары и милливольтметра включен мост, од-
ним из плеч которого является терморезистор Дт, помещенный возле свободных концов термопары (остальные плечи моста выполнены из манганиновых резисторов). При температуре 0О мост находится в равновесии и напряжение на его выходной диагонали равно нулю. При повышении температуры свободных концбв сопротивление Дт
изменяется, мост выходит из равновесия и возникающее напряжение на выходной диагонали моста компенсирует уменьшение термо-ЭДС термопары. Уравновешивание моста при температуре терморезистора, равной нулю, производится изменением сопротивления одного из манганиновых резисторов. Изменение выходного напряжения ДВЬ1Х моста при температуре терморезистора 0 до значения, равного уменьшению термо-ЭДС АД, так, чтобы Двых (0) — — АД (0) = 0, производится изменением напряжения питания моста, т. е. сопротивления R. Вследствие нелинейности харак-
теристики термопар полной коррекции погрешности при помощи описываемого устройства получить не удается, однако погрешность
значительно уменьшается.
Погрешность, обусловленная изменением сопротивления измерительной цепи. В термоэлектрических термометрах для измерения термо-ЭДС применяют как обычные милливольтметры, так и потенциометры с ручным или автоматическим уравновешиванием на предел измерения до 100 мВ.
В тех случаях, когда термо-ЭДС измеряется милливольтметром, может возникнуть погрешность из-за изменения сопротивлений всех элементов, составляющих цепь термо-ЭДС. Измерительная цепь термопары включает в себя рабочие термоэлектроды, удлинительные
264
термоэлектроды и соединительные провода или линию. Сопротивление рабочих термоэлектродов из неблагородных металлов не превышает 1 Ом, сопротивление рабочих термоэлектродов из благородных металлов больше. Кроме того, термоэлектроды, за редким исключением, выполняются из материалов, имеющих относительно высокий ТКС, и при изменении температуры на несколько сотен градусов внутреннее сопротивление термопары существенно возрастает.
В частности, термопара платина — платинородий, составленная из двух термоэлектродов диаметром d = 0,35 мм и длиной I = 1 м, имеет сопротивление 7?т — — 1,11 + 2,09 = 3,2 Ом при 20 °C и RT — 4,06 + 2,39 = 6,45 Ом при 1000 °C. Даже если пренебречь сопротивлением удлинительных термоэлектродов и соединительных проводов, то при измерении термо-ЭДС милливольтметром с внутренним сопротивлением /?вн = 100 Ом падение напряжения на сопротивлении самой термопары /?т составит
л£__ 6,45__.
КТ+КВН 6,454-100
Таким образом, напряжение, измеренное милливольтметром, будет равно не (7 = 9,550 мВ, что соответствует термо-ЭДС при 1000 °C, a = 8,905 мВ, чТо соответствует 0 = 944 °C, и температурная погрешность составит 56 °C.
Чтобы уменьшить погрешность от падения напряжения на внутреннем сопротивлении термопары, милливольтметры, как правило, градуируются по температуре в комплекте с термопарой с указанием сопротивления линии (обычно 5 Ом), которое подгоняется изменением сопротивления добавочной катушки непосредственно при монтаже прибора. При соблюдении этих условий погрешность возникает при изменении сопротивления термоэлектродов в результате окисления в процессе эксплуатации, при изменении сопротивления термопары при разных глубинах ее погружения, при изменении сопротивления удлинительных термоэлектродов и соединительных проводов в зависимости от температуры окружающей среды.
11-4. ТЕРМОРЕЗИСТОРЫ, ОСНОВЫ ИХ РАСЧЕТА
И ПРИМЕНЯЕМЫЕ МАТЕРИАЛЫ
Для измерения температур используются терморезисторы из материалов, обладающих высокостабильным ТКС, линейной зависимостью сопротивления от температуры, хорошей воспроизводимостью свойств и инертностью к воздействиям окружающей среды.. К таким материалам в первую очередь относится платина. Благодаря своей дешевизне широко распространены медные терморезисторы, применяются также вольфрамовые и никелевые.
Сопротивление платиновых терморезисторов в диапазоне температур от 0 до +650 °C выражается соотношением R& — Ra (1 + Д0 + + Вб2), где Ra — сопротивление при 0 °C; © — температура, °C. Для платиновой проволоки с отношением Rwo/Ro — 1,385 значения А = 3,90784 • 10~3 К"1; В = 5,7841-Ю-7 К-2. В интервале температур от 0 до —200 °C зависимость сопротивления платины от температуры имеет вид Re = /?0 [1 + Л© + В©2 + С (0 — 100) 03], где С = — —4,482-10'12 К"4. Промышленные платиновые термометры согласно
265
ГОСТ 6651—78 используются в диапазоне температур от —260 до + 1100 °C.
Миниатюрные высокоомные платиновые терморезисторы изготовляют путем вжигания или нанесения иным путем платиновой пленки на керамическое основание толщиной 1—2 мм. При ширине пленки 0,1—0,2 мм и длине 5—10 мм сопротивление терморезистора лежит в пределах ,200—500 Ом. Такого рода термочувствительные элементы при нанесении пленки с обеих сторон используются для измерения температурного градиента и имеют порог чувствительности (1 + 5) Ю~5 К/м.
При расчете сопротивления медных проводников в диапазоне температур от —50 до +180 °C можно пользоваться формулой Re — = Ro (1 + а©), где а = 4,26-10'3 К'1; Ro — сопротивление при 0 °C.
Если для медного терморезистора требуется определить сопротивление Re, (при температуре ©2) по известному сопротивлению /?в1 (при температуре ©х), то следует пользоваться формулойRe2 = Rel (1 +«02)/(1 + а©х).
Медный терморезистор можно применять только до температуры 200 °C в атмосфере, свободной от влажности и корродирующих газов. При более высоких температурах медь окисляется. Нижний предел температуры для медных термометров сопротивления равен —200 °C, хотя при введении индивидуальной градуировки возможно их применение вплоть до —260 °C.
Погрешности, возникающие при измерении температуры термометрами сопротивления, вызываются нестабильностью во времени начального сопротивления термометра и его ТКС, изменением сопротивления линии, соединяющей термометр с измерительным прибором, перегревом термометра измерительным
током. В частности, В. И. Лахом для определения допустимого измерительного тока через термометр в диапазоне измеряемых температур, до 750 °C приводится соотношение I — 2d1>5A0°>5, где I — ток, А; d— диаметр проволоки термометра, мм; А© — допустимое приращение показаний термометра за счет его нагревания током. В диапазоне температур от —50 до +100 °C перегрев находящегося в спокойном воздухе провода диаметром d = 0,05 -ь 0,1 мм определяется из формулы А© = 5/2/d2.
Полупроводниковые терморезисторы отличаются от металлических меньшими габаритами и большими значениями ТКС.
ТКС полупроводниковых терморезисторов (ПТР) отрицателен и уменьшается обратно пропорционально квадрату абсолютной температуры: а = В/®2. При 20 °C ТКС составляет 0,02—0,08 К-1.
Температурная зависимость сопротивления ПТР (рис. 11-12, кривая 2) достаточно хорошо описывается формулой R& — АеВ1Т, где Т — абсолютная температура; А — коэффициент, имеющий размерность
266
сопротивления; В — коэффициент, имеющий размерность температуры. На рис. 11-12 для сравнения приведена температурная зависимость для медного терморезистора (прямая 1).
Если для применяемого ПТР не известны коэффициенты А и В, но известны сопротивления R± и R2 при 7\ и Т2, то сопротивление и коэффициент В для любой другой температуры можно определить из соотношений:
*2 — * 1 ^2
Недостатками полупроводниковых терморезисторов, существенно снижающими их эксплуатационные качества, являются нелинейность зависимости сопротивления от температуры (рис. 11-12) и значительный разброс от образца к образцу как номинального сопротивления, так и постоянной В,
Рис. 11-13
Конструктивно терморезисторы могут быть изготовлены самой разнообразной формы. На рис. 11-13 показано устройство нескольких типов терморезисторов. Терморезисторы типа ММТ-1 и КМТ-1 представляют собой полупроводниковый стержень, покрытый эмалевой краской, с контактными колпачками и выводами. Этот тип терморезисторов может быть использован лишь в сухих помещениях.
Терморезисторы типов ММТ-4а и КМТ-4а заключены в металлические капсулы и герметизированы, благодаря чему они могут быть использованы при любой влажности и даже в жидкостях, не являющихся агрессивными относительно корпуса терморезистора.
Особый интерес представляют миниатюрные полупроводниковые терморезисторы, позволяющие измерять температуру малых объектов с минимальными искажениями режима работы, а также температуру, изменяющуюся во времени. Терморезисторы СТ1-19 и СТЗ-19 имеют каплевидную форму. Для герметизации чувствительный элемент в них оплавлен стеклом и снабжен выводами из проволоки, имеющей низ
267
кую теплопроводность. В терморезисторе СТЗ-25 чувствительный элемент также помещен в стеклянную оболочку, диаметр которой доведен до 0,5—0,3 мм. Терморезистор с помощью выводов прикреплен к траверсам.
Терморезистор СТ4-16, в котором для герметизации термочувствительный элемент в виде бусинки оплавлен стеклом, обладает повышенной стабильностью и относительно малым разбросом номинального сопротивления (менее ±5%). Терморезистор СТ17-1 предназначен для работы в диапазоне низких температур (от —258 до +60 °C). При температуре кипения жидкого азота (—196 °C) его ТКС составляет от —0,06 до —0,12 К"1, при температуре —252,6 °C ТКС возрастает и достигает значения от —0,15 до —0,30 К'1, постоянная времени при погружении в жидкий азот не превышает 3 с. Терморезистор СТ18-1 рассчитан на работу в температурном диапазоне от +200 до +600 °C, его ТКС при +250 °C составляет —0,034 К-1, при 600 °C равен —0,011 К"1.
В табл. 11-5 приведены характеристики для некоторых типов ПТР, взятые из соответствующих стандартов, В графе «номинальное сопротивление» приведены крайние значения рядов номинальных сопротивлений.
Таблица 11-5
Тип ПТР Номинальное сопротивление при 20 °C, кОм Постоянная В, 102 К Диапазон рабочих температур, ®С Мощность рассеяния ТКС Постоянная времени,
Р . rmin, мВт ^тах, Вт р доп, мВт при К 20 *С, —1
KMT-1 К МТ-8 22—1000 0,1—10 36—72 —60 ... +180 -45 ... +70 1.0 з.о 1.0 о.б 0,3 1,0 —0,042. . —0,084 85 115
ММТ-1 1-220 20,6—43 —60 ... -4-125 1.3 0.6 0,4 —0,024. . —0,05 85
ММТ-8 0,001—0,047 0,056—0,100 0,120-1.000 ЬЭ ОС ЬС fcCtsO© цг co'to сл -45 ... +70 10 0,6 2.0 <£> ооо о' о' о' 1 1 1 о S о s’© © III
ММТ-9 0,01-4,7 20,6—43 —0,024.. . —0,05 -
CT3-23 2,2; 2,7; 3,3; 3,9; 4,7 Ом 26—32 -60 ... +125 10 2.0 —0,0305 ..0,0375
СТЗ-17 СТ1-17 0,033—0,330 0,330—22 23,8—38,6 36—60 —бо... н-loo 0,8 0,5 - 0.2 -0,03 —0,042.. . —0,045 . —0,07 30
Минимальной мощностью рассеяния Pmin называется мощность, при которой у терморезистора, находящегося в спокойном воздухе при температуре (20 ± 1) °C, сопротивление уменьшается от разогревания током не более чем на 1%. Максимальной называется мощность Ртах, при которой терморезистор, находящийся в тех же условиях, разогревается током до верхней допустимой температуры. Кроме этого, указывается допустимая мощность Рдоп при максималь
268
ной допустимой температуре. По стандартам для большинства терморезисторов допускаются отклонения от номинальных значений начальных сопротивлений в пределах± 20%, при длительной выдержке ПТР при максимальной допустимой температуре допускается изменение сопротивления в пределах± 3%, при хранении в течение 18 месяцев изменение сопротивления не должно превышать ± (1 -ь 3)%, при хранении до 10 лет изменение сопротивления может достигать ±30%. Однако опыт работы с ПТР показывает, что стабильность характеристик ПТР оказывается в большинстве случаев значительно выше указываемой в стандартах.
В настоящее время не на все типы выпускаемых ПТР имеются стандарты. Основные характеристики некоторых из этих типов ПТР, не вошедших в табл. 11-5, даны в табл. 11-6. В графе «постоянная В» приводятся два диапазона возможных значений В: первая строка относится к низким температурам, а вторая — к высоким. Номинальные сопротивления ПТР типов KMT-14, СТ1-18, СТ 1-19 нормируются для 150 °C, остальные — для 20 °C.
Таблица 11-6
Тип ПТР Номинальное сопротивление, кОм Постоянная В, 102 К Диапазон рабочих температур, °C Коэффициент рассеяния, мВт/К Постоянная времени (не более), с
ММТ-6 10—100 20,6 —60. . +125 1,7 35
СТЗ-6 6,8—8,2 20,5—24 —90. • +125 1,6 35
кмт-ю 100—3300 36 0. . 125 —
СТ4-2 2,1—3,0 34,7—36,3 36,3—41,2 —60. .+125 36 —
СТ4-15 1,5—1,8 23,5—26,5 29,3—32,6 —60. . ±180 36 —
СТ4-17 1,5—2,2 32,6—36 —80. • +100 2 30
КМТ-14 0,51—7500 41—70 —10. . +300 0,8 60
СТЗ-14 1,5—2,2 26—33 27,5—36 —60. . +125 1,1 4
СТ1-18 1,5—2200 40,5—90 —60. . —300 0,2 1
СТ3-19 2,2—15 — -90. . +125 0,5 3
СТЗ-25 3,3—4,5 26—32 — 100. . +125 0,08 0,4
11-5. ИЗМЕРИТЕЛЬНЫЕ ЦЕПИ ТЕРМОРЕЗИСТОРОВ
Измерительные цепи терморезисторов строят обычно или на основе уравновешенных мостов или используя преобразование сопротивления в напряжение.
На рис. 11-14, а показана упрощенная схема измерительной цепи самопишущего термометра типа КС. Металлический терморезистор Ре включается здесь в мост, образованный резисторами Рь Р2, Р3 и реохордом Рр. Мост питается от источника переменного напряжения 6,3 В через добавочный резистор Рд. Выходное напряжение моста подается на усилитель неравновесия УН, управляющий работой двига-
269
теля Д, связанного с движком реохорда и пером самописца. Вращаясь, двигатель перемещает движок реохорда до тех пор, пока мост не придет в состояние равновесия. Перемещение движка пропорционально изменению сопротивления 7?0, и шкала прибора градуируется по температуре.
Как видно из рис. 11-14, а, терморезистор в данном случае присоединен к мостовой цепи с помощью трехпроводной линии связи. Благодаря этому уменьшается погрешность, вызываемая изменением сопротивления проводов линии. Действительно, сопротивления ПрОВОДОВ Гу и г3 включены в соседние плечи моста (последовательно с /?0 и /?3), а сопротивление провода г2 включено последовательно с источником питания. Таким образом, г2 вообще не влияет на состояние равновесия, а влияния сопротивлений Гу и г3в значительной степени компенсируют друг друга.
Если обозначить буквой т] относительное перемещение движка реохорда от нижнего по схеме зажима, то условие равновесия моста в схеме рис. 11-14, а запишется следующим образом:
(/?о +п4-т|Кр)/?2 = !^14-(1 -Л^Жз-Нз)-
Из этого равенства соответственно найдем
__ R2R(y (^i + ^p) ^з~Ь^2г1 Уз ^0 (^2 + Rs + rg)
Последнее соотношение позволяет количественно оценить влияние нестабильности сопротивлений Гу и г3 на показания прибора т].
Широкое распространение цифровых вольтметров привело к тому, что в настоящее время получили применение измерительные цепи, основанные на преобразовании сопротивления в напряжение.
На рис. 11-14, б показана схема преобразователя сопротивления в напряжение, содержащая неравновесный мост, в одно из плеч которого включен по трехпроводной схеме терморезистор R&. Благодаря, использованию в цепи операционного усилителя ОУ достигается линейная зависимость выходного напряжения UBMX от сопротивления /?0. Напряжение на выходе ОУ., которое является напряжением питания моста, равно U = Uo (Ry + Rq + Гу r3)/Ry. Выходное напряжение 270
моста определяется как
Л гг Ri + Re+ri + rs Ra г, Ri + rs ^вых~ 0 R1 Rb + Rs U° R,
Если 7?! = R2 = 7?з = R и Re = R + AR, то
^вых= Uо (AR 4- ri — ^з)/(27?).
Как видно из последнего выражения, сопротивления проводов и г3 компенсируют друг друга и при ri = rs выходное напряжение Кых = 0,5 U0AR/R. Напряжение питания Uo ограничивается значением допустимого тока через терморезистор, ток через терморезистор определяется формулой I = UJRr-
Радикальным методом борьбы с влиянием проводов соединительной линии является использование четырехпроводного включения терморезистора (см. § 3-5). Четырехпроводное включение показано на рис. П-15, а. Через терморезистор протекает ток 1а, задаваемый! стабилизатором тока или специальным источником с большим внутренним сопротивлением. Таким образом, сопротивления проводов /у и rlt а также изменение сопротивления Re не влияют на ток /0. Если для измерения напряжения [/вых использовать вольтметр с высоким входным сопротивлением, то сопротивления проводов г2 и г3 также не повлияют на результат измерения. Так обеспечивается практически полное исключение погрешностей, вызванных нестабильностью сопротивлений проводов соединительной линии, а напряжение (/вых определяется простым соотношением UBm — I0Re.
Один из возможных вариантов цепи с источником тока и четырехпроводной соединительной линии показан на рис. 11-15,6. Источник тока здесь построен на основе операционного усилителя ОУ1 и резисторов с сопротивлениями Rr— Rt. Как известно [1], если в такой цепи установить R4/R3 — Ri/Ri, то ток 10, поступающий в терморези-
271
(11-
6
^вых
стор /?е (при условии, что Ri = 00), будет определяться соотношени I = U0/R3.
Операционный усилитель ОУ2 обеспечивает поддержание нулеЖ! вого потенциала на нижнем зажиме терморезистора Re вне зависимости от сопротивления проводов г3 и г4. Благодаря этому напряжение между проводом г2 и землей оказывается пропорциональным R® и отпадает необходимость в использовании дифференциального усилителя.
Построенный на основе операционного усилителя ОУЗ неинве тирующий усилитель обеспечивает выходное напряжение, равное
~R / R \ R ~ = I0Re (1 + RM - U0Re/Ra := ! 1 + “ /г® •
Если требуется, чтобы при начальном значении сопротивлени терморезистора Re = Ro обеспечивалось равенство выходного н пряжения ивък нулю, то отношение Ra/R5 следует выбирать в соот-4 ветствии с равенством Re/Ri = Ra/(R3 — Ro). Тогда (7ВЫХ = = Uo (Re - R0)/(R3 - /?0).
Вводя в измерительную цепь (рис. 11-15, б) резистор R7, можно скорректировать в некоторых пределах нелинейность преобразования температуры в сопротивление Re (если таковая нелинейность имеется), При введении R, нужно скорректировать значения сопротивлений Ri — Rt так, чтобы выполнялось равенство /?4 (R3 ф- /?7)/(/?3/?7) = = Rz/Rt- При этом ток /0 оказывается равным /0 — U0/R3 4~ UBbtJR7.
Подставляя в выражение (11-7) найденные значения /0 и Т?6/Т?5, получим соотношение
U — D-f Др ^BblX \ ьвых I
из которого определим (7ВЬИ как
^ВЫХ =
Ro
Ra — Ro
Ro
Ra — Ro ’
(R3—Ro) 1
R& ~Ro___
R0R3
R? (R3—Ro) J
Подобным путем при правильном выборе элементов цепи удается скорректировать погрешность линейности платинового термометра сопротивления и уменьшить эту погрешность в диапазоне измерения О—400 °C до значения 0,1—0,2 °C. Без линеаризации погрешность линейности составляет около 8 °C.
Полупроводниковые терморезисторы имеют весьма нелинейную зависимость сопротивления от температуры (кривая 1 на рис. 11-16, а). Для полупроводниковых терморезисторов разработаны специальные линеаризующие цепи.
Простейшая из таких цепей образуется при шунтировании полупроводникового терморезистора постоянным сопротивлением, как это показано на рис. 11-16,6. Линеаризованное сопротивление Re = = ReRJ(Re + Ri) изменяется в зависимости от температуры в соответствии с кривой 2 на рис. 11-16, а. Для того чтобы получить точку перегиба кривой 2 при заданной температуре Та (Та целесообразно 272
задать в середине диапазона измеряемых температур), нужно выбрать в соответствии с формулой
R1^Rra(B-2Tn)/(B + 2Tn), (11-8)
где Тп — абсолютная температура, К; Rra — сопротивление терморезистора, соответствующее температуре Та.
Часто одновременно с линеаризацией проводят также унификацию характеристик полупроводниковых терморезисторов, т. е. строят двухполюсники с одинаковыми характеристиками при использовании в них терморезисторов с несколько различающимися параметрами. При этом измерительная цепь, естественно, усложняется. Один из возможных вариантов унифицирующей цепи показан на рис. 11-16, в. Сопротивление полученного двухполюсника определяется формулой Re = R3 + (Re + R1) RJ(Re + Ri + R2). Путем подбора сопро
c)
Рис. 11-16
тивлений резисторов Rlt R2 и R3 можно совместить реальную характеристику с желаемой в трех точках. При этом средняя точка, соответствующая перегибу зависимости сопротивления R'e от температуры, будет при температуре Та, если выполнено условие Rx + R2 = - RTa (В - 2Та)!(В + 2ТП).
Для линеаризации при работе с полупроводниковыми терморезисторами можно использовать также нелинейную зависимость напряжения от одного из сопротивлений в резистивном делителе или неравновесном мосте (см. § 3-2 и 3-3). На рис. 11-16, г показана цепь подобного рода, содержащая операционный усилитель ОУ. В этой цепи напряжение с делителя Rx, R® подается на неинвертирующий вход усилителя ОУ. Сопротивление выбирается в соответствии с выражением (11-8). Сопротивления R3 и R2 определяются исходя из требуемой чувствительности преобразования. Напряжение {/вых находится как
11-6. РАЗНОВИДНОСТИ ТЕРМОЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТОВ
Кроме широко распространенных и описанных выше термочувствительных преобразователей — термопар и терморезисторов, в последние годы в измерительных
273
устройствах находят применение термочувствительные элементы, основанные на иных физических эффектах.
В высокоточных термометрах и вакуумметрах используются термочувствительные пьезорезонаторы (см. § 6-3), в преобразователях тепловых излучений — пироэлектрические преобразователи (см. § 12-3), в приборах температурного контроля — сегнетокерамические емкостные преобразователи (см. § 7-1). Для измерения сверхнизких температур и для измерения очень высоких температур разрабатываются термошумовые преобразователи, выходной величиной которых является ЭДС шума резистивных элементов (см. §5-1).
Термодиоды и термотранзисторы находят применение в датчиках температуры, работающих в диапазоне от—80 до -(-150 °C. Верхняя граница температурного диапазона ограничивается тепловым пробоем р-п-перехода и для отдельных типов германиевых датчиков достигает 200 °C, а для кремниевых датчиков — даже 500 °C. Нижняя граница температурного диапазона определяется уменьшением концентрации основных носителей и может достигать для германиевых датчиков —(240 ч- 260) °C, для кремниевых —200 °C. I
Основными преимуществами термодиодов и термотранзисторов являются малые габариты, возможность взаимозаменяемости и, главное, дешевизна, позволяющая применять их в датчиках одноразового употребления. I
Связь между током / через р-п-переход и падением напряжения U на нем опре-1 деляется уравнением / = loe~в/т (eqUI(kT'> — 1),где 1ае~В!Т = /нас— ток насыщения,' зависящий от абсолютной температуры Т; /0 — ток насыщения при Т оо; у = = 1,6-10-19 Кл — заряд электрона; k — 1,38- 10"гз Дж/К — постоянная Больцмана. Это уравненФцопределяет ток через переход как при прямом (U = + 17), так и при обратном (U = ^JJ) смещении перехода. Однако, учитывая, что при температуре Т — 300 К значение kT/q = 26 мВ при напряжениях на переходе | U | > 26 мВ, можно пользоваться приближенными формулами для прямого и обратного токов: /пр= /ое~/обр =— 1ае~В/Т Как видно нз приведенных формул, и прямой и обратный токи р-п-перехода являются функциями температуры, однако для измерения температуры чаще используются открытые р-п-переходы. Падение напряжения на открытом р-и-переходе при токе / через переход определяется приближенной формулой
feTln(///0) + feB
<7 ’
из которой видно, что падение напряжения линейно зависит от температуры и уменьшается с увеличением температуры (70 +> 7). Температурная чувствительность
р-я-перехода по напряжению составляет S0 « 1,5 мВ/K. Сравнивая между собой коэффициенты температурной чувствительности для падения напряжения на р-п-переходе и термо-ЭДС термопар, работающих в этом же температурном диапазоне (например, хромель — копель), можно сказать, что чувствительность р-п-перехода примерно в 100 раз выше чувствительности термопар.
На рис. 11-17 представлена схема преобразователя температуры в частоту с диодом ТД типа Д9 в качестве термочувствительного элемента. Диод ТД подключен к неинвертирующему входу операционного усилителя, выполняющему функцию интегратора. На инвертирующий вход этого уси-
лителя подается напряжение с делителя Делитель и термодиод питаются стабильным током (7ТД = 1 мА) от источника опорного напряжения, задаваемого диодом Д1. Интегратор сбрасывается через транзистор Т1, когда конденсатор С± заряжается до напряжения 10 В. Время заряда
274
конденсатора и, следовательно, частота импульсов на выходе интегратора зависят от температуры, так как с увеличением температуры уменьшается напряжение на диоде ТД и увеличивается разность напряжений на входах усилителя. Регулировка чувствительности (S = 10 Гц/К) осуществляется изменением сопротивления R регулировка нуля — изменением сопротивления R]. Диапазон измерений преобразователя 0—100 °C, погрешность не превышает ±0,3 °C.
Позисторы, критезисторы. В настоящее время известен ряд материалов, для
которых наблюдается резкое изменение проводимости в относительно узком диапазоне
температур, близком к температуре фазового перехода для данного материала, т е. к температуре точки Кюри. Резисторы, которые характеризуются особенно большим значением ТКС в окрестности критической температуры, в ряде работ получили название критезисторов. В зависимости от материала проводимость в критической области температур может как уменьшаться, так и увеличиваться. Так, серия резисторов типа СТ6, разработанных па базе титаната бария ВаТЮ3, имеет высокие положи-
Рис. 11-18
тельные ТКС в области температур 65—150 °C. Полупроводниковые резисторы с положительными ТКС получили название позисторов. Температурные зависимости сопротивления некоторых типов позисторов показаны на рис. 11-18, а. В узком температурном диапазоне зависимость сопротивления позистора от температуры может быть приближенно выражена формулой Re = АеаГ, где А — постоянная, имеющая
размерность сопротивления; а =—-—температурный коэффициент, К1.
I Зависимости а от температуры приведены на рис. 11-18, б. Статические вольт-амперные характеристики, представляющие собой зависимость между током через позистор и напряжением на нем в условиях теплового равновесия с внешней средой, имеют за счет саморазогрева выраженный участок с отрицательным сопротивлением. На рис. 11-18, в показаны вольт-амперные характеристики 1, 2 и 3 позистора СТ6-1Б (/?0==2О «с ~ 500 Ом), снятые в спокойном воздухе при температурах 20, 40 и 70 °C соответственно. Там же для сравнения дана вольт-амперная характеристика 4 полупроводникового резистора КМТ-1 (Т?0=2О<>С = 35 кОм).
Резисторы на основе двуокиси ванадия VO2 имеют отрицательный температурный коэффициент в области температур 60—80 °C. На основе VO2 выпускаются резисторы СТ9-1А и СТ9-1Б (критезисторы), выполненные в виде прямоугольных штабиков
275
и герметизированные в стеклянных баллонах диаметром 6 мм и данной 60 мм, а также изготовляются пленочные элементы путем напыления металлического ванадия на слюдяную подложку с последующим его окислением. Пленочный термочувствительный элемент может быть смонтирован в корпусе маломощного транзистора.
На -рнс. II-I9, а приведена зависимость R = f (0) для критезистора СТ9-1А. В диапазоне 60—80 °C ТКС приближенно составляет от —I до —1,5 К-1, погрешность гистерезиса не превышает 3 °C. По данным И. 3. Окуня н В. В. Шаповалова, сопротивление пленочного элемента изменялось от нескольких десятков килоом до сотен ом прн изменении температуры от 62 до 68 °C. На рис. 11-19, б показаны вольт-амперные характеристики критезистора при разных температурах.
Позисторы и ванадиевые крнтезисторы используются для измерения температуры в узком температурном диапазоне, в окрестности критической температуры, обладая в этом диапазоне повышенной по сравнению с другими термочувствительными элементами чувствительностью. Это позволяет применять их в термосигналнзаторах и температурных реле.
11-19
Кроме этого, при подогреве для крнтезнсторов может быть обеспечен режим автостабнлнзацни температуры независимо от изменения температуры окружающей среды. Это обстоятельство позволяет разрабатывать на базе указанных материалов самокомпенсирующиеся термостаты, а также использовать крнтезисторы для измерения температуры в области, лежащей ниже критического диапазона. Прн этом критезнстор с положительным ТКС должен работать в режиме заданного напряжения, а критезнстор с отрицательным ТКС—в режиме заданного тока.
Рассмотрим эти возможности на примере критезистора с отрицательным ТКС. При разогреве критезистора проходящим по нему током до температуры 0, близкой к критическому диапазону, сопротивление его начинает падать, соответственно уменьшаются падение напряжения на крнтезнсторе, выделяемая в нем мощность н температура разогрева.
Уравнение теплового баланса критезистора запишется в виде
П/0=-^т.о (©кт - ©ср).
где U и /0 — напряжение на крнтезнсторе н стабилизированный ток через него; kT 0 — коэффициент теплоотдачи критезистора; 0КТ — температура критезистора; 0Ср — температура среды, окружающей критезнстор.
Температура критезистора 0КТ автоматически стабилизируется на уровне температуры, близкой к точке Кюри 0^.. Таким образом, при изменении температуры окружающей среды и постоянном коэффициенте k., 0 напряжение на крнтезнсторе будет изменяться и в первом приближении эти величины связаны линейной зависимостью
U = (const — k-, .О0ср)//о-
При высоком коэффициенте стабилизации по температуре погрешность линейности зависимости U = / (0ср) не превышает 1—2%. Чувствительность пленочного преобразователя в диапазоне температур ±35 °C составляла 50—100 мВ/K. Преобразователи легко сделать взаимозаменяемыми, корректируя разброс значений коэффициента теплоотдачи Лт-0 изменением питающего тока.
276
11-7. ПРОМЫШЛЕННЫЕ ТЕРМОПАРЫ И ТЕРМОМЕТРЫ СОПРОТИВЛЕНИЯ
Термопары промышленного типа выпускаются в СССР в соответствии с ГОСТ 6616—74, градуировочные таблицы термопар даны в ГОСТ 3044—77, а также в стандарте СТ СЭВ 1059—78. Типы промышленных термопар, их обозначения, обозначения градуировок и основные параметры приведены в табл. 11-7. В ГОСТ 6616—74 приводится пять термопар, в стандарте СТ СЭВ 1059—78 — девять термопар. Термопара хромель-алюмелевая (тип ТХА) в СТ СЭВ 1059—78 не указана, но ее характеристики совпадают с характеристиками термопары типа К. В табл. 11-7 данные по термопаре ТХА приведены в скобках.
Таблица 11-7
Материал термо-электродов по СТ СЭВ 1059—78 Обозначение типа термопары по Обозначение градуировки по ГОСТ 6616—74 | Класс точности Пределы измерения при длительном применении, °C Максимальная температура кратковременного режима работы, °C
СТ СЭВ 1059—78 гост 6616—74
Медь — копель Медь-медноникелевый Железо-медноникеле-вый Хромель — копель Хромель -медноникеле-вый 1 Е тхк хкв8 — —200...+100 —200...+400 —200...+700 —50...+600 — 100...+700 900 800 900
Хромель — алюмель К (ТХА) (ХАИ) — —200... +1000 (—50)... (+1000) 1300 (1300)
Платинородий (10%)— платина S ТПП ПП68 1 2 0... +1200 0... + 1300 1600
Платинородий (30%)— платинородий (6%) В ТПР ПР-30/668 +300...+1600 1800
Вольфрамрений (5%)— вольфрамрений (20%) — ТВР ВР-5/20-1в8 ВР-5/20-2и ВР-5/20-Зи ВР-5/20,й — 0...+2200 2500
Для измерения температур ниже —50 °C могут найти применение специальные термопары, например медь—константан (до —270 °C). Для измерения температур выше 2500 °C изготовляются термопары на основе карбидов металлов — титана, циркония, ниобия, талия, гафния (теоретически до 3000—3500 °C), на основе углеродистых и графитовых волокон.
Градуировочные характеристики термопар основных типов (ГОСТ 3044—77) в сокращенном объеме приведены в табл. 11-8. Там же даны градуировочные характеристики термопар типов I, К и В из СТ СЭВ 1059—78. В табл. 11-8 указана температура рабочего спая 0 в градусах Цельсия и приведены значения термо-ЭДС соответствующих термопар в милливольтах при температуре свободных концов 0 °C. Градуировочные характеристики по ГОСТ 3044—77 и СТ СЭВ 1059—78 для некоторых значений температур различаются в третьем знаке.
277
Таблица 11-8
Тип термопары Обозначение градуировки Значение термо-ЭДС, мВ, при температуре рабочего спая, °C
—200 | —150 | —100 | —80 | —50 | —20 0 20 40 60 100 150 200 250 | 300
I — —7,890| —6,4991 —4,632| —3,785| —2,431 —0,995 0 1,019 2,058 3,115 5,268 8,008 10,777 13,553 16,325
К (ТХА) — 5,892 —4,913| —3,553| —2,920 —1,889| —0,777 0 0,798 1,611 2,436 4,095 6,137 8,137 10,151 12,207
ТХК хкв8 — I—3’11 — 0 1,303 2,658 4,050 6,898 10,624 14,570 18,690 22,880
ТПП пп68 / 0 0,113 0,234 0,363 0,644 1,026 1,436 1,867 2,314
ТВР ВР-5/20-188 ВР'5/20-268 ВР-5/20-368 0 0 0 0,250 0,252 0,248 0,508 0,512 0,504 0,774 0,780 0,768 1,330 1,340 1,320 2,075 2,094 2,055 2,869 2,899 2,840 3,688 3,728 3,649 4,519 4,569 4,470
ВР-5/2068 —
В (ТПР) ПР-30/688 — 0,443
Продолжение табл. 11-8
Тип термопары Обозначение градуировки Значение термо-ЭДС, мВ, при температуре рабочего спая, °C
400 500 | 600 | 700 ( 800 1000 1200 | 1400 | 1600 | 1800 2000 | 2200 | 2300 | 2400 | 2500
1 —• 21,846 21,388 33,096 | 39,130 | 45,498 —
К (ТХА) —• 16,395 20,640 24,902 29,128 33,277 41,269 48,828 —
ТХК хк68 31,480 | 40,270 49,090 | 57,820 | 66,420 —
ТПП пп68 3,250 4,216 5,218 6,253 7,317 9,550 11,904 14,315 16,685[ —
ТВР ВР-5/20-168 ВР~5/20-268 ВР-5/20-Звя 6,209 6,279 6,139 7,909 7,999 7,829 9,598 9,708 9,508 11,273 11,392 11,164 12,929 13,059 12,800 16,136 16,290 15,981 19,146 19,325 18,975 21,963 22,162 21,773 24,590 24,810 24,380 26,999 27,227 26,768 —
ВР-5/2068 26,999 29,177| 31,13б| 32,02б| 32,857| 33,636
В (ТПР) ПР-30/668 0,808 1,274 1,830 2,476 3,208 4,916 6,904[ 9,10б| 11,429 13,778 —
В соответствии с ГОСТ 3044—77 допускаются отклонения реальных термо-ЭДС от значений, приведенных в табл. II-8, на величины, указанные в табл. 11-9.
Таблица 11-9
Обозначение градуировки Диапазон температур, °C Пределы допускаемых отклонений
ДЕ, мВ де, ’С
пп68 —20...+300 +300...+1600 0,01 0,01+2,5- 10-6(0 — 300) 1,09 1,09—3,70
ПР-30/668 +300 ..+1800 0,01+3,3- 10-6(0 — 300) 3,12—5,08
тха68 . —50...+300 +300...+1300 0,16 0,16 + 2,0- Ю-4 (6-300) 3,86 3,86—10,03
хк68 —50...+300 +300...+800 0,20 0,20 + 6,0- 10-4 (0 - 300) 2,38 2,38-5,81
ВР-5/2068 0...+100 100... 1800 0,08 0,08 + 4,0- 10-6 (0—ЮОО) 5,П 5,11—9,74
По СТ СЭВ 1059—78 допустимые отклонения должны определяться по уравнению ДЕ = ± [а + Ь (0 — с)] SE, где SE = (dE/dt)& — чувствительность термопары; величины а, & и с приводятся в стандарте для каждой из термопар и для наиболее распространенных термопар даны в табл. 11-10.
При длительном времени эксплуатации согласно ГОСТ 6616—74 допускаются отклонения градуировочных характеристик термопар от их начальных значений. В табл. 11-11 приведены допустимые отклонения Д0 градуировочных характеристик, после того как термопара находилась в течение 10 000 ч при указанной температуре 0j.
Таблица 11-10
Тип термопары Класс точности Диапазон температур, °C а, °C 5-10’ с, °C
к — —200... —100 — 100...+400 +400... +1300 4 —10 0 7,5 — 100 0 400
S I 0... +300 +300... +1600 1,5 0 2 0 300
2 0...+600 +600...+1600 3 0 5 0 600
в — +300...+600 +600...+1800 0 5 0 600
В СТ СЭВ 1059—78 даны интерполяционные уравнения для расчета термо-ЭДС термопар. Например, термо-ЭДС платино-платинородиевой термопары в диапазоне температур 0—630,74 °C определяется следующим уравнением (нами приводятся 6
округленные значения коэффициентов): Е — У] ^0*, где dQ = 0; = 5,399-IO*3;
279
rf2 = 1,252- IO"?; da = -2,245- IO’3; d4 = 2,845- IO*11; + = -2,244-10’J4; ds = 8,505 X X 10-1».
Конструкция платино-платинородиевой термопары типа ТПП-1378, пред-
назначенной для измерения температуры воздуха и инертных газов, показана на рис. 11-20, а. Рабочий спай термопары открыт. Термоэлектроды представляют собой проволоку диаметром 0,3 или 0,5 мм и изолированы друг от друга керамическим изолятором, защитной арматурой также служат керамические трубки. Термопары выполняются длиной L = 40ч-10 000 мм,
выводы имеют длину I, равную 20 или 50 мм, внешний диаметр термопары d составляет 4 или 2,5 мм.
Конструкция термопары промышленного типа показана на рис. 11-20,6. Это термопара с термоэлектродами из неблагородных металлов, расположенными в составной защитной трубе с подвижным фланцем для ее крепления. Рабочий спай 1 термопары изолирован от трубы фарфоровым наконечником 2. Термоэлектроды изолированы бусами 4. Защитная труба состоит из рабочего 3 и нерабочего 6 участков. Передвижной фланец 5 крепится к трубе винтом. Головка термопары имеет литой корпус 7 с крышкой 11, закрепленной винтами 10. В головке укреплены фарфоровые колодки 8 (винтами 15) с «пла-
Таблица 11-11
Тип термопары 61, "С Дб, *с
ТВР 1400 56,0
ТПР 1200 16,5
ТПП 1000 12,0
ТХА, dnp = l,5 мм 800 27,0
ТХК, dnp==l,5 мм 600 24,0
вающими» (незакрепленными) зажимами 12, которые позволяют термоэлектродам удлиняться под воздействием температуры без возникновения механических напряжений, ведущих к быстрому разрушению термоэлектродов. Термоэлектроды крепятся к этим зажим&м^винтами 13, а соединительные провода — винтами 14. Эти провода проходят через штуцер 9 с асбестовым уплотнением.
Различные типы промышленных термопар согласно ГОСТ 6616—74 имеют показатель тепловой инерционности 5—180 с. Под показателем тепловой инерцион
ности имеется в виду постоянная времени термопары, определяемая при погружении
ее в воду.
Промышленные термометры сопротивления выпускаются в СССР в соответствии с ГОСТ 6651—78 двух типов — платиновые (ТСП) и медные (ТСМ). Основные характеристики термометров сопротивления приведены в табл. 11-12. Типы термометров, отмеченные скобками, применять не рекомендуется.
Термометры сопротивления выпускаются нескольких классов точности. Для существующих классов точности допустимые отклонения сопротивления Ро при 0 °C и чувствительности Sloo = R100/Ra, определяемой как отношение сопротивлений при 100 и 0 °C, приведены в табл. 11-13.
В табл. 11-14 приведены в сокращенном объеме градуировочные характеристики термометров. Численные значения сопротивлений для кратных градуировок получаются соответственно умножением или делением на 10.
Согласно ГОСТ 6651—78 термометры могут выпускаться одинарные и двойные — по числу терморезисторов в одной зоне. Если терморезисторы расположены в разных зонах, то термометр называется многозонным. По числу выводных проводников термо-
метры выпускаются с двумя, тремя и четырьмя выводами для включения их в измерительную цепь двух-, трех- или четырехпроводной линией соответственно. Под действием тока, протекающего по терморезистору и вызывающего его нагрев, сопротивление терморезистора не должно меняться на величину, большую 0,1% его номинального значения при 0 °C; ток при этом выбирается из ряда 0,1; 0,2; 0,5; 1,0; 2,0; 5,0; 10,0; 20,0; 50,0 мА.
Конструкция промышленного термометра сопротивления типа ТСП-6097, предназначенного для измерения температуры газообразных или жидких химически неагрессивных и агрессивных сред в диапазоне от —50 до +250 °C, показана на рис. рис. 11-21. Чувствительный элемент 1 платинового термометра представляет собой керамический каркас, в каналы которого помещена спираль из платиновой проволоки. Концы спирали приварены к выводам, через которые чувствительный элемент
280
Рис. 11-20
4 5 2 1
Рис. 11-21
281
соединен с трехжильным кабелем. Каналы каркаса засыпаны керамическим порош* ком, торцы герметизируют глазурью. Защитная арматура 2 термометра представляет
Таблица 11-12
Тип термометра Номинальное сопротивление при 0° С, Ом Обозначение градуировочной характеристики Диапазон температур, °C
тсп 1 5 10 (46) 50 100 500 1П 5П 10П (гр- 21) 50П 100П 500П ( —50... +1100 — 100...+1100 —200...+1000 —260... +1000 —260...+ 1000 —260... +1000 —260... +300
тем 10 50 (53) 100 ЮМ 50М (гр. 23) 100М —50...+200 —50... +200 —50... +180 —200... +200
собой сварную конструкцию из стальной трубы и штуцера. Место соединения чувствительного элемента с кабелем закрывается колпаком 4 из пресс-материала АГ-4В, ввинчиваемым в верхнюю часть штуцера 3, и заливается компаундом.
Таблица 11-13
Класс точ- Параметр термометра
Тип термо- $100 — 1,3910 Sloo = 1,4280
метра ности % +о —ь +о | -Ь
тсп I II III IV V ±0,05 ±0,1 ±0,2 ±0,4 ±0,8 0,0015 0,0005 0,0010 0,0020 0,0030 0,0050 —
тем I II III IV V ±0,1 ±0,2 ±0,5 ±1,0 0,001 0,002 0,003 0,005
Показатели тепловой- инерционности промышленных термометров составляют 10—60 с и определяются так же, как и для термопар. Исключение составляют термометры, предназначенные для измерения температуры газа; для них показатель тепловой инерционности определяется как постоянная времени при погружении термометра в поток воздуха, имеющего постоянную скорость 0,5 м/с.
282
Таблица 11-14
Обозначение градуировки Сопротивление термометра, Ом, при температуре, °C
—26U —200 —150 —100 —50 -20 0 20 40 60 80 100 150 200
100П 0,406 17,307 38,799 59,621 79,983 92,032 100,000 107,919 115,791 123,613 131,388 139,113 158,221 177,033
50П 0,203 8,654 19,399 29,810 39.991 46,016 50,000 53,959 57.895 61,806 65,694 69,556 79,110 88,516
100М — 12,160 34,180 56,610 78,480 91,420 100,000 108,563 117,124 125,684 134,242 142,800 164,192 185,583
50М — — —— — 39,240 45,710 50,000 54,281 58,562 62,842 67,121 71,400 82,096 92,791
гр. 23 — — — 41,71 48,48 53,00 57,52 62,03 66,55 71,06 75,58 86,87 —
гр. 21 — 7,95 17,85 27.44 36,80 42,34 46,00 49,64 53,26 56,86 60,43 63,99 72,78 81,43
Продолжение табл. 11-14
Обозначение градуировки Сопротивление термометра, Ом, при температуре. °C
300 400 500 600 700 750 800 850 900 950 1000 1050 1100
100П 50П 100М 50М гр. 23 гр. 21 213,779 106,889 98,34 249,358 124,679 283,760 141,880 316,960 158,480 348,931 174,465 364,470 182,235 379,719 189,859 394,672 197,336 409,333 204,666 423,699 211,849 437,776 218,888 451,555 225,777 465,052 232,526
ГЛАВА ДВЕНАДЦАТАЯ
ОПТОЭЛЕКТРИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ
12-1. ОСНОВНЫЕ СВОЙСТВА ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ И ОБЛАСТЬ ПРИМЕНЕНИЯ ОПТОЭЛЕКТРИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ
Оптическое излучение представляет собой электромагнитные волны, длина которых лежит в диапазоне 0,001—1000 мкм. Оптический спектр делится на поддиапазоны, показанные на рис. 12-1, а, где приведены длины волн к и частоты электромагнитных колебаний v == с/А. (с — — 2,998-108 м/с — скорость света в вакууме).
^'-излучение
Оптический диапазон
Видимый свет
Гц
0,38 Ультрафиолетовое излучение^ у
0,01
0,1
1,0
0,78
Инфракрасное излучение
10
100
‘мкм
1016 1015 1014' 10й Ю1г
Радиоволны
Рис. 12-1
Системы энергетических и фотометрических величин. Для описания оптических явлений применяют три системы величин: энергетическую, световую (фотометрическую) и квантовую. В квантовой системе величин свет рассматривается как поток частиц — квантов, энергия которых составляет wK — hv, где h — 6,6256-10"34 Дж-с — постоянная Планка. Кванты видимого света обладают энергией 2—5 эВ.
Основной величиной энергетической и фотометрической систем является поток излучения Ф, определяемый в системе энергетических величин в ваттах, а в системе световых (фотометрических) величин — в люменах. Световые величины используются для оценки излучения по производимому им световому ощущению, т. е. по реакции человеческого глаза, и связь между энергетическими и световыми величинами устанавливают через спектральную чувствительность глаза V?.. Зависимость относительной спектральной чувствительности глаза Кк = 1Д/(1Д)тах от длины волны называют кривой видности (рис. 12-1, б). Для нормального глаза К.х = 1 при К — 0,555 мкм.
Если известна функция распределения мощности излучения по длинам волн (спектральная плотность излучения), то видимый
284
световой поток в люменах равен
о ,8
Ф = 683 KtJP-k d\.
0,4
(12-1)
Как следует из приведенной формулы, световому потоку 1 лм соответствует разная мощность в зависимости от спектрального состава света; в области максимальной чувствительности эквивалент энергетического потока равен 683 лм/Вт.
Основные энергетические и световые величины, а также их графическое изображение, обозначения и единицы представлены в табл. 12-1. Однако если для характеристики оптических явлений нет необходимости в указании конкретных единиц, то часто пользуются общим понятием «интенсивность света», под которым может подразумеваться поток, сила света, яркость и т. д.
Основные законы теплового излучения. На рис. 12-2, а приведены кривые спектральной светимости абсолютно черного тела (АЧТ). Связь между излучением АЧТ и его температурой определяется следующими основными законами.
Закон Стефана—Больцмана определяет связь между энергетической светимостью R АЧТ и его температурой: R — а?4, где о == = 5,6697• 10~8 Вт/(м2-К4) — постоянная. Стефана—Больцмана.
Закон Планка дает качественную характеристику лучистого потока, указывая, как распределяется энергия излучения АЧТ по длинам волн: (^, Т) = С^-5 {ехр [С2/(7А)1 — I}'1, где Сх = 3,7415 X X 1СГ18 Вт>м2; С2 = 1,4388- КГ2 м-К.
Закон Голицина — Вина позволяет определить длину волны излучения АЧТ, соответствующую максимуму кривой (^, Л; Хтах = — 2898/7’, мкм.
Реальный тепловой излучатель характеризуется коэффициентом излучения (коэффициентом черноты) 8 = f (X), который показывает, какую часть энергетическая светимость R данного тела составляет от энергетической светимости АЧТ при той же температуре.
285
Таблица !2-1
Энергетические величины Графическая интерпретация Световые величины
Наименование Обозначение и определяющее уравнение Единица Наименование Обозначение и определяющее уравнение Еди-ница
Поток излучения Спектральная плотность потока излучения Р Р% = dPJdt Вт Вт/м Jb х Световой поток Спектральная плотность световой мощности Ф = z/ф/^Х лм
Энергия излучения Спектральная плотность энергии излучения t Й7 = / РЛ a Wx=dW/dK Дж Дж/м р t Световая энергия t Q = / Ф (0 dt 0 лм-с
Энергетическая сила света 1 = dPIdQ Вт/ср /ДА Сила света / = йФ/dQ кд
Энергетическая светимость = dPtdS В т/м2 ф As Светимость R = d<S>/dS лм/м2
Энергетическая освещенность E3 — dP/dS Вт/м2 Освещенность Е — d<P/dS лк
Энергетическая яркость Г, = 9 - Э ds cos 0 Вт/(ср»м2) А Яркость L _ _ dS cos 0 кд/м2
Энергетическая экспози-ци я t н9 = J E (i) dt 0 Дж/м2 Экспозиция t И = J E (t) dt 0 лк «с
286
Фундаментальные законы излучения позволяют использовать оптические методы для бесконтактного измерения температуры АЧТ, а при известном коэффициенте е — и для измерения температуры любого реального тела.
Излучение веществ в газообразном и парообразном состоянии. Так как атомы и молекулы газа характеризуются строго индивидуальным и дискретным набором возможных значений внутренней энергии Е>, то газы и пары обнаруживают значительное поглощение (а следовательно, и излучение) только на резонансных частотах v; = EJh или при длинах волн X, = hc/Ei и характеризуются линейчатыми спектрами поглощения и излучения. В качестве примера на рис. 12-2, б показан видимый спектр излучения паров кадмия.
Длины волн излучения некоторых элементов характеризуются весьма высокой стабильностью и воспроизводимостью (до 10~8), что позволяет использовать их в качестве образцовых мер длины (красная линия кадмия, оранжевая линия криптона).
Законы распространения излучения. Свет распространяется в среде со скоростью vx — с/п, где п — оптическая плотность среды (показатель преломления). Показатель преломления воздуха п = 1,0003, поэтому скорость света в атмосфере незначительно отличается от скорости света в вакууме. Постоянство скорости света в вакууме (и с некоторым приближением в атмосфере) используется для измерения расстояний. При измерениях больших расстояний измеряется время, необходимое для прохождения светом расстояния до объекта измерения и обратно (световые локаторы и светодальномеры). Малые расстояния сравниваются с длиной световой волны посредством фазовых или интерференционных методов.
Поглощение света в веществе описывается законом Бугера — Ламберта I = , где /0 и I — интенсивности плоской моно-
хроматической волны на входе в слой поглощающего вещества толщиной I и на выходе из него; рх — удельный показатель поглощения, численно равный толщине слоя вещества, после прохождения которого интенсивность света уменьшается в е = 2,718 раза. Показатель поглощения цх зависит от длины волны (селективность, или избирательность, поглощения). У «прозрачных» веществ в видимой области спектра рх составляет от 10~3 м-1 (воздух) до 1 м-1 (стекло).
Рассеяние света сопровождается изменением направления распространения света и проявляется как несобственное свечение вещества. Потери света в результате рассеяния могут быть выражены зависимостью I = , где — коэффициент экстинкции.
Изменение интенсивности света в зависимости от толщины слоя, а также селективность поглощения и рассеяния лежат в основе действия ряда оптических преобразователей, предназначенных для определения толщины, уровня, концентрации, структуры и химического состава вещества.
Отражение и преломление света имеют место на границе раздела двух прозрачных сред (рис. 12-3). Между углами падения ф1( преломления <р2 и отражения <р3 существует простая связь: <рг = <р3;
287
sin фх»! = sin ф2п2, где пг и п2 — коэффициенты преломления сред до и после границы раздела.
Измеряя углы падения и преломления, можно определить коэффициенты преломления веществ (рефрактометрия). Интенсивность отраженного света позволяет оценить состояние поверхности (шероховатость, помутнение при выпадении росы и т. д.).
Основные свойства оптического излучения. Электромагнитные волны оптического диапазона, как и любые электромагнитные волны,
ческого диапазона
являются волнами поперечными и характеризуются взаимно перпендикулярными векторами Ей Н электрического и магнитного полей, которые изменяются синхронно в плоскости, перпендикулярной к направлению распространения волн. Скорость распространения света в вакууме является фундаментальной физической константой: с — 2,998-108 м/с.
В большинстве процессов взаимодействия оптического излучения более важную роль играет вектор Е, поэтому услов-
но принято рассматривать для волн опти-только электрический вектор Е. В частности, ин-
тенсивность света, пропорциональная мощности излучения, определяется для излучения с частотой v = 1 IT как
I р Г / 2л/ \12 Е*
/ = т J Ksinb—ЬфН =
о L
(12-2)
Оптическое излучение складывается из элементарных актов излучения атомами или молекулами, из которых состоит источник, отдельных порций — цугов — электромагнитных волн. Каждый атом или молекула излучает цуг волн в течение промежутка времени порядка 10'8 с. Протяженность цуга имеет порядок 107 длин волн. В первом приближении каждый цуг можно считать квазимонохро-матичным. Однако волны спонтанно излучаемых цугов могут иметь произвольные начальные фазы колебаний, различные частоты колебаний и различные направления колебаний вектора Е. При времени наблюдения, намного большем времени излучения цуга (/набл (> 10~8с), электромагнитное излучение оптического диапазона является суперпозицией волн отдельных цугов. Согласованность колебаний отдельных цугов характеризует монохроматичность, когерентность и поля-ризованность излучения.
Монохроматичным называется излучение, для которого вектор Е колеблется с одной и той же частотой v0 или все колебания имеют одну и ту же длину волны Хо. Степень монохроматичности характеризуется шириной оптической спектральной линии Av0 (рис. 12-4, а). Наиболее близко к идеально монохроматичному излучение лазеров, для которых Av0 103 Гц.
288
Когерентными называются колебания, разность фаз между которыми постоянна. Временная когерентность определяется длительностью цуга электромагнитных волн. Если представить, что пучок света от точечного источника S (рис. 12-4, б) разделяется на два пучка 1 и 2 и собирается в точке Р, то для колебаний, относящихся к одному цугу, фазовый сдвиг между колебаниями в пучках 1 и 2 в точке Р будет определяться только разностью ходов этих пучков. Если разность ходов велика, то в точке Р складываются колебания, относящиеся к разным цугам, и фазовый сдвиг между ними становится случайной величиной.
Когерентность излучения однозначно связана с его монохроматичностью и характеризуется временем когерентности А/ или дли-
ной когерентности L = c&t. Время когерентности определяется как Д< = - и соответствует отрезку времени, за который фаза коле-Av/Vp
баний изменяется на 2л радиан. Например, излучение Хо — 0,5 мкм с шириной линии ДХо = 0,5-10'6 мкм характеризуется временем когерентности
_ 0,5-10-в 0,5-10-в_1 7 )П_9
AZoAo ~ 0,5 10'12 3 108
и длиной когерентности L — cAt = 0,5 м.
Поляризованность света характеризуется способностью вектора Е сохранять неизменной свою ориентацию в пространстве. Если направление колебаний вектора Е бессистемно и, следовательно, любая его ориентация в плоскости, перпендикулярной к направлению распространения волны, равновероятна, то такой свет называют непо-ляризованным или естественным. Если колебания вектора Е фиксированы строго в одной плоскости (рис. 12-5, а), то свет называется линейно поляризованным. Удобно графически изображать поляризованный свет в виде проекции конца колеблющегося вектора Е на плоскость хОу, перпендикулярную лучу г. Проекционная картина линейно поляризованного света с азимутом поляризации а, показана на рис. 12-5, б. Если по одному направлению распространяются две линейно поляризованные волны Ех и Ег длиной X, то вид поля- 10
10 Е. С. Левшина, П. В. Новицкий
289
ризации суммарной волны может быть различным. Если азимут поляризации обеих волн одинаков, то результирующая волна будет линейно поляризована с тем же азимутом. Если азимуты различны, то вид поляризации суммарной волны зависит от сдвига фаз <р между слагаемыми волнами.
На рис. 12-5, в показан результат сложения перпендикулярно поляризованных волн, совпадающих по фазе; в этом случае суммарная волна будет линейно поляризована. На рис. 12-5, г показан результат сложения перпендикулярно поляризованных волн при сдвиге фаз <р = л/2 и Ег — Е2. В этом случае суммарная волна будет
циркулярно поляризованной или поляризованной по' кругу, так как проекция конца вектора Es на плоскость хОу представляет собой окружность. При произвольном сдвиге фаз, а также при <р = л/2, но сложении волн с различными амплитудами конец вектора Es будет описывать эллиптическую винтовую линию, а проекционная картина изобразится в виде эллипса.
Свет подавляющего большинства источников является естественным или частично поляризованным. Дополнительную поляризацию свет получает при отражении от прозрачных поверхностей и при преломлении. Таким образом, свет солнца, прошедший через стекло, уже является частично поляризованным. Наиболее эффективная поляризация имеет место при прохождении света через оптически-анизотропные среды, на основе которых изготовляются поляризаторы и анализаторы света, позволяющие произвести разделение
290
световых волн с разными азимутами поляризации. Пример такого устройства показан на рис. 12-6.
Неполяризованное излучение от источника ИС попадает на оптический элемент Р1, называемый поляризатором. Из всех возможных направлений колебаний светового вектора Е поляризатор выделяет только те колебания, которые совпадают с направлением пропускания поляризатора. На рис. 12-6 это направление совпадает с направлением оси Оу. После поляризатора линейно поляризованное колебание Ej = Ет sin 2nvt попадает на объект О, обладающий оптической анизотропией, которая проявляется в том, что коэффициенты преломления пл и п2 и, следовательно, скорости v1 — с/пг и и2 = с/п2 распространения световых волн, направления поляризации которых совпадают с осями xt и уг, различны. При повороте объекта О так, что его оси хг и ух не совпадают с осями х и у поляризатора Р1, дей-
ствие объекта проявляется в разложении вектора на два вектора Е2 и Е3, направленных по собственным ochmxj и объекта, и в возникновении между колебаниями Е2 и Е3 разности хода \ = d(n1—п2), где d — толщина объекта, вследствие того, что скорости распространения перпендикулярно поляризованных колебаний Е2 и Е3 в объекте не равны между собой. При этом можно записать, что Е2 = = Ет cos a sin 2nvZ; Е3 — Ет sin a sin (2nv^ + 2лД/л) =Ет sin а, х X sin (2nv/ -f- 2лГа.), где а — угол между направлением пропускания поляризатора Р1 и осью Охг объекта; Г — разность фаз в единицах длины волны, называемая волновой разностью фаз. Колебания Е2 и Е3 в сумме дают эллиптически поляризованный свет, который попадает на оптический элемент Р2 (аналогичный РР), называемый анализатором. Предположим, что ось пропускания анализатора Р2 повернута относительно оси поляризатора Р1 на 90°. Тогда через анализатор проходят только те составляющие колебаний Е2 и Е3, которые совпадают с направлением оси Ох пропускания Р2: Ei = = Ет cos a sin a sin 2nvt и Еъ = Ет sin a cos a sin (2nvt + 2лД/Х). На выходе Р2 имеем колебание Е6, равное разности колебаний Е4 и Е5, а именно Ев — 0,5Ет sin 2а [sin 2nvt — sin (2avt + 2лД/Х)].
Глаз и другие фотоприемники реагируют на интенсивность света 1 = Ё:6, т. е. на усредненный по времени квадрат напряженности Ев
10*
291
электрического поля световой волны, поэтому окончательно имеем
/ = /osin22asin2nA/%. (12-3)
При оптимальной установке объекта, когда а = л/4, интенсивность света на выходе поляризационно-оптической системы будет зависеть от разности хода как / = 0,5/о (1 — cos 2лД/Х).
Оптическая анизотропия, вызывающая двойное лучепреломление, возникает в прозрачных изотропных телах под действием механических напряжений, электрического и магнитного поля, что позволяет на основе этих эффектов разрабатывать оптоэлектрические преобразователи для измерения механических величин, электрических напряжений и магнитных полей. При действии механических напряжений разность коэффициентов преломления п1 — п2 = ko пропорциональна напряжению ст и константе фотоупругости k. Для различных сортов стекла значение k составляет k = (0,2 -+ 0,3) ИГ11 м2/Н.
Возникновение двухлучепреломления под действием электрического поля, направление которого перпендикулярно распространению света, называется эффектом Керра. Волновая разность фаз, возникающая вследствие эффекта Керра, определяется как Г = = BdE2, где Е — напряженность поля; В — постоянная Керра; d — толщина элемента. Наибольшее значение В = 393 • КУ14 м/В2 (при 0 — 20 °C и X = 0,546 мкм) имеет нитробензол.
Наряду с квадратичным электрооптическим эффектом Керра существует линейный эффект Поккельса, который заключается в изменении коэффициента преломления под действием электрического поля, приложенного в направлении хода луча. Наиболее ощутимо эффект наблюдается для пластин Z-среза из дигидрофосфата аммония (АДР) и дигидрофосфата калия (КДР). Напряжение полуволнового смещения (т. е. напряжение, при котором Г = 1/2) для КДР равно 8 кВ, для АДР — 10 кВ. С использованием эффекта Керра и эффекта Поккельса могут быть построены высоковольтные вольтметры и модуляторы света.
Оптическая анизотропия появляется и под действием магнитного поля (эффект Коттона — Мутона), однако применения в измерительных целях эффект пока не находит.
В некоторых веществах плоскость колебаний проходящего через них света поворачивается.'Эти вещества называются оптически активными. Явление оптической активности используется при построении концентратомеров. Одним из наиболее широко распространенных веществ, обладающих оптической активностью, является раствор сахара.
Вращение плоскости поляризации для некоторых веществ происходит также под действием магнитного поля (магнитооптический эффект Фарадея). Угол поворота плоскости поляризации
ф = СДД, (12-4)
где Ск — постоянная Верде; I — длина пути светового луча в веществе. Специальные сорта стекла имеют постоянную Верде Ск ~ ~ 10*4 рад/А.
292
г” Интерференций. Проблемой оптических измерений является измерение разности фаз между колебаниями вектора Е, частота которых лежит в диапазоне 1014 — 1015 Гц. В настоящее время никакой детектор света не успевает откликаться на такие быстрые колебания и эталоном сравнения может служить только сама волна света, т. е. интерференционная картина, возникающая при сложении в одной точке пространства двух световых пучков. При сложении света двух независимых источников, дающих равные освещенности в данной точке, освещенность удваивается. Иначе обстоит дело, если складываются два луча одного источника.
Пусть в одну точку пространства в одном направлении приходят две монохроматические волны, колебания которых лежат в одной плоскости и периоды одинаковы: Е1Х = Ет1 sin (2л//Т + фх) и Егх = = Е.„2 sin (2л1/Т 4- <р2).
Интенсивность результирующего излучения согласно выражению (12-2) равна
7
/ = ~ [Ет1 sin (2л//Г 4- ф3) 4- Ет2 sin (2л//Г + ф2)]2 dt = * J
о
= 0,5 [E?„i + Esm2 + 2Ет1Ет2 cos (®j — ф,)] (12-5)
Рис. 12-7
п2 — показатели преломле-
и может изменяться в зависимости от разности фаз между колебаниями от 0,5 (£ml — £m2)2 при фх — ф2 = л до 0,5 (Ет1 + Ет2)2 при ф1 — ф2 = 0. При равенстве интенсивностей = /2 = 4 = = Е'^/2 двух складывающихся колебаний результирующая интенсивность изменяется от 0 до 4/0, как показано на рис. 12-7.
Если две интерферирующие волны имеют одинаковые начальные фазы, то разность фаз между ними определяется формулой
Ф1 —• Ф2 = 2л (%i/7i — х2«2)А = 2лД/Х, где х2 и х2 — расстояния, проходимые первой и второй волнами до места встречи, т. е. до поля интерференции; п} и
ния первой и второй сред, через которые проходят волны; Д — оптическая разность хода. Если волновая разность фаз Г = ДА равна целому числу, то наблюдается максимум освещенности; при Г = = 1/2, 3/2 и т. д., —минимум освещенности. При Г = 1 имеет место первый интерференционный максимум, при Г = 2 — второй и т. д.
Как видно из выражения для разности хода Д = х^ — х2п2, интерференционная картина меняется при изменении показателей преломления и при изменении длин пути. Эти обстоятельства позволяют использовать явление интерференции в приборах для измерения перемещений, сравнимых по значению с длиной волны, и в приборах, включающих в себя поляризационные устройства.
293
Голограмма является аналогом фотонегатива в голографии. Информация об удаленности точек предмета регистрируется в голографии по величине запаздывания лучей от разных точек предмета. Простейшая схема получения голограммы показана на рис. 12-8, а. В плоскости негатива 3 создается интерференционная картина, которая образуется путем добавления к исходной волне предметного пучка ПП света опорного пучка 077. Оба пучка создаются лазером Л, освещающим зеркало 1 и предмет 2. Если волны строго когерентны и в оптической системе не происходит вращения плоскости поляризации света, то возникает интерференционная картина, которая содержит полную информацию как об амплитуде, так и о фазе предметного пучка и может быть зафиксирована на фотографической пластинке 3. Проявленная фотопластинка с зарегистрированной на ней интерференционной картиной называется голограммой. Для
Рис. 12-8
того чтобы восстановить предметную волну, необходимо направить на голограмму волну света, совпадающую с опорной волной, использованной при записи голограммы. Восстановленное изображение (рис. 12-8, б) является копией исследуемого объекта. Голография широко применяется как метод физических исследований. В частности, голография позволяет производить исследования вибрационного состояния тела. Если объект вибрирует во время экспозиции и длительность экспозиции превышает период колебаний, то на голограмме будут зарегистрированы волны, рассеянные этим объектом во всех состояниях, которые он последовательно проходит. Вклад в общую экспозицию различных положений объекта будет определяться скоростью, с которой объект проходит через эти положения. Минимальную скорость объект имеет в крайних положениях, соответствующих амплитудным значениям виброперемещений. Таким образом, вклад этих двух состояний в экспозицию будет максимален и приближенно можно рассматривать голограмму как соответствующую двум амплитудным положениям объекта, т. е. как голограмму, полученную методом двух экспозиций. При восстановлении голограммы изображение предмета окажется перерезанным интерференционными полосами, которые дадут представление о характере движения различных точек объекта. Точки, для которых разность хода предметных волн в амплитудных положениях объекта составляет
294
нечетное число полуволн, дадут минимумы интенсивности и будут соответствовать серединам темных полос. Точки, для которых разность хода составляет четное число полуволн, будут соответствовать серединам светлых полос. Максимальную яркость имеют неподвижные точки.
Интенсивность светлых полос убывает по мере увеличения амплитуды колебаний. Причина уменьшения интенсивности заключается в том, что в предметном пучке, отраженном от движущейся точки, происходит уширение спектра излучения АХ по сравнению с опорным пучком. Это уширение, определяемое эффектом Допплера, будет тем больше, чем больше скорость движения точки, т. е. при заданной частоте колебаний чем больше амплитуда колебаний точки. Соответственно уменьшается время экспозиции, в течение которого точку можно считать условно неподвижной.
Для расширения возможностей метода голографического исследования производится ряд усовершенствований. Ценность метода заключается в том, что он позволяет в реальном времени получить вибрационное поле значительной части объекта без механического или электрического контакта с ним.
12-2. ИСТОЧНИКИ ИЗЛУЧЕНИЯ
В измерительных преобразователях в качестве источников излучения используются лампы накаливания, газоразрядные лампы, светодиоды и лазеры. Основным?, характеристиками источников излучения являются характер свечения (непрерывный или импульсный), спектральный состав излучения, мощность излучения (световой поток, сила света, яркость), потребляемая мощность (напряжение и ток питания), габариты.
Лампы накаливания имеют непрерывный спектр излучения, охватывающий видимую и инфракрасную области. Мощность излучения ламп накаливания относи- , тельно невелика, спектральный состав и интенсивность свечения зависят от температуры нити, определяемой напряжением и током питания. Характер свечения непрерывный. Параметры некоторых ламп накаливания, применяемых в измерительных приборах, представлены в табл. 12-2.
Таблица 12-2
Тип лампы Напряжение, В Ток, А Световой поток, лм Размеры, мм Тип цоколя
Диа-метр D Длина L
МН2,5-0,5 2,5 0,5 8 16 30 РЮ-1
МН26-0.12 26 0,12 12 11 28,5 1Ш9-1
НСМ9-60-2 9 0,055 1,4 3,2 7 —
НСМ6-90ВН-1 6 0,020 0,2 3,2 9 —
СЦ-61 8 2,5 250 21 56 2Ш 1.5-1
Газоразрядные лампы представляют собой кварцевый или стеклянный баллон, заполненный газом, с впаянными токоведущими электродами. Электрический разряд в газовом промежутке сопровождается интенсивным световым излучением. Газоразрядные лампы подразделяют на лампы непрерывного свечения и импульсные, сила света во вспышках которых достигает Ю8 кд. Газоразрядные лампы имеют линей
295
чатый спектр излучения. К недостаткам газоразрядных ламп относятся большие габариты и сложность схем включения. Параметры некоторых газоразрядных ламп приведены в табл. 12-3.
Таблица 12-3
Тип лампы Напряжение, В Мощность, Вт Яркость, Гкд/м2 Дли-тель-и ость вспышки, мс Частота вспышки, Гц Размеры, мм
Диаметр D Длина L
ДксШ-200 70 200 0,09 Непрерывное
ДксШ-3000 60 3000 0,5 излучение — —
ИСП-15 800 1,2 5 0,09 0,2 — 67
ИСШ-3 250 3 2 0,0025 20 22 43
ИСШ-100-3 4500 100 100 0,0025 50 — —
Лазеры. В настоящее время применяются газовые (ГОСТ 23202—78), твердотельные и полупроводниковые (ГОСТ 17490—77) лазеры. В состав лазера обычно входят излучатель и блок питания, а также могут входить блок автоматики и вспомогательные устройства.
Параметры излучения зависят от излучателя, а также от режима излучения лазера, который может быть непрерывным, импульсным и режимом одиночных импульсов. При импульсном (пульсирующем) режиме излучение лазера происходит в виде регулярной последовательности импульсов с частотой f, причем длительность импульсов гораздо меньше периода их повторения. В режиме одиночных импульсов длительность импульса обычно не превышает 10"3 с, а промежутки между ними достигают десятков минут.
Максимальная мощность излучения достигается в режиме одиночных импульсов и для твердотельных лазеров составляет десятки мегаватт. В измерительной технике наибольшее распространение получили газовые лазеры, излучение которых отличается высокой степенью монохроматичности и поляризованности. Технические характеристики некоторых гелий-неоновых газовых лазеров (длина волны излучения 0,6328 мкм) приведены в табл. 12-4.
Таблица 12-4
Тип лазера Габариты излучателя, мм Масса излучателя, кг Диаметр пучка, мм . Угол расходимости пучка, рад Нестабильность частоты излучения за 8 ч работы, не более Потребляемая мощность, Вт
ЛГ-77 300x95 х 125 5 0,73+0,18 2,7 • IO"3 1 • 10-8
ЛГ-78 330x35x48 0,7 2,5 3-Ю-3 — 30
ЛГ-75 1080x114x103 10 — 2,9-10-з — —
Светодиоды представляют собой излучающий р-п-переход. В настоящее время наибольшее распространение получили арсенидно-галлиевые светодиоды полусферической конструкции (диаметр излучающей полусферы 1,4 мм), максимум интенсивности излучения которых соответствует длинам волн 0,92—0,96 мкм, ширина спектральной линии 20—70 нм. Процессы включения и выключения светодиодов определяются постоянными времени 10“8—10“9 с, и светодиоды могут использоваться как в режиме постоянного свечения, так и в импульсном режиме. Характеристики светодиодов зависят от температуры: при повышении температуры уменьшается мощ
296
ность излучения (примерно 0,01 К'1) и сдвигается в сторону больших длин волн максимум интенсивности излучения (около 0,3—2 нм/К).
Достоинствами полупроводниковых светодиодов являются высокий КПД, возможность модуляции излучения по произвольному закону путем управления возбуждающим током, малые габариты, возможность согласования с интегральными схемами, высокая надежность.
Параметры серийно выпускаемых светодиодов приведены в табл. 12-5. ,
Таблица 12-5
Тип светодиода Длина волны, мкм Ток возбуждения, мА Н апря-жение, В Мощность излучения, мВт Длительность фронта импульса излучения, нс
АЛ102Б АЛ 102В 0,69 0,56 20 4,5 0,01 100—500
АЛ103Б 0,96 50 1,6 1 200—300
АЛ106В АЛ107Б АЛ108А 0,93 0,95 0,94 100 1,7 2 1,35 0,6 10 1,5 10—20 20—100 400—2400
12-3. ПРИЕМНИКИ ИЗЛУЧЕНИЯ
Диапазон длин волн, в котором приемники излучения обладают постоянной чувствительностью, позволяет подразделить их на две группы: интегральные и селективные приемники.
К интегральным относятся тепловые преобразователи, принцип действия которых основан на преобразовании энергии излучения в температуру. Тепловые приемники поглощают всю мощность падающего на них излучения независимо от длины волны излучения.
К селективным относятся фотоэлектрические преобразователи (ФП), в которых используются явления внешнего или внутреннего фотоэффекта: вакуумные и газонаполненные фотоэлементы, фотоумножители, фоторезисторы, фотодиоды и т. д.
Тепловой приемник представляет собой тонкий металлический диск 1 и термочувствительный элемент 3, измеряющий температуру диска (рис. 12-9, а).
Диск 1, покрытый слоем черни 2, поглощающим падающее на него излучение, нагревается до температуры, при которой мощность, рассеиваемая излучением, теплопроводностью и конвекцией (см. § 11-1), будет равна поглощаемой мощности. Коэффициент поглощения черненой поверхности мало отличается от единицы в диапазоне от ультрафиолетового до инфракрасного излучения. Таким образом, выходная величина приемника пропорциональна интегральной мощности Рх падающего на его приемную площадку излучения и не зависит от спектрального состава этого излучения.
В ряде случаев преобразователь излучения не имеет специального диска и представляет собой плоскую полоску из двух различных металлов, образующих термопару, либо тонкую полоску из металла или полупроводника, изменяющую свое сопротивление в зависимости от температуры. Преобразователи с изменяющимся сопротивлением называются болометрами.
Для уменьшения конвективных потерь преобразователь излучения помещают в вакууме (при откачивании воздуха в баллоне до 10"а Па чувствительность возрастает более чем в 10 раз). В корпусе преобразователя делается окно из кварца, прозрачного для инфракрасного и ультрафиолетового излучения. Площадь элемента, воспринимающего излучение, ие должна превышать площади сечения падающего пучка лучей и в зависимости от поставленной задачи может составлять 0,1—104 мм2.
297
Преобразователь мощности излучения в температуру является апериодическим звеном, коэффициент преобразования которого и постоянная времени при наличии только потерь на излучение определяются из уравнения теплового баланса (см. § 11-1) cdQ/dt 4~ 4е2ст T’eSj = е1 wl)S1 как
* = 0M = e1S1/(4e2o7’gS2) и ттепл = с/(4е2ст7’§52),
где с — теплоемкость; а1,, — удельная мощность излучения; Sj и — площадь и коэффициент поглощения облучаемой площадки; S2 и е2 — эквивалентная излучающая площадь и эквивалентный коэффициент излучения элемента; ст — постоянная Стефана—Больцмана; То — абсолютная температура элемента; 0 — приращение температуры элемента. Частотная характеристика преобразователя показана на рис. 12-9. б.
В качестве термочувствительного элемента может быть использован герморезистор (см. § 11-4) или батарея термопар (см. § 11-2), пьезорезонатор, частота которого изменяется в зависимости от температуры (см. § 6-3), а также пироэлектрический преобразователь. —
Пироэлектрические элементы входят в группу пьезоэлектриков. Пироэлектрический эффект заключается в том, что заряд на гранях элемента появляется под I
действием температуры, значение заряда определяется как ?0 = yS0, где у — пиро- j
электрический коэффициент по соответствующей оси; S — площадь элемента; 0 — |
температура. !
К пироэлектрикам относится ряд пьезоэлектрических кристаллов и текстур, [ из которых наиболее широко применяются титанат бария ВаТЮ3 [у = 5 X ; X 1О~10 Кл/(см2- К) при 20 °C], триглицинсульфатТГС [у = 3-10"8 Кл/(см2- К)), пьезо- < керамика ЦТС-19 [у = 5-10"9 Кл/(см2-К)] и танталат лития LiTaO? [у = 1,6 X ' X Ю"8 Кл/(см2-К)]-
Особенностью пироэлектрических преобразователей излучения является в пер- ; вую очередь совершенно иная частотная характеристика преобразователя (рис. 12-9, г), чем у преобразователей излучения с терморезисторами и термоэлементами (рис. 12-9, в). !
Объясняется это различие тем, что пироэлектрический преобразователь, так же как и пьезоэлектрический (см. гл. 6), в области низких частот является дифференцирующим звеном. Рабочий диапазон частот пироэлектрического преобразователя ограничен, как видно из рис. 12-9, в, снизу частотой со1 = 1/ттеп, (т1епл «г 10 4- 20 с) и сверху частотой <в2 = 1/тэ (тэ яа 10"? 4- 10"6 с).
298
Рис. 12-10
Важной характеристикой приемников излучения является порог чувствительности по мощности излучения. При нормальной температуре, т. е. при 0 « 25 °C, для болометрических приемников порог чувствительности характеризуется величиной Р ~ 10-10 Вт/Гц0’5, для пироэлектрических Р а 2-10-9 Вт/Гц°А При охлаждении приемников значение Р понижается, в частности при —253 °C для болометров Р к 5-10-12 Вт/Гци’3. Тепловые приемники излучения применяются в термографии, т. е. при съемках без освещения, и позволяют определить разницу температур различных предметов до 0,1 °C.
Характеристики фотоприемииков (ФП). Монохроматической чувствительностью ФП называется отношение приращения фототока к изменению плотности монохроматического потока с длиной волны Л, а именно S^= &1/&Р^ в микроамперах на ватт. Зависимость = f (Л) называется спектральной характеристикой ФП.
Практически чаще используется относительная спектральная характеристика у^. = = S?JS^ где S? —максимальное значение монохроматической чувствительности ФП. Интегральная чувствительность зависит, как это видно из рис. 12-10, от степени перекрытий функций спектральной чувствительности ФП и спектральной плотности Рк лучистого потока:
S
_ Л/ ДР
AmaxJ Л к
\Рк^ П
(12-6)
Фотоприемники, предназначенные для работы в видимой области спектра, характеризуются интегральной световой чувствительностью 5ф = Д//ДФ в микроамперах на люмен, которая может быть рассчитана по формуле (12-6), если ее знаменатель заменить выражением (12-1). Интегральные чувствительности, приводимые в паспортных данных, определены при использовании стандартных источников. При использовании источников излучения, отличных от стандартных, интегральная чувствительность должна быть пересчитана.
Чувствительность ПФ зависит от конкретной схемы включения ФП, поэтому употребляются понятия «чувствительность по напряжению» и «чувствительность по току».
Вольт-амперная характеристика определяет зависимость фототока от напряжения питания, приложенного к ПФ при постоянном значении светового потока.
Световая характеристика — зависимость фототока от значения светового потока неизменного спектрального состава — характеризует нелинейность ФП.
Постоянная времени определяет быстродействие ФП и возможность измерения световых потоков переменной интенсивности. Порог чувствительности характеризуется минимальным значением потока излучения, который вызывает на выходе фотоприемника сигнал, в заданное число (от) раз превышающий уровень шума. Поскольку уровень шума задается обычно на выходе ФП как дисперсия иш, порог чувствительности определяется формулой ДР = от /S.
Верхний предел измерения ограничен наличием эффекта усталости светочувствительного слоя, зависящего как от значения светового потока, так и от времени его действия и вызывающего уменьшение чувствительности и смещение спектральной характеристики ФП. Эффект усталости ограничивает максимально допустимые освещенности или максимально допустимые выходные токи фотоприемников.
Температура окружающей среды влияет на значения флуктуационных помех, темнового тока и чувствительности ФП, и для некоторых типов ФП, в особенности подверженных действию температуры (фоторезисторы), в паспорте приводятся и температурные характеристики.
299
Фотоэлементы с внешним фотоэффектом — это вакуумные и газонаполненные фотоэлементы и фотоумножители. Принцип действия этих фотоэлементов заключается в том, что кванты света, достигая поверхности фотокатода, выбивают электроны, которые увлекаются внешним электрическим полем и создают фототок.
Электрон может покинуть катод, лишь если энергия фотона больше работы выхода, т. е. /гсА А, где h — постоянная Планка. Значение А зависит от химической природы и состояния поверхности. Таким образом, для каждого типа фотокатода существует длинноволновая, или красная, граница спектральной чувствительности, определяемая длиной волны Ло = A/(hc).
Спектральные характеристики вакуумных газонаполненных фотоэлементов и фотоумножителей целиком определяются свойствами фотокатодов. На рис. 12-11, а _) приведены такие характеристики для
' % наиболее распространенных серебря-
нокислородноцезиевого (кривая )), су-рьмяноцезиевого (кривая 2) и многоше-лочпого (кривая 3) фотокатодов.
Вакуумные фотоэлементы выполняются в виде сферических стеклянных баллонбв, на внутреннюю поверхность которых наносится слой фоточув-ствнтельного материала, образующий фотокатод. Анод выполняется в виде
"0.2 0,4 0,6 0,8 1,0 мкм
кольца или сетки из никелевой проволоки. На рис. 12-11, б приведены вольт-амперные характеристики вакуумного фотоэлемента.
Преобразование светового потока в ток в вакуумных фотоэлементах практически безынерционно, так как определяется в основном временем фотоэмнссии (около ИГ12 с) и временем пролета электронов (около 10-9 с). Однако при использовании фотоэлементов приходится ориентироваться на значительно большую инерционность цепи, определяемую внутренним сопротивлением и емкостью фотоэлемента, а также сопротивлением и емкостью подключаемых к нему внешних цепей.
При измерении слабых световых потоков необходимо учитывать ток, текущий через фотоэлемент, когда он затемнен. Основными составляющими темнового тока фотоэлемента является ток термоэлектронной эмиссии с катода (около 10~12 А) и ток утечки между электродами (10~10—10~? А).
Освещенность фотокатода при длительной работе должна быть такой, чтобы ток фотоэмиссии не превышал 1 мкА на 1 см2 поверхности катода (£ as 102 лк). Таким образом, выходные токи вакуумных фотоэлементов не превышают нескольких микроампер.
Характеристики вакуумных фотоэлементов приведены в табл. 12-6. В спектральном диапазоне указана длина волны, соответствующая максимальной чувствительности .
Газонаполненные фотоэлементы позволяют получать токи, в несколько раз большие токов от вакуумных фотоэлементов. При заполнении фотоэлемента инертными газами Ne, Аг, Кг, Хе фотоэлектроны, движущиеся к аноду, сталкиваются с молекулами газа и ионизируют их. В результате от катода к аноду двигается нарастающая лавина электронов, а к катоду — лавина положительно заряженных ионов.
300
Таблица 12-6
Обозначение фотоэлемента и тип фотокатода Напряжение, В Интегральная чувствительность, мкА/лм Спектральный диапазон, мкм Темновой ток, мкА Размеры, мм
Длина L Диа-метр D
ЦВ-3, кислородноцезие-вый, вакуумный 240 20 0,4—0,8—1,2 о,1 — —
Ф-5, сурьмяноцезиевый, вакуумный 30 80 0,4—0,45—0,6 10-4 — —
ЦГ -1, кислородноцезие- вый, газонаполненный 240 75—150 0,4—0,8—1,2 0,1 130 55
ФЭУ-L сурьмяноцезиевый с одним эмиттером * 220 600 0,4—0,45—0,6 0,1 124 40
ФЭУ-68, сурьмяноцезиевый с десятью эмиттерами 1350 50—106 0,3—0,43—0,8 0,01 75 15
Отношение тока, усиленного за счет ионизации, к первичному фототоку называется коэффициентом газового усиления и может достигать 6—7. Соответственно этому чувствительность газовых фотоэлементов составляет 5ф = 100 Ч- 250 мкА/лм (табл. 12-6). Из приведенных на рис. 12-11, в вольт-амперных характеристик следует, что чувствительность газовых фотоэлементов весьма сильно зависит от напряжения питания, которое должно стаби
лизироваться и не превышать 100—240 В, ибо выше этих значений начинается область самостоятельного разряда.
В газовых фотоэлементах максимальная амплитуда фототока достигается лишь через некоторое время после начала освещения (по мере развития газового разряда). Поэтому газовые фотоэлементы применяются для регистрации световых потоков с частотами не выше нескольких сотен герц.
Фотоумножители. В фотоумножителях для усиления пер-
вичного фототока используется
вторичная электронная эмиссия. Для этого в фотоумножителях (рис. 12-11, г), помимо фотокатода К и анода А, вводятся вторичные катоды (эмиттеры) Э и системы фокусировки электронного пучка. Коэффициент вторичной эмиссии может составлять 2,5—4. Общий коэффициент усиления в многокаскадных фотоумножителях достигает сотен тысяч. Выходной ток фотоумножителей может достигать 1 мА.
Явление вторичной электронной эмиссии практически безынерционно, поэтому фотоумножители, как и вакуумные фотоэлементы, могут использоваться для регистрации весьма быстро протекающих процессов. Параметры некоторых фотоумножителей приведены в качестве примера в табл. 12-6.
Фоторезисторы представляют собой однородную полупроводниковую пластинку
с контактами, которая при освещении уменьшает свое сопротивление в результате внутреннего фотоэффекта. Спектральные характеристики фоторезисторов представлены на рис. 12-12 и определяются свойствами используемых полупроводниковых материалов. Кривая 1 характеризует фоторезисторы из сернистого свинца (тип ФС-А), кривая 2 — из селенида кадмия (тип ФС-Д), кривая 3 — из поликристаллов сернистого кадмия (тип ФС-К) и кривая 4 — из монокристаллов сернистого кадмия (тип
301
ФС-КМ). Фоторезисторы характеризуются кратностью изменения сопротивления под действием света п = 7?темн/7?£=200 лк> к°тоРая для различных типов фоторезисторов лежит в пределах 1,2—10.
Вольт-амперные характеристики фоторезисторов линейны в пределах допустимых мощностей рассеяния. Световая характеристика фоторезистора линейна только при малых уровнях светового потока, практически до освещенностей 200—300 лк. Постоянные времени фоторезисторов составляют 10“2—10-8 с.
Порог чувствительности фоторезисторов определяется дрейфом темнового сопротивления и шумами различных видов. Дисперсия теплового и дробового шумов определяется соответственно формулами: и7епл = ^kTRkf и иДроб = 2 ei0R2\f, где k — постоянная Больцмана; Т — абсолютная температура; А/ — полоса частот; е — заряд электрона; i0 — среднее значение тока через фоторезистор. Избыточный шум (шум вида 1//) обусловлен неоднородностью структуры материала чувствительного слоя приемника. Дисперсию избыточного шума определяют по формуле и~ш.я = = Ai'-0R2\f/f, где А = 10-11 4- 10~12 — постоянный коэффициент. Фотонный шум определяется флуктуациями числа фотонов, попадающих на фотоприемник. Общая флуктуация (для пары тепловой источник — приемник), определяющая дисперсию, равна = 8etoSA/ (Т^ + Т’), где е — коэффициент поглощения чувствительного слоя приемника; а — постоянная Стефана — Больцмана; S — площадь чувствительного слоя приемника; Та, Тп — абсолютная температура источника и приемника соответственно.
Характеристики фоторезисторов (темновое сопротивление, чувствительность, инерционность) сильно зависят от температуры. Темновое сопротивление и чувствительность с ростом температуры уменьшаются, а постоянная времени т увеличивается. Для большинства фоторезисторов допустимый температурный диапазон составляет от —60 до +60 °C. Характеристики некоторых фоторезисторов приведены в табл. 12-7.
Таблица 12-7
Параметры фоторезисторов Значение параметров для фоторезисторов типа
ФСА-1а ФСК-5 ФСК-7А СФЗ-1 СФ4-1
Рабочая площадь, мм2 7,5x7,5 1X1 200 0,3 х 1,5 1X1
Напряжение, В 100 50 50—220 15 15
Темповое сопротивление, Ом Удельная чувствитель- Ю4—10е 5- Юк I04—10° 3- 107 104—108
500 3000 350 10» 6- 104
ность, мкА/(лм • В) Кратность 1,2 600 10—300 10т 1,03
Допустимая мощность рассеяния, Вт Постоянная времени 0,01 0,05 0,4 0,01 0,01
4- 10“' — 6- 10-2 — (3 4- 5) 10“г'
при затемнении, с Верхняя граничная (1 4-5) 10s 100 — — 3- 10*
частота, Гц Длина волны при 2,1 0,64 0,64 3,5 3,5
S?.max- мкм ....
Следует отметить, что фоторезисторы могут иметь самые разнообразные конструктивные решения: герметизированные, с жесткими и мягкими выводами, кольцевой формы и т. д. Конструкция фоторезистора ФСК-1 показана на рис. 12-13, а. Представляют интерес дифференциальные фоторезисторы, которые имеют три вывода и могут прямо включаться в дифференциальные измерительные цепи. Дифференциальный фоторезистор типа ФСК-7А изображен на рис, 12-13, б. Позиционно-чувстви
302
тельные фоторезисторы выполняют роль бесконтактных реохордов и делителей тока, управляемых перемещением светового пятна. Конструкция такого фоторезистора показана на рис. 12-13, в. На диэлектрической подложке нанесены фоторезистцвная полоса Д высокоомный резистивный слой 2 и низкоомный резистивный слой 3, представляющий собой эквипотенциальный коллектор. Фоторезистор освещается световым зондом 4. Эквивалентная схема фоторезистора показана на рис. 12-13, г, где R — сопротивления отдельных участков резистивного слоя 2; gT и — соответственно темновая и световая проводимости участков фоторезистора; С — емкость между резистивным слоем 2 и коллектором 3. Схема деления напряжения в предположении, что gT -> О, С -> 0 и gc -> оо, показана на рис. 12-13, д. Лучшие фотопотенциометры имеют разрешающую способность 1—10 мкм.
Рис. 12-13
Фоторезисторы широко применяются в преобразователях перемещений. В этом случае перемещение светового зонда возможно как в направлении, перпендикулярном электродам (рис. 12-13, е), так и в направлении, параллельном электродам (рис. 12-13, ж). В первом случае проводимость р.езистора определяется формулой G = [1 + т] (п — 1)]/ЛТемн> где 7?Темн — темновое сопротивление; п — кратность изменения сопротивления при заданной освещенности; t| = /г0СВ/Л — отношение ширины освещенной части к полной ширине элемента.
Полагая, что в начальном положении т] = 0,5 и Ga = [1 + 0,5 (п — 1)]//?темн. можно найтн относительное изменение проводимости AG/G0 = /(е) в зависимости от относительного перемещения е = 2ДЙ/Й как AG/G0 = 0,5е (п — 1)/[ 1 + 0,5 (п — 1)]. При кратностях изменения сопротивления п > 100 значение AG/G0 — е, при малых кратностях п = 1,2 имеем AG/G0 0,1s.
При смещении светового пятна параллельно электродам начальное сопротивление фоторезистора Ro при т] = Z0CB/Z = 0,5 составляет Ro = 0,57?тем[| (п + 1)/п. Относительное изменение сопротивления определяется как = е (1 — /г)/(1+п) и равно Д7?//?о ж е при п > 100 и Д/?//?о « 0,09е при п = 1,2.
Измерительные цепи фоторезисторов строятся с использованием как постоянного, так и переменного напряжения питания. Допустимое напряжение питания
303
определяется допустимой мощностью рассеяния и сопротивлением максимально освещенного фоторезистора как U sS I/Рдоп^осв- Наиболее распространенной измерительной цепью является мостовая цепь, реже применяется включение фоторезистора в цепь делителя напряжения. При выборе элементов мостовой измерительной цепи следует иметь в виду, что сопротивление или проводимость фоторезистора меняются очень существенно и измерительная цепь может внести дополнительную нелинейность (см. § 3-2). В состав современных измерительных цепей включаются операционные усилители. Пример измерительной цепи с операционным усилителем показан на рис. 12-14. Выходное напряжение усилителя ивык = — EGJG2 пропорционально отношению проводимостей двух фоторезисторов дифференциального преобразователя. При использовании одинарного преоб
разователя и замене фоторезистора 2 резистором Ra напряжение Двых = — ER^ пропорционально изменению проводимости фоторезистора 1; при замене фоторезистора 1 резистором Ro напряжение Двых =—ER2/R0 пропорционально изменению сопротивления фоторезистора 2.
Фотодиоды (ФД) и фототранзисторы (ФТ) относятся к группе полупроводниковых фотоприемников. В фототранзнсторе совмещены фотодиод и усилитель фототока. ФД могут работать в двух режимах — фотогенераторном (вентильном) и фотодиодном. В фотогенераторном режиме источник внешнего напряжения отсутствует. В фотодиодном режиме к ФД приложено запирающее напряжение. При отсутствии облучения под действием этого напряжения проходит лишь небольшой темновой
в зависимости от интенсивности
ток, а при освещении р-я-перехода ток увеличивается облучения.
Рис. 12-15
На рис. 12-15, а показаны световые характеристики ФД, иа рис. 12-15,6 — вольт-амперные характеристики ФД, там же проведены прямые, соответствующие нагрузочным характеристикам ФД в генераторном режиме при большом (прямая /) и малом (прямая 2) сопротивлениях нагрузки и в фотодиодном режиме (прямая 3). Из приведенных характеристик очевидно, что фотодиодный реи-сим характеризуется наличием темнового тока, возрастающего при увеличении приложенного напряжения. Напряжение холостого хода t/s x в фотогенераторном режиме (рис. 12-15, б) не превышает 0,2—0,5 В (потенциальный барьер) и увеличивается при увеличении освещенности лишь до значений Е « 550 мкВт/мм2. Характеристика 3 — f (Е) обладает большей линейностью, ток пропорционален освещенности до значения Е х 1500 мкВт/мм2. Линейность характеристик в фотодиодном режиме наблюдается до освещенностей: Е « 103 -i- 104 лк — для германиевых ФД и Е « Ю5 лк — для кремниевых ФД. Характеристики относительной спектральной чувствительности кремниевых (кривая /) и германиевых (кривая 2) ФД приведены на рис. 12-15, в.
Интегральная чувствительность серийно выпускаемых ФД и ФТ определяется в фотодиодном режиме при освещении от стандартного источника с цветовой температурой = 2360 К как S = (/осп — /Темн)/Ф, где (/осв — /трын) — разность между световым и темновым токами. Для кремниевых ФД порог чувствительности может достигать 10”1'1—Ю"-14 Вт-Гц-0’5, для германиевых 10~12 Вт-Гц-0,5. Для реали-304
Рис.
12-16
зации низких порогов входные сопротивления усилителей, используемых с ФД, должны быть в диапазоне 5—50 МОм [11].
Инерционность ФД определяется временем пролета носителей (10~8—Ю'9 с) и постоянной времени RC-цепи, образованной емкостью р-п-перехода и последовательно включенной с ней суммой сопротивлений собственно ФД и нагрузки Ra. Емкость р-я-перехода для фотодиодов составляет в зависимости от площади перехода 10—100 пФ и уменьшается с увеличением обратного напряжения, приложенного к переходу. При напряжениях U « 10 В и сопротивлениях нагрузки, не превышающих 10—100 кОм, частотный диапазон может достигать 0,1—1 МГц. Специальные ФД имеют частотный диапазон до 108—109 Гц.
Характеристики ФД зависят от температуры. Для кремниевых ФД в генераторном режиме напряжение t/x х падает с уменьшением температуры примерно на 2,5 мВ/K, ток /к з увеличивается, относительное изменение тока составляет около ры минимум спектральной чувствительности смещается в сторону длинноволнового излучения, монохроматическая чувствительность увеличивается на 0,002 К-1. Очень сильно зависит от температуры темновой ток, увеличиваясь при повышении температуры от 20 до 60 °C в сотни раз. На рис. 12-16 приведены зависимости темновых токов от температуры для кремниевых (рис. 12-16, а) и германиевых (рис. 12-16, б) ФД. ' Характеристики некоторых ФД и ФТ приведены в табл. 12-8.
3 • 10 8 К-1. При повышении температу-
Таблица 12-8
Тип фотопри-емннка Пл О’ щадь ЧуВСТВИ’ тельной поверхности, мм2 Рабочее напряжение, В Интегральная чувствительность, мА/лм Темновой ток, мкА Постоянная времени, с
ФД-1 5 15 20 30 5- 10-&
ФД-2 1 30 20 25 5- 10-?
ФД-3 2 10 15 10 5- IO"6
ФД-5Г 5 15 25 1 (3-4-5) IO-®
ФД-6К 2 20 7 5 (3-4-5) 10-«
ФД-7К 78 27 2,5 10 io~7
ФД-9К 19,6 10 3 1 io-?
1690 2 20 4 1
1691 2 0 0,7 1 3- 10-6
ФТ-1К 2 5 70 1
Фтк-з 3 5 1000 3 10-*
Схемы включения фотодиодов показаны на рис. 12-17. В фотодиодном режиме ФД может рассматриваться как резистор и включается в схемы делителей (рис. 12-17, а) или мостовые измерительные цепи (рис. 12-17, б), позволяющие в известной степени уменьшить влияние дрейфа темнового тока (см. §3-2). ФД по напряжению питания хорошо согласуются с полупроводниковыми электронными элементами, поэтому используются обычно в схемах совместносоперациопиыми усилителями. На рис. 12-17, в показана схема включения ФД, работающего в фотогенераторном режиме. Благодаря тому что входное сопротивление усилителя (Д„х — Rox/ko) ие превышает 10 Ом ФД работает в режиме, близком к короткому замыканию (прямая 2 на рис. 12-15, б) и обладает достаточно линейной характеристикой. Использование низкоомаой на»
305
Грузия позволяет также увеличить быстродействие фотодиода за счет снижения постоянной времени
а)
Фотоварикапы. Принцип действия фотоварикапа основан на изменении емкости р-п-перехода при действии потока оптического излучения. Емкость р-п-перехода для кремниевых фотоварикапов составляет 30 пФ/мм2, относительное изменение емкости на единицу потока равно 5,7 мВт-1. Фотоварикапы из арсенида галлия имеют удельную емкость до 500 пФ/мм2 и светочувствительность 240 мВт-1.
Оптроны представляют собой комбинацию миниатюрного источника света и приемника излучения. Между элементами оптроннон пары отсутствует электрическая связь, а преобразование входного сигнала в выходной происходит по схеме: электрический сигнал— оптический сигнал — электрический сигнал. На рис. 12-18 приведена конструкция оптрона. Излучение све-
тодиода 1 фокусируется отражателем 2 на поверхности фотоприемника 3. Пространство между светодиодом и фотоприемником залито прозрачным компаундом. Оптроны получили широкое применение как элементы схем измерительных приборов, позволяющие осуществить гальваническую развязку цепей.
< 2 3
Рис. 12-18
12-4. ОСНОВНЫЕ СТРУКТУРНЫЕ СХЕМЫ ОПТОЭЛЕКТРИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ
Обобщенная структурная схема оптоэлектрического преобразователя (рис. 12-19) содержит источник излучения, оптический канал, приемник излучения и измерительную цепь. Измеряемая величина X воздействует непосредст-
венно на источник излучения, изменяя параметры излучаемого потока Фь или на оптический канал, модулируя соответствующий параметр потока в
Рис. 12-19
процессе распространения
излучения. Чаще всего под действием измеряемой величины изменя-
ется интенсивность лучистого потока,
например вследствие измене-
ния температуры излучателя, пропускания, поглощения или рассеяния оптического канала, однако могут изменяться также фазовый сдвиг между электромагнитными колебаниями в двух лучах, вызываемый разностью оптического хода этих лучей, и частота и длина волны излучения, генерируемого источником [41.
306
Соответственно структурные схемы оптоэлектрических преобразователей могут быть разделены на три группы: схемы измерения интенсивности излучения, схемы измерения сдвига фаз и угла поворота плоскости колебаний и схемы измерения частоты и длины волны электромагнитных колебаний оптического диапазона.
Непосредственное измерение частоты колебаний и угла сдвига между колебаниями оптического диапазона затруднено из-за отсутствия фотоприемников и электронных схем, быстродействие которых соответствует частотам 1014—1017 Гц. Схемы измерения частоты и фазы колебаний строятся в подавляющем большинстве случаев с предварительным преобразованием в интенсивность излучения или гетеродинным преобразованием частоты. Преобразования подобного рода требуют наличия источника когерентных колебаний,
поэтому электрооптические преобразователи, в которых используется преобразование измеряемой величины X в угол сдвига, получили развитие только в последние годы, когда появилась возможность широкого использования лазеров.
Структуры оптоэлектрических преобразователей интенсивности излучения. В этих преобразователях используются три алгоритма работы: а) отношения потоков Ф^Фг, где мер Ф2, обычно используется в) измерение разности потоков 1 ф2 = ф10 -ф АФ и Ф2 = Ф20 -
Рис. 12-20
измерение потока Фх; б) измерение в качестве одного из потоков, напри-образцовый (эталонный) поток Фэ;
Di — Ф2, где (Dj = ФЛ, Ф2 = Фэ или АФ.
В качестве примера преобразователя, измеряющего непосредственно поток ФЛ, на рис. 12-20 показано схематическое устройство автоматического экспонометра для кинокамеры. Световой поток Фх, проходя объектив / и диафрагму 2 и отражаясь от зеркального обтюратора 3, попадает на фоторезистор В в отрезок времени, когда не происходит экспонирования пленки 5. Исполнительным механизмом служит измерительный механизм ИМ логометра, обмотка 6 подключена к источнику питания через резистор R, а обмотка 7 — через фоторезистор В. Обмотки 6 и 7 создают встречные вращающие моменты, поворачивающие рамку, соединенную с диафрагмой 2. Движение диафрагмы 2 происходит до тех пор, пока сопротивление фоторезистора В не станет равным сопротивлению резистора R, которое используется для установки параметров экспозиции. В качестве фотоприемника применяются сернистокадмиевые, селенидно-кадмиевые и сульфидно-кадмиевые фоторезисторы, отличающиеся высокой чувствительностью, малыми габаритами и дешевизной.
Фотоэлектрические преобразователи широко используются для измерения перемещений. Особенно высокой чувствительностью обла-
307
дают преобразователи с растрами. Геометрические структуры элементов, образующих растр, весьма разнообразны. Устройство преобразователя с плоскими параллельными растрами показано на рис. 12-21, а. Между источником света и приемником располагаются два растра, один из которых неподвижен, а второй перемещается. Сопряжение двух растров позволяет получить картину иду-
Рис. 12-21
щих поперек штрихов светлых и темных полос, называемых комбинационными или муаровыми полосами. Высокая чувствительность к перемещению получается за счет того, что перемещение муаровых полос АУ оказывается во много раз больше перемещения растра АХ. В частности, при сопряжении двух параллельных растров, развернутых под некоторым малым углом а, получается комбинация светлых и темных полос, в преувеличенном виде показанная на рис. 12-21,б.
Рис. 12-22
Коэффициент оптической редукции Кред — &Y/&X такого сопряжения при равных шагах растров = w2 = w равен /Сред = 1 /sin а.
Измерительные цепи, позволяющие реализовать второй и третий алгоритмы, т. е. измерение отношения и разности световых потоков, были показаны выше на рис. 12-14 и 12-17. Однако особенность
оптоэлектрических преобразователей заключается в том, что при современной технологии изготовления фотоприемников трудно подобрать пару фотоприемников, обладающих совершенно идентичными характеристиками не только при начальных условиях, но и под действием всех влияющих факторов. Неидентичность характеристик, как известно (см. § 3-2), сводит на нет преимущества дифференциального и логометрического включений преобразователей, позволяющих существенно повысить точность измерения при использовании преобразователей с идентичными характеристиками. Для того чтобы избежать этого недостатка, в оптоэлектрических преобразователях используются структуры с одним фотоприемником и временным раз
308
делением поступающих на него потоков. Измерительная схема подобного преобразования показана на рис. 12-22. Пучок света источника 1 при помощи зеркал 2 разделяется на два потока Фо и ФЛ. Интенсивность потока Фх зависит от измеряемой величины (например, прозрачности объекта 3). С помощью модулятора осуществляется периодическое освещение фоторезистора ФП измеряемым ФЛ и опорным Фо потоками. Синхронно с движением шторки Шт переключается ключ К, с помощью которого на вход интегратора (ФП, конденсатор С, усилитель Ус) через фоторезистор ФП подается ток от положительного и отрицательного полюсов источника напряже-
Рис. 12-23
ния Е. При этом ток, пропорциональный измеряемому потоку, заряжает конденсатор С, а ток, пропорциональный опорному потоку, разряжает его. В конце второго такта модуляции на выходе интегратора устанавливается напряжение U, которое измеряется указателем Ук. Напряжение U — Е (Go — Gx) / (С/Кл), где Go = 5Ф0 и Gx = 5ФХ — проводимости фоторезистора при освещении потоками Фо и Фх соответственно; S — чувствительность фоторезистора; /кл — частота переключения ключа.
На рис. 12-23, а показано схематическое устройство прибора бесконтактного контроля диаметра проволоки. Световой поток, создаваемый источником 1, делится диафрагмой 2 с двумя отверстиями на два луча. Верхний луч частично перекрывается проволокой 3, нижний луч проходит через оптический клин 6. Матовая пластинка 4 рассеивает свет, чтобы облучение фотоприемника ФП было равномерным. Заслонка 7 колеблется между сдвинутыми отверстиями диафрагмы, модулируя световой поток на входе ФП. Если интенсивности верхнего и нижнего лучей не равны (рис. 12-23, б),
309
на выходе ФП появляется переменная составляющая напряжения, управляющая двигателем Д. Двигатель перемещает клин 6 до уравнивания интенсивностей лучей. Выходной величиной прибора служит угол поворота двигателя, отсчитываемый по шкале 5.
Схемы измерения фазового сдвига на частотах оптического диа-
Рис. 12-24
пазона. На рис. 12-24 приведена схема светодальномера, который состоит из генератора Г1 гармонических колебаний, полупроводникового лазера Г, фотоприемника ФП и фазометра. Излучение лазера Г, модулированное по амплитуде, распространяется до уголкового отражателя УО, установленного на расстоянии Dx от дальномера. Отраженное излучение возвращается к фотоприемнику ФП. Время распространения
волны до отражателя и обратно составляет t — 2Dxnic. За это время фаза
напряжения, питающего лазер, изменится на величину фк = s>ot = co02Dxn/c, где coQ — частота модуляции; п — показатель преломления среды. Сдвиг фаз ф* измеряется с помощью фазометра.
Порог чувствительности современных промышленных высокочастотных фазометров составляет около 0,1°, что при частоте модуляции fo = 10 МГц и п ~ 1 соответствует Dxmi„ = 4 мм. Стабиль
ность результатов измерения определяется стабильностью частоты модуляции и постоянством условий на пути светового потока.
На рис. 12-25 показан принцип действия интерферометра Майкельсона, в котором для измерения фазового сдвига оптических колебаний использовано преобразование на основе явления интерференции фазового сдвига в интенсивность света. Интерферометр состоит из лазера Г, светоделителя СД, двух зеркал 31 и 32. Пучок света Фо проходит через светоделитель СД и разделяется на два
пучка Oj и Ф2, которые, отразившись от зеркал, вновь попадают на светоделитель, где объединяются и интерферируют. Полученный в результате интерференции пучок света Ф преобразуется фотоприемником ФП в соответствии с выражением (12-3). Разность фаз ф зависит от разности длин оптического пути ф = 2л (Д — 12) Д и длины волны А. излучения. Предположим, что под действием измеряемой величины зеркало 31 переместилось на расстояние 1Х от исходного положения, определяемого расстоянием /0 = Ц = /2. В этом случае фаза изменится на величину фд = 2л/д./А = 2лП х, где У х — 1ХД — общее число полных периодов фазы, укладывающихся на отрезке 1Х.
310
Таким образом, считая число экстремумов функции U — 0,51/0 (1 4-4- cos 2nlx/k) и зная длину волны А. излучения, можно измерить перемещение 1Х.
На рис. 12-26 показан принцип действия пьезооптического преобразователя механических напряжений, основанного на явлении фотоупругости.
Первоначально изотропный упругий чувствительный элемент в виде прямоугольной прозрачной призмы 4 находится в условиях одноосного напряженного состояния под действием силы Fx. Пучок света от источника 1 поляризуется поляризатором 2 (например, поляроидной пленкой) в плоскости, наклоненной под углом 45° к направлению главной деформации, которое в данном случае совпадает с направлением действия силы Fx. Поляризованные лучи А и В проходят через упругий элемент 3 и фазовую пластину 4 на анализаторы 5А
Рис. 12-26
и 5В, один из которых скрещен с поляризатором 2, а второй параллелен ему. После анализаторов лучи А и В падают соответственно на фотоприемники 6А и 6В.
Интенсивность света, попадающего на приемник 6В, определяется, как было показано выше [см. рис. 12-6 и формулу (12-3)], выражением /х = Io sin2 [(2лАА 4- а0) /2], интенсивность света, попадающего на приемник 6В, — как /2 = /0 cos2 [(2лАА + а0) /2], где а0 — фазовый сдвиг, вносимый пластиной 4. Зависимость разности хода А от деформации еп определяется как А = nil (рп — р1г) еп, где п0 — показатель преломления фотоупругого материала в ненапряженном состоянии; I — длина образца в направлении просвечивания; рп и р12 — упругооптические коэффициенты, являющиеся тензорами четвертого ранга (см. § 4-5). Выходное напряжение диагонали моста, в который включены фотоприемники, пропорционально разности их освещенностей: UBm = U А — UB — kI0 cos (2лАА 4- a0). При a0 = = л/2 и малых а — 2лАА можно считать cos (л/2 4 4) ~ ct и UBM = = [й/02лп’/ (рп — р12) А] еп.
На основе пьезооптических преобразователей в МГУ им. М. В. Ломоносова (Институт механики) разработан ряд приборов: датчики давления, акселерометры, силоизмерители, тензометры. В част
311
ности, пьезооптические акселерометры имеют предел измерении 50—1000 g при собственной частоте 4—15 кГц, порог чувствитель-ности около 10'4 (от предела измерений) и погрешности 0,2—1,5%. При измерении статических величин температурная погрешность
Рис. 12-27
составляет 0,1 %/К (дрейф нуля) и 0,05—0,1 % /К (изменение чувствительности).
На рис. 12-27 показан принцип действия устройства «Трансоптик», предназначенного для дистанционного измерения тока в линиях электропередачи.
«Трансоптик» представляет собой измерительную систему с фарадеевским датчиком / (стеклянный стержень из тяжелого флинта), размещенным вблизи провода 2 линии электропередачи, в которой требуется измерить ток /х. Пло-скополяризованное излучение Фо от лазера 3 проходит в стержень 1 и, отразившись от торца с зеркальным покрытием, возвращается на землю к приемной части.
Приемная часть системы содержит компенсационный фарадеевский датчик 4 с обмоткой, подклю-
ченной через резистор 5 и амперметр к выходу усилителя 6; два фотодиода 7 и 8, подключенных к инвертирующему и неинвертирующему входам усилителя 6, и бианализатор 9, световые потоки (Гф и Ф2 на выходе которого равны, если в системе не происходит поворота плоскости поляризации. При про-
хождении светового луча через датчик 1 плоскость поляризации луча поворачивается на угол ф, пропорциональный, как видно из выражения (12-4), напряженности Нх и, следовательно, току
1Х. В компенсационном дат-л j _ г** FJ • J. сд
чике 4 ток /к направлен так, что сводит эффект вращения плоскости поляризации в датчике / к нулю, т. е. фх— фк =0. При идентичных оптических элементах датчиков 1 и 4 фх = фк при /к = Ix/wK, где оу — число витков датчика 4. Подобные системы называют иногда оптико-электронными трансформаторами тока.
Схема измерения частоты и длины волны излучения оптического диапазона. На рис. 12-28 показана структурная схема преобразователя с гетеродинным преобразованием частоты. Преобразователь
312
содержит источник опорного сигнала ИОС частоты v0, светоделитель СД, фотоприемник ФП, усилитель Ус и частотомер. На светоделитель поступают два пучка света: пучок света, частоту которого v.v нужно определить, и опорный пучок. Эти пучки складываются и посылаются на фотоприемник. Световой поток, поступающий на фотоприемник, кроме постоянной составляющей Ф, содержит низкочастотную составляющую Ф (/) = Фт cos (vx — v0) t. Если разностная частота vBbIX = vx — v0 находится в полосе пропускания электронной схемы, то измерение этой частоты частотомером при известном значении v0 позволяет найти vv — vBm + v0.
Устройства с интерференционным преобразованием частоты строятся на базе интерферометров с использованием модуляции излучения по частоте.
СПИСОК ЛИТЕРАТУРЫ
1. Гутников В. С. Интегральная электроника в измерительных устройствах. — Л.: Энергия, 1980.
2. Ленк А. Электромеханические системы. Системы с сосредоточенными параметрами: Пер. с нем./Под ред. Н. В. Петькина. —М.: Мир, 1978.
3. Линевег Ф. Измерение температур в технике. Справочник. —М.: Металлургия, 1980.
4. Малов В. В. Пьезорезонансные датчики. — М.: Энергия, 1978.
5. Мирошников М. М. Теоретические основы оптикоэлектронных приборов. —> Л.: Машиностроение, 1977.
6. Прецезионные датчики угла с печатными обмотками/Л. Н. Сафонов, В. Н. Вол-нянский, А. И. Окулов, В. Н. Прохоров.—М.: Машиностроение, 1977.
7. Проектирование датчиков для измерения механических величин/Е. П. Осадчий, А. И. Тихонов, В. И. Карпов и др. Под ред. Е. П. Осадчего. — М.: Машиностроение, 1979.
8. Спектор С. А. Измерение больших постоянных токов. —Л.: Энергия, 1978.
9. Средства измерений параметров магнитного поля/Ю. В. Афанасьев, Н. В. Сту-денцов, В Н. Хорев и др —Л.: Энергия, 1979.
10. Электрические измерения неэлектрических величин/А. М. Туричин, П. В. Новицкий, Е. С. Левшина и др. Под ред. П. В. Новицкого. —Л.: Энергия, 1977.
11. Якушенков Ю. Г. Основы оптикоэлектронного приборостроения. — М.1 Советское радио, 1977.
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Абсорбция 129
Акселерометр 45, 119, 131, 311
Активность 226
Анализатор света 211
Аналог электрический 45
Анизотропия магнитная 193, 195
— оптическая 290, 292
Болометр 297
Вакуумметр 257
Варистор 85
Веберметр 200
Величина входная естественная 5
Виброметр 200
Волны акустические поверхностные 129
Вольтметр электростатический 136
Газоанализатор 129, 257
Геркон 89
Гигрометр 129
Гистерезис механический 71
Голограмма 294
Датчик давления 39, 82, 101, 128, 135, 143, 311
— уравновешивания магнитоэлектрический 171
Декремент затухания 41
Делитель лестничный 88
— многоступенчатый 87
— напряжения 85
— — индуктивный 169
— тока 85
Диск Корбино 222
Диссоциация 225
Добротность 41
Жесткость вносимая 175
Закон Голицина—Вина 285
— Планка 285
— Стефана—Больцмана 285
Затухание контура 41
Защита эквипотенциальная 61
Индуктосин 188
Индукция насыщения 205
Индукция остаточная 163
Инерционность пневматическая 36
— тепловая 34
Интервалы группирования 13
Интерференция 293
Интерферометр Майкельсона 310
Ионистор 249
Калибровка 57
КНК-структура 101
КНС-структура 101
Когерентность 289
Компоненты напряжения 76
Конвекция 253
Конденсатор динамический 140
Контрэксцесс, погрешность определе» ния 15
Контур резонансный 148
Коррекция погрешностей 57, 218
Коэффициент активности 226
— барический 84, 93
— излучения 285
— Пуассона 67, 78
— температурный индукции 166
— — сопротивления 83, 265
— тензорезистнвный 94-
— — поперечный 94
— — продольный 94
---сдвиговый 94
— тензочувствительности 93
— теплоотдачи 35
— теплопроводности 253
— трансформации 167
— электромеханической связи 47
Кривая видности 284
— размагничивания 163
Критезистор 275
Критерий Прандтля 254
— Рейнольдса 254
Лазер 296
Лампа газоразрядная 295
— накаливания 295
Лучеиспускание 254
Магнит 163
Магнитодиод 223
315
Магниторезистор 221
Масса эквивалентная 44
Матрица упругости 78
Мембрана, расчет 72
Механизм измерительный магнитоэлектрический 178
— — ферродинамнческий 178
— — электродинамический 178
— — электромагнитный 178
— — электростатический 136
Микрофон конденсаторный 141
Модуль пьезоэлектрический 109
— сдвига 67, 78
— упругости 67, 78
— Юнга 67, 78
Момент вращающий 178
— инерции 41
— противодействующий 178
Монохроматичность 288
Мост измерительный 53
---квазиуравновешенный 106
--- неравновесный 55
— •— параллельно-симметричный 55
---последовательно-симметричный 55
— — равновесный 58
Мощность допустимая 57, 81, 160, 173
Обмотка бифилярная .82
Оптрон 306
Освещенность 286
Ось кристаллографическая 78,94, 111
Пироэлектрик 298
Плотность излучения спектральная 286
— среды оптическая 287
Погрешность, законы распределения 17
— , правила округления 16
— , правила суммирования 27
— прогрессирующая 7
— с заданной доверительной вероятностью (доверительная) 9
— систематическая 6
— случайная 6
— средняя квадратическая 11
— , энтропийное значение 12
Податливость эквивалентная 44
Позистор 275
Показатель поглощения 287
Полуэлемент каломельный 240
— хлорсеребряный 240
Поляризатор света 291
Поляризация электродов 229
Помехоподавление 64, 119
Постоянная Больцмана 83
— Планка 300
— Стефана—Больцмана 285
— Холла 215
Потенциал электродный 227, 238
— электрокинетические 231
Потенциалометр магнитный 199
Потери диэлектрические 133
Преобразователь взаимоннду'кт*йв-иый 186
— виброскорости 202
— вихретоковый 190
— гальванический 238
— гальваномагнитный 214
— гальваномагниторекомбинацион-ный 223
— генераторный 5
— дифференциальный 101,105,142,186, 196, 236, 308
— емкостный 141
• — индуктивный 184
— индукционный 197
— кондуктометрический 232
— контактного сопротивления 90
— контактный 89
— кулонометрический 244
— магнитомодуляционный 204
— магниторезистивный 221
— магнитоупругий 191
— магнитоэлектрический 47, 170, 178
— маг нитоэлектрогидр одинам иче-ский 175
— множительный 155, 215
— неравновесия 171
— обратный 170
— параметрический 5
— перемещения 89, 90, 142, 184, 186, 206, 308, 310
— пироэлектрический 298
— полярографический 247
— пьезооптический 311
— пьезоэлектрический 107
— реостатный 31, 90
— скорости 256
— тепловой 256
— трансформаторный 186
— угла поворота 189, 201
— Холла 214
— электромагнитный 50
— электростатический 50
— электрохимический 225
Проводимость магнитная 159
Проницаемость диэлектрическая 135
Пьезокерамика 113
Пьезомодуль 109
Пьезорезонатор 113, 121
Пьезоэлемент биморфный 112, 120
— , срезы 111
Пьезоэффект 108
— поперечный ПО
• — продольный ПО
Разность потенциалов контактная 134
Расходомер индукционный 203
Резонанс акустический 42, 121, 129 — механический 42
Результат, правила округления 16
Светимость 286
Светодальномер 310
316
Светодиод 296
Свойства анизотропные 74
— динамические 34
Сердечник тороидальный 151
Сжатие гидростатическое 77, 93, 110
Сила магнитодвижущая 160
— электромагнитная 155
Согласование 52
Сопротивление вносимое 49
— линии 61
— утечки 61
Степень успокоения 41
Схема эквивалентная 45
---магнитной цепи 157
Тахогенератор 201
Тахометр 201, 213
Тензометр 92, 236, 311
Т е нзопреобр азовате л ь конду ктометр и-ческий 236
Тензор 74
— механических напряжений 76
— упругости 78
Тензорезистор 92
— термокомпенсированный 96
— фольговый 98
Тензоэффект 92
Теплоемкость 34, 252
Теплообмен 252
Теплопроводность 253
Термоанемометр 257
Термодиод 274
Термометр 277
Термопара 259
Терморезистор 265
— медный 265
— платиновый 265
— полупроводниковый 267
Термо-ЭДС 62, 259
Термоэлектрод удлинительный 262
Токосъем емкостный 146
Торсио.ч 67
Трансформатор измерительный 166
— постоянного тока 207
Указатель фазочувствительный 60
Усилитель заряда 116
— операционный 106, 116, 146, 270, 304
Успокоитель 179
Феррозонд 209
Фотоварикап 306
Фотодиод 364
Фотоприемник 299
Фоторезистор 301
Фотоумножитель 301
Фотоупругость 292, 311
Фотоэлемент 300
Характеристика преобразования номинальная 6
— — реальная 6
Частота собственная 41
Чувствительность гальваномагнитная 216
— магнитоупругая 193
Шум термодинамический 83, 302
ЭДС граничная 228
— Холла 215
Экран электростатический 63
Экспозиция 286
Экспонометр 307
Электрод водородный 239
— стеклянный 240
Электролиз 229
Электрометр 138
Электроосмос 231
Электрофорез 231
Элемент нормальный 243
— упругий 66
Эффект Баркгаузена 153, 211
— Видемана 193
— Гаусса 214
— Керра электрооптический 292
— Пельтье 260
— пироэлектрический 298
— поверхностный 82, 158
— Поккельса электрооптический 292
— Томсона 260
— Фарадея магнитооптический 292,312
— Холла 214
Эффективность преобразования 51
Яркость 286
ОГЛАВЛЕНИЕ
Предисловие........................................................... 3
ГЛАВА ПЕРВАЯ. ОБЩИЕ СВОЙСТВА И ВОПРОСЫ ТЕОРИИ ПОГРЕШ-
НОСТЕЙ ИЗМЕРИТЕЛЬНЫХ ПРЕОБРАЗОВАТЕЛЕЙ . . 5
1-1. Основные понятия и определения............................. —
1-2. Оценки случайных погрешностей измерительных преобразователен (необходимые сведения нз теории вероятностей).............. 8
1-3. Определение оценок случайных погрешностей по экспериментальным данным (необходимые сведения из статистики)........... 13
1-4. Разновидности аналитического описания законов распределения погрешности .............................................. 17
1-5. Законы распределения отдельных составляющих погрешности измерительных преобразователей ............................. 23
1-6. Основы теории суммирования погрешностей................... 25
ГЛАВА ВТОРАЯ. ДИНАМИЧЕСКИЕ СВОЙСТВА ИЗМЕРИТЕЛЬНЫХ ПРЕОБРАЗОВАТЕЛЕЙ ....................................................... 34
2-1. Динамические свойства преобразователей с тепловой инерционностью ...................................................... . . . —
2-2. Динамические характеристики пневматических и гидравлических звеньев....................................................... 36
2-3. Расчет частотных характеристик механических и акустических
звеньев с сосредоточенными и распределенными параметрами ... 40
2-4. Эквивалентные электрические схемы механоэлектрических преобразователей .......................................... 45
ГЛАВА ТРЕТЬЯ. ИЗМЕРИТЕЛЬНЫЕ ЦЕПИ..................................... 51
3-1. Измерительные цепи генераторных преобразователей —
3-2. Измерительные цепи параметрических преобразователей..... 53
3-3. Особенности неравновесных мостов переменного гока ........ 59
3-4. Уменьшение погрешностей от влияния паразитных сопротивлений и помех в измерительных цепях .............................. 61
ГЛАВА ЧЕТВЕРТАЯ. УПРУГИЕ ЭЛЕМЕНТЫ ИЗМЕРИТЕЛЬНЫХ ПРЕОБРАЗОВАТЕЛЕЙ ....................................................... 66
4-1. Разновидности упругих элементов............................ —
4-2. Основы расчета упругих элементов.......................... 67
4-3. Нелинейность упругих элементов............................ 71
4-4, Материалы для изготовления упругих элементов ............. 73
4-5. Особенности расчета упругих элементов из анизотропных материалов . , ............................................... 74
318
ГЛАВА ПЯТАЯ. РЕЗИСТИВНЫЕ ПРЕОБРАЗОВАТЕЛИ ................... SO
5-1. Принцип действия, общие свойства, область применения резистив-
5-2. Резистивные делители тока и напряжения........................ 85
5-3. Контактные преобразователи и преобразователи контактного сопротивления .............................................. 89
5-4. Реостатные преобразователи........................... 90
5-5. Тензорезисторы ............................................... 92
ГЛАВА ШЕСТАЯ. ПЬЕЗОЭЛЕКТРИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ.................. 107
6-1. Физические основы и область применения пьезоэлектрических преобразователей ................................................. —
6-2. Пьезоэлектрические преобразователи силы, давления t ускорения 113
6-3. Пьезорезонансные преобразователи .......................... 121
6-4. Измерительные преобразователи, основанные на использовании поверхностных акустических волн........................... 129
ГЛАВА СЕДЬМАЯ. ЭЛЕКТРОСТАТИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ .... 131
7-1. Принцип действия и область применения электростатических преобразователей .............................................. . —
7-2. Электростатические преобразователи в вольтметрах и датчиках уравновешивания.......................................... 136
7-3. Емкостные преобразователи ................................... 141
7-4. Измерительные цепи емкостных преобразователей................ 144
ГЛАВА ВОСЬМАЯ. ЭЛЕКТРОМАГНИТНЫЕ ПРЕОБРАЗОВАТЕЛИ............ 149
8-1. Принцип действия и область применения электромагнитных преобразователей ......................................................... —
8-2. Теоретические основы расчета электромагнитных преобразователей ................................................... 157
8-3. Измерительные трансформаторы и индуктивные делители напряжения ................................................. . . . . 166
8-4. Магнитоэлектрические и магнитогидродинамические преобразователи датчиков уравновешивания........................... 170
8-5. Электромагнитные преобразователи измерительных механизмов электромеханических приборов ................ , ......... 176
8-6. Индуктивные преобразователи ................................. 184
8-7. Трансформаторные (взаимоиндуктивные) преобразователи .... 186
8-8. Вихретоковые индуктивные преобразователи .................... 190
8-9. Магнитоупругие преобразователи............................... 191
8-10. Индукционные преобразователи................................ 197
8-11. Магнитомодуляционные преобразователи ....................... 204
8-12. Преобразователи на основе эффекта Баркгаузена............... 211
ГЛАВА ДЕВЯТАЯ. ГАЛЬВАНОМАГНИТНЫЕ ПРЕОБРАЗОВАТЕЛИ ... 214
9-1. Преобразователи Холла...................................... —
9-2. Магниторезистивные преобразователи .......................... 221
9-3. Гальваномагниторекомбинацнонные преобразователи.............. 223
ГЛАВА ДЕСЯТАЯ. ЭЛЕКТРОХИМИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ .... 225
10-1. Общие теоретические основы электрохимических преобразователей —
10-2. Электрохимические резистивные преобразователи............... 232
10-3. Гальванические преобразователи.............................. 238
10-4. Кулонометрические преобразователи .......................... 244
10-5. Полярографические преобразователи .......................... 247
10-6. Ионисторы ................................................. 249
10-7. Электрокинетические преобразователи ........................ 251
319
Пр
гл
гл;
ГЛА
ГЛА
ГЛАВА ОДИННАДЦАТАЯ. ТЕПЛОВЫЕ ПРЕОБРАЗОВАТЕЛИ........................252
11-1. Теоретические основы расчета тепловых преобразователей .... —
11-2. Термоэлектрические преобразователи, их принцип действия и применяемые материалы....................................259
11-3. Удлинительные термоэлектроды, измерительные цепи, погрешности термопар...........................................262
11-4. Терморезисторы, основы их расчета и применяемые материалы 265
11-5. Измерительные цепи терморезисторов.................... 269
11-6. Разновидности термочувствительных элементов........ . , 273
11-7. Промышленные термопары и термометры сопротивления......277
ГЛАВА ДВЕНАДЦАТАЯ. ОПТОЭЛЕКТРИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ 284
12-1. Основные свойства оптического излучения и область применения . I оптоэлектрических преобразователей ............................ — |
12-2. Источники излучения ................................ . 295 •
12-3. Приемники излучения..................................... 297 1
12-4, Основные структурные схемы оптоэлектрических преобразователей . ,..........................................306
Список литературы. ................................................314
Предметный указатель . ............................................315
ЕЛЕНА СЕРАФИМОВНА ЛЕВШИНА ПЕТР ВАСИЛЬЕВИЧ НОВИЦКИЙ
ЭЛЕКТРИЧЕСКИЕ ИЗМЕРЕНИЯ ФИЗИЧЕСКИХ ВЕЛИЧИН
ИЗМЕРИТЕЛЬНЫЕ ПРЕОБРАЗОВАТЕЛИ
Редактор Л. М. ПАРХОМЕНКО
Художественный редактор Д. Р. СТЕПАНОВИЧ Технический редактор А. Г. РЯБКИ НА Корректор А. Н. АКИМОВ
ИБ № 1906
Сдано в набор 10.12.82. Подписано в печать 01.03.83. М-45549. Формат 6OX9O7ie. Бумага типографская № 2-Гарнитура литературная. Печать высокая. Усл. печ. л. 20. Усл. кр.-отт. 20. Уч.-изд. л. 24.67- Тираж 36 000 экз.
Заказ 54 .. Цена 1 р; 10 к.
Энергоатомиздат, Ленинградское отделение.
191041, Ленинград. Марсово поле, 1.
Набрано и сма!ротировано в ордена Октябрьской Революции, ордена Трудового Красного Знамени Ленинградском производственно-техническом объединении «Печатный Двор» им. А. М. Горького Слюзполи-графпрома при Государственном комитете СССР по делам издательств, полиграфии и книжной торговли. 197136, Ленинград, Чкаловский пр., 15. Отпечатано в Ленинградской типографии № 6 ордена Трудового Красного Знамени Ленинградского объединения «Техническая книга» им. Евгении Соколовой Союзполиграф» прома при Государственном комитете СССР по делам издательств, полиграфии и книжной торговли. 193144,
Ленинград, ул. Моисеенко, 10.
318