/











































































































Author: Иодко Е.К.
Tags: электротехника физика телемеханика электромеханика основы автоматики автоматизированные системы издательство связь
Year: 1968
Similar




Text
ЕКИОДКО
ОСНОВЫ АВТОМАТИКИ
И ТЕЛЕ' МЕХАНИКИ
6
Е. к. ио дко
ОСНОВЫ АВТОМАТИКИ И ТЕЛЕ- . МЕХАНИКИ
ДОПУЩЕНО МИНИСТЕРСТВОМ СВЯЗИ СССР
В КАЧЕСТВЕ УЧЕБНОГО ПОСОБИЯ ДЛЯ ФАКУЛЬТЕТОВ РАДИОСВЯЗИ И РАДИОВЕЩАНИЯ ИНСТИТУТОВ связи
♦
Издательство «Связь» 1968
чйтдяьаыЯ здя
УДК 621.398—621.3.078
Е. К. Иодко
Год выпуска 1968
Таблиц 12, иллюстраций 135, библиографий 56.
£9900
УДК 621.398—621.3.078
ОСНОВЫ АВТОМАТИКИ И ТЕЛЕМЕХАНИКИ
ЛА
ЕВГЕНИЙ КОНСТАНТИНОВИЧ ИОДКО
Основы автоматики и телемеханики
Отв. редактор Я- Б. Гутин Редактор Т. Б. Котырева
Техн, редактор С. Ф. Романова Корректор В. Н. Булыгина
Сдано в набор 15/VII 1968 г. Подписано в печ. 30/VIII 1968 г.
Форм.бум. 60x90/16 14,5 печ. л. 14,5 усл.-п. л. 14,41 уч.-йзд. л.
Т-08498 Тираж 10000 экз. Зак. изд. 13375 Цена 68 коп.
Издательство «Связь», Москва-центр, Чистопрудный бульвар, 2.
Дана классификация автоматических систем, показано использование автоматики в радиосвязи и вещании. Изложены основы теории регулирования непрерывных, импульсных и некоторые особенности нелинейных систем.
Кратко изложены принципы телеуправления и телеконтроля. Даны элементы теории и расчета и пути пс/вышения их надежности.
Книга является учебным пособием и написана по программе курса «Основы автоматики и телемеханики», изучаемого студентами факультетов радиосвязи и вещания институтов связи, и может быть полезна при самостоятельном изучении основ автоматики и телемеханики.
3-3-13
5-68
Типография издательства «Связь» Комитета по печати при Совете Министров СССР. Москва-центр, ул. Кирова, 40. Зак. тип. 296
ОГЛАВЛЕН И Е
Предисловие . .................................................. 5
Введение ............................................................... 6
Глава 1. Автоматизация предприятий и средств радиосвязи
1.1. Программное управление коротковолновыми линиями радиосвязи . . 10
1.2. Автоматизация радиостанций и радиопередающих устройств ... 12
1.3. Автоматизация радиоприемных устройств..............................17
1.4. Применение автоматики в системах космической связи.................21
Глава 2. Классификация и краткая характеристика автоматических систем
2.1. Общая классификация автоматических систем..........................25
2.2. Неприспосабливающиеся замкнутые системы............................33
Глава 3. Эквивалентные звенья автоматических систем
3.1. Понятие об эквивалентных звеньях...................................41
3.2. Средства описания свойств (основные характеристики) звеньев и систем ...................................................................42
3.3. Характеристики основных эквивалентных звеньев.....................49
3.4. Моделирование звеньев с помощью электронных вычислительных машин непрерывного действия...............................................66
Глава 4. Структурные схемы и структурные преобразования
4.1. Характеристики цепей при различном соединении звеньев .... 69
4.2. Структурная схема и характеристики системы дистанционной настройки вещательного приемника...............................................77
4.3. Структурная схема и характеристики системы автоматической подстройки частоты с частотным дискриминатором.............................81
Глава 5. Качество работы автоматических систем
5.1. Требования, предъявляемые к автоматическим системам .... 86
5.2. Устойчивость автоматических систем.................................88
5.3. Ошибки систем при детерминированных воздействиях..................101
5.4. Ошибки систем при случайных воздействиях..........................112
5.5. Коррекция автоматических систем...................................121
Глава 6. Нелинейные системы автоматического регулирования
6.1. Основные типы нелинейных характеристик элементов автоматических систем........................................................135
6.2. Устойчивость нелинейных систем автоматического регулирования . . 141
6,.3. Особенности нелинейных автоматических систем.....................148
6.4. Система фазовой автоподстройки частоты генератора.................151
Глава 7. Имйульсные системы автоматического регулирования
7.1. Дискретные автоматические системы и их разновидности..............159
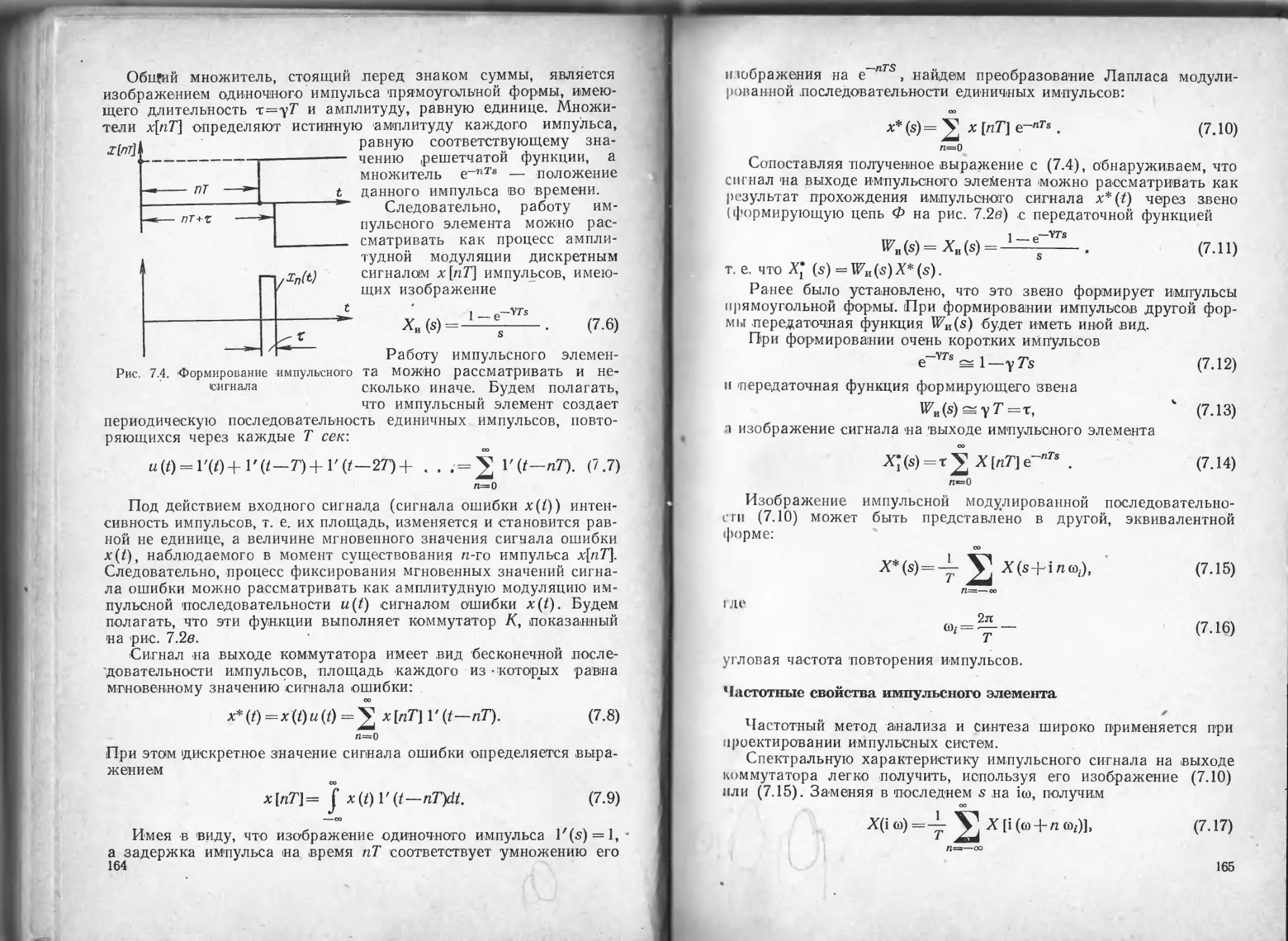
7.2. Общая характеристика системы импульсного регулирования . . . 161
7.3. Метод г-преобразавания............................................167
7.4. Анализ работы систем импульсного регулирования....................171
Глава 8. Основы телеуправления и телеконтролй
8.1. Общая характеристика и задачи телеуправления и телеконтроля на предприятиях радиосвязи и вещания......................................181
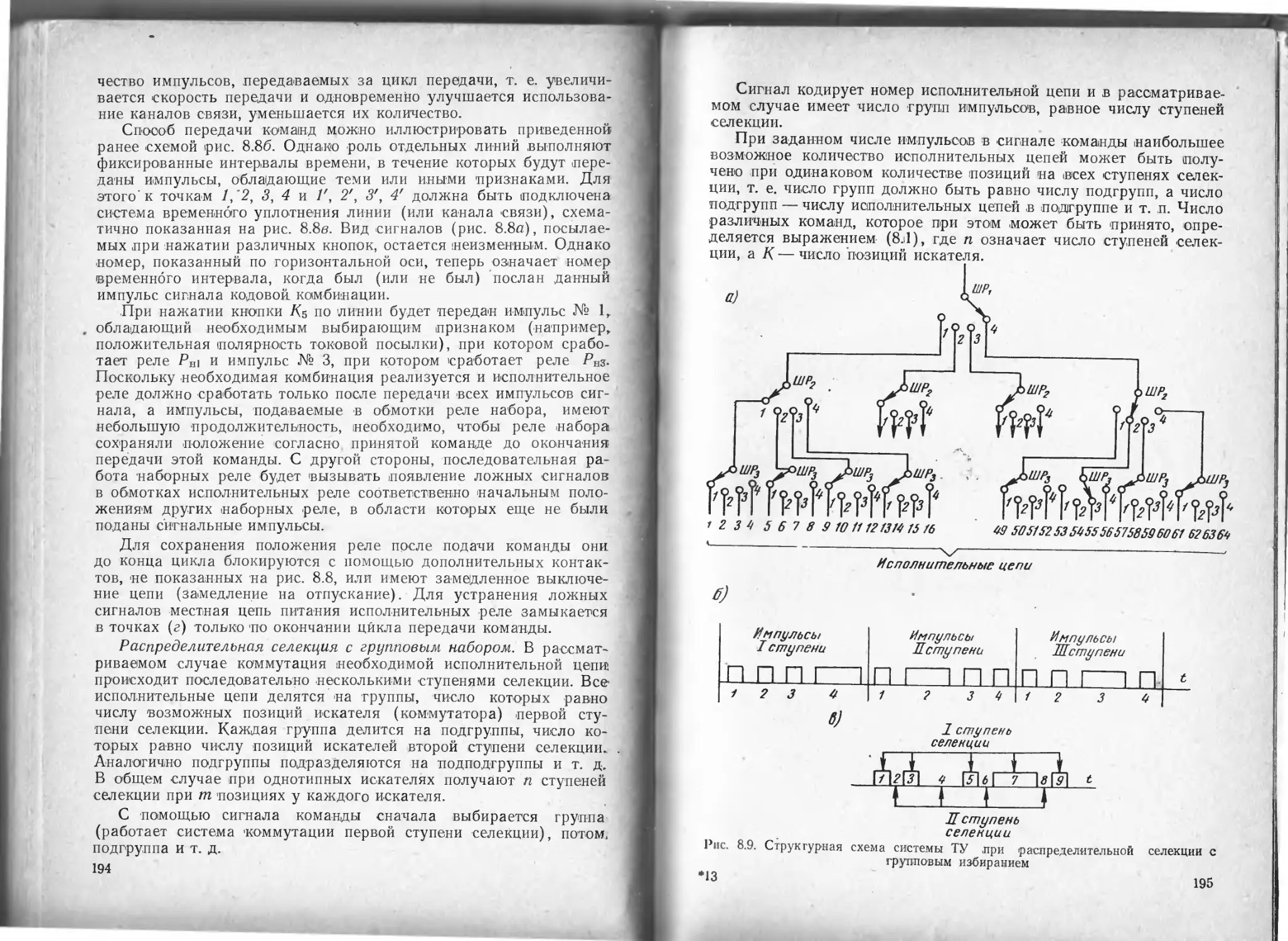
8.2. Принципы формирования команд управления и контроля .... 185
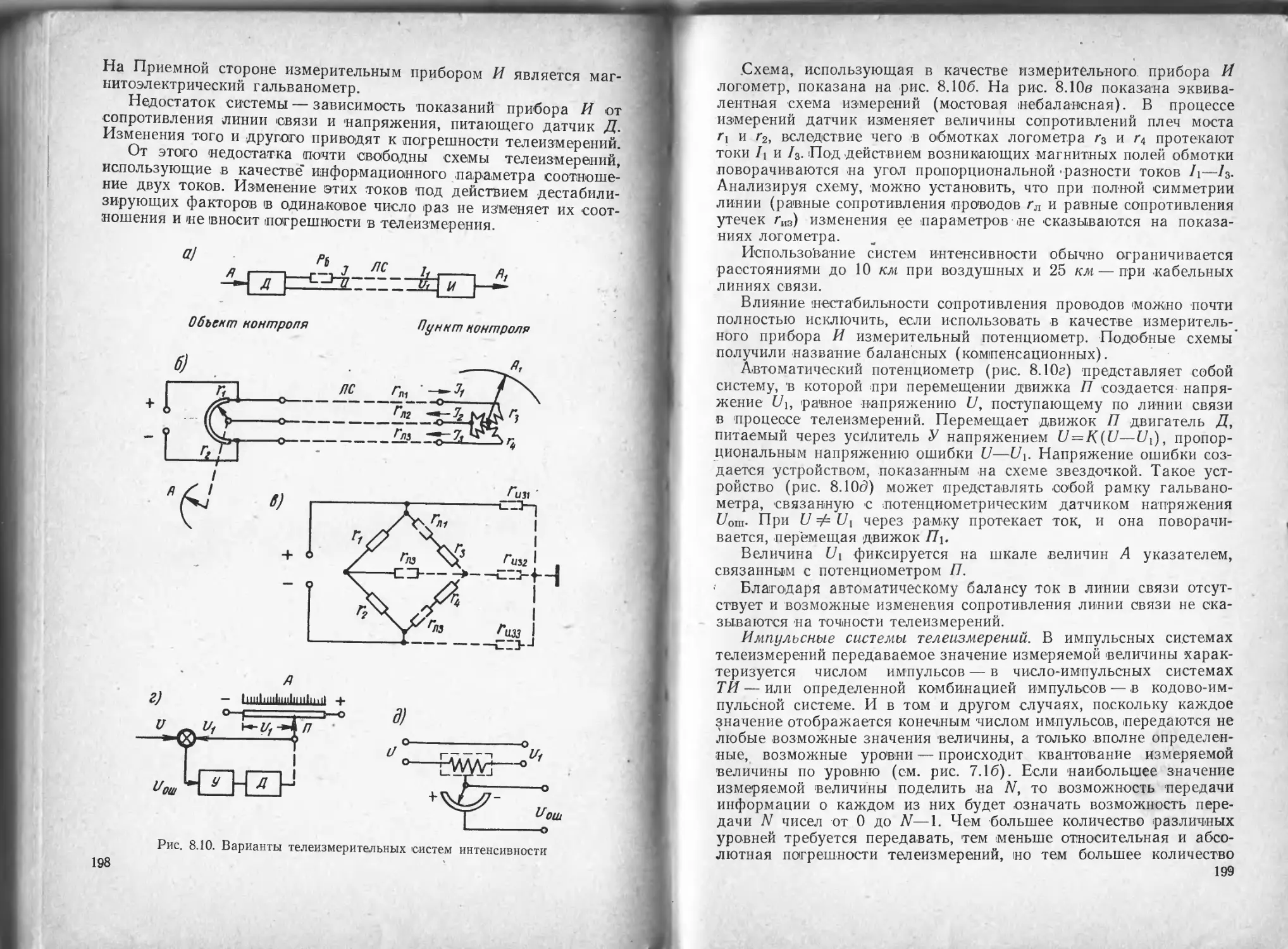
8.3. Принципы телеизмерений............................................196
8.4. Система ТУ—ТК радиорелейных линий связи...........................201
Глава 9. Надежность автоматических систем
9.1. Основные понятия надежности.......................................206
9.2. Основные характеристики надежности................................208
9.3. Расчет надежности устройств и систем..............................217
9.4. Пути повышения надежности автоматических устройств и систем . . 223
Литература...................\ ... /..................................231
ПРЕДИСЛОВИЕ
Предлагаемое учебное 'пособие «Основы автоматики и телемеханики» написано по программе одноименного курса, изучаемого студентами факультетов радиосвязи и вещания электротехнических институтов связи.
Учитывая, что данному курсу учебным планом отводится ограниченное время, программа не предполагает изучения большого количества специфических элементов, применяемых в устройствах автоматики. Не рассматриваются также конкретные схемы автоматизации радиостанций, радиопередающих и радиоприемных устройств и средств звукового и телевизионного вещания.
Теория и практика создания этих устройств и объектов изучается в специальных курсах. В данном пособии элементы автоматизации объектов радиосвязи и вещания рассматриваются в гл. 1 в общем плане.
Классификации автоматических систем посвящена гл. 2. Среди большого количества типов выделены и рассматриваются подробнее замкнутые неприспосабливающиеся системы.
Теории таких систем (теории регулирования) и - знакомству с некоторыми их типами посвящена основная часть учебного пособия. Системы предполагаются линейными, а управляющие сигналы—непрерывными во времени (гл. 3, 4, 5). Некоторые особенности нелинейных систем рассмотрены в гл. 6, а импульсных — в гл. 7. Телеуправлению и телеконтролю посвящена гл. 8. Поскольку практический успех автоматизации, в первую очередь, зависит от ее экономической эффективности и надежности, в гл. 9 рассмотрены вопросы определения и улучшения надежности систем. Экономика радиотехнических систем так же, как и техника цифровых и аналоговых вычислительных машин, используемых в сложных автоматических системах, является предметом изучения других курсов.
В основу учебного пособия были положены лекции, читаемые автором с момента введения курса в Московском электротехническом институте связи.
Автор выражает признательность рецензенту книги Л. М. Голь-денбергу, ответственному редактору Я. Б. Гутину и Р. А. Гутни-ченко за ценные замечания, учтенные при доработке рукописи.
Отзывы и замечания по книге следует направлять в издательство «Связь» (Москва-центр, Чистопрудный 'бульвар, 2).
ВВЕДЕНИЕ
Вместе с электроникой и атомной энергией автоматика является основой современного технического прогресса и определяет главные его черты.
» Автоматика — наука об управлении и контроле различных объектов, проводимых без непосредственного участия человека.
Телемеханика — область автоматики, где такое управление производится на расстоянии с .применением специальных средств связи — средств телеуправления и телеконтроля.
Автоматизация проникает во все отрасли народного хозяйства — позволяет непрерывно оптимизировать управление промышленными предприятиями, сетями связи, энергетическими системами, средствами железнодорожного, водного и воздушного транспорта, сетями газо- и нефтепроводных линий, целыми отраслями •народного хозяйства и даже народным хозяйством в целом. Надежность систем существенно повышается автоматизацией контроля надежности прогнозирования и поиска неисправностей и восстановления работоспособности системы при выходе из строя отдельных ее элементов^
Централизация управления различными объектами базируется на средствах телеуправления, телеконтроля и телерегулирования. Автоматический контроль позволяет заглянуть в пространства, недоступные человеку непосредственно.
Советские автоматические станции впервые в истории человечества побывали на Луне и Венере и передали на Землю ценную информацию. Средства телеуправления и телеконтроля обеспечивают управление космическими кораблями, отправляемыми с исследовательскими целями на сотни миллионов километров от Земли.
Г Развитие научной основы автоматики—теории регулирования, теории информации и вычислительной техники — породило кибернетику— общую науку об оптимальном управлении сложными динамическими системами самой различной природы (техническими, экономическими, биологическими и др.).
Согласно Программе КПСС, принятой XXII съездом партии, «...В течение двадцатилетия осуществится в массовом масштабе 6
комплексная автоматизация производства со все большим переходом к цехам и предприятиям-автоматам, обеспечивающим высокую технико-экономическую эффективность. Ускорится внедрение высокосовершенных систем автоматического управления. Получат широкое применение кибернетика, электронные счетно-решающие и управляющие устройства в производственных процессах промышленности, строительной индустрии и транспорта, в научных исследованиях, в плановых и проектно-конструкторских расчетах, в сфере учета и управления» J).
Широкое применение находят средства автоматического управления и контроля и в хозяйстве связи. Как единая автоматизированная система строится сеть связи нашей страны. Это позволяет маневрировать различными средствами сети при изменении потребностей в каналах или ухудшении (повреждении) средств на отдельных направлениях. Маневрирование должно производиться с наименьшими потерями рабочего времени и с наилучшими экономическими показателями. Определение целесообразного изменения направления потоков информации, состава используемых средств и т. п. производится при помощи вычислительных машин. Единая сеть связи использует наиболее совершенные автоматизированные технические средства. Без автоматизации большого количества процессов невозможно было бы создание линий связи с использованием искусственных спутников Земли типа «Молния», системы наземных пунктов связи «Орбита», радиорелейных и других систем связи.
В мировой практике нашли применение такие линии радиосвязи, в которых автоматически анализируются условия прохождения радиоволн, накапливается передаваемая информация, соответственно качеству прохождения радиоволн изменяется пропускная способность системы и автоматически корректируются возникающие ошибки. Примером могут служить линии, использующие отражение радиоволн от ионизированных следов метеоров.
Автоматизация радиопередающих и радиоприемных устройств и других средств радиосвязи, звукового и телевизионного вещания позволяет увеличить техническую вооруженность хозяйства связи без существенного увеличения количества обслуживающего персонала. 1
Большое распространение получила автоматизация различных процессов в радиотехнических устройствах: система автоматического регулирования уровня (АРУ), система автоматической подстройки частоты гетеродина приемника (АПЧ), система автоматического регулирования полосы пропускания приемного устройства (АРП), (автоматического регулирования яркости и контрастности телевизионных изображений. Широкое применение нашли
*) Программа КПСС, Госполмтиздат, 1961 г.
автоматические узкополосные следящие фильтры, позволившие реализовать новые помехоустойчивые методы радиосвязи.
Важную роль играет автоматика в системе проводного вещания. Значительный объем применяемых технических средств, размещаемых на огромных пространствах нашей страны, делает отрасль радиофикации наиболее трудоемкой среди других отраслей радиохозяйства. Внедрение автоматики. здесь существенно повышает производительность труда и дает большой экономический эффект.
В крупных городах экономное построение сети достигается созданием большого количества централизованно управляемых усилительных подстанций и линий с различными рабочими напряжениями. Автоматизируется проверка линий, в том числе отделенных от центрального пункта управления усилительными и трансформаторными подстанциями. Централизованный контроль и управление, переход на резервную аппаратуру, перераспределение нагрузки и маневрирование фидерными линиями при возникновении различных неисправностей существенно повышают надежность системы вещания и достигаются широким использованием средств автоматики. Большое количество усилительных станций, мощность которых часто составляет десятки киловатт, полностью автоматизировано и работает без постоянного дежурного персонала.
В сетях радиофикации сельских районов автоматизируются периферийные пункты, подача программ которым производится по линиям, общим для каналов вещания и каналов телефонной связи.
Централизованное управление и контроль средствами проводного вещания обусловливают применение специальной аппаратуры телеуправления и телеконтроля, каналы .которых используют те же физические цепи, что и каналы вещания, и часто уплотняют сами каналы вещания.
Автоматика широко применяется в технических комплексах создания программ вещания—различного рода вещательных аппаратных.
IОгромную роль играет радиоавтоматика в обороне. Системы автоматического радиообнаружения противника, радионаведения, автоматического управления беспилотными летающими устройствами, самолетами-снарядами, ракетами и т. п. являются одним из основных средств обороны.
Создание современных автоматических и телемеханических систем было бы невозможно без вычислительных устройств.
Общая схема управления приведена на рис. В.1. Основные функции управления выполняет управляющая машина, которая собирает, перерабатывает и хранит информацию о свойствах, состоянии и условиях работы объекта управления. Эту информацию собирают и преобразуют в электрические сигналы контроля различные измерительные элементы или датчики. Поступает она к машине по каналам телеконтроля. На основе определенных правил, т. е. определенного алгоритма управления, Мишина принимает ре
шения и выдает их в форме соответствующих сигналов управления. Сигналы управления по каналам телеуправления (или непосредственно) поступают в исполнительные органы, которые производят необходимые (преднамеренные или контролируемые) изменения состояния объекта управления.
Требуемое оптимальное в определенном смысле состояние объекта управления характеризуется одним или несколькими параметрами. Необходимые величины этих параметров могут быть
'Рис. 1. Общая схема управления
найдены заранее и быть постоянными или определенным образом изменяться во времени в зависимости от различных причин. Возможны случаи, когда сама управляющая машина решает задачу оптимизации системы и определяет способ реализации решения.
Наиболее распространенным классом систем, которые часто служат элементами и более сложных, являются .замкнутые .непри-спосабливающиеся системы, состояние которых характеризуется величиной одного выходного параметра. Управляющая Мишина превращается в простое устройство, сравнивающее требуемое и фактическое значения выходного параметра и при их различии вырабатывающее сигнал ошибки, который используется для изменения состояния объекта управления в необходимую сторону.
Глава 1
АВТОМАТИЗАЦИЯ
ПРЕДПРИЯТИЙ И СРЕДСТВ РАДИОСВЯЗИ
1.1. Программное управление коротковолновыми линиями радиосвязи
Задача автоматизации коротковолновых линий радиосвязи как единых (комплексов в настоящее время еще не решена. Автоматизация линий затрудняется сложностью организации радиосвязи и необходимостью обеспечения ее высокой надежности. Задача автоматизации технических средств радиостанций несколько проще, и в этом направлении достигнуты большие успехи.
Автоматизация сложных радиотехнических устройств позволит создать системы программного управления ими.
Блок-схема такого управления средствами передающей или приемной радиостанции показана на рис. 1.1.
Основной частью системы управления является программное устройство, состоящее из блока точного времени БВ и программно-
Рис. 1.1. Схема программного управления 'средствами радиосвязи
го датчика ПД. Программное устройство позволяет вести управление передающей или приемной радиостанцией по определенной программе, которая предусматривает последовательность включе-
ния и выключения аппаратуры, изменение режима работы, смену волн и другие операции, которые при отсутствии автоматики'выполняет штат дежурных техников. Программное устройство записывает, хранит и в определенные моменты времени выдает соответствующие команды в форме различных электрических сигналов.
Передатчик системы телеуправления ПТУ кодирует поступающие на него команды управления и преобразует импульсные посылки в тональные для передачи в линию связи.
Приемник телеуправления ПрТУ декодирует поступающие команды и подает их на соответствующие исполнительные органы автоматизированной приемной или передающей радиостанции АРС.
Передатчик ПСК и приемник ПрСК телесигнализации и теле
контроля контролируют правильность передачи команд и сигнализируют о выполнении заданных операций, а также о состоянии управляемого объекта.
Блок точного времени выдает сигналы, запускающие программный датчик, и определяет временной режим работы системы программного управления.
Программный датчик позволяет многократно управлять передающими или приемными радиосредствами по определенной суточной программе, включающей в себя несколько подпрограмм. Предусмотрена возможность коррекции волнового расписания, для чего используется аппаратура контроля качества радиоканала и средств служебной связи. С помощью программного датчика можно произвести оперативную проверку технической исправности аппаратуры. Схема программного датчика показана на рис. 1.2.
Программный датчик содержит индивидуальные и общие эле-
менты, используемые для управления передающими и приемными
радиосредствами (блок питания БП, блок временной программы БВП, блок привязки к панели управления аппаратуры ТУ—ТК и др.).
БВП использует сигналы электрических часов и вырабатывает через определенные инервалы времени
От шифратора 01У
1—т—1 Контроль
I—*—। ।-------1 I [ \В канал ТУ
БМП г-*4 УВ 7М —*-
—I— г Отпанели
—I—. "* Тара вл. ТУ-ТО
БРА Ё—------------------От ОрСК
—т—П __________От аппарат, служебн
, I—1—। связи
Ч БП
импульсы, подаваемые в обмотки шаговых искателей.
Рис. 1.2. Схема программного датчика
Контакты полей шаговых
искателей заведены на переключатели выбора нужного часа и нужной минуты для создания цепи срабатывания того или иного программного реле.
В установленное время программное реле включает программный датчик на отработку той программы, которую реле выполняет.
Блок магнитной памяти БМП состоит из магнитного барабана и подвижной каретки с магнитной головкой. На барабане кре-
11
пятся кулачковые диски секторов и оборотов, которые совместно с контактными группами используются в .цепях автоматики программного датчика. На барабане записываются команды, формируемые шифратором аппаратуры ТУ—ТС. Предварительно сигналы команды усиливаются усилителем записи УЗ.
Команды, считанные магнитными головками с барабана, усиливаются усилителем воспроизведения УВ и подаются в тонмани-пулятор ТМ, где импульсы постоянного тока 'превращаются в тональные.
Блок релейной автоматики БРА обеспечивает закрепление секторов записывающих дорожек за соответствующими кнопками выбора органа управления объектом. С этой целью на шаговый искатель от контактной группы кулачкового .механизма секторов подаются импульсы тока. Правильность установки головки записи на нужный сектор контролируется специальными реле. На панели управления имеются кнопки пуска программного датчика и контроля исходного положения барабана.
Магнитный барабан имеет 'большое количество дорожек, поделенных на секторы. На каждом секторе дважды записываются команды выбора органа управления и его позиции. Различные дорожки используются .для записи команд управления линией радиосвязи: первая для записи команд программы режима работы объекта для данного времени, вторая—для выбора рабочих волн, третья — резервных волн в случае ухода от помех и т. д.
1.2. Автоматизация радиостанций и радиопередающих устройств
Автоматизация средств радиосвязи началась почти одновременно с их внедрением в общую систему связи.
Первоначально автоматизировались те или иные функции отдельно: обеспечивающие безопасность обслуживания, необходимую последовательность и скорость включения при выполнении дежурным техником только одной операции — пуске, сигнализация о состоянии или положении различных органов и др. Эти функции теперь выполняет единый комплекс средств автоматики, обязательно присутствующий во всех радиопередающих станциях, называемый системой УБС (управление, блокировка и сигнализация).
Все более широко применяются также системы автоматического регулирования, стабилизирующие или изменяющие параметры устройств по заданному закону или следящие за изменением других параметров. К этим системам относятся системы стабилизации частоты, напряжения, температуры, автоматической настройки контуров каскадов передатчиков и т. п. Становится возможным управление передающими и приемными радиостанциями без дежурного обслуживающего штата.
На рис. 1.3 показана схема централизованного управления средствами передающей радиостанции, аналогичная схеме управления приемной радиостанции.
Централизованное управление предполагает высокую степень автоматизации основных средств радиостанций. Пункт управления
Рис. 1.3. Централизованная система управления передающей радиостанцией •
может оборудоваться в радиобюро, вещательной аппаратной или на одной из радиостанций, входящих в предприятие связи.
Управление может производиться или вручную дежурным техником (простое дистанционное управление) или программным устройством. В обоих случаях имеется пульт управления и контроля — ПУм.К. В первом — он служит для подачи команд оператора, контроля за их исполнением и состоянием оборудования радиостанций, а во втором — резервом и средством ввода программы.
Команды формируются шифратором Ш-1 и с помощью передающих средств телеуправления ТУ-1 передаются по линии связи на передающую (или приемную) радиостанцию.
Принятые на радиостанции команды с помощью средств теле-контроля ТК-2 и ТК-1 передаются обратно и сравниваются с исходными. В случае их идентичности подается команда и данные передаются в дешифратор ДШ-2. Тракт передачи команд заканчивается приемником команд, на выходе которого находятся релейные контакты, включающие на исполнительные элементы питающее напряжение. После выполнения команд с передатчика на пункт управления посылаются квитирующие сигналы (подтверждающие правильность приема команды). После того как необходимая коммутация выполнена, начинается автоматическая настройка усилительных каскадов передатчика, по окончании которой на пункт управления подается сигнал готовности передатчика к работе.
На одном из дистанционно управляемых передающих радио-центров производятся следующие операции:
— выбор и подключение одной из линий связи, по которой к передатчику поступала передаваемая программа;
— выбор одного из 16 видов работы передатчика (различные виды телефонного и телеграфного режимов работы и т. п.);
— выбор любой частоты декадного возбудителя;
— включение и выключение передатчика, установка заданной мощности;
— выбор необходимой антенны, изменение направления главного излучения (реверс).
На приемных радиостанциях автоматизируются включение и выключение радиоприемных устройств, их настройка на заданные
Рис.
От модуляторов и манипуляторов
К пункту управлони я
1.4. Блок-схема автоматизированной
передающей радиостанции
волны, коммутация линий и антенн и другие операции, выполняемые обычно штатом дежурных.
Схема размещения основных узлов автоматизированной передающей станции дана на рис. 1.4. По принятым из пункта управления командам устанавливается необходимая частота возбудителя, коммутируется один из 16 модуляторов и манипуляторов и устанавливается род работы.
Усилительный тракт содержит устройство автоматической настройки тракта на заданную частоту. Дистанционно также устанавливается необходимая мощность передатчика и коммутируется требуемая антенна.
Переключение различных цепей по принятым командам производится поворотными переключателями, снабженными двигателями шагового типа. С помощью дополнительной ламели переключателя подается сигнал обратного контроля.
Наиболее сложными и ответственными являются управление и автоматическая настройка усилительного тракта автоматизированного передающего устройства.
Автоматическая настройка осуществляется по этапам: грубая настройка, настройка при пониженном анодном напряжении, точная настройка при полном анодном напряжении, регулировка уровня и установка переключателя режима работы. Общая длительность настройки с момента подачи команды до получения сигнала готовности составляет 10—30 сек. Если за это время требуемый режим не установится, то процесс настройки автоматически повторяется. После повторной неудачи подается аварийный сигнал.
Первый этап настройки — грубая установка органа настройки в исходное положение — может производиться с помощью специальной команды, которая устанавливает также частоту колебаний, подаваемых от возбудителя. В одном из вариантов более экономичным было признано использование специального анализатора диапазона, схема которого приведена на рис. 1.5.
Весь диапазон частот (34-30 Мгц) разделен на 23 поддиапазона, каждому из которых соответствует свой дискриминатор (Дь Дг, •••). Дискриминаторы отрегулированы так, что нули соот-
Рис. 1.5. Схема анализатора диапазона i
ветствуют нижним границам поддиапазона. Каждая схема на выходе имеет реле, которое срабатывает, как только частота сигнала превышает частоту, соответствующую нулевому сигналу.
Одновременное срабатывание нескольких реле в диапазоне не приведет к 'многозначности, так как контакты реле соединены последовательно. Например, при срабатывании Р\ и Р2 выход Р\ обесточен, так как сработало Р2 и управляющий сигнал создается только на выходе второго реле.
Анализатор создает сигнал управления для всех устройств предварительной установки приборов в данном поддиапазоне.
После того как органы настройки каскадов усилительного тракта передатчика установлены соответственно требуемому поддиапазону, производится точная автоподстройка каскада, схема которой показана на рис. 1.6.
Напряжение высокой частоты UBX подается от возбудителя (или предыдущего каскада) на вход 'настраиваемого каскада НК и на первый вход фазового датчика ФД. На второй его вход по-
Рис. 1.6. Схема точной автоматической настройки каскада передатчика
дается напряжение с выхода настраиваемого каскада. Схема фазового датчика построена так, что напряжение на его выходе (напряжение сигнала ошибки) зависит от разности фаз входных напряжений и 'пропорционально расстройке анодного контура каскада относительно частоты входного напряжения.
Если каскад расстроен, то напряжение сигнала ошибки' усиливается усилителем У и поступает на двигатель Дв, который перемещает элемент настройки каскада ЭН до тех пор, пока настраиваемый каскад НК не окажется настроенным на частоту входного напряжения UBX, после чего напряжение сигнала ошибки сделается равным нулю и подстройка прекратится.
1.3. Автоматизация радиоприемных устройств
Основным видом оборудования приемных радиоцентров являются радиоприемные устройства, приспособленные для простого дистанционного или программного управления.
Примером автоматизированного коротковолнового приемника является приемник «МАК-57», разработанный Государственным научно-исследовательским институтом Министерства связи СССР под руководством Н. А. Симонова [39].
Приемник позволяет вести сдвоенный прием телеграфных станций, работающих по системам AM, ЧМ и ДЧТ в диапазоне частот 3—30 Мгц. Управление производится автоматически с возможностью дистанционного задания суточной работы, либр полуавтоматически с пульта управления из радиобюро и может быть дублировано средствами, размещенными на панелях приемного устройства.
При дистанционном управлении нужны т.ри управляющих сигнала: включения, выключения всего комплекта аппаратуры и .настройки на любую из шести волн, которые заранее устанавливаются в пределах всего диапазона. Одновременно производится необходимое переключение антенн и выбирается скорость телеграфной работы. Высокая точность настройки, стабильность частоты и помехозащищенность обеспечивают достаточно малую величину ошибок при приеме сигналов (меньше 10~4).
На пункте управления системой обратного контроля .контролируется правильность выполнения посланной команды.
Обратный контроль производится с помощью двух сигналов: включения питания приемника и сигнала окончания настройки и готовности к работе. При искажениях управляющих импульсов и
неправильном приеме ‘«команды предусматривается автоматическое повторение команд.
Блок-схема приемника показана на рис. 1.7. Устройство имеет канала приема с двойным преобразованием частоты. Каждый
два
co
Рис. 1.7. Блок-схема автоматизированного приемника магистральной коротковолновой связи
из каналов образован усилителем высокой частоты УВЧ, смесителем См1г усилителем первой промежуточной частоты УПЧХ и вторым смесителем См2. Один из гетеродинов второго преобразования частоты Г2 с помощью фазового детектора ФД и реактивной лампы РЛ подстраивается, обеспечивая синфазность сигналов в контуре сложения КС. При этом фазовращатель ФВ компенсирует постоянный фазовый сдвиг, возникающий в цепях. После сложения сигналы усиливаются УПЧ2 и подаются в систему автоматического регулирования уровня АРУ, на интегрирующие фильтры ИФ, в систему автоматической подстройки частоты АПЧ первого гетеродина Г\, к См3 и частотному дискриминатору ЧД блока выделения синхронной частоты манипуляции БСЧ. Сигналы с выхода интегрирующего фильтра ИФ поступают на выходное устрой
ство ВУ, где формируются в выходные телеграфные сигналы при работе по системе частотного и двойного частотного телеграфирования. При амплитудной манипуляции используются Г3 и усилитель низкой частоты УНЧ. Рассмотрим некоторые автоматизированные узлы 'приемника.
Дистанционно-управляемый переключатель
Дистанционно управляемый переключатель в процессе дистанционной настройки приемника переключает кварцы в Ги присоединяет вход приемника к соответствующей антенне и выбирает заданную скорость телеграфирования в блоке выделения синхронной частоты.
Устройство автоматической настройки преселектора и УВЧ
Настройка преселектора и УВЧ производится путем плавного автоматического изменения положения органов настройки. Для этой цели предназначен вспомогательный канал настройки. Схема настройки показана на рис. 1.8. После того как произведено вклю-
чение необходимого кварца и Г\ Начал генерировать нужную частоту, включается генератор сигнала корреспондента ГСК, частота которого с помощью двигателя Де и редуктора Р плавно изменяется одновременно с изменением положения оси настройки приемника. Как только частота ГСК совпадет с частотой корреспондента, на выходе смесителя канала настройки СКН по-
Рис. 1.8. Схема автоматической настройки ЯВИТСЯ сигнал, который уси-преселектора и УВЧ аивается усилителем У КН,
выпрямляется выпрямителем В и заставляет сработать реле РКН (замыкаются верхние его контакты). Двигатель, получавший ранее питание от постоянных источников через усилитель-преобразователь УП теперь питается напряжением, создаваемым частотным детектором ЧД. Частотный детектор настроен на промежуточную частоту канала настройки приемника, равную промежуточной частоте основного канала приемника. При неточной настройке ГСК на частоту корреспондента и соответственно неточной настройке УВЧ и преселектора основного канала приемника на выходе ЧД создается
.напряжение (сигнал ошибки), обусловливающее дальнейшую работу двигателя до точной настройки, при которой напряжение сигнала ошибки сделается равным нулю и подстройка прекратится. На схеме не показаны элементы коммутации, обеспечивающие автоматическую последовательность всех операций по настройке пр есел екто р а 'и У В Ч.
Автоматическая подстройка частоты первого гетеродина
На рис. 1.9 показана блок-схема точной автоматической подстройки частоты (АПЧ) первого гетеродина приемника Г[. Такая
Рис. 1.9. Блок-схема автоматической подстройки частоты 1-го гетеродина приемника
подстройка позволяет компенсировать небольшие изменения частоты принимаемых сигналов и нестабильность частоты самого гетеродина.
При приеме сигналов станции, работающей в режиме частотного телеграфирования, частот|НОМ1анипулированное напряжение с выхода УПЧ2 подается на фазовый детектор ФД. На второй вход ФД подается сигнал от местного кварцевого генератора ГК1 или КГ2 в зависимости от того, какую частоту имеет напряжение на входе — частоту нажатия или отжатия. Коммутация генераторов производится с помощью выходного напряжения приемника и манипулируемого усилителя МУ.
Если в процессе работы частоты нажатия и отжатия на выходе УПЧ2 отличаются от номинальных значений, определяемых кварцевыми генераторами КГi и КГ2, то на выходе фильтра Ф фазового детектора появляется напряжение, поступающее на реактивные лампы РЛ{ и РЛ2. Происходит подстройка КГi и КГ2 с, точностью до фазы. При ошибке в фазе на выходе ФД появляется постоянное напряжение, величина и знак которого определяются величиной и знаком частотного отклонения сигнала на выходе УПЧ2 от заданного номинала. В различных посылках это напряжение может быть различным. Для воздействия на частоту первого гетеродина это напряжение усредняют с помощью интегрирующей цепочки И. Затем оно поступает на усилитель-преобразо-
ватель УП и далее на Дв. Изменение знака напряжения ошибки меняет фазу переменного напряжения и приводит к.реверсу двигателя.
Двигатель с помощью редуктора -Р вращает подстроечный конденсатор первого гетеродина 1\, благодаря чему уменьшается отклонение от номинала частоты сигнала на выходе УГРД. Подстройка происходит до тех пор, пока напряжение сигнала ошибки на выходе фазового детектора не станет равным нулю и частота гетеродина Г। не приблизится к номинальной.
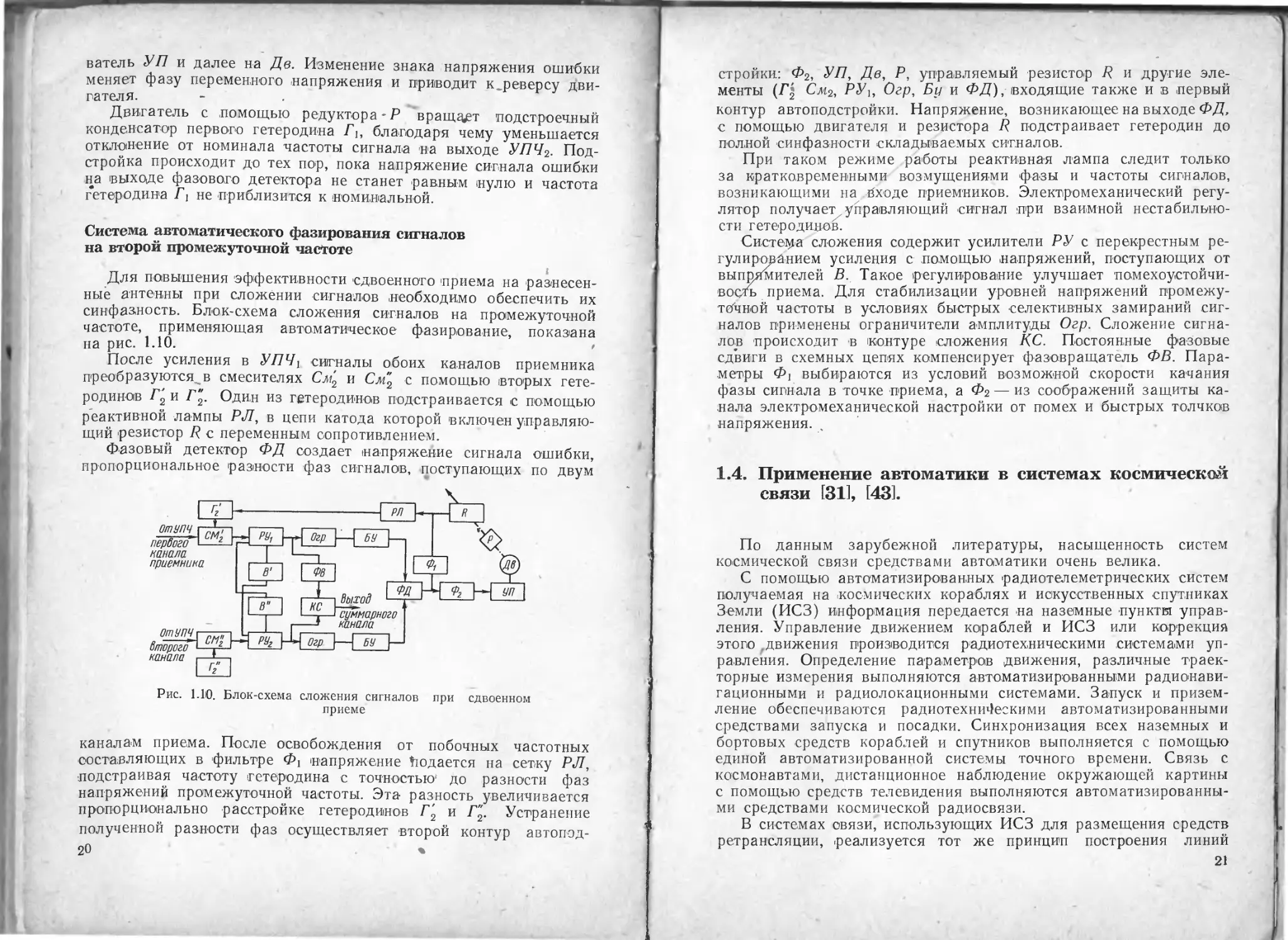
Система автоматического фазирования сигналов на второй промежуточной частоте
Для повышения эффективности сдвоенного приема на разнесенные антенны при сложении сигналов необходимо обеспечить их синфазность. Блок-схема сложения сигналов на промежуточной частоте, применяющая автоматическое фазирование, показана на рис. 1.10. *
После усиления в УПЧХ сигналы обоих каналов приемника преобразуются^в смесителях См'2 и См2 с помощью вторых гетеродинов Г2 и Г". Один из гетеродинов подстраивается с помощью реактивной лампы РЛ, в цепи катода которой включен управляющий резистор R с переменным сопротивлением.
Фазовый детектор ФД создает напряжение сигнала ошибки, пропорциональное разности фаз сигналов, поступающих по двум
Рис. 1.10. Блок-схема сложения сигналов при сдвоенном приеме
каналам приема. После освобождения от побочных частотных составляющих в фильтре Ф\ напряжение бодается на сетку РЛ, подстраивая частоту гетеродина с точностью до разности фаз напряжений промежуточной частоты. Эта разность увеличивается пропорционально расстройке гетеродинов Г'2 и Г". Устранение полученной разности фаз осуществляет второй контур автопод-20 *
стройки: Ф2, УП, Дв, Р, управляемый резистор R и другие элементы (Г» См2, РУ}, Огр, Бу и ФД), входящие также и в первый контур автоподстройки. Напряжение, возникающее на выходе ФД, с помощью двигателя и резистора R подстраивает гетеродин до полной синфазности складываемых сигналов.
При таком режиме работы реактивная лампа следит только за кратковременными возмущениями фазы и частоты сигналов, возникающими на йходе приемников. Электромеханический регулятор получает управляющий сигнал при взаимной нестабильности гетеродинов.
Система сложения содержит усилители РУ с перекрестным регулированием усиления с помощью напряжений, поступающих от выпрямителей В. Такое регулирование улучшает 'помехоустойчивость приема. Для стабилизации уровней напряжений промежуточной частоты в условиях быстрых селективных замираний сигналов применены ограничители амплитуды Огр. Сложение сигналов происходит в контуре (сложения КС. Постоянные фазовые сдвиги в схемных цепях компенсирует фазовращатель ФВ. Параметры Ф] выбираются из условий возможной скорости качания фазы сигнала в точке приема, а Ф2 — из соображений защиты канала электромеханической настройки от помех и быстрых толчков напряжения.
1.4. Применение автоматики в системах космической связи [ЗП, [43].
По данным зарубежной литературы, насыщенность систем космической связи средствами автоматики очень велика.
С помощью автоматизированных радиотелеметрических систем получаемая на космических кораблях и искусственных спутниках Земли (ИСЗ) информация передается на наземные пункты управления. Управление движением кораблей и ИСЗ или коррекция этого движения производится радиотехническими системами управления. Определение параметров движения, различные траекторные измерения выполняются автоматизированными радионавигационными и радиолокационными системами. Запуск и приземление обеспечиваются радиотехническими автоматизированными средствами запуска и посадки. Синхронизация всех наземных и бортовых средств кораблей и спутников выполняется с помощью единой автоматизированной системы точного времени. Связь с космонавтами, дистанционное наблюдение окружающей картины с помощью средств телевидения выполняются автоматизированными средствами космической радиосвязи.
В системах связи, использующих ИСЗ для размещения средств ретрансляции, реализуется тот же принцип построения линий
связи, что и в обычных наземных радиорелейных системах. Вместе с тем такие системы имеют особенности, требующие дополнительных средств, преимущественно автоматических. К таким особенностям относятся: 'медленно изменяющиеся потери энергии при распространении радиоволн, изменение усиления антенн спутника в зависимости от его положения относительно Земли, небольшие погрешности пеленга луча наземной системы относительно направления на спутник, изменяющийся допплеровский сдвиг частоты и др. (31].
Для снижения веса бортовых систем применяют остронаправленные наземные антенны, следящие за положением спутника в пространстве. С повышением направленности наземных антенн поиск и сопровождение ИСЗ (по угловым координатам) затрудняются. .
Трудности автоматического слежения антенны за спутником становятся ясными хотя бы из того, что общий вес вращающегося устройства может составлять сотни тонн, а мощность основного двигателя сотни киловатт. При этом требуется обеспечить высокую точность наводки луча во время слежения при большой ветровой нагрузке.
Управление наземными средствами облегчается накоплением и обработкой данных о движении ИСЗ и прогнозированием его тра-
Рис. 1.11. Схема наземного пункта линии связи, использующей ИСЗ
ектории. Эти операции выполняют вычислительные машины наземного пункта управления.
На рис. 1.11 приводится блок-схема наземного пункта экспериментальной линии радиосвязи [31], использующей ИСЗ.
Весь комплекс наземного пункта связи включает три антенны Д1, Д2 и А3 с различной степенью направленности.
Управление комплексом производится с центрального пункта управления ЦПУ. Поскольку каждый ИСЗ находится в зоне прямой видимости ограниченное время, для продолжительной непре-22
рывной связи используется несколько ИСЗ. Переход от одного ИСЗ к другому связан с изменением ориентировки антенны.
Первоначально слабонаправленная антенна Ai по командам с 'пункта управления системой грубого -наведения СГН ориентируется в направлении предполагаемого появления ИСЗ. Система работает по моноимпульсному методу и .позволяет обнаружить спутник в значительном диапазоне углов — около 20°.
По данным зарубежной печати [31] на ИСЗ устанавливается передатчик (маяк), непрерывно работающий на частоте 136 ТИа/р После того как сигналы маяка будут приняты, система грубого наведения переходит в режим автосопровождения с ошибкой менее ± 1°. По каналу управления с помощью передатчика команд ПК на частоте 123 Мгц посылают команды на запуск бортовой радиотелеметрической аппаратуры, прием сигналов которой ведется приемником радиотелеметрической системы ПрТМ. При исправной бортовой аппаратуре включаются остальные средства спутника, в том числе аппаратура маяка, передающего сигналы на частоте 4080 Мгц.
Система точного наведения СТН имеет антенну Л2 с более узкой диаграммой направленности, шириной 2°. Эта антенна вначале ориентировочно направляется на спутник, работая в режиме синхронного сопровождения Ai. Система точного наведения принимает сигналы второго маяка на частоте 4080 Мгц и после захвата ИСЗ обеспечивает слежение с точностью до сотых долей градуса.
При этом включается система управления СУА антенны Л3, которая начинает следить за Л2. После приема сигналов маяка приемником автосопровождения ПрСл высокоэффективная рупорно-параболическая антенна Л3 переходит в режим автослежения за спутником с высокой степенью точности 0,005°. Стабильное сохранение направления антенны на ИСЗ обеспечивает надежную работу основного широкополосного канала радиосвязи, использующего передатчик ПС и приемник ПрС. Данные о движении спутника накапливаются в записывающем устройстве ЗУ. Вычислительное устройство ВУ обрабатывает данные и создает программу движения спутника, которая в последующем используется для управления Аз.
Другим примером применения автоматики для решения сложных радиотехнических проблем являются высокоэффективные самофокусирующиеся антенные системы.
Для целей космической радиосвязи, требующей антенны с очень большими коэффициентами усиления, разработаны антенные системы, в которых сигналы нескольких антенн складываются не на высокой, а на промежуточной частоте. Перед сложением они автоматически фазируются.
При одних и тех же требованиях к точности выполнения отражающей поверхности самофокусирующиеся антенны позволяют получить усиление на порядок и более высокое, чем от одиночной антенны. Система из нескольких самофокусирующихся антенн об
ладает лучшими экономическими 'показателями, чем эквивалентная крупногабаритная антенна.
Самофокусирующиеся антенны были 'разработаны для связи с космическими (кораблями, находящимися в дальнем космосе: например, для связи с 'кораблем jb районе Марса потребовалось усиление 70 дб, однако такие антенны нашли применение и для связи через ИСЗ [31].
Блок-схема самофокусирующейся антенной системы показана на рис. 1.12.
Каждая из антенн, образующих систему А}, А2, ..., имеет свой приемник, на выход радиочастотной части которого включен сме-
Рис. 1.12. Самофокусирующаяся антенная система
ситель См. Частота и фаза выходного сигнала смесителя зависят от частоты и фазы гетеродина.
На ФД всех каналов через фазовращатель (не показанный на схеме) подается общий опорный сигнал. Если фаза колебаний на выходе того или иного смесителя отличается от фазы опорного сигнала, то на выходе соответствующего ФД создается напряжение, которое через фильтр Ф подается на реактивную лампу РЛ (или иной управитель частоты) гетеродина. Частота и фаза каждого из гетеродинов изменяются до совпадения частот и фаз сигналов на выходе всех смесителей. В суммирующем блоке БС происходит сложение сигналов. На рисунке показаны два канала системы. Остальные каналы идентичны.
Глава 2
КЛАССИФИКАЦИЯ И
КРАТКАЯ ХАРАКТЕРИСТИКА
АВТОМАТИЧЕСКИХ СИСТЕМ
2.1. Общая классификация автоматических систем
Приводимая ниже классификация не является полной и проведена по ограниченному количеству признаков, представляющих наибольший интерес.
Рис. 2.1. Классификация систем автоматического управления
Схема классификации автоматических систем показана на рис. 2.1.
Все системы делятся на два больших класса: неприспосабли-еающиеся (простые или априорные системы) и приспосабливающиеся 1).
В ^приспосабливающихся системах не происходит какого-либо преднамеренного изменения свойств системы управления во время работы. Параметры, структура системы и правила, по которым происходит формирование управляющих сигналов (алгоритм управления), остаются неизменными.
Неприспосабливающиеся системы подразделяются на замкнутые и разомкнутые.
Замкнутые системы работают по замкнутому циклу, используя принцип отклонения. Алгоритм управления сводится к определению разности между задаваемым значением выходного параметра и его фактической величиной и использованию этой разности (сигнала ошибки) для изменения выходного параметра с помощью исполнительного устройства так, чтобы ошибка не превышала допустимой величины.
Задающий сигнал может сохранять свою величину неизменной, изменяться либо по определенной программе, либо по неизвестному заранее закону. Соответственно этому замкнутые системы разделяют на системы стабилизации, программного регулирования и следящие.
Замкнутые системы (рис. 2.2) содержат один (п) или несколько замкнутых контуров, охватывающих друг друга. Соответственно их называют одноконтурными и многоконтурными. Требуемая величина выходного параметра объекта управления ОУ задается задающим устройством ЗУ. Устройство сравнения УС сравнивает истинную и требуемую величины выходного параметра и создает сигнал ошибки, соответствующий их разности. Сигнал ошибки усиливается и преобразуется устройствам формирования управляющего сигна-
ла УФУС и воздействует с помощью исполнительного органа ИО на органы управления ОУ. Многоконтурные системы (б) возникают, например, при использовании схем параллельной коррекции, когда для улучшения свойств системы отдельные ее звенья
(б) а)
величина Выходного параметра
Требуемая Истинная - х1м
(Замкнутый контур управления ()
цепь обратной связи'
6)
| зу уФус Н k
цепь местнойЬобратнойЬ Внутр нонтур управления
связ
и
Внешний нонтур управления_____
Цепь главной обратной связи'
Рис. 2.2. Функциональная схема разомкнутой системы управления
') Для характеристики приспосабливающихся систем использована классификация, предложенная В. В. Солодовниковым [42].
внутреннего контура охватывают пенью обратной связи, называемой местной, которая часто содержит специальное корректирующее устройство 7<У. Обратная связь внешнего контура называется главной.
Параметры элементов систем с течением времени изменяются. Если эти изменения происходят значительно 'медленнее изменения сигналов управления, то параметры можно считать постоянными, такие системы называют стационарными. Системы с параметрами, подверженными быстрым изменениям, называются нестационарными. О нестационарности систем можно судить по различию реакции системы на определенное воздействие в зависимости от момента времени, когда это воздействие прикладывается к системе.
Автоматические системы подразделяются на линейные и нелинейные в зависимости от вида уравнений, которыми они описываются.
Хотя все реальные системы являются нелинейными, во многих случаях нелинейные 'зависимости существенно себя не проявляют и анализ и синтез таких систем производят на основе линейной теории автоматического управления.
Процесс управления в автоматических системах связан с передачей информации. Структура системы и ее свойства зависят от характера передачи и преобразования сигналов. Системы, в которых передается или преобразуется каждое мгновенное значение сигналов, называются непрерывными. Системы, в которых хотя бы один из параметров сигнала квантуется, называются дискретными.
Дискретные системы подразделяются на импульсные, релейные и цифровые. В импульсных системах квантование сигналов происходит по времени, в релейных — по уровню, в цифровых — и по времени и по уровню. /
Выходной параметр системы регулирования (частота подстраиваемого генератора, уровень стабилизируемого сигнала или температуры, скорость движения и т. п.) должен принимать задаваемые значения. Вместе с тем о.н должен по возможности меньше изменяться от действия различных возмущений (помех, изменения питающих напряжений, изменения нагрузки и др.). При возмущении, стремящемся к постоянному значению, отклонение выходной величины с течением времени может стремиться к нулю или к постоянному (установившемуся) значению, которое зависит от величины возмущения. В первом случае установившаяся ошибка не возникает и система называется астатической по отношению к возмущению. Во втором случае появляется постоянная установившаяся ошибка и система называется статической.
Системы могут по-разному отрабатывать и задаваемые величины. Система называется статической по отношению к управляющему воздействию, если при его изменении на постоянную величину установившаяся ошибка системы стремится к постоянному значению, зависящему от величины задаваемого воздействия, и астатической, если ошибка стремится к нулю.
Системы могут 'быть статическими по отношению к управляющему (воздействию и астатическими по отношению к возмущению и наоборот.
В последующем, говоря об астатических или статических системах, будем подразумевать статизм или астатизм по отношению к задающему воздействию.
Порядок астатизма системы определяется количеством интегрирующих звеньев в главной ветви контура управления. Статическая система имеет нулевой порядок астатизма.
В подавляющем большинстве случаев информация .передается электрическим током или напряжением, которые модулируются сигналами, несущими передаваемую информацию. В зависимости от вида используемого тока (напряжения) различают системы постоянного и переменного токов.
Разомкнутые системы отличаются от замкнутых, показанных на рис. 2.2«, отсутствием цепи обратной связи и устройства сравнения УС. Предполагается такое малое влияние изменения условий работы системы и ее параметров, что программа изменения величины выходного параметра, определяемая задающим устройством ЗУ, с необходимой точностью будет выполняться объектом управления ОУ. Такие разомкнутые системы будем называть программными.
При значительных изменениях условий работы системы и больших возмущающих воздействиях могут использоваться разомкнутые системы с компенсацией влияния возмущающих воздействий — системы с компенсацией (рис. 2.3).
В дополнение к обычной схема содержит измерительное устройство ИЗУ, усилитель-преобразователь УП и корректирующее устройство КУ. С их помощью определяются величины возмущающих
Рис. 2.4. Разомкнутая система программного управления линией радиосвязи
Рис. 2.3. Функциональная схема разомкнутой системы с компенсацией возмущающего воздействия
воздействий, вырабатываются управляющие сигналы и производится коррекция параметров объекта, компенсирующая непосредственное воздействие возмущений на объект.
Примером разомкнутой системы первого вида является система программного управления линией радиосвязи без автоматической коррекции, программы (рис. 2.4).
Программное устройство ПУ по определенной программе создает управляющие сигналы, подаваемые в исполнительные устройства приемника ИУ\ и передатчика ИУ2. В соответствии с программой происходит включение, выключение, смена волн, установка режима работы, мощности и т. п. Нетрудно видеть недостатки такой системы управления — она не реагирует на непредусмотренные программой (изменения условий прохождения радиосвязи.
Примером разомкнутой системы второго вида является система программного управления с коррекцией программы при изменении внешних условий, например условий распространения радиоволн. В отличие от предыдущей, система содержит устройство, анализирующее изменение условий распространения радиоволн АВУ, показанное на том же рис. 2.4 пунктиром. С помощью анализатора происходит коррекция программы управления приемо-передающими средствами. По разомкнутому циклу с учетом изменяющихся внешних условий работают также системы параметрической стабилизации частоты передатчиков.
Программное устройство в определенные моменты посылает команды, по которым происходит скачкообразное ((или плавное) изменение частоты возбудителя передатчика. Однако программа предполагает вполне определенные внешние условия (например, окружающую температуру). Анализатор внешних условий при изменении внешних условий создает сигналы коррекции, которые с помощью исполнительного устройства корректируют частоту возбудителя. Практически, такими корректирующими элементами могут быть специальные подстроечные конденсаторы с ‘необходимыми температурными коэффициентами изменения емкости.
По разомкнутому циклу часто строятся и системы включения сложных радиопередающих устройств, обеспечивающие определенную последовательность включения элементов (охлаждение, накал, цепи смещения, возбудитель, пониженное анодное 'напряжение и т. д.)
Разомкнутые системы обычно просты (и соответственно более надежны), однако используются при стабильных внешних условиях работы или небольшом количестве влияющих факторов, которые сравнительно легко могут быть компенсированы.
Разомкнутые системы так же,/как и замкнутые, могут быть системами постоянного и переменйого токов, стационарными и нестационарными, линейными и нелинейными, непрерывными и дискретными.
Класс более сложных — приспосабливающихся (адаптивных) систем, называемых также кибернетическими, включает такие, в процессе работы которых происходит преднамеренное (контролируемое) изменение параметров системы и управляющих сигналов (самонастраивающиеся системы), структуры системы (самоорганизующиеся системы) или алгоритма управления (самоалго-ритмизирующиеся системы). Система «приспосабливается» к изменяющимся условиям работы.
В зависимости ют способа реализации контролируемых изменений приспосабливающиеся системы 'подразделяются на пассивные и активные.
В пассивных системах приспосабливание происходит по определенной программе, определяющей характер преднамеренных изменений при изменении условий работы. Программа разрабатывается заранее, на стадии проектирования системы, по данным априорной информации о будущих условиях ее работы. Примером
29 t
пассивной приспосабливающейся системы является система радиосвязи, изменяющая параметры устройств заранее разработанным образом в зависимости от изменения нагрузки, условий прохождения радиоволн, уровня помех и др.
В активных системах изменения свойств производятся в результате решения задачи о целесообразности такого изменения, выполняемого в процессе эксплуатации системы на основе рабочей (текущей) информации о реальных условиях работы. При этом преднамеренные изменения могут быть неизвестны заранее.
4 В зависимости от наличия или отсутствия самоанализа эффекта приспосабливания системы подразделяют на замкнутые и разомкнутые. В первом случае имеется дополнительный контур приспособления, с помощью которого анализируется и оценивается эффект преднамеренных изменений системы. Такие системы не. только определяют условия, при которых обеспечивается экстремум показателя цели управления, но и. соответственно изменяют свойства, обеспечивая этот экстремум.
Разновидностью таких систем являются игровые автоматические системы, в которых сложные задачи управления, возникающие, например, в больших системах связи, решаются методами теории игр. Задачи управления трактуются как задачи автоматического проведения некоторой игры двух или более сторон, в которой действия сторон подчинены определенным правилам (алгоритмам) или являются случайными. Управление производится дискретно, этапами. /
Каждая команда управления (действия первой стороны) формируется на основе анализа множества решений — выборов в каждом этапе. Критерием выбора является экстремум показателя цели (максимум функции выгоды).
Рис. 2.5. Схема игровой системы управления
Упрощенная схема игровой системы управления дана на рис. 2.5. По такой схеме может быть построена автоматизированная сеть связи. В этом случае в различных пунктах в различное время возникают требования передачи сообщений (действия второй стороны). Начальной информацией О’ первой стороне являются данные о размещении средств связи и их пропускной способности. Однако рабочая информация о первой стороне может отличаться от априорной, она может содержать сведения о выходе из строя тех или иных линий или узлов связи, ухудшении качества связи на отдельных направлениях и т. п.
Начальная информация о второй стороне основывается на потребностях в каналах связи на отдельных направлениях и фактической их загрузке. Вообще же эта информация в игровых системах может быть минимальной.
По способу обеспечения цели управления приспосабливающиеся системы подразделяются на аналитические и поисковые.
Аналитические или вычислительные системы находят условия экстремума показателя цели аналитическим путем с помощью вычислений, производимых по алгоритму, который представляет собой аналитическое решение задачи оптимизации.
В поисковых системах преднамеренные изменения свойств управляющей системы производят в результате поиска условий экстремума.
Аналитическим системам необходимы информация и время для вычислительной работы. Поисковым системам не требуется полной информации, но необходимо время на поиск оптимального решения. Поэтому поисковые системы применяют при сравнительно
Рис. 2.6. Схема поисковой системы экстремального регулирования
медленно изменяющихся условиях работы. Добавляя в систему быстрые искусственные возмущения поиска, определяют изменение показателей качества работы системы и производят соответствующее изменение параметров, улучшающее эти показатели.
Примером поисковой системы является система экстремального регулирования (рис. 2.6а), предназначенная для настройки колебательного контура каскада передатчика на максимум напряжения на контуре. При ручной настройке такого,, контура изменяют емкость конденсатора С„ и наблюдают 'изменения режима. работы каскада, по которым судят о настройке контура на частоту подводимых к сетке лампы колебаний. Если изменение емкости ухудшает показатели на- ' стройки, то ее изменяют д другую сторону до тех пор, пока эти показатели качества настройки (обычно одновременное уменьшение постоянной составляющей анодного тока и увеличение сеточного тока лампы) не станут наилучшими. Оператор при этом ищет оптимальное значение емкости конденсатора.
В самонастраивающейся системе поиск производится с помощью конденсатора поиска Сп, имеющего небольшую емкость. В результате определяется, в какую сторону следует изменять емкость контура (увеличивать или уменьшать). Это изменение вносится конденсатором настройки Сп. Двигатель поиска ДП периодически изменяет емкость Сп и управляет устройством формирования опорного сигнала УФОС. Анализатор А сопоставляет опорное напряжение С/оп с изменением напряжения на контуре UK и создает напряжение коррекции UKopr зависящее от отклонения настройки контура от необходимой (от резонанса). Изменение емкости Сп приводит к амплитудной модуляции напряжения на контуре. Огибающая этого напряжения имеет частоту, равную частоте изменения емкости Сп, и фазу, зависящую от отклонения частоты настройки от резонансной. При изменении емкости вблизи резонансной величины частота огибающей удваивается (рис. 2.36). Направление вращения двигателя настройки ДН зависит от сдвига фазы огибающей относительно фазы опорного напряжения Uоп. Двигатель вращается до тех пор, пока напряжение коррекции не станет равным нулю, а это произойдет, когда контур окажется настроенным на частоту усиливаемых колебаний f.
Анализатором может служить фазовый детектор, который должен создавать на выходе напряжение разных знаков при увеличении или уменьшении суммарной емкости контура СК = СПЧ-СН относительно резонансной величины Со.
Схема аналитической .самонастраивающейся системы приведена на рис. 2.7. Задача управления заключается в автоматическом определении параметров и подстройке корректирующего устройства
Рис. 2.7. Схема аналитической самонастраивающейся системы
КУ так, чтобы обеспечивался оптимальный режим работы объекта управления ОУ. Необходимые операции производятся на основе информации, получаемой вычислительным устройствам ВУ, о внешних и внутренних условиях работы системы. В случае разомкнутых систем вычислительное устройство определяет исходные характеристики воздействий и импульсную переходную функцию
объекта управления, находит оптимальную импульсную переходную функцию системы и соответственно необходимую оптимальную импульсную переходную функцию корректирующего устрой-С1ва КУ. Информация о требуемых динамических свойствах КУ с помощью преобразующего устройства преобразуется в сигналы, управляющие динамическими свойствами корректирующего устройства с целью приближения их к оптимальным.
В случае замкнутой самонастраивающейся системы ВУ определяет исходные характеристики воздействий и переходную функцию объекта управления, находит идеальную оптимальную переходную функцию системы в результате решения задачи первичной оптимизации и действительную переходную функцию системы. Далее, после сравнения текущих оптимальных и реальных динамических свойств системы и решения задачи на экстремум показателя качества управления, находят необходимые импульсные переходные функции разомкнутой системы и корректирующего устройства.
Значительную часть изучаемого курса составляет теория регулирования, являющаяся научной основой неприспосабливающихся замкнутых систем. Как упоминалось ранее, эти системы имеют наибольшее распространение как самостоятельные устройства и как элементы более сложных — приспосабливающихся систем. Рассмотрим их более подробно.
2.2. Неприспосабливающиеся замкнутые системы
Функциональная схема замкнутой системы управления дана на рис. 2.8.
Пунктиром на рисунке показана идеализированная система ИС, которая точно выполняет команды и не вносит никаких ошибок.
а)
I Задающий Входной
I сигнал
ис
выходной параметр системы
Идеальн.
значение
Ошибка
Сигнал Регулирующий Регулируе-ошибки сигнал мая величина!
ВУ
РС
НРС
системы
^Косвенно регулируемая Величина
гос
Командный сигнал
Сигнал главной обратной связи
Рис 2.8. Типовая схема замкнутой системы регулирования
р
Реальная система регулирования показана сплошными линиями. Система содержит входное устройство ВУ, вычитающее устройство, помеченное крестиком, регулятор Р, регулируемую часть системы РС, косвенно регулируемую часть системы КРС и цепь главной обратной связи ГОС.
Деление системы на две части — регулируемую и косвенно регулируемую связано с тем, что часто интересующий параметр системы регулируется и измеряется не непосредственно, а косвенно. Например, в системе стабилизации напряжения на нагрузке может .регулироваться ток, отдаваемый в нагрузку, в системе стабилизации температуры в камере с кварцем — температура датчика и т. п. При этом взаимосвязь между регулируемой и косвенно регулируемой величинами предполагается вполне определенной.
Входное устройство устанавливает связь между командным сигналом и задающей входной величиной.
Вычитающее устройство сравнивает задающую входную величину с регулируемой величиной и создает сигнал ошибки, равный их разности.
Регулятор Р преобразует сигнал ошибки в регулирующий сигнал, с помощью которого объект изменяет 'регулируемую величину, вследствие чего ошибка и соответственно сигнал ошибки уменьшаются ДО' нуля (или небольшой, допустимой техническими условиями, величины). Обычно (регулятором являются усилители и различные корректирующие (стабилизирующие) и преобразующие устройства, работающие на низком энергетическом уровне.
Цепь главной обратной связи устанавливает связь между регулируемой величиной и сигналом обратной связи. В этой цепи со- -держатся элементы, преобразующие регулируемую величину в сигнал той же физической природы, что и задающий сигнал.
Для удобства анализа задачу регулирования можно формулировать и решать по упрощенной схеме, показанной на рис. 2.86. Схема содержит регулятор Р, формирующий регулирующий сигнал, и объект управления О. Состояние объекта характеризуется величиной выходного параметра хВЫх, которая должна равняться задаваемому значению х3. Оба сигнала подводятся к вычитающему устройству, создающему сигнал ошибки: х = х3—хВЫх-
Задача системы заключается в точной отработке задающего воздействия х3 и сведении ошибки к нулю. В реальных условиях на систему влияют различные мешающие воздействия (внутренние и внешние). В связи с этим регулируемая величина может изменить заданное значение — появится ошибка. Необходимо свести эту ошибку к нулю (или минимально допустимой величине). Мешающие воздействия можно представить в виде эквивалентных сигналов, возникающих в той или иной точке системы. Рассмотрим разновидности замкнутых систем.
Системы стабилизации
Системы стабилизации поддерживают выходной сигнал на определенном постоянном уровне.
В радиосвязи и радиовещании системы стабилизации очень распространены: стабилизаторы тока и напряжения электропитаю-34
щих устройств, стабилизаторы уровня сигналов в (различных устройствах, стабилизаторы частоты, фазы и амплитуды сигналов переменного тока, стабилизаторы температуры, скорости движения, положения в пространствечи др. Рассмотрим устройство нескольких стабилизаторов более .подробно.
Внутренний контур стабилизатора температуры кварцевого эталона частоты. Для эталонов частоты с относительной нестабильностью частоты 1О~10 применяют двойную стабилизацию температуры кварцевого генератора. Камера, в ко-
Рис. 2.9. Схема стабилизации температуры кварцевого эталона частоты
торую помещен кварц, имеет внешний контур грубой стабилизации температуры, •поддерживающий температуру (приблизительно постоянной, и внутренний контур точной стабилизации температуры (рис. 2.9а).
Камера Км с кварцем Кв и нагревателем Н, так же как и сильфон С, помещена в полость, наполненную веществом, имеющим стабильную температуру плавления и относительно большой коэффициент объемного расширения.
Изменение температуры в камере приводит к повышению давления на сильфон и к перемещению ферритового стержня Ф на величину Д/ в катушке самоиндукции датчика температуры КД. Катушка датчика является элементом входного устройства ВУ, при разбалансе которого на входе усилителя У появляется напряжение величина и знак которого .зависят от величины и знака изменения температуры в камере (точнее, около сильфона). На выходе усилителя включен нагревательный элемент Н, температура которого также возрастает или уменьшается сбответственно напряжению на выходе усилителя. Изменение колй-чества тепла, отдаваемого нагревательным элементом в камеру (AQ), приводит к уменьшению первоначально возникшего изменения температуры в камере. Стабилизация температуры, производимая описанным способом, обеспечивает ее постоянство с точностью до 0,001-7-0,0001°C.
2* 35
На рис. 2.96 показана блок-схема рассматриваемой системы стабилизации. Требуемая температура камеры задается установкой определенных значений параметров входного устройства ВУ. Возникающее напряжение сигнала ошибки ДЙ усиливается усилителем У и подается на исполнительное устройство ИУ, роль которого выполняет нагревательный элемент. Увеличивая или уменьшая приток тепла AQ, нагревательный элемент изменяет выходной параметр (температуру) объекта управления ОУ (‘камеры Л-и). Измерительным элементом ИЭ является сильфон, превращающий изменения температуры в механическое перемещение феррита на величину Д/, .которое преобразователем Пр (индуктивным датчиком температуры) превращается в изменение индуктивности ДБ.
Возмущающими воздействиями, влияющими на нормальную работу системы, являются различного рода помехи, изменение параметров входного устройства, ♦ изменение питающих напряжений и изменение окружающей температуры.
Заметим, что наблюдаемые многократные преобразования физических величин, отображающих сигналы управления (температура—индуктивность—напряжение — ток — тепло — температура — механическое перемещение — индуктивность), являются особенностью большинства автоматических систем. В силу этого при количественном описании процессов и расчете систем используются различные физические законы, устанавливающие взаимосвязи сигналов на входе и выходе различных элементов системы.
Система стабилизации скорости движения носителя в устройствах магнитной записи. Для неискаженной записи и воспроизведения звуковых программ магнитная лента или другой носитель должны перемещаться с постоянной скоростью. Особенно большие требования предъявляются к системам записи широкополос-п. На рис. 2.,10 показана блок-схема системы, стабилизирующей скорость движения магнитной ленты устройства, предназначенного для воспроизведения магнитной записи.
На специальную дорожку ленты предварительно записывается синусоидальный сигнал высокостабилыного генератора Г.
При воспроизведении лента Л перемещается мимо контрольной головки воспроизведения КГБ и головки воспроизведения основного сигнала ГВС. Перемещение осуществляется вращением ведущего вала ВВ и прижимного ролика ПР.
опорный сигнал от генератора и на
пряжение с выхода усилителя Уi, воспроизводящее аналогичный сигнал, записанный ранее и считанный с ленты головкой ДГВ. В случае изменения скорости движения ленты считываемый сигнал приобретает паразитную фазовую модуляцию. На выходе ФД появляется сигнал ошибки — напряжение, знак и величина которого соответствуют знаку и величине изменения скорости движения. После усиления в„усилителе У2 и преобразования в устройстве П появляется сигнал, изменяющий скорость вращения двигателя' Д и через редуктор Р скорость вращения ведущего вала ВВ. Изменение скорости ведущего вала меняет скорость перемещения ленты так, что воспроизводимый синусоидальный контрольный сигнал перестает отличаться от сигнала генератора Г. Скорость движения ленты при воспроизведении становится равной скорости, которую она имела при записи. Инерционные свойства двигателя не позволяют устранять быстрые изменения скорости движения носителя, их устраняет дополнительное устройство, меняющее положение головки ГВС, которое на рис. 2.10 не показано.
В рассматриваемой системе выходным параметром является скорость движения магнитной ленты. Входным устройством, задающим необходимую скорость в форме напряжения определенной частоты, является генератор Г. Фазовый де-36
ных сигналов, сигналов управления и т.
С) ГВС
□О
______Л_
О К ГВ
I у. I Выход основного I д I
L—т—1 сигнала L—Ч—1
Рис. 2.10. Блок-схема стабилизации скорости движения ленты в системе магнитной записи
На фазовый детектор ФД подаются
I
тектор выполняет роль измерителя рассогласования (вычитающего устройства). Фактическая скорость движения ленты измеряется и преобразуется в напряжение 'соответствующей частоты с помощью головки воспроизведения КГБ и усилителя У1, 'которые образуют цепь главной обратной связи. Двигатель, редуктор и ведущий вал в совокупности являются исполнительным органом системы стабилизации.
Системы программного регулирования
Программное управление предполагает изменение регулируемой величины по наперед заданному закону. Для создания .необходимого задающего входного сигнала применяют программное устройство /7У. В этом случае схема программного регулирования приобретает хвид, показанный на рис. 2.11.
Работу системы программного регулирования можно рассматривать как работу системы стабилизации, в которой задаваемая величина в соответствии с определенной программой получает некоторые изменения. Эти изменения должны с минимальными искажениями отрабатываться системой. Как*и в системе стабилизации, эффект различных мешающих воздействий должен сводиться к ничтожной величине.
Программное автоматическое управление применяют в случае полной уверенности в том, что
предусмотренная программа действий системы удовлетворяет условиям эксплуатации. По определенной программе можно менять частоту возбудителя передатчика или гетеродина приемника, по
Рис. 2.11. Схема программного регулирования
ирби мольные данные движения ПЗС
Блок-схема программного управления антенной системы связи через ИСЗ
лосу пропускания йли род работы радиоустройства, ориентировочно наводить антенны радиотелескопов или систем космической радиосвязи и др.
На рис. 2.12 приведена блок-схема системы программного наведения антенны системы связи, использующей искусственный спутник Земли.
Программа управления разрабатывается вычислительным устройством наземного пункта связи ВУ и поступает в блок памяти БП, связанный с системой
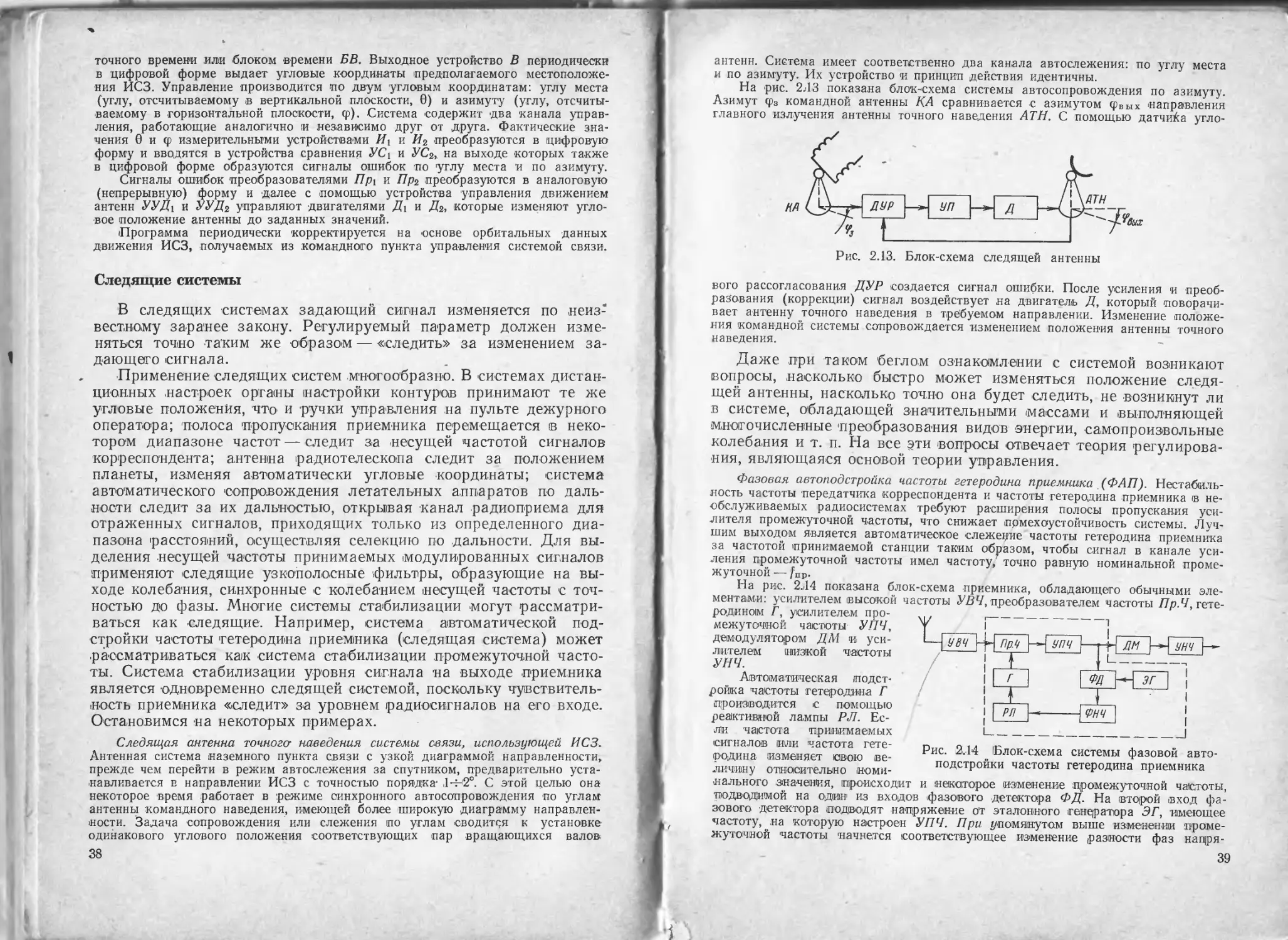
точного времени или блоком времени БВ. Выходное устройство В периодически в цифровой форме выдает угловые координаты предполагаемого местоположения ИСЗ. Управление производится по двум угловым координатам: углу места (углу, отсчитываемому в вертикальной плоскости, 0) и азимуту (углу, отсчитываемому в горизонтальной плоскости, (р). Система содержит два канала управления, работающие аналогично '.и независимо друг от друга. Фактические значения 6 и ф измерительными устройствами И\ и И2 преобразуются в цифровую форму и вводятся в устройства сравнения УС\ и УС2, на выходе которых также в цифровой форме образуются сигналы ошибок по углу места и по азимуту.
Сигналы ошибок преобразователями Пр\ и Пр2 преобразуются в аналоговую (непрерывную) форму и далее с помощью устройства управления движением антенн УУД\ и УУД2 управляют двигателями Д1 и Д2, которые изменяют угловое положение антенны до заданных значений.
/Программа периодически корректируется на основе орбитальных данных движения ИСЗ, получаемых из командного пункта управления системой связи.
Следящие системы
В следящих системах задающий сигнал изменяется по неизвестному заранее закону. Регулируемый параметр должен изменяться точно таким же образом — «следить» за изменением задающего сигнала.
Применение следящих систем многообразно. В системах дистанционных настроек органы настройки контуров принимают те же угловые положения, что и ручки управления на пульте дежурного оператора; полоса пропускания приемника перемещается в некотором диапазоне частот — следит за несущей частотой сигналов корреспондента; антенна радиотелескопа следит за положением планеты, изменяя автоматически угловые координаты; система автоматического сопровождения летательных аппаратов по дальности следит за их дальностью, открывая канал радиоприема для отраженных сигналов, приходящих только из определенного диапазона расстояний, осуществляя селекцию по дальности. Для выделения несущей частоты принимаемых модулированных сигналов применяют следящие узкополосные .фильтры, образующие на выходе колебания, синхронные с колебанием несущей частоты с точностью до фазы. Многие системы стабилизации могут рассматриваться как следящие. Например, система автоматической подстройки частоты гетеродина приемника (следящая система) может рассматриваться как система стабилизации промежуточной частоты. Система стабилизации уровня сигнала на выходе приемника является одновременно следящей системой, поскольку чувствительность приемника «следит» за уровнем радиосигналов на его входе. Остановимся на некоторых примерах.
Следящая антенна точногсг наведения системы связи, использующей ИСЗ. Антенная система /наземного пункта связи с узкой диаграммой направленности, прежде чем перейти в режим автослежения за спутником, предварительно устанавливается в направлении ИСЗ с точностью порядка- ,1-4-2°. С этой целью она некоторое время работает в режиме синхронного автосопровождения по углам антенны командного наведения, имеющей более широкую диаграмму направленности. Задача сопровождения или слежения по углам сводится к установке одинакового углового положения соответствующих пар вращающихся валов. 38
антенн. Система имеет соответственно два канала автослежения: по углу места и по азимуту. Их устройство и принцип действия идентичны.
На рис. 2ЛЗ показана блок-схема системы автосопровождения по азимуту. Азимут (р3 командной антенны КА сравнивается с азимутом <рВых направления главного излучения антенны точного наведения ATM. С помощью датчика угло-
Рис. 2.13. Блок-схема следящей антенны
вого рассогласования ДУР создается сигнал ошибки. После усиления и преобразования (коррекции) сигнал воздействует на двигатель Д, который поворачивает антенну точного наведения в требуемом направлении. Изменение положения командной системы сопровождается изменением положения антенны точного наведения.
Даже при таком беглом ознакомлении с системой возникают вопросы, насколько быстро может изменяться положение следящей антенны, насколько точно она будет следить, не возникнут ли в системе, обладающей значительными массами и выполняющей •многочисленные преобразования видов энергии, самопроизвольные колебания и т. п. На все эти вопросы отвечает теория регулирования, являющаяся основой теории управления.
частоты УВЧ, преобразователем частоты Пр.Ч,гете-
Рис. 2.14 Блок-схема системы фазовой автоподстройки частоты гетеродина приемника
и некоторое изменение промежуточной частоты,
Фазовая автоподстройка частоты гетеродина приемника (ФАП). Нестабильность частоты передатчика корреспондента и частоты гетеродина приемника в необслуживаемых радиосистемах требуют расширения полосы пропускания усилителя промежуточной частоты, что снижает прмехоустойчивость системы. Лучшим выходом является автоматическое слежецие частоты гетеродина приемника за частотой принимаемой станции таким образом, чтобы сигнал в канале усиления промежуточной частоты имел частоту/ точно равную номинальной промежуточной — /пр.
На рис. 2.44 показана блок-схема приемника, обладающего обычными элементами: усилителем высокой родином Г, усилителем промежуточной частоты УПЧ, демодулятором ДМ и усилителем низкой частоты УПЧ.
Автоматическая подстройка частоты гетеродина Г Производится с помощью реактивной лампы РЛ. Если частота принимаемых сигналов или частота гетеродина изменяет свою величину относительно номинального значения, происходит подводамой на один1 из входов фазового детектора ФД. На второй вход фазового, детектора подводят напряжение от эталонного генератора ЭГ, имеющее частоту, на которую настроен УПЧ. При t/помянутом выше изменении промежуточной частоты начнется соответствующее изменение разности фаз напря
жений, подводимых ко входам фазового детектора, и на его выходе возникнет напряжение сигнала ю-шибки, пропорциональное разности фаз. .Фильтр низкой частоты ФНЧ освобождает напряжение сигнала ошибки от побочных частотных составляющих, после чего оно поступает на вход (реактивной лампы. Происходит изменение частоты гетеродина так, что промеж'уточная частота принимает номинальное .значение. Поддержание нового установившегося значения частоты требует соответствующего напряжения на входе РЛ и, следовательно, некоторой разности фаз колебаний на входе Ф^1, т. е. система ФАП производит настройку с точностью до фазы.
Таким ’ образом, в процессе работы частота гетеродина следит за изменениями частоты принимаемых сигналов, поэтому разность все время остается равной номинальной промежуточной частоте, на которую настроен УПЧ. С другой стороны, поскольку в процессе автоподстройки величина промежуточной частоты поддерживается .постоянной, систему можно рассматривать как систему стабилизации.
Элементы, образующие замкнутый контур системы автоподстройки частоты, обведены на рис. 2.14 пунктиром.
Фазовая автоподстройка используется в следящих фильтрах, находящих широкое применение в современных системах радиосвязи.
Глава 3
ЭКВИВАЛЕНТНЫЕ ЗВЕНЬЯ
АВТОМАТИЧЕСКИХ СИСТЕМ
3.1. Понятие об эквивалентных звеньях
Процесс управления может рассматриваться как процесс прохождения управляющего сигнала через различные элементы системы. При этом даже в сравнительно несложных устройствах происходят многократные изменения сигналов управления. В рассмотренном ранее стабилизаторе температуры изменения температуры внешней среды вызывали изменение давления, оказываемого заполнителем камеры на сильфон. Давление вызывало перемещение феррита; перемещение приводило к изменению магнитного поля, которое вызывало изменение напряжения на входе усилителя, и соответственно к изменению мощности, потребляемой нагревателем, и количеству выделяемого тепла. Последнее ком-, пенсировало первоначальное изменение температуры.
Всю систему можно представить как совокупность звеньев, соединенных между собой определенными способами.
Деление на звенья производят таким образом, чтобы они обладали однонаправленным действием, т. чтобы сигнал на выходе звена определялся только входным сигналом и свойствами звена и не зависел от характеристик последующих звеньев.
Далее, если это специально не оговорено, изучаются линейные, стационарные звенья и системы.
Схематическое обозначение звена дано на рис. 3.1, где стрелками показано направление процесса управления.
Звенья различают по виду дифференциальных уравнений или передаточных Функций, связывающих выходной и входной сигналы.
Количество различных типов эквивалентных звеньев сравнительно невелико.
Х6ых
Х8х
u/(s)
Рис. 3.1. Схематичное обозначение эквивалентного звена
Следует заметить, что одно и то же устройство может представляться различными эквивалентными звеньями в зависимости от того, какие параметры его следует считать входными и выходными. Например, электродвигатель, входным сигналом которого является напряжение, будет .представляться одним типом звена (инерционным), если выходным сигналом считать скорость вращения вала, и другим типом звена (инерционно-интегрирующим), если выходным сигналом считать угол поворота вала.
3.2. Средства описания свойств (основные характеристики) звеньев и систем
Физические величины, представляющие сигналы управления на входе хвх(0 и выходе хВых('О звена, могут быть различными. Они определяются физической природой процессов, которые протекают в соответствующих технических устройствах.
Взаимосвязь входных и выходных величин представляется дифференциальными уравнениями, временными характеристиками, передаточными функциями и частотными характеристиками.
' Дифференциальные уравнения полностью характеризуют звенья и системы. Они имеют вид
№вых (0 d"-1 хВЬ1Х(0 z Л _
ап-------+ a„_i-----~-----г . . • + «охвых \Ч —
dtn dt x
= bm + • • •+V» (О, (3.1)
dtm dtm~l
где at и bi — постоянные коэффициенты уравнения, определяемые физическими параметрами звена или системы. В реальных системах всегда п^т.
Временные характеристики устанавливают .зависимость выходного сигнала от времени при определенных типовых воздействиях на входе звена или системы.
Важнейшими временными характеристиками являются переходные характеристики (или переходные функции) и импульсные характеристики (или импульсные функции).
Переходная характеристика h(t) представляет собой зависимость от времени сигнала на выходе звена (системы) при единичном скачкообразном воздействии на его входе (ступенчатой функции)
*„0=1 (0=1 ° "ри*<° (3.2)
( 1 при t > О,
отнесенного к этому воздействию, при нулевых начальных условиях.
Сигнал, 'соответствующий скачкообразному изменению входной величины
хвх(0=Л1(0, (3.3)
является типовым входным воздействием при исследовании систем.
В реальных условиях подобное воздействие соответствует быстрому включению задающего сигнала, имеющего постоянную величину, или возникновению постоянного мешающего воздействия и т. п.
Переходные характеристики во многих случаях легко получить экспериментальным путем, что облегчает исследование систем, когда аналитическое представление протекающих процессов затруднено.
Импульсная переходная характеристика представляет собой реакцию звена или системы при нулевых начальных условиях на единичный импульс, отнесенную >к площади этого импульса.
Единичный импульс (имщ льсная 6-функция) представляет собой Производную от единичной ступенчатой функции
*вх(0=б(0=1'(0 (3.4)
и соответствует импульсу бесконечно большой амплитуды и бесконечно малой длительности, возникающему в момент /=0, так, что его площадь оказывается равной единице, т. е.
+-
f l'(0<ft = l. (3.5)
“ СО
/
Воздействия, близкие к импульсным, наблюдаются при формировании дискретных сигналов и при некоторых видах возмущений (помехах).
Для определения реакции звеньев или систем на изменяющиеся задающие воздействия используют также сигналы, определяемые степенными функциями времени: линейный
... f At при t > 0 /о е.
*МЮ = п .С. (3-6)
( 0 при f<0,
квадратичный
•^вх (О —
при t > О
(3.7)
при t<Z О,
а также синусоидальный
^вх (0 — -^вх sin СО
(3.8)-
43
Графики импульсного, линейного, квадратичного и скачкообразного сигналов показаны на рис. 3.2.
Передаточные функции
Рис. 3.2. Типовые входные воздействия
Среди различных передаточных функций, характеризующих изменение сигнала при его прохождении через звено или систему, большое распространение получили передаточные функции, устанавливающие взаимосвязь между преобразованиями Лапласа сигнала на входе и выходе звена или системы.
Преобразование Лапласа X(s) функции времени x(t)\ X(s)=L [х (01 = j х (t) e~stdt;
о
(3.9) й где s = 0--M(i), a co и о и co — действительные числа.
Функция x(t) называется оригиналом, a X(s) —’ее изображением ’).
Применив преобразование Лапласа к ур-нию (3.1) при нулевых начальных условиях, найдем взаимосвязь изображений входной и выходной функций:
__j S + . . . Ч- CLq ^вых 00 =
. . + ^0]XBX(s) (3.10)
или
-^•вых (s)=XBX (s)V(s). (3.11)
Отношение изображений выходной величины к входной
IT(s)= *Bblx(s) (3.12)
^BX (s)
называется передаточной функцией звена или системы.
Воспользовавшись выражениями (3.12) и (3.10), выразим передаточную функцию через коэффициенты дифференциального уравнения (3.1):
W (s) - + sm-' + . . . + Z>o = ^00 , ,3 j
an$n + an~\ d1 + . . . -f- a0
’) Преобразование Лапласа функции, представляющей изменение сигнала во времени, будем дальше .называть просто изображением сигнала.
где 7W(s) и N(s) —полиномы соответственно степени тип, M(s)-6/rasm + ^_1sm-1+ . . ,+Z>0, (3.14)
N(s)=ansn + an_lsn-1^. . . . 4-а0. (3.15)
Если известны передаточные функции отдельных звеньев системы, то по изложенным ниже правилам с помощью простых алгебраических операций получают передаточную функцию системы или интересующей ее части.
Обратный переход от изображения к соответствующей функции времени производится путем, обратного преобразования Лапласа, обозначаемого
*(0=£-‘[X(s)].
(3.16)
Определение оригинала по изображению можно произвести аналитическим путем или используя соответствующие справочные таблицы (см., например, [15]). Некоторые функции x(t) и их изображения X(s) приведены в табл. 3.1.
Нахождение сигнала на выходе звена или системы хВЫх(0 ПРИ заданном входном воздействии хВх(0 производится в следующем
порядке:
а) аналитически или по таблицам справочника находится изображение входного сигнала Хвх (s),
б) находится передаточная функция звена IF(s),
в) находится изображение выходного сигнала XBbix’(s) = = XBX(s)F(s),
г) по справочнику или таблицам находится оригинал хВых(0, соответствующий изображению XBbix(s)y/
Пример 1. Найти изображение ступенчатой (функции x(t)=Ai(t).
Согласно (3.9) /
о
“ А
e“s/ dt= f Al (f)e~s< dt = —— e~sZ 6 s
t=o
А_ s
(3.17)
Пример 2. Найти реакцию звена, имеющего передаточную функцию W (s], на импульсное воздействие xvx(t)='l'(t).
Изображение' входного воздействия
Хвх (s)^/t [ l'-(01=s ~ = 1 ‘ (3.18)
Изображение сигнала на выходе звена
*вых (S) = Хвх (S) W (s) = W (s). (3.19)
Реакция звена на импульсное воздействие (импульсная переходная характеристика)
^вых (0 — L 1 [-^вых (s)] — L 1 [W (s)J — w (t).
(3.20)
Реакция звена или системы w(t) на импульсное воздействие 1'(0 имеет своим изображением передаточную функцию U^(s) и называется весовой функцией звена (или системы).
ТАБЛИЦА3.1
ПРЕОБРАЗОВАНИЯ ЛАПЛАСА X (s) НЕПРЕРЫВНЫХ ФУНКЦИЙ ВРЕМЕНИ x(f) И z-ПРЕОБРАЗОВАНИЯ X*(z) СООТВЕТСТВУЮЩИХ ДИСКРЕТНЫХ ФУНКЦИЙ ВРЕМЕНИ х[пТ]
X(s) » X*(z)
1'(0 1 I
Г (t — пТ) e~nTs z~n
A Az
Л1(0
s z — 1
A ATz
At
s2 (z-1)2
At2 A Л *(*+!)
» • Л
2 s3 2 (z—I)3
at 1 z
S 4? a z — e~ar
1 Tz e~aT
t е (S + *)a (г_е-“г)2
1 Р—at a ( 1 — e=ar) z
S (s + a) (2 — l)(z— e~ar)
t I
т 1 z
а -V- s —— Ina
T z — a
2
SIH (Do Т z sin o)o T
S2+ (D§ z2 — 2z cos o)oT 4- 1
COS (Do t s z (z — COS 0)0 T)
S2 4- (D§ Z2 — 2z COS (Do?1 4- 1
(D0 z e~aTsin w0T
e~at sin (d0 t (s + a)2+ 0)2 z2 — 2e—aT z cos (ooT 4- e—2aT
1 (1 — e—aT) z
1 1 — e a a a8 S2 (s 4- a.) a(2~ I)2 a2(z— i)(z —e“ar)
Для оценки точности работы автоматических систем часто используют теорему о конечном значении функции x(t), которая имеет вид
lim %(/)=. lim sX(s), (3.21)
s-»0
т. e. установившееся значение функции равно пределу, к которому стремится изображение этой функции, умноженное на переменную 5 при условии, что последняя стремится к нулю.
Частотные характеристики
Частотные методы анализа, используемые в радиотехнике, нашли широкое применение и в теории автоматического управления." Если на вход линейного звена или системы, имеющих постоянные параметры, воздействует сигнал
*Bx(0 = /BX,rasincot (3.22)
то на выходе при установившемся состоянии сигнал будет иметь ту же частоту, но будет отличаться от входного амплитудой и фазой:
•^вых (О = -^-вых/п sin (со t -р- ср). (3.23)
Взаимосвязь выходного и входного сигналов определяется комплексной частотной или комплексной передаточной функцией
W(i со) = _^выхД)_ _ ^вых т gi<F
- -^вх (О *вх т
где
Л'ох(/)==Л',1хте'“^ ~у их____ у- J (<•>*+¥)
Лвь1х — Лвыхт с
Комплексную частотную функцию можно определить, частное решение дифференциального ур-ния (3.1) в виде
U7(i (о)= (д)т (i G>)m 1-р . . -р &о
0 со/+an_j (i о)"'1 + . . .-Р а0
Нетрудно заметить, что эту функцию можно также получить * из передаточной функции (3.13) заменой переменной s на ко. Комплексная частотная функция представляется совокупностью вещественной и мнимой составляющих
W (i со) = U (со) + i V (со), (3.28)
где U (со) и V(оз) — соответственно вещественная и мнимая частотные характеристики, а также в показательной форме
№(i со) = W» еМю). (3.29)
(3.24)
(3.25)
(3.26) находя (3.26)
(3.27)
Согласно (3.24) и (3.29) модуль комплексной частотной функции
U7 (со) = = у и2 (ю) + у2(ю). (3.30)
Зависимость от частоты отношения амплитуды выходного сигнала к амплитуде входного, равна модулю комплексной частотной функции IF(oj), называется амплитудно-частотной характеристикой (АЧХ) звена (системы).
Зависимость от частоты фазового сдвига, получаемого сигналом после прохождения звена (системы), равная аргументу комплексной частотной функции
<p(co)=arctg^- , (3.31)
t/(o>)
называется фазо-частотной характеристикой (ФЧХ).
Сама комплексная частотная функция, определяя изменение амплитуды и фазы сигнала в зависимости от его частоты, назы-
Рис, 3.3. Построение амплитудно-фазовой характеристики
вается амплитудно-фазовой характеристикой (АФХ). Ее график строится на плоскости комплексного переменного или в полярных координатах, придавая частоте различные значения и используя выражение (3.28) или (3.29), как показано на рис. 3.3. Стрелка указывает движение представляющей точки [изменение IF(i(o)] при увеличе-
нии частоты.
Находят широкое применение амплитудно- и фазо-частотные характеристики, построенные в логарифмическом масштабе и называемые соответственно логарифмической амплитудно-частотной (ЛАЧХ) и логарифмической фазо-частотной (ЛФЧХ) характеристиками.
Для построения ЛАЧХ .модуль комплексной передаточной функции И7(ы) откладывают по оси ординат в децибелах:
Ц7[Д6](И)=2О18Ш(Ш).
(3.32)
По оси абсцисс откладывают частоту со в логарифмическом масштабе или логарифм частоты. Десятикратное изменение частоты называется декадой. Начало координат часто помещают в точку, соответствующую частоте со=1 (нуль декад или lgw=0).
При построении ЛФЧХ величина <р(со) откладывается по оси ординат в обычном линейном масштабе.
На рис. 3.4 показаны системы координат при построении ЛАЧХ (а) и ЛФЧХ (б).
По частотным характеристикам можно определять параметры системы не только в частотной, но и во временной области. Частот-
ьо
-2_______-_у_
0,01 0,1
6)
-2 • -/
~ooi ~oi
го -о
Декада
/ f
"id 100
S Ц" 1000 т, рад/сек
to
0 1
7 W
2 ~ioo
3 ьдш
ЮОО ш, рад/сек
-90
Рис. 3.4. Системы координат логарифмических характеристик
ные характеристики могут быть достаточно просто получены экспериментальным путем. Построение логарифмических частотных характеристик сложных систем значительно проще, чем обычных частотных характеристик. /
3.3. Характеристики основных эквивалентных звеньев /
Безынерционное (усилительное) звено
Безынерционным или усилительным звеном называют звено, не изменяющее формы сигнала, а только его уровень, когда
*вь1Х(0=Овх(г), (3.33)
где К — постоянная действительная величина, называемая коэффициентом передачи или коэффициентом усиления.
Применив к обеим частям равенства преобразования Лапласа, получим
Авых ($) ~ К^вх ($),
откуда передаточная функция звена
-^вх (s)
На рис. 3.5 показаны амплитудно-фазовая («), амплитудно-частотная (б), фазо-частотная (в), логарифмическая амплитудно-частотная '(г) и переходная (д) характеристики безынерционного звена.
г)
а)
и(ш)
и(ш)
ЦЫ
S) Jf(w/
Рис. 3.5. Характеристики безынерционного звена
О
К
Безынерционными звеньями представляется большое количество устройств, когда инерция оказывается практически неощутимой. К ним относятся многие электронные усилители, редукторы, большое количество датчиков, преобразующих различные физические величины >в напряжение: потенциометрические датчики линейных и угловых перемещений, сельсин-трансформатор и др.
Инерционное звено первого порядка
Для инерционного звена первого порядка, называемого также просто инерционным или апериодическим, взаимосвязь входной и выходной величин определяется дифференциальным уравнением
Т +Л. (0=х (<) (3.35)
at
где Т — постоянная времени.
Применив преобразование Лапласа при нулевых, начальных условиях, получим
7sXBbIX (sj + Хвых (s.) = Xm (s),
откуда передаточная функция инерционного звена.
.Хвых (s) =___1___.
Хвх (s} 1 -р Та
Заменив комплексную переменную s на ico, получим комплексную передаточную функцию звена
W(ia>)= 1 1 =7®
1
_ ,___________ е-|аге1еТ“ . (3.37)
1 + Г2 со2 14- Т2со2 V14- Т* со2 v '
При этом амплитудно-частотная характеристика звена
U7 (со) = г , (3.38)
' ’ у 1 -|_ т* со2 v
амплитудно-фазовая характеристика
<р (со) = — arc tg Т со, (3.39)
а вещественная и мнимая частотные характеристики соответственно
U (со) =--1--- и V (со) =---. (3.40)
V 7 1+72ю2 ' ' 14-72(02* Л 1
В реальных устройствах элементы обладают, как правило, не только инерционностью, но и усилительными свойствами.
Такое звено можно назвать усилительно-инерционным. Его передаточная функция
r(s)=-T^r / <3-41)
отличается от (3.36) наличием множителя К. При К=\ звено ста-
новится чисто инерционным.
На рис. 3.6а показаны амплитудно-фазовые характеристики инерционного звена при различных величинах коэффициента уси-
Рис. 3.6. Амплитудно-фазовая (а) и амплитудно-частотная (б) характеристики инерционного звена
ления. Характеристики имеют вид полуокружностей с диаметром, равным К. На рис. 3.66 приведена амплитудно-частотная характеристика.
Логарифмическая амплитудно-частотная характеристика звена (при /С =й=1) имеет вид
Г(дб] (й) = 201g Г («) = 20 1g к— '201g /1 + Гы2. (3.42)
। Заметим, что
при оз<< у-= озс 1ЕГдб] (оз) =-- 2C)lg/<, (3.43а)
при оз>> —— = озс ^дб] (ю)= 201g/f—201g У со, (3.436).
при со= у- = озс ДО^дб] (со) = 201g/< — 3 дб. (3.43в)
Если в области о изменить, например, увеличить частоту
в 10 раз, т. е. на одну декаду, то коэффициент усиления упадет на 20 дб. Действительно, воспользовавшись (3.436), получим
^[дб] (ЮсМ-ИМ (031) = 201gк-201g 107Х-
1 — [201gК—201gТоз]- —201g 10 = —20 дб.
Следовательно, логарифмическую амплитудно-частотную характеристик” инерционного звена «можро построить приближенно
1
в виде двух полупрямыл, смыкающихся при частоте оз = — = озс» называемой частотой сопряжения. Левее точки озс характеристика идет горизонтально на уровне 201g/C=A[56j, правее — наклонно, с угловым коэффициентом — 20 дб!дек. Истинная ЛАЧХ асимптотически приближается к линейно ломаной, которая называется асимптотической логарифмической амплитудно-частотной характеристикой. Наибольшее различие в ординатах обеих характеристик, равное 3 дб, наблюдается при частоте сопряжения.
На рис. 3.7 построены логарифмические амплитудно-частотная (а) и фазо-частотная (б) характеристики для случая А=100 и 7 = 0,1 сек.
Влияние величин постоянной времени и коэффициента усиления на ЛАЧХ показано соответственно на рис. 3.8g и б.
Найдем переходную характеристику звена, приняв А=1. Изображение выходного сигнала при единичном ступенчатом сигнале на входе *
Хвых (s)= (S) И7 (s) = 1 (s) V(S) =-7ГГ7-, • (3.44)
s (1 4 Ts)
Соответственно табл. 3.1 оригиналом такого изображения является функция
*вых (0 = h (/) = 1 — е т. (3.45)
На рис. 3.9 показана переходная характеристика инерционного звена при различных величинах постоянной времени Т, являющейся важнейшим параметром, определяющим свойства звена. 52 ь
Во временной области она определяет инерционность звена. С ростом постоянной времени увеличивается время установления 'сигнала. Практически переходный процесс заканчивается через 1 = ЗТ, когда сигнал достигает 95% установившегося значения.
Рис. 3.7. Логарифмические частотные характеристики инерционного звена
Вместе с тем постоянная времени определяет свойства звена в частотной области. Звено является фильтром нижних частот Если считать допустимым уменьшение передаточной функции до
Рис. 3.8. Изменения ЛАЧХ при изменении постоянной времени (а) и коэффициента усиления (б)
*0,707 от наибольшего значения, то инерционное звено имеет полосу пропускания, численно равную частоте сопряжения (ос=— .
Чем больше постоянная времени звена, тем медленнее устанавливается заданное значение сигнала и тем меньше полоса пропускания звена.
Рассмотрим примеры представления элементов инерционными звеньями.
Цепочка из резистора R и конденсатора С. Пусть в схеме рис. 3.10 входным сигналом является напряжение выходным .— U2.
Тогда
0,95
t
Д.. ________________L_
t-jrz t=3Tz
3.9. Переходные характеристики инерционного звена
о,бз j- y-
a
Рис.
1
l4(s)=Ut(s)
Cs
U1(s} , где T = RC, 1-J-Ts
и передаточная функция цепочки
W (s) = ~^BHX (s) 4/a(s) £
XBX (s)
R
0
С =r
^быт U?
0-
Рис. 3.10. Цепочка RC, представляемая инерционным звеном
0
напряжение на якоре u(t) нием
Vi(s) 1-f-Ts ’
г. e. цепочка рассмотренного вида представляется инерционным звеном с коэффициентом усиления Ц=\ и постоянной времени T=RC.
Электродвигатель постоянного тока с независимым возбуждением. Угловая скорость вращения вала электродвигателя Q(/) и
связаны дифференциальным уравне-
т dQ(f)
•Дв Я/
V^{l,=K№u(t),
(3.46)
где ГдВ — электромеханическая постоянная,
Ддв —коэффициент передачи двигателя.
Приняв за входной сигнал напряжение, а за выходной — скорость вращения вала и применяя преобразование Лапласа, при нулевых начальных условиях получим
^дв^-^вых ($) -^вых (^) ~ АТдв-^вх 00•
Откуда передаточная функция двигателя
Ц7 (g) = ~^ВЬ1Х (s) — (s) _ Адв XBX(s) U (s) 1+ТДв5-
Следовательно, при таком .выборе входного и выходного сигналов двигатель также представляется инерционным звеном.
Интегрирующее звено
Входной и выходной сигналы интегрирующего звена связаны уравнением t
(3.47)
О
Передаточная функция звена при А=1
№(§)=—. (3.48)
s
Реальные устройства, помимо интегрирующих свойств, обладают также и усилительными, так что передаточная функция такого реального интегрирующего звена приобретает вид
UZ(g)=A, (3.49)
s
Где К — коэффйциент усиления звена.
Комплексная передаточная функция звена
№(i (D)= А. . (3.50)
i со
Амплитудно- и фазо-частотные характеристики соответственно
Ц7(<й) = А и <р(ю)= —А. (3-51>
Амплитудно-фазовая и амплитудно-частотная * характеристики показаны на рис. 3.11а и б.
Рис. 3.11. Амплитудно-фазовая (а) и амплитудно-частотная (б) характеристики интегрирующего звена
Логарифмическая амплитудно-частотная характеристика
№[дб] (<в) = 201gW»= 201gК—201gto. (3.52)
ЛАЧХ (а) .можно представить суммой двух графиков: горизонтальной прямой /, проходящей на уровне /СДб, и прямой 2, проходящей через начало координат (через точку <о=1) с наклоном — 20 дб!дек. (рис. 3.12а). ЛАЧХ интегрирующего звена представляет-
ся прямой с угловым коэффициентом — 20 дб!дек, отсекающей на оси ординат отрезок, равный Аде. Влияние коэффициента усиления на характеристики показано на рис. 3.126. Фазо-частотная характеристика звена показана на рис. 3.12е.
Для получения переходной характеристики звена применим преобразование Лапласа. Изображение выходного сигнала пр'и единичном скачке
Хт (S) = й7 (S) (s) = 1 (s) W (s) = 4
, s2
Согласно табл. 3.1 такое изображение соответствует линейно изменяющейся функции ХВых(0 = АЛ Отклик интегрирующего звена
Рис. 3.13. Отклик интегрирующего звена на скачок входного воздействия
на скачок показан на рис. 3.13.
Подобная переходная характеристика — чрезвычайно важная особенность звена. Небольшое изменение сигнала на входе звена с течением времени приводит к неограниченному возрастанию сигнала на его выходе. Возрастание происходит тем быстрее, чем больше коэффициент усиления звена. Поместив интегрирующее звено в цепь управляющего сигнала, можно добиться необходимого изменения регулируе
мого параметра при самой незначительной величине сигнала ошиб-' ки, т. е. практически ликвидировать статическую ошибку си-стемЬт.
Рассмотрим примеры элементов, обладающих интегрирующими свойствами.
Вращающаяся ось. Если за входной сигнал принять угловую скорость вращения оси = П(0, а за выходной — угол поворота оси хВых(0 =ф(0> поскольку скорость вращения вала
Q^=dj?(0 , dt f то ' t t
q> (0 = J Q (0 dt и хвых (0 = J xBX (0 dt, (3.53)
T. e. удовлетворяет условию (3.47). Действительно, если в некоторый момент времени ось начнет вращаться с постоянной скоростью, то угол поворота будет линейно возрастать.
Электродвигатель. Электродвигатель содержит, вращающуюся ось, удовлетворяющую условию (3.53). Учитывая ур-ние (3.46), можно получить взаимосвязь угла поворота <p(t) и входного напряжения u(t) в виде
т- ^Ф(0 I Й(0 гг /л
Полагая, что Хвх(0=«(О, а Хвых(О=ф(0, и применяя преобразование Лапласа, получим
V^bhx ($) + S Хвых (S) = Кдв^вх (S).
откуда передаточная функция двигателя
= ^вых (s) — ^~Дв /
^вх (s) s (1 -f- Тдвз)
Звено обладает усилительными, интегрирующими и инерционными свойствами и часто называется инерционно-интегрирующим.
Если постоянная времени мала (когда двигатель работает в режиме холостого хода) и слагаемым THBs можно пренебречь, то
s и двигатель представляется интегрирующим звеном.
Элемент, представляемый инерционным звеном, также обладает интегрирующими свойствами, и тем большее время, чем больше его постоянная времени. Действительно, формально при этом
U7(s)=----—
4 ' ' 1 + Ts s. /
где K'f= — коэффициент усиления интегрирующего звена.
(3.54)
-
1
Переходные характеристики инерционного звена (см. рис. 3.9) в начальной области совпадают с переходными характеристиками интегрирующих звеньев (рис. 3.13). Это совпадение наблюдается тем дольше, чем больше постоянная времени инерционного звена. Соответственно этому совпадают и частотные характеристики инерционного и интегрирующего звеньев в области высоких частот. Как это видно из рис. 3.7 и 3.12, характеристики обоих видов звеньев в области частот выше частоты сопряжения сос= —имеют найлон — 20 дб/дек.
Дифференцирующее звено
Взаимосвязь входного и выходного сигналов дифференцирующего звена определяется уравнением
(3.55)
at
Соответственно передаточная и комплексная частотная функции имеют вид
lF(s)=/(s и IT(i(o)=/<i(o, (3.56)
а амплитудно-частотная и фазо-частотная характеристики
. tt7 (со) = /\ со и <р (со) = , (3.57)
Логарифмическая амплитудно-частотная характеристика
ITtfl6]((o)=201gK(o. (3.58
представляется прямой, пересекающейся с осью абсцисс в точке Ксч = 1 с наклоном +20 дб/дек. Наличие у элемента, помимо дифференцирующих, усилительных свойств, (соответствующих коэффициенту усиления К) приводит к перемещению графика на К[дб] вверх (при К>1) или вниз (при К<1). Заметим, что при этом выражения (3.55), (3.56) и (3.57), за исключением выражения фазо-частотной характеристики, приобретают множитель К, а выражение (3.58) —слагаемое К[дб]-
На рис. 3.14 приведены частотные характеристики звена.
Примером идеального дифференцирующего звена может служить конденсатор без потерь, если входным сигналом считать напряжение u(t), а выходным — ток через (конденсатор /(/):
. __Q du(t) = с dx^dt) =
X / D1A \ / ' и ГЯА \ / Jo А \ / >
№(s) = 7<s, где К=С.
Индуктивность также может 'служить примером дифференцирующего звена, если входным сигналом считать ток, а выходным — напряжение на индуктивности.
Рис. 3.14. Частотные характеристики дифференцирующего звена: АФХ (а), АЧХ (б), ЛАЧХ (в) и ЛФЧХ (г)
В электромеханических схемах для целей ''дифференцирования угловых перемещений используют тахогенераторы — маломощные генераторы постоянного или переменного тока. Эде, развиваемая тахогенераторами, рассматриваемая как выходной сигнал, пропорциональна скорости вращения ротора. Угол поворота ротора принимается за входной сигнал.
Во многих случаях используется схема, в которой последовательно с емкостью включают небольшое сопротивление, напряжение с которого снимается, например, для ’последующего усиления. Схема такой цепочки представлена на рис. 3.15а.
0)
Рис. 3.15. Реальные дифференцирующие звенья
При этом
H2(s)=H1(s)
R
R + Ts
а передаточная функция
Ц7 (s) = = (3.59)
^i(s) I + 7?Cs l + 7s
где T=K=RC.
Здесь постоянная времени численно равна коэффициенту усиления. Звено обладает дифференцирующими и инерционными свойствами и иногда называется также инерционно-дифференци-рующим.
Уменьшая постоянную времени Т, снижаем инерционность, но при этом снижается и коэффициент усиления звена. Сигнал на его выходе становится значительно меньшим, чем на входе, что часто ограничивает использование этой схемы.
Рис. 3.16. Частотные характеристики реального дифференцирующего звена: АФХ (а), АЧХ (б), ЛАЧХ (в), ЛФЧХ (г)
Таким же инерционно-дифференцирующим звеном является и цепочка из R и L (рис. 3.156).
Воспользовавшись (3.59), можно получить все остальные характеристики инерционно-дифференцирующего звена. На рис. 3.16 60
показаны АФХ (а), АЧХ (6), ЛАЧХ (е) и ЛФЧХ (а) звена. Для построения ЛАЧХ было получено выражение
Г(л6] (<о) = 201g Г («.) = 201g =
= 201g К + 201g (о—201g /1 +W.
(/) (2) . (5)
Звено может рассматриваться как последовательно соединенные безынерционное (/), идеально дифференцирующее (2) и инерционное (5) звенья. ЛАЧХ звена, как это показано на рис. 3.1 бе, является суммой логарифмических характеристик составляющих звеньев. Здесь рассмотрен общий случай, когда К^Т.
Форсирующее звено
Форсирующим называется звено, у которого взаимосвязь выходного и входного сигналов определяется уравнением
xBKA0=T‘^ + xm(t). (3.60)
at
Передаточная функция звена
I^(s)=l+Ts. (3.61)
Сигнал на выходе пропорционален не только входному сигналу, но и его производной. Если инерционное звено обуславливало замедление реакции при изменении входного сигнала, то у форсирующего звена, наоборот, при возрастании входного сигнала (производная положительна) выходной сигнал возрастает более значительно, чем входной, а при убывании уменьшается и тем более значительно, чем быстрее убывает входной сигнал. Введение форсирующего звена в цепь управления позволяет ускорить процесс,
Рис. 3.17. Характеристики форсирующего звена
компенсируя реакцию инерционных звеньев. На рис. 3.17 показаны амплитудно/’Фазовая и л'огаРиФмические амплитудно-частотная (б) и фазе ^-частотная (в) характеристики форсирующего звена.
' 61
Звено второго порядка
Взаимосвязь входного и выходного сигналов звена второго порядка определяется уравнением
Р ^(0 + 2Е т A-w.W + д.вых W = КХю (Oi (3.62)
dt* dt
где К — коэффициент усиления звена,
Т — постоянная времени,
£• — относительный коэффициент затухания.
Передаточная функция
W (s) =------. (3.63)
' 72s2 27 £ s-f-1 v '
Комплексная частотная функция
IT(i со) =-----. (3.64)
’ (1 — 72 «2)4-127 ею '
Амплитудно-частотная и фазо-частотная характеристики соответственно
IT (со) = г_____* и Ф(со) = — arctg-^-^-. (3.65)
' ’ /(1— 72 Ю2)2 + (27 £со)2 7 1 — 72 «2 v '
На рис. 3.18 показаны амплитудно-фазовая (а) и логарифмические амплитудно- и фазо-частотная (б) характеристики.
Уменьшение коэффициента затухания увеличивает выброс частотной характеристики в области частоты со = соо= — (графики ЛАЧХ и ЛФЧХ построены для случая /С=1).
Передаточную функцию звена второго порядка при | ^-1 можно представить в виде v
Ц7 ($) =-----*--------- , (3.66)
- (14-71S)(1H-T2S)
т. е. как результат последовательного соединения двух инерционных звеньев с постоянными времени
= — и Г2 = —, (3.67)
Г1 Г2
где
и r,=g+y?=i. (3.68)
Асимптотические ЛАЧХ показаны на том же рис. 3.18в для случаев £=1 (/) и £>1 (2).
.Переходная характеристика звена находится решением характеристического уравнения
72s2 + 2r^s+l=0,. (3.69)
которое имеет два корня:
(3.70)
При 1<1 корни являются комплексными сопряженными и переходный процесс характеризуется затухающими колебаниями звено называется колебательным.
ЩЫ) V
б) ffpag
Рис. ЗЛв. Частотные характеристики колебательного звена
, Переходная характеристика при £>1 может быть представлена выражением
хВЬ1х(0 = Л(0=А' 1-
^-е
(3.71)
При £<1, когда звено является колебательным
-Г' / е . / г
^x(t)=h(t)=K 1-
(3.72)
где
г = ]/1 —g2, <p=arctg —. $
(3.73)
порядка
Графики переходной характеристики звена (второго приведены на рис. 3.19а.
Угловая частота затухающих свободных .колебаний (при £<1)
(3.74)
Г )Л1—£2 ----2
«СВ - р -- р — «О т 1 ’
при малом затухании 1)
«св = «0=4
(3.75)
В момент времени
Т / 3 \ л
— —л — ср * ' г \ 2
ЮСВ
(3.76)
е
наблюдается первый (наибольший) выброс характеристики. Отношение величины .выброса к установившемуся значению переходной функции Луст называется перерегулированием:
сг=-^) 100%. (3.77)
Луст
Характеристика перерегулирования в зависимости от коэффициента относительного затухания £ показана на рис. 3.196.
В автоматических системах колебания нежелательны и допу- 4 стимая величина перерегулирования нормируется, в связи с чем коэффициент затухания не должен быть очень малым. Однако значительное его увеличение увеличивает время установления ts.
Если перерегулирование не должно превышать 5%, то оптимальная величина коэффициента затухания
l=U = 0,707. (3.78)
f
Длительность времени установления в заданных условиях имеет наименьшую величину, равную ts = ЗТ. '
64
/1
Звеном второго порядка представляются многие элементы и не-
которые системы. *
Примером колебательного звена является показанная на рис. 3.20. Если под хвх(0 понимать напряжение щ, а под xBBIX(Z) напряжение на конденсаторе и2, то получим передаточную функцию:
(s)_ -^вых (s) _ U2(s) 1
7 *вх(з) U^s) LCs2 4- RCs + 1 *
электрическая цепь, R
о—CZJ------л™—-о
t7r с “= иг
L
О-----------------О
Рис. 3.20. Схема колеба-
тельного звена
Она может быть приведена к стандартной форме (3.63), если положить К = 1, Г =]/LC и .
2 1/ L_
Г С
Звено постоянного запаздывания
Выходной сигнал звена запаздывания повторяет форму входного, однако запаздывает относительно 1него на .время т:
•^вых (0 =-^вх 'О* (3.79)
в—1296 65
Подобное запаздывание наблюдается в 'Системах, использующих магнитную запись и воспроизведение, в линиях связи, в которых приходится считаться с 'временем группового запаздывания, в линиях задержки и др.
Передаточная функция звена с запаздыванием
IF(s)=e~TS. (3.80)
Комплексная частотная функция
IF (i cd) = e~iT“ .
Амплитудно- и фазо-частотные характеристики:
IF (со) = 1, ср (со) =—ты. (3.81)
Соответственно ЛАЧХ и ЛФЧХ:
Г[дб] («>) = 0, Ф(®) = —г е1п“ = —т е2,31е“ . (3.82)
Рис. 3.21. Характеристика звена постоянного запаздывания
Характеристики звена показаны на рис. 3.21. ЛАЧХ имеет вид окружности единичного 'радиуса (рис. 3.21а). С увеличением частоты радиус-вектор поворачивается по часовой стрелке, повторяя свое положение при изменении частоты на —. На .рис. 3.216 по-т
казаны логарифмические частотные характеристики.
3.4. Моделирование звеньев с помощью электронных вычислительных машин непрерывного действия
Исследование автоматических систем, особенно сложных и дорогих, существенно упрощается и удешевляется путем их моделирования с помощью электронных вычислительных .машин непрерывного (аналоговые машины) и дискретного действия.
Модель системы составляется из моделей отдельных звеньев,, которые имеют те же передаточные функции, что и сами звенья.
Основой модели звена является операционный усилитель — усилитель постоянного тока с большим коэффициентом усиления К и 66
очень большим вход- а /ос z2
ним сопротивлением. Во входную цепь усилителя включается сопротивление Zb а в цепь отрицательной обратной связи — Z2. Для обеспечения отрицательной обратной связи количество каскадов, как правило, является нечетным. Схема включения сопротивлений показана на рис. 3.22а. Упрощенный вид схемы приведен на рис. 3.226.
Пользуясь обозначениями, приведенными на схеме, найдем передаточную функцию модели эквивалентного звена.
Поскольку входное сопротивление очень велико, /вх~0 и г ^7 - 61-Д6
'ос~/1 v
Но, с другой стороны,
= SV-=-Ui-, а -Д-ДСЛ 2-2
Комбинируя полученные выражения, получим при К—>со
Рис. 3.22. Модель эквивалентного звена
Таким образом, полагая под входным сигналом напряжение а под выходным С72, получим передаточную функцию модели в виде
W(s) = —^L. (3.83)
Zi (s)
Подбирая сопротивления Zi и Z2, можно получить различные передаточные функции, соответствующие различным эквивалентным звеньям, т, е. получить модели последних. Например, включив сопротивления
Zx=/?,
т. е.
Z2= —~ и
1 со С
Z2(s)=-^~ и sC
получим передаточную функцию
W(s) =
Z2(s)
Zi(s)
RCs
Передаточная функция модели соответствует выражению передаточной функции интегрирующего звена (3.49). Коэффициент усиления /С== —Таким образом, данная .схема является моделью
интегрирующего звена.
Получаемое в каждой модели дополнительное изменение фазы ыа величину л учитывается отдельно.
В табл. 3.2 приведены схемы моделей и выражения основных параметров моделей различных эквивалентных звеньев.
МОДЕЛИ ЭКВИВАЛЕНТНЫХ ЗВЕНЬЕВ
ТА БЛИЦ А 3.2
Тип эквивалентного звена Схема модели Передаточная функция модели и ее параметры
Безынерционное (усилительное) я, н>- r(s) = -x, к = -~
Апериодическое (инерционное) о- —1Г~ г (s) = — - ' ’ 1 -J- Ts До к- * , t = r2c
Интегрирующее я -Hr н>— <
Дифференцирующее с -НН я Н>— F(s) = — Rs, K=RC
Колебательное (при 4СГ/?3 >/?2Сг) я, Яд ни о • £1 гЕз ix W(s) = — ' ' T2s2 4- 26 Ts -J- 1 До / Ri Д1/. c^... 2 Г R2R3Ct
—
Цепь с передаточной функцией (s) имеет различное количество последовательно соединенных инерционных звеньев соответственно виду Wi ($), а цепь 1^2 (s)—различное количество интегрирующих звеньев. Движение представляющей точки по характеристике при возрастании частоты показано стрелками.
Нетрудно заметить, что- число квадрантов, занимаемых АФХ, равно числу последовательно соединенных инерционных звеньев. При нулевой частоте представляющая точка лежит на оси вещественных значений W(со) = К.
Если к цепи присоединять последовательно интегрирующие звенья, то ее характеристики будут перемещаться против часовой стрелки на число квадрантов, равное числу присоединяемых интегрирующих звеньев, а представляющая точка при нулевой частоте будет удаляться в бесконечность. При этом <р(со—*0)^—v—’ где v — число интегрирующих звеньев.
Логарифмические и фазо-частотные характеристики звеньев суммируются таким образом, что
Дб] («)=2 дб] ии <р (“)=2<Pi^' (4- 3)
i=l i=l
Следовательно, логарифмические характеристики систем можно получить, построив предварительно характеристики звеньев, а затем суммируя их.
Во многих случаях передаточную функцию представляют в виде
Ц7— ^0 + 7iis) (1 + 7\2s) > » < /4 4)
Sv (1 + TaS) (1 + T22s) . , . ’
который соответствует 'последовательному соединению безынерционного, форсирующих, инерционных и v интегрирующих звеньев. Построение ДАЧХ выполняется следующим путем.
1) На оси ординат, проведенной через точку со=1 (lg<o=O), отмечается точка К[дб^ = 201g/(.
2) Через- отмеченную точку проводится прямая с найлоном — 20v дб!дек.
3) Вычисляются частоты сопряжения форсирующих и инерционных звеньев (ос = —, а сами звенья нумеруются в порядке возрастания частот Юс 1<(ос2<о>сз ••• Далее отмечаются соответствующие точки на оси абсцисс и через них проводятся вспомогательные вертикальные прямые.
4) ЛАЧХ всей системы левее самой низкой частоты сопряжения сое 1 совпадает с построенной наклонной прямой. Правее <ос i наклонную прямую следует вести с наклоном (на 20 дб/дек большим, если (Ос 1 является частотой сопряжения инерционного звена, и на 20 дб[дек меньше, — если форсирующего).
5) Дойдя до пересечения с вспомогательной .вертикалью, проходящей через фс 2, 'прямую вновь изламываем, и правее ее наклон также увеличивается на 20 дб!дек, если <ос2 принадлежит инерционному звену, и уменьшается на 20 дб!дек, если она принадлежит форсирующему.
Рис. 4.2. Построение ЛАиХ по заданной передаточной функции
Продолжая этот процесс, получаем искомую логарифмическую а м п л иту дн о -ч а сточную хар анте рнети ку.
В качестве примера на рис. 4.2 построена ЛАЧХ системы, имеющей передаточную функцию
(1 4- Гlts) (1 -4- У 12s) s (1 + Т21$)2 (1 + Т22s)
причем 7"22<^н<^12<7,21 и, следовательно, частоты сопряжения
1 . 1 . 1 . 1
G)cl — _ о)с2 — < 0)сЗ — 0)с4, — — •
1 21 1 12 * 11 1 22
Система имеет два одинаковых инерционных звена с постоянными времени Т^\. Поэтому после частоты cdc i наклон ЛАЧХ увеличивается не на 20, а на 40 дб)дек.
Параллельное соединение звеньев
При параллельном соединении звеньев, показанном на рис. 4.3, сигналы на выходе складываются. Поскольку входные сигналы
Рис. 4.3. Параллельное соединение звеньев
звеньев одинаковы, то передаточная функция такой системы
(4.5)
г=1
т. е. при параллельном соединении звеньев их передаточные функции суммируются.
Например, при Параллельном соединении усилительного и дифференцирую
щего звеньев, имеющих передаточные функции Wi(s)=Ki и W2(s) =/(2^ получим систему с передаточной функцией
W (s) = (s) + (s) = Кг + К* = К (1 + Ts), (4.6) т. е. цепь, соответствующую форсирующему звену с коэффициентом усиления К=К\ и постоянной времени Т==~~ .
Параллельно-встречное соединение звеньев
(цепи с обратной связью)
При параллельно-встречном соединении звеньев, показанном на рис. 4.4, на вход звена цепи прямой связи подается сумма входного сигнала и сигнала цепи обратной связи (положительная обратная связь) или их разность (отрицательная обратная связь).
На входе звена цепи прямой -связи сигнал имеет изображение
(S) = Хвх (S) + х, (s) =Х„ (s) + (s) (s).
Изображение выходного сигнала
-^ВЫХ ($) = W. (s) X. (s) = W. (s) Хвх (s)± W. (s) Г2 (s) ХБЫХ (s).
q Передаточная функция всей системы
| W (s) = ^вых == ^i(s) м 7}
1 ' X^ds) l^WMWt(s)
или __
IT(s)=—----------. (4.8)
Знак «минус» соответствует суммированию сигналов — положительной связи, а знак «плюс» — вычитанию, т. е. отрицательной обратной связи.
Рассмотрим связь передаточных функций системы регулирования в разомкнутом и- замкнутом состояниях.
На рис. 4.5 показана замкнутая система, отличающаяся от приведенной на рис. 2.86 тем, что все элементы системы, за исключением вычитающего устрой-
Рис. 4.4. Параллельно-встречное включение звеньев
ства, представлены одним экви-
валентным звеном с передаточной функцией U7(s), которая является передаточной функцией разомкнутой системы. Замыкание цепи обратной связи соответствует введению звена с передаточной функ
цией IF2(s) = 1. Согласно (4.7) передаточная функция замкнутой системы будет иметь вид
ф (s) — -Bblx(s>. -F(s) . (4 9)
X8(s) l + r(s)
Пример 1. Инерционное звено с жесткой обратной связью. Если инерционное
Ki
звено с передаточной функцией ITi.(s) = ~~ охватить жесткой (не изме-l-f--' 1$
няющей формы сигнала) обратной связью, включив звено Wq(s)=Kz, то полученная комбинация будет иметь передаточную функцию
' ' 1 Т ITJs) W2 (s) 1 + Ts
Гйе к _ K1 т = 71
1 Т KiK* ’ 1 + К1К2 '
Устройство, образованное инерционным звеном с жесткой обратной связью, представляется также инерционным звеном, коэффициент усиления и постоянная
Рис. 4.5. Упрощенная схема замкнутой системы регулирования
Пример 2. Интегрирующее звено с Передаточные функции цепей прямой i
времени которого увеличиваются при 1ПО|Л1ОЖ1ИТ1елъной и уменьшаются цри отрицательной обратной связи (знаки плюс и минус в выражениях (4.9) и (4.40) соответственно).
Такое использование жесткой отрицательной обратной связи позволяет уменьшать инерционность, вносимую в автоматическую систему.
жесткой отрицательной обратной связью. обратной связи:
1^(5) = —, F2(s) = /c2,
S а всей совокупности
W7! (s) К
W (s) =------112-------- = —1, (4.11)
V ’ 1 + Wj_ (s) Г2 (s) 1+ Ts ' ’
где 1 1
T=~^-a2 Л1Л2
Подобная комбинация используется при создании позиционных двигателей, которые должны производить механические перемещения (например, поворот на некоторый угол), пропорциональные приложенному напряжению.
Из рассмотренных примеров следует, что введением в цепь обратной связи дополнительных звеньев 'можно изменять характер преобразования сигнала управления. Например, в примере 2 введение жесткой обратной связи превратило интегрирующее звено в апериодическое. , '
%
Перенос точек суммирования и разветвления
В некоторых случаях перенос точек разветвления и суммирования сигналов упрощает анализ систем. Преобразование схемы производится, исходя из условия неизменности выходных сигналов преобразуемого участка.
Правила преобразования схем, основанные на линейности, стационарности и односторонней проводимости звеньев, приведены в табл. 4.2. Комбинации, названные в таблице эквивалентными
ТАБЛИЦА 4.2
ЭКВИВАЛЕНТНЫЕ ИЗМЕНЕНИЯ СХЕМ ПРИ ПЕРЕНОСЕ ТОЧЕК РАЗВЕТВЛЕНИЯ И СУММИРОВАНИЯ
цепями, могут быть исходными, и тогда эквивалентными цепями будут те, которые в таблице названы исходными.
На рис. 4.6 показана последовательность преобразования сложной структурной оистемы (а) к простому виду — одному звену, охваченному жесткой обратной связью (6). Во многих случаях
сложные системы в процессе их анализа представляют именно такой упрощенной схемой. Для сокращения
Рис. 4.6. Преобразование сложной структурной схемы к более простому виду
записи в передаточных функциях опущен оператор s.
Первый этап заключается в замене параллельно соединенных звеньев с передаточными функциями W4 и W5 по правилу (4.5) звеном WZ45j 1^45= 1^4+ и переносе точки введения обратной связи (/) в точку (2). Согласно табл. 4.2 это возможно, если в соответствующую цепь обратной связи ввести звено Wi
(рис. 4.66).
Полученный внутренний контур из звеньев Wi, W2 и W3 по
правилу (4.7) заменим эквивалентным звеном с передаточной функцией Г12з= д/ ц/ ’ как показа;но на рис. 4.6в.
Внутренний контур из звеньев IF123
обратной связью,
согласно
1^12345 =
1^123^45
1+F123F45
(4.1)
и IF45, охваченных жесткой и (4.7) заменим звеном
Получив схему рис. 4.6а и заменяя последовательно соединенные звенья 1Г1 и 1Г12345 одним эквивалентным IF112345=IF1IFi2345, при-
ведем сложную исходную схему к типовой схеме из одного звена, охваченного жесткой обратной связью (рис. 4.66).
Последняя комбинация также может быть представлена звеном рис. 4.бе соответственно (4.9) Ф= —F1-1?3.45— .
’ 1+^112345
4.2. Структурная схема и характеристики системы дистанционной настройки вещательного приемника
Используем изложенные в предыдущем параграфе правила для составления структурной схемы и получения характеристик системы дистанционной настройки приемника «Фестиваль» (рис. 4.7).
Рис. 4.7. Система дистанционной настройки приемника «Фестиваль»
На пульте дистанционного управления находится ручка Р дистанционной установки органов настройки приемника: переменных конденсаторов Сь С2 и С3 и перемещающихся ферритов Фь Ф2 и Ф3. Пульт имеет градуированную шкалу с делениями (ау). Аналогичную шкалу с делениями (аПр) имеет приемник. Указатель шкалы приемника жестко свяЗбн с системой элементов настройки приемника Ф и С. При совпадении положения движков аПр=ссу органы настройки занимают положение, обеспечивающее настройку приемника на станцию, соответствующую положению движков и градуировке шкал пульта и приемника.
Система работает следующим образом. Потенциометры ГЦ и П2 образуют мостовую схему, питаемую переменным током от трансформатора Тр. С диагонали моста через ползунки напряжение (сигнала ошибки) поступает на вход усилителя, питающего обмотку 1 асинхронного двигателя ЭДП-1. Регулирующим сигналом является напряжение беременного тока, поэтому данная система является системой переменного тока. Ось двигателя через кинематическое устройство, включающее редуктор Ред, связана с органами настройки и движком потенциометра 772.
Установив нужное положение элементов настройки ручкой Р на пульте, получаем разбаланс моста, если положения движков потенциометров П2 и /7] различны и апр ау. В диагонали моста при этом появляется напряжение сигнала ошибки 77ОШ, а на обмотке двигателя 1 — напряжение 7/дв. Ротор двигателя начинает вращаться и перемещает движок потенциометра 772 до тех пор, пока тот не займет положение апр = ау, при котором напряжение сигнала ошибки будет равно нулю.
Система дистанционной настройки относится к категории следящих систем. Органы настройки «следят» за движением указателя пульта управления. Функциональная схема системы приведена на рис. 4.8.
«!1
Рис. 4.8. Функциональная схема системы дистанционной настройки
Задающим органом является движок .потенциометра Пх, с помощью которого задается требуемое положение указателя на шкале ау. Потенциометр П2 является измерительным органом, преобразующим фактическое положение органов настройки апр в величину Ппр электрического потенциала движка. Схемой сравнения является схема электрического моста, образованная потенциометрами 77] и П2.
Усилительным элементам является двухкаскадный усилитель переменного тока. Исполнительный орган — асинхронный двигатель с редуктором. Объектом управления является блок элементов настройки различных каскадов приемника.
Работа элементов системы описывается приводимыми ниже уравнениями.
Напряжение между движком 77] и точкой О пропорционально устанавливаемому значению ау (частоте принимаемой станции). Следовательно1, задающий орган можно представить безынерционным звеном с передаточной функцией lTy(s) = = /fv, el дел.
«y(s)
Напряжение между движком П2 и точкой О пропорционально положению указателя шкалы приемника «пр, передаточная функция измерительного органа (в этом случае = =
anp(s)
= Км, в!дел. При идентичности шкал и потенциометров пульта управления и приемника IFy(s) = lFn(s) = lFBX(s) =/(вх.
Схема сравнения (вычитающее устройство) образует сигнал ошибки UOVI=Uy—Unp.
Электронный усилитель в рабочей полосе частот также является безынерционным. Его передаточная функция IFyc(s) =
1/ош(5)
Двигатель имеет передаточную функцию (3.54)
Ц7 (s) = ; % &L .
Д 7 U№ (s) s(14-TflBs) дв в-сек
Кинематическое устройство преобразует поворот вала двигателя' <р в пропорциональное перемещение движка П2 и указателя аПр, так что его передаточная функция ^(s) = =Лк > ~ •
Рассматриваемую систему можно представить схемой, показанной на рис. 4.9а. Перенося точку вычитания сигналов левее звена lFy(s) по правилам, приводимым в табл. 4.2, и учитывая идентичность шкал и потенциометров 77, и П2, получим схему рис. 4.96, которую можно упростить (рис. 4.9в).
Рис. 4.9 Структурные схемы системы дистанционной настройки
Эквивалентное звено, характеризующее всю систему в разомкнутом состоянии, имеет передаточную функцию
r(S)=rBX(S)Wyc(s)rw(s)FK(s) = —. (4.12)
5(1 Ч-ТдвЗ)
т. е. система может быть представлена инерционно-интегрирующим ЗВеНОМ С Коэффициентом усиления /< = /<вх/<ус/<дв/<к и постоянной времени, равной Гдв.
На рис. 4.10 показаны амплитудно-фазовая (а) и логарифмические амплитудно- и фазо-частотные (б) характеристики разом
Рис. 4.10. Частотные характеристики разомкнутой системы дистанционной настройки
кнутой системы. Передаточная функция замкнутой системы соответственно (4.9)
<D(S) =М£1 = F<s) -=-----------. м 13)
cty(s) l-f-ir(s) ’ T2s2 4-2716 s 4-1 v ’
В замкнутом (рабочем) состоянии система дистанционной настройки представляется звеном второго порядка с коэффициентом усиления /<3=1, постоянной времени Т = _Гд?.. и коэффициентом
1 относительного затухания £ =—-?=— • 2 г КТдВ
Полученные ранее характеристики звена второго порядка в полной мере распространяются на рассматриваемую систему. Например, при £<1 или КТ№> — установка нового значения настройки ау будет сопровождаться затухающими колебаниями движка П2 и элементов настройки приемника с частотой «Св =— = 1/ — , Т V Тдв которая повышается с увеличением коэффициента усиления и уменьшением постоянной времени двигателя.
На рис. 4.11 приведены зависимости изменения положения элементов настройки приемника аПр от времени при скачкообразном задании нового значения настройки ау при Тдв=0,1 сек и различных величинах коэффициента усиления системы: /<1 = 100 (£ = 0,163), /<2=10 (£ = 0,5), /<з=5 (£=0,707) и /<4=»1 (£=1,63).
Описанная система дистанционной настройки является разно
видностью системы силовых следящих приводов, широко исполь
зуемых для управления органами настройки и изменения положе-
ния объектов управления: антенных устройств элементов, настройки контуров каскадов радиопередающих устройств и др.
Однако такой способ настройки не всегда гарантирует необходимую точность, если выходной параметр объекта управления является косвенно регулируемой величиной. Например, настраивая контур каскада передатчика или гетеродина приемника, можно лишь установить в определенное положение органы настройки. Полученное значение резонансной частоты контура (косвенно регулируемая величина) может отли-
Рис 4.11. Отработка системой дистанционной нагрузки скачкообразного изменения заданной настройки
чаться от необходимого, например, из-за изменения нагрузки контура или ухода частоты принимаемой станции.
Для дальнейшего уточнения настройки вводят систему точной автоподстройки. В рассмотренном выше случае имеется дополни-
тельная система автоподстройки частоты гетеродина, которая следит за частотой принимаемой станции, подстраивая гетеродин таким образом, чтобы величина промежуточной частоты приемника оставалась постоянной.
4.3. Структурная схема и характеристики системы автоматической подстройки частоты с частотным дискриминатором
На рис. 4.12 приведена блок-схема системы автоподстройки частоты гетеродина приемника.
Помимо обычных элементов приемника — преобразователя частоты ПрЧ, усилителя промежуточной частоты УПЧ, детектора Д и гетеродина Г, в схеме АПЧ имеется частотный детектор ЧД, усилитель постоянного тока У ПТ и управитель частоты Упр.Ч.
Управителем частоты является устройство, изменяющее частоту гетеродина в зависимости от изменения входного напряжения U. Таким устройством может быть двигатель, меняющий емкость пе-
81
ременного конденсатора, реактивная лампа или транзисторная схема с управляемой емкостью. В диапазоне увч управителем частоты может быть отражатель клистрона гетеродина.
Рис. 4.12. Блок-схема автотодстройки частоты гетеродина с 'частотным детектором
Удовлетворительный прием сигналов происходит, когда напряжение на входе УПЧ имеет частоту /про, на которую настроены УПЧ и ЧД. Из-за нестабильности частоты принимаемых сигналов или частоты гетеродина промежуточная частота изменяется на величину А/. Это приводит к появлению пропорционального напряжения At/д на выходе ЧД, которое после усиления поступает на управитель частоты. После изменения частоты .гетеродина промежуточная частота вновь принимает номинальное значение.
На рис. 4.13ц приведена схема управления частотой гетеродина, собранного на клисторне, включающая частотный детектор и усилитель постоянного тока. Колебательные .контуры и /<2 на-
строены на промежуточную частоту /про- Если фактическая частота напряжения t/np, подводимого на вход схемы, будет отличаться от величины /про, то будут различаться и напряжения промежуточной частоты: Е3 на детекторе Д\ и Е4 на детекторе Д2. Измене-82
ние напряжений при частотах fnp<fnPo, /пр>/про и /пР=/пРо 'представлено векторными диаграммами, приведенными на рис. 4.136.
Выпрямленные диодами Д{ и Д2 напряжения выделяются на резисторах 7?з и и создают на выходе величину ДС7д, зависимость которой от частоты показана на графике рис. 4.14а.
Рис. 4.14. Изменение сигналов системы АПЧ
Для подавления нежелательных частотных компонент частотный детектор имеет фильтр нижних частот, образованный конденсаторами и резисторами, значения которых подобраны так, чтобы взаимосвязь между выходным напряжением Д£/д и отклонением частоты Af определялась передаточной функцией
W (s) — А
Л Д/(з) 1 + ТдЗ '
где /Сд — коэффициент усиления,
Тд — постоянная времени.
С помощью потенциометра на отражателе клистрона устанавливается отрицательный потенциал, обусловливающий частоту гетеродина /го, которая в нормальных условиях при Af/fl=Q обеспечивает равенство промежуточной частоты номинальному ее значению fjrp = f про-
Зависимость напряжения на выходе усилителя постоянного тока, т. е. на отражателе клистрона t/ynp, от промежуточной частоты и частоты гетеродина показана на рис. 4.14б”и 4.14в.
Усилитель постоянного тока и управитель частоты являются практически безынерционными звеньями с передаточными функциями соответственно IT (s) = 7777 = ^y и F ^(s) = ^77 = Kynp ,
A67a(s) j Al/(s)
где и /Супр — коэффициенты усиления.
Если под действием каких-то факторов уменьшится частота гетеродина или увеличится частота сигналов принимаемой стан
ции, то промежуточная частота fnp=fr—fc уменьшится. Как следует из графиков, уменьшение fnp относительно величины /про увеличивает отрицательный потенциал отражателя. Это приводит к увеличению частоты гетеродина и приближению .промежуточной частоты к номинальному значению ' (рис. 4.14г). Измененным частотам сигнала /с i и fG 2 соответствуют частоты гетеродина fr 1 и fr2, поэтому .разность частот остается приблизительно равной требуемой промежуточной частоте.
Для поддержания нового значения частоты гетеродина необходимо новое измененное напряжение на отражателе и соответствующее напряжение на выходе частотного детектора. Последнее возможно только в том 'случае, когда промежуточная частота отличается от номинального значения, т. е. при наличии ошибки регулирования. Следовательно, система частотной автоподстройки обладает статической ошибкой и поэтому является статической системой.
Требуемое изменение напряжения на отражателе будет достигнуто при меньшем напряжении на выходе частотного детектора, если увеличить коэффициент усиления усилителя. Как будет видно из дальнейшего, это качество присуще всем системам: статическая ошибка уменьшается с увеличением коэффициента усиления системы.
В рассматриваемой автоматической системе частотный детектор выполняет несколько функций. Он является чувствительным элементом, создающим напряжение, зависящее от регулируемой величины (частоты гетеродина). Он содержит задающий орган, определяющий ту величину частоты, на которую должна отличаться частота гетеродина от частоты сигнала. Этим органом является колебательный контур, настроенный на частоту /про- Наконец, он выполняет роль вычитающего устройства, на выходе которого создается сигнал ошибки.
Учтя все сказанное выше, систему можно представить структурной схемой, показанной на рис. 4.15ц. В схеме сравнения 1 возникает частота, равная разности частот гетеродина и сигнала, а в устройстве 2 полученная разность вычитается из заданного значения /про, образуя сигнал ошибки Л/, который последовательно проходит инерционное и два усилительных звена (частотный детектор, усилитель и управитель частоты).
Новое значение частоты гетеродина /г появляется в результате ее изменения управителем частоты на величину Д/г. Процесс образования частоты /г условно представлен 'сложением частот Д/г и fro в сумматоре 3.
Сигнал ошибки можно выразить через отклонения частот сигнала и гетеродина от номинальных значений /со и /г0:
Д/~ /про /пр =/про (/г /с)” /про '(/го +Д/г /со Д/с) =
— / про (/ ГО /со) + Д /с Д/г — Д/с Д/г-
Структурную схему можно упростить, как показано на рис. 4.156, рассматривая только приращения частот. В та.ком виде данная система является следящей. Частота гетеродина Afr должна следить за частотой сигнала Afc. Заметим, что в другой трактовке система может рассматриваться и как система стабилизации (промежуточной частоты).
Рис. 4.15. Структурные схемы системы АПЧ
В структурной схеме три звена заменяем одним эквивалентным (рис. 4.5в) с передаточной функцией
F(s) = ra(s)ry(s)ry„p(s)=—. (4.14)
где К — коэффициент усиления разомкнутой системы АПЧ, А=АдАуАупр.
Следовательно, в разомкнутом состоянии система представляется инерционным звеном первого порядка с постоянной времени, равной постоянной времени фильтра. • »
Передаточная функция замкнутой системы
ф(5)=АМ1)=__Е!£Е_ =—f (4.15}
Л/сОО l + U7^) где
А3=—, а Г = (4.16)
1 + А 1 + А
Динамические свойства рассматриваемой системы определяются свойствами инерционного звена с коэффициентом усиления А3 и постоянной времени Т.
Глава 5
КАЧЕСТВО РАБОТЫ
АВТОМАТИЧЕСКИХ СИСТЕМ
5.1. Требования, предъявляемые к автоматическим системам
К автоматическим .системам, как и к другим, 'предъявляются требования высокой надежности, малых .габаритов и веса, простоты обслуживания, легкой взаимозаменяемости элементов (блоков или даже устройств в целом) и экономичности. Имеется и ряд специфических требований, выполнение которых характеризует необходимое качество работы автоматических систем. Главными из них являются устойчивость, показатели переходного процесса и ошибки системы в установившемся режиме.
Устойчивость систем
Наличие в автоматических системах инерционных элементов и запаздывание сигналов вследствие конечной скорости их распространения обусловливают особенности переходного процесса и при определенных условиях .приводят к нарушению требуемой взаимосвязи между управляемым параметром и задающим воздействием. Система, получив задающее или возмущающее воздействие, не переходит в устойчивое состояние после окончания этих воздействий. Величина регулируемого параметра может начата неограниченно долго колеб-аться или монотонно безгранично возрастать.
Система называется устойчивой, если она возвращается в установившееся состояние после прекращения возмущающего воздействия, которое вывело ее из этого состояния.
Устойчивость является необходимым качеством всех автоматических систем.
Показатели переходного процесса
Во время переходного процесса величина регулируемого параметра может существенно отличаться от заданного значения, как показано для двух систем на рис. 5.1. Если ошибка будет наблjo-86
даться длительное время, то это может привести к (неудовлетворительной работе системы. Качество переходного процесса оценивается быстродействием, .перерегулированием и колебательностью-
Рис. 5.1. Характер переходных процессов в системе и показатели переходного процесса
Быстродействие системы оценивается двумя показателями: временем первого согласования t\ и за которое система впервые принимает заданное состояние, и длительностью переходного процесса Б и t"s- Последние величины определяют время, за которое переходный процесс в системе практически заканчивается, т. е. когда выходной параметр приобретает почти точно заданное значение, отклоняясь от него не (более чем на ±6% (часто 6 = 5%).
Перерегулирование. Колебательный характер переходного процесса приводит к отклонениям регулируемого параметра от заданного значения. Максимальная величина выброса переходной характеристики, называемая перерегулированием о, не должна превышать заданного значения, например 20—30%. В системе дистанционной настройки, рассмотренной в 4.2, перерегулирование наблюдается, когда коэффициент усиления системы К>~—— .
ЧГдв
Колебательность. В зависимости отсхемы и величины параметров системы регулируемый параметр может многократно отклоняться от того значения, которое он примет в установившемся режиме. Склонность к колебаниям или колебательность определяется количеством колебаний (положительных выбросов) за время переходного процесса. Увеличение колебательности, обычно» сопровождающееся и увеличением длительности переходного процесса, является нежелательным. В этом случае возникают перенапряжения, увеличиваются механические усилия в механических элементах, происходит .перегрузка элементов и увеличивается изнашиваемость.
Ошибки систем в установившемся режиме
После того как ©.кончится переходный процесс, значение регулируемого параметра хВых(0 может отличаться от задаваемой величины х3(0- Возникает ошибка хош(0, равная
^ОШ (0 = Л'З (О ^ВЫХ (О = ХОШ уст • (5’1)
Эта ошибка появляется по различным причинам. Ее можно записать
М>ш уст ^ош СТ ^ош СК ^ош уск >
где Хошст — статическая ошибка, возникающая при скачкообразном изменении задающего сигнала х3(t) =А 1 (/) (сюда же включают и ошибку, обусловленную нечувствительностью элементов системы к слабым сигналам); Лошск и Лошуск— ошибки по скорости (или скоростная) и по ускорению, соответственно пропорциональные первой и второй производным задающего сигнала.
Возможны также составляющие ошибки, пропорциональные более .высоким производным.
5.2. Устойчивость автоматических систем
Устойчивость систем в течение заданного времени работы является непременным условием их нормальной работы; потеря устойчивости означает потерю управляемости.
При выяснении устойчивости проектируемой замкнутой системы ее представляют в виде структурной схемы и преобразуют к виду, показанному на рис. 4.5.
Система в разомкнутом состоянии имеет передаточную функцию W(s). При устойчивости отдельных звеньев неустойчивость системы может наблюдаться только при наличии обратной связи, т. е. когда система замкнута. В связи с этим исследуем систему в замкнутом состоянии. Соответственно (4.11) передаточная функция замкнутой системы Ф(з) выражается через передаточную функцию разомкнутой системы:
Ф (§) = У вых (s) __ W7 (s) x3(s) 14-F(s) •
Если функция W(s) представлена частным полиномов (3.13), то
Л4 (s)
ф М — Ms) _ ^f(s) /Г оч
! 4 М N (s) + M(s) ( * )
W(s) и, следовательно,
(s) [N (s) + M (s)] = X3 (s) M (s). (5.4)
Соответствующее этой передаточной функции дифференциальное уравнение, которое связывает задающее воздействие х3(0 и выходную величину хВых(0» имеет .вид
dx^mx (1)
^Хвых(0 dn~lxBbK(t) ,
dtn dtn~1
dmx3(t) dm-'x3(t)
m dtm m~1 atm-l
• • • । -i "Ь ^(Лвых (0 —
dx<> (t)
+ . . . + (5.5)
at
где коэффициенты вида являются суммами коэффициентов ур-ния (3.1) при производных ОДНОГО .порядка Сг- = «г + 6г.
Для определения устойчивости системы следует решить соответствующее однородное уравнение. Для рассматриваемого линейного уравнения выражение свободного движения (свободных колебаний) Хвыхсв(/) имеет вид
п t
^вь.хСв(0=2Вг’ e₽i ’ (5’6>
1=1
где p< = Yi + i(Oi — корень характеристического уравнения замкнутой системы
СпрП+c»-i р”~1 + •+С1Р+с°~°’ (5-7)
а у, и io)i — соответственно вещественная и мнимая части корня. Составляющие свободного движения
хсМ=В^у^‘ (5.8)
имеют различный вид в зависимости от характера корней., На рис. 5.2 на плоскости комплексного переменного показаны различные корни и графики соответствующих составляющих свободного движения. »
Если норни действительные положительные величины (9, 10), то составляющие свободного движения неограниченно возрастают по экспоненциальному закону; при отрицательных действительных корнях (5, 6) они также по экспоненте уменьшаются. В случае двух комплексных сопряженных корней с положительной вещественной частью (7, 8) компонента неограниченно возрастает и имеет колебательный характер с частотой, равной ординате соответствующей точки ог-. При действительной части корня, равной нулю (1,2), возникают незатухающие колебания, а при отрицательной действительной части (3,4) — затухающие.
Следовательно, для того чтобы система была устойчивой, вещественные корни или вещественные составляющие комплексных сопряженных корней ее характеристического уравнения должны быть отрицательными. Рассмотренному выше условию устойчивости систем соответствуют различные критерии устойчивости, кото-
рые более удобны для анализа систем. Рассмотрим наиболее распространенные критерии устойчивости: Рауса—Гурвица, Михайлова, Найквиста и частотный критерий, основанный на логарифмических частотных характеристиках.
Рис. 5.2. Вид составляющих свободного движения системы при различных корнях характеристического уравнения
Критерий Рауса—Гурвица
Система будет устойчивой и корни характеристического уравнения (5.9) будут иметь отрицательные вещественные части, если при С„>0 все диагональные определители матрицы 7И, составленной из коэффициентов характеристического уравнения, будут положительны:
Сп-1 Сп— 3 С п—о Сп—7 0 • « е
сп Сп—2 С а П—4 Сп-6 0
АГ- 0 Сп— 1 Сп—3 С е п—5 0 (5.9)
0 сп Сп—2 £ А п—4 0 1 • в
0 0 0 0 « « « ^0
систему неустойчивой, как показано на рис. 5.3 для астатической системы пятого порядка.
Длина отрезка аК (рис. 5.3е) определяет критическую величину коэффициента усиления: -
Акр —~ — Аг-
Рис. 5.3. Годографы устойчивой (а), (г) и неустойчивой (б), (в), (д), (е) систем
По удалению характеристической кривой от начала координат," т. е. по величине отрезка аО, можно судить о запасе устойчивости системы.
Критерий Найквиста
Рассмотренные ранее способы определения устойчивости системы основывались на характеристиках замкнутой .системы. Критерий Найквиста является как и критерий Михайлова частотным, но базируется на использовании амплитудно-фазовой характеристики разомкнутой системы.
Для устойчивости замкнутой системы, устойчивой в разомкнутом состоянии, необходимо и достаточно, чтобы амплитудно-фазовая характеристика разомкнутой системы не охватывала точки с координатами (— 1; 10).
Для выяснения, охватывает ли АФХ точку (—1,Ю), ветвь АФХ, уходящую в бесконечность (если такая ветвь имеется), условно продолжают до положительной полуоси вещественных значений, как показано на рис. 5.4. Характеристика не охватывает точку (—1, i(T) и система устойчива, если радиус-вектор, проведенный от точки (—1, iO) к любой точке АФХ при изменении частоты от О до оо совершает суммарный поворот, равный нулю (рис. 5.4а). Характеристика охватывает точку (—1,iO), и система неустойчива,
если поворот вектора оказывается равным — 2пп, где п — целое число 1 (рис. 5.46).
В зависимости от изменения устойчивости при изменении коэффициента усиления системы подразделяют на два вида. В наиболее
распространенных системах первого вида увеличение коэффициен
Рис. 5.4. АФХ устойчивых и неустойчивых систем первого (а), (б), (в) и второго (г) видов
та усиления свыше критического значения А=Акр .приводит к неустойчивости. Уменьшение А<АКр повышает устойчивость системы АФХ одной из таких систем для различных А(А1<Аг<Аз<А4) без соблюдения масштаба построены на рис. 5.4в. При критическом значении А—Аз=Акр система находится на границе устойчивости, при А=А4>Акр— неустойчива и при Ai и Аг (<Акр)— устойчива.
Системы второго вида при увеличении коэффициента усиления могут перейти из неустойчивого состояния в устойчивое и, наоборот, при уменьшении коэффициента усиления перейти из устойчивого состояния в неустойчивое. АФХ такой системы, устойчивой при А—Аг и неустойчивой как при большем (Аз), так и при меньшем (Ai) значениях коэффициентов передачи, показаны на рис. 5.4г. Признаком устойчивости таких замкнутых систем (устойчивых в разомкнутом состоянии) является четное количество пересечений АФХ оси вещественных значений левее точки —1.
В табл. 5.2 даны передаточные функции трех статических систем (/, 2, 3), т. е. систем, не содержащих в главной ветви интегрирующих звеньев, и систем с астатизмом первого, .второго и третьего
ТАБЛИЦА 5 2
ВЛИЯНИЕ СТРУКТУРЫ СИСТЕМЫ И ВЕЛИЧИНЫ КОЭФФИЦИЕНТА УСИЛЕНИЯ НА УСТОЙЧИВОСТЬ СИСТЕМЫ
порядков (4, 5, 6), содержащих соответственно одно, два и три интегрирующих звена. Там же приведены их АФХ, построенные для различных величин коэффициента усиления А1<А2<Аз-
Статические системы первого и второго порядков (1 и 2) и системы второго порядка с астатизмом первого (порядка (4) структурно устойчивы, т. е. устойчивы при любых конечных величинах А и Т.
Статическая система третьего порядка (5) и система третьего порядка с астатизмом первого порядка (5) устойчивы при небольших величинах коэффициента усиления (A=Ai) и неустойчивы при больших А (А2 и Аз).
Системы (6) с астатизмом второго порядка (и более высоких порядков) неустойчивы при любых конечных значениях А и Т, т. е. структурно неустойчивы. Они могут быть сделаны устойчивыми только при введении специальных корректирующих звеньев.
Воспользуемся критерием Найквиста, чтобы определить, как влияет запаздывание сигналов управления на устойчивость системы.
Рассмотрим систему (рис. 5.5а), образованную последовательно соединенными инерционным звеном и звеном с постоянным запаздыванием, имеющими передаточные функции соответственно IFH(s) =—~—иВД=е^ . Амплитудно-фазовые характеристики звеньев при К> 1 показаны на рис. 5.56.
Перемножая комплексные частотные функции звеньев, получим частотную функцию разомкнутой системы
’г(‘")=-пНЬе-,ю'- (5Л2)
Модуль комплексной частотной функции
W (ю) = -—£= , (5.13)
V1 + СО2 v 7
а аргумент
<р (со) - —arc tg (d Т—(dt.
(5.14)
АФХ разомкнутой системы имеет вид спирали, закручивающейся с увеличением частоты. Наибольшая величина Модуля радиуса-вектора IF((d) равна А при (d=0. При А<1 при любой частоте (D^O IF((d) < 1 и годограф не охватывает точку (—1,Ю) ни при каких значениях Гит. При А> 1 АФХ системы может не охватить (в) или охватить (6) точку (—1, iO) в зависимости от того, насколько быстро с увеличением частоты уменьшается модуль частотной функции инерционного звена. С увеличением постоянной времени Т скорость уменьшения модуля ? ростом частоты возрастает и вероятность устойчивого состояния системы увеличи-
вается. Увеличение же постоянной т звена запаздывания увеличивает фазовый сдвиг, вносимый системой при заданном значении
частоты, что увеличивает вероятность неустойчивого состояния.
На частоте среза (о = (оСр модуль комплексной частотной функции
Г((оср)
= 1.
(5.15)
Если при этом фазовый сдвиг, вносимый системой, будет равняться <р(<оср) =—л, то система окажется неустойчивой.
Из условия (5.15) частота среза
Чр= 1 ' (5.16)
Подставив ее значение в (5:14), найдем условие устойчивости системы в виде
т < I arc te Vk522’]- (5-17)
Годограф системы, удовлетворяющей полученному условию (т. е. устойчивой),'показан на рис. 5.5в. Годографы (а) и (5) соответствуют систем'ам неустойчивым.
Запас устойчивости
По мере приближения параметров устойчивой системы к критическому значению ухудшается качество •переходного процесса. Появляется сильная колебательность, приобретают существенное
Рис. 5.6. Определение запаса устойчивости по амплитудно-фазовым (а), (б) и логарифмическим (в) характеристикам
4—296
97
значение параметры, которыми ранее пренебрегали ввиду их малости. При некоторой нестабильности параметров возможна неустойчивость системы. Поэтому для повышения надежности работы предусматривают запас устойчивости системы, характеризуемый запасом устойчивости по модулю и по фазе.
Запас по модулю h показывает, насколько модуль комплексной частотной функции U7(<o) отличается от единицы при частоте, на которой <р((о) =—л.
. Запас по фазе у показывает, насколько аргумент комплексной частотной функции <р((оСр) отличается от —л на частоте среза, при КОТОРОЙ №((йср)=1.
Величины запасов устойчивости по модулю и по фазе показаны на рис. 5.6а. В некоторых случаях предусматривают запретную область, куда не должна попадать АФХ разомкнутой системы ни при каком значении частоты (рис. 5.66). На логарифмических характеристиках соответствующие значения даны на рис. 5.6в.
Определение устойчивости замкнутых систем по логарифмическим частотным характеристикам разомкнутых систем
В зависимости от характера изменения амплитудно-фазовой характеристики изменяется и вид характеристик логарифмических. Это позволяет определить особенности логарифмических характеристик систем, удовлетворяющих критерию Найквиста.
На рис. 5.7 показаны структурная схема (а) и логарифмические характеристики (б) системы первого вида, имеющей в разомкнутом состоянии передаточную функцию W(s) = - _
8(1~Р/ 1S) ( 1-Н 2s) где К^К'К"К"'.
На рис. 5.8в приведены АФХ разомкнутой системы, а на рис/5.7а — переходные характеристики замкнутой.
Характеристики построены для четырех значений 1коэффициента усиления (Ai<A2<A3<A4). Три из них (/, 2, 3) соответствуют устойчивой системе и одна (4) —неустойчивой. Заметим, что изменение коэффициента усиления не сказывается только на фазовой характеристике.
При малой величине K=Ki наблюдаются медленный переходный процесс, большие запасы устойчивости по модулю и фазе уь АФХ-1 значительно удалена от точки (—1,Ю). ЛАЧХ-1 пересекает ось абсцисс на частоте среза (o = (oCpi, имея наклон — 20 дб!сек.
При некотором увеличении коэффициента усиления до К=К2 переходный процесс ускоряется, появляется перерегулирование (не очень существенное), запасы устойчивости по модулю h2 и фазе у2 несколько сокращаются. ЛАЧХ .пересекает ось абсцисс на 98
1
частоте (о = (оСр=<ос= с наклоном, переходящим от —20 дб
—40 дб!дек. Т1
Увеличение К до .величины Лз еще не нарушает устойчивости системы. Однако переходный процесс становится существенно колебательным. Недопустимо снижаются запасы устойчивости (й3 и уз) и увеличивается перерегулирование.
При К—Кц система становится неустойчивой. ЛАЧХ пересекает ось абсцисс с наклоном —40 дб!дек.
Из рассмотренного примера следует общий признак устойчивости:
системы первого вида, устойчивые в разомкнутом состоянии, будут устойчивы в замкнутом, если во всей области частот, где логарифмическая амплитудно-частотная характеристика положительна, фазовая характеристика проходит выше уровня — л.
Во многих случаях этот критерий заменяется еще более простым и удобным для приближенных оценок качества системы по одной только. ЛАЧХ разомкнутой системы: система устойчива, если ЛАЧХ пересекает ось абсцисс с наклоном не более — 20 дб!дек. Этот приближенный критерий устойчивости дает удовлетворительный результат при отсутствии в системе звеньев с запаздыванием и достаточно большом удалении частот сопряжения от частоты среза. В рассмотренном примере при К=Кз система, являясь устойчивой, не удовлетворяет последнему критерию. Однако она имеет плохую переходную характеристику и малый запас устойчивости, что позволяет считать ее практически неустойчивой.
У систем второго вида АФХ могут многократно пересекать отрезок оси от — оо до —1. Соответственно фазовая характеристика будет многократно пересекать уровень —л в диапазоне частот, где ЛАЧХ положительна. В этом случае системы, устойчивые в разомкнутом состоянии, будут устойчивы в замкнутом, если в диапазоне частот, где разность между числом положительных и от-
рицательных переходов фазовой характеристики через уровень — л будет равна нулю.
Переход называется положительным, если фазовая характеристика при увеличении частоты пересекает уровень —л снизу вверх, и отрицательным, если сверху вниз.
На рис. 5.8а показаны характеристики устойчивой системы. В области частот, где (®) 0, имеются один положительный
и один 'Отрицательный переходы. Там же (б) приведены характеристики неустойчивой системы (два отрицательных и один положительный переходы).
Рис. 5.8. Логарифмические характеристики устойчивой (а) и неустойчивой (б) систем второго вида
Условие устойчивости систем второго вида распространяется и на системы первого вида, если иметь в виду, что в случае устойчивости у последних будут отсутствовать и положительные и отрицательные переходы.
5.3. Ошибки систем при детерминированных воздействиях
В замкнутых системах, использующих .принцип отклонения, различие между задаваемым значением x3(t) и фактической величиной выходного параметра хвых(0 реализуется в форме сигнала ошибки после схемы сравнения, как показано на рис. 5.9:
*ош (О = х3 (t)—xBSX (/). (5.18)
Различают ошибки, возникающие во время переходного процесса, и ошибки установившиеся, которые наблюдаются, когда переходный процесс практически закончился.
Рис. 5.9. Структурная схема системы и сигналы, обусловливающие ошибки
Ошибки могут возникать вследствие неточности отработки системой задаваемого воздействия x3(t) и вследствие возникновения возмущающих воздействий xB(t): радиопомех, проникающих на вход системы вместе с управляющими сигналами, флуктуационных помех внутриаппаратурного происхождения, изменения питающих напряжений, изменения параметров элементов или нагрузки, окружающей температуры и др.
Ошибки первого вида будем для краткости называть ошибками регулирования яОшр(0» а второго вида—ошибками от .возмущающих воздействий хОшв(0- Сами возмущающие воздействия могут возникать в различных элементах системы и представляться эквивалентными дополнительными сигналами xB(t), проникающими в систему в различных ее точках, например, как это показано на рис. 5.9. Иногда для удобства расчетов сигналы, возникающие в одной точке, заменяют эквивалентными сигналами, действующими в другой точке, что для линейных систем не представляет трудностей.
Общий метод нахождения ошибок, использующий преобразование Лапласа и передаточные функции, заключается в следующем.
Для определения величины ошибки используют передаточные функции системы по ошибке регулирования
®owP(s)=^^- (5.19)
Х3 (S)
и по ошибке от возмущающего воздействия
4,0B(s)=%77-- . (5.20)
XB(s) устанавливающие взаимосвязь изображений ошибки и сигнала, обусловливающего эту ошибку.
Изображения ошибки регулирования и ошибки от возмущающего (воздействия
А'ош р (S) = хз (s) Фош р (S) и ХОШВ($)=ХВ($)ФОШВ(5). (5.21)
Обратным преобразованием Лапласа или по справочным таблицам находят величины ошибок как функции времени
'“ош р (0 = L [ХоШ р (s)] и хоШ в (/) = L, [XOUI в (s)].
Во многих 'случаях представляет интерес определить установившуюся ошибку при достаточно больших значениях времени (предельную величину ошибки — Хош). Это легко сделать на основе предельной теоремы (3.21), не прибегая к обратному преобразованию Лапласа. В общем виде такое предельное значение установившейся ошибки можно записать:
* ^ош ^П1 х'ощ (/) = lim sA^oin (s). (5.22)
s->0
Ошибки регулирования
Для нахождения ошибок регулирования применим преобразование Лапласа к ф-ле (5.18), полагая, что хош(0 =хОшр(0:
ЛГошр(5) =Xa(s)—А-ВЬ1Х (s)= A-a(s) Г1 — ,
L ^з(8) J • а учитывая (4.9),
Лош р (s) — AV, ч = (5)Фош р ($), (5. 23)
1 И/
где Ч» S
- 1 Фошр(5) = 1^-Щ- (5.24)
— передаточная функция 'системы по ошибке регулирования, а VT(«s) —передаточная функция разомкнутой системы.
Для схемы рис. 5.9 ©та функция равна
W(s) = ^(s)^0(s).
Передаточную функцию разомкнутой системы (4.4) можно также представить в виде
+ S^-l+ , . , + 1)
Sv (ansn -j- an_j Sn 1 -J- . « . + 1 )
(5.25)
где v — показатель астатизма системы, определяющий количество последовательно соединенных интегрирующих звеньев в главной ветви системы, а также кратность полюса 'передаточной функции IF(s) при $ = 0.
Рассмотрим ошибки регулирования, возникающие, когда задающее воздействие представляется степенной функцией вида
*э(0=4'М<0- (5.26)
rl
Ее изображение
Xs(s)=-$r • (5.27)
Используя выражения (5.22), (5.23) и (5.24), предельное значение установившейся ошибки выразим в виде
Хош= lim sX3 (s) Фош р (s) = lim sXa(s) , (5.28)
ош s_0 pU s->ol-F№(s) V 7
а после подстановки значений изображения задающего сигнала Аг. sr
передаточной функции (5.25) и (5.27) окончательно имеем
Хош lim ,, , e-m. ।
s—0 1 Г _£b_Pfft S •
sv ans"+ .
= lim
s-o sr -j- Ks
(5.29)
A
Определим (предельные значения установившихся ошибок статических и астатических систем.
Ошибки статических систем. Согласно определению, статические системы имеют установившиеся ошибки при скачкообразном воздействии вида х3(0 =^о* 1(0- Это выражение является частным случаем (5.26), когда г=0. Величина установившейся ошибки статических систем
Хош = lim----. (5.30)
При всех значениях v>0 установившаяся ошибка равна нулю. Она отлична от нуля только в случае v = 0, т. е. наличие интегрирующих звеньев является признаком астатических систем, отсутствие— признаком статических. 'Величина статической ошибки
(5.31)
1 1 Л пропорциональна величине скачка и обратно пропорциональна коэффициенту усиления разомкнутой системы К.
При линейно возрастающем (г=4), квадратичном (г=2), кубичном (г=3) и т. в. задающих сигналах, когда г>0, ошибка системы 'непрерывно возрастает и
Хош= lim ——------ = оо.
s-*o sr(l + К)
(5.32
Пример 1. Определить ошибки системы авто-подстройки частоты, рассмотренной в § 4.3, как функции времени и в момент t=tm=2 сек. Ошибки найти в случаях, если:
а) частота принимаемой станции изменилась скачком на Х3=Д,/С=5 кгц,
б) частота принимаемой станции -изменяется линейно: X3=Afc (t) —Ajt — со скоростью Л1=|10 кгц!сек.
Элементы системы имеют следующие параметры:
в
Коэффициент передачи частотного детектора Кд=1 —- Постоянная времени К2Ц
фильтра частотного детектора Тд=0,1 сек. Коэффициент усиления усилителя постоянного тока Ку=20. Коэффициент передачи управителя /<уПр=2 кгц/в.
Решение.
1. Передаточная функция разомкнутой системы соответственно (4.14) равна
«7(s)=TT^- •
Коэффициент усиления
К = КдКуКупр = 1.20-2= 40.
2. Передаточная функция системы по ошибке регулирования (5.24) 1_______________________________________1 +TflS
фошр(5)— J + 1F(S)- 1+/C+TflS •
3. При скачке частоты принимаемой станции:
а) изображение скачка соответственно табл. 3.1 д
Х3 (s) — — > гДе -Д=Д /с = кгц-, s
б) изображение ошибки (5.21)
А 1 I Т (si
^ош р (s) — Х3 (s) Фош р (s) = . rr I?- •
S 1 -f- Д -j- 1 As
Представляем изображение в виде двух слагаемых и вводим обозначения:
^ош р (s) = Xt (s) + АаХ2 (s),
А 1
где
X. (S) =-------- , Х2 (s) =---—, а = Тэ = -Тя = - °— = 0,0024;
' s(l-bas)’ l.-fas’ э К+1 40 + 1 ’ ’
в) по табл. 3.1 определяем оригиналы изображений X]-(s) и X2(s):
__L !
Xi (0 = 1 — е 2 , x2(t) = — е а;
г) по изображению ошибки (п.б) находим ошибку системы как функцию времени:
у}
*ош р (0 = , хг (/) + Аах% (/) =
лт1
А ( _Д\ А К --
* =--------1-е а Н-Яе а=-------4-Л—а.
K+1V 7 К+1 К+1
Учитывая, что а=0,0024, t=tm=2 сек вторым слагаемым ошибки можно пренебречь. Тогда
А Д /с 5
*ошр (//п) - кчЛ = к+7 = 40+7=0,244 кгц-
Система имеет значительную статическую ошибку, уменьшить (которую можно путем увеличения коэффициента усиления.
Величину установившейся ошибки можно было бы получить непосредственным использованием выражения (5.31), к которому свелось полученное здесь решение.
4. При линейном изменении частоты принимаемой станции:
а) изображение линейно возрастающей функции Д/с (0 =A}t=x3(Q. Соответ-
А
ственно табл. 3.1 X3(s)=—• ;
s2
б) изображение ошибки
р (s) = К3 (s) Фош р (s) = —' _
8 1 1 Д t < до
или аналогично -предыдущему
^ош р (з) = „ . . Хо (s) + Аг aXt (s) a + i
где
Xo (s) =--------------- , x. (s) =--------------------;
s2( 1 + as) s (1 + as)
в) по данным табл. 3.1 оригиналы изображения:
х0 (t) = a e a + t — a, л* (/) = 1 — e a
г) ошибка как функция времени находится соответственно изображению (п.б):
л Г - — 1 Г - —1
*ОШ Р (0 = - I а е а + t — а] + Ага I 1 — е а =
А + 1 и
А г ( - L\ ]
А + 1 u
С течением времени ошибка возрастает. Это согласуется и с выражением (5.32); •
д) в момент сек с учетом замечания, сделанного в п. За, ошибка
Хцп р (tm) s tm — 2 — 0,488 кгЦ^,
А “Г J -f- 1
Ha ipMic. 5.10 показаны графики изменения частоты гетеродина приемника и возникающих ошибок регулирования при скачкеДа) и линейном изменении (б)' частоты принимаемых сигналов.
Ошибки астатических систем. Системы с астатизмом v-ro порядка имеют v интегрирующих звеньев, последовательно включенных в главную ветвь контура системы регулирования. У астатических систем 1.
Рис. 5.10. Изменение частоты гетеродина приемника при скачкообразное (а) и в линейном (б) изменении частоты принимаемых сигналов
Предельное значение установившейся ошибки определяется выражением (5.29) и зависит от показателя степенной (функции г задающего воздействия (5.26).
Возможны три случая:
1. Показатель степени функции задающего воздействия меньше порядка астатизма системы r<v.
При этом г—v<0 и
Хош Р = lim — = lim 0. (5.33)
s->o sr + Ksr s-*o
т. е. предельное значение установившейся ошибки равно нулю.
2. Показатель степени функции задающего воздействия равен порядку астатизма системы r = v, т. е. г—г = 0.
Предельная установившаяся ошибка
х0Шр=пт-^-=А'. <5-34>
s->0 s д Д
Коэффициент Аг .представляет собой r-ю производную задающего сигнала (5.26). Следовательно, если порядок астатизма равен показателю степени задающего воздействия, то предельная ошибка равна производной задающего сигнала порядка х—r и обратно пропорциональна коэффициенту усиления системы.
3. Показатель степени задающего воздействия выше порядка астатизма r>v.
Согласно (5.29) предельная установившаяся ошибка ХОШр=со.
Если показатель степени задающего воздействия выше порядка астатизма системы, предельная установившаяся ошибка с течением времени неограниченно возрастает. В реальных системах сигналы всегда ограничиваются конечными величинами.
Таким образом, в системах с нулевым порядком астатизма (статических системах) наблюдается постоянная установившаяся ошибка (ошибка по положению), равная отношению амплитуды скачка к коэффициенту усиления системы. Установившаяся ошибка с течением времени возрастает при линейном, квадратичном, кубичном и т. д. воздействиях.
В системах с астатизмом первого порядка скачкообразное задающее воздействие отрабатывается без ошибки (ошибка по положению равна нулю). При линейно возрастающем воздействии имеется постоянная установившаяся ошибка, равная отношению скорости изменения задающего сигнала к коэффициенту усиления системы (скоростная ошибка). При квадратичном, кубичном и т. д. воздействиях установившиеся ошибки возрастают с течением времени.
В системах с астатизмом второго порядка ошибки по положению и скоростная равны нулю. При квадратичном воздействии появляется постоянная установившаяся ошибка, равная отношению второй производной задающего сигнала к коэффициенту усиления системы (ошибка по ускорению). При кубичном и воздействиях более высоких порядков ошибки с течением времени возрастают.
С ростом коэффициента усиления ошибки регулирования уменьшаются.
В табл. 5.3 приведен характер изменения ошибок статических и астатических систем при скачкообразном и линейно изменяющемся задающем воздействии.
Нахождение ошибок регулирования с помощью коэффициентов ошибок. В реальных условиях требуется определять установившиеся ошибки, в определенные моменты времени. Если задающее воздействие определяется функцией, имеющей г первых производных в рассматриваемом интервале времени, то, помимо общего решения, изложенного в начале этого параграфа, ошибка может быть найдена с помощью так называемых коэффициентов ошибок.
Функция ошибки выражается бесконечным рядом, однако очень ч§сто оказывается достаточным небольшое количество членов:
• ^9 • • С— 1
^ошРЮ=сол:3(0 + с1х3(О + —х3(0+ . . .+ (Z), (5.35)
где с0, ci, ..., сг-\ — коэффициенты ошибок;
x3(t), x3(Z), ..., x^-i —соответственно первая, вторая, ..., (г—1)-я производные функции задающего воздействия x3(f).
ТАБЛИЦА 5.3
ОШИБКИ СТАТИЧЕСКИХ И АСТАТИЧЕСКИХ СИСТЕМ
В табл. 5.4 .приведены выражения нескольких коэффициентов ошибок, имея ;в виду, что исходной для них является передаточная функция системы в разомкнутом состоянии W(s), определяемая выражением (5.26).
ТАБЛИЦА 5.4
КОЭФФИЦИЕНТЫ ОШИБОК СТАТИЧЕСКИХ И АСТАТИЧЕСКИХ СИСТЕМ
Выражения коэффициентов для типов систему
Коэффициенты ошибок статических - - с астатизмом первого порядка с астати змем второго порядка
1 1+tf 0 0
(«1~Р1)К 1 *
61 (1 + Ю2 ~к 0
са 2 («2-М к 20! (P!-«1)K сч t 7 О о? 2
(1+Ю2 + (H-Ю3 + \ (1+Ю3 К № К
Ошибки от мешающих воздействий
Ошибки системы (см. рис. 5.9), вызываемые действием возмущений хОшв(0, определяются из условия (5.18). Полагая для простоты задающее воздействие x3(t) =0, получим
*ош в (0 = — -Хвых (0- (5.36)
Общим случаем является возникновение возмущения в точке 2 системы.
Введем в рассмотрение передаточную функцию ФОшв2(«) системы по ошибке от возмущающего воздействия хВ2, учтя (4.9) и (5.36):
ФоШ в2 (s) = *°швг(5) =-, (5.37)
*B2(s) l + ^(s)
где IF(s) (s) IF0(s) — передаточная функция разомкнутой системы.
Передаточная функция системы по ошибке от возмущения (5.37) отличается от передаточной функции системы по ошибке регулирования (5.24) знаком и наличием множителя IF0(s). Этот множитель является передаточной функцией части системы между ее выходом и точкой введения возмущения.
Изображение ошибки, вызванной возмущением хВ2(0> согласно (5.37)
Л'ош „2 (s) = Х„2 (S) фош в2 (S) = - хв2 (s) . (5.38)
1 + (S)
В том случае, когда возмущение действует на входе системы, IFo(s) = IF(s) — передаточная функция по ошибке:
/ФошМ (S) • (5-39)
/ AB1(s) 1 + lT(S)
Сопоставляя’ полученный результат с выражением передаточной функции замкнутой системы (4.9), обнаруживаем отличие только в знаке, т. е. Фошв i(s) =—Ф($)* у
Изображение ошибки в этом случае
(5.40)
1 -f- W (s)
Если возмущение действует на выходе системы, то можно считать, что между возмущением и выходом системы находится часть главной ветви системы с передаточной функцией IF0(s) = 1 (сигнал, проходя эту часть системы, не испытывает никаких изменений). Тогда передаточная функция системы по ошибке от этого возмущающего воздействия
ф- (s>=- -ттк - -ф«- <s)-4p-41)
109
i
Соответственно изображение ошибки
Хошм(5)=--^. (5.42)
Если характеристики управляющего (задающего) и мешающих воздействий 'одинаковы, то наиболее опасной точкой системы является ее вход, а наименее — выход. В первом случае (передаточная функция системы ПО' ошибке от возмущения и передаточная функция замкнутой системы почти одинаковы и отличаются только знаком. Следовательно, и влияния на выходной параметр помехи и управляющего сигнала также будут одинаковыми. Уменьшить действие помех можно путем согласования характеристик системы с характеристиками задающего сигнала и «рассогласования» их с характеристиками возмущающего воздействия.
Например, при широкополосной помехе и узкополосном задающем сигнале сужение полосы пропускания системы уменьшит ее ошибку от действия помех.
Наименее опасными являются возмущения, действующие на выходе системы. Если характеристики задающего сигнала и возмущения одинаковы, то действие возмущения существенно ослабляется. Передаточные функции системы по ошибке от такого возмущения и по ошибке регулирования почти одинаковы (отличаются знаками).
Сами ошибки находятся обратным преобразованием Лапласа их изображений (или с помощью таблиц).
Пользуясь теоремой о предельном значении, можно найти предельное значение ошибки от возмущающего воздействия:
в = limsXB(s)O0UlB(s). (5.43)
s—>0 *
Пример 2. Требуется определить ошибки от возмущающих воздействий, возникающих в системе, структурная схема которой показана на рис. 5.11. Возмущения имеют характер скачка хв (t) =А • 1 (/) и вводятся в различных точках, показанных на той- же схеме.
'1 . При разомкнутом состоянии системы ее передаточная функция
W (S) = 1|7, (S) U7,(s) = ,
s(l + Ts)
где K=T<IK2—коэффициент передачи разомкнутой системы:
2. Передаточная функция системы по ошибке от возмущения, действующего в первой точке системы,
F(s) 1
Фош B1 (S) = — 1 W (s) = ~ Tjs2 4- 26 70s + 1 ’
где
1
2/дТ
Рис. 5.11. Ошибки, возникающие в системе с эстетизмом 'первого порядка при различных точках введения скачкообразной помехи
3. Изображение ошибки от возмущающего воздействия
А 1
л ™ м (?) = (S) фош м (S) = _ — .
4. Ошибка Лот в 1(0 может быть найдена по справочнику [15]. Однако в данном случае Фошв1($) является передаточной функцией колебательного звена, а реакция последнего на ступенчатое воздействие определяется умножением переходной характеристики (3.71) или (3.72) на величину скачка А. Следовательно, Хеш в 1(0=—Ah(i).
5. Предельное значение ошибки находится непосредственно из полученного в п. 4 выражения ошибки или на основе предельной теоремы и выражения (5.43):
А s —
^ош bi ~ s*bi (s) Фош bi (s) = —Hm------------------------ — yj
s->0 s^° Tg s2 + 26 Tos + 1
6. Аналогичным путем определяются передаточные функции по ошибке от возмущающих воздействий, возникающих в других точках системы, и величин установившихся ошибок. Установившаяся ошибка от воздействия в точке 2 Хош в 2=—а от возмущения в точке 3 ХОш вз=0.
Л1
Графики ошибок от возмущающих воздействий, возникающих в различных точках системы, показаны на том же рис. 5.12.
Отметим важные особенности эффекта возмущающих воздействий.
1) установившаяся ошибка не зависит от коэффициентов усиления звеньев, находящихся между точкой возникновения помехи и выходом системы, но обратно пропорциональна,, коэффици-
енту усиления звеньев, расположенных между входом системы и точкой приложения возмущения;
2) наличие интегрирующего звена между точкой приложения возмущения и выходом системы не устраняет установившуюся ошибку от скачка, тогда как введение такого звена до точки приложения возмущающего скачка сводит ошибку к нулю.
5.4. Ошибки систем при случайных воздействиях
Во многих случаях возмущения, действующие на систему, носят случайный характер. Как случайный процесс можно рассматривать внутриприемные шумы, радиопомехи, изменения параметров элементов, изменение нагрузки, условий работы и пр. Как случайную можно рассматривать и задаваемую величину в следящих системах. Например, система автотюдстройки частоты гетеродина должна следить за частотой принимаемых сигналов, но последняя изменяется под действием многих случайных воздействий и сама является случайной функцией времени.
Траектория движения искусственного спутника Земли изменяется под действием многих факторов, вследствие чего координаты спутника могут рассматриваться как случайные величины. Система автослежения за спутником имеет в качестве задаваемых параметров координаты спутника, величины которых являются, следовательно, случайными.
Случайные процессы характеризуются различными статистическими параметрами. Возникает необходимость связать их величины с характеристиками автоматических систем и, в частности, с передаточными функциями. Будем полагать, что случайные процессы и соответствующие им случайные функции стационарны и обладают эргодическими свойствами ’).
Основными характеристиками случайных функций x(t), которые в дальнейшем понадобятся, являются следующие.
Средний квадрат функции или дисперсия:
т
j2(0=a*=lim-L. f Xl(t)dt, (5.44)
Т-* со 2Т J
—Т
где %о(О = x(t)—*(0 — центрированная случайная функция;
x(f) — математическое ожидание (среднее значение) случайной величины:
т
x(Z)=lim— f x(t)dt. (5.45)
У-* со 2Т J
—т
Далее рассматриваются только- центрированные случайные функции с нулевыми средними значениями x(t)=O (индекс опускается) .
Автокорреляционная функция, характеризующая степень связи (постоянство) двух значений случайной функции, разделенных временем автокорреляции т, имеет вид
т
(т) = х (Z) х (/+ т) = lim — Г х (f) x(t-\-i:)dt. (5.46)
у-х» 2Т J
—Т
Из сопоставления (5.44) с (5.46) следует, что
а*=ЯД0). (5.47)
Автокорреляционная функция три т=0 равна дисперсии, т. е. среднему значению квадрата функции.
’) Случайная функция называется стационарной, если ее вероятностные характеристики не зависят от времени. Эргодическим свойством она обладает, если вероятностные характеристики, полученные на основе одной реализации в течение достаточно большого промежутка времени, совпадают с вероятностными характеристиками, полученными для множества реализаций при фиксированном времени.
Используя интеграл Фурье, случайную функцию можно представить в частотной области как некоторую функцию
X(ico) = J x(f)e~iatdt. (5.48)
— оо
Энергия случайного процесса А пропорциональна величине т
f и/)]2 <«.
—г
Энергетическая форма интеграла Фурье (формула Рэлея) устанавливает связь этой величины во временной и спектральной областях:
J |Х (i co)|2d со = J |X(ico)|2d/ = J [x(t)]2dt.
(5.49)
Распределение мощности случайной величины характеризуется спектральной плотностью Sx(co):
Sx(co) = lim-^-|X(ico)|2,
Т—>оо z/
которая связана с корреляционной функцией соотношением
(5.50)
«Sx(©) = /ЯхСОе
~^d т
(5.51)
и обратно
;ifi)Tdco,
(5.52)
а с учетом того, что автокорреляционная функция и спектральная плотность являются функциями четными:
Sz(<o)=2 J Rx (т) cos сот d т, о
(5.53)
J 5 (со) cos cor d со. о
(5.54)
Дисперсия случайной величины соответственно (5.47) находится подстановкой в выражение (5.52) величины т = 0.
a2 — — С S(co)cZco, х 2л J
(5.55)
т. е. для нахождения дисперсии 'необходимо спектральную плотность проинтегрировать по всему диапазону частот.
Часто спектральную плотность рассматривают только для -положительных частот, удваивая ее величину, что вполне законно, поскольку спектральная функция является четной функцией частоты. Тогда
оо оо
oj. = — С So(co) d со = — С 5((o)dcd, (5.56)
2я 2 «тс
о —оо
где 5о(со) =2S(co)—спектральная плотность для положительных частот.
Зная статистические параметры управляющего или .мешающего воздействия, можно найти параметры возникающего выходного (регулируемого) сигнала и соответствующую ошибку системы.
Спектральная плотность процесса ЗДко) на выходе линейной системы, имеющей комплексную частотную функцию Ф(1со), связана со спектральной плотностью сигнала на входе Sx(co) соотношением
^И=5Д®)Ф2« (5.57)
где Ф (со) = | Ф (ico) |—модуль комплексной частотной функции, представляющий амплитудно-частотную характеристику системы.
Дисперсия случайного сигнала на выходе системы соответственно (5.55) равна со
f 5Дт)Ф2(«>М<о. (5.58)
— оо
Дисперсию можно определить различными путями. Один из них заключается в том, что подынтегральное выражение преобразуют к виду
А (“°) =------------- , (5.59)
\А (i со)}2 A (i со) А (— i со)
где
ЯОт)=о0Осау + <г1(1«>)''_1+ . . ,+а„, (5.60)
G(iio)=fco(i<o)a‘“2 + Mi®)2"-4+ . . -+V1- (б-61)
Здесь 2п — наивысшая степень знаменателя. Степень числителя в реальных системах не может быть выше (2/г—2). Тогда вычисление дисперсии (5.58) сводится к нахождению интеграла:
7= J- С G(i--)dt0—=_L С “Lrfoj. (5.62) 2л J A (i со) А (— i со) 2л J (i со)}2
--с» -90
Этот интеграл ® общем случае равен
Г _ 1 Мп п~ 2а0 Дп
(5.63)
где Мп и Дп — о,пределители, составленные из коэффициентов сц и bi.
© а со ел . . . 0 ... 0 . . . 0 . . . 0 Г <9. - ^0 ^1 ^2 Gq Q2 ® ® <® 1 ... 0 ... 0 ... 0 ® ® W. • . (5.64)
«0 0 0 ^4 а3
0 0 а3 aQ а2
^0 а2
0 0 0 fe • - 0 0 0 , • № О'П
Для небольших величин п значения интеграла равны: при п= 1
2^^
при п — 2
ь’е +
1 _ «2
«/2 — ------------- »
2tzua1
при п = 3 аоаА ---------------------------------~Ь ^0^1------
J3 = --------------------,
2а0 (а0а3 — ага2)
при п = 4
Ь9 (— сщ 4- а2а3) — а(АА -J- а0агЬ2 -J- (а0а3 — а^)
J4 =---------------------------------------------------------
2а0 (a^af {- aja4 — ага2а3 )
(5.65)
Зная передаточные функции системы по ошибке регулирования и по ошибке от мешающего воздействия и спектральные плотности задающего сигнала S3(co) и мешающего воздействия 5в(со), нетрудно найти спектральные плотности и сшибки, возникающие в этих случаях.
Если задаваемый управляющий сигнал x3(t) является стацио-йарны'М случайным сигналом со спектральной плотностью S3(co), то соответственно (5.57) и (5.24) —спектральная плотность ошибки регулирования:
5ОШр(й)=5з(®)Ф2П1ПП(®)=-^--------• (5.66)
ошр\ / з\ / ошр\ / |14-F(ico)|2 ' ’
Средний квадрат ошибки регулирования aJJ находится подстановкой (5.66) в (5.55):
©о
°ош р “ J ^ош р (®М
— оо
оо
»=-£ J s3 («.)<!*,,»<&>= — оо
= 1 С s3 (со)
2л J |1 + W (ico)|a ч —<»
(5.67)
б/сО.
Для определения спектральной плотности ошибки системы Зош в (со) от возмущающего воздействия хв(0 (рис. 5.9) воспользуемся выражениями (5.57) и (5.37), заменив в последнем предварительно s на ico:
6™ . («>)= «в («>)К*», в («>)= S, (<о) I Г . (5.68)
I (1 COJ) [
Средний квадрат ошибки о2шв от случайного мешающего воздействия хв(0 определяется после подстановки (5.68) в (5.55):
оо оо
а1вв=4; f 5оШв(т)<г®=-^- f 5в(<а)ф^шв(<о)<г<о=
—oo —oo
oo
=— f (co)! y»B(M .2|2dfi) (5.69)
2Л J v 71 1 H VT (i cd) I ' '
—oo
Спектральная* плотность результирующей ошибки при отсутствии корреляции между управляющим и мешающим сигналами
*^ош (со) — Soiu р (co) + SOIUB(co), (5.70)
I
а средний квадрат результирующей ошибки при том же условии
о2 =(Г2 + О2 . (5 71)
Соответственно среднеквадратичное значение ошибки
<*ОШ р-^ОШВ. (5.72)
Рассмотрим, как изменяется характер помех при наличии в системе дифференцирующего или интегрирующего звена.
Если в контур управления введено дифференцирующее звено с передаточной функцией W(s)=Ks, на входе которого действуют помехи с равномерным спектром Sx(g))=Sx, то спектральная плотность сигнала на выходе звена будет равна
S^co)=S^cd)№2(cd)=SX2<o2. - (5.73)
Спектральная плотность помехи возрастает пропорционально квадратам частоты и коэффициента усиления звена. Введение
дифференцирующего звена увеличивает воздействие широкополосных помех (которое возрастает и при увеличении- коэффициента усиления).
При введении интегрирующего звена с передаточной функцией W($) = — спектральная плотность помехи на его выходе
S,(4>)=S^.
СО2
(5.74)
Возрастание коэффициента усиления по-прежнему увеличивает влияние помех, однако воздействие широкополосных помех уменьшается. В области низких частот амплитуды сигнала возрастают. Следовательно, точность воспроизведения управляющего сигнала возрастает.
Пример 3. Определить средний квадрат |(дисперсию) суммарной ошибки, возникающей в системе с передаточной функцией
W (s) =---------- ,
s(l+Tos)
d
если спектральная плотность задающего сигнала1) sa(co) =-----------------,
С02( 1+С02Т2)
где d и Т — постоянные величины.
Помеха действует на входе системы и имеет равномерный спектр (рис. 5.12).
Спектральная плотность помехи SB(co) =N=const.
Решение.
1 Определяем ошибку регулирования при случайном задающем воздействии:
а) комплексную частотную функцию разомкнутой системы получаем путем замены s на iw в передаточной функции системы:
F(i со) = -———;
i со (1 -J- J со 70) !
б) спектральная плотность ошибки регулирования
5 /ш) = (<о) = d I iсо(1 + i соТр) 2 =
ошр “ |1 + w (i со)|2 со2 (1 + со2Г) | i со (1 + i*co 70) +К
___________d(l + <o2rg)_______________d(l+co27^)
“(l + co2?'2) iro(ico)24-ico4-K|2 “ |1 + i to Т|2 |Т0 (i со)2 + ico + ^2 *
Учитывая, что <о2= — (ico)2, последнее выражение преобразуем к виду
s , =d[l-Tg(im)a]= С(!ш)
*) Следует заметить, что при такой спектральной плотности задаваемый процесс нестационарен и имеет дисперсию ст2—>оо. Но так как система имеет аста-тизм (первого порядка), то ошибка обусловлена только производными задающего воздействия, относительно которых процесс стационарен. Действительно, для скорости воздействия
$з скор (W) — S3 (со) =
1 ф- со2Г2 ’
Соответственно обозначениям (5.60) и (5.61) в нашем случае для .полинома A (ico) наивысшая степень переменной (iw) п—3 и коэффициенты а0=ТТ0, а^ — —Т+То, а2='1+КТ, аз = Д.
Для полинома, находящегося в числителе, 2п—2=4 и &о=0, 2п—4=2 и bt =—Т q, 2п—6=0 и Ь2=1;
в) дисперсия ошибки регулирования i(5.67)
со ОО
9 1 С 1 f G (i со) ,,
»U=^- J j
— СО —оо
Воспользовавшись результатом интегрирования (5.65), находим (имея в виду, что 6о=О)
, , , ОойуЬг , czi^2
— С?2^0 + ао ^1 — —
о2 _ ______________________аз _ d_____________аз
°ош р 2а0 (ооДз — а1сг) 2(0^3 — ^1^2)
и после подстановки величин коэффициентов а и b
, d Т +
=-------------------- .
ош р 2 К (То + Т Д КТ*)
2. Определяем ошибку системы, обусловленную действием помех:
а) спектральная плотность ошибки- от действия помех согласно (5.68) и с учетом того, что помеха действует на входе системы, т. е. W'o(ico) =Wz(i<o)r. равна
о , >_с , J )Т«(1<») 1: „| Г(1И) I» w2
Лоп.в(ш) Зв (о) | ( + " I 1 + «/(io) I = |T„(i Ш)а + i <u-|- AT ’
Как и в предыдущем случае, выражение спектральной плотности представляем в виде частного полиномов G(i(o) и 4(ico)
G (i со)
Степень полинома A (ico) равна /1=2, а коэффициенты -полиномов соответственно (5.60) И|(5.61) равны: * Л»
Оо — То, ау — 1» cz2 — К, Ьо — 0, by — 1;
б) дисперсия ошибки системы от действия возмущений (5.69 k 00 00
9 If 1 с G (i л)
4.>=2-J s0MB(m)dM=Wa-J
Используя результаты интегрирования (5.65) и подставляя найденные значения коэффициентов, получаем
аоЬу
°ош п=N1<2------------—— = ж2— = ;
р 2aoay 2а1о2 2/< 2
в) суммарная ошибка системы имеет дисперсию (5.7|1)
„2 = .2 J-„2 T+^ + KTt,
° ОШ ° ОШ Р Ч ° ОШ В ----------------
2 К(Го + Т + К72)
В случае, когда постоянная времени Т^То и ,
02 d _,КК
°ош - + 2 '
+ Л7С
2 '
(5.75)
Из рассмотренного примера следует, что с увеличением коэффициента усиления системы компонента ошибки регулирования убывает, тогда как 'Составляющая, обусловленная действием помех, увеличивается.
Оптимизация систем по точности
При рассмотрении ошибок регулирования при детерминированных задающих сигналах и в разобранном примере 3 было
Рис. 5.13. Ошибки системы при случайном управляющем сигнале и флуктуационной помехе на входе'
показано, что величины ошибок регулирования уменьшаются с увеличением коэффициента усиления разомкнутой системы. Что касается ошибок от действия помех, проникающих по каналу управления, то они с увеличением коэффициента усиления возрастают. Следовательно, результирующая ошибка при некотором оптимальном значении коэффициента усиления = Лопт имеем минимум ОоШМИН,
как это показано на рис. 5.13. если система при этом не теряет устойчивости.
В рассмотренном примере оптимальную величину Л”Опт можно найти, дифференцируя выражение (5.75) и приравнивая нулю пер-
т-г - 3 г—~
вую производную. Проделав эти операции, получим Лопт^!, и минимальную величину квадрата ошибки сг;шмин
2_1_ 2
3 d
2
л 2Хопт
В ряде устройств параметры системы (коэффициенты усиления и постоянные времени) отдельных звеньев могут изменяться. В этих случаях возможна непрерывная оптимизация системы по- точности соответствующим изменением коэффициента усиления одного из усилителей.
✓
5.5. Коррекция автоматических систем
Улучшение (показателей качества работы замкнутой системы достигается путем изменения параметров или структуры системы — введением специальных устройств (корректирующих звеньев).
Простейшим путем увеличения точности статических и астатических систем является увеличение коэффициента усиления разомкнутой системы. Одновременно расширяется полоса пропускания (возрастает частота среза) и до определенного предела увеличивается быстродействие. Однако .при этом уменьшается запас устойчивости, увеличивается колебательность и уменьшается помехоустойчивость системы от помех, проникающих по каналу управления.
Влияние величины К на характеристики системы было показано на рис. 5.7. Поскольку согласно ориентировочному критерию устойчивость системы достигается при пересечении оси абсцисс ЛАЧХ с наклоном — 20 дб)дек и достаточном удалении частот сопряжения от частоты среза, можно найти наибольшие допустимые величины коэффициентов усиления Адоп, при которых это условие выполняется.
ЛАЧХ систем, в которых реализованы такие коэффициенты усиления, показаны на рис. 5.14а и б.
Рис. 5.14. Практичееки допустимые величины коэффициентов’ усиления статической (а) и астатической (б) систем
Для астатических систем (а) частота среза соср — <ос 1= 1/Т1. При этом Ti>T2> ... >Тп. Вся частотная характеристика вплоть до частоты среза определяется наличием усилительного и интегрирующего звена, т. е. IF(s) « —. На частоте среза №(соср) =-^доп = s соср
= 1, откуда
Лдоп~ ^cl- (5-76)
11
В случае статических систем (рис. 5.156) (оср = сос2=—Вплоть до частоты среза характеристика зависит в основном от усцли-121
тельного и первого На частоте среза инерционного звена с постоянной времени Т\. W (<оср) яв Кл°° = 1, р К1 + (Лсоср)з
следовательно, /* / Т. \2 • ^ДОП=1/ 1+ V- » у \ 1 2 /
а в случае, когда Т\ » ^2, . (5.77) •* 2 1°с1
Допустимая величина коэффициента усиления статических систем определяется не абсолютной величиной, а отношением наибольших постоянных времени инерционных звеньев системы.
Улучшить показатели системы можно путем изменения характера управляющего сигнала последовательным включением ,в схему специальных корректирующих звеньев или охватывая дополнительной обратной связью некоторые элементы системы. Соответственно этим способам различают методы последовательной и параллельной коррекции.
Последовательная коррекция
Схема последовательной коррекции в общем виде приведена на рис. 5.15.
Корректирующее устройство имеет передаточную функцию U?K(s), а сама система без коррекции U^i(s).
Рис. 5.1'5. Схема последовательной коррекции
В простейших случаях с помощью корректирующего устройства дополнительно к сигналу ошибки вводят сигнал, пропорциональный либо производной, либо интегралу от сигнала ошибки, либо и тот и другой одновременно. Эти способы также называют коррекцией по сигналу рассогласования или по отклонению.
Введение производной сигнала ошибки. Производную сигнала ошибки можно создать и ввести в систему с помощью форсирующего звена, имеющего передаточную функцию WK(s) =Кк(1 + Ts), где /Ск и Т — коэффициент усиления и постоянная времени корректирующего звена.
Действие такой коррекции покажем на примере системы третьего порядка с астатизмом первого порядка, имеющей передаточную функцию
Wt (s) --------, (5.78>
s(l + T1S) (1 +ЗД
причем ТХ>Т2.
При введении корректирующего звена передаточная функция разомкнутой 'системы
IF(s)=U7K(S)^(s)
s(l + 7\s) (1 + T2s)
Если постоянную времени корректирующего звена сделать равной постоянной времени наиболее инерционного звена, т. е.
™ w'<s)° ’ где
S(1+^2S)
При быстрых изменениях управляющего 'сигнала за счет дифференцирования создается дополнительное управляющее воздействие, компенсирующее влияние наиболее инерционной части системы.
Допустимая величина .коэффициента усиления системы после коррекции Лдоп2 аналогично (5.76) равна /СДОП2 =—>—=Дд0П1# 72 Тг
Следовательно, сохранив прежний запас устойчивости, можно увеличить коэффициент усиления системы и быстродействие и уменьшить установившуюся ошибку. Повысить усиление можно, увеличивая коэффициент передачи одного из звеньев системы или подбором Кк.
На рис. 5.16« показана АФХ системы до коррекции при коэффициенте усиления К=К\, обеспечивающем необходимый запас устойчивости (/), при введении коррекции и увеличении коэффи
Рис. 5.16. Коррекция астатической системы введением форсирующего звена
циента усиления до К=К2 (2) и при таком же увеличении коэффициента усиления К = К2, но без введения корректирующего звена (<?). Там -же (б) показаны ЛАЧХ; формирующего звена при
/Ск= 1 (Л. разомкнутой системы до введения коррекции (2), после введения форсирующего звена с постоянной времени Т=1\ (3) и (4) 'после введения коррекции с дополнительным усилением на \К=Кг—Ki, дб.
Введение интеграла сигнала ошибки. Для создания сигнала, пропорционального интегралу сигнала ошибки, можно ввести интегрирующее звено с передаточной функцией WK(s) =^-. При этом S
повысится порядок астатизма и .в зависимости от структуры системы уменьшатся либо вообще исчезнут соответствующие компоненты ошибок.
Однако при включении интегрирующего звена в систему с астатизмом даже первого порядка повышение порядка астатизма приводит к неустойчивости. Поэтому вместе с сигналом, пропорциональным интегралу сигнала ошибки, одновременно передают и сам сигнал ошибки. Такое корректирующее устройство можно получить, соединяя параллельно безынерционное звено с передаточной функцией К' интегрирующее с передаточной функцией—.
S
В этом случае передаточная функция корректирующего устройства приобретает вид
irK (s) = К' + — = Кк . (5.79)
s S Ч
где
т__ К’
Такой же эффект можно получить последовательным соединением усилительного, форсирующего и интегрирующего звеньев. На рис. 5.17 показаны ЛАЧХ корректирующего звена»для случая К'=1. Включение звена сообщает системе интегрирующие свойства только в области частот ниже <о= — =<оСк-
Рис. 5.17. Логарифмические характеристики корректирующего звена вида '(5.79)
Выбрав частоту сопряжения корректирующего звена соСк в области частот, где ЛАЧХ нескорректированной системы имеет наклон 20 дб/дек, можно сохранить этот наклон в некоторой области частот выше (оск и увеличить наклон на частотах ниже соСк- Система приобретает астатизм второго порядка. Изменяя коэффициент усиления (перемещая ЛАЧХ вверх или вниз), можно добиться, чтобы ЛАЧХ пе
ресекала ось частот с наклоном —20 дб!дек, и обеспечить устойчивость системы.
Пусть до коррекции система имела астатизм первого порядка и передаточную функцию (6.78). После коррекции она приобретает астатизм второго порядка. Ее передаточная функция
lE(S)=FK(S)ri(S) =
^к(1 + 7s) s2(l 4 71S) (1 +T2s)
На рис. 5.18п показаны ЛАЧХ и ЛФЧХ системы до введения коррекции (7), характеристики корректирующего звена (2) и характеристики системы после коррекции (5). Введение коррекции
Ряс. 5.18. Коррекция системы
введением интегрирующего и форсирующего звеньев (5.79)
увеличило коэффициент усиления системы (AiAK вместо /G), повысило порядок астатизма и точность, однако несколько снизило устойчивость системы. На рис. 5.186 приведены АФХ системы до (7) и после (2) коррекции. Введение корректирующего звена повернуло характеристику по часовой стрелке на 90°, однако деформировало ее так, что критическая точка оказалась вне годографа.
Вместе с положительными свойствами система после коррекции приобретает и отрицательные. Она становится очень критичной к выбору коэффициента усиления. Устойчивость понижается не только при увеличении, но и при уменьшении коэффициента усиления.
Звено быстрого реагирования. На рис. 5.19п приведена схема звена, быстрого реагирования или звена с опережением по фазе, передаточная функция которого
(5-80>
„где коэффициент передачи звена
Я14&
а постоянная времени
T — R^C.
Такое корректирующее звено может рассматриваться как последовательное соединение безынерционного, форсирующего и инерционного звеньев. При этом постоянная времени форсирующего звена больше чем у инерционного (7,>аТ).
На рис. 5.196 приведена переходная характеристика звена. При быстром изменении управляющего сигнала звено сначала полностью пропускает возникший сигнал (сигнал ошибки), обеспечивая быструю отработку этого сигнала системой и сокращение переходного процесса. Затем сигнал на выходе звена уменьшается, это предотвращает или уменьшает возможное перерегулирование в системе.
Логарифмические амплитудно- и фазо-частотные характеристики звена с опережением по фазе показаны на рис. 5.19в.
Звено уменьшает общий коэффициент усиления системы на а дб и вносит положительный фазовый сдвиг
ср (gj) = arc tg со Т—arc tgmT. (5.81)
Наибольшая величина фазового сдвига
. 1 — а
фт=аГС51П-----
(5.82)
(наблюдается на частоте
где
1 Фер—
/а ®ср
— частота сопряжения
форсирующего звена.
(5.83)
Звено быстрого реагирования можно использовать для коррекции систем с астатизмом и первого, и второго порядков. Для уменьшения влияния инерционной части звена .постоянную времени аТ уменьшают, переводя частоту сопряжения инерционной части звена в область высоких частот, где общее затухание в си-
стеме становится очень большим и вид частотной характеристики перестает заметно влиять на качество работы системы. Уменьшение величины аТ при постоянной величине частоты сопряжения форсирующей части (т. е. неизменном Т) достигается уменьшением коэффициента передачи звена а. Это одновременно улучшает фазовую характеристику, увеличивая <рт, но часто требует допол
нительного усиления, компенсирующего уменьшение величины а,
что связано с дополнительными затратами.
Возможность коррекции систем с астатизмом второго порядка показана с помощью логарифмических характеристик рис. 5.20а. Структурно неустойчивая система, имевшая ЛАЧХ и ЛФЧХ (/) после введения звена быстрого реагирования (2) приобрела устойчивость и запасы устойчивости по фазе у° и по модулю h^d6j. Часть ЛАЧХ с наклоном — 40 дб!дек после коррекции уменьшила наклон до — 20 дб/дек. Характеристикй системы после коррекции обозначены (5). Вид амплитудно-фазовых характеристик до (/) и после (5) коррекции, а также корректирующего звена (2) показан на рис. 5.206.
Звено медленного реагирования. Схема звена медленного реагирования, называемого также интегрирующим и звеном с отставанием по фазе, приведена на рис. 5.21а.
Передаточная функция звена
W(s) =
1-j-aTs
1 + Ts
(5.84)
где
pIp <‘- Г = (Л + едС. .
^1 T A2
Как и в предыдущем случае, звено 'медленного реагирования может рассматриваться как последовательное соединение форсирующего и инерционного звеньев, однако коэффициент передачи равен единице, а постоянная времени форсирующего звена мень-
Рис. 5.21. Схема и характеристики звена с запаздыванием
ше, чем инерционного а7'<7'. Вследствие этого и переходная (б) и логарифмические (в) характеристики в основном определяются свойствами инерционного звена. Однако ЛАЧХ звена медленного реагирования подобна ЛАЧХ инерционного звена только в области частот ниже частоты сопряжения форсирующей части звена, равной , на которой ЛАЧХ понижается до уровня а дб. Этот аТ
уровень на более высоких частотах остаётся неизменным.
Звено всегда вносит запаздывание по фазе
Ф (со) = — arc tg со Т 4- arc tg coot Т. (5.85)
Наибольшее запаздывание по фазе и частота, на которой оно наблюдается, определяются выражениями (5.82) и (5.83).
В диапазоне частот от — до— рад/сек, т. е. в пределах 1g — Т аТ а
декад, ЛАЧХ имеет наклон — 20 дб/дек, а вне его она горизонтальна. Следовательно, звено медленного реагирования нельзя использовать для коррекции структурно неустойчивых систем, например, имеющих астатизм второго порядка. Однако с его помощью можно уменьшить полосу пропускания и, следовательно, помехоустойчивость систем по отношению к помехам, проникающим по каналу управления (не уменьшая точности систем в установившемся режиме). Можно также, сохранив ширину полосы пропускания неизменной, увеличить коэффициент передачи и таким образом уменьшить ошибки регулирования.;
На рис. 5.22 показаны логарифмические (а) и амплитудно-фазовая (б) характеристики системы с астатизмом первого порядка, имевшей до коррекции в разомкнутом состоянии передаточную функцию (5.78) и частоту среза, равную частоте сопряжения наш
Рис. 5.22. Характеристики астатической системы, корректированной с помощью звена с запаздыванием
5—296
129
более инерционного звена (оСр=— (графики 1). После включения Л.
звена с запаздыванием, имевшего обе постоянные времени больше Т\ (графики 2), система 'приобрела характеристики вида (5). Увеличив коэффициент 'Передачи системы до величины /С дб, получаем характеристики (4); при этом точность системы повышается, частота среза уменьшается. Хотя запас по фазе несколько снижается, переходный процесс ,в системе сохраняется удовлетворительным. Увеличение коэффициента усиления системы от до К2 без введения звена с запаздыванием сделало бы систему практически неустойчивой (5).
Интегро-дифференцирующее звено. Интегро-дифференцирую-щее звено сочетает в себе свойства звеньев медленного реагирования в области низких и быстрого реагирования в области высоких частот.
Схема одного из вариантов интегро-дифференцирующих звеньев приведена на рис. 5.23а.
Р,ис. 5.23. Схема интефо-дмфферен’цир'ующего звена и его характеристики
Передаточная функция звена
цу(s) = (1 + а Hs) (1 + Tas)
U (1+T1S) (l + «T2s) ’
(5.86)
где а>1—коэффициент, определяющий наибольшее вносимое затухание и диапазоны частот----;--и-----в пределах которых
7Х 72 «72
ЛАЧХ, показанная на рис. 5.236, имеет наклоны соответственно + 20 и —20 дб/дек. На рис. 5.23е показана фазовая характеристика звена.
Постоянная времени и соответствующие частоты сопряжения выбирают, исходя из вида ЛАЧХ, которую нужно получить .после коррекции системы, так чтобы удовлетворялось условие
71 a7i Т,2 аТ 2
130 *
Задавшись величиной емкости Сь остальные значения /пара-метров схемы можно наити, пользуясь выражениями: /<х=—, /<2 = = И с . с
С2’ 2 аТ1 1#
Большое количество схем корректирующих звеньев приведено в [9].
Параллельная коррекция
Параллельная коррекция систем производится путем охвата обратной связью одного или нескольких элементов, как показано на рис. 5.24а. Свойства элементов, охваченных обратной связью, изменяются в зависимости от вида передаточной функции цепи
Цепь главной обратной связи
Рис. 5.24 Схема параллельной коррекции и эквивалентная схема ’
обратной связи, и система приобретает желаемое качество. Участок, охваченный корректирующей обратной связью, можно представить эквивалентным звеном с передаточной функцией/
• JFTs)=----'ЩЙ------. (5.87)
Тогда система представляется схемой из последовательно соединенных звеньев (рис. 5.246) с передаточными функциями W' (s) и IF2(s). Следовательно, систему с параллельной коррекцией можно исследовать теми же способами, что и систему с последовательной коррекцией.
Применяют два вида обратной связи: жесткую и гибкую.
Жесткая обратная связь воздействует на систему в переходном и в установившемся режимах. При этом сигнал на выходе корректирующего звена пропорционален величине сигнала на его входе, т. е. lFK(s) =Кк.
Гибкая обратная связь воздействует на систему только в переходном режиме, т. е. когда сигнал на входе корректирующего 5* 131
звена изменяется. В наиболее распространенном случае гибкая обратная связь реализуется с помощью дифференцирующего звена (№к(/)==Кк($).
Коррекция с помощью жесткой обратной связи. Рассмотрим Коррекцию астатической системы с передаточной функцией
W (s) =----------------, (5.88)
S(l + r1s)(14-7’2s)
полагая, что ома представляется структурной схемой (рис. 5.25а), где
ГГГ~. Г*) = -77Т^Г> К=ЫЪ l+7\s зО + ЗД
Охватив инерционное звено жесткой обратной связью с передаточной функцией №k(s) =Кк, получим согласно (4.10) эквива-
лентное звено с передаточной функцией IFJ(s)=-----, где К{ =
l-j-71 jS
= _..Л'_иГ;=.
1+№ 1 1+KiKk
Передаточная функция системы с коррекцией
s (1 4~ Ti s) (1 4~ r2s)
имеет тот же вид (5.88), что и до коррекции. Однако постоянная времени наиболее инерционной части системы уменьшилась в 1+/С1/С2 раз. Соответственно (5.76) новая допустимая величина коэффициента системы увеличивается также в l + KiKs раз.
Коэффициент усиления системы К'=К{К2 = — также
уменьшается вследствие снижения в l+Ki/G раз коэффициента усиления эквивалентного звена. Восстановить прежний коэффициент усиления системы и увеличить его далее до Кдоп можно путем увеличения усиления других звеньев W2(s) или введением дополнительного усилителя с коэффициентом усиления Ку=(1+К1Кк)2.
Жесткая обратная связь позволяет сделать устойчивой и астатическую систему второго порядка, например, систему с передаточной функцией
r(s) = —. (5.89)
s2(l-p7s) 7
Положив в схеме рис. 5.24 IFi(s)=. — ’, 1Г2 (s) = ——— и s s(l—j—
К=К\К2 и считая, что интегрирующее звено охвачено жесткой обратной связью, получим lT'(s)=— =——, где К\ =—.
Новое эквивалентное зв-ено уже является инерционным и передаточная функция системы приобретает вид №'($) =----------—------,
, s(l+7’,s)(l+T1s)
j де К'=К\ К2.
Система может быть сделана устойчивой изменением коэффициента усиления или величины Т' (путем изменения коэффициента усиления цепи местной обратной связи Кн). Заметим, что в рассматриваемом случае устойчивость системы была достигнута за счет понижения 'порядка астатизма, что не во всех случаях желательно.
Коррекция с помощью гибкой обратной связи. Особенности гибкой обратной связи покажем на примерах статической и астатической систем.
/Пусть статическая система (ем. рис. 5.24) имеет передаточные Функции:. У, (s) = (s) = , Л >> Т2 > Т„.
14-T1S (14-72s) (I + T3S)
Передаточная функция системы без коррекции W (s) =
=-------------------, где К=К1К2.
(1+Л5)(НЗД(1+Гз8) ’
Охватывая наиболее инерционное звено гибкой обратной связью с передаточной функцией №K(s) =KKs, получим эквивалентное звено с передаточной функцией IF'(s)=--------,
1 Ц-ll7K(s)IFx(s) 14-71! s
где 7'1' = Ti + /<i7<K.
Эквивалентное звено, так же как и исходное звено системы Wi ($),,. является инерционным. Однако постоянная времени его возросла на величину KiKk-
Если до коррекции предельная величина коэффициента усиле-т
нпя согласно (5.77) составляла КЛоп= то теперь она равна Т’г
*'доп т
7 2
Корректируя астатическую систему с передаточной функцией (5.88) соответственно схеме 5.24, охватим гибкой обратной связью часть системы с передаточной функцией U^((s)= ——----------. При
sCl-j-Tis)
,том W2(s)= и К=К1Л2.
1+Г2з
Эквивалентное звено будет иметь передаточную функцию
r;(s) =------, где к{ — - и?; =—.
1 i + uMsmcs) S(i+t;S) 1 -1 i+л^к
После введения обратной связи не изменился вид звена, но уменьшились в (1 + KiXk) раз коэффициент усиления и постоянная времени. Следовательно, система и после коррекции будет иметь
ту же структурную схему и астатизм 'первого порядка, однако допустимая величина коэффициента усиления согласно (5.76) возрастет в 14-/С1/Ск раз. Увеличить коэффициент усиления ’системы М’ОЖ|НО путем увеличения коэффициентов усиления основных звеньев системы или вводя специальный усилитель.
Сравнительная оценка последовательной и параллельной коррекции
При параллельной коррекции благодаря корректирующей обратной связи увеличивается стабильность характеристик системы. При последовательной коррекции, чтобы обеспечить постоянство главных элементов системы, требуются более жесткие производственные допуски и более дорогие 'материалы. В противном случае уменьшение усиления может увеличить ошибки, а его увеличение— вызвать неустойчивость системы. Вместе с тем при последовательной коррекции часто удается применять малогабаритные и недорогие элементы, смонтированные в каскадах усиления.
При последовательной коррекции при большом уровне помех, сопровождающих сигнал ошибки, эффективность коррекции снижается. Дифференцирование .помех существенно увеличивает их уровень и может привести к перегрузке последующих элементов системы. На корректирующее устройство, .включенное в цепь обратной связи (параллельная коррекция), помехи влияют меньше, так как сама система представляет собой весьма узкополосное устройство (фильтр низкой частоты).
Большая мощность сигналов на выходе системы позволяет применять параллельные корректирующие устройства без введения в обратную связь дополнительных усилителей.
Однако для получения сигналов обратной связи яасто требуются дорогие и громоздкие устройства—тахогенераторы, дифференцирующие трансформаторы и др., — которые должны быть размещены непосредственно у выхода системы, что не всегда возможно. Например, для небольших электромеханических следящих систем размеры и вес тахогенератора могут оказаться соизмеримыми с размерами и весом силового двигателя.
Кроме того, при глубокой корректирующей обратной связи образуемый с ее помощью контур сам по себе может оказаться неустойчивым.
В некоторых случаях возникают трудности суммирования сигналов, поступающих по цепи обратной связи, с сигналами канала ошибки.
I
Глава 6
НЕЛИНЕЙНЫЕ СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
6.1. Основные типы нелинейных характеристик элементов автоматических систем
Нелинейными системами называют системы, содержащие нелинейные элементы, параметры которых зависят от величины действующих сигналов. Строго говоря, все существующие системы, в том числе и автоматические, являются нелинейными. Однако в определенных режимах работы и при определенных требованиях к системе се нелинейный характер незаметен.
Помимо естественной нелинейности характеристик, в системы специально вводят элементы с существенно выраженными нелинейностями (например, ограничители), улучшающие качество работы.
Изменение свойств элементов при изменении уровня сигнала каст .возможность создания определенным образом приспосабливающихся систем.
Среди большого количества нелинейных характеристик можно выделить несколько наиболее распространенных типовых видов. Типовым характеристикам придают идеализированную форму, упрощая этим анализ без внесения существенных погрешностей.
Рассмотрим основные виды характеристик нелинейных элементов.
Нелинейные элементы с зоной нечувствительности. Идеализированная характеристика нелинейного элемента этого типа приведена на рис. 6.1ш Пунктиром показан реальный ход характеристики. Такими характеристиками обладают многие чувствительные элементы, определенным образом включенные диоды, усилители, двигатели и др.
Изменения входного сигнала по абсолютной величине меньше чем Авхо не вызывают появления сигнала на выходе, что эквивалентно разрыву цепи. Приращения входного сигнала за пределами 135
xBX = ^вх о сопровождаются пропорциональными приращениями выходного сигнала, т. е. рис. 6.16 и в:
•^ВЫХ --
(Хвх -^-вхо)
О
(Л-ВХ Н- -^-вх о)
при Хвх JVBX q При |хвх[ -^"вхо При Хвх^С -^вх о*
(6.1)
В случае небольшого уровня входного сигнала (xBX i) выходной сигнал хВых 'равен нулю. Если уровень входного сигнала (хвх2)
не выходит далеко за пределы зоны нечувствительности, то выходной сигнал остается пропорциональным входному небольшую часть времени и его форма существенно отличается от формы входного сигнала. Только при больших уровнях входного сигнала (хвх3) выходной сигнал имеет практически ту же форму, что и входной.
Нелинейные элементы с насыщением. Идеализированные характеристики элементов с насыщением показаны на рис. 6.2, где пунктиром дан их реальный ход.
Насыщением обладают многие элементы, содержащие ферромагнитные материалы, электронные лампы, амплитудные и другого типа ограничители и др.
В области сигналов |хвх|<Хвхн элемент работает как усилительный с коэффициентом усиления К- В области |xBX|>XBXH при-136
р,чтения входного’ сигнала не вызывают изменений выходного viii нала. Следовательно,
*вых = ‘ /ГХ,
К-^ВХ
вх и Лвых н
ВЫХ н
при ]хвх] Хвх н при Хвх Хвх н при Хвх Хвх н.
(6.2)
Нелинейность типа люфт (зазор в механической передаче). Идеализированная характеристика нелинейного элемента, 'обла-
дающего люфтом, показана и<i рис. 6.3а.
Характер изменения выходного сигнала при изменении входного зависит от начального значения входного.
Если люфт «не выбран» и рабочая точка не находится па наклонных прямых (>— 9 или 7—8, а расположена, например, в начале координат, то увеличение хБХ до значения xBxi Ч (или уменьшение до хвх ю) не вызовет никакого изменения выходного сигнала. Такой же эффект наблюдается все-
гда и при изменении знака
приращения входного сигнала, когда рабочая точка до этого находилась на прямых 6—9 или 7—8.
При дальнейшем неограниченном увеличении входного сигнала приращения выходного сигнала будут ,пропорциональны приращениям входного с коэффициентом пропорциональности К- Однако если после достижения входного сигнала некоторой величины хвх2 (или хпХб) входной сигнал начать уменьшать, то выходной сигнал перестанет изменяться, сохраняя свое значение хвх2 (или хВЫхб) до тех пор, пока не 'будет выбран весь люфт, т. е. пока хвх2 не достигнет значения хвх3 (или %вх7). Дальнейшее уменьшение вход
ного сигнала вызовет пропорциональное уменьшение выходного сигнала и движение представляющей точки по прямой 7—8 вниз.
На рис. 6.3 показано, что при подведении на вход синусоидального воздейтвия (б) выходной сигнал (в) становится несинусоидальным и приобретает асимметрию относительно вертикальной
оси, чем существенно отличается от аналогичных выходных сигналов элементов, нелинейные характеристики которых рассмотрены выше-.
') Индекс соответствует номеру точки на рис. 6.3.
Нелинейные характеристики реле. На рис. 6.4 .приведены варианты двухпозиционных (а), (б) и трехпозиционных (в), (б) реле. У двухпозиционных реле возможны два устойчивых состояния,,
^ых
-•^вых
Рис. 6.3. Нелинейная характеристика типа «люфт» (п), форма сигнала на выход 'нелинейного элемента (б) при подаче на вход синусоидального воздействия (в)
когда на 'выходе наблюдается сигнал +ХВЬ1хн или —Хвыхн- У трехпозиционных реле в .некоторой конечной области изменения входного сигнала [или только в точке хВх=0, как в случае (в)] сигнал на выходе равен нулю, а вне ее — либо +ХВыхн, либо —XBbIXH.
Рис. 6.4. Варианты характеристики реле: двухпозиционных (а), (б), трехпозиционных (в), (г)
Характеристики могут иметь гистерезисный характер (б) и (б), когда возможность перехода реле в новое состояние зависит от предшествующего значения входного сигнала.
На рис. 6.5 показан вид выходного сигнала при подаче на вход двухпозиционного реле синусоидального входного сигнала. Рассматриваемое реле может находиться в одном из двух устойчивых 138
состояний, создавая на выходе сигналы либо Ч-Л'выхн, либо Хвыхн- Переход из первого состояния во .второе и наоборот в реальных реле происходит при различных величинах входного сигнала.
Если реле находилось в таком состоянии, что сигнал на выходе был —Хвыхн, то переход в другое состояние происходит при сигнале на входе 4-Хвхо. Если же до этого на выходе был сигнал +^выхн, то переход в первое состояние (—XBbIXH) произойдет при хвх =—^пхо- Приращения входного сигнала в области |явх| >Хвх0 не вызывают изменений (выходного сигнала, и эффект, вносимый реле, оказывается подобным действию насыщения при больших входных сигналах, которое наблюдается при первой из рассмотренных выше нелинейностей.
Синусообразные нелинейные характеристики. В автоматических радиосистемах широко применяются фазовые, частотные и временные дискриминаторы, элементы, чувствительные к положению тел в пространстве, измерители угловых координат, использующие антенные устройства и др. Все эти элементы имеют характеристики, близкие к виду, показанному на рис. 6.6а. В процессе анализа характеристики иногда аппроксимируют синусоидальной функцией (показано пунктиром).
Поведение элемента при различных уровнях входного сигнала удобно проследить при подаче на вход сигнала синусодиальной формы с различной амплитудой (рис. 6.66). Получающиеся при этом сигналы на выходе элемента имеют вид, показанный на рис. 6.6в.
При малых входных уровнях элемент работает как линейное звено с коэффициентом передачи /С и форма выходного сигнала совпадает с формой входного (/). С увеличением амплитуды возрастание сигнала на выходе ограничивается и вершины его делаются более плоскими (2). Дальнейшее увеличение уровня вход-
Рис. 6.6. Синусообразная нелинейная характеристика
ного сигнала приводит к уменьшению сигнала на выходе, тем более значительному, чем более входной сигнал превышает порог ограничения Лвхо-
Для удобства анализа синусообразные характеристики часто аппроксимируют отрезками прямых. Примером такой аппроксимации является характеристика фазового детектора (рис. 6.6г). Характеристика периодична по углу Atp —разности фаз напряжений, подаваемых на входы. К такому виду близка характеристика балансного фазового детектора при подаче на его входы напряжений равной амплитуды.
Модели нелинейных звеньев. Анализ нелинейных автоматических систем представляет гораздо большие трудности, чем систем линейных. Эти трудности успешно преодолеваются применением электронной вычислительной техники. Нелинейные характеристики представляемые отрезками прямых, удобно получать, комбинируя решающие усилители с диодными ключевыми схемами.
На рис. 6.7 приведены схемы, создающие 'нелинейные функциональные зависимости с насыщением (а), зоной нечувствительности (б), люфтом (.гистерезисом) (в) и релейную (г).
Если структурная схема исследуемой системы задана, то, моделируя различные звенья и соединяя их между собой соответственно схеме, можно наблюдать процессы, аналогичные процессам, (протекающим в реальной системе.
6.2. Устойчивость нелинейных систем автоматического регулирования
Наличие в автоматических системах нелинейных элементов может существенно изменять устойчивость систем. Устойчивая линейная система при введении нелинейного элемента может стать не-
141
устойчивой, .неустойчивая линейная система — устойчивой. Расходящийся процесс при неустойчивости системы ограничивается и становится стационарным благодаря нелинейным характеристикам тех или иных элементов.
Общий анализ систем можно проводить, решая соответствующие нелинейные уравнения, что представляет большие трудности, преодоленные только для небольшого количества классов систем.
Исследование упрощается путем аппроксимации нелинейных характеристик кусочно-линейными функциями и составлением линейных дифференциальных уравнений, соответствующих каждому линейному участку характеристики.
Этот метод применяется при сравнительно больших сигналах, требует большого объема вычислений, особенно при системах высокого порядка или сложной форме нелинейной характеристики.
Другим методом анализа является метод фазовой плоскости (или фазового пространства), разработанный А. А. Андроновым, С. Э. Хайкиным и др. [3], который позволяет получать качественную картину явлений в системах высокого порядка и полную картину поведения системы второго порядка. В основном — это метод графического решения, позволяющий понять физическую сущность протекающих процессов при самых различных видах нелинейностей.
Наиболее эффективным методом анализа и синтеза нелинейных систем является их .моделирование, позволяющее исследовать влияние структуры, параметров системы И вида нелинейных элементов на .все характеристики.
В случае одной нелинейности в системе простым и удобным является метод гармонической линеаризации или .гармонического баланса, основанный на работах Н. М. Крылова и Н. Н. Боголюбова [27]. Метод является распространением методики частотного анализа линейных систем на системы нелинейные. Приведем основ-т ные его положения и используем их для оценки устойчивости систем.
При гармонической линеаризации рассматривается действие нелинейного элемента, у которого входной и выходной сигналы связаны нелинейной функцией
*выХ(0=/(*вх), (6.3)
при условии, что входной сигнал является гармонической функцией времени
хвх (О = A sin to t. (6.4)
При этом предполагается, что действием высших гармоник, .возникающих на выходе элемента, .можно пренебречь. Последнее предположение вполне допустимо, поскольку почти все системы регулирования имеют ограниченную полосу пропускания, являясь, как правило, фильтрами нижних частот.
Действие нелинейного элемента характеризуется эквивалентным комплексным коэффициентом усиления ]Fa(A), который опре-142
деляет взаимосвязь первой гармоники выходного сигнала с гармоническим сигналом на входе нелинейного элемента. Модуль эквивалентного комплексного коэффициента определяет соотношение амплитуд, а аргумент — фазовый сдвиг, который получает первая гармоника .выходного сигнала относительно входного. Величины модуля, аргумента и .соответственно эквивалентного комплексного коэффициента усиления являются функциями амплитуды А входного сигнала, а также параметров и вида нелинейного элемента.
Разлагая выходной сигнал в ряд Фурье и ограничиваясь составляющими основной частоты, получаем эквивалентный коэффициент усиления W3 (Д) в виде
ГЭ(Д) = ^=«(Л)4-!6(Л), (6.5)
%вх
где
2к
g (Д) = — [ f (Asintot)sintotdtot, (6.6)
зт A J
о
' 2я
b (Д) = — C f (Д sin co t) cos totdtot. (6.7)
лД J
о
Соответственно в показательной форме №э(Д)=Ц7э(Д)еМЛ) , (6.8)
где
ГЭ(Д) = = /^(Л)4-/)2(4 (6.9)
<P(^)=arctg~^ , (6.10)
а Хвыхт) и <р(Д) — амплитуда и фаза первой гармоники выходного сигнала соответственно.
Для удобства анализа эквивалентный комплексный 'коэффициент усиления нелинейного звена часто представляют в виде произведения
^Э(Д)=КЭГЭО(Д), (6.11)
где Кэ — наибольшая величина модуля эквивалентного коэффициента:
Яэ=^ЭМаКс=^э(АД (6.12)
достигаемая при некотором значении амплитуды входного сигнала Д = Дт. ..
ЭКВИВАЛЕНТНЫЕ КОМПЛЕКСНЫЕ КОЭФФИЦИЕНТЫ УСИЛЕНИЯ НЕЛИНЕЙНЫХ ЭЛЕМЕНТОВ
В этом случае .нелинейный элемент представляется в виде двух последовательно соединенных звеньев. Первое—нелинейное с нормированной величиной эквивалентного коэффициента усиления
wэ
с наибольшим значением 'модуля, равным единице. Второе — линейное безынерционное звено с коэффициентом усиления (6.12). В эквивалентной схеме второе звено помещается правее первого. )ффект его действия часто учитывают увеличением коэффициента усиления линейной части ветви контура, лежащей правее нелинейного элемента.
Для нахождения эквивалентного комплексного коэффициента усиления характеристики нелинейных элементов аппроксимируют, как правило, линейно ломаными функциями, трафики которых имеют вид, показанный сплошными линиями на рис. 6.1ц, 6.2, 6.3а, 6.4, 6.5 и 6.6г. Примерами функций, разлагаемых в ряд Фурье, могут служить функции, представленные графиками рис. 6.1в или 6 36 соответственно для нелинейностей с зоной нечувствительности и типа люфт.
В табл. 6.1 приведены выражения эквивалентных комплексных коэффициентов усиления для четырех видов нелинейности. Там же даны их графики на плоскости комплексного переменного и зависимости от амплитуды входного сигнала.
Автоматическая система с нелинейным элементом для определения устойчивости может быть приведена к виду, показанному па рис. 6.8. Нелинейное звено предшествует линейному и .имеет комплексный коэффициент 1ЕЭ(А), а линейное имеет комплексную частотную функцию IF(io)).
Гармоническая линеаризация нелинейных элементов позволяет решить важную задачу определения устойчивости нелинейных систем, а также ответить на вопрос, могут ли возникнуть в системе самовозбуждающиеся колебания.
Если показанная на рис. 6.8 замкнутая система будет находиться на границе устойчивости, и в ней возникнут незатухающие
колебания, то соответственно критерию Найквиста амплитуднофазовая характеристика разомкнутой системы должна пройти через точку (—1,Ю). Следовательно, неустойчивость системы характеризуется условием
№3G4)lT(i(o) = —1 (6.14)
или
(6Л5)
» W3/7?J — Щ(1ш)
Рис. 6.8. Упрощенная схема нелинейной системы
Значения частоты со и амплитуды А, при которых удовлетворяются эти условия, определяют соответственно частоту и амплитуду возникающих колебаний.
Неустойчивость нелинейных систем имеет особенности, связанные с характером возникающих колебаний — с их устойчивостью.
Предположим, что система оказалась неустойчивой, и колебания в точке а системы (см. рис. 6.8) имеют амплитуду и частоту, удовлетворяющие условию (6.il4). Для оценки устойчивости возникших колебаний определим, как будет реагировать система на изменение уровня сигнала в точке а.'
Если нелинейная характеристика такова, что при увеличении входного сигнала уменьшается, а при уменьшении увеличивается эквивалентный комплексный коэффициент усиления, случайные изменения уровня сигнала будут компенсироваться системой, т. е. возникшие колебания будут устойчивыми (а система неустойчивой). Такие характеристики в определенных областях имеют, например, нелинейности с ограничением или реле (см. табл. 6.1).
Если же нелинейная характеристика такова, что эквивалентный комплексный коэффициент усиления возрастает с увеличением и уменьшается с уменьшением амплитуды входного сигнала, то возникшие колебания будут неустойчивыми. Они будут нарастать, если амплитуда сигнала несколько увеличится относительно первоначального состояния, и затухать, если уменьшится. Такую характеристику имеют, например, элементы с зоной нечувствительности.
Определение устойчивости упрощается, если на плоскости комплексного переменного построить амплитудно-фазовую характеристику линейной части системы и график зависимости------------
ЖЭ(Л) нелинейного элемента. Точка пересечения будет определять амплитуду и частоту возникающих колебаний.
На рис. 6.9 показаны графики зависимости —• —=-------- для
нескольких видов нелинейных характеристик: с насыщением (а),
inna люфт (6) и разновидностей релейных характеристик (в),
Рассмотрим устойчивость систем, содержащих -реле, с характеристикой вида рис. 6.9в.
На рис. 6.10а показаны график характеристики----------- ре-
и/э(Л) лейного элемента и амплитудно-фазовые характеристики линейной части системы для двух случаев: линейная часть системы имеет комплексную частотную функцию
К
1 со (1 -HcoTj
НЛП
/<
Рис. 6.10. Устойчивость систем, содержащих релейный нелинейный элемент с различными характеристиками
2)Г2(1со) =
i со (1 + i со Тг) (1 -р i соТ2)
При третьем порядке уравнения линейной части системы наличие нелинейного релейного элемента приводит к возникновению устойчивых колебаний с амплитудой А[ и частотой coi даже в том случае, если при отсутствии нелинейного элемента’система была устойчивой. Рост коэффициента усиления линейной части увеличивает амплитуду стационарных колебаний А2, сохраняя неизменной их частоту «1 (соответственно прерывистому графику, показанному на рис. 6.10а).
При втором порядке уравнения линейной части системы амплитудно-фазовая характеристика и график — 1 .. соприкасаются только в на- — чале координат и в системе возможны автоколебания только нулевой амплитуды и бесконечно большой частоты — система практически устойчива.
Принципиальный интерес представляют нелинейные характеристики типа люфт и реле (см. рис. 6.96 и д). Введение таких элементов даже в структурно устойчивые линейные системы может привести к неустойчивости и вызвать автоколебания си- -стемы.
На рис. 6.106 приведены характеристики системы, схем# которой дана на рис. 6.8. Линейная часть системы п р ед ст а в л я ется и н е р цион н о -интегр и-рующим звеном. Нелинейный элемент имеет релейную характеристику, показанную на рис. 6.96.
При малой величине коэффициента усиления АФХ линейной части (пунктир) не имеет точек соприкосновения с характеристикой нелинейного । элемента, в этом случае система оказывается устойчивой.
При большом коэффициенте усиления АФХ имеет две точки пересечения с графиком----_ —— .
Предположим, что из-за сильного случайного воздействия в системе возникли колебания с амплитудой At и частотой «ц, соответствующие точке пересечения характеристик (/). Сохранится ли это со'стояние в дальнейшем? Случайное увеличение амплитуды приведет к увеличению модуля функции IF3(A). Следовательно, колебания в системе начнут нарастать, а так как при этом будет изменяться аргумент эквивалентного коэффициента усиления релейного элемента, внося меняющийся фазовый сдвиг возникающих колебаний, то будет увеличиваться и частота колебаний. Этот процесс прекратится, когда амплитуда и частота достигнут величин А2 и (>)2 (координат точки пересечения характеристик (2). В системе наступят стационарные колебания, что соответствует неустойчивой системе автоматического управления.
Случайное увеличение (или уменьшение) амплитуды колебаний относительно величины А2 обусловит уменьшение (или увеличение) модуля IF3(A), и благодаря действию обратной связи это изменение будет компенсировано'. Следовательно, точка (2) пересечения характеристик определяет устойчивые стационарные колебания. Однако колебания эти могут возникнуть только тогда, когда начальное возмущение будет достаточно большим, чтобы амплитуда оказалась больше величины Ai (жесткий режим возникновения колебаний).
Если возмущения имеют амплитуду меньшую величины Аь то возникшие колебания будут затухать.
6.3. Особенности нелинейных автоматических систем
Свойства нелинейных систем определяются структурной схемой, типом и местом нелинейных элементов в схеме. При наличии в системе нелинейного элемента структурные преобразования схемы можно производить с некоторыми ограничениями, обусловленными тем, что вид сигнала на выходе нелинейного элемента существенно зависит от амплитуды входного сигнала. Составляя структурную схему, нелинейный элемент следует по возможности выделить в самостоятельное звено.
Объединяя все линейные элементы, расположенные до или после нелинейного элемента, в одно эквивалентное звено, можно получить типичные случаи нелинейных одноконтурных систем, показанные на рис. 6.11.
Рассмотрим ..влияние некоторых типов нелинейных элементов
на работу системы.
Нелинейные элементы с зоной нечувствительности. Пусть рассматриваемую нелинейность имеет элемент НЭ, находящийся в начале главной ветви замкнутого контура (рис. 6.11а).
При больших рассогласованиях, например, при подаче значительного задающего воздействия х3, когда выходной параметр хВых существенно отличается от заданного значения, нелинейный элемент ведет себя как усилительное звено с коэффициентом усиления Кн. В это время система может рассматриваться как линейная; свойства ее определяются параметрами линейного элемента с учетом коэффициента усиления нели-
Рис. 6.11. Типичные случаи местоположения (нелинейных элементов ,в автоматической системе
нейного элемента.
Существенные особенности появляются при уменьшении рассогласования. Если сигнал на входе нелинейного элемента уменьшится до %вх%вх о, то сигнал на его выходе станет равным нулю и дальнейшее регулирование прекратится. Следовательно, к ошибке линейной системы, наблюдаемой в .установившемся режиме, добавится ошибка, обусловленная зоной нечувствительности. Величина этой ошибки не зависит от параметров линейной части системы, поэтому следует особенно .внимательно выбирать чувствительные элементы рассогласования (потенциометры, сельсин-трансформа-торы, детекторы сигнала ошибки и др,), так как их нечувствительность к малым сигналам непосредственно вносит ошибку 1в работу системы и не может быть уменьшена изменением параметров дру
гих элементов.
Если нелинейному элементу, находящемуся в главной ветви, предшествует линейный ЛЭ (рис. 6.116), то поведение системы существенно изменяется независимости от свойств этого линейного элемента.
Сигнал на входе нелинейного элемента зависит от передаточной функции линейного элемента (s) и сигнала ошибки х3—хВЫх-В случае, если линейный элемент ЛЭ представляет собой безынерционное звено IFj(s)=7<i, регулирование прекращается, когда сигнал ошибки, усиленный в Ki раз, уменьшается до величины ХВх о- Следовательно, ошибка системы в установившемся режиме, обусловленная зоной нечувствительности, будет равна
(6.16>
Величину этой ошибки, в отличие ют предыдущего случая, можно уменьшить путем увеличения коэффициента усиления линейной части системы, предшествующей нелинейному элементу. Более того, если ЛЭ содержит интегрирующее звено, то в результате его действия даже самая малая ошибка х3—хВЫх после интегрирования превысит уровень Хпо и система 'будет ее отрабатывать. Следовательно, введение интегрирующего звена до нелинейного элемента ликвидирует ошибку системы в установившемся режиме, обусловленную зоной нечувствительности.
Третий рассматриваемый случай предполагает, что нелинейный элемент находится в цепи обратной связи (рис. 6.11в). При малых выходных сигналах, когда хВых<^вхо, цепь обратной связи оказывается разомкнутой и изменения выходного сигнала определяются только изменениями задающего сигнала и передаточной функцией линейной части (основной ветви) системы. При больших уровнях выходного сигнала нелинейный элемент приблизительно представляется усилительным звеном с коэффициентом усиления /Сн, и вся система ведет себя как замкнутая система с жесткой обратной связью. Уменьшение выходного сигнала приводит к уменьшению эквивалентного коэффициента усиления нелинейного звена (за счет возросшего влияния зоны нечувствительности), т. е. к уменьшению жесткой обратной связи. Следовательно, качество регулирования будет зависеть от свойств линейной части системы (основной ветви) и величины хвых.
Например, пусть линейный элемент имеет передаточную функцию ^(5) = — (т. е. представляется интегрирующим звеном) и на вход системы, ранее находившейся в покое, подается скачок сигнала х3. Поскольку выходной сигнал до этого равнялся нулю, цепь обратной связи оказалась разомкнутой и выходной сигнал в результате действия интегрирующего звена начнет линейно возрастать со скоростью х3Къ
После наступления равенства хВЫх=^вхо появится жесткая обратная связь, которая будет увеличиваться по мере увеличения Хвых. Система станет эквивалентна инерционному звену, коэффициент усиления и постоянная времени которого будут уменьшаться по мере увеличения уровня выходного сигнала. При достаточно больших величинах хВЫх можно считать, что коэффициент усиле-" 1 мия эквивалентного инерционного звена равен —, а постоянная
1
времени --------, где — коэффициент передачи нелинейного
КуКп
звена в линейной области его характеристики.
Таким образом, охватывая систему или ее часть нелинейной обратной связью, удается изменять ее свойства на разных этапах переходного процесса.
Нелинейность, обладающая насыщением. Для повышения точности линейной системы в установившемся режиме и ее быстро-В50
действия увеличивают коэффициент усиления, .в результате чего обеспечивается достаточно быстрая реакция объекта регулирования. В этом случае большие рассогласования, вызванные значительным изменением задаваемой величины, помехами или возможным самовозбуждением системы, приводят к резкому увеличению сигналов и нарушению нормальной работы последующих устройств: возникновению чрезмерно больших напряжений, токов, •скоростей, ускорений и т. п., что может привести к аварийному состоянию системы.
Рассмотрим, какое действие может оказать в этих условиях нелинейный элемент с насыщением, находящийся в главной ветви, до линейной части (см. рис. 6. Ня). Очевидно, что воздействие на линейную часть системы не может превысить величины сигнала насыщения ХВыхн ни при каких рассогласованиях. Следовательно, если такой уровень сигнала не вызовет перегрузки последующих элементов, то система будет работать нормально. Подобные ограничители находят широкое применение в автоматических системах.
При малых рассогласованиях, например, к концу переходного процесса эффект ограничения отсутствует, а эквивалентный коэффициент усиления нелинейного элемента возрастает до величины, соответствующей прямолинейному участку характеристики нелинейного элемента. Возрастает общее усиление системы, обеспечивая малую величину установившихся ошибок. Вся система при этом может рассматриваться как линейная. ’ .
Если нелинейный элемент с насыщением введен в цепь обратной связи (см. рис. 6.Не), то при малых выходных сигналах устройство работает как линейное.' С увеличением выходного сигнала, когда он начинает заходить в область насыщения, глубина обратной связи уменьшается.
Существенные особенности приобретают автоматические системы при наличии синусообразных характеристик. Эти особенности будут выяснены на примере фазовой автоматической подстройки частоты генератора.
6.4. Система фазовой автоподстройки частоты генератора 1
Блок-схема системы фазовой автолодстройки частоты (ФАП), широко используемой в различных радиосистемах, показана на рис. 6.12гг.
Напряжение задающего сигнала, например, от эталонного генератора или напряжение радиосигналов, принимаемых по линии связи Uс, имеет частоту со3 и поступает на один из входов фазового детектора. На второй вход подается напряжение подстраиваемого । оператора Ur, имеющее частоту а>г. На выходе фазового детектора возникает напряжение, зависящее от разности фаз Д<р напряжений
Vc и Ur. Различие фаз и различие частот связано соотношением Лср = J ЬсыД. Эта зависимость учитывается при построении структурной схемы системы, показанной на рис. 6.126, введением инте* грирующего звена с передаточной функцией — .
S
Как было показано раньше (см. рис. 6.6а), характеристику фазового детектора ФД можно в ряде случаев аппроксимировать ку-
Рис. 6.12. Схемы фазовой автоггодстройки частоты генератора
сочно-линейной функцией. При изменении фазы в пределах от О до л напряжение на выходе ФД и пропорционально разности фаз А<р, что на структурной схеме отражено введением усилительного звена с передаточной функцией Кь Для освобождения сигнала от побочных частотных компонент на выходе ФД включается фильтр низкой частоты ФНЧ (в виде цепочки RC, звена с запаздыванием шли других схем), имеющий передаточную функцию №ф($). С помощью управителя частоты (частотного модулятора) Упр производится подстройка частоты генератора Ген. Изменение частоты в широких пределах может быть сделано пропорциональным напряжению на выходе фильтра, что на структурной схеме отражается введением усилительного звена с передаточной функцией К2-
Система ФАП подвержена возмущениям, действующим на входе ФД и на входе управителя частоты.
Возмущения на входе .вызываются различными попадающими туда помехами. В том случае, когда подстраиваемый генератор должен следить за несущей частотой частотномодулированного сигнала, такими возмущениями являются быстрые изменения частоты, обусловленные частотной модуляцией. На структурной схеме эти возмущения обозначены эквивалентным изменением частоты хп ь
На частоту подстраиваемого генератора действуют напряжения помех на входе управителя частоты ип2 и различные дестабилизирующие факторы. На структурной схеме действие всех этих факторов обозначено эквивалентным изменением сигнала хп2.
Рассмотрим работу системы ФАП с учетом того, что характеристика фазового детектора не является линейной, но может быть представлена линейно ломаной (рис. 6.6г). Из графика следует, что характеристика периодична но углу Аф.
Величина изменения частоты генератора Асог связана с разностью фаз сигналов на входе ФД соотношением
Асог = КгК2 Афуст. (6.18>
Для поддержания частоты генератора, измененной на величину Асог, необходимо некоторое напряжение на выходе ФД и соответствующая разность фаз колебаний задающего сигнала и гетеродина, равная
Д<р = Д<ру„=-^-. (6.19)
В силу нелинейности характеристики фазового детектора наибольший размах напряжения на его выходе равен nKi. Следовательно, частота генератора может изменяться только в пределах некоторого диапазона, называемого диапазоном синхронизации — ДС:
ДС = тгКД2. (6.20)
Если в процессе работы расстройка генератора превысит эту величину, система выйдет из синхронизма, так «как управитель частоты не получит напряжения, достаточного для необходимого изменения частоты генератора. Увеличение диапазона синхронизации достигается увеличением коэффициентов усиления фазового детектора и управителя частоты Кг-
Если полоса пропускания фильтра достаточно широка (превышает частоту среза частотной характеристики разомкнутой системы), то возможность синхронизации не зависит от того, как изменялась расстройка генератора от малых ее значений до очень больших или от больших к малым. И в том, и в другом случаях система выходила из синхронизма и входила в синхронизм при одной и той же расстройке.
При сужении .полосы пропускания фильтра начальная расстройка, при которой система входит в синхронизм, т. е. при которой происходит захват системы, оказывается 'меньше граничной частоты полосы синхронизации.
Полоса частот начальных расстроек генератора, в пределах которых система входит в синхронизм, называется диапазоном захвата ДЗ. Диапазон захвата 'может быть .меньше диапазона синхронизации, но не может быть больше его.
На рис. 6.13 показана зависимость разности частот генератора и задающего сигнала А(о = со3—®г от начальной расстройки генератора Асог (которую он имел при разомкнутом контуре автоподстройки). Пунктир — зависимость при разомкнутой системе (раз
ность равна величине начальной расстройки), а сплошная линия — при замкнутой.
Если генератор точно настроить на задаваемую частоту, включить систему АПЧ, а затем медленно расстраивать, то система АПЧ будет компенсировать расстройку Асог до тех пор, пока будет выполняться условие Acor<Qc, где Qc—граничная частота диапазона синхронизации.
Рис. 6.13. Зависимость различия частот генератора и задающего сигнала от начальной расстройки
При дальнейшем увеличении Дйг система автоподстройки лишь немного компенсирует начальную расстройку.
В том случае, когда генератор до включения системы АПЧ оказывается предварительно расстроенным или если начальную расстройку вести от очень больших значений к малым, система впервые впадает в синхронизм только при Acor=Q3, где Q3— граничная частота диапазона захвата.
Работу системы ФАП при достаточно большой полосе пропускания фильтра можно пояснить рис. 6.14, на котором представлены графики зависимостей частоты генератора от разности фаз колебаний задающего сигнала и генератора. Период повторения равен 2л. Каждый график соответствует своей первоначальной настройке генератора, т. е. величине частоты, которую он имел бы в случае разомкнутой обратной связи в системе ФАП.
Синхронизация происходит (т. е. частота генератора становится равной эталонной частоте) при такой первоначальной настройке, при которой график частоты генератора пересекает линию со3. Такими частотами являются од 2, согз, ..., (оГб- При начальных значениях частоты генератора од3, од 4 и од5 каждый график пересекает линию о)3 в двух точках, однако стабильным положением представляющей точки является только одно (/).
Область стабильных положений представляющей точки определяет область синхронизации и соответственно диапазон синхронизации. Пусть генератор, имевший первоначально частоту <пГ4^ синхронизирован действием управителя частоты. На входе управи-
Рис. 6.14. Зависимость частоты подстраиваемого генератора от разности фаз
теля для этой цели создается напряжение, обусловленное фазовым сдвигом (точка /). Если частота генератора .под действием тех или иных возмущений начнет изменяться, то возникнет необходимость в новых фазовых сдвигах,-лежащих в области от 0 до л. Если возмущения будут таковы, что частота генератора при отсутствии обратной связи не выйдет за пределы диапазона соГ2^<йгб, то система АПЧ компенсирует вносимую расстройку и синхронизм наступит, однако, с новым постоянным фазовым сдвигом, определяемым выражением (6.19). Следовательно, в данном случае диапазон синхронизации равен диапазону захвата:
ДС = ДЗ = шг6 — сог2.
Точка 2 лежит в области нестабильных значений фазы, соответствующих изменению знака обратной связи (положительной вместо отрицательной). При случайном увеличении частоты генератора разность фаз будет непрерывно уменьшаться, а при уменьшении — увеличиваться. И то и другое ведет к дальнейшему отклонению частоты генератора от заданной (эталонной) величины.
При первоначальной расстройке генератора, соответствующей величине сог i, график частоты генератора, подстраиваемого системой АПЧ, н'е пересекает график частоты задающего сигнала. Разность фаз колебаний непрерывно возрастает, а текущее значение частоты непрерывно изменяется, то .приближаясь, то удаляясь от задаваемой величины, — происходит дополнительная частотная мо
дуляция. В моменты значительного удаления частоты генератора от эталонной разность фаз изменяется 'быстрее, а при незначительном медленнее. Соответственно этому напряжение на выходе фазового детектора приобретает резко несинусоидальную форму. Появляется постоянная составляющая напряжения, которая в среднем приближает частоту генератора к задаваемой величине, однако не уменьшает до нуля расстройку и в системе устанавливается устойчивый режим биений.
Влияние помех xnl и хП2 на частоту генератора и роль параметров элементов системы .можно установить, пользуясь спектральными представлениями. Для этого систему от точки приложения помехи до выхода представим в виде некоторого эквивалентного частотноизбирательного звена. Если пренебречь действием ФНЧ, т. е. считать, что его полоса пропускания превышает величину, определяемую частотой среза системы, то передаточную функцию системы ФАП в разомкнутом состоянии 'можно представить в виде
S
Тогда передаточная функция системы для первой помехи
фп1(5)=М±=_^1_ = _^_ ,
Xni(s) l-f-lF(s) 1+TiS где
Следовательно, для помех хп i система ФАП ведет себя как инерционное звено с постоянной времени 7\, т. е. как ФНЧ с полосой пропускания
П1=К1Х2=^- = -^-, зт зт
частотная характеристика которого показана на рис. 6.15а.
Рис. 6.15. Частотные характеристики системы АПЧ при различных точках входа
помех
Увеличение коэффициентов усиления К\ и Л2 с целью увеличения диапазонов захвата й синхронизации расширяет полосу пропускания 'системы для помех, поступающих на ее вход, и увеличивает флуктуации частоты генератора под действием этих помех.
Для помех хп г, действующих во второй точке системы, передаточная функция
ф1й(«)=Щ^ =—— =_L —£—.
X„2(S) l+lT(s) Ki l + T1S
В этом случае система ведет себя как инерционно-дифференци-рующее звено, т. е. как фильтр высоких частот с характеристикой, приведенной на 'рис. 6.156.
Следовательно, компоненты помех хП2 с малыми скоростями изменения своей величины с частотами ниже ЛгКг ослабляются, в то время как высокочастотные составляющие появляются на выходе с большой интенсивностью. Величина их при одной и той же полосе захвата и синхронизации уменьшается с увеличением коэффициента усиления фазового детектора К\, что изменяет частотную характеристику, как показано на рис. 6,156 пунктиром.
Благодаря таким частотным свойствам системы быстрые изменения частоты задающего сигнала (например, обусловленные частотной модуляцией, несущей полезную информацию в системах радиосвязи) могут не вызывать заметных изменений частоты подстраиваемого генератора, а быстрые изменения помех внутреннего происхождения непосредственно влияют на его частоту.
При расширении полосы пропускания путем увеличения коэффициентов усиления К\ и К2 частота генератора начинает следовать за быстрым изменением частоты принимаемых сигналов, но зато уменьшаются быстрые изменения частоты, обусловленные внутренними помехами.
Чтобы средняя частота генератора длительное время оставалась стабильной независимо от наличия частотной модуляции задающего сигнала, следует уменьшать полосу пропускания системы путем уменьшения коэффициента усиления разомкнутой системы K\Ki. При этом введение большой инерционности самого подстраиваемого генератора (например, путем кварцевой стабилизации его частоты) позволит устранить возможность появления внутренних помех.
Для подстройки генераторов с большой нестабильностью частоты, например, использующих клистроны, необходимо увеличивать коэффициент усиления разомкнутой системы К1К2, что одновременно увеличивает диапазоны синхронизации и захвата.
Фильтр ФНЧ, включаемый на выход ФД, уменьшает полосу захвата по сравнению с полосой синхронизации пропорционально уменьшению полосы фильтра относительно частоты среза (при фильтре в виде ДС-цепочки). Лучший результат достигается использованием схеь^ы фильтра с запаздыванием.
Возможность нормальной 'работы системы ФАП только при начальной расстройке генератора, не выходящей за пределы диапазона захвата, обусловливает необходимость предварительной настройки синхронизируемого генератора на частоту задающих колебаний. Этот процесс, называемый поиском, производится системой грубой настройки (или вручную), которая выключается после того, как произойдет захват.
Таким образом, режим работы систем автоматического слежения с нелинейностями рассмотренного вида предполагает три этапа: поиск, захват и синхронизацию. Эти этапы включает, например, работа системы настройки преселектора и усилителя высокой частоты приемника, описанная в разд. 1.3.
Глава 7
ИМПУЛЬСНЫЕ СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
7.1. Дискретные автоматические системы и их разновидности
В рассмотренных ранее случаях сигналы управления имели непрерывный характер. Наряду с непрерывными системами автоматического управления большое распространение -получили автоматические системы, в которых управление носит дискретный характер.
Как и непрерывные, дискретные системы могут работать по разомкнутому или замкнутому циклу, а также комбинированно. По разомкнутому циклу работают системы измерения и контроля, обработки данных и системы программного управления.
В системах телеизмерения и телеконтроля непрерывно изменяющаяся величина, характеризующая состояние объекта управления (например, мощность передатчика, коэффициент модуляции, уровень сигнала в определенной точке системы и т. л.), преобразуется в дискретную, которая после кодирования поступает в канал связи и далее либо в вычислительное устройство, либо на цифровое указывающее (измерительное) устройство.
В системах программного управления предусмотренная программа управления записывается и хранится в блоках памяти обычно в форме дискретных команд, выдаваемых в определенные моменты времени. Команды непосредственно или по каналам телеуправления поступают на управляемый объект. Исполнительное устройство объекта может иметь дискретный характер действия (например, различные переключатели шагового действия) и срабатывать в момент прихода соответствующей команды.
Большое количество управляемых процессов носит непрерывный характер: непрерывное изменение настройки гетеродина, непрерывное слежение антенны за искусственным спутником Земли, непрерывная запись показаний измерительных приборов и др. Однако и в этих случаях управляющие сигналы в той или иной части системы могут носить дискретный характер.
Дискретный характер управляющих ‘сигналов обусловлен применением импульсных систем связи (управления, контроля) и, в частности, систем с временным разделением каналов. Такой характер сигналы приобретают также при использовании цифровой вычислительной техники для создания управляющих устройств (например, в устройстве управления антеннами наземных пунктов связи через ИСЗ). В автоматизированных приемных и передающих устройствах широко используют реле, которые также имеют дискретный характер действия.
В замкнутых системах регулирования дискретными процессами могут быть 'задание, сравнение и формирование управляющего сигнала, как это имело место, например, в системе программного' управления движением антенны в системе связи через ИСЗ (рис. 2.12).
Применение дискретных систем позволяет улучшить процесс измерения, нагружая объект измерительными элементами только-, в короткие промежутки времени.
В дискретных системах телеуправления и телеконтроля можно использовать временное уплотнение каналов и повысить пропускную способность линий связи. В свою очередь, дискретные способы передачи сигналов телеуправления и телеконтроля позволяют существенно улучшить точность управления и контроля.
В отличие от непрерывных автоматических систем, где передаются и используются все мгновенные величины сигналов, в дискретных системах хотя бы одна физическая величина подвергается квантованию.
Квантование сигналов может .происходить по времени, по уровню и комбинированно по уровню и по времени. При квантовании по времени через определенные промежутки времени передаются мгновенные значения сигналов, соответствующие этим моментам времени. Автоматические системы, использующие этот принцип, называются импульсными.
Квантование по уровню предполагает передачу сигналов только вполне определенных уровней в те моменты, когда эти уровни наблюдаются. Соответствующие системы называются релейными.
Рис. 7.1. Квантование сигналов управления в импульсных (а), релейных (б) и цифровых (в) системах
Оба вида квантования используются в цифровых автоматических системах.
На рис. 7.1 показаны сигналы, .подвергаемые квантованию по времени (я), по уровню (б) и по времени и уровню (в).
7.2. Общая характеристика системы импульсного регулирования
Типовая схема системы импульсного регулирования показана па рис. 7.2а. 7
Задающее воздействие x3(t) и выходной -сигнал хВых(0 имеют непрерывный характер изменения, однако измерение ошибки регулирования x(fl=x3(f}—хВых(0 производится с помощью импульс-
Рис. 7.2. Схема системы импульсного регулирования
ного элемента (ИЗ) в дискретные моменть! времени через каждые Т сек. Величина Т называется периодом повторения или периодом дискретизации -сигналов системы.
Сигнал, возникающий на выходе импульсного элемента, усиливается усилителем У и -с помощью исполнительного устройства ИУ изменяет величину выходного параметра объекта управления ОУ. Элементы, следующие за импульсным, в -совокупности образуют непрерывную часть системы НЧ, и схема представляется упрощенно, как показано на рис. 7.26.
Сигнал ошибки в дискретные -моменты обозначается х[пТ], где п может иметь любое целое значение: 0, 1, 2... Импульсный элемент, измеряя эти значения сигнала ошибки, создает на выходе сигнал, представляющий собой последовательность импульсов. 6—296 161
Один из параметров импульсов, например амплитуда или длительность, /меняется пропорционально величине х [пТ].
Две основные функции импульсного элемента: регистрация дискретных значений сигнала ошибки и использование этих данных для формирования модулированной импульсной последовательности для целей анализа — представляются как функции переключающего (коммутирующего) устройства К и формирующей цепи Ф (|рис. 7.2а). В некоторых случаях формирующая цепь называется также фиксатором.
Процесс формирования сигнала ошибки на выходе импульсного элемента, обозначаемого' через %* (/), показан на рис. 7.3. Из всего (многообразия значений сигнала ошибки (а) фиксируются значения, отстоящие друг от друга на величину Т (б), которые преобразуются в последовательность очень узких импульсов длительностью т каждый с амплитудами, равными соответствующим значениям х[лГ],— А.ИМ сигнал (в). Однако эту длительность можно сделать и значительной, например рав; ной Т' (а). Импульсный сигнал ошибки может быть представлен и сигналом, модулированным по длительности (б).
Значения функции х (/) в дискретные моменты времени к [н7] образуют новую функцию, которая называется решетчатой.
Рис. 7.3. Формирование сигнала ошибки .на выходе импульсного элемента
Вместо величины т вводят также величину относительной дли-т
гельности импульсов у = — , откуда
т=уТ. (7.1)
В последующем ipacdMaTpHBaeTcn только случай ,получения импульсных сигналов, не учитывающих изменений сигнала ошибки, происходящих за время существования импульсов.
Аналитические представления импульсного сигнала ошибки и его изображения
Если импульсньш элемент формирует сигнал ошибки, изобра-/кенный на рис. 7.3в, то импульс xn(t), возникающий в момент t — nT, можно представить как разность двух ступенчатых функций с амплитудой х[пТ] каждая. Одна из них смещена во 'времени на величину пТ, а вторая — на величину пТ+х= (п+у) Т, как это показано на рис. 7.4.
xn(t) = х[пТ] • 1 (t-пТу- х[пТ] • 1 ^_(/г + у)7]. (7.2)
Сигнал на выходе импульсного элемента, представляющий собой совокупность всех импульсов,
со со
< (7) = 2 Х„ (/) = 2 х ["И (1 V1' [/-(л + у) Т]}. (7.3) 71=0 71=0
Проведя преобразование Лапласа, найдем изображение импульсного сигнала на выходе импульсного элемента Л* (5).
Изображение ступенчатой функции имеет вид (3.17), а задержка сигнала по времени на некоторую величину то согласно (3.80) соответствует умножению изображения сигнала на e~ST° ; изображение импульсного сигнала ошибки
xj(s) = У х[пТ] [J-e~nTs------Le-(-+V)rs
L s s
пли
x[nT]e~nTs.
(7.4)
В том случае, когда длительность импульсов равна периоду по-вгорения, т. е. у=у- = 1 (рис. 7.3г),
1 о— Ts _
X х*(s)= —_------ х [пТ] e~nTs- (7.5)
71=0
(>*
163.
пт
T1T+Z
Рис. 7.4. Формирование импульсного (сигнала
Обилий множитель, стоящий .перед знаком суммы, является изображением одиночного импульса прямоугольной формы, имеющего длительность х=уТ и амплитуду, равную единице. Множители х[/гТ] определяют истинную амплитуду каждого импульса, равную соответствующему значению решетчатой функции, а множитель e~nTs — положение данного импульса во времени.
Следовательно, работу импульсного элемента можно рассматривать как процесс амплитудной модуляции дискретным сигналом х[пТ] импульсов, имеющих изображение
1 e-YT-s
XH(S)=-—s--------. (7.6)
Работу импульсного элемента можно рассматривать и несколько иначе. Будем полагать, что импульсный элемент создает
периодическую последовательность единичных импульсов, повторяющихся через каждые Т сек:
оо
u(Z) = l'(0+l'(«-7')+l'(/-2O+ . . . = 2 x’(t-nT). (7.7) n=0
Под действием входного сигнала (сигнала ошибки %(/)) интенсивность импульсов, т. е. их площадь, изменяется и становится равной не единице, а величине мгновенного значения сигнала ошибки х(£), наблюдаемого в момент существования n-го импульса х[п7]. Следовательно, процесс фиксирования мгновенных значений сигнала ошибки можно рассматривать как амплитудную модуляцию импульсной последовательности u(t) сигналом ошибки x(t). Будем полагать, что эти функции выполняет коммутатор К, показанный на рис. 7.2в.
Сигнал на выходе коммутатора имеет .вид бесконечной после-'довательности импульсов, площадь каждого из-которых равна мгновенному значению сигнала ошибки:
x*(0=x(Z)«(0=2 xInTl l'(t—nT). (7.8)
n=0
При этом дискретное значение сигнала ошибки определяется выражением
х[пТ]= J x(t)l'(t—nT)dt. (7.9)
—сю
Имея в виду, что изображение одиночного импульса l/(s) = l, • а задержка импульса на время пТ соответствует умножению его 164
изображения на е nTS, найдем преобразование Лапласа модулированной .последовательности единичных импульсов:
х* (s) = 2 * [пТ] e~nTs . (7.10)
п—0
Сопоставляя полученное выражение с (7.4), обнаруживаем, что сигнал на выходе импульсного элемента можно рассматривать как результат прохождения импульсного сигнала %*(/) через звено (формирующую цепь Ф на рис. 7.2б) с передаточной функцией
(S) = Хи (s) = —. (7.11)
т. е. что X* (s) = WH(s)X*(s).
Ранее было установлено, что это звено формирует импульсы прямоугольной формы. При формировании импульсов другой формы передаточная функция IFH(s) будет иметь иной вид.
При формировании очень коротких импульсов
e~yTs 1— yTs (7.12)
и передаточная функция формирующего звена
IFH(S)-yT=r, 4 (7.13)
1 изображение сигнала на выходе импульсного элемента
XJ(s) = т V X[nT] e“nrs . (7.14)
п=0
Изображение импульсной модулированной последовательности (7.10) может быть представлено в другой, эквивалентной форме:
оо
Х*(«) = ф 2 X(s+in<0,), (7.15)
Л=—оо
I де
= (7.16)
угловая частота повторения импульсов.
Частотные свойства импульсного элемента
✓
Частотный метод анализа и синтеза широко применяется при проектировании импульсных систем.
Спектральную характеристику импульсного сигнала на выходе коммутатора легко получить, используя его изображение (7.10) или (7.15). Заменяя в последнем s на ico, получим оо
X(i ®) = Ф V X (i (и + п М, (7.17)
П==—ОО
откуда следует, что каждая частотная компонента сигнала на входе импульсного элемента привела к появлению на выходе множества частотных состав
а)
6)
V г)
i ^Х ((л))
РЫ1<2сит
-2(1)1 (i)l 0 (Di 2Ы
Рис. 7.5. Амплитудно-частотные характери-. стики ‘входного и импульсного сигналов при различных частотах повторения импульсов
ляющих, отличающихся от нее на ±шог-, где п — = 0, 1, 2,... Соответственно спектр сигнала на входе порождает бесконечную последовательность таких же спектров, сдвинутых по шкале частот на величину со; друг от друга, как показано на рис. 7.5.
Амплитудный спектр сигнала ошибки (а) образует на выходе импульсного элемента последовательности (б), (в), и (г), которые могут размещаться с некоторым частотным интервалом при
<0тп< — (б), примыкать друг к другу при сото= ~ (в) и частично
2 2
перекрывать друг друга при <от> (г). Здесь
Шт —наивысшая
частота сигнала ошибки.
Соответственно теореме В. А. Котельникова вся информация, содержащаяся в непрерывном сигнале ошибки, может быть восстановлена на выходе импульсного элемента, если частота дискретизации <0/ > 2о)т.
Понижение частоты повторения до величин сог-<2(от приводит к слиянию участков спектра (а). Выделение информации, содержавшейся в непрерывном сигнале, возможно только для той ее части, которая соответствовала частотам, меньшим величины СОг (О т-
В системе импульсного (регулирования излишние частотные составляющие могут удаляться естественным путем за счет ограниченной полосы пропускания (инерционности) регулятора и объекта регулирования. Однако в некоторых случаях вводят специальные фильтрующие цепи. При этом сужение полосы пропускания в результате установки идеального ФНЧ с граничной частотой ~ приводит к усложнению системы (особенно 'при малой частоте импульсов) и значительному фазовому запаздыванию сигналов в пределах полосы пропускания. Устойчивость системы понижается, а обычные методы коррекции путем введения звеньев
с опережением или отставанием приводят к изменению полосы пропускания. Таким образом, понижение частоты импульсов приносит к затруднениям, так как 'при улучшении фильтрации трудное получить необходимую устойчивость.
Частичную фильтрацию можно получить с помощью формирующей цепи импульсного элемента, которая конструктивно может являться составной частью прерывателя. Например, если формирующая цепь создает импульсы длительностью т=7\ то соответственно (7.11) передаточная функция формирующей цепи будет иметь вид
1 — e~Ts
№H(S)=—|, (7.18)
комплексная частотная функция
1_е~1юГ (1 — cos со Т) 4- i sin ce Т
i со i со
Амплитудно-частотная характеристика такого фильтра
Ги(1 ш) =
(Q) =r- + (1 — cos co 4- sin2 co T _ 2
л с учетом (7-16)
СО
СО
. соГ sin___ .
2
ад=— СО/
л co sin------
лсо
лее sin------
л со
С0£ СО/
График амплитудно-частотной характеристики формирующей цепи показан на рис. 7.6. На частоте со= -у- фильтр ослабляет Однако по мере возрастания ча-
\М(ш)
п
O&Ti
IVl Wi 2ti>i Зан Su>[
епгпал примерно на одну треть, его гы ослабление более значи-гельпо. Фазовая характеристика щ и и имеет вид / ч Ti (®)
<Р(«) =------ >
I. е. цепь вносит запаздывание сигнала по времени, равное половине периода дискретизации.
Для удобства анализа пе
редаточную функцию формирующей цепи часто объединяют с передаточной функцией непрерывной части системы.
о
Рис. 7.6. Амплитудно-частотная характеристика сглаживающего фильтра
7.3. Метод ^-преобразования
Анализ систем импульсного регулирования основан на решении системы дифференциальных уровней, частотных методах, использующих многие критерии качества работы непрерывных си-
167
стем, на использовании импульсных переходных характеристик, определяющих суммарную реакцию системы на воздействие последовательности отдельных импульсов. Наибольшее распространение получили дискретное преобразование Лапласа, разработанное Я. 3. Цыпкиным, и метод ^-преобразований и его модификации. z-преобразование непрерывной функции х(/) описывает сигнал в дискретные моменты времени, отстоящие друг от друга на величину периода дискретизации Т.
Если значение x(Z) рассматривать в фиксированные моменты времени пТ (п = 0, 1, ...), то ^-преобразованием функции х[пТ] называют функцию комплексного аргумента г, определяемую выражением
Х*(г) = У x[nT]z~n.
п=0
Преобразование существует для значений z, удовлетворяющих условию |г|>7?=—, где р — радиус сходимости ряда, представляемого последним выражением, ^-преобразование связывают с дискретным преобразованием Лапласа—преобразованием Лапласа (7.10) импульсной функции (7.8), вводя обозначение ег® = 2.
Преобразование сводится к трем операциям:
1. Определяется величина непрерывного сигнала в дискретные моменты времени, полученные значения образуют дискретную функцию времени х* (i).
2. Производится преобразование Лапласа найденной дискретной функции и находится ее изображение (7.10).
3. Выражение ег® заменяют новым переменным
z=ers, (7.19)
получая таким образом z-изображение:
‘ оо
(7,20)
п=0 ,
Всякая непрерывная функция, 'преобразуемая по Лапласу, имеет и ^-преобразование, которое зависит от величины периода дискретизации, ^-преобразование содержит полную информацию о непрерывном сигнале при правильном выборе периода дискретизации Т, т. е. в том случае, когда в соответствии с теоремой В. А. Котельникова частота дискретизации более чем вдвое превышает наивысшую частоту спектра сигнала x(t).
При ^-преобразовании предполагается, что начало прерывания и начало функции времени совпадают.
Обратное ^-преобразование находит дискретную функцию времени х* (t) по ее г-изображению.
Как и при обычном преобразовании Лапласа, в случае исполь-овппия z-преобразования применяются справочные таблицы (например, табл. ЗЯ). Следует иметь в виду, что 'приведенные в таб-IIIцах непрерывные функции времени дают точные значения, соответствующие заданному z-изображению, только в дискретные моменты времени пТ.
Нахождение искомой функции времени часто облегчается предварительным разложением z-изображения X* (z) на простые дроби, 1ля каждой из которых соответствующий оригинал содержится в таблице.
Другим путем обратного z-преобразования является 'разложение z-изображения в ряд по степеням z~l. При этом коэффициент при z~n будет соответствовать значению функции времени в момент t=nT. Ограничивая разложение некоторым количеством членов, можно получить последовательность значений х[пТ] в интересующем нас интервале времени.
Разложение z-изображения f* (z) на простые (некратные) дроби можно произвести следующим образом.
1. Представляют функцию f* (z) в виде с
/*(?)= ФИ , (7.21)
(z —Qi) £ (z)
। те at — полюс функции f*(z), т. e. величина переменного z, обращающая функцию f*(z) в бесконечность, f*(ai)=oo.
f* (z)
2. Находят вычет функции -—•
Rez.=|^. (7.22)
£ («i)
3. Повторяют эту операцию для всех других полюсов, например для ai, а2 и а3, соответственно находя значения вычетов Rezlt Rez2 и Rez3.
4. Представляют z-изображение в виде суммы дробей:
Г(г)
zRezx । zReza z — ai z — а2
zRez3 z — a3
(7.23)
Найденные для каждого слагаемого оригиналы затем суммируются и образуют искомую функцию времени.
Большой практический интерес представляет простой способ определения конечного (при t—>оо) и начального (при t—>0) зна-чений функции времени непосредственно по ее z-изображению, не прибегая к обратному z-преобразованию. Для этого, как и в обычном преобразовании Лапласа, используются теоремы о конечном и начальном значениях функций.
1. Если функция x(t) имеет z-изображение X*(z), у которого нет полюса на окружности единичного радиуса или вне ее, то конечное значение дискретной функции
iimx[n7’]= Пт
П-»оо Z-»l
Г-----
L z
(7.24)
Это выражение позволяет просто определять установившиеся ошибки импульсных систем.
2. Начальное значение функции
lim х [пТ\ = lim [X? (z)]. (7.25)
f-»-0 z->oo
Пример 1. Найти z-изображение, соответствующее ступенчатой функции х(/) =Д|1 (f) (рис. 7.7а).
Начало прерываний совмещено с началом ступенчатой функции (при i—0).
•1. Значения ступенчатой функции в дискретные моменты времени t—nT xlnT]=Al[nT] = A.
График дискретной функции времени показан на рис. 7.76.
Рис. 7.7. Ступенчатая и экспоненциальная функции времени и соответствующие им дискретные функции времени
2. z-преобразование согласно (7.2'0) оо оо
X*(z)=2 x[nT]z~n z-n = A[\ + z~i +z~2+ , . .] =
n=0 n=0
A Az 1 — z~i z — 1 для E|Z—1|<1.
Пример 2. Найти z-преобразование, соответствующее экспоненциальной функции x(t)=Ae~ at
1. Значения функции в дискретные моменты времени t=nT х [пТ] = A ё~апТ .
I рлфик дискретной функции времени показан на рис. 7.7г.
2. z-преобразование
оо
X* (z) = А е~апТ z~n = A [eoz° -}- е~аТ г~^ е~2аГ z~2 -f- . , .] — n=0
A Az
= Л(1 + е-*Г>+е-«гЦ . . J *
1 — С <6 с
7.4. Анализ работы систем импульсного регулирования
Анализ импульсных систем существенно упрощается, если исследовать ^протекающие процессы не в течение 'всего времени их работы, а только в дискретные моменты, соответствующие работе прерывателя.
На рис. 7.8а показана схема импульсной системы, где через №($) обозначена передаточная функция линейной непрерывной части системы, включающей фильтрующий и формирующий элементы, а также другие звенья системы регулирования.
a) s)
Рис. 7.8. Эквивалентная схема системы импульсного регулирования
% Вых
Взаимосвязь z-изображений различных сигналов устанавливается с помощью эквивалентной схемы, показанной на рис. 7.86. Соотношение ^-преобразований выходного сигнала и сигнала ошибки определяется z-передаточной функцией разомкнутой системы:
1T(Z)= , (7.26)
X* (г)
-.передаточная функция зам.кнутой системы, устанавливающая взаимосвязь z-изображений задающего и выходного сигналов,
ф (2) = = 117 (г) •
х:<г) 1+ИЧг)’
(7.27)
-передаточная функция системы по ошибке регулирования
Ф<лп р (z)
Х*(2) А; (г)
1
1 + Г(г) ’
(7.28)
Передаточная функция непрерывной части «системы W(z) может быть найдена по табл. 3.1 соответственно преобразованию Лапласа, определяемому передаточной функцией IF(s). Другим способом является определение весовой функции непрерывной части системы w(/), т. е. ее импульсной характеристики, z-изобра-жение весовой функции и будет з-передаточной функцией непрерывной части системы.
При последовательном соединении непрерывных звеньев необходимо предварительно найти передаточную функцию всей непрерывной части системы IF(s) = (s) IF2(s) ..., и только затем
для найденной передаточной функции IF(s) искать z-изображение.
При параллельном соединении непрерывных звеньев, когда
дискретизация производится на входе параллельно соединяемых звеньев, как показано на рис. 7.96, z-передаточная функция эквивалентной цепи является суммой z-передаточных функций звеньев.
Пример 3. Определить z-передаточную функцию интегрирующего звена, для Д’
которого IT(s)=~—- .
<3
4. Решение первым способом заключается -в следующем.
Рис. 7:9. (Последовательное (а) и параллельное (б) соединение звеньев «в импульсных «системах
По табл. 3.1 находим 2-изображение функции, для которой обычное преобразование Лапласа совпадает с передаточной функцией звена. Положив Л = Д, найдем
Дг ^(3)= —
2. Решение вторым способом состоит «в следующем.
Находим весовую функцию, соответствующую нашей передаточной «функции.
Согласно табл. 3.1 при Л=Д она равна
и/(0 = д-1(0.
— преобразование такой функции, найденное -в примере 1, будет тождественно уже полученному выше:
Кг
2 — 1
W(z) =
Соотношения z-изображений сигналов импульсной .системы позв'оляют определять показатели качества работы системы, подобно тому,« как это делалось для обычных непрерывных систем. 172
Наибольший интерес представляют устойчивость системы, характер переходного процесса и установившиеся ошибки системы.
Определение устойчивости системы импульсного регулирования
Как было показано Я. 3. Цыпкиным [53], устойчивость импульсных систем можно определить, пользуясь критериями, уже рассмотренными ранее. Здесь для этой цели воспользуемся z-ne-редаточной функцией замкнутой системы (7.27).
Составим характеристическое уравнение
14-117(2)= 0 (7.29)
и найдем его корни Zf.
Система оказывается устойчивой, если все корни характеристического уравнения находятся в пределах круга единичного радиуса, т. е. если
к|<1. (7.30)
Имея в виду, что 2{ = е/ =е * , сформулированный крите-
рий соответствует отрицательным значениям вещественной части корней уравнения в плоскости s.
Если характеристическое уравнение имеет первый порядок, т. е. приводится к виду z+a—О, то система устойчива, когда |а|<1.
При характеристическом уравнении второго порядка, приводимом к виду z2 + aiz+a2 = 0, система оказывается устойчивой, если удовлетворяются три неравенства:
1+gi + #2>0, 1—0,4-02 > 0, с2< 1. (7-31)
При использовании критерия Найквиста об устойчивости импульсной системы судят по тому, охватывает ли амплитудно-фазовая характеристика разомкнутой системы точку с координатами (—1; Ю).
Определение переходного процесса
Согласно (7.27) z-изображение сигнала на выходе системы
X* (2) = X* (z) Ф (z) = x:'(s) -(г) - . (7.32)
Считая, что задающее воздействие представляет собой скачок, и воспользовавшись результатами примера 1 или данными табл. 3.1, получим
X* (Z) = А —-----• (7.33)
BbixV > z _ 1 1 4- U7(z)
Таким образом, для получения дискретных значений переходной характеристики нужно найти z-передаточную функцию замкнутой
173
системы, ^-преобразование выходного сигнала 'при ступенчатом задающем воздействии и, выполнив обратное ^-преобразование, определить значения переходной характеристики хВыХ [иТ].
Ошибки регулирования
Ошибка регулирования находится с помощью передаточной функции системы по ошибке (7.28). z-изображение сигнала ошибки
X* (г)
X* (г) = х; (г) Фош „(г) = -. (7.34)
Для определения предельных установившихся величин ошибок Х*ш воспользуемся теоремой о конечном значении функции (7.24), учитывая только что полученное 2-изображение сигнала ошибки
2—*1
Z— 1
X*(z)
3 2 [1 +Г(г)]
(7-35)
Далее найдем предельные установившиеся ошибки при различных видах задающего воздействия.
Скачкообразное задающее воздействие. Согласно табл. 3.1 2-преобразование скачкообразного сигнала
х;(2)=л^.
Подставив это значение в (7.35), получим установившуюся ошибку регулирования v* 1. А А
= lim-----=---------
ош 2-*ii + r(z) 14-Г(1)
А
(7.36)
Для того чтобы установившаяся ошибка равнялась нулю, необходимо, чтобы IF(1) =со. Следовательно, система не имеет ошибки по положению, если ее 2-п ер ед аточная функция W(z) содержит в точке 2=1 полюс первого или более высоких порядков. Такие системы называются астатическими.
Система имеет установившуюся ошибку по положению, если 1^(2) не содержит полюса в точке 2=1. Такую систему по аналогии с непрерывной будем называть статической.
Линейно изменяющееся задающее воздействие, z-преобразование линейно изменяющегося сигнала
АТ------—
(2-1)2
и установившаяся ошибка (регулирования
Хош =lim -------~--------=---------—-------- • (7-37)
ош 2-1 (2—1)11 4-ТГ (2)1 lim 1(2—1)Й7(2)]
2—1
Если передаточная функция W(z) не содержит полюса в точке z=l, т. е. система статическая, то установившаяся ошибка стремится к бесконечности.
При астатизме первого порядка, когда передаточная функция и точке z= 1 имеет полюс первого порядка, ее можно представить в виде
(7.38)
где W'i(z) функция, не содержащая сомножителя z—I. Установившаяся ошибка
X* =------АТ . =dZL . (7.39)
ош limlFHz) IFi(l) z—*1
Установившаяся ошибка импульсной системы с астатизмом первого порядка равна постоянной величине, пропорциональной скорости изменения задающего сигнала и величине периода дискретизации Т, и называется скоростной ошибкой.
Когда передаточная функция W(z) имеет в точке z=l полюсы второго и более высоких порядков, т. е. в импульсных системах с астатизмом второго и более высоких порядков, ошибки по положению и по скорости равны нулю.
Квадратичный закон изменения задающего воздействия. Задающий сигнал имеет вид
Установившаяся ошибка
х* =--------АЦ-------. (7.40)
ош lim [(г— l)»lF(z)J
z-»l
В системах с астатизмом нулевого и первого порядков ошибка будет стремиться к бесконечности.
В системах с астатизмом второго порядка, для которых передаточную функцию можно представить в виде
V' <7-41)
где U72(z)—некоторая функция, не имеющая множителя (z—1), возникает постоянная ошибка регулирования, пропорциональная ускорению задающего воздействия — ошибка по ускорению:
X* =------= (7.42)
ош lim (z) П72(1)
Z-fl
Системы с астатизм'ом третьего и более высоких порядков ошибок по ускорению не имеют.
Пример 4.
Импульсный элемент системы, структурная схема которой показана на рис. 7.26, создает прямоугольные импульсы длительностью 1=0,01 сек .и периодичностью Т=0,1 сек, амплитуды которых равны мгновенным значениям сигнала ошибки в моменты 'возникновения импульсов. Непрерывная часть системы имеет Ко передаточную функцию IF0(s) == , где Ко==ЛОО, 7о = 7=О,1 сек.
о(14~/ Оо)
Найти z-передаточную функцию разомкнутой системы W(z) и определить реакцию системы на единичное ступенчатое воздействие xa(t) = 1 (t).
Решение.
1. Так как импульсный элемент создает прямоугольные импульсы малой I длительности, учитываем его влияние передаточной функцией (7.13): 1Th(s)=t,
относя этот эффект к непрерывной части системы, передаточная функция которой в этом случае становится равной
К
W (s) = Ги (s) IF0(s) = ,
s(l + 7’0s)
где jK=TjKo=0,01 • 100=1.
2. Находим z-передаточную функцию разомкнутой системы. Соответственно табл .3.1 найденной функции W/s) соответствует ^-преобразование
К \ 1 - е Т'
Й7 (г) =-------------------------
Z
(z — 1) \z — e Г<
3. z-передаточная функция замкнутой системы
W (г)
ф (2) =---------
7 1 + W (z)
z
Т
-1) —(К4-1)е Т'
/С \ 1 — е
_ _L г -J- e Го
4. z-изображение входного сигнала — единичной ступенчатой функции (см. табл. 3.1):
<z) = Try
5. z-изображение выходного сигнала
—
Z2__
_ г
К-1)-(К+1)е Тс
вых <г)=хз (г) ф (г) =
। Г< z + е
(2-1)
6. z-изображение выходного сигнала при заданных величинах коэффициента усиления, периода прерывания и постоянной времени
V* / ч 0.632Z2
A (2) =--------------------------------- .
вых 1 (z — 1) (z2 — 0,736z + 0,368)
7. Так как в табл; 3.1 отсутствуют необходимые данные, разлагаем -А"вых (г) на сумму простых дробей:
t) находим корни выражения х2—0,736г+0,368=0: 31=P4-ico, z2e» i"1 I"1» с «> Р == 0,368, со = 0,483;
б) представляем выражение в виде: г8 — 0,736г + 0,368 = (г— гх) (г— ?2),
в) вводим в хвых (г) значения полюсов функции
0,632г2
'* (z) =
вых< > (Z_1)(Z_21)(2_Z2)
«де I, Z\, z2— полюсы функции ХВых(Х);
находим вычет Rezj функции
X* (г) --------соответствующий 0,632 г
полюсу Z—I
(г — гх) (г — г2)
|г— 1
___________1___________.
(1 — Zj) (1 — г2)
д) вычет функции, соответствующий полюсу z=zit
z | гх
(г — 1) (г — г2) |z=21 (zx — 1) (гх — г2)
е) вычет функции, соответствующий полюсу г = г2,
D г I *2 .
(2 _ 1) (г _ Z1) |2=2г (г2 — 1) (г2 — гх)
ж) представляем г-изображение выходной функции в виде простых дробей
XLx<0 = 0.632г
Rez2
(г —гх)
Rez3 (•г — z2)
г г г
= - -}- а2 ф- а3
z — 1 г — гг г — г2
где =0,632 Rez!, cz2=0,632 Rez2, а3=0,632 Rez3.
8. Величины вычетов функции Хвых(г)
1
I
Rezi=-------------
(1-21)(1-г2)
[(1_₽)—ico][(l—pj + i (1_₽)2_|_юа ’
Rez2=
(гх— 1)(гх — га)
Р+ »
2i со [(Р — 1) + i со]
г2
Rez3 = (^-П^-г,)
Р — i со
— 2i со [(Р — 1) — i со]
Г , Р(Р~1)
L______ со
2 [(Р- I)2 + <‘>21
2[(Р~-1)2-| о9]
Z1
После подстановки величин Рим, мнимые части второго и третьего вычетов обращаются в нуль:
_______1_____________________1_______________1
(1 —P)2_|_to2 = (1 -0.368)2 + 0,4832 ~ 0,632 '
0,632
9. Величины множителей а: аг = 0,632 Rezt = .
U । OOZ
1, а2 — 0,632 Reza =
1
2 ’
—0,632
2-0,632
а3 = 0,632 Rez3=
0,632
2-0,632
1
2 ’
10. Пользуясь табл. 3.1, находим функции времени жения Хвых (г), полученного в п. 7ж:
для слагаемых z-изобра-
z для-------
Z — 1
Z для ------
Z — Zj
Z для ------
z^z2
где
/1(0= 1 (0;
t t . i
т 'г *г
fz (0 = = 1211т е т;
/з (0 = 22Г = |22| г е * т;
Л — — -
|21|Г = N7 = [/ Р2 + со2] Т = 0,606 т
t t at, 0,483 Л t
<p — =-----arc tg — = — arc tg —— =0,92 —
4 T T p T 0,368 T
III. Функция времени, соответствующая z-изображению выходного сигнала
*вых (0 = «1/1 (0 + «г/г (0 + «з/з (0 —
1 i0,92^- 1 4 “i0
= 1— — 0,606 т е т— — 0,606 т е
2 2
V Г t = 1 — 0,606т cos 0,92 —
Т
12. Выходной сигнал точно определяется найденной функцией только в моменты, кратные периоду дискретизации, t=nT:
Хвых [ПТ} = 1 — 0,606" cos [0,92л].
Определяем значения сигнала для различных л:
л 0 1 23 45 67
Явых [пТ] 0 0,52 1,1 1,21 1,12 1,01 0,96 0,97 .
43. Строим график дискретной функции выходного сигнала (рис. 710)
Пример 5.
Для рассмотренной в примере 4 <п" гемы импульсного регулирования определить условия устойчивости и V с hi повившиеся ошибки регулирования при скачке задающего сигнала \, (/) —А • 1 (/) и линейном его изме-нспни л3(0 =At. (
Рис. 7.10. Выходной сигнал импульсной системы при единичном ступен-'ы гом воздействии по каналу управления
Решение,
1 УСЛОВИЯ УСТОЙЧИВОСТИ
1. Находим функцию il + W(z), определяющую согласно (7.29) устойчивость системы, используя данные примера 4 >(п. 2):
1 4- w (z) = 1
f/ ___Г_\ / ___Г\1 ___T
________^^l-e —(14-е r<>/]z4-e Г° (z— 1) (z — e Го)
2. Применительно к принятым в (7.31) обозначениям:
(т \ ( т \ т
те ) — Го) г0
1 — е ) \ 1 -|— е ) > rz2 — е .
3. Определяем, при каких значениях параметров удовлетворяются условия / __ г \ / ___г \ _т_ /
м-тойчивости (7.31): 1Д-а1-}-аа= 1Д/С \1—е т° / \l-f-e г° / Д-е т° — К \1—
с т° />0 — это условие удовлетворяется при любых величинах К, Т и То\ а2=
е г° <1— это условие, как и предыдущее, удовлетворяется всегда; 1—а1 + п2 = / ____г\ / ___г\
— К \1—е г°/+2\1+е т° / > 0 — это условие удовлетворяется, и, следова-
К“.1ьно система будет устойчива, только когда
К < 2
При заданных значениях Г=То=О,!1 сек система будет устойчива, если Л<4,3.
4. Структурно устойчивая непрерывная система (эквивалентная в разомкнутом состоянии инерционно-интегрирующему звену) при введении импульсного' элемента может стать неустойчивой (в рассмотренном случае при К>4,3).
II. УСТАНОВИВШАЯСЯ ОШИБКА ПРИ СТУПЕНЧАТОМ ВОЗДЕЙСТВИИ *
1. Определяем свойства z-передаточной функции рассматриваемой системы:
z
(z — 1) \ z — е °/
Функция имеет полюс первого порядка в точке z=\l. Система обладает астатизмом первого порядка, и установившаяся ошибка при скачке задающего сигнала равна ХоШ =0.
III. УСТАНОВИВШАЯСЯ ОШИБКА ПРИ ЛИНЕЙНО ИЗМЕНЯЮЩЕМСЯ ВОЗДЕЙСТВИИ '1. Передаточную функцию W(z) можно представить в виде (7.38):
Wi(z) где W, (г) =
К\1 —е Т'
/ 2 т
тв z— e
не содержит сомножителя (z—!).
2. Согласно (7.39) установившаяся (скоростная) ошибка равна
AT
X =
ош lim ITi (z)
AT
К
1
ЛТ\1 —е Tl ( т \ /С\1 —е
При лцнейном задающем воздействии установившаяся ошибка возрастает
с увеличением скорости изменения задающего сигнала и периода дискретизации и уменьшается с увеличением коэффициента усиления.
На рис. 7.11 показан характер случаях.
изменения сигналов ошибки в рассмотренных
Рис. 7.11. Ошибки регулирования импульсной системы при ступенчатом (а) и линейном (б) задающих 'воздействиях
Глава 8
ОСНОВЫ ТЕЛЕУПРАВЛЕНИЯ И ТЕЛЕКОНТРОЛЯ
8.1. Общая характеристика и задачи телеуправления и телеконтроля на предприятиях радиосвязи и вещания *
Оперативное обслуживание технических средств приемных и передающих радиостанций, аппаратных звукового и телевизионного вещания выполняется с помощью пультов управления. Один дежурный имеет возможность управлять и ^контролировать большое количество комплектов оборудования, размещаемого обычно в поле зрения дежурного.
В процессе централизованного оперативного обслуживания выполняется несколько основных функций.
1 .’ Осуществляется управление основным оборудованием. Оно сводится в основном к включению и выключению устройств, установке различных переключателей в заданное положение, переходе на резервный комплект и т. п.
2 . Получаются подтверждения о выполнении команд, сведения о положении различных органов настройки или коммутации: переключателей диапазонов, номере рабочей частоты, номере включенного передатчика, номере использования линии и т. п. Эти сведения доводят до оператора с помощью средств сигнализации, например с помощью световых табло, звонков и др.
3.. Производится измерение важнейших величин, характери-1ующих Состояние аппаратуры и режим работы: питающих напряжений, мощности, отдаваемой в систему, нелинейных искажений, глубины модуляции, уровня шумов, токов, характеризующих режим работы отдельных устройств или каскадов и др.
4. Производится регулирование величин. В необходимых случаях с пульта управления регулируют напряжение в некоторых цепях, положение органов настройки, величины индуктивности или емкости контура, свйзи между каскадами-или с антенной и пр. Регулирование сводится к нажатию кнопки «больше» или «меньше», включающей реле питания исполнительного двигателя.
Все перечисленные операции управления, сигнализации, измерения и регулирования удается реализовать, связывая пульт управления с соответствующими исполнительными элементами оборудования или измерительными приборами. Связь осуществляется индивидуальными электрическими цепями.
Управление может быть значительно упрощено в случае 'применения местной автоматизации. Разработанная и применяемая система управления, блокировки и сигнализации (УБС) обеспечивает безопасность обслуживания и необходимую последовательность включения отдельных блоков оборудования с помощью небольшого количества команд.
Таким образом, при централизации оперативного обслуживания технических радиосредств требуется централизация средств управления, регулирования, сигнализации и измерений. Процессы сигнализации и измерений часто объединяют одним термином «контроль».
Частичная автоматизация объектов радиосвязи и вещания является важным шагом по пути дальнейшей автоматизации, поскольку в этом случае сокращается количество неавтоматизированных операций, выполняемых дежурным техником. Дальнейшая автоматизация идет по пути централизованного управления средствами нескольких радиостанций или даже всей сети связи из одного (или нескольких) пунктов управления, находящихся на значительном расстоянии от объектов управления. Такое дистанционное управление независимо от того, выполняется ли оно диспетчерам пункта управления или эти функции доверены специальной управляющей машине, реализуется с помощью средств телеуправления (ТУ), телесигнализации (ТС), телерегулирования (ТР) и телеизмерений (ТИ). Средства телеизмерений называют также средствами телеметрии, а при использовании радиоканалов — радиотелеметрии (РТМ). Понятие телеконтроля (ТК) включает телесигнализацию и телеизмерения. Все эти средства требуют гораздо меньшего количества каналов связи, чем количество объектов управления или контроля. Весь 'комплекс средств называется также средствами телемеханики.
Блок-схема системы телеуправления, телеконтроля и телерегулирования (ТУ—ТК—ТР) приведена на рис. 8.1.
Пунктом управления может являться центральная аппаратная, радиобюро, одна из радиостанций, один из пунктов радиорелейной линии связи (опорная станция) и другие объекты связи и вещания, с которых производится управление различными объектами: радиостанцями, усилительными подстанциями, необслуживаемыми пунктами радиорелейных линий связи, аппаратурой связных ИСЗ и др.
, По линии связи передаются сигналы управления, контроля и регулирования. Управление и контроль средствами коротковолновой связи и коротковолнового, длинноволнового и укв звукового, 182
а также телевизионного вещания, производят в основном с помощью кабельных линий связи, как более надежных и стабильных, а контроль и управление средствами радиорелейных линий и искусственных спутников Земли — с помощью радиосредств связи.
. Рис. 8.1. Блок-схема системы ТУ—ТК—ТР
Средства телеуправления (ТУ) предназначены для передачи по каналам связи команд, которые на управляемом пункте воздействуют на соответствующие исполнительные элементы (J73), входящие, как правило, в систему управления, блокировки и сигнализации. Соответственно команде происходит включение, выключение, переход на резерв и т. п. объекта управления (ОУ). Запуск системы ТУ и подача команды производятся с пульта управления (ПУ).
На передающем конце (пункт управления) в функции аппаратуры ТУ входит образование сигналов, соответствующих коду команды. Эти функции выполняет шифратор. Сигнал, состоящий, как правило, из нескольких импульсов, передается в линию связи в определенной последовательности. Требуемая последовательность передачи обеспечивается распределительными узлами аппаратуры. Сигнал расшифровывается в управляемом пункте дешифратором, который образует цепь к тому исполнительному органу, который предусмотрен принятой командой.
Средства телесигнализации (ТС) после выполнения команды формируют исполнительный сигнал. Переданный на пульт управления сигнал расшифровывается и поступает к средствам сигнализации (СС), которые извещают о выполнении команды. Кроме того, СС используются для передачи данных о состоянии объектов, не управляемых непосредственно, например для передачи аварийного сигнала, характеризующего нарушение связи или аварийное состояние аппаратуры. При управлении рассредоточенными объектами, например пунктами радиорелейной линии связи, система сигнализации подает квитирующий сигнал о приеме команды вызова данного пункта по системе ТУ. При управлении радиостанциями средства сигнализации системы телеуправления и те
леконтроля дублируют состояние средств оптической сигнализации, которыми располагает система УБС радиостанции.
Система телеизмерений {ГИ) обеспечивает 'получение в пункте управления данных о показаниях различных измерительных приборов, характеризующих режим работы аппаратуры управляемого объекта. Измеряемые величины могут иметь различную физическую природу, например температуру, влажность и др. Эти величины предварительно преобразуются с помощью датчиков (Д) в напряжение. В пункте управления измеряемые величины регистрируются измерительными приборами (Я/7).
Средства телерегулирования (ТР) позволяют плавно изменять уровень величины или состояние какого-либо объекта, например плавно изменять величину связи каскадов, частоту или уровень сигнала и т. п. Подобное регулирование можно производить с помощью системы ТУ, посылая команду на включение исполнительного двигателя, а затем на его выключение.
При проектировании системы ТУ—ТК—ТР стремятся к возможно более полному использованию технических узлов и сокращению их количества за счет рационального построения сигналов управления и контроля, их универсальности, к выполнению одними и теми же узлами нескольких функций.
Система ТУ—ТК—ТР является составной частью сложной системы управления, работающей по замкнутому циклу управления. Замыкание контура может производиться через дежурного оператора или в более совершенных системах через соответствующую управляющую машину.
Особенно большое значение имеют телеуправление и телеконтроль в системах связи через ИСЗ.
На одном из спутников связи [43] 93% полупроводниковых приборов использованы в командном и телеметрическом оборудовании. По командам, посылаемым с Земли, включается и выключается передатчик ретранслятора, радиомаяк точного автослежения, аппаратура измерения интенсивности радиоактивного излучения, производится испытание приемников и декодирующих устройств, включается и выключается телеметрическое оборудование и др.
В процессе разработки систем ТУ—ТК—ТР должны быть удовлетворены требования быстроты передачи и исполнения команд управления и контроля, необходимой емкости системы, надежности передачи и исполнения команд и экономичности.
Скорость передачи и исполнения определяется выбором вида сигналов управления и контроля (видом кода), способом передачи, схемой исполнительного устройства и быстродействием элементов.
Емкость системы характеризуется возможностью управления или контроля того или иного количества объектов, т. е. соответствующим количеством различных команд управления или контроля, которое в состоянии передать система.
Надежность работы системы определяется аппаратурной на-(ежностью, ее бесперебойной работой и точностью выполнения команд управления и контроля в условиях помех и изменения характеристик линий связи и аппаратуры.
8.2. Принципы формирования команд управления и контроля
Признаки импульсных сигналов
Современные дистанционные системы управления и контроля используют почти исключительно дискретную технику связи. Передача распоряжений (команд) и сведений об их исполнении или состоянии объектов производится сигналами, имеющими форму импульсов тока (напряжения). Сигналы должны отображать содержание .команды й обеспечивать ее передачу в необходимую исполнительную цепь.
В самых распространенных случаях (телеуправлении, телесигнализации и телерегулировании) передаваемая информация ограничивается весьма лаконичными сообщениями типа: «включить», «выключить», «включено», «выключено», «больше», «меньше» и т. п.
Каждая команда передается одним или несколькими импульсами. Соответствующие системы передачи делятся на одноимпульс-ные и многоимпульсные.
Различные параметры импульсов называют импульсными признаками, а величины параметров — значениями признаков. Придавая импульсам различные признаки и различные -величины этих признаков, создают возможность .передачи содержания приказа по необходимому адресу. При выборе того или иного признака учитывают возможность передачи таких сигналов по имеющемуся каналу (линии) связи, их помехоустойчивость, простоту формирования сигнала и распознавания признака на приемном конце, а также возможное число значений признака.
Признаками сигнала являются интенсивность, время или частота импульсов (рис. 8.2). Соответственно этому могут быть использованы параметры: амплитуда, полярность, длительность, время возникновения, фаза переменного тока, частота заполнения или частота самих импульсов, их число в цикле и скважность. Можно 'придавать импульсам несколько признаков, например изменять длительность и частоту заполнения. В этом случае получаются комбинированные импульсные признаки.
Импульсы, отображающие команду, могут передаваться одновременно или последовательно, образуя соответственно сигналы с параллельной или последовательной структурой.
Продолжительность передачи команды- называется циклом передачи сигнала.
При последовательной передаче импульсы либо разделяются специальными элементами (паузами, импульсами определенного значения), либо не разделяются, что 'сокращает время одного цикла передачи. На рис. 8.3-показаны сигналы, использующие частот-
---I—д
I I tu
Рис. 8.2. Импульсные признаки, используемые при формировании сигналов команд
Рис. 8.3. Сигналы с частотным признаком три параллельной и последовательной структуре
t”*— Гц
ный признак при параллельной структуре (а) и последовательной —с защитными интервалами в форме пауз (б) и без защитных интервалов (в).
Длительность цикла передачи 4, в значительной степени определяет скорость передачи. При параллельной структуре при 186
последовательной с защитными элементами (и—1)/п и при
последовательной без защитных элементов tn=ntn, где — длительность импульса, tn — длительность защитного-элемента (пау-<ы), п — число импульсов в сигнале.
При формировании сигналов команд из одного импульса сокращается длительность цикла передачи, но и ограничивается возможное количество команд N величиной
т
N=^Kh
Z=1
где Ki—.количество значений, которое может быть придано /-му признаку, т — количество реализуемых импульсных признаков.
В подавляющем большинстве случаев требования высокой помехоустойчивости и простоты формирования и дешифровки сигнала заставляют использовать только два значения признака, например положительную и отрицательную полярность то-ка, сдвиг но фазе на 180°, две различные длительности импульсов и др. Наиболее распространенным исключением из этого правила является частота, которой чисто придают много значений.
При двух значениях признака возможное количество команд V = 2т.
Формируя сигнал команды из п импульсов и используя те или иные коды, можно увеличить возможное количество команд. Так, при постоянном количестве импульсов в сигнале каждой команды (равномерном или комплектном коде) и при двух значениях импульсного признака возможное количество -команд N= Кп=2п.
Значение импульсного признака, при котором происходит срабатывание исполнительного устройства в месте приема, называется выбирающим признаком.
При равномерном кодировании различном командам будут соответствовать различные положения и числа импульсов, имеющих выбирающий признак, при одинаковом количестве импульсов в каждом сигнале. На рис. 8.4 показаны сигналы при равномерном нятиэлементном коде, когда выбирающим признаком является положительная полярность. Сигналы а и б отличаются положением импульсов, обладающих выбирающим признаком, а сигналы виг различаются и числом, и положением таких импульсов. На рис. 9.4д показаны зависимости возможного количества команд от количества импульсов в сигнале при равномерном кодировании и при различном количестве импульсных признаков (или различном значении неизменного импульсного признака).
Емкость системы телеуправления и телеконтроля, т. е. максимальное количество команд, которое может быть передано, возрастает с увеличением количества импульсов в сигнале и количества признаков, придаваемых каждому импульсу (или количества значений выбранного признака).
Рис. 8.4. Кодирование четырех различных команд при пятиэлёментном равномерном коде (а) и количество различных команд 'при различном количестве признаков и количество импульсов в сигнале (б)
Принципы разделения (селекции) импульсных сигналов
В общих чертах схема передачи распорядительных или исполнительных команд показана на рис. 8.5.
Содержание команды СК («включить передатчик № 2» или «передатчик № 2 включен») формируется в соответствующий рас-
• Пул нт управления ( । Управляемый компленс
Рис. 8.5. Тракт передачи распорядительной или исполнительной команды
порядительный (или исполнительный) сигнал с помощью шифратора Ш и подается в канал связи КС. На приемной стороне сигнал поступает в дешифратор ДШ, где преобразуется в исполнительный сигнал, воздействующий на исполнительный орган ИО (например, пусковое реле передатчика № 2) того или иного объекта управления ОУ.
Для того чтобы на приемном конце расшифровать смысл команды, необходима регистрация каждого импульса сигнала — их разделение. Как и .в других видах связи, в этом случае используют методы пространственного (схемного), частотного и временного разделения импульсов, образующих сигнал команды.
Каждому импульсу сигнала присваивается .порядковый номер и за каждым порядковым номером .при различных методах разделения закрепляется либо определенная физическая цепь, либо определенная частота тока, посылаемого по линии связи, либо временной интервал.
Принципы реализации пространственной, частотной и временной селекций показаны на рис. 8.6.
накс
Lt2 Ltn
—Н-----I----h - I - t
Lt3
К* *-
/Рис. 8.6. Основные 'виды селекции импульсов
При пространственной селекции (рйс. 8.6ц) каждый /-й импульс, формируемый датчиком импульсов Дг, после нажатия ключа Кг посылается по своей линии Лг и расшифровывается приемником Прг. Количество линий равно количеству импульсов, используемых для формирования команд. Поскольку все импульсы могут передаваться одновременно, длительность цикла передачи при этом равна примерно длительности импульса.
При частотном разделении (рис. 8.66) импульсы передаются по общей линии Л сигналами, имеющими различные частоты. Приемные устройства импульсов имеют узкополосные фильтры, настроенные на частоты различных импульсов.
Передача п импульсов требует диапазона частот А/=/макс-ь/мип (рис. 8.6а). Импульсы могут передаваться 'одновременно, длительность цикла в этом случае равна длительности импульса. Повышение скорости передачи за счет уменьшения длительности импульсов расширяет требуемую полосу частот А/, поскольку для удовлетворительной передачи импульса необходимо иметь полосу частот АД- где АД- — длительность /-го-импульса.
АД
Кроме того, для уменьшения переходных помех может быть предусмотрен дополнительный частотный интервал АД между соседними .каналами. Временное разделение импульсов (рис. 9.6в) предполагает их последовательную передачу по общей линии. Для этого каждый датчик импульса с помощью распределителей Pi и Р2 соединяется линией со своим приемником поочередно. В качестве распределителей могут использоваться электромеханические типа шаговых или релейных, транзисторные и ламповые схемы, схемы, использующие бесконтактные магнитные элементы, а также электроннолучевые трубки. Длительность цикла передачи возрастает по сравнению с предыдущим случаем (рис. 8.66).
Необходимая синфазность поддерживается равномерным движением своих распределителей, на которые для этого подаются специальные тактовые импульсы. Однако большую надежность при изменяющихся внешних условиях обеспечивает шаговое движение распределителя, при котором его переход в следующее положение производится с помощью импульсной посылки — импульса движения. Для повышения экономичности импульсы движения могут использоваться одновременно для передачи команд. Для этого им придаются импульсные признаки соответственно выбранному методу передачи команд и принципу кодирования, т. е. импульсы движения модулируют сигналом команды.
Методы разделения команд ТУ—ТК
(метод избирания)
Помимо передачи содержания приказа, необходимо, чтобы приказ выполнило то исполнительное устройство, которому приказ адресован. Эта задача в условиях использования общего канала 190
связи для передачи сигналов решается применением различных методов избирания: качественного, комбинационного, распределительного, комбинационно-распределительного и распределительного-с групповым выбором.
Качественный метод избирания. Каждая команда передается сигналом из одного импульса. Различным командам соответствуют различные импульсные признаки или различные значения признака. Этот способ обеспечивает высокую скорость передачи, сравнительно прост. Однако практически достижимая емкость системы получается небольшой.
Селекция по качественным соотношениям. Выбор исполнительной цепи определяется соотношением значений импульсных признаков двух поочередно передаваемых импульсов или соотношением значений импульсного признака сигнала и значения опорного сигнала. Опорный импульс имеет дополнительные .признаки, позволяющие отделить его от сигнальных импульсов, или передается по отдельному каналу.
При кодировании адреса исполнительной цепи отношением амплитуд пары соседних импульсов уменьшаются искажения от медленных изменений уровня сигнала, так как при этом пропорциональные изменения амплитуд не изменяют их соотношения. Дальнейшее повышение помехоустойчивости достигается увеличением количества посылаемых импульсов.
Р аспределителъная (временная) селекция. При распределительной селекции команды, формируемые на передающем конце, поочередно передаются в соответствующие исполнительные устройства по общей линии связи, подобно тому, как передавались отдельные импульсы команды (см. рис. 8.6в).
За время цикла передачи передаются команды во все исполнительные устройства. При распределительной селекции увеличивается время передачи сообщений и усложняется приемное устройство.
Если распределитель имеет п контактов (позиций) и для формирования команд используют m импульсных .признаков, то общее количество возможных команд составляет N= (m—l)n.
Для передачи любой команды необходимо передать весь цикл сигнала, что удлиняет время передачи. Увеличить скорость работы можно, посылая несколько приказов за один цикл движения распределителя. Однако для передачи большого количества команд управления, особенно при использовании сравнительно медленно работающих электромеханических распределителей и реле, время передачи команд существенно возрастает.
При передаче команд типа «да» — «нет» или «вкл.»—«выкл.» количество импульсов можно уменьшить почти вдвое, передавая сначала содержание приказа, а затем уже номер той цепи, которая должна выполнить этот приказ. Для этого первый и второй импульсы отображают соответственно команду «включить» и «выключить», а остальные — номера исполнительных цепей.
На рис. 8.7 показаны сигналы, соответствующие командам: включить третий и пятый объекты управления (рис. 8.7а) и выключить второй объект (рис. 8.76). Импульсы движения совмещены с импульсами команды. Выбирающим признаком является дли-
Ддрес команды
Содержание команды
распределительной се-
Рис. 8.7. Сигналы команд три лекции
тельность посылки. Предполагается, что при передаче третьего импульса срабатывает исполнительное реле объекта управления № 1, при передаче четвертого — № 2, пятого — № 3 и т. д.
Простая комбинационная (кодовая) селекция. При комбинационной (кодовой) селекции каждый сигнал сообщения комбинируется из нескольких импульсов, кодирующих номер исполнительной цепи (обычно исполнительного реле). При простой комбинационной селекции импульсы передаются по различным каналам связи. Число требуемых линий равно числу 'элементов кода, а число значений импульсного признака, используемых при формировании импульсов,-—основанию кода. Количество команд, которое может быть передано при К значениях признака и п линиях, составляет
N=Kn. (8.1).
При использовании двух значений признака (наличие и отсутствие тока или положительная и отрицательная полярности токовых посылок и др.) количество различных команд
N=4n. (8.2)
На рис. 8.86 [35] показана схема шифратора и дешифратора, позволяющая производить включение восьми исполнительных реле Р0, • •, Р7.
Шифратор представляет собою систему кнопок, при нажатий которых формируются токовые посылки в трех линиях связи. Число возможных команд составляет 7V = 23 = 8.
При нажатии одной из кнопок Ki—К? по линиям связи посылается комбинация импульсов, показанная на рис. 8.8а. (При этом порядковый номер, показанный на горизонтальной оси, озна-192
чает порядковый номер линии, в которой при нажатии данной кнопки возникает (или не возникает) токовая посылка.
Дешифратор построен по схеме, называемой «пирамидой». Он состоит из наборных реле PHi, Р112 и Рнз, имеющих группы контак-
Рис. 8.8. Принципиальные схемы шифратора и дешифратора при простой комбинационной селекции сигналов
тов а, б и в. Срабатывание наборных реле приводит к включению одного из исполнительных реле: например, при нажатии кнопки Л5 появляется ток в линиях 1 и 3, срабатывают наборные реле PRl и Рн3 и труппы контактов а и в. Реле Р$ получает питание от местной батареи.
Для повышения помехоустойчивости применяют полярные признаки сигнала. В отличие от рассмотренного случая, паузу заменяют импульсом другой полярности, а в качестве наборных реле используют поляризованные реле, направление срабатывания которых зависит от полярности тока в обмотке.
Комбинационно-распределительная селекция. Этот вид селекции отличается от предыдущего способом разделения импульсов сигнала. Если раньше импульсы, кодирующие команду, передавались по различным физическим цепям или каналам связи, то теперь'они передаются поочередно по одному общему каналу. Количество различных команд, которое 'может быть передано, определяется выражением (8.2), в котором величина п определяет количество импульсов, образующих кодовую комбинацию.
По сравнению с распределительным методом селекции при одном и том же возможном количестве команд сокращается коли-13—296 193
чество импульсов, передаваемых за цикл передачи, т. е. увеличивается скорость передачи и одновременно улучшается использование каналов связи, уменьшается их количество.
Способ передачи команд можно иллюстрировать приведенной ранее схемой рис. 8.86. Однако роль отдельных линий выполняют фиксированные интервалы времени, в течение которых будут переданы импульсы, обладающие теми или иными признаками. Для этого'к точкам /,'2, 3, 4 и 2', 3', 4' должна быть подключена система временного уплотнения линии (или канала связи), схематично показанная на рис. 8.8в. Вид сигналов (рис. 8.8а), посылаемых при нажатии различных кнопок, остается неизменным. Однако номер, показанный по горизонтальной оси, теперь означает номер временного интервала, когда был (или не был) послан данный импульс сигнала кодовой комбинации.
При нажатии кнопки Ks по линии будет передан импульс № 1, обладающий необходимым выбирающим признаком (например, положительная полярность токовой посылки), при котором сработает реле Рн) и импульс № 3, при котором сработает реле Рнз-Поскольку необходимая комбинация реализуется и исполнительное реле должно сработать только после передачи всех импульсов сигнала, а импульсы, подаваемые в обмотки реле набора, имеют небольшую продолжительность, необходимо, чтобы реле набора сохраняли положение согласно принятой команде до окончания передачи этой команды. С другой стороны, последовательная работа наборных реле будет вызывать появление ложных сигналов в обмотках исполнительных реле соответственно начальным положениям других наборных реле, в области которых еще не были поданы сигнальные импульсы.
Для сохранения положения реле после подачи команды они до конца цикла блокируются с помощью дополнительных контактов, не показанных на рис. 8.8, или имеют замедленное выключение цепи (замедление на отпускание). Для устранения ложных сигналов местная цепь питания исполнительных реле замыкается в точках (г) только по окончании цикла передачи команды.
Распределительная селекция с групповым набором. В рассматриваемом случае коммутация необходимой исполнительной цепи: происходит последовательно несколькими ступенями селекции. Все исполнительные цепи делятся на группы, число которых равно числу возможных позиций искателя (коммутатора) первой ступени селекции. Каждая группа делится на подгруппы, число которых равно числу позиций искателей второй ступени селекции.. Аналогично подгруппы подразделяются на подподгруппы и т. д. В общем случае при однотипных искателях получают п ступеней селекции при m позициях у каждого искателя.
С помощью сигнала команды сначала выбирается группа (работает система 'коммутации первой ступени селекции), потом, подгруппа и т. д.
Сигнал кодирует номер исполнительной цепи и в рассматриваемом случае имеет число групп импульсов, равное числу ступеней селекции.
При заданном числе импульсов в сигнале команды наибольшее возможное количество исполнительных цепей может быть получено при одинаковом количестве позиций на всех ступенях селекции, т. е. число групп должно быть равно числу подгрупп, а число подгрупп — числу исполнительных цепей в подгруппе и т. п. Число различных команд, которое при этом может быть принято, определяется выражением (8Л), где п означает число ступеней селекции, а К — число позиций искателя.
Исполнительные цепи
Импульсы Импульсы Импульсы
Тступени Иступени Шету лени
1 ступень селекции
И ступень селекции
Рис. 8.9. Структурная схема системы ТУ при распределительной селекции с групповым набиранием
На рис. 8.9/2 показана схема дешифратора *) при трех ступенях селекции и четырех позициях каждого искателя. На различных ступенях селекции использованы распределители ШР\, ШР2 и ШР3, которые приобретают положение соответственно положению импульса, обладающего избирательным признаком в сигнале ТУ. Положение распределителей, показанное на схеме, обеспечивает срабатывание исполнительного устройства № 55. На рис. 8.96 показан соответствующий сигнал, совмещающий функции движения и команды.
Команды, соответствующие различным ступеням селекции, могут иметь качественно различный смысл. Например, на первой ступени выбирается объект управления (передатчик, каскад и т. п.), на второй — характер операции (перейти на другой поддиапазон, включить, выключить и т. п.), на третьей — исполнительное устройство.
Увеличить скорость передачи можно, используя паузы для построения кодовой комбинации, соответствующей одной или нескольким ступеням искания. Избирательным признаком в этом случае будет длительность паузы. Такой способ соответствует .многоступенчатому параллельному избиранию. На рис. 9.9в показана структура сигнала при параллельном двухступенчатом избирании. Первая ступень имеет пять позиций и управляется сигналом, состоящим из нечетных импульсов, вторая — четыре позиции и управляется четными импульсами (паузами).
Дальнейшее увеличение скорости передачи может быть достигнуто заменой распределительного (временного) избирания частотным.
При небольшом количестве команд можно применять качественное избирание и- частотный избирающий признак. Для этого потребуется количество различных частот, равное числу различных команд. Применяя комбинационные методы избирания с частотным избирающим признаком, можно сократить требуемое количество различных частот.
8,3. Принципы телеизмерений 1
Чтобы обеспечить нормальную работу различных объектов связи и вещания, необходимо измерять большое количество параметров, характеризующих качество работы технических средств. При контроле и управлении из пункта управления, находящегося на значительном удалении от объекта, эти измерения проводятся по заданной программе шли по специальной команде, переданной средствами ТУ. Данные измерений с помощью средств телеизмерений (ТИ) поступают в пункт управления-.
Важнейшим требованием, предъявляемым к системе ТИ, является точность измерений, которая оценивается величинами абсо-
’) Такую схему называют «пирамидой».
лютной АД и относительно 64% погрешностей: A4=4i—Л2 и АЛ
6/1 = — Ю0%, где А — истинное значение измеряемой величины, Л
Ai — показания воспроизводящего прибора.
Информация о.'величинах измеряемых параметров может передаваться всеми способами, которыми передается по линиях связи любая другая информация, однако требование высокой точности передачи вызывает дополнительные трудности.
Дискретные системы связи обладают большими возможностями неискаженной передачи данных, поэтому более распространены,, чем непрерывные. Однако непрерывные системы более просты и часто применяются при передаче данных на небольшие расстояния.
В зависимости от вида параметра сигнала, несущего информацию, различают системы интенсивности, частотные и импульсные.
В системах интенсивности измеряемую величину отображает амплитуда тока (или напряжения) в линии связи. Низкая помехоустойчивость и влияние параметров линии связи ограничивают применение этого способа использованием его для телеизмерений на небольших расстояниях (системы ближнего действия). Сигналы, образованные импульсами тока или напряжения, и частотномоду-лированные сигналы меньше зависят от действия помех и изменений параметров линий.
Системы интенсивности. Системы интенсивности находят применение в хозяйстве радиосвязи и вещания при небольшой удаленности объектов контроля, например, в сетях проводного вещания благодаря большой простоте.
Варианты схемы' телеизмерений, использующих принцип интенсивности, показаны па рис. 8.10.
Система телеизмерений на передающей стороне содержит датчик измеряемой величины Д, линию связи ЛС и измерительный прибор И в пункте контроля (рис. 8.Юн). Датчик преобразует измеряемую величину (коэффициент модуляции, уровень шума и .др.) в пропорциональную величину постоянного тона и напряжения I и U.
Ток и напряжение на выходе линии Д и питают измерительный прибор И, показания которого Ai должны быть равны величине А.
Чтобы уменьшить влияние изменений параметров линии на величины тока и напряжения, вводят высокостабильное высокоомное балластное сопротивление R&.
Наиболее , распространены датчики—преобразователи рода тока.и потенциометрические датчики. Первые преобразуют энергию сигналов в точке измерений в энергию постоянного тока так, что напряжение (ток) последнего оказывается пропорциональным измеряемому параметру. Например, датчиком тока высокой частоты в фидере передатчика служит выпрямитель. Потенциометрические датчики преобразуют механическое перемещение первичного измерителя в напряжение, снимаемое с потенциометра.
На Приемной стороне измерительным прибором И является магнитоэлектрический гальванометр.
Недостаток системы — зависимость показаний прибора И ют сопротивления линии связи и 'напряжения, питающего датчик Д. Изменения того и другого приводят к погрешности телеизмерений.
От этого 'недостатка почти свободны схемы телеизмерений, использующие в качестве' информационного параметра соотношение двух токов. Изменение этих токов под действием дестабилизирующих факторов в одинаковое число раз не изменяет их соотношения и не вносит погрешности в телеизмерения.
Объект контроля
Пункт контроля
/7
Рис. 8.10. Варианты телеизмерительных систем интенсивности
.Схема, использующая в качестве измерительного, прибора И логометр, показана на рис. 8.106. На рис. 8.10в показана эквивалентная схема измерений (мостовая небалансная). В процессе измерений датчик изменяет величины сопротивлений плеч моста Г1 и г2, вследствие чего в обмотках логометра г3 и протекают токи /1 и /3. Под действием возникающих магнитных полей обмотки поворачиваются на угол пропорциональной -разности токов 1\—73. Анализируя схему, можно установить, что при полной -симметрии линии (равные сопротивления проводов гл и равные сопротивления утечек гиз) изменения ее параметров не -сказываются на показаниях логометра.
Использование систем интенсивности обычно ограничивается расстояниями до 10 км при воздушных и 25 км — при кабельных линиях связи.
Влияние нестабильности сопротивления проводов -можно -почти полностью исключить, если использовать в качестве измерительного прибора И измерительный потенциометр. Подобные схемы’ получили название балансных (компенсационных).
Автоматический потенциометр (рис. 8.10а) представляет собой систему, в которой при перемещении движка П -создается напряжение 171, равное напряжению U, поступающему по линии связи -в процессе телеизмерений. Перемещает движок П двигатель Д, питаемый через усилитель У напряжением U=K(JJ—Ui), пропорциональным напряжению ошибки 17—£7Ь Напряжение ошибки создается устройством, показанным на схеме звездочкой. Такое устройство (рис. 8.106) может -представлять собой рамку гальванометра, -связанную -с потенциометрическим датчиком напряжения t/ош- При U U\ через рамку протекает ток, и она поворачивается, перемещая движок П\.
Величина U\ фиксируется на шкале величин А указателем, связанным с потенциометром /7.
Благодаря автоматическому балансу ток в линии связи отсутствует и возможные изменения сопротивления линии связи не сказываются -на точности телеизмерений.
Импульсные системы телеизмерений. В импульсных системах телеизмерений передаваемое значение измеряемой величины характеризуется числом импульсов — в число-импульсных системах ТИ — или определенной комбинацией импульсов — в кодово-импульсной системе. И в том и другом случаях, поскольку каждое значение отображается конечным числом импульсов, передаются не любые возможные значения величины, а только вполне определенные, возможные уровни — происходит квантование измеряемой величины по уровню (см. рис. 7.16). Если наибольшее значение измеряемой величины поделить на N, то возможность передачи информации о каждом из них будет означать возможность передачи N чисел от 0 до N—1. Чем большее количество различных уровней требуется передавать, тем -меньше относительная и абсолютная погрешности телеизмерений, но тем большее количество 199
чисел должно быть закодировано в процессе обработки данных измерений. * •
В число-импульсной системе передача N уровней означает формирование и передачу сигнала из N импульсов (при наибольшей измеряемой величине).
Передающая часть такой системы может представлять собой электромеханическое устройство, прерывающее электрическую цепь число раз, пропорциональное углу отклонения первичного измерительного устройства. Возможны также электрические схемы, состоящие из генератора импульсов и ключевой схемы, отпирающей цепь на время, пропорциональное величине измеряемого напряжения.
Приемными измерительными устройствами являются различного рода счетчики импульсов, проградуированные в значениях измеряемой величины.
Поскольку измеренную величину можно характеризовать определенным числом, то оно может быть представлено сигналом соответственно принятой системе исчисления. Наибольшее число N, которое можно закодировать при основании кода К и количестве разрядов п, определяется выражением (8.1).
В случае десятичного кода и двух разрядов 100. При таком кодировании необходимо передать два десятка импульсов. Импульс первого десятка, обладающий выбирающим признаком, передает ч количество десятков, а такой же импульс второго десятка — количество единиц числа, представляющего измеряемую величину. Общее количество требуемых импульсов составляет mX/i, в данном случае — двадцать. На рис. 8.11а показан сигнал, чсоответ-ствующий измеряемой величине — 64.
а)
Десятки Единицы
сшп%пппппЬаша%пип
987654321096 7654321 О
б)
П.......-
U 1JUUUU с
г6 2s2“ 2$2г 21 о0
Рис. 8.11. Сигналы телеизмерений при десятичной и двоичной системе кодирования
Более распространена двоичная система исчисления, имеющая основанием К =2, требующая меньшего (Количества импульсов. Сигнал, определяющий величину 32, показан на рис. 8.116.
8А Система ТУ-ТК радиорелейных линий связи.
Рассмотрим в качестве примера систему, разработанную коллективом специалистов НИИ Министерства связи [35].
Система позволяет управлять и контролировать работу десяти необслуживаемых промежуточных станций радиорелейной линии. Управление производится путем подачи на любую станцию 59 команд. Вызов станции и получение ею команды подтверждается квитирующим сигналом. Каждая станция имеет 64 датчика телесигналов, с помощью которых может быть передано извещение об изменении положения исполнительного устройства. Положение каждого датчика любой из станций определяется по специальному запросу с пункта управления. При непрохождении сигналов по основному каналу связи на пункт управления поступает аварийный сигнал.
В целях повышения надежности в системе широко применены бесконтактные релейные элементы, транзисторы и „безнакальные тиратроны.
Система телеуправления. Передатчик системы ТУ формирует сигналы команд, представляющие последовательность трех тональных импульсов длительностью 20 мсек каждый,, разделенных паузами 50 мсек. Частота заполнения каждого импульса может принимать одно из четырех возможных значений. Следовательно,, всего может быть закодировано ^=43 = 64 команды.
Команда подается нажатием одной из кнопок панели управления.
Схема передатчика приведена на рис. 8.12ц [35]. При нажатии кнопки замыкается ее контактная группа и в колебательные контуры трех генераторов Гь Г2 и Г3 включаются те или иные емкости Ci—С4. Соответственно набранной кодовой комбинации генерируется напряжение трех частот.
Процесс генерирования происходит последовательно. Обычно напряжение питания поступает только на коллекторы транзисторов Тр], Тр2 и Тр3. При подаче команды одновременно подается напряжение на аноды тиратронов. Через время то, определяемое величинами и С5, загорается тиратрон Т\ и начинают заряжаться конденсаторы С6 и С7. В процессе заряда конденсатора С6 получает питание эмиттер транзистора Тр\ и генератор Г\ генерирует колебание с частотой Д, определяемой величиной включенной емкости (Ci—С4). Продолжительность генерации зависит от величины емкости С6.
После того как она зарядится, генерация прекращается. Спустя 50 мсек, после этого существенно увеличивается потенциал конденсатора С7 и загорается тиратрон Т2, подается питание эмиттеру транзистора Тр2 и начинает работать генератор Г2 с частотой f2. Колебания прекращаются после того, как зарядится конденсатор С8. Аналогично создается и третий импульс. Идеализированная форма сигнала команды показана на рис. 8.126.
7—296 201
Приемная часть системы телеуправления содержит усилитель принимаемых сигналов, фильтры тональных сигналов и дешифратор. Дешифратор построен по схеме пирамиды и соответствует функциональной
fl —— so — го— so -~го —
—ж------
t, tg 4 *
Рис. 8.12. Схема передатчика телеуправле-
<ния (а) и вид сигнала команды (б)
схеме, описанной раньше (рис. 8.9). Всего имеется три ступени селекции соответственно трем импульсам команды и четыре позиции каждого искателя. Роль искателей (распределителей) ШР (выполняет четверка тиратронов, эквивалентная схеме из четырех параллельно работающих выключателей, показанной на рис. 8.13ц [35]. Положение распределителя определяется номером поджигаемого тиратрона, совпадающим с номером частоты заполнения принятого импульса команды.
Первая ступень селекции имеет один распределитель, состоящий из одной четверки тиратронов, вторая — четыре распределителя из четырех четверок и третья — шестнадцать распределителей,
состоящих из шестнадцати четверок тиратронов. В каждой четверке загорается только тот тира
трон, номер которого совпадает с номером частоты заполнения принятого им
пульса.
На рис. 8.136 показана часть принципиальной схемы дешифратора, которая содержит одну четверку тиратронов первой ступени селекции, первую четверку — второй и первую — третьей ступени селекции (соответственно второй, третий и четвертый ярусы тиратронов на схеме).
Принятые команды усиливаются усилителем У. В зависимости от частоты заполнения импульс проходит через один из фильтров 202
Ф1—Ф4 и поджигает соответствующий сигнальный тиратрон, с катода «которого поджигающее напряжение подается в каждую четверку к тиратронам с одноименными номерами. После .приема трех импульсов загорается один из тиратронов третьей ступени искания и срабатывает соответствующее исполнительное реле.
6) +120в
Рис. 8.13. Схема дешифратора
7*
2о.1
В рассматриваемой системе для управления исполнительными цепями использованы 59 из 64 реле. Остальные предназначены для вызова любой из 10 телеуправляемых станций. Каждой станции радиорелейной линии присваивается одна из комбинаций, заставляющая сработать и заблокироваться реле вызова Р(7). При этом на остальные тиратроны последней ступени искания подается анодное напряжение (замыкаются контакты /).
После приема исполнительной команды или отбоя срабатывают реле Р(3) и Р(2) (реле отбоя»), реле Р(1) деблокируется и отпускает, разрываются контакты (2), а затем (1) гаснут тиратроны третьей ступени. Продолжающие гореть тиратроны первой и второй ступеней гасятся специальной схемой самосброса.
Схема самосброса имеет интегрирующую цепочку и реле сброса, которое срабатывает после прохождения всех импульсов сигнала команды и на некоторое время выключает анодное напряжение тиратронов дешифратора.
Для повышения помехоустойчивости в системе используются узкополосные фильтры (Фц—Ф± на рис. 8.436) и амплитудный ограничитель в усилителе У. Последовательная передача тональных импульсов допускает значительные нелинейные искажения в канале связи. Предусмотрено специальное устройство самосброса, .которое срабатывает после случайного поджигания тиратрона первой ступени искания от действия помех.
Система телесигнализации. Сигнализация обеспечивает передачу информации о состоянии исполнительных органов, об аварийном состоянии объекта управления и квитирующих сигналов.
Сигнализация по вызову производится посылкой последовательности тональных импульсов длительностью около 30 мсек каждый.
Номер импульса соответствует номеру датчика. Частота заполнения импульса может иметь два значения соответственно двум возможным состояниям контролируемого органа управления.
Схема передающей части системы телесигнализации показана на рис. 8.14. Она состоит из цепочки тиратронов соответственно числу подлежащих передаче сигналов.
Первый тиратрон поджигается от формирующей 7?С-цепочки вызывного реле при вызове станции, а также после исполнения команды при отбое. При этом запускается генератор с частотой j\. Таким образом, и при вызове станции, и при отбое передается импульс частотой /].
Если на станции будет получена команда вызова телесигнализации, то сработает реле Запуск ТС, контакты замкнутся и тиратроны Т2, Тг начнут вспыхивать последовательно друг за другом. В зависимости от положения контактов датчиков Дх, Д2 при каждой вспышке будет генерироваться импульс с частотой заполнения Л или f2.
Приемник телесигнализации имеет два комплекта усилителей с фильтрами и сигнальными тиратронами для приема сигналов 204
с обоих направлений радиорелейной линии. Приемник ТС аналогичен приемнику сигналов телеуправления. Состояние того или иного объекта управления (исполнительной цепи) отражается на сигнальном табло, состоящем из цепочек тиратронов. Зажигание тиратрона характеризует состояние цепи.
Система сигнализации также автоматически сигнализирует об аварийном состоянии станции. Для этого служит генератор аварийных сигналов. В нормальном состоянии он посылает в канал
+ 506 0-
+ 1806 О’
Отформирующей
НС-цепочки вызывного
реле
К контактам реле „Запуск ГС"
~гов$------
Генератор
Инвертор общеаварийного генератора
Генератор Гг
П Г г L 1 fl ‘
И Генератор Н
Зг
Рис. 8.14. Схема передатчика ТС
тональные импульсы длительностью 10—20 мсек с частотой заполнения, соответствующей номеру станции. Сами импульсы следуют с частотой несколько герц. При аварийном состоянии основного канала связи в передаче импульсов происходит перерыв длительностью несколько секунд.
Для оповещения оператора пункта управления о приеме телеуправляемой станцией команд служит квитирующая сигнализация. Передача квитирующего сигнала происходит при срабатывании и отпускании вызовного реле Р{1) на схеме рис. 8.13а. Регистрация квитирующих сигналов происходит по табло. Отдельно регистрируется принятие команды и вызова станции.
Глава 9
НАДЕЖНОСТЬ АВТОМАТИЧЕСКИХ СИСТЕМ
9.1. Основные понятия надежности
При определении (надежности различных устройств обычно оперируют с такими терминами, как система и элемент системы.
Системой называется совокупность действующих объектов (блоков), предназначенная для самостоятельного выполнения установленного задания.
Часть системы, предназначенная для выполнения определенных функций, называется элементом системы или просто устройством.
Телевизионный центр, подготавливающий, организующий и проводящий телевизионные передачи, тракт распространения радиоволн и совокупность телевизионных приемных устройств, обслуживаемых самими потребителями, образуют систему телевизионного вещания. Телевизионный дередатчик в данном случае является элементом системы. Элементом системы являются и детали аппаратуры — лампы, конденсаторы, резисторы. Иногда при анализе больших систем выделяют блоки системы, подразумевая под блоками достаточно сложные технические комплексы, выполняющие важные технологические функции. Например, в системе спутниковой связи такими блоками могут быть пункт управления,, спутник, наземная оконечная станция и т. п. Использование трех градаций целесообразно, если в процессе исследования одновременно учитываются объекты всех трех категорий значимости. Однако в большинстве случаев удается обойтись двумя градациями. Тот же радиопередатчик можно рассматривать как элемент системы радиосвязи, а в другом случае называть его системой, если в рассмотрение вводят образующие его детали, которые в данном случае будут элементами.
Вводимые ниже понятия и определения относятся одновременно и к системам, и к элементам (блокам), хотя часто будет использоваться общий термин — устройство.
Надежностью элементов или систем называют их способность выполнять заданные функции в течение заданного времени в определенных условиях эксплуатации.
В системах связи выполнение заданных функций означает их нормальную работу, при которой удовлетворяются все показатели качества работы системы связи.
Невыполнение в данный момент времени хотя бы одного требования, предъявляемого к системе, свидетельствует о неисправном состоянии. Заметим, что при этом не делается различия между существенными или второстепенными требованиями, которые к системе предъявляются. Возникновение неисправности называется отказом.
Полная утрата работоспособности называется полным отказом. Состояние системы, при котором она работает, но недопустимо изменился один или несколько показателей, называется частичным отказом. Например, если автоматизированный передатчик прекратил свою работу из-за перегорания лампы или обрыва антенны, то отказ является полным. Если же он работает, но уровень шумов или нелинейных искажений превысил допустимую величину, то отказ является частичным. Заметим, что обнаружение частичного отказа, как правило, более трудно', чем полного.
По характеру возникновения отказы могут быть внезапными и постепенными. В первом случае отказ возникает из-за скачкообразного недопустимого изменения параметров системы, а во втором — в результате постепенного их изменения. Например, резкое ухудшение качества работы устройства из-за нарушения контакта в цепи в результате плохой пайки является отказом внезапным, тогда как недопустимое ухудшение показателя качества работы, происшедшее из-за сравнительно медленного старения резистора, включенного в ту же цепь, является отказом постепенным. Из-за старения применяемых материалов и других процессов, происходящих независимо от режима работы, параметры системы постепенно и непрерывно изменяются — происходит старение системы (физическое старение).
В отличие от старения, наблюдается также изнашиваемость системы — постепенное изменение ее параметров от действия различных нагрузок, связанных только с режимом работы. Такими нагрузками могут быть механические (вибрации, удары, ускорения), электрические (ток, напряжения, рассеиваемая мощность), тепловые и др.
Системы могут быть восстанавливаемыми, которые после возникновения отказа восстанавливаются, и невосстанавливаемыми. Невосстанавливаемые системы либо не подлежат, либо не поддаются восстановлению. Как правило, они являются системами однократного (разового) действия.
Одна и та же система может быть невосстанавливаемой на некотором отрезке времени и восстанавливаемой в течение осталь-207
ното времени. Радиоаппаратура автоматизированного пункта радиорелейной линии является восстанавливаемым элементом системы, тогда как аналогичная аппаратура искусственных спутников Земли пока еще невоостанавливаемая.
Под восстановлением понимается устранение неисправности системы — достижение требуемых ее характеристик. Если восстановление происходит автоматически или самопроизвольно, то система называется самовосстанавливаемой. В радиопередающих устройствах часто предусматривается автоматическое повторное включение анодного напряжения при кратковременно возникающих перетоках (например, при обратном зажигании газотрона), в системе связи — автоматическое изменение направления передачи сообщений при выходе из строя обычно используемой линии связи.
Система, обладающая возможностью перехода на резервные элементы, тоже может рассматриваться как самовосстанавливаю-щаяся.
Продолжительность перерыва в работе восстанавливаемого устройства, необходимого для обнаружения и устранения отказа, называется временем восстановления.
/При рассмотрении сложных больших систем границу между неисправным и исправным состояниями установить трудно.. Например, автоматизированная сеть связи обладает большим количеством линий, каналов, узлов, позволяет передавать сообщения по многим различным путям. Многие линии взаимозаменяемы. Отказ одного канала в этой системе не влечет существенных последствий, но тем не менее этот канал не работает. Система продолжает работать при выходе из строя целой магистрали или даже нескольких магистралей.
Для больших систем понятие надежности в указанном смысле заменяется понятием эффективности. Под эффективностью системы понимаются ее способность к решению поставленной задачи и степень соответствия системы своему назначению. Эффективность оценивается вероятностью того, насколько система в состоянии выполнить поставленные задачи в заданных условиях в заданные интервалы времени.
9.2. Основные характеристики надежности
На надежность устройства влияет очень много разнообразных факторов, поэтому время 0, по истечении которого произойдет отказ, является случайной величиной. В связи с этим оценка надежности производится с привлечением аппарата теории вероятности и математической статистики.
Рассмотрим основные показатели (характеристики) надежности.
Вероятность безотказной работы p(t) определяет вероятность того, что устройство, исправное в .момент .времени /=0, безотказно проработает до момента времени t, или, иначе 'говоря, вероятность того, что случайная величина продолжительности работы устройства до отказа 0 окажется больше требуемой величины t:
р(0=р{6>/}. (9Л)
Вероятность того, что до этого момента времени t устройство откажет, т. е. что случайная величина времени безотказной работы окажется меньше или равной требуемой величине t, называется вероятностью отказа:
q(t)=q^<t}. (9.2)
Приближенно вероятность безотказной работы определяется отношением числа устройств, безотказно проработавших до момента времени /, к числу устройств, находившихся в исправном состоянии в момент £=0. Соответственно величина вероятности отказов определяется отношением числа устройств, отказавших к моменту t, к числу устройств, исправных в момент £=0.
Работоспособное состояние и состояние отказа являются событиями противоположными, следовательно,
р(0 + <7(0 = 1- (9-3)
Функции p(t) и q(t) называются соответственно функциями надежности и ненадежности. Их вид для одного из частных случаев показан на рис. 9.1а.
Функции надежности устройств могут быть определены на основе статистических данных. Во многих случаях могут использоваться законы распределения, хорошо изученные в теории вероятности. На рис. 9.16 показаны графики функции надежности при законах распределения времени' безотказной работы: экспоненциальном (/), нормальном (2), равномерном (5) и распределении Рэлея (4).
Частота отказов (плотность распределения q(t)). Частота отказов f(t) 'представляет собой плотность 'вероятности того, что^слу-чайная 'величина .времени 'безотказной работы 0 окажется меньше t:
(9.4) at at „
Приближенное значение частоты отказов определяется количеством отказов в единицу времени, отнесенное к количеству устройств, бывших исправными в момент /=0.
Зная частоту отказов, можно найти вероятность отказа
9(0 = ^f(x)dx (9.5)
о
и вероятность безотказной работы
р (/) = J f (%) dx.= 1 — j f (x)dx. (9.6)
t d
Практический интерес представляет также величина вероятности отказа устройства в интервале от t до t+t0 при условии, что устройство ДО' момента времени t проработало безотказно,
Ж.
q(t, t + t0) = j’ f(x)dt. (9.7)
7
Вероятность безотказной работы устройства в том же интервале
р(/, / + /0) = 1— J f(x)dx. (9.8)
t
Интенсивность отказов. Интенсивность отказов Z(/) представляет собой условную плотность вероятности отказа устройства для момента времени t при условии, что до этого момента отказ не произошел.
Интенсивность отказа связана с предыдущими характеристиками соотношением
) в . (9.9)
Р (О Р (О
Приближенно интенсивность отказов можно определить как отношение числа устройств, отказавших в течение единичного интервала времени, к числу устройств, оставшихся исправными к началу этого интервала.
Функция Z(Z) элемента, устройства или системы называется ^-характеристикой элемента, устройства или системы соответственно.
Вид ^-характеристики устройства для определенного типового режима работы элементов и определенных условий эксплуатации показан сплошной линией на рис. 9.2.
^-характеристика имеет три существенно различные области: а — область начальных отказов. В -пределах этой области интенсивность отказов быстро возрастает до значительной .величины, а затем уменьшается. За это время успевают проявить себя различные дефекты .производственного характера (плохие пайки, неправильно выбранный режим работы деталей, недоброкачественные детали, плохой монтаж и т. п.).
Предварительной тренировкой аппаратуры и устранением возникших повреждений можно обеспечить более надежную работу устройства в последующем.
б — область случайных отказов является основным рабочим периодом эксплуатации 'аппаратуры. Здесь отказы носят преимущественно, случайный характер и интенсивность отказов остается постоянной, = %=const
в — область износовых отказов характеризуется резким -возрастанием интенсивности отказов, обусловленным износом элементов устройства.
Величины интенсивности отказов различных элементов в большинстве случаев являются основными исходными данными для расчета надежности различных устройств и систем. Они имеют большой разброс и зависят от типа, конструкции, технологии производства элемента и др.
В табл. 9.1 приведены максимальные, средние и минимальные величины интенсивностей отказов некоторых элементов на основе данных национальных симпозиумов по вопросам надежности, проведенных в США в 1961—1963 1гг.
Величины интенсивности -отказов, приведенные в таблице, определены для некоторых типов условий работы. Изменение условий эксплуатации изменяет ^-характеристики, как показано на рис. §.2 пунктиром.
Влияние различных условий эксплуатации можно учесть двумя путями — приближенно и более точно.
ТАБЛИЦА 91
ИНТЕНСИВНОСТЬ ОТКАЗОВ НЕКОТОРЫХ ЭЛЕМЕНТОВ УСТРОЙСТВ
№ пн. Наименование элементов • Интенсивность отказов Х-10в, ч
макс. среди. мнннм.
1 Диоды 1,47 0,2 0,16
2 Транзжсторы германиевые 1,91 0,9 0,6
3 Транзисторы кремниевые 1,44 0,5 0,27
4 Электронные лампы передающие 175 58 3,8
5 Электронные лампы приемные 7,5 2,5 1,1
6 Резисторы 1,0 0,16 0,001
7 Конденсаторы 2,4 0,1 0,001
8 Катушки индуктивности 0,33 0,05 0,008
9 Потенциометры 15,9 3 0,018
10 Двигатели шаговые 0,71 0,37 0,22
11 Электродвигатели переменного тока 9,4 5,24 1,12
12 Электродвигатели постоянного тока I 9,36 —
13 Сельсины 0,61 0,35 0,09
14 Реле электромагнитные 0,5/к.г. 0,3/к.г. 0,11/к.г*
15 Антенны 3,52 0,36 0,2
Примечание. Величина интенсивности отказов реле указана на одну контактную группу (к. г.).
Приближенный учет производится введением коэффициента Ки, который показывает, во сколько раз средняя величина интенсив-
Рис. 9.3. Зависимость поправочного коэффициента от условий эксплуатации
пости отказов элементов и самой аппаратуры увеличится в конкретных условиях эксплуатации. График величины поправочного коэффициента приведен на рис. 9.3.
На рисунке приняты следующие обозначения: 1 — лабораторные условия, 2 — (наземная аппаратура, 3— корабельная, 4 — автомобильная, 5 — поездная, 6 — высокогорная, 7 — самолетная, 8—аппаратура, ранее применявшаяся в ракетах, 9 — аппаратура современных ракет.
Более точно интенсивность отказов можно найти, если известно ее номинальное значение, даваемое заводом-изготовителем для определенных номинальных условий эксплуатации Ло. Такими номинальными условиями при отсутствии данных можно считать условия, соблюдаемые при эксплуатации наземной аппаратуры. Тогда интенсивность отказов элементов в конкретных условиях л = ло^1^2 . •. ап, где а — эксплуатационные коэффициенты интенсивности отказов, учитывающие изменение 1, 2, ..., n-го факторов, относительно их номинальных значений.
На рис. 9.4 показаны зависимости эксплуатационных коэффициентов интенсивности отказов от окружающей температуры при различных величинах рассеиваемой мощности для объемных резисторов (а) при различных величинах рабочего напряжения, для керамических конденсаторов (б) и полупроводниковых диодов (г).
Величины интенсивностей отказов Z, приводимые в справочниках и рассчитываемые с учетом различных нагрузок, относятся к области б ^-характеристики (см. рис. 9.2).
Зная ^-характеристики элементов, можно найти соответствующие значения вероятностей отказов и безотказной работы.
Интегрируя обе части выражения (9.9), получим
t
Jk(O^ = — lnp(Z), (9.10)
о
откуда вероятность безотказной работы t
— С
p(t)=e b , (9.И)
а вероятность отказа t
- J ww
<?(Z) = 1— е о . (9.12)
При эксплуатации аппаратуры в области случайных отказов, где интенсивность отказов остается постоянной, вероятность безотказной работы
р(0=е~М. (9.13)
а вероятность отказов
q(t)= 1— е~?< (9.14)
Следовательно, для области случайных отказов справедлив экспоненциальный закон распределения времени безотказной работы или экспоненциальный закон надежности.
о
досохши тзондпэнэшнп шнэп'ппффеон ntwHon'rmiJvfiuuaxo
дошшо пшэондпэношнп шнэгФпффоон пмнноп'пршоЛшээну
Окружающая темпеоатцра Ю 30 30 30 80 90100 П0120130 10203090 50 60 70 80 90100110120130190
элемента, °с' Окружающая температура элемента, °C Окружающая температура элемента, °C
Рис. 9.4. Зависимости эксплуатационных коэффициентов интенсивности отказов от окружающей температуры для объемных резисторов (а), керамических конденсаторов (б), полупроводниковых диодов (в)
Во многих практических случаях представляют интерес интенсивности отказов, близкие к единице. Тогда с погрешностью
(9.15)
выражения (9.13) и (9.14) можно заменить более простыми: р(0=1—U, (9.16)
(9-17)
Среднее время безотказной работы. Среднее время безотказной работы Т является '"математическим ожиданием (средним значением) времени работы устройства до отказа:
со
T = Jp(0<K. (9.18)
О
При экспоненциальном законе надежности с учетом (9.13)
T=fe->'d/=— (9.19)
о
— среднее время безотказной работы элемента, равное обратной величине его интенсивности отказов.
Вводя в выражение (9.13) вместо X среднее время безотказной работы, получим
t
p(f) = e т. (9.20)
Определим вероятность безотказной работы элемента >в промежутке от 0 до t=T\
1
р(Т)=е г =—=0,37. е
Следовательно, под средним временем безотказной работы при экспоненциальном законе надежности можно понимать промежуток времени, в течение которого вероятность безотказной работы уменьшается от 1 до 0,37.
Характеристики восстанавливаемых (ремонтируемых) систем. Перечисленные выше характеристики не учитывают дальнейшую судьбу устройства после его отказа. Без всяких оговорок эти характеристики применимы для оценки надежности систем разового действия, которые не подлежит дальнейшему восстановлению. В реальных условиях радиосвязи и вещания количество таких систем относительно невелико. К их числу относятся, например, средства связи, размещаемые на искусственных спутниках Земли.
Однако, как правило, аппаратура автоматизированных радиостанций, радиорелейных линий связи, радиотрансляционных сетей и других после выхода и,з строя ремонтируется, восстанавливается, 215
и знание вероятности ее безотказной работы -в течение определенного времени после начала эксплуатации недостаточно. Восстанавливаемые устройства или системы называют также системами многократного действия (в отличие от систем(разового действия).
На рис. 9.5 показана характеристика возможных состояний восстанавливаемого устройства. Ординате Но соответствует рабо-
"о
з ГЦ II п < п
t
Рис. 9.5. График состояний восстанавливаемого устройства
чее состояние, а ординате Н\ — неисправное состояние. Предполагается, что в течение времени неисправного состояния происходит восстановление аппаратуры, ее ремонт. Продолжительность исправного и неисправного состояний является случайной величиной. Длительность устранения повреждения зависит и от вида повреждения, и от факторов организационно-технического характера.
Как правило, предполагается, что все случайные величины 01, 02, ... имеют один и тот же закон распределения. То же предположение принимается и для времени восстановления £i, £2, •.. В большинстве (случаев распределение времени до отказа предполагается экспоненциальным с интенсивностью отказов Z. Экспоненциальным является и закон распределения времени восстановления элемента с интенсивностью восстановления ц.
Для упрощения анализа часто полагают, что после ремонта аппаратура полностью восстанавливает работоспособность, какой она обладала в момент начала эксплуатации, и вероятность безотказной работы в момент окончания каждого ремонта равняется единице.
Подобно среднему времени безотказной работы, для восстанавливаемых систем вводится также понятие среднего времени восстановления системы (элементна) т=— .
Н
Для ремонтируемых систем представляет интерес определение состояния системы или устройства в произвольный момент времени, весьм,а удаленный от начала отсчета, без точного знания состояния системы в момент начала отсчета. Для этих условий вводят коэффициенты готовности и простоя, называемые стационарными.
Коэффициент готовности системы определяется соотношением
и характеризует вероятность нахождения устройства в исправном состоянии при достаточно большом времени после начала эксплуа-216
тации (при со). Коэффициент готовности .может быть определен отношением количества'работоспособных устройств в произвольный удаленный момент времени к общему количеству устройств данного типа.
Вероятность противоположного события — нахождения устройства в 'неисправном состоянии — характеризуется коэффициентом простоя
К„ = 1—Кг= —г—.
Т + т
Если в момент начали отсчета устройство было исправно, то вероятность нахождения устройства в момент t в исправном состоянии определяется нестационарным коэффициентом готовности
Хг(0 = Кг-1-Л'„е“<'+,,)'. (9.21)
а вероятность неисправного1 состояния —нестационарным коэффициентом простоя
Kn(/) = l-Kr(0=K„(l-e-(x-hl)'). (9.22)
Достаточно большие значения времени, при которых нестационарные и стационарные величины коэффициентов оказываются приблизительно равными, можно определить из условия
t > <2,13> = (2 3> . (9.23)
9.3. Расчет надежности устройств и систем
Расчет надежности автоматического устройства или системы предполагает количественную оценку надежности по одному или нескольким показателям, которые были приведены в предыдущем разделе; Количественная оценка различных вариантов построения системы или устройства позволяет выбрать наиболее надежный. Сравнение вариантов по надежности целесообразно сопровождать, сравнением тех же вариантов по экономическим показателям. При этом стремятся к той величине надежности, которая обеспечивает наибольший экономический эффект системы связи, в составе которой работает автоматическое устройство или система.
При сравнении вариантов следует считаться с точностью исходных характеристик элементов или устройств, которые являются основой. последующих расчетов. При значительном разбросе их величин преимущества устройства можно 'окончательно оценить, учитывая возможную погрешность получаемых результатов из-за неточных исходных данных.
Точность получаемых результатов зависит также от степени разработанности проектируемого устройства. При разработке блок-схемы или устройства можно использовать данные о надежности
217
аналогичных устройств с учетом их работы в предполагаемых условиях. Детальная разработка принципиальной схемы устройства и системы позволяет детализировать и расчет надежности, принимать во внимание приближенные или более точные характеристики надежности элементов, образующих устройство.
Расчет надежности автоматической системы может проводиться в трех основных направлениях:
1) определение функции надежности и среднего времени безотказной работы,
2) определение надежности по постепенным отказам,
3) определение характеристик надежности систем с учетом их свойств восстанавливаемости и особенностей организации эксплуатации.
Второе направление требует детального учета постепенных изменений параметров элементов и их влияния на показатели работы устройства, а третье — особенностей эксплуатации и характеристик ремонта (восстановления) выходящих из строя элементов и устройств автоматической системы.
Далее рассмотрим принципы расчета надежности, соответствующие первому направлению.
Расчет надежности автоматизированного устройства (блока)
а) Схема блока проработана детально. Имеются точные характеристики надежности элементов, применяемых в схеме.
1. По спецификации принципиальной схемы устройства определяются элементы схемы, отказы которых приводят к отказу устройства. Индексом i будем обозначать название (тип) данного элемента (например, резистор типа ММТ-1 ком).
2. По данным заводов-изготовителей определяются интенсивности отказов элементов схемы (ламп, транзисторов, конденсаторов и т. п.) для нормальных условий работы (номинальной температуры, рассеиваемой мощности, напряжения и т. п.) Х<о- -
3. Определяются эксплуатационные условия работы деталей и с помощью графиков, подобных приведенным на рис. 9.4, соответствующие величины эксплуатационных коэффициентов ац. Здесь индекс / учитывает вид условий работы (окружающая температура, мощность и т. п.) i-то элемента.
4. Определяется интенсивность отказов элементов i-то вида с учетом условий эксплуатации:
(9.24)
где k — количество различных эксплуатационных факторов, величины которых отличаются от номинальных значений.
218
ч
5. Определяется интенсивность отказа устройства Л:
п
Л=2Х/Пг’’ z=i
(9.25)
где tii — число элементов i-ro вида, работающих в одинаковых условиях; т — количество различных видов элементов.
6. Определяется средняя величина 'времени безотказной работы устройства Т — — .
7, Строится кривая надежности устройства
р(/)=е-Л*. (9.26)
Сравнение 'вариантов устройств следует производить по величинам их интенсивности отказов Л. Для выбранного варианта можно построить кривую надежности. Устройство, имеющее меньшую величину интенсивности отказов, естественно, является более надежным.
б) Схема проработана детально, но точные данные о надежности имеются только для одного из типов элементов. В данных условиях может использоваться коэффициентный метод расчета интенсивностей отказов различных элементов по известной характеристике одного из элементов. Способ предполагает, что соотно-
ТАБЛИЦА 9.2
СООТНОШЕНИЯ МЕЖДУ ИНТЕНСИВНОСТЯМИ ОТКАЗОВ РАЗЛИЧНЫХ ЭЛЕМЕНТОВ И ОТКАЗОВ РЕЗИСТОРОВ ЗНАЧЕНИЕ х ДЛЯ РАЗЛИЧНЫХ ЭЛЕМЕНТОВ
№ элемента Наименоване элемента хмин хмакс
1 Электровакуумные приборы 19 47
2 Резисторы 1 1
3 Конденсатору 0,25 0,835
4 Трансформаторы 1.3 3
5 Дроссели, катушки индуктивности 1 2
6 Реле 1 100
7 Электродвигатели 10 40
8 Сельсины 1.3 3,5
9 Полупроводниковые диоды 1,3 30
10 Полупроводниковые триоды 1,3 75
11 Штепсельные разъемы . 1 6
ш-ение интенсивностей отказов различных элементов в различных условиях эксплуатации остается неизменным и равным величине
х = — = const, (9.27)
А/
где X — достоверно известная интенсивность отказов одного из элементов устройства в реализуемых эксплуатационных условиях,
— интенсивность отказов рассматриваемого элемента в тех же условиях.
В табл. 9.2 даны величины коэффициента к для различных элементов, причем за единицу принята интенсивность отказов резисторов. Для учета возможного разброса параметров приведены максимальные и 'минимальные значения коэффициентов.
Последовательность расчета
1. Как и в предыдущем случае, определяют элементы схемы, отказ которых приводит к отказу устройства.
2. Для одного из элементов с большой достоверностью находят интенсивность отказов в эксплуатационных условиях Z. При ис-ч пользовании данных табл. 9.2 этим элементом является резистор.
3. Определяется интенсивность отказов-устройства:
Л = (9.28)
i—i
где т — число типов элементов.
4. При сравнении надежности вариантов можно не определять интенсивности отказов исходного элемента (резистора), а следует определять отношение интенсивностей отказов вариантов устройства (например, первого Ai и второго Л2):
м
’ <9-29>
/=1
где М и т — количество различных элементов по первому и второму вариантам.
5. Найдя вариант с наименьшей относительной величиной интенсивности отказов, определяют его интенсивность отказов согласно л. 3 и строят трафик функции надежности (9.13).
в) Точные данные о режимах работы и достоверные данные об интенсивностях отказов применяемых элементов отсутствуют.
220
1. По спецификации принципиальной схемы устройства определяются элементы схемы, отказы которых .приводят к отказу устройства.
2. По справочным данным усредненных величин (подобных приведенным в табл. 9.1) определяют средние величины интенсивности отказов элементов схемы
3. Определяют интенсивность отказа устройства по ф-ле (9.25), полагая, что найденная величина соответствует лабораторным условиям работы элементов.
4. Пользуясь графиком рис. 9.3, находят величину поправочного коэффициента Ли, соответствующего условиям работы, для которых предназначено проектируемое устройство.
5. Определяют интенсивность отказов устройства в реальных условиях эксплуатации по формуле
т
(9.30)
t=i
6. При сравнении вариантов для выбора более надежного варианта поправочный коэффициент можно не определять, находя относительные величины интенсивностей отказов вариантов (например, первого и второго):
м
. (9.31)
Л. т
/=1
7. Для варианта с наименьшей интенсивностью отказов определяют величину интенсивности отказов (9.30) и строят кривую надежности (9.13).
Расчет надежности автоматической системы
В общем случае автоматическая система состоит из нескольких устройств (блоков). Для нормальной работы может потребоваться обязательная работоспособность одновременно нескольких, например двух, блоков. Возможен также случай, когда достаточно, чтобы работоспособным оставался или один или другой блок (или оба вместе).
В первом случае вероятность безотказной работы комбинации блоков равна произведению вероятностей безотказной работы отдельных блоков, а во втором — вероятность отказа равна произведению вероятностей отказов отдельных блоков.
Расчет надежности проводят в следующем порядке.
1. Вся система представляется в виде совокупности отдельных блоков. В состав каждого из них входят все элементы, отказ хотя бы одного из которых приводит к отказу всего блока.
2. Для каждого /-но блока определяется вероятность безотказной работы как это было сделано выше. Аргумент функции pi(t) для упрощения записи опускаем.
3. Выявляются комбинации блоков, обеспечивающие безотказную работу системы, и составляется таблица, подобная табл. 9.3.
4. По данным табл. 9.3 составляется логическая схема надеж-
ТАБЛИЦА 9.3
КОМБИНАЦИИ БЛОКОВ, ОБЕСПЕЧИВАЮЩИЕ НОРМАЛЬНУЮ РАБОТУ СИСТЕМЫ
№ комбинации Для безотказной работы систем должны быть исправны блоки
1 1 2 7 9 10
2 1 2 8 9 10
3 1 3 7 9 10
4 1 3 8 9 10
5 4 5 7 9 10
6 4 5 8 9 10
7 4 6 7 9 10
8 4 6 8 9 10
ности, показанная на рис. 9.6 (которая не является функциональной схемой системы).
Для работоспособности системы необходимо прохождение «логического сигнала надежности» от а до б. Последовательное соединение означает необхо-
Рис. 9.6. Логическая схема для определения надежности автоматической системы
димость одновременной работоспособности блоков (групп блоков), параллельное — достаточность работоспособности одного из блоков (групп блоков).
В нашем случае имеем четыре группы блоков. Группы I и II соединены параллельно «между собой и .после
довательно с группами III и IV.
5. По найденным ранее значениям вероятности безотказной работы блоков pi или соответствующим (9.3) значениям вероятности отказов qi находим вероятность безотказной работы системы. 222
При этом имеем в виду, что вероятность безотказной работы комбинации последовательно 'соединенных (в логической схеме) блоков равна произведению вероятностей безотказной работы отдельных блоков, а вероятность- отказа комбинаций параллельно соединенных блоков равна произведению вероятностей отказа отдельных блоков:
<а) вероятность безотказной работы групп блоков I—IV Pi=Pi(l~ <72<7з), Рп =р2(1— ЯМв),
Рщ ~ 1 ^7^8» Piv ~ РвРю>
б) вероятность беозтказной работы системы
Р= Рщ Р\\ ^п) = Р^Рю 0 “ X
i Х{1—[1—Р1(1 —<72<7з)1 [1— Р2 (-1 — ^б)]}.
9.4. Пути повышения надежности автоматических устройств и систем
От начала до конца своего существования автоматические устройства и системы проходят три этапа: разработка и проектирование, производство (изготовление) и эксплуатация. На всех трех этапах могут приниматься меры, способствующие повышению надежности устройств и систем. Если в процессе разработки не
проявлено достаточно внимания к вопросам надежности, то на последующих этапах возникают большие непроизводительные затраты, связанные с переделками, заменами, ремонтами и т. ш (рис. 9.7).
На рисунке приведены графики для этапов: планирования — /т эскизного проектирования — 77, технического проектиров1ания — ///„ передачи в производство — IVэтапа передачи заказчику— V.
Дополнительные расходы на переделки.
Сумма плани-
брак выявлен б процессе производства
о
руемыхза.рат небольшая экономия средств; качество аппаратуры невысокое
Брак выявлен заказчиком
большая экономия средств; аппаратура высокого качества
_ Этапы конструирования
Рис. 9.7. Характер изменения затрат при учете требований надежности на различных этапах конструирования аппаратуры
График (/) соответствует случаю, когда средства на повышение надежности были вложены на последнем этапе, после того как изделие было забраковано заказчиком.
В результате многократных возвращений изделия на завод-изготовитель, (различных переделок и изменений в схеме и конструкции фактические затраты значительно превысили планируемую величину.
График (2) определяет затраты на обеспечение надежности в процессе производства путем контроля качества продукции. Естественно, что контроль сам по себе не может устранить дефекты конструкции. Необходимые переделки, как и в первом случае, приводят к значительному превышению планируемых затрат.
График (5) определяет фактические затраты, когда работы по обеспечению надежности проводились на этапе технического проектирования средств автоматизации. При этом была достигнута небольшая экономия средств по сравнению с планируемой величиной, однако качество аппаратуры все же оказалось недостаточно высоким.
Наилучший результат (график (4)) достигается, когда средства на повышение надежности вкладываются, начиная с первого этапа создания аппаратуры. Повышение надежности на всех этапах создания аппаратуры обусловливает не только наибольшее совершенство, но и снижает ее стоимость.
Повышение надежности устройств путем рационального проектирования. Повышение. надежности достигается улучшением и упрощением схемных решений и конструкций, уменьшением количества элементов схемы. Схема должна строиться так, чтобы не только уменьшить вероятность отказа, но и ограничить размеры последствий, которые обусловливаются отказом. Например, автоматизируя систему охлаждения мощных ламп, следует исключить .возможность их перегрева при отказе системы регулирования температуры.
Надежность повышается также при введении в схему избыточности по допустимой нагрузке элементов — резервированием элементов по нарузке. Избыточность вводится применением элементов, допускающих нагрузки, которые превышают рабочие значения. Можно также ввести большее число элементов, которые в совокупности будут иметь некоторый запас по нагрузке. Например, можно включить одно сопротивление, допускающее некоторую перегрузку по рассеиваемой мощности, можно также включить два сопротивления параллельно. Более надежным является вариант с меньшей интенсивностью отказов, когда учтены условия эксплуа-. тации. При этом следует учесть введение дополнительных паек.
Схема должна проектироваться таким образом, чтобы изменение параметров элемента в результате старения или замены в наименьшей степени влияло на основные показатели устройства. Примером может служить частичное включение контура в анодную 224
цепь лампы, уменьшающее ее шунтирующее действие на контур и 'влияние изменений параметров лампы гири изменении режима работы, старении или замене. «
При производстве аппаратуры приходится считаться с разбросом параметров элементов. Суммарная допустимая величина отклонения параметров элементов схемы определяется допусками на старение, на воздействие различных нагрузок в эксплуатационных условиях и начальными производственными допусками.
Повышение допустимой величины отклонения параметров увеличивает надежность, уменьшая постепенные отказы.
В процессе конструирования следует применять более надежные элементы с меньшим количеством преры’ваемых контактов и перемещающихся деталей, нитей накаливания, тонких обмоток и т. п.
Применяемые детали должны работать в предусмотренных заводами-изготовителями условиях. Целесообразно максимально снижать действующие нагрузки.
При конструировании аппаратуры должен, по возможности, облегчаться тепловой режим работы: снижаться рассеиваемая мощность, элементы, чувствительные к нагреву, удаляться от источников тепла (ламп, трансформаторов и др.), улучшаться теплоотвод.
Необходимо обеспечивать высокую механическую прочность аппаратуры, особенно если она предназначена для работы в условиях тряски, вибрации и т. п.
Очень важно получить высокую ремонтопригодность устройств, облегчить поиск неисправностей и их устранение в процессе эксплуатации. Ремонт существенно упрощается, сокращается и удешевляется в случае применения блочного принципа построения систем, использования модульных и микромодульных элементов, унификацией схем. При этом должны обеспечиваться удобство и быстрота замены элементов, доступ к ним и удобство включения необходимой измерительной аппаратуры.
Повышение надежности устройств в процессе производства. Основными причинами ненадежной работы устройств являются пониженная надежность некоторых элементов, имеющих скрытые дефекты, и неудовлетворительное выполнение различных производственных операций: пайки, монтаж, регулировка и др.
Улучшенная технология производства, его автоматизация, тренировка элементов и устройств и статистический контроль качества продукции повышают надежность устройств и систем.
Повышение надежности в процессе эксплуатации. Автоматизированные средства радиосвязи и вещания обслуживаются специальными бригадами путем организации планово-предупредительных (профилактических) осмотров и ремонтов и срочных ремонтов, проводимых при отказе отдельных устройств.
Во время профилактических осмотров и ремонтов проводят работы по предупреждению возможных отказов. Они могут про-
водиться практически без нарушения нормальной работы систем, если имеется некоторое количество резервных устройств.
Наряду с внезапными отказами, носящими случайный характер, вследствие старения элементов происходит постепенное изменение параметров аппаратуры: .коэффициента усиления, полосы пропускания, уровня шумов, параметров сигналов и др. Выход параметров за допустимые пределы приводит к постепенным отказам аппаратуры.
Продолжительность безотказной работы зависит от величины допусков на тот или иной параметр, задаваемых при создании аппаратуры.
Во многих случаях причиной отказов являются лампы. Об ухудшении их работы можно судить по уменьшению крутизны характеристики, изменению анодного тока, по появлению токопроводящих дорожек от испаряемого электродами вещества. В последнем случае могут возникнуть шумы и паразитные обратные связи.
Важную роль в повышении надежности играет прогнозирование отказов, т. е. определение вероятности безотказной работы в течение некоторого .времени эксплуатации, основанное на специальных измерениях параметров аппаратуры.
Для этого выбирается параметр ф, характеризующий нормальное функционирование устройства в целом. Это может быть один из основных выходных параметров устройства или системы (мощность, коэффициент гармоник, уровень шумов и т. п.) или какой-нибудь неосновной параметр, косвенно характеризующий работоспособность системы: изменения частотной, фазовой или модуляционной характеристик, коэффициент усиления и т. п.
Для выбранного параметра устанавливают допустимое граничное значение ф=фпРед, выход за пределы которого приводит к отказу системы.
Изменение контролируемого параметра происходит по определенному закону, вследствие чего момент отказа системы, связанный с постепенным изменением параметров, может быть .прогнозирован. Характер изменения прогнозируемого параметра показан на рис. 9.8а.
Рис. 9.8. Графики изменения прогнозируемых рапаметров
Помимо величины фпред, определяется скорость изменения параметра в районе отказа ф,(/Отк). Обычно эта скорость с течением времени возрастает.
Контрольные измерения производят во /время профилактических ремонтов, имеющих периодичность 7рем.
Устанавливается допустимая величина прогнозируемого параметра ф = фпрогн, зависящая от межремонтного периода Грем, приближенно определяемая условием
фпрогн фпред Ч- ^"рем |ф (4>тк)1- (9.32^
В процессе планово-предупредительных ремонтов измеряют величину ф. В случае ф>фпРогн продолжается нормальная эксплуатация, а при ф Фпред выявляются и заменяются дефектные элементы.
Заметим, что прогнозируемый параметр может иметь и иной характер зависимости от времени, например возрастать (уровень шумов, коэффициент нелинейности и др.). В этом случае аналогичным путем можно найти прогноизруемую величину параметра и требовать, чтобы величина ф, измеренная /во время профилактических ремонтов, удовлетворяла условию ф<фПрогн-
Другой, чаще применяемый, способ прогнозирования заключается в измерении прогнозируемого параметра при уменьшении напряжения питания.
На рис. 9.86 показан характер изменения параметра фн при номинальном и фп при пониженном напряжениях питания. С увеличением износа уменьшение напряжения сказывается на величине параметра более существенно.
Если в процессе измерений, проводимых при профилактических ремонтах, понижение напряжения не приводит к уменьшению величины ф ниже фпред, эксплуатация системы продолжается. В случае фп<фпред производится замена изношенных элементов.
Этот способ используется, в частности, при прогнозировании отказов радиоламп. Прогнозируемым параметром выбирают крутизну лампы, измеряемую при номинальном и пониженном напряжении накала.
Автоматизация контроля и поиска неисправностей. Время, требуемое для восстановления исправного состояния аппаратуры, может быть уменьшено, а время безотказной работы увеличено введением средств автоматического контроля за состоянием аппаратуры, прогнозированием отказов и поиска неисправных блоков, устройств, модулей и отдельных деталей.
Контроль может производиться непрерывно с уведомлением о недопустимом отклонении параметра специальным сигналом или периодически. Данные о контролируемых параметрах собираются системой датчиков, размещаемых в различных точках аппаратуры.
Схема автоматического контроля показана на рис. 9.9. В соответствии с предусмотренной программой испытаний, задающее устройство ЗУ с помощью устройства формирования испытатель-
Рис. 9.9. Блок-схема контроля и поиска неисправностей
ние отказов. В случае угрозы отказа
ных сигналов У ФИС и переключателя Ki подает в различные точки объекта контроля ОК испытательные сигналы. Различные элементы, блоки или даже вся система определенным образом реагируют на эти сигналы. Информация об этой реакции с помощью переключателя Къ подается на устройство сравнения, анализа и накопления данных УСАН. Сравнение данных с нормативными величинами определяет степень отклонения их от нормы. По накопленным данным ведут прогнозирова-происходит поиск неисправ
ного элемента с помощью устройства поиска неисправностей У ПН.
Резервирование элементов автоматической, системы. Сущность резервирования заключается в таком построении схемы системы, при котором отказ одного или нескольких ее элементов не приводит к отказу системы в целом.
Простейший вид резервирования — резервирование элементов устройств по нагрузке — был рассмотрен выше. Выход из строя какого-нибудь элемента не приводил к перестроению схемы. Такой принцип называется принципом пассивного резевирования.
В практике автоматизированных радиорелейных систем связи, автоматизированных средств радиовещания и др. широко применяют методы активного резервирования, при которых система перестраивает свою структуру. Автоматические переключатели отключают отказавшую часть системы и включают соответствующий резервный блок. Переключающее устройство содержит индикатор отказа, управляющий и исполнительный органы.
При переходе на резерв кратковременно нарушается работа системы. Это должно быть практически незаметным для -прохождения связи, т. е. допустимо заданными техническими условиями.
Резервные устройства могут включаться в работу только после отказа основного (ненагруженный — холодный — резерв), могут работать до отказа в облегченных условиях — пониженный накал, выключенное анодное напряжение и т. п. (облегченный резерв), могут находиться в тех же условиях, что и основное оборудование (нагруженный — горячий — резерв). Естественно, что время, необходимое для восстановления системы при отказе основного устройства, в рассмотренных случаях будет соответственно сокращаться.
На рис. 9.10 приведены логические схемы двух основных вариантов активного резервирования: блочного (а) и линейного (поствольного) (б).
Метод блочного резервирования предполагает' резервирование отдельных блоков Bi, В2, ..., Бп системы. Заметим, что понятие блока здесь имеет широкий смысл. Под блоком можно понимать 228
небольшой технический узел, стойку, входящую в комплект обо
рудования, или станцию каждый блок имеет различное количество резервных блоков. Однако, для простоты, общее число блоков принято равным т. Число переключающих устройств П принято равным числу блоков, хотя возможен вариант одного переключателя, обслуживающего т
(радиорелейной линии). В общем случае
Ри'с. 9.10. Логические схемы блочного (а) и линейного (б) резервирования
блоков каждого вида. Соответственно логиче-
ской схеме работоспо-
собность системы обеспечивается, если в каждой группе блоков работает хотя бы одна пара последовательно соединенных переключателя и блока.
Воспользовавшись методикой, изложенной в разд. 9.3, определим вероятность безотказной работы системы при блочном резервировании и принятых допущениях, полагая, что вероятности безотказной работы Z-го блока и f-го переключателя соответственно равны Рб г и РПг, а отказы устройств статистически независимы.
Вероятности отказа пары последовательно соединенных /-го переключателя И /-ГО блока СОСТавЛЯЮТ 1—Рпг^бг-
Вероятность отказа /-й группы Qi, состоящей из т параллельно соединенных пар, Qi = (1—РПгРбг)т, а вероятность ее безотказной работы Pi= 1—Qi = l— (1— PniP6.i)m.
Вероятность безотказной работы системы Р, состоящей из последовательно соединенных групп:
Р= П Р>= П (9-33)
/=1
В частном случае, при одинаковых надежностях блоков Рбг = Рб и одинаковых надежностях переключателей Рпг^Рп надежность системы
P=[l-(l-PnP6)wr
(9.34)
а вероятность ее отказа
Q = 1 -Р = 1 - [1 -(1 -/WT. (9.35)
Линейное резервирование, показанное схематично на рис. 9.106, предусматривает переход на резерв всего комплекса средств (всей радиорелейной линии, ствола радиорелейной линии, тракта радиопередачи и т. п.). По сравнению с предыдущим случаем, уменьшается необходимое количество переключающих устройств, т. е. количество ненадежных элементов. Однако при этом сокра
щаются возможности резервирования при том же объеме резервных средств, поскольку выход из строя т любых блоков в различных линиях выводит из строя всю систему.
Вероятность безотказной работы одной из линий
(9.36)
а вероятность отказа
<21=1-Л = 1-₽п fl Ра-
1=1
Вероятность отказа всей системы п ~1т
Q=Q^-= 1-РпП Pei ,
(9.37)
(9.38)
а вероятность безотказной работы системы
п "1m
P = l-Q= 1- 1-Р„П
(9.39)
В частном случае при одинаковых надежностях блоков Рбг=Ре
Р = 1 — [1— , (9.40)
а вероятность отказов
<2=[l-P„Pg]”>. (9.41
Если переключатели имеют высокую степень надежности или вообще отсутствуют (система пассивного резервирования), а вероятность отказа всей системы в целом невелика, то при блочном резервировании и одинаковых надежностях блоков вероятность отказа системы согласно (9.35) будет равна
Q = 1 — [1 — 1 — [1 — nq™\ = nq™, (9.42)
а при линейном резервировании соответственно (9.41)
Q = [ 1 — (1 — q6)n]m ~ [ 1 — (1 — я^б)]т = пт (9 43)
Здесь <7б=1—Р&—вероятность отказа одного блока.
Поделив выражение (10.43) на (10.42), найдем, что вероятность отказа системы линейного резервирования в /гт-1 раз больше вероятности отказа системы блочного резервирования.
При наличии переключателей можно найти границу относительной экономичности того или иного способа резервирования, зависящую от надежности переключателей.
Окончательно судить о преимуществах способа резервирования можно лишь с учетом других особенностей систем. Например, при построении автоматизированных радиорелейных систем связи учитываются особенности прохождения сигналов на участках линии, необходимость борьбы с замираниями, возможные помехи и др.
Литература
1. Аксенов В. Н. Выпрямители и трансформаторные подстанции. Связь-издат, 1961.
2. Н а г о 1 d Т., М с А 1 е е г. Новая точка зрения о фазокогерентном генераторе. PJRE, '1959, июнь.
3. Андронов А. А. и Хайкин С. Э. Теория колебания. ОНТИ, 1937.
4. Атабеков Г. И. Теоретические основы электротехники. Ч. 1. Изд-во «Энергия», 1966.
5. Б е с е к е р с к и й В. А., Попов Е. П. Теория систем автоматического регулирования. Изд-во «Наука», 1966.
Б. Бес ид с кий Г. 3. Новая телеуправляемая двухпрограммная УКВ ЧМ радиовещательная станция. «Вестник связи», 1958, № 3.
7. Booth G., Мa cl art у В. Новая высокочастотная станция В. Рагби. Proc. JEE, т. 103, 1956, май, № 9.
8. Бродский М. В., Петров В. В., Новоспасский Г. Д., Зацепин В. Ф. Телесигнализация и телеуправление на радиорелейных линиях. Электросвязь, 1957, № 8.
9. Васильев Д. В., Митрофанов Б. А., Р а б к и н Г. А. и др. Проектирование и расчет следящих систем. Изд-во «Судостроение», 11964.
10. Воронов А. А. Основы теории автоматического управления. Ч. 1 и 2. Изд-во «Энергия», 1965, 1966.
11. Гитис Э. И. Автоматика радиоустановок. Изд-во «Энергия», 1964.
12. Гольдфарб Л. С. О некоторых нелинейностях в системе регулирования. «Автоматика и телемеханика», 4947, № 5.
13. Городецкий С. Э Автоматизация радиопередающих устройств. «Вестник связи», I960, № 6.
14. Delong. Техника автоматической настройки оборудования однополосной связи. Proc. IRE, т. 44, 1956, декабрь, № 2.
15. D ё и. Руководство к практическому применению преобразования Лапласа. Изд-во «Наука», 4965.
16. Д о б р о г у р с к и й С. О., Казаков В. А., Соломонов Л. А., Титов В. К- Счетно-решающие устройства. Машиностроение, 1966.
17. Дружинин Г. В. Надежность устройств автоматики. Изд-во «Энергия», 1964. *
Г8. Ильин В. А. Телеконтроль и телеуправление рассредоточенными объектами. Госэнергоиздат, 1963.
49. Иодко Е. К- Метод анализа импульсно-модулированных сигналов. Н—Т сборник МЭИС, 1ВЫ1П. 1, il950.
20' . Калашников Н. И., Быков В. Л., К р а п о т и н О. С. Радиосвязь с помощью искусственных спутников Земли. Изд-во «Связь», 1964.
21. Калашников Н. И. Радиорелейная система связи «Вестник» с авго-матизирю1в энными промежуточными станциями. «Вестник связи», .1958, №№ 5 и 6.
22. Караваев И. А. Автоматическая настройка каскадов высокой частоты коротковолнового передатчика. «Вестник связи», 1957, № 6.
23. Керша В. О. Новые автоматическйе телевизионные ретрансляторы. «Вестник связи», 1959, № 1.
24. Красовский А. А. и Поспелов Г. С. Основы автоматики и технической кибернетики. ГЭИ, 1962.
25. К р и в и ц к и й Б. X. Автоматические системы радиотехнических устройств. Госэнергоиздат, 4962.
26. Куракин К- И. Следящие системы малой мощности. Изд-во «Машиностроение», 1965.
27. Крылов Н. М. и Боголюбов Н. Н. Введение в нелинейную механику. Изд-во АН СССР, 1937.
ч
28. Левин Б. Р. Теория случайных процессов и ее применение в радиотех-нике. Изд-во- «Советское радио», 1957.
29. М айовцев А. П. и Раввин Г. И. Основы телеуправления и телс-контроля. Госэнергоиздат, 1959.
30. Нюренберг В. А. Технический контроль в звуковом вещании. Связь-из дат, 1963. . J
31. П о к р а с А. М. Антенные устройства зарубежных линий связи через искусственные спутники Земли. Изд-во «Связь», 1965.
.32 . Попков С. Л. Следящие системы. Изд-во «Высшая школа», 1963.
33. Prokott Е. Связные передающие станции с дистанционным управлением. Telefunken Zeitung, т. 35, 1962.
34. Пугачев В С. Теория случайных функций и ее применение к задачам автоматического управления. Физматиздат, 1960.
35. Р ад ион о в В. М., Строков В. Н., ШебероваР Н. Аппаратура дистанционного управления и контроля для радиорелейных линий. «Электросвязь», 1959, № 2.
36. С е р г е й ч у к К. Я. Проблемы связи и кибернетика. Сборник «Кибернетику на службу коммунизму». Под ред. акад. А. И. Берга. Госэнергоиздат, 1961.
37. С и м о н о в Н. А. Автоматизированные линии радиосвязи. «Вестник связи», 1960, № 5.
38. Симонов Н. А. и Дерюгин Н. В. Автоматизация .приемных радио-центров. «Вестник связи», 1958, № 7.
39. Симонов Н. А. и Дерюгин Н. В. Приемник с автоматическим управлением для магистральных кв линий связи, МАК-57. Связьиздат, 1959.
40. Солодовников В. В. Статистическая динамика линейных систем автоматического управления. Физматиздат, 1960.
41. Солодовников В. В. Основы автоматического регулирования, т. 1, Машгиз, 1962.
42. С о л о д о в н и к о в В. В. Некоторые вопросы теории и принципы построения аналитических самонастраивающихся систем. Сборник под ред. Солодовникова В. В. — Аналитические самонастраивающиеся системы автоматического управления. Изд-во «Машиностроение», 1965.
43. Спутники связи. Военное издательство, 1966.
44. Терентьев Б. П. (ред.) Радиопередающие устройства. Связьиздат, 1962.
45. Терентьев Б. П. и Китаев В. Е. Электропитание предприятий радиосвязи. Изд-во «Связь», 1966.
46. D. Т р a n с е 1. Синтез систем автоматического регулирования. Машгиз, 1959.
47. Ю л и у с Т. Т у. Цифровые и импульсные системы автоматического управления. Изд-во «Машиностроение», 1964.
48. Хлытчиев С, М., Александров Г. А., Деарт Ю. Н., С м а-г и н И. И. Пути автоматизации радиоприемных центров. «Электросвязь», 1958, № 6.
49. X о в и н С. И. Дистанционное управление коротковолновым передатчиком. «Вестник связи», 1960, № 1.
50. Холин' А. Т. Автоматика и телеуправление на радиостанциях. Изд-во «Связь», 1965.
51. Цы кин Г. С. Электронные усилители. Связьиздат, ,1960.
52. Цыпкин Я. 3. Дискретные автоматические системы, проблемы теории и перспективы развития. Сборник трудов конференции: «Теория и применение дискретных автоматических систем». Изд-во АН СССР, I960.
53. Цыпкин Я- 3. Теория линейных импульсных систем. Физматгиз, 1958.
54. Цыпкин Я. 3. Теория релейных систем автоматического регулирования. Гостехиздат, 1955.
55. Чистяков Н. И., Сидоров В. М., Мельников В. С. Радиоприемные устройства. Связьиздат, 1959.
56. Шахгильдян В. В., Ляховкин А. А. Фазовая автоподстройка частоты. Изд-во «Связь», 1966.