/


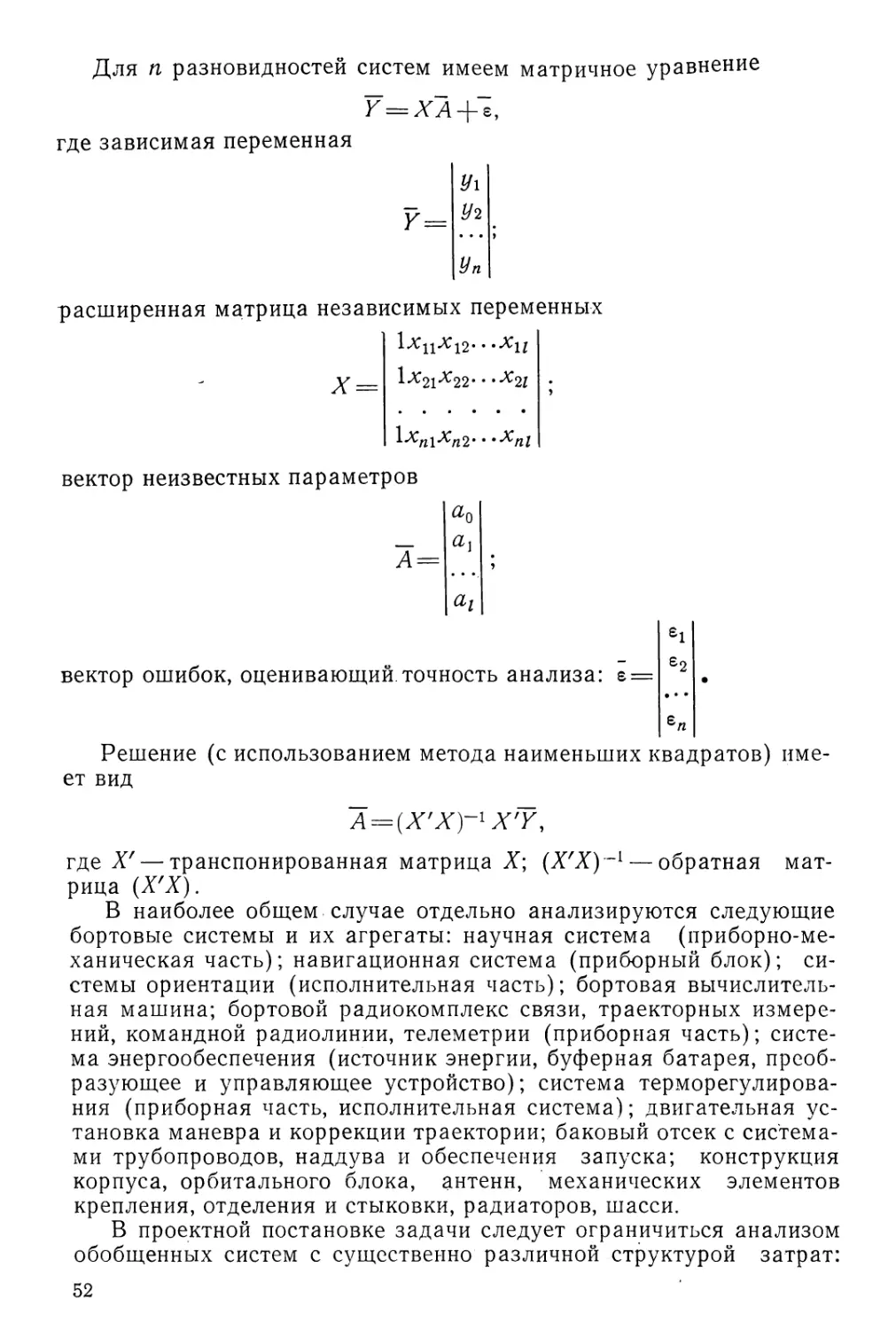
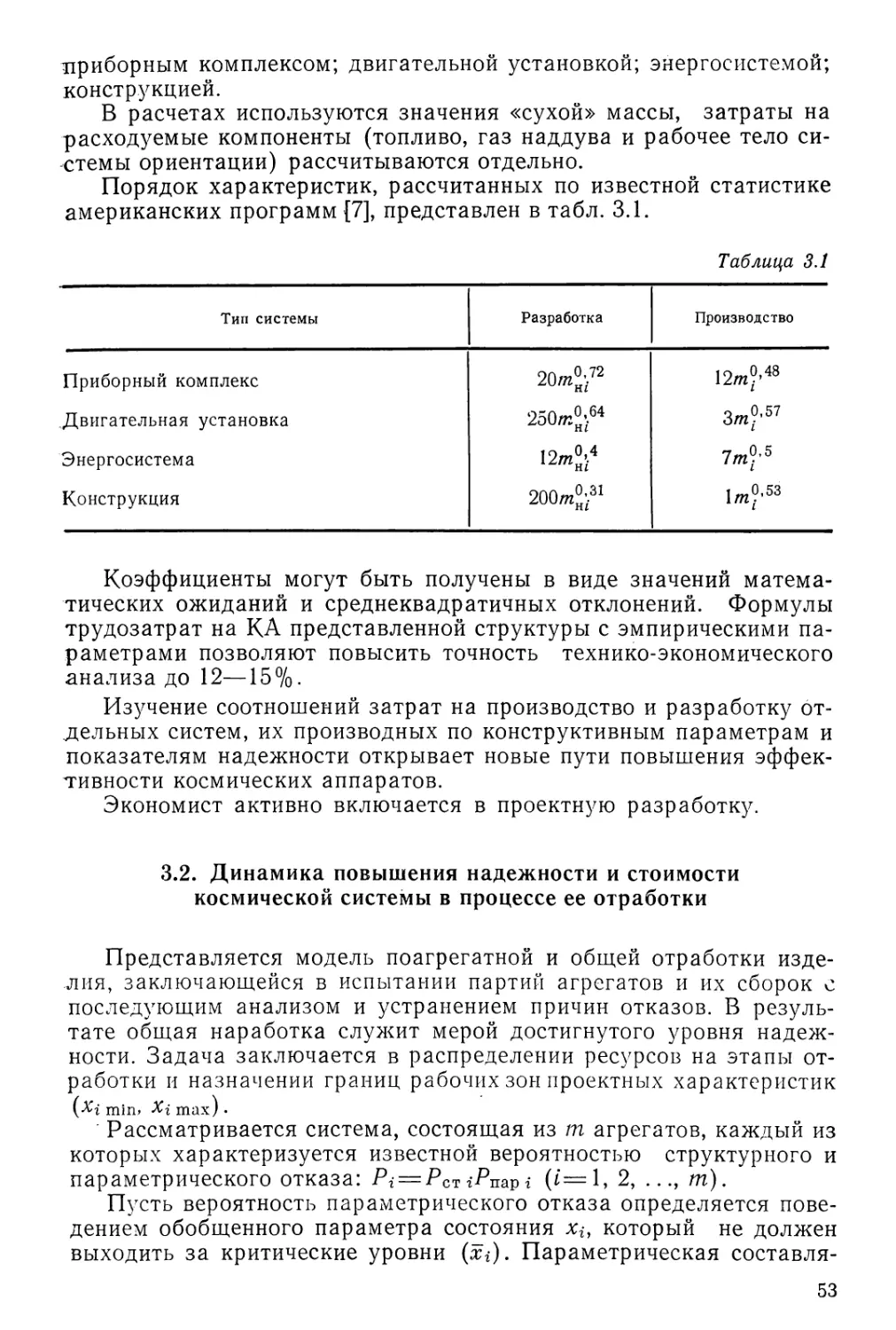


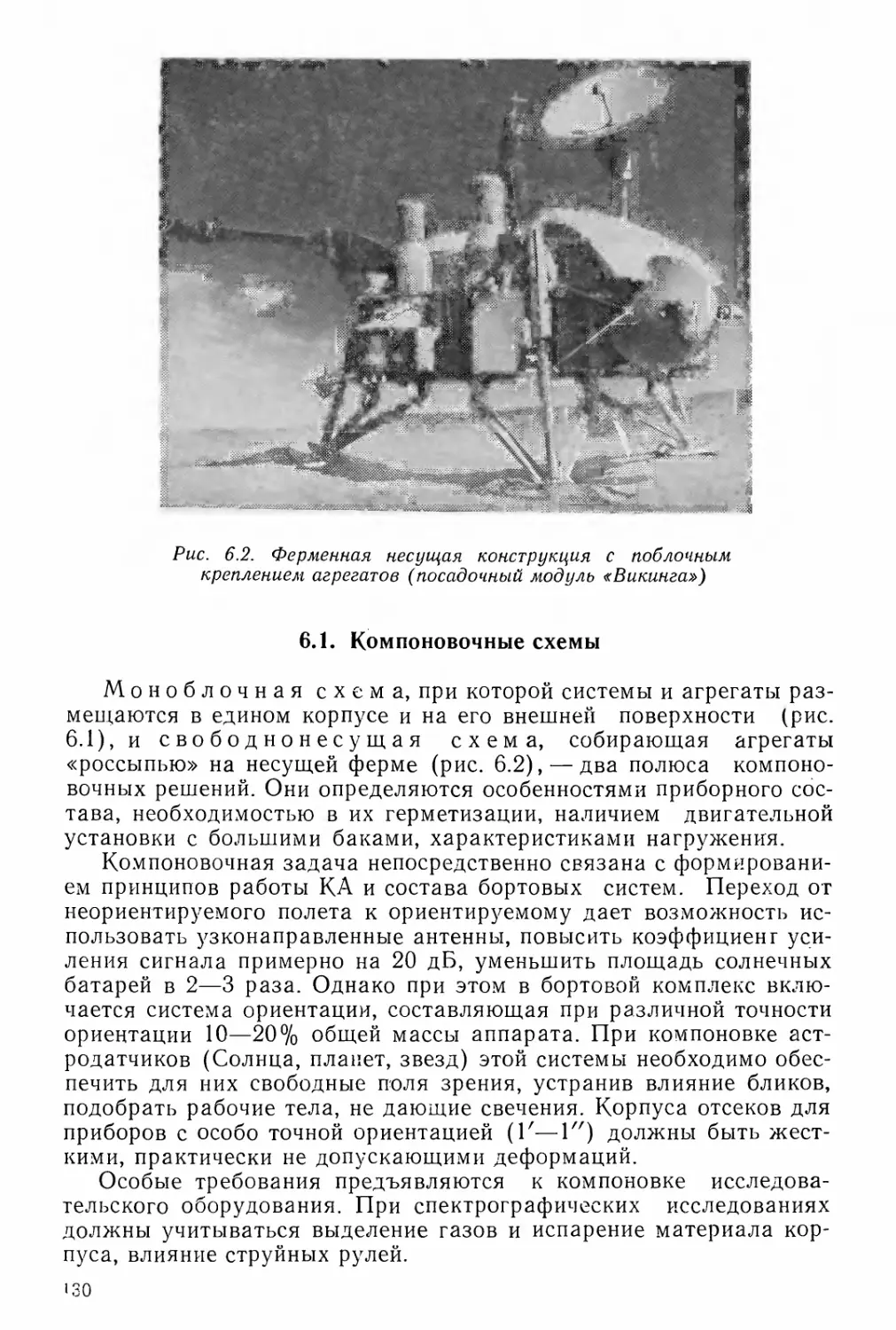





Text
ГК Малышев, Х.С. , ККЗериов
ПРОЕКТИРОВАНИЕ
АВТОМАТИЧЕСКИХ
КОСМИЧЕСКИХ
АППАРАТОВ
/Г В. Малышев, ХС.
ПРОЕКТИРОВАНИЕ
АВТОМАТИЧЕСКИХ
КОСМИЧЕСКИХ
АППАРАТОВ
Вероятностные
методы анализа
Москва
fМАШИНОСТРОЕНИЕ*
1982
ББК 39.62
М18
УДК 629.7.01
Рецензент засл. деят. науки и техники РСФСР П. В. Цыбин
Малышев Г. В., Блейх X. С., Зернов В. И.
М18 Проектирование автоматических космических аппа¬
ратов. Вероятностные методы анализа. — М.: Машино¬
строение, 1982. 152 с., ил.
В книге изложены методические основы общего проектирования автомати¬
ческих космических аппаратов с учетом случайных факторов. Разработаны
принципы определения характеристик оптимальной летной партии аппара¬
тов, конструктивных параметров, сочетания вероятностей выполнения полет¬
ных операций и надежности агрегатов, направленные на повышение эффек¬
тивности космических систем. Книга предназначена для инженеров, специа¬
лизирующихся в области космической техники.
50 к.
3607000000-203
038(01)-82
203-82
ББК 39.62
6Т6
©Издательство «Машиностроение», 1982 г..
ПРЕДИСЛОВИЕ
Автоматические космические аппараты выполняют широкий
спектр научных и народнохозяйственных задач. Их бортовые систе¬
мы способны надежно работать в течение многих месяцев и лет в
жестких условиях глубокого вакуума, радиации, метеорных воздей¬
ствий, резких колебаний поверхностной температуры. Области дей¬
ствия автоматических космических аппаратов — околоземное про¬
странство и вся Солнечная система. Двигаясь с космическими ско¬
ростями, они преодолевают расстояния, измеряемые в астрономи¬
ческих единицах.
Несмотря на обилие литературы по проектированию летатель¬
ных аппаратов различного назначения и их бортовых систем, в об¬
ласти проектирования космических аппаратов еще нет обобщающей
монографии. Не претендует на эту роль и предлагаемая книга.
Говорить о методах проектирования автоматических космиче¬
ских аппаратов в небольшой книге можно, лишь выделив одну-две
проблемы этой неисчерпаемой темы. Одна из проблем проектиро¬
вания, рассматриваемая в данной монографии, связана с перехо¬
дом к крупномасштабным целевым программам. Становится неэко¬
номичным создание единичных космических аппаратов, все большее
значение приобретают унификация, интегральный подход к зада¬
чам разработки, производства и эксплуатации космической техни¬
ки. Для проектировщика это необъятное расширение задачи, вне¬
дрение в область широких технико-экономических исследований.
Другая проблема — необходимость углубления анализа мате¬
матических моделей космических аппаратов, повышения их точно¬
сти, приоритетного развития моделей надежности. Для этого тре¬
буется качественный переход от постановки задач в детерминиро¬
ванной форме к анализу вероятностной, статистической природы
процессов. Вероятностные методы, широко используемые при ана¬
лизе случайных факторов в теории управления, оказываются эф¬
фективными в задачах прогнозирования надежности, нормирования
вероятностей выполнения частных операций и реализации космиче¬
ских программ в целом.
От оценок надежности и эффективности космических аппаратов
на завершающих этапах разработки к целенаправленному повыше¬
нию этих определяющих параметров на всех этапах создания си¬
стем — ведущая тенденция современного проектирования, взятая
авторами за основу книги.
550 3
В книге рассмотрены вопросы анализа эффективности на этапе
формирования технического предложения, когда решается задача
о наиболее общих принципах построения космической системы. Се¬
рия взаимосвязанных задач об эффективности системы в целом,
единичного аппарата и элементов его бортового комплекса пред¬
ставлена как органическая часть проектно-конструкторской раз¬
работки.
Книга не конкурирует с литературой по проектированию отдель¬
ных бортовых систем, теории полета, конструированию и анализу
прочности агрегатов, технико-экономическому анализу. В ней де¬
лается попытка с единых позиций проанализировать влияние пара¬
метров элементов бортового комплекса и полетных операций на
общую эффективность космической системы.
В первых главах книги показано, что методическое совершенст¬
вование теории проектирования не менее важно, чем поиски новых
конструктивных решений, освоение новых материалов и топлив.
Иллюстрируется многообразие случайных факторов, показано их
влияние на облик космических систем. С различной степенью дета¬
лизации рассматриваются также частные задачи обеспечения вы¬
сокой эффективности элементов космической системы. На методи¬
ческих примерах, дающих представление о современном уровне тех¬
ники, оценивается значимость случайных факторов, формулируются
некоторые рекомендации по проектированию.
В заключение делается вывод об эффективности вероятностных
методов исследования в проектировании. Методическое совершенст¬
вование проектирования, усложняя первичные этапы разработки,
позволяет повысить эффективность сложных космических систем,
более обоснованно строить общую программу исследований.
Авторы искренне благодарны рецензенту книги засл. деят. науки
и техники РСФСР П. В. Цыбину и его сотрудникам за критический
анализ книги и конструктивные предложения по ее улучшению.
Авторы с благодарностью примут все замечания и пожелания чи¬
тателей по книге, которые следует посылать в адрес издательства
«Машиностроение». ..
1. НАПРАВЛЕНИЯ РАЗВИТИЯ КОСМИЧЕСКОЙ ТЕХНИКИ
И МЕТОДОВ ЕЕ ПРОЕКТИРОВАНИЯ
Анализируя путь отечественной и зарубежной космической тех¬
ники от запуска первого советского спутника Земли, можно вы¬
делить три этапа развития автом'атических космических аппара¬
тов (КА).
Сначала это были простейшие автоматы с жесткой последователь¬
ностью операций, рассчитанные на работу в условиях, наиболее
тяжелых из возможных. Второе поколение представлялось система¬
ми с избыточностью (резервированием наиболее ответственных аг¬
регатов), гибкой программой функционирования по алгоритмам с
переменными параметрами, автоматической компенсацией внешних
и внутренних возмущений, характеризуемых детерминированными
и вероятностными параметрами. Третье, современное поколение,—
это адаптирующиеся, самоорганизующиеся системы, изменяющие
структуру и алгоритмы оптимального управления.
Автоматические КА и их комплексы следует отнести к слож¬
ным (большим) системам с количеством взаимодействующих эле¬
ментов, исчисляемым десятками и сотнями тысяч. Для них харак¬
терна «неопределенность поведения» — вероятностная природа ряда
параметров, определяющих внешние воздействия и рабочие про¬
цессы. Проектная математическая модель функционирования (ма¬
тематическое описание взаимодействующих систем КА, их рабочих
процессов) также должна быть вероятностной. Проектирование,
использующее методы статистического анализа, отражающее до¬
стигнутый уровень техники, должно с известной степенью доверия
прогнозировать тенденции ее развития, определяя рациональные
конструктивные параметры,— оценивать, в какой мере они обеспе¬
чивают высокую эффективность системы.
1.1. Традиционные методы проектных исследований
В работе «Принципы и методы проектирования ракет большой
дальности» [19] С. П. Королев сформулировал основы теории про¬
ектирования ракетно-космических систем. В прикладном исследова¬
нии устанавливались (как сами собой разумеющиеся) этапы, со¬
ставные задачи проектной разработки, предвосхищающие прин¬
5
ципы системного анализа, методологии теории «больших систем».
Затем они стали органическими частями проектирования космиче¬
ских аппаратов.
Параллельно складывались терминология основные понятия,
характеризующие объект разработки:
космическая система это совокупность технических сродств,
предназначенных для решения научной или народнохозяйственной
задачи, комплекс летательных аппаратов и наземных средств транс¬
портировки, технического контроля, обслуживания, запуска и уп¬
равления в полете;
космическая программа — это цикл взаимосвязанных, распре¬
деленных во времени мероприятий, обеспечивающих разработку,
производство и эксплуатацию космической системы;
бортовой комплекс — это система взаимодействующих агрегатов
космического аппарата, включающая целевой блок, непосредствен¬
но выполняющий поставленную задачу, блоки связи с Землей или
между КА, управления траекторией и ориентацией, энергопитания
и обеспечения расчетных рабочих условий.
Формировались понятия качества системы, надежности и эф¬
фективности. Устанавливались этапы разработки — формирования
технического задания и технического предложения, эскизного, ра¬
бочего проектирования и т. д., т. е. то, что теперь гостировано и
составляет основу практики.
Критерий эффективности проектируемого КА, как пра¬
вило, сводился к его массе. Масса определяла объем конструктив¬
но-технологической и испытательной работы по корпусу, двигате¬
лю, транспортно-пусковым средствам. С ней связывались габарит¬
ные размеры, мобильность системы, удобство эксплуатации, а для
ракет и транспортная проходимость.
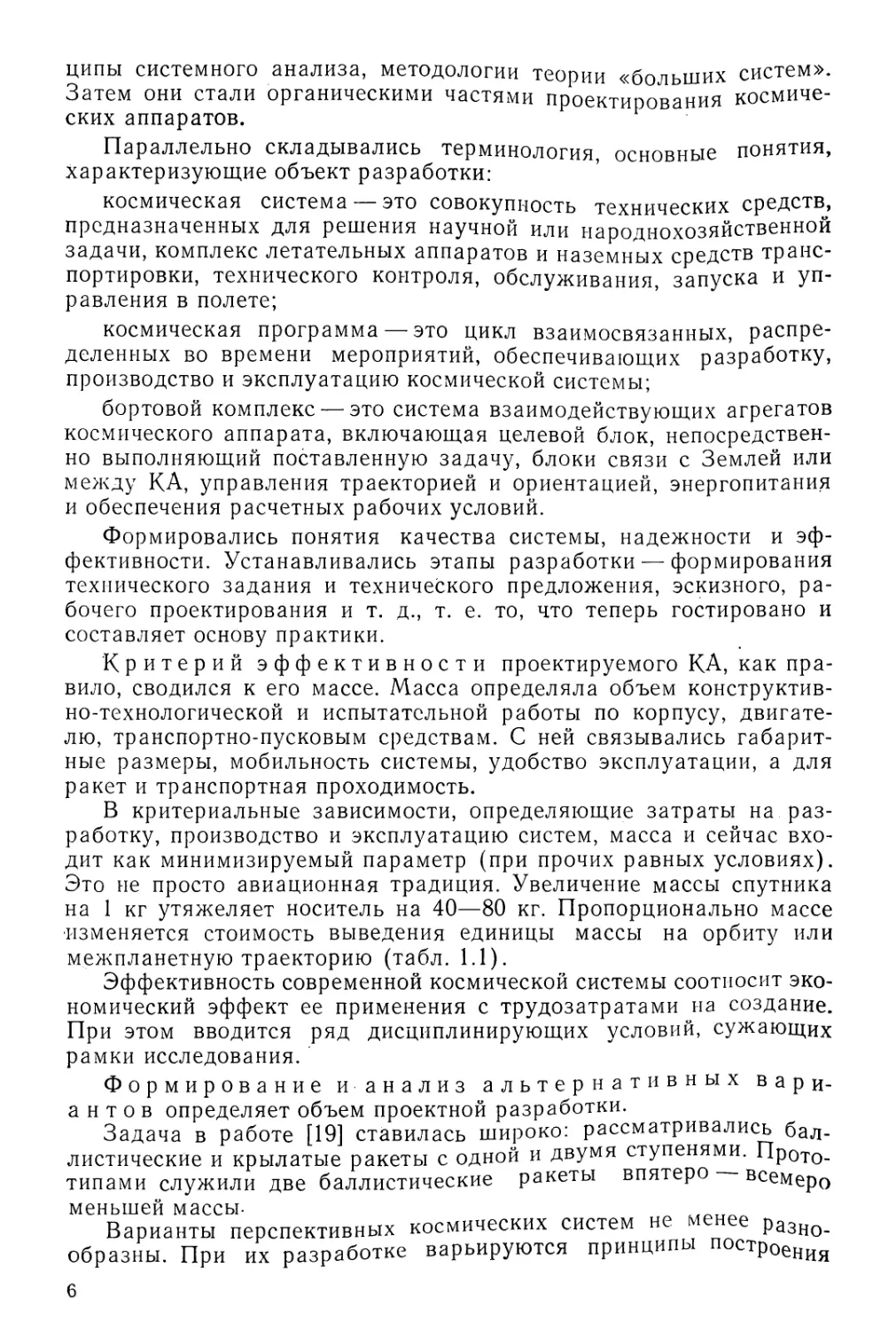
В критериальные зависимости, определяющие затраты на раз¬
работку, производство и эксплуатацию систем, масса и сейчас вхо¬
дит как минимизируемый параметр (при прочих равных условиях).
Это не просто авиационная традиция. Увеличение массы спутника
на 1 кг утяжеляет носитель на 40—80 кг. Пропорционально массе
изменяется стоимость выведения единицы массы на орбиту или
межпланетную траекторию (табл. 1.1).
Эффективность современной космической системы соотносит эко¬
номический эффект ее применения с трудозатратами на создание.
При этом вводится ряд дисциплинирующих условий, сужающих
рамки исследования.
Формирование и анализ альтернативных вари¬
антов определяет объем проектной разработки.
Задача в работе [19] ставилась широко: рассматривались бал¬
листические и крылатые ракеты с одной и двумя ступенями. Прото¬
типами служили две баллистические ракеты впятеро всемеро
меньшей массы-
Варианты перспективных космических систем не е разно¬
образны. При их разработке варьируются принципы построения
6
Таблица 1.1
Ракета-носитель
Стартовая
масса, т
Полезная
масса, кг
Цена выведе¬
ния, дол л./к г
Орбита И С 3/траектория ,,ухода“
«Скаут»
18
135/нет
4130/нет
«Тор-Дельта»
45
360/55
4200/27500
«Тор-Аджена»
57
730/нет
4200/нет
«Атлас-Аджена»
127
2400/380
1700/11000
«Атлас-Кентавр»
137
3850/1000
1600/6000
«Сатурн-1 Б»
587
14500/нет
1100/нет
«Сатурн-5»:
две ступени
2650
88900/нет
950/нет
три ступени
2950
122000/44000
850/2500
траекторий, физические принципы работы бортовых систем. Вместе
с тем, они не абстрактны, а жестко связаны с конкретной конст¬
рукторско-технологической базой.
Математическая модель — система алгебраических и
дифференциальных уравнений, описывающая конструкцию и дина¬
мику движения ракеты — рассматривалась как объект проектного
исследования. Задача сводилась к установлению функциональных
связей между определяющими проектными параметрами и крите¬
рием эффективности, к определению их сочетания, соответствующе¬
го минимуму критерия.
С различной детализацией ракету можно описать и десятком и
сотней параметров. Следовало выбрать их минимальное количест¬
во, к изменению которых массовый критерий наиболее чувстви¬
телен.
Динамическая часть модели баллистической ракеты первона¬
чально включала пятнадцать уравнений, описывающих ее простран¬
ственное движение на активном и пассивном участках с учетом уп¬
равляющих воздействий и аэродинамики, переменной силы тяжести
и влияния вращения Земли. Приводя члены уравнений к единой точ¬
ности, пренебрегая малыми величинами и упрощая те члены, кото¬
рые индифферентны к анализируемым вариантам аппарата,
С. П. Королев сводил систему к одному наиболее характерному
уравнению — проекции сил на касательную к траектории. Оно оп¬
ределяло интегральную формулу конечной скорости активного
участка полета, однозначно связанной с дальностью полета. Это —
развитие формулы Циолковского, учитывающее влияние гравита¬
ционных и аэродинамических потерь при полете ракеты в атмос¬
фере с учетом изменения энергетических свойств двигательной ус¬
тановки.
Конструктивно-массовая формула дополняла проектную систе¬
му уравнений. В этой части модели Главный конструктор выделил
серию достаточно стабильных характеристик, которые при проек¬
7
тировании можно брать из статистики, и проектных параметров,
к которым критерий наиболее чувствителен. Их определение и есть
цель исследования.
Для ракет и космических ракетных блоков стабильные относи¬
тельные массовые и энергетические характеристики:
Ят.о — относительная масса топливного отсека (а-г.о — ^.оМт);
Уд.у — относительная масса двигательной установки (уд.у = тд.у/^) »
И-пр — относительная масса прочих конструктивных элементов
(tunp = ^nPMo); £уд — удельный импульс (РУд = /?/т), где тТ.о, тт,
/72д у, тир, т0 — масса топливного отсека, топлива, двигателя, про¬
чих элементов, ракеты в целом; R — тяга двигателя; т — секунд¬
ный расход топлива.
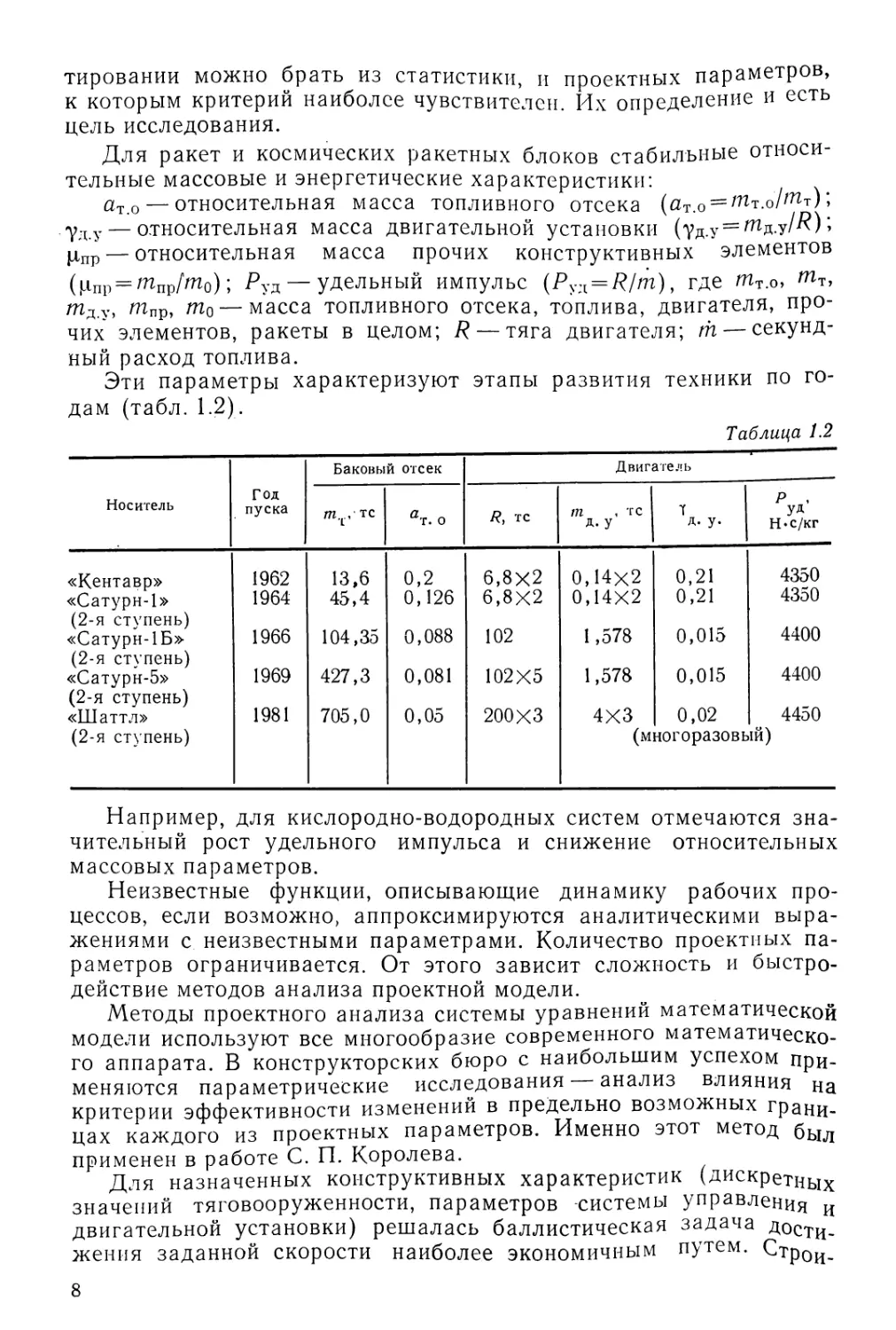
Эти параметры характеризуют этапы развития техники по го¬
дам (табл. 1.2).
Таблица 1.2
Носитель
Год
пуска
Баковый отсек
Двигатель
m , тс
ал. о
R} тс
т , тс
Д- У
т
д. у.
р ,
уд
Н*с/кг
«Кентавр»
1962
13,6
0,2
6,8X2
0,14x2
0,21
4350
«Сатурн-1»
1964
45,4
0,126
6,8X2
0,14X2
0,21
4350
(2-я ступень)
«Сатурн-1 Б»
1966
104,35
0,088
102
1,578
0,015
4400
(2-я ступень)
«Сатурн-5»
1969
427,3
0,081
102X5
1,578
0,015
4400
(2-я ступень)
«Шаттл»
1981
705,0
0,05
200X3
4X3
0,02
4450
(2-я ступень)
(многоразовый)
Например, для кислородно-водородных систем отмечаются зна¬
чительный рост удельного импульса и снижение относительных
массовых параметров.
Неизвестные функции, описывающие динамику рабочих про¬
цессов, если возможно, аппроксимируются аналитическими выра¬
жениями с неизвестными параметрами. Количество проектных па¬
раметров ограничивается. От этого зависит сложность и быстро¬
действие методов анализа проектной модели.
Методы проектного анализа системы уравнений математической
модели используют все многообразие современного математическо¬
го аппарата. В конструкторских бюро с наибольшим успехом при¬
меняются параметрические исследования анализ влияния на
критерии эффективности изменений в предельно возможных грани¬
цах каждого из проектных параметров. Именно этот метод был
применен в работе С. П. Королева.
Для назначенных конструктивных характеристик (дискретных
значений тяговооруженности, параметров -системы управления и
двигательной установки) решалась баллистическая задача дости¬
жения заданной скорости наиболее экономичным путем. Стр0И-
8
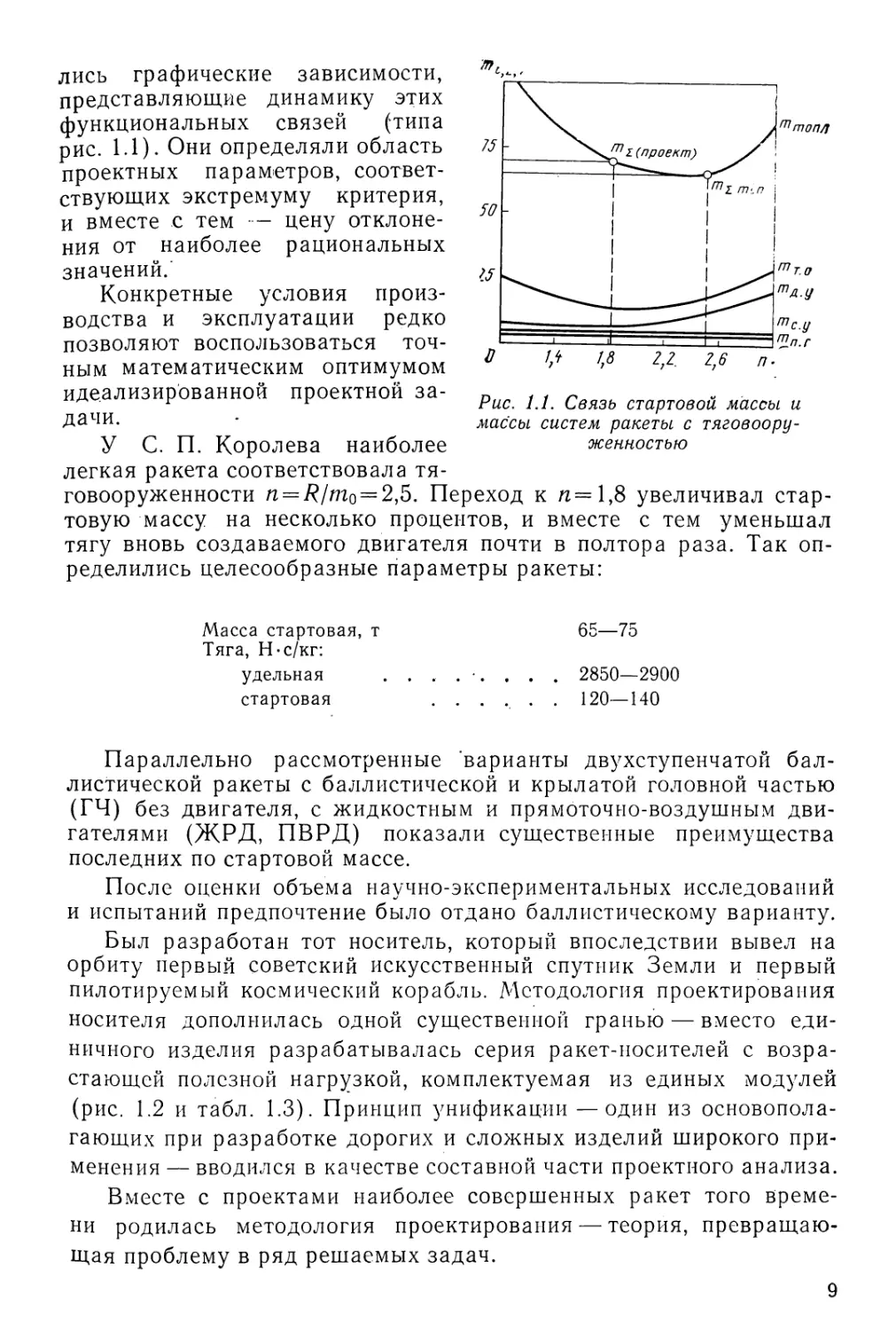
лись графические зависимости,
представляющие динамику этих
функциональных связей (типа
рис. 1.1). Они определяли область
проектных параметров, соответ¬
ствующих экстремуму критерия,
и вместе с тем — цену отклоне¬
ния от наиболее рациональных
значений.'
Конкретные условия произ¬
водства и эксплуатации редко
позволяют воспользоваться точ¬
ным математическим оптимумом
идеализированной проектной за¬
дачи.
Рис. 1.1. Связь стартовой массы и
массы систем ракеты с тяговоору-
женностью
У С. П. Королева наиболее
легкая ракета соответствовала тя-
говооруженности n = R/nio = 2,5. Переход к п = 1,8 увеличивал стар¬
товую массу на несколько процентов, и вместе с тем уменьшал
тягу вновь создаваемого двигателя почти в полтора раза. Так оп¬
ределились целесообразные параметры ракеты:
Масса стартовая, т 65—75
Тяга, Н-с/кг:
удельная ........ 2850—2900
стартовая ...... 120—140
Параллельно рассмотренные варианты двухступенчатой бал¬
листической ракеты с баллистической и крылатой головной частью
(ГЧ) без двигателя, с жидкостным и прямоточно-воздушным дви¬
гателями (ЖРД, ПВРД) показали существенные преимущества
последних по стартовой массе.
После оценки объема научно-экспериментальных исследований
и испытаний предпочтение было отдано баллистическому варианту.
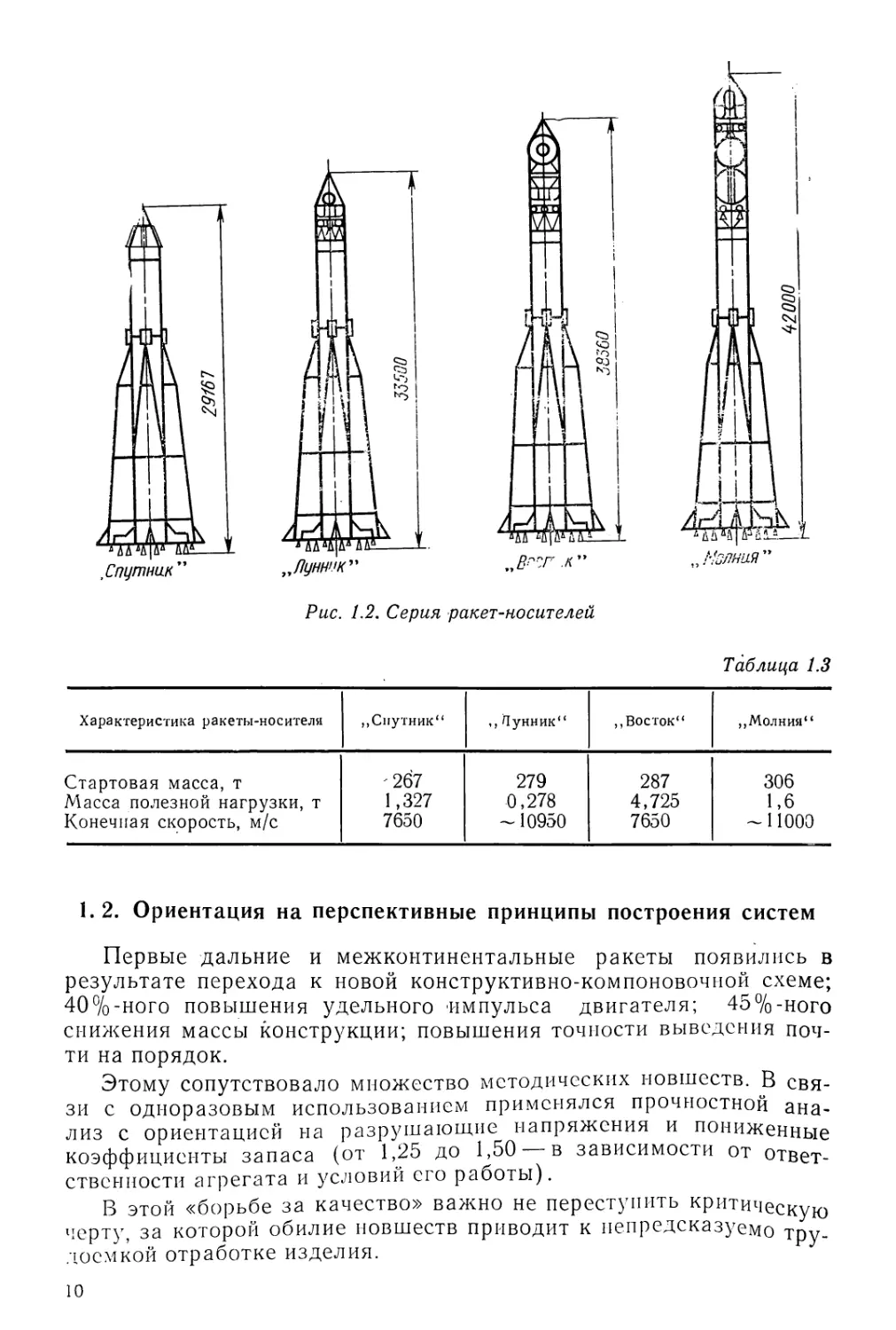
Был разработан тот носитель, который впоследствии вывел на
орбиту первый советский искусственный спутник Земли и первый
пилотируемый космический корабль. Методология проектирования
носителя дополнилась одной существенной гранью — вместо еди¬
ничного изделия разрабатывалась серия ракет-носителей с возра¬
стающей полезной нагрузкой, комплектуемая из единых модулей
(рис. 1.2 и табл. 1.3). Принцип унификации —один из основопола¬
гающих при разработке дорогих и сложных изделий широкого при¬
менения — вводился в качестве составной части проектного анализа.
Вместе с проектами наиболее совершенных ракет того време¬
ни родилась методология проектирования — теория, превращаю¬
щая проблему в ряд решаемых задач.
9
Рис. 1.2. Серия ракет-носителей
Таблица 1.3
Характеристика ракеты-носителя
,, Спутник “
,, Пунник“
,, Восток “
,,Молния“
Стартовая масса, т
'267
279
287
306
Масса полезной нагрузки, т
1,327
0,278
4,725
1,6
Конечная скорость, м/с
7650
-10950
7650
-11000
1.2. Ориентация на перспективные принципы построения систем
Первые дальние и межконтинентальные ракеты появились в
результате перехода к новой конструктивно-компоновочной схеме;
40%-ного повышения удельного импульса двигателя; 45%-ного
снижения массы конструкции; повышения точности выведения поч¬
ти на порядок.
Этому сопутствовало множество методических новшеств. В свя¬
зи с одноразовым использованием применялся прочностной ана¬
лиз с ориентацией на разрушающие напряжения и пониженные
коэффициенты запаса (от 1,25 до 1,50 в зависимости от ответ¬
ственности агрегата и условий его работы).
В этой «борьбе за качество» важно не переступить критическую
черту, за которой обилие новшеств приводит к непредсказуемо тру¬
доемкой отработке изделия.
ю
Как правило, даже этап поисковых исследований ограничивает¬
ся жесткими рамками программы.
По-видимому, такая «умеренность» — необходимое свойство
конструктора на каждом этапе развития. И оно должно сочетаться
со стремлением к новизне.
Развитие методологии проектирования и последующих этапов
создания сложных систем — необходимое дополнение к чисто кон¬
структивному совершенствованию изделий, переходу к более эф¬
фективным рабочим процессам и материалам. Причем эффектив¬
ность конструктивного совершенствования космической техники и
развития методологии разработки оказывается соизмеримой. Осо¬
бенно весома роль проектирования — этапа, оценивающегося в
3—8% общих затрат. Однако корректировка проекта в процессе
дальнейших этапов разработки и производства может удвоить об¬
щие затраты, а в отдельных случаях повысить их на порядок [7].
Современное проектирование КА имеет ряд характерных черт.
Анализ комплекса перспективных космических систем
в отличие от практиковавшейся разработки единичных программ и целевых КА
становится определяющим принципом современного проектирования. Так; около
шестисот запусков научного и хозяйственного назначения, планируемых в США
на ближайшее пятнадцатилетие, рассматриваются с единых позиций. Их класси¬
фикация по характерным траекториям, массе и особенностям использования целе¬
вых блоков, приведенная ниже, выявляет общность систем, открывает возможно¬
сти унификации бортовых комплексов, средств выведения и маневрирования в
космосе [24]:
Доля от обще¬
го количества
запусков, %
Высотность орбиты:
низкие околоземные орбиты . . 65
синхронные орбиты 17
межпланетные траектории 4
прочие траектории 14
Наклонение орбиты:
полярные 27
экваториальные . 17
с малым наклоном (~30°) 37
с большим наклоном (~55°) 10
Комплектность выведения:
индивидуальное выведение 20
выведение серией 34
использование космического буксира .... 43
повторное посещение объекта . . . ; 3
Особенности нагрузок:
низкая масса (до 900 кг) . . 55
средняя масса (■—■ 1350 кг) 38
большая масса (>1350 кг) 7
Ремонтопригодность .... 58
Такая информация позволяет оптимально использовать существующие одно¬
разовые ракеты-носители с уменьшающейся стоимостью выведения единицы мас¬
сы при возрастающей полезной нагрузке, сформулировать требования к системе
космических буксиров.
Составной частью проектирования комплекса программ становится унифика¬
ция бортовых систем, их модулей и аппаратов в целом. При этом для ряда про¬
грамм практически идентичными могут быть выполнены блоки астродатчиков,
11
преобразующие, исполнительные блоки систем навигации и управления траекто¬
рией, агрегаты радиосистем, систем энергообеспечения, терморегулирования.
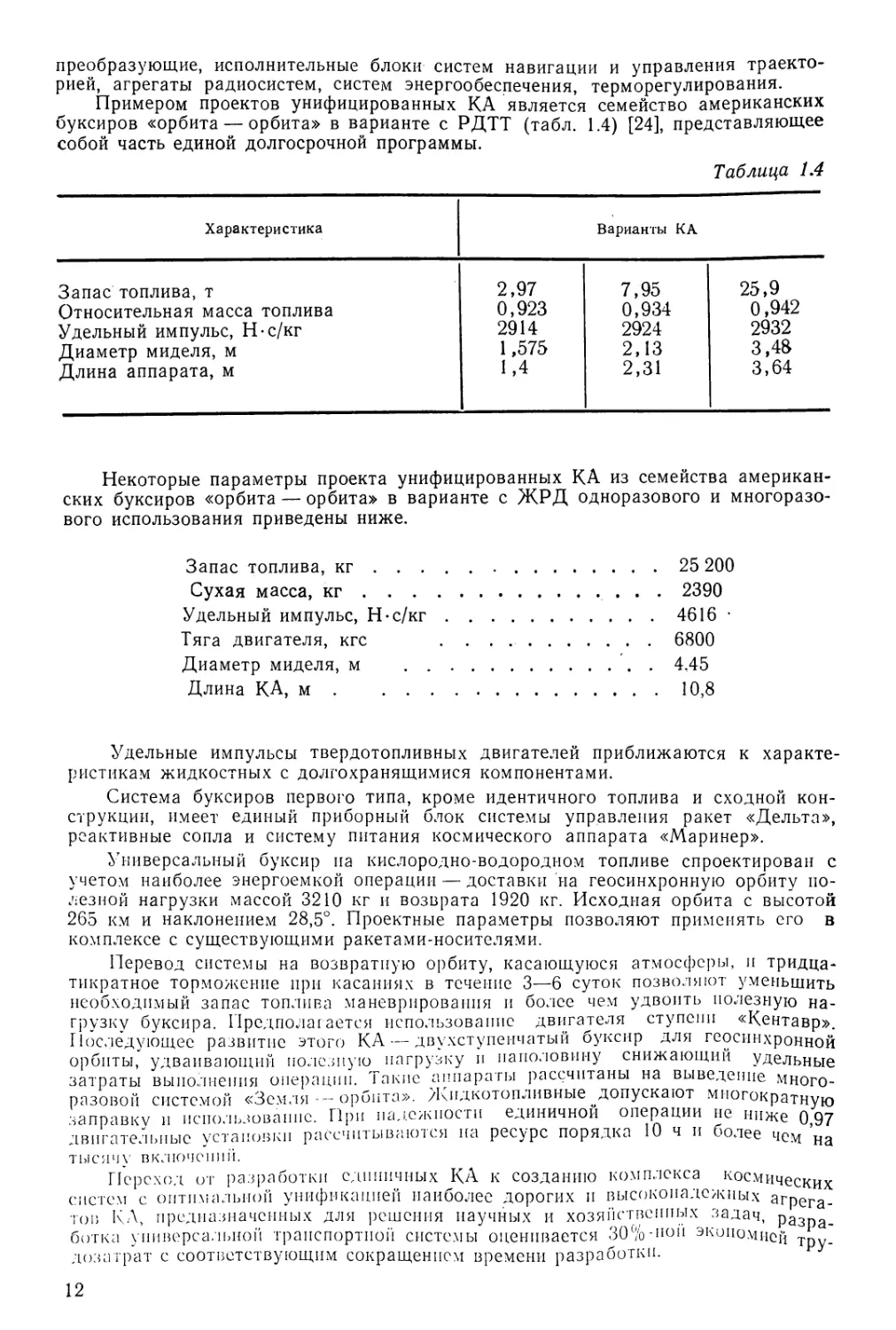
Примером проектов унифицированных КА является семейство американских
буксиров «орбита — орбита» в варианте с РДТТ (табл. 1.4) [24], представляющее
собой часть единой долгосрочной программы.
Таблица 1.4
Характеристика
Варианты КА
Запас топлива, т
2,97
7,95
25,9
Относительная масса топлива
0,923
0,934
0,942
Удельный импульс, Н-с/кг
2914
2924
2932
Диаметр миделя, м
1,575
2,13
3,43
Длина аппарата, м
1,4
2,31
3,64
Некоторые параметры проекта унифицированных КА из семейства американ¬
ских буксиров «орбита — орбита» в варианте с ЖРД одноразового и многоразо¬
вого использования приведены ниже.
Запас топлива, кг 25 200
Сухая масса, кг . . 2390
Удельный импульс, Н-с/кг 4616 •
Тяга двигателя, кгс . . . 6800
Диаметр миделя, м 4,45
Длина КА, м 10,8
Удельные импульсы твердотопливных двигателей приближаются к характе¬
ристикам жидкостных с долгохранящимися компонентами.
Система буксиров первого типа, кроме идентичного топлива и сходной кон¬
струкции, имеет единый приборный блок системы управления ракет «Дельта»,
реактивные сопла и систему питания космического аппарата «Маринер».
Универсальный буксир на кислородно-водородном топливе спроектирован с
учетом наиболее энергоемкой операции — доставки на геосинхронную орбиту по¬
лезной нагрузки массой 3210 кг и возврата 1920 кг. Исходная орбита с высотой
265 км и наклонением 28,5°. Проектные параметры позволяют применять его в
комплексе с существующими ракетами-носителями.
Перевод системы на возвратную орбиту, касающуюся атмосферы, и тридца¬
тикратное торможение при касаниях в течение 3—6 суток позволяют уменьшить
необходимый запас топлива маневрирования и более чем удвоить полезную на¬
грузку буксира. Предполагается использование двигателя ступени «Кентавр».
Последующее развитие этого КА — двухступенчатый буксир для геосинхронной
орбиты, удваивающий полезную нагрузку п наполовину снижающий удельные
затраты выполнения операции. Закпе аппараты рассчитаны на выведение много¬
разовой системой «Земля---орбита». /Кпдкотопливные ^допускают многократную
заправку и использование. При надежности единичной операции не ниже 0,97
двигательные установки рассчшываются на ресурс порядка 10 ч и более чем на
тысячу включений.
Переход от разработки единичных КА к созданию комплекса космических
систем с оптимальной унификацией наиболее дорогих и высоконадежных агрега¬
тов КА, предназначенных для решения научных и хозяйственных задач, разра_
ботка универсальной транспортной системы оценивается 30%-пой экономией тру¬
дозатрат с соответствующим сокращением времени разработки.
12
Рис. 1.3. Компоновка бакового и приборного отсеков с совмещенной стенкой
Интегральные компоновочные схемы современных ав¬
томатических КА обеспечивают снижение массовой доли силовой конст¬
рукции. В какой-то степени это — реакция на аналогичную тенденцию в авиации.
Интегральные конструкции многообразны: бак — двигательная установка, бак —
система наддува, двигатель с системой управления вектором тяги, корпус спуска¬
емого аппарата с системой теплозащиты.
Применение моноблочных агрегатов без соединительных элементов обеспечи¬
вает высокую плотность компоновки, повышает долю приборного комплекса и топ¬
лива в общем массовом балансе (рис. 1.3). При неуклонном росте степени рас¬
ширения сопла (до 200—400) прослеживается тенденция всемерного укорачива¬
ния двигательных установок путем использования связки камер с интерференци¬
ей истекающих струй.
Простое и интересное решение системы наддува достаточно емких баков
состоит в увеличении объема газовой подушки и повышении первоначального
давления наддува. При этом бескавитационная работа системы подачи обеспечи¬
вается путем простого расширения заправленного газа.
Общая силовая завязка бакового и приборного отсеков, использование гер¬
метических емкостей в качестве силовой основы КА, совмещение бакового отсека
с отсеком агрегатов двигательной установки, укорачивание компоновок с целью
уменьшения протяженности коммуникаций, которые составляют более 20% мас¬
сы оборудования, — все это способствует повышению полезной отдачи ап¬
парата.
Совершенствование бортовых систем связано с широким ис¬
пользованием больших микромодульных схем, применением элементной базы,
13
обеспечивающей раоотоспособность приборного комплекса в вакууме, в расши¬
ренном диапазоне рабочих температур. Это путь микроминиатюризации прибор¬
ных олоков, существенного снижения энергопотребления, качественного улучше¬
ния выходных характеристик систем, использующих электронику.
Переход к негерметическим приборным отсекам, обеспечивающим необходи¬
мый тепловой и радиационный режимы, уменьшает долю силовых конструктив-
ных элементов и элементов бортовой кабельной сети почти вдвое.
В технике связи, навигационных приборах много обещает внедрение лазер¬
ных систем. С их помощью удается на порядок повысить точность гироблоков
и измерения дальности, на несколько порядков увеличить информативность ка¬
налов связи.
Исполнительные блоки систем ориентации и стабилизации — управляющие
ракетные сопла с обслуживающими агрегатами — существенно облегчаются при
переходе на жидкие компоненты. Применение однокомпонентного топлива с вы¬
соким удельным импульсом существенно уменьшает запас рабочего тела.
Масса емкостей с топливом уменьшается в несколько раз по сравне¬
нию с массой баллонов, редукторов и клапанов широко используемых газовых
систем.
Упрощенные системы обеспечения теплового режима аппаратов относительно
малой мощности используют в основном пассивные средства — экранновакуумную
теплоизоляцию, специальные покрытия радиационных поверхностей, саморегули-
руемые жалюзи. Их приводы выполняются автоматическими в виде биметалли¬
ческих пластин, простейших механизмов, использующих эффекты теплового рас¬
ширения твердых тел, газов, фазовые переходы в регулируемом диапазоне тем¬
пературы.
Развитие энергосистем идет по пути повышения КПД солнечных батарей
(кремниевых до 10°/о, из арсенида галия до 25% и выше), использования зер¬
кальных концентраторов солнечной энергии. Дальнейшее развитие получают
радиоизотопные генераторы, наиболее целесообразные для космических зондов
внешнего кольца планет Солнечной системы.
Облегчение конструкций баков, ферм, сопл двигательных установок может
.быть обеспечено широким внедрением композиционных материалов. Использова¬
ние стеклопластиковых баков и ферм, проекты изготовления крупногабаритных
сопловых насадков двигателей из новых материалов — характерные примеры это¬
го направления в конструировании.
Представляют интерес экзотические раскрывающиеся конструкции надувно¬
го типа, крупногабаритные сетчатые 'антенны из металлов, «запоминающие»
геометрию. Последние могут сминаться, компактно закладываясь в транспорти¬
ровочный контейнер, и раскрываться, приобретая точную исходную форму без
механических приводов.
Очевидно, целью усовершенствования конструкции является их облегчение,
повышение доли массы приборных систем и упрощение, повышающее надеж¬
ность агрегатов.
Дальнейшее повышение удельного импульса — ведущая
тенденция в разработке космических маневрирующих систем.
Известный эффект дало использование кислородно-водородного топлива.
От первого применения на космической ступени «Кентавр» двигатели претерпели
существенные изменения. Давление в камерах поднялось с 28-105 до 282-105 Па
в перспективных системах. Степень расширения сопла— от 57 до 300—400. Варь¬
ировался коэффициент избытка окислителя. При этом обобщающий параметр
удельный импульс поднялся с 4350 до 4620 Н ■ с/кг [24]. Существенный недоста¬
ток топлива — малая плотность и, как следствие этого, большой объем и масса
бакового отсека — устраняется переходом на повышенные коэффициенты избытка
окислителя (от 5 до 7 и выше) и введением третьего углеводородного компо¬
нента топлива. При этом на начальных участках полета целесообразно использо¬
вание топлива более тяжелого состава с меньшим удельным импульсом, а на
заключительных — более легкого сочетания, отвечающего максимальному удель.
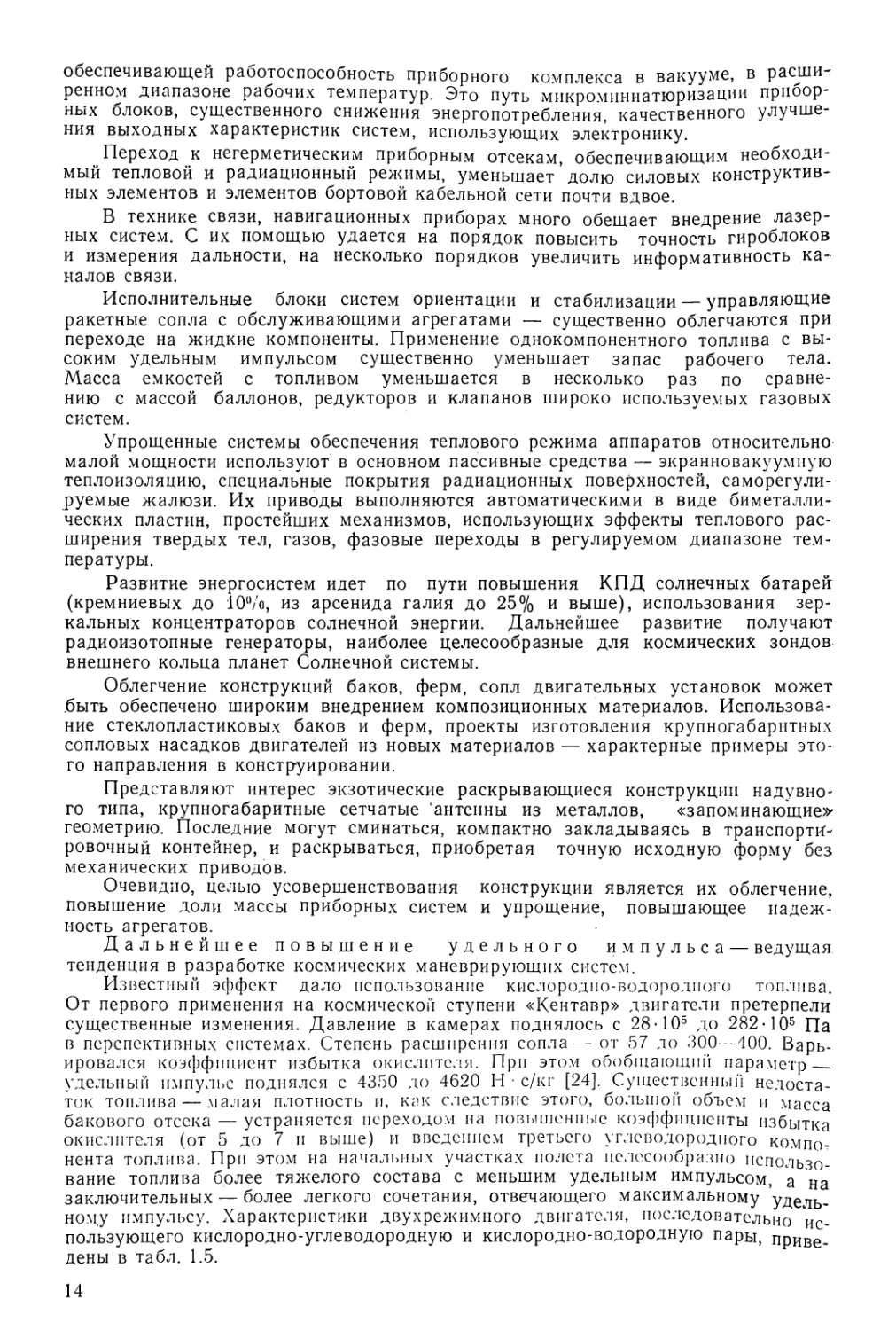
ному импульсу. Характеристики двухрежимного двигателя, последовательно ис¬
пользующего кислородно-углеводородную и кислородно-водородную пары, приве¬
дены в табл. 1.5.
14
Таблица 1.5
\ Характеристика двигателя
1-й режим
2-й режим
Удельный импульс, Н-с/кг (на земле/в вакууме)
3125/3380
3860/4520
Давление в камере, Па
282-105
211,5-105
Степень расширения сопла
40
200
Коэффициент избытка окислителя
2,4
7,0
Регулирование тяги осуществляется изменением сечения сопла или подачей
в камеру газообразного или жидкого окислителя. Последнее средство применяет¬
ся и как способ отсечки и повторного включения двигателя. При этом может быть
несколько повышен удельный импульс.
Некоторые высокоэнергетические компоненты не могут быть использованы
обычным путем в смесевом топливе. Они вводятся в виде микрокапсул.
Большие перспективы открывает применение двух- и трехкомпонентных гиб¬
ридных двигателей с жидкими и твердыми топливами. Так, введение в кислород¬
но-водородное топливо горючего на основе лития обеспечивает удельный импульс
в 4900—4950 Н ■ с/кг.
Многообразие технических новшеств дополняется методическим
совершенствованием' процессов разработки больших космических
систем.
1.3. Объем и принципы решения современных проектных задач
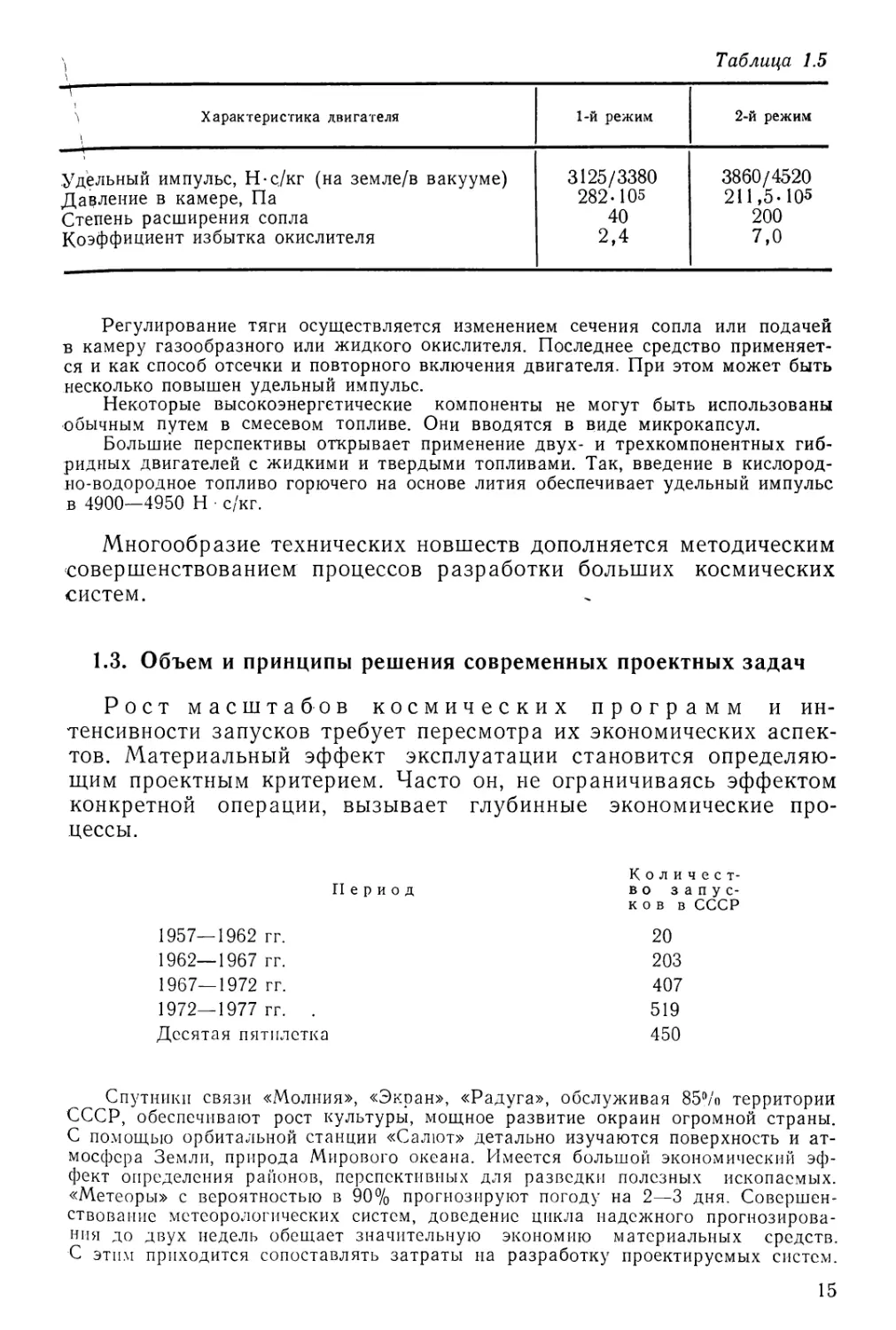
Рост масштабов космических программ и ин¬
тенсивности запусков требует пересмотра их экономических аспек¬
тов. Материальный эффект эксплуатации становится определяю¬
щим проектным критерием. Часто он, не ограничиваясь эффектом
конкретной операции, вызывает глубинные экономические про¬
цессы.
Количест-
Период во запус¬
ков в СССР
1957—1962 гг. 20
1962—1967 гг. 203
1967—1972 гг. 407
1972—1977 гг. . 519
Десятая пятилетка 450
Спутники связи «Молния», «Экран», «Радуга», обслуживая 85°/о территории
СССР, обеспечивают рост культуры, мощное развитие окраин огромной страны.
С помощью орбитальной станции «Салют» детально изучаются поверхность и ат¬
мосфера Земли, природа Мирового океана. Имеется большой экономический эф¬
фект определения районов, перспективных для разведки полезных ископаемых.
«Метеоры» с вероятностью в 90% прогнозируют погоду на 2—3 дня. Совершен¬
ствование метеорологических систем, доведение цикла надежного прогнозирова¬
ния до двух недель обещает значительную экономию материальных средств.
С этим приходится сопоставлять затраты на разработку проектируемых систем.
15
Вслед за К. Э. Циолковским, сулившим человечеству осваивающему космос
(как возможную будущую среду обитания человека) «горы хлеба и бездну мо¬
гущества», мы рассматриваем космос как важный источник сырья ' и
энергии.
По прогнозам зарубежных футурологов, к 2050 году почти 80% ресурсов
горючих ископаемых будут исчерпаны. А необходимое для развивающегося,
растущего численно человечества повышение мощности земных энергосистем
чревато «тепловым загрязнением» среды, трудно прогнозируемым изменением
природы планеты и чуть ли не «всемирным потопом» — подъемом мирового океа¬
на. на 30—40 метров в связи с интенсивным таянием льдов.
Сегодняшнее энергопотребление оценивается 0,01%> солнечной энергии, при¬
ходящей к Земле. Для выравнивания уровня энерговооруженности в передовых
и экономически слабых странах необходимо увеличить эту цифру приблизитель¬
но в 30 раз.
Дальнейшее освоение (до 1%) поступающей энергии космическими средст¬
вами, создание с этой целью серии станций с солнечными батареями площадью
в сто квадратных километров каждая будут способствовать экономии около-
1011 т химического топлива, ежегодно. Однако сейчас такая энергия была бы
существенно дороже используемой химической, гидроэлектрической, атомной [14]..
В космонавтике идет этап создания крупномасштабных нацио¬
нальных и международных программ:
«Связь» — обеспечение международной радиотелефонной и те¬
левизионной связи;
«Метеорология» — надежное прогнозирование погоды на
пять — семь суток;
«Навигация» — переход к точным и универсальным средствам:
космической навигации;
«Природа» — обеспечение прикладной информацией, выявление
фундаментальных закономерностей в природе Земли, Солнечной,
системы, в строении и происхождении мира;
«Индустрия» — полупромышленное производство в космосе ма¬
териалов и систем с особой структурой и точностью изготов¬
ления;
«Энергетика» — разработка перспективных энергосистем и си¬
стем передачи энергии на расстояние.
Обычно при проектировании экономический анализ переносился на заклю¬
чительные этапы. Уложиться в заданное ограничение по массе необходимо. Носи¬
тель, выбранный из небольшого числа разновидностей, не поднимает больше рас¬
четного полезного груза. Отсюда — жесткие требования к оценке массы.
Экономические прогнозы при ограниченной статистике особенно затруднены.
Не было ни одной американской программы, которая была бы реализована в со¬
ответствии с первоначальной экономической заявкой. А на некоторые американ¬
ские программы затраты были выше на порядок [7]. Однако с ростом объема
статистики качество экономических прогнозов существенно повысилось.
Каждой из технических программ сопутствует многогранная технико¬
экономическая программа, исследующая взаимосвязи в единой структуре народ¬
ного хозяйства, которое питает частные программы и воспринимает результаты
их реализации.
Программа «Аполлон», завершившаяся высадкой астронавтов на поверхность
Луны, по различным источникам оценивается в 20—33 млрд. долларов. Параллель¬
ной программой планировалось использование большинства из 25 000 изобрете¬
ний, зарегистрированных в процессе разработки комплекса КА. Так, система по¬
садки лунного корабля послужила основой для новой системы посадки верто¬
16
летов, а широкое использование жидких водорода и кислорода на ракете-носпте-
Де «Сатурн-5» дало скачок развитию криогенной техники в земных системах. До¬
ходные статьи программы включали даже сборы со зрителей, наблюдавших за
запусками космических кораблей.
Запуск первого в мире советского спутника, полет Юрия Алексеевича Гага¬
рина, высоко подняв научный престиж страны, способствовали значительному
расширению внешней торговли, послужили основой развития новых направлений
в технологии.
Очевидно, всех последствий глобальных космических программ предусмотреть
невозможно, однако при формировании математических критериев эффективности
не следует подходить к задаче узкотехнически.
Вопросы экономической эффективности косми¬
ческих систем являются составной частью проектного анализа, на¬
чиная с построения общей схемы операции.
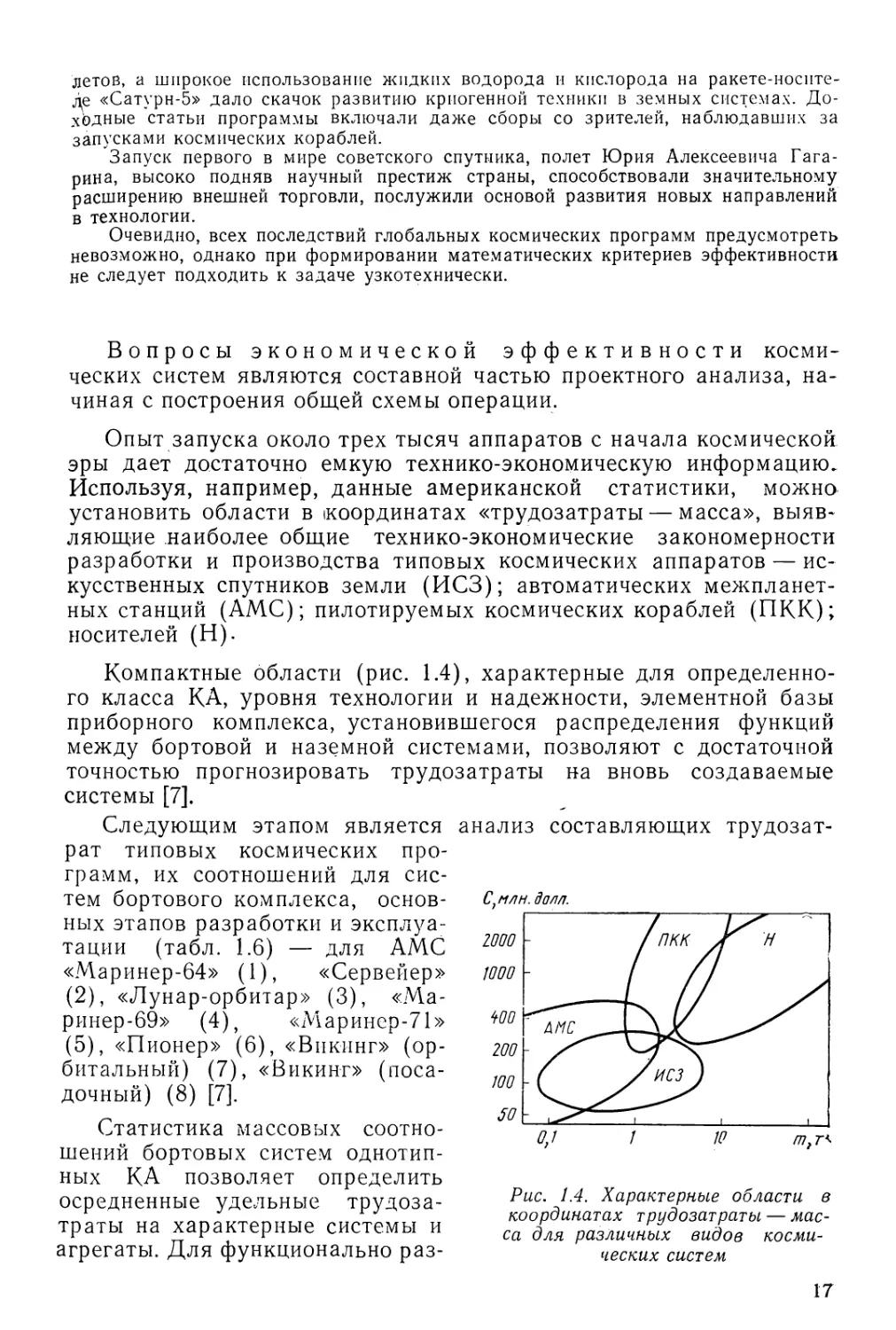
Опыт запуска около трех тысяч аппаратов с начала космической
эры дает достаточно емкую технико-экономическую информацию.
Используя, например, данные американской статистики, можно
установить области в координатах «трудозатраты — масса», выяв¬
ляющие наиболее общие технико-экономические закономерности
разработки и производства типовых космических аппаратов — ис¬
кусственных спутников земли (ИСЗ); автоматических межпланет¬
ных станций (АМС); пилотируемых космических кораблей (ПКК);
носителей (Н).
Компактные области (рис. 1.4), характерные для определенно¬
го класса КА, уровня технологии и надежности, элементной базы
приборного комплекса, установившегося распределения функций
между бортовой и наземной системами, позволяют с достаточной
точностью прогнозировать трудозатраты на вновь создаваемые
системы [7]-
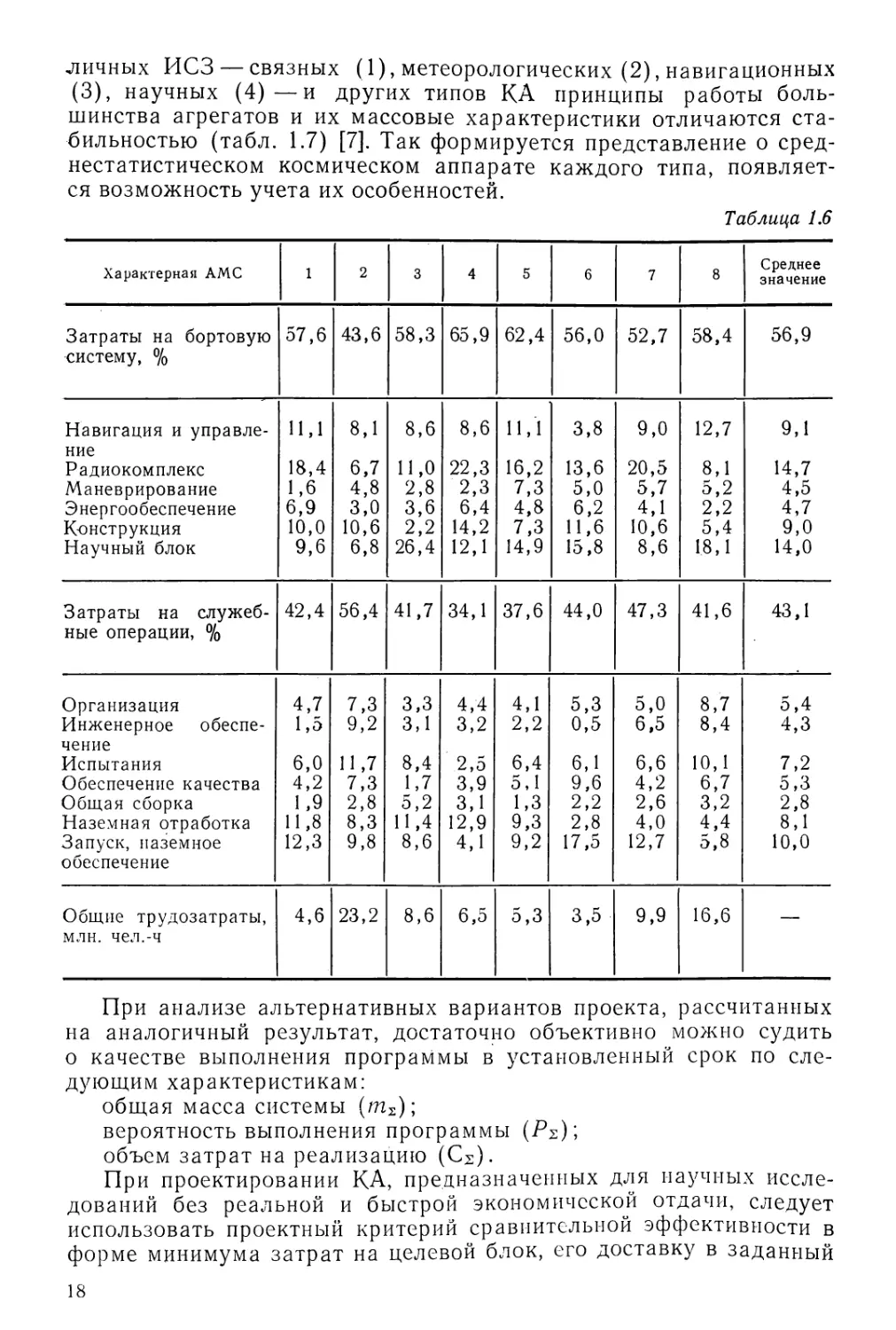
Следующим этапом является анализ составляющих трудозат¬
рат типовых космических про¬
грамм, их соотношений для сис¬
тем бортового комплекса, основ¬
ных этапов разработки и эксплуа¬
тации (табл. 1.6) — для АМС
«Маринер-64» (1), «Сервейер»
(2), «Лунар-орбитар» (3), «Ма-
ринер-69» (4), «Маринер-71»
(5), «Пионер» (6), «Викинг» (ор¬
битальный) (7), «Викинг» (поса¬
дочный) (8) [7].
Статистика массовых соотно¬
шений бортовых систем однотип¬
ных КА позволяет определить
осредненные удельные трудоза¬
траты на характерные системы и
агрегаты. Для функционально раз¬
С}млн. далп.
Рис. 1.4. Характерные области в
координатах трудозатраты — мас¬
са для различных видов косми¬
ческих систем
17
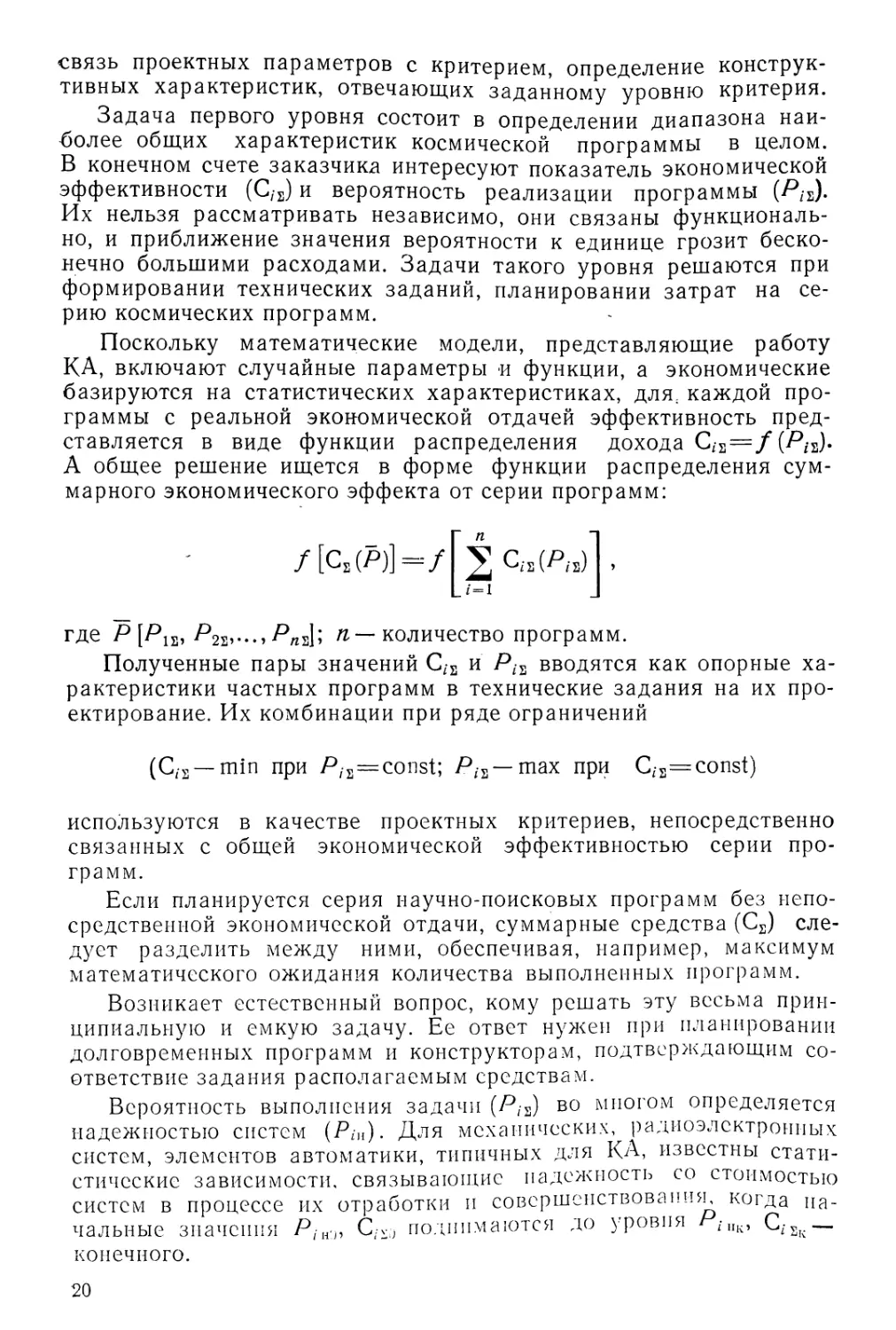
личных ИСЗ — связных (1), метеорологических (2), навигационных
(3), научных (4)—и других типов КА принципы работы боль¬
шинства агрегатов и их массовые характеристики отличаются ста¬
бильностью (табл. 1.7) [7]. Так формируется представление о сред¬
нестатистическом космическом аппарате каждого типа, появляет¬
ся возможность учета их особенностей.
Таблица 1.6
Характерная AMC
1
2
3
4
5
б
7
8
Среднее
значение
Затраты на бортовую
систему, %
57,6
43,6
58,3
65,9
62,4
56,0
52,7
58,4
56,9
Навигация и управле¬
ние
Радиокомплекс
Маневрирование
Энергообеспечение
Конструкция
Научный блок
11,1
18,4
1,6
6,9
10,0
9,6
8,1
6.7
4.8
3,0
10,6
6.8
8,6
11,0
2,8
3,6
2,2
26,4
8,6
22,3
2.3
6.4
14,2
12,1
11,1
16,2
7.3
4,8
7.3
14,9
3.8
13.6
5,0
6,2
11.6
15.8
9.0
20.5
5,7
4.1
10.6
8,6
12,7
8,1
5.2
2.2
5,4
18,1
9,1
14,7
4,5
4,7
9,0
14,0
Затраты на служеб¬
ные операции, %
42,4
56,4
41,7
34,1
37,6
44,0
47,3
41,6
43,1
Организация
Инженерное обеспе¬
чение
Испытания
Обеспечение качества
Общая сборка
Наземная отработка
Запуск, наземное
обеспечение
4,7
1,5
6,0
4,2
1,9
11,8
12,3
7,3
9.2
11,7
7.3
2,8
8.3
9,8
3.3
3.1
8.4
1,7
5.2
11,4
8,6
4.4
3,2
2.5
3,9
3.1
12,9
4.1
4.1
2.2
6,4
5.1
1.3
9.3
9.2
5,3
0,5
6,1
9,6
2,2
2,8
17,5
5.0
6.5
6.6
4,2
2,6
4.0
12,7
8.7
8.4
10,1
6.7
3,2
4.4
5.8
5,4
4,3
7.2
5.3
2,8
8,1
10,0
Общие трудозатраты,
млн. чел.-ч
4,6
23,2
8,6
6,5
5,3
3,5
9,9
16,6
—
При анализе альтернативных вариантов проекта, рассчитанных
на аналогичный результат, достаточно объективно можно судить
о качестве выполнения программы в установленный срок по сле¬
дующим характеристикам:
общая масса системы (т2);
вероятность выполнения программы (Рц)\
объем затрат на реализацию (С^).
При проектировании КА, предназначенных для научных иссле¬
дований без реальной и быстрой экономической отдачи, следует
использовать проектный критерий сравнительной эффективности в
форме минимума затрат на целевой блок, его доставку в заданный
18
район пространства и
эксплуатацию. При¬
чем масса блока и
объем полученной ин¬
формации считаются
одинаковыми для раз¬
личных вариантов про¬
екта.
Космические аппа¬
раты, используемые в
народном хозяйстве,
имеют экономическую
отдачу. При их проек¬
тировании необходимо
обеспечить максималь¬
ную разность между
стоимостным выраже¬
нием эффекта проведенной операции и суммарными расходами на
разработку, производство и эксплуатацию всей космической си¬
стемы.
Таблица 1.7
Характерный ИСЗ
1
2
3
4
(доля массы, %/доля затрат, % на систему)
Специальная аппаратура
10/15
15/15
20/20
20/25
Система ориентации, стаби¬
лизации
Радиосистема
25/10
15/8
15/8
10/8
связи
4/8
4/4
4/4
4/4
контроля орбиты
Я
4/1
4/1
4/1
командная линия
2/4
2/2
2/2
2/2
Служебная аппаратура
35/25
25/15
25/15
20/15
Энергопитание
20/20
20/15
20/20
20/20
Антенны, кабели
.10/3
10/4
5/5
5/3
Корпус
15/6
20/4
15/4
25/4
Прочее
5/5
10/2
10/2
10/2
Сборочные, отладочные ра¬
боты
/25
/44
/33
/30
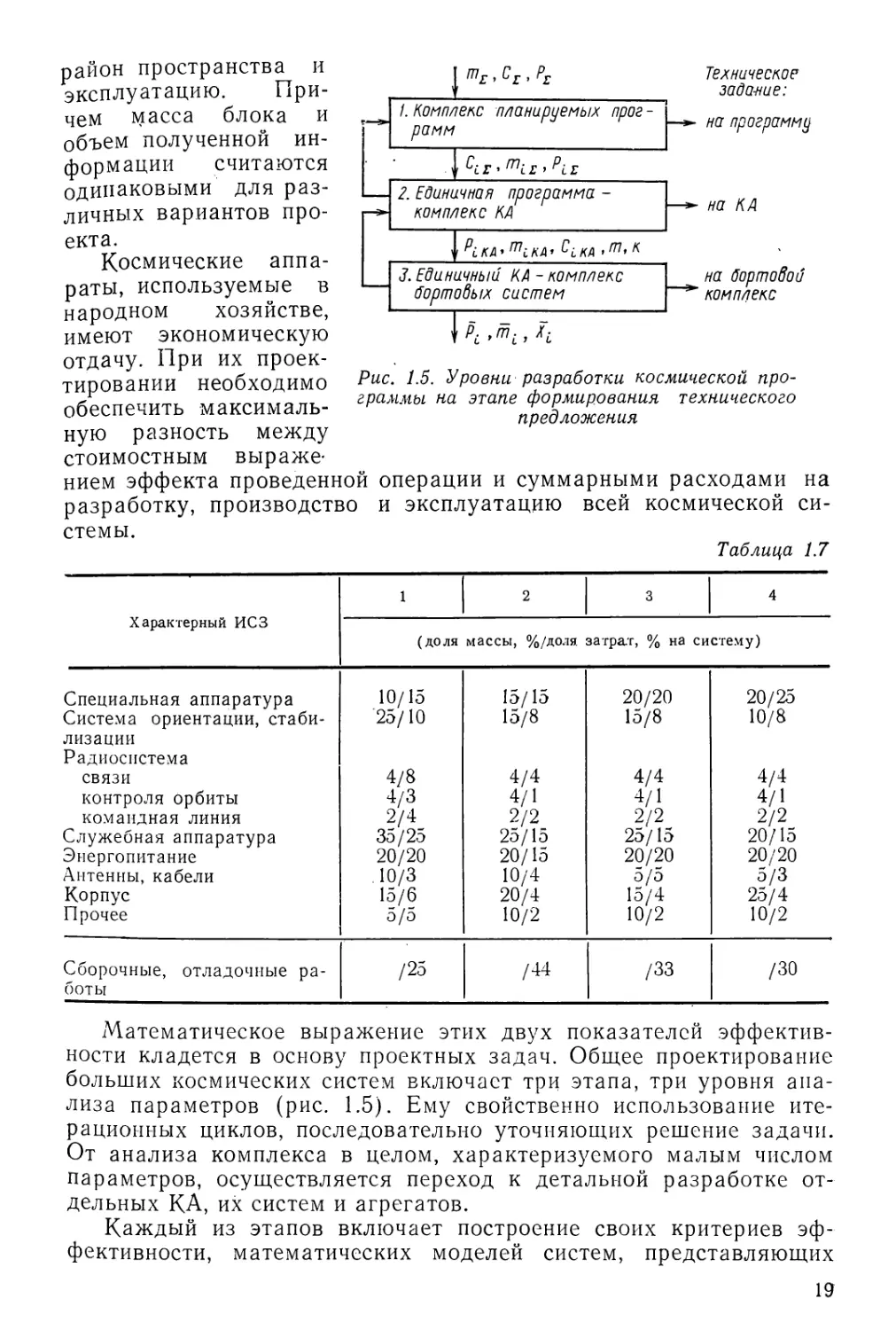
Математическое выражение этих двух показателей эффектив¬
ности кладется в основу проектных задач. Общее проектирование
больших космических систем включает три этапа, три уровня ана¬
лиза параметров (рис. 1.5). Ему свойственно использование ите¬
рационных циклов, последовательно уточняющих решение задачи.
От анализа комплекса в целом, характеризуемого малым числом
параметров, осуществляется переход к детальной разработке от¬
дельных КА, их систем и агрегатов.
Каждый из этапов включает построение своих критериев эф¬
фективности, математических моделей систем, представляющих
Техническое
зада-ние:
на программу
на КА
на бортовой
' комплекс
Рис. 1.5. Уровни разработки космической про¬
граммы на этапе формирования технического
предложения
19
связь проектных параметров с критерием, определение конструк¬
тивных характеристик, отвечающих заданному уровню критерия.
Задача первого уровня состоит в определении диапазона наи¬
более общих характеристик космической программы в целом.
В конечном счете заказчика интересуют показатель экономической
эффективности (С/а) и вероятность реализации программы (Я/а).
Их нельзя рассматривать независимо, они связаны функциональ¬
но, и приближение значения вероятности к единице грозит беско¬
нечно большими расходами. Задачи такого уровня решаются при
формировании технических заданий, планировании затрат на се¬
рию космических программ.
Поскольку математические модели, представляющие работу
КА, включают случайные параметры и функции, а экономические
базируются на статистических характеристиках, для; каждой про¬
граммы с реальной экономической отдачей эффективность пред¬
ставляется в виде функции распределения дохода С/а=/(Я/а).
А общее решение ищется в форме функции распределения сум¬
марного экономического эффекта от серии программ:
/[Ся(£)]=/|^2 Qs(P;a) ,
где Я[Р1Е, ^,..,,^^1; п— количество программ.
Полученные пары значений С/а и Я/а вводятся как опорные ха¬
рактеристики частных программ в технические задания на их про¬
ектирование. Их комбинации при ряде ограничений
(С/а —min при Я/а = const; Я/а —max при C/a=const)
используются в качестве проектных критериев, непосредственно
связанных с общей экономической эффективностью серии про¬
грамм.
Если планируется серия научно-поисковых программ без непо¬
средственной экономической отдачи, суммарные средства (Са) сле¬
дует разделить между ними, обеспечивая, например, максимум
математического ожидания количества выполненных программ.
Возникает естественный вопрос, кому решать эту весьма прин¬
ципиальную и емкую задачу. Ее ответ нужен при планировании
долговременных программ и конструкторам, подтверждающим со¬
ответствие задания располагаемым средствам.
Вероятность выполнения задачи (Я/а) во многом определяется
надежностью систем (Pin). Для механических, радиоэлектронных
систем, элементов автоматики, типичных для КА, известны стати¬
стические зависимости, связывающие надежность со стоимостью
систем в процессе их отработки и совершенствовании^ когда на¬
чальные значения Я/н:л С/а0 поднимаются до уровня £пк, C/S[.—
конечного.
20
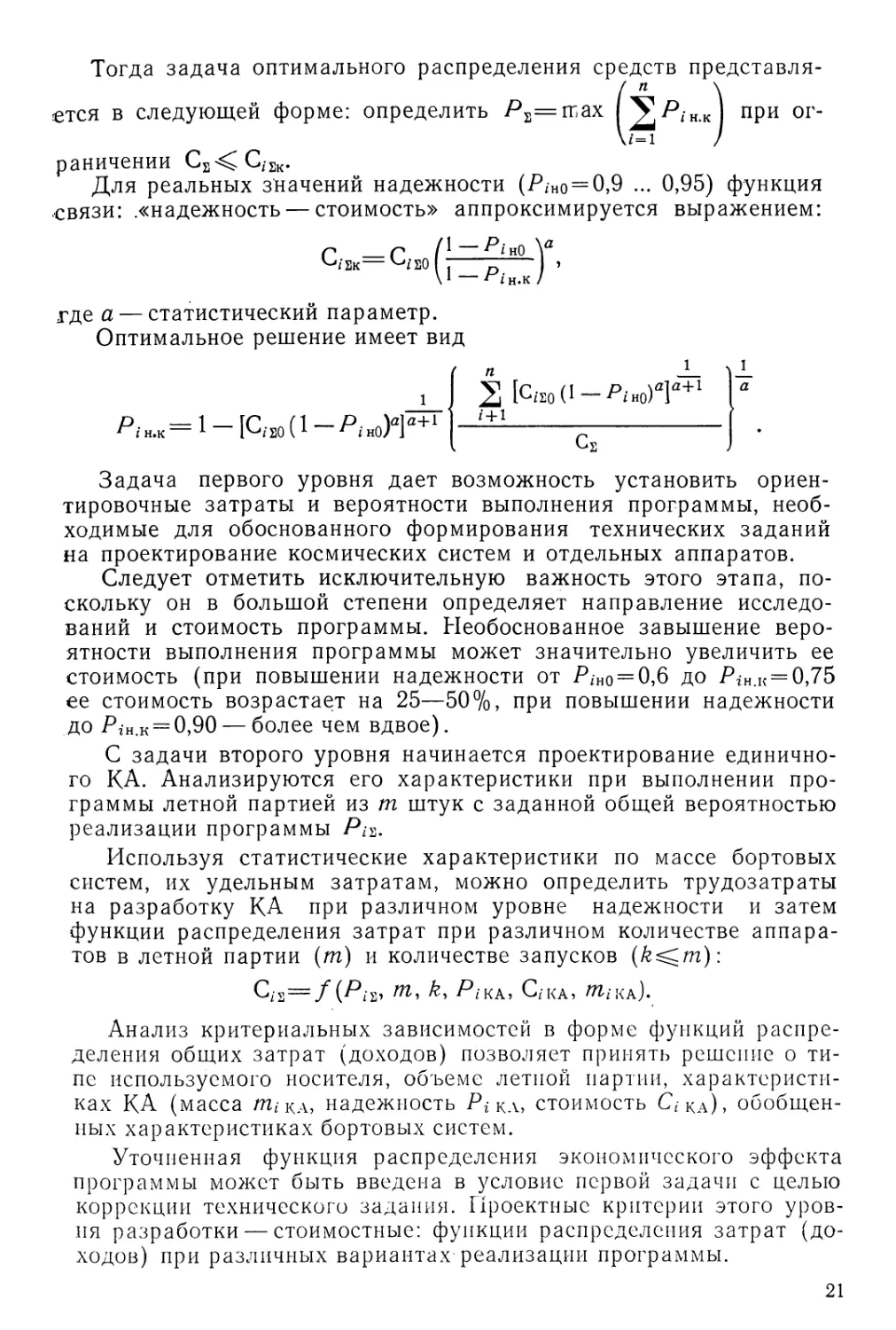
Тогда задача оптимального распределения средств представля-
раничении Са<С/ак.
Для реальных значений надежности (Р/но = 0,9 ... 0,95) функция
связи: .«надежность — стоимость» аппроксимируется выражением:
Задача первого уровня дает возможность установить ориен¬
тировочные затраты и вероятности выполнения программы, необ¬
ходимые для обоснованного формирования технических заданий
на проектирование космических систем и отдельных аппаратов.
Следует отметить исключительную важность этого этапа, по¬
скольку он в большой степени определяет направление исследо¬
ваний и стоимость программы. Необоснованное завышение веро¬
ятности выполнения программы может значительно увеличить ее
стоимость (при повышении надежности от Р/но = 0,6 до Ргн.к = 0,75
ее стоимость возрастает на 25—50%, при повышении надежности
до Ргн.к = 0,90 — более чем вдвое).
С задачи второго уровня начинается проектирование единично¬
го КА. Анализируются его характеристики при выполнении про¬
граммы летной партией из т штук с заданной общей вероятностью
реализации программы Я/2.
Используя статистические характеристики по массе бортовых
систем, их удельным затратам, можно определить трудозатраты
на разработку КА при различном уровне надежности и затем
функции распределения затрат при различном количестве аппара¬
тов в летной партии (т) и количестве запусков (k^Zm):
Анализ критериальных зависимостей в форме функций распре¬
деления общих затрат (доходов) позволяет принять решение о ти¬
пе используемого носителя, объеме летной партии, характеристи¬
ках КА (масса /п/ка, надежность Я/ка, стоимость С/ка), обобщен¬
ных характеристиках бортовых систем.
Уточненная функция распределения экономического эффекта
программы может быть введена в условие первой задачи с целью
коррекции технического задания. Проектные критерии этого уров¬
ня разработки — стоимостные: функции распределения затрат (до¬
ходов) при различных вариантах реализации программы.
ется в следующей форме: определить
где а — статистический параметр.
Оптимальное решение имеет вид
2 [сио(1-я/но)вГ+1 г
п
Л'н.к=1-[Сш(1-Лно)Г+1
С,-а= /(Я.-s, т, k, Я;ка, С/КА, От/ка).
21
Задачи третьего уровня проектного анализа (см. рис. 1.5) отно¬
сятся к этапам проектирования бортовых систем. Если предыдущие
этапы строились на использовании статистических зависимостей
и коэффициентов, третий — базируется на анализе физических мо¬
делей работы агрегатов. Изучается надежность систем, определя¬
ются вероятностные характеристики выполнения частных операций
как функции точности систем. Работы на этом этапе должны под¬
твердить заложенные вероятностные характеристики и улучшить
их при заданных ограничениях.
В качестве проектных критериев этого этапа разработки вы¬
ступают вероятностные характеристики бортовых систем, опреде¬
ляющие в комплексе вероятность выполнения всей космической
программы.
Наиболее полно критерий эффективности этого уровня (Л ка)
раскрывается как вероятность выполнения задачи с учетом надеж¬
ности работы, степени соответствия рабочих условий расчетным и
пригодности КА данной конструкции к выполнению предложенных
функций. Критерии эффективности агрегатов, систем и КА в целом
представляются в виде функций их надежности (Pin.K = f(Xi1 У*))
и номинальной эффективности изделий (Pi3 = f(Xi)) — вероятности
выполнения задач в состоянии полной исправности: Р;ка=/[^'н.к,
Лэ] № — вектор параметров изделия; У* — вектор внешних ха¬
рактеристик) .
Номинальная эффективность определяется выходными свойст¬
вами изделия и способом его использования. Надежность — функ¬
ция проектных параметров и режимов работы агрегатов в. диапа¬
зоне возможных внешних условий.
Решение задачи третьего уровня — вероятностные характери¬
стики надежности и номинальной эффективности систем бортового
комплекса, обеспечивающие при заданных суммарных ограниче¬
ниях (С/а, т^) максимальную вероятность выполнения программы
одним космическим аппаратом. Оно может быть введено в условие
задачи предыдущего уровня для корректировки исходных данных
и повторения циклов анализа.
Вероятностный характер тех ни ко-экономиче¬
ских параметров, случайный характер рабочих
процессов качественно изменяют математические модели слож¬
ных космических систем. Строго говоря, большинство законов (да¬
же законов природы) справедливо лишь в среднем и подтвержда¬
ется среднестатистическими экспериментальными характеристи¬
ками.
Условия работы проектируемых космических аппаратов обыч¬
но характеризуются параметрами, имеющими широкие диапазоны
значений. Это иногда объясняется тем, что рабочая среда (косми¬
ческое пространство, атмосферы планет, условия на поверхности
планет и их спутников) недостаточно изучена. Часть воздействий,
имеющих вероятностную природу, представляется функциями рас¬
пределения характеристик или случайными функциями. Многие
рабочие процессы в бортовых системах КА и траекторные опера¬
22
ции, направленные на реализацию программы, также характери¬
зуются случайными параметрами и функциями.
В принципе вероятностные характеристики рабочих процессов
свойственны любым техническим системам. Однако при проекти¬
ровании «земных» изделий часто удается использовать простейшие
детерминированные модели. С этой целью применяются осреднен-
ные или граничные значения случайных величин, соответствующие
пренебрежимо малым вероятностям отказов. Системы получают
возможность нормально работать при нагрузках и режимах, пре¬
вышающих номинальные, но оказываются несколько перетяжелен-
ными. Причем большие значения резерва оправдывают себя в ред¬
ких (маловероятных) ситуациях.
Если использовать аналогичные методики для космических си¬
стем, о величине запасов, гарантирующих безотказность их от¬
дельных элементов, можно судить, например, по коэффициентам
вариации прочностных характеристик конструкций, функциональ¬
но связанных с массой, или гарантийным запасом топлива двига¬
тельных установок и рабочего тела ориентации. Эти запасы рас¬
считываются независимо для каждой .системы и составляют 5—
20% массы конструкции, компонентов топлива или рабочего тела.
Из анализа соотношений массовых характеристик для совре¬
менных КА можно видеть, что с учетом резервных приборных бло¬
ков такие запасы могут более чем на порядок превышать массу
научной аппаратуры, ради доставки которой на планету и созда¬
ется аппарат. Для характерной марсианской станции, блок кото¬
рой осуществляет посадку на планету, массовые характеристики
имеют следующее выражение, если принять общую массу станции
с разгонным блоком на орбите ИСЗ как га0: топливо разгонного
блока — 0,6т0; станция — 0,2т0; топливо коррекции и торможения
станции — 0,08т0; конструкция станции — 0,03т0; спускаемый ап¬
парат— 0,016т0; научная аппаратура спускаемого аппарата —
0,001т0.
Характеристики вероятностей выполнения отдельных операций
и надежности систем лежат в пределах 0,85—0,999, однако общая
вероятность выполнения задачи марсианским КА оценивается зна¬
чениями 0,7—0,8.
Повышения эффективности программы путем увеличения полу¬
чаемой научной информации можно добиться, увеличивая полез¬
ную нагрузку за счет гарантийных запасов тех систем, которые
имеют большую массу и малую производную функции надежности
(эффективности) по массе. Другой путь заключается в распреде¬
лении масс (и других ограничивающих параметров), обеспечиваю¬
щем такое сочетание вероятностей выполнения частных операций,
которое отвечает максимуму общей экономической эффективности
программы.
Последняя задача, которая может быть названа синтезом эф¬
фективности космической программы, выдвигает новые принципы
общего проектирования. Это построение вероятностных моделей
бортовых систем, разработка методов автономного анализа систем
23
и их оптимального объединения в комплексы, анализ выходных ве¬
роятностных характеристик эффективности КА.
Физические условия работы КА определяются глубоким ваку¬
умом космического пространства, электромагнитной и корпуску¬
лярной радиацией, наличием переменных гравитационных и маг¬
нитных полей, метеорной опасностью, экстремальными параметрами
атмосферы, поверхности и грунта планеты, к которой он при¬
ближается (или садится). Конструктивные решения связываются
со статическими и динамическими нагрузками, испытываемыми
КА в процессе производства и испытаний, при запуске, в полете,
при спуске и посадке на другую планету. С наибольшей полнотой
практически все рабочие условия характеризуются вероятностны¬
ми параметрами и функциями.
Для параметров космических условий характерно взаимное
влияние. Так, большинство физических параметров Солнечной си¬
стемы непосредственно зависит от солнечной активности, изменя¬
ющей интенсивность корпускулярных потоков в 1000—10 000 раз
по сравнению с обычным «фоном». Солнечные вспышки, имеющие
одиннадцатилетний цикл активности, прогнозируются как вероят¬
ностные события.
На первых этапах проектирования следует представить функ¬
ции распределения рабочих характеристик систем, наиболее под¬
верженных космическим воздействиям,— конструкций из пласти¬
ков, оптических элементов, покрытий, полупроводниковых прибо¬
ров, солнечных батарей, топлива в камерах РДТТ и т. д. [9].
Подобным образом, зная вероятностные характеристики мете¬
орных потоков, можно оценить вероятность пробоя корпуса стан¬
ции метеором или подобрать характеристики антиметеорного экра¬
на, который бы защитил космический аппарат с заданной вероят¬
ностью.
Разбросы значений давления и плотности атмосферы Земли,
влияющие на траектории спускаемых аппаратов и искусственных
спутников с низкими орбитами, с учетом широтных, сезонных и су¬
точных колебаний, аппроксимируются нормальными законами рас¬
пределения с коэффициентами вариации & = 4 ... 10%, увеличиваю¬
щимися с высотой.
Вероятностные прочностные характеристики конструкций, свя¬
занные со случайными отклонениями геометрических параметров
их элементов, свойств материалов и внешних нагрузок, описыва¬
ются нормальными распределениями с соответствующими коэффи¬
циентами вариаций [16]:
К о э ф ф и-
Параметр циснтва-
р и а ц и и, %
Геометрические характеристики 2—3
Напряжения, модуль упругости 3—8
Внешние нагрузки 8—15
Рабочие процессы в бортовых системах КА, как правило, опи¬
сываются случайными характеристиками и функциями. Таковы
24
/. Анализ ста -
! тистики по
\ прототипам
2.Разработка
технического
задания на КА
т;
3. Выбор траекто¬
рии полета
А'С;м,т,к
4. Разработка систем
бортового комплекса
* ЛТД
I
Синтез систем
Рис. 1.6. Циклы общего проектирования
теплофизические процессы в
камерах ЖРД и РДТТ, про¬
цессы астроориентации КА,
коррекции орбиты и т. п.
Анализ надежности КА це¬
ликом построен на изучении
вероятностных свойств элемен¬
тов и их объединений, а про¬
ектный экономический ана¬
лиз — в основном на исполь¬
зовании статистических зави¬
симостей с параметрами в ви¬
де математических ожиданий,
граничных значений случай¬
ных величин.
Используя при разработке
значения случайных характе¬
ристик, гарантирующие рабо¬
тоспособность, конструктор
перетяжеляет аппарат. Необ¬
ходимы более тонкие методы
анализа случайных факторов
в конструкторских и технико¬
экономических задачах, обес¬
печивающие наиболее эффективное распределение резервов массы,
трудозатрат, вероятностей выполнения частных операций.
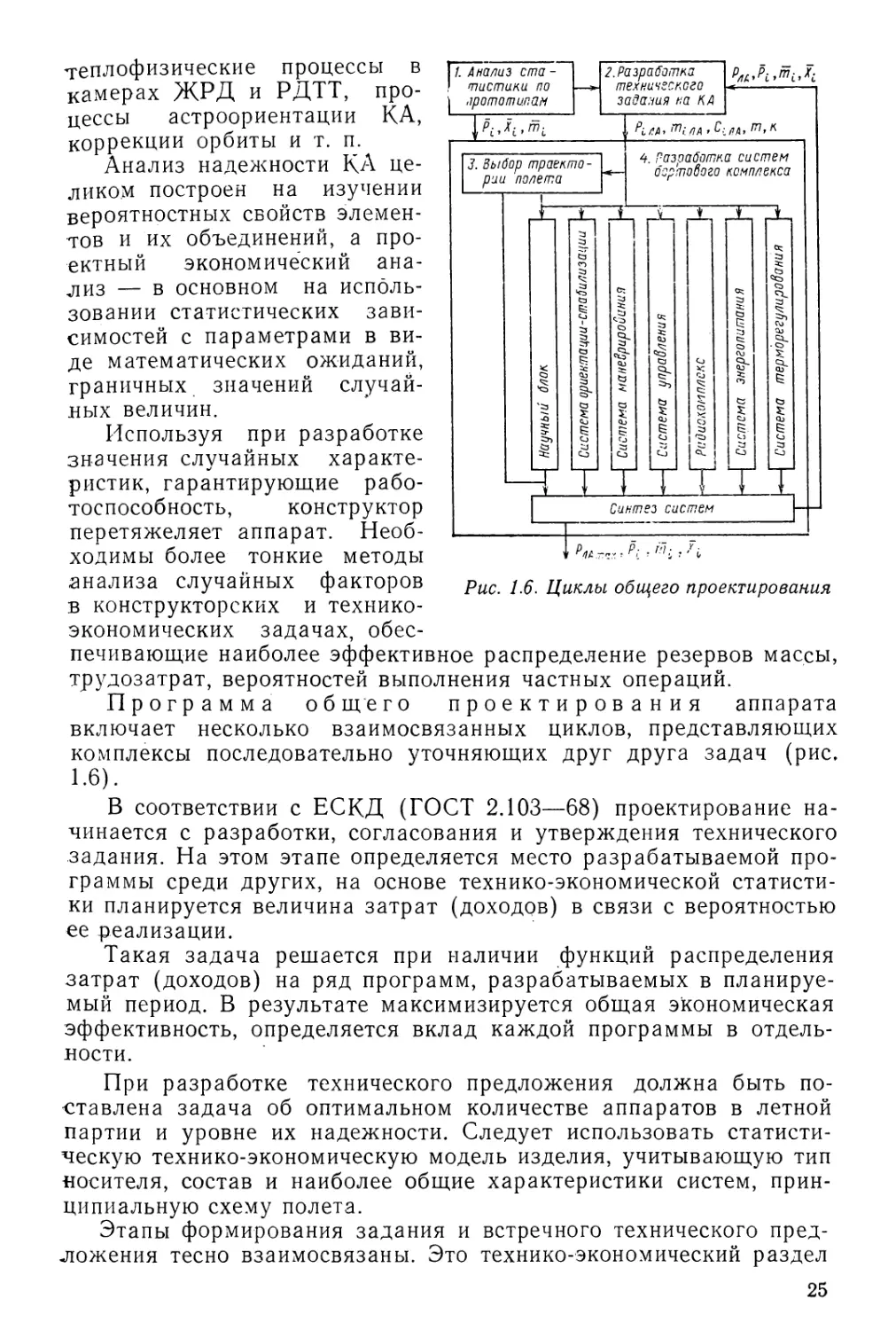
Программа общего проектирования аппарата
включает несколько взаимосвязанных циклов, представляющих
комплексы последовательно уточняющих друг друга задач (рис,
1.6).
В соответствии с ЕСКД (ГОСТ 2.103—68) проектирование на¬
чинается с разработки, согласования и утверждения технического
задания. На этом этапе определяется место разрабатываемой про¬
граммы среди других, на основе технико-экономической статисти¬
ки планируется величина затрат (доходов) в связи с вероятностью
ее реализации.
Такая задача решается при наличии функций распределения
затрат (доходов) на ряд программ, разрабатываемых в планируе¬
мый период. В результате максимизируется общая экономическая
эффективность, определяется вклад каждой программы в отдель¬
ности.
При разработке технического предложения должна быть по¬
ставлена задача об оптимальном количестве аппаратов в летной
партии и уровне их надежности. Следует использовать статисти¬
ческую технико-экономическую модель изделия, учитывающую тип
носителя, состав и наиболее общие характеристики систем, прин¬
ципиальную схему полета.
Этапы формирования задания и встречного технического пред¬
ложения тесно взаимосвязаны. Это технико-экономический раздел
25
общего проектирования, этап определения принципиальных кон¬
структорских решений по всем системам и агрегатам. При этом
строятся и анализируются вероятностные модели работы и эффек¬
тивности систем.
Общая задача проектирования имеет разделы, которые разра¬
батываются достаточно автономно специалистами по механике по¬
лета и управлению, системам бортового комплекса, двигательным
установкам.
Для каждой из систем находят функцию эффективности от ог¬
раничивающих параметров. Затем их оптимально объединяют, оп¬
ределяя состав комплекса. Используется иерархия взаимосвязан¬
ных критериев целого и частей изделия. Разработка систем постав¬
лена в определенные рамки: предварительно намечены принципы
их работы, ограничения, известна форма представления решений.
Траекторцая задача построения общей схемы полета, опреде¬
ления дат и «окон» запуска решается в детерминированной поста¬
новке. Для обеспечения номинальной траектории разрабатывает¬
ся программа коррекций, которая базируется на анализе случай¬
ных разбросов параметров после выведения и коррекций из-за не¬
совершенства измерительных средств и неточности математической
модели движения. В результате устанавливается функциональная
связь между располагаемым запасом топлива и вероятностью по¬
падания КА в заданный район космического пространства.
До сих пор различные варианты подобной задачи решались в
стохастической постановке специалистами по управлению [20]. За
критерий оптимальности систем принимался расход топлива. При
этом обеспечивалась высокая вероятность (~ 0,997) попадания в
район планеты-цели, которая, естественно, никак не сочеталась с
надежностью системы управления и других систем. В качестве
решений предлагались достаточно сложные машинные алгоритмы,
в том числе статистические, более пригодные для поверочного ана¬
лиза спроектированных систем.
Предпочтительнее постановка задачи, решение которой обеспе¬
чивает максимальную вероятность попадания станции в район
планеты-цели с учетом точности и работоспособности управляющих
систем при заданном ограничении по массе. При этом должен
учитываться вероятностный характер координат выведения, прира¬
щений скорости при коррекциях, случайные ошибки определения
координат аппарата, случайное количество используемых коррек¬
ций. Предпочтительны аналитические решения или численные в
безразмерных координатах, пригодные для широкого круга одно¬
типных проектных задач.
Проектирование ракетного блока (особенно корректирующего)
в отличие от большинства бортовых систем в большой степени ба¬
зируется на анализе вероятностных траекторных характерис¬
тик.
Рассматривается модель блока, обеспечивающего максималь¬
ную вероятность достижения заданных координат и скорости в
конце активного участка полета. Причем необходимо определить
26
оптимальное сочетание характеристик надежности элементов, га¬
рантийных запасов топлива, конструктивных параметров бакового
отсека. Параллельно целесообразно рассмотреть вопрос об управ¬
лении вектором тяги, которое часто осуществляется путем исполь¬
зования основных компонентов, связано с характеристиками и про¬
должительностью работы блоков.
Составная часть модели ракетного блока — вероятностная мо¬
дель эффективности двигательной установки. Для ЖРД исход¬
ной информацией являются функции связи тяги с массой и интен¬
сивностями отказов. Могут использоваться однокамерная и мно¬
гокамерные установки.
При однокамерном и однорежимном двигателе определяется
номинальная тяговооруженность блока. Многокамерная двига¬
тельная установка может допускать отказы части камер и исполь¬
зоваться при «жесткой» и «гибкой» программах разгона. При
«жесткой» — в случае отказов части камер оставшиеся форсируются
до исходной суммарной тяги, при «гибкой» — режимы могут не
изменяться, но увеличивается продолжительность активного участ¬
ка, т. е. продолжительность работы и сами режимы в общем слу¬
чае случайны.
Типовые системы бортового комплекса (ориентации и стабили¬
зации, радиоблоки, системы энергообеспечения и терморегулирова¬
ния) также должны разрабатываться на основе анализа вероят¬
ностных математических моделей, представляющих структуру обо¬
рудования и рабочие процессы.
Отсек объединенного приборного комплекса проектируется та¬
ким образом, чтобы обеспечить максимальную надежность (веро¬
ятность безотказной работы блоков). Причем существует опти¬
мальное сочетание характеристик рабочих условий в отсеке (мас¬
сой системы терморегулирования) и доли общей массы, идущей на
резервирование блоков.
Эффективность струйной системы ориентации и стабилизации
связывается с вероятностной программой полета (например, слу¬
чайным количеством сеансов связи и коррекций автоматической
межпланетной станции), с вероятностью того, что запас рабочего
тела достаточен, с надежностью электропневмоклапанов управля¬
ющих сопл. Энергоемкие операции поиска астроориентира — так¬
же случайные процессы. Ориентир располагается в поле обзора
датчика случайно, поэтому время поиска и затраты рабочего тела
характеризуются случайными величинами.
Для радиокомплекса целесообразно сочетать вероятность без¬
отказной работы и вероятность передачи информации без искаже¬
ния при наличии «шумов».
Система энергообеспечения при вероятностных радиационных
потоках и система терморегулирования при случайном изменении
характеристик покрытий и наличии метеорной опасности должны
с максимальной вероятностью обеспечивать рабочие режимы бор¬
тового комплекса.
27
В результате «общего проектирования» конкретизируются за¬
дания на техническое проектирование отдельных агрегатов системУ
включающие нормы надежности и эффективности.
При создании опытных, летных образцов и испытаниях уточня¬
ется программа использования изделия.
Параллельно с запуском аппарата проводится работа с экви¬
валентным наземным объектом, повторяющим все программные
операции. Основная задача этого этапа — детализация конкретной
программы, анализ реальных воздействий, которые при проекти¬
ровании рассматривались в широком «случайном» диапазоне, от¬
мена нецелесообразных операций, изменение программы и пере-
стройка систем в случае частичных отказов.
Анализ результатов полета производится с целью повышения
эффективности будущих модернизаций аппарата. При этом уточ¬
няется статистика по надежности элементов, точностям систем,,
характеристикам внешних условий. Строится база дальнейшего
уточнения методологии разработки.
Унификация систем бортового комплекса яв¬
ляется органической частью разработки крупномасштабных кос¬
мических программ. После запуска более полутора тысяч отечест¬
венных космических аппаратов нельзя говорить об уникальности
всех -элементов вновь создаваемых систем. КА считается новым,
если 30% его элементов спроектированы заново. Естественно, в
новых КА широко используются хорошо зарекомендовавшие себя
в летных испытаниях старые элементы.
Применение унификации систем и агрегатов КА позволяет
уменьшить стоимость разработки путем уменьшения номенклатуры
изделий и стоимость производства — путем увеличения объема вы¬
пуска однотипных изделий.
Важным преимуществом при создании КА из унифицированных
бортовых систем (агрегатов) является значительное сокращение
объема проектно-конструкторских работ и сроков разработки его
модификаций.
Общий алгоритм индивидуальной разработки серии программ
дополняется процедурой совместного анализа подобных систем,
которая позволяет скорректировать характеристики агрегатов, не
нарушая условий функционирования и снижая общие затраты на
разработку. При этом рассматривается частный критерий, соотно¬
сящий удешевление унифицированных систем С/(А/, Л/, Р/, шу) с
удорожанием их функционирования вследствие отклонения харак¬
теристик от оптимальных:
сун:=21 пр pj' т^~ дС/(д^у)1 >
/=1
где I — количество унифицированных систем; ДА/ — вектор откло¬
нения проектных параметров унифицированных систем от опти¬
мальных; /г/ — объем производственной партии; Р/ — надежность
унифицированной системы; mj — масса унифицированной системы.
28
При введении в разрабатываемый КА унифицированных систем
характеристики неунифицируемых корректируются в связи с необ¬
ходимостью уточнения ограничивающих параметров для обеспече¬
ния максимальной эффективности в новых условиях. При этом
итерационный цикл проектирования повторяется.
Анализ исследовательских космических программ периода
1960—1980 гг. показал, что для снижения затрат на разработку
и эксплуатацию на многих КА широко использовались ранее раз¬
работанные агрегаты и системы бортового комплекса.
Наиболее часто в космических программах используются идентичные двига¬
тели, заведомо не оптимальные по тяговооруженности, удельному импульсу, пер¬
воначально рассчитанные на другой ресурс:
Типдвигателя Вариант использования
ЖРД (тяга 22,7 кгс, топливо — гид- -Рейнджер», «Маринер-62»
разин)
ЖРД (тяга 23 кгс, топливо — гидра- «Маринер-65» (Венера), «Маринер-67»
зин) (Марс), «Маринер-73» (Меркурий),.
«Маринер-69» (два включения, Марс)
ЖРД «Маринер-71», «Викинг-75» (ОБ), ис¬
следование Марса в 1981 —1984 гг.
«Лунар-Орбитар»
ЖРД J-2 (тяга 102 тс, топливо во¬
дород— кислород) «Сатурн-1» (2-я ступень)
«Сатурн-5» (2-я ступень)
РДТТ (тяга 4000 кгс, масса 624,6 кг) «Сервейер», «Атлас-Центавр» (3-я
ступень)
РДТТ (тяга 372 кгс, масса 36,3 кг) «Синком», «Лунар-Эксплорер-1, -2»
РДТТ «Торад-Делта-Супер Найт» (1-я сту¬
пень), «Скаут» (2-я ступень)
Коррекция траектории полета и ориентация КА «Пионер-10», «Пионер-11»,
«Пионер-Венера-1, -2», «Вояджер-77» (исследование Юпитера с пролетной тра¬
ектории) осуществляется микродвигателями системы ориентации и стабилизации
КА, которые идентичны по своим параметрам.
Разработка программы исследования Юпитера с околопланетной орбиты вклю¬
чает запуск КА «MJO-81», на котором установлена корректирующетормозиач
двигательная установка с «Викинга-75».
Сложный по структуре бортовой радиотехнической комплекс (БРК) косми¬
ческих аппаратов претерпевает значительно более быстрые изменения за равный
период времени по сравнению с другими бортовыми системами. Это вызвано
развитием элементной базы и совершенствованием технологии изготовления, при¬
менением новых методов и способов кодирования и передачи информации, пере¬
ходом на новый диапазон частот и т. д. Несмотря на это, анализ ряда программ
исследования космического пространства показал, что для различных программ
применяются идентичные или частично модифицированные подсистемы БРК.
Например, радиотехнический комплекс КА «Маринер-62» был выполнен на
базе БРК «Рейнджер» (неизменными остались приемо-передающая система,
остронаправленная антенна). Программа исследования Венеры и Марса автома¬
тическими аппаратами серии «Маринер» предусматривает незначительную моди¬
фикацию БРК от объекта к объекту, увеличение емкости памяти запоминающего
устройства, увеличение (или уменьшение) числа команд, выполняемых КА и
другие изменения. Масса БРК космических аппаратов этой серии, за исключением
«Маринера-62», колеблется в пределах 8— 10°/о. Идентичные передатчики, имею¬
щие одинаковую рабочую частоту, установлены на аппаратах «Маринер-65, -67,
-69, -71, -73».
Базовым вариантом БРК «Пионера-10» и «Пионера-11» (исследование Юпи¬
тера с пролетной траектории) является радиотехнический комплекс КА «Пионер-6,.
-7, -8» (исследование Венеры и Марса). Внесены частичные изменения: установ¬
29
лена новая остронаправленная антенна, увеличена емкость памяти запоминаю-
щего устройства и др.
На «Вояджере-77» установлены с орбитального блока КА «Викинг-75» ПР°"
граммно-командная система, подсистема записи информации, блок детектирова¬
ния команд, с «Маринера-73» — телеметрическая система, передатчики двух Диа'
пазонов частот; с «Гелиоса-А» и ИСЗ ERTS — усилители ламп бегущей волны.
Бортовой радиотехнический комплекс КА «Маринер-71», «Маринер-73» и орби¬
тального блока «Викинг-75» выполнен на базе БРК «Маринер-69». Основным
различием в зависимости от решаемых задач являются расширение диапазона
частот, увеличение габаритов остронаправленной антенны, изменение емкости за¬
поминающего устройства.
Анализ программы исследований Венеры и Марса автоматическими косми¬
ческими аппаратами США типа «Маринер» показал, что система энергопитания
каждого последующего КА выполнена на базе ранее разработанной. Панели сол¬
нечных батарей различаются размерами и их установкой на корпусе. Потребная
энергоемкость химических батарей (свинцово-кадмиевых или никель-кадмиевых)
достигается набором определенного числа одинаковых элементов. Для КА «Ма-
ринер-65» и «Маринер-67» системы энергопитания идентичны.
Ранее разработанная радиоизотопная энергетическая установка СНАП-19 для
метеоспутника «Нимбус-В» успешно применялась на КА «Пионер-10», «Пионер-
11», «Вояджер-77», на посадочном блоке «Викинг-75». Обеспечение потребной
электроэнергией достигается объединением в один блок единичных энергоуста¬
новок в сочетании с термоэлектрическим преобразователем энергии. Исследуется
возможность использования таких радиоизотопных установок на последующих КА
для исследования Марса и Юпитера в 1981 —1984 гг.
Советские космические программы исследования Венеры и Марса (КА типа
«Венера» и «Марс») имеют в составе бортового комплекса много общего. Двига¬
тельная установка таких КА и часть бортовых систем идентичны.
От унификации при последовательном усовершенствовании аг¬
регатов осуществляется переход к проектированию и разработке
систем, оптимальных для серии программ. Это не простое осредне¬
ние параметров, а экономически и технически обоснованное обоб¬
щенное решение, характеризующееся не только входными —
выходными конструктивными параметрами, но и оптимальным ре¬
сурсом, надежностью, стоимостью. На этом пути в системах ориента¬
ции и стабилизации осуществлен переход от более чем ста инди¬
видуальных сборок к 60 типам систем, предназначенным для
работы на КА различной массы, в установленных диапазонах точно¬
сти ориентации, для различных ресурсов. Сто пятьдесят перспек¬
тивных систем энергообеспечения удалось скомпоновать из десят¬
ка типов модулей источников энергии, буферных батарей и пре¬
образующих блоков.
Эффект от унификации ряда американских космических про¬
грамм 1965—1975 гг. оценивается экономией 30—35% затрат на
бортовой комплекс. При этом учитывается взаимное влияние си¬
стем, соотношения их массы, надежности, возможность повышения
массы КА, вызывающей увеличение затрат на выведение.
2. УЧЕТ СЛУЧАЙНЫХ ФАКТОРОВ ПРИ ВЫБОРЕ
ПРОЕКТНЫХ КРИТЕРИЕВ, МЕТОДОВ АНАЛИЗА
И СИНТЕЗА СИСТЕМ
Автоматические космические аппараты и их системы относятся
к классу «сложных (больших) систем». Основание для этого дают
30
их следующие признаки: наличие большого количества взаимодей¬
ствующих элементов; сложность функций, объединенных общей
задачей; возможность членения на системы, функционирование
которых подчинено общей цели КА; наличие разветвленной инфор¬
мационной сети управления, обеспечивающей самоорганизацию
системы и взаимодействие с окружающей средой; возможность
корректировки рабочих программ и структуры систем в связи со
случайными отказами, отклонением рабочих режимов от номи¬
нала, случайными внешними воздействиями.
Теория «сложных систем» выделяет две стадии проектирования:
макро- и микропроектирование.
Применительно к широкому классу летательных аппаратов —
самолетам, ракетам, космическим аппаратам макропроектирова¬
ние получило название «общего проектирования». Это — комплекс
взаимосвязанных задач по определению общей схемы выполнения
программы, последовательности операций, состава, принципов ра¬
боты и наиболее общих характеристик бортовых систем и аппара¬
та в целом. Этот этап начинается с обоснования и формирования
технического задания на проектирование изделия и заканчивается
составлением детальных технических заданий на проектирование
систем и агрегатов.
Совокупность методов макропроектирования получила назва¬
ние системотехники. Она включает в себя выбор показателя (или
показателей) эффективности, разработку общей математической
модели системы, связывающей критерий с проектными параметра¬
ми аппарата, определение принципов анализа и оптимизации мо¬
дели.
2. 1. Определение критериев эффективности космических
программ, КА и их бортовых систем
Совсем недавно проблема конструирования машин ограничива¬
лась достижением определенных физических выходных характери¬
стик. Задача безотказности работы решалась автоматически вслед¬
ствие относительной простоты конструкций.
Образцы современной ракетно-космической техники отличают¬
ся огромным количеством элементов, их сложной взаимосвязью,
тяжелыми режимами работы, что выдвигает на первый план про¬
блемы работоспособности. Если в последовательной системе веро¬
ятность безотказной работы элементов достаточно высока (Л =
= 0,99; 0,999), но их количество превышает т = 70 и 700 штук со¬
ответственно, то за рабочий период будет отказывать каждая вто¬
рая система: P^^Pni=0,5. Американская ракета-носитель «Са¬
турн-5» состоит почти из 85 тысяч одних только электрических
основных и резервных элементов, и вероятность выполнения ею зада¬
чи оценивается значением 0,9. Автоматическая межпланетная стан¬
ция «Маринер» с 25 тысячами элементов доставляет полезный груз
в район планеты-цели с вероятностью 0,7.
Усложнение систем требует детального анализа нового качест¬
31
ва — эффективности, которое определяет, в какой степени система
приспособлена для выполнения поставленной задачи.
Основополагающий экономический критерий эффективности КА
или системы КА может быть построен с использованием принципов
«Типовой методики определения экономической эффективности
капитальных вложений» или ее приложений к системам летатель¬
ных аппаратов. В зависимости от типа проектной задачи исполь¬
зуются критерии абсолютной или сравнительной эффективности
[25]. Критерии абсолютной экономической эффективности приме¬
няются при анализе совершенно новых систем, при замене функ¬
ционирующих систем несоизмеримо более совершенными. Крите¬
рии сравнительной экономической эффективности используются
для выбора наиболее целесообразного проекта из ряда анализируе¬
мых. Таким критерием может быть стоимость выполнения харак¬
терной операции или всей программы. При этом существует еди¬
ная база для сравнения: все КА (системы) выполняют одинако¬
вые функции, имеется ряд постоянных ограничений (по массовым
характеристикам, времени разработки и т. д.).
Критерии сравнительной эффективности представляются раз¬
лично для характерных космических программ. Назначение КА
первого типа состоит в доставке некоторого груза в заданный рай¬
он космического пространства. При отказах пуски повторяются
столько раз, сколько имеется летных экземпляров изделий. Время
работы КА, выполнившего задачу,— не менее заданного (напри¬
мер, времени перелета к планете назначения). Выполнение'зада¬
чи КА второго типа связано с суммарной продолжительностью их
работы. Это КА, выполняющие научно-исследовательские или на¬
роднохозяйственные задачи, воспринимающие, обрабатывающие и
передающие информацию; их эффективность находится в прямой
зависимости от продолжительности работы. Для программ первого
типа следует минимизировать суммарные затраты, для программ
второго типа — максимизировать суммарную прибыль.
Стоимостные характеристики космических программ во многих
отношениях случайны. Базирующиеся на статистике проектные
оценки долгое время отличались от реальных затрат в несколько
раз [7]. Теперь очевидно, что это связано не только с индивидуаль¬
ной структурой разработки и производства новых систем, но и со
случайной природой развития системы во времени от появления
задачи до реализации программы. Наиболее полно критерий эф¬
фективности должен характеризоваться функцией распределения
случайной величины, когда значение затрат (доходов) непосредст¬
венно связывается с вероятностью реализации программы.
Естественно, что конструктору удобнее оставить экономические
задачи экономистам (или зарождающейся службе «системного
анализа»). Поэтому в конструкторских задачах применяются кри¬
терии в форме функций конструктивных характеристик или харак¬
теристик качества функционирования. В свою очередь, эти проме¬
жуточные критерии являются параметрами формул для экономи¬
ческих оценок.
32
Особое значение (как критерий технической эффективности)
приобретает параметр — вероятность выполнения программы в це¬
лом или своих ограниченных функций единичным космическим ап¬
паратом. Он органично включает в себя характеристики работо¬
способности и качества КА, непосредственно влияя на экономиче¬
ские показатели. Вместе с тем он взаимосвязан с конструктивными
параметрами и показателями качества работы всех систем борто¬
вого комплекса. В более общей задаче о составе космического
комплекса он определяет необходимый объем летной партии, по¬
казатели рабочего ресурса.
Критерий технической эффективности в форме вероятности вы¬
полнения задачи единичным космическим аппаратом без большо¬
го ущерба для общности методики компонуется в форме
ЯкА = | Я9(ф)Ян(Ф)^(<Ь),
£(ф)
где ф— траектория (обобщенно — способ выполнения задачи), ха¬
рактеризуемая некоторым состоянием системы, рабочими режи¬
мами, условиями работы; £(ф)—множество траекторий; Рэ(ф)—
номинальная эффективность, вероятность выполнения задачи при
условии безотказности системы, зависящая от принципов работы,
точности, быстродействия агрегатов; Рн(ф)—вероятность безот¬
казной работы (надежность) КА на траектории ф; dF(ф)—функ¬
ция распределения траекторий.
Критерий технической эффективности определяет вероятность
выполнения задачи одним КА с учетом принципов работы, точно¬
сти систем и вероятности безотказной работы в конкретных усло¬
виях функционирования.
Очевидны единство и взаимосвязь характеристик номинальной
эффективности и надежности — они равноправно определяют об¬
щую вероятность выполнения программы и ее стоимость, однако
достаточно автономны и для заданной траектории ф часто могут
анализироваться независимо.
Для анализа вариантов проекта с единственной опорной тра¬
екторией (программой использования) при некоторых нежестких
ограничениях критерий эффективности агрегатов, систем и КА в
целом можно представить в. виде произведения их надежности
(PHi = P(xh yi)) на номинальную эффективность (Яэ/ — Рэ (л:,-))1
Р =Р Р
1 I 1 НI1 эм
где xi — вектор проектных параметров изделия; yi— вектор внеш¬
них характеристик и показателей надежности системы.
Номинальная эффективность определяется выходными свойст¬
вами КА и способом его использования. Надежность — функция
проектных параметров и режимов работы агрегатов в диапазоне
возможных внешних условий.
Выполнение задачи можно рассматривать как пересечение не¬
скольких событий: неисправности не сорвали выполнения задачи
или их не было, внешние условия соответствовали расчетным и раз-
2—550 33
брос характеристик систем обеспечил заданные точности выпол¬
нения программы.
Вероятностные критерии эффективности отдельных систем и
выполнения траекторных операций следует унифицировать и рас¬
сматривать как составляющие эффективности КА, определяющие,
в какой степени выбранный принцип работы и конструктивное ис¬
полнение отвечают решению общей задачи.
В унифицированной постановке следует представить все част¬
ные задачи проектирования.
Траекторная задача заключается в обеспечении некото¬
рого диапазона исходных параметров орбиты для спутника, в по¬
строении программы коррекций межпланетной станции, обеспечи¬
вающей максимальную вероятность ее попадания в заданную
область космического пространства. В качестве ограничения, эквива¬
лентного ограничению по массе, может выступать суммарная ха¬
рактеристическая скорость корректирующей двигательной уста¬
новки,
Задача отыскания конструктивных характе¬
ристик ракетного блока состоит в определении числа сту¬
пеней, разбивки приращения скорости по ступеням, характеристик
двигательных установок (ДУ), соответствующих максимальной ве¬
роятности достижения заданных траекторных параметров при из¬
вестных массе системы и массе полезной нагрузки. Для ДУ содер¬
жание критерия можно представить как вероятность безотказной
работы на режиме, соответствующем ее максимуму.
Формирование приборного комплекса включает
определение принципов работы, состава и параметров систем, от¬
вечающих максимальной вероятности выполнения задачи КА при
заданных ограничениях. Характеристики систем формулируются
конкретно применительно к каждой из них. Для исследовательских
систем это вероятность получения, обработки и передачи инфор¬
мации, для механических — вероятность срабатывания, сохранения
прочности и герметичности, для обслуживающего комплекса (си¬
стем терморегулирования, энергообеспечения, защиты от вредных
воздействий) —вероятность обеспечения рабочих условий для при¬
борного комплекса.
В принципе при проектировании используются и другие техни¬
ческие критерии, связанные со сравнительными экономическими.
Так, если в научной задаче трудно априорно оценить ценность ин¬
формации, за критерий может быть взят ее объем, связанный с вре¬
менем функционирования, или сама случайная продолжительность
работы космической системы при известной стоимости программы.
Характерным является то, что вероятностная модель системы тре¬
бует использования в проектной задаче вероятностного критерия
(при детерминированных ограничениях).
Не всегда, особенно для многоцелевых аппаратов, удается све¬
сти задачу к однокритериальной. В этом случае строятся наилуч¬
шие несравнимые векторы эффективности, которые дают возмож¬
ность выбрать целесообразное решение.
2. 2. Построение критериев с учетом структуры
космических программ и отдельных КА
Каждый из этапов разработки включает построение своих кри¬
териев эффективности, математических моделей систем, представ¬
ляющих связи проектных параметров с критерием, и определение
параметров, отвечающих заданному уровню критерия. Разработка
систем специалистами соответствующего профиля, обеспечивающая
необходимую глубину анализа, -предполагает наличие общей тео¬
рии, позволяющей объединять элементы в единицы большего мас¬
штаба вплоть до космических аппаратов или взаимодействующих
космических комплексов.
При сравнении вариантов научных космических программ, ко¬
торые не имеют непосредственной и быстрой материальной отда¬
чи, или сходных народнохозяйственных программ с одинаковой от¬
дачей следует пользоваться показателем сравнительной экономи¬
ческой эффективности в форме минимума приведенных затрат.
Включаются текущие и капитальные затраты на научно-исследова¬
тельскую работу, опытно-конструкторские разработки, изготовле¬
ние и эксплуатацию с учетом динамики изменения затрат по годам.
На этапе общего проектирования, когда рассматриваются экви¬
валентные по своей полезной отдаче проекты, рассчитанные на
конкретное производство, сходные сроки и условия эксплуатации,
следует ограничиться сравнением существенно упрощенных крите¬
риев. Для этого необходимо сгруппировать приведенные затраты
по целевому принципу: на разработку и производство космических
аппаратов, средства их.запуска и эксплуатацию.
Причислив космическую программу к одной из двух больших
групп — научно-исследовательской без непосредственной экономи¬
ческой отдачи или народнохозяйственной с реальной экономиче¬
ской отдачей,— для построения критериев эффективности следует
провести дальнейшее уточнение способов решения поставленных
задач.
При анализе вероятностных характеристик надежности и эф¬
фективности принципиальным является вопрос о продолжительно¬
сти реализации программ, которая может определяться детерми¬
нированной или вероятностной характеристикой времени.
Продолжительность работы автоматических межпланетных
станций, некоторых других космических аппаратов и их блоков
должна быть не меньше времени перелета и времени на выполне¬
ние научной программы. Их эффективность есть функция этого
времени.
Для большинства космических аппаратов народнохозяйствен¬
ного назначения (связных, метеорологических, навигационных, гео¬
физических, астрофизических) эффективность повышается с уве¬
личением продолжительности работы, объема принятой, перерабо¬
танной и переданной информации. Она связана со стоимостью
полученной для заказчика информации в виде фотографий, пере¬
данных радио- и телевизионных сообщений и т. п.
2*
35
Для КА первого тппп следует минимизировать себестоимость
доставки'и эксплуатации целевого блока:
Cl = min (Ckaot/i -f С nkl2 -f СэтЕр/31,
и использовать этот параметр в качестве критерия при сравнении
вариантов проекта с одинаковым техническим эффектом.
Для КА второго типа необходимо обеспечить максимальную
разность между доходами и расходами
Ci I=max [—Cka^/i — Cnkl2 + (Сц — С9) tsp/3]
при фиксированных одновременных капитальных вложениях на
создание КА, подготовку его производства и эксплуатации.
В приведенных формулах используются следующие обозначе¬
ния: СКа — средняя стоимость создания (разработки и изготовле¬
ния) одного КА; Сп — стоимость запуска одного КА, включающая
затраты на ракету-носитель, стартовый комплекс и обслуживание;
Сэ — средняя часовая стоимость обслуживания полета КА назем¬
ным комплексом (эксплуатационные затраты); Сц — цена часа ра¬
боты КА — осредненная цена полученной на Земле информации
(народнохозяйственные программы)'; т — количество летных об¬
разцов КА; k — планируемое количество запусков
lu h, h — коэффициенты, учитывающие разновременность затрат
на разработку КА, запуски и обслуживание его в полете (прини¬
маются постоянными при сравнении вариантов одной космической
программы).
При реализации программы несколькими КА (1 ^.k^m) число
запусков (k) и общее время работы и обслуживания системы (т2р)
будут случайными величинами, следовательно, и затраты (доходы)
будут случайными.
Средняя себестоимость разработки и изготовления единичного
КА (Ска) в свою очередь имеет достаточно сложную структуру.
Обилие факторов как чисто технических, так и административно¬
управленческого характера обосновывает статистический подход к
решению задачи [7].
Широко используемый метод удельных затрат устанавливает
зависимость средней стоимости типовых бортовых систем КА от
их массы. Он не учитывает многих технических факторов и имеет
невысокую точность (30—50%).
Учет факторов массы, конструктивной сложности, надежности
систем, темпов и степени освоения производства, разделение за¬
трат на разработку и изготовление летной партии обеспечивает точ¬
ность порядка ±20% [7].
Используя принципы этих методов, можно представить трудоза¬
траты на КА в виде суммы затрат на п систем (целевую, радиоком¬
плекс, энергообеспечения, терморегулирования и т. д.):
Ска =
п
-*об2 \f\i ^нов/> ^сл i J /) “Г f 2i (^им ^кол i ? ^осв i ’ ^исп /» ^и/Л*
36
Для i-й системы затраты на разработку и изготовление пред¬
ставляются в виде функций (/%, f2i) конструктивно-экономических
характеристик, причем Срг*, СИг — затраты (или трудозатраты в ча¬
сах) на разработку и изготовление среднестатистических систем;
&ТЮВ i — коэффициент, учитывающий фактор новизны проекта;
&сл г — коэффициент сложности, обобщенно учитывающий техни¬
ческие характеристики системы (точность, максимальную мощность,
количество режимов работы и т. д.); kBi — коэффициент, учитыва¬
ющий уровень надежности изделия; &Колг — коэффициент, учитыва¬
ющий объем летной партии КА; k0CB г — коэффициент освоения про¬
изводства КА; &исп г — коэффициент, учитывающий новизну и слож¬
ность в связи с необходимым объемом испытаний; /рг-, /иг- — коэф¬
фициенты, учитывающие разновременность затрат; /г0б — коэффи¬
циент, учитывающий общие затраты на КА в сборе, его отработку и
проектирование системы.
Трудозатраты в часах, обобщенно представляющие как трудо¬
емкость процессов создания, так и стоимость материалов, перево¬
зок и т. д., представляются в виде эмпирических функций массы
элементов КА (rrii).
Статистика по существующим КА определяет значимость пара¬
метров в формуле трудозатрат. Новые проекты характеризуются
долей вновь создаваемых элементов порядка 70%. В проектах по
имеющимся прототипам количество новых агрегатов и узлов состав¬
ляет 25—40% [7]. При малых партиях летных изделий затраты на
разработку в 2—5 раз превышают затраты на изготовление. Их со¬
отношение в основном определяется новизной создаваемого косми¬
ческого аппарата (системы).
Стоимость КА исключительно чувствительна к одной из вероят¬
ностных характеристик систем, которая достаточно произвольно
назначалась на этапе общего проектирования. Это — надежность
систем и соответствующий коэффициент (kui), который может изме¬
нять значение стоимости более чем вдвое.
Анализ слагаемых, входящих в показатели экономической эф¬
фективности космических программ, показывает, что это случайные
величины, функции ряда случайных параметров систем. В общем
случае программы выполняются за случайное время и при случай¬
ных затратах.
Анализ структуры проектируемого КА позволяет построить кри¬
терий его эффективности, один из параметров эффективности про¬
граммы в целом.
Автоматические космические аппараты компонуются из ряда
достаточно автономных систем, которые состоят из агрегатов и уз¬
лов, комплектуемых из деталей и готовых изделий. Соответственно
можно говорить об уровнях структурных схем и уровнях надежно¬
сти— от машины в целом до элементарного. Элементы связаны
функционально, у них во многом сходные рабочие условия, одно¬
типные ограничения при проектировании.-Контакты между систе¬
мами, агрегатами и их элементами фиксируются взаимосвязанными
входными — выходными параметрами. Например, выходная мощ¬
37
ность системы энергообеспечения соответствует
суммарному энерго¬
потреблению, которое, в свою очередь, определяет мощность тепло¬
отвода системы терморегулирования.
Функциональные схемы КА имеют «вход» (командный блок
связи с Землей или программное устройство) и «выход» (передача
информации на Землю).
Выполнение задачи (событие А) реализуется в случае срабаты¬
вания всех систем (событий Лг*, где i= 1, 2, ..., УУ; N — число си¬
стем) :
N
А= П Л-.
/=1
Выполнение своей задачи каждой из систем представляется как
пересечение случайных событий: Вi—безотказности системы, Сг* —
выполнения своих функций при условии безотказной работы:
At = Bt ПС„
Соответствующие вероятности P(Ai) =Р(Ви Ci) —P(Bi) X
ХР{Сг/В{), где P(Ci/Bi) —номинальная эффективность; Р(В{) —
надежность i-й системы.
Аналогичные зависимости можно установить для каждого струк¬
турного уровня системы вплоть до ее элементов.
Построение аналитических выражений для критериев эффектив¬
ности систем, их частей и элементов следует базировать на анализе
соответствующих моделей и схем эффективности. Последние подоб¬
ны используемым схемам надежности, дополненным блоками «но¬
минальной эффективности». В результате схема эффективности
включает в себя блоки двух типов:
блоки надежности Н, соответствующие реальным элементам
(деталям, приборам, системам, их комплексам), учитываемым как
отдельные самостоятельные части, имеющие свои количественные
показатели надежности и ограничивающих параметров;
блоки номинальной эффективности НЭ, характеризующие ве¬
роятности выполнения своих задач элементами и их объединениями
в случае сохранения их полной работоспособности.
Блоки НЭ могут быть связаны с одним реальным блоком или
с их комплексом. Они характеризуются не детерминированными
ограничивающими параметрами (типа массы, стоимости), а только
условными вероятностями, функциями распределения характери¬
стик или вероятностями решения частных задач.
Между блоками Н и НЭ можно установить некоторые типы вза¬
имосвязи.
1. Блоки НЭ могут представлять варианты стратегий или спо¬
собов использования реальных блоков (систем). Тогда вероятность
выполнения соответствующей частной задачи описывается форму¬
лой, сходной с формулой полной вероятности:
P(A^Vp№/.)p№))
7 = 1
38
где /— индекс варианта использования блоков (/=1, 2, ...);
P(Cij/Bij) —НЭ с учетом вероятности /-го варианта
Р надежность /-го блока в рассматриваемом варианте ис¬
пользования.
Такая взаимосвязь надежности и номинальной эффективности
характерна для траекторных задач и задач коррекции, когда варь¬
ируются число коррекций, принципы наведения в район планеты-
цели. При этом определяются функции распределения ошибок
траекторных параметров, число включений двигательной установ¬
ки, аппаратуры астрокоррекции и точной ориентации. Надежность
систем очевидно связана с количеством циклов их использования,
продолжительностью работы.
2. Блоки НЭ могут определять функции распределения харак¬
теристик внешних условий работы, в то время как блоки Н — на¬
дежность в более узком диапазоне рабочих условий конкретной си¬
стемы.
В этом случае НЭ (Р(С*)) определяется вероятностью попада¬
ния случайных параметров внешних условий в рабочую область
(с детерминированными характеристиками):
P(Ct)=\ f(xt)dx,
где f(xi)—функция распределения параметров внешних условий
(я); 5Р — диапазон рабочих условий.
Если надежность определяется как функция конкретных рабо¬
чих условий P(Bi) = PBi(x)y эффективность блока представляется
выражением
Я(Л,)=[ f{Xn) j /(-*«-1)-- f fxix^PeiWdx,
sn Sn—1 'Sl
где f(Xi) —функция распределения Xi-го параметра рабочих усло¬
вий; Si — возможный диапазон параметров одного из рабочих ус¬
ловий; х(хи x2t ...у хп) —вектор характеристик рабочих условий.
Приведенные зависимости используются, например, для анали¬
за надежности приборного комплекса при случайной температуре
в приборном отсеке, для расчета энергопроизводительности сол¬
нечных батарей в условиях случайных радиационных воздействий
и т. п. Если возможные стратегии или характеристики внешних ус¬
ловий относятся к системе элементов, блок НЭ устанавливается по¬
следовательно всей системе.
3. Наиболее общая вероятностная зависимость между блоками
Н и НЭ устанавливается при наличии корреляции между характе¬
ризующими их вероятностными величинами. В этом случае вероят¬
ностные характеристики блоков Р(В\), Р(Сг)—функции одних и
тех же случайных величин.
39
Состояния Bij Сг характеризуются случайными величинами.
^(А*) Р fa в h -Xci) Р (xBi) Р (Xq/) “j- COV (Xg/, Xci)—
= P(xBi) P{xci) + r{xBi, xCi)D(xBi)D{xCi),
где соv(xBh хы) — ковариация; r(xBii *ы) — коэффициент корре¬
ляции; D(xBi), D(xa) —дисперсии случайных величин.
Такого типа зависимости имеют место, например, в траекторной
задаче, когда случайное отклонение исходных траекторных харак¬
теристик определяет как принципы дальнейшего управления (число
и время коррекций), так и надежность работы исполнительных бло¬
ков (продолжительность и режимы использования).
В схеме эффективности блоки НЭ обычно устанавливаются по¬
следовательно с соответствующими исполнительными блоками.
В тех случаях, когда с некоторой вероятностью можно выполнить
полет, не используя некоторую систему, вводится блок НЭ, парал¬
лельный ей.
Между комплексными элементами (Н+НЭ) схемы эффектив¬
ности устанавливаются типичные связи схем надежности: последо¬
вательно-параллельные, типа «голосования», «мостиковые» и др.
Построение формулы общей эффективности не вызывает затруд¬
нений только при простейшей последовательно-параллельной струк¬
туре схемы. В общем случае анализ вероятности выполнения зада¬
чи сводится к перебору всех возможных состояний системы и к
суммированию вероятностей, отвечающих ее выполнению. Это
трудоемкий и не всегда осуществимый процесс. В случае несколь¬
ких десятков элементов с произвольным соединением число вариан¬
тов, соответствующих работоспособному состоянию системы, стано¬
вится необозримым.
Компактное решение задачи дает использование метода «мини¬
мальных путей» и «минимальных сечений», позволяющего по¬
строить верхнюю и нижнюю границы критериев [21]. Для высоко¬
надежных элементов космических систем (P*>0,99) они различа¬
ются незначительно. Полученные границы (или только нижняя из
них) используются как проектные критерии.
Структура новых критериев вполне соответствует физике рабо¬
ты системы: введение резервного элемента или повышение эффек¬
тивности используемого, установление дополнительных связей по¬
вышает общую эффективность.
Условием применения метода является характерная для КА
«монотонная структура» системы, отвечающая требованиям:
система работоспособна, если все элементы работоспособны;
система отказывает, если все элементы отказывают;
при отказе очередного элемента эффективность системы пони¬
жается (не повышается).
«Минимальным путем» называется минимальная цепочка эле¬
ментов, обеспечивающая нормальное функционирование системы.
1 при соответствии решению задачи;
О — в противном случае;
40
Очевидно, при наличии блоков, резервируемых функционально и
поблочно (систем с избыточностью), такой путь всегда не единст¬
венный.
«Минимальным сечением» называется минимальное множество
элементов, отказ которых приводит к отказу системы.
С каждым минимальным путем Aj можно связать логическую
функцию,, описывающую структуру цепочки:
aj(x)= П Xh
'6 Aj
Функция принимает значение 1, если все элементы минимально¬
го пути нормально работают, и 0, если отказывает хотя бы один из
них.
Минимальных путей в системе может быть несколько (г).
Структурная функция системы, определяющая ее работоспособ¬
ность через характеристики минимальных путей, имеет вид
<p(*)=n ajix) = 1 — П [1 —а/л:)|.
1<у<г 1<;<г
Она показывает, что система работоспособна, если существует
хотя бы один минимальный путь, содержащий только исправные
элементы.
Вероятность безотказной работы системы:
{?W=l) = P{n.<r(a^x)=l)}=l-P{n.Ja;W=l)}.
р (ф(х)=;„ . х , v ,
Логические функции, характеризующие работоспособность ми¬
нимальных путей, как правило, оказываются зависимыми, посколь¬
ку содержат одни и те же элементы, откуда
Р(п (М*)= 1)}>П /5{а;.(х)=1}=П [1-/чм*)=1}] =
1 </<г . ,
11<;</-
= п (1-ПЛ).
1<}<г 1*А,
Неравенство имеет место, поскольку отбрасываются положи¬
тельные ковариации случайных величин.
Таким образом, определена верхняя граница эффективности си¬
стемы:
1-П /1 — П рЛ>Р{<?Н= 1).
J
Нижняя граница определяется из анализа сечений.
Для k-ro сечения из Ви элементов логическая функция имеет вид
h (•*) = n xt =1 - n (i - xt).
l£Bk &Bk
Она принимает значение 0, если все элементы неисправны, и 1,
если работает хотя бы один из них.
41
Если всего в системе S минимальных сечений, структурная функ¬
ция имеет вид
?(*)= П Рл(*),
1<£<S
т. е. система работоспособна, если во всех сечениях имеется по край¬
ней мере по одному исправному элементу.
Вероятность нормальной работы
Р{<?(х)=\}=Р (П (?*(*)= 1)1.
Вследствие зависимости событий отказа сечений
^{п №)=1)}>П рШх)=Ц=П р-ПП-М
J 1<ft<s l<ft<5 L 16Bft\ /
Нижняя граница эффективности системы
Р(?(*)=!!> П [1-П(1-Л)
Kft<sL ;евй
Двусторонняя граница
1-П (1 -Л
w
<Я{ср(х)=1}< 1-
1-П )•
1<j<r\ i£Bk )
Если взять за основу событие отказа элементов, образующих се¬
чения P/i(x) =0, то вероятность отказа системы
P{cp(x)=i) = P{u(3ftW=0}=2^(?ftW=0}-
-2^|3/W=0; Зу(х)=0)+2 ptti (^)=°; ^W=0;-?„W=0}-...,
i <j i<j<m
Поскольку P{pfe(x)=0} малы, при расчете можно отбрасывать
последующие слагаемые суммы с ошибкой, не превышающей по¬
следнего отброшенного члена.
Приемлемая форма выражения для критерия — вероятности вы¬
полнения задачи КА с учетом надежности агрегатов, соответствия
рабочих условий расчетным и выполнения требований по точности —
представляется в виде
р*>П [1-Пи-ло
Kfccs L i^Bk
где Pi — вероятности, характеризующие работоспособность элемен¬
тов системы; S — количество «минимальных сечений»; Ви — множе¬
ство элементов k-то сечения.
42
2. 3. Методы анализа и выбора проектных параметров
Практически проектировщику сложных систем никогда не уда¬
ется свести свою задачу к чисто математической задаче оптими¬
зации критерия при известных ограничениях. Проектирование КА —
это, как правило, итерационный процесс, связанный с последова¬
тельным улучшением системы, принятием конструктивных решений.
Каждый цикл включает в себя анализ эффективности изделия,
влияния на нее характеристик частных систем и ограничений.
Знание структуры КА, программы работы и характеристик его
элементов дает возможность построить критериальную функцию
эффективности
Р = f (а, х, т, и),
где а — вектор постоянных характеристик систем; х—вектор вы¬
бираемых проектных параметров; т — вектор ограничений; и —
вектор случайных параметров систем и внешних воздействий.
Проектные параметры соответствуют экстремуму критерия.
Общим методом анализа сформированной стохастической моде¬
ли системы, включающей в себя случайные реализации парамет¬
ров, является статистическое моделирование.
Анализ заключается в определении функции распределения зна¬
чений критерия эффективности Р для множества случайных реали¬
заций параметров й при заданных значениях проектных парамет¬
ров х. Значения случайных параметров находятся с помощью дат¬
чиков случайных чисел. Метод характеризуется большими затрата¬
ми машинного времени (особенно при моделировании траекторных
задач), поскольку необходим расчет критерия при нескольких де¬
сятках реализаций каждого случайного параметра. Погрешность
метода убывает с увеличением числа испытаний.
Очевидно, что это не проектировочный анализ, поскольку пара¬
метры изделия не варьируются, не выявляется их связь с критери¬
ем эффективности. Если же повторять весь цикл операций, изменяя
в определенных границах каждый проектный параметр, трудоем¬
кость метода становится неприемлемой.
Градиентный метод последовательного улучшения системы час¬
то оказывается более целесообразным при анализе проектных па¬
раметров.
Организуется шаговый процесс, при котором спроектированная
в первом приближении система приближается к оптимальной, па¬
раметры которой соответствуют максимуму эффективности Р при
ограничениях т и для которой в предположении, что Р(х), т(х) —
гладкие функции х, выполняются необходимые условия стационар¬
ности функции Лагранжа
ср(а, х, т, &Д)=Я(а, х, а, т)-{-\т{х).
Машинный итерационный процесс определения проектных па¬
43
раметров изделия по алгоритмам градиентных методов представ¬
ляется системой уравнений [8]:
~ “ | а, и, т, X) .
лп +1 — лп I а 7= 5
дх
г г . д<р(*, а, и, /и, X)
/г + 1 — Л/г+# >
дХ
где хп, *n+i — значения проектных параметров на п-й и (ц+1)-й
итерациях; а — некоторый скаляр, регулирующий процесс.
Варьируются определяющие проектные параметры, в том числе
количество резервирующих блоков в системах.
Однако итерационные математические методы последователь¬
ного улучшения систем обладают рядом недостатков, часто застав¬
ляющих отказываться от их использования. Не всегда выполняется
необходимое условие дифференцируемости функционала ср по пара¬
метрам, часть решений х может иметь смысл только в целочислен¬
ной форме (например, количество резервируемых блоков), ограни¬
чения могут иметь форму неравенств.
Анализ космического аппарата в целом делает задачу очень
большой, заставляет упрощать модели входящих систем и тем са¬
мым уменьшать их точность. Он позволяет использовать случай¬
ные характеристики параметров только в форме математических
ожиданий или граничных значений, соответствующих заданной до¬
верительной вероятности.
В большой степени моделирует естественную деятельность кон¬
структора математический метод динамического программирова¬
ния, обеспечивающий оптимальное объединение систем с предва¬
рительно оптимизируемой структурой. Обычно бортовые системы
КА компонуются в виде объединенных блоков. Для них характер¬
на большая автономность работы в комплексе других систем и на¬
личие большого количества внутренних связей. Отсюда — общепри¬
нятая двухступенчатость проектирования систем и КА в целом.
Задача проектирования КА (или их. систем) сводится к опреде¬
лению проектных параметров х, соответствующих при заданных ог¬
раничениях т максимуму функционала Р(а, х, т, й).
Принцип динамического программирования используется при
критериальной функции в мультипликативной (или аддитивной)
форме:
Р A=fi (Р (А) /2 (Р (-%)),. -J(P {хп));
х(хх, х2,...,хп).
Он состоит в распределении ограничивающего параметра in
между элементами системы, обеспечивающем максимум критерия.
При одном ограничении (по массе т), наиболее часто исполь¬
зуемом в проектировании, алгоритм решения описывается рекур¬
рентным соотношением
44
Rk(m*)—vr.ax[/ЦР(**))#*_1 (от* —/я* (.**))];
0 <mR<.m*,
причем Rk-1(m*) = max \f{P{xx)) f (P(x2)),..„ / (Я(хй_,))],
где k, k—1—размерность функций (6=2, 3, ri)\ tn* — ограни¬
чение на функцию Rk(tn*)
Процесс начинается с оптимального объединения двух первых
функций
/?2(от*)=тах 1/1(Р(х1))/2(Р{х2))};
О <^т (хг) /гг*; т (х2) = /гг* — т (xj
и завершается общим решением
Р (x)=Rn (х, m)max= max [/„ (Р (x„)) Rn_x (т* — т (*„))];
О <^т(хп)<^т.
Принцип динамического программирования — целенаправлен¬
ный перебор при объединении некоторых пар элементов единого
целого — можно рассматривать как алгоритм оптимального объ¬
единения систем и агрегатов в единицы более высокого уровня
.вплоть до машины в целом (и комплексов КА).
Характеристики г-го элемента (системы) в числе определя¬
ющих конструктивных параметров должны иметь зависимость эф¬
фективности от ограничения: Pi = f(m). Решение определяет целе¬
сообразное сочетание эффективности элементов (Pi), соответству¬
ющее единственному распределению между ними ограничивающего
параметра •
Задача с двумя и большим количеством ограничений (напри¬
мер, по массе т и стоимости С) легко сводится к рассмотренной
путем перехода к новому функционалу типа
п
Rn = Pn(x, т, С)ехр[ — Х/ге(х)]; V С, < С,
/= 1
где Рп(х, т, С) —эффективность системы п элементов; X — коэф¬
фициент, аналогичный множителю Лагранжа; С* — стоимость i-го
элемента.
Для построения рекуррентного соотношения вводится' функция
#*(*> CU = max [РА(х, т, С)ехр(—Х/гг(а:))] =
= max [Pk-i(x, /гг, С*)ехр( — \т(х))Р(хк, /гг, С — С*)ехр(— Хт(хк))\\
k=2, 3,...,/г; 0<С*<С.
Затем процедура решения совпадает с рассмотренной. Коэффи-
45
циент К находится последовательными приближениями. При этом
удовлетворяется соотношение
п
^ mi ^ т•
/ = 1
В общем случае сложной системы критериальная функция не
имеет мультипликативной или аддитивной структуры.
Для проектировочных, схем эффективности КА она получается
использованием метода «минимальных сечений» и представляется
в форме
i-п (1-ля=2 п рп
ге вк J i6'v
где М, N — области сочетаний произведений Pi размерностью не
выше SxBk; Pi — эффективность единичного блока с внутренним
поэлементным резервированием: Pi = f(a, х, т, й).
Критериальную функцию можно привести к форме, удобной для
использования динамического программирования:
/=1 /=о
где ki = f(Pv Я2,..., Pj-i, п — число элементов
системы.
Каждая сумма выражения объединяет члены критериальной
функции с сомножителями Pj. Критерий представляет собой п-ю
степень значения эффективности системы. Его максимизация экви¬
валентна максимизации эффективности.
Задача оптимизации системы решается при условии сходимости
следующего итерационного процесса:
1. На основании статистических данных выбирается первое при¬
ближение значений эффективности элементов Pj0.
2. Определяются коэффициенты ki 0.
3. Для заданных ограничений т производится цикл расчетов ди¬
намического программирования, определяющий оптимальные зна¬
чения эффективности элементов Pj i, соответствующие
0°Л/)тах=П
;'= 1 / = 0
4. Указанный цикл (1—3) повторяется для полученных значе¬
ний эффективности элементов до их сходимости.
В процессе итераций изменяются коэффициенты критериальной
функции и, следовательно, сама функция. Обозначив ее текущее
выражение через ит, где т — порядок итерации, имеем выражение
для процесса: um+i = (p(um).
Область сходимости ^процесса определяется следующей теоре¬
мой.
^>П
l<k<S
46
Пусть функция ф(ц), определенная на отрезке действительной
оси, удовлетворяет условию Липшица:
I? (и) “ <Р (и)| < М \и — и\
для и, u^F, где F — область определения функции ф, 0^М<1.
Для непрерывных функций условие имеет вид \ц'(и) |<1.
Выберем в F элемент и0 и определим ui = q}(u0).
Если множество, определяемое неравенством
\а — щ\ ^_|И1 — и0\
принадлежит F или известно, что ит могут быть вычислены для
/72 = 1, 2, ..., причем все ит останутся в F, то существует одно реше¬
ние £ уравнения и=у(и), последовательность иш сходится к £ и ре¬
шение принадлежит множеству, определяемому последним нера¬
венством.
В случае рассматриваемой задачи функция ф включает в себя
процесс оптимизации P.s по параметрам Р{ с ограничением т.
Поскольку на каждом шаге выполняется цикл динамического
программирования, имеем
d<p ду
дР[ dirii
= 0.
В области оптимального решения (сходимости) к этим условиям
добавляется = 0.
dki
Область сходимости Итераций определяется неравенством
<*Р/и+1
dPi
<
dPi
Эти условия необходимо обеспечить при выборе первого при¬
ближения.
В реальных случаях заведомо высокой эффективности систем
первыми приближениями порядка 0,9 обеспечивается быстрая
сходимость процесса. ^
3. МЕТОДОЛОГИЧЕСКИЕ ВОПРОСЫ АНАЛИЗА
ЭФФЕКТИВНОСТИ ПРИ ПРОЕКТИРОВАНИИ
КОСМИЧЕСКИХ СИСТЕМ
Параллельно с совершенствованием конструкций, материалов и
технологии развиваются методы технико-экономического анализа,
углубляется разработка вопросов о сущности, критериях и путях
повышения эффективности.
Задачи выбора параметров сложных систем, как правило, не
вписываются в классические рамки оптимизации и исследования
операций. Проектированию КА свойственно использование итера¬
ционных циклов, последовательно уточняющих решение задачи. От
47
циент X находится последовательными приближениями. При этом
удовлетворяется соотношение
п
trii < т.
i= 1
В общем случае сложной системы критериальная функция не
имеет мультипликативной или аддитивной структуры.
Для проектировочных, схем эффективности КА она получается
использованием метода «минимальных сечений» и представляется
в форме
i-п (1-л)1=2 п рп
i£Bk J j£M feN
где М, N — области сочетаний произведений Pi размерностью не
выше SxBk'.; Pi — эффективность единичного блока с внутренним
поэлементным резервированием: Pi = f(a, х, т, й).
Критериальную функцию можно привести к форме, удобной для
использования динамического программирования:
pj=п
у = 1 / = 0
где ki = f(Pli Я2,..., Яу-i, &</г; я — число элементов
системы.
Каждая сумма выражения объединяет члены критериальной
функции с сомножителями Pj. Критерий представляет собой п-ю
степень значения эффективности системы. Его максимизация экви¬
валентна максимизации эффективности.
Задача оптимизации системы решается при условии сходимости
следующего итерационного процесса:
1. На основании статистических данных выбирается первое при¬
ближение значений эффективности элементов Pj0.
2. Определяются коэффициенты ki о. -
3. Для заданных ограничений т производится цикл расчетов ди¬
намического программирования, определяющйй оптимальные зна¬
чения эффективности элементов Pj It соответствующие
(^Vmax=n
j= 1 / = 0
4. Указанный цикл (1—3) повторяется для полученных значе¬
ний эффективности элементов до их сходимости.
В процессе итераций изменяются коэффициенты критериальной
функции и, следовательно, сама функция. Обозначив ее текущее
выражение через ит, где т — порядок итерации, имеем выражение
для процесса: цш+1 = ф(ат).
Область сходимости ^процесса определяется следующей теоре¬
мой.
л.>П
1<й<5
46
Пусть функция ф(^), определенная на отрезке действительной
оси, удовлетворяет условию Липшица:
Ыи)-ч(Ъ)\<М\и-и\
для и, где F — область определения функции ф, 0^А1<1.
Для непрерывных функций условие имеет вид |ф'(^) |<1-
Выберем в F элемент и0 и определим Ui=<p(u0).
Если множество, определяемое неравенством
\а — а\\ Т~Тг \и1 — ио\
1 — /и
принадлежит F или известно, что иш могут быть вычислены для
пг= 1,2,..., причем все иш останутся в F, то существует одно реше¬
ние | уравнения u — (p(u)i последовательность иш сходится к £ и ре¬
шение принадлежит множеству, определяемому последним нера¬
венством.
В случае рассматриваемой задачи функция ф включает в себя
процесс оптимизации Ps по параметрам Pi с ограничением т.
Поскольку на каждом шаге выполняется цикл динамического
программирования, имеем
dP-L dm-i
В области оптимального решения (сходимости) к этим условиям
добавляется —^- = 0.
dki
Область сходимости итераций определяется неравенством
д<?т + 1
dPi
<
дР-,
Эти условия необходимо обеспечить при выборе первого при¬
ближения.
В реальных случаях заведомо высокой эффективности систем
первыми приближениями порядка Р\^0,9 обеспечивается быстрая
сходимость процесса.
3. МЕТОДОЛОГИЧЕСКИЕ ВОПРОСЫ АНАЛИЗА
ЭФФЕКТИВНОСТИ ПРИ ПРОЕКТИРОВАНИИ
КОСМИЧЕСКИХ СИСТЕМ
Параллельно с совершенствованием конструкций, материалов и
технологии развиваются методы технико-экономического анализа,
углубляется разработка вопросов о сущности, критериях и путях
повышения эффективности.
Задачи выбора параметров сложных систем, как правило, не
вписываются в классические рамки оптимизации и исследования
операций. Проектированию КА свойственно использование итера¬
ционных циклов, последовательно уточняющих решение задачи. От
47
приближенного анализа, космического комплекса в целом, харак¬
теризуемого малым числом параметров, осуществляется переход к
детальной разработке отдельных аппаратов, их систем и агрега¬
тов.
Проектировщик нормирует показатели эффективности большой
системы и ее элементов и только на этой базе конструирует.
Этап первичного технико-экономического анализа включает ре¬
шение серии принципиальных задач:
определение характеристик эффективности составных частей
космической системы;
оптимизацию объема летной партии, ресурса и надежности еди¬
ничных КА;
определение обобщенных характеристик эффективности борто¬
вых систем, вероятности выполнения частных операций, их надеж¬
ности и стоимости.
3. 1. Структура формулы трудозатрат на разработку
и производство единичного КА
В технико-экономической статистике для КА с широким диапа¬
зоном конструктивных параметров потенциально содержится ин¬
формация о динамике их влияния на трудоемкость производства и
разработки. Аналитические зависимости, отражающие общие каче¬
ственные соотношения между характеристиками, дополненные ста¬
тистическими параметрами, обеспечивают удовлетворительную точ¬
ность анализа.
Формула стоимости единичного КА кроме его конструкции и со¬
става бортового комплекса отражает технологию разработки и про¬
изводства:
т I I
Ска = К0РгКс.До,К6йз V ки М»и КС.„К„., v (I Л-E)’ y.j +
/=11 Тг1
В случае сравнения альтернативных вариантов конструкции
первые коэффициенты, учитывающие затраты на производство КА
в целом, постоянны; Корг — организационные и накладные расходы
(1,5—1,75); Кс.а — затраты на теоретическую разработку, систем¬
ный анализ в целом (1,05—1,08); Ко.с — затраты на общую сборку,
отработку на функционирование КА (1,25—1,90); Кбаз — базовые
затраты (масштабная единица: например, затраты на производство
1 кг массы баковых отсеков).
Сравнительный критерий эффективности упрощается, если при¬
нять безразмерную форму:
Cka = 2(Rp^hV Ксл/Кн/ 2(1+£УY,/ + KviMpn^iKuL
/=1 I j=0 J
где КргКиг — безразмерные статистические параметры, определя-
48
ющие относительные трудозатраты единичных объемов разработки
и производства; п\— объем производственной партии изделий;
1—1
—коэффициент повышения затрат по времени (т—
у-О
время до первого пуска, годы); Е — норма эффективности исполь¬
зования капиталовложений (£=0,15 [25]); yXj — распределение тру-
дозатрат на разработку по годам (в долях единицы); СПг — харак¬
теристика снижения затрат на единичный агрегат в связи с ростом
объема летной партии (щ)\ Кп*— характеристика качества произ¬
водства в связи с потребной надежностью (Km^l).
Два параметра учитывают отклонение характеристик от сред¬
него уровня (отсчитываются от единицы в стороны увеличения или
уменьшения); Ксл г отражает сложность разработки, связанную с
облегчением или утяжелением агрегата, точностью выходных пара¬
метров (Кслг = 0,5 ... 2,0); Кпг учитывает отклонение надежности
от космических стандартов в связи с изменением ресурса (Кнг=
= 0,75 ... 2,5).
Слагаемые затрат на каждую из т систем включают затраты на
разработку и производство (Сг-Разр, Сгпр). Причем затраты на раз¬
работку для некоторых систем при выпуске малых серий изделий
на порядок и более превышают затраты на производство.
В основу формулы положены трудозатраты на некоторые образ¬
цы изделий с осредненными характеристиками [7]:
С- = К •А4С- —К • 7W^2£’
разр Н/’ ^пр — ^uiIvli >
где Mi — масса системы (агрегата); МНг — масса новых элементов
в системе (агрегате); у и, у2г — статистические коэффициенты, оп¬
ределяющие в зависимостях типа Му объем исследований при раз¬
работке и трудоемкость технологических процессов изготовления
системы (агрегата).
Новизна изделия характеризуется относительной массой новых
агрегатов Mui/Mi. При модернизации (MHi/Mi) =0,1.. .0,2. В зави¬
симости от класса КА эта характеристика принимает значения от
0,4 до 0,8:
Искусственные спутники Земли:
исследовательские 0,55—0,70
прикладного назначения 0,40—0,60
Автоматические межпланетные станции . . . 0,60—0,80
Ракетные блоки:
ступени носителей 0,60—0,70
новое топливо 0,75—0,80
Пилотируемые космические корабли 0,70—0,80
Распределение затрат в процессе разработки обычно представ¬
ляется'гладкой функцией с максимумом на 60—70% т — времени
первого пуска. С удлинением этапа разработки до трех-четырех
лет коэффициент повышения затрат O + ^VYt/jвозрастает до
значений 1,33—1,44. ’
49
Коэффициент сложности (Кслг) учитывает отклонения трудоза¬
трат от среднестатистического значения в связи с возможным раз¬
бросом^ выходных конструктивных параметров агрегата (относи¬
тельной массы, удельной мощности, информативности и проч. Qi(X),
где X — вектор исходных данных его разработки).
Используя принципиально разные решения или различную тех¬
нологию, можно повысить или понизить отдачу агрегата, выполня¬
ющего одни и те же функции при соответствующих затратах. Так
усложняя конструкцию бака, используя дорогие вафельные панели
или дорогую в отработке аблирующую теплозащиту двигателя, уда¬
ется в определенном диапазоне изменять выходные параметры и за¬
траты.
Отклонение комплекса выходных характеристик (Aqi(X)) свя¬
зывается с изменением трудоемкости разработки формулой
где Z{ — статистический параметр.
Так, для конструкции топливного отсека и двигательной уста¬
новки в качестве выходных параметров целесообразно использовать
известные характеристики:
тд.у — масса топлива, топливного отсека, двигателя; R — тяга дви¬
гательной установки.
В арсенале конструктора разнообразные средства параллельно¬
го изменения проектных параметров и трудозатрат для любых си¬
стем и агрегатов. Функциональное представление параметра qi(X)
и определение соответствующей статистической характеристики Z*
влияет на точность общей формулы трудозатрат.
Параметр надежности (Кнг), учитывающий взаимный рост на¬
дежности изделий и затрат на их разработку, требует особого ана¬
лиза. Необходимой точности проектной модели отвечает двухпара¬
метрическое функциональное представление этой характеристики,
базирующееся на стандартной модели отработки.
Агрегаты характеризуются прогнозируемой априорной вероят¬
ностью безотказной работы (Лн)> рассчитываемой теоретически
или выявляемой по прототипам. Используя двухуровневую схему
отработки — агрегатов и их сборок,— удается рассчитать характе¬
ристику динамики роста затрат (СР=С2) в формуле (разд. 3.2)
Другой путь — использование статистической закономерности
типа [п]
— —относительная масса отсека;
относительная масса двигателя, где тт; тт.0,
50
Характеристика снижения затрат на единичное изделие в связи
с ростом производства для значительного объема летной партии
где р — статистический параметр; R — коэффициент освоения тех¬
нологии производства, зависящий от массы изделия (тг-, кг) и го¬
довой программы выпуска (v2- шт./год).
Производство тяжелых агрегатов более индивидуально, зави¬
симость затрат от количества изделий приближается к линейной.
С увеличением партии изделий повышаются возможности механи¬
зации технологических процессов, снижается доля накладных рас¬
ходов, приходящихся на единицу продукции. Для рассматриваемо¬
го класса систем коэффициент аппроксимируется следующим выра¬
жением (7]:
При увеличении годовой партии от одного до 10 изделий в год
затраты на каждый легкий спутник снижаются почти наполовину.
Для тяжелых изделий с сухой массой порядка 10 т — только на
Характеристика качества производства (Km) в связи с потреб¬
ной надежностью агрегатов учитывает класс точности изготовления
и объем производственных испытаний. Для больших партий изде¬
лий средней сложности КПг = 1,08 ... 1,12, для особо сложных бло¬
ков систем навигации и управления Km=l,18 ... 1,25 [7].
Эмпирические параметры формул: Крг-, Km-, Уцу Y2i, Z?, а* для
каждой из m-систем могут быть получены по статистике методами
регрессионного анализа.
Используется мультипликативная форма выражения для затрат
на производство и разработку
где Qj — набор характеристик системы; К;, л7- — статистические па¬
раметры; lj — количество определяющих параметров.
Логарифмированием она приводится к виду, удобному для ана¬
лиза:
/?=(0,75-[-0,05 lg — (0,15 — 0,03 lg т{) lgvz.
8% [7].
v = a0 -T-^ajXj.
5Г
Для п разновидностей систем имеем матричное уравнение
7=ха + 1,
где зависимая переменная
У =
расширенная матрица независимых переменных
1хпх12...хи
Х =
1 •^21*^22* • 1
^■Хп\Хп2' • •ХП1
вектор неизвестных параметров
А--
ai
вектор ошибок, оценивающий.точность анализа: е =
е2
Решение (с использованием метода наименьших квадратов) име¬
ет вид
А = (Х'Х)~1Х'Г,
где X' — транспонированная матрица Х\ (Х'Х)~[ — обратная мат¬
рица (Х'Х).
В наиболее общем случае отдельно анализируются следующие
бортовые системы и их агрегаты: научная система (приборно-ме¬
ханическая часть); навигационная система (приборный блок); си¬
стемы ориентации (исполнительная часть); бортовая вычислитель¬
ная машина; бортовой радиокомплекс связи, траекторных измере¬
ний, командной радиолинии, телеметрии (приборная часть); систе¬
ма энергообеспечения (источник энергии, буферная батарея, преоб¬
разующее и управляющее устройство); система терморегулирова¬
ния (приборная часть, исполнительная система); двигательная ус¬
тановка маневра и коррекции траектории; баковый отсек с система¬
ми трубопроводов, наддува и обеспечения запуска; конструкция
корпуса, орбитального блока, антенн, механических элементов
крепления, отделения и стыковки, радиаторов, шасси.
В проектной постановке задачи следует ограничиться анализом
обобщенных систем с существенно различной структурой затрат:
52
приборным комплексом; двигательной установкой; энергосистемой;
конструкцией.
В расчетах используются значения «сухой» массы, затраты на
расходуемые компоненты (топливо, газ наддува и рабочее тело си¬
стемы ориентации) рассчитываются отдельно.
Порядок характеристик, рассчитанных по известной статистике
американских программ [7], представлен в табл. 3.1.
Таблица ЗА
Тип системы
Приборный комплекс
20 /к°н;72
12/к?’48
Двигательная установка
250/к®;-64
3/к®'57
Энергосистема
12/к®;4
Ю
О
5
Конструкция
200m°Hf
1/к®'53
Разработка
Производство
Коэффициенты могут быть получены в виде значений матема¬
тических ожиданий и среднеквадратичных отклонений. Формулы
трудозатрат на КА представленной структуры с эмпирическими па¬
раметрами позволяют повысить точность технико-экономического
анализа до 12—15%.
Изучение соотношений затрат на производство и разработку от¬
дельных систем, их производных по конструктивным параметрам и
показателям надежности открывает новые пути повышения эффек¬
тивности космических аппаратов.
Экономист активно включается в проектную разработку.
3.2. Динамика повышения надежности и стоимости
космической системы в процессе ее отработки
Представляется модель поагрегатной и общей отработки изде¬
лия, заключающейся в испытании партий агрегатов и их сборок о
последующим анализом и устранением причин отказов. В резуль¬
тате общая наработка служит мерой достигнутого уровня надеж¬
ности. Задача заключается в распределении ресурсов на этапы от¬
работки и назначении границ рабочих зон проектных характеристик
(%г mim max) •
Рассматривается система, состоящая из т агрегатов, каждый из
которых характеризуется известной вероятностью структурного и
параметрического отказа: Рг = -Рст Аар * (*=1, 2, ..., т).
Пусть вероятность параметрического отказа определяется пове¬
дением обобщенного параметра состояния который не должен
выходить за критические уровни (xi). Параметрическая составля-
53
ющая эффективности, определенная на основании решения «задачи
о выбросах» может быть выражена зависимостью
Япар=ехр^ — глфхр
X; тах)2
2 Dx
где А{ коэффициент, зависящий от параметров корреляционной
функции процесса; DXi — дисперсия параметра состояния Xi\ Т —
время работы.
Интенсивность параметрических отказов представляется форму¬
лой
Хпар/ = Д.ехР(-^,
где к1 = (х1 — Xi)2lDxi — безразмерная величина «запаса».
Структурная составляющая эффективности Рст г агрегата, вы¬
явленная в процессе отработки и связанная со случайным перехо¬
дом в нерабочее состояние, определяется интенсивностью отказов
а - ^
с /
n-Lti
где П{ — количество параллельно отрабатываемых агрегатов; U —
время наработки (в ресурсах); Bi— коэффициент, учитывающий'
наличие типовых уже отработанных элементов с известными ха¬
рактеристиками надежности (их отказы не учитываются). Коэффи¬
циент Bi может быть найден при определении уровня интенсивности
отказов собранной системы.
Пусть Ра — вероятность безотказной работы типовых элемен¬
тов i-го агрегата с известными характеристиками надежности.
Тогда интенсивность отказов типовой части агрегата
In Р0/,
причем размерностью X является 1/ресурс.
При отработке такого агрегата справедливо соотношение
- In Ры-
'Bi
Ujti tl[ti
откуда Вi — 1 + nfa In Pol.
При отработке изделия в целом
, _ 1 +NQToln'Pg
Х0т о • ‘
где No — количество параллельно отрабатываемых изделий; То —
время отработки (в ресурсах); Р0 — вероятность безотказной ра¬
боты типовых элементов изделия.
В процессе отработки собранных изделий в основном проявля¬
ются отказы вследствие взаимного влияния элементов.
Для экспоненциального закона надежности можно записать вы¬
ражение для интенсивности отказов системы после процесса по-
54
агрегатной и общей отработки в виде зависимости
т
- N сТ Р,
jL.J L riiti
i=1
I 1 -Г iVpi Q ill /-Q
Г ЗД
Стоимость испытаний и затрат в связи с расширением границ
«запаса» представляется формулой
—(Си3дО + С0бо + С0сн0^о) ^0'“Ь Свспо^оЧ"
тп
+ 2[(С; + Со6г +
С0снЛ) + Свсп А + аА'Ь
i=l
где Сиздо — стоимость опытного образца изделия; С0бо — стоимость
оборудования для испытания изделия; СОСно — средний повремен¬
ной расход на обслуживание испытаний; СВСп о — средний повремен¬
ной расход на управленческий и вспомогательный персонал; Сг- —
стоимость опытного образца i-го агрегата; С0бг, С0снг, Свспг — со¬
ответствующие статьи расходов в приложении к испытаниям агре¬
гатов; а* — коэффициент, учитывающий совместные изменения
стоимости и коэффициента запаса..
Анализ приведенной системы уравнений приводит к постановке
задачи оптимизации испытаний.
Целесообразно разделить общую задачу на подзадачи, реша¬
емые совместно: 1) выбор параметров испытаний изделия (NqT0);
2) выбор параметров_испытаний агрегата (riu U)\ 3) назначение оп¬
тимальных запасов (кг).
Математическая модель процесса отработки представляется сле¬
дующими выражениями:
cs — Q + С2-Ь С3; Xs—Х1 + Х2+-Х3; Q — (^изд о ^обо Сосн7^0)
“hQicno^o» ^i:
0*0
Q—(С/Ч~Собл/ + СоснА) Я/4-Свн/ t[\
i = 1
rti m m
£ l+tT“; >-s=y^«p(-*,).
/=1 /=1 /=1
Каждая подзадача определяет оптимальную характеристику
h=f(Ci). В силу аддитивности функций и С2 решение общей за¬
дачи может быть получено методами динамического программиро¬
вания.
Оптимальное решение имеет вид
ЛЛПП +
что характеризует условие «равной эффективности» варьируемых
параметров и определяет соотношения между параметрами н
форме
М*Г0=(Снздо + Соб0 -ь Сосн0 То) = Njl (Сосн N0 + Свс„) -
(С,- 4* с0б(. -)- Соснг ti)=nfi (C0CHi я,- -j- Cncni) =
Л/ exp ( — ki)
const.
d\i
dC i
Соотношения между объемом партии и временем отработки* мо¬
гут быть получены в виде
t’l ^всп/ (S^i ^об/)>
Свс,1о = А/'0(С0 + Собо).
Решение первой задачи может быть получено в форме
/ р
ДГ • _1 / всп 0 .
Oopt у (h -Ип/>0)(СИЗд0+Соб0) ’
т’ - __ 1 / СиздрСобо
0OPt V Сзепо^+ЬРо)
Р /р I р I р \ -ш / Си3др + Собр v
^1 1'-,издР I ^обО “Г ^оснО/ 1/ п , 1 п \
У Свсп0 (Ai + In Р0)
Свсгр I_C 1 / -
(С0 -г Соб0) (к\ + In Р0) всиу
-щ / и If’ 1 / СцЗДР + Собр
СвспР (^1 + In Pq )
Решение второй задачи аналогично:
^7 optг
(Х2 + In Ро/) (СI + С0б/)
fiopt—
j. / С/ + Соб i
A; nnf
СВсн i
(\% + In Ро/)
Затраты на испытания агрегатов:
т ,
с2 = V (Cl + Собг 4- Соснг) 1 / Сг + Собг X
Zj V CBC1I/(X2 + In Pol)
г-1
XI' Свсп г / (С/ + С0б /)
у (С/ + Соб /) (h + In Род всп * у CBC1I / (Х2 + In Poi) ’
Решение третьей задачи определяется системой уравнений
т т
*ioPt=-ln-jf-; С3=\^аД; Х3= ^ Д.ехр(-Д),
* г-1 г-1
где I — константа, определяющая значения Сз и Яз.
56
Для определения структуры общей формулы увеличения стои¬
мости при повышении надежности целесообразно представить фор¬
мулы для интенсивности отказов и стоимости в виде их линейного
разложения в ряды Лорана и Тейлора (в области исходных харак¬
теристик: k0 и По и U и Too, Л^оо):
%ч А[ exp (— k0i) 4 . 1 , 1 \ , 1 , 1
Аа=
ki n0ti toim / TqqNq Л^ооГо
/=i
г)-
т
^ f(Q + Co6/ + COCH/+^0/) ^i"t“(C0CH/% + CBCn/) ti -f-аД-] +
i= 1
—\~ (^издО ^обО " I 4)сн0 I оо) N0 + (Coch0jVоо -(- Свсп0) Т0 -|- С2,
где Сг — некоторая константа.
Решение задачи оптимизации приводит к соотношениям
= const) :
\дС i J
Aj exp ( — k0i) kh j I
i (Coch i^Oi “b^BCii/) Hi^Oi
(C / + Coo i ~h C0CH M
-/ = const.
NooT2o (СоснО-^"оо "b CBCII) : T00Nq (Co + Собо + СоснГoo)
С использованием условий оптимальности формулы для интен¬
сивности отказов и общих затрат могут быть преобразованы к виду
{гп
^ |^о« У щАг ехр (— Ъы) +1/
I ^ / С/ + С0б / Т"СОсн/^0/ |
+У % .1 j.
]_ 1 / Сосн jTiQi -j- Свсп /
n0i
/ СоснрА^ oq + CBCn0
\/ Noo
Y:
_|_ l / Сизд0 + Соб0 + СоснО^ОО
Г I
Too
( m _
1
im
/ С/ Н~ Соб j + Oqch 1^0/ | / Сосн/^Ot ~t~ Овсп i I
Yu\V *<И V m
I £ I/ Л,ехр( — koi) \л/\ CqchQ-^OO CBcnQ i
00 V а/ J ' Noo ‘
| /~ Со + Србо + СоснрГсо )
' V Too j
При CS=C0; Х=Хо] 1 = 1 о + С2, где С0, То, Iо — начальные значения
характеристик при Р2 = Р0
57
:(1_С2)-^ + С2;
Со In Р
-и Hi's
{т
%[V
I Л / CocninOi + Свсп/ I ^ . 1/ ехР ( kpi) | 1 /" СрсноДАро + Свспр i
' «о/ 01 V a i V ЛГ00
I , Г ср + соб0 -f-
Срсн о Тоо I
V гоо J '
Пусть х — параметр отработки (N0, То, U, щ). Тогда в общем
виде решения примут вид Ах/х2 = 1, ~къ=У1Ак.
Справедливы соотношения —=—1/ —— -\-Вх\У1=
х0 Х0 у I
х V А-х-А-х т г,
или = —-|-Вх.
х0 ^TpXs
/г
При х=х0 Вх= 1——— Аъ причем АХ1 Лх, Вх, С^ — констан-
^рЛр
ты, зависящие от исходных параметров отрабатываемых изделий и
стоимости отдельных операций. Индекс (0) характеризует началь-
л: У АХА \ / У АХА
ное состояние системы; = — —1
х0 x0^0 ^2 \ -*0^0
или
^дг=(1-С^)-^-+Сл, где Су= 1 — ^АхА* ,
In Ps JCpXp
В результате стоимостные характеристики отвечают соотноше¬
нию
С — С0 (1 — С2)
1пР0
InP
s
Объем отработочной партии изделий растет при повышении на¬
дежности в соответствии с формулой
(1-CJ
1пРр
1пЯ«
где входящие параметры С2, Сх — функции частных конструктив¬
ных и стоимостных характеристик систем, испытательного оборудо¬
вания и методики проведения отработки.
Определена структура формулы взаимного повышения надеж¬
ности и стоимости двухуровневой системы (агрегаты и их сборка,,
бортовые системы и аппарат в целом).
Найдены характеристики программы отработки (мг> tiy N0, Т0
при i=l, 2, ..., пг), обеспечивающие повышение надежности от
уровня Р0 до Р2.
58
3.3. Нормирование характеристик эффективности
космической системы
При проектировании космических систем помимо конструктор¬
ских решается серия «системных» задач о сочетании характеристик
эффективности их составных частей. «Большой технической систе¬
ме» соответствует многоуровневая иерархия характеристик эффек¬
тивности, объединяемая обобщающей функцией эффективности си¬
стемы в целом.
Конструктивно подобные системы могут иметь существенно раз¬
личную полезную отдачу вследствие различного ресурса, надежно¬
сти КА и составляющих их агрегатов. Если конструирование на¬
правлено на облегчение каждого из агрегатов, а их взаимодействие
ограничивается обеспечением заданных характеристик на «входе» и
«выходе», легко получить неоправданно дорогую или малонадеж¬
ную систему.
Серия технико-экономических задач нормирования затрат, на¬
дежности элементов КА и вероятностей выполнения отдельных опе¬
раций предполагает ряд последовательных уточнений. От обосно¬
вания связи общих затрат с вероятностью реализации программы
в целом осуществляется переход к нормированию Надежности и
трудозатрат на единичный аппарат, к определению объема летной
партии изделий. Затем возможна дальнейшая детализация харак¬
теристик на уровне систем бортового комплекса и отдельных агре¬
гатов.
Нормирование вероятностей выполнения и стоимости подпро¬
грамм, надежности систем бортового комплекса.
Из общей формулы затрат на системы бортового комплекса вы¬
деляется составляющая, характеризующая затраты на разработку,
в которую входят параметры надежности (Кнг):
Они отражают динамику увеличения стоимости систем при пе¬
реходе от уровня надежности Р0г- к уровню Рг-
Естественным ограничением в задаче минимизации стоимости
выступает уровень надежности аппарата (Я*): Pi — P* = 0.
гдеиг = К/ MyJ. Кслг 0n PoiT'i имеем решение задачи в форме системы
уравнений
т
i= 1
т ■
i= 1
Записывая выражение для лагранжиана
т
т / т \
/ т
59
dL
dPi
Uidi
-X^1 = 0 (i= 1, 2,..., m);
* i
(In Pi)'1*1 Pi
I
I
П pt-p*=o,
1=1
откуда нормированный уровень надежности определяется системой
уравнений
Р;
i opt '
^exp
\=
Lin P* Я*
l
«,+1
a • 4-1
В формуле затрат для всего аппарата следует сравнить случай¬
ный параметр надежности с оптимальным:
кн,
(In Ро)
opt'
/“/аЛйТП
\\Р*)
Появляется возможность указать бортовые системы, которые
наиболее целесообразно дорабатывать, повышая надежность ком¬
плекса с минимальными затратами.
Космическая программа, представляя единое целое, выполняет¬
ся достаточно автономными комплексами — космическим, ракет¬
ным и наземным. В свою очередь каждый комплекс состоит из си¬
стем меньшего масштаба, подверженных дальнейшему членению.
Если п подпрограмм независимы и осуществляются последо¬
вательно, обобщающая вероятность выполнения программы, учи¬
тывающая возможности отказов, представляется зависимостью
л.=П р>р1
i=1
где Pi — нормируемая характеристика.
Динамика роста стоимости при отработке подпрограмм одно¬
значно определяет нормы надежности.
Решение подобно предыдущему:
Ры = ехР
XC0;(InP0i) 'а,-
1
\ =
lnPs
Li (С0/ (In Pqi) iai
a;+l
60
При этом реализуются минимальные суммарные затраты на от¬
работку программы:
^ (1пЯ0;)а/
j Ч>,
i=i Г XC0f- (In Ppj) Lctj
L pl
O./4-1
Аналогично могут быть распределены затраты между несколь¬
кими программами или достаточно автономными элементами еди¬
ного целого.
Ориентируясь на полученное значение (Рм, С/^), для летной
партии аппаратов можно перейти к следующему этапу анализа эф¬
фективности.
Нормирование объема летной партии КА.
Решается задача о целесообразности использования малого ко¬
личества высоконадежных космических аппаратов или большего
с меньшими затратами на отработку.
Если т аппаратов выполняют задачу независимо друг от друга,
их обобщающая надежность Р*, а надежность каждого Рт, их ко¬
личество равно:
1п(1—Р*) +1"
т = Е
In (1 -Рт)
где Е — целая часть числа в скобках.
Затраты на летную партию изделий составят:
Ml -Р*) |
С ,=Е
L In (1 ~Рт)
/ In Pqт\а
\in рт!
где р — параметр, учитывающий удешевление единичного аппара¬
та с увеличением объема производства.
•Очевидно, в большой степени оптимальные решения зависят от
значений статистических характеристик ат, р, которые определяют¬
ся структурой и характеристиками изделий и производства.
Иной подход к нормированию надежности и определению летной
партии ИСЗ, образующих в течение заданного времени т единую
космическую систему (навигационную, геодезическую, метеорологи¬
ческую, связи и т. п.).
Система включает необходимое число объектов т и дополни¬
тельное количество k, используемое в случае отказа первых.
Объем летной партии составляет: n=m-\-k.
Резервная партия должна предусматривать возможность отка¬
зов на орбите (i изделий), вероятность неудачных запусков при
первичном формировании системы (/ изделий) и ее восстановлении
(5 изделий). Резервное количество изделий равно: k=i-{-j-\-S.
При вероятности выведения единичного объекта Рв вероятность
/ неудачных пусков оценивается выражением
Я, = С'+УРВП(1
61
Вероятность i орбитальных отказов при интенсивности отказов
на единичном аппарате X представляется распределением Пуас¬
сона
Р{ = -уу- ехр (— д/гт).
Вероятность S неудачных пусков при восстановлении системы:
Функция распределения необходимого количества резервных
пусков:
При установленных исходных данных (/г, т, Рв, А,) полученная
зависимость определяет вероятность заданного количества резерв¬
ных аппаратов -(& = 0, 1, 2, ...), по которому может быть найдена
стоимость летной партии изделий:
Так выявляется оптимальный уровень надежности аппаратов
восполняемой космической системы. При невысоком уровне затрат
на выведение надежность длительно работающих КА может быть
относительно низкой, составляя 0,7 вместо обычных значений 0,9—
0,95. При этом летная партия изделий почти удваивается.
Индивидуального подхода требует анализ объема летной пар¬
тии автоматических межпланетных станций — космических аппара¬
тов, используемых последовательно в случае отказа запущенных.
Они относятся к первому типу изделий — без рассчитываемой эко¬
номической отдачи.
Проектные характеристики стоимости разработки и изготовле¬
ния одного аппарата и его надежность (Ска, Рн) определяются в ре¬
зультате решения задачи о формировании оптимального критерия
сравнительной экономической эффективности программы с задан¬
ной общей вероятностью ее реализации (Р*).
Для первого типа аппаратов показатель стоимости летной пар¬
тии
k k—jk—j—i
k k—j k—j—i
p*=22 2^A=exP(-x«t)22 2 p"+'x
7=0/=0 5=0
7 = 0 i=0 s=0
In (1 P*)
+1}
In (1 — PцР$Рn)
62
где Рп — вероятность успешного выведения АМС на исходную ор¬
биту.
Стоимость fe-пусков
OfeE Сл^2^ QzS^ Cnml2\
затраты на обслуживание
СэЕ== СэТ3р/3, Т'нол ^ ”^Ер ^ Т^пол^-
Знание законов распределения затрат двух последних видов да¬
ет возможность построить функцию распределения показателя
стоимости космической программы.
Вероятность того, что показатель примет значение Ci=C, оп¬
ределяется по формуле полной вероятности
Р(С)=2р(А)Я(С/л*).
£=1
Рассматриваются гипотезы (Ah) выполнения задачи первым,
вторым, ..., &-, ... m-аппаратом, вероятности которых
Р{Аъ)={\-Р*РьРп)к-1Р»Р*Рп.
Вероятность С-затрат при /Ц-гипотезе совпадает с вероятностью
того, что реализуется суммарное время работы tsp
Я(С/Л*) = Я(%),
С — СкА'^1 — 2
Сэ/з
Затраты на КА и пуски при данной гипотезе детерминирован¬
ные. Используя распределение Эрланга времени до отказа (k—1)-го
КА, получаем вероятность того, что время обслуживания при
Аь-гипотезе составляет Tsp:
( 0 при tSp<t1I0;i;
, J Iх С*!? — 'Спол)]*-2 exp [ — X (-D — -Спол)]
Р{'сЕр)={ —— ПРИ *..<*< *iP< тпол£;
I \k 1).
1 при кхпол.
Принимается экспоненциальная функция надежности КА с ин¬
тенсивностью отказов
Задача решается для диапазона затрат
0п!п = 0<А/7гЛ + C^2~h ^э^пол^з» Qnax = (^КА^1 "Г С/А) ЖСЭХП0ЛГП13.
при известных характеристиках Р*, а, 1\> /2, /3 и заданном числе КА
в серии т.
63
Результаты численного анализа могут формулироваться следу¬
ющим образом:
при проектировании современной космической системы с веро¬
ятностью выполнения задачи 0,8—0,9 следует рассчитывать на ис¬
пользование двух-трех летных образцов изделий;
с уменьшением затрат по доработке изделий до заданного уров¬
ня надежности (с уменьшением аг- с 1 до 0,7) потребное число лет¬
ных изделий уменьшается;
минимальные затраты составляют 60—70% от оптимальных, ис¬
пользуемых при реализации программы.
По-видимому, это — одна из причин обычного занижения плани¬
руемых затрат. ,
В проектные критерии КА второго типа — с реальной экономи¬
ческой отдачей входят еще неопределенные случайные величины:
суммарное время работы до отказа ^-аппаратов (k=l9 2, ..., т):
/=1
или случайное количество КА, работающих заданное общее время
При известном количестве КА связь суммарного времени с со¬
ответствующей вероятностью его реализации представляется рас¬
пределением Эрланга [4]:
Р* (rsp)= {k_{) , ехР ( -Xtsp)-
Для конкретной программы, выполняемой в течение заданного
времени с заданной вероятностью Р*, надежность одного КА
определяется из системы уравнений
^ exp (- XtZp) {Р3РпУ+1 = Р*-,
1=0
Р = ех р( —XtSp).
Показатель стоимости КА соответствует уровню его надеж¬
ности.
Критерий сравнительной эффективности системы (Сп) опреде«
ляется дискретно для каждого количества используемых КА (k=
= 1, 2, ..., т). В каждом случае ему соответствует вероятность ре¬
ализации:
р= V ^exp(-XtSp)(P„P9)‘-+1.
i=0
Численный анализ, характерный для современного уровня ин¬
тенсивностей отказов, показывает, что с увеличением объема летной
партии критерий в среднем растет.
64
При заданных ограничениях (по стоимости, общей массе и дру¬
гим параметрам) вероятность выполнения задачи одним КА может
рассматриваться в качестве проектного критерия его сравнительной
экономической эффективности. Уровень этой объективной характе¬
ристики аппарата устанавливается при анализе более общей задачи
об экономической эффективности космического комплекса.
Методика оценки экономической эффективности космических
программ относится к этапу формирования технического предло¬
жения, обоснования технического задания на проектирование бор¬
товых систем КА.
Предварительный анализ экономической эффективности дает
возможность обоснованно строить космическую программу, а
именно:
установить функциональную связь между затратами на про¬
грамму и вероятностью ее реализации;
определить общее количество КА в летной партии;
найти соотношение между затратами на разработку и изготов¬
ление КА.
Приведенный анализ позволяет приступить к решению задач
о выборе проектных параметров отдельных КА, для которых:
сформулирован упрощенный проектный критерий, позволяющий
перейти к анализу вероятностной физической модели функциони¬
рования;
имеется возможность по соотношению затрат на системы су¬
дить об их наиболее общих параметрах (массе, надежно¬
сти);
определен некоторый оптимальный уровень надежности единич¬
ного КА, на который следует ориентироваться при дальнейшей
разработке.
В результате последующего анализа исходные параметры при¬
веденных зависимостей будут уточняться. Возникнет необходимость
проведения итерационных циклов, последовательно уточняющих
решения.
3.4. Унификация бортовых систем
В методологию проектирования комплекса космических аппа¬
ратов должна органично входить задача унификации бортовых си¬
стем с целью удешевления программ, повышения надежности
КА, сокращения цикла их разработки. В соответствии с физически¬
ми принципами работы систем (агрегатов) конструктивная унифи¬
кация может быть качественно различной.
Из серии разнородных выходных параметров исходных неуни¬
фицированных систем унифицированная система (агрегат) может
набирать комплекс их верхних границ — располагаемую мощность
и энергоемкость энергетической системы, точность и быстродей¬
ствие системы ориентации и т. д. При этом из ряда программ
выбирается максимальный ресурс или надежность унифицирован¬
ной системы.
3—550
65
Для унифицированных ракетных блоков тяга, удельный им¬
пульс могут принимать некоторые промежуточные значения, не вы¬
ходящие на границы областей характеристик неунифицированного
массива. При этом в связи с изменением тяговооруженности блоков
изменяются потребные запасы топлива, весь комплекс массовых ха¬
рактеристик. Аналогично использование большой группы агрега¬
тов, изменение характеристик которых влияет на динамику рабо¬
чих процессов, не нарушая работоспособности систем.
Соответственно строятся методики унификации.
Пусть система (агрегат) первого типа используется в ^-програм¬
мах, каждая из которых имеет количество или частоту выполнения
Ш (£= 1, 2, ..., N). Трудозатраты С2 на неунифицированные систе¬
мы включают обычные статьи на разработку, производство и экс¬
плуатацию.
В сравнительном критерии эксплуатационные расходы можно
ограничить затратами на выведение:
где Ki, К2 — комплексные коэффициенты трудозатрат, приходящих¬
ся на этапы разработки и производства; K3*— доля новых элемен¬
тов в системе; rrii = f(Xi)—масса системы (агрегата) /-программы
функции вектора проектных параметров; С; — удельные трудоза¬
траты выведения единицы массы в /-программе; уи У2 — эмпириче¬
ские коэффициенты, обобщающие статистику по трудозатратам;
Кн it Кпг — параметры надежности и массовости производства, ап¬
проксимирующиеся выражениями, применяемыми в машинострое¬
нии:
Здесь -Ро г — начальное значение надежности /-системы (агрега¬
та); Pi — требуемый уровень надежности /-системы (агрегата);
rii — количество систем (агрегатов) /-типа; А и, а* — эмпирические
коэффициенты, учитывающие динамику роста затрат в зависимости
от надежности и объема производства /-изделия.
Коэффициент сложности представляет отклонения стоимости
конкретной установки от среднестатистической модели со сходны¬
ми проектными параметрами (Xi):
где Aqi(xi)=qi(xi)—cji(x); qi{x)—действительное значение обоб¬
щенного параметра сложности /-системы (агрегата); qi(xi) —сред¬
нестатистическая величина параметра /-системы (агрегата); z\ —
параметр, связывающий отклонение характеристик от среднестати¬
стических значений со стоимостью.
66
При использовании для ряда программ единых агрегатов (об¬
ласти Uj) вводятся новые ограничения на их массу и надежность.
Если на унификацию возложена задача улучшения качества рабо¬
ты всех систем, различающихся мощностью, производительностью,
ресурсом, ограничивающие параметры определяются из соотноше¬
ний
т
"j = nij [max (л:)],
itu
в том числе из соотношений Я/ = тах[ЯД.
jeuj
Плата за это — усложнение унифицированного агрегата, рост
суммарной массы, выводимой на орбиту, или перераспределение
массы систем (агрегатов) бортового комплекса.
Областей унификации может быть несколько (L), и они могут
охватывать не весь спектр исследуемых программ.
Оптимальность выбора областей унификации характеризуется
минимумом критерия:
L
Се=inf I Ki
2 (К3//П/)у-КСЛ1-Кн/+2 (КзХГКслуКн,
7 = 1
+
+ К2
2И/)“к„/+ 2
7 = 1
leuj
7=1
JWi
где индексы (/), (*) относятся к унифицированной системе борто¬
вого комплекса.
Задача выбора количества и определения оптимальных границ
областей унификации относится к классу комбинаторных, которые
в общем случае решаются с учетом особенностей критерия.
Критерий имеет аддитивную структуру, это — суммарный эконо¬
мический эффект по областям унификации
АС; = шах
2 ас,;
leu*
общий эффект представляется зависимостью
ДСв=шах (^[кД^ (Кз/я,)'* Ксл;Кн; - (К3/я>* Кел/Кв
0=1 L \ieuj
+ к2(2
\ieuj
Л +
Для решения задачи удобно пользоваться методом последова¬
тельного улучшения комплекса однотипных систем (агрегатов),
например, последовательным попарным объединением некоторых
программ. Для двух программ (/, k)^N рассматривается одна об¬
ласть унификации (L = 1), причем U\ содержит два элемента (/, k).
3* 67
Среди всех вариантов систем (агрегатов) находится отвеча¬
ющий условию
ACi*k* = шах ДС/£ > 0.
Варианты (/, k) объединяются по формулам
ггы* = т [max (xt, xk)]\ mk* = 0;
Р/* = тах[Я/, Pk\; Pk* = 0;
tii*= tik\ tik* = 0.
Две системы замещаются одной с наибольшей мощностью, про¬
изводительностью, надежностью и объединенной производственной
партией. В последующем анализе они выступают как единая сис¬
тема. Процесс продолжается при выполнении условия целесообраз¬
ности унификации:
ДС/***]> 0.
Анализ возможностей метода на примере модельной задачи уни¬
фикации бортовых систем шестнадцати американских космических
программ («Пионер», «Маринер», «Викинг», «Вояджер» и др.) пока-
зывает высокую эффективность этого этапа разработки.
Количество вновь разрабатываемых систем бортового комплек¬
са уменьшается более чем наполовину. Относительный эффект уни¬
фикации отдельных систем оценивается экономией от 5 до 22,7% их
стоимости, от 0,7 до 9,8% затрат на КА в целом (табл. 3.2). Эф¬
фект от унификации конструктивных элементов невелик. Наиболее
целесообразна унификация дорогих в разработке систем управле¬
ния, ориентации, радиокомплекса.
Таблица 3.2
Изменение параметров
Радио-
комплекс
Система
энерго¬
обеспечения
Система
управле¬
ния
Система
ориентации
Двигатель¬
ная уста¬
новка
Количество систем:
до унификации
16
16
15
15
8
после унификации
3
7
4
4
2
Относительный эффект унифи¬
кации в процентах от стоимо¬
сти:
системы
21,8
5,0
18,5
22,7
54,2
космического аппарата
9,8
0,7
5,2
6,4
7,3
Очевидные особенности имеет унификация двигательных уста¬
новок. Если уровень надежности может определяться верхней гра¬
ницей неунифицированных агрегатов, тяга и удельный импульс
принимают промежуточные значения, вызывая изменение массы
расходуемого топлива. В математическую модель анализируемой
системы включается баллистический блок, корректирующий харак¬
теристику массы КА при переходе к новой тяговооруженности. Пе¬
68
реход к меньшей номенклатуре разрабатываемых изделий «штра¬
фуется» увеличением выводимой массы или, если это возможно,
перераспределением массовых характеристик систем бортового
комплекса, гарантирующих высокую надежность (гарантийных за¬
пасов топлива, резервирующих блоков).
В приведенном примере (табл. 3.2) назначились верхние грани¬
цы тяги, удельного импульса, надежности и массы унифицируемых
двигателей. Восемь типов двигателей удалось собрать в две груп¬
пы, существенно понизив общие затраты на системы маневрирова¬
ния. Стоимость программ понизилась на 7,3%.
Использование в рассмотренных программах бортовых ком¬
плексов с пятью унифицированными системами уменьшает затра¬
ты на аппаратуру на 25—30%, что свидетельствует о необходимости
изучать, развивать и внедрять уже сложившуюся методику.
4. УЧЕТ СЛУЧАЙНЫХ ФАКТОРОВ ПРИ ПРОЕКТИРОВАНИИ
БОРТОВОГО КОМПЛЕКСА
Анализ случайных факторов при разработке систем бортового
комплекса обычно завершал проектирование. В результирующих
данных всегда присутствовала оценка надежности, вероятности вы¬
полнения программы.
В расчеты межорбитальных траекторий, коррекций, оценки га¬
рантийных запасов топлива, в задачи выбора параметров систем
управления, ориентации и стабилизации органично включалось
изучение стохастических процессов, вероятностные и статистиче¬
ские оценки.
Конструкторы других бортовых систем обычно решали свои за¬
дачи в детерминированной постановке. Хотя анализируемые про¬
цессы в неменьшей степени случайны, граничные оценки обеспечи¬
вали гарантированное выполнение программ. Поверочные расчеты
вероятностей выполнения программ устраивали разработчиков.
Положение изменилось после первого десятилетия космонавти¬
ки, когда сложность систем существенно повысилась, а количество
элементов наиболее совершенных КА стало измеряться сотнями
тысяч. Повышение вероятности выполнения перспективных про¬
грамм потребовало развития теоретических методов проектирова¬
ния.
Соотношение характеристик надежности, стоимости и массы
элементов КА тош времени показывало, что между ними нет какой-
то функциональной связи. Хотя в принципе должна реализовывать¬
ся естественная закономерность, что только для наиболее тяжелых
и дорогих агрегатов и систем допустим меньший уровень вероятно¬
сти безотказной работы. По-видимому, это стало толчком внедре¬
ния вероятностного анализа в проектирование систем бортового
комплекса.
Ниже приводятся элементы разработки бортовых систем. Рас¬
сматриваются заведомо упрощенные проектные модели, анализ ко¬
торых отражает важность учета характерных случайных факторов.
69
4.1. Типы проектных задач
Критерии эффективности систем бортового комплекса (характе¬
ризующие вероятности выполнения их функций) определяют их
вклад в вероятность решения общей задачи. Поэтому целесообраз¬
но сформировать частные проектные задачи как задачи максими¬
зации эффективности систем и агрегатов при однотипных ограни¬
чениях.
Результаты разработки по каждой системе представляются в
виде функций
Р=тах f (а, х, и, G),
где а — вектор констант системы; х — вектор проектных парамет¬
ров; й — вектор ограничений; G — вектор случайных характерис¬
тик системы и внешних воздействий.
Затем системы объединяются в комплексы максимальной эффек¬
тивности. Зависимость критериев от ограничивающих параметров
становится очевидной в процессе проектирования и доработки, ког¬
да повышение надежности осуществляется усилением отказавших
элементов, резервированием, сужением диапазона рабочих условий
путем конструктивных усовершенствований, приводящих в конеч¬
ном счете к утяжелению и удорожанию системы.
Часть агрегатов рассматривается как готовые изделия (астро¬
датчики, гироблоки системы управления, радиоблоки, двигатели и
т. д.). Задача состоит в обеспечении их рабочих условий и рацио¬
нальной компоновки. Влиять на эффективность системы конструк¬
тор может лишь резервируя такие агрегаты.
Роль проектанта-компоновщика более активна при формирова¬
нии другой группы агрегатов, параметры которых непосредственно
связаны с КА в целом. Это — исполнительные органы систем ори¬
ентации, баковые отсеки, элементы управления вектором тяги, сис¬
темы энергообеспечения и терморегулирования. Для них выбира¬
ются принцип работы и конструктивное исполнение.
Характерны несколько типовых задач.
1. В математической модели системы легко выделяются две час¬
ти— с детерминированными и вероятностными характеристиками.
Параметры первой влияют на вторую. Это типично для корпуса
приборного отсека с системой обеспечения рабочих условий и объе¬
диненного приборного комплекса бортовых систем, располагаемого
в отсеке, или для радиационной защиты панели элементов солнеч¬
ной батареи.
Рабочие условия, зависящие от характеристик первых элемен¬
тов, определяют вектор интенсивностей отказов (л) приборов и аг¬
регатов, их надежность и, следовательно, количество резервных
блоков, эффективность комплекса при заданных ограничениях.
Алгоритм решения включает оптимальное резервирование агре¬
гатов при некоторых фиксированных ограничениях и рабочих усло¬
виях. Цикл таких расчетов проводится для ряда сочетаний ограни¬
чивающего параметра двух рассматриваемых составляющих
70
(£[, Gи), отвечающих условию G2 ^Gn = Gz—Gi, где Gz — вектор
ограничений комплекса.
Вариант с максимальной эффективностью и соответствующим
единственным оптимальным сочетанием ограничений (Gi, Gu) есть
решение задачи. При этом целесообразным может оказаться и гра¬
ничное решение: приборный комплекс без конструктивно оформ¬
ленного отсека, панель батареи без радиационной защиты.
2. Модель разделяется на две независимые части с вероятност¬
ными характеристиками и различными по своей природе критери¬
ями (типа «надежности» и «номинальной эффективности», гл. 2).
Так, в радиокомплексе легко выделить приборный блок (харак¬
теризуемый надежностью Pi) и антен-но-фидерное устройство (па¬
раметры которого в большой степени влияют на вероятность связи
при наличии случайных «шумов» Рц).
Очевидно, эффективность выражается зависимостью Ps =
= (^V*n)-
Здесь также целесообразно использовать анализ вариантов при
варьировании ограничений на элементы комплекса (0<(?i
Gn = G^ — C?i), выбирая случай с максимальной эффективностью.*
3. Модель характерна функциональной взаимосвязью _па_рамет-
ров х\ и х2, а ограничение представляется в_виде_Оа=/_(а, х±, х2,
G). При ЭТОМ, фиксируя характеристики Х\ ЕЕ {х1т\п^Х' ^ х2тгу)\
следует определять х, отвечающее Ягаах = / (а, х*, х2, Gs) и затем
Ps=max/(<z, л:1? х2, Os)-
При проектировании радиатора системы терморегулирования с
учетом вероятности пробоя метеором анализируется толщина обо¬
лочки (6 = Xi) и количество резервирующих панелей (х2 = гп). Фик¬
сируя один из параметров х[ ЕЕ (0_< xi ^тах), находят х2=f (а,
х'и Оа), соответствующее Ртах(а, x'i, х2, Gs) и max [Ятах (хь х2)]
для 0<(jcl)<&max.
4. Принципиально важна проектно-конструкторская задача, ко¬
торую условно можно назвать «синтезом эффективности». Она
представляет двухуровневую разработку отдельных систем борто¬
вого комплекса и их оптимальное объединение.
Результаты проектного анализа каждой из k систем представля¬
ются в координатах «вероятность выполнения системой ее назначе¬
ния (Pi) —масса (rrii)». При каждом ограничении (miy i= 1,2, ...,£)
осуществляются внутренняя оптимизация единичной системы, вы¬
бор конструктивных параметров (хг), отвечающих максимуму кри¬
терия Pi = maxf(mil xi).
Объединение систем осуществляется по алгоритму динамическо¬
го программирования:
fm (от*)=тах \Рт (тт, хт) (т* - тт)|;
О0тт<^ тъ; т= 2,...,k;
Р s (/я8)=fk (т s) = max
п Pi{mlt xt)
i= 1
71
J 60 90 mL, к<.' 550 540 550 m,KZ
Рис. 4.1. Функция надежность — масса Рис. 4.2. «Синтезированная» система
для систем бортового комплекса:
/ — система терморегулирования; 2 — про¬
граммно-временное устройство; 3 — система
энергопитания; 4—система ориентации; 5—
бортовой радиокомплекс
где Ръ(т^) —общая вероятность выполнения задачи, соответству¬
ющая установленному массовому ограничению (яг2).
«Синтез эффективности», проведенный для гипотетической ав¬
томатической межпланетной станции, спроектированной с учетом
случайных факторов, показывает достоинства метода. Приведены
исходные зависимости для систем бортового комплекса: Pi —
= maxf(mit Xi) (i= 1, 2, ..., 5) и итоговая характеристика (рис. А.)
и 4.2): Ps=/(/res) = max •
Казалось бы, незначительное перераспределение массовых ог¬
раничений на системы позволяет повысить вероятность выполнения
общей задачи (Я2 —0,61...0,67).
4.2. Определение состава приборного комплекса
и характеристик приборного отсека
Как правило, определение приборного состава и конструирова¬
ние приборного отсека рассматриваются как последовательные за¬
дачи. Комплексный подход к решению открывает новые возможно¬
сти.
Пусть задача проектирования отсека объединенного приборного
комплекса бортовых систем включает определение оптимального
состава агрегатов с учетом резервирования, геометрии и конструк¬
тивных характеристик корпуса, рабочих условий в отсеке и исход¬
ных параметров для проектирования системы терморегулирования.
При этом должна обеспечиваться максимальная вероятность
нормального функционирования комплекса при заданном ограниче¬
нии по массе, целесообразное распределение массы между систе¬
мой, обеспечивающей рабочие условия, и приборным комплексом.
Известен алгоритм оптимального резервирования агрегатов при
заданных рабочих условиях. Для последовательной цепочки из п
агрегатов, каждый из которых имеет эффективность Pi и лз; раз ре¬
зервирован (£=1, 2, ..., п\ Xi= 1, 2, ...), задача заключается в мак¬
симизации функционала
72
п
PN{x)=m?ix П Pl(Xi)', ■*=[*!> х2,...,хп]
i = 1
Tl
при условии^? т{ (х^ < пг*.
i = 1 .
Здесь P]{x.L) — эффективность резервированного агрегата, за¬
висящая от принципа резервирования [18]:
при горячем резервировании
Pf=l-(l-PiY^
при холодном резервировании
я?= 1—
Xi !
при резервировании замещением и горячем резерве (х{ резервных
для т основных идентичных элементов)
т
l-m + xi
где tni(Xi) —масса i-го агрегата; т*—суммарное ограничение по
массе; Xi — вектор проектных параметров, определяющий количест¬
во элементов каждого типа.
Алгоритм решения представляется рекуррентным соотношением
/»(«*)=max \Рт{тт) /^{т*- тт)\\
О <С тт /И=2, 3
Однако эффективность агрегатов изменяется с изменением ра¬
бочих условий. Многие агрегаты КА не приспособлены к работе в
открытом космосе. При использовании герметического приборного
отсека с «нормальной» атмосферой интенсивности отказов агрега¬
тов резко уменьшаются, оставаясь функциями рабочей темпера¬
туры.
Влияние повышения температуры на надежность типичных аг¬
регатов КА и их элементов достаточно хорошо изучено. Составлены
таблицы интенсивностей отказов Х0т при нормальных условиях, вы¬
явлена их функциональная зависимость от температуры [18]:
'**=/(*<*. ДО.
где ДТ — отклонение температуры от «нормальной»; аш — вектор
эмпирических коэффициентов.
Диапазон отклонений температуры в течение полета определя¬
ется наличием приборного отсека, конструктивными характеристи¬
ками системы терморегулирования (СТР) и, в конечном счете, их
массой.
Масса конструкции mh определяется объемом размещаемого
оборудования, геометрией и исполнением корпуса отсека. В массо¬
73
вую сводку приборного комплекса следует ввести массу кабелей, а
для корпуса — массу монтажных и герметизирующих элементов
конструкции и газа наддува.
Суммарная масса системы терморегулирования (СТР) выража¬
ется зависимостью
где Q — мощность приборного комплекса, отводимая системой тер¬
морегулирования и излучаемая радиатором, Вт; 7Vc.t.p — относи¬
тельная мощность собственного потребления СТР; Yp> Ус.э.о, Уавт,
Уцир — относительные значения массы (единицы площади радиато¬
ра в кг/м2, системы энергообеспечения в кг/Вт, автоматики управ¬
ления СТР в кг/Вт, теплоносителя и агрегатов, обеспечивающих его
циркуляцию, в кг/Вт).
Характеристики радиатора СТР:
Б 1 (Т'вх/Гвых)3 -1 Д. Д.
г =— коэффициент, учитывающий неравномер-
3 1 —(Т’вых/Т'вх)
ность нагрева радиатора (Твх, Твых— температура теплоносителя
на его входе и выходе) [27]; о — постоянная Больцмана; в—коэф¬
фициент черноты.
Расширение границ температуры Твх в приборном отсеке умень¬
шает массу системы.
Считая, что эффективность системы определяется надежностью
приборного комплекса (эффективность СТР РСтр~1), получаем
для случая горячего резервирования агрегатов аналитическую за¬
пись алгоритма решения задачи в следующей форме:
frn ('rn) = max {[ 1 — (1 — РJx«] fm_x (ms - tnk - mcrp - mmxj};
xm GE E)\ ш =■ 2, 3,...,л;
0<лгстр</гга — mk\
где E — целая часть частного, п — число последовательных агрега¬
тов различного типа; D — область определения параметров хш\
гпъ — общее ограничение на массу, тш — масса одного агрегата
га-го типа; тк — масса корпуса; хт — число параллельных агрега¬
тов m-го типа.
которым малым шагом Дтс.т.р, легко выбрать вариант с макси¬
мальной эффективностью для каждого значения ограничивающего
параметра т2. Решение задачи для типовой геометрии отсеков
(шар, тор) при заданных ограничениях (Г, т) определяет соотно¬
шение массы приборного комплекса, обслуживающих систем и дос¬
тижимый уровень надежности (рис. 4.3).
п
Повторяя этот цикл для 0</7ic.T.p<[/7Zs — mk — 2 ттхт с не-
74
Характерно, что уровень ин¬
тенсивностей отказов ' агрегатов
является определяющим не толь¬
ко в задачах резервирования. На¬
дежность приборов современной
элементной базы, их способность
работать в вакууме качественно
изменяют представление о при¬
борном отсеке. Негерметический
отсек, обеспечивающий радиаци¬
онную безопасность и тепловой
режим, существенно легче клас¬
сического герметического кон¬
тейнерах земными рабочими ус¬
ловиями.
4.3. Анализ характеристик
элементов системы управления
траекторией, ориентации
и стабилизации
Системы ориентации, стабили¬
зации и управления траекторией обычно включены в единый при¬
борно-исполнительный комплекс- Принцип их работы определяется
необходимой точностью ориентации КА, которая может быть не¬
одинакова в течение полета. Если для солнечных батарей, широко¬
направленных антенн вполне удовлетворительна точность 5°—10°,
при коррекциях, сеансах связи с Землей, научных экспериментах
потребная точность должна иметь порядок 0,1° (до 0,1' — при аст¬
рономических исследованиях). Соответственно следует использо¬
вать принципиально различные типы датчиков и исполнительных
органов.
Задача об основном и резервном составе блоков (астродатчики
ориентации, гироагрегаты инерциальной системы управления, уси¬
лители-преобразователи, вычислительные и программные устройст¬
ва) — составная часть проектирования приборного отсека (разд.
4.2).
Две другие характерные вероятностные задачи рассматриваются
как составные части проектирования таких систем.
Первая связана с принципами общего построения траекторий,
определением программы коррекций, характеристической скорости
и запаса топлива на маневрирование. При этом эффективность тра-
екторных операций, например, коррекции траектории межпланет¬
ной станции, определяется вероятностью попадания КА в заданную
область космического пространства.
Для оптимальной программы коррекции строится функция «ве¬
роятность попадания — характеристическая скорость» P0 = f(V)
(рис. 4.4). Задачи, связывающие такую характеристику с расходом
топлива, рассматриваются в теории коррекции [20]. Анализ слу¬
чайного количества коррекций, их функций распределения допол-
75
/77, кг
Рис. 4.3. Функция надежность — мас¬
са для приборного комплекса:
1—масса корпуса; 2— масса агрегатов сис¬
темы терморегулирования; 3 — масса при¬
борного комплекса
няет методику. При этом
как случайные величины
определяются количество
рабочих циклов и ресурсы
всех участвующих систем.
Вторая задача — ско¬
рее конструкторская —
устанавливает взаимо¬
связь вероятности вы¬
полнения программы по¬
лета и ориентации с рас¬
полагаемым запасом ра¬
бочего тела, надежно¬
стью агрегатов исполнительной системы.
Рассмотрены схематичные модели плоской линейной коррекции,
упрощенные модели ориентации. Методические примеры отражают
качественную взаимосвязь вероятностей выполнения этапов поле¬
та с конструктивными ограничениями на системы.
Функции распределения числа коррекций
На эффективность систем, осуществляющих маневрирование КА, существен¬
но влияют случайные характеристики: количество коррекций и суммарная про¬
должительность работы корректирующего блока.
Надежность систем, обеспечивающих коррекцию (ориентацию, точную ста¬
билизацию, работу двигательной установки), выражается зависимостью
Р (А) = 2 Р (Hj) Р (.A/Hj),
.7 = 1
где P(Hj)—вероятность осуществления у-й коррекции; Р(Л/Я?)—надежность
при у-й коррекции.
В формуле первые сомножители сумм, как типичные характеристики «номи¬
нальной эффективности», связаны с точностными параметрами систем.
Для простейшей модели с учетом нормального распределения ошибок по
скорости определим вероятность осуществления у коррекций при я-импульсной
стратегии (/ = 0, 1, ..., п) в плоской задаче (решение получено совместно с
Jl. М. Калашниковым).
Пусть к какому-то моменту времени проведено у коррекций (/<тг). Вероят¬
ность того, что у-я коррекция — последняя, соответствует вероятности попада-
( Р* Р* \
ния ошиоки скорости (flj) у-и коррекции в зону — — • •. I картин-
V B(tj)
ной прямой. Назовем эту вероятность Pj n . Она определяется из выражения
Р*
в(Ч)
РУХ= 2 f f(a,)daj,
о
где р*— радиус цели; B(tj)—производная отклонения от центра цели по ошиб¬
ке скорости (аД; f(aj) —функция распределения ошибки скорости.
76
у*
о,5?
0//5
/
'/^ТГвухи.мпульсна. я
)!\
Одноампульсная
/
Марс
/А
Венера
10 15 V,n/c
1,5 5 7,5 7, м/с
Рис. 4.4. Функция надежность — характе¬
ристическая скорость для системы коррек¬
ции
Рассмотрим предыдущую (/—1)-ю коррекцию. Вероятность того, что после
этой коррекции целесообразно произвести у-ю, записывается как
vi-1
^” = 2 I /«*/_,)
Р*
B(tj-l)
где Vj_i — характеристическая скорость, соответствующая запасу топлива после
(у—1)-й коррекции; Vo— начальная характеристическая скорость.
Аналогично определяются и остальные значения Р^п вплоть до Р$г
Таким образом, вероятность осуществления ровно у коррекций при п-им¬
пульсной стратегии определяется из системы
v° (1) ^
Pfl = 2 [ / (а0) Pj.ndao,
Р*/В(10)
Vi
Pj% = 2 f f (at) P'^dar,
Э-i
Vi — определяется из соотношения
/—l
V,.v0- V
a=l
Для нахождения функции распределения f(di) и пределов интегрирования
необходимо знать время коррекции ti как функции ошибок а0, аь сц-\. Дан¬
ные функции определяются из условия максимума вероятности попадания для
/г-импульсной стратегии.
Рассмотрим двухимпульсную стратегию и определим вероятность осуществ¬
ления ровно одной (^{^2)» ровно двух (^2°2) и Р°вно нуля коррекций
Из общего соотношения имеем
p*/B(t0)
где Ф(*) —интеграл вероятностей.
Вероятность осуществления ровно одной коррекции определится из соотно¬
шения
р1?2=2 f / (а0) P^dao;
P*/B(t0)
Vi
^ = 2 f {a\)da\.
P*/B{tx)
77
Раскрывая это выражение, получаем
У0/°а0
v о/°а0
т\ “-Hr
ф
Ci
V0z (х)
аа^х
dx у
B(t0)aa0
а0К0 „ Р* B(t0)ar>
где х=—=—, Ci = , 2 =
а#о В (t0) k В (ti) V0
при допущении, что среднеквадратичная ошибка скорости аппроксимируется за-
В (t[)
коном 0(2/ =~z~, ky i— 1,2; k— коэффициент с размерностью скорости,
В (ч—i)
определяющий точность ее измерения.
Вероятность осуществления ровно двух коррекций находится из соотно¬
шений
к0 К,
Р{2,1 = 2 j / (Ъ0) />$ = 2 J / (£i) Р^ац
?*/B(t0) Р*
Bit i)
р */B(tt) _ ^
$ = 2 J f{a2)dw2.
О
Раскрывая эти соотношения, имеем равенство
р(0) р( о) р(°)
2,2 ~ ^0— 0,2 — *1,2 »
где Ро — полная вероятность попадания при заданном начальном топливе У0
для двухимпульсной стратегии.
Для одноимпульсной стратегии величина вероятности осуществления одно*
импульсной коррекции определяется как
р(2).
2,г
\аа0В (t0) ,
где Ро* — полная вероятность попадания при заданном начальном топливе Va
для одноимпульсной стратегии.
Очевидно, вероятности осуществления заданного числа коррекций для каж¬
дой стратегии являются функциями точности систем (характеристик cij) и сум¬
марной располагаемой характеристической скорости (Vo).
Итоговые характеристики анализа представляются в форме зависимостей:
вероятности попадания в область цели (заданную фазовую область) как
функции располагаемой характеристической скорости (см. рис. 4.4);
вероятности осуществления ровно j коррекций при ц-импульсной стратегии
(р!й как функции располагаемой характеристической скорости (рис. 4.5).
При этом должна быть известна точность коррекции и параметры цели.
В общей схеме эффективности блоки номинальной эффективности траектор¬
иях операций вводятся последовательно и параллельно с системами, обеспечи¬
вающими выполнение этих операций. Параллельное включение, как правило,,
определяется вероятностью того, что система или какой-то ее блок могут не ис¬
пользоваться в полете. Очень часто не используются некоторые из запланиро¬
ванных коррекций. При особенно точном выведении КА может вообще отпасть
необходимость в коррекциях траектории и в использовании соответствующих
систем.
Результаты решения траекторной задачи легко представляются в удобных
для дальнейшего использования координатах: «вероятность выполнения зада¬
чи — масса системы».
Эффективность исполнительной системы
Эффективность механизмов, создающих управляющие силы и
моменты, связана с их конструктивным исполнением и динамикой.
Марс
р,<
/
Рг 2
//
S-
Ро2
Вене
?ра
Рн
s'
—
/
Pf2
//,
Po2
Г
^Pz2
5 Ю 15 \м/с 0 3 6 9 У, м/с
Рис. 4.5. Вероятности проведения j
коррекций из п запланированных
работы. Они могут быть принци- Pjn
пиально различными, использо- 0,8
вать роторный принцип (закрут- о,б
ку, силовой гироскоп), внешние ОЛ
поля и силы (гравитацию, солнеч- о,г
ное давление, сопротивление ат- о
мосферы планеты) и управляю¬
щие реактивные сопла.
Большое распространение по¬
лучили газореактивные системы
ориентации, которые в течение большей части полета обеспечивают
«грубую» ориентацию КА относительно Солнца, Земли или планет
и точную — в сеансах связи, при коррекциях и научных экспери¬
ментах.
Типичная реактивная исполнительная система включает баллон,
редуктор, коллектор, обеспечивающий подвод газа, систему сопл с
электропневмоклапанами. В нее может входить энергоблок, пред¬
назначенный для подогрева используемого газа.
Эффективность такой системы связывается с достаточдостью
бортового запаса газа, надежностью электропневмоклапанов струй¬
ных сопл, энергоблока.
Запас газа обеспечивает суммарный расход:
1) на стабилизацию по трем осям (/= 1, 2, 3) в течение заданно¬
го времени (/) полета при угловой точности (А<р) и точности по уг¬
ловой скорости (Дсо):
пгст=
s
/=1
lit Дф2
Pyzh ДсР
(>+•-£
где а — управляющее ускорение; Ат — запаздывание управления
по времени; U — момент инерции (по оси £); Руд — удельная тяга
газа; U — плечо управляющей силы;
2) на точную ориентацию в специальных режимах (коррекция,
связь и т. п.), которая включает режим поиска ориентира (Солнце,
звезда, планета) и точной стабилизации.
Расход на ориентацию определяется характеристиками системы
и логикой управления. Предварительно датчик с известным . углом
зрения (Дфр) вводится в область поиска (±фрг-, *'=1, 2— оси). По¬
иск ориентира осуществляется сканированием датчика в течение
случайного времени, не превышающего заданное максимальное
(tn). Предположим, что сканирование производится по идеальному
циклу безынерционной системы с постоянной угловой скоростью
(со), мгновенно изменяющей свое направление при достижении гра¬
ниц по осям связанной прямоугольной системы координат (=Ьф,
±0):
k |А®р| — по ОСИ ± ср; |Дсрр|(&-)-У2/2) — по оси (—В),
где &= 1, 2 п\ я = фр/Дфр.
79
Время работы сопла при одном переключении
где Pi — управляющая сила.
Максимальное угловое перемещение датчика (и КА) по одной
из осей в процессе поиска
Максимальный расход топлива на ориентацию по одной оси
Следует иметь в виду, что при введении датчика в центр зоны
поиска функция распределения координат ориентира подчиняется
закону, приближающемуся к нормальному. Соответствующее рас¬
пределение должен иметь угол захвата (ср3, 0^ф3^фр) и суммар¬
ный расход топлива до «захвата» ориентира т3:
где К, L — количество участков стабилизации и ориентации с ха»
рактерными значениями точности, имеющей свои законы распреде»
ления, в соответствии с программой перелета.
80
п
i = 1
Потребная угловая скорссть
Ушах ^р(П+ ')
tn 2tn
по двум осям
/=1
Pynli^pill
Масса рабочего запаса газа
к L
+ 2 movl,
k — l
1=1
Необходимый запас газа зависит от удельной тяги, которая мо¬
жет регулироваться путем подогрева газа (с исходной температу¬
ры Т0 на АТ):
степень расширения сопл.
Масса шаровых баллонов с газом, если учесть, что газ выраба¬
тывается не полностью (начальные параметры температуры и дав¬
ления Гп, конечные Гк, рк), составит:
где у — плотность материала; о — предельное напряжение; f — ко¬
эффициент запаса.
Масса источника энергии оценивается зависимостью
где к — коэффициент, связывающий массу системы с ее мощно¬
стью; ср — удельная теплоемкость газа; Р 2 — средняя суммарная
тяга сопл; ц — КПД нагревателя; g — ускорение земного притя¬
жения.
Суммарная масса системы
где /Пк.с.а — масса коллектора, управляющих сопл, элементов авто¬
матики (связана с Rz)\ &а— коэффициент, учитывающий массу ар¬
матуры, трубопроводов, клапанов и др. (связан с массой балло¬
нов) .
Схема эффективности системы может быть представлена че¬
тырьмя блоками:
1) номинальной эффективности, учитывающей вероятности раз¬
личных режимов использования системы в течение полета Рн.э;
2) эффективности исполнительной части, в основном определя¬
емой безотказностью сопл:
где kN — интенсивность отказов сопл; N — случайное число их ра¬
бочих циклов;
3) эффективности баллонного блока, в основном определяемой
достаточностью рабочего газа Р^(тт)\
здесь х — показатель адиабаты; Rr — газовая постоянная; рс/Рк —
тб
РкТ н
PJ к
m3 = k
СрМР
О + ka)
/Эк.с.а=ехр(-ХЛгЛг),
81
4) эффективности энергоблока, представляемой зависимостью
Я9=ехр( —/■„*),
где Хэ — интенсивность отказов энергоблока; t—время работы.
С надежностью энергоблока связано реализуемое значение
удельной тяги, а значит, и масса рабочего запаса газа.
На этапе проектирования системы с заданной жесткой програм¬
мой работы достаточно рассмотреть эффективность исполнительной
части системы ориентации и стабилизации в форме Рс.о.с=^к-с-а^б,
учитывая, что Р6 = }(РЭ).
Составляющие эффективности могут анализироваться независи¬
мо и затем оптимально объединяться:
Рсо,(пг) = шах [Рк.с.а(т*)Рь{т — т*)\;
О <^т* <^т.
В первом приближении можно осреднить расход газа по време¬
ни и считать его запас изменяющимся линейно при каждом задан¬
ном уровне удельной тяги (Pyjli). В этом случае необходимый сум¬
марный запас рабочего тела определяется случайным временем
/* отказа энергоблока и перехода от повышенной удельной тяги
(Руд2) к работе без подогрева газа (Рудi):
t* \
1 1 — \
»Г=/Д- 1 '
р уд1 Р ул2 tfl
где /s=Р4п— суммарный импульс сопл, причем
г = ру лгу/Г-
Рул2 = ‘
Тр+АТ
То'
Распределение случайного времени отказа энергоустановки оп-
In Рэ
ределяется зависимостью f*= .
Вероятность использования запаса газа шг:
Р= ехр
^гРуд! ^ 'j
/v
1 htn
1
Tn -'r АТ
Т,
о
Py,ll Р УЛ2
Число включений сопл оценивается выражением
JV=3^
A <f>i
i= 1
где i = 1, 2 ..., k — число режимов ориентации в течение времени
с точностью АсОг, Афг- Оно не зависит от запаса рабочего тела. На¬
82
дежность сопл может анализироваться независимо от остальных аг¬
регатов. Их масса невелика по аравнению с другими составляю¬
щими.
Оптимизация системы сводится к определению запаса рабочего тела (гаг),
массы энергоустановки (тэ), приращения температуры газа (ЛГ), соответству¬
ющих максимуму эффективности (Р) при заданном ограничении по массе (тъ).
Следует решить задачу Лагранжа:
минимизировать функцию
( ПгРуп!
In Р =
1 I М/г
1
7ф+ АТ
при ограничении
т,=-
kcp\TPs
gT\P УД1
То + А Г
- тг
3 Y f п
- — — RrTH
2 су н
, РкТн
То
РнТ к
Введя обозначения B=\3tu А=-
уд1
С —
kCpPs
^ГП^уд!
D =
1
РкТ" н
РпТк
имеем Лангранжиан (с коэффициентом X)
Атг — В
L. = г -f- X
-V-.
То
А Т
ДГ
' г„
mrD
Из необходимых условий оптимума
dL
' = 0;
■ = о
после ряда преобразований аналитически определяются проектные параметры
системы:
D In Р '
1
А Т = 27ф
В + / 1 -
2 АСТо
(-/■
1
1—2
1пР
2АС
Рис. 4.6. Проектные параметры ис¬
полнительной системы ориентации и
стабилизации
р
/77,
АР
кг
0,88
■4
800
0,86
■3
■600
0,84
■2
-400
-
Численный анализ типичной системы, использующей в качестве
рабочего тела азот, устанавливает взаимосвязь между массовыми
характеристиками системы
(тг) и вероятностью ее безот¬
казной работы (Р) (рис. 4.6),
дает возможность сформули¬
ровать следующие рекомен¬
дации конструктору:
"'/77^^'" "
^ \ ^
х
\
\
тГ
/77г,лг
83
при жестких ограничениях по массе необходимо идти на повы¬
шение температуры рабочего тела, при этом масса энергоблока мо¬
жет составлять около половины суммарной массы системы;
в наиболее надежных системах целесообразно использовать хо¬
лодное рабочее тело;
для современных систем резерв массы ~20% от минимального
обеспечивает повышение эффективности системы до уровня средних
значений эффективности бортовых систем КА (Р^0,95).
4.4. Исследование обобщенных характеристик типового
радиоблока
Бортовой радиокомплекс (БРК) обеспечивает двустороннюю
связь, передачу телеметрической и фототелевизионной информации,
радиообнаружение и слежение за КА, определение траекторных па¬
раметров и телеуправление. При проектировании блока БРК любо¬
го назначения следует совместно рассматривать приборный комп¬
лекс, антенно-фидерное устройство и обслуживающую систему энер¬
гопитания.
Эффективность работы радиокомплекса характеризуется веро¬
ятностью приема и передачи станцией некоторого объема информа¬
ции. Рабочие частоты систем и длины волн (^) связываются с на¬
значением радиоканала и дальностью действия.
При компоновке приборного отсека для БРК общая схема, по¬
блочный состав (точный или ориентировочный) известны, требует
уточнения вопрос о резервировании блоков каждого типа, общей
массе и надежности.
Бортовые антенны различаются по конструкции и габаритам в
зависимости от назначения, рабочей частоты, потребного коэффи¬
циента усиления, формы диаграммы направленности.
Определяющая характеристика радиолиний любого назначе¬
ния — соотношение между излученной мощностью радиопередатчи¬
ка (И^пер) и принятой мощностью сигнала на входе приемника
(MAip)—связывает основные проектные параметры элементов
БРК [15]:
где/ — расстояние между передатчиком и приемником; С?*ер, G*p —
коэффициенты усиления их антенн.
Критерий проектирования определяется произведением вероят¬
ности передачи информации без искажения (Рсв) на вероятность
безотказной работы приборного блока (Рп.б): ^б.р-к^^свЛгб.
Эти вероятности имеют различный порядок: Рсв^1... 10-5,
^п.б = 0,85 ... 0,95.
Определение их сочетания, соответствующего максимуму эффек¬
тивности при заданном суммарном ограничении на массу систе¬
мы,— одна из задач общего проектирования.
84
Для распространенных способов модуляции и нормального за¬
кона распределения помех вероятность ошибочного приема инфор¬
мации составляет:
где Рс, Рш — мощности полезного сигнала и шума соответственно;
т — основание кода (т = 2,4, 8).
Мощность бортового радиопередатчика функционально связана
с отношением (PJPm) [11]:
где £ — коэффициент потерь (фарадеевское вращение, поглощение
в атмосфере); k — постоянная Больцмана; ТЪз— суммарная шумо¬
вая температура Земли (наземного приемника) с учетом космиче¬
ских шумов поглощения; Дf—ширина полосы частот приемника;
X — длина волны; г] — КПД фидера передатчика; В3 — выигрыш
вследствие помехозащитных свойств наземного приемника; Gne[)
_ *
ипр— коэффициенты усиления антенн (бортовой и наземной).
Коэффициент усиления антенны зависит от ее геометрических
параметров. Для параболического рефлектора с диаметром (DA)
Подстановка последней формулы в предыдущее выражение ус¬
танавливает связь между мощностью, диаметром антенны бортово¬
го передатчика и отношением «сигнал—шум» на наземном прием¬
нике.
При заданной вероятности связи потребная мощность передат¬
чика однозначно связана с диаметром антенны:
где К—параметр, обобщающий все характеристики линии связи,
кроме геометрических параметров антенны.
Суммарная масса системы составляет:
^=^п.б+^а.ф.у+^б.п.
Масса параболической антенны пропорциональна ее площади:
где &а — масса единицы поверхности.
Считая массу блока питания (БП) пропорциональной потреб¬
ной мощности, имеем
где &б.п учитывает удельный вес (Н/Вт) энергосистемы и совершен¬
пер
^б.п — ^б.п^]’ер>
85
ство радиокомплекса (через отно¬
шение потребляемой и излучае¬
мой мощности передатчика).
Итак:
■ 9JT/C I 1 ллтт
тъ = т,п бД- —— Ь^б.п W лер*
10 Иг пер
Оптимальное значение WUGV
определяется из условия
(dm^/dWnep) = 0.
Если принять массу прибор¬
ного блока постоянной, не зави¬
сящей в некоторой области реше¬
ний от мощности передатчика, то
/18лМ2№зЛ/ / Рс \
»v„ep = —— ИЛИ Wuep=l/ — — .
у -^з^б.м^^цр \ Рщ /
При заданной надежности линии связи (Рс/Рш=const) опреде¬
ляется оптимальное сочетание мощности передатчика (W^ep), раз¬
мера антенны (Da) и массы системы без приборного комплекса
(тх). Для остатка (т2—^1 = ^2), приходящегося на приборный
комплекс, легко найти его надежность с учетом резервирования
блоков. Остается (для 0<;m 1 <]/тг3) оптимально объединить веро¬
ятности надежной работы линии связи и безотказной работы при¬
борного блока. Аналогично может быть проанализирована надеж¬
ность радиоканалов других типов.
Анализ характеристик радиокомплекса с межпланетной даль¬
ностью связи, работающего вместе с мощной наземной станцией (с
диаметром антенны 64 м) при достигнутых массовых характеристи¬
ках бортовых антенн и систем энергопитания выявляет общие тре¬
бования к конструированию.
Установлена взаимосвязь между повышением эффективности сис¬
темы (Р?) и целесообразным увеличением диаметра параболиче¬
ской антенны (Dk), а также мощности бортового передатчика
(^пер) (рис. 4.7). Основные резервы повышения эффективности та¬
ких систем заключаются в повышении надежности приборного бло¬
ка, резервировании его отдельных агрегатов.
4.5. Характеристики эффективности систем энергообеспечения
Принципы работы, состав и массовые характеристики систем
энергообеспечения (СЭО) зависят от назначения КА, его траекто¬
рии относительно Солнца, средней потребляемой мощности, пико¬
вых нагрузок и времени функционирования. Как правило, они
включают постоянный источник энергии и буферную батарею. На¬
пример, для современной автоматической межпланетной станции,
проводящей исследования в области планет земной группы в тече¬
ние более двух недель при средней мощности бортовых систем по¬
Pz
0,9
0,8
0,1
4,
Щер,
м
Вт
-1,9
-100
<8
- 90
V
- 80
~рГ~
/ ^
/
X ШпБ
У /
T/-/
/ /77z
100 110 120 150mz,KZ
Рис. 4.7. Параметры радиоблока
Г'/2
9 л/<£а
86
рядка 0,2—0,8 кВт, целесообразно использование энергоблока, сос¬
тоящего из солнечной батареи (СБ) и буферной химической бата¬
реи (ББ).
Кроме этих элементов, системы включают блоки управления,
преобразования и распределения энергии, составляющие 15—25%
общей массы. Энергоблок обеспечивает в течение полета заданные
уровни напряжения и тока, соответствующие графику загрузки
бортовых систем. За критерий эффективности принимается вероят¬
ность того, что рабочие характеристики (мощность, напряжение,
-сила тока) не опустятся ниже установленных значений в течение
всего полета.
Рассмотрим эффективность системы: СБ—ББ. Для остальных
блоков (управляющих, преобразующих и т. п.) методика построе¬
ния функций «эффективность—масса» не имеет особенностей.
Для обеспечения стабильного цикла работы мощность солнечной
батареи (Л^с.б) должна удовлетворять соотношениям
где N(t) — мощность нагрузки; г\ — КПД цикла «заряд—разряд»
буферной батареи; — суммарное время; ^Зар—время заряда ББ;
/раз — время разряда ББ.
Энергоемкость (А) буферной батареи определяется формулой
Если (для заданной нагрузки) определены зависимости «эффек¬
тивность—масса» солнечной и буферной батарей [Рб.б = !\ (^б.б);
Рс.б = Ытс.б)], то максимальная эффективность блока питания при
заданном ограничении по массе определяется путем «оптимально¬
го объединения» функций:
(^б.б^с.б)тах = max [/, (т6Л) /2 (от„ - т6Л)\;
0<отб.б <тъ; т6л-\-тС'6 = тг.
Определение зависимости «эффективность — масса»
буферной батареи
Используя упрощенную модель надежности, примем, что бата¬
рея набирается из блоков постоянной энергоемкости '(Аг-) и отно¬
сительной массы (£ — отношение массы к энергоемкости блока).
Функция распределения отказов отдельных блоков с достаточ¬
ной точностью характеризуется законом Пуассона. Вероятность от¬
0
87
каза i блоков (Рг) из общего числа (jul) за заданное время (/) при
известной средней интенсивности отказов (?.) определяется форму¬
лой
При скользящем резервировании рр-блоками надежность (Рб.б)
определяется формулой
Оптимальная энергоемкость одного блока дает максимум эф¬
фективности (Рб.б) при ограничении по массе (/Пб.б) и определя¬
ется из соотношений
где Е — целая часть числа; А —энергоемкость батареи; Л*— энер¬
гоемкость блока.
Функция надежности имеет ступенчатый вид.
Эффективность солнечной батареи определяется вероятностью
обеспечения минимального тока (Pi = P(I>Imin)) и напряжения
(Pu = P(U>Um[n)) и приближенно выражается формулой Рс.б =
= Р1Ри. В основном она зависит от надежности работы отдельных
элементов схемы и их соединения, механической надежности пане¬
лей, рабочей температуры и полученной дозы радиации.
Наиболее распространенный тип СБ — кремниевые элементы
на плоской ориентированной на Солнце панели.
Отдельные солнечные элементы объединяются параллельно-пос¬
ледовательно в группу (тХп)\ параллельно-последовательное объ¬
единение групп образует элементарную батарею (AlX^V); эти груп¬
пы объединяются в параллельный блок из К штук [2].
Функции распределения силы тока и напряжения зависят от
построения схемы СБ, а именно: от числа параллельно соединен¬
ных элементов; от числа последовательно соединенных элементов;
от вероятности отказа элементов типа «обрыв»; от вероятности от¬
/=о
При этом масса буферной батареи
m6.6 — ^i {А + 1АрЛ-)*
Рв.о = max ex р (— jvi)
Определение зависимости «эффективность — масса»
солнечной батареи
88
каза элементов типа «короткое замыкание»; от вероятности корот¬
кого замыкания промежуточного соединения на корпус.
Отказ типа «обрыв» любого из элементов понижает суммарный
ток группы на ток одного элемента (/э) и не влияет на напряжение
в группе. Короткое замыкание любого из элементов группы выво¬
дит из строя все параллельные ему элементы и понижает напряже¬
ние группы на величину напряжения одного элемента (UB). В слу¬
чае замыкания одного из элементов на корпус выводятся из строя
все вертикальные ряды между замкнувшимся элементом и корпу¬
сом.
Зависимость надежности СБ от структуры схемы соединения
элементов проанализирована в работе [2].
Если ограничиться учетом отказов типа «обрыв», надежность
соединения группы элементов (тХп) определяется вероятностью
р (X < JC*) = 2 \СпРпо~1 ( 1 - РоУГ".
;=о
где х — количество ветвей (путей тока в параллельно-последова¬
тельном соединении); Pq — вероятность «обрыва» в элементе; л:* —
число резервных ветвей.
Основными факторами, определяющими радиационную опас¬
ность, являются радиационные пояса Земли и солнечная активность
в период полета. Каждая солнечная вспышка вызывает потоки за¬
ряженных частиц различной энергии и интенсивности. Концентра¬
ция частиц и их энергия в радиационных поясах и потоках при
вспышках характеризуются случайными величинами.
Для характеристики радиационной опасности используются два
параметра: плотность потоков электронов и протонов и жесткость
энергетического спектра.
Доза радиации, воспринимаемая полупроводниковыми элемен¬
тами СБ при прохождении радиационных поясов Земли, достаточ¬
но стабильна, энергия корпускулярных потоков при солнечных
вспышках может различаться более чем на порядок.
Вспышки можно разделить на несколько типов. Вероятность по¬
явления вспышек £-го типа характеризуется выражением
р _М_1 ^ ^
(*;)!
где П{ — частота вспышки £-го типа; — число вспышек £-го типа
(£=1, 2,..., т).
Полученная энергия определяется величиной эквивалентного по¬
тока электронов с энергией 1 МэВ (Ф;).
Распределение полного эквивалентного потока электронов ха¬
рактеризуется системой уравнений:
Ф(Р)=5Х*‘'Фг: Р=П2’^Гехр(-'г‘'°'
i ki i ki
89
С увеличением дозы радиации ток и напряжение солнечной ба¬
тареи падают по известным экспериментальным зависимостям [9]
///0=/i®on uiu,=f2<t>(P),
где Ф — эквивалентный поток частиц.
При приведении потока заряженных частиц к эквивалентному
электронному с энергией 1 МэВ учитывается толщина радиацион¬
ной защиты, за которой он реализуется.
В общем случае Ф = f(W, ku я*), где W=рб; б, р — толщина и
плотность вещества защиты.
С повышением температуры напряжение кремниевой солнечной
батареи падает, а ток практически не меняется. Падение напряже¬
ния с ростом температуры приближенно определяется формулой
UlUQ=l-kt,
где k — коэффициент, 1/градус; t — превышение рабочей темпера¬
туры панелей СБ.
Равновесная температура батареи, смонтированной на плоских
панелях, определяется формулой
* = Г( 1 _ Т)) А. _А|0,28_ 293,
L а 5И е J
где г| — КПД фотоэлемента; g — мощность падающего излучения;
а—постоянная Больцмана; 5П, 5И — площади поглощающей и из¬
лучающей поверхностей; ас, е— интегральные коэффициенты пог¬
лощения и излучения.
На лицевой стороне панели солнечной батареи располагаются
фотоэлементы с оптическими характеристиками ас.ф, 8ф и имеется
свободная поверхность с характеристиками ас.п» £п- Доля панели,,
покрытой фотоэлементами, определяется коэффициентом заполне¬
ния:
k3 = — ,
3 5
где 5ф — площадь, покрытая фотоэлементами; 5 — общая пло¬
щадь СБ.
Интегральные оптические коэффициенты панели определяются
по формулам
«с К ^ ^с.ф ^с.и ^ ~ j 1 £ £и ( ~k ^j
Окончательная формула падения напряжения при нагреве СБ:
U/U0= \ — k
(l_r])-i_ —(ас-Ф +/(Хс-") 1°’25_2931
а (£ф 4- l*n) J J
/ 1 1
причем k
90
Масса батареи определяется зависимостью
[уф+Уз+Ук(* + 1)Ь
где 5ф — суммарная площадь фотоэлементов, м2; уф, у3, ук — отно¬
сительная масса фотоэлемента, защиты и конструкции, Н/м2.
Алгоритм определения проектных параметров СБ включает не¬
сколько этапов:
1) по графику потребления мощности бортовыми системами в
течение полета находят минимальную потребную мощность солнеч¬
ной батареи, работающей вместе с буферной;
2) определяют статистические параметры схемной надежности
элементов СБ (полупроводниковых пластин, соединений с отказами
типа «обрыв», «короткое замыкание»);
3) по продолжительности и в зависимости от расположения тра¬
ектории перелета определяют функции распределения доз радиа¬
ции в фотоэлементах, соответствующие функции распределения
силы тока и напряжения, снимаемого с элементов батареи;
4) для различных сочетаний коэффициента заполнения панелей
(&з)’и толщин покрытия (6) определяют параметры коммутацион¬
ной схемы п, т, N, М, К, соответствующие максимальной эффек¬
тивности СБ в широком диапазоне изменения массы;
5) в области полученных решений выбирают максимальные зна¬
чения
Рс.6ты = f {К 8. N, М, К).
Затем функции эффективности солнечной и буферной батарей
оптимально объединяют, определяя параметры энергетической час¬
ти системы.
С целью анализа работоспособности алгоритма и получения не¬
которых закономерностей для систем энергообеспечения автомати¬
ческих станций рассматривается задача выбора их параметров.
График энергопотребления бортовых систем представляется цикли¬
чески повторяющейся функцией, типичной для работы станций.
Используются энергетические и массовые характеристики, пара¬
метры надежности современных энергоблоков и известные характе¬
ристики радиационных воздействий на полупроводниковые фото¬
элементы [2, 9].
Решение задачи представляется следующим набором характе¬
ристик: минимальной мощностью солнечной батареи (Wc.б), ми¬
нимальной энергоемкостью буферной батареи (Аб.б), характеристи¬
кой «надежность системы (Р2) —масса (т2)», имеющей, как и
для буферной батареи, ступенчатый характер.
Анализируя отдельные факторы, следует отметить:
при оценке радиационной опасности достаточно учитывать по¬
токи лишь двух наиболее мощных типов вспышек — 28 февраля
1956 г. и 12 ноября 1960 г.;
91
наибольшее влияние на параметры солнечной батареи оказы¬
вает толщина радиационной защиты;
результирующая зависимость «надежность—масса» в области
минимально допустимых значений мощности и энергоемкости чув¬
ствительна к введению резервов; так для повышения надежности
системы от 0,97 до 0,99 оказывается достаточным увеличить массу
системы на 10%.
4.6. Эффективность элементов
системы терморегулирования
Системы терморегулирования современных КА относительно
легки и недороги. Поэтому анализ случайных факторов, связанных
с их работой, может быть, не представляет большого интереса. Од¬
нако перспективные космические энергосистемы будут иметь в сво¬
ем составе мощные радиаторы, масса которых в общем балансе
весьма весома. К этому, видимо, следует готовиться.
Космические аппаратьь-с потребляемой пиковой мощностью бо¬
лее 10—20 Вт и продолжительностью таких режимов, измеряемой
десятками минут, снабжаются активными системами терморегули¬
рования (СТР). При меньшей мощности и стационарных режимах
часто используется отвод тепла к корпусу отсека и излучение энер¬
гии в пространство.
Развитая система терморегулирования, обеспечивающая малые
колебания температуры в отсеке с чувствительной аппаратурой,
предполагает применение вынесенного в открытое пространство ра¬
диатора. Циркулирующий газ наддува приборного отсека охлажда¬
ет приборные блоки и через теплообменник или непосредственно
передает теплопотоки на радиатор. При этом теплообмен через кор¬
пус отсека регулируется матами экранно-вакуумной теплоизоляции
(ЭВТИ). Регулирование теплообмена осуществляется термодатчи¬
ками, изменяющими расход теплоносителя.
За эффективность системы принимается вероятность сохранения
температуры в установленных границах. В общем случае система
включает горячий и холодный контуры. В первом осуществляется
теплосъем с приборного комплекса, во втором — теплоотвод к ради¬
атору и излучение потока в пространство. На большинстве автома¬
тических КА горячий и холодный контуры взаимосвязаны, а в каче¬
стве теплоносителя используется газ наддува приборного отсека. За
расчетный режим при проектировании выбирается стационарный
режим пиковой нагрузки бортового комплекса.
Задачи обеспечения высокой эффективности агрегатов системы,
кроме радиатора, не имеют особенностей. Как обычно, предполага¬
ется резервирование поэлементное и по мощности. Определенный
интерес представляет проектирование радиатора с максимальной
вероятностью выведения пикового теплопотока и агрегатов, рабо¬
тающих совместно с ним, при заданной массе.
За типовую панель радиатора принимается пластина, в которую
вварен змеевик трубопровода с циркулирующим теплоносителем.
92
Выбор его минимальной площади (5ИЗЛ), обеспечивающей необ¬
ходимую мощность теплоотвода, является первым шагом решения
задачи. Если за расчетный режим принимается работа системы при
постоянной излучаемой мощности (Q), то площадь радиатора сос¬
тавляет
J jp J
где F =——ВЬ1Х параметр, учитывающий неравномерность
1 —'вых/'вх
нагрева [22]; ТВХу Твых — температура теплоносителя на входе и
выходе из радиатора.
Характеристики радиатора (площадь 5ИЗЛ, диаметр D, длина ох¬
лаждающего тракта I, расстояние между соседними витками трубо¬
провода) обеспечивают баланс поступающего и излучаемого теп-
лопотоков:
Q = лТш/F = а/\грД/р,
где а — коэффициент теплоотдачи в трубопроводе; Етр — площадь
поверхности трубопровода; Д/р— осредненная разность температур
теплоносителя и трубопровода; о — постоянная Больцмана; е—
степень черноты покрытия радиатора.
При этом расход теплоносителя (m) определяется условием вос¬
приятия теплопотоков приборного отсека:
О
пг = , где сп — теплоемкость теплоносителя.
сР(ТиХ — ТвыХ) р
Блок вентиляторов обеспечивает заданный перепад давления,
соответствующий гидравлическим потерям в тракте:
где £м — коэффициенты потерь в прямом канале (длиной L, диа¬
метром d) и при местных искривлениях с характерной геометрией
(Lb d\); р — плотность теплоносителя; со — скорость движения теп¬
лоносителя.
Мощность вентилятора
N APuF
В »
где г| — КПД вентилятора, F—площади проходного сечения.
Масса вентилятора и обслуживающей энергосистемы
тн=^ЛУ\-\- Y2)>
где Yi—удельная массовая характеристика системы вентилятора,
кг/Вт; у2 — то же энергоблока.
Сочетание характеристик радиатора и вентиляторного блока
обеспечивает скорость движения теплоносителя, соответствующую
93
оптимальному коэффициенту теплоотдачи. Используя в качестве
прототипа радиаторы с газовым контуром известных автоматиче¬
ских станций, можно принять расстояние между соседними витка¬
ми трубок диаметра Z), равным л£)/2.
Анализ работы панелей следует проводить с учетом метеорной
опасности. Опасность пробоя может понижаться при использова¬
нии трубопроводов с утолщенными стенками или введении резерв¬
ных панелей с соответствующей системой их подключения. Будем
считать, что задача сводится к оптимальному распределению мас¬
сы между толщиной панелей и их резервной площадью.
Для установленной геометрии трубопроводов и промежутков
между ними метеорной опасности подвержена площадь, пропорцио¬
нальная площади вписанной в трубопровод крестовины: 5мет =
= 5изл/я. Пусть радиатор расчленен на п секций с целью локализа¬
ции пораженных участков.
Вероятность, что одна из п панелей с площадью, подверженной
метеорной опасности (Si = SH3nAtft), не будет поражена, определя¬
ется по формуле Пуассона [22]
Д)=ехР [ — ^5изл/ля].
Причем частота соударения метеоров, обладающих массой, ко¬
торая приводит к поражению оболочки, составляет
v= 10“12(&Tp/£)“3’331/1,11,
где бтр — толщина трубопровода; k—коэффициент, учитывающий
свойства конструкционного материала оболочки; V — средняя ско¬
рость метеоров; т — время пребывания оболочки в космосе.
Если в радиатор, кроме необходимых п панелей, включены га
резервных, эффективность системы определяется выражением
т
pw=^cUnPTn~l{\-p,)1.
/=0
Требуется найти максимум эффективности (Ррад) при заданном
ограничении по массе (га), определив толщину стенки трубопрово¬
дов (бтр) и число резервных панелей (га).
Решение задачи оптимизации параметров радиатора для широ¬
кого диапазона излучаемой мощности показывает эффективность
введения резервных панелей. Ус¬
танавливается зависимость меж¬
ду толщиной трубопроводов, про¬
должительностью функциониро¬
вания системы и ее мощностью
(рис. 4.8). Технологические огра¬
ничения (на толщину трубопро¬
водов, гладких тонких панелей)
снижают интерес к рассмотрен¬
ной задаче для современных КА.
Для перспективных систем боль-
94
.$,мм
Рис. 4.8. Характеристики радиатора
системы терморегулирования
шой мощности, рассчитанных на существование в течение несколь¬
ких лет, методы приведенного анализа позволяют более обосно¬
ванно подходить к вопросам конструирования — выбора толщины
оболочки, площади основных и резервных панелей.
5. ВЕРОЯТНОСТНЫЕ МОДЕЛИ РАЗГОННЫХ БЛОКОВ
Разгонные блоки современных КА и космических ступеней носи¬
телей обладают характеристической скоростью в 2000—5000 м/с.
Они обеспечивают выход на геостационарную орбиту, полет к пла¬
нетам Солнечной системы. Для повторного маневрирования в рай¬
оне планеты-цели, возврата на траекторию к Земле используются
дополнительные ступени. Исключительно энергоемки операции, свя¬
занные с исследованием Юпитера и Сатурна (табл. 5.1).
Таблица 5.1
Характеристическая скорость, м/с
Космическая операция
Юпитер
Сатурн
1. Перелет по эллипсу Гомана
6600—.7100
7400—7900
2. Переход на орбиту спутника
1390—2300
700—1600
Анализ массовых характеристик таких блоков показывает, что
для них особенно острой является проблема повышения полезной
отдачи. Для них неприемлемы стандартные проектные методики,
при которых гарантийные запасы топлива иногда соизмеримы с по¬
лезной нагрузкой. Введение анализа случайных факторов повышает
массовую отдачу блоков большой тяги, оставляя за ними роль эф¬
фективных транспортных средств.
Методической особенностью проектирования разгонного блока
КА является органическое единство математических моделей конст¬
рукции, надежности и динамики движения. В этом сложность емко¬
го, многопараметрического исследования. Конструктивные пара¬
метры (тяга двигателя, запасы рабочего тела, масса агрегатов) не¬
посредственно связаны с траекторными характеристиками, которые,
в свою очередь, влияют на продолжительность маневров и характе¬
ристики надежности элементов космических систем.
Критерий автономной разработки разгонного блока, непосредст¬
венно связанный со стоимостными характеристиками, представля¬
ется в форме вероятности осуществления заданного маневра (раз¬
гона или торможения КА, коррекции траектории, стыковки и т. п.)
с учетом вероятности:
попадания вектора конечного состояния в допустимую область
отклонений траектории;
безотказной работы и установленной точности режимов агрега¬
тов на всех участках полета;
95
достаточности запаса топли¬
ва на маневр, и стабилизацию при
наличии большого количества
случайных воздействий.
В качестве ограничивающего
параметра выступает масса сис¬
темы, диапазон изменения кото¬
рой известен. Очевидно, миними¬
зация массы ракетного блока при
установленном уровне надежно¬
сти соответствует минимуму за¬
трат на разработку и производ¬
ите. 5.1. Схема проектирования ра- ство. При использовании прин-
кетного блока ципа взаимности оказывается це¬
лесообразным переход к задаче о
максимуме надежности при заданном ограничении на массу блока.
Функция надежность — масса вместе с формулой стоимости позво¬
ляет найти проектное решение, соответствующее минимуму затрат,
и оценить чувствительность затрат к отклонению конструктивных
параметров.
Схема проектирования, допускающая декомпозицию задачи
(рис. 5.1), предполагает следующие этапы разработки разгонного
блока:
1) анализ прототипов изделия;
2) баллистическое проектирование, выбор обобщенных траектор-
ных и конструктивных параметров (тяги Pit приращений скорости
AV{, запасов топлива гатг- по ступеням i= 1, 2, ..., k)\
3) анализ проектных параметров входящих систем — двигателя,
бакового отсека, систем подачи, управления вектором тяги;
4) анализ случайного разброса траекторных характеристик;
5) определение целесообразного сочетания вероятностных ха¬
рактеристик надежности и эффективности.
Статистика по прототипам определяет диапазон относительных
массовых характеристик конструкции агрегатов, случайный разброс
траекторных, энергетических и конструктивных параметров.
При баллистическом проектировании решается задача определе¬
ния обобщенных конструктивных параметров блока в связи с тра-
екторной задачей. На этапе проектирования систем вводятся под¬
робные математические модели, характеризующие конкретное кон¬
структивное исполнение агрегатов. Анализируется динамика про¬
цессов, их случайные отклонения. Оценивается точность траектор¬
ных параметров вследствие разброса характеристик систем борто¬
вого комплекса.
Для блока с ЖРД характерны следующие случайные факторы,
влияющие на вероятность разгона КА до заданной скорости:
1) достаточность топлива;
2) безотказность двигателя;
3) безотказность системы подачи;
“пн. VzuMri' 6г
/. Статистика по
прототипам
2. Баллистическое
проектирование
■ ЯL,&i/L , б,*i
3. проектирование систем
Г
ЗУ !
Соба¬
Jnpafl-
j Бак
ча
лёпие
l = 12 34
4.Анализ
точности
траектории
S. Синтез надежности, детектив:части
I х£ , тех Р£ - f(Gc)
96
4) безотказность системы управления вектором тяги или стаби¬
лизации.
В результате независимого проектирования агрегатов и анализа
точности траектории устанавливаются функциональные связи ве¬
роятностей выполнения системами своих функций от массовых за¬
трат (Pi = f{rrii)). В блоке «синтеза» ^-системы оптимально объеди¬
няются по алгоритму:
k к
//р.б = шах fj А ПРИ т~~
i=\ i=1
В результате цикла разработки уточняются исходные массовые
и баллистические характеристики, позволяющие провести повтор¬
ное определение всего многообразия параметров. Итерационные
циклы формируют сходящееся решение, моделируя реальный про¬
цесс последовательного уточнения проектных параметров в конст¬
рукторских бюро. Разрабатывая интерактивный процесс проекти¬
рования разгонного блока, следует спланировать управляющие эта¬
пы анализа, на которых конструктор активно включается в разра¬
ботку. Конструктор формирует исходные данные, анализируя про¬
тотипы, непосредственно включается в проектирование агрегатов,
начинающееся вводом информаций с эскиза общей компоновки,
варьирует программы работы системы и анализирует соотношение
массовых ограничений на отдельные агрегаты.
5.1. Случайные факторы и критерий проектирования
Исходные статистические параметры по прототипам изделия
или подобным космическим операциям пригодны в качестве некото¬
рых нижних границ вновь создаваемых систем.
Относительные конструктивные характеристики, рассчитанные
как математические ожидания соответствующих параметров реаль¬
ных конструкций, достаточно стабильны для аналогичных материа¬
лов и сходной технологии. Таковы относительные массы баковых от¬
секов: аб.о — ^б.о/тт = !\(^т) (рис. 5.2), двигательных установок:
Уд.у=тд.у//?==/2(Л) (рис. 5.3). Их разброс укладывается в 8—12%
от номинальных значений.
Весьма значителен разброс рабочих параметров двигафзлей
[16,5], характеризующий нестабильность процессов в камере сгора¬
ния, системе подачи, в процессе включения и отсечки двигателя.
Для ЖРД характерны коэффициенты вариации основных энергети¬
ческих показателей в пределах одного процента от номинальных
значений. Неточности установки и ориентации двигателя, измеря¬
емые величинами порядка одного миллиметра и одного углового
градуса, вызывают значительный возмущающий момент.
Для компенсации отклонений энергомассовых характеристик
вводятся гарантийные запасы топлива. Их необходимость для ЖРД
4—550
97
Рис. 5.2. Относительные харак¬
теристики баковых отсеков
Рис. 5.3. Относительные харак¬
теристики двигательных уста¬
новок
определяется разбросом удельной тяги (^уд), коэффициента избыт¬
ка окислителя (&), неточностью заправки окислителя (т3.ок) и го¬
рючего (т3.г), отклонением массовых характеристик (т0).
Исходными характеристиками для выбора гарантийных запасов служат
среднеквадратические отклонения массы окислителя и горючего:
, / / дток п \2 , I дток , \2 , / dm0K \2 ,
“""““К \ ") + ПГ "V + +
^( дт0к ^2 I дток ^2
-г ( т3.ок — — 0/Из.ок-г <^3.r ,
\ o/tzq / \ dtfir) J
/( дтГ ^ \2 / dmr \2 / dmг
(—.ЯУЛ) + (-£-<*) + (-^
дтг \2
— <нв +
<Э/ип
/ дтг \2 / <?/иг \2
Ur gW3-0KJ + r3,r-^J а,”3-г’
+
где оРуД, ат0, ат3.0, ат3.г — среднеквадратические отклонения удельной
тяги, соотношения компонентов, стартовой массы, заправки окислителя и горю¬
чего. Два последних члена под радикалами учитывают взаимные потребности
в окислителе и горючем вследствие случайных отклонений при заправке. Входя¬
щие в выражения производные (без учета работы системы регулирования расхо¬
да) приведены в табл. 5.2.
Таблица 5.2
Производные
'°РУА
/дк
/дт0
дток
k
/ — \ \ /
ток -г тг
k (то + тТ)
, (Я*ОК /ИТ)Х
k + 1
V хар
х gP2
s ул
(А + 1)2
(k + 1) то
дтг
(ток — mr) Vхар
(ток + т г)
то -Ь тг
(А + 1) gP уд
(А + О2
(k + 1) то
98
Имея функцию распределения гарантийных запасов топлива, легко получить
массу компонентов, обеспечивающую работу блока с любой заданной вероят¬
ностью.
Запасы топлива на управление обеспечивают реализацию за¬
данной программы тангажа, управление и демпфирование колеба¬
ний относительно программного положения КА.
В простейшем случае, когда управление сводится к стабилиза¬
ции аппарата по трем осям, запас рабочего тела оценивается по
формуле
з
VI ILt Дсо2 /1 , аДт \2
/й„т= > I И ,
jmd РуяЬ Дер \ Дсо ;
/= 1
где U — момент инзрции КА (относительно одной из трех осей);
t — продолжительность разгона или пассивного полета; Руд—
удельная тяга управляющих двигателей; U — плечо управляющих
двигателей (относительно соответствующей оси); Асо — точность
стабилизации по угловой скорости; Дер — точность угловой стабили¬
зации; а — угловое ускорение при управлении; Ат — время запаз¬
дывания управляющей системы. Характеристики U, Руд, Асо, Дер, а,
t имеют вероятностный xapaKTqp.
Решение задачи необходимо представить как функцию распре¬
деления трл. или построенную на ее основе функцию вероятности
достаточности топлива на управление: РуПр = Р(^р.т) • Вероятности
того, что каждого из компонентов топлива будет достаточно, долж¬
ны быть оптимальным образом связаны с характеристиками эффек¬
тивности двигательной установки (ДУ) и с другими компонентами
общей эффективности.
Эти вероятности представляются в виде функций массы гаран¬
тийных запасов горючего /пг.3.г
РГ=Ф (
\ а/72г )
и окислителя тг^0
Рп = Ф
/ ^г.з.о \
\ 5Шок )
где Ф — интегралы вероятности; о/пг, от0К — среднеквадратические
отклонения запасов топлива вследствие разброса характеристик
топлива и разгонного блока.
Общая формула вероятности выполнения блоком своих функ¬
ций, обобщающая характеристики основных случайных воздействий
и отклонений исходных параметров, имеет вид
Дгип \
Яр,б = Ф (-~^|п!п ) ехр — ТС
\qF (
ехр
(■^min — Ям)2
2 (аЯ)2
°Тр.Г
+«ф ()]}ф I—7рУ ) *
х|-| ф/Ута»-«« | ,).
\ о?/ / \ о//
X
4*
99
Здесь первый член учитывает попадание в заданную область
фазовых координат конца активного участка в связи с располагае¬
мыми гарантийными запасами топлива (F), второй — вероятность
невыхода за установленные границы режимов двигателя (Pmin,
Ртах), третий — попадание в область допустимых режимов систе¬
мы подачи (Ртр.о, Ртр.г), четвертый — попадание в область рабочих
режимов системы стабилизации и вероятность безотказной работы
исполнительных органов по осям i=x, у, -г.
Используются обозначения: oF, аР, оРвх.о, стРвх.Г, сгфг, oti—
среднеквадратические отклонения параметров состояния; Т — вре¬
мя функционирования; С — эмпирический коэффициент; фшах —
предельный угол отклонения при работе системы стабилизации;
^amin — минимальное время импульса управляющих двигателей;
еhi — параметр переключения управляющих ДУ; Хг — интенсив¬
ность отказов управляющих двигателей по включениям-выключе¬
ниям; Ni — количество циклов работы управляющих двигателей.
Проектный критерий в форме вероятности выполнения задачи
выступает в комплексе с ограничением по массе. Его структура
позволяет разделить частные задачи определения обобщенных ха¬
рактеристик разгонного блока и параметров отдельных систем. Ре¬
шение каждой из частных задач допускает внутреннюю оптимиза¬
цию и анализ характерных для системы случайных факторов. Пред¬
ставление частных решений в виде функций надежность—масса,
вероятность выполнения цикла операций — масса системы позво¬
ляет затем их оптимально объединить, выявляя ограничения на
каждую из систем, наиболее целесообразное сочетание индивиду¬
альных критериев.
5.2. Общая оптимизация параметров ракетного блока
На этапе исследования, часто называемом баллистическим про¬
ектированием, определяются конструктивные параметры, в наи¬
большей степени влияющие на траекторию движения (тяга, массо¬
вые характеристики КА в целом, программа управления вектором
тяги).
В связи с анализом случайных факторов, использованием крите¬
рия вероятности осуществления блоком своих функций возникает
серия новых задач — о связи эффективности с тяговооруженностью,
0 влиянии режимов форсирования и дросселирования, о соотноше¬
нии эффективности многоступенчатых систем, о влиянии количества
камер с учетом их возможного резервирования. Рекомендации к про¬
ектированию могут быть сформулированы на основе решения серии
простых задач, в которых анализируется влияние на эффективность
какого-то одного из параметров или их комплексов. Рассматрива¬
ется одноступенчатый ракетный блок, сообщающий КА заданную
суммарную характеристическую скорость Рхар. G помощью основ¬
ных компонентов обеспечивается и ориентация в течение полета
(время t) с точностью по угловой скорости Асо и углу Дер. Варианты
двигательной установки характеризуются интенсивностью отказов
1 on
Л, относительной массой у = тд.у/Р, удельной тягой Руд. Ставится
задача обеспечения максимальной эффективности блока при задан¬
ном ограничении на суммарную массу КА и известной полезной на¬
грузке тПЛ1.
Проектировочный критерий
н ур/_Хт0 (1~^ РУ" )
\ атг j \ от0 j \ р I
Система уравнений связи:
тг л / ^хар\
относительная конечная масса КА |д,=ехр ^—— J;
запас топлива (номинальный, управления, гарантийный)
з
/7гт= /тг0
"^Г (1+а‘' +m-o+wr.3.r;
i=l
варьируемая масса гп^=уРтТт^0-\- mT%3tT\
запас компонентов (окислителя, горючего) m0 = --k - mT; mT—
— —средний момент инерции КА относительно i-и оси /х- =
k ~г I
— ML2 •
среднее угловое ускорение в процессе управления а{= (UPi)//,*;
здесь Р — тяга ДУ; М—средняя масса; Licv— средний радиус
инерции КА; Pi — управляющая тяга; U — плечо управляющего
двигателя; ат<0 — относительная масса топливного отсека; цПр —
относительная масса прочих элементов (кроме ДУ, бакового отсека
с топливом и полезной нагрузки) \inv=mnp/mo-
Лагранжиан:
+/ (Y/)+mr.3.o4-mr.3.r-m*),
где / — постоянная Лагранжа.
Из системы уравнений Лагранжа следует
= ехр/_х т.0.(1~|Х).Яу—=0;
^г.з.г V °mr J \ ат0 ) \ Р )
dL /. (тг г, о \ ^ 1тг ч г \ / y mo 0 Н-)
' х _^оО / = 0;
V 1 \ о/иг } \ Р 1
дР V атг ) \ ат$ ) Р2 \ Р )
+/Y=0;
исключая постоянную и все неизвестные, кроме одного тг.3.0, име¬
ем условие оптимальности
101
ylntQ (1 (J.) PyR
ф (mr,3'° ) fm*— mr.3.o(l +-^) \
\ аток ) \ V о/Пок / /
где f(x) —плотность распределения случайной величины (я).
т* — тГт3л0 + О
Оптимальная тяга Р = — ; гарантийный
<зтг
запас горючего ^г.3.г = /гггз.0 .
ат0 к
Численный анализ показывает, что оптимальные гарантийные
запасы обычно несколько меньше определяемых по существующим
методикам (3аток; 3атг). Тяговооруженности отличаются сущест¬
венно. В среднем обеспечивается 5%-ный выигрыш в массе полез¬
ной нагрузки при высокой эффективности блоков (Я = 0,98 ... 0,99).
При продолжительном движении в сильных гравитационных по¬
лях необходимо учитывать гравитационные потери активного участ¬
ка, усложнив динамическую часть модели.
Проанализируем влияние на эффективность режимов форсиро¬
вания и дросселирования тяги. Учитывая определяющее значение
надежности двигателя и его систем, для одноступенчатого блока с
однокамерной ДУ, разгоняющей КА в течение одного рабочего цик¬
ла, критерий можно записать в упрощенной форме:
Я=ехр(-(Ь + Х/^),
где Хр = дХо1дР, Р — степень форсирования (дросселирования) ДУ.
Массовое уравнение связи проектных параметров:
ц — (1 — ц) ат>0 — уп0 — ци.„ — РпР=,0,
где рп.и, Цпр — относительные массы полезной нагрузки и прочих
элементов.
При тангенциальном законе управления тягой, характеризуемом
малыми гравитационными потерями, система уравнений движения
в центральном поле, записанная в планетоцентрической системе ко¬
ординат, имеет вид
л/ SonQ^x д- X a
Х~ ilV R* ’
т> _ gonoVy г Г
У~ (ХК Д /?3 ’
X = Vx\
Y = vu\
£=--V = ]/ vl+v2y; R=VX* + Y2,
Рук
где V — скорость КА; Vx,y — проекция скорости на оси OX, OY
ине|рциальной системы координат; X, Y — проекция на оси ОХ, OY
102
радиус-вектора R положение КА; К — гравитационная постоянная
планеты; go — ускорение силы тяжести.
Интеграл этой системы в общем виде
/0*> «о. VK) = 0.
Если VK— конечная скорость разгона, обеспечивающая уход ап¬
парата из сферы притяжения планеты и удовлетворяющая гранич¬
ному условию
V2 — у2 - -
Як
(V оо скорость ухода в сфере действия планеты; RK — радиус-век¬
тор конца активного участка), задача состоит в определении мак¬
симума
Я = ехр(—(Хо+хДО/j
в области решений системы уравнений
^ — (1 — Н') «т.о — Y«o — ь,.н—1^пр=0;
4«о(1+^)-руд(1-1А)=0;
Дн-. «0. ^к)=0;
Vi-Vl + ^-=Q,
где /к — время конца разгона.
Для двухступенчатого блока критерий эффективности имеет вид
Н=НХН2, где Ни Н2 — эффективности первой и второй ступеней.
Система массовых уравнений:
Ь**1 — (1 — ^l) ат.0\ — Yl^Ol — ^02 — ftipl — 0»
^2 — (1 — 1^2) «то2 — Y2«02 — — Л,р2 = 0.
№
Здесь и далее индексы «1», «2» обозначают соответствующие пара¬
метры первой и второй ступеней; p,o2=/7W^o — относительная
масса второй ступени.
Интеграл системы уравнений движения принимает вид
/№1» 1^2 ^01» Я-02» ^к) —0*
Общее условие задачи можно записать следующим образом: оп¬
ределить максимум Н=Н\ Н2 в области
tf 1 — exp (-(V + A plpx) tt)=0;
Н 2 — ехр(—ГА02 —j— Asp2/?2) Д=0;
Р-1 — (1 — Pi) От.о1 — Yx Лох — Р-02 — Л.рх = 0;
ц2 — (1 — (i2) ar, 02 — Y2«02 — — !Anp2 = 0;
1*02
103
А «01 (1 + Pi) - Ру:а (1 — М = 0;
^2«о2 (1 ~Ь Рг) — ^удг (1 — М = 0;
/0*1, h>, «01. «02, VK) = 0.
Аналогичным способом могут быть представлены условия задач
для n-ступенчатых разгонных блоков.
При проектировании удобнее использовать приближенный ме¬
тод, в котором интеграл уравнений движения представляется уп¬
рощенной аналитической зависимостью.
Уравнение движения блока с произвольным управлением в про¬
екции на продольную связанную ось имеет вид
V=go— — g{r) sin 0(7),
где go, g(r) —ускорения силы тяжести, исходное и на удалении г
от планеты; 0(/) —угол наклона вектора скорости к горизонту.
Его интеграл с использованием теоремы о среднем
V = —ис In (х — g sin Ъ.
Здесь ис — скорость истечения; g — среднее значение g(r); 0 —
среднее значение 0(/).
Задача оптимизации параметров двухступенчатого блока запи¬
сывается в такой форме: определить максимум Н = Н\Н2 в области
решения уравнений системы
Нг - ехр (-(Х01 + Хпрг )tx)=0;
Н 2 — ехР ( — (^02 “Ь ^2) — 05
^1 (1 ^l^T.ol Yl^Ol — l^npl Р'02==Ф
1^2 — (1 —^2) a-r.02 — Ч2П02 — P-,ip2 — = 0;
H*02
^1^01 (1 + А)~^ул1 0 — lAi) = 05
^2^02 ( 1 “Ь P2) — ^ул2 (1 ^2) =
—uc 1 In [Xj — uc2 In (X2 — g sin 0 (^1 + ^2) — V* = 0;
-Пк+п1 + — = 0.
^ ^ Ro
Решение задачи Лагранжа:
Нг+12 = 0;
Н 2~\-l\ = Q\
l\H\ (Х01 h~ ^5^01 (1 Pi) hs S^n 0 =
^2^2 {K02 ~\~\2P2)~\~ ^6^02(1—p2) — Ijg sin 0 = 0;
104
0;
/4 ( 1 + Ят.о2) + ^0^уд2 — ll
Р-2
—4Y3+^i(i—а)=0;
— ^4У2 + ^2(1“Л) = 0;
0;
-/з+/4-^ = 0.
Параметры рь /?2 определяются из условий: А0г>Арг-— макси¬
мальное форсирование; Ао*<АРг— максимальное дросселирование.
После определения множителей Лагранжа система уравнений
принимает вид
Для случая Ai = A2, Api = Ap2, Р\=Р2 условие оптимальности при¬
нимает форму
Решение данной системы вместе с уравнениями связи определя¬
ет оптимальные параметры двухступенчатого разгонного блока.
Конструктор задает исходные параметры: характеристическую
скорость Ухар или параметры начала (0) и конца (к) активного
участка; г0, г0, гк, гк — варианты количества ступеней (1, 2, ..., f, ...
м); компоненты топлива и их параметры Руд if оРуд г, &г, <т&г, You,
уГ; начальную массу т0 или ряд значений в интересующем диапа¬
зоне; массу полезной нагрузки тии или ряд значений в интересую¬
щем диапазоне; характеристики интенсивностей отказов ДУ
АДР, уд.у), АрДР, уд.У); относительные массовое характеристики
СИСТеМ ат.о г> Yfl-У г» М'Пр г-
Выходные характеристики — число ступеней i и приращение
скорости по ступеням AViy тяговооруженности n0i, режимы исполь¬
зования двигателей pi, максимальные пе!регрузки тах
обеспе¬
чивают максимальную эффективность блока.
Задача позволяет установить функциональную связь между эф¬
фективностью блока, характеристиками топлива и ДУ, важнейши-
Yl^Oi ^02 V2
^1 — р2)
У\п01 __ Р’огУ^ог ^
^1 Н*н.н^2
105
ми параметрами системы в целом и ее элементов т0, тп.н, Ят.о, ^д.у»
которые могут варьироваться.
Численный анализ показывает, что в наиболее эффективных
многоступенчатых блоках каждая последующая ступень отличается
от предыдущей некоторым понижением вероятности выполнения
своей задачи, тяговооруженности, гарантийных запасов топлива.
Перераспределяются и характеристические скорости по ступеням
по сравнению с задачами с массовыми критериями.
Одной из возможностей повышения эффективности является пе¬
реход к многокамерным резервируемым двигательным установкам.
Будем считать, что в многокамерных ДУ используются автономные,
идентичные двигатели, отказ части которых не влияет непосредст¬
венно на работоспособность остальных. Многокамерная ДУ компо¬
нуется таким образом, чтобы тяга каждой камеры проходила через
центр масс КА. В этом случае при отказе части камер не возника¬
ет вращающий момент и не требуются дополнительные расходы на
управление. При работе по жесткой программе управления при от¬
казе части камер остальные форсируются до уровня сохранения
суммарной тяги.
Надежность N камерной установки определяется выражением
Изменение степени форсирования р по мере отказа определения
из условия постоянства суммарной тяги
где Ро — номинальная тяга камеры; i — число отказавших камер;
ро—начальная ступень форсирования; pi — изменение степени
форсирования.
Время работы N—i двигателей характеризуется функцией рас¬
пределения
F(T <7’,)=1 — exp (-(W - i) (Х0 + \р) f^— (!+/,„) + /,„) rj .
Здесь i (число отказавших двигателей) изменяется от нуля до
некоторого предельного значения М, определяемого максимально
возможной степенью форсирования (ртах):
Я = ехр(-ТУ(Х0 + Хр/70)Г).
P0{N — i)(l+/?0 + jo)=const,
Введем величину Хр.
+PoK)N+HK~xo).
где Е — целая часть числа.
106
Перейдя к_ новой переменной АУ, определяемой выражением
\(\-NPo)
0==—n 1 — и к пеРеменнои / = вводим условие
Xj= j"ki (у=1, 2,..., т1).
т +1
В этом случае Т %= ^ 77, а функция распределения опреде-
7 = 1
ляется выражением
т +1
/=• (Т < Тъ)=2 (•- 1У-* CL (1 - ехр (-ЛГ)),
/-1
где ^i = ---+-(l + A>)V
Надежность связки при Ко = Хо' определяется выражением
m+1
Н (Хо)=F{T < 7s)|r = 1 - 2 (-1)ж CL(1- ехр (-АП).
7 = 1
Для номинальных Х0 Н (\0) = Н (Ао) Х° .
Окончательная формула надежности многокамерных ДУ имеет
вид
/ т + 1 _ \ Х0(УУ 4-1)
^ = ^l-^(-l)^c4(l-eXp(-yW^i±^7'))j .
С учетом построенных функций надежности многокамерных дви¬
гательных установок решается задача баллистического проектиро¬
вания разгонных блоков с блочным резервированием и резервиро¬
ванием по мощности. Результаты исследования показывают высо¬
кую эффективность систем с двигателями, работающими на облег¬
ченных режимах.
Анализ показывает большую чувствительность проектных пара¬
метров к интенсивности отказов двигателя.
Переход к критерию эффективности в форме вероятности вы¬
полнения задачи нарушает устоявшееся представление о типичных
значениях характеристик разгонных блоков, блоков маневрирова¬
ния КА. Их тяговооруженности непосредственно связываются с ин¬
тенсивностями отказов ДУ, они, как правило, выше значений, полу¬
ченных в задачах с массовым критерием. Перераспределяются ха¬
рактеристические скорости по ступеням, отдается предпочтение ре¬
зервированию по мощности.
107
Проведенный анализ подчеркивает необходимость тщательного
изучения всех компонент характеристики эффективности разгонных
блоков.
5.3. Динамические модели функционирования двигателей
Основой анализа надежности двигателя служат результаты
стендовых испытаний, а также данные телеметрических измерений
реальных изделий.
Характеристики процессов в камере сгорания и системе подачи
представляют собой случайные функции времени с ограничениями,
соответствующими требованиям работоспособности и точности про¬
граммы полета. Номинальный режим работы двигателя характери¬
зуется стабильностью рабочих параметров во времени.
Разбросы рабочих параметров вызваны большим количеством
случайных факторов, законы их распределения предполагаются
нормальными в сечениях по времени.
Обычно реализуются условия стационарности, непрерывности и
нормальности случайных функций, которые записываются в следу¬
ющем виде:
оо
x{t) = ^ xf (л:) dx = const = Xм;
— оо
оо
D (х (/)) = J (х — Хм)2 / (х) dx=const=Dx;
ОО
ОО
к (*1. h) = j {(xl — Xu){x2 — Xu)f{x1, x2)Ht2 — tl))dxldx2=K{t2 — ti)\
д*К
dtidt2
t = tx —t2 (h2
т = 0
а
F (х < a)|,_t = -у^щ- \ exp(-(x-a)2/2Dx) dx,
ОО
где K(tj, t2) — корреляционная функция.
Наиболее общим видом корреляционной функции, отвечающей
указанным условиям, будет функция вида
К (x)=Dxexp(—a|t|)^cospt + sin ?\х\
Жидкостной ракетный двигатель (ЖРД) анализируется как
система со случайной функцией рабочих параметров. Примем, что
его надежность определяется вероятностью непересечения в тече¬
ние заданного времени (Т) вектор-функцией рабочих параметров
(Рк(Т)) критических уровней (Ртах, Рmin) •
108
Из формулы вероятности безотказной работы следует выраже¬
ние для интенсивности отказов ДУ
Х=С^ехр(—(Р|11|П2~P"i)2 ) + ехр^—(Р|па^~Р",)2 J ,
где С = У а2 —|— р2/ хс.
Определение коэффициентов аир производится исследованием осцилло¬
грамм записи случайных функций давления, температуры, определением вида
корреляционных функций К(т).
Поверочная методика позволяет оценивать эффективность двигательной ус¬
тановки без проведения дорогостоящих испытаний, сопровождающихся отказом
двигателя. В качестве исходных данных используются параметры корреляцион¬
ной функции аир, определяемые из осциллограмм ограниченных огневых ис¬
пытаний.
Для определения коэффициентов аир корреляционной функции достаточ¬
но знать первую и вторую точки ее пересечения оси абсцисс ть т2:
Р = —-—; а = — р ctg Эть
т2 —И
На динамику работы камеры оказывают влияние процессы в
системах, обеспечивающих подачу топлива. Случайные отклонения
параметров систем подачи — одна из областей анализа надежности
установок.
Совместные решения уравнений динамики агрегатов устанавли¬
вают зависимости, связывающие значения выходных параметров
агрегата с режимом работы и характеристиками внешних условий.
Для камеры сгорания это связь давления в камере (Рк) с секунд¬
ными расходами окислителя и горючего (т0, тг) при известной
температуре в камере (Т0, Тг) и площади критического сечения соп¬
ла (Ркр)
Рк = РЛ”1о, ”1п То, Тт, /\р).
Для турбонасосного агрегата — зависимость давления, создава¬
емого насосами окислителя и горючего, от секундного расхода ком¬
понентов (т0, щг), частоты вращения (я), плотности компонентов
(ро, рг) и наружных диаметров крыльчатки (D0j DT) :
Dh.o:= Т)Н'0(м0, я, р0, Do),
DH г =-■ DH г (я£г, я, рг, Dr).
Аналогично определяются зависимости мощностей насосов
(N0, NT) от указанных параметров и коэффициентов полезного дей¬
ствия насосов (г)0, Цт):
N0 = N0(rn0, я, р0, Я0, Л0),
NT=NT{mT, я, рг, Яг, Лг).
Для турбины ТНА определяется зависимость мощности (;YT) от
секундных расходов компонентов топлива в газогенераторе (tn0'\
109
тг"), частоты вращения (п) и коэффициента полезного действия
турбины (%)’
N.t=N.r(ml, ml, п, nr).
Для гидромагистралей характерна зависимость перепада дав¬
ления (АР) от секундного расхода в магистрали (т), потерь на
трение (£Тр), местных потерь (£м) и плотности компонента (р):
ЬР=кР(т, р, (гр, У.
Для определения влияния возмущений на разбросы выходных
характеристик приведенная система управлений линеаризуется в
форме
Ч
bz^^aJ.bXi, j= 1, 2,..., и-
i = l
где Zj — выходной параметр /-го агрегата; Х{ — возмущающий
х •
фактор; а х\ —коэффициент влияния; lj — число возмущений; т —
число параметров.
Коэффициенты влияния имеют выражения:
для камеры сгорания
аР* = (\+a{k *■->-) ; арк = —— (1 а{к~1)-
1р )' тт k+ 1 V
то к -|- 1 \ Ip j тг к + 1 V 1р
рь а{ГтСг _ ph aikP0C0 _
IJ Ip (к- 1)’ ™ Ip(k-l)’
арр = — 1;
кр
для турбонасосного агрегата
m
= 2-
m
' лГ
tg Р;
N
= i +
m
а. н =
тп
k”
^0
Р; <н
Р п
н
tg Э; а‘> = 1 + у— tg р;
•* н
N < Ш N IV k” , m0 fx дурГг
apH=1-:^tgP; *,-=-1; а^=__т_(л.+ 1)л<Я1_5_
для гидромагистралей
где Ip—удельный импульс давления; С0> Сг, i0, ъ— удельные теплоемкости и
энтальпии компонентов; а1{, а* — угол наклона кривой в зависимостях удельного
импульса давления от параметра и энтальпии топлива; |3 — угол наклона напор¬
ной характеристики насоса; qTг — работоспособность генераторного газа; ть
Ш2 — конструктивные параметры турбины.
В общей формуле надежности система подачи представлена
членом
Г-Ъ ^ I -^ПХ.О ^т.р.г \ _ / Рвх.г ^т.р.г \
Р- = Ф( °Л,х.о )Ф( .Я„.г )’
где Ф — интеграл вероятности; Рт.р.0, Рт.р-г — минимально допусти¬
мые уровни давления компонентов; аРвх.о> сгРвх.г— среднеквадра¬
тичные отклонения давления компонентов; Рвх.о, Рвх.г—номиналь¬
ные значения давлений.
Ракетный двигатель твердого топлива (РДТТ) отличается от
жидкостного (ЖРД) простотой конструкции и существенно боль¬
шими разбросами выходных параметров.
Эффективность РДТТ на этапе подтверждения заявленных ха¬
рактеристик, может определяться на основании анализа осцилло¬
грамм изменения давления в камере сгорания, по значениям раз¬
бросов выходных параметров. Допустимые разбросы давления име¬
ют более широкие пределы, чем для ЖРД.
Формула эффективности РДТТ имеет вид
Я = ехр ( -ГС (ехр — (Р|11|2П~Ям>) +ехр х
N
х \\Нizim.n<Zi<Zinyay),
i= 1
где Zi — выходной параметр РДТТ; Z* max, Zi min — ограничения
выходного параметра.
Динамика процесса горения твердого топлива в стационарных
и нестационарных условиях описывается системой дифференциаль¬
ных уравнений в частных производных.
Процессы горения и истечения обычно представляются квази-
стационарными и замороженными, а- параметры двигателя осред-
ненными по объему [17].
Система алгебраических уравнений радиального течения газа в
сопле включает зависимости:
уравнение массового балланса истекающего газа
Syu-
<Р2В (k) У gFK[)PK
k
выражение для секундного расхода
92 B(k)VgFKVPK
пг= .—
. / уЯт
ill
выражение для тяги двигателя
P^WlF^P&^-FaP*-
Выражения для функций, входящих в систему уравнений, имеют
следующее аналитическое представление
рп W*
2
Vl^Kp
Случайный характер условий работы РДТТ, выражающийся^в
изменениях начальной температуры (6Г11ач), разбросе характерис¬
тик топлива (6ц, 6у) и отклонениях параметров конструкции (бАр,
6S) определяют случайный характер выходных параметров РДТТ.
Линеаризация системы уравнений динамики позволяет опреде¬
лить разбросы выходных параметров РДТТ.
Вариация давления в камере сгорания находится из выражения
ЬРк
Pk
1 / Ьи . SS j 5y I &X ^¥2 I ^ ТО
1 — v \ и S у X ¥2 ЯТч F] р нач
кр
где ар — коэффициент линейного расширения топлива; v — показа¬
тель степени в выражении для скорости горения. Вариация расхода
через сопло
±!L=_!_/i^ + 4 + Ji + vi]L_iIL + L^__^+a„srJ,
2хЯГ dRT„ r
m 1 — V \ a S V X ¥2 FK[)
1 da , v ^ №v)
где am = — — b-r-^r a,-.
нач
Вариация тяги для многосопловой конструкции
ьр =—(+—+-^L + ii_ j- _|_ a b T \ _f_
1— vl4 a 1 5 V X 1 P 4)
+ P. V^(l-/4,)i2li-+/> V + ^) +
jmA ¥1/ JmU \ 1 — V A ¥2/ j
i=1 i=l
112
п. п.
+ 7>2(Л//4,-ад)^,+ ^5]И/-ед)(-^а<)8а;,
/=1 al /=1
где
п п
A, = ?u?2/FKp/Q^)cosal; Bt=Fai cosa,.; 4=2 Л; В=^1 В‘'
/=1 /-1
Вариация тяги двигателя
5Р_ = Щ> / Ьи ^ 85 | Ьу | 8х 8 (ЯТ„) ^ ^ »9l ^
Р 1 — via' 5 ' y ' X + 2 RT ' 1 <pj
+ 52i2L_fi2_^L + fi3^.+a87’H.4)
92 Якр Яа 1
%Р
Як
= (! —v) (/-
кр
где 5=^; 51 = (1-v)(1-/4); 52=v (1-/4) + /4; Я3 =
^ К
I+B
(—р
k-1
Вариация удельной тяги
ЬР
Уя
^уд
Б /5а , 5S Ьу \ , 1 -f Ъ — у / 5Х i 5 (^ГуЛ _
-vl « 5 у / 1-v V 2Х ■ 2/?rv J
(1 +Ь) Ьх Вер! , V — Ь2(\ +В) /5/?-
1 — V ср! 1 — V
(£г+*а.)+
V Якр 92 /
I ДЗО+Д) ЪРд | йРу1
1—v 1-V нач‘
В случае многосопловой конструкции вариация давления в каме¬
ре сгорания
5/>1 1 / da , 5S , BY , ВХ , HR7\)
Э1 = 1 / ди
э1 1 — V \ и
+
>СОо: bF ]
кр I
<*>2/ Ркр1
/= 1
Т2//7 кр/
где & —
п
2 Т2/У7кр/
/=1
5—550 ИЗ
Условия функционирования РДТТ определяют форму парамет¬
ров состояния в виде
*/ = /j(MV 8Руд, ЬР, Ьт).
Эффективность РДТТ записывается в функциональном виде
Л/=ехр^ —ГС^ехр^—(pmtn —Лп)2 j_|_
П
+ ехр(—([~тл\~рРт)2 ))) П Я(Д,пт</,-(8Яуд, ЬРк, ЬР, bm)<Zlmax).
i= 1
5.4. Модели динамики маневрирования КА
Программное движение КА с работающим двигателем, соответ¬
ствующее выбранному закону управления, характеризуется измене¬
нием скоростей и координат в течение полета. Вероятность реше¬
ния TpaeKTqpHoft задачи — критерий эффективности этого этапа по¬
лета— определяется точностью параметров в конце активного уча¬
стка.
Модель движения центра масс КА может быть представлена
системой дифференциальных уравнений. В наиболее общей форме
для центрального Ньютоновского поля тяготения планетоцентриче¬
ской системы координат система имеет вид
ю d-Vx 0 п0 f ьг X
<B2=^-=ga Л±-\/Г^Т2—К — ;
dt ё° (х r J /?з
dX
dY 1/ .
f,-—=y„
T5 dt Pyx
где P=Y^X2-\-Y2\ / — функция управления, определяемая выбран-
ным законом управления.
Для существующих законов управления, близких к оптимально¬
му, функция управления принимает следующие значения:
для постоянного угла тангажа (Фо)
/=£ os&0;
для линейной зависимости угла тангажа от времени
& = »0+W;
/=cos(d0 + W);
114
для тангенциального управления
Детерминированная модель движения блока представляет собой
проинтегрированную систему дифференциальных уравнений, кото¬
рую можно записать в форме:
Выходными параметрами модели будут компоненты вектора
конца активного участка V(VXJ Vy), R{RX, Ry), а также значение
относительной конечной массы ((лк).
Тип и параметры закона управления, а также тяговооружен-
ность и время разгона (п0, /к) являются управляющими параметра¬
ми, выбираемыми в процессе анализа данной модели. Переход
от детерминированной постановки задачи к вероятностной требует
расширения описанной модели дополнительной системой дифферен¬
циальных уравнений, определяющих разбросы выходных парамет¬
ров. Случайный характер ряда переменных (л0, tKl Руд) обусловлен
вероятностными режимами двигательной установки и существую¬
щими допусками на массовые параметры конструкций и энергети¬
ческие характеристики топлива.
Установлена зависимость вариаций параметров п0 и tK от пре¬
дельных отклонений параметров двигателя и конструкции:
где РУд — удельная тяга; Шр — начальная масса блока; Р — тяга
двигательной установки; рк— конечная относительная масса;.6я0,
WK, бР, дт0, бРуд — вариация параметров разгонного блока.
Если вектор выходных параметров (хв) определяется коорди¬
натами хв (VX) Vy, Ху У, р) при вероятностной постановке задачи
он дополняется вектором отклонений (Ла;в):
Аналогично записывается вектар входных параметров (я0):
V X V х (/к, Пр, Руд, f)\
Vy=Vy{tK'> ^Q, Руд’ f\
X = X(tK, nQ, Руд, /);
У = У (4, п0, Руд, /);
^ = по, Руд, /).
Ьп0=—— SP 4-—^-Ът0; Ык
то (1 - р) Руд
Р2
kxB(hVx, LVy, ДА", ДК, Др.).
Л^, л0, Руд); ДЛГ°(Д/К, Дя0, ДРуд).
5*
115
Для линеаризованной системы существует связь между векто¬
ром разброса выходных и входных параметров в матричной форме
ДЛГВ
dVx dVx
dVx
dt
dn0
dPyA
dVy
dVy
dVy
dt
dn0
dPyA
dX
dX
dX
dt
dn0
dPyA
dY
dY
dY
dt
dn0
dPyn
dp
dp
dp
dt
dnQ
dPyA
Д«о
Д Р,
уд
При этом справедливо соотношение
Д1/=—ДКЛ
dVr
dV ДVy\ Д/? = ДЛГ
dR
dV
dX
dY
Д Y.
Для определения производных используется основная система дифференци¬
альных уравнений:
д f dVх \ д<р 1 (?ср! dX ( dyi dR ( ^ср1 dp
dR dno ' dp dn0
d<Pi dR t dy i dp
dp dPw
dn0
d
dP
уд
dn0
d
dP
уд
/ dyx \ d<?i
\ dt ) dn0
№)-
ldVy\ _ dy2
\ ^ / d/20
/ dVy \ dy2
\ dt / dPyj
+ dX dn0 n
d<Pi fyi dX
dX dP
d<f2 dY
dY driQ
УД
dR dP
уд
уд
dy2 dR
dR dno
dy2 dp ^
dp dn$
d^2 dY dcp2 dR dcp2
dn0 \ dt
d I dX\ dVjc
)-
d/j0
dy dPуД
УЛ:
dP dP
уд
dp dP
уд
<ЭРуд \ dP
уд
dn0
Обозначив
/ dY \ 0УУ
\ dt j dn0
dn0
d
dP
уд
dt j
(-£)-
■(*)-
d/2n
УД
Щ
p2
уд
|Z| =
dVx
dVx
dVx
dt
dn0
^A
dVy
dVa
dVy
dt
dn0
dPyA
dX
dX
dX
dt
dn0
dPyA
dY
dY
dY
dt
dno
^A
dp
dp
dp
dt
dn0
dPyA
116
и элементы матрицы |Z| как Z,-j, можно записать
Zn = ¥ь Z21 = «рг; Z3i - W, Z41 = I
^ ло . ^ ^
^51 = —» z52 = —“ > z53 = р2 *
^Уд Уд уд
Оставшиеся элементы матрицы |Z| определяются из решения дополнитель¬
ной системы дифференциальных уравнений, получаемой из соотношений
^ - V к г^Т5 (i+' (f-^(z“ + Ч - 7 2в)-
*4
dZyi
&
dt
dZ± 2
= ^12;
))-
dZi3 __ £0^0/ ^ Z53 ^ ^ f Z13 (Zi3 -f Z23)
d* V \ Vx У2
*/C / Z33 3
- «3 (-*—т(2»+зд)!
^z23 __ g~0^0 A. _ - / Z53 , / Z23 ^ (Z13 + Z23) \\ _
I* y f [ fi +P{ Vy V2 ))
~ (Z;33 + z«)j;
di
YK I Z43 3
R*
dZ3 3
dt
dZA3
= Z i3;
' = Z23;
dt
dZ5s щ
dt p2y, '
Система, описывающая отклонения координат, должна интегрироваться сов¬
местно с основной системой дифференциальных уравнений движения. При тан¬
генциальном управлении параметр р= 1, в остальных случаях р = 0.
Условия выполнения задачи, накладываемые на выходные пара¬
метры, зависят от функционального назначения блока. Так, для
блоков, выполняющих задачу коррекции траектории, вероятность
успешного функционирования может оцениваться вероятностью вы¬
полнения неравенства V^Vmln, определяющего вероятность того,
117
что достигнутая характеристическая скорость коррекции не ниже
некоторого минимального уровня.
В этом случае, используя значения произвольных параметров
конца активного участка и соотношения
(v iTii 1/ dVy)
дп0 V V * дп0 ^ у дп0 )
dV I L, dVx , ,, dvt
дР уд V
(Vx^ + Vy^L)
\ дп0 у дп0 )
dR 1 / Y дХ . у дГ у
\ дп0 дп0 ) ’
дп0 R \ ип0
™-=±(x^L + r^-),
дРуд R \ дРул дРуп )
можно определить разбросы скорости в конце активного участка
LV = ± ((VXZ12 + VyZn) М0 МУxZu + VyZ23) дяуд +
+ xZn ~h Уу%2\) Д^к)-
Величины n0, Руд, tK принимаются нормально распределенными.
Дисперсия скорости в конце активного участка определяется соот¬
ношением
Dv=гг ((y*Zl2 + VyZ22)2 Dno + (V2xZ2l3 + V2yZ23) DPyx +
+ (V2xZ2u + V2yZ2n)DtK).
Вероятность выполнения задачи выражается формулой
В случае задачи перелета в качестве выходного параметра мо¬
жет быть использовано значение энергии перелета
2 К
F = V2-
Разброс значений радиуса-вектора конца активного участка
может быть определен по формуле
A/?=-^((^Z32+rZ42)A/?0 + (^Z53 + rZ43) ДЯуд+
+ (ZZ31 + KZ41)A4).
Дисперсия радиуса-Be.KTqpa как случайного выходного парамет¬
ра определяется по формуле
D«= -£T«*2z*H- K2Z«) Dn0 + (X*zl3+Y*Zl3) Орул +
+ (Z2Z32i + K2Z4i)D<k). >
118 I
П|ри этом дисперсия энергии перелета
DP = АУЮу
4 К2
№
Вероятность выполнения задачи
f F ^mln
н=ф(
\ V df
5.5. Модель стабилизации КА
Назначение системы стабилизации состоит в поддержании про¬
граммных значений угловых скоростей и угловых положений КА
при движении относительно центра масс. Существует большое ко¬
личество внешних и внутренних источников возмущения как на ак¬
тивном участке, так и в процессе свободного движения аппарата.
Все возмущающие факторы являются случайными величинами, по¬
этому определенный расход топлива, обеспечивающий процесс ста¬
билизации, также является случайным.
Методика построения вероятностных характеристик данного
процесса рассматривается в рамках простой модели, описывающей
плоское движение при действии возмущающего момента двигателя.
Выбранный закон управления соответствует идеализированной сис¬
теме, драбатывающей без запаздывания и учитывающей лишь угло¬
вые отклонения КА.
Входными параметрами математической модели системы стаби¬
лизации являются параметры, ограничивающие угловое положение
±е и угловую скорость ±е аппарата.
При малом значении возмущающего момента Мв КА совершает
малые колебания относительно нейтральной оси. Пусть управляю¬
щие двигатели работают в дискретном режиме, включаясь по сиг¬
налу датчиков при определенном угле отклонения ±ек, не превыша¬
ющем заданные границы.
Параметры цикла стабилизации описываются уравнениями
Mt I * \ ■
—т-+£; ?>ек;
<р=
<р=
±£; М<£к;
, Mt
/
Mt2
21
- —е; ?<£к;
+£Н£К; <р>£к;
± £к ± et; | < ек;
Mt2
21
-zt — г- ср<е„.
Из данной системы уравнений определяются условия переклю¬
чения:
V ш.
119
Коэффициент заполнения, определяемый отношением времени
активной работы управляющих двигателей ко времени полета, на¬
ходится из выражения
*= ! .
о т
0,5 +-
Расходы топлива тт зависят от времени полета t. удельной тя¬
ги управляющих двигателей Руд и определяются плечом относитель¬
но центра масс тяги управляющих двигателей L:
v М^иол
т=-
LP
уд
/ Ш \
(0,5 + -^-)
Общее количество включения—выключения управляющих дви¬
гателей
^11ПЛ
N -
2 е/
2 в
2т I
Удельная тяга и моменты инерции КА являются случайными
параметрами, остальные считаются детерминированными, посколь¬
ку могут быть определены с высокой точностью.
Управляющим параметром является величина управляющего
момента М, которая считается также детерминированной.
Логика управления системой стабилизации, заключающаяся в
переключениях управляющих двигателей при сигналах датчика уг¬
лового положения ±ек, считается неизменной, не зависящей от воз¬
мущений.
При действии на систему случайного возмущающего момента
Мв происходят изменения цикла установившегося движения.
Уравнения движения КА относительно центра масс имеют вид
(М — Мн) t
±i+it
_iTM±*K
(
st-
{М—Мя) (2
<p= | ± et Zf
— ei* +
l
2/
МЯП
21
(M + AfB) V
21
<p>
—ек<<р<®к;
<p> -£K;
:k '?> ек!
—£k<cp<®k;
— £k<?-
120
При этом
— е2/ I
?тах 2 (М-Мп)^£ю
^пол (М — Mr) (М + Мп) Мп
k =
I (еМ (М + Мв) + eiМн (М + Мв))
1
. (« — «!) (Л4—Мв) (М + Мп)
MR(k (М + AlB) + ei(M— Мв))
tmin
28! /
Мв + М
Если возмущающий момент достаточно велик, т. е.
62/
ЛД>
4ек
то цикл имеет одно переключение.
В этом случае
к = Жв_. ш= м*г . дг_^ ШВ(М-МВ)
М ’ 1Руя ’ 2/еЛ4
Для нормального функционирования системы принимаются сле¬
дующие требования:
отклонение по углу ершах меньше заданного предельного вк;
минимальное В|ремя работы двигателя выше предельно допусти¬
мого /*;
количество циклов включения — выключения не вызывает отка¬
за автоматики ДУ;
топлива стабилизации достаточно для всего полета.
Вероятность безотказной работы автоматики принимается в
следующей форме:
Н =exp(kNN),
где N—математическое ожидание количества рабочих циклов.
Для определения случайного возмущающего момента задается
случайный вектор а(ах, ау, аг) с нормально распределенными ком¬
понентами, характеризующий точку приложения вектора тяги в
связанной системе координат. Направление вектора тяги задается
случайными и нормально распределенными углами ср и ф.
Проекции вектора тяги на оси связанной системы координат оп¬
ределяются выражениями
РХ = Р cos^ sin <р; Ру = Р sin 6 sin ср; PZ = P cos<p.
6—550 121
Вектор возмущающего момента (векторное произведение векто-
1ров Р и а) имеет компоненты
Мх=ауР cos ср —а2Я sin ф sin ср;
My = azP cos ф sin ср — ахР coscp;
М2=ахР sin ф sin ср — ауР соБф sin ср
и является случайным в силу случайного характера его составляю¬
щих.
Параметры распределения компонент возмущающего момента
определяются методом линеаризации.
Выражения для соответствующих производных
дМх
= Р cos ср;
= Р sin ф sin ср;
да^
дМх
дах
дМх
—— = ауР sin ср — а2Р sin ф cos ср;
дМх
— = azP cos 4-;
дЩ
да.
дМу
daz
дМи
дМу
—— — azP sin 4* sin tp;
0ф
дМу
— = az cos ф sin <р;
дМг
• = Р cos ср;
= Р cos ф sin ср;
■ = р sin ф sin ср;
дах
дМ2
= Р cos ф Sin ср;
дау
дМ
-7^- •= cos ф (ах Р sin ср — a,jP sin ф);
дМ2
— -р = ах sin ф sin ср — ау cos ф sm ср.
—— = azP cos ф c.os ср —j— аХР sin ср;
0ср
Дисперсия проекции вектора моментов Dm(DMx, DMy, DMz) определяется
по формуле
DM =
/дМЛ2 (дМх\% (дМЛ2 /дМх\2 {дМх\2
\д^~) (ity) \1ц) [~дР
у
№У\2 0 1дМу\2 tdMyV tdMyV/дМуУ
\дах / \дах М д? I \ <?ф / I дР )
(дМЛ2 (дМ2 .2 (дМгУ(дМг\2(дМг 2
\дах ) [ дау ) [ ду ) [ дф ) [ дР )
DaX
Day
Daz
D,
дисперсия распределения фшах находится из выражения
£2/ у
-AW
Dm е
2 (М
_е2 \2
1-Мв) )
Dj.
Параметры распределения минимального времени активной работы управ¬
ляющего двигателя определяются по формулам
122
D( in I n —
(———)2 DMb+( — )2 D'4-{-{—— )2 D, при двух пере-
\(iV!+MB)2/ \ (М + Мп)1 \(M-HWB) / ключениях;
2ё/ \2 / 2e \2
Dmb-H Dj при одном переключении.
\ , ЛЛ , J
(М+Л4В)2/ ‘,1В \(М-\-М
Параметры распределения потребных запасов топлива находятся из линеа¬
ризованных выражений:
для случая двух переключений в цикле стабилизации
dm д / Mt
дмп - дмв ^ ^
Мв(ё (М + Мв) ■«! (М-мв))
дтг д / Mt
дЧ дЧ Пя (1 + (ё + ё1)(/И-М„)(М+Л4в)
УД МВ^(М + МВ) + 'Ч(М-МВ)У
дтг М
УЧ ЛГв(ё(М + Л/в) + ё1(М-Мв))
дтг Mt^Qji
dPyi LP2 { 1 | (к +*)(М-МВ)(М+MB)
уд V лгв (ё (ЛГ -|- мв) + li (М - Af„))
для стабилизации с одним переключением
дтТ t dmт MBt dmx MR
dmB LPyjl дР уд LPyJk dt LP уд
Дисперсия запаса топлива на стабилизацию определяется по
формуле
/= 1
Вероятность успешного выполнения задачи записывается фор¬
мулой
н= п
1 = Х, у, Z
X
tn-zx \ mT у
■тт \
^vr 7. •
V D6, х D6T у -t- D(зт z
Индексы х, у, z обозначают стабилизацию по соответствующим
осям координатной системы.
Управляющими параметрами в задаче общей оптимизации сис¬
темы управления являются: значение граничного угла включения
двигателя (ек), величина управляющего момента (М), рабочий за¬
пас топлива (тт).
6* 123
5.6. Массовая модель
Массовые характеристики бакового отсека зависят от его ком¬
поновки, конструктивного исполнения, тяги, принципа работы сис¬
темы подачи и других характеристик ДУ. В блок общей оптимиза¬
ции входит единственный параметр — относительная масса баково¬
го отсека, которую можно определить как отношение массы отсека
(конструкции, системы наддува и обеспечения запуска в невесомос¬
ти) к рабочему запасу топлива.
В компоновке отсеков, как правило, используются сочетания ци¬
линдрических, сферических, эллиптических, торовых баков, объеди¬
ненных между собой и двигательной установкой силовыми элемента¬
ми (фермами, оболочками). Компоновка отсека выбирается сравне¬
нием ряда типичных схем, составленных из баков оптимальных про¬
порций, соответствующих минимуму суммарной массы конструкции
при заданном полезном объеме.
Как правило, расчетное нагружение соединительных конструк¬
ций —нагружение активного участка. Масса элементов обслужива¬
ющих систем в первом приближении оценивается следующими зави¬
симостями.
Масса баллонов с газом наддува составляет
где рн, рнач, рк — давление наддува баков, в баллонах, начальное и
конечное; RT — постоянная газа наддува; Т — рабочая температура.
Для обеспечения запуска в невесомости используются раздели¬
тельные устройства, разделяющие в баках топливо и газ наддува
(мешки, диафрагмы, сильфоны); инерциальные системы, разделяю¬
щие жидкость и газ наддува при создании искусственной тяжести;
устройства, использующие явление смачиваемости и силы поверхно¬
стного натяжения; накопительные устройства, сохраняющие полно¬
стью заправленными малые бачки для запуска двигателя.
В зависимости от массы топлива и возможной величины пере¬
грузок /гВОзм определены границы использования указанных систем.
Их характеристики задаются как функции массы и объема топлива
(табл. 6.3).
Габаритно-массовые параметры двигателя описываются систе¬
мой уравнений с варьируемыми проектными параметрами: Р — тя¬
гой; k — показателем адиабаты продуктов истечения; R — универ¬
сальной газовой постоянной; TK = f(pK)—температурой в камере
сгорания; р — удельным импульсом давления; / — удельной отно-'
сительной расходонапряженностью; L*—-характеристической дли¬
ной камеры сгорания; 5 = -^- —степенью расширения сопла; дав-
^бал
Ра
124
лением на срезе сопла Ра. Система включает в себя следующие
уравнения [16]:
Рк = ЪРа\
Таблица 6.3
Тип системы
,лт. н
"возм
А /га, %
А У у %
Вытеснительные
100—5000
10—12
■ 3—5
2—5
Использующие
явление
смачиваемости:
соты
ЮОО-ЗООО
До 1
2—4
2
сетки
3000—10000
0,01—0,02
1—2
1
Инерционные:
ускоряющие
Ы04—Ы05
Неограничено
1—2
0
закручивающие
1-106
1
0
Накопительные
2-104
о
3
2
w=
2k
k —
R 7\
скорость истечения;
TK = Tc[-\-a (pK— b)—температура в камере;
т
Та—Ра—"—температура на срезе сопла;
Р к
PyA=\V
'(1+гУ
удельная тяга двигателя;
ш — ~т, —секундный расход топлива; /7КР= 3 —площадь кри-
^УЛ Рк
тического сечения сопла; Fа-
2
к + 1
кр
(тГ-(тГ
■ площадь
г*, m
среза сопла; гК = площадь сечения камеры сгорания;
J’Pk
Рк-
кр
L=
3 / tg 63
= L* + LK0H — общая длина камеры; LK
— длина конусной части камеры сгорания; LK =
{VFa — VF кр) ctgMc—
Ул
Длина сопла (-& — угол полураствора); 8К = 1/
а0,2 Г Л
толщина
125
стенки камеры сгорания (сто,2—предельно допустимое напряжение
сопла; mr = 2dKFKy — масса головки камеры сгорания (у — удель¬
ный вес материала); mK=26uFKy-\-8cSckOK + 2Su8K — суммарная
масса камеры (1^&0х^2 — учитывает охлаждаемую часть сопла).
Масса автоматики и турбонасосного агрегата может быть пред¬
ставлена эмпирическими формулами, обобщающими статистические
данные:
где Ар — перепад давления на насосах; а2, bь Ь2 — эмпириче¬
ские коэффициенты.
Учитывается также масса фермы крепления т,ф.
Относительная масса двигательной установки
5.7. Влияние энергомассовых параметров топлива и конструкции
на характеристики ракетных блоков
Проектные параметры космических ракетных блоков (разбивка
характеристической скорости по ступеням, тяговооруженности, со¬
отношения гарантийных запасов топлива) зависят от исходных дан¬
ных, связанных с совершенством конструкции и технологии произ¬
водства. Ракетные блоки, спроектированные сегодня и десять лет
назад, будут различаться параметрами и, может быть, конструк¬
тивно-компоновочной схемой.
Рассмотрим модельную задачу проектирования — выбор проект¬
ных параметров одноступенчатого ракетного блока, типа доставля¬
ющего на Землю КА с лунным грунтом (станции «Луна-16, -20,
-24, рис. 5.4).
Для общности решения не будем базироваться на абсолютных
значениях массовых характеристик. Используем безразмерные па¬
раметры конструкции (ат.о = 0,08; ^д.у = 0,06; цПр = 0,08) и энергети¬
ческие характеристики (характеристическая скорость VXap=
=■•2500 м/с, удельный импульс в диапазоне Руд=2750 ... 3000 Нс/м).
Интенсивности отказов рассматриваются в диапазоне Х =
= 10-4... 10-5 1/с.
Параллельное решение по массовому критерию (рис. 5.5) и по
критерию эффективности (рис. 5.6, 5.7) выявляет достоинства и не¬
достатки методов (табл. 6.4).
тхс.с Ч- та Ч- /яТНа Ч- Щ
126
Рис. 5.4. Ракетный блок «Луна» — «Земля» АМС «Луна-16»
В решении по критерию эффективности гарантийные запасы топ¬
лива на 20—25% ниже стандартных, определяемых по максималь¬
ным отклонениям (±3ахг) случайных исходных характеристик
Xi (^УД> ат.о, Уд.у> Цпр) •
Проектирование начинается с разработки принципиальной ком¬
поновочной схемы, которая влияет на назначение исходных массо¬
вых параметров. В диапазоне возможных значений варьируются их
сочетания. Устанавливается влияние на выходные характеристики
Цп.т Н) всех исходных параметров.
Рис. 5.5. Проектные параметры
ракетного блока при разработ¬
ке с массовым критерием
Пopt
Рис. 5.6. Проектные параметры
ракетного блока при разработ¬
ке с критерием эффективности
127
J1 п.I
Увеличение удельной тяги двига¬
тельной установки снижает тяговоору-
женность блока. При решении задач
по массовому критерию (цп.нтах) оп¬
тимальная тяговооруженность умень¬
шается вследствие ослабления влия¬
ния гравитационных потерь. Меньший
запас топлива требует меньших гаран¬
тийных запасов при заданном уровне
эффективности. Это влияет на пере¬
распределение резервной массы и также снижает оптимальную тя¬
говооруженность при решении задачи по вероятностному критерию.
Таблица 6.4
Рис. 5.7. Сравнение проектных
параметров двух решений
Тип критерия
п
%.Н
н
Массовый
0,9
0,147
0,983
Ип.н шах
Н = const
1,3
0,154
0,983
Fb*
- р
уи
о
О
3
СО
1,4
0,147
0,988
Массовое совершенствование двигателя, сопровождающееся сни¬
жением удельного веса двигательной установки (уд.у), вызывает
увеличение расчетной тяговооруженности. Более мощный двигатель
той же массы уменьшает гравитационные потери; он обладает бо¬
лее высокой надежностью благодаря сокращению времени работы.
Обратным образом влияет на оптимальную тяговооруженность
снижение интенсивности отказов двигателя. Выгодным оказывается
двигатель меньшей мощности, причем освободившийся резерв по
массе идет на повышение надежности других систем.
Изменение характеристик топливного отсека оказывает слабое
влияние на значение оптимальных параметров. Снижение ат.0 вы¬
зывает незначительное уменьшение оптимальной тяговооруженно¬
сти.
Изменение значений коэффициента цПр не влияет на решение за¬
дачи по массовому критерию, меняется только характер самого
экстремума. При слишком больших Цпр проектная задача может
быть вообще неразрешимой для данных значений скорости манев¬
ра. Снижение цпр освобождает резервы по массе и вызывает увели¬
чение тяговооруженности и гарантийных запасов компонентов.
Разработка многоступенчатых систем, осуществленная по по¬
добной методике, определяет общую тенденцию снижения гаранти¬
128
рующих запасов на ракетных блоках последующих ступеней, пони¬
жения теоретической надежности блоков, прилегающих к полезной
нагрузке.
Методика проектирования ракетных блоков по критерию эффек¬
тивности заставляет пересмотреть некоторые традиции в вопросах
выбора проектных параметров, позволяет оптимально сочетать их
характеристики с параметрами конкретных бортовых систем.
6. РАЗРАБОТКА КОМПОНОВОЧНО-КОНСТРУКТИВНОЙ
СХЕМЫ КОСМИЧЕСКОГО АППАРАТА
При разработке компоновочно-конструктивной схемы КА впер¬
вые предстает как единое целое.
Это практически не формализуемый этап работы. Конструктор
определяет «логику» схемы, комплектует взаимодействующие бло¬
ки, устанавливает геометрию обводов под сбрасываемым обтекате¬
лем, определяет взаимное влияние систем, соотношение моментов
инерции, «пути» нагрузок. Определяются пояса стыковки с носите-
лем и транспортными системами, возможности регулирования час-
Рис. 6.1. Моноблочная конструктивно-
комповоночная схема (АМС «Вене¬
ра»)
тотных характеристик в связи
с динамическим характером
нагружения КА на режимах
старта носителя и отсечки его
ступеней.
Комплекс противоречивых
требований редко удовлетво¬
ряется полностью.
129
Рис. 6.2. Ферменная несущая конструкция с поблочным
креплением агрегатов (посадочный модуль «Викинга»)
6.1. Компоновочные схемы
Моноблочная схема, при которой системы и агрегаты раз¬
мещаются в едином корпусе и на его внешней поверхности (рис.
6.1), и свободнонесущая схема, собирающая агрегаты
«россыпью» на несущей ферме (рис. 6.2), — два полюса компоно¬
вочных решений. Они определяются особенностями приборного сос¬
тава, необходимостью в их герметизации, наличием двигательной
установки с большими баками, характеристиками нагружения.
Компоновочная задача непосредственно связана с формировани¬
ем принципов работы КА и состава бортовых систем. Переход от
неориентируемого полета к ориентируемому дает возможность ис¬
пользовать узконаправленные антенны, повысить коэффициент уси¬
ления сигнала примерно на 20 дБ, уменьшить площадь солнечных
батарей в 2—3 раза. Однако при этом в бортовой комплекс вклю¬
чается система ориентации, составляющая при различной точности
ориентации 10—20% общей массы аппарата. При компоновке аст¬
родатчиков (Солнца, планет, звезд) этой системы необходимо обес¬
печить для них свободные поля зрения, устранив влияние бликов,
подобрать рабочие тела, не дающие свечения. Корпуса отсеков для
приборов с особо точной ориентацией (Г—1") должны быть жест¬
кими, практически не допускающими деформаций.
Особые требования предъявляются к компоновке исследова¬
тельского оборудования. При спектрографических исследованиях
должны учитываться выделение газов и испарение материала кор¬
пуса, влияние струйных рулей.
130
Выбор общей геометрии, соотношений моментов инерции также
определяется рабочими режимами. Взаимодействие с гравитацион¬
ным полем планеты, эффективность гравитационной системы ори¬
ентации непосредственно связаны с характеристиками эллипсоида
инерции КА. Если один из моментов инерции в 2—3 раза меньше
других, ось, соответствующая ему, имеет тенденцию располагаться
по направлению на притягивающее тело. Спутники и межпланет¬
ные станции могут использовать закрутку для ориентации относи¬
тельно объекта исследования или Солнца (зарядка химических ба¬
тарей, сеанс связи, стабильный тепловой режим и т. п.). Такая
стабилизация околопланетных КА требует угловой скорости де¬
сять— двадцать оборотов в минуту, для межпланетных—несколь¬
ко градусов в секунду. Устойчивое вращение происходит относи¬
тельно оси с наибольшим моментом инерции при минимуме кинети¬
ческой энергии.
Чтобы угол прецессии из-за несовпадения строительных осей
КА с осями эллипсоида инерции был невелик, соотношение между
наибольшим и наименьшим моментами инерции должно составлять
не менее 1,5—1,8.
Геометрия аппарата имеет непосредственное влияние на нагру¬
жение корпуса, его массовые характеристики. С этих позиций КА
следует делать коротким, что уменьшает нагрузки и сокращает ком ¬
муникации. Особого внимания заслуживает анализ влияния геомет¬
рии КА на его собственные частоты колебаний при установке на
носителе. Как известно, инерционные нагрузки в процессе выведе¬
ния имеют почти статический характер и достигают максимума в
конце работы ступеней. При их последовательной работе в момен¬
ты включения и отсечки двигателей, главным образом первой сту¬
пени, возникают особые условия нагружения. Система приходит в
колебательное состояние в продольном и поперечном направлениях
одновременно.
Поскольку периоды продольных колебаний КА малы по сравне¬
нию со временем нарастания и отсечки тяги, заброс продольных
перегрузок по его отсекам характеризуется коэффициентами уси¬
ления 1,3—1,8. Их максимумы для различных отсеков по времени
обычно не совпадают.
Более существенными оказываются поперечные колебания и со¬
ответствующие им поперечные перегрузки. Эти колебания — след¬
ствие несимметрии тяги при неодновременном выходе на режим
связки двигателей и боковых порывов ветра.
Компонуя КА, контролируя систему его стыков и особенно креп¬
ление к носителю, целесообразно собственную частоту колебаний
аппарата довести до значений на 20 30%, превышающих частоты
характерной гармоники, поперечных колебаний^носителя, ограничи¬
вая боковые перегрузки по длине в пределах 0,5 2,0.
Носители «пакетной схемы» (типа «Восток»), у которых с мо¬
мента старта работают одновременно первая и вторая ступени и
длина которых существенно меньше, чем у носителей с последова-
131
I
15
ft
r
П
Рис. 6.3. Общий вид AMC «Марс»
тельным расположением ступеней, не имеют таких переходных про¬
цессов и колебательного режима нагружения космического аппа¬
рата не возбуждают.
Комплекс изложенных принципов получает отражение в конст¬
руктивно-силовой схеме каждого КА.
Типичную моноблочную компоновку имеет аппарат «Марс» (рис.
6.3 и 6.4). Силовой основой корпуса является двухкомпонентный
топливный бак, а внизу — торовый приборный отсек. На боковых
кронштейнах установлены две панели солнечной батареи, радиато¬
ры системы терморегулирования, узконаправленная параболиче¬
ская антенна большого диаметра, агрегаты системы ориентации и
стабилизации, широконаправленные антенны. Управляющие сопла,
установленные на панели солнечной батареи, имеют большие плечи,
обеспечивающие малый расход рабочего тела. Соотношение осей
эллипсоида инерции позволяет использовать режим закрутки. База
крепления по диаметру торового приборного отсека обеспечивает
жесткость стыка.
Соединение КА с носителем осуществляется с помощью фермы,
что позволяет использовать систему разделения по отдельным уз¬
лам с помощью пиротолкателей. Такая система, надежная и «мяг¬
кая» по своему воздействию на элементы конструкции, позволяет
обеспечить точную относительную скорость отделения КА от носи¬
теля.
В приборном орбитальном отсеке, выполненном в виде торовой
оболочки, пространство в середине оставляется свободным для ус¬
тановки двигателя многократного включения. Это существенно сок¬
ращает протяженность объекта.
132
гГ
/
к—1
и
Рис.
6.4. Конструктивно-компоновоч¬
ная схема «Марса»:
/—спускаемый. аппарат; 2—марсианская
станция; 3—парашютный отсек; 4—блок
баков; 5—панель солнечной батареи; 6—
радиатор; 7—антенна; 8—двигатель; 9—
приборный отсек
Соединение приборного кон¬
тейнера с баковым отсеком осу¬
ществляется конической простав¬
кой, усиленной продольными бал¬
ками по числу узлов стыковки с
фермой. Балки имеют переменное
сечение с максимальной пло¬
щадью в узлах стыка с фермой
и с минимальной по стыку с ба¬
ковым отсеком. Для предотвра¬
щения больших деформаций то-
рового отсека при снятой крышке
во время монтажа оборудования
и для передачи инерционных на¬
грузок с внутреннего периметра
торовой оболочки введены под¬
держивающие подкосы.
Баковый отсек с общим раз¬
делительным донышком из три-
металла имеет эллипсоидальные
днища с отношением полуосей один к двум. Вместе с большим диа¬
метром это позволяет получить короткий баковый отсек. В зоне
стыковки с конической проставкой в его обечайку вварен шпан¬
гоут.
Для многократного запуска в условиях невесомости в каждой
основной емкости имеются пусковые, из которых компоненты выдав¬
ливаются с помощью диафрагм. На нижнем днище бакового отсека
имеется небольшая ниша с фланцем по периметру. В нее частично
входит двигатель, что также сокращает протяженность объекта.
На верхнем днище бакового отсека через проставку закреплен
полезный груз — спускаемый аппарат, который для интенсивного
торможения в атмосфере имеет аэродинамический лобовой экран, а
для посадки — парашютный отсек.
Панели солнечных батарей на участке выведения находятся под
головным обтекателем в сложенном положении, а на трассе поле¬
та открываются в рабочее положение. Каждая панель имеет по
два лонжерона для восприятия нагрузок, возникающих при их рас¬
крытии и постановке на замки. Легкие диагональные элементы слу¬
жат для восприятия секущих сил.
КА имеет минимальное число стыков. Их местная податливость
сведена к минимуму. Вместе с минимизацией удлинения без лиш¬
ней затраты массы удалось получить большую собственную частоту
колебаний аппарата и в результате небольшие боковые перегрузки
на участке выведения.
6.2. Прочность, жесткость и геометрия элементов конструкции
Прочность и жесткость агрегатов непосредственно связаны с их
геометрией. При «завязке» силовой схемы отдается естественное
предпочтение общим требованиям к конфигурации КА в целом, од-
133
Рис. 6.5. Компоновка сферического бака и торового приборного отсека
нако целесообразна и оптимизация в «малом» — форма каждого
агрегата связывается с его массой и надежностью. Характеристика
массы агрегатов как функций геометрических параметров — ис¬
ходный материал для компоновщика.
Герметические емкости — баки, приборные отсеки, восприни¬
мающие внутреннее давление и сосредоточенные внешние силы, —
разделяются на две группы: емкости большого и малого объема.
Это членение связано не столько с габаритами, сколько с техноло¬
гическими ограничениями на толщину, которая из соображений на¬
дежности и герметичности не должна быть меньше 1,2—1,5 мм. При
расчетной толщине 6^1,2 ... 1,5 мм (малый объем) выбирается гео¬
метрия с минимумом поверхности. В противном случае (большой
объем) оптимизируется масса корпуса. Для сравнительной оценки
отсеков вводится безразмерный параметр—относительная масса
тк
конструкции: а = —, где тк — масса конструкции; тр — масса
т?
размещаемого топлива или приборов.
Объединение сферических, цилиндрических, торовых отсеков,
промежуточных ферм и оболочек образует силовую основу корпуса
(рис. 6.5), наибольшую плотность обеспечивает компоновка с сов¬
мещенными стенками отсеков (рис. 6.6).
134
Рис. 6.6. Автоматическая межпланетная станция «Луна-16»
Сфера — наиболее экономная форма отсеков с минимальной
толщиной, площадью поверхности и массой. Части сферы легко
штампуются и химически фрезеруются. Их соединение осуществля¬
ется высоконадежной автоматической сваркой. Будучи состыкована
цилиндрическими проставками, группа из четырех и более сфер об¬
разует компактную платформу для удобной стыковки с соседними
отсеками. Независимо от количества сфер при известном общем
объеме и внутреннем давлении (р), временном сопротивлении (а),
плотности материала (рк) и плотности заполнения отсека (рот) от¬
носительная масса конструкции представляется формулой
Она определяет нижнюю границу массы отсека заданного объ¬
ема.
Цилиндрическая форма позволяет наиболее просто включать
емкость в общую силовую схему. Ее длина при заданных объеме и
диаметре зависит от геометрии днищ, которые могут иметь вид по¬
лусферы, сферического сегмента, полуэллипсоида вращения, по¬
верхности, получаемой вращением половины овала Кассини.
135
Сопряжение полусферического донышка с обечайкой позволяет
обойтись в месте стыка без шпангоута. Хотя такое донышко самое
легкое и технологичное, емкость имеет недостаток — она при задан¬
ном объеме имеет большую протяженность, чем с донышками дру¬
гой геометрии. Ее относительная масса (при «большом объеме»)
представляется выражением
_2(л+1) р рк
цил л « ’
4 ав Рот
п + —
3
I
где п = удлинение цилиндрической части.
Лшл
Если донышко — сферический сегмент с радиусом R = 2гцил, что
позволяет донышко и обечайку иметь одинаковой толщины, емкость
укорачивается на 0,4г. Однако в месте стыка появляется распорный
шпангоут, воспринимающий распределенную радиальную нагрузку
pR
?mn = ~cosa) где a — угол половины сегмента. Это приводит к
сжимающим усилиям в сечении шпангоута
cosa-
Поддерживающее влияние обечайки и днища в реальных конст¬
рукциях позволяет, как правило, не проводить расчет этого шпанго¬
ута на устойчивость, а только на сжатие. Но даже при этом оказы¬
вается, что его масса составляет 1,4 тд при а = 30°, 1,0 тд при а =
= 45° (тд — масса донышка), что является крупным недостатком
этой формы.
Донышко в форме полуэллипсоида вращения не требует уста¬
новки распорного шпангоута. Однако для этой формы донышка
существенно соотношение между радиусом цилиндра (большая по¬
луось эллипса г) и глубиной днища (малая полуось Ь). В зоне сты¬
ка днища с обечайкой при г>"|/26 окружные напряжения становят¬
ся сжимающими
=^Lfi—CL
1 Ь V 262
Донышко в этой зоне может потерять устойчивость.
Известна формула, определяющая величину критического дав¬
ления:
_ 1 ,21£52 Ь2 я
^кр г2 — 2Ь2 г2 ’
из этой формулы может быть определено безопасное значение г lb:.
: ,21£52
pr2
где Е — модуль упругости; 6 — толщина оболочки. Для алюминие¬
вых сплавов это отношение чуть меньше 2.
136
При соотношении r/b = 2 радиус кривизны в полюсе вдвое боль¬
ше радиуса обечайки, днище и обечайка равнопрочны при одинако¬
вой толщине оболочки. Масса такой емкости при различном удли¬
нении обечайки, отнесенная к массе сферы того же объема, опреде¬
ляется зависимостью
/ицил 2,76 -f- 2п
тс ф 1 + 1,5 п
Такой бак короче бака с полусферическими днищами на 0,33 г.
Если в конструкции бака применен высокопрочный материал
(а^500 МПа), значение (г/А)кр оказывается меньше 2. В этом
случае при (г/6)кр<; ]/3 более выгодным по геометрии оказывается
донышко, образованное вращением половины овала Кассини.
Эта кривая представляет собой геометрическое место точек, про¬
изведение расстояний от которых до двух полюсов, разделенных
расстоянием 2с, есть величина постоянная, равная а2. Ее уравнение
(у2 -f х2)2 - 2с2 {х2 - у2) = а4 - с4.
Оптимальные характеристики днища реализуются при соотно¬
шении а = УЪс (соотношение полуосей г/Ь=У2). Радиус кривиз¬
ны в полюсе равен диаметру обечайки. Напряжения в донышке
везде растягивающие. Длина емкости вследствие большей полноты
кривой меньше аналогичной с эллиптическими днищами на 0,08 г.
Для уплотнения компоновки часто используются двухкомпонен¬
тные баки с разделительным сегментальным донышком, выпол¬
ненным из триметаллической композиции: АМГ6 — алюминий —
АМГ6. Такая композиция уверенно противостоит воздействию аг¬
рессивных сред и обеспечивает длительную взаимную герметич¬
ность соседних объемов. Донышко стыкуется с обечайкой посред¬
ством шпангоута и в процессе нормальной эксплуатации подверга¬
ется давлению в сторону вогнутости. В аварийных ситуациях пере¬
пад давления может действовать в сторону выпуклости.
Значение полуугла сегмента а оптимизируется по минимуму
массы системы шпангоут—донышко.
Масса донышка
2лг2 а
^дон . ^Р
1 -1 cos а
(г — радиус обечайки).
Масса шпангоута
т»
a tg а
Из уравнения — (/ядоч-|-/ггш;1) = 0 получаем
да
sin3 а рг
(1 + cos а)2 2а5
Зная правую часть формулы, находим значение а.
137
Рис. 6.7. Торовые емкости, обеспечивающие высокую плотность ком¬
поновки
Затем днище проверяется на аварийный обратный перепад дав-
Торовые емкости (рис. 6.7) способствуют повышению плотности
компоновки двигательных или промежуточных отсеков, хотя имеют
ряд конструктивных недостатков. Будучи неравнопрочными при
постоянной толщине оболочки, они отличаются большой относитель¬
ной массой. Из-за различной степени вытяжки при штамповке за¬
труднено их химическое фрезерование. Сварные швы проходят в
наиболее нагруженной зоне. Передача нагрузок с внутреннего пе¬
риметра на внешний без специальных шпангоутов приводит к ис¬
кажению формы поперечного сечения.
Постоянная толщина оболочки рассчитывается по меридиональ¬
ным напряжениям в зоне внутреннего экватора
где п = отношение радиуса осевой линии к радиусу сечения.
Отношение масс тора большого объема и сферы с такими же
объемом и внутренним давлением определяется формулой
ления
где k — экспериментальный коэффици¬
ент, который для 60 <—<300 равен k
5
138
^тор 4п — 2
тс ф Зя — 3
У торового бака в области нижних полюсов обычно устанавли¬
вается заборный желоб. Оболочка, воспринимающая меридиональ¬
ные напряжения, на участке под ним должна быть плоской и иметь
перфорацию в соответствии с расходом топлива. Ее толщина при
этом увеличивается. Масса тора из-за желоба возрастает на 3—4%.
Иногда из компоновочных соображений в центральную часть то¬
ра вводятся цилиндрические вставки. При этом внутренняя обечай¬
ка, сжимаемая погонными широтными нагрузками q = p(R—г), уси¬
ливается шпангоутами. При больших значениях давления и вели¬
чины (R—г) это приводит к заметным потерям массы и из-за лиш¬
них сварных швов понижается надежность по герметичности.
Более рациональной оказывается проставка со слабо вогнутыми
меридианами. Возникающие в ней меридиональные растягивающие
усилия вызывают широтные деформации растяжения, резко повы¬
шающие ее устойчивость. Даже при малой вогнутости (порядка
8%) внутренняя проставка вообще не теряет устойчивости.
Поперечное сечение тора в виде эллипса, большая ось которого
перпендикулярна его плоскости, позволяет сгладить существенный
недостаток кругового тора — его неравнопрочиость. Полагая, исхо¬
дя из равного объема с круговым тором, большую полуось эллипса
а=--цг, а малую полуось Ь = г/ц, получим, что при т]~ 1,1 и любом
Rjr меридиональные напряжения во всех точках сечения падают,
а широтные на внешнем экваторе при этом значении п достигают
максимальных меридиональных. В этом смысле тор эллиптического
сечения можно по двум этим зонам сделать равнопрочным и умень¬
шить его массу более чем на 10%.
Герметические емкости как база крепления навесных агрегатов
и элементов общей сборки
В силовой схеме КА герметические емкости часто образуют ее
основу. Они объединяются с помощью ферм и оболочек, восприни¬
мая в местах стыка значительные сжимающие нагрузки. При этом
внутреннее давление проявляется как положительный фактор. Вы¬
зывая меридиональные растягивающие напряжения, оно компенси¬
рует сжимающие инерционные нагрузки. Кроме того, растяжение
оболочки уменьшает всегда имеющие место технологические дефек¬
ты, связанные с отступлением от ее теоретической формы. Это, как
показывает опыт, существенно повышает критические напряжения.
R
Так, для цилиндрического бака, когда 60<^ —300, это увеличе¬
ние с хорошим приближением можно оценить как Дзкр=0,25 .
5
Тогда условие прочности будет
J—— <££■ — 4- 0,75 -2- ,
Я/-25 2лгЬ г
где М и N— расчетные изгибающий момент и сжимающая сила в
сечении.
139
Что касается локальных нагрузок, то баки, находящиеся под
давлением, являются удобным конструктивным элементом для
крепления к ним силовых узлов с минимальной затратой массы. Ес¬
ли условия компоновки позволяют выдержать направление подво¬
димых к узлам усилий, близким по касательной к оболочке, можно
обойтись без специальных шпангоутов, используя для крепления
лишь небольшие местные усиления.
Установка аппаратуры в деформируемых отсеках
Ряд астрономических и гироскопических приборов требует иск¬
лючительной точности установки и не допускает нагружения сво¬
их корпусов.
Обеспечивая требования по точности установки оборудования
в приборных отсеках, следует проанализировать особенности их де¬
формации при изменении избыточного давления. Последнее имеет
место при испытаниях, рабочем наддуве, при выходе в космическое
пространство. В этой связи представляют интерес некоторые осо¬
бенности деформации торового отсека от давления. Известно, что
формулы для напряжений в круговой торовой оболочке с ростом
R/r переходят в формулы напряжений для цилиндрической оболоч¬
ки. Однако для перемещений такой переход не имеет места. Дейст¬
вительно, если по формулам двухосного напряженного состояния
подсчитать приращения размеров ЛОВ и ЛОЛ (рис. 6.8), то получим
где р — коэффициент Пуассона.
Полученное выражение не зависит от R и поэтому должно бы¬
ло бы совпадать с аналогичным выражением для приращения диа-
метра цилиндрического бака Ad = — (2 —р)- Оно оказывается в 2,5
ЬЕ
раза больше, чем ААВ.
В направлении полюсов тор деформируется значительно силь¬
ней ACD= pr2 (1 — р4- — 2 Л Это больше, чем в эквато-
ЬЕ \ /1 — (г/Д)2/ .
риальной плоскости (при R[r = 2,5 в 4, 1 раза).
/(- д
Рис. 6.8. Геометрические ха- Рис. 6.9. Установка оборудования в
рактеристики торового от- отсеке
сека
140
г(
1 1,5 1 1,5 3 n
Puc. 6.10. Top с эллиптическим Рис. 6.11. Геометрия тора с недефор-
сечением мируемым экваториальным сечением
Оказывается, можно найти такую форму поперечного сечения
тора, при которой деформация горизонтального диаметра его по¬
перечного сечения от давления вообще будет отсутствовать. Тогда
крепление гироагрегатов или каких-либо других блоков, требующих
особо точной юстировки, будучи осуществлено, как показано на
рис. 6.9, вообще не будет подвержено деформации.
Рассмотрим поперечное сечение тора в виде эллипса, большая
ось которого лежит в плоскости тора (рис. 6.10). Исходя из площа¬
ди, равновеликой кругу, примем его полуоси а = цг\ Ь = г/ц. Тогда,
определив меридиональные и широтные напряжения в точках А и
jВ, можно найти, что
Приравнивая выражение в скобках нулю, получим
712('у]4 — 2 + f*)
2 (1-1,4)
Это соотношение позволяет по заданным размерам торовой обо¬
лочки R и г найти полуоси эллипса поперечного сечения, дающего
нулевую деформацию горизонтального диаметра от.давления (рис.
6.11). Как показывают расчеты, стыковочные шпангоуты в этом
случае незначительно влияют на характер деформаций поперечного
сечения.
Геометрия силовых элементов раскрывающихся конструкций
После выхода на орбиту на космических объектах раскрывается
много различных устройств, которые из-за больших габаритов и по
условиям прочности на участке вывода находились под головным
обтекателем в убранном положении. К ним относятся солнечные
батареи, всевозможные антенны, магнитометры, астродатчики и
т. п. Исходя из накопленного опыта для их раскрытия предпочтение
отдается шарнирным и многозвенным механизмам перед телеско¬
пическими выдвижными, обладающими меньшей надежностью.
В качестве приводов механизмов используются торсионы, пружи¬
ны, пневмо- и пиротолкатели. При раскрытии, для надежной поста¬
новки этих устройств на замки, механизмы должны уверенно преодо-
141
левать работу сил трения, сопротивления, вызванные перегибом
жгутов и волноводов, и другие вредные факторы.
Это приводит к тому, что конструктор вынужден делать меха¬
низмы раскрытия с энергетическим запасом, и тогда при минималь¬
ном сочетании сопротивлений постановка устройств на замки может
произойти с довольно большой угловой скоростью
со = 0,8... 1,2 1/с.
Накопленная живая сила Тх — Лм~ (где /м— массовый момент
инерции раскрываемого устройства относительно оси его враще¬
ния) переходит при этом в потенциальную энергию деформации си¬
ловых элементов устройства, вызывая в них существенные напря¬
жения. Эти элементы, обычно имеющие вид консольных балок, из¬
гибаются инерционными силами, интенсивность которых резко на¬
растает к свободному концу. Еще больше изменяются по длине из¬
гибающие моменты, и поэтому делать сечения этих балок постоян¬
ными крайне нерационально. Для таких конструкций, где масса
имеет первостепенное значение, а интенсивность инерционных сил
зависит от жесткости, необходим анализ, позволяющий создать оп¬
тимальную конструкцию. Задавая форму упругой линии в виде ду¬
ги окружности, удается получить оптимальное решение задачи сра¬
зу, не прибегая к последовательным приближениям.
Положенное в основу решения соотношение "^" = (:oris^
при постоянной или мало меняющейся строительной высоте силовых
элементов приводит к равнопрочной конструкции.
Для иллюстрации рассмотрим расчет лонжерона панели солнеч¬
ной батарей, который можно представить как консольную балку с
произвольно распределенной по ее длине массой. Пусть форма ее
собственных колебаний — дуга окружности радиуса R. Тогда про¬
гиб точки с координатой х будет: у = — sin pt,
2 R
где р — частота собственных колебаний. Соответственно Ушах —
рх% " р2-Г2
= ~2R
Изгибающий момент в сечении х от инерционных сил будет:
i
= ^ mz2(z — x)dz,
X
где т — погонная масса; г — текущее значение координаты в ин¬
тервале х—/.
В заделке М0=— Fu где ^ mz3dz.
2R
о
Обозначая жесткость в заделке £70 и используя положенное в
мк ,
основу расчета соотношение —— =const, получим выражение жест-
EI х
142
кости в произвольном сечении:
i
EIX = ^ mz2{z — x)dz.
X
Подсчитаем кинетическую Т и потенциальную U энергии этой
балки
i
T = EEL- р Где F2=[ mxAdx\
о
/ I I
U = —!— \ EIXdx _Zl где p =[ f mz2(z — x)dzdx.
2R2 ] 2R2 fi J J V
0 Ox
Потенциальную энергию U можно подсчитать также по формуле
i
U=— \ Mdx=-^-F3.
' 2R J 4Д2
О
Тогда из равенства T=U получаем
2EI о
F2=F3-2 и р2
El
Зная угловую скорость балки в момент подхода ее к замку, из
равенства T\ = U найдем амплитудное значение радиуса
*=-Lj/
EIqF3
FFi
о
По формуле пх — находим распределение перегрузок:
2 Rg
” —А-х2, где А = ш|// -!°Fa
8 V FXF з
Возникающие при постановке на замки перегрузки необходимо
знать для надежной отработки чувствительных элементов.
Изгибающий момент в сечении X будет:
/
МХ = А j* mz2(z — x)dz.
о
Значения коэффициентов Fu входящие в расчетные формулы,
легко подсчитываются графически или аналитически.
Пусть погонная масса части панели, приходящаяся на рассчи¬
тываемую балку, по длине постоянна: m = const.
Тпгяп F —т/4 • F — т[5 • F —т15-
143
mlз . _9 8EI0 . ц = J_ | / 1 ,2EI0
to/ I m
nx
3 /Я/4
3,65to
gi3
— JC
где
X~~Y ' Е1*=Е1ь{\+^-±х
Из выражения, полученного для /Vf.v, следует, что если попереч¬
ное сечение лонжерона имеет форму двутавра, увеличение его стро¬
ительной высоты h не влияет на величину напряжения о. Действи-
F h? /
тельно, в этом случае / = —- ; W = Fh, и тогда a = 0,6W ■■ / тЕ
2 Vе
Повысить прочность конструкции в этом случае можно, только уве¬
личивая площадь пояса сечения.
В случае трубчатого сечения напряжение в заделке соответст¬
венно будет а = 0,51со/ \/ ^-,где R — средний радиус трубы; б —
V bR
толщина стенки.
Из этих формул следует, что выбор материала в таких задачах
надо проводить по критерию )
\ Jmin
Для таких традиционных материалов, как магний, алюминиевые
сплавы и титан, этот критерий мало отличается. А так как в общей
массе силовых элементов, как правило, около 20% составляют по¬
бочные детали, предпочтение отдают магнию.Сейчас в такие конст¬
рукции начинает проникать новый высокопрочный материал — уг¬
лепластик.
6.3. Анализ случайных конструктивно-компоновочных
факторов
В приведенные массовые формулы для элементов конструкции
включаются коэффициенты безопасности, отражающие отличие ре-
альных конструкций от их моделей в строительной механике. Нап¬
ряженное состояние и работоспособность в большой степени зави¬
сят от случайных разбросов геометрических и прочностных харак¬
теристик, отклонения расчетных нагрузок и характера их прило¬
жения. Сведение всего многообразия реальной работы агрегатов к
схемам, описываемым формулами строительной механики в детер¬
минированной постановке, осуществляется через исключительно
емкие параметры — коэффициенты безопасности. Коэффициенты
безопасности обеспечивают работу с допустимым минимумом оста¬
точных деформаций. Этим определяется их нижняя граница: f=--
= 1,25... 1,3. Частично они учитывают составляющую приращения
напряжений вследствие случайного разброса характеристик мате¬
риалов, режимов производства и нагружения. А в большей степе¬
ни — реальный опыт безотказной работы конструкций. Первая сос¬
144
тавляющая может быть проанализирована теоретически на основа¬
нии случайных характеристик нагружения и несущей способности.
Нагрузки, определяющие принципы построения силовой схемы
агрегатов и их прочностные характеристики, подразделяются на
ряд типов:
наземной эксплуатации и предстартовой подготовки (транспор¬
тировка, такелажные операции, подъем в вертикальное положение,
стоянка на старте при воздействии ветра);
активного участка полета (тяга двигателей разгонных ступеней
к инерционные силы, аэродинамические силы с учетом порывов вет¬
ра и струйных течений, вибрации с широким спектром частот:
10—2500 Гц вследствие пульсации тяги и компонентов топлива в
трубопроводах, вследствие колебаний корпуса при прохождении
критического числа М=0,9 ... 1,1);
разделения ступеней, раскрытия элементов, стыковки объектов
(срабатывание пиротехнических средств, установка на замки рас¬
крывающихся элементов, работа стыкующих элементов, демпфе-
ров);
номинальной работы агрегатов (внутреннее давление в камерах
двигателей, в баллонах, в баках, в пневмо- и пиросистемах, в при¬
борных отсеках, рабочие нагрузки подвижных механизмов);
передвижения по поверхности планет.
Рассмотрим особенности учета типичных нагрузок при разра¬
ботке конструктивной схемы аппарата.
1. Система транспортировочных и такелажных точек выбирается
таким образом, чтобы наземные напряжения не превышали полет¬
ных.
В том случае, когда системы крепления статически определимы,
это условие легко находится.
Поскольку такелажные и транспортные операции происходят в
присутствии людей, вблизи дорогостоящего оборудования, коэффи¬
циент безопасности для этих видов нагружения /=2,0. Транспор¬
тировочные перегрузки достигают значений п=2 ... 4.
2. На активном участке максимальное нагружение элементов
КА имеет место в конце работы одной из ступеней, когда текущее
значение тяги максимально, а масса носителя минимальна (пх=
= 4 ... 10).
Особое значение имеет момент отсечки тяги первой ступени, ког¬
да ракета испытывает максимальное знакопеременное колебатель¬
ное нагружение. При этом действующая нагрузка может в два и
более раз превышать значение, определенное без учета динамики
отсечки. При анализе такого нагружения носитель и КА приводят¬
ся к модели, состоящей из дискретных масс, соединенных пружи¬
нами [6].
Полетные вибрации имеют сложный спектр, характеризуемый
экспериментальной монотонно возрастающей функцией: продольная
перегрузка — частота: /i~0,35v0’46.
Продолжительность действия вибраций (т) для типичного носи¬
теля составляет 600—750 с.
145
Значения перегрузок и частот однозначно определяют амплиту¬
ду колебаний в мм:
250/2
а-- .
V2
Очевидно, при больших частотах амплитуды малы (v = 2000 Гц,
а= 1 мк) и никакой опасности для прочности не представляют.
Для прочности крепления отдельных блоков большое значение име¬
ют частоты, близкие к их собственным (20—100 Гц). В этом случае
к максимальным значениям статической перегрузки добавляются
виброперегрузки (пв = 1 ...2). Коэффициент безопасности при этом
берется минимальный (/=1,2... 1,3).
3. Для аэродинамических обтекателей расчетными принимаются
условия при максимальном скоростном напоре (35000 Па) и угле
атаки, достигающем из-за струйных течений ~6—8°.
4. Разделение ступеней производится обычно с помощью пиро¬
толкателей, пироболтов или кумулятивных зарядов (КЗ), перере¬
зающих соединительные элементы. Действие этих устройств при¬
водит к возникновению больших давлений за промежуток времени,
измеряемый миллисекундами. Давления трансформируются в силы,
осуществляющие разделение.
Относительно спокойное нарастание сил обеспечивается пиро¬
толкателями, но они тяжелы, занимают большие объемы, и поэтому
конструкторы часто предпочитают им пироболты и КЗ. При ис¬
пользовании последних ярко выраженный динамический характер
сил приводит к тому, что в прилегающих зонах кратковременные
перегрузки достигают стаи более единиц. Любые агрегаты (клапа¬
ны, электроразъемы) следует выносить из зон такого разделения.
Раскрытие складываемых на выведении для уменьшения габа¬
ритов КА агрегатов (антенн, солнечных батарей, научно-исследова¬
тельских приборов) осуществляется с помощью пружин, торсионов
или других приводов.
Вследствие разброса в момент трения шарниров (в жесткости
кабельных жгутов, соединяющих секции механизмов) раскрываемые
устройства могут получать энергию, вызывающую повышенные
угловые (и линейные) скорости движения (со = 1 ... 1,2 рад/с).
Кинетическая энергия движущихся элементов К = — (/ — мо¬
мент инерции движущихся элементов) должна компенсироваться
энергией деформации опорных элементов.
Задаваясь формой деформации, из равенства энергий определя¬
ются напряжения элементов конструкции. Причем часть кинетиче¬
ской энергии может быть воспринята тормозящими устройствами
(прокладками, пружинами). Для этих случаев коэффициент безо¬
пасности вводится повышением расчетной угловой скорости (/=
-1,2).
Обобщенные коэффициенты безопасности, связывающие реальные напряже¬
ния с рассчитанными по моделям строительной механики, включают случайные
компоненты, поддающиеся теоретическому анализу.
146
Выделение случайных параметров в виде со¬
множителей и определение их в форме функции
конструктивных параметров открывает возмож¬
ности снижения массы конструкции.
В статистических задачах коэффициент без¬
опасности легко связывается с вероятностью без¬
отказной работы конструкции [10]:
Ф=»г
L/ А -Ь A.cJ
где Ф(х) — интеграл вероятности; Л/д — дейст¬
вующая нагрузка; / — коэффициент безопасно¬
сти; Du.с — дисперсия несущей способности эле¬
мента; DH — дисперсия действующей нагрузки.
Для реальных коэффициентов вариации на¬
грузок и несущей способности интервал вероятно¬
сти безотказной работы, соответствующий при¬
меняемым коэффициентам безопасности (k =
= 13 ... 1,5), лежит в пределах 0,96—0,999 (рис.
6.12).
Сложнее анализ динамических моделей. От¬
сечка двигателя после действия максимальной пе¬
регрузки, посадочные нагрузки спускаемого ап¬
парата, нагружение при стыковке и разделении
аппаратов — типичные случаи динамического нагружения [16].
Переходные процессы, возникающие после быстрого нагружения, связанные
с жесткостью конструкции аппаратов, характеризуются коэффициентами усиле¬
ния нагрузок (Р). Они представляют «забросы» напряжений по сравнению со
случаями статического нагружения [23].
Для КА, его корпуса и бортовых систем представляет практический интерес
анализ поперечных колебаний при динамических воздействиях.
Рассматривая КА в первом приближении как одномассовую консольную
систему на упругой заделке, можно оценить коэффициент усиления боковых
перегрузок по формуле
V (l_(i)Y + (v7")
где со — частота одного из тонов поперечных коле¬
баний носителя; р — частота собственных колеба¬
ний КА; у — коэффициент конструкционного демп¬
фирования.
Очевидно, коэффициент усиления боковых на¬
грузок Р является случайной величиной. Кроме пред¬
полагаемых или известных частот поперечных коле¬
баний носителя со и собственных колебаний аппара¬
та р большое влияние на разброс р оказывает опре¬
деляемый лишь по статистике коэффициент конст¬
рукционного демпфирования у. ' Конструкционное
демпфирование — гашение колебаний путем трения
контактирующих поверхностей, соударения в зазорах,
циклической деформации материала — связано с ло¬
гарифмическим декрементом затухания у = \/л; Х =
= 0,15 ... 0,25 — для типовых конструкций. Специ¬
альные способы демпфирования, используемые для
некоторых видов аппаратуры (гиросистемы, датчики)
для аппаратов в целом не применяются. По боковой
перегрузке в месте стыка с носителем п0 определяют
перегрузку в центре масс /г0(3. Принимая, что пере¬
грузка изменяется по линейному закону, находят ее
значение в любой точке.
Рис. 6.13. Коэффициент'
усиления перегрузок как
функция отношения час¬
тот колебаний носителя
(со) и КА (р)
/
Ж
ш
Ш/.
УУ//Л
W
7
Щ
щ
щ
W
ш.
I
1,1 1,1 1,3 !,+ к
Рис. 6.12. Вероятность не-
разрушения силового агре¬
гата как функция коэффи¬
циента безопасности:
/ и 2 — нижняя и верхняя гра¬
ницы разброса несущих свойств
и действующих нагрузок
147
В области, близкой к резонансу (оз = р)„ перегрузки могут достигать боль¬
ших значений (п = 4 ... 5) (рис. 6.13), что недопустимо.
Конструируя КА и его систему крепления к носителю, можно влиять на ко¬
эффициент усиления, выполняя условия: р= 1,3 со. При этом существенно умень¬
шаются расчетные боковые перегрузки.
Математическое ожидание Р и дисперсия Д3 коэффициента усиления боко
пых перегрузок может быть оценена по формулам
где р — математическое ожидание коэффициента усиления; со, р, X— математи¬
ческие ожидания входящих параметров; Ош, Dv, Dx —дисперсии входящих па¬
раметров. Производные имеют вид
д? _2сор_ /_Х2_ \ д$ 2о)23 , ^ —V д^ ^
ди> р2 \ я2 ^ р2 ) 1 др /73 \ Р2 я2 / д\ 71 рЪ
Нагрузки F, линейно связанные с коэффициентами усиления, характеризу¬
ются математическим ожиданием: N^ = Fр и дисперсией DH = $2DF + F2D$y
где F — статическая нагрузка; р — коэффициент усиления; Dn — дисперсия дей¬
ствующей нагрузки; D« —дисперсия коэффициента усиления.
Таким образом, в характеристиках динамического нагружения удается вы¬
делить случайные составляющие — функции конструктивных параметров, кото¬
рыми можно управлять, облегчая конструкцию.
Заключение
Что же дает несомненное усложнение проектной задачи — учет
случайных факторов, разработка системы взаимосвязанных крите¬
риев эффективности в составных проектных задачах, частичное
включение в анализ кроме проектируемого КА ему подобных, раз¬
рабатываемых в параллельных программах?
Решая проблему унификации при совместной разработке серии
космических программ, сокращая номенклатуру вновь создаваемых
агрегатов, экономически обосновывая использование уже летавших,
есть реальная возможность реализации перспективных программ с
существенной экономией.
Анализ случайных факторов на всех этапах проектирования, ис¬
пользование составляющих суммарной вероятности выполнения
программы в качестве максимизируемых критериев при решении
частных задач способствуют повышению уровня этого важного па¬
раметра. При этом выявляются объективные характеристики зат¬
рат — плата за высокую вероятность выполнения программы.
В задачах «малого масштаба» проектирования каждой из борто¬
вых систем на базе вероятностных моделей целесообразно устанав¬
ливать зависимости типа надежность—масса и оптимально объеди¬
нять системы, максимизируя вероятность нормального функциони¬
рования бортового комплекса. Путем перераспределения массы,
148
приходящейся на резервные блоки, гарантийные запасы рабочего
тела и топлива, теоретическая вероятность выполнения задачи не¬
которыми из существующих КА могла бы быть повышена почти на
10%- Это эквивалентно 15—20%-ному сокращению затрат на отра¬
ботку или снижению объема летной партии КА до 80%.
Целесообразно углублять и расширять поисковые этапы форми¬
рования сложных и дорогих космических систем. Они во многом
определяют уровень эффективности будущих космических аппара¬
тов наряду с освоением новых физических принципов, конструкци¬
онных материалов и рабочих процессов.
Список литературы
1. Аппазов Р. Ф., Лавров С. С., Мишин В. П. Баллистика управляемых ракет
дальнего действия. М.: Наука, 1968. 307 с.
2. Ашарин Л. Н. Надежность солнечных батарей. — Электротехника, 1967,
№ 8, с. 10—13.
3. Варфоломеев В. И./Под ред. М. И. Копытова. Проектирование и испыта¬
ние баллистических ракет. М.: Изд. МО СССР, 1970. 386 с.
4. Вентцель Е. С., Овчаров Л. А. Теория вероятностей. М.: Наука, 1973.
366 с.
5. Волков Е. Б., Судаков Ф. С., Сырицын Т. А. Основы теории надежности
ракетных двигателей. М.: Машиностроение, 1974. 399 с.
6. Гладкий В. Ф. Прочность, вибрация и надежность конструкции летатель¬
ного аппарата. М.: Наука, 1975. 456 с.
7. Келле Д. Модели стоимости в ракетно-космической технике. — Вопр. ра¬
кетной техники. М.: Мир, 1972, № 12, 3—63 с.
8. Константинов М. С. Методы математического программирования в проек¬
тировании летательных аппаратов. М.: Машиностроение 1975. 163 с.
9. Крошкин М. Г. Физико-технические основы космических исследований. М.:
Машиностроение, 1969. 287 с.
10. Кузнецов А. А. Надежность конструкций баллистических ракет. М.: Ма¬
шиностроение, 1978. 256 с.
11. Кулаков Н. И., Загоруйко А. С. Методы оценки повышения надежности
технических изделий по технико-экономическим показателям. М.: Наука, 1969.
142 с.
12. Максимов Г. Ю. Теоретические основы разработки космических аппара¬
тов. М.: Наука, 1980. 320 с.
13. Основы строительной механики ракет/Л. И. Балабух, К. С. Колесников.
B. С. Зарубин и др. М.: Высшая школа, 1969. 494 с.
14. Проблемы космического производства/В. С. Авдуевский, И. В. Бармин,
C. Д. Гришин и др. М.: Машиностроение, 1980. 222 с.
15. Радиосвязь с помощью ИСЗ/Н. И. Калашников, В. Л. Быков, О. С. Кра-
потин. М.: Связь, 1964. 124 с.
16. Ракетные двигатели/М. Баррер, А. Жомотт, Б. Вебек и др. М.: Оборон-
гиз, 1962. 799 с.
17. Соркин Р. Е. Газотермодинамика ракетных двигателей на твердом топ¬
ливе. М.: Наука, 1967. 368 с.
18. Сотсков Б. С. Основы теории и расчет надежности элементов и устройств
автоматики и вычислительной техники. М.: Высшая школа, 1970. 271 с.
19. Творческое наследие академика Сергея Павловича Королева/Под ред.
М. В. Келдыша. М.: Наука, 1980. 592 с.
20. Тихонравов М. К. Основы теории полета космических аппаратов. М.: Ма¬
шиностроение, 1972. 607 с.
21. Ушаков И. А. Инженерные методы расчета надежности. М.: Знание, вып.
3, 1970. 100 с.
22. Фаворский О. Н., Каданер Я. С. Вопросы теплообмена в космосе. — М.:
Высшая школа, 1967. 280 с.
23. Шиманский Ю. А. Динамический расчет судовых конструкций. М.: Суд-
промгиз. 1963. 408 с.
24. Шунейко И. И. Итоги науки и техники. — Ракетостроение. Т. 3. М.:
ВИНИТИ, 1973. 323 с.
25. Экономическая оценка больших технических систем/Под ред. С. А. Сарки¬
сяна. Изд. МАИ, вып. 295, 1974. 65 с.
Оглавление
Стр.
Предисловие , , , , , 3
1. Направления развития космической техники и методов ее проектирования 5
1.1. Традиционные методы проектных исследований 5
1.2. Ориентация на перспективные принципы построения систем ... 10
1.3. Объем и принципы решения современных проектных задач ... 15
2. Учет случайных факторов при выборе проектных критериев, методов
анализа и синтеза систем 30
2.1. Определение критериев эффективности космических программ, КА
и их бортовых систем 31
2.2. Построение критериев с учетом структуры космических программ и
отдельных КА 35
2.3. Методы анализа и выбора проектных параметров 43
3. Методологические вопросы анализа эффективности при проектировании
космических систем 47
3.1. Структура формулы трудозатрат на разработку и производство еди¬
ничного КА 48
3.2. Динамика повышения надежности и стоимости космической системы
в процессе ее отработки 53
3.3. Нормирование характеристик эффективности космической системы 59
3.4. Унификация бортовых систем 65
4. Учет случайных факторов при проектировании бортового комплекса 69
4.1. Типы проектных задач 70
4.2. Определение состава приборного комплекса и характеристик при¬
борного отсека 72
4.3. Анализ характеристик элементов системы управления траекторией,
ориентации и стабилизации 75
4.4. Исследование обобщенных характеристик типового радиоблока . 84
4.5. Характеристики эффективности систем энергообеспечения .... 86
4.6. Эффективность элементов системы терморегулирования 92
5. Вероятностные модели разгонных блоков .... 95
5.1. Случайные факторы и критерий проектирования 97
5.2. Общая оптимизация параметров ракетного блока 100
5.3. Динамические модели функционирования двигателей 108
5.4. Модели динамики маневрирования КА 114
5.5. Модель стабилизации КА ... 119
5.6. Массовая модель 124
5.7. Влияние энергомассовых параметров топлива и конструкции на ха¬
рактеристики ракетных блоков 126
6. Разработка компоновочно-конструктивной схемы космического аппарата 129
6.1. Компоновочные схемы 130
6.2. Прочность, жесткость и геометрия элементов конструкции .... 133
6.3. Анализ случайных конструктивно-компоновочных факторов . . . 144
Заключение ... 148
Список литературы 150
151
ИБ № 3559
Геннадий Викторович Малышев,
Хайтек Соломонович Блейх,
Владимир Игоревич Зернов
ПРОЕКТИРОВАНИЕ АВТОМАТИЧЕСКИХ
КОСМИЧЕСКИХ АППАРАТОВ
Редактор Ф. Г. Тубянская
Художественный редактор В. В. Лебедев
Корректоры В. А. Воробьева, Л. Е. Хохлова
Технический редактор И. Н. Раченкова
Оформление художника А. Я. Михайлова
Сдано в набор 19.07.82. Подписано в печать 29.11.82. Т-21413. Формат 60X90Vic.
Бумага типографская Л1» 2. Гарнитура литературная. Печать высокая. Уел. печ. л. 9,5.
Уч.-изд. л. 10,02. Тираж 1900 экз. Заказ 550. Цена 50 к.
Ордена Трудового Красного Знамени издательство «Машиностроение»,
107076, Москва, Стромынский пер., д. 4
Московская типография № 8 Союзполиграфпрома
при Государственном комитете СССР
по делам издательств, полиграфии и книжной торговли.
Хохловский пер., 7.
МОСКВА
« МАШИНОСТРОЕНИЕ»