/




























Text
УДК 530.1@75.8)
Л22
ББК 22.31
Ландау Л. Д., Лифшиц Е. М. Теоретическая физика:
Учеб. пособ.: Для вузов. В 10 т. Т. VII. Теория упругости. — 5-е
изд., стереот. —М.: ФИЗМАТ ЛИТ, 2003. —264 с—ISBN 5-9221-0122-6
(Т. VII).
Теория упругости излагается как часть теоретической физики. На-
Наряду с традиционными вопросами рассматриваются макроскопическая
теория теплопроводности и вязкости твердых тел, ряд вопросов теории
упругих колебаний и волн, теория дислокаций. В четвертом издании
добавлена специальная глава о механике жидких кристаллов, объеди-
объединяющая в себе черты, свойственные как жидкостям, так и упругим
средам.
Для студентов университетов, студентов физических специально-
специальностей вузов, а также для аспирантов соответствующих специальностей.
Ответственный редактор курса «Теоретическая физика» академик
РАН, доктор физико-математических наук Л. П. Питаевский
ISBN 5-9221-0122-6 (Т. VII)
ISBN 5-9221-0053-Х ©ФИЗМАТЛИТ, 1987, 2001, 2003.
ОГЛАВЛЕНИЕ
Предисловие к четвертому изданию 7
Из предисловия к «Механике сплошных сред» 7
Некоторые обозначения 8
Глава I. Основные уравнения теории упругости
1. Тензор деформации 9
2. Тензор напряжения 13
3. Термодинамика деформирования 18
4. Закон Гука 21
5. Однородные деформации 25
6. Деформации с изменением температуры 28
7. Уравнения равновесия изотропных тел 31
8. Равновесие упругой среды, ограниченной плоскостью .... 40
9. Соприкосновение твердых тел 46
10. Упругие свойства кристаллов 53
Глава П. Равновесие стержней и пластинок
11. Энергия изогнутой пластинки 63
12. Уравнение равновесия пластинки 65
13. Продольные деформации пластинок 73
14. Сильный изгиб пластинок 78
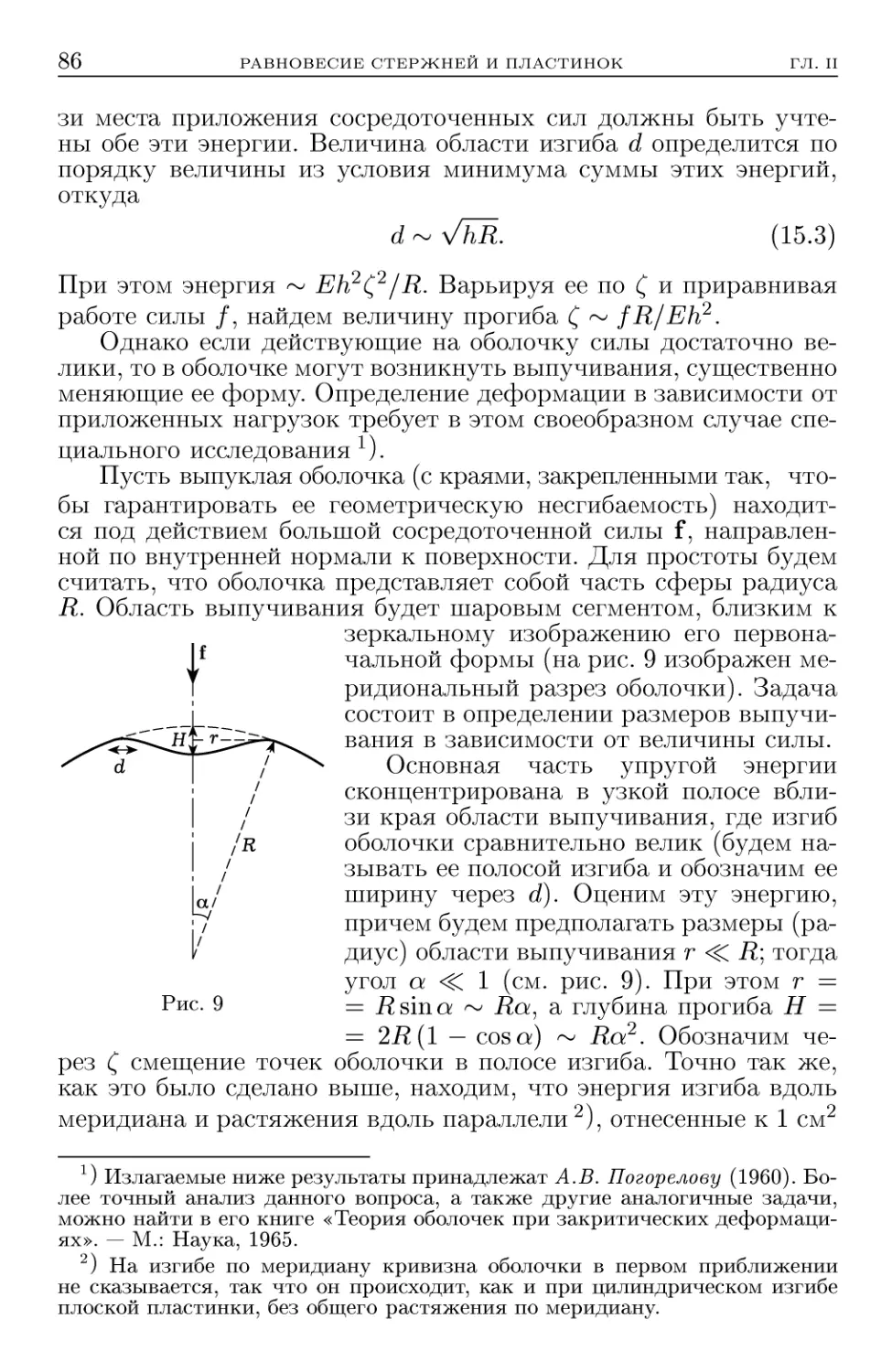
15. Деформация оболочек 84
16. Кручение стержней 91
17. Изгиб стержней 98
18. Энергия деформированного стержня 102
19. Уравнение равновесия стержней 107
20. Слабый изгиб стержней 115
21. Устойчивость упругих систем 125
Глава III. Упругие волны
22. Упругие волны в изотропной среде 130
23. Упругие волны в кристаллах 137
24. Поверхностные волны 140
25. Колебания стержней и пластинок 145
26. Ангармонические колебания 152
ОГЛАВЛЕНИЕ
Глава IV. Дислокации
27. Упругие деформации при наличии дислокации 157
28. Действие поля напряжений на дислокацию 168
29. Непрерывное распределение дислокаций 173
30. Распределение взаимодействующих дислокаций 178
Глава V. Теплопроводность и вязкость твердых тел
31. Уравнение теплопроводности в твердых телах 183
32. Теплопроводность кристаллов 185
33. Вязкость твердых тел 186
34. Поглощение звука в твердых телах 189
35. Очень вязкие жидкости 197
Глава VI. Механика жидких кристаллов
36. Статические деформации нематиков 200
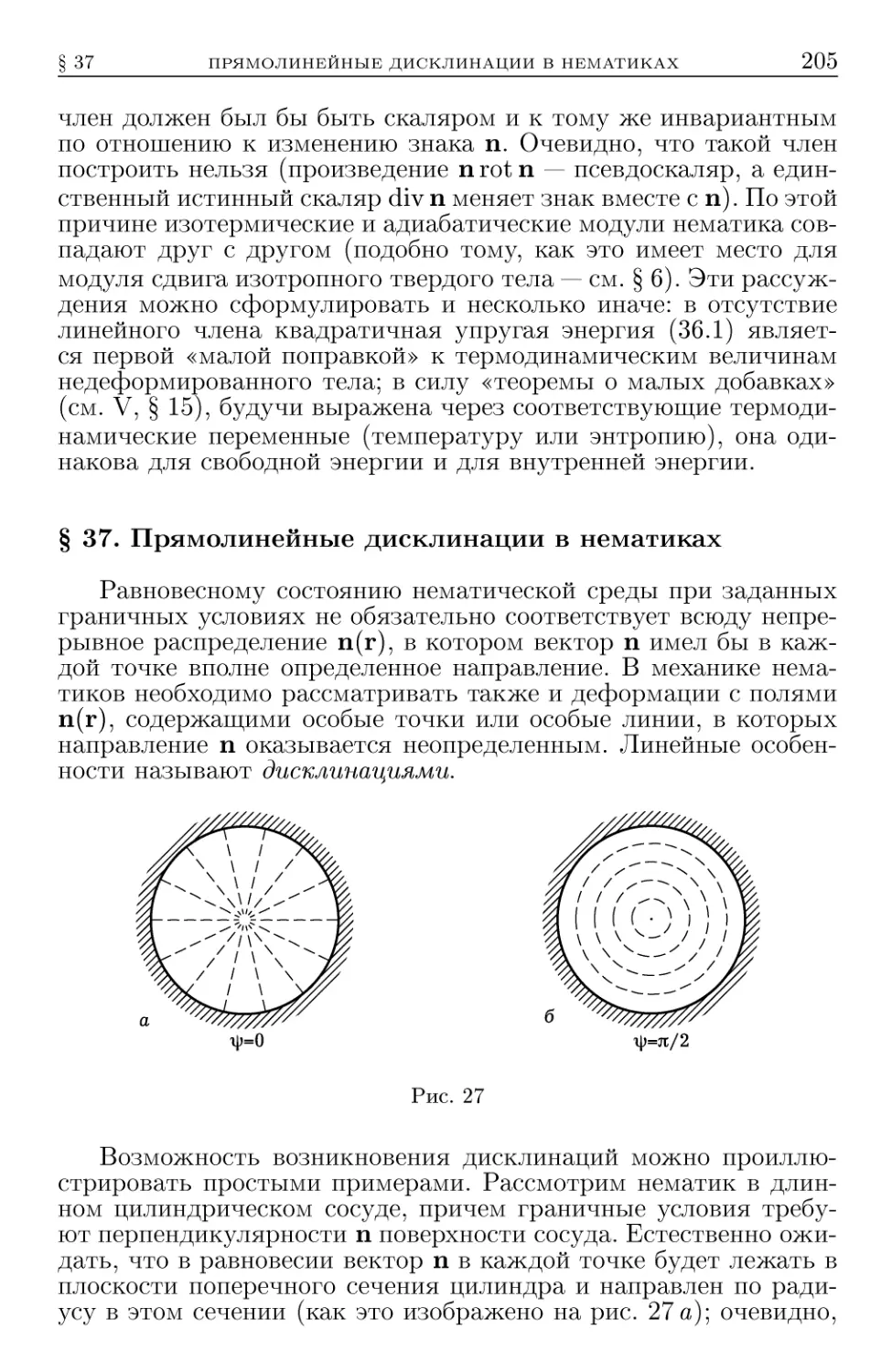
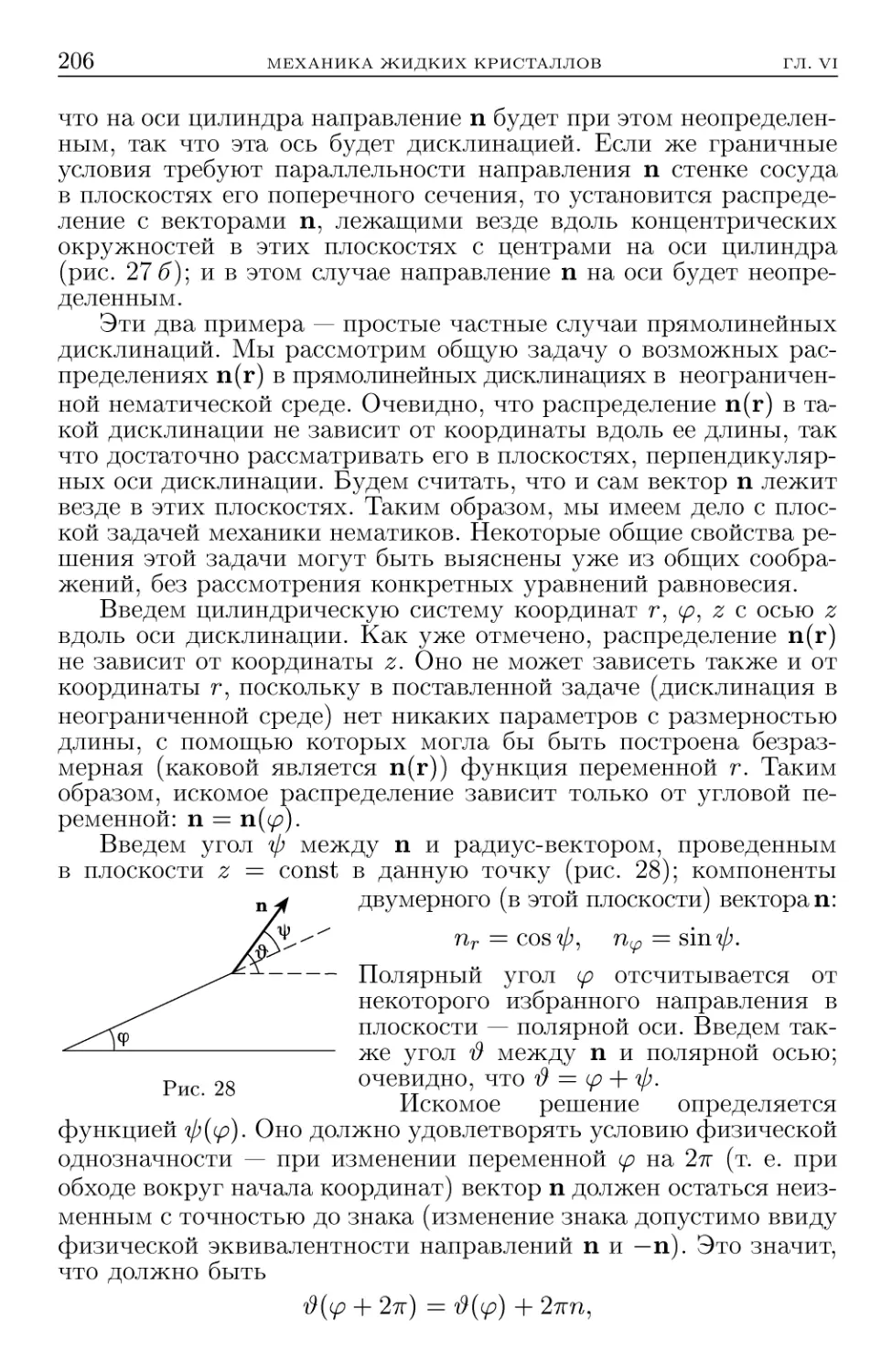
37. Прямолинейные дисклинации в нематиках 205
38. Несингулярное осесимметричное решение уравнений равно-
равновесия нематиков 211
39. Топологические свойства дисклинации 215
40. Уравнения движения нематиков 219
41. Диссипативные коэффициенты нематиков 226
42. Распространение малых колебаний в нематиках 230
43. Механика холестериков 236
44. Упругие свойства смектиков 240
45. Дислокации в смектиках 247
46. Уравнения движения в смектиках 250
47. Звук в смектиках 254
Предметный указатель 258
ПРЕДИСЛОВИЕ К ЧЕТВЕРТОМУ ИЗДАНИЮ
Основное содержание этой книги (главы 1—III, V) мало изме-
изменилось по сравнению с тем, каким оно было написано для пер-
первых двух изданий A944, 1953 гг.), в которых теория упругости
была, по случайным причинам, объединена с гидродинамикой
в виде «Механики сплошных сред». Такое постоянство — есте-
естественное следствие того, что основные уравнения и результаты
теории упругости уже давно «устоялись».
В третьем издании A965 г.) была добавлена глава о теории
дислокаций в кристаллах (написанная совместно с A.M. Косеви-
чем); эта глава подверглась теперь лишь сравнительно неболь-
небольшим изменениям.
В настоящем издании добавлена новая глава, посвященная
механике жидких кристаллов; она написана совместно с Л.П. Пи-
таевским. Эта новая область механики сплошных сред несет в
себе одновременно черты, свойственные механикам жидких и
упругих сред. Поэтому представляется целесообразным в дан-
данном курсе расположить ее после изложения как гидродинамики,
так и теории упругости твердых тел.
Как всегда, я извлек много пользы из обсуждения ряда затро-
затронутых в этой книге вопросов со своими друзьями и товарищами
по работе. В этой связи я хотел бы с благодарностью упомя-
упомянуть Г.Е. Воловика, В.Л. Гинзбурга, В.Л. Инденбома, Е.И. Каца,
Ю.А. Косевича, В.В. Лебедева и В.П. Минеева, сделавших ряд
полезных замечаний, учтенных в работе над книгой.
Институт физических проблем АН СССР Е.М. Лифшиц
Январь 1985 г.
ИЗ ПРЕДИСЛОВИЯ К «МЕХАНИКЕ СПЛОШНЫХ
СРЕД»
... В книге, написанной физиками и в первую очередь для
физиков, нас, естественно, интересовали вопросы, которые обыч-
обычно не излагаются в курсах теории упругости; таковы, например,
вопросы теплопроводности и вязкости твердых тел, ряд вопросов
теории упругих колебаний и волн. В то же время мы лишь очень
кратко касаемся ряда специальных проблем (например, слож-
сложных математических методов теории упругости, теории оболо-
оболочек и т. п.), в которых к тому же авторы ни в какой степени не
являются специалистами.
1953 г. Л. Ландау, Е. Лифшиц
НЕКОТОРЫЕ ОБОЗНАЧЕНИЯ
Плотность вещества р
Вектор смещения и
Тензор деформации щ^ = - ( —— + —— )
2 \дхк dxi J
Тензор напряжений а^
Модуль всестороннего сжатия К
Модуль сдвига \i
Модуль растяжения (модуль Юнга) Е
Коэффициент Пуассона а
Продольная и поперечная скорости звука с\ и ct (выражения
для них через К, \i или Е, а — см. с. 131)
Величины К\ \i и Е, а связаны формулами
_ ЗК -2/1
°
к Е Е
К = ^
3A-2G) 2A+сг)
По всей книге принято обычное правило суммирования по
векторным и тензорным индексам: по всем дважды повторяю-
повторяющимся в данном выражении («немым») индексам подразумева-
подразумевается суммирование по значениям 1, 2, 3.
В главе VI используется обозначение di = d/dxi для опера-
оператора дифференцирования по координатам.
Ссылки на номера параграфов и формул в других томах это-
этого курса снабжены римскими цифрами: II — том II, «Теория по-
поля», 1989; V — том V, «Статистическая физика, часть 1», 1995;
VI — том VI, «Гидродинамика», 1988; VIII — том VIII, «Элек-
«Электродинамика сплошных сред», 1982.
ГЛАВА I
ОСНОВНЫЕ УРАВНЕНИЯ ТЕОРИИ УПРУГОСТИ
§ 1. Тензор деформации
Механика твердых тел, рассматриваемых как сплошные сре-
среды, составляет содержание теории упругости1).
Под влиянием приложенных сил твердые тела в той или иной
степени деформируются, т. е. меняют свою форму и объем. Для
математического описания деформации тела поступают следую-
следующим образом. Положение каждой точки тела определяется ее
радиус-вектором г (с компонентами х\ = ж, Х2 = у, жз = %)
в некоторой системе координат. При деформировании тела все
его точки, вообще говоря, смещаются. Рассмотрим какую-нибудь
определенную точку тела; если ее радиус-вектор до деформиро-
деформирования был г, то в деформированном теле он будет иметь неко-
некоторое другое значение г' (с компонентами х[). Смещение точки
тела при деформировании изобразится тогда вектором г7 — г, ко-
который мы обозначим буквой и:
щ = х\ - Х{. A.1)
Вектор и называют вектором деформации (или вектором сме-
смещения). Координаты х\ смещенной точки являются, конечно,
функциями от координат xi той же точки до ее смещения. По-
Поэтому и вектор деформации является функцией координат Х{.
Задание вектора и как функции от xi полностью определяет де-
деформацию тела.
При деформировании тела меняются расстояния между его
точками. Рассмотрим какие-нибудь две бесконечно близкие точ-
точки. Если радиус-вектор между ними до деформирования был dx{,
то в деформированном теле радиус-вектор между теми же двумя
точками будет dx\ = dx{ + du{. Само расстояние между точками
до деформирования было равно
dl = \ldx\ + dx\
а после деформирования
dl' =
) Основные уравнения теории упругости были установлены Коши и Пуас-
Пуассоном в 20-х годах XIX века.
10 ОСНОВНЫЕ УРАВНЕНИЯ ТЕОРИИ УПРУГОСТИ ГЛ. I
Согласно общему правилу написания сумм имеем
dl2 = dx2, dl'2 = dx'2 = (dxi + duiJ.
Так как dui = —-dxkl то перепишем dl'2 в виде
дхк
77/2 772 С\ 0U{ 7 7 OUi 0U{ 7 7
dl = dl +2 dxidxk + dxkdxi.
дхк дхк dxi
Поскольку во втором члене оба индекса г и к являются немыми,
их можно переставить и соответственно записать этот член в
явно симметричном виде
/ UUi UUk 17 7
( + 1 dxidxk'
В третьем же члене поменяем местами индексы г и /. Тогда окон-
окончательно получаем
dl'2 = dl2 + 2щк dx{ dx^ A-2)
где
7|„ = I f^L 4. ^ 4- ^^L^l . A.3)
2 \дхк oxi d
Этими выражениями определяется изменение элемента длины
при деформировании тела. Тензор щк называют тензором де-
деформации; по своему определению он симметричен:
Щк = uki- A.4)
Как и всякий симметричный тензор, можно привести тен-
тензор Щк в каждой данной точке к главным осям. Это значит,
что в каждой данной точке можно выбрать такую систему ко-
координат — главные оси тензора, — в которой из всех компонент
Щк отличны от нуля только диагональные компоненты глц, г^225
|/зз • Эти компоненты — главные значения тензора деформации —
обозначим через и^\ и^2\ и^3\ Надо, конечно, помнить, что если
тензор Щк приведен к главным осям в некоторой точке тела, то
он, вообще говоря, недиагонален во всех других точках.
Если тензор деформации приведен в данной точке к главным
осям, то в окружающем ее элементе объема элемент длины A.2)
приобретает вид
dl'2 = №/с + %Щк) dxi dxk =
= A + 2uW) dxj + A + 2^B)) dx\ + A + 2u^) dx\.
Мы видим, что это выражение распадается на три независимых
члена. Это значит, что в каждом элементе объема тела деформа-
деформацию можно рассматривать как совокупность трех независимых
ТЕНЗОР ДЕФОРМАЦИИ 11
деформаций по трем взаимно перпендикулярным направлени-
направлениям — главным осям тензора деформации. Каждая из этих де-
деформаций представляет собой простое растяжение (или сжатие)
вдоль соответствующего направления: длина dx\ вдоль первой
из главных осей превращается в длину
dx[ =
и аналогично для двух других осей. Величины
представляют собой, следовательно, относительные удлинения
(dx'i — dxi)jdxi вдоль этих осей.
Практически почти во всех случаях деформирования тел де-
деформации оказываются малыми. Это значит, что изменение лю-
любого расстояния в теле оказывается малым по сравнению с самим
расстоянием. Другими словами, относительные удлинения малы
по сравнению с единицей. Ниже мы будем рассматривать все де-
деформации как малые.
Если тело подвергается малой деформации, то все компонен-
компоненты тензора деформации, определяющего, как мы видели, относи-
относительные изменения длин в теле, являются малыми. Что же каса-
касается вектора деформации, то он может быть в некоторых случаях
большим даже при малых деформациях. Рассмотрим, например,
длинный тонкий стержень. Даже при сильном изгибе, когда его
концы значительно переместятся в пространстве, растяжения и
сжатия внутри самого стержня будут незначительными.
За исключением таких особых случаев 1), при малых дефор-
деформациях является малым также и вектор деформации. Действи-
Действительно, никакое «трехмерное» тело (т. е. тело, размеры которого
не специально малы ни в каком направлении) не может быть,
очевидно, деформировано так, чтобы отдельные его части силь-
сильно переместились в пространстве, без возникновения в теле силь-
сильных растяжений и сжатий.
Тонкие стержни будут нами рассмотрены отдельно в гл. П.
В остальных же случаях, следовательно, при малых деформаци-
деформациях смещения щ , а с ними и их производные по координатам,
малы. Поэтому в общем выражении A.3) можно пренебречь по-
последним членом как малой величиной второго порядка. Таким
образом, в случае малых деформаций тензор деформации опре-
определяется выражением
1 (дщ дик\ /-, г\
Щк = - ( — + т— • A.5)
2 \дхк dxi J
х) Кроме деформаций тонких стержней сюда относятся изгибы тонких
пластинок в цилиндрическую поверхность. Следует исключить также слу-
случай, когда «трехмерное» тело наряду с деформацией поворачивается как
целое вокруг некоторой оси на конечный угол.
12 ОСНОВНЫЕ УРАВНЕНИЯ ТЕОРИИ УПРУГОСТИ ГЛ. I
Относительные удлинения элементов длины вдоль направлений
главных осей тензора деформации (в данной точке) равны теперь
с точностью до величин высших порядков
т. е. непосредственно главным значениям тензора щ^.
Рассмотрим какой-нибудь бесконечно малый элемент объ-
объема dV и определим его величину dV' после деформирования
тела. Для этого выберем в качестве осей координат главные оси
тензора деформации в рассматриваемой точке. Тогда элементы
длины dx\, dx2, dx% вдоль этих осей после деформирования пе-
перейдут в dx[ = A + v№)dx\ и т. д. Объем dV есть произведе-
произведение dx\dx2dx%1 объем же dVf равен dx^dx^dx1^. Таким образом,
dV' = dV(l +
Пренебрегая величинами высших порядков малости, находим от-
отсюда
dV' = dV(l + u^ + и® + и®).
Но сумма и^' -\-и^ -\-и^ главных значений тензора есть, как из-
известно, его инвариант и равна в любой системе координат сумме
диагональных компонент иц = иц + U22 + ^зз-
Таким образом,
dV = dV{l + Uii). A.6)
Мы видим, что сумма диагональных компонент тензора дефор-
деформации дает относительное изменение объема (dVf — dV)/dV.
Часто бывает удобным пользоваться компонентами тензора
деформации не в декартовых, а в сферических или цилиндри-
цилиндрических координатах. Приведем здесь для справок соответствую-
соответствующие формулы, выражающие эти компоненты через производные
от компонент вектора смещения в тех же координатах. В сфери-
сферических координатах г, #, ср имеем
диг 1 див иг
игг = , uqq = + —,
дг г дв г
и - l dUip I щ ctz в I Ur
aLp(p . п n \ blbU i 1
г sin 9 dip r r
—— — иш cte; в ) -\- , A.7)
див ив 1 ди
r sin в dip дг
§ 2 ТЕНЗОР НАПРЯЖЕНИЙ 13
В цилиндрических координатах г, <р, z
диг 1 ди<р ur duz
urr = — 5 ^^(^ = - + -> uzz = — ,
or г dip г oz
~ 1 duz ди^р - диг . duz (л о\
г д(р dz dz dr
~ ди^ U(p . 1 диг
ZUr(p — — — + -— .
or г г O(f
§ 2. Тензор напрялсений
В недеформированном теле расположение молекул соответ-
соответствует состоянию его теплового равновесия. При этом все его
части находятся друг с другом и в механическом равновесии.
Это значит, что если выделить внутри тела какой-нибудь объем,
то равнодействующая всех сил, действующих на этот объем со
стороны других частей, равна нулю.
При деформировании же расположение молекул меняется и
тело выводится из состояния равновесия, в котором оно находи-
находилось первоначально. В результате в нем возникают силы, стре-
стремящиеся вернуть тело в состояние равновесия. Эти возникающие
при деформировании внутренние силы называются внутренни-
внутренними напряжениями. Если тело не деформировано, то внутренние
напряжения в нем отсутствуют.
Внутренние напряжения обусловливаются молекулярными
силами, т. е. силами взаимодействия молекул тела друг с дру-
другом. Весьма существенным для теории упругости является то
обстоятельство, что молекулярные силы обладают очень незна-
незначительным радиусом действия. Их влияние простирается вокруг
создающей их частицы лишь на расстояниях порядка межмо-
межмолекулярных. Но в теории упругости, как в макроскопической
теории, рассматриваются только расстояния, большие по сравне-
сравнению с межмолекулярными. Поэтому «радиус действия» молеку-
молекулярных сил в теории упругости должен считаться равным нулю.
Можно сказать, что силы, обусловливающие внутренние напря-
напряжения, являются в теории упругости силами «близкодействую-
«близкодействующими», передающимися от каждой точки только к ближайшим
с нею. Отсюда следует, что силы, действующие на какую-нибудь
часть тела со стороны окружающих ее частей, проявляют это
действие только непосредственно через поверхность этой части
тела.
Здесь необходима следующая оговорка: сделанное утвержде-
утверждение несправедливо в тех случаях, когда деформирование тела
сопровождается появлением в нем макроскопических электриче-
электрических полей; такие (так называемые пиро- и пьезоэлектрические)
тела рассматриваются в т. VIII этого курса.
14 ОСНОВНЫЕ УРАВНЕНИЯ ТЕОРИИ УПРУГОСТИ ГЛ. I
Выделим в теле какой-нибудь объем и рассмотрим действую-
действующую на него суммарную силу. С одной стороны, эта суммарная
сила может быть представлена в виде объемного интеграла
FdV,
где F — сила, действующая на единицу объема тела. С другой
стороны, силы, с которыми действуют друг на друга различные
части самого рассматриваемого объема, не могут привести к по-
появлению отличной от нуля суммарной равнодействующей силы,
поскольку они в силу закона равенства действия и противодей-
противодействия в сумме уничтожают друг друга. Поэтому искомую пол-
полную силу можно рассматривать как сумму только тех сил, ко-
которые действуют на данный объем со стороны окружающих его
частей тела. Но, согласно сказанному выше, эти силы действу-
действуют на рассматриваемый объем через его поверхность, и потому
результирующая сила может быть представлена в виде суммы
сил, действующих на каждый элемент поверхности объема, т. е.
в виде некоторого интеграла по этой поверхности.
Таким образом, для любого объема тела каждая из трех ком-
компонент / F{ dV равнодействующей всех внутренних напряжений
может быть преобразована в интеграл по поверхности этого объ-
объема. Как известно из векторного анализа, интеграл от скаляра
по произвольному объему может быть преобразован в интеграл
по поверхности в том случае, если этот скаляр является дивер-
дивергенцией некоторого вектора. В данном случае мы имеем дело с
интегралом не от скаляра, а от вектора. Поэтому вектор F{ дол-
должен являться дивергенцией некоторого тензора второго ранга,
т. е. иметь вид1)
Fi = ^. B.1)
Тогда сила, действующая на некоторый объем, может быть напи-
написана в виде интеграла по замкнутой поверхности, охватывающей
этот объем2):
4kdfk. B.2)
г) Вектор df элемента площади направлен по нормали, внешней по от-
отношению к охватываемому поверхностью объему. Интеграл по замкнутой
поверхности преобразуется в интеграл по объему путем замены dfi операто-
оператором dV • d/dxi.
2) Строго говоря, при определении полной силы, действующей на дефор-
деформированный объем тела, интегрирование должно производиться не по ста-
старым координатам Xi, а по координатам х\ точек деформированного тела.
Соответственно этому и производные B.1) должны были бы браться по х'к.
Но ввиду малости деформации производные по Хк и по хк отличаются друг
от друга на величины высших порядков малости, и потому можно все диф-
дифференцирования производить по координатам Хк-
§ 2 ТЕНЗОР НАПРЯЖЕНИЙ 15
Тензор Gik называют тензором напряжений. Как видно из
B.2), (Jikdfk есть г-я компонента силы, действующей на элемент
поверхности di. Выбирая элементы поверхности в плоскостях ху\
yz; xz, находим, что компонента а^ тензора напряжений есть г-я
компонента силы, действующей на единицу поверхности, перпен-
перпендикулярную к оси хк. Так, на единичную площадку, перпенди-
перпендикулярную к оси ж, действуют нормальная к ней (направленная
вдоль оси х) сила ахх и тангенциальные (направленные по осям у
и z) силы аух и azx.
Необходимо сделать здесь следующее замечание по поводу
знака силы (Jikdfk- В B.2) интеграл по поверхности представляет
собой силу, действующую на ограниченный этой поверхностью
объем со стороны окружающих частей тела. Наоборот, сила, с
которой этот объем действует сам на окружающую его поверх-
поверхность, имеет обратный знак. Поэтому, например, сила, действу-
действующая со стороны внутренних напряжений на всю поверхность
тела, есть
- § Oikdfk,
где интеграл берется по поверхности тела, a di направлен по
внешней нормали.
Определим момент сил, действующих на некоторый объем
тела. Момент силы F можно, как известно, написать в виде ан-
антисимметричного тензора второго ранга с компонентами Fixk —
— FfrXi, где Х{ — координаты точки приложения силы х\ Поэтому
момент сил, действующих на элемент объема dV, есть (FiXk —
— FfcXi) dV, а на весь объем действует момент сил
Mik = J (FiXk - FkXi) dV.
Как и полная сила, действующая на любой объем, момент этих
сил тоже должен выражаться в виде интеграла по поверхности
объема. Подставляя для F{ выражение B.1), находим
dv =
d d/
Замечаем, что во втором члене производные dx^/dxi составляют
единичный тензор д^. В первом же члене под интегралом стоит
дивергенция некоторого тензора; этот интеграл преобразуется в
интеграл по поверхности. В результате находим
= § {&цхк ~ crkiXi) dfi + J (aki - aik) dV. B.3)
:) Момент силы F определяется как векторное произведение [Fr]. Компо-
Компоненты векторного произведения двух векторов составляют антисимметрич-
антисимметричный тензор второго ранга, компоненты которого написаны в тексте.
16 ОСНОВНЫЕ УРАВНЕНИЯ ТЕОРИИ УПРУГОСТИ
Тензор Mik будет выражен в виде интеграла только по поверх-
поверхности, если тензор напряжений симметричен,
°ik = °ки B.4)
так что объемный интеграл исчезает (к обоснованию важного
утверждения B.4) мы вернемся еще в конце параграфа). Момент
сил, действующих на некоторый объем тела, представится тогда
в простом виде:
М1к = J (FiXk - FkXl) dV = § (апхк - аыхг) dft. B.5)
Легко написать тензор напряжений в случае равномерного
всестороннего сжатия тела. При таком сжатии на каждую еди-
единицу поверхности тела действует одинаковое по величине давле-
давление, направленное везде по нормали к поверхности внутрь объ-
объема тела. Если обозначить это давление буквой р, то на элемент
поверхности dfi действует сила —pdfi. С другой стороны, эта си-
сила, будучи выражена через тензор напряжений, должна иметь
вид (Jikdfk- Написав —pdfi в виде —pSikdfk, мы видим, что тен-
тензор напряжений при равномерном всестороннем сжатии выгля-
выглядит следующим образом:
°%к = -P^ik- B.6)
Все отличные от нуля его компоненты равны просто давлению.
В общем случае произвольной деформации отличны от ну-
нуля также и недиагональные компоненты тензора напряжений.
Это значит, что на каждый элемент поверхности внутри тела
действует не только нормальная к нему сила, но также и тан-
тангенциальные, скалывающие, напряжения, стремящиеся сдвинуть
параллельные элементы поверхности друг относительно друга.
В равновесии силы внутренних напряжений должны взаимно
компенсироваться в каждом элементе объеме тела, т. е. должно
быть Fi = 0. Таким образом, уравнения равновесия деформиро-
деформированного тела имеют вид
^ = 0. B.7)
дхк
Если тело находится в поле тяжести, то должна исчезать сум-
сумма F + pg сил внутренних напряжений и силы тяжести pg, дей-
действующей на единицу объема тела (р — плотность1), g — век-
вектор ускорения свободного падения, направленный вертикально
вниз); уравнения равновесия в этом случае имеют вид
+ pgi = 0. B.8)
дхк
г) Строго говоря, плотность тела при его деформировании меняется. Учет
этого изменения приводит, однако, в случае малых деформаций к величинам
высших порядков малости и потому для нас несуществен.
§ 2 ТЕНЗОР НАПРЯЖЕНИЙ 17
Что касается внешних сил, приложенных непосредственно к
поверхности тела (которые и являются обычно источником де-
деформации), то они входят в граничные условия к уравнениям
равновесия. Пусть Р есть внешняя сила, действующая на едини-
единицу площади поверхности тела, так что на элемент поверхности df
действует сила Р df. В равновесии она должна компенсироваться
силой —(Jikdfki действующей на тот же элемент поверхности со
стороны внутренних напряжений. Таким образом, должно быть
Pi df - aik dfk = 0.
Написав dfk в виде dfk = nkdf, где п — единичный вектор, на-
направленный по внешней нормали к поверхности, находим отсюда
агкпк = Р{. B.9)
Это и есть условие, которое должно выполняться на всей поверх-
поверхности находящегося в равновесии тела.
Выведем здесь еще формулу, определяющую среднее значе-
значение тензора напряжений в деформированном теле. Для этого
умножим уравнение B.7) на хк и проинтегрируем по всему объ-
объему тела:
f^uXkdV= fd(aMx^dv_ faudxldv = 0
J dxi J dxi J dxi
Первый интеграл справа преобразуем в интеграл по поверхно-
поверхности тела; во втором интеграле имеем ввиду, что dxkjdx\ = 8к\.
Отсюда получаем
апхк dfi - J aik dV = 0.
Подставляя в первый интеграл B.9), находим
Pixk df = J aik dV = Vaik
где V — объем тела, а 7т^ — среднее по всему объему значе-
значение тензора напряжений. Воспользовавшись тем, что aik = aki,
можно написать эту формулу в симметричном виде:
°гк = ^§ (РгХк + PkXi) df. B.10)
Таким образом, среднее значение тензора напряжений может
быть определено непосредственно по действующим на тело внеш-
внешним силам без предварительного решения уравнений равновесия.
Вернемся к приведенному выше доказательству симметрич-
симметричности тензора напряжений; оно нуждается в уточнении. Постав-
Поставленное физическое условие (представимость тензора М^к в виде
интеграла только по поверхности) будет выполнено, не только
18 ОСНОВНЫЕ УРАВНЕНИЯ ТЕОРИИ УПРУГОСТИ ГЛ. I
если антисимметричная часть тензора а^ (т. е. подынтеграль-
подынтегральное выражение в объемном интеграле в B.3)) равна нулю, но
и если она представляет собой некоторую полную дивергенцию,
т. е. если
О /л 1 1 \
дх\
где ifiki — произвольный тензор, антисимметричный по первой
паре индексов. В данном случае этот последний тензор долж-
должен выражаться через производные дщ/дх^ и соответственно в
тензоре напряжений возникнут члены с высшими производными
от вектора смещения. В рамках излагаемой в этой книге теории
упругости все такие члены должны рассматриваться как малые
высшего порядка и опускаться.
С принципиальной точки зрения существенно, однако, что
тензор напряжений может быть приведен к симметричному ви-
виду и без этих пренебрежений1). Дело в том, что определение
этого тензора, согласно B.1), неоднозначно — допустимо любое
преобразование вида
~ д
v i\j v i\j i~\ /\j i> i\j l> 7 /\j if i\j v /\j i> v iv / V /
ox i
где Xikl — произвольный тензор, антисимметричный по по-
последней паре индексов; очевидно, что производные дац^/дх^ и
дацъ/дхк, определяющие силу F, тождественно совпадают. Если
антисимметричная часть тензора а^ имеет вид B.11), то несим-
несимметричный тензор Gik может быть приведен к симметричному
виду преобразованием такого вида. Симметричный тензор име-
имеет вид
1 Я
Gju = —{(Jjk + (Jhi) \ [(Р?1к Н~ ФкН)- (ZAo)
2 ох\
Действительно, легко убедиться, что разность 3^ —<т^ имеет вид
B.12) с тензором
Xikl = Щи + Ч>Ик - 4>%ш B.14)
(Р.С. Martin, О. Parodi, P.S. Pershan, 1972).
§ 3. Термодинамика деформирования
Рассмотрим какое-нибудь деформированное тело и предпо-
предположим, что его деформация меняется так, что вектор деформа-
деформации щ изменяется на малую величину 5щ. Определим работу,
) В соответствии с общими утверждениями микроскопической теории —
ср. II, § 32.
§ 3 ТЕРМОДИНАМИКА ДЕФОРМИРОВАНИЯ 19
производимую при этом силами внутренних напряжений. Умно-
Умножая силу Fi = ddik/dxk на перемещение 5щ и интегрируя но
всему объему тела, имеем
J
SRdV=
дхк
Символом SR мы обозначили работу сил внутренних напряже-
напряжений в единице объема тела. Интегрируя по частям, получаем
fSRdV=f aik8Ui dfk -
Рассматривая неограниченную среду, не деформированную
на бесконечности, устремим поверхность интегрирования в пер-
первом интеграле к бесконечности; тогда на ней а^ = 0, и интеграл
исчезает. Второй же интеграл можно, воспользовавшись симмет-
симметрией тензора ац^ переписать в виде
Таким образом, находим
SR = -aik6uik. C.1)
Эта формула определяет работу SR по изменению тензора де-
деформации.
Если деформация тела достаточно мала, то по прекращении
действия вызвавших деформацию внешних сил тело возвраща-
возвращается в исходное недеформированное состояние. Такие деформа-
деформации называют упругими. При больших деформациях прекраще-
прекращение действия внешних сил не приводит к полному исчезновению
деформации, — остается, как говорят, некоторая остаточная де-
деформация, так что состояние тела отличается от того, в каком
оно находилось до приложения к нему сил. Такие деформации
называют пластическими. В дальнейшем везде (за исключением
гл. IV) мы будем рассматривать только упругие деформации.
Предположим далее, что процесс деформирования соверша-
совершается настолько медленно, что в каждый момент времени в теле
успевает установиться состояние термодинамического равнове-
равновесия, соответствующее тем внешним условиям, в которых тело в
данный момент находится (фактически это условие почти все-
всегда выполняется). Тогда процесс будет термодинамически обра-
обратимым.
Условимся относить в дальнейшем все такие термодинамиче-
термодинамические величины, как энтропия *S, внутренняя энергия ? и т. п.,
20 ОСНОВНЫЕ УРАВНЕНИЯ ТЕОРИИ УПРУГОСТИ ГЛ. I
к единице объема тела (а не к единице массы, как это принято
в гидродинамике) и обозначать их соответствующими большими
буквами.
В этой связи необходимо сделать следующее замечание.
Строго говоря, надо различать единицы объема до и после де-
деформирования; эти объемы содержат, вообще говоря, различные
количества вещества. Все термодинамические величины мы бу-
будем в дальнейшем везде, кроме гл. VI относить к единице объ-
объема недеформированного тела, т. е. к заключенному в нем коли-
количеству вещества, которое после деформирования может занять
объем, несколько отличный от первоначального объема. Соответ-
Соответственно этому, например, полная энергия тела получается всегда
интегрированием ? по объему недеформированного тела.
Бесконечно малое изменение d? внутренней энергии равно
разности полученного данной единицей объема тела количества
тепла и произведенной силами внутренних напряжений рабо-
работы dR. Количество тепла равно при обратимом процессе TdS,
где Т — температура. Таким образом, d? = T dS — dR] взяв dR
из C.1), получим
d? = TdS + aikduik. C.2)
Это — основное термодинамическое соотношение для деформи-
деформируемых тел.
При равномерном всестороннем сжатии тензор напряжений
равен Gik = —pfiih B.6). В этом случае
Но мы видели (см. A.6)), что сумма иц представляет собой отно-
относительное изменение объема при деформировании. Если рассма-
рассматривать единицу объема, то иц будет просто изменением этого
объема, a duu — элементом dV этого изменения. Термодинами-
Термодинамическое соотношение принимает тогда обычный вид:
d? = TdS-pdV. C.2а)
Вводя вместо энергии ? свободную энергию тела F = ? — TS,
переписываем соотношение C.2) в виде
dF = -SdT + alkdulk. C.3)
Наконец, термодинамический потенциал Ф тела определяется как
ф = ? - TS - агкЩк = F- агкЩк. C.4)
Это — обобщение обычного выражения Ф = ? — TS + pV1).
) При всестороннем сжатии выражение C.4) переходит в
$ = F + puu = F + p(V-V0),
где V — Vo — изменение объема в результате деформации. Отсюда видно,
что принимаемое нами здесь определение Ф отличается от применяемого
обычно в термодинамике Ф = F + pV членом — рVo.
ЗАКОН ГУКА 21
Подставив C.4) в C.3), находим
^ф = -SdT - uik daik. C.5)
Независимыми переменными в C.2) и C.3) являются соответ-
соответственно 5, uik и Т, щк. Компоненты тензора напряжений можно
получить, дифференцируя Е или F по компонентам тензора де-
деформации соответственно при постоянной энтропии S или тем-
температуре Т:
( д? \ ( OF \ ,Q аЛ
(Угк = (-—) = (-—) • C.6)
\дщк/S \дщк/т
Аналогично, дифференцируя Ф по компонентам Oik^ можно
получить компоненты щ&
§ 4. Закон Гука
Для того чтобы иметь возможность применять общие тер-
термодинамические соотношения к тем или иным конкретным слу-
случаям деформаций, необходимо иметь выражение для свободной
энергии тела F как функции от тензора деформации. Это выра-
выражение легко получить, воспользовавшись малостью деформаций
и соответственно этому разложив свободную энергию в ряд по
степеням Щк- При этом мы будем пока рассматривать только
изотропные тела; соответствующие выражения для кристаллов
будут получены ниже, в § 10.
Рассматривая деформированное тело, находящееся при неко-
некоторой (постоянной вдоль тела) температуре, мы будем считать
недеформированным состояние тела при отсутствии внешних
сил при той же температуре (эта оговорка необходима ввиду теп-
теплового расширения; см. подробнее § 6). Тогда при г^ = 0 долж-
должны отсутствовать также и внутренние напряжения, т. е. должны
быть Oik — 0. Поскольку Oik = dF/duik, то отсюда следует, что в
разложении F по степеням Щк должны отсутствовать линейные
члены.
Далее, поскольку свободная энергия является величиной ска-
скалярной, то и каждый член в разложении F тоже должен быть
скаляром. Из компонент симметричного тензора Щк можно со-
составить два независимых скаляра второй степени; в качестве них
можно выбрать квадрат и\ суммы диагональных компонент и
сумму ufk квадратов всех компонент тензора Щк- Разлагая F по
степеням г^, мы получим, следовательно, с точностью до членов
второго порядка выражение вида
F = F0 + ±ul + txul. D.1)
22 ОСНОВНЫЕ УРАВНЕНИЯ ТЕОРИИ УПРУГОСТИ ГЛ. I
Это есть общее выражение для свободной энергии деформиро-
деформированного изотропного тела. Величины Аи/i называют коэффици-
коэффициентами Ламэ.
Мы видели в § 1, что изменение объема при деформации опре-
определяется суммой иц. Если эта сумма равна нулю, то это значит,
что при деформировании объем данного тела остается неизмен-
неизменным и меняется только его форма. Такие деформации без изме-
изменения объема называют сдвигом.
Обратным случаем является деформация, сопровождающая-
сопровождающаяся изменением объема, но без изменения формы. Каждый эле-
элемент объема тела при такой деформации остается подобным са-
самому себе. Из § 1 следует, что тензор такой деформации имеет
вид щк = const • 8ik • Такую деформацию называют всесторонним
сжатием.
Всякую деформацию можно представить в виде суммы де-
деформаций чистого сдвига и всестороннего сжатия. Для этого до-
достаточно написать тождество
D.2)
Первый член справа представляет собой, очевидно, чистый
сдвиг, поскольку сумма его диагональных членов равна нулю
(напоминаем, что 8ц = 3). Второй же член связан со всесторон-
всесторонним сжатием.
В качестве общего выражения для свободной энергии де-
деформированного изотропного тела удобно написать вместо D.1)
другое, воспользовавшись указанным разложением произволь-
произвольной деформации на сдвиг и всестороннее сжатие. Именно, выбе-
выберем в качестве двух независимых скаляров второй степени сум-
суммы квадратов компонент соответственно первого и второго чле-
членов в D.2). Тогда F будет иметь вид1)
F( 1 ? A i К 2 (л о\
= 11 Uju — —OjuUii + —Uii. D. о)
Величины К и \i называют соответственно модулем всесторон-
всестороннего сжатия и модулем сдвига; К связано с коэффициентами
Ламэ соотношением
K = \+h. D.4)
1) Постоянный член Fq — свободная энергия недеформированного тела —
в дальнейшем не будет нас интересовать. Поэтому мы будем для кратко-
краткости всегда опускать его, подразумевая под F одну только интересующую
нас свободную энергию деформации или, как говорят, упругую свободную
энергию.
ЗАКОН ГУКА 23
В состоянии термодинамического равновесия свободная энер-
энергия, как известно, минимальна. Если на тело не действуют ни-
никакие внешние силы, то F как функция от щк должно иметь
минимум при щк = 0. Это значит, что квадратичная форма D.3)
должна быть положительна. Если выбрать тензор щк таким, что
иц = 0, то в D.3) останется только первый член; если же выбрать
тензор вида щк = const • Sikl то останется только второй член.
Отсюда следует, что необходимым (и, очевидно, достаточным)
условием положительности формы D.3) является положитель-
положительность каждого из коэффициентов К и /i.
Таким образом, мы приходим к результату, что модули сжа-
сжатия и сдвига всегда положительны:
К > 0, /i > 0. D.5)
Воспользуемся теперь общим термодинамическим соотноше-
соотношением C.6) и определим с его помощью тензор напряжений. Для
вычисления производных dF / дщк напишем полный дифферен-
дифференциал dF (при постоянной температуре). Имеем
dF = Кии dun + 2/i (uik - -uu6ikj d (uik - -иц6ш) .
Во втором члене умножение первой скобки на 8ik дает нуль, так
что остается
dF = Кии dun + 2/i [uik - -uuSikJ duik
или, написав du\\ в виде 8ikduikl
dF = \Kuii5ik + 2/i [uik - -uuSikj^ duik.
Отсюда имеем для тензора напряжений
aik = KuuSik + 2/i (uik - -SikUuJ . D.6)
Это выражение определяет тензор напряжений через тензор де-
деформации для изотропного тела. Из него видно, что если де-
деформация является чистым сдвигом или чистым всесторонним
сжатием, то связь между О{к и щк определяется соответственно
одним только модулем сдвига или модулем всестороннего сжа-
сжатия.
Нетрудно получить и обратные формулы, выражающие щк
через Gik. Для этого найдем сумму диагональных членов оц. По-
Поскольку для второго члена D.6) эта сумма обращается в нуль, то
а а = ЗКиц, или
6К
24 ОСНОВНЫЕ УРАВНЕНИЯ ТЕОРИИ УПРУГОСТИ ГЛ. I
Подставляя это выражение в D.6) и определяя оттуда щ^, нахо-
находим
Щк = —кк°п + — (°ik ~ -Sik°uj , D.8)
что и определяет тензор деформации по тензору напряжений.
Равенство D.7) показывает, что относительное изменение
объема иц при всякой деформации изотропного тела зависит
только от суммы ац диагональных компонент тензора напряже-
напряжений, причем связь между иц и а и определяется только модулем
всестороннего сжатия. При всестороннем (равномерном) сжатии
тела тензор напряжений имеет вид aik = —p5ik- Поэтому в этом
случае имеем из D.7):
Щг = -?• D.9)
Поскольку деформации малы, то иц и р — малые величины, и
мы можем написать отношение иц/р относительного изменения
объема к давлению в дифференциальном виде; тогда
К V\dpJT
Величину 1/К называют коэффициентом всестороннего сжа-
сжатия (или просто коэффициентом сжатия).
Из D.8) мы видим, что тензор деформации щ^ является ли-
линейной функцией тензора напряжений а^. Другими словами, де-
деформация пропорциональна приложенным к телу силам. Этот
закон, имеющий место для малых деформаций, называют зако-
законом Гука г).
Приведем еще полезную форму выражения для свободной
энергии деформированного тела, получающуюся непосредствен-
непосредственно из квадратичности F по тензору деформации. Согласно тео-
теореме Эйлера имеем
ulk^- = 2F,
откуда, ввиду того что dF/дщк = ац^
F = ^i*. D.10)
Если в эту формулу подставить щ^, выраженные в виде ли-
линейных комбинаций компонент <т^, то упругая энергия будет
х) Фактически закон Гука применим ко всем упругим деформациям. Дело
в том, что деформации обычно перестают быть упругими еще тогда, когда
они настолько малы, что закон Гука является достаточно хорошим прибли-
приближением (исключение представляют тела типа резины).
§ 5 ОДНОРОДНЫЕ ДЕФОРМАЦИИ 25
представлена как квадратичная функция величин о^. Снова
применяя теорему Эйлера, будем иметь
и сравнение с D.10) показывает, что
Щк = |^. D.11)
Следует, однако, подчеркнуть, что, в то время как формула а^ =
= dF/дщк является общим термодинамическим соотношением,
справедливость обратной формулы D.11) связана с выполнением
закона Гука.
§ 5. Однородные деформации
Рассмотрим несколько простейших случаев однородных де-
деформаций^ т. е. деформаций, при которых тензор деформации
постоянен вдоль всего объема тела1). Однородной деформацией
является, например, уже рассмотренное нами равномерное все-
всестороннее сжатие.
Рассмотрим теперь так называемое простое растяжение
(или сжатие) стержня. Пусть стержень расположен вдоль оси z
и к его концам приложены силы, растягивающие его в проти-
противоположные стороны. Эти силы действуют равномерно на всю
поверхность концов стержня; сила, действующая на единицу по-
поверхности, пусть будет р.
Поскольку деформация однородна, т. е. щ^ постоянны вдоль
тела, то постоянен также и тензор напряжений <т^, а поэтому его
можно определить непосредственно из граничных условий B.9).
На боковой поверхности стержня внешние силы отсутствуют, от-
откуда следует, что с^п^ = 0. Поскольку единичный вектор п на
боковой поверхности перпендикулярен к оси z, т. е. имеет только
компоненты пж, пу, то отсюда следует, что все компоненты <т^,
за исключением только aZZi равны нулю. На поверхности концов
стержня имеем о^щ = _р, откуда azz = р.
Из общего выражения D.8), связывающего компоненты тен-
тензоров деформации и напряжений, мы видим, что все компоненты
Щк с г т^ к равны нулю. Для остальных компонент находим
1/1 1 \ 1 / 1 . 1\ /г -,4
^ж = %, = --(--->, и** = з\пс + Ц) р- EЛ)
1) Компоненты тензора деформации как функции координат не являются
вполне независимыми величинами, поскольку шесть различных компонент
Щк выражаются через производные всего трех независимых функций — ком-
компонент вектора и (см. задачу 9 § 7). Но шесть постоянных величин Щк могут
быть в принципе заданы произвольным образом.
26 ОСНОВНЫЕ УРАВНЕНИЯ ТЕОРИИ УПРУГОСТИ ГЛ. I
Компонента uzz определяет относительное удлинение стерж-
стержня вдоль оси z. Коэффициент при р называют коэффициен-
коэффициентом растяжения, а обратную величину — модулем растяжения
(или модулем Юнга) Е:
uzz = |, E.2)
где
Е = -jp^- E.3)
Компоненты ихх и иуу определяют относительное сжатие стерж-
стержня в поперечном направлении. Отношение поперечного сжатия
к продольному растяжению называют коэффициентом Пуассо-
Пуассона а1):
( Г" Л \
ni — (Til I t I I
где
1 ЗК - 2fi (- кч
о = -. E.5)
2Q7/ I ,, v '
Поскольку К и \i всегда положительны, то коэффициент Пуас-
Пуассона может меняться для различных веществ только в пределах
от —1 (при К = 0) до 1/2 (при /i = 0). Таким образом 2),
-1 < а < I. E.6)
Наконец, относительное увеличение объема стержня при его ра-
растяжении равно
иц = —. E.7)
Свободную энергию растянутого стержня можно написать, вос-
воспользовавшись непосредственно формулой D.10). Поскольку от
нуля отлична только компонента aZZi то
F = \uzzgzz = ?-. E.8)
В дальнейшем мы будем пользоваться, как это обычно при-
принято, величинами Ежа вместо модулей К и \i. Эти последние,
:) Обозначение коэффициента Пуассона через а, а компонент тензора на-
напряжений через oik не может привести к недоразумению, поскольку послед-
последние, в отличие от первого, всегда имеют индексы.
) Фактически коэффициент Пуассона меняется только в пределах от 0
до 1/2. В настоящее время неизвестны тела, у которых было бы а < 0, т. е.
которые бы утолщались при продольном растяжении. Укажем также, что
неравенству а > 0 отвечает Л > 0; другими словами, всегда положительны
оба члена не только в выражении D.3), но и в D.1), хотя это и не требуется
термодинамикой. Близкие к 1/2 значения а (например, у резины) соответ-
соответствуют модулю сдвига, малому по сравнению с модулем сжатия.
§ 5 ОДНОРОДНЫЕ ДЕФОРМАЦИИ 27
а также второй коэффициент Ламэ А выражаются через Е и а
формулами
Х= A2*)A + °У м = ^гЬ)' К=т^~У E'9)
Выпишем здесь общие формулы предыдущего параграфа с коэф-
коэффициентами, выраженными через Ежа. Для свободной энергии
имеем
F = Е (и2гк + -?—ul) . E.10)
2A + cr) V lk 1-2G llJ V У
Тензор напряжений выражается через тензор деформации со-
согласно
Щк + —^-uil^ik] • E.П)
1 2сг /
°ik \Щк + ^
1 + сг V 1 — 2сг
Обратно:
^г/с = —[A + cr)aik - aauSik]. E.12)
Поскольку формулами E.11) и E.12) приходится постоянно
пользоваться, выпишем их здесь для удобства в расписанном по
компонентам виде:
Е \(л _ \ i ( i ^1
а E.13)
°zz =
&ху ; ихуч ®xz ; uxz-> ®уг ;
1+сг 1+сг 1+сг
и обратные формулы;
x = —[(Ухх - °{?уу + °zz)],
Uxx
Hi
иУУ = т\
УУ
\ E.14)
uzz = — \ozz — а {а хх + (Jyy)],
hi
_1 + с _
Uxz ~ E Gxz-> UVZ ~
Рассмотрим теперь сжатие стержня, боковые стороны кото-
которого закреплены так, что его поперечные размеры не могут ме-
меняться. Внешние силы, производящие сжатие стержня, приложе-
приложены к его основаниям и действуют вдоль его длины, которую мы
28 ОСНОВНЫЕ УРАВНЕНИЯ ТЕОРИИ УПРУГОСТИ ГЛ. I
опять выберем в качестве оси z. Такую деформацию называют
односторонним сжатием. Поскольку стержень деформируется
только вдоль оси 2:, то из всех компонент щ^ от нуля отлична
только uzz. Из E.13) имеем теперь
_ _
°ХХ ~ Gyy ~
Обозначая опять сжимающую силу через р (azz = р] р отрица-
отрицательно при сжатии), имеем
A + сг)A-2сг) (г Лг\
uzz = - - '-р. E.15)
ЕAа) V J
Коэффициент при р называется коэффициентом одностороннего
сжатия. Для напряжений, возникающих в поперечном направле-
направлении, имеем
°хх = Оуу = Р—^—- E.16)
1 — а
Наконец, для свободной энергии стержня имеем
F= 2A + 0A20
2ЕA-(т)
§ 6. Деформации с изменением температуры
Рассмотрим теперь деформации, сопровож:дающиеся измене-
изменением температуры тела; изменение температуры может проис-
происходить как в результате самого процесса деформирования, так и
по посторонним причинам.
Будем считать недеформированным состояние тела при от-
отсутствии внешних сил при некоторой заданной температуре Т$.
Если тело находится при температуре Т, отличной от Tq, to даже
при отсутствии внешних сил оно будет, вообще говоря, дефор-
деформировано в связи с наличием теплового расширения. Поэтому
в разложение свободной энергии F(T) будут входить не толь-
только квадратичные, но и линейные по тензору деформации члены.
Из компонент тензора второго ранга щ^ можно составить все-
всего только одну линейную скалярную величину — сумму иц его
диагональных компонент. Далее мы будем предполагать, что со-
сопровождающее деформацию изменение Т — Tq температуры ма-
мало. Тогда можно считать, что коэффициент при иц в разложе-
разложении F (который должен обращаться в нуль при Т = То) просто
пропорционален разности Т — Tq. Таким образом, получим для
свободной энергии следующую формулу (заменяющую D.3)):
F(T) = F0(T) - Ка(Т - Т0)иц + ц (uik - UikUltf + |<4 F-1)
§ 6 ДЕФОРМАЦИИ С ИЗМЕНЕНИЕМ ТЕМПЕРАТУРЫ 29
где коэффициент при Т — Tq написан в виде —Ка. Величины /i,
К, а надо считать здесь постоянными; учет их зависимости от
температуры привел бы к величинам высшего порядка малости.
Дифференцируя F по щ^, получим тензор напряжений.
Имеем
огк = -Ка(Т - Т0Nгк + KuuSik + 2/i (uik - Ulku^. F.2)
Первый член здесь представляет собой дополнительные напря-
напряжения, связанные с изменением температуры тела. При свобод-
свободном тепловом расширении тела (при отсутствии внешних сил)
внутренние напряжения должны отсутствовать. Приравнивая
Gik нулю, найдем, что щк имеет вид: const • <^, причем
ии = а(Т-Т0). F.3)
Но Щ[ представляет собой относительное изменение объема при
деформации. Таким образом, а является не чем иным, как коэф-
коэффициентом теплового расширения тела.
Среди различных (в термодинамическом смысле) типов де-
деформаций существенны изотермические и адиабатические де-
деформации. При изотермических деформациях температура тела
не меняется. Соответственно этому в F.1) надо положить T = Tq,
и мы возвращаемся к обычным формулам; коэффициенты К и \i
можно поэтому назвать изотермическими модулями.
Адиабатическими являются деформации, при которых не
происходит обмена теплом между различными участками тела,
а также, конечно, и между телом и окружающей средой. Эн-
Энтропия S остается при этом постоянной. Как известно, энтропия
равна производной —dF/dT от свободной энергии по темпера-
температуре. Дифференцируя выражение F.1), находим с точностью до
членов первого порядка по щк
S(T) = S0(T)+Kauu. F.4)
Приравняв это выражение постоянной, можно определить изме-
изменение температуры при деформации, которое оказывается про-
пропорциональным иц\
^(Т-Т0) = -Каиц. F.5)
J-0
Подставив это выражение в F.2), получим для а^ выражение
обычного типа
( ) F.6)
с тем же модулем сдвига, но с другим модулем сжатия К&А.
Связь адиабатического модуля К&д с обычным, изотермическим
30 ОСНОВНЫЕ УРАВНЕНИЯ ТЕОРИИ УПРУГОСТИ ГЛ. I
модулем К можно, однако, найти и непосредственно по общей
термодинамической формуле
dV\ = fdV_\ ^i(dV\
dp)s~ \дР)т ср\дт)Р
(Ср — теплоемкость при постоянном давлении, отнесенная к еди-
единице объема тела). Если понимать под V объем, занимаемый ве-
веществом, находившимся до деформации в единице объема тела,
то производные dV/dT и dV/dp определяют относительные из-
изменения объема соответственно при нагревании и при сжатии.
Другими словами,
dpJs~ Кад' \др)т~ К
Таким образом, получаем для связи между адиабатическими и
изотермическими модулями 1)
1 1 То?
1Л- F)
Для адиабатических модуля растяжения и коэффициента
Пуассона легко получаем следующие соотношения:
Е Е о - ^ + ст^2/(9^) F 8)
ад 1 - ЕТаУ(9Ср)' аД 1 - ЕТаУ(9Ср) ' У ' }
В реальных случаях величина ЕТа2 /Ср обычно мала, и поэтому
с достаточной точностью можно написать:
Еад = Е + Е2Щ, аад = а + A + а)ЕЩ. F.9)
При изотермической деформации тензор напряжений выра-
выражается в виде производных от свободной энергии:
dF
' т
При постоянной же энтропии надо написать (см. C.6)):
= ( °S )
где ? — внутренняя энергия. Соответственно этому при адиаба-
адиабатических деформациях выражение, аналогичное D.3), определя-
определяет не свободную энергию, а просто внутреннюю энергию единицы
объема тела:
F.10)
) Для того чтобы получить эти формулы из F.5), F.6), надо было бы ис-
использовать еще и известную термодинамическую формулу Cp — Cv = Та2К.
§ 7 УРАВНЕНИЯ РАВНОВЕСИЯ ИЗОТРОПНЫХ ТЕЛ 31
§ 7. Уравнения равновесия изотропных тел
Выведем теперь уравнения равновесия изотропных твердых
тел. Для этого надо подставить в общие уравнения B.7)
дхк
выражение E.11) для тензора напряжений. Имеем
dcfik _ Ест дин Е дщк
~дх~к~ ~ (I + ст)A - 2ст)~дх~ 1+ст~дх~к~'
т-г 1 (дщ . дик \
Подставляя сюда щь = - + , получим уравнения рав-
2 \дхк dxi J
новесия в виде
Е д2 1 * +РЕг = О. G.1)
2A + а) дх\ 2A + а)(\ - 2а) дх{ dxi
Эти уравнения удобно переписать в векторных обозначениях. В
этих обозначениях величины д2щ/дх^ являются компонентами
вектора Аи, а дщ/dxi = div и. Таким образом, уравнения рав-
равновесия приобретают вид
Аи + -^— graddivu = -pg2A + a). G.2)
1 — 2сг Е
Иногда бывает удобным писать это уравнение в несколько ином
виде, воспользовавшись известной формулой векторного анализа:
grad div u = Аи + rot rot и.
Тогда G.2) приобретает вид
-, -,. 1-2сг , , A+сг)A-2сг) ,г- оч
graddivu — rot rot u = —pg -. G.3)
5 2A -а) ИЬ ЕA-а) V ;
Мы пишем уравнения равновесия в однородном поле сил тя-
тяжести, имея в виду, что последние являются наиболее обычными
в теории упругости объемными силами. При наличии каких-либо
иных объемных сил вектор pg в правой части уравнения долж-
должен быть заменен соответствующей другой плотностью объемных
сил.
Наиболее существен случай, когда деформация вызывается
не объемными силами, а силами, приложенными к поверхности
тела. Тогда уравнение равновесия гласит
A - 2а) Аи + grad div и = 0 G.4)
32 ОСНОВНЫЕ УРАВНЕНИЯ ТЕОРИИ УПРУГОСТИ ГЛ. I
или в другом виде
2A - a) grad div u - A - 2а) rot rot u = 0. G.5)
Внешние силы входят в решение только через посредство гра-
граничных условий.
Применяя к уравнению G.4) операцию div и помня, что
div grad = А, находим
A div u = 0, G.6)
т. е. величина div u (определяющая изменение объема при де-
деформации) является гармонической функцией. Применяя же к
уравнению G.4) оператор Лапласа А, получим теперь
ААи = 0, G.7)
т. е. в равновесии вектор деформации удовлетворяет бигармони-
ческому уравнению. Эти результаты остаются в силе и в однород-
однородном поле тяжести (при операциях дифференцирования правая
часть уравнения G.2) исчезает), но они несправедливы в общем
случае переменных вдоль тела объемных внешних сил.
Тот факт, что вектор деформации удовлетворяет бигармони-
ческому уравнению, не означает, разумеется, что общий инте-
интеграл уравнений равновесия (при отсутствии объемных сил) есть
произвольная бигармоническая векторная функция; следует по-
помнить, что функция u(x,y,z) должна в действительности удо-
удовлетворять еще и дифференциальному уравнению более низкого
порядка G.4). В то же время оказывается возможным выра-
выразить общий интеграл уравнений равновесия через производные
от произвольного бигармонического вектора (см. задачу 10).
Если тело неравномерно нагрето, то в уравнении равновесия
должен быть добавлен дополнительный член. В тензоре напря-
напряжений должен быть учтен член —Ка(Т — Tq)^ (см. F.2)) и со-
соответственно в daik/dxk возникает член
т, дТ Еа дТ
—Ка— = — .
дх{ 3A - 2а) дх{
В результате получаем уравнения равновесия в виде
3A ~а) grad div u - 3A ~ 2a) rot rot u = aVT. G.8)
1+сг Ь 2A +cr) V J
Остановимся на частном случае плоской деформации, при ко-
которой во всем теле одна из компонент вектора смещения равна
нулю (uz = 0), а компоненты их, иу зависят только от ж, у. При
этом тождественно обращаются в нуль компоненты uzz, uXZi uyz
тензора деформации, а с ними и компоненты aXZi ayz тензора на-
напряжений (но не продольное напряжение aZZi существование ко-
которого должно обеспечить постоянство длины тела вдоль оси z).
§ 7 УРАВНЕНИЯ РАВНОВЕСИЯ ИЗОТРОПНЫХ ТЕЛ 33
Поскольку все величины не зависят от координаты z, то
уравнения равновесия (при отсутствии внешних объемных сил)
daik/dxk = 0 сводятся в данном случае к двум уравнениям:
дахх _|_ даху __ q даух , дауу __ q G 9)
дх ду ' дх ду
Наиболее общим видом функций aXXl axyi ayyi удовлетворяющих
этим уравнениям, является
^ = fe G-Ю)
где х — произвольная функция от х и у. Легко получить уравне-
уравнение, которому должна удовлетворять эта функция. Такое урав-
уравнение должно существовать в силу того, что три величины аХХ1
Оху> &уу выражаются в действительности всего через две вели-
величины uXi uy и потому не являются независимыми. С помощью
формул E.13) найдем для плоской деформации
+ Х ~^~ Uyy''
&хх + Оуу и +а)A - 2а)
Но
дих диу _
дх ду
+ сгуу = Дх, ихх + иуу = -^- + -^- = div и,
и поскольку divu есть, согласно G.6), гармоническая функция,
то мы заключаем, что функция \ удовлетворяет уравнению
ААХ = 0, G.11)
т. е. является бигармонической. Функцию х называют функцией
напряжений. После того как плоская задача решена и функ-
функция х известна, продольное напряжение azz определяется непо-
непосредственно по формуле
(Л I \(Л О \ ^ <Л-><Л->
A + сгД1 — la)
или
azz = aAX. G.12)
3 адачи
1. Определить деформацию длинного стержня (длины /), стоящего вер-
вертикально в поле тяжести.
Решение. Направляем ось z по оси стержня, а плоскость ху — в плос-
плоскости его нижнего основания. Уравнения равновесия
daxi dayi dazi
= ^ = ° = №
2 Л. Д. Ландау, Е.М. Лифшиц, том VII
34 ОСНОВНЫЕ УРАВНЕНИЯ ТЕОРИИ УПРУГОСТИ ГЛ. I
На боковой поверхности стержня должны обращаться в нуль все компонен-
компоненты dik, кроме azz, а на верхнем (z = V) основании axz = ayz = azz = 0.
Удовлетворяющее этим условиям решение уравнений равновесия есть
а все остальные <7ik = 0. По <7ik определяем Щк в виде
ихх = иуу = —pg(l - z), uzz = , uxy = uxz = uyz = 0,
hi hi
а отсюда интегрированием — компоненты вектора деформации
hi
hi
Выражение для uz удовлетворяет граничному условию uz = 0 только в
одной точке нижней поверхности стержня. Поэтому полученное решение
неприменимо вблизи нижнего конца стержня.
2. Определить деформацию полого шара (наружный и внутренний ради-
радиусы R2 и Ri), внутри которого действует давление pi; давление снаружи р^.
Решение. Вводим сферические координаты с началом в центре шара.
Деформация и направлена везде по радиусу и является функцией только
от г. Поэтому rot u = 0, и уравнение G.5) приобретает вид
Vdivu = 0.
Отсюда
1 d(r2u)
divu = = const = За,
г2 г
или
и = аг + Ъ/г .
Компоненты тензора деформации (см. формулы A.7)):
2Ъ
игг = а ,
г3
Радиальное напряж:ение
Е
[A
иее =
- Upp =
2аивв]
¦a +
1
b
r3'
E
-2a
2E
1 + cr
b
(Trr [
(l + cr)(l-2cr)
Постоянные а и b определяются из граничных условий: arr = —р\ при г = R\
и (тгг = —р2 при г = R,2- Отсюда находим
_ P1R1-P2R2 1 -2G R\Rl(pi -Р2) 1 + <7
ЩRf Ё~' ~
Щ-Rf Ё' Щ-Rf 2Ё'
Так, распределение напряжений по толщине шарового слоя, внутри ко-
которого действует давление р\ = р, а снаружи р2 = 0, дается формулами
l Л Rl\ pRi
§ 7 УРАВНЕНИЯ РАВНОВЕСИЯ ИЗОТРОПНЫХ ТЕЛ 35
Для тонкой сферической оболочки толщины h = R2 — Ri < й имеем при-
приближенно
pR2(l-a) pR _ р
и = , (jqq = (тфф = , агг = —
2Eh ** 2h 2
(arr — среднее по толщине оболочки значение радиального напряжения).
Распределение напряжений в неограниченной упругой среде с шарооб-
шарообразной полостью (радиуса Л), подвергаемой равномерному всестороннему
сжатию, получим, положив R\ = R, R2 = 00, р\ = 0, р2 = Р'-
На границе полости тангенциальные напряжения аев = сг^^ = —Зр/2, т. е.
превышают давление на бесконечности.
3. Определить деформацию сплошной сферы (радиуса R) под влиянием
собственного гравитационного поля.
Решение. Сила тяготения, действующая на единицу массы сфериче-
сферического тела, равна —gr/R. Подставив это выражение вместо g в уравнение
G.3), получим для радиального смещения следующее уравнение:
ЕA-а) d ( 1 d(r2u)\ _ r_
(l + cr)(l-2cr)dr Vr2 dr )~PgR
Решение, конечное при г = 0 и удовлетворяющее условию агг = 0 при г = R,
есть
_ gpR(l - 2<т)A + а) ГЗ — сг г2
10ЕA-а) Г[1 + сг~Я
Отметим, что внутри сферической поверхности радиуса RI I
вещество сжато (игг < 0), а вне ее — растянуто (игг > 0). Давление в центре
шара оказывается равным
3-сг
10A-а
4. Определить деформацию полой цилиндрической трубы (наружный и
внутренний радиусы R2 и Ri), внутри которой действует давление р\ давле-
давление снаружи отсутствует х).
Решение. Вводим цилиндрические координаты с осью z по оси тру-
трубы. При однородном вдоль трубы давлении деформация представляет собой
чисто радиальное смещение иг = и(г). Аналогично задаче 2 имеем теперь
1 diru)
div u = —- = const = 2a.
r r
Отсюда
и = ar -\—.
r
Отличные от нуля компоненты тензора деформации (см. формулы A.8)):
du Ъ и Ъ
игг = — = а -, и^ч, = - = а + —.
dr r2 r г2
1) В задачах 4, 5, 7 предполагается, что цилиндры удерживаются при
постоянной длине, так что продольная деформация отсутствует.
2*
36 ОСНОВНЫЕ УРАВНЕНИЯ ТЕОРИИ УПРУГОСТИ
Из условий агг = 0 при г = R2 л а г г = —р при г = R\ находим
п= R\-R\ Ё ' Ь= R\-R\ E
Распределение напряжений по толщине трубы дается формулами
R2A . _ pRl Л , Rl
Rl-Rl
5. Определить деформацию цилиндра, равномерно вращающегося во-
вокруг своей оси.
Решение. Написав в G.3) центробежную силу р?2 г вместо силы тя-
тяжести (Q — угловая скорость), получаем в цилиндрических координатах для
смещения иг = и(г) уравнение
a) d
(l+a)(l-2a)dr \r dr
оряю:
ЦC-2сг)Я2-г2].
Решение, конечное при г = 0 и удовлетворяющее условию агг = 0 при г = R,
есть
8ЕA-а)
6. Определить деформацию неравномерно нагретого шара со сфериче-
сферически симметричным распределением температуры.
Решение. В сферических координатах уравнение G.8) для чисто ра-
радиальной деформации гласит:
d ( 1 d(r2u)\ _ l + сг dT
dr \r2 dr J 3A -a) dr
Решение, конечное при г = 0 и удовлетворяющее условию агг = 0 при г = R,
есть
2A-2G) Г f 2 \
— — / T(r)r dr > .
1 + а Я3 У W f
о )
Температура Т(г) отсчитывается от значения, при котором равномерно на-
нагретый шар считается недеформированным. В качестве этой температуры
здесь выбрана температура внешней поверхности шара, так что T(R) = 0.
7. То же для неравномерно нагретого цилиндра с осесимметричным рас-
распределением температуры.
Решение. Аналогичным путем в цилиндрических координатах полу-
получаем
R Л
)— [T(r)rdr\
R? J
о )
^ о
8. Определить деформацию неограниченной упругой среды с заданным
распределением температуры T(x,y,z) таким, что на бесконечности темпе-
температура стремится к постоянному значению То и деформация отсутствует.
§ 7 УРАВНЕНИЯ РАВНОВЕСИЯ ИЗОТРОПНЫХ ТЕЛ 37
Решение. Уравнение G.8) имеет, очевидно, решение, в котором
rot u = 0, divu = a 1 + а [T(x,y,z)-T0].
3A -а)
Вектор и, дивергенция которого равна заданной функции, определенной во
всем пространстве и обращающейся в нуль на бесконечности, а ротор которо-
которого тождественно исчезает, может быть написан, как известно из векторного
анализа, в виде
( \
u(x,y,z) = -
l Y7 Г div'u(x',y',z') ,
—V / LdV ,
4тг J r
где г2 = (х — х'J + (г/ — у'J + (z — z'J. Поэтому получаем общее решение
поставленной задачи в виде
12ттA-ст)
(i)
(,у,)
Если в очень малом участке объема неограниченной среды (в начале
координат) выделяется конечное количество тепла д, то распределение тем-
температуры можно написать в виде (С — теплоемкость среды)
TTo 6
где S обозначает ^-функцию. Интеграл в A) равен тогда q/Cr, и деформация
дается формулой
_ аA + a)q r
U~ 12тгA -а)С г3'
9. Вывести уравнения равновесия изотропного тела (при отсутствии
объемных сил), выраженные через компоненты тензора напряжений.
Решение. Искомая система уравнений содержит наряду с тремя
уравнениями
^ = 0 A)
дхк
еще уравнения, являющиеся следствием того факта, что шесть различных
компонент щи не являются независимыми величинами. Для вывода этих
уравнений пишем сначала систему дифференциальных соотношений, кото-
которым удовлетворяют компоненты тензора Щк. Легко видеть, что величины
— I
2 \дхк
тождественно удовлетворяют соотношениям
д2щк , д2Щт д2иц
¦ н = ь
дх\ дхщ dxi дхк дхк дхш dxi дх\
Здесь имеется всего шесть существенно различных соотношений (соответ-
(соответствующих значениям г, к, /, гп: 1122, 1133, 2233, 1123, 2213, 3312); мы сохра-
сохраним их все, упростив написанное тензорное равенство по индексам /, гп:
д2иц д2иц д2иы /оЧ
dxi дхк дхк дх\ dxi дх\
38 ОСНОВНЫЕ УРАВНЕНИЯ ТЕОРИИ УПРУГОСТИ ГЛ. I
Подставляя сюда Щк, выраженное через <7ik согласно E.12), и учитывая
A), получим искомые уравнения
^0. C)
Эти уравнения остаются в силе и при наличии постоянных вдоль тела внеш-
внешних объемных сил.
Упростив уравнение C) по индексам г, ?;, найдем, что
ДGН = О,
т. е. аи — гармоническая функция. Применив же теперь к этому уравнению
операцию А, найдем, что
AAaik = О,
т. е. компоненты aik — бигармонические функции; эти результаты следуют,
впрочем, уже непосредственно из G.6) и G.7) ввиду линейной связи между
Vik И Щк.
10. Выразить общий интеграл уравнений равновесия (при отсутствии
объемных сил) через произвольный бигармонический вектор (Б.Г. Галёркин,
1930).
Решение. Естественно искать решение уравнения G.4) в виде
u = Af + Agraddivf.
Отсюда divu = A + A) div Af. Подставляя это в G.4), получим
A - 2сг) A Af + [2A - а) А + 1] grad div Af = 0.
Отсюда видно, что если f — произвольный бигармонический вектор
AAf = 0,
то
b
11. Выразить напряжения агг, Оч>ч>, &Г(р при плоской деформации (в
полярных координатах г, ф) в виде производных от функции напряжений.
Решение. Поскольку искомые выражения не могут зависеть от выбо-
выбора начала отсчета полярного угла <р, то они не содержат его явным образом.
Поэтому можно применить следующий прием: преобразуем декартовы про-
производные G.10) в производные по переменным г, <р, после чего замечаем,
что
arr = (Txx-, o"(f(p = ffyy, &ry> = (УХу при (р = 0
(угол (р отсчитывается от оси х). Таким образом, получим
_idx i<^x _д\ -_9_fi9x
г дг г2 д(р2 дг2 дг \г д(р
12. Определить распределение напряжений в неограниченной упругой
среде с шаровой полостью, подвергаемой (на бесконечности) однородной де-
деформации.
Решение. Общая однородная деформация может быть представлена
в виде наложения однородного всестороннего растяжения (или сжатия) и
однородного сдвига. Первое было рассмотрено в задаче 2, так что достаточно
рассмотреть однородный сдвиг.
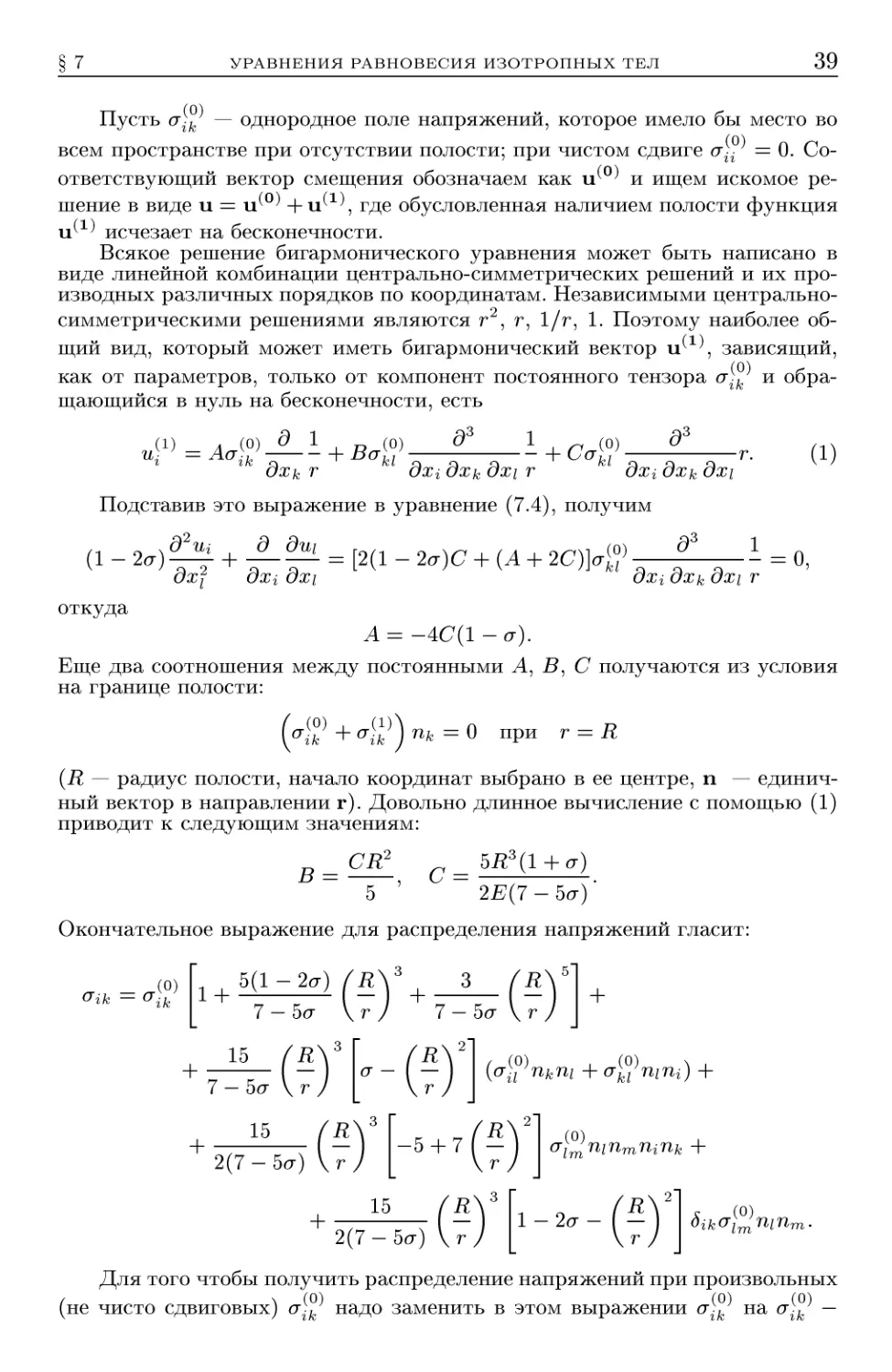
§ 7 УРАВНЕНИЯ РАВНОВЕСИЯ ИЗОТРОПНЫХ ТЕЛ 39
Пусть crik — однородное поле напряжений, которое имело бы место во
всем пространстве при отсутствии полости; при чистом сдвиге аи =0. Со-
Соответствующий вектор смещения обозначаем как ir°) и ищем искомое ре-
решение в виде u = lt ^ + lt \ где обусловленная наличием полости функция
lt ^ исчезает на бесконечности.
Всякое решение бигармонического уравнения может быть написано в
виде линейной комбинации центрально-симметрических решений и их про-
производных различных порядков по координатам. Независимыми центрально-
симметрическими решениями являются г2, г, 1/г, 1. Поэтому наиболее об-
общий вид, который может иметь бигармонический вектор \г-г\ зависящий,
@) г
как от параметров, только от компонент постоянного тензора а\к и обра-
обращающийся в нуль на бесконечности, есть
Ui ~ °ih дхк г °ы dxi дхк дхг г °ы дх{ дхк дхг Г'
Подставив это выражение в уравнение G.4), получим
откуда
Еще два соотношения между постоянными А, В, С получаются из условия
на границе полости:
к = 0 при г = R
(R — радиус полости, начало координат выбрано в ее центре, п — единич-
единичный вектор в направлении г). Довольно длинное вычисление с помощью A)
приводит к следующим значениям:
в — ^^ с —
~ 5 ' ~ 2ЕG -5сг)"
Окончательное выражение для распределения напряжений гласит:
5A-2G) /Я43
2G- 5сг
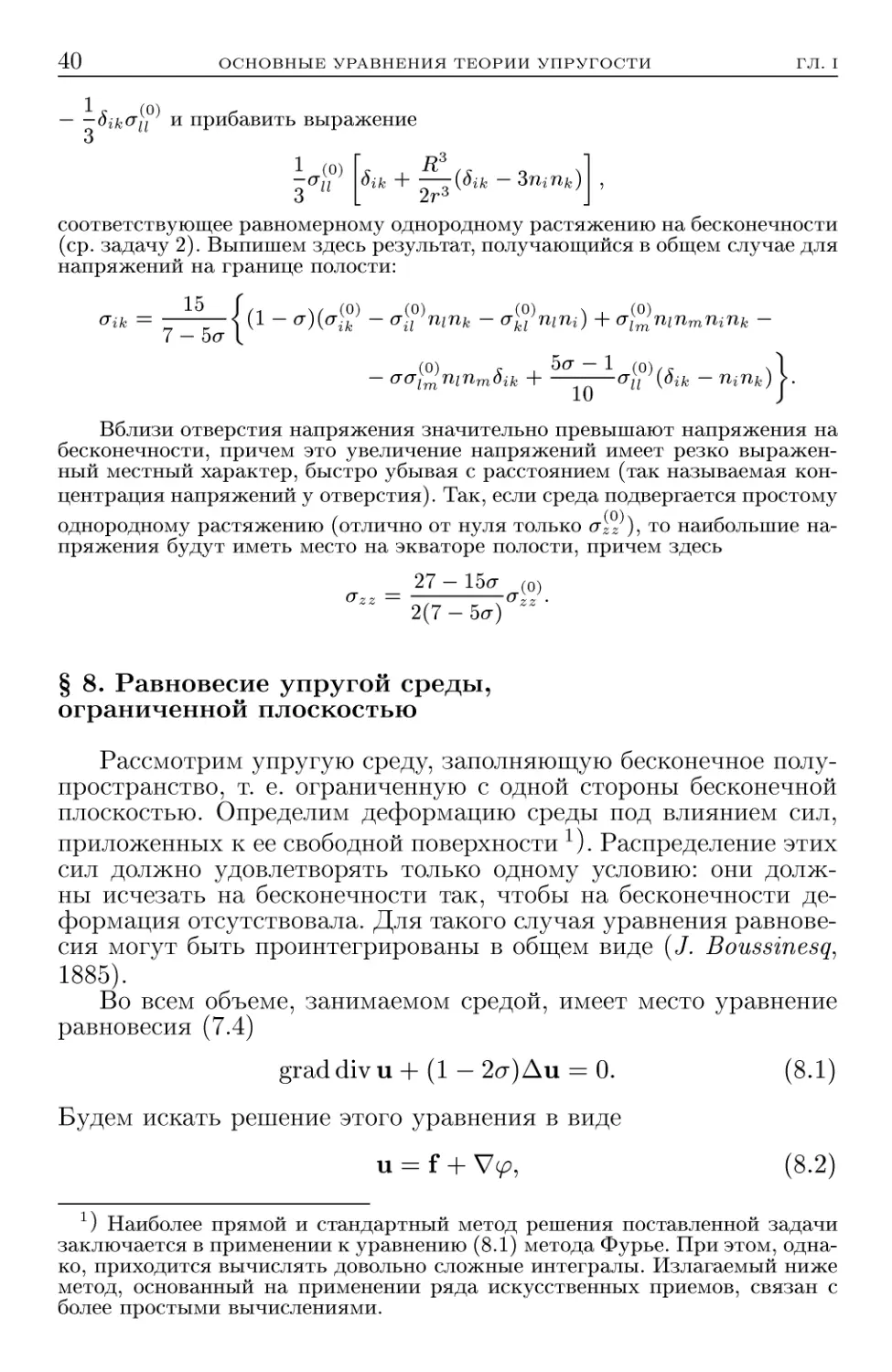
Для того чтобы получить распределение напряжений при произвольных
/ ч @) @) @)
(не чисто сдвиговых) а\к надо заменить в этом выражении а\к на а\к —
40 ОСНОВНЫЕ УРАВНЕНИЯ ТЕОРИИ УПРУГОСТИ
1 г- @) g.
0{кСГц и прибавить выражение
о
4 \8гк + Щ
3 L 2И
соответствующее равномерному однородному растяжению на бесконечности
(ср. задачу 2). Выпишем здесь результат, получающийся в общем случае для
напряжений на границе полости:
7 — эа
@) х ЪG — 1 @)/с ч
l^ninmdik Н ——(Гц J{dik - гцпк)
Вблизи отверстия напряжения значительно превышают напряжения на
бесконечности, причем это увеличение напряжений имеет резко выражен-
выраженный местный характер, быстро убывая с расстоянием (так называемая кон-
концентрация напряжений у отверстия). Так, если среда подвергается простому
однородному растяжению (отлично от нуля только crZz ), то наибольшие на-
напряжения будут иметь место на экваторе полости, причем здесь
27 — 15сг (о)
2G-5а) "
§ 8. Равновесие упругой среды,
ограниченной плоскостью
Рассмотрим упругую среду, заполняющую бесконечное полу-
полупространство, т. е. ограниченную с одной стороны бесконечной
плоскостью. Определим деформацию среды под влиянием сил,
приложенных к ее свободной поверхности х). Распределение этих
сил должно удовлетворять только одному условию: они долж-
должны исчезать на бесконечности так, чтобы на бесконечности де-
деформация отсутствовала. Для такого случая уравнения равнове-
равновесия могут быть проинтегрированы в общем виде (J. Boussinesq,
1885).
Во всем объеме, занимаемом средой, имеет место уравнение
равновесия G.4)
grad div u + A - 2а) Аи = 0. (8.1)
Будем искать решение этого уравнения в виде
u = f + V<p, (8.2)
:) Наиболее прямой и стандартный метод решения поставленной задачи
заключается в применении к уравнению (8.1) метода Фурье. При этом, одна-
однако, приходится вычислять довольно сложные интегралы. Излагаемый ниже
метод, основанный на применении ряда искусственных приемов, связан с
более простыми вычислениями.
§ 8 РАВНОВЕСИЕ УПРУГОЙ СРЕДЫ, ОГРАНИЧЕННОЙ ПЛОСКОСТЬЮ 41
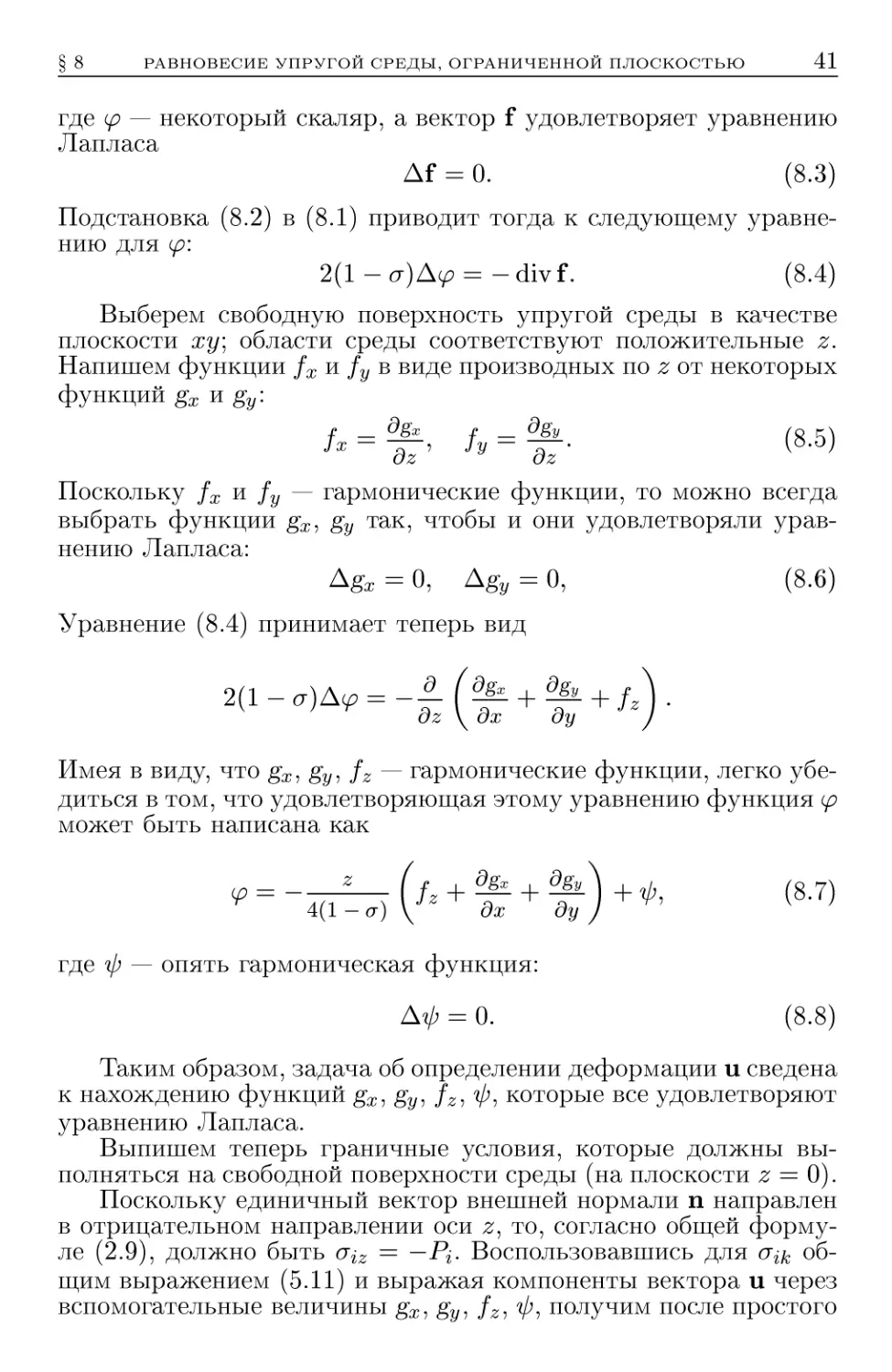
где ср — некоторый скаляр, а вектор f удовлетворяет уравнению
Лапласа
Af = 0. (8.3)
Подстановка (8.2) в (8.1) приводит тогда к следующему уравне-
уравнению для ср:
2A-а)А(р = -divf. (8.4)
Выберем свободную поверхность упругой среды в качестве
плоскости ху] области среды соответствуют положительные z.
Напишем функции fx и fy в виде производных по z от некоторых
функций gx и gy\
f _ дёх f _ Dgy
Поскольку fx и fy — гармонические функции, то можно всегда
выбрать функции gXi gy так, чтобы и они удовлетворяли урав-
уравнению Лапласа:
Agx = 0, Agy = 0, (8.6)
Уравнение (8.4) принимает теперь вид
ду
Имея в виду, что gXl gyi fz — гармонические функции, легко убе-
убедиться в том, что удовлетворяющая этому уравнению функция ср
может быть написана как
/ ~ ~ \
¦ф, (8.7)
^ г [fz + f + f
4A - а) \ дх ду )
где ф — опять гармоническая функция:
= 0. (8.8)
Таким образом, задача об определении деформации и сведена
к нахождению функций gXi gyi fZi ф, которые все удовлетворяют
уравнению Лапласа.
Выпишем теперь граничные условия, которые должны вы-
выполняться на свободной поверхности среды (на плоскости z = 0).
Поскольку единичный вектор внешней нормали п направлен
в отрицательном направлении оси z, то, согласно общей форму-
формуле B.9), должно быть G{z = — Р{. Воспользовавшись для <т^ об-
общим выражением E.11) и выражая компоненты вектора и через
вспомогательные величины gXi gyi fZi ф, получим после простого
42
ОСНОВНЫЕ УРАВНЕНИЯ ТЕОРИИ УПРУГОСТИ
вычисления
d2gx
dz2
+
z=0
d2gy
dz2
+
z=0
d,
граничные условия в следующем виде:
0
дх
0
ду
-(
Г1-
12A
\ 1-
12A
-2а ,
¦.Jz
-а)
-1а .
-a)JZ
dgy\
ду )
1
2A -а)
1
2A-а)
пдф\
+ dzj
(В
1 ~г
\
/ dgx о
1 ~г
2
-о
tgA i
A + <т)
Е
dz
2A
09V
2A
Pz-
;}
:}
Е
(
=0
р
(8.9)
=0
р
8.10)
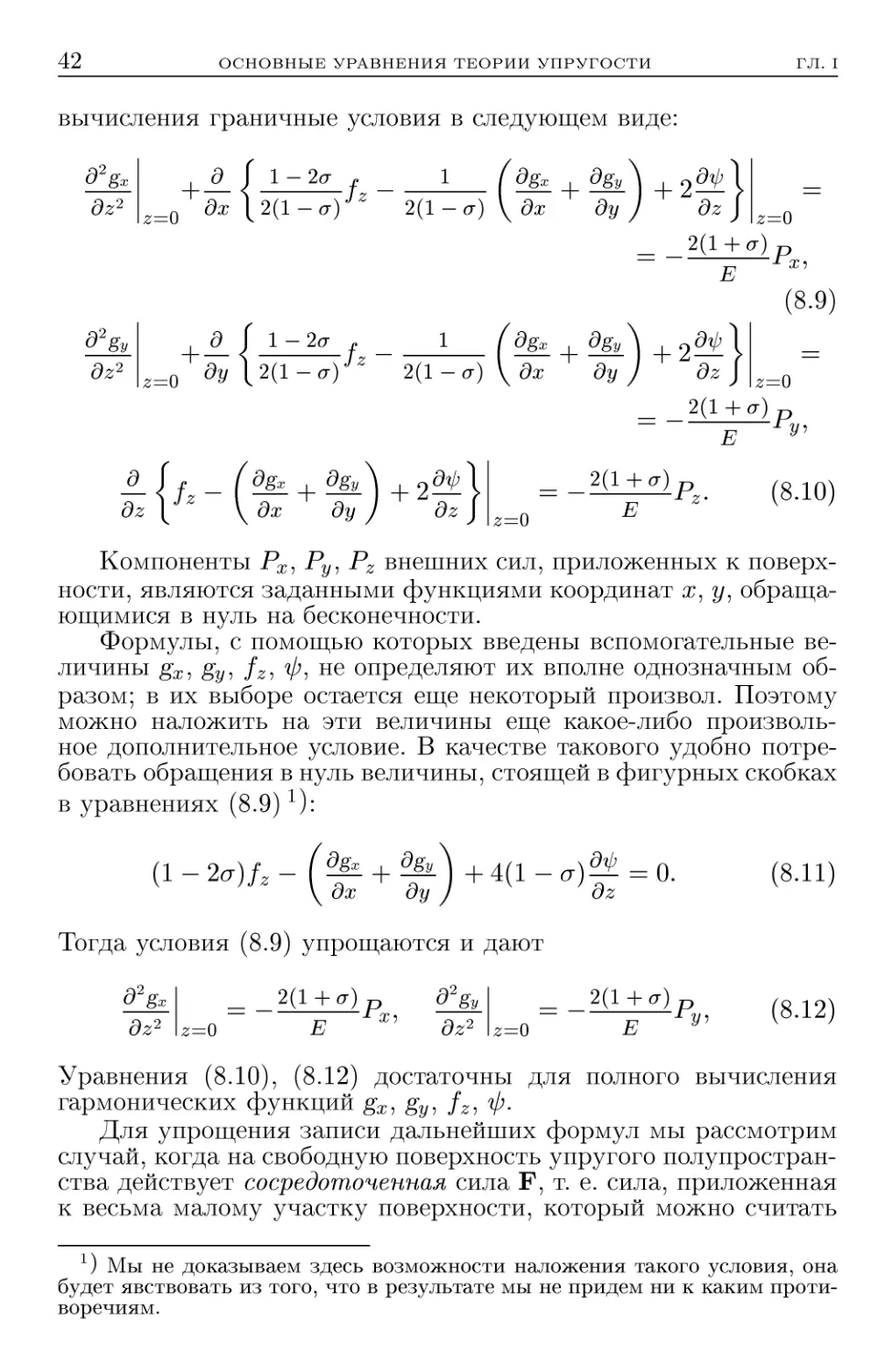
Компоненты Рж, Pyi Pz внешних сил, приложенных к поверх-
поверхности, являются заданными функциями координат ж, у, обраща-
обращающимися в нуль на бесконечности.
Формулы, с помощью которых введены вспомогательные ве-
величины gXi gy, fZi ф, не определяют их вполне однозначным об-
образом; в их выборе остается еще некоторый произвол. Поэтому
можно наложить на эти величины еще какое-либо произволь-
произвольное дополнительное условие. В качестве такового удобно потре-
потребовать обращения в нуль величины, стоящей в фигурных скобках
в уравнениях (8.9) г):
дх ду
Тогда условия (8.9) упрощаются и дают
dz2
z=0
Е
«т)р d2gy
— 2A+(Т)
z=0
Уравнения (8.10), (8.12) достаточны для полного вычисления
гармонических функций gXl gyi fZl ф.
Для упрощения записи дальнейших формул мы рассмотрим
случай, когда на свободную поверхность упругого полупростран-
полупространства действует сосредоточенная сила F, т. е. сила, приложенная
к весьма малому участку поверхности, который можно считать
:) Мы не доказываем здесь возможности наложения такого условия, она
будет явствовать из того, что в результате мы не придем ни к каким проти-
противоречиям.
§ 8 РАВНОВЕСИЕ УПРУГОЙ СРЕДЫ, ОГРАНИЧЕННОЙ ПЛОСКОСТЬЮ 43
точечным. Действие этой силы может быть описано как действие
поверхностных сил, распределенных по закону
Р = FS(x)S(y),
где 6 обозначает E-функцию, а начало координат выбрано в точ-
точке приложения силы. Зная решение задачи для сосредоточенной
силы, можно непосредственно построить решение для произволь-
произвольного распределения сил Р(ж,у). Именно, если
Ui = Gik(x,y,z)Fk (8.13)
есть деформация под действием сосредоточенной силы F, при-
приложенной в начале координат, то деформация под действием сил
Р(ж,у) дается интегралом1)
Щ = JjGik(x -х',у- у', z)Pk(x', у') dx'dy'. (8.14)
Из теории потенциала известно, что гармоническая функ-
функция /, обращающаяся на бесконечности в нуль и обладающая
заданной нормальной производной df/dz на плоскости z = О,
определяется формулой
df(x',y',z)
dz
dx'dy'
z=0
Поскольку величины dgx/dz, dgy/dz и величина, стоящая в фи-
фигурных скобках в уравнении (8.10), удовлетворяют уравнению
Лапласа, а равенства (8.10) и (8.12) как раз определяют значе-
значения их нормальных производных на плоскости z = 0, имеем
+ +2 [[dxd
дх ду ) dz тгЕ J J г тгЕ г
(8.15)
Ogx _ l + cr Fx dgy _ 1+a Fy /g щ
dz тгЕ г dz тгЕ г
где теперь г = л/ж2 + у2 + z2.
В выражения для компонент искомого вектора и входят не
самые величины gXi gy, а только их производные по ж, у, z. Для
вычисления dgx/dx, dgy/dy дифференцируем равенства (8.16)
соответственно по ж и по у:
02gx _ 1+gFxx d2gy _ l +
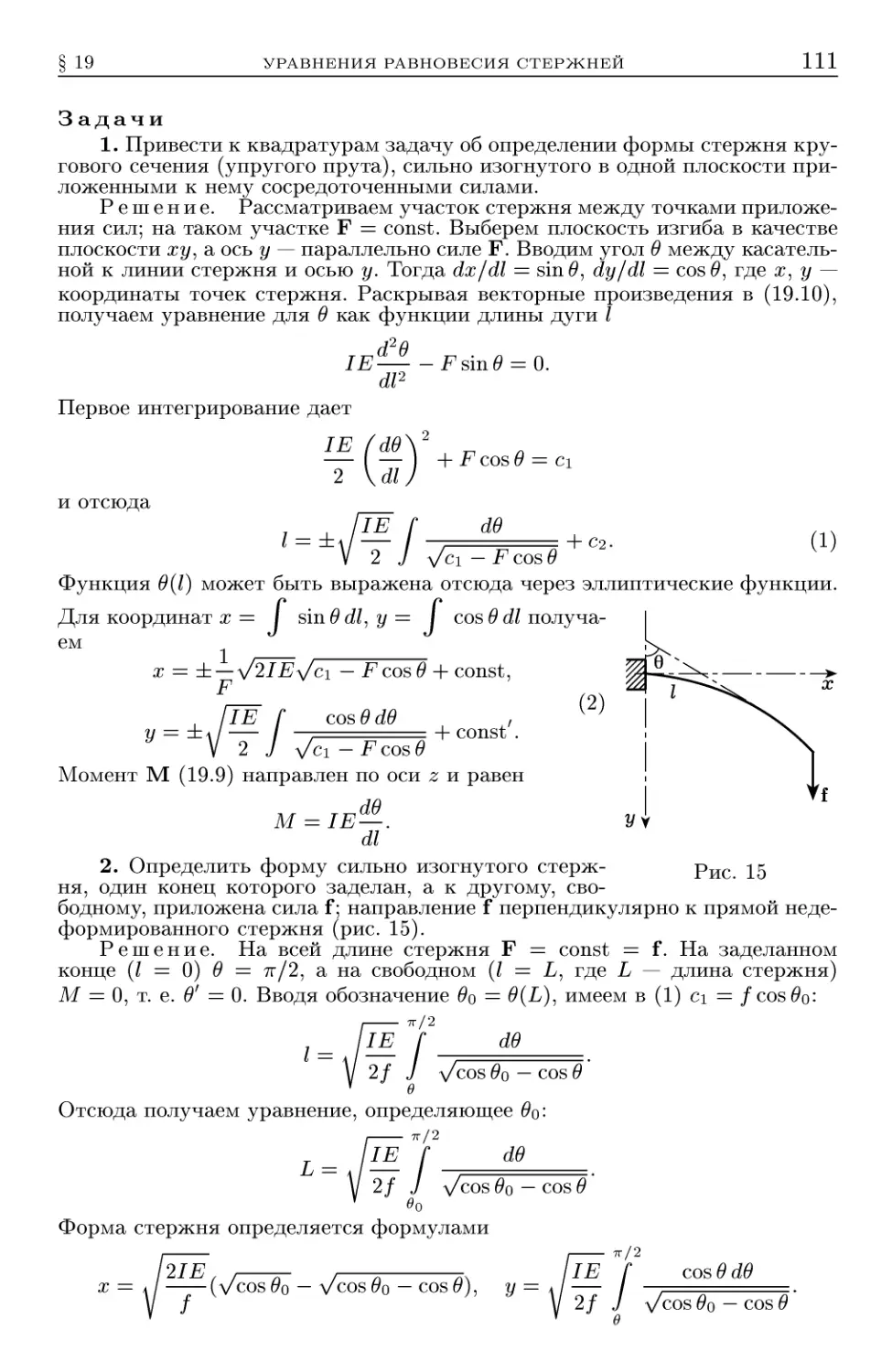
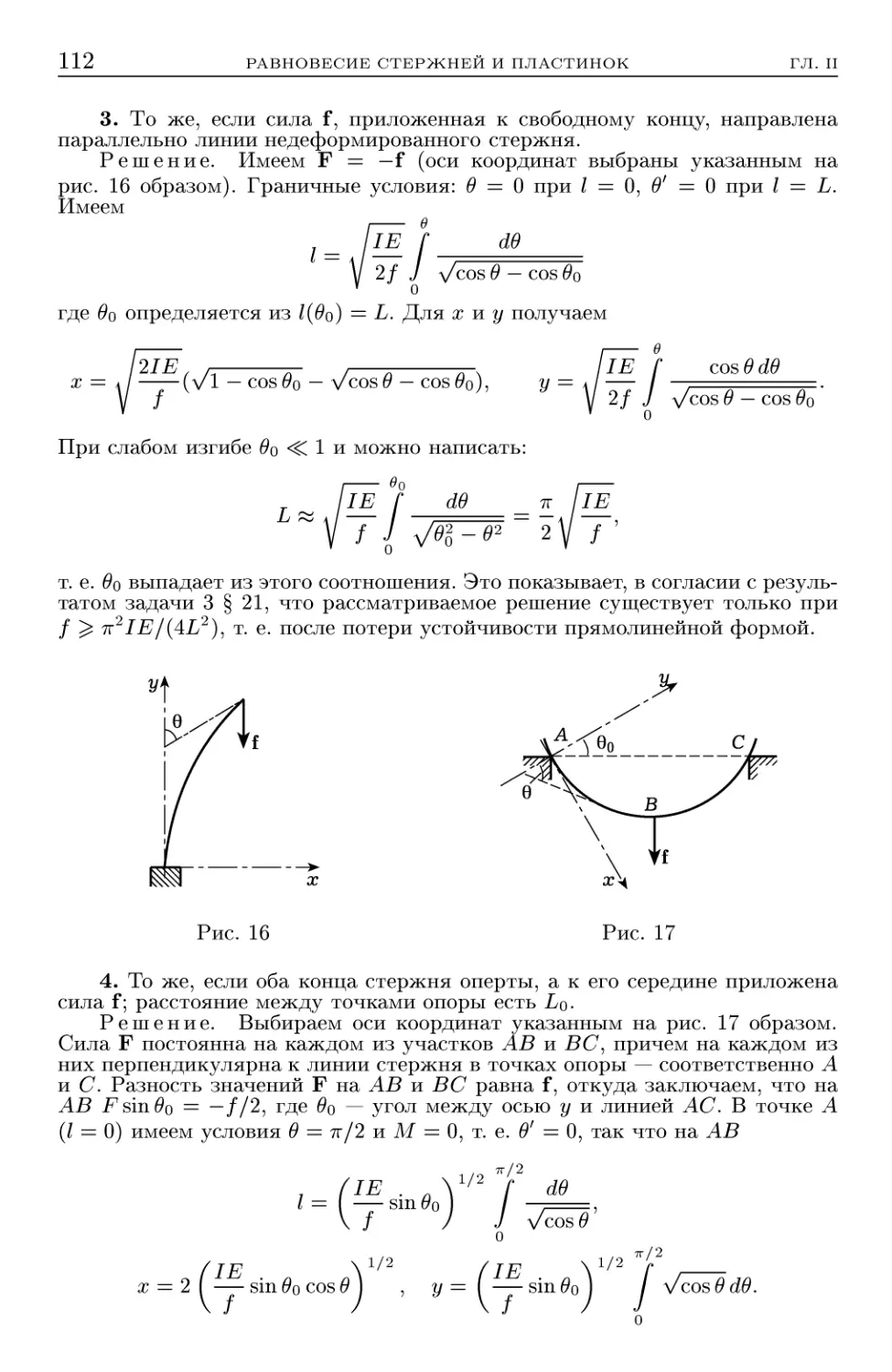
dxdz тгЕ г3 ' dydz тгЕ
) Согласно математической терминологии Gik есть тензор Грина для
уравнений равновесия полу бесконечной среды.
44 ОСНОВНЫЕ УРАВНЕНИЯ ТЕОРИИ УПРУГОСТИ ГЛ. I
Интегрируя теперь по dz в пределах от оо до 2:, получаем
dgx _ 1 + сг Fxx dgy _ 1 + а Fyy /g 17ч
дх тгЕ r(r + zY ду тгЕ r(r + z)'
Мы не станем производить здесь дальнейших простых, но
довольно громоздких вычислений. Из уравнений (8.11), (8.15)
и (8.17) определяем fz и дф/dz. Зная дф/dz, легко вычислить
дф/дх, дф/ду, интегрируя сначала по z, а затем дифференци-
дифференцируя по ж и по у. Так мы получим все величины, нужные для
вычисления вектора деформации согласно (8.2), (8.5), (8.7). В
результате получим следующие окончательные формулы:
ж* (\-2<т)хЛр 2A -<j)r + zF
I [*r{<jr + z) + z2]x
1±? ( Ы _ A-2^1 F 2(l-*)r + zF
^ 2тгЕ Ur3 r(r + ^) J ^ r(r + ^) ^
r3(r + ^J J
1 + cr Г Г2A-сг) , ^21 ^ , Г1
2тг?^ LL r r3J Lr(
-2сг , ^
т + т
) r3
В частности, смещение точек самой свободной поверхности сре-
среды дается формулами, получающимися отсюда при z = 0:
_ 1 + а 1 Г_A -2а)х р о/-| _ ч Ei , 2сгж
2тг?7 г I r г2
/2 ~Т~ ^ V ) 1/ "^ \ X "Т" У У/ Г 7
«г = ^J^ {2A - a)Fz + A - 2аI(Ж^ + yFy)) . (8.19)
3 адача
Определить деформацию неограниченной упругой среды, к малому
участку которой приложена сила F (W. Thomson, 1848) *).
Решение. Рассматривая деформацию на расстояниях г, больших по
сравнению с размерами участка приложения силы, мы можем считать, что
*) Аналогичная задача для произвольной неограниченной анизотропной
среды решена И.М. Лифшицем и Л.Н. Розенцвейгом (ЖЭТФ. 1947. Т. 17.
С. 783).
§ 8 РАВНОВЕСИЕ УПРУГОЙ СРЕДЫ, ОГРАНИЧЕННОЙ ПЛОСКОСТЬЮ 45
сила приложена в точке. Уравнение равновесия гласит (ср. G.2)):
Аи Н graddivu= -F5(r) A)
1-2G Е
(где д(г) = S(x)S(y)S(z), а начало координат выбрано в точке приложения
силы). Ищем решение в виде u = uo + ui, где ио удовлетворяет уравнению
типа Пуассона: ( .
Аио = - ^ +(T'?8(y). B)
Е
Соответственно для ui получим уравнение
Vdivui + A - 2cr)Aui = -Vdivu0. C)
Обращающееся на бесконечности в нуль решение уравнения B) есть
- 1 + crF
U° ~ 2кЕ г '
Применив к уравнению C) операцию rot, получим Arotui = 0. На бес-
бесконечности должно быть rot ui = 0. Но функция, гармоническая во всем
пространстве и обращающаяся в нуль на бесконечности, равна нулю тожде-
тождественно. Таким образом, rot ui = 0 и соответственно этому можно писать
ui в виде ui = grad (p. Из C) получаем
V{2A -a)A(p + divu0} = 0.
Отсюда следует, что стоящая в скобках величина есть постоянная, и по-
поскольку она должна исчезать на бесконечности, то во всем пространстве
д^ = _ divu° = 1±^_FVI.
2A -а) 4тгЕA-а) г
Если ф — решение уравнения Аф = 1/г, то
4тг?A -а)
Выбрав не имеющее особенностей решение ф = г/2, получим
1+сг (Fn)n-F
= \7(р =
8тг?A - а)
где п — единичный вектор в направлении радиус-вектора г. Окончательно
имеем
1+сг C - 4cr)F + n(nF)
u =
8тг?;A -а) г
Представив эту формулу в виде (8.13), получим тензор Грина уравнений
равновесия неограниченной изотропной среды 1):
Gik = ^~^Гл г C-4G)й*+пгп* - = — г .
8тгЕA -а) г 4тг// L т 4A - a) dxi дхк J
:) Тот факт, что компоненты тензора Gik — однородные функции первого
порядка от координат ж, у, z, заранее очевиден из соображений однородно-
однородности в связи с видом уравнения A), в левой части которого стоит линейная
комбинация вторых производных от компонент вектора и, а в правой —
однородная функция третьего порядка F(ar) = a~sS(r)). Это свойство оста-
остается и в общем случае произвольной анизотропной среды.
46
ОСНОВНЫЕ УРАВНЕНИЯ ТЕОРИИ УПРУГОСТИ
§ 9. Соприкосновение твердых тел
Пусть два твердых тела соприкасаются друг с другом в точ-
точке, не являющейся особой точкой их поверхностей (на рис. 1 а
изображен разрез через обе поверхности вблизи точки соприкос-
соприкосновения О). В этой точке обе поверхности имеют общую каса-
касательную плоскость, которую мы выберем в качестве плоскости
ху. Положительное же направление оси
z условимся считать различным для обо-
обоих тел, — для каждого из них будем от-
отсчитывать ^-координату по направлению
в глубь тела, обозначая ее соответственно
как z и z1.
Как известно, вблизи обыкновенной
точки касания координатной плоскости
(плоскости ху) уравнение поверхности мо-
может быть написано в виде
СУ LJ *^ СУ *^ LJ } V /
где по дважды повторяющимся индексам
а, /3 подразумевается суммирование по
значениям 1, 2 [х\ = ж, %2 = у), а жар
есть двумерный симметрический тензор,
характеризующий кривизну поверхности
(главные значения тензора уса$ равны 1/2R\ и l/2i?2, где i?i,
i?2 — главные радиусы кривизны поверхности в точке касания).
Аналогичное соотношение для поверхности второго тела вблизи
точки соприкосновения напишем в виде
т
Рис. 1
z =
(9.2)
Предположим теперь, что оба тела сдавливаются приложен-
приложенными к ним силами, в результате чего они сближаются на неко-
некоторое малое расстояние h1).
Тогда вблизи точки первоначального соприкосновения на по-
поверхности тел возникает вмятина, и тела будут соприкасаться
уже не в одной точке, а по некоторому малому, но конечному
участку их поверхности. Пусть uz и u'z — компоненты (соответ-
(соответственно по осям z и z') векторов смещения точек поверхностей
обоих тел при сдавливании. На рис. 1 б штриховыми линиями
изображены поверхности тел, какими они были бы при отсут-
отсутствии деформации, а сплошной линией — поверхности сдавлен-
сдавленных тел; буквы z и z' обозначают длины, определяемые равен-
) Излагаемая так называемая контактная задача теории упругости была
впервые решена Герцем (Н. Hertz, 1882).
§ 9 СОПРИКОСНОВЕНИЕ ТВЕРДЫХ ТЕЛ 47
ствами (9.1) и (9.2). Как непосредственно видно из рисунка, во
всех точках области соприкосновения имеет место равенство
(z + uz) + (zr + u'z) =h,
или
(кар + х!ар)хахр + uz + u'z = h. (9.3)
В точках же вне этой области, где обе поверхности не соприка-
соприкасаются, имеет место неравенство z + zf + uz + uz < h.
Выберем направления осей ж, у таким образом, чтобы тензор
каC + ^ав был приведен к главным осям. Обозначая главные
значения этого тензора через А и В, перепишем равенство (9.3)
в виде
Ах2 + By2 + uz+ u'z = h. (9.4)
Величины Аи В связаны с радиусами кривизны i?i, R2 и Д'1? R'2
обеих поверхностей следующими формулами, которые приведем
без вывода:
2(А + В) = — + — + -1- + -L,
.Ri -R2 ^1 ^2
где ур — угол между теми нормальными сечениями поверхностей,
в которых радиусы кривизны — R\ и R[. Знаки радиусов кри-
кривизны предполагаются положительными, если соответствующие
центры кривизны расположены внутри соответствующего тела,
и отрицательными — в обратном случае.
Обозначим через Pz(x,y) давление между обоими сдавлен-
сдавленными телами в точках их соприкосновения (вне области сопри-
соприкосновения, разумеется, Pz = 0). При определении зависимости
между Pz и смещениями uz, u'z можно с достаточной точностью
рассматривать поверхности тел как плоские и воспользоваться
полученными в предыдущем параграфе формулами. Согласно
третьей из формул (8.19) (учитывая также (8.14)) смещение uz
под влиянием нормальных сил Pz(x,y) определяется выражени-
выражениями
(95)
48 ОСНОВНЫЕ УРАВНЕНИЯ ТЕОРИИ УПРУГОСТИ ГЛ. I
(а, а' и Е, Е' — коэффициенты Пуассона и модули растяже-
растяжения обоих тел); поскольку вне области соприкосновения Pz = О,
то интегрирование производится здесь только по этой области.
Заметим, что из этих формул следует, что отношение uz/u'z по-
постоянно и равно
Uz_ = A-сг2)Е'
Соотношения (9.4) и (9.6) вместе непосредственно определяют
распределение деформации uz, u'z по области соприкосновения
(сами же формулы (9.5) и (9.6) относятся, конечно, и к точкам
вне этой области).
Подставив выражения (9.5) в (9.4), получим
z^x 'y dxdy1 = h — Ах2 — By2. (9.7)
Это интегральное уравнение определяет распределение давле-
давления Pz по области соприкосновения. Его решение может быть
найдено из аналогии со следующими известными из теории по-
потенциала соотношениями. На мысль воспользоваться этой ана-
аналогией наводит тот факт, что, во-первых, интеграл, стоящий в
левой части уравнения (9.7), — типа обычных в теории потенци-
потенциала интегралов, определяющих потенциал, создаваемый некото-
некоторым распределением зарядов, и, во-вторых, что потенциал поля
внутри равномерно заряженного эллипсоида есть квадратичная
функция координат.
Если по объему трехосного эллипсоида
++=1
а2 Ъ2 с2
равномерно распределен заряд (с постоянной объемной плотно-
плотностью /э), то потенциал поля внутри эллипсоида определяется вы-
выражением
ОО
= npabc
о
В предельном случае сильно уплощенного (в направлении оси z)
эллипсоида, что соответствует с —>• 0, получим отсюда
оо
tp(x, у) = npabc / Ь - -^— ~ -?— > -=
О
§ 9 СОПРИКОСНОВЕНИЕ ТВЕРДЫХ ТЕЛ 49
(при переходе к пределу с —>> 0 надо, разумеется, положить рав-
равной нулю также и координату z точек внутри эллипсоида). С
другой стороны, потенциал ср(х,у, z) может быть написан в виде
интеграла
(p(x
ч [[[ pdx'dy'dz'
' JJJ ^{x-x>y + {y-y>y
где интегрирование производится по объему эллипсоида. Пере-
Переходя здесь к пределу с —>• 0, мы должны положить под корнем
z = z1 = 0; производя интегрирование по dzf в пределах между
l
± с ^1 - — - ^-) , получим
(г = у/(х-х'J + (у-у'J),
где интегрирование производится по площади внутри эллипса
х/2/а2 + у/2/Ь2 = 1. Приравнивая оба выражения для <р(х,у),
получим следующее тождество:
dx'dy' \l_^__f_ =
r V a2 62
OO
= ZEg* /"/i--g!---y!-\ ^ (9.8)
2 J { «2+^ ^2+^J л/(а2+ОF2+Ш
0
Сравнивая это соотношение с уравнением (9.7), мы видим,
что в их правых частях стоят квадратичные функции от ж и у
одинакового вида, а в левых — интегралы одинакового типа. По-
Поэтому мы можем сразу заключить, что область соприкосновения
тел (т. е. область интегрирования в интеграле в (9.7)) ограничена
эллипсом вида
9 9
(9.9)
4
а2
и что функция Pz(x,y) должна быть вида
2 2
Pz(x,y) = const • Wl - ^- - у—.
Выбирая const так, чтобы интеграл JfPz dx dy по области со-
соприкосновения был равен заданной полной силе F, с которой
50 ОСНОВНЫЕ УРАВНЕНИЯ ТЕОРИИ УПРУГОСТИ
сдавливаются оба тела, получим
*<*¦»> = ssV1 - г-?¦ (9Л0)
Эта формула определяет закон распределения давления по пло-
площади области соприкосновения. Отметим, что давление в центре
области в полтора раза превышает среднее давление F/Grab).
Подставив (9.10) в уравнение (9.7) и заменив получающийся
в нем интеграл его выражением согласно (9.8), получим
где
+
Е Е'
Это равенство должно выполняться тождественно при всех зна-
значениях ж, у (внутри эллипса (9.9)); поэтому должны быть попар-
попарно равны в отдельности коэффициенты при ж и у и свободные
члены в обеих частях. Отсюда находим следующие соотношения:
(9.11)
А=—
7Г
о
оо
_ FD f
* J <
(9.12)
Уравнения (9.12) определяют полуоси а и b области соприкос-
соприкосновения по заданной силе F (А и В — известные для данных
тел величины). После этого соотношение (9.11) определит зави-
зависимость между силой F и вызываемым ею сближением тел h.
Интегралы, стоящие в правых частях этих уравнений, эллипти-
эллиптические.
Таким образом, задачу о соприкосновении тел можно считать
полностью решенной. Форма поверхности тел (т. е. смещения
uZl u'z) вне области соприкосновения определяется теми же фор-
формулами (9.5), (9.10), причем значения интегралов можно сразу
определить, исходя из аналогии с потенциалом поля заряженно-
заряженного эллипсоида, — на этот раз вне его. Наконец, по формулам
§ 9 СОПРИКОСНОВЕНИЕ ТВЕРДЫХ ТЕЛ 51
предыдущего параграфа можно было бы определить также и
распределение деформации по объему тел (но, конечно, лишь
на расстояниях, малых по сравнению с размерами тела).
Применим полученные формулы к соприкосновению двух
шаров с радиусами RylR'. Здесь
2 \R R'
из соображений симметрии ясно, что будет и а = 6, т. е. область
соприкосновения есть круг. Из (9.12) получим для радиуса а
области соприкосновения значение
R + R1
В данном случае h есть разность между суммой R + R1 и рас-
расстоянием между центрами шаров. Из (9.10) получим следующее
соотношение между F и h:
1/3
(9.14)
Отметим, что h пропорционально степени F2/3 сдавливающей
силы; обратно, сила F пропорциональна степени /г3/2 произво-
производимого ею сближения тел. Напишем еще потенциальную энер-
энергию U соприкасающихся шаров. Замечая, что должно быть
(-F) = —dU/dh, получим
Наконец, укажем, что зависимость вида
h = const • F2/3, F = const • /i3/2
имеет место не только для шаров, но и при соприкосновении
других тел конечных размеров. В этом легко убедиться из со-
соображений подобия. Если произвести замену а2 —)>аа2, Ь2 —>> ab2,
, где а — произвольная постоянная, то уравнения
(9.12) останутся неизменными. В уравнении же (9.11) правая
часть умножится на а, и для того чтобы оно осталось неизмен-
неизменным, надо заменить h на ah. Отсюда и следует, что F должно
быть пропорционально In?'2.
52 ОСНОВНЫЕ УРАВНЕНИЯ ТЕОРИИ УПРУГОСТИ ГЛ. I
3 адачи
1. Определить время, в течение которого соприкасаются два сталкива-
сталкивающихся упругих шара.
Решение. В системе отсчета, в которой центр инерции обоих шаров
покоится, энергия шаров до столкновения равна кинетической энергии отно-
относительно движения fiv2/2, где v — относительная скорость сталкивающихся
шаров, a ц = mirri2/(mi + тг) — их приведенная масса. В течение столкно-
столкновения полная энергия равна сумме кинетической энергии, которую можно
написать в виде fih2/2, и потенциальной энергии (9.15). В силу закона со-
сохранения энергии имеем
а — + kh ' = iiv , к =
\dtj 5D \R + Rf
Максимальное сближение шаров ho соответствует моменту, когда их отно-
относительная скорость h обращается в нуль, и равно
Время т, в течение которого длится столкновение (т. е. h меняется от О
до ho и обратно до нуля), равно
2^1/5 ' dx
J (v2-kh5/2/tiy/2 \кЧ) J у/
о
2 ч 1/5 /24 !/5
5Г(9/10) \кч) ~ ' \кч)
Пользуясь при решении этой задачи полученными в тексте статическими
формулами, мы тем самым пренебрегаем упругими колебаниями шара, воз-
возникающими при столкновении. Возможность такого пренебрежения требует,
чтобы скорость v была достаточно мала по сравнению со скоростью звука.
Фактически, однако, применимость этой теории ограничивается еще раньше
благодаря тому, что возникающие при столкновении деформации переходят
за предел упругости вещества.
2. Определить размеры области соприкосновения и распределение дав-
давления в ней при сдавливании двух цилиндров вдоль их образующих.
Решение. Область соприкосновения представляет собой в этом слу-
случае узкую полоску вдоль длины цилиндров. Ее ширину 2а и распределение
давления в ней можно найти из полученных в тексте формул путем пре-
предельного перехода Ь/а —»¦ оо. Распределение давления будет функцией вида
Pz(x) = const •
(х — координата вдоль ширины полосы соприкосновения); нормируя ее на
отнесенную к единице длины цилиндров сдавливающую силу F, получим
§ 10 УПРУГИЕ СВОЙСТВА КРИСТАЛЛОВ 53
Подставляя это выражение в (9.7) и производя интегрирование с помощью
(9.8), имеем
оо
4DF f d? SDF
А =
Ч-
J (а2
Зтг J (а2 + ?K/2? Зтга2
о
Один из радиусов кривизны цилиндрической поверхности бесконечен, а дру-
другой совпадает с радиусом цилиндра; поэтому в данном случае
U + ), В = 0.
2\R R'J
Окончательно находим для искомой ширины полосы соприкосновения:
A6DF RB! ч1/2
V Зтг R + R
§ 10. Упругие свойства кристаллов
Изменение свободной энергии при изотермическом сжатии
кристалла является, как и у изотропных тел, квадратичной
функцией тензора деформации. В противоположность тому, что
имело место для изотропных тел, эта функция содержит теперь
не два, а большее число независимых коэффициентов.
Общий вид свободной энергии деформированного кристалла
есть
F = -\к1тЩкЩт, (Ю.1)
где Xikim есть некоторый тензор 4-го ранга, называемый тен-
тензором модулей упругости. Поскольку тензор деформации сим-
симметричен, то произведение щ^щт не меняется при перестановке
индексов i с к, I с т или пары г, А; с парой /, т. Очевидно поэтому,
что и тензор Xikim может быть определен так, чтобы он обладал
такими же свойствами симметрии по отношению к перестановке
индексов:
Xikim = Хкцт = Xihmi = Ximik. A0.2)
Путем простого подсчета можно убедиться в том, что число
различных компонент тензора 4-го ранга, обладающего такими
свойствами симметрии, равно в общем случае 21г).
Соответственно выражению A0.1) для свободной энергии за-
зависимость тензора напряжений от тензора деформации имеет в
кристаллах вид (ср. также сноску на с. 61)
°ik = = ХштЩт. A0.3)
дщк
:) В литературе используются также обозначения, в которых компоненты
тензора 4-го ранга записываются как \ар с двумя индексами, пробегающими
значения 1, 2, 3, 4, 5, 6, которым отвечают соответственно пары индексов
хх, уу, zz, yz, zx, xy.
54 ОСНОВНЫЕ УРАВНЕНИЯ ТЕОРИИ УПРУГОСТИ ГЛ. I
Наличие той или иной симметрии кристалла приводит к по-
появлению зависимостей между различными компонентами тензо-
Ра \klm-) так чт0 число его независимых компонент оказывается
меньшим, чем 21.
Рассмотрим эти соотношения для всех возможных типов ма-
макроскопической симметрии кристаллов, т. е. для всех кристал-
кристаллических классов, распределив их по соответствующим кристал-
кристаллическим системам (см. V, § 130, 131).
1.Триклинная система. Триклинная симметрия (клас-
(классы Ci и Cj) не накладывает никаких ограничений на компо-
компоненты тензора \kirm а выбор системы координат с точки зре-
зрения симметрии вполне произволен. При этом отличны от нуля
и независимы все 21 модуль упругости. Произвольность выбора
системы координат позволяет, однако, наложить на компоненты
тензора Xikim дополнительные условия. Поскольку ориентация
системы координат относительно тела определяется тремя ве-
величинами (углами поворота), то таких условий может быть три;
можно, например, три из компонент считать равными нулю. Тог-
Тогда независимыми величинами, характеризующими упругие свой-
свойства кристалла, будут 18 отличных от нуля модулей и 3 угла,
определяющих ориентацию осей в кристалле.
2. Моноклинная система. Рассмотрим класс Cs; выби-
выбираем систему координат с плоскостью жу, совпадающей с плоско-
плоскостью симметрии. При отражении в этой плоскости координаты
подвергаются преобразованию: x^x,y^y,z^—z. Компонен-
Компоненты тензора преобразуются как произведения соответствующих
координат. Поэтому ясно, что при указанном преобразовании все
компоненты А^т, среди индексов которых индекс z содержится
нечетное A или 3) число раз, переменят свой знак, а остальные
компоненты останутся неизменными. С другой стороны, в силу
симметрии кристалла все характеризующие его свойства вели-
величины (в том числе и все компоненты \ikim) должны остаться
неизменными при отражении в плоскости симметрии. Поэтому
ясно, что все компоненты с нечетным числом индексов z долж-
должны быть равными нулю. Соответственно этому общее выражение
для свободной упругой энергии кристалла моноклинной системы
есть
= Хи + и ~^~ Xu + XUUyy +
+ л
+ :
=
xxz
1 л
-ЛХ0[
Z^XX
:хху^
]XXU
UZz
ьххь
+л
I-
+ 2Л
iyyu
yyyx
2
1 ,
'+2X
^^xy
Uyx ~r
4
/ +
/zz
+ Л
¦2ЛЖ
xu
xxyy
zxzu
Uxx
-4Л
A0.4)
В этом выражении 13 независимых коэффициентов. Такое же
выражение получается для класса С 2, а также и класса Сък •> со~
держащего оба элемента симметрии (С2 и а^) вместе. В изложен-
§ 10 УПРУГИЕ СВОЙСТВА КРИСТАЛЛОВ 55
ных рассуждениях, однако, соображения симметрии фиксируют
выбор направления лишь одной из осей координат (z), направ-
направления же осей ж, у в перпендикулярной плоскости остаются про-
произвольными. Этим произволом можно воспользоваться для того,
чтобы надлежащим выбором осей обратить в нуль одну из ком-
компонент, скажем \xyzz. Тогда 13 величинами, характеризующими
упругие свойства кристалла, будут 12 отличных от нуля модулей
и один угол, определяющий ориентацию осей в плоскости ху.
3. Ромбическая система. Во всех классах этой систе-
системы (С2-у, D2, -D2/1) выбор осей координат однозначно диктует-
диктуется симметрией и для свободной энергии получается выражение
одинакового вида. Рассмотрим, например, класс T>2h и выберем
плоскости координат в трех плоскостях симметрии этого клас-
класса. Отражения в каждой из этих плоскостей представляют собой
преобразования, при которых одна из координат меняет знак, а
две другие не меняются. Очевидно, поэтому, что из всех компо-
компонент Xikim отличными от нуля останутся только те, среди индек-
индексов которых каждое из их значений ж, у и z встречается четное
число раз; все остальные компоненты должны были бы менять
знак при отражении в какой-нибудь из плоскостей симметрии.
Таким образом, общее выражение для свободной энергии имеет
в ромбической системе вид
г = ~^XXXXUXX ~т~ 7^ УУУУ^уу ' 7^ zzzz^zz * ^XXyyUxxUyy ~т~
~г AXXZZUXXUZZ -\- AyyZZUyyUzz -\- ZAXyXyUXy -\- 2AXZXZUXZ -\- ZAyZyZUyZ.
A0.5)
Оно содержит всего девять модулей упругости.
4. Тетрагональная система. Рассмотрим класс C^v.
Выбираем координаты с осью z по оси С±, а оси ж, у — пер-
перпендикулярными к двум из вертикальных плоскостей симмет-
симметрии. Отражения в этих двух плоскостях означают соответствен-
соответственно преобразования х —>> —ж, у^у, z ^ z и х ^ х, у ^ —у,
z —)> z\ в силу этого исчезают все компоненты Xikim c нечетным
числом одинаковых индексов. Далее, поворот на угол тг/4 вокруг
оси С^ представляет собой преобразование х —>> у, у —>> —ж, z —> z.
Отсюда вытекают соотношения
Остальные преобразования, входящие в класс С^, ничего не до-
добавляют к этим условиям. Таким образом, выражение для сво-
свободной энергии кристаллов тетрагональной системы имеет вид
F = -Kxxx(u2xx + u2yy) + -\zzzzu2zz + Xxxzz(uxxuzz + uyyuzz) +
+ XXXyyUxxuyy + 2\xyXyUXy + 2\xzxz[uxz + uyz). A0.5)
Оно содержит шесть модулей упругости.
56 ОСНОВНЫЕ УРАВНЕНИЯ ТЕОРИИ УПРУГОСТИ ГЛ. I
Такой же результат получится и для других классов тетраго-
тетрагональной системы, в которых естественный выбор осей координат
диктуется симметрией (Г>2<ь ?>4, Г>4/г)- В классах же С4, SU, С4/1
однозначен выбор лишь одной оси (z) — вдоль оси С4 или S4. При
этом требования симметрии допускают существование (помимо
фигурирующих в A0.6)) еще и компонент
Надлежащим выбором направлений осей ж, у эти компоненты
могут быть обращены в нуль, и тогда F снова приведется к тому
же виду A0.6).
5. Ромбоэдрическая система. Рассмотрим класс C%v
и выберем систему координат с осью z вдоль оси третьего поряд-
порядка и осью у, перпендикулярной к одной из вертикальных плос-
плоскостей симметрии. Для выяснения ограничений, налагаемых на
компоненты тензора Xikim наличием оси Сз, удобно произвести
формальное преобразование, введя комплексные «координаты»
?, т\ согласно определению
? = ж + гу, г] = х-гу; A0.7)
координату же z оставляем без изменений. К этим новым коор-
координатам преобразуем также и тензор Xikim] в ег0 компонентах
индексы пробегают теперь значения ?, г/, z. Легко видеть, что
при повороте на 120° вокруг оси z новые переменные подверга-
подвергаются преобразованию
г/ -> т/е
Отличными от нуля могут быть в силу симметрии кристалла
только те из компонент А^т, которые не меняются при этом
преобразовании. Очевидно, что этим свойством обладают те ком-
компоненты, среди индексов которых три раза повторяются ? или 7/
(обращаем внимание на то, что (е2угг/3K — е27гг — ]_)? или индекс ?
содержится столько же раз, сколько г/ (поскольку e2W3e-2W3 —
= 1); таковыми являются компоненты
Далее, отражение в плоскости симметрии, перпендикулярной к
оси у, есть преобразование х —>> ж, у —>> —у, 2: —)> 2:, или для вели-
величин ?,?/:?—^?7,?7—^?. Поскольку при этом преобразовании А^^
переходит в \тщ^ то эти две компоненты должны быть равны
друг другу. Таким образом, кристаллы ромбоэдрической систе-
системы обладают всего шестью модулями упругости. Для того что-
чтобы написать выражение для свободной энергии, надо составить
сумму \klmuikulm-) в которой индексы пробегают значения ?, г/,
z\ поскольку нам надо выразить F через компоненты тензора де-
деформации в координатах ж, у, z, то мы должны выразить через
§ 10 УПРУГИЕ СВОЙСТВА КРИСТАЛЛОВ 57
них компоненты в «координатах» ?, г/, z. Это легко сделать, вос-
воспользовавшись тем, что компоненты тензора щ^ преобразуются
как произведения соответствующих двух координат. Так, из
?? = (# + iyJ = х2 - у2 + 2ixy
следует, что
F = -
В результате находим для F следующее выражение:
Uxx+^yf
Uyy)uzz + 4
+ 4%^[(^жЖ - uyy)uxz - 2uxyuyz]. A0.8)
Оно содержит 6 независимых коэффициентов. Такой же резуль-
результат получится для классов D% и Оз^. В классах же Сз и S6,
в которых выбор осей ж, у остается произвольным, требования
симметрии допускают также и отличную от нуля разность
Она, однако, может быть обращена в нуль надлежащим выбором
осей ж, у.
6. Гексагональная система. Рассмотрим класс Cq и
выберем систему координат с осью z по оси 6-го порядка. Введем
снова координаты A0.7). При повороте на угол 2тг/6 вокруг оси
z они подвергаются преобразованию
Отсюда видно, что отличны от нуля только те компоненты \kim-)
среди индексов которых индексы (иг| встречаются одинаковое
число раз. Таковыми являются
Другие возможные элементы симметрии гексагональной систе-
системы ничего не добавляют к этим ограничениям. Таким образом,
имеется всего пять модулей упругости. Свободная энергия имеет
вид
Следует отметить, что деформация в плоскости ху (деформа-
(деформация с отличными от нуля ихх-) иуу-) иху) определяется всего дву-
двумя упругими модулями, как и для изотропного тела; другими
словами, в плоскости, перпендикулярной к гексагональной оси,
58 ОСНОВНЫЕ УРАВНЕНИЯ ТЕОРИИ УПРУГОСТИ ГЛ. I
упругие свойства гексагонального кристалла изотропны. По этой
причине выбор направлений осей в этой плоскости вообще несу-
несуществен и никак не отражается на виде F. Выражение A0.9)
относится поэтому ко всем классам гексагональной системы.
7. Кубическая система. Направим оси ж, у, z по трем
осям 4-го порядка кубической системы. Уже наличие тетраго-
тетрагональной симметрии (с осью 4-го порядка вдоль оси z) ограни-
ограничивало число различных компонент тензора \ыт следующими
шестью:
Повороты на 90° вокруг осей х и у дают соответственно преоб-
преобразования х —>> ж, у —>> —2, 2; 4 1/ и ж 4 2:, 1/ 4 у, 2: 4 —ж.
В силу них из написанных шести компонент делаются равными
первая со второй, третья с четвертой и пятая с шестой. Таким
образом, остается всего три различных модуля упругости. Сво-
Свободная энергия кристаллов кубической системы имеет вид1)
Fl-./OOO\A/ \
— A ill —\—ОI —\—ОI I I \ (о/ о/ .А—о/ о/ —1—0 1 о/ 1 I
/\rprprprp I LJL гр гр | Ubn in I I i->v ~ ~ i | '^ПГПГИИ V Uv rprp ^^1111 I LAjorof* LJL у у \ ^^1111 ^ У. У. ] I
+ 2\xyxy(uly + ulz + u2yz). A0.10)
Выпишем еще раз число независимых параметров (модулей
упругости или углов, определяющих ориентацию осей в кристал-
кристалле) для классов различных систем:
триклинная 21
моноклинная 13
ромбическая 9
тетрагональная (С4, S4, C^h) 7
тетрагональная (С^, ^26,-, D4, D4h) 6
ромбоэдрическая (С3, Se) 7
ромбоэдрическая (Сзу, Ds, D3d) 6
гексагональная 5
кубическая 3
Минимальное же число отличных от нуля модулей, которого
можно добиться надлежащим выбором осей координат, одинако-
одинаково для всех классов в каждой системе:
триклинная 18
моноклинная 12
ромбическая 9
тетрагональная 6
ромбоэдрическая 6
гексагональная 5
кубическая 3
:) В кубических классах Т и Т^ нет осей четвертого порядка. Тот же
результат получается, однако, в этих случаях путем рассмотрения осей тре-
третьего порядка, повороты вокруг которых переводят друг в друга оси второго
порядка — оси ж, у, z.
§ 10 УПРУГИЕ СВОЙСТВА КРИСТАЛЛОВ 59
Все сказанное относится, разумеется, к монокристаллам. По-
Поликристаллические же тела с достаточно малыми размерами
входящих в их состав кристаллитов можно рассматривать как
изотропные тела (поскольку мы интересуемся деформациями в
участках, больших по сравнению с размерами кристаллитов).
Как и всякое изотропное тело, поликристалл характеризуется
всего двумя модулями упругости. Можно было бы на первый
взгляд подумать, что эти модули можно получить из модулей
упругости отдельных кристаллитов посредством простого усред-
усреднения. В действительности, однако, это не так. Если рассматри-
рассматривать деформацию поликристалла как результат деформации вхо-
входящих в него кристаллитов, то следовало бы в принципе решить
уравнения равновесия для всех этих кристаллитов с учетом со-
соответствующих граничных условий на поверхностях их раздела.
Отсюда видно, что связь между упругими свойствами кристал-
кристалла, рассматриваемого в целом, и свойствами составляющих его
кристаллитов зависит от конкретной формы кристаллитов и от
корреляции между их взаимными ориентациями. Поэтому не су-
существует общей зависимости между модулями упругости поли-
поликристаллов и монокристалла (того же вещества).
Вычисление модулей изотропного поликристалла по моно-
монокристаллическим модулям может быть произведено со значи-
значительной точностью лишь в случае слабой анизотропии упругих
свойств монокристалла1). В первом приближении модули упру-
упругости поликристалла можно положить равными просто «изо-
«изотропной части» упругих модулей монокристалла. Тогда в сле-
следующем приближении появляются члены, квадратичные по ма-
малой «анизотропной части» этих модулей. Оказывается, что эти
поправочные члены не зависят от формы кристаллитов и от кор-
корреляции их ориентации и могут быть вычислены в общем виде 2).
Наконец, остановимся на тепловом расширении кристаллов.
В изотропных телах тепловое расширение происходит одинаково
по всем направлениям, так что тензор деформации при свобод-
свободном тепловом расширении имеет вид (см. § 6)
3
где а — коэффициент теплового расширения. В кристаллах же
надо писать
_ Oi^/rri гтл \ A0 1 Л
3
где otik — некоторый тензор второго ранга, симметричный по ин-
г) Так, мерой анизотропии упругих свойств кубического кристалла явля-
является разность Ххххх —Хххуу — 2^хуху', если она равна нулю, выражение A0.10)
сводится к выражению упругой энергии изотропного тела D.3).
2) См. ИМ. Лифшиц, Л.Н. Розенцвейг. // ЖЭТФ. 1946. Т. 16. С. 967.
60 ОСНОВНЫЕ УРАВНЕНИЯ ТЕОРИИ УПРУГОСТИ ГЛ. I
дексам г, к. Выясним число различных независимых компонент
этого тензора в кристаллах разных систем. Для этого проще все-
всего воспользоваться известным из тензорной алгебры обстоятель-
обстоятельством, что всякому симметричному тензору второго ранга можно
привести в соответствие некоторый, как говорят, тензорный эл-
эллипсоид1). Из соображений симметрии непосредственно очевид-
очевидно, что при триклинной, моноклинной и ромбической симметри-
ях эллипсоид является, вообще говоря, трехосным (т. е. длины
всех его осей различны). При тетрагональной же, ромбоэдриче-
ромбоэдрической и гексагональной симметриях эллипсоид должен являться
эллипсоидом вращения (с осью соответственно вдоль осей сим-
симметрии С4, Сз или Cq). Наконец, кубическая симметрия приво-
приводит к вырождению эллипсоида в шар. Но трехосный эллипсоид
определяется тремя независимыми величинами (длинами осей),
эллипсоид вращения — двумя, а шар — всего одной (радиусом).
Таким образом, число независимых компонент тензора а^ в кри-
кристаллах различных систем есть:
триклинная, моноклинная, ромбическая 3
тетрагональная, ромбоэдрическая, гексагональная 2
кубическая 1
Кристаллы первых трех систем называются двухосными, а
вторых трех — одноосными. Обратим внимание на то, что теп-
тепловое расширение кристаллов кубической системы определяется
всего одной величиной, т. е. что они ведут себя в отношении сво-
своего теплового расширения как изотропные тела.
3 адачи
1. Выразить упругую энергию гексагонального кристалла с помощью
упругих модулей \ikim в координатах х, у, z (ось х — по оси шестого поряд-
порядка).
Решение. При произвольном (не ортогональном) преобразовании ко-
координат надо различать контра- и ковариантные компоненты векторов и
тензоров; первые преобразуются как сами координаты хъ (их принято обо-
обозначать с верхними индексами), а вторые — как операторы дифференци-
дифференцирования д/дхг (их обозначают с нижними индексами). Скаляр A0.1) надо
записывать при этом как
FJ- л гк 1т
= -XiklmU U .
В выражениях A0.8), A0.9) компоненты Щк преобразованы как контрава-
риантные; поэтому для установления связи между компонентами Аш™, в
координатах ?, 77, z и ж, у, z их надо рассматривать как ковариантные (в
декартовых координатах те и другие компоненты, разумеется, совпадают).
Для преобразования A0.7) имеем
д__д_+д_ d__i(d__d_
дх д^ дц ду \д(, дц,
Тензорный эллипсоид определяется уравнением aikXiXk = 1.
§ 10 УПРУГИЕ СВОЙСТВА КРИСТАЛЛОВ 61
Преобразуя компоненты Аш™, как произведения этих операторов, найдем
ZA^^, ЛХуХу =
АЖЖ22 = XyyZZ =
Свободная энергия A0.9), выраженная через эти модули, имеет вид
i7" = -Кххх(ихх + 'Wt/t/J + -A^^L + \XXZz(uxx + Uyy)uzz +
Н~ ^АЖ2Ж.г ('М-ж.г + UyZ) -\~ \ЛХХХХ ЛХХуу)(иХу UxxUyy).
2. Найти условия положительности упругой энергии кубического кри-
кристалла.
Решение. Первые два члена в A0.10) составляют квадратичную фор-
форму трех независимых переменных ихх, иуу, uzz- Условия положительности
этой формы требуют положительности определителя ее коэффициентов, од-
одного из его миноров и коэффициента Ххххх. Кроме того, должен быть поло-
положителен третий член в A0.10). Эти условия приводят к неравенствам
Ai > 0, Аз > 0, < А2 < Аь
где обозначено Ai = Ажжжж, А2 = Ажжуу, Аз = ХХуху
3. Определить зависимость модуля растяжения кубического кристалла
от направления в нем.
Решение. Выбираем оси координат в направлениях ребер куба.
Пусть ось вырезанного из кристалла стержня имеет направление единич-
единичного вектора п. Тензор напряжений в растянутом стержне должен удовле-
удовлетворять следующим условиям: должно быть ацгПк = рщ, где р — действую-
действующая на единицу площади оснований стержня растягивающая сила (условие
на основаниях стержня); для направлений t, перпендикулярных п, должно
быть (Jiktk = 0 (условие на боковых сторонах стержня). Такой тензор дол-
должен иметь вид (Tik = рп{Пк- Вычислив компоненты (Tik дифференцированием
выражения A0.10) :) и сравнив их с выражениями crik = рщпк, получим для
компонент тензора деформации выражения
(Ai +2\2)nl - А2 _ пхпу
UP
и аналогичные для остальных компонент.
dl' - dl
Относительное продольное удлинение стержня есть и = , где
dl
dx'
dl' дается формулой A.2) и = щ. Это дает для малых деформаций
dl
х) Если вычислять (Tik не непосредственно по формулам aik = XikimUim, a
путем дифференцирования конкретного выражения F, то производные по
Щк с г ф к дают удвоенные значения aik. Это связано с тем, что формула
Gik = dF/дщк имеет по существу смысл лишь как выражающая тот факт,
что dF = Gik duik', но в сумму Gik duik члены с дифференциалами duik каж-
каждой из компонент с г ф к симметричного тензора Щк входят дважды.
62 ОСНОВНЫЕ УРАВНЕНИЯ ТЕОРИИ УПРУГОСТИ ГЛ. I
и = ЩкЩПк- Модуль Юнга определяется как коэффициент пропорциональ-
пропорциональности в р = Ей, и для него находим
Модуль имеет экстремальные значения в направлениях ребер (оси ж, у, z) и
пространственных диагоналей куба. В направлении вдоль ребер куба
Я (А1+2А2)^^.
Ai + A2
При этом поперечное сжатие стержня ихх = иуу = —auzz = —аи, где ве-
величина а = А2ДА1 + Аг) играет роль коэффициента Пуассона. Согласно
полученным в предыдущей задаче неравенствам: —1<а< 1/2.
ГЛАВА II
РАВНОВЕСИЕ СТЕРЖНЕЙ И ПЛАСТИНОК
§ 11. Энергия изогнутой пластинки
В этой главе мы будем заниматься изучением некоторых
частных случаев равновесия деформируемых тел и начнем с рас-
рассмотрения деформаций тонких пластинок. Когда мы говорим,
что пластинка является тонкой, то подразумевается, что ее тол-
толщина мала по сравнению с размерами в двух других направлени-
направлениях. Сами деформации по-прежнему считаются малыми. В дан-
данном случае критерием малости деформации является малость
смещений точек пластинки по сравнению с ее толщиной.
При применении к тонким пластинкам общие уравнения рав-
равновесия значительно упрощаются. Удобнее, однако, выводить
эти упрощенные уравнения не непосредственно из общих урав-
уравнений, а вычислять заново свободную энергию изогнутой пла-
пластинки и затем проварьировать эту энергию.
При сгибании пластинки внутри нее в некоторых местах воз-
возникают растяжения, в других — сжатия. Именно, на выпуклой
стороне пластинки происходит растяжение; по мере же углубле-
углубления в толщу пластинки это растяжение постепенно уменьшает-
уменьшается, достигая в конце концов нуля, вслед за чем в дальнейших
слоях начинается постепенно увеличивающееся сжатие. Таким
образом, внутри пластинки имеется нейтральная поверхность,
на которой растяжение вообще отсутствует, а по двум сторонам
ее деформация имеет противоположный знак. Очевидно, что эта
поверхность расположена по середине толщины пластинки.
Выберем систему координат с началом в какой-нибудь точ-
точке нейтральной поверхности и осью z, направленной по нормали
к ней. Плоскость ху совпадает с плоскостью недеформирован-
ной пластинки. Обозначим вертикальное смещение точек ней-
нейтральной поверхности, т. е. их ^-координату, буквой ? (рис. 2).
Что касается компонент смещений этих точек в плоскости ху, то
они являются, очевидно, величинами второго порядка малости
по сравнению с ? и потому могут быть положены равными нулю.
Таким образом, вектор смещения точек нейтральной поверхности:
Для дальнейших вычислений необходимо сделать следующее
замечание относительно напряжений, действующих в деформи-
64 РАВНОВЕСИЕ СТЕРЖНЕЙ И ПЛАСТИНОК ГЛ. II
рованной пластинке. Поскольку пластинка тонкая, то для того
чтобы изогнуть ее требуется приложить к ее поверхности срав-
сравнительно небольшие силы. Эти силы во всяком случае будут
значительно меньше, чем те внутренние напряжения, которые
возникают внутри деформированной пластинки благодаря име-
имеющим в ней место растяжениям и сжатиям. Поэтому в гранич-
граничных условиях B.9) можно пренебречь силами Р^, так что остается
°%кпк — 0. Поскольку пластинка слабо изогнута, то можно счи-
считать, что вектор нормали п направлен по оси z. Таким образом,
на обеих поверхностях пластинки должно быть
&xz = &yz = Ozz = 0.
Но поскольку толщина пластинки мала, то из
равенства этих величин нулю на двух сторо-
рис 2 Hcix пластинки следует, что они малы и внутри
нее. Таким образом, мы приходим к выводу,
что во всей пластинке компоненты aXZi ayZi azz малы по сравне-
сравнению с остальными компонентами тензора напряжений. На этом
основании мы можем положить их равными нулю и определить
компоненты тензора деформации из этого условия.
Согласно общим формулам E.13) имеем
_ Е Е
°zx ~ V^~U и
7
Е
^1 ^ + (
Приравнивая эти выражения нулю, находим
дих duz дщ duz а ( . \
dz дх' dz ду' ZZ I - а хх уу)'
В первые два уравнения можно для uz с достаточной точностью
подставить ((х,у):
дих дС, диу дС,
dz дх' dz ду'
откуда
СС, (уС, (л л (х\
дх ду
Постоянные интегрирования положены равными нулю так, что-
чтобы при z = 0 имело место их = иу = 0. Зная их и иу, мож:но
определить все компоненты тензора деформации:
— ,
= UqJZ = (J, Uzz = Z\ + .
\дх2 ду2 J 1 — а
§ 12 УРАВНЕНИЕ РАВНОВЕСИЯ ПЛАСТИНКИ 65
Теперь уже можно вычислить, воспользовавшись общей фор-
формулой E.10), свободную энергию F единицы объема пластинки.
Простое вычисление приводит к выражению
_Ё_ ( 1 (94 + дЧJ + \(^С_J _ дЧ?Ч
+ а \ 2A - о-) \дх2 ду2) \\дхду) дх2 ду2
"A1.5)
Полная свободная энергия пластинки получится отсюда интегри-
интегрированием по всему ее объему. Интегрирование по z производится
в пределах от —h/2 до +/i/2, где h — толщина пластинки, а по ж,
у — по всей поверхности пластинки. В результате находим пол-
полную свободную энергию FUJI = Г F dV деформированной пла-
пластинки в виде
24A-«72O7 \\дх*+ду*
у^]} (И.6)
(для элемента поверхности можно ввиду малости деформации
писать с достаточной точностью просто dx dy).
После того как получено выражение для свободной энергии,
можно рассматривать пластинку как не обладающую толщиной,
т. е. как геометрическую поверхность, поскольку нас интересу-
интересует только форма, принимаемая ею под влиянием приложенных
сил, а не распределение деформаций внутри самой пластинки.
Величина ? является тогда смещением точек пластинки, рассма-
рассматриваемой как поверхность, при ее изгибании.
§ 12. Уравнение равновесия пластинки
Уравнение равновесия пластинки мы выведем из условия ми-
минимума ее свободной энергии. Для этого надо вычислить вариа-
вариацию выражения A1.6).
Разобьем стоящий в A1.6) интеграл на сумму двух интегра-
интегралов и будем варьировать каждый из них в отдельности. Первый
интеграл можно написать в виде
где df = dxdy — элемент поверхности, а А = д2/дх2 + д2/ду2
обозначает здесь (и везде в § 12-14) двумерный оператор Лапла-
Лапласа. Варьируя этот интеграл, имеем
51- J (ACJ df = J ACA^C df = J AC div grad <5C df =
= J div(ACV^C) df - J
3 Л. Д. Ландау, Е.М. Лифшиц, том VII
66 РАВНОВЕСИЕ СТЕРЖНЕЙ И ПЛАСТИНОК ГЛ. II
Все векторные операции производятся здесь, конечно, в двух-
двухмерной системе координат ху. Первый интеграл справа преоб-
преобразуем в интеграл по замкнутому контуру, охватывающему пла-
пластинку 1):
Г div(ACVEC) df = ? AC(ngrad?C)d/= /д(— ей,
J J J on
где д/дп означает дифференцирование по направлению внешней
нормали к контуру.
Во втором интеграле применяем такое же преобразование и
получаем
J V6(VA( df = J VF(VA() df-J 6(A2( df =
= § 5((nV)A(dl- f 5(A2(df = ?s(^dl- f 5(A2(df.
Подставляя полученные результаты, получаем
81- J (ACJ df= j8CA2Cdf-^SC^dl + ^AC^dl. A2.1)
Преобразование вариации второго интеграла в A1.6) несколь-
несколько более длинно. Это преобразование удобнее производить не в
векторном виде, а в компонентах. Имеем
дЧд*к ^c^2cl df
дх2 ду2 дх2 ду2 J J'
дхдудхду
Подынтегральное выражение здесь можно написать в виде
д (ддС, д\ _ дд^^
дх \ ду дх ду дх ду2 J ду \ дх дх ду ду дх2 J '
т. е. как двумерную дивергенцию некоторого вектора. Поэтому
1) Формула преобразования двумерных интегралов в точности аналогич-
аналогична трехмерной формуле. Роль элемента объема dV играет теперь элемент
поверхности df (рассматриваемый как скаляр), а вместо элемента поверхно-
поверхности df стоит элемент длины контура dl, умноженный на вектор п внешней
нормали к контуру. Преобразование интеграла по df в интеграл по dl осу-
осуществляется заменой оператора df d/dxi на величину щ dl. Так, если (р есть
некоторый скаляр, то
/ Vtpdf = Ф (pndl.
§ 12 УРАВНЕНИЕ РАВНОВЕСИЯ ПЛАСТИНКИ 67
можно переписать вариацию в виде интеграла по контуру:
8
дх2 ду2 ) J
дхду) дх2 ду2 ) J [дхдхду ду
ду дх ду дх д
где в — угол между осью х и нормалью п к контуру (рис. 3).
Производные от 6( по х и у выразим через
производные по направлению нормали п к кон-
контуру и по направлению касательной 1 к нему со-
гласно формулам
А = cos^— - sin^-, — = sine— + cose-.
дх дп dl ду дп dl
Рис. 3 Тогда интегралы в формуле A2.2) приобретают
следующий вид:
{2sin0cos^sm^cos^
дп { дхду дх2 ду2 J
\
>
+ ф dl—^ < sine cose —^ — —-1 + (cos e — sm в)—2- > .
J dl \ \ду2 дх2) v 'дхду)
Второй интеграл можно вычислить, взяв его по частям. По-
Поскольку он берется по замкнутому контуру, то пределы интегри-
интегрирования сливаются в одну точку, и потому мы получаем просто
<ду2 дх2) v 'дхду
Сводя все полученные выражения вместе и написав перед
ними коэффициенты согласно формуле A1.6), получаем оконча-
окончательно следующее выражение для вариации свободной энергии:
SFUJI = D < J A2E( df - Ф 5( dl
ду2 дх2)
дп \_ \ дхду
• 2Л^С ^/^^^Ik /1Л О\
3*
68 РАВНОВЕСИЕ СТЕРЖНЕЙ И ПЛАСТИНОК ГЛ. II
где
D = —^ . A2.4)
12A -a2) V '
Для того чтобы получить отсюда уравнение равновесия пла-
пластинки, надо приравнять нулю сумму вариации SF и вариации
SU потенциальной энергии пластинки, связанной с наличием
действующих на нее внешних сил. Эта последняя вариация рав-
равна взятой с обратным знаком работе внешних сил при смещении
пластинки. Пусть Р есть действующая на пластинку внешняя
сила, отнесенная к единице площади ее поверхности 1) и направ-
направленная по нормали к ней. Тогда работа, произведенная силами
при смещении точек пластинки на $?, равна
Таким образом, имеем в качестве условия минимальности полной
свободной энергии пластинки уравнение
SFUJI- J P5(df =
В левой части этого равенства стоят как интегралы по по-
поверхности, так и интегралы по контуру. Поверхностный интеграл
есть
J{DA2(-P}8(df.
Вариация д? в нем произвольна. Поэтому интеграл равен нулю,
если
DA2( = P. A2.5)
Это — уравнение равновесия пластинки, изгибаемой действую-
действующими на нее внешними силами. Коэффициент в этом уравнении
называют жесткостью пластинки при изгибе или цилиндриче-
цилиндрической жесткостью.
Граничные условия для этого уравнения получаются из ра-
равенства нулю контурных интегралов в A2.3). При этом следует
рассмотреть несколько различных частных случаев.
Предположим, что часть края пластинки свободна, т. е. на
нее не действуют никакие внешние силы. Тогда вариации 8Q и
5 (д(/дп) на ней произвольны и должны быть равными нулю
коэффициенты при этих вариациях в интегралах по контуру. Это
1) Сила Р может являться здесь результатом действия объемных сил (на-
(например, силы тяжести) и равна тогда интегралу от последней по толщине
пластинки.
§ 12 УРАВНЕНИЕ РАВНОВЕСИЯ ПЛАСТИНКИ 69
приводит к уравнениям
=0, A2.6)
дхду
ДС + A - a) <2s\necos6-^ - sin20^ - cos2 в^ 1 = 0.
(^ дх ду дх2 ду2 J
A2.7)
Они должны выполняться на всей свободной границе пластинки.
Краевые условия A2.6), A2.7) весьма сложны. Значительно
более просты случаи, когда края пластинки заделаны или оперты.
Если края пластинки заделаны (рис. 4 а), то они не могут испы-
испытывать никакого вертикального смещения и, сверх того, не может
измениться также и направление этих краев. Угол, на который
поворачивается данный участок края пластинки относительно
своего первоначального положения, равен
(при малых смещениях () производной
дС,/дп. Таким образом, на заделанных кра-
краях пластинки вариации 8С^ ж 8 (д^/дп) равны
нулю, так что контурные интегралы в A2.3)
исчезают тождественно. Граничные условия
имеют в этом случае простой вид:
С = 0, |? = 0. A2.8)
Первое выражает собой тот факт, что края
пластинки вообще не испытывают вертикального смещения при
деформации, а второе — что направление края остается горизон-
горизонтальным.
Легко определить силы реакции, действующие на пластин-
пластинку со стороны опоры в точках закрепления. Эти силы равны и
противоположны силам, действующим на опору со стороны пла-
пластинки. Как известно из механики, сила, действующая в неко-
некотором направлении, равна производной от энергии по коорди-
координатам, взятой по этому направлению. В частности, сила, с ко-
которой пластинка действует на опору, определяется производной
от энергии по смещению ( края пластинки, взятой с обратным
знаком, а обратная сила реакции — той же производной с по-
положительным знаком. Но эта производная есть не что иное, как
коэффициент при 8( во втором интеграле в A2.3). Таким обра-
образом, сила реакции, отнесенная к единице длины контура, равна
выражению, стоящему в левой части уравнения A2.6) (конечно,
не равному теперь нулю), умноженному на D. Аналогично, мо-
момент сил реакции определяется выражением, стоящим в левой
70 РАВНОВЕСИЕ СТЕРЖНЕЙ И ПЛАСТИНОК ГЛ. II
части уравнения A2.7), умноженным на тот же коэффициент D.
Это следует из известного из механики обстоятельства, что мо-
момент силы равен производной от энергии по углу поворота тела.
Угол же поворота края пластинки равен производной дС^/дп, так
что соответствующий момент сил определяется коэффициентом
при 5(д(/дп) в третьем интеграле в A2.3). При этом оба эти
выражения (для силы и момента) ввиду условий A2.8) сильно
упрощаются. Именно, поскольку ( и д(/дп равны нулю вдоль
всего контура края пластинки, то обращаются тождественно в
нуль также и их производные всех порядков по направлению ка-
касательной 1. Учитывая это обстоятельство и переходя в A2.6) и
A2.7) от производных по ж и у к производным в направлениях
п и 1, получим следующие простые выражения для силы F и
момента М реакции опоры:
dl d
M = D%\. A2.10)
on2
Другой важный случай — опертая пластинка (рис. 4 б"), у ко-
которой края только опираются на неподвижную опору, но не за-
закреплены в ней. В таком случае на контуре пластинки (т. е. на
линии, по которой пластинка опирается на опору) вертикальное
смещение по-прежнему отсутствует, но направление отнюдь не
остается неизменным. Соответственно этому в A2.3) в интегра-
интеграле по контуру
НО
дп
Поэтому из двух условий A2.6), A2.7) остается только второе.
Выражение же, стоящее в левой части A2.6), определяет, как
и в предыдущем случае, силу реакции, действующую в точках
опоры пластинки (момент же этих сил равен теперь в равнове-
равновесии нулю). Граничное условие A2.7) упрощается, если перейти к
производным по направлениям п и 1, причем учесть, что в силу
равенства ( = 0 на всем контуре обращаются в нуль также и
производные д(/д1 и д2(/д12. В результате получим граничные
условия в виде
С = 0, ? + *%? = 0. A2.11)
on2 dl on
§ 12 УРАВНЕНИЕ РАВНОВЕСИЯ ПЛАСТИНКИ 71
3 адачи
1. Определить деформацию круглой пластинки (радиуса R) с заделан-
заделанными краями, расположенной горизонтально в поле тяжести.
Решение. Выбираем полярные координаты с началом в центре пла-
пластинки. Сила, действующая на единицу площади поверхности пластинки,
равна Р = phg. Уравнение A2.5) приобретает вид
16h2E
(положительные ? соответствуют смещению по направлению действия силы
тяжести). Поскольку ? есть функция только от г, то для А в полярных
координатах надо писать А = (г — ). Общий интеграл этого уравнения
г dr \ dr J
есть
f = /3r4 + ar2 + b + cr2 In — + din —.
R R
r
В данном случае надо положить d = О, так как In — обращается при г = 0 в
R
бесконечность, а также с = 0, так как этот член приводит к особой точке у А(
при г = 0 (это соответствовало бы силе, приложенной к центру пластинки, —
см. задачу 3). Постоянные а и Ь определяются из граничных условий ? = О,
— = 0 при г = R. В результате находим
dr
2. То же для пластинки с опертыми краями.
Решение. Граничные условия A2.11) в случае круглой пластинки
приобретают вид
С = о, ^ + ^ = о.
dr r dr
Решение аналогично решению задачи 1 и приводит к результату
3. Определить деформацию круглой пластинки с заделанными краями,
к центру которой приложена сила /.
Решение. Везде, кроме начала координат, имеет место уравнение
Интегрируя, находим
9 9 Г
= ar -\-b + cr In —.
R
(член с In r опять опускаем). Полная сила, действующая на пластинку, равна
силе /, приложенной к ее центру; поэтому интеграл от А ( по поверхности
пластинки должен быть равен
f
2Cdr= —.
D
72 РАВНОВЕСИЕ СТЕРЖНЕЙ И ПЛАСТИНОК ГЛ. II
Отсюда получается с = //(8tt.D). Постоянные а и Ъ определяются из гра-
граничных условий, и в результате находим
8тг?>
4. То же для пластинки с опертыми краями.
Решение.
-г2 21п^
Ср(Яг 1п
16тг?> |_1+сг У г
5. Определить деформацию круглой пластинки, подвешенной в своем
центре и находящейся в поле тяжести.
Решение. Уравнение для ? и его общее решение — такие же, как в
задаче 1. Поскольку в центре смещение С = 0, то с = 0. Постоянные а, Ъ
определяются из граничных условий A2.6) и A2.7), имеющих при круговой
симметрии вид
7 9 " I / ' 79" 7
\ат2 тат) аг2 тат
В результате находим
г 1 + сг
6. От тела отрывается тонкий слой (толщиной h) приложенными к нему
внешними силами, действующими против сил поверхностного натяжения на
поверхности отрыва. При заданных внешних силах устанавливается равно-
равновесие с определенными величиной поверхности отрыва и формой отрывае-
отрываемой пластинки (рис. 5). Вывести формулу, связывающую величину поверх-
поверхностного натяжения с формой отрываемой пластинки.
Решение. Отрываемый слой рассматриваем как пластинку, один из
краев которой (линия отрыва) заделан. Изгибающий момент, действующий
у этого края, определяется формулой
Jn A2.10); работа, производимая этим мо-
моментом при удлинении области отрыва
на Sx, равна
.... _ ^) Sx A)
<9ж <9ж2 \дх2)
рис ^ (работа же изгибающей силы .Р являет-
является малой величиной второго порядка).
Условие равновесия состоит в равенстве этой работы изменению энергии
системы. Последнее складывается из двух частей: изменения поверхност-
поверхностной энергии и изменения упругой энергии отрываемой пластинки за счет
удлинения ее изогнутой части. Первая равна 2aSx, где а — коэффициент
поверхностного натяжения, а множитель 2 учитывает возникновение при
отрыве двух свободных поверхностей. Вторая же часть равна
ЫA-а2)\\дхУ
(энергия A1.6), приходящаяся на длину Sx пластинки), т. е. составляет по-
половину работы A). Таким образом, получим
_ D (д2С\2
а~ Т Vdx'2 J
§ 13 ПРОДОЛЬНЫЕ ДЕФОРМАЦИИ ПЛАСТИНОК 73
§ 13. Продольные деформации пластинок
Особым видом деформаций тонких пластинок являются про-
продольные деформации, происходящие в самой плоскости пластин-
пластинки и не сопровождающиеся ее изгибом. Выведем уравнения рав-
равновесия, описывающие такие деформации.
Если пластинка достаточно тонка, то деформацию можно
считать однородной по ее толщине. Тензор деформации явля-
является при этом функцией только от х и у (плоскость ху выбрана
в плоскости пластинки) и не зависит от z. Продольные дефор-
деформации пластинки вызываются обычно либо силами, приложен-
приложенными к ее краям, либо действующими в плоскости пластинки
объемными силами. Граничные условия на обеих поверхностях
пластинки гласят при этом: о^п^ = 0, или, поскольку вектор
нормали направлен по оси z: Oiz = 0, т. е.
axz = ayz = azz = 0.
Следует, однако, заметить, что в излагаемой ниже приближен-
приближенной теории эти условия остаются в силе и в том случае, ког-
когда растягивающие внешние силы приложены непосредственно к
поверхностям пластинки, так как эти силы все равно будут ма-
малыми по сравнению с возникающими в пластинке продольными
внутренними напряжениями (<тжж, ауу, сху). Будучи равными ну-
нулю на границах, величины aXZi ayZi azz будут малыми и на всем
протяжении малой толщины пластинки, в силу чего мы можем
приближенно считать их равными нулю во всем объеме пластин-
пластинки.
Приравнивая нулю выражения A1.2), получим следующие
соотношения:
uzz = --?—(ихх + иуу), uxz = uyz = 0. A3.1)
1 — а
Подставив их в общие формулы E.13), получаем отличные от
нуля компоненты тензора напряжений в виде
- Е (и +аи )
1 - а2 ХХ УУ '
П — Е (У +П-77 1 A19}
УУ ~ 1 2 У УУ * axx)i yio.z,)
Е
Следует обратить внимание на то, что путем формальной замены
эти выражения переходят в формулы, определяющие связь меж-
между напряжениями aXXl axyi ayy и деформациями uXXl uyyi uzz при
плоской деформации (формулы E.13) с uzz = 0).
74 РАВНОВЕСИЕ СТЕРЖНЕЙ И ПЛАСТИНОК ГЛ. II
После того как мы таким образом исключили вовсе смеще-
смещение uZl мы можем рассматривать пластинку просто как неко-
некоторую двумерную среду (упругая плоскость), не обладающую
толщиной, и говорить о векторе деформации и как о двумерном
векторе с двумя компонентами их и иу. Если Рж, Ру — компо-
компоненты внешней объемной силы, отнесенной к единице площади
пластинки, то общие уравнения равновесия гласят:
^ + ^)+Px 0, h(^ + ^
дх ду ) \ дх ду )
Подставляя сюда выражения A3.2), получаем уравнения равно-
равновесия в виде
2A
2A
1
-а)
1
-а)
д2иу
дхду
д2их~
дхду
1 -а2 дх2 2A+сг) ду2
= 0. A3.4)
1-а2 ду2 2A+(т) дх2
Эти уравнения могут быть написаны в двумерном векторном виде
graddivu — rot rot u = —P —, A3.5)
2 Eh
где все векторные операции понимаются как двумерные.
В частности, в отсутствие объемных сил уравнение равнове-
равновесия гласит:
grad div u — rot rot u = 0. A3.6)
Оно отличается лишь значением коэффициента (в соответствии
с A3.3)) от уравнения равновесия для плоской деформации
неограниченного вдоль оси z тела (§ 7I). Так же как и для
плоской деформации, можно ввести здесь функцию напряже-
напряжения, определенную соотношениями
_ д2Х _ д2х _ д2х (л<\7\
ду2 дхду дх2
автоматически удовлетворяющими уравнениям равновесия, на-
написанным в виде
д°хх , даху _ q даух дауу _ q
д ' д
дх ду ' дх ду
:) Однородную вдоль оси z деформацию, при которой во всем теле azx =
= &zy = &zz = 0, иногда называют плоским напряженным состоянием в
отличие от плоской деформации, при которой во всем теле uzx = uzy =
= uzz = 0.
§ 13 ПРОДОЛЬНЫЕ ДЕФОРМАЦИИ ПЛАСТИНОК 75
Функция напряжений по-прежнему удовлетворяет бигармониче-
скому уравнению, так как для Ах имеем соотношение
тр тр
^X = °хх + Оуу = (ихх + иУу) = div u,
1 — а 1 — а
отличающееся лишь множителем от того, что мы имели для
плоской деформации.
Отметим здесь следующее обстоятельство: распределение на-
напряжений в пластинке, деформируемой приложенными к ее кра-
краям заданными силами, не зависит от упругих постоянных веще-
вещества пластинки. Действительно, эти постоянные не входят ни
в бигармоническое уравнение, которому удовлетворяет функция
напряжений, ни в формулы A3.7), определяющие компоненты
Gik по этой функции (а потому и в граничные условия на краях
пластинки).
3 адачи
1. Определить деформацию плоского диска, равномерно вращающегося
вокруг оси, проходящей через его центр и перпендикулярной к его плоско-
плоскости.
Решение. Искомое решение отличается лишь значениями постоян-
постоянных коэффициентов от полученного в задаче 5 § 7 решения для плоской
деформации вращающегося цилиндра. Радиальное смещение иг = и(г) да-
дается формулой
8Е
Это — выражение, переходящее при замене A3.3) в формулу, полученную в
задаче 5 § 7.
2. Определить деформацию полубесконечной пластинки (с прямолиней-
прямолинейным краем) под влиянием сосредоточенной силы, приложенной к точке края
пластинки и действующей в ее плоскости.
Решение. Вводим полярные координаты с углом ср, отсчитываемым
от направления действия приложенной силы;
он пробегает значения от — (тг/2 + а) до тг/2 —а,
где а — угол между направлением силы и нор-
нормалью к краю пластинки (рис. 6). Во всех точ-
точках свободной границы, за исключением точки \^^^
приложения внешней силы (начало координат), '( |_\ N] \
должны выполняться условия сгрр = аГр = ( i \ \ а\ J \
= 0. Воспользовавшись выражениями для а^^ \ ч^.—-
11 § 7
\
/
и аГр, полученными в задаче 11 § 7, найдем, что \ i ^ч ,
для этого функция напряжений должна удовле- \ \|
творять условиям
— = const, — = const при ш = =F а. Рис- 6
дг г dip 2
Оба эти условия выполняются, если \ = rf((f)- При такой подстановке би-
гармоническое уравнение
гдг \ дг) dtp2
76 РАВНОВЕСИЕ СТЕРЖНЕЙ И ПЛАСТИНОК ГЛ. II
дает для f(ip) решения вида sin ip, cos 9?, ip sin 92, ip cos ip. Из них первые два
фиктивны, так как приводят к тождественно равным нулю напряжениям.
Решение, дающее правильное значение приложенной в начале координат
силы: „ „
F 2F cos if
X = r<^sm<?, crrr = , (Trip = о>^ = 0 A)
(F — значение силы, отнесенное к единице толщины пластинки). Действи-
Действительно, проецируя силы внутренних напряжений на направления, парал-
параллельное и перпендикулярное к силе F, и интегрируя по малой полуокруж-
полуокружности с центром в начале координат (радиус которой можно представить
себе стремящимся затем к нулю), получим
/ arr cos ifrdif = —F, / (Trr sin ipr dip = 0,
т. е. как раз те значения, которые компенсируются приложенной в начале
координат внешней силой.
Формулы A) определяют искомое распределение напряжений. Оно ока-
оказывается чисто радиальным: на всякую площадку, перпендикулярную к ра-
радиусу, действует только радиальная сжимающая сила. Линиями равных на-
напряжений являются окружности г = d cos if, проходящие через начало ко-
координат и имеющие центры на прямой, вдоль которой действует сила F
(рис. 6).
Компоненты тензора деформации
(Trr CF
Urr = , U (р(р = &ГГ-, Urip = U.
Е Е
Отсюда интегрированием (с помощью выражений A.8) для компонент Щк в
полярных координатах) можно найти вектор смещения:
2F , г (l-a)F .
ur = cos ip In —ipsm if,
тгЕ а тгЕ
2aF . 2F r . (l-a)F, .
Um = sin if) -\ In — sin ip + — (sin ip — ip cos ip).
тгЕ тгЕ а тгЕ
Постоянные интегрирования выбраны здесь таким образом, чтобы исклю-
исключить перемещение (перенос или поворот) пластинки как целого; именно,
предполагается несмещенной некоторая условно выбранная точка, находя-
находящаяся на расстоянии а от начала координат на линии действия силы.
С помощью полученного решения можно построить решение для про-
произвольного распределения сил, действующих на край пластинки (ср. § 8).
Само по себе оно, разумеется, неприменимо в непосредственной окрестности
начала координат.
3. Определить деформацию бесконечной клиновидной пластинки (с уг-
углом 2а при вершине) под влиянием силы, приложенной к ее вершине.
Решение. Распределение напряжений определяется формулами, от-
отличающимися от полученных в предыдущей задаче лишь нормировкой. Ес-
Если сила действует вдоль средней линии клина (сила F\ на рис. 7), то имеем
_ F\ cos if _ _
сг — —— сг — cr — (j.
r(a + (l/2)sin2a)
Если же сила действует в перпендикулярном направлении (i^ на рис. 7), то
_ F2 cos if
Grr ~ ~r(a-A/2) sin 2a)"
В каждом из этих двух случаев угол ip отсчитывается от соответствующего
направления действия силы.
13
ПРОДОЛЬНЫЕ ДЕФОРМАЦИИ ПЛАСТИНОК
77
4. Определить деформацию круглого диска (радиуса Л), сжатого двумя
равными и противоположными силами Fh, приложенными к двум концам
диаметра (рис. 8).
Рис. 7
Рис. 8
Решение. Решение задачи получается путем наложения трех распре-
распределений внутренних напряжений. Два распределения:
2F cos (pi
СГглгл — —-
гB) -
7Г П
2F cos(p2
7Г Г2
.A) -
тB) - ^B)
= о,
где п, (fi и Г2, <^2 — полярные координаты произвольной точки Р с началами
соответственно в точках А л В (это есть напряжения, которые возникли бы
от нормальной силы F, приложенной к точке на границе полуплоскости, см.
задачу 2). Третье распределение
представляет собой равномерное растяжение определенной интенсивности.
Действительно, если точка Р лежит на окружности края диска, то для нее
ri = 2Rcoscpi, Г2 = 2Rcos(p2, так что
ТГ/ь
Поскольку направления ri и Г2 в этой точке взаимно перпендикулярны, то
мы видим, что первые две системы напряжений приводят на краю диска
к равномерному сжатию; эти силы как раз компенсируются равномерным
растяжением третьей системы, так что край диска оказывается, как и сле-
следовало, свободным от напряжений.
5. Определить распределение напряжений в неограниченной пластинке
с круглым отверстием (радиуса Я), подвергаемой равномерному растяже-
растяжению.
Решение. Равномерному растяжению сплошной пластинки соответ-
соответствуют напряжения aiJ = Т, а у у = сгху =0, где Т — растягивающая сила.
78 РАВНОВЕСИЕ СТЕРЖНЕЙ И ПЛАСТИНОК ГЛ. II
Им отвечает функция напряжений
/q\ _/ 2 J. о • 2 1 2
X - -J/ - -г sin if - - г A - cos 2ip).
При наличии круглого отверстия (с центром в начале полярных координат
г, ф) ищем функцию напряжений в виде
X = Х@) + ХA), ХA) = /W + F(r) cos 2<p.
Не зависящий от <р интеграл бигармонического уравнения имеет вид
f(r)=ar \nr-\-br +clnr,
а в интеграле, пропорциональном cos 2cp:
F{r)=dr2 + erA + ^-.
г2
Входящие сюда постоянные определяются условиями а^к = 0 при г = оо и
а г г = (Тгр =0 при г = R. В результате получим
2
и распределение напряжений определяется так:
2Л2 ЗЛ4
В частности, на границе отверстия сг^^ = ТA — 2 cos 2^), а при 9? = ±тг/2
сг^^ = ЗТ, т. е. в три раза превосходит напряжения на бесконечности (ср.
задачу 12 § 7).
§ 14. Сильный изгиб пластинок
Изложенная в § 11—13 теория изгиба тонких пластинок при-
применима лишь к достаточно слабым изгибам. Забегая вперед, ука-
укажем уже здесь, что условием применимости этой теории явля-
является малость прогиба ( по сравнению с толщиной h пластин-
пластинки. Теперь мы перейдем к выводу уравнений равновесия сильно
изогнутой пластинки. Прогиб ? при этом уже не предполагает-
предполагается малым по сравнению с h. Подчеркиваем, однако, что самая
деформация по-прежнему должна быть мала в том смысле, что
тензор деформации должен быть мал. Практически это обыч-
обычно означает требование ? <С /, т. е. прогиб должен быть мал по
сравнению с размерами / пластинки.
§ 14 СИЛЬНЫЙ ИЗГИБ ПЛАСТИНОК 79
Изгиб пластинки сопровождается, вообще говоря, ее общим
растяжением г). В случае слабого изгиба этим растяжением мож-
можно пренебречь. При сильном же изгибе этого уже отнюдь нельзя
сделать; в сильно изогнутой пластинке не существует поэтому
никакой «нейтральной поверхности». Наличие растяжения, со-
сопровождающего изгиб, является специфической особенностью
пластинок, отличающей их от тонких стержней, которые могут
быть подвергнуты сильному изгибу, не испытывая при этом об-
общего растяжения. Это свойство пластинок является чисто гео-
геометрическим. Пусть, например, плоская круглая пластинка изги-
изгибается в поверхность шарового сегмента. Если произвести изгиб
так, чтобы длина окружности осталась неизменной, то должен
растянуться ее диаметр. Если же диаметр пластинки не растя-
растягивается, то должна сжаться ее окружность.
Вычисленная в § 11 энергия A1.6), которую можно назвать
энергией чистого изгиба, представляет собой лишь ту часть пол-
полной энергии, которая обусловлена неравномерностью растяже-
растяжения и сжатия вдоль толщины пластинки при отсутствии какого-
либо полного ее растяжения. Наряду с этой энергией в полную
энергию входит еще часть, обусловленная как раз наличием это-
этого общего растяжения; ее можно назвать энергией растяжения.
Деформации чистого изгиба и чистого растяжения были рас-
рассмотрены соответственно в § 11, 12 и 13. Поэтому теперь мы
можем непосредственно воспользоваться полученными там ре-
результатами. При этом отпадает необходимость в рассмотрении
структуры пластинки по ее толщине, и мы можем сразу рассма-
рассматривать пластинку как двумерную поверхность, не обладающую
толщиной.
Предварительно выведем выражение для тензора деформа-
деформации, определяющего растяжение пластинки (рассматриваемой
как поверхность), подвергнутой одновременному изгибу и ра-
растяжению в своей плоскости. Пусть и есть двумерный вектор
смещения (с компонентами их, иу) при чистом растяжении; (
по-прежнему обозначает поперечное смещение при изгибе. Тог-
Тогда элемент длины dl2 = dx2-\-dy2 недеформированной пластинки
перейдет после деформации в элемент dl\ квадрат которого равен
dl'2 = (dx + duxJ + (dy + duyJ + dB.
Написав здесь dux — —-dx + —-dy и аналогично для duv и d(,
dx dy
получим с точностью до членов более высокого порядка
dl'2 = dl2 + 2г
) Исключением является, например, изгиб плоской пластинки в цилин-
цилиндрическую поверхность.
80 РАВНОВЕСИЕ СТЕРЖНЕЙ И ПЛАСТИНОК
где двумерный тензор деформации определяется как
(В этом и следующем параграфах мы будем обозначать грече-
греческими буквами индексы, пробегающие всего два значения хну;
по дважды повторяющимся индексам, как всегда, подразумева-
подразумевается суммирование.) Члены, квадратичные по производным от
иа, здесь опущены; с производными от ( то же самое сделать,
разумеется, нельзя, поскольку членов первого порядка по ним
вообще не имеется.
Тензор напряжений сгар, связанный с растяжением пластин-
пластинки, определяется формулами A3.2), в которые вместо иар надо
подставить полный тензор деформации, определяемый согласно
формуле A4.1). Энергия чистого изгиба определяется формулой
A1.6), которую мы напишем условно в виде
где Ф].(С) обозначает все выражение, стоящее под интегралом
A1.6). Энергия же растяжения, отнесенная к единице объема
пластинки, есть, согласно общим формулам, иа^аа^/2. Энергия,
приходящаяся на единицу поверхности, получается отсюда умно-
умножением на /г, так что полная энергия растяжения может быть
написана в виде
где
Ф2 = b^^S-. A4.2)
Таким образом, полная свободная энергия сильно изогнутой пла-
пластинки есть
^пл= /[*l(C) + *2(«^)]rf/- A4-3)
Раньше чем перейти к выводу уравнений равновесия, оценим обе
части энергии. Первые производные от ? — порядка ?//, где I —
размеры пластинки, а вторые — порядка (/I2. Поэтому из A1.6)
видно, что Фх ~ Eh?С?у/4:. Порядок же величины тензора иар
есть B//2, и потому Ф2 ~ Eh^/l4. Сравнение обоих этих выра-
выражений показывает, что пренебрежение Ф2, делаемое в прибли-
приближенной теории изгиба пластинок, законно только при условии
С2« ь2.
Условие минимальности энергии гласит: SF + SU = 0, где U —
потенциальная энергия в поле внешних сил. Мы будем считать,
что действием внешних растягивающих сил, если таковые име-
имеются, можно пренебречь по сравнению с силами изгибающими.
§ 14 СИЛЬНЫЙ ИЗГИБ ПЛАСТИНОК 81
(Это можно всегда сделать, если только растягивающие силы не
слишком велики, поскольку тонкая пластинка гораздо легче под-
подвергается изгибу, чем растяжению.) Тогда для SU имеем то же
выражение, что и в § 12:
где Р — внешняя сила, отнесенная к единице поверхности пла-
пластинки. Вариация интеграла Г ^\df была уже вычислена в § 12
и равна
Интегралы по контуру, стоящие в формуле A2.3), мы не пишем,
поскольку они определяют не само уравнение равновесия, а толь-
только граничные условия к нему, которыми мы не станем здесь ин-
интересоваться.
Наконец, вычислим вариацию интеграла / Ф2^/- Варьиро-
Варьирование в нем должно производиться как по компонентам вектора
и, так и по ?. Имеем
uaf3
Производные от свободной энергии единицы объема по иар
равны сгар] поэтому д^2/диа^ = haa^. Подставляя также для
иар выражение A4.1), получаем
S / Ф2 rf/ = h aaC 6uaC df =
j j
_ h f / ддиа дди/з ОС, 05С, 05С, ОС, \ А?
— — / ааC л -^— + "^— -г т;—т;— + т;—т;— f Ц/?
2 J [ охр дха дха охр дха охр )
или ввиду симметричности
6
[<H2df = h [aa
J J J al
dx0 dxa
Интегрируя теперь по частям, получаем
Интегралы по контуру, огибающему поверхность пластинки, мы
опять не пишем.
Сводя вместе все полученные выражения, имеем
<5FnjI + SU =
Up^) P]S( h^SuAdf = 0.
OX/3 J J
82 РАВНОВЕСИЕ СТЕРЖНЕЙ И ПЛАСТИНОК ГЛ. II
Для того чтобы это соотношение имело место тождественно, дол-
должны обращаться в нуль отдельно коэффициенты при 5( и при
5иа. Таким образом, получаем систему уравнений
д(Та* = 0. A4.5)
В эту систему входят в качестве неизвестных функций три
величины: две компоненты их, иу вектора и и поперечное сме-
смещение ?. Ее решение определяет одновременно форму изогнутой
пластинки (т. е. функцию С (ж, у)) и возникающее в результате из-
изгиба растяжение. Уравнения A4.4) и A4.5) могут быть несколько
упрощены посредством введения в них функции %, связанной с
аар соотношениями A3.7). После подстановки A3.7) в уравнение
A4.4) оно приводится к виду
t|4 + |l|i-2^L^-)=P. A4.6)
у2 дх2 ох2 ду2 дхдудхду/
Что касается уравнений A4.5), то выражениями A3.7) они удо-
удовлетворяются автоматически. Поэтому необходимо вывести еще
одно уравнение, которое может быть получено исключением иа
из соотношений A3.7) и A3.2).
Для этого поступаем следующим образом. Выражаем иар че-
через <7ар. Из A3.2) получаем
— —( — \ — —( — \ — 1 + (Т
ихх — ~\&хх Wyy)-) иуу — ~^\Оуу Wxx)-) иху — ~ &ху
hi hi hi
Подставляя сюда для иа$ выражение A4.1), а для аар — выра-
выражения A3.7), находим равенства
дх 2\dxJ
ду 2\ду) Е\дх2 ду
дих диу_ ^С ^С _ 2A+ (г) д2х
дх ду дх ду Е дх ду
Применим к первому равенству операцию д2/ду2, ко второму
д2/дх21 к третьему д2/дхду1 после чего сложим первое равен-
равенство со вторым и вычтем третье. Тогда члены, содержащие их и
иу, взаимно сокращаются, и мы получаем уравнение
§ 15 СИЛЬНЫЙ ИЗГИБ ПЛАСТИНОК 83
Уравнения A4.6) и A4.7) представляют собой полную систему
уравнений сильного изгиба тонких пластинок (A. Foppl, 1907).
Эти уравнения весьма сложны и не могут быть решены точно
даже в простейших случаях. Обращаем внимание на то, что они
нелинейны.
Упомянем коротко об особом случае деформаций тонких пла-
пластинок — о так называемых мембранах. Мембраной называют
тонкую пластинку, подвергнутую сильному растяжению прило-
приложенными к ее краям внешними растягивающими силами. В та-
таком случае можно пренебречь дополнительными продольными
натяжениями, возникающими при изгибе пластинки, и соответ-
соответственно этому можно считать, что компоненты тензора аар рав-
равны просто постоянным внешним растягивающим напряжениям.
В уравнении A4.4) можно теперь пренебречь первым членом по
сравнению со вторым, и мы получаем уравнение равновесия
Щ Р = 0 A4.8)
с граничным условием ( = 0 на контуре края мембраны. Это
уравнение линейно. В особенности прост случай изотропного ра-
растяжения, когда натяжение мембраны одинаково по всем направ-
направлениям. Пусть Т есть абсолютная величина приложенной к краю
пластинки растягивающей силы, отнесенной к единице длины
этого края. Тогда haa^ = T6a^ и мы получаем уравнение рав-
равновесия в виде
ТА( + Р = 0. A4.9)
3 адачи
1. Определить зависимость величины прогиба пластинки от действую-
действующей на нее силы при изгибе настолько сильном, что ? ^> h.
Решение. Оценка членов уравнения A4.7) показывает, что х ~ ЕС?.
При ? ^> h первый член в A4.6) мал по сравнению со вторым, который имеет
порядок величины hC,x/^A ~ EhC?/1А (I — размеры пластинки). Сравнивая с
внешней силой Р, получаем
Eh
Отсюда, в частности, видно, что ? пропорционально кубическому корню из
силы.
2. Определить деформацию круглой мембраны (радиуса R), располо-
расположенной горизонтально в поле тяжести.
Решение. Имеем Р = pgh] в полярных координатах A4.9) принимает
вид
(Г
rdr\ dr
Решение, конечное при г = 0 и удовлетворяющее условию ? = 0 при г = R,
есть
4Г
84 РАВНОВЕСИЕ СТЕРЖНЕЙ И ПЛАСТИНОК ГЛ. II
§ 15. Деформации оболочек
Говоря до сих пор о деформациях тонких пластинок, мы все-
всегда подразумевали, что в недеформированном состоянии пла-
пластинка является плоской. Между тем деформации пластинок,
обладающих в своем естественном состоянии искривленной фор-
формой (такие пластинки называют оболочками), обнаруживают
особенности, принципиально отличающие их от деформаций
плоских пластинок.
Растяжение, сопровождающее изгиб плоской пластинки, яв-
является эффектом второго порядка малости по сравнению с ве-
величиной самого прогиба. Это проявляется, например, в том,
что тензор деформации A4.1), определяющий такое растяжение,
квадратичен по ?. Совершенно иное положение имеет место при
деформациях оболочек: здесь растяжение есть эффект первого
порядка и потому играет существенную роль даже при слабом
изгибе. Проще всего это свойство видно уже из самого простого
примера равномерного растяжения сферической оболочки. Если
все ее точки подвергаются одинаковому радиальному смещению
С, то увеличение длины экватора равно 2тг?. Относительное ра-
растяжение 2тг?/'BтгД) = С/Д, а потому и тензор деформации про-
пропорционален первой степени ?. Этот эффект стремится к нулю
при R —>• оо, т. е. при стремлении кривизны к нулю, и является,
таким образом, специфическим свойством, связанным с кривиз-
кривизной оболочки.
Пусть R есть порядок величины радиуса кривизны обо-
оболочки, совпадающей обычно с порядком величины ее разме-
размеров. Тогда тензор деформации растяжения, сопровождающего
изгиб, — порядка ?/Д, соответствующий тензор напряжений
~ E?/R, а энергия деформации (отнесенная к единице площа-
площади), согласно A4.2), ~ Eh((/RJ. Энергия же чистого изгиба
по-прежнему ~ Eh^^/R4". Мы видим, что отношение первой ко
второй ~ (i?//iJ, т. е. очень велико. Подчеркнем, что это имеет
место независимо от соотношения между величиной ? изгиба и
толщиной /г, в то время как при изгибе плоских пластинок ра-
растяжение начинало играть роль только при ? ~ h.
В некоторых случаях может существовать особый тип изги-
изгиба оболочек, при котором никакого растяжения не происходит
вовсе. Так, например, цилиндрическая оболочка (с открытыми
обоими концами цилиндра) может быть деформирована без ра-
растяжения, если все образующие цилиндра остаются при изгибе
параллельными друг другу (т. е. оболочка как бы вдавливает-
вдавливается по какой-нибудь из образующих). Такие деформации без ра-
растяжения геометрически возможны, если оболочка имеет свобод-
свободные края (т. е. не замкнута) или же если оболочка замкнута, но
ее кривизна в разных местах имеет разный знак. Например, за-
§ 15 ДЕФОРМАЦИИ ОБОЛОЧЕК 85
мкнутая сферическая оболочка не может быть изогнута без ра-
растяжения, если же в ней прорезано отверстие (причем его края
не закреплены), то такие деформации становятся возможными.
Поскольку энергия чистого изгиба мала по сравнению с энерги-
энергией растяжения, то ясно, что если данная оболочка допускает де-
деформации без растяжения, то именно такие деформации и будут,
вообще говоря, реально осуществляться при воздействии на нее
произвольных внешних сил. Требование отсутствия растяжения
при изгибе накладывает существенные ограничения на возмож-
возможные смещения иа. Эти условия являются чисто геометрическими
и могут быть выражены в виде дифференциальных уравнений,
которые должны содержаться в полной системе уравнений рав-
равновесия для таких деформаций. Мы не будем здесь останавли-
останавливаться на этом вопросе.
Если же деформация оболочки сопровождается растяжени-
растяжением, то напряжения растяжения, вообще говоря, велики по срав-
сравнению с напряжениями изгиба и последними можно пренебречь
(основанную на таком пренебрежении теорию оболочек называ-
называют мембранной).
Энергия растяжения оболочки может быть вычислена как ин-
интеграл
^пл = - / Ua/ЗСГа/З df', A5.1)
взятый по ее поверхности. Здесь иар есть двумерный (а, /3 =
= 1, 2) тензор деформации в соответствующих криволинейных
координатах, а тензор напряжений аар связан с иар формулами
A3.2), которые могут быть написаны в двумерных тензорных
обозначениях как
К1
Особого рассмотрения требует случай, когда оболочка под-
подвержена воздействию сосредоточенных сил в поперечном к обо-
оболочке направлении. Такими силами могут являться, в частности,
силы реакции, действующие на оболочку со стороны опор в точ-
точках (или линиях) закрепления. Сосредоточенные силы произво-
производят изгиб оболочки в небольшой области вокруг точек их прило-
приложения. Пусть порядок величины этой области для приложенной
в точке силы / есть d (так что ее площадь ~ d2). Поскольку из-
изгиб ? сильно меняется на протяжении расстояний с/, то энергия
изгиба (на единицу площади) — порядка величины Eh3B/dA, a
полная энергия изгиба (на площади ~ d2) ~ EhsB/d2. Тензор же
деформации растяжения по-прежнему ~ С/^о и полная энергия
вызванного сосредоточенной силой растяжения ~ Eh((^/RJ d2.
Поскольку энергия изгиба растет, а энергия растяжения падает с
уменьшением с/, то ясно, что при определении деформации вбли-
86 РАВНОВЕСИЕ СТЕРЖНЕЙ И ПЛАСТИНОК ГЛ. II
зи места приложения сосредоточенных сил должны быть учте-
учтены обе эти энергии. Величина области изгиба d определится по
порядку величины из условия минимума суммы этих энергий,
откуда
d ~ VhR. A5.3)
При этом энергия ~ Eh2B/R. Варьируя ее по ( и приравнивая
работе силы /, найдем величину прогиба ( ~ fR/Eh2.
Однако если действующие на оболочку силы достаточно ве-
велики, то в оболочке могут возникнуть выпучивания, существенно
меняющие ее форму. Определение деформации в зависимости от
приложенных нагрузок требует в этом своеобразном случае спе-
специального исследования 1).
Пусть выпуклая оболочка (с краями, закрепленными так, что-
чтобы гарантировать ее геометрическую несгибаемость) находит-
находится под действием большой сосредоточенной силы f, направлен-
направленной по внутренней нормали к поверхности. Для простоты будем
считать, что оболочка представляет собой часть сферы радиуса
R. Область выпучивания будет шаровым сегментом, близким к
зеркальному изображению его первона-
первоначальной формы (на рис. 9 изображен ме-
меридиональный разрез оболочки). Задача
состоит в определении размеров выпучи-
выпучивания в зависимости от величины силы.
Основная часть упругой энергии
сконцентрирована в узкой полосе вбли-
вблизи края области выпучивания, где изгиб
оболочки сравнительно велик (будем на-
называть ее полосой изгиба и обозначим ее
ширину через d). Оценим эту энергию,
причем будем предполагать размеры (ра-
(радиус) области выпучивания г<й; тогда
угол ск < 1 (см. рис. 9). При этом г =
Рис. 9 = Rs'ma ~ Ra, а глубина прогиба Н =
= 2RA — cos a) ~ Ra2. Обозначим че-
через ? смещение точек оболочки в полосе изгиба. Точно так же,
как это было сделано выше, находим, что энергия изгиба вдоль
меридиана и растяжения вдоль параллели 2), отнесенные к 1 см2
г) Излагаемые ниже результаты принадлежат А.В. Погорелову A960). Бо-
Более точный анализ данного вопроса, а также другие аналогичные задачи,
можно найти в его книге «Теория оболочек при закритических деформаци-
деформациях». — М.: Наука, 1965.
2) На изгибе по меридиану кривизна оболочки в первом приближении
не сказывается, так что он происходит, как и при цилиндрическом изгибе
плоской пластинки, без общего растяжения по меридиану.
§ 15 ДЕФОРМАЦИИ ОБОЛОЧЕК 87
поверхности, по порядку величины равны соответственно
EhsB EhB
— и ——.
d4 В?
Порядок величины смещения ( определяется в данном случае
геометрически: направление меридиана меняется на ширине d на
угол ~ а, и потому ( ~ ad ~ rd/R. Умножив также на площадь
полосы изгиба (~ rd), получим энергии
Eh3r3 Ehd3r3
B?d И Я4
Из условия минимальности их суммы снова найдем d ~ (/ii?I/2,
а полная упругая энергия при этом ~ Er3(h/RM/2 или, иначе х),
const -Eh5/2 — . A5.4)
R v y
В произведенном выводе подразумевалось, что d <С г; поэтому
формула A5.4) справедлива при условии
^ « 1. A5.5)
При образовании выпучивания внешние слои шарового сегмен-
сегмента становятся внутренними и соответственно сжимаются, а вну-
внутренние — внешними и растягиваются. Относительное растяже-
растяжение (или сжатие) ~ h/R, так что связанная с ним полная энергия
в области выпучивания ~ E(h/RJhr2. При условии A5.5) она
действительно мала по сравнению с энергией в полосе изгиба
A5.4).
Искомая зависимость между глубиной прогиба Н и прило-
приложенной силой / получится приравниванием / к производной от
энергии A5.4) по Н. Таким образом, найдем
f2 р2
UL A5.6)
Обратим внимание на нелинейный характер этой зависимости.
Наконец, пусть деформация (выпучивание) оболочки проис-
происходит под действием равномерного внешнего давления р. Работа
внешних сил в таком случае равна р AV, где AV ~ Hr2 ~ H2R —
изменение ограничиваемого оболочкой объема при выпучивании.
Приравняв нулю производную по Н от полной свободной энер-
энергии (т. е. упругой энергии A5.4) за вычетом указанной работы),
получим
5 2
1) Более точное вычисление дает для постоянного коэффициента значение
const = 1, 2A — сг2)-3/4.
РАВНОВЕСИЕ СТЕРЖНЕЙ И ПЛАСТИНОК
Обратный характер зависимости (увеличение Н при уменьше-
уменьшении р) указывает на неустойчивость выпученного состояния в
этом случае. Определяемое формулой A5.7) значение Н отвеча-
отвечает неустойчивому равновесию при заданном р: выпучивания с
большими значениями Н самопроизвольно растут, а с меньши-
меньшими — уменьшаются (легко проверить, что A5.7) отвечает мак-
максимуму, а не минимуму полной свободной энергии). Существует
такое критическое значение внешней нагрузки р = ркр, за кото-
которым самопроизвольно возрастают уже малые изменения формы
оболочки. Его можно оценить как то значение р, при котором
формула A5.7) дает Н ~ h:
Ркр ~ — • A5.8)
Мы ограничимся в теории оболочек изложенными краткими
сведениями и некоторыми простыми примерами, приведенными
в задачах к этому параграфу.
3 адачи
1. Вывести уравнения равновесия для сферической оболочки (радиуса
Я), деформируемой симметрично относительно оси, проходящей через ее
центр.
Решение. В качестве двумерных координат на поверхности оболочки
пользуемся углами 9, (р сферической системы координат с началом в центре
сферы и полярной осью по оси симметрии деформированной оболочки.
Пусть Рг — отнесенная к единице поверхности оболочки радиальная
внешняя сила. Эта сила должна компенсироваться радиальной равнодей-
равнодействующей сил внутренних напряжений, действующих на элемент оболочки
в тангенциальных к нему направлениях. Соответствующее условие гласит:
— ((Т<р<р +(Тбб) = Рг- A)
К
Это уравнение в точности аналогично известному уравнению Лапласа, опре-
определяющему разность давлений двух сред, связанную с действующим в по-
поверхности их раздела поверхностным напряжением.
Пусть, далее, Qz@) есть направленная вдоль полярной оси (оси z) рав-
равнодействующая всех внешних сил, действующих на часть оболочки, распо-
расположенную над параллельным кругом в = const. Эта сила должна компен-
компенсироваться проекцией на ось z напряжений 27rRsm 6haee, действующих на
сечение 2тгЯ/г sin в оболочки по указанной окружности. Отсюда
2тгRhsin2 баев = Qz{0). B)
Уравнениями A) и B) определяется распределение напряжений, после
чего тензор деформации находится по формулам
иве = —(сев — о-о-рр), и^ = — (сг<^ — сгсгев), Щ^> = 0, C)
Е Е
а затем вектор смещения с помощью уравнений
1 (due \ 1 / , л , ч
( + Ь {t6 + )
1; ( Т7Г + иг Ь u<pv {U6ctg6 + Ur). D)
К \ аи I К
15
ДЕФОРМАЦИИ ОБОЛОЧЕК
89
2. Определить деформацию под влиянием собственного веса полусфе-
полусферической оболочки, расположенной куполом вверх; края купола свободно
перемещаются по горизонтальной опоре (рис. 10).
Решение. Имеем
Рг = -pgh cos 0, Qz = -2тгЯ2A - cos 9)pgh
(Qz есть полный вес оболочки над окружностью 9 = const). Из A) и B)
находим
Rpg
1 + cos 9'
1 + COS 9
- COS0
По формулам C) вычисляем и^ и гб##, после чего из уравнений D) вычисля-
вычисляем ив и иг (постоянная, возникающая при интегрировании первого из этих
уравнений, определяется так, чтобы при 9 = тг/2 было щ =0). В результате
получим
R2pg{l
1-
cos 9
1 + cos 9
2 + a
1 .
+ In (I + cos в) sin 6>,
cos в — cos ^ In A + cos t
E L 1+cr
Значение иг при 9 = тг/2 дает горизонтальное смещение опоры
Ре
Рис. 10
Рис. 11
3. Определить деформацию полусферической оболочки с закреплен-
закрепленными краями, расположенной куполом вниз и наполненной жидкостью
(рис. 11); весом самой оболочки можно пренебречь по сравнению с весом
жидкости.
Решение. Имеем
Pr = pogRcos9,
г cos 0 sin 9 d9 =
-(l-cos3(9)
Qz =
(po — плотность жидкости). Далее, по формулам A) и B) находим
_ R2pog 1 - cos3
~ ~3/i sin26>
_ R2pog (-1 + 3 cos 9 - 2 cos3 9)
3h
sin2 9
90 РАВНОВЕСИЕ СТЕРЖНЕЙ И ПЛАСТИНОК
Для смещений получается
tfW(l + °) sinв r_cgsg_ cqs
ЗЖ Ll + cos(9 V
3Eh [ V J 1+crJ
При 0 = тг/2 иг остается конечным, а не обращается в нуль, как должно
было быть. Это значит, что в действительности вблизи линии закрепления
оболочки происходит настолько сильный ее изгиб, что полученное решение
становится неприменимым.
4. Оболочка в виде шарового сегмента опирается своими свободными
краями на неподвижную опору (рис. 12). Определить величину ее прогиба
под действием собственного веса Q.
Решение. Основная деформация проис-
происходит вблизи краев, отгибающихся в сторону
(штриховая линия на рис. 12). При этом сме-
смещение щ мало по сравнению с радиальным сме-
смещением иг = С,- Поскольку ? быстро убывает по
мере удаления от линии опоры, то возникающую
деформацию можно рассматривать как дефор-
деформацию плоской длинной (длины 2'kRsuiol) пла-
пластинки. Эта деформация складывается из из-
изгиба и растяжения пластинки. Относительное
рис 22 удлинение пластинки в каждой ее точке равно
C/R (R — Радиус оболочки), и потому энергия
растяжения (на единицу объема) есть ЕС, /2R . Вводя в качестве независи-
независимой переменной расстояние х от линии опоры, имеем для полной энергии
растяжения
2R?
Энергия же изгиба есть
Варьируя сумму ^Пл = ^шл + i*2im по ?, получим уравнение
dx1 + h?R? C = °"
При х -Л оо С должно стремиться к нулю, а при х = 0 должны выполняться
граничные условия равенства нулю момента сил: С," = 0, и условие равен-
равенства развивающейся при изгибе силы нормальной к поверхности оболочки
компоненте силы тяжести:
l3 тр
27rRsma С1" = Qcosa.
12A-сг2)
Удовлетворяющее этим условиям решение есть
где
„= [3A-a2)]174 A=Qctga
h?R? \ Eh V 8тг/г3
Величина прогиба оболочки есть
d = ?@) cos a = A cos a.
§ 16 КРУЧЕНИЕ СТЕРЖНЕЙ 91
§ 16. Кручение стержней
Перейдем теперь к изучению деформаций тонких стержней.
Этот случай отличается от всех ранее рассматривавшихся тем,
что вектор смещения и может быть большим даже при слабой
деформации, т. е. при малом тензоре щ^ 1). Так, при слабом сги-
сгибании тонкого длинного стержня его концы могут значительно
переместиться в пространстве, даже если относительные смеще-
смещения соседних точек в стержне малы.
Существует два типа деформаций стержней, могущих сопро-
сопровождаться большим смещением отдельных частей стержня. Од-
Одним из них является изгиб стержня, а вторым — его кручение. С
рассмотрения этого второго случая мы и начнем.
Деформация кручения заключается в том, что в стержне,
остающемся при этом прямым, каждое поперечное сечение по-
поворачивается относительно ниже лежащих на некоторый угол.
Если стержень длинный, то при слабом кручении достаточно
удаленные друг от друга сечения могут повернуться на большой
угол. Образующие боковой поверхности стержня, параллельные
его оси, приобретают при кручении винтовую форму.
Рассмотрим тонкий прямой стержень произвольного сечения.
Выберем систему координат с осью z вдоль оси стержня и нача-
началом координат где-нибудь внутри него. Введем угол кручения т
как угол поворота, отнесенный к единице длины стержня. Это
значит, что два бесконечно близких поперечных сечения, нахо-
находящихся на расстоянии dz, поворачиваются друг относительно
друга на угол dcp = r dz (так что т = dcp/dz). Сама дефор-
деформация кручения, т. е. относительные смещения соседних частей
стержня, предполагаются малыми. Условием этого является ма-
малость относительного поворота сечений, удаленных вдоль длины
стержня на расстояния порядка его поперечных размеров i?, т. е.
тД<1. A6.1)
Рассмотрим небольшую область длины стержня вблизи на-
начала координат и определим смещения и точек стержня в этой
области. В качестве несмещенного выберем поперечное сечение
стержня в координатной плоскости ху. Как известно, при по-
повороте радиус-вектора г на малый угол Sip смещение его конца
определяется формулой
5г = [5срт], A6.2)
где Sip — вектор с абсолютной величиной, равной углу поворота,
направленный вдоль оси, вокруг которой производится поворот.
г) Исключением является только простое растяжение стержня без изме-
изменения его формы, — при слабом растяжении наряду с тензором Щк всегда
мал также и вектор и.
92 РАВНОВЕСИЕ СТЕРЖНЕЙ И ПЛАСТИНОК ГЛ. II
В нашем случае поворот производится вокруг оси z, причем для
точек с координатой z угол поворота относительно плоскости ху
равен rz (угол т в области вблизи начала координат можно рас-
рассматривать как постоянный). Формула A6.2) дает теперь для
компонент иХ1 иу вектора смещения
их = —Tzy, иу = rzx. A6.3)
При кручении стержня его точки испытывают, вообще гово-
говоря, также и смещение вдоль оси z. Поскольку при т = 0 это
смещение отсутствует, то при малых т его можно считать про-
пропорциональным т. Таким образом,
uz = тф(х,у), A6.4)
где ф(х,у) — некоторая функция от ж и у, называемая функцией
кручения. В результате описываемой формулами A6.3) и A6.4)
деформации каждое поперечное сечение стержня поворачива-
поворачивается вокруг оси z, одновременно искривляясь, переставая быть
плоским. Следует заметить, что, выбрав определенным образом
начало координат в плоскости ху, мы тем самым «закрепляем»
определенную точку сечения стержня так, что она не смещается
в этой плоскости (смещаясь, однако, вдоль оси z)\ изменение вы-
выбора начала координат не отразилось бы, разумеется, на самой
деформации кручения, приведя лишь к несущественному обще-
общему смещению стержня как целого.
Зная и, можно найти компоненты тензора деформации. По-
Поскольку и в рассматриваемой области мало, то можно восполь-
воспользоваться формулой Щк = - ( —— + —— ) • В результате находим
2 \дхк dxi J
г (дф \ т(дф , \ A6'5)
uxz = - —- — у , uyz = - —- + х .
XZ 2\дх У)' yZ 2\ду )
Обращаем внимание на то, что ии = 0; другими словами, кру-
кручение не сопровождается изменением объема, т. е. представляет
собой деформацию чистого сдвига.
Для компонент тензора напряжений находим
г\
о (дф \ о (дф , \ A6*6)
oxz — l\iuxz = /ir I — — у I , avz = 2fiuvz = firl —^ +x
(здесь удобнее пользоваться модулем сдвига \i вместо Ежа).
Поскольку отличны от нуля только axz и ayz, то общие уравнения
равновесия да^/дх^ = 0 сводятся к уравнению
дх ду
§ 16 КРУЧЕНИЕ СТЕРЖНЕЙ 93
Подставив сюда A6.6), мы найдем, что функция кручения дол-
должна удовлетворять уравнению
Аф = 0, A6.8)
где А — двумерный оператор Лапласа.
Несколько более удобно, однако, пользоваться другой вспо-
вспомогательной функцией х(хтУ), определяемой равенствами
о О'Х, о О'Х, (л а. с\\
ду' yZ дх1
для этой функции получаются более удобные граничные условия
на контуре сечения стержня (см. ниже). Сравнив A6.9) с A6.6),
получим
дф j_ О ^^ ®^ 9 ^^ (Л({ ЛС\\
дх ду' ду дх
Дифференцируя первое равенство по у, второе по ж и вычитая
одно из другого, получим для функции х следующее уравнение:
Дх = -1. A6.11)
Для определения граничных условий на поверхности стерж-
стержня замечаем, что благодаря малой толщине стержня действую-
действующие на его боковую поверхность внешние силы малы по сравне-
сравнению с возникающими в стержне внутренними напряжениями и
потому могут быть положены (при отыскании граничных усло-
условий) равными нулю. Это обстоятельство в точности аналогично
тому, что мы имели при рассмотрении изгиба тонких пластинок.
Таким образом, на боковой поверхности стержня должно быть
&1кпк — 0; поскольку ось z направлена по оси стержня, то вектор
нормали п имеет только компоненты пж, пу, так что написанное
уравнение сводится к условию
<Jzxnx + ®гупу = U.
Подставляя сюда A6.9), получаем
ду дх
Но компоненты вектора нормали к плоскому контуру (контуру
dy dx
dl' y dV
ты точек контура, a dl — элемент дуги. Таким образом, получаем
сечения стержня) равны пх = — —, пу = —, где ж, у — координа-
dl dl
%dx + gdy = dx = 0,
дх ду
откуда х = const, т. е. на контуре сечения функция х постоян-
постоянна. Поскольку в определения A6.9) входят только производные
от функции Х-) т0 ясно, что к этой функции можно прибавлять
94
РАВНОВЕСИЕ СТЕРЖНЕЙ И ПЛАСТИНОК
любую постоянную. Если контур сечения односвязен, то можно,
следовательно, без всякого ограничения общности положить на
нем в качестве граничного условия к урав-
уравнению A6.11) г)
Х = 0. A6.12)
В случае же многосвязного контура х
будет иметь различные постоянные значе-
значения на каждой из замкнутых кривых, со-
составляющих контур. Поэтому положить х
равным нулю можно будет лишь на одной
из этих кривых, например на внешнем кон-
контуре (Cq на рис. 13). Значения же х на
остальных частях контура определятся из условия, являющего-
являющегося следствием однозначности смещения uz = тф(х,у) как функ-
функции координат. Именно, ввиду однозначности функции кручения
ф(х,у) интеграл от ее дифференциала di\) по замкнутому конту-
контуру должен быть равен нулю. С помощью соотношений A6.10)
имеем поэтому
Рис. 13
/г /
J \дх ду
= -2 ф r^dy - ^
или
Г
— Ф (xdy — уdx) = 0,
j
A6.13)
где дх/дп есть производная функции х по направлению внешней
нормали к контуру, a S — охватываемая этим контуром площадь.
Применяя A6.13) к каждой из замкнутых кривых Ci, C2, ... , мы
и получим искомые условия.
Определим свободную энергию подвергнутого кручению
стержня. Для энергии единицы объема имеем
1) Задача об определении деформации кручения по уравнению A6.11) с
граничным условием A6.12) формально совпадает с задачей об определении
формы прогиба равномерно нагруженной плоской мембраны по уравнению
A4.9).
Полезно заметить также гидродинамическую аналогию: уравнением вида
A6.11) определяется распределение скоростей v(x,y) вязкой жидкости по
сечению трубы; граничному условию A6.12) соответствует условие v = 0 на
неподвижных стенках трубы (см. VI, § 17).
§ 16 КРУЧЕНИЕ СТЕРЖНЕЙ 95
и, подставляя сюда A6.9):
где V означает двумерный градиент. Энергия кручения, отне-
отнесенная к единице длины стержня, получится отсюда интегриро-
интегрированием по площади поперечного сечения, т. е. равна Ст2/2, где
коэффициент С равен
Величину С называют крутильной жесткостью стержня. Пол-
Полная упругая энергия стержня равна интегралу
FCT = - J Cr2dz, A6.14)
взятому по его длине.
Написав
+ X
и преобразуя интеграл от первого члена в интеграл по линии
контура сечения стержня, получим
f A6.15)
Если контур сечения односвязен, то ввиду граничного условия
X = 0 первый член исчезает и остается
С = A/jJ Xdxdy. A6.16)
Для многосвязной же границы (см. рис. 13), положив \ — О на
внешнем контуре Со и обозначив через Хк постоянные значения
X на внутренних контурах С&, получим с помощью A6.13)
A6.17)
(следует помнить, что при интегрировании в первом члене в
A6.15) контур Cq обходится в прямом, а контур С& — в обратном
направлениях).
Рассмотрим наиболее обычный случай кручения, когда один
из концов стержня закреплен неподвижно, а внешние силы при-
приложены только к поверхности другого его конца. Эти силы та-
таковы, что производят только кручение стержня без какой бы
то ни было другой его деформации, например изгиба. Другими
словами, они составляют некоторую пару сил, закручивающую
стержень вокруг его оси. Момент этой пары обозначим через М.
96 РАВНОВЕСИЕ СТЕРЖНЕЙ И ПЛАСТИНОК ГЛ. II
Естественно ожидать, что в таком случае угол кручения т по-
постоянен вдоль длины стержня. В этом можно убедиться, напри-
например, из условия минимума полной свободной энергии стержня
в равновесии. Полная энергия деформированного стержня рав-
равна сумме FCT + [/, где U — потенциальная энергия, обусловлен-
обусловленная действием внешних сил. Подставляя в A6.14) т = dtp/dz и
варьируя по углу <р, находим
2 J \dz
J dz dz
или, интегрируя по частям,
f C—
J dz
Ст6(р = 0.
В последнем члене слева берется разность значений на пределах
интегрирования, т. е. на концах стержня. Один из этих концов,
скажем нижний, закреплен так, что на нем Scp = 0. Что касает-
касается вариации SU потенциальной энергии, то, взятая с обратным
знаком, она представляет собой работу внешних сил при пово-
повороте на угол Sep. Как известно из механики, работа пары сил
при таком повороте равна произведению MScp угла поворота на
момент пары. Поскольку никаких других внешних сил нет, то
SU = —MScp, и мы получаем
C—Sipdz + 6(р(-М + Ст) = 0. A6.18)
dz
Во втором члене берется его значение на верхнем пределе. В
интеграле по dz вариация Scp произвольна, а потому должно быть
Cdr/dz = 0, т. е.
г = const. A6.19)
Таким образом, угол кручения постоянен вдоль всей длины
стержня. Полный угол поворота верхнего основания относитель-
относительно нижнего равен поэтому просто произведению т1 угла т на
длину / стержня.
В уравнении A6.18) должен исчезнуть также и второй член.
Отсюда находим следующее выражение для постоянного угла
кручения:
т = —. A6.20)
3 адачи
1. Определить крутильную жесткость стержня с круговым сечением
(радиуса R).
Решение. Решения задач 1-4 формально совпадают с решениями за-
задач о движении вязкой жидкости в трубе соответствующего сечения (см.
примеч. на с. 94); количеству Q протекающей через сечение трубы жидко-
жидкости соответствует здесь величина С.
§ 16 КРУЧЕНИЕ СТЕРЖНЕЙ 97
Для стержня кругового сечения имеем (начало координат в центре се-
сечения)
X=1-{R*-XZ-yZ).
Крутильная жесткость:
c
2
Для функции ф получаем из A6.10) ф = const. Но постоянная ф соответ-
соответствует, согласно A6.4), простому смещению стержня как целого вдоль оси z,
поэтому можно считать, что ф = 0. Таким образом, поперечные сечения кру-
кругового стержня при кручении остаются плоскими.
2. То же для стержня эллиптического сечения (полуоси а и Ь).
Решение. Крутильная жесткость:
Распределение продольных смещений дается функцией кручения:
, Ъ2-а2
(оси координат направлены по осям эллипса).
3. То же для стержня с сечением в виде равностороннего треугольника
(длина сторон а).
Решение. Крутильная жесткость:
С = LLCL .
80
Функция кручения
ф = —у(хл/3 + у)(ху/Ъ - у),
6а
причем начало координат выбрано в центре треугольника, а ось х совпадает
с одной из его высот.
4. То же для стержня, имеющего вид длинной тонкой пластинки (ши-
(ширина с/, толщина h <^L d).
Решение. Задача эквивалентна задаче о течении вязкой жидкости
между плоскопараллельными стенками. Результат:
с
3
5. То же для цилиндрической трубы (внутренний и внешний радиусы
Ri и R2).
Решение. Функция
x=\{Rl-r2)
(в полярных координатах) удовлетворяет условию A6.13) на обеих границах
кольцевого сечения трубы. По формуле A6.17) найдем
С = %(Ri - Rl).
6. То же для тонкостенной трубы произвольного сечения.
Решение. Ввиду тонкости стенки трубы можно считать, что на про-
протяжении ее ширины h функция \ меняется от нуля на одной стороне до xi
на другой по линейному закону х = Xiy/h (У — координата вдоль толщины
4 Л. Д. Ландау, Е.М. Лифшиц, том VII
98 РАВНОВЕСИЕ СТЕРЖНЕЙ И ПЛАСТИНОК ГЛ. II
стенки). Тогда условие A6.13) дает xiL/h = S, где L — длина периметра се-
сечения трубы, а5 — охватываемая им площадь. В выражении A6.17) второй
член мал по сравнению с первым, и мы получаем
с = *hS2»
L
Если трубу разрезать продольно по одной из ее образующих, то крутиль-
крутильная жесткость резко уменьшается, становясь равной (согласно результату
задачи 4) С = /iLhs/3.
§ 17. Изгиб стержней
В изогнутом стержне в некоторых местах его происходит ра-
растяжение, а в других — сжатие. Растянуты линии на выпуклой
стороне изогнутого стержня, а на вогнутой стороне происходит
сжатие. Как и в случае пластинок, вдоль длины стержня внутри
него существует «нейтральная» поверхность, на которой не про-
происходит ни растяжения, ни сжатия. Она отделяет собой области
сжатия от областей растяжения.
Начнем с исследования деформации изгиба в небольшом
участке длины стержня, в котором изгиб можно считать слабым;
под слабым мы понимаем здесь изгиб, при котором мал не только
тензор деформации, но и абсолютная величина смещений точек
стержня. Выберем систему координат с началом в некоторой точ-
точке нейтральной поверхности внутри рассматриваемого участка
стержня. Ось z направим параллельно оси стержня (недефор-
мированного); изгиб пусть происходит в плоскости zx. При сла-
слабом изгибании стержня можно считать, что изгиб происходит в
одной плоскости. Это связано с известным из дифференциаль-
дифференциальной геометрии обстоятельством, что отклонение слабо изогнутой
кривой от плоскости (так называемое ее кручение) является ма-
малой величиной высшего порядка по сравнению с кривизной.
Аналогично тому, что мы имели в случае изгиба пластинок
и кручения стержней, и при изгибе тонких стержней внешние
силы, действующие на боковую поверхность стержня, малы по
сравнению с возникающими внутри стержня напряжениями, и
при определении граничных условий на этой поверхности их
можно считать равными нулю. Таким образом, вдоль всей бо-
боковой поверхности стержня имеем с^п^ = 0, или, поскольку
nz = 0,
°ххПх + °хуПу = 0
и аналогично для г = у, z. Выберем такую точку на контуре
поперечного сечения стержня, в которой нормаль п направлена
параллельно оси х. Другая такая же точка имеется где-нибудь на
противоположной стороне контура. В обеих этих точках пу = 0,
и из написанного выше равенства имеем ахх = 0. Но поскольку
§ 17 ИЗГИБ СТЕРЖНЕЙ 99
самый стержень предполагается тонким, то, если ахх исчезает
на двух сторонах его сечения, оно мало и вдоль всего сечения,
так что можно положить ахх = 0 во всем стержне. Аналогич-
Аналогичным образом убеждаемся в том, что все компоненты тензора на-
напряжений должны быть равными нулю, за исключением только
компоненты azz. Другими словами, при изгибе тонкого стерж-
стержня большой является только растягивающая (или сжимающая)
компонента тензора внутренних напряжений. Деформация, в ко-
которой отлична от нуля только компонента azz тензора напряже-
напряжений, есть не что иное, как деформация простого растяжения или
сжатия (§ 5). Таким образом, в каждом элементе объема изги-
изгибаемого стержня происходит простое растяжение (или сжатие).
Самая величина этого растяжения, конечно, различна в разных
точках каждого из поперечных сечений стержня, что и приводит
в результате к изгибу всего стержня.
Легко определить величину относительного растяжения в
каждой точке стержня. Рассмотрим какой-нибудь элемент длины
dz, параллельный оси стержня и находящийся где-нибудь вбли-
вблизи начала координат. При изгибании стержня длина dz изме-
изменится, сделавшись равной dz'. Неизменными остаются только те
элементы длины, которые расположены на нейтральной поверх-
поверхности. Пусть R есть радиус кривизны нейтральной поверхности
вблизи начала координат. Длины dz и dz1 можно рассматривать
как элементы дуги окружностей с радиусами соответственно R и
R + x, где х — значение координаты х в точке, в которой выбран
элемент dz1. Поэтому
dz = dz = 1 + — ) dz.
R V Rj
Относительное удлинение равно, следовательно,
dz' -dz _ х
dz ~ R
С другой стороны, относительное удлинение элемента длины
dz равно компоненте uzz тензора деформации. Следовательно,
uzz = |. A7.1)
Мы можем написать теперь aZZl воспользовавшись непосред-
непосредственно соотношением azz = EuZZl имеющим место при простом
растяжении. Таким образом,
azz = -Е. A7.2)
До сих пор еще расположение нейтральной поверхности
в изогнутом стержне оставалось неопределенным. Его можно
определить из условия, что рассматриваемая нами здесь дефор-
деформация должна представлять собой чистый изгиб, без какого бы
4*
100 РАВНОВЕСИЕ СТЕРЖНЕЙ И ПЛАСТИНОК ГЛ. II
то ни было общего растяжения или сжатия стержня. Для этого
полная сила внутренних напряжений, действующая на попереч-
поперечное сечение стержня, должна быть равной нулю, т. е. должен
исчезать интеграл
fazzdf,
взятый по этой поверхности. В связи с выражением A7.2) для
azz это приводит к условию
f xdf = 0. A7.3)
С другой стороны, можно ввести понятие о центре инерции
сечения стержня, как о центре инерции однородного плоского
диска соответствующей формы. Координаты этого центра:
fxdf fydf
7*"' 7*"'
Таким образом, условие A7.3) означает, что в системе координат
с началом, лежащим на нейтральной поверхности, ж-координата
центра инерции сечения стержня равна нулю. Другими словами,
нейтральная поверхность проходит через центры инерции попе-
поперечных сечений стержня.
Помимо uzz отличны от нуля еще две компоненты тензора де-
деформации, так как при простом растяжении имеем ихх = иуу =
= —auzz. Зная тензор деформации, легко найти также и смеще-
смещения точек. Пишем:
_ duz _ х дих _ диу _ ах
dz R дх ду R
дих duz р дих диу ^ диу duz ^
dz дх ду дх ' dz ду
Интегрирование этих соотношений приводит к следующим вы-
выражениям для компонент перемещения:
их = -^ + а(х2-у% иу = -а^, «, = f. A7.4)
lit it it
Постоянные интегрирования положены равными нулю; это зна-
значит, что мы закрепляем в пространстве положение начала коор-
координат.
Из формул A7.4) видно, что точки, расположенные в попе-
поперечном сечении z = const = zq, после изгиба заполняют поверх-
поверхность
z = zq +uz = zq A + ^
V it
Мы видим, что в рассматриваемом приближении сечения оста-
остаются при изгибе плоскими, лишь поворачиваясь на некоторый
17
ИЗГИБ СТЕРЖНЕЙ
101
угол относительно своего первоначального положения. Форма
же сечения меняется; так при изгибе стержня прямоугольного
сечения (со сторонами а и о) боковые стороны контура сечения
у = ±6/2 после изгиба занимают положения
¦ Ь . | Ь (л (тх\
У = ±- + Щ = ±- ( 1 — — ) ,
У 2 у 2 V RJ '
т. е. становятся наклонными, оставаясь прямыми. Верхняя же и
нижняя стороны х = =Ьа/2 изгибаются в параболические кривые
(рис. 14):
2Х 2 2R I ° V 4 У )\
Свободная энергия единицы объема стержня:
crikUik crzzuzz Ex2
2 2 2R?
Интегрируя по всему поперечному сечению стержня, имеем
2df. A7.5)
Это есть свободная энергия единицы длины изогнутого стержня.
Радиус кривизны R определен здесь как
радиус кривизны нейтральной поверхности.
Но в силу тонкости стержня здесь с той же
точностью R можно считать просто радиу-
радиусом кривизны самого изогнутого стержня,
рассматриваемого как не имеющая толщи-
толщины линия (об этой линии часто говорят как
об упругой линии).
В выражении A7.5) удобно ввести поня-
понятие момента инерции площади поперечно-
поперечного сечения стержня. Именно, определим мо-
момент инерции сечения относительно проходящей через его плос-
плоскость оси у как интеграл:
а
г~
1
1
1
Рис. 14
Iy=
A7.6)
т. е. аналогично обычному понятию момента инерции с той толь-
только разницей, что вместо элемента массы стоит просто элемент по-
поверхности df. Тогда свободная энергия единицы длины стержня
запишется в виде
Е 7 A7-7)
Определим еще момент сил внутренних напряжений, дей-
действующих в данном сечении стержня (этот момент называют из-
изгибающим). К элементу df поверхности сечения приложена сила
102 РАВНОВЕСИЕ СТЕРЖНЕЙ И ПЛАСТИНОК ГЛ. II
&zzdf = —Edf, направленная вдоль оси z. Ее момент относи-
R
тельно оси у есть xazzdf. Поэтому полный момент сил относи-
относительно этой оси есть
Mv = - Г x2df = ^. A7.8)
у RJ J R K J
Таким образом, кривизна 1/R упругой линии пропорциональна
действующему в данном сечении изгибающему моменту.
Величина 1у зависит от того, как направлена ось у в плос-
плоскости сечения. Удобно, как это принято в механике, выражать
1у через два так называемых главных момента инерции. Если в
есть угол между осью у и одной из главных осей инерции сечения
стержня, то, как известно,
1у = h cos2 в + I2 sin2 0, A7.9)
где Д, 1% — главные моменты инерции. Плоскости, проходящие
через ось z и главные оси инерции сечения стержня, называют
главными плоскостями изгиба.
Если, например, сечение стержня является прямоугольником
(со сторонами а и 6), то его центр инерции находится в центре
прямоугольника, а главные оси инерции параллельны его сторо-
сторонам. Главные моменты инерции равны
д = ^ 12 = 2*1. A7.10)
12 ' 12 V J
При круговом сечении (с радиусом R) центр инерции находится
в центре круга, а направление главных осей инерции произволь-
произвольно. Момент инерции вокруг любой оси, проходящей в плоскости
сечения через его центр, равен
1=^-. A7.11)
§ 18. Энергия деформированного стержня
В предыдущем параграфе мы рассматривали только неболь-
небольшую область вдоль длины изогнутого стержня. Переходя теперь
к исследованию деформации во всем стержне, необходимо на-
начать с выбора подходящего способа описания такой деформации.
Существенно, что при сильном г) изгибе стержня в нем одновре-
одновременно возникает, вообще говоря, также и некоторая деформация
кручения, так что результирующая деформация есть комбина-
комбинация чистого изгиба и кручения.
) Напомним, что под сильной мы понимаем здесь такую деформацию,
при которой вектор и не мал, тензор же деформации по-прежнему является
малым.
§ 18 ЭНЕРГИЯ ДЕФОРМИРОВАННОГО СТЕРЖНЯ 103
Для описания деформации удобно поступить следующим об-
образом. Разделим весь стержень на ряд бесконечно малых элемен-
элементов, каждый из которых вырезается из стержня двумя бесконеч-
бесконечно близкими поперечными сечениями. В каждом таком элементе
введем свою систему координат ?, г/, ?; направления осей вы-
выберем таким образом, чтобы в недеформированном стержне все
эти системы были параллельны друг другу, причем все оси ( на-
направлены параллельно оси стержня. При изгибании стержня в
каждом элементе система координат поворачивается, причем в
различных элементах, вообще говоря, различным образом. Каж-
Каждые две бесконечно близкие системы оказываются при этом по-
повернутыми друг относительно друга на некоторый бесконечно
малый угол.
Пусть dcp — вектор угла относительного поворота двух си-
систем, находящихся на расстоянии dl вдоль длины стержня (как
известно, бесконечно малый угол поворота можно рассматривать
как вектор, направленный вдоль оси поворота; его составляющие
представляют собою углы поворота вокруг каждой из трех осей
координат).
Для описания деформации мы введем вектор
П = % A8.1)
dl
определяющий «скорость» поворота осей координат вдоль
длины стержня. Если деформация является чистым кручением,
то поворот последовательных систем координат происходит
только вокруг оси стержня, т. е. вокруг осей (. В этом случае,
следовательно, вектор fi направлен вдоль оси стержня и пред-
представляет собой не что иное, как угол кручения т, которым мы
пользовались в § 16. Соответственно этому и в общем случае про-
произвольной деформации компоненту О^ вектора fi можно назвать
углом кручения. При чистом же изгибе стержня в одной плос-
плоскости вектор fi не имеет компоненты О^, т. е. лежит в каждой
точке целиком в плоскости ^г/. Если при этом выбрать плоскость,
в которой происходит изгиб, в качестве плоскости ??, то поворот
происходит в каждой точке вокруг оси г/, т. е. ft параллелен оси т\.
Введем единичный вектор t, направленный по касательной
к стержню, рассматриваемому здесь просто как упругая линия.
Производная dt/dl называется вектором кривизны линии; его
абсолютная величина равна 1/Д, где R — радиус кривизны1),
а его направление называется направлением главной нормали
г) Напомним, что всякая кривая в пространстве характеризуется в каждой
точке своими так называемыми кривизной и кручением. Это кручение (нам
не придется пользоваться им) не следует смешивать с тем, что мы называем
здесь деформацией кручения, представляющей собой закручивание стержня
вокруг его оси.
104 РАВНОВЕСИЕ СТЕРЖНЕЙ И ПЛАСТИНОК ГЛ. II
кривой. Изменение вектора при бесконечно малом повороте рав-
равно векторному произведению вектора угла поворота на сам рас-
рассматриваемый вектор. Поэтому для разности векторов t в двух
бесконечно близких точках упругой линии можно написать:
dt = [dipt],
или, разделив на dl:
§ = [nt]. A8.2)
Умножив это равенство с обеих сторон векторно на t, получаем
П= [t|]+t(tO). A8.3)
Направление вектора касательной в каждой точке совпадает с
направлением оси ? в этой же точке. Поэтому (tfi) = О. Вве-
Введя единичный вектор п главной нормали так, что dt/dl = n/i?,
можно, следовательно, написать:
П = -[tn]+tO. A8.4)
Первый член справа представляет собой вектор с двумя ком-
компонентами О^, О^. Единичный вектор [tn] называется, как из-
известно, единичным вектором бинормали. Таким образом, компо-
компоненты О^г, ftv образуют вектор, направленный по бинормали к
стержню и по абсолютной величине равный его кривизне 1/R.
Введя, таким образом, вектор fi, характеризующий деформа-
деформацию, и выяснив его свойства, мы можем вывести выражение для
упругой свободной энергии изогнутого стержня. Упругая энер-
энергия (отнесенная к единице длины стержня) является квадратич-
квадратичной функцией деформации, т. е. в данном случае квадратичной
функцией компонент вектора ft. Легко видеть, что в этой ква-
квадратичной форме должны отсутствовать члены, пропорциональ-
пропорциональные fiff\ или 0^0^. Действительно, поскольку стержень одно-
однороден вдоль всей своей длины, то все величины, в частности и
энергия, не должны меняться при изменении направления поло-
положительного отсчета координаты ?, т. е. при замене ? на —?; ука-
указанные же произведения при такой замене переменили бы свой
знак.
Что касается члена с квадратом О?, то надо помнить, что при
О^г = ftv = 0 мы имеем дело с чистым кручением, и тогда выра-
выражение для энергии должно совпасть с выражением, полученным
в § 16. Таким образом, соответствующий член в свободной энер-
энергии имеет вид
2
Наконец, члены, квадратичные по О^, О^, можно напи-
написать, исходя из выражения A7.7) для энергии слабо изогнутого
§ 18 ЭНЕРГИЯ ДЕФОРМИРОВАННОГО СТЕРЖНЯ 105
небольшого участка стержня. Предположим, что стержень под-
подвергается лишь слабому изгибу. Плоскость ?? выберем в плос-
плоскости изгиба так, что компонента О^ исчезает; кручение также
отсутствует при слабом изгибе. Выражение для энергии должно
в этом случае совпадать с A7.7):
Но мы видели, что 1/В? является как раз квадратом плоского
вектора (Г2^, fl»q)- Поэтому энергия должна иметь вид
-1п2
При произвольном выборе осей ?, г) это выражение напишется,
как известно из механики, в виде
где 1щ, 7^, 1^ — компоненты тензора инерции сечения стержня.
Удобно выбрать оси ?, г/ так, чтобы они совпали с главными
осями инерции сечения стержня. Тогда мы будем иметь просто
f (Щ + Щ),
где Д, /2 — главные моменты инерции сечения. Поскольку ко-
коэффициенты при О? и О^ постоянные, то полученное выражение
должно иметь место и при сильном изгибе.
Наконец, интегрируя по всей длине стержня, получим окон-
окончательно следующее выражение для свободной упругой энергии
изогнутого стержня:
Далее, выразим через ft момент сил, действующих на сече-
сечение стержня. Это легко сделать, используя опять результаты,
полученные ранее для чистого кручения и слабого чистого изги-
изгиба. При чистом кручении момент сил относительно оси стержня
равен Ст. Поэтому заключаем, что в общем случае момент М^
относительно оси ? должен быть равен М^ = Cft^. Далее, при
слабом изгибе в плоскости ?? момент относительно оси г/ есть
EI2/R. Но при таком изгибе вектор ft направлен по оси г/, так
что 1/R есть просто его абсолютная величина и EI2/R = E^ft.
Поэтому заключаем, что в общем случае должно быть М^ =
= Elift^ Mv = Е12&Г) (оси ?, г/ выбраны по главным осям инер-
инерции сечения). Таким образом, компоненты вектора М момента
сил равны
A8.6)
106 РАВНОВЕСИЕ СТЕРЖНЕЙ И ПЛАСТИНОК ГЛ. II
Упругая энергия A8.5), выраженная через момент сил, имеет
вид
[{^L ^<\l A8.7)
Важным случаем изгиба стержней является слабый изгиб,
при котором на всем протяжении стержня отклонение его от пер-
первоначального положения мало по сравнению с длиной стержня.
В этом случае кручение можно считать отсутствующим, так что
можно положить О^ = 0 и из A8.4) имеем просто
п=>)s ['3 ¦ A8-8)
Введем неподвижную в пространстве систему координат ж, у, z с
осью z вдоль оси недеформированного стержня (вместо связан-
связанных в каждой точке со стержнем координат ?, г/, ?. Обозначим
через X, Y координаты ж, у точек упругой линии стержня; X
и Y определяют смещение точек линии от их первоначального
положения до изгиба.
Ввиду того что изгиб слаб, вектор касательной t почти парал-
параллелен оси z, так что приближенно можно считать его направлен-
направленным вдоль этой оси. Далее, единичный вектор касательной равен
производной
dl
от радиус-вектора г точек кривой по ее длине. Поэтому имеем
dt _ d2r ^ d2r
dl ~ dl2 ~ dz2
(производную по длине стержня можно приближенно заменить
производной по z). В частности, х- и у-компоненты этого вектора
равны соответственно d2X/dz2 и d2Y/dz2. Компоненты О^, О^ с
той же точностью равны теперь компонентам Ож, О^, и из A8.8)
получаем
Подставляя эти выражения в A8.5), получаем упругую энер-
энергию слабо изогнутого стержня в виде
Напомним, что Д, I2 — моменты инерции соответственно отно-
относительно осей ж, у, являющихся главными осями инерции.
В частности, для стержня кругового сечения I\ = I2 = /
и в подынтегральном выражении получается просто сумма ква-
квадратов вторых производных, совпадающая в рассматриваемом
§ 19 УРАВНЕНИЯ РАВНОВЕСИЯ СТЕРЖНЕЙ 107
приближении с квадратом кривизны стержня:
J
\dz2 ) ~ В? '
Ввиду этого формулу A8.10) можно естественным образом обоб-
обобщить для слабого изгиба стержней (кругового сечения), имею-
имеющих в своем естественном (недеформированном) состоянии лю-
любую непрямолинейную форму. Для этого надо написать энергию
изгиба в виде
где Rq — радиус естественной кривизны стержня в каждой его
точке. Это выражение, как и должно быть, обладает миниму-
минимумом в недеформированном состоянии (R = i?o)? a при До —>• оо
переходит в формулу A8.10).
§ 19. Уравнения равновесия стержней
Мы можем теперь перейти к выводу уравнений равновесия
изогнутых стержней. Рассмотрим опять какой-нибудь из беско-
бесконечно малых элементов стержня, вырезанный двумя бесконечно
близкими сечениями, и вычислим полную действующую на него
силу. Обозначим силу внутренних напряжений, приложенную к
площади сечения стержня, через F1). Компоненты этого вектора
равны интегралам от а^ по площади сечения:
Fi=fai<:df. A9.1)
Если рассматривать два бесконечно близких сечения как поверх-
поверхности оснований вырезаемого ими элемента стержня, то на верх-
верхнее основание действует сила F + c/F, а на нижнее — сила — F;
их сумма есть дифференциал dF. Пусть далее К есть действую-
действующая на стержень внешняя сила, отнесенная к единице его длины.
Тогда на элемент длины dl действует внешняя сила К ей. Равно-
Равнодействующая всех сил, действующих на этот элемент, есть, сле-
следовательно, c/F + K dl. В равновесии эта сила должна обращаться
в нуль. Таким образом, получаем
§ = -К. A9.2)
dl
Второе уравнение получается из условия равенства нулю пол-
полного момента сил, приложенных к данному элементу. Пусть М
) Обозначение этой силы через F не может привести к смешению со сво-
свободной энергией, которой мы не пользуемся ниже, в § 19-21.
108 РАВНОВЕСИЕ СТЕРЖНЕЙ И ПЛАСТИНОК ГЛ. II
есть момент сил внутренних напряжений, действующих на пло-
площадь сечения стержня. Этот момент берется относительно точ-
точки (начала координат), лежащей в самой плоскости этого сече-
сечения; его компоненты определяются формулами A8.6). Будем вы-
вычислять суммарный момент, приложенный к данному элементу
стержня, относительно точки (назовем ее точкой О), лежащей в
плоскости его верхнего основания. Тогда внутренние напряже-
напряжения на этом основании дают момент М + dM. Момент же (от-
(относительно О) сил внутренних напряжений в нижнем основании
элемента складывается из момента — М этих сил относительно
начала координат в плоскости нижнего основания (точка О') и
момента (относительно О) суммарной силы —F, действующей на
этом основании. Этот второй момент равен [(—dl)(—F)], где d\ —
вектор элемента длины стержня от О7 к О. Момент же, обуслов-
обусловленный внешними силами К, является малой величиной выс-
высшего порядка. Таким образом, полный действующий на элемент
стержня момент сил есть dM + [dlF]. В равновесии он должен
быть равным нулю:
dm + [лр] = о.
Разделив это равенство на dl и замечая, что dl/dl = t есть еди-
единичный вектор касательной к стержню (рассматриваемому как
линия), получаем уравнение
^ = [Ft]. A9.3)
Уравнения A9.2) и A9.3) представляют собой полную систему
уравнений равновесия произвольным образом изогнутого стерж-
стержня.
Если действующие на стержень внешние силы являются, как
говорят, сосредоточенными, т. е. приложены только к отдель-
отдельным изолированным его точкам, то на участках стержня между
точками приложения сил уравнения равновесия заметно упро-
упрощаются. Из A9.2) имеем при К = 0
F = const, A9.4)
т. е. силы внутренних напряжений постоянны вдоль длины каж-
каждого из указанных участков стержня. Значения этих постоянных
определяются тем, что разность F2 — Fi значений силы в точ-
точках 1 ж 2 равна
, A9.5)
где сумма берется по всем силам, приложенным к отрезку стерж-
стержня между точками 1 и 2. Обращаем внимание на то, что в разно-
разности F2 — Fi точка 2 является более удаленной от начала отсчета
§ 19 УРАВНЕНИЯ РАВНОВЕСИЯ СТЕРЖНЕЙ 109
длины стержня (т. е. длины дуги /), чем точка 1\ это замечание
существенно при определении знаков в равенстве A9.5). В част-
частности, если на стержень действует всего одна сосредоточенная
сила f, приложенная к его свободному концу, то F постоянно
вдоль всей длины стержня и равно f.
Второе уравнение равновесия A9.3) тоже упрощается. Напи-
Написав в нем t = dl/dl = dr/dl (где г — радиус-вектор от некоторой
заданной точки к произвольной точке стержня) и интегрируя,
получаем ввиду постоянства F
М = [Рг] + const. A9.6)
Если же отсутствуют также и сосредоточенные силы, а изгиб
стержня происходит под действием приложенных к нему сосре-
сосредоточенных моментов (т. е. сосредоточенных пар сил), то F =
= const вдоль всей длины стержня, а М испытывает в точках
приложения сосредоточенных пар скачки, равные их моментам.
Обратимся, далее, к вопросу о граничных условиях на кон-
концах изгибаемого стержня. Здесь могут представиться различные
случаи.
Конец стержня называют заделанным (рис. 4 а, см. с. 66), ес-
если он не может испытывать никаких смещений — ни продольных,
ни поперечных, и, сверх того, не может измениться его направ-
направление (т. е. направление касательной к стержню в его конце). В
этом случае граничные условия заключаются в том, что задают-
задаются координаты конца стержня и единичный вектор касательной t
к нему. Сила же и момент сил реакции, действующие на стер-
стержень со стороны опоры в точке закрепления, определяются в
результате решения уравнений.
Противоположным является случай свободного конца стерж-
стержня. В этом случае координаты конца и его направление произ-
произвольны. Граничные условия заключаются в том, что сила F и
момент сил М на конце стержня должны обратиться в нуль 1).
Если конец стержня закреплен на шарнире, то он не может
испытывать никаких смещений, но его направление не задано.
Момент сил, действующих на такой свободно поворачивающийся
конец, должен исчезать.
Наконец, если стержень оперт в некоторой точке опоры
(рис. 4 5), то он может скользить по этой точке, но не может
испытывать в ней поперечных смещений. В этом случае неза-
незаданными являются направление t и положение точки, в которой
опирается стержень, по его длине. Момент сил в точке опоры
должен быть равным нулю соответственно тому, что стержень
может свободно поворачиваться, а сила F в этой точке должна
) Если к свободному концу приложена сосредоточенная сила f, то гра-
граничным условием будет не F = 0, a F = f.
110 РАВНОВЕСИЕ СТЕРЖНЕЙ И ПЛАСТИНОК ГЛ. II
быть перпендикулярна к стержню; продольная компонента силы
вызвала бы дальнейшее его скольжение в точке опоры.
Аналогичным образом легко установить граничные условия
и при других способах закрепления стержня. Мы не будем оста-
останавливаться здесь на этом, ограничившись приведенными ти-
типичными примерами.
Уже в начале предыдущего параграфа было отмечено, что
сильный изгиб стержня произвольного сечения сопровождает-
сопровождается, вообще говоря, одновременным его кручением, даже если к
стержню не прилагается никаких внешних крутящих моментов.
Исключением является изгиб стержня в его главных плоскостях.
При таком изгибе кручение не возникает. У стержня кругово-
кругового сечения никакой изгиб не сопровождается кручением (если,
конечно, нет внешних крутящих моментов). В этом можно убе-
убедиться следующим образом. Кручение определяется компонен-
компонентой О^ = (fit) вектора ft. Вычислим его производную по длине
стержня. Для этого пишем, замечая, что О^ = М^/С:
(Mt) C t + M.
dV J dl dl dl
При подстановке A9.3) первый член обращается в нуль, так что
dl dl'
У стержня кругового сечения I\ = I2 = /; согласно A8.3) и A8.6)
можно поэтому написать М в виде
A9.7)
При умножении на dt/dl оба члена дают нуль, так что dft^/dl =
= 0, откуда
Ос = const, A9.8)
т. е. угол кручения постоянен вдоль стержня. Если к концам
стержня не приложено крутящих моментов, то П^ на концах рав-
равно нулю, а потому кручение отсутствует и по всей длине стержня.
Для стержня кругового сечения можно, таким образом, на-
написать при чистом изгибе
] El№]. A9.9)
dl J L dl dl2 J v ;
Подстановка этого выражения в A9.3) приводит к уравнению
чистого изгиба стержней кругового сечения в виде
idldPl I dl\ V '
§ 19 УРАВНЕНИЯ РАВНОВЕСИЯ СТЕРЖНЕЙ 111
3 адачи
1. Привести к квадратурам задачу об определении формы стержня кру-
кругового сечения (упругого прута), сильно изогнутого в одной плоскости при-
приложенными к нему сосредоточенными силами.
Решение. Рассматриваем участок стержня между точками приложе-
приложения сил; на таком участке F = const. Выберем плоскость изгиба в качестве
плоскости ху, а ось у — параллельно силе F. Вводим угол 9 между касатель-
касательной к линии стержня и осью у. Тогда dx/dl = sin#, dy/dl = cos#, где ж, у —
координаты точек стержня. Раскрывая векторные произведения в A9.10),
получаем уравнение для 9 как функции длины дуги /
IE Fsin(9 = 0.
Первое интегрирование дает
IE
Т \dlt
и отсюда
, , [Ш f dd
'^VTiVc-Fcos/^ A)
Функция 9A) может быть выражена отсюда через эллиптические функции.
Для координат х = / sin9dl,y= I cos 9 dl получа-
получаем
х = d= — \121Е\/с\ — F cos 9 + const,
F B)
cos9d9 y J
л/а — F cos 9
Момент М A9.9) направлен по оси z и равен
Tf
... ._ . 2/Y
dl
2. Определить форму сильно изогнутого стерж- Рис. 15
ня, один конец которого заделан, а к другому, сво-
свободному, приложена сила f; направление f перпендикулярно к прямой неде-
формированного стержня (рис. 15).
Решение. На всей длине стержня F = const = f. На заделанном
конце (/ = 0) 9 = тг/2, а на свободном (/ = L, где L — длина стержня)
М = 0, т. е. 9' = 0. Вводя обозначение 9о = 0(L), имеем в A) с\ = fcos9o:
к/2
Vcos в0 - cos в
Отсюда получаем уравнение, определяющее i
¦ тг/2
2/ J л/cos во - cos 9
Форма стержня определяется формулами
[Ъ1Ё( / 2Г / Ъ Ъл IIE f cos 9 d9
х = а (v cos во — v cos во — cos 9), y =
л/cos 9о — cos 9
112
РАВНОВЕСИЕ СТЕРЖНЕЙ И ПЛАСТИНОК
3. То же, если сила f, приложенная к свободному концу, направлена
параллельно линии недеформированного стержня.
Решение. Имеем F = —f (оси координат выбраны указанным на
рис. 16 образом). Граничные условия: в = 0 при / = 0, в' = 0 при / = L.
Имеем
, в
dO
2/ J д/cos в — cos во
о
где во определяется из 1(во) = L. Для х и у получаем
21Е,
х = л (л/l — cos во — \/cos# — cos#o),
При слабом изгибе во <С 1 и можно написать:
L г
2/ У \/cos # — cos #o
о
°
т. е. ^о выпадает из этого соотношения. Это показывает, в согласии с резуль-
результатом задачи 3 § 21, что рассматриваемое решение существует только при
/ ^ тг IE/DL ), т. е. после потери устойчивости прямолинейной формой.
Рис. 16
Рис. 17
4. То же, если оба конца стержня оперты, а к его середине приложена
сила f; расстояние между точками опоры есть Lq.
Решение. Выбираем оси координат указанным на рис. 17 образом.
Сила F постоянна на каждом из участков АВ л ВС, причем на каждом из
них перпендикулярна к линии стержня в точках опоры — соответственно А
и С. Разность значений F на АВ л ВС равна f, откуда заключаем, что на
АВ Fsin#o = —//2, где во — угол между осью у и линией АС. В точке А
(I = 0) имеем условия в = тг/2 и М = 0, т. е. в' = 0, так что на АВ
/jE \ 1/2 /jE \ 1/2 ПС2
х = 2 ( sin #o cos #1 , 2/ = ( sin во ) / Vcosd dd.
\ J У \ J / J
§ 19 УРАВНЕНИЯ РАВНОВЕСИЯ СТЕРЖНЕЙ 113
Угол во определяется из условия, что проекция длины АВ на прямую АС
должна быть равна Lo/2, откуда имеем
При некотором определенном значении во, лежащем между 0 и тг/2, произ-
производная df /ddo (где / рассматривается как функция от во) обращается в нуль
и делается положительной. Дальнейшему уменьшению во, т. е. увеличению
прогиба, соответствовало бы уменьшение /. Это значит, что найденное ре-
решение делается неустойчивым; стержень «проваливается» между опорами.
5. Привести к квадратурам задачу о пространственном сильном изгибе
стержня под действием сосредоточенных сил.
Решение. Рассматриваем участок стержня между точками приложе-
приложения сил, на котором F = const. Интегрируя A9.10), получаем
= [Fr] + cF; A)
постоянная интегрирования написана в виде вектора cF, направленного
вдоль F, поскольку надлежащим выбором начала координат, т. е. прибав-
прибавлением к г некоторого постоянного вектора, можно исключить аддитивный
вектор, перпендикулярный к F. Умножая A) скалярно и векторно на г'
(штрих означает дифференцирование по I) и замечая, что г'г" = 0 (по-
(поскольку г' =1), получаем
F[rr'] + cFr' = 0, Е1т" = [[Fr] г'] + c[Fr'].
В компонентах (ось z выбрана по направлению F)
(ху - ух') + cz = 0, EIz" = -F(xx + уу).
Вводя в этих уравнениях цилиндрические координаты г, <р, z, получаем
г2 if' + cz = 0, EIz" = -Frr. B)
Из второго уравнения имеем
1-г2), C)
где А — постоянная. Комбинируя B) и C) с тождеством
/2 . 2 /2 . /2 -,
Г + Г if + Z =1,
получаем
.. л.. Г tti2
(г2 +с2)(А-г2
после чего из B) и C) находим
F ПА- r2)r ^ cF Г А-г2
Z ~ 2EI J G(r) Г' ^ ~ 2EI J rG(r)
чем и определяется форма изогнутого стержня.
dr,
114 РАВНОВЕСИЕ СТЕРЖНЕЙ И ПЛАСТИНОК ГЛ. II
6. Стержень кругового сечения подвергнут кручению (угол кручения г)
и изогнут в винтовую линию. Определить силу и момент сил, которые дол-
должны быть приложены к концам стержня для того, чтобы удерживать его в
таком состоянии.
Решение. Пусть R — радиус цилиндра, на поверхности которого на-
навита винтовая линия (ось z выбираем по оси этого цилиндра), а а — угол
между касательной к линии и плоскостью, перпендикулярной к оси z; шаг
винтовой линии h связан с а л R посредством h = 27rRtga. Уравнения
винтовой линии:
x = Rcos(p, у = Rsimp, z = (pRtga
{if — угол поворота вокруг оси z)\ элемент длины дуги dl = R dip /cos a.
Подставляя эти выражения в A9.7), вычисляем компоненты вектора М, а
затем по формуле A9.3) — силу F (постоянную вдоль всей длины стержня).
В результате находим, что сила F направлена по оси z и равна
_, _, „ sin a EI 2
Fz = F = Ст cos a sin a.
R R?
Момент М имеет составляющую по оси z\
EI о
Mz = Ст sin а Н cos a
R
и составляющую М^, направленную в каждой точке стержня по касательной
к окружности поперечного сечения цилиндра, равную М^ = FR.
7. Определить форму гибкой нити (сопротивлением которой на изгиб
можно пренебречь по сравнению с сопротивлением на растяжение), подве-
подвешенной за две точки в поле тяжести.
Решение. Выбираем плоскость, в которой расположена нить, в каче-
качестве плоскости ху с осью у, направленной вертикально вниз. В уравнении
A9.3) можно пренебречь членом с/М/с//, поскольку М пропорционально EI.
Тогда [Ft] = 0, т. е. F направлено в каждой точке нити по t и можно напи-
написать F = Ft. Уравнение A9.2) дает теперь
(VH, (F
dl\dlj dl\ dl
(q — вес единицы длины нити), откуда
F^ = c, FdJL=ql.
dl dl
Отсюда имеем F = д/с2 + g2/2, так что
dx _ A dy _
(где А = c/q). Интегрирование дает
откуда
у = Ach—,
А
т. е. нить имеет форму цепной линии. Выбор начала координат и постоянная
А определяются тем, что кривая должна пройти через две заданные точки
и должна иметь заданную длину.
§ 20 СЛАБЫЙ ИЗГИБ СТЕРЖНЕЙ 115
§ 20. Слабый изгиб стержней
Уравнения равновесия значительно упрощаются в практиче-
практически важном случае слабого изгиба стержней. Изгиб является сла-
слабым, если направление касательной t к стержню медленно ме-
меняется вдоль его длины, т. е. производная dt/dl мала. Другими
словами, радиус кривизны изогнутого стержня в каждой точке
должен быть велик по сравнению с длиной стержня. Практи-
Практически это условие сводится к требованию малости поперечного
прогиба стержня по сравнению с его длиной. Подчеркнем, что
при этом отнюдь не требуется малости прогиба по сравнению с
толщиной стержня, как это должно было быть в приближенной
теории слабого изгиба пластинок, развитой в § 11, 12 г).
Продифференцируем A9.3) по длине:
d2M
dl2
- [f
Второй член содержит малую величину —, вследствие чего им
dl
обычно (за исключением некоторых особых случаев, о которых
речь идет ниже) можно пренебречь. Подставляя в первом члене
dF/dl = —К, получаем уравнение равновесия в виде
— = [tK]. B0.2)
dP L J v }
Напишем это уравнение в компонентах, для чего подставим в
него, согласно A8.6) и A8.9),
Мх = -EhY", Му = EI2X", Mz = 0 B0.3)
(знак ' означает везде дифференцирование по z). Единичный
вектор t можно считать направленным по оси z. Тогда мы полу-
получим
Е12Х"" -Кх = 0, EhY"" -Ky = 0. B0.4)
Эти уравнения определяют зависимость прогибов X и Y от z,
т. е. форму слабо изогнутого стержня.
Силу F внутренних напряжений, действующую на попереч-
поперечное сечение стержня, также можно выразить через производные
от X и Y. Подставляя B0.3) в A9.3), получаем
Fx = -EI2X'", Fy = -EhY'". B0.5)
г) Мы не излагаем вовсе сложной теории изгиба стержней, которые в сво-
своем естественном, недеформированном, состоянии имеют изогнутую форму
(ограничиваясь лишь одним простым примером в задачах 8, 9 этого пара-
параграфа).
116 РАВНОВЕСИЕ СТЕРЖНЕЙ И ПЛАСТИНОК ГЛ. II
Мы видим, что вторые производные определяют момент сил вну-
внутренних напряжений, а третьи производные определяют сами
эти силы. Силу B0.5) называют перерезывающей силой. Если
изгиб производится сосредоточенными силами, то перерезываю-
перерезывающая сила постоянна вдоль каждого из отрезков стержня между
точками приложения сил, а в каждой из этих точек испытывает
скачок, равный приложенной внешней силе.
Величины EI2 и Е1\ называют жесткостью стержня на изгиб
соответственно в главных плоскостях xz и yzl).
Если приложенные к стержню внешние силы действуют в од-
одной плоскости, то и изгиб стержня произойдет в одной плоско-
плоскости. Эти две плоскости, однако, в общем случае не совпадают
друг с другом; легко найти угол между ними. Если а — угол меж-
между плоскостью действия сил и первой главной плоскостью изгиба
(плоскостью xz), то уравнения равновесия принимают вид
vnn cos a j^ vnn sin а ^
Л А, У = А.
hE
I2E
Оба уравнения отличаются только коэффициентом при К. По-
Поэтому X и Y пропорциональны друг другу, причем
Угол в между плоскостью изгиба и плоскостью xz определяется
равенством
^tga. B0.6)
г) Уравнением вида
DX"" -Кх=0 B0.4а)
описывается также в определенных предельных случаях и изгиб тонкой пла-
пластинки. Пусть прямоугольная пластинка (с длинами сторон а и Ъ и толщи-
толщиной К) укреплена вдоль своих сторон а (направление у) и изгибается вдоль
сторон Ъ (ось z) однородной вдоль оси у нагрузкой. В общем случае произ-
произвольных а и Ь для определения изгиба должно быть использовано двумерное
уравнение A2.5) с соответствующими граничными условиями на укреплен-
укрепленных и на свободных сторонах пластинки. В предельном случае а^> Ъ дефор-
деформацию можно считать однородной вдоль оси у, и тогда двумерное уравнение
равновесия переходит в уравнение вида B0.4а), причем роль жесткости на
изгиб играет величина
12 V }
Уравнение B0.4а) применимо и в обратном предельном случае а <^Ь, когда
пластинку можно рассматривать как стержень длины Ь с узким прямоуголь-
прямоугольным сечением (сечение в виде прямоугольника со сторонами а и /г); при этом,
однако, жесткость на изгиб определяется другим выражением
12
§ 20 СЛАБЫЙ ИЗГИБ СТЕРЖНЕЙ 117
Для стержня кругового сечения I\ = I2 и а = #, т. е. изгиб про-
происходит в плоскости действия сил. То же самое имеет место и
для стержня произвольного сечения при а = 0, т. е. когда си-
силы направлены в главной плоскости. Для абсолютной величины
прогиба
С + у2
имеет место уравнение
Е1("" = К, 1= hh ^. B0.7)
у 1( cos2 а + Ц sin а
Перерезывающая сила F лежит в той же плоскости, что и К, и
равна
F = -Е1('". B0.8)
Величина / играет роль эффективного значения момента инер-
инерции сечения стержня.
Напишем в явном виде граничные условия для уравнений
равновесия слабо изогнутого стержня. Если конец стержня заде-
заделан, то на нем должно быть X = Y = 0 и, сверх того, не может
измениться его направление, т. е. должно быть X' = Y' = 0.
Таким образом, на заделанном конце стержня должны выпол-
выполняться условия
X = Y = 0, X1 = Y1 = 0. B0.9)
Сила же и момент сил реакции в точках опоры определяются по
известному решению формулами B0.3) и B0.5).
При достаточно слабом изгибе стержня закрепление его кон-
конца в шарнире и опирание его в точке эквивалентны в отношении
граничных условий. Дело в том, что во втором случае продоль-
продольное смещение стержня в точке опоры является при слабом изгибе
величиной второго порядка малости по сравнению с поперечным
прогибом и потому должно считаться равным нулю. Граничные
условия исчезновения поперечного смещения и момента сил да-
дают в этих случаях
X = Y = 0, X" = Y" = 0. B0.10)
Направление же конца стержня и сила реакции в точке опоры
определяются в результате решения уравнений.
Наконец, на свободном конце должны отсутствовать сила F и
момент сил М. Согласно B0.3) и B0.5) это приводит к условиям
X" = Y" = 0, X'" = Y'" = 0 B0.11)
(если к свободному концу приложена сосредоточенная сила, то F
должно быть равно этой силе, а не нулю).
Нетрудно обобщить уравнения B0.4) на случай стержней пе-
переменного сечения. У таких стержней моменты инерции 1\ и /2
118 РАВНОВЕСИЕ СТЕРЖНЕЙ И ПЛАСТИНОК ГЛ. II
являются функциями z. Формулы B0.3), определяющие момен-
моменты сил в каждом данном сечении стержня, по-прежнему оста-
остаются справедливыми. Подстановка их в B0.2) приводит теперь
к уравнениям
= Kv
у
Е— (l2—) = Кх, B0.12)
dz2 V l dz2 ) ж' v ;
в которых 1\ и 12 нельзя вынести из-под знака производной. Для
перерезывающей силы имеем
= -E±(lim). B0.13)
dz\ dz* J V ;
Х dz\ dz* J ' У dz
Вернемся снова к уравнениям B0.1). Произведенное нами
пренебрежение вторым членом в правой части равенства может
оказаться в некоторых случаях незаконным даже при слабом из-
изгибе. Это — те случаи, в которых вдоль длины стержня действу-
действует большая сила внутренних напряжений, т. е. Fz очень велико.
Наличие такой силы вызывается обычно сильным натяжением
стержня приложенными к его концам внешними растягивающи-
растягивающими силами. Обозначим действующее вдоль стержня постоянное
натяжение через Fz = Т. Если стержень подвергается сильному
сжатию, а не растяжению, то сила Т отрицательна. Раскрывая
векторное произведение [Fdt/dl], мы должны теперь сохранить
члены, содержащие Т, членами же с Fx и Fy можно по-прежнему
пренебречь. Подставляя для компонент вектора dt/dl соответ-
соответственно Х7/, У7/, 1, получим уравнения равновесия в виде
12ЕХ"" - ТХ" -Кх = 0,
B0.14)
hEY"" - TY" -Ку = 0.
К выражениям B0.5) для перерезывающей силы надо прибавить
теперь члены, равные проекциям действующей вдоль вектора t
силы Т на оси х и у:
Fx = -EI2Xm + ТХ1, Fy = -EhY1" + TY1. B0.15)
Эти формулы могут быть, конечно, получены и непосредственно
из A9.3).
Большая сила Т может в некоторых случаях появиться и в ре-
результате самого изгиба, даже если нет никаких специально при-
приложенных растягивающих сил. Рассмотрим стержень, оба конца
которого заделаны или закреплены на шарнирах в неподвижных
опорах, так что не могут испытывать продольного смещения. То-
Тогда прогиб стержня неизбежно сопровождается его удлинением,
что и приводит к появлению в нем силы Т. Легко оценить ве-
величину прогиба, при котором эта сила делается существенной.
§ 20 СЛАБЫЙ ИЗГИБ СТЕРЖНЕЙ 119
Длина L + AL изогнутого стержня равна интегралу
ь
L + AL =
о
взятому по прямой, соединяющей точки опоры. При слабом изги-
изгибе можно разложить корень в ряд, и мы получаем для удлинения
AL выражение
ь
2о
Возникающая при простом растяжении сила натяжения рав-
равна относительному удлинению, умноженному на модуль Юнга и
на площадь S сечения стержня. Таким образом, сила Т равна
TPQL
Т=— Пх'2 + Y'2) dz. B0.16)
2L q
Если S есть порядок величины поперечного прогиба, то про-
производные X' и Y' — порядка 5/L, так что весь интеграл, стоящий
в B0.16), - порядка величины (S/LJ L = 52/L и Т - ES F/LJ.
Порядок величины первых и вторых членов в B0.14) — соответ-
соответственно IE6/L4 и T6/L2 ~ ESS3 /L4. Момент инерции / имеет
порядок величины / ~ /i4, a S ~ /г2, где h — толщина стержня.
Подставляя это, легко получаем, что первые и вторые члены в
B0.14) сравниваются по порядку величины при S ~ h.
Таким образом, при изгибе стержней, концы которых за-
закреплены, можно пользоваться уравнениями равновесия в ви-
виде B0.4), только если прогиб мал по сравнению с толщиной
стержня. Если же S не мало по сравнению с h (но, конечно, по-
прежнему S <С L), то надо пользоваться уравнениями B0.14).
При этом сила Т в этих уравнениях заранее неизвестна. При
их решении надо сначала рассматривать Т как заданный пара-
параметр, а затем по полученному решению определить Т согласно
формуле B0.16), чем и определится связь Т с приложенными к
стержню изгибающими силами.
Обратным предельным случаем является тот, когда сопротив-
сопротивление стержня на изгиб мало по сравнению с его сопротивлением
на растяжение, так что в уравнениях B0.14) можно пренебречь
первыми членами по сравнению со вторыми. Физически такой
случай может быть осуществлен либо очень сильным растяже-
растяжением Т, либо при достаточно малом EI, что может быть связано
с малой толщиной h (о сильно натянутых стержнях говорят как
о струнах). Уравнения равновесия гласят в этих случаях:
ТХ" + Кх = 0, TY" + Ку = 0. B0.17)
120 РАВНОВЕСИЕ СТЕРЖНЕЙ И ПЛАСТИНОК ГЛ. II
Концы струны надо представлять себе закрепленными в том
смысле, что их координаты заданы, т. е.
X = Y = 0. B0.18)
Направление же концов не может быть задано произвольным
образом, а определяется решением уравнений.
В заключение покажем, каким образом уравнения равнове-
равновесия слабо изогнутого стержня можно получить, исходя из вариа-
вариационного принципа, используя выражение A8.10) для упругой
энергии:
В равновесии должна быть минимальна сумма этой энергии и
потенциальной энергии, связанной с действующими на стержень
внешними силами К, т. е. должно быть
6FCT - J (KX6X + KySY) dz = 0
(второй член представляет собой работу внешних сил при беско-
бесконечно малом смещении линии стержня). При варьировании FCT
производим дважды интегрирование по частям:
-5 J X dz= J X" 5Х" dz = X" SXf - J X'" SXf dz =
= X" SX' - X1" SX + J X"" SX dz
и аналогичным образом для интеграла от Y. Собирая различ-
различные члены, получим
J [{EhYim - KyNY + (EI2X"n - KXNX] dz +
+ Eh {Y" SY' - Y'" SY) + EI2 {X" 5X' - X'" SX)
= 0.
Из первого, интегрального, члена следуют ввиду произвольно-
произвольности вариаций SX и SY уравнения равновесия B0.4). Остальные
же, проинтегрированные, члены дают граничные условия к этим
уравнениям; так, на свободном конце вариации SX, 5Y, 5Х1\ 5Y'
произвольны и соответственно получаются условия B0.11). В то
же время коэффициенты при SX и SY в этих членах дают вы-
выражения B0.5) для компонент перерезывающей силы, а коэф-
коэффициенты при 8Х1 и 8Y1 — выражения B0.3) для компонент
изгибающего момента.
Наконец, уравнения равновесия B0.14) при наличии растя-
растягивающей силы Т можно получить тем же способом, прибавив к
§ 20 СЛАБЫЙ ИЗГИБ СТЕРЖНЕЙ 121
варьируемой энергии величину
2
представляющую собой работу силы Т на пути AL — удлинении
стержня.
3 адачи
1. Определить форму прогиба стержня (длины I) под влиянием соб-
собственного веса при различных способах закрепления его концов.
Решение. Искомая форма определяется решением уравнения
(q — вес единицы длины стержня) с теми или другими граничными услови-
условиями на его концах, сформулированными в тексте. При различных способах
закрепления концов стержня получаются следующие формы прогиба и мак-
максимальные смещения (так называемые стрелки прогиба); начало координат
везде выбрано в одном из концов стержня.
а) Оба конца стержня заделаны:
24EI К J \2J 384 EI
б) Оба конца оперты:
S 24EI У h S V2/ 384 EI
в) Один конец (z = l) заделан, а другой (z = 0) оперт:
С = -2—zBz3 - 3lz2 + /3), C@,42/) = 0, 0054^.
S 48EI У h SV ' ; ' EI
г) Один конец (z = 0) заделан, а другой (z = l) свободен:
С = -2—z\z2 - 4lz + 6/2), C@ = - —•
S 24EI V ;' SW 8EI
2. Определить форму прогиба стержня под влиянием приложенной к
его середине сосредоточенной силы /.
Решение. Везде, кроме точки z = //2, имеем уравнение С,"" = 0. Гра-
Граничные условия в концах стержня (z = 0 л z = I) определяются способом
закрепления; в точке же z = 1/2 должны быть непрерывны ?, ?', ^7/, а раз-
разность перерезывающих сил F = —EICJ" по обе стороны этой точки должна
быть равна силе /.
Форма стержня (на участке 0 ^ z ^ 1/2) и стрелка прогиба даются
следующими формулами.
а) Оба конца стержня заделаны:
48EI \2J 192EI
б) Оба конца стержня оперты:
48EI \2) 48EI
122 РАВНОВЕСИЕ СТЕРЖНЕЙ И ПЛАСТИНОК ГЛ. II
Форма стержня симметрична относительно его середины, так что функция
?(z) на участке 1/2 ^ z ^ / получается отсюда просто заменой z на / — z.
3. То же для стержня, один из концов которого (z = 0) заделан, а другой
[z = I) свободен, причем к последнему приложена сосредоточенная сила /.
Решение. Вдоль всего стержня F = const = /, так что (,'" = —f/EI.
С условиями ? = 0, ?' = 0 при z = 0 и С," = 0 при z = I получаем
С = —z2Ci - z), c@ = —•
6?/ 3?/
4. Определить форму прогиба стержня с закрепленными концами под
влиянием сосредоточенной пары сил, приложенной к его середине.
Решение. Вдоль всей длины стержня С,"" = 0, а в точке z = 1/2
момент М = EIC," испытывает скачок, равный моменту т приложенной
сосредоточенной пары. С соответствующими условиями на концах получим:
а) оба конца стержня заделаны:
при 0^z^l/2,
-*)] при '/2<^<1;
б) оба конца закреплены в шарнирах:
С = -^—z(l2 - 4z2) при 0 ^ z <: 1/2,
С = — (I - z)[l2 - 4A - zJ] при 1/2 ^z^l.
2AEIV П У } J '
По обе стороны от точки z = 1/2 стержень изогнут в разные стороны.
5. То же, если сосредоточенная пара приложена к свободному концу
стержня, другой конец которого заделан.
Решение. Вдоль всей длины стержня имеем М = EIC," = ш, а в
точке z = 0: С = 0? С' = 0- Форма изгиба дается формулой
т 2
6. Определить форму стержня (кругового сечения) с закрепленными в
шарнирах концами, растягиваемого силой Т и изгибаемого силой /, прило-
приложенной к его середине.
Решение. На отрезке 0 ^ z ^ 1/2 перерезывающая сила равна //2,
так что B0.15) дает уравнение
С'"_ JLC' = _J1.
EI 2EI
Граничные условия: ? = 0, ? =0 при 2 = 0, /, а при z = 1/2 должно быть
?'=0 (в силу непрерывности ?'). Для формы стержня (на отрезке
0 ^ z ^ //2) получим формулу
1/2
с = ^ *-
i _ / т \
2Т L kdi{kl/2)\
При малых к это выражение переходит в формулу, полученную в задаче 26.
При больших же значениях к оно переходит в
§ 20 СЛАБЫЙ ИЗГИБ СТЕРЖНЕЙ 123
т. е., в согласии с уравнением B0.17), гибкая нить принимает под влиянием
силы / форму, составленную из двух прямых отрезков, пересекающихся в
точке z = 1/2.
Если сила Т сама возникает в результате растяжения стержня попереч-
поперечной силой, то для ее определения надо воспользоваться формулой B0.16).
Подставив в нее полученное выражение, найдем уравнение
1 Г3 _l l ^ ы 3 23
— - + - th
kQ [2 2 2 kl 2\ f2S
определяющее в неявном виде Т как функцию от /.
7. Стержень (кругового сечения) бесконечной длины лежит на упругом
основании, т. е. при изгибе на него действует сила К = — а?, пропорцио-
пропорциональная прогибу. Определить форму, принимаемую стержнем при действии
на него сосредоточенной силы /.
Решение. Выбираем начало координат в точке приложения силы /.
Везде, кроме точки z = 0, имеет место уравнение
Е1("" = -аС
Решение должно удовлетворять условиям ? = 0 при z = d=oo, а при z = 0
должны быть непрерывны ?', ?"'; разность же значений перерезывающей
силы F = —Е1(!" при 2 4 +0 и 2 4 -0 должна быть равна /. Такое
решение есть
8/33EI L ' ' ' IJ \4ElJ
8. Вывести уравнение равновесия для слабого изгиба тонкого стерж-
стержня (кругового сечения), имеющего в своем естественном состоянии форму
дуги окружности и изгибаемого в своей плоскости приложенными к нему
радиальными силами.
Решение. Выбирая начало полярных координат г, (р в центре окруж-
окружности, напишем уравнение деформированной линии стержня в виде z = а +
+ С (у) j где а — радиус дуги, а ? — малые радиальные смещения при изгибе.
Воспользовавшись известным выражением для радиуса кривизны в поляр-
полярных координатах, найдем с точностью до членов первого порядка по ?
R (r2+r/2K/2 a a2
(штрих означает дифференцирование по if). Согласно A8.11) находим упру-
упругую энергию изгиба:
^0 о ^0
7G4) •*-?/«¦<">¦
гр т
Fct = — / ( ^-- ) adif-
о о
(у?о — центральный угол дуги). Уравнение равновесия получается из вариа-
вариационного принципа,
о
(Кг — отнесенная к единице длины внешняя радиальная сила) с дополни-
дополнительным условием
о
выражающим собой в рассматриваемом приближении условие неизменно-
неизменности общей длины периметра стержня, т. е. условие отсутствия общего его
124
РАВНОВЕСИЕ СТЕРЖНЕЙ И ПЛАСТИНОК
растяжения. Следуя методу Лагранжа, приравниваем нулю сумму
У О <Р0
SFCT — J aKr6^ dcp + аа J 5(, dcp = О,
о о
где а, — постоянная. Производя варьирование в подынтегральном выраже-
выражении в Fct и интегрируя член с 6С," дважды по частям, получим
S(dip
Отсюда находим уравнение равновесия
выражение для перерезывающей силы
и выражение для изгибающего момента
= о.
(ср. конец § 20). Постоянная а определяется условием отсутствия общего
растяжения стержня.
9. Определить деформацию кругово-
кругового кольца, изгибаемого двумя сосредото-
сосредоточенными силами f, действующими вдоль
диаметра (рис. 18).
Решение. Интегрируя уравнение
A) по всей длине кольца, найдем, что
f
2тгаа = / Krad(p = 2/.
Везде, кроме точек <р = 0 и <р = тг, имеем
уравнение A) с Кг = 0:
= 0.
Рис. 18
irEI
Искомая деформация кольца симметрич-
симметрична относительно диаметров АВ и CD, в
силу чего в точках А, В, С, D должно
быть ?' = 0. Разность значений перерезывающей силы ори с^ —>> =Ь0 дол-
должна быть равна /. Удовлетворяющее этим условиям решение уравнения
равновесия есть
j- /а3 /1 1 тг 1 . \ Л ^ ^
С = —I—(р cos (р cos (р sin (р , 0 ^ (р ^ тг.
EI \тг 4: 8 4 /
В частности, точки А и В взаимно сближаются на величину
§ 21 УСТОЙЧИВОСТЬ УПРУГИХ СИСТЕМ 125
§ 21. Устойчивость упругих систем
Поведение стержня, подверженного воздействию продольных
сжимающих сил, представляет простейший пример важного яв-
явления упругой неустойчивости, впервые обнаруженного Л. Эй-
Эйлером.
При отсутствии поперечных изгибающих внешних сил Кх, Ку
уравнения равновесия сжатого стержня B0.14) имеют очевид-
очевидное решение X = Y = 0, соответствующее стержню, остающе-
остающемуся при воздействии продольной силы Т прямолинейным. Это
решение, однако, соответствует устойчивому равновесию стерж-
стержня лишь до тех пор, пока сжимающая сила \Т\ остается меньше
некоторого критического значения Ткр. При \Т\ < Ткр прямоли-
прямолинейная форма стержня устойчива по отношению к произвольно-
произвольному малому возмущению. Другими словами, если под влиянием
какого-либо малого воздействия стержень подвергается слабому
изгибу, то по прекращении этого воздействия стержень будет
стремиться вернуться в исходное состояние.
Напротив, при \Т\ > Ткр прямолинейная форма отвечает
неустойчивому равновесию. Достаточно уже бесконечно малого
воздействия (изгиба) для того, чтобы равновесие нарушилось, в
результате чего произойдет сильный изгиб стержня. Ясно, что в
этих условиях сжатый стержень вообще не сможет реально су-
существовать в неизогнутом виде.
Поведение стержня после потери им устойчивости должно
описываться уравнениями сильного изгиба. Однако самое значе-
значение критической нагрузки Ткр может быть получено с помощью
уравнений слабого изгиба. При \Т\ = Ткр прямолинейная форма
стержня соответствует некоторому безразличному равновесию.
Это значит, что наряду с решением X = Y = 0 должны суще-
существовать еще и состояния слабого изгиба, которые тоже явля-
являются равновесными. Поэтому критическое значение Ткр можно
определить как то значение |Т|, при котором у уравнений
Е12Х"" + \Т\Х" = 0, EhY"" + \T\Y" = 0 B1.1)
появляется отличное от нуля решение. Само же это решение
определяет характер деформации, которой подвергнется стер-
стержень непосредственно после потери им устойчивости.
В задачах этого параграфа приведен ряд типичных случаев
потери устойчивости различными упругими системами.
3 адачи
1. Определить критическую сжимающую силу для стержня с шарнирно
закрепленными концами.
Решение. Поскольку нас интересует наименьшее значение |Т|, при
котором появляется отличное от нуля решение уравнений B1.1), то доста-
достаточно рассмотреть лишь то из этих двух уравнений, которое содержит мень-
126 РАВНОВЕСИЕ СТЕРЖНЕЙ И ПЛАСТИНОК ГЛ. II
шее из /i, /2; пусть 12 < 1\. Ищем решение уравнения
Е12Х"" + \Т\Х" = О
в виде
X = А + Bz + С sin kz + D cos Jb, jfe = (\T\/EI2I/2.
Отличное от нуля решение, удовлетворяющее условиям X = О, X" = 0 при
2 = 0 и 2 = /, есть
X = С sin kz,
причем должно быть sin kl = 0. Отсюда находим искомую критическую силу
Гкр = ж2Е12/12.
После потери устойчивости стержень примет форму, изображенную на
рис. 19 а.
2. То же для стержня с заделанными концами (рис. 19 б).
Решение. ТКр = 4тг2 Е12/12.
3. То же для стержня, один из концов которого заделан, а другой сво-
свободен (рис. 19 е).
Решение. ТКр = тг2 Е12/412.
4. Определить критическую сжимающую силу для стержня (кругового
сечения) с шарнирно закрепленными концами, лежащего на упругом осно-
основании (см. задачу 7 § 20).
Решение. Вместо уравнений B1.1) здесь надо рассмотреть уравнение
EIX"" + \Т\Х" + аХ = 0.
Аналогичное исследование приводит к решению
X = A sin — z, ТКр = ( п2 +
причем для п должно быть взято то из целых значений, для которого по-
получается наименьшее значение Ткр. При достаточно больших значениях а
получается п > 1, т. е. после потери устойчивости стержень принимает фор-
форму с несколькими пучностями.
5. Стержень кругового сечения подвергнут кручению, и его концы за-
заделаны. Определить критическую величину кручения, после которой пря-
прямолинейная форма стержня делается неустойчивой.
Решение. Критическое значение
угла кручения определяется появлени-
появлением отличных от нуля решений уравне-
уравнений слабого изгиба закрученного стерж-
стержня. Для вывода этих уравнений подста-
подставляем выражение A9.7):
M = El\t— I +Crt
L dl \
(г — постоянный угол кручения) в урав-
уравнение A9.3); это дает
Рис. 19 L dP I dl
Дифференцируем это уравнение; по-
поскольку изгиб слабый, то при дифференцировании первого и третьего чле-
членов можно считать t постоянным, равным вектору to, направленному по
оси стержня (оси z). Помня также, что dF/dl = 0 (внешние силы по длине
§ 21 УСТОЙЧИВОСТЬ УПРУГИХ СИСТЕМ 127
стержня отсутствуют), получаем
или в компонентах:
Y — хХ = О, X + >cY = О,
где >с = Ст/(Е1). Введя в качестве неизвестной функцию ? = X + гУ, полу-
получим уравнение
? — гх? = 0.
Ищем решение, удовлетворяющее условиям ? = 0, ?' = 0 при г = 0, /в виде
и находим в качестве условия совместности для получающихся для а и Ъ
уравнений соотношение
ixi 2 + %yd yd yd
2-Ы1 2 & 2
Наименьший корень этого уравнения: ydj2 = 4, 49, так что
8, 98EI
ткр —
С1
6. То же для стержня с шарнирно закрепленными концами.
Решение. Здесь получается
причем ус определяется из ег>с = 1, т. е. yd = 2тг. Поэтому искомый крити-
критический угол кручения
2ттЕ1
гкр = ~сГ'
7. Определить предел устойчивости вертикального стержня, находяще-
находящегося под действием собственного веса; нижний конец стержня заделан.
Решение. Если продольное натяжение Fz = Т меняется вдоль длины
dFz
стержня, то в первом члене в B0.1) ф 0 и вместо уравнений B0.14)
dl
получается
12ЕХ"" - (ТХ1)' -Кх=0,
hEY"" - {TY')' -Ky = 0.
В данном случае поперечные изгибающие силы отсутствуют по всей длине
стержня, а Т = —q(l — z), где q — вес единицы длины стержня, a z отсчи-
тывается от его нижнего конца. Предполагая, что /2 < i"i, рассматриваем
уравнение
12ЕХ'" = ТХ' = -q(l - z)X'
(при z = / автоматически имеем X'" = 0). Общий интеграл этого уравнения
для функции и = X' есть
128 РАВНОВЕСИЕ СТЕРЖНЕЙ И ПЛАСТИНОК
где
Граничные условия X' = 0 при z = 0 и X" = 0 при г = / дают для функции
u(rf) условия
2 / р \ 1/2
гб = 0 при т/ = т/о = - ( ) , и rj1'3 = 0 при г/ = 0.
3 \Е12/
Для того чтобы удовлетворить этим условиям, надо положить 6 = 0, при-
причем J_i/3(r/o) = 0. Наименьший корень этого уравнения щ = 1,87, откуда
находим критическую длину стержня
КР ,^У
V q J
8. Стержень обладает вытянутой формой поперечного сечения, так что
1ч У?> h • Один конец стержня заделан, а к свободному концу приложена сила
/, изгибающая его в главной плоскости xz (в которой жесткость на изгиб
есть EI2). Определить критическое значение /кр, после которого плоская
форма изгиба становится неустойчивой и стержень отгибается в боковую
сторону (в плоскости yz), одновременно испытывая кручение.
Решение. Ввиду большой величины жесткости EI2 по сравнению с
Eli (и с жесткостью на кручение СI) неустойчивость по отношению к
сильному боковому изгибу возникает в то время, когда изгиб в плоскости xz
остается еще слабым. Для определения момента наступления неустойчиво-
неустойчивости надо составить уравнения слабого бокового изгиба стержня, сохраняя в
них члены, пропорциональные произведениям действующей в плоскости xz
силы / на малые смещения. Поскольку сосредоточенная сила приложена
лишь к свободному концу стержня, то вдоль всей его длины F = f, а на сво-
свободном конце (z = I) момент М = 0; по формуле A9.6) находим компоненты
момента относительно закрепленной системы координат ж, у, z\
Мх =0, My = (l- z)f, MZ = (Y- Y0)f,
где Уо = Y(l). Проецируем эти моменты на связанные в каждой точке со
стержнем оси координат ?, г/, ?; с точностью до членов первого порядка по
смещениям получим
Mi (lz)f^
dz
где ср — полный угол поворота сечения стержня при его закручивании (угол
кручения т = dip/dz здесь не постоянен вдоль длины стержня). С другой
стороны, согласно A8.6) и A8.9) имеем при слабом изгибе
Мс = -EhY", Mv = EI2X", Mc = C(pf
) Так, для узкого прямоугольного сечения с шириной h и высотой Ъ ^> h
имеем
рт bh% wt ьЧр г bh3
Ы\ = —hi, ь±2 = —hi, о = —ii.
12 12 3
§ 21 УСТОЙЧИВОСТЬ УПРУГИХ СИСТЕМ 129
и, сравнивая эти выражения, получим уравнения равновесия
Е12Х" = (I - z)f,
EhY" = -ip(l - z)f, dpf = (l- z)fYf + (У - Y0)f.
Первое из этих уравнений определяет основной изгиб стержня в плос-
плоскости xz; требуется найти значение /, при котором появляется отличное от
нуля решение у второго и третьего уравнений. Исключая из них У, найдем
ч> (*)?-, - Е1С-
Общий интеграл этого уравнения есть
На заделанном конце (z = 0) должно быть <р = 0, а на свободном крутящий
момент Сер' = 0. Из второго условия имеем а = 0, а первое дает J_1/4(kl2/2) =
= 0. Наименьший корень этого уравнения: Ы2/2 = 2,006, откуда
5 Л. Д. Ландау, Е.М. Лифшиц, том VII
ГЛАВА III
УПРУГИЕ ВОЛНЫ
§ 22. Упругие волны в изотропной среде
Если в деформируемом теле происходит движение, то тем-
температура тела, вообще говоря, отнюдь не постоянна, а меняется
как со временем, так и от точки к точке вдоль тела. Это обстоя-
обстоятельство сильно усложняет точные уравнения движения в общем
случае произвольных движений.
Обычно, однако, положение упрощается благодаря тому, что
передача тепла из одного участка тела в другой (посредством
простой теплопроводности) происходит очень медленно. Если
теплообмен практически не происходит в течение промежутков
времени порядка периода колебательных движений в теле, то
можно рассматривать каждый участок тела как теплоизолиро-
теплоизолированный, т. е. движение будет адиабатическим. Но при адиаба-
адиабатических деформациях а^ выражается через щ^ по формулам
обычного вида с той лишь разницей, что вместо обычных (изо-
(изотермических) значений величин Е, а надо брать их адиабати-
адиабатические значения (см. § 6). Ниже мы будем считать это условие
выполненным, и соответственно этому под Е и а в этой главе
будут подразумеваться их адиабатические значения.
Для того чтобы получить уравнения движения упругой сре-
среды, надо приравнять силу внутренних напряжений дац^/дх^ про-
произведению ускорения щ на массу единицы объема тела, т. е. на
его плотность р:
). B2.1)
1) Подразумевается, что скорость v точек среды совпадает с производной
и от ее смещения. Подчеркнем, однако, что отождествление этих двух ве-
величин отнюдь не является чем-то само собой разумеющимся. В кристаллах
вектор и представляет собой смещение узлов решетки; скорость же v опре-
определяется в механике сплошных сред как импульс единицы массы вещества.
Равенство v = u справедливо, строго говоря, лишь для идеальных кристал-
кристаллов, где в каждом узле решетки (и только в них) находится по атому. Если
же кристалл содержит дефекты (незаполненные узлы — вакансии, или же,
напротив, лишние атомы в междоузлиях), то перенос массы относительно
решетки (т. е. отличный от нуля импульс) может существовать и в неде-
формированной решетке — за счет диффузии дефектов «сквозь решетку».
Отождествление v и и подразумевает пренебрежение этими эффектами —
в связи с медленностью диффузии или малой концентрацией дефектов.
§ 22 УПРУГИЕ ВОЛНЫ В ИЗОТРОПНОЙ СРЕДЕ 131
Это — общий вид уравнений движения. В частности, уравне-
уравнения движения изотропной упругой среды можно написать непо-
непосредственно по аналогии с уравнением равновесия G.2). Имеем
рй = —-—Аи + grad div и. B2.2)
Н 2A + сг) 2A+G)A-2(т) 6 V J
Поскольку все деформации предполагаются малыми, то рас-
рассматриваемые в теории упругости движения представляют со-
собой малые упругие колебания или волны. Начнем с рассмотре-
рассмотрения плоской упругой волны в неограниченной изотропной среде,
т. е. волны, в которой деформация и является функцией только
от одной из координат, скажем, от х (и от времени). Все произ-
производные по у и z уравнениях B2.2) исчезают, и мы получаем для
отдельных компонент вектора и следующие уравнения:
д2их 1 д2их _ п д2иу 1 д2и
у _
(уравнение для uz такое же, как для иу), где введены обозначе-
обозначения 1):
Г рп „\ 11/2 Г р 11/2
*=\.» {L\J . ci= -A- . B2.4)
Уравнения B2.3) представляют собой обычные волновые
уравнения в одном измерении, и входящие в них величины с\
и ct являются скоростями распространения волны. Мы видим,
что скорость распространения волны оказывается различной для
компоненты их, с одной стороны, и компонент иу, uz — с другой.
Таким образом, упругая волна представляет собой по суще-
существу две независимо распространяющиеся волны. В одной из них
(их) смещение направлено вдоль распространения самой волны;
такую волну называют продольной, она распространяется со ско-
скоростью с\. В другой (иу, uz) — смещение направлено в плос-
плоскости, перпендикулярной направлению распространения; такую
волну называют поперечной, она распространяется со скоростью
ct. Как видно из B2.4), скорость q всегда больше скорости q2):
с, > {фI'2сь. B2.5)
1) Дадим также выражения скоростей с\ и а через коэффициенты сжатия
и сдвига и через коэффициенты Ламэ:
) При фактическом изменении а в пределах от 0 до 1/2 (см. примеч. на
с. 26) имеет место и более сильное неравенство с\ > cty/2.
5*
132 УПРУГИЕ ВОЛНЫ
Скорости q и ct называют продольной и поперечной скоростями
звука.
Мы знаем, что изменение объема при деформации опреде-
определяется суммой диагональных членов тензора деформации, т. е.
величиной чц = divu. В поперечной волне имеются только ком-
компоненты иу, uz, и поскольку они не зависят ни от у, ни от 2;,
для такой волны divu = 0. Таким образом, поперечные волны не
связаны с изменением объема отдельных участков тела. Напро-
Напротив, для продольных волн divu 7^ 0; эти волны сопровождаются
сжатиями и расширениями в теле.
Разделение волны на две независимо распространяющиеся с
разными скоростями части можно произвести и в общем слу-
случае произвольной (не плоской) упругой волны в неограниченном
пространстве.
Перепишем уравнение B2.2), введя в него скорости q и q:
u = c2t Аи + (cf - c2t) graddivи. B2.6)
Представим вектор и в виде суммы двух частей:
и = щ + ии B2.7)
из которых одна удовлетворяет условию
divut = 0, B2.8)
а другая — условию
rot ui = 0. B2.9)
Из векторного анализа известно, что такое представление всегда
возможно (это есть представление вектора в виде суммы ротора
некоторого вектора и градиента некоторого скаляра).
При подстановке и = щ + и^ в B2.6) получаем
iii + Щ = с2гА(щ + щ) + (с{ - с?) grad divu/. B2.10)
обеим частям этого уравнения оп
= 0, мы получим
div iii — с?Л div щ + (cf — с2) A div
Применим к обеим частям этого уравнения операцию div. По-
Поскольку div щ = 0, мы получим
или
div(ii/ - cfAui) = 0.
С другой стороны, rot стоящего в скобках выражения тоже равен
нулю в силу B2.9). Но если rot и div некоторого вектора исчезают
во всем пространстве, то этот вектор тождественно равен нулю.
Таким образом,
cfAui =0. B2.11)
dt2 1 к J
§ 22 УПРУГИЕ ВОЛНЫ В ИЗОТРОПНОЙ СРЕДЕ 133
Аналогично применяя к уравнению B2.10) операцию rot и
помня, что rot u^ = 0 и что rot всякого градиента равен нулю,
находим
rot (lit - с^Ащ) = 0.
Поскольку div стоящего в скобках выражения тоже равна нулю,
мы приходим опять к уравнению того же вида, как и B2.11):
0. B2.12)
Уравнения B2.11) и B2.12) представляют собой обычные вол-
волновые уравнения (в трех измерениях). Каждое из них соответ-
соответствует распространению упругой волны со скоростью соответ-
соответственно с\ или ct. Одна из этих волн (и^) не связана с измене-
изменением объема (в силу divu^ = 0), а другая (щ) сопровождается
объемными сжатиями и расширениями.
В монохроматической упругой волне вектор смещения имеет
вид
u = Re{uo(r)e-^}, B2.13)
где uo — функция координат. Эта функция удовлетворяет урав-
уравнению
(?t Au0 + (cf - c2t) graddivu0 + cj2u0 = 0, B2.14)
получающемуся при подстановке B2.13) в B2.6). Продольная
и поперечная части монохроматической волны удовлетворяют
уравнениям
Диг + kfut = 0, Aut + tfut = 0, B2.15)
где ki = o;/q, kt = oo/ct — волновые векторы продольной и попе-
поперечной волн.
Наконец, рассмотрим отражение и преломление плоской мо-
монохроматической упругой волны на границе раздела между дву-
двумя различными упругими средами. При этом надо иметь в виду,
что при отражении и преломлении характер волны, вообще гово-
говоря, меняется. Если на границу раздела падает чисто поперечная
или чисто продольная волна, то в результате получаются сме-
смешанные волны, содержащие как поперечные, так и продольные
части. Характер волны не меняется (как это явствует из сообра-
соображений симметрии) только в случае перпендикулярного падения
волны на поверхность раздела и в случае падения под произ-
произвольным углом поперечной волны с параллельными плоскости
раздела колебаниями.
Соотношения, определяющие направления отраженной и
преломленной волн, могут быть получены непосредственно из
постоянства частоты и касательных к поверхности раздела ком-
134
УПРУГИЕ ВОЛНЫ
понент волнового вектора 1). Пусть вив' — угол падения и угол
отражения (или преломления), а с, с' — скорости обеих рассма-
рассматриваемых волн. Тогда
с
с'
B2.16)
Пусть, например, падающая волна поперечна. Тогда с = сц
есть скорость поперечных волн в первой среде. Для поперечной
же отраженной волны имеем тоже cf = Qi, и потому B2.16) даст
т. е. угол падения равен углу отражения. Для продольной же
отраженной волны имеем с1 = сц и потому
sin в
Ctl
Ql
Для поперечной части преломленной волны имеем с' =
поперечной же падающей волне имеем
и при
sin в
Ctl
Аналогично для продольной преломленной волны имеем
sin в' ci2
3 адачи
1. Определить коэффициент отражения продольной монохроматической
волны, падающей под произвольным углом на границу тела с вакуумом.
Решение. При отражении под произвольным уг-
углом возникают как продольная, так и поперечная отра-
отраженные волны. Из соображений симметрии заранее ясно,
что вектор смещения в поперечной отраженной волне бу-
будет лежать целиком в плоскости падения (рис. 20; по, п/,
nt — единичные векторы вдоль направлений падающей,
продольной и поперечной отраженных волн, a uo, u/, lit —
соответствующие векторы смещений). Полное смещение в
теле равно сумме (общий множитель e~lujt для краткости
опускаем)
Am,e
kir
At [an,]
Рис 20
(a — единичный вектор, перпендикулярный к плоскости
падения). Абсолютные величины волновых векторов рав-
равны: ко = hi = cj/q, kt = uj/ct, а углы падения во и отражения 0i, 9t связаны
соотношениями 6i = во, sin 0t = sin во —. Для компонент тензора деформа-
) См. VI, § 66. Все изложенные там соображения, полностью применимы
и здесь.
§ 22 УПРУГИЕ ВОЛНЫ В ИЗОТРОПНОЙ СРЕДЕ 135
ции на границе тела получаем
ихх = iko(Ao + Ai) cos2 в0 + iAtkt cos6t sin0?,
uu = iko(Ao + Ai),
uxy = iko(Ao — Ai) sin 0O cos0o H—Atkt(cos2 6t — sin2 0*)
(общие экспоненциальные множители опускаем). Компоненты тензора на-
напряжений вычисляем по общей формуле E.11), которую удобно писать здесь
в виде
dik = 2pc2uik + p(cf - 2c2)uiiSik.
Граничные условия на свободной поверхности среды: а^п^ = 0, откуда
(Ухх = (Уух = 0, и дают два уравнения, из которых можно выразить Ai,
At через Aq. В результате вычислений получается
л с2 sin 20* sin 2(9О - с2 cos2 20*
Ai = Ло
At = -Ао
с2 sin 20* sin 2(9О + с2 cos2 20*'
2qc* sin 20o cos 20*
с2 sin 26t sin 20o + c2 cos2 26t
При 0o = 0 имеем А\ = — Ao, At = 0, т. е. волна отражается целиком как
продольная. Отношение перпендикулярной к поверхности среды компонен-
компоненты плотности потока энергии в отраженной продольной волне к такому же
потоку в падающей волне есть
Аналогичное отношение для отраженной поперечной волны есть
Rt =
ct cos 0t
C\ COS 00
At
An
Разумеется, Щ + Rt = 1.
2. To же, если падающая волна поперечная (и направление колебаний
в ней лежит в плоскости падения) :).
Решение. Волна отражается в виде поперечной же и продольной
волн, причем 6t = 0o, с* sin0; = c\ sin0o. Полный вектор смещения:
и = [ап0] Аое*ог + п,А,е*1Г + [ant] ite'k'r.
Для амплитуд отраженных волн получаются выражения
At с2 sin 2д\ sin 20o — с2 cos2 20o
Ао ~ с2 sin 20г sin 20O + с2 cos2 20O '
А\ 2qc* sin 20о cos 20о
Ао ~ с2 sin 20г sin 20O + с2 cos2 20O '
) Если колебания перпендикулярны плоскости падения, то волна отра-
отражается целиком в виде такой же волны, так что Rt = 1.
136 УПРУГИЕ ВОЛНЫ
3. Определить частоты радиальных собственных колебаний упругого
шара радиуса R.
Решение. Выбираем сферические координаты с началом в центре
шара. При радиальных колебаниях и направлено по радиусу и зависит толь-
только от г (и от t). Поэтому rot u = 0. Введем «потенциал» смещения ср согласно
иг = и = dif/dr. Выраженное через (р уравнение движения сводится к вол-
волновому уравнению с2А(р = ф, или для периодических по времени (~ e~lujt)
колебаний:
д 1 д ( 2д<р\ 2 u>
А^=—— [г -М =-к if, к=-. A)
г2 or \ or у а
Решение, конечное во всем объеме шара, включая его центр, есть
. sin кг
if = A
г
(временной множитель не пишем). Радиальные напряжения:
сггг = р{(с2 - 2c2t)uu + 2c2turr} = р{(с2 - 2c2t)Aip + 2с?<р"}
или, использовав уравнение A):
B)
a = ш <р 4c (
р г
Граничное условие arr(R) = 0 приводит к уравнению
tg kR _ 1
kR ~ 1- (kRci/2ctJ'
C)
Его корни определяют частоты собственных колебаний и = с\к.
4. Определить частоту радиальных колебаний сферической полости в
неограниченной упругой среде, для которой с\ У&> ct.
Решение. В неограниченной среде радиальные колебания полости
сопровождаются излучением продольных звуковых волн, что приводит к по-
потере энергии и тем самым к затуханию колебаний. При с\ ^> ct (т. е. К ^> /л)
это излучение будет слабым и можно говорить о собственных частотах ко-
колебаний с малым коэффициентом затухания.
Ищем решение уравнения A) в виде расходящейся сферической волны
ср = А , к = —
г с\
и с помощью B) получаем из граничного условия arr(R) = 0
kR-) = 4(l-ikR).
Отсюда (при а ^> ct)
2ct ( .ct
UJ = 1 — I —
R V Q
Вещественная часть и дает собственную частоту колебаний, а мнимая —
коэффициент затухания; в несжимаемой среде (q —>¦ оо) затухание, есте-
естественно, отсутствовало бы. Эти колебания — специфический результат со-
сопротивляемости среды по отношению к сдвигу (// ф 0). Обратим внимание
на то, что для них kR = 2ct/ci <C 1, т. е. соответствующая этим колебаниям
длина волны велика по сравнению с R (интересно сравнить это с колебани-
колебаниями упругой сферы, для которых при с\ ^> ct первая собственная частота
определяется согласно C) из kR = тг).
§ 23 УПРУГИЕ ВОЛНЫ В КРИСТАЛЛАХ 137
§ 23. Упругие волны в кристаллах
Распространение упругих волн в анизотропной среде, т. е. в
кристаллах, подчиняется более сложным закономерностям, чем
распространение волн в изотропном теле. Для исследования та-
таких волн надо обратиться к общим уравнениям движения
рЩ =
ОХ к
и воспользоваться для а^ общим выражением A0.3)
Соответственно сказанному в начале предыдущего параграфа
под Xikim надо везде подразумевать адиабатические значения мо-
модулей упругости.
Подставляя а^ в уравнения движения, получаем
•• _ \ дщт _ ^ikim д ( дщ . дит
РЩ - лШт ^ - 2 ^ у +
д2щ 1
дхк дхт 2 дхк дх\
Поскольку тензор \kim симметричен по индексам / и т, то, ме-
меняя во втором члене обозначение индексов суммирования / и т
на обратное, находим, что первый и второй члены тождественны.
Таким образом, получаем уравнения движения в виде
РЩ = Xiklm-f^-- B3.1)
ОХ ОХ
Рассмотрим монохроматическую упругую волну в кристалле.
Для этого мы должны искать решение уравнений движения в
виде .
( — постоянные), причем соотношение между волновым век-
вектором к и частотой ио должно быть определено так, чтобы напи-
написанная функция действительно удовлетворяла уравнению B3.1).
Дифференцирование щ по времени приводит к умножению на
—ш, а дифференцирование по х^ — к умножению на гк^. Поэто-
Поэтому уравнение B3.1) после подстановки превращается в
Написав щ = Simumi переписываем это равенство в виде
(pU>25im - Xiklmhk)Um = 0. B3.2)
Это — система трех однородных уравнений первой степени от-
относительно неизвестных иХ1 иу, uz. Как известно, такая система
138 УПРУГИЕ ВОЛНЫ
имеет отличные от нуля решения лишь при условии равенства
нулю определителя коэффициентов уравнений
Wkimhk - pu2Sim\ = 0. B3.3)
Этим уравнением определяется зависимость частоты волны
от волнового вектора; об этой зависимости говорят как о законе
дисперсии волн, а определяющее его уравнение называют дис-
дисперсионным. Уравнение B3.3) — уравнение третьей степени по
ио2. Оно имеет три различных корня ио2 = с^|(к) — три, как го-
говорят, ветви закона дисперсии. Подставляя поочередно каждый
из этих корней обратно в уравнения B3.2) и решая их, мы най-
найдем направления вектора смещения и в этих волнах, — как го-
говорят, направления их поляризации (в силу своей однородности,
уравнения B3.2) не определяют, конечно, абсолютной величины
вектора и, остающейся произвольной) 1). Направления поляри-
поляризации трех волн с одним и тем же волновым вектором к взаимно
перпендикулярны. Это важное утверждение следует прямо из
того, что уравнение B3.3) можно рассматривать как уравнение,
определяющее главные значения симметричного тензора второ-
второго ранга \klmkkh2)] уравнения же B3.2) определяют главные
направления этого тензора, которые, как известно, взаимно пер-
перпендикулярны. Ни одно из этих направлений, однако, не являет-
является, вообще говоря, ни чисто продольным, ни чисто поперечным
по отношению к направлению к.
Скорость распространения волны (ее групповая скорость)
дается производной
U = — B3.4)
dk v }
(см. VI, § 67). В изотропной среде зависимость о;(к) сводится к
пропорциональности абсолютному значению /с, и потому направ-
направление этой скорости совпадает с направлением волнового векто-
вектора. В кристаллах это не так, и направление распространения вол-
волны не совпадает, вообще говоря, с направлением к. Векторы к
и U коллинеарны для некоторых исключительных направлений
осей симметрии кристалла.
) В изотропном теле этими ветвями являются и = с\к (продольно поля-
поляризованные волны) и два совпадающих корня и = ctk, отвечающие волнам
с двумя независимыми поперечными направлениями поляризации.
2) В силу свойств симметрии тензора Xikim имеем
Последнее выражение отличается от первого только обозначением немых
индексов к, /, т. е. тензор Xikimkkki действительно симметричен по индек-
индексам г, т.
§ 23 УПРУГИЕ ВОЛНЫ В КРИСТАЛЛАХ 139
Из дисперсионного уравнения B3.3) видно, что в кристалле ио
является однородной функцией первого порядка от компонент
вектора к (если ввести в качестве неизвестной величины отноше-
отношение w/k, то коэффициенты уравнения не зависят от к). Поэтому
скорость U — однородная функция нулевого порядка от кХ1 ку,
kz. Другими словами, скорость распространения волны, являясь
функцией ее направления, не зависит от частоты.
Если построить в k-пространстве (т. е. в координатах кХ1 ку,
kz) поверхность постоянной частоты, со (к.) = const (для какой-
либо из ветвей закона дисперсии), то направление вектора B3.4)
совпадает с нормалью к поверхности. Очевидно, что если эта
поверхность всюду выпуклая, то связь между направлениями U
и к взаимно однозначна: каждому направлению к отвечает одно
определенное направление U и наоборот. Если же поверхность
постоянной частоты не всюду выпукла, то эта связь становится
не взаимно однозначной: каждому направлению к по-прежнему
отвечает (в данной ветви закона дисперсии) одно направление U,
но заданное направление U может осуществляться с различными
направлениями к.
3 адачи
1. Определить закон дисперсии упругих волн в кубическом кристалле,
распространяющихся в кристаллографической плоскости @01) — плоскость
грани куба (а) и в кристаллографическом направлении [111] — направление
диагонали куба (б).
Решение. В кубическом кристалле отличны от нуля упругие модули
Ххххх = Ai, Хххуу = Аг, Ххуху = Аз (и равные им компоненты тензора с
заменой индексов ж, у другими из х, у, z — см. § 10); оси ж, у, z направлены
вдоль ребер куба.
а) Выберем плоскость @01) в качестве плоскости ху и пусть в — угол
между лежащим в ней волновым вектором к и осью х. Составив дисперси-
дисперсионное уравнение B3.3) и решив его, найдем три ветви закона дисперсии:
ри>12 = -k2{Xi + Аз ± [(Ai - A3J- 4(Ai + A2)(Ai - А2 - 2А3) sin2 в cos2 6>]1/2},
pojj = Хзк2.
Волна третьей ветви поперечна и поляризована вдоль оси z. Волны пер-
первых двух ветвей поляризованы в плоскости ху. Из соображений симметрии
очевидно, что скорость распространения U = дии/дк всех этих волн тоже
лежит в плоскости ху, поэтому для ее вычисления достаточно полученных
выражений.
При 0 = 0 (к вдоль оси х) имеем
puj2 = А1&2, рш2- = Аз&2,
причем волна 1 продольна (поляризована вдоль оси ж), а волна 2 поперечна
(поляризована вдоль оси у).
При в = тг/4 (к вдоль диагонали грани куба) имеем
рш\ = I(Ai + А2 + 2A3)fc2, рш\ = i(Ai - A2)fe2.
Волна 1 продольна, а волна 2 поперечна и поляризована в плоскости ху.
140 УПРУГИЕ ВОЛНЫ
б) В этом случае волновой вектор имеет компоненты кх = ку = kz =
= /с/л/З- Решение дисперсионного уравнения дает
pool = -/c2(Ai + 2A2+4A3),
о
Р^2,з = ~k2(Xi - А2 + Аз).
о
Волна 1 продольна, волны 2 и 3 поперечны.
2. Определить закон дисперсии упругих волн в кристалле гексагональ-
гексагональной системы.
Решение. Гексагональный кристалл имеет пять независимых упру-
упругих модулей (см. задачу 1 § 10), для которых введем обозначения:
Лжжжж — Луууу — B, Л-хуху — V1 Л-ххуу — Q> ^0,
Л-xxzz -— Л-yyzz -— С, Л-xzxz -— Л-yzyz -— &•) Л-zzzz -— J'•
Ось z направлена по оси симметрии шестого порядка, направления же осей
ж, у могут быть выбраны произвольно. Выберем плоскость xz так, чтобы в
ней лежал волновой вектор к. Тогда кх = к sin в, ку =0, kz = к cos 6, где в —
угол между к и осью z. Составляя уравнение B3.3) и решая его, найдем
= k2f;
pool з = -к2{a sin2 в + / cos2 в + d ±
=b[((a-d)si
При в = 0 имеем
волна 3 продольна, волны 1 и 2 поперечны.
§ 24. Поверхностные волны
Особым видом упругих волн являются волны, распростра-
распространяющиеся вблизи поверхности среды и не проникающие в глубь
нее — волны Рэлея (Rayleigh, 1885).
Напишем уравнения движения в виде B2.11), B2.12):
— -с2Аи = 0 B4.1)
dt2 v J
(где и — какая-либо из компонент векторов и^, "Щ, а с — соот-
соответствующая ей скорость с\ или q), и будем искать решения, от-
отвечающие поверхностным волнам. Поверхность упругой среды
будем предполагать плоской, и выберем ее в качестве плоскости
ху] области среды пусть соответствуют z < 0.
Рассмотрим «плоскую» монохроматическую поверхностную
волну, распространяющуюся вдоль оси х\ функция u(t, x, z) в ней
имеет вид
§ 24 ПОВЕРХНОСТНЫЕ ВОЛНЫ 141
где функция f(z) удовлетворяет уравнению f" = х2/; введено
обозначение
НI"- B4-2)
Если /с2 — о;2/с2 < 0, то /(г) — периодическая функция, т. е. мы
получили бы обычную плоскую волну, не исчезающую во всем
объеме среды. Поэтому надо считать, что к2 — со2/с2 > 0, и ус —
вещественное число. Уравнение имеет решения вида exp(±?cz);
из них надо выбрать то, которое затухает при z —>> — оо.
Таким образом, мы приходим к следующему решению урав-
уравнений движения:
и = const .ei(kx-u>t)e*ze B43)
Оно соответствует волне, быстро (экспоненциально) затухающей
внутрь тела, т. е. распространяющейся только вблизи его поверх-
поверхности. Величина ус определяет скорость этого затухания.
Истинный вектор деформации и в волне является суммой
векторов U| и Ut, компоненты каждого из которых удовлетворя-
удовлетворяют уравнению B4.1) со скоростью с = q для U| и с = q для u^.
В случае объемных волн в неограниченной среде эти две части
представляют собой две независимо распространяющиеся вол-
волны. В случае же поверхностных волн такое разделение на две
независимые части оказывается (благодаря наличию граничных
условий) невозможным. Вектор смещения и должен быть опре-
определенной линейной комбинацией векторов и^ и щ. По поводу
этих последних надо также отметить, что они отнюдь не имеют
теперь наглядного смысла параллельных и перпендикулярных к
направлению распространения компонент смещения.
Для определения линейной комбинации векторов и/ и и^, да-
дающей истинное смещение и, надо обратиться к предельным усло-
условиям на границе тела. Отсюда же определится связь между вол-
волновым вектором к и частотой о;, а следовательно, и скорость
распространения волны. На свободной поверхности должно вы-
выполняться условие (Ухк^к — 0. Поскольку вектор нормали п на-
направлен по оси z, то отсюда следуют условия
&xz = &yz = &zz = 0,
откуда
uxz = 0, uyz = 0, сг(ихх + иуу) + A - o)uzz = 0. B4.4)
Поскольку все величины не зависят от координаты у, то вто-
второе из этих условий дает
диу диЛ 1 ди
142 УПРУГИЕ ВОЛНЫ
С учетом B4.3) отсюда следует
иу = 0. B4.5)
Таким образом, в поверхностной волне вектор деформации и ле-
лежит в плоскости, проведенной через направление распростране-
распространения перпендикулярно к поверхности.
«Поперечная» часть волны и^ должна удовлетворять усло-
условию B2.8) divut = 0, или
дщх | dutz _ q
дх dz
Ввиду B4.3) это условие приводит к равенству
гкщх + ЩЩг = 0,
определяющему отношение щх/Щг- Таким образом, имеем
Щх — що> ехр (гкх + щг — iuot) ,
B4.6)
utz = —ifcaexp (гкх + щг — iuot),
где а — постоянная.
«Продольная» часть и^ удовлетворяет условию B2.9) rot щ =
= 0, или
дщх _ duiz _ ^
dz дх ~ '
откуда
•/ п Л2 ^2\1/2
ikuiz - щщх = 0, щ= \к — —)
Таким образом, долж:но быть
щх = kbeikx+*lZ-iujt, ulz = -{щЪешх+щ*-ш, B4.7)
где b — постоянная.
Теперь воспользуемся первым и третьим из условий B4.4).
Выражая щ^ через производные от щ и вводя скорости q и Cf,
переписываем эти условия в виде
дих duz г,
dz дх - ' B48)
f^ (f 2)^
cf + (cf 2с,) 0.
1 Oz W tJ Ox
Сюда надо подставить
их = Щх + Щх, uz = щг + utz-
В результате первое из условий B4.8) дает уравнение
а(к2 + н*) + 2Ъкщ = 0. B4.9)
§ 24 ПОВЕРХНОСТНЫЕ ВОЛНЫ 143
Второе приводит к равенству
2ас2гщк + Ь[с{(к? - к2) + 2c2tk2] = О,
или
2ащк + Ъ(к2 + к2) = 0. B4.10)
Условие совместности двух однородных уравнений B4.9) и
B4.10) дает
(к2 + H2tJ = ^к2щщ,
или, возведя в квадрат и подставив значения щ, щ\
Этим уравнением определяется связь между со и к. Очевидно,
что uj = const -к] для определения коэффициента пропорциональ-
пропорциональности, напишем это соотношение в виде
ш = с№. B4.12)
Тогда общий множитель к8 сокращается и, раскрыв скобки, по-
получим для ? уравнение
?6 - 8?4 + 8?2 C - 2^|) - 16(l - ^|) = 0. B4.13)
Отсюда видно, что число ? зависит только от отношения q/c/,
являющегося некоторой характерной для каждого данного веще-
вещества постоянной и зависящего в свою очередь только от коэффи-
коэффициента Пуассона:
с? _ 1-2сг
с] " 2A-а)*
Величина ? должна быть, разумеется, вещественной положи-
положительной, причем ? < 1 (так, чтобы щ, щ были вещественны).
Уравнение B4.13) имеет только один корень, удовлетворяющий
этим условиям, так что для каждого данного значения ctjc\ по-
получается всего одно определенное значение ? х\
Таким образом, для поверхностных волн, как и для объем-
объемных, частота пропорциональна волновому вектору. Коэффици-
Коэффициент пропорциональности между ними есть скорость распростра-
распространения волны
U = ct?. B4.14)
:) При переходе от уравнения B4.11) к B4.13) теряется корень и2 = 0
(nt = щ = к), которому отвечает значение ? = 0, тоже удовлетворяющее
условию ? < 1. Из уравнений B4.9), B4.10) видно, однако, что этому корню
соответствует равенство а = —6, и потому полное смещение и = и; + и^ = 0,
т. е. движение вообще отсутствует.
144
УПРУГИЕ ВОЛНЫ
Этим определяется скорость распространения поверхностных
волн через скорости ct и q поперечных и про-
продольных объемных волн. Отношение амплитуд
поперечной и продольной частей волны опреде-
определяется по значению ? формулой
1,00
0,95
0,90
0,85
i
/
о
B4.15)
о
Отношение q/q фактически меняется для раз-
' ' личных веществ в пределах от 1/у2 до 0, что
Рис 21 соответствует изменению а от 0 до 1/2; при этом
? меняется от 0, 874 до 0, 955. На рис. 21 дан гра-
график зависимости ? от а.
3 адача
Плоскопараллельный пласт толщины h (среда 1) лежит на упругом по-
полупространстве (среда 2). Определить зависимость частоты от волнового
вектора для поперечных волн в пласте с направлением колебаний, парал-
параллельным границам пласта.
Решение. Выберем плоскость раздела между пластом и полупро-
полупространством в качестве плоскости ху, причем упругому полупространству
соответствуют z < 0, а пласту h ^ z ^ 0. В пласте имеем
Uxl=Uzl=0, uyl=f{z)ei{kx-wt\
а в среде 2 пишем затухающую в глубь нее волну:
= Uz2 = 0, uV2=Ae^zei(-kx-"t\
Для функции f(z) имеем уравнение
= i*a-^
1/2
(мы увидим ниже, что должно быть >с\ > 0), откуда
f(z) = В sin >c\z + С cos >c\z.
На свободной границе пласта (z = /г) должно быть azy = 0, т. е. duy\/dz = 0.
На границе же между обеими средами (z = 0) имеем условия
duyi _ диУ2
Щ1 = Щ2,
dz
dz
(/ii, /^2 — модули сдвига обеих сред). Из этих условий находим три уравнения
для А, В, С, условие совместности которых дает
Это уравнение определяет в неявном виде зависимость и от к; оно имеет
решения лишь при вещественных ус\ их2, так что всегда ct2 > ш/к > сц.
Отсюда видно, что распространение рассматриваемых волн возмож:но лишь
При УСЛОВИИ Ct2 > Сц.
§ 25 КОЛЕБАНИЯ СТЕРЖНЕЙ И ПЛАСТИНОК 145
§ 25. Колебания стержней и пластинок
Волны, распространяющиеся в тонких пластинках и стерж-
стержнях, существенно отличаются от волн, распространяющихся в
среде, неограниченной во всех направлениях. При этом речь идет
о волнах, длина которых велика по сравнению с толщиной стерж-
стержня или пластинки. В обратном предельном случае длин волн,
малых по сравнению с этой толщиной, стержень или пластинку
можно было бы вообще рассматривать как неограниченные во
всех направлениях, и мы получили бы снова соотношения, имев-
имевшие место в неограниченных средах.
Необходимо различать волны, в которых колебания происхо-
происходят параллельно оси стержня или плоскости пластинки, от волн
с перпендикулярными колебаниями. Начнем с изучения продоль-
продольных волн в стержнях.
Продольная деформация стержня (однородная вдоль его се-
сечения), на боковую поверхность которого не действуют никакие
внешние силы, представляет собой простое растяжение или сжа-
сжатие. Таким образом, продольные волны в стержне представляют
собой распространяющиеся вдоль его длины простые растяже-
растяжения или сжатия. Но при простом растяжении отлична от нуля
только компонента <jzz тензора напряжений (ось z — вдоль дли-
длины стержня), связанная с тензором деформации соотношением
(см. § 5)
azz = buzz = Ь .
dz
Подставляя это в общее уравнение движения
дхк
находим
«V _?«V =0> B5Л)
dz2 е dt2 v J
Это есть уравнение продольных колебаний в стержнях. Мы ви-
видим, что оно имеет вид обычного волнового уравнения. Скорость
распространения продольных волн в стержнях оказывается рав-
равной
;?Г- <»*>
Сравнив ее с выражением B2.4) для q, видим, что она меньше
скорости распространения продольных волн в неограниченной
среде.
Перейдем теперь к продольным волнам в тонких пластинках.
Уравнения движения для таких колебаний можно написать ера-
146 УПРУГИЕ ВОЛНЫ
зу, подставив в уравнениях равновесия A3.4) —ph—— и —ph- Uv
dt2 г dt2
вместо Рж, и Ру:
р д2их _ 1 д2их 1 д2их 1 д2иу
~Ё dt2 ~ 1 - а2 дх2 2A+ сг) ду2 2A-а)дхду'
р д2иу _ 1 д2иу 1 д2иу 1 д2их
~Ё dt2 ~ 1 - а2 ду2 2A+ сг) дх2 2A-а)дхду'
Рассмотрим плоскую волну, распространяющуюся вдоль оси ж,
т. е. волну, в которой деформация зависит только от координа-
координаты ж, но не от у. Тогда уравнения B5.3) сильно упрощаются и
принимают вид
Е д2иу _ Q ^ ^,
д2их
dt2
E
-a2)
d2ux _ f
дх2
' dt2
¦a) dx2
Мы получаем, таким образом, опять простые волновые урав-
уравнения. Стоящие в них коэффициенты различны для их и иу.
Скорость распространения волны с колебаниями, параллельны-
параллельными направлению распространения (их), равна
Е Х B5.5)
РA-*2)
Скорость же волны (иу) с колебаниями, перпендикулярными на-
направлению распространения (но по-прежнему лежащими в плос-
плоскости пластинки), равна скорости ct поперечных волн в неогра-
неограниченной среде.
Мы видим, таким образом, что продольные волны в стерж-
стержнях и пластинках обладают таким же характером, как и волны в
неограниченной среде, отличаясь лишь величиной своей скоро-
скорости, по-прежнему не зависящей от частоты. Совсем иные соот-
соотношения получаются для волн изгиба в пластинках и стержнях,
при которых колебания происходят в направлении, перпендику-
перпендикулярном к оси стержня или плоскости пластинки, т. е. сопровож-
сопровождаются их изгибом.
Уравнения свободных колебаний пластинки можно написать
непосредственно на основании уравнения равновесия A2.5). Для
этого надо заменить в нем —Р произведением ускорения ? на
массу ph, приходящуюся на единицу площади поверхности пла-
пластинки. Таким образом, получаем
(А — двумерный оператор Лапласа).
§ 25 КОЛЕБАНИЯ СТЕРЖНЕЙ И ПЛАСТИНОК 147
Рассмотрим монохроматическую упругую волну, соответ-
соответственно чему будем искать решение уравнения B5.6) в виде
C = const-ez(kr-^ B5.7)
(волновой вектор к имеет, конечно, всего две компоненты кх
и ку). Подстановка в B5.6) приводит к уравнению
-рои2 + ^4 = 0.
h
Отсюда получаем следующее соотношение между частотой и
волновым вектором волны:
2 ( h2E У7'. B5.8)
phj \12p(l-a*)
Таким образом, частота оказывается пропорциональной квадра-
квадрату абсолютной величины волнового вектора, в то время как в
волнах в неограниченной среде она пропорциональна первой ее
степени.
Зная закон дисперсии волн, можно найти скорость их распро-
распространения согласно формуле B3.4). В данном случае находим
г h*w i1/2
ft E \ к , ¦.
Таким образом, скорость распространения волн изгиба по пла-
пластинке пропорциональна волновому вектору, а не постоянна, как
для волн в неограниченной трехмерной среде1).
Аналогичные результаты справедливы и для волн изгиба тон-
тонких стержней; колебания изгиба предполагаются малыми. Урав-
Уравнения движения получим, заменив в уравнениях равновесия сла-
слабо изогнутого стержня B0.4) силы — Кх, —Ку произведениями
ускорений X, Y на массу pS единицы длины стержня (S — пло-
площадь его сечения). Таким образом,
^ = EIX^. B5.10)
Решение этих уравнений снова ищем в виде
X = const ¦ ё {kz~^, У = const • ё
x) Волновой вектор k = 2тг/А, где А — длина волны. Поэтому, согласно
B5.9), скорость U должна была бы неограниченно возрастать при А —> 0.
Физическая бессмысленность этого результата связана с тем, что формула
B5.9) в действительности неприменима к слишком коротким волнам.
148 УПРУГИЕ ВОЛНЫ
и находим следующий закон дисперсии:
1/2 / \ 1/2
\ j) (EI) е B5.il)
Ps ; \Ps
для колебаний вдоль осей хну. Соответствующие скорости рас-
распространения:
() (eiA
= 2 (шЛ к и(у) = 2 (
V ^ / V ps
Наконец, рассмотрим крутильные колебания стержня. Урав-
Уравнение движения стержня, подвергаемого деформации кручения,
получается приравниванием выражения Сдт/dz (см. § 16, 18)
производной по времени от момента импульса единицы длины
стержня. Этот момент равен pi dcp/dt, где dcp/dt — угловая ско-
скорость вращения (ср — угол поворота данного сечения), а
1=
— момент инерции сечения стержня относительно его центра
инерции (при чисто крутильных колебаниях каждое сечение со-
совершает вращательные колебания вокруг оси инерции стержня,
остающейся неподвижной). Написав т = d(p/dz, находим урав-
уравнение движения в виде
CS = Pl% B5.13)
Отсюда видно, что скорость распространения крутильных коле-
колебаний вдоль стержня равна
3 адачи
1. Определить частоты продольных собственных колебаний стержня
(длины /), один из концов которого закреплен, а другой — свободен.
Решение. На закрепленном конце (z = 0) должно быть uz = 0, а на
свободном конце (z = I) azz = Euzz = 0, т. е. duz/dz = 0. Ищем решение
уравнения B5.1) в виде
uz = A cos (ut + a) sinkz, к = ш( — )
V2
)
Из условия при z = / имеем cos kl = 0, откуда для собственных частот
находим
Е\1/2
(п — целые числа).
§ 25 КОЛЕБАНИЯ СТЕРЖНЕЙ И ПЛАСТИНОК 149
2. То же для стержня, оба конца которого свободны или оба закреплены,
Решение. В обоих случаях
/ тр\ 1/2
I Л/ \ 7Г
UJ = I — I —П.
\ р J I
3. Определить частоты собственных колебаний струны (длины /).
Решение. Уравнение движения струны:
д2х Ps д2х _
dz2 T dt2
(ср. уравнение равновесия B0.17)). Граничные условия: X = 0 при z = 0, /.
Собственные частоты:
fpS\ll2nn
\Т ) I
4. Определить частоты поперечных собственных колебаний стержня
(длины /) с заделанными концами.
Решение. Уравнение B5.10) при подстановке в него
X = X0(z) cos (out + a)
приобретает вид
d Xo
4 4 2 pS
= х, А о, х = и .
EIy
Общий интеграл этого уравнения есть
Xo = A cos x,z + В sin x,z + С ch xz + D sh xz.
Постоянные A, B, G, Z) определяются из граничных условий X = 0, dX/dz =
= 0 при г = 0, /. В результате находим
Xo = A {(sin х/ — sh >cl)(cos kz — ch xz) — (cos >d — ch >d)(sin x^ — sh x^)}
и уравнение
cos xl ch xl = 1,
корни которого определяют собственные частоты колебаний. Наименьшая
из собственных частот равна
_ 22,4 Е1У
^min-—^-
5. То же для стержня с опертыми концами.
Решение аналогично решению задачи 4. Результат:
Xo = A sinxz,
а частоты определяются из sinx/ = 0, т. е.
Наименьшая частота есть
_ 9, 87 Ely
Ui~ I2 PS
150 УПРУГИЕ ВОЛНЫ
6. То же для стержня, заделанного на одном конце и свободного на
другом.
Решение. Получаем для смещения
Хо = A {(cos yd + ch yd)(cos xz — ch >cz) + (sin yd — sh >d)(sin xz — sh >cz)}
(закрепленный конец z = 0, свободный z = l), и уравнение
cos xl ch xl + 1 = 0
для собственных частот. Наименьшая частота есть
_ 3, 52 #/у
^min-—^-
7. Определить собственные колебания прямоугольной пластинки (дли-
(длины сторон а и Ь) с опертыми краями.
Решение. Уравнение B5.6) при подстановке в него
С = Co(x,y)cos(u
приобретает вид
Выбираем оси координат по сторонам пластинки. Граничные условия A2.11)
приобретают вид
д2С
при х = 0, а: ( = 0, = 0;
ох2
д2с
при у = 0, Ь: С = 0, —- = 0.
ду2
Удовлетворяющее этим условиям решение есть
, . . ттгх . птгу
С о = A sin sin
a b
(m, n — целые числа), причем частоты определяются равенством
Eh 2\{mY . (п"
8. Определить собственные частоты колебаний мембраны прямоуголь-
прямоугольной формы (с длинами сторон а и Ь).
Решение. Уравнение колебаний мембраны
(ср. уравнение равновесия A4.9)). Края мембраны должны быть закреплены
так, что С = 0- Соответствующее решение для прямоугольной мембраны есть
. . ттгх . птгу
С = A sin sin cos ut,
a b
где собственные частоты
2 T 2 (m2 , п2
ph V a2 b2
(m, n — целые числа).
§ 25 КОЛЕБАНИЯ СТЕРЖНЕЙ И ПЛАСТИНОК 151
9. Определить скорость распространения крутильных колебаний по
стержням с сечением в виде круга, эллипса и равностороннего треугольника
и по стержню, имеющему вид длинной прямоугольной тонкой пластинки.
Решение. Для кругового сечения (радиуса R) момент инерции / =
= ttR4/2; взяв С из задачи 1 § 16, получим для скорости значение (///рI'2,
совпадающее со скоростью с*.
Аналогично (используя результаты задач 2-4 § 16) получаем для стерж-
стержня эллиптического сечения скорость
2аЪ
для стержня с сечением в виде равностороннего треугольника
для стержня в виде длинной прямоугольной пластинки
2-е*
Все эти скорости меньше с*.
10. Поверхность бесконечно глубокой несжимаемой жидкости покрыта
тонкой упругой пластинкой. Определить связь между волновым вектором
и частотой для волн, одновременно распространяющихся по пластинке и в
поверхностном слое жидкости.
Решение. Выбираем плоскость пластинки в качестве плоскости z = О,
а ось х выбираем вдоль направления распространения волны; области жид-
жидкости пусть соответствуют z < 0. Уравнение движения свободной пластинки
есть
dt2 dx4
(ро — плотность материала пластинки). При наличии жидкости к правой ча-
части этого уравнения надо прибавить силу, действующую со стороны жидко-
жидкости на 1 см2 поверхности пластинки, т. е. давление р жидкости. Но давление
в волне выражается через потенциал скорости посредством р = — р dip/dt
(полем тяжести пренебрегаем). Поэтому получаем уравнение
A)
z=0
Далее, нормальная компонента скорости жидкости на ее поверхности дол-
должна быть равна скорости точек пластинки, откуда получаем условие
B)
dt dz w
Потенциал ip должен удовлетворять во всем объеме жидкости уравнению
Ищем С в виде бегущей волны С = ?оегкх~гшЬ; соответственно этому берем
решение уравнения C) в виде затухающей в глубь жидкости поверхностной
волны . п ,ч ,
г (kx — out) kz
ip = (рое v 'е
Подстановка этих выражений в A) и B) приводит к двум уравнениям для
ipo и Со из условия совместности которых получаем
uj2 = D-
hpok)
152 УПРУГИЕ ВОЛНЫ
§ 26. Ангармонические колебания
Вся изложенная теория упругих колебаний является прибли-
приближенной в том же смысле, в каком приближенна вообще вся тео-
теория упругости, основанная на законе Гука. Напомним, что в ее
основе лежит разложение упругой энергии в ряд по степеням
тензора деформации, причем оставляются члены до второго по-
порядка включительно. Соответственно этому компоненты тензо-
тензора напряжений оказываются линейными функциями компонент
тензора деформации, и уравнения движения — линейны.
Наиболее характерной особенностью упругих волн в этом
приближении является то, что всякую волну можно предста-
представить в виде простого наложения, т. е. в виде линейной комби-
комбинации отдельных монохроматических волн. Каждая из этих мо-
монохроматических волн распространяется независимо от осталь-
остальных и может существовать также и сама по себе, не сопровожда-
сопровождаясь какими-либо посторонними движениями. Можно сказать,
что различные монохроматические волны, одновременно распро-
распространяющиеся в одной и той же среде, «не взаимодействуют»
друг с другом.
Все эти свойства, однако, исчезают при переходе к следую-
следующим приближениям. Эффекты следующих приближений хотя
и являются малыми, но для некоторых явлений могут играть
основную роль. Эти эффекты обычно называют ангармониче-
ангармоническими в связи с тем, что соответствующие уравнения движения
нелинейны и не допускают простых периодических (гармониче-
(гармонических) решений.
Мы рассмотрим здесь ангармонические эффекты третьего
порядка, происходящие от кубических по деформации членов
в упругой энергии. В общем виде соответствующие уравнения
движения оказываются очень громоздкими. Выяснить же харак-
характер возникающих эффектов можно с помощью следующих рас-
рассуждений. Кубические члены в упругой энергии дают квадра-
квадратичные члены в тензоре напряжений, а потому и в уравнениях
движения. Представим себе, что в этих уравнениях все линейные
члены перенесены в левые, а все квадратичные — в правые ча-
части равенств. Решая эти уравнения методом последовательных
приближений, мы должны в первом приближении вовсе отбро-
отбросить квадратичные члены. Тогда останутся обычные линейные
уравнения, решение ио которых может быть представлено в виде
наложения монохроматических бегущих волн вида const-ег (kr~^)
с определенными соотношениями между о; и к. Переходя к сле-
следующему, второму, приближению, надо положить и = ио + Ui,
причем в правой стороне уравнений (в квадратичных членах)
надо сохранить только члены с ио. Поскольку ио удовлетворяет,
по определению, однородным линейным уравнениям без правых
§ 26 АНГАРМОНИЧЕСКИЕ КОЛЕБАНИЯ 153
частей, то в левой части равенств члены с ио взаимно сокра-
сокращаются. В результате мы получим для компонент вектора Ui
систему неоднородных линейных уравнений, в правой части ко-
которых стоят заданные функции координат и времени. Эти функ-
функции, получающиеся подстановкой ио в правые части исходных
уравнений, представляют собой сумму членов, каждый из кото-
которых пропорционален множителю вида ег[(к1-к2)г-(сл-^2)*]^ или
ez[(ki+k2)r-(^i+^2)^ Где ел, о;2 и кь к2 — частоты и волновые
векторы каких-либо двух монохроматических волн первого при-
приближения.
Как известно, частный интеграл линейных уравнений такого
вида представляет собой сумму членов с такими же экспоненци-
экспоненциальными множителями, какие стоят в свободных членах (правых
частях) уравнений, и с надлежащим образом подобранными ко-
коэффициентами. Каждый из этих членов соответствует бегущей
волне с частотой wi ±о;2 и волновым вектором ki i k2 (часто-
(частоты, равные сумме или разности частот исходных волн, называют
комбинационными).
Таким образом, эффекты ангармоничности третьего порядка
приводят к тому, что на совокупность основных монохроматиче-
монохроматических волн (с частотами o;i, 6^2, • • • и волновыми векторами ki,
k2, ... ) налагаются некоторые «волны» слабой интенсивности с
комбинационными частотами вида ио\ =Ь ио2 и волновыми вектора-
векторами ki zb k2. Мы говорим здесь о них как о «волнах» в кавычках,
имея в виду, что они представляют собой некоторый поправоч-
поправочный эффект и не могут существовать сами по себе (за исклю-
исключением некоторых особых случаев; см. ниже). Между ио\ ± ио2 и
ki zb k2 не удовлетворяются, вообще говоря, те соотношения, ко-
которые имеют место для частот и волновых векторов в обычных
монохроматических волнах.
Ясно, однако, что возможны и такие специальные подборы
значений ио\, ki и^, к2, при которых между ио\ + ио2 и ki + k2
(будем говорить для определенности о суммах, а не о разностях)
будет выполняться одно из тех соотношений, которые должны
иметь место для монохроматических волн в данной среде. Вводя
обозначения ио% = ио\ + ио2 и кз = ki + к2, мы можем сказать с
математической точки зрения, что о;з, кз соответствуют в этих
случаях волнам, удовлетворяющим однородным линейным урав-
уравнениям движения (без правой части) первого приближения. Если
в правой части уравнений движения второго приближения име-
имеются члены, пропорциональные ег(кзг-^3?) с такими а;з, кз, то,
как известно, частный интеграл этих уравнений будет предста-
представлять собой волну этой частоты с амплитудой, неограниченно
возрастающей со временем.
Таким образом, наложение двух монохроматических волн и\,
ki и со>2, к2, для которых суммы а;з, кз удовлетворяют указанно-
154 УПРУГИЕ ВОЛНЫ
му условию, приводит в результате эффекта ангармоничности к
явлению резонанса — возникает новая настоящая монохромати-
монохроматическая волна а;з, кз, амплитуда которой возрастает со временем
и в конце концов перестает быть малой. Очевидно, что если при
наложении волн o;i, ki и Со>2, ^2 возникает волна а;з, кз, то при
наложении волн o;i,ki иа;з, кз тоже будет иметь место резонанс
и возникает волна с^2 = ^з — ^1 •> ^2 = кз — ki, а при наложении
волн со>2, к2 и^з, кз возникает волна o;i, ki.
В частности, в изотропном теле со связано с к посредством
uj = Ctk или uj = qfc, причем с\ > с^. Легко видеть, в каких случа-
случаях возможно выполнение какого-либо из этих соотношений для
каждой из трех волн: cji, k]_; CJ2, k2 и а;з = cji + CJ2, кз = ki + к2.
Если ki и к2 не совпадают по направлению, то к% < /ci + /^25 ясно
поэтому, что при таких ki, k2 резонанс возможен лишь в следу-
следующих двух случаях: 1) волны cji, ki и 6^2, k2 поперечны, а волна
а;з, кз продольна; 2) одна из волн o;i, ki или Со>2, к2 продольна,
другая поперечна, а волна а;з, кз продольна. Если же векторы
ki и к2 имеют одинаковое направление, то резонанс возможен в
случаях, когда все три волны продольны или все три поперечны.
Эффект ангармоничности с явлением резонанса возникает не
только при наложении нескольких монохроматических волн, но
и при наличии всего одной только волны cji, k]_. В этом случае в
правой части уравнений движения имеются члены, пропорцио-
пропорциональные e2*(kir-^i*)# Но если для o;i, ki удовлетворяется обыч-
обычное соотношение, то (в силу однородности первого порядка этого
соотношения) оно удовлетворяется и для 2o;i, 2ki. Таким обра-
образом, эффект ангармоничности приводит к появлению наряду с
каждой из имеющихся монохроматических волн cji, ki также и
волны 2o;i, 2ki с удвоенными частотой и волновым вектором,
причем амплитуда этой волны растет со временем.
Наконец, остановимся коротко на том, каким образом могут
быть составлены уравнения движения с учетом ангармонических
членов. Тензор деформации должен определяться теперь пол-
полным выражением A.3)
1 / дщ дик , дщ дщ \ ,оа 1 ч
2 \дхк dxi dxi дхк/
в котором нельзя пренебречь квадратичными по щ членами. Да-
Далее, общее выраж:ение для плотности энергии S1) для тел с дан-
данной симметрией должно быть написано как скаляр, составлен-
составленный из компонент тензора щ^ и некоторых характерных для ве-
вещества тела постоянных тензоров, содержащих члены до жела-
желаемой степени по щ^. Подставляя затем выражение B6.1) для щ^
) Мы говорим здесь о внутренней энергии ?, а не о свободной энергии F,
поскольку речь идет об адиабатических колебаниях.
§ 26 АНГАРМОНИЧЕСКИЕ КОЛЕБАНИЯ 155
и отбрасывая члены слишком высоких порядков по щ, получим
энергию ? как функцию производных дщ/дхк с желаемой сте-
степенью точности.
Для того чтобы получить уравнения движения, заметим сле-
следующее. Вариация д? может быть написана в виде
SS = — 6—,
д(дщ/дхк) дхк
или, вводя обозначение:
aik = — , B6.2)
дудщ/дхк)
переписываем д? следующим образом:
г с Общ О / г- ч г- ^~
ОС = Gjh = [(JjhOUj) — ОЩ
Г\ Г\ \ bib V / V С\
ОХк ОХк ОХк
Коэффициенты при —дщ представляют собой компоненты си-
силы, отнесенной к единице объема тела. Они имеют формально
прежний вид, и потому уравнения движения могут быть напи-
написаны по-прежнему в виде
рощ = —, B6.3)
дхк
где ро — плотность недеформированного тела, а компоненты тен-
тензора Gik определяются теперь, согласно B6.2), с ?, написанным с
желаемой степенью точности. Тензор Oik теперь не симметричен.
Подчеркнем, что aik не имеет теперь смысла плотности по-
потока импульса (тензора напряжений). В обычной теории такое
истолкование получалось в результате интегрирования плотно-
плотности объемной силы doikjdxk по объему тела. При этом суще-
существенно, что при интегрировании мы не делали различия между
координатами точек тела до и после деформирования, пренебре-
пренебрегая разницей между ними. Однако при переходе к следующим
приближениям такое пренебрежение становится невозможным, и
поверхность, ограничивающая область интегрирования, не сов-
совпадает с реальной поверхностью рассматриваемого участка тела
после его деформирования.
В § 2 было показано, что симметричность тензора О{к связана
с сохранением момента импульса. Теперь этот результат не имеет
места в связи с тем, что плотность момента импульса должна
записываться не в виде Х{йк — хкщ, а как
щ)йк - (хк + ик)щ.
156 УПРУГИЕ ВОЛНЫ
3 адача
Написать общее выражение для упругой энергии изотропного тела в
третьем приближении.
Решение. Из компонент симметрического тензора второго ранга
можно составить два квадратичных скаляра (и2к и ufi) и три кубических
(ufi, ици2к, UikUuUki). Поэтому наиболее общий вид скалярного выражения,
содержащего члены второй и третьей степеней по Щк со скалярными же
(изотропное тело!) коэффициентами, есть
2 (К /Л 2 А 2 С з
I = fiUik + I — - - I uu + —UikUuUki + Buikuu + —uu
2
I uu + UikUuUki + Buikuu +
2 о / о о
(коэффициенты при uik и Чц выражены через модули сжатия и сдвига; А,
В, С — три новые постоянные). Подставляя сюда выражение B6.1) для
Щк и оставляя члены до третьего порядка включительно, получим упругую
энергию в виде
2
=(j, (дщ_ диЛ2 (К_ _ /Л (дщ\2
4 \дхк дхъ) \2 ЗУ \dxiJ
А\ дщ дщ дщ /В + К /i\ дщ ( дщ \
~1) ~дх~к"дх~~дх~к~ V 2 ~i)^x~i\dx~k)
А дщ дик дщ В дщ дик дщ С (дщ \
п~дх~к~~дх^~дх~ ~2~dx~k"dx~~dx~i ~3 \dx~iJ
ГЛАВА IV
ДИСЛОКАЦИИ1)
§ 27. Упругие деформации при наличии дислокации
Упругие деформации в кристалле могут быть связаны не
только с воздействием на него внешних сил, но и с наличием
в нем внутренних дефектов структуры. Основным видом таких
дефектов, существенных для механических свойств кристаллов,
являются так называемые дислокации. Изучение свойств дисло-
дислокаций с атомарной, микроскопической точки зрения не входит,
разумеется, в план этой книги; мы рассмотрим здесь лишь чисто
макроскопические аспекты этого явления с точки зрения теории
упругости. Однако для лучшего уяс-
уяснения физического смысла излагаемых \у
соотношений предварительно напомним ••••!••••
на двух простых примерах, в чем заклю- ••••
чается характер дислокационных дефек- ••••!••••
тов с точки зрения структуры кристал- ....i....
лической решетки. 7~r~i~7~«L~;~7~r~;~^
Представим себе, что в кристалличе-
кристаллическую решетку (разрез которой изобра-
изображен на рис. 22) вдвинута «лишняя» кри-
кристаллическая полуплоскость (совпадаю-
(совпадающая на рисунке с верхней полуплоско- рис. 22
стью yz). Линия края этой полуплоско-
полуплоскости (перпендикулярная плоскости рисунка ось z) называется в
этом случае краевой дислокацией. Искажение структуры решет-
решетки в непосредственной близости к дислокации велико, но уже
на расстояниях порядка нескольких периодов кристаллические
плоскости смыкаются друг с другом почти правильным образом.
Деформация существует, однако, и вдали от дислокации. Она яс-
ясно обнаруживается при обходе в плоскости ху по узлам решетки
вдоль замкнутого контура вокруг начала координат: если опре-
определять вектором и смещение каждого узла от его положения в
идеальной решетке, то полное приращение этого вектора при об-
обходе будет отлично от нуля и равно одному периоду вдоль оси х.
) Эта глава написана совместно с A.M. Косевичем.
158
ДИСЛОКАЦИИ
Другой тип дислокации можно наглядно представить себе как
результат «разреза» решетки по полуплоскости, после чего ча-
части решетки по обе стороны разреза сдвигаются относительно
друг друга на один период параллельно краю разреза (который
называется в этом случае винтовой дислокацией). Наличие та-
такой дислокации превращает кристаллические плоскости в решет-
решетке в геликоидальную поверхность (подобную винтовой лестнице
без ступенек). При полном обходе вокруг линии дислокации (ось
геликоидальной поверхности) вектор смещения узлов получает
приращение на один период параллельно этой оси. На рис. 23
изображена схема описанного разреза.
С макроскопической точки зрения дислокационная деформа-
деформация кристалла как сплошной среды обладает в общем случае
следующим свойством: при обходе по любому замкнутому кон-
контуру L, охватывающему линию дислокации D, вектор упруго-
упругого смещения и получает определенное конечное приращение Ь,
©
Рис. 23
Рис. 24
равное (по величине и направлению) одному из периодов решет-
решетки; постоянный вектор b называется вектором Бюргерса данной
дислокации. Это свойство записывается в виде
Aщ = 0 dxk = —bi.
^ B7.1)
L L
причем принимается, что направление обхода контура связано
правилом винта с выбранным направлением вектора касатель-
касательной к линии дислокации т (рис. 24). Сама линия дислокации
является при этом линией особых точек поля деформации.
Упомянутым выше простым случаям краевой и винтовой дис-
дислокаций отвечают прямые линии D, вдоль которых т 1 b или
т || Ь. Отметим также, что в изображенной на рис. 22 нагляд-
наглядной картине краевые дислокации с противоположными направ-
направлениями b различаются тем, что «лишняя» кристаллическая по-
полуплоскость лежит сверху или снизу от плоскости ху (о таких
дислокациях говорят как о различающихся по знаку).
§ 27 УПРУГИЕ ДЕФОРМАЦИИ ПРИ НАЛИЧИИ ДИСЛОКАЦИИ 159
В общем случае дислокация является кривой линией, вдоль
которой угол между т и b меняется. Самый же вектор Бюргер-
са b неизбежно постоянен вдоль всей линии дислокации. Оче-
Очевидно также, что линия дислокации не может просто окончить-
окончиться внутри кристалла (ср. ниже примеч. на с. 160). Она должна
выходить обоими концами на поверхность кристалла либо (как
это обычно и бывает в реальных условиях) представлять собой
замкнутую петлю.
Условие B7.1) означает, другими словами, что при наличии
дислокации вектор смещения является неоднозначной функцией
координат, получающей заданное приращение при обходе вокруг
линии дислокации. Физически, разумеется, никакой неоднознач-
неоднозначности нет: приращение b означает дополнительное смещение то-
точек решетки на один из периодов, что вообще не меняет ее со-
состояния. В частности, тензор напряжений а^^ характеризующий
упругое состояние кристалла, является однозначной и непрерыв-
непрерывной функцией координат.
Для дальнейшего будет удобным ввести обозначение
wik = p-, B7.2)
OXi
с помощью которого условие B7.1) записывается в виде
xx = -bk. B7.3)
L
Тензор w^ (несимметричный) принято называть тензором ди-
сторсии. Его симметричная часть дает обычный тензор дефор-
деформации
Щк = -{Щк + и>ы)- B7.4)
Тензоры Wik и Щк — однозначные функции координат, в проти-
противоположность неоднозначной функции и (г).
Условие B7.3) можно записать и в дифференциальном виде.
Для этого преобразуем интеграл по контуру L в интеграл по
какой-либо поверхности Sl, опирающейся на этот контур 1):
wmkdxm = J ецт^-dfi. B7.5)
SL
1) Согласно теореме Стокса преобразование осуществляется заменой эле-
элемента интегрирования по линии dxm оператором
„ д
йХт —»> бит Ц/г "Г ,
дх\
где ецш — единичный антисимметричный тензор, df — элемент площади.
Напомним, что выражение вида eumaibi есть компонента [ab]m векторного
произведения векторов а и Ь.
160 ДИСЛОКАЦИИ
Поскольку тензор ецт антисимметричен по индексам /, га, а тен-
тензор dwmk/dxi = d2Uk/dxidxm симметричен по этим же индек-
индексам, то подынтегральное выражение тождественно равно нулю
везде, за исключением точки пересечения линии D с поверхно-
поверхностью Sl] на самой линии дислокации, как линии особых точек,
представление wm^ в виде производных B7.2) теряет смысл 1). В
этих точках величины w^ надо определить с помощью соответ-
соответствующей E-функции так, чтобы интеграл B7.5) приобрел тре-
требуемое значение — Ь&. Пусть ? — двухмерный радиус-вектор, от-
отсчитываемый от оси дислокации в данной ее точке в плоскости,
перпендикулярной вектору т. Элемент площади этой плоскости
выражается через элемент di поверхности Sl как т di. По опре-
определению двумерной E-функции 8(?) имеем
Ясно поэтому, что для достижения поставленной цели надо по-
положить
^j B7.6)
Это и есть искомая дифференциальная запись условия B7.3).
Поле смещений и (г) вокруг дислокации может быть выра-
выражено в общем виде, если известен тензор Грина G^ уравнений
равновесия данной анизотропной среды, т. е. функция, опреде-
определяющая смещение щ, созданное в неограниченной среде сосре-
сосредоточенной в начале координат единичной силой, направленной
вдоль оси Xk (см. § 8). Это легко сделать с помощью следующего
формального приема.
Вместо того чтобы искать неоднозначные решения уравнений
равновесия, будем рассматривать u(r) как однозначную функ-
функцию, условившись, что она испытывает заданный скачок b на
некоторой произвольно выбранной поверхности Sd, опирающей-
опирающейся на дислокационную петлю D. Если и+ и и_ — значения функ-
функции соответственно на верхнем и нижнем берегах разрыва Sd , то
u+ - u_ = b. B7.7)
(«Верхний» и «нижний» берега определены на рис. 24. Нормаль
п к поверхности Sl>, направленная по отношению к т указан-
указанным на рисунке образом, дает направление от нижнего берега
к верхнему.) Интегрирование по контуру L от верхнего берега к
нижнему дает тогда результат B7.3) с правильным знаком. Тен-
Тензоры wik и щь, формально определенные согласно B7.3), B7.4),
х) Если бы линия дислокации оканчивалась в какой-либо точке внутри
тела, то поверхность Sl могла бы быть выбрана охватывающей эту точку
и тем самым нигде не пересекающей линию D. Тогда интеграл B7.5) обра-
обратился бы в нуль — в противоречии с поставленным условием.
§ 27 УПРУГИЕ ДЕФОРМАЦИИ ПРИ НАЛИЧИИ ДИСЛОКАЦИИ 161
будут иметь на «поверхности разрыва» E-образную особенность:
4!} 1? \ B7.8)
где ? — координата, отсчитываемая от поверхности Sjj вдоль
нормали n (d( = ndl, где d\ — элемент длины контура L).
Поскольку никакой физической особенности в среде вокруг
дислокации в действительности нет, то тензор напряжений <т^,
как уже было указано, должен быть однозначной везде непре-
непрерывной функцией. Между тем с тензором деформации B7.8)
формально связан тензор напряжений
(S)
тоже имеющий особенность на поверхности Sp. Для того чтобы
исключить его, надо ввести фиктивные объемные силы, распре-
распределенные вдоль поверхности Sd с определенной плотностью f ^.
Уравнения равновесия при наличии объемных сил имеют вид
дспк , AS) _ п
дхк
Отсюда ясно, что надо положить
/f) = ~^ = -XMJ-f. B7.9)
Таким образом, задача об отыскании неоднозначной функции
u(r) эквивалентна задаче об отыскании однозначной, но разрыв-
разрывной функции при наличии объемных сил, определяемых форму-
формулами B7.8), B7.9). Теперь можно воспользоваться формулой
(S),
щ(г)= fGtJ(r-r')ff\r')dV.
Подставив сюда B7.8), производим интегрирование по частям;
интеграл по бесконечно удаленной поверхности исчезает, а в
оставшемся интеграле по объему E-функция устраняется триви-
тривиальным образом. Заметив также, что dGij/dx'k = —dGij/dx^,
получим окончательно
^(Г) = -Xjklmbm J nl?-kGv(T ~ Г0 df' B7'10)
SD
Тем самым поставленная задача решена1).
:) Тензор Gij для анизотропной среды найден в указанной на с. 44 статье.
Этот тензор, вообще говоря, очень сложен. В случае прямолинейной дис-
дислокации, когда мы имеем дело с плоской задачей теории упругости, может
оказаться проще непосредственно решать уравнения равновесия.
6 Л. Д. Ландау, Е.М. Лифшиц, том VII
162 ДИСЛОКАЦИИ
Наиболее простой вид деформация B7.10) имеет вдали от
замкнутой дислокационной петли. Если представлять себе пет-
петлю расположенной вблизи начала координат, то на больших (по
сравнению с ее линейными размерами) расстояниях в производ-
производной dGij/dxk можно положить г — г' « г и вынести ее за знак
интеграла. Тогда получим
B7.11)
где
d{k = Sibk, Si= Jmdf = -еш §хк dx\. B7.12)
SD Z D
Компоненты аксиального вектора S равны площадям, ограни-
ограниченным проекциями петли D на плоскости, перпендикулярные
соответствующим координатным осям; тензор d{k естественно на-
назвать тензором дислокационного момента. Компоненты тензора
Gij являются однородными функциями первого порядка от коор-
координат ж, у, z (см. с. 45). Поэтому из B7.11) видно, что щ ы> 1/г2.
Соответствующее же поле напряжений О{к оо 1/г3.
Легко выяснить также характер зависимости от расстояния
упругих напряжений вокруг прямолинейной дислокации. В ци-
цилиндрических координатах z, r, ср (с осью z вдоль линии дислока-
дислокации) деформация будет зависеть только от г и (р. Интеграл B7.3)
не должен меняться, в частности, при произвольном подобном
изменении размеров любого контура в плоскости ху. Очевид-
Очевидно, что это возможно, лишь если все wik oo 1/г. Той же степени
1/г будет пропорционален и тензор щк, а с ним и напряжения:
Хотя до сих пор мы говорили только о дислокациях, тем не
менее полученные формулы применимы также и к деформациям,
вызываемым другого рода дефектами кристаллической струк-
структуры. Дислокации — линейные дефекты структуры. Наряду с
ними существуют дефекты, в которых нарушение правильной
структуры распространяется по области вблизи некоторой по-
поверхности2). С макроскопической точки зрения такой дефект
может быть описан как поверхность разрыва, на которой век-
вектор смещения и испытывает скачок (напряжения же О{к оста-
:) Обратим внимание на определенную аналогию между полем упругой
деформации вокруг линии дислокации и магнитным полем линейных про-
проводников; роль силы тока играет при этом вектор Бюргерса. Однако, не
говоря уже о совершенно различной природе тех и других физических яв-
явлений, степень аналогичности уменьшается также и различием в тензорном
характере соответствующих величин.
) Известным примером такого рода дефектов является тонкая двойнико-
двойниковая прослойка в кристалле.
§ 27 УПРУГИЕ ДЕФОРМАЦИИ ПРИ НАЛИЧИИ ДИСЛОКАЦИИ 163
ются непрерывными в силу условий равновесия). Если на всей
поверхности величина b скачка одинакова, то в отношении со-
создаваемых им деформаций такой разрыв ничем не отличается
от дислокации (расположенной вдоль его края). Разница состоит
лишь в том, что вектор b не равен периоду решетки. Положение
же поверхности So, о которой была речь выше, перестает быть
произвольным и должно совпадать с фактическим расположени-
расположением физического разрыва. С такой поверхностью разрыва связана
определенная дополнительная энергия, что может быть описано
путем введения соответствующего коэффициента поверхностно-
поверхностного натяжения.
3 адачи
1. Написать дифференциальные уравнения равновесия для дислокаци-
дислокационной деформации в изотропной среде, выраженные через вектор смеще-
смещения г).
Решение. В терминах тензора напряжений или тензора деформации
уравнения равновесия имеют обычный вид: daik/ дхк = 0 или, подставив а%к
из E.11):
дхк 1 — 2а dxi
Но при переходе к вектору и надо учесть дифференциальное условие B7.6).
Умножив B7.6) на eikn и упростив по г, к, получим2)
dwnk dWkk г ,1 г/^ч /о\
-^ -т = -[тЪ]п6(?). B)
дхк охп
Переписав A) в виде
1 dwik I dwki cr dwu _
2 дхк 2 дхк 1 — 2а дх{
и подставив сюда B), находим
-Ь^—— = [тЬ]г<*(?).
дхк 1 — 2а dxi
Переходя теперь к и, согласно B7.2), находим искомое уравнение для неод-
неоднозначной функции u(r) в виде
Аи + —-—V div и = [тЬ]<*(?). C)
Решение этого уравнения должно удовлетворять условию B7.1).
2. Определить деформацию вокруг прямолинейной винтовой дислока-
дислокации в изотропной среде.
г) Физический смысл этой и других задач, относящихся к изотропной сре-
среде, условен, поскольку реальные дислокации по самому своему существу
свойственны лишь кристаллам, т. е. анизотропной среде. Эти задачи, одна-
однако, представляют определенный иллюстративный интерес.
2) Напомним формулу
6*
164 ДИСЛОКАЦИИ
Решение. Выбираем цилиндрические координаты z, г, if с осью z
вдоль линии дислокации; вектор Бюргерса: Ъх = Ъу = 0, bz = Ъ. Из сообра-
соображений симметрии очевидно, что смещение и параллельно оси z и не зависит
от координаты z. Уравнение равновесия C) задачи 1 сводится к /\uz = 0.
Решение, удовлетворяющее условию B7.1) 1):
Ь
uz = -<р.
У тензоров Щк и ац- отличны от нуля лишь компоненты
_ Ъ _ fib
uZip = - , aZ(f, = - ,
4тгг 2тгг
так что деформация представляет собой чистый сдвиг.
Свободная энергия дислокации (на единицу ее длины) дается интегралом
F = - Г 2uZ(paZ(p dV = — / —,
2 J 4тг J r
логарифмически расходящимся на обоих пределах. В качестве нижнего пре-
предела следует взять величину порядка атомных расстояний (~ 6), на которых
деформация велика и макроскопическая теория неприменима. Верхний же
предел определяется размерами порядка длины L дислокации. Тогда
4тг Ъ
Энергию же деформации в «сердцевине» дислокации вблизи ее оси (в обла-
области с площадью сечения ~ Ъ2) можно оценить как ~ fib2. При In (L/b) ^> 1
эта энергия мала по сравнению с энергией поля упругой деформации ).
3. Определить внутренние напряжения в анизотропной среде вокруг
винтовой дислокации, перпендикулярной плоскости симметрии кристалла.
Решение. Выбираем систему координат ж, у, z так, чтобы ось z сов-
совпадала с линией дислокации (и снова пишем bz =b). Вектор и опять имеет
лишь компоненту uz = u(x,y). Так как плоскость ху является плоскостью
симметрии, то равны нулю все компоненты тензора Ашт5 У которых ин-
индекс z встречается нечетное число раз. Поэтому отличны от нуля только
две компоненты тензора <7ik'.
_ ди ди _ ди ди
&xz = Axzxz — h Axzyz ~Г~ , &yz = \yzXz ~ h ^yzyz ~T~ •
ox oy ox oy
Введем двухмерные вектор сг и тензор \а(з'- &а = &az, ^aC = ^azCz (a = 1, 2).
Тогда
_ ®и
О~а — Ла/3— ,
ОХC
а уравнение равновесия записывается в виде diver = 0. Искомое решение
этого уравнения должно удовлетворять условию B7.1): §Vud\ = b.
) Во всех задачах о прямолинейных дислокациях принимаем вектор т в
отрицательном направлении оси z.
2) Эти оценки имеют общий характер и справедливы по порядку величины
для любой (не только винтовой) дислокации. Следует отметить, что факти-
фактически значения In (L/b) обычно не столь велики, так что энергия «сердцеви-
«сердцевины» составляет заметную часть полной энергии дислокации.
§ 27 УПРУГИЕ ДЕФОРМАЦИИ ПРИ НАЛИЧИИ ДИСЛОКАЦИИ 165
В таком виде задача совпадает с задачей о нахождении индукции и на-
напряженности магнитного поля (роль которого играют сг и \7и) в анизотроп-
анизотропной среде (с магнитной проницаемостью \ар) вокруг прямолинейного тока,
сила которого / = сЬ/4тг. Воспользовавшись известным из электродинамики
решением этой задачи, найдем
Ь
где |Л| — определитель тензора \а/з (см. VIII, задача 5 к § 30).
4. Определить деформацию вокруг прямолинейной краевой дислокации
в изотропной среде.
Решение. Пусть ось z направлена вдоль линии дислокации, а вектор
Бюргерса: Ъх = 6, Ъу = bz = 0. Из симметрии задачи очевидно, что вектор
деформации лежит в плоскости ху и не зависит от z, так что мы имеем дело
с плоской задачей. Ниже в этой задаче все векторы и векторные операции —
двумерные в плоскости ху.
Будем искать решение уравнения
Аи Н V div и = -
(см. задачу 1; j — единичный вектор вдоль оси у) в виде u = ir°) + w, где
ir°) — вектор с составляющими
(о) Ь (о) Ь .
<-—?>, иу = —\пг
Z7T Z7T
(мнимая и вещественная части от — In (ж + iy))\ г, (р — полярные коорди-
2тг
наты в плоскости ху. Этот вектор удовлетворяет условию B7.1). Поэтому
задача сводится к нахождению однозначной функции w. Поскольку, как
легко убедиться,
divu@) =0, Au@) =bj6(r),
то w удовлетворяет уравнению
AwH Vdivw = -
Это — уравнение равновесия под действием сил, сосредоточенных вдоль
оси z с объемной плотностью
(ср. уравнение A) в задаче к § 8). С помощью найденного в той же задаче
тензора Грина для неограниченной среды нахождение w сводится к вычис-
вычислению интеграла
по
_2 I Г(з-М! , *у
8тгA-сг) J [ R 1
о
В результате получим
1 ху
Ъ f 1-2G , , 9 , , , 1 ж2 )
^v = < In Wx2 + у2 Н > .
У 2тг \ 2A - сг) V 2A-сг)ж2+?/2 J
166 ДИСЛОКАЦИИ
Вычисленный отсюда тензор напряжений имеет декартовы компоненты
или полярные
sin 9? cos 9?
ЪВ , (Trip = ЪВ ,
г г
где В = И .
2тгA-сг)
5. Бесконечное число одинаковых параллельных прямолинейных крае-
краевых дислокаций в изотропной среде расположены в одной плоскости, пер-
перпендикулярной их векторам Бюргерса, на одинаковых расстояниях h друг
от друга. Найти напряжения сдвига, создаваемые такой «дислокационной
стенкой» на расстояниях, больших по сравнению с h.
Решение. Пусть дислокации параллельны оси z и расположены в
плоскости yz. Согласно результатам задачи 4 суммарное напряжение, соз-
создаваемое всеми дислокациями в точке ж, у, дается суммой
/ \ иъ ST^ x2-(y-nhJ
(тХу(х,у)=ЪВх 2^ г о , , Г^"-
Перепишем эту сумму в виде
аху = -ЪВ- J(а, /3) + а—у-^-
h [ да
Согласно формуле суммирования Пуассона
оо оо °?
Е /(«)= Е /
п = -оо *•- — J
найдем
J(a, /3) = 22 '
При а = ж//г^1в сумме по к можно оставить лишь первый член, и в
результате получим
Таким образом, напряжения убывают при удалении от стенки по экспонен-
экспоненциальному закону.
6. Определить деформацию изотропной среды вокруг дислокационной
петли (J. M. Burgers, 1939).
§ 28 УПРУГИЕ ДЕФОРМАЦИИ ПРИ НАЛИЧИИ ДИСЛОКАЦИИ 167
Решение. Исходим из формулы B7.10). Тензор Xikim для изотропной
среды согласно E.9) и E.11) может быть представлен в виде
S -—SikSlm + 6ц6кт + ^irn^kl \ •
Тензор Грина для изотропной среды найден в задаче к § 8 и может быть
представлен как
16тг// A — a) R
Здесь R = (г — г') — радиус-вектор от элемента dff (в точке г7) к точке
наблюдения деформации (точка г); v = Tt/R — единичный вектор в этом
направлении. Подставив эти выражения в B7.10) и произведя под интегра-
интегралом требуемые дифференцирования, получим после вычисления
u(r) = J"^ J ^{b(i/df) + (bi/) df - i/(b df)}
So
Стоящие здесь интегралы можно выразить через интегралы по контуру
D — по петле дислокации. Для этого используем следующие формулы:
^[bdl'] = j ^{(bi/) df - i/(b df)},
D SD
(f[hv]d\f = - f -{hdf + (bi/) (i/df7)}.
/ J R
Интегралы в правых частях равенств получаются из контурных интегралов
в левой части применением теоремы Стокса, согласно которой преобразо-
преобразование осуществляется заменой d\f —»¦ [dff • V'] (где V7 = д/дг')] поскольку
подынтегральное выражение зависит только от разности г — г7, это преоб-
преобразование эквивалентно замене d\' —»¦ — [df' • V] (где V = д/дг). Введем
также телесный угол Q, под которым петля D видна из точки наблюдения,
согласно определению
п= f —vdf.
J R?
Тогда поле смещений представится в виде
8тгA — сг)
D D
Неоднозначность этой функции заключена в первом члене — угол О, меня-
меняется на 4тг при обходе вокруг линии D.
Вдали от петли выражение A) сводится к
u(r) = я n~2\m{S (bl/) + b (Sl/) " v (Sb)} + я (л 3 ^2^) (bl/)I/-
8тг A - сг) R? 8тг A - сг) R?
Эту формулу можно было бы получить и непосредственно из B7.11), B7.12).
168 ДИСЛОКАЦИИ
§ 28. Действие поля напряжений на дислокацию
Рассмотрим дислокационную петлю D в поле упругих на-
напряжений а^, созданных действующими на тело внешними на-
нагрузками, и вычислим силу, действующую на нее в этом поле.
Согласно общим правилам для этого надо найти работу 5Rd,
производимую над дислокацией при бесконечно малом ее сме-
смещении.
Вернемся к введенному в § 27 представлению о дислокацион-
дислокационной петле D как линии, на которую опирается поверхность (Sd)
разрыва вектора смещения; величина разрыва дается формулой
B7.7). Смещение линии дислокации D приводит к изменению
поверхности Sd- Пусть Jx — вектор смещения точек линии D.
Смещаясь на ?х, элемент d\ длины линии описывает площадь
6i = [$х • dl] = [jx • т] d/, чем и определяется приращение пло-
площади поверхности Sd- Поскольку речь идет теперь о реальном,
физическом смещении дислокации, необходимо учесть, что ука-
указанная операция сопровождается изменением физического объ-
объема среды. Поскольку смещения и точек среды по обе стороны
поверхности различаются на величину Ь, то это изменение дает-
дается произведением
SV = b rff = [<hc • т] b df = Jx [rb] df. B8.1)
В связи с этим возможны две существенно различные фи-
физические ситуации. В одной из них SV = 0, смещение линии
дислокации не связано с изменением объема. Так будет, если
смещение происходит в плоскости, определяемой векторами т
и Ь. Эту плоскость называют плоскостью скольжения данного
элемента дислокации. Огибающую семейства плоскостей сколь-
скольжения всех элементов длины петли D называют поверхностью
скольжения дислокации; она представляет собой цилиндриче-
цилиндрическую поверхность с образующими, параллельными вектору Бюр-
герса b 1). Физическая особенность плоскости скольжения состо-
состоит в том, что только в ней возможно сравнительно легкое ме-
механическое перемещение дислокации (о котором в этом случае
обычно говорят как о ее скольжении) 2).
С изменением площади поверхности Sd при смещении дис-
дислокации связано изменение сингулярной деформации B7.8), со-
) Возможные системы плоскостей скольжения в анизотропной среде фак-
фактически определяются структурой ее кристаллической решетки.
2) Так, для передвижения изображенной на рис. 22 краевой дислокации
в ее плоскости скольжения (плоскость xz) достаточно сравнительно неболь-
небольших перемещений атомов, в результате которых «лишними» будут оказы-
оказываться все более удаленные от плоскости yz кристаллические полуплоскости.
§ 28 ДЕЙСТВИЕ ПОЛЯ НАПРЯЖЕНИЙ НА ДИСЛОКАЦИЮ 169
средоточенное на линии D. Его можно представить в виде
() \ B8.2)
где 8(?) — введенная в § 27 двумерная E-функция. Подчеркнем,
что эта деформация однозначно определяется формой линии D
и смещением #х, в отличие от выражения B7.8), зависящего от
произвольного выбора поверхности Sjj.
Выражение B8.2) описывает локальную неупругую остаточ-
остаточную деформацию (ее называют пластической), не сопровож-
сопровождающуюся упругими напряжениями. Связанная с ней работа,
совершаемая в конечном счете внешними источниками, дается
интегралом
(ср. C.2) ), где под 6щ^ надо понимать полное геометрическое
изменение деформации. Оно складывается из упругой и пласти-
пластической частей; нас интересует здесь только работа, связанная с
пластической частью1). После подстановки 8щ^л из B8.2), вви-
ввиду наличия в нем E-функции, остается интегрирование только
вдоль длины дислокационной петли D:
SRD = §о$ецт Sxirm dl. B8.3)
D
Коэффициент при Sxi в подынтегральном выражении есть сила
//, действующая на единицу длины линии дислокации. Таким
образом,
U = ештка^Ьт B8.4)
(М.О. Peach, J.S. Kohler, 1950). Отметим, что сила f перпенди-
перпендикулярна вектору т, т. е. линии дислокации.
Формула B8.3) допускает наглядную интерпретацию. Соглас-
Согласно сказанному выше смещение элемента линии дислокации сво-
сводится к разрезанию некоторой площадки df и сдвигу верхнего
берега разреза относительно нижнего на длину Ь. Приложенная
к di сила внутренних напряжений есть af^ dfk, а производимая
(в)
этой силой при сдвиге работа есть b^V 4/ft-
Поскольку в написанном виде формула B8.4) относится толь-
только к перемещению в плоскости скольжения, имеет смысл сразу
:) При выводе уравнений движения виртуальные пластическую и упру-
упругую деформации надо рассматривать как независимые переменные. Инте-
Интересуясь уравнением движения дислокации, надо рассматривать только пла-
пластическую деформацию.
170 ДИСЛОКАЦИИ
же написать проекцию силы f на эту плоскость. Пусть х — еди-
единичный вектор нормали к линии дислокации в плоскости сколь-
скольжения. Тогда
или
' \т, B8.5)
где v = [хт] — вектор нормали к плоскости скольжения. По-
Поскольку векторы b и v взаимно перпендикулярны, то (выбрав
вдоль них две из координатных осей) мы видим, что сила /j_
(е)
определяется всего одной из компонент тензора а^.
Если же смещение дислокации происходит не в плоскости
скольжения, то SV ^ 0. Это значит, что смещение берегов разре-
разреза привело бы к появлению избытка вещества (когда один берег
«перехлестывает» другой) или к его недостаче (образование ще-
щели между раздвигающимися берегами). Этого нельзя допустить,
если полагать, что в процессе движения дислокации сплошность
среды не нарушается и ее плотность остается неизменной (с точ-
точностью до упругих деформаций). Устранение избыточного веще-
вещества или заполнение его нехватки происходит в реальном кри-
кристалле диффузионным способом (ось дислокации становится ис-
источником или стоком диффузионных потоков вещества) *). О пе-
перемещении дислокации, сопровождающемся диффузионным «за-
«залечиванием» дефектов сплошной среды, говорят как о ее пере-
переползании 2).
Из сказанного ясно, что, допустив переползание дислокации
в качестве возможного ее виртуального перемещения, необходи-
необходимо считать, что оно, как и скольжение, происходит без локаль-
локального изменения объема среды. Это значит, что из деформации
B8.2) надо вычесть ответственную за изменение объема часть
-$ikuu Л\ т- е- описывать пластическую деформацию тензором
• т]к + hk[Sx ¦ т]г - Ui
¦ т]} 8(?). B8.6)
Соответственно вместо B8.4) получим следующую формулу для
) Так, изображенная на рис. 22 дислокация может перемещаться в плос-
плоскости yz лишь за счет диффузионного ухода вещества из «лишней» полу-
полуплоскости.
) Поскольку такой процесс лимитируется диффузией, он может факти-
фактически играть роль лишь при достаточно высоких температурах.
§ 28 ДЕЙСТВИЕ ПОЛЯ НАПРЯЖЕНИЙ НА ДИСЛОКАЦИЮ 171
действующей на дислокацию силы 1):
Uty B8.7)
(J. Weertman, 1965). Полная сила, действующая на всю дисло-
дислокационную петлю, равна
F% = ешЪт <Ь la™ - Ц1та^ dxk. B8.8)
D
Она отлична от нуля только в неоднородном поле напряжений
(при а^ = const интеграл сводится к § dxk = 0). Если на протя-
протяжении петли поле напряжений меняется мало, то
т-> l & ( (е) Ь (е)\ ? /
Fi = ешЪт— [акт1 - -Sima^lJ j) Dxpdxk
(петлю представляем себе расположенной вблизи начала коор-
координат) . Входящие сюда интегралы образуют антисимметричный
тензор
§xpdxk = -§xkdxp.
Имея это в виду, легко выразить силу через введенный в B7.12)
ы
дислокационный момент d; - 2 '•
Fi = dim—^- + - du—— - du—— . B8.9)
UX% о \ OX i OX% I
В однородном поле напряжений эта сила, как уже было указано,
обращается в нуль. При этом, однако, на петлю действует момент
сил
который тоже можно выразить через дислокационный момент:
Кг = eikldkm (<rg - Ulma^ . B8.10)
*) Представляется очевидным, что всестороннее (равномерное) сжатие
кристалла не должно приводить к появлению силы f; выражение B8.7) этим
свойством обладает.
2) При выводе используется также формула eiki^irnn = $кт$1п — $кп$1т и
уравнения равновесия да^/дхщ = 0.
172 ДИСЛОКАЦИИ
3 адачи
1. Найти силу взаимодействия двух параллельных винтовых дислокаций
в изотропной среде.
Решение. Сила, действующая на единицу длины одной дислокации в
поле напряжений, создаваемых второй дислокацией, определяется по фор-
формуле B8.4) с помощью результатов задачи 2 § 27. Она имеет радиальное
направление и равна
2тгг
Дислокации одного знака (b\b2 > 0) отталкиваются, а дислокации разных
знаков (bib2 < 0) притягиваются.
2. Прямолинейная винтовая дислокация расположена параллельно плос-
плоской свободной поверхности изотропной среды. Найти действующую на дис-
дислокацию силу.
Решение. Пусть плоскость yz совпадает с поверхностью тела, а дис-
дислокация параллельна оси z и имеет координаты х = жо, у = 0.
Поле напряжений, оставляющее поверхность среды свободной, описыва-
описывается суммой полей дислокации и ее зеркального отражения в плоскости yz,
как если бы они были расположены в неограниченной среде:
У У
&XZ —
CTyz
2.1
fib I
2тг |
-(*
Ах
-жоJ4
X — Хо
-жоJ4
У2
У2
(х-
(х-
+ хоJ 4-
X + Хо
+ хоJ +
У2
У2
Такое поле действует на рассматриваемую дислокацию с силой, равной при-
притяжению со стороны ее зеркального изображения, т. е. дислокация притяги-
притягивается к поверхности среды с силой
3. Найти силу взаимодействия двух параллельных краевых дислокаций
в изотропной среде, расположенных в параллельных плоскостях скольже-
скольжения.
Решение. Пусть плоскости скольжения параллельны плоскостям xz,
а ось z параллельна линиям дислокаций; как и в задаче 4 § 27, полагаем
rz = — 1, bx = b. Тогда сила, действующая на единицу длины дислокации в
поле упругих напряжений сгц^, имеет компоненты
fx = baxy, fy = —baxx.
В данном случае aik определяются выражениями, найденными в задаче 4
§ 27. Если одна дислокация совпадает с осью z, то она действует на вто-
вторую дислокацию, проходящую через точку ж, у на плоскости ху, с силой,
компоненты которой в полярных координатах равны
, bib2B bib2B . fi
fr = , U = sm2<?, B =
2тгA-сг)
Проекция же силы на плоскость скольжения равна
Она обращается в нуль при (р = тг/2 и при (р = тг/4. Первое из этих поло-
положений соответствует устойчивому равновесию при b\b2 > 0, а второе — при
bib2 < 0.
§ 29 НЕПРЕРЫВНОЕ РАСПРЕДЕЛЕНИЕ ДИСЛОКАЦИЙ 173
§ 29. Непрерывное распределение дислокаций
Если в кристалле имеется одновременно много дислокаций,
находящихся на относительно малых (хотя, конечно, и больших
по сравнению с постоянной решетки) расстояниях, то становит-
становится целесообразным их усредненное рассмотрение. Другими сло-
словами, рассматриваются «физически бесконечно малые» элемен-
элементы объема кристалла, через которые проходит достаточно много
дислокационных линий.
Формулировка уравнения, выражающего основное свойство
дислокационных деформаций, достигается естественным обоб-
обобщением уравнения B7.6). Введем тензор р^ (тензор плотности
дислокаций) такой, чтобы его интеграл по поверхности, опираю-
опирающейся на любой контур L, был равен сумме b векторов Бюргерса
всех дислокационных линий, охватываемых этим контуром:
fi = bk. B9.1)
Непрерывные функции р^ описывают распределение дислока-
дислокаций в кристалле. Этот тензор заменяет собой теперь выражение
в правой части уравнения B7.6):
еит—— = —Pik- {Z9.Z)
о xi
Как видно из этого уравнения, тензор р^ должен удовлетворять
условию
д
(в случае одиночной дислокации это условие выражает собой
просто постоянство вектора Бюргерса вдоль линии дислокации).
При таком рассмотрении дислокаций тензор w^ становится
первичной величиной, описывающей деформацию и определяю-
определяющей тензор деформации согласно B7.4). Вектор же смещения и,
который был бы связан с w^ определением B7.2), при этом во-
вообще не может быть введен (это ясно уже из того, что при таком
определении левая з'бвм уравнения B9.2) тождественно обра-
обратилась бы в нуль во всем объеме кристалла).
До сих пор мы предполагали дислокации неподвижными. Вы-
Выясним теперь, каким образом должна быть сформулирована си-
система уравнений, позволяющая в принципе определить упругие
деформации и напряжения в среде, в которой дислокации совер-
совершают заданное движение х\
г) Мы не занимаемся здесь вопросом об определении самого движения
дислокаций по приложенным к телу силам. Решение этого вопроса требует
детального изучения микроскопического механизма движения дислокаций
и их торможения на различных дефектах, которое должно производиться с
учетом фактических данных о реальных кристаллах.
174
ДИСЛОКАЦИИ
Уравнение B9.2) не зависит от того, покоятся или движутся
дислокации. При этом тензор w^ по-прежнему остается вели-
величиной, определяющей упругую деформацию; его симметричная
часть есть тензор упругой деформации, связанный обычным об-
образом законом Гука с тензором напряжений.
Это уравнение, однако, теперь недостаточно для полного
формулирования задачи. Полная система уравнений должна
определять также и скорость v перемещения точек среды.
Но при этом необходимо учесть, что дви-
движение дислокаций сопровождается, помимо из-
изменения упругой деформации, также и из-
изменением формы кристалла, не связанным с
возникновением напряжений — пластической
деформацией. Как уже упоминалось, движение
дислокаций как раз и представляет собой меха-
механизм пластической деформации. (Связь движе-
движения дислокаций с пластической деформацией
ясно демонстрируется рис. 25: в результате про-
прохождения краевой дислокации слева направо
верхняя — над плоскостью скольжения — часть
кристалла оказывается сдвинутой на один пе-
период решетки; поскольку решетка в результа-
результате остается правильной, то кристалл остается
ненапряженным.) В противоположность упру-
упругой деформации, однозначно связанной с тер-
термодинамическим состоянием тела, пластиче-
пластическая деформация является функцией процесса.
При рассмотрении неподвижных дислокаций
вопрос о разделении упругой и пластической
деформаций не возникает: нас интересуют при
этом лишь напряжения, не зависящие от пре-
предыдущей истории кристалла.
Пусть и — вектор геометрического смеще-
Рис. 25 ния точек среды, отсчитываемый, скажем, от
их положения перед началом процесса дефор-
деформации; его производная по времени й = v. Если образовать с
помощью вектора и тензор «полной дисторсии» Wik = duk/dxi,
то мы получим его «пластическую часть» w^1 , вычтя из W^
тензор «упругой дисторсии», совпадающий с фигурирующим в
B9.2) тензором w^. Введем обозначение
„(пл)
-Jik =
B9.4)
симметричная часть j^ определяет скорость изменения тензора
пластической деформации: изменение
1
за бесконечно малое
§ 29 НЕПРЕРЫВНОЕ РАСПРЕДЕЛЕНИЕ ДИСЛОКАЦИЙ 175
время St равно
^кл) = -\{ш+ЗыЩ B9.5)
(Е. Kroner, G. Rieder, 1956). Отметим, в частности, что если пла-
пластическая деформация происходит без нарушения сплошности
тела, то след тензора 2%к равен нулю. Действительно, пластиче-
пластическая деформация не приводит к растяжению или сжатию тела
(которые всегда связаны с возникновением внутренних напряже-
нии), т. е. и\к } = 0, а потому и jkk = —ои\к } jot = 0.
Подставив в определение B9.4) w^1 = W{k — u^, запишем
его в виде уравнения
-дГ = ^ + ^ B9-6)
связывающего скорости изменения упругой и пластической де-
деформаций. Здесь jih надо рассматривать как заданные величи-
величины, которые должны удовлетворять условиям, обеспечивающим
совместность уравнений B9.6) и B9.2). Эти условия получаются
дифференцированием B9.2) по времени и подстановкой в него
B9.6); они имеют вид уравнения
^ ^ = 0. B9.7)
х
Уравнения B9.2), B9.6) вместе с динамическими уравнениями
B9.8)
дх к
составляют полную систему уравнений, описывающих динами-
динамику упругой среды с движущимися дислокациями {A.M. Косевич,
1962). Фигурирующие в этих уравнениях тензоры р^ и j^ явля-
являются заданными функциями координат (и времени), характери-
характеризующими распределение и движение дислокаций. Эти функции
должны удовлетворять условиям совместности уравнений B9.2)
друг с другом и с уравнением B9.6), выражаемым равенствами
B9.3) и B9.7).
Условие B9.7) можно рассматривать как дифференциальное
выражение «закона сохранения вектора Бюргерса» в среде. Дей-
Действительно, проинтегрировав обе части уравнения B9.7) по по-
поверхности, опирающейся на некоторую замкнутую линию L, вве-
введя согласно B9.1) полный вектор Бюргерса b охваченных линией
L дислокаций и воспользовавшись теоремой Стокса, получим
^ = - f LJik dxi. B9.9)
dt J
Из вида этого равенства очевидно, что интеграл в его правой
части определяет величину вектора Бюргерса, «протекающего»
176 ДИСЛОКАЦИИ
в единицу времени через контур L, т. е. уносимого дислокация-
дислокациями, пересекающими линию L. Поэтому естественно назвать j%k
тензором плотности потока дислокации.
Ясно, в частности, что в случае отдель-
отдельной дислокационной петли тензор jik име-
имеет вид
О • j —— (Э • j f\ -ш -ш \/ —— (Э • j П~1 \/ ГЛ-i Л I JU I I / \Л I I I |
tS&rb tvlltgvrb lit Ьь 11Ь v lit l\j \^/ \ /
в соответствии с выражением B8.2) для
26 пластической деформации при смещении
дислокации; здесь V — скорость линии дислокации в данной ее
точке. При этом вектор потока через элемент d\ контура L (jikdli)
пропорционален d\ [rV] = V[dlr], т. е. проекции скорости V на
направление, перпендикулярное как сД, так и т; из геометри-
геометрических соображений очевидно, что так и должно было быть —
только эта проекция скорости приводит к пересечению дислока-
дислокацией элемента d\.
Отметим, что след тензора B9.10) пропорционален проекции
скорости дислокации на нормаль к ее плоскости скольжения. Вы-
Выше было указано, что отсутствие неупругого изменения плотно-
плотности среды обеспечивается условием ja = 0. Мы видим, что для
отдельной дислокации это условие означает движение в плоско-
плоскости скольжения в соответствии со сказанным выше о физической
природе движения дислокаций (см. примеч. °) на с. 168).
Наконец, остановимся на случае, когда дислокационные пет-
петли в кристалле распределены таким образом, что их суммарный
вектор Бюргерса (обозначим его через В) равен нулю1). Это
условие означает, что при интегрировании по любому попереч-
поперечному сечению тела
B9.11)
Отсюда следует, что плотность дислокации в этом случае может
быть представлена в виде
Pik = euj^- B9.12)
(F. Kroupa, 1962); тогда интеграл B9.11) преобразуется в инте-
интеграл по контуру, проходящему вне тела и обращается в нуль.
Отметим также, что выражение B9.12) автоматически удовле-
удовлетворяет условию B9.3).
Легко видеть, что определенный таким образом тензор Р^
представляет собой плотность дислокационного момента в де-
деформированном кристалле (его естественно назвать поэтому
г) Наличие дислокации связано с некоторым изгибом кристалла, как это
схематически изображено в утрированном виде на рис. 26. Условие В = 0
означает отсутствие макроскопического изгиба кристалла в целом.
§ 29 НЕПРЕРЫВНОЕ РАСПРЕДЕЛЕНИЕ ДИСЛОКАЦИЙ 177
дислокационной поляризацией). Действительно, полный дисло-
дислокационный момент кристалла D^ равен по определению
dXm = - J
где суммирование производится по всем дислокационным пет-
петлям, а интегрирование — по всему объему кристалла. Подставив
сюда B9.12), имеем
п 1 Г дРф ,т/ 1 [ (дРгпк дРгк\ ,т/
и после интегрирования по частям в каждом из двух членов
Dik=fPikdV. B9.13)
Плотность же потока дислокаций выражается через тот же
тензор Pik согласно
3ik = ~д-^- B9.14)
В этом легко убедиться, например, вычислив интеграл / ^ik dV
по произвольной части объема тела с помощью выражения
B9.10) как сумму по всем заключенным в этом объеме дисло-
дислокационным петлям. Отметим, что выражение B9.14) вместе с
B9.12) автоматически удовлетворяют условию B9.7).
Сравнив B9.14) и B9.4), мы видим, что Sw^^ = бР^. Если
условиться считать пластическую деформацию отсутствующей
в состоянии с Pih = 0, то будет и w^1 = Рц^. Подразумевается,
что весь процесс деформации происходит при В = 0. Это обсто-
обстоятельство надо подчеркнуть, поскольку между тензорами Р^ и
(пл) т->
wik существует принципиальное различие: в то время как гц*
является функцией состояния тела, тензор ^^ не есть функ-
функция состояния, а зависит от процесса, приведшего тело в данное
состояние. В этих условиях имеем
Wtk - w\f = p.- Ргк, B9.15)
где снова щ — вектор полного геометрического смещения от по-
положения в недеформированном состоянии. Уравнение B9.6) при
этом удовлетворяется тождественно, а динамическое уравнение
B9.8) принимает вид
рщ - \Шт-——- = -лШт——. B9.16)
дхк дх\ дхк
178 ДИСЛОКАЦИИ
Таким образом, определение упругой деформации, созданной
движущимися дислокациями с В = 0, сводится к задаче обыч-
обычной теории упругости с объемными силами, распределенными по
кристаллу с плотностью —\klmdPimldxk.
§ 30. Распределение взаимодействующих дислокаций
Рассмотрим совокупность большого числа одинаковых пря-
прямолинейных дислокаций, расположенных параллельно друг дру-
другу в одной и той же плоскости скольжения, и выведем уравне-
уравнение, определяющее их равновесное распределение. Пусть ось z
параллельна дислокациям, а плоскость xz совпадает с плоско-
плоскостью скольжения.
Будем для определенности считать, что векторы Бюргерса
дислокаций направлены вдоль оси х. Тогда сила, действующая
в плоскости скольжения на единицу длины дислокации, равна
Ьаху, где аху — напряжение в точке нахождения дислокации.
Напряжения, создаваемые одной прямолинейной дислокаци-
дислокацией (и действующие на другую дислокацию), убывают обратно
пропорционально расстоянию от нее. Поэтому напряжение, со-
создаваемое в точке х дислокацией, находящейся в точке ж7, имеет
вид bD/(x — ж7), где D — постоянная порядка величины упругих
модулей кристалла. Можно показать, что эта постоянная D > О,
т. е. две одинаковые дислокации в одной и той же плоскости
скольжения отталкиваются друг от друга (для изотропной сре-
среды это показано в задаче 3 § 28).
Обозначим через р(х) линейную плотность дислокаций, рас-
распределенных на отрезке (ai,a2) оси х\ р(х) dx есть сумма век-
векторов Бюргерса дислокаций, проходящих через точки интервала
dx. Тогда полное напряжение, создаваемое в точке х оси х всеми
дислокациями, запишется в виде интеграла
If-
ai
Для точек внутри самого отрезка (ai,a2) этот интеграл должен
пониматься в смысле главного значения для того, чтобы исклю-
исключить физически бессмысленное действие дислокации самой на
себя.
Если в кристалле имеется также и плоское (в плоскости ху)
поле напряжений а^(ж,у), созданное заданными внешними на-
нагрузками, то каждая дислокация будет находиться под действи-
действием силы Ь(аху +^(ж)), где мы обозначили для краткости р(х) =
— o'xyix^O). Условие равновесия заключается в обращении этой
§ 30 РАСПРЕДЕЛЕНИЕ ВЗАИМОДЕЙСТВУЮЩИХ ДИСЛОКАЦИЙ 179
силы в нуль: аху +р = 0, т. е.
/^ = еМ = ш(ж), C0.2)
где главное значение обозначено, как это принято, перечеркну-
перечеркнутым знаком интеграла. Это — интегральное уравнение для опре-
определения равновесного распределения р(х). Оно относится к типу
сингулярных интегральных уравнений с ядром Коши.
Решение такого уравнения сводится к задаче теории функ-
функций комплексного переменного, формулируемой следующим об-
образом.
Обозначим через ft(z) функцию, определенную во всей плос-
плоскости комплексного z (с разрезом по отрезку (ai,a2)), как инте-
интеграл
ад = Г еИЖ. (зо.з)
J s Z
Предельные значения этой функции на верхнем и нижнем бере-
берегах разреза обозначим через О+(ж) и Q,~(x). Они равны таким же
интегралам, взятым по отрезку (ai, 0,2) с обходом точки z = х со-
соответственно снизу или сверху по бесконечно малой полуокруж-
полуокружности, т. е.
а2
/ ^М ± тр(х). C0.4)
J ?~
Если р(?) удовлетворяет уравнению C0.2), то главное значение
интеграла равно оо(х), так что имеем
+ Q~(x) = 2w(x), C0.5)
- П~(х) = 2тр(х). C0.6)
Таким образом, задача о решении уравнения C0.2) эквива-
эквивалентна задаче об отыскании аналитической функции Q(z) со
свойством C0.5), после чего р(х) определяется по C0.6). При
этом физические условия рассматриваемой задачи требуют так-
также, чтобы О(оо) = 0; это следуют из того, что вдали от системы
дислокаций (х —>> =Ьоо) напряжения аху должны обращаться в
нуль (по определению C0.3), вне отрезка (ai,a2): crxy(x) = —
-DQ(x)).
Рассмотрим сначала случай, когда внешние напряжения от-
отсутствуют (р(х) = 0), а дислокации сдерживаются какими-либо
препятствиями (дефектами решетки) на концах отрезка (ai,a2)-
180 ДИСЛОКАЦИИ
При ио(х) = 0 имеем из C0.5): О+(ж) = —О (ж), т. е. функция
Vt{z) должна менять знак при обходе каждой из двух точек «i,
а,2. Этому условию удовлетворяет любая функция вида
ОД = Р<«> C0.7)
V(a2 - Z)(Z -CLi)
где P(z) — полином. Условие же О(оо) = 0 фиксирует (с точ-
точностью до постоянного коэффициента) выбор P(z) = 1, так что
ОД = \ C0.8)
Такой же вид будет иметь, согласно C0.6), и искомая функция
р(х). Определив коэффициент в ней согласно условию
а2
f B C0.9)
(В — сумма векторов Бюргерса всех дислокаций), получим
р(х) = В C0.10)
7rv(a2 - х)(х - ai)
Мы видим, что дислокации скапливаются по направлению к пре-
препятствиям (границам отрезка) с плотностью, обратно пропорци-
пропорциональной корню из расстояний до них. По такому же закону воз-
возрастают при приближении к а\ или п2 напряжения вне отрезка
(ai,a2); так, при х > п2
~ BD
(уj'y ^^ — .
/( { )
Другими словами, концентрация дислокаций у границы приво-
приводит к такой же концентрации напряжений по другую сторону
границы.
Предположим теперь, что в тех же условиях (препятствия
в заданных концах отрезка) имеется также и внешнее поле на-
напряжений р(х). Обозначим через Q,o(z) функцию вида C0.7) и
перепишем равенство C0.5) (разделив его на Oq~ = — О^~) в виде
_ П~(х) _ 2ио(х)
Сравнив это равенство с C0.6), делаем вывод, что
30
РАСПРЕДЕЛЕНИЕ ВЗАИМОДЕЙСТВУЮЩИХ ДИСЛОКАЦИЙ
181
где P(z) — полином. Решение, удовлетворяющее условию
О(оо) = 0, получим, выбрав в качестве fto(z) функцию C0.8)
и положив P(z) = С (С — константа). Искомая функция р(х)
находится отсюда по формуле C0.6) и равна
а2
Р(х) \
- х)(х -
C
+ =. C0.12)
y/(a2 - x)(x - a\)
Постоянная С определяется условием C0.9). И здесь р(х) воз-
возрастает при х —>> п2 (или х —)> а\) по закону (п2 — ж)/2, а по
другую сторону препятствия возникает такая же концентрация
напряжений.
Если препятствие имеется только с одной стороны (скажем,
в точке а2), то искомое решение должно удовлетворять условию
конечности напряжений при всех х < а,2, включая точку х = а\\
при этом само положение последней точки заранее неизвестно и
должно определиться в результате решения задачи. В терминах
(l(z) это значит, что O(ai) должно быть конечным. Такая функ-
функция (удовлетворяющая также и условию О(оо) = 0) получится по
той же формуле C0.11), если в качестве fto(z) выбрать функцию
тоже относящуюся к виду C0.7), и положить в C0.11) P(z) = 0.
В результате получим
CL2
При х —)> а\ р(х) обращается в нуль как у/х — а\. По такому
же закону стремится к нулю с другой стороны точки а\ полное
напряжение аху(х) +р(х).
Наконец, пусть препятствия отсутствуют в обоих концах от-
отрезка и дислокации сдерживаются лишь внешними напряже-
напряжениями р(х). Соответствующее ft(z) получим, положив в C0.11)
= y/(a2-z)(z-a1), P(z) = 0.
Однако условие О(оо) = 0 требует при этом соблюдения допол-
дополнительного условия: произведя в C0.11) предельный переход к
z —>> оо, найдем
а2
h
= 0.
C0.14)
182 ДИСЛОКАЦИИ
Искомая функция р(х) дается формулой
а2
p(x) = -±y/(a2-x)(x-a1)J' "<*> -^-, C0.15)
тг2 J v/(a2-0(^-ai) ?-х
причем координаты ai, a 2 концов отрезка определяются условия-
условиями C0.9) и C0.14).
3 адача
Найти распределение дислокаций в однородном поле напряжений
(р(х) = ро) на участке с препятствием на одном или на обоих концах.
Решение. В случае препятствия на одном конце (аг) вычисление ин-
интеграла C0.13) дает
CL2 — X
Из условия же C0.9) определяется длина участка расположения дислока-
дислокаций: CL2 — ai = 2BD/po. Вблизи препятствия, по другую сторону от него,
напряжения концентрируются по закону
В случае участка (длины 2L), ограниченного двумя препятствиями, вы-
выбираем начало отсчета х в его середине и находим по C0.12)
ГЛАВА V
ТЕПЛОПРОВОДНОСТЬ И ВЯЗКОСТЬ
ТВЕРДЫХ ТЕЛ
§ 31. Уравнение теплопроводности в твердых телах
Неравномерная нагретость твердой среды не приводит к воз-
возникновению в ней конвекции, как это обычно имеет место в жид-
жидкостях. Поэтому перенос тепла осуществляется здесь одной толь-
только теплопроводностью. В связи с этим процессы теплопроводно-
теплопроводности в твердых телах описываются сравнительно более простыми
уравнениями, чем в жидкостях, где они осложняются конвекцией.
Уравнение теплопроводности в твердой среде может быть
выведено непосредственно из закона сохранения энергии, выра-
выраженного в виде уравнения непрерывности для количества тепла.
Количество тепла, поглощаемое в единицу времени в единице
объема тела, равно TdS/dt, где S — энтропия единицы объема.
Эта величина должна быть приравнена — div q, где q — плот-
плотность потока тепла. Этот поток практически всегда пропорцио-
пропорционален градиенту температуры, т. е. может быть записан в виде
q = — xVT (х — теплопроводность). Таким образом,
Т—= div(xVT). C1.1)
Согласно формуле F.4) энтропия может быть записана в виде
S = S0(T) + Кащи
где а — температурный коэффициент расширения, a Sq — энтро-
энтропия тела в недеформированном состоянии. Будем предполагать,
что, как это обычно имеет место, имеющиеся в теле разности тем-
температур достаточно малы для того, чтобы можно было считать
постоянными такие величины, как х, а и т. п. Тогда уравнение
C1.1) после подстановки написанного для S выражения примет
вид
Т^ + аКТ ^« = хАТ.
dt dt
Согласно известной, термодинамической формуле имеем
Cp-Cv = Ка2Т.
184 ТЕПЛОПРОВОДНОСТЬ И ВЯЗКОСТЬ ТВЕРДЫХ ТЕЛ ГЛ. V
Производную от So можно написать как
dSo_ _ dSo_dT_ _ С^дТ_
dt ~ дТ dt ~ T dt
(производная dSo/dt берется при иц = divu = 0, т. е. при посто-
постоянном объеме).
В результате получим уравнение теплопроводности в следую-
следующем виде:
Cv— + Cp~Cv J-divu = xAT. C1.2)
dt a dt
Для того чтобы получить полную систему уравнений, надо
присоединить сюда еще уравнение, определяющее деформацию
неравномерно нагретого тела. Этим уравнением является урав-
уравнение равновесия G.8)
2A - a) grad div u - A - 2а) rot rot u = 2aA + a)VT. C1.3)
о
Из уравнения C1.3) может быть определена, в принципе, дефор-
деформация тела при произвольно заданном распределении темпера-
температуры. Подстановка полученного таким образом для divu выра-
выражения в уравнение C1.2) приведет к уравнению, определяющему
распределение температуры, в котором неизвестной функцией
является одна только T(x,y,z,t).
Рассмотрим, например, теплопроводность в неограниченной
твердой среде с распределением температуры, удовлетворяющим
только одному условию: на бесконечности температура стремит-
стремится к постоянному пределу Tq и деформация отсутствует. В та-
таком случае уравнение C1.3) приводит к следующей зависимости
между divu и Т (см. задачу 8 § 7):
Подставляя это выражение в C1.2), получим уравнение
A + а)Ср + 2A - 2a)Cv дТ _ д ( ,
3B-a) Ot У ' }
типа простого уравнения теплопроводности.
Уравнением такого же типа описывается и распределение
температуры вдоль длины тонкого прямого стержня, если хо-
хотя бы один из его концов не закреплен. Распределение темпе-
температуры вдоль каждого из поперечных сечений стержня можно
считать постоянным, так что Т будет функцией только от коор-
координаты х вдоль его длины (и от времени). Тепловое расширение
такого стержня приводит только к изменению его длины без из-
изменения прямолинейной формы и без возникновения внутренних
§ 32 ТЕПЛОПРОВОДНОСТЬ КРИСТАЛЛОВ 185
напряжений в нем. Ясно поэтому, что производная dS/dt в об-
общем уравнении C1.1) должна браться при постоянном давлении,
и поскольку (dS/dt)p = Ср/Т, то распределение температуры бу-
будет описываться одномерным уравнением теплопроводности
п дТ д2Т
р dt дх2
Надо, впрочем, отметить, что с практически достаточной точ-
точностью распределение температуры в твердом теле может всег-
всегда определяться простым уравнением теплопроводности. Дело в
том, что второй член в левой части уравнения C1.2) представля-
представляет собой поправку порядка (Ср — Cv)/Cv по сравнению с первым
членом. Но у твердых тел разница между различными теплоем-
костями обычно весьма мала, и если пренебрегать ею, то урав-
уравнение теплопроводности в твердых телах можно всегда писать в
виде
7? = ХАТ, C1.5)
ot
где х ~ есть температуропроводность, определяемая как от-
отношение коэффициента ж к некоторой средней теплоемкости С
единицы объема, х = к/С.
§ 32. Теплопроводность кристаллов
В анизотропном теле направление потока тепла q не должно,
вообще говоря, совпадать с направлением градиента температу-
температуры. Поэтому вместо формулы q = —ж 1ST между q и градиентом
температуры в кристалле имеет место более общая зависимость
qi = -Щк — . C2.1)
дхк
Тензор второго ранга щк называют тензором теплопроводности
кристалла. Соответственно этой зависимости уравнение тепло-
теплопроводности C1.5) тоже будет иметь более общий вид
пдТ _ д2Т ,Q9 9ч
dt дх'дхъ
Тензор теплопроводности симметричен:
Щк = хы. C2.3)
Это утверждение, к доказательству которого мы теперь перей-
перейдем, является следствием принципа симметрии кинетических ко-
коэффициентов (см. V, § 120).
Скорость увеличения полной энтропии тела благодаря
необратимым процессам теплопроводности равна
/г г
dv = — / div — dv + / qgrad — dv.
T J T J 4B T
186 ТЕПЛОПРОВОДНОСТЬ И ВЯЗКОСТЬ ТВЕРДЫХ ТЕЛ ГЛ. V
Первый интеграл, будучи преобразован в интеграл по поверхно-
поверхности, исчезает. Таким образом, получаем
или
J ^^ C2.4)
В соответствии с общим определением кинетических коэффи-
коэффициентов1) мы можем на основании C2.4) сделать вывод, что в
данном случае таковыми являются коэффициенты Т2щ^ в соот-
соотношениях
( 1 ОТ \
Яг = -Т Щк {)
Поэтому из симметрии кинетических коэффициентов непосред-
непосредственно следует искомое соотношение C2.3).
Квадратичная форма
дТ дТ дТ
должна быть существенно положительной, поскольку положи-
положительной должна быть производная C2.4) от энтропии по вре-
времени. Условием существенной положительности квадратичной
формы является, как известно, положительность главных значе-
значений матрицы ее коэффициентов. Поэтому все главные значения
тензора теплопроводности щ^. всегда положительны, что, впро-
впрочем, очевидно и из простых соображений о направлении тепло-
теплового потока.
Число различных независимых компонент тензора щ^ зави-
зависит от симметрии кристалла. Поскольку тензор щ^ симметричен,
это число такое же, как у симметричного тензора второго ранга
ctik (тензора теплового расширения; см. § 10).
§ 33. Вязкость твердых тел
При изучении движения в упругих телах мы до сих пор счи-
считали, что процесс деформирования происходит обратимым об-
образом. В действительности процесс термодинамически обратим,
только если он происходит с бесконечно малой скоростью, так
что в каждый данный момент в теле успевает установиться состо-
состояние термодинамического равновесия. Реальное движение про-
происходит, однако, с конечной скоростью, тело не находится в каж-
каждый данный момент в равновесии, и поэтому в нем происходят
Используется определение в форме, данной в VI, § 59.
§ 33 ВЯЗКОСТЬ ТВЕРДЫХ ТЕЛ 187
процессы, стремящиеся привести его в равновесное состояние.
Наличие этих процессов и приводит к необратимости движения,
проявляющейся, в частности, в диссипации механической энер-
энергии, переходящей в конце концов в тепло 1).
Диссипация энергии обусловливается процессами двух родов.
Во-первых, при неодинаковости температуры в разных местах
тела в нем возникают необратимые процессы теплопроводности.
Во-вторых, если в теле происходит какое-нибудь внутреннее дви-
движение, то происходят необратимые процессы, связанные с конеч-
конечностью скорости движения; эти процессы диссипации энергии
можно назвать, как и в жидкостях, процессами внутреннего тре-
трения или вязкости.
В большинстве случаев скорость макроскопического движе-
движения в теле настолько мала, что диссипация энергии незначитель-
незначительна. Такие «почти обратимые» процессы могут быть описаны с
помощью так называемой диссипативной функции (см. V, § 121).
Именно, если имеется некоторая механическая система, дви-
движение которой сопровождается диссипацией энергии, то движе-
движение может быть описано с помощью обычных уравнений движе-
движения, в которых надо только к действующим на систему силам
добавить диссипативные силы или силы трения, являющиеся
линейными функциями скоростей. Эти силы могут быть пред-
представлены в виде производных по скоростям от некоторой квадра-
квадратичной функции скоростей, называемой диссипативной функци-
функцией R. Сила трения /а, соответствующая какой-нибудь из обоб-
обобщенных координат qa системы, имеет тогда вид
г _ _dR
dqa
Диссипативная функция является существенно положительной
квадратичной формой скоростей qa. Написанное соотношение эк-
эквивалентно соотношению
где SR — изменение диссипативной функции при бесконечно ма-
малом изменении скоростей. Можно также показать, что удвоенная
диссипативная функция 2R определяет уменьшение механиче-
механической энергии системы в единицу времени.
Легко обобщить соотношение C3.1) на случай движения с
трением в сплошном теле. В этом случае состояние системы опре-
определяется непрерывным рядом обобщенных координат. Этими ко-
координатами является вектор смещения и, заданный в каждой
1) Под механической энергией здесь подразумевается сумма кинетической
энергии макроскопического движения в упругом теле и его потенциальной
(упругой) энергии, обусловленной наличием деформации.
188 ТЕПЛОПРОВОДНОСТЬ И ВЯЗКОСТЬ ТВЕРДЫХ ТЕЛ ГЛ. V
точке тела. Соответственное этому соотношение C3.1) должно
быть написано в интегральном виде:
S f RdV = - f fiSvi dV, C3.2)
где v = u, a f — диссипативная сила, действующая на единицу
объема тела; запишем полную диссипативную функцию всего те-
тела в виде I RdV, где R — диссипативная функция, отнесенная
к единице объема тела.
Определим теперь общий вид диссипативной функции R
для деформируемых тел. Функция i?, описывающая внутрен-
внутреннее трение, должна обращаться в нуль, если в теле отсутствует
внутреннее движение, в частности, если тело совершает только
поступательное или вращательное движение как целое. Други-
Другими словами, диссипативная функция должна обращаться в нуль
при v = const и при v = [fir]. Это значит, что она должна за-
зависеть не от самой скорости, а от ее градиента, причем может
содержать лишь такие комбинации производных, которые обра-
обращаются в нуль при v = [fir]. Таковыми являются суммы
%к 2 \дхк
т. е. производные тензора деформации по времени1). Таким
образом, диссипативная функция должна быть квадратичной
функцией от vik- Наиболее общий вид такой функции:
R= -ViklmVikVlm- C3.3)
Тензор четвертого ранга Щыт может быть назван тензором вяз-
вязкости. Этот тензор обладает следующими очевидными свойства-
свойствами симметрии2):
Viklm = Vlmik = Vkilm = Vikml- C3.4)
Выражение C3.3) аналогично выражению A0.1) для свобод-
свободной энергии кристалла: вместо тензора упругости в нем стоит
теперь тензор щыт-, а вместо щ^ — тензор v^. Поэтому все ре-
результаты, полученные в § 10 для тензора \ikim в кристаллах раз-
различной симметрии, в полной мере относятся и к тензору
г) Ср. аналогичные рассуждения по поводу вязкой жидкости (VI, § 15).
2) Напомним, что существование диссипативной функции является след-
следствием принципа симметрии кинетических коэффициентов Онсагера. Имен-
Именно этот принцип приводит к первому из равенств C3.4) (для коэффициен-
коэффициентов в линейных соотношениях C3.7)), эквивалентному факту существования
квадратичной формы C3.3). Это будет прямо показано по аналогичному по-
поводу в § 41.
34 ПОГЛОЩЕНИЕ ЗВУКА В ТВЕРДЫХ ТЕЛАХ 189
В частности, в изотропном теле тензор Щыт имеет всего две
независимые компоненты и R может быть записано в виде, ана-
аналогичном выражению D.3) для упругой энергии изотропного
тела:
{ 1 \ С 2
R = fn[vik- -SikVu) + ^-vlh C3.5)
где г\ и ? — два коэффициента вязкости. Поскольку R — суще-
существенно положительная функция, коэффициенты г/, ? должны
быть положительными.
Соотношение C3.2) аналогично соотношению, имеющему ме-
место для свободной упругой энергии:
SfFdV = -fFt8utdV,
где Fi = doikjdxk — сила, действующая на единицу объема тела.
Поэтому выражение для диссипативной силы через тензор v^
может быть написано непосредственно по аналогии с тем, как Fi
выражается через щ\~\
U = |-*, C3.6)
где диссипативный тензор напряжений a'ik определяется посред-
посредством
/ О±ь /QQ Т\
агк — т; — Viklmvlm- {66.1)
dvik
Учет вязкости в уравнениях движения может быть осуществлен,
следовательно, просто путем замены тензора напряжений <т^ в
этих уравнениях суммой <т^ + о\к.
В изотропном теле
C3.8)
Это выражение, естественно, формально совпадает с выражени-
выражением для вязкого тензора напряжений в жидкости.
§ 34. Поглощение звука в твердых телах
Коэффициент поглощения звука в твердых телах может быть
вычислен вполне аналогично тому, как это делается для жидко-
жидкостей (см. VI, § 79). Произведем здесь соответствующие вычисле-
вычисления для изотропного тела.
Диссипация механической энергии в теле дается суммой
^мех = "f
где первый член обусловлен теплопроводностью, а второй —
вязкостью. Воспользовавшись выражением C3.5), имеем, таким
dV-2jRdV,
190 ТЕПЛОПРОВОДНОСТЬ И ВЯЗКОСТЬ ТВЕРДЫХ ТЕЛ ГЛ. V
образом, формулу
^ = ~f (VTJ dV - 2V jj (vik - ±5ikvu) 2 dV-Cj vl dV.
C4.1)
Для вычисления градиента температуры пользуемся тем, что
звуковые колебания в первом приближении адиабатичны. С по-
помощью выражения F.4) для энтропии запишем условие адиаба-
тичности в виде
S0(T) + KaUll = 5о(То),
где Tq — температура в недеформированном состоянии. Разла-
Разлагая разность So(T) — So (To) в ряд по степеням Т — То, имеем с
точностью до членов первого порядка
50(Г) - So(To) = (Г - То)^ = %-{Т - Го)
(производная от энтропии берется при иц = 0, т. е. при постоян-
постоянном объеме). Таким образом, имеем
гр гр ТаК
Воспользовавшись также соотношениями
К = К = —К ^^ = с2 - -с2
переписываем это выражение в виде
4i- C4.2)
Рассмотрим сначала поглощение поперечных упругих волн.
Теплопроводность вообще не может привести к поглощению та-
таких волн (в рассматриваемом приближении). Действительно, в
поперечной волне иц = 0, и потому температура в ней, соглас-
согласно C4.2), постоянна. Пусть направление распространения волны
выбрано в качестве оси х\ тогда
их = О, иу = щу cos {kx — uot), uz = uqz cos {kx — uot)
и из компонент тензора деформации отличны от нуля только
иху = — Оу sin {kx — uot), uxz = — Oz sin {kx — uot).
§ 34 ПОГЛОЩЕНИЕ ЗВУКА В ТВЕРДЫХ ТЕЛАХ 191
Будем относить диссипацию энергии к единице объема тела;
для среднего (по времени) значения этой величины получаем из
C4-1)
где мы подставили к = uo/ct. Полная же средняя энергия вол-
волны равна удвоенной средней кинетической энергии; относя эту
величину тоже к единице объема, получим
Коэффициент поглощения звука определяется как отноше-
отношение средней диссипации энергии к удвоенному среднему пото-
потоку энергии в волне; эта величина определяет закон изменения
амплитуды волны с расстоянием, убывающей пропорционально
е-7ж Таким образом, находим для коэффициента поглощения
поперечных волн следующее выражение:
C4.3)
В продольной звуковой волне их = щ cos (кх — ujt), uy = uz =
= 0. Аналогичное вычисление с помощью формул C4.1) и C4.2)
приводит к результату:
Эти формулы относятся, строго говоря, лишь к полностью
изотропным аморфным телам. По порядку величины они, одна-
однако, определяют закон поглощения звука также и в анизотропных
монокристаллах.
Своеобразные особенности представляет поглощение звука в
поликристаллических телах. Если длина волны звука А мала по
сравнению с размерами а отдельных кристаллитов, то в каждом
кристаллите звук поглощается так же, как он поглощался бы в
большом кристалле, и коэффициент поглощения пропорциона-
пропорционален ио2.
Если же А ^> а, то характер поглощения меняется. В такой
волне можно считать, что каждый кристаллит подвергается воз-
воздействию однородно распределенного давления. Но ввиду анизо-
анизотропии кристаллитов и граничных условий на поверхностях их
соприкосновения возникающая при этом деформация неоднород-
неоднородна. Она будет испытывать существенные изменения (изменение
порядка величины ее самой) на протяжении размеров кристал-
192 ТЕПЛОПРОВОДНОСТЬ И ВЯЗКОСТЬ ТВЕРДЫХ ТЕЛ ГЛ. V
лита, а не на протяжении длины волны, как это было бы в одно-
однородном теле. Для поглощения звука существенны скорости изме-
изменения деформации и возникающие градиенты температуры. Из
них первые будут иметь по-прежнему обычный порядок величи-
величины. Градиенты же температуры в пределах каждого кристалли-
кристаллита аномально велики. Поэтому поглощение звука, обусловленное
теплопроводностью, будет велико по сравнению с поглощением,
связанным с вязкостью, и достаточно вычислить только первое.
Рассмотрим два различных предельных случая. Время, в те-
течение которого происходит выравнивание температур на рас-
расстояниях ~ а путем теплопроводности (время релаксации для
теплопроводности), — порядка величины а2/х- Предположим
сначала, что ио <С xl°^ - Это значит, что время релаксации мало
по сравнению с периодом колебаний в волне, и потому тепло-
тепловое равновесие в пределах каждого кристаллита в значительной
степени успевает установиться; мы имеем здесь дело с почти изо-
изотермическими колебаниями.
Пусть Т' — возникающие в кристаллите разности темпера-
температур, a Tq — разности, которые возникли бы при адиабатическом
процессе. Расход тепла путем теплопроводности (на единицу объ-
объема) есть
-divq = xAT'~ —.
а2
Количество же тепла, выделяющееся при деформации, — поряд-
порядка величины TqC ~ иоТ^С (С — теплоемкость). Приравнивая эти
два выражения, получим
2
А.
Температура испытывает изменение ~ Т' на протяжении разме-
размеров кристаллита, так что ее градиент ~ Т'/а. Наконец, Tq нахо-
находим из C4.2), где надо положить иц ~ ки ~ иио/с (и — амплитуда
вектора смещения):
Т> ~ ^и C4.5)
(оценивая порядки величин, мы, естественно, не отличаем раз-
различные скорости звука с). С помощью этих результатов вычис-
вычисляем диссипацию энергии в единице объема:
)
и, разделив ее на поток энергии сЕ ~ срио2и2, получим искомый
коэффициент затухания
Та2оса2 2 ^ X /o/i n\
7~ 00 при ш < — C4.6)
ХС а2
§ 34 ПОГЛОЩЕНИЕ ЗВУКА В ТВЕРДЫХ ТЕЛАХ 193
(С. Zener, 1938). Сравнивая это выражение с обычным выраже-
выражением C4.3) и C4.4), мы можем сказать, что в рассматриваемом
случае поглощение звука поликристаллическим телом происхо-
происходит так, как если бы оно обладало вязкостью
77
Та2р2с4а2
гораздо большей, чем истинная вязкость составляющих его кри-
кристаллитов.
Далее, рассмотрим частный предельный случай, когда
со ^> х/0?- Другими словами, время релаксации велико по срав-
сравнению с периодом колебаний в волне, и за время каждого перио-
периода не успевает произойти заметное выравнивание возникающих
при деформации разностей температур. Было бы, однако, непра-
неправильным считать, что определяющие поглощение звука градиен-
градиенты температуры порядка величины Т^/а. Тем самым мы учиты-
учитывали бы лишь процесс теплопроводности внутри каждого кри-
кристаллита. Между тем основную роль в данном случае должен
играть теплообмен между соседними кристаллами (М.А. Исако-
вич, 1948). Если бы кристаллиты были теплоизолированы друг
от друга, то на границе между ними создавались бы разности
температур того же порядка величины Tq, что и разности темпе-
температур в пределах отдельного кристаллита. В действительности
же граничные условия требуют непрерывности температуры при
переходе через поверхности соприкосновения между кристалли-
кристаллитами. В результате возникают «распространяющиеся» от гра-
границ внутрь кристаллита «температурные волны», затухающие
на расстоянии х) ,
В рассматриваемом случае (J < а, т. е. основной градиент темпе-
температуры — порядка величины Tq/S и имеет место на расстояниях,
малых по сравнению с общими размерами кристаллита. Соответ-
Соответствующая часть объема кристаллита ~ а15] относя ее к полному
объему ~ а3, найдем среднюю диссипацию энергии:
a S кТг)
Тад
г) Напомним, что если теплопроводящая среда ограничена плоскостью
х = 0, избыточная температура которой изменяется периодически по закону
Т' = Тов~га)?, то распределение температуры в среде описывается «темпера-
«температурной волной»
Т' = % exp [-twt - A + 0 х
(см. VI, § 52).
7 Л. Д. Ландау, Е.М. Лифшиц, том VII
194 ТЕПЛОПРОВОДНОСТЬ И ВЯЗКОСТЬ ТВЕРДЫХ ТЕЛ ГЛ. V
Подставив для Tq выражение C4.5) и разделив на сЕ ~ сриР"и2,
получим искомый коэффициент поглощения
при со > ^-. C4.7)
ttu a2
Он оказывается пропорциональным корню из частоты1).
Таким образом, коэффициент поглощения звука в поликри-
поликристаллическом теле при самых малых частотах (со <С х/0?) ме-
меняется как со2] затем в области х/°^ ^ °° ^ с/а он меняется
пропорционально о;1/2, а при со ^> с/а коэффициент поглощения
снова пропорционален со2.
Аналогичные соображения относятся и к затуханию попереч-
поперечных волн в тонких стержнях и пластинках. Если h есть толщина
стержня или пластинки, то при А ^> h существен градиент тем-
температуры в поперечном направлении и затухание обусловлено в
основном теплопроводностью (см. задачи этого параграфа). Ес-
Если при этом выполняется неравенство со <С х/^2? т0 колебания
можно считать изотермическими; поэтому при определении, на-
например, частот собственных колебаний стержня или пластинки
надо в этом случае пользоваться изотермическими значениями
модулей упругости.
3 адачи
1. Определить коэффициент затухания продольных собственных коле-
колебаний стержня.
Решение. Коэффициент затухания колебаний со временем определя-
определяется как
2Е '
амплитуда колебаний убывает со временем пропорционально е~^1.
В продольной волне в каждом малом участке стержня происходит про-
простое растяжение или сжатие; компоненты тензора деформации
duz duz
uzz = ——, ихх = иуу = -стад——,
dz dz
при этом uz = uq cos kz cos ut, где
Вычисления, аналогичные приведенным в тексте, приводят к следующему
выражению для коэффициентов затухания:
^ Зс?-4с? Сс? У
3
2рЬ(с?-с?)с? (сг2-С?)(Зс?-4С?)
Вместо ?^ад, стад мы ввели здесь скорости q, ct согласно формулам B2.4).
:) Такой же частотной зависимостью характеризуется поглощение звука,
распространяющегося в жидкости или в газе вблизи твердой стенки (напри-
(например, по трубе); см. VI, § 79.
§ 34 ПОГЛОЩЕНИЕ ЗВУКА В ТВЕРДЫХ ТЕЛАХ 195
2. То же для продольных колебаний пластинки.
Решение. Для волн с направлением колебаний, параллельным на-
направлению волны (оси ж), имеем следующие отличные от нуля компоненты
тензора деформации:
дих стад дих
ихх = , uzz =
ох 1 — сгад ох
(см. A3.1)). Скорость распространения этих волн равна
Вычисление приводит к результату:
ш2 f п 3cf + 4с? - 6с?с? Cc2t
2рЬ с2сг2(сг2-с2) cf(cf-c2)
Для волн с направлением колебаний, перпендикулярным направлению
волны, ии = 0 и затухание обусловлено одной только вязкостью г]. Коэффи-
Коэффициент затухания для таких случаев всегда определяется формулой
К этим случаям относится также и затухание крутильных колебаний в
стержнях.
3. Определить коэффициент затухания поперечных собственных коле-
колебаний стержня (с частотами, удовлетворяющими условию и ^> x/h •> ^ —
толщина стержня).
Решение. Основную роль в затухании играет теплопроводность. Со-
Согласно § 17 имеем в каждом элементе объема стержня
X X
uzz = —, ихх = иуу = — стад —
R R
(изгиб в плоскости xz)\ при ш ^> x/h2 колебания адиабатичны. При слабом
изгибе радиус кривизны R = 1/X", так что
ии = A - 2сгад) хХ"
(штрих означает дифференцирование по z). Наиболее быстрое измене-
изменение температура испытывает в направлении поперек стержня; поэтому
(VTJ и (дТ/дхJ. С помощью C4.1) и C4.2) получаем для средней дис-
диссипации энергии во всем стержне
9С2
J Xdz
(S — площадь сечения стержня). Среднюю полную энергию можно найти
как удвоенную потенциальную энергию:
Еад1у J X^dz.
Окончательно получим для коэффициента затухания
196 ТЕПЛОПРОВОДНОСТЬ И ВЯЗКОСТЬ ТВЕРДЫХ ТЕЛ ГЛ. V
4. То же для поперечных колебаний пластинки.
Решение. Согласно A1.4) имеем в каждом элементе объема пластинки
1 - 2сгад д2(
Uii Z
1 — стад дх2
(изгиб в плоскости xz). Диссипацию энергии находим по формулам C4.1) и
C4.2), а полную среднюю энергию — удваивая выражение A1.6). Коэффи-
Коэффициент затухания равен
_ 2хТа2Е^ 1 + сгад _ 2хТа2р (Зс2 - 4с?Jс?
5. Определить изменение собственных частот поперечных колебаний
стержня, связанное с неадиабатичностью колебаний. Стержень имеет фор-
форму длинной пластинки толщины h. Поверхность стержня предполагается
теплоизолированной.
Решение. Пусть Тад (ж, t) есть распределение температуры в стержне
при адиабатических колебаниях, a Т(ж,?) — истинное распределение темпе-
температуры в нем (х — координата вдоль толщины стержня; изменением темпе-
температуры вдоль плоскости yz пренебрегаем как более медленным). Поскольку
при Т = Тад теплообмен между отдельными участками тела отсутствует,
ясно, что уравнение теплопроводности должно иметь вид
д /ГГ1 *2гг
При периодических колебаниях с частотой ш отклонения тад = Тад — То, т =
= Т — То температуры от своего равновесного значения То пропорциональны
е~га)?, и мы имеем
„ iuj iuj
т -\ т = —гад
X X
(штрих означает дифференцирование по х). Поскольку т&д, согласно C4.2),
пропорционально иц, а компоненты Щк пропорциональны х (см. § 17), то
тад = Ах, где А — постоянная, которую нет надобности вычислять (она
выпадает из окончательного ответа). Решение уравнения
// iw iw л
т -\ т = —Ах
X X
с граничным условием т' = 0 при х = =Ь/г/2 (поверхность стержня теплоизо-
теплоизолирована) есть
. / sin кх \ . .. .ч / ш
т = А[х , к = A + г) а —.
V kcos(kh/2)J' У ;У2Х
Момент Му сил внутренних напряжений в изогнутом стержне (изгиб
в плоскости xz) складывается из изотермической части Му из (момент при
изотермическом изгибе) и из части, связанной с неравномерной нагретостью
стержня. Если Муад есть момент при адиабатическом изгибе, то при не
вполне адиабатическом процессе дополнительная часть момента уменьша-
уменьшается по сравнению с величиной Му ад — Му из в отношении
h/2
J zr dz j
-h/2 /
/ h/2
1 I *
-h/2
§ 35 ОЧЕНЬ ВЯЗКИЕ ЖИДКОСТИ 197
Определяя при произвольной частоте ио модуль Юнга Еш как коэффициент
пропорциональности между Му и Iy/R (см. A7.8)) и замечая, что ?эд —
— Е = Е2Та2/(9СР) (см. F.8); Е — изотермический модуль Юнга), можем
написать: _ 9
9СР
Вычисление дает для f(u) выражение
Ft ч 24 fkh kh
/М =
/*3/с3 V 2 ° 2
При cj —>- оо получаем, как и должно было быть, / = 1, так что ?^о = ?^ад,
а при cj —>- 0 / = 0 и ?Jo = Е.
Частоты собственных колебаний пропорциональны корню из модуля
Юнга (см. задачи 4-6 § 25). Поэтому имеем
.2"
где cjo — значения собственных частот при полной адиабатичности колеба-
колебаний. Это и комплексно. Разделяя действительную и мнимую части (и = о/ +
+ г/3), получаем окончательно для собственной частоты
Г ?Га2 1
CJ = CJo 1
и для коэффициента затухания
2ЕТа2Х L _ 1
' г» y^f TO >-
где введено обозначение ^ = /i(cjo/2xI/2.
При больших значениях ? частота cj стремится, как и следовало, kwo, a
коэффициент затухания к
= 2СТа2Х
ЗСр/г2
в согласии с результатом задачи 3.
Малые же значения ? соответствуют почти изотермическим условиям;
в этом случае
/ ЕТа2\ ( Е \1/2
а коэффициент затухания
_ ET2a2h2 2
в = UJ
§ 35. Очень вязкие жидкости
Для типичных жидкостей уравнения Навье-Стокса приме-
применимы до тех пор, пока периоды движения велики по сравне-
сравнению с молекулярными временами. Это, однако, не относится к
очень вязким жидкостям. Для таких жидкостей обычные гид-
гидродинамические уравнения становятся неприменимыми уже при
198 ТЕПЛОПРОВОДНОСТЬ И ВЯЗКОСТЬ ТВЕРДЫХ ТЕЛ ГЛ. V
гораздо больших периодах движения. Существуют вязкие жид-
жидкости, которые в течение достаточно малых (но в то же время
больших по сравнению с молекулярными) промежутков времени
ведут себя, как твердые тела (например, глицерин, канифоль).
Аморфные твердые тела (например, стекло) можно рассматри-
рассматривать как предельный случай таких жидкостей с весьма большой
вязкостью.
Свойства этих жидкостей могут быть описаны следующим
способом (предложенным Максвеллом). В течение малых про-
промежутков времени они упруго деформируются. После прекра-
прекращения деформации в них остаются напряжения сдвига, зату-
затухающие, однако, со временем, так что по истечении достаточно
большого промежутка времени никаких внутренних напряжений
в жидкости практически не остается. Пусть т есть порядок ве-
величины времени, в течение которого происходит затухание на-
напряжений (т называют иногда максвелловским временем релак-
релаксации). Предположим, что жидкость подвергается воздействию
некоторых переменных внешних сил, периодически меняющихся
со временем с частотой ио. Если период 1/ио изменения сил велик
по сравнению с временем релаксации т, т. е. а;т < 1, то рас-
рассматриваемая жидкость будет вести себя, как обычная вязкая
жидкость. Напротив, при достаточно больших частотах ио (когда
иот ^> 1) жидкость будет вести себя, как аморфное твердое тело.
Соответственно таким «промежуточным» свойствам рассма-
рассматриваемых жидкостей их можно характеризовать одновременно
коэффициентом вязкости т\ и некоторым «модулем сдвига» \i.
Легко получить соотношение, связывающее друг с другом по-
порядки величин г/, \i и времени релаксации т. При воздействии
периодических сил с достаточно малой частотой, когда жидкость
ведет себя, как обычная, тензор напряжений определяется обыч-
обычным выражением для вязких напряжений в жидкости, т. е.
aik = 2r]uik = -2гт]сощк.
В обратном предельном случае больших частот жидкость ве-
ведет себя, как твердое тело, и внутренние напряжения должны
определяться по формулам теории упругости, т. е. а^ = 2/ш^
(речь идет все время о «деформациях чистого сдвига», так что
предполагается, что иц = 0, ац = 0). При частотах порядка
ио ~ 1/т напряжения, определяющиеся этими двумя выраже-
выражениями, должны совпадать по порядку величины. Таким образом,
имеем rju/Xr ~ /ш/А, откуда
г/ - rfi. C5.1)
Это и есть искомое соотношение.
§ 35 ОЧЕНЬ ВЯЗКИЕ ЖИДКОСТИ 199
Выведем, наконец, уравнение движения, качественно описы-
описывающее поведение рассматриваемых жидкостей. Для этого бу-
будем исходить из наиболее простого предположения о законе зату-
затухания внутренних напряжений (после прекращения движения);
именно, будем считать, что оно происходит по простому экспо-
экспоненциальному закону, чему соответствует уравнение
dt т
С другой стороны, в твердом теле было бы а^ = 2/ш^, и потому
dt ^ dt
Легко видеть, что уравнение
daik | 1 о, duik /of- с%\
at т at
приводит к правильным результатам в обоих предельных случа-
случаях медленных и быстрых движений, а потому может служить
интерполяционным уравнением для промежуточных случаев.
Так, для периодического движения, когда щ^ и а^ зависят
от времени посредством множителя e~iujt, имеем из C5.2)
-iUGik + -Gik =
т
откуда
°ik = ——у-,—тЩк- C5.3)
1 +l/@JT)
При иот ^> 1 эта формула дает а^ = 2/ii/^, т. е. обычное выра-
выражение для твердых тел, а при иот <^ 1
— обычное выражение для жидкости с вязкостью /jr.
ГЛАВА VI
МЕХАНИКА ЖИДКИХ КРИСТАЛЛОВ1)
§ 36. Статические деформации нематиков
Жидкие кристаллы представляют собой с макроскопической
точки зрения анизотропную текучую среду. Механика этих сред
несет в себе черты, свойственные как обычным жидкостям, так
и упругим средам, и в этом смысле занимает положение, проме-
промежуточное между гидродинамикой и теорией упругости.
Существуют различные типы жидких кристаллов. Катего-
Категорию нематических жидких кристаллов (или, как говорят для
краткости, нематиков) составляют среды, которые в своем неде-
формированном состоянии однородны не только макро-, но и
микроскопически; анизотропия среды связана только с анизо-
анизотропной ориентацией молекул в пространстве (см. V, § 139, 140).
Подавляющее большинство известных нематиков относится к
простейшему их типу, в котором анизотропия полностью опре-
определяется заданием в каждой точке среды единичного вектора п,
выделяющего всего одно избранное направление; вектор п назы-
называют директором. При этом значения п и — п, различающие-
различающиеся лишь знаком, физически эквивалентны, так что выделенной
является лишь определенная ось, а два противоположных на-
направления вдоль нее эквивалентны. Наконец, свойства этого ти-
типа нематиков (в каждом элементе их объема) инвариантны от-
относительно инверсии — изменения знака всех трех координат2).
Ниже мы рассматриваем только этот тип нематических жидких
кристаллов.
Таким образом, состояние нематической среды описывается
заданием в каждой ее точке наряду с обычными для жидкости
величинами — плотности р, давления р и скорости v — еще и
директора п. Все эти величины входят в качестве неизвестных
функций координат и времени в уравнения движения нематика.
В равновесном состоянии неподвижный нематик, не нахо-
находящийся под действием внешних сил (в том числе со сторо-
стороны ограничивающих его стенок), однороден: во всем его объеме
г) Эта глава написана совместно с Л.П. Питаевским.
2) Нематики, не инвариантные относительно инверсии, неустойчивы по
отношению к деформации, превращающей их в так называемые холестери-
ки — см. 8 43.
§ 36 СТАТИЧЕСКИЕ ДЕФОРМАЦИИ НЕМАТИКОВ 201
n = const. В деформированном же нематике направление дирек-
директора медленно меняется по пространству; медленность подразу-
подразумевается здесь в обычном для макроскопической теории смысле:
характерные длины, на которых деформация существенно ме-
меняется, велики по сравнению с молекулярными размерами, так
что производные дщ/дх^ должны рассматриваться как малые
величины.
В этой главе мы будем относить все термодинамические вели-
величины к единице объема деформированного тела, а не к единице
объема недеформированного, как в предыдущих главах. Опреде-
Определенная таким образом плотность свободной энергии F немати-
ческой среды складывается из свободной энергии недеформиро-
недеформированного нематика Fq(p,T) и энергии деформации F^. Последняя
представляет собой квадратичное по производным от п выраже-
выражение, общий вид которого (C.W. Oseen, 1933; F.C. Frank, 1958;
J.L. Ericksen, 1962)
Fd = F-F0 = ^(divnJ + ^(nrot nJ + ^[nrot n]2 C6.1)
(cm. V § 140); отметим, что для единичного вектора n(r) в силу
тождества Vn2 = 0 справедливо равенство
[nrotn] = -(nV)n, C6.2)
поэтому последний член в C6.1) может быть записан также и в
эквивалентной форме Кз((пУ)пJ/2.
Энергия C6.1) играет в механике нематиков роль, аналогич-
аналогичную роли упругой энергии деформированного твердого тела, и
именно ее существование придает этой механике некоторые чер-
черты теории упругости х).
Три квадратичные комбинации производных в C6.1) незави-
независимы друг от друга: каждая из них может быть отлична от нуля
при равных нулю двух других. Поэтому условие устойчивости
недеформированного состояния требует положительности всех
трех коэффициентов К\, Кэ, К% (функции плотности и темпе-
температуры); мы будем называть их модулями упругости нематика
(их называют также модулями Франка).
Упомянем, что деформации, в которых отлична от нуля лишь
одна из величин divn, nrotn или [nrotn], называют соответ-
г) Деформирование жидкого кристалла приводит, вообще говоря, к его
диэлектрической поляризации и соответственно к возникновению электри-
электрического поля (см. VIII, § 17); этот эффект обычно слаб, и мы не будем рассма-
рассматривать его влияние на механические свойства среды. Мы не будем также
рассматривать влияние, которое оказывает на свойства жидких кристаллов
внешнее магнитное поле; ввиду анизотропии магнитной (фактически диа-
диамагнитной) восприимчивости нематика магнитное поле оказывает на него
ориентирующее действие.
202 МЕХАНИКА ЖИДКИХ КРИСТАЛЛОВ ГЛ. VI
ственно поперечным изгибом, кручением или продольным изги-
изгибом1). В общем случае, конечно, деформация нематика содер-
содержит одновременно все эти три элемента. Для иллюстрации их
характера укажем простые примеры. Пусть нематическая среда
заполняет пространство между двумя коаксиальными цилиндри-
цилиндрическими поверхностями; р, <р, z — цилиндрические координаты
с осью z по оси цилиндров. Если директор п в каждой точке
среды направлен вдоль радиуса (пг = 1, п^ = nz = 0), то де-
деформация представляет собой поперечный изгиб (divn = 1/г).
Если п направлен в каждой точке вдоль окружности с центром
на оси z (п^ = 1, nr = nz = 0), то мы имеем чистый продольный
изгиб (rot^ n = 1/г). Наконец, если по толщине (ось z) плоско-
плоскопараллельного слоя нематика направление директора меняется
по закону пх = cos(^(^), ny = sin<p(;z), nz = 0, мы имеем дело с
чистым кручением (nrotn = —cpf(z)).
Стенки, ограничивающие занимаемый жидкокристалличе-
жидкокристаллической средой объем, и даже ее свободная поверхность оказывают
на среду ориентирующее воздействие (об этом будет говориться
подробнее ниже). Поэтому уже само наличие граничных поверх-
поверхностей приводит, вообще говоря, к деформированию неподвиж-
неподвижной жидкокристаллической среды. Возникает вопрос о нахожде-
нахождении уравнений, определяющих эту деформацию; другими слова-
словами — об уравнениях, определяющих равновесное распределение
п(г) при заданных граничных условиях (J.L. Ericksen, 1966).
Для этого исходим из общего термодинамического условия
равновесия — минимальности полной свободной энергии тела,
т. е. интеграла f FdV, представляющего собой функционал от
функции п(г). Поскольку вектор п единичный, этот функционал
должен быть минимален при дополнительном условии п2 = 1.
Следуя известному методу неопределенных множителей Лагран-
жа, надо потребовать равенства нулю вариации
6 f(F--X(r)n2\dV, C6.3)
А (г) — некоторая функция. Подынтегральное выражение зависит
как от самих функций щ(г), так и от их производных. Имеем 2)
8fFdV= {?L6ni
J J I dm
\ Srii dV + ф 8щ dfk- C6.4)
> J д(дкт)
— dk \ Srii dV + ф
dm д(дкт) > J д(дкт)
:) По английской терминологии: splay, twist или bend.
) В этой главе для упрощения записи формул мы будем пользоваться
принятым в современной литературе кратким обозначением оператора диф-
дифференцирования по координатам: hi = d/d
§ 36 СТАТИЧЕСКИЕ ДЕФОРМАЦИИ НЕМАТИКОВ 203
Второй член — интеграл по поверхности тела — существен лишь
для нахождения граничных условий. Полагая пока 5п = 0 на
границах, находим для вариации полной свободной энергии
S J FdV = - J Шп rfV, C6.5)
где Н — вектор с компонентами
Величина Н играет роль поля, стремящегося «выпрямить» на-
направления п во всем объеме жидкого кристалла; его называют
молекулярным полем.
Уравнение же C6.3) принимает вид
f
= 0,
откуда ввиду произвольности вариации 6п находим уравнение
равновесия в виде Н = —An. Отсюда А = — Нп, т. е. продольная
компонента этого уравнения удовлетворяется за счет выбора А.
Поэтому фактически условие равновесия сводится к требованию
коллинеарности векторов Н и п в каждой точке среды; продоль-
продольная же компонента Н не имеет физического смысла. Таким об-
образом, условие равновесия можно записать в виде
h = Н - п(пН) = 0, C6.7)
введя вектор h, для которого nh = 0.
Найдем явное выражение молекулярного поля, соответствую-
соответствующего свободной энергии C6.1). Для проведения дифференциро-
дифференцирования по д]^щ замечаем, что
div n = д{Щ, rot/ n = eiki дкщ
(где eiki — антисимметричный единичный тензор), и поэтому
<9divn г- д ,
— о*]?, rot/ n = eihj.
д(дкпг) lk' д(дкпг) l lkl
В результате получим для тензора тг/^ выражение
K3[[nrot п]п]г еш. C6.8)
Дальнейшее дифференцирование, согласно определению C6.6),
приводит к следующей довольно сложной формуле для молеку-
молекулярного поля:
Н = V(Kidivn) - {K2(nrotn)rotn + rot(K2(nrotn)n)} +
+ {K3[[nrot n] rot n] + rot [K3n[nrot n]]}. C6.9)
204 МЕХАНИКА ЖИДКИХ КРИСТАЛЛОВ ГЛ. VI
Граничные условия к уравнениям равновесия не могут быть
установлены в общем виде: они зависят не только от упругой
энергии C6.1), но и от конкретного рода взаимодействия жид-
жидкости с ограничивающей ее стенкой; эта поверхностная энергия
должна была бы быть включена в полную свободную энергию,
минимальность которой определяют условия равновесия. Фак-
Фактически эти поверхностные силы обычно настолько велики, что
именно они устанавливают направление п на границе, не зави-
зависящее от характера деформации в объеме образца. Если гранич-
граничная твердая поверхность анизотропна, то это направление ока-
оказывается вполне определенным (или одним из нескольких вполне
определенных). Если же поверхность изотропна (сюда относит-
относится и случай свободной поверхности), то оказывается заданным
лишь угол между п и нормалью к поверхности. Если этот угол
равен нулю, то п имеет вполне определенное направление — по
нормали к поверхности. Если же угол отличен от нуля, то до-
допустимые направления п заполняют коническую поверхность с
определенным углом раствора.
В этой последней ситуации необходимо поставить дополни-
дополнительное граничное условие. Оно устанавливается требованием
обращения в нуль поверхностного интеграла в C6.4) для вариа-
вариаций Eп, представляющих собой повороты п вокруг нормали в
каждой точке поверхности с сохранением угла наклона к ней
(т. е. вариаций, не меняющих поверхностной энергии). Такая ва-
вариация имеет вид дп = [i/n] Stp, где v — единичный вектор нор-
нормали, a Scp — произвольный (в каждой точке поверхности) угол
поворота. Написав также элемент поверхности в виде df = vdf,
получим
= о,
§
откуда ввиду произвольности Scp следует граничное условие
^Ы^гтпПп^т^к = 0, C6.10)
или, направив ось z вдоль v\
Ttzx^y - Kzynx = 0. C6.11)
Наконец, сделаем еще следующее замечание по поводу фигу-
фигурирующих в C6.1) модулей упругости. Поскольку они введены
как коэффициенты в свободной энергии, ими определяются изо-
изотермические деформации тела. Легко видеть, однако, что те же
коэффициенты определяют в нематиках также и адиабатические
деформации. Действительно, мы видели в § 6, что для твердого
тела различие между изотермическими и адиабатическими мо-
модулями возникает в силу наличия в свободной энергии члена,
линейного по тензору деформации. Для нематиков аналогичную
роль мог бы играть член, линейный по производным д^щ. Такой
§ 37
ПРЯМОЛИНЕЙНЫЕ ДИСКЛИНАЦИИ В НЕМАТИКАХ
205
член должен был бы быть скаляром и к тому же инвариантным
по отношению к изменению знака п. Очевидно, что такой член
построить нельзя (произведение nrotn — псевдоскаляр, а един-
единственный истинный скаляр div n меняет знак вместе с п). По этой
причине изотермические и адиабатические модули нематика сов-
совпадают друг с другом (подобно тому, как это имеет место для
модуля сдвига изотропного твердого тела — см. § 6). Эти рассуж-
рассуждения можно сформулировать и несколько иначе: в отсутствие
линейного члена квадратичная упругая энергия C6.1) являет-
является первой «малой поправкой» к термодинамическим величинам
недеформированного тела; в силу «теоремы о малых добавках»
(см. V, § 15), будучи выражена через соответствующие термоди-
термодинамические переменные (температуру или энтропию), она оди-
одинакова для свободной энергии и для внутренней энергии.
§ 37. Прямолинейные дисклинации в нематиках
Равновесному состоянию нематической среды при заданных
граничных условиях не обязательно соответствует всюду непре-
непрерывное распределение п(г), в котором вектор п имел бы в каж-
каждой точке вполне определенное направление. В механике нема-
тиков необходимо рассматривать также и деформации с полями
п(г), содержащими особые точки или особые линии, в которых
направление п оказывается неопределенным. Линейные особен-
особенности называют дисклинациями.
Рис. 27
Возможность возникновения дисклинации можно проиллю-
проиллюстрировать простыми примерами. Рассмотрим нематик в длин-
длинном цилиндрическом сосуде, причем граничные условия требу-
требуют перпендикулярности п поверхности сосуда. Естественно ожи-
ожидать, что в равновесии вектор п в каждой точке будет лежать в
плоскости поперечного сечения цилиндра и направлен по ради-
радиусу в этом сечении (как это изображено на рис. 27 а); очевидно,
206
МЕХАНИКА ЖИДКИХ КРИСТАЛЛОВ
что на оси цилиндра направление п будет при этом неопределен-
неопределенным, так что эта ось будет дисклинацией. Если же граничные
условия требуют параллельности направления п стенке сосуда
в плоскостях его поперечного сечения, то установится распреде-
распределение с векторами п, лежащими везде вдоль концентрических
окружностей в этих плоскостях с центрами на оси цилиндра
(рис. 27 5); и в этом случае направление п на оси будет неопре-
неопределенным.
Эти два примера — простые частные случаи прямолинейных
дисклинаций. Мы рассмотрим общую задачу о возможных рас-
распределениях п(г) в прямолинейных дисклинациях в неограничен-
неограниченной нематической среде. Очевидно, что распределение п(г) в та-
такой дисклинаций не зависит от координаты вдоль ее длины, так
что достаточно рассматривать его в плоскостях, перпендикуляр-
перпендикулярных оси дисклинаций. Будем считать, что и сам вектор п лежит
везде в этих плоскостях. Таким образом, мы имеем дело с плос-
плоской задачей механики нематиков. Некоторые общие свойства ре-
решения этой задачи могут быть выяснены уже из общих сообра-
соображений, без рассмотрения конкретных уравнений равновесия.
Введем цилиндрическую систему координат г, <р, z с осью z
вдоль оси дисклинаций. Как уже отмечено, распределение п(г)
не зависит от координаты z. Оно не может зависеть также и от
координаты г, поскольку в поставленной задаче (дисклинация в
неограниченной среде) нет никаких параметров с размерностью
длины, с помощью которых могла бы быть построена безраз-
безразмерная (каковой является п(г)) функция переменной г. Таким
образом, искомое распределение зависит только от угловой пе-
переменной: п = п(ср).
Введем угол ф между п и радиус-вектором, проведенным
в плоскости z = const в данную точку (рис. 28); компоненты
двумерного (в этой плоскости) вектора п:
nr = соБф, Пу = sin^.
Полярный угол if отсчитывается от
некоторого избранного направления в
плоскости — полярной оси. Введем так-
также угол # между п и полярной осью;
очевидно, что # = ср + ф.
Искомое решение определяется
Рис. 28
функцией ф((р). Оно должно удовлетворять условию физической
однозначности — при изменении переменной ср на 2тг (т. е. при
обходе вокруг начала координат) вектор п должен остаться неиз-
неизменным с точностью до знака (изменение знака допустимо ввиду
физической эквивалентности направлений п и — п). Это значит,
что должно быть
2тг) = #(<р) + 2тгп,
§ 37 ПРЯМОЛИНЕЙНЫЕ ДИСКЛИНАЦИИ В НЕМАТИКАХ 207
где п — целое или полуцелое положительное или отрицательное
число (значение п = 0 отвечает «недеформированному» состоя-
состоянию n = const). Для функции ф{ф) = $ — <р имеем отсюда
ф(ср + 2тг) = 2тг(п - 1) + ф{ф). C7.1)
Число п называют индексом Франка дисклинации.
Уравнение равновесия (которое будет выписано ниже) опре-
определяет производную d^/dip и имеет вид
^ J C7.2)
его правая часть не содержит независимой переменной ср — как
следствие того, что уравнение должно быть инвариантно по от-
отношению к любому повороту всей системы (нематика) как целого
вокруг оси z (т. е. по отношению к преобразованию ср —>> ср + сро);
функция /(ф) периодична с периодом тг, поскольку значения ф
и ф + тг физически тождественны. Отсюда
tp = ff(x)dx, C7.3)
о
где постоянная интегрирования выбрана так, что ф = 0 при ср =
= 0. Подставив это выражение в C7.1), найдем, что
ij ^ C7.4)
dx ,
q П — 1
при пф\ (черта означает усреднение по периоду функции).
Отсюда можно сделать важное заключение о симметрии дис-
2тг
клинации: при повороте всей картины на угол щ = во-
вокруг оси z углы ф меняются на тг, т. е. все распределение остается
неизменным. Действительно, с учетом периодичности функции
/(ф) это преобразование приводит к тождеству
if + = J f(x) dx = ff(x) dx + / f(x) dx = if + /тг.
n~l 0 0 ф
Таким образом, в результате одного лишь требования однознач-
однозначности ось z автоматически оказывается осью симметрии (Ст)
порядка
m = 2|n-l|, пф\. C7.5)
«Линии тока» директора определяются как линии, в каждой
точке которых элемент длины dl (dlr = dr, dl^ = r dip) паралле-
параллелен п. Дифференциальное уравнение этих линий:
208 МЕХАНИКА ЖИДКИХ КРИСТАЛЛОВ ГЛ. VI
Отсюда видно, в частности, что среди линий тока имеются
прямолинейные, на которых ф = ртг (р — целое число). Эти линии
представляют собой 2 \п — 1| радиальных лучей
V=7^~[\p = Vp> Ф=Р7Г1 р = 0, 1, 2, ..., га-1. C7.7)
Плоскость поперечного сечения дисклинации делится этими лу-
лучами на га одинаковых, повторяющих друг друга секторов.
Перейдем к конкретному построению решения для нематика,
энергия деформации которого дается формулой C6.1) 1).
Для плоского распределения имеем
-,. 1 drier, . пг 1 / /1 i //\
divn = - + — = - cos^l + ф ),
г dip r r
, 1 dnr , П(л 1 .
rot^ п = — + —^ = - si
г dip r r
n rot n = О
(фг = dф/dcp). В свободной энергии остаются только члены с К\
Интеграл по dr логарифмически расходится. В реальных за-
задачах он обрезается сверху на некоторой длине R порядка ве-
величины размеров образца. Снизу же интеграл обрезается на
расстояниях порядка величины молекулярных размеров а, где
перестает быть применимой макроскопическая теория. При опре-
определении интересующего нас решения на расстояниях а ^ г ^ R
можно считать множитель
т [ dr , R
L = / — « In —
- Г it.
J г
*) Эта задача решалась Осееном (C.W. Oseen, 1933) и Франком
(F.C. Frank, 1958) для частного случая нематика, в котором К\ = Кз. Из-
Излагаемое ниже общее решение принадлежит И.Е. Дзялошинскому A970).
2) В подынтегральном выражении ниже опущена полная производная
A — a cos 2гр) • 2ф' = Bгр — a sin 2'0)/, что не влияет на формулировку вариа-
вариационной задачи. Мы выводим здесь уравнение равновесия заново, не при-
прибегая к общим уравнениям C6.7), C6.8), что фактически потребовало бы
более громоздких вычислений.
§ 37 ПРЯМОЛИНЕЙНЫЕ ДИСКЛИНАЦИИ В НЕМАТИКАХ 209
просто некоторой постоянной, так что равновесное распределе-
распределение ф((р) определяется минимальностью функционала
2тг
/A - a cos 2ф) A + ф'2) dip = min. C7.8)
о
Уравнение Эйлера этой вариационной задачи:
A - асо$2ф)ф" = a sin 2фA - ф12). C7.9)
Оно имеет, прежде всего, два очевидных решения:
ф = 0 C7.10)
ф = тг/2. C7.11)
Это — осесимметричные решения, которым отвечают соответ-
соответственно рис. 27а и б1). Эти решения однозначны, т. е. индекс
Франка этих дисклинаций п = 1 (ср. C7.1)).
Для нахождения решений с п ф 1 замечаем, что уравне-
уравнение C7.9) имеет первый интеграл2)
(\-аыъ2ф)(фп -\) = const = —-1. C7.12)
q2
Отсюда находим решение в виде C7.3) с функцией
V2
Константа q определяется условием C7.4)
I г -.1/2
/ 1\ / 1— OL COS 2ф 7 , /о^7 1 /1\
J \_1 — aq2 cos2^J
0
(при этом должно быть \а\ q2 < 1). Эти формулы определяют ис-
искомое решение. При каждом п решение единственно: поскольку
левая часть условия C7.14) — монотонно возрастающая функ-
функция д, это равенство удовлетворяется лишь одним значением q.
Функция f(x) четна; поэтому <p(i/j) — нечетная функция. Это
значит, что плоскость ср = 0 является плоскостью симметрии
) Отметим, что в «вырожденном» случае К\ = К%, а = 0 существуют
решения с любыми ф = const.
2) Если рассматривать подынтегральное выражение в C7.8) как функцию
Лагранжа одномерной механической системы (причем ф играет роль обоб-
обобщенной координаты, ср — роль времени), то C7.12) есть интеграл энергии.
210 МЕХАНИКА ЖИДКИХ КРИСТАЛЛОВ ГЛ. VI
распределения; в силу существования оси симметрии Ст тем са-
самым возникают еще га — 1 проходящих через ось z плоскостей
симметрии. Наконец, плоскостью симметрии, очевидно, являет-
является плоскость z = 0. Таким образом, дисклинация с индексом п
обладает полной симметрией точечной группы T>mh-
При п = 2 из C7.14) очевидным образом следует, что q = 1,
и соответствующее решение есть просто
ф = ср = #/2. C7.15)
Для выяснения качественного характера полученных реше-
решений исследуем поведение линий тока вблизи радиальных лучей
ср = срр C7.7). На этих лучах ф = _ртг, а вблизи них ф « ртг и
функция C7.13) сводится к постоянной:
1/2
= А. C7.16)
1 — aq1
Отсюда
I
ф — тгр ^ — (
л
Дифференциальное уравнение линий тока принимает вид
d\nr _, . * . 1 .. А
dcp
откуда находим для формы линий тока вблизи луча
г = const • \ср - (рр\х. C7.17)
Если ввести декартовы координаты с осью х вдоль луча, то вбли-
вблизи последнего: г ~ х, (р — (рр ~ у/х и уравнение линий тока запи-
записывается в виде
у = const-ж1+1/Л. C7.18)
Далее надо рассмотреть различные случаи. При п ^ 3/2 име-
имеем п — 1 > 0, и из C7.14) очевидно, что q > 0, и потому А > 0.
В этом случае линии тока выходят из начала координат, касаясь
луча.
При п = 1/2 параметр q < 0, а с ним и А < 0. Численное ис-
исследование уравнения C7.14) показывает, что q2 > 1, а потому и
|А| > 1. Из C7.18) видно, что у растет вместе с х. Область вбли-
вблизи начала координат нельзя рассмотреть этим способом, так как,
согласно C7.17), при А < 0 малым значениям ср — срр отвечают
большие значения г.
Наконец, при п < 0 параметр — 1 < А < 0 и, согласно C7.18),
у —>• 0 при х —>• оо. Линии тока асимптотически прижимаются к
лучу.
38
НЕСИНГУЛЯРНОЕ ОСЕСИММЕТРИЧНОЕ РЕШЕНИЕ
211
На рис. 29 схематически показаны линии тока для дисклина-
Ций с п = 3/2, п = 1/2 и п = -1/2.
71=1/2
т=1
п=-1/2
т=3
Рис. 29
§ 38. Несингулярное осесимметричное решение
уравнений равновесия нематиков
Осесимметричные деформации C7.10), C7.11) (см. рис. 27),
представляющие дисклинации с индексом Франка п = 1, явля-
являются точными решениями уравнений равновесия нематической
среды с заданными граничными условиями на стенках сосуда.
Однако они не являются единственными решениями этих задач.
Они единственны только в категории плоских ре-
решений. Если же отказаться от предположения о
расположении векторов п везде в поперечных к
оси сосуда плоскостях, то возможны и другие ре-
решения, причем не обладающие особенностью на
оси. Так, если граничные условия требуют перпен-
перпендикулярности п стенке, то линии тока директора
в таком решении без особенности расположены в
меридиональных плоскостях и имеют показанную
на рис. 30 форму. Начинаясь на стенке нормаль-
нормально к ней, линии тока изгибаются, стремясь к оси
г = 0, на которой, таким образом, направление п
оказывается вполне определенным. Более того, мы
увидим, что отсутствие особенности в таком ре-
решении приводит к его большей термодинамиче-
термодинамической выгодности (меньшей полной упругой свобод-
свободной энергии) по сравнению с решением с особенностью на оси
{Р.Е. Cladis, M. Шётап, 1972). Приступим к построению этого
решения.
Будем искать осесимметричное, однородное вдоль оси z ре-
решение в цилиндрических координатах г, <р, z в виде
ч
i /
i /
> i
I/
V
N
\ \
\ »
\\
Рис. 30
пТ =
п<р = 0, nz =
C8.1)
212 МЕХАНИКА ЖИДКИХ КРИСТАЛЛОВ ГЛ. VI
(смысл угла х показан на рис. 30). Граничное условие на стенке:
х = 0 при г = R C8.2)
(R — радиус цилиндрического сосуда), а на оси поставим условие
Х = тг/2 при г = 0, C8.3)
отвечающее, как уже указано, отсутствию особенности. Имеем
, dnz d\
rot^n = —— = -cosx-г,
dr dr
-,. 1 d(rnr) . d\ . cosy
divn = --^—-1- = -smx- + -.
r dr dr r
Свободная энергия деформации (на единицу длины вдоль оси z)
дается интегралом
R In Я
f27rrFd dr = тг / {(Кг sin2 х + К3 cos2 x)x'2 +
0 -оо
+ Кх cos2 х-Кг sin 2X • х} (%, C8.4)
где штрих означает дифференцирование по переменной ? = In г 1).
Первый интеграл уравнения равновесия (т. е. уравнения Эй-
Эйлера вариационной задачи о минимуме функционала C8.4)):
(Ki sin2 x + К3 cos2 х)х'2 ~ Ki cos2 x = const. C8.5)
Согласно условию C8.3) должно быть х ~^ ^/2 при ^ —)> —оо.
Очевидно, что для этого должно быть х! ~^ 0 ПРИ X ~^ ^/25
поэтому const = 0, так что
/ _
Х ~ (Kisi
Отсюда находим искомое решение, удовлетворяющее усло-
условию C8.2), в виде
ln R = 1 [ (^sin^ + Kscos^I/2 ( }
г л/Ж7 7 cosx
о
В противоположность дисклинации C7.10) это решение не авто-
модельно: в него входит размерный параметр длины R. Интеграл
*) Последний член в подынтегральном выражении несуществен для фор-
формулировки вариационной задачи, но нужен для вычисления полной свобод-
свободной энергии.
§ 38 НЕСИНГУЛЯРНОЕ ОСЕСИММЕТРИЧНОЕ РЕШЕНИЕ 213
C8.6) выражается через элементарные функции. Выпишем ответ
в предположении, что К% > К\\
г Г л/1 - k2 sin2 х ~ kf sinx I f к • п • \\
— = < vy — > ехр < — — arcsm(A;sm v) >
R \ л/1 - к2 sin2 x + jfe' sinX J I A;' J C8.7)
A;2 = *з^, fc,2 = x _ fc2 = ^
При г —)> 0 разность тг/2 — % стремится к нулю пропорционально
первой степени г, а линии тока приближаются к оси z по экспо-
экспоненциальному закону г ~ ехр (const • z).
Для свободной энергии, связанной с этим решением, вычис-
вычисление дает
fFd27rrdr = ttKi J2 + -^ arcsinA;) . C8.8)
Q L /С/С J
Отметим, что это выражение вообще не зависит от радиуса со-
сосуда R. Энергия же дисклинации (рис. 27а; решение C7.10)):
R
, C8.9)
где L = In (R/a) — большой логарифм, происхождение которого
связано именно с особенностью на оси. Мы видим, что решение
без особенности энергетически более выгодно по сравнению с ре-
решением с особенностью (если только коэффициент К\ не ано-
аномально мал).
Поле п(г) рассмотренного здесь осесимметричного без осо-
особенности решения уравнений равновесия может быть получено
из поля п(г) в дисклинации с п = 1 путем непрерывной (т. е. без
возникновения каких-либо разрывов) деформации — постепен-
постепенным выводом векторов п из плоскостей z = const. Это обстоя-
обстоятельство является проявлением весьма общей ситуации, которая
будет выяснена в следующем параграфе.
3 адачи
1. Найти осесимметричное решение уравнений равновесия нематической
среды в цилиндрическом сосуде без особенности на оси, отвечающее гранич-
граничным условиям рис. 27 б.
Решение. Ищем решение в виде
пг =0, rip = cosx(r), nz = sinx(r)
с граничными условиями
x(R) = o, х@) = |.
Имеем
dx C0SX dx л. г,
n = sinx —, divn = 0.
d
, rot^ n sinx
dr r dr
214 МЕХАНИКА ЖИДКИХ КРИСТАЛЛОВ ГЛ. VI
Свободная энергия:
R In Я
j27rrFd dr = тг J {7^2 (sin x cos x — xJ + Ks cos4 x} d?.
0 — oo
Первый интеграл уравнения равновесия:
К2х2 — (К2 sin2 х cos2 x + Ks cos4 x) = 0.
Интегрирование этого уравнения приводит к результату (полагаем Ks > К2):
г _ ) л/1 - k2 sin2 х - к' sinх [ ,2 _ ^з - ^2 ,/2 _ ^2
~ — Л —/ / , л — — , К — -^-.
К
При г —>- 0 угол х —>¦ тг/2 по закону
2 Л
Свободная энергия этой деформации
R Г 1 1
j27rrFd dr = тгК2 <2-\ arcsin k > ,
о I кк' )
между тем как свободная энергия плоской дисклинации рис. 27 б\ ttKsL.
2. Исследовать устойчивость дисклинации с индексом п = 1 относи-
относительно малых возмущений вида $п(<^) (СИ. Анисимов, И.Е. Дзялошинскип,
1972).
Решение, а) Невозмущенное поле радиальной дисклинации (рис. 27а):
пг = 1, Пер = nz = 0. Возмущенное же поле пишем в виде
пг = cos в cos Ф и 1 (#2 + Ф2), п^ = cos в sin Ф и Ф, nz = sin # и #,
где углы # и Ф — функции угловой координаты (р. Энергия, связанная с
этим возмущением:
J Fdrdrdip = — J {КгФ'2 + К2в12 + (Ks - Кг)Ф2 - K
Для общего исследования надо было бы положить
оо оо
в((р)= Y, eseia<p, Ф((р)= ^ Ф3еи<р
S = — ОО S = — ОО
и выразить энергию как функцию всех 9S, Ф5- Но и без того сразу видно,
что рассматриваемая дисклинация всегда неустойчива относительно возму-
возмущения во (член — Ki6q в энергии).
б) Невозмущенное поле циркулярной дисклинации (рис. 27 б): nr = nz =
= 0, Пр = 1. Возмущенное поле записываем в виде
nr = cos в cos ( —Ь Ф) ~ —Ф, rip = cos в sin f —ЬФ) ~1 (в2 + Ф2),
nz = sin в и 6>
§ 39 ТОПОЛОГИЧЕСКИЕ СВОЙСТВА ДИСКЛИНАЦИИ 215
(определение угла Ф изменено по сравнению с предыдущим случаем). Соот-
Соответствующая энергия:
J Fdrdrdif = — / {K3@f2 + Ф/2) + (Кг - К3)Ф2 + (К2 - 2K3H2}d(p.
Наиболее «опасны» возмущения во и Фо; условия устойчивости по отноше-
отношению к этим возмущениям:
Кх > К3, К2 > 2К3.
Полученное в тексте и в задаче 1 утверждение, что свободная энергия
деформации в дисклинациях с п = 1 превышает энергию несингулярного
осесимметричного решения означает лишь, что эти дисклинации могли бы
быть в лучшем случае метастабильными. Теперь мы видим, что радиальная
дисклинация вообще неустойчива, а циркулярная устойчива (относительно
возмущений указанного вида) при соблюдении определенных соотношений
между модулями.
3. Нематическая среда заполняет пространство между двумя парал-
параллельными плоскостями, причем граничные условия на одной плоскости тре-
требуют перпендикулярности, а на другой — параллельности директора по-
поверхности. Определить равновесную конфигурацию п(г).
Решение. Равновесная конфигурация будет, очевидно, плоской; вы-
выберем ее плоскость в качестве плоскости xz с осью z перпендикулярной гра-
граничным плоскостям (плоскости z = 0 и z = К). Положим
пх =
Свободная энергия деформации:
f Fddz=^J {Кг sin2 Х + К2 cos2 X}x'2 dz.
Первый интеграл уравнения равновесия:
(Ki sin2 x + К2 cos2 x)x'2 = const,
откуда с учетом граничных условий
f(Ki sin2 x + К2 cos2 xI/2 dx= - J (Ki sin2 x + K2 cos2 xI/2 dx,
о ho
z = h E{x'k) k2 = ^
?(тг/2, *)' Kx
где E(xik) — эллиптический интеграл второго рода.
§ 39. Топологические свойства дисклинации
Данное в § 37 определение индекса Франка было существен-
существенно связано с предположением о плоском характере деформации в
дисклинации и однородностью вдоль ее длины. Покажем теперь,
каким образом это понятие может быть введено в общем слу-
случае произвольных криволинейных дисклинации в нематической
среде.
Энергия нематика не меняется при одновременном произволь-
произвольном повороте директора во всех его точках. В этом смысле можно
216 МЕХАНИКА ЖИДКИХ КРИСТАЛЛОВ ГЛ. VI
сказать, что состояния нематика вырождены по направлениям
директора; эти направления играют роль параметра вырожде-
вырождения. Введем понятие о пространстве вырождения — области до-
допускаемого без изменения энергии изменения параметра вырож-
вырождения. Им является в данном случае поверхность сферы еди-
единичного радиуса, каждая точка которой отвечает определенному
направлению п. Надо однако учесть еще, что состояния немати-
нематика, отличающиеся изменением знака п физически тождествен-
тождественны. Другими словами, диаметрально противоположные точки на
сфере физически эквивалентны. Таким образом, пространство
вырождения нематика — сфера, на которой каждые две диамет-
диаметрально противоположные точки считаются эквивалентными1).
Представим себе, что мы производим в физическом объеме
нематика обход вокруг расположенной в нем дисклинационной
линии по некоторому замкнутому контуру (назовем его конту-
контуром 7)- Будем следить при этом обходе за направлением векто-
вектора п. Изображающая его точка в пространстве вырождения —
на сфере — опишет некоторый тоже замкнутый контур (назовем
его контуром Г). Здесь надо различать два случая.
В одном из них контур Г замкнут в
буквальном смысле. Возвращаясь в ис-
исходное положение, изображающая точка
описывает некоторое целое число п пе-
петель (так, для контуров Гх и Г2 на рис. 31
это число равно 1 и 2). Это число и явля-
является целочисленным индексом Франка.
В другом случае контур Г, вый-
выйдя из некоторой точки на сфере, за-
заканчивается в диаметрально противо-
противоположной точке. Такой контур тоже
должен рассматриваться как «замкну-
рис зх тый» ввиду эквивалентности диамет-
диаметрально противоположных точек. Индекс
Франка определяется как полуцелое «число петель», описывае-
описываемых при этом изображающей точкой (так, для полуокружности
Гх/2 эт0 число п = 1/2).
Любой замкнутый контур на поверхности сферы может быть
превращен в любой другой замкнутый контур путем непрерыв-
непрерывной (т. е. без разрыва контура) деформации. Более того, любой
замкнутый контур может быть непрерывным образом стянут в
точку2).
) Этому геометрическому образу отвечает в топологии так называемая
проективная плоскость.
2) Деформация контура может отражать собой как изменение контура j
в физическом пространстве, так и изменение самого поля п(г).
§ 39 ТОПОЛОГИЧЕСКИЕ СВОЙСТВА ДИСКЛИНАЦИИ 217
Также могут быть превращены друг в друга любые контуры,
начинающиеся и кончающиеся в диаметрально противополож-
противоположных точках сферы. Такие контуры, однако, не могут быть стяну-
стянуты в точку: при деформировании концы контура могут смещать-
смещаться, но лишь оставаясь при этом на концах какого-либо диаметра
сферы.
Таким образом, индекс Франка не является топологическим
инвариантом. Топологически инвариантен лишь факт его цело-
или полуцелочисленности.
Из сказанного следует, что все дисклинации в нематической
среде распадаются на две категории, в каждой из которых все
дисклинации топологически эквивалентны — могут быть пере-
переведены друг в друга путем непрерывного деформирования поля
п(г) (СИ. Анисимов, И.Е. Дзялошинский, 1972). Одну катего-
категорию составляют дисклинации с целыми индексами Франка; эти
дисклинации к тому же топологически неустойчивы — они мо-
могут быть вообще устранены путем непрерывного деформирова-
деформирования. Дисклинация целого индекса может заканчиваться в объеме
нематика.
Другую категорию составляют дисклинации с полуцелыми
индексами. Эти дисклинации неустранимы, они топологически
устойчивы.
Вопрос о том, какая из топологически эквивалентных струк-
структур должна фактически осуществиться в тех или иных заданных
условиях, зависит от относительной термодинамической выгод-
выгодности этих структур. Это задача выходит за рамки топологиче-
топологического анализа.
Наряду с линейными особенностями, дисклинациями, в нема-
нематической среде могут существовать также и точечные особенно-
особенности. Простейший пример такой особенности — точка, из которой
торчат векторы п во все стороны («еж»).
Для выяснения топологической классификации точечных
особенностей снова обратимся к отображениям в пространстве
вырождения на единичную сферу. Выбе-
Выберем в заполненном нематиком физическом
пространстве две точки А и В, соединен-
соединенные некоторым контуром 75 окружающим
особую точку О, как показано на рис. 32.
На единичной сфере контуру 7 отвечает
определенный контур Г. Будем теперь вра- Рис 32
щать контур 7 вокруг прямой АВ. После
полного оборота, когда контур совместится сам с собой, он опи-
опишет в физическом пространстве замкнутую поверхность а. Ее
отображение S, описываемое контуром Г, покроет единичную
сферу, возможно, более чем один раз. Число N покрытий еди-
единичной сферы отображением S является топологической харак-
характеристикой особой точки. Отображение S можно представить
218 МЕХАНИКА ЖИДКИХ КРИСТАЛЛОВ ГЛ. VI
себе как натянутую на сферу замкнутую пленку; очевидно, что
ее никак нельзя (не производя на ней каких-либо разрезов) стя-
стянуть в точку. Этим выражается неустранимость особенности. Ес-
Если N = 0, то пленка вообще не охватывает сферу. Это отвечает
отсутствию особенности или ее устранимости — такую пленку
можно стянуть в точку. Для особых точек в нематике знак N не
имеет смысла: его изменение означает лишь изменение направ-
направлений п во всем пространстве на обратные, что не отражается
на состоянии нематика.
Число 7V, характеризующее точечную особенность, может
быть только целым. Легко видеть, что полуцелое N означало бы
в действительности существование неустранимой линейной, а не
точечной особенности. Так, если S покрывает половину сферы
(N = 1/2), то это значит, что, проследив за какой-либо одной
точкой на 7, мы найдем, что ее отображение описывает на сфере
контур вида Г*1/2 (рис 31), что свидетельствовало бы о наличии
неустранимой дисклинации с индексом Франка п = 1/2 1).
В связи с обсуждением топологических свойств особенностей
в нематиках остановимся кратко на топологическом истолкова-
истолковании дислокаций — особых линий в кристаллических решетках.
Представим себе неограниченную кристаллическую решетку и
введем оси жх, Ж2, #з? направленные вдоль трех основных пери-
периодов решетки; величины этих периодов пусть будут ах, а2, аз-
Энергия решетки не меняется при ее параллельных сдвигах на
любые расстояния вдоль осей жх, Ж2, х$. Области изменения па-
параметров вырождения (величин сдвигов) — отрезки длины ах,
а2, аз, причем у каждого отрезка обе его концевые точки рассма-
рассматриваются как эквивалентные (поскольку сдвиг на период сов-
совмещает решетку саму с собой, т. е. оставляет состояние решетки
тождественно неизменным). Отрезок с эквивалентными концами
топологически совпадает с окружностью. Таким образом, про-
пространство вырождения кристаллической решетки представляет
собой трехмерную область, построенную на трех окружностях.
Эту область можно представить себе как куб, противоположные
грани которого попарно эквивалентны, или, что то же самое, как
трехмерную поверхность тора в четырехмерном пространстве 2).
На таком торе существуют не стягиваемые в точку контуры Г,
каждый из которых характеризуется тремя целочисленными то-
топологическими инвариантами пх, П2, пз — числами обходов трех
образующих тор окружностей. Если контур Г — образ контура 7,
г) При целом N подобные рассуждения не привели бы к аналогичному
выводу, поскольку дисклинация целого индекса устранима, а отображение
с целым N отвечает неустранимой особенности.
2) Подобно тому, как квадрат с попарно эквивалентными противополож-
противоположными сторонами топологически эквивалентен двумерной поверхности тора
в трехмерном пространстве.
§ 40 УРАВНЕНИЯ ДВИЖЕНИЯ НЕМАТИКОВ 219
обходящего в физическом пространстве особую линию (дислока-
(дислокацию), то три его инварианта совпадают с тремя компонентами
вектора Бюргерса (измеренными в единицах соответствующих
периодов ai, a2, аз). Таким образом, дислокации — топологиче-
топологически устойчивые неустранимые особые линии, а их векторы Бюр-
Бюргерса — топологические инварианты.
§ 40. Уравнения движения нематиков
Состояние движущейся нематической среды определяется
распределениями в пространстве четырех величин: директора п,
плотности массы /э, скорости v и плотности энтропии S. Со-
Соответственно этому полная система гидродинамических уравне-
уравнений движения нематика состоит из четырех уравнений, опре-
определяющих производные по времени от указанных величин
{J.L. Eriksen, 1960; F.M. Leslie, 1966)х).
Начнем о уравнения для директора. Если нематик находится
в равновесии (так что h = 0) и движется как целое с постоян-
постоянной по пространству скоростью, то это уравнение должно вы-
выражать собой просто тот факт, что и значения п переносятся
в пространстве с той же скоростью. Другими словами, каждая
частица жидкости перемещается в пространстве со своим зна-
значением п. Это выражается равенством нулю полной (или, как
говорят, субстанциональной) производной по времени
*И = <*± + (vV)n = 0. D0.1)
dt dt v } v }
В общем же случае произвольного движения в правой части
уравнения появляются члены, зависящие от h и от производных
скорости по координатам; в первом неисчезающем гидродинами-
гидродинамическом приближении надо ограничиться членами, линейными по
этим величинам. Производные dvi/dx^ составляют тензор, кото-
который можно разделить на симметричную и антисимметричную
части:
Щк = - (divk + dkvi), ttik = - (divk - dkvi). D0.2)
Для установления зависимости от f^fc достаточно заметить, что
при равномерном вращении нематика как целого с угловой ско-
скоростью ft, с той же скоростью будет вращаться и все поле п(г).
Такое вращение описывается уравнением
dn 1 г , -1 drti ^
— = -[rot v • п] или — = ftkink.
г) Мы, частично, следуем изложению D. Forster, Т. С. Lubensky, P. С. Mar-
Martin, J. Swift, P.S. Pershan A971).
220 МЕХАНИКА ЖИДКИХ КРИСТАЛЛОВ ГЛ. VI
Действительно, скорость точек вращающегося как целое тела
v = [fir]; тогда rotv = 2fi и для скорости изменения директора
получается такое же выражение dn/dt = [fin]. Члены же, за-
зависящие от Vik, должны быть составлены с учетом требования
n dn/dt = 0, следующего из постоянства квадрата п = 1. Та-
Таким образом, приходим к следующему общему виду «уравнения
движения директора»:
^ = Qkink + ХEп - щщ)пкюы + Nu D0.3)
at
где1)
N = h/7. D0.4)
Член N описывает релаксацию директора к равновесию под дей-
действием молекулярного поля, а второй член в D0.3) — ориенти-
ориентирующее действие градиента скорости на директор. Коэффици-
Коэффициент 7 (с размерностью вязкости) и коэффициент А (безразмер-
(безразмерный) в этих членах имеют кинетическую (а не термодинамиче-
термодинамическую) природу2).
Уравнение для временной производной плотности жидкости
есть уравнение непрерывности
| + div(pv) = 0. D0.5)
Отметим, что этим уравнением, по существу, определяется гид-
гидродинамическая скорость как плотность потока вещества, отне-
отнесенная к единице его массы.
Уравнение для временной производной скорости есть дина-
динамическое уравнение
>г = F- DОб)
где F — сила, действующая на единицу объема. В соответствии
с изложенными в § 2 общими рассуждениями, объемные силы
могут быть представлены в виде тензорной дивергенции
где еж — тензор напряжений. Тогда динамическое уравнение за-
запишется в виде
р^ = р (^ + (vVb) = дкагк. D0.7)
Вид тензора напряжений будет установлен ниже.
) Обозначение N введено для более ясного выявления структуры неко-
некоторых формул ниже, а также ввиду дальнейших обобщений в § 43.
2) Отсутствие в правой части уравнения D0.3) членов с градиентами плот-
плотности и энтропии (или температуры) связано с требованиями инвариантно-
инвариантности уравнений по отношению к пространственной инверсии и по отношению
к изменению знака п. См. об этом подробнее в § 43.
§ 40 УРАВНЕНИЯ ДВИЖЕНИЯ НЕМАТИКОВ 221
Наконец, остается еще уравнение для энтропии. В отсутствие
диссипативных процессов движение жидкости было бы адиаба-
тичным, причем адиабатичным в каждом элементе жидкости,
которые передвигались бы со своими постоянными значениями
энтропии. Уравнение, выражающее сохранение энтропии, запи-
записывалось бы просто в виде уравнения непрерывности для нее:
где S — энтропия единицы объема, a wS — плотность потока
энтропии1). При учете диссипативных процессов энтропийное
уравнение имеет вид
( )f. D0.8)
Здесь R — так называемая диссипативная функция; 2R/T опре-
определяет скорость возрастания энтропии 2); она представляет собой
квадратичную форму, составленную из компонент тензора vik и
векторов h и градиента температуры VT. Вектор же q — плот-
плотность потока тепла, связанного с теплопроводностью. Компонен-
Компоненты этого вектора — линейные функции компонент вектора гра-
градиента температуры
Чг = -ЩкдкТ. D0.9)
В нематической среде тензор коэффициентов теплопроводно-
теплопроводности щк имеет две независимые компоненты и может быть пред-
представлен в виде
Щк = ЩЩПк + X±(Sik ~ ЩПк), D0.10)
где хц и к\_ описывают теплопроводность в продольном и попе-
поперечном (по отношению к п) направлениях.
Закон сохранения энергии в гидродинамике выражается
уравнением вида
|[^ ] = 0, D0.11)
где Е — плотность внутренней энергии, a Q — плотность потока
энергии. Плотность энергии Е = Eq + Е&, где Е$(р, S) относится
:) Это уравнение может быть представлено в эквивалентном виде
is-=is-+ws-=o,
at p at p p
выражающем постоянство переносимой частицами жидкости энтропии, от-
отнесенной к единице массы.
) Сама же функция 2R дает (как и в § 33) скорость диссипации механи-
механической энергии (ср. VI, § 79).
222 МЕХАНИКА ЖИДКИХ КРИСТАЛЛОВ ГЛ. VI
к недеформированной, однородной среде, а энергия Е^ связана
с искажением поля п(г). Согласно сказанному в конце § 36 вели-
величина Ed совпадает со свободной энергией F^ C6.1), с той лишь
разницей, что модули упругости К\, 7^2, К% подразумеваются
выраженными через плотность и энтропию, а не температуру.
Закон сохранения энергии содержится, конечно, в уравнениях
движения. Мы же воспользуемся им для установления связи меж-
между введенными выше функцией i?, тензором О{к и вектором N.
Раскроем производную по времени в уравнении D0.11) с уче-
учетом термодинамических соотношений
(ЕЕ) -т (°Е
\as)p,n~ ' \dp,
где /i — химический потенциал 1). Имеем
Рассмотрим отдельно последний член. Введя обозначение
из C6.6), имеем
дЕЛ =(дЕЛ дпг д дпг _
dt Jp,S \дпг)PiS dt k% k dt
(вместо Н здесь написано h, поскольку продольная часть Н
сразу выпадает ввиду равенства ndn/dt = 0). Подставив сюда
dn/dt из D0.3), пишем
( —j-) = (укдкщ + VLiknk - Xviknk)hi - Nh + div (• • •)
V ut / p, S
и после выделения еще одной полной дивергенции:
-)' D0ЛЗ)
:) Подчеркнем, что Е относится к заданному (единичному) объему, а пе-
переменным является число N частиц (молекул) в этом объеме. В V хими-
химический потенциал везде относился к одной частице, т. е. определялся как
/1 = dE/dN. Поскольку N = р/тп (гп — масса молекулы), то принятое здесь
определение отличается от определения в т. V лишь множителем т. Во из-
избежание недоразумений при сравнении с термодинамическим соотношени-
соотношением C.2а), напомним, что здесь Е есть внутренняя энергия единицы объема
в точном смысле этого слова, между тем как в § 3 величина ? определена
как энергия количества вещества, заключенного в единице объема недефор-
мированного тела.
§ 40 УРАВНЕНИЯ ДВИЖЕНИЯ НЕМАТИКОВ 223
где
Gi = -hkdink + -дк(щкк - nkhi) - -дк(щкк + nkhi). D0.14)
Здесь и ниже мы не выписываем полностью выражение под зна-
знаком дивергенции с целью уменьшения громоздкости формул.
Эти члены (к которым мы вернемся еще в конце параграфа)
не существенны для решения поставленного вопроса.
Выражение D0.14) можно представить в виде
°i = дк°к + (№)p,s, D0.15)
где
vtk = ~пк1 дгЩ - ^(щкк + пкЫ) + ^(щкк - nkhi). D0.16)
При преобразовании использовано равенство
{diEd)s = ^dinj +
Определение тензора а^ неоднозначно: выражение D0.15)
не изменится при добавлении к а^к любого слагаемого вида
где хик — произвольный тензор, антисимметричный по
последней паре индексов (хик — ~Xikl)- Хотя тензор D0.16) не
симметричен, он может быть приведен к симметричному виду
прибавлением члена указанного вида с надлежащим образом по-
подобранным тензором хик- Фактическое проведение этой, доволь-
довольно громоздкой, операции отложим до конца параграфа, а сейчас
продолжим вывод уравнений движения, предполагая симметри-
(г)
зацию a\kJ уже произведенной.
Подставив D0.15) в D0.13) и выделяя в одном из членов пол-
полную дивергенцию (с учетом симметричности сг^), получим1)
. т , о - civile - (diE)p,s vi + div (•••)¦ D0.17)
V Ot / p, b
Наконец, подставим в D0.12) фигурирующие там производ-
производные по времени из D0.5), D0.7), D0.8) и D0.17), причем частную
(при постоянных р и S) производную от Е выразим через полную
производную согласно
О{Е = (uiEjp 5* Н~ U>OiP '
Поскольку EQ = E0(p,S), то (diEd)p,s = (diE)p,s.
224 МЕХАНИКА ЖИДКИХ КРИСТАЛЛОВ ГЛ. VI
После ряда преобразований (выделения полных дивергенций) по-
получим в результате
IYy + Е] = ~а'гкЩк"Nh + ?qVT + 2R + div{'"h D(U8)
где a'ik связано с а^ формулой
o{?+o'ik, D0.19)
а давление введено согласно его термодинамическому определе-
определению:
p = p/j-E + TS D0.20)
(рц = Ф — термодинамический потенциал единицы объема ве-
вещества); как и должно было быть, им определяется изотропная
часть тензора напряжений.
Сравнив D0.18) с уравнением сохранения энергии D0.11), мы
видим, что
2R = a'ikvik + Nh - IqVT. D0.21)
Эта функция определяет вызванное диссипативными процесса-
процессами увеличение энтропии. Ясно поэтому, что введенный в D0.19)
тензор a'ik представляет собой диссипативную («вязкую») часть
тензора напряжений. Тензор же <т^/ в D0.21) не входит; он пред-
представляет собой недиссипативную (помимо связанной с давлени-
давлением) часть тензора напряжений 1), специфическую для нематиче-
ской (в отличие от обычной) жидкости.
Обратим также внимание на то, что в диссипативную функ-
функцию не входит коэффициент А. Хотя описываемый этим безраз-
безразмерным коэффициентом эффект имеет явно кинетическую (а не
термодинамическую) природу, он не диссипативен 2).
Плотность объемных сил в движущейся нематической среде
F% = -дгр + дка$ + дка'гк = -дгр + if} + F'.
В неподвижной равновесной (хотя и деформированной) среде
F7 = 0, а согласно условию равновесия C6.7) и h = 0. Согласно
D0.14), D0.15) при этом сила
рМ = -(VEd)PtS, F = -Vp - (VEd)PtS.
*) Ее иногда называют реактивной частью (отсюда индекс (г), которым
мы снабдили ее обозначение).
) Эта ситуация не уникальна: напомним эффект Холла в электродина-
электродинамике проводящих тел; он тоже не связан с диссипацией.
§ 40 УРАВНЕНИЯ ДВИЖЕНИЯ НЕМАТИКОВ 225
Если считать модули упругости постоянными, не зависящими
от р и S величинами, то (VE^)p, s — VE^ и тогда сила F =
— ~~ V(p + ??d). Но в равновесии должно быть также и F = 0. От-
Отсюда следует, что (в указанном предположении) распределение
давления вдоль находящейся в равновесии нематической среды
дается формулой 1)
р = const - Ed. D0.22)
Произведем теперь в явном виде упомянутую выше операцию
(Г) ТТ
симметризации тензора сг\к - Прежде всего, вычислим в явном
виде антисимметричную часть этого тензора. При вычислении
(г) (г)
разности агу — aKkiJ надо учесть, что выражение
Bik = -^-пк + Ш dink - -кы дгЩ
симметрично по индексам г, к. Проверить эту симметрию непо-
непосредственно нелегко. Проще сделать это косвенным путем, вос-
воспользовавшись тем, что энергия Ed — скаляр и тем самым ин-
инвариантна относительно произвольных вращений системы коор-
координат. При бесконечно малом повороте на угол Sip координаты
преобразуются как
г7 = г + Jr, Sr = [S(p • г],
т. е.
Sxi = eikxkl eik = eukSipi = -еы.
Для изменения вектора п и тензора дкщ имеем соответственно
5щ = ецщ, 5{дкщ) = ец дкщ + ек\ д\щ.
Инвариантность функции Е& при этом повороте означает, что
Bik?ik = 0. Поскольку sik — произвольный антисимметричный
тензор, то отсюда следует, что В ж — симметричный тензор, что
и требовалось доказать.
Имея это в виду, легко привести антисимметричную часть
тензора а^ к виду B.11) с тензором
*) Если не делать указанных предположений, то силу F при постоянной
температуре можно привести к виду F = — pV/i так, что условие равнове-
равновесия сводится к обычному fi = const. Действительно, дифференцируя вы-
выражение D0.20) для давления и учитывая термодинамическое соотношение
dE = TdS + /jJdp+(dEd)p,s, найдем -Vp = -pV//-SVT+(V#d)p,s, откуда
при Т = const и получается указанное выражение для F.
8 Л. Д. Ландау, Е.М. Лифшиц, том VII
226 МЕХАНИКА ЖИДКИХ КРИСТАЛЛОВ ГЛ. VI
После этого симметризованный тензор а^к получается непосред-
непосредственно по формуле B.13). После некоторых приведений получим
ik ^(nihk + nkhi)
aik = ~^(nihk + nkhi) - -(пы дгЩ + щг дкщ) -
- тгцпк]. D0.23)
Отметим, что это выражение фактически содержит только попе-
поперечные (по индексу к) компоненты тензора тг^. Если представить
последний в виде
(так что ^\kfik = 0), то в D0.23) останутся только члены с тг^. .
Наконец, вернемся к членам с полными дивергенциями, ко-
которые мы до сих пор не выписывали. Сравнив D0.18) с D0.11),
видим, что выражение, стоящее под знаком div в совокупности
этих членов, определит собой плотность потока энергии. Приведем
здесь получающийся таким образом окончательный результат:
-щ
/ 2 \
Qi = [W+ YJ Vi ~
+ -(щкк - nkhi)vk + -(щкк + nkhi)vk - a\kvk - щк
D0.24)
где W =p + E — тепловая функция. Первый член совпадает с вы-
выражением потока энергии в гидродинамике обычной жидкости.
§ 41. Диссипативные коэффициенты нематиков
Члены с N и <т^ в уравнениях движения выражают собой ре-
релаксационные процессы, возникающие вследствие термодинами-
термодинамической неравновесности среды; эта неравновесность в свою оче-
очередь связана с отличными от нуля Ьи%. В обычном гидродина-
гидродинамическом приближении неравновесность предполагается слабой,
т. е. величины h, vik — в определенном смысле малыми. Тогда
a'ik является их линейными функциями.
Однако при принятой нами форме записи уравнений движе-
движения зависящих от h членов в afik писать не надо. Действительно,
такие члены, составленные из компонент h и п, имели бы вид
const • (щкк + nkhi). Но член такого вида уже есть в недиссипа-
тивной части тензора напряжений а^ D0.23); добавление подоб-
подобного члена в a'ik сводилось бы поэтому лишь к переопределению
коэффициента А.
§ 41 ДИССИПАТИВНЫЕ КОЭФФИЦИЕНТЫ НЕМАТИКОВ 227
Общий вид линейной зависимости a'ik от vik:
cr'ik = ViklmVlm, D1.1)
причем тензор четвертого ранга щк\т обладает очевидными свой-
свойствами симметрии (следствиями симметрии тензоров a'ik и vik)
Viklm = Vkilm = Vikml- D1-2)
Кроме того, этот тензор обладает и более глубокой симмет-
симметрией, следующей из общего принципа симметрии кинетических
коэффициентов Онсагера (см. V, § 120; как и в § 32, ниже в
этом параграфе мы пользуемся формулировкой этого принципа,
данной в VI § 59 и введенными там определениями величин ха
и Ха). Из выражения 2R/T для скорости увеличения энтропии
видно 1), что если под величинами ха понимать компоненты тен-
тензора <т^, то «термодинамически сопряженными» с ними вели-
величинами Ха будут компоненты тензора —vim/T2). Компоненты
же тензора щк\ш играют роль кинетических коэффициентов 7аб-
Принцип Онсагера требует равенств 7аб — Ъа, т- е-
Viklm = Vlmik- D1-3)
Тензор f]ikim должен быть составлен лишь с помощью еди-
единичного тензора 5^ и вектора п с учетом указанных свойств
симметрии. Имеется всего пять линейно независимых таких ком-
комбинаций)
щпкщпт, щпкб1
+ ПкЩЬът + Щ^т^М +
$ik ^Im ? &il 4m +
Соответственно тензор Щыт имеет пять независимых компонент;
представим составленный с его помощью тензор напряжений в
виде3)
dik = 2r]ivik + (r/2 -
пкгцуц) +
- 2r/3 - 2щ)щпкП1ПтУ1т. D1.4)
:) Напомним, что эта скорость выражается через величины ха, Ха фор-
формулой 2R/T = - Y, хаХа.
а
) В литературе о величинах ха и Ха часто говорят соответственно как о
термодинамических потоках и термодинамических силах.
3) Диссипативные коэффициенты нематиков были введены (в другом ви-
виде) Лесли (F.M. Leslie, 1966) и Народи (О. Parodi, 1970). Общепринятый
выбор определений коэффициентов вязкости нематиков в литературе, по-
видимому, еще не установился.
8*
228 МЕХАНИКА ЖИДКИХ КРИСТАЛЛОВ ГЛ. VI
Целесообразность именно такого определения всех коэффици-
коэффициентов иллюстрируется следующим выражением диссипативной
функции, которое оно принимает при выборе одной из осей ко-
координат (оси z) вдоль направления п:
2R = 27/1 [уар - ^Sap^J la lz
\ {2 2} l\ D1.5)
)}
где индексы a, /3, 7 пробегают два значения ж, у. Поскольку дол-
должно быть R > 0 (энтропия возрастает), то коэффициенты щ, г/2,
г/з, г/5, хц, x_l, 7 положительны и, кроме того,
Таким образом, нематическая среда характеризуется всего
девятью кинетическими коэффициентами: пятью коэффициен-
коэффициентами вязкости, двумя коэффициентами теплопроводности, коэф-
коэффициентом 7 (тоже имеющим размерность вязкости) и бездис-
сипативным безразмерным коэффициентом А.
Число фигурирующих в уравнениях движения коэффициен-
коэффициентов вязкости уменьшается в важном случае, когда движущую-
движущуюся жидкость можно считать несжимаемой (для чего ее скорость
должна быть мала по сравнению со скоростью звука). Уравне-
Уравнение непрерывности несжимаемой жидкости сводится к равенству
div v = vu = 0. В тензоре напряжений D1.4) второй член выпада-
выпадает вовсе, а третий принимает вид const • Sik(ninmvim). Замечаем,
что последний член не дает вклада в диссипативную функцию
(он выпадает при образовании произведения (j'ikviki поскольку
vik$ik = vkk = 0). Кроме того, он имеет такую же тензорную
структуру, как и член —p8ik в полном тензоре напряжений ац^.
Между тем, в гидродинамике несжимаемой жидкости давление
выступает (наряду со скоростью) просто как одна из неизвест-
неизвестных функций координат и времени, определяемых в результате
решения уравнений движения; оно не является здесь термоди-
термодинамической величиной, связанной с другими подобными вели-
величинами уравнением состояния. Поэтому члены —p8ik и const •
* 3ik(nlnmvim) B тензоре напряжений можно объединить друг с
другом, что сводится просто к переопределению давления. Та-
Таким образом, вязкий тензор напряжений несжимаемой немати-
ческой жидкости сводится к выражению
а\к = 2r\\vik + (г/3 - 2тц)(щп1Ук1 +
D1.7)
(где 7/2 = V2 + Щ ~ 2^/4) и содержит всего три независимых коэф-
коэффициента вязкости. Соответствующая диссипативная функция
§ 42 ДИССИПАТИВНЫЕ КОЭФФИЦИЕНТЫ НЕМАТИКОВ 229
(ось z вдоль п):
2R = 2гц [yap - ^Sapv77) + rj2v2
zz
J} + ±к2 D1.8)
(напомним, что vaa + г>^ = 0); положительность коэффициента
7/2 обеспечивается неравенством D1.6).
3 адача
Определить силу, действующую на прямолинейную дисклинацию (с ин-
индексом Франка п = 1), движущуюся в перпендикулярном ее оси направле-
направлении (Н. Imura, К. Окапо, 1973).
Решение. Рассматриваем дисклинацию в системе координат, где она
покоится (и совпадает с осью z), а жидкость движется с постоянной ско-
скоростью v вдоль оси х. Распределение п(г) в дисклинации в этой системе
стационарно и дается формулами (для дисклинации с радиальными «лини-
«линиями тока директора», рис. 27 а)
пх = cos (p, пу = sin if,
где полярный угол ср = axctg(y/x). В уравнении D0.3) имеем dn/dt = 0 и
Vif, = 0 (ввиду однородности потока), так что остается
дп h
v — = —.
дх 7
Отсюда находим для возникающего в результате движения слабого молеку-
молекулярного поля
h = jv[i/n] -^,
дх
где v — единичный вектор в направлении оси z (в отсутствие движения
молекулярное поле h = 0, так как неподвижная дисклинация представляет
собой равновесное состояние среды). Диссипативная функция
7 \дх
Энергия, диссипируемая в единицу времени (и отнесенная к единице длины
линии дисклинации), дается интегралом
2Rdx dy = 7vyv2L, L = In—,
a
где R — поперечные размеры области движения, а а — молекулярные раз-
размеры. Эта диссипация должна компенсироваться работой vf, совершаемой
действующей на дисклинацию силой f. Отсюда находим
f = TvyvL.
Для дисклинации с круговыми линиями тока (см. рис. 27 б) получается
такой же результат.
230 МЕХАНИКА ЖИДКИХ КРИСТАЛЛОВ ГЛ. VI
§ 42. Распространение малых колебаний в нематиках
Полная система точных уравнений гидродинамики немати-
ков очень сложна. Она, естественно, упрощается в случае малых
колебаний, когда допустима линеаризация уравнений.
Приступая к исследованию распространения малых колеба-
колебаний в нематических средах, напомним предварительно, какие ти-
типы (моды) колебаний существуют в обычных жидкостях. Преж-
Прежде всего, это обычные звуковые волны с законом дисперсии (свя-
(связью между частотой ио и волновым вектором к) ио = ск и скоро-
скоростью распространения
с = x[(f). D2.1)
у \др/s
Колебания в звуковой волне продольны (см. VI, § 64).
Далее, существуют сильно затухающие вязкие волны с зако-
законом дисперсии
гоо = ^к2, D2.2)
Р
где т\ — коэффициент вязкости (см. VI, § 24). Эти волны попе-
поперечны (скорость v перпендикулярна вектору к), в связи с чем
их часто называют сдвиговыми. Они могут иметь два независи-
независимых направления поляризации; закон дисперсии от направления
поляризации не зависит.
Наконец, в неподвижной жидкости малые колебания темпе-
температуры (и энтропии) распространяются, как столь же сильно за-
затухающие волны с законом дисперсии
iou = Xk2, D2.3)
где х — температуропроводность среды (см. VI, § 52).
Волны аналогичных типов существуют и в нематических сре-
средах. Но наличие у нематиков дополнительной динамической пе-
переменной — директора п — приводит к появлению еще и новых,
специфических для них типов волн (P.G. de Gennes, 1968).
Начнем с обычного звука в нематиках. Легко видеть, что в
пределе достаточно длинных волн (т. е. достаточно малых значе-
значений к) поправки к скорости звука, связанные с наличием новой
динамической переменной, малы, так что скорость звука дает-
дается прежней простой формулой D2.1). Представим директор в
колеблющейся среде в виде п = по + ?п, где по — постоянное
вдоль среды невозмущенное значение, а дп — малая переменная
часть (поскольку n2 = rig = 1, то щбп = 0). Сравнение левой
части уравнения D0.3), с первыми двумя членами в его правой
части показывает, что ио8п ~ kv, т. е. 6п ~ v/с (член же N = h/7
в рассматриваемом приближении является малой величиной бо-
§ 42 РАСПРОСТРАНЕНИЕ МАЛЫХ КОЛЕБАНИЙ В НЕМАТИКАХ 231
лее высокого порядка, поскольку, согласно C6.9), молекулярное
поле h о к2). Поэтому член Е^ в плотности энергии жидкости:
т. е. имеет порядок к2 по сравнению с основным членом, который
~ pv2. В рассматриваемом приближении этой энергией можно,
следовательно, пренебречь, чем и доказывается сделанное выше
утверждение о скорости звука.
В следующем по к приближении появляется связанное с дис-
сипативными процессами поглощение звука. Специфика немати-
ка (по сравнению с обычными жидкостями) проявляется в ани-
анизотропии этого поглощения — его зависимости от направления
распространения звуковой волны (см. задачу 1).
Остальные типы колебаний в нематиках имеют закон диспер-
дисперсии, подобный D2.2), D2.3): ио^к2. Это значит, что при доста-
достаточно малых к во всяком случае будет а; < cfc. В свою очередь
отсюда следует, что в этих колебаниях жидкость можно рассма-
рассматривать как несжимаемую 1). Уравнение непрерывности сводит-
сводится тогда к divv = 0 или для плоской волны kv = 0. Таким
образом, в отношении колебаний скорости рассматриваемые ко-
колебания поперечны — сдвиговые колебания.
Для исследования всех этих колебаний произведем линеари-
линеаризацию уравнений движения, положив в них n = no + ?n, р =
= ро + 5р. В первом приближении молекулярное поле линейно по
производным от п и тем самым — линейно по 5т:
Н = K\V div 5т — К2 rot (no (no rot 5m)) + K% rot [no [no rot 5m\].
D2.4)
Первый же член в «реактивной» части тензора напряжений
D0.16) квадратичен по 5т и потому должен быть опущен. Дол-
Должны быть опущены также и квадратичные члены, возникаю-
возникающие при образовании тензорной дивергенции дка^ в уравне-
уравнении D0.7) и член (vV)v в его левой части. В результате это
уравнение сводится к следующему:
-(пОг dkhk - nO/c dkhi) - -(noi dkhk
D2.5)
г) Напомним (см. VI, § 10), что нестационарно движущуюся жидкость
можно считать несжимаемой при условиях v ^С с и г ^> 1/с, где т и I —
промежутки времени и расстояния, на которых скорость жидкости испы-
испытывает заметное изменение. Для колебательного движения первое условие
всегда выполняется при достаточно малых амплитудах колебаний, а второе
условие как раз и означает требование ио/к ^С с.
232 МЕХАНИКА ЖИДКИХ КРИСТАЛЛОВ ГЛ. VI
В уравнении же D0.3) достаточно заменить (в первых двух чле-
членах в правой части) п на по и опустить член (vV)Jn в левой
части:
Общ ^ | \ /х \ I 1 и //1о а\
\к + л[дц — noiTiQi) TiQkVki -\- —\1{. \4iZ.b)
Ot 7
Ввиду равенств по#п = 0, vk = 0 векторы 6п и v имеют всего по
две независимые компоненты. Уравнения D2.5), D2.6) составля-
составляют поэтому систему четырех линейных уравнений. Ими опреде-
определяются четыре колебательные моды, в каждой из которых ис-
испытывают связанные друг с другом колебания как скорость, так
и директор. Обычно, однако, ситуация существенно упрощается
ввиду того, что безразмерное отношение
„ = f D2.7)
оказывается малой величиной ~ 10~2-10~4 (здесь К иг/ — поряд-
порядки величины модулей упругости нематика и его коэффициентов
вязкости г/1, 7/2> Щ-> т)- Как будет показано ниже, при этом мож-
можно различать два существенно различных типа колебаний, для
каждого из которых уравнения D2.5), D2.6) допускают опреде-
определенные упрощения.
В одном из них частота связана с волновым вектором соот-
соотношением вида
ш ~ 2^, D2.8)
Р
аналогичным D2.2) (по причине, которая выяснится ниже, эти
колебания называют быстрыми сдвиговыми). В обоих уравнени-
уравнениях D2.5), D2.6) можно тогда пренебречь всеми членами, содер-
содержащими h. Действительно, из D2.8) видно, что
г kv pv
on ~ — ~ —,
UJ ф
и поэтому молекулярное поле
h
Используя эти оценки, легко убедиться, что члены с h в уравне-
уравнениях малы по сравнению с членами с г^ в отношении ~ \i. Таким
образом, система уравнений для быстрых сдвиговых колебаний
сводится к
р—V— = dkG\k ~ di&Vi D2.9)
дЗть'
—-^ = У^ыЩк + Щи — П(аЩ1) ЩкУы- D2.10)
dt
§ 42 РАСПРОСТРАНЕНИЕ МАЛЫХ КОЛЕБАНИЙ В НЕМАТИКАХ 233
Первое уравнение не содержит 5п и определяет колебания ско-
скорости и закон дисперсии, после чего второе уравнение непосред-
непосредственно дает сопутствующие колебания директора (см. задачу 2).
Перейдем ко второму типу сдвиговых колебаний при условии
/i « 1 - к специфическим для нематика медленным колеба-
колебаниям директора. В этих колебаниях порядок величины перемен-
переменной части директора определяется балансом между производной
dSn/dt в левой части уравнения D2.6) и членом h/j в его правой
части: ио5п ~ /1/7, и поскольку h ~ Кк2Ьп^ закон дисперсии этих
колебаний качественно дается соотношением
ш ~ **!. D2.11)
7
Очевидно, что производная pdv/dt ~ pvuo в левой части уравне-
уравнения D2.5) оказывается при этом малой по сравнению с членами
^k(Jik ~ Vvk в ег0 правой части и потому может быть опущена.
Уравнение
- diSp + -(пОг dkhk - Щк dkhi) - -{пы dkhk +
+ щкдккг) + дка'гк = 0 D2.12)
определяет связь между колебаниями скорости и директора, по-
после чего закон дисперсии определяется из уравнения D2.6) (см.
задачу 3).
Обратим внимание на то, что отношение частот D2.11)
и D2.8) иош/ио^ ~ \i. Таким образом, при одном и том же зна-
значении к частота о;м, мала по сравнению с U1& с этим и связано
название соответствующих колебаний медленными и быстрыми.
Наконец, температурные колебания в неподвижной немати-
ческой среде отличаются от аналогичных колебаний в обычной
жидкости лишь появлением анизотропии в законе дисперсии,
аналогичном D2.3) (см. задачу 4).
3 адачи
1. Определить коэффициент поглощения звука в нематической среде.
Решение. Коэффициент поглощения х) вычисляется как отношение
cpv2
(см. § 34), причем диссипативная функция дается формулой D1.5). При
этом в ней можно опустить член h2/7. Действительно, как уже указано,
молекулярное поле h с^> к2, и потому h2/jcs>k4, между тем, как остальные
) Мы обозначаем здесь эту величину через Г, во избежание путаницы с
диссипативным коэффициентом 7-
234 МЕХАНИКА ЖИДКИХ КРИСТАЛЛОВ ГЛ. VI
члены в R пропорциональны более низкой степени волнового вектора — А;2,
Простое вычисление приводит к следующему результату г):
1 + Г/2) + 2G/3 + Г/4 - Г/1 - Г/2) COS2 9 +
s4 9 +[ + ( ) 2 0] (
Г ?
2рс3
+ (г/1 + г/2 + г/5 - 2г/з - 2774) cos4 9 +[к± + (>*| - к±) cos2 0] (
\CV Cp
где 0 — угол между к (и тем самым v) и п. Вычисление теплопроводност-
ной части поглощения полностью аналогично такому же вычислению для
обычной жидкости — см. VI, § 79 (ср, cv — теплоемкости единицы массы
вещества).
2. Найти закон дисперсии быстрых сдвиговых колебаний.
Решение. Для плоской волны (v оо ехр г(кг — iut)) уравнение D2.9)
принимает вид
i —ikiSp + ikkcrik.
Для несжимаемого нематика вязкий тензор напряжений дается форму-
формулой D1.7), и простое вычисление (с учетом поперечности v, vk = 0) приво-
приводит уравнение к виду 2)
где
а\ = r/i Л— (г/з — 2r/i) cos2 0,
а2 = - (т/з - 2t/i) + (rj2 + т/1 - 2г/3) cos2 0,
а3 = - (г/з - 2r/i)cos0,
где 0 — угол между кип. Умножив уравнение A) на к, получим формулу,
определяющую колебания давления по колебаниям скорости:
dp = ik(nv) (аз + ci2 cos 9). B)
Искомый же закон дисперсии определяется поперечными компонентами
уравнения A). Умножив это уравнение на [nk], получим закон дисперсии
iu± = —ai@) = — ( r/i sin2 0 -\—т/з cos2
Р Р V 2
отвечающий колебаниям v, перпендикулярным плоскости, проходящей че-
через векторы кип. Закон же дисперсии для колебаний, поляризованных в
указанной плоскости, получится умножением уравнения A) на п и исклю-
исключением из него др с помощью B):
iuju = — {ai@)+a2@)sin20} = — (-(r/i+772)sin220+-r/3cos220l.
Р Р U 2 J
) При вычислении квадратичных величин все колеблющиеся величины
должны, конечно, записываться в вещественном виде — их зависимость от t
и г дается множителями cos (kr — out).
2) Для упрощения записи формул индекс у по везде ниже в задачах опус-
опускаем.
§ 42 РАСПРОСТРАНЕНИЕ МАЛЫХ КОЛЕБАНИЙ В НЕМАТИКАХ 235
Оба закона находятся, конечно, в согласии с качественной оценкой D2.8).
3. Найти закон дисперсии медленных сдвиговых колебаний.
Решение. Для плоской волны ($п оо ехр (гкг — iuut)) линеаризованное
молекулярное поле
h = Н — п(пН) = —К\{к — n(nk)}(k?n) — K^viybvL) — Кз(кпJ?п,
где
i/ = [nk] {у2 = к2 sin2 в).
Уравнение же D2.12) (с a'ik из D1.7)) принимает вид
—ikdp — a±k2v — a2k2n(nv) — a3&k(nv) + i n(kh) — i h(nk) = 0 A)
(функции ai@), аг@) определены в задаче 2). Умножив его на i/, находим
связь между колебаниями v и ?п, поляризованными перпендикулярно плос-
плоскости к, п:
ai(vi/) = —г (nk)(hi/) = i (kn)K±(i/6n), B)
где
К± = if 2 sin2 в + Кз cos2 в.
Далее, пишем уравнение D2.6), умноженное на v.
%
= -A + A)(nk)(i/v) -
2
( + A)()()
2 7
Исключив отсюда (vi/) с помощью B), найдем закон дисперсии колебаний,
поляризованных перпендикулярно плоскости к, п:
7 4ai J
Для нахождения закона дисперсии колебаний, поляризованных в плос-
плоскости kn, проецируем уравнение A) на направление, перпендикулярное век-
вектору к (в плоскости пк) и умножаем его на п; это дает
(nv)(ai + d2 sin в) = A + Acos26>)Kii(k^n),
2
где
К|| = К\ sin2 в + Кз cos2 в.
Произведя такие же операции с уравнением D2.6), получим
г 2 к2
iuo(kdn) = —к A + A cos 20) (nv) H К\\(кдп).
2 7
Исключив (nv) из обоих полученных уравнений, найдем закон дисперсии
j2r/ (I A + Acos20J 1
гш\\ = к К\\ < - + — ¦ г^-тг > •
lj 4(ai + п2 sin в) )
236 МЕХАНИКА ЖИДКИХ КРИСТАЛЛОВ ГЛ. VI
Оба закона находятся в соответствии с качественной оценкой D2.11) 1).
4. Найти закон дисперсии температурных колебаний в неподвижном
нематике.
Решение. Преобразование уравнения D0.8) для несжимаемого нема-
тика производится в точности так, как это делается в случае обычной жид-
жидкости (см. VI, § 50) и приводит к уравнению
дТ _ _ xik
dt ' рср
Для колебаний ST с^ ехр (гкг — iuot) находим закон дисперсии
iu = к (хц cos 6> + x±sin в).
§ 43. Механика холестериков
Холестерические жидкие кристаллы (холестерики) отлича-
отличаются от нематиков отсутствием среди их элементов симметрии
центра инверсии. Направления же п и — п директора по-преж-
по-прежнему остаются эквивалентными (см. V, § 140).
Отсутствие центра симметрии приводит к тому, что свобод-
свободная энергия деформации может теперь содержать линейный по
производным член — псевдоскаляр nrotn. Ее общий вид может
быть представлен в виде
Fd = — (divnJ + — (nrotn+ gJ + —[nrotn]2, D3.1)
где q — параметр с размерностью обратной длины. Это отличие
приводит к радикальному изменению характера равновесного (в
отсутствие внешних воздействий) состояния среды. Оно не яв-
является теперь пространственно однородным (n = const), как у
нематиков.
Равновесному состоянию холестерика отвечает распределе-
распределение направлений директора, для которого
divn = 0, nrotn = — q, [nrotn] =0 D3.2)
(свободная энергия D3.1) минимальна — равна нулю). Эти урав-
уравнения имеют решение:
пх = cos qz, ny = sin qz, nz = 0. D3.3)
Эту структуру (ее называют геликоидальной) можно предста-
представить себе как результат закручивания вокруг оси z нематиче-
ской среды, первоначально ориентированной своими n = const в
:) При вещественных к вещественная величина iuo должна быть положи-
положительной — колебания должны затухать (а не самопроизвольно усиливаться)
со временем. Все найденные в задачах 2 и 3 законы дисперсии этим свойст-
свойством обладают.
§ 43 МЕХАНИКА ХОЛЕСТЕРИКОВ 237
одном направлении в плоскости ху. Ориентационная структура
холестерика оказывается периодической вдоль одного направле-
направления в пространстве (оси z). Вектор п возвращается к прежнему
значению через каждый интервал длины 2n/q вдоль оси z, но по-
поскольку направления п и — п эквивалентны, истинный период по-
повторяемости структуры вдвое меньше — равен тг/q. Разумеется,
макроскопическое описание геликоидальной структуры холесте-
холестерика формулами D3.3) имеет смысл, лишь если шаг структуры
велик по сравнению с молекулярными размерами. В реальных
холестериках это условие выполняется (тг/q ~ 10~5 см).
При выводе уравнений равновесия и уравнений движения
нематиков наличие у них центра инверсии не использовалось.
Поэтому те же уравнения в их общем виде справедливы и для
холестериков. В то же время имеется и ряд отличий. Прежде все-
всего, меняется выражение i7^, с которым должно вычисляться, со-
согласно определению C6.5), молекулярное поле h. Далее, наличие
линейного по производным члена в свободной энергии приводит
к появлению различия между изотермическими и адиабатиче-
адиабатическими значениями модуля К% (ср. конец § 36). В сформулиро-
сформулированной в § 40, 41 системе гидродинамических уравнений основ-
основными термодинамическими переменными являются плотность и
энтропия. Соответственно этому должны использоваться адиа-
адиабатические значения (как функции р и S) модуля упругости.
Наконец, существенное изменение в гидродинамических
уравнениях холестериков по сравнению с уравнениями для нема-
нематиков состоит в появлении дополнительных членов в диссипатив-
ных частях уравнений — в тензоре напряжений a'ik1 тепловом по-
потоке q и величине N в правой стороне части D0.3) (F.M. Leslie,
1968):
aik =
velklnkd{T, D3.4)
Ql = (ф)нем + vieikiKkhi + ^i(eimink + eimkni)nmvik
(члены с индексом «нем» обозначают выражения из гидродина-
гидродинамики нематиков). Дополнительные члены в этих соотношениях
являются не истинными, а псевдотензором и псевдовекторами.
Тем самым нарушается симметрия относительно пространствен-
пространственной инверсии, и именно по этой причине эти члены отсутству-
отсутствуют в гидродинамике нематиков. Обратим внимание на то, что
построение аналогичных членов, которые были бы истинными
тензорами или векторами, невозможно в силу требования ин-
инвариантности уравнений относительно изменения знака п. Так,
член вида const (щдкТ + nkdiT) в a'ik или член вида const • h в q
меняли бы знак вместе с п, между тем как тензор напряжений
и тепловой поток должны быть инвариантны по отношению к
238 МЕХАНИКА ЖИДКИХ КРИСТАЛЛОВ ГЛ. VI
этому преобразованию. Аналогичным образом, член вида const x
х VT в N невозможен, поскольку он инвариантен по отношению
к изменению знака п, между тем как величина N (определяющая
производную dn/dt) должна была бы изменить знак.
Коэффициенты в выражениях D3.4) связаны друг с другом
соотношениями, следующими из принципа Онсагера. Для при-
применения этого принципа (ср. § 41) выберем в качестве вели-
величин ха — «термодинамических потоков» — величины afik, qi, Ni.
Из вида диссипативной функции D0.21) (точнее, из вида функ-
функции 2i?/T, определяющей рост энтропии) видно, что соответ-
соответствующими «термодинамическими силами» Ха будут величины
—Vik/T, д{Т/Т2, —hi/T. Надо также учесть, что величины a'ik
четны, a q^ Ni нечетны по отношению к обращению времени (как
это видно из места, занимаемого ими в уравнениях D0.3), D0.7)
и D0.8)). Если величины ха и хь имеют одинаковую четность по
этому преобразованию, то соответствующие кинетические коэф-
коэффициенты связаны равенством 7аб — 1Ьа] если же четности ха
и хь различны, то 7аб — ~1Ьа- Сравнив теперь «перекрестные»
коэффициенты в соотношениях D3.4) 1), найдем равенства
i/i = i/T, /ii = /jT.
Таким образом, можно окончательно переписать D3.4) в виде
<4 = Юнем - /i(nz[nVTb + n^[nVT]z),
N = NHeM + ^[nVT], D3.5)
q = qHeM + uT[nh] + 2liT[n{v • n)],
где символ (г; • n) обозначает вектор с компонентами г^п&.
Итак, в механике холестериков появляется зависимость тен-
тензора напряжений и вектора N от градиента температуры 2). Фор-
Форма этой зависимости (векторное произведение [nVT]) означает,
что градиент температуры приводит к появлению закручиваю-
закручивающих моментов, действующих на директор и на массу жидкости.
В то же время молекулярное поле (сопровождающее вращение
директора относительно жидкости) и градиенты скорости жид-
жидкости приводят к появлению в ней тепловых потоков.
1) При сравнении необходимо тщательно следить за порядком индексов в
множителе еш'
) Напомним (см. VI, § 49), что существование среди диссипативных чле-
членов в уравнениях движения членов с градиентом второй независимой термо-
термодинамической величины (например, давления) запрещено требованиями за-
закона возрастания энтропии. Наличие таких членов привело бы к появлению
в диссипативной функции членов с произведениями VpVT, hVp, которые в
отсутствие членов с квадратом (VpJ сделали бы невозможным обеспечение
положительности R.
§ 43 МЕХАНИКА ХОЛЕСТЕРИКОВ 239
Одно из своеобразных, специфических для холестериков гид-
гидродинамических явлений может быть наглядно описано, как
«просачивание» жидкости сквозь остающуюся неподвижной ге-
геликоидальную структуру (W. Helfrich, 1972). Оно состоит в сле-
следующем.
Представим себе холестерическую среду, геликоидальная
структура которой закреплена в пространстве (скажем, за счет
определенных эффектов сцепления с ограничивающими среду
стенками). Покажем, что в этих условиях возможно существова-
существование однородного по пространству равномерного потока жидко-
жидкости в направлении оси структуры (ось z).
Поскольку структура D3.3) отвечает равновесному состоя-
состоянию среды, она обращает в нуль молекулярное поле, h = 0. Нали-
Наличие «просачивающегося» потока несколько искажает структуру
и соответственно создает малое (вместе со скоростью потока v)
молекулярное поле. Определим это поле, исходя из уравнения
движения директора D0.3). Поскольку поле п(г) (в нулевом по
скорости приближении) неподвижно, dn/dt = 0, а поскольку
поток жидкости предполагается однородным (vz = v = const),
и Vik = &ik = 0. В результате уравнение сводится к равенству
/ т-7\ dn h
(vV)n = v— = —.
dz 7
С функцией n(z) из D3.3) находим отсюда
D3.6)
где вектор q (с абсолютной величиной q) направлен вдоль оси z.
В рассматриваемых условиях выражение диссипативной функ-
функции D0.21) сводится к 2R = Ь2/т и с h из D3.6):
2R = jv2q2. D3.7)
Этим дается энергия, диссипируемая в единицу времени в еди-
единице объема жидкости. При стационарном движении эта энергия
компенсируется работой внешних источников, поддерживающих
действующий вдоль оси z градиент давления р' = dp/dz. Плот-
Плотность действующих в среде объемных сил как раз дается гра-
градиентом —Vp; работа этих сил (в единицу времени в единице
объема) есть —p'v и приравняв ее 2R найдем скорость «просачи-
«просачивания»
v = И. D3.8)
По отношению к частице жидкости, протекающей «сквозь» ге-
геликоидальную структуру, директор п вращается с угловой ско-
скоростью vq. Это вращение сопровождается «трением», характери-
характеризуемым коэффициентом 75 им и определяется скорость течения.
240 МЕХАНИКА ЖИДКИХ КРИСТАЛЛОВ ГЛ. VI
В реальных условиях скорость не может быть постоянной по
всей ширине потока — она должна обращаться в нуль на стен-
стенках ограничивающей поток трубки. Падение скорости происхо-
происходит в слое некоторой толщины S. Но единственным параметром
длины, характерным для рассматриваемого движения, является
величина 1/q. Если принять, что все коэффициенты вязкости хо-
лестерика имеют одинаковый порядок величины, то отсутствуют
также и какие-либо безразмерные параметры, которые не были
бы ~ 1. Очевидно, что в этих условиях возможно лишь 6 ~ 1/q-
Таким образом, при течении по трубке большого по сравнению
с 1/q радиуса формула D3.8) будет справедлива везде, за ис-
исключением лишь очень тонкого (толщина порядка шага гелико-
геликоидальной структуры) пристеночного слоя.
§ 44. Упругие свойства смектиков
По принятой терминологии к категории смектических жид-
жидких кристаллов (или смектиков) относятся анизотропные жид-
жидкости разнообразной слоистой структуры. По крайней мере неко-
некоторые из них представляют собой тела с микроскопической
функцией плотности молекул, зависящей только от одной ко-
координаты (скажем, z) и периодической по ней, р = p(z). На-
Напомним (см. V, § 128), что функцией плотности определяется
распределение вероятностей различных положений частиц в те-
теле; в данном случае можно говорить о различных положениях
молекул как целого, т. е. pdV есть вероятность центру инерции
отдельной молекулы находиться в элементе объема dV. Тело с
функцией плотности p(z) можно представлять себе как состоя-
состоящее из свободно смещающихся друг относительно друга плос-
плоских слоев, расположенных на одинаковых расстояниях друг от
друга. В каждом из слоев расположение центров инерции мо-
молекул беспорядочно, и в этом смысле каждый из них пред-
представляет собой «двумерную жидкость», жидкие слои, однако,
могут быть как изотропными, так и анизотропными. Это раз-
различие может быть связано с характером упорядоченной ориен-
ориентации молекул в слоях. В простейшем случае анизотропия рас-
распределения ориентации задается всего одним направлением п
(скажем, направлением «длинной оси» молекулы). Если это на-
направление перпендикулярно плоскости слоев, слои изотропны,
так что ось z является осью аксиальной симметрии тела; та-
такова, по-видимому, структура так называемых смектиков А.
Если же направление п наклонно к плоскости жу, то в этой
плоскости появляется избранное направление и осевая симмет-
симметрия исчезает; такова, по-видимому, структура так называемых
смектиков С.
§ 44 УПРУГИЕ СВОЙСТВА СМЕКТИКОВ 241
Мы будем рассматривать ниже только более простые смекти-
ки А (и говорить о них просто как о смектиках). Во всех извест-
известных смектиках А, помимо аксиальной симметрии вокруг оси z,
имеет место также и эквивалентность обоих направлений оси z.
Если смектик обладает еще и центром инверсии, то его макро-
макроскопическая симметрия (т. е. точечная группа симметрии) такая
же, как у нематиков; микроскопическая же симметрия, а с нею
и механические свойства, конечно, совершенно разные.
По поводу сказанного до сих пор надо сделать следующую
очень важную оговорку. Существование структуры с непостоян-
непостоянной вдоль объема тела функцией плотности предполагает доста-
достаточную малость смещений, испытываемых малыми участками
тела в результате тепловых флуктуации. Между тем для струк-
структуры с р = р (z) эти флуктуационные смещения неограничен-
неограниченно растут при увеличении размеров тела (см. V, § 137). Строго
говоря, это означает невозможность существования одномерной
периодической структуры в неограниченной по своим размерам
среде. Фактически, однако, смысл этого утверждения оказывает-
оказывается весьма условным ввиду медленности (всего логарифмической)
возрастания флуктуации при увеличении размеров тела. Оцен-
Оценки (использующие типичные значения материальных констант
известных смектиков) показывают, что разрушение одномерной
периодической структуры могло бы произойти лишь при практи-
практически нереальных огромных размерах и, таким образом, в любой
реальной постановке вопроса структура р (z) оказывается осуще-
осуществимой.
Подчеркнем в то же время, что с разрушенной флуктуация-
ми структурой p(z) (т. е. в которой стало уже р = const) среда
отнюдь не становится обычной жидкостью. Принципиальное от-
отличие состоит в свойствах корреляционной функции флуктуации
плотности в различных точках пространства: Eр (ri) 5p (г2)). В
обычной жидкости эта функция изотропна и убывает при г =
= |г2 — ri| —>> оо по экспоненциальному закону (см. V, § 116). В
системе же с р = р (z) корреляционная функция остается (при
увеличении размеров тела) анизотропной и убывает при г —>> оо
лишь по медленному, степенному закону, причем тем медленнее,
чем ниже температура (см. V, § 138).
Приступая к построению механики смектических сред, надо
начать с отыскания выражения для плотности свободной энер-
энергии их деформации. Ввиду микроскопической однородности сре-
среды в плоскости ху смещения ее точек в этой плоскости связа-
связаны с изменением энергии лишь постольку, поскольку они при-
приводят к изменению плотности вещества. Имея это в виду, вы-
выберем в качестве основных гидродинамических переменных (по-
(помимо температуры, предполагающейся постоянной вдоль среды)
плотность р и смещение uz = и точек среды вдоль оси z. Энергия
242 МЕХАНИКА ЖИДКИХ КРИСТАЛЛОВ ГЛ. VI
деформации зависит от изменения плотности р — ро (ро — плот-
плотность недеформированной среды) и от производных смещения и
по координатам. При этом первые производные ди/дх, ди/ду во-
вообще не могут входить в квадратичную часть свободной энергии:
если повернуть тело как целое вокруг осей х или у, то эти про-
производные изменятся, между тем как энергия должна остаться
неизменной 1).
Как всегда в теории упругости, изменения всех величин в
пространстве будут предполагаться достаточно медленными, так
что энергия деформации определяется первыми неисчезающими
членами разложения по степеням пространственных производ-
производных. Кроме того, однако, будет предполагаться еще и более дале-
далеко идущее условие: сами смещения и предполагаются настолько
малыми, что слои остаются везде почти параллельными одной и
той же плоскости ху2).
В этих предположениях и с учетом симметрии среды свобод-
свободная энергия деформации смектика дается следующим выраже-
выражением:
Fd = F-F0(T) =
А / ч2 , гч( \ди . Вро (ди\2 , К\ / А ч2
= ^-{р-ро) +с(р-роЬ- + 4^ (тг) +^гА^Ь
2ро dz 2 \dz/ 2
я2 я2
^ = h+w D4Л)
Член вида3) (du/dz)A±u запрещается предполагаемой здесь эк-
эквивалентностью обоих направлений оси z, т. е. симметрией по
отношению к преобразованию и —>> —и, z —>> —z, x, у —>> ж, у (от-
(отражение в плоскости ху) или и —>• —и, z —>• —z, у —>• —у, х —^ х
(поворот вокруг горизонтальной оси второго порядка — оси х)]
по этой же причине отсутствует член вида (р — ро)А±и. Учет
первого члена разложения по вторым производным (отсутству-
(отсутствующий в теории упругости твердых тел) необходим ввиду отсут-
отсутствия в Fd первых производных по ж и у. Условия устойчивости
недеформированного состояния, т. е. условия положительности
энергии D4.1), гласят
А>0, Б>0, АВ>С2. D4.2)
х) В упругую энергию твердых тел эти производные входят в комбина-
комбинациях uxz и uyz с производными от их и иу\ эти комбинации при указанном
повороте не изменятся.
2) В этом смысле область применимости развиваемой здесь механики
смектиков более узка, чем для рассмотренной выше механики нематиков,
в которой допускались поля директора п(г), сколь угодно сильно отличаю-
отличающиеся от недеформированного однородного распределения.
3) Такой член фигурировал в V, § 137.
§ 44 УПРУГИЕ СВОЙСТВА СМЕКТИКОВ 243
Обозначение коэффициента К\ в D4.1), совпадающее с обо-
обозначением в C6.1), выбрано не случайно. Действительно, дефор-
деформацию слоистой структуры смектиков можно описывать распре-
распределением директора п(г), понимая его как нормаль к деформи-
деформированным слоям, задаваемым уравнениями u(r) = const. При
малом искажении слоев
ди ди л / /1 /1 о \
пх « —, пу « —, nz « 1, D4.3)
дх у ду
и тогда (Д_|_глJ = (divnJ, т. е. как раз та величина, которая
фигурирует в соответствующем члене в C6.1). Коэффициенты
же В и С в D4.1) характерны для специфической кристалличе-
кристаллической природы смектиков, отличающих их от нематиков г).
Обратим внимание на то, что в приближении D4.3)
nrotn « rot^ n = 0. Поэтому член вида nrotn в свободной
энергии (а тем самым и холестерическое искажение структуры —
§ 43) в смектиках отсутствует вне зависимости от наличия или
отсутствия среди его элементов симметрии центра инверсии.
Уравнения равновесия смектика получаются минимизацией
полной свободной энергии по переменным ржи при дополни-
дополнительном условии / pdV = const, выражающем сохранение пол-
полной массы тела. Минимизируя разность
J FddV-\J pdV
(где А — постоянный множитель Лагранжа) по /э, получим ра-
равенство
А / ч ^ ди л
— (р-ро) + С— = А,
ро oz
связывающее изменение плотности с деформацией слоев. Пола-
Полагая, что ро есть плотность при du/dz = 0, имеем А = 0, и тогда
dU COO (AA А\
ро = -porn—-, ш=-^. D4.4)
OZ А.
) Подчеркнем, что директор п (понимаемый как избранное направление
ориентации молекул в слоях) не является в смектиках (смектиках А) незави-
независимой гидродинамической переменной. Для переменной п в гидродинамике
нематиков характерно, что однородный поворот поля п(г) во всем теле не
связан с изменением энергии. Именно поэтому медленное изменение п вдоль
тела связано лишь с малым изменением энергии, последняя зависит только
от производных от п и может быть разложена по ним. В смектиках же вся-
всякий такой поворот меняет ориентацию относительно слоистой структуры и
был бы связан со значительным изменением энергии. Отметим, что в смек-
смектиках С, где директор наклонен к нормали под некоторым определенным
углом, однородный поворот направлений п вокруг нормалей с сохранени-
сохранением величины угла наклона снова не был бы связан с изменением энергии.
Поэтому здесь снова появляется новая гидродинамическая переменная —
проекция п на плоскость слоев.
244 МЕХАНИКА ЖИДКИХ КРИСТАЛЛОВ ГЛ. VI
Безразмерный коэффициент т связан с коэффициентом
Пуассона а для «стержня», вырезанного из смектика в направ-
направлении оси z. Действительно,
Р — ро _ V — Vo _ / . . ч
— 77 — v^xx ~г Uyy -\- Uzz)
ро Vo
(см. A.6)), где uzz = ди/dz, а ихх, иуу — компоненты тензора
деформации в плоскости ху. Полагая ихх = иуу, имеем
1 — т
^хх — ~ tizz
Z
и, сравнив с определением E.4):
а = —^—. D4.5)
При т = 0 коэффициент а принимает характерное для жидко-
жидкости значение а = 1/2.
Исключив из D4.1) изменение плотности с помощью D4.4),
получим свободную энергию, выраженную только через и:
f(^)f D4.6)
где
В' = В-—. D4.7)
.А
Варьируя полную свободную энергию по и, найдем теперь после
нескольких интегрирований по частям:
6 J FddV = - / Fz 5udV, D4.8)
где
^i D4.9)
Очевидно, что Fz есть (отнесенная к единице объема) сила, дей-
действующая в направлении оси z в деформированном смектике при
условии, что изменение плотности уже «подстроилось» под де-
деформацию.
В равновесии Fz = 0, так что смещение и удовлетворяет ли-
линейному дифференциальному уравнению
роВ'^-К^и^О. D4.10)
Если на тело действуют еще и приложенные к нему объемные
внешние силы, то они должны быть добавлены к левой части
уравнения (ср. B.8)).
Отношение (К\/В1 р$I12 имеет размерность длины и грубая
его оценка есть: (К\/В'р$I'2 ~ а, где а — период одномерной
§ 44 УПРУГИЕ СВОЙСТВА СМЕКТИКОВ 245
структуры (расстояние между слоями). Если смектик подверг-
подвергнут деформации, существенно меняющейся в плоскости ху на
расстояниях ~ 1± ^> а, то из D4.10) следует, что в направлении
оси z деформация испытывает существенное изменение лишь на
расстояниях /ц ~ l^/а ^> 1_\_.
В качестве примера найдем гриновскую функцию уравне-
уравнения D4.10), т. е. смещение и = Gzz(r) = G(r) в переменной точ-
точке г, вызванное единичной сосредоточенной силой, приложенной
в точке г = 0 и действующей в направлении оси z (ср. задачу
к § 8). Эта функция удовлетворяет уравнению
p0B'^--K1A2±G + S(r) = 0. D4.11)
Совершая над этим уравнением преобразование Фурье (т. е.
умножив его на е~ и проинтегрировав по с/3ж), находим для
фурье-компонент функции G(r) выражение
где к\ = к2х + ку. Обратное фурье-преобразование дает искомую
функцию в виде интеграла
- —. D4.12)
Этот интеграл логарифмически расходится при к —>> 0. Для при-
придания ему определенного смысла надо исключить перемещение
тела как целого, предположив закрепленной некоторую условно
выбранную его точку, г = го; тогда в числителе подынтеграль-
подынтегрального выражения надо писать егкг — егкг° и расходимость устра-
устраняется.
Вернемся еще раз к вопросу о влиянии тепловых флуктуации
на свойства смектиков — на этот раз на их упругие свойства.
Наиболее определенным образом вопрос может быть поставлен
следующим образом: как меняется под влиянием флуктуации де-
деформация, создаваемая приложенной к телу сосредоточенной си-
силой, т. е. как меняется гриновская функция G(r)? Оказывается,
что это изменение сводится к замене в выражении D4.12) k2z и
к^_ соответственно на
/2 Л 1 V4/5 /4 Л М2/5
к7 In — и к i In
z\kJ ^Kk
к7
z
1
—
akJ
где а — величина порядка периода структуры 1). В свою оче-
:) Grinstein С, Pelcovits R.A. // Phys. Rev. Lett. 1981. V. 47. P. 856; Phys.
Rev. 1982. V. A26. P. 915; Е.И. Кац // ЖЭТФ. 1982. Т. 83. С. 1376. При
исследовании необходимо учитывать также и члены третьего и четвертого
порядков по и в разложении свободной энергии.
246 МЕХАНИКА ЖИДКИХ КРИСТАЛЛОВ ГЛ. VI
редь такое изменение можно наглядно интерпретировать как из-
изменение эффективных значений упругих модулей В' и К\ при
уменьшении характерных значений волнового вектора деформа-
деформации (т. е. увеличении ее характерной протяженности ~ 1/&). Мы
видим, что эффективное значение В1 л убывает при kz —>• 0 как
[1пA/а?^)]~4/5, а К1эф растет при к_\_ —>> 0 как [In A/ак_\_)]2/5.
Фактически, однако, эти эффекты могли бы стать существенны-
существенными лишь при практически нереальных огромных размерах.
Укажем в заключение этого параграфа, что выражение D4.6)
для упругой энергии смектика можно несколько обобщить вклю-
включением в него некоторых членов более высокого порядка, но без
введения при этом дополнительных коэффициентов.
Для этого заметим, что вклад в энергию, описываемый пер-
первым членом в D4.6), физически связан с изменением расстоя-
расстояния а между слоями; производная du/dz совпадает с относи-
относительным изменением этого расстояния при смещении uz = и, и
потому этот член можно записать в виде - poBfFa/aJ. Но рас-
расстояние между слоями может измениться не только из-за зави-
зависимости смещения и от координаты 2:, но и от его зависимости
от х и у. Это легко понять, представив себе все слои одновремен-
одновременно повернутыми, скажем, вокруг оси у на угол в таким образом,
что величина периода структуры вдоль оси z остается равной щ
расстояние же между слоями (измеренное по направлению нор-
нормалей к ним) оказывается при этом равным a cos в. При малых
углах в изменение расстояния между слоями
5а = a(cos# — 1) « .
Поскольку в то же время смещение и при рассматриваемом по-
повороте есть и = const + х tg в « const + хв, то
а ~ 2 \дх)
В таком виде это выражение справедливо при любой зависимо-
зависимости и от х] если же и зависит также и от у, то вместо (ди/'дхJ
надо писать (V±uJ.
Таким образом, с учетом описанного эффекта свободную
энергию D4.6) надо писать в виде
р Р^\ди_1_ Гдиу _l_(Ou]\
й 2 [dz 2 \дх) 2 \ду) J 2
Это выражение используется в задаче к этому параграфу.
f
J
§ 45 ДИСЛОКАЦИИ В СМЕКТИКАХ 247
3 адача
Слой смектика (толщины h) с плоскими границами, параллельны-
параллельными плоскостям слоистой структуры, подвергнут однородному растяжению
вдоль перпендикулярной ему оси z. Найти критическую величину растяже-
растяжения, за которым слоистая структура смектика становится неустойчивой по
отношению к поперечным возмущениям (W. Helfrich, 1971) ).
Решение. Однородное растяжение означает деформацию и = jz,
где постоянная 7 > 0. Для исследования устойчивости полагаем и = jz +
+ Su(x,z), где Su — малое возмущение, удовлетворяющее граничным усло-
условиям Su = 0 при z = =Ь/г/2 (плоскость ху выбрана посередине слоя). С
точностью до членов второго порядка, полная упругая энергия возмущения
(отнесенная к единице длины вдоль оси у):
л л х fin' {д6и\2 , (д8и\2 (д28и\2\
dxdz=- \В Ро — -В ро-yl — ) +кЛ^т) ) dxdz
2^1 \ dz J V их ) \ дх2 ) J
A)
(член с jdSu/dz выпадает при интегрировании по dz в силу граничных
условий).
Будем рассматривать возмущения вида
Su = const • cos kzz • cos kxx, kz = тгп/h, n = 1, 2, ...
(поперечная модуляция слоистой структуры). Условие устойчивости струк-
структуры состоит в положительности энергии A). Заменив все интегрируемые
множители sin2, cos2 их средними значениями 1/2, получим это условие в
виде
В1po(k2z - -ykl) + Клк\ >0.
Граница устойчивости (по мере увеличения 7) определяется появлением ве-
вещественного корня к2х трехчлена в левой части этого неравенства (комплекс-
(комплексные значения кх не удовлетворяют условию конечности возмущения во всей
плоскости ху). Первое такое появление происходит для возмущения с п =
= 1. Для него находим критическое растяжение и соответствующее значение
кх = ккр 2):
1/2
§ 45. Дислокации в смектиках
Понятие дислокации в смектике имеет тот же смысл, что и
в обычном кристалле. Разница состоит лишь в том, что вви-
ввиду одномерной (вдоль оси z) периодичности микроскопической
*) Эта неустойчивость аналогична рассмотренной в § 21 неустойчивости
сжимаемого прямого стержня.
2) Значение &Кр определяет лишь абсолютную величину «волнового век-
вектора» возмущения в плоскости ху, но не полную симметрию возникающей
деформации. Определение последней требует выхода за границы прибли-
приближения, отвечающего линейным (по Su) уравнениям равновесия (ситуация
здесь аналогично той, которая имеет место для конвективной неустойчиво-
неустойчивости плоскопараллельного слоя жидкости — см. VI, § 57). См. Delrieu J.M. //
Journ. Chem. Phys. 1974. V. 60. P. 1081.
248 МЕХАНИКА ЖИДКИХ КРИСТАЛЛОВ ГЛ. VI
структуры смектиков вектор Бюргерса дислокации в них всегда
направлен по оси 2;, а по величине равен целому кратному от
периода а структуры.
С учетом этого замечания для деформации вокруг дислока-
дислокации в смектике остается справедливой полученная в § 27 фор-
формула B7.10) — при надлежащем определении тензора модулей
упругости \ikim- Для этого введем тензор напряжений в смекти-
смектике Gik в соответствии с обычным определением, т. е. по формуле
Fz = dkazk, D5.1)
где Fz — объемная «сила внутренних напряжений» D4.9). Вве-
Введем также тензор деформаций, отвечающий смещению uz = щ
отличные от нуля его компоненты:
ди 1 ди 1 ди /лк п\
Щг = —, Uxz = - —, Uyz = - — • D5.2)
dz 2 дх 2 ду
Сила D4.9) может быть представлена в виде D5.1), если выра-
выразить тензор напряжений через тензор деформации формулами
D5.3)
Xzxzx = Xzyzy = — К\А±,
s^zxzy — ^zxzz — ^zyzz — ^5
некоторые из этих компонент — операторы.
Формула B7.10) для смещения uz = и принимает вид
u(r) = -Xzkizb / rn—G(r - r') d/', D5.4)
SD
где G = Gzz — функция D4.12).
Рассмотрим два частных случая дислокаций — прямолиней-
прямолинейные винтовую и краевую. В первом случае ось дислокации совпа-
совпадает с направлением вектора Бюргерса, т. е. с осью z. Этот слу-
случай вообще не требует каких-либо новых вычислений. Заранее
ясно, что деформация и будет зависеть только от координат ж,
у. Но в плоскости ху среда изотропна. Поэтому можно сразу
воспользоваться результатом задачи 2, § 27, согласно которому
u=bf, D5.5)
где ср — полярный угол радиус-вектора в плоскости ху.
) Остальные компоненты ХгЫт можно выбрать так, чтобы было Fx =
= Fy =0; в формулу D5.4) эти компоненты не входят.
§ 45 ДИСЛОКАЦИИ В СМЕКТИКАХ 249
Обратимся к более сложному случаю краевой дислокации
(P.G. de Gennes, 1972). В этом случае ось дислокации перпен-
перпендикулярна вектору Бюргерса; пусть она совпадает с осью у. То-
Тогда в качестве поверхности Sd в интеграле D5.4) можно взять
правую полуплоскость жу, а вектор п нормали к ней будет ле-
лежать вдоль отрицательного направления оси z. Из всех компо-
компонент вида Xzkzz отлична от нуля только Xzzzz = В1ро, так что
формула D5.4) принимает вид
u(r) = ЬВ'ро
-оо О
Подставляем сюда функцию G из D4.12). Дифференцирова-
Дифференцирование по z дает множитель ikZi интегрирование по dy дает 2тг8(ку),
E-функция устраняется затем интегрированием по dky. В инте-
интеграле
Je~tkxX dx'
о
для обеспечения сходимости надо понимать кх как кх—г0. Таким
образом, после выполнения интегрирований по dx' dy' dky полу-
получаем
оо
u() b
оо
\ i / exp (ikxx) 7-/7 \dkx
) = — b / —FV JI(kx,z)—-,
J kx-i0 V X' J 2тг '
где
оо
z\ _ f
J
kzexp(ikzz)dkz
2тг ' B'po'
Последний интеграл вычисляется путем замыкания контура
интегрирования бесконечно удаленной полуокружностью в верх-
верхней (при z > 0) или нижней (при z < 0) полуплоскости ком-
комплексной переменной kz и взятия вычета в полюсе kz = iXk^, или
гО z — o/\lbrp'
I = ±Uxp{-Xk2x\z\),
где верхний или нижний знак относятся соответственно к z > 0
и z < 0. Таким образом, смещение
u(x,z) = ±— ! exp{-Xk2x\z\ +ikxx}-^-. D5.6)
250 МЕХАНИКА ЖИДКИХ КРИСТАЛЛОВ ГЛ. VI
Более интересно, однако, не само смещение, а его производные
по координатам. Для производной по х имеем
ОО
г) h С
-^ = ±— / exp {-\k\\z\ + ikxx} dkx =
дх 4тг J
d
Согласно D5.6) производная по z связана с производными по х
формулой
ди ,л <9 и
~d~z ~ Ъх2'
откуда
ди Ъх Г х2 Л (Аг оч
— = — ; ехр < — >. D5.8)
dz 8(тгЛI/2|^|з/2 ^ ^ 4X\z\) v y
Деформация быстро (экспоненциально) стремится к нулю при
х\ —)> оо и гораздо медленнее (по степенному закону) при \z\ —)> оо.
§ 46. Уравнения движения смектиков
Механика смектиков имеет то общее с механикой немати-
ков, что в обоих случаях речь идет о гидродинамике с допол-
дополнительными (по сравнению с обычной жидкостью) переменны-
переменными. В случае нематиков этой переменной является директор п,
а в случае смектиков — смещение и слоев (Р. С. Martin, О. Раго-
di, P.S. Pershan, 1972). Последнее требует пояснения. Скорость
определяется в гидродинамике как импульс единицы массы ве-
вещества. Ее компонента vz отнюдь не обязана совпадать в дан-
данном случае с производной du/dt. Перенос массы (в направле-
направлении оси z) может осуществляться в смектике не только за счет
деформирования слоев, но и путем «просачивания» вещества
сквозь остающуюся неподвижной одномерную структуру (подоб-
(подобно описанному в § 43 аналогичному эффекту в холестериках).
Это явление не специфично для жидких кристаллов, аналогич-
аналогичное явление возможно и в твердых кристаллах, где оно связано
с диффузией дефектов (см. примеч. на с. 130). Но в смектиках
оно в принципе неустранимо ввиду большей «размытости» пери-
периодической структуры (как бы содержащей значительное число
дефектов — вакансий) и большей подвижности молекул.
При адиабатическом движении каждый элемент жидкости
переносит свое постоянное значение энтропии s (отнесенной к
единице массы); если в какой-либо начальный момент времени
энтропия s была постоянна по всему объему среды, она останется
постоянной и в дальнейшем. Поскольку условие s = const спра-
справедливо именно для энтропии единицы массы, будет удобным от-
§ 46 УРАВНЕНИЯ ДВИЖЕНИЯ СМЕКТИКОВ 251
носить сначала к единице массы также и внутреннюю энергию
среды; обозначим ее через е. Для деформированного смектика
эта величина выражается формулой, аналогичной D4.1):
А. / о (J / \ c)ii
Sd = г — ?q(s) = —-(р — ро) + —(р — ро)—- +
2р2о ро dz
В ( ди \ 2 К\ / \ 9
2 4 02/ 2/9о
где ро — плотность недеформированной среды; коэффициен-
коэффициенты А, В, С здесь не совпадают с таковыми в D4.1) — они пред-
представляют собой теперь адиабатические значения модулей упру-
упругости (и предполагаются выраженными в функции от s), а не
изотермические, как в D4.1); что касается коэффициента К\, то
его изотермическое и адиабатическое значения совпадают по тем
же причинам, что и для нематиков (см. конец § 36) 1).
Единица массы вещества занимает объем 1/р. Поэтому тер-
термодинамическое соотношение для дифференциала энергии:
de = T ds — p dV = T ds + —dp.
р2
Давление в среде можно, следовательно, найти дифференциро-
дифференцированием выражения D6.1)
\ D6.2)
Z
Дальнейшее построение уравнений движения смектиков очень
близко по используемой последовательности операций произве-
произведенному в § 40 выводу уравнений движения нематиков. Для уси-
усиления этой аналогии снова (как и в § 40) будем пользоваться
энергией Е = ре и энтропией S = ps, отнесенными к единице
объема.
Уравнение непрерывности имеет обычный вид2)
| . D6.3)
Динамическое уравнение для скорости должно иметь вид
^ D6.4)
х) Строго говоря, в D6.1) надо было бы писать du/dz — So(s) вместо du/dz,
где So(s) — значение du/dz в отсутствие внешних сил при энтропии s. Рас-
Рассматривая движение при заданном s, мы можем выбрать в качестве неде-
формированного именно это состояние и положить So(s) = 0. Подчеркнем,
однако, что после этого уже нельзя, например, дифференцировать выраже-
выражение D6.1) nose целью определения температуры по формуле Т = (de/ds)p\
2) Хотя мы интересуемся в конечном счете лишь линеаризованными урав-
уравнениями движения, мы не производим линеаризации на каждом этапе вы-
выводов, так как это усложнило бы запись формул.
252 МЕХАНИКА ЖИДКИХ КРИСТАЛЛОВ ГЛ. VI
(ср. D0.7)); вид тензора напряжений будет установлен ниже.
Еще одно уравнение связано с наличием дополнительной пе-
переменной и выражает собой отличие vz от du/dt:
— - vz = N. D6.5)
dt v J
Величина N представляет собой скорость «просачивания» — ско-
скорость жидкости относительно одномерной решетки; она имеет
кинетическую природу, и ее выражение будет установлено ниже.
Наконец, уравнение для энтропии, учитывающее диссипатив-
ные процессы в среде, имеет вид D0.8)
— + div (Sv +*) = ™. D6.6)
dt \ т; т v }
Как и в § 40, вычисляем производную по времени от полной энер-
энергии единицы объема среды, фигурирующую в уравнении закона
сохранения энергии D0.11). Отличие возникает только в виде по-
последнего члена в D0.12). Имеем теперь1)
дЕЛ _( dEd\ 0_0u + Ki{A±u) (л ди
| ...} D6.7)
(как и в § 40, члены с полными дивергенциями не выписываем),
где введено обозначение
D6.8)
Если рассматривать h как ^-компоненту векторной величины
h = nh (n — единичный вектор вдоль оси z), то легко убедиться,
что этот вектор может быть представлен в виде дивергенции
Ы = дкст$, D6.9)
(г)
где симметричный тензор а^к имеет следующие компоненты:
(г) (г) Тг д ди
(г) т^ д ди (г) A ди (г) *
дх
7-> ди
д ди
^С(р-
Vxy —
*) Здесь и ниже изменением модулей упругости вдоль среды пренебрегаем.
§ 46 УРАВНЕНИЯ ДВИЖЕНИЯ СМЕКТИКОВ 253
Подставив в D6.7) du/dt из уравнения D6.5) и снова выделив
в одном из членов полную дивергенцию, пишем
{¦¦¦}.
Это выражение отличается от D0.17) лишь смыслом обозначе-
обозначений h и N1). Поступая далее также, как это было объяснено
в § 40, получим прежнее выражение D0.21) для диссипативной
функции
2R = a'ikvik + Nh- ^VT, D6.11)
где a'ik — вязкая часть тензора напряжений:
Динамическое уравнение D6.4) с этим тензором напряжений
принимает после линеаризации (опускаем член (vV)v) вид
^ Ы + дка'ш, D6.13)
где вектор h = n/i определен выражением D6.8).
Вязкий тензор напряжений <т^, тепловой поток q и скорость
просачивания N («термодинамические потоки») обычным обра-
образом представляются выражениями, линейными по «термодина-
«термодинамическим силам» —vik/T, T~2 д{1', —/г/Т, причем коэффициен-
коэффициенты в этих выражениях связаны друг с другом соотношениями,
следующими из принципа Онсагера. Не повторяя заново соответ-
соответствующих рассуждений (ср. § 41, 43), напишем результат. При
этом будем считать, что (как это обычно имеет место) смектик
обладает центром инверсии (до сих пор это еще не предполага-
предполагалось). Тогда вязкий тензор напряжений дается той же форму-
формулой D1.4), что и для нематиков, причем под п следует понимать
направление оси z. Тепловой поток и скорость просачивания да-
даются выражениями
qz = -x\\j-z+Vh, q± =-*lV_lT, N = \ph-^, D6.14)
причем положительность диссипативной функции требует вы-
выполнения неравенств
хц, >*j_, Хр > 0, /i2 < Т\рк\\. D6.15)
*) А также отсутствием члена Vi(diE). Такой член, однако, являлся бы
в данном случае малой величиной третьего порядка, которой можно прене-
пренебречь по сравнению с величинами второго порядка.
254 МЕХАНИКА ЖИДКИХ КРИСТАЛЛОВ ГЛ. VI
Явление просачивания делает возможным существование в
смектиках эффекта, подобного описанному в конце § 43 для хо-
лестериков. Если периодическая структура смектика каким-то
способом закреплена в пространстве, возможно существование
однородного стационарного течения вдоль оси z. Из D6.13) сле-
следует, что для такого течения dp/dz = /i, а из D6.5) с N из D6.14):
Vz = -\ph = -Xp^. D6.16)
dz
К сказанному выше о кинетических коэффициентах смекти-
ков надо сделать важную оговорку. Уже упоминавшаяся в § 45
расходимость флуктуации в смектиках в особенности сильно про-
проявляется именно в кинетических явлениях, что может суще-
существенно изменить их характер 1).
§ 47. Звук в смектиках
В обычных жидкостях (а также в нематических жидких
кристаллах) существует лишь одна ветвь слабозатухающих зву-
звуковых колебаний — продольные звуковые волны. В твердых
кристаллах и аморфных твердых телах существуют три звуко-
звуковые (акустические) ветви линейного закона дисперсии колебаний
(§ 22, 23). Одномерные кристаллы — смектики — и здесь занима-
занимают промежуточное положение: в них имеются две акустические
ветви (P.G. de Gennes, 1969). Не интересуясь здесь коэффици-
коэффициентами затухания этих волн, и имея в виду лишь определение
скоростей их распространения, пренебрежем в уравнениях дви-
движения всеми диссипативными членами. Полная система лине-
линеаризованных уравнений движения складывается из уравнения
непрерывности
^ + pdivv = 0 D7.1)
dt
(здесь и ниже индекс у ро опускаем; р1', р' — переменные части
плотности и давления), уравнения D6.5), которое сводится к
vz = — D7.2)
dt v J
— просачивание отсутствует, и динамического уравнения D6.13):
I- nh, D7.3)
иъ
причем, согласно D6.2),
/ Л I S~4 dVb / А1-Г Л\
p = Ар + рС —. D7.4)
См. Кац Е.И., Лебедев В.В. // ЖЭТФ. 1983. Т. 85. С. 2019.
§ 47 ЗВУК В СМЕКТИКАХ 255
В выражении D6.8) для h следует опустить член KiA^u, содер-
содержащий производные высших порядков, — он оказался бы слиш-
слишком высокого порядка по волновому вектору /с, который для зву-
звуковых волн следует рассматривать как малую величину:
к = РВд^2+Сд-?. D7.5)
В реальных смектиках величины В и С обычно малы по срав-
сравнению с А. В этих условиях, которые мы и будем предполагать,
природа обеих акустических ветвей в смектиках становится бо-
более наглядной.
Если пренебречь в уравнениях движения всеми членами, со-
содержащими малые коэффициенты В и С, то они сведутся к урав-
уравнениям движения обычной жидкости с уравнением состояния
р' = Ар1', т. е. с сжимаемостью (dp' /dp')s = А. Соответствую-
Соответствующие этому случаю колебания представляют собой обычные зву-
звуковые волны — продольные волны сжатия и расширения среды.
Скорость их распространения
d = A1'2 D7.6)
и (в рассматриваемом приближении) не зависит от направления.
Фазовая скорость С2 волн второй акустической ветви, как мы
увидим, мала по сравнению с с\\ ио/к = С2 <С с\. Поэтому по
отношению к этим колебаниям среду можно считать несжимае-
несжимаемой (ср. примеч. на с. 231). Уравнение непрерывности сводится
при этом к условию несжимаемости divv = 0; в D7.5) опускаем
второй член, так что уравнение D7.3) принимает вид
Продифференцировав z-компоненту этого уравнения по z и под-
подставив в него vz = du/dt, получим
где 8 = du/dz. Применив же к уравнению D7.7) операцию div, в
силу условия несжимаемости получим
Ар = рВ—.
dz2
Наконец, исключив из этих двух уравнений ]/, получим одно
уравнение для величины 5:
А5 в\ + А5\. D7.8)
dt2 I dz* dz2 / v '
256 МЕХАНИКА ЖИДКИХ КРИСТАЛЛОВ ГЛ. VI
Зависимость смещения и от координаты z означает, что ме-
меняются расстояния а между соседними слоями: 8а = (du/dz)a,
сама же величина S = du/dz дает относительное изменение этого
расстояния. Таким образом, уравнение D7.8) описывает распро-
распространение поперечной (kv = 0) волны, в которой испытывают
колебания расстояния между слоями при постоянной плотности.
Для плоской волны, в которой 6 оо expjikr — iuot}, из D7.8) имеем
откуда находим скорость
с2 = B1/2s'm6cos6, D7.9)
где в — угол между к и осью z. Эта скорость анизотропна, при-
причем обращается в нуль для распространения как вдоль оси z
F = 0), так и в плоскости ху (в = тг/2). При углах, близких к
этим значениям, возрастает роль диссипативных эффектов. (См.
задачи 2 и 3 к этому параграфу.)
3 адачи
1. Найти фазовые скорости акустических волн в смектиках при произ-
произвольном соотношении между модулями А, В, С.
Решение. Продифференцировав уравнение D7.3) по t и исключив
производные dp /dt и du/dt с помощью D7.1), D7.2), получим уравнение
dz [ dz dz?
Для плоской волны, в которой v оо ехр (гкг — icjt), это уравнение сводится
к соотношению
-cj2v = -Ak(kv) + Ckkzvz + n[Cfe(kv) - Bk2zvz]. A)
Пусть волновой вектор к расположен в плоскости xz. Тогда из A) следует,
что и скорость v находится в той же плоскости, а ж- и ^-компоненты дают
систему двух уравнений
vz [с2 - (А + В - 2С) cos2 в] + vx (С - A) sin в cos в = 0,
vz(C - A)sin(9cos(9 + ^[c2 - Asm2 в] = 0,
где с = и/к — скорость волны, а в — угол между к и осью z. Приравняв
нулю определитель этой системы, получим дисперсионное уравнение
с4 - с [А + (В - 2С) cos2 в] + (АВ - С2) sin2 в cos2 в = 0.
:орни этого квадратного (по с2) уравне]
стности
А1/2 при в = тг/2,
Больший и меньший корни этого квадратного (по с2) уравнения определяют
скорости с\ и С2. В частности
В-2СI/2 при (9 = 0.
Скорость же С2 в этих направлениях обращается в нуль.
§ 47 ЗВУК В СМЕКТИКАХ 257
2. С учетом диссипации определить закон дисперсии второй акустиче-
акустической ветви при распространении в плоскости слоев (у = тг/2).
Решение. В условиях задачи скорость v направлена по оси z, а все
величины зависят от х. Проецируя уравнение D6.13) на ось z, получаем
—iujpv = —Kik4u-\-ikafzx. B)
С помощью D1.7) находим
azx = v.
2
Легко проверить, что ввиду малости параметра Kip/rj2, (ср. с D2.7)) можно
пренебречь левой частью B), а эффекты просачивания при малых к несу-
несущественны, так что v = —iuju. Окончательно получаем закон дисперсии:
2К! 2
iuj = к .
3. То же для распространения перпендикулярно плоскости слоев (# =
= 0).
Решение. Условие несжимаемости приводит в этом случае к тому,
что v = 0 и движение смектика происходит только путем просачивания.
Из D6.5) и D6.14) имеем тогда
ди л _ д2и
— = Крв —
dt dz2
или 2
iuj = ХррВк .
Мы пренебрегли в D6.14) членом с градиентом температуры. Это воз-
возможно, если температура релаксирует быстрее, чем смещение и, т. е. если
Х|| ^ ХррВ. В этом случае, однако, нужно понимать под В изотермический
модуль упругости.
9 Л. Д. Ландау, Е.М. Лифшиц, том VII
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ1)
Бигармоническое уравнение 32, 38
Бесстолкновительная ударная
волна 189
Вектор Бюргерса 158
— директора нематика 200
смектика 243
— смещения 9
Волны изгиба 146
— Релея 140
— сдвиговые 230
Геликоидальная структура 236
Грина тензор 43, 45
смектика 245
Групповая скорость 138
Деформация диска 75 и далее
— цилиндра 35 и далее
— шара 34 и далее
Дисклинаций устойчивость 214,
217
Дислокаций плотность 173
потока 176
Дислокационная поляризация 177
Дислокационный момент 162, 176
Дислокация винтовая 158, 163, 164,
172, 258
— краевая 157, 172, 165, 258
Диссипативная функция 187, 188,
221, 224, 253
Дисторсии тензор 159, 174
Жесткость крутильная 95
— при изгибе 68, 116
— цилиндрическая 68
Индекс Франка 207, 215
Клиновидная пластинка 76
Комбинационные частоты 153
Контактная задача 46
для цилиндров 52
Концентрация напряжений 40, 78
Коэффициент всестороннего сжа-
сжатия 24
— Пуассона 26
смектика 244
— теплового расширения 29, 59
Коэффициенты Ламэ 22
Максвелловская жидкость 198
Мембрана 83, 85, 150
Модули адиабатические 30, 204,
237
— всестороннего сжатия 22
— изотермические 29, 204, 237
— растяжения (Юнга) 26
— сдвига 22
— упругости кристаллов 53
нематиков (Франка) 201
смектиков 242, 243, 246
Молекулярное поле 203
Нематиков кручение 202
— поперечный изгиб 202
— продольный изгиб 202
Нейтральная поверхность 63, 98
Неустойчивость упругая 88, 112,
125
смектика 247
Одностороннее сжатие 28
Отражение звука 133 и далее
Параметр, пространство вырожде-
вырождения 216
Переползание 170
Пластическая деформация 19, 169,
174
Плоская деформация 32
Плоское напряженное состояние 74
Плоскость скольжения 168, 176
Поверхностное натяжение 72
Поверхность скольжения 168
Принцип Онсагера 188, 227, 238,
253
г) Этот указатель дополняет оглавление книги, не повторяя его. В ука-
указатель включены термины и понятия, непосредственно не отраженные в
оглавлении.
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
259
Просачивание 239, 250, 252, 257
Простое натяжение 25
Сдвиг 22
Сила перерезывающая 116
— трения дисклинации 229
Скорость звука 132, 230, 255
Собственные колебания мембраны
150
пластинки 150
полости 136
стержня 148
шара 136
Столкновение шаров 52
Термодинамические потоки и силы
227, 238, 253
Тождества для тензора деформа-
деформации 38
Упругая линия 101
— нить 114
— плоскость 74
— струна 119
Упругие деформации 19
Функция кручения 92
— напряжений 33, 38, 74
Энергия взаимодействия дислока-
дислокаций 172
— дисклинации 213
— дислокации 164
9*
Учебное издание
ЛАНДАУ Лев Давидович
ЛИФШИЦ Евгений Михайлович
ТЕОРИЯ УПРУГОСТИ
(Серия: «Теоретическая физика», том VII)
Редактор: Д. А. Миртова
Оригинал-макет: Ст. Ю. Мельников
ЛР №071930 от 06.07.99
Подписано в печать 10.07.01. Формат 60x901/i6
Бумага офсетная № 1. Печать офсетная
Усл. печ. л. 16,5. Уч.-изд. л. 15,3. Заказ №
Издательская фирма
« Физико-математическая литература»
МАИК «Наука/Интерпериодика»
117864 Москва, Профсоюзная ул., 90
Отпечатано с готовых диапозитивов в ПФ «Полиграфист».
160001, г. Вологда, ул. Челюскинцев, 3.
Тел.: (8172) 72-55-31, 72-61-75, факс (8172) 72-60-72.
E-mail: form.pfp@votel.ru http://www.vologda/~pfpv
ISBN 5-9221-0122-6
9785922 101226