





Author: Гущин В.Н.
Tags: авиация и космонавтика летательные аппараты ракетная техника космическая техника междупланетные соединения (междупланетные полеты) космонавтика (аэронавтика) аэродинамика космос космонавтика издательство машиностроение
ISBN: 5-217-01301-X
Year: 2003



ДЛЯ ВУЗОВ
В.Н Гущин
основы
УСТРОЙСТВА
КОСМИЧЕСКИХ
АППАРАТОВ
Допущено Министерством образования Рос-
сийской Федерации в качестве учебника для
студентов высших учебных заведений, обучаю-
щихся по специальности "Космические лета-
тельные аппараты и разгонные блоки"направ-
ления подготовки дипломированных специа-
листов ‘Ракетостроение и космонавтика"
И
МОСКВА
«МАШИНОСТРОЕНИЕ»
2003
УДК 629.782.001.66(075.8)
ББК 39.62я73
Г 98
Рецензенты: кафедра "МАТИ" - Российского технологического
университета имени К.Э. Циолковского и профессор, д-р техн, наук
В. В. Алавердов
Гущин В.Н.
Г 98 Основы устройства космических аппаратов: Учебник для
вузов. - М.: Машиностроение, 2003. - 272 с.: ил.
ISBN 5-217-01301-Х
Изложены принципы формирования состава космических аппаратов (КА),
устройства КА различного назначения, методы выбора проектных, конструктивных
и технологических вариантов систем КА, компоновки КА применительно к решению
конкретных целевых задач.
Рассмотрены существующие и перспективные системы энергообеспечения,
терморегулирования, ориентации и стабилизации.
Представлены основные законы движения КА.
ББК 39.62я73
ISBN 5-217-01301-Х
© В.Н. Гущин, 2003
© Издательство "Машиностроение", 2003
Введение
Создание космических аппаратов (КА) представляет собой одно из
сложнейших дел, которые когда-либо предпринимались человеком, что
связано с множеством самых разнообразных и нередко трудно формали-
зуемых факторов, вовлекаемых в процесс разработки. Особенно сложным
является начальный этап проектирования, когда кроме общего
представления о назначении и функционировании аппарата ничего не
известно.
Первым шагом в проектировании КА является решение вопроса о
конструктивно-компоновочной схеме и распределении масс между
целевой нагрузкой и служебными системами, основными из которых
являются: система энергопитания (СЭП), система ориентации и
стабилизации (СОС) и система терморегулирования (СТР), а также
конструкция как отдельная система.
К настоящему времени разработано великое множество конструкций
перечисленных систем, что существенно затрудняет процедуру статисти-
ческой обработки предшествующих результатов проектирования
служебных систем и проектный анализ. Кроме того, проектировщик
находится в рамках финансовых и массовых ограничений. Ограничения
по массе связаны с возможностями современных ракет-носителей.
В настоящее время появляются дополнительные условия при
проектировании искусственных спутников Земли (ИСЗ): проектирование
ИСЗ с учетом унификации составных систем и проектирование
многоцелевых ИСЗ.
Космическая техника, аккумулируя достижения научно-технического
прогресса, является в то же время его движущей силой. Когда мы говорим
о космонавтике, то следует иметь в виду, что это организационно
оформленное и сложившееся направление деятельности государства.
Сейчас уже становится очевидным, что для решения основных задач
в космическом пространстве необходимо иметь:
- средства доставки на орбиту ИСЗ космических объектов и
возвращения их на Землю (космический челнок);
-долговременную орбитальную станцию на орбите ИСЗ (космичес-
кую лабораторию);
3
- транспортное средство для сообщения КА дополнительной скорости
(для перехода между орбитами ИСЗ) вплоть до второй космической
(космический буксир).
Рассмотрим, как эти проблемы создания технических средств
решались ведущими космическими державами - СССР и США. Что
имелось для решения этих задач в обеих странах?
Начиная с 1961 г., после полета Ю.А. Гагарина, в нашей стране
уделялось серьезное внимание пилотируемым полетам, и основным в
развитии пилотируемых полетов было наращивание времени пребывания
человека в космическом пространстве, этот вопрос был принципиальным.
Надо было не просто провести длительный период в невесомости, важно
было сохранить работоспособность на орбите и вернуться здоровым на
Землю, реадаптироваться к земным условиям.
Американские "Аполлоны" для длительного пребывания в космичес-
ком пространстве не были приспособлены: лишь на сутки, недели.
И, кроме того, ради экономии массы систем на них для дыхания
использовался чистый кислород, а он вызывал сухость слизистых
оболочек. Да и длительное пребывание в кислородной среде сопряжено
с неисследованными последствиями. Американцы на орбитальной
станции "Скайлэб" пытались перейти на земной состав атмосферы, но
очень быстро от таких экспериментов отказались.
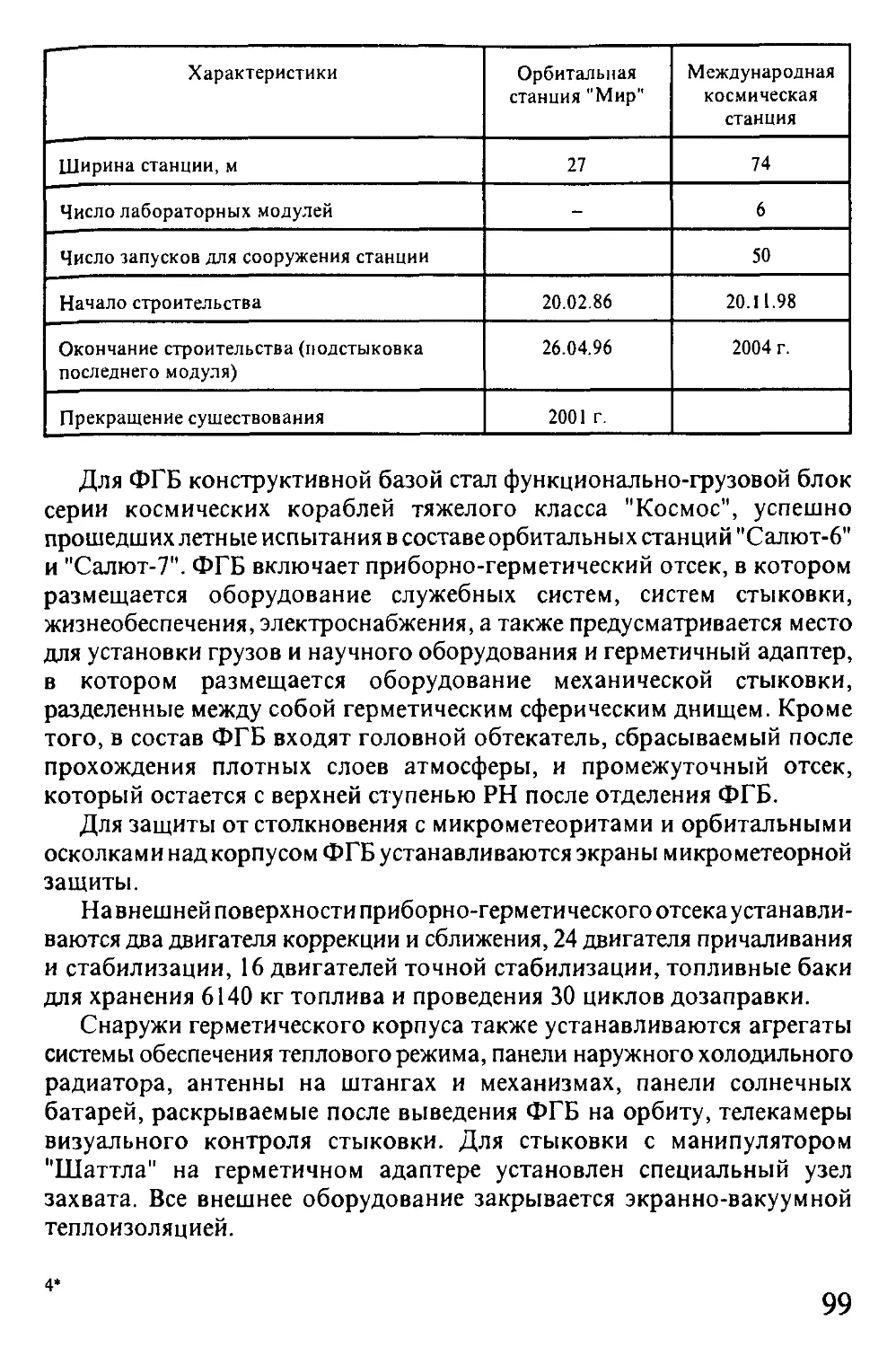
Сейчас мы перекрыли годичное время пребывания человека в
космосе. Это рекорд, но рекорд не в спортивном смысле этого слова. Это
показатель того, на какие задачи, связанные с присутствием человека и
длительностью его пребывания в невесомости, можно рассчитывать.
Станция "Мир" с шестью стыковочными узлами просуществовала
достаточно долго (15 лет при гарантийном сроке 5 лет). Уже на
"Салютах" была отработана технология непрерывного совершенствова-
ния станции. После запуска современной станции она, естественно, через
некоторое время начинает устаревать. Тогда с помощью транспортных
кораблей "Союз ТМ" и грузовых кораблей "Прогресс" на станции
начинается обновление аппаратуры и замена некоторых систем, и таким
образом все время поддерживается ее современное состояние.
После успеха программы "Аполлон" (стоимость программы - 25 млрд
долл.) американцы подняли вопрос о пилотируемом полете к Марсу в
составе двух кораблей и с обязательным участием нашей страны. Решение
этой задачи оценивалось в 300 млрд долл. Это планировалось на 1992 г.
(75-летие Октябрьской революции и 500-летие открытия Америки). Да
и следующее Великое противостояние Марса, когда он подходит к Земле
на кратчайшее расстояние в 55 млн км, приходится на 2003 г. Тогда этот
год казался в очень далекой перспективе... Срок этот конечно, был
нереальным.
4
Когда американцы выбирали достойную своей страны задачу, то
остановились на Луне. Прежде всего потому, что Луна по космическим
понятиям почти рядом. Полет на Луну стал готовиться американскими
специалистами в самом начале развития практической космонавтики,
когда еще не было ни опыта пилотируемых полетов, ни соответствующей
техники, ни достаточных знаний о космических условиях на трассе
"Земля - Луна" и на самой Луне. Конечно, нужны были веские причины,
чтобы решиться на этот шаг. В чем же они состояли? Ответ кроется в
истории короткого, но насыщенного важными событиями начального
этапа развития космонавтики.
К середине 1950-х годов в результате проводившихся исследований
в США сформировалось мнение о возможности запуска ИСЗ. Советский
Союз также официально заявил о своем намерении запустить ИСЗ. Так
между двумя странами началось заочное соревнование за честь запустить
спутник первыми. В США заранее была определена и дата запуска -
1957 г. Все знали о том, какие фирмы изготовляли двигатели, корпуса
ракет и измерительные приборы для проведения научных исследований.
Подсчитали даже стоимость всех работ по запуску ИСЗ. Царила полная
уверенность, что США будут первыми.
Однако действительность внесла свои коррективы: 4 октября 1957 г.
в СССР был запущен первый в мире искусственный спутник Земли.
В газете "Нью-Йорк тайме" от 6 октября 1957 г. это событие было
названо "...уничтожающим ударом по престижу Соединенных Штатов".
Американская лунная программа призвана была исправить это
положение.
Созданная в нашей стране ракетная техника позволяет выводить на
орбиту до 100 т полезной нагрузки. "Протон" выводит около 24 т.
Проведенные исследования (как в нашей стране, так и за рубежом -
в США, странах Западной Европы, в Японии и Китае) показали все
возрастающую роль использования космического пространства в
решении оборонных задач, глобального влияния космонавтики на
экономику, социальную сферу как отдельных стран, так и на все мировое
хозяйство. Это связано с решением крупных проблем научно-техническо-
го прогресса (энергетики, экологии, глобальной связи и телевидения),
прогнозированием погоды и стихийных бедствий, с изучением природ-
ных ресурсов, проведением фундаментальных исследований Солнечной
системы и дальнего космоса.
Прогноз развития потребностей мирового сообщества на ближайшие
несколько десятилетий позволяет определить следующие задачи для
космонавтики.
1. Обеспечение национальной обороны и безопасности: космическая
разведка, космическая связь и управление, система раннего обнаружения
5
и предупреждения о ракетно-ядерном нападении, радиоэлектронное
противодействие.
2. Космические услуги для народного хозяйства и населения: связь и
телевидение, метеорология и навигация, геодезия и картография,
исследование природных ресурсов Земли и космический мониторинг.
3. Создание на околоземных орбитах постоянно действующего
промышленного производства: выращивания сверхчистых кристаллов
полупроводников, получения новых медицинских препаратов, новых
сверхэффективных материалов и др.
4. Изоляция в космосе особо опасных отходов техногенной деятель-
ности на Земле, в том числе:
а) особо опасных радиоактивных отходов атомной промышленности;
б) отходов химической технологии, в том числе и компонентов
химического оружия;
в) сверхопасных отходов биотехнологий и др.
5. Создание космических солнечных электростанций, исследование
и освоение Луны, планет Солнечной системы, астероидов, создание на
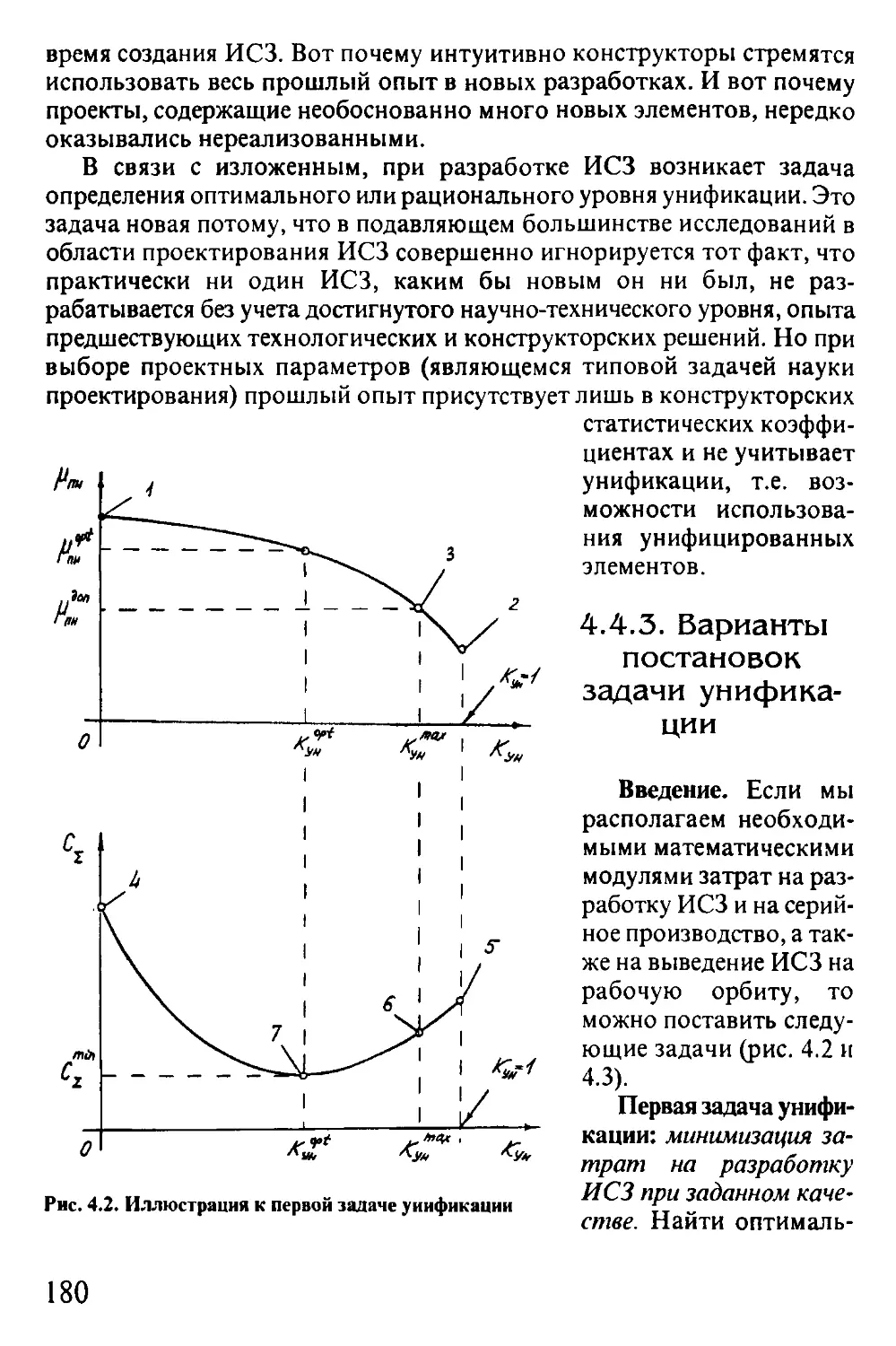
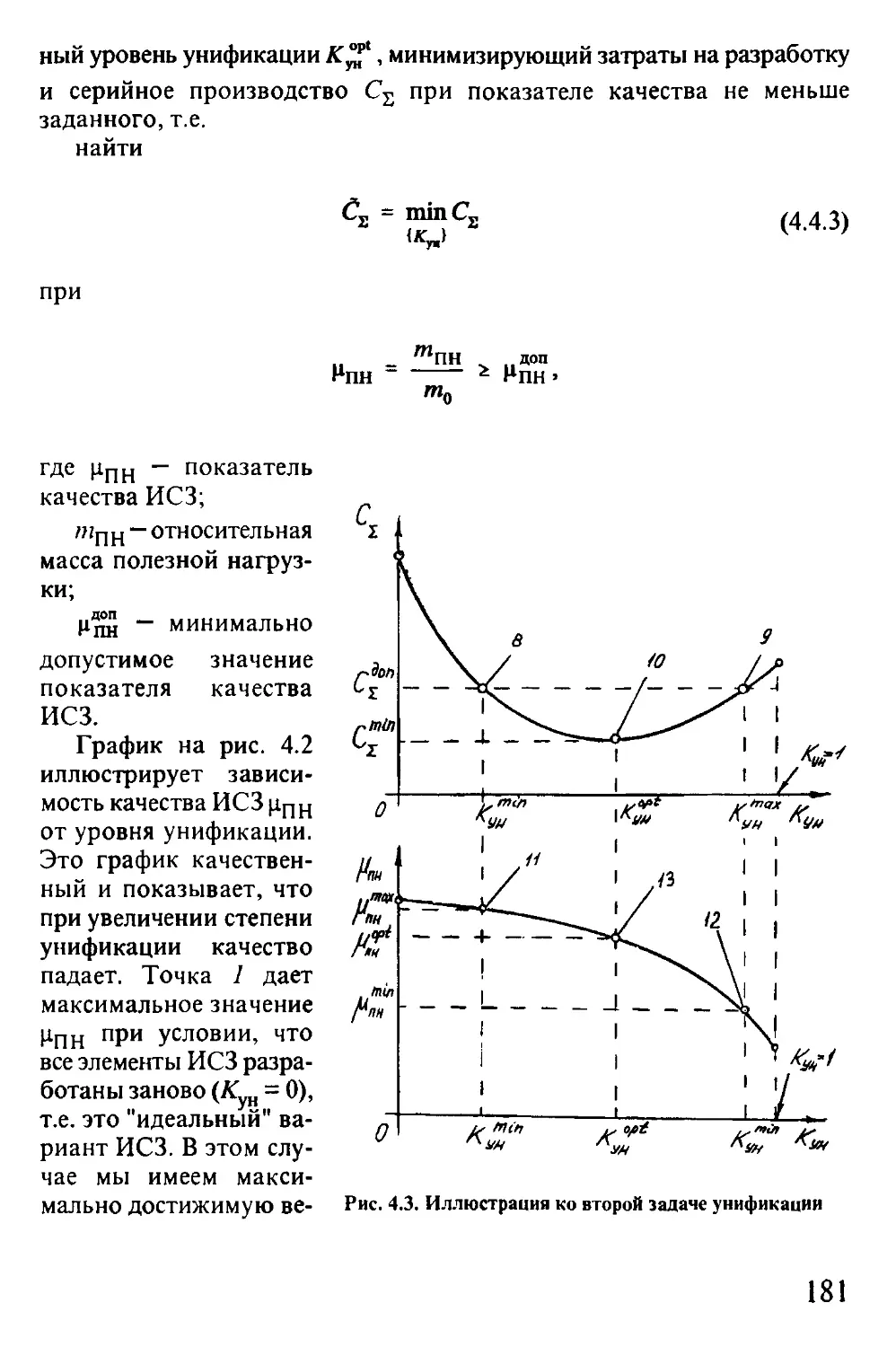
орбитах Луны и Марса орбитальных обитаемых станций, экспедиция
на Луну и создание там постоянно действующей базы, экспедиция на
Марс.
6. Создание специальных космических средств для ликвидации
астероидной опасности для Земли.
6
Глава 1
Космические аппараты
1.1. Классификация космических аппаратов
Интенсивное освоение космического пространства требует создания
космических аппаратов (КА), обеспечивающих решение новых
специфических задач. В настоящее время имеется множество разнообраз-
ных КА, решающих задачи по исследованию космоса, народнохо-
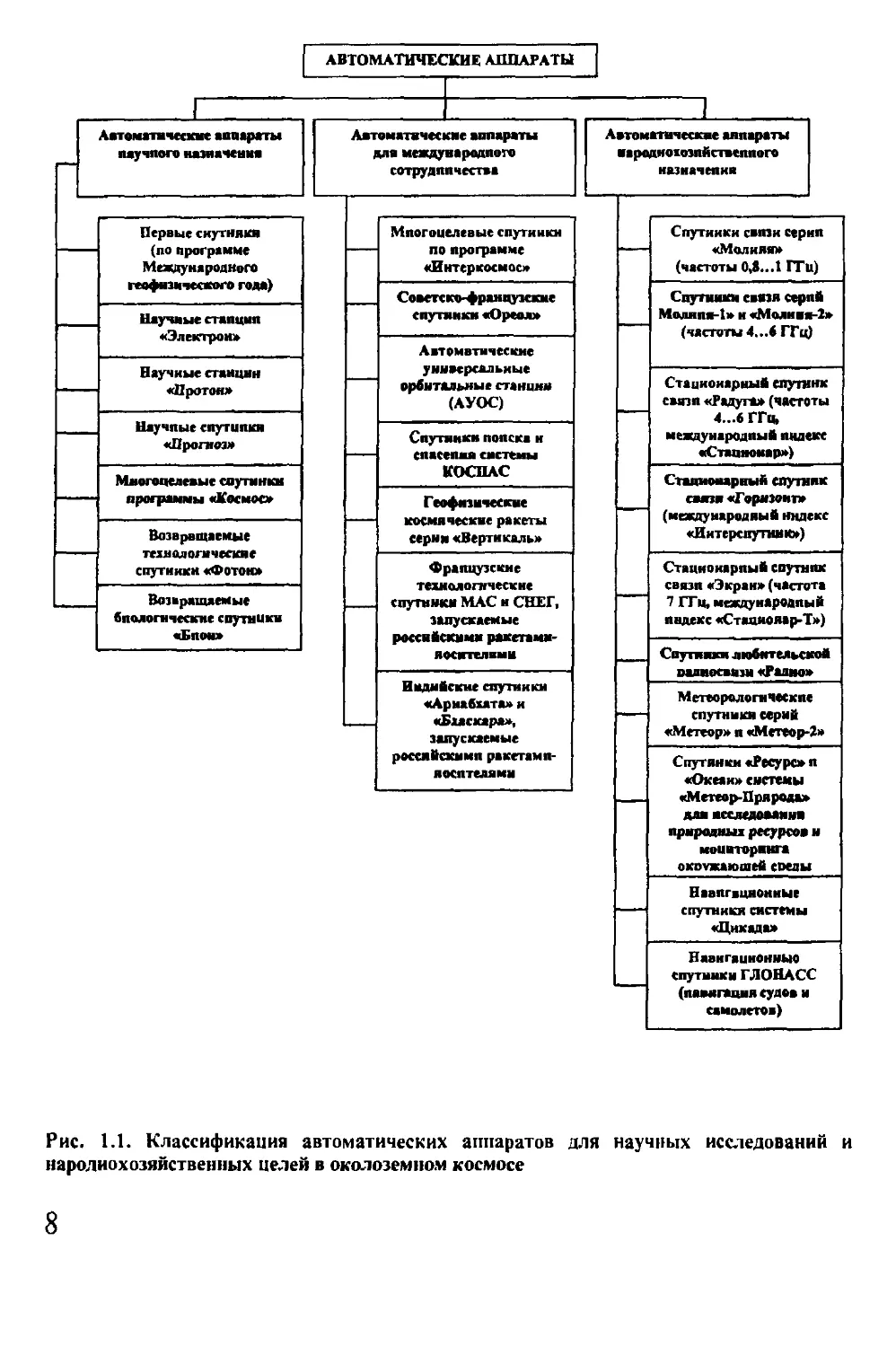
зяйственные, специального назначения и т.д. (рис. 1.1).
В первом приближении КА можно классифицировать на следующие
основные группы.
1. По назначению:
а) народнохозяйственные (метеорологические, навигационные,
спутники связи и телевещания и др.);
б) научно-исследовательские (геофизические, геодезические,
астрономические, дистанционного зондирования Земли);
в) военные;
г) специальные (спускаемые аппараты).
2. Ближнего и дальнего космоса:
а) околоземные КА (искусственные спутники Земли, обитаемые
орбитальные станции, обсерватории);
б) аппараты для полета к Луне (облетные, десантные, искусственные
спутники Луны);
в) межпланетные КА (пролетные, десантные, спутники планет).
3. По типу двигательных установок:
а) КА с двигательными установками (ДУ) большой тяги (ДУ на
химическом топливе, ДУ на ядерном топливе);
б) КА с ДУ малой тяги (плазменные ДУ, электростатические ДУ).
4. По типу управления: автоматические и пилотируемые.
Рассмотрим некоторые из них.
7
АВТОМАТИЧЕСКИЕ АППАРАТЫ
I " ' __ 1
Автоматические аппараты паучпого назначения Автоматические аппараты для международного сотрудничества Автоматические аппараты ародиохозпйствеппого назначения
Первые сиутнякя
(по программе
Между народного
геофизического года)
Научные станции
«Электрон»
Многоцелевые спутники
по программе
«Интеркосмос»
Советско-французские
спутники «Ореол»
Научные станции
«Протон»
Автоматические
универсальные
орбитальные станции
(АУОС)
Научные спутники
«Прогноз»
Многоцелевые спутмнкм
программы «Космос»
Возвращаемые
технологические
спутники «Фотон»
Возвращаемые
внелогические спутники
«Бноы»
Спутники поиска и
спасения системы
КОСТАС
Геофизические
космические ракеты
серим «Вертикаль»
Французские
технологические
спутники МАС и СНЕГ,
запускаемые
российскими ракетами-
яоентелвми
Индийские спутники
«Ариабхата» и
«Бхаскара»,
запускаемые
россяйскимп ракетамп-
яоептелями
Спутники евпзн серии «Молния» (частоты 0,8.. Л ТТи)
Спутники связи серий Молння-1» и «Молипя-2» (частоты 4...6 ГГц)
— Стационарный спутник связи «Радуга» (частоты 4...б ГГц, международный пндекс «Стационар»)
Стационарный спутник связи «Горизонт» (международный индекс «Иитерспутник»)
Стационарный спутнпк связи «Экран» (частота 7 ГГц, международный пндекс «Стацмоя8|»Т»)
Спутники любительской цадноевязн «Радио»
Метеорологические спутники серий «Метеор» и «Метеор-2»
Спутники «Ресурс» и «Океан» системы «Метеор-Прярода» для исследования природой ресурсов и мониторинга окпужаюшей спелы
— Навигационные спутники системы «Цикада»
— Навигационные спутники ГЛОНАСС (навигация судов и самолетов)
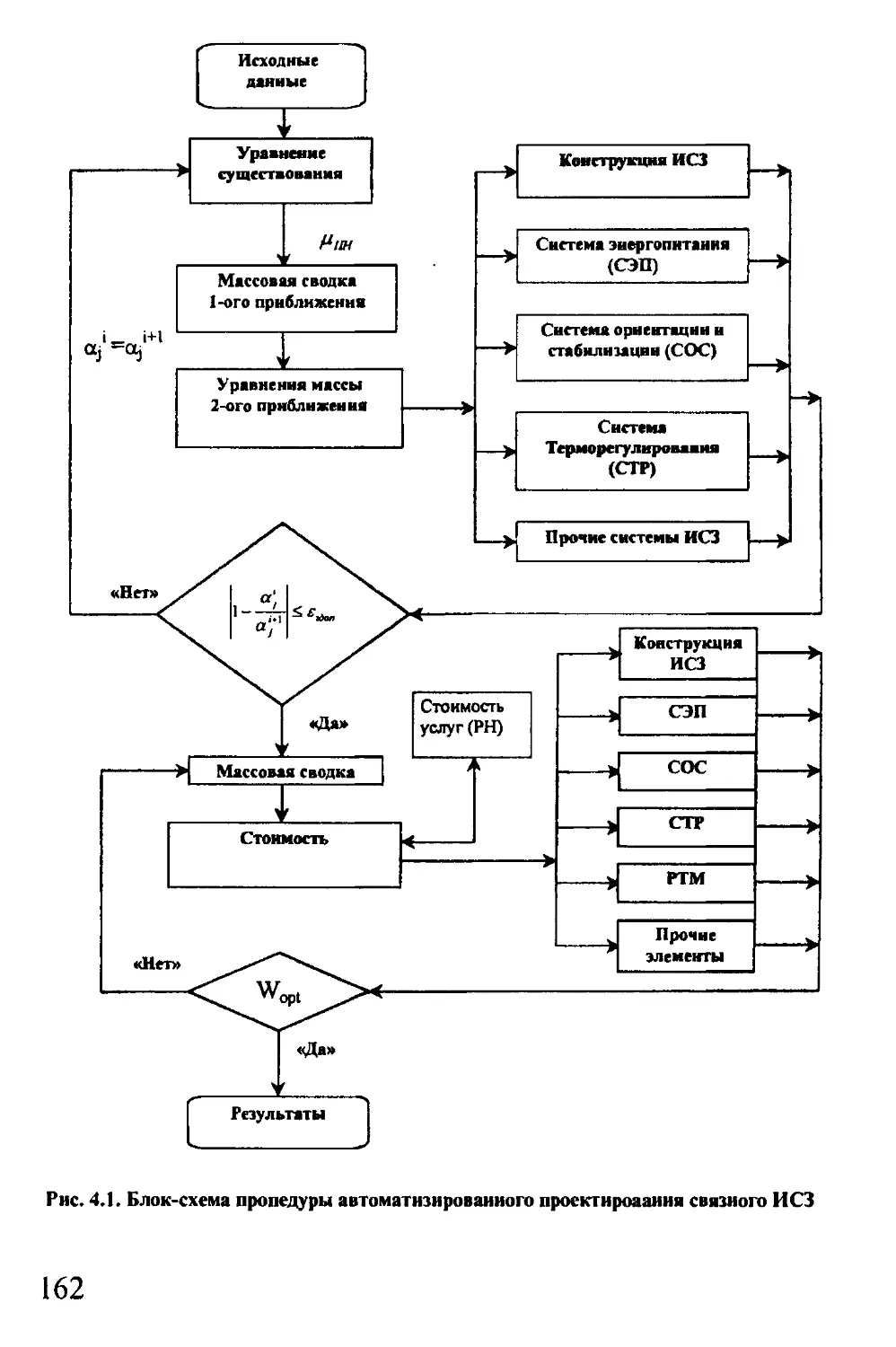
Рис. 1.1. Классификация автоматических аппаратов для научных исследований и
народнохозяйственных целей в околоземном космосе
8
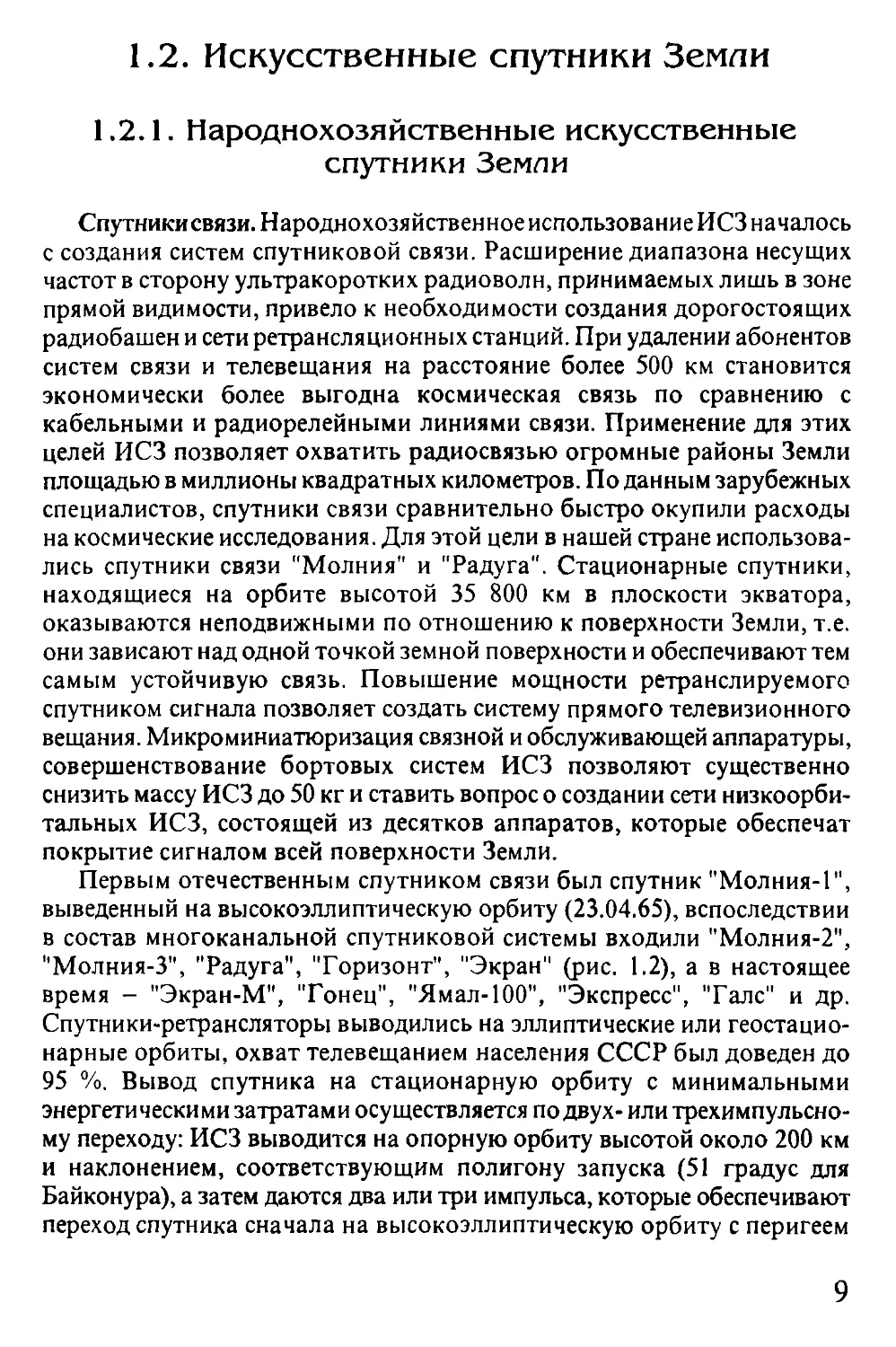
1.2. Искусственные спутники Земли
1.2.1. Народнохозяйственные искусственные
спутники Земли
Спутники связи. Народнохозяйственное использование ИСЗ началось
с создания систем спутниковой связи. Расширение диапазона несущих
частот в сторону ультракоротких радиоволн, принимаемых лишь в зоне
прямой видимости, привело к необходимости создания дорогостоящих
радиобашен и сети ретрансляционных станций. При удалении абонентов
систем связи и телевещания на расстояние более 500 км становится
экономически более выгодна космическая связь по сравнению с
кабельными и радиорелейными линиями связи. Применение для этих
целей ИСЗ позволяет охватить радиосвязью огромные районы Земли
площадью в миллионы квадратных километров. По данным зарубежных
специалистов, спутники связи сравнительно быстро окупили расходы
на космические исследования. Для этой цели в нашей стране использова-
лись спутники связи "Молния" и "Радуга". Стационарные спутники,
находящиеся на орбите высотой 35 800 км в плоскости экватора,
оказываются неподвижными по отношению к поверхности Земли, т.е.
они зависают над одной точкой земной поверхности и обеспечивают тем
самым устойчивую связь. Повышение мощности ретранслируемого
спутником сигнала позволяет создать систему прямого телевизионного
вещания. Микроминиатюризация связной и обслуживающей аппаратуры,
совершенствование бортовых систем ИСЗ позволяют существенно
снизить массу ИСЗ до 50 кг и ставить вопрос о создании сети низкоорби-
тальных ИСЗ, состоящей из десятков аппаратов, которые обеспечат
покрытие сигналом всей поверхности Земли.
Первым отечественным спутником связи был спутник "Молния-1",
выведенный на высокоэллиптическую орбиту (23.04.65), вспоследствии
в состав многоканальной спутниковой системы входили "Молния-2",
"Молния-3", "Радуга", "Горизонт", "Экран" (рис. 1.2), а в настоящее
время - "Экран-М", "Гонец", "Ямал-100", "Экспресс", "Галс" и др.
Спутники-ретрансляторы выводились на эллиптические или геостацио-
нарные орбиты, охват телевещанием населения СССР был доведен до
95 %. Вывод спутника на стационарную орбиту с минимальными
энергетическими затратами осуществляется по двух- или трехимпульсно-
му переходу: ИСЗ выводится на опорную орбиту высотой около 200 км
и наклонением, соответствующим полигону запуска (51 градус для
Байконура), а затем даются два или три импульса, которые обеспечивают
переход спутника сначала на высокоэллиптическую орбиту с перигеем
9
4
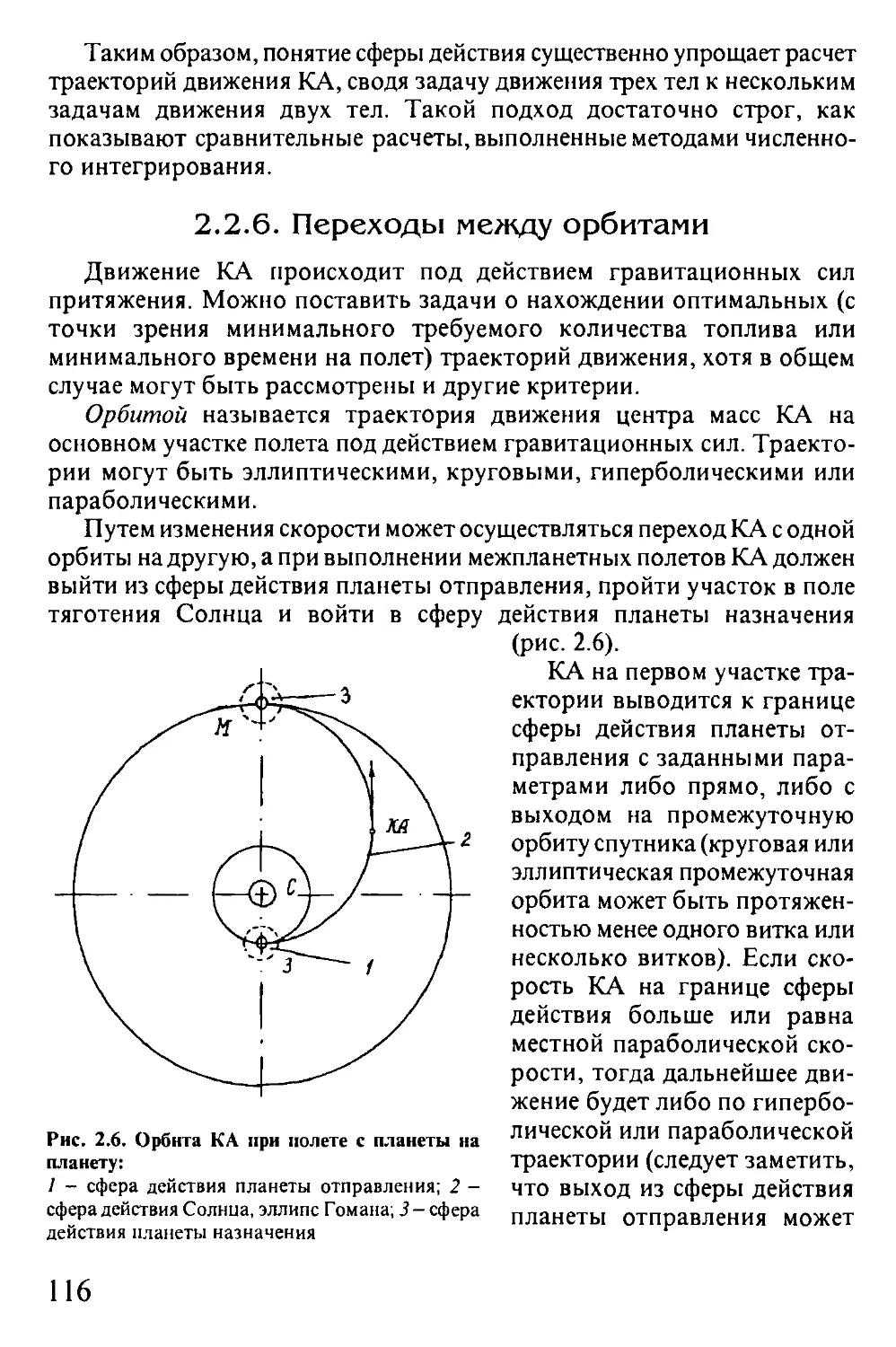
Рис. 1.2. Схема системы "Экран": I - центр радиовещания; 2 - Останкинский телевизион-
ный центр; 3 - передающая станция; 4 - ИСЗ "Экран"; 5 - антенны профессионального
приема ТВ-сигнала; б - антенны коллективного приема ТВ-сигнала с распределением по
зоновой сети; 7-антенны коллективного приема ТВ-сигнала с подачей на маломощный
радиотелевизионный ретранслятор
и апогеем в плоскости экватора, получение или доведение высоты апогея
до высоты геостационарной орбиты и последующее формирование
стационарной круговой орбиты с нулевым наклонением.
Спутники нового поколения, запуск семи из которых запланирован
Росавиакосмосом на 2002-2005 гг., увеличат долю присутствия России
на мировом рынке космической связи в 2,5 раза - 4 %. Новые связные
КА будут отличаться увеличенным сроком службы - до 10... 15 лет, вместо
5...7. "Аппаратная начинка" реализована с использованием новых
полупроводниковых микросхем и микроэлектроники новейшего
поколения.
Метеорологические спутники последовательно передают на Землю
изображения облачного покрова, по которым специалисты определяют
направления и скорости ветров, зарождение циклонов и ураганов.
Глобальность действия, высокая эффективность и оперативность
передаваемой на Землю информации из космоса позволяет спутникам
за время одного витка (1,5 ч) получать метеоданные, которые по объему
в 100 раз превышают поступающие от всех наземных метеостанций.
С помощью метеорологических ИСЗ проводятся измерения теплового
излучения Земли и солнечной активности, которые в сочетании с
информацией от шаров-зондов и наземных метеостанций позволяют
10
предсказывать погоду в краткосрочном и долгосрочном аспектах. Для
этой цели использовались и используются у нас в стране ИСЗ "Метеор",
у американцев - "Тирос", "Нимбус", "Эсса".
Геодезические и картографические ИСЗ. Начало космической геодезии
в нашей стране относится к 1962 г., когда были запущены первые
аппараты серии "Космос". В основе работы геодезических ИСЗ лежит
принцип триангуляции, когда ИСЗ наблюдается одновременно из
нескольких точек на Земле.
Применение геодезических спутников позволяет с высокой степенью
точности определять относительное положение континентов и объектов,
удаленных на тысячи километров, исследовать движение полюсов. Эти
спутники предназначены для составления точных карт местности,
взаимной привязки различных объектов, а также для уточнения формы
Земли и поля тяготения. Первый в нашей стране геодезический спутник
ТЕО-ИК" был запущен в 1981 г. Спутники этой серии создавались в
НПО ПМ им. академика Михаила Решетнева (близ Красноярска в городе
Железногорске). НПО ПМ создает почти 70 % всех российских спутников
различного назначения. За 20 лет запущено 14 КА серии "ГЕО-ИК",
которые успешно отработали свою программу.
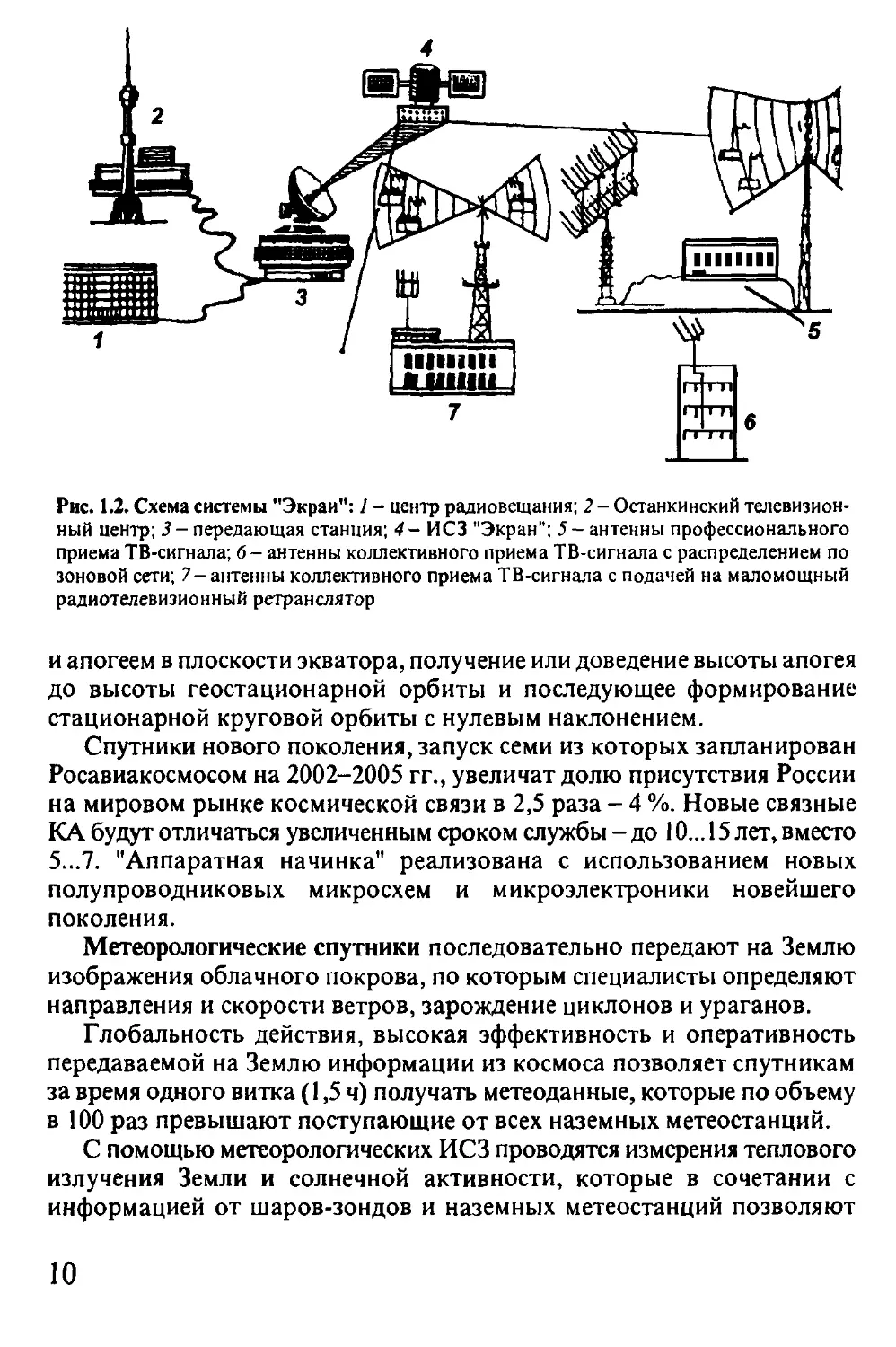
Одними из первых геодезических спутников США были спутники
"Анна" и "Секор", которые использовались в качестве подвижных
объектов для наблюдения с наземных станций и построения на этой
основетриангуляционной системы. Космическая триангуляция основана
на одновременном наблюдении спутника с нескольких точек поверхности
Земли.
Спутник "Анна" (рис. 1.3) имел массу 160 кг и выводился на орбиту
высотой около 1000 км. На спутнике был установлен световой маяк,
четыре импульсные ксеноновые газоразрядные лампы с силой света по
8-106 свечей. Команды на создание
вспышек подавались с Земли; вспыш-
ки проводились сериями по пяти с
интервалом 5,6 с и продолжительнос-
тью 1 мкс. Точность момента вспыш-
ки составляла 0,5 мкс. Вспышки фо-
тографировались на фоне звездного
неба одновременно с четырех назем-
ных пунктов и по полученным фотог-
рафиям определялись геоцентричес-
кие координаты спутника. Обработка
данных позволяла произвести взаим-
ную привязку наземных пунктов: из
четырех наземных станций три распо-
Рис. 1.3. Геодезический спутник "Айна'
11
лагались в точках с известными координатами, а четвертый - в точке,
координаты которой требовалось определить. Кроме оптических для
решения задачи могут использоваться радиометрические методы:
дальномерный и доплеровский.
Навигационные ИСЗ играют роль небесных тел, функционирование
которых поддерживается специальной наземной системой обеспечения,
служат для навигации самолетов и кораблей.
С 1978 г. после запуска нескольких ИСЗ серии "Космос" на орбиты,
близкие к полярным орбитам, начала функционировать система
"Цикада", которая обеспечивала решение навигационных задач для
морских судов. Она в любое время суток независимо от погоды совместно
с наземными контрольно-измерительными центрами и аппаратурой
"Шхуна", размещаемой на судах, позволяет определять координаты
плавучих средств со среднеквадратической ошибкой 80... 100 м. При этом
экономится 7...8 % ходового времени за счет выбора оптимальных
судовых маршрутов. К настоящему времени развернута глобальная
национальная спутниковая система (ГЛОНАСС), имеющая в своем
составе 24 ИСЗ.
Для каждого навигационного спутника точно известны параметры
движения по орбите, но в отличие от небесных тел они позволяют
осуществлять измерения в любое время суток и в любую погоду,
поскольку их координаты определяются с помощью высокочастотного
радиомаркера. Примером навигационных ИСЗ служат спутники
"Космос-1000" и "Транзит".
Другие искусственные спутники Земли используются в океанографии
для получения обширной информации о факторах и явлениях в океанах
и морях: температура воды и атмосферы, ветры, волнение и испарение
воды, глубина шельфовых зон, расположение плавучих льдов и
айсбергов, миграция рыбных косяков и многое другое, что имеет не
только огромное научное и хозяйственное, но и оборонное значение.
Важную роль играют исследования природных ресурсов и мониторинг
окружающей среды. Спутники получают информацию с Земли с
помощью приема приходящего на борт электромагнитного излучения
наблюдаемых объектов. Гидрологические исследования, проводимые
с помощью ИСЗ, позволяют систематически наблюдать за реками,
озерами, ледниками, выявляя режимы их функционирования, что
необходимо для гидротехнического строительства, мелиорации,
ирригации, судоходства, сельского хозяйства. Это особенно значимо,
учитывая пространства нашей страны. Геологическое строение и
закономерностиразмещенияразличных пород, дополняемыефотометри-
ческими исследованиями земной поверхности в различных лучах,
магнитными и гравиметрическими исследованиями эффективно изучается
с помощью ИСЗ. Это имеет важное научное и прикладное значение, в
12
частности, облегчая поиск полезных ископаемых. Оперативный обзор
огромных площадей позволяет оценивать состояние сельскохозяйствен-
ных угодий, лесов, изучать и обнаруживать поражения вредителями и
лесные пожары, а также в целом состояние окружающей среды.
Исключительно велико оборонное значение ИСЗ, которые использу-
ются как разведчики-инспекторы, фиксирующие строительство военных
объектов, перемещение больших скоплений войсковых соединений (фото-
и радиоаппаратура), старт ракет (инфракрасная аппаратура), а в
будущем возможно их применение и для инспекции космических
объектов.
В 1982 г. США объявили о создании системы противоракетной
обороны с элементами космического базирования, на которых
предполагалось установить лучевое (лазерное) и кинетическое оружие
для поражения ракет противника. Впоследствии было заключено
соглашение о запрещении использования космического пространства
в военных целях, кроме инспекции.
Начало реализации программы "Метеор-природа" относится к 1974г.
В начале 1980-х годов был запущен новый ИСЗ "Метеор-природа" с более
совершенной аппаратурой и имеющий больший ресурс. В течение
нескольких лет он проводил многозональную телевизионную съемку
Земли в 10 поддиапазонах спектра (0,4...2,4 мкм) с разрешением 30...800 м
при полосах съемки от 30 до 2000 км.
Космические средства при высокой информативности наблюдений
и полного обновления данных в течение нескольких недель позволяют
исследовать природные явления в динамике, что особенно важно для
сельского хозяйства, для наблюдения за возникновением и развитием
ураганов, циклонов, пожаров и наводнений, контроля загрязнений
окружающей среды городов и целых промышленных районов. С 1979 г.
обеспечивается с помощью космической техники ("Космос-1176")
наблюдение за процессами в Мировом океане (Программа "Океан"),
которая была продолжена серией спутников "Космос-1500", "Кос-
мос-1602", "Космос-1176" и других с целью контроля ледовой обстановки,
изучения течений, приливов и отливов, контроля загрязненности
акваторий нефтепродуктами и другими промышленными отходами.
В различные годы эксплуатировались и будут эксплуатироваться
спутники системы "Ресурс" ("Ресурс-0", "Ресурс-01", "Океан-0", "Оке-
ан-01", "Океан-02" для оперативного получения многозональными
съемочными камерами и бортовыми радиолокационными станциями
информации о состоянии суши, океана и окружающей среды), а также
"Ресурс-Ф" и "Ресурс-Ф 1М" (для фотографирования земной поверхности
с высоким пространственным разрешением).
В дальнейшем состав системы дистанционного зондирования Земли
пополнят ИСЗ "Электро" и "Ресурс-ДК".
13
Информация со спутников о природных ресурсах Земли, океанографи-
ческие и другие сведения с высокой оперативностью обрабатываются
в Госцентре "Природа", НПО "Планета", "ВНИИЦ "Агроресурсы" и
других научных центрах. В результате стало возможным решение до 300
научных природоведческих и природопользовательских задач и
своевременная передача более 1000 организациям - потребителям этих
данных.
Весьма важную функцию космическая техника выполняет в поиске
и спасении попавших в бедствие людей, судов, самолетов. Первым эту
функцию начал выполнять ИСЗ "Космос-1383" (1982 г.) в соответствии
с советско-американским соглашением о мирном использовании
космического пространства. В 1984 г. с помощью "Космос-1500" были
получены оперативные данные для руководства Севморпути, что
помогло вывести из ледового плена караван судов, а на следующий год
в Антарктиде был спасен ледокол "Сомов", так как со спутника была
получена информация о трещинах льда и возможных путях проходов для
движения к чистым ото льда водам. Радиолокатор спутника позволил
определить сроки и площади весеннего паводка во многих районах
страны, провести гляциологические исследования высокогорий,
исследовать поймы рек.
Космическая система поиска аварийных судов и самолетов (КОСПАС)
предназначена для определения с помощью ИСЗ координат радиобуев,
установленных на судах и самолетах. Система включает также пункты
приема информации и центр управления. Ошибка в определении
координат объектов, терпящих бедствие, составляет не более 3 км.
В США, Франции и Канаде эксплуатируется аналогичная система
САПСАТ; ИСЗ, взаимосвязанные между собой, могут работать
автономно. Единая система КОСПАС - CAPCAT работает с 70
радиобуями на частотах 121,5 МГц, дежурный режим 406,1 МГц (сигнал
бедствия).
1.3. Межпланетные космические станции
1.3.1. Космические аппараты для исследования
Луны
С момента запуска первого искусственного спутника Земли 4 октября
1957 г. благодаря отечественной космонавтике человечество стало
свидетелем фундаментальных открытий при изучении космическими
аппаратами Луны, Венеры, Марса, кометы Галлея. Наряду с замечатель-
ными достижениями США и ряда стран Европы и Азии это во многом
изменило наши представления о Луне и планетах и позволило по новому
14
подойти к проблеме понимания происхождения Вселенной, ее строения
и эволюции.
Большой вклад в разработку КА для исследования Луны и планет
внесли коллективы, возглавляемые видными учеными и конструкторами
С.П. Королевым и Г.Н. Бабакиным. Разработка проектов началась в
конце 1957 г. отделом, возглавляемым М.К. Тихонравовым. Необходимо
было осуществить первые проработки компоновок КА различного
целевого назначения, определить основные требования к бортовым
системам аппаратов, выбрать схемы и траектории полета, разработать
программы полетов и функционирования важнейших приборов и
служебных систем. Кразработке научных основ полета КА привлекались
крупные ученые тех лет: М.В. Келдыш, А.П. Виноградов, Д.Е. Охоцим-
ский, П.Е. Эльясберг и многие другие.
Полеты к Луне и планетам Солнечной системы в нашей стране были
начаты 2 января 1959 г., когда первая космическая ракета с автоматичес-
кой станцией "Луна-1" прошла на расстоянии 6000 км от поверхности
Луны и вышла на орбиту вокруг Солнца, став первой искусственной
планетой, получившей название "Мечта". Эта ракета впервые развила
вторую космическую скорость и преодолела силы земного тяготения.
"Мечта" и сейчас движется по орбите с минимальным расстоянием от
Солнца (в перигелии) 146,4 млн км и максимальным расстоянием (в
афелии) 197,2 млн км. Конечная масса последней ступени ракеты с
автоматической межпланетной станцией (АМС) "Луна-1" составила
1472 кг.
Первый "лунник" представлял собой корпус сферической формы из
алюминиевого сплава, образованный двумя тонкими полуоболочками
с герметичным стыком. На внешней поверхности корпуса размещались
четыре стержневые антенны, центральный штырь с установленным на
нем магнитометром, две протонные ловушки и два пьезоэлектрических
датчика для изучения метеорных частиц.
Проведенные в полете измерения дали новые сведения о радиацион-
ном поясе Земли и космическом пространстве. "Луна-2" (12.09.59),
совершившая первый в мире полет на другое небесное тело, имела общую
массу вместе с научной измерительной аппаратурой, установленной на
последней ступени ракеты, 390,2 кг.
Сложной инженерной задачей при полете станции "Луна-2" было
обеспечение высокой точности выведения последней ступени КА на
траекторию полета к Луне: точность достижения величины и направле-
ния вектора скорости в момент выключения двигателя последней ступени
и точность (с ошибкой, не превышающей нескольких секунд) выдержки
этого момента, кроме того, с такой же точностью должно быть
выдержано и время старта. На Луну был доставлен вымпел, что явилось
15
также достаточно сложной проблемой, если учесть, что скорость
столкновения с лунной поверхностью превышала 10 000 км/ч.
Непосредственно на поверхность Луны была доставлена научная
измерительная аппаратура, с помощью которой было установлено
отсутствие радиационного пояса и заметного магнитного поля.
КА "Луна-3" был выведен (4.10.59) на новую и более сложную
траекторию полета, которая представляет собой очень вытянутую орбиту
искусственного спутника Земли. Система ориентации станции "Луна-3",
необходимая для фотографирования Луны, явилась прообразом систем
ориентации многих современных КА. "Луна-3", двигаясь по траектории,
огибающей Луну, прошла на расстоянии 6200 км от ее поверхности и
сфотографировала обратную, невидимую с Земли, сторону Луны.
"Луна-3" имела массу 278,5 кг. Полет ее был первым опытом изучения
другого небесного тела с борта КА.
При создании "Луны-3" впервые в отечественной и мировой
космической технике были использованы следующие системы и
устройства: система поиска и ориентации на Солнце и Луну, всенаправ-
ленная солнечная батарея как единый для всех систем генератор
электроэнергии, фототелевизионное устройство, обеспечивающее
получение, обработку и передачу на Землю изображений (панорам)
лунной поверхности.
Эти три старта положили начало новой эпохе в астрономии -
исследованию небесных тел с близких расстояний.
На "Зонде-З" (18.06.65) помимо научной аппаратуры была установле-
на аппаратура для фотографирования в космическом пространстве и
передачи на Землю изображений с больших расстояний. Было выполнено
фотографирование той части Луны, которая не была охвачена предыду-
щей съемкой.
Исследования космических частиц высоких и сверхвысоких энергий
с селеноцентрической орбиты проводились пятью американскими
искусственными спутниками Луны (10.08.66- 01.08.67)"Лунар орбитер".
Начальная масса отделяемого аппарата составила 386 кг, масса при
движении по окололунной орбите - 270 кг. На борту аппаратов имелась
фототелевизионная система для съемок лунной поверхности с орбиты
с последующим проявлением отснятой фотопленки и передачи получен-
ных изображений по телевизионному каналу. При полетах были
получены снимки лунной поверхности, имеющие большую научную
ценность. Специально были отсняты в увеличенном масштабе районы,
представляющие интерес для высадки в последующем лунной экспедиции.
Полеты КА "Луна-3" (10.59) и "Зонд-З" (06.65) позволили решить
задачи первоначального глобального обзора лунной поверхности,
построения первых (с учетом невидимой с Земли стороны Луны) карт
16
лунной поверхности и создания на их основе глобуса Луны. Анализ
картографической информации показал асимметрию распределения
крупных образований на лунной поверхности: если на видимом
полушарии Луны около 40 % поверхности занимают "моря" (темные
пятна), то на ее обратной стороне, более светлой, на их долю приходится
немногим более 10 % поверхности. Обнаружены круглые впадины
овальной формы, по площади сравнимые с лунными морями, названные
талассоидами (мореподобными). Диаметр их достигает 500 км. На
снимках обнаружен еще один тип формаций, не встречающихся на
видимой стороне - многочисленные цепочки кратеров протяженностью
до 600 и более километров.
Запуски первых трех автоматических межпланетных станций (АМС)
к Луне производились каждый раз в то время, когда Луна находилась
вблизи южного участка своей орбиты. Запущенные непосредственно с
Земли станции постепенно набирали скорость до второй космической
с последующим переходом к пассивному полету к цели без использования
промежуточной орбиты спутника Земли и без коррекции траектории
перелета. В дальнейшем советские космические аппараты запускались
к Луне и планетам уже с применением промежуточной орбиты ИСЗ, что
обеспечивало существенный энергетический выигрыш и расширяло
временные интервалы запуска к Луне.
В 1963-1965 гг. были запущены станции "Луна-4" - "Луна-8" по схеме
полета, когда вначале осуществлялся вывод станции на орбиту ИСЗ, а
затем в нужный момент - старт с этой орбиты, затем набор скорости,
близкой ко второй космической скорости, производилась коррекция
траектории полета, гашение скорости тормозной двигательной
установкой при подлете к Луне. Запуском станций ”Луна-7" и "Луна-8"
завершился этап отработки бортовых систем коррекции, астроориента-
ции, управления, радиоаппаратуры и систем мягкой посадки. В эти же
годы США вели работы по исследованию Луны с помощью КА
"Рейнджер".
Успех первых полетов доказал реальность и своевременность
постановки очередной задачи - осуществления мягкой посадки на Луну.
В предшествующих полетах отечественных КА "Луна-1" - "Луна-8" и
американских "Рейнджер-1" - "Рейнджер-9" проводились исследования
физических характеристик Луны и окололунного пространства,
отрабатывались аппаратура и конструкции аппаратов, а также методика
управления системой мягкой посадки.
После того как работы по КА для исследования Луны были переданы
в КБ Г.Н. Бабакина от КБ С.П. Королева специалистам пришлось решать
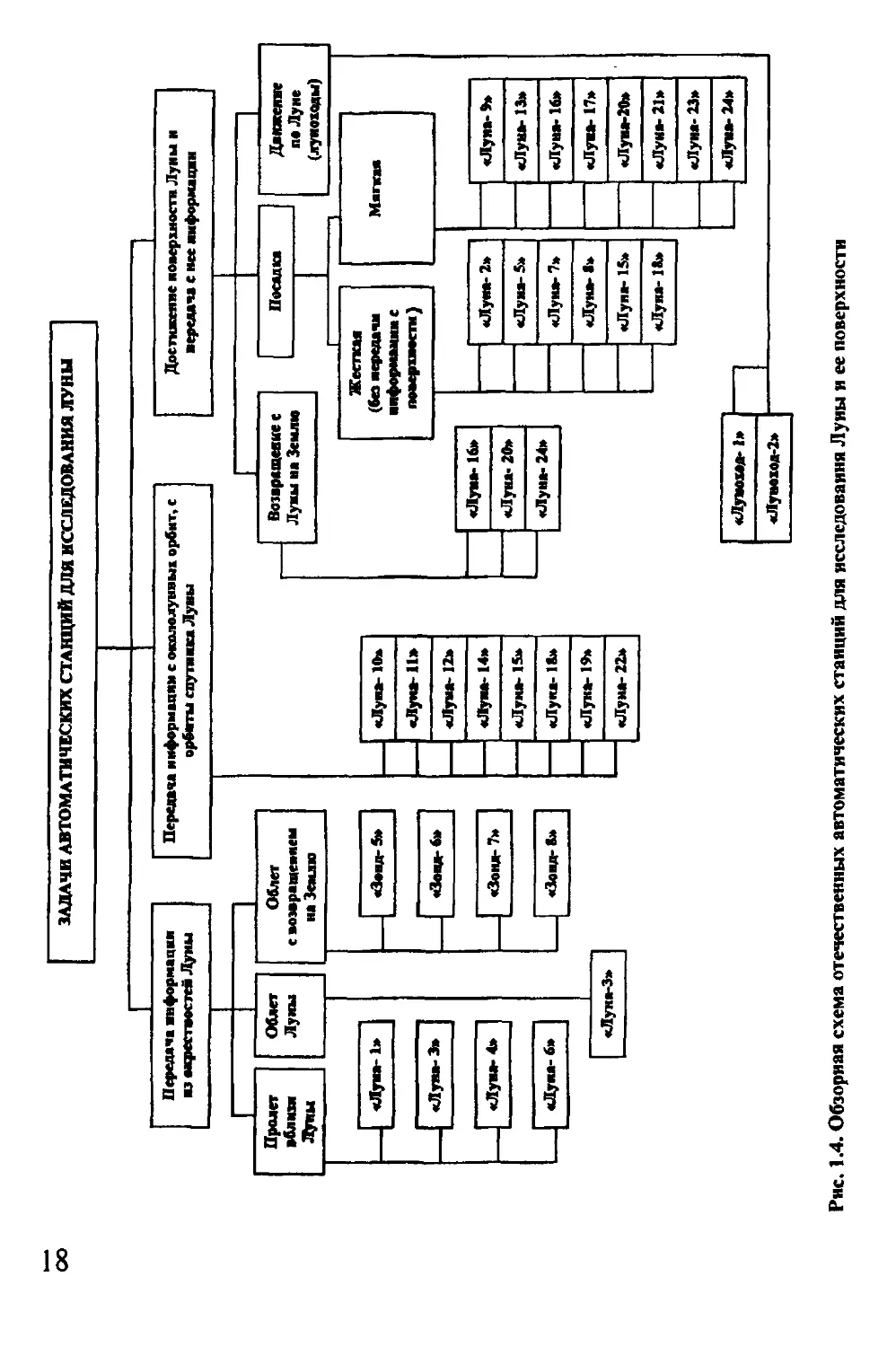
ряд задач (рис. 1.4), основными из которых были следующие:
- создание систем навигации и ориентации;
17
оо
Рис. 1.4. Обзорная схема отечественных автоматических станций для исследования Луны и ее поверхности
- обеспечение ориентации аппарата относительно Солнца, Земли и
Луны для проведения коррекции его траектории и торможения около
Луны;
- разработка реактивного двигателя для коррекции траектории,
торможения и посадки, способного запускаться не менее двух раз в
течение полета и работающего при различных значениях тяги;
- разработка системы управления движением аппарата, необходимой
для его стабилизации на участках работы двигателя, и управления
выключением двигателя во время коррекции орбиты КА и его торможе-
ния;
- создание средств амортизации автоматической лунной станции при
ударе о поверхность Луны (характеристики которой были неизвестны);
- разработка системы терморегулирования автоматической лунной
станции (АЛС) практически при любых ее положениях на поверхности
Луны и различных оптических коэффициентах, характеризующих
участки лунной поверхности.
КА "Луна-9" (03.02.66) общей массой 1583 кг (после вывода на
траекторию полета к Луне) впервые в мире осуществил мягкую посадку
на Луну в Океане Бурь и доставил на поверхность Луны АЛС массой
100 кг, передавшую по телевизионным каналам на Землю круговое
панорамное изображение лунной поверхности в районе посадки.
"Луна-13" (12.66) передала данные о физико-механических свойствах
поверхностного слоя Луны в 400 км от места посадки "Луны-9".
Аналогичную информацию дали американские КА "Сервейор-1" -
"Сервейор-6", совершившие мягкую посадку на поверхность Луны. При
первом запуске КА "Сервейор-Г’ (30.05.66) была произведена посадка
также в Океане Бурь и получены телевизионные изображения лунной
поверхности, аналогичные полученным ранее с КА "Луна-9". На
последующих аппаратах "Сервейор" были установлены механические
устройства с ковшом, которым были прорыты борозды глубиной до
20 см для изучения лунного грунта, и приборы для определения
химического состава поверхностного слоя Луны. Масса аппаратов
"Сервейор" после посадки на Луну была равна примерно 280 кг.
Всего в исследовании Луны со стороны нашей страны участвовало
24 станции серии "Луна" и 5 автоматических станций серии "Зонд",
которые подтвердили высокую эффективность применения автоматов
для изучения этой планеты.
"Луна-9" дала информацию лишь об одном маленьком участке
поверхности Луны. Чтобы иметь ясное представление о Луне, необходи-
мы более длительные наблюдения ее с близкого расстояния. Такие
наблюдения мог провести только искусственный спутник Луны. КА,
ставшие искусственными спутниками Луны (ИСЛ), "Луна-10" (31.03.66),
19
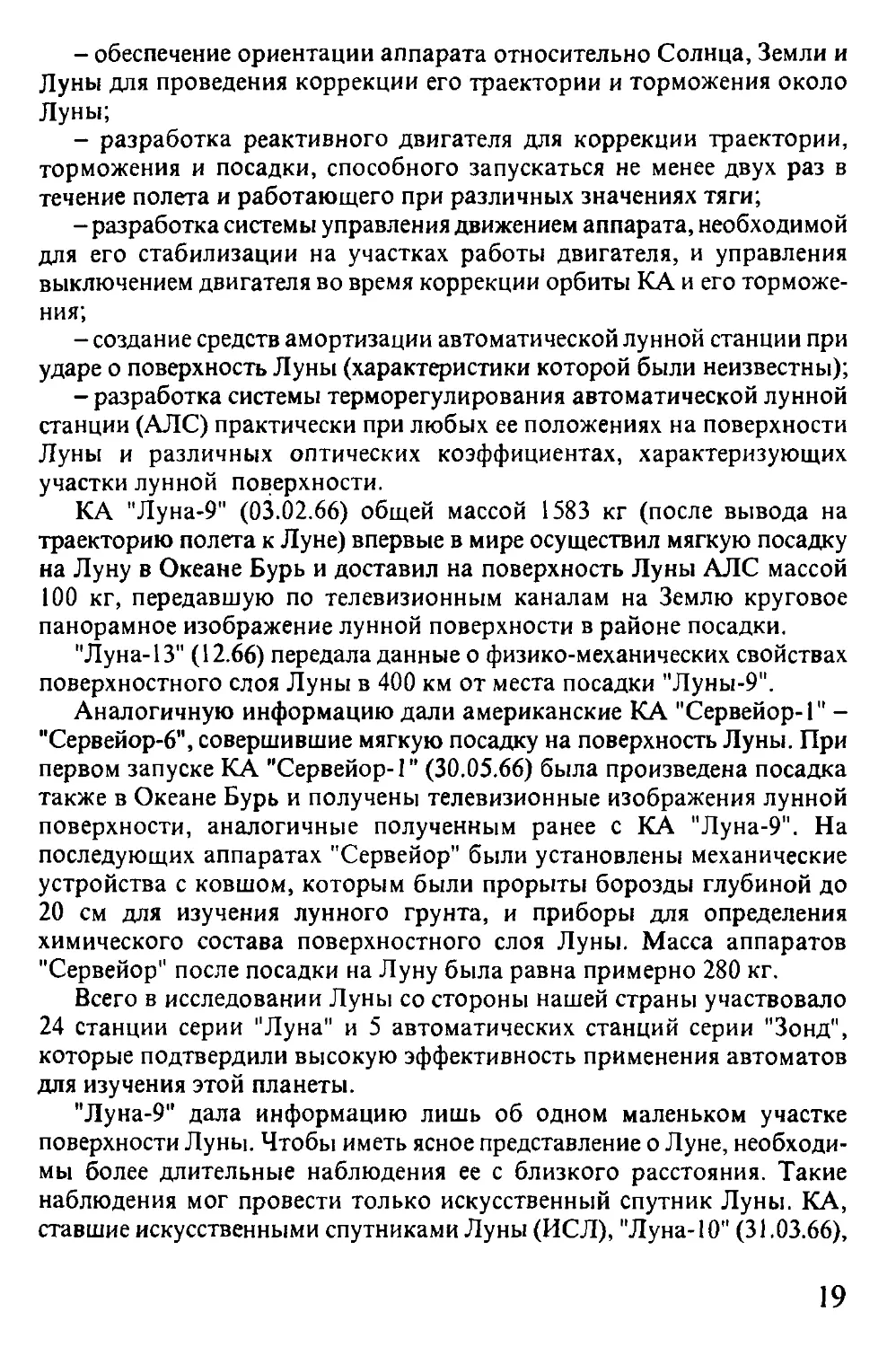
Рис. 1.5. АМС "Луна-12"
"Луна-11" (24.08.66), "Луна-12" (22.10.66) (рис. 1.5) имели массу -1600 кг.
Масса ИСЛ, отделяемых после перехода на окололунную орбиту,
составляла -245 кг. С помощью ИСЛ была получена научная информа-
ция о характеристиках окололунного пространства и косвенные данные
о составе поверхностных лунных пород, а также получены и переданы
на Землю с высоким разрешением крупномасштабные изображения
лунной поверхности (на снимках различались кратеры размерами до
15...20 м).
Однако, более полные сведения о лунных породах могли дать только
прямые измерения специальными приборами. КА "Луна-13" (21.12.66),
совершивший посадку на поверхность Луны в районе Океана Бурь, был
20
оснащен механическим грунтомером, приборами для измерения
теплового потока от лунной поверхности, счетчиком для регистрации
корпускулярного излучения.
Полеты советских и американских автоматических станций к Луне
продолжались. Много важного и интересного рассказывали автоматы
о Луне. Мы узнали о покрове Луны, что его складывают породы,
похожие на земной слежавшийся песок, и определили его плотность. Мы
перестали страшиться лунной пыли и обрели уверенность в достаточной
плотности лунной поверхности для посадки тяжелых аппаратов. Перед
тем как человек ступил на Луну, к ней для исследований было запущено
более 40 советских и американских автоматических станций. Автоматы-
разведчики проложили человеку дорогу к Луне.
В сентябре 1970 г. полет на Луну и обратно совершила автоматическая
станция "Луна-16". На борту ее было специальное устройство, с помощью
которого осуществлено бурение лунного грунта на глубину до 35 см.
Принципиально "Луна-16" отличалась от всех созданных до этого
автоматических космических аппаратов наличием ракеты "Луна - Земля",
впервые осуществившей старт с другого небесного тела и доставившей
образцы лунного грунта на Землю для их исследования и изучения.
Спускаемый аппарат ракеты "Луна - Земля" осуществил прямой вход
в атмосферу со второй космической скоростью, при которой значения
перегрузки достигали 350, а температура в критической точке измерялась
многими тысячами градусов. Станция "Луна-16" прилунилась в Море
Изобилия.
АМС "Луна-17" (17.11.70) доставила на поверхность Луны передвиж-
ную лабораторию "Луноход-1". Начался новый этап в изучении Луны.
В результате годового периода работы и передвижения по поверхности
Луны ученые узнали много нового и интересного. Было выполнено
комплексное исследование трех крупных кратеров, образующих систему,
которая представляет значительный интерес для селенологии. Системати-
чески определялись физико-механические и химические свойства лунного
грунта, а с помощью рентгеновского телескопа и радиометра измерялись
различные характеристики потоков солнечных и галактических
космических лучей. Развивающаяся рентгеновская астрономия поможет
решить многие проблемы происхождения и развития звезд и галактик.
Условия передвижения лунохода по Морю Дождей при изучении
системы кратеров были значительно более сложными, чем на равнине.
Многочисленные вторичные кратеры с диаметрами 5...30 м, россыпи
камней размерами до 3 м, сыпучий грунт на крутых склонах кратеров
создавали значительные трудности для передвижения. Глубокий
космический вакуум, резкий перепад температур: от 130-ти градусной
жары лунным днем до 170-ти градусного мороза ночью, повышенный
21
уровень радиации подвергали жестким испытаниям и конструкцию, и
все системы лунохода. Тем не менее, конструкция и бортовые системы
лунохода успешно выдержали эти испытания. Экипаж, управляющий
работой лунохода из Центра дальней космической связи, проявил
высокое мастерство "вождения" аппарата в сложных условиях. Был
получен большой объем ценной научной информации. Результаты
проведенных исследований явились основой для построения детальных
топографических карт всего исследовавшегося района Моря Дождей,
составления топографических планов с изображением отдельных его
участков, расширения и углубления научных представлений о закономер-
ностях распределения кратеров и камней по площади, проверки теорий
процессов формирования лунной поверхности.
Проведенные исследования бортовых систем и конструкции
"Лунохода-1" полностью подтвердили правильность инженерно-
конструкторских решений, принятых при создании первого передвижно-
го устройства, действующего на другом небесном теле Солнечной
системы. Накопленный опыт эксплуатации первого образца инопланет-
ного транспорта конструкторы использовали для дальнейшего
совершенствования конструкции.
Выяснив, из чего состоит "морская" поверхность, ученые захотели
узнать, из каких пород сложены лунные материки. И в очередной рейс
отправляется "Луна-20" (14.02.72) - космический геолог, который
осуществляет бурение лунного грунта уже на глубину до 2 м в лунных
горах (между Морем Изобилия и Морем Кризисов). Таким образом, 25
февраля 1972 г. завершен новый сложный эксперимент: возвращаемый
аппарат АМС "Луна-20" доставил на Землю образцы пород из горного
района лунной поверхности. Была решена сложная научно-техническая
задача посадки и взлета автомата в труднодоступном материковом
районе Луны.
В январе 1972 г. теперь уже в Море Ясности сделал первые "шаги"
"Луноход-2", доставленный на Луну АМС "Луна-21". На втором
луноходе также были установлены приборы для изучения химического
состава и физико-механических свойств лунного грунта. В отличие от
своего предшественника "Луноход-2" исследовал не только "морскую"
поверхность, но и вышел к лунным горам. Новая самоходная лаборато-
рия была оборудована приборами, измерявшими освещенность лунного
неба и намагниченность отдельных участков лунной поверхности.
Полученные данные научных экспериментов имели большое значение
для дальнейшего изучения Луны, а также для исследования Солнца,
межпланетного и межгалактического пространства, для углубления
научных представлений о строении и развитии Вселенной.
22
Первая пилотируемая экспедиция на Луну состоялась в июне 1969 г.
на космическом корабле "Аполлон-11", после чего США произвели еще
6 запусков (один неудачный, но без катастрофы - "Аполлон-13") и
потеряли интерес к Луне. Американскими экспедиями и советскими
автоматами на Землю было доставлено 420 кг лунного грунта из
различных районов.
В целом до начала грандиозной лунной эпопеи:
- неизвестен был состав лунного грунта и структура лунных недр;
- изучено лишь 60 % лунной поверхности (из-за того, что Луна
обращена к Земле одной стороной);
- неизвестны были данные о магнитном поле и структуре гравитаци-
онного поля.
В результате полетов автоматических станций и экспедиций человека
на Луну:
- определен химический и минералогический состав, а также возраст
Луны, который оказался около 4,6 млрд лет, как предположительно и
возраст Земли. Было установлено, что основные тектонические процессы
на Луне завершились за несколько периодов в первые 1,5 млрд лет (когда
Луна, как и другие небесные тела солнечной системы, пережила сильную
бомбардировку огромными небесными телами, приводившую к
истечению лавы, появлению разломов и других явлений);
- на Луне не было обнаружено воды и практически отсутствует
газовая оболочка; "материки" Луны образовались раньше "морей";
- обнаружено, что поверхность покрыта реголитом - легкой рыхлой
породой с толщиной залегания от долей метра до 10...20 м;
- установлено, что имеется постоянное магнитное поле и магнитные
аномалии, в то же время сильного дипольного поля, как у Земли, не
обнаружено;
- построена модель гравитационного поля Луны, открыты аномалии
силы тяжести;
- определена средняя плотность Луны, которая составляет 3350 кг/м3
(5520 кг/м3 - у Земли), и было выяснено, что Луна имеет кору толщиной
56... 1050 м (как у Земли), а диаметр ядра Луны - 100...200 км, оно
содержит много железа и находится в полурасплавленном состоянии;
- на глубине 1000 км находится зона, через которую не проходят
поперечные сейсмические колебания;
- не обнаружено признаков вулканической деятельности (по
наблюдениям астронома Н.А. Козырева в ноябре 1953 г. и американских
астрономов в октябре 1959 г. вулканическая деятельность на Луне имеет
место).
23
1.3.2. Космические аппараты для исследования
Венеры
Важным этапом в исследовании Солнечной системы являются полеты
КА к планетам. КА "Венера-1" (12.02.61) массой 643,5 кг прошел на
расстоянии около 100 тыс. км от Венеры. При этом запуске решались
задачи дальнейшего исследования космического пространства, проверки
радиосвязи на межпланетных расстояниях, фотографировании планет.
В конструкторском отношении АМС "Венера-1" представляла собой
герметичный аппарат, оснащенный комплексом радиоаппаратуры,
программным устройством, системами ориентации, управления и
блоками химических батарей. Снаружи корпуса станции располагались
часть научной аппаратуры, две панели солнечных батарей и антенны для
связи с Землей: одна - остронаправленная обеспечивала связь с Землей
на больших расстояниях, две другие - для связи на средних расстояниях,
и еще одна антенна предназначалась для передачи информации и
определения параметров траектории на прицельном участке. Основная
аппаратура, обеспечивающая работу станции в процессе полета, была
сосредоточена в орбитальных отсеках, где размещались также специаль-
ные программные устройства, осуществляющие автономное управление
бортовыми системами станцией и обеспечивавшие через заданные
интервалы времени сеансы радиосвязи, которые могли проводиться
также и по командам с Земли.
В 1965 г. к планете Венера отправились сразу две советские АМС
"Венера-2" и "Венера-3". Одна из них - "Венера-3" достигла планеты
(01.03.66): завершился первый в истории космонавтики межпланетный
перелет. Опыт предыдущих полетов помог советским конструкторам и
ученым уже через год провести уникальный эксперимент по зондирова-
нию атмосферы Венеры. Его выполнила станция "Венера-4" (12.06.67),
которая со второй космической скоростью вошла в атмосферу Венеры.
От КА отделился спускаемый аппарат (СА), который после аэродинами-
ческого торможения продолжал спуск на парашюте. Приборы в течение
1,5 ч измеряли давление, плотность, температуру и химический состав
атмосферы Венеры. Масса станции 1106 кг, спускаемого аппарата -
383 кг. Автоматическая станция впервые осуществила плавный спуск и
посадку на поверхность другой планеты.
Анализ химического состава атмосферы Венеры показал, что
углекислота является основной компонентой (90...95 %) атмосферы и не
было зарегистрировано заметного присутствия азота, хотя до полета
АМС "Венера-4" считалось, что азот - основная составляющая
венерианской атмосферы. Содержание кислорода - 0,4 %.
24
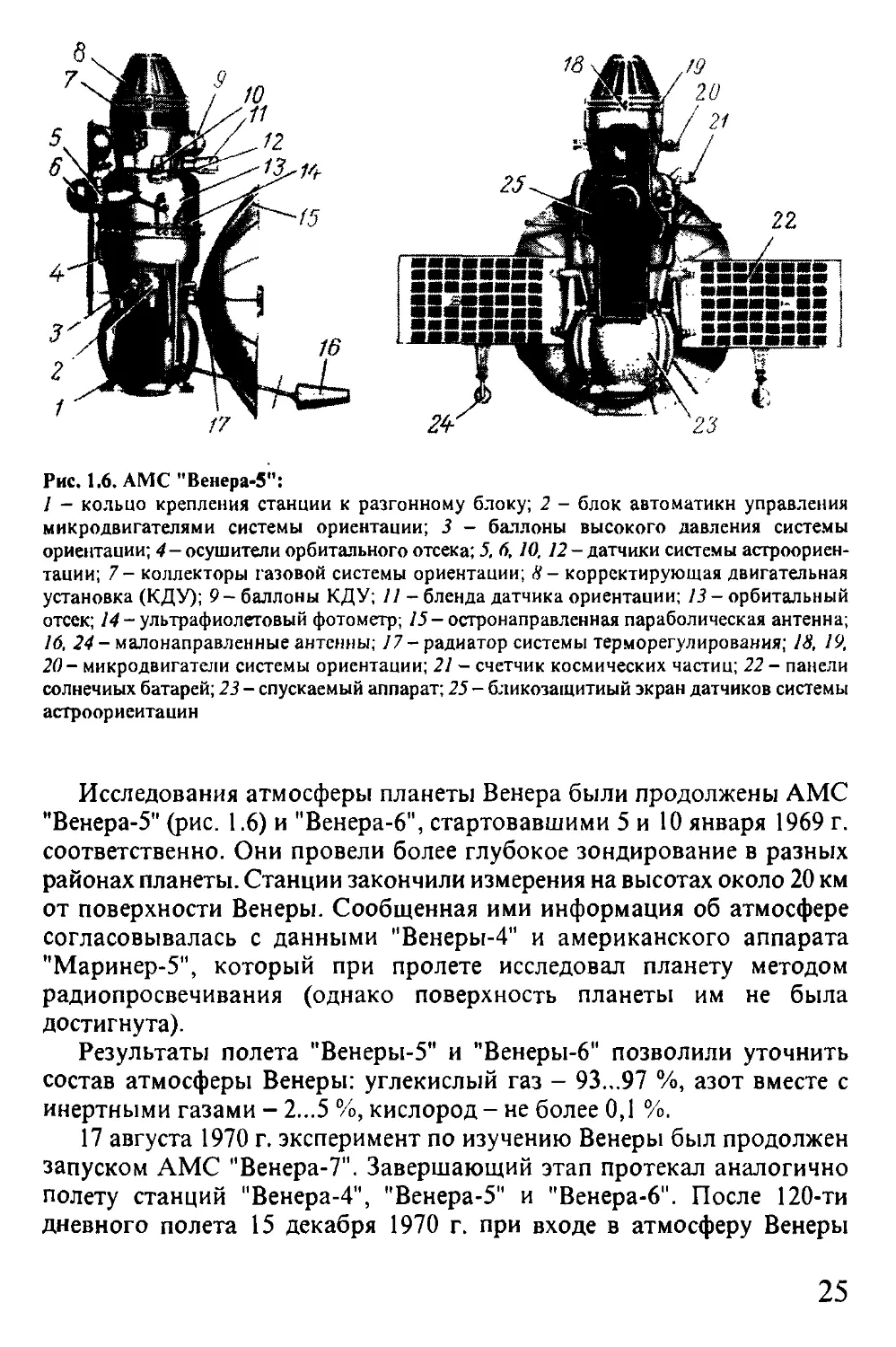
Рис. 1.6. АМС "Венера-5":
I - кольцо крепления станции к разгонному блоку; 2 - блок автоматики управления
микродвигателями системы ориентации; 3 - баллоны высокого давления системы
ориентации; 4-осушители орбитального отсека; 5. 6.10. 12- датчики системы астроориен-
тации; 7 - коллекторы газовой системы ориентации; 8- корректирующая двигательная
установка (КДУ); 9 -баллоны КДУ; 11- бленда датчика ориентации; 13 - орбитальный
отсек; 14-ультрафиолетовый фотометр; 15-остронаправленная параболическая антенна;
16, 24 - малонаправленные антенны; 17 - радиатор системы терморегулирования; 18, 19,
20- микродвигатели системы ориентации; 21 - счетчик космических частиц; 22 - панели
солнечных батарей; 23 - спускаемый аппарат; 25 - бликозащитиый экран датчиков системы
астроориентации
Исследования атмосферы планеты Венера были продолжены АМС
"Венера-5" (рис. 1.6) и "Венера-6", стартовавшими 5 и 10 января 1969 г.
соответственно. Они провели более глубокое зондирование в разных
районах планеты. Станции закончили измерения на высотах около 20 км
от поверхности Венеры. Сообщенная ими информация об атмосфере
согласовывалась с данными "Венеры-4" и американского аппарата
"Маринер-5", который при пролете исследовал планету методом
радиопросвечивания (однако поверхность планеты им не была
достигнута).
Результаты полета "Венеры-5" и "Венеры-6" позволили уточнить
состав атмосферы Венеры: углекислый газ - 93...97 %, азот вместе с
инертными газами - 2...5 %, кислород - не более 0,1 %.
17 августа 1970 г. эксперимент по изучению Венеры был продолжен
запуском АМС "Венера-7". Завершающий этап протекал аналогично
полету станций "Венера-4", "Венера-5" и "Венера-6". После 120-ти
дневного полета 15 декабря 1970 г. при входе в атмосферу Венеры
25
произошло отделение спускаемого аппарата от орбитального отсека. Во
время аэродинамического торможения скорость спускаемого аппарата
относительно планеты уменьшилась с 11,5 км/с до 200 м/с. При этом
перегрузки, действующие на аппарат, достигли 350 единиц, а температура
достигла 11 000 °C. Посадка аппарата на поверхность планеты
осуществлялась на парашюте. Таким образом, впервые АМС достигла
поверхности планеты Венера. Условия там оказались действительно
очень жесткими: температура - около 500 °C, давление - близкое к
10 МПа. При такой температуре обычные стали размягчаются, цветные
металлы плавятся, но конструкция корпуса АМС "Венера-7", выполнен-
ная из специальных жаропрочных материалов обеспечила рабочие
условия для приборов.
Общая масса АМС составила 1180 кг. СА имел форму, близкую к
шару диаметром около 1 м, масса его - несколько более 400 кг.
Все аппараты, вплоть до "Венеры-7", осуществляли посадку на
"ночную" сторону планеты. Посадка СА ria "дневную” сторону Венеры
технически неизмеримо сложнее. Впервые она была осуществлена
22 июля 1972 г. АМС "Венера-8, которая была оборудована научными
приборами, позволяющими осуществить широкий комплекс исследова-
ний атмосферы и поверхности планеты на дневной стороне, а также
исследования межпланетной среды на трассе полета. Общая масса АМС
"Венера-8" - 1184 кг, СА - 495 кг. Конструкция СА подверглась
существенной модификации. Для уточнения станцией "Венера-7"
параметров атмосферы были снижены расчетные нагрузки на корпус СА
и величину максимальной температуры. Это позволило сделать
перераспределение масс между конструкцией и научным оборудованием.
Для связи с Землей в СА станции "Венера-8" была применена новая
антенная система.
22 и 25 октября 1975 г. на поверхность Венеры были осуществлены
мягкие посадки СА АМС "Венера-9” (рис. 1.7) и "Венера-10", а также
созданы первые два искусственных спутника Венеры, находящиеся на
различных орбитах и используемые не только для научных исследований,
но и для ретрансляции сигналов. Панорамные телевизионные камеры,
установленные на СА, позволили получить четкие изображения
поверхности Венеры в экваториальной области.
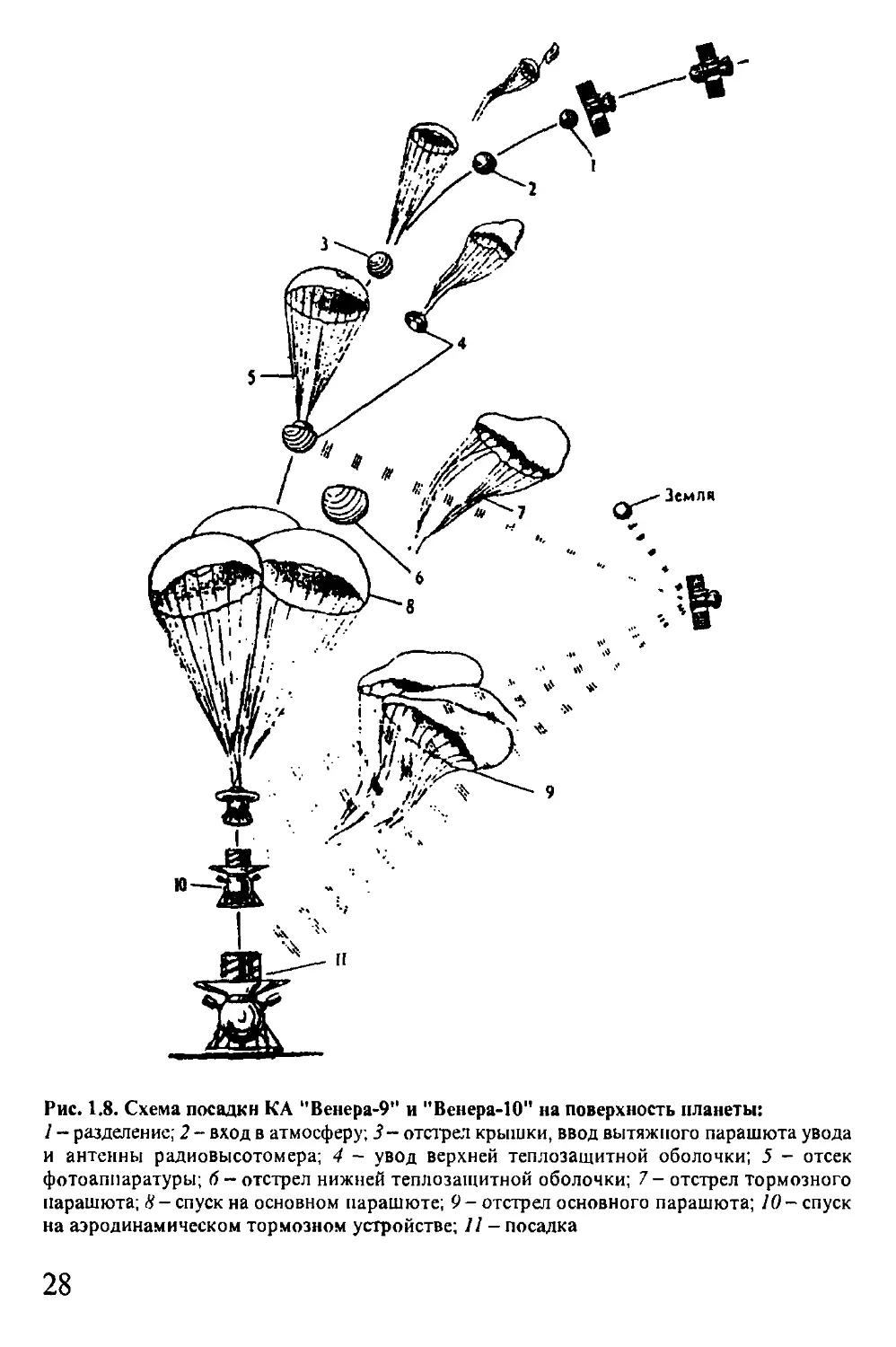
Спускаемые аппараты отечественных АМС нового поколения
"Венера-9" (08.06.75) и "Венера-10" (14.06.75) 22 и 28 октября 1975 г.
соответственно произвели зондирование атмосферы Венеры и совершили
посадку (рис. 1.8) на ее поверхность, а спускаемые аппараты "Венера-11"
(09.09.78) и "Венера-12" (14.09.78) 21 и 25 декабря 1978 г. соответственно
достигли поверхности планеты на расстоянии 800 км один от другого.
Эти полеты дали возможность установить, что на Венере, также как и
на Земле, Лупе и Марсе, протекали сходные геохимические процессы.
26
Рис. 1.7. АМС "Венера-9"
Тонкий химический анализ атмосферы позволил установить ее состав
и концентрацию азота, аргона, неона, криптона. В аэрозольном слое
вместо ожидавшейся серы обнаружили хлор. Были зарегистрированы
грозы.
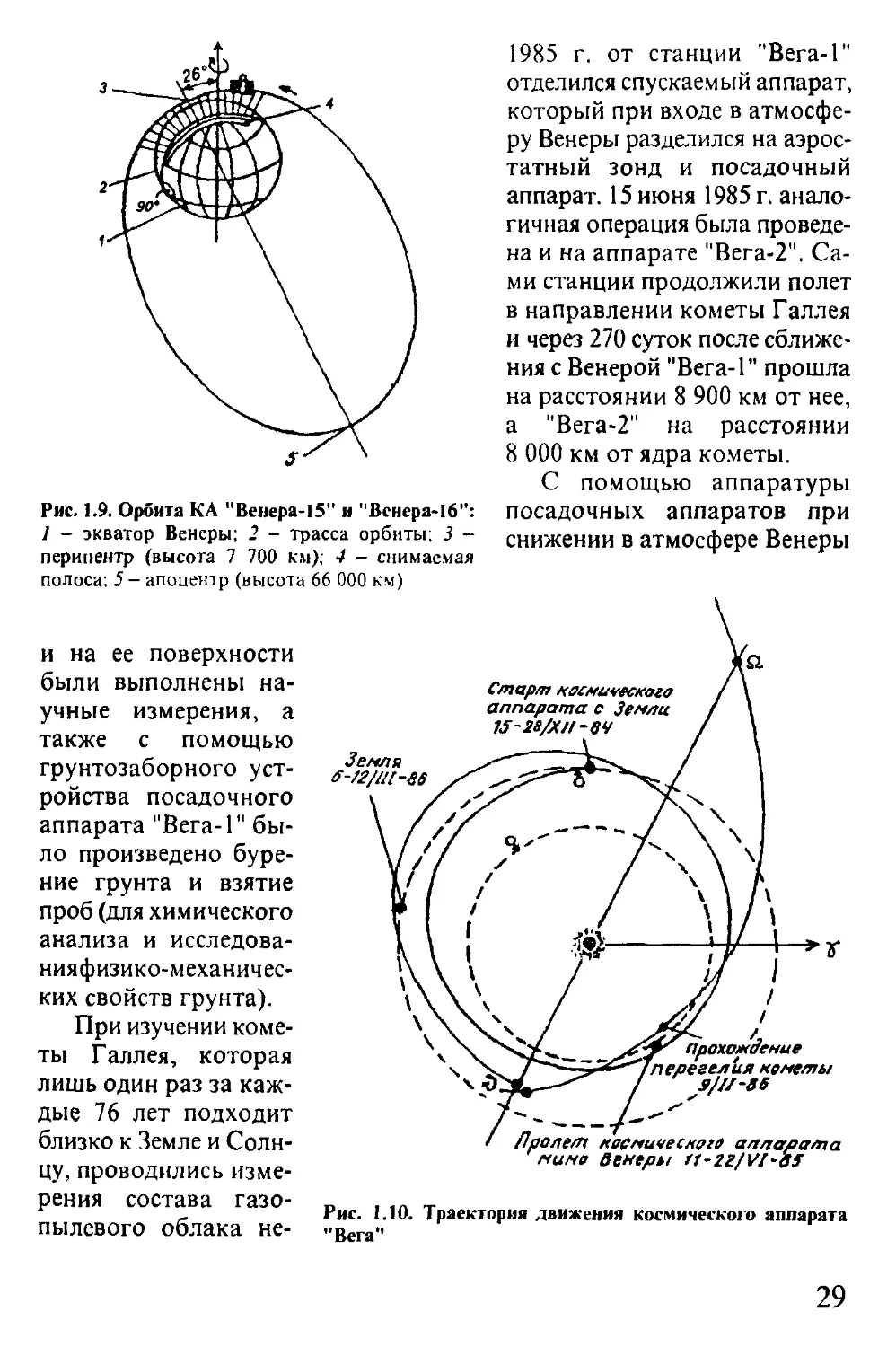
Исследования были продолжены АМС "Венера-13" и "Венера-14" в
1982 г., "Венера-15" и "Венера-16" в 1983-1984 гг. (рис. 1.9). Затем был
реализован международный проект исследований Венеры и кометы
Галлея - изучение атмосферы Венеры посредством аэростатных зондов:
посадка на поверхность планеты и исследования ее покрова, пролет через
газопылевую атмосферу (кому) и плазменную оболочку кометы Галлея.
АМС "Вега-1" и "Вега-2" (рис. 1.10) стартовали в декабре 1984 г. 9 июня
27
Рис. 1.8. Схема посадки КА "Венера-9" и "Венера-10" на поверхность планеты:
1 - разделение; 2 - вход в атмосферу; 3-отстрел крышки, ввод вытяжного парашюта увода
и антенны радиовысотомера; 4 - увод верхней теплозащитной оболочки; 5 - отсек
фотоаппаратуры; 6 - отстрел нижней теплозащитной оболочки; 7 - отстрел тормозного
парашюта; 8-спуск на основном парашюте; 9 - отстрел основного парашюта; 10 -спуск
на аэродинамическом тормозном устройстве; 11 - посадка
28
Рис. 1.9. Орбита КА "Венера-15" и "Венера-16":
1 - экватор Венеры; 2 - трасса орбиты; 3 -
перицентр (высота 7 700 км); 4 - снимаемая
1985 г. от станции "Вега-1"
отделился спускаемый аппарат,
который при входе в атмосфе-
ру Венеры разделился на аэрос-
татный зонд и посадочный
аппарат. 15 июня 1985 г. анало-
гичная операция была проведе-
на и на аппарате "Вега-2". Са-
ми станции продолжили полет
в направлении кометы Галлея
и через 270 суток после сближе-
ния с Венерой "Вега-1" прошла
на расстоянии 8 900 км от нее,
а "Вега-2" на расстоянии
8 000 км от ядра кометы.
С помощью аппаратуры
посадочных аппаратов при
снижении в атмосфере Венеры
полоса; 5 - апоцентр (высота 66 000 км)
и на ее поверхности
были выполнены на-
учные измерения, а
также с помощью
грунтозаборного уст-
ройства посадочного
аппарата "Вега-1" бы-
ло произведено буре-
ние грунта и взятие
проб (для химического
анализа и исследова-
нияфизико-механичес-
ких свойств грунта).
При изучении коме-
ты Галлея, которая
лишь один раз за каж-
дые 76 лет подходит
близко к Земле и Солн-
цу, проводились изме-
Рис. 1.10. Траектория движения космического аппарата
"Вега"
рения состава газо-
пылевого облака не-
29
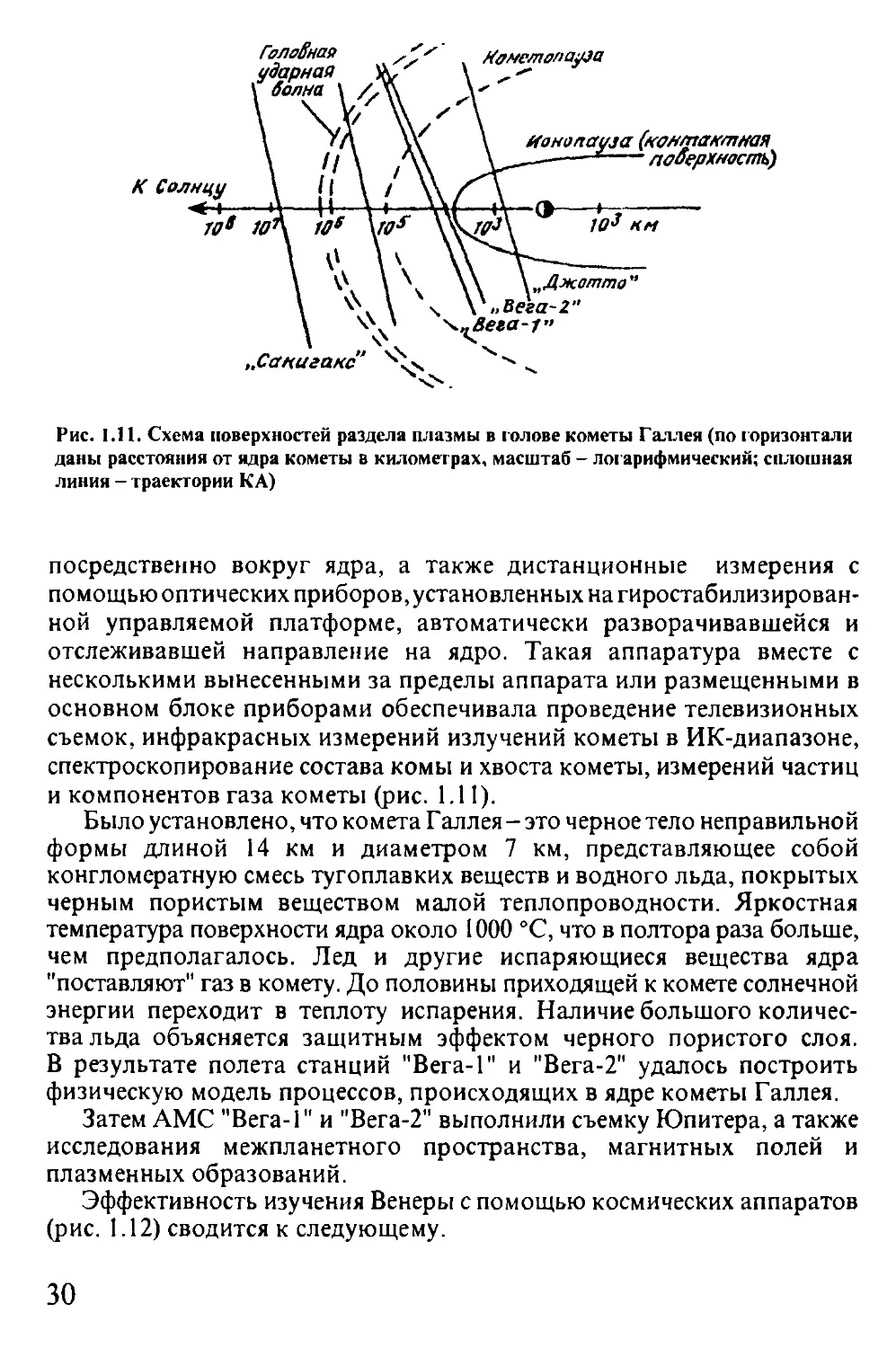
Рис. 1.11. Схема поверхностей раздела плазмы в голове кометы Галлея (по горизонтали
даны расстояния от ядра кометы в километрах, масштаб - логарифмический; сплошная
линия - траектории КА)
посредственно вокруг ядра, а также дистанционные измерения с
помощью оптических приборов, установленных на гиростабилизирован-
ной управляемой платформе, автоматически разворачивавшейся и
отслеживавшей направление на ядро. Такая аппаратура вместе с
несколькими вынесенными за пределы аппарата или размещенными в
основном блоке приборами обеспечивала проведение телевизионных
съемок, инфракрасных измерений излучений кометы в ИК-диапазоне,
спектроскопирование состава комы и хвоста кометы, измерений частиц
и компонентов газа кометы (рис. 1.11).
Было установлено, что комета Г аллея - это черное тело неправильной
формы длиной 14 км и диаметром 7 км, представляющее собой
конгломератную смесь тугоплавких веществ и водного льда, покрытых
черным пористым веществом малой теплопроводности. Яркостная
температура поверхности ядра около 1000 °C, что в полтора раза больше,
чем предполагалось. Лед и другие испаряющиеся вещества ядра
"поставляют" газ в комету. До половины приходящей к комете солнечной
энергии переходит в теплоту испарения. Наличие большого количес-
тва льда объясняется защитным эффектом черного пористого слоя.
В результате полета станций "Вега-1" и "Вега-2" удалось построить
физическую модель процессов, происходящих в ядре кометы Галлея.
Затем АМС "Вега-1" и "Вега-2" выполнили съемку Юпитера, а также
исследования межпланетного пространства, магнитных полей и
плазменных образований.
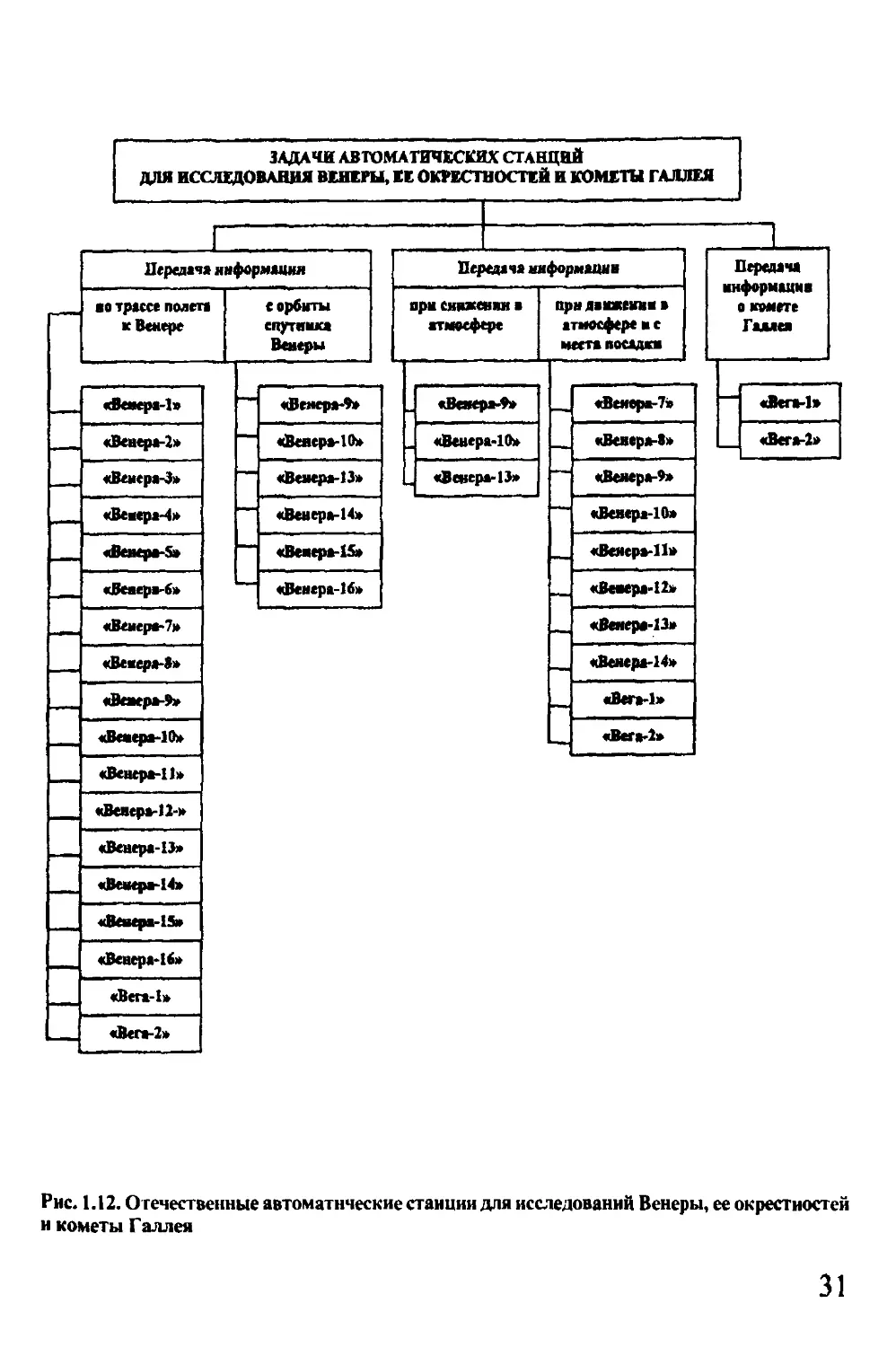
Эффективность изучения Венеры с помощью космических аппаратов
(рис. 1.12) сводится к следующему.
30
ЗАДАЧИ АВТОМАТИЧЕСКИХ СТАНЦИЙ
Д ЛЯ ИССЛЕДОВАНИЯ ВЕНЕРЫ, ЕЕ ОКРЕСТНОСТЕЙ И КОМЕТЫ ГАЛЛЕЯ
Передача информация
о трассе полета к Венере сорбиты спутника Венеры
«Венера-1» «Венера-9»
«Венера-2» «Венера-10»
«Вемера-Э» «Веиера-13»
—— «Веиера-4» «Венера-14»
«Вомрн-5» «Веаера-15»
«Веаерв-б» «Венера-16»
«Вемере-7»
—- «Веиера-1»
«Вокра-Р»
—— «Веаер>-10»
«Венера-11»
«Венера-12-»
«Венгра-13»
— «Венера-14»
«Веаера-13»
—-, «Венера-16»
мм. «Вега-1»
— «Вега-2»
Рис. 1.12. Отечественные автоматические станции для исследований Венеры, ее окрестностей
и кометы Галлея
31
До полетов предполагалось, что на планете есть вода; атмосфера
Венеры аналогична земной; у поверхности планеты низкая освещенность;
благоприятные условия для развития различных форм жизни.
В результате исследований с помощью космических аппаратов
выяснилось, что
- на Венере отсутствует вода;
- у поверхности давление венерианской атмосферы в 100 раз больше
земного; температура около 500 °C;
- в атмосфере планеты до 95...98 % СО и сернокислые облака;
- у поверхности хорошая освещенность, достигающая 104 лк;
- поверхность планеты - базальтовая (в исследованных районах);
- отсутствие на поверхности планеты благоприятных условий для
жизни.
Таким образом, благодаря полетам отечественных и американских
космических аппаратов планета Венера как бы была открыта заново.
1.3.3. Космические аппараты для исследования
Марса
Первый КА, стартовавший к Марсу, был "Марс-1" (1.11.62). При этом
запуске решались задачи дальнейшего исследования космического
пространства, проверки радиосвязи на межпланетных расстояниях,
фотографирования планет.
Конструктивно АМС "Марс-1" массой 893,5 кг была выполнена из
двух герметических отсеков: орбитального, в котором располагалась
аппаратура, обеспечивавшая работу станции во время ее полета к Марсу,
и планетного с научными приборами для работы непосредственно у
планеты. Снаружи на орбитальном отсеке размещалась корректирующая
двигательная установка, панели солнечных батарей, элементы системы
терморегулирования и антенны.
Полет "Марса-1" дал новые данные о физических свойствах
космического пространства между орбитами Земли и Марса.
Автоматическая станция "Зонд-1" (2.04.64) стартовала к Марсу с
тяжелого спутника, выведенного на промежуточную орбиту. Затем к
планете Марс стартовал "Зонд-2" (30.11.64) для дальнейшей отработки
бортовых систем и проведения научных исследований. На этой станции
впервые были установлены плазменные двигатели, использовавшиеся
в качестве органов управления системы ориентации.
Идентичные КА "Марс-2" (19.05.71) и "Марс-3" (28.05.71), состоявшие
из орбитальных отсеков и спускаемых аппаратов, были оснащены
автономными бортовыми системами стабилизации и ориентации,
32
Орбита ИСМ
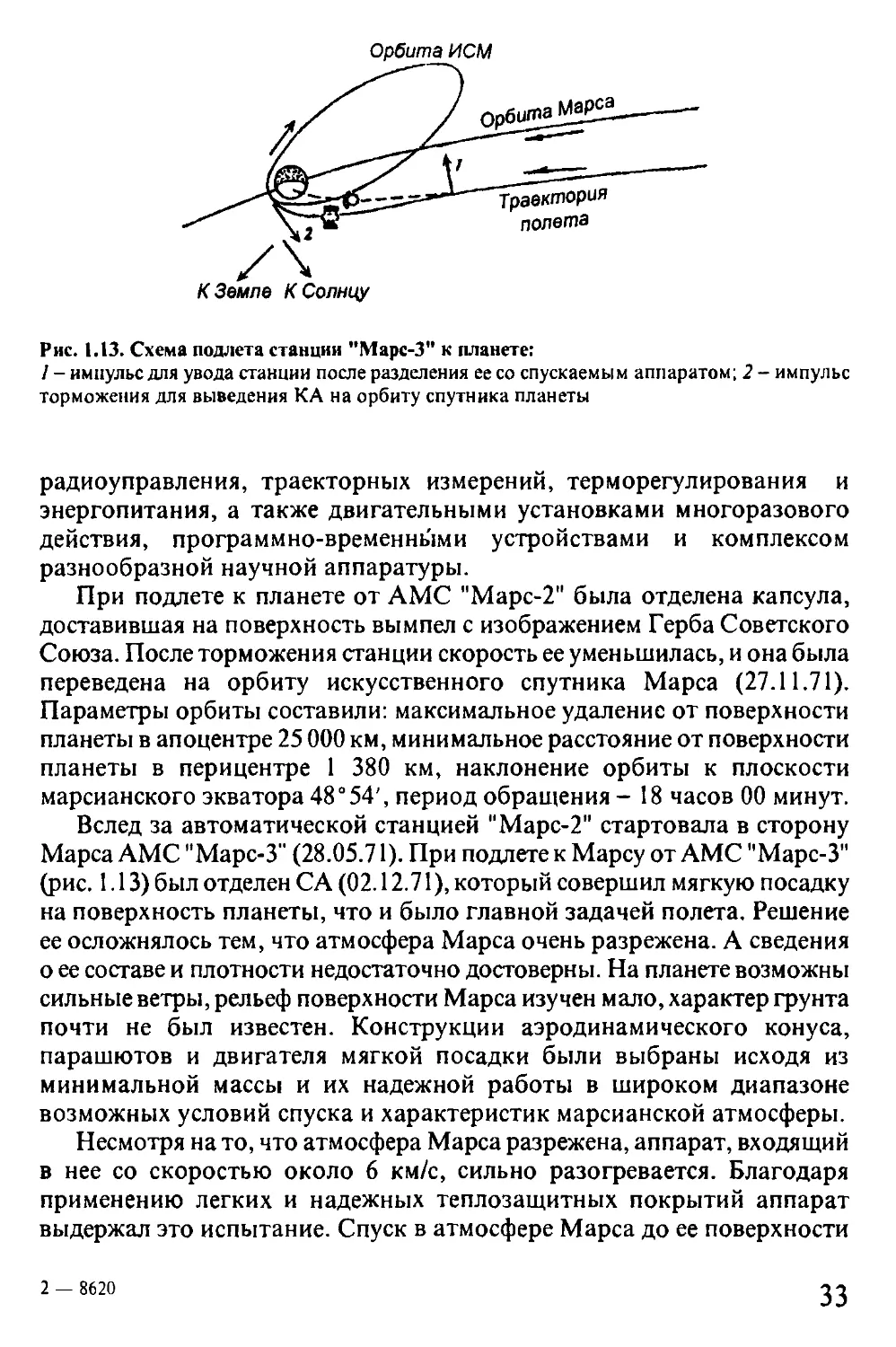
Рис. 1.13. Схема подлета станции "Марс-3” к планете:
1 - импульс для увода станции после разделения ее со спускаемым аппаратом; 2 - импульс
торможения для выведения КА на орбиту спутника планеты
радиоуправления, траекторных измерений, терморегулирования и
энергопитания, а также двигательными установками многоразового
действия, программно-временными устройствами и комплексом
разнообразной научной аппаратуры.
При подлете к планете от АМС "Марс-2" была отделена капсула,
доставившая на поверхность вымпел с изображением Герба Советского
Союза. После торможения станции скорость ее уменьшилась, и она была
переведена на орбиту искусственного спутника Марса (27.11.71).
Параметры орбиты составили: максимальное удаление от поверхности
планеты в апоцентре 25 000 км, минимальное расстояние от поверхности
планеты в перицентре 1 380 км, наклонение орбиты к плоскости
марсианского экватора 48 ° 54', период обращения - 18 часов 00 минут.
Вслед за автоматической станцией "Марс-2" стартовала в сторону
Марса АМС "Марс-3" (28.05.71). При подлете к Марсу от АМС "Марс-3"
(рис. 1.13) был отделен СА (02.12.71), который совершил мягкую посадку
на поверхность планеты, что и было главной задачей полета. Решение
ее осложнялось тем, что атмосфера Марса очень разрежена. А сведения
о ее составе и плотности недостаточно достоверны. На планете возможны
сильные ветры, рельеф поверхности Марса изучен мало, характер грунта
почти не был известен. Конструкции аэродинамического конуса,
парашютов и двигателя мягкой посадки были выбраны исходя из
минимальной массы и их надежной работы в широком диапазоне
возможных условий спуска и характеристик марсианской атмосферы.
Несмотря на то, что атмосфера Марса разрежена, аппарат, входящий
в нее со скоростью около 6 км/с, сильно разогревается. Благодаря
применению легких и надежных теплозащитных покрытий аппарат
выдержал это испытание. Спуск в атмосфере Марса до ее поверхности
2 — 8620
33
продолжался немногим более трех минут. В конце участка торможения
по команде от датчика перегрузки еще при сверхзвуковой скорости
полета с помощью порохового двигателя были введены вытяжной, а
затем и основной парашюты. На высоте 20...30 м от поверхности был
включен тормозной двигатель мягкой посадки.
Доставив СА в нужную точку околопланетного пространства, АМС
"Марс-3" перешла на орбиту искусственного спутника планеты.
Радиосигнал СА принимался автоматической станцией, находящейся на
орбите спутника, запоминался на ее борту, а затем в сеансы радиосвязи
посылался на Землю ее радиопередатчиком.
АМС "Марс-2" и "Марс-3" фотографировали Марс с различных
расстояний разноцветными светофильтрами. Экспонированная пленка
проявлялась на борту станции, а затем с помощью телевизионных камер
полученное изображение передавалось на Землю.
В июле-августе 1973 г. были последовательно запущены "Марс-4",
"Марс-5", "Марс-6", "Марс-7". Хотя станции и различались между собой,
но имели одинаковую пролетную ступень. Не все поставленные задачи
были выполнены. Вместе с тем было установлено (по совместным
результатам всех АМС):
давление на поверхности Марса ....................................0,6 кПа
температура у поверхности .....................................43 °C (230 К)
высота тропопаузы .............................................. 25...30 км
температурный градиент в тропопаузе............................... 2,5 К/км
температура изометрической атмосферы............................ 160...180 К
Необходимо было исследовать планету с пролетной траектории и с
орбиты искусственного спутника, доставить на поверхность посадочный
аппарат.
Полет АМС, ставших искусственными спутниками Марса, первая в
истории космонавтики мягкая посадка на его поверхность, комплексные
научные исследования планеты и окружающего космического простран-
ства, решение сложнейшей технической проблемы автономной навигации
и управления полетом АМС на значительном удалении от Земли - успех
отечественной космонавтики.
Американские КА "Викинг-1" (20.08.75) и "Викинг-2" (09.09.75) (масса
каждого аппарата составляла 3458 кг, в том числе орбитального блока -
2325 кг, СА - 1133 кг) были запущены с комплексом приборов для поиска
и обнаружения признаков жизни на Марсе, оба аппарата (16.06.76 и
28.06.76 соответственно) вышли на ареоцентрические орбиты, после чего
от орбитальных блоков были отделены посадочные аппараты,
совершившие мягкую посадку на поверхность планеты. Посадка СА
"Викинг-2" (03.09.76) и анализ проб грунта показал, что грунт состоит
34
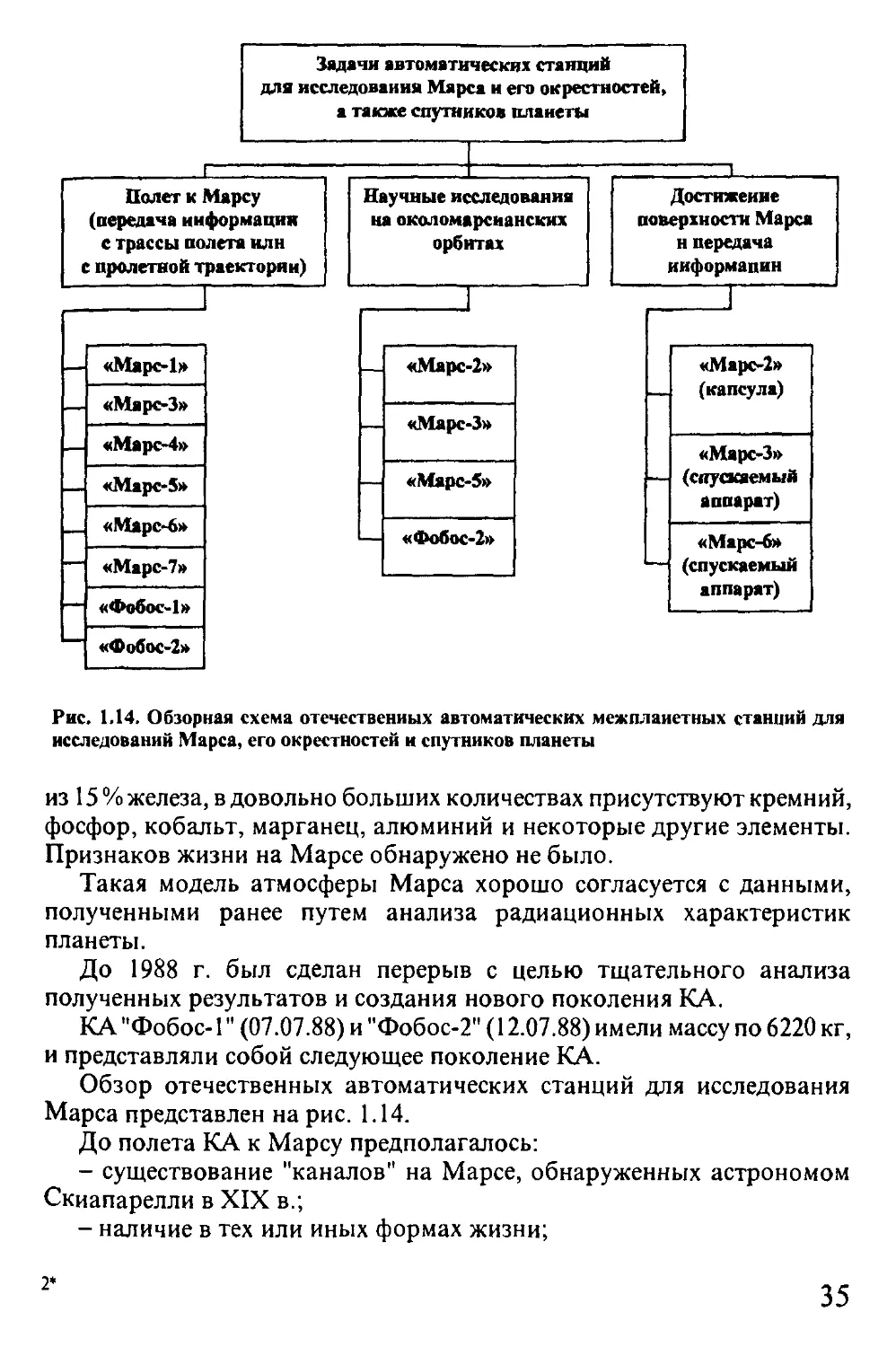
Рис. 1.14. Обзорная схема отечественных автоматических межпланетных станций для
исследований Марса, его окрестностей и спутников планеты
из 15 % железа, в довольно больших количествах присутствуют кремний,
фосфор, кобальт, марганец, алюминий и некоторые другие элементы.
Признаков жизни на Марсе обнаружено не было.
Такая модель атмосферы Марса хорошо согласуется с данными,
полученными ранее путем анализа радиационных характеристик
планеты.
До 1988 г. был сделан перерыв с целью тщательного анализа
полученных результатов и создания нового поколения КА.
КА "Фобос-1" (07.07.88) и "Фобос-2" (12.07.88) имели массу по 6220 кг,
и представляли собой следующее поколение КА.
Обзор отечественных автоматических станций для исследования
Марса представлен на рис. 1.14.
До полета КА к Марсу предполагалось:
- существование "каналов" на Марсе, обнаруженных астрономом
Скиапарелли в XIX в.;
- наличие в тех или иных формах жизни;
2*
35
- значительность возраста планеты, сглаженность ее рельефа;
- наличие темного и слабо освещенного неба,
В результате полетов к Марсу и проведенных исследований:
- обнаружены горы, молодые, выше земных (27 км), множество
кратеров, вулканы, каньоны;
- открыты русла высохших рек (но не каналов), следы водной эрозии,
а также получены другие доказательства, свидетельствующие о наличии
в прошлом значительных запасов жидкой воды, которая, по-видимому,
сейчас находится в форме вечной мерзлоты в грунте и в полярных шапках
в смеси с углекислотой;
- установлено, что атмосфера Марса по сравнению с Землей, более
чем в 100 раз разрежена, небо розовое и очень светлое;
- прямых указаний на существование жизни не обнаружено.
1.3.4. Космические аппараты для исследования
других планет, астероидов и комет
Американский автоматический аппарат "Маринер-10" (16.03.75)
предназначался для исследования Венеры и Меркурия с пролетной
траектории. Совершив пертурбационный маневр в поле тяготения
Венеры, КА вышел на гелиоцентрическую орбиту, проходящую около
Меркурия, проведя съемку планеты и исследование ее магнитного поля.
Получено около 3000 снимков Меркурия. Поверхность планеты
изобилует кратерами, обнаружена чрезвычайно разреженная гелиевая
атмосфера и слабое магнитное поле.
"Вояджер-1" (американский КА для исследования Юпитера, Сатурна
и их спутников), прошедший в непосредственной близости от Юпитера,
передал на Землю снимки планеты и некоторых ее спутников. Наиболь-
ший интерес ученых вызвали снимки Большого Красного Пятна и
спутника Ио, на поверхности которого специалисты обнаружили, по
крайней мере, шесть действующих вулканов, выбрасывающих газы и
пыль на высоту около 500 км. Это первые действующие вулканы,
обнаруженные вне Земли. После пролета Юпитера (10.80) была
достигнута орбита Сатурна.
В результате выполнения программы "Вояджер" были получены
уникальные сведения о Юпитере, Сатурне, Уране, Нептуне.
После космических полетов к Юпитеру:
- установлено, что магнитное поле и радиационные пояса в 100 раз
больше земных по напряженности и протяженности;
36
- подтверждено существование гелия и близость соотношения гелия
и водорода к солнечному составу;
- в атмосфере обнаружена вода;
- определен химический состав Большого Красного Пятна (дрейфую-
щего по широте Юпитера) и получены аргументы в пользу его вихревого
характера;
- открыты механизмы циклического ускорения электронов и выброса
их в межпланетное пространство;
- уточнены массы и размеры спутников Юпитера;
- установлено, что плотность спутников уменьшается с удалением их
от планеты;
- открыта атмосфера и вулканическая деятельность на спутнике Ио.
1.4. Пилотируемые космические корабли
1.4.1. Общие требования к конструктивно-
компоновочным схемам и основным системам
и агрегатам
К пилотируемым КА из-за присутствия на борту человека предъявля-
ются очень жесткие требования по надежности, имея в виду высокий
уровень вероятности безотказной работы. Поэтому в конструктивно-
компоновочной схеме широко применяют дублирование и троирование.
При разработке конструктивно-компоновочной схемы стремятся к
простоте, компактности, минимальной массе.
Помимо дублирования необходимо предусмотреть аварийное
спасение экипажа на всех этапах полета.
Следует учитывать, что КА функционирует и как самостоятельный
аппарат, и как аппарат в составе ракеты-носителя, поэтому рациональная
компоновка должна обеспечивать такое сочетание.
Поскольку КА функционирует как самостоятельный аппарат, то
требуется обеспечить:
- оптимальное размещение агрегатов КА и аппаратуры. С одной
стороны, необходимо обеспечить рациональное использование объема
(свободного внутреннего пространства) с целью уменьшения массы
конструкции, повысить эффективность терморегулирования; с другой -
(и это противоречие предыдущему) обеспечить удобный доступ для
демонтажа (при замене) и регулирования бортового оборудования;
- минимальное смещение центра масс в процессе функционирования
КА и минимальное изменение моментов инерции относительно
координатных осей при расходовании топлива;
37
- минимальное смещение фокуса СА при номинальных режимах
полета для СА, входящих в состав пилотируемых КА;
- необходимую центровку КА сточки зрения минимального влияния
динамических нагрузок и неравномерности распределения масс в полете
на работу систем ориентации и стабилизации;
- удобство монтажа и сборки КА;
- взаимозаменяемость отдельных отсеков, агрегатов и систем КА;
- удобство стыковки и отделения КА от ракеты-носителя (PH);
- удобство и безопасность эксплуатации КА;
- широкое применение стандартизации и унификации отдельных
элементов и систем КА;
- перспективность конструкции, допускающей совершенствование
КА в пределах данной конструктивно-силовой схемы.
В процессе разработки КА следует применять наиболее эффективные
конструкционные, теплозащитные и теплоизоляционные материалы,
выбирать которые следует с учетом технологии изготовления.
1.4.2. Конструктивно-компоновочная схема
и устройство корабля-спутника "Восток'1
Первые шесть советских одноместных космических кораблей (КК),
созданных под руководством С.П. Королева, получили наименование
"Восток" и были предназначены для осуществления первых полетов
человека в космическое пространство. Полетам человека предшествовали
полеты беспилотных модификаций этих КК (пять запусков) в автомати-
ческом режиме и с животными на борту.
На "Бостоках" совершили полеты по околоземной орбите космонавты
Ю.А. Гагарин, Г.С. Титов, А.Г. Николаев, П.Р. Попович, В.Ф. Быков-
ский, В.В. Терешкова.
На "Бостоках" изучалось воздействие условий орбитального полета
на состояние и работоспособность космонавта, проводились исследова-
ния, связанные с проверкой принципов построения КК, отработкой их
конструкций и систем.
В результате этих экспериментов были получены первые важные
данные. С высокой точностью выполнены следующие сложнейшие
задачи:
- старт и полет по заданной программе ракеты-носителя, обеспечив-
шей вывод космического корабля на заданную орбиту;
-управляемый полет корабля и спуск его на Землю в заданный пункт;
и проверены:
38
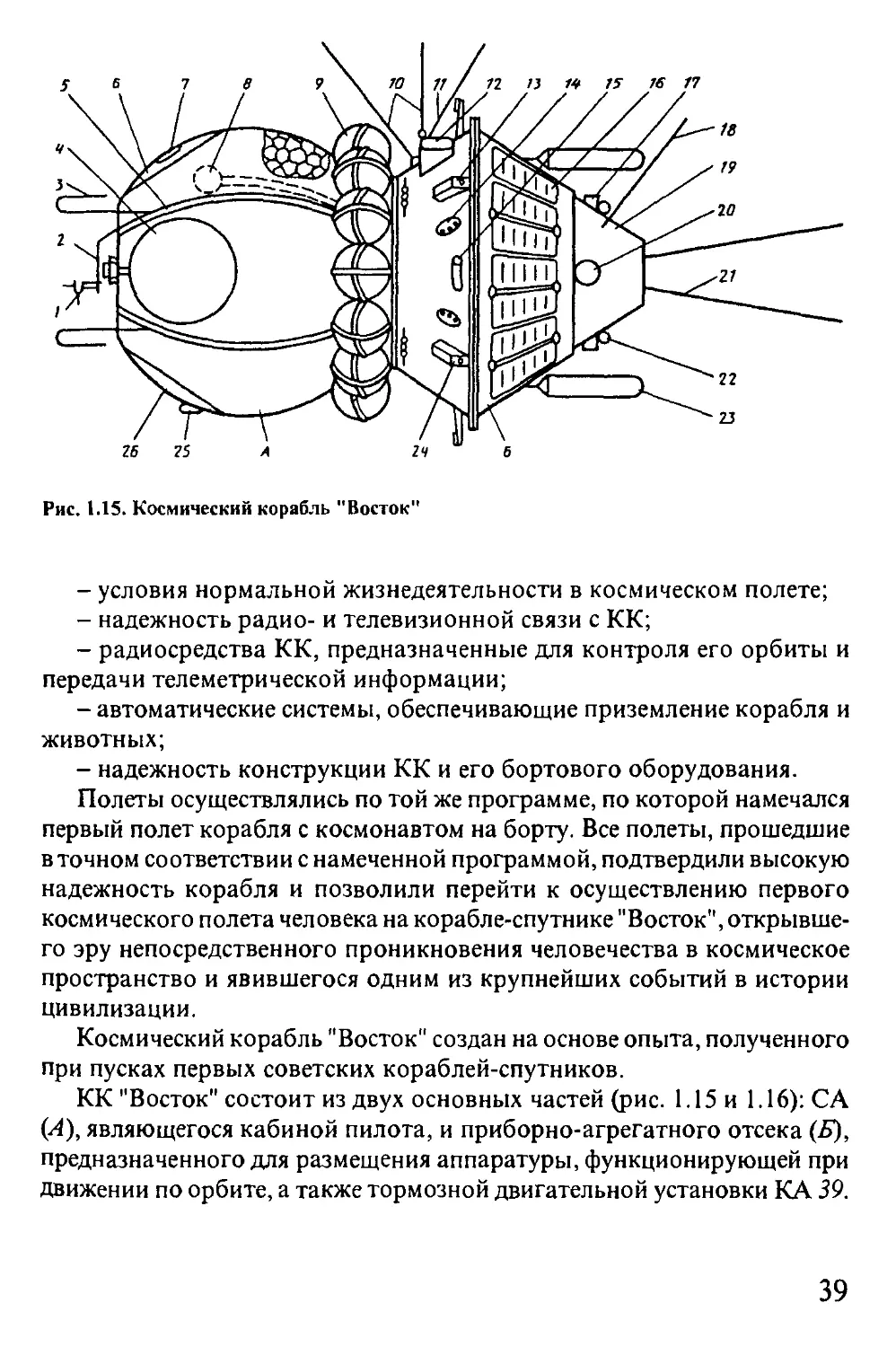
Рис. 1.15. Космический корабль "Восток"
- условия нормальной жизнедеятельности в космическом полете;
- надежность радио- и телевизионной связи с КК;
- радиосредства КК, предназначенные для контроля его орбиты и
передачи телеметрической информации;
- автоматические системы, обеспечивающие приземление корабля и
животных;
- надежность конструкции КК и его бортового оборудования.
Полеты осуществлялись по той же программе, по которой намечался
первый полет корабля с космонавтом на борту. Все полеты, прошедшие
в точном соответствии с намеченной программой, подтвердили высокую
надежность корабля и позволили перейти к осуществлению первого
космического полета человека на корабле-спутнике "Восток", открывше-
го эру непосредственного проникновения человечества в космическое
пространство и явившегося одним из крупнейших событий в истории
цивилизации.
Космический корабль "Восток" создан на основе опыта, полученного
при пусках первых советских кораблей-спутников.
КК "Восток" состоит из двух основных частей (рис. 1.15 и 1.16): СА
(А), являющегося кабиной пилота, и приборно-агрегатного отсека (5),
предназначенного для размещения аппаратуры, функционирующей при
движении по орбите, а также тормозной двигательной установки КА 39.
39
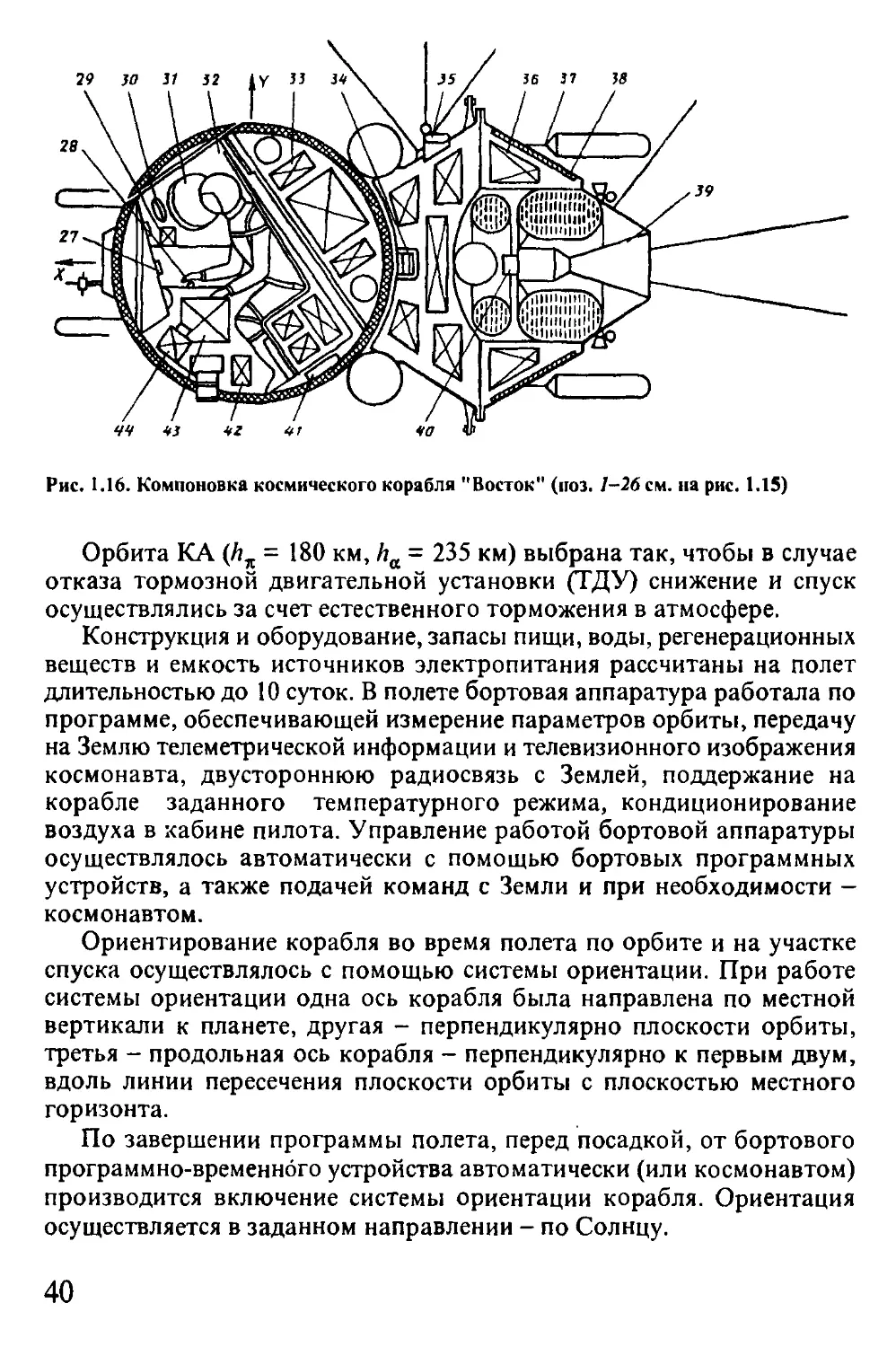
Рис. 1.16. Компоновка космического корабля "Восток" (поз. 1-26 см. на рис. 1.15)
Орбита КА (Лл = 180 км, Ла = 235 км) выбрана так, чтобы в случае
отказа тормозной двигательной установки (ТДУ) снижение и спуск
осуществлялись за счет естественного торможения в атмосфере.
Конструкция и оборудование, запасы пищи, воды, регенерационных
веществ и емкость источников электропитания рассчитаны на полет
длительностью до 10 суток. В полете бортовая аппаратура работала по
программе, обеспечивающей измерение параметров орбиты, передачу
на Землю телеметрической информации и телевизионного изображения
космонавта, двустороннюю радиосвязь с Землей, поддержание на
корабле заданного температурного режима, кондиционирование
воздуха в кабине пилота. Управление работой бортовой аппаратуры
осуществлялось автоматически с помощью бортовых программных
устройств, а также подачей команд с Земли и при необходимости -
космонавтом.
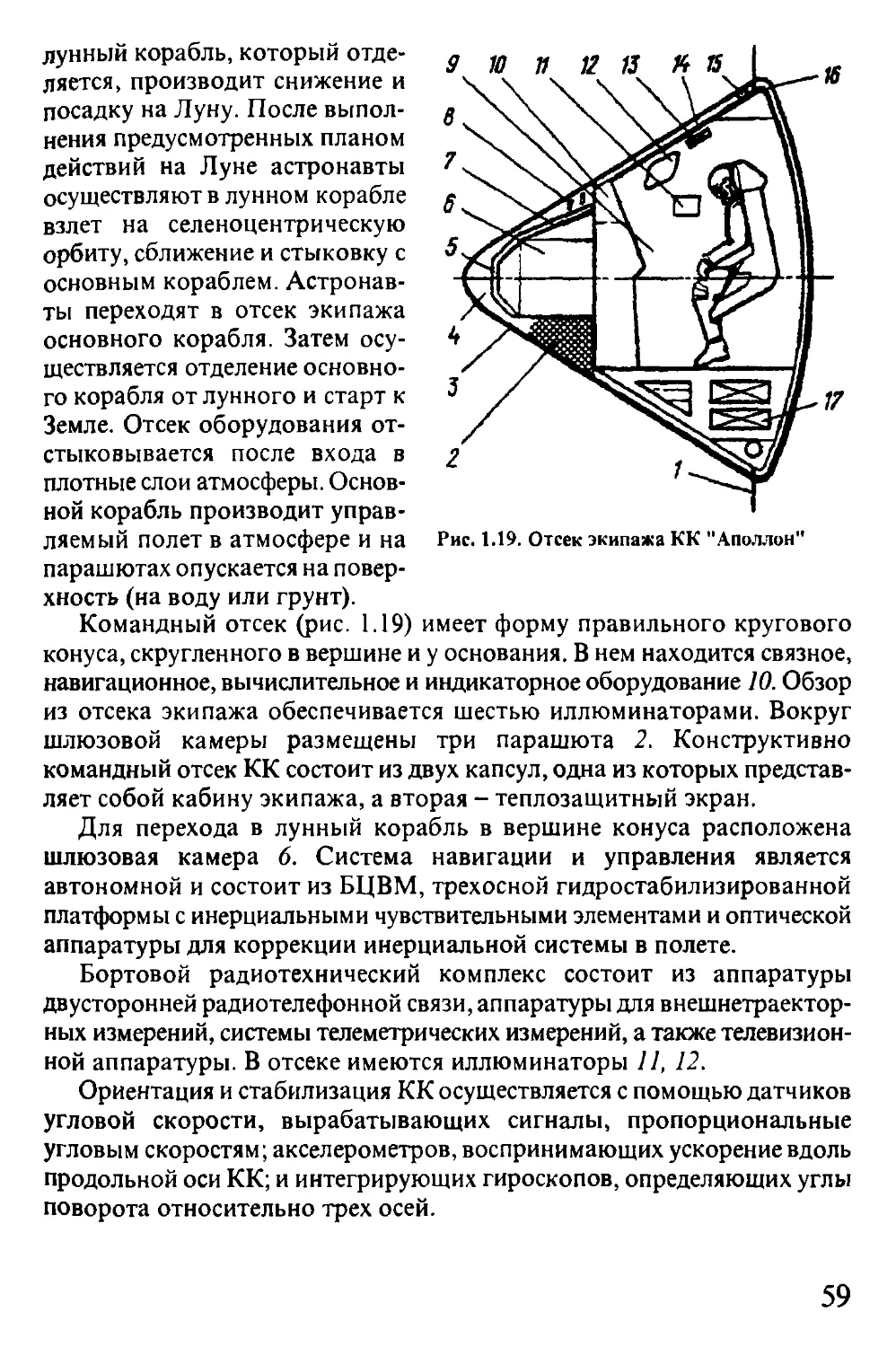
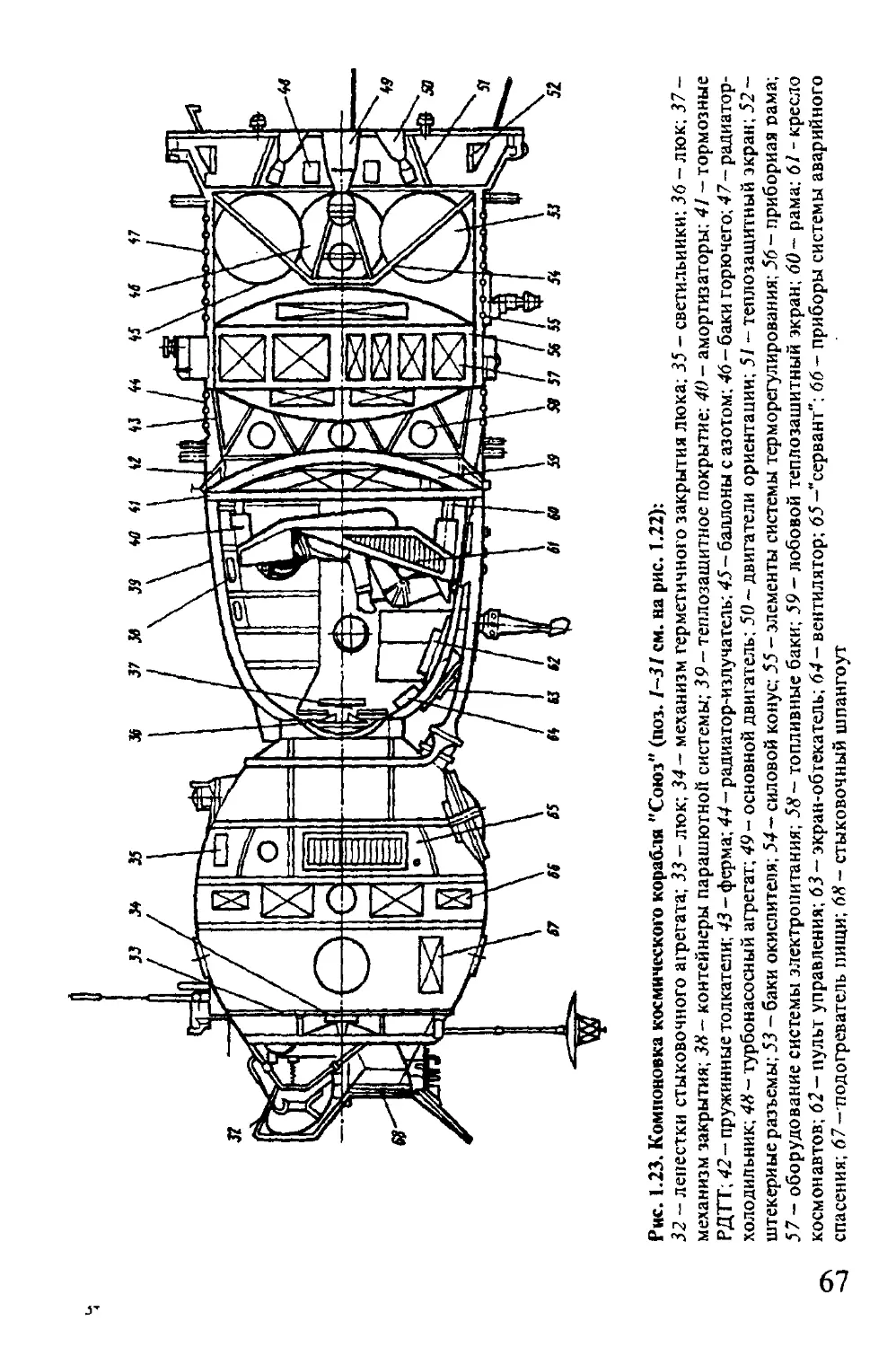
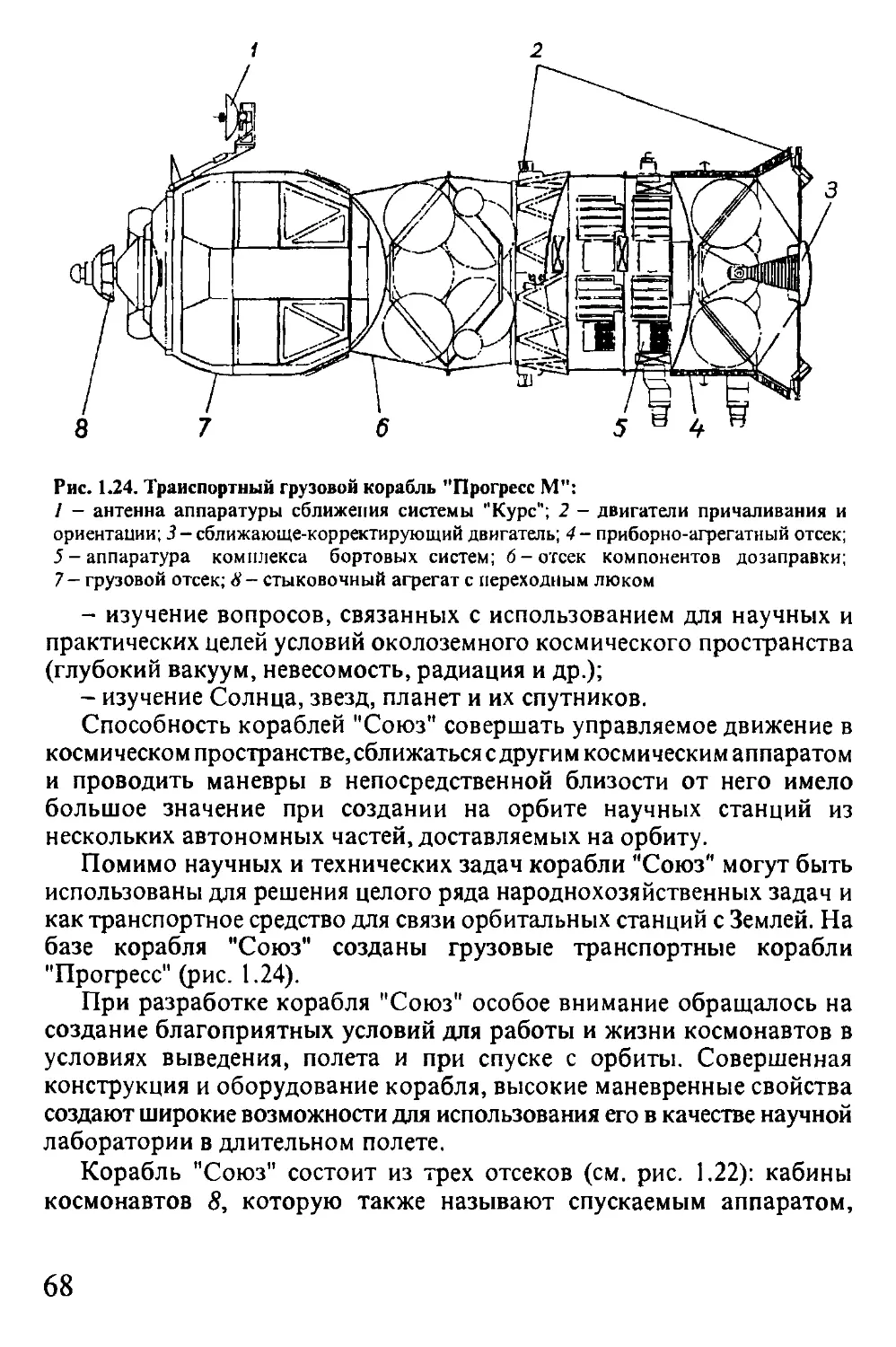
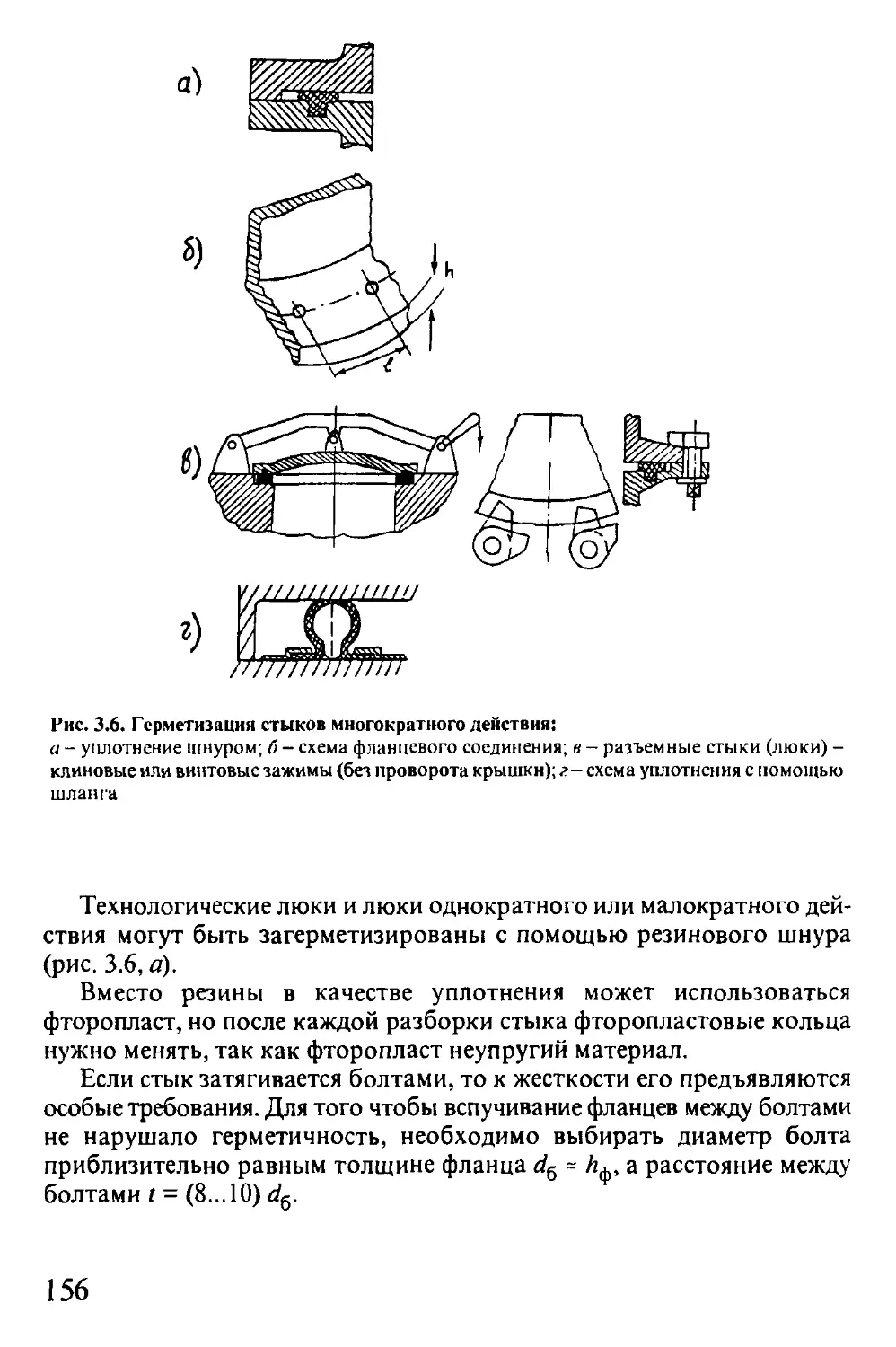
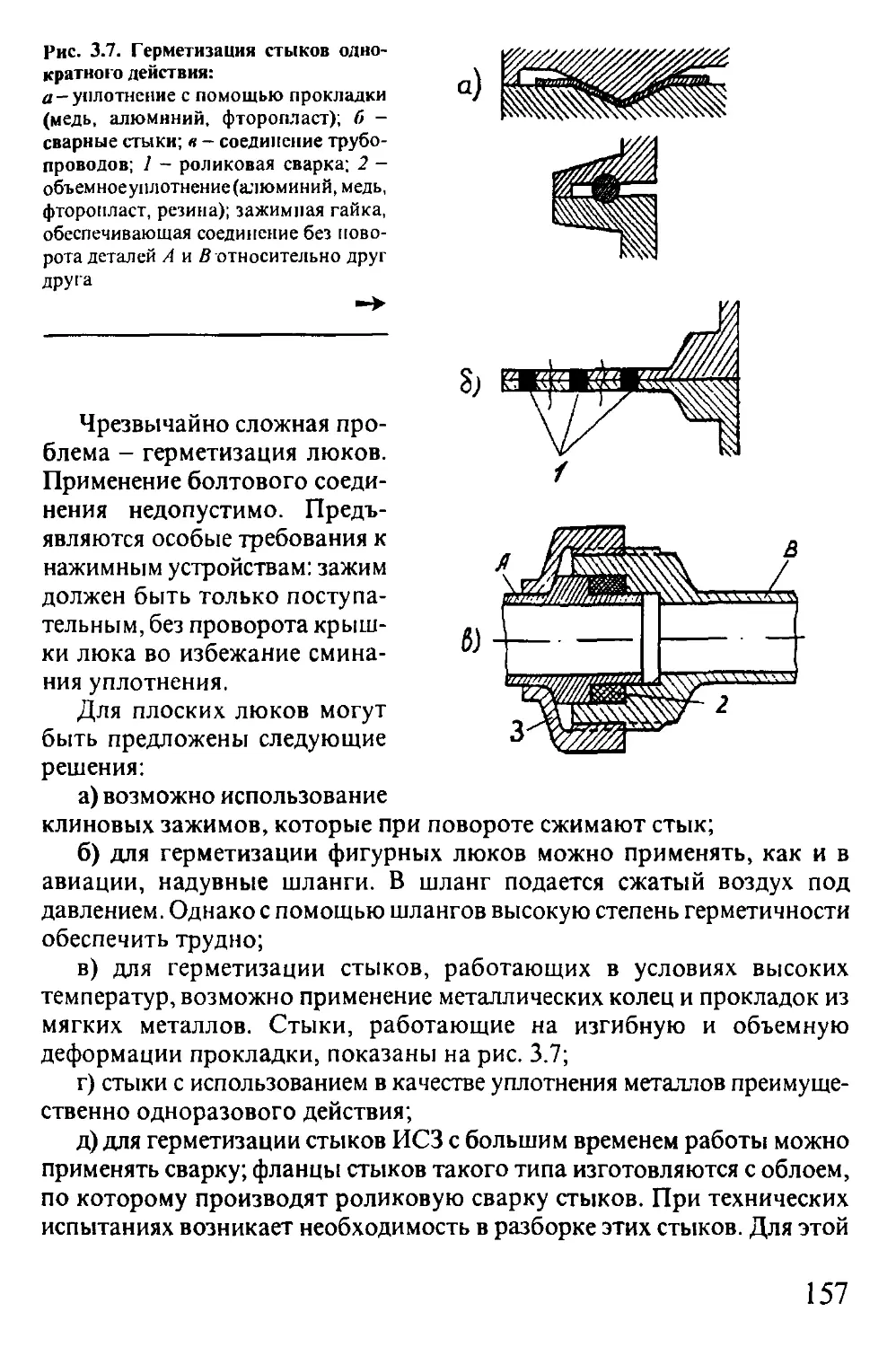
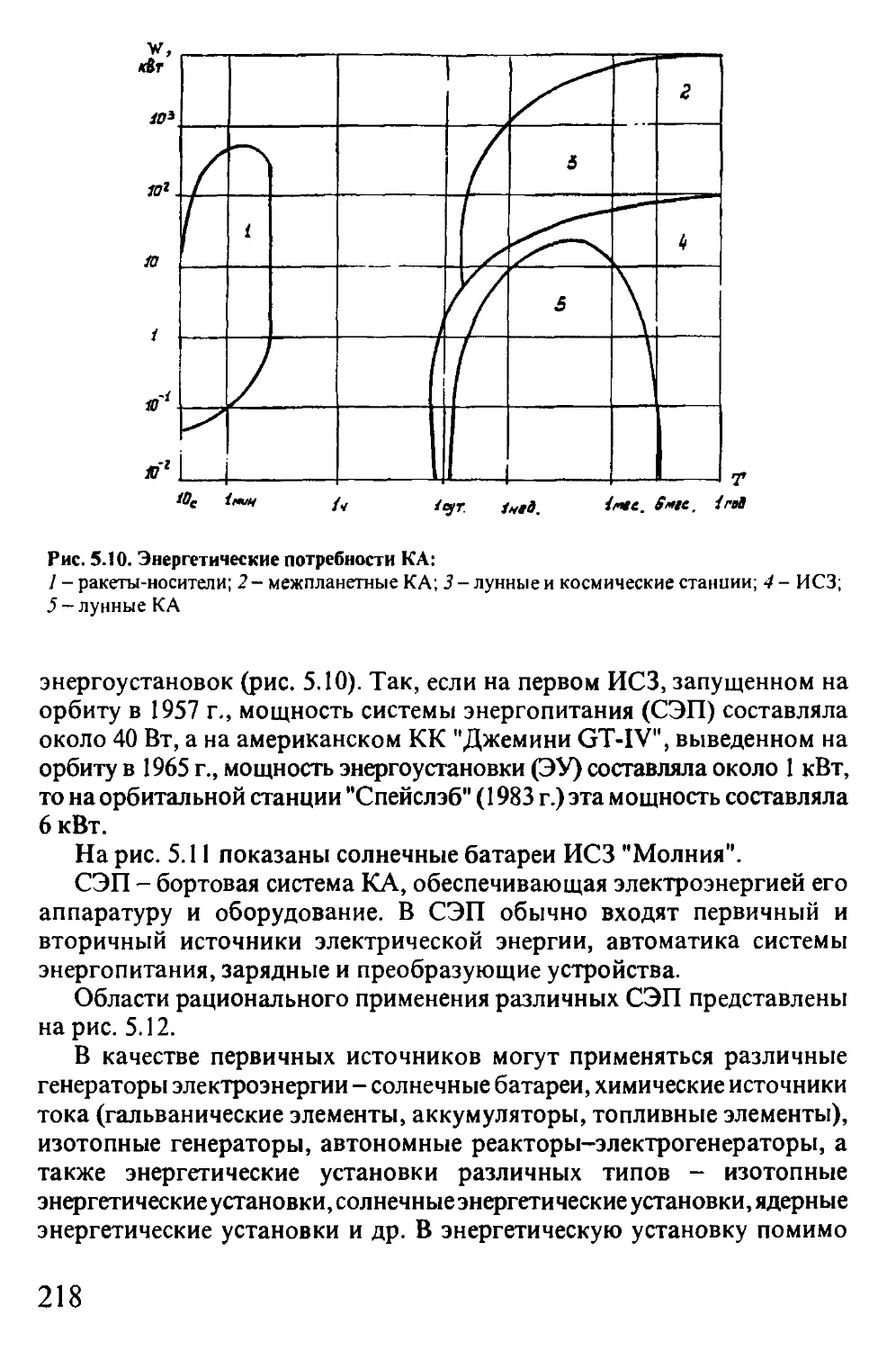
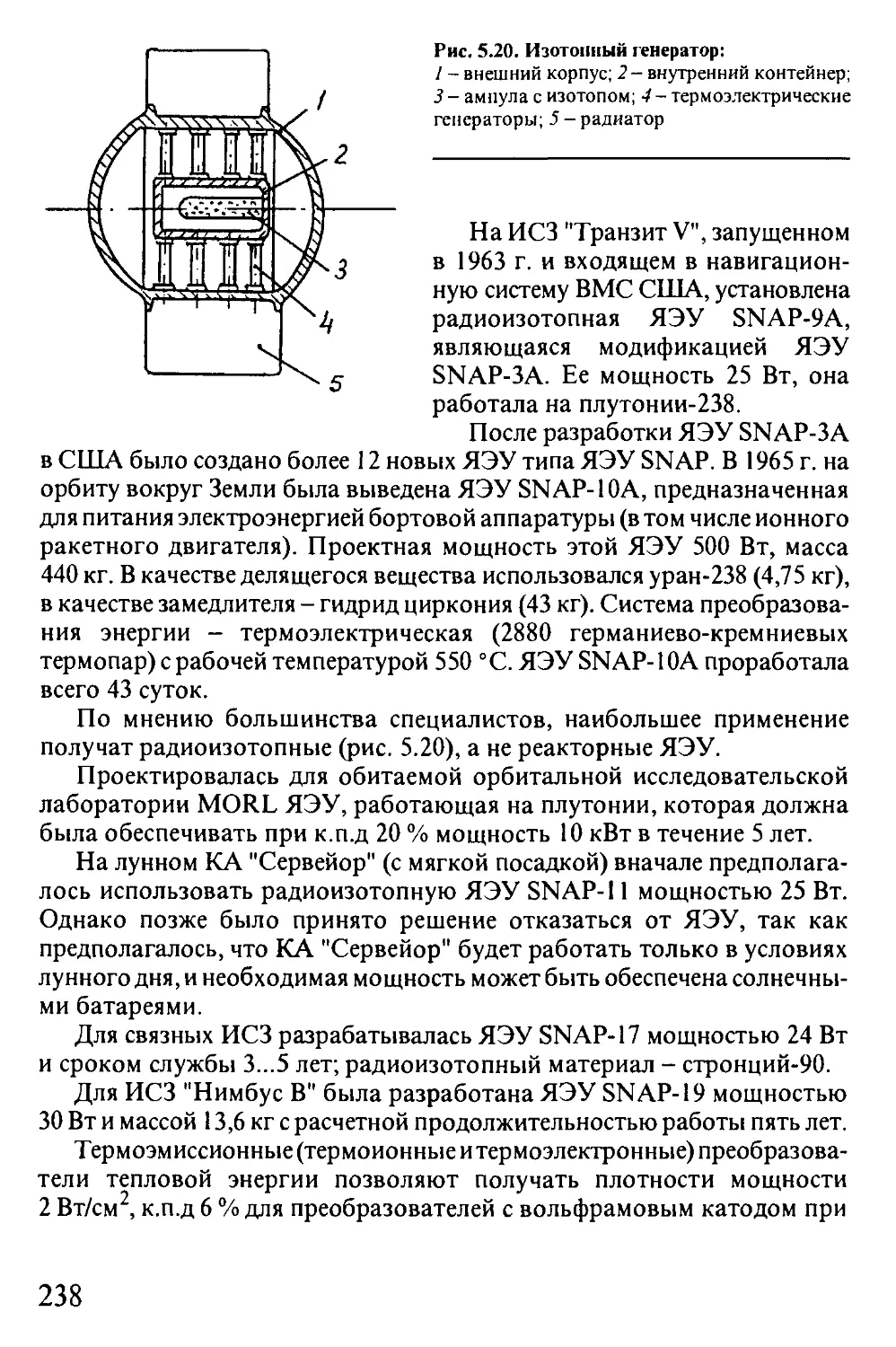
Ориентирование корабля во время полета по орбите и на участке
спуска осуществлялось с помощью системы ориентации. При работе
системы ориентации одна ось корабля была направлена по местной
вертикали к планете, другая - перпендикулярно плоскости орбиты,
третья - продольная ось корабля - перпендикулярно к первым двум,
вдоль линии пересечения плоскости орбиты с плоскостью местного
горизонта.
По завершении программы полета, перед посадкой, от бортового
программно-временного устройства автоматически (или космонавтом)
производится включение системы ориентации корабля. Ориентация
осуществляется в заданном направлении - по Солнцу.
40
При отказе автоматической системы ориентация осуществляется
космонавтом с помощью оптической системы "Взор" и ручного
управления.
Для спуска КК с орбиты на Землю в заданной точке орбиты
включается тормозная двигательная установка, которая уменьшает
скорость корабля до расчетной величины. После этого корабль
переходит на траекторию спуска, где происходит отделение от СА
приборно-агрегатного отсека, который затем сгорает при входе в
плотные слои атмосферы. СА с космонавтом тормозится в атмосфере.
Траектория его спуска выбирается таким образом, чтобы максимальные
перегрузки при входе аппарата в плотные слои атмосферы не превышали
перегрузок, допустимых для человека. Максимальные перегрузки при
торможении СА в атмосфере не превосходят 10 единиц. При снижении
СА корабля до заданной высоты 7 км включается система приземления.
По команде от барометрических реле сбрасывается крышка катапультно-
го люка и космонавт катапультируется из аппарата, приземляясь на
парашюте. Предусмотрена также возможность приземления космонавта
в СА. Непосредственное приземление космонавта происходит с малой
скоростью - 6 м/с, кабины космонавта - 10 м/с. После катапультирования
космонавта включаются радиопеленгационные системы, предназначен-
ные для пеленгации кабины космонавта во время спуска на парашютах
и после их приземления.
Протяженность участка спуска с момента включения тормозной
двигательной установки до приземления корабля составляет около
8000 км, а продолжительность полета примерно - 30 мин. Высокая
точность приземления КК (отклонение точки приземления от расчетной
не превышает 10 км) свидетельствует о совершенстве системы управления
кораблем и точности определения элементов орбиты наземным
измерительным комплексом, ошибки которого непосредственно влияют
на отклонение точки приземления.
Требования к знаниям точности элементов орбиты КК обусловлены
величинами допустимых ошибок при его приземлении. Для приземления
в заданный район необходимо выбрать момент времени включения
тормозной двигательной установки с учетом реальных величин
координат и скорости КК в этот момент времени.
Ошибка в скорости корабля на 1 м/с приводит к отклонению точки
приземления почти на 50 км. Ошибка истинной высоты над поверхнос-
тью Земли, равная 100 м, отклоняет точку приземления на 4,5 км, а
ошибка в направлении вектора скорости по отношению к местному
горизонту на одну угловую минуту приводит к отклонению точки
приземления на 50...60 км.
41
Для предохранения конструкции от воздействия высоких температур
(за счет кинетического нагрева при движении в плотных слоях атмосфе-
ры) внешняя поверхность СА покрыта слоем тепловой защиты.
Как показали Аллен и Эггерс (см. статью в [58]), полное количество
теплоты, подведенное к оболочке за время движения СА в плотных слоях
атмосферы, можно представить в виде
1 ^х
Q = - (£г_ - Ек ),
где CY - коэффициент лобового сопротивления, который включает в
себя коэффициенты волнового сопротивления трения и донного
сопротивления, т.е.
- начальная кинетическая энергия СА;
Е^ - конечная кинетическая энергия СА.
Существуют два способа уменьшения количества теплоты, выделяю-
щейся во время движения СА:
1) СА придается хорошо обтекаемая иглообразная форма, для
которой Сх = Сх = 0, а Сх » Сх ; тогда
Q = - тконКон)>
где мнач, wK0H - массы СА, начальная и конечная соответственно;
Гнач, Исон “ скорости СА, начальная и конечная соответственно.
Таким образом, снижение подводимой к СА теплоты достигается путем
уменьшения потерь кинетической энергии;
2) путем увеличения аэродинамического сопротивления. Для плохо
обтекаемых тел (например, для сферы Сх = 1, сегментального тела 1 <
ла
< Су < 2) велика составляющая С„ (С = 0,02), тогда
Су > Су и Е„ » Е„ .
ла лтр Лнач Лкон
При втором способе основная часть кинетической энергии расходует-
ся на создание мощного отсоединенного прямого скачка уплотнения и
42
вовлечения в движение большого объема воздуха, причем Q < 0,01£^.
Происходит значительное торможение СА уже в верхних слоях
атмосферы. С учетом всего этого с целью уменьшения массы теплозащит-
ного покрытия (ТЗП) и СА в целом форма СА выбрана сферической,
поскольку:
- во-первых, сфера является единственным геометрическим телом,
обладающим минимальной поверхностью при заданном объеме;
- во-вторых, центр приложения аэродинамических сил на всех
режимах полета не перемещается и находится в центре сферы (поэтому
достаточно сместить центр масс вперед по направлению полета, чтобы
движение СА было устойчивым);
- в-третьих, движение сферы в потоке воздуха хорошо изучено
теоретически и всесторонне исследовано в модельных и натурных
экспериментах.
Диаметр сферы равен 2,3 м, при этом объем кабины составляет 5 м3.
Минимальные габариты СА определяются позой космонавта. СА
устанавливается на приборно-агрегатном отсеке теплозащитной
стороной к нему. Механическая связь их осуществляется с помощью
стяжных лент 5, заканчивающихся быстроразъемными замками,
прикрепленными к переднему шпангоуту приборного отсека, на котором
находится также датчик, фиксирующий разделение СА и приборно-
агрегатного отсека. Импульс разделения сообщает им пружинный
толкатель 34, расположенный в центре переднего съемного днища
приборного отсека. Кабина космонавта на КК много просторнее кабины
пилота на самолете. Оборудование размещено с учетом удобства работы
космонавта в полете таким образом, чтобы он имел возможность
осуществлять все необходимые операции по наблюдению, связи с Землей,
контролю полета и управлению кораблем.
Космонавт размещается в КК на катапультируемом кресле, которое
на роликах установлено в центре СА на двух рельсовых направляющих
так, что он обращен лицом вперед по отношению к оси ракеты-носителя.
Кресло установлено таким образом, чтобы обеспечить телу космонавта
удобную позу, при которой перегрузки на участках выведения и спуска
действовали бы на космонавта наиболее благоприятно (в направлении
грудь-спина). Поза космонавта - угол наклона спины 66° к продольной
оси корабля, углы изгиба ног - позволяет переносить номинальные и
аварийные перегрузки спуска, нормально работать в период предстарто-
вой подготовки, орбитального полета и катапультирования. Катапульта
32 установлена за спинкой кресла космонавта, которое является его
рабочим местом в полете и используется при приземлении и для
аварийного покидания корабля.
43
Космонавт одет в защитный скафандр, обеспечивающий жизнедея-
тельность и работоспособность даже в случае разгерметизации кабины
в полете.
В корпусе кресла пилота смонтированы:
- катапультная установка и блок двух ракетных двигателей
(ускорителей); пиротехнические устройства и автоматика катапультиро-
вания с источниками тока;
- отделяемая спинка с привязной системой для фиксации тела при
катапультировании и спуске на парашюте; парашютные системы; система
вентиляции скафандра и парашютный кислородный прибор; носимый
аварийный запас (пищи, воды, снаряжения) и радиосредства для связи
и пеленгации 41, которыми космонавт может воспользоваться после
приземления.
На корпусе СА имеются три люка одинакового размера, два из
которых являются быстро раскрывающимися и отстреливающимися с
помощью пиротехнических систем. Люк № 1 располагается над головой
космонавта (б) и служит для входа в корабль, катапультирования и
выхода; на люке имеется иллюминатор 7. Люк № 2 (4) располагается
слева от пилота и является люком парашютных систем аппарата. Если
космонавт приземляется в аппарате и почему-либо не может воспользо-
ваться люком № I, он может выйти из аппарата через люк № 2, открыв
люк-лаз в парашютном контейнере. Этот люк может открываться и
снаружи. Люк № 3 (26), расположенный в области ног космонавта,
является технологическим и предназначен для монтажа бортового
оборудования; на люке имеется иллюминатор, на котором смонтирован
оптический ориентатор системы "Взор" 25. Оптический ориентатор
позволяет определять положение корабля по отношению к Земле и
производить ориентацию корабля в случае применения ручного
управления. Он состоит из двух кольцевых зеркал - отражателей,
светофильтра и стекла с сеткой-шкалой. Лучи, идущие от линии
горизонта, попадают на первый отражатель и далее через стекла
иллюминатора проходят на второй отражатель, который направляет их
через стекло с сеткой-шкалой в глаз космонавта. При правильной
ориентации корабля относительно вертикали космонавт видит
изображение горизонта в виде кольца.
Через центральную часть иллюминатора космонавт просматривает
находящийся под ним участок земной поверхности. Положение
продольной оси корабля относительно направления полета определяется
наблюдением движения земной поверхности в поле зрения ориентатора.
Сетка-шкала оптического ориентатора имеет сеть концентрически
расположенных относительно оптической оси прибора окружностей.
С помощью органов управления, космонавт может развернуть
корабль так, чтобы проекция линии горизонта Земли была видна в
44
ориентаторе концентрично окружностям на сетке-шкале, т.е. в форме
концентричного кольца, а направление движения земной поверхности
совпадало с курсовой чертой сетки-шкалы. Это будет свидетельствовать
о правильной ориентации корабля. В случае необходимости поле зрения
ориентатора может закрываться светофильтром или шторкой.
Справа в верхней полусфере (по отношению к космонавту) на корпусе
СА располагается третий иллюминатор 30. Все три иллюминатора
снабжены жаропрочными стеклами и позволяют космонавту произво-
дить наблюдения в течение всего полета.
Прямо перед космонавтом на расстоянии вытянутой руки перпендику-
лярно линии визирования располагается приборная доска. На приборной
доске 27 расположен ряд стрелочных индикаторов и сигнальных табло
контроля бортовых систем, прибор контроля режимов спуска, электри-
ческие часы и прибор "Глобус", позволяющий определить текущее
местоположение корабля над Землей и ожидаемое место посадки.
Пульт управления установлен слева от космонавта на парашютном
контейнере. На пульте находятся рукоятки включения ручной ориента-
ции, управления шторками иллюминаторов, управления радиотелефон-
ной системой, системами кондиционирования и регулирования
температуры воздуха в кабине, а также включения тормозного двигателя.
Ручка управления ориентацией корабля 28 находится под правой рукой
космонавта.
Справа от люка № 1 на ферме установлены источники электропитания
системы энергоснабжения корабля и бортовой коммутатор питания 31,
аза креслом и частично справа и слева от него находятся блоки системы
кондиционирования воздуха, система записи сохраняемой информации,
блоки аварийной системы терморегулирования, автоматика и аппаратура
катапультирования 33.
Система кондиционирования поддерживает в кабине пилота
нормальные давление, концентрацию кислорода и углекислого газа (не
выше 1 %), температуру на уровне 15...22 °C и относительную влажность
в пределах 30...70 %. Регенерация воздуха осуществляется автоматически
с использованием высокоактивных химических соединений.
Очистка воздуха от загрязнения вредными примесями, выделяющими-
ся в результате жизнедеятельности человеческого организма и работы
аппаратуры, осуществляется специальными фильтрами.
Поддержание заданного температурного режима с большой
точностью осуществляет система терморегулирования. Отвод тепла из
кабины производится продувкой воздуха через радиатор-теплообменник,
в котором циркулирует жидкий теплоноситель и температура которого
поддерживается стабильной. Расход воздуха через радиатор зависит от
температуры в СА и регулируется автоматически. Для поддержания
45
стабильной температуры теплоноситель через быстроразъемный
комплексный герметический вывод 8 подается в радиационный
теплообменник с системой автоматически управляемых жалюзи 16,
обеспечивающий требуемый температурный режим в приборном отсеке.
В области ног, слева от космонавта, располагаются два бака с
питьевой водой 43 и аппаратура системы обеспечения жизнедеятельности
42. Контейнер с пищей находится справа от космонавта.
Телевизионная система осуществляет передачу на Землю изображения
космонавта, позволяя визуально контролировать его состояние.
Одна телевизионная камера 44 передает изображение космонавта в
анфас, другая 29 - в профиль.
Для передачи изображений космонавта использовалась специальная
телевизионная аппаратура. Изображения, передававшиеся с борта,
регистрировались на кинопленку. Одновременно на этой же пленке с
точностью до одного кадра записывались метки времени, синхронно с
метками времени на телеметрических лентах. Благодаря этому при
сопоставлении пленок можно определить, какие физиологические
изменения сопутствовали тем или иным действиям космонавта в данный
момент времени.
Внутренняя поверхность кабины пилота, парашютный контейнер,
окантовки люков и иллюминаторов, поверхности элементов конструкции
и оборудования закрыты панелями, оклеенными поролоном.
Двусторонняя связь космонавта с Землей обеспечивалась радиотеле-
фонной системой "Заря", работающей в диапазонах коротких волн (9,019
и 20,006 МГц) и ультракоротких волн (143,625 МГц), имеющей на
внешней поверхности корабля антенны 1, 10, 18. УКВ канал использовал-
ся для связи с наземными пунктами на расстояниях до 1500...2000 км и
обеспечивал, как показал опыт, связь с территорией Советского Союза
на большей части орбиты.
На корабле установлена радиосистема "Сигнал", предназначенная
для оперативной передачи части телеметрической информации,
пеленгации корабля и отработки вопросов радиотелефонной связи со
спутниками. Система работала в диапазоне коротких волн на частоте
19,995 МГц и имеет антенны 2, 21.
Передача информации о состоянии космонавта, физических условиях
в кабине и приборном отсеке, о работе бортовой аппаратуры осуществля-
лась с помощью радиотелеметрических систем на наземные измеритель-
ные комплексы. Антенны телеметрической системы 23 расположены на
приборном отсеке. Радиотелеметрические системы работали в двух
режимах:
- непосредственной передачи телеметрической информации на
измерительные пункты в моменты пролета корабля;
46
— запоминания (накапливания) информации с последующим
воспроизведением и передачей этой информации при пролете корабля
над измерительными пунктами.
Управление кораблем помимо автоматического было предусмотрено
также путем подачи команд с Земли, для чего на стяжных лентах
установлены антенны командной радиолинии 3. На борту имелась
система траекторных измерений для контроля орбиты с аитенно-
фидерными устройствами 13. Антенны систем "Заря" и "Сигнал"
штыревые ленточного типа (в сложенном состоянии имеют вид
"рулетки") раскрываются, как и антенны телеметрической системы -
после отделения корабля от ракеты-носителя.
Приборный отсек имеет герметически замкнутый корпус, выполнен-
ный в форме двух усеченных правильных круговых конусов, состыкован-
ных по большому основанию. В приборном отсеке размещены радиотеле-
метрическая аппаратура, аппаратура управления полетом корабля, часть
аппаратуры для научных исследований (приборы для изучения
космических лучей и коротковолнового излучения Солнца), аппаратура
терморегулирования, источники питания 35 и тормозная двигательная
установка.
Приборы и источники тока в виде блоков устанавливаются на корпусе
приборного отсека и приборной раме таким образом, чтобы можно было
в случае необходимости заменить их без расстыковки конусов.
Гироприборы тормозной двигательной установки и системы
ориентации устанавливаются на индивидуальных приборных рамах.
На наружной поверхности приборного отсека на переднем шпангоуте
располагаются 14 баллонов 9 с запасом сжатого газа системы ориента-
ции, вентиляции скафандра и системы подачи топлива к тормозному
двигателю.
Рулевые сопла системы ориентации корабля по каналу тангажа 12,
по каналу курса 15 расположены в главных плоскостях связанной
системы координат, по каналу крена 24-в области переднего шпангоута
верхнего конуса приборного отсека. Здесь же размещены комплексные
герметические выводы 14, обеспечивающие выход кабеля из приборного
отсека, и отрывной штепсельный разъем 11, с помощью которого
коммутируются электрические цепи КА и ракеты-носителя. Поверхность
заднего конуса приборного отсека служит радиатором - теплообменни-
ком системы терморегулирования. К заднему конусу крепится теплоизо-
ляционный экран 79 тормозной двигательной установки.
Тормозная двигательная установка представляет собой жидкостный
ракетный двигатель 39 с высокооборотным турбонасосным агрегатом
(ТНА) 40, размещенным внутри кольцевых баков окислителя 38 и
горючего 37, выполненных в форме круговых торов. Для обеспечения
47
работы двигательной установки и ее автоматики используется пневмосис-
тема с запасом газа в основном пневмоблоке 36.
Тормозная двигательная установка имеет достаточно высокую
плотность компоновки и конструктивно выполнена в виде автономного
блока, имеющего свой корпус, вмонтированный внутри приборного
отсека со стороны кормы.
Стабилизация корабля во время работы тормозной двигательной
установки производится специальной системой, имеющей исполнитель-
ные органы по каналам тангажа 77, курса 20 и крена 22, расположенные
в главных плоскостях аппарата на экранеТДУ и работающие на "мятом"
парогазе.
1.4.3. Конструктивно-компоновочная схема
корабля "Восход" и его устройство
"Восход" - наименование серии многоместных КК, на которых
выполнили полеты по околоземной орбите космонавты В.М. Комаров,
К.П. Феоктистов, Б.Б. Егоров, П.И. Беляев, А.А. Леонов.
В задачи полетов входило:
- испытание нового многоместного пилотируемого корабля,
-исследованиеработоспособности и взаимодействия в полете группы
космонавтов, специалистов различных областей науки и техники,
- проведение физико-технических исследований и расширенной
программы медико-биологических исследований.
Трехместный корабль "Восход" представлял собой модификацию
корабля "Восток". Геометрические габаритные размеры и формы СА и
приборно-агрегатного отсека сохранены, а масса увеличена до 5320 кг.
Изменена конструктивно-компоновочная схема СА в связи с
увеличением экипажа. Экипаж в СА располагался таким образом, что
корпус парашютного контейнера и его люк № 2 находились над головами
космонавтов, люк № 1 - справа, а люк № 3 - слева (см. рис. 1.15, 1.16).
Это привело к необходимости отказаться от катапультирования
космонавтов при приземлении и применить посадку экипажа в СА.
Для этого была разработана (в дополнение к парашютной системе)
и установлена на СА специальная система "мягкой" посадки, представля-
ющая собой твердотопливный двигатель, включающийся непосред-
ственно перед касанием поверхности грунта и уменьшающий скорость
в момент контакта аппарата с поверхностью Земли практически до нуля.
Численное изменение экипажа потребовало изменения или модификации
некоторых систем корабля, в частности, системы обеспечения жизнедея-
тельности экипажа.
48
Корабль "Восход" отличался от корабля "Восток" еще и тем, что имел
дополнительную резервную тормозную твердотопливную двигательную
установку, которая устанавливалась в передней части корабля и
крепилась на ложементе стяжными лентами, новое приборное оборудова-
ние - дополнительная система ориентации с ионными датчиками,
усовершенствованная телевизионная и радиотехническая аппаратура и
ДР-
Космонавты располагались в креслах, установленных в ряд в
поперечной плоскости, и впервые совершали полет без защитных
скафандров.
Корабль "Восход-2" являлся двухместным и был предназначен для
выполнения выхода космонавта в открытый космос. Для этого
"Восход-2" был оборудован соответствующим образом: для обеспечения
выхода космонавта в космос без разгерметизации кабины корабля были
применены специальная шлюзовая камера, размещенная на люке № 1,
системы шлюзования и элементы систем обеспечения и контроля выхода
человека в космос. Шлюзовое устройство конструктивно выполнено
геометрически изменяемой формы из эластичной ткани и в сложенном
виде под специальным защитным экраном крепится на люк № 1.
Для сохранения цилиндрической формы в сложенном и рабочем
состоянии в оболочку шлюзового устройства вмонтированы металличес-
кие кольца - ребра жесткости. Привод в рабочее положение осуществля-
ется с помощью сжатого газа, поступающего в оболочку устройства.
Космонавт А.А. Леонов в скафандре с автономной системой
обеспечения жизнедеятельности впервые в истории совершил выход в
открытое космическое пространство, практически подтвердив возмож-
ность пребывания и работы вне космического корабля.
1.4.4. Конструктивно-компоновочная схема
и устройство корабля "Меркурий"
"Меркурий" - серия первых американских одноместных космических
кораблей, предназначенных для околоземных орбитальных полетов.
На корабле "Меркурий" вначале были совершены первые суборби-
тальные полеты (по баллистической траектории), а затем полеты по
орбите ИСЗ с высотой в перигее около 160 км и в апогее до 285 км.
Корабль имел форму усеченного правильного кругового конуса,
переходящего в небольшой высоты цилиндр, на который установлен еще
один небольшой усеченный конус (рис. 1.17), Диаметр основания
корабля, являющегося основанием усеченного конуса, равен 1,88 м, а
общая длина 2,74 м. В большом усеченном конусе размещена герметичес-
49
Рис. 1.17. Космический корабль "Меркурий": 1 - аэродинамическая игла; 2 - система
аварийного спасения; 3 - двигатели рыскания; 4 - герметическая кабина с двойными
стенками; 5 - двигатели крена; б - двигатели отделения; 7- тормозные двигатели
ки замкнутая кабина пилота и различные системы, обеспечивающие
жизнедеятельность космонавта и полет корабля.
В цилиндрическом отсеке находится парашютный контейнер
основного и тормозного парашютов, а в малом конусе, являющемся
антенным обтекателем, - антенны. К коническому антенному отсеку с
помощью пироболтов крепится ферма, несущая два ракетных двигателя
твердого топлива (РДТТ). Основной РДТТ 2 является двигателем
системы аварийного спасения и служит для увода корабля после
отделения от ракеты-носителя на безопасное расстояние от места аварии.
Этот двигатель развивает тягу 22,7 кН и имеет три сопла, отклонен-
ных в сторону от продольной оси для предохранения корпуса корабля
от воздействия выхлопных газов во время его работы. Малый РДТТ
используется для отделения двигателя системы аварийного спасения и
увода вместе с ферменной конструкцией его крепления в сторону от КК
в случае протекания полета в нештатном режиме.
В основании корабля находится теплозащитный экран, выполненный
из абляционного стеклопластика, к которому в центре стяжными лентами
крепится, ТДУ, представляющая собой блок из трех твердотопливных
двигателей. В блоке ТДУ помимо основных РДТТ размещены еще три
малых РДТТ 6, предназначенных для отделения корабля от ракеты-
носителя. К основанию корпуса корабля крепится кресло астронавта с
системой привязных ремней. Кресло размещается на легкой опоре,
выполненной по форме тела астронавта в позе, удобной для восприятия
перегрузок в наиболее благоприятном направлении (грудь-спина), лицом
вперед по оси ракеты-носителя.
Поза астронавта - спина и ноги ниже колен параллельны друг другу
и перпендикулярны продольной оси корабля - позволяет безопасно
переносить перегрузки при выведении, спуске и в аварийных ситуациях,
50
а также нормально работать при подготовке к старту. Ноги астронавта
удерживаются на месте с помощью укрепленных в полу кабины
фиксаторов, в которые входят носки обуви. Непосредственно перед
астронавтом установлены: перископ, основные приборные доски и
пульты управления. В середине верхней части приборной доски находятся
приборы контроля ориентации и индикаторы угловых скоростей
вращения КК. Контроль ориентации корабля осуществляется по
приборам, работающим от двух гироскопов, которые можно корректиро-
вать по сигналам датчиков горизонта. Бортовые часы показывают
текущее время по гринвичскому меридиану, время, прошедшее с момента
старта и оставшееся до момента запуска тормозного двигателя, время
момента запуска ТДУ. Слева впереди находится приборная панель
системы программного управления, переключатели рода работ системы
управления и органы управления системы наддува кабины. Еще левее
распложена консоль управления ориентацией. Рядом с ручками
управления находятся специальные рукоятки (защищенные от случайного
включения предохранительными колпачками), обеспечивающие
разгерметизацию кабины в случае пожара и необходимости удаления
токсичных газов и выполнения наддува кабины. Справа впереди
находятся приборы системы кондиционирования, показывающие
температуру и давление в кабине, количество кислорода и хладагента,
температуру в теплообменнике. В правой части приборной доски
размещены органы управления и приборы электро- и радиооборудова-
ния, световые сигнализаторы, индикаторы и предохранители.
Все приборы расположены таким образом, чтобы обеспечить быстрое
и удобное считывание их показаний. Каждый компонент оборудования
дублирован, а некоторые системы, как например, система управления,
имеют двойное дублирование. Основной режим управления полетом (и
работы бортовых систем) - автоматический, однако предусмотрен и
ручной:
-запуск ТДУ;
- раскрытие парашюта;
-управлениереактивной системой ориентации - по каналам тангажа,
курса 3 и крена 5 (работающей на перекиси водорода).
Ручное управление положением корабля осуществляется рукояткой,
находящейся под правой рукой, левая рука располагается на включателе
системы аварийного спасения.
Прямо перед астронавтом над приборной панелью расположен
иллюминатор, через который он может наблюдать за состоянием системы
аварийного спасения на активном участке и за горизонтом - при запуске
ТДУ. Наблюдая через иллюминатор за звездами или за поверхностью
Земли, астронавт может определить и скорректировать рыскание или
снос спутника, подобно тому, как это делается на самолете.
51
Вход и выход из корабля осуществляются через люк, находящийся
справа от иллюминатора. Быстрое сбрасывание крышки люка произво-
дится пирозарядом, размещенным по периметру люка. Подрыв
пирозаряда может быть произведен как изнутри, так и снаружи кабины.
Для выхода из корабля после его посадки на воду предусмотрен еще
один аварийный люк, обеспечивающий выход через отсек парашютных
систем. Для перехода через этот люк астронавт должен отодвинуть в
сторону правую часть приборной доски, снять круглую герметичную
крышку передней стенки кабины, вытолкнуть из носовой части пустой
контейнер из-под парашюта и выползти вверх, развернуть надувной
спасательный плот и прыгнуть на него.
Аппаратура системы обеспечения жизнедеятельности расположена
под креслом астронавта. За спиной астронавта расположены баки с
перекисью водорода для питания систем управления. Справа от
астронавта находится аппаратура радиосвязи.
Для уменьшения нагрузки на астронавта и на аппарат при посадке
(на воду или на сушу до значений, находящихся в пределах выносливос-
ти) предусмотрено надувное амортизирующее устройство, расположен-
ное в сложенном состоянии между основанием корпуса корабля и его
теплозащитным экраном. Сложеный пневматический амортизатор
представляет собой посадочную подушку из прорезиненной стеклоткани,
раскрываемую под воздействием веса теплозащитного экрана, отделяемо-
го от корпуса аппарата после раскрытия основного или запасного
парашюта.
После запуска ТДУ, предназначенной для обеспечения схода
космического аппарата с орбиты, блок ТДУ отбрасывается, и аппарат
начинает входить в атмосферу. На высоте примерно 7 км автоматически
раскрывается тормозной парашют. Астронавт может, управляя
барометрическим контрольным клапаном (баростатом), раскрывать
тормозной парашют на высоте до 15 км.
Для высоты 3,5 км аппарат стабилизируется при помощи тормозного
парашюта, после чего обтекатель антенны, к которому прикреплен
тормозной парашют, сбрасывается. При сбрасывании обтекателя
антенны освобождается основной парашют.
В случае несрабатывания основного парашюта вводится в дей-
ствие запасной парашют. Заключительной операцией является отделение
теплозащитного экрана, который вытягивает посадочную амортизацион-
ную подушку.
Для коммутации электрических цепей корабля и ракеты-носителя
используется отрывной штепсельный разъем.
Антенны системы радиоконтроля орбиты расположены в цилиндри-
ческом отсеке. Здесь же находятся и средства, облегчающие поиск
52
корабля после посадки: дымовой сигнал, буй и световой сигнал,
дополняющие систему аварийно-спасательной связи.
Перечень некоторых систем и элементов конструкции корабля
"Меркурий" приведен ниже.
Массовые .характеристики (в кг) корабля "Меркурий"
Стартовая масса.................................................... 1308,4
Орбитальная масса.....................................................1010
Масса при входе в атмосферу............................................879
Корпус корабля .........................................................75
Кабина..................................................................59
Система аварийного спасения ...........................................310
Оборудование кабины астронавта..........................................31
Подвеска астронавта.....................................................20
Пульты ............................................................... 7,7
Навигационные приборы ............................................... 18,2
Оборудование радиосвязи.................................................96
Исследовательские приборы............................................. 6,8
Самописцы ..............................................................II
Источники питания .................................................... 7,1
Программное устройство .................................................95
Астронавт в скафандре ..................................................95
Прочие элементы конструкции.......................................... 60,5
Теплозащитный экран....................................................181
Система автоматического контроля положения..............................92
Система возвращения ....................................................75
Тормозная двигательная установка........................................95
1.4.5. Конструктивно-компоновочная схема
и устройство корабля "Джемини"
"Джемини" - американские двухместные КК, предназначенные для
полетов по околоземной орбите. Конструкторы при разработке КК
"Джемини" стремились обеспечить максимальную преемственность
одноместных КК "Меркурий" и вместе с тем обеспечить возможность
маневрирования на орбите, стыковку с другим КК, выход астронавта
в космическое пространство. С этой целью габаритные размеры аппарата
по сравнению с КК "Меркурий" были увеличены примерно на 14 %, что
позволило увеличить объем кабины экипажа на 50 % при общем
увеличении объема КК на 43 %.
В КК "Джемини" была упрощена система управления, поскольку
опыт КК "Меркурий" показал, что астронавт способен эффективно
управлять КК в космическом пространстве. Здесь также была применена
Модульная конструкция систем, при которой отдельные блоки легко
заменить независимо от других. Модули размещались вне герметической
кабины. Модульный принцип применен и к кабелям.
53
Рис. 1.18. Компоновка космического корабля "Джемини”:
А - возвращаемый отсек; Б-вспомогательный отсек; а - система стыковки на орбите; б -
секция системы управления при входе в атмосферу; в- кабина экипажа; г-секция тормозной
двигательной установи (ТДУ); О - секция оборудования; 1 - радиолокационная станция;
2 - стабилизирующий парашют; 3 - элементы системы стыковки; 4 - баллоны со сжатым
газом; 5 - приборы сисгсмы управления; 6 - управляющие двигатели; 7 - приборная доска;
8 - иллюминатор; 9 - ручка системы ориентации; 10 - аккумуляторные батареи; II -
катапульта; 12 - автоматика катапультируемого кресла; 13 - двигатели; 14 - ТДУ; 15 -
топливные баки; 16-топливные элементы; 17. 18 - двигатели; /9-теплозащитный экран;
20 - основной запас кислорода; 21 - оборудование; 22 - блок системы кондиционирования
Компоновка КК "Джемини" (рис. 1.18) КА состоит из двух основных
отсеков: возвращаемого А и вспомогательного Б, каждый из которых
состоит из отдельных секций. Общая длина КК около 6 м, наибольший
диаметр (в основании вспомогательного отсека) около 3 м.
Возвращаемый отсек по конфигурации подобен возвращаемому
отсеку КК "Меркурий". Общая длина отсека 3,5 м, диаметр основания
2,3 м. Отсек состоит из трех секций: кабины экипажа в, системы
управления аппаратом при входе в атмосферу б и системы стыковки на
орбите а.
Секция, где распложена герметическая кабина экипажа, внешне
представляет собой усеченный правильный круговой конус с диаметром
оснований 2,3 м и 0,96 м и высотой 1,9 м.
В кабине экипажа установлены два катапультируемых кресла для
астронавтов, панель с приборами, элементы управления КК и часть
оборудования системы жизнеобеспечения.
54
Большая часть системы кондиционирования смонтирована в виде
отдельного блока 22, помещенного под сидениями астронавтов.
В систему кондиционирования входят вентиляторы для продува кабины
и скафандров, системы удаления углекислого газа и воды, регуляторы
давления кислорода и различные распределительные клапаны.
Для рационального использования объема кабины астронавты сидят
рядом, но каждое кресло развернуто по отношению друг к другу и для
улучшения условий при катапультировании наклонено вперед к
продольной оси КК. Катапультирование производится в аварийных
ситуациях и при приземлении катапультой 11, расположенной за спинкой
кресла. Здесь же расположена автоматика катапультирования кресел 12.
Предусмотрена и посадка в космическом аппарате. Над головами
астронавтов находятся индивидуальные люки для входа в КК, выхода
и катапультирования.
Крышки люков с вмонтированными в них иллюминаторами 8
сбрасываются при катапультировании с помощью пиротехнических
систем. Иллюминаторы обеспечивают обзор на орбите при стыковке,
наблюдение за горизонтом при запуске тормозной двигательной
установки, наблюдение за поверхностью Земли при посадке.
Впереди, в центре между креслами астронавтов, расположена
приборная доска 7, ручка управления системой ориентации 9, ручка
катапультирования кресел и аварийного спасения.
Командир корабля работаетручкой управления системой ориентации
правой рукой, а второй астронавт (при необходимости) - левой. Второй
астронавт контролирует также работу цифрового вычислительного
устройства, топливных элементов и работу стыковочного аппарата.
Команда на катапультирование может быть инициирована любым
астронавтом. На командира возложен контроль за работой двигателей
PH при выведении на орбиту. Обе крышки люков сбрасываются
одновременно и одновременно катапультируются оба кресла. При
помощи ручки аварийного спасения одновременно запускаются четыре
двигателя /^/тормозной двигательной установки и происходит отделение
КК от PH на большой высоте при малом аэродинамическом сопротивле-
нии.
Внутренний объем корпуса КК, помимо кабины экипажа, разделен
на одиннадцать негерметизированных отсеков, в которых размещаются
блоки оборудования различных систем 21.
Для доступа к оборудованию в каждой секции имеется люк.
Такое размещение блоков вызывает необходимость решать проблему
их охлаждения. Она решается следующим образом. Тепло от блоков
передается на панели через слой теплопроводного желеобразного
вещества, содержащего частицы серебра. С панелей тепло снимается с
55
помощью жидкого теплоносителя, который насосами прокачивается
через радиатор-теплообменник, смонтированный в корпусе переходного
отсека между КК и PH. Циркуляция жидкости осуществляется в
пустотелых утолщениях, находящихся со стороны внутренней поверхнос-
ти ребер жесткости, для обеспечения высокой степени механической
защиты, что вызвано вероятностью метеоритной опасности при
длительном полете.
В основании конуса секции кабины экипажа расположен теплозащит-
ный экран, выполненный из абляционного материала.
Непосредственно перед кабиной экипажа находится система
управления КК при входе в атмосферу. Секция, в которой находится
система, выполнена в виде цилиндра диаметром 0,96 м и длиной 0,45 м.
Здесь находятся баки с топливом /5 и баллоны со сжатым газом 4,
регуляторы давления, клапаны и блок из 16-ти управляющих двигателей
6 с тягой по 110 Н. Двигатели объединены в два параллельных кольцевых
узла по восемь двигателей в каждом. В этих узлах двигатели размещаются
парами с противоположно направленными соплами (срез которых
выполнен заподлицо с обшивкой секции) на угловом расстоянии в 90°
по окружности кольца. Система работает на двухкомпонентном
самовоспламеняющемся топливе. Для каждого узла двигателей имеются
отдельные мягкие топливные баки, помещенные в цилиндрические
титановые корпусы. Система подачи топлива-вытеснительная. Сжатый
азот поступает из сферического баллона в пространство между
титановым корпусом и мягким баком и вытесняет топливо.
После вывода на орбиту самой сложной и ответственной задачей
является ориентация КК в момент включения и в течение всего времени
работы ТДУ.
В системе реактивного управления применено дублирование, и она
используется только для ориентации при работе ТДУ и для стабилизации
в процессе полета в плотных слоях атмосферы.
Секция системы стыковки на орбите представляет собой усеченный
конус с диаметром в вершине 0,76 м и длиной 0,94 м, установленный на
цилиндре диаметром 0,96 м и длиной 0,23 м. Она разделена на носовое
и кормовое отделения поперечной панелью на расстоянии 0,23 м от
передней части конуса. В переднем отделении находится радиолокацион-
ная станция 1, работающая в диапазоне частот 390... 1550 МГц и имеющая
антенну с широкой диаграммой направленности, а также стабилизирую-
щий парашют 2. Антенна конструктивно выполнена в виде решетки из
четырех элементов, вписанных в объем собственно радиолокационной
станции, и открывается после сбрасывания крышки, защищающей ее при
движении в плотных слоях атмосферы.
56
Радиолокационная система дает информацию по углам визирования,
дальности и скорости сближения КК в пределах от 360 км до нескольких
десятков сантиметров.
В кормовом отделении объемом 0,254 м3 размещается основной
парашют 3, диаметр которого 25,6 м.
Вспомогательный отсек КК имеет форму усеченного конуса с
диаметром оснований 2,28 и 3,05 м и длиной 2,28 м. В отсеке имеются
секция ТДУ г и секция оборудования д. Здесь размещены четыре
сферических РДТТ 14. Двигатели установлены на крестообразной раме,
выполненной из алюминиевого сплава. В этой же секции установлены
шесть двигателей системы ориентации и маневрирования на орбите.
Четыре двигателя 13 с тягой по 450 Н, расположенные через 90° по
передней кромке секции, обеспечивают перемещение аппарата по
тангажу и рысканию. Векторы тяг этих двигателей направлены
перпендикулярно к оси симметрии аппарата и проходят через его центр
масс.
Два двигателя с тягой по 380 Н, расположенные через 180° по
передней кромке секции ТДУ, обеспечивают торможение КК.
В секции оборудования размещены топливные элементы 16, запасы
жидких водорода и кислорода для них, десять двигателей 17,18 и запасы
топлива для системы ориентации и маневрирования на орбите /5, запасы
кислорода 20 и оборудование системы обеспечения жизнедеятельности,
оборудование системы связи, которое необходимо только на орбите, и
электронное оборудование.
Водородно-кислородные топливные элементы, учитывая требуемую
мощность и время существования на орбите (две недели), оказались легче,
чем серебряно-цинковые аккумуляторы. Из-за больших габаритных
размеров самих топливных элементов и баллонов системы их криогенно-
го хранения они размещаются в переходном отсеке. Поэтому в СА
установлены четыре серебряно-цинковые аккумуляторные батареи 10
и два баллона со сжатым до высокого давления кислородом (для дыхания
в аварийных ситуациях и на участке спуска).
Основной запас кислорода для дыхания находится в отдельном модуле
в секции оборудования 20. В другом модуле находятся топливные
элементы /би криогенная система подачи с соответствующими органами
управления. В третьем модуле совмещены топливные баки 15 системы
ориентации и маневрирования на орбите, соответствующие клапаны
наддува и регуляторы. Насосы для охлаждения и теплообменники
контура охлаждения системы кондиционирования смонтированы в виде
отдельного блока. Продольные элементы конструкции и обшивка
вспомогательного отсека образуют радиатор, обеспечивающий отвод
теплоты от систем аппарата.
57
В секции оборудования установлены десять двигателей системы
ориентации и маневрирования на орбите. Два двигателя /7 с тягой по
450 Н, расположенные через 180° на задней кромке вспомогательного
отсека, - для поступательного ускорения КК.
Восемь двигателей 18 с тягой по 110 Н расположены через 45° по
задней кромке вспомогательного отсека. Они обеспечивают управление
по тангажу, рысканию и крену. Включаются они парами. Векторы тяги
направлены по касательной к поверхности отсека.
Здесь топливо также самовоспламеняющееся, подается из общей
системы баков. Для подачи топлива используется газообразный гелий
(по сравнению с азотом дает выигрыш в массе около 9 кг).
Второй комплект баков с окислителем, горючим и гелием (общей
массой 320 кг) предназначен для маневрирования на орбите с целью
поиска, стыковки и последующего маневрирования в состыкованном
состоянии двух аппаратов. Масса КК в состыкованном виде возрастает
с 3080 до 3540 кг.
Все двигатели системы ориентации и маневрирования на орбите
выполнены по одной схеме и могут работать как в импульсном, так и
в непрерывном режимах. Срезы сопл утоплены заподлицо с обшивкой
отсека. Восемь двигателей системы маневрирования: шесть 13, /7 с тягой
по 450 Н и два 18 с тягой по 380 Н, управляются только командиром КК.
Вспомогательный отсек с кормовой стороны закрыт теплозащитным
экраном 19, предохраняющим от солнечного излучения размещенные в
секции оборудования баки с криогенным топливом.
1.4.6. Конструктивно-компоновочная схема
и устройство корабля "Аполлон"
"Аполлон" - наименование серии трехместных КК, на которых
впервые в истории человечества американские астронавты летом 1969 г.
совершили полеты к Луне, высадку на Луну с последующим возвращени-
ем на Землю.
Из возможных методов осуществления полета Земля - Луна - Земля
по минимуму стоимости и высокой вероятности выполнения программы
в кратчайшие сроки был выбран вариант с выходом на орбиту Луны и
возвращением сначала на орбиту Луны, а затем прямой посадкой на
Землю. По схеме полета КК "Аполлон", состоящий из основного корабля
с экипажем из трех человек, отсека оборудования и лунного экспедицион-
ного корабля, выводится тяжелой PH "Сатурн-5" на траекторию полета
к Луне. Близ Луны КК переводится на селеноцентрическую орбиту. Двое
из трех астронавтов переходят из отсека экипажа основного корабля в
58
лунный корабль, который отде-
ляется, производит снижение и
посадку на Луну. После выпол-
нения предусмотренных планом
действий на Луне астронавты
осуществляют в лунном корабле
взлет на селеноцентрическую
орбиту, сближение и стыковку с
основным кораблем. Астронав-
ты переходят в отсек экипажа
основного корабля. Затем осу-
ществляется отделение основно-
го корабля от лунного и старт к
Земле. Отсек оборудования от-
стыковывается после входа в
плотные слои атмосферы. Основ-
ной корабль производит управ-
ляемый полет В атмосфере И на Рис. 1.19. Отсек экипажа КК "Аполлон"
парашютах опускается на повер-
хность (на воду или грунт).
Командный отсек (рис. 1.19) имеет форму правильного кругового
конуса, скругленного в вершине и у основания. В нем находится связное,
навигационное, вычислительное и индикаторное оборудование 10. Обзор
из отсека экипажа обеспечивается шестью иллюминаторами. Вокруг
шлюзовой камеры размещены три парашюта 2. Конструктивно
командный отсек КК состоит из двух капсул, одна из которых представ-
ляет собой кабину экипажа, а вторая - теплозащитный экран.
Для перехода в лунный корабль в вершине конуса расположена
шлюзовая камера 6. Система навигации и управления является
автономной и состоит из БЦВМ, трехосной гидростабилизированной
платформы с инерциальными чувствительными элементами и оптической
аппаратуры для коррекции инерциальной системы в полете.
Бортовой радиотехнический комплекс состоит из аппаратуры
двусторонней радиотелефонной связи, аппаратуры для внешнетраектор-
ных измерений, системы телеметрических измерений, а также телевизион-
ной аппаратуры. В отсеке имеются иллюминаторы 11,12.
Ориентация и стабилизация КК осуществляется с помощью датчиков
угловой скорости, вырабатывающих сигналы, пропорциональные
угловым скоростям; акселерометров, воспринимающих ускорение вдоль
продольной оси КК; и интегрирующих гироскопов, определяющих углы
поворота относительно трех осей.
59
Астронавты во время полета постоянно находятся в рабочем костюме,
поверх которого надевается скафандр. В качестве атмосферы КК
используется чистый кислород, что позволяет уменьшить массу системы.
Три серебряно-цинковые аккумуляторные батареи 17 используются
в качестве вспомогательных источников электроэнергии. Основными
являются топливные элементы.
Крышка шлюза 5 и передняя часть переходного отсека 4 для
предохранения от термодинамического воздействия атмосферы на
участке выведения закрыты только защитным экраном (обтекателем) 3,
выполненным в виде конического колпака, являющегося передней
секцией внешней капсулы. Колпак откидывается перед стыковкой
командного отсека с лунным кораблем и перед выходом астронавтов в
открытый космос. Передняя секция сбрасывается непосредственно перед
раскрытием парашютов.
Средняя секция внешней капсулы состоит из верхней и нижней
кольцеобразных частей. На нижней - имеются откидные панели для
доступа к оборудованию. Задняя секция представляет собой дискообраз-
ный теплозащитный экран 16, отделяемый от аппарата по плоскости
разъема 1 в момент наполнения набегающим потоком воздуха куполов
парашютной системы.
Внутренняя капсула состоит из двух частей: верхней 7, имеющей
форму усеченного конуса, и нижней 9, имеющей форму цилиндра.
Вся внешняя поверхность отсека покрыта стальными сотовыми
панелями 14, которые заполнены абляционным материалом для защиты
от аэродинамического нагрева.
Для уменьшения перегрузок, действующих на экипаж на участке входа
в атмосферу и при движении в атмосфере на участке спуска, а также для
увеличения точности посадки применена траектория полета, когда
аппарат имеет небольшое аэродинамическое качество. При этом
осуществляется управление подъемной силой, которая создается из-за
несимметричного обтекания корпуса СА набегающим потоком. При угле
атаки а - 33° аэродинамическое качество К = 0,5. Балансировка КК
обеспечивается смещением центра масс от оси симметрии в вертикальной
плоскости. Управление по дальности ведется путем изменения ориента-
ции по крену.
Управление входом в атмосферу осуществляется с помощью шести
жидкостных ракетных двигателей (ЖРД) (S, 15 - двигатели тангажа),
которые работают на самовоспламеняющемся топливе, состоящем из
окислителя (четырехокись азота) и горючего (аэрозин-50). Система
подачи топлива - вытеснительная. Это фактически две сдублированные
системы, которые работают одновременно и каждая из них может
обеспечить управление положением корабля в случае выхода из строя
другой.
60
Рис. 1.20. Отсек оборудования КК "Аполлон":
I - топливные элементы; 2 - реактивная система; 3 - запас кислорода; 4 - баки; 5 -
основной ЖРД; 6 - радиаторы системы терморегулирования
Система посадки КК состоит из трех основных парашютов (диамет-
ром 26,8 м): трех вытяжных и одного стабилизирующего.
В случае посадки на воду КК обладает определенной плавучестью.
Отсек оборудования - цилиндрической формы (рис. 1.20), внутренняя
поверхность его разделена на шесть секций радиальными балками. Здесь
расположены системы, которые не требуют непосредственного
обслуживания для управления на большей части траектории полета к
Луне и обратно. Здесь же находятся основной запас кислорода 3,
топливные элементы 1, основной ЖРД 5, баки 4 с горючим и окислите-
лем, реактивная система управления положением 2, которая состоит из
четырех модульных блоков, включающих по четыре небольших ЖРД,
устанавливаемых снаружи на небольшом расстоянии от передней кромки
отсека под углом 90° друг к другу и через 90°.
Система реактивного управления и стабилизации состоит из четырех
независимых идентичных схем. Два двигателя в каждой четверке служат
для управления по углу крена, а два других - по углам тангажа и
рыскания. Управление поступательным движением при коррекции
траектории осуществляется одновременным запуском одинаково
ориентированных двигателей в расположенных напротив друг друга
четверках. Двигатели работают на самовоспламеняющемся топливе,
которое для каждого блока хранится в отдельных баках, состоящих из
мягких резервуаров (трехслойный тефлон) в титановых контейнерах.
Топливо подается выдавливанием из мешков с помощью гелия.
Двигатели могут работать в импульсном и непрерывном режимах.
Основной ЖРД предназначен для коррекции траектории на среднем
участке полета, торможения при переходе на селеноцентрическую орбиту,
старта с этой орбиты к Земле, торможения при возвращении к Земле,
61
Рис. 1.21. Лунный экспедиционный корабль "Аполлон":
/ - взлетная ступень; 2 - передний входной люк; 3 - люк к силовой установке; 4 - основной
двигатель; 5 - топливные элементы; 6 - управляющие двигатели; 7 - баки для топливных
элементов; 8 - основные топливные бакн; 9 - силовая установка посадочной ступени; 10 -
посадочное устройство
совершения маневров при встрече на орбите, а также для спасения при
аварии.
Основной ЖРД представляет собой двигатель постоянной тяги,
закрепленный на шарнирном подвесе и допускающий большое число
запусков.
Топливо размещается в четырех баках, расположенных в отсеке
оборудования, и подается в двигатель с помощью вытеснительной
системы, использующей гелий.
На внешней поверхности корпуса отсека устанавливаются радиаторы
6, обеспечивающие отвод теплоты от электросистем и от системы
жизнеобеспечения.
Лунный экспедиционный корабль (рис. 1.21) является самостоятель-
ным КК, предназначенным для работы в условиях космического
62
пространства в районе Луны. Он состоит из посадочной и взлетной
ступеней со своими силовыми установками. Это резко увеличивает
надежность системы. Силовые установки (ЖРД) каждой ступени
полностью автономны, в том числе по топливным системам и системам
подачи компонентов (вытеснительные).
В качестве горючего используется аэрознн-50 (смесь равного
количества гидразина - N2H4 и несимметричного диметилгидразина -
(CH3)2N2H2, в качестве окислителя - четырехокись азота - N2O4.
Кабина экипажа размещена на взлетной ступени 1, в которую входят:
приборный отсек, оборудование системы кондиционирования, отсек
электронной аппаратуры, силовая установка, источники электроэнергии,
реактивная система управления. В кабине (на передней стороне) имеются
два иллюминатора треугольной формы, передний входной люк 2 со
стыковочным шлюзом, органы управления, приборы контроля, а также
элементы системы жизнеобеспечения. Астронавты в кабине располагают-
ся стоя рядом и каждый имеет наспинный ранец системы жизнеобеспече-
ния. Из-за небольших перегрузок при снижении и взлете с Луны в
условиях экономии массы и объема кресла астронавтов отсутствуют и
заменены системой привязных ремней.
Каждый астронавт независимо друг от друга может управлять
кораблем. Непосредственно за кабиной размещается герметический
приборный отсек. Здесь находятся верхний входной люк со стыковочным
шлюзом и люк к силовой установке 3. Далее находится негерметическая
секция оборудования, не требующего герметизации. Здесь размещены
контур охлаждения и бак с газообразным кислородом 7 для системы
кондиционирования, два бака с гелием для наддува двигателя взлетной
ступени, преобразователи, аккумуляторы, топливные элементы 5 с
жидким водородом и кислородом.
Баки с горючим и окислителем для двигателей взлетной ступени
установлены по бокам ступени. Снаружи они закрыты экранами, а от
приборного отсека отделены герметическими перегородками.
Двигатель 4 расположен в центре масс взлетной ступени и закреплен
неподвижно относительно корпуса.
Система управления положением отсека содержит четыре отдельных
блока 6 - по четыре небольших ЖРД в каждом блоке.
Верхний стыковочный шлюз, расположенный в верхней части
взлетной ступени, используется при перестройке, осуществляемой вскоре
после вывода КК на траекторию полета к Луне. Передний стыковочный
шлюз, расположенный в нижней части лицевой стороны кабины,
используется для выхода из корабля на поверхность Луны и перехода
астронавтов в командный отсек после старта с Луны и встречи отсеков
корабля на орбите.
63
Стыковка взлетной ступени с основным кораблем может быть
осуществлена любым из двух стыковочных шлюзов. Герметические
вставные люки в каждом шлюзе открываются и закрываются при
помощи механических средств.
Посадочная ступень состоит из силовой установки 9, необходимой
для снижения корабля с лунной орбиты на поверхность Луны, и служит
одновременно пусковой установкой для старта с поверхности Луны.
Кроме силовой установки в посадочную ступень входят посадочное
устройство 10, научная аппаратура, вспомогательные баки с водой,
кислородом и водородом, аппаратура управления посадкой.
Корпус посадочной ступени имеет форму восьмигранной призмы.
Основная силовая конструкция состоит из двух попарно-поперечных
балок, расположенных крестообразно, и из верхней и нижней перегоро-
док.
Двигатель шарнирно закреплен в центре посадочной ступени и
поворачивается с помощью приводов. Четыре основных топливных бака
8 крестообразно размещены вокруг двигателя. Два бака с окислителем
установлены на одной оси, а два бака с горючим - на другой.
Посадочное устройство для амортизации удара при посадке, а также
для вертикализации положения КК представляет собой шасси складыва-
ющегося типа и консольно присоединяется с наружной стороны к
корпусу посадочной ступени. Оно состоит из четырех опор, каждая из
которых состоит из основной стойки, пяты, привода, дополнительных
распорок, двух нижних фиксаторов и двух треугольных рам, соединенных
между собой двумя поперечными балками.
Массовые характеристики некоторых составляющих элементов КК
"Аполлон" (в кг) приведены ниже.
Система аварийного спасения: ........................................... 2 800
- конструкция ......................................................2 100
- двигатель и пиропатроны, двигатель отделения САС ................... 700
Командный отсек: ....................................................... 4 850
- оборудование и аппаратура системы управления........................ 230
- система ориентации при спуске ...................................... 300
- система приземления ................................................ 415
- конструкция командного отсека......................................2 130
- система жизнеобеспечения ........................................... 200
- оборудование для членов экипажа..................................... 840
- источники питания отсека экипажа.................................... 225
- аппаратура и оборудование системы связи и телеметрии ............... 230
- пульт пилотов....................................................... 200
- пища, вода и запасное оборудование................................... 80
Отсек оборудования: ................................................... 22 666
- топливо и конструкция двигателя ................................. 20 500
- система ориентации ................................................. 425
64
- система управления ................................................ 13
- конструкция отсека оборудования................................... 1 100
- топливныеэлементы ................................................. ИЗ
- системы связи и телеметрии ....................................... 115
- оборудование системы жизнеобеспечения............................. 400
Лунный экспедиционный корабль: ......................................... 11 305
- астронавты (два человека), система жизнеобеспечения, вспомогательные
установки, система ориентации и прочее оборудование..................... 1 020
- приборы для научных исследований ................................. 115
- конструкция корпуса............................................... 1 130
- шасси............................................................. 1 130
- запас топлива для посадки ........................................ 5 650
- запас топлива для взлета, выхода на селеноцентрическую орбиту
и сближение ............................................................ 2 260
1.4.7. Конструктивно-компоновочная схема
и устройство корабля "Союз"
"Союз" - наименование серии советских многоместных КК, которые
пришли на смену "Бостокам" и "Восходам".
КК "Союз" (рис. 1.22 и 1.23) характеризует новый этап в развитии
пилотируемых кораблей. В отличие от своих предшественников новый
корабль - аппарат многоцелевого назначения. Отличается наличием двух
жилых отсеков: орбитального отсека, предназначенного для проведения
научных исследований, а также используемого в качестве шлюза для
выхода в открытый космос и размещения грузов, доставляемых на
орбитальные станции, и спускаемого аппарата, где космонавты
находятся во время выведения на орбиту и при возвращении на Землю.
Надежные бортовые системы, экономичные двигательные установки,
системы сближения и стыковки, разнообразное научное оборудова-
ние и широкие возможности маневра в полете обеспечивают выпол-
нение кораблями "Союз" разносторонней программы комплексных
исследований.
Работы по программе "Союз" были направлены на дальнейшее
изучениеоколоземного космического пространства исовершенствование
космической техники. Они предусматривают проведение широкой
программы научных и технических исследований, а также создание и
обслуживание долговременных обитаемых орбитальных станций на
околоземных орбитах.
К научным и техническим задачам, которые выполнялись и
выполняются с помощью кораблей "Союз" относятся:
- всестороннее исследование Земли и ее атмосферы с целью более
успешного решения вопросов радиофизики, геофизики, геологии,
космической навигации;
3 - 8620
65
О>
O>
Рис. 1.22. Космический корабль "Союз":
1 - андрогинный периферийный агрегат стыковки; 2 - стыковочные мишени; 3 - телекамера внешнего обзора; 4 - антенны
радиосвязи; 5 - антенны телевидения; 6 - орбитальный отсек; 7 - отстреливаемая крышка люка парашютного отсека; 8 - кабина
космонавтов; 9 - бортовые огни ориентации; 10 - двигатели причаливания и ориентации; II - проблесковый маяк; 12 - датчик
ориентации на Солнце; 13 - приборно-агрегатный отсек; 14 - двигатели причаливания и ориентации; 15 - двигатели
ориентации; 16 - антенны систем телеметрии; 77-бортовой огонь ориентации; 18- антенны связи экипажа с Землей;
19 - сближающе-корректирующая ДУ; 20 - ионные датчики; 21 - солнечные батареи; 22 - датчик инфракрасной вертикали; 23 -
проблесковый маяк; 24, 29 - антенны траекторных измерений; 25 - визир-ориентир; 26 - иллюминатор; 27- гермоплата: 28 - люк;
30- иллюминатор; 31 - антенны радиосвязи
Рис. 1.23. Компоновка космического корабля "Союз" (поз. 1-31 см. на рис. 1.22):
32 - лепестки стыковочного агрегата; 33 - люк; 34 - механизм герметичного закрытия люка; 35 - светильники; 36 - люк; 37 -
механизм закрытия; 38- контейнеры парашютной системы; 39- теплозащитное покрытие: 40- амортизаторы: 41 - тормозные
РДТТ; 42- пружинные толкатели; 43- ферма; /•/-радиатор-излучатель: 45- баллоны с азотом; ^6-баки горючего; 47-радиатор-
холодильник; 48- турбонасосный агрегат; 49- основной двигатель: 50- двигатели ориентации; 51 - теплозащитный экран; 52-
штекериые разъемы; 53 - баки окислителя; 54— силовой конус; 55-элементы системы терморегулирования; 56- приборная сама;
57 - оборудование системы электропитания; 58- топливные баки; 59 - лобовой теплозащитный экран; 60- рама; 61 - кресло
космонавтов; 62 - пульт управления; 63 - экран-обтекатель; 64 - вентилятор; 65 -"сервант": бб - приборы системы аварийного
-j спасения; 6 7 - подогреватель пищи; 68-стыковочный шпангоут
1
2
Рис. 1.24. Транспортный грузовой корабль "Прогресс М":
/ - антенна аппаратуры сближения системы "Курс"; 2 - двигатели причаливания и
ориентации; 3-сближающе-корректирующий двигатель; 4- приборно-агрегатный отсек;
5-аппаратура комплекса бортовых систем; б-отсек компонентов дозаправки;
7- грузовой отсек; Я - стыковочный агрегат с переходным люком
- изучение вопросов, связанных с использованием для научных и
практических целей условий околоземного космического пространства
(глубокий вакуум, невесомость, радиация и др.);
- изучение Солнца, звезд, планет и их спутников.
Способность кораблей "Союз" совершать управляемое движение в
космическом пространстве, сближаться с другим космическим аппаратом
и проводить маневры в непосредственной близости от него имело
большое значение при создании на орбите научных станций из
нескольких автономных частей, доставляемых на орбиту.
Помимо научных и технических задач корабли "Союз" могут быть
использованы для решения целого ряда народнохозяйственных задач и
как транспортное средство для связи орбитальных станций с Землей. На
базе корабля "Союз" созданы грузовые транспортные корабли
"Прогресс" (рис. 1.24).
При разработке корабля "Союз" особое внимание обращалось на
создание благоприятных условий для работы и жизни космонавтов в
условиях выведения, полета и при спуске с орбиты. Совершенная
конструкция и оборудование корабля, высокие маневренные свойства
создают широкие возможности для использования его в качестве научной
лаборатории в длительном полете.
Корабль "Союз" состоит из трех отсеков (см. рис. 1.22): кабины
космонавтов 8, которую также называют спускаемым аппаратом,
68
орбитального отсека 6 и приборно-агрегатного отсека 13. Он имеет
стартовую массу 6800 кг, длину более 7 м, размах солнечных батарей
около 8,4 м. СА расположен в середине корабля "Союз" таким образом,
чтобы на участках активного и пассивного полета вектор перегрузки был
ориентирован относительно тела космонавтов в направлении грудь -
спина.
Орбитальный отсек 6 расположен в передней части корабля
непосредственно перед СА и сообщается с ним с помощью герметическо-
го люка 36 (см. рис. 1.23).
С противоположной стороны к кабине космонавтов примыкает
приборно-агрегатный отсек, на котором установлены солнечные батареи
21 (см. рис. 1.22).
На участке выведения на орбиту корабль защищен от воздействия
аэродинамических, силовых и тепловых нагрузок специальным
аэродинамическим экраном (головным обтекателем) цилиндро-
конической формы, сбрасываемым после прохождения плотных слоев
атмосферы. На головном обтекателе установлены мощные пороховые
двигатели системы аварийного спасения экипажа и складные решетчатые
стабилизаторы. В случае аварии PH на старте они должны поднять
переднюю часть головного обтекателя вместе с кораблем на высоту,
необходимую для ввода парашюта. При аварийных ситуациях на участке
выведения корабля на орбиту двигатели системы аварийного спасения
должны преодолеть силу аэродинамического сопротивления и удалить
СА на безопасное расстояние от места аварии.
Для стыковки в космосе корабли оборудуются специальными
стыковочными узлами. На схеме представлен андрогинный периферий-
ный агрегат стыковки 1, в центре которого имеется люк 33 (см. рис. 1.22
и 1.23) для перехода в другой корабль. Люк-лаз снабжен механизмом для
герметичного закрытия 34.
СА является основой космического корабля. В нем находятся
космонавты во время управляемого полета, а также во время выполнения
некоторых операций в полете.
Только СА возвращается из космоса обратно на Землю. Аппарат
представляет собой герметический отсек сегментально-конической
формы. Геометрическая форма СА является одной из важнейших его
характеристик. Главная особенность этой формы заключается в том, что
при несимметричном (угол атаки а=-10..-30°) обтекании обеспечивает-
ся аэродинамическое качество К - 0,1...0,5, позволяющее создавать
маневр и управляемый спуск в атмосфере и существенно снизить
максимальные перегрузки при возвращении и в аварийных ситуациях.
69
Более высокое, чем у сферы, значение коэффициента лобового аэродина-
мического сопротивления обеспечивает гашение скорости и торможение
аппарата в атмосфере при спуске.
Траектория спуска с использованием аэродинамического качества
позволяет уменьшить максимальные перегрузки, действующие на экипаж
на участке спуска до 3...4 единиц, в то время как они достигают 8... 10
единиц при баллистическом спуске у аппаратов типа "Восток".
Маневрирование в атмосфере по высоте связано с изменением
направления полета, так как изменение подъемной силы по величине
осуществляется путем изменения направления общей аэродинамической
силы, действующей на аппарат. Величину подъемной силы можно
регулировать автоматически или вручную, разворачивая аппарат вокруг
продольной оси (по каналу крена) с помощью реактивных двигателей
малой тяги системы управления спуском, установленных на корпусе СА.
Аналогичные двигатели управления по каналу тангажа установлены в
кормовой части СА. Для предохранения от чрезмерного перегрева они
имеют специальный экран-обтекатель 63 (см. рис. 1.23).
Полет в атмосфере с использованием аэродинамического качества
уменьшает не только силовое воздействие (перегрузки), но и тепловое
(значительно уменьшается нагрев) и позволяет повысить точность
приземления. Во время управляемого спуска на поверхности аппарата
выделяется в 10 раз меньше теплоты, чем при баллистическом спуске. Но
и этого теплового потока достаточно, чтобы расплавить металлическую
конструкцию корпуса аппарата, так как температура обтекающего его
воздушного потока в ударной волне достигает 3500...4000 °C. Поэтому
на переднюю, наиболее нагревающуюся часть, установлен лобовой
теплозащитный экран 59, отделяемый от аппарата перед посадкой. Экран
состоит из нескольких слоев материалов с низкой теплопроводностью.
Под воздействием тепловых потоков поверхность наружного слоя экрана
нагревается и сублимирует, т.е. испаряется, минуя жидкую фазу - фазу
плавления. Мощный встречный поток воздуха уносит частицы горящего
материала, аккумулировавшие большую часть теплоты, и за время спуска
масса теплозащиты уменьшается. За счет более низкой теплопроводности
и высокого термического сопротивления материалов внутренних слоев
теплозащиты фронт тепловой волны не успевает достигнуть металличес-
кой конструкции корпуса СА и она остается неповрежденной.
Масса теплозащиты СА сегментально-конической формы существенно
меньше, чем у аппарата сферической формы.
Корпус аппарата выполнен в основном из алюминиевого сплава. Для
предохранения от интенсивного аэродинамического нагрева при спуске
на Землю снаружи на него нанесено теплозащитное покрытие 39, а
изнутри - теплоизоляция в сочетании с декоративной обшивкой.
70
Благодаря наружному теплозащитному покрытию корпуса СА и
внутренней теплоизоляции кабины, играющей одновременно роль
звукоизоляции, температура в кабине к моменту посадки не превышает
25...30 °C.
В кабине веерообразно размещены кресла космонавтов 61.
В центральном кресле находится командир корабля, справа от него -
бортинженер, слева - инженер-испытатель (исследователь). Поза
космонавта в кресле, его положение относительно действующих в полете
перегрузок, а также выполненное по форме тела космонавта кресло
позволяют переносить большие перегрузки.
В кабине космонавтов монтируется радиоаппаратура связи, приборы
для управления спуском и система обеспечения жизнедеятельности.
Над головами космонавтов в специальных контейнерах 38 размеща-
ются основная и запасная парашютные системы.
Непосредственно перед пилотом-командиром установлен пульт
управления космическим кораблем 62. Слева и справа от центрального
пульта располагаются боковые вспомогательные пульты с командно-
сигнальными устройствами. На пульте расположены приборы для
контроля работы систем и агрегатов корабля, навигационное оборудова-
ние, телевизионный экран и клавишные переключатели для управления
бортовыми системами.
На центральном пульте расположены: индикатор напряжения и тока,
навигационный космический индикатор "Глобус", индикатор давления
и температуры в отсеках, бортовые часы, электролюминесцентная
сигнализация основных систем, кнопки управления командно-сигналь-
ным устройством, регуляторы громкости, индикатор расстояния и
скорости, комбинированный электронно-лучевой индикатор, индикатор
контроля программ, блок цифровой информации, индикатор шлюзова-
ния и ранца скафандра.
На пультах командно-сигнальных устройств расположены: кнопки
включения микрофонов и ларингофонов, регуляторы громкости КВ-,
УКВ-радиостанций, внутреннего переговорного устройства и дальнего
радиокомпаса, кнопка контроля транспаранта сигнализации, датчики
температуры воздуха в отсеке и жидкости в системе терморегулирования,
кнопки управления режимами и системами, транспарант сигнализации,
кнопки режимов. Рядом с пультом на специальном иллюминаторе
установлен оптический визир-ориентир 25 (см. рис. 1.22).
По бокам кресла командира размещены две ручки управления
кораблем. Правая ручка-для управления ориентацией корабля вокруг
центра масс, левая - для изменения линейной скорости корабля при
маневрировании.
71
Для визуального наблюдения и кинофотосъемки кабина снабжена
двумя иллюминаторами 26, расположенными по левому и правому
бортам.
Оборудование корабля позволяет осуществлять полностью автоном-
ный полет и пилотирование корабля без участия наземного командного
комплекса.
Системы терморегулирования и регенерации поддерживают во время
полета в кабине корабля нормальное атмосферное давление, влажность
и температуру. В жилых отсеках используется обычная кислородно-
азотная атмосфера с давлением 1,0-105...±1,3-104 Па. При увеличении
содержания кислорода до 40 % по объему предусмотрена возможность
понижения давления до 6,94 104...±410тПа. Вентилятор холодильно-
сушильного агрегата 64 обеспечивает принудительную циркуляцию
воздуха. Принудительная конвекция с помощью обыкновенных
вентиляторов необходима в условиях невесомости для равномерного
распределения теплоты и выравнивания поля температур по всему
объему кабины корабля.
Основными задачами системы терморегулирования являются защита
КК от внешних тепловых потоков и сброс избыточной теплоты в космос.
Для этого перед полетом корабль одевают в "шубу" экранно-вакуумной
изоляции. На все части корабля, которые по различным причинам не
укрываются, наносятся специальные покрытия, способные большую
часть лучистой энергии отражать обратно в космос.
Однако, используя только пассивные средства, как указывалось ранее,
невозможно избежать перегрева корабля. Поэтому помимо пассивных
средств используются более эффективные средства терморегулирования.
Снаружи корабля установлен радиатор-холодильник 47, поверхность
которого не закрыта экранно-вакуумной изоляцией. С ним соединяются
трубопроводы активной системы терморегулирования. Нагретая внутри
отсека жидкость-теплоноситель перекачивается в радиатор, который
излучает тепловой поток в космическое пространство. Жидкость при
этом охлаждается и снова возвращается внутрь отсека корабля.
Экипаж во время полета может находиться в обычной одежде без
скафандров.
Кроме систем терморегулирования и регенерации в комплекс систем
обеспечения жизнедеятельности входят система обеспечения газового
состава, комплект скафандров, система питания и водоснабжения с
запасами воды и пищи в контейнерах, ассенизационно-санитарное
устройство, средства гигиенического и медицинского обеспечения.
Комплекс систем обеспечения жизнедеятельности создает условия, не
только необходимые для жизни космонавтов в полете, но и для перехода
из корабля в корабль, и для работы вне корабля.
72
Основная часть приборов системы управления, гироплатформа с
аппаратурой, блок автоматики приземления, программно-временное
устройство, коммутатор, газоанализатор, отжимное устройство системы
обеспечения жизнедеятельности, источники питания, приборы радио-
комплекса размещены на раме 60 СА, расположенной на его днище за
креслами космонавтов.
Кресла космонавтов для смягчения удара при посадке подвешены на
амортизаторах 40, которые приводятся в рабочее состояние перед
спуском на Землю.
В кормовой части спускаемого аппарата находится герметичный люк
36 для посадки космонавтов и перехода в орбитальный отсек корабля.
Крышка люка снабжена механизмом закрытия 37. Окантовка люка
является одновременно щелевой антенной. В ней также находятся
клапаны для выравнивания давления внутри аппарата до величины
внешнего атмосферного при посадке корабля.
Масса спускаемого аппарата составляет 2 800 кг.
При спуске с орбиты после аэродинамического торможения в
атмосфере скорость аппарата уменьшается до 200 м/с на высоте около
9 км. На этой высоте по команде от барометрического реле отстреливает-
ся крышка 7 люка парашютного контейнера и раскрывается небольшой
тормозной парашют. На высоте около 3 км тормозной парашют
отстреливается и вводится большой купол основного парашюта, на
котором осуществляется приземление. При этом отстреливается от
аппарата чаша лобового теплозащитного экрана. Непосредственно перед
контактом аппарата с поверхностью планеты на высоте около 1 м
срабатывают тормозные РДТТ мягкой посадки 4J по команде от
высотомера. Парашютная системаобеспечивает дальнейшее торможение
СА и его снижение с небольшой вертикальной скоростью - менее 10 м/с,
а двигатели мягкой посадки окончательно тормозят аппарат, благодаря
чему скорость приземления не превышает 2...3 м/с.
Таким образом, комплекс средств приземления включает в себя
парашютно-реактивную систему (основную и запасную) и амортизацион-
ную подвеску кресел космонавтов.
Управление работой комплекса средств приземления осуществляется
специальной автоматикой.
Для обеспечения поиска после приземления СА оборудован
радиосистемами, позволяющими осуществлять его пеленгацию на участке
парашютирования и после приземления или приводнения.
Радиосредства работают в различных диапазонах волн, что
обеспечивает дальний и ближний поиск наземными станциями, авиацией
и флотом.
73
Орбитальный отсек корабля в соответствии со своим назначением
создан для проведения научных экспериментов, обеспечения перехода
экипажа из корабля в корабль и для отдыха космонавтов. В нем
космонавт имеет возможность проводить научные исследования,
выполнять необходимый комплекс физических упражнений, принимать
пищу. В отсеке оборудованы места для работы, отдыха и сна космонав-
тов.
Корпус орбитального отсека выполнен из магниевого сплава и
состоит из двух полусферических оболочек, соединенных цилиндричес-
кой вставкой. Спереди на отсеке установлен андрогинный периферийный
агрегат стыковки с внутренним люком-лазом диаметром 0,8 м.
Основными элементами стыковочного агрегата являются направляющее
кольцо, стыковочный шпангоут 68 с элементами жесткой фиксации
кораблей и лепестки стыковочного агрегата 32. Помимо стыковочного
агрегата в систему стыковки входят приборы автоматики стыковки,
задающей необходимые режимы работы при стыковке.
Вспомогательными средствами для сближения и причаливания
являются стыковочные мишени 2 (см. рис. 1.22), два световых проблеско-
вых маяка 77, 23, с помощью которых можно наблюдать за кораблем на
неосвещенном участке полета, и установленные иа солнечных батареях
бортовые огни ориентации 9: слева - красный, справа - зеленый и сзади -
два белых.
При стыковке кораблей помимо жесткой силовой связи осуществляет-
ся стыковка их электрических, гидравлических и пневматических
коммуникаций.
Стыковка кораблей является одной из самых сложных операций,
выполняемых в полете. Она выполняется как автоматически, так и с
участием экипажа. Целью стыковки может быть монтаж крупных
орбитальных станций, межпланетных кораблей из отдельных блоков,
последовательно выводимых на околоземную орбиту. Стыковка
необходима также для оказания помощи или спасения экипажа корабля
и аварийных ситуациях.
В орбитальном отсеке имеются три иллюминатора: два обзорных 30-
размещены на боковой поверхности, третий - для визуального контроля
стыковки - на крышке люка-лаза и агрегата стыковки.
Посадка экипажа в корабль на стартовой позиции и выход в космос
осуществляются через люк 28.
В отсеке расположены пульт управления, приборы и оборудование
основных и вспомогательных систем.
Для размещения продуктов питания, агрегатов жизнеобеспечения,
аптечки, предметов личной гигиены, научной аппаратуры, а также
приборов систем радиоконтроля орбиты, аварийного спасения
74
66(см. рис. 1.23) в отсеке имеется специальный "сервант" 65 и подогрева-
тель пищи 67. Аппаратура управления и связи, переносная телекамера,
кино- и фотоаппараты и научные приборы расположены на рабочем
месте и около иллюминаторов в удобных для использования зонах.
Состав научной аппаратуры может быть различен в зависимости от задач
конкретного полета. Кроме специальной аппаратуры связи имеется
всеволновый приемник для приема программ земных радиовещательных
станций.
Снаружи орбитального отсека установлены телекамера внешнего
обзора 3, антенны систем радиосвязи 4, 31, телевидения 5 и траекторных
измерений 29, 24 (см. рис. 1.22).
Для коммутации все системы, расположенные в отсеке, имеют выводы,
сгруппированные на герметичной специальной плате 27 с отстреливае-
мым штекерным разъемом.
Если орбитальный отсек используется для выхода в космос, то он
оборудуется системой шлюзования и является шлюзовой камерой. При
выходе люк 28 открывается как автоматически, так и вручную.
Масса орбитального отсека составляет 1300 кг.
Приборно-агрегатный отсек предназначен для размещения основной
аппаратуры, оборудования и систем, обеспечивающих орбитальный
полет. Этот отсек состоит из переходной, приборной и агрегатной
секций, выполненных из алюминиевых сплавов. Силовой основой
переходной секции является ферма 43, в вершинах которой находятся
пирозамки крепления СА и пружинные толкатели 42. На кронштейнах
ферм крепятся девять двигателей причаливания и ориентации 10,
топливные баки и вытеснительная система подачи топлива 58. Снаружи
этой секции расположены малый радиатор-излучатель 44 системы
терморегулирования, верхние узлы крепления солнечных батарей и
антенна командной радиолинии. Аппаратура и оборудование размеща-
ются в приборной секции, представляющей собой герметический отсек,
имеющий форму короткого цилиндра, замкнутого сферическими
сегментальными днищами.
Внутри приборного отсека поддерживаются условия, необходимые
для нормального функционирования аппаратуры. В нем сосредоточены
приборы системы ориентации и управления движением корабля со
счетно-решающими устройствами, аппаратура дальней радиосвязи и
радиотелеметрии, приборы системы управления бортовым комплексом
аппаратуры и оборудования, системы единого электропитания 57.
Циркуляция газообразного хладагента внутри отсека осуществляется
вентилятором системы терморегулирования 55 приборного отсека. На
пути газового потока, создаваемого вентилятором, находится теплооб-
менный агрегат, включенный в контур системы терморегулирования, по
75
которому циркулирует жидкий теплоноситель. Приборы и агрегаты
размещены на приборной раме 56. С наружной стороны приборной
секции установлены датчик построения инфракрасной вертикали на
Землю 22 и датчик ориентации на Солнце 12.
Агрегатная секция негерметична и выполнена в виде цилиндрической
оболочки, переходящей в коническую. Снаружи расположен большой
радиатор-излучатель системы терморегулирования 47, четыре двигателя
причаливания и ориентации 14, нижние узлы крепления солнечных
батарей, восемь двигателей ориентации 15 и антенны систем радиотеле-
метрии 16 и связи экипажа с Землей 18, а также ионные датчики 20
системы ориентации.
Солнечные батареи - два "крыла", состоящие из трех створок каждое,
имеют полезную площадь 14 м2 и раскрываются в рабочее положение
после вывода корабля на орбиту. На их концевых створках размещены
антенны радиосвязи и телеметрии УКВ- и КВ-диапазонов.
Внутри агрегатной секции размещена жидкостная ракетная двигатель-
ная установка, которая используется для выполнения маневров на
орбите, а также для спуска корабля на Землю.
Сближающе-корректирующая двигательная установка 19 состоит из
двух двигателей - однокамерного основного 49 с тягой 4170 Н и
двухкамерного дублирующего с тягой 4110 Н, топливных баков с
двухкомпонентным топливом, системы подачи топлива и автоматики
установки. Баки горючего 46 и окислителя 53 сферической формы имеют
эластичные мешки для разделения жидкой и газовой фаз внутри них. Для
вытеснения компонентов топлива из баков и раскрутки турбонасосных
агрегатов (ТНА) 48 основного и дублирующего двигателей используется
газообразный азот, заправляемый в баллон 45. Сближающе-корректиру-
ющая установка смонтирована в виде автономного блока на силовом
конусе 54. С торцевой стороны она имеет теплозащитный экран 51. Во
время работы сближающе-корректирующей двигательной установки
ориентация и стабилизация корабля осуществляются реактивными
рабочими органами 50, расположенными в горизонтальной плоскости
(по каналу курса) и вертикальной плоскости (по каналу тангажа).
Коммутация электрических связей PH корабля осуществляются через
штекерные разъемы 52.
Масса запаса топлива сближающе-корректирующей двигательной
установки корабля более 500 кг, что позволяет совершать маневры до
высоты 1300 км.
Масса приборно-агрегатного отсека с солнечными батареями
составляет при старте 2700 кг.
Одной из основных систем корабля является система ориентации и
управления движением. Она обеспечивает ориентацию корабля в
76
пространстве, стабилизацию при работе двигателей и управление при
коррекции орбиты, сближение с другим КК и маневрирование вблизи
него. Часть этой системы, размещенная в СА, обеспечивает управление
движением его на участке спуска. Система может работать как в
автоматическом режиме, так и в режиме ручного управления. Она
включает в себя:
- датчики ориентации;
- оптический визир-ориентатор космонавта;
- гироскопические приборы;
- электронные счетно-решающие блоки управления;
- радиотехнические средства поиска, наведения при сближении;
- систему исполнительных органов - двигателей малой тяги.
Система реактивных двигателей причаливания и ориентации гасит
угловые возмущения при отделении корабля от PH и обеспечивает
развороты корабля относительно его центра масс вокруг трех осей и
координатные малые перемещения центра масс вдоль каждой из трех
осей. В ее состав входят 14 реактивных двигателей причаливания и
ориентации 14 тягой по 100 Н, 8 реактивных двигателей ориентации 15
тягой по ЮН, топливные баки 58 с однокомпонентным топливом,
трубопроводами, системой подачи топлива и автоматикой системы.
Система исполнительных органов СА обеспечивает управление
движением его после отделения отсеков корабля перед возвращением на
Землю. В ее состав входят 6 реактивных двигателей ориентации,
топливные баки с однокомпонентным топливом, трубопроводами,
системой подачи топлива и автоматикой системы.
Для обеспечения постоянного освещения солнечных батарей
предусмотрен режим их ориентации на Солнце за счет "закрутки" -
придания кораблю вращения относительно оси, направленной на Солнце,
со скоростью несколько градусов в секунду.
Энергоснабжение бортовой аппаратуры осуществляется централизо-
ванной системой электропитания. Система единого электропитания
обеспечивает аппаратуру КК постоянным током с напряжением в 27 В.
Она включает в себя основную систему и резервную батарею. Основная
система состоит из солнечных и химических аккумуляторных батарей,
используемых в буферном режиме. Резервная батарея может обеспечить
кратковременный полет и спуск корабля в случае отказа основной
системы. Еще одна автономная батарея имеется на борту СА, она
обеспечивает электропитанием его системы после отделения от корабля.
Корабль снабжен комплексом радиотехнических средств, обеспечива-
ющих определение параметров орбиты, прием команд с Земли,
двустороннюю радиотелефонную и телеграфную связь космонавтов с
Землей в различных диапазонах волн, передачу на Землю телевизионных
77
изображений из отсеков корабля и внешней обстановки, наблюдаемой
космонавтами.
Системы радиосвязи корабля включают командную радиолинию,
систему радиотелефонной и радиотелеграфной связи, радиотелеметричес-
кую, телевизионную и систему радионаведения. Командная радиолиния
позволяет принимать передаваемые с наземных командно-измерительных
комплексов на борт команды с выдачей сигналов о правильности приема,
а также выполняет траекторные измерения на участке выведения и при
полете по орбите.
Система радиотелефонной и радиотелеграфной связи обеспечивает
двусторонний контакт между экипажами кораблей, находящихся в
полете, и наземными станциями, а также передает с борта сигналы
оперативной информации (телеметрии). Она работает и в режиме пеленга
для быстрого обнаружения и поиска СА на участке парашютирования
и после его посадки на Землю.
После стыковки кораблей связь осуществляется по внутренней
проводной системе связи.
Радиотелеметрическая система позволяет передавать в автоматичес-
ком режиме и по командам с Земли телеметрическую информацию о
состоянии систем и агрегатов корабля и медицинскую информацию о
состоянии здоровья экипажа.
Многоканальные телеметрические системы корабля обеспечивают
передачу большого объема научной и служебной информации. При
полете корабля вне "видимости" наземных приемных пунктов измери-
тельная информация сохраняется в бортовых запоминающих устройствах
и передается на Землю в очередном сеансе радиосвязи.
Телевизионная система предназначена для контроля за процессом
сближения и стыковки с другим аппаратом, телерепортажей и обзора
окружающего пространства. Бортовая телевизионная система имеет
четыре камеры (из них две-цветные). Две камеры установлены в отсеках
корабля, а две снаружи. Телевизионное изображение нормального
стандарта (625 строк при 25 кадрах в секунду) поступает на бортовое
видеоканальное устройство или передается по радиолинии на Землю.
Отсеки на борту корабля оборудованы светильниками 35.
Система радионаведения включает в себя радиостанцию, со-
стоящую из УКВ-приемо-передатчика с переносчиком частот дальности.
С помощью этой радиостанции обеспечивается не только голосовая
связь, но и получение информации о расстоянии между кораблями при
сближении.
Система управления бортовым комплексом аппаратуры состоит из
коммутационных приборов, размещенных в отсеках корабля. Управление
78
бортовыми системами корабля может проводиться космонавтами с
пульта, а также автоматически - по командам с Земли.
Нормальные физиолого-гигиенические условия для экипажа создает
комплекс систем жизнеобеспечения. Система регенерации атмосферы
содержит запасы окислов щелочных металлов, поглощающих углекислый
газ с одновременным выделением кислорода. Очистка воздуха и
поглощение вредных примесей, выделяемых в атмосферу человеком,
осуществляется с помощью активированного угля. Система работает
автоматически и поддерживает в обитаемых отсеках газовый состав,
подобный обычным земным условиям.
Температурный режим в отсеках корабля поддерживается системой
терморегулирования, обеспечивающей также и необходимую влажность.
Для этого теплообменные агрегаты наряду с регулированием температу-
ры одновременно конденсируют избыток влаги, содержащейся в
атмосфере отсеков, и собирают ее в специальные влагосборники. Уровень
температуры и влажности в отсеках космонавт может регулировать по
своему желанию.
Конструкция кораблей "Союз" обеспечивает защиту экипажа от
космической радиации.
1.5. Многоразовые космические аппараты
1.5.1. "Спейс шаттл'1
12 апреля 1981 г. многоразовый космический челнок "Колумбия",
пилотируемый командиром корабля Дж. Янгом и астронавтом
Р. Криппеном, стартовал в космос. 14 апреля "Спейс шаттл" вошел в
плотные слои атмосферы со скоростью, соответствующей числу (Маха)
М = 25 и, покрыв расстояние 8150 км, коснулся посадочной полосы на
высохшем озере Роджерс авиабазы Эдвардс (штат Калифорния).
1.5.2. "Буран"
"Буран" - крылатый орбитальный корабль (ОК) многоразового
использования, который предназначен для:
- выведения на орбиту вокруг Земли различных космических
объектов;
- обслуживания космических аппаратов на орбите ИСЗ;
- доставки модулей и персонала для сборки на орбите крупногабарит-
ных сооружений и межпланетных комплексов;
79
- возврата на Землю неисправных и выработавших свой ресурс
спутников;
- освоения оборудования и технологий космического производства;
- доставки продукции на Землю;
- выполнения других грузопассажирских перевозок по маршруту
Земля - Космос - Земля;
- решения ряда оборонных задач.
ОК "Буран" выполнен по самолетной схеме типа "бесхвостка" с низко
расположенным треугольным крылом двойной стреловидности по
передней кромке. Аэродинамические органы управления включают
элевоны, балансировочный щиток в хвостовой части фюзеляжа и руль
направления, который, раскрываясь по задней кромке, выполняет
функции воздушного тормоза. Посадку "по-самолетному" обеспечивает
трехопорное с носовым колесом выпускающееся шасси.
В носовой части "Бурана" расположены герметическая вставная
кабина (объемом 73 м3) для экипажа (на двух - четырех человек) и
пассажиров (до 6 человек), отсеки бортового оборудования и носовой
блок двигателей управления. Среднюю часть занимает грузовой отсек
с открывающимися наверх створками, где размещаются манипуляторы
для выполнения погрузочно-разгрузочных и монтажно-сборочных работ
и различных операций по обслуживанию космических объектов. Под
грузовым отсеком расположены агрегаты систем энергоснабжения и
обеспечения температурного режима. В хвостовом отсеке установлены
агрегаты двигательной установки,топливные баки, агрегаты гидросисте-
мы. В конструкции "Бурана" использованы алюминиевые сплавы, титан,
сталь и другие материалы. На внешней поверхности ОК имеется
теплозащитное покрытие, которое рассчитано на многоразовое
использование. На менее подверженную нагреву верхнюю поверхность
устанавливается гибкая теплозащита, а другие поверхности покрыты
теплозащитными плитками, изготовленными на основе волокон кварца
и выдерживающими температуру до 1300 °C. В особо теплонапряженных
зонах (в носках фюзеляжа и крыла, где температура достигает 1500...
1600 °C) применен композиционный материал типа углерод-углерод.
Этап наиболее интенсивного нагревания ОК сопровождается образовани-
ем вокруг него слоя воздушной плазмы, однако, конструкция ОК не
прогревается к концу полета более чем до 160 °C. Каждая из 36 000
плиток спроектирована под конкретное место установки, обусловленное
теоретическими обводами корпуса ОК. Для снижения тепловых нагрузок
выбраны также большие значения радиусов затупления носков крыла
и фюзеляжа. Расчетный ресурс конструкции - 100 орбитальных полетов.
Объединенная двигательная установка предназначена для довыведе-
ния ОК на опорную орбиту, выполнение межорбитальных маневров,
80
точного маневрирования вблизи обслуживаемых объектов, ориентацию
и стабилизацию ОК и торможение для схода с орбиты. Она состоит из
двух двигателей орбитального маневрирования, работающих на
углеводородном горючем и жидком кислороде, и 46 двигателей
газодинамического управления, которые сгруппированы в три блока
(один носовой блок и два хвостовых).
В единый бортовой комплекс на основе ЭВМ объединены более 50
бортовых систем, которые включают в себя радиотехнические,
телевизионные и телеметрические комплексы, системы жизнеобеспечения,
терморегулирования, навигации, электроснабжения и др. Он обеспечива-
ет продолжительность пребывания "Бурана" на орбите до 30 суток.
Тепло, выделяемое бортовым оборудованием, с помощью теплоносителя
подводится к радиационным теплообменникам, установленным на
внутренней стороне створок, которые открыты во время нахождения на
орбите, и излучается в окружающее пространство.
Первый и единственный полет в автоматическом режиме состоялся
15 ноября 1988 года.
Основные характеристики ОК "Буран" следующие.
Характеристики Значение
Максимальная стартовая масса (в первом полете), т................... 105 (79,4)
в том числе:
- запас окислителя (жидкий кислород), т.............................10,4
- запас горючего (циклин), т ........................................4,1
Масса полезного груза, выводимого на орбиту Н = 200 км, т:
-с наклонением i = 50,7° ............................................. 30
- с наклонением i = 97°.............................................. 16
Посадочная масса, т:
- номинальная........................................................ 82
- максимальная....................................................... 87
Масса полезного груза возвращаемого с орбиты, т:
- максимальная ...................................................... 20
- номинальная........................................................ 15
Экипаж, человек:
- на этапе летных испытаний (при наличии катапультных кресел)......... 2
- максимальный (без катапультных кресел)............................до 10
Продолжительность полета, сут.:
- номинальная.......................................................... 7
- максимальная (с дополнительными баками)............................ 30
Диапазон возможных наклонений орбит, град........................ 50,7...! 10
Высота орбиты, км:
- рабочая круговая ............................................. 250...500
- максимальная..................................................... 1000
Перегрузки:
- при выведении на орбиту (максимальная)............................... 3
- при спуске в атмосфере (по номинальной траектории) ................1,6
Аэродинамическое качество:
81
- на гиперзвуковых скоростях.........................................1,5
- при посадке......................................................... 5
Максимальная величина бокового маневра при спуске с орбиты, км ........ 1700
Посадочная скорость, км/ч:
- средняя (при посадочной массе 85 т) .............................. 312
- максимальная...................................................... 360
- в первом полете .................................................. 263
Маршевый двигатель орбитального маневрирования:
- тяга в вакууме, кН ................................................ 88
- удельный импульс в вакууме, с..................................... 362
Геометрические характеристики, м:
- общая длина .....................................................36,37
- длина фюзеляжа...................................................30,85
- ширина фюзеляжа (максимальная)....................................5,50
-размахкрыла .......................................................23,92
- высота на стоянке................................................16,35
- шасси (база; колея)......................................... 7,00; 12,79
- длина отсека полезного груза.....................................18,55
- диаметр отсека полезного груза....................................4,70
Кратность использования (ресурс), полетов............................... 100
1.6. Орбитальные станции
1.6.1. "Салют"
Космические станции первого поколения "Салют" были двух типов:
гражданские "Салют" и военного назначения "Алмаз", которые все
назывались "Салют". Станции имели лишь один стыковочный узел и не
могли снабжаться после запуска. Они запускались PH "Протоном" в
беспилотном режиме и позже посещались пилотируемыми "Союзами".
Первая орбитальная станция "Салют-1"(1971 г.) предназначалась для
отработки технологий и проведения научных экспериментов. Первона-
чально первую орбитальную станцию должен был посетить экипаж
"Союза-10" (В.А. Шаталов, А.С. Елисеев, Н.Н. Рукавишников), но из-за
отказа системы стыковки от посещения пришлось отказаться. Ее посетил
экипаж космического корабля "Союз-Н" (Г.Т. Добровольский,
В.Н. Волков, В.И. Пацаев), трагически погибший при спуске на Землю
из-за разгерметизации корабля (это была вторая авария КК после гибели
В.М. Комарова на "Союзе-1").
"Космос-557" - космическая станция подобная станции "Салют-1",
но не выполнившая своей задачи из-за аварии на борту и потому не
обозначенной в официальных сообщениях как "Салют".
"Салют-2" ("Алмаз") (1973 г.) была предназначена для проведения
фоторазведки.
82
"Салют-3" ("Алмаз") (1974 г.) посещалась экипажем с Земли.
На орбитальных станциях "Салют-4" (1975 г.), "Салют-5" (1976 г.) и
"Салют-6" (1977 г.) было проведено большое количество технологических
экспериментов: восстановление алюминиевого покрытия зеркала
солнечного телескопа методом вакуумного напыления; исследование
поведения жидкости в невесомости; выращивание кристаллов; изготовле-
ние металлических шариков; проведение пайки; изучение работы
капиллярного насоса, действующего на основе использования сил
поверхностного натяжения; плавка металлов для получения сплавов,
которых в земных условиях получить невозможно. Они подтвердили
большую перспективу использования космических систем по получению
новых материалов в условиях космоса.
Для ориентации и стабилизации станции в пространстве имеется
система исполнительных органов: воздушная и гидравлическая системы,
реактивные микродвигатели ориентации, блоки включения и контроля.
Для создания управляющих моментов используются жидкостные
реактивные двигатели. Длительный орбитальный управляемый полет
обеспечивается соответствующим запасом топлива.
В состав единой системы энергоснабжения входят первичные
источники, солнечные и аккумуляторные батареи, электроавтоматичес-
кие устройства управления и телеконтроля, преобразователи постоянного
тока в переменный. Для ориентации солнечных батарей на Солнце
применяется специальный режим закрутки станции, поскольку на каждом
витке около 40 % времени станция находится в тени, а характер
потребления электроэнергии отличается чередованием относительно
малой нагрузки дежурного режима и большой нагрузки в период
проведения сеансов связи, телевидения, работы научной аппаратуры.
Система терморегулирования поддерживает в заданных пределах
температуру рабочих отсеков, аппаратуры и оборудования, а также в
жилых отсеках температуру 15...20 °C и влажность воздуха 20...80 %.
Одновременно она осуществляет вентиляцию жилых и приборных зон
станции.
Жизнедеятельность экипажа на борту обеспечивалась несколькими
системами. Одна из них - система поддержания в отсеках необходимого
состава атмосферы, поглощения запахов и пыли, выравнивания давления
между отсеками станции и транспортного корабля после стыковки,
она же компенсирует возможные утечки газа в случае частичной
негерметичности объекта. Барометрическое давление поддерживалось
в пределах 760...960 мм рт. ст. Для подачи кислорода и удаления
углекислого газа использовались блоки регенераторов, каждый из
которых состоял из двух патронов, заполненных высокоактивным
химическим веществом. Воздух проходит через блоки регенерации и в
83
результате химической реакции обогащается кислородом, углекислый
газ и вредные примеси поглощаются. Для удаления жидких и твердых
продуктов жизнедеятельности на станции имелось ассенизационно-
санитарное устройство.
Для компенсации недостатка физической нагрузки на борту станции
имелся стенд для физических упражнений и "бегущая дорожка". Кроме
того, использовались нагрузочные костюмы типа комбинезонов с
вшитыми эластичными элементами для создания длительных статических
нагрузок на скелетно-мышечную систему, имитирующих нагрузки на
Земле.
Станции "Салют-6" и "Салют-7" относятся к станциям второго
поколения: они имели два стыковочных узла и могли обслуживаться с
Земли для более длительного пребывания на ней. Для доставки грузов
был спроектирован транспортный КА "Прогресс", который мог
стыковаться со станцией при помощи второго стыковочного узла.
Первый стыковочный узел использовался для стыковки кораблей
посещения. Поскольку корабли серии "Союз" могли находиться в космосе
не более 60-90 дней, а пребывание на станции требовало значительно
большего времени, был сконструирован "Союз-ТМ", рассчитанный на
180 дней пребывания в космическом пространстве.
За все время пребывания в космосе "Салюта-6" КА "Прогресс"
доставили более 20 т различных грузов. Орбитальная станция "Салют-7"
подобна "Салюту-6", просуществовала на орбите с 1982 по 1991 гг.,
продолжительность пребывания человека на борту - 237 дней, было
доставлено свыше 25 т грузов.
1.6.2. "Мир"
Орбитальная космическая станция (ОКС) "Мир", созданная в нашей
стране, - сложнейший и уникальнейший технический объект двадцатого
века, в котором были сконцентрированы материально-технические
ресурсы, потенциал, уникальные результаты, рекорды, колоссальный
опыт отечественной и мировой космонавтики в области пилотируемых
космических полетов, длительной (до полутора лет) жизни людей вне
Земли, постоянного доступа в космос и присутствия человека на
околоземной орбите, гарантированного возвращения на Землю.
Это принципиально новый объект научно-технического наследия
человечества.
На станции российским космонавтом Валерием Поляковым
установлен рекорд продолжительности пребывания в невесомости -
438 суток. Работу станции обеспечивали более 40 грузовых транспортных
кораблей "Прогресс", доставивших на "Мир" свыше 100 т грузов.
84
Рис. 1.25. Конфигурация станции "Мир":
1 - грузовой транспортный корабль “Прогресс М"; 2 - модуль "Кристалл”; 3 -
стыковочный отсек для "Шаттла”; 4 - модуль "Квант-2"; 5 - грузовая стрела; 6 - ферма
"Софора"; 7-ферма "Рапана"; 8-модуль "Квант"; 9-транспортный корабль "Союз-ТМ“;
70-базовый блок; //-модуль "Природа"; 12- модуль "Спектр"
В шести модулях станции (общая масса станции - около 150 т, габа-
риты - 33x27 м) к моменту ее схода с орбиты было размещено 11,5 т
научного оборудования 27 стран мира. Ориентировочная стоимость
станции составила 3 млрд. долл. Ресурсы станции к моменту затопления
ее в Тихом океане были израсходованы не более чем на 50 %, т.е. ее
остаточная стоимость - 1,5 млрд. долл.
Орбитальная космическая станция (ОКС) "Мир" (рис. 1.25) - станция
третьего поколения, отличающаяся постоянно действующим экипажем,
наличием базового блока с шестью стыковочными узлами и реализован-
85
Рис. 1.26. Компоновка базового блока (1986 г.):
1 - стыковочный агрегат; 2 - узел подстыковки манипулятора; 3 - переходный отсек; 4 - гнроплата; 5 - центральный пост
управления; б - привод вращения солнечной батареи; 7 - устройство для измерения массы тела; 3 - аппаратура и оборудование
служебных систем; 9-велоэргометр; /0-стол; //-шлюзовая камера; 12-индивидуальная кабина; /./-бегущая дорожка; 14-
-'й гигиены; /5 - двигатели системы ориентации; 16- агрегатный отсек; 17- переходная камера
ным принципом модульности по основным частям и бортовым системам
и по станции в целом. Головной разработчик "Мира” - РКК "Энергия",
базового блока и модулей - ГКНПЦ им. М.В. Хруничева. За время
сборки и эксплуатации в состав комплекса помимо базового блока были
включены пять крупных модулей и специальный стыковочный отсек с
усовершенствованными стыковочными агрегатами андрогинного типа.
Базовый блок; Базовый блок (рис. 1.26) десятой орбитальной станции,
получившей впоследствии название "Мир" (ДОС-6) (20.02.86), по
конструктивно-компоновочной схеме и габаритам подобен ОКС
"Салют". Основу базового блока составляет герметический рабочий отсек
с центральным постом управления и средствами связи и двумя индивиду-
альными каютами для экипажа, общей кают-компанией с рабочим
столом и устройствами для подогрева воды и пищи. Там же находятся
беговая дорожка и велоэргометр. В корпус отсека вмонтирована
портативная шлюзовая камера. На наружной поверхности в районе
рабочего отсека расположены две подвижные панели солнечных батарей.
Третья панель (неподвижная) была смонтирована космонавтами в ходе
полета. Герметический переходный отсек - шлюз для выхода в открытый
космос расположен перед рабочим отсеком, имеет пять стыковочных
портов для соединения с транспортными кораблями и научными
модулями. Негерметичный - агрегатный отсек (двигательная установка
и топливные баки) размещен по другую сторону от рабочего отсека.
В середине приборно-агрегатного отсека находится переходная камера
со стыковочным узлом. К нему впоследствии был пристыкован модуль
"Квант". На поворотной штанге снаружи установлена остронаправленная
антенна для связи с Землей через геостационарный спутник-ретранслятор.
"Квант" - второй астрофизический модуль (09.04.87) - представляет
собой единый герметический отсек с двумя люками (рис. 1.27), один из
которых - рабочий порт для приема транспортных кораблей снабжения.
На наружной поверхности модуля расположен комплекс астрофизичес-
ких приборов для исследования рентгеновских источников излучения,
а также два узла крепления поворотных солнечных батарей и рабочая
площадка для монтажа крупногабаритных ферм, на конце одной из
которых размещается выносная двигательная установка.
"Квант-2" -третий модуль (06.12.89), модуль дооснащения (рис. 1.28),
в котором сосредоточено значительное количество оборудования,
необходимого для систем функционирования жизнеобеспечения станции
и создания дополнительного комфорта ее обитателям. Шлюзовой отсек
используется как хранилище скафандров и как ангар для автономных
средств перемещения космонавтов.
"Кристалл" - четвертый (стыковочно-технологический) модуль
(10.06.90) содержит преимущественно научное и технологическое
87
Рис. 1.27. Компоновка астрофизическою модуля "Квант" (1987 г.):
/-антенны радиотехнической системы стыковки "Игла"; 2- активный стыковочный узел;
5- блок системы управления бортовым комплексом; 4- пост управления; 5 - гироскопы
динамические; 6 - аппаратура системы управления движением; 7 - фотоизмерительное
устройство; /(-оптический блок инфракрасной вертикали; 9 - адаптер лабораторного
модуля; 10-рентгеновский спектрометр "Пульсар Х-1"; 11 - отсек научных инструментов;
12 -шлюзовая камера; 13 -ультрафиолетовый телескоп "Глазар"; 14- магнитометр; 15 -
переходная камера; 16- спектрометр "Сирень"; 17- пассивный стыковочный узел; 18-
антенна радиотехнической системы стыковки "Курс"
оборудование для исследования процессов получения новых материалов
в условиях невесомости (микрогравитации) (рис. 1.29). На нем установле-
ны два узла андрогинно-периферийного типа, один из которых соединен
со стыковочным отсеком, а другой - свободен. На наружной поверхности
находятся две поворотные панели солнечных батарей, впоследствии
перенесенных на модуль "Квант".
"Спектр" - пятый геофизический модуль (01.06.95) для экологическо-
го мониторинга атмосферы, океана, земной поверхности, проведения
медико-биологических исследований и др. (рис. 1.30). Для вынесения
экспериментальных образцов на наружную поверхность запланирована
установка копирующего манипулятора "Пеликан", работающего
совместно со шлюзовой камерой. На поверхности модуля - четыре
поворотные панели солнечных батарей.
88
Рис. 1.28. Компоновка модуля дооснащения "Квант-2" (1989 г.):
1 - антенны стыковки "Курс"; 2-активное стыковочное устройство; 3 - пост управления; 4 - гигиеническая секция; 5 - система
регенерации воды; 6 - двигатели коррекции и стабилизации; 7- датчики ИК-вертикали системы управления движением; Л -
солнечные датчики системы управления движением; 9- контейнеры для еды; 10-буферные элекрохнмнческие батареи; 11 - блоки
системы управления движением; 12-радиатор системы терморегулирования, 13- шары-баллоны с гелием; 14- портативный блок
системы водоснабжения; 15 - топливный бак; 16- антенны системы "Куб-контур"; 17- контейнеры для полезного груза; 78-
гироскопы динамические; /9-баки системы "Родник”; 2(1- оборудование для шлюзования; 21 -средство перемещения космонавтов
в космосе; 22-оптический звездный датчик; 23-космический скафандр "Орлан Д"; 24-выходной люк; 25-устройство для выхода
ЧО космонавтов в космос
Рис. 1.29. Компоновка технологического модуля "Кристалл" (1990 г.):
1 - антенны системы стыковки "Курс"; 2 - активный стыковочный узел; 3 — пост управления; 4- панель управления аппаратурой
"Кратер-5"; 5 - бегущая дорожка; б - двигатели коррекции и стабилизации; 7 - датчики ИК-вертикали системы управления
движением; 8— солнечные датчики системы управления движением; 9-радиатор СТР; /0- блоки системы управления движением;
И-буферные электрохимические батареи; 12-шары-баллоны с гелием; 13-устройство "Свет"; 14-топливный бак; /5-антенны
системы "Куб-контур"; /б - панель системы "Родник"; 17-баки системы "Родник"; 18 - холодильник; /9- телескоп "Глазар-2";
20 - устройство "Ксения"; 21 - привод многоразовой солнечной батареи; 22- кристаллизатор; 23 - аппаратура "Марина"; 24-
фотокомплекс "Природа-5"; 25 - андрогинный стыковочный агрегат
Рис. 1.30. Компоновка оптического модуля "Спектр" (1995 г.):
I - антенны системы стыковки "Курс”; 2—активный стыковочный узел; 3- пост управления; 4-система "Таурус"; 5-декоративные
панели "стен" приборно-грузового отсека; 6- двигатели коррекции и стабилизации; 7- датчики ИК-вертикали систем ы управления
движением; 8- солнечные датчики системы управления движением; 9- буферные электрохимические батареи; /0-блоки системы
управления движением; II - радиатор СТР; 12- шары-баллоны с гелием; 13-топливный бак; 14- антенны системы "Куб-контур";
/5- комплекс аппаратуры "Гриф"; 16- шлюзовая камера; /7-рабочий пост; 18- аппаратура "Астра-2"; /9-рама с пультами
»— управления научной аппаратурой; 20-негерметический отсек; 21 - панель дополнительной основной солнечной батареи
V©
Рис. 1.31. Компоновка стыковочного отсека (1995 г.):
/ - андрогинный периферийный агрегат стыковки (А ПАС-1); 2 - иллюминатор; 3 - вентилятор обдува иллюминатора; 4 - клапан
выравнивания давления; 5 - телекамера; 6 - пылефильтр; 7- розетки бортовой сети; 8- блок управления клапанами давления;
9- пульт управления андрогинной периферийной системой стыковки (АПСС); 10 - блок плавких предохранителей; II - усилитель-
коммутатор нагревателя СТР; /2-блок автоматических переключателей СТР; /3-блок включения питания; 14- блок плавких
предохранителей АПСС; 15- панель управления СТР; /б-блок энергопитания АПСС; / 7-система обеспечения температурного
режима (СТР); 18- лампа внутреннего освещения; 19- вентилятор обеспечения циркуляции воздуха; 20- люк; 21 - разъем
подключения питания; 22- клапан выравнивания давления; 23- ручной клапан; 24-АПАС-2
Рис. 1.32. Компоновка исследовательского модуля "Природа" (1996 г.):
/ - антенны системы стыковки "Курс"; 2 - активный стыковочный узел; 3 - пост управления; 4 - аппаратура NASA; 5 - пульт
питания аппаратуры NASA; б-контейнер сукладками NASA; 7-пульт управления аппаратурой "Алиса"; 8-двигатели коррекции
и стабилизации; 9- датчики ИК-вертикали системы управления движением; 10- площадка для установки доставляемой аппаратуры
NASA; 11 - солнечные датчики системы управления движением; 12- буферные электрохимические батареи; 13- блоки системы
управления движением; 14- радиатор СТР; /5- топливный бак; /б - блоки аппаратуры "Ручей"; 17- шары-баллоны с гелием;
18 - антенны системы "Куб-контур"; 19- оптический блок системы "Алиса”; 20 - спектрометр "Икар"; 21 - оптический блок
аппаратуры "Уровень"; 22 - антенна системы “Траверс-1 ГТ; 23 - радиометр Р-600; 24 - Фурье-интерферометр "Доли"; 25 -
ь» многоканальные скаиируюшие устройства
Шестой стыковочный модуль (15.11.95) создан для стыковки корабля
"Атлантис" и доставлен на "Мир" американским "Спейс шаттлом"
(рис. 1.31).
"Природа" - седьмой, научный, модуль (26.04.96) содержал приборы
высокоточного наблюдения за земной поверхностью в различных
диапазонах спектра. В составе модуля находилось американское
оборудование (около тонны) для изучения поведения человека в
длительном космическом полете (рис. 1.32).
В общей сложности на борту станции было выполнено более 16,5
тысяч экспериментов, получены знания и результаты большой практичес-
кой значимости. Разработано медицинское обеспечение долгосрочных
межпланетных полетов. На станции выполнено 23 международные
программы экспериментальных исследований. А в процессе разработки
ОКС "Мир" создано более 600 новейших технологий с практическим
внедрением в различные сферы народного хозяйства.
1.6.3. Международная космическая станция
Международная космическая станция (МКС) находится в стадии
строительства. Она должна быть построена к середине 2004 г. при
участии США, России, Японии, Канады и стран - членов Европейского
космического агентства в период с 1997 по 2004 г. Это самый крупный
международный технический проект XXI в.
В рамках этого проекта предполагается Россией провести работы по
следующим основным направлениям:
- технология и производство материалов;
- биотехнология;
- экология;
- геофизика;
- внеатмосферная астрономия и астрофизика;
- материаловедение;
- медицина;
- биология;
- технические эксперименты.
Технология и производство материалов предусматривает исследования
по изучению процессов кристаллизации, затвердевания, массопереноса
в жидких и газовых средах по новому научно-техническому направле-
нию - космической технологии. Еще с 1986 г. на орбитальной станции
"Мир" проводилась отработка технологий получения материалов на
установках "Корунд-1М", "Галлар", "Кратер-В", "Оптизон-1". Было
проведено более 100 экспериментов. Выращенные в условиях микрогра-
витации монокристаллы полупроводниковых материалов обладают
94
более регулярной кристаллической решеткой и более однородным
распределением примесей. Планируется отработать технологические
процессы получения высококачественных монокристаллов и эпитакси-
альных структур большого диаметра (76...100 мм). На начальном этапе
предполагается проведение экспериментов по изучению роста кристал-
лов, затвердевания стекол, получения новых материалов, исследования
поведения жидкости в условиях невесомости и выпуск опытных партий
для микроэлектроники, СВЧ-техники, ядерной энергетики, медицины
монокристаллов арсенида галлия, теллурида кадмия, оксида цинка
методами роста из газовой фазы. На конечном этапе планируется
наладить полупромышленное производство монокристаллов арсенида
галлия диаметром 76 мм методом направленной кристаллизации, а также
кремниевых эпитаксиальных пластин диаметром 1000...150 мм.
Космическая биотехнология предусматривает получение уникальных
в условиях микрогравитации биологических материалов, биообъектов,
лекарственных препаратов высокой степени чистоты и однородности
их физико-химических свойств. Уже на станциях "Салют" и "Мир" были
получены монокристаллы белков с недостижимыми на Земле свойствами,
увеличена производительность очистки биопрепаратов в 400... 1000 раз
со степенью чистоты, превышающей в 10 раз по сравнению с аналогич-
ным процессом на Земле. На МКС биологические исследования будут
проводиться в биотехнологическом модуле, оснащенном многоцелевой
исследовательской аппаратурой, биотехнологической аппаратурой для
регенерации и приготовления растворов, низкотемпературного хранения
препаратов, оперативной обработки результатов экспериментов.
К настоящему времени в области экологии путем дистанционного
зондирования Земли с борта пилотируемых кораблей и орбитальных
станций проведено большое количество фотографических и спектро-
радиометрических экспериментов: около 39 тысяч фотоснимков земной
поверхности по минерально-сырьевым ресурсам России, сезонной
изменчивости сельскохозяйственных угодий и биологической продуктив-
ности Мирового океана в интересах боле чем 800 отечественных и
зарубежных организаций.
Научная аппаратура на МКС позволит решать следующие задачи:
- экологический мониторинг;
- исследования естественных, антропогенных, различных внешних
факторов, влияющих на экосистемы;
- мониторинг чрезвычайных ситуаций;
-исследование природных ресурсов и контроль природопользования;
- метеорологии, климатологии, океанографии и науки о Земле.
Геофизика предусматривает решение (с помощью исследований,
проводимых на МКС) следующих прикладных проблем:
95
- разработка способов управления потенциалом корпуса объекта;
- использование плазменных образований и пучков заряженных
частиц как генераторов электромагнитных волн в ОНЧ-диапазоне;
- исследование собственной внешней атмосферы станции и верхней
атмосферы Земли;
- контроль космического пространства и поверхности Земли в
диапазоне ионизирующих излучений.
Внеатмосферная астрономия и астрофизика (с помощью исследований,
проводимых на МКС) позволит приблизиться к получению ответов на
ряд фундаментальных вопросов, таких как:
- что такое Вселенная, каковы ее свойства, структура, ранние стадии
развития;
- как образовались галактики, чем объясняется многообразие их
свойств, какова природа активных процессов в галактиках и химическая
эволюция вещества во Вселенной;
- построение неразрывной картины образования звезд и околозвезд-
ных планетных систем и их эволюционных стадий;
- какова связь между появлением и эволюцией жизни с эволюцией
звезд, планет и других космических явлений.
Исследования в области материаловедения позволят изучать влияние
факторов космического пространства на свойства пленочных и
композиционных материалов, оптических свойств покрытий систем
обеспечения теплового режима, конструкционных материалов.
Материаловедческие эксперименты будут проводиться для:
- комплексной оценки изменения технологических и эксплуатацион-
ных свойств материалов;
- прогнозирования долговечности конструкционных материалов в
различных условиях эксплуатации (агрессивная среда, вода, вакуум,
радиация и др.);
- обнаружения технологических дефектов в материалах и элементах
конструкции (трещины, поры, расслоения, инородные включения,
непровары, утолщения и т.д.);
- анализа спектра вибраций деталей и конструкций;
- контроля процессов, протекающих в изделиях при их производстве
и в эксплуатации.
В области медицины основные усилия при полетах на станциях
"Салют" и "Мир" были направлены на создание системы обеспечения
длительных космических полетов. Эта система требует больших затрат
времени на выполнение физических упражнений, медицинских обследова-
ний физиологического и гигиенического характера. Она не дает гарантии
того, что наблюдаемое при полетах длительностью до одного года
благополучное состояние организма не обеспечивается мобилизацией
96
всех его резервных возможностей и при истощении которых не будут
наблюдаться необратимые изменения в организме.
На МКС основными направлениями будут медицинские исследования,
связанные с определением оптимальной продолжительности экспедиций,
в течение которых экипаж будет работать с наибольшей производитель-
ностью, а также с обеспечением длительных экспедиций при пилотируе-
мых полетах на Марс.
Биологические исследования, проведенные на орбитальных станциях
"Салют" и "Мир", показали, что невесомость и радиация в космическом
полете не препятствуют протеканию нормальных жизненных процессов,
хотя и приводятк некоторым изменениям их характера. Были исследова-
ны прохождение циклов индивидуального развития у растений и
животных, а у ряда видов - и смены нескольких поколений. Во многих
случаях были выявлены изменения в структурно-функциональной
организации клеток (при клеточном делении), в обмене веществ, в
частоте мутаций, в скорости старения организмов.
На МКС биологические исследования будут направлены на:
- продолжение фундаментальных исследований о принципах
организации жизни на уровнях от молекулярного и субклеточного до
уровня организмов популяционного и межпопуляционного;
- выявление особенностей жизненных процессов, представляющих
интерес для биотехнологии, сельского хозяйства;
- отработку отдельных звеньев биолого-технических систем
жизнеобеспечения для перспектив пилотируемой космонавтики;
- исследования по экспериментальной экологии для углубления
знаний о механизмах разрушающего техногенного воздействия на
природу и путях предупреждения его нежелательных последствий.
Уникальные технические эксперименты на МКС связаны:
- с испытанием крупногабаритных конструкций;
- с освоением орбитальных тросовых технологий;
- с исследованием условий эксплуатации крупногабаритного
орбитального комплекса, определением его динамических и прочностных
характеристик, отработкой технологии монтажа при выполнении
сборочно-монтажных и ремонтных работ;
- с получением исходных данных для создания и эксплуатации
перспективных средств ориентации, сближения, наведения, навигации
и др.
Аналогичные работы планируют провести кроме России и другие
страны - участники полетов на МКС.
В результате рассмотрения и взаимной увязки была сформирована
полная конфигурация МКС, включающая следующие основные
элементы:
4- 8620
97
- функционально-грузовой блок (ФГБ), обеспечивающий стыковку
и сборку в составе ФГБ-NODE-1;
- служебный модуль для коррекции орбиты станции на всех этапах
ее развертывания, ориентации в пространстве и обеспечения постоянной
работы экипажа;
- научно-энергетическая платформа с солнечными батареями для
энергоснабжения российского сегмента станции;
- универсальный стыковочный модуль для пристыковки российских
научных модулей;
- российский модуль жизнеобеспечения;
- российские исследовательские модули ИМ-1, ИМ-2, ИМ-3;
- американские модули NODE-1, N0DE-2 для соединения в единую
конструкцию герметических отсеков станции;
- американский лабораторный модуль - LAB;
- модуль для размещения экипажа в американском сегменте - НАВ;
- основная ферма станции - американская конструкция, используемая
для размещения основной системы энергоснабжения станции;
- японские исследовательские модули JEM PM, JEM EF;
- европейский исследовательский модуль АРМ;
- канадский манипулятор.
Основные характеристики МКС представлены в табл. 1.1.
Таблица 1.1
Сравнительный анализ некоторых характеристик орбитальной станции "Мир"
и международной космической станции
Характеристики Орбитальная станция "Мир" Международная космическая станция
Масса на орбите, т 130 400
Энергетика, кВт 17...18 120
Объем герметических отсеков, м3 1200
Экипаж, чел. 3 7
Расчетное время существования на орбите (фактическое время), лет 5(15) 15
Рабочая высота орбиты,км 400
Наклонение орбиты, ° 51,6
Длина станции, м 33 108
98
Характеристики Орбитальная станция "Мир" Международная космическая станция
Ширина станции, м 27 74
Число лабораторных модулей - 6
Число запусков для сооружения станции 50
Начало строительства 20.02.86 20.11.98
Окончание строительства (подстыковка последнего модуля) 26.04.96 2004 г.
Прекращение существования 2001 г.
Для ФГБ конструктивной базой стал функционально-грузовой блок
серии космических кораблей тяжелого класса "Космос", успешно
прошедших летные испытания в составе орбитальных станций "Салют-6"
и "Салют-7". ФГБ включает приборно-герметический отсек, в котором
размещается оборудование служебных систем, систем стыковки,
жизнеобеспечения, электроснабжения, а также предусматривается место
для установки грузов и научного оборудования и герметичный адаптер,
в котором размещается оборудование механической стыковки,
разделенные между собой герметическим сферическим днищем. Кроме
того, в состав ФГБ входят головной обтекатель, сбрасываемый после
прохождения плотных слоев атмосферы, и промежуточный отсек,
который остается с верхней ступенью PH после отделения ФГБ.
Для защиты от столкновения с микрометеоритами и орбитальными
осколками над корпусом ФГБ устанавливаются экраны микро метеорной
защиты.
Навнешней поверхности приборно-герметического отсека устанавли-
ваются два двигателя коррекции и сближения, 24 двигателя причаливания
и стабилизации, 16 двигателей точной стабилизации, топливные баки
для хранения 6140 кг топлива и проведения 30 циклов дозаправки.
Снаружи герметического корпуса также устанавливаются агрегаты
системы обеспечения теплового режима, панели наружного холодильного
радиатора, антенны на штангах и механизмах, панели солнечных
батарей, раскрываемые после выведения ФГБ на орбиту, телекамеры
визуального контроля стыковки. Для стыковки с манипулятором
"Шаттла" на герметичном адаптере установлен специальный узел
захвата. Все внешнее оборудование закрывается экранно-вакуумной
теплоизоляцией.
4*
99
ФГБ имеет в своем составе системы, предназначенные для выполнения
основных функций по управлению движением, управлению бортовым
комплексом, а также радиотехническую систему для обмена информацией
с Землей, систему механической стыковки, состоящую из трех различных
стыковочных агрегатов, системы жизнеобеспечения, пожарообнаружения
и пожаротушения, телевидения, наружного и внутреннего освещения,
телефонной связи, аппаратуру телеоператорного режима управления.
Для оценки масштаба международной космической станции можно
сравнить ее с орбитальной станцией "Мир" (см. табл. 1.1).
100
Глава 2
Механика космического движения
2.1. Характеристика космического
пространства
2.1.1. Общие сведения
В настоящее время под космосом подразумевается бесконечная во
времени и пространстве Вселенная. Исследования с помощью оптических
телескопов позволяют заглянуть в глубину на расстояние в 5 млрд,
световых лет, что составляет около 5-10“ км, а с помощью радиотелеско-
пов это расстояние надо увеличить вдвое. Нижняя граница космоса
определяется в 100 км, причем земная атмосфера ограничивается
сферической поверхностью, находящейся на высоте 70 км (сферический
слой между высотами 70 и 100 км - переходная область). Поэтому
космическим полетом, а точнее движением в космическом пространстве
называется движение искусственного объекта на высотах больших
100 км. Наблюдаемая часть Вселенной позволяет исследовать многообра-
зие явлений и процессов, протекающих во Вселенной, включая и
проблему существования внеземных цивилизаций. Ниже приведены
Структура и спектр масс космоса, в кг
Наблюдаемая часть Вселенной........... 1051
Млечный путь (наша Галактика)......... 1042
Большое Магелланово Облако............ Ю40
Малое Магелланово Облако ............. 5-1039
Солнце................................ 1,983-Ю3®
Планеты Солнечной системы............. 3,17-1023... 1,9-1027
Земля ................................ 5,98-1024
Луна.................................. 7,35-1022
Астероиды............................. 106... 102°
Метеорные тела ....................... 10“|5...1О6
Космическая пыль (микрометеориты) .. 10-,9...10-15
Молекулярные и атомные частицы .... 1,64-10"27... 10”22
Электроны............................. 9,107-Ю-31
Нейтрино.............................. 0
Кванты электромагнитного излучения . 0
101
данные, касающиеся распределения массы в наблюдаемой части
Вселенной.
В космосе существуют поля: электростатическое, магнитное,
гравитационное. Это относится в основном к полям в Солнечной системе.
Существуют теоретические предположения (гипотезы) о существовании
в космосе изолированных электромагнитных образований - геонов и
гравитонов (квантов гравитационного поля). Несмотря на ограниченные
возможности для наблюдения только в области оптического и радиодиа-
пазонов, удалось с использованием теоретических расчетов определить
уникальные по своей напряженности поля. Так, в конце 1935 г. в
созвездии Кассиопеи была открыта звезда 13-й величины , масса которой
в 2,8 раз больше массы Солнца, а объем - в 8 раз меньше объема Земли.
Сила тяжести на поверхности ее превышает земную в 3,7• 106 раз.
Представим звездные величины некоторых звезд:
Солнце....................................... -26
Сириус (а Большого Пса) ................... -1,6
Канопус (а Киля)........................... -0,9
а-Центавра ................................. -0,1
Р-Центавра .................................. 0,9
5-Золотой Рыбы................................ 8
Во Вселенной возможно существование нейтронных и гиперонных
звезд, высокая плотность и малый радиус которых вызывают эффект
"гравитационного запирания" светового излучения. Этот эффект был
предсказан теорией относительности и экспериментально наблюдался
во время солнечных затмений как искривление светового луча от близко
расположенных к солнечному диску звезд. Помимо этого известен эффект
гравитационного "красного смещения" (чем больше напряженность
гравитационного поля на поверхности звезды, тем сильнее спектральные
линии смещены в сторону длинных волн). При очень больших гравитаци-
онных полях световое излучение вообще не будет выходить за пределы
гравитационного радиуса , т.е. звезда будет невидима.
Звездная величина характеризует относительную светимость звезд, наблюдаемую
невооруженным глазом. При этом яркость каждой последующей величины отличается от
предыдущей в 2,512 раза. Условный стандарт яркости, 1; величины меньшие этой -
положительны, большие - отрицательные.
"Гравитационный радиус для Солнца равен 1,48 км.
102
Кроме видимого (относительного) блеска в астрономии существует
понятие истинного блеска, который характеризуется абсолютной
звездной величиной, которую бы имела звезда, находясь от нас на
расстоянии в 10 парсек (ЗЮ14 км). По этой характеристике звезда S
Золотой Рыбы - самая яркая из всех известных звезд, ее абсолютная
яркость в 105 выше абсолютной яркости Солнца.
Что касается геонов (так называются взаимодействующие замкнутые
статические магнитные и электрические поля), то нелинейная теория
гравитации предсказывает возможность создания гравитационного поля,
помимо взаимодействующих космических масс, электростатическим и
магнитным полями независимо от космических масс.
К настоящему времени установлено, что у звезд довольно часто
встречается магнитное поле. Так, у Солнца, напряженность магнитного
поля максимальна у наружной поверхности пятен и составляет от 4 до
24-105 А/м, а средняя напряженность магнитного поля на поверхности
Солнца - около 4103 А/м. Помимо звезд, обладающих более высокими
значениями средней напряженности магнитного поля, существуют
магнитопеременные звезды: у звезды а2 Гончих Псов магнитное поле
меняется от +44 О5 до -4-105 А/м в течение 4...5 земных суток.
Магнитное поле Галактики имеет незначительную величину (порядка
нескольких А/м); оно направлено вдоль галактических рукавов
протяженностью в тысячи световых лет, однако считается, что оно
ответственно за конфигурацию и эволюцию Галактики.
Гипотеза о существовании в космосе, кроме магнитного и гравитаци-
онного, электростатического поля непосредственными наблюдениями
пока не подтверждено, хотя выполненные теоретические вычисления
дают оценку времен электрических разрядов в 1О9...1О10 лет.
Русские ученые Б. Понтекорво и Я. Смородинский высказали
гипотезу, согласно которой во Вселенной должно преобладать
нейтрино, - самой проникающей частицы с плотностью ее в
24 О3 МэВ/см3 по сравнению с остальными частицами (космическими
компонентами) 10-2 МэВ/см3.
Галактика по форме приближенно соответствует чечевице диаметром
100 и толщиной в центре 16 тысяч световых лет. Мы видим нашу
Галактику с ребра в виде Млечного Пути. В Галактике примерно 150
миллиардов звезд. Наша звезда - Солнце относится к звездам спектраль-
ного класса G (спектральные классы звезд: О, V, A, G, М, К, F -
латинские буквы - первые буквы слов предложения: "Один высокий
англичанин жевал морковь как финики").
103
2.1.2. Скорости в космическом пространстве
Относительно скоростей, с которыми перемещаются небесные тела
в космическом пространстве, в настоящее время известно следующее:
Скорость движения (средняя) Земли
по орбите вокруг Солнца ...................... 29 км/с
Скорость движения Солнца относительно
звезд ближайшей галактической окрестности ... 19 км/с
Скорость вращения Галактики в точке
расположения Солнечной системы............... 250 км/с
Скорость движения Галактики относительно
фона реликтового излучения .................. 160 км/с
2.1.3. Расстояние в космическом пространстве
В настоящее время за единицу измерения расстояний в космическом
пространстве для исследования движения и расчета траекторий принято
несколько единиц, самая наименьшая из которых - а.е. - астрономичес-
кая единица длины, представляющая собой среднее расстояние от Земли
до Солнца (единица, которую применяли Коперник и Кеплер). Оценка
расстояний с помощью такой единицы может быть выполнена с высокой
точностью, чего нельзя сказать о самой астрономической единице:
1 а.е. = 149 600 000 ±30 000 км,
точность которой для практических нужд космонавтики должна быть
увеличена до 30 км. В 1961 г. одновременно в СССР, США и Англии
была впервые проведена успешная радиолокация планеты Венера, с
помощью которой уточнялось значение а.е. (табл. 2.1).
Таблица 2.1
Результаты экспериментов по уточнению астрономической единицы - а.е.
Организация, проводившая эксперимент Частота радиопередатчика, Мгц а.е., км
Институт радиотехники и элек- троники, СССР, 1961 г 700 149 599 300+2000
Калифорнийский институт, США, 1961 г. 2388 149 598 640±200
104
Организация, проводившая эксперимент Частота радиопередатчика, Мгц а.е., км
Массачусетский институт, США, 1961 г. 440 149 598 000+300
Обсерватория Джодрелл-Бэнк, Англия, 1961 г. 408 149 600 000+5000
Институт радиотехники и элек- троники, СССР, 1962 г. 700 149 598 100+750
Калифорнийский институт, США, 1962 г. 2388 149 958 900+670
Обсерватория Джодрелл-Бэнк, Англия, 1962 г. 410,25 149 596 600+900
1 парсек (пк) - расстояние от Земли до светила, которое обладает
годичным параллаксом в 1 секунду (угол, под которым радиус земной
орбиты виден со звезды под углом в 1 секунду):
1 пк = 206 264,8 а.е. = 3,0837-1013 км = 3,259 св. лет.
1 свет, год = 9, 460-1012 км = 0,3069 пк = 63 280 а.е.
2.2. Законы Иоганна Кеплера и
закон всемирного тяготения
Исаака Ньютона
2.2.1. Законы движения небесных тел
Конец XVI и начало XVII вв. ознаменовались революцией в
астрономии, которая связана с изобретением телескопа и выходом в свет
трех книг: в 1543 г. "Об обращениях небесных сфер" Николая Коперника
из Торуна, в 1609 г. "О движениях Марса" ив 1610 г. "Звездный вестник"
изобретателя телескопа Галилео Галилея.
До этого времени в описании картины мира господствовала система
Птолемея (Гиппарха), согласно которой Земля находилась в центре
Вселенной; планеты двигались по малым окружностям (эпициклам), а
Центр эпициклов перемещался по большой окружности вокруг Земли,
Однако центр большой окружности не совпадал с "центром вселенной" -
Землей, т.е. они были близки, но не находились в одной точке. Коперник,
105
ссылаясь на Аристарха Самосского, построил другую схему: он поместил
Солнце в центре, а планеты, в том числе и Землю, - на эпициклы. Кеплер
сделал следующий шаг.
Датский астроном Тихо Браге в 1609-1619 гг. выполнял большой
объем наблюдений за движениями планет и в частности планеты Марс,
при этом движение Марса не вписывалось в Птолемеевскую схему.
Когда же Кеплер изобразил положения Марса на большом листе
бумаги, то стала вырисовываться совсем другая картина. Кеплер сначала
не был уверен в себе: ему казалось, что путь обращения Марса вокруг
Солнца должен быть идеальным кругом, но вместо этого получалась
совсем другая фигура - эллипс, имеющий не один центр, как круг, а два
фокуса. Можно думать, что Кеплер утешил себя тем, что круг является
частным случаем эллипса - эллипса с совмещенными в одной точке
фокусами. Таким образом, он пришел к выводу, что планеты движутся
по эллиптическим орбитам, а Солнце для каждой из них находится в
одном из фокусов эллипса. Этот вывод известен как первый закон
Кеплера.
Первый закон. "Все планеты (и кометы) движутся по коническим
сечениям (эллипс, парабола и гипербола), в одном из фокусов которых
находится Солнце".
Математически (рис. 2.1):
= Р
1 + ecoscp ’
где г - радиус-вектор из фокуса, в котором находится Солнце; р -
параметр орбиты; геометрически параметр равен половине хорды,
проведенной через фокус конического сечения перпендикулярно к его
главной оси; е - эксцентриситет конического сечения; для эллиптической
Рис. 2.1. Иллюстрации к 1-му закону
И. Кеплера
орбиты эксцентриситет равен отно-
шению расстояния с от центра эллип-
са к большой полуоси а эллипса:
с ^а2 -Ь2
а а
<р- угол между радиусом-вектором
и главной осью орбиты, отсчитыва-
емый по движению планеты от на-
правления радиуса-вектора в пери-
гелий (ближайшую точку траектории
к фокусу, в котором находится
Солнце).
106
При a-b эксцентриситет равен
нулю и орбита обращается в
окружность. Зная эксцентриситет
эллипса и его большую полуось,
можно определить величину ма-
лой полуоси эллипса по формуле
b = ау/\ - е2.
При е = 1 эллипс становится \ Р /
параболой, которая представляет L-------
собой разомкнутую кривую и
обладает тем свойством, что для !.ис/,2’2' И;,Л10стРа11,,я к0 2"МУ закону
- „ И. Кеплера
иее расстояние любой точки тра-
ектории от фокуса равно расстоя-
нию этой же точки от неподвижной прямой, перпендикулярной к главной
оси сечения, называемой директрисой, отстоящей на расстоянии p = 2q
от этого фокуса.
При е > 1 траектория движения обращается в гиперболу, особеннос-
тью которой является то, что разность расстояний любой ее точки от
двух фокусов является величиной постоянной, равной 2а; для гиперболы
параметр р - а(е2 - 1).
Второй закон. "Площади, описываемые радиусами-векторами планет
относительно Солнца, пропорциональны соответствующим временам
движения планет по их орбитам" ("Закон площадей") (рис. 2.2).
Для двух планет можно записать:
Косове, = K2r2cos02,
где 0- угол наклона траектории, характеризующий направление вектора
скорости движения планеты по орбите, относительно местного горизонта
(перпендикуляра к радиусу-вектору).
Третий закон. "Для планет, движущихся по эллипсам, квадраты времен
обращения относятся, как кубы больших полуосей их эллиптических
орбит" ("Гармонический закон").
Третий закон Кеплера запишем в современном уточненном варианте:
где а - большая полуось эллиптической орбиты;
107
Т- период одного полного обращения планеты вокруг Солнца;
f- ньютоновская гравитационная постоянная;
М - масса Солнца;
m - масса планеты.
При этом формулировку Кеплера третьего закона оставим неизмен-
ной.
В 1666 г. на основе этих трех законов Кеплера Исаак Ньютон вывел
закон всемирного тяготения, ставший краеугольным камнем не только
небесной механики, но и всего так называемого ньютоновского
мировоззрения.
"Всякие два тела притягиваются друг к другу с силой, пропорциональ-
ной произведению их масс и обратно пропорциональной квадрату
расстояния между ними":
F = —
г2
причем знак минус в этой формуле показывает, что сила тяготения
стремится уменьшить расстояние между телами.
2.2.2. Основы движения космических аппаратов
Космический аппарат, который перемещается в космическом
пространстве с выключенным двигателем, подчиняется законам небес-
ной механики в той же степени, как и планеты, кометы, астероиды и
другие тела естественного происхождения. Основы небесной механики,
заложенные более 300 лет тому назад, с успехом применяются при
расчетах движения космических аппаратов, созданных человеком.
Для определения характера движения физического тела под
воздействием приложенных к нему сил в современной механике
применяется принцип, получивший название "начала Д’Аламбера",
установленный французским математиком и философом. Эти "начала"
позволяют задачу о движении свести к задаче равновесия и найти таким
образом связь между известными действующими силами и силами
давления, натяжения и др.
Принцип Д’Аламбера в формулировке Н.Е. Жуковского:
"Если в какой-нибудь момент времени остановить движущуюся
систему и добавить к ней, кроме сил ее движущих, еще все силы инерции,
соответствующие данному моменту времени, то будет иметь место
равновесие; при этом все силы давления, натяжения и т.д., которые
108
развиваются между частями системы при таком равновесии, будут
действительные силы давления, натяжения и т.д. при движении системы
в рассматриваемый момент времени".
Математически уравнение движения записывается в виде уравнения
равновесия
-та + F = О,
где а - ускорение; F - сила; т - масса точки.
В этом уравнении первое слагаемое представляет собой "даламберову
силу инерции". В действительности такой реальной силы не существует.
Так, если рассматривать движение КА по круговой орбите искусственно-
го спутника Земли, то в случае существования такой реальной силы,
которая бы уравновешивала бы другую действительно реальную силу
притяжения, КА по инерции начал бы двигаться по касательной к
окружности орбиты, т.е. по прямой линии. Но дело в том, что на КА
никакая другая реальная сила, кроме силы притяжения (силы сопротивле-
ния весьма разреженной атмосферы, светового давления и других сил
крайне незначительны для типичных условий движения и существующих
КА) не действует. КА движется по орбите потому и только потому, что
он получил при выведении на орбиту от ракеты-носителя начальную
кинетическую энергию и такое количество движения, благодаря
которому сила притяжения при дальнейшем его движении сможет только
удерживать КА на круговой орбите, но не притянуть его к Земле.
2.2.3. Орбиты космических аппаратов
В небесной механике исследование движения двух материальных тел,
притягивающихся друг к другу по закону Ньютона, называется задачей
двух тел. В этом случае можно дифференциальные уравнения движения
решить аналитически и полностью определить характер движения одного
материального тела по отношению к другому.
При исследовании (в общем виде) движения трех или нескольких тел
встречаются большие затруднения: решение дифференциальных
уравнений не может быть получено в конечном виде - приходится
прибегать к численному интегрированию составленных дифференциаль-
ных уравнений. В случае трех и более тел математически невозможно
исследовать формы орбит и характер движения, за исключением
некоторых частных случаев.
109
2.2.4. Задача трех тел
Лагранж получил пять точных решений задачи трех тел (рис. 2.3),
когда массы их подчиняются условию т1 > т2 > ту, а движение
происходит в одной плоскости. Эти решения определяют пять точек, в
которых масса т3, имея нулевую относительную скорость, остается
неподвижной относительно пц и т2. все три тела будут двигаться в
плоскости, в которой они находятся, так, что их взаимные расстояния
всегда сохранятся неизменными. Эти точки называются либрационными,
или центрами либрации, три из которых - коллинеарные либрационные
точки, расположенные на прямой АВ: Lx - между массами и т2, L2 -
за массой т2, и Ly - за массой т^. Конкретное положение этих точек
зависит от соотношения между массами т} и т2.
Две другие точки - эквидистантные либрационные точки, и массы
т1,т2 и ту образуют равносторонние треугольники: точка L4- впереди
массы т2 по направлению ее движения; £5 - позади массы т2.
Оказалось, что движение тела, находящегося в точках L(, L2 и Ly,
неустойчиво, а движение вблизи точек L4 и L5 - устойчиво.
Открытие малых планет на орбите Юпитера вблизи точек L4 и L5
показало, что решение частной задачи трех тел, полученное Лагранжем,
представляет ие только теоретический интерес. Эти планеты относятся
к группе астероидов, захваченных Юпитером, и носят название троянцев.
Решение Лагранжа точно описывает совместное движение: Солнца (nzj),
Юпитера (ш2) и каждого из
Рис. 2.3. Пял ь точных решений Лагранжа
задачи движения трех тел
троянцев (wj), которые при движении
сохраняют расстояние между собой
неизменным.
Представляют интерес для органи-
зации устойчивой межпланетной
станции для наблюдения за явления-
ми, происходящими на земном шаре
и на Луне, для астрономических
исследований и в более далеком буду-
щем - космогорода: устойчивые
либрационные точки в системе Зем-
ля-Луна (точки Л4 и Ly (см. рис.2.3)).
В 1961 г. в системе Земля - Луна в
окрестности точки Ly польский аст-
роном Кордилевский обнаружил два
тусклых облакоподобных объекта.
Позже было сообщение об обнаруже-
нии подобного же облака в районе
точки Л4.
110
Якоби рассматривал задачу трех тел для случая, когда масса одного
тела равна или меньше массы другого, а третье тело обладает исчезающе
малой массой: масса тела, движение которого исследуется, настолько
мала, что влиянием его на движение тел с массами /?1| и т2вполне можно
пренебречь. Этот подход получил название ограниченной задачи трех
тел и состоит в том, что требуется исследовать движение тела с
исчезающе малой массой, в соответствии с законом Ньютона, по
формулам задачи о двух телах. Такая задача может быть решена в
конечном виде в случае, если движение происходит в одной плоскости.
Для исследования движения КА в Солнечной системе ограниченная
задача имеет большое значение, так как планеты расположены
приблизительно в одной плоскости - в плоскости эклиптики, а движение
КА, как правило, так же происходит в плоскости эклиптики. В некоторых
случаях, при соответствующих значениях массы и скорости тел, можно
получить решение в конечном виде.
В общем случае при решении задачи трех тел приходится прибегать
к численному интегрированию. Численные решения позволяют
проследить за движением третьего тела или нескольких тел в пределах
того промежутка времени, который охватывался этим решением. Для
широких исследований желательно получать массовые решения при
различных начальных условиях. Для этого приходится упрощать задачу
так, чтобы она решалась до конца. Одним из таких приемов является
введение понятия о "сферах действия планет".
Задача о движении небольшого тела (космического аппарата) среди
других небесных тел с помощью введения понятия "сферы действия
планеты" сводится к нескольким задачам двух тел.
Если небесное тело А движется вокруг центрального тела В по одному
из конических сечений и если появляется третье тело С, которое своим
притяжением начинает влиять на тела А и В, то в их движении появятся
некоторые изменения. Эти изменения называются возмущениями, тело
С называется возмущающим телом, а силы, вызываемые им, - возмущаю-
щими силами. Равнодействующая возмущающей силы и силы притяжения
тела А к центральному телу В уже не будет центральной силой.
Рассмотрим для простоты случай, когда все три тела А, В и С
расположены на одной прямой (рис. 2.4) так, что тело А находится между
телами В и С. Возмущающее тело С, взаимодействуя с телами А и В по
закону Ньютона, вызовет силы притяжения, которые сообщат телам А
и В ускорения. Эти силы будут возмущающими силами. Сделаем так,
чтобы центральное тело В стало неподвижным и при этом условии
рассмотрим движение тела А. Для этого приложим к системе А -В силу,
равную по величине, но противоположную по направлению возмущаю-
щей силы, вызванной телом С и действующей на тело В. Тогда тело В
111
Рис. 2.4. К понятию сферы действия планет
будет находиться в покое, так как обе действующие на него силы
уравновешены, и влияние возмущающих сил выразится равнодействую-
щей силой, приложенной к телу А.
Силы вызовут ускорения тел. Ускорения будут равны отношению
величины силы притяжения к массе тела, на которую сила действует.
Если мы обозначим через т массу тела С, то ускорение JA тела А,
вызванное возмущающим телом С, будет равно
где р и R - расстояния между телом С и телами А иВ соответственно.
Расстояния связаны равенством р = R-r, где г - расстояние между телами
А и В или радиус кривой, по которой тело А обращается около
центрального тела В. Дробь —- разлагаем в биномиальный ряд
1 _ 1 + 2г + Зг2 +
(R-r)2 R2 R3 R4
Тогда
, ( 1 2г Зг2 1 , 2г (. Зг
Ji = fm — + — +-------+...--------- fm— 1 +-----+... .
Л ^R2 R3 R4 R2) R3l 2R )
Если исследуется движение тел в Солнечной системе, например
движение искусственного спутника А, обращающегося около Земли В
при возмущающем влиянии Солнца С, то величина г мала по сравнению
112
с К, а дробь — будет настолько малой, что вторым и последующим
R
членами в выражении jA можно пренебречь.
Тогда/, =fm —
R3
Так как ускорения пропорциональны величине сил, то отсюда следует,
что если силы притяжения обратно пропорциональны второй степени
расстояния, то возмущающие силы обратно пропорциональны третьей
степени расстояния. Кроме того, возмущающая сила прямо пропорцио-
нальна расстоянию возмущаемого тела от центрального тела. Следует
заметить, что к тому же заключению приводит рассмотрение и любого
другого расположения возмущаемых и возмущающих тел.
Возмущающие силы могут иметь и иное, причем самое разнообразное,
происхождение, т.е. появляться не только вследствие изменения сил
тяготения.
Основные возмущения ИСЗ, вызванные несферичностью Земли, -
прецессия орбиты и появляющееся вращение большой оси эллиптической
орбиты в плоскости этой орбиты. Прецессией называется явление
поворота плоскости орбиты вокруг земной оси в направлении,
противоположном движению спутника, при этом наклон плоскости
орбиты к экватору сохраняется постоянным. Вращение большой оси
орбиты приводит к смещению точек апогея и перигея, т.е. к изменению
углового расстояния перигея от восходящего узла. Однако, несферич-
ность Земли вызывает и другие возмущения.
У низкоорбитальных ИСЗ верхние слои атмосферы вызывают
возмущения, приводящие к уменьшению большой оси орбиты спутника,
уменьшению эксцентриситета орбиты и увеличению периода обращения.
Возмущения называются вековыми, если в движении тела они
вызывают непрерывные во времени изменения. Вековые возмущения
могут сильно исказить движение тела в зависимости от величины и
продолжительности времени действия (возмущения, вызванные
несферичностью Земли и сопротивлением атмосферы, а также влиянием
магнитного поля, давления солнечного света и др.).
Возмущения, повторяющиеся через известный интервал времени
(например, периодическое включение системы терморегулирования КА),
называются периодическими.
Мгновенные - кратковременные непериодические возмущения
(внецентренный удар микрометеорита по КА).
из
2.2.5. Сферы действия планет
Пусть имеются два небесных тела, одно из которых большой массы
М, например Солнце, и движущееся вокруг него другое тело значительно
меньшей массы т, например Земля или какая-либо другая планета
(рис. 2.5). Положим также, что в поле тяготения этих двух тел находится
третье тело, например КА, масса которого р так мала, что практически
совершенно не влияет на движение тел массой М и т. В этом случае
можно или рассматривать движение тела р в поле тяготения планеты и
по отношению к планете, считая, что притяжение Солнца оказывает
возмущающее влияние на движение этого тела, или наоборот, рассматри-
вать движение тела р в поле тяготения Солнца по отношению к Солнцу,
считая, что притяжение планеты оказывает возмущающее влияние на
движение этого тела. Для того чтобы выбрать тело, по отношению к
которому следует рассматривать движение тела р в суммарном поле
тяготения тел М и т, пользуются введенным Лапласом понятием сферы
действия. Область, называемая так, в действительности не является
точной сферой, но очень близка к сферической.
Сферой действия планеты по отношению к Солнцу называется такая
область вокруг планеты, в которой отношение возмущающей силы со
стороны Солнца к силе притяжения тела р планетой меньше, чем
отношение возмущающей силы со стороны планеты к силе притяжения
тела р Солнцем.
Пусть М - масса Солнца, т - масса планеты, ар- масса КА; К и г -
расстояния КА соответственно от Солнца и планеты, причем R
значительно больше г.
Сила притяжения массы р Солнцем
F=f^,
R2
fl планетой -
+ F = №
/\ Л I J г
д. ХА При перемещении тела р
' ' \l zn возникнут возмущающие силы
Солнце Планета = -f^^bR,
R3
Рис. 2.5. Движение КА в сфере действия планеты
114
д/г = -/2^Ндг.
1 г3
На границе сферы действия, согласно данному выше определению,
должно выполняться равенство
AF . „ „ . „ „ /и2Дг Л/2ДЛ . . „ т2 М2
----= — ДF.-F, = ДF-F-, --------= ; Дг « ДR; — =-
F F, 1 1 г5 Л5-г5 R5
где г* - радиус сферы действия планеты.
Так как г значительно меньше R по условию, то за R обычно
принимается расстояние между рассматриваемыми небесными телами.
Формула для г* - является приближенной. Зная массы Солнца и планет
и расстояния между ними, можно определить радиусы сфер действия
планет по отношению к Солнцу (табл. 2.2, где приведен также радиус
сферы действия Луны по отношению к Земле).
Таблица 2.2
Сферы действия планет
Планета Масса т относитель- но массы Земли Расстояние R, в млн км г* - радиус сферы действия, км
Меркурий 0,053 57,91 111 780
Венера 0,815 108,21 616 960
Земля 1,000 149,6 924 820
Марс 0,107 227,9 577 630
Юпитер 318,00 778,3 48 141 000
Сатурн 95,22 1428,0 54 744 000
Уран 14,55 2872,0 51 755 000
Нептун 17,23 4498,0 86 925 000
Луна 0,012 0,384 66 282
115
Таким образом, понятие сферы действия существенно упрощает расчет
траекторий движения КА, сводя задачу движения трех тел к нескольким
задачам движения двух тел. Такой подход достаточно строг, как
показывают сравнительные расчеты, выполненные методами численно-
го интегрирования.
2.2.6. Переходы между орбитами
Движение КА происходит под действием гравитационных сил
притяжения. Можно поставить задачи о нахождении оптимальных (с
точки зрения минимального требуемого количества топлива или
минимального времени на полет) траекторий движения, хотя в общем
случае могут быть рассмотрены и другие критерии.
Орбитой называется траектория движения центра масс КА на
основном участке полета под действием гравитационных сил. Траекто-
рии могут быть эллиптическими, круговыми, гиперболическими или
параболическими.
Путем изменения скорости может осуществляться переход КА с одной
орбиты на другую, а при выполнении межпланетных полетов КА должен
выйти из сферы действия планеты отправления, пройти участок в поле
тяготения Солнца и войти в сферу
действия планеты назначения
(рис. 2.6).
КА на первом участке тра-
ектории выводится к границе
сферы действия планеты от-
правления с заданными пара-
метрами либо прямо, либо с
выходом на промежуточную
орбиту спутника(круговая или
эллиптическая промежуточная
орбита может быть протяжен-
ностью менее одного витка или
несколько витков). Если ско-
рость КА на границе сферы
действия больше или равна
местной параболической ско-
рости, тогда дальнейшее дви-
жение будет либо по гипербо-
лической или параболической
траектории (следует заметить,
что выход из сферы действия
планеты отправления может
Рис. 2.6. Орбита КА при полете с планеты на
планету:
1 - сфера действия планеты отправления; 2 -
сфера действия Солнца, эллипс Гомана; 3 - сфера
действия планеты назначения
116
быть выполнен по эллиптической орбите, апогей которой лежит на
границе сферы действия планеты).
В случае непосредственного выхода на траекторию межпланетного
полета (и большой орбитальной скорости) общая продолжительность
полета сокращается.
Гелиоцентрическая скорость на границе сферы действия планеты
отправления равна векторной сумме выходной скорости относительно
планеты отправления и скорости движения самой планеты по орбите
вокруг Солнца. В зависимости от выходной гелиоцентрической скорости
на границе сферы действия планеты отправления движение будет
проходить по эллиптической, параболической или гиперболической
траектории.
Орбита КА будет близка к орбите отправления, если гелиоцентричес-
кая скорость выхода КА из сферы действия планеты будет равна ее
орбитальной скорости. Если выходная скорость КА больше скорости
планеты, но одинакова по направлению, то орбита КА будет распола-
гаться вне орбиты планеты отправления. При меньшей и противополож-
ной по направлению скорости - внутри орбиты планеты отправления.
Меняя геоцентрическую скорость выхода, можно получить эллиптичес-
кие гелиоцентрические орбиты, касательные к орбитам внешних или
внутренних планет относительно орбиты планеты отправления. Именно
такие орбиты могут служить траекториями полета с Земли к Марсу,
Венере, Меркурию и Солнцу.
На конечном этапе межпланетного перелета КА входит в сферу
действия планеты прибытия, выходит на орбиту ее спутника и произво-
дит посадку в заданном районе.
Относительная скорость, с которой КА войдет в движущуюся ему
наперерез или нагоняющую его сзади сферу действия, всегда будет
больше местной (на границе сферы действия) параболической скорости
в поле тяготения планеты. Поэтому траектории внутри сферы действия
планеты назначения всегда будут гиперболами и КА должен неизбежно
покинуть ее, если только он не войдет в плотные слои атмосферы
планеты или не уменьшит скорость до круговой или эллиптической
орбит.
2.2.7. Использование гравитационных сил
при полетах в космическом пространстве
Силы гравитации являются функциями координат и обладают
свойством консервативности: работа, совершаемая силами поля, не
зависит от пути, а зависит только от положения начальной и конечной
точек пути. Если начальная и конечная точки совпадают, т.е. путь есть
117
Рис. 2.7. Электрическое поле около изогнутого
по окружности проводника
замкнутая кривая, то прираще-
ния живой силы не происходит.
Однако, встречаются случаи,
когда это утверждение неверно:
например (рис. 2.7), если в точку
К (в электрическом поле вокруг
изогнутого проводника, по кото-
рому течет ток и в котором сило-
вые линии замкнуты) помещена
заряженная частица, то под дей-
ствием сил поля она будет дви-
гаться по силовой линии и, вер-
нувшись опять в К, будет иметь
т v2
некоторую живую силу -------.
Если точка опять опишет за-
мкнутую траекторию, то полу-
чит дополнительное приращение
живой силы и т.д. Таким обра-
зом, можно получить сколь угодно большое увеличение ее кинетической
энергии. В этом примере показано, как осуществляется превращение
энергии электрического поля в энергию движения точки. Ф. Дж. Дайсон
описал возможный принцип устрой-
ства "гравитационной машины",
использующей для получения работы
поля тяжести (Н.Е. Жуковский. Кине-
матики, статика, динамика точки.
Оборонгиз, 1939; Ф. Дж. Дайсон.
Межзвездная связь. "Мир", 1965): в
Галактике может быть найдена двой-
ная звезда с компонентами А и В,
которые вращаются около общего
центра масс по некоторой орбите
(рис. 2.8). Если масса каждой звезды
М, то орбита будет круговой с радиу-
сом R. Скорость каждой звезды не-
трудно найти из равенства силы
притяжения центробежной силе:
Рис. 2Я. Использование гравитационных
сил при иолетах в космическом про-
странстве
v
fM
118
По направлению к этой системе движется тело С небольшой массы
по траектории CD. Траектория рассчитана так, что тело С подходит
близко к звезде В в тот момент, когда эта звезда движется навстречу телу
С. Тогда тело С совершит оборот вокруг звезды и далее будет двигаться
с увеличенной скоростью. От этого маневра получится почти такой же
эффект, как от упругого столкновения тела С со звездой В: скорость тела
С будет приблизительно равна 2v. Источником энергии при таком
маневре является гравитационный потенциал тел А и В. Если тело С-
космический аппарат, то он таким образом получает для дальнейшего
полета энергию от поля тяжести за счет взаимного притяжения двух
звезд. Таким образом, возможен разгон КА до скорости в тысячи
километров в секунду.
2.2.8. Траектории спуска с орбиты
Задачи, возникающие при посадке на планету. Завершением космичес-
кого полета считается посадка на планету. К настоящему времени только
три страны научились возвращать на Землю космические аппараты:
Россия, США и Китай. Для планет с атмосферой проблема посадки
сводится главным образом к решению трех задач:
1) преодоление высокого уровня перегрузок;
2) защита от аэродинамического нагрева;
3) управление временем достижения планеты и координатами точки
посадки.
При посадке на планету без атмосферы снимается проблема защиты
от аэродинамического нагрева.
Спуск на планету с атмосферой. КА, находящийся на орбите
искусственного спутника планеты или приближающийся к планете с
атмосферой для совершения посадки на нее обладает большим запасом
кинетической энергии, связанной со скоростью КА и его массой, и
потенциальной энергии, обусловленной положением КА относительно
поверхности планеты.
При входе в плотные слои атмосферы перед носовой частью СА
возникает ударная волна, нагревающая газ до высокой температуры. По
мере погружения в атмосферу СА тормозится, скорость его уменьшается,
а раскаленный газ все больше нагревает СА. Кинетическая энергия
аппарата превращается в тепло. При этом большая часть энергии
отводится в окружающее пространство двумя путями: большая часть
тепла отводится в окружающую атмосферу из-за действия сильных
ударных волн и за счет теплоизлучения с нагретой поверхности СА.
119
Наиболее сильные ударные волны возникают при затупленной форме
носовой части, вот почему для СА применяют затупленные формы, а не
заостренные, характерные для полета при малых скоростях.
С ростом скоростей и температур большая часть тепла передается к
аппарату не за счет трения о сжатые слои атмосферы, а за счет излучения
и конвекции от ударной волны.
Для отвода тепла от поверхности СА применяются следующие
методы:
- поглощения тепла теплозащитным слоем;
- радиационного охлаждения поверхности;
- применения уносимых покрытий.
До входа в плотные слои атмосферы траектория КА подчиняется
законам небесной механики. В атмосфере на аппарат помимо гравитаци-
онных сил действуют аэродинамические и центробежные силы,
изменяющие форму траектории его движения. Сила притяжения
направлена к центру планеты, сила аэродинамического сопротивления
по направлению, противоположному вектору скорости, центробежная
и подъемная силы - перпендикулярно направлению движения СА. Сила
аэродинамического сопротивления уменьшает скорость аппарата, в то
время как центробежная и подъемная силы сообщают ему ускорения в
направлении, перпендикулярном его движению.
Характер траектории спуска в атмосфере определяется в основном
его аэродинамическими характеристиками. При отсутствии подъемной
силы у СА траектория его движения в атмосфере называется баллистичес-
кой, а при наличии подъемной силы - либо планирующей, либо рикошети-
рующей. Движение по планетоцентрической орбите не предъявляет
высоких требований к точности наведения при входе в атмосферу,
поскольку путем включения двигательной установки для торможения
или ускорения сравнительно легко скорректировать траекторию. При
входе в атмосферу со скоростью, превышающей первую космическую,
ошибки в расчетах наиболее опасны, так как слишком крутой спуск
может привести к разрушению СА, а слишком пологий - к удалению от
планеты.
Коридоры входа, посадка на планету без атмосферы. При посадке на
планету без атмосферы снимается проблема аэродинамического нагрева,
но для осуществления посадки гашение скорости осуществляется с
помощью тормозной двигательной установки, которая должна работать
в режиме программируемой тяги, а масса топлива при этом может
значительно превышать массу самого СА.
120
2.3. Сведения о Земле
2.3.1. Общие сведения
Ошибка при расчете траектории КА зависит от того, как точно мы
рассчитаем пассивный участок. Что влияет на это? Незнание констант,
которые мы закладываем в расчеты: ускорение свободного падения g =
= 9,81 м/с2, характеристики вращения Земли и т.д.
Для практических расчетов Землю считают сферой радиусом R -
= 6371 км. В действительности Земля ближе к эллипсоиду вращения
Яэкв = 6378,45 км.
Сжатие Земли - а = = 1 - — = —?—.
а а 298,3
Одни звездные сутки = 23Л56"‘0,4'г - один оборот вокруг своей оси.
Угловая скорость вращения Земли
<о = = 7,2921-Ю*5—.
86164 с
На все твердые тела на Земле и в поле земного притяжения действует
гравитационная или массовая сила притяжения Земли. Кроме этого,
действует центробежная сила. Суммарная сила:
g = gj+g2>
Суммарная сила называется ускорением силы тяжести.
По закону Ньютона
= у = 667.10-11._м2_,
1 г2 г2 кг-с2
М = 5,9763-1024 кг - масса Земли.
К = f-M - 0,398620-1015 м3/с2. Среднее значение ускорения - g, =
= 9,8204 м/с2, а в действительности (табл. 2.3):
121
Таблица 2.3
Л, км 0 20 50 100 500 1000
g|. м/с2 9,820 9,741 9,650 9,500 8,427 7,127
gl £|омх 1 0,9938 0,9845 0,9692 0,8597 0,7271
Центробежная сила (действует только на Земле):
g2 = r'u>2-, г' = /?cos<p; g27?u2cos<p;
g2 = (6371-IO3) (7,2921 10 5)2 = 0,0340 м/с2;
7 = = 0>0035^i(°>35O/^i)-
Отклонение гравитационной силы от линии отвеса составляет 6', а
от направления к центру 12'. Нецентральность поля земного притяже-
ния - это шесть минут для гравитационной силы и шесть минут для
центробежной. Происхождение нецентральное™ поля земного тяготения
связано с неравномерностью распределения масс или с магнитной
аномалией.
На тела, движущиеся в системе координат, связанных с Землей или
находящихся на поверхности Земли, действует кориолисово ускорение
У, которое перпендикулярно плоскости, содержащей векторы V и ы:
j = 2&хГ; j = 2ь>Ksin(G>r); У = 2ь>К.
Кориолисово ускорение зависит от направления и величины скорости
(табл. 2.4).
Таблица 2.4
V, м/с 1000 3000 5000 8000
7, м/с2 0,146 0,438 0,730 1,168
j!g< % 1,49 4,47 7,45 11,9
122
В проектных расчетах кориолисовыми силами пренебрегают.
2.3.2. Свойства атмосферы
Параметры атмосферы влияют на движение, зависят от высоты
рассматриваемой точки, долготы, широты, времени суток и других
геофизических факторов. Чтобы избежать затруднений, создаются
таблицы стандартной атмосферы - типичные характеристики для данной
точки земного шара:
pV = RT-, р = —; V = р = gpRT; р =
К р RT
Рассмотрим условия вертикального равновесия атмосферы. Давление,
оказываемое элементарным столбиком, будет
р , h
dp = -gpdh\dp = -^-dh-У-Е- = -f-^-dh;
к i > p j к i
Po 0
h h
lnp|£ = -f-£—dh;ln-£- = -f-^-dh;
'° (rt p0 {rt
p
Последнее уравнение представляет собой уравнение атмосферы.
Видно, что для определения давления надо знать р0, Т по высоте:
123
р = рЯТ;р0 = РоЯТо;^- =
Ро Ро * о
Р = P_.I1
Ро Ро т
То
р = РоуеХР
h
-f-2-dh
J RT
о /
плотность атмосферы зависит от плотности на Земле и распределения
по температуре.
2.4. Особенности движения ИСЗ
Когда ИСЗ движется по эллиптической орбите, высота его над
поверхностью Земли h изменяется. Если высота апогея и перигея
одинаковы, орбита является круговой, и высота спутника над поверхнос-
тью Земли все время остается постоянной. Степень вытянутости орбиты
может быть охарактеризована ее эксцентриситетом. Эксцентриситет -
большая полуось орбиты, перигейное и апогейное расстояния связаны
между собой соотношениями
Z. ГП + ГА .
а = -----;
2
_ ГА “ ГП
е = -----.
ГА + ГП
Из этих соотношений следует, что большая полуось равна среднему
расстоянию спутника от центра Земли
а = Я+*n+.\
2
а эксцентриситет орбиты зависит от разности высот апогея и перигея:
124
е =
2а
Если большая полуось эллиптической орбиты равна среднему
расстоянию спутника от центра Земли, то период обращения спутника
вокруг Земли зависит в соответствии с формулой для периода обращения
по эллиптической орбите от средней высоты его полета (табл. 2.5):
Таблица 2.5
Период обращения спутника
Средняя высота полета, км Период обраще- ния, ч Средняя высота полета, км Период обраще- ния, ч
0 1,41 1 690 2,00
250 1,49 2 000 2,12
500 1,58 5 000 3,35
750 1,66 10 000 5,78
1 000 1,75 35 800 23,935
1 500 1,93
Из данных табл. 2.5 видно, что при средней высоте полета в несколько
сот километров период обращения спутника составляет примерно 1,5 ч,
при высоте полета 1690 км - 2 ч, а при высоте полета 35 800 км период
обращения равен звездным суткам (периоду обращения Земли вокруг
своей оси). Спутник, запущенный в восточном направлении и выведен-
ный на круговую орбиту, лежащую в плоскости экватора на высоте
35 800 км, находился бы все время над одной и той же точкой земной
поверхности.
При движении спутника по круговой орбите скорость его постоянна
и равна первой космической скорости на высоте полета спутника.
125
Значения круговой скорости для различных высот даны в табл. 2.6.
Таблица 2.6
Значения круговой скорости спутника
Высота, км 0 250 500 1 000 1 500 2 000 5 000 10 000 35 800
Круговая скорость, м/с 7 909 7 759 7617 7 354 7 116 6 901 5 921 4 935 3 072
Круговая скорость у поверхности Земли составляет около 7900 м/с.
С увеличением высоты круговая скорость уменьшается. Для высоты
35 800 км (орбита с периодом около 24 ч) она составляет около 3070 м/с.
При движении спутника по эллиптической орбите скорость его
периодически изменяется, достигая максимального значения в перигее
и минимального - в апогее орбиты. Скорость спутника в перигее
превышает круговую скорость на высоте перигея, а скорость в апогее
меньше, чем круговая скорость на высоте апогея.
Значения скорости движения спутника в перигее и апогее (для орбит
с различными высотами перигея и апогея) приведены в табл. 2.7.
Таблица 2.7
Значения скорости спутника в перигее и апогее орбиты
Высота перигея, км 250 500 1000
Высота апогея, км 500 1000 2500 1000 2000 5000 2000 4000 10000
Скорость в пери- гее, м/с 7831 7964 8304 7749 7982 8504 7584 7951 8636
Скорость в апогее, м/с 7546 7154 6198 7224 6552 5139 6678 5651 3888
Наклонение орбиты и прямое восхождение восходящего узла
определяют ориентацию орбиты в пространстве и ее положение по
отношению к земной системе координат. Наклонение орбиты i- это угол
между плоскостью орбиты и плоскостью земного экватора. Восходящим
узлом орбиты называется точка орбиты, в которой спутник пересекает
плоскость земного экватора, переходя из южного полушария в северное.
Соответственно противоположная точка на орбите называется
нисходящим узлом, а линия, соединяющая эти точки - линией узлов.
Прямым восхождением восходящего узла С называется угол между линией
узлов и направлением на точку весеннего равноденствия.
126
Для ориентации самой орбиты в плоскости орбиты и определения
положения спутника на орбите в данный момент времени используется
угловое расстояние перигея от восходящего узла w (угол между линией
узлов и линией апсид) и время прохождения спутника через восходящий
узел орбиты /0.
Движение спутника по орбите характеризуется шестью элементами:
- наклонением орбиты i,
- прямым восхождением восходящего узла С,
- большой полуосью орбиты а,
- ее эксцентриситетом е,
- угловым расстоянием перигея ы и
- временем прохождения спутника через восходящий узел 10.
При движении спутника в центральном поле тяготения, когда
отсутствует сопротивление атмосферы, первые пять элементов орбиты
остаются постоянными, и периодическое движение спутника по орбите
может продолжаться неопределенно большой промежуток времени.
На движение ИСЗ оказывает влияние ряд дополнительных факторов
таких, как сопротивление атмосферы; отличие поля тяготения Земли от
центрального; поля тяготения Солнца и Луны.
Влияние этих факторов за ограниченные промежутки времени
сравнительно невелико и в связи с этим может рассматриваться как
возмущения основного, кеплерового, движения спутника, описанного
выше.
Истинное движение спутника может быть представлено как движение
его по кеплеровой орбите, основные элементы которой непрерывно
изменяются, являясь функциями времени. Текущие значения элементов
орбиты в этом случае называются оскулирующими элементами.
Сопротивление верхних слоев атмосферы постепенно изменяет
скорость движения ИСЗ и вызывает непрерывные (вековые) изменения
формы его орбиты. Наиболее существенно спутник тормозится в периоды
прохождения области перигея. В результате торможения спутника
уменьшается его кинетическая энергия и сокращаются апогейное и
перигейное расстояния. При этом уменьшение апогейного расстояния
и высоты апогея происходит значительно быстрее, чем уменьшение
перигейного расстояния и высоты перигея. Эксцентриситет орбиты
непрерывно уменьшается, а сама орбита стремится к круговой.
Торможение спутника по мере сокращения его орбиты прогрессивно
возрастает. В конечном счете, спутник, постепенно снижаясь, входит в
плотные слои атмосферы, где разрушается и сгорает вследствие сильного
нагревания. После снижения высоты орбиты до 150 км спутник
совершает всего лишь 1...2 оборота. Продолжительность движения
спутника от момента выведения его на орбиту до полного торможения
в плотных слоях атмосферы называется временем существования.
\Z1
Степень торможения спутника при прочих равных условиях зависит
от его аэродинамических характеристик - коэффициента сопротивления
и отношения массы к площади миделя (поперечного сечения), так
называемой поперечной нагрузки.
Можно установить универсальное соотношение между скоростью
изменения высоты апогея и перигея орбиты, определяемое только
параметрами орбиты и распределением плотности атмосферы по высоте
и не зависящие от массовых и аэродинамических характеристик ИСЗ.
Этот результат позволяет составить простые таблицы для определения
времени существования спутника на орбите.
Время существования спутника массой 100 кг и диаметром 1 м в
зависимости от начальных значений высоты перигея и апогея эллиптичес-
кой орбиты дано в табл. 2.8.
Таблица 2.8
Время существования спутника (в сутках) на эллиптических орбитах
Высота перигея, км Высота апогея, км
500 700 1000 1300 1600
200 9 18 37 58 82
230 25 52 102 165 237
260 53 116 238 370 535
300 114 260 545 890 1280
400 410 1120 2630 4450 6600
В табл. 2.9 приведены данные о времени существования подобного
спутника на круговых орбитах (данные табл. 2.8 и 2.9 основаны на
результатах теоретических расчетов).
Таблица 2.9
Время существования спутника на круговых орбитах
Высота круговой орбиты, км 200 250 300 350 400 500
Время существования, сут. 0,4 4 20 65 160 1010
Из таблиц видно, что для рассматриваемого ИСЗ время существова-
ния при начальной высоте перигея 230 км и высоте апогея орбиты 700 км
128
составляет около 50 сут. Увеличение высоты апогея на 300 км (до
1000 км) приводит к возрастанию времени существования в два раза.
Примерно такое же возрастание времени существования получается при
увеличении высоты перигея всего на 25 км (до 225 км). Для круговых
орбит увеличение высоты с 300 до 400 км увеличивает время существова-
ния примерно в восемь раз, а до 500 км - еще в шесть раз.
Для ИСЗ, обладающих различными значениями коэффициентов
сопротивления и нагрузки на мидель, время существования при прочих
равных условиях прямо пропорционально значению поперечной
нагрузки и обратно пропорционально коэффициенту сопротивления
Так, для спутника, имеющего диаметр 2 м при массе 1000 кг, время
существования увеличится в 2,5 раза по сравнению с данными, приведен-
ными в табл. 2.8 и 2.9.
Видно, что зависимость времени существования спутника от высоты
орбиты очень сильная. При высоте полета спутника порядка нескольких
тысяч километров движение происходит за пределами верхних слоев
атмосферы. Такой ИСЗ практически может считаться постоянным
спутником Земли.
Возмущения орбиты из-за сжатия Земли у полюсов и связанное с ним
отличие поля тяготения от центрального можно разделить на периоди-
ческие и вековые.
Периодические возмущения орбиты за счет нецентральности поля
сравнительно невелики и сводятся к отклонениям действительных
координат спутника от координат, соответствующих движению по
эллипсу - около десятка километров. Вековые возмущения, действуя все
время в одну и ту же сторону, приводят с течением времени к существен-
ным изменениям элементов орбиты.
Прецессия орбиты, т.е. - равномерное вращение ее плоскости за счет
нецентральности поля земного тяготения в абсолютном пространстве
относительно земной оси является основным вековым возмущением
орбиты спутника. При этом наклонение орбиты остается примерно
неизменным.
Скорость прецессии (величина прецессии за один оборот ИСЗ по
орбите) определяется формулой
da
dN
2itR2( a2R
----- a--------
P2 V 2g0 i
cos I,
(2.4.1)
где Яэ - экваториальный радиус Земли;
a - сжатие Земли;
Q - угловая скорость суточного вращения Земли;
5 - 8620
129
g0 - ускорение силы земного тяготения на экваторе;
р - параметр эллиптической орбиты;
I - наклонение орбиты;
N- порядковый номер оборота спутника вокруг Земли.
Скорость прецессии, как следует из формулы (2.4.1), существенно
зависит от наклонения орбиты.
При наклонении, равном 65°, и высотах, соответствующих высотам
орбиты первого советского спутника, прецессия орбиты составляет
примерно 0,25° за один оборот спутника. При наклонении орбиты,
равном 90° (полярная орбита), скорость прецессии равна нулю.
Поворот большой оси эллипса в плоскости орбиты (изменение
углового расстояния перигея от восходящего узла ы) является другим
вековым возмущением за счет нецентральности поля тяготения. При этом
происходит смещение области перигея (и соответственно апогея) от
одних географических широт к другим.
Скорость поворота большой оси эллиптической орбиты характеризу-
ется изменением углового расстояния перигея от восходящего узла за
один оборот спутника по орбите:
dN
2лЯэ2
•(5cos2i- 1).
(2.4.2)
2*о ,
Как видно из формул, при i - 63,5’ — = 0.
dN
В соответствии с формулами (2.4.1) и (2.4.2) скорость прецессии
орбиты и скорость ухода перигея обратно пропорциональны квадрату
параметра орбиты р. Следовательно, для спутников, движущихся на
значительных расстояниях от Земли (порядка нескольких десятков тысяч
километров), прецессия орбиты и уход перигея за счет нецентральности
поля тяготения Земли будут незначительными.
Таким образом, сжатие Земли не вызывает вековых изменений формы
орбиты. Вековые возмущения орбиты за счет сжатия Земли проявляются
лишь в изменении ориентации орбиты.
130
Глава 3
Факторы космического
пространства и их влияние
на работу элементов конструкции
космического аппарата
3.1. Общие сведения
Условия работы систем КА и его конструкционных элементов связаны
с влиянием глубокого вакуума, с электромагнитной и корпускулярной
радиацией, с метеорной опасностью, со своеобразными тепловыми
режимами, широким диапазоном статических и вибрационных
перегрузок.
После выхода в космос аппарат создает вокруг себя облако газа из
испаряющегося материала, рабочего тела системы ориентации и
стабилизации, воздуха из пористых материалов теплозащиты и
конструкции. Во время длительного пребывания аппарата в глубоком
вакууме постоянно испаряются конструкционные материалы, покрытия
и смазки.
Электрические и радиоэлектронные блоки размещаются в герметичес-
ких отсеках со специальной атмосферой, так как при их работе
используются диэлектрические свойства газа. Газ отсека является и
теплоносителем, который участвует в поддержании расчетного теплового
режима.
Космическая радиация влияет на физико-химическую структуру
материалов, их прочность, агрегатное состояние, цвет и вызывает
ионизацию среды, где функционируют приборы.
Метеорная опасность связана с эрозией поверхности, изменяющей
ее оптические характеристики и, следовательно, тепловой режим
аппарата. Возможен пробой оболочки герметических отсеков со всеми
вытекающими отсюда последствиями. Изменяются характеристики
солнечных батарей.
5*
131
Большие перегрузки при выведении КА на орбиту и особенно при
спуске на поверхность планеты и контакте с поверхностью требуют
новых конструктивных и приборных решений.
Невесомость усложняет работу систем с жидкими и газовыми
рабочими телами, требует учета смачиваемости, поверхностного
натяжения жидкостей, отсутствия свободной конвекции.
Для КА необходима высокая надежность, стабильность работы
агрегатов в столь своеобразных условиях в течение времени, измеряемого
годами. Требуется подробный анализ влияния указанных факторов на
элементы аппарата, поиск таких конструктивных решений, при которых
рабочие условия агрегатов определяются с большей достоверностью и
точностью.
При разработке КА в качестве стандартных выбирают некоторые
единые условия по внешним воздействиям. Количественно внешние
условия характеризуются следующими параметрами:
- интенсивностью внешнего теплового воздействия на уровне
1400 Вт/м2;
- спектральным составом и параллельностью светового потока,
соответствующими солнечному потоку на орбите Земли;
- давлением окружающей среды не выше 1О~3...1О-4 Па.
3.2. Нагрузки, действующие на КА при
выведении и движении по расчетной
траектории
3.2.1. Характер нагрузок
Нагрузки, определяющие принципы построения силовой схемы
агрегатов и их прочностные характеристики, подразделяются на ряд
типов:
- наземной эксплуатации и предстартовой подготовки (транспорти-
ровка, такелажные операции, подъем в вертикальное положение, стоянка
на старте при воздействии ветра);
- активного участка полета (тяга двигателей разгонных ступеней и
инерционные силы, аэродинамические силы с учетом порывов ветра и
струйных течений, вибрации с широким спектром частот 10...2500 Гц
вследствие пульсации тяги и колебаний компонентов топлива в
трубопроводах из-за колебаний корпуса при прохождении критического
числа М = 0,9...1,1);
- разделения ступеней, раскрытия элементов, стыковки объектов
(срабатывание пиротехнических и прочих замков-толкателей, установка
132
на замки раскрывающихся элементов, работа стыкующих элементов,
демпферов);
- номинальной работы агрегатов (внутреннее давление в камерах
двигателей, в баллонах, баках, в пневматических и пиросистемах, в
приборных отсеках, рабочие нагрузки подвижных механизмов);
- входа в атмосферу (аэродинамические, инерционные нагрузки);
- парашютирования (нагрузки при раскрытии парашюта);
- посадки (нагрузки при контакте с поверхностью планеты).
3.2.2. Особенности учета типовых нагрузок
для большинства конструкций КА
1. Система транспортировочных и такелажных точек выбирается
таким образом, чтобы наземные напряжения не превышали полетных.
В том случае, если системы крепления статически определимы, легко
определяются их расчетные случаи. Поскольку такелажные и транспорт-
ные операции происходят в присутствии людей, вблизи дорогостоящего
оборудования, коэффициент безопасности для этих видов нагружения
f - 2,0. Транспортировочные перегрузки достигают значений п - 2...4.
2. На активном участке полета максимальное нагружение элементов
КА имеет место в конце работы одной из ступеней, когда текущее
значение тяги максимально, а масса минимальна (пх - 3...12).
Особое значение имеет момент отсечки тяги первой ступени, когда
ракета испытывает максимальное знакопеременное колебательное
нагружение. При этом действующая нагрузка может в два и более раз
превышать значение, определенное без учета динамики отсечки тяги. При
анализе такого нагружения ракета-носитель приводится к модели,
состоящей из дискретных масс, соединенных пружинами.
Полетные вибрации имеют сложный спектр, характеризуемый
экспериментальной монотонно возрастающей функцией "продольная
перегрузка - частота" пх - v (табл. 3.1). Продолжительность действия
вибраций т приводится для типичного носителя со временем выведения
около 750 с.
Таблица 3.1
Полетные вибрации
Продольная перегрузка, пх 1...2 2...4 3 4...10 7...12
Частота вибраций, v, Гц 5-10 10-50 50-100 100-500 500-1000
Продолжительность, т, с 150 180 200 600 750
133
Эти характеристики однозначно определяют амплитуду колеба-
ний, мм:
250-м
а = -----.
V2
Очевидно, при больших частотах амплитуды малы (v = 2500 Гц, п =
- 12, а = 0,8 мкм) и опасности для прочности не представляют.
Для прочности крепления отдельных блоков большое значение имеют
частоты, близкие к их собственным (20... 100 Гц). В этом случае к
максимальным значениям статической перегрузки добавляются
виброперегрузки (ив - 1...2). Коэффициент безопасности при этом берется
минимальный/= 1,2...1,3.
Для аэродинамических обтекателей расчетными принимаются условия
при максимальном напоре (около 0,15 МПа) и при угле атаки около 3...5°.
3. Разделение ступеней производится обычно с помощью пиротолкате-
лей, пироболтов и детонирующих удлиненных зарядов, перерезающих
неразъемные соединительные элементы.
4. Раскрытие складываемых агрегатов при выведении на орбиту для
уменьшения габаритов аппарата (антенн, солнечных батарей, научно-
исследовательских приборов) осуществляется с помощью пружин,
торсионов или других приводов.
Вследствие разброса в моментах трения шарниров, в жесткости
кабельных жгутов, соединяющих секции механизмов, раскрываемые
устройства могут получать энергию, вызывающую повышенные угловые
(и линейные) скорости движения (ы = 1... 1,5 рад/с).
/•со2
Кинетическая энергия движущихся элементов К = -у (/- момент
инерции движущихся элементов, ы - их угловая скорость) должна
компенсироваться энергией деформации опорных элементов.
Задаваясь формой деформации, из равенства энергий определяются
напряжения элементов конструкции, причем часть кинетической энергии
может быть воспринята тормозящими устройствами (прокладками,
пружинами). Для этих случаев коэффициент безопасности вводится
повышением расчетной угловой скорости: ырасч = 1,2 ыэксп.
5. При входе в атмосферу максимальные значения перегрузок могут
достигать нескольких сотен, а аппарате большой частотой и амплитудой
может вращаться вокруг центра масс. Эти затухающие колебания при
достаточно стабильном направлении перегрузок вдоль вектора скорости
центра тяжести аппарата приводят к сложному пространственному
нагружению конструкции.
134
Для спускаемых аппаратов оказывается целесообразным использова-
ние элементов, демпфирующих колебания. Их масса оказывается меньше
утяжеления всей силовой конструкции. Коэффициент безопасности при
этом /= 1,3.
6. Нагрузки, возникающие при раскрытии парашюта, носят
динамический характер. Коэффициент динамичности/д = 2,0. Коэффици-
ент неравномерности распределения усилий по стропам парашюта/и =
= 1,5.
7. Для расчета нагрузок при посадке существенную роль играют
характеристики поверхности. Если не вводятся особо тяжелые условия
посадки, можно принимать:
наклон поверхности............................................ 10...15°
прочность:
- верхний предел (для пенобетона) ....................... 200..300 Н/ см2
- нижний предел (для песка) ............................. 10..30 Н/см2
- коэффициент трения....................................... ц = 0,25...0,5
Принимается, что продольная ось аппарата в момент посадки может
быть наклонена к вертикали на 10°. В соответствии с допустимыми
перегрузками подбирается амортизация.
Коэффициент безопасности/= 1,2.
3.3. Влияние глубокого вакуума
на конструкционные материалы
Среда с давлением р < 10-6 Па считается глубоким вакуумом.
Условия космического полета характеризуются чрезвычайно низким
давлением окружающей среды р = 10“8... 10-12 Па.
В земных условиях можно достигнуть давления р = 10-4 Па только
в хороших барокамерах; минимальное давление, которое удалось
достигнуть в настоящее время, составляет околор - КГ7 Па.
При выходе в космос начинается газовыделение аппарата. В этом
процессе участвует теплозащитная обмазка, пластмассы и даже
конструкционные материалы. Газовыделение уменьшается со временем
и зависит от температуры поверхности.
Глубокий вакуум вызывает испарение конструкционных материалов,
их покрытий, унос пластмасс, испарение смазок в трущихся парах. Если
толщина уноса достигает значений около 10-4 мм, изменяются оптичес-
кие свойства поверхности; при уносе 0,5... 1 мм ставятся под сомнение
прочностные свойства конструкции, возможна проницаемость гермети-
ческих отсеков.
135
Поведение материалов в глубоком вакууме характеризуется большой
испаряемостью материалов, особенно у тех, у которых сравнительно
низкие температуры плавления. Унос материала S см/год за счет
испарения можно подсчитать по формуле Ленгмюра
S = 0,2466-106-£. -Н-,
р N т’
гдер - давление насыщенных паров материала, Па;
р - плотность материала, кг/м3;
р- молекулярный вес газовой фазы испаряющегося материала;
Т- температура окружающей среды, К.
Трудность в практическом использовании этой формулы заключается
в том, что давление р является параметром, сильно зависящим от
температуры окружающей среды Т.
Для металлов давление паров мало и составляет величину менее
10-8 Па и существенно зависит от температуры. Их поверхностный унос
значительно повышается с увеличением температуры.
Для анализа стойкости конструкционных материалов к испарению
в вакууме достаточно сравнить их температуры, соответствующие
заданному линейному уносу. Следует рассмотреть характеристики
испаряемости различных неорганических материалов, данные по
которым приведены в табл. 3.2.
Таблица 3.2
Испаряемость различных неорганических материалов
в глубоком вакууме
Элемент Температура, соответствующая уносу с поверх- ности t, °C Температура плавления /, °C
м/год, 107 м/год, 105 м/год, Ю3
Cd 40 80 120 250
Se 50 80 120 480
Zn 70 130 180 420
Mg НО 170 240 650
Pb 270 330 430 330
Ag 480 590 700 960
136
Элемент Температура, соответствующая уносу с поверх- ности /, °C Температура плавления 1, °C
м/год, 107 м/год, 105 м/год, 103
А1 .550 680 810 660
Be 620 700 840 1280
Си 680 760 900 1080
Аи 660 800 950 1060
Ge 660 800 960 940
Сг 750 870 1000 1880
Fe 770 900 1050 1540
Si 790 920 1080 1410
Ni 800 940 1090 1450
Ti 920 1070 1250 1670
Mo 1380 1630 1900 2810
C 1530 1680 1880 3700
w 1880 2150 2500 3400
Толщина уносимого слоя пропорциональна времени (Г = const).
В реальном диапазоне температуры корпуса (±150 °C) испаряемость
металлов существенна только для тонких покрытий кадмия или цинка.
Для радиаторов системы терморегулирования мощных энергоустановок
(Т= 750...800 °C) целесообразно использовать молибден.
Величина 5 = 10-3 м/год сказывается на механических свойствах
материалов (ослабление сечения).
Величина 5 = 10~5 м/год сказывается на оптических свойствах
материала (меняются коэффициенты поглощения и отражения).
Из табл. 3.2 видно, что Cd (кадмий), который обычно используется
для покрытия наружных поверхностей, не рекомендуется как покрытие
для наружных деталей КА, так как быстро испаряется в условиях
глубокого вакуума при обычной t = 40...80 °C на поверхности КА.
137
Цинкование в качестве покрытия тоже не рекомендуется, так как
диапазон температур, указанный в табл. 3.2, реальный для КА.
Селен (Se), который обычно применяется для покрытия чувствитель-
ных элементов в фотоэлектрических приборах, также не применим в
условиях глубокого вакуума из-за большой испаряемости.
Магниевые (Т11Л = 650 °C) и алюминиевые (Тпл - 660 °C) сплавы
широко применяются при разработке КА.
Используются в космической технике серебро (Ag), Тпл = 960 °C и
золото (Au), Тпл = 1060 °C в качестве покрытий для достижения
определенных оптических свойств поверхности.
Бериллий (Be) находит широкое применение не только в авиации как
конструкционный материал, но и в космической технике - в качестве
материала для тепловых экранов (Тпл - 1200... 1300 °C).
Германий (Ge) широко используется для производства полупроводни-
ковых приборов (Гпл = 940 °C).
Хром (Сг) находит применение для покрытий деталей КА (Тпл =
= 1880 °C).
Широко используются сплавы железа (Fe), стали при производстве
КА(ТПЛ= 1540 °C).
Высокие требования в условиях глубокого вакуума предъявляются
к материалам, используемым при создании радиаторов с температурным
диапазоном Т ~ 700...800 °C.
Необходимы тугоплавкие материалы для создания реакторов ЯРД
и ЭРД, реальный рабочий диапазон температур которых I > 1000 °C.
Кремний (Si) используется при производстве полупроводников (Тп1 =
= 1410 °C).
Широкое использование находят титановые (7^ = 1670 °C) и
никелевые (Тпл = 1450 °C) сплавы.
К материалам, используемым в качестве теплозащиты, предъявляются
еще более жесткие требования, т.е. они должны выдерживать температуру
выше 1200 °C.
Такими материалами являются молибден (Мо), Тпл = 1260 °C; графит
(С), Тпл = 3700 °C; вольфрам (W), Тпл = 3400 °C.
Молибденовые сплавы могут использоваться при изготовлении
конструкций радиаторов ядерных энергоустановок (ЭУ); рассматрива-
лись проекты СА с молибденовой обшивкой.
Графит является перспективным материалом теплозащиты аппаратов
при полете по баллистической траектории в атмосферах Земли и планет.
Большинство сталей, сплавов на основе алюминия и магния по
испарению мало отличаются от чистых металлов. Испаряемость сплавов
грубо можно оценивать по характеристикам наиболее слабого
компонента.
138
Для того чтобы уменьшить испаряемость материалов, рекомендуется
применять покрытия защитными пленками (оксидные пленки, фосфати-
рование и т.д.).
Если для металлов испаряемость характеризуется величиной уноса
S = КГ3... 10-4 см/год или м/год, то для пластических материалов она
измеряется в процентах от массы в год (табл. 3.3).
Таблица 3.3
Испаряемость пластических материалов
Материал Температура 1 при потере массы 10 % в год, °C
Нитроцеллюлоза 40
Нейлон 30...200 (210)
Эпоксидные смолы 40...240
Полиуретан 70...150
Хлорвинил 90
Изопрен 120
Полистирол 130...220
Фенольные смолы 130...270 (250)
Бутадиен 150...230
Целлюлоза 180
Ацетат целлюлоза 190
Майлар 200
Кремнеорганические соединения 200
Фторопласты 250...380
Терилен (тетраэтленфтолат) 380
Металлы достаточно стойки к испарению в вакууме. Следствием
испарения может быть лишь изменение чистоты поверхности и
вследствие этого нарушение теплового режима. Но только специальные
конструкционные пластмассы рассчитаны на длительную работу в
вакууме.
139
Пластмассы в отличие от металлов испаряются не только с поверхнос-
ти, но и во всем объеме. Доля испарившейся массы есть функция
температуры и времени (годы). Для заданного значения т =
_ ;lgT _ к т = Z!^:igT = jt-J. - константа, определяемая, экспери-
»t0 Т т0 Т
ментально.
Перечисленные в табл. 3.3 пластические материалы имеют следующее
применение:
- нейлон - часто применяемый конструкционный материал;
- эпоксидные смолы - широко используются в качестве наполнителей
панелей радиоаппаратуры, микромонтажа;
- полиуретан - применяют для конструкций панелей и теплозащиты;
- полистирол - используется в качестве пленок деталей;
- фенольные смолы - для изготовления теплоизоляционных
материалов (стеклотекстолит, асботекстолит);
- целлюлозу применяют в качестве прокладочного картона и
теплоизоляции.
Из условия сохранения механических свойств в зависимости от
времени допустимые потери для пластических материалов не должны
превышать 1 ...2 % в год.
Пластмассовые оболочки, как правило, металлизируются - покрыва-
ются слоем алюминия, иногда золота. Не следует использовать в
открытом космосе пластмассы, содержащие пластификаторы и
гидрированную керамику. Потеря летучих компонентов ухучшает
прочностные свойства, изменяет электрическое сопротивление,
оптические характеристики.
В вакууме могут использоваться почти все металлы, пластические же
материалы нужно использовать с большой осторожностью. Тем не менее,
они достаточно широко используются для изготовления конструкцион-
ных узлов.
Кабельные сети, которые прокладываются по поверхности КА,
рекомендуется экранировать ЭВТИ (экрано-вакуумной теплоизоляцией)
для защиты от температуры и радиации.
3.4. Воздействие космической радиации
на КА
Электромагнитная и корпускулярная радиация воздействуют на
электронные оболочки веществ, изменяя их свойства.
Источниками радиационного воздействия являются:
140
1) радиационные пояса Земли. Внутренний пояс имеет протонную
радиацию (протоны высоких энергий), зона его максимальной эффектив-
ности 3,5 тыс. км. Внешний пояс (электроны высоких энергий) имеет
электронную радиацию, зона его максимальной эффективности
15...25 тыс. км. Наиболее неприятен с точки зрения воздействия
внутренний пояс (защита от протонов существенно тяжелее);
2) корпускулярное излучение Солнца;
3) космические лучи - частицы высоких энергий;
4) электромагнитные излучения Солнца (ультрафиолетовое и
рентгеновское у-излучение).
Солнечная активность имеет период 11 лет. При солнечных вспышках,
которые особенно опасны и характеризуются тем, что уровень солнечной
активности повышается в 10... 100 раз. Вспышки бывают почти через
каждые 10 дней и прогнозируются по состоянию солнечной хромосферы.
При удалении от источника излучения поток энергии падает:
,.. Чо
Ч(Г) =
г1-
где q0 - солнечная постоянная - поток на удалении от Солнца в одну
астрономическую единицу (1 а.е. = 149,5 млн км; q0 = 0,14 Вт/см2);
г - расстояние от Солнца, а.е.
Для некоторых планет относительные потоки энергии представлены
в табл. 3.4.
Таблица 3.4
Относительные потоки энергии, приходящие от Солнца
Планета Меркурий Венера Луна Земля Марс Юпитер
Is* 5,2 1,94...1,88 1,04..0,96 1,034...0.967 0,52...0,36 0,0385
В зависимости от длины волны электромагнитные излучения
подразделяются на гамма-излучение, рентгеновское, ультрафиолетовое,
световое, инфракрасное и радиоизлучение.
На ультрафиолетовую область (2000...4000 А) солнечного спектра
приходится почти 10 % общей энергии, и она является определяющей.
Радиационное воздействие сказывается, в первую очередь, на
оптических свойствах материала, а для пластических материалов - и на
механических свойствах.
141
Дозы радиации от различного радиационного воздействия приведены
в табл. 3.5.
Из табл. 3.5 можно сделать выводы, что обшивка корпуса КА
существенно ослабляет воздействие электронной радиации, но значитель-
но меньше защищает от воздействия протонной радиации; практически
не ослабляются обшивкой космические лучи, так как являются частицами
большой массы и больших энергий.
Таблица 3.5
Годовые дозы космической радиации ( х —!— • 10“5)
Источник радиации Дозы радиации,МэВ/г
на поверхности под защитой в I г/см2
Внутренний радиационный пояс Земли (протоны) 1О1о...1О12 1О7...Ю9
Внешний радиационный пояс Земли (электроны) Ю|3...1О15 Ю6...Ю8
Солнечное излучение 107...109 1О4.Ю6
Космические лучи 102...103 ю2...ю3’
Частицы высоких энергий (тяжелые ядра) очень слабо поглощаются защитой.
Кроме излучений во время повышения активности Солнца, имеется
непостоянное излучение (постоянный фон - протоны, электроны, ядра
гелия), которое заметно ослабляется обшивкой корпуса ИСЗ.
Допустимые дозы радиации для различных материалов приведены
в табл. 3.6.
Таблица 3.6
Дозы радиации, изменяющие свойства материалов ( х —!— • 10~5)
Материалы и нарушаемые свойства Доза радиации, МэВ/г
Пластики (электрические и механические свойства) 1О7...Ю9
Прозрачные пластики (прозрачность) 1О6...1О10
Эластомеры (упругость) 1О8..1О"
Стекло (прозрачность) 1О5..1О10
142
Материалы и нарушаемые свойства Доза радиации, МэВ/г
Стекло, керамика (механические свойства) I011
Кварц (прозрачность) 107...10"
Полупроводники (электрические свойства) 1О8...1О10
На основании анализа табл. 3.6 можно сделать следующие рекоменда-
ции:
- в качестве наружных покрытий КА пластики не применяются
(особенно на КА, проходящих через пояса радиации);
- необходимо зашторивать иллюминаторы оптических приборов,
остекленные прозрачными пластиками (шторки открывать только при
работе оптических датчиков).
При превышении допустимой дозы радиации пластические материалы
теряют механические и электрические свойства (прозрачные - мутнеют),
керамические материалы и стекло теряют свои механические, электричес-
кие и оптические свойства, резиновые материалы - эластичность,
полупроводники - коэффициент усиления.
Таким образом, если сопоставить табл. 3.5 и табл. 3.6, можно увидеть,
что особенно тяжелыми условиями для работы КА являются радиацион-
ные пояса.
К выбору материалов для КА нужно подходить с очень большой
осторожностью.
Защита от радиации определяется в основном массой защитного
материала.
При воздействии повышенной радиации резко снижается эффектив-
ность фотоэлектрических преобразователей (ФЭП) (они отказывают при
солнечных вспышках и теряют эффективность при работе в радиацион-
ных поясах).
Особая трудность с хранением фотопленки в зоне радиационных
поясов (защита 0,001...0,010 г/м2), поэтому приходится переходить на
другие приемы записи информации (на ИСЗ "Тирос", работавшем на
высотах Н = 500...600 км, применялась магнитная запись).
Интенсивность воздействия радиационных поясов увеличивается в
моменты солнечных вспышек.
Гамма-излучение также воздействует на кварцевое стекло, поэтому
необходима защита оптической аппаратуры щитками.
Ультрафиолетовое излучение (УФИ) составляет постоянный фон
солнечного излучения. Металлы безразличны к УФИ, но оно вредно для
оптики (наружное остекление иллюминаторов делают из кварцевого
143
стекла с защитными шторками). На пластические материалы УФИ
действует аналогично радиации, поэтому необходима экранно-вакуумная
теплоизоляция (ЭВТИ). В этом случае нужно бояться разрушения
пластиков от нарушения теплового режима.
УФИ особенно неприятно для эмалевых красок, так как красители
теряют свои свойства. Белая краска на основе ТЮ2 желтеет, нарушаются
оптические свойства. Изменение оптических свойств поверхности ИСЗ
может привести к нарушению теплового режима. В настоящее время
используются керамические краски.
3.5. Микрометеорное воздействие
Активное воздействие (пробои) микрометеоров на КА пока еще не
обнаружено, возможно, из-за относительно малого времени работы
аппаратов подобного типа.
Основное воздействие микрометеоров - это эрозия оптики.
На низких орбитах Земли микрометеорное воздействие на оптику
200 A/год, вдали от Земли - это воздействие существенно меньше и вне
сферы действия Земли (г г 1 млн км) составляет 1 А/год (10“10 м).
Исследования, проведенные на ИСЗ, показали, что вблизи Земли
много микрометеоритной пыли (пылевые частицы массой т = 10-12 г),
которая вызывает эрозию оптики.
Для борьбы с эрозией стремятся оптику ставить перпендикулярно
направлению движения и зашторивать (особенно оптические датчики
системы ориентации КА). Если полет КА идет от Земли, то целесообраз-
но оптическую аппаратуру ориентировать на Землю.
По оценке столкновения с микрометеорами имеется довольно большая
информация, которая отражается на графике данных по количеству
метеоров в окрестности Земли в зависимости от их массы (рис. 3.1).
Из графика видно, что для низких орбит ИСЗ количество метеоров
возрастает из-за наличия мелкого пылевого облака вблизи Земли.
Для оценки радиуса кратера, выбиваемого метеоритом, можно
воспользоваться формулой Бьерка:
2
г = K(mV)3,
где т - масса метеорита, г; V- скорость метеорита, м/с; К- коэффициент,
зависящий от материала {К = 1,09 для алюминиевого бойка, ударяющего
по алюминиевой стенке, К = 0,606 - железо по железу, К = 1,3 - свинец
по свинцу; К = 0,9 - алюминий по железу).
144
Для ориентировочных
расчетов можно принять
К= 1.
Условием пробиваемости
стенки является выбор тол-
щины стенки, в 1,5...2 раза
превышающей радиус крате-
ра, т.е. 6СТ = (1,5...2) г.
Для расчета толщины ме-
теорной защиты может быть
использована формула, полу-
ченная на основе теории гид-
родинамического удара:
d 3 о VK
где б - толщина стенки; d -
диаметр ударяющей частицы;
р
а = — - отношение плотнос-
Рм
ти материала стенки к плот-
Рис. 3.1. Зависимость частоты ударов метеоров от
их массы:
I - удар в одну сторону метеорных тел с массой
>т; 2 - для спутников на низких орбитах; 3 -
вдали от Земли
ности материала метеора;
Кк i 1,5 км/с - конечная ско-
рость метеора; Ин - началь-
ная скорость метеора.
Что касается скорости встречи метеора с КА, то принимается средняя
скорость Иц, = 20 км/с; максимальная - Итах = 70 км/с.
В космосе имеется постоянный фон метеорных частиц и потоки
частиц, встречаемых при прохождении метеорных потоков. Длительность
ливней метеорных потоков не превышает нескольких дней; ливней не
более 20 и все они известны.
Повышенная защита аппарата за счет увеличения толщины корпуса
нецелесообразна, так как приводит к перетяжелению конструкции КА.
Поэтому следует разрабатывать защиту в двух направлениях:
1) секционирование КА с одновременным дублированием аппаратуры
и служебных систем, чтобы в случае выхода из строя одного отсека
обеспечить работу другого (основное средство защиты);
145
2) создание защитных противометеорных экранов. В этом случае метеор
пробивает обшивку экрана и распадается на большое количество мелких
частиц, которые уже не опасны для обшивки КА, что позволяет
значительно уменьшить толщину основной обшивки.
Расстояние, на которое необходимо установить экран, чтобы
обеспечить наивыгоднейшие условия для защиты обшивки КА, можно
определить по формуле
/
s = 2'вобш
\
2
2
&обш
б -р
экр Гэкр
где бобш - толщина обшивки, мм- бэкр - толщина экрана, мм; рэкр -
плотность материала экрана, г/см3.
б,
Пример. Для алюминиевого экрана с -5= = 10 расстояние s =
6»р
~ 4’^обш-
В литературе встречаются рекомендации делать экран из бериллия,
у которого высокая ударная вязкость. В этом случае при том же
6
соотношении = 10 получаем s « (5...6) б б .
Рис. 3.2. Метеорная защита и схема дробления метеора на экране:
/ - дренаж; 2 - экран; 3 - обшивка; 4 - соты; 5 - пенопласт; 6 - осколки метеора; 7 -
метеор; S-пробои экрана; 9-экран; /0-обшивка; //-осколки обшивки; /2-тепло-
и звукоизоляция; 13 - внутренняя обшивка
146
Для защиты жизненно важных частей ИСЗ с толщиной обшивки
бо6ш -2 мм размещаем экран бэкр = 0,2...0,3 мм на расстоянии 5 = 5'бо6ш -
= 10 мм, и это расстояние между экраном и обшивкой заполняем сотовым
наполнителем.
Кроме внешнего экрана, необходим еще и внутренний экран, так как
при ударе выбивается обшивка с внутренней стороны (рис. 3.2), осколки
которой могут повредить элементы бортовых систем. Этот экран,
размещенный на тонкой металлической подложке, может одновременно
служить тепло- и звукоизоляцией.
3.6. Трение в условиях глубокого вакуума
3.6.1. Общие требования
В конструкции КА есть много подвижных соединений. Проблема
работы трущихся пар в условиях глубокого вакуума давно известна
проектировщикам вакуумных установок. В подвижных соединениях
обычно стремятся заменить сухое трение гидродинамическим. Для этой
цели используют различные смазки для создания жидкого подслоя.
Смазки в условиях глубокого вакуума испаряются и гидродинамичес-
кое трение сменяется сухим трением, которое характеризуется скалывани-
ем частиц с поверхности.
Сложной задачей является
обеспечение смазки в тру-
щихся парах - шарнирах,
подшипниках, выдвигающих-
ся телескопических механиз-
мах, зубчатых зацеплениях и
пр. Испарения смазок приво-
дит к сухому трению неокис-
ляемых в вакууме поверхнос-
тей. Чистые поверхности при
контакте подвержены интен-
сивной диффузии и "холод-
ной сварке".
После относительно не-
долгого пребывания в вакуу-
ме (1...3 ч) существенно уве-
личивается коэффициент тре-
ния смазанных пар (рис. 3.3).
Однако в процессе работы (за
8... 10 мин) он понижается до
Рис. 3.3. Зависимость коэффициента трения от
времени работы при различном предварительном
выдерживании трущейся пары в глубоком вакууме
в состоянии покоя:
р = 10-6 мм рт. ст., MoS2 + нержавеющая сталь,
(= 25 °C, V = 3,1 м/с
147
первоначального. Таким образом, одним из следствий этих процессов
является необходимость повышения мощности приводов механиз-
мов.
Чтобы избежать "холодной сварки", целесообразно покрывать
контактирующие поверхности пленками из золота, серебра, использовать
поверхностное цементирование, закалку; в подшипниках применять
самосмазывающиеся пластмассовые пары (тетра фторэти лен).
Решением задачи является герметизация трущихся пар, использование
мощных сальниковых уплотнений, специальных покрытий и смазок с
низким давлением насыщенных паров.
Таким образом, несмотря на то, что имеется целый ряд вакуумных
консистентных смазок для различного диапазона температур, высоко-
оборотные вращающиеся пары с большим количеством рабочих циклов
герметизируются индивидуально или размещаются в приборном отсеке.
Исключительно эффективным материалом, используемым в качестве
твердого покрытия и компонента вакуумных смазок, является дисульфид
молибдена (M0S2). Он имеет чешуйчатую (подобно графиту) структуру,
но в отличие от графита не требует в процессе работы окисления. В виде
тонкого (5... 10 мк) твердого покрытия осей вращения малооборотных
пар, поверхностей узлов разъема дисульфид молибдена выдерживает
давление 600...700 Н/мм2.
В обычных условиях чистого сухого трения не бывает, так как роль
смазки играет оксидная пленка, грязь, влага. В условиях же глубокого
вакуума (р <. 10-6 мм рт. ст.) влага, оксидная пленка испаряются и
происходит чистое сухое трение. Оголенный металл на отдельных
участках сваривается, причем однородные металлы свариваются лучше,
разнородные - хуже (мягкие металлы - алюминий, медь - сваривается
хорошо, стали - хуже).
Обычно герметические ИСЗ заправляли не воздухом, а азотом (сухим).
Это приводило к тому, что графитовые щетки электрических машин
быстро стирались (в течение нескольких десятков часов).
Вода, адсорбированная графитом, в условиях глубокого вакуума
испаряется, и графит, теряя свои смазывающие свойства, становится
абразивным материалом.
В атмосфере азота и вакууме в трущихся парах образуются задиры
поверхности, окисной пленки не образуется, что приводит к свариванию
за счет молекулярной диффузии, т.е. подшипниковые пары быстро
выходят из строя. Поэтому герметические ИСЗ заполняются азотом с
5 %-ным содержанием кислорода и с содержанием влаги, соответствую-
щим точке росы при t = -(10...20) °C.
Жалюзи на некоторых ИСЗ (со специальной смазкой) работают
хорошо, отсюда можно сделать вывод, что в условиях глубокого вакуума
148
низкооборотные пары работают и нужно избегать высокооборотных
пар.
Для улучшения работы подвижных соединений в условиях глубокого
вакуума применяют:
I) специальные консистентные смазки и антифрикционные материалы
с низким давлением насыщенных паров;
2) различные покрытия (фосфатирование, окисные пленки, цементиро-
вание);
3) самосмазывающиеся материалы (пластмассы, текстолиты,
специальные материалы);
4) замену трущихся пар - полную, либо частичную (вынесение в
космос низкооборотных пар, герметизацию, снижение испарения смазки
при частичной герметизации и др.).
3.6.2. Специальные консистентные смазки
Применение смазывающих материалов с низким давлением насыщен-
ных паров в условиях вакуума позволяет им удерживаться на трущихся
поверхностях. В качестве таких смазок используются смазки на основе
минеральных масел с добавками дисульфида молибдена (M0S2) в виде
мелкодисперсного порошка (величина частиц - 5... 15 мк). Подобные
смазки впервые были применены американцами в период второй
мировой войны в тяжелонагруженных парах авиадвигателей.
Типы смазок на основе кремнийорганических соединений и различных
масел разработаны и разрабатываются институтом авиационных топлив
и масел (ЦИАТИМ):
а)ЦИАТИМ-221 (жидкие кремнийорганические соединения, которые
сгущаются стеаратом кальция) - консистентная смазка без добавки
дисульфида молибдена, которая удовлетворительно работает в диапазоне
температур -50 °C s t <. +50 °C и низких давлениях; используется в
подшипниках качения и скольжения в указанном диапазоне температур;
б) ВНИИНП-220 (институт нефтепродуктов) имеет состав такой же,
как и предыдущая смазка, но с добавкой 3...4 % дисульфида молибдена.
Удовлетворительно работает в диапазоне температур-50 °C <, t <, +50 °C
при давлениир - 1...10-4 Па; рекомендуется для подшипников качения,
скольжения и механических пар (шарниров антенн и жалюзи, узлов
разделения и т.д.) с небольшим числом циклов работы (низкооборот-
ных - с числом циклов, меньшим нескольких тысяч);
в) ВНИИНП-232- смесь минерального масла с большим содержанием
дисульфида молибдена - 70...75 %. Рекомендуется для тяжелонагружен-
ных узлов с удельным давлением р - 0,6 ГПа. Диапазон температур до
уд
149
t = 500 °C. В условиях вакуума ВНИИНП-232 сохраняется до одного года
на поверхности узлов трения малократного действия.
Почти все вышеперечисленные смазки содержат мелкодисперсный
порошок дисульфида молибдена и рекомендуются для малоцикличных
пар, работающих в вакууме.
За рубежом применяются в качестве смазки, работающей в условиях
вакуума, примерно те же самые материалы.
Идут поиски новых материалов, заменителей дисульфида молибдена
(вероятно, будет применяться диселенид вольфрама WSe), которые
смогут обеспечить в условиях вакуума работу высокоцикличных пар с
числом циклов 10... 100 тысяч.
3.6.3. Антифрикционные покрытия
Твердые антифрикционные покрытия изготовляются на основе
порошкообразного дисульфида молибдена, смешанного с различными
смолами (для адгезии с металлами) с последующей термообработкой.
Смола отвердевает и получается покрытие с б = 5...20 мкм - для трущихся
пар. Поверхность пар предварительно обрабатывается пескоструем, а
затем наносится антифрикционное покрытие.
Типы покрытий:
а) ВНИИНП-209 - на основе кремнийорганической смолы К-55 с
добавкой дисульфида молибдена. Смола растворяется в бутилацетате,
и покрытие наносится лаковой пленкой на поверхность. Температура
термообработки t = 300...320 °C. Стальные пары с этим покрытием
работают при удельном давлении руд = 0,7...0,8 ГПа, при давлении
окружающей среды р = 10-4 Па с малым числом циклов. Это покрытие
предназначено для пар, выполненных из стальных и титановых сплавов.
Для магниевых и алюминиевых сплавов разработано покрытие с
меньшей температурой термообработки;
б) ВНИИНП-212 - мочевиноформальдегидная смола с добавкой
дисульфида молибдена, растворенная в спирте. Температура термообра-
ботки t = 150...250 °C. Рекомендуется для многоциклических пар при
больших удельных давлениях (в зоне упругих напряжений алюминиевых
и магниевых сплавов - 2,5...4,5 ГПа);
в) ВНИИНП-229 - силикат натрия, связующее - кремнийорганическая
смола. Рекомендуется в качестве покрытия стальных узлов (руд =
= 0,7.„О,8 ГПа), работающих в жидком кислороде (t = -183 °C).
150
3.6.4. Антифрикционные материалы
на основе пластических масс
(самосмазывающиеся пластмассы)
Особенность - высокая термостойкость, износоустойчивость,
вибропрочность, условия работы - как в условиях нормального
давления, так и в условиях глубокого вакуума.
Это механические смеси на основе MoS2, нитрида бора, различных
смол и арматуры (металлических порошков или тонких конструктивных
элементов).
Специальные антифрикционные материалы - маслянит и аманы.
Маслянит - отвержденные консистентные смазки - смеси минераль-
ных масел, полиамидных смол и мелкодисперсного порошка алюминия.
Диапазон температур -100 $ t $ +200 °C при удельном давлениируд -
= 0,5...0,8 ГПа, коэффициент трения f - 0,05 при V s 3 м/с (втулки,
вкладыши, пластины). Материал хорошо формируется, прессуется,
обтачивается.
Аманы - антифрикционные материалы, разработанные Академией
наук РФ.
Состав смеси: дисульфид молибдена, силиконовые смолы, порошок
меди (для термостойкости).
Марки материала: 1М, 2М.
Условия работы - как и у маслянитов, но рабочие температуры выше
300 °C.
Материал хорошо обрабатывается и имеет металлический вид.
3.6.5. Варианты, позволяющие избежать
трущихся пар в условиях вакуума
Создание высокооборотных пар, предназначенных для работы в
условиях вакуума, дело трудное, так как они предназначены для
низкооборотных пар. Поэтому прибегают к специальным конструктив-
ным вариантам.
Герметические выводы приводов:
а) вывод через сильфон (рис. 3.4, а); в авиации подобные сильфоны
изготовляются из резины, пластмасс, эластичных мешков, в космической
технике - из металла с последующей сваркой с другими элементами
конструкции; вывод через сильфон подобного типа используется для
качающихся и возвратно-поступательных пар;
б) пары с ограниченным углом поворота (до ±40° по аналогии
манометров с трубками Бурдоне) (см. рис. 3.4,6); подобные пары могут
использоваться для поворота следящих антенн; в спирально изогнутую
151
Рис. 3.4. Варианты конструкции, позволяющие избежать трения в условиях вакуума:
1 - поступательное движение; 2 - ограниченное вращение; 3 - графики ограниченного
вращения; 4- низкооборотная пара; 5- высокооборотные пары
трубку подается давлениер сжатого газа, под действием которого трубкг
распрямляется; изменение угла поворота от давления р показано нг
рис. 3.4, б;
в) механизм поворота антенны может быть выполнен следующим
образом: металлический сильфон разделен мембраной на две полости.
152
Рис. 3.5. Варианты частичной герме-
тизации подшипниковых пар:
а - дроссельные шайбы; б - сальни-
ковые уплотнения; «-лабиринтные
уплотнения; 1 - сепаратор; 2 - дрос-
сельные шайбы с малым зазором
(дефлектор); 3 - смазка с низким
давлением насыщенных паров; 4 -
антифрикционный материал; 5 -
уплотнения (фторопласт, текстолит);
б-набивка консистентной смазки с
низким давлением насыщенных па-
ров; 7-лабиринт
в которые подаются разные
давления; под действием раз-
ности давлений сильфон по-
ворачивается в одну или дру-
гую сторону - качается (см.
рис. 3.4, в); тарировочный
график данного механизма
показан там же;
г)вывод полнооборотных
пар, в которых обойтись без
подшипников в вакууме не-
льзя, представлен на рис. 3.4, г; для пар подобного рода высокооборот-
ные пары помещают в герметичный контейнер, а низкооборотные пары
выносятся в условия вакуума через магнитную муфту.
Рассмотрим частичную герметизацию подшипниковых пар (сущест-
венно улучшающих работу этих пар).
Выбираются смазки с низким давлением насыщенных паров (рис. 3.5)
р - 10-1... 10-3 Па, которые плотно набиваются в сепаратор подшипника
качения. Испарение, которое все же будет иметь место, можно еще
существенно снизить экранированием смазки дефлекторами (см.
рис. 3.5, б).
В этом случае смазка сохраняется значительно дольше, процесс
истечения через зазоры молекулярный, а следовательно, поддается
расчету как стационарный процесс истечения при давлении насыщенных
паров р = 10“2... 10-3 Па. Это грубое экранирование.
Еще больший эффект дает более тонкое экранирование с применением
сальников и лабиринтных уплотнений (см. рис. 3.5, в).
153
Средства, помогающие работе трущихся пар:
1) закалка поверхности, цементирование;
2) нанесение покрытий из благородных металлов (серебро, золото).
3.7. Герметизация отсеков
3.7.1. Газовый состав и температура
герметических отсеков ИСЗ
Обычно герметические отсеки заправляются до давлений р =
= 0,9...0,13 МПа.
Раньше такие отсеки заправляли азотом, но азот снимает антифрикци-
онные свойства графитовых щеток электрических двигателей (влага
испаряется и чешуйки графита становятся абразивом). При заправке
азотом необходима добавка 3...4 % кислорода и соответствующая
влажность с точкой выпадения росы (-10...-20) °C.
Температура отсеков обычно выбирается в диапазоне 0...40 °C,
отрицательные температуры нежелательны, что связано с влажностью
газов.
Большие потери давления (утечки) на 20...30 % нежелательны, так как
может быть нарушена нормальная работа системы терморегулирования.
Допустимый перепад давлений для ИСЗ составляет 0,03...0,05 МПа.
3.7.2. Обеспечение герметичности отсеков КА
Всякий отсек имеет стыки и соединения, через которые могут
происходить утечки:
= одзз —,
I с
где V-объем газа, который равен внутреннему объему отсека, л; Др -
потеря давления = 20...30 %.
Процесс истечения можно считать стационарным (молекулярным) с
постоянной скоростью, т.е. абсолютная величина утечки 2ут не будет
зависеть от общего объема (утечки через стык пропорциональны
размерам щели (67)-
154
Меньшие объемы будут раньше терять давление, что видно из такой
оценки:
Ап _ бут* _
Др = —-— = —ot = —t = -----
V Р Р
~ bt = bnD в /6;
при этом принято, что б = const при одинаковой затяжке стыков любого
объема.
Следовательно, за фиксированное время у отсека меньших объемов
будет больший перепад давлений. Отсюда требование: малые отсеки
должны иметь более высокую степень герметичности для допустимого
перепада давлений Др по сравнению с большими отсеками.
Пример. Для отсека с объемом V- 10 м3 и допустимой потерей давления Др = 270 Па
Н*м
при времени работы около I года получили Q = 7 -, что отвечает требованиям не очень
п с
высокой степени герметичности.
Невысокая степень герметичности допускает:
1—s io—.
с у с
Высокая степень герметичности требует:
0,01 — s е„^0,1—.
с г с
Отсюда требование к компоновке ИСЗ: с точки зрения обеспечения
лучшей герметичности необходимо все агрегаты компоновать в одном
герметическом отсеке, а не в мелких (особенно выносных) блоках, где
требуется более высокая степень герметичности.
3.7.3. Типы герметизации стыков
Для герметизации стыков обычно используется белая вакуумная
резина (почти чистый каучук), которая допускает обжатие Д/ = 30...50 %
и хорошо работает до давлений р - 4 МПа.
В диапазоне температур -30° s t s +50 (100 °C) гарантируется время
работы t - 0,5... 1 год.
Силиконовые резины работают в диапазоне температур -150° s z s
s +350 °C.
155
Рис. 3.6. Герметизация стыков многократного действия:
а - уплотнение шнуром; б - схема фланцевого соединения; в - разъемные стыки (люки) -
клиновые или винтовые зажимы (без проворота крышки); г- схема уплотнения с помощью
шланга
Технологические люки и люки однократного или малократного дей-
ствия могут быть загерметизированы с помощью резинового шнура
(рис. 3.6, а).
Вместо резины в качестве уплотнения может использоваться
фторопласт, но после каждой разборки стыка фторопластовые кольца
нужно менять, так как фторопласт неупругий материал.
Если стык затягивается болтами, то к жесткости его предъявляются
особые требования. Для того чтобы вспучивание фланцев между болтами
не нарушало герметичность, необходимо выбирать диаметр болта
приблизительно равным толщине фланца = йф, а расстояние между
болтами t - (8... 10) rf6.
156
Рис. 3.7. Герметизация стыков одно-
кратного действия:
а-уплотнение с помощью прокладки
(медь, алюминий, фторопласт); 6 -
сварные стыки; в - соединение трубо-
проводов; 1 - роликовая сварка; 2 -
объемное уплотнение (алюминий, медь,
фторопласт, резина); зажимная гайка,
обеспечивающая соединение без пово-
рота деталей А и В относительно друг
друга
Чрезвычайно сложная про-
блема - герметизация люков.
Применение болтового соеди-
нения недопустимо. Предъ-
являются особые требования к
нажимным устройствам: зажим
должен быть только поступа-
тельным, без проворота крыш-
ки люка во избежание смина-
ния уплотнения.
Для плоских люков могут
быть предложены следующие
решения:
а) возможно использование
клиновых зажимов, которые при повороте сжимают стык;
б) для герметизации фигурных люков можно применять, как и в
авиации, надувные шланги. В шланг подается сжатый воздух под
давлением. Однако с помощью шлангов высокую степень герметичности
обеспечить трудно;
в) для герметизации стыков, работающих в условиях высоких
температур, возможно применение металлических колец и прокладок из
мягких металлов. Стыки, работающие на изгибную и объемную
деформации прокладки, показаны на рис. 3.7;
г) стыки с использованием в качестве уплотнения металлов преимуще-
ственно одноразового действия;
д) для герметизации стыков ИСЗ с большим временем работы можно
применять сварку; фланцы стыков такого типа изготовляются с облоем,
по которому производят роликовую сварку стыков. При технических
испытаниях возникает необходимость в разборке этих стыков. Для этой
157
цели облой со сварным швом обрезают, а затем опять заваривают и
так 3...4 раза.
3.7.4. Герметизация трубопроводов
Трубопроводы большого диаметра могут быть загерметизированы
вышеперечисленными способами с помощью фланцев.
Для герметизации трубопроводов малого диаметра используется
объемная деформация уплотнителя (кольца резины, фторопласта,
красной мягкой меди, алюминия и т.д.).
Часто используется соединение трубопроводов ниппельного типа
(см. рис. 3.7).
3.7.5. Испытание отсеков на герметичность
Испытание отсеков на герметичность производится в барокамерах
больших размеров, которые обычно делаются по очертаниям испытывае-
мого объекта (форма головного обтекателя ракеты-носителя).
В камере производится имитация условий полета; постоянно воздух
откачивается до давления р = 10-2... КГ4 Па. Радиация Солнца имитирует-
ся нагревом (инфракрасные ртутные лампы), охлаждение - охлаждением
(жидкий азот) специальных панелей термобарокамеры.
Объект выдерживается в камере несколько часов или суток и
измеряется перепад давлений внутри объекта, по которому определяется
степень герметичности объекта.
Для определения места течи объект заправляют гелием с избыточным
давлением (р0 = 0,2 МПа) и с помощью течеискателя просматривают все
стыки, трубопроводы, герморазъемы и др. Барокамеры, как правило,
совмещают с термокамерами.
158
Глава 4
Некоторые вопросы
проектирования космических
аппаратов
4.1. Логика и технология
проектирования КА
4.1.1. Особенность процесса проектирования КА
На начальном этапе проектирования КА, как правило, имеется
ограниченный набор исходных данных. Однако, накоплен большой
теоретический и практический материал, позволяющий построить
математические модели, описывающие состав бортовых систем и
конструкцию практически с любой степенью точности. Особенность
проектирования КА состоит в том, что существует такое разнообразие
объектов, что попытки получить обобщенные зависимости встречают
большие трудности. В настоящее время таких практических наработок
нет. Конкретизация назначения КА позволяет при построении математи-
ческих моделей использовать конкретные статистические данные
традиционных схем. Кроме того, на начальном этапе проектирования
можно абстрагироваться от конкретной схемы ИСЗ, что облегчает
исследование и построение математических моделей.
Особенность проектирования КА заключается также в том, что
практически отсутствуют теоретические работы, связанные с выбором
параметров и логикой процесса их проектирования на этапе предэскиз-
ных разработок. В частности, наиболее важным и сложным является
вопрос о выборе основных проектных параметров КА.
Совершенно неисследованным является вопрос о логике и технологии
автоматизированного проектирования КА на начальном этапе
разработки, т.е. речь идет о той последовательности работ, составе
исходных данных и статистике, вовлекаемых в процесс проектирования
на каждом его этапе. Кроме того, отсутствуют достаточно простые и
универсальные математические модели, устанавливающие связь между
исходными данными, проектными параметрами, а также характеристика-
ми КА и параметрами функционирования его систем.
159
4.1.2. Процесс проектирования КА
Процесс проектирования КА представляет собой многоуровневый
итерационный и оптимизационный процесс, в течение которого
рассчитываются характеристики аппарата и его массовая сводка. Для
того чтобы организовать такой процесс, необходимо разработать логику
и технологию его. Учитывая, что для решения такой сложной задачи
используется большое число уравнений, исходных данных и численных
значений, входящих в уравнение коэффициентов, необходимо применение
ЭВМ. Поэтому имеетсмысл рассматривать логику автоматизированного
проектирования. Этот процесс будем рассматривать применительно к
этапу предэскизного проектирования. Этот этап характеризуется тем,
что кроме общего представления о компоновке ИСЗ и предполагаемых
типах основных служебных систем, а также некоторых исходных данных,
ничего не известно.
Модель процесса проектирования должна содержать следующие
основные модели: существования, возможности и функционирования.
4.1.3. Модель существования КА
Модель существования КА содержит уравнения (или одно уравнение),
связывающие между собой начальную массу аппарата с некоторыми
основными проектными параметрами. В состав этих уравнений из
обычно задаваемых исходных данных входит масса целевой аппаратуры
(коммерческая нагрузка). Кроме того, в эти уравнения входят статисти-
ческие коэффициенты, которые характеризуют конструкцию, служебные
системы и другие элементы КА (в зависимости от степени подробности
этих уравнений, глубины проработки математической модели). Для
общности эти уравнения представляются в безразмерном виде (в
относительных величинах).
4.1.4. Модель возможности
Модель возможности представляет собой систему уравнений,
описывающих связь между характеристиками КА (как правило,
задаваемыми в исходных данных) и некоторыми основными проектными
параметрами. Фактически эта система уравнений является упрощенным
и обобщенным решением задачи выполнения цели полета с учетом
только основных действующих факторов (и для основного режима
функционирования КА).
160
4.1.5. Модель движения
Модель движения - это система дифференциальных уравнений,
описывающих движение КА. Решение этих уравнений позволяет, во-
первых, подтвердить тот факт, что с данными проектными параметрами
имассово-геометрическимихарактеристикамиКАвыполняетпоставлен-
ную задачу, и, во-вторых, получить дополнительную информацию для
уточнения характеристик служебных систем.
Эти три модели образуют первый (верхний) уровень проектирования.
Он является недостаточным для определения масс, размеров и энергетики
аппарата, поэтому необходимо иметь модель, описывающую аппарат
с учетом его основных составных частей. Эту модель назовем моделью
для расчета массовых характеристик (модель масс).
4.1.6. Модель масс
Модель масс включает в себя набор уравнений, с помощью которых
определяются массы составных частей аппарата: корпуса, бортовых
систем и др. Эта модель позволяет получить более точное значение массы
ИСЗ (масса ИСЗ второго приближения) на основе применения уравнений,
включающих статистические коэффициенты и описывающие элементы
конструкции и бортовых систем. Таких моделей может быть несколько
в зависимости от степени проработки конструкции и бортовых систем.
4.1.7. Логика автоматизированного
проектирования
Предлагаемая логика автоматизированного проектирования
включает в себя три итерационных цикла (рис. 4.1).
Цикл "Согласования характеристик". Необходимость этого цикла
связана с тем, что в начале проектирования статистические коэффициен-
ты, полученные в результате обработки результатов предшествующих
разработок как КА в целом, так и его составных частей, известны
недостаточно точно (характеризуются большим разбросом). После
расчета с помощью модели масс появляется возможность эти коэффици-
енты уточнить применительно к конкретному разрабатываемому КА и
сравнить их между собой. Такая процедура образует итерационный цикл.
Цикл "Оптимизация". Он подразумевает изменение (вариацию)
основных проектных параметров КА с целью получения экстремального
значения выбранного критерия оптимизации при заданных ограничени-
ях. Эта оптимизация осуществляется с помощью одного из известных
6 8620
161
Исходные
данные
Рис. 4.1. Блок-схема пропедуры автоматизированного проектирования связного ИСЗ
162
методов, например, последовательных приближений,случайного поиска,
градиентного спуска и т.п.
Цикл "Согласование технических требований". С помощью этого
цикла осуществляется изменение параметров аппарата с целью
обеспечения характеристик КА, соответствующих исходным данным
(техническим требованиям) на проектирование.
Как видно из рис. 4.1, проектирование начинается с формализации
технических требований, сформулированных заказчиком. Формализа-
ция заключается в придании элементам технических требований
числовых или логических значений. Таким образом, технические,
требования включаются в набор исходных данных для проектирования.
Для начала процесса проектирования необходимо задать начальные
значения проектных параметров и статистические коэффициенты,
полученные на основе предшествующего опыта или исходя из диапазона
их вероятных изменений.
Перечисленные величины образуют полный набор исходных данных
для того, чтобы с помощью математических моделей существования и
возможности КА получить массово-геометрическую сводку и основные
характеристики первого приближения для бортовых служебных систем.
Полученные данные используются в модели масс для определения масс
элементов конструкции и служебных систем, их основных характерных
размеров. С помощью модели масс получаем более подробную массово-
геометрическую сводку, которая помимо прочего позволяет определить
коэффициенты, которые ранее принимались на основе статистических
данных, отвечающих проектируемому варианту КА (коэффициенты 2-го
приближения). Далее проводим сравнение статистических коэффициен-
тов, задаваемых в исходных данных, и полученных коэффициентов.
Сравнение осуществляется по формуле:
где ktпредыдущее значение коэффициента; ki+ t - последующее значение
коэффициента; ел. - задаваемая заранее точность приближения по
коэффициенту.
В связи с тем, что коэффициентов, характеризующих бортовые
системы КА, может быть несколько, то условие (4.1.1) должно быть
выполнено по всем коэффициентам. Если условие (4.1.1) выполняется по
всем коэффициентам, тогда делается следующий шаг в соответствии с
логической схемой (см. рис. 4.1). Если условие не выполняется хотя бы
по одному коэффициенту, тогда происходит переприсвоение по форме:
6*
163
kj = : ki+l, и повторно выполняются расчеты с помощью моделей
существования и возможностей КА.
Описанная процедура, образующая первый итерационный цикл,
повторяется n-е число раз. В нашем случае сходимость по этому циклу
обеспечивалась за три итерации.
После завершения итерации по коэффициентам производится расчет
выбранного критерия качества КА (критерия оптимизации). Численные
значения проектных параметров в составе исходных данных назначались
исходя из некоторых средних значений. Теперь на этом шаге необходимо
провести их изменение (вариацию) с целью обеспечить экстремум
принятого критерия оптимизации:
W = max И7, j = 1,2..N,
где W-экстремальное значение критерия оптимальности; 1У-критерий
оптимальности, как функционал от проектных параметров; Xj - набор
проектных параметров, подлежащих оптимизации.
Каждый раз, когда происходит изменение проектных параметров в
соответствии с принятым методом оптимизации, осуществляется первый
итерационный цикл. После выполнения процедуры оптимизации, т.е.
когда получено экстремальное значение принятого критерия и определе-
ны (выбраны) проектные параметры, отвечающие этому критерию
(оптимальные проектные параметры), осуществляется переход к
следующему шагу проектирования - моделированию с помощью ЭВМ
функционирования ИСЗ на всевозможных режимах движения по орбите.
В результате расчетов на основе модели движения получаются конкрет-
ные параметры функционирования бортовых систем, обычно это:
количество тепла, получаемое ИСЗ от внешних и внутренних источников,
характер сеансов связи, возмущающие силы и моменты и т.п. Эти
характеристики сравниваются с аналогичными, задаваемыми в исходных
данных (технических требованиях). Поскольку выполнение этих
требований является безусловным, то сравнение выполняется по формуле:
т^ДОП у
у ДОП Ч
где Y“on - заданное значение основных характеристик КА; - значение
основных характеристик КА, полученных в процессе моделирования
164
функционирования КА; еу - задаваемая точность выполнения техничес-
ких требований по основным характеристикам.
Если эти требования выполняются, т.е. спроектированный аппарат
отвечает предъявленным требованиям, то формируется перечень
результатов расчетов и процедуры проектирования. В случае не
выполнения хотя бы одного из требований, необходимо внести изменения
в процедуру проектирования.
По завершению цикла проектирования, формируются результаты,
в состав которых входят технические требования на разработку КА,
полная окончательная массово-геометрическая сводка, включающая
оптимальные проектные параметры, а также энергетические и другие
характеристики. Кроме того, здесь также содержатся основные
результаты моделирования движения и функционирования КА, т.е.
параметры орбиты и циклограмма функционирования на различных
участках орбитального движения, соответствующие заданному профилю
полета. По возможности представляется и компоновка КА, соответствую-
щая принятой схеме аппарата и рассчитанным геометрическим
параметрам.
4.2. Математическая модель КА
В процессе решения задач оптимизации проектных параметров КА
возникает необходимость в математических моделях существования
(моделях масс), включающих описание наиболее существенных
элементов - служебных систем, масса которых, с одной стороны, зависит
от требований со стороны целевой аппаратуры, а с другой - определяется
их структурой и собственными параметрами каждой системы.
Наиболее универсальной и наглядной формой записи математической
модели масс является обобщенное уравнение в относительных величинах,
уравнение существование.
Анализ литературных источников показывает, что подобного
уравнения до настоящего времени не встречалось.
Введем следующее основное уравнение существования КА:
. _ аховстр _ »
1 проч
„ = _______Рисз___________
ипн . в , >
1 ЕСЭП Рстр ' СОС “проч
показывающее связь между относительной массой целевой аппаратуры
165
(ЦА) и статистическими коэффициентами, описывающими долю каждой
служебной системы в составе КА.
При выводе этого уравнения были приняты следующие обозначения:
ОТцА = Цди - относительная масса полезной нагрузки (ПН);
«исз
№ца - масса целевой аппаратуры;
щИсз “ масса КА;
= рисз - плотность размещения аппаратуры и систем;
Кисз
Иисз - масса КА;
ЛЛг°нстр = аконп1) - удельная масса конструкции;
^исз
Монстр “ масса конструкции;
Wc3n = гоп - относительная масса системы энергопитания (СЭП);
«ЦА
/мСэп “ масса системы энергопитания;
тстг = Рстр - относительная масса системы терморегулирования (СТР);
«ЦА
wctp ~ масса системы терморегулирования;
= усос - относительная масса системы ориентации и стабилиза-
«ЦА
ции;
wctp- масса системы ориентации и стабилизации;
---—262---= - относительная масса прочих элементов КА;
/'вм \ ПР°Ч Г
(«исз «ца)
/мпроч ~ масса прочих элементов КА.
Задание массы целевой аппаратуры ?«цА и коэффициентов а, р, е, р,
у, б дает возможность получить сводку масс по КА:
тиг, = —— “ масса КА;
Рпн
Иисз = —“ объем КА;
Рисз
Монстр = КИсз’“констр - масса конструкции;
шсэп = шЦА есэп “ масса системы энергопитания;
ШСОС = wUA’Ycoc “ масса системы ориентации и стабилизации;
ШСТР = wU,A'Pctp ~ масса системы терморегулирования;
«проч = («ИСЗ “ «ЦА>бпРоч - масса прочих элементов.
166
Полученное нами обобщенное уравнение обладает универсальностью,
что позволяет описывать множество КА самой разнообразной структуры
и выходить на конкретную модель, манипулируя статистическими
коэффициентами, получаемыми на основе прошлого опыта конструиро-
вания. Больше того, можно при статистической обработке данных по
КА, разработанным в различных странах и в разное время, получить
значения этих коэффициентов в их динамике по годам разработки и
таким образом на основе выявленных тенденций прогнозировать их
значения, по крайней мере, на срок разработки собственного КА.
Будем считать, что масса целевой аппаратуры КА связи и телевещания
зависит в первую очередь и главным образом от мощности бортового
радиокомплекса (БРК), определяемого заказчиком в зависимости от
высоты орбиты функционирования и чувствительности наземных
приемных станций. Анализ ИСЗ (табл. 4.1), имеющих мощность
0,5...2,5 кВт, дает формулу:
^ца ~ 46,7 + 73,3-1УБРК.
Энергетическая мощность, требуемая д ля обеспечения работы системы
ориентации и стабилизации, системы терморегулирования и других
служебных систем, зависит от энергетической мощности целевой
аппаратуры (табл. 4,2):
И'нсз = -0,10 + 1,6- И/Брк.
Анализ статистических данных современных ИСЗ позволяет получить
ряд полезных зависимостей для расчета масс СЭП, СТР и СОС.
Таблица 4.1
Зависимость массы целевой аппаратуры от энергетической мощности
бортового радиокомплекса (БРК) (по зарубежным ИСЗ связи и телевещания)
Характеристики Название спутника
"Инмарсат-2" "Инмарсат-3" TV-SAT "Астра-1А"
Масса ИСЗ, кг 860 1100 1025 1820
Масса целевой аппаратуры, кг 130 190 220 190
Энергетическая мощность целевой аппаратуры, Вт 1 200 2 300 2 500 2 000
Срок активного существова- ния, лет 10 13 9 10
167
Таблица 4.2
Зависимость энергетической мощности СОС, СТР и других служебных систем
от энергетической мощности целевой аппаратуры
(но зарубежным ИСЗ связи и телевещания)
Характеристики Название спутника
"Интелсат-5а" "Интелсат-6" "Интелсат-7" TV-SAT "Астра-1 А"
Масса ИСЗ, кг 1142 4170 3610 1025 1820
Масса целевой аппаратуры, кг . 90 662 446 220 190
Энергетическая мощность ИСЗ, Вт 1 453 2 252 3 968 4 500 3 600
Энергетическая мощность целе- вой аппаратуры, Вт 978 1 531 2 580 2 500 2 000
Срок активного существования, лет 7 13 15 9 10
Массу системы энергопитания на основе солнечных батарей
представим в виде суммы масс основных составляющих: массы панелей
солнечных батарей (СБ) (лиСБ), массы буферных аккумуляторов (шаккум)
и массы системы контроля работы СЭП 0иконтр)-
Масса панелей солнечных батарей:
где IF-расчетная средняя мощность, отдаваемая в систему энергопита-
ния, кВт; ф- коэффициент полезного действия солнечных батарей; Тс а с -
срок активного существования ИСЗ.
Масса буферных аккумуляторов:
= 20,0-£(1 + 3,0-0 >
где Е- расчетная емкость буферных аккумуляторов, кВт ч.
Масса системы контроля работы СЭП:
168
"‘контр = 30,0(PF+ I)0'5.
Масса системы терморегулирования зависит от хладопроизводитель-
ности Q и срока активного существования ИСЗ Тс а с:
щстр = 11О,0о,8(Гьвс + О,2)о,м,
где Q - хладопроизводительность системы терморегулирования, кВт.
Массу системы ориентации и стабилизации представим в виде
следующей функции массы ИСЗ:
тсос = “5®’/иисз + 215тиИСз - 35.
4.3. Методика расчета затрат
на разработку и серийное производство КА
4.3.1. Общие статьи затрат
Под разработкой понимаются этапы создания КА, начиная с
получения технического задания и заканчивая поставкой серийно
изготовленной продукции заказчику. Суммарные затраты на разработку
вновь создаваемого КА включают в себя:
- затраты на проведение научно-исследовательских работ (НИР),
- опытно-конструкторских работ (ОКР), в том числе на проведение
автономных комплексных наземных и натурных испытаний,
- затраты на серийное (опытное) производство.
Суммарные затраты на разработку КА представим в виде суммы:
= ^мл + ^НИОКР + ^произ»’
где См ч - стоимость материальной части, предназначенной для
проведения полного цикла основных испытаний, выполняемых при
НИОКР; Сниокр - затраты на проведение НИР и ОКР без стоимости
материальной части; Спроизв - затраты в серийном производстве.
Суммарная стоимость материальной части при проведении НИОКР
может быть проведено по формуле:
i
169
где квс - коэффициент, учитывающий стоимость вспомогательного
оборудования, необходимого для проведения испытаний (Л’вс = (0,1 ...0,2);
Сг“впр| - стоимость опытного образца конструкции, изготовленного для
испытаний; - количество образцов без наполнителя двигателя для
стендовых испытаний (СИ) - объем отработки при СИ; - стоимость
служебных систем, изготовленных для испытаний; - количество
образцов служебных систем, изготовленных для АСИ (объем отработки
служебных систем, включая отработку технологии); Су - стоимость ИСЗ
без стоимости целевой аппаратуры; пкси - количество образцов для
проведения комплексных сдаточных испытаний (КСИ).
Для унифицированных элементов стендовые испытания и другие виды
автономных испытаний не проводятся, и затраты на материальную часть
определяются только количеством КСИ:
См, = СЕлкси.
В случае применения унифицированной конструкции не требуется
использования нового вспомогательного оборудования квс - 0.
4.3.2. Затраты на разработку конструкции
Стоимость конструкции (затраты на разработку конструкции)
определяется в зависимости от ее массы, удельной стоимости, связанной
с конкретным элементом конструкции, рассчитываемой по статистичес-
ким данным, а также в зависимости от степени освоенности произ-
водства.
Стоимость конструкции КА в общем случае определяется по формуле
/чМ.Ч _ L/эЧ-Ч
''КОНСТр! ~ *'“'KOHCipffIKOHCip’
где к - коэффициент, учитывающий степень освоенности производства;
обычно принимается к - кОйв = 1,2- для вновь разрабатываемого КА
(для конструкции с использованием преимущественно композиционных
материалов, косв - 1,25); к = Лсер = 0,7 - для унифицированной конструк-
ции; однако, учитывая, что для испытаний материальная часть
изготавливается по серийной технологии, то примем, что стоимость
материальной части соответствует стоимости КА на этапе освоения
серийного производства: к = косв = 1,0 на этапе освоения серийного
производства; - удельная стоимость конструкции на период
освоения серийного производства; если суммировать удельные стоимости
170
элементов конструкции, то получаются удельные стоимости конструкции;
/«констр “ масса конструкции КА.
Учитывая, что конструкцию можно расчленить на отдельные
элементы, то тогда стоимость конструкции КА:
_ у» 1 х-t М.Ч
^"констр I — L %^-'констр I ^констр I >
где ^-коэффициент, учитывающий степень освоенности производства
для каждого элемента конструкции; - удельная стоимость
элементов конструкции на период освоения серийного производства
(табл. 4.3, 4.4, 4.5); >»констр , - масса элементов, входящих в состав
конструкции КА; У - количество элементов конструкции.
Количество стендовых испытаний (СИ) для элементов конструкции
"конетр; приведены в табл. 4.4.
Таблица 4.3
Удельная стоимость элементов конструкции на период освоения серийного
производства по ступеням (долл./кг10-3)
№ по пор. Элементы конструкции с“ч XOBCTpi
1 Корпус ИСЗ 0,480
2 Приборная рама 0,240
3 Система отделения от носителя 0,990
4 Механизмы раскрытия элементов конструкции 1,110
5 Прочие элементы конструкции 0,510
Таблица 4.4
Количество стендовых испытаний (СИ) для унифицированных и
неунифицированиых элементов конструкции
№ по пор. Наименование элемента конструкции СИ ^«овстр/
Неунифициро- ванные элементы Унифицирован- ные элементы
1 Корпус ИСЗ 70 45...50
2 Приборная рама 30 25
171
№ по пор. Наименование элемента конструкции СИ
Неунифициро- ванные элементы Унифицирован- ные элементы
3 Система отделения от носителя 75 45...50
4 Механизмы раскрытия элементов конструкции 150...220 45...50
5 Прочие элементы конструкции 20 10...15
4.3.3. Стоимость служебных систем
Таблица 4.5
Ориентировочные значения удельных стоимостей (тыс. доллЭкг)
бортовых систем и элементов КА
№ по пор. Элементы КА С“' , слух/
1. Целевая аппаратура
1.1. Радиоретранслятор 3,5
2. Служебные системы
2.1. Агрегаты системы ориентации и стабилизации
2.1.1. Гиромаховики (точность 1 ") 2,2
2.1.2. Сопла ориентации (разгрузка гиромаховиков при пнковых нагрузках) 1,4
2.1.3. Корректирующая двигательная установка (КДУ) 1,9
2.1.4. Топливо для сопл СОС и КДУ 0,03
2.2. Система энергопитания
2.2.1. Панели солнечных батарей (тыс. долл./м2) 15
2.2.2. Буферные аккумуляторы 0,6
2.3. Система терморегулирования
2.3.1. Элементы системы терморегулирования 3,8
2.3.2. Прибор управления СТР 2,1
3. Прочие элементы КА
3.1. Бортовая кабельная сеть (БКС) 1.0
3.2 Система управления 2,8
172
Количество конструкций КА для проведения комплексных сдаточных
испытаний составляет 20...25 - в случае неунифицированных конструкций
КА и 20 - для унифицированных конструкций.
4.3.4. Стоимость ИСЗ без учета стоимости
целевой аппаратуры для КСИ
В рассматриваемой методике стоимость КА для комплексных
сдаточных испытаний определяется как сумма стоимости конструкции
и стоимости служебных систем без учета стоимости целевой аппаратуры.
4.3.5. Затраты на НИОКР
Затраты на НИОКР без учета затрат на разработку материальной
части определятся по формуле:
^ниокр = СНир + СОкр >
где Снир - затраты на проведение НИР; С0КР - затраты на проведение
ОКР без учета затрат на материальную часть.
Анализ фактических данных показывает, что затраты на НИР по
обоснованию технического задания и затраты на разработку технических
предложений составляют 1...2 % от затрат на ОКР. Таким образом,
затраты на проведение НИОКР можно представить в виде:
^ниокр = О +^нир)'^окр»
где А'нир = 0,01...0,02 - коэффициент, характеризующий отношение
стоимости НИР к стоимости ОКР.
Затраты на проведение ОКР без учета затрат на изготовление и
приобретение материальной части складываются из расходов на зарплату
инженерно-технических работников, обеспечивающих разработку
конструкторской, технологической и нормативно-технической
документации на проектируемую ракету, оснастку, испытательное
оборудование, включая накладные расходы, затраты на услуги
сторонних организаций, и определяются по формуле:
где Ск0| - среднегодовые затраты на проведение ОКР без учета
стоимости материальной части по конструкции КА; •-среднегодо-
173
вые затраты на проведение ОКР без учета стоимости материальной части
служебных систем; Т- время на проведение ОКР.
Обобщенно Сконсгр = 10...15 млн долл./год, а С z= 1...3 млн долл./год.
Для отдельных элементов КА приведены данные по удельным
(среднегодовым) затратам на проведение ОКР.
Элементы ИСЗ Среднегодовые затраты
в млп долл./год
Приборный комплекс ........................ 3
Система ориентации и стабилизации...... 10
Система энергопитания...................... 2
Система терморегулирования................. 7
Конструкция............................ 15
Использование в разработке изделия унифицированной ступени
позволяет сократить время и средства на исследования по созданию
нового узла или схемно-конструктивного решения, затраты на разработ-
ку конструкторской документации, технологических процессов,
разработку и изготовление технологической оснастки. Таким образом,
в этом случае затраты на проведение ОКР по ступеням ракеты будут
равны нулю: Сокр = 0, следовательно, и Сниокр = 0.
4.3.6. Затраты в серийном производстве
Затраты на серийное производство КА складываются из затрат на
производство конструкции и затрат на производство служебных систем
бортового оборудования.
Затраты на серийное производство конструкции определяется по
формуле:
^"констр ~ ^констр ^констр ^ос + сер ^констр ^констр (^прогр ^ос)5
где Аос - количество КА на этапе освоения серийного производства;
Апрогр ~ количество КА в программе выпуска.
В случае применения унифицированной конструкции этап освоения
серийного производства отсутствует, поэтому затраты определяются по
формуле:
С = к Сич т N
констр сер констр констр прогр ’
174
Затраты на изготовление служебных систем в серийном производстве:
^служ X ^служ i maryx i + ^сер ^прогр ~ ^ое)Ь ’
Аналогично определяем затраты, если в составе служебных систем
есть унифицированные
С = к fM'4 т V
’-'служ/ Лсер ^спуж/^служ! Jvnporp‘
4.4. Унификация бортовых систем КА
как средство снижения затрат
4.4.1. Общий подход к решению задачи
унификации ИСЗ
Задача проектирования ИСЗ с учетом унификации служебных систем
относится к классу задач поиска экстремума функции с ограничениями,
решение которой может быть получено путем сведения ее к задаче поиска
экстремума новой функции без ограничений. При этом новая функция
формируется на основе старой с добавлением членов, содержащих
ограничения. В этом случае появляются дополнительные неизвестные -
неопределенные множители Лагранжа, число которых определяется
числом функций, описывающих ограничения.
Решение в этом случае сводится к поиску экстремума унимодальной
функций, который может быть осуществлен с помощью известных
методов численной оптимизации.
В частном случае для решения задачи можно обойтись и без
применения метода неопределенных множителей Лагранжа. Такая
ситуация может возникнуть при ограничении на параметры или, когда
решение лежит на границе.
В процессе решения конкретной задачи при заданных численных
значениях исходных данных должен быть проведен анализ размеров
области изменения искомой функции и характер ее поведения.
175
4.4.2. Математическая формулировка задачи
Определения и допущения. В процессе предварительного проектирова-
ния геостационарного ИСЗ связи и телевещания, а также при подготовке
технических требований к такому аппарату возникает необходимость
в определении оптимальных его характеристик. При этом стремятся
достигнуть существенной экономии ресурсов: людских, финансовых и
материальных при одновременном сокращении сроков разработки
аппарата.
На наш взгляд, такая возможность появляется при рассмотрении
нового научного направления в проектировании технических систем:
унификации, теоретические основы которого были разработаны группой
авторов [37].
Считается, что если в КА 30 % элементов спроектированы заново, то
он новый [59].
Применительно к геостационарному ИСЗ связи и телевещания при
постановке проектной задачи применяются две основные модели: модель
существования ИСЗ и модель стоимости.
Модель существования ИСЗ представляет собой обобщенную
зависимость критерия качества или показателя совершенства ИСЗ от
массово-геометрических и энергетических характеристик ИСЗ.
Модель стоимости описывает затраты на разработку и серийное
производство в зависимости от массы составляющих элементов ИСЗ.
Параметр унификации. В связи с рассмотренным подходом к
постановке проектной задачи с учетом унификации возникает необходи-
мость во введении параметра или в общем случае параметров унифика-
ции, т.е. в выборе или определении таких параметров, к которым были
бы "чувствительны" и качество ИСЗ, и затраты, и, если возможно, время
разработки. Другими словами, необходимо найти количественную меру
унификации. Итак, параметр унификации должен быть таким, чтобы к
нему были "чувствительны" те критерии, по которым можно судить о
целесообразном уровне унификации. Учитывая, что масса элемента
является определяющей для целого ряда ИСЗ в связи с тем, что масса ИСЗ
зависит от массы целевой аппаратуры при прочих равных условиях и
времени активного существования (что лимитируется возможностями
носителей), а также учитывая тот факт, что многие критерии качества
и затраты тем или иным образом зависят от массы, то параметром
унификации предлагается считать относительную массу унифицируемых
элементов.
Критерии при унификации. При решении вопроса о проектировании
ИСЗ с учетом унификации следует рассмотреть три критерия: качество
ИСЗ, затраты, время разработки.
176
Качество ИСЗ. Можно много говорить о качестве ИСЗ, но мы можем
определять это качество максимально достижимым (при рассматривае-
мом уровне технологии) значением относительной массы полезного
груза. Понятно, что сравниваемые ИСЗ должны быть однотипными и
отвечать одинаковым требованиям по характеру выполняемых задач,
высоте орбиты. А однотипность подразумевает сравнение ИСЗ, имеющих
одинаковое целевое назначение. Ясно, что тот аппарат, у которого
относительная масса полезного груза (т.е. отношение массы полезной
нагрузки к начальной массе ИСЗ) больше, будет иметь меньшую
начальную массу, а следовательно, меньшую материалоемкость как
самого ИСЗ, так и устройств его обслуживающих: транспортных,
стартовых, технологических.
Как же влияет унификация на этот показатель качества? Отрицатель-
но, т.е. чем выше уровень унификации (мы пока не говорим о количе-
ственном ее выражении), чем больше использовано "старых" элементов,
тем хуже будет этот показатель. Можно сказать, что с точки зрения
качества наилучшим будет тот ИСЗ, в котором все элементы разрабаты-
ваются заново, на современном уровне технологии, с использованием
новых материалов и при высоком уровне проектирования, а наихудшим
- тот, в котором все элементы (или максимальное их количество)
являются заимствованными. Если бы этот критерий оценки был
единственным, то не было бы предмета исследования. Однако, есть
другие показатели, влияние унификации на которые отличается от ее
влияния на качество. Рассмотрим эти критерии.
Затраты на разработку. Известно, что затраты на разработку
современных ИСЗ исчисляются десятками и сотнями миллионов.
Производимые затраты - это затраты на НИОКР, на серийное
производство и на эксплуатацию. Учет всех затрат-достаточно сложное
дело. Не будем рассматривать затраты на эксплуатацию, хотя бы потому,
что они мало "чувствительны" к унификации (не вообще, а при
рассмотрении одного и того же ИСЗ, но с различной степенью унифика-
ции). Унификация влияет на первые две составляющие затрат. Ясно, что
при заимствовании элементов для них не надо проводить НИР,
разработку конструкторской документации, испытаний и отработку в
автономном варианте. Таким образом, затраты на НИОКР снижаются.
По-видимому, при отработке в сборе унифицированных и неунифициро-
ванных элементов эта фаза разработки будет дешевле, чем когда все эти
составляющие являются новыми. Вторая составляющая затрат, т.е.
затраты на серийное производство, более сложно реагирует на
унификацию. С одной стороны, изготовление уже отработанных с точки
зрения производства элементов обходится дешевле, но, с другой - надо
учитывать следующее. Отечественные и зарубежные модели затрат в
177
серийном производстве в связи со сложностью их расчета, используют
массу в качестве основного параметра. Другими словами, затраты в
серийном производстве напрямую связаны с массой. Поэтому, когда мы
учитываем эту другую сторону, то, поскольку масса унифицированных
элементов больше, чем неунифицированных, затраты также будут
больше. Эта двойственность свойства затрат позволяет говорить о том,
что должен существовать некоторый оптимальный по затратам уровень
унификации, отвечающий минимуму затрат.
Затраты на выведение ИСЗ на рабочую орбиту. Затраты на выведение
ИСЗ на рабочую орбиту зависят от стоимости предоставляемых услуг.
Если при решении задачи и ее анализе учитывать не только затраты на
разработку, но и затраты на выведение ИСЗ на рабочую орбиту, то
характер функции стоимости от унификации может измениться в том
смысле, что оптимальное решение может находиться в рассматриваемом
диапазоне параметра унификации. Это обстоятельство может существен-
но усложнить решение поставленной задачи.
Стоимость предоставляемых услуг возрастает в зависимости от массы
ИСЗ, но эта зависимость в общем случае носит дискретный характер,
однако, как показывают исследования [98], [99] и [100], при попутном
выведении имеет место плавно возрастающая зависимость стоимости
от массы ИСЗ. Например, удельная стоимость выведения полезного груза
с помощью действующих транспортных средств при попутном выведении
составляет 6000-11000 долл./кг [98]. В табл. 4 даны ориентировочные
значения стоимости выведения не геостационарную орбиту.
Стоимость выведения при попутном выведении на рабочую орбиту
может быть определена по приближенной формуле:
Свывед = ^>исз, (4.4.1)
а при самостоятельном выведении на геостационарную орбиту:
^"вывсц = 0,05479 шисз - 9,01, (4.4.2)
при /иисз > 600 кг;
где С„, - стоимость выведения, млн долл.; - масса ИСЗ, кг.
D Ы D СдА ' г 1 О 7
178
Таблица 4.6
Ориентировочные значения стоимости выведения на
геостационарную орбиту в зависимости от массы ИСЗ
Название носителя Масса полезного груза на геостационарной орбите, кг Стоимость выведе- ния, млн долл.
"Спейс шаттл" + PAM-D 545 21,5
"Ope.T-S2" + PBV 725 30
“Дельта" + PAM-D 726 29,7
"Спейс шаттл" + РАМ-А 1000 40
"Атлас-Центавр" 1226 65
“Opeji-S2" + USTM 1360 30
“Ариан-4" 1400 68
"Атлас-2" 1820 62.5
"Титан-34В" + IVS 1861 140
" Атлас-2А" 1980 70
"3eniiT-3SL" 2100 85
Н-2 2200 190
"Атлас-2А5" 2250 70
"Спейс шаттл" + IVS 2270 126
"Ариан-44Ь" 2500 115
"Титан-42" 4540 350
"Спейс шаттл" + "Центавр" 5448 167
Время разработки. Это важный критерий, и степень, в которой
он - определяющая вероятность реализации проекта, обусловливает
сложность формализации задачи. Анализ литературы показывает, что
более или менее практичные модели, которые связывали бы время
разработки с параметрами ИСЗ, отсутствуют. Легко представить, что
отказ от разработки новых элементов позволяет существенно сократить
179
время создания ИСЗ. Вот почему интуитивно конструкторы стремятся
использовать весь прошлый опыт в новых разработках. И вот почему
проекты, содержащие необоснованно много новых элементов, нередко
оказывались нереализованными.
В связи с изложенным, при разработке ИСЗ возникает задача
определения оптимального или рационального уровня унификации. Это
задача новая потому, что в подавляющем большинстве исследований в
области проектирования ИСЗ совершенно игнорируется тот факт, что
практически ни один ИСЗ, каким бы новым он ни был, не раз-
рабатывается без учета достигнутого научно-технического уровня, опыта
предшествующих технологических и конструкторских решений. Но при
выборе проектных параметров (являющемся типовой задачей науки
проектирования) прошлый опыт присутствует лишь в конструкторских
статистических коэффи-
Рис. 4.2. Иллюстрация к первой задаче унификации
циентах и не учитывает
унификации, т.е. воз-
можности использова-
ния унифицированных
элементов.
4.4.3. Варианты
постановок
задачи унифика-
ции
Введение. Если мы
располагаем необходи-
мыми математическими
модулями затрат на раз-
работку ИСЗ и на серий-
ное производство, а так-
же на выведение ИСЗ на
рабочую орбиту, то
можно поставить следу-
ющие задачи (рис. 4.2 и
4.3).
Первая задача унифи-
кации: минимизация за-
трат на разработку
ИСЗ при заданном каче-
стве. Найти оптималь-
но
ный уровень унификации ЛГ^Р', минимизирующий затраты на разработку
и серийное производство С2 при показателе качества не меньше
заданного, т.е.
найти
Cs = minC2
(4.4.3)
при
Нин ~
WnH „доп
---- * Нин
т0
где цпн — показатель
качества ИСЗ;
7Нпн ~ относительная
масса полезной нагруз-
ки;
Нпн “ минимально
допустимое значение
показателя качества
ИСЗ.
График на рис. 4.2
иллюстрирует зависи-
мость качества ИСЗ цп н
от уровня унификации.
Это график качествен-
ный и показывает, что
при увеличении степени
унификации качество
падает. Точка 1 дает
максимальное значение
Рпн ПРИ условии, что
все элементы ИСЗ разра-
ботаны заново (Кун = 0),
т.е. это "идеальный" ва-
риант ИСЗ. В этом слу-
чае мы имеем макси-
мально достижимую ве-
Рис. 4.3. Иллюстрация ко второй задаче унификации
18!
личину качества ИСЗ при прочих равных условиях. Точка 2 показыва-
ет значение качества при максимальном значении уровня унификации
(Л?н = 1). Хотя в общем случае максимальный уровень унификации ЛГун =
= 1 маловероятен, так как возникает сомнение о возможности такого
ИСЗ отвечать задаваемым техническим требованиям. Введение
ограничения по К^, К^\т.е. задание Цдц — минимально допустимого
значения показателя качества ограничивает степень унификации верхним
его значением (точка 3). Таким образом, горизонтальная линия
ограничивает область возможных решений верхней полуплоскостью.
На рис. 4.3 показана качественная зависимость затрат на разработку
и серийное производство ИСЗ и выведения на орбиту С2 в функции
показателя унификации Кун. Как видно из графика, суммарные затраты
с увеличением степени унификации в начале падают, а затем растут,
причины чего объясняются увеличением массы ИСЗ и, следовательно,
увеличением стоимости в серийном производстве и при выведении.
Точка 4 на графике соответствует максимальным затратам на
разработку и серийное производство и выведения принципиально нового
ИСЗ (ЛГун = 0); точка 5 — затратам на разработку и серийное произво-
дство и выведения полностью или почти унифицированного ИСЗ.
Введение ограничения по цпн сужает область поиска, как это показано
точкой б, соответствующей максимальному значению с предыдуще-
го графика. Точка 7 показывает минимальное значение затрат, которое
требуется найти путем вариаций ЛГун. По мере увеличения Хун, двигаясь
от точки 4 будет иметь место уменьшение затрат за счет сокращения
объема конструкторской работы и экспериментальной отработки.
Однако при дальнейшем увеличении ЛГун, начиная с некоторого значения,
наблюдается рост затрат, что связано с возрастанием составляющей
стоимости, а именно — затрат на серийное производство и выведение,
которые прямо зависят от массы элементов ИСЗ и в целом для ИСЗ из-за
роста массы каждого отдельного унифицированного элемента. Используя
найденное ранее граничное значение АГ““ из предыдущего графика,
строим границу и таким образом находим точку 6 и область возможных
решений, лежащую слева от границы. На графиках (см. рис. 4.2 и 4.3)
показано также оптимальное значение , обеспечивающее минималь-
ное значение и соответствующее ему оптимальное значение ц°пн-
Возможно, что оптимальное решение будет лежать на границе. Это
зависит от конкретных условий и значения ц^тн. При анализе конкретных
182
проектов это устанавливается путем пробных расчетов с применением
ЭВМ.
Вторая задача унификации: максимизация качества ИСЗ при заданных
затратах на разработку. Найти оптимальный уровень унификации ,
максимизирующий качество ИСЗ цун, при затратах на разработку и
серийное производство и выведения, не превышающих заданные СЕоп,
т.е.
найти
рпн = гпахцпн (444)
'Луж'
при
С, £. СЕдап.
2л 2л
Эта задача является обратной первой задаче унификации, рассмотрен-
ной ранее. Вернемся снова к зависимости затрат от уровня унификации
(см. рис. 4.3). При заданном (допускаемом) уровнезатрат СЕ0П появляют-
ся две точки: 8 и 9 пересечения графика с горизонтальной прямой,
соответствующей этому уровню: точка 8, которая дает минимально
допустимый уровень унификации К^1, при котором затраты не
превышают заданные. Ниже этого уровня опускаться нельзя. Эта
величина фактически диктует образ базового или начального варианта
ИСЗ, которым закладывается семейство впоследствии модернизируемых
и модифицируемых ИСЗ, т.е. начало перехода от проекта к проекту с
сохранением наиболее удачных проектно-компоновочных и
конструкторско-технологических решений.
Когда мы от качественных графиков перейдем к конкретным
математическим моделям и исходным данным, соответствующим
определенному типу ИСЗ, то будет видно, что всегда существует
минимальный уровень унификации, не равный нулю, т.е. даже для
базового варианта существует определенный уровень унификации.
Другими словами, "идеальный" вариант ИСЗ, т.е. вариант высшего
качества тоже содержит заимствованные элементы.
Точка 9 соответствует максимально допустимому уровню унификации
АГ““, начиная с которого дальнейшее увеличение степени унификации
приводит к увеличению затрат. Таким образом, оптимальное решение
лежит в пределах от К™ до Такое исследование, проведенное
предварительно, позволяет ограничить число возможных решений,
183
а также ускорить и упростить нахождение оптимального ва-
рианта.
Переходя к графику качества, находим две точки: точка И соответ-
ствует максимально допустимому качеству, а точка 12 — минимальному
при заданном уровне затрат.
Как и в случае предыдущей задачи, возможно оптимальное решение
на границе.
Хотя в общем случае решение, как это видно из графика рис. 4.3
(точка 10), лежит между К™ и
Переходя к рис. 4.3, находим точку 13 - оптимальное значение
качества ИСЗ.
Если в распоряжении исследователя в дополнение к двум моделям
связи имеется также модель, описывающая зависимость сроков
разработки от уровня унификации, то можно сформулировать (поста-
вить) еще три задачи.
Третья задача унификации: минимизация затрат на разработку ИСЗ
при заданных качестве и сроках разработки. Найти оптимальный уровень
унификации К^', минимизирующий затраты на разработку и серийное
производство и выведения С2, при качестве ИСЗ не меньше заданного
и сроках разработки не выше допустимых 7<10П; т.е. найти
= Се (4.4.5)
Т £ Тдоп
при
= тПН доп
Мпн 2 Нпн-
т0
Дополнительные ограничения сужают область возможных решений
и упрощают процедуру нахождения оптимального решения.
Четвертая задача унификации: максимизация качества ИСЗ при
заданных затратах и времени разработки. Найти оптимальный уровень
унификации Х]^р|, максимизирующий качество ИСЗ цпн при затратах
на разработку и серийное производство и выведение, не превышающих
заданные С£оп и сроках разработки не выше допустимых 7**°°, т.е.
184
найти
Дпн = 5иРНпн (4.4.6)
<S«>
при Cs < С*°п и Т s Т00".
Пятая задача унификации: минимизация времени разработки ИСЗ при
заданных затратах и качестве. Найти оптимальный уровень унификации
АГ^р|, минимизирующий сроки разработки Тпри затратах на разработку
и серийное производство и выведение, не превышающих заданные С£°п,
и качестве ИСЗ не ниже рдц, т.е.
найти
|44’|
приСЕ£СГирпн= — "Нпн-
т0
Если минимальное значение соответствует базовому
варианту, то К ““ = Кун2 практически отвечает последнему модернизиро-
ванному варианту, после которого осуществляется переход к принципи-
ально новому варианту, и развитие ИСЗ повторяется от К™ к АГ““, но
уже на новом качественном уровне и, возможно, при новых значениях
4.4.4. Применение метода неопределенных
множителей Лагранжа
В процессе проектирования КА возникает необходимость в математи-
ческой постановке задачи оптимизации его проектных параметров при
существовании нескольких критериев, характеризующих многосторонние
аспекты его разработки и функционирования. При этом один из
критериев, например затраты на разработку и серийное производство
С2, выбирается в качестве основного, а другие критерии, такие как
надежность функционирования, качество (цпн) (отношение массы
целевой аппаратуры к массе КА), информативность (I), рассматриваются
185
как ограничения. Тогда задачу оптимизации проектных параметров
можно сформулировать следующим образом.
Найти
СЕ = minCE
(а/
(4.4.8)
при^/*™ Ипн*1Сп,/*7Д0П,
где «,• - основные проектные параметры КА.
Задача оптимизации КА математически представляет собой задачу
с ограничениями. Лагранж предложил задачу с ограничениями свести
к задаче без ограничений с помощью введения дополнительных
неизвестных - неопределенных множителей, определяемых в процессе
нахождения оптимальных проектных параметров. Для этого вводится
новая функция
СЕ + А,(Р - Р®”)* Л2(цпн - + А3(/-/®°“). (4.4.9)
При выполнении ограничений экстремум функции С2 совпадает с
седловой точкой.
Тогда решение задачи сводится к решению системы
dW_dCz dP . ^Мпн ж , di
—— — 1 * * ' Л| * ' Ny * “ ' Лj * -
dat daj dat dat da(
dW ~ p _ p доп _ q .
d^
dW . ДОП n.
“77 Мпн ИпН ~ 0>
«Л2
dW - j _ /доп _ q
dk3
(4.4.10)
Такой прием позволяет получать оптимальные решения при разных
оптимизируемых критериях эффективности КА.
186
Глава 5
Бортовые системы
5.1. Состав бортовых систем
Космический аппарат состоит из целого комплекса основных
составных частей. Это, прежде всего, целевая аппаратура, ради которой
и проектируется КА. Таким образом, целевая аппаратура предназначена
для непосредственного обеспечения решения поставленной перед
аппаратом задачи. Выбор оптимального состава целевой аппаратуры
представляет собой самостоятельную научно-техническую задачу.
Другой важнейшей составной частью является корпус КА. В состав КА
входят также служебные системы: жизнеобеспечения, терморегулирова-
ния, ориентации и стабилизации, энергоснабжения, аварийного спасения,
посадки, маневра, управления, отделения от носителя, разделения и
стыковки, бортового радиокомплекса.
В качестве целевой аппаратуры используют фотоаппаратуру,
телевизионную, инфракрасную и ультрафиолетовую, радиолокацион-
ную и другую радиотехническую аппаратуру. Научная и специальная
аппаратура также могут быть целевой аппаратурой. Тип аппаратуры,
применяемой на КА, определяется задачами, временем ее функциониро-
вания и достигнутым уровнем развития современной аппаратуры.
При выборе аппаратуры исходят из ее основных характеристик:
разрешающей способности, информативности, оперативности, точ-
ности, возможности использования в условиях света и тени, облачности
(т.е. при плохой видимости), массовых, габаритных, энергетических и
экономических.
Разрешающая способность является одной из основных характерис-
тик. Под ней понимают минимальные линейные размеры объектов или
деталей на местности, позволяющие при дешифрировании информации
опознать эти объекты.
Информативность аппаратуры представляет собой количество,
наглядность, достоверность полученной информации.
Оперативность характеризует быстроту выполнения поставленной
задачи или получения необходимой информации.
Кино- и фототелевизионная аппаратура предназначена для получения
изображения небесных тел (Луны, планет) и передачи информации (этих
изображений) на Землю.
187
С помощью кинофотоаппаратуры получают информацию (снимки),
обладающую документальной достоверностью, высокой разрешающей
способностью и наглядностью.
Фототелевизионная аппаратура может применяться при картографи-
ровании и для детального фотографирования определенных районов
планеты.
Кинофотоаппаратура может быть использована самостоятельно,
особенно на пилотируемых КК. Информация, полученная с помощью
кинофотоаппаратуры, может доставляться на Землю либо в специальных
капсулах с экспонированной пленкой, сбрасываемых с КА, либо путем
посадки КА на Землю, либо с помощью телевизионных систем,
передающих полученные на пленке изображения путем их построчной
развертки.
Фототелевизионная система, как правило, включает в себя несколько
камер, снабженных объективами с разными фокусными расстояниями.
Длиннофокусные объективы применяют для получения крупномасштаб-
ных изображений и снимков, их фокусные расстояния измеряются в
метрах (от одного до десяти метров). При таких фокусных расстояниях
можно получить высокую разрешающую способность, измеряемую в
метрах - (1...5 м) для высот до 300 км.
Короткофокусные объективы обеспечивают привязку крупномас-
штабных снимков к местности, их фокусные расстояния составляют
десятые доли метра-(0,2...0,3 м). Таким образом, выбором определенно-
го сочетания фокусного расстояния оптики, чувствительности фотомате-
риалов (пленки) и высоты орбиты КА можно достичь желаемой
величины разрешающей способности.
В качестве примера можно привести многозональный космический
фотоаппарат МКФ-6, разработанный совместно отечественными и
немецкими специалистами, который был установлен на орбитальной
космической станции "Салют-6".
Фототелевизионная система позволяет получать высококачественные
изображения других небесных тел при прохождении КА на больших
расстояниях от них или непосредственно на их поверхности. Это
обеспечивается путем достаточно медленной передачи полученных на
пленке изображений по радиоканалу, что существенно сужает полосу
частот видеосигнала и увеличивает дальность радиосвязи. Развертка
фототелевизионной системы АМС "Зонд-З" имела 1100 строк, время
передачи одного кадра - 34 мин, обеспечивала работу на межпланетных
расстояниях.
С помощью фототелевизионных систем были получены фотографии
обратной (невидимой с Земли) стороны Луны ("Луна-3"), панорамные
изображения лунного ландшафта ("Луна-9", "Луноходы-1, -2" и т.д.),
ландшафты Марса и Венеры.
188
Телевизионная аппаратура использовалась самостоятельно на
метеорологических КА типа "Метеор-1, -2", "Тирос", "Нимбус" и т.д.
В этом случае информация передавалась на мониторы наземных пунктов
и здесь уже фотографировалась и обрабатывалась. Достоинством
телевизионных систем по сравнению с фотоаппаратурой является
высокая оперативность и непрерывность получения достоверной и
наглядной информации, однако их разрешающая способность ниже, чем
у фотоаппаратуры. Кроме того, следует иметь в виду, что информатив-
ность фототелевизионных систем сильно зависит от освещенности,
облачности и других метеоусловий.
Корпус КА является силовой основой, на которой размещается все
бортовое оборудование КА. Корпус как несущий элемент КА может быть
монококовой (оболочковой) или стержневой (в виде ферм или рам)
конструкцией. Оболочковые конструкции применяются тогда, когда
необходимо создать для экипажа и бортового оборудования определен-
ный микроклимат и защиту от окружающей среды внутри герметически
замкнутого отсека или емкости или когда необходимо получить
определенные летно-технические или радиотехнические характеристики
аппарата путем выбора определенных геометрических форм корпуса КА
(например, аэродинамическое качество). В том случае, когда бортовая
аппаратура КА может нормально функционировать в глубоком вакууме,
корпус КА не имеет герметизации и может представлять собой
стержневую конструкцию.
Корпус должен быть достаточно прочным и жестким, способным
выдержать нагрузки, действующие на КА на всех этапах его жизненно-
го цикла.
Корпус должен обеспечивать надежную защиту экипажа и бортового
оборудования, расположенного в нем, от воздействия окружающей
среды.
Форма корпуса должна обеспечивать при движении КА в атмосфере
устойчивость, управляемость, заданное аэродинамическое качество.
Элементы конструкции корпуса выполняются из легких сплавов.
Отдельные отсеки изготавливаются из жаропрочных и термостойких
материалов. Отсек экипажа, как правило, имеет теплоизоляционное и
звукоизоляционноепокрытия,люки и иллюминаторы. Корпус пилотиру-
емого КК может быть выполнен многосекционным и состоять из жилого
(бытового), рабочего, переходного (шлюзового) и других отсеков.
Снаружи корпус пилотируемого КК может иметь специальные
радиационную и противометеорную защиты.
Система управления (СУ) обеспечивает выполнение заданной
программы работ в автоматическом или автоматизированном режиме,
189
когда на некоторых этапах необходимо вмешательство человека:
космонавта на борту или оператора на Земле.
Система ориентации и стабилизации (СОС) осуществляет ориентацию
аппарата во время полета и ориентацию относительно объекта
исследования, а также стабилизацию (закреплению этого положения).
Ориентация может быть постоянной или изменяющейся в процессе
движения, может осуществляться не только конкретного аппарата в
целом, но и отдельных его частей.
Система терморегулирования (СТР) обеспечивает необходимый
тепловой режим на борту ИСЗ, что связано с определенными требования-
ми для аппаратуры в целом или для каждого прибора в отдельности, хотя
существуют определенные общие требования, предъявляемые к
разрабатываемой аппаратуре и условиям ее функционирования в составе
КА.
Система энергопитания (СЭП) выбирается исходя их времени
функционирования и потребляемой мощности.
Бортовой радиокомплекс (БРК) обладает широким диапазоном
функций: от измерения расстояний и поиска аппарата до осуществления
связи.
Двигательная установка (ДУ) с собственной системой управления для
маневрирования на орбите (ИСЗ), выдачи импульса коррекции при
движении по траектории к планетам, создание тормозного импульса при
посадке на Землю или на поверхность планеты.
Система управления включает автоматику, обеспечивающую в
заданной последовательности выполнение рабочих операций, маневр
аппарата, заключающийся в определении собственных координат,
расчете требуемого импульса и управлении вектором тяги двигательной
установки.
Способ определения своего положения (и исполнительный орган)
может строитьтся на использовании внешних воздействий в зависимости
от гравитационных, магнитных полей, влияния атмосферы планеты и
солнечного давления. В основу может быть заложен принцип гироприбо-
ров (гироскопические датчики положения, закрутка аппаратов или
специальных роторов). Система может использовать в качестве
исполнительных органов малые управляющие реактивные двигатели,
работающие на сжатом газе. Информация об ориентации ИСЗ может
поступать отдатчиков указанного типа или астродатчиков положения
Солнца, планет и звезд. Каждый из принципов обеспечивает определен-
ную точность ориентации, определяющую его использование.
Система терморегулирования. Поверхности КА на околоземной
орбите имеют среднюю температуру около 300 К и это обеспечивается
подбором их оптических характеристик и отношением площадей, на
190
которую падает солнечное излучение и с которой излучается тепловая
энергия. Изменение теплового потока, падающего на рассматриваемый
элемент КА, приводит к изменению температуры поверхности и, как
следствие, к выходу КА из строя. Кроме того, как показывают результа-
ты исследований, обеспечить приемлемый уровень температур для
надежной работы научной, радиопередающей и другой аппаратуры без
специальных мероприятий невозможно.
Система терморегулирования обеспечивает подвод к аппарату
заданных внешних теплопотоков. Для этого аппарат определенным
образом ориентируется относительно Солнца, используются покрытия
с подобранными значениями коэффициентов поглощения и черноты,
экранно-вакуумная теплоизоляция, практически исключающая
теплообмен. Иногда этого достаточно для обеспечения рабочего режима
аппарата (пассивная система), при необходимости точного регулирова-
ния температуры (например, с точностью ±2 °C) применяются активные
системы, организующие теплоотвод в соответствии с режимом аппарату-
ры. Граница использования систем первого и второго типа определяется
максимальной мощностью бортового комплекса и допустимыми
колебаниями температуры (обычно она лежит в пределах 20...40 Вт).
В активной системе циркулирующий газ приборного отсека отводит
тепловой поток на корпус или специальный радиатор. Если необходимо
обеспечить большой удельный теплосъем (больше, чем 2 Вт/см2), в
качестве теплоносителя используется жидкость. Обязательным элементом
воздушного контура является вентилятор, обеспечивающий циркуляцию
газа и вынужденную конвекцию (свободная конвекция отсутствует в
невесомости). В качестве управляющих элементов применяются дроссели
расхода, работающие по командам от датчиков температуры.
Система обеспечения обычно строится на использовании некоторого
постоянного источника энергии, рассчитанного на средний уровень
мощности бортового комплекса, и буферных химических батарей,
обеспечивающих пиковые нагрузки. В качестве постоянных источников
применяются химические и солнечные батареи, топливные элементы,
изотопные и ядерные энергоустановки. В зависимости от потребляемой
мощности и продолжительности работы определяются зоны целесообраз-
ного использования каждого из источников. Кроме того, система
включает в себя преобразователи, коммутационное устройство,
автоматику управления и кабельную сеть.
Радиокомплекс включает в себя приборные блоки и антенно-фидерное
устройство. В зависимости от назначения, длины волны и необходимого
коэффициента усиления используются штыревые, щелевые и рупорные
антенны, полуволновые диполи и параболические рефлекторы. Антенны
191
больших размеров часто изготавливают складывающимися на участке
выведения.
Частоты от 100 МГц до 1 ГГц предполагается использовать для связи
с ИСЗ на небольшой высоте, когда применяются ненаправленные и
ш ироконаправленные антенны; частоты 1... 10 ГГц - при узконаправлен-
ных антеннах и широкополосных линиях связи (системы слежения,
телепередачи). Эти частоты соответствуют радиоокну атмосферы и
минимуму "шумов неба".
Двигательная установка КА имеет существенные особенности. Так,
для подачи топлива к двигателю часто применяются вытеснительные
системы. Баки должны быть снабжены системами и средствами,
обеспечивающими запуск двигателя в условиях невесомости. Если
применяются системы подачи топлива с помощью турбонасосного
агрегата (TH А), то образующийся парогаз используется как рабочее тело
в управляющих соплах, либо дожигается в двигателе. Топлива,
используемые для двигательных установок КА, - долгохранимые и
самовоспламеняющиеся.
С целью уменьшения массы, повышения надежности и управляемости
современные космические ЖРД работают при сравнительно низком
давлении в камере, при возможности глубокого дросселирования (1:5)
тяги. С той же целью - уменьшения массы конструкции - сопла камер
охлаждаются лишь частично с помощью циркулирующего компонента
в зоне, прилегающей к критическому сечению.
РДТТ, используемые для КА, характеризуются низкой величиной
импульса. Для обеспечения стабильности применяется термостатирова-
ние.
5.2. Принципы конструирования КА
5.2.1. Некоторые общие положения
Блоки систем КА, как правило, требуют нормальных условий работы
(давление около 0,1 МПа; температура 0...40 °C). Некоторые из них,
имеющие собственный герметический корпус, могут работать в открытом
космосе. По этому принципу они собираются в блоки, размещаемые в
соответствующих отсеках: в герметических, негерметических с понижен-
ным давлением (около 0,015 МПа). Единый герметический отсек легче
индивидуальных корпусов входящих блоков.
В космической технике широко используется модульный принцип
компоновки - создание комплексов приборов и агрегатов, выполняющих
некоторый законченный цикл операций. При этом в случае отказа
192
модуля при испытаниях, он не ремонтируется в составе аппарата, а
заменяется. Этот принцип позволяет легко "расчленять" аппарат и,
расширяя фронт работ, производить отработку каждого модуля.
Используются две принципиальные компоновочные схемы КА:
моноблочная, при которой системы и агрегаты размещаются в едином
отсеке и на его корпусе ("Марс"), и свободная, при которой отдельные
блоки систем монтируются на несущей ферме ("Сервейор").
Распределение масс аппарата существенно, когда используется
гравитационная ориентация или гравитационные моменты являются
нежелательными возмущениями. В первом случае аппарат компонуется
так, чтобы один из его моментов инерции был в 3...4 раза меньше других.
Так, ось, соответствующая ему, будет располагаться по направлению на
притягивающее тело. Во втором случае следует стремиться, чтобы
моменты инерции были приблизительно равными.
Выбирая принцип работы той или иной системы, необходимо
учитывать их взаимосвязь и влияние на параметры аппарата в целом.
Так, переход от неориентируемого к ориентируемому полету спутников
связи позволяет использовать узконаправленную антенну и увеличивать
коэффициент усиления сигнала приблизительно на 20 дБ. Однако масса
аппарата возрастает на 15...20 %. При этом необходимо проанализиро-
вать, не больший ли эффект даст увеличение мощности передатчика,
соответствующее такому резерву массы.
Переход к ориентируемым солнечным батареям обычно целесообра-
зен при их мощности более 80... 100 Вт. Если она ниже, эффективнее
увеличивать площадь батареи, размещенной на корпусе свободно
вращающегося спутника.
При компоновке астродатчиков системы ориентации (датчиков
Солнца, планет, звезд) необходимо обеспечивать свободное поле зрения,
устранять влияние бликов, подбирать рабочие тела, не дающие свечения
при их выделении из КА.
Корпуса аппаратов с особо точной ориентацией Г-1" изготавливают-
ся жесткими, не допускающими деформаций. Для них необходимо
анализировать влияние тепловых деформаций.
Особые требования предъявляются к КА с исследовательским
научным оборудованием.
При спектроскопических исследованиях должно учитываться
выделение газов материалами конструкции и струйными рулями.
Датчики магнитного поля должны быть вынесены за собственное поле
спутника. При размещении и конструировании датчиков, располагае-
мых на корпусе, часто требуется исключить наведение на них статических
зарядов.
7 - 8620
193
5.2.2. Некоторые статистические данные
по массовой сводке КА
Конструкция корпуса. Конструкция ИСЗ состоит из корпуса,
приборных рам, системы отделения от носителя, кронштейнов и
механизмов раскрытия и крепления выносных элементов. Масса
конструкции л?констр = (0,12...0,25)/иисз. Нижнее значение относительной
массы конструкции относится к крупногабаритным ИСЗ, масса которых
определяется нагрузками на участке выведения на орбиту wK0HCTp =
= (0,12...0,15)/писз. Верхнее значение шконстр = (0,15...0,25)гаисз
характерно для возвращаемых ИСЗ, для которых при расчете конструк-
ции на прочность принимаются нагрузки на участке спуска с орбиты.
Система энергопитания (СЭП). В настоящее время в качестве
типичных источников энергопитания применяются аккумуляторы,
солнечные батареи с аккумуляторами, топливные элементы, радиоизо-
топные источники.
Масса СЭП зависит от типа источника тока. Относительная масса
СЭП: wKOHCTp = (0,08...0,25)гаисз. Нижнее значение относится к ИСЗ с
солнечными батареями и буферными химическими элементами
(аккумуляторами). Верхнее значение относительной массы у - 7... 10 СЭП
соответствует химическим элементам. Солнечные батареи в целом:
конструкция у = 3...6 кг/м2; фотоэлементы у = 3,5...4,5 кг/м2.
Система терморегулирования (СТР). Масса системы терморегулирова-
ния зависит от величины тепловыделения аппаратуры и систем ИСЗ.
Относительная масса СТР: wCTP = (0,012...0,035)/иисз, причем нижнее
значение относится к малогабаритным ИСЗ с небольшим уровнем
тепловыделения и простейшими, как правило, пассивными системами
терморегулирования. Верхнее значение относительной массы системы
терморегулирования касается ИСЗ с большим тепловыделением и
сложной системой терморегулирования с жидкостными контурами,
радиаторами и т.п.
Система управления (СУ). Система управления ИСЗ зависит от
назначения аппарата и программы его функционирования. Относитель-
ная масса системы управления wcy = (0,050...0,100)/писз. Нижнее
значение-для простейших ИСЗ. Верхнее значение-для многофункцио-
нальных ИСЗ.
Система ориентации и стабилизации (СОС). Масса системы ориента-
ции и стабилизации зависит от типа системы (активная или пассивная),
а для активных СОС - от времени работы: /исос = (0,08...0,15)шисз.
Нижнее значение касается ИСЗ со временем работы от нескольких дней
194
до нескольких месяцев, а верхнее - для ИСЗ со временем работы более
года.
Антенно-фидерные устройства (АФУ) и кабельные сети (БКС).
Относительная масса антенн и фидерных устройств гаАФУ = (0,008...
...0,025)гаисз. Относительная масса кабельной сети тБКС = (0,06...
...0,10)/нисз.
Бортовой радиокомплекс (БРК). Приведены некоторые массовые
данные (в кг) относительно бортового радиокомплекса:
аппаратуры радиолинии связи ...........................................30...50
аппаратуры радиоконтроля орбиты........................................80... 150
телеметрические системы (450 кг 2 тисз < 1500 кг)......................40...50
Электронная аппаратура (ЭА) различных систем:
отэа = (0>20...0,60)тисз.
Некоторые другие массовые соотношения. Плотность размещения
аппаратуры в приборном отсеке: р = = 400...600 кг/м3. Масса
^отс
приборного отсека с аппаратурой (термоконтейнер, приборная рама,
воздуховоды и т.п.): р = 600... 1000 кг/м3.
Относительная масса топливных баков (ТБ): аТБ = 0,05...0,10.
Масса баллонов со сжатым газом, находящимся под давлением
10...30 МПа, - р= 3500...4000 кг/м3.
Баллон с пропаном при давлении 0,3...0,6 МПа имеет плотность
1500 кг/м3.
5.2.3. Функциональные зависимости
на примере ИСЗ связи и телевещания
Будем считать, что масса целевой аппаратуры ИСЗ связи и телевеща-
ния зависит в первую очередь и главным образом от мощности
бортового радиокомплекса (БРК), определяемого заказчиком в
зависимости от высоты орбиты функционирования и чувствительности
наземных приемных станций. Анализ ИСЗ, имеющих мощность
),5...2,5 кВт, дает формулу:
Шла = 46,7 + 73,3 •И' .
* Dil\
Энергетическая мощность, требуемая для обеспечения работы системы
эриентации и стабилизации, системы терморегулирования и других
:лужебных систем, зависит от энергетической мощности целевой
7*
195
аппаратуры:
И'исз = -0.10 + 1.6-1ГБрК.
Анализ статистических данных современных ИСЗ позволяет получить
ряд полезных зависимостей для расчета масс СЭП, СТР и СОС.
Массу системы энергопитания на основе солнечных батарей
представим в виде суммы масс основных составляющих: массы панелей
солнечных батарей (тсъ), массы буферных аккумуляторов 0иаккум) и
массы системы контроля работы СЭП (лгконтр).
Масса панелей солнечных батарей
где И'- расчетная средняя мощность, отдаваемая в систему энергопита-
ния, кВт;
<р - коэффициент полезного действия солнечных батарей;
Тс а с - срок активного существования ИСЗ.
Масса буферных аккумуляторов
'"аккуи = 20,0 Е(1 + 3,0-О,
где Е- расчетная емкость буферных аккумуляторов, кВт/ч.
Масса системы контроля работы СЭП:
'"контр = 30,0 (W+ 1)4
Масса системы терморегулирования зависит от хладопроизводитель-
ности Q и срока активного существования ИСЗ Тс а с:
щСТР = 110-e°-8(TCJLC + 0,2)0,25,
где Q - хладопроизводительность системы терморегулирования, кВт.
Массу системы ориентации и стабилизации представим в виде
следующей функции массы ИСЗ:
отсос = ”30'»1исз + 215-тисз - 35.
Определение хладопроизводительности системы терморегулирова-
ния Q-%.
196
6е - бсолнА^О + 6ца + бсЭП + бсОС + бсТР>
где бсолн - солнечная постоянная на орбите (2С0ЛН = 1,4 кВт/м2);
As - коэффициент поглощения солнечной радиации (As - 0,15);
So - площадь поперечного сечения ИСЗ (площадь миделя, в первом
приближении можно принять ИСЗ - сфера, для которой So =
3. у \-
= 2к —3);
4л )
2цА = ИцА(1 - Л) - количество тепла, выделяемого целевой
аппаратурой, можно принять q = 0,9 - коэффициент полезного действия
целевой аппаратуры;
6s - (Ица + ^исз)( 1 _ Ф)~тепловыделение системы энергопитания,
а <р = 0,1 - к.п.д. солнечной батареи; (2СОС + 6стр = И'исз-
5.3. Системы терморегулирования
5.3.1. Назначение системы терморегулирования
В КА требуется поддержать определенный тепловой режим,
зависящий от назначения аппарата:
- для научных приборов диапазон достаточно широк: 0°±10°...40°±
± 15 °C и даже в более узком диапазоне для приемников инфракрасного
измерения, оптических систем;
- для пилотируемых КК в отсеках размещения экипажа температура
должна поддерживаться в диапазоне 18±5°C;
- в других герметических отсеках пилотируемых КК и в отсеках
автоматических КА - 0...+40 °C;
- температурный режим агрегатов двигательной установки -
50...+40 °C;
- для элементов, расположенных вне герметических отсеков,
температурный режим задается исходя из требований, предъявляемых
к конструкции.
КА - это самостоятельное небесное тело, находящееся в теплообмене
с окружающей средой, но особенности космического пространства таковы,
что передача тепла от объекта к объекту и в том числе сброс тепла в
окружающее пространство может быть осуществлен лишь путем
излучения.
КА получает тепло как от внутренних источников: приборов,
агрегатов, энергоустановок, так и от внешних:
- от прямого солнечного излучения;
197
- отраженного от планеты;
- собственного излучения планеты;
- выделяющееся при столкновении аппарата с молекулами газа
верхних слоев атмосферы планеты.
Если КА находится в термодинамическом равновесии с окружающим
космическим пространством, то уравнение теплового баланса имеет вид:
С , бвнузр + бсоЛН + ботр + бсоб^СОб + биол бизл ’
где есоб - энергия собственного излучения планеты;
бвнутр “ суммарные внутренние тепловые потоки;
бСОлн-пРямой солнечный тепловой поток, падающий на поверхность
КА;
ботр - солнечная энергия, отраженная от планеты;
бмол ~ тепловая энергия, выделяющаяся за счет столкновения
поверхности КА с отдельными атомами и молекулами атмосферы
планеты;
бИзл “ тепло, излучаемое КА;
As - коэффициент поглощения солнечной радиации;
ЛС0б _ коэффициент поглощения собственного излучения планеты.
Как легко видеть из правой части уравнения, тепловые потоки в
процессе движения КА изменяются во времени. Это делает тепловые
режимы нестационарными, а их расчеты - чрезвычайно сложными.
Для получения количественных оценок следует рассмотреть законы
лучистого теплообмена.
5.3.2. Законы лучистого теплообмена
Как известно, носителями лучисто й энергии являются электромагнит-
ные колебания, в интервале 0,2...80 мк, на которых в основном и
происходит теплообмен. Тепловая энергия может отражаться, погло-
щаться и проходить сквозь тело. Различают соответственно отражатель-
ную, поглощательную и пропускательную способность. Пропускательная
способность для КА принимается равной нулю. Тела, поглощательная
способность которых (отношение поглощенного тепла к общему
количеству тепла) равна единице, носят название абсолютно черных.
Абсолютно черные тела при данной температуре излучают макси-
мальное количество энергии. Максимум излучения при этом приходится
198
la длину волны, которая опре-
[еляется законом Вина: А =
2 9
: , где А - длина волны, Т-
емпература, в градусах Кель-
ина. Распределение энергии
ю длинам волн не является
'авномерным, как это показа-
:о на рис. 5.1. С увеличением л
емпературы максимум излуче-
ия сдвигается в сторону более Рис- 5 |- Распределение энергии излучения по
r J длинам воли (Г, > > 7\)
оротких волн, так, например, 1 2 у
ля тела, имеющего температу-
у 300 К (+27 °C), максимум
злучения приходится на длину волны около 9,6 мк, а 95 % энергии
злучается в диапазоне длин волн 3...25 мк. Тело, имеющее температуру
ООО К излучает максимум энергии на волне 0,49 мк, а 95 % приходится
а диапазон 0,2...2,5 мк. Это можно охарактеризовать спектральной
лотностью (интенсивностью) излучения. Спектральная интенсивность
злучения определяется как 1^ = —. Согласно закону Планка для
</А
бсолютно черного тела
ie С, и С2 - постоянные.
Полное количество энергии, излучаемое абсолютно черным телом при
знной температуре, определяется законом Стефана-Больцмана:
ie о - постоянная в законе Стефана-Больцмана;
с0 - коэффициент лучеиспускания абсолютно черного тела.
Для реальных тел, к которым относятся КА, интенсивность излучения
эределяется экспериментально. Вводится понятие относительной
(тенсивности излучения, как отношение интенсивности излучения
осматриваемого тела к интенсивности излучения абсолютно черного
199
Рис. 5.2. Зависимость относительной интенсивности излучения от длины волны для
различных тел:
/ - абсолютно черное тело; 2 - серое тело; 3 - не серое тело (реальные тела)
тела, вычисляемого теоретически. Относительная интенсивность
излучения как и интенсивность излучения, зависит от длины волны
и от температуры тела. Однако, для большинства материалов, применяе-
мых в конструкции КА, в реализуемом диапазоне температур еА -
практически не зависит от температуры. Если еА = const, то тело
называется серым.
Многие тела нельзя отнести ни к черым, ни тем более к абсолютно
черным (рис. 5.2).
Излучательная способность тела может быть определена как
/ j, \ 4
Е = ( = с f = ЕСо 777 • (5.3.1)
J J \ 1UU /
Х=0 Х-0 ' '
Коэффициент е называется степенью черноты или относительной
излучательной способностью тела, при этом е = еА. Для реальных тел е *
* и их излучательная способность подсчитывается по формуле (5.3.1),
а степень черноты тела подсчитывается как
200
е
х=-
£ ехА>х^
л=о
х=
f
л=о
но в этом случае е зависит от температуры.
По закону Кирхгофа относительная интенсивность излучения е
является функцией длины волны и равна поглощательной способности
тела на той же длине волны, т.е. = А^. Если тело не является серым,
е * А, е является функцией температуры и функцией спектра той
лучистой энергии, которая падает на тело (рис. 5.3).
Это свойство используется для пассивного регулирования температу-
ры КА, находящихся в космическом пространстве.
Характерен такой пример. На двигателях поворота солнечных
батарей МКС перепад температур от -93 °C до +199 °C. Для существен-
ного уменьшения величины диапазона космонавты (10.12.2001) в
открытом космосе закрыли двигатели экрано-вакуумной теплоизоляцией
(ЭВТИ).
Поскольку КА на околоземной орбите имеет среднюю температуру,
близкую к Т- 300 К, то основная доля излучения приходится на область
длин волн от 3 до 25 мк. Солнце имеет температуру, близкую к Т =
= 6000 К, и основная доля излучения приходится на диапазон 0,2...2,5 мк.
Другими словами, излучение и поглощение приходится на различные
области спектра. Таким образом, можно подобрать поверхности КА с
определенным законом
изменения еЛ = /(Л), т.е.
можно получать различ-
ные соотношения между
коэффициентом погло-
щения солнечной радиа-
ции Asи относительной
излучательной способ-
ностью тела е при нор-
мальных температурах.
Если на поверхность
КА падает только со-
лнечное излучение, а
внутреннее тепловыделе-
ние отсутствует, то урав-
нение теплового баланса
Рис. 5.3. Спектральная характеристика алюминиевого
листа:
/-анодированный алюминий; 2 -алюминий в состоянии
поставки
201
в этом случае имеет вид
I Т |4
всоян^г ~ £Col IQQ I ’
откуда можно определить температуру поверхности КА
Т = 100
Видно, что при заданных солнечных тепловых потоках при отсутствии
внутреннего тепловыделения, при заданной ориентации КА относительно
Солнца температура поверхности КА полностью определяется только
соотношением коэффициентов —.
Имеется большой выбор покрытий, позволяющий обеспечить
изменение этого соотношения в пределах 0,15...7,0.
5.3.3. Внешние тепловые потоки
Солнечные тепловые потоки определяются по формуле 2солн =
- S0FuAs, где So - солнечная постоянная (табл. 5.1), представляющая
собой тепловой поток на площадку в 1 м2, расположенной перпендику-
лярно солнечным лучам; FM - проекция поверхности КА на плоскость,
перпендикулярную солнечным лучам, м2.
Поток солнечной радиации S на расстоянии R от Солнца определится
по формуле:
В общем случае часть времени пребывания на орбите ИСЗ находится
в тени. Тогда за один оборот (рис. 5.4)
где Т- период обращения ИСЗ вокруг Земли; т - время пребывания в
тени Земли.
202
Рис. 5.4. Изменение солнечного потока на орбите ИСЗ
Таблица 5.1
Значения солнечной постоянной для некоторых планет
Планета Среднее расстояние от Солнца Яд,, млн км Солнеч- ная по- стоянная 5q,, Вт/м2 Апогей Перигей
млн км s... Вт/м2 лп. млн км ^п’ 2 Вт/м2
Меркурий 57,8 9331 69,7 6431 45,9 14411
Венера 108,1 2674 108,8 2639 107,4
Земля 149,5 1373 152 1349 147 1446
Марс 227,7 602 249 504 206,4 2708
Юпитер 777,6 52 815 47 740 57
Сатурн 1426 15 1505 14 1346 17
Уран 2868 4 3005 3,5 2733 4
Нептун 4494 1,5 4455 1,5 4333 1,6
При движении по орбите, плоскость которой параллельна солнечным
лучам, ИСЗ будет находиться в тени максимальное время, и соответствен-
203
но ИСЗ не будет заходить в тень Земли при движении по орбите,
плоскость которой перпендикулярна солнечным лучам (табл. 5.2).
Таблица 5.2
Количенство среднего солнечною тепла
Н, км Т, мин т, мин бсолн.ср* Вт/м
200 88,3 37,2 808
300 90,3 36,5 833
500 94,4 35,7 868
700 98,6 35,2 898
1000 104,9 34,8 933
1500 115,8 34,4 976
Для расчета собственного излучения Земли полагаем, что вся поверх-
ность Земли излучает одинаково. Количество теплоты Ео, излучаемое
единицей поверхности, определится из условия теплового баланса Земли,
т.е.:
S0BR2(l [ ") \ E04BR2,
здесь " S альбедо Земли S доля солнечной энергии, отраженной от Земли
(для Земли среднее значение альбедо по планете составляет 0,37).
Тепловая энергия, излучаемая единицей поверхности Земли, составит
Е х М1 I ) х 220 Вт/м2
0 4
В табл. 5.3 приведена
зависимость теплового
потока от излучения
Земли, приобретаемого
ИСЗ сферической формы
(рис. 5.5).
Рис. 5.5. К расчету тепловых потоков, отраженных от
поверхности Земли
204
Таблица 5.3
Зависимость теплового потока от излучения Земли,
приобретаемого ИСЗ сферической формы
Высота круговой орбиты Н, км 200 300 500 700 1000 1500
Тепловой поток Q, Вт/м2 333 310 277 250 221 184
Солнечные тепловые потоки, отраженные от поверхности Земли,
рассматриваются как отражающиеся диффузно и подчиняющиеся закону
Ламберта, другими словами, делается предположение, что индикатрисса
отражения аналогична индикатриссе излучения. Тепловой поток для
сферического ИСЗ определяется по формуле:
( * V 2/i+H _ 'Jh1 + 2RH
R Г
R+HI
cos<p.
Формула справедлива, когда вся поверхность Земли, видимая с ИСЗ,
освещается Солнцем, т.е. до зенитного расстояния ф = 70° (для орбит
высотой Н = 300...500 км). При ф = 90°, Q0Tp ср = 0. Среднее (за один
виток) количество отраженной солнечной энергии £)отр ср определяется
интегралом
бозр.ср = ^7—•
В табл. 5.4 приведено количество отраженной солнечной энергии для
ИСЗ на круговой орбите в плоскости солнечных лучей, т.е. для орбит,
на которых ИСЗ находится наибольшее время в тени.
Таблица 5.4
Количество отраженной солнечной энергии для ИСЗ
на круговой орбите в плоскости солнечных лучей
Высота орбиты Н, км 200 300 500 700 1000 1500
Количество тепла Q. Вт/м2 242 225 199 179 156 128
205
Количество тепловой энергии, выделяющейся за счет столкновения
ИСЗ с отдельными атомами и молекулами воздуха, может быть в первом
приближении определено по формуле:
О = к^-
^иол 2084 ’
где р - плотность атмосферы;
V-скорость ИСЗ;
к - коэффициент аккомодации.
Величина существенна для высот менее 250 км: при Н - 250 км, £2М0Л =
= 35 Вт/м2.
Коэффициент аккомодации учитывает степень упругости столкнове-
ния молекул с корпусом ИСЗ: к - 0, когда происходит упругое столкнове-
ние и не происходит превращение кинетической энергии в тепловую;
к = 1, когда вся кинетическая энергия превращается в тепловую
(табл. 5.5).
Таблица 5.5
Величина молекулярного тепла приходящего на ИСЗ
Н, км 150 170 200 250 300
р-1012, кг/м3 256 120 52 17 7,5
Смол- Вт/м2 525 241 105 35 15
5.3.4. Пассивные системы терморегулирования
В пассивных системах терморегулирования используют для
поддержания заданной температуры КА:
- тепловую термоизоляцию;
- терморегулирующие покрытия;
- оптимальное расположение элементов КА относительно внешних
источников тепла.
При постоянстве тепловых потоков пассивные системы всегда
обеспечивают заданные температуры.
В действительности тепловые потоки из разных источников постоянно
меняются и, кроме того, сами значения коэффициентов As и е могут быть
получены для поверхности ИСЗ только с определенной точностью.
Поэтому пассивные системы терморегулирования обеспечивают
диапазон температур, определяемый границами изменений указанных
выше величин.
206
Рассмотрим область применения пассивных систем терморегулирова-
ния. Для примера рассмотрим сферический ИСЗ. Пусть температура на
поверхности корпуса во всех точках одинакова. Внутреннее тепловыделе-
ние мало или им можно пренебречь. Оценим влияние изменения внешних
тепловых потоков и точности получения заданных значений коэффициен-
тов As и е на температуру ИСЗ. Оценку будем производить для
Л.
предельных случаев: 2QBHeiI]H и — имеют максимальное значение и
Е
А
и — имеют минимальное значение.
4“ВпСШп
е
Для ИСЗ, движущегося на высоте более 300 км, можно записать
следующее уравнение теплового баланса:
soFmAs + езмЛе + ботрЛА = ecoF(-j^j
тогда для сферы — = —:
4
Т = 100 .
1
Л А,
50 — + е0Ч>— + бзем
е е
Для примера взята круговая орбита высотой 300 км. В зависимости
от положения орбиты в пространстве ИСЗ будет получать разное
количество тепла (табл. 5.6).
Таблица 5.6
Количество тепла, получаемое ИСЗ
Характеристика орбиты ^СОЛН’ ^т/м бземц Вт/кг
Солнечная орбита 1398 210 186
Тепловая орбита 833 225 310
„ А. . ~
Для — = 1,2:
в
207
т
соли
100
——^—(1373-1,1 + 310) = 301 К = 28 °C;
т
тепл
100
N 4-5,7
(833-1,3 + 225-1,1 +310) = 284 К = 11 °C.
Значения As. и е могут быть получены с точностью порядка 10 % и,
А,
следовательно, отношение — может находиться в данном случае в
е
пределах 0,9...1,3.
Рассмотрим влияние точности получения заданного отношения:
Т
соли
4 '
100
———(1373-1,3
4-5,7
+ 310) = 312 К = 39 °C;
Т
тепл
100
1
4-5,7
(833-0,9 + 225 -0,9 + 310) = 273 К = 0 °C.
Таким образом, пассивная система терморегулирования в данном
случае практически обеспечивает температуру в диапазоне 0...+40 °C,
который необходим для нормальной работы приборов и систем ИСЗ.
Пассивные системы терморегулирования неприменимы для КА,
совершающих полет к планетам. Так, при полете к планете Венера
солнечная постоянная меняется в пределах 1373...2679 Вт/м2; если
покрытия на поверхности КА при нахождении его около Земли обеспечат
ему температуру 0 °C, то около планеты Венера за счет изменения
солнечной постоянной температура увеличится до 45 °C.
При полете к планете Марс солнечная постоянная будет изменяться
в пределах 1373...500 Вт/м2; и таким образом, если покрытия КА
обеспечат температуру поверхности около 40 °C во время пребывания
близ Земли, то вблизи Марса за счет изменения солнечной постоянной
температура упадет до-31 °C.
Пассивные системы терморегулирования нашли применение на
объектах, температурный режим которых можно поддерживать в
довольно широких пределах.
208
5.3.5. Активные методы регулирования
температуры КА
Как правило, для КА используют наряду с пассивными элементами
системы обеспечения теплового режима активные методы. К активным
системам терморегулирования относятся системы, обеспечивающие
принудительный теплообмен элементов КА с окружающей средой.
Регулирование температуры КА может осуществляться путем
изменения:
- ориентации КА;
- внутреннего теплового сопротивления;
- термического сопротивления между отсеком с приборами и
выносными наружными поверхностями, имеющими различные
температуры;
- излучательной способности поверхности КА с помощью жалюзи.
Путем изменения ориентации КА можно изменять количество
получаемого и излучаемого тепла, если различные поверхности его
имеют разные значения Asn е. Такой метод регулирования температуры
находит ограниченное применение, поскольку ориентация КА определя-
ется основными решаемыми задачами.
Возможно регулирование температуры КА путем изменения
термического сопротивления между самими приборами и конструкцией
корпуса КА (рис. 5.6).
Рис. 5.6. Схема активного регулирования температуры с помощью вентилятора (а) и жалюзи
(6):
/ - вентилятор; 2 - приборы; 3 - газовод; 4 - корпус ИСЗ; 5 - теплоизоляция; 6 -
приборный отсек; 7- жалюзи; 8- негерметический отсек
8 8620
209
Рис. 5.7. Схема активного регулирования температуры с помощью радиаторов:
1 ~ приборный контейнер; 2 - радиатор-охладитель; 3 - радиатор-нагреватель
Принудительный теплообмен КА с окружающей средой может
обеспечиваться:
- электрическими и радиоизотопными подогревателями;
- внешними и внутренними радиаторами с принудительным
движением теплоносителя между ними (рис. 5.7).
На КА, как правило, используют как активные, так и пассивные
элементы обеспечения теплового режима. Увеличивая число автономных
контуров активной системы, добиваются повышения надежности.
В таких контурах обычно циркулируют жидкие или газообразные
теплоносители. При использовании нескольких теплоносителей на стыке
контуров устанавливается теплообменник. Например, тепло от
тепловыделяющих приборов герметического отсека передается
омывающему их газу, охлаждение которого происходит в жидкостном
теплообменнике.
210
Регулирование тепловой мощности активной СТР может осу-
ществляться за счет механического изменения площади радиаторов. Если
площадь радиационных поверхностей неизменна, то регулирование
осуществляется:
- изменением расхода теплоносителя;
- путем перепуска части теплоносителя через обводную (байпасную)
линию;
- периодическим включением расхода теплоносителя;
- изменением ориентации КА относительно внешних тепловых
источников.
Механическое регулирование теплозащитных свойств осуществляет-
ся автоматическими створками или экранами (например, надувными),
затеняющими элементы пассивной СТР от внешних тепловых потоков,
или разворотом КА в определенное положение.
Жалюзи представляют собой весьма эффективную конструкцию для
изменения излучательной и поглощательной способности КА, в
результате чего можно эффективно регулировать температуру внутри
КА. Жалюзи могут быть выполнены в виде створок, барабана с
прорезями и др. (рис. 5.8).
Здесь используется нанесение на поверхность теплоизоляционных и
терморегулирующих покрытий с требуемыми свойствами. Например,
Рис. 5.8. Схема действии створчатых жалюзи, изменяющих излучательную способность
поверхности КА:
7 - поверхность КА; 2-жалюзи закрыты; 3-жалюзи открыты; I-длина створки жалюзи;
6 - зазор межу поверхностью и створкой жалюзи
8*
211
идеальные отражатели - солнечные отражатели, идеальные поглотите-
ли - солнечные поглотители. Идеальные отражатели и поглотители
работают в широком диапазоне длин волн теплового излучения, тогда
как солнечные - только в диапазоне длины волны солнечного спектра
излучения. В качестве отражателей используют покрытия белого цвета
или зеркально полированные поверхности из алюминия, магния, стали,
серебра, золота и других материалов.
"Захолаживание" элементов КА или научных приборов до низких
температур осуществляется специальными системами излучателей или
активными системами охлаждения. При помощи системы радиаторов-
излучателей, применяемых относительно низких уровнях значений
тепловых потоков, обеспечивают уровень температур жидкого азота
(78 К). Активная система охлаждения позволяет поддерживать уровень
температуры жидкого гелия (около 4 К), необходимый для нормального
функционирования чувствительного элемента субмиллиметрового
телескопа станции "Салют". Такая активная система состоит из газового
компрессора, двух холодильных машин, ряда теплообменников, средств
автоматики и контрольного оборудования.
5.3.6. Радиационные характеристики материалов
Величина радиационных коэффициентов (поглощательная способ-
ность солнечной радиации As и относительная излучательная способ-
ность - степень черноты е) зависит от материала, характера обработки
его поверхности (механической, гальванической,химической,электрохи-
мической, а также от применения керамических и лакокрасочных
покрытий) и температуры поверхности.
Радиационные характеристики материалов определяются различными
методами:
- методом накладного фотометра, в котором с помощью фотометри-
ческого шара и фотоэлементов измеряется коэффициент отражения;
- спектральным методом, при котором излучение Солнца заменяется
излучением "черного" тела;
- радиационным методом, когда прямые измерения по Солнцу
сравниваются с эталонным покрытием.
Аналогичными методами определяется и величина е.
Величины As и £ некоторых материалов с поверхностью в состоянии
поставки при t - 20...40 °C представлены в табл. 5.7.
212
Таблица 5.7
Величины At и с некоторых материалов с поверхностью
в состоянии поставки при t = 20...40 °C
№ п/п Материал е Обработка поверхности
Алюминиевые сплавы
1 АМг-бТ; АД-1 0,40...0,50 0,06...0,09 Химическая полировка с после- дующим анодированием
2 Амг-ЗМ 0,45...0,60 0,05...0,10 Кадмирование
3 Д16 0,35...0,50 0,06...0,08 Цинкование
4 АМг-5в 0,50...0,60 0,06...0,09 Пескоструивание с последую- щим анодированием;оксидиро- вание
Коэффициенты могут быть: As = 0,13...0,90; е = 0,05...0,95
Магниевые сплавы
5 МА2-1 0,87 0,83 Анодирование
6 МА-8 0,53 0,20
7 МА-8 0,90 0,98 Оксидирование
Титановые сплавы
8 ОТ-4 0,65 0,23 При никелировании As- 50; е- 0,90
9 ВТ-14 0,79 0,44
10 ВТ-1 0,75 0,30
И ВТ-1-2 0,55...0,63 0,23...0,28
Другие сплавы и металлы
12 Углеродис- тые стали 0,75—0,77 0,37...0,39 Пескоструйные
13 1Х18Н9Т 0,65 0,25 При электрохимической поли- ровке As = 0,36...0,45; £ = 0,11...0,26
14 Тантал 0,60 0,08
15 Ниобий 0,47 0,10
213
№ п/п Материал л, е Обработка поверхности
Неметаллические материалы
16 Текстолит 0,73 0,9
17 Пенопласт (глянцевый) 0,40 0,90
18 Оргстекло 0,10 0,98
19 Керамичес- кая краска 0,26...0,33 0,90...0,95 На алюминиевой подложке
20 Эмаль белая 0,25 0,95
21 Эмаль чер- ная 0,94 0,92
5.3.7. Модели отказов системы терморегулирования
К настоящему времени существует несколько моделей отказов
системы терморегулирования КА. В них используются различные
показатели тепловых режимов КА:
- стационарных тепловых режимов;
- апериодических тепловых режимов;
- устойчивости работы СТР и др.
К показателям стационарных тепловых режимов относят:
- коэффициент теплоты использования теплопроизводительности
контура СТР;
- коэффициент использования допустимой величины теплообмена
с окружающей средой через элемент наружной поверхности;
- температуру характерных элементов с известным диапазоном.
Среди показателей апериодических тепловых режимов: эффективная
теплоемкость КА; темпы остывания или время остывания на заданную
величину от некоторого уровня и т.д.
В связи с тем, что в СТР могут возбуждаться автоколебания
температуры, для КА находят границы устойчивости работы СТР.
В одних моделях считается, что развивающийся во времени отказ на-
ступает при превышении установленного значения коэффициента пол-
ноты использования теплопроизводительности контура СТР за счет де-
градации теплофизических характеристик терморегулирующих по-
крытий, что ухудшает эффективность радиационных теплообменников.
214
В других моделях отказов СТР предполагается, что при достижении
выбранными параметрами предельных значений происходит выход из
строя агрегатов СТР. В таких моделях обычно известны зависимости
между показателями функционирования СТР и изменяющимися во
времени теплофизическими и оптическими характеристиками
поверхностей или других элементов КА, влияющих на работу СТР.
Принципиально отличаются модели отказов, предусматривающие
выход из строя СТР вследствие поломок, нарушения тепловых связей
между элементами КА, разрушения поверхности терморегулирующих
покрытий, загрязнения поверхностей КА.
Некоторые тепловые воздействия для определяющих элементов СТР
КА (таких, как радиационный теплообменник, наружная теплоизоляция,
приборы внутри герметического отсека, элементы конструкции и т.п.),
характеризующиеся предельно большими или предельно малыми
значениям и тем ператур или других показателей, являются экстремальны-
ми. Для КА в целом и элементов КА экстремальным режимам соответ-
ствуют неблагоприятные сочетания таких параметров, как изменение
ориентации на орбите, режим максимального потребления энергии и др.
Имитационное моделирование с помощью ЭВМ проводится раньше,
чем осуществляется выход на тепловые, тепловакуумные и натурные
испытания, на которые надо выходить не для обработки конструкции
и систем терморегулирования, а для подтверждения результатов
математического моделирования.
Уравнение теплового баланса - того характерного элемента КА имеет
вид:
dT,
С,щ.—- + eaS,T4 = A q S. + га S, + SO... (5 3 1)
/ । /“соля /соля /“план /план
где С( - теплоемкость /-го элемента;
/и,- масса /-го элемента;
Sj - площадь собственного излучения /-го элемента;
51С0Л1), ^план _ нормальные проекции поверхности /-го элемента по
отношению к солнечному и планетному излучению;
4солн> <?план “ удельные потоки солнечного и планетного излучения;
Qy - тепло, излучаемое в единицу времени к /-му элементу от у'-го
элемента КА.
Введением в правую часть уравнения теплового баланса дополнитель-
ного внешнего (фиктивного) теплового потока можно получить решение
для случая экстремальной ситуации.
Иногда ставится задача определить верхнюю границу такого
внешнего воздействия, которое приводит к выходу элемента СТР, а
215
следовательно, и КА из строя, а также времени, за которое это произой-
дет.
В некоторых случаях в зависимости от конструктивного исполнения
КА можно уравнение теплового баланса (5.3.1) упростить, если КА имеет
элементы, теплообменом которых с соседними элементами можно
пренебречь из-за его незначительности. Такое явление характерно для
КА простых форм, внешний теплообмен которых осуществляется через
наружный радиационный теплообменник, не облучающийся выступаю-
щими частями аппарата, или теплоизолированные элементы наружных
поверхностей КА и внешних приборов не осуществляют радиационный
теплообмен.
В этом случае уравнение (5.3.1) примет вид
C<gS,.T4S( = AiqcomSicom + (5.3.2)
Во втором случае, для КА, находящихся на высоких орбитах,
тепловые потоки планетного излучения пренебрежимо малы и уравнение
теплового баланса (5.3.1) не содержит членов, описывающих излучение
планеты.
В практических расчетах тепловых режимов КА широкое распростра-
нение получило разделение аппарата на ряд изотермических элементов,
для которых принимаются неизменными: температура,теплофизические
свойства, внешние и внутренние тепловые потоки.
Исходя из таких допущений уравнение (5.3.1), записанное для каждого
элемента, освобождается от частных производных, т.е. происходит
замена пространственных производных конечно-разностными отношени-
ями. В результате получается система уравнений:
dT. " " . .
= £ ау(Т} - Г() + £ ^(Т/ - Т(4) <• Qt, (5.3.3)
(к ; = i y=i
где i = 1,2.п - число элементов.
Система уравнений (5.3.3), дополненная краевыми условиями,
характеризующими внешний теплообмен и начальное тепловое состояние
КА, уравнениями, описывающими работу активных СТР, составляют
математическую тепловую модель КА. Такая модель связывает значения
параметров теплового режима с внешними воздействиями и параметрами
режимов СТР и позволяет анализировать и прогнозировать изменение
теплового состояния во времени при выходе из строя отдельных
элементов СТР.
216
5.4. Системы энергопитания
5.4.1. Потребители энергии на борту КА
Энергетическая установка является одной из важнейших бортовых
систем КА, от которой во многом зависит конструкционное исполнение
аппарата, габаритные размеры, масса и срок активного существования.
Выход из строя энергоустановки влечет за собой выход из строя всего
аппарата.
На рис. 5.9 показаны панели солнечных батарей на транспортном
корабле снабжения "Союз-ТМ".
Масса бортовой энергетической установки отечественных КА
находится в пределах 8...25 % от массы объекта, а для американских
космических аппаратов эта величина колеблется от 9 до 44 % и
составляет в среднем около 25 %.
По мере расширения круга задач, решаемых в космическом простран-
стве с помощью КА, возрастает требуемая мощность бортовых
Рис. 5.9. Транспортный корабль снабжения "Союз-ТМ":
1 - стыковочный агрегат; 2 - панели солнечных батарей; 3 - приборно-агрегатный отсек;
4 - спускаемый аппарат; 5 - орбитальный отсек
217
Рис. 5.10. Энергетические потребности КА:
/ - ракеты-носители; 2- межпланетные КА; 3-лунные и космические станнин; 4 - ИСЗ;
5- лунные КА
энергоустановок (рис. 5.10). Так, если на первом ИСЗ, запущенном на
орбиту в 1957 г., мощность системы энергопитания (СЭП) составляла
около 40 Вт, а на американском КК "Джемини GT-IV", выведенном на
орбиту в 1965 г., мощность энергоустановки (ЭУ) составляла около 1 кВт,
то на орбитальной станции "Спейслэб" (1983 г.) эта мощность составляла
6 кВт.
На рис. 5.11 показаны солнечные батареи ИСЗ "Молния".
СЭП - бортовая система КА, обеспечивающая электроэнергией его
аппаратуру и оборудование. В СЭП обычно входят первичный и
вторичный источники электрической энергии, автоматика системы
энергопитания, зарядные и преобразующие устройства.
Области рационального применения различных СЭП представлены
на рис. 5.12.
В качестве первичных источников могут применяться различные
генераторы электроэнергии - солнечные батареи, химические источники
тока (гальванические элементы, аккумуляторы, топливные элементы),
изотопные генераторы, автономные реакторы-электрогенераторы, а
также энергетические установки различных типов - изотопные
энергетическиеустановки,солнечныеэнергетические установки, ядерные
энергетические установки и др. В энергетическую установку помимо
218
7
Рис. 5.11. ИСЗ "Молния":
1- передний отсек; 2-подвижные панели солнечных батарей; 3 - радиоантенна;
4 - излучатель; 5 - приборно-агрегатный отсек; 6 - баллоны с гелием; 7 - двигатель
коррекции; 8- датчики солнца; 9- неподвижные панели солнечных батарей
собственного источника (генератора) электрической энергии входят
вспомогательные системы, обеспечивающие его работу, например,
система терморегулирования топливных элементов, система ориентации
концентратора солнечной энергии и т.д. Возможно применение
комбинированных схем СЭП, например, с солнечными батареями и
электрохимической установкой.
Автоматика системы энергопитания - это совокупность устройств
для автоматического управления работой системы энергопитания КА
и контроля ее параметров. Обычно автоматика осуществляет поддержа-
ние параметров системы (напряжения, температуры, давления и т.д.) в
заданном диапазоне: переключения, связанные с изменением режима
работы источников электроэнергии или их агрегатов (например, переход
с так называемых основных источников электроэнергии на резервные
и обратно); распознавание отказов и аварийную защиту источников
электроэнергии; токовую защиту агрегатов системы энергопитания;
контроль параметров системы с выдачей информации в радиотелеметри-
ческую систему и на пульт космонавтов. В ряде случаев возможен переход
с автоматического управления системой на ручное (с пульта космонавтов
или с Земли по командной радиолинии) и обратно.
219
Рис. 5.12. Области рационального применения различных СЭП:
/-аккумуляторы; 2-химические динамические системы; 3 - криогенные динамические
системы; 4 - топливные элементы; 5 - ядерная динамическая система; 6 - солнечная
динамическая система; 7-солнечная термоэлектрическая или термоионная системы;
8- фотоэлектрические системы; 9- радиоизотопные источники
В автоматику входят:
- датчиковая аппаратура (чувствительные элементы, сигнализаторы);
- электронные блоки, обеспечивающие усиление, преобразование и
обработку сигналов и команд;
- блоки электросиловой коммутации и исполнительные органы
(клапаны, регуляторы и т.д.).
Бортовая аппаратура современных КА обычно работает на
постоянном токе напряжением 28 или 12 В. Аппаратура, работающая
на переменном токе, получает питание через преобразователи, которые
преобразуют постоянный ток в переменный. Наибольшее распростране-
ние получили статические полупроводниковые преобразователи.
Зарядные устройства обеспечивают заряд вторичных источников
электрической энергии (аккумуляторных батарей) от первичных.
Кроме обеспечения бортовой аппаратуры электроэнергией СЭП могут
выполнять дополнительные функции, например, СЭП КК "Аполлон" с
энергоустановкой на основе водородно-кислородных топливных
элементов предназначена также для обеспечения экипажа КК водой.
СЭП можно разделить на два основных типа:
220
1) СЭП, масса которых
существенно зависит от
времени работы (СЭП с
электрохимическими ис-
точниками тока одноразо-
вого действия, с батареями
гальванических элементов
или аккумуляторными ба-
тареями одноразового дей-
ствия) с электрохимически-
ми энергетическими уста-
новками, с электромашин-
Рис. 5.13. Сравнительный анализ СЭП различных
типов:
1 - серебряно-цинковый аккумулятор; 2 - топливный
элемент с капиллярной мембраной
ными энергетическими ус-
тановками открытого цик-
ла и др. Обычно такие СЭП
применяются на КА со сро-
ком службы от нескольких
часов до 1...2 месяцев);
2) СЭП, масса которых не зависит от времени их работы (СЭП с СБ,
с солнечными энергетическими установками, с изотопными генераторами
и с изотопными энергетическими установками на основе долгоживущих
изотопов, с ядерными и изотопными электромашинными энергетически-
ми установками; такие СЭП применяют на КА со сроком службы от
нескольких месяцев до нескольких лет).
Наиболее распространены СЭП с СБ, применяемые на большинстве
КА, например "Эксплорер", "Молния", "Электрон", "Рейнджер", "Венера",
"Марс", "Маринер", "Скайлэб", "Союз", "Салют", "Мир" и на междуна-
родной космической станции.
Сравнительный анализ СЭП различных типов представлен на
рис. 5.13.
5.4.2. Солнечные батареи
Солнечная батарея (СБ) - источник электрической энергии в системе
энергопитания КА, состоящий из полупроводниковых фотоэлектричес-
ких преобразователей (ФЭП) (рис. 5.14) и несущей конструкции, на
которой укрепляются преобразователи. Представляет собой большое
количество последовательно-параллельно соединенных ФЭП. Такое
соединение обеспечивает необходимые напряжение и силу тока. Обычно
ФЭП скрепляют внахлест, что одновременно обеспечивает их последова-
221
Рис. 5.14. Устройство кремниевого фотопреобразователя:
1 - противоотражающее покрытие; 2-стекло; 3 -фильтр ультрафиолетовых лучей;
4-слой эпоксидного клея; 5-кремний л-типа; 6 -кремнийр-типа; 7-клей; 8-эпоксидная
изоляция; 9. 11 - пластины анодированного алюминия; К) - алюминиевые соты
тельное электрическое соединение. ЭДС отдельного ФЭП не зависит от
его площади и равна 0,5...0,55 В; ток короткого замыкания составляет
35...40 мА на 1 см2 площади ФЭП. Ток СБ зависит от условий освещен-
ности и достигает максимума при перпендикулярном падении солнечных
лучей на поверхность СБ.
При удалении от Солнца происходит снижение мощности СБ
(рис. 5.15).
Средний КПД современных СБ составляет 8... 13 %, что соответствует
мощности около 130 Вт на 1 м2 площади (при расстоянии КА от Солнца
Рис. 5.15. Зависимость мощности фотопреобразователей
от расстоянии до Солнца:
I - арсенид галлия; 2 - кремний
около 150 млн км - сред-
нее расстояние от Земли
до Солнца). С ростом
температуры (свыше
25°С) происходит
уменьшение КПД
(рис. 5.16) за счет сниже-
ния напряжения ФЭП.
Рабочая температура
колеблется, как правило,
в пределах от -30 до
70 °C в зависимости от
внешних тепловых пото-
ков, воздействующих на
СБ. В качестве несущей
конструкции СБ исполь-
зуется часть наружной
поверхности КА или
222
Рис. 5.16. Влияние температуры на параметры солнечной батареи
раскрывающиеся жесткие панели. Для эффективной работы СБ
необходима их ориентация на Солнце с погрешностью 10... 15°. При
использовании жестких панелей это достигается, как правило, при
развороте самого КА; применяются также автономные электромехани-
ческие системы ориентации СБ (ИСЗ "Метеор”). При этом панели СБ
выполняются подвижными относительно корпуса КА. Применяются
также неориентируемые СБ, ФЭП которых располагаются на корпусе
КА или на выносных панелях так, чтобы обеспечить необходимую
электрическую мощность при любой произвольной ориентации КА.
Масса 1 м2 СБ 7... 10 кг, из них около 40 % приходится непосредственно
на массу ФЭП. Мощность СБ может достигать нескольких десятков и
даже сотен киловатт. СБ обеспечивают электропитание бортовой
аппаратуры обычно совместно с аккумуляторной батареей. Изучаются
несколько проектов СБ, которые находясь на стационарной орбите,
будут обеспечивать энергией наземных потребителей. Ожидаемая
мощность таких СБ - 50 ГВт.
Продолжительность работы СБ зависит от метеорной эрозии,
ухудшающей оптический коэффициент ее поверхности, воздействия
радиационного излучения, понижающего фотоэдс ФЭП (главным
образом при полете в радиационном поясе Земли и в результате
солнечных вспышек), и воздействия термических ударов, являющихся
следствием глубокого охлаждения СБ на затененных и нагрева на
освещенных участках полета и разрушающих электрическую коммута-
цию и узлы крепления ФЭП. Используются эффективные меры защиты
СБ от радиационного воздействия и воздействия солнечных вспышек -
прозрачные защитные покрытия, легирующие добавки в материал ФЭП
223
и др. Разработаны СБ, допускающие многократное охлаждение их до
температуры 150 °C без существенного снижения мощности. Продолжи-
тельность работы СБ достигает нескольких лет.
СБ применены в качестве основного источника электрической энергии
в составе систем электропитания многих КА: "Космос", "Молния",
"Метеор", "Протон", "Эксплорер", ТИРОС, "Нимбус", АИС, ОГО, ОСО,
ОАО, "Венера", "Марс", "Зонд", "Маринер", "Пионер", "Сервейор",
"Рейнджер", "Союз", "Салют", "Мир", "Скайлэб", МКС и др.
Наибольшее распространение в качестве ЭУ для ИСЗ и КК получили
солнечные батареи на фотопреобразователях (ФП) с п-р- переходом.
Такие ФП обычно изготавливаются из цилиндрических монокристаллов
кремния диаметром 2 см, разрезаемые на таблетки, которые в дальней-
шем обрабатываются на прямоугольники размерами 1x2 см. Отдельные
элементы толщиной 0,5 мм собираются в модули по 3...5 элементов в
каждом; из модулей монтируется солнечная батарея. Выходная мощность
одного ФП составляет 50 мВт (напряжение 0,45 В, ток 125 мА), к.п.д.
8...13 %. Ориентируемая солнечная батарея метеорологического ИСЗ
"Нимбус", состоящая из 11 000 таких ФП, имеет массу 35,5 кг и выходную
мощность 0,5 кВт, т.е. удельные характеристики 70 кг/кВт.
Стоимость кремниевых ФП достаточно высока: солнечная батарея
на напряжение 9 В и ток 15 мА стоит 5,95 долл. (44 долл, на 1 Вт
мощности). Разработана технология изготовления ФП методом
вытягивания монокристалла кремния до 30 см в длину, что при ширине
1 см позволяет получить полезную площадь одного элемента около
25 см2. Применение таких ФП позволило повысить надежность СБ и
снизить коммутационные потери за счет использования меньшего числа
элементов, а также получить экономический выигрыш по сравнению с
использованием монокристаллов большего диаметра. Эксперименты
показали, что кремниевые ФП с л-р-переходом обладают гораздо лучшей
стойкостью к радиационному облучению, чем ФП с р-п- переходом,
которые применялись на большинстве первых американских ИСЗ.
Решение о переходе на ФП с л-р-переходом принято, несмотря на то, что
они имеют более низкий к.п.д. и более высокую стоимость.
ФП с л-р-переходом возможно будут применяться на предназначен-
ных для работы в дальнем космосе КА типа "Маринер" и "Рейнджер",
которые находятся в радиационных поясах Земли непродолжительное
время. СБ КА "Маринер-4" имела 28 224 кремниевых ФП с л-р-переходом
и имела массу 33,9 кг. Мощность ее в начале полета составляла 640 Вт,
при пролете Марса - 340 Вт.
С целью повышения радиационной стойкости и уменьшения нагрева
кремниевых ФП обычно применялись кварцевые покрытия. Разработаны
защитные покрытия из органических полимеров, а также неорганические,
224
отличающиеся повышенной прочностью, лучшей радиационной
стойкостью и меньшей стоимостью. Такие покрытия могут наноситься
методом напыления сразу на всю поверхность солнечной батареи. Пленка
защитного покрытия, предложенного фирмой "Гофман Электронике",
имеет толщину 1 мк и полностью защищает ФП от электронов с энергией
1,60-10’13 Дж и протонов с энергией 0,64-10'13 Дж.
Ухудшение характеристик ФП под действием радиационного
облучения является главным препятствием к использованию СБ на КА
с длительным сроком активного существования (табл. 5.8). Ведутся
поиски способов уменьшения влияния радиации и методов восстановле-
ния прежних характеристик ФП, находившихся под действием радиаци-
онного облучения. Так, фирма "Вестингауз" рекомендует нагревать ФП
до 450°С и выдерживать в течение нескольких минут эту температуру.
Нагрев предполагается производить с помощью солнечных концентрато-
ров (линз), которые по командам с Земли будут последовательно
фокусировать солнечные лучи наразличных участках панелей солнечных
батарей.
Таблица 5.8
Зависимость параметров СБ от времени работы в космическом пространстве
Тип ФЭП Н = 770 км, наклонение = 98°, 15 лет ГСО, наклонение = 0°, 15 лет
Параметр ФЭП Начальная мощность, Вт/м2 Коэффи- циент дег- радации Конечная мощность, Вт/м2 Коэффи- циент дег- радации Конечная мощность, Вт/м2
Si:
- монок- ристалл 223 0,96 214,1 0,82 182,9
- сверхтон- кий 239 0,97 231,8 0,82 196,0
ArGa:
- кристалл 215 0,96 206,4 0,83 178,4
- толщина 200 мк 159 0,85 135,6 0,69 110,1
- сверхтон- кие 5 мк 160 0,90 144,0 0,76 121,6
225
На основе выпускаемых в настоящее время кремниевых ФП можно
создать СБ мощностью около 1 кВт, рассчитанную на 1...2 года работы.
Дальнейшее увеличение мощности батарей приводит к конструктивным
трудностям, связанным с большой площадью панелей, сложностью их
установки под обтекателем на PH, развертыванием после выхода на
орбиту и т.п. Площадь панелей СБ, рассчитанной на 40 кВт, должна
составлять около 370 м2 (0,1 кВт с 1 м2).
Ряду фирм, работающих над вопросами увеличения удельной
мощности СБ, удалось достичь обнадеживающих результатов. Так,
фирма "Электро-Оптикал Систем" разработала тонкие (0,1 мм)
кремниевые ФП с КПД 9 %. Их можно наклеивать на полиамидную
пленку, которая до выхода объекта на орбиту свернута в рулон, а после
выхода разворачивается. Использование таких ФП позволит в 1,5 раза
уменьшить удельную массу СБ.
Другим путем повышения удельной мощности батарей является
применение тонкопленочных поликристаллических ФП, позволяющих
снизить удельную массу СБ на порядок и больше. Тонкопленочные ФП
представляют собой основу из молибденовой или алюминиевой фольги
толщиной 25 мк, на которую нанесена пленка фотоактивного полупро-
водникового материала толщиной 18 мк. Тонкая металлическая сетка,
образованная методом напыления, является токоотводом от верхнего
слоя. На нее сверху наложено защитное покрытие из пластика толщиной
в несколько ангстрем. В качестве фотоактивного материала для
тонкопленочных поликристаллов ФП применяются сульфиды, теллуриды
и селениды кремния, арсенида и фосфориды галлия и другие материалы.
СБ фирмы "Клевайт" с тонкопленочными ФП из сульфида кадмия на
пластиковой основе имеют удельную массу 4,55 кг/кВт при к.п.д. до 8 %.
В ближайшее время фирма надеется снизить удельную массу до 2,6 кг/кВт.
Отдельные образцы этой фирмы при испытаниях, имитирующих
орбитальный полет (давление в барокамере 10*7 мм рт. ст., чередование
свет-тень при изменении температуры от +60 до -100 °C), нормально
работали в течение 11 000 термических циклов, что соответствует двум
годам работы на орбите. Однако пока не удалось достигнуть необходи-
мой стабильности свойств отдельных ФП. Основная причина их выхода
из строя при испытаниях - отслоение металлической сетки-вывода и
фотоактивного металла от пластиковой основы. Лучшие показали имеют
ФП с металлической сеткой, нанесенной гальваническим способом.
Тонкопленочные ФП из сульфида кадмия фирмы "Харшоу Кемикал"
имеют стабильный и достаточно высокий ресурс работы, но их к.п.д. не
превышает 5 %. СБ фирмы "Клевайт" с тонкопленочными ФП из
сульфида кадмия имеют отдельную массу 4,55 кг/кВт при к.п.д. 5...6 %.
226
Образец батареи фирмы RCA с ФП из арсенида галлия имеет удельную
массу 3,35 кг/кВт и к.п.д. 5,1 %.
Наибольшая масса, гибкость и хорошая радиационная стойкость
тонкопленочных поликристаллических ФП позволяют считать их
перспективными для создания СБ мощностью в несколько десятков
киловатт.
Для повышения удельной мощности СБ могут быть использованы
также концентраторы солнечной энергии, увеличивающие интенсивность
освещения ФП. Считается, что коэффициент концентрации не должен
превышать 2,5, так как иначе произойдет перегрев ФП и вследствие этого
снижение их к.п.д.
В настоящее время СБ являются одними из наиболее надежных и
достаточно отработанных ЭУ. Их ресурс и показатели мощности
позволяют полагать, что в течение ближайшего десятилетия они будут
широко использоваться в качестве энергетических установок на ИСЗ,
орбитальных космических станциях и автоматических КА.
Дальнейшее совершенствование солнечных батарей идет главным
образом в направлении:
- улучшения радиационной стойкости,
- снижения удельной массы,
- повышения к.п.д. и удельной мощности,
— разработки новых материалов для ФП с целью улучшения их
фотоэлектрических свойств.
На исследования в области СБ ВВС США в 1966 г. израсходовали
1 млн долл. С 1962 по 1965 гг. специалистами ВВС удалось увеличить
мощность с 10 до 20 Вт на 1 кг массы ЭУ. Полагают, что удастся
получить 40 Вт/кг.
Зависимость интенсивности солнечного излучения от орбиты планеты:
Планета
Меркурий ..................................
Венера ....................................
Земля .....................................
Марс ......................................
Интенсивность облучения, кВт/м?
11,1
2,65
1,373
0,598
Важным фактором для СБ является температура поверхности при
освещении ее солнечным потоком.
Температура СБ при двустороннем охлаждении излучением:
2а£’
227
где Е = 0,975 - степень черноты; о = 5,67-10 8 --— - постоянная
(м2-К4)
Стефана-Больцмана.
Таблица 5.9
Температурные характеристики солнечной батареи на орбитах планет
Планеты Меркурий Венера Земля Марс
Температура Тсъ, °C 230 130,5 60 -2
В зависимости от изменения температуры меняется и к.п.д. солнечной
батареи (табл. 5.9 и 5.10).
Изменения температуры связаны с отражением солнечного излучения
от облачного покрова Земли. Вольтамперные характеристики СБ
изменяются в зависимости от температуры. В силу неопределенности
некоторых коэффициентов принимаются некоторые линейные зависимос-
ти к.п.д. от температуры - табл. 5.11.
Таблица 5.10
Температура поверхности солнечной батареи в зависимости от высоты
околоземной орбиты
Высота околоземной орбиты, Я, км Температура поверхности СБ, Тс^, °C
370 67
780 65
1 110 64
1 850 62
7410 57
14 820 55
22 240 54
35 880 53
228
Таблица 5.11
Принятые линейные зависимости для ФЭП
^СБ. °C КПД, %
Фотоэлементы
ArGa Si
20 10 10
144 7,3 2
180 5 0
Приведенные данные относятся к 1984 г. и по данным НПО "Квант"
1996 г. должны быть скорректированы для фотоэлементов ArGa в
1,5 раза (к.п.д 15 % при 25 °C) и для фотоэлементов Si в 1,3 раза (к.п.д
13 % при 25 °C).
Табл. 5.12 показывает динамику развития СБ (данные НИИТП, июнь
1996 г.), а табл. 5.13 - влияние радиационных поясов СБ КА.
Таблица 5.12
Характеристики ФЭП в стадии развития
Тип ФЭП ArGa Si
Развитие ФЭП, годы 1996 2010 1996 2010
КПД % 6,2...8,0 •2,5 9,8...13,0 16,5
Удельная поверхностная мощ- ность, Вт/м2 55... 100 145 85...145 190
Относительная масса, кг/м2 0,8...1,0 0,3...0,5 1,0...1,5 0,3...0,5
Удельная массовая мощность, Вт/кг 55... 125 240...480 55...145 37O...63O
Удельная стоимость, долл./Вт 200...700 100...200 600... 1400 200...500
229
Таблица 5.13
Влияние радиационных поясов на эффективность СБ КА, находящегося на
орбите высотой Н = 7400 км, наклонение орбиты - 50° в течение 5 лет
Тип ФЭП Монокрис- талл Si Монокристалл ArGa Тонкопленоч- ные 200 мкм
Коэффициент падения мощ- ности 0,78 0,8 0,5
Конечная мощность, Вт/м2 173,9 172,0 81,4
5.4.3. Аккумуляторные батареи
Солнечные батареи, устанавливаемые на КА, как правило, работают
вместе с аккумуляторными батареями (рис 5.17), так называемыми
буферными химическими батареями, из которых наибольшее распростра-
нение получили никель-кадмиевые батареи. Они по сравнению с другими
типами аккумуляторных батарей допускают наибольшее (до 7000)
количество зарядно-разрядных циклов и обладают наилучшей стойко-
стью к перезаряду. Эти качества необходимы для обеспечения активного
существования КА в течение одного года и более.
Никель-кадмиевы е
аккумуляторы ИСЗ "Tel-
star" использовались в
Рис. 5.17. Конструкция герметического дискового аккуму-
лятора:
1 - положительный электрод; 2 - разделительная пласти-
на; 5- отрицательный электрод; 4-крышка; 5- пружина;
6 - изоляционная прокладка
качестве источника энер-
гии при нахождении
ИСЗ в тени и функцио-
нировали более двух
лет. Батарея состояла из
19 герметично выпол-
ненных элементов, что
исключало потери элек-
тролита; ее рабочий диа-
пазон от -10 до +32°,
напряжение разряда по-
чти постоянное.
Серийно выпускае-
мые никель-кадмиевые
батареи, применяемые в
космической технике,
230
имеют удельную энергию 0,7...1,0-105 Дж/кг и работают в диапазоне
температур от-15 до +60 °C. Для нормальной работы никель-кадмиевых
батарей требуются специальные средства герметизации, обеспечивающие
работу в течение одного года и более при максимальной утечке 10‘8 см3/с.
Наилучшие показатели достигнуты с помощью металлокерамических
уплотнений.
Гораздо реже в качестве буферных химических батарей применяются
серебряно-цинковые, которые имеют самую высокую удельную энергию
(0,54...0,90-106 Дж/кг) по сравнению с аккумуляторами других типов, но
по количеству зарядно-разрядных циклов (300...400, т.е. примерно на
один месяц работы на ИСЗ) сильно уступают никель-кадмиевым
батареям. Серебряно-цинковые батареи применяются в качестве
буферных только в тех случаях, когда имеются большие ограничения по
массе КА и по условиям работы не предвидятся частые и длительные
переходы от освещенного состояния солнечной батареи к неосвещенному.
В частности, они применялись на КА "Маринер IV". По заказу ВВС США
проводились разработки серебряно-цинковых батарей с расчетным
количеством зарядно-разрядных циклов 3500 при величине удельной
энергии 1,08-106 Дж/кг и более. В основном такие батареи применяются
в качестве первичных источников на ракетах-носителях.
Серебряно-кадмиевые батареи, занимающие по своим показателям
среднее положение между никель-кадмиевыми и серебряно-цинковыми,
имеют удельную энергию 0,270...0,324-106 Дж/кг при количестве заряд-
но-разрядных циклов около 2000 (глубина разряда 30...60 %). Они
наименее отработаны и пока не характеризуются хорошей стабильнос-
тью работы, однако, благодаря парамагнитным свойствам применяются
на ИСЗ для геомагнитных измерений. В частности, на ИСЗ "Эксплорер
ХИ" (1961 г.) такая батарея в течение полета (112 суток) работала
безотказно.
Основное направление совершенствования буферных химических
батарей - повышение допустимого количества зарядно-разрядных
циклов и увеличение удельной энергии.
Поскольку резервирование буферных химических батарей является
крайне нежелательным ввиду их значительной массы, большое внимание
уделяется повышению их надежности и разработке прогрессивной
технологии испытаний, позволяющей производить тщательный контроль
качества их изготовления.
К системам накопления, используемым для совместной работы с СБ
или другими источниками и предназначенным для работы в космическом
пространстве, предъявляются следующие требования:
- высокие удельные массогабаритные и электрические характеристи-
ки;
231
- широкий диапазон рабочих температур;
— способность подзарядки малыми токами;
- низкие токи саморазряда.
Из большого разноообразия существующих в настоящее время типов
аккумуляторов рассматриваются два основных типа: никель-кадмиевые
и никель-водородные аккумуляторы, нашедшие наибольшее применение
при освоении космического пространства (табл. 5.14).
В настоящее время ведутся разработки и изготовлен ряд аккумулято-
ров на основе соединений лития, которые имеют массогабаритные и
энергетические характеристики вдвое лучше, чем рассмотренные выше.
Нередко аккумуляторная батарея играет роль стабилизатора
напряжения, поскольку ее напряжение в рабочем диапазоне температур
слабо зависит от величины нагрузки.
К.п.д цикла - заряд-разряд аккумуляторной батареи зависит от ее
типа и температуры, при которой она работает. Так, для герметичных
никель-кадмиевых аккумуляторов в диапазоне рабочих температур от
-20 до +50 °C к.п.д цикла - заряд-разряд принимается равным 0,75.
Таблица 5.14
Основные характеристики аккумуляторов
Наименование характеристики Тип аккумулятора
Никель- кадмиевый Никель- водородный
Удельная объемная энергия, Вт ч/дм3 80 60
Удельная массовая энергия, Вт-ч/кг 25...40 50
Рабочее напряжение, В 1.2 1,25
Диапазон рабочих температур, °C -40...+50 -20...+50
Срок службы (в циклах заряд-разряд) не менее 1000 1000
Срок хранения, годы, не менее 5 5
Конструкция герметичная герметичная
В табл. 5.15 приводятся некоторые характеристики химических
источников тока, применяемых на КА.
232
Таблица 5.15
Характеристики химических источников тока,
применяемых в системах энергопитания КА
Источник тока Тип Электрохимическая система
Положи- тельное активное вещество Элек- тро- лит Отри- цатель- ное ак- тивное ве- щество эдс, в Теоре- тичес- кая удель- ная энергия, Вт-ч/кг Срок службы
Никелево- кадмиевый Аккуму- лятор NiOOH кон Cd 1,36 220 Не- сколько лет
Серебряно- цинковый Аккуму- лятор AgO кон Zn 1,85 520 Не- сколько месяцев
Серебряно- кадмиевый Аккуму- лятор AgO кон Cd 1,40 295 До одно- го года
Кислород- но-водо- родный Топлив- ный эле- мент о2 кон н2 1,227 3660 Не- сколько месяцев
5.4.4. Топливные элементы
В 1965 г. на КК "Джемини GT-V" в качестве ЭУ впервые в космичес-
кой технике стали использовать топливные элементы, которые при
расчетном времени работы от нескольких суток до 1...2 месяцев имеют
преимущества перед ЭУ, использующими солнечные батареи с буферны-
ми химическими батареями, по величине удельной мощности и
габаритно-массовым показателям.
Батарея топливного элемента КК "Джемини" работала на газообраз-
ных водороде и кислороде и состояла из трех блоков, включающих по
32 элемента каждый напряжением 0,8 В. Элемент состоит из двух
металлических электродов, которые находятся в контакте с твердым
электролитом, представляющим собой ионообменную мембрану. Батарея
размещается в титановом цилиндрическом контейнере диаметром 32 и
длиной 63 см. Масса батареи с контейнером около 31 кг, мощность 1 кВт,
напряжение 23,5...26,5 В. Энергоустановка на КК "Джемини GT-V"
состояла из двух таких батарей и была рассчитана на работу в условиях
233
невесомости при давле-
нии 10 8 мм рт. ст., тем-
пературе от -50 до
+70 °C и относительной
влажности до 100%. Не-
исправность, имевшая
место в энергетической
установке КК (падение
давления в бачке с жид-
ким кислородом и в ре-
зультате выхода из
строя подогревателя и
сокращение по этой при-
чине подачи кислорода
в топливный элемент),
не означает наличия
каких-либо недостатков в самих элементах, которые показали способ-
ность надежно работать в течение всех 8 суток полета.
Опытный блок топливного элемента, разрабатывавшегося для
обитаемой орбитальной станции MOL, при испытаниях обеспечивал в
течение одного месяца мощность 1,8 кВт при напряжении 28 В. Масса
блока 43,5 кг, масса блока с запасом топлива (Н2 и О 2) на 30 суток полета
- 635 кг. По мнению специалистов, химические батареи, способные
обеспечить указанную мощность в течение того же времени, имели бы
массу 4,5 т.
В системах электропитания КА нашли применение водородно-
кислородные топливные элементы, так как водород является наиболее
калорийным топливом, а вода, являющаяся конечным продуктом
реакции, может быть использована для технических и бытовых нужд (на
космических пилотируемых кораблях и станциях). Водородно-кислород-
ные топливные элементы в зависимости от рабочей температуры делятся
на низкотемпературные (до 100 °C) и среднетемпературные (100...250 °C).
В топливных элементах применяют жидкий электролит (раствор ОН),
так называемый связанный электролит (асбестовая матрица, пропитан-
ная раствором ОН) и твердый электролит (ионообменная мембрана из
полимерного материала).
Принципиальная схема водородно-кислородного топливного
элемента показана на рис. 5.18. Топливный элемент состоит из трех
камер, разделенных между собой пористыми стенками - электродами,
изготовленными из мелкодисперсной никелевой подложки, на которую
нанесен никелевый порошок (крупнопористой структуры). На границе
мелких и крупных пор внедрен катализатор: водородный электрод
234
активизируется платино-палладиевым катализатором, кислородный -
чисто платиной. В средней камере находится электролит - 30...40 %-ный
раствор ОН. В крайние камеры подаются газообразные водород и
кислород. Внутри пористого электрода обеспечивается устойчивая
граница газ-электролит, так как, с одной стороны, давление газов
больше давления электролита, что предохраняет попадание электролита
в крупные поры, и, с другой стороны, капиллярные силы предотвращают
попадание газа в мелкие поры. Электрохимическая реакция соединения
водорода и кислорода протекает на электродах на границе трех фаз:
твердой (катализатор), жидкой (электролит) и газообразной (водород-
кислород). При разомкнутой внешней цепи между электродами возникает
разность потенциалов (1,0...1,1 В). При размыкании полюсов через
электрическую нагрузку на каждую электрохимически прореагировав-
шую молекулу водорода от отрицательного полюса к положительному
текут два электрона, которые реагируют на положительном полюсе с
адсорбированным кислородом и образуют ионы гидроксила ОН,
являющиеся носителями тока в жидком электролите. В отличие от
обычного сгорания водорода и кислорода электрохимическое взаимо-
действие ("холодное горение") происходит на разделенных электродах,
при этом электрохимическая реакция (Н2 + ~О2 = Н2О) обратна
электролизу воды. Для обеспечения работы топливных элементов
необходимо отводить воду и теплоту, выделяющиеся в процессе реакции.
Водородо-кислородные топливные элементы имеют малые удельный
объем и массу, устойчивы к перегрузкам, обладают стабильным
напряжением, бесшумны в работе. К.п.д топливных элементов (50...75 %)
пропорционален напряжению и увеличивается с уменьшением нагрузки
в отличие от к.п.д турбинных установок и двигателей внутреннего
сгорания.
Сравнительно высокая стоимость жидких Н2 и О2, применяемых в
качестве горючего и окислителя, а также трудность их хранения
ограничивают использование этих топливных элементов в космической
технике. Использование баллонов высокого давления или сосудов
дьюара, обеспечивающих хранение Н2 и О2 в сжиженном состоянии,
приводит к неизбежному увеличению массы и объема ЭУ. Эти недостатки
не позволяют в полной мере реализовать преимущества топливных
элементов, применение которых тем более заманчиво, что теоретически
к.п.д топливного элемента может быть близок к 100 %.
Существует много разновидностей топливных элементов, отличаю-
щихся по топливу, температурному режиму работы, электролиту и т.д.
Получены экспериментальные подтверждения возможности
применения в топливных элементах других видов топлива, в частности
235
в качестве горючего используются метиловый спирт, гидразин, жидкие
углеводороды, натрий, калий и др., в качестве окислителя - перекись
водорода, хлор, азотная кислота и др. Использованию жидких углеводо-
родов и метилового спирта в низкотемпературных топливных элементах
препятствует в основном отсутствие дешевых и эффективных катализато-
ров. Применение этих топлив возможно и без катализатора, но при этом
для разрыва химических связей между атомами углеводородов
необходимо повышение температуры в зоне реакции до 500...600 °C.
Высокотемпературные топливные элементы в ближайшее время вряд ли
найдут применение в космической технике из-за больших технических
трудностей, связанных с созданием высоких температурных зон и
использованием в качестве электролита расплавленных солей.
Для решения проблемы доставки металлических топлив в зону
реакции было предложено использовать жидкие смеси металлов с ртутью.
Проводились работы над проектом батареи топливных элементов на
соединениях натрия с ртутью (проектная мощность батареи 75 кВт).
Проводятся интенсивные исследования по созданию топливных
элементов, работающих на воздухе и водороде, воздухе и углеводород-
ном горючем, а также в области повышения ресурса топливных
элементов.
При испытаниях отдельные образцы элементов, работающих на
Н2-О2, функционировали непрерывно в течение семи месяцев. В них
использовался "твердый" электролит, близкий по составу к тефлону.
Устройство топливных элементов КК "Джемини" представлено на
рис. 5.19.
Батарея топливных элементов на Н2-О2 для КК "Аполлон" состояла
из нескольких блоков по 31 элементу в каждом. Один блок обеспечивал
мощность до 0,296 кВт, суммарная мощность батареи до 1,4 кВт,
напряжение 30 В. Батарея размещалась в цилиндрическом контейнере
диаметром 0,5 и длиной 1 м. На КК "Аполлон" были установлены три
такие батареи.
На мобильной лаборатории проектировалось использовать батарею
топливных элементов мощностью 7,5 кВт. Было подсчитано, что для
14-ти суточного пребывания на Луне потребуется 295 кг Н2 и О2.
Выделяющуюся при работе элемента воду можно использовать для питья.
В целом топливные элементы, имеющие в настоящее время удельную
мощность 36 Вт/м3 (или 2,2 Вт/кг), ресурс до 2000 ч и к.п.д 60...70 %,
являются весьма перспективными ЭУ для космических аппаратов.
Основные направления работ по их усовершенствованию:
- увеличение ресурса;
- снижение стоимости;
- повышение надежности;
236
Рис. 5.19. Устройство топливных элементов КК "Джемини":
1 - внешняя нагрузка; 2 - газовые камеры; 3 - мембрана
- отыскание новых дешевых видов топлива, окислителя и горючего,
а также эффективных катализаторов.
Одно из перспективных направлений в разработке топливных
элементов для КА - создание регенеративных топливных элементов,
являющихся энергоемкими аккумуляторами электрической энергии.
5.4.5. Ядерные энергетические установки
Наиболее перспективной ЭУ для КА, рассчитанных на 3...5 и более
лет активного существования, является ядерная энергетическая установка
(ЯЭУ) типа SNAP. Использование ЯЭУ наиболее целесообразно на ИСЗ
со сроком активного существования более одного года и на КА,
совершающих полет в областях, где интенсивность солнечного излучения
недостаточна для эффективной работы солнечных батарей, а также на
больших орбитальных и лунных станциях.
На навигационном ИСЗ "Транзит IVA", выведенном на орбиту в
1961 г., была впервые установлена радиоизотопная ЯЭУ SNAP-3A
мощностью 2,7 Вт, массой около 2 кг.
237
Рис. 5.20. Изотопный генератор:
/ - внешний корпус; 2- внутренний контейнер;
3 - ампула с изотопом; 4 - термоэлектрические
генераторы; 5 - радиатор
На ИСЗ "Транзит V", запущенном
в 1963 г. и входящем в навигацион-
ную систему ВМС США, установлена
радиоизотопная ЯЭУ SNAP-9A,
являющаяся модификацией ЯЭУ
SNAP-ЗА. Ее мощность 25 Вт, она
работала на плутонии-238.
После разработки ЯЭУ SNAP-3A
в США было создано более 12 новых ЯЭУ типа ЯЭУ SNAP. В 1965 г. на
орбиту вокруг Земли была выведена ЯЭУ SNAP-10A, предназначенная
для питания электроэнергией бортовой аппаратуры (в том числе ионного
ракетного двигателя). Проектная мощность этой ЯЭУ 500 Вт, масса
440 кг. В качестве делящегося вещества использовался уран-238 (4,75 кг),
в качестве замедлителя - гидрид циркония (43 кг). Система преобразова-
ния энергии - термоэлектрическая (2880 германиево-кремниевых
термопар) с рабочей температурой 550 °C. ЯЭУ SNAP-10А проработала
всего 43 суток.
По мнению большинства специалистов, наибольшее применение
получат радиоизотопные (рис. 5.20), а не реакторные ЯЭУ.
Проектировалась для обитаемой орбитальной исследовательской
лаборатории MORL ЯЭУ, работающая на плутонии, которая должна
была обеспечивать при к.п.д 20 % мощность 10 кВт в течение 5 лет.
На лунном КА "Сервейор" (с мягкой посадкой) вначале предполага-
лось использовать радиоизотопную ЯЭУ SNAP-11 мощностью 25 Вт.
Однако позже было принято решение отказаться от ЯЭУ, так как
предполагалось, что КА "Сервейор" будет работать только в условиях
лунного дня, и необходимая мощность может быть обеспечена солнечны-
ми батареями.
Для связных ИСЗ разрабатывалась ЯЭУ SNAP-17 мощностью 24 Вт
и сроком службы 3...5 лет; радиоизотопный материал - стронций-90.
Для ИСЗ "Нимбус В" была разработана ЯЭУ SNAP-19 мощностью
30 Вт и массой 13,6 кг с расчетной продолжительностью работы пять лет.
Термоэмиссионные (термоионные и термоэлектронные) преобразова-
тели тепловой энергии позволяют получать плотности мощности
2 Вт/см2, к.п.д 6 % для преобразователей с вольфрамовым катодом при
238
температуре 1300 °C и 2,66 Вт/см2; к.п.д 10,5 % для преобразователей с
молибденовым катодом при температуре 1350 °C.
В реакторных ЯЭУ достигнута плотность мощности до 15 Вт/см2 при
температуре 1990 °C и к.п.д 8 %.
Радиоизотопные ЯЭУ, которые способны обеспечить мощность от
нескольких ватт до 10 кВт в течение многих лет работы следует
рассматривать как перспективные ЯЭУ для ИСЗ и КА, хотя их стоимость
гораздо выше, чем стоимость солнечных батарей с буферными химичес-
кими элементами.
5.4.6. Другие типы энергетических установок
На ИСЗ и КА могут применяться другие виды ЭУ:
- солнечные статические (термоэлектрические и термоэмиссионные)
в диапазоне мощностей от одного до нескольких десятков киловатт при
сроках службы от нескольких месяцев до нескольких лет;
- солнечные турбогенераторные с мощностью от одного до несколь-
ких десятков киловатт, рассчитанные на срок службы от одного месяца
до 1...2 лет;
- ядерные турбогенераторные и ядерные термоэмиссионные
мощностью от нескольких киловатт до нескольких десятков мегаватт
с ресурсом 1...2года;
- химические с механическим преобразованием энергии (двигатели
внутреннего сгорания) в диапазоне мощностей от нескольких сотен ватт
до нескольких мегаватт и сроком службы, ограниченным только
запасами топлива.
Фирма "Виккерс" разрабатывала ЭУ, в которой в качестве привода
генератора использовался двухтактный двигатель внутреннего сгорания,
работающий на газообразных Н2 и О2. Проектная мощность установки
3 кВт при к.п.д 90 %. Расход топлива составляет 0,69 кг на 1 кВт
производимой электроэнергии, масса ЭУ без топлива 39,4 кг, объем
около 0,186 м3. Опытный образец установки при испытаниях безотказно
работал в течение более 60 ч.
Разрабатывалась солнечная турбогенераторная установка для
применения на ИСЗ и КК, в которой использовался термодинамический
цикл Ренкина мощностью 3 кВт. В качестве теплоносителя применялась
ртуть. Эта установка была рассчитана на один год работы и имела
аккумулятор тепла на гидриде лития, необходимый для поддержания
нормального теплового режима на теневых участках орбиты. Солнечные
лучи фокусировались на приемнике энергии параболическим концентра-
тором диаметром 9,8 м.
239
Система энергопитания (СЭП)
Рис. 5.21. Варианты систем энергопитания ИСЗ
Хотя практического применения на КА рассмотренные виды ЭУ пока
не нашли, однако есть все основания считать их перспективными для
использования в будущем.
Представляют интерес некоторые способы получения электроэнергии
с использованием сопутствующих полету КА явлений. Так, был
предложен способ преобразования тепловой энергии, выделяющейся при
входе КА в атмосферу. Поверхность носовой части при входе в
атмосферу испускает поток электронов, которые через плазму,
окружающую носовую часть, проходят к кормовой части аппарата и
заряжают ее отрицательно. Образующаяся при этом разность потенциа-
240
лов между носовым конусом и донной частью создает ЭДС. При
испытаниях моделей носовых конусов в плазменной установке получена
плотность тока до 4,9 А/см2 поверхности носового конуса, что согласно
расчетам соответствует мощности 1 кВт для конуса с диаметром
основания 0,9 м.
Вопросы рационального выбора и эксплуатации энергоустановок
рассматриваются комплексно, с учетом требований всей системы
энергопитания, а также систем терморегулирования и ориентации.
Специалисты полагают, что для увеличения к.п.д системы энергопитания
и уменьшения паразитных токов в электрических цепях, напряжение
первичных источников целесообразно повысить с 20...30 до 40...60 В. Для
получения необходимых видов и величин напряжений, задаваемых
требованиями нагрузки, рекомендуется применять преобразователи, а
не специальные схемы включения первичных источников электроэнергии.
При соответствующем резервировании наиболее ответственных
элементов применение преобразователей увеличивает надежность
системы энергопитания, повышает к.п.д, а также позволяет получить
лучшие характеристики по массе и габаритам.
На рис. 5.21 показаны варианты систем энергопитания ИСЗ.
5.5. Системы ориентации и стабилизации
5.5.1. Классификация систем
Угловой стабилизацией называется движение КА вокруг центра масс
на тех участках траектории, где полет протекает со значительными
ускорениями: при коррекции орбиты, переходе с одной орбиты на
другую, переходе на траекторию спуска и т.д. В эти сравнительно
кратковременные моменты, когда работает двигательная установка, для
обеспечения нужного направления приращения скорости необходимо
сохранять неизменным пространственное угловое положение КА.
Системы угловой стабилизации требуют и значительных затрат
энергии, поскольку они работают при сравнительно больших возмущаю-
щих силах и моментах.
Угловая стабилизация КА не является самостоятельной задачей, а
преследует вспомогательные цели при управлении движением центра
масс КА.
Ориентацией КА называется управление угловым движением КА на
участке свободного полета, т.е. ориентация КА - это придание его осям
определенного положения относительно заданных направлений.
9 - 8620
241
Для ИСЗ характерна орбитальная ориентация, при которой одна из
осей - ось курса постоянно направлена к центру Земли; вторая - ось
тангажа - перпендикулярна плоскости орбиты, а третья - ось крена -
лежит в этой плоскости. Если ИСЗ совершает полет по круговой орбите,
то ось крена совпадает с касательной к орбите.
Системы ориентации, таким образом, в отличие от угловой
стабилизации действуют в условиях малых возмущающих сил и
моментов.
Необходимость в ориентации КА возникает:
- при получении энергии за счет работы солнечных батарей;
- при навигационных измерениях;
- при проведении научных исследований;
- при проведении исследований в интересах народного хозяйства;
- при передаче информации на Землю с помощью остронаправленной
антенны;
- перед включением тормозного или разгонного двигателя с целью
изменения траектории полета КА.
Ориентация КА требует поддержания заданного положения либо
постоянно, либо кратковременно.
В отличие от стабилизации ориентация не оказывает влияния на
положение центра масс КА.
Системы ориентации и стабилизации нередко выполняются с учетом
их тесного взаимодействия и используют одни и те же датчики.
По числу ориентированных осей КА различают одноосную
ориентацию, при которой поддерживается определенное угловое
положение одной из его осей относительно заданного направления, и
полную ориентацию, когда определенное угловое положение придается
всем трем осям КА.
В то время как системы стабилизации используются как исключитель-
но активные, системы ориентации - как активные, так и пассивные.
К пассивным системам ориентации относятся: гравитационная,
инерционная, аэродинамическая и ряд других, т.е. таких, которые для
своей работы не требуют затрат энергии, запасенной на борту КА. Они
отличаются высокой экономичностью. Вместе с тем области их
применения ограничены.
К системам, требующим для своей работы определенной энергии,
запасаемой на борту КА, или массы, т.е. активным системам, относятся:
реактивные двигатели ориентации, инерционные маховики, электромаг-
нитные устройства и др.
Преимуществом активных систем является их гибкость, возможность
обеспечить разворот КА в нужном направлении с требуемой угловой
скоростью.
242
Для пилотируемых КК различают системы автоматические и
неавтоматические в зависимости от степени участия космонавта в их
функционировании.
В автоматических системах ориентации управление осуществляется
по командам с Земли, либо от бортовых систем управления.
В неавтоматических системах ориентация осуществляется космонав-
том, который способен быстрее и правильнее оценить ситуацию и
принять решение, чем автоматическая аппаратура.
Система ориентации КА получает от чувствительных элементов-
датчиков информацию о положении КА относительно осей ориентации
и о характере его углового движения.
Чаще всего применяются электронно-оптические датчики, использу-
ющие в качестве опорных ориентиров небесные светила - Солнце, Землю,
Луну, звезды. Оптические приборы под действием видимого света или
инфракрасного излучения при отклонении осей датчиков от направления
на опорный ориентир вырабатывают электрический сигнал. Инфракрас-
ное излучение объекта, например Земли, удобнее всего регистрировать,
поскольку дневная и ночная стороны в этом случае эквивалентны.
В качестве прибора, регистрирующего угловое положение КА, может
быть использован ионный датчик.
Применяются также чувствительные магнитные элементы, позволяю-
щие определить положение КА относительно магнитного поля Земли.
Гироскопические датчики используют свойство быстровращающегося
волчка сохранять неизменным направление в пространстве.
Электрические сигналы с датчиков поступают в преобразующее
устройство, которое осуществляет:
- усиление, сопоставление и преобразование сигналов в управляющие
сигналы для включения и выключения исполнительных органов;
-логическиеоперации, необходимые для правильного функциониро-
вания системы ориентации.
Варианты систем энергопитания ИСЗ представлены на рис. 5.22.
Поскольку на вращающийся КА будут действовать внешние
возмущающие моменты (гравитационный, магнитный, аэродинамичес-
кий) от управляющих рулевых двигателей, то возникает прецессия.
Угловая скорость прецессии при этом (рис. 5.23):
д _ ^возм
где А/возм - внешний возмущающий момент;
Якин= Jzu>z ~ кинетический момент КА;
9*
243
Рис. 5.22. Варианты системы ориентации и стабилизации
Jz - момент инерции КА;
апр - угол прецессии КА относительно оси z (оси, вокруг которой
проводилась закрутка).
Ориентация вращением обеспечивает точность положения не менее 1 °.
Сравнительный анализ различных систем ориентации представлен
в табл. 5.16 (рис. 5.24).
244 Возможность применения той или иной системы ориентации зависит от высоты орбиты функционирования КА, типа применяемой системы, значе- ний возмущающих моментов и момен- тов стабилизации. <- Рис. 5.23. Прецессия КА после предварительной закрутки его при отделении от носителя
Рис. 5.24. Области применения систем стабилизации:
/-моменты от перемещения массе КА; 2-гравитационная система; 3- солнечная система
стабилизации; 4- аэродинамическая система
Таблица 5.16
Сравнительный анализ различных систем ориентации
Системы ориентации Враще- нием С реактив- ными со- плами Гравитационная;аэроди- намическая, солнечным давлением Магнитная и электро- магнитная
Точность не менее 1° до Г 5’ (до Г с демпфированием) до 0,5°
Область применения - гравитационная 200 км < Н < 2000 км - аэродинамическая 200 км < Н < 400 км - солнечным давлением Н > 2500 км 600 км < <Н < 6000 км
245
5.5.2. Гравитационная система ориентации
Гравитационная система ориентации относится к пассивным системам
и поэтому не требует для своего функционирования затрат энергии или
массы, запасенных на борту КА. Ее функционирование основано на
использовании гравитационного момента, который возникает в случае,
если КА спроектирован таким обра-
Рис. 5.25. Иллюстрация возникновения
гравитационного момента
зом, что момент инерции относитель-
но оси ориентации имеет значительно
меньшее значение, чем момент инер-
ции относительно других осей.
Такого эффекта можно добиться
путем специальной компоновки в
размещении масс КА, например, в
виде гантели или удлиненного цилин-
дра. Аналогично получается гравита-
ционный момент, если на специаль-
ных штангах вынести за пределы КА
грузы. Если через штанги осуществля-
ется гибкая связь с КА, то возможно
демпфирование колебаний вокруг
устойчивого положения.
Подобная система эффективна для КА, совершающего орбитальный
полет вокруг Земли на высотах орбиты, лежащей в пределах 200 км < Н<
< 2000 км.
На высотах, меньших, чем указано в диапазоне применения,
сказывается возмущающее влияние атмосферы. На больших высотах и
при полетах в межпланетном пространстве система неэффективна из-за
ослабленного гравитационного градиента поля Земли и недостаточного
значения градиента поля тяготения Солнца.
Рассмотрим рис. 5.25. Если не существует разнесенных масс, связанных
с КА, то суммарная сила, действующая на КА, будет
р = f тМ _ шК2
(Я + И)2 ’ (я + Н)
При гибкой или жесткой связи разнесенных масс т2 и грузов,
движущихся с одинаковой скоростью, но на высотах, отличающихся на
некоторую малую величину, высота движения каждой разнесенной
массы отличается от высоты движения их общего центра масс на
246
величину ±/sin —. При этом на верхнем грузе возникает сила
«/ =
mi М
(R + Н)2\ R + Н
- V2 вя,
а на нижнем грузе
»/ =
т\ ( _2f М +
(Я < Я)Ц R + н
ън,
или в общем случае
«/ =
т, ( м
±----!- 2/-——
(Я + Н)2\ R + Н
- V2} ън,
ЪН = ± — sina.
2
Гравитационный момент составит величину
б Л/,, = б Fl cos a
грав
или
ml (
4(Я + ЯД
К2 - 2/ sin 2 а.
Я + Н
Гравитационный момент при а = 0 и а = у равен нулю и максимален
при a = — (рис. 5.26). Следовательно, при a = 0 и a = — мы имеем две
4 4
точки равновесия, но точка a = 0 является точкой неустойчивого
равновесия: при увеличении угла а (а колебания КА всегда имеют место)
гравитационный момент возрастает. В точке a = у положение
устойчивое, и при небольшом отклонении по углу а в ту или иную
сторону КА будет возвращаться к этому устойчивому положению.
247
Рис. 5.26. Диаграмма изменения гравитационного
момента
Наличие гибких штанг
или других устройств демп-
фирует колебания КА относи-
тельно положения равновесия
при а = у. При отсутствии
демпфирования КА соверша-
ет колебания по углам тангажа
и крена с частотой
зц - Л)
Л
v
где со =-------средняя угло-
вая скорость обращения КА вокруг Земли;
J, = Jx, Jj = Jy—моменты инерции относительно осей, перпендикуляр-
ных продольной оси z;
Jz - моменты инерции относительно продольной оси г.
5.5.3. Аэродинамическая система ориентации
При движении КА по низким орбитам возможна ориентация КА
вдоль вектора скорости путем использования следов атмосферы
(рис. 5.27). Известно, что сила аэродинамического сопротивления зависит
от плотности атмосферы р, которая на больших высотах мала, от
квадрата скорости V, которая, напротив, велика:
V2
X = р—exSM.
г 2 хо м
Если величинами р и Vуправ-
лять мы не можем, то путем под-
бора коэффициента аэродинами-
ческого сопротивления сх и
максимальной площади попереч-
ного сечения 5М самого КА или
специальной плоскости (сфери-
ческого баллона, конуса и т.д.),
размещенной на некотором рас-
Рис. 5.27. Схема аэродинамической стабилиза-
ции
248
стоянии от КА на штанге или с помощью гибкой связи, возможна такая
аэродинамическая ориентация (см. рис. 5.27).
При отклонении оси аппарата, ориентированного вдоль вектора
скорости, на угол а от направления вектора скорости возникает
аэродинамический стабилизирующий момент
V2
М = р—S„/sina,
2 0
где I- расстояние от центра масс (или точки крепления в случае гибкой
связи) до центра давления. При небольших углах sina = a.
Вследствие вращения атмосферы с Землей появляется ошибка
ориентации по углу рыскания в орбитальной системе отсчета
дф = _™
“max v
*3
где Катм - скорость движения
атмосферы;
И3 - угловая скорость
Земли.
Так при движении ИСЗ по
круговой полярной орбите
на высоте Н = 200 км, Д<ртах
= = 3,5°.
Система аэродинамичес-
кой ориентации эффективна
на высотах 200... 400 км.
Начиная с высоты 2500 км
возможно использование
эффекта давления солнечных
лучей для создания системы,
аналогичной системе аэроди-
намической ориентации.
В этом случае солнечное
давление может быть вычис-
лено по формуле
Рис. 5.28. График изменения во времени требуемой
площади стабилизатора в зависимости от возмущаю-
щего момента:
1 - требуемая площадь стабилизатора для париро-
вания возмущающего момента; 2 - располагаемый
управляющий момент
249
F0S ,
Ft = (1 + 0-2-sin2«,
c
где С - отражательная способность экрана;
Fo - солнечная постоянная;
S — площадь экрана;
с - скорость света;
а - угол атаки.
Стабилизирующий момент при этом составит Мс = Fc пр/, где Мс =
~ Fc пр/- проекция стабилизирующей силы на направление, перпендику-
лярное плечу.
На рис. 5.28 приведено сравнение требуемой и располагаемой
площадей стабилизатора для КА, совершающего полет к Луне. Из
рисунка видно, что только через 27 мин после старта стабилизатор
площадью 5 м2 для КА с моментом инерции 4000 Нм способен париро-
вать возмущающий момент.
5.5.4. Электромагнитная система ориентации
Электромагнитная система ориентации может быть либо пассивной,
либо активной. Если на КА установить постоянные магниты, то они
будут взаимодействовать с очень мощным магнитным полем Земли и
соответствующим образом ориентировать в пространстве КА (рис. 5.29).
Установка соленоидов или электромагнитов позволяет активно влиять
на процесс взаимодействия электромагнитного поля КА с магнитным
полем Земли. Элементы электромагнитной системы ориентации
Рис. 5.29. Положение магнитоориеитируемого ИСЗ относительно магнитного поля Земли
250
могут применяться для
демпфирования коле-
баний КА, когда ис-
пользуются другие
системы ориентации
(рис. 5.30).
Система может при-
меняться для КА, со-
вершающих полет на
высотах от 600 до
6000 км.
При пассивной ори-
ентации (ориентация с
помощью постоянных
магнитов) стабилизи-
рующий момент рас-
считывается по форму-
ле
Рис. 5.30. Время затухания вращения ИСЗ под действием
магнитного поля Земли (орбита круговая):
/ - цилиндрический ИСЗ; 2 - сферический ИСЗ; 3 - орбита
лежит в плоскости магнитного экватора; 4 - орбита
ортогональна плоскости магнитного экватора
Lnacc = "Hosino,
где НЕ - напряженность магнитного поля Земли;
ц - магнитный дипольный момент;
о - угол между осью магнитного стержня и вектором магнитного поля
Земли.
В свою очередь, магнитный дипольный момент ц = VB, зависит от
объема магнитного стержня V и индукционного магнитного поля В.
При пассивной магнитной ориентации за период обращения ИСЗ
совершает два оборота вокруг оси, перпендикулярной плоскости орбиты.
Момент взаимодействия электрического контура с геомагнитным
полем (активная ориентация) может быть вычислен по формуле
ьакт = -^niFHE&iaa,
где go - магнитная проницаемость;
п - число витков электрического контура;
F- площадь контура.
251
Рис. 5.31. Схема ориентации
с помощью газовых сопл
5.5.5. Ориентация и стабили-
зация с помощью
газовых сопл
С помощью газовых сопл или микро-
ракетных двигателей малой тяги может
осуществляться активная ориентация и
стабилизация КА. Такие системы нашли
широкое применение из-за их способнос-
ти создавать большие управляющие
моменты, которыми можно парировать
любые возмущающие моменты (рис. 5.31). Тяга газовых сопл может
создаваться за счет энергии сжатого газа, разложения вещества, горения
твердого или жидкого топлива и др. На рис. 5.32 показано расположение
сопл и клапанов, распределяющих расход газа по соплам в зависимости
от требуемого управления по крену, тангажу и рысканию КА.
В качестве рабочих тел в системах,
использующих сжатый газ, обычно
применяется азот или гелий, находя-
щийся в баллонах под давлением
35 МПа. При давлении в камерах сопл
порядка 0,07 МПа возникающий
удельный импульс тяги составляет 70 с
для азота и 170 с для гелия.
Управляющий момент, возникаю-
щий при использовании сопл, будет
М = Ap^F^lzosa,
где А - коэффициент, зависящий от
показателя адиабаты;
рк - давление в камерах сопл;
FKp - площадь критического сече-
ния сопл;
/ - длина плеча момента;
Рис. 5.32. Схема управления газовыми соплами:
1 - заслонки-переключатели; 2 - сопла
252
а - угол между направлением газового потока и перпендикуляром к
плечу.
Требуемый запас топлива для обеспечения ориентируемого полета
зависит от точности по угловой скорости Ды и точности по углу Д(р:
„ =
р
где J- момент инерции КА;
Руд - удельный импульс тяги;
/- плечо;
t - время ориентируемого полета.
5.5.6. Системы ориентации с помощью инерцион-
ных маховиков, установленных в карданном подвесе
Для ориентации ИСЗ, находящихся на стационарных орбитах и
имеющих массу более 2000 кг, используются инерционные маховики,
установленные в двухстепенном карданном подвесе. Эта же система
используется и для стабилизации. Для вращения маховика применяется
электродвигатель. Ось собственного вращения маховика параллельна
вектору орбитальной угловой скорости и формирует ось тангажа ИСЗ.
Ось вращения внутренней рамы подвеса параллельна вектору линейной
скорости, а ось вращения внешней рамы направлена по местной
вертикали. Такое расположение системы на борту КА является
наилучшим с точки зрения качества управления. Маховик в режиме
ориентации вращается с некоторой скоростью, величина которой может
регулироваться в заранее заданных пределах. Управляющий момент по
оси тангажа создается в случае малых отклонений ИСЗ по крену и
рысканию (рис. 5.33).
Управление положением ИСЗ по осям крена и рыскания определяется
постоянным кинетическим моментом маховика и обеспечивается
управляющими моментами, прикладываемыми к рамам карданного
подвеса.
Система с гиромаховиком позволяет управлять ориентацией ИСЗ
относительно всех трех осей. Поскольку существует взаимосвязь
движений ИСЗ по крену и рысканию, то для ориентации можно
использовать лишь один датчик горизонта Земли, информация с
которого подается лишь к каналам тангажа и рыскания.
253
Рис. 5.33. Схема системы с инерционным
маховиком, установленным в двухстепенном
карданном подвесе:
/ - внутренняя рамка; 2 - маховик; 3 - внешняя
рамка
Взаимодействие вращающе-
гося маховика и КА, совершающего
вращение относительно центра
масс, описывается уравнением
~ ~ Лпах^Чпах’
где М — кинетический момент;
JKa “ момент инерции КА;
Jmax - момент инерции махо-
вика;
<р - угловое ускорение КА;
“т» “ угловая скорость махо-
вика относительно КА.
Угол отклонения КА зависит
от времени и описывается урав-
нением
Рис. 5.34. Изменение угловых скоростей КА и маховика:
1 - зона стабилизации по угловой скорости; 2 - зона стабилизации по углу
254
т max’
'KA
Рис. 535. Схема системы с двумя инерционны-
ми маховиками
где <p - угол отклонения KA; t -
текущее время.
Особенно эффективны инер-
ционные маховики при воздей-
ствии знакопеременных возму-
щений (рис. 5.34).
Когда на КА воздействуют
постоянные возмущения, то уг-
ловая скорость инерционных
маховиков приближается к мак-
симальной, управление такой
системой становится затрудни-
тельным. Для снятия возмуще-
ния необходимо включать управляющий ракетный двигатель.
Характеристики систем с инерционным маховиком. К настоящему
времени разработано большое число разнообразных систем, реализую-
щих способ ориентации с применением инерционного маховика,
установленного в карданном подвесе. Рассмотрим один из них.
Законы управления инерционным маховиком, шаговыми двигателями,
газовыми реактивными двигателями системы разгрузки реализуются на
цифровых элементах, конструктивно объединенных в единый блок
электроники массой около 4 кг и имеющем габаритные размеры
0,16x0,20x0,13 м, средняя потребляемая мощность составляет 12 Вт.
Основным возмущающим моментом для стационарного ИСЗ является
момент от солнечного давления.
Амплитуда ошибки ориентации по рысканию в случае отсутствия
компенсации в законе управления внешнего возмущения составляет 0,94°.
При компенсации постоянной и периодической составляющих возмуще-
ния ошибка может быть уменьшена до 0,5°.
Система стабилизации и ориентации ИСЗ с двумя инерционными
маховиками. Для управления ориентацией сквозного стационарного ИСЗ
можно использовать блок из двух инерционных маховиков, оси вращения
которых жестко закреплены по отношению к корпусу ИСЗ (рис. 5.35).
Направление связанных с корпусом осей координат выбрано обычным,
т.е. ось X - ось крена совпадает с направлением полета, а ось Y- ось
тангажа направлена противоположно орбитальной угловой скорости.
С целью сканирования горизонта оси вращения маховиков располо-
жены под углом друг к другу. Так, на ИСЗ "Нимбус" оси вращения
255
Рис. S.36. Схема системы, использующей трехстепенные гироскопы управления
относительно осей:
1 - ОХ; 2 - OZ; 3-OY
маховиков совпадали, а направления вращения были противоположны.
При этом вектор результирующего кинетического момента в случае
номинальной ориентации ИСЗ совпадал с отрицательным направлением
оси тангажа и был перпендикулярен плоскости орбиты. Желаемая форма
траектории сканирования может быть получена дополнительным
разворотом плоскости векторов кинетических моментов маховиков
вокруг оси тангажа на некоторый угол; по отношению к плоскости
"тангаж - рыскание" (см. рис. 5.35). Выбранное положение маховиков
позволяет одинаковым изменением их угловой скорости управлять
ориентацией ИСЗ по тангажу. Приращения скоростей маховиков,
противоположные по знаку, обеспечивают управление ориентацией ИСЗ
по крену.
Наряду с высокоточной системой ориентации с двумя инерционными
маховиками на борту ИСЗ может быть установлена более грубая
газореактивная система, предназначенная для разгрузки маховиков и
проведения различных поворотных маневров ИСЗ, которые связаны
например, с коррекцией параметров орбиты. В системе управления тогда
используется лишь один датчик горизонта Земли.
256
Ориентация с помощью блока свободных гироскопов. Системы
управления ориентацией, которые используют управляющие трехстепен-
ные гироскопы (рис. 5.36), имеют ряд преимуществ по сравнению с
системами, использующими инерционные массы.
В такой системе при отсутствии ограничений на углы поворота рам
подвеса поверхность, которую описывает конец вектора кинетического
момента гироскопа, является сферой. Поэтому этот вектор может быть
направлен в любом желаемом направлении, что значительно облегчает
решение вопроса о выборе ориентации исполнительного устройства по
отношению к ИСЗ и исключает опасность насыщения в системе.
Управляющие моменты в системе определяются командной угловой
скоростью разворота рам подвеса гироскопа. Идеальным является
случай, при котором управляющие моменты, прикладываемые к ИСЗ,
в точности равны моментам, которые определяются выбранным законом
управления.
Идеальный случай может иметь место при условии автономности
процессов управления по осям, т.е. при отсутствии перекрестных связей
и при условии, что динамика исполнительного устройства может быть
описана динамикой звена первого порядка. Но наличие собственных
моментов инерции рам подвеса, сил трения в опорах и других неучтенных
факторов приводит к тому, что реальная динамика системы отличается
от идеальной. Кроме того, следует учитывать влияние на динамику
различных нелинейностей в системе, например, квантования по уровню
сигналов управления при использовании в контуре управления
цифрового носителя. Для больших КА, имеющих, например, устройства
стыковки, следует учитывать большие панели солнечных батарей, при
точной оценке динамики системы - влияние нежесткости конструкции.
257
Заключение.
Методика прогнозирования
развития КА
Место прогнозирования при разработке КА. Прогнозирование
занимает особое место в структуре разработки КА. Заказчик формирует
технико-эксплуатационные требования, если возникает необходимость
(потребность) в новом КА. Встречная работа проводится и на головных
предприятиях потенциальных разработчиков. На основе этих требований
формируются альтернативные варианты развития КА. Эти варианты
аккумулируют в себе отечественный и зарубежный опыт предшествующе-
го развития, а также современное состояние разработок аналогичных
систем. Каждый альтернативный вариант должен быть подвергнут
всесторонней экспертизе, т.е.:
- анализу последствий создания КА;
- оценке вероятности реализации того или иного варианта КА;
- экономико-статистическому анализу потребных ресурсов для
разработки, серийного производства и эксплуатации КА.
После принятия решения, т.е. выбора варианта КА, проводится
уточнение технико-эксплуатационных требований. Формируется
комплексная целевая программа развития научно-технического
направления, на основе которой создается программа развития основной
и сопутствующих отраслей промышленности и план развития системы
КА (рис. 3.1).
Структура базы данных. Характерные признаки, описывающие
конструкцию конкретного КА (и при том однозначно) могут быть
помещены в некоторую матрицу, по строкам которой перечислены
наименования признаков, а по столбцам - варианты их представления.
Вид информации, получающийся на пересечении строк и столбцов, не
имеет в данном случае значения. Важно, что такая информация имеется,
хранится сколько угодно длительное время и легко может быть извлечена
при необходимости и представлена в удобном для того или иного
использования виде. В качестве исходных матриц строятся матрицы
отечественных и зарубежных разработок в прошлом, отечественных
НИОКР, выполняемых в настоящее время, зарубежных НИОКР, а также
матриц собственных НИОКР, т.е. выполняемых на головном, разрабаты-
вающем предприятии. Представляет интерес матрица, составленная на
основе патентной информации. На основе упомянутых матриц строятся
матрицы развития, показывающие последовательные изменения
258
Рис. 3.1. Место прогнозирования в структуре процесса разработки КА
вариантов по каждому признаку конструкторско-компоновочной схемы.
Построение альтернативной матрицы существующего положения и
матрицы, описывающей некоторые гипотетические варианты, позволяет
сформировать варианты развития КА. Эти варианты являются
логическим следствием процесса развития, отражают современные
основные тенденции. Конкретизация размеров и массы осуществляется
путем задания технико-эксплуатационных требований. Варианты
учитывают степень преемственности конструкции и степень проработки
научно-технической идеи (рис. 3.2).
Понятие степени новизны проекта КА. Вероятность реализации
варианта проекта КА зависит от трех основных действующих факторов:
1) наличных ресурсов;
2) проектно-конструкторских решений;
3) технологии и материалов.
Наличные ресурсы включают финансы, материально-техническое
обеспечение (имея в виду наличие сырьевой базы и развитой промышлен-
ности) и трудовые ресурсы (в том числе степень их обученности).
259
Рис. 3.2. Схема формирования вариантов КА
Проектно-конструкторские решения, основанные на рационализаторских
предложениях, позволяют модернизировать конструкцию. Если
дополнительно применять изобретения, то можно получить новую
конструкцию. Широкое применение изобретений (заимствованных или
разработанных в процессе создания КА) позволяет создать новейшую
конструкцию. Использование открытий дает возможность получить
принципиально новую конструкцию.
Третьим компонентом являются взаимосвязанные материалы и
технология, позволяющие получать модернизированную, новую,
новейшую или принципиально новую технологию в зависимости от
использованных соответственно рационализаторских предложений,
рационализаторских предложений и изобретений, изобретений и
открытий (рис. 3.3).
Модель реализуемости КА. Космический аппарат можно представить
состоящим из трех основных компонентов: корпуса (планера), силовой
установки, бортового оборудования, каждый из которых требует затрат
260
Рис. 3.3. Зависимость вероятности реализации КА от основных действующих факторов
на развитие и совершенствование.
Вероятность реализации зависит от наличных ресурсов и правильного
их распределения по основным компонентам, возможностям произво-
дства и проектно-конструкторским решениям.
Принятие тех или иных проектно-конструкторских решений и выбор
технологии определяет достижимый при этом технический прогресс и
научно-технический уровень разработок. Можно рассмотреть четыре
пути технического прогресса в проектировании и технологии каждого
компонента КА:
1) рационализаторские предложения;
2) изобретения;
3) изобретения на основе новых открытий;
4) открытия,
которым будут соответствовать:
- модернизированная конструкция и модернизированная технология;
- новая конструкция и новая технология;
- принципиально новая конструкция и принципиально новая
технология;
- новейшая конструкция и новейшая технология.
261
Рис. 3.4. Зависимость вероятности реализации от
затрат и времени разработки КА
Каждый из этих путей будет
отличаться:
- затратами;
- достижимым уровнем
(качеством);
- временем разработки.
Вероятность реализации
зависит от инвестиций и време-
ни разработки и определяется
требуемым качеством:
Р = 1 - ехр^ - у -Aj ,
где Р - вероятность реализа-
ции компонента КА;
С - затраты (на разработку,
серийное производство и в
эксплуатации или суммарные);
Т - время реализации или
жизненного цикла КА (компо-
нентов КА);
к - тот или иной показатель
качества.
Задаваемые вероятность
реализации и качество (напри-
мер, отношение массы полезной нагрузки к массе КА) определяют
соотношение стоимости и времени разработки. Отношение стоимости
ко времени разработки представляют собой тангенс угла наклона
секущей М на графике рис. 3.4, где показаны требуемые вложения и
время разработки.
Этими графиками можно оперировать как для компоненты КА, так
и для КА в целом:
ВКЛ
уР
t С
tgY = у
Как видно из графика рис. 3.4, соотношения для затрат в зависимости
от вероятности реализации имеют разный уровень для компонентов КА.
Этим графиком можно пользоваться для определения соотношения
вложений в каждую из компонент для одного уровня реализации.
262
Влияние вложенных средств на качество КА в целом зависит от
степени новизны проектно-конструкторских решений и технологии.
Вначале скачок в качестве имеет место при использовании изобрете-
ний на основе новых физических принципов. В дальнейшем совершен-
ствование идет на базе изобретений, развивающих предыдущие и,
наконец, рационализаторские предложения завершают совершенствова-
ние компоненты КА, - качество возрастает слабо. Нужен новый скачок
для следующего принципиально нового этапа.
Составляющие сложной технической системы и затраты. Любую
сложную техническую систему можно расчленить на принципиально
различные части. Так, КА можно представить, состоящим из целевого
оборудования, корпуса, двигательной установки и бортового оборудо-
вания. Каждый из этих компонентов может иметь свой вариант
выполнения, и таким образом сочетание вариантов по компонентам
определяет ту или иную степень новизны КА и его конфигурацию.
Каждый вариант требует своих затрат в зависимости от сложности
компонента; это также влияет на вероятность реализации. Чем сложнее
компонента, тем неопределеннее реализация тех или иных новшеств.
Прогнозирование последствий создания КА. Целесообразно в первую
очередь рассмотреть следующие составляющие последствий реализации
будущего КА.
1. Влияние на окружающую среду.
2. Влияние на ускорение научно-технического прогресса.
3. Возможность реализации научно-технических достижений в
народном хозяйстве.
4. Оценка масштаба применимости.
5. Возможности экспорта.
6. Оценка психологического фактора.
Вновь разрабатываемый КА должен подвергаться экспертизе по
оценке его влияния на окружающую среду. Существуют определенные
нормы санитарии, которые ограничивают уровень шума, содержание
токсичных веществ в воздухе и др. Должен быть оценен экономический
ущерб в результате отчуждения определенных площадей, связанных с
испытаниями в процессе разработки и эксплуатацией КА.
Разработка нового КА существенно стимулирует научно-технический
прогресс, так как ставит перед отраслями материаловедческие,
технологические и другие научные и технические проблемы, решение
которых способствует развитию этих отраслей.
Здесь имеется в виду возможность использования научно-технических
достижений, полученных в результате создания КА, для народного
хозяйства. Возникает необходимость разработки составных частей КА
по критериям технико-экономической эффективности, а также примене-
263
ния их в аналогичных изделиях. При разработке необходимо предусмат-
ривать возможность их модификации, т. е. улучшения характеристик.
Масштаб применимости агрегатов и систем в различных отраслях
промышленности определяет технико-экономическую целесообразность
разработки. Как правило, использование не по прямому назначению
требует определенной доработки агрегатов и систем. Прогнозирование
такого использования, например, изделий, снимаемых с прямого
применения, в народном хозяйстве дает возможность делать составные
части универсальными или легко допускающими модификацию, а
главное, обращать внимание на их технико-экономические показатели.
Что касается экспорта, то здесь может принести положительный
эффект продажа самих изделий, предоставления услуг за счет использова-
ния КА и продажи лицензий на технологию или изготовление этих
изделий.
264
Список литературы
1. Авдуевский В.С., Успенский Г.Р. Космическая индустрия. М.: Машиностроение, 1989,
568 с.
2. Авиационно-космические системы // Сб. статей под ред. Г.Е. Лозино-Лозинского и
А.Г. Братухина. М.: Изд-во МАИ, 1997, 416 с.
3. А гадкое В.С., Сире А.Ш. Метеорологические искусственные спутники // Сер.
Космонавтика, астрономия. М.: Знание. 1977, № 11, 64 с.
4. Александров С.Г., Федоров Р.Е. Советские спутники и космические корабли. М.: Изд-
во АН СССР, 1961,440 с.
5. Алешков М.Н., Жуков И.И. Физические основы ракетного оружия. М.: Воениздат,
1965, 464 с.
6. Алифанов О.М. Обратные задачи теплообмена. М.: Машиностроение, 1988. 280 с.
7. Андрейчук О.Б., Малахов Н.Н. Тепловые испытания космических аппаратов. М.:
Машиностроение, 1982, 143 с.
8. Андреянов В.В. и др. Автоматические планетные станции. М.: Наука, 1973. 280 с.
9. Аппазов Р.Ф., Сытин О.Г. Методы проектирования траекторий носителей и спутников
Земли. М.: Наука, 1987. 440 с.
10. АсташенковП.Т.АкадемикС.П. Коралев/Подред.ТруноваК.И. М.: Машинострое-
ние, 1969. 208 с.
11. Аэродинамика летательных аппаратов и гидравлики их систем / Под ред.
М.И. Ништа. Учебник. М.: Изд-во ВВИА им. Н.Е. Жуковского, 1981. 580 с.
12. Баженов В.И., Осин М.И. Посадка космических аппаратов на планеты. М.'.
Машиностроение, 1978, 159 с.
13. Бурдаков В.П., Зигель Ф.Ю. Физические основы космонавтики. М.: Атомиздат, 1975,
232 с.
14. Бурдаков В.П., Данилов Ю.И. Внешние ресурсы и космонавтика. М.: Атомиздат,
1976,552 с.
15. Вакуумная техника: Справочник / Фролов Е.С., Минайчев В.Е., Александрова А.Т.
и др. / Под общей редакцией Е.С. Фролова, В.Е. Мннайчева. М.: Машиностроение, 1985.
360 с.
16. Бушуев КД. Подготовка и осуществление программы ЭПАС //Сер. Космонавтика,
астрономия. М.: Знание, 1976, № 10, 72 с.
17. Вииииков К.Я. Новый расчет теплового баланса системы Земля - атмосфера //
Метеорология и гидрогеология. 1965, № 8, С. 32-37.
18. Волчков О.Д., Матюшев Ю.С. Выбор расчетных схем и расчет на прочность
элементов конструкций летательных аппаратов//Учебное пособие. М.: Изд-во МАИ, 1990,
48 с.
19. Вороинов-Вельямииов Б.А. Астрономия. М.: Учпедгиз, 1958, 144 с.
20. Гарук С.В., Гершензон В.Е. Космические системы дистанционного зондирования
Земли. М.: Издательство А и Б, 1997, 296 с.
21. Гнеденко Б.В., Беляев Ю.К., Соловьев А.Д. Математические методы в теории
надежности. М.: Наука, 1975, 524 с.
265
22. Гущии В.Н. Информ ационно-компьютерная технология (И К-технология) разработок
летательных аппаратов, г. Жуковский: Авиационный Печатный Двор, 2001, 248 с.
23. Гушии В.Н., Панкратов Б.М., Родионов АД. Основы устройства и конструирования
космических аппаратов. Учебное пособие для вузов. М.: Машиностроение, 1992. 250 с.
24. Гушии В.Н. Проектирование твердотопливных наполнителей / Учебное пособие.
М.: Изд-во МАИ, 1992, 46 с.
25. Гущин В.Н. Основы устройства ЛА. Часть 1. Основы твердотопливной техники /
Учебное пособие. М.: Изд-во МАИ, 1976, 50 с.
26. Гущии В.Н. Проектирование искусственных спутников Земли / Конспект лекций.
М.: МАИ, 1977, 2 с.
27. Гущин В.Н. Основы устройства ЛА. Ч. 2. Устройства баллистических ракет на
жидком топливе / Учебное пособие. М.: Изд-во МАИ, 1977. 62 с.
28. Гущин В.Н. Теория баллистического проектирования ракет с РДТТ (Основы
автоматизированного проектирования) / Учебное пособие. М.: Изд-во МАИ, 1977, 132 с.
29. ГильбергЛ.А. От самолета к орбитальному комплексу М.: Просвещение, 1992, 287 с.
30. Двигательные установки ракет на жидком топливе. М.: Мир, 1966, 404 с.
31. Дементьев Г.П., Захаров А.Г., Базаров Ю.К. Физико-технические основы создания
и применения космических аппаратов. М.: Машиностроение, 1987, 263 с.
32. Добронравов В.В. Техника космических полетов. М.: Знание, 1962, с. 40.
33. Жуковский Н.Е. Кинематика, статика, динамика точки. М.: Оборонгиз, 1939.
34. Залетаев В.М., Капинос Ю.В., Сургучев О.В. Расчет теплообмена космического
аппарата. М.: Машиностроение, 1979.
35. Зигель Р., Хауэлл Дж. Теплообмен излучением / Пер. с англ, под ред. Б.А. Хрустале-
ва. М.: Мир, 1975, 234 с.
36. Золотов А.А., Вараев В.К. Выбор проектных решений ЛА с учетом согласования
массы, надежности и ресурса многоразовых систем / Учебное пособие. М.: Изд-во МАИ,
2000. 84 с.
37. Иванова Н.В., Гущии Л.В., Гущин В.Н. Методы проектирования твердотопливных
ракет-носителей с учетом унификации //Авиационные и космические новости, № I, 1993.
38. Излучательные свойства твердых тел: Справочник / Под общ. ред. А.Б. Шейндлина.
М.: Энергия, 1974, 472 с.
39. Имитация тепловых условий космического пространства для испытаний космических
летательных аппаратов: По материалам иностранной печати за 1960-1966 гт. // ЦАГИ БНИ,
Обзор № 197, 1966, 247 с.
40. Инженерный справочник по космической технике / Под ред. А.В. Солодова. М.:
Воениздат, 1977, 430 с.
41. Калашников Н.И. Системы связи через искусственные спутники Земли. М.: Связь,
1969.
42. Камалов В.С. Производство космических аппаратов. М.: Машиностроение, 1982,
280 с.
43. Кобранов Г.П., Цветков А.П., Белов А.И., Сухнев В.А. Внешний теплообмен
космических аппаратов. М.: Машиностроение, 1977, 104 с.
44. Коваль А.Д., Тюрин Ю.А. Космос - Земля. М.: Знание, 1979.
45. Конструирование автоматических космических аппаратов / Под ред. Д.И. Козлова.
М.: Машиностроение, 1996, 448 с.
46. Колесников А.В., Сербии В.И. Моделирование внешнего теплообмена космических
аппаратов. М.: ООО "Информация - XXI век", 1997, 170 с.
266
47. Кондратьев К.Я., Якушевская К.Е. Угловое распределение уходящего теплового
излучения в различных областях спектра//В сб.: Искусственные спутники Земли. М.: Изд-во
АН СССР, 1962, вып. 14, С. 13-30.
48. Космические аппараты / Под ред. К.П. Феоктистова. М.: Воениздат, 1983.
49. Космонавтика. Маленькая энциклопедия / Гл. ред. В.П. Глушко. 2-е изд., доп. М.:
Сов. Энциклопедия, 1970, 592 с.
50. Космонавтика: Энциклопедия / Под ред. Глушко В.П., ред. кол.: В.П. Бармин,
К.Д. Бушуев, В.С. Верещетин и др. М.: Сов. Энциклопедия, 1985, 528 с.
51. Краффт А. Эрике. Будущее космической индустрии: Пер. с англ. М.: Машинострое-
ние, 1979.
52. Кузнецов А.А. Аэродинамика и динамика летательных аппаратов. Конспект лекций.
Ч. 2. М.: Изд-во МАИ, 1966, 165 с.
53. Латышев Л.А. Введение в авиационную и космическую технику / Учебное пособие
для технических вузов. М.: Машиностроение, 1979, 136 с.
54. Левантовский В.И. Механика космического полета в элементарном изложении. М.:
Наука, 1970, 492 с.
55. Левантовский В.И. Механика космического полета в элементарном изложении. М.:
Наука, 1980.
56. Лей В. Ракеты и полеты в космос. М.: Воениздат, 1961, с. 440. (См. также Willy Ley.
Rockets, missiles and space travel. New York, Viking Press, 1958.)
57. Лизин B.T., Пяткин B.A. Проектирование тонкостенных конструкций. М.:
Машиностроение, 1976, 344 с.
58. Лох У. Динамика и термодинамика спуска в атмосфере планет. М.: Мир, 1966, 276 с.
59. Максимов Г.Ю. Теоретические основы разработки космических аппаратов. М.:
Наука, 1980.
60. Малышев Г.В., Блейх Х.С., Зериов В.И. Проектирование автоматических
космических аппаратов. Вероятностные методы анализа. М.: Машиностроение, 1982, 152 с.
61. Маров М.Я. Планеты солнечной системы: 2-е изд., доп. и перераб. М.: Наука, 1986,
320 с.
62. Мишин В.П. Проектирование и конструкция ЛА. Ч. 1. С.П. Королев и советская
ракетно-космическая техника. М.: МАИ, 1984, 98 с.
63. Мишин В.П., Осии М.И. Введение в машинное проектирование летательных
аппаратов. М.: Машиностроение, 1978.
64. Мишин В.П. Почему мы не слетали на Луну? // Новое в жизни, науке, технике: Сер.
"Космонавтика, астрономия"; № 12. М.: Знание, 1990, 64 с.
65. Мишин В.П. От создания баллистических ракет к ракетно-космическому
машиностроению. М.: Информ - Знание, 1997. 127 с.
66. Моделирование тепловых режимов космического аппарата и окружающей его среды
/ Козлов Л.В., Нусинов М.Д. и др. Под ред. Акад. Г.И. Петрова. М.: Машиностроение, 1971,
382 с.
67. Морей, Горшей. Тепловое проектирование и испытание полномасштабной модели
аппарата для посадки на планеты // Вопросы ракетной техники, 1970, № 5, С. 3-20.
68. Мороз В.И. Физика планет. М.: Наука, 1967, 496 с.
69. Научное использование искусственных спутников Земли И Сб. статей. М.:
Иностранная литература, 1960. 404 с.
70. Новиков В.Н., Вейтии В.Е. Введение в ракетно-космическую технику / Учебное
пособие. М.: Изд-во МАИ, 1997, 212 с.
267
71. Нусинов М.Д. Воздействие и моделирование космического вакуума. М.:
Машиностроение, 1982, 176 с.
72. Околоземное космическое пространство. Справочные данные / Пер. с англ, под ред.
Ф.С. Джонсона. М.: Мир, 1966. 191 с.
73. Осима К., Осима Ю. Метод теплового расчета космического аппарата // Вопросы
ракетной техники. 1969, № 8, С. 3-14.
74. Основы теплопередачи в авиационной и ракетно-космической технике /
В.С. Авдуевский, Б.М. Галицейский, Г.А. Глебов и др. М.: Машиностроение, 1975, 624 с.
75. Паничкин Н.И. и др. Конструкция и проектирование космических летательных
аппаратов. М.: Машиностроение, 1986.
76. Перов В.Д., Стахов Ю.И, Космические аппараты исследуют Луну/Сер. Космонавти-
ка, астрономия. М.: Знание. 1979, № I, 74 с.
77. Победоносцев Ю.А. Искусственный спутник Земли. М.: Знание, 1957, 108 с.
78. Победоносцев Ю.А. Путь в космос. Достижения советской ракетной техники. М.:
Воениздат, 1962, 104 с.
79. Полежаев Ю.В., Юревич Ф.Б. Тепловая защита//Под ред. А. В. Лыкова. М.: Энергия,
1976, 392 с.
80. Поток энергии Солнца и его измерения: Сб. статей // Под ред. О. Уайта, пер. с англ.
М.: Мир, 1980, 558 с.
81. Разыграев А.П. Основы управления полетом космических аппаратов и кораблей.
М.: Машиностроение, 1977.
82. Романов В.В., Хашев Ю.М. Химические источники тока. М.: Советское радио, 1978.
83. Системы спутниковой связи / Под ред. Л.Я. Кантора. М.: Радио и связь, 1992.
84. Скотт. Проектирование и испытание системы терморегулирования КЛА 1TOS-1 И
Вопросы ракетной техники, 1972, № 8, С. 8-19.
85. Смирнов Г.Д. Управление космическими аппаратами. М.: Наука, 1978.
86. Соколов С.С. Новое поколение "Венер" изучает планету / Сер. Космонавтика,
астрономия. М.: Знание. 1976, № 12, 66 с.
87. Соловьев Ц.В., Смирнов А.Я. Проектирование и конструкции космических
летательных аппаратов. Конспект лекций. Ч. 1. М.: Изд-во МАИ, 1972.
88. Справочник по космонавтике. М.: Воениздат, 1966. 328 с.
89. Тарасов Е.В. Космонавтика. М.: Машиностроение, 1977.
90. Теплообмен н тепловой режим космических аппаратов / Под ред. Дж. Лукаса, пер.
с англ, под ред. Н.А. Анфимова. М.: Мир, 1974, 249 с.
91. Тихонравов М.К. Технические и физические проблемы космонавтики: Конспект
лекций (Лекция 1-15). М.: Изд-во МАИ, 1971. 1975.
92. Фаворский О.Н., Кадаиер Я.С. Вопросы теплообмена в Космосе. М.: Высшая школа.
1972, 280 с.
93. Феодосьев В.И. Основы техники ракетного полета. М.: Наука, 1979, 496 с.
94. Физические основы ракетного оружия. М.: Воениздат, 1972, 312 с.
95. Фридлендер Г.О. Инерциальные системы навигации. М.: Физматгиз, 1961. 156 с.
96. Штерифельд А. Искусственные спутники Земли.
97. Brij N. Agraval. Design of geosynchronous spacecraft. Prentice-hall, Inc, 1986.
98. Элике К. Космический полет. Т. 2: Динамика, Ч. 1. М.: Наука, 1969, 572 с.
99. Dodel Hans und Baumgart Michael. Satellitensysteme fur kommunikation. Femsehen und
Rundfunk, Theorie und Technologie. 1986.
100. Martin Jams. Communications satellite systems, 1978.
101. Trinogga L.A. and others. Satellite broadcasting systems. 1985.
268
Оглавление
Введение ................................................................. 3
Глава /. Космические аппараты ............................................ 7
1.1. Классификация космических аппаратов............................... 7
1.2. Искусственные спутники Земли ..................................... 9
1.2.1. Народнохозяйственные искусственные спутники Земли ......... 9
1.3. Межпланетные космические станции ................................ 14
1.3.1. Космические аппараты для исследования Луны ............... 14
1.3.2. Космические аппараты для исследования Венеры.............. 24
1.3.3. Космические аппараты для исследования Марса ............. 32
1.3.4. Космические аппараты для исследования других планет,
астероидов и комет......................................... 36
1.4. Пилотируемые космические корабли ................................ 37
1.4.1. Общие требования к конструктивно-компоновочным
схемам и основным системам и агрегатам ......................... 37
1.4.2. Конструктивно-компоновочная схема и устройство
корабля-спутника "Восток" ....................................... 38
1.4.3. Конструктивно-компоновочная схема корабля
"Восход" и его устройство ....................................... 48
1.4.4. Конструктивно-компоновочная схема и устройство
корабля "Меркурий".............................................. 49
1.4.5. Конструктивно-компоновочная схема и устройство
корабля "Джемини"............................................... 53
1.4.6. Конструктивно-компоновочная схема и устройство
корабля "Аполлон"............................................... 58
1.4.7. Конструктивно-компоновочная схема и устройство
корабля "Союз".................................................. 65
1.5. Многоразовые космические аппараты ............................... 79
1.5.1. "Спейс шаттл" ............................................ 79
1.5.2. "Буран"................................................... 79
1.6. Орбитальные космические станции.................................. 82
1.6.1. "Салют" ................................................ 82
1.6.2. "Мир" .................................................... 84
1.6.3. Международная космическая станция ........................ 94
Глава 2. Механика космического движения................................. 101
2.1. Характеристика космического пространства........................ 101
2.1.1 Общие сведения............................................ 101
2.1.2. Скорости в космическом пространстве ..................... 104
269
2.1.3. Расстояния в космическом пространстве.................... 104
2.2. Законы Иоганна Кеплера и закон всемирного тяготения
Исаака Ньютона ..................................................... 105
2.2.1. Законы движения небесных тел............................. 105
2.2.2. Основы движения космических аппаратов.................... 108
2.2.3. Орбиты космических аппаратов ............................ 109
2.2.4. Задачи трех тел .......................................... ПО
2.2.5. Сферы действия планет ................................... 114
2.2.6. Переходы между орбитами ................................. 116
2.2.7. Использование гравитационных сил при полетах
в космическом пространстве ............................... 117
2.2.8. Траектории спуска с орбиты .............................. 119
2.3. Сведения о Земле................................................ 121
2.3.1. Общие сведения........................................... 121
2.3.2. Свойства атмосферы....................................... 123
2.4. Особенности движения ИСЗ........................................ 124
Глава 3. Факторы космического пространства и их влияние на работу
элементов конструкции космического аппарата............................. 131
3.1. Общие сведения ................................................. 131
3.2. Нагрузки, действующие на КА при выведении и движении
по расчетной траектории ........................................ 132
3.2.1. Характер нагрузок ....................................... 132
3.2.2. Особенности учета типовых нагрузок для большинства
конструкций КА ........................................... 133
3.3. Влияние глубокого вакуума на конструкционные материалы ........ 135
3.4. Воздействие космической радиации на КА......................... 140
3.5. Микрометеорное воздействие..................................... 144
3.6. Трение в условиях глубокого вакуума............................ 147
3.6.1. Общие требования ........................................ 147
3.6.2. Специальные консистентные смазки......................... 149
3.6.3. Антифрикционные покрытия................................. 150
3.6.4. Антифрикционные материалы на основе пластических
масс (самосмвзывающиеся пластмассы)....................... 151
3.6.5. Варианты, позволяющие избежать трущихся пар в
условиях вакуума .............................................. 151
3.7. Герметизация отсеков .......................................... 154
3.7.1. Газовый состав и температура герметических
отсеков ИСЗ.................................................... 154
3.7.2. Обеспечение герметичности отсеков КА .................... 154
3.7.3. Типы герметизации стыков ................................ 155
3.7.4. Герметизация трубопроводов .............................. 158
3.7.5. Испытание отсеков на герметичность....................... 158
270
Глава 4. Некоторые вопросы проектирования космических аппаратов......... 159
4.1. Логика и технология проектирования КА .......................... 159
4.1.1. Особенность процесса проектирования КА................... 159
4.1.2. Процесс проектирования КА................................ 160
4.1.3. Модель существования КА ................................. 160
4.1.4. Модель возможности ...................................... 160
4.1.5. Модель движения ......................................... 161
4.1.6. Модель масс.............................................. 161
4.1.7. Логика автоматизированного проектирования................ 161
4.2. Математическая модель КА........................................ 165
4.3. Методика расчета затрат на разработку н серийное
производство КА...................................................... 169
4.3.1. Общие статьи затрат...................................... 169
4.3.2. Затраты на разработку конструкции ....................... 170
4.3.3. Стоимость служебных систем .............................. 172
4.3.4. Стоимость ИСЗ без учета стоимости целевой
аппаратуры для КСИ ............................................ 173
4.3.5. Затраты на НИОКР ........................................ 173
4.3.6. Затраты в серийном производстве.......................... 174
4.4. Унификация бортовых систем КА как средство
снижения затрат..................................................... 175
4.4.1. Общий подход к решению задачи унификации ИСЗ............. 175
4.4.2. Математическая формулировка задачи ...................... 176
4.4.3. Варианты постановок задачи унификации.................... 180
4.4.4. Применение метода неопределенных
множителей Лагранжа ........................................... 185
Глава 5. Бортовые системы .............................................. 187
5.1. Состав бортовых систем ......................................... 187
5.2. Принципы конструирования КА .................................... 192
5.2.1. Некоторые общие положения ............................... 192
5.2.2. Некоторые статистические данные по массовой
сводке КА...................................................... 194
5.2.3. Функциональные зависимости на примере ИСЗ
связи и телевещания ........................................... 195
5.3. Системы терморегулирования ..................................... 197
5.3.1. Назначение системы терморегулирования.................... 197
5.3.2. Законы лучистого теплообмена............................. 198
5.3.3. Внешние тепловые потоки.................................. 202
5.3.4. Пассивные системы терморегулирования .................... 206
5.3.5. Активные методы регулирования температуры КА ............ 209
5.3.6. Радиационные характеристики материалов................... 212
5.3.7. Модели отказов системы терморегулирования................ 214
5.4. Системы энергопитания .......................................... 217
5.4.1. Потребители энергии на борту КА.......................... 217
271
5.4,2. Солнечные батареи....................................... 221
5.4.3. Аккумуляторные батареи.................................. 230
5.4.4. Топливные элементы ..................................... 233
5.4.5. Ядерные энергетические установки........................ 237
5.4.6. Другие типы энергетических установок.................... 239
5.5. Системы ориентации и стабилизации ............................. 241
5.5.1. Классификация систем ................................... 241
5.5.2. Гравитационная система ориентации....................... 246
5.5.3. Аэродинамическая система ориентации..................... 248
5.5.4. Электромагнитная система ориентации..................... 250
5.5.5. Ориентация и стабилизация с помощью газовых сопл........ 252
5.5.6. Системы ориентации с помощью инерционных
маховиков, установленных в карданном подвесе ................. 253
Заключение. Методика прогнозирования развития КА ......................... 258
Список литературы ..................................................... 265
УЧЕБНОЕ ИЗДАНИЕ
ГУЩИН Виталий Николаевич
ОСНОВЫ УСТРОЙСТВА
КОСМИЧЕСКИХ АППАРАТОВ
Редактор О.Ю. Срибная
Дизайнер Т.Н.Галицына
Технический редактор Т.Н. Андреева
Корректор Т.Р. Колганова
Лицензия ИД № 05672 от 22.08.01 г.
Сдано в набор 24.03.03.
Бумага офсетная.
Уч.-издл. 17,19.
Подписано в печать 13.08.03.
Печать офсетная.
Тираж 1000 экз.
Формат 60x88 1/16
Усл. печ.л. 16,66.
Заказ 8620
ФГУП "Издательство "Машиностроение", 107076, Москва, Стромынский пер.. 4
Отпечатано в полном соответствии с качеством предоставленного оригинал-макета
в ППП «Типография «Наука» 121099, Москва, Шубииский пер.. 6
272