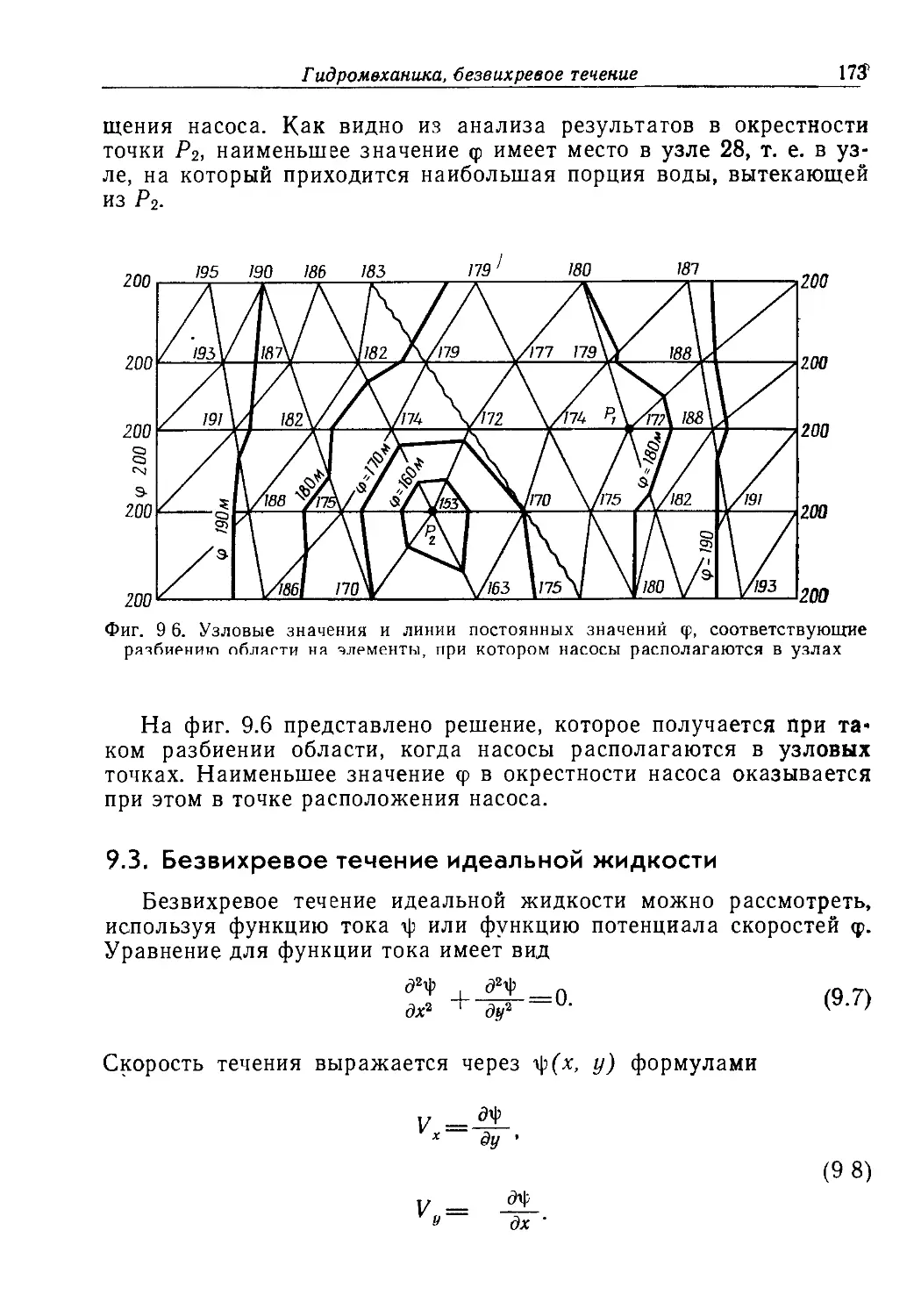
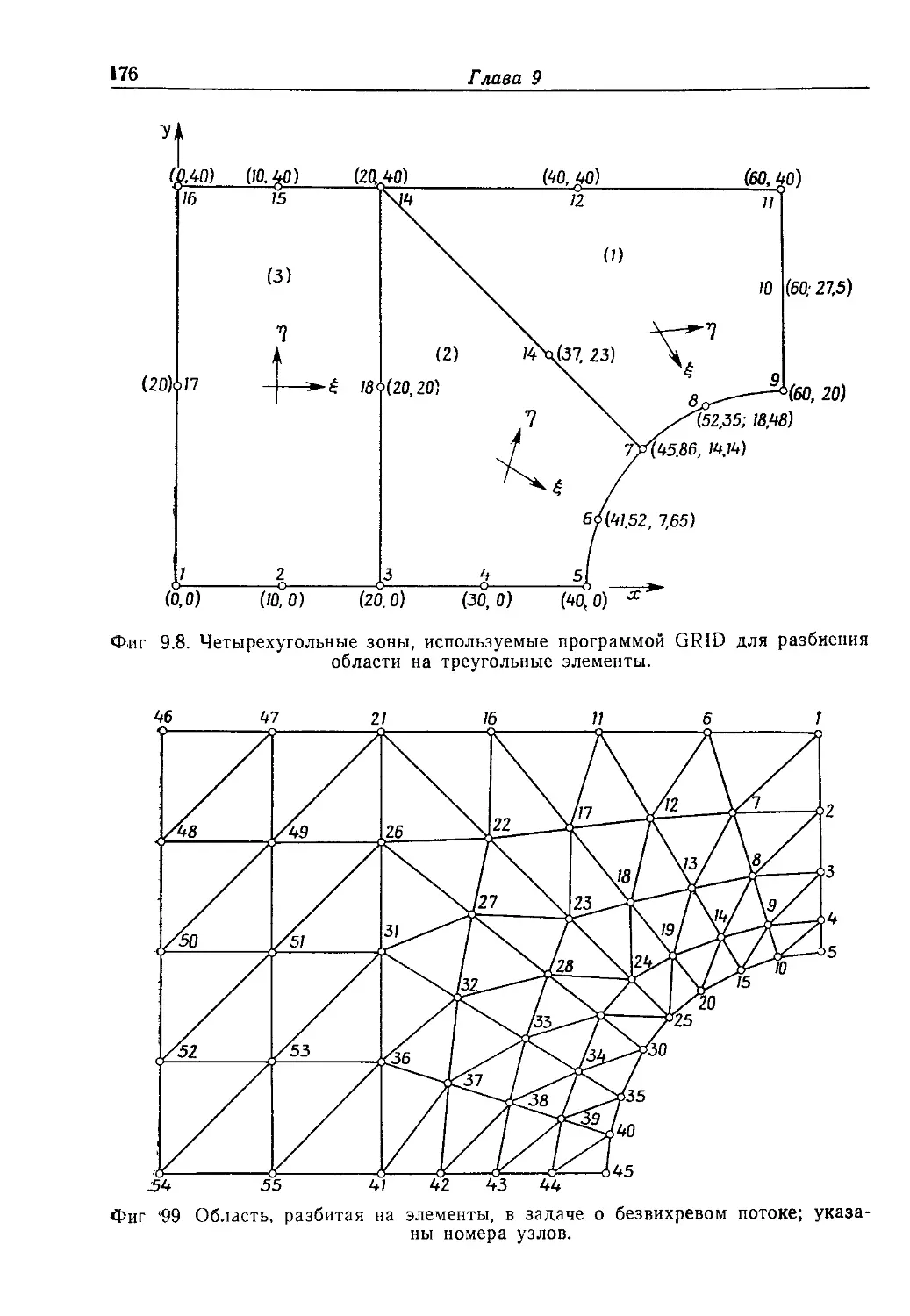
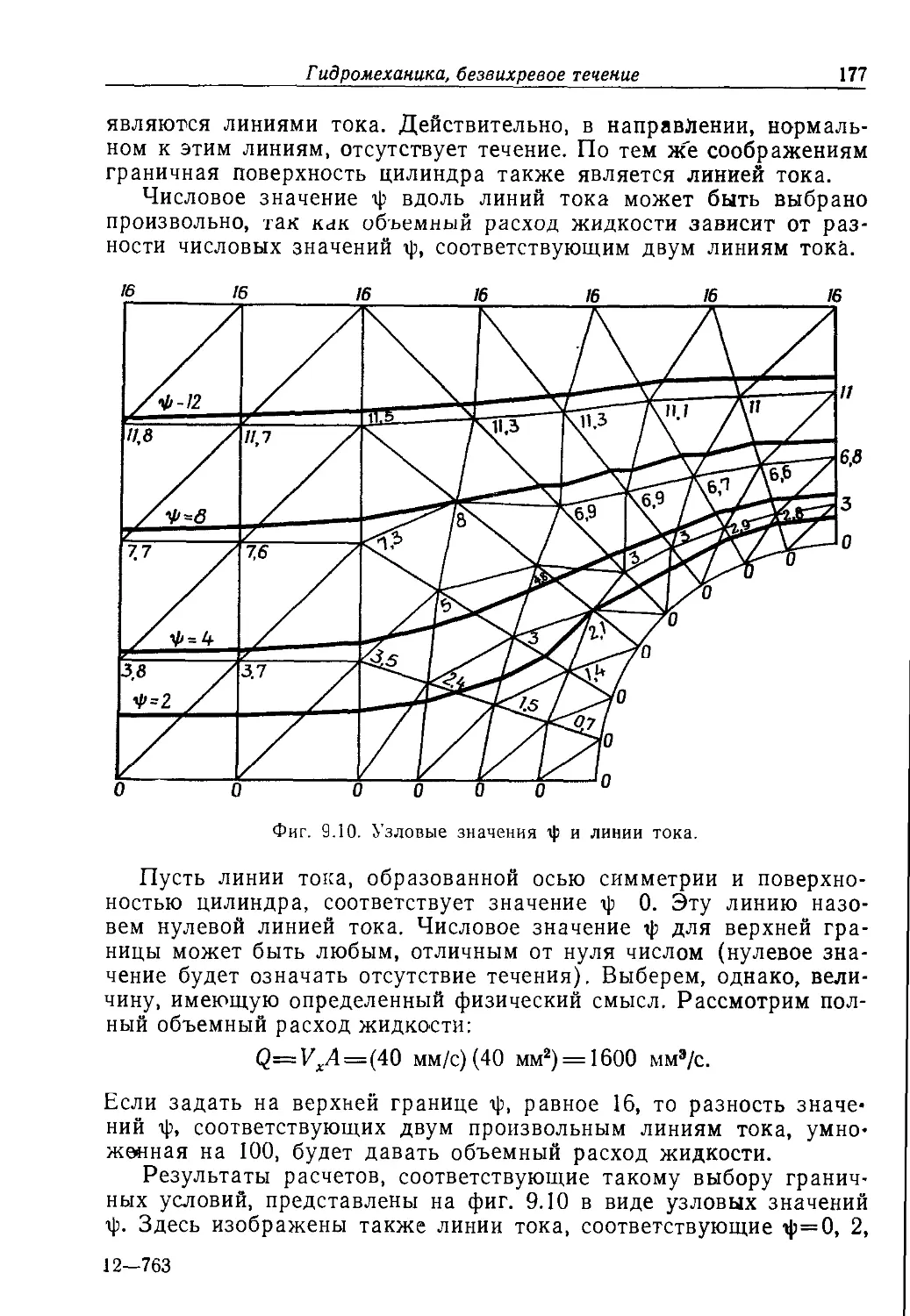
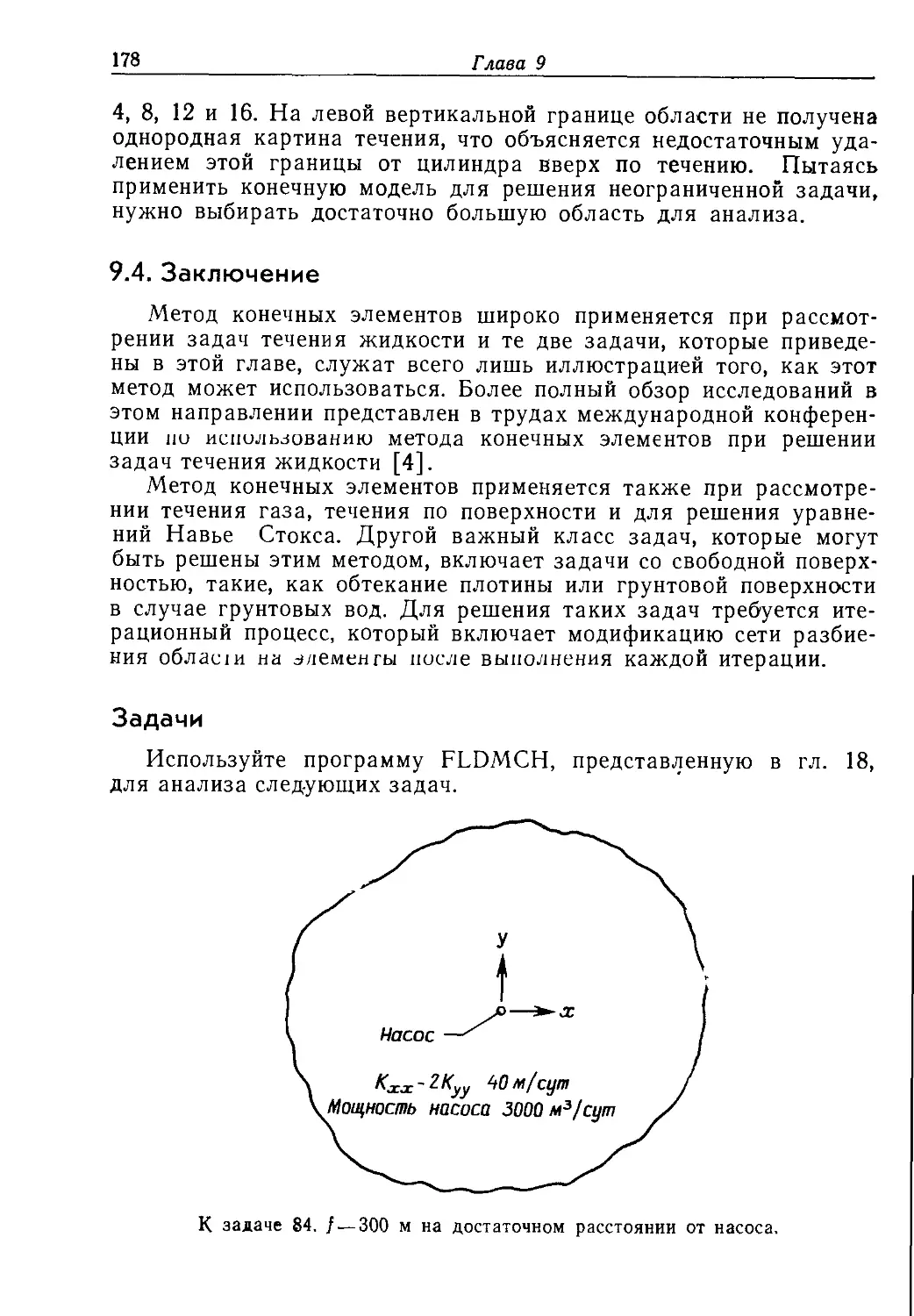
/
























































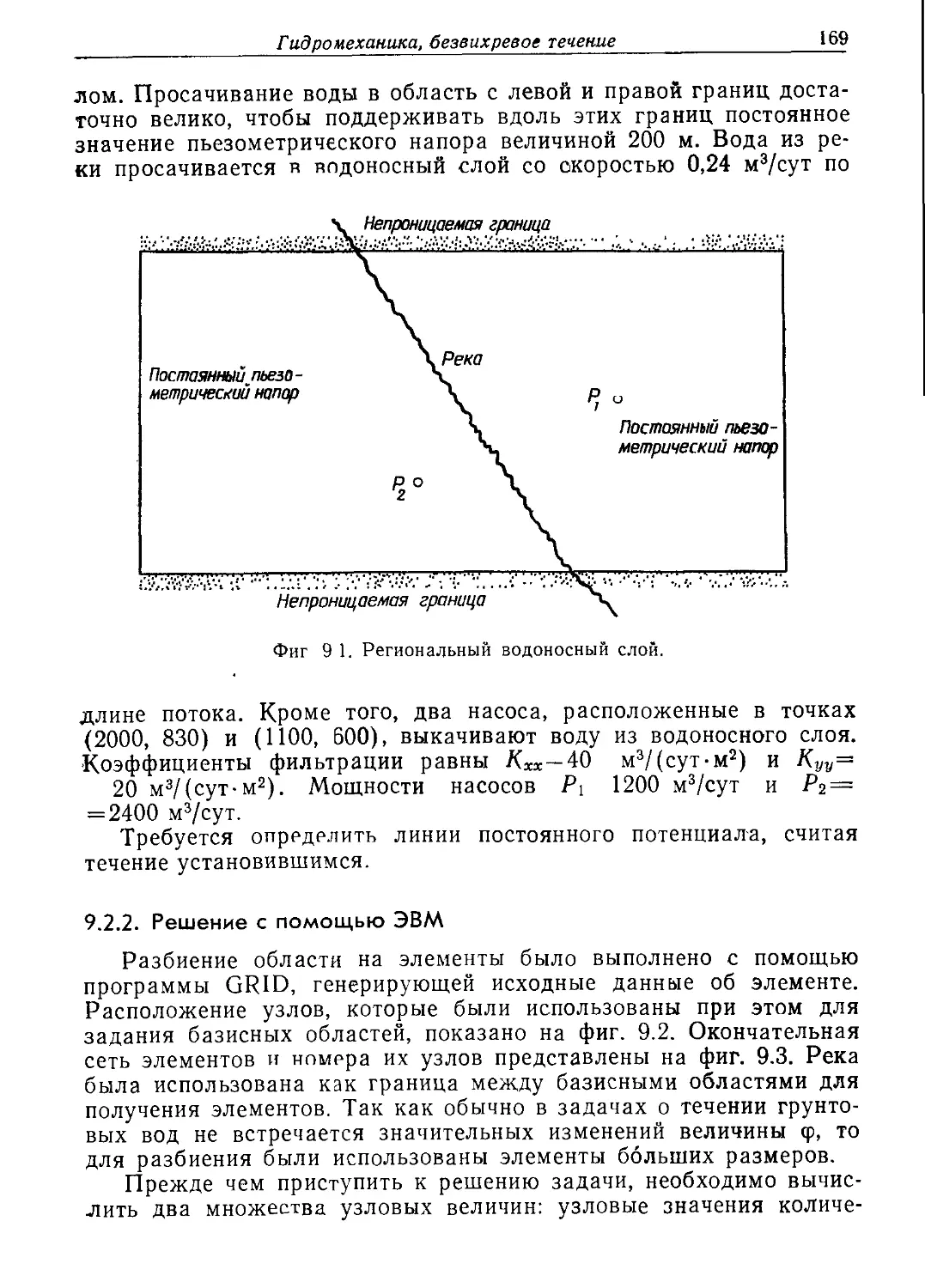
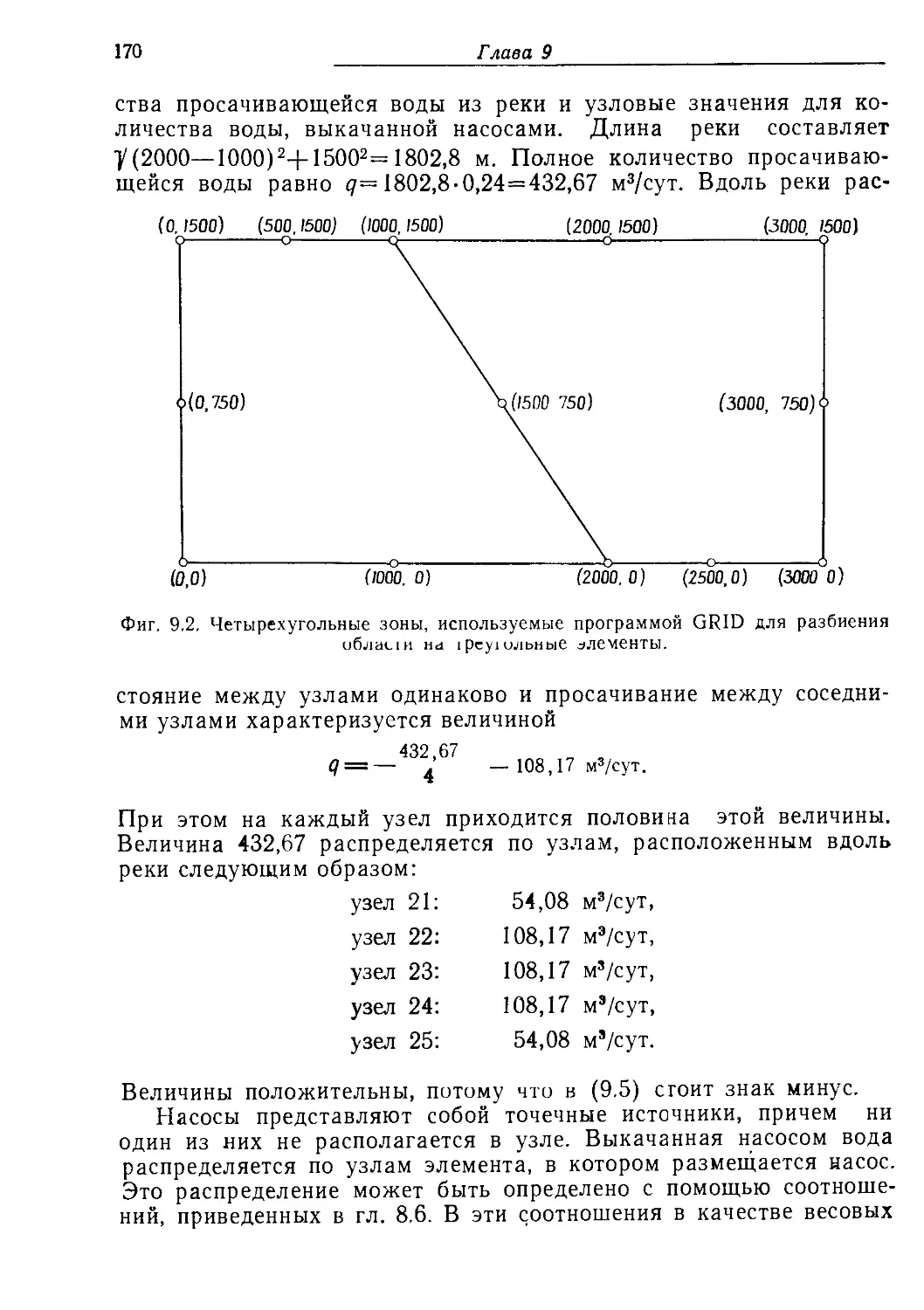
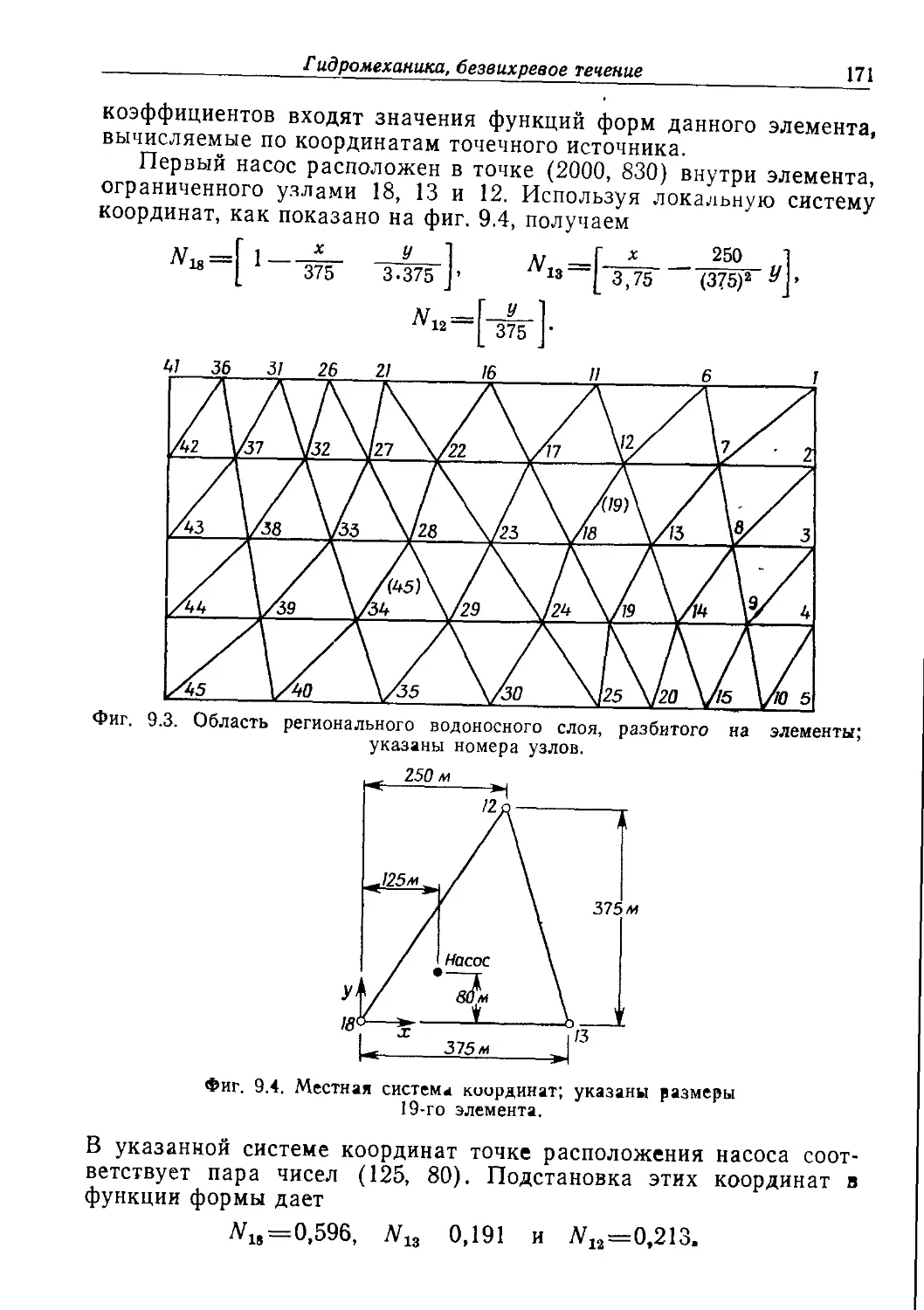
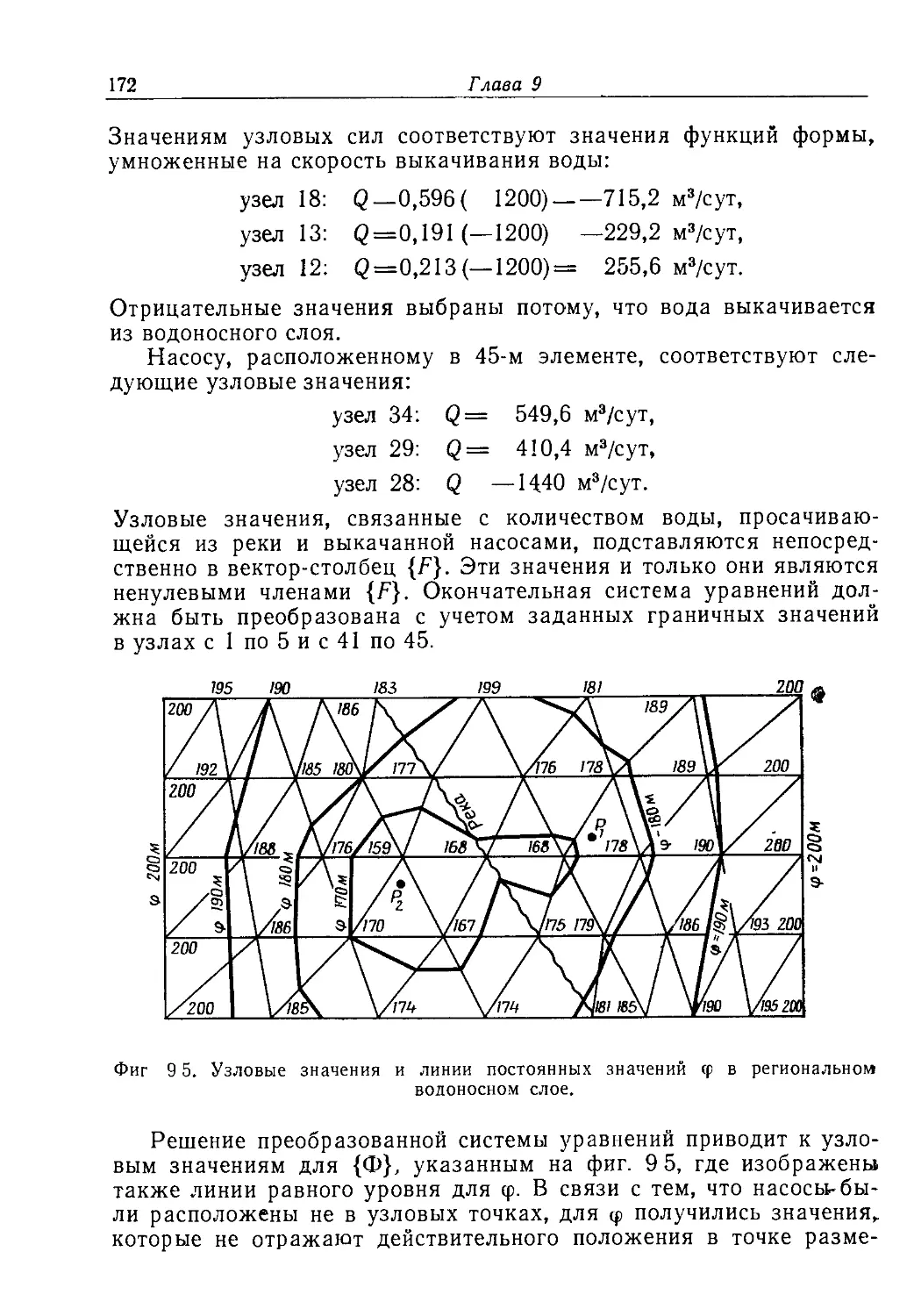



























































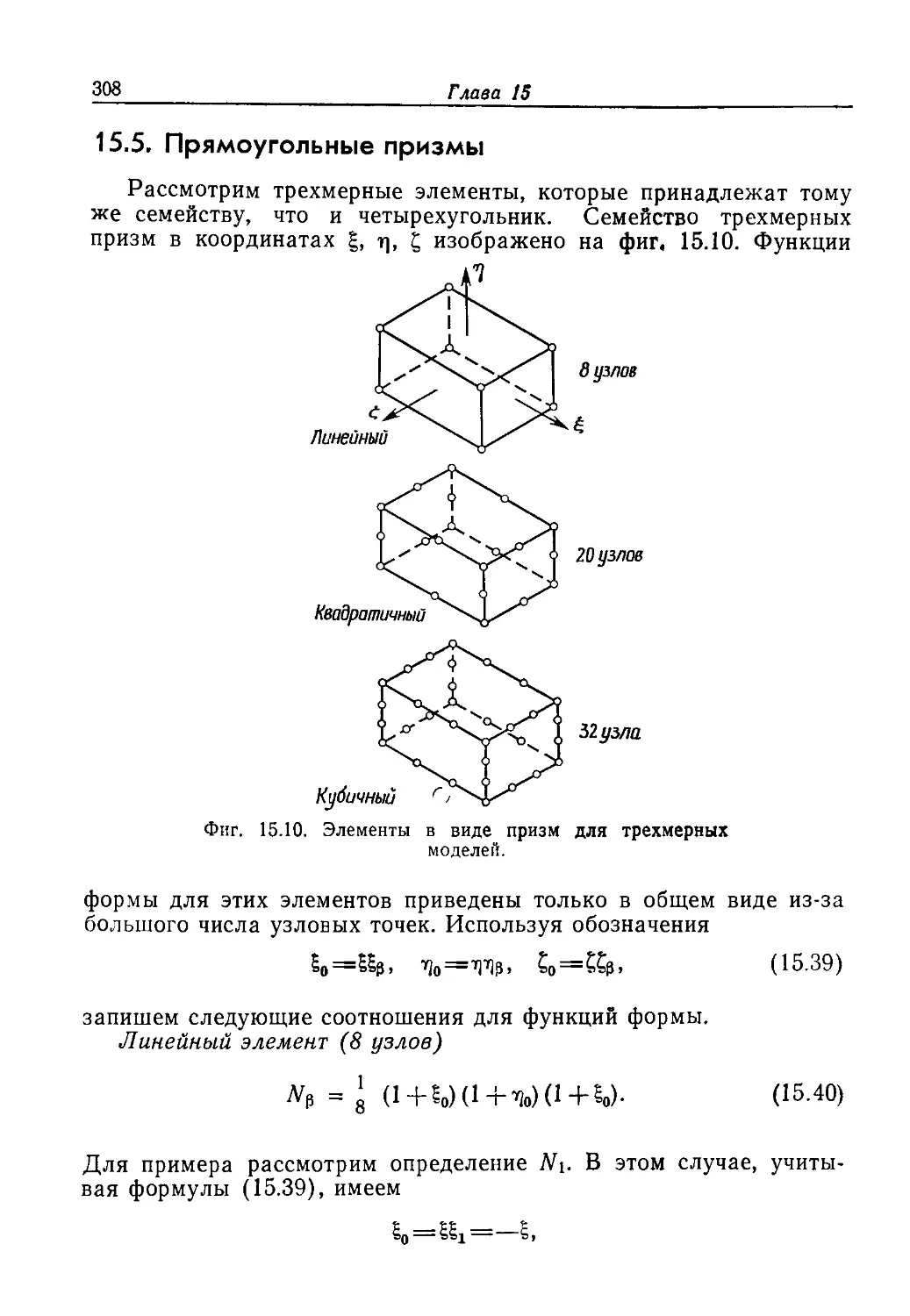



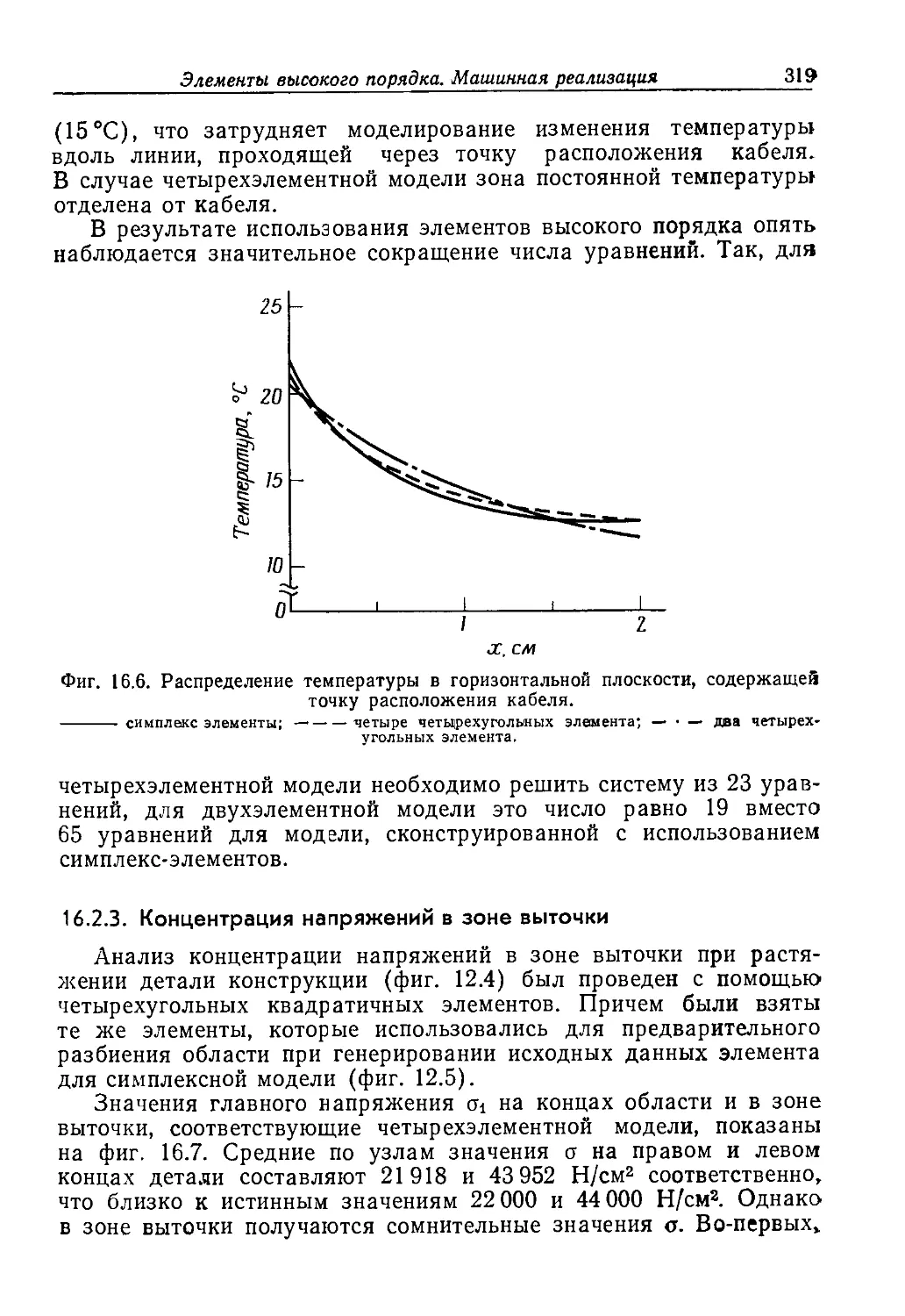





























Text
Applied
Finite Element
Analysis
Larry J. Segerlind
Associate Professor
Department of Agricultural Engineering
Michigan State University
John Wiley and Sons, Inc.
New York/London/Sydney/Toronto
1976
Л. СЕГЕРЛИНД
ПРИМЕНЕНИЕ
МЕТОДА
КОНЕЧНЫХ
ЭЛЕМЕНТОВ
Перевод с английского
канд. физ.-мат. наук
А. А. ШЕСТАКОВА
под редакцией
Д-ра физ.-мат. наук
Б. Е. ПОБЕДРИ
ИЗДАТЕЛЬСТВО
«МИР»
Москва 1979
УДК 619.3
Книга представляет собой руководство по широко используемому в настоя-
настоящее время методу конечных элементов, позволяющему получать численные реше-
решения инженерных, физических и математических задач. Детальное обсуждение
основных идей метода сопровождается примерами, иллюстрирующими технику
его применения. Приводится большое число простых программ, написанных на
алгоритмическом языке ФОРТРАН и служащих учебиым целям.
Книга предназначена для ииженеров-конструкторов, специалистов в области
механики сплошных сред, физиков, математиков, а также для аспирантов и сту-
студентов старших курсов техиических вузов.
Редакция литературы по новой технике
1702070000
20204—171 Copyright © 1976 by John Wiley & Sons, Inc All
041@1) 79 — rights reserved. Authorized translation from English
language edition, published by- John Wiley & Sons,
Inc.
© Перевод на русский язык, «Мир», 1979
Л. Сегерлинд
ПРИМЕНЕНИЕ МЕТОДА КОНЕЧНЫХ ЭЛЕМЕНТОВ
Ст. научный редактор Л. Якименко. Мл. научный редактор Е. Орлова. Художник Е. Са«
мойлов. Художественный редактор Л. Безрученков. Технический редактор Г. Алюлииа.
Корректор В. Соколов
ИБ № 1259
Сдано в набор 19.07.78. Подписано к печати 08.02.7g
Формат 60X90'/ie. Бумага кн жури.
Гарнитура латинская. Печать высокая. Объем 12,25 бум. л.
Усл. печ. л. 24,50. Уч.-изд. л. 21,10. Тираж 12000 экз. Зак. 763
Цена 1 р. 80 к.
Издательство «Мир> Москва, 1-й Рижский пер., 2.
Московская типография № 11 Союзполиграфпрома при Государственном комитете СССР
по делам издательств, полиграфии и книжной торговли.
Москва, 113105, Нагатинская ул., д. 1.
ПРЕДИСЛОВИЕ РЕДАКТОРА ПЕРЕВОДА
Перед каждым вычислителем стоит проблема — получить ре-
решение важной практической задачи с наименьшими затратами ма-
машинного времени и наперед заданной точностью.
В подходе к решению указанной проблемы можно выделить два
направления: математическое (теоретическое) и инженерное
(практическое). Эти направления можно проследить на одном из
самых распространенных и «модных» в настощее время методов
решения задач математической фйаики — методе конечных элемен-
элементов (МК.Э). Представители первого направления (теоретики) час-
часто называют этот метод вариационно-разностным, подчеркивая
тем самым его математическую природу. Они занимаются мате-
математическим обоснованием МК.Э, т. е. проводят теоретический ана-
анализ его сходимости и точности реализации. Представители же вто-
второго маправления (инженеры) решают довольно сложные техииче-
ские задачи, часто не задумываясь над строгим обоснованием при-
применяемых ими приемов. Однако, чтобы не получить «кота в меш-
мешке», они проверяют работу построенных алгоритмов и программ
•на известных точных решениях.
Наиболее полно отражают современное состояние первого и
второго направлений соответственно книги Г. Стренга и Дж. Фик-
Фикса [I] и О. Зенкевича [2]. Эти направления интенсивно разви-
развиваются, взаимно дополняя и обогащая друг друга.
Предлагаемая советскому читателю книга Л. Сегерлинда не
содержит существенно новых результатов ни по первому, ни по
второму направлениям. Тем не менее она окажет несомненную
пользу широкому кругу читателей, ибо представляет собой хоро-
хороший самоучитель по МК.Э. Она предназначена для всех, кто хочет
овладеть практическими основами МКД «набить руку» в решении
простейших задач. Проработав данную книгу, читатель легко спра-
справится с составлением сложной программы для интересующей его
задачи и сможет изучать тонкие вопросы МК.Э по монографиям и
периодической литературе.
Следует отметить, что автор ссылается в оаио&ном на работы
американских авторов, хотя большой вклад в развитие МК.Э внес-
внесли советские исследователи [6—8, 13—17] и ученые других стран
[3]; отметим, например, работы французских математиков
Предисловие редактора перевода
[4, 5]. Идеи метода конечных элементов используются советскими
учеными при решении различных технических проблем [9—12].
Мы надеемся, что эта книга будет с интересом принята студен-
студентами, аспирантами, инженерами и научными сотрудниками самых
различных областей науки и техники.
Б. Е. Победря
ЛИТЕРАТУРА
1. Стренг Г., Фикс Дж. Теория метода конечных элементов. — М.: Мир, 1977.
2. Зенкевич О. Метод конечных элементов в технике. — М.: Мир, 1975.
3. Метод конечных элементов в строительной механике и механике сплошных"
сред, Библиографический указатель. Зарубежная литература, 1970—1972, Л.>
вып. 1—2, 1973.
4. Обэн Ж. П. Приближенное решение эллиптических краевых задач. — М : Мир,
1977.
5. Ciarlet P. G. The Finite Element Method for Elliptic Problems, North-Holland,
Amsterdam, 1978.
6. Розин Л. А., Основы метода конечных элементов в теории упругости. Л.,
изд во ЛПИ, 1972.
7. Розин Л. А. Метод конечных элементов в приложении к упругим системам.—
М.: Стройиздат, 1977.
8. Корнеев В. Г. Схемы метода конечных элементов высоких порядков точно-
точности, изд-во ЛГУ, 1977.
9. Безухов Н. И., Лужин О. В. Приближение методов теории упругости и пла-
пластичности к решению инженерных задач. М.; Высшая школа, 1974.
10. Постнов В. А, Хархурим И. Я. Метод конечных элементов в расчетах судо-
судовых конструкций. -М.: Судостроение, 1974.
11. Александров А. В. и др. (под общей редакцией А. Ф. Смирнова). Методки
расчета стержневых chcicm, пластин и оболочек с использованием ЭЦНМ,—
М.: Стройиздат, 1976, ч. 1, ч. 2.
12. Слесарев И. С, Сиротин А. М. Вариационно разностные схемы в теории пе-
переноса нейтронов. — М.: Атомиздат, 1978.
13. Оганесян Л. А., Ривкинд В. Я., Руховец Л. А. Вариационно разностные мето-
методы решения эллиптических уравнений. Сб. «Дифференциальные уравнения к
их приложение». Вильнюс, вып. 5, 1973, вып. 8, 1974.
14. Михлин С. Г. Вариационно сеточная аппроксимация. Сб. «Численные методы
и автоматическое программирование». Записки научных семинаров ЛОМИ.—
М : Наука, т. 48, 32 188, 1974.
1&. Дьяконов Е. Г. Проекционно разностные и разностные методы решения не-
нелинейных стационарных задач теории упругости и пластичности. Сб. «Числен-
«Численные методы механики сплошной среды», т. 7, № 5, 14—78, 1976.
16. Марчук Г. И. Методы вычислительной математики. — М.: Наука, 1977.
17. Дьяконов Е. Г. О некоторых модификациях проекционно-разностных мето-
доз. Вестник Московского университета, Сер. «Вычислительная математика »
кибернетика», № 2, 3 1&, 1977.
Посвящается Донне, Джону, Керэн и Брайену
ПРЕДИСЛОВИЕ
Метод конечных элементов представляет собой эффективный
численный метод решения инженерных и физических задач. Об-
Область его применения простирается от анализа напряжений в кон-
конструкциях самолетов или автомобилей до расчета таких сложных
систем, как атомная электростанция. С его помощью рассматрива-
рассматривается движение жидкости по трубам, через плотины, в пористых
средах, исследуется течение сжимаемого газа, решаются задачи
электростатики и смазки, анализируются колебания систем.
Эту книгу следует рассматривать как введение в метод конеч-
конечных элементов в том его виде, как он применяется к задачам кон-
континуального типа. В ней приводятся основные идеи метода и спо-
способы их реализации. Изложенного материала более чем достаточ-
достаточно для первоначального ознакомления с методом студентов стар-
старших курсов и аспирантов.
Книга ориентирована на тех, кто хочет научиться применять
метод конечных элементов, т. е. получать численные решения кон-
конкретных задач. Поэтому она представляет интерес для инженеров,
физиков, а также математиков, изучающих основные положения
метода. Предварительных знаний о методе конечных элементов не
требуется.
В монографии отражены работы многих исследователей, и я
¦не утверждаю, что в большей части она оригинальна. Однако по-
порядок расположения материала существенно отличается от других
книг и является результатом моего опыта преподавания инжене-
инженерам, которые применяют метод при решении задач, выходящих за
рамки традиционных областей механики сплошных сред. Большин-
Большинству этих инженеров приходится решать технические задачи. По-
Поэтому в книге рассматриваются прикладные аспекты метода. Ма-
Математические основы метода конечных элементов безусловно важ-
<ны, но я считаю, что они должны изучаться после того, как станет
понятно, как реализовать метод и какого типа результаты он мо-
может дать.
В книгу включено примерно 180 задач. Большинство из них ре-
решается вручную, многие связаны с модификацией программ, при-
приведенных в гл. 18, практические задачи (решаются на ЭВМ.
*»««*??
Глава \
МЕТОД КОНЕЧНЫХ ЭЛЕМЕНТОВ
Метод конечных элементов является численным методом реше-
<ния дифференциальных уравнений, встречающихся в физике и тех-
технике. Возникновение этого метода связано с решением задач кос-
космических исследований A950 г.). Впервые он был опубликован в
работе Тернера, Клужа, Мартина и Толпа [4]. Эта работа спо-
способствовала появлению других (работ; был опубликован ряд статей
с применениями метода конечных элементов к задачам строитель-
строительной механики и механики сплошных сред. Важный вклад в теоре-
теоретическую разработку метода сделал в 1963 г. Мелош [2], который
показал, что метод конечных элементов можно рассматривать как
один из вариантов хорошо известного метода Рэлея—Ритца.
В строительной механике метод конечтаых элементов минимизацией
потенциальной энергии позволяет свести задачу к системе линей-
линейных уравнений равновесия.
Связь метода конечных элементов с процедурой минимизации
привела к широкому использованию его при решении задач а дру-
других областях техники. Метод применялся к задачам, описываемым
уравнениями Лапласа или Пуассона. Решение этих уравнений так-
также связано с минимизацией некоторого функционала. В первых
публикациях [6, 7] с помощью метода конечных элементов реша-
решались задачи распространения тепла. Затем метод был применен к
задачам гидромеханики, в частности к задаче течения жидкости в
пористой среде.
Область применения Метода конечных элементов существенно
расширилась, когда было показано [3, 8], что уравнения, опреде-
определяющие элементы в задачах строительной механики, распростра-
распространения тепла, гидромеханики, могут быть легко получены с по-
помощью таких вариантов метода взвешенных невязок, как метод
Галёрвдша или способ наименьших квадратов. Установление этого
факта сыграло важную роль в теоретическом обосновании метода
конечных элементов, так как поаволило применять его при решении
любых дифференциальных уравнений. Следует отметать, что более
общие теоретические обоснования исключают необходимость вари-
вариационной формулировки физических задач.
Метод конечных элементов из численной процедуры решения
задач строительной механики превратился в общий метод числем-
10 Глава 1
ного решения дифференциального уравнения или системы диффе-
дифференциальных уравнений. Этот прогресс был достигнут за пятнад-
пятнадцатилетний период за счет совершенствования быстродействующих
цифровых вычислительных машин, необходимых для более точного
расчета конструкций летательных аппаратов, а также благодаря
помощи Национального комитета по исследованию космического»
пространства. Вычислительная машина позволила ускорить про-
проведение многих сложных численных расчетов. Изучение космиче-
космического пространства потребовало выделения средств на проведение
фундаментальных исследований и стимулировало совершенствова-
совершенствование универсальных вычислительных программ. Метод конечных
элементов применяется при проектировании самолетов, ракет,
различных пространственных оболочек и т. п.
1.1. Основная концепия метода конечных элементов
Основная идея метода конечных элементов состоит в том, что
любую непрерывную величину, такую, как температура, давление-
и перемещение, можно аппроксимировать дискретной моделью, ко-
которая строится на множестве кусочно-непрерывных функций^, оп-
определенных на конечном числе подобластей. Кусочно-непрерывные
функции определяются с помощью значений непрерывной величины
в конечном числе точек рассматриваемой области.
В общем случае непрерывная величина заранее неизвестна №
нужно определить значения этой величины в некоторых внутрен-
внутренних точках области. Дискретную модель, однако, очень легко по-
построить, если сначала предположить, что числовые значения этой
величины в каждой внутренней точке области известны. После
этого можно перейти к общему случаю. Итак, при построении дис
крешой модели непрерывной величины поступают следующим об-
образом:
1. В рассматриваемой области фиксируется конечное число»
точек. Эти точки называются узловыми точками или просто уз-
узлами.
2. Значение непрерывной величины в каждой узловой точке-
считается переменной, которая должна быть определена.
3. Область определения непрерывной величины разбивается на
конечное число подобластей, называемых элементами. Эти элемен-
чы имеют общие узловые точки и в совокупности аппроксимируют
форму области.
*' В этой книге рассматриваются только функции в виде линейных, квадра-
квадратичных и кубичных полиномов. Слова «полином» и «функция» в дальнейшем
будут считаться эквивалентными по смыслу.
Метод конечных элементов
11
4. Непрерывная величина аппроксимируется на каждом эле-
элементе полиномом, который определяется с помощью узловых зна-
значений этой величины. Для каждого элемента определяется свой
полином, но полиномы подбираются таким образом, чтобы сохра-
сохранялась непрерывность величины вдоль границ элемента1).
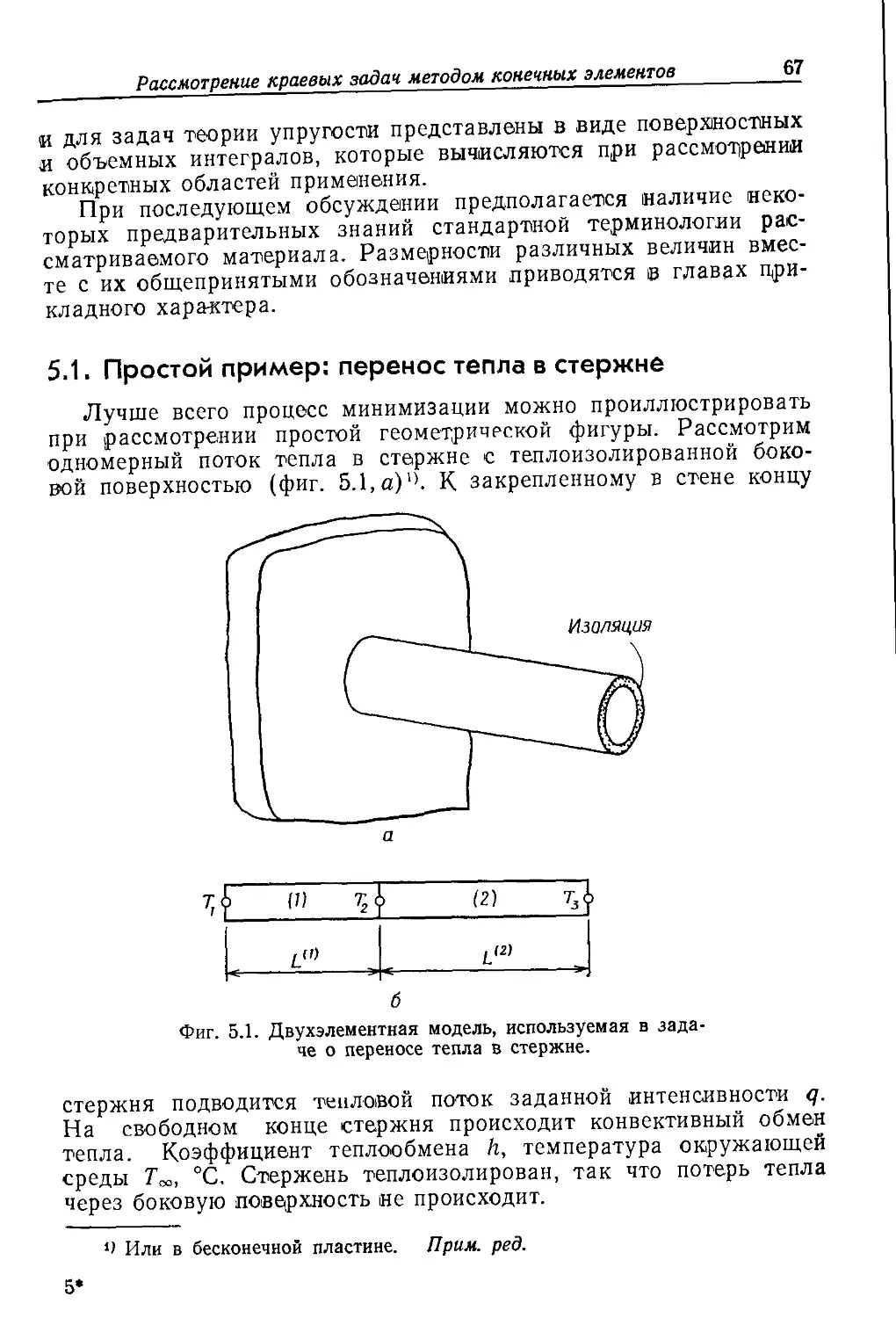
Основная концепция метода конечных элементов может быть
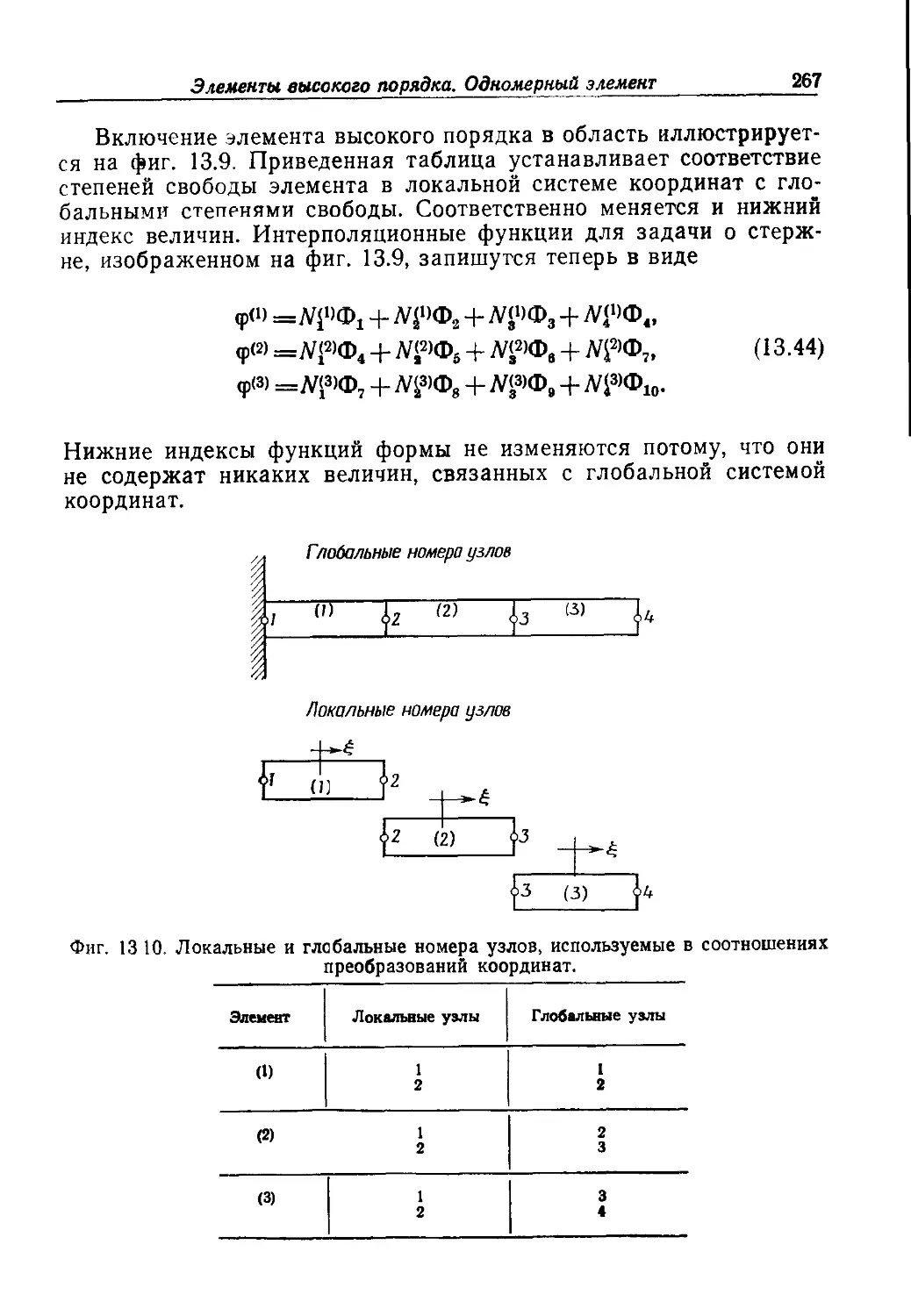
наглядно проиллюстрирована на одномерном примере заданного
распределения температуры в стержне, показанном на фиг, 1.1.
Рассматривается непрерывная величина Т(х), область определе-
определения отрезок OL вдоль оси х. Фиксированы и пронумерованы
пять точек на оси х (фиг. 1.2,а). Это узловые точки; совсем не
¦х L
Фиг. 1.1. Распределение температуры в од-
одномерном стержне.
Фиг. 1.2. Узловые точки и предпо-
предполагаемые значения Т(х).
обязательно располагать их на равном расстоянии друг от друга.
Очевидно, можно ввести в рассмотрение и более пяти точек, но
этих пяти вполне достаточно, чтобы проиллюстрировать основную
идею метода. Значения Т{х) в данном случае известны в каждой
узловой точке. Эти фиксированные значения представлены графи-
графически на фиг. 1.2,6 и обозначены в соответствии с номерами узло-
узловых точек через Т\, Т2,..., Т5.
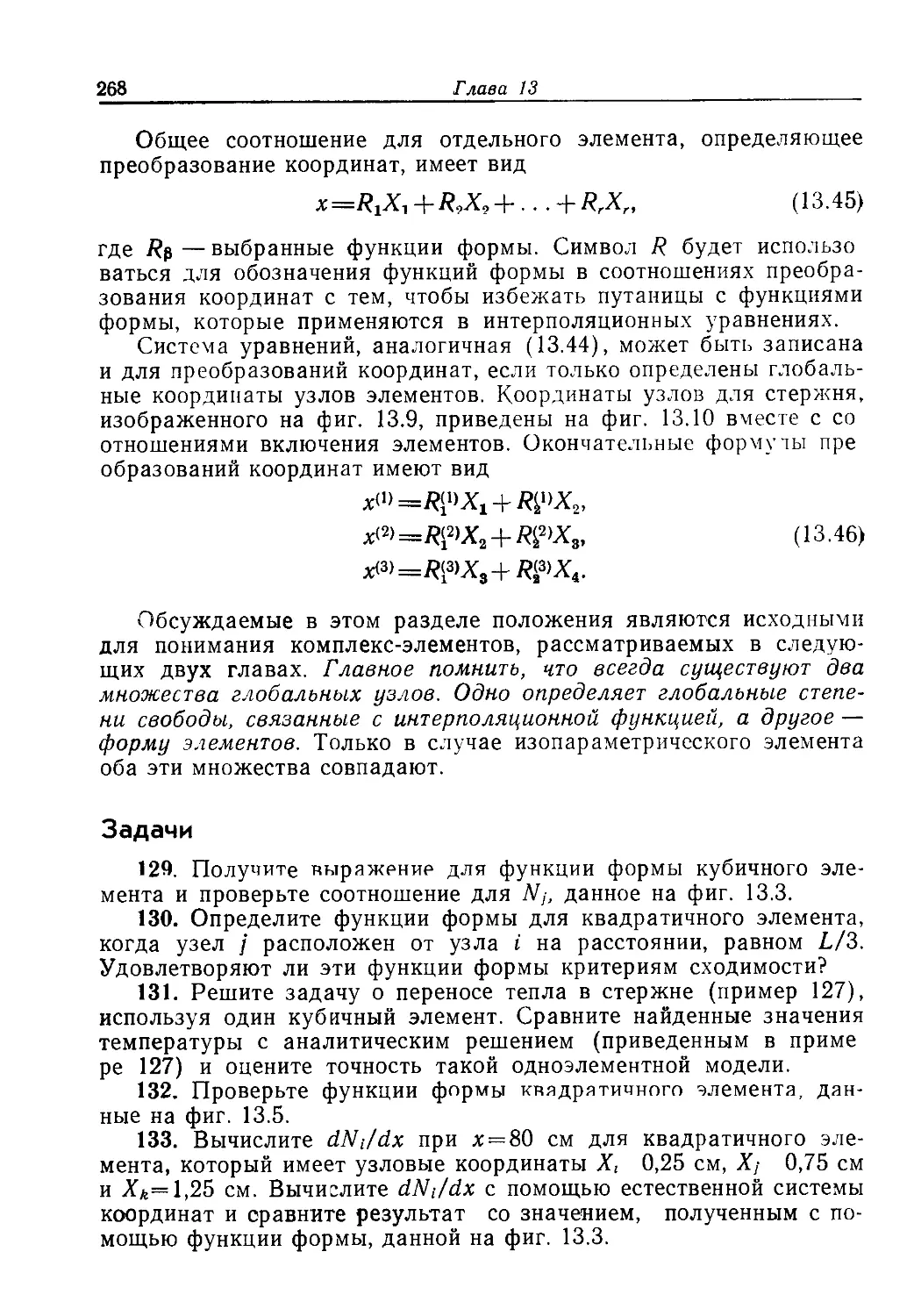
Разбиение области на элементы может быть проведено двумя
различными способами. Можно, например, ограничить каждый эле-
элемент двумя соседними узловыми точками, образовав четыре эле-
элемента (фиг. 1.3, а), или разбить область на два элемента, каждый
из которых содержит три узла (фиг. 1.3,6). Соответствующий
элементу полином определяется по значениям Т(х) в узловых точ-
4 Этот полином, связанный с каждым элементом, автор далее называет
функцией элемента. — Прим. ред.
12
Глава 1
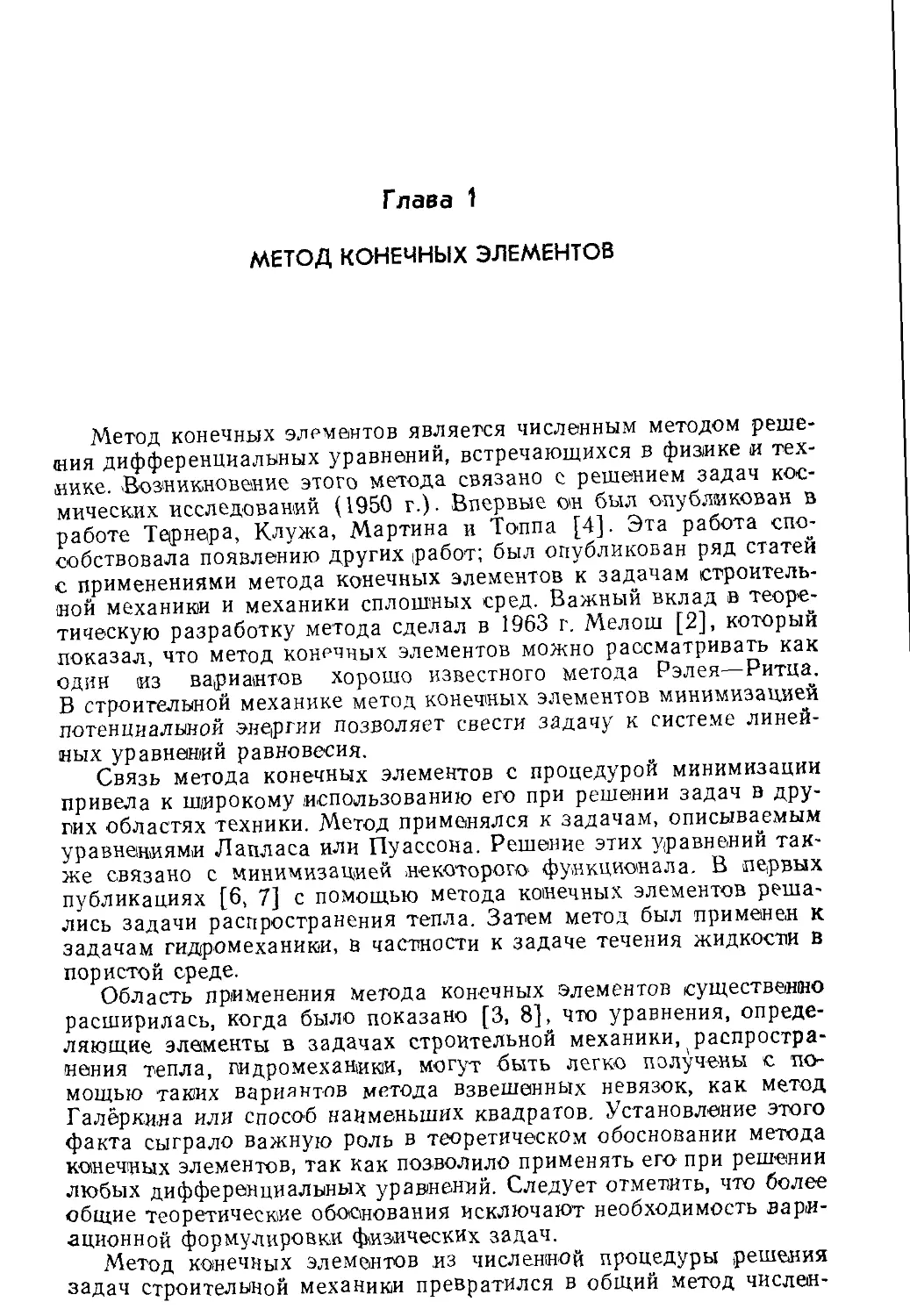
ках элемента. В случае разбиения области на четыре элемента,,
когда на каждый элемент приходится по два узла, функция эле-
элемента будет линейна по х (две точки однозначно определяют пря-
прямую линию) Окончательная аппроксимация Т(х) будет состоять
из четырех кусочно линейных функций, каждая из которых опре-
определена на отдельном элементе (фиг. 1.4,а).
Другой способ разбиения области на два элемента с тремя
узловыми точками приводит к представлению функции элемента
в виде полинома второй степени. В этом случае окончательной
г
г z з з 4
б
Фиг. 1.3. Деление области на эле- Фиг. 1.4. Дискретные модели для одно-
менты, мерного температурного поля.
аппроксимацией Т(х) будет совокупность двух кусочно непрерыв-
непрерывных квадратичных функций. Отметим, что это приближение будет
именно кусочно непрерывным, так как углы наклона графиков
обеих этих функций могут иметь разные значения в третьем узле.
В общем случае распределение температуры неизвестно и мы
хотим определить значения этой величины в некоторых точках.
Методика построения дискретной модели остается точно такой же,
как описано выше, но с добавлением одного дополнительного ша-
шага. Снова определяются множество узлов и значения температуры
в этих узлах Ти Т2, Т3,..., которые теперь являются переменными,
так как они заранее неизвестны. Область разбивается на элемен-
Метод конечных элементов
13
ты, на каждом из которых определяется соответствующая функция
элемента. Узловые значения Т(х) должны быть теперь «отрегули-
«отрегулированы» таким образом, чтобы обеспечивалось «наилучшее» при-
Фиг. 1.5. Моделирование двумерной скалярной функции
с помощью треугольных и четырехугольных элементов.
Фиг. 1.6. Моделирование двумерной скалярной функции
с помощью квадратичного треугольного элемента.
ближение к истинному (распределению температуры. Это «регу-
«регулирование» осуществляется путем минимизации некоторой вели-
величины, связанной с физической сущностью задачи. Если рассматри-
рассматривается задача распространения тепла, то минимизируется функ-
функционал, связанный с соответствующим дифференциальным урав-
уравнением. Процесс минимизации сводится к решению систем линей-
14 Глава 1
ных алгебраических уравнений относительно узловых значе-
значений Т(х).
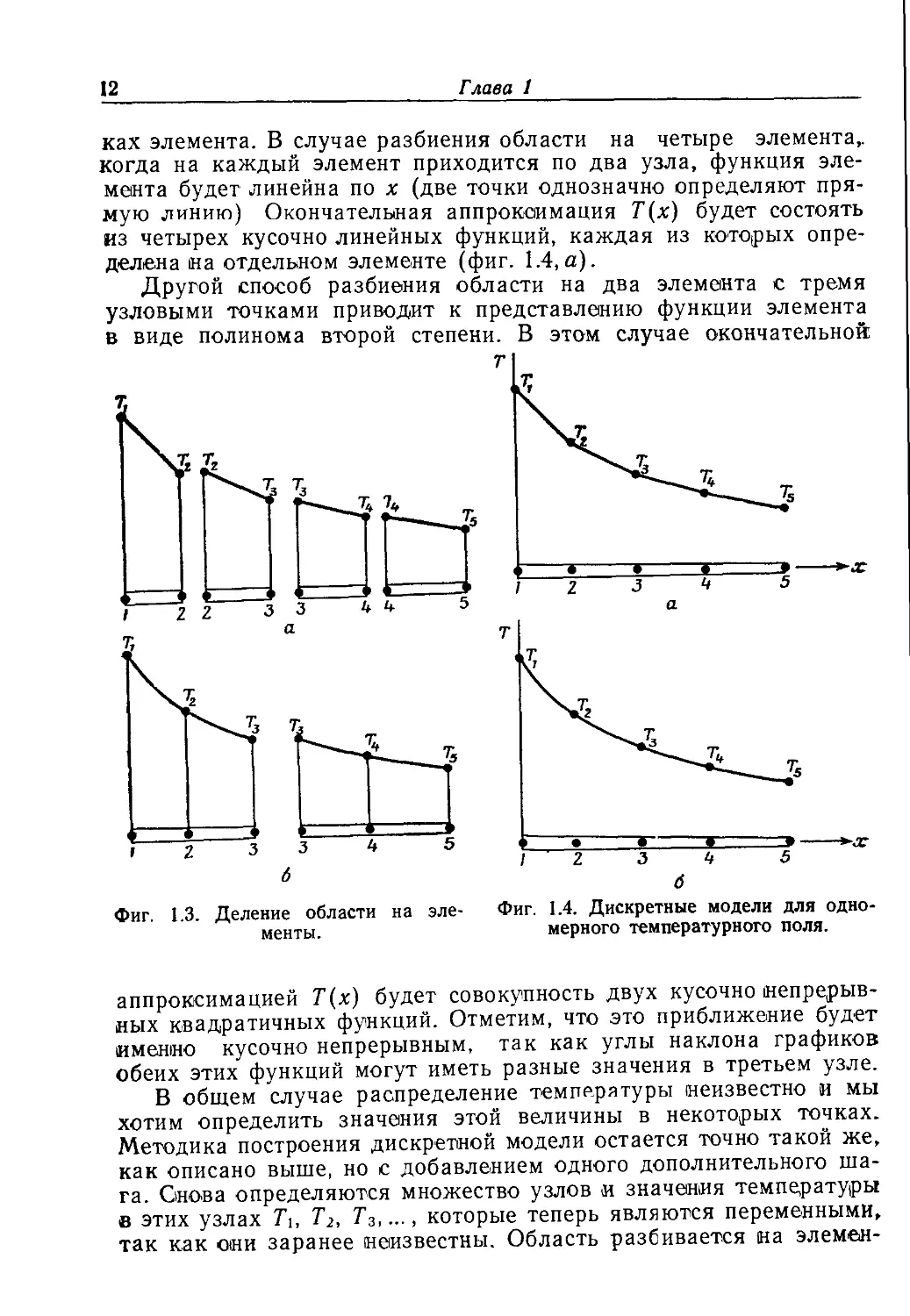
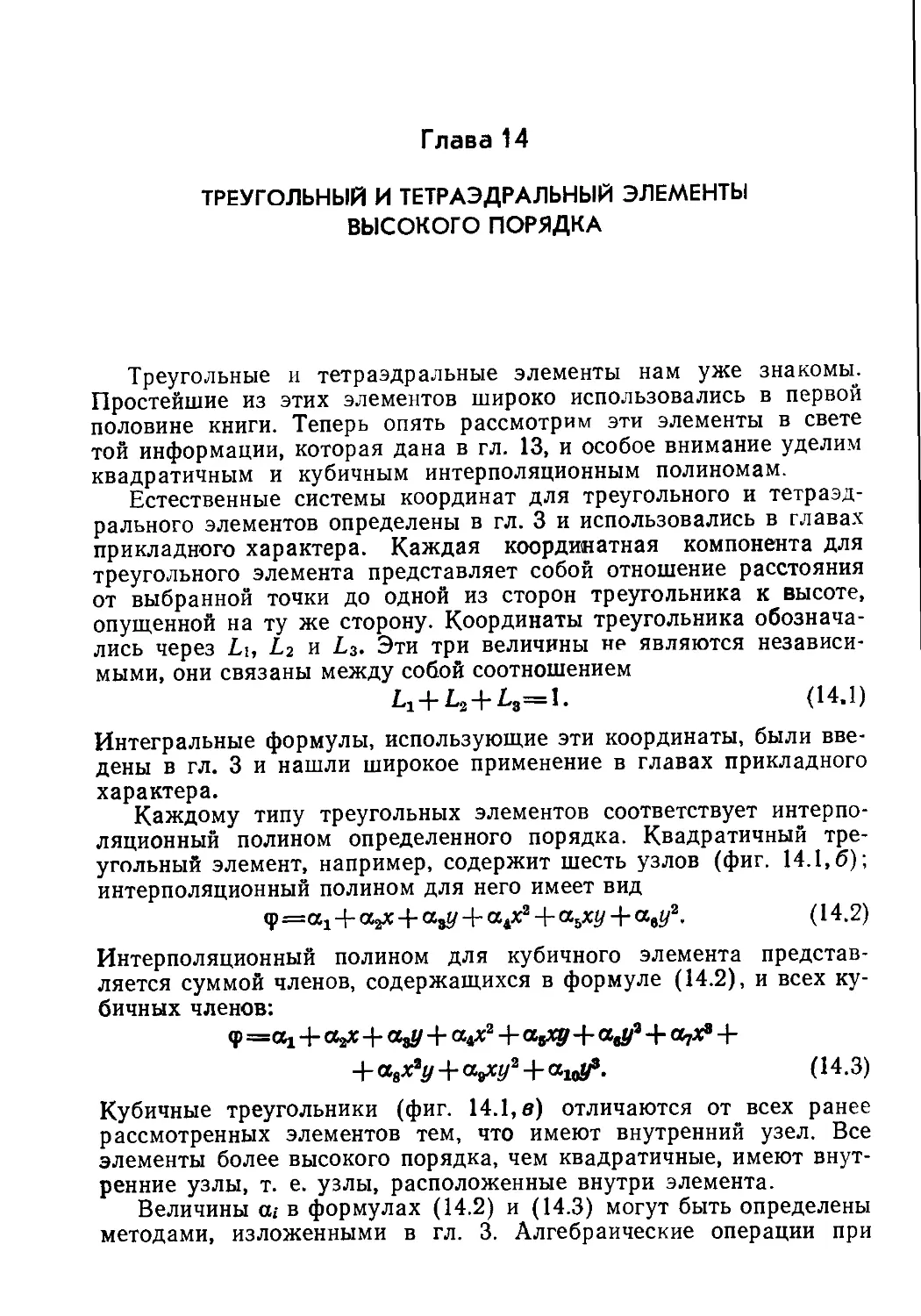
Цри построении дискретной модели непрерывной величины,
определенной в двух- или трехмерной области, основная концеп-
концепция метода конечных элементов используется аналогично. В дву-
двумерном случае элементы описываются функциями от х, у, при
этом чаще всего рассматриваются элементы в форме треуголыника
или четырехугольника. Функции элементов изображаются теперь
плоскими (фиг. 2.5) или криволинейными (фиг. 1.6) поверхностя-
поверхностями. Функция элемента будет представляться плоскостью, если для
данного элемента взято минимальное число узловых точек, которое
для треугольного элемента равняется трем, а для четырехугольно-
четырехугольного — четырем.
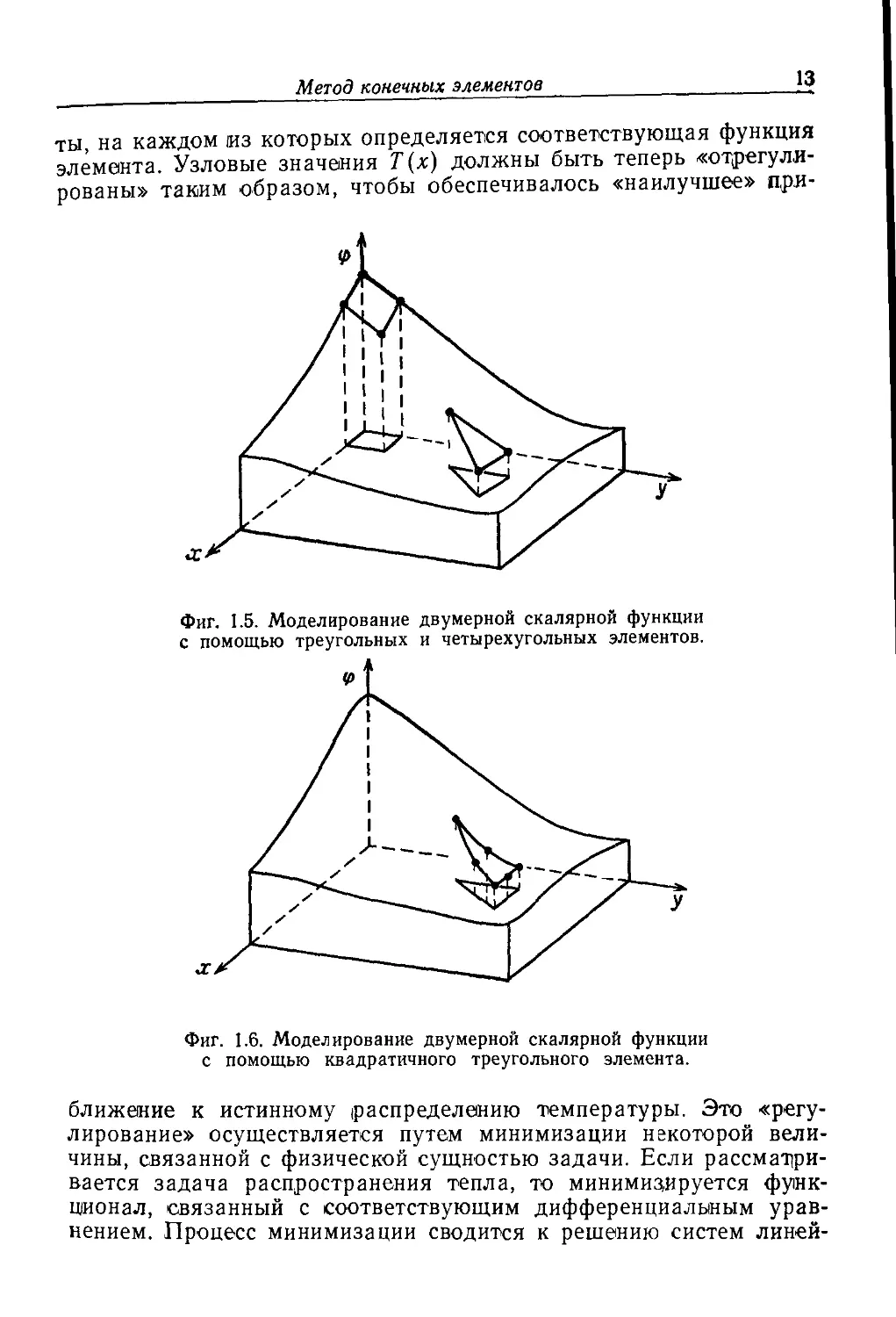
Если используемое число узлов больше минимального, то
функции элемента будет соответствовать криволинейная поверх-
поверхность. Кроме того, избыточное число узлов позволяет рассматри-
рассматривать элементы с криволинейными границами. Окончательной ап-
аппроксимацией двумерной непрерывной величины ц>{х, у) будет
служить совокупность кусочно-непрерывных поверхностей, каждая
из которых определяется на отдельном элементе с помощью значе-
значений ф(х, у) в соответствующих узловых точках.
Важным аспектом метода конечных элементов является воз-
возможность выделить из набора элементов типичный элемент при
определении функции элемента. Это позволяет определять функ-
функцию элемента независимо от относительного положения элемента
в общей связной модели и от других функций элементов. Задание
функции элемента через произвольное множество узловых значе-
значений и координат позволяет использовать функции элемента для
аппроксимации геометрии области.
1.2, Преимущества и недостатки
В настоящее время область применения метода конечных эле-
элементов очень обширна и охватывает все физические задачи, кото-
которые могут быть описаны дифференциальными уравнениями. Наи-
Наиболее важными преимуществами метода конечных элементов, бла-
благодаря которым аи широко используется, являются следующие:
1. Свойства материалов смежных элементов не должны быть
обязательно одинаковыми. Это позволяет применять метод к те-
телам, составленным из нескольких материалов.
2. Криволинейная область может быть аппроксимирована с по-
помощью прямолинейных элементов или описана точно с ткжощью
криволинейных элементов. Таким образом, методом Можно поль-
пользоваться не только для областей с «хорошей» формой границы.
3. Размеры элементов могут быть переменными. Это дозволяет
укрупнить или измельчить сеть разбиения области На элементы,
если в этом есть (необходимость.
Метод конечных элементов
4. С помощью метода конечных элементов не представляет
труда рассмотрение граничных условий с разрывной поверхност-»
ной нагрузкой, а также смешанных граничных условий.
б. Указанные выше преимущества метода конечных элементов
могут быть использованы при составлении достаточно общей про-
программы для решения частных задач определенного класса. Напри-
Например, с помощью программы для осесимметрической задачи о рас-
распространении гепла можно решать любую частную задачу этого
типа. Факторами, препятствующими расширению круга задач, ре-
решаемых методом конечных элементов, являются ограниченность
машинной памяти и высокая стоимость вычислительных работ.
Главный недостаток метода конечных элементов заключается
к необходимости составления вычислительных программ и приме-
применения вычислительной техники. Вычисления, которые требуется
проводить при использовании метода конечных элементов, слиш-
слишком громоздки для ручного счета даже в случае решения очень
простых задач. Для решения сложных задач необходимо исполь-
использовать быстродействующую ЭВМ, обладающую большой памятью.
В настоящее время имеются технологические возможности для
создания достаточно мощных ЭВМ. Некоторые коммерческие и
управляющие организации располагают обширными комплектами
вычислительных программ. Смягчить основной недостаток метода
конечных элементов могут совершенствование вычислительных про-
программ и создание мощных ЭВМ.
1.3, Структура книги
Целью этой книги является обсуждение тех аспектов метода ко-
конечных элементов, которые связаны с решением задач механики
сплошных сред, в частности задач переноса тепла, гидромехани-
гидромеханики, двумерных и трехмерных яадач теории упругости. Наряду с
основами теории рассматривается реализация метода на ЭВМ, так
как конечной целью является получение численного решения фи-
физических задач.
В следующих шести главах рассматриваются основные аспекты
метода конечных элементов:
1. Дискретизация области; определение узловых точек и эле-
элементов.
2. Определение функции элемента для отдельного элемента.
3. Получение из функций элементов кусочно-непрерывной функ-
функции, определенной на всей области.
4. Составление системы уравнений путем минимизации функ-
функционала, связанного с физической задачей.
5. Решение указанной системы уравнений относительно узло-
узловых значений.
6. Вычисление искомых величин в элементе.
<T6 Глава 1
Главы 8 12 посвящены приложениям в различных конкрет-
конкретных областях механики сплошных сред: к задачам распростране-
распространения тепла и гидродинамики, ос&симметрическим задачам теории
ноля, нестационарным задачам теории поля и задачам теории уп-
упругости. Для иллюстрации основ теории в гл. 6 приводится задача
о кручений цилиндра некругового сечения. В гл. 13—16 рассма-
рассматриваются элементы высокого порядка. В гл. 17 обсуждается ме-
метод Галёркина. Гл. 18 содержит некоторые вычислительные про-
программы, которые могут быть использованы для решения задач,
рассмотренных в книге. Эта глава должна использоваться совмест-
совместно с гл. 2 и гл. 6 -12. Вычислительные программы в гл. 18 со-
составлены специально для учебных целей. Они не относятся к об-
общим программам, с помощью которых решаются сложные задачи.
ЛИТЕРАТУРА
1. Lynn P. P., Arya S. К., Use of the Least Squares Criterion in the Finite Element
Formulation, Intern. I. for Numerical Methods in Engineering, 6, 75—83 A973).
2. Melosh R. J., Basis for Derivation of Matrices for the Direct Stiffness Method,
/. Am. Inst. for Aeronautics and Astronautics, J, 1631—1637 A965).
3. Szabo B. A., Lee G. C, Derivation of Stiffness Matrices Eor Problems in Plane
Elasticity by Galerkin's Method, Intern. J. of Numerical Methods in Engineering,
1, 301—310 A969).
4. Turner M Л, Clough R. W., Martin H. C, Topp L. J., Sliffness and Deflection
Analysis of Complex Structures, /. Aeronaut. Sci., 23, 805—824 A956).
5. Visser W., A Finite Element Method for the Determination of Non Stationary
Temperature Distribution and Thermal Deformations, Proc. Conf. on Matrix
' Methods in Structural Mechanics, Air Force Inst. of Technology, Wright Patter-
Patterson Air Force Base, Dayton, Ohio, 1965.
6. Wilson E. L., Nickell R. E., Application of the Finite Element Method to Heat
Conduction Analysis, Nuclear Engineering and Design, 4, 276 286 A966).
7. Zienkiewicz O. C, Cheung Y. K., Finite Elements in the Solution of Field Prob-
Problems, The Engineer, 507—510 A965).
8. Zienkiewicz О. С, The Finite Element Method in Engineering Science, McGraw-
Hill, London, 1971; есть русский перевод: Зенкевич О., Метод конечных элемен
тов в технике, изд-во «Мир>, М., 1975.
Глава 2
ДИСКРЕТИЗАЦИЯ ОБЛАСТИ
Разбиение области на подобласти представляет собой первый
шаг на пути к решению задачи, и именно этот шаг не имеет тео-
теоретического обоснования. Искусство разбиения области зависит
от имеющихся инженерных навыков. Плохое или несовершенное
разбиение будет приводить к ошибочным результатам, если даже
остальные этапы метода осуществляются с достаточной точностью.
Дискретизация области (тела) включает задание числа, раз-
размеров и формы подобластей, которые используются для построе-
построения дискретной модели реального тела. Как инженеры мы сталки-
сталкиваемся при этом с довольно деликатной ситуацией. С одной сторо-
стороны, элементы должны быть выбраны достаточно малыми, чтобы
получались приемлемые результаты, а с другой стороны, приме-
применение достаточно крупных элементов сокращает вычислительную
работу. Нуж1но иметь некоторые общие соображения об оконча-
окончательных значениях, с тем чтобы можно было уменьшить размеры
элементов в тех областях, где ожидаемый результат может очень
сильно меняться (большие величины градиентов), и увеличить их
там, где ожидаемый результат почти постоянен.
Навыки в дискретизации области приходят с опытом. Однако
некоторые общие правила можно сформулировать. Эти правила и
некоторые советы относительно дискретизации и обсуждаются в
этой главе.
2.1. Типы конечных элементов
При решении задач методом конечных элементов используются
элементы различных типов. Некоторые, наиболее общие из них,
обсуждаются в этом разделе.
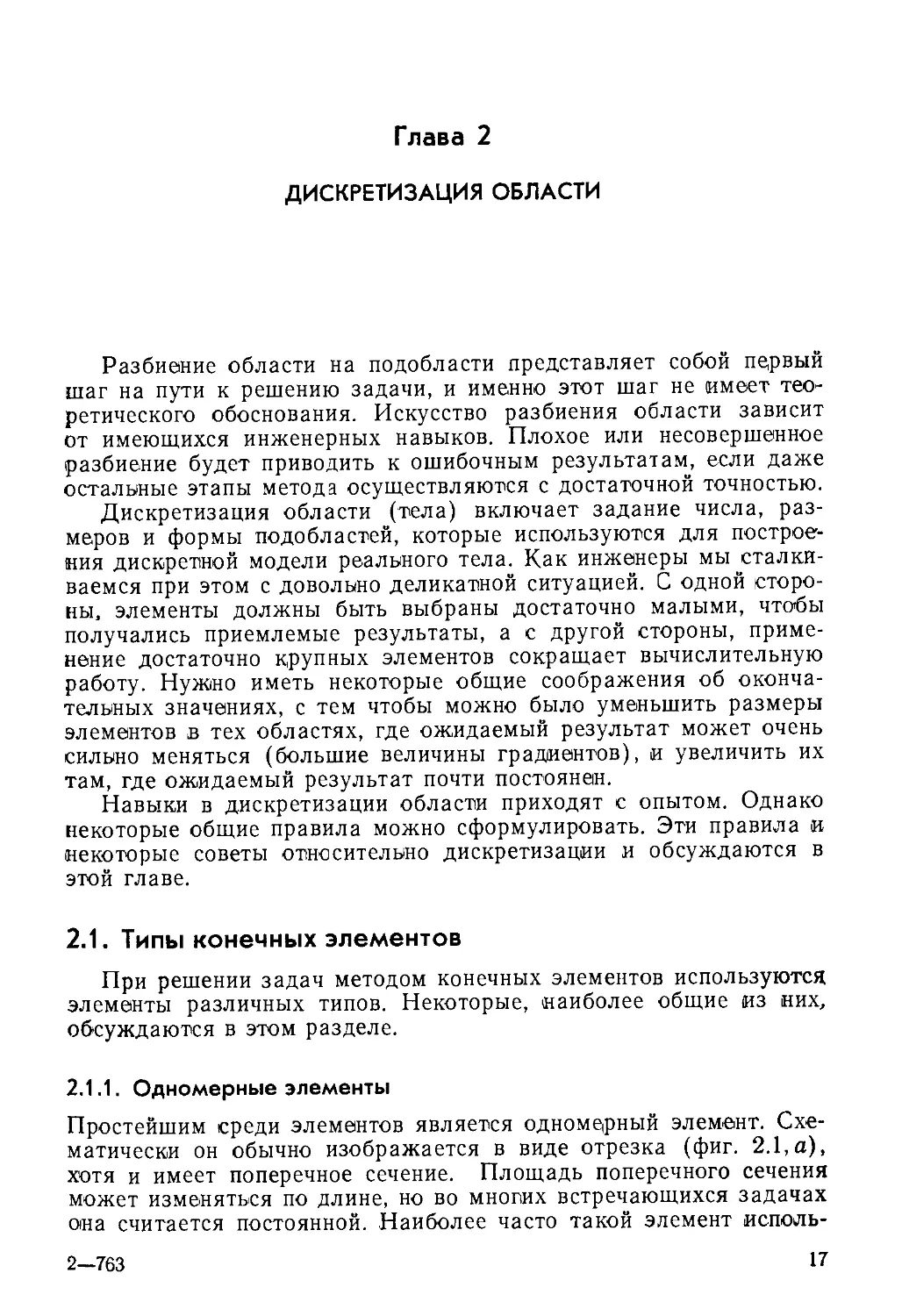
2.1.1. Одномерные элементы
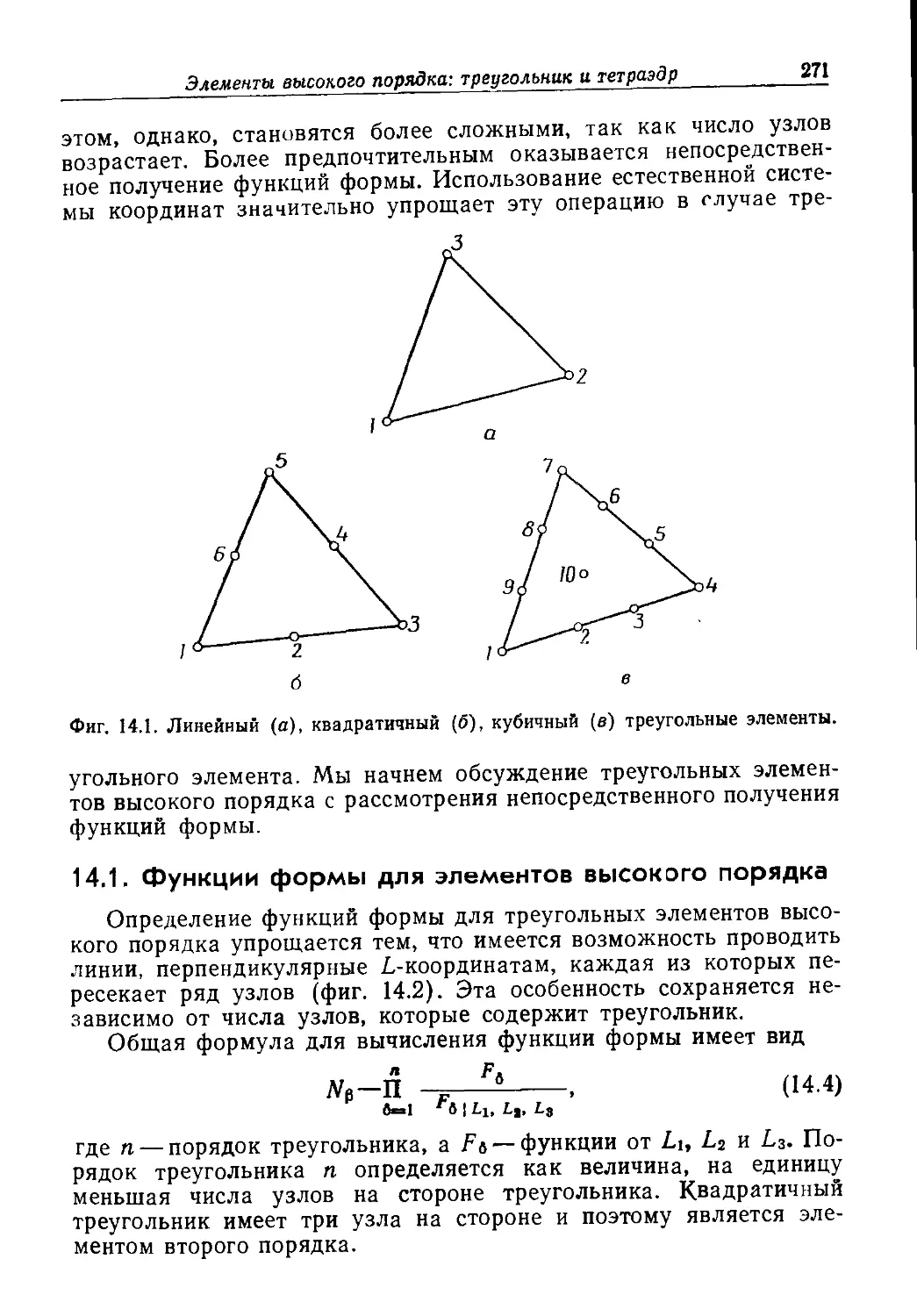
Простейшим среди элементов является одномерный элемент. Схе-
Схематически он обычно изображается в виде отрезка (фиг. 2.1,а),
хотя и имеет поперечное сечение. Площадь поперечного сечения
может изменяться по длине, но во многих встречающихся задачах
она считается постоянной. Наиболее часто такой элемент исполь-
2—763 17
18 Глава 2
зуется в одномерных задачах распространения тепла и в задачах
строительной механики при (расчете стержневых элементов кон-
конструкций (типа ферм).
Простейший одномерный элемент имеет два узла, по одному
на каждом конце. Элементы более высокою .порядка, трехузловые
\ \
a
/ \
"• Фиг. 2.1. Некоторые одномер-
одномерные конечные элементы.
(квадратичные) и четырехузловые (кубические), изображены на
фиг. 2.1,6 и в. Одномерный элемент может быть криволинейным
(фиг. 2.1, в) при условии, что длина дуги входит в уравнения, оп-
определяющие элементы.
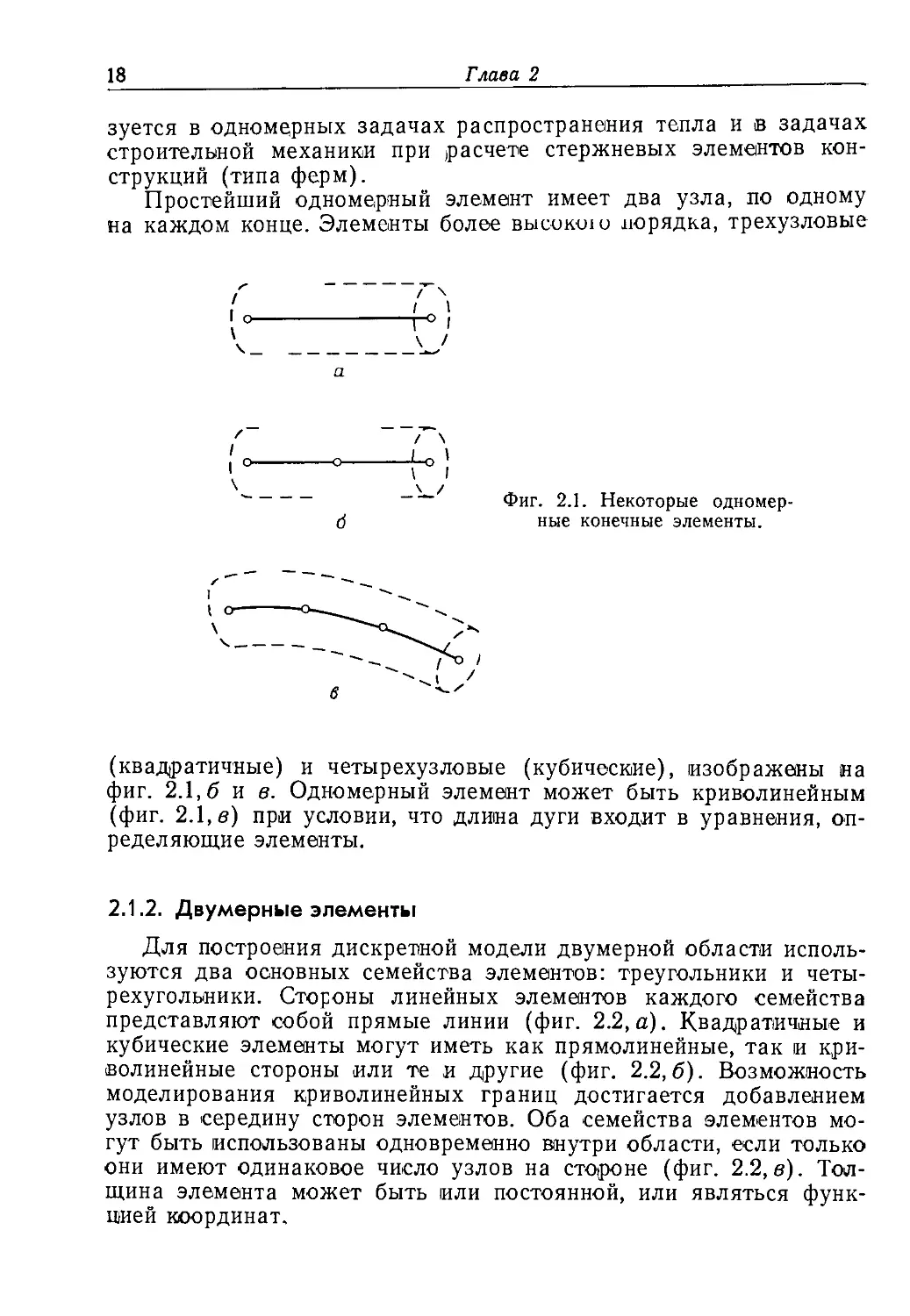
2.1.2. Двумерные элементы
Для построения дискретной модели двумерной области исполь-
используются два основных семейства элементов: треугольники и четы-
четырехугольники. Стороны линейных элементов каждого семейства
представляют собой прямые линии (фиг. 2.2, а). Квадратичные и
кубические элементы могут иметь как прямолинейные, так и кри-
криволинейные стороны или те и другие (фиг. 2.2,6). Возможность
моделирования криволинейных границ достигается добавлением
узлов в середину сторон элементов. Оба семейства элементов мо-
могут быть использованы одновременно внутри области, если только
они имеют одинаковое число узлов на стороне (фиг. 2.2,в). Тол-
Толщина элемента может быть или постоянной, или являться функ-
функцией координат.
Дискретизация области
19
2.1.3. Трехмерные элементы
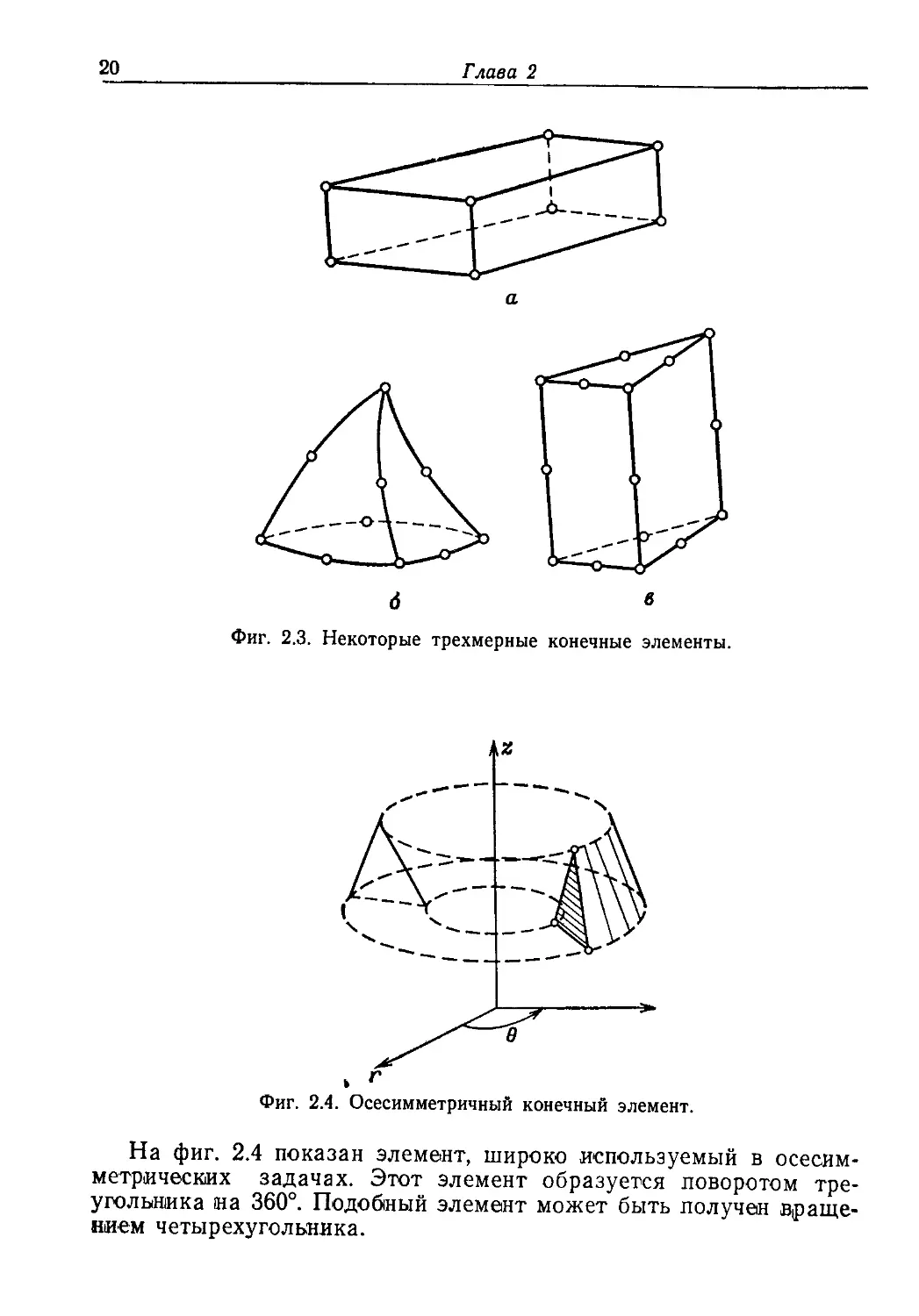
Наиболее часто встречающимися трехмерными элементами яв-
являются тетраэдр и параллелепипед (фиг. 2.3,а и б). В обоих слу-
случаях линейные элементы ограничены прямолинейными сторонами
(плоскостями), тогда как элементы более высокого порядка могут
иметь в качестве границ криволинейные поверхности. При разбие-
разбиении трехмерного тела трудно наглядно представить расположение
в
Фиг. 2.2. Некоторые двумерные конечные элементы.
элементов в дискретной модели, поэтому, вероятно, более жела-
желательным из этих двух типов элементов является параллелепипед.
На фиг. 2.3, в показан другой вид элементов, которые исполь-
используются при рассмотрении тел цилиндрической формы. Эти элемен-
элементы подобны двумерному треугольнику и позволяют еще учесть из-
изменение неизвестной величины вдоль третьей координаты.
20
Глава 2
6 *
Фиг. 2.3. Некоторые трехмерные конечные элементы.
Фиг. 2.4. Осесимметричныи конечный элемент.
На фиг. 2.4 показан элемент, широко используемый в осесим-
метрических задачах. Этот элемент образуется поворотом тре-
треугольника на 360°. Подобный элемент может быть получен враще-
вращением четырехугольника.
Дискретизация области 21
2.2. Разбиение области на элементы
Процесс дискретизации может быть разделен на два этапа: раз-
разбиение тела на элементы и нумерация элементов и узлов. Послед-
Последний этап логически совершенно прост, но усложняется в связи с
нашим желанием повысить эффективность вычислений.
В этом разделе рассматривается разбиение двумерной области
на линейные треугольные элементы. Двумерная область выбрана
для удобства иллюстрации; кроме того, идеи, представленные
здесь, могут быть обобщены на случай трехмерного тела. Дискре-
а . 6
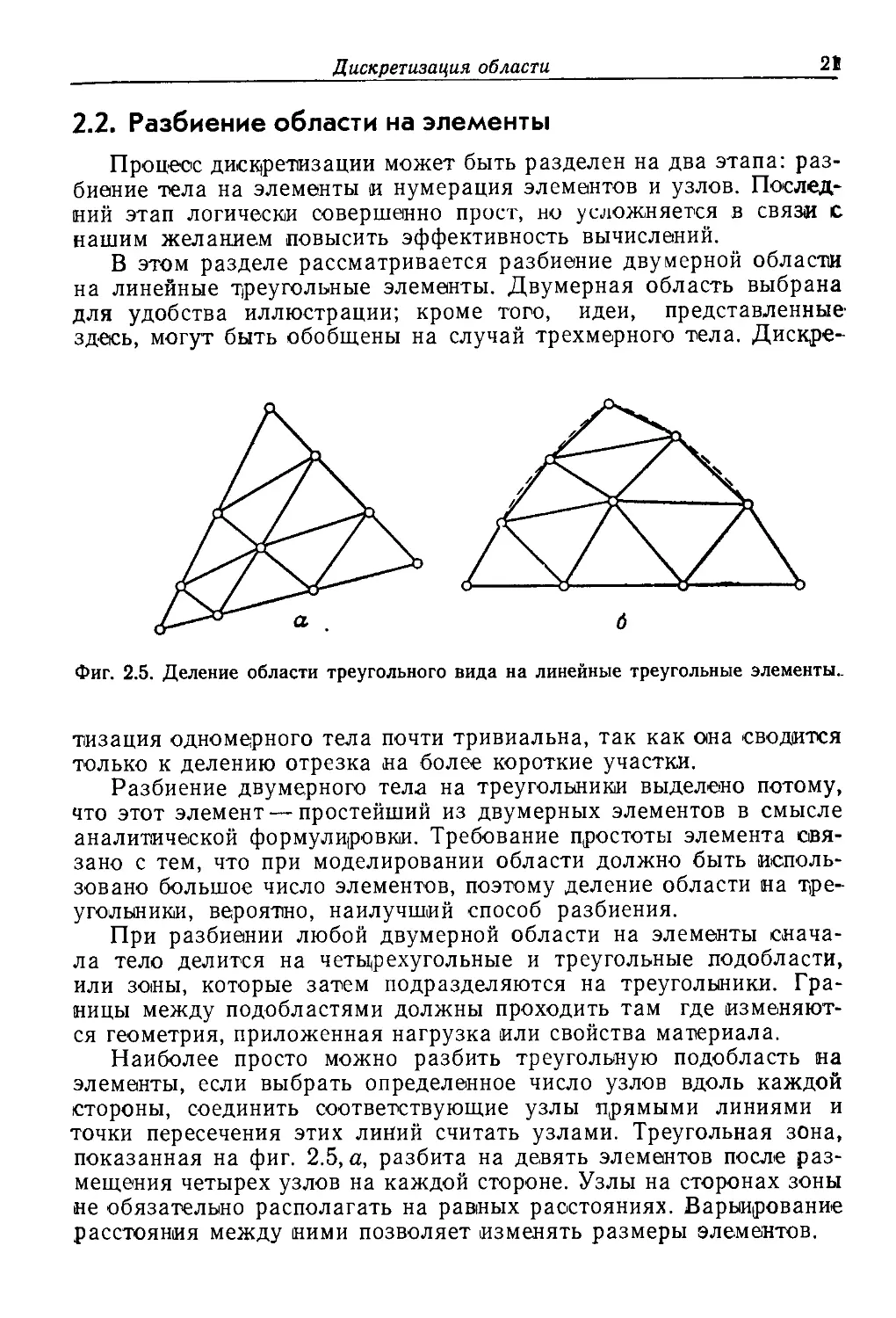
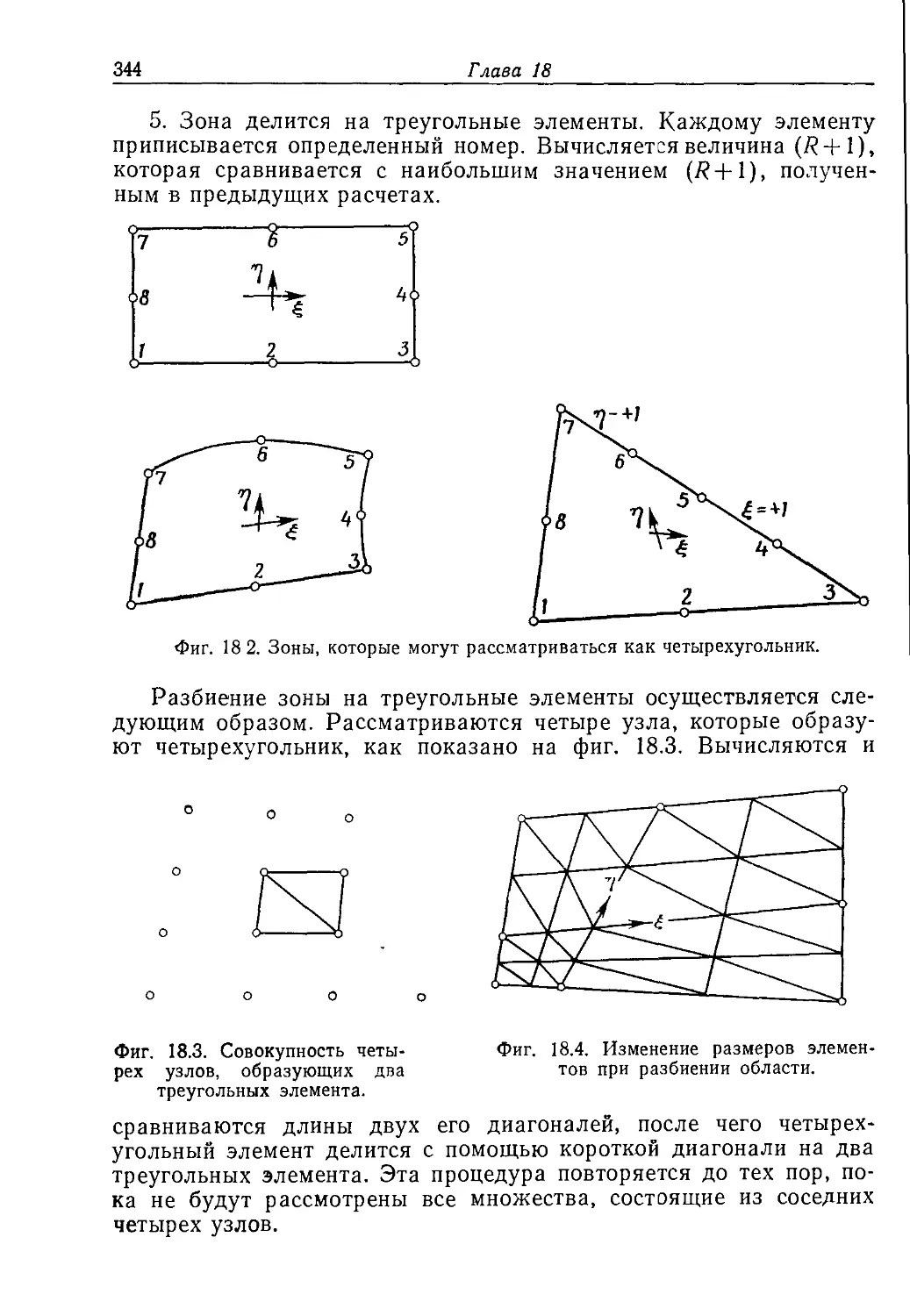
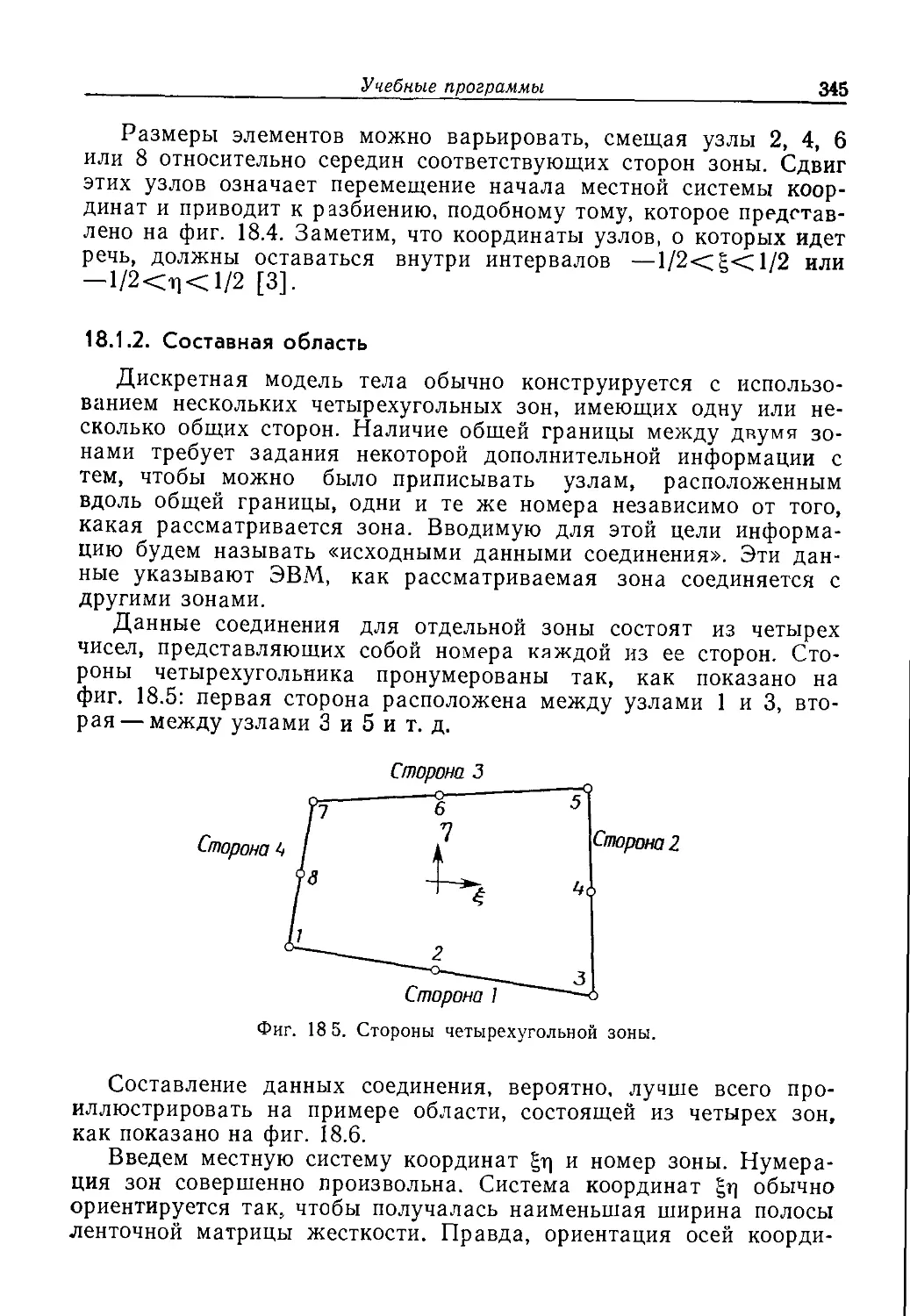
Фиг. 2.5. Деление области треугольного вида на линейные треугольные элементы..
тизация одномерного тела почти тривиальна, так как она сводится
только к делению отрезка на более короткие участки.
Разбиение двумерного тела на треугольники выделено потому,
что этот элемент — простейший из двумерных элементов в смысле
аналитической формулировки. Требование простоты элемента свя-
связано с тем, что при моделировании области должно быть исполь-
использовано большое число элементов, поэтому деление области на тре-
треугольники, вероятно, наилучший способ разбиения.
При разбиении любой двумерной области на элементы снача-
сначала тело делится на четырехугольные и треугольные подобласти,
или зоны, которые затем подразделяются на треугольники. Гра-
Границы между подобластями должны проходить там где изменяют-
изменяются геометрия, приложенная нагрузка или свойства материала.
Наиболее просто можно разбить треугольную подобласть на
элементы, если выбрать определенное число узлов вдоль каждой
стороны, соединить соответствующие узлы прямыми линиями и
точки пересечения этих линий считать узлами. Треугольная зона,
показанная на фиг. 2.5, а, разбита на девять элементов после раз-
размещения четырех узлов на каждой стороне. Узлы на сторонах зоны
не обязательно располагать на равных расстояниях. Варьирование
расстояния между ними позволяет изменять размеры элементов.
22
Глава 2
Если треугольная подобласть криволинейная, криволинейные
границы элементов заменяются на прямые отрезки. Разбиение
криволинейной треугольной зоны на линейные треугольники пока-
показано на фиг. 2.5,6. Штриховой линирй представляйа исходная фор-
форма, сплошными линиями изображены элементы.
Желательное
разбиение
Нежелательное
разбиение
•Фиг. 2.6. Деление области в виде четырехугольника на линейные треугольные
элементы.
Если на стороне треугольной подобласти выбрано п узлов, чис-
.ло треугольных элементов в результате разбиения равняется
(я-1J.
Четырехугольные зоны обычно разбивают на элементы соеди-
соединением узлов на противоположных сторонах (фиг. 2.6,а). Пересе-
Пересечения линий определяют внутренние узловые точки. Внутренние
четырехугольники могут рассматриваться как элементы; они мо-
могут быть разбиты на треугольные элементы проведением короткой
диагонали в каждом внутреннем четырехугольнике (фиг. 2.6,6).
Разбиение с использованием короткой диагонали предпочтительно,
потому что элементы, близкие по форме к равностороннему тре-
треугольнику, приводят к более точным результатам, чем длинные
узкие треугольники.
Число узлов на смежных сторонах четырехугольника может
быть различным, но на противоположных сторонах узлов должно
быть поровну, если только сеть разбиения не измельчается (или
укрупняется). Расстояние между граничными узлами можно варь-
варьировать, чтобы получать элементы различных размеров. В четы-
четырехугольнике будет 2(п—1) (т—1) элементов, если на смежных
сторонах его фиксировано пит узлов.
Треугольная и четырехугольная подобласти могут иметь об-
общую границу. Число узлов на этой границе для обеих подобластей
должно быть одинаковым и относительное положение узлов долж-
шо совпадать. Это требование необходимо для сохранения непре-
непрерывности рассматриваемых величин вдоль общей границы эле-
•ментов.
Дискретизация области
23
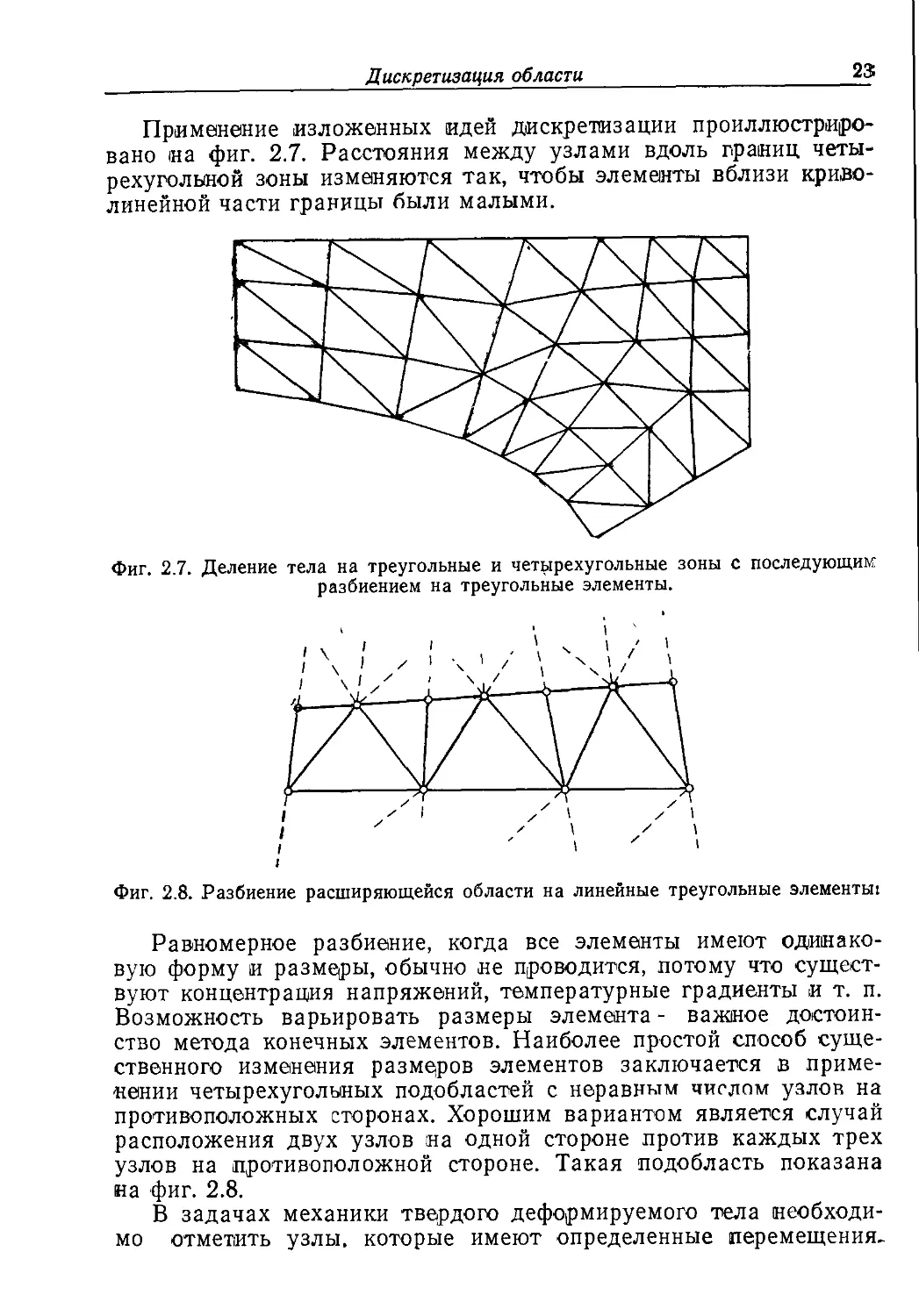
Применение изложенных идей дискретизации проиллюстриро-
проиллюстрировано на фиг. 2.7. Расстояния между узлами вдоль границ четы-
четырехугольной зоны изменяются так, чтобы элементы вблизи криво-
криволинейной части границы были малыми.
Фиг. 2.7. Деление тела на треугольные и четырехугольные зоны с последующим
разбиением на треугольные элементы.
Фиг. 2.8. Разбиение расширяющейся области на линейные треугольные элементы:
Равномерное разбиение, когда все элементы имеют одинако-
одинаковую форму и размеры, обычно не проводится, потому что сущест-
существуют концентрация напряжений, температурные градиенты и т. п.
Возможность варьировать размеры элемента - важное достоин-
достоинство метода конечных элементов. Наиболее простой способ суще-
существенного изменения размеров элементов заключается в приме-
применении четырехугольных подобластей с неравным числом узлой на
противоположных сторонах. Хорошим вариантом является случай
расположения двух узлов на одной стороне против каждых трех
узлов на противоположной стороне. Такая подобласть показана
на фиг. 2.8.
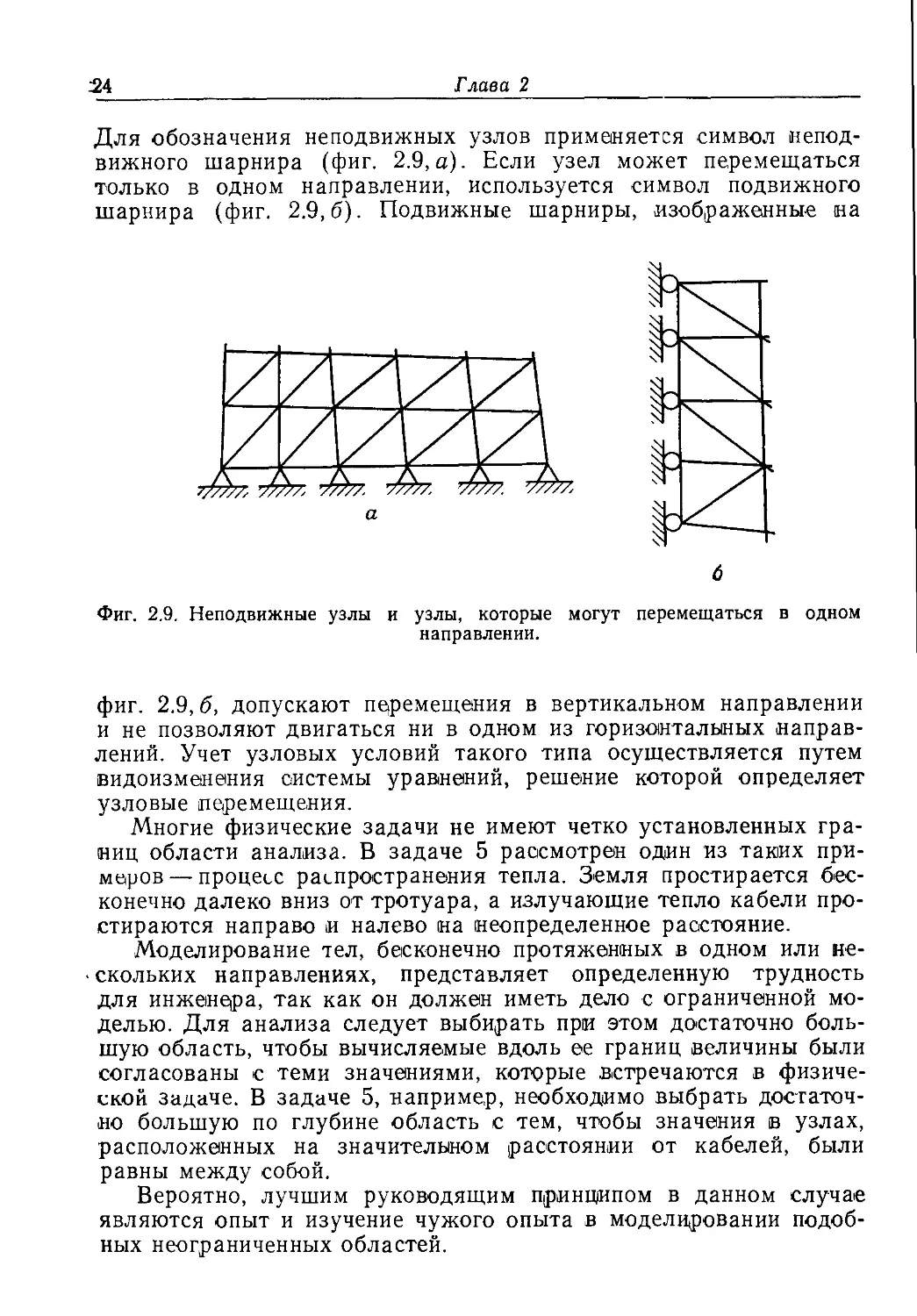
В задачах механики твердого деформируемого тела необходи-
необходимо отметить узлы, которые имеют определенные перемещения.
24 Глава 2
Для обозначения неподвижных узлов применяется символ непод-
неподвижного шарнира (фиг. 2.9,а). Если узел может перемещаться
только в одном направлении, используется символ подвижного
шарнира (фиг. 2.9,6). Подвижные шарниры, изображенные на
Фиг. 2.9. Неподвижные узлы и узлы, которые могут перемещаться в одном
направлении.
фиг. 2.9, б, допускают перемещения в вертикальном направлении
и не позволяют двигаться ни в одном из горизонтальных направ-
направлений. Учет узловых условий такого типа осуществляется путем
видоизменения системы уравнений, решение которой определяет
узловые перемещения.
Многие физические задачи не имеют четко установленных гра-
границ области анализа. В задаче 5 рассмотрен один из таких при-
примеров— процесс распространения тепла. Земля простирается бес-
бесконечно далеко вниз от тротуара, а излучающие тепло кабели про-
простираются направо и налево на неопределенное расстояние.
Моделирование тел, бесконечно протяженных в одном или не-
нескольких направлениях, представляет определенную трудность
для инженера, так как он должен иметь дело с ограниченной мо-
моделью. Для анализа следует выбирать при этом достаточно боль-
большую область, чтобы вычисляемые вдоль ее границ величины были
согласованы с теми значениями, которые встречаются в физиче-
физической задаче. В задаче 5, например, необходимо выбрать достаточ-
достаточно большую по глубине область с тем, чтобы значения в узлах,
расположенных на значителыном расстоянии от кабелей, были
равны между собой.
Вероятно, лучшим руководящим принципом в данном случае
являются опыт и изучение чужого опыта в моделировании подоб-
подобных неограниченных областей.
Дискретизация области
2&
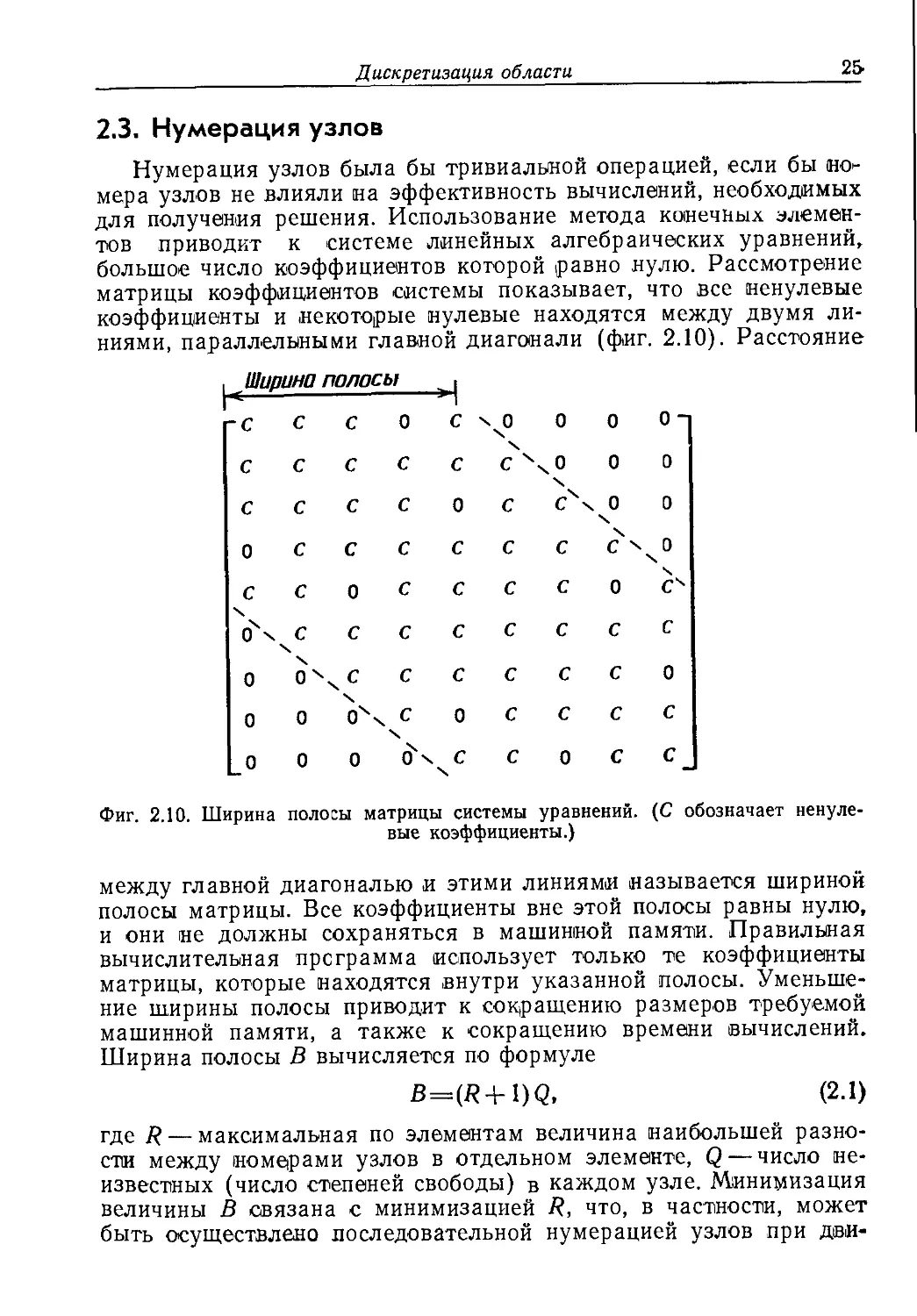
2.3. Нумерация узлов
Нумерация узлов была бы тривиальной операцией, если бы но
мера узлов не влияли на эффективность вычислений, необходимых
для получения решения. Использование метода конечных элемен-
элементов приводит к системе линейных алгебраических уравнений,
большое число коэффициентов которой равно нулю. Рассмотрение
матрицы коэффициентов системы показывает, что все ненулевые
коэффициенты и некоторые нулевые находятся между двумя ли-
линиями, параллельными главной диагонали (фиг. 2.10). Расстояние
Ширина полосы
-с
с
с
0
с
N
О
О
О
с
с
с
с
с
с
ч
N
О N
О
О
с
с
с
с
О
с
с
N
оЧ
О
О
с
с
с
с
с
с
с
N
-, 1
с
с
О
с
с
с
с
О
ч С
N
\ о
N
с
с
с
с
с
с
с
с
О
Чо
N
сЧ
с
с
с
с
с
0
0
0
0
N
с
0
с
с
с
с
о-
0
0
N 0
N
с4
с
0
с
с
Фиг. 2.10. Ширина полосы матрицы системы уравнений. (С обозначает ненуле-
ненулевые коэффициенты.)
между главной диагональю и этими линиями называется шириной
полосы матрицы. Все коэффициенты вне этой полосы равны нулю,
и они не должны сохраняться в машинной памяти. Правильная
вычислительная программа использует только те коэффициенты
матрицы, которые находятся внутри указанной полосы. Уменьше-
Уменьшение ширины полосы приводит к сокращению размеров требуемой
машинной памяти, а также к сокращению времени вычислений.
Ширина полосы В вычисляется по формуле
В=(Я + 1)Q, B.1)
где R — максимальная по элементам величина наибольшей разно-
разности между номерами узлов в отдельном элементе, Q — число не-
неизвестных (число степеней свободы) в каждом узле. Минимизация
величины В связана с минимизацией /?, что, в частности, может
быть осуществлено последовательной нумерацией узлов при дви-
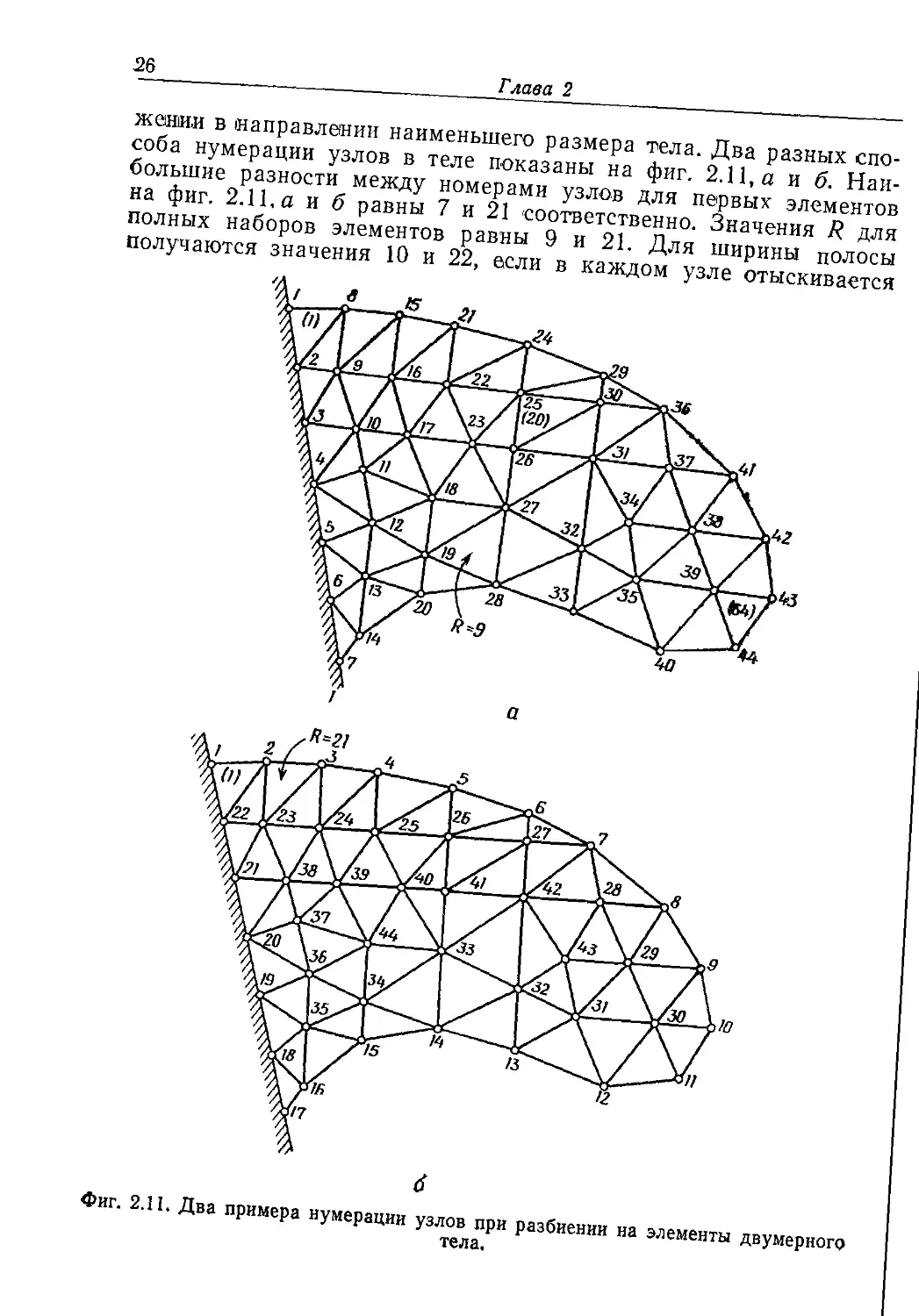
26 Глава 2
жеиии в направлении наименьшего размера тела. Два разных спо-
способа нумерации узлов в теле показаны на фиг. 2.11, а и б. Наи-
Наибольшие разности между номерами узлов для первых элементов
на фиг. 2.11, а и б равны 7 и 21 соответственно. Значения R для
полных наборов элементов равны 9 и 21. Для ширины полосы
получаются значения 10 и 22, если в каждом узле отыскивается
Фиг. 2.11. Два примера нумерации узлов при разбиении на элементы двумерного
тела.
Дискретизация области 27
по одной неизвестной величине, или значения 20 и 44, если в каж-
каждом узле рассматриваются две неизвестные величины. Правильная
нумерация узлов в этом примере сокращает машинную память
более чем на 50%.
Нумерация элементов представляет собой простую процедуру.
В этой книге номер элемента будет заключаться в круглые скобки
с тем, чтобы избежать путаницы с номерами узлов. Элемент A)
на фиг. 2.11, а содержит узлы с номерами 1, 2 и 8. Нумерация
элементов не влияет на вычислительные аспекты задачи.
2.4. Заключение
При решении задач методом конечных элементов используются;
разнообразные элементы. Некоторые наиболее важные из них вве-
введены были в этой главе в связи с рассмотрением дискретизации
сплошного тела.
В следующих десяти главах наше внимание будет сосредоточе-
сосредоточено на симплекс-элементах. Эта группа включает линейный одно-
одномерный элемент с двумя узлами, линейный треугольник с тремя
узлами и линейный тетраэдр с четырьмя узлами. Упор на эта
элементы делается по нескольким причинам. Они просты в теоре-
теоретическом отношении, что дает возможность легко проиллюстриро-
проиллюстрировать их применение. Треугольный и тетраэдальный элементы мо-
могут быть использованы для аппроксимации границ сложной фор-
формы, потому что они могут быть ориентированы как угодно. Другой
важной причиной является то, что во многих имеющихся вычисли-
вычислительных программах используются эти элементы.
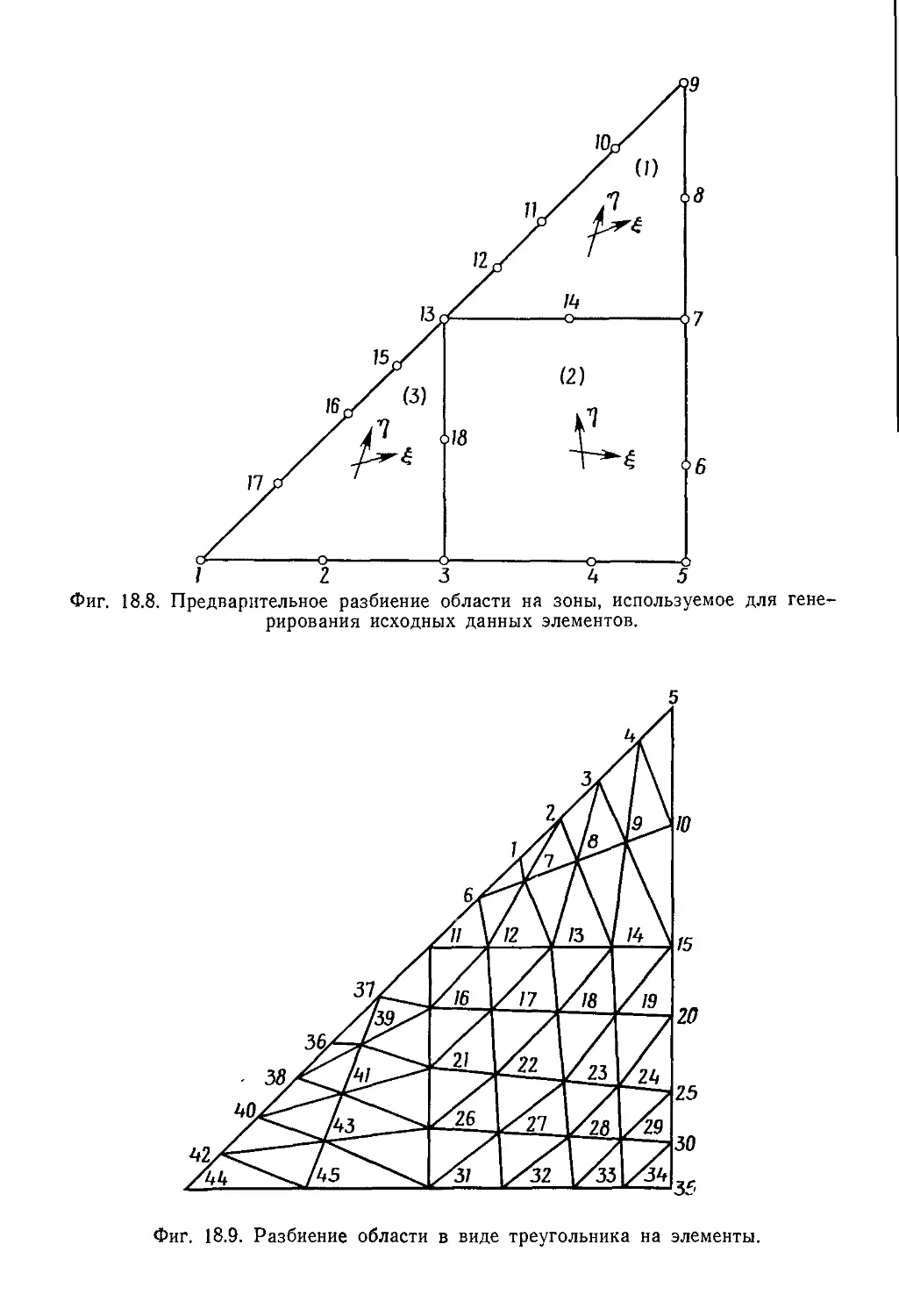
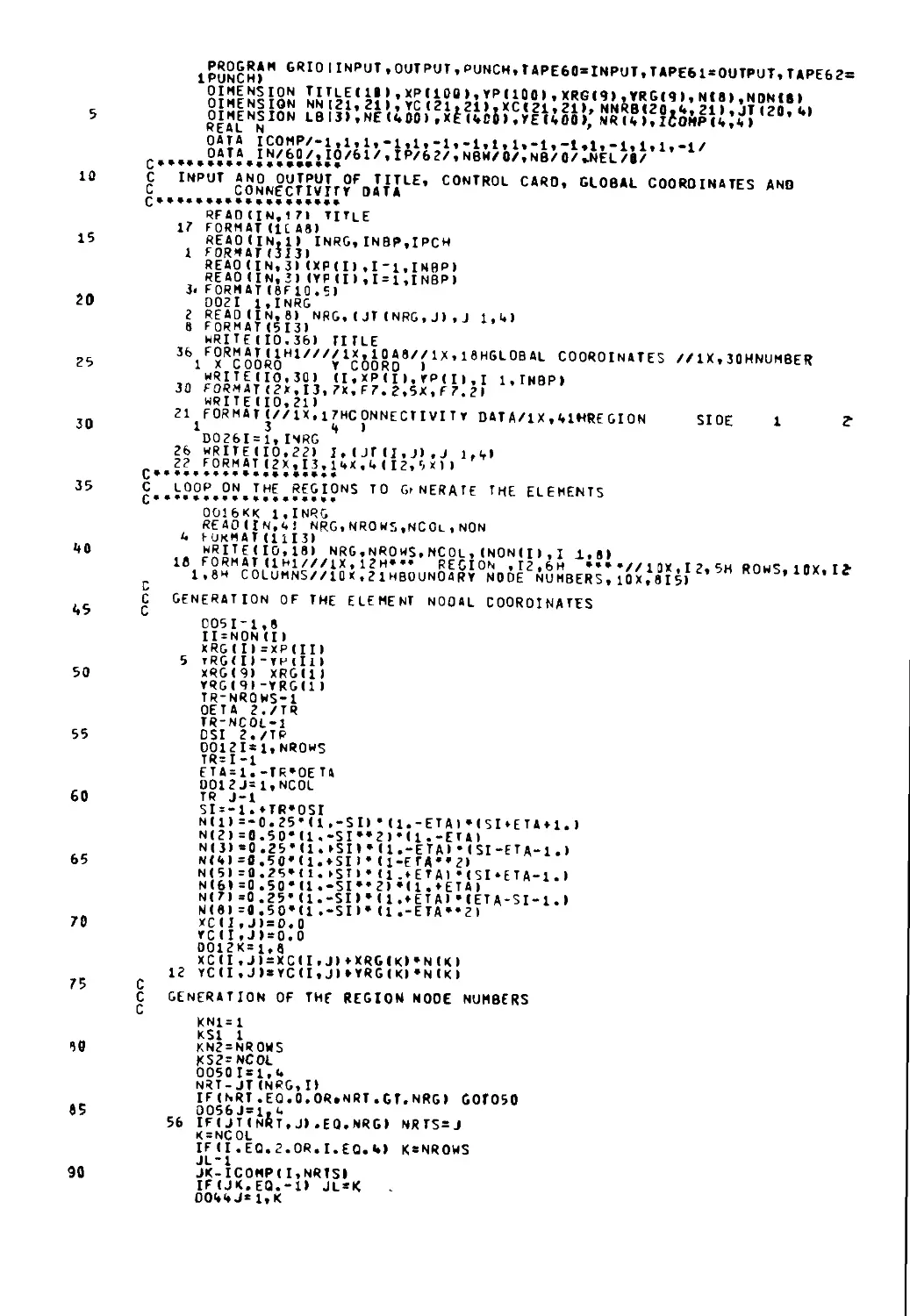
В гл. 18 представлена программа GRID сеточного разбиения,
определяющая номера узлов и координаты треугольных симплекс-
элементов в произвольной четырехугольной области. Читатель мо-
может воспользоваться этой программой для решения задач, поме-
помещенных в конце этой главы, и для получения исходных данных
элементов в задачах из глав прикладного характера.
Задачи
1. Разбейте треугольную область на 16 элементов, пронуме-
пронумеруйте узлы и вычислите определенную выше ширину полосы,
предполагая наличие двух степеней свободы в каждом узле.
2. Разбейте четырехугольник на 24 элемента, используя пять
узлов вдоль одной пары сторон и четыре узла вдоль другой пары.
Пронумеруйте узлы так, чтобы получить минимальное значение
величины R.
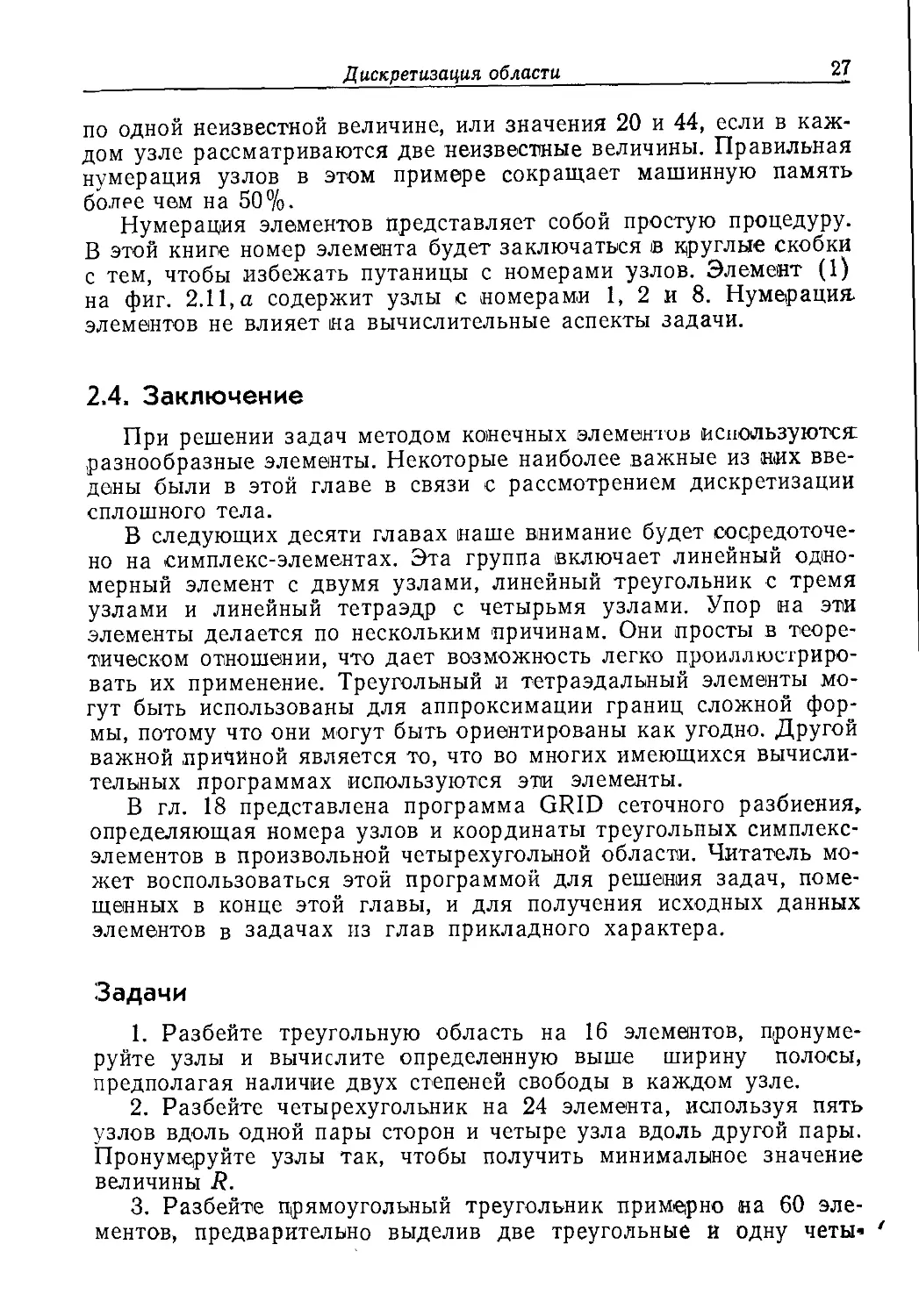
3. Разбейте прямоугольный треугольник примерно на 60 эле-
элементов, предварительно выделив две треугольные и одну четы» '
Глава 2
рехугольную подобласти. Поместите наименьшие по размерам
элементы вблизи прямого угла.
4. Разбейте консоль «а линейные треугольные элементы. На
закрепленной границе разместите вдвое больше узлов, чем на
свободном конце. Укажите с помощью принятых обозначений не-
неподвижно закрепленные узлы.
4см
-4см-
К задаче 3.
К задаче 4.
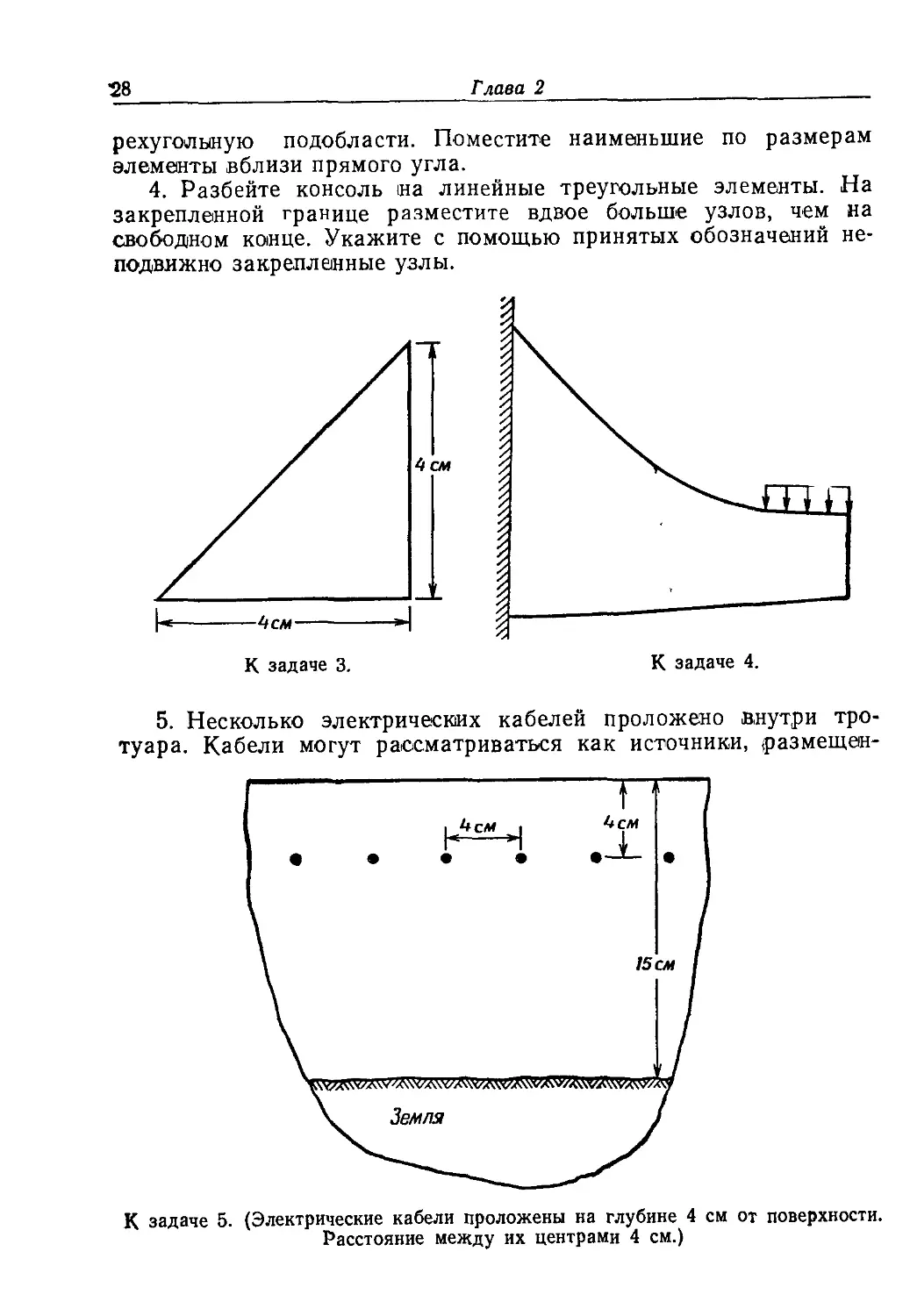
5. Несколько электрических кабелей проложено внутри тро-
тротуара. Кабели могут рассматриваться как источники, размещен-
К задаче 5. (Электрические кабели проложены на глубине 4 см от поверхности.
Расстояние между их центрами 4 см.)
Дискретизация области 29
ные в узлах. Выберите пригодную для анализа область и (разбей-
(разбейте ее на треугольные элементы.
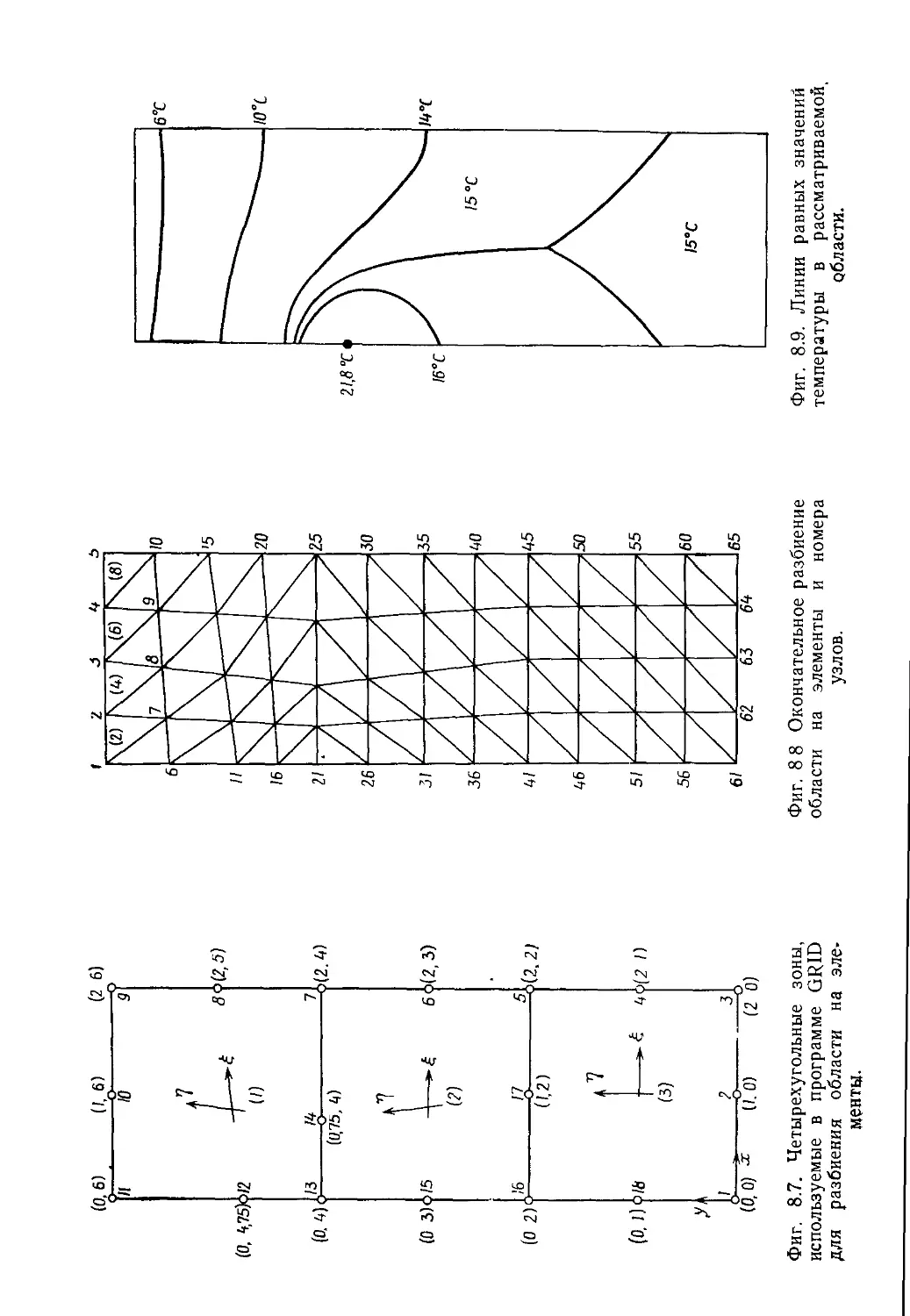
6. Используя программу GRID из гл. 18, определите исходные
данные элементов для областей, рассмотренных в задачах 3 и 5.
ЛИТЕРАТУРА
1, Desai С. S., Abel J. F., Introduction to the Finite Element Method, Van Nostrand
Reinhold Co., N. Y., 1970.
Глава 3
ЛИНЕЙНЫЕ ИНТЕРПОЛЯЦИОННЫЕ ПОЛИНОМЫ
Метод конечных элементов основан на идее аппроксимации
непрерывной функции (температуры, давления, перемещения
и т. д.) дискретной моделью, которая строится на множестве ку-
кусочно-непрерывных функций, определенных на конечном числе
подобластей, называемых элементами. В качестве функции эле-
элемента чаще всего применяется полином. Порядок полинома за-
зависит от числа используемых в каждом узле элемента данных
о непрерывной функции.
Классификация конечных элементов может быть проведена в
соответствии с порядком полиномиальных функций этих элемен-
элементов. При этом рассматриваются три следующие группы элемен-
элементов: симплекс-, комплекс и мультиплекс-элементы [4]. Симплекс-
элемеитам соответствуют полиномы, содержащие константу и ли-
линейные члены. Число коэффициентов в таком полиноме на едини-
единицу больше размерности координатного пространства. Полином
(р=а1-\-а2х + <х3у C.1
представляет собой симплексную функцию для двумерного тре-
треугольного элемента. Этот полином линеен по х и у и содержит
три коэффициента, потому что треугольник имеет три узла.
Комплекс-элементам соответствуют полиномиальные функ-
функции, содержащие константу, линейные члены, а также члены вто-
второго, третьего и более высокого порядка, если это необходимо.
Форма комплекс-элементов может быть такой же, как и у симп-
симплекс-элементов, но комплекс-элементы имеют дополнительные
граничные узлы и, кроме того, могут иметь также и внутренние
узлы. Главное различие между симплекс и комплекс-элементами
состоит в том, что число узлов в комплекс-элементе больше ве-
величины, равной размерности координатного пространства плюс
единица. Интерполяционный полином для двумерного треуголь-
треугольного комплекс-элемента имеет вид
<p=a!-f а^х + азу + а^ + а^у + аву*. C.2)
Это соотношение включает шесть коэффициентов, поэтому рас-
рассматриваемый элемент должен иметь шесть узлов.
Линейные интерполяционные полиномы
31
Для мультиплекс-элементов также используются полиномы,
содержащие члены высокого порядка, но границы элементов при
этом должны быть параллельны координатным осям что необхо-
необходимо для достижения непрерывности при переходе от одного эле-
Фиг. 3.1. Прямоугольник, двумерный мультиплекс элемент.
мента к другому. Границы симплекс- и комплекс-элементов не
подвергаются такому ограничению. Прямоугольный элемент на
фиг. 3.1 —отличный пример мультиплекс-элемента.
Здесь будут рассмотрены симплекс элементы. Комплекс- и
мультиплекс-элементы наряду с изопараметрическими элементами
обсуждаются после прикладных разделов книги.
3.1. Одномерный симплекс-элемент
Одномерный симплекс-элемент представляет собой прямоли-
прямолинейный отрезок длины L с двумя узлами, по одному на каждом
конце отрезка (фиг. 3.2). Узлы обозначаются индексами i и /,
узловые значения через Ф* и Ф;- соответственно. Начало систе-
Фиг. 3.2. Одномерный симплекс-элемент.
32 Глава 3
мы координат располагается вне элемента. Полиномиальная
функция ф для скалярной величины1' имеет вид
Ф=а1 + а2х. C.3)
Коэффициенты си и а2 могут быть определены с помощью усло-
условий в узловых точках:
ср=ф. при х=Х%
и
Ф=ф;. при x=Xj.
Эти узловые условия приводят к системе двух уравнений
решение которой дает
ах= '-?—'— C.4а)
и
Ф/— Ф{ /О ЛА\
ct2———?—-. C.46)
Подставляя найденные значения ai и аг в формулу C.3), полу-
получаем для ф выражение
которое может быть переписано в виде
^)* <3'5>
Линейные функции от х в формуле C.5) называются функци-
функциями формы или интерполяционными функциями. Эти функции
всюду обозначаются через N. Каждая функция формы должна
быть снабжена нижним индексом для обозначения узла, к кото*
рому она относится. Произвольную функцию формы будем обо-
обозначать через Ы$. В соотношение C.5) входят следующие функ-
функции формы:
V Xj — x д, —х — Xj
j\t — — и jv;— L
'> Буква ф используется для обозначения произвольной скалярной велнчнны.
Буквы tup прнменяются соответственно для обозначения температуры и давле-
давления, когда речь идет о конкретных приложениях.
Линейные интерполяционные полиномы
33
Соотношение C.5) может быть записано в матричном виде
где [N] — [N^Nj]—матричная строка и {Ф}=\ф4 —вектор-стол-
—вектор-столбец. Как видно из формулы C.5), функция Ni = \Xj — x)jL равна
единице в узле с номером i и равна нулю в j-u узле. Аналогично»
функция Nj равна нулю в t-м узле и равна единице в узле с но-
номером /. Эти значения характерны для функций формы. Они рав-
равны единице в одном определенном узле и обращаются в нуль во
всех других узлах.
Пример
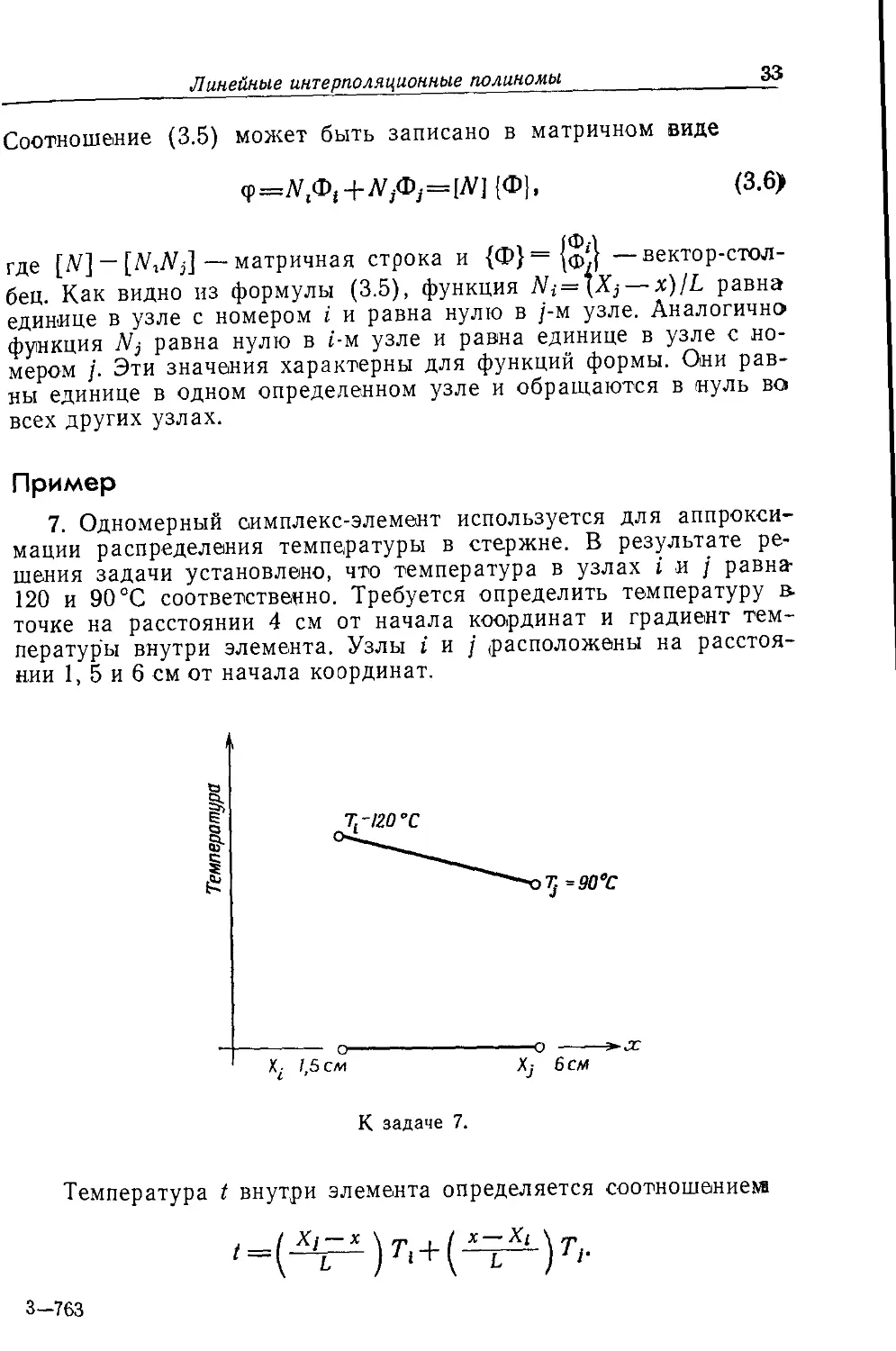
7. Одномерный симплекс-элемент используется для аппрокси-
аппроксимации распределения температуры в стержне. В результате ре-
решения задачи установлено, что температура в узлах i и / равна*
120 и 90 °С соответственно. Требуется определить температуру в.
точке на расстоянии 4 см от начала координат и градиент тем-
температуры внутри элемента. Узлы i и / (расположены на расстоя-
расстоянии 1, 5 и 6 см от начала координат.
•90'С
X.. 7 5 С/и
j 6 СМ
К задаче 7.
Температура t внутри элемента определяется соотношением
3-763
34 Глава 3
Данные элемента:
Хг 1,5 см, Гг = 120°С,
X] — 6,0 см, Tj—90 °С,
#=4,0 см, L = X;-—Хг=4,5 см.
Подставляя «сходные данные в формулу для температуры, полу-
получаем
—53,33 f- 50 = 103,33°С.
Для градиента температуры имеем
Л 1 г . 1 т, 1 ,rp rps_ 90—120 —30 —6,67 "С
~зг=~тгу*+тг)i—L^i~1^'——4^—=~ту——s—
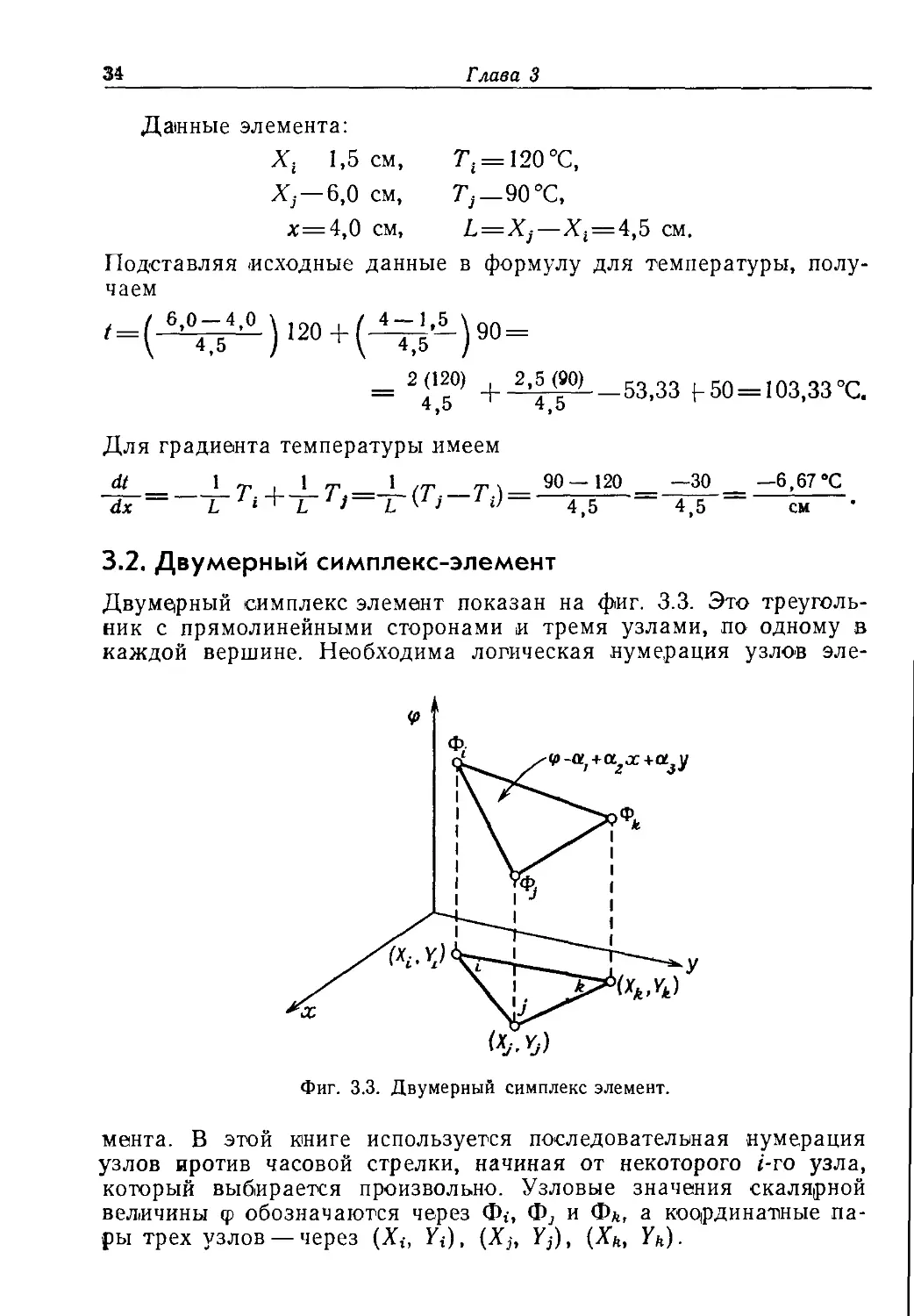
3.2. Двумерный симплекс-элемент
Двумерный симплекс элемент показан на фиг. 3.3. Это треуголь-
треугольник с прямолинейными сторонами и тремя узлами, по одному в
каждой вершине. Необходима логическая нумерация узлов эле-
<р
Фиг. 3.3. Двумерный симплекс элемент.
мента. В этой книге используется последовательная нумерация
узлов против часовой стрелки, начиная от некоторого г'-го узла,
который выбирается произвольно. Узловые значения скалярной
величины ф обозначаются через Ф,, cDj и Ф*, а координатные па-
пары трех узлов —через {Xit У{), {Xjt Yj), {Xh, Yh).
Линейные интерполяционные полиномы
35
Интерполяционный полином имеет вид
(f=a1-\-aix+aay. C.7)
В узлах выполняются следующие условия:
Ф=Ф, при x=Xt, y=Yt,
ф=ф;. при х=Хр y=Yj
и
Ф=ФА при x=Xk, y=Yk.
Подстановка этих условий в формулу C.7) приводит к систе-
системе уравнений
C.8)
решая которую получаем
XtYk) Ф3 +
a* = ТА [{Хк -Х>} Ф' +{Xt ~X
ТА
Определитель системы связан с площадью треугольника А соот-
соотношением
1 X. Yt
1 X, У,
=2А
C.9)
Подставляя значения ai, й2 и аз в формулу C.7), можно преобра-
преобразовать выражение для <р к виду, подобному C.6). Это соотноше-
соотношение, определяющее элемент, содержит три функции формы, по
одной для каждого узла:
А> C.10)
где
и &,=y,-
ct=Xk—-Х/,
36 Глава 3
и \ь,=Ук-
bk=Yt-YJt
ck=X}-Xt.
Вычислим значение Ni в i-м узле:
=-^- (X^ft _Xft^ + YjXt -YkXt + Xk y,-X,YJ
Выражение в скобках представляет собой величину определителя
в формуле C.9), поэтому в узле с номером i
Предлагаем читателю показать, что Ni (равно нулю во втором
и третьем узлах, так же как и во всех точках прямой, проведен-
проведенной через эти узлы. !
Скаляриая величина <р определяется внутри элемента функ-j
циями формы, линейными по х и у. Это означает, что градиенты]
этой величины в направлениях х и у будут постоянны. Градиент
в направлении х определяется соотношением
Ь'О
Поэтому
~!r~~^=bl*fi -\- bjtfj -f- btSfu. C.12)
Так как 6,, &i, bh постоянны (они фиксированны как только зада-
заданы узловые координаты) и ср,, q>j и ц>к не зависят от координат
пространства, частная производная в C.12) имеет постоянное
значение. Постоянство градиента внутри каждого элемента озна-
означает, что необходимо использовать очень малые по величине эле-
элементы, чтобы аппроксимировать быстро меняющуюся функцию ср.
Линейные интерполяционные полиномы
37
Пример
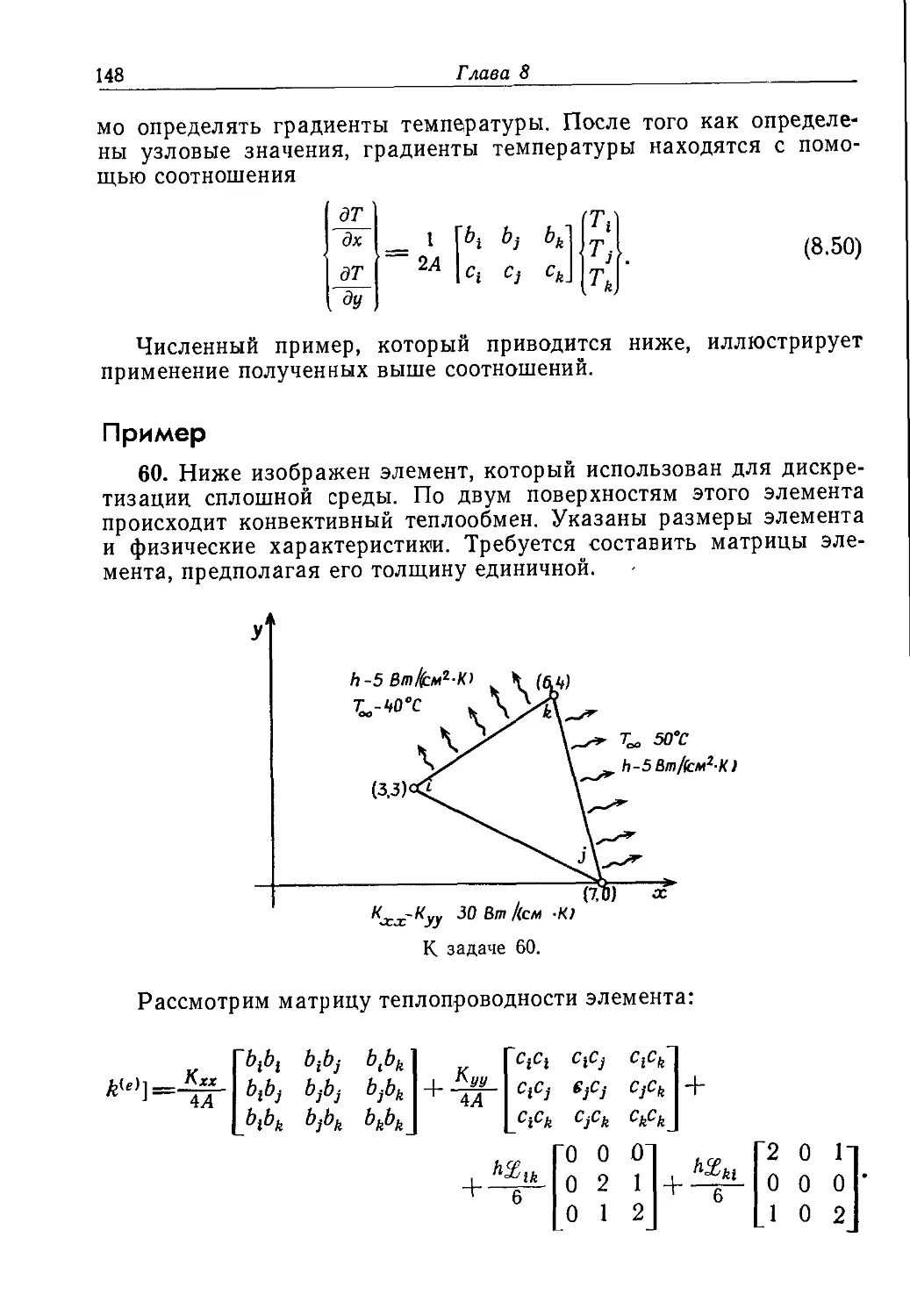
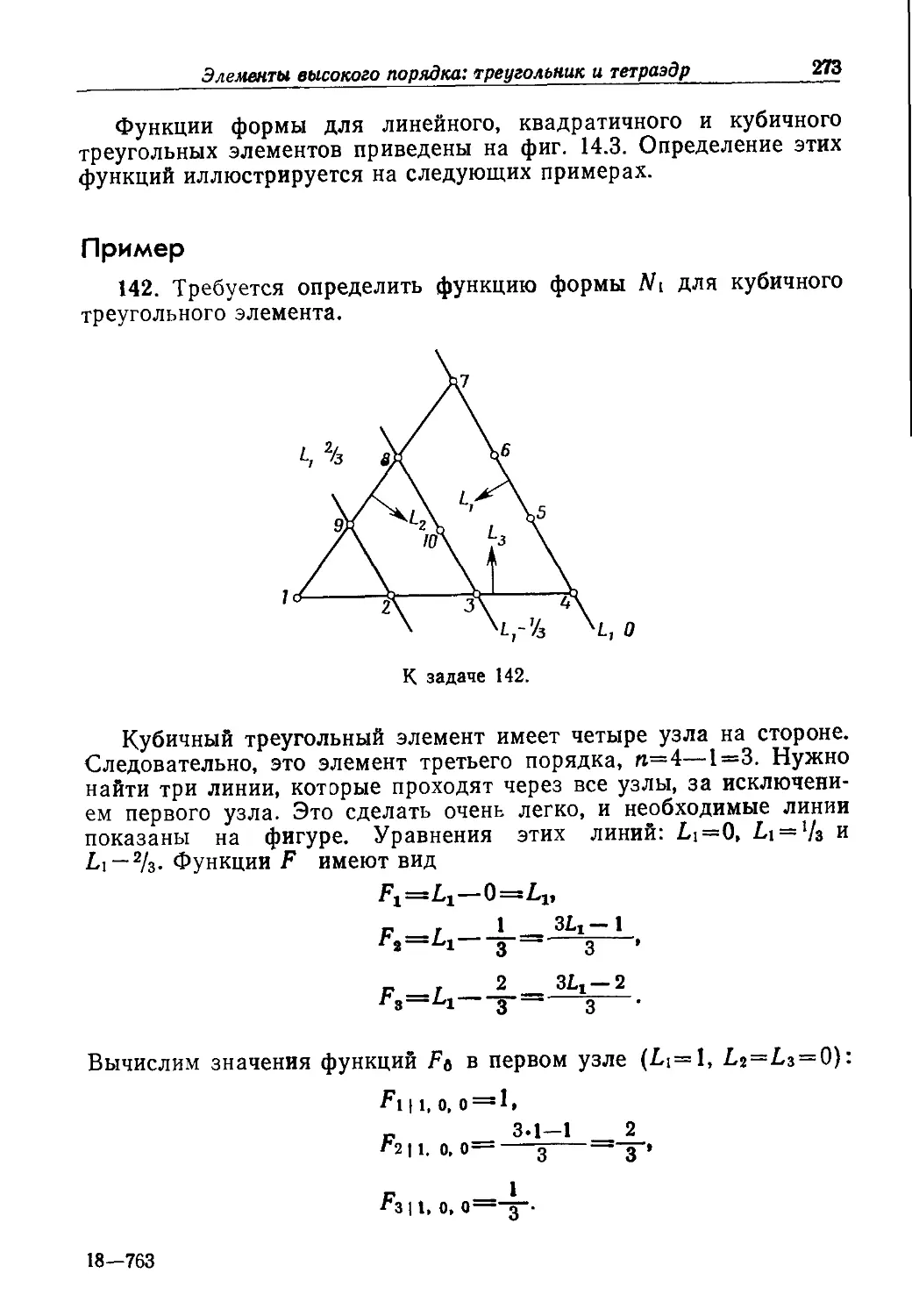
8. Требуется получить соотношение, определяющее элемент, и
вычислить значение давления в точке В с координатами B, 1,5),
если заданы узловые значения Р* — 40 Н/см2, А,=34 Н/см2 и Рн =
= 46 Н/см2.
К задаче 8.
Давление р внутри элемента определяется по формуле
p=NlPi + Ni
где
Подстановка значений координат узлов в формулу C.10) дает
с, =X}Yk -ВД = 4E) -2 Ш = 19,
/=XkYt — ХгГЛ=2@) —0E)=0,
=УЛ—Г, — 5— 0=5,
38
Глава 3
Ci=Xk—Xj=2— 4 = 2,
Cj-=Xt—Xk=0—2=—2,
ск=Х;-Хг = 4-0 4,
2Л =
1
1
1
х.
Ух
yt
Yk
=
1
1
1
0
4
2
0
1
2
5
—20 — 1 = 19.
После подстановки констант в функции формы выражение для р
принимает вид
Значение давления р в точке В с координатами B, 1,5) равно
Р=-^-[G) D0) + 7C4) + 5D6)]=39,37 Н/см*.
Следует отметить два полезных свойства треугольного элемен-
элемента. Во-первых функция <р изменяется линейно между двумя лю-
любыми узлами. Так как узлы определяют границы элемента, ф ме-
меняется линейно вдоль каждой из трех его сторон. Отсюда следует
второе полезное свойство: любая линия, вдоль которой ф прини-
принимает одинаковые значения, есть прямая, пересекающая две сторо-
стороны элемента. Исключением будет случай, когда во всех узлах
значения ф одинаковые. Приведенные два свойства позволяют
легко определять линии уровня скалярной величины. Обратимся
опять к предыдущему примеру, чтобы проиллюстрировать эти
свойства.
Пример
9. Требуется определить линию уровня, соответствующую ве-
величине давления 42 Н/см2, для треугольного элемента, использо-
использованного в задаче 8.
Искомая линия уровня пересекает стороны ik и kj. Поскольку
давление меняется линейно вдоль каждой из сторон треугольни-
треугольника, можно составить простые отношения, позволяющие получить
координаты точек на указанных сторонах, через которые проходит
искомая линия. Для стороны \k имеем
46 — 42 2-х 4 2-х п г-
4S-34
2 — 4 «
ИЛИ -пг=-
—2
Линейные интерполяционные полиномы
39
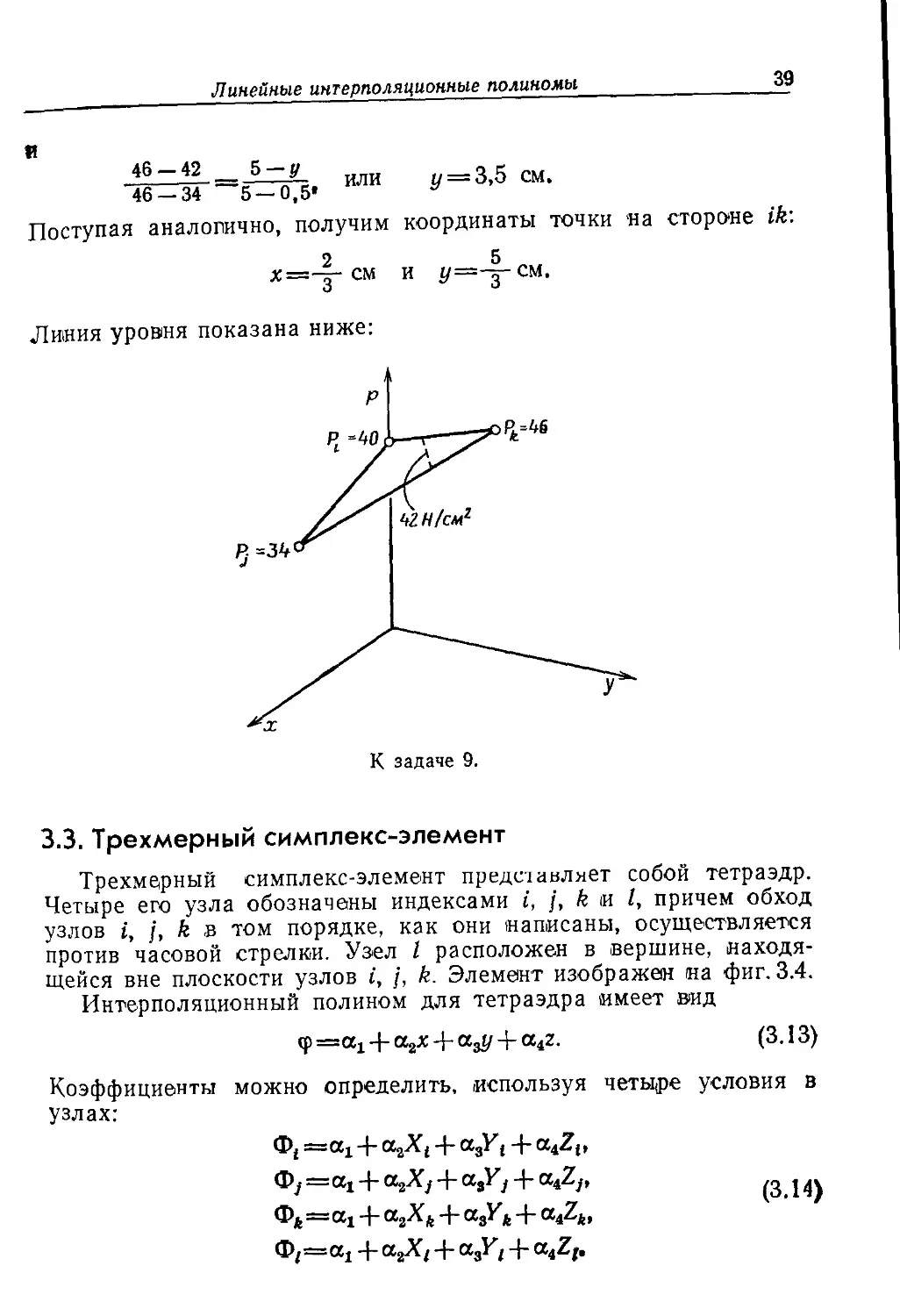
Поступая аналогично, получим координаты точки иа стороне ik:
2 5
=~g- СМ И ?/ = -д-
Линия уровня показана ниже:
К задаче 9.
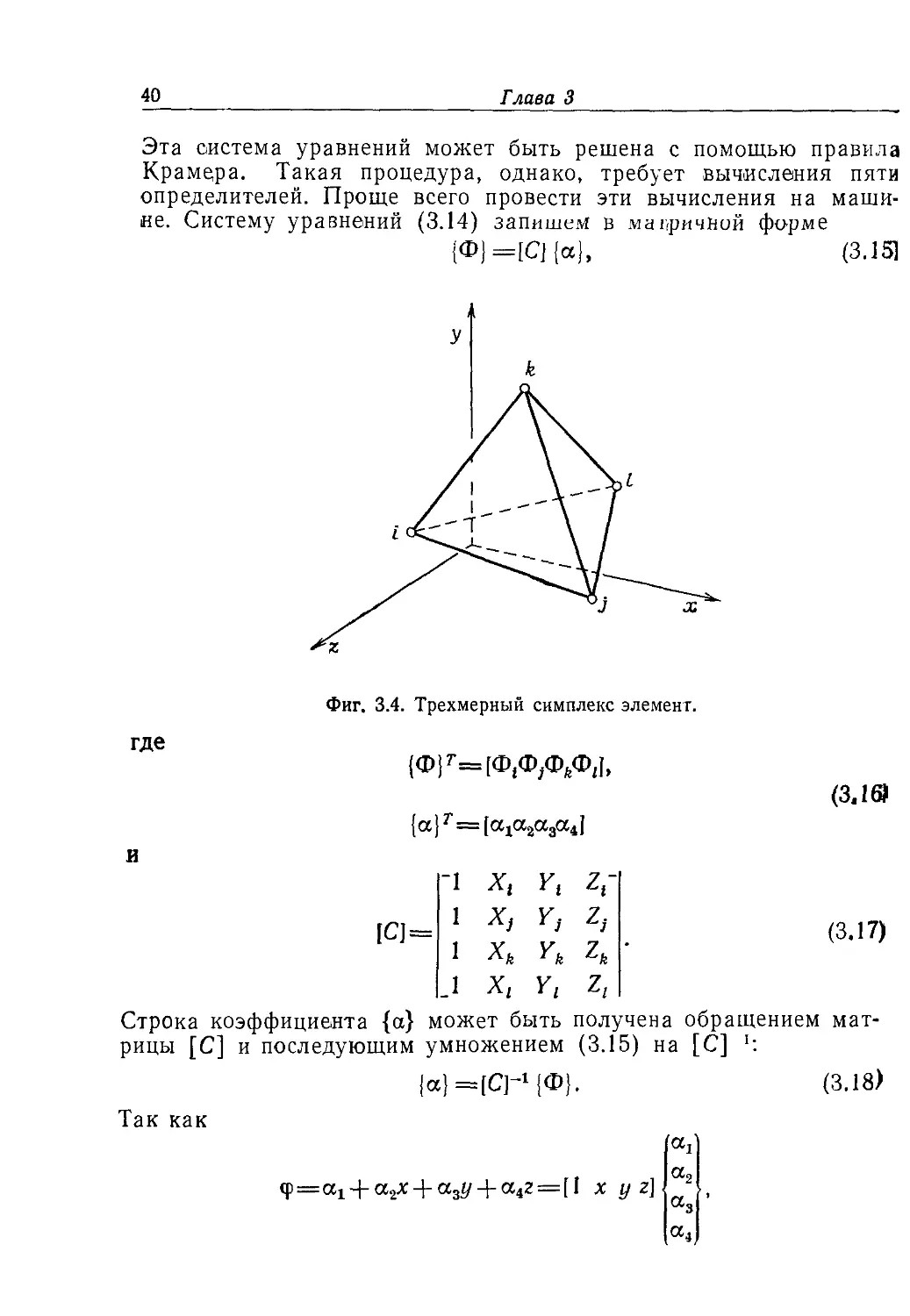
3.3. Трехмерный симплекс-элемент
Трехмерный симплекс-элемент представляет собой тетраэдр.
Четыре его узла обозначены индексами i, /, k и I, причем обход
узлов i, /, k в том порядке, как они написаны, осуществляется
против часовой стрелки. Узел I расположен в вершине, находя-
находящейся вне плоскости узлов i, /, k. Элемент изображен на фиг. 3.4.
Интерполяционный полином для тетраэдра имеет вид
{р=ОС1-4~а2*~ЬазУ "Ьа42- C.13)
Коэффициенты можно определить, используя четыре условия в
узлах:
C.14)
t -f atZt
40
Глава 3
Эта система уравнений может быть решена с помощью правила
Крамера. Такая процедура, однако, требует вычисления пяти
определителей. Проще всего провести эти вычисления на маши-
машине. Систему уравнений C.14) запишем в матричной форме
{Ф}=[С]{а}, C.151
Фиг. 3.4. Трехмерный симплекс элемент.
где
а)г=[а1а2а3а41
[С]-
1y
i
1 X,
Yk Zk
Уi Zt
C.i a
C.17)
Строка коэффициента {а} может быть получена обращением мат-
матрицы [С] и последующим умножением C.15) на [С] ':
C.18)
Так как
а42 = [1 х у z]
Линейные интерполяционные полиномы
41
то, используя формулу C.18), получим
Ф=[1 х у г][С]^
C.19)
Определитель матрицы [С] раиен шести объемам тетраэдра.
Элементы матричной алгебры, необходимые при использовании
правила Крамера, изложены, например, в книге Зенкевича [5].
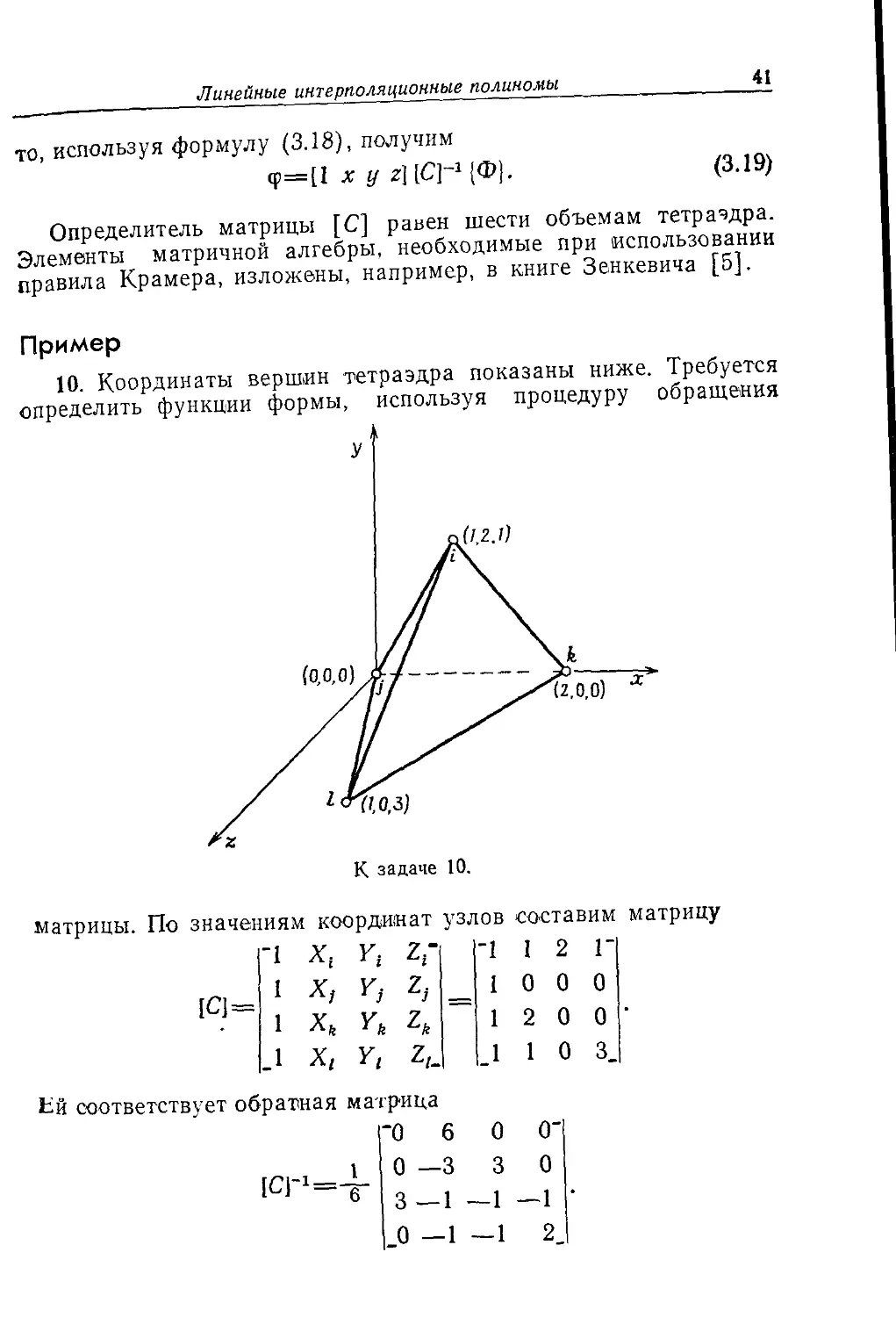
Пример
10. Координаты вершин тетраэдра показаны ниже. Требуется
определить функции формы, используя процедуру обращения
матрицы. По значениям координат узлов составим матрицу
"I У V 7 "
1 Лг Гг Z2
1 X; Y, Z,
-1 X/ У,
12 1"
10 0 0
12 0 0
110 3
соответствует обратная матрица
"О 6
О -3
3—1
0 0-
30
1 —1
О —1 —1 2
42
Глава 3
Запишем интерполяционный полином
Ф=[1 х у г][С]-1{Ф].
Так как
<Р=М{Ф},
функции формы представляются произведением вида
[N] = [l х у г][С]-\
После подстановки |С]~' имеем
-0 6 0 0"
_0 —1 —1 2.
или
Таким образом, функции формы рассматриваемого элемента
имеют вид
1 2 '
д, __ 6 — Зх— у — г
lsi ~ б
3.4. Интерполирование векторных величин
Интерполяционные соотношения в предыдущих разделах ис-
используются при рассмотрении скалярной величины. Векторная
величина, например перемещение, имеет как величину, так и на-
направление, поэтому в каждом узле необходимо определять более
одной неизвестной (степени свободы). Обычно в этом случае по-
поступают следующим образом: векторная величина представляется
ее компонентами, которые рассматриваются как неизвестные ска-
скалярные величины. Каждый узел будет содержать одну, две или
три неизвестные в зависимости от того, какая задача рассматри-
рассматривается— одномерная, двумерная или трехмерная.
Линейные интерполяционные полиномы
43
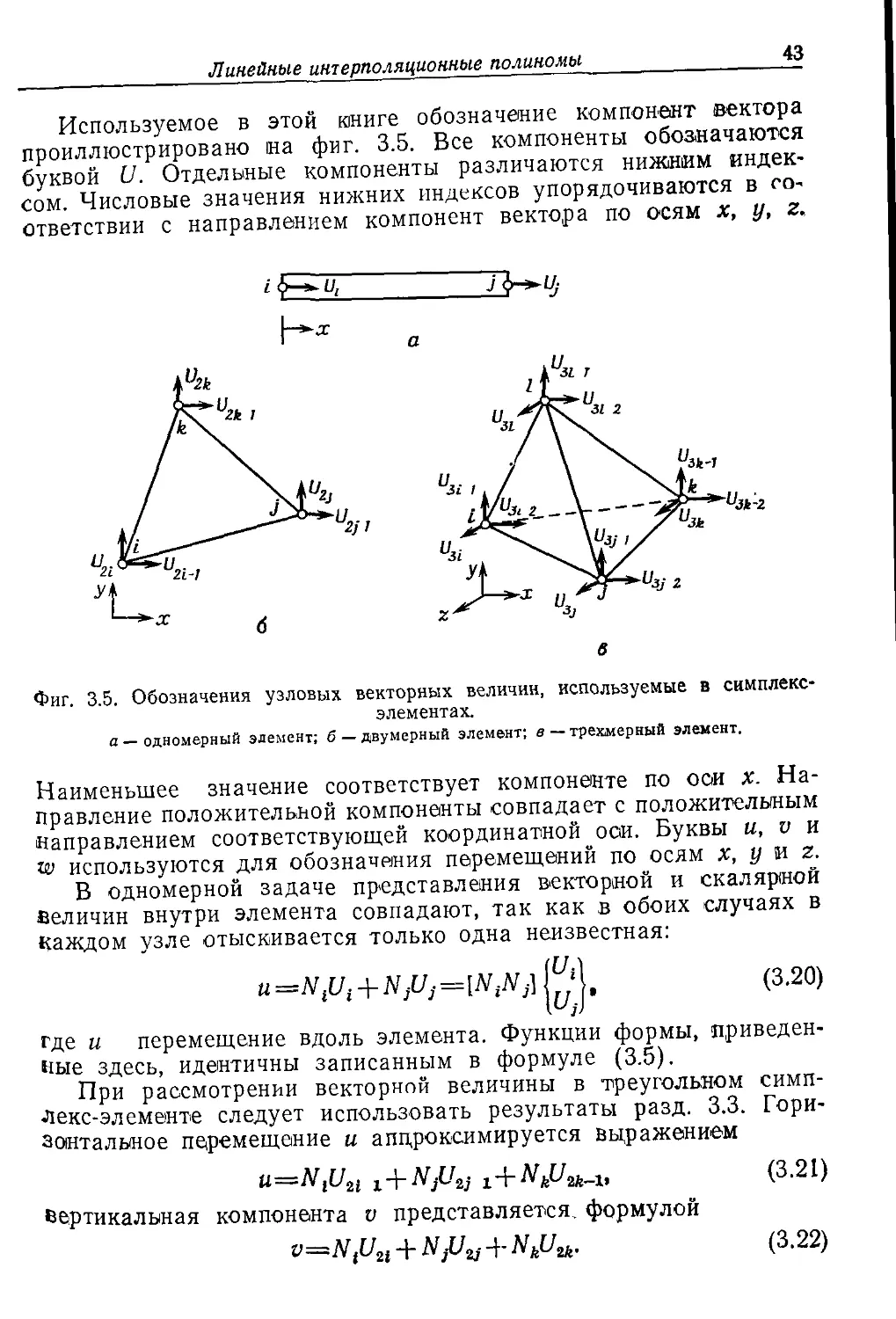
Используемое в этой юниге обозначение компонент вектора
проиллюстрировано иа фиг. 3.5. Все компоненты обозначаются
буквой U. Отдельные компоненты различаются нижним индек-
индексом. Числовые значения нижних индексов упорядочиваются в го-
ответствии с направлением компонент вектора по осям х, у, г.
Фиг. 3.5. Обозначения узловых векторных величин, используемые в симплекс-
элементах.
а — одномерный элемент; б — двумерный элемент; в — трехмерный элемент.
Наименьшее значение соответствует компоненте по оои х. На-
Направление положительной компоненты совпадает с положительным
направлением соответствующей координатной оси. Буквы и, v и
w используются для обозначения перемещений по осям х, у и г.
В одномерной задаче представления векторной и скалярной
величин внутри элемента совпадают, так как в обоих случаях в
Каждом узле отыскивается только одна неизвестная:
C.20)
(uj)
где и перемещение вдоль элемента. Функции формы, приведен-
приведенные здесь, идентичны записанным в формуле C.5).
При рассмотрении векторной величины в треугольном симп-
симплекс-элементе следует использовать результаты разд. 3.3. Гори-
Горизонтальное перемещение и апцрок-симируется выражением
C.21)
C.22)
вертикальная компонента v представляется, формулой
44
Глава 3
Эти два соотношения могут быть записаны с учетом всех узловых
значений вектора перемещения:
u=NlUn
v=0U
2t
1 + NkU2k.
Воспользуемся матричными обозначениями
Nj 0 Nt
о n} о
u2i i
C.23)
Функции формы в C.23) идентичны представленным в формуле
C.10).
Распространив эту процедуру на случай трех измерений, по-
получим следующие зависимости:
Nt 0 0 Nj 0 0 Nk О О
О Nt О О N} 0 0 Nk О
О 0 Nt 0 0 ^ 0 0 iVft
C.24)
3.5. Местная система координат
Получение системы уравнений для узловых значений неизвест-
неизвестных величин включает интегрирование по площади элемента функ-
функций формы или их частных производных. Интегрирование может
быть упрощено, если записать интерполяционные соотношения в
системе координат, связанной с элементом. Эту систему координат
называют местной (или локальной) системой координат.
Интерполяционные соотношения могут быть записаны в мест-
местной системе координат путем преобразования уравнений, полу-
полученных в глобальной системе координат.
Рассмотрим треугольный элемент, в котором скалярная вели-
величина представляется в виде
Линейные интерполяционные полиномы
45
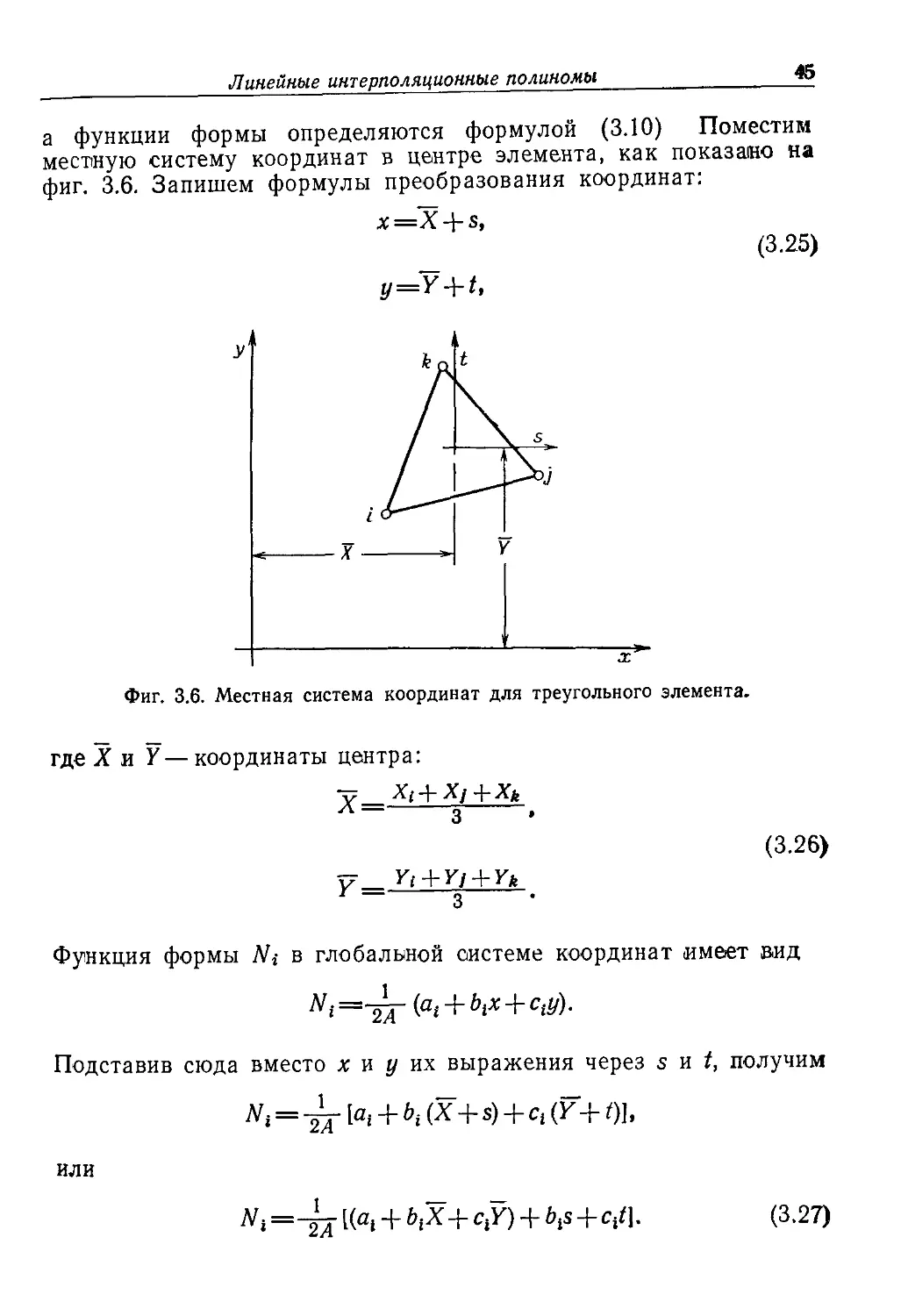
а функции формы определяются формулой (ЗЛО) Поместим
местную систему координат в центре элемента, как показано на
фиг. 3.6. Запишем формулы преобразования координат:
C.25)
Фиг. 3.6. Местная система координат для треугольного элемента.
где X и У— координаты центра:
C.26)
У—
Функция формы Ni в глобальной системе координат имеет вид
Подставив сюда вместо х и у их выражения через s и t, получим
N* = 4а [а' + bi &+ s> + ^ (F+ ')!•
или
C.27)
46 Глава 8
В результате преобразования Ь,- и d остаются неизменными и
по-прежнему умножаются на независимые переменные. Константа
с» изменяется. Вспоминая определения аи bt и Сг, данные в фор-
формуле C.10), и учитывая выражения C.26), можем обнаружить,
что (ai+ЬД+СгУ) равно 2Л/3. Таким образом, функция формы
в системе координат, связанной с элементом, принимает вид
Аналогично получаем выражения для других функций формы:
Интеграл от функции, заданной в глобальной системе координат,
может быть вычислен в местной системе координат с помощью
соотношения [3]
f f (х, у)dxdy=§f [x(s, t), y(s, t)]\J\dsdt, C.30)
R R*
где R и R* — соответственно старая и новая области интегриро-
интегрирования, |/|—абсолютное значение определителя преобразования
системы координат, которое равно отношению площадей в двух
системах координат Axy/Ast. Так как обе системы прямоугольные
и масштабы измерения "в них совпадают, то |/| = 1. Кроме того,
R—R*, поскольку форма элемента сохраняется при этом неиз-
неизменной. Таким образом, соотношение C.30) сводится к следую-
следующему:
Г/ (лг, у) dxdy =U[x(s, t), y (s, t)] dsdt. C.31)
if «•
Функция f(x, у) в левой части равенства C.31) представляет со-
собой функцию формы элемента, выраженную в глобальной систе-
системе координат, тогда как f[x(s, t), y(s, t)] соответствует функции
формы элемента, представленной в локальной системе координат.
3.5.1. Одномерный элемент
При рассмотрении одномерного элемента нет большой необхо-
необходимости в использовании местной системы координат, так как ин-
интерполяционное уравнение легко интегрируется в этом случае. До
некоторой степени интегрирование можно упростить, поместив на-
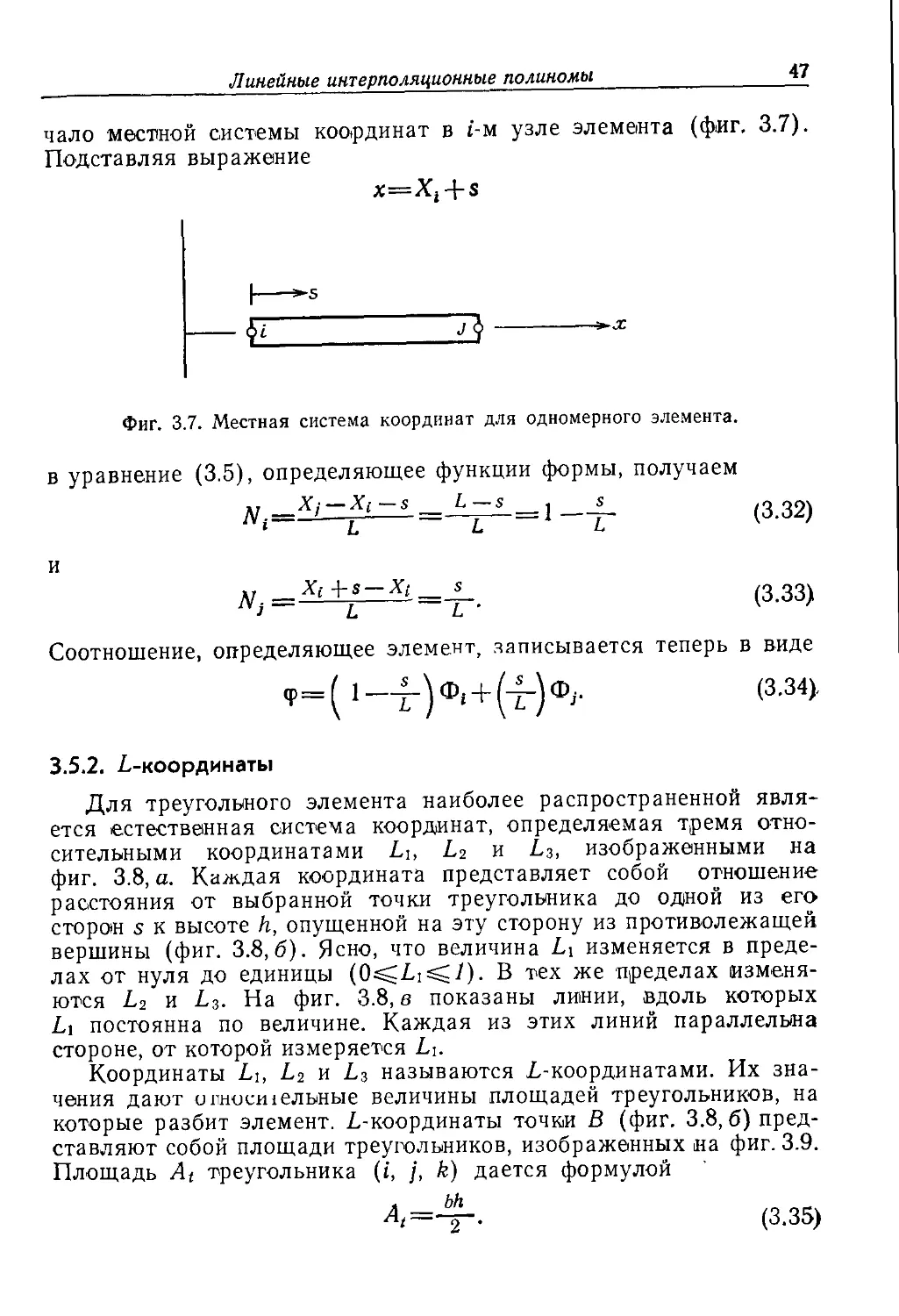
Линейные интерполяционные полиномы 47
чало местной системы коардинат в i-м узле элемента (фиг. 3.7).
Подставляя выражение
Фиг. 3.7. Местная система координат для одномерного элемента.
в уравнение C.5), определяющее функции формы, получаем
Ni=x<-Xl-s=±=JL=l-JL C.32)
Соотношение, определяющее элемент, записывается теперь в виде
3.5.2. L-координаты
Для треугольного элемента наиболее распространенной явля-
является естественная система координат, определяемая тремя отно-
относительными координатами Lb L2 и L3, изображенными на
фиг. 3.8, а. Каждая координата представляет собой отношение
расстояния от выбранной точки треугольника до одной из его
сторои s к высоте h, опущенной на эту сторону из противолежащей
вершины (фиг. 3.8,6). Ясно, что величина Lx изменяется в преде-
пределах от нуля до единицы @^Li^7). В тех же пределах изменя-
изменяются L2 и L3. На фиг. 3.8, в показаны линии, вдоль которых
L\ постоянна по величине. Каждая из этих линий параллельна
стороне, от которой измеряется Lu
Координаты Li, L2 и L3 называются L-координатами. Их зна-
значения дают ошисшельные величины площадей треугольников, на
которые разбит элемент. L-координаты точки В (фиг. 3.8, б) пред-
представляют собой площади треугольников, изображенных на фиг. 3.9.
Площадь At треугольника (i, /, k) дается формулой '
л bh
At=~Tm- C.35)
48
Глава 3
Площадь А\ заштрихованного треугольника (В, /, k) равна
Л ——
Составим отношение этих площадей
Ал S т
C.36)
Фиг 3.8. L-координаты для треугольника.
Фиг. 3.9. Три площади, связанные с произвольной точ-
точкой треугольника.
Итак, координата Li представляет собой отношвние площади за-
заштрихованного треугольника на фиг. 3.9 к площади всего эле-
Линейные интерполяционные полиномы 49
мента:
Аналогичные формулы могут быть записаны для L2 и L3"
Так как ++
l. C.39)
Уравнение C.39) связывает между собой три координаты. Урав-
Уравнения этого типа следовало ожидать, потому что три координаты
в двумерном случае «е могут быть независимыми. Местоположе-
Местоположение произвольной точки может быть полностью описано с по-
помощью только двух координат.
Изучение свойств L\, Li и L3 с учетом соотношения C.39) об-
обнаруживает некоторые интересные сведения. Координатные пере-
переменные Lu L2 и L3 представляют собой функции формы для тре-
треугольного симплекс-элемента:
Nt=Llt Nj=L2, Nk=L3. C.40)
Как видно из фиг. 3.8, а,
т ( 1 в узле с номером i,
{ 0 в узлах / и k.
Подобные соотношения выполняются также для Z-2 и L3. Кроме
того, формула C.39) позволяет утверждать, что в произвольной
точке элемента функции формы всегда в сумме равны единице и,
таким образом, выполняется критерий сходимости, обсуждаемый
далее в этой главе. Наконец, если записать следующие зависи-
зависимости:
x=LtXt -f- L2Xj -f- LaXk,
k, C.41)
и разрешить их относительно L\, Li и L3, то в результате полу-
получим соотношения, идентичные C.10). Первые два уравнения в
C.41) представляют координаты х и у как функции узловых зна-
значений. Эти уравнения справедливы, поскольку х в у представля-
представляют собой компоненты расстояния, а мы уже видели, что вектор-
векторные компоненты могут быть выражены как функции соответству-
соответствующих узловых значений.
4—763
50 Глава 3
Преимуществом использования L-координат является сущест-
существование интегральных формул, которые упрощают вычисление ин-
интегралов вдоль сторон элемента и по его площади [1]:
I IalbACf — ul ' (fi d ЛО\
X
_l U» _|
\А. C.43>
\
Использование соотношения C.43) может быть проиллюстриро-
проиллюстрировано при вычислении интеграла вида
где Ni и Nj — функции х и у. Этот интеграл по площади элемента
преобразуется следующим образом:
Координаты L\ и L2 соответствуют функциям формы Nu Nj, как
показано на фиг. 3.8 а. Поскольку Nh не вошло в подынтегральное
выражение, показатель степени с у множителя Ьг приравнен
нулю.
Соотношение C.42) используется для вычисления интегралов,
вдоль стороны элемента. Величина X представляет собой расстоя-
расстояние между двумя узлами рассматриваемой стороны.
Удобства применения формул C.42) и C.43) станут очевид-
очевидны, когда мы перейдем к рассмотрению конкретных задач.
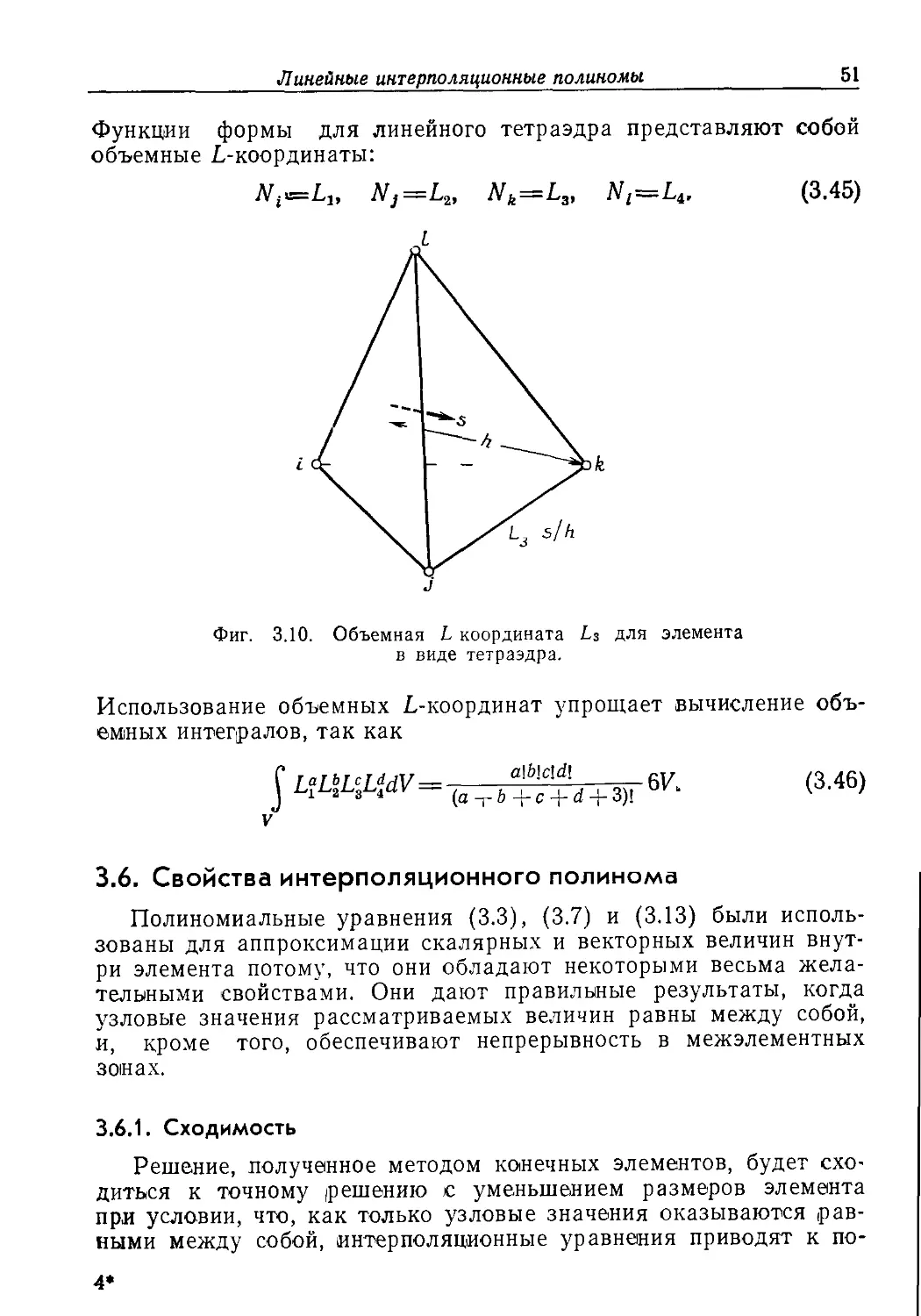
3.5.3. Объемные /.-координаты
Естественная система координат для тетраэдрального элемента
вводится почти полностью аналогично тому, как это было сдела-
сделано в случае плоских L-координат. Четыре относительных расстоя-
расстояния Li, L2, L3 и L4 определяются как отношения расстояний от
выбранной произвольной точки элемента до одной из его граней
к высоте, опущенной на эту грань из противолежащей вершины.
Такие L-координаты называются объемными (фиг. 3.10). Они свя-
связаны между собой соотношением
^Х. C.44)
Линейные интерполяционные полиномы
51
Функции формы для линейного тетраэдра представляют собой
объемные L-координаты:
Ar.«=Llt N.=1
C.45)
Фиг. 3.10. Объемная L координата L3 для элемента
в виде тетраэдра.
Использование объемных L-координат упрощает вычисление объ-
емных интегралов, так как
C.46)
3.6. Свойства интерполяционного полинома
Полиномиальные уравнения C.3), C.7) и C.13) были исполь-
использованы для аппроксимации скалярных и векторных величин внут-
внутри элемента потому, что они обладают некоторыми весьма жела-
желательными свойствами. Они дают правильные результаты, когда
узловые значения рассматриваемых величин равны между собой,
и, кроме того, обеспечивают непрерывность в межэлементных
зонах.
3.6.1. Сходимость
Решение, полученное методом конечных элементов, будет схо-
сходиться к точному решению с уменьшеиием размеров элемента
при условии, что, как только узловые значения оказываются рав-
равными между собой, интерполяционные уравнения приводят к по-
52 Глава 3
стоянным значениям рассматриваемых величин внутри элемента.
При этом подразумевается, что градиенты бесконечно малы.
Интерполяционные уравнения для элемента должны модели-
моделировать постоянные значения, если только такие значения встреча-
встречаются. Эти критерии накладывают ограничения на функции фор-
формы. Предположим, что узловые значения элемента, который име-
имеет г узлов, равны ф,=ф;=фА = -" = фг=С, где С—постоянная
скалярная величина. В общем виде выражение для ф записывает-
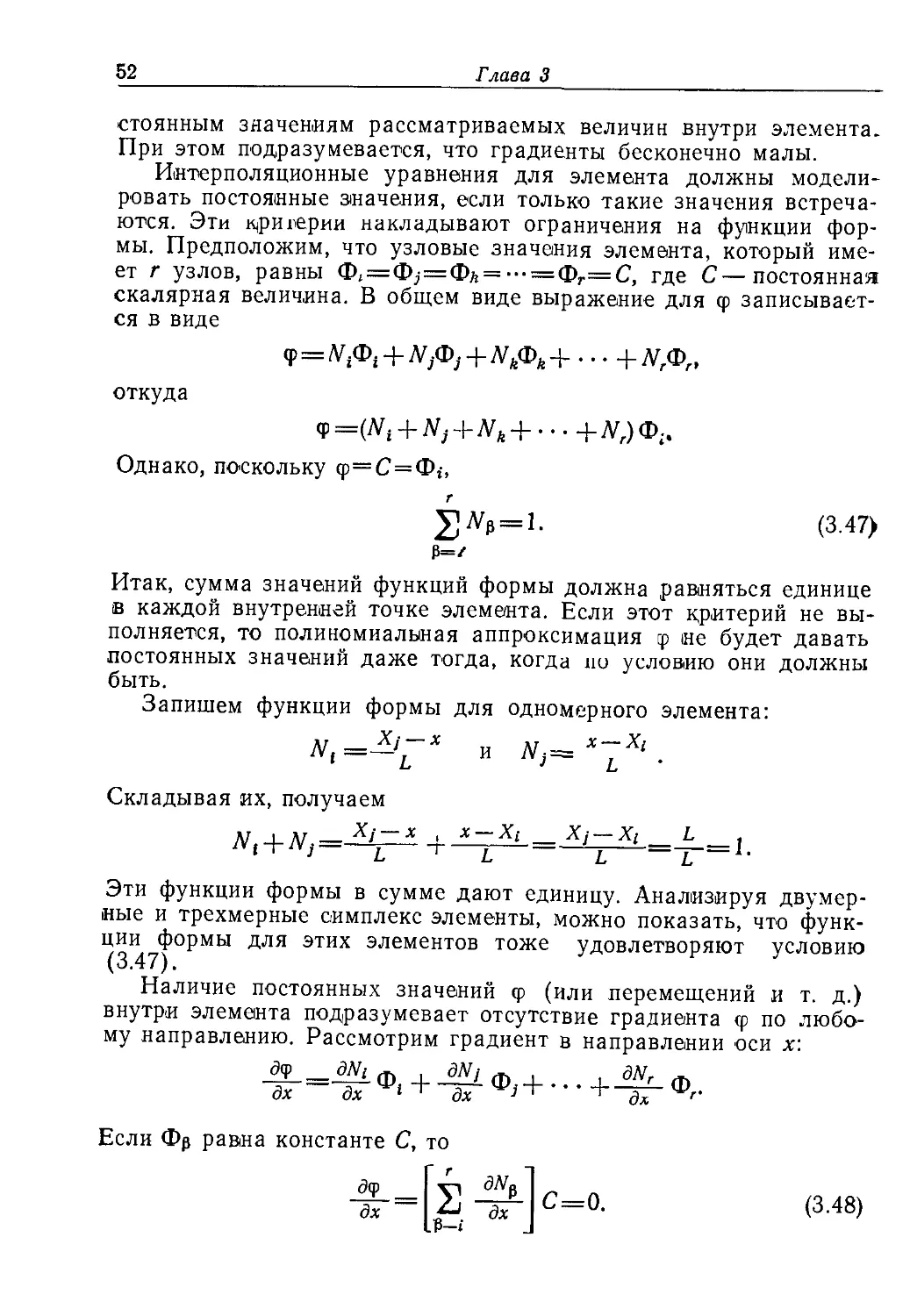
записывается в виде
Ф = ЛГ, Ф, + Ы}Ф} + Nk<t>k +...+NrQ>r,
откуда
<p=(Ni + N} + Nk+---+ Nr) Ф;.
Однако, поскольку ф=С=Ф,-,
2#Э = 1- C.47)
Итак, сумма значений функций формы должна равняться единице
в каждой внутренней точке элемента. Если этот критерий не вы-
выполняется, то полиномиальная аппроксимация tp не будет давать
постоянных значений даже тогда, когда но условию они должны
быть.
Запишем функции формы для одномерного элемента:
Nt = ^~x и N^x~Xi.
Складывая их, получаем
Эти функции формы в сумме дают единицу. Анализируя двумер-
двумерные и трехмерные симплекс элементы, можно показать, что функ-
функции формы для этих элементов тоже удовлетворяют условию
C.47).
Наличие постоянных значений ф (или перемещений и т. д.)
внутри элемента подразумевает отсутствие градиента ф по любо-
любому направлению. Рассмотрим градиент в направлении оси х:
Если Фэ равна константе С, то
«Эф
дх
C.48)
Линейные интерполяционные полиномы 5$
Так как константа С не обязательно равна нулю, равенство
C.48) удовлетворяется, если только
2 -^-0. C.49>
Преобразуя выражение C.49), получаем
^? — dN'
дх ~ дх
~ дх ~дх~ ^~дх
Однако, так как сумма 2Л/р = 1, частная производная по х от
этой суммы равна нулю. Таким образом, критерий относительно-
градиента удовлетворяется автоматически, если только удовле-
удовлетворяется критерий C.47).
3.6.2. Непрерывность
Дискретная модель для непрерывной функции строится на
множестве кусочно непрерывных функций, каждая из которых,
определена на отдгльном элементе. Для интегрирования в даль-
дальнейшем кусочно-непрерывной функции необходимо сформулиро-
сформулировать условие ее непрерывности в межэлементной зоне. Интеграл,
от ступенчатой функции f(x) определен постольку, поскольку
f(x) остается ограниченной [2]. Чтобы интеграл
*j^dx
был определен, функция ср должна быть непрерывна вместе с»
своими производными до порядка (п—1) включительно, что обес-
обеспечивает наличие у производной порядка п только конечного чис-
числа точек разрыва ступенчатого типа. Соблюдение этого условия
означает, что первые частные производные от аппроксимирующей
функции должны быть непрерывны на границах между элемен-
элементами, если дифференциальное уравнение содержит частные произ-
производные второго порядка, т. е. п—-2. Все дифференциальные урав-
уравнения, рассматриваемые в этой книге, могут быть представлены*
в форме соотношений, содержащих самое большее первые част-
частные производные, поэтому от интерполяционных функций следует
требовать непрерывности в межэлементной зоне, но их частные
производные не должны подчиняться этому условию.
54
Глава 3
Непрерывность для одномерного элемента гарантирована, так
как любые два смежных элемента имеют общий узел. Однако
треугольный элемент сложнее. Рассмотрим два смежных элемен-
элемента (фиг. 3.11). Начало системы координат поместим в t-м узле.
"
shll
¦Фиг. 3 11. Непрерывность Фиг. 3.1'2. Значения L координат в точках на
вдоль общей границы двух границе элемента,
треугольных элементов.
Обозначим узловые значения через Фг-, Ф;, Фь и Фг. Аппроксими-
Аппроксимирующие функции для ф имеют вид
) = дт ф
ф
ф
C.50)
Ф«) =N? Ф2 + Nf Oj + Nf Фк,
где верхний индекс обозначает элемент.
Доказать непрерывность ф вдоль общей границы элементов
просто, если воспользоваться L-координатами. L-координаты L^>
и L(x2> изме,ряются от сторон, противоположных t му узлу. Перепи-
Перепишем формулы C.50), используя L-координаты:
фA) = Ш ф + L(l) ф _|_ М1)ф
C.51)
Линейные интерполяционные полиномы
55
L-координаты L^' и Ц2) измеряются от общей границы, поэто-
поэтому вдоль этой границы L(S1'=L^'=O. Соотношения C.51) в точках
общей границы сводятся к следующим:
A -Li1») Фк,
C.52)
-ЦО) Ф
к,
так как
= 1 и
Рассмотрим произвольную точку общей границы, которая рас-
расположена на расстоянии s от k го узла (фиг. 3.12). Отношения
Л^'/Д1' и ЛB>/Д2) равны величине s/b и, следовательно, равны
между собой. С другой стороны, указанные отношения представ-
представляют собой числовые значения L координат Д1' и Ц2), откуда
можно заключить, что Lp — .Ц2' для произвольной точки общей
границы. Используя это равенство в формуле C.52), получаем,
что всюду вдоль границы ср^ — ср<2>, что и требовалось доказать.
Задачи
П. Вычислите функции формы для следующих элементов.
Узловые координаты указаны в круглых скобках.
B)
ко@,75,1.5)
B,0)
,(/.5; 2)
@,5; 0,5)
B,5, 0,5)
X
К задаче 11.
12. Определите локальные функции формы для одномерного
элемента, если начало локальной системы координат расположе-
расположено в центре элемента.
56
Глава 3
13. Узловые значения температуры для треугольного симплекс-
элемента равны Ti—130 °С, Г3-=100°С и 7а=120°С. Выясните, где
изотерма 125 °С пересекает границы элемента.
14. Покажите, что А^ для симплексного треугольника равна
нулю в узлах / и к.
(К 'Л)
{0.0)
К задаче 13.
15. Покажите, что N{ для симплексного треугольника равна
нулю в произвольной точке отрезка, соединяющего узлы / и k.
16. Покажите, что функции формы для симплексного треуголь-
k
вика удовлетворяют критерию SjVr^I в каждой точке элемента.
0=1
17. Матрица [С]-1 для тетраэдрального элемента с узлами i,
j, k и / в точках @, 0, 0), B, 1, 0), A, 0, 1) и A, 1, 2) соответ-
соответственно имеет вид
1
2
3
1
3
1
3
0
1
3
1
3
1
3
0
2
3
4
3~
1
3
о -
1
3
2
3
1
3
Убедитесь, что эта матрица является обратной к [С] и затем
юпределите функции формы дли этого элемента.
18. Что вы можете сказать о строках матрицы [С] ' в задаче
17, если критерий сходимости Ni-\-Nj-{-Nh-\-N[—l удовлетворяется,
•когда рассматривается тетраэдральный элемент?
19. Определите градиент d<p/dx для тетраэдрального элемента
двумя способами: 1) выбирая в качестве исходных соотношения
Линейные интерполяционные полиномы
57
C.16), выполняя дифференцирование, а затем умножение матриц;
2) дифференцируя функции формы.
20. Заданы узловые перемещения для двумерного симплекс-
элемента:
2|-х^ 2 мм,
y = 5 мм,
= 4 мм, U27- x = (
= — 1 мм.
мм,
Определите компоненты перемещения в точке В A0, 10). Коор-
Координаты узлов (в миллиметрах) указаны в круглых скобках.
[8,20) ,
К задаче 20.
21. Вычислите интеграл
N,
N..
где %{$ — длина стороны симплексного треугольника между узла-
узлами i и /, a Ni, N1 и Nk — функции формы.
22. Вычислите объемный интеграл
N}
dV
для симплексного треугольника площади А и толщины t.
58 Глава 3
ЛИТЕРАТУРА
1. Eisenberg M. A, Malvern L. E., On Finite Element Integration in Natural Coor-
Coordinates, Intern. J. for Numerical Methods in Engineering, 7, 574 575 A973).
2. Kaplan W., Advanced Calculus, Addison Wpslpy, Reading, Mass, 1952.
3. Kreyszig E., Advanced Engineering Mathematics, 3 rd ed., Wiley, N. Y., 1972.
4. Oden J. Т., Finite Elements of Nonlinear Continua, McGraw Hill, N. Y., 125—
137 A972); есть русский перевод: Оден Дж., Конечные элементы в нелинейной
механике сплошных сред, изд-во «Мир», М., 1977.
5. Zienkiewicz О. С, The Finite Element Method in Engineering Science, McGraw-
Hill, London, 1971, p. 93; есть русский перевод: Зенкевич О., Метод конечных
элементов в технике, изд-во «Мир», М, 1975.
Глава 4
ИНТЕРПОЛЯЦИОННЫЕ ПОЛИНОМЫ
ДЛЯ ДИСКРЕТИЗОВАННОИ ОБЛАСТИ
В гл. 3 обсуждались интерполяционные соотношения для
симплекс элементов. Числовые значения узловых координат при
чтом не фиксировались, так что размеры элемента и его ориен-
ориентация могут быть выбраны так, как это необходимо. Это одно из
важных достоинств метода конечных элементов. Свобода в вы-
выборе размеров и ориентации элементов позволяет составить весь-
весьма общие вычислительные подпрограммы, включающие различ-
различные элементы. Такие подпрограммы могут быть использованы без
изменения при рассмотрении областей с самыми разнообразными
границами.
Теперь сосредоточим внимание на отдельном элементе, с тем
чтобы нынести систему уравнений для области в целом. Точнее
говоря, мы хотим включить каждый элемент в рассматриваемую
область и выразить через глобальные координаты и глобальные
узловые значения интерполяционные уравнения для каждого ис-
используемого элемента. Начнем с рассмотрения скалярных вели-
величин и затем обобщим полученные результаты на случай вектор-
векторных величин.
4.1. Скалярные величины
Интерполяционный полином в общей форме, полученный в
гл. 3, имеет вид
Фь
ф,
D.1)
где г число узлов элемента, верхний индекс (е) означает про-
произвольный элемент.
Техника включения элемента в область может быть проиллю-
проиллюстрирована на примере простой пятиэлементной конфигурации,
показанной на ф:-.г. 4.1. Узлы пронумерованы от единицы до шее-
^>0 Глава 4
ти. Величины Фь Ф2, Ф3, Фа, Фб и Ф6 представляют собой гло-
глобальные степени свободы. Координаты узлов (Хр, Ур), р=
1, 2,..., 6, предполагаются известными. Номера элементов запи-
записаны в круглых скобках.
Для обозначения номеров узлов элемента могут быть исполь-
использованы принятые выше индексы i, j и k, как только определен
первый узел в каждом элементе. На фиг. 4.1 t-й узел в
Фиг. 4.1. Правильно маркированная пятиэлементная
область.
каждом элементе выделен звездочкой. Выбор этого узла совер-
совершенно произволен, хотя читатель вскоре сам убедится в удобстве
именно такого расположения первых узлов. Узлы / и k следуют
за t-м узлом в направлении против часовой стрелки. Фиксирова-
Фиксирование узла i позволяет записать следующие равенства для первого
элемента:
1=2, /=3, k=l. D.2а)
Соответствие такого же типа может быть установлено для других
элементов:
элемент 2: t=3, / = 2, k=4, D.26)
элемент 3: i~5, j=3, k=4, D.2в)
элемент 4: t=6, /=3, k=5, D.2r)
элемент 5: t = l, /=3, k = Q. D.2д)
С помощью этих соотношений можно осуществить включение эле-
элемента в область, так как они ставят в соответствие индексы эле-
элемента i, j, k глобальным номерам узлов. Эдот процесс фиксирует
координаты узлов элемента.
Интерполяционные полиномы для дискретизованной области Crt
Значения индексов ? j и k могут быть подставлены в формулу
D.1), что приводит к следующей совокупности уравнений для эле-
элементов:
ф<1> =№» Ф2
D.3)
ф(*> =
Функции формы — множители при узловых значениях в фор-
формулах D.3) определяются подстановкой числовых значений ?, /
и k в уравнения для функций формы. В обозначениях i, j, k функ-
функция формы N^ записывается в виде
^ fy) D.4)
где
Для пятого элемента ?=1, /=3 и /г-6. Подставляя эти значения
в выражение D.4), получаем
где
Функции формы N<e4) и N<p в D.3) —совершенно разные величи-
величины, даже если ЛD) равно Л<5>. В выражение для N 4' входят сле-
следующие константы:
6i« =Г3-П, D.6)
гD) V V
Сравнение формул D.5) и D.6) яоно показывает, что N > отли-
отличается от Л/(?)
62
Глава 4
С помощью уравнений D.3) достигается наша основная цель.
Конечные элементы объединяются в ансамбль, а интерполяцион-
интерполяционные функции выражаются через глобальные узловые значения
и глобальные координаты, которые вводятся вместо произвольных
1, У и к, рассматриваемых в гл. 3.
Каждое из уравнений в системе D.3) содержит глобальные
узловые значения, но относится к конкретному элементу. Мы бу-
будем в дальнейшем использовать расширенную форму этих урав-
уравнений, которая имеет вид
D.7)
) _O0i +¦ О02
=001 + О02
4 + 0Ф5 + О0в)
5 + О0в,
+ О04 + NW 05
О04 + О06
Эти уравнения можно записать следующим образом:
„
фE) =
им
(X)
C)
D)
F)
О
=. о
О
Щ5)
щ»
щ»
О
О
О
о
о
о
щг)
N®
О
О
0
о -
о
о
01
0,
D.8)
Сокращенная форма интерполяционных уравнений использует-
используется, когда осуществляется машинная реализация метода. Расши-
Расширенная форма имеет некоторое преимущество, когда рассматри-
рассматривается процесс минимизации, который связан с дифференцирова-
дифференцированием матриц элементов. Расширенная форма уравнений применя-
применяется только в следующих двух главах. Сокращенная форма урав-
уравнений будет использоваться, когда мы будем иметь дело с при-
применениями метода к специальным областям.
Альтернативой формулы D.8) является уравнение, которое по-
получается объединением уравнений для отдельных элементов; по-
последнее уравнение определяет область в целом. Суммируя урав-
уравнения для отдельных элементов, получаем
п(е)
D.9)
где Е — число элементов. Применение формулы D.9) к совокуп-
совокупности уравнений D.8) дает
0,
+ tf» ]0e. D.10)
Интерполяционные полиномы для дискретизованной области
63
Уравнение D.10) не используется в этом учебнике. Оно включе-
включено только для того, чтобы познакомить читателя с его существо-
существованием.
4.2. Векторные величины
Включение элемента при рассмотрении векторных величин про-
проводится с помощью рассуждений, аналогичных тем, которые при-
приведены в случае скалярной величины. Правильно пронумерован-
Фиг. 4.2. Пятиэлементная область с обозначениями
компонент вектора перемещений.
ные узловые перемещения для области на фиг. 4.1 показаны на
фиг. 4.2. Общее уравнение для элемента C.23) приведено здесь
для удобства:
*<«>
Ше) О Nf О Nf
[ О Nf О Nje) О
U.
U,
V-.
U.
U.
21 1
2i
2]
2ft 1
DЛ1)
Соответствие между узлами элемента i, j и k и глобальными
узлами идентично представленному в D.2), если только исполь-
используются те же самые отправные узлы. Соотношения для четвертого
64
Глава 4
элемента i 6, /=3, k 5 сводятся к следующим:
[ 0
№*>
О NW
О
и
»
и
*
D.12)
Уравнения D.12) представляют собой сокращенную форму
уравнений для и<4) и иD). Расширенная форма будет включать все
12 узловых значений Uu..., ?Л2. Расширенная форма уравнений,
определяющих элементы, для области на фиг. 4.2 дана в D.13):
yd)
uB)
j,B)
«C)
у(Я)
u4
и4
u5
о6
0
0
0
0
0
0
0
0
0
N[l>
0
0
0
0
0
0
0
0
Np
0
0
0
0
0
0
0
0
Np
0
Np
0
0
0
0
0
0
N0>
0
3
0
0
3
0
0
0
N0>
0
jV<2>
0
jV<3>
0
JV<4>
0
0
0
jV<2)
0
jV<3)
0
0
0
0
0
0
0
0
0
Np
0
0
0
0
0
0
0
0
jV<3)
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
Q
0
Д/E)
e
0
о -
0
0
0
0
0
0
6
0
e e
^9
u»
4.13)
4.3. Выводы
Изложенные в этой главе идеи очень просты, но и очень важ-
важны, потому что позволяют осуществить закрепление элемента в
каркасе тела. Воспроизведение этого процесса для отдельных эле-
элементов дает возможность аппроксимировать скалярную или век-
векторную величину на всей области кусочно-непрерывной функцией.
Задачи
23—26. Определите соотношения, с помощью которых можно
осуществить включение элементов в области, изображенные ниже.
Отправной узел отмечен звездочкой. Узловые координаты даются
в круглых скобках.
Интерполяционные полиномы для дискретизованной области
65
27—30. Получите общие уравнения, определяющие элемен-
элементы, для областей в задачах 23 26, если в каждом узле рассма-
рассматривается одна неизвестная.
@.25,2)
\*\ О)
B)
C)
D)
10)
B)
E)
П)
19)
К задаче 23.
<г, 0,25) &. 0,6;
К задаче 24.
0,0)
1-025,075)
(О'О) A 0J
К задаче 25.
25)
A.2)
31—33. Получите общие уравнения, определяющие элемен-
элементы, для областей в задачах 24 26, если в каждом узле рассма-
рассматриваются две векторные компоненты.
34—37. Запишите интерполяционные соотношения для первого
элемента каждой из областей в задачах 23 26 через х и у
{х в задаче 23), предполагая, что в каждом узле отыскивается
одна неизвестная.
5-763
Глава 5
РАССМОТРЕНИЕ НЕКОТОРЫХ КРАЕВЫХ ЗАДАЧ
С ПОМОЩЬЮ МЕТОДА КОНЕЧНЫХ ЭЛЕМЕНТОВ
В двух предыдущих главах рассматривался вопрос о том, как
аппроксимировать непрерывную функцию на отдельном элементе.
Кроме того, было показано, как из результатов, полученных для
отельных элементов, составляется множество кусочно-непрерыв-
кусочно-непрерывных функций, необходимое для аппроксимации данной непрерыв-
непрерывной функции на всей области. Это множество кусочно-непрерыв-
кусочно-непрерывных функций определяется числовыми значениями узловых вели-
величин-. Наша конечная цель — получить для узловых величин такие
числовые значения, при которых соотношения для элементов очень
точно аппроксимируют некоторый важный физический параметр.
На ранней стадии развития метода конечных элементов узловые
значения определялись минимизацией интегральной величины,
связанной с физическим процессом. В задачах механики дефор-
деформируемого тела, например, минимизировалась потенциальная
энергия системы. В результате уравнения, определяющие элемен-
элементы, сводились к системе алгебраических уравнений равновесия,
которые можно разрешить относительно узловых перемещений.
В задачах теории поля (перенос тепла, течение грунтовых вод,
расчет магнитных полей и др.) минимизировался некоторый функ-
функционал. Этот функционал обладает тем свойством, что любая
минимизирующая его функция удовлетворяет как исходным диф-
дифференциальным уравнениям, так /и ipannwhbiM услиьиим. Позднее
для вывода системы уравнений, определяющих узловые значения,
стали использоваться методы взвешенных невязок. Один из них,
метод Галёркина, обсуждается в гл. 17.
В данной главе дается вывод уравнений метода конечных эле-
элементов, основанный на минимизации некоторой интегральной ве-
величины. Мы начнем с рассмотрения небольшого примера, который
иллюстрирует вывод уравнений для узловых значений искомой
величины в задачах теории поля. Затем на том же примере мы
докажем, что процесс минимизации может быть завершен до вы-
вычисления интегралов по элементам. После рассмотрения примера
дается общий вывод уравнений метода конечных элементов для
трехмерных задач теории поля. Глава завершается общим выво-
выводом уравнений метода конечных элементов для задач теории упру-
упругости. Окончательные результаты как для задач теории поля, так
Рассмотрение краевых задач методом конечных элементов
67
и для задач теории упругости представлены в виде поверхностных
и объемных интегралов, которые вычисляются при рассмотрении
конкретных областей применения.
При последующем обсуждении предполагается наличие неко-
некоторых предварительных знаний стандартной терминологии рас-
рассматриваемого материала. Размерности различных величин вмес-
вместе с их общепринятыми обозначениями приводятся в главах при-
прикладного характера.
5.1. Простой пример: перенос тепла в стержне
Лучше всего процесс минимизации можно проиллюстрировать
при рассмотрении простой геометрической фигуры. Рассмотрим
одномерный поток тепла в стержне с теплоизолированной боко-
боковой поверхностью (фиг. 5Л,аI). К. закрепленному в стене концу
Изоляция
it.
B)
Ltl>
,B)
Фиг. 5.1. Двухэлементная модель, используемая в зада-
задаче о переносе тепла в стержне.
стержня подводится тепловой поток заданной интенсивности q.
На свободном конце стержня происходит конвективный обмен
тепла. Коэффициент теплообмена h, температура окружающей
среды Гоо, °С. Стержень теплоизолирован, так что потерь тепла
через боковую поверхность не происходит.
•' Или в бесконечной пластине. Прим. ред.
68 Глава 5
Запишем дифференциальное уравнение для распределения тем-
температуры внутри стержня:
Кх -^г=0 E-1)
** dx2
с граничными условиями
*«-?-+*=0 при х=0 E.2)
и
^ +Л(Т~Тос)=0 при x=L, E.3)
где /Схх — коэффициент теплопроводности материала стержня.
Тепловой поток q положителен, если тепло отводится от стержня.
Уравнение E.1) с приведенными граничными условиями имеет
единственное решение. Оно является отправной точкой при полу-
получении численного решения методом конечных разностей. Другой
метод решения задач переноса тепла основан на вариационном
подходе. В вариационном исчислении1' устанавливается, что для
минимизации функционала
v
необходимо, чтобы удовлетворялось дифференциальное урав-
уравнение
с граничными условиями
_Тоо) = 0, E.6)
Уравнения E.5) и E.6) идентичны исходным уравнениям E.1) —
E.3), поэтому любое распределение температуры, при котором
функционал %, определяемый формулой E.4), становится мини-
минимальным, также удоштетворяет дифференциальным уравнениям и,
таким образом, является решением исходной задачи. Оба гранич-
граничных условия E.2) и E.3) содержатся в E.6), так как поверхно-
поверхностный интеграл в E.4) должен быть разбит на два интеграла по
каждой из торцовых поверхностей стержня.
*> Введение в этот предмет дано в приложении А.
Рассмотрение краевых задач методом конечных элементов 69
Уравнение E.4) служит отправной точкой для определения
температуры в каждом узле. Мы минимизируем функционал
E.4), используя множество функций элементов, каждая из кото-
которых определена на отдельном элементе и выражена через узло-
узловые значения. Узловые значения 7'р— неизвестные величины в-
нашей формулировке. Так как они определяют значение функцио-
функционала х, минимизация % должна быть проведена по этим вели-
величинам.
Реализация метода конечных элементов начинается с опреде-
определения подобластей и их узловых точек. Стержень может быть
разбит на два линейных элемента (фиг. 5.1,6) с узловыми зна-
значениями Ti, T2 и Т3. Температура внутри элементов находится
из формул
TU)=NpT1 + NpTi,
E.7)
Соответствующие функции формы определены соотношениями
лН>_ XI^L .V()— x~Xi
Для рассматриваемого примера функционал представляет собой
сумму следующих интегралов:
+ \" 4-[Г (*)-Г.]» dS. E-8)
Sl
где Si и S2 — площади поверхностей, на которых заданы q и h.
Значение функционала % получается подстановкой температуры
Т(х) и вычислением интегралов.
Поверхностные интегралы легко вычисляются, так как подын-
подынтегральным выражениям соответствуют узловые значения. Начнем
с интеграла, включающего тепловой поток q:
J qT (x) dS=qT1 J dS=<tT1A1, E.9)
$ S
где Ai — площадь поперечного сечения стержня, соответствующая
первому узлу. Функция, описывающая изменение температуры
Т(х), принимает постоянное значение Л в точках сечения, соот-
70 Глава 5
ветствующего первому узлу. Рассмотрим поверхностный интеграл,
включающий коэффициент теплообмена h:
ил
ft/13 срг от 7 4- Т2 \ <?> 1П\
о У1 з Z1 а1 =»"Г 1 со), (о.IV)
тде Лз площадь поперечного сечения стержня и 7V—темпера-
7V—температура в третьем узле.
Объемный интеграл в E.8) содержит производную от темпе-
температуры. Дифференцируя E.7), имеем
-^7(-Тг + Т2) E.11)
dx
Объемный интеграл должен быть разбит на два интеграла, потому
что выражение для dT/dx не сохраняет непрерывности по объему
тела в целом. Разделение, подстановка и интегрирование дают
J 2 [dx ) d
^(ГГJ EЛ2)
При вычислении интеграла предполагалось, что площадь попереч-
поперечного сечения каждого элемента посшянна, так что dV—A^dx.
Представление объемного интеграла по области в виде суммы
интегралов, каждый из которых вычисляется по отдельному эле-
элементу, позволяет рассматривать различные свойства материала
для различных элементов. Это является важной особенностью ме-
метода конечных элементов.
Значение функционала % получается сложением выражений
E.9), E.10) и E.12). В результате получается выражение для
этого функционала через узловые значения температуры:
х = ^ {Т\ -27,7, + 722) + *?- (Т1-2Т2Т3
+ qA1T1+ h*3 G1
где CW=AM№/LW и С^=
Рассмотрение краевых задач методом конечных элементов
Правильными значениями Т\, Т2 и 73 являются те, при которых
величина % минимальна, поэтому
Г2-С(г>Г3=0,
=_сшт2 + [С(з) + Мз] Ta-hA3Tm=0.
E.15)
E.16)
2
Уравнения E.14) могут быть преобразованы к виду
О _
или к более общей матричной форме
0 1
-cB)
[СBчлл3]
Т2
тэ
\-qAx
= 0
hA3Tm
Матрицу коэффициентов [К] в формуле E.16) обычно называют
глобальной матрицей жесткости. Более уместным было бы назвать
ее глобальной матрицей теплопроводности, поскольку мы имеем
дело с задачей переноса тепла. Векторный столбец {F} есть гло-
глобальный вектор нагрузки.
Последний шаг нашего анализа заключается в задании кон-
конкретных значений для физических характеристик материала и
получении числовых значений температуры Ти Т2 и Тг. Пусть
Кхх=75 Вт/(см-°С),
Л=10 Вт/(см2-°С),
Л = 7Г СМ2,
L=7,5 см,
</ = —150 Вт/см2
(минус поставлен потому, что тепло подводится к телу) и Т^ —
— 40 °С. Вычисляем коэффициенты:
сA)=я.75 _20ге =
-qA1=
hAaTm= 10-тг.40=400 тс.
72
Глава 5
Окончательная система уравнений имеет вид
Г 20 —
я —20
L ° -
—20 0"
40 —20
—20 30
Ь
150
0
400
E.17)
Этим уравнениям удовлетворяют следующие узловые значения
температуры: Т\ = 70, Г2 = 62,5, Т3 55.
5.2. Повторное рассмотрение примера
Как следует из уравнения E.15), процедура минимизации
приводит к системе линейных уравнений, которые могут быть ре-
решены относительно узловых значений. Однако на цифровой вы-
вычислительной машине не легко реализовать процедуру минимиза-
минимизации в том виде, в каком она использовалась здесь для получения
уравнений. Существует другой способ получения необходимой си
стемы уравнений. Интегральная величина % разбивается на со-
соответствующие отдельным элементам слагаемые, которые миними-
минимизируются по узловым значениям до того, как будут вычислены
интегралы. В результате получается совокупность интегралов, ко-
которые могут быть вычислены и просуммированы по элементам.
Представим % в виде суммы
Х=ХA) + ХB\ EЛ8)
где х'1'—сумма интегралов для первого элемента, а хB) — подоб-
подобная сумма для второго элемента:
dV + \
,B)
J 2/>:
1/B)
E.19)
где С")
и С<2) Л<2>/(?> /L<2>. Продифференцируем те-
теперь каждую компоненту % по всем узловым значениям. Начнем
с v(O-
/A)
sd)
дТ2
E.20)
--— 0.
Рассмотрение краевых задач методом конечных элементов
73
Вычисляя в этих соотношениях интегралы, получаем
д{Т)
Дифференцируя вторую компоненту, имеем
- cll)
—CA)
0
—Cu)
0
0
0
0
+¦
\чАЛ
о
о
E.21)
dTt
V2
cB)
или после вычисления интегралов
0 0
О Г{2) ГB)
1 ; о —СB) [СB) + ЛЛ
¦+¦
E.22)
Для минимизации % по узловым значениям необходимо, чтобы
выполнялось (равенство
^L^!L /5 23)
д{7} ~й{Г} ^ д{Т} ~
Поэтому если сложить выражения E.21) и E.22) и результат
приравнять нулю, то получим желаемую систему уравнений
о
—С*
О _
О
ГО)
о
о
. E 24)
Эта система идентична системе уравнений E.15).
В изложенном подходе к процессу минимизации важно именно
то, что система уравнений может быть получена для отдельных
элементов. Суммирование по элементам в соответствии с форму-
формулой E.23) представляет собой очень удобную для машинной реа-
реализации процедуру.
5.3. Уравнения метода конечных элементов:
задачи теории поля
Одномерная задача распространения тепла, рассмотренная в
предыдущих разделах, является одной из нескольких важных фи-
физических задач, которые могут быть описаны аналогичными диф-
74 Глава 5 _____^_
ференциальными уравнениями в частных производных. Диффе-
Дифференциальное уравнение для каждого из этих физических процес-
процессов содержится в общем квазигармоническом уравнении
(*» t) + '* (*¦ %)+е- ° <6-26>
с граничными условиями
ф=фв на St E.26)
и (или)
4К^-ч^в0 E<27)
на S2. Объединение Si и 5г образует полную границу. Коэффици-
Коэффициенты Кхх, Куу и Kzz, а также величина q могут быть функциями
х, у и г, но предполагаются независимыми от ф. Величины lx, 1у
и lz в формуле E.27) — направляющие косинусы вектора нормали
к поверхности. Уравнение E.25) применимо как к изотропным,
так и к анизотропным телам. Координатные оси, однако, должны
быть параллельны главным осям инерции в анизотропных об-
областях.
Уравнение E.25) вместе с граничными условиями описывает
распространение тепла в трехмерной области [4]. В этом случае
Кхх, Куу и Kzz соответствуют коэффициентам теплопроводности,
Q — внутренний источник тепла или сток, q — тепловой поток на
части поверхности и h — коэффициент теплообмена. Полевая
функция ф определяет температуру тела. Уравнение для одномер-
одномерного и двумерного случаев распространения тепла может быть
получено из формулы E.25) с учетом того, что dq>/dy 0 и (или)
dq>ldz = Q. Если на той части границы, где ф не определено (на
S2), обе величины q и h равны нулю, равенство E.27) сводится
к следующему условию:
| Т?-'.=0. E-28)
которое отражает отсутствие переноса тепла (теплоизолирован-
(теплоизолированная граница).
Рассмотрим далее двумерную ситуацию, когда Кхх~Куу—\,
Q — 2GQ и фв = 0 на всей границе. В этом случае уравнение E.25)
свидится к следующему уравнению:
g^ 0, E.29)
которое встречается в задаче о кручении упругого стержия не-
цругового сечения [5]. Полевая функция <р теперь является функ-
функцией напряжений, G — упругая характеристика материала, 6 —
Рассмотрение краевых задач методом конечных элементов 75
угол закручивания сечения стержня. Напряжения сдвига, вызван-
вызванные внешним крутящим усилием, получаются дифференцирова-
дифференцированием ф ПО X И у.
Другой важной двумерной задачей является задача о безвих-
безвихревом течении жидкости. В этом примере Кхх = Куу = 1, Q=0 и
уравнение E.25) сводится к уравнению
с граничными условиями ф = фв и (ду/дхIх+ {д($/дуIу = 0 [6].
Если полевая функция ф задана на непроницаемых границах
области (на границах, по нормали к которым не прэисходит те-
течения жидкости), то уравнение E 30) определяет линии тока при
безвихревом течении жидкости. С другой стороны, если полевая
функция определена на тех частях границы, по нормали к кото-
которым течет жидкость, то уравнение E.30) описывает эквипотенци-
эквипотенциальные линии, которые ортогональны линиям тока.
Дифференциальное уравнение для ограниченного потока грун-
грунтовых вод [2] также содержится в E.25). В этом случае
v д2у . v d2tp , л п /с оtv
I\rv- -. „ НЛ„„—7~5 r"V==U, (О.Oil
а граничные условия имеют вид ср = срв и (или) Kxx(dq>ldx)tx+
-\-Kyy(dffldy)ly-\-q = O. Коэффициенты Кхх и Куу определяют про-
проницаемость почвы, Q — источник (или сток) воды, а полевая
функция ср — пьезометрический напор. Величина q соответствует
просачиванию воды через водоносный слой вдоль части его гра-
границы.
Другие важные физические задачи, которые описываются урав-
уравнением E.25), связаны с рассмотрением электростатического и
магнитоста1Ического полей, а также жидких смазочных пленок.
Последняя задача подробно изучена в работе [3].
С вариационной точки зрения решение уравнения E.25) с гра-
граничными условиями E.26) и E.27) эквивалентно отысканию ми-
минимума функционала
E.32)
Минимизация функционала E.32) должна быть осуществлена
на множестве узловых значений {Ф}. Для этой цели воспользу-
воспользуемся процедурой, рассмотренной в предыдущем разделе, а именно
будем минимизировать функционал E.32) перед вычислением ин-
76
Глава 5
тегралов. Этот подход позволяет выбрать характеристики элемен-
элементов, наиболее приемлемые для каждой конкретной задачи.
Начнем процесс минимизации с преобразования функционала
E.32). Этот шяг несколько упрощает последующие операции.
Введем две матрицы:
№33)
Кг
О О
о к№ о
E.34)
Соотношение E.32) может быть теперь записано в виде
X— ГтИё}т \D] [g\ — 2yQ.\dV + Г
E.35>
s»
Вспоминая, что функции от ф не являются непрерывными во всей
области, вместо них введем в рассмотрение функции <р(е>, опреде-
определенные на отдельных элементах. Интегралы в E.35) должны быть
разбиты «а интегралы по отдельным элементам, что дает
ё
Г Ф(еУе) dS+ Г
, E.36)
где ? — общее число элементов. Последнее соотношение может
быть символически записамо как
м'
E.37)
где х(е) — вклад отдельного элемента в %. Минимизация % требует
выполнения соотношения
I
д{Ф)
е-Л
д{Ф)
Рассмотрение краевых эадач методом конечных элементов
77
Частные производные д%<-еIд{Ф) в E.38) не могут быть опре-
определены, пока интегралы в E.36) не будут выражены через узло-
узловые значения {Ф}. Учитывая соотношение D.1):
можно вычислить величину E.33), которая вместе с D.1) может
быть подставлена в E.36). Запишем выражение для {g(e)}:
5ф(й>
дх
ду
дг
' dNf
dx
i
дг
дх
ду
дг
'" dx
'" ду
¦" дг
Ф
E.39)
ИЛИ
{§М} =[ВМ] |Ф), E.40)
где [В] содержит инфо(рмацию, связанную с производными от
функций формы. Эти величины пока не известны, потому что
функции формы еще не определены. Использование формул D.1)
и E.40) позволяет записать интегралы по элементам в E.36)
в виде
= Г-i-
{Ф} dV +
}Ф} dS+ ^~{Ф}Т [Nie)]
s(.e)
1
E.41)
s SW
2 2
Величины Q, q, ^ и h — известные коэффициенты. Они внесены
под знак интеграла, потому что могут изменяться внутри эле-
элемента. Дифференцирование величины E.41) по {Ф} представляет
собой совершенно простую операцию, если пользоваться правила-
правилами дифференцирования, приведенными в приложении Б. Рассмо-
Рассмотрим формулу E.41):
= Г [Biei]
у(е)
{Ф| dV,
78 Глава 5
\TdV,
v(e)
= J ?[tf<«T dS,
E.42)
3,™ ,-9-(ф)Т
s
г
-T^—0-
s(.e)
Вклад отделыного элемента д%(еУд{Ф} в общую сумму в
д%/д{Ф} равен
Г Л [^(«)]г [,/Vte)] d5) {Ф} — Г
[q[N^]T dS— Г/гфоо [yV(e']r dS. E.43)
SC«) sw
Эта совокупность интегралов может быть записана в компактной
форме:
-{Г'}, E.44)
- i - у
где
= Г [B^f [D(e>\ [BM] dV+ Г h [NM]T [NM]dS E.45)
v(e) s(e)
= — ("q [A^w]r dV+ tq[NM]T dS— ^topm [N^f dS. E.46)
Рассмотрение краевых задач методом конечных элементов 79
Окончательная система уравнений получается после подстанов-
подстановки выражения E.44) в E.38):
aw =2^(е>1(ф14-{/(е>))=0' E-47)
е—1
ИЛИ
[A:]{O} = {F}t E.48)
где
M = 2>wl E.49)
e-l
Интегралы в E.45) определяют матрицу теплопроводности
элемента [&(е)], а интегралы в E.46) вектор нагрузки элемента
{/(е)}. Эти интегралы представляют собой основные результаты
этого раздела. Вычисление этих интегралов обсуждается в гла-
главах, где рассматриваются специальные области применения. Со-
Составление глобальной матрицы из матриц элементов иллюстриру-
иллюстрируется и описывается детально в следующей главе.
5.4. Уравнения метода конечных элементов:
теория упругости
Решение задач теории упругости может быть проведено одним
из диух методов С помощью первого метода решают дифферен-
дифференциальные уравнения с заданными граничными условиями. Второй
метод заключается в минимизации интегральной величины, свя-
связанной с работой напряжений и внешней приложенной нагрузки.
Для решения задач теории упругости методом конечных элемен-
элементов используется последний подход. Если задача решается в пере-
перемещениях и на границе заданы их значения, то нужно минимизи-
минимизировать потенциальную энергию системы. Если задача решается
в напряжениях с заданными на границе усилиями, то нужно ми-
минимизировать дополнительную работу системы. Общепринятая
формулировка метода конечных элементов предполагает отыска-
отыскание поля перемещений и тем самым связана с минимизацией по-
потенциальной энергии системы при отыскании узловых значений
вектора перемещений. После того как перемещения будут опре-
определены, можно вычислить компоненты тензоров деформаций и на-
напряжений.
80 Глава 5
Поскольку далее мы будем пользоваться формулировкой ме-
метода конечных элементов, связанной с минимизацией потенциаль-
потенциальной энергии, приведем здесь теорему о потенциальной знер-
1ИИ [1].
Из всех перемещений, удовлетворяющих кинематическим гра-
граничным условиям, стационарное (экстремальное) значение потен-
потенциальной энергии сообщают те перемещения, которые удовлетво-
удовлетворяют уравнениям равновесия.
Важное требование этой теоремы состоит в том, что искомые пе-
перемещения должны удовлетворять заданным значениям на гра-
границе.
Полная потенциальная энергия упругой системы может быть
разделена на две части, одна из которых соответствует энергии
деформаций в теле, а другая определяется потенциальной энер-
энергией массовых сил и приложенных поверхностных сил. В соответ-
соответствии с этим запишем полную потенциальную энергию в виде
U=A + WP, E.51)
где Л — энергия деформаций, a Wp — потенциальная энергия при-
приложенных сил. Работа внешних сил противоположна по знаку их
потенциальной энергии:
W=—Wp. E.52)
Из формул E.51) и E.52) получаем
П=Л— W. E.53)
После разбиения области на элементы равенство E.53) записыва-
записывается в виде суммы
Е Е
?] яЫ- E.54)
Прежде чем обсуждать минимизацию П в общем случае, рас-
рассмотрим один простой пример.
5.4.1. Осевое нагружение элемента конструкции
Применение тесремы о минимуме потенциальной энергии бу
дет проиллюстрировано на примере осевого нагружения элемен-
элемента конструкции, показанного на фиг. 5.2. Осевое перемещение из-
изменяется линейно от нуля на закрепленном конце до величины
A — PL/AE на нагруженном конце. В этой формуле Р — нагрузка,
L длина, А — площадь поперечного сечения детали конструкции,
Е — модуль упругости материала.
Рассмотрение краевых задач методом конечных элементов
81
С помощью метода конечных элементов определим перемеще-
перемещение на нагруженном конце стержня. Решение задачи при этом
начинается с выбора модели для перемещения. Эта модель зави-
Фиг. 5.2. Осевое нагруженне детали конструкции.
сит от типа выбранного элемента. Мы будем использовать один
линейный одномерный элемент, поэтому
Так как И\ должно равняться нулю на закрепленном конце, вы-
вышеприведенное уравнение сводится к следующему:
Потенциальная энергия определяется формулой
— PUt.
E.55}
E.56>
Интегральное слагаемое представляет энергию деформаций, тогда
как член вида PU2 выражает работу приложенной силы. Компо-
Компонента тензора напряжений ахх связана с компонентой тензора
деформаций гхх законом Гука ахх = Е гхх, поэтому выражение
E.56) может быть записано в виде
L
-PU» E.57)
6-7СЗ
$2Глава 5
где dV—Adx. Предполагается, что площадь поперечного сечения
детали конструкции постоянна по длине.
Деформация ехх связана с перемещением соотношением гХх —
du/dx. Дифференцирование выражения E.55) дает
в„=-?-. E-58)
Потенциальная энергия системы теперь выражается следующим
образом:
L
йхри ^ ри
о
Минимизация П по ?/2 приводит к уравнению
-§-=*Lu2-P=0. E.60)
Решая уравнение E.60), получаем
tf E6I)
что совпадает с теоретическим значением. Теоретическое значе-
значение в рассматриваемом случае было достигнуто благодаря выбо-
выбору модели перемещения, точно соответствующей физической зада-
задаче; перемещение изменяется линейно как в модели, так и в реаль-
реальной физической задаче.
5.4.2, Общий случай
Энергия деформации бесконечно малого объема dV дается
формулой
d\=-^{B}T{a}--L{B0}T{a}, E.62)
где {е}—-полная деформация, а {ео}—начальная деформация.
Величина dh. называется плотностью энергии деформации, а пол-
полная энергия деформации получается интегрированием этой величи-
величины по объему тела:
f4-({e}r {a}-{eo}T [a})dV. E.63)
Вид векторных столбцов {е} и {а} зависит от того, какая задача
решается. Например, для двумерного случая плоской деформации
Рассмотрение краевых задач методом конечных элементов 89
эти вектор-столбцы имеют вид
и
В основе курса теории упругости [5] лежат два важных соот-
соотношения: закон Гука, который связывает компоненты тензоров-
напряжений и деформаций, и соотношения связи между дефор-
деформациями и перемещениями. Закон Гука в общей форме имеет
вид
{o}=[D]{e}-[D]{e0}, E.64>
где [D] содержит упругие константы материала. Соотношения
связи между деформациями и перемещениями записываются как
du da dw
dx ' УУ dy ' гг dz
du . до dv dw du , dw
У*у ~dy ' dx ' Ууг dz "¦" dy • ¦« ~dz ' dx •
E.65)
где и, v и w — компоненты перемещений в направлении коорди-
координатных осей х, у и г соответственно1). Эти компоненты перемеще-
перемещений были выражены в гл. 3 через узловые значения следующим
образом:
{u} = [N]{U}. E.66)
Здесь [N]—матрица функций формы C.24). С помощью формул
E.65) можно выразить вектор деформации {е} через узловые пе-
перемещения {U}. Общая форма этих соотношений такова:
[e}=[B]{U). E.67)
Здесь [В]—матрица, получаемая дифференцированием надлежа-
надлежащим образом матрицы [N]. Фактические значения коэффициентов
матрицы [В] зависят от вида используемого элемента и от типа
рассматриваемой задачи. Поэтому точное определение [В] будет
отложено до рассмотрения конкретных примеров.
Энергия деформации Л(е) отдельного элемента с помощью фор-
формул E.64) и E.67) может быть записана в следующем виде:
-2 [Щт [B^f [DM] (ем } + (ejo }т до.)] {ew}) dV_ E.68>
4> Для того чтобы компоненты деформаций E.65) образовывали тензор, не-
необходимо правые части выражений уХу„ yyz, Y« умножить на '/г- — Прим. ред.
$4 Глава 5
Последнее слагаемое в E.68) не зависит от узловых значений
{?/}, поэтому оно не влияет на процесс минимизации и в дальней-
дальнейших ссылках на E.68) не будет приниматься во внимание.
Работа, совершаемая внешними силами, может быть разделе-
разделена на три различные части: работа Wc, совершаемая сосредото-
сосредоточенными силами, работа Wp, которая получается в результате
действия компонент напряжений на внешней стороне поверхности,
работа Wb, совершаемая массовыми силами.
Работу сосредоточенных оил легко определить, если в каждой
точке приложения сосредоточенной силы поместить узел. Работа
-сосредоточенной силы равна произведению величины этой силы
на длину пути, на котором эта сила действует. Таким образом,
работа отдельной силы равна P-U. Обозначая узловые силы че-
через {Р}, а узловые перемещения через {?/}, совершенную работу
можно записать в виде произведения матриц:
WC=*[U)T [Р}=*[Р)т [U]. E.69)
Это определение предполагает, что силы разложены на компонен-
компоненты, параллельные компонентам перемещений. Эта часть полной
работы не входит в сумму E.54), так как рассмотренные силы
сосредоточены в узлах.
Работа объемных оил Э?, У-, ЗС дается формулой
W
(е)
= f (иЖ + vf + wZ) dV, E.70)
где и, v я w — компоненты вектора перемещений внутри элемента
по осям х, у и z соответственно. Интеграл здесь необходим, так
как и, v и w вместе с I, ^ и ? могут изменяться внутри эле-
элемента. Используя равенство E.66), формулу E.70) можно пере-
переписать в виде
= \ [Щт
dV. E.71)
v(e)
Работа поверхностных сил определяется следующим образом:
^jiupV + vpF+wpWdS, E.72)
где и, v и w — компоненты вектора перемещений, а рх, ру и рг —
компоненты .вектора напряжений, параллельные коо^рдинатным
осям х, у и z.
Рассмотрение краевых задач методом конечных элементов
85
Сравнение формул E.72) и E.70) показывает, что они иден-
идентичны по форме. Поэтому
dS.
E.73)
Используя формулы E.54), E.68), E.69), E.71) и E.73), по-
получаем выражение для полной потенциальной энергии:
Е Г
П=У f4-{f/}r [B(e)\T [D(e)][fi(e) [U)dV —
и M 2
e=l| v(e)
Чтобы минимизировать величину П, продифференцируем выра-
выражение E.74) по {U} и приравняем (результат нулю. Эту опера-
операцию можно выполнить, используя дифференциальные соотношения
Б1 и Б2. В результате будем иметь
дП
— {P)=0. E.75)
Глава 5
Интегралы в формуле E.75) определяют для каждого элемен-
элемента вектор нагрузки {f&} и матрицу жесткости (Wj, которые мож-
можно объединить следующим образом:
Tj^ E.76)
Уравнение E.76) очень похоже на уравнение E.44). В рассматри-
рассматриваемом случае [&<«>] — объемный интеграл вида
dV, E.77)
а {/<«>}— сумма нескольких интегралов:
dV—
-{P}. E.78)
Матрица жесткости элемента E.77) не содержит поверхност-
поверхностный интеграл, который встречается в задачах теории поля. Объем-
Объемный интеграл в формуле E.77) по форме идентичен объемному ин-
интегралу в E.45), хотя числовые значения [б<е>] и [?>(е)] совершен-
совершенно разные в этих двух случаях.
Глобальная матрица жесткости [К] и глобальный вектор-стол-
вектор-столбец {F} в матричном уравнении
{F] E.79)
даются соотношениями
[tf]=ij[*(e)j, E-8o)
j E.81)
Задачи
38. Выведите уравнения для примера в разд. 5.1, если правый
конец стержня, третий узел, теплоизолирован, а по боковой по-
поверхности происходит конвективный обмен тепла.
Рассмотрение краевых задач методом конечных элементов
87
39. Выведите систему уравнений для перемещений в изобра-
изображенном ниже элементе конструкции, подверженном осевой нагруз-
нагрузке. Используйте двухэлементную модель с узловыми перемещения-
перемещениями Uи ^2 и Hz. Заметим, что значение U\ должно равняться нулю.
'"г
, B)
К задаче 39.
40. Прогиб опертой балки, подверженной действию постоянного
изгибающего момента М, описывается дифференциальным уравне-
уравнением
iS- + -fT—°> Уо—yL—0'
где El — жесткость поперечного сечения, не зависящая от длины.
а) Дайте выриационную формулировку этой задачи.
б) Выведите систему уравнений для определения У2, Уз и
У4, используя четырехэлементную модель, показанную ниже.
м
V А~
К задаче 40.
41. Покажите, что объемный интеграл в формуле E.35) экви-
эквивалентен объемному интегралу в E.32).
88 Глава 5
ЛИТЕРАТУРА
1. Fung Y. С, Foundations of Solid Mechanics, Prentice-Hall, Englewood Cliffs,
N. J., 1965.
2. Harr M. E., Groundwater and Seepage, McGraw-Hill, N. Y., 1962.
3. Huebner К. Н., The Finite Element Method for Engineers, Wiley, N. Y., 1975.
4. Krieth F., Principles of Heat Transfer, 3-rd ed., Intex Educational Publishers,
N. Y., 1973.
5. Timoshenko S. P., Goodier J. N., Theory of Elasticity, McGraw-Hill, N. Y., 1970;
есть русский перевод: Тимошенко С. П., Гудьер Дж., Теория упругости, изд-во
«Наука», М., 1975.
6. Vallentine H. R., Applied Hydrodynamics, Butterworth, London, 1959.
Глава 6
КРУЧЕНИЕ СТЕРЖНЯ НЕКРУГОВОГО
СЕЧЕНИЯ
В четырех предыдущих главах рассматриваются вопросы дис-
дискретизации тела, построения интерполяционного полинома для от-
отдельного элемента и использование интерполяционных полиномов
для дискретизованной области, а также дается вывод основных
уравнений. Каждая из этих глав содержит исходную информацию,
связанную с методом конечных элементов. В этой главе мы пере-
переходим от рассмотрения теории метода к его реализации. Ее цель —
проиллюстрировать все этапы реализации метода. Эта цель дости-
достигается путем получения численного решения задачи о кручении
стержня некругового сечения.
Выбор именно этой задачи для иллюстрации реализации мето-
метода конечных элементов объясняется двумя причинами. Во первых,
в этом случае относительно просто выводятся уравнения метода
конечных элементов. Матрица [К] легко вычисляется, а интегралы
по границе области обращаются в нуль в силу задания нулевых
граничных значений искомой функции. Во-вторых, концепции, ис-
используемые при рассмотрении кручения стержня некругового сече-
сечения, одинаково важны как для механических задач, так и для за-
задач теории поля. Хотя теория кручения стержней представляет со-
собой самостоятельный раздел механики деформируемого тела, ис-
используемые в ней дифференциальные уравнения аналогичны урав-
уравнениям, которые описывают перенос тепла и течение грунтовых
вод.
6.1. Общая теория кручения стержня
Согласно теории1' кручения цилиндрических стержней с произ-
произвольной формой сечения, сдвиговые напряжения, возникающие в
теле в результате действия крутящего момента Т относительно оси
г (фиг. 6.1), могут быть вычислены в произвольной точке тела по
') Существуют две теории кручения стержней некругового сечения. Одна из
них была развита Сен Венаном, другая — Прандтлем. Обе теории обсуждаются
в работе [1]. Вариационная теория Прандтля, используемая в этой главе, описа-
описана в книге Тимошенко и Гудьера [3].
90 Глава 6
формулам
dq> dtp
Ггх= ду . %гу=—-^, F.1)
где ф — функция напряжений. Дифференциальное уравнение для
этой функции имеет вид
Фиг. 6.1. Сдвиговые напряжения в стержне некругового
сечения, подверженном действию крутящего момента.
а граничное условие записывается как
ср=О. F 3)
В уравнение F.2) как параметры входят модуль сдвига мате-
материала G [Н/см2] и крутка (угол закручивания на единицу длины)
6 [рад/см]. При такой постановке задачи дифференциальное урав-
уравнение не содержит приложенного крутящего момента Т [Я-см].
Величина Т вычисляется после решения уравнения F.2) по фор-
формуле
^ F.4)
Функцию напряжений можно наглядно представить как некоторую
поверхность, охватывающую поперечное сечение стержня (фиг.
6.2). Крутящий момент пропорционален объему, охватываемому
этой поверхностью, а сдвиговые напряжения связаны с углами
наклона касательных к этой поверхности1) в плоскостях xz и yz.
Уравнение F.2) обычно записывают в виде
00°. <6-5>
'> Это так называемая мембранная аналогия (см. [3], стр. 309).—
Прим. ред.
Кручение стержня некругового сечения
91
Вариационная формулировка задачи о кручении стержня связа-
связана с рассмотрением функционала
Фиг. 6.2 Поверхность функции напряжений <р и со-
соответствующее сдвиговое напряжение.
который в соответствии с изложенным в гл. 5 может быть записан
в виде
\g}-BGQ)<f]
dV,
F.7)
где
{*}=-
дх
¦4
КХХ О
Вектор-столбец {g} соответствует сдвиговым напряжениям, мат-
матрица [D] становится единичной, так как КХх=Кт=1. Минимиза-
Минимизация % по {Ф} приводит к системе линейных уравнений
Е
Е
>]dV (Ф) =2 Г
BG0) dV, F.8)
где [N&] определена в формуле D.1), а [?<е>]—матрица гради-
градиентов, определенная в формуле E.39). К решению системы F.8)
приступают после того, как выбрана форма сечения и это сечение
разбито на элементы.
92
Глава 6
6.2. Построение матриц элементов
Чтобы показать, как определяются матрицы элементов и ка-
каким образом с их помощью формируется система линейных урав-
уравнений, рассмотрим стержень с поперечным сечением в форме квад-
квадрата (фиг. б.З.а). В связи с наличием четырех осей симметрии
можно рассматривать только '/в квадрата. Разобьем эту часть се-
сечения на четыре элемента, как показано на фиг. 6.3,6. Четырех
Оси симметрии
Площадь
сечения 1смг
G 0.8хЮ7Н/смг
в-1'на 100см
а
0,25 см
Ф,
0,25см
Фиг. 6.3. Разбиение области на элементы в задаче о кручении стержня квадрат-
квадратного сечения.
элементов мало для получения приемлемой точности решения, но
вполне достаточно для иллюстрации техники получения необходи-
необходимой системы уравнений, что является нашей целью.
Кручение стержня некругового сечения 93>
Согласно методам, изложенным в гл. 4, представим интерполя-
интерполяционные полиномы для элементов в виде
0Ф6,
F.9)-
>=оф,+оф2 ^ оф3+
w ф5
Общая формула для матрицы жесткости элемента записывает-
записывается как
= С 1В<"]Г
Здесь учтено, что [?>] = [/] в-рассматриваемом случае. Для опре-
определения [ВA)] необходимо дифференцировать [<рA)] по х и у. Рас-
Рассмотрим подробно первый элемент:
о —~ о о =
=—!—М» М» 0 Ьр 0 0], F.10а).
О i^«_. о 0 =
=—^-[cp 4') 0 c<'> 0 0]. F.10б>
Матрица градиентов [ВA)] имеет вид
<» о о|
<'> 0 Oj
[i« 4'> 0
Площадь этого элемента
Коэффициенты b и с равны
^>=У,_У4= 0,25, с{')=Х4-Х2-0,
6i» — Yi—K1=0,25, 4" Хх—Х4=—0,25,
i<1)=r1-K2=0, ci1)—X,—Хх=0,25.
Подставляя эти значения в формулу F.11), получаем
-4 4 0 0 0 01
0 —4 0 4 0 0 V '
«4
Глава 6
ИЛИ
Произведение
[БA»]г [БA>] =
[ЯA)]
т [В*1']
[В<
-—4
4
0
0
0
0
-
равно
о-
—4
0
4
0
0
Г—4
1
16 —16
—16
0
0 -
0
0
32
0
-16
0
0
0
0
0
0
0
0
0
4 0
—4 0
0
— 16
0
16
0
0
0
4
0
0
0
0
0
0
0 0
0 0
0"
0
0
0
0
0
•
F.13)
Матрица жесткости элемента представляет собой интеграл от
F.13). Так как произведение матриц [BO]^/?*1)] является посто-
постоянной величиной, оно может быть вынесено из-под интеграла, что
дает
[?AI=[ВA>1Г [БAI ^dV=[BW]T [?<D] да).
Толщина элемента предполагается при этом единичной. Восполь-
Воспользовавшись формулой F.13) и тем, что ЛA)= 1/32, получаем
[*A)]=4-
Объемный интеграл
1
—1
0
0
0
0
—1
2
0
— 1
0
0
0
0
0
0
0
0
0
—1
0
1
0
0
0
0
0
0
Q
0
0
0
0
0
0
0
F.14)
{fA)} = 2GA'0
J
0
о
о
dV
Кручение стержня некругового сечения
95
вычисляется просто, если воспользоваться системой L-координат,.
рассмотренной в гл. 3:
L1=N[», L2=NP, L3=Np.
Объемный интеграл запишется как
F.15)
= 2GA)e
dV.
F.16)
Предполагая толщину элемента единичной и применяя интеграль-
интегральную формулу C.43), находим
т=
2GA>O4A>
F.17)
Подстановка значений G^ 6 и ЛС дает1'
29,07]
29,07
{/Ш)= 29,07
0
0
F.18)
)
Таким образом, система уравнений для первого элемента имеет вид
[^>]{Ф}={/A))
или
F.19а)
•> В качестве единиц размерности выбраны Н/см2 для G, см2 для Л") и рад/см
для 6. 6 — я/180Х1/Ю0 при закручивании стержня на 1° на длине 100 см.
1
2
" 1
—1
0
0
0
0
—1
2
0
—1
0
0
0
0
0
0
0
0
0
—1
0
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
Ф1
фа
Фз
ф4
ф5
Фв
29,07
29,07
0
29,07
0
0
96
Глава 6
Аналогично можно получить систему уравнений для любого
другого элемента. Окончательные выражения для матриц осталь-
остальных элементов приводятся ниже:
1
2~
1
2"
1
2"
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
—1
0
0
0
0
1
0
—1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
[#¦>! {Ф}
0
—1
2
0
—1
0
0
0
={Г
0
0
0 —1
0
0
0
0
1
0
[^>1{ф}=
0
0
0 —1
0
0
0
0
0
0
2 —1
0 —1
0
0
[?D>] {ф}
0
0
0
1
—1
0
0
0
0
—1
2
—1
1
0
—
0
0
0
0
0
0_
{р
(Г
0
0
0
0
0_
{/tt>
0"
0
0
0
—1
1
Ф1]
ф2
Фз
ф4
ф5
ф.
—
}.
фх
ф2
Фз
ф4
ф5
фв
).
ф2
Фз
ф4
Фь
ф«
—
0
29,07
29,07
0
29,07
0
0
29,07
0
29,07
29,07
0
0
0
0
29,07
29,07
29,07
F.196)
F.19b)
F.19г)
Окончательная полная система уравнений получается алгебра-
алгебраическим суммированием уравнений для отдельных элементов. Она
имеет вид
F.20)
1
2~
1
— 1
0
0
0
0
—1
4
—1
—2
0
0
0
—1
2
0
—1
0
0
—2
0
4
—2
0
0
0
— 1
—2
4
—1
0
0
0
0
1
1
ф2
Фз
ф4
ф5
фй
—
29,071
87,22
29,07
87,22
87,22
29,07
Величины Ф3, Ф5 и Ф6 равны нулю, так как соответствующие
им узлы расположены на внешней границе. Преобразуя систему
Кручение стержня некругового сечения
97
уравнений F.20) и решая ее, получаем
Ф1=218,16, Ф3=0,
Ф2=160, Ф,=0, F.21)
Ф4 = 123,63, Ф6=0.
Преобразование системы уравнений F.20) обсуждается в следую-
следующей главе, где рассматривается реализация метода конечных эле-
элементов с помощью вычислительной машины. Поверхность ф, соот-
соответствующая полученному множеству узловых значений, представ-
представлена на фиг. 6.4.
Определение узловых значений — главный шаг в решении за-
задачи. Однако в большинстве случаев бывает необходимо вычис-
вычислять еще целый набор величин для каждого элемента. Такие ве-
Фиг. 6.4. Узловые значения функции напряжений в за
даче о кручении стержня, вычисленные для четырех-
элементной модели.
личины ниже будут называться результантами элемента. В рас-
рассмотренной задаче, например, интересно знать такие результанты,
как значения сдвиговых напряжений в каждом элементе и крутя-
крутящего момента Т, который вызывает закручивание стержня на угол
6. Методика вычисления результантов элемента обсуждается в сле-
следующем разделе.
7—763
98
Глава 6
6.3. Стандартные результанты элемента
В задаче о кручении стержня важными величинами являются
производные функции ф, поскольку они просто связаны с напря-
напряжениями сдвига:
(Эф
~w
т _ д<р
гУ дГ
Значения сдвиговых напряжений легко вычислить, так как матри-
матрица градиентов для каждого элемента уже определена. Матрица
градиентов для первого элемента представлена в формуле F.11):
{gA)}
1
—
со>
(Эф
дх
<Эф
ду
W о ьр
4'> о с'1»
0
0
°1
о]
ф1
ф2
Фз
ф5
{gA)} =
С учетом формул F.12) и F.21) получаем
'218,16^
160,0
(g(ll) =
4
0
4 0 0 0 01 0
4 0 4 0 0| 123,63
0
0
232,61
145,4]'
Поэтому
' -.(D _ ^Ф _
-(')_ ^ф
Тад дГ
145,4 Н/см2,
232,6 Н/см2.
Компоненты тензора напряжений для других элементов вычисля-
вычисляются аналогично:
элемент 2: тгх-0 Н/см2, хгу 639,4 Н/см2,
элемент 3: х1х 145,4 Н/см2, т.„=494,0 Н/см2,
элемент 4: тгх 0 Н/см2, xzy 494,0 Н/см2.
Эти значения схематически показаны на фиг. 6.5.
Сдвиговые напряжения получаются постоянными в каждом из
элементов потому, что интерполяционные полиномы для элементов
Кручение стержня некругового сечения
99
взяты линейными по х и у. Невозможность получения переменных
по площади элемента производных является недостатком исполь-
использования симплекс-элементов.
Компоненты положительных
сдвиговых напряжений
У
с
/ IU5 '
233
А
/
LU9U /
т /
/Ш9
/и
i- о
/ 2 3 ^
Фиг. Ь.5. Сдвиговые напряжения в задаче о кручении
стержня, вычисленные для четырехэлементной модели.
Все значения выражены в. ньютонах на квадратный сан-
сантиметр.
Уточнить значения напряжений внутри стержня, полученные в
данном примере, можно тремя способами. Во-первых, можно уве-
увеличить число элементов, используемых при разбиении области по-
поперечного сечения. Так как при этом размеры элементов уменьша-
уменьшаются, вычисленные значения напряжений оказываются более близ-
близкими к действительным. Во-вторых, можно использовать треуголь-
треугольный элемент с большим числом узлов, а в интерполяционные
полиномы включить квадратные и кубичные члены. Тогда в резуль-
результате дифференцирования будут получаться градиенты, являющие-
являющиеся функциями координат. Третий подход заключается в примене-
применении теории сопряженной аппроксимации. Эта теория позволяет
определять напряжения в узловых точках, а также напряжения
внутри элемента как функции координат х, у. Применение этой
теории обсуждается в следующем разделе.
Другим заслуживающим внимания результантом является кру-
крутящий момент Т, который представлен формулой F.4) :
Т 2
^dA,
где S — площадь поперечного сечения стержня.
7*
100
Глава 6
Этот интеграл эквивалентен следующему:
Т =
=2 Jv
ЧА,
F.22)
с 1 S
где ф'е) определяется формулой F.9). Начнем рассмотрение с пер-
первого элемента:
или
2 ГфЧ'йЛ =2 Un{» N[» 0 #<•> 0 0]
AU) АМ
2 ГфA'йЛ = 2[Ф]7' UnA)]t dA.
лA) л'1»
Фх
Фз
Ф4
Ф5
Ф«
йЛ, F.23)
F.24)
Последнее выражение идентично интегралу в F.16). Можно сра-
сразу сделать вывод, что
П
2 Гф<»>Л4=-?^--[Ф]г
= -^-(Ф1 + Ф, + Ф4). F.25)
Подстановка узловых значений дает
2 Г<р<1'А4= 2Л3A> B18,16+160+123,63)—2^-E01,79).
лA)
Аналогично находим для остальных элементов
2 |ф«'<М=-^ (Ф2 + Ф3 + Ф5)- 2Лз<2> A60),
ЛB)
2 Г ф<3 ЧА ^~ (Ф2 - Фя -J- Ф4) ^- B83,63),
лC)
2 |"фD)^ = ^1_(ф4^ф5 гфв) =
'4)'
24<«>
A23,63).
Кручение стержня некругового сечения - 101
Суммируя эти соотношения и замечая, что площади элементов
одинаковы, получаем
Е
T = Yi \ 2(?{e' dA =Г E01,79 -г 160 + 283,63 + 123,63),
е \А(е)
Т =-^-A069,05) = 1069
3A6) '
Поскольку на элементы разбивалась только '/в области попереч-
поперечного сечения, полный крутящий момент М равен
М =87=8^-^ = 178,16 Н-см.
Это означает, что крутящий момент величиной 178 Н-см вызывает
закручивание на 1° стального стержня длиной 100 см и с попереч-
поперечным сечением в форме квадр'ата со стороной в 1 см. Однако точ-
точность этого результата весьма сомнительна вследствие выбора гру-
грубой сетки разбиения. В самом деле, теоретическое значение Х) мо-
момента равно 196,3 Н-см. Наш результат на 9,5% меньше этой ве-
величины.
6.4. Согласованные результанты элемента
Недостатком применения линейных интерполяционных полино-
полиномов является невозможность получить градиенты как функции х
и у. Градиент и любая связанная с ним величина получаются по-
постоянными внутри элемента. Чтобы иметь более приемлемые зна-
значения узловых величин применяются различные методы усредне-
усреднения. Можно, например, в качестве значения градиента в данном уз-
узле принять среднюю по всем окружающим этот узел элементам
величину. Узловые значения результантов элемента можно также
получить с помощью теории сопряженной аппроксимации [2]. Эта
теория дает значения результантов элемента, согласованные с ап-
аппроксимирующими полиномами для векторной или скалярной ве-
величины.
Изложение теории сопряженной аппроксимации выходит за
рамки дяннпй книги. Применение этой теории, однако, не пред-
представляет труда и будет проиллюстрировано на четырехэлементной
модели рассмотренной выше задачи о кручении.
4) Связь между приложенным крутящим моментом и углом закручивания
квадратного стержня со стороной, равной 2а, дается формулой Т—0,1406G9BaL
([3], формула 170 на стр. 313). Для рассматриваемого примера 1а 1 н Т —
— 0.1406G9 196,3 Н-см
102
Глава 6
Узловые значения результантов элемента получаются реше-
решением системы уравнений
[С] (а) = {#}, F.26)
где [С] и {R} представляют собой сумму матриц элементов вида
[см] = С [iV<'>]r [JV<«>] dV F.27)
и
F.28)
a a — стандартный результант элемента. Определить {г<е>} неслож-
несложно, потому что величина а постоянна внутри элемента. Легко вы-
вычислить [с<е)], используя плоские /.-координаты Рассмотрим пер-
первый элемент подробнее. Имеем
[#u>]=[?i Z.2 0 Z.3 0 0].
Запишем произведение [iVa)]r [N{1)]:
[ДГA)]Г [#<!)] =
Интегрируя по площади с использованием формулы C.43), получаем ^
LXL,
0
LxL*
0
0
LtL2
L\
0
Щ3
0
0
0
0
0
0
0
0
LXL3
ЦЪ
0
L\
0
0
0
0
0
0
0
0
0
0
0
0
0
0
[c">] =
12
2 10 10 0-
12 0 10 0
0 0 0 0 0 0
1 10 2 0 0
0 0 0 0 0 0
0 0 0 0 0 0
F.29)
(толщина элемента предполагается единичной).
Вектор-столбец для первого элемента имеет вид
rCDl = /<1)о
{'U)} = -
= АШ
B33)
П
1
о
1
о
о
=А™
77,67
77,67
0
77,67
0
0
F.30)
Кручение стержня некругового сечения
103
В предыдущих расчетах использовалось сдвиговое напряжение
tzy только потому, что оно имеет наибольшее значение внутри каж-
каждого элемента. Сдвиговое напряжение xzx может быть рассмотрено
точно так же. Вектср столбец {R} должен быть вновь вычислен
с использованием числовых значений хгх- Заметим, что вектор-
столбец {/?} составляется только для величины, изменяющейся от
элемента к элементу. Итак, числовые матрицы элементов с пер-
первого по четвертый даются формулами F.29) — F.33).
[с<2>]=-
12
'0
0
0
0
0
0
0
2
1
0
1
0
0
1
2
0
1
0
0
0
0
0
0
0
0
1
1
0
2
0
0
0
0
0
0
0
[гЩ -АB)
(Л
213
213
0
213
0
[с
CI
М'3'
12
[<•<*>] =
ЛD)
12
0 0 0 0 0 0
0 2 0 110
0 0 0 0 0 0
0 10 2 10
0 10 12 0
0 0 0 0 0 0
00000
0 0 0 0 0 0
0 0 0 0 0 0
0 0 0 2 1 1
0 0 0 12 1
0 0 0 1 12
{г(з>}=Л(з>
0
164,67
0
164,67
164,67
0
F.31)
F.32)
М4')=ЛD)
0
0
0
164
164
164
1
,67
,67
,67
F.33)
Окончательная система уравнений получается суммированием
уравнений для каждого элемента. В результате имеем
1
12
2
1
0
1
0
0
1
6
1
2
2
0
0
1
2
0
1
0
1
2
0
6
2
1
0
2
1
2
fi
1
О]
°3
о*
77,67
455,35
213
407,01
542,34
164,67
F.34)
Так как все элементы имеют одинаковую площадь, то в последних
формулах она опущена.
Узловые значения результанта следующие:
{<т}г=[70,9, 436,5, 724,1, 353,6, 671,4, 475,5].
104 Глава 6
Для результантов элемента можно, кроме гого, получить со-
соотношения, которые выражают изменение этих величин по пло-
площади элемента. Мы не будем останавливаться подробно на этом,
поскольку такие соотношения широко не применяются.
Применение теории сопряженной аппроксимации сводится к
решению системы алгебраических уравнений, порядок которой
совпадает с порядком системы, используемой для получения уз
ловых значений. Это представляет определенное неудобство при
решении задач, которые требуют включения большого числа эле-
элементов.
Способ,* не требующий решения полной системы уравнений, об-
обсуждается в гл. 7, где рассматривается кручение квадратного
стержня с большим числом элементов.
Последние этапы метода конечных элементов проиллюстриро-
проиллюстрированы в этой главе на конкретной задаче. Было показано, как полу-
получаются матрицы элементов, а также как определяются результан-
результанты элемента, если известны узловые значения.
Следующая глава посвящена вопросам машинной реализации
метода конечных элементов. В гл. 8—12 будут рассмотрены раз-
различные применения метода.
Задачи
41. Проверьте матрицу жесткости и вектор нагрузки в уравне-
уравнениях:
1) F.196), 2) F.19в),3) F.19д).
42. Проверьте значения сдвиговых напряжений для элементов:
а) второго, б) третьего, в) четвертого для примера, рассмотрен-
рассмотренного в разд. 6.3.
43. Вычислите числовые значения {R}, необходимые для опре-
определения узловых значений tzx.
ЛИТЕРАТУРА
1. Fung Y. С, Foundations of Solid Mechanics, Prentice-Hall, Englewood Cliffs,
N. J., 1965, pp. 162—170.
2. Oden J. Т., Brauchli H. J., On the Calculation of Consistent Stress Distributions
in Finite Element Approximations, Intern. J. for Numerical Methods in Engi-
Engineering, 3, 317—325 A971).
3. Timoshenko S. P., Goodier J. N.. Theory of Elasticity, McGraw-Hill, N. Y., 1970,
pp. 315 316; есть русский перевод: Тимошенко С. П , Гудьер Дж., Теория
упругости, изд во «Наука», М., 1975.
ДОПОЛНИТЕЛЬНАЯ ЛИТЕРАТУРА
Owen D. R. J., Zienkiewicz О. С, Torsion of Axi Symmetric Solids of Variable
Diameter—Including Acceleration Effects, Intern J. for Numerical Methods in
Engineering, 8, 195—212 A974).
Yamada Y., Kawai Т., Yoshemura N., Analysis of the Elastic Plastic-Problems by
the Matrix Displacement Method, Proc. of the Second Conf. on Matrix Methods
in Structural Mechanics (AFFDL-TR-68 150), Wright-Patterson Air Force Base,
Dayton, Ohio, 1968.
Глава 7
РЕАЛИЗАЦИЯ МЕТОДА КОНЕЧНЫХ
ЭЛЕМЕНТОВ НА ЭВМ
Из результатов гл. 6 очевидно, что применение метода конеч-
конечных элементов приводит к системе алгебраических уравнений. По-
Порядок системы совпадает с общим числом неизвестных. Это число
может быть порядка 10, 100, 1000, 10 000 или даже 100 000. Ясно,
что для решения таких систем необходима вычислительная маши-
машина. Наше обсуждение метода конечных элементов будет неполным,
если не рассмотреть машинную реализацию этой процедуры.
В этой главе рассматриваются процедура составления системы
уравнений, ее преобразование и решение. Здесь представлена об-
общая блок схема вычислений, в которой используются симплекс-
элементы, и приводится полученное с помощью ЭВМ численное
решение задачи о кручении, рассмотренной в гл. 6.
7.1. Прямое построение глобальной матрицы
жесткости
Метод построения глобальной матрицы жесткости, представ-
представленный в предыдущей главе, весьма неэффективен при использо-
использовании цифровой вычислительной машины. Эта неэффективность
объясняется тем, что матрица жесткости отдельного элемента
[№] имеет такое же число строк и столбцов, что и глобальная
матрица жесткости \К). Как видно из формул F.19), большинст-
большинство коэффициентов в матрице элемента равно нулю. Предположим,
что область разбита на 50 элементов с 75 узловыми точками и нуж
но построить матрицу элемента [#е>]. Матрица элемента должна
содержать 75 строк и столбцов с общим числом коэффициентов
752=5625. Из этих коэффициентов 5616 должны равняться нулю,
так как для рассмотренной задачи о кручении матрица элемента
содержит только девять ненулевых коэффициентов.
Дополнительные неудобства связаны с тем, что глобальная
матрица жесткости [К] получается суммированием матриц жест
кости элементов [?(е)], [К] = 2 [&(е)].. Матрица каждого элемента
должна быть вычислена отдельно от [К] и затем прибавлена к
последней, а это требует запоминания обеих матриц [К] и [&(е)].
Необходимость помнить две большие матрицы приводит к пере-
106
Глава 7
грузке запоминающего устройства, когда решаемая задача имеет
большое число неизвестных.
В эффективных программах процедура построения глобальной
матрицы жесткости использует сокращенную форму матриц эле-
элементов [ЛДе)] при получении уравнений для элемента. Такой метод
известен как метод «прямой жесткости». Применение этого метода
исключает необходимость хранения больших матриц элементов,
содержащих всего несколько отличных от нуля коэффициентов.
Процедура кодирования, которая описывается ниже, представле-
представлена в работе [4].
При использовании этого метода сначала рассматривается
[ЛДе>] для конкретного элемента. Все глобальные степени свободы
<р (или и в случае векторных величин), которые не относятся к
этому элементу, исключаются из-рассмотрения. Функции формы за-
записываются в соответствии с порядком следования индексов i,- j, k,
начиная с узла i, в направлении против часовой стрелки. Рассмот-
Рассмотрим, например, элемент C) на фиг. 6.3. Согласно формуле F.9),
для ф<3' имеем
Ф<=» =0Фх + Щ3* Ф2 + 0Ф3+#<?)Ф4 + Af> Ф5 -t- 0Ф6.
Этому элементу соответствуют узлы 2, 5 и 4 и глобальные степени
свободы Ф2, Ф5 и Ф4. После упорядочивания функций формы в
направлении против часовой стрелки, начиная от узла i, последнее
соотношение в сокращенном виде записывается как
ф(з)=л?<з)ф2 + Л^Фа + N& Ф4.
G.1)
Матрица градиентов имеет вид
{§} =
5ф
дх
5ф
2Л<3) [с
= [БC)]{Ф<3)). G.2)
Значения коэффициентов 6<р3)и с'^могут быть вычислены по форму-
формулам C.10), если заданы координаты узлов элемента. После под-
подстановки этих значений в [В^] соотношение G.2) примет вид
Подставляя [?<3>] в сокращенной форме в равенство F.8) и вы-
выполняя умножение и интегрирование, получаем
-0,5"
[0,5 0 —0,
О 0,5 —0,
—0,5 —0,5 1,
G.4)
Реализация метода конечных элементов на ЭВМ
10 7
Таким образом, в результате мы имеем матрицу размером 3X3
вместо матрицы размером 6X6, данной в F.19в). Матрица эле-
элемента имеет размер 3X3, потому что этому элементу соответству-
соответствуют три глобальные степени свободы.
Применив подобную процедуру к интегралу
2GqUn™]t dA,
I
получим
г)х__ШУ^_
{/C))=
G.5)
С помощью формул G.4) и G.5) уравнения для данного элемента
можно записать следующим образом:
1
0
—1
0
1
—1
—1
—1
2
Ф2
Ф5
Ф4
=
29
29
29
,07'
,07
,07
G.6)
Уравнения G.6), очевидно, не идентичны уравнениям F.19в).
Чтобы полученная матрица соответствовала точной матрице жест-
жесткости третьего элемента, ее нужно переформировать и расширить.
Алгоритм переформирования и расширения матрицы несложен.
Строкам и столбцам сокращенной матрицы элемента приписы-
приписываются номера глобальных степеней свободы. Порядок располо-
расположения степеней свободы соответствует обходу элемента против
часовой стрелки, начиная от i го узла.
Матрицы элементов в задаче о кручении имеют только одну
степень свободы (искомую величину) в каждом узле, поэтому
функции формы в G.1) упорядочены так же, как и глобальные
степени свободы. Используя указанную нумерацию для строк и
столбцов матрицы G.4), запишем
[A'J']-5
1-1/г
Приписывание столбцам и строкам матрицы элемента номеров
глобальных степеней свободы позволяет определить, какое место
займут коэффициенты матрицы элемента в глобальной матрице
жесткости. Например, коэффициент —7г, заключенный в квадрат
матрицы G.7), находится на пересечении второй строки и четвер-
108
Глава 7
того столбца глобальной матрицы жесткости. Коэффициент —72.
заключенный в треугольник, находится на пересечении четвертой
строки и пятого столбца. Расположение всех коэффициентов мат-
матрицы элемента в глобяльной мятрице жесткости показано ня
2
©
и _
0,5
0.5
А
0.5
-0.5
А
0.5
0
0.5
1
0,5
0
А
0,5
а о
Фиг. 7.1. Расширение и переформирование сокращенной матрицы жесткости
элемента.
а — сокращенная матрица; б — расширенная и переформированная матрица.
фиг. 7.1. Незаполненные прямоугольники для [&<3>] соответствуют
нулевым элементам. Сопоставление фиг. 7.1 и соотношения F.19в)
показывает, что мы имеем теперь точную Матрицу жесткости
данного элемента.
Метод прямой жесткости построения глобальной матрицы же-
жесткости является очень важным алгоритмом реализации метода
конечных элементов на ЭВМ, потому что он значительно сокраща-
сокращает загрузку запоминающего устройства. В частности, он исключает
необходимость запоминания больших матриц элементов, которые
содержат всего несколько ненулевых коэффициентов. Число строк
и число столбцов сокращенной матрицы жесткости элемента рав-
равны числу степеней свободы элемента.
7.2. Система линейных уравнений-
При использовании метода конечных элементов получается си-
система линейных уравнений, которая должна быть решена относи-
относительно неизвестных узловых параметров. Решение этих уравнений
является очень важным аспектом задачи в целом, потому что си
Реализация метода конечных элементов на ЭВМ
109
стема уравнений обычно очень большая. Методы решения систем
с малым или большим числом уравнений мало отличаются друг от
друга. Реализация этих методов, однако, зависит от технических
возможностей ЭВМ.
Во второй главе, где рассматривался процесс дискретизации
сплошной среды, было отмечено, что путем надлежащей нумера-
нумерации узлов можно контролировать расположение коэффициентов в
~ С
С
с
0
с
ч
N
0
0
0
0
Ширина полосы
с
с
с
с
с
N С
V
N
0 N
0
0
с
с
с
с
0
с
с
V
N
0 N
0
0
с
с
с
с
с
с
с
\
N
°Ч
(
: n о
N
С С N
0 С
с с
с с
с с
с
с
0 С
с с
0
N°
N
с
с
с
с
с
с
0
0
0
\о
N
с4
0
с
с
с
с
о-
0
0
N 0
ч
с4.
с
0
с
с
Фиг. 7.2. Общий вид системы уравнений, получаемой
при использовании метода конечных элементов.
глобальной матрице жесткости. Напомним, что при разумной ну-
нумерации узлов получается матрица ленточного типа вместо полной
матрицы. Ленточная матрица характеризуется тем, что все ее не-
ненулевые коэффициенты располагаются вблизи главной диагонали,
а все коэффициенты за пределами некоторой полосы, ограниченной
линиями, параллельными главной диагонали, равны нулю. Схема
тически это проиллюстрировано на фиг. 7.2, где ширина полосы
ленточной матрицы показана штриховыми линиями. Через С обо
значены ненулевые члены. Вообще говоря, нулевые коэффициенты
могут встречаться и внутри полосы.
Два свойства результирующей системы уравнений делают ее
идеальной: симметрия и положительная определенность матрицы.
Наличие симметрии означает, что приблизительно половину не-
ненулевых членов матрицы можно не запоминать. Положительная
определенность означает, что коэффициент, стоящий на главной
диагонали, всегда положителен и обычно много больше по вели
Ш Глава 7
чине, чем любой другой коэффициент соответствующей строки или
столбца.
В случае симметричной положительно определенной матрицы
ленточного типа значительно сокращается объем вычислений, не-
необходимых для получения решения системы уравнений. К тому
же уменьшается вероятность больших ошибок округления.
Существование симметрии в матрице ленточного типа позволя
ет значительно сократить объем памяти, требуемой для хранения
глобальной матрицы. Обычно при программировании предусматри-
предусматривается превращение матрицы, изображенной на фиг. 7.2, в прямо
угольный массив, ширина которого совпадает с шириной полосы
матрицы, а длина равна числу уравнений. Чтобы проиллюстриро
вать преимущество такого представления матрицы, допустим, что
мы решаем задачу, которая включает 200 узловых неизвестных.
Обычно при этом получается глобальная матрица жесткости, для
хранения которой требуется 200X200, т. е. 40 000 единиц машин-
машинной памяти. Однако, если эта ленточная матрица имеет ширину
полосы, равную 40, и хранится в виде прямоугольного массива,
требуется уже только 8000 единиц машинной памяти для запо
минания 40 столбцов по 200 элементов в каждом. Таким образом,
загрузка машинной памяти сокращается на 20% по сравнению с
загрузкой, требуемой при хранении квадратной матрицы.
Решение системы уравнений может быть проведено с помощью
алгоритмов, которые обсуждаются во многих книгах, посвящен
ных численному анализу. Следует подчеркнуть, что обращение мат-
матрицы очень неэффективная процедура решения системы урав
нений. Эта неэффективность может быть объяснена двумя причи
нами. Обращение матрицы эквивалентно решению системы Лг
уравнений с N неизвестными. Если при этом рассматривается ог
раниченное число столбцов правых частей (глобальный вектор на
грузки), то вычисление обратной матрицы мало оправдано. Крп
ме того, в результате обращения ленточной матрицы получается
матрица неленточного типа. Процедура обращения матрицы неэф-
неэффективна также еще и с точки зрения экономии машинной памяти.
7.2.1. Преобразование системы уравнений
Результирующая система уравнений имеет вид
она получается суммированием уравнений для всех элементов. Эта
система должна быть преобразована, если некоторые составляю
щие {Ф} известны, что является скорее правилом, чем исключени-
исключением. В большинстве задач теории поля некоторые граничные зна-
значения искомой величины заданы; во всех задачах теории упругости
должны быть фиксированы некоторые перемещения с тем, чтобы
Реализация метода конечных элементов на ЭВМ Ш
исключить перемещение среды как жесткого тела. В задачах ме-
механики деформируемых сред матрица жесткости [К] будет син
гулярной до тех пор, пэка не заданы некоторые перемещения.
Цель этого раздела обсуждение и иллюстрация процедуры
преобразования [К] и {F} таким образом, чтобы получить пра-
правильный ответ, не изменяя размеры [К] и {F}, ибо это повлечет
за собой трудности при программировании.
Если фиксирована одна степень свободы узлового параметра
{Ф}, то преобразование системы уравнений представляет собой
двухшаговую процедуру. Пусть, например, известно значение Ф5;
преобразование сводится тогда к следующему:
1. Все коэффициенты пятой строки, за исключением диагональ-
диагональных, приравниваются нулю. Диагональный член остается неизмен-
неизменным. В форме равенства это выглядит как Кь3 0 при / \,...,п и
)=/=Ь. Соответствующая компонента Fs вектора{i7} заменяется на
произведение
2. Все остальные уравнения преобразуются вычитанием произ-
произведения
из Fj и подстановкой /С,-5 0, / \,...,п, \ФЪ.
Пример
44. Требуется преобразовать следующую систему уравнений, ес-
если известно, что Ф1 = 150 и Ф5 40:
55Ф2— 46Ф2+ 4Ф3 =500,
—46Ф1+140Ф2— 46Ф3 =2000,
4Ф2— 46Ф2+110Ф3— 46Ф4+ 4Ф5_1000,
— 46Ф3 + 142Ф4 — 46Ф5—2000,
4Ф3— 46Ф4 + 65Ф5=900.
На первом этапе приравняем нулю все коэффициенты в первой
и пятой строках, за исключением диагональных членов, которые
оставим неизменными. Компоненты Fx и F5 b{F} заменим соответ
ственно на КцФг и КььФб- В результате будем иметь
55Ф!. =8250,
—46Ф1+140Ф2,— 46Ф3 =2000,
4Ф2— 46Ф2-И10Ф3— 46Ф4+ 4Ф5 = 1000,
— 46Ф3+142Ф4 46Ф5—2000,
65Ф5=2600.
112 глава 7
Второй этап состоит в исключении столбцов матрицы, коэффи-
коэффициенты которых умножаются на ф[ и Ф5. Это осуществляется пе-
переносом членов, содержащих Ф[ и Ф5, в правую часть системы.
Например, величина F2 становится равной 2000+46Фь или 8900.
Завершая второй шаг, получим
55ФХ =8250,
140Ф2— 46Ф3 =8900,
— 46Ф2-г110Ф3- 46Ф4=240,
— 46Ф3+142Ф4=3840,
65Ф6=2600.
Описанная выше процедура совершенно проста и легко подда-
поддается программированию. Та же методика преобразования может
быть использована также в случае, когда [К] хранится в виде
прямоугольного массива. Логика программирования, однако, при
этом более сложная.
Другой метод, применяемый некоторыми исследователями, со-
состоит в том, что диагональный коэффициент, соответствующий за-
заданному узловому значению Фр, умножается на очень большое
число, скажем на 1015, a F$ заменяется на A015) Фр. Это равно
сильно приближенной замене коэффициентов вне главной диаго-
диагонали нулями. Такой способ очень легко реализовать на ЭВМ, но
он неприменим, если заданное значение Фр очень мало. Именно
с таким случаем сталкиваются при решении задач механики твер
дого деформируемого тела, когда заданные перемещения малы по
величине. Первый метод, рассмотренный выше, всегда будет да
вать правильные результаты там, где мы сталкиваемся с малыми
заданными величинами Фр.
7.2.2. Решение системы уравнений
Одним из наиболее эффективных методов решения системы
уравнений, которые получаются при использовании метода конеч
ных элементов, является известный вариант метода исключения
Гаусса [1]. Матрица системы преобразуется к треугольному виду,
после чего решение получается обратной прогонкой. Проиллюстри
руем сначала метод на примере решения простой системы уравне-
уравнений, а затем проведем обобщение, обсуждая вопросы, которые име-
имеют отношение к методу конечных элементов.
Рассмотрим систему уравнений
а— Ф3=4, G.9)
Реализация метода конечных элементов на ЭВМ 113
Матрица этой системы симметрична, причем наибольшие ее коэф-
коэффициенты расположены на главной диагонали. Метод исключения
основан на том, что любая неизвестная может быть исключена из
всех уравнений, следующих за тем, в котором эта неизвестная на-
находится на главной диагонали. Например, неизвестную Oi можно
исключить из второго и третьего уравнений, а затем исключить Ф2
из третьего уравнения. Чтобы исключить Oi из второго и третьего
уравнений, решим первое уравнение относительно Ф^
Ф1=О,75 — 0,25Ф2—0,125Ф3.
Подставив это выражение во второе уравнение, получим
2@,75 — 0,25Ф2 — 0,125Ф3) + 6Ф2—Ф3 = 4,
или
5,5Ф2 — 1,25Ф„=2,5.
Подстановка в третье уравнение дает
@,75 —0,25Ф2 0,125Ф3)—Ф2 + 4Ф3=2,
или
- 1,25Ф2 + 3,875Ф3 = 1,25.
В результате система уравнений принимает вид
8ФХ + 2Ф2 +Ф3 =6,
5,5ФЯ — 1,25Ф3 =2,5, G.10)
— 1,25Ф2 + 3,875Ф3 = 1,25.
Повторим процедуру, исключая Ф2 из третьего уравнения:
вФ^гФ, +ф3 =6,
5,5Ф2 — 1,25Ф3 =2,5, G.11)
3,591Ф„= 1,818.
Эта система может быть решена обратной прогонкой. Из третьего
уравнения получаем
Подставляя это значение Ф3 во второе уравнение, и решая его от-
относительно Ф2, получаем
2,5 + 1,25Ф3 =
5,5
Поскольку Ф2 и Ф3 известны, из первого уравнения имеем
Ф1==0,544.
Мы видим, что метод включает два этапа. Первый состоит в
превращении исходной матрицы в треугольную. На втором этапе
8-763
114
Глава 7
решается полученная система уравнений. Первый этап обычно на-
называют разложением матрицы, поскольку матрица жесткости пе-
переходит в более простую матрицу. Второй этап решения называют
обратной прогонкой.
После того как мы- подробно познакомились с методом, рас-
рассмотрим систему уравнений более общего вида. Снова предпо-
предположим, что система уравнений симметрична и доминирующие чле-
члены находятся на главной диагонали. Кроме тсго, допустим, что
матрица системы ленточного типа. Имея это в виду, рассмотрим
приведенную ниже систему уравнений:
G.12)
=Ft,
Ширина полосы матрицы, очевидно, равна трем. Нулевые коэф-
коэффициенты здесь не показаны. После исключения d>i имеем
О
О F,
О
К® К&> 0
О К&>
К®
О К® К® Kfl К®
о о
F0>
G.13)
где коэффициенты расширенной ') матрицы выражаются через ис-
исходные коэффициенты следующим образом:
А23
23
23
Л21 ft — ,
21
v
Л
32
Верхний индекс A) используется для обозначения первого исклю-
исключения, или редукции. Общее соотношение для произвольного коэф-
коэффициента после первой редукции имеет вид
к к ^i/ ; ;-> 1
'> Расширенная матрица для системы уравнений [К] {Ф} {F} получается
присоединением к матрице [К] вектор столбца {F} [1].
Реализация метода конечных элементов на ЭВМ 115
Редукции с номером п соответствует общее соотношение вида
I\)t =A}; Д//1 , 7T— 1,1 > tl. G.14)
Аналогичные формулы получаются для вектор-столбца {F}:
G.15)
Из соотношения G.14) можно извлечь важную информацию.
Прежде всего очевидно, что симметрия в коэффициентах после опе-
операции исключения сохраняется. Это легко увидеть, сравнивая, на-
например, коэффициенты Д1У и /СCУ в матрице G.13). Так как в ис-
исходной матрице K.2i~Ki2 и К\з Кзь из вышеприведенных формул
следует, что К$ — К$• Поскольку симметрия сохраняется после
каждой редукции, то /С^--1) К[^ "и матрица G.11) может быть
переписана в виде
)<-(я 1)
А,-/ =Ау — Апг (п 1} . G.1Ь)
ллл
Разложение матрицы таким образом может быть проведено с ис-
использованием только коэффициентов, находящихся на главной ди-
диагонали и выше ее, так что нет необходимости запоминать полную
матрицу.
Еще одну важную.особенность можно обнаружить при рассмот-
рассмотрении матрицы G.13): если К% !) или /(]," Нравно нулю, то Щ)
/((" и_ Например, коэффициенты в четвертом и пятом столбцах
и в четвертой и пятой строках матрицы G.13) не изменились после
операции исключения, потому что Ки Кц — 0 и К\5 Кы = 0. На
каждом шаге исключения следует рассматривать только те коэф-
коэффициенты в пределах ширины полосы, которые изменяются в про-
процессе исключения. Если система из 100 уравнений имеет матрицу
с шириной полосы 15, только 15 уравнений этой системы видоиз-
видоизменяются после каждого отдельного исключения. Это приводит к
экономии машинного времени при рассмотрении систем уравнений
большого порядка.
Элементы матрицы, находящиеся вне полосы, не влияют на
процесс исключения (ибо они равны нулю). Следовательно, их пом-
помнить не нужно. Это обстоятельство позволяет хранить глобальную
матрицу жесткости в виде прямоугольного массива шириной, рав-
равной ширине полосы матрицы.
8*
И6 Глава 7
Получающиеся после разложения коэффициенты Кц содержат
достаточно информации, чтобы преобразовать надлежащим обра
зом произвольный вектор-столбец, даже если это не было сделано
в процессе разложения матрицы. Последнее обстоятельство позво-
позволяет анализировать многочисленные вектор столбцы {F} и дает
определенное преимущество этому методу перед другими процеду-
процедурами, которые применяются при рассмотрении отдельного вектор-
столбца. Если {/} не модифицируется вместе с [К], рассматрива-
рассматриваемый метод сводится к следующей трехшаговой процедуре:
1. Матрица коэффициентов [К] преобразуется в верхнюю треу-
треугольную матрицу.
2. Вектор столбец {/•"} модифицируется обращением п раз к
формуле G.15). Этот процесс называют прямым разложением.
3. Решение пол>чается методом обратной прогонки.
Первый шаг обычно реализуется в одной подпрограмме, тогда
как второй и третий шаги объединяются в другой подпрограмме.
В гл. 18 представлены подпрограммы, которые выполняют все эти
действия для матрицы, хранящейся в виде прямоугольного мас-
массива.
7.3. Общая блок-схема вычислений
Одним из преимуществ метода конечных элементов является то,
что многие его этапы являются общими для всех областей прило-
приложения метода. Процедура решения задач переноса тепла и тече-
течения грунтовых вод включает много тех же шагов, которые встре-
встречаются при расчете жестких рам и ферм и при анализе напряжен-
напряженного и деформированного состояний деформируемой сплошной сре-
среды. Общая блок схема вычислений представлена на фиг. 7.3. Эта
блок схема предназначена для симплекс-элементов и пригодна для
всех областей применения, обсуждаемых в следующих пяти гла-
главах. Блок-схема неприменима в случае изопараметрических эле-
элементов, которые будут изучены позже в этой книге. Работа основ-
основных блоков схемы будет рассмотрена в общем случае, а не в связи
с каким-то специальным примером.
Все программы, реализующие метод конечных элементов, дол-
должны содержать предварительную информацию о числе уравнений,
числе элементов и ширине полосы матрицы. Сведения о числе
уравнений необходимы для того, чтобы в исходном состоянии гло-
глобальную матрицу жесткости и глобальный вектор нагрузки можно
было заполнить нулями (предварительная чистка матриц), по-
поскольку в процессе счета эти матрицы составляются путем сумми-
суммирования.
Сразу после чистки матриц следует циклическая операция, вы-
выполняемая для каждого элемента. Эта операция включает ввод
исходной информации об элементе, составление матриц элементов
Реализация метода конечных элементов на ЭВМ
117
Считывание
число уравнений,
число элементов.
ширины полосы матрицы
характеристик ттертпа
Засылка нулей в глобальные
матрицы жесткости и на
грузки
Считывание
номера элемента, номеров
узлов, узловых координат,
указателя характеристик
материала
Засылка основных данных
об элементе на магнитную
ленту, диск и тд
Печать исходных данных
об элементе
Вычисление матриц жест
кости и сил для элемента
Включение матриц для
элементов в глобальные
матрицы
Конец цикла по элементам
Считывание
значении узловых сип и
добавление их к глобальной
матрице нагрузки
Считывание
заданных узловых значе
ний искомой величины и
модификация глобальной
матрицы жесткости
Разложение глобальных
матриц и решение системы
уравнений методом обратной
прогонки
Считывание исходных дан
ных об элементе с перфо
карт или с магнитной ленты
Вычисление и печать
значении результантов
элементов
Конец цикла па элементам
Останов
Фиг. 7.3. Общая блок-схема программы, реализующей метод конечных элементов.
П8 Глава 7
и включение их в глобальные матрицы. Конкретная информация-
об элементе включает в себя номер элемента и номера узлов. Сюда
могут быть отнесены значения координат узлов элемента. Послед-
Последние могут быть введены независимо и вызываться из машинной
памяти с помощью номеров узлов элемента. Если используется
последняя процедура, все узловые координаты должны быть введе-
введены перед началом работы цикла.
Вся важная информация об элементе должна быть выведена
на печать где-либо внутри указанного цикла. Вывод исходных дан-
данных на печать позволяет убедиться, что эти данные правильно от-
перфорированы и введены в нужном порядке. Неверная исходная
информация об элементе главный источник ошибки в програм-
программах, реализующих метод конечных элементов.
Задание номеров узлов предпочтительнее задания узловых сте-
степеней свободы. Узловые степени свободы могут быть рассчитаны,
если известны номера узлов. В задачах, связанных с рассмотрени-
рассмотрением векторных величин, ввод номеров узлов может сократить на
половину или на две трети требуемую информацию об узловых
данных.
Составление матриц элементов требует знания свойств мате-
материала. Существуют три способа обработки данных об этих свой-
свойствах. Если данные о свойствах материала не зависят от номера
элемента, они могут быть введены одновременно с предвари1ель-
ной информацией. Именно так делается в программах, представ-
представленных в гл. 18, потому что эти программы носят учебный, а не
исследовательский характер. Их используют в основном не для
решения сложных задач, а для иллюстрации применения метода
конечных элементов. При другом способе обработки данных о
свойствах материала эти данные вводятся и запоминаются как
массив перед началом работы цикла. Тогда номер соответствующе-
соответствующего материала должен быть представлен в исходных данных эле-
элемента. При использовании третьего способа вводится группа
свойств материала, которой пользуются для всех элементов до тех
пор, пока некоторое контрольное целое число в исходных данных
элемента не укажет, что пора вводить другую группу свойств.
Количество исходных данных элемента (таких, как номера уз-
узлов, узловые координаты и свойства материала), которые хранят-
хранятся в ЭВМ, зависит от используемой программы и от размеров па-
памяти ЭВМ. Стоит придерживаться правила не хранить исходную
информацию об элементе, когда размеры памяти ЭВМ ограничен-
ограниченны. Эта память в большей степени необходима для хранения гло-
глобальных матриц. Одним из средств хранения информации являет-
является внешнее запоминающее устройство, такое, как магнитная лента.
Если же внешним устройством воспользоваться нельзя, данные об
элементе стираются и вводятся вновь, когда подсчитываются ре-
результанты элемента.
Реализация метода конечных элементов на ЭВМ Ш)
Ввод узловых сил, если вообще это требуется, и составление
глобального вектора нагрузки {F} осуществляются после завер-
завершения указанного выше цикла по элементам. Вектор узловых сил
содержит величины, которые связаны с определенным узлом, а не
с определенным элементом. Вообще большинство из этих величин
связано с граничными узлами, как, например, сосредоточенные си-
силы в задачах механики деформируемых сред, или псевдосилы,
такие, как количество просочившейся воды в задаче о течении
грунтовых вод или количество потерь тепла в задаче о переносе
тепла. Силы будут определены для различных типов задач в при-
прикладных областях. Величины и расположение этих сил будут за-
заданы при решении конкретной задачи.
Число узловых сил различно в разных задачах, поэтому необ-
необходимо обеспечить своевременное прекращение ввода. Обычно это
достигается использованием нулезого или отрицательного номера
узла для размещения узловой силы.
После ввода узловых сил производится ввод заданных узло-
узловых значений искомой величины. Поскольку число их может быть
произвольным, завершение ввода снова осуществляется с помощью
нулевого или отрицательного номера узла. Необходимая модифи
кация системы уравнений выполняется так, как описано в пре-
предыдущей главе.
После преобразования системы уравнений проводится реше-
решение этих уравнений относительно неизвестных узловых значений.
Существует несколько процедур построения решения. Одна из них
уже обсуждалась в середине этой главы. Система уравнений имеет
специальный вид: ее матрица ленточная, причем диагональные
элементы обычно положительны и доминируют над элементами
соответствующих столбцов и строк вне главной диагонали. Это
позволяет многие достаточно общие процедуры решения видоизме-
видоизменить так, чтобы повысить их эффективность.
После решения системы уравнений осуществляется вывод уз-
узловых значений. Если результанты элементов не вычисляются, то
этот этап завершающий.
Для вычисления результантов элементов требуется еще один
цикл по элементам. В этом цикле снова вводятся исходные дан-
данные элемента, вычисляются результанты элемента и все другие
важные величины, связанные с элементом. Если информация об
элементе не хранится во внешнем периферийном устройстве, то ис-
использование операторов считывания, идентичных тем, которые
применяются при первоначальном вводе данных, обладает опре-
определенным достоинством. Это позволяет применять тот же самый
набор исходных данных для расчета результантов элемента. Мож-
Можно также включить в программу операторы сравнения, которые бу-
будут сравнивать вычисленные значения с максимальными или ми-
минимальными значениями для предыдущих элементов и оставлять
наименьшее или наибольшее значение вместе с номером элемента.
120
Глава 7
2
1
0
1
0
0
1
6
1
2
2
0
0
1
2
0
1
0
1
2
0
6
2
1
0
2
1
2
6
1
0"
0
0
1
1
2
ФЛ
Ф,
Ф3
Ф*
Ф5
Фв
932
5464
2556
4884
6508
1976
Вывод на печать информации этого типа производится после рас-
рассмотрения всех элементов.
Эффективная программа не рассматривает глобальную матри-
матрицу жесткости, глобальный вектор нагрузки и вектор решения как
отдельные массивы, размеры которых заданы заранее, а хранит
все эти величины в общем одномерном массиве в виде столбца
[3].
Концепция одномерного массива может быть проиллюстриро-
проиллюстрирована при рассмотрении системы уравнений, которая используется
для получения согласованных результантов элемента четырехэле-
ментной модели в задаче о кручении из гл. 6. Запишем эту систему
уравнений F.34):
G.17)
Обычно запоминание этой системы уравнений требует 48 ячеек
машинной памяти — 36 для [К] и по 6 для {Ф} и {F}. В соответ-
соответствии с нумерацией узлов, показанной на фиг. 6.3, система урав-
уравнений будет иметь ширину полосы, равную четырем. Матрица
жесткости может быть представлена четырьмя столбцами:
'2101
6 12 2
G.18)
Через х обозначены несуществующие числа, которые обычно за-
заменяются в ЭВМ нулями (в результате предварительной чистки).
Заметим, что первый столбец соответствует членам главной диаго-
диагонали, второй столбец заполнен коэффициентами диагонали, следу-
следующей за главной, и т. д.
При использовании одномерного массива вначале помещаются
узловые значения {Ф1}» затем следует глобальный вектор нагрузки
{F} и далее располагается матрица жесткости столбец за столб-
столбцом. Такое хранение матрицы G.18) вместе с {Ф} и {F} показано
на фиг. 7.4. Порядковые номера расположения первых коэффици-
коэффициентов {Ф[}, {F} и {К} в этом столбце называются указателями.
Значение указателя для первого столбца матрицы жесткости на
2
6
6
2
0
2
1
X
1
1
X
X
0
X
X
X
Реализация метода конечных элементов на ЭВМ
121
единицу больше удвоенного числа уравне-
уравнений. Это значение равно 13 в примере, пред-
представленном на фиг. 7.4.
Основной причиной игатольчопяния одно-
одномерного массива является то, что его раз-
размер может быть установлен при выполне-
выполнении программы. При этом исключаются
ошибки, связанные с определением разме-
размеров массивов, и кроме того, место, отводи-
отводимое в памяти машины для хранения матри-
матрицы жесткости, может быть освобождено для
других целей, как только система уравне-
уравнений будет решена.
Подготовка исходных данных требует от
программиста большого внимания. Наибо-
Наиболее часто неправильная работа программы
объясняется ошибками в исходных данных.
Прежде чем отправлять исходные данные в
вычислительную машину, необходимо ка-
каким либо опособом убедиться в их правиль-
правильности. Для этого существует несколько спо-
способов: одни из них очень простые, другие —
более сложные.
Простейший метод проверки данных —
записать их в в.иде описка и сравнить с ис-
исходной схемой, чтобы убедиться, что раз-
размеры элементов и номера узлов записаны
правильно. Кроме этого, всегда необходимо
проверять правильность расположения чи-
чисел в столбцах, потому что сдвиг в столбце
может привести к ошибочному ответу. Та-
Такая процедура проверки данных все же
наименее желательна, так как человек, со-
составляющий список, легко может ошибить-
ошибиться. В качестве промежуточного шага можно
использовать программу, которая содержит
те же операторы ввода и записи ис-
исходных данных, что и программа, реали
зующая метод конечных элементов, но ко
торая не выполняет никаких вычислений.
Программа такого типа позволит вводить
данные в ЭВМ, которая будет считывать и
записывать данные. Любые неверно состав-
составленные столбцы чисел будут обнаружены
при напечатании. Программа будет также
обнаруживать ошибки в расположении пер-
*2
*!_
932
5464
2556
4884
6508
1976
~~2
6
2
6
6
_?_.
1
1
0
2
1
х
ь~
2
1
1
Фиг. 7.4. Система урав-
уравнений которая хранится
в виде вектор столбца.
122 Глава 7
фокарт. Удобнее проверять исходные данные, если ввести их в
программу, которая затем представляет диаграмму всей анализи-
анализируемой области в целом. Такой метод позволит очень быстро об-
обнаружить элементы с неверными номерами узлов или ошибочны-
ошибочными координатами, так как их графическое изображение будет на-
накладываться на изображение других элементов. Наиболее совер-
совершенный метод обработки исходных данных использовать гене-
генератор данных элемента. Это программа, которая размещает и ну-
нумерует узлы, вычисляет координаты узлов и затем разбивает об-
область на элементы. Программы этого типа обычно приспосабли-
приспосабливают к определенным областям применения, потому что исходные
данные могут существенно различаться при переходе от одной об-
области применения к другой. Если говорить более подробно, дан-
данные, которые вводятся в программу, составленную для решения
задачи о кручении бруса, будут сильно отличаться от исходных
данных, которые вводятся в программу, связанную с задачей пе-
переноса тепла, если даже обе программы основаны на одной и той
же системе уравнений. Мой собственный опыт показывает, что
трудно написать набор программ, способных генерировать все
исходные данные для задач переноса тепла, в которых конвекция
происходит только на некоторых граничных элементах. В гл. 18
представлена программа, генерирующая исходные данные эле-
элемента.
7.4. Решение задачи о кручении бруса
с помощью вычислительной машины
Блок-схема вычислений, представленная на фиг. 7.3, составле-
составлена не для какой-либо определенной задачи, а дает общую схему
реализации метода конечных элементов. При рассмотрении кон-
конкретных областей применения должны быть введены незначитель-
незначительные изменения. Мы будем комментировать эти модификации в
конце каждой главы прикладного характера. Начнем с нескольких
замечаний о машинной реализации задачи о кручении, рассмотрен-
рассмотренной в гл. 6. Реализация этой задачи на ЭВМ отличается от общей
блок схемы на фиг. 7.3, потому что внешняя нагрузка — крутящий
момент не входит в расчетные формулы до тех пор, пока не оп-
определены узловые значения. С другой стороны, приложенный кру-
крутящий момент обычно при расчете конструкции известен и требу-
требуется определить максимальное сдвиговое напряжение, вызываемое
этим моментом.
Одна из процедур получения правильных значений сдвиговых
напряжений состоит в следующем. Задача решается в предполо-
предположении, что торцевые сечения повернутся относительно друг друга
на единичный угол закручивания. Это эквивалентно следующей ве-
Реализация метода конечных элементов на ЭВМ
123
личине угла закручивания на единицу длины:
Вычисляются крутящий момент, который вызовет такое закручи-
закручивание стержня, и соответствующие ему напряжения в элементах.
(. чшпывание числа уравнеши,чио\
Шентов, ширины по/юсы
ы,знвчения контрольной
ткржня величины крутящего
момента, числа осей симметрии
т
Засылка нулей в гло
бальные матрицы
жесткости и нагрузки
®
Цикл
по
элементам
Тчмь<вание задании! узло-
узловых значений искомой ве-
величины и модификация
глобальной матрацы
жесткости
Считывание номера элемен
та, номеров узлов, узла
вых координат
Печать
исходных данных
элемента
Вычисление
матриц жесткости
и нагрузки для элемента.
Включение
матриц для элемента
в глобальные матрицы
[Конец цикпа по элементам ) ¦ I
I
Разложение
глобальных матрац
и решение системы црав-
ненио обратной прогонкой
Цикл
по
элементам
Цикл
по
элементом
Считывание
номера элемента, нот
ров углов, узловых коор
динат
Вычисление для злем-ытв
напряжении, coomeemimeyio
\щих закручиванию сечениялв|
(мин граОус и определение вкло\
,dii этого элемента винтегроя
1 UdA
Конец цикла по элемента/ч
Вычисление
правильных напряжении
в элементе
Сравнение
напряжений в элементе с
TAU/ИЛХ для отыскания макса
шального значения
Печать
значений
напряжений
I
Гконец цикла по элементам V—'
Считывание
Поскольку s данной задаче
узловые силы отсутствуют,
считываете^ число I
Чычиспение крутящею мешен
та.соотвтетвующего закру I
чцеанию сечения на одинеращ
\а определение отношения 7} /Тс
Печать максимального
сдвигового напряжения и
номера элемента, в
котором она встречается
Останов
Фиг. 7.5. Блок схема программы решения задачи о кручении стержня.
Истинные значения напряжений могут быть определены по формуле
G.19)
Ги
- "I' -J
' расч
расч>
124
Глава 7
где Гпст заданная величина крутящего момента, ГраСч, траСч —
расчетные величины крутящего момента и сдвигового напряжения,
соответствующие единичному углу закручивания. Истинное значе-
значение угла закручивания равно
Й ——
"ист — 7"
Расч
так как первоначальная величина угла закручивания предполага-
предполагалась единичной.
20k~/
У/69,
/<Z^W>
У/37^^>
/ 112 ^\^/
/
Ж
Ik/z-
1 291
275
1см
/
/290
300
;r>
303
\>
29U
/Y
/3il\
33b/\
/3W '
386 /
/Ы5
7
U51 /
/k7k
307-^/f
A/3'
36/ \
Auo \ j
uo /\
/51$ \
513 /
\/56U
f-
56U/
\/ьоо
\598 У
\Уо!8
/<
Аз/
'д63\
563 /\
/649
651 /
\/707
1 709 7
\/>Ы
\W*~/
\ /761
1831 \
150\
l\5U5
\70п\
700 /
/797
,801 /
v853
ш
\а&г/
[/891
Фиг. 7.6. Значения хуг в задаче о кручении стержня квадратного сечения, вычис-
вычисленные для модели из 64 элементов
Описанная выше процедура решения требует запоминания всех
величин, которые зависят от отношения ГИст/7\>асч- Масштабирова-
Масштабирование величин в соответствии с формулой G.19) производится после
завершения последнего этапа работы программы, изображенной
на фиг. 7.3. Блок-схема программы для задачи о кручении Пред-
Представлена на фиг. 7.5. Заметим, что вывод узловых значений также
Реализация метода конечных элементов на ЭВМ
125
отодвинут на более поздний этап работы программ, ибо эти зна-
значения тоже должны быть умножены на отношение ГИст/^расч-
В гл. 18 представлена и рассмотрена программа, которая мо-
жех быть использована при решении задачи о кручении, сформули-
сформулированной в гл. 6. Эта программа была использована для расчета
напряжений сдвига в стержне с квадратной формой сечения (фиг.
6.3), причем разбиение на элементы соответствовало фиг. 7.6. На
Фиг. 7.7. Согласованные значения %уг для стержня квадратного сечения.
фиг. 7.6 также показаны значения rzy по элементам. Максималь-
Максимальное значение xzy, равное 892 Н/см2, было получено в элементе, бли-
ближайшем к узлу, расположенному в середине стороны квадрата.
Это значение отличается от теоретического на 5,6%. Расчетные
значения соответствуют крутящему моменту, равному 196,3 Н-см.
Расчетные значения могут быть уточнены путем использования
теории согласованных результантов элементов, рассмотренной в
577 ваз
Фиг. 7.8. Согласованные значения туг, полученные с помощью 23 элементов.
7/S 838
Фиг. 7.9. Согласованные значения хуг, полученные с помощью восьми элементов.
Реализация метода конечных элементов на ЭВМ
127
гл. 6. Узловые значения xyz, вычисленные с использованием этой
теории, представлены на фиг. 7.7. Значение 905 Н/см2, которое
встречается в угловом узле, на 4,2% меньше теоретического значе-
значения, равного 945 Н/см2. Наибольшее сдвиговое напряжение xyz
= 915 Н/см2 получено в узле, первом из тех, которые расположены
выше узла в середине стороны квадрата. Это значение на 3,2%
Фиг. 7.10. Область влияния, соответствующая е 0,7.
отличается от теоретического максимума. Однако положения рас-
расчетного и теоретического максимумов не совпадают.
Теория согласованных результантов элементов приводит к си-
системе уравнений, порядок которой совпадает с порядком системы,
используемой для определения {Ф}. Это представляет определен-
определенное неудобство, когда в рассмотрение включается большое чдело
узлов. Приближенный метод составления согласованных/резуль-
согласованных/результантов ограничивается анализом элементов, расположенных в рай-
районе с наибольшим результантом элемента. Это приближение назы-
называется «областью влияния» [2].
128
Глава 7
Два примера, которые иллюстрируют концепцию области влия-
влияния, приведены на фиг. 7.8 и 7.9. Первый включает 23 элемента и
19 узлов. Результаты очень хорошо согласуются со значениями,
вычисленными с использованием всего набора элементов; исклю-
исключением является внутренняя граница области. Даже при выборе
меньшей области, которая включает восемь элементов и девять
узлов, максимальные значения снова получаются эквивалентными
тем, которые получаются при использовании 64 элементов.
Один из способов определения области влиялия состоит в том,
что выбирается число, меньшее единицы, скажем е=0,7, и включа-
включаются все элементы, результанты которых больше, чем максималь-
максимальный результант, умноженный на е. Область влияния, соответству-
соответствующая е—0,7 в задаче о кручении, показана на фиг. 7.10.
Преимуществом использования концепции области влияния яв-
является сокращение требуемого числа уравнений. Выбор правиль
ного значения е — довольно спорный вопрос, но все же результаты
на фиг. 7.9 показывают, что очень ограниченнее число элементов
может дать результаты, достаточно точные для инженерных рас
четов.
Задача о кручении будет вновь рассмотрена в гл. 16 и 18.
Задачи
45. Ниже приведены сокращенные матрицы элементов для че
тырехэлементной модели в задаче о кручении, сформулированной
в гл. 6. Используя метод прямой жесткости, постройте глобальные
матрицы.
К задаче 45.
К задаче 46.
1
-1
0
Реализация метода конечных элементов на ЭВМ
129
29,07
29,07
29,07
46. Для тела, разбитого на три элемента, ниже даны сокращен-
сокращенные матрицы жесткости. Используя метод прямой жесткости, по-
постройте матрицу [К]. В каждом узле рассмотрите по одной неиз-
неизвестной. Узел i для каждого элемента помечен звездочкой.
12 4 —8
—4 12 8
—8 —8 16
12 —8 -4
—8 16 —8
—4 —8 12
47. Сокращенные матрицы элементов для двухэлементной зада-
задачи теории упругости даны ниже. В каждом узле рассматриваются
по два перемещения. Используя метод прямой жесткости, построй-
постройте матрицу [К]. Узел i для каждого элемента помечен звездочкой.
К задаче 47.
К задаче 48.
162
О
О
-216
-162
216
О
432
-144
О
144
-432
О
-144
768
О
-768
144
—216
О
О
288
216
—288
-162
144
-768
216
930
-360
216
—432
144
—288
—360
720
9—763
130
Глава 7
768
0
768
144
0
144
0
288
216
—288
—216
0
—768
216
930
—360
—162
144
144
—288
—360
720
216
—432
0
—216
—162
216
162
0
— 144
0
144
—432
0
432
48. Постройте матрицу [К] для четырехэлементного тела по
данным сокращенным матрицам элементов. В каждом узле одна
неизвестная, а узел i помечен звездочкой.
6 —4 -2
-4 12 —8
-2 —8 10
3 0 —3
0 6—6
-3 —6 9
• 4 —2 —2'
—2 6 —4
—2 —4 6
1—1 0'
-1 2 —1
0 —1 1
49. Выполните следующие преобразования приведенной ниже
системы уравнений с симметричной матрицей:
а) Приведите матрицу [К] к треугольному виду и одновремен-
одновременно разложите {F}.
б) Используя только матрицу [К] треугольного вида, разложи-
разложите вектор-столбец {F}T = [6, 12, 12, 6]. Убедитесь, что для выпол-
выполнения указанного разложения достаточно информации, которая
хранится в матрице треугольного вида [К].
в) Решите полученную систему уравнений для вектор-столбцов,
соответствующих случаям а) и б).
8,
2?/s+4t/4=4.
50. Преобразуйте и решите систему уравнений F.20), исполь-
используя метод, изложенный в этой главе.
51. Преобразуйте и решите одну из представленных ниже си-
систем уравнений, когда задано одно из следующих условий:
(I) (/^3; (II) l/2=4, l/4=-l; (III) Us=0;
(IV) [/,=0, t/,-1,
Реализация метода конечных элементов на ЭВМ 13Г
а)
^+ 6?/2— 4U3 + Ut = 40,
=75,
6)
/4+ 6i/5=75,
U2— 4U3 + 6?/4+12?/5=40.
0?/3 + ?/4=40,
t/8+2t/4-28,
в)
6UX+ 4U2+ 2U3 =12,
4Ux+l2U,+ 4U3 -18,
2t/1+ 4i/2+12i/3+ 4Ut + 2Ub=24,
4U3+12U4 + 4Ub=10,
2U3+ 4i/4 + 6i/5=6.
52 56. Представленные ниже поперечные сечения стержней
разбейте на линейные треугольные элементы и вычислите макси-
максимальное напряжение сдвига, используя программу TORSION, пред-
представленную в гл. 18. Для получения исходных данных об элементе
можно использовать программу GRID. Каждый из стержней име-
имеет длину 100 см, сделан из стали, G 8-Ю6 Н/см2 и подвержен
действию крутящего момента величиной 5000 Н-см. Сравните по-
полученные результаты с теоретическими максимумами, когда это
возможно.
57. Вычислите узловые значения компонент напряжений сдвига
для одного из поперечных сечений задач 52—56, используя пред-
представленную в гл. 18 программу CONSTR вычисления согласован-
согласованного результанта элемента.
58. Измените программу TORSION так, чтобы можно было рас-
рассматривать элементы из разных материалов, и проанализируйте
изображенное ниже сечение составного стержня. Стержень имеет
длину 100 см и подвержен действию крутящего момента величиной
3000 Н-см.
132
Глава 7
« 4 см —
К задаче 52.
Zcm
К задаче 54.
Zcm
1,5см
Zcm
К задаче 63.
5 см
К задаче 55.
2 см
2 см
Алюминий
Itm
1см
К задаче 58,
Глава 8
ПЕРЕНОС ТЕПЛА ЗА СЧЕТ
ТЕПЛОПРОВОДНОСТИ И КОНВЕКЦИИ
Во многих инженерных задачах важным аспектом является
знание распределения температуры в теле. Количество тепла, под-
подводимого к телу или теряемого им, может быть вычислено, если
известно распределение температуры. Температурное поле, кроме
того, влияет на распределение напряжений. Температурные напря-
напряжения имеют место в каждом теле, в котором существуют градиен-
градиенты температуры и которое не может свободно расширяться во всех
направлениях. Эти напряжения необходимо учитывать при проек-
проектировании вращающихся механизмов, таких, как реакторные дви-
двигатели или паровые генераторы. Для расчета температурных на-
напряжений следует прежде всего определить распределение темпе-
температуры в теле.
В этой главе будет рассмотрено применение метода конечных
элементов для определения распределения температуры в теле.
Использование этого распределения для расчета напряжений об-
обсуждается в гл. 12.
8.1. Уравнения переноса тепла
Уравнение теплопроводности в сплошной среде имеет вид
***-а?- + *и-^г+*г*-агг-т-<2—°. К8-')
где Т — температура; Кхх, Kvv, Kzz — коэффициенты теплопровод-
теплопроводности в направлениях х, у и z размерности кВт/м-К; Q — источник
тепла внутри тела, который считается положительным, если тепло
подводится к телу, его размерность кВт/м3.
С уравнением (8.1) связывают два различных типа граничных
условий. Если температура известна на некоторой части границы,
то пишут
T=TB(s), (8.2)
где Тв — температура на границе, которая может быть функцией
координат точек поверхности s. Если на границе происходит кон-
конвективный теплообмен, который характеризуется величиной h(T—
Перенос тепла за счет теплопроводности и конвекции 135
—Гоо), или задан поток тепла q, то граничное условие имеет вид
К-хх дТ (t + ^ -^-/ +KZZ дТ lz-\-h(T—Гоо) + <7 = 0, (8.3)
где h — коэффициент теплообмена, кВт/м2-К; Т — температура на
границе (неизвестная), /С; Т^, — температура окружающей среды
(известная), К; lx, h и lz — направляющие косинусы; q — поток
тепла, кВт/м2, который считается положительным, если тепло те-
теряется телом. Поток тепла q и конвективная потеря тепла h(T—
—Гоо) не имеют места на одном и том же участке поверхности гра-
границы. Если существуют потери тепла за счет конвекции, то отсут-
отсутствует отвод или приток тепла за счет теплового потока и обратно.
Уравнения (8.1) и (8.3) могут быть применены к одномерным
и двумерным задачам после простого вычеркивания членов, свя-
связанных с ненужными координатам*. Уравнение для одномерной
задачи записывается в виде
/С _|^- + Q = 0 (8.4)
ОХ
с граничным условием
Если конвективный теплообмен отсутствует и, кроме того, поток
тепла равен нулю, то уравнение (8.3) сводится к соотношению
dT=o,
dn
которое выражает условие существования теплоизолированной гра-
границы (п — внешняя нормаль).
Минимизация функционала, связанного с (8.1), была рассмот-
рассмотрена в гл. 5. Уместно подытожить здесь результаты этого обсуж-
обсуждения, прежде чем начать рассмотрение одномерного случая пере-
переноса тепла. Запишем матрицу теплопроводности элемента:
T [N<e)]dS. (8.6)
Матрица [Мв>] содержит функции формы, причем ¦>
T]. (8.7)
') Т без верхнего индекса или скобок обозначает обычную функцию.
136
Глава 8
Матрица [?Хе>] содержит значения коэффициентов теплопроводно-
теплопроводности:
Й! О О
0 Kfy О
о о
(8.8)
а матрица [В<е>] получается дифференцированием [ЛАе>] по х, у и
z. Соотношение для определения [ВЩ имеет вид
дТ
дх
дТ
дТ
дг
= [?<•',! {Г}.
(8.9)
Вектор-столбец правых частей уравнений для элемента опреде-
определяется формулой E.46):
{р>) = — f [Nie)]T QdV+ {[Nie)]T qdS — UNM}T T^hdS, (8.10)
s(e)
где величины Q, q, T^ и h имеют заданные числовые значения.
Вышеприведенные формулы содержат все данные, необходимые
для составления матриц элементов в задаче о переносе тепла за
счет теплопроводности. В следующих нескольких разделах наше
внимание будет сосредоточено на уравнениях для отдельного эле-
элемента, поэтому мы будем опускать верхний индекс (е) во всех обо-
обозначениях матриц элементов, исключая случай, когда необходимо
будет различать два разных элемента.
8.2. Одномерный случай переноса тепла
Интерполяционный полином для одномерного линейного эле-
элемента имеет вид
T=NtTl + N1TJ, (8.11)
где
-(!-?) и *,_?.
Эти функции формы определены относительно системы координат,
показанной на фиг. 8.1. Элемент имеет длину L. Матрицы в (8.7) и
(8.9) принимают теперь вид
Перенос тепла за счет теплопроводности и конвекции
137
\N\-\N, JV,|=[(l_f-) -f],
поэтому
(8.12)
(8.13)
Фиг. 8.1. Линейный одномерный элемент.
Матрица свойств материала сводится к одному коэффициенту:
[D]=[KXX]. (8.14)
Вычислим интегралы в (8.6)*
L .д-
Площадь поперечного сечения при этом предполагается постоян-
постоянной.
{h\N]T
'—г
т-]л- <8J6>
так как dS—Pdx, где Р — периметр. Периметр тоже предполагает-
предполагается неизменным вдоль оси х. Производя перемножение в (8.16) и
вычисляя интеграл, имеем
hlN)T[N]dS hf \\ \
(8.17)
138
Глава 8
Матрица теплопроводности элемента получается сложением мат-
матриц (8.15) и (8.17):
Член в (8.18), описывающий конвекцию, исчезает, если h равно
нулю на границе элемента.
Вычисление интегралов в векторе сил элемента (8.10) дает
{[N]T QdV=QA Г
X
(8.19)
Si
х
qPL /1
2 1
(8.20)
Так как третий интеграл идентичен по форме второму, можно сра-
сразу же записать
'iNfhTvodS^^f1* jjj. (8.21)
si
Полное выражение для {/<е>} теперь имеет вид
(8.22)
Имея в виду последующее включение этого члена в сумму {F} =
= 2{/<е>}, это выражение можно переписать как
е=1
f(e)
¦н
QAL-qPL
(8.23)
Примером одномерной задачи переноса тепла является задача
об охлаждении стержня. Рассмотрим стержень, один конец кото-
которого соединен с источником тепла; через боковую поверхность
стержня и другой его конец тепло отводится в окружающую среду.
Формулы (8.19) и (8.23) предполагают, что потери тепла за счет
конвекции происходят только от боковой поверхности. Теперь рас-
рассмотрим соотношения, которые связаны с отводом тепла от конца
одномерного элемента.
Перенос тепла за счет теплопроводности и конвекции 139
Предположим, что тепло отводится через поверхность правого
конца стержня (узел /). Потеря (приток) тепла происходит либо
в результате конвективного теплообмена, либо из-за наличия за-
заданного теплового потока q. Поэтому должны быть рассмотрены
только поверхностные интегралы. Рассмотрим поверхностный ин-
интеграл в матрице теплопроводности:
J-
Так как мы интересуемся поверхностью в /-м узле, ЛГ{=0, JVj=l,
и в результате подстановки этих величин имеем
s s s
или
h[N]T [N]dS=hA \°n °1. (8.24)
Эта матрица должна добавляться к сумме матриц (8.18), если на
свободном конце происходит потеря тепла. Совершенно ясно, что
коэффициент теплообмена в (8.24) может отличаться от коэффи-
коэффициента, который задан на боковой поверхности.
Поверхностные интегралы в матрице {/(е)} принимают вид
j) (8-25)
и
([N]T qdS=qAl°\. (8.26)
s
Использование формул (8.24) —(8.26) вместе с (8.18) и (8.23) ил
люстрируется на следующем примере.
Пример
59. Требуется вычислить распределение температуры в одно
мерном стержне с приведенными ниже физическими характеристи-
характеристиками.
Разделим конструкцию на 5 элементов длиной 1,5 см каждый.
Матрицы элементов для первых четырех элементов идентичны и
могут быть составлены с помощью формул (8.18) и (8.23). За-
140
Глава 8
iso'ci
h 10 Вт/(смг-К)
K^ 72 Вт /км- К)
1,5 см
I CM
t; i50°c
К задаче 59.
пишем величины различных параметров, входящих в эти соотно-
соотношения:
АКхх = 48тс
L '
hPL
Матрица теплопроводности для первого элемента имеет вид
или
[k^\ =
48, -48.
О* 5,
5, 10.
w r 58 -43i.
J [—43 58 J
Матрицы теплопроводности для второго, третьего и четвертого
элементов идентичны [?A)]. Вектор нагрузки (8.23) элемента пре-
преобразуется к виду
так как Q и q равны нулю.
Матрицы для пятого элемента получаются из соответствующих
матриц первого элемента добавлением членов, описывающих по-
потери тепла на правом конце стержня. Чтобы построить матрицу
теплопроводности, нужно добавить к [?A)] результаты вычисле-
Перенос тепла за счет теплопроводности и конвекции
141
ний в (8.24). Так как ЛЛ=10я, нужно добавить следующую мат-
матрицу:
ГО 01 ГО
[о ij [о
10-
58
—43
43
68
Вектор нагрузки для пятого элемента
Il
или
\600wJ \40(k
'П
( 60(Ч
\1000tcJ
После применения метода прямой жесткости совокупность рас-
рассмотренных матриц элементов приводит к следующей системе
уравнений:
58
—43
—43
116
—43
—43
116
—43
—43
116
—43
—43
116
—43
—43
68
7\1
т3
т*
П
т.
600
1200
1200
1200
1200
1000
Здесь проведено сокращение на множитель я, так как он входит
в обе части системы уравнений. Пустые места в [К] означают ну-
нулевые коэффициенты.
Значение Т\ известно A50°С), так что система уравнений дол-
должна быть модифицирована перед решением. Эта модификация
преобразует столбец правых частей к виду
{.F}r=[8700 7650 1200 1200 1200 1000].
После решения системы имеем
{7у = [150 82,6 59 48,6 44,2 42,6].
Теоретические значения температуры [2] следующие:
{ПеоРет)г=[150 89,9 62,8 50,6 45,2 43,3].
Результаты, полученные по методу конечных элементов, доста-
достаточно хорошо согласуются с истинными значениями, если учесть,
что было проведено разбиение области на одинаковые элементы.
142 Глава 8 /
Решение по методу конечных элементов можно было бы улучшить,
если использовать более короткие элементы вблизи стены, в кото-
которую заделан стержень.
В предыдущем примере площадь поперечного сечения стержня
была постоянной. Этого требовать необязательно. Площадь мо-
может быть также функцией длины элемента. Если площадь элемен-
Фиг. 8 2. Одномерный элемент с переменной площадью сечения.
та меняется по длине, то матрица элемента должна быть преобра-
преобразована. Обсудим теперь это преобразование.
Рассмотрим элемент, изображенный на фиг. 3.2. Его площадь
поперечного сечения изменяется от Аг на левом конце до Л; на пра-
правом. Если ограничиться случаем линейного изменения площади,
можно сразу записать соотношение для площади
j, (8.27)
где Nt и Nj — линейные функции формы.
Следующий шаг- определение матриц элемента. Используя
для вычисления [&(е>] первую часть формулы (8.15), получаем
'wiDuBidV=¦%?-{ [ \]\Adx- (8-28)
V 'О
Так как величина А в этой формуле не постоянна вдоль х, ее нель-
нельзя вынести за знак интеграла. Подстановка выражения (8.27) в
(8.28) дает
Кх*
о
Выполняя интегрирование, получаем
Кхх Г 1 -1
-1 1
Кхх Г 1
¦^ -1
Йеренос тепла эа счет теплопроводности и конвекции ИЗ
или
—1] At+Aj /829ч
j
Так как (Ai+A3)l2 равно средней площади элемента, выражение
(8.29) может быть записано как
J "П. (8.30)
Г
v
где А— средняя площадь. Формула (8.30) совпадает с (8.15) с
точностью до замены площади на ее среднее значение.
Интегралы по боковой поверхности могут быть выражены ана-
аналогичным образом. Периметр можно записать в виде соотношения
P^Nfi + Nf,, (8.31)
с учетом которого имеем
h ^flN]dS=h^ ^у*Х. (8.32)
о- - iN> "' J
Первый коэффициент в (8.32) после подстановки N{ и N) и вычис-
вычисления интеграла будет равен
L L
о
Поверхностные интегралы представляются соотношениями
Л Г \Ы\т [N]dS=^r\{3^ + P>) {Р* + Р>>] (8.34)
Сложив матрицы (8.30) и (8.34), можно получить [k&]. Соот-
Соотношение (8.35) дает часть {/(е>}. Из формул (8.34) и (8.35) ясно,
что их нельзя получить из (8.17) или (8.21) простой подстановкой
среднего периметра в случае элемента конической формы.
144
Глава 8
8.3. Двумерный перенос тепла
Треугольный элемент с тремя узлами широко используется для
решения двумерных задач теплопроводности. Этот элемент уже
применялся при рассмотрении кручения некругового стержня, и
теперь можно воспользоваться некоторыми результатами, получен-
полученными в гл. 6. Напомним функции формы для линейного треуголь-
треугольного элемента:
1
Р =*,/,
(8.36)
где ар,
определены в C.10). Температура дается формулой
T=[Nt N, Nk]
(8.37)
где T{, Tj и Tu — значения температуры в узлах, последовательно
проходимых от узла i в направлении, противоположном направле-
направлению движения часовой стрелки.
Запишем еще матрицу градиентов [В]:
(8.38)
(8.39)
Теперь можно вычислить матрицу теплопроводности элемента.
Первое слагаемое принимает вид
и матрицу свойств материала [D]:
о
0
к
1!Л ь,
yy\lcl CJ
dV. (8.40)
Предполагая толщину элемента единичной, заменим dV на dA.
Подынтегральное выражение в (8.40) постоянно и может быть
вынесено за знак интеграла:
Г [В\т [D] [В] dV=[Bf [D] [В] Г dA=A [В]т [D] [В\. (8.41)
V А
Вычисляя произведение матриц, имеем
4А
\Ъ,
bkb
kbk
\А
CiCl Cfj [CiCk
Cfix Cfij CjCk
ckct ckcs ckck
(8.42)
Перенос тепла за счет теплопроводности и конвекции
145
Второй интеграл {h[N]T[N]dS должен быть вычислен по поверх-
поверхности. Подставляя в матрицу [N] функции формы и выполняя мат-
матричное умножение, получаем
dS. (8.43)
\N\dS=h
NkNt NkN}- NkNk
Функции формы зависят от х и у, поэтому произведения вида
NiNj не могут быть вынесены за знак интеграла. Кроме того, зна-
значение интеграла зависит от того, на какой поверхности наблюда-
п
\ )^\ \ \ этой\
Тепло теряется путем
конвекции
=0 вдоль
этой стороны
Фиг. 8.3. Конвективные потери тепла вдоль одной из
сторон треугольного элемента.
ется конвективный теплообмен. Если, например, конвекции подвер-
подвержена сторона между узлами i и / (фиг. 8.3), то Nh равно нулю
вдоль этой стороны и интеграл сводится к следующему выражению'
J
hlN\T\N]dS h
О О
dS.
(8.44)
Если любая из двух других сторон подвержена конвекции, то рас-
расположение отличных от нуля членов в (8.43) будет иным, чем в
(8.44).
Вычисление произведений в (8.43) не представит труда, если
применить L-координаты и интегральные формулы C.43). Пред-
Предполагая, что L, измеряется от стороны, противоположной t-му уз-
узлу, можно записать
L1==Nt,
2=Nj и L3=Nh
10—763
146
Глава 8
Если предположить, что конвективный теплообмен имеет место на
поверхности стороны элемента между узлами i и ), то в точках
этой поверхности iV^—L3=0 и соотношение (8.44) примет вид
LXLX L2L2 О
0
0 0 0
dX,
(8.45)
где dS = tdX, причем толщина t предполагается единичной. Два
типа произведений входят в формулу (8.45): квадрат величины Ц
или Lf и перекрестное произведение L\L?.. Начнем с квадратных
членов:
[L\d%=
210!
B+0 + 1)!
С^- — длина стороны между узлами i и /. Интегрирование пе-
перекрестного произведения дает
V
Интегралы ^ЩйХ и ^LjdX равны между собой. Подставляя
полученные результаты в формулу (8.45), получаем
Г2 1 0"
h
[\N)T
1 2 0
0 0 0
(8.46a)
Аналогичные соотношения получаются для стороны между узла-
узлами / и k:
Г0 0 0~|
(8.466)
0
0
0
0
2
1
0"
1
2
и для стороны между узлами k и U
2
0
1
0
0
0
Г
0
2
(8.4бв)
Три интеграла в выражении для вектора нагрузки элемента
также легко вычисляются, если воспользоваться L-координатами.
Начнем с интеграла f [N]TQdV; предположим, что величина Q
Перенос тепла за счет теплопроводности и конвекции
147
постоянна внутри элемента. Тогда будем иметь
dV =
QV
(8.47)
Таким образом, тепло, генерируемое в элементе, распределяется
[N]TqdS и] [N^hTcodS за -
Si Sa
писываются в одинаковой форме:
N}\dS,
Nb
(8.48)
так что только один из них необходимо вычислить. Поскольку ин-
интеграл (8.48) поверхностный, его можно рассмотреть так же, как
интеграл (8.43). Результаты зависят от того, на какой из сторон
элемента происходит конвективный теплообмен, характеризуемый
величиной h, или приток тепла за счет теплового потока q. Пред-
Предполагая q постоянным по поверхности элемента, получим для ин-
интеграла (8.48) три следующие формы записи:
1
(8.49а)
(8.496)
(8.49в)
Величина
dS
идентична (8.49а) (8.49в) с учетом замены q на НТ,»-
Если тепловой поток или конвективный теплообмен наблюда-
наблюдаются на двух сторонах элемента, то поверхностный интеграл за-
заменяется суммой интегралов по каждой из сторон. То же самое
относится к интегралу (8.43).
В большинстве задач о переносе тепла интерес представляют
значения температуры в узловых точках. Иногда бывает необходи-
10*
148
Глава 8
мо определять градиенты температуры. После того как определе-
определены узловые значения, градиенты температуры находятся с помо-
помощью соотношения
дТ
дТ
\ду
1
ЧА
Ь, Ь,
(8.50)
Численный пример, который приводится ниже, иллюстрирует
применение полученных выше соотношений.
Пример
60. Ниже изображен элемент, который использован для дискре-
дискретизации, сплошной среды. По двум поверхностям этого элемента
происходит конвективный теплообмен. Указаны размеры элемента
и физические характеристики. Требуется составить матрицы эле-
элемента, предполагая его толщину единичной.
h-5
C.3)
^ 50°С
h-5Bm/(cM2-K)
Kj;jrKyy 30 S/" /fcAf ^
К задаче 60.
Рассмотрим матрицу теплопроводности элемента:
bfik
bjbk
Куу
4А
s
6
с
gj
'0
0
0
CJ
Cj
ck
0
2
1
Cjt
0"
1
2
'ft
Перенос тепла за счет теплопроводности и конвекции
149
Константы Ь и с вычисляются по формулам
bk=Yl—Yj=3—0=3,
cl=Xk-XJ=6-7=-l,
Cj=Xt Xk=3—6 = —3,
1
1
1
xt
x}
xk
Yt
y,
Yk
=
1
1
1
3
7
6
3
0
4
A =
13
2 •
Длины сторон Xjk и Xkt равны
,12 см,
3,16 см.
Подстановка полученных числовых значений в_ [k(e)] дает
30
26
16 —4
—4 1
-12 3
— 12
30
16
' 1 3—4
3 9 —12
—4 —12 16
' 5 D,12)
6
о о о
О 2 1
О 1 2
5C,16)
О Г
0 0 0
1 0 2
или
Л2_
26
17
—1
-16
-1
10
g
— 16-
9
25
* Г6'
+ -r °
L3.
32
16
0
8
4
,24
,12
" 24
— 1
21
3
4
14
,88
,15
,09
16"
12
56
=
— 1,15
18,41
—6,96
21,09
—6,96
40,98
Вектор нагрузки элемента {f<e>} представляет собой сумму двух
поверхностных интегралов по каждой из сторон, где происходит
150
Глава 8
конвективный
hTxXn
\f ] 2
теплообмен:
Is'
hT *~P
+ 2
1
0
1
5-50.4,12;
5-40.3,16
0] C16
= 1515+ 0
[515 C16
316
515
831
В.4. Трехмерный случай переноса тепла
Вывод соотношений для элемента в трехмерных задачах пере-
переноса тепла аналогичен соответствующим процедурам в одномер-
одномерном и двумерном случаях. В качестве элемента дискретизации рас-
рассмотрим тетраэдр с четырьмя узлами. Функции формы, соответст-
соответствующие данному случаю, имеют вид
(8.51)
где константы вычисляются с использованием определителей или
матричным умножением, как показано в гл. 3. Запишем необхо-
необходимые матрицы
[N] = [Nt Nj Nk Nil (8.52)
b-i bj bk tm
ct cs ck сi ¦ (8.53)
d, dj 4 d,
1
Интегралы довольно легко вычисляются, если воспользоваться
¦объемными L координатами
!.!=#„ L2=Nj, Ls=Nk и L^Nt.
Вычисление интегралов дает следующие результаты:
1
v
[B]T
dV--
36V
bibj btbk
btbj bjbk
hbi
K>
УУ
36V
Симметрично
Симметрично
ckct
Cfit
36V
didi dtdj dtdk dtd{
djdj djdk djdi
dkdk dkdt
Симметрично dtdt
(8.54)
Перенос тепла за счет теплопроводности и конвекции
151
[-
dS =
hSjki
12
1
1
1
1
hTmS
3
0
0
0
0
f
kl
0
2
1
1
0
1
1
1
0 0
1 1
2 1
1 2
(8.55)
(8.56>
(8.57>
Для интеграла (8.55) существуют три другие формы записи,
по одной на каждую из оставшихся сторон. В каждой из них зна-
значения коэффициентов на главной диагонали равны двум и зна-
значения ненулевых коэффициентов вне главной диагонали равны
единице. Коэффициенты в строках и столбцах, соответствующих
узлам, расположенным вне рассматриваемой поверхности, равны
нулю. Для интеграла (8.57) тоже существуют три другие формы
записи. Нулевой коэффициент находится в строке, соответствую-
соответствующей узлу вне рассматриваемой поверхности. 5i;?fe — площадь по-
поверхности, содержащая узлы i, \, k и т. д.
8.5. Преобразования координат
При выводе уравнения (8.1) используется предположение, важ-
важное для применения метода конечных элементов к задачам, рас-
рассматривающим анизотропные материалы. Главные оси инерции
должны быть параллельны координатным осям. Матрицы элемен-
элемента должны быть составлены относительно главных осей инерции,
которые могут быть различным образом ориентированы относи-
относительно глобальной системы координат.
Это требование усложняет ввод исходной информации о коор-
координатах узлов элемента. Если координаты узловых точек измеря-
измеряются относительно глобальной системы координат, то для вычис-
вычисления координат узлов в локальной системе координат необходи-
необходимо выполнить преобразование координат. Включение преобразова-
преобразования координат в программу обычно несложная задача, но она тре-
требует использования некоторых приемов для того, чтобы указывать
152 Глава 8
вычислительной машине момент использования этого преобразо-
преобразования. Эти приемы связаны с вводом дополнительного параметра
для каждого элемента.
Запишем формулы преобразования для двумерного случая:
y'j [ sine cosGj \у\
Здесь х', у' соответствуют локальной системе координат, а х, у—
координаты глобальной системы. Эти формулы предполагают сов-
совпадение начала координат обеих систем.
8.6. Точечные источники
До сих пор мы не рассматривали важные для многих физиче-
физических задач понятия точечного и линейного источников. Говорят,
что точечный (или линейный) источник тепла существует, когда
генерирование тепла Q происходит внутри очень малого объема
или очень малой площади. Физическими
примерами линейных источников являют
ся проложенные в земле трубы для пода
чи горячей воды и (или) водяного пара
и проводящий электрический ток провод
в электропроводящей среде. В каждом из
этих случаев площадь поперечного сече
ния трубы или провода мала по сравне
нию с размерами окружающей среды. В
Л о . ~ . задачах о течении грунтовых вод насосы,
Фиг. 8.4. Точечный источник FJ « >
внутри треугольного эле выкачивающие воду из водоносного слоя,
мента. также рассматриваются как точечные ис
точники.
Точечные и линейные источники достаточно часто встречаются
в окружающей действительности, что оправдывает наше внимание
к ним. Мы ограничимся обсуждением источника внутри двумер-
двумерного элемента, но процедура, которая будет рассмотрена, очень
быстро распространяется и на трехмерный элемент.
Рассмотрим треугольный элемент на фиг. 8.4 с линейным ис-
источником Q* [кВт/м] (тепло притекает и считается положитель-
положительным), расположенным в точке Хо, У<>. Так как тепловой источник
находится в точке, Q теперь не постоянно внутри объема элемента,
а является функцией координат х и у. Используя единичные им
пульсные функции 6(х—хс) и 6(у—уо) [1], можно записать
t/o). (8.59)
Перенос тепла за счет теплопроводности и конвекции
15а
Интеграл
Г \N]T QdV
может быть теперь записан как
N,
b{x-xo)b(y-yo)dxdy. (8.60)
Толщина элемента предполагается равной единице. Используя из-
известные свойства импульсных функций, имеем
(8.61)
о
У Yq
Соотношение (8.61) устанавливает, что, если точечный (линей-
(линейный) источник находится внутри элемента, Q распределяется по
узлам пропорционально соответствующим величинам N{, Nj и Nh,
которые вычисляются с помощью координат точечного источника.
Так как SiVp 1 в любой точке внутри элемента, мы не получим
величины, большей чем Q*.
Пример
61. Интенсивность источника Q* = 52 Вт/см. Источник находит-
находится в точке с координатами E.2) внутри элемента, показанного ни-
ниже (этот элемент использовался в задаче 60). Требуется опреде-
определить распределение Q* по узлам элемента.
О* 52 6га /см
G0)
К задаче 61.
154
Глава 8
Значения Ь и с были вычислены в задаче 60:
Ьг= 4, сг=—1,
bj= 1, c;=—3,
bk= 3, 6fe= 4.
Вычислим константы а:
d =Х,УЙ_ХЙУ,=G) D) -F) @)=28,
а,=ВД-ХгГ,=F) (З)-(З) D)=6,
Вспоминая, что 2А- 13, соотношения для jVp можно переписать
в виде
tf, = -j5-[28-4x—у],
Nj=-~[6 + x-3y],
АГ 1 г Л
Подставляя сюда Хо=5 и Уо=2, получаем
ЛО =-^-[6 + 5-3B)]=-^-,
^=-^-[-21+ 3E)+ 4 B)]= j23 .
Величина Q* разделяется по узлам t, / и k на части 6/i3. БЛз и 2/i3
соответственно. Поэтому интеграл ) [N]TQdV для этого элемента
v
равен
AT,
52
13
o
I» Vo
5
2
24
20
=^20^ Вт/см.
При разбиении на элементы сплошной среды точечный (линей-
(линейный) источник можно разместить в одном из узлов. Это упрощает
интегрирование выражения (8.63). Предположим, что источник
Перенос тепла за счет теплопроводности и конвекции
155
находится в /-м узле (фиг. 8.5), тогда Ni~Nh=0 и
§[N]TQdV=Q* Г
Nb
б (х—х0) 8 (у —у0) dA =±
Nb
(8.62)
Далее Q* в (8.62) должно быть преобразовано с учетом того,
что источник относится теперь к более чем одному элементу. Вели-
Величина интенсивности источника должна быть распределена по эле-
Фиг. 8.5. Точечный источник в узле.
ментам, окружающим узел. Это распределение проводится в соот-
соответствии с тем, какую часть от 360° составляет угол при вершине
данного элемента, расположенной в узле /. Правильное соотно-
соотношение для элемента (е) на фиг. 8.5 имеет вид
(8.63)
Однако нет необходимости вычислять угол а для различных
элементов, окружающих узловой источник. После того как с по-
помощью метода прямой жесткости уравнения для отдельных эле-
элементов будут объединены, совместный вклад всех элементов, от-
относящихся к этому узлу, составит полную величину Q*. Простей-
156 Глава 8
ший способ учета узлового источника состоит в добавлении вели-
величины Q* к глобальному вектору нагрузки {F}, точнее к той его
компоненте, которая соответствует глобальной степени свободы,
отнесенной к этому узлу.
В случае трехмерного элемента источник, локализованный внут-
внутри элемента, распределяется по четырем узлам в соответствии с
формулой
§lN]T{Q}dV=Q*
N,
X Xo
У Yo
(8.59)
где (Xq, Yo, Zo)— координаты точки расположения источника.
8.7. Машинная реализация
В гл. 18 представлена программа TDHEAT, способная решать
двумерные задачи переноса тепла. Эта программа ограничена од-
одним набором характеристик материала; кроме того, главные оси
инерции должны быть параллельны координатным осям х, у. Блок-
схема, представленная на фиг. 7.3, может быть использована для
анализа работы этой программы.
Задание исходных данных об элементе в программе TDHEAT
существенно отличается от задания исходной информации об эле-
элементе в любой другой программе, представленной в гл. 18. Вычис-
Вычислительной машине должно быть указано, какая сторона элемента
подвержена конвективному теплообмену, если он имеет место. Но-
Номер каждой стороны, подверженной теплообмену, перфорируется в
качестве исходных данных об элементе, начиная со столбца 75.
Максимально допустимы две стороны, и нумерация этих сторон
соответствует обходу элемента против часовой стрелки, начиная
со стороны, расположенной между узлами i и /.
8.7.1. Постановка задачи
Ряд кабелей помещен в теплопроводящую среду (фиг. 8.6). Ка-
Кабели расположены на глубине 2 см от поверхности среды, а рас-
расстояние между их центрами составляет 4 см. Среда имеет коэффи-
коэффициенты теплопроводности Кхх Куу=\0 Вт/см-К. Коэффициент
теплообмена на поверхности среды Л=5 Вт/см2-К. Воздух на гра-
границе с поверхностью имеет температуру —5°С. Проводящая среда
снизу ограничена толстым слоем теплоизоляции. Необходимо оп-
определить распределение температуры в теле, если известно, что
мощность излучения тепла каждым кабелем составляет 200 Вт на
единицу длины.
Перенос тепла за счет теплопроводности и конвекции
157
8.7.2. Решение на ЭВМ
Последовательное размещение кабелей и тот факт, что каждый
из них излучает одинаковое количество тепла, позволяют сокра-
сократить размеры области анализа. Легко заметить два семейства плос-
плоскостей симметрии в задаче: вертикальные плоскости, содержащие
7L -5 "С
h 5 Вт /(см2 -К)
Анализируемая
область
2 см
6 см
Иуу Ю ВтЦсм-К)
Изоляция
Фиг. 8.6. Кабели в теплопроводящей среде.
кабели, и вертикальные плоскости, проходящие на равном расстоя-
расстоянии между ними, причем последние из указанных плоскостей мо-
могут рассматриваться как теплонепроницаемые границы. Оконча-
Окончательная область анализа показана на фиг. 8.6.
Исходная информация может быть получена с использованием
программы GRID. Квадратные области, использованные для полу-
получения элементов, показаны на фиг. 8.7 вместе с локальными си-
системами координат %х\. Области выбраны так, чтобы кабель рас-
тюлагался в узле. Такое узловое размещение желательно потому,
что кабель может рассматриваться как линейный источник. Узлы
12 и 14 помещены не в средних точках соответствующих сторон,
а смещены ближе к узлу 13, так чтобы меньшие по размерам эле-
элементы встречались вблизи этого узла. Меньшие элементы здесь не-
необходимы потому, что именно в области, окружающей этот узел,
градиенты температуры максимальны по величине. Окончательное
разбиение, которое содержит 65 узлов и 96 элементов, показано
на фиг. 8.8. Кабелю при этом соответствует узел 21.
Второй, четвертый, шестой и восьмой элементы подвержены
конвективному теплообмену, причем каждый вдоль второй стороны.
В связи с этим в 75 м столбце перфокарт с исходными данными
для указанных четырех элементов должно быть проблто число 2.
Числовое значение интенсивности линейного источника ставит-
ставится непосредственно в вектор-столбец {F}. Число 100 будет постав-
поставлено в 21-ю строку, поскольку рассматривается только половина
области, окружающей кабель. Это значение приписывается состав-
составляющей F2l, так как источник расположен в 21-м узле окончатель-
окончательного разбиения.
@,6) (/,6)
B 6)
@,0)
(/.0) B 0)
Фиг. 8.7. Четырехугольные зоны,
используемые в программе GRID
для разбиения области на эле-
элементы.
62 63 64
Фиг. 8 8 Окончательное разбиение
области на элементы и номера
узлов.
Z 1,8 Х<
16° С
Фиг. 8.9. Линии равных значений
температуры в рассматриваемой,
области.
Перенос тепла за счет теплопроводности и конвекции
159
Окончательные узловые значения и линии равных значений тем-
температуры приведены на фиг. 8.9. Эта задача будет рассмотрена
вновь в гл. 16.
Задачи
62. Вычислите распределение температуры для стержня в зада-
задаче 59, если его диаметр изменяется линейно от 1,5 см на конце,
заделанном в стену, до 0,5 см на свободном конце.
63. Проверьте правильность вычисления поверхностного инте-
интеграла (8.466).
64. Убедитесь в правильности формулы (8.49в).
65. Вычислите объемный интеграл \ [5]r[D] [B]dV, егли коэф-
фициент теплопроводности КХх меняется линейно между t-м и /-м
узлами одномерного элемента.
66—69. Составьте матрицы элемента для изображенных ниже
элементов. Коэффициенты теплопроводности в каждом случае
k
(в, б)
У\
F.2)
К задаче 66.
Q 75 Вт/см
НО. /)
Q 50 Вт/см
К задаче 67.
160
Глава 8
J
считать равными Кхх~КуУ—15 Вт/(см-К.), а коэффициент теплооб-
теплообмена h = 20 Вт/(см2-К). Другие необходимые величины приведе-
приведены на графиках.
№ 6)
Q=IOO Вт/см
D.0)
B,2)
(-2,-2)
К задаче 68.
К задаче 69.
70. Некоторые элементы конструкций имеют двумерное распре-
распределение температуры Т(х, у). Эти элементы достаточно тонкие, так
что можно пренебречь изменением их температуры по толщине
(в направлении z). Для конструкций такого типа явление теплооб-
теплообмена наблюдается в значительно большей степени вдоль лицевых
поверхностей элементов, чем по ограничивающим их кромкам. Вы-
Вычислите поверхностные интегралы, которые входят в [&(е)] и {/(е)}
для двумерного симплекс элемента, если потери тепла происходят
путем конвекции, как показано на рисунке.
71. Источник тепла имеет форму тонкого диска, расположенно-
расположенного на расстоянии 0,5 см от /-го узла одномерного элемента, изо-
изображенного ниже. Определите распределение по узлам элемента
тепла от источника, если его мощность равна 50 Вт.
Конвективный теп
лообмен наблюдает
ся на обеих лице
вых поверхнос,
К задаче 70.
Перенос тепла за счет теплопроводности и конвекции^
16)
72. Вычислите поверхностные интегралы, которые входят^ в
[№е)] и {f(e)}, если коэффициент теплообмена меняется линейно
между узлами i и / одномерного симплекс элемента. Коэффн-
•0,5 см
I
w
w
и
и
и
1,5 см
К задаче 71.
циенты теплообмена в узлах i и / обозначьте через hi и hf, h\
предполагается отличным от нуля.
73. Рассмотрите задачу 72 для стороны между узлами i и h
двумерного симплекс-элемента.
74. Коэффициент теплопроводности линейного одномерного эле-
элемента представлен кусочно-постоянной функцией равной значению
К\ слева от точки Хо и значению /*С2 справа от Хо. С помощью сту-
ступенчатой функции h(x— а) коэффициент теплопроводности Кя*
может быть записан аналитически в виде
Вычислите матрицу элемента [№>], если элемент имеет длину L.
Предполагается, что узел i расположен в точке *=0.
75—79. Используя программу TDHEAT, рассчитайте распреде-
распределение температуры в двумерных телах, изображенных ниже. Для
получения исходных данных об элементе используйте программу
GRID.
80. Главные оси инерции элемента, показанного ниже, повер-
повернуты на 30° относительно системы координат ху. Коэффициенты
теплопроводности, соответствующие этим направлениям, равны
2Kss=K((=30 Вт/см-К Составьте матрицу [&(е)].
81. Модифицируйте программу TDHEAT так, чтобы ее можно
было использовать для вычисления распределения температуры
в одномерном стержне. Проверьте программу, решив задачи 59 и
62.
82. Модифицируйте программу TDHEAT, представленную в
гл. 18, так,-чтобы она могла обрабатывать более одного набора
характеристик материала. Используйте модифицированную про-
программу для определения распределения температуры в теле, изо-
изображенном ниже.
И-763
К задаче 74.
У
По всей
поверхности
h=l5 Вт Кем2-К)
Г» 150°С
18 см
11см
36 см
-*¦'¦..-
К.» -
ЪВт/(см-К}",
На внешней
поверхности
24 см
h=5Bm/(cMz-Kl
Гю-30°С
К задаче 75
T-200'C
К задаче 76.
нххнуу 2 Вт/(см-К)
К задаче 77 На внутренней границе цилиндра температура 140 "С.
Внутренний диаметр цилиндра 2 см Наружный диаметр цилиндра 8 см.
/бСА)
К задаче 78. Всюду на внешней границе температура 20 °С. Температура внутри
¦моста 100'С.
Изоляция
h 25 Вт/(c/i'z -К) Т, 5°С
5 источников тепла
Мощность каждого источника
Q-ЮОВт
+
2 см
2 см
2 см
I
1см
2 с/и
. СЛ(
в см
Температура поверхности 60°С
8 см
К задаче 79.
С. ЗУ
ос
К задаче 80.
Перенос тепла за счет теплопроводности и конвекции
165
83. Рассмотрите изменения, которые должны быть внесены в
программу TDHEAT с тем, чтобы можно было анализировать ани-
анизотропные материалы. Внесите конкретные изменения в програм-
h -30 Вт1Ы2-«).
\Температура поверхности 200
Материал I: Кла. Куу \В,т/(см-К)
Материал Z: K^ 2K = 10 Вт/(см ¦ К)
К задаче 82.
му, связанные с включением в нее формул преобразования коорди-
координат.
ЛИТЕРАТУРА
1. Kaplan W., Operational Methods for Linear Systems, Addison Wesley, Reading.
Mass., 1962.
2. Krieth F., Principles of Heat Transfer, 3 rd ed., Intext Educational Publishers,
N. Y., 1973.
ДОПОЛНИТЕЛЬНАЯ ЛИТЕРАТУРА
Meyers G. E, Analytical Methods in Conduction Heat Transfer, McGraw-Hill.
N. Y., 1971.
Visser \V., A Finite Element Method for Determination of Non Stationary Tempe-
Temperature Distribution and Thermal Deformations, Proc. Conf. on Matrix Methods
in Structural Mechanics, Air Force Inst. of Technology Wright Patterson Air For-
Force Base, Dayton, Ohio, 1965.
Wilson E. L., Nickell R. E., Application of the Finite Element Method to Heat
Conduction Analysis, Nuclear Engineering and Design, 4, 276—286 A966).
Zienkiewicz O. C, Finite Element Method in Engineering Science, McGraw-Hill,
London, 1971; есть русгкий перевод- Зенкевич О, Метод конечных элементов
в технике, изд во «Мир», М , 1975.
Глава 9
ГИДРОМЕХАНИКА, БЕЗВИХРЕВОЕ ТЕЧЕНИЕ
Безвихревое течение идеальной жидкости рассматривается до-
достаточно широко потому, что при этом могут быть решены многие
важные физические задачи, такие, как обтекание углов, плотин,
несущих поверхностей самолета, различных конструкций. Идеаль-
Идеальное безвихревое течение представляет собой некоторое приближе
ние к реальному физическому процессу. При этом предполагается,
что между жидкостью и обтекаемой поверхностью нет трения
(идеальная жидкость) и вращательное движение частиц жидкости
отсутствует (безвихревое течение).
Поток воды в грунте также может быть достаточно тщательно
изучен в предположении безвихревого течения. Анализ течения
грунтовых вод является важным аспектом в региональном пла-
планировании, поскольку снабжение водой многих районов внутри
страны полностью или частично связано с грунтовыми водами. Те-
Течение грунтовых вод через дамбы и под ними, так же как и по
подпочвенным дренажным каналам может быть изучено с помощью
этой теории.
Все задачи, включающие рассмотрение безвихревого течения,
могут быть решены с помощью метода конечных элементов, так
как эти задачи описываются квазигармоническим уравнением E.1)
с граничными условиями E.2) и E.3).
9.1. Двумерный случай течения грунтовых вод
Дифференциальное уравнение в частных производных для ог-
ограниченного водоносного слоя с течением в горизонтальной плос-
плоскости (х, у) имеет вид
& ?*0, (9.1)
где Кхх и Куу т коэффициенты фильтрации [м3/(сут-мг) или
м/сут]; ф — пьезометрический напор, измеряемый в метрах от ниж-
нижней границы водоносного слоя; Q — потери воды (м3/сут). Выкачн
вание воды соответствует отрицательной величине Q.
Граничные условия записываются как
9=?* (9.2)
Гидромеханика, безвихревое течение
167
И (или)
(9.3)
Слагаемое q в формуле (9.3) представляет поток воды, дви-
движущейся из области через границу. Единицей измерения этого
количества просочившейся воды является м3/сут.
Приведенные выше уравнения идентичны уравнениям, которые
использовались при рассмотрении кручения и переноса тепла. По-
Поэтому в данном случае применимы матрицы, полученные в преды-
предыдущих главах. Из-за отсутствия члена /i(<p—<рв)> описывающего
конвекцию в формуле (9.3), определяющие элемент соотношения
в задаче о грунтовых водах менее сложные, чем подобные соотно-
соотношения для задач переноса тепла.
Матрицы элемента составляются с помощью формул
= ('
]D{e)\{B{e)]dV
{/<«>} = f [№\т QdV— f{N^f qdS.
Используя результаты, полученные в гл. 8, можно сразу же за-
записать
btbj
ЬА
Kyy
1~
С-fi;
Cfik tifik
. (9.4)
где A — илищадь элемента. Вектор нагрузки для элемента имеет
вид
(П A
(9.5)
\-я^
В первом слагаемом (9.5) предполагается, что выкачивание
или потери воды постоянны по элементу. При изучении водоносно-
водоносного слоя обычно рассматриваются площади больших размеров (но-
рядка квадратных километров), что делает возможным локализо-
локализовать насос в узле и трактовать его как линейный источник. Резуль-
Результаты обсуждения линейных источников в разд. 8.6 применимы и
для рассмотрения выкачивания грунтовых вод.
Второй член в (9.5) связан с просачиванием воды в элемент
или из него наружу. Просачивание может наблюдаться вдоль лю-
168 Глава 9
бой из сторон элемента, поэтому существуют три формы записи
поверхностного интеграла: по одной для каждой из сторон тре-
треугольного элемента. Форма записи, представленная формулой
(9.5), соответствует стороне элемента между узлами i и ], длина
которой равна Хц. Две другие в точности совпадают с теми,
что даны в (8.49).
Во многих задачах о течении грунтовых вод граница водонос-
водоносного слоя предполагается водонепроницаемой. Это обстоятельство
влияет на решение таким же образом, как наличие теплоизолиро-
теплоизолированной границы в задаче о переносе тепла. Если при этом для ре-
решения используется метод конечных элементов, то никакого специ-
специального рассмотрения не требуется, так как условие непроницае-
непроницаемости границы д(р/дп 0 входит в функционал, который миними-
минимизируется для получения окончательной системы уравнений.
Анизотропные материалы учитываются точно так же, как это
делается в разд. 8.5. Соотношения для элемента должны быть по-
получены при использовании связанной с элементом системы коор-
координат, оси которой параллельны главным осям инерции.
Результанты элемента содержат компоненты скорости течения:
*~ v** дх
V ——К
V у "у
(9.6)
где Vx и Vv — скорости в направлениях хну соответственно.
9.2. Рассмотрение задачи о течении грунтовых вод с по-
помощью ЭВМ
Решение двумерной задачи о течении грунтовых вод с помощью
ЭВМ можно провести в соответствии с блок-схемой, представлен-
представленной на фиг. 7.3, без каких-либо изменений. При этом нет необхо-
необходимости включать в программу вычисление компонент вектора на-
нагрузки для элемента по формуле (9.5), потому что это легко мож-
можно сделать вручную и приписать их значения соответствующим уз-
узлам в процессе модификации окончательной системы уравнений.
Программа вычислений для решения двумерной задачи о течении
грунтовых вод представлена в разд. 18.6. Эта программа была ис-
использована для решения следующей задачи о водоносном слое.
9.2.1. Постановка задачи
На фиг. 9.1 изображен небольшой региональный водоносный
слой. Это прямоугольник со сторонами длиной 1500 и 3000 м, ог-
ограниченный вдоль длинных сторон водонепроницаемым материа-
Гидромеханика, безвихревое течение
169
лом. Просачивание воды в область с левой и правой границ доста-
достаточно велико, чтобы поддерживать вдоль этих границ постоянное
значение пьезометрического напора величиной 200 м. Вода из ре-
реки просачивается к водоносный слой со скоростью 0,24 м3/сут по
К;.''¦'••.•Л-;,'.;~.:.Л'-'!;';'.'.';:'.Л;'л".'.С',
Постоянный пьезо-
пьезометрический напор
v Непроницаемая граница
\река
\
Р2° \
Постоянный пьезо-
пьезометрический напор
Непроницаемая граница
Фиг 9 1. Региональный водоносный слой.
длине потока. Кроме того, два насоса, расположенные в точках
B000, 830) и A100, 600), выкачивают воду из водоносного слоя.
Коэффициенты фильтрации равны Кхх—40 м3/(сут-м2) и Куу=
20 м3/(сут-м2). Мощности насосов Pi 1200 м3/сут и Рг =
= 2400 м3/сут.
Требуется определить линии постоянного потенциала, считая
течение установившимся.
9.2.2. Решение с помощью ЭВМ
Разбиение области на элементы было выполнено с помощью
программы GRID, генерирующей исходные данные об элементе.
Расположение узлов, которые были использованы при этом для
задания базисных областей, показано на фиг. 9.2. Окончательная
сеть элементов и номера их узлов представлены на фиг. 9.3. Река
была использована как граница между базисными областями для
получения элементов. Так как обычно в задачах о течении грунто-
грунтовых вод не встречается значительных изменений величины ф, то
для разбиения были использованы элементы больших размеров.
Прежде чем приступить к решению задачи, необходимо вычис-
вычислить два множества узловых величин: узловые значения количе-
170 Глава 9
ства просачивающейся воды из реки и узловые значения для ко-
количества воды, выкачанной насосами. Длина реки составляет
УB000—1000J+15002= 1802,8 м. Полное количество просачиваю-
просачивающейся воды равно <7= 1802,8-0,24=432,67 м3/сут. Вдоль реки рас-
@J500) E00, J500J (Ю00,1500) {2000,1500) C000, 1500)
@,750) \A500 750) C000, 150)
@,0) 0000,0) B000,0) B500,0) C000 0)
Фиг, 9,2, Четырехугольные зоны, используемые программой GRID для разбиения
иблас!и на 1рсу1ильные элементы.
стояние между узлами одинаково и просачивание между соседни-
соседними узлами характеризуется величиной
432,67
4 = — 4 — 108,17 м3/сут.
При этом на каждый узел приходится половина этой величины.
Величина 432,67 распределяется по узлам, расположенным вдоль
реки следующим образом:
узел 21: 54,08 м3/сут,
узел 22: 108,17 мэ/сут,
узел 23: 108,17 м8/сут,
узел 24: 108,17 м3/сут,
узел 25: 54,08 м'/сут.
Величины положительны, потому что в (9,5) сгоит знак минус.
Насосы представляют собой точечные источники, причем ни
один из них не располагается в узле. Выкачанная насосом вода
распределяется по узлам элемента, в котором размещается насос.
Это распределение может быть определено с помощью соотноше-
соотношений, приведенных в гл. 8,6. В эти соотношения в качестве весовых
Гидромеханика, безвихревое течение
171
коэффициентов входят значения функций форм данного элемента,
вычисляемые по координатам точечного источника.
Первый насос расположен в точке B000, 830) внутри элемента,
ограниченного узлами 18, 13 и 12. Используя локальную систему
координат, как показано на фиг. 9.4, получаем
] д. Г__* 250 ]
-J, ^13— [ з,75 C75J У\>
N
Фиг. 9.3. Область регионального водоносного слоя, разбитого на элементы;
указаны номера узлов.
250 м
375 м
Фиг. 9.4. Местная систем* координат; указаны размеры
19-го элемента.
В указанной системе координат точке расположения насоса соот-
соответствует пара чисел A25, 80). Подстановка этих координат в
функции формы дает
Nls=0,596, N13 0,191 и ЛГ12=0,213.
172
Глава 9
Значениям узловых сил соответствуют значения функций формы,
умноженные на скорость выкачивания воды:
узел 18: Q— 0,596 ( 1200) ——715,2 м3/сут,
узел 13: Q=0,191 (—1200) —229,2 м3/сут,
узел 12: Q=0,213(—1200)= 255,6 мэ/сут.
Отрицательные значения выбраны потому, что вода выкачивается
из водоносного слоя.
Насосу, расположенному в 45-м элементе, соответствуют сле-
следующие узловые значения:
узел 34: Q= 549,6 мэ/сут,
узел 29: Q= 410,4 м3/сут,
узел 28: Q —1440 м3/сут.
Узловые значения, связанные с количеством воды, просачиваю-
просачивающейся из реки и выкачанной насосами, подставляются непосред-
непосредственно в вектор-столбец {/•"}. Эти значения и только они являются
ненулевыми членами {F}. Окончательная система уравнений дол-
должна быть преобразована с учетом заданных граничных значений
в узлах с 1 по 5 и с 41 по 45.
195
Фиг 9 5. Узловые значения и линии постоянных значений ср в региональном
водоносном слое.
Решение преобразованной системы уравнений приводит к узло-
узловым значениям для {Ф}, указанным на фиг. 9 5, где изображены
также линии равного уровня для ф. В связи с тем, что насосы-бы-
насосы-были расположены не в узловых точках, для ф получились значения,
которые не отражают действительного положения в точке разме-
Гидромеханика, безвихревое течение
17S
щения насоса. Как видно из анализа результатов в окрестности
точки Р2, наименьшее значение ф имеет место в узле 28, т. е. в уз-
узле, на который приходится наибольшая порция воды, вытекающей
из Р2.
zoo
200
200
S
ZOO
200
195 ВО 186 183
179'
180
181
/Ц/
/ 191 у
А
/А
/ |
У
//Й7У
/\
\Jl82
Л
А
\\ /
/70 V
/ТО ^
л
Ч//72
\
/
\/бЗ
/777
\
JI70
К
\;т5
179
(С
\
1
V
X
775
\
\
4
/\ Я
/191
\/
\п93
200
ZOO
200
200
200
Фиг. 9 6. Узловые значения и линии постоянных значений ф, соответствующие
рячбирниш пблягти ня члементы, при котором насосы располагаются в узлах
На фиг. 9.6 представлено решение, которое получается при та-
таком разбиении области, когда насосы располагаются в узловых
точках. Наименьшее значение ф в окрестности насоса оказывается
при этом в точке расположения насоса.
9.3. Безвихревое течение идеальной жидкости
Безвихревое течение идеальной жидкости можно рассмотреть,
используя функцию тока i|) или функцию потенциала скоростей ф.
Уравнение для функции тока имеет вид
дх*
ду2
-=0.
(9.7)
Скорость течения выражается через ty(x, у) формулами
ду •
(9 8)
дх
]74 Глава 9
Объемный расход жидкости определяется разностью значений
функций Tfi и грг, соответствующих двум соседним линиям тока:
Q=%—*!• (9-9)
Здесь Q — расход жидкости на единицу глубины в направлении г.
Линии тока характеризуются также тем, что в перпендикулярном
к ним направлении отсутствует течение жидкости.
При обтекании тела идеальной жидкостью считается, что жид-
жидкость не проникает в тело и не отходит от него, образуя пустоты.
ЗД-им/с ЧОмм
' \ Т
80 мм
Фиг. 9.7. Обтекание цилиндрического тела.
Это приводит к следующему условию на граничной поверхности:
компонента скорости течения жидкости, нормальная к граничной
поверхности, совпадает со скоростью поверхности в этом направ-
направлении [2]1>. Для неподвижной границы приведенное условие озна-
означает отсутствие течения, перпендикулярного к этой границе, по-
поэтому на неподвижной границе перпендикулярная к ней компонен-
компонента скорости течения равна нулю.
В связи с вышеизложенным можно заключить, что неподвиж-
неподвижные границы являкмся линиями тока, поскольку в точках линий
тока скорость течения направлена по касательной к ним. Линия
симметрии, параллельная направлению течения, также будет ли-
линией тока. Определение значений ty\, ч|J, ... для различных линий
тока иллюстрируется далее на примере задачи обтекания цилинд-
цилиндра (фиг. 9.7). Числовые значения ч|з, соответствующие граничным
линиям тока, должны быть при этом определены до решения за-
задачи.
Задача о безвихревом течении может быть сформулирована с
использованием гш1енциала скоростей. Дифференциальное уравне-
уравнение примет вид
*> См. также П. Г. Лойцяиский, Механика жидкости и газа, изд-во «Наука»,
М., 1973. Прим. ред.
Гидромеханика, безвихревое течение 175
Компоненты скорости определяются следующими формулами:
V ——'— V „ ———. (У.11)
Компонента скорости, нормальная к неподвижной границе,
V= д? =о
п дп
ИЛИ
дх х "^ ду у ' ' '
где 1Х и 1У — направляющие косинусы единичной нормали. Соотно-
Соотношение (9.12) идентично условиям непроницаемости для водонепро-
водонепроницаемого слоя при рассмотрении грунтовых вод или для тепло-
теплоизолированной границы при изучении переноса тепла. Это соотно-
соотношение уже использовалось в вариационной постановке задачи.
При решении уравнения (9.10) с граничным условием (9.12)
возникает дополнительная трудность. Решение уравнения (9.10) не
единственно. Матрица [К] системы сингулярна. Эта трудность мо-
может быть преодолена выбором одного узла и заданием значения ф
в этом узле. Так как скорости определяются дифференцированием
функции ф, то значение ф в выбранном узле всехда можно брать
равным нулю.
Применение метода конечных элементов при рассмотрении без-
безвихревого течения идеальной жидкости иллюстрируется на задаче
обтекания цилиндра (фиг. 9.7). Применение вышеизложенных по-
понятий при решении задачи обтекания многих тел обсуждается в
работах [1, 3].
9.3.1. Постановка задачи
Определить линии тока для течения вокруг цилиндрического
тела диаметром 40 мм, центр которого расположен посередине
между двумя параллельными стенками. Расстояние между стен-
стенками равно 80 мм. На достаточном расстоянии эт цилиндра одно-
однородный поток жидкости имеет скорость 40 мм/с.
9.3.2. Решение на ЭВМ
На фиг. 9.8 показано разбиение области на три базисные под-
подобласти, которое было использовано для получения исходной ин-
информации об элементах. Окончательное разбиение на элементы и
номера узлов показаны на фиг. 9.9.
Задание граничных условий на линиях тока не представляет
труда. Горизонтальная ось симметрии и верхняя граница области
176
Глава 9
(РАО) (Ю.40) B0,40)
(Щ 40)
F0,40)
F0/27.5)
F0, 20)
@,0) A0,0) B0.0) C0,0) (Щ0)
Фиг 9.8. Четырехугольные зоны, используемые программой GRID для разбиения
области на треугольные элементы.
Фиг 199 Область, разбитая на элементы, в задаче о безвихревом потоке; указа-
указаны номера узлов.
Гидромеханика, безвихревое течение
177
являются линиями тока. Действительно, в направлении, нормаль-
нормальном к этим линиям, отсутствует течение. По тем же соображениям
граничная поверхность цилиндра также является линией тока.
Числовое значение if вдоль линий тока может быть выбрано
произвольно, так как объемный расход жидкости зависит от раз-
разности числовых значений if, соответствующим двум линиям тока.
о
Фиг. 9.10. Узловые значения 1|з и линии тока.
Пусть линии тока, образованной осью симметрии и поверхно-
ностью цилиндра, соответствует значение if 0. Эту линию назо-
назовем нулевой линией тока. Числовое значение if для верхней гра-
границы может быть любым, отличным от нуля числом (нулевое зна-
значение будет означать отсутствие течения). Выберем, однако, вели-
величину, имеющую определенный физический смысл. Рассмотрим пол-
полный объемный расход жидкости:
Q=VxA=D0 мм/с)D0 мм2) = 1600 ммэ/с.
Если задать на верхней границе if, равное 16, то разность значе-
значений if, соответствующих двум произвольным линиям тока, умно-
умноженная на 100, будет давать объемный расход жидкости.
Результаты расчетов, соответствующие такому выбору гранич-
граничных условий, представлены на фиг. 9.10 в виде узловых значений
if. Здесь изображены также линии тока, соответствующие г|)=0, 2,
12-763
178
Глава 9
4, 8, 12 и 16. На левой вертикальной границе области не получена
однородная картина течения, что объясняется недостаточным уда-
удалением этой границы от цилиндра вверх по течению. Пытаясь
применить конечную модель для решения неограниченной задачи,
нужно выбирать достаточно большую область для анализа.
9.4. Заключение
Метод конечных элементов широко применяется при рассмот-
рассмотрении задач течения жидкости и те две задачи, которые приведе-
приведены в этой главе, служат всего лишь иллюстрацией того, как этот
метод может использоваться. Более полный обзор исследований в
этом направлении представлен в трудах международной конферен-
конференции пи использованию метода конечных элементов при решении
задач течения жидкости [4].
Метод конечных элементов применяется также при рассмотре-
рассмотрении течения газа, течения по поверхности и для решения уравне-
уравнений Навье Стокса. Другой важный класс задач, которые могут
быть решены этим методом, включает задачи со свободной поверх-
поверхностью, такие, как обтекание плотины или грунтовой поверхности
в случае грунтовых вод. Для решения таких задач требуется ите-
итерационный процесс, который включает модификацию сети разбие-
разбиения облас1и на элементы после выполнения каждой итерации.
Задачи
Используйте программу FLDMCH, представленную в гл. 18,
для анализа следующих задач.
Мощность насоса 3000 м3/сит
К задаче 84. /¦—300 м на достаточном расстоянии от насоса.
Гидромеханика, безвихревое течение
179
84—85. Определите понижение уровня воды в точках располо-
расположения насосов и постройте графики эквипотенциальных линий для
изображенных ниже областей.
(800, 800)
о Насос 1
Непроницаемая
граница
У
и> юом-
о насос 2
A300, 200)
1000м
2000 м
НИ
К задаче 85. Кхх~Куу 45 м/сут.
Мощность насосов: 600 м3/сут (насос 1), 400 м3/сут (насос 2).
86—88. Постройте графики линий постоянных значений ср и
(или) if> для изображенных ниже областей.
К задаче 86.
К задаче 87.
12*
180
Глава 9
80мм/с
ЗД/ил»
К задаче
ЛИТЕРАТУРА
1. deVries G, Norrie D. H, The Application of the Finite-Element Technique to
Potential Flow Problems, Trans. ASME, Series E, I. AppL Mechanics, 38, 798—
802 A971).
2. Duncan W. J., Thorn A. S., Young A. D., Mechanics of Fluids, 2-nd ed., Am. Else-
vier Publ. Co., N. Y., 1970
3. Oden J. Т., Zienkiewicz О С, Gallagher R. H., Taylor C, Finite Element Methods
in Flow Problems, The Univ. of Alabama, Huntsville Press, 1974.
ДОПОЛНИТЕЛЬНАЯ ЛИТЕРАТУРА
Ikegawa M., Washizu K., Finite Element Method Applied to Analysis oi Flow
over a Spillway Crest, Intern. J. for Numerical Methods in Engineering, 6, 179—
189 A973).
Martin H. C, Finite Element Analysis of Fluid Flows, Proc of Second Conf. on
Matrix Methods in Structural Mechanics, Wright Patterson Air Force Base, Day-
Dayton, Ohio, 1968.
Newman S. P., Witherspoon P A., Finite Element Method of Analyzing Steady
State Seepage with a Free Surface, Water Resources Research, 6, 3, 889—896
A970).
Глава 10
РАДИАЛЬНЫЕ И ОСЕСИММЕТРИЧЕСКИЕ
ЗАДАЧИ ТЕОРИИ ПОЛЯ
Ряд важных физических двумерных и трехмерных задач мо-
может бьиь решен с использованием одномерных и двумерных эле-
элементов. Эти задачи обладают осевой или центральной симметрией.
Задача о радиальном потоке тепла через концентрические цилинд-
цилиндры с различными коэффициентами теплопроводности является од-
одним из примеров таких задач. В достаточно длинном цилиндре пе-
ток тепла распространяется как в радиальном, так и в осевом на-
направлениях. Поток тепла не зависит от азимутального угла 0, если
граничные условия не зависят от 0. Другим примером задачи с
осевой симметрией является задача о плоском течении -воды к
скважине. В этом случае характеристики течения не должны за-
зависеть от угла 0. Многие трехмерные задачи теории поля облада-
обладают осевой симметрией. Большинство из рассмотренных здесь задач
связано с переносом тепла, впрочем течение воды к скважине в
пористой среде — пример важной задачи гидродинамики.
Методика решения двумерных и трехмерных задач, которая об-
обсуждалась ранее, изменяется в случае наличия симметрии. Глав-
Главное изменение связано в порядком используемого элемента. Дву-
Двумерные симметрические задачи становятся одномерными, а трех-
трехмерные осесимметрические задачи решаются с использованием
двумерного элемента.
Вариационная формулировка задач и вычисление соответствую-
соответствующих интегралов по площади элемента настолько отличаются от
того, что было описано в предыдущих главах, что требуют специ-
специального рассмотрения, которое будет дано в этой главе.
10.1. Симметрические двумерные задачи
теории поля
Рассмотрим дифференциальное уравнение для квазистатиче^
ских задач теории поля в цилиндрических координатах [1]
182 Глава 10
с граничными условиями
Ф=ФВ (Ю.2)
К„ J К +Kw-%-le + Kzz^lz + q + h (ф -Фоо) -=0. A0.3)
Члены, связанные с координатой z, не учитываются в двумер-
двумерной задаче. Наличие симметрии означает, что ф не зависит от 9
и соответствующие члены в приведенных соотношениях должны
быть отброшены.
Запишем дифференциальное уравнение для симметрической
двумерной задачи теории поля
^l d 0 A0.4)
с граничными условиями
Ф=Фв (Ю.5)
и
|фоо)=о. (Ю.6)
Условия A0.5) и A0.6) могут быть заданы одновременно, но на
разных частях границы.
Вариационная формулировка, соответствующая уравнению
A0.4) и граничяым условиям, связана с функционалом
+ Г q<?dS + Г \ [ф2 2ФФО, + <?lo] dS. A0.7)
5l 6 2
Поверхностные интегралы в A0.7) идентичны интегралам в фор-
формуле E.35), тогда как объемный интеграл можег быть записан в
форме, идентичной соответствующему интегралу в E.35), если
[D] определить как [rKrr] и Q в E.35) заменить на rQ. После
этих подстановок минимизация A0.7) можег быть осуществлена
так же, как в одномерном случае, представленном в E.35), и при-
приводит к следующим соотношениям:
dX _ifc(gjj |ф| _|_ \fe)]r A0.8)
где
~ h[Nie)]T [N{e)] dS
s,
= Г [В^]т [?><'>] [Бы] dV + Г
v s
Радиальные и осесимметрические задачи теории поля
183
=_ Г (rQ) [N^]T dV+ ^[N^f dS— Г
V Si S2
dS.
Разбиение области на элементы в данном случае показано на
фиг. 10.1,а. Каждый элемент ограничивается концентрическими
окружностями. Значение ф внутри каждого элемента не зависит
от угла 8, и множество концентрических окружностей может быть
Скважина
Фиг. 10.1. Одномерные элементы, используемые для
моделирования радиального течения воды к скважине.
заменено линейными элементами, изображенными на фиг. 10.1,6.
Функции формы для одномерного элемента C.5), выраженные
через радиус г, имеют вид
"i 4L4- и Л0=^=4Ь (Ю.9)
Переменная ср аппроксимируется зависимостью
A0.10)
Матрица градиентов выражается следующим соотношением:
SNt dN; I 1
дг di
A0.11)
184 Глава 10
Вычислить интегралы в A0.8) сравнительно просто. Бесконеч-
Бесконечно малое изменение объема dV элемента единичной толщины равно
dV=2nrdr. A0.12)
Внешнюю поверхность могут иметь только два элемента: элемент
на внешней границе и внутренний элемент при наличии полости.
В обоих случаях эти поверхности совпадают с узлами и интеграл
ло поверхности сводится к J dS.
Рассмотрим теперь более детально интегралы по элементам,
опуская верхний индекс (е) у всех переменных, кроме [№] и {/(е>}.
Вычислим объемный интеграл в [#е>], используя формулы A0.11)
и A0.12):
V
[-l 1] Air,
где Krr предполагается постоянным, a L=Rj—Ri— длина элемен-
элемента. После умножения и интегрирования будем иметь
<кш>
Поверхностный интеграл в [#e>] имеет вид
Вычислим этот интеграл по внешней поверхности, которая совпа-
совпадает с / м узлом наиболее удаленного от центра элемента. В этом
узле функции формы имеют значения Nj=l и Л/<=0 и поверхност-
поверхностный интеграл записывается следующим образом:
h[N\T [N]dS=2^Rih\Q °]. A0.14)
Толщина элемента предполагается единичной. Для внутренней по-
поверхности того же элемента тот же самый интеграл имеет вид
j. A0.15)
Поверхностные интегралы формулы A0.8) для {/<е>} определяются
аналогично.
Радиальные и осесимметрические задачи теории поля
185
Вычисление объемного интеграла, входящего в {f(e)}, сводится
к интегрированию членов, включающих г2 и. г3. Запишем оконча-
окончательный результат
1
rQ[N) dV-
nQ
A0.16)
Величина Q теперь не распределяется, как раньше, поровну меж-
между узлами, хотя это не столь очевидно из A0.16). Более половины
величины Q приходится на узел \, потому что радиальная коорди-
координата возрастает в направлении этого узла. Неравномерное распре-
распределение Q по узлам элемента иллюстрируется на следующем при-
примере.
Пример
89. Концентрический одномерный элемент с внутренним радиу-
радиусом 2 см и внешним радиусом 4 см содержит источник тепла ин-
интенсивностью 20 Вт/см3. Требуется определить, какая часть тепла
пт этого источника приходится на каждый из двух узлов элемента.
Толщину элемента считать единичной.
К задаче 89.
Распределение по узлам выражается формулой
6 1П Г) \
где /?j=4 и Ri=2 см. Подстановка этих значений дает следующие
величины:
(/Ы1 "¦-20 (D4 4BK4+3B)* 1 20п [176
1' I 6D—2) \зD)* — 4 DK B) + 24)) 12 |272
{/<•>}=«
|293,33
\453.33f
186
Глава 10
В заключение этого раздела рассмотрим еще один численный
пример, который иллюстрирует использование одномерного эле-
элемента в задаче о течении грунтовых вод.
Пример
90. В неограниченном водоносном слое с коэффициентом про-
проницаемости 20 м3/(ч-м2) имеется скважина. Расход воды состав-
составляет 200 м3/ч. Течение к скважине происходит в радиальном на-
направлении, причем пьезометрический напор на расстоянии 300 м
от скважины поддерживается равным 30 м. Определите макси-
максимальное понижение уровня воды при установившемся режиме те-
течения.
Радиальные координаты узлов
Узлы
1
2
3
4
Расстояние, м
0
10
20
40
Узлы
5
6
7
Расстояние, м
80
160
300
К задаче 90.
Для аппроксимации водоносного слоя используем шесть эле-
элементов различной длины. Самый короткий элемент расположим
вблизи скважины, с удалением от нее длина элементов возрастает.
В соответствии с формулой A0.13) запишем матрицу элемента
J—
3 («/-
В этой формуле при переходе от элемента к элементу изменяется
только отношение (R3,—R )/(R3—RiJ. Значения этого отношения
для каждого элемента представлены в следующей таблице:
Радиальные и осесимметрические задачи теории поля
187
Элемент
1
2
3
4
5
6
0
10
20
40 '
80
160
10
20
40
80
160-
300
_i L_
10
70
140
280
560
1168,57
Результирующая система уравнений имеет вид
• io
— 10
— 10
80 —70
—70 210
— 140
140
420
—280
—280
840
—560
—560
1728,57
— 1168,57
1168,57
1168,57
Ф1
ф2
Фз
ф4
Ф5
ф6
Ф7
0>
0
0
0
0
0
0
Глобальный вектор нагрузки содержит нули, потому что все ин-
интегралы, входящие в {fle)}, равны нулю. Однако в этой системе
должны быть отражены два имеющихся в формулировке задачи
условия. Во-первых, Ф7 — известная величина, равная по условию
30 м. Во-вторых, расход скважины, рассматриваемой как точечный
сток, равен 200 м3/ч. Поскольку вода покидает водоносный слой, то
значение 200 необходимо подставить в Fx. Окончательная систе-
система уравнений имеет вид
10
-10
10
80 —70
-70 210
— 140
140
420
-280
-280
840 560
-560 1728,57 0
О 1168,57
Фх
Ф2
Фз
Ф4
Ф5
Фв
Ф7
-4,77
0
0
0
0
836,88
836,88
Здесь обе части системы разделены на величину 2л/(п73, равную
41,89.
Запишем решение этой системы уравнений
(ф)г=[29,39, 29,87, 29,94, 29,97, 29,99, 30,0, 30,01.
188 Глава 10
Максимальное понижение уровня воды равно 0,61 м и достигается
в точке, где находится скважина.
10.2. ОсесимметричеСкие задачи теории поля
Если трехмерное тело обладает геометрическсй симметрией от-
относительно оси 2, то это тело называют осесимметричным телом.
Если к тому же исследуемая фиеическая величина не зависит от 0,
то дифференциальное уравнение A0.1) сводится к следующему:
К d2<!L+Krr J^ + K i!5L+O=0 A0 17)
Для решения этого двумерного уравнения может быть использован
треугольный симплекс элемент.
Следует еще раз подчеркнуть, что для того, чтобы уравнение
A0Л7) было справедливо, требуется больше, чем симметрия фор-
формы рассматриваемого тела. При несимметричном распределении
температуры в осесимметричном теле задачу нельзя считать осе-
симметрической.
Граничные условия для уравнения A0.17) выражаются форму-
формулой A0.2) и следующим соотношением:
Вариационная формулировка задачи A0.17) и A0.18) связана с
рассмотрением функционала
4 qfcJdS. A0,19)
Интегралы, которые входят в основные соотношения, определяю-
определяющие элементы, в точности совпадают с теми, что выведены в гл. 5
[формулы E.20) и E.21)], если только определить теперь [D] как
a Q заменить на произведение rQ.
Подобие между осеоимметрическими и двумерными задачами
упрощает решение осесимметрических задач. При использовании
одного из способов решения КХх, Куу и Q в двумерной задаче заме-
заменяются на гКтт, rKzl и rQ и далее используется та же самая про-
Радиальные и оеесимметрические задачи теории поля
189
грамма вычислений. При этом г означает расстояние от оси сим-
симметрии до центра элемента, а произведения rKrr и т. д. должны
быть вычислены для каждого элемента. Этот приближенный спо-
способ дает достаточно точные результаты, если размеры элементов
малы. Сочетание большого элемента и большого г может стать
источником ошибки, но вряд ли эта ошибка будет существенна.
Полевая функция ср определяется соотношением
(p=./V Фг + N-Ф- \-NkQ)k, A0.21)
где
Константы а, Ь и с определены в соотношении C.10). Объем-
Объемный интеграл в [?<е>] дается формулой
[Bf[D][B):
4А
bbb
kuk
4-
CXCX Cf}
iCi CjCj CkCk
Здесь через R обозначено произведение матриц:
— 1
Г) г D D D 1
K — TYlKi К, К/А
A0.22)
2
1
1
1
2
1
1
1
2
Г'
К
A0.23)
ибо объемный интеграл сводится к виду \ rdV после того, как по-
постоянные члены выносятся за знак интеграла. Действительно, учи-
учитывая зависимость dV 2nrdA, запишем
C
A0.24)
Радиальное расстояние г может быть выражено в L-координатах:
LR ]A-L^k1 A0.25)
190
Глава 10
а величина г2 тогда может быть представлена произведением
[Rt
Rj RK\
L2L2
L2LS
A0.26)
Выполнив интегрирование с помощью интегральных соотношений
для L-координат из гл. 3, получим A0.23).
Если, следуя приближенному способу, заменить rKrr и гКгг на
константы гКгт и гКгг, то для объемного интеграла в [№] будем
иметь
[В\т
ЬА
ЬА
2лг
"fit
CjCj
CjCk
Cfk
A0.27)
В этом случае r-(Rt+R,+Rk)/3.
Формулы A0.22) и A0.27) совпадают с точностью до замены
2
R на г. Приближенная формула A0.27) будет содержать ошибку,
если рассматривается большой элемент и большое число г. Одна-
Однако, как показывает следующий пример, ошибка эта, вероятно, не-
несущественна.
Пример
91. Ниже показан треугольный элемент, используемый в неко-
некоторой осесимметрической задаче теории ноля. Представлены ра-
радиальные координаты его узлов. Сравните матрицы теплопровод-
теплопроводности элементов, вычисленные по формулам A0.22) и A0.27).
Поскольку соотношения A0.22) и A0.27) совпадают с точно-
_ 2
стью до замены R на г сравнение указанных матриц можно про-
2
вести, рассматривая вычисленные значения г и R:
20 + 25
3
7=*'+*'-
' — 22,67
г =513,78 см*,
# = -j2-|
1
1
1
2
1
Г
1
2
k
Радиальные и осесимметрические задачи теории поля
191
=-ПГ 120 25 23]
12
1
1
1
2
1
Г
1
2
B0
25
B3
6178
12
R 514,83 см2.
Rfe 23 см
К, 25 с/и
К задаче 91.
Определим относительную величину расхождения в процентах:
!_=*_ х 100^3,78-514,^3 xlQ0 _
^ 014,Во
Объемный интеграл
J rQ \IV\T
dV.
который входит в {/(в)}, может быть аппроксимирован следующей
зависимостью:
(rL1}
rQ Г [IVf dV=rQ f 2я I rL2 1 d/4.
i/ У \ rL \
v а (гь3)
A0.28)
Составляя произведения rLi с помощью соотношения A0.25) и ин-
интегрируя, получаем
'2
1
1
1
2
1
Г
1
2
к
A0.29)
192
Глава 10
Точно так же, как при рассмотрении интеграла A0.16), отсюда
можно заключить, что тепло от источника внутри элемента распре-
распределяется неравномерно по узлам элемента, как это имело место в
двумерном случае, представленном формулой (8 47).
Фиг. 10.2 Осесимметричный треугольный злемент.
Поверхностные интегралы в задачах переноса тепла вычисля-
вычисляются относительно просто. Начнем с поверхностного интеграла,
который входит в [
лами /' и k (фиг. 10.2):
\dS =
и рассмотрим сторону элемента между уз-
уз[0 L2
О О
rL2L,2 TL2L,3
rL2L3 rL9L3
dX. A0.30)
Используя соотношение A0.25) для г, составляя соответствующие
произведения и интегрируя с учетом формулы C.43), получаем
о
о
(Rj+3Rk)
A0.31)
где ?jh — длина стороны между узлами / и k. Существуют еще
две формы записи соотношения A0.31), соответствующие двум
Радиальные и осесимметрические задачи теории поля
193
другим сторонам элемента. Для сторон между узлами i и / и меж-
между узлами ( и k соответственно имеем
(з/г,+я,) (
0
0
A0.32)
h[N]T
CRt+Rk) 0
О О
(Ri+Rk) о
A0.33)
Поверхностный интеграл в {/<е>} имеет вид
I'
1
'2
1
0
1
2
0
0"
0
0
(*•
*'
Я*.
A0.34)
Аналогичные формулы для двух других сторон легко получаются
изменением положения ненулевых коэффициентов матрицы в фор-
формуле A0.34). Двойки при этом всегда остаются на диагонали.
Соотношение A0.34) интересно тем, что оно применимо как
для вертикальной, так и для горизонтальной поверхностей соответ-
соответствующих сторон элемента. Для вертикальной поверхности (фиг.
10.3,а) Rt^Rj-R и
(О
Мы видим, что конвективный приток тепла так же, как и в дву-
двумерной задаче, распределяется равномерно по узлам вертикаль-
вертикальной поверхности элемента. С другой стороны, если Ri и Rj нахо-
находятся на горизонтальной поверхности (фиг. 10.3,6), то ?ц—Ri—
—Ri и
I'
dS =
(R,
о
Теперь конвективное тепло, характеризуемое произведением
2яЛфоо35«/6, распределяется неравномерно по узлам. Большая
часть этой величины приходится на узел, наиболее удаленный от
оси симметрии.
13—763
194
Глава 10
А -площадь поверхности
6)
Фиг. 10 3. Узловые компоненты {/<*>} для горизонтальных и вертикальных поверх-
поверхностей сторон элементов.
Пример
92. Составьте уравнения, определяющие элемент, для осесим-
метричного треугольника, показанного ниже.
Ш.5)
К задаче 92.
Радиальные и осесимметрические задачи теории поля
195
Матрица теплопроводности [№] выражается в виде суммы
двух интегралов: объемного интеграла, представленного формулой
A0.22), и поверхностного интеграла из A0.31), Запишем числовые
значения констант, входящих в эти формулы:
1
1
1
8
8,
7,
5
5
3
4
4
V
V
12
2 А г.
Zft=0,
7 -_. 1
[В 8,5 7,5j
2я64,04.40
= 1,0,
2
1
1
1
2
1
Г
1
2
= 8047,5 =
ЛА ~ 4A/2) -»,— 4Л '
Подставив результат вычисления в формулу A0.22), получим
Г
[S]r
8047,5
5
0
0
0 -
8047,5
4023,75
4023,75
0 0
I i
¦1 1
4-
+ 8047,5
—4023,75
10059,38
—6035
,63
1 —0,5
—0,5 0,25
—0,5 0,25
—4023,75'-
—6035,63
10059,38
—0,5
0,25
0,25
Поверхностному интегралу в lku)\, вычисленному по поверхности
стороны jk, соответствует выражение
0 0
0 (
%=8,5—7,5«-1 см,
^=8,5 и #*=7,5.
13*
196
Глава 10
Подстановка этих величин дает
[#4-0,262
О О О
О 33 16
О 16 31
оо о ¦
О 8,65 4,19
О 4,19 8,12
Матрица теплопроводности получается сложением двух вычислен-
вычисленных матриц:
8047,5 —4023,75 —4023,75
—4023,75 10068,03 —6031,44
—4023,75 —6031,44 10067,5
Поверхностный интеграл, входящий в {[Щ, записывается сле-
следующим образом:
0
0
0
0
2
1
0"
1
2
к
или
2л.
Ы/2
6
• 300
0
0
0
2
1
0
1
2
{/<<>] =|з848,4 •
C691,4)
Окончательные уравнения, определяющие элемент, имеют вид
' 8047,5 —4023,75 —4023,75'
—4023,75 10068,03 —6031,44
—4023,75 —6031,44 10067,5
W
0
3848
3691
,4
,4
10.3. Машинная реализация
Решение радиальных и осесимметрических задач теории поля
на ЭВМ мало отличается от машинной реализации одномерных и
двумерных задач теории поля, рассмотренной в гл. 8 и 9. Про-
Радиальные и осесимметрические задачи теории поля 197
грамма для осесимметрического случая проще соответствующей
двумерной программы, потому что в первом случае отпадает необ-
необходимость в координатных преобразованиях. Главные оси инерции
должны быть параллельны координатным осям г, г, ибо в против-
противном случае задача перестанет быть осесимметрической. В теле,
составленном из нескольких материалов, оси инерции для всех
материалов также должны быть ориентированы по оси симметрии.
Программы для ЭВМ составляются так, чтобы их можно было
использовать для двумерных или осесимметрических задач теории
поля. Переход от одного типа задач к другому в таких программах
обычно осуществляется с помощью приближенного метода, рас-
рассмотренного в предыдущем разделе. Величины КХх и Kvv заменя-
заменяются на rKrr и гКгг- Любая программа такого типа должна содер-
содержать операторы, которые позволяют выбирать соответствующие
формулы для поверхностных интегралов. При решении осесиммет-
осесимметрических задач указанные интегралы содержат радиальное рас-
расстояние, и формулы, определяющие эти интегралы, не так просто
приспособить для двумерного случая. Так, соотношение A0.34) в
случае двумерной задачи будет давать правильные результаты,
если оно используется для вертикальной поверхности, но будет
давать ошибочные значения при рассмотрении горизонтальной
поверхности.
Задачи
93. Убедитесь в эквивалентности функционала A0.7) диффе-
дифференциальному уравнению A0.4) с граничными условиями A0.6)
(см. приложение А).
94. Металлическая труба, для которой /Сп- = 70 Вт/(см-К), ок-
окружена изоляционным материалом с Кгг~5 Вт/(см-К). Жидкость,
движущаяся в трубе, имеет температуру 573 К. Температура сна-
снаружи изолятора равна 320 К. Размеры трубы: внутренний диа-
диаметр 2 см, внешний диаметр 4 см. Внешний диаметр изолятора
8 см. Используя четырехэлементную модель, вычислите темпера*
туру срединной поверхности трубы, внутренней поверхности тру-
трубы изолятора и срединной поверхности изолятора. Определите теп-
тепловой поток для каждого элемента и выясните, почему он не по-
постоянен по элементам.
95. В качестве теплообменника используется ряд тонких круго-
круговых пластин, насаженных на круглую трубу, по которой течет
жидкость. Пластинки считаются тонкими, так что изменением тем-
температуры по их толщине можно пренебречь. Предполагая темпера-
температурное поле радиальным, вычислите поверхностные интегралы, свя-
связанные с передачей тепла от пластины в окружающую среду. Теп-
Теплообменом по торцевым частям пластины пренебречь.
198
Глава 10
К задаче 95.
96. Выведите определяющие элемент уравнения, необходимые
для расчета средней массовой температуры тела. Средняя массо-
вая температура определяется формулой R= \T(x,y)dM/ \ dM, где
dM— элементарная масса. Выполните расчеты для следующих
случаев:
а) радиального переноса тепла;
б) осесимметричного переноса тепла.
97. Вычислите объемный интеграл \ rQ[N]TdV без применения
v
какой-либо аппроксимации. Используя элемент из задачи 91, срав-
сравните вычисленное значение с результатом, полученным по формуле
A0.28).
98. Вычислите поверхностный интеграл ^hTcclN^dS вдоль сто-
, . s
роны между узлами я и i треугольного элемента.
99. Составьте вектор-столбец {f} для изображенного ниже эле-
элемента.
100. Составьте матрицу теплопроводности [kW] для элемента,
используемого в задаче 99, если
Krr=2Kzz=SQ Вт/(см-К).
101. Обсудите способ расчета теплообменника в виде ряда тон-
тонких круговых пластин, насаженных на сплошной круговой цилиндр.
Используйте элементы обоих типов, рассмотренные в этой главе.
102. Измените программу FLDMCH так, чтобы ее можно было
использовать для решения задач, включающих радиальный поток
воды к скважине. Проверьте программу, решив задачу 90 из этой
главы.
Радиальные и осесимметрические задачи теории поля
199
(9.
Q*BO Вт/см*
К задаче 99.
103. Модифицируйте программу TDHEAT так, чтобы ее можно
было использовать для решения" осесимметрической задачи пере-
переноса тепла. Используйте эту программу для определения распреде-
распределения температуры в теле, показанном ниже.
Температура внешней
поверхности 300К-
Krr Kzx -10 Вт /(см -К)
Температура внутренней
поверхности 500 к
16 см
К задаче 103.
ЛИТЕРАТУРА
1. Krieth F., Principles of Heat Transfer, 3 rd ed., Intex Educational Publishers,
N. Y.( 1973.
ДОПОЛНИТЕЛЬНАЯ ЛИТЕРАТУРА
Zienkiewicz О. С, The Finite Element Method in Engineering Science, McGraw-
Hill, London, 1971, Ch. 15; есть русский перевод: Зенкевнч О., Метод конечных
Глава 11
НЕСТАЦИОНАРНЫЕ ЗАДАЧИ
ТЕОРИИ ПОЛЯ
В задачах теории поля, которые рассматривались в двух пре-
предыдущих главах, предполагалось, что к моменту, когда предпри-
предпринимается анализ, в теле уже достигнуто установившееся состояние.
Другой важный класс физических задач представляют задачи, учи-
учитывающие изменение искомых величин во времени. В некоторых
из них имеет место так называемый переходный период между на-
началом физического процесса и достижением установившегося со-
состояния. Встречаются задачи, в которых установившееся состояние
вообще не достигается и переходный период составляет весь фи-
физический процесс.
С нестационарными задачами очень часто сталкиваются при
исследовании явления переноса тепла и течения грунтовых вод.
Динамическое поведение различных конструкций также представ-
представляет пример переходной задачи, но оно не будет рассматриваться
в этой книге. Наше обсуждение ограничивается переходными за-
задачами теории поля в тех областях, которые были рассмотрены в
предыдущих главах.
11.1. Соотношения, определяющие элементы
Многие физические задачи описываются рассмотренным в пя-
пятой главе квазигармоническим дифференциальным уравнением,
включающим член, который содержит частную производную по
времени. При этом получается нестационарное уравнение
с граничными условиями, выраженными формулами E.26) и
E.27). Величина К в уравнении A1.1) представляет собой некото-
некоторый параметр материала или комбинацию таких параметров. Все
коэффициенты уравнения Кхх, Куу, Kzz и %, также как и Q, могут
изменяться со временем.
При использовании метода конечных элементов для решения
уравнения A1.1) член с частной производной по времени рассмат-
рассматривается как функция пространственных координат в каждый фик-
Нестационарные задачи теории поля 201
сированный момент времени. Тогда уравнение A1.1) можно рас-
рассматривать как уравнение, идентичное E.25), с учетом того, что
величина Q в формуле E.25) теперь заменяется на разность
После этой замены решение физической задачи получается мини-
минимизацией связанного с уравнением A1.1) функционала для каж-
каждой точки временного интервала. Перед каждой такой минимиза-
минимизацией коэффициенты теплопроводности и другие величины, завися-
зависящие от времени, должны быть пересчитаны заново.
Функционал, связанный с уравнением A1.1), имеет вид
+ J 4" t<P2-2ФФ- + Ф»1 dS- ("-3)
S
J
Si
Выражение A1.3) отличается от E.32) только величиной Q в объ-
объемном интеграле. В результате минимизации получаются соотно-
соотношения, идентичные E.45) и E.46). Эти соотношения будут приве-
приведены ниже.
Вклад модифицированной величины Q в функционал A1.3) со-
составляет
v
Последнее соотношение должно быть переписано как
V, A1.5)
поскольку ф определяется поэлементно. Полевая функция ф^ оп-
определяется формулой
A1.6)
где [Л/<е>] — расширенная форма матрицы функций формы D.8).
Дифференцируя выражение (П.б) по времени, получаем
(П.7)
202 Глава 11
так как [N&>] является только функцией координат и не зависит
от времени. Подстановка выражений (И.6) и A1.7) в A1.5) дает
|^^) A1.8)
Эта сумма интегралов должна быть минимизирована по {Ф}. Диф-
Дифференцируя по {Ф}, получаем
JS В
T^y^-^r-QdV + 2 (JMA^J^'J^I^. A1.9)
Второе соотношение в E.42) должно быть заменено соотношени-
соотношением A1.9). После объединения A1.9) с результатами дифференци-
дифференцирования остальных интегралов из A1.3) процесс минимизации
приводит к следующей системе дифференциальных уравнений:
A1.10)
Вклад каждого элемента в матрицы [К], [С\ и {F} выражается
формулами i
[?<«>]« Г К [Щт [N] dV, (И.Па)
v
)} = — $QlN]TdV-r U{N}T dS — f ЛФ«[JVf dS. A1.11b)
V S S
v
[#•'1 = Г[В]т [D][В] dV+ ^h\N]T [N]dS, A1.116)
Si
Все интегралы в формулах A1.11а) —A1.11в) берутся по отдель-
отдельному элементу. Суммирование вкладов отдельных элементов про-
проводится обычным образом. Соотношение A1.10) представляет со-
собой систему линейных дифференциальных уравнений первого по-
порядка. Матрицу [С] в A1.10) иногда называют матрицей демпфи-
демпфирования. Это единственная новая матрица. Интегралы, определя-
определяющие [#е>] и {/<е>} в формулах A1.116), A1.Ив), уже рассматри-
рассматривались в предыдущих главах.
В случае решения задач переноса тепла величина Я в формуле
A1.1) равна произведению рс, где р — плотность, кг/м3, а с —
удельная теплоемкость, Дж/(м3-°С). Величинам Кх%, Куу и Kzz со-
соответствуют коэффициенты теплопроводности, введенные в гл. 8.
Нестационарные задачи теории поля
203
Уравнение, описывающее нестационарное фильтрационное те-
течение, имеет вид
где Тхх, Tyv и Т„ — коэффициенты проницаемости. В ограниченном
водоносном слое ТХХ=ЬКХХ и т. д., где 6 — глубина водоносного
слоя. Если водоносный слой неограничен, Тхх^уКхх и т. д., где
Ф — пьезометрический напор, измеряемый от дна водоносного слоя,
5 — коэффициент упругоемкости.
11.2. Матрица демпфирования элемента
Рассмотрение переходных задач теории поля приводит к новой
матрице [С], называемой матрицей демпфирования. Вклад от-
отдельного элемента в эту матрицу определяется объемным интегра-
интегралом A1.11а), который должен быть вычислен для каждого эле-
элемента.
11.2.1. Одномерный симплекс-элемент
Матрица функций формы для одномерного элемента записы-
записывается в локальной системе координат следующим образом:
Подставляя это выражение в формулу A1.11а) и учитывая зави-
зависимость dV—Adx, где А — площадь поперечного сечения элемента,
получаем
X
L
ИЛИ
Ц
.13)
11.2.2. Двумерный симплекс-элемент
Матрица функций формы для двумериого элемента, выражен-
выраженная через плоские L-координаты, имеет вид
204
Глава 11
Считая толщину элемента единичной, вычислим объемный инте-
интеграл A1.11а):
U
L3]dA=-
12
2
1
1
1
2
1
Г
1
2
A1.14)
Соотношение A1.14) идентично интегралу, который встречается в
теории согласованных напряжений, если X полагается равной еди-
единице. Матрица, которая встречается в теории согласованных на-
напряжений, является матрицей демпфирования, поэтому каждое из
приводимых в этом разделе соотношений, определяющих элементы,
может быть использовано для построения приближенной матрицы
в соответствии с теорией согласованных результантов элементов.
Например, в A1.14) представлена согласованная матрица элемен-
элемента для двумерного симплекс-элемента.
11.2.3. Трехмерный симплекс-элемент
Функции формы для трехмерного симплекс-элемента, выражен-
выраженные через объемные L-координаты, имеют вид
[^]=[La L2 L3 Lt].
Подставляя их в формулу A1.11а) и используя объемный интег-
интеграл C.46), получаем
1 1 Г
1211 /II 1
20
11.2.4. Радиальные и осесимметричные элементы
Матрица демпфирования для радиальной и осесимметрической
задач определяется соотношением
= Гг[Л/]г [N]
dV.
Для радиального элемента dV=2nrdr и N=l/L[(r—Rj)(Ri—г)].
В результате вычисления интеграла имеем
60L*
X
[Симметрично
)R'i— 3RD
A1.16)
Нестационарные задачи теории поля 205
Матрицу демпфирования для осесимметричного элемента наи-
наиболее просто вычислить, если использовать плоские L-координаты
и соотношение A0.25). Ниже приведены окончательные выраже-
выражения для коэффициентов симметричной матрицы-
cn-=D [l2R*t + 2Я? + 2Rl + 6fl,fy + 6RtRk + 2RjR&
с12=D [ЗЯ! + 3tf,a + RI + ARiRj + 2RtRk + 2RjRk],
схг=D [3tf? + R] + 3RI + 2RtR}- + iRtRk + 2RjRk],
A1.17)
c2,=D [2R1 + 12R) + 2Rl + 6/?;/?; + 2RtRk +¦ 6RjRk),
c23=D № \- Щ -f- 3RI + 2RtRj + 2RtRk + 4RjRk],
ciZ=D {2R? + 2R] + 12Rl
11.3. Конечно-разностное решение дифференциальных
уравнений
Чтобы получить значения {Ф} в каждой точке временного ин-
интервала, необходимо решить линейное дифференциальное уравне-
уравнение A1.10). Существуют два распространенных метода решения
уравнений такого типа. Один из них заключается в приближенной
замене частной производной по времени ее конечно-разностным
аналогом с применением центральной разностной схемы. Другой
метод состоит в использовании конечных элементов, определенных
теперь уже не в пространственной, а во временной области. Этот
метод обсуждается в гл. 17 в связи с методом Галёркина. Здесь
мы рассмотрим конечно-разностное решение.
На кривой <p(f) (фиг. 11.1) даны две точки с абсциссами t0 и t\
на расстоянии \t—t\—10 друг от друга. Для первой производной в
средней точке интервала t\—to имеем приближенное соотношение
Э<р _Ф1-Ф„ m lg.
Если рассматривать узловые значения как функции времени, то
можно записать
Так как {Ф} вычисляется в средней точке временного интервала,
в этой точке также должны быть вычислены {Ф} и {F}. Эти вели-
величины определяются по приближенным формулам
206
Глава II
И
A1.21)
Подставляя выражения A1.19) — A1.21) в дифференциальное
уравнение A1.10), получаем соотношение
1 ,,
м
=0. (П-22)
v-W
Фиг. 11.1. Численное определение первой производной. Первая производная ср
в точке А равна (Фх—Фо)/Д^.
которое может быть преобразовано к виду
,—2(F}*. A1.23)
Считая исходные узловые значения в момент времени t изве-
известными, узловые значения в момент времени /-|-Д/ можно полу-
получить, решая уравнение A1.23). Вектор-столбец {F}* содержит из-
известные параметры; следовательно, его можно вычислить до ре-
решения уравнения A1.23).
Так как соотношения A1.18) — A1.20) записаны в средней точ-
точке временного интервала, то многие предпочитают вычислять {Ф}
именно в этой точке. Эти узловые значения могут быть определены
путем подстановки результатов, полученных из решения уравне-
уравнения A1.23), в A1.20) вместе с {Ф}0. Это можно также сделать,
исключая из уравнения A1.22) с помощью формулы A1.20) чле-
члены, содержащие {Ф}ь Такой способ приводит к уравнению
A1.24)
{[К\+-1г[С])[Ф}*=~-[С]{Фи-
Нестационарные задачи теории поля
207
Независимо оттого, используется формула A1.23) или A1.24),
окончательная система уравнений имеет вид
1Л]{Ф}„ов=^]{ФиР-И. (и-25>
Матрица [А] является комбинацией матриц [С] и [К] и зависит
от шага по времени At. Если At и параметры материала не зависят
от времени или от {Ф}, то матрица [А] во все моменты времени
одинакова. Если М или параметры материала изменяются в_ про-
процессе решения, то матрицу [А] следует вычислять каждый раз
заново, проводя суммирование по всем элементам и затем триан-
гуляризацию. Эта процедура значительно увеличивает объем вы-
вычислений, но она неизбежна при переменном At или в случае, ког-
когда Кхх и т. д. являются функциями температуры.
Объем численных расчетов даже для несложной задачи слиш
ком велик, чтобы можно было здесь привести полностью какой то
числовой пример. Однако в следующем примере приведено вычис-
вычисление матрицы [А].
Пример
104. Требуется составить матрицу [Л] из формулы A1.25) для
стержня (задача 59), предполагая, что ср=15 Дж/(см-К). Шаг по
времени считать равным 1 мин. Стержень и расположение узло-
узловых точек показаны ниже.
Тоо--Ч0'С ft = 10 Вт/(рмг-К)
I50oci
7,5 см
L "' j2
К задаче 104.
Матрица [К] была рассчитана в задаче 59; она имеет вид
|- 58 —43 0 0 0 0"
—43 116 —43 0 0 0
0 —43 116 —43 0 0
0 0 —43 116 —43 0
0 0 0 —43 116 —43
0 0 0 0 —43 68
]—я
208
Глава 11
Матрица демпфирования элемента определяется формулой
A1.13):
Подстановка числовых значений Л и L дает
,5 3,751
,75 7,5 1
Объединяя матрицы элементов в соответствии с методом прямой
жесткости, получаем
(е) 1&..1М.Б Г2 II Г7.
[С ' * [\ 2J [3,
7,5
3,75
О
О
О
О
3,75
15,0
3,75
0
0
0
0
3,75
15
3,75
0
0
О
О
3,75
15
3,75
О
О
О
О
3,75
15
3,75
О "
О
О
О
3,75
15
Матрица [Л] получается сложением матриц [С] и [К]:
[A] 1КЦ--?-[С].
В размерности коэффициента теплопроводности время выражается
в часах, поэтому At должно быть выражено в часах, т. е. Д?=1/60,
и [Л] равно [Л:] + 120[С], или
¦958 407
407 1916 407
407 1916 407
407 1916 407
407 1916 407
407 968
Л — 7Г
11.4. Численная устойчивость и колебания
Конечно-разностная схема, используемая для временной обла-
области, построена на основе центрально-разностной схемы Кранка—
Никольсона, которая является безусловно устойчивой [ 1 ]. Безуслов-
Безусловная устойчивость означает, что если распределение температуры во
времени преобразовать по Фурье в частотную область, то коэффи-
коэффициент усиления для каждой частотной компоненты будет затухать
во времени. При этом могут возникать и обычно возникают коле-
колебания числовых значений искомых величин даже тогда, когда ме-
Нестационарные задачи теории поля 209
тод счета сам по себе устойчив. Размах колебаний зависит от
свойств материала, размеров элемента, величины временного шага
и от значений фурье-компонент температурного распределения, со-
соответствующих началу временного шага. Поскольку свойства
материала обычно известны, переменными, которые можно варь-
варьировать, являются только размеры элемента и шаг по времени.
Фурье-компоненты начального распределения температуры могут
быть изменены путем изменения размеров элемента. Одновремен-
Одновременное уменьшение размеров элемента и временного шага будет су-
существенно снижать размах колебаний. Но изменение только одной
из этих переменных, когда другая остается фиксированной, не
всегда улучшает ситуацию. Типичной ошибкой является сочетание
грубого сеточного разбиения области на элементы и малого шага
по времени. Такая комбинация иногда приводит к результатам, ко-
которые противоречат физическому смыслу задачи. Грубое разбие-
разбиение области обычно является результатом утомительной работы
по подготовке исходных данных элемента там, где программа, ге-
генерирующая сеточное разбиение, неприменима.
Большие трудности возникают при таком виде температурного
распределения, когда значения температуры в граничных узлах
значительно выше (или ниже), чем внутри тела. При такой ситуа-
ситуации граничные элементы испытывают большие температурные
градиенты. Общее правило состоит в том, чтобы использовать ма-
малые элементы при наличии значительных градиентов температуры.
Использование малых элементов будет уменьшать размах колеба-
колебаний числовых значений, которые могут возникнуть в связи с рез-
резким изменением температуры.
11.5. Решение задач на ЭВМ
Составление и решение уравнения A1.24) во многом аналогич-
аналогичны процедурам, которые обсуждались в предыдущих главах, но
все же отличаются от них. Построение матрицы [А] осуществля-
осуществляется по общей уже рассмотренной методике. Должны быть состав-
составлены две матрицы элементов, на основе которых строятся матрицы
[А] и [Р], соответствующие по форме либо A1.23), либо A1.24).
Далее осуществляется триангуляризация [А], а затем использует-
используется подпрограмма, которая вычисляет искомые узловые значения
{Ф} з нужные моменты времени.
Методика решения уравнения A1.24) зависит от того, имеются
ли по условиям задачи какие-либо заданные узловые значения.
Если ни одно из значений {Ф} не задано заранее, то уравнение
A1.24) решается так же, как любая другая система уравнений.
Произведение [Р] {Ф}0 вместе с {F} образует вектор-столбец, ко-
который разлагается параллельно с триангуляризацией [А], после
чего решение получается обратной прогонкой.
14-763
210
Глава 11
Если некоторые компоненты {Ф}о заданы, они должны оста-
оставаться неизменными во времени. Это означает, что заданные зна-
значения {Ф}0 следует восстанавливать после каждой итерации. Не-
Необходимость восстановления заданных значений требует запоми-
запоминания этих значений вместе с соответствующими им номерами
узлов.
В программе должна содержаться информация о числе итера-
итераций и шаге по времени At. В некоторых программах предусматри-
предусматривается выборочная печать результатов только для определенных
итераций вместо того, чтобы делать это после каждой итерации.
Программа с такой выборочной печатью должна содержать допол-
дополнительную информацию, связанную с указанием момента печата-
печатания результатов счета.
Задачи
105. Проверьте матрицу демпфирования элемента, представлен-
представленную следующими соотношениями: а) A1.13), б) A1.14), в) A1.15),
г) A1.16), д) A1.17).
106. Выведите уравнение A1.24), которое определяет {Ф} в
средней точке временного шага.
107. Используя уравнение A1.24), рассчитайте {Ф} для задачи
о брусе (задача 104). Вектор-столбец {.F} приведен в задаче 59, а
приведенная к треугольному виду матрица [/(]4-2/Д?[С] дана ни-
ниже. Рассмотрение во времени ограничить тремя минутами.
"958 407
1743,09 407
1820,97 407
1825,03 407
1825,23 407
877,24_
ЛИТЕРАТУРА
1. Donea J., On the Accuracy oi Finite Element Solutions to the Transient Heat-
Conduction Equation, Intern. J. for Numerical Methods in Engineering, 8, 103—
110 A974).
ДОПОЛНИТЕЛЬНАЯ ЛИТЕРАТУРА
Bruch J. C, Jr., Zyvaloski G., Transient Two-Dimensional Heat Conduction Prob-
Problems Solved by the Finite Element Method, Intern, J. for Numerical Methods in
Engineering, 8, 4» 1—494 A974).
Kohler W., Pittr X, Calculation of Transient Temperature Fields with Finite Ele-
Elements in Space and Time Dimensions, Intern. J. jor Numerical Methods иг Engi-
Engineering, 8, 625—631 A974).
Zienkiewicz O. C, Parekh С J., Transient Field Problems: Two Dimensional and
Three-Dimensional Analysis by Isoparametric Finite Elements, Intern. J. for Nu
merical Methods in Engineering, 2, 61—71 A970).
Глава 12
МЕХАНИКА ДЕФОРМИРУЕМОГО ТВЕРДОГО ТЕЛА.
ТЕОРИЯ УПРУГОСТИ
Применения метода конечных элементов к задачам механики
деформируемого твердого тела очень обширны. Сюда относятся
задачи теории упругости, задачи теории пластин и оболочек, зада-
задачи расчета конструкций, составленных из пластин и оболочек, ана-
анализ упругопластического и вязкоупругого поведения материала,
динамические задачи, расчет составных конструкций. Данная гла-
глава посвящена задачам теории упругости. Другие области меха-
механики деформируемого тела рассматриваться не будут. Мы обсу-
обсудим здесь общие случаи одномерных, двумерных и трехмерных
задач теории упругости, а также специальный случай задач с осе-
осевой симметрией. Кроме того, будет рассмотрена машинная реали-
реализация задачи о плоском напряженном состоянии.
Теоретическим введением к этой главе служит материал, пред-
представленный в гл. 5, где рассмотрена минимизация потенциальной
энергии упругого тела. В процессе минимизации получаются ин-
интегралы, которые входят в уравнения для элементов. Эти интегра-
интегралы имеют вид
(I2.I)
{/<<>) = — f [Nk)p I y.(e) I dv— \[B^f [D(e)]{eW) dV —
d5-{Pj, A2.2)
где [B^]—матрица градиентов, связывающая деформации и пе-
перемещения; [DW] — матрица, описывающая механические свойст-
свойства; {e<f']—начальная деформация элемента; [Л^(е)] — матрица
функций формы; |Х«, %¦&, 2« объемные силы, р^К pf, p^> —
поверхностные нагрузки и {Р} —вектор-столбец узловых сил.
Определение этих матриц и вычисление приведенных выше ин-
интегралов— главная иель этой главы.
14*
212 Глава 12
12.1. Теория упругости. Одномерный случай
Простейшая одномерная задача является удобной отправной
точкой для дальнейшего изложения, поскольку только она позво-
позволяет проиллюстрировать все выкладки для конкретного числового
примера. В двумерном и тем более в трехмерном случае объем
вычислений слишком велик для этого. Так как обсуждение, прово-
проводимое ниже, относится к отдельному элементу, верхний индекс в
обозначениях всех величин, за исключением [&<е>] и {/(е)}, будет
опускаться.
Предполагая, что одномерное упругое тело ориентировано
вдоль оси х, будем иметь только одну компоненту тензора напря-
напряжений Охх и соответствующую компоненту тензора деформаций
ехх. Запишем закон Гука
вхх-Е({е}-{Ч}). A2.3)
Формула A2.3) в матричном виде записывается как {а} =
— [^]({е) — (ео})> поэтому [D]=E, где Е—модуль упругости. На-
Начальную деформацию обычно связывают с тепловым расширением
аД7\ где а — коэффициент теплового расширения, а АГ — отклоне-
отклонение температуры от некоторого равновесного значения.
Для одномерного элемента функция перемещения имеет вид
A2.4)
где U{ и Uj — перемещения узлов i и / в направлении оси х. Де-
Деформаций ехх связана с перемещением формулой
™L] F'l A2 5)
Производные от функций формы вычисляются легко, так как
*,= !--? и *,=¦?.
Дифференцирование дает
ъхх=-~[ 1 1]{U}=[B]{U]. A2.6)
Матрица градиентов [В] теперь определена, так что можно при-
приступить к составлению матрицы жесткости. Подставляя [В] и [D]
в формулу A2.1) и предполагая площадь поперечного сечения по-
постоянной, получаем
-yB]TlDmdV=M i}-1 []ух' A2-7)
Механика деформируемого твердого тела. Теория упругости
213
или
]~ L [-1 l\
A2.8)
Соотношение A2.8) идентично по форме матрице элемента, полу-
полученной в одномерном случае переноса тепла.
Интегралы, определяющие вектор нагрузки, вычисляются так-
также просто. Интеграл, связанный с тепловым расширением, записы-
записывается как
V О
Интеграл от объемных сил имеет вид
— UN]T{X}dV=~XA Г
V О
О-*)
X
L
ZAL A
111
. A2.10)
Из поверхностных нагрузок в одномерном случае остается только
Рх, и она должна быть сосредоточена в одной из узловых точек.
Предполагая, что рх приложена в t-м узле, вычислим поверхност-
поверхностный интеграл
где нижний индекс i обозначает номер узла. Матрица функций
формы сводится к { \, }, потому что нагрузка сосредоточена в узле.
Если она приложена в /-м узле, поверхностный интеграл записы-
записывается как
A2.12)
Полная система уравнений, определяющих элемент, имеет вид
XAL
A2.13)
Все объемные интегралы должны быть вычислены заново, -если
площадь поперечного сечения меняется по длине элемента. В слу-
случае линейного изменения площади величину А _в формулах
A2.8) — A2.10) можно заменить средней площадью A=(Ai+A})/2.
Это выражение сразу же получается после замены А на А —
214
Тлава 12
= NiAlJrNjAj и вычисления интеграла. Подобное выражение мо-
может быть использовано для температуры, если она меняется ли-
линейно по длине. Нелинейные изменения учитываются с помощью
интерполяционных полиномов, обсуждаемых в гл. 13. На следую-
следующем примере показано, как видоизменить определяющие элемент
соотношения, чтобы они соответствовали линейному изменению
площади элемента.
Пример
108. Нужно вывести и решить систему линейных уравнений для
узловых перемещений в конусообразной детали конструкции, один
конец которой жестко закреплен, а другой подвержен действию на
грузки в 42 000 Н. Площадь поперечного сечения меняется линейно
от 12 см2 на левом конце до 6 см2 на правом. Кроме того, деталь
конструкции испытывает тепловое расширение вследствие повы-
повышения ее температуры на 20° равномерно по всей длине а=7Х
ХЮ 6 1/°С. Для аппроксимации рассматриваемой части конструк-
конструкции следует использовать три элемента длиной 30 см каждый.
Площадь поперечного сечения в узловых точках имеет значе-
значения Ах 12 см2, А2 10 см2, Л3 8 см2 и А4 = 6 см2. Первые три эле-
элемента свободны и от объемных, и от поверхностных нагрузок, по-
поэтому матрицы этих элементов и векторы нагрузки определяются
соответственно соотношениями A2.8) и A2.9).
А =6 см?
U2000H
а-7 *Ю~6см/?м-°С)
Е = 6,7 *Ю6 Н/см2
30 см *+«—30 см
-*+<—30 см =и
К задаче 108.
Механика деформируемого твердого тела. Теория упругости
215
Для первого элемента имеем
J -
[-1
г 2,46 -2.46-1
[-2,46 2.46J
Уравнения, определяющие этот элемент, имеют вид
| 2,46 -2,461|Ц| [-10318}
'46 2,4бЛц! 1 10318J
,1 2.
L-2,
Первый и второй элементы различаются только размером пло-
площади поперечного сечения. Для второго элемента средняя пло-
площадь равна 9 см2. Определяющие уравнения для второго элемен-
элемента записываются как
106
Г 2,(
[-2,1
,01 -2,011 (ЩГ-8442}
,01 2,01 Лц/ i 8442J'
Третьему элементу соответствуют уравнения, полученные с по-
помощью соотношений A2.8) и A2.9), а также A2.12), поскольку
этот элемент нагружен на конце.
1,56 -1.561 ГЦ, (-6566} Г01 (-6566}
—1,56 1.56J \Ц| \ 6566] \lj I 48566J
Соотношения включения:
для первого элемента: t = l, /=2,
для второго элемента: i=2, / = 3,
для третьего элемента: /=3, /=4.
Суммируя уравнения, определяющие элементы, получаем
10»
¦ 2,46 —2,46 0 0 ¦
—2,46 4,47 —2,01 0
0 —2,01 3,57 —1,56
0 0 —1,56 1,56
и,
и*
—
— 10318
1876
1876
48566
Первый узел расположен в неподвижно закрепленной точке,
поэтому ?Л=0, и приведенная система уравнений должна быть
изменена с тем, чтобы учесть это граничное условие. В результате
216
Глава 12
имеем
10е
,46
0
О
О
О
4,47
-2,01
О
О
2,01
3,57
-1,56
о -
0
1,56
1,56
и2
и3
и.
=
0
1876
1876
48566
Приведем решение этой системы:
\U}T=.[0, 0,0207, 0,0450, 0,0753], см.
Теоретическое решение этой задачи получается путем интегриро-
интегрирования деформации по длине. После выполнения этой процедуры
получаем следующие значения для узловых перемещений:
t/1=0,0 см, ?/3=0,046 см,
?/2=0,021 см, (У4=0,078 см.
Перемещения, определенные методом конечных элементов, хоро-
хорошо согласуются с торетическими значениями. Еще более точные
значения были бы получены при использовании элементов мень-
меньших размеров.
12.1.1. Напряжения в элементах
Определение напряжений является важной частью решения
большинства задач теории упругости, потому что эти величины
используются инженерами для расчета различных элементов кон-
конструкций. Результанты элемента, связанные с напряжениями, мо-
могут быть определены, как только вычислены деформации внутри
элемента. Для одномерной задачи деформация ехх дается форму-
формулой A2.6). Нормальное напряжение получается из закона Гука
в форме A2.3).
Так как производные постоянны по элементу, деформация вну-
внутри отдельного элемента не меняется, что влечет в свою очередь
в соответствии с законом Гука неизменность внутри элемента на-
напряжения. Узловые значения ахх могут быть рассчитаны с по-
помощью теории согласованных результантов элементов, представлен-
представленной в гл. 6. Это делается аналогично тому, как было описано ра-
ранее. Компоненты тензора напряжений являются результантами
элемента. Теория согласованных результантов элементов может
быть использована также для определения узловых значений ком-
компонент тензора деформаций.
Механика деформируемого твердого тела. Теория упругости 217
Пример
109. Для детали конструкции, рассмотренной в предыдущем
примере, нужно рассчитать узловые значения охх, используя тео-
теорию согласованных результантов элементов.
Запишем вычисленные ранее узловые перемещения
{U}T=[0, 0,0207, 0,0450, 0,0753].
Определим теперь деформацию элементов:
J П П0П71
первый элемент: е,,=-^7г-(—I
U«+U3 0,0207 f 0,0450
второй элемент: ехх=— go = 30^
U3+U. 0,0450 f 0,0753 ЛЛЛ1Л1
третий элемент. е,,= 3„„ 4 =—: w^—1 =0,00101.
Напряжения в элементах даются формулой
охх=Евхх аЕ(АГ)=6,7- 106ежж -
—7.10-в-6,7-10в-20=6,7.10вежж 938.
Подставляя значения вхх, получаем
первый элемент: а^ — 3685 Н/см2,
второй элемент: а?' = 4480 Н/см2,
третий элемент: а2—5820 Н/см2.
Уравнения теории согласованных результантов для элементов
имеют вид
г ГО 1 1 \„ \ г f il
L \2 111 <тг I Loxx 11
где Охх—вычисленный результант для конкретного элемента, а
О{ и Oj — узловые значения охх соответственно в узлах i и /. Запи-
Запишем эти уравнения для каждого элемента отдельно:
2j|aJ 2 ilj Il842,5j
первый элемент: —.-
второй элемент:
третий элемент:
218
Глава 12
Объединим эти уравнения, используя метод прямой жесткости:
2
1
0
0
1
2
1
0
0
1
2
1
0"
0
1
2_
<?з
1842,5
__ 4087
5159
2914,5
Эта система имеет следующее решение:
{ст}Г=[3558, 3935, 5222, 6132], Н/см2.
Теоретические значения напряжения ахх в узлах получаются
делением величины приложенной нагрузки на площадь поперечно-
поперечного сечения в соответствующей узловой точке. Три множества зна-
значений Gxx приведены в следующей таблице:
Номер
узла
1
2
3
4
Теоретическое
значение
ахх Р/А, н/смз
3500
4200
5250
7000
Метод конечных элементов
согласованное
напряжение, Н/см2
3558
3935
5222
6132
напряжение, постоянное
по элементу, Н/см2
Первый элемент 3685
Второй элемент 4489
Третий элемент 5829
Значения а*ж, вычисленные по теории согласованных результан-
результантов, определенно лучше значений напряжения, постоянных по эле-
элементу, но они все же еще недостаточно близки к теоретическим
значениям. Дальнейшее улучшение значений ахх может быть до-
достигнуто путем применения элементов меньших размеров.
12.2. Двумерные задачи теории упругости
Двумерные задачи теории упругости намного сложнее одно-
одномерных, поскольку в случаях плоского напряженного или плоско-
плоского деформированного состояния может иметь место анизотропия
материала. Каждому из этих двух состояний соответствует своя
матрица упругих характеристик [D].
В плоских задачах теории упругости применим треугольный
симплекс элемент с шестью компонентами узловых перемещений
Механика деформируемого твердого тела. Теория упругости
219
(фиг. 12.1). Перемещения и и и внутри элемента даются зависи-
зависимостью
u\\Nt 0 MNj 0 Nk О
J О JV, О Nj О #
и
*
A2.14)
Обозначения узловых перемещений показаны на фиг. 12.1. Функ-
Функции формы, входящие в соотношения A2.14), определены в C.10).
Будем считать, что рассматриваемая область располагается в
плоскости ху, и введем следующие компоненты напряжения и де-
деформации: {о)т— [Охх, oVy, хху] и {е}т=[ежж, гуу, уху]. Для пло-
U-
Фиг. 12.1. Компоненты перемещения для двумерного
симплекс-элемента.
ского напряженного состояния, встречающегося во многих тонких
телах, имеем Ozz=tzx=xZy=0- Компоненты тензора деформации
Ууг и yXz тоже равны нулю, но e2z отлична от нуля и может быть
получена из закона Гука, после того как определены {о} и {е}.
Говорят, что плоское деформированное состояние имеет место, ког-
когда компоненты деформаций в направлении оси z равны нулю
(еет Y*z=Yyz=0). Компоненты тензора напряжений izy и xzx так-
также равны нулю при плоской деформации, но <rzz отлична от нуля
и вычисляется с помощью закона Гука после того, как определены
{о} и {е}.
220
Глава 12
Соотношения связи между деформациями и перемещениями в
двумерном случае имеют вид
ди dv ди . dv
XX Qx > УУ Qy » 1*У Qy "t" QX
или с учетом A2.14)
V,
bt 0 bj 0 bk 0
О с, О cy- 0 cA
C; 6; c; bj ck bk
A2.15)
Соотношения A2.15) определяют матрицу градиентов [В],
так как {е} = [?]{?/}. Теперь есть почти все необходимое для вы-
вывода уравнений, определяющих элемент. Осталось только записать
матрицу упругих характеристик [D] и вектор начальной деформа-
деформации {ео}. В случае плоского напряженного состояния имеем
[D]=-
E
l-(i»
В случае плоской деформации
[А О
fi 1 О
О 0 A —
A2.16)
A2.17)
AH-2A)
— ц) О
О
О
A2.18)
{ео}=A+ц)аАГ
A2.19)
Формулы A2.16) — A2.19) соответствуют изотропному материалу
с модулем упругости Е и коэффициентом Пуассона \i.
Интегралы, на основе которых составляются уравнения, опреде-
определяющие элемент, легко вычисляются, поскольку матрицы [В] и
Механика деформируемого твердого тела. Теория упругости
22J
[D] содержат только константы. Вычислим объемный интеграл,
представляющий матрицу жесткости:
A2.20)
\№\=[В\Т \D\\B\tA.
Здесь t — толщина элемента, А — его площадь. Общее выражение
для матричного произведения [?]T[D][?] не приведено из-за его
громоздкой записи. Обычно поступают так: определяют числовые
значения коэффициентов [В] и [?>], а затем ЭВМ выполняет ука-
указанное перемножение матриц. Интеграл, связанный с тепловым
расширением, имеет вид
- f [Bf [D] (е0} dV = -[Bf [D] г0] /А. A2.21)
Матричное произведение в формуле A2.21) нетрудно составить.
Для случая плоских напряжений получаем
[B]T[D]^}tA=f{^TU
A2.22)
I
Объемный интеграл от объемных сил аналогичен интегралу
[N]T{Q}dV, который был получен при рассмотрении задач тео-
теории поля. Основное отличие заключается в том, что теперь матрица
[iV]r состоит из двух столбцов, так как имеются две объемные си-
силы. Подставляя [N]T и применяя L координаты, получаем
"I
0
Nj
0
Nk
0
0
Ni
o'
Nj
0
A2.23)
Интеграл от поверхностных нагрузок также аналогичен поверх-
поверхностному интегралу в задачах теории поля. Рассматривая отдель-
отдельно каждую из сторон элемента, можно записать три различных
значения этого интеграла. Предположив, что на стороне между
узлами i и / действуют равномерно распределенные нагрузки ин-
222
Глава 12
тенсивности рх параллельно оси х и интенсивности ри параллельно
оси у, получим
p*\dS
Ру
-J
s
~Nt
0
0
Nk
0
0 ~
Ni
0
N,
0
Py
0
L2
0
0
0
0 ~
Lx
0
L2
0
0
Py
A2.24)
где Si, — площадь поверхности стороны элемента между узлами
i и /, Sij = t%ij. Компоненты результирующей силы в направлении
координатных осей х и у равны соответственно pxSu и pySij. Как
видно из формул A2.24), на каждый из рассматриваемых узлов
приходится по половине каждой компоненты результирующей силы.
На основе соотношений A2.20)—A2.24) строятся определяю
щие элемент уравнения для треугольного элемента из изотропного
материала. Вычисление матриц элемента иллюстрируется на еле
дующем примере.
Пример
ПО. Нужно вывести определяющие элемент уравнения для изо
браженного ниже элемента в случае плоского напряженного со
стояния. Перпендикулярно к стороне jk действует равномерно
распределенная нагрузка интенсивности 20 Н/см2. Элемент испы
тывает также тепловое расширение вследствие повышения его тем
пературы на 15°.
Запишем матрицу градиентов
0
0
•гл
где А =C-2) /2=3 см2,
bj
0
о К
с} 0
Ь, ск
0
Механика деформируемого твердого тела. Теория упругости
223
гон/см1
Зсм
-2 см
t 2 см
Е-6*Ю6н/см2
а=7*Ю ъсм/(см-°С)
11=0.25
К задаче ПО.
Подстановка числовых значений коэффициентов дает
"—3 0 3 0 0 0"
0—1 0—102
—1 —з —1 3 2 0
[
Матрица упругих констант в данном случае имеет вид
i -
О
1 О
[D] = :
О 0 A-|х)/2
6,4.10е
6-Ю6
ID].
1—0.252
8 2 О
2 8 0
0 0 3
т 1 °
о о 4-
Запишем матрицу жесткости элемента
= [B\T[D\[B\tAt
224
1
6
-—з
Глава
12
0 — Г
0 —1 -
3 0 -
0 —1
0 0
0
_ 6,4
M6.4. 10*
288
-_24 —6
—2 —8
24 6
—2 —8
0 0
4 16
[№] = 13333
" 75
15
—69
—3
6
2
10е
8
—3"
—9
—3
9
6
0_
-3
-1
3
2
0
6
"—24
—2
24
—2
0
4
'—3
0
J
15 —69
35
3 -
3 75
19 —15
18
—12 —16
6
12
,4-10»
8
—6
—8
6
—8
0
16
0
i
—3
—3
-19
15
35
18
16
Г8]
2
o"
—3
g
—3
9
6
0_
3
0
-1
-6
— 18
—6
18
12
0
2 0'
8 [iO
Oj 3
0 0 0'
1 0 2
3 2 0
— 12
— 16
12
— 16
0
32
•
Вектор нагрузки элемента {/(е)} обусловлен как тепловым воз-
воздействием, так и поверхностной нагрузкой. Вклад в вектор нагруз-
нагрузки теплового воздействия определяется величиной
Учитывая формулу A2.22), имеем
7-10 6-6-106-2-15
\Uh\— 2A-0,25)
з
—1
3
-1
0
( 2
— ¦
—2520
—840
2520
—8401
0
1680
Механика деформируемого твердого тела. Теория упругости
225
Вклад в {/(е>} поверхностной нагрузки определяется следую-
следующим образом. Компоненты полной величины этой нагрузки рас-
распределяются поровну между узлами ; и k. Длина стороны jk равна
Xlk—YB— 1)* + C-0)»=УТ0=3,163.
Компоненты внешней поверхностной нагрузки по осям х и у
равны соответственно
рх=рcos8=20C/3,163) = 18,97 Н/см1,
ру=р sin 9 =20 A/3,163) = 6,32 Н/см2.
Функция формы Ni обращается в нуль на стороне jk, поэтому
dS =
0
N,
0
Nk
0
о -
0
0
Nj
0
Nk
Py\
0
1
0
1
0
o-
0
0
1
0
1
После подстановки рх, ру, а также числового значения площади
S/ft=3,163-2=6,326 см2 и умножения матриц получаем
0
0
60
20Г
60
20
Теперь можно записать полную гистему уравнений для эле-
элемента:
13333
75 15
35
—69
3
75
—3
— 19
15
35
—6
-18
—6
18
12
Симметрично
12-
16
12
16
0
32
и*
uv
—2520
—840
2580
—820
60
1700
Вектор-столбец {/(е)} равен сумме {/$ } + {/?'}•
Для того чтобы проиллюстрировать применение формул
A2.20) — A2.24), приведенного выше примера вполне достаточно.
Нетрудно заметить, что здесь необходимо выполнить большой
объем вычислений. Очевидно также, что выбирать в качестве ил-
15—763
226
Глава 12
люстрации пример, в котором рассматривается несколько элемен-
элементов, непрактично.
Существуют два способа проверки правильности составления
матрицы [&(е)]. Прежде всего [&(е>] должна быть симметричной
матрицей с положительными коэффициентами на главной диаго-
диагонали. Кроме того, сумма коэффициентов любой строки или столбца
матрицы должна обращаться в нуль.
12.3. Трехмерные задачи теории упругости
Трехмерный симплекс-элемент в задачах теории упругости рас-
рассматривается почти так же, как двумерный элемент. Три компо-
компоненты перемещения и, v и w аппроксимируются внутри элемента
соотношениями
fjV;
= 0
о
0
0
0
0
Ni
N j
0
0
0
0
0
0
Nj
Nk
0
0
0
Nk
0
0
0
. A2.25)
Двенадцать узловых значений изображены на фиг. 3.5 и воспро-
воспроизводятся для удобства здесь (фиг. 12.2). Функции формы опре-
определены в гл. 3. В общей форме они записываются как
A2.26)
где ар, 6р, ср и dp выражаются через координаты узлов.
Соотношения связи между перемещениями и деформациями в
данном случае имеют вид
* ди dv dw
дх
do
УхУ dx
УУ~
ди
ду'
dy'
dw
~дТ
A2.27)
я., ' Ухг я» ~i~ л. > У иг л-, Т д., •
дг
dv
дг
dw
Матрица градиентов [В] в формуле {е} [В] {U} легко вычис-
вычисляется дифференцированием A2.25) с последующим использова-
использованием зависимостей [12.27). Приведем здесь окончательный резуль-
результат:
Механика деформируемого твердого тела. Теория упругости
227
="б7
Ъ, О О Ь, О О bk О О bt О (Г
О О с} О О ck О О с, О
О Ci
О О
0
О О d,
с^ 6^ О
d, О bt dj О
O dj с, 0 dj
О О dk О О
dk 0
О
d, 0
О
ck 0 dz cz_
A2.28)
Фиг. 12.2. Компоненты перемещения для трехмерного симплекс-элемента.
Запишем компоненты вектора деформаций {е}:
{е}г=[8« гии ггг уху ухг Ууг]. A2.29)
Компоненты вектора напряжений {а} должны располагаться в той
же последовательности.
Матрица упругих характеристик [D] для трехмерного изотроп-
изотропного материала имеет вид
A+,0A-2,1)
0
0
0
1—2ц
Симметрично
О
О
О
о
1 —2ц
2A~Ц)
о
О
О
О
о
1—2ц
2A-ц)
A2.30)
15»
228
Глава 12
Вектор начальной деформации
A2.31)
Вычисление интегралов, определяющих матрицы элементов,
не составляет труда, поскольку [В] и [D] содержат только посто-
постоянные члены и, следовательно, могут быть вынесены за знак ин-
интеграла. Для матрицы жесткости элемента имеем
= Г [B]r [D\ [B\ dV=[B]r [D] [В] Г dV=[Bf [D\ [В] V. A2.32)
v i
Перемножение матриц выполняется ЭВМ. Вектор-столбец {/(е)}
представляется суммой трех интегралов, после вычисления кото-
которых имеем
гае
aVE(AT)
1—2ц
l°J
A2.33)
V-
ж
Из первого вектор-столбца видно, что объемные силы распределя-
распределяются поровну между четырьмя узлами элемента. Второй вектор-
столбец, соответствующий тепловому расширению материала, со-
сохранен в виде произведения матриц, которое будет вычислять
ЭВМ. Как видно из последнего вектор-столбца, поверхностные на-
нагрузки распределяются поровну между тремя узлами стороны
элемента, к которой приложены эти нагрузки. В формуле A2.33)
предполагается, что указанная сторона определяется узлами i, j и
k, a Sijk — ее площадь. Последние три члена в вектор-столбце рав-
равны нулю, потому что они связаны с интегралом j NidS, a Ni равно
нулю на этой стороне. Расположение нулевых членов в столбце
1)
1
I
0
0
0
+ 3
Px
Py
Pz
Px
Py
Pz
Px
Py
Pz
0
0
0
Механика деформируемого твердого тела. Теория упругости
229
зависит от того, к какой стороне элемента приложены поверхност-
поверхностные нагрузки. Если поверхностные нагрузки действуют более чем
на одной стороне элемента, в выражении для {/(е)} появятся до-
дополнительные вектор-столбцы.
12.4. Осесимметрические задачи теории
упругости
Важный класс задач теории упругости включает задачи, в ко-
которых рассматриваются тела вращения при осесимметричном на-
гружении. Хотя такие тела и являются трехмерными, но ни их гео-
геометрия, ни условия нагружения не зависят от азимутальной коор-
координаты. Поэтому при решении может быть использован тот же
подход, что и к двумерным задачам. Осесимметричный треуголь-
треугольный элемент, полученный вращением треугольного симплекс-эле-
симплекс-элемента, образует треугольный тор.
Уравнения для элемента составляются почти так же, как в
предыдущих трех разделах. Необходимо записать несколько новых
соотношений, потому что удобнее использовать компоненты тензо-
тензоров напряжения и деформаций в цилиндрической системе коорди-
координат. Здесь представлены основные величины [1]: компоненты век-
вектора напряжений
1°}т=1о„ °вв <ra \*h A2.34)
компоненты вектора деформаций
{е)г=[е„ бее г„ угг]. A2.35)
Соотношения связи между деформациями и перемещениями име-
имеют вид
ди _dw и_ ди . dw
A2.36)
Схематически компоненты тензора напряжений показаны на
фиг. 12.3. Заметим, что кольцевое нормальное напряжение авв и
деформация е^ также используются в расчетах.
Предполагая материал изотропным, запишем матрицу упругих
характеристик
230
Глава 12
и вектор начальной деформации, вызванной тепловым воздейст-
воздействием,
1
{ео}=аДГ
Поле перемещений внутри элемента аппроксимируется соотно-
соотношениями, идентичными A2.14), за исключением того, что функции
Фиг. 12.3. Компоненты напряжений в осесимметрических задачах.
формы теперь выражаются через г и z, а перемещения обознача-
обозначаются буквами и и w. Итак, для перемещений имеем
и) (W, 0
0 Nk 0
^0 Nh
2J-1
21
A2.37)
Дифференцируя A2.37) и используя соотношения связи между де-
деформациями и перемещениями A2.36), получаем
Механика деформируемого твердого тела. Теория упругости
231
e 1
егг
е.о
об
Угг .
_ 1
2А
' bt
0
I
г
0
Ci
о
67-
0
Ni
1
r
ci
0
Ci
о
0
r
ck
V
»
2k
A2.38)
Матрица коэффициентов в A2.38) соответствует [В], так как
[B]{U}
{} []
Вычисление интегралов, определяющих матрицы элементов, не-
несколько сложнее, чем это было в одномерных, двумерных и трех-
трехмерных задачах. Матрица [В] содержит теперь коэффициенты,
являющиеся функциями координат, и не может быть вынесена за
знак интеграла.
Матрицу жесткости можно определить, вычислив [В] по зна-
значениям г и z в центре элемента. Такой способ позволяет выносить
матрицу [В] из-под интеграла:
Т \dV.
Учитывая, что объем элемента дается формулой
где А — площадь поперечного сечения элемента, получаем для
[№>] окончательное выражение:
F A2.39)
[kM]=[B]T[D][B]2nFA.
Черта над [В] указывает на приближенное значение. Формула
A2.39) приближенная, но она дает приемлемые результаты, если
разбиение на элементы согласуется с ожидаемым распределением
напряжений, т. е. в области с большими значениями градиентов
напряжений используются малые элементы и т. д.
Вектор-столбец, связанный с тепловым расширением, опреде-
определяется точно так же, поскольку под интегралом стоит матрица [В].
Приближенное соотношение получается вычислением [В] по зна-
значениям г и z для данного элемента. Приведем окончательный ре-
результат:
1
A2.40)
Объемный интеграл от объемных сил может быть проинтегри-
проинтегрирован точно с использованием L-координат или приближенного
232
Глава 12
метода. Этот интеграл выражается через L-координаты следую-
следующим образом:
" rLx О
О rLx
rU О
О гЬ
г1г О
О rl
A2.41)
где dV заменено на 2nrdA. Радиальное расстояние г также может
быть выражено через L-координаты:
r—RtLi + RjLz + RbLa. A2.42)
Подстановка выражения A2.42) в A2.41) приводит к произведе-
произведениям типа L] или LtLh которые вычисляются с помощью формулы
C.43). Окончательно получаем
12
A2.43)
Соотношение A2.43) подобно A0.29). Оно показывает, что компо-
компоненты объемной силы Я или <2Тне распределяются в данном случае
поровну между тремя узлами элемента. Большая часть приходится
на узлы, наиболее удаленные от оси вращения.
Интеграл, включающий поверхностные нагрузки, вычисляется с
помощью L-координат. Этот интеграл имеет вид
''Us,
где рг и рг — компоненты поверхностной нагрузки в направлениях
гиг. Рассматривая сторону между узлами i и /, вдоль которой
Nk=0, будем иметь
О
rU
О "
О
О '
. ° г1ч.
A2.44)
где dS=
Механика деформируемого твердого тела. Теория упругости
233
Последний интеграл вычисляется с помощью формулы C.42) пос-
после подстановки выражения A2.42):
A2.45)
0
0
26*7 по-прежнему обозначает длину стороны между узлами i и j.
Соотношение A2.45) обладает тем же самым свойством, что и
A0.34), а именно оно применимо к поверхности, ориентированной
произвольным образом. Если рассматривать вертикальную поверх-
поверхность, то Ri=Rj=R,
\ Iр } —
2пЯ?2?у
2
Рг
Рг
Рг
Рг
0
0
A2.46)
Формула A2.46) показывает, что компоненты нагрузки поровну
распределяются между узлами. Этот результат идентичен тому,
который получен для двумерной задачи. С другой стороны, если
рассматривается горизонтальная поверхность, Rt^Rf, и тогда на
наиболее удаленный от оси вращения узел будет приходиться
большая часть нагрузки.
Две другие формы записи A2.45) получаются приравниванием
нулю L\ (для стороны jk) или Li (для стороны ik) в формуле
A2.44) и последующим интегрированием.
Напряжения в элементах вычисляются по закону Гука:
{o}=[D](e}-[D]{80}.
С учетом формулы {е} = [В]{(/} напряжения могут быть выраже-
выражены через узловые перемещения:
\i)=*\D\\B\\U) — [D]{e0}. A2.47)
Записывая подробно равенство A2.47) или просто рассматривая
A2.38), можно убедиться, что нормальные напряжения зависят от
величины евв , которая является функцией гиг, так как от г и г
зависят коэффициенты матрицы [В]. Таким образом, можно вы-
234 Глава 12
числить напряжения во многих различных точках внутри элемента.
Компонента напряжения сдвига, однако, не зависит от еее и ока-
оказывается постоянной внутри каждого элемента.
12.5. Решение с помощью ЭВМ
Представленная на фиг. 7.3 блок-схема вычислений применима
с незначительными изменениями к решению двумерных задач тео-
теории упругости для изотропного материала. Изменения касаются
ввода средней температуры каждого элемента, когда это необхо-
необходимо для анализа. Эти исходные данные вводятся перед началом
цикла, в котором составляются глобальные матрицы. Осуществле-
Осуществление указанной модификации в программе должно сопровождаться
некоторым целочисленным переменным параметром, который ука-
указывает на необходимость ввода температурных данных или исклю-
исключает его.
Средняя по элементу температура вычисляется путем усредне-
усреднения узловых значений температуры для каждого элемента, если
только температурное распределение известно. Если распределение
температуры в теле определялось с помощью метода конечных
элементов, средняя по элементу температура может быть пробита
на перфокартах вместе с информацией, предназначенной для упру-
упругой задачи. Такой способ применим, если только разбиение обла-
области на элементы при решении задачи переноса тепла совпадает с
разбиением, используемым для решения задачи теории упругости.
Определение напряжений в элементе обычно сопровождается
вычислением главных напряжений, так как эти величины представ-
представляют интерес при расчете конструкции. При решении двумерных
задач можно рассматривать плосконапряженное или плоскодефор-
мированное состояние. Различие при этом заключается только в
написании матрицы упругих характеристик [D\. Оба случая мо-
могут быть объединены в одной программе использованием услов-
условного оператора IF, который позволяет выбирать правильную мат-
матрицу.
Машинная реализация осесимметрической задачи теории упру-
упругости почти идентична реализации на ЭВМ двумерной задачи. По-
Поскольку ни плоская деформация, ни плоское напряжение не имеют
отношения к осесимметрическому случаю, матрицу упругих кон-
констант здесь выбирать не приходится. Координаты элемента в осе-
осесимметрической задаче должны быть отнесены к глобальной сис-
системе координат. Для одномерной, двумерной или трехмерной за-
задач координаты элемента могут быть отнесены либо к местной,
либо к глобальной системе координат.
В гл. 18 представлена учебная программа, позволяющая иссле-
исследовать плосконапряженное состояние упругого тела. Применение
этой программы иллюстрирует следующий пример.
Механика деформируемого твердого тела. Теория упругости
235
12.5.1. Постановка задачи
Требуется определить коэффициент концентрации напряжений,
вызванной круговой выточкой, при осевом нагружении детали кон-
конструкции, показанной на фиг. 12.4. Ширина детали меняется от 8
до 4 см, толщина всюду одинакова и равна 0,50 см. Нормальное
t
1
8 см
|
У
Радиус 2 см
22000 Н/а*
? 2*Ю7Н/смг
/J 0,25
t 0,5 см
Фиг. 12.4. Осевое нагружение детали конструкции с выточкой.
напряжение в точках сечения, расположенного справа от выточек
на достаточно большом расстоянии, достигает величины
44 000 Н/см2. Деталь сделана из стали с модулем упругости
2-Ю7 Н/см2 и коэффициентом Пуассона 0,25.
12.5.2. Решение на ЭВМ
Исходные данные об элементах могут быть получены с по-
помощью программы GRID. Предварительное разбиение на зоны и
размещение узлов для программы GRID показаны на фиг. 12.5.
В силу симметрии исходной задачи далее рассматривается только
половина детали. Наличие однородного напряженного состояния
на большей части детали позволяет отказаться от построения
дискретной модели для всей области и ограничиться участком,
левая граница которого удалена на 8 см влево от выточки, а пра-
правая расположена на 5 см правее выточки. Теоретический анализ
концентрации напряжений показывает, что выбранные размеры
участка, вероятно, достаточно велики, чтобы на его границах уста-
установилось равномерное распределение напряжений.
В первой зоне локальная координата | выбрана параллельной
направлению меньшего размера детали с тем чтобы последова-
последовательная нумерация уз лот» элементов производилась в направлении
меньшего размера. Выбор такого направления для | приводит к
наименьшей ширине полосы матрицы системы уравнений. Оконча-
Окончательное разбиение области на элементы показано на фиг. 12.6.
В задачах теории упругости глобальная матрица жесткости
[К] получается сингулярной, если только в теле не заданы какие-
либо перемещения. Задание перемещений должно исключать дви-
236
Глава 12
жение тела как абсолютно твердого, т, е. смещение и вращение его
как целого. В рассматриваемом случае это может быть достигнуто
закреплением первого узла и запрещением вертикального движе-
движения узла 91. В данном примере необходимо, кроме того, исключить
1
@. 2)
A57)
Фиг. 12.5. Предварительное разбиение области на зоны, используемое програм-
программой GRID для получения исходных данных элементов.
Увел
13
14
15
16
18
Координаты
(9,235, 3,152)
(8.586, 2,586)
G,879. 1,879)
(8,152, 3.235)
G,5. 4,0)
возможность горизонтального перемещения точек левой границы
области. Это означает, что U3—Us~U7~U<> = 0. Вертикальные пе-
перемещения точек этой границы определяются из решения задачи.
Ось симметрии (нижняя граница области) должна совпадать с
осью х, поэтому точки этой границы не могут перемещаться в вер-
вертикальном направлении (параллельно оси у). Вообще в рассмат-
70 75 80 85 90 95
11
/6 27 26 5! 56 61 66 7/ % 81 86 91
Фиг. 12.6. Окончательное разбиение на элементы и номера граничных узло*.
Механика деформируемого твердого тела. Теория упругости 2J
риваемом случае фиксированы 20 узловых перемещений, каждс
из них равно нулю.
На правой границе области приложена нагрузка интенсивност
р*~44 000 Н/см2. Эта нагрузка равномерно распределяется по ч<
тырем элементам. Площади сторон, подверженных действию внеы
ней нагрузки, в каждом из этих элементов одинаковы и равн
0,25 см2. Узловые значения нагрузки для каждого элемента оос
ветствуют по величине @,25 см2Х44 000 Н/см2)/2, или 5500 I
В следующей таблице приведены номера узловых перемещений
значения узловых сил, предназначенные для ввода в качестве hi
ходных данных.
Номер
узлового
перемещения
181
183
185
187
189
Узловая сила, Н
5500
11000
11000
11000
5500
В результате вычислений для горизонтальных перемещений в у
ловых точках правой границы получаем одинаковые значени
равные 0,0247 см. Это дает основание считать, что область одн
родной деформации, а следовательно, и напряжения достигнута
что была выбрана приемлемая длина дискретной модели.
22053
2/ 757
ЯЖ9<
22199
22434
U3966
. 43977
Фиг. 12.7. Узловые значения av в зоне выточки и на концах детали.
Компоненты напряжения, соответствующие решению задач
постоянны для каждого отдельного элемента. Узловые значен
этих величин могут быть получены с помощью теории согласова
ных результантов элемента, рассмотренной в гл. 6. Узловые знаг
ния наибольшего главного напряжения в зоне выточки предста
лены на фиг. 12.7. Максимальное значение имеет место в 6о-м уз
и равно 64 576 Н/см2. Коэффициент концентрации напряжет
определяемый как отношение максимального напряжения к \
238
Глава 12
грузке D4 000 Н/см5), составляет 1,47, что хорошо согласуется с
величиной 1,42, приведенной в работе [1] (табл. 13.1). Этот при-
пример опять будет рассмотрен в гл. 16.
Задачи
ПО. Ниже приведены координаты узлов и узловые перемеще-
перемещения для некоторых из элементов, изображенных на фиг. 12.6. Оп-
Определите напряжения в элементах, если ?~20-106 Н/см2,
{л~0,25. Координаты и перемещения даны в сантиметрах. Толщина
элементов равна 0,5 см.
111.
112.
ИЗ.
П4.
115.
xt
Yf
и*
u«
Xt
Yi-
О»
U2
xt
Yi
Ut
u%
xt
Yt
o%
o%
Xt
Yi-
От
o«
—2 4
= 0,0
Е„х=0,00272
t«0,0
=3,6
= 3,0
, t= 0,00388
г= —0,00109
= 6,6
= 3,26
M=0,00676
,==-0,00132
=9,0
= 0,0
^x=0,01215
,=0,0
=«11,0
«1,8
,_x=« 0,01592
,= -0,00079
Xy-1,2
yi=i,o
?7^=0,00134
i/3/= —0,00033
X,-=2,4
У^=4,0
i/2i^=0,00262
{/„ = — 0,00127
X,= 6f87
У^4,0
t/y_1== 0,00637
?/„»- 0,00139
^==8,53
yi=0,95
1/2^=0,01113
{Ду= —0,00025
Х^Ю.0
yi=1,875
(/^«0,01354
{/ai=—0,00061
ЛА— Х'^
У,= 0,0
?/M-i=0,00135
?/й=0,0
Xfe-2,4
У,-3,0
Otk-t— 0,00261
С/2А,= — 0,00099
Х,=6,0
У,= 4,0
У№_х=0,00594
{/2ft = —0,00148
ХА«8,0
У*=0,0
t/2ft.x= 0,01044
(/2ft==0,0
Xft==10,0
У*=1,5
t/tt-i«0.1366
{/2А= —0,00042
116. Вычислите поверхностный интеграл ] [N]T{p*}dS в слу-
случае поверхностного нагружения, схематически показанного ниже.
Механика деформируемого твердого тела. Теория упругости 239
задаче 116.
К задаче 117.
//-0,30
К задаче 118.
К задаче 119.
? = 20*Ш6Н/см2
!- г см
120000И
г
L
бел»
I20000H
К задаче 120
Глад,
'а 12
К задаче 123
Механика деформируемого твердого тела. Теория упругости 241
117. Вычислите поверхностный интеграл в задаче 116 для слу-
случая нагрузки, показанной на рисунке.
118. Составьте матрицу жесткости для осесимметричного эле-
элемента, изображенного на рисунке.
119. Вычислите поверхностный интеграл в задаче 116 для пере-
переменной поверхностной нагрузки, приложенной к горизонтальной
поверхности осесимметричного элемента.
120—123. Определите распределение напряжений в одном из
представленных выше тел. Получите исходную информацию об
элементах с помощью программы разбиения GRID.
124. Вычислите узловые значения компонент напряжений в
одной из задач 120—123. Напряжения в элементах должны быть
отперфорированы программой STRESS с тем, чтобы затем ввести
их в программу CONSTR.
125. Измените программу STRESS так, чтобы ее можно было
использовать для решения осесимметрических задач.
ЛИТЕРАТУРА
1. Fung Y. С, Foundations of Solid Mechanics, Prentice-Hall, Englewood Cliffs,
N. J., 1965.
2. Singer G. L., Strength of Materials, 2 nd ed., Harper and Row, N. Y., 1962.
ДОПОЛНИТЕЛЬНАЯ ЛИТЕРАТУРА
Cooke R. D., Concepts and Applications of Finite Element Analysis, Wiley, N. Y.,
1974.
Martin H. C, Carey G. F., Introduction to Finite Element Analysis, McGraw-
Hill, N. Y., 1973.
Zienkiewicz О. С, The Finite Element Method in Engineering Science, McGraw-
Hill, London, 1971; есть русский перевод: Зенкевич О., Метод конечных элемен-
элементов в технике, изд-во «Мир», М., 1975.
16—763
Глава 13
ЭЛЕМЕНТЫ ВЫСОКОГО ПОРЯДКА.
ОДНОМЕРНЫЙ ЭЛЕМЕНТ
В шести предыдущих главах при обсуждении различных обла-
областей применения метода конечных элементов использовались симп-
симплекс-элементы. Другой подход к прикладным задачам состоит в
применении элементов высокого порядка, т. е. комплекс- или муль-
типлекс-элементов. Напомним, что число узлов в таких элементах
превышает размерность решаемой задачи более чем на единицу.
При таком подходе для достижения заданной степени точности
решения требуется меньшее количество элементов, что приводит к
сокращению числа перфокарт с исходными данными об элементах^
а это в свою очередь уменьшает вероятность ошибки при обработ-
обработке данных. Применение элементов высокого порядка не всегда,
однако, ведет к сокращению полного времени счета на ЭВМ. Для
составления матриц элемента необходимо использовать методы
численного интегрирования, которые требуют выполнения большо-
большого числа арифметических операций и, следовательно, увеличивают
полное время счета, затрачиваемое на обработку одного элемента.
Однако эти дополнительные затраты машинного времени компен-
компенсируются, вероятно, экономией времени в процессе обработки ис-
исходных данных.
В тех прикладных областях, где градиенты искомых величин н&
могут быть надлежащим образом аппроксимированы системой ку-
кусочно-постоянных функций, использование элементов высоких по-
порядков позволяет получать более точные результаты.
Сокращение времени обработки исходных данных в сочетании
с большей точностью результатов расчета служит достаточным
основанием для изучения возможностей применения указанных
элементов.
В этой главе основное внимание будет сосредоточено на об-
обсуждении одномерного элемента. В первом разделе рассматрива-
рассматриваются функции формы, второй раздел иллюстрирует применение
квадратичного элемента. Использование естественной системы ко-
координат и методы численного интегрирования обсуждаются в
третьем и четвертом разделах, причем эти вопросы включены в
данную главу потому, что при рассмотрении одномерного элемента
упрощается иллюстрация их реализации. Действительная необхо-
необходимость в методах численного интегрирования будет пояснена в
Элементы высокого порядка. Одномерный элемент
243
следующих двух главах, где рассматриваются треугольный и че-
четырехугольный элементы. Данная глава заканчивается введением
в теорию изопараметрических элементов.
13.1. Квадратичные и кубичные элементы
Аппроксимирующий полином в общей форме для одномерного
элемента имеет вид
. . . +arxr~\
A3.1)
где г число узлов элемента. Рассмотрим элемент с тремя узла-
узлами, причем один из его узлов расположен посередине между край-
J°
111
Фиг. 13.1. Одномерный квадратичный элемент.
ними точками (фиг. 13.1). Ему соответствует интерполяционный
полином
A3.2)
A3.3)
где cii, п2 и аз определяются из условий
ф=ф{ при х=0,
(р=ф/ при х=-^,
ф=Фй при X=L.
Так же как в гл. 3, эти условия приводят к алгебраической систе-
системе уравнений, решив которую, находим
, — ЗФ/ —
A3.4)
«3
16*
244 Глава 13
Подставив выражение A3.4) в A3.2) и выполнив некоторые пре-
преобразования, получим
(f=NlOl + Npj + NkOkt A3.5)
где
•-т-('-т)-
Лргко видеть, что эти функции формы удовлетворяют критерию,
установленному в гл. 3:
2 #р=1, p=t, /, k г. A3.6)
Только что описанная процедура определения коэффициентов а
становится утомительной при большом числе узлов. Другой способ
определения функций формы состоит в использовании формул
A3.6) и еще двух дополнительных свойств функции формы:
N = A в узле с номером р, (J3 ?)
р [0 во всех других узлах, отличных от р,
и
N&=a1 + a2x+a3x2+ . . . + arxr-1. A3.8)
Первое свойство уже обсуждалось в предыдущих главах. Второе
свойство, хотя и не рассматривалось ранее, очевидным образом
следует из того факта, что все ар в A3.1) могут быть записаны в
виде линейных комбинаций Фр. Например, формулы
A3.9)
можно использовать для элемента с тремя узлами. Сравнивая
формулы A3.9) и A3.4), можно заметить, что
а, —1, aj=ak=:0,
и 4 . 3 . 1
* b Ь
_ 4 _ 2
CJ~ J%-> Ck—[T-
Элементы высокого порядка. Одномерный элемент
Таким образом, если в интерполяционном полиноме A3.2) заме-
заменить а линейными комбинациями узловых значений Фр, то после
надлежащей перегруппировки получим, что функции формы долж-
должны быть такого же типа, как аппроксимирующая функция. Напри-
jfe
Фиг. 13.2. Узловые функции для квадратичного элемента.
мер, функции формы A3.5) могут быть записаны в форме
Мр=ар + йрХ+срл;2, совпадающей по виду с многочленом A3.2).
Выражение A3.8) может быть представлено в виде произведе-
произведения сомножителей типа
ih + ik*, A3.10>
или
3Л1>
Найти произвольные константы в A3.11) просто, если заметить,,
что N =0 во всех узлах, отличных от узла р. Это требование мо-
может быть удовлетворено за счет подбора сомножителей в A3.11)
таким образом, чтобы каждый из них обращался в нуль в одном
из узлов. Совокупность функций fi, каждая из которых обращается
в нуль в определенном узле, показана для квадратичного элемен-
элемента на фиг. 13.2. Положим
A3.12)
и определим функцию F ь следующим образом:
fb, если 6 Ф р для #р,
F
в"
1, если 6={J для Afp
фиксировано, 6=t, /, k, . . ,,r).
Представим Afp в виде
246
Глава 18
где
R==FrFrFk . . . Fn
г — число узлов элемента, Г произвольная константа, опреде-
определяемая из условия, что Л^в = 1 в узле р. Функция формы N дается
формулой
[х=ха
Описанная здесь процедура может быть обобщена на двумер-
двумерные и трехмерные элементы. Соотношения, аналогичные A3.14),
для четырехугольного и треугольного элементов будут даны ниже.
¦oj
а) Линейный
Lll
иг
I О
6) Квадратичный
k
с U* >
в) Кубичный
'Фиг. 13.3. Линейный, квадратичный н кубичный одномерные элементы.
>*!N
Элементы высокого порядка. Одномерный элемент 247
На фиг. 13.3 приведены выражения функций формы для линей-
линейного, квадратичного и кубичного элементов в одномерном случае.
Пример
126. С помощью формул A3.14) и A3.12) требуется опреде-
определить функции формы квадратичного одномерного элемента дл»
узлов i и \.
Начнем с узла L Имеем p=i и Xp=Xt=0. Функциям F(,y
6=i, /, k соответствуют выражения
¦Fj = l, так как 6=i=p,
Fk=fk=(l-xlL).
Вычисляя значения этих функций в точке х=Х$ = 0, получаем
F) | х=л = 1 и Fk | jc=0 = I.
Подстановка в формулу A3.14) дает
= A-
что совпадает с A3.5).
Повторяя выкладки для центрального узла /, имеем P=/V
x=Xi=L/2,
д. _ (x/L) 1 [\-(х/Щ _ Ах (. х\
"}— A/2) ~1 (Щ — ТГ\1 Г)'
13.2. Применение квадратичного элемента
Элементы высокого порядка применяются так же, как симп-
симплекс-элементы, поскольку выбор интерполяционного полинома не
связан с исходными дифференциальными уравнениями. Однако
есть смысл рассмотреть применение квадратичного элемента, ко-
который обсуждался в предыдущем разделе, с тем, чтобы закрепить-
наши знания, связанные с реализацией метода конечных элемен-
элементов.
В качестве примера рассмотрим одномерную задачу переноса
тепла из гл. 8. Задача состоит в том, чтобы определить распреде-
распределение температуры по длине стержня, подверженного конвектив-
конвективному теплообмену.
248
Глава 13
Уравнения для элемента, выведенные в гл. 5, имеют вид
A3.15)
где
[#•>]= С [B]T[D][B]dV + f h[N]T[N]dS
{/«>}=-
Si Sg
hTm[N]TdS + {Q[N]TdV.
Так как мы пользуемся квадратичным элементом вместо линейно-
линейного элемента, который применялся в гл. 8, все интегралы в A3.15)
должны быть вычислены заново.
Во внутренних точках элемента температура определяется с
помощью матрицы функций формы [N]:
Матрица градиентов имеет вид
dT
~ST
JW*1
A3.16)
A3.17)
¦С помощью функций формы в A3.5) получаем
Ах 3 \ /4 8х
Учитывая, что в данном случае [D] — [Кхх] и dV=Adx, интеграл
[Bf[D] [B]dV
запишем в виде
'/Ах 3 \2 /4х 3W4 8х\ /4х 3 \ / Ах 1 V
(ТР—Г) (ТГ—ГДТ-ItJ (IT—Tj(lP~TJ
/ 4х _ 8х \ / 4х 1\
(it тгДтт—rj
Симметрично
Ах 1 \2
)
dx.
Элементы высокого порядка. Одномерный элемент
249-
Отсюда имеем
14 —16 2
—16 32 —16
2 —16 14
где А — площадь поперечного сечения элемента. Конвективная
часть [&<е>] дается формулой
l Г Nfl^NtNj NtNt
^h[N]T[N]dS=Ph Г NjNt N}Nj NjN,
', о [ NkNt NtJVj NkN
PhL
30
4 2 —Г
2 16 2
-12 4
A3.19)
где Р — периметр элемента. Конвективная составляющая вектор-
столбца {/<е>} имеет вид
(«-?+¦?)
PhTooL
6
f 11
4
1
A3.20)
Если конвективный теплообмен наблюдается на конце элемен-
элемента, например в узле i, то Nt I, N,~Nk = 0 и поверхностный интег-
интеграл принимает вид
П
AT» f[tf]rdS=ATooi4, 0
s2 I 0
A3.21)
где At площадь поверхности в узле L Наличие теплообмена в
узле i сказывается и на матрице теплопроводности [k{e)] благода-
благодаря поверхностному интегралу
I
s2
iV,^
ад
Интегрируя по поверхности, содержащей узел i, получаем
1 О О
\h[N)T[N]dS=Aih
5,
о о
о о
°1
° Г
A3.22)
A3.23)
250
Глава IS
Интеграл от теплового потока q идентичен уже вычисленному
интегралу A3.21), поэтому можно сразу записать
Si
Г М
о
о
A3.24)
где q — заданный поток в узле L Объемный интеграл, включающий
источник тепла Q, вычисляется также легко:
(N,
Nb
AQL
П
4
1
A3.25)
Применение полученных соотношений иллюстрируется ниже на
примере того же стержня кругового сечения, который был рассмот-
рассмотрен в гл. 8 (стр. 139).
Пример
127. Нужно определить распределение температуры в стержне
кругового сечения, изображенном ниже.
T^-UO'C h ЮВт/(см2-К)
ВтКсм-К)
7,5 см
оЦ.
Тг150°С
К задаче 127.
Запишем матрицы теплопроводности
14 —16 2"
—16 32 -16
2 —16 14
Ч"
[¦
0
0
0
A) A
h
30
0
0
0
) A)
L
0]
0 •
1
' 4
2
—1
2
16
2
—1
2
4
Элементы высокого порядка. Одномерный элемент
251
Матрица [&B)] содержит дополнительное слагаемое в связи с тем,
что на свободном конце второго элемента тоже происходит тепло-
теплообмен. Для вектор-столбцов {/<¦>} и {fB)} имеем
{/tt)}=
—46,2 3,9 T
142,4 —46,2 ,
—46,2 54,8 J
После подстановки числовых значений исходных данных получаем
" 54,8
—46,2
3,9
500
{P») = it 2000 ,
500
' 54,8 —46,2 3,9
—46,2 142,4 —46,2
—3,9 —46,2 64,8
500
2000 .
900
Соотношения, включающие эти элементы в единую дискретную мо-
модель, имеют вид
первый элемент: /==1, / = 2, &=3,
второй элемент: »=3, /=4, к=Ъ.
Объединение уравнений, определяющих отдельные элементы, про-
произведем методом прямой жесткости. В результате придем к систе-
системе уравнений
- 54,8
—46,2
3,9
0
0
—46,2
142,4
—46,2
0
0
3,9
—46,2
109,6
—46,2
3,9
0
0
—46,2
142,4
—46,2
0
0
3,9
—46,2
64,8
500
2000
1000
2000
900
252
Глава 13
Так как Т\ 150 °С задана, эта система уравнений должна быть
предварительно модифицирована. Модифицированная система
уравнений имеет вид
4,8 0 0 0 0 ¦
142,4 —46,2 0 О
109,6 —46,2 3,9
142,4 —46,2
Симметрично 64,8
Решая эту систему, получаем следующие значения температуры в
узловых точках:
{Г}г^[150, 80,8 55,8, 46,3 43,5], "С.
т3
=
8220
8930
415
2000
900
Эти значения хорошо согласуются с аналитическим решением ис-
исходной задачи:
' аналитическое
г=[150, 80,9, 55,4, 46,2, 43,3], °С.
Сделаем несколько замечаний, касающихся матриц квадратич-
квадратичного элемента. Во-первых, поверхностный интеграл, который ис-
используется при составлении матрицы теплопроводности
h[N}T[N]dS,
содержит несколько отрицательных коэффициентов, чего не было
в случае линейного элемента с двумя узлами. Отрицательные чле-
члены встречаются при рассмотрении всех элементов высокого поряд-
порядка. Во-вторых, результат вычисления поверхностного интеграла
PLhToo I
перестает быть интуитивно очевидным. Как мы видели, в анало-
аналогичной ситуации в случае линейного элемента конвективные поте-
потери тепла делились поровну между его узлами. Этот результат вы-
выглядит интуитивно верным, так как элемент имел два узла. Каза-
Казалось бы, что в случае элемента с тремя узлами следует ожидать
распределения по узлам в отношении 'Д, '/г, 'А, но вместо этого
получаем распределение в отношении '/б. 2/з. '/е-
Не пытайтесь предугадать результаты интегрирования, когда
имеете дело с элементами высокого порядка. Они не будут совпа-
совпадать с вашей физической интуицией. Все сказанное относится так-
также к двумерным и трехмерным элементам.
Элементы высокого порядка. Одномерный элемент 253
13.3. Естественная система координат.
Преобразования координат. Матрица Якоби
Естественная система координат обладает определенным преи-
преимуществом при рассмотрении двумерных и трехмерных элементов,
так как она позволяет деформировать границы этих элементов.
Безразмерная система координат может быть также введена и для
одномерных элементов. Однако упомянутое преимущество здесь
Jo
Фиг. 13.4. Естественная система координат для одномерного квадратичного
элемента.
носит главным образом академический характер. Оно упрощает
иллюстрацию самого понятия локальных координат и некоторых
вычислительных операций. В этом разделе будет рассмотрена есте-
естественная система координат для одномерного элемента как
необходимое введение к обсуждению двумерных и трехмерных
элементов, которому посвящены следующие главы.
Естественной системой координат для одномерного элемента
служит относительная длина, определяемая как
— 1<Б<1, A3.26)
где g — координата. Начало отсчета g выбрано в средней точке
элемента, как показано на фиг. 13.4. Функции формы N могут
быть определены с помощью формулы A3.14), если только f вы-
выражены теперь через g вместо х. Функции формы для линейного,
кубичного и квадратичного элементов приведены на фиг. 13.5. Чи-
Читатель сам может убедиться в их правильности.
В этом разделе будет проиллюстрировано вычисление матрицы
элемента. Если вернуться к гл. 5, то мы увидим, что каждое из
приведенных там соотношений, определяющих матрицы элементов,
содержит производные от функций формы по переменным х, у и
z. В случае одномерной задачи теории поля, например, выражение
для коэффициентов матрицы теплопроводности содержит произ-
производную dN$ldx:
[k$] = Г Кхх Ш. ^LdV, p=t, у, k, y=i, и ft. A3.27)
J dx dx
v
Для дальнейших выкладок нам потребуются формулы преоб-
преобразования координат вида
*=Л5) A3.28а)
254
Глава 13
или
A3.286)
Функции /(?) и g(x) предполагаются взаимнооднозначными.
Соотношение преобразования координат A3.28) может быть
записано с помощью функций формы, приведенных на фиг. 13.5.
Проиллюстрируем это на примере квадратичного элемента. Интер-
Lo-
а) Линейный
6) Квадратичный
-с/
¦ok
-ol
б) Кубичный
Фиг. 13.5. Естественные функции формы для одномерных элементов.
a)N{ ^-A-5), INj g-d + E);
б) Nt =._-i(i_g),
поляционное соотношение для скалярной величины, скажем для
температуры, имеет вид
b, A3.29)
где
Элементы высокого порядка. Одномерный элемент 255
Формулу преобразования координат можно записать, используя
такую же комбинацию функций формы, но только в качестве уз-
узловых параметров нужно взять координаты узлов:
A3.30)
где N$, — те же функции формы, что и в формуле A3,29).
Вычисление dN^/dx теперь не представляет труда, если вспом-
вспомнить, что
^L ^ JL. A3.31)
dx
Обращая последнее равенство, имеем
1 dN* A3.32)
dx dx/dl d%
Величина dxld\ называется матрицей Якоби преобразования коор-
координат [2]; далее она будет обозначаться через [/]. Для одномер-
одномерного случая [/] есть матрица размером 1X1, которая вычисляется
по формуле
dx dNi v dNj Y , , <Mr v
Применение формул A3 32) и A3.33) лучше всего проиллюстриро-
проиллюстрировать на конкретном примере.
Пример
128. Требуется выразить производные dNt/dx, dNjjdx, dNJdx
в местной системе координат в случае одномерного квадратичного
элемента, который имеет следующие узловые координаты:
Xt=-jp X^l и Xk= -^-.
В соответствии с формулой A3.32)
dx —[J] ^' P~1' u k'
Прежде всего составим матрицы [/] и [/]-'. Используя формулу
A3.33), получаем
./I- dNi у л dNl у 4 dNk у
256
Глава 13
Запишем производные функций формы по ?:
Щ _ d г 6 A — Б) 1 _ 1
dl — dl [ 2 J~ ~
]= 2Б,
1_ 1
J-2
Подставив эти выражения вместе с числовыми значениями коор-
координат в выражение для [/], получим
4-.
Так как dNp/dl уже определено, можно получить dN$/dx. Из фор-
формулы A3.32) находим
dx
Л = \
dNk
dx
(-21)
A3.34)
поскольку [/] ' = 2.
Заметим, что записанные производные являются функциями
естественной координаты ?. Это означает, что, прежде чем вычис-
вычислять [&(е)], нужно сделать замену переменной интегрирования в
интеграле A3.27). Для малого элемента объема имеем
dV=dxdydz=\ det
A3.35)
В рассматриваемом случае имеется только одна координата |, по-
поэтому
1
= j [В]»" [D] [B1 ^=Л j [Bf [D] [В] | det [J] | Д. A3.36)
где А — площадь поперечного сечения и |det[/] | =7г-
Элементы высокого порядка. Одномерный элемент
257
Подставив в A3.36) полученные выше выражения, будем иметь
=АКХХ Г
-Г
— 1+2Г
—41
1+21
[(-1+21) (-41)
или
!*<•>] =
(-1+2IJ (—4&)(—1+26) (l+24)(-l+2|)
16i2
(-41) A+21)
(H 21) (-1+21) (_4|)A+21)
После интегрирования находим
dl.
AKX
14 —16 2
— 16 32 —16
2 —16
14
Этот результат идентичен результату, полученному при использо-
использовании формулы A3.15), если величину L считать равной единице,
как в данном случае. Факт совпадения результатов подтверждает
правильность рассмотренной методики. Однако ощутимое преиму*
щество использования естественной системы координат заключает-
заключается в возможности изменения формы элемента, что иллюстрируется
в следующей главе.
13.4. Применение численного интегрирования
при определении матриц элемента
В предыдущем разделе удалось продемонстрировать стандарт-
стандартную методику определения матриц элементов в общих чертах на
примере с использованием естественной системы координат потому,
что все интегралы были вычислены почти без труда. Но это скорее
исключение, чем правило. Обычно матрица Якоби [/] является
функцией I и не может быть легко вычислена, так как ее коэф-
коэффициенты— полиномы. В таких случаях [7] никогда не опреде-
определяется явным образом и для составления матриц элементов ис-
используются методы численного интегрирования.
При рассмотрении одномерного элемента в предыдущем разде-
разделе в численном интегрировании не было необходимости. Однако
этот элемент имеет одну очень важную характеристику, которая
делает его удобным для иллюстрации методов численного интегри-
интегрирования: ограниченное число точек интегрирования. Объем вычис-
вычислений при этом сокращается настолько, что их можно полностью
провести для некоторого иллюстративного примера.
17—763
258
Глава 13
Численно взять интегралы можно одним из двух основных спо-
способов. Согласно первому способу, значения подынтегральной функ-
функции вычисляются в точках, расположенных на равном расстоянии
друг от друга. Если имеется п таких точек, то можно построить
интерполяционный многочлен порядка (п—1), совпадающий в ука
занных точках с подынтегральной функцией (фиг. 13.6), после чего
Фиг. 13.6. Точки интегрирования квадратуры Ньютона—
Котеса при п=6.
интегрирование выполняется точно. В результате применения та-
такой процедуры получаются, например, формула трапеций при л=2
и формула Симпсона при л=3. Такой способ численного интегри-
интегрирования известен как квадратура Ньютона—Котеса. Значение ин
теграла получается суммированием значений подынтегральной
функции в точках интегрирования, умноженных на весовые коэф-
коэффициенты:
о п
jf(x)dx=LVHsf(xs),
A3.37)
где L = b—а. В табл. 13.1 даны величины весовых коэффициентов
Hs для квадратур до четвертого порядка.
Согласно второму способу численного интегрирования, точк ч
разбиения области интегрирования не фиксируются заранее, а
Таблица 13 1
Весовые коэффициенты квадратурной формулы Ньютона — Котеса
до четвертого порядка
я
2
3
4
5
Hi
V*
7.
V.
V«
я2
ч*
Hi
Ve
12/eo
Hi
v8
32/eo
я5
Vie
Элементы высокого порядка. Одномерный элемент
259
подбираются с целью достижения наибольшей точности вычисле-
вычислений. Это означает, что при выборе п точек рассматриваются 2п
неизвестных / и х; следовательно, порядок интерполяционного мно-
многочлена теперь равен Bп—1). После построения интерлоляционно-
го многочлена интегрирование выполняется точно. При таком под-
подходе, известном как квадратура Гаусса — Лежандра, должны быть
решены дополнительно некоторые уравнения, после чего значения
f и х записываются в таблице. В табл. 13.2 представлены коорди-
Таблица 13.2
Координаты узлов и весовые коэффициенты для квадратуры
Гаусса—Лежандра до четвертого порядка
2
3
Si
+0,577350
0,0
±0,774597
"i
1,00
8/9
5/9
п
4
5
li
+0 861136
+0,339981
0,0
+0,538469
+0 906180
»l
0,347855
0,652145
0 568889
0,478629
0,236927
наты точек интегрирования и весовые коэффициенты Н для квад-
квадратуры Гаусса — Лежандра до четвертого порядка [1]. Располо-
Расположение точек разбиения, соответствующее интервалу интегрирова-
интегрирования от 1 до 1 для случаев л = 2 и п 3, показано графически на
фиг. 13.7. При расчетах методом конечных элементов нрименяется
квадратурная формула Гаусса — Лежандра, так как она требует
меньшего числа точек интегрирования, чем это необходимо при
использовании метода Ньютона — Котеса для достижения одина-
одинаковой степени точности Ниже используется только способ Гаус-
Гаусса Лежандра.
Теперь вернемся к нашей главной задаче — использованию ме-
методов численного интегрирования при составлении матриц элемен-
элемента. В этом разделе будет продолжено рассмотрение квадратично-
квадратичного элемента. Матрицы элемента выражаются интегралами
1 1
lD)lB)\det[J}\dl+PhUN)r |det[J]|dE, A3.38)
A3.39)
где функции формы и преобразование координат те же, что даны
в A3.29) и A3.30).
17*
260
Глава 13
Порядок квадратурных формул, используемых для вычисления
данных интегралов, зависит от порядка полиномов в произведени-
произведениях [B]r[?>]i[B] и [#]Г[ЛГ|. Произведение [N]T[N] содержит поли-
полином более высокого порядка, так как [В] связано с дифференци-
дифференцированием [N]. Поскольку Na=f(li), произведение N$NV будет со-
а
Фиг. 13.7. Точки интегрирования квадратуры Гаусса—
Лежандра.
а —точки интегрирования для п=2; б —точки интегрирования для л=3
держать | в четвертой степени. Порядок квадратуры Гаусса
Лежандра л определяется из равенства
2п —1=4,
_5_
2 •
Так как п должно быть целым, выбираем п=3 для интегрирования
произведения [N]7[N]. Для интегрирования выражения
[B]r[D][fi] достаточно квадратуры второго порядка п 2, по-
поскольку это произведение содержит члены степени не выше, чем
|2. Для вычисления интеграла A3.39) также может быть исполь-
использована квадратура второго порядка.
Последовательности арифметических операций при вычислении
интегралов, содержащих [В]Г[?][В] и [NJr[N], почти идентич-
идентичны, поэтому только один из них заслуживает детального рассмот-
Элементы высокого порядка. Одномерный элемент 26 V
рения. Рассмотрим интеграл от [iV]r[A/], так как для него весовые
коэффициенты Я* не равны единице.
Используя данные табл. 13.2 при п=3, получаем
или
J A3.40)
г
J
—г
где
1Х=—0,774597, Я,,=5/9,
13=0,0, Яа=8/9,
?,=.0,774597, Я8=5/9.
Подынтегральная функция f(|) в данном случае имеет вид
=(JVf lJVUdetH/Ц. A3.41)
Применим тот же элемент, который был рассмотрен в примере
128, что позволит воспользоваться результатами предыдущих рас-
расчетов. Мы уже знаем, что [/] = 1/г, [-П 1 — 2. Абсолютное значение
определителя [/] равно Уг, и функция f{t)=V2[N]T[N], поэтому
I,)] Hz).
Вычислим произведения вида [JV(t)]r|[JV(!)]. Начнем с точки
Ь=— 0,774597.
N, (Ц)=» —JJ. A — 61)=»-|'ц'^<*" A + 0,774597) =0,687299,
JV, (У=A — у A+10=0,400000,
#fe (y =^ A + у =—0,087298,
f(li)=WT \N}=~
0,687299"
0,400000
—0,087298
[0,687299 0,400000 —0,0872981
262
Тлава 13
или
f(Sx) =
0,472299 0,274896
0,160000
Симметрично
Теперь рассмотрим ?2=0,0. Имеем
—0,059995
—0,034919
0,007621
Последняя узловая точка s3= -f 0,774597. Ей соответствуют сле-
следующие значения функций формы:
N, (У 0,087298,
N; (У = 0,400000,
Nk (у — 0,687299,
0,007621 —0,034919 —0,059995
0,160000 0,274896
Симметрично 0,472299
Так как Н\ =
то
Подечаноька матриц для f(|i),
соотношение дает
5
9
j
и /(|3) в приведенное выше
0,48 0,24 —0,12
0,24 0,32 0,24
—0,12 0,24 0,48
0 0 0"
0 1 О
0 0 0
Элементы высокого порядка. Одномерный элемент
263
Отсюда получаем
0,1333 0,0667 —0,0333
0,0667 0,5333 0,0667
—0,0333 0,0667 0,1333
В разд. 13.2 были получены точные значения для рассматриваемо-
рассматриваемого интеграла с помощью соотношения A3.16). Только что вычис-
вычисленные значения хорошо согласуются с точными значениями при
L=l иЛР=1.
В табл. 13.3 приведен порядок квадратуры, необходимый для
получения точного результата для одномерных элементов, пред-
представленных на фиг. 13.5.
Таблица 13.3
Порядок квадратуры Гаусса—Лежандра
для одномерных элементов
Элемент
Линейный
Квадратичный
Кубичный
[A'f[V] IB}T[B]1)
2
3
4
2
3
2
2
2
') В случае линейного элемента нет необходимости интегри
ровать [BJ* [В], так как это произведение содержит только
константы
13.5. Субпараметрические, изопараметрические
и суперпараметрические элементы
Функции формы, которые связывают координаты х и | в A3.30),
идентичны функциям, описывающим распределение температуры
внутри элемента [формула A3.29)]. Когда такое условие выпол-
выполняется, элемент называют изопараметрическим. Совпадение функ-
функций формы соотношения преобразования координат и интерполя-
интерполяционного полинома далеко не всегда имеет место. В действитель-
действительности изопараметрический элемент является скорее исключением,
чем правилом.
Для упрощения ввода данных в ЭВМ и повышения эффектив-
эффективности вычислений следует использовать в соотношениях преобра-
преобразования координат возможно более простые функции формы. Ес-
Если элемент ограничен прямолинейными сторонами, то для описа-
описания преобразований координат достаточно линейных функций
формы. Матрица Якоби [)] и |detJ7]| при рассмотрении элемен-
элемента с прямыми сторонами будут теми же самыми независимо от
264 Гмва 13
того, какие функции формы —линейные, квадратичные или кубич-
кубичные— используются в формулах преобразований координат. Что-
Чтобы показать это, опять коротко рассмотрим пример 128. Так как
элемент изображается прямолинейным отрезком, в качестве фор-
формулы преобразования координат могло бы быть использовано так-
также соотношение
k. A3.42)
Применяя линейные функции формы, получим
±\ +1) Хк,
где Х,= 1/2 и Xj = 3l2. Матрица Якоби имеет вид
I n dffi у , dNk у 1 у 1 у 1
Этот результат идентичен тому, что был получен в иллюстративном
примере с использованием квадратичных функций формы. Фор-
Формула преобразования координат может быть представлена с по
мощью четырех узлов кубичного элемента, но матрица Якоби при
этом не изменится.
Тот факт, что функция, описывающая преобразование коорди
нат, не должна совпадать по порядку с интерполяционной функ-
функцией, открывает новые чрезвычайно благоприятные перспективы.
Можно описывать геометрию элемента независимо от аппроксима-
аппроксимации неизвестной величины. Это позволяет сочетать как интерпо-
интерполяционные полиномы высокого порядка с элементами простой гео
метрии, так и элементы сложной формы с простыми интерполя-
интерполяционными полиномами. В следующих двух главах будет рассмот-
рассмотрено применение элементов такого типа.
Два независимых множества узлов теперь могут быть заданы
в некоторой области. Одно множество узлов определяет преобра
зование координат (форму элемент^), а второе — интерполяци
онный полином. Что касается соотношения между числами узлов в
этих двух множествах, то тут имеются три следующих варианта:
1. Число узлов, используемых для определения формы элемен-
элемента, меньше числа узлов, используемых при определении интерпо-
интерполяционной функции температуры, и т. д.
2. Число узлов, определяющих форму элемента, равно числу
узлов, определяющих интерполяционную функцию.
3. Число узлов, используемых для задания формы элемента,
Элементы высокого порядка. Одномерный элемент
265
!
Субпараметрические
элементы
больше числа узлов, используемых для определения интерполяци-
интерполяционной функции.
В соответствии с этими тремя вариантами элементы называют
субпараметрическими, изопараметрическими и суперпараметриче-
суперпараметрическими. Субпараметрические элементы преобладают там, где ис-
используются комплекс-элементы, потому что они применяются, ког-
когда нет необходимости в иска-
искажении формы элемента. При-
Примеры субпараметрических и
суперпараметрических элемен-
элементов показаны на фиг. 13.8 при-
применительно к задаче о стерж-
стержне из второго раздела этой
главы. Суперпараметрический
элемент на фиг. 13.8 приведен
только для иллюстрации, а не
в связи с решением задачи.
Суперпараметрический эле-
элемент, однако, применяется в
двумерных и трехмерных за-
задачах.
Достигаемое за счет ис-
использования естественной си-
системы координат увеличение
гибкости элемента не лишено
недостатков. Матрицы элемен-
элементов должны теперь определять-
определяться с помощью численных мето-
методов интегрирования. Еще один
недостаток связан с обозначе-
обозначениями, и его надо устранить
прежде 'всего. Дело в том, что
далее становится неудобным
использовать для обозначений
узлов элемента индексы i, \, k,
I. В самом деле, некоторые
Суперпараметрические
элементы
°J
OJ
ok
Фиг. 13.8. Субпараметрические к супер-
параметрические одномерные элементы.
Субпараметрические а кубичный элемент
для аппроксимации распределения температу-
температуры; б линейный элемент для определения
формы.
Суперпараметрические: а - квадратичны* эле-
элемент для аппроксимации распределения тем-
температуры; б — кубичный элемент для опреде-
определения формы.
элементы могут иметь в общей
сложности до 30 узлов. К тому
же при таких обозначениях
нельзя отличить узлы, которые
иапользуются для определения
формы элемента, от узлов, которые определяют интерполяционный
полином.
Таким образом, приходится отказаться от обозначения узлов
элемента буквенными индексами i, }, k, I, ..., г; далее для этой цели
будут использоваться числовые значения. Интерполяционная функ-
266
Глава 13
ция элемента для скалярной величины в общем виде записывается
теперь следующим образом:
A3.43)
Номера узлов 1, 2 г одномерного элемента располагаются после-
последовательно от левого конца элемента к правому. В случае двумер-
двумерных элементов нумерация начинается в произвольной точке и со-
соответствует обходу элемента в направлении против движения ча-
часовой стрелки.
Глобальные номера узлов
I о2
44 о5 об
од
(I)
B)
Локальные номера узлов
1 о2 оЗ
B)
W о2
4=-'
C)
Фиг. 13.9. Локальные и глобальные номера узлов, используемые для интерполя-
интерполяционного полинома.
Элемент
(О
B)
C)
Локальные степени
свободы
1
2
3
4
1
2
3
4
1
2
3
4
Глобальные степени
свободы
1
2
3
4
4
5
6
7
7
8
9
10
Элементы высокого порядка. Одномерный элемент
267
Включение элемента высокого порядка в область иллюстрирует-
иллюстрируется на фиг. 13.9. Приведенная таблица устанавливает соответствие
степеней свободы элемента в локальной системе координат с гло-
глобальными степрнями свободы. Соответственно меняется и нижний
индекс величин. Интерполяционные функции для задачи о стерж-
стержне, изображенном на фиг. 13.9, запишутся теперь в виде
фB) =
A3.44)
Нижние индексы функций формы не изменяются потому, что они
не содержат никаких величин, связанных с глобальной системой
координат.
Глобальные номера узлов
B)
C)
Локальные номера узлов
B)
C)
Фиг. 13 10. Локальные и глобальные номера узлов, используемые в соотношениях
преобразований координат.
Элемент
0)
Локальные узлы
1
2
B) 1
C)
1
2
Глобальные узлы
I
2
2
3
3
4
268 Глава 13
Общее соотношение для отдельного элемента, определяющее
преобразование координат, имеет вид
г, A3.45)
где Rp—выбранные функции формы. Символ R будет использо
ваться для обозначения функций формы в соотношениях преобра-
преобразования координат с тем, чтобы избежать путаницы с функциями
формы, которые применяются в интерполяционных уравнениях.
Система уравнений, аналогичная A3.44), может быть записана
и для преобразований координат, если только определены глобаль-
глобальные координаты узлов элементов. Координаты узлов для стержня,
изображенного на фиг. 13.9, приведены на фиг. 13.10 вместе с со
отношениями включения элементов. Окончательные форму ты пре
образований координат имеют вид
+ R^Xi,
A3.46)
Обсуждаемые в этом разделе положения являются исходными
для понимания комплекс-элементов, рассматриваемых в следую-
следующих двух главах. Главное помнить, что всегда существуют два
множества глобальных узлов. Одно определяет глобальные степе-
степени свободы, связанные с интерполяционной функцией, а другое —
форму элементов. Только в случае изопараметрического элемента
оба эти множества совпадают.
Задачи
129. Получите иыряжрнир для функции формы кубичного эле-
элемента и проверьте соотношение для N,-, данное на фиг. 13.3.
130. Определите функции формы для квадратичного элемента,
когда узел / расположен от узла i на расстоянии, равном L/3.
Удовлетворяют ли эти функции формы критериям сходимости?
131. Решите задачу о переносе тепла в стержне (пример 127),
используя один кубичный элемент. Сравните найденные значения
температуры с аналитическим решением (приведенным в приме
ре 127) и оцените точность такой одноэлементной модели.
132. Проверьте функции формы киядрятичнпгп элемента, дан-
данные на фиг. 13.5.
133. Вычислите dNi/dx при * = 80 см для квадратичного эле-
элемента, который имеет узловые координаты X, 0,25 см, X,- 0,75 см
и Xft=l,25 см. Вычислите dNi/dx с помощью естественной системы
координат и сравните результат со значением, полученным с по-
помощью функции формы, данной на фиг. 13.3.
Элементы высокого порядка. Одномерный элемент
134. Вычислите dNj/dx в точке jc—0,3 см для квадратичного
элемента с узловыми координатами Xi — 0 см, X, — 0,25 см и
Xk~0,5 см с помощью естественной системы координат и сравните
результат со значением, которое получается при использовании
функций формы, данных на фиг. 13.3.
135. Вычислите поверхностный интеграл J [N]TdS для кубич-
s
ного элемента.
136. Вычислите поверхностный интеграл j hTx[N]TdS для од-
s
номерного элемента, учитывая линейное изменение коэффициен-
коэффициента теплообмена h от нуля в узле i до ho в узле k. Периметр Р счи-
считать постоянным по длине.
137. Вычислите [?<*)] в случае, когда для определения темпе-
температуры используется линейный интерполяционный полином, а для
задания площади поперечного сечения применяется квадратичная
интерполяция.
138. Проинтегрируйте численно функцию /(g) = l+2g + ?2 на
отрезке от —1 до 1. Сравните результат со значением, получен-
полученным аналитически.
139. Проинтегрируйте численно функцию /(?)=2|2 + ?4 на от-
отрезке от —1 до 1. Сравните результат со значением, полученным
аналитически.
140. Измените программу TDHEAT так, чтобы она использо-
использовала квадратичный элемент для решения одномерных задач о
стержне.
141. Напишите подпрограмму, которая вычисляет dNp/dx в
заданной точке (координата точки вводится) для линейного, квад-
квадратичного или кубичного элементов. Функции формы должны быть
выражены в естественной системе координат.
ЛИТЕРАТУРА
1. Conte S. D., Elementary Numerical Analysis, McGraw-Hill, N. Y., 1965.
2. Kreyszig E., Advanced Engineering Mathematics, 3-rd ed., Wiley, N.
3. Williams P. W., Numerical Computation, Nelson, Don Mill, Can., 1972.
Глава 14
ТРЕУГОЛЬНЫЙ И ТЕТРАЭДРАЛЬНЫЙ ЭЛЕМЕНТЫ
ВЫСОКОГО ПОРЯДКА
Треугольные и тетраэдральные элементы нам уже знакомы.
Простейшие из этих элементов широко использовались в первой
половине книги. Теперь опять рассмотрим эти элементы в свете
той информации, которая дана в гл. 13, и особое внимание уделим
квадратичным и кубичным интерполяционным полиномам.
Естественные системы координат для треугольного и тетраэд-
тетраэдрального элементов определены в гл. 3 и использовались в главах
прикладного характера. Каждая координатная компонента для
треугольного элемента представляет собой отношение расстояния
от выбранной точки до одной из сторон треугольника к высоте,
опущенной на ту же сторону. Координаты треугольника обознача-
обозначались через L\, L2 и L3. Эти три величины не являются независи-
независимыми, они связаны между собой соотношением
l. A4.1)
Интегральные формулы, использующие эти координаты, были вве-
введены в гл. 3 и нашли широкое применение в главах прикладного
характера.
Каждому типу треугольных элементов соответствует интерпо-
интерполяционный полином определенного порядка. Квадратичный тре-
треугольный элемент, например, содержит шесть узлов (фиг. 14.1,6);
интерполяционный полином для него имеет вид
(f=a1 + a^c + aiy + aix2 + abxy + a9y2. A4.2)
Интерполяционный полином для кубичного элемента представ-
представляется суммой членов, содержащихся в формуле A4.2), и всех ку-
кубичных членов:
ф=<*! + «а*+ОД + а**2 -1- а^хд+од3 + щх* -f
A4.3)
Кубичные треугольники (фиг. 14.1, в) отличаются от всех ранее
рассмотренных элементов тем, что имеют внутренний узел. Все
элементы более высокого порядка, чем квадратичные, имеют внут-
внутренние узлы, т. е. узлы, расположенные внутри элемента.
Величины а,- в формулах A4.2) и A4.3) могут быть определены
методами, изложенными в гл. 3. Алгебраические операции при
Элементы высокого порядка: треугольник и тетраэдр
271
этом, однако, становятся более сложными, так как число узлов
возрастает. Более предпочтительным оказывается непосредствен-
непосредственное получение функций формы. Использование естественной систе-
системы координат значительно упрощает эту операцию в случае тре-
Фиг. 14.1. Линейный (а), квадратичный (б), кубичный (в) треугольные элементы.
угольного элемента. Мы начнем обсуждение треугольных элемен-
элементов высокого порядка с рассмотрения непосредственного получения
функций формы.
14.1. Функции формы для элементов высокого порядка
Определение функций формы для треугольных элементов высо-
высокого порядка упрощается тем, что имеется возможность проводить
линии, перпендикулярные L-координатам, каждая из которых пе-
пересекает ряд узлов (фиг. 14.2). Эта особенность сохраняется не-
независимо от числа узлов, которые содержит треугольник.
Общая формула для вычисления функции формы имеет вид
л
b Lt,
A4.4)
где n — порядок треугольника, a Fd — функции от Lu L2 и L3. По-
Порядок треугольника п определяется как величина, на единицу
меньшая числа узлов на стороне треугольника. Квадратичный
треугольник имеет три узла на стороне и поэтому является эле-
элементом второго порядка.
272
Глава 14
Функции Fe определяются из уравнений п линий, которые про-
проходят через все узлы, за исключением узла, для которого опреде-
определяется функция формы. Если рассматривается уравнение прямой
Фиг. 14.2. Перпендикулярные L\ линии, которые прохо-
проходят через все узлы.
L\ = c, то Fb=L\—с. Знаменатель A4.4) есть значение /•"«, опреде-
определяемое с помощью координат узла fi (узла, в котором вычисляет-
вычисляется
•г
Фиг. 14.3. Функции формы для линейного (а),
квадратичного (б) и кубичного (в) треугольных
элементов.
а) Nj.» L\, Nfm ?.2, Л^з» L&
б) Ni = iiBI.i — 1),
1.зB1.з — 1),
4Z.1Z.3;
e) Ni L L1QL1 - 1) C1.! - 2).
- П.
Элементы высокого порядка: треугольник и тетраэдр 273
Функции формы для линейного, квадратичного и кубичного
треугольных элементов приведены на фиг. 14.3. Определение этих
функций иллюстрируется на следующих примерах.
Пример
142. Требуется определить функцию формы Ni для кубичного
треугольного элемента.
L, О
Кубичный треугольный элемент имеет четыре узла на стороне.
Следовательно, это элемент третьего порядка, м=4—1=3. Нужно
найти три линии, которые проходят через все узлы, за исключени-
исключением первого узла. Это сделать очень легко, и необходимые линии
показаны на фигуре. Уравнения этих линий: Z,i=0, Li==l!3 и
L\~2k. Функции F имеют вид
**—Li—3 з •
«7 г 2 _ 3Lt-2
Гя—Ч. з^ 3 '
Вычислим значения функций Fa в первом узле (Li=l, Z,2=Z,3 = 0):
^i 11, о, о = 1»
р 3.1-1 2
/•2 |1. 0.0= g^ =^,
^зц, о, о=-з~-
18—763
274 Глава 14
Подставляя найденные величины в формулу A4.4), получаем
или
Пример
143. Требуется определить функцию формы N\s для треуголь-
треугольного элемента четвертого порядка.
\о
К задаче 143.
Так как порядок элемента равен четырем, нужно найти четыре
линии, которые проходят через все узлы, за исключением узла 15.
Три из них соответствуют сторонам треугольника Li=0, L2=0 и
L3 = 0. Четвертая линия проходит через узлы 12, 13, 14 и 6. Урав-
Уравнение этой линии Lz XU; функции Fc имеют вид
F_ 4Z.3-1
После подстановки этих выражений в формулу A4.4) и учета ко-
координат 15-го узла ОД, XU, !/2) имеем
А/ —ТТ F* — ^ -Ь- L* 4L3-1
U 8=1 ^б 1/4. 1/4, 1/2 ~~ A/4) A/4) A/2) 4/A/4) '
Элементы высокого порядка: треугольник и тетраэдр
275
или
Nlb=
lb
14.2. Вычисление производных функций формы
Для вычисления частных производных dN$/dx и dN$/dy мож-
можно воспользоваться процедурой, описанной в гл. 13. Некоторые
изменения все же необходимо внести, поскольку мы теперь имеем
дело с двумерной задачей и пользуемся координатами, которые не
являются независимыми.
В качестве независимых координат выберем координаты L\ и
L2. Дифференцируя соотношение A3.32), получаем
dNa dNa. dx dNa ду
dLx
dNa
dx
dN*
dLx
дх
дх
Матрица Якоби имеет вид
- дх
дх
dL3
ду
ду
ду -
dLx
ду
д1.2
ду
A4.5)
A4.6)
Поэтому
dLx
dx
A4.7)
dLa dy
Таким образом, для производных получаем
dx
dLx
дЦ
(Н.8)
Чтобы учесть зависимую координату ?з, можно поступить двоя-
двояко: либо переписать все функции формы, выразив ил через L\ и
Li, либо заметить, что
dLx
dJVp dLx
dLt
~ЖХ~
dL3
dLi •
A4.9)
18»
276
Глава 14
Производная dLi/dLi равна единице, a dL2/dLi равна нулю, так
как L\ и Z.2 независимые. Третье слагаемое может быть вычислено
с помощью соотношения
L3=l—Z.x —Л2.
Дифференцируя его, имеем
A4.10)
дЦ =
Теперь формула A4.9) преобразуется к виду
dN,
Р
dLs
A4.11а)
A4.116)
Аналогичное выражение получаем для dN$jdL2:
6Na SNa dNa
p p p
dL% dL% dL$
Принятые в формулах A4.11а) и A4.116) обозначения могут
сначала вызвать недоумение, потому что члены ONp/dLx и
cWp/<3L2 находятся в обеих частях равенства. Частная производная
от N$ в левой части равенств вычисляется, когда Np выражена как
функция независимых координат Lx и L2. В правой части функция
Af считается выраженной через Lb L2 и L3.
Соотношения преобразований координат, определяющие форму
элемента, обычно записываются с использованием трех координат.
Следовательно, при вычислении матрицы Якоби должны приме-
применяться формулы A4.11а) и A4.116).
Применение сформулированных выше положений иллюстри-
иллюстрируется на следующем примере.
Пример !
144. Требуется вычислить dNJdx в точке A,4) для квадратич-
квадратичного треугольного элемента, показанного ниже.
К задаче 144. Узлы, используемые
для определения интерполяцией
ного полинома.
К задаче 144. Узлы, используемые
для задания формы элемента.
Элементы высокого порядка: треугольник и тетраэдр
277
Форма элемента может быть задана с помощью линейных функ-
функций формы L\, L2 и Lz и координат узловых точек, расположенных
в вершинах треугольника. Запишем формулы преобразований ко-
координат
х=
LSX3,
После подстановки узловых координат имеем
Вычислим производные, входящие в матрицу Якоби:
дх дх дх
dL,, ™ dLt * dL3
=-1,
дх дх дх л 1 о
У/-2 С^2 ^^3
_^_ ф ду fi
Л/ Л/ "*~ Л/ ~~" »
Матрица Якоби и обратная к ней матрица имеют вид
¦"¦Г. =3-
1 Г-4
—2
Функция формы N4 есть 4L2L3. Дифференцируя ее по ii и Z.2,
получаем
dNt dNt _ <j^4 _
dJV4 (Э^ 5/V4 _y
ai.2 dLt dL3 э
Подстановка этих частных производных вместе с [/] 'в формулу
A4.8) дает
dNt
_L|" 4
16 -2
dx
dy
278 Глава 14
или
-^-=0,751,-0,251,.
Эти два соотношения выполняются в произвольной точке элемента.
Наша цель — определить производные в точке A, 4). Для дости-
достижения этой цели следует определить L-координаты данной точки.
Используя преобразования координат, можно записать
Решением этой системы являются числа
^2—X'
Подставляя значения Li и Ьз в формулы для производных, полу-
получаем
_
Л/ 16 •
14.3. Составление матриц элементов
Если интерполяционные соотношения содержат L-координаты,
в уравнениях для элементов появляются интегралы по площади
элемента следующего вида:
et[7]ldL1dL2, A4.12)
о о
Эти интегралы должны быть определены численно, поскольку мат-
матрица Якоби является функцией L координат и невозможно полу-
получить явное выражение для обратной матрицы. Некоторые интег-
_ Элементы высокого порядка: треугольник и тетраэдр 279
ралы могли бы быть определены с помощью формул, представлен-
представленных в третьей главе. Однако использование этих формул услож-
усложняется тем, что, прежде чем приступать к почленному интегриро-
интегрированию, требуется вычислить произведение матриц [B]r[D][B].
Ошибок будет меньше, если эту операцию интегрирования выпол-
выполнит ЭВМ.
Процедура численного интегрирования аналогична той, которая
была рассмотрена применительно к одномерному элементу. В ра-
работе [1] предложено множество точек интегрирования для тре-
треугольника, позволяющее упростить численные расчеты. Располо-
Расположение точек интегрирования и соответствующие весовые коэффи-
коэффициенты приведены в табл. 14.1. Использование данных табл. 14.1
эквивалентно замене интеграла A4.12) суммой:
1 1-lg я
\ \/(^1> ^-ч» ^з) Idfit [J] | dLidL2^ \ Wfg(Li, L2, L3)> A4.13)
о о i—i
где g(L], L2, L3) включает |det[/]|. Порядок интерполирования
определяется суммой показателей степеней трех координат в каж-
каждом члене. Например, если интегрируется произведение LiL2Ll>
сумма показателей степеней которого равна четырем, следует ис-
использовать схему интегрирования четвертого порядка точности из
табл. 14.1.
Пример
145. Требуется определить интеграл от произведения с сомно-
сомножителями dNi/dx и dNi/dy по площади элемента, рассмотренного
в задаче 144. Проверить ответ, применив для вычислений интег-
интегральную форму C.43).
Частные производные и матрица Якоби были определены в за-
задаче 144. Они имеют вид
дх
и |det[/] I = 16. Запишем произведение
dNt dNt _ 3 2 10 . , 3 a
~дГ ~ду~~~ 8" Ь*Л 8~^ьз— 8 ь*'
В этом выражении каждый член представляет собой произведение
второго порядка, поэтому при интегрировании можно ограничить-
Таблица 14.1
Формулы численного интегрирования для треугольников
/ ао ^г\
/л
/ ob d о N4
e
/\
/ ao \
/ \
т c &
/ \
/" °a \
/of oc ffo\
a-0,05961587
P =0,47014206
Y=0,10128651
Д =0,79742699
Ошибка
R=O(h>)
R-O{h?)
R 0(Л«)
R-O(h*)
R=O(ffi)
Точки
a
a
b
с
a
b
с
d
a
b
с
d
e
f
8
a
b
с
d
e
f
g
Координаты
V»
0
V»
11/l5
Vu
a i
Vu
Vi
Vi
V»
0
0
l
0
Vi
a
P
P
У
A
У
Vi
0
V,
V.
Vl5
Vu
u/l»
V.
0
V*
Vi
0
0
l
V.
p
p
a
Y
Y
Д
Vi
Vi
0
V.
Vu
9 1
Vu
Vi
Vi
0
Vi
1
0
0
Vi
p
a
P
Д
Y
Y
Весовые
коэффициенты
Vi
V.
V.
V.
S7
2V96
27uo
Vu.
3/iM
0,11250
0,66197075
0,06296959
Элементы высокого порядка: треугольник и тетраэдр 281
ся схемой второго порядка точности. Координаты точек интегриро-
интегрирования:
Каждая точка интегрирования имеет весовой коэффициент 7в-
Интеграл и A4.13) преобразуется к виду
1 1—L2
I ^ LU -!TLL- ^
i 1
где
L3)=--(—
или
A (^, L2, L3)=-6L*
так как
| det[J]| = 16.
Для первой точки интегрирования Li = L3 = V2, L2—0 и
Для других точек интегрирования
3
&= 2~
и
^8 = 2.
Подставляя эти результаты в формулу A4.13), получаем
282 Глава 14
Интеграл от произведения (dNildxdN^ldy) может быть вычис-
вычислен также с помощью интегральных формул, приведенных в гл. 3.
Используем равенство
(ЛЬ\с\ о .
"(а + 6+с + 2)!'
В рассматриваемом случае имеем
ЗА
J 8 - L^L3dA ^ ^j-
зл
Площадь элемента может быть вычислена с помощью формулы
C.9), что дает А = 8. Окончательно получаем
3 20
n
J \
дх ду ) пЛ ~ 8 \ 6 + 24 6 J — 6 "
Этот результат в точности совпадает со значением, которое было
получено численным методом.
В формулы для матриц элементов входят два типа поверхност-
поверхностных интегралов:
S2
и fa[JV]r dS, A4.14)
где а — коэффициент вида hTco, q или рх. Эти интегралы могут
быть очень просто определены с помощью соотношений, представ-
представленных в гл. 3. Наиболее просто вычисляется второй интеграл в
A4.14), поэтому мы начнем с него.
Допустим, что требуется вычислить интеграл \lq[N]TdS вдоль
s
стороны Z-i = 0 квадратичного элемета, изображенного на
фиг. 14.3, б. Запишем функции формы
N,=0, N6=LsBL3-l),
1), N„=0.
Элементы высокого порядка: треугольник и тетраэдр
283
Теперь можно записать интеграл в виде
О
О
L2BL2-1)
4L2L3
L3BL3
О
2^3
t/345
6
A4.15)
где35345 длина стороны L\ 0. Толщина элемента предполагается
единичной. Окончательный результат получается такой же, как в
случае одномерного квадратичного элемента: величина q распре-
распределяется по трем узлам элемента в отношении 7б, 2/3, '/е- Форму-
Формулы, аналогичные A4.15), могут быть выведены и для других сто-
сторон элемента.
Интеграл j q[N]TdS равен
0
о
о
1
3 A4.16)
3
1
о
о
I
для стороны L\ 0 кубичного элемента. 2?45б7 длина стороны,
содержащей узлы 4, 5, 6 и 7. Соотношения A4.15) и A4.16) не
применимы к осесимметрическим задачам, если рассматриваемая
сторона параллельна оси симметрии (всем узлам, расположенным
на этой стороне, соответствует одно и то же значение радиуса).
Поверхностный интеграл j h[N]T[N]dS вычисляется таким же
s
образом, как A4.15) и A4.16). Запишем окончательные выраже-
выражения для стороны L\—0 в случае квадратичного и кубичного эле-
элементов:
h[N]T[N]dS —
Л2бв44
30
0
0
0
0
0
0
0
0
0
0
0
0
0
4
2
-1
0
0
0
2
16
2
0
0
0
— 1
2
4
0
о-
0
0
0
0
0
A4.17)
284
Глава 14
):
h[N]T[N]dS =
7
1680
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
128
99
—36
19
0
0
0
0
0
0
99
648
—81
—36
0
0
0
0
0
0
—36
—81
648
99
0
0
0
0
0
0
19
—36
99
128
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
о-
0
0
0
0
0
0
0
0
0
A4.18)
Соотношения, подобные A4.17) и A4.18), для других сторон за-
записываются аналогично. Значения ненулевых коэффициентов не
изменяются, меняется их положение внутри матрицы.
14.4. Тетраэдральные элементы
Естественная система координат для тетраэдрального элемента
вводится почти так же, как в случае плоских L-координат. Четыре
безразмерных расстояния Lu L2, L3 и L4 определяются как отно-
отношения расстояний от выбранной произвольной точки элемента до
одной из его сторон к высоте, опущенной на эту сторону из про-
противолежащей вершины. Такие L-координаты называются объемны
ми, они связаны между собой соотношением
A4.16)
Функции формы для линейного тетраэдра представляют собой
объемные L-координаты:
S=L3 и #4=
A4.20)
Функции формы для элементов высокого порядка могут быть по
лучены из формулы A4.4) с учетом того, что F& теперь определя-
определяются уравнениями плоскостей, проходящих через соответствующие
узлы, а не уравнениями прямых, как в случае треугольника. Ниже
приводятся типичные функции формы для элементов различного
порядка; элементы изображены на фиг. 14.4.
Элементы высокого порядка: треугольник и тетраэдр
285
Фнг. 14.4. Расположение узлов в линейном (а), квадратичном (б) и кубичном
(в) тетраэдральных элементах. Узлы 17—20 расположены на гранях тетраэдра.
Квадратичный тетраэдр A0 узлов)
Для углового узла
A4.21)
286
Глава 14
В этом случае плоскость, определяемая уравнением Z.i = 0, содер-
содержит узлы 2, 3, 4, 6, 9 и 10. Плоскость, определяемая уравнением
?i = k, охватывает узлы 5, 7 и 8. Для узла на ребре
#5=41Л. A4.22)
В этом случае плоскость L2—0 содержит узлы 1, 3, 4, 7, 8 и 10.
Кубичный тетраэдр B0 узлов)
Таблица 14.2
Формулы численного интегрирования для тетраэдра
Ошибка
Точки
Координаты
Весовые
коэффициенты
а 05в5ЬЮ20
? аввшо
сс=О, 58541020
Р=0,13819660
R-O(h?)
R =0(A4)
a
и
b
с
d
a
b
с
d
e
V.
f
a
P
P
P
a
P
P
P
P
a
Vt
V.
V,
Ve
V,
V.
V,
V,
V.
44
V.
V,
7з
Vi
Vi
Ve
V.
V.
V.
Vm
') Li перпендикуляр к грани напротив первого узла.
Элементы высокого порядка: треугольник и тетраэдр
287
Для углового узла
Л
Для узла на ребре
Для узла на грани
N18=27L2LsLt.
A4.23)
A4.24)
A4.25)
Сравнение формул A4.20) A4.25) с двумерными функциям-и
формы, данными на фиг. 14.3, показывает, что недостающие фор-
формулы могут быть легко получены. В табл. 14.2 приведены точки
интегрирования для тетраэдра, используемые при численном ин-
интегрировании.
Задачи
146. Определите функцию формы N& для кубичного элемента.
147. Определите функцию формы Nn для элемента четвертого
порядка в задаче 143.
148. Получите матрицу Якоби для элемента в задаче 144, ис-
используя для задания формы элемента квадратичные функции
формы.
149. Получите матрицу Якоби для элемента, показанного ниже.
F.5)
(I 25)
К задаче 149.
150. Используя квадратичный интерполяционный полином, вы-
вычислите частные производные dN2fdx и dN^dy во внутренней
точке D, 3) элемента, изображенного ниже.
288
Глава 14
151. Вычислите dNJdx и dN6/dy для элемента задачи 150.
152. Определите численно интеграл по объему элемента из за-
задачи 150 от произведения величин dNz/dx и дМ2/ду. Результат
сравните с соответствующим значением, полученным путем точно-
точного интегрирования.
E,5)
F.0)
К задаче 150.
153. Вычислите численно интеграл по объему элемента из за-
задачи 150 от произведения величин dN6/dx и dN6/dy. Результат
сравните со значением, полученным путем точного интегрирова-
интегрирования.
154. Покажите на конкретном примере, что при рассмотрении
линейного треугольного элемента достаточно одной точки интегри-
интегрирования для того, чтобы вычислить интеграл от произведения ве-
величин dNi/dx и dN,/dx.
155. Напишите подпрограмму, которая сможет вычислять все
частные производные от функций формы по х и по у, если интер-
интерполяционная функция квадратична, а геометрия элемента может
быть описана линейными функциями формы.
ЛИТЕРАТУРА
1. Hammer P. С, Marlowe О. P., Stroud A. H., Numerical Integration over Simple-
xes and Cones, Mathematics Tables Aids Сотр., 10, 130—137 A956).
Глава 15
ЧЕТЫРЕХУГОЛЬНЫЕ ЭЛЕМЕНТЫ
До сих пор применения метода конечных элементов были свя-
связаны с использованием одномерных линейных элементов, двумер-
двумерных треугольных элементов и трехмерного тетраэдра. Теперь рас-
рассмотрим новую группу элементов: двумерный четырехугольник и
трехмерную призму.
Четырехугольный элемент представляет собой мультиплекс-
элемент. Границы такого элемента должны быть параллельны ко-
координатным линиям для сохранения непрерывности при переходе
от одного элемента к другому. Прямоугольный элемент является
специальным случаем четырехугольника. Свойства прямоугольно-
прямоугольного элемента служат основой для применения криволинейной систе-
системы координат, необходимой при использовании четырехугольного
элемента. Прямоугольный элемент рассматривается в первом раз-
разделе, а затем полученные результаты обобщаются на случай ли-
линейных квадратичных и кубичных четырехугольных элементов.
15.1. Линейный четырехугольный элемент
Интерполяционный полином для прямоугольного элемента с
четырьмя узлами имеет вид
y=al + aix + a9y + alxy. A5.1)
Вместо членов х2 или у2 здесь оставлено произведение ху, потому
что оно гарантирует линейное изменение ф вдоль каждой линии,
где постоянны х или у.
Пронумерованные узлы и расположение системы координат
показаны на фиг. 15.1. В узлах должны быть выполнены следую-
следующие условия:
Ф=фа при х=—Ь, у=—а,
Ф=Ф2 при х=Ь, у = —а,
Ф=Фа при х=Ь, у=а,
Ф=Ф4 при' л:=—Ь, у=а.
19—763
290
Глава 15
Подстановка этих выражений в формулу A5.1) приводит к си-
системе четырех уравнений, которые могут быть решены относи-
относительно а:
Ф1 -f Ф2 -1- Ф3 -f Ф4
__ Ф! + Фа + Ф3 — Ф4
«2 4& '
ф, — ф2 + ф, + ф.
СС„ = - —- 3 *,
4 4аВ "
У
< ь >
4
/
«с b >
2.
/
\
i
\
\
а
а
1
Фиг. 15.1. Прямоугольный элемент.
Если положить ф] Ф2 Фз Ф4 С, то щ — С и аг~а3 = а4=0.
Таким образом, критерий сходимости выполняется. Подставим
ар в исходное соотношение и преобразуем его к виду
A5.2)
где
Одно из главных различий между этим элементом и симплекс-
элементами состоит в том, что градиенты теперь не постоянны, а
меняются линейно вдоль одного из координатных направлений. На-
Например,
Четырехугольные элементы
291
Градиент в направлении оси х постоянен вдоль оси х, но меняется
линейно по у, и, наоборот, ду/ду постоянна по у, но линейно из-
изменяется вдоль оси х.
(ч п
о, о
Фиг. 15.2, Система координат |т\ для прямоугольного
элемента.
Полученные результаты для прямоугольного элемента могут
<5ыть записаны в безразмерной форме с помощью отношений х/Ь
и у/Ь. Начнем с Nu
где
и —
Если обозначить эти отношения как
у
а
A5 3)
то функции формы в соотношении A5.2) могут быть представле-
представлены в виде произведений безразмерных координат
где
A5.4)
Схематически этот элемент показан на фиг. 15.2. Введенная толь-
только что система координат называется естественной системой коор-
координат, потому что координаты при этом изменяются в диапазо-
диапазоне ±1,
19*
292 Глава 15
Совсем не обязательно требовать, чтобы естественная систе-
система координат была прямоугольной, она может быть и криволиней-
криволинейной. Использование криволинейной системы координат позволяет
изменять ориентацию сторон четырехугольника относительно си-
4--/
Фиг. 15.3. Четырехугольный элемент общего вида.
стемы координат ху, при этом требование непрерывности будет
удовлетворяться. Пример четырехугольного элемента общего вида
показан на фиг. 15.3. Началу координат соответствует точка пере-
пересечения двух линий, делящих пополам противоположные стороны
элемента (штриховые линии на фиг. 15.3). Линия, соотвсмствую-
щая g— V2» также показана на фиг. 15.3. Эта линия не параллель-
параллельна оси т], она проходит через средние точки cad отрезков верхней
и нижней сторон четырехугольника, ограниченных линиями 1 0 и
1=1-
Функции формы для элемента, показанного на фиг. 15.3, иден-
идентичны функциям формы, представленным формулами A5.4). За-
Заметим, однако, что теперь нельзя получить частные производные
dN?/dx и dN$ /ду непосредственно. Необходимы еще формулы пре-
преобразования координат, чтобы связать систему |т] с системой ху.
Сохранение непрерывности вдоль границ между элементами —
главное преимущество системы grj. Стороны четырехугольников при
этом не должны оставаться параллельными координатным линиям
системы ху. Непрерывность вдоль границ между элементам-и мо-
может быть доказана рассмотрением двух смежных элементов
(фиг. 15.4). Запишем интерполяционные полиномы для каждого
элемента:
A5.5)
ФB)=;
где Же) определена в A5.4). Так как мы интересуемся тем, что
происходит на границе между двумя элементами, можно положить
Четырехугольные элементы
293
ti(I) =—1 и т)B>=1 в выражениях для соответствующих функций
формы. При этом получаются следующие выражения:
1 J- 4 ь/1\1
A5.6)
Фиг. 15.4. Четырехугольные элементы с общей границей.
для первого элемента и
M = -L
A5.7)
для второго элемента. Формулы для ф<" и ф<2) упрощаются:
С учетом выражений для функций формы получаем
A5.8)
A5.9)
'294 Глава IS
Замечая, что в каждой точке границы выполняется очевидное ра-
-венство 5A>=|B>, можно переписать формулу для срB) в виде
=-^-Ц1+&<»>!Ф.+ П—^Ф^Ч*». A5.10)
Таким образом, скалярные величины непрерывны вдоль границы
двух смежных элементов. Непрерывность векторных величин тоже
может быть доказана, хотя это доказательство несколько слож-
сложнее.
Итак, была введена криволинейная система координат 1ц и до-
доказана непрерывность величин вдоль границы смежных элементов.
Теперь можно рассмотреть четырехугольные элементы с более чем
четырьмя узлами.
15.2. Квадратичные и кубичные четырехугольные
элементы
Четырехугольные элементы, обсуждавшиеся в предыдущем
разделе, называются линейными, потому что им соответствуют ин-
интерполяционные полиномы, линейные no | вдоль линий ц = const и
по т[ вдоль линий ?=const. В этом разделе рассматриваются четы-
четырехугольные элементы, содержащие 8 и 12 узлов. Такие элементы
называются соответственно квадратичными и кубичными элемен-
элементами, так как их интерполяционные полиномы являются квадра-
квадратичными или кубичными функциями вдоль линий |=const и
ч\ = const. Существуют элементы, содержащие более 12 узлов, или
элементы с числом узлов от 8 до 12, но они не обсуждаются здесь.
Элементов трех типов, которые мы рассматриваем, вполне доста-
достаточно как для иллюстрации основных понятий, так и для большин-
большинства расчетов.
Интерполяционные полиномы соответственно для квадратично-
квадратичного и кубичного элементов (фиг. 15.5) записываются© виде
A5.11)
Фиг. 15.5. Квадратичный и кубичный четырехугольные элементы.
Четырехугольные элементы
295
а4?а + автJ
Функции формы для этих элементов представляют собой полино-
полиномы, идентичные по форме A5.11) и A5.12). Функции формы для
двумерных элементов равны нулю во всех узлах, за исключением
узла, номер которого совпадает с номером соответствующей функ-
функции формы; кроме того, они принимают нулевые значения вдоль
всех границ элемента, которые не содержат указанного узла. На
пример, функция формы Ni для квадратичного элемента
(фиг. 15.5) обращается в нуль во всех узлах, за исключением пер
вого узла. Кроме того, Nt принимает нулевые значения вдоль сто-
Фиг. 15.6. Граничные функции четырехугольного элемента.
рон четырехугольника g=l и т]=1. Функция формы для второго
узла обращается в нуль вдоль сторон g=l, т]——1 и т] = 1.
Функции формы могут быть получены либо путем решения си-
системы уравнений (гл. 3), либо непосредственно комбинированием
функций, которые обращаются в нуль на границах элемента. Мно-
Множество функций, равных нулю вдоль одной из сторон элемента,
легко получить из функций формы для линейного четырехугольни-
четырехугольника. Эти функции показаны на фиг. 15.6. Произведение любых двух
таких функций соответствует первым четырем членам в форму-
формулах A5.11) и A5.12). Поэтому удобно записать функции формы
в виде произведения двух полиномов:
для квадратичного элемента
+ asti), A5.13)
=(ax + a
для кубичного элемента
Щ = (О! + a2l + СС3Т1
A5.14)
296 Глава 15
Остановимся теперь на определении постоянных, входящих в по-
последние соотношения. В качестве базисных функций выберем сле-
следующие:
A5.15)
/4 =(
Каждая из них обращается в нуль на одной из границ элемента.
Введем еще множество функций F{, i~\, 2, 3, 4:
Ifk, если узел Р не принадлежит стороне k,
k = l, 2, 3, 4, A5.16)
1, если узел р принадлежит стороне k.
Функция формы для квадратичного и кубичного элементов дает-
дается формулой
4
[ ] + ОД2). A5.17)
4
=[ П
Степень многочлена в A5.17) определяется числом имеющихся
узловых условий. Его коэффициенты определяются приравнива-
приравниванием Л/р единице в узле C и нулю во всех других узловых точках,
4
которые не входят в произведение YlFj. Коэффициенты а4 и аъ
/-1 п
всегда равны нулю в случае квадратичного элемента. Применение
формулы A5.17) будет проиллюстрировано на двух следующих
частных примерах.
Пример
157. Требуется определить Мг и N2 для квадратичного элемен-
элемента, показанного иа фиг. 15.5.
Решение начнем с определения функций Fit /2, Л и f( в
A5.16). Так как первый узел угловой и принадлежит одновремен-
одновременно первой и четвертой сторонам, то Fjs=l и F4=l. Другие две
функции следующие: F2—fz'={\—I) и F&=f&—{\—ц) [формулы
A5.15)]. Произведение в A5.17) равно
Четырехугольные элементы 297
Общее выражение для ЛЧ имеет вид
JV1=(l-E)(l-ti)(al + e«E + a,T)).
Произведение A—?)A— ц) обращает в нуль Nt в узлах 3, 4, 5,
6 и 7. Константы ait a2 и а3 должны быть выбраны так, чтобы
Ni была равна единице в первом узле и нулю в узлах 2 и 8.
Подстановка этих трех узловых условий
N1 = l, если § =— 1, *] =— 1,
iVx=0, если 1=0, Ti=— 1,
Л^!=0, если |= —1, т]=0,
в формулу для jVi дает три уравнения, которые могу г быть ре-
решены относительно неизвестных констант. В результате имеем
ai=^a2==a3=—j-.
Таким образом, функция формы Ni имеет вид
-Vi=—5-0—?)A—-4)(l+S + -n).
Функция формы Л^2 соответствует средней точке первой сторо-
стороны, поэтому
F1 = l, F2=f2=(l-g),
F,=f,=(l-4) и F4=f4 = (l+E).
После вычисления произведения в формуле A5.17) получаем
Остается удовлетворить только одному узловому условию #2=1
при |=0 и т] = — 1, поэтому в многочлене (ач+а^+азл) следует
сохранить только один член с произвольной константой. Таким
образом, для Nz получаем выражение
После подстановки этого выражения ь узловое условие имеем
298 Глава 15
Пример
158. Требуется определить функцию формы N2 Для кубичного
четырехугольного элемента, показанного на фиг. 15.5.
Узел 2 принадлежит первой стороне элемента, поэтому из при-
приведенного выше примера можно заключить, что
Полином, содержащий произвольные константы, должен быть усе-
усечен, так как не выполнены всего два узловых условия
О
и
iVa=0 при 1=~, г| = —1.
Коэффициенты а4 и а5 должны быть вычеркнуты, поскольку чле-
члены вида |4 или |%|2 не входят в формулу A5.12). Сохранение чле-
члена а3т) приводит к системе уравнений с нулевым определителем,
поэтому этот член тоже должен быть зачеркнут. Таким образом,
для Nz имеем
Используя условия в узлах, получаем систему
откуда находим at=9/32 и а2——27/32. Окончательное выражение
для функции формы имеет вид
^=^-A-?2) A-1) A-31).
Функции формы для квадратичного и кубичного элементов при-
приведены на фиг. 15.7 и 15.8. Простым сложением можно убедиться,
г
что эти функции формы удовлетворяют критерию SJVr—1 для
p=i
каждого элемента.
Представленную здесь процедуру можно применить и к эле-
элементам более высокого порядка. Однако необходимость использо-
использования таких элементов весьма сомнительна. Трех представленных
здесь элементов вместе с элементами, описанными в гл. 13 и 14,
достаточно для решения едва ли не любых задач. Можно постро-
построить четырехугольные элементы и других типов, например скон-
Фиг. 15.7. Функции формы для квадратичного элемента.
j-(l-5)(l-ri)E + Ti + l). A'j-.-i-
—f <1 + S)(l-n)F-n-:i), *,--!
N1 L A _
^. (i _ „2) A _
*3=4
N'-w
Фиг. 15.8. Функции формы для кубичного элемента:
9
A - I) A - Л) [- Ю + 9E2 + тJ)],
A - л) A - &>) A + зу,
A ¦*¦ I) (I tis) (I 3ti),
A + 5) A + Л) [- Ю + 9E2 + ТJ)],
^2=Ж n-iHl-PHl-eS).
N*" "зТA + 5) A ~Т1) I-10 + э«5» + ъ*П,
1 ... ....
"е-^-A + 4) A-6«)A + 35),
Л'ю = -^ A - 5) A + л) [- ю + 9E» +
#12 = 4" С ~ 5) A - tl*> A - ЗТ)).
300
Глава 15
струировать элементы, интерполяционные функции которых будут
представлены полиномами разной степени по каждой из двух ко-
координат. Рассмотрим, например, интерполяционный полином, ли-
линейный по Ti и квадратичный по |. Соответствующий ему элемент
будет содержать шесть узлов, как показано в задаче 162 (в конце
этой главы). Полином вида
Ф=а1-+ а3? + а311 4- а4?тц- а5!2 + а6т] I2 A5.18)
сводится к
Ф=о1 + а2?4-о3?2, если ц постоянна,
Ф—fei + Vb если ? постоянна.
и к
Здесь аи а2, а3, bi и Ъ% — константы. Область применения этого
элемента, вероятно, очень ограниченна; соответствующие функции
формы могут быть получены исследователем, использующим эле-
элемент.
15.3. Вычисление производных функций формы
Формулы для вычисления производных dNfi/dx и cWp/дг/ полу-
получают непосредственно из результатов, приведенных в предыдущих
главах. Матрица Якоби определяется соотношением
dn
" дх
~W
дх
ду
~щ
ду
дт]
дх
ду
W
ду
A5.19)
которое можно обратить, чтобы получить частные производные
по х и по у.
Матрица Якоби является функцией 1 и г\ даже для простей
ших четырехугольных элементов. Эта зависимость легко обнару-
обнаруживается при рассмотрении преобразования координат:
х=
A5.20)
где функции формы те же, что даны в A5.4), а Xit X2, Х3, Хь —
х-координаты четырех вершин. /?р используется здесь для обозна-
обозначения функций, определяющих форму элемента. Дифференцируя
х по 1, получаем
дх
у
3
Четырехугольные элементы 301
ft»
и
После
подстановки
дх _ —A-
^Е 4
д? 4
0? 4
dl 4 "
и перемножения имеем
4 '
/1С Oil
Отсюда видно, что коэффициенты матрицы [/] являются функ-
функциями Ъ, и т).
Пример
159. Требуется найти частные производные dNJdx и dNJdy в
точке | '/г, 'Ч=1/2 элемента, изображенного ниже, в предположе-
предположении, что скалярная величина ф аппроксимируется квадратичным
полиномом. Запишем формулы преобразования координат:
х =
y=RxYx+ R.Y. + R.Y, + RtYv
где i?g — линейная функция формы. Для скаляра ср имеем соот-
соотношение
ф =ЛГ1Ф1 + Ы2Ф2 + Л^3Ф3 + ЛГ4Ф4 + Л^5Ф5 + ЛГ„Фв + Л^7Ф7 + Л?8Ф8,
где Np — функции формы, представленные на фиг. 15.7.
Прежде всего составим матрицу Якоби. Производная
приведена в A5.21). Вычислим дЯ$/дт\:
dRx _ 1-1 dR2 _ 1+|
дц 4 * дц 4 '
dR3 _ 1+6 dRt _ 1-j
дг) 4 * <?т| 4
Матрица Якоби теперь записывается в виде
Y,
A+6) (l-B)J
302
Глава 15
B5,30)
B0,15}
A0, 10)
К задаче 159.
Подстановка координатных значений | и г\ вместе с узловыми
значениями х и у дает
—1/2 1/2 3/2 —3/2
— 1/2 —3/2 3/2 1/2
0
20
25
8
10"
15
30
25
или
[J]
=_Ц61 20]
8 [13 60j
8 Г 60 —20]
3400 [_13 6lj"
Искомые величины dNJdx и dNi/dy можно вычислить, если из-
известны производные dNifdb, и dNi/дц:
Дифференцируя Л^ь получаем
Четырехугольные элементы
303
ti
JL _
дг\ — 4
Вычисляя эти величины в точке ? = '/2. ц — г/г, имеем
_/, l_\ 2-Чш+Чш L
"I1 2 4 ~16
(¦-(¦
<w,
2 } 4
После перемножения матриц получаем
16
_3_
16-
8 [" 60 — 201 f 3/161
—13 61J C/16/
3400
120-,
68001
144_ '
6800i
ИЛИ
15_ dNt
~850 ду ~8
_ ^
дх ~850 ду ~850"
15.4. Соотношения, определяющие элементы
Чтобы получить соотношения, определяющие элемент, необхо-
необходимо вычислить объемные и поверхностные интегралы:
[?<*>]= Г [B]TlD][B]dV+ {h[N\T[N]dS,
V Si
= Г A7-ooI^]rdS, A5.22)
Замену переменных интегрирования можно сделать с помощью
соотношения
dV=\det[J]\tdtd-r\, A5.23)
где t — толщина элемента. Объемные интегралы в A5.22) приво-
приводятся к виду
l l
Г [В? [D] [В] dV=t Г Г [BY [D] [В] | det[/] | dr\dl,
v -l -i
—1 -1
1 1
A5.24)
UN]T[N]dV=t Г Г[ЛЧГ
V -l-I
304
Глава 15
Переход к переменным интегрирования | и ц упрощает пределы
интегрирования, что позволяет избежать трудностей, возникающих
при рассмотрении элементов с криволинейными границами.
Объемные интегралы в A5.24) записываются в общем виде
следующим образом:
1 1
Z = f Г /A, r\)dr\dl. A5.25)
—1 -1
Этот интеграл может быть определен численно: сначала вычис-
вычисляется внутренний интеграл, в котором | считается постоянной,
а затем вычисляется внешний интеграл. Вычисление внутреннего
интеграла дает
1 я
f(l,~i])dr\=2jHjf(l, r^)=g(i), A5.26)
"i /-1
g(l)—функция от |. Внешний интеграл теперь записывается
в виде
1 п
g(l)dl=YiHig(h)- A5.27)
f-i
Последнее выражение после подстановки g(g) по формуле A5.26)
принимает вид
1 л п
1=У.Н
,
—1
1=1
или
A5.28)
/-1
Порядок квадратурных формул, требуемый для точного вычис-
вычисления объемных интегралов, дан в табл. 15.1. Для определения
Таблица 15.1
Порядок квадратур Гаусса—Лежандра
для двумерных элементов
Элемент
[ЛПГ
[В? [В]
IN?
Линейный
Квадратичный
Кубичный
S.
2,
з
4,
п
2
3
4
1.
2,
2,
Ц
2
2
1.
1
2
2
1
.1
to
,2
Четырехугольные элементы 306
матриц элемента в случае линейного четырехугольника необхо-
необходимы четыре точки интегрирования, для кубичного четырехуголь-
четырехугольника требуется уже 16 точек интегрирования. Эти точки интегри-
интегрирования располагаются по элементу симметрично в соответствии
ft
г
1-f
г
-t
-t _,
-t
-t- '
-t-
. 0,7746Д П 77ЫЮ
Фиг. 15.9. Точки интегрирования, соответствующие чис-
численному интегрированию выражения [ЛГ|Г [N] по квад-
квадратичному элементу.
со значениями координат, представленными в табл. 13.2. Распо-
Расположение точек для квадратичного четырехугольника показано на
фиг. 15.9.
Применение формул A5.28) требует большого объема вычис-
вычислений и не иллюстрируется здесь. Процедура расчетов по форму-
формуле A5.28) совпадает с той, которая проиллюстрирована в гл. 13.
Различие заключается только в большем числе точек интегриро-
интегрирования.
Для составления матриц элемента в A5.22) необходимо опре-
определить два поверхностных интеграла:
Г h [N]T [N] dS и Г ЛГоо [N]TdS. A5.29)
Вычисление этих интегралов является относительно простой опе-
операцией, если элемент ограничен прямолинейными сторонами, но
становится более сложным в случае криволинейных сторон.
Если стороны элемента прямолинейные, проще всего интегра-
интегралы в A5.29) вычисляются аналитически. После вычисления ко-
коэффициентов матриц они могут быть сохранены в машинной па-
памяти для дальнейшего использования. Рассмотрим линейный че-
четырехугольный элемент, на второй стороне которого (узлы 2 и 3)
наблюдается конвективный теплообмен. Вычисление интегралов
начнем с вычисления функций формы при |—1, что соответствует
рассматриваемой стороне. Вспоминая функции формы A5.4),
имеем
Nx=— 4 ~~ —^' если 1 = 1,
20—763
306
Глава 15
_ (i+BP-ч) _ i-n
— ? 2~,
_ A+ВA+Ч) _ '+«1
— 4 ~~~2~'
Запишем произведение
" 0
1-т,
-f [О A-т)) A + т,) 0] =
О 0"
0 С1 —¦»!>¦ (l-^l2) О
О A-гJ) AН-Т))» О
0 0
о о
A5.30)
От нуля отличны только те члены, которые связаны с рассмат-
рассматриваемыми узлами.
Далее необходимо связать дифференциал длины dS с диффе-
дифференциалом переменной интегрирования dr\. Преимущество интег-
интегрирования по т] заключается в том, что при этом просто записы-
записываются пределы интегрирования. Дифференциалы dS и dr\ свя-
связаны соотношением
A5.31)
A5.32)
в котором |det[/]| определяется зависимостью
S A + 71K6
где 35 —длина стороны между узлами 2 и 3. Матрица Якоби [/]
для данной одномерной зависимости имеет вид
СЮ 1 /у» г т. /1 С ООч
Таким образом, имеет место равенство |det[7] | =36/2, и диффе-
дифференциалы связаны соотношением
A5.34)
Четырехугольные элементы
ЗОТ
Подстановка выражений A5.30) и A5.34) в A5.29) дает
0 0 0
0 A— г?) A + т,J О
0 0 0 0
"О О О О'
0 2 10
0 12 0
0 0 0 0
-1
Ц-Л-Ч, A5-35)
A5.36)
Отметим, что ненулевые коэффициенты в A5.36) изменяют
свое положение в зависимости от того, какая сторона элемента
рассматривается. Двойки при этом всегда остаются на главной
диагонали, а единицы располагаются вне ее. Чтобы убедиться в
этом, читатель сам может показать, что
h?[N]T[N)dS=-
0 0 V
0 0 0 0
0 0 0 0
10 0 2
A5.37)
для стороны, содержащей первый и четвертый узлы.
После приведенного рассмотрения вычисление второго интег-
интеграла в A5.29) не составляет труда. Используя матрицу функций
формы [N]T из A5.30) и соотношение A5.34), находим
—т)) L
1
i
-1
0
A —Т))
A +Т))
0
A5.38)
Значения ненулевых коэффициентов в матрицах, получаемых
в результате вычисления интегралов A5.29), идентичны значени-
значениям, полученным для треугольных элементов. Соотношения A4.17)
и A4.18) могут быть применены и к четырехугольным элементам.
Выведенные выше формулы могут быть также использованы для
элементов с криволинейными границами, при этом величина %
представляет собой длину дуги рассматриваемой стороны. Этот
факт непосредственно следует из соотношения A5.32), в котором
длина дуги у выражается через | (или т)) с помощью соответст-
соответствующих функций формы.
20»
308 Глава 15
15.5. Прямоугольные призмы
Рассмотрим трехмерные элементы, которые принадлежат тому
же семейству, что и четырехугольник. Семейство трехмерных
призм в координатах |, ц, ? изображено на фиг, 15.10. Функции
Линейный
Кубичный
20 узлов
Т ^ Д
Квадратичный
52узла
Фиг. 15.10. Элементы в виде призм для трехмерных
моделей.
формы для этих элементов приведены только в общем виде из-за
большого числа узловых точек. Используя обозначения
Е,=йц, 4o=TO. Со=Кз. A5.39)
запишем следующие соотношения для функций формы.
Линейный элемент (8 узлов)
Щ = 8 A+?о)(
Для примера рассмотрим определение Wi. В этом случае, учиты-
учитывая формулы A5.39), имеем
Четырехугольные элементы 309
так как ?i = — 1, тю=—Ц, ?о ?• Используя эти выражения, по-
получаем для Nt следующее соотношение:
Квадратичный элемент B0 узлов)
Для угловых узлов
2). A5.41)
Для узлов на ребрах
gp=O, ц=±1, ?=±1,
A5.42)
Соответствующие выражения для узлов на других ребрах полу-
получаются перестановкой координат.
Кубичный элемент C2 узла)
Для угловых узлов
^ )-19]. A5.43)
Для узлов на ребрах
6= ±-g-. %=±1. ? = ±1. A5.44)
Приведенные выше выражения сводятся к их двумерному аналогу
при ? ±1. Так как при |=±1 или ti = + 1 двумерные функции
формы сводятся к одномерным функциям формы, рассмотренные
трехмерные элементы могут быть объединены в один класс с соот-
соответствующими плоскими или одномерными элементами.
В случае трехмерных элементов сохранение непрерывности при
переходе от одного элемента к другому означает непрерывность
по поверхности, общей для двух соседних элементов. Таким обра-
образом, функции формы должны быть такими, чтобы неизвестные ве-
величины однозначно определялись их узловыми значениями в точ-
точках поверхности, общей для двух элементов. Приведенные выше
функции формы обладают этим свойством.
Процедура составления матриц элемента почти идентична той,
которую мы обсудили при рассмотрении четырехугольного элемен-
элемента. Матрица Якоби теперь имеет размеры 3X3, число точек ин-
интегрирования при вычислении величины [B]ff[B] равно 23=8, 27
и 64 соответственно для линейного, квадратичного и кубичного
310
Глава 15
элементов. При этом предполагается симметрия в аппроксимирую-
аппроксимирующем полиноме (порядок полинома по каждой из координат один
и тот же). Общая форма интегралов записывается как
1 1 1
f f f
-i -i -i
= S 2
det
A5.45)
Очевидно, что определение матриц элемента в данном случае
требует большого объема вычислений. Для получения матрицы
[&<е>] в случае кубичного элемента должны быть вычислены
64 матрицы каждая размером 32X32. Для составления матрицы
линейного элемента требуется вычислить 16 матриц размером
8x8, в случае квадратичного элемента необходимо вычислить
27 матриц размером 20X20. Поскольку ЭВМ легко справится с
такими расчетами, приведенные цифры не должны удерживать от
использования квадратичных и кубичных элементов.
Задачи
квад-
квад160. Получите выражения для функций формы N3 и
ратичного четырехугольного элемента.
161. Получите выражения для функций формы N5 и N^ кубич-
кубичного четырехугольного элемента.
162. Получите выражения для функций формы четырехугольно-
четырехугольного элемента, изображенного ниже.
К задаче 162.
163. Определите порядок интегрирования, необходимый для
численного определения интеграла j [N]T[N]dV в случае элемен-
элемента из задачи 162.
164. Вычислите частные производные dNzjdx и dNzjdy в точке
?=*/2, т) =—1 элемента из задачи 159.
Четырехугольные элементы ЗП
165. Вычислите частные производные dN3ldx и dNs/dy в точке
|=—iU, ц = 1/2 элемента из задачи 159.
166. Напишите подпрограмму, которая. будет вычислять част-
частные производные функций формы по х и у. Зависимость х и у
от естественных координат считайте линейной, а для <р используй-
используйте выражение A5.11). Координаты (|, ц) точки, в которой вычис-
вычисляются производные, должны вводиться в подпрограмму в качест-
качестве исходных данных.
167. Проинтегрируйте численно J [ATJr<2S вдоль границы ц—1
квадратичного элемента и сравните результат со значением, полу-
полученным аналитически.
168. Составьте блок-схему программы численного интегрирова
ния \ [N]T[N]dV. Зависимость х и у от естественных координат
V
считайте линейной, для <р используйте выражение A5.11).
ДОПОЛНИТЕЛЬНАЯ ЛИТЕРАТУРА
Cook R. D., Concepts and Applications of Finite Element Analysis, Wiley, N. Y.,
1974.
Zienkiewicz О. С, The Finite Element Method in Engineering Science, McGraw-
Hill, London, 1971; есть русский перевод: Зенкевич О., Метод конечных эле-
элементов в технике, изд во «Мир», М., 1975.
Глава 16
ЭЛЕМЕНТЫ ВЫСОКОГО ПОРЯДКА.
МАШИННАЯ РЕАЛИЗАЦИЯ
В гл. 13 15 обсуждались общие свойства элементов высокого
порядка. Был рассмотрен только один пример использования этих
элементов, а именно в задаче о переносе тепла в стержне был
применен одномерный квадратичный элемент. Вопрос о том, как
выполнить надлежащие расчеты с помощью ЭВМ, не обсуждал
ся. Настоящая глава завершает рассмотрение элементов высокого
порядка. Здесь будет описана машинная реализация указанных
элементов, приведены три конкретных примера, а также будет
показано, как определить координаты узлов, расположенных на
криволинейных границах.
16.1. Машинная реализация
Вычисление матриц элемента в случае использования элемен-
элементов вцсокого порядка требует выполнения большого числа ариф-
арифметических операций, которые проще всего проводить с помощью
быстродействующей цифровой вычислительной машины. Последо-
Последовательность выполнения операций не зависит от типа элемента.
Общая блок-схема вычисления матриц элемента представлена на
фиг. 16.1. Рассмотрим основные этапы вычислений по этой схеме.
Отправной точкой в расчетах является выбор точек интегри-
интегрирования и весовых коэффициентов для численного интегрирова-
интегрирования. Число точек интегрирования зависит от порядка интерполя-
интерполяционного полинома, который в свою очередь определяется тем,
какой элемент используется при построении дискретной модели.
Информация о типе и порядке (линейный, квадратичный, кубич-
кубичный и т. д.) элемента должна быть введена в ЭВМ до того, как
начнется вычисление матриц элемента. Эта информация обычно
вводится вместе с номерами узлов элемента. Порядок элемента
должен быть определен при задании геометрии элемента и при
интерполировании искомой величины по ее узловым значениям.
Значения координат точек интегрирования и весовых коэффи-
коэффициентов вычисляются в отдельной подпрограмме. Правильные
значения этих величин для рассматриваемого элемента получают-
получаются при использовании ряда условных операторов IF, определяю-
определяющих тип элемента (треугольный, четырехугольный и т. д.) и его
Выбор точек интегрирования
и весовых коэффициентов
WC
Заполнение [kle>] и {f'e>}
нулями
Вычисление [J], [f\ '
и \m[J\
II jj ¦>
Да
Нет
Вычисление
ШвГММ.
1
Вычисление функции формы
и их производных
J
Цикл
I 1.NR
Det[j]\* WC (KK)
Фиг. 16.1. Блок схема численного определения матриц элемента.
К число точек интегрирэвания; NR — число строк и столбцов в матрицах; // — порядок
элемента полинома, используемый для задания формы элемента; 11 — порядок элемента,
используемый при определении узловых параметров
314 Глава 16
порядок. Необходимо также сохранить для основной программы
величину, соответствующую числу точек интегрирования, так как
эта величина потребуется в качестве параметра цикла, в котором
выполняется численное интегрирование.
Составление матрицы Якоби, обратной к ней матрицы и вы-
вычисление ее определителя составляют первый этап работы цикла,
в котором вычисляются коэффициенты матриц элементов. Необ-
Необходимые для составления матрицы Якоби частные производные
вычисляются в подпрограмме, которая определяет как функции
формы Ru так и их производные dRildl, и dRi/дц. Выбор соответ-
соответствующего множества функций формы осуществляется с помощью
условных операторов IF, устанавливающих тип и порядок эле
мента.
После того как вычисление матрицы Якоби завершено, нужно
решить, какими функциями формы будем пользоваться для интер-
интерполирования величины ф. Будут ли это те же самые функции
формы, которые использовались для получения матрицы Якоби,
или они будут другими? Если это те же самые функции формы,
т. е. элемент изопараметрический, то Nit dNi/d%, dNi/дц и т. д.
совпадают с R{, dRildl, и т. д., использованными для получения
матрицы Якоби, и можно приступить непосредственно к вычисле
нию частных производных dNi/дх, dNi/dy и dNi/dz. Если интерпо-
интерполяционный полином для ф отличается от полинома, который при
менялся для задания формы элемента (субпараметрический или
суперпараметрический элемент), то необходимо вычислить Ni,
dNi/db,, dNijdx] и т. д., прежде чем приступить к следующему шагу.
Частные производные по координатам х, у и z определяются
в подпрограмме, которая выполняет умножение вектор-столбца,
содержащего dN{/d% и т. д., на матрицу Якоби. Зная частные про-
производные, можно построить матрицу градиентов [Б] и вычислить
все подынтегральные выражения, такие, как [B]T[D][B],
[5]т[/)] {ео}. Элементы матриц [№] и {}Щ теперь получаются
умножением соответствующих значений подынтегральных выра-
выражений на весовые коэффициенты и сложением полученных вели-
величин с результатами аналогичных операций, уже выполненных для
других точек интегрирования. Поскольку [№] и {/(е>} получаются
путем суммирования, элементы этих матриц должны быть при-
приравнены нулю перед началом работы внешнего цикла.
Для определения результантов элемента необходимы частные
производные dNJdx и т. д. Поэтому процедура вычисления этих
величин включает многие из тех расчетов, которые производятся
при составлении матриц элемента. Результанты элемента могут
быть вычислены в точках интегрирования или в любых других
точках внутри элемента. Координаты точек, отличных от точек
интегрирования, должны быть указаны для каждого элемента.
Элементы высокого порядка. Машинная реализация
315
16.2. Примеры применения
В этом разделе обсуждается решение трех задач, рассмотрен-
рассмотренных ранее. Будут рассмотрены кручение стержня с поперечным
сечением в виде квадрата, распределение температуры вблизи ка-
кабеля, а также распределение напряжений в области выточки.
Каждая из этих задач была решена ранее с использованием тре-
треугольного симплекс-элемента. Мы сравним результаты, полученные
с помощью элементов высокого порядка, с данными, которые по-
получаются при использовании симплекс-элементов.
16.2.1. Кручение стержня квадратного сечения
В гл. 7 были найдены сдвиговые напряжения в стержне квадрат-
квадратного сечения со стороной 1 см, подверженном действию крутящего
момента величиной 196 Н-см. Из соображений симметрии рассмат-
рассматривалась часть стержня в виде
прямоугольного треугольника,
который разбивался на 64 эле-
элемента с 45 узлами. Было полу-
получено максимальное значение
тг!/=915 Н/см2, которое отлича*
ется от теоретического макси-
максимума 945 Н/см2 на 3,2%.
Задача о кручении стержня
была решена дважды путем раз-
разбиения исходной области на ку-
кубичные треугольные элементы.
В обоих случаях для задания
формы элемента использовались
линейные функции формы для
треугольника. В первом случае
для разбиения применялся толь-
только один элемент (фиг. 16.2,а),
во втором случае область разби-
разбивалась на четыре элемента (фиг.
16.2,6). В обоих случаях наи-
наибольшее сдвиговое напряжение
было получено в вершине пря-
прямого угла исходной треугольной
области.
В одноэлементной модели мак-
максимальное значение ryz равно
890 Н/см2. Это значение практи- 0
чески совпадает со значением, по- фиг. 162. Разбиение области на эле-
лученным при использовании 64 менты в задаче о кручении.
316
Глава 16
симплекс элементов (892 Н/см2) до применения теории согласо-
согласованных результантов элементов. В случае разбиения области на
четыре кубичных треугольных элемента максимальное значение х:у
равно 929 Н/см2. Эта величина только на 1,7% меньше теорети
ческого максимума 945 Н/см2.
<>929
Фиг. 16.3. Значения напряжения хгу в отдельных точках эбласти (напряжение
хгу вычислялось в узловых точках). G —8-106 Н/см2, g 1° на 100 см, 2G0 —
-2791 Н-рад/см3.
При использовании элементов высокого порядка исчезает не-
необходимость в применении теории согласованных результантов эле-
элементов, потому что результанты элемента теперь являются функ-
функциями координат и могут быть вычислены в произвольной точке.
На фиг. 16.3 представлены значения xzy в точках, расположенных
на границах элементов. Заметим, что точкам, которые являются
общими для двух и большего числа элементов, соответствует не
сколько чисел. Эти числа могут существенно отличаться по вели
чине. То же самое наблюдается при вычислении любой другой
величины, зависящей от производных искомой функции. Послед-
Последнее обстоятельство указывает на то, что в точке, общей для смеж
ных элементов, поверхность, соответствующая искомой функции,
имеет по разным направлениям различные углы наклона. Полу
ченные значения можно уточнить, если использовать при разбие-
разбиении области элементы меньших размеров.
Главное отличие, которое получается при вычислении резуль-
результантов элемента с использованием симплекс-элементов и элемен-
Элементы высокого порядка. Машинная реализация
317
тов высокого порядка, иллюстрируется на фиг. 16.4, где показано
изменение величины xzy вдоль оси х. При использовании симплекс-
элементов напряжение получается постоянным в каждом элемен-
элементе, что соответствует ступенчатому изменению напряжения при пе-
переходе от одного элемента к другому. В случае применения тео-
теории согласованных результантов распределение xyz получается не-
WOOh
0.25
^ X. CM
Фиг. 16.4. Распределение по оси х значений1 хгу, вычисленных тремя различными
методами.
симплекс элементы; — согласованные напряжения; — • — четыре кубич-
кубичных треугольных элемента.
прерывным, но оно отклоняется от истинных значений в центре и
на границе области. Значения, полученные с помощью модели из
четырех кубичных треугольников, тоже непрерывны, но они рав-
равны нулю в центре квадрата и правильно отражают распределение
напряжений вблизи границы области. Значение в точке х 0,25 см
получено усреднением по трем значениям %уг.
Применение элементов высокого порядка уменьшает не только
количество требуемых данных, но и размер результирующей си-
системы уравнений. Десять уравнений были решены в случае одно-
одноэлементной модели, для четырехэлементной модели решалась систе-
система из 28 уравнений. В обоих случаях число уравнений меньше 45,
т. е. меньше числа уравнений, полученных при использовании
симплекс элементов. Кроме того, при использовании элементов
высокого порядка отпадает необходимость в применении теории
согласованных результантов элемента. Таким образом, исключает-
исключается из рассмотрения еще одна система из 45 уравнений. В резуль-
результате сокращения числа уравнений уменьшаются время решения
их на ЭВМ и объем требуемой машинной памяти.
318
Глава 16
16.2.2. Распределение температуры вблизи кабеля
Задача, в которой рассматривался кабель, помещенный в теп-
лопроводящую среду, была решена в гл. 8 (фиг. 8.6), причем ис-
исходная область разбивалась на 96 элементов с 65 узлами. Эта
«область была рассмотрена с применением разбиения на четыре
Кабель
\
Кабель '
I
С
. W <
E) <
• B) '
¦ 0) «
"Фиг. 16.5. Четырехугольные элементы, используемые при исследовании переноса
тепла вокруг кабеля.
квадратичных четырехугольных элемента, а также разбиения на
два кубичных четырехугольных элемента. Эти элементы были рас-
расположены (фиг. 16.5) так, чтобы кабель находился в узле.
~ Сравнение результатов, полученных для трех различных моде
лей, проведено на фиг. 16.6, где показано распределение темпера-
температуры вдоль линии г/=4 см. Модель, использующая симплекс-эле
менты, и модель из четырех четырехугольных элементов дают по
существу совпадающие результаты, тогда как двухэлементной мо
дели соответствуют меньшие значения температуры в точке рас-
расположения кабеля и на оси симметрии (правая граница области)
л большие значения температуры на отрезке ст 0,25 до 1,5 см.
Температура кабеля равна 21,8, 21,1 и 20,4 °С соответственно для
модели, использующей симплекс-элементы, четырехэлементной и
двухэлементной моделей. Как видно, различие в приведенных
значениях температуры кабеля несущественно, а значения темпе
ратуры в точках верхней границы области, вычисленные по трем
моделям, отличаются не более чем на 0,5 °С.
Модель из четырех четырехугольных элементов, видимо, точнее
двухэлементной, так как на большой части первого элемента в
двухэлементной модели температура получается постоянной
Элементы высокого порядка. Машинная реализация
319
A5°С), что затрудняет моделирование изменения температуры
вдоль линии, проходящей через точку расположения кабеля.
В случае четырехэлементной модели зона постоянной температуры
отделена от кабеля.
В результате использования элементов высокого порядка опять
наблюдается значительное сокращение числа уравнений. Так, для
25
I
I
20
75
/О
О
X, СМ
Фиг. 16.6. Распределение температуры в горизонтальной плоскости, содержащей
точку расположения кабеля.
симплекс элементы; — четыре четырехугольных элемента; — ¦ — два четырех-
четырехугольных элемента.
четырехэлементной модели необходимо решить систему из 23 урав-
уравнений, для двухэлементной модели это число равно 19 вместо
65 уравнений для модели, сконструированной с использованием
симплекс-элементов.
16.2.3. Концентрация напряжений в зоне выточки
Анализ концентрации напряжений в зоне выточки при растя-
растяжении детали конструкции (фиг. 12.4) был проведен с помощью
четырехугольных квадратичных элементов. Причем были взяты
те же элементы, которые использовались для предварительного
разбиения области при генерировании исходных данных элемента
для симплексной модели (фиг. 12.5).
Значения главного напряжения oi на концах области и в зоне
выточки, соответствующие четырехэлементной модели, показаны
на фиг. 16.7. Средние по узлам значения о на правом и левом
концах детали составляют 21918 и 43 952 Н/см2 соответственно,
что близко к истинным значениям 22 000 и 44 000 Н/см2. Однако
в зоне выточки получаются сомнительные значения о. Во-первых»
320
Глава 16
значения ахх и ауу в вершине прямого угла не равны нулю, как
это должно быть на самом деле, а составляют величины порядка
2000 Н/см2. Узловому значению верхнего из узлов, общих для
третьего и четвертого элементов, соответствуют два числа, отли-
отличающихся между собой примерно на 15 000 Н/см2. Все это пока-
=2326
2201Л
509—*-
Фиг. 16.7. Некоторые значения О[ для модели из четырех элементов в виде
четырехугольников.
зывает, что данное разбиение области на элементы еще не доста
точно мелкое. Величины напряжений вдоль криволинейной грани
цы выточки очень сильно изменяются, и для моделирования эти\
значений двух уравнений явно недостаточно. Наибольшее значс
ние at получается порядка 67 000 Н/см2. Это соответствует коэф
фициенту концентрации напряжений 1,52, что отличается от при-
принятого значения 1,42 на 7%.
При более мелком разбиении области на элементы можно ожи-
ожидать получения более точных значений напряжений. Определение
координат узлов и перфорирование исходных данных при более
мелком разбиении требует больших затрат времени, так что при-
применение элементов высокого порядка больше не ускоряет решс
ние проблемы. Решение, данное в гл. 12, видимо, самое простое,
и нужно отдать предпочтение именно ему. Использование большо
го числа малых простых элементов также дает возможность ап
проксимировать перемещения вдоль границы выточки с достаточ
ной степенью точнэсти. Главный недостаток в использовании симп
лекс-элементов состоит в необходимости решать еще одну систе
му уравнений для получения узловых значений компонент напря-
напряжений.
16.3. Криволинейные границы
Размещение узлов при задании формы элемента и определение
узловых значений {/(е)} не составляют большого труда, когда гра-
границы элемента прямолинейные. Однако наличие напряжений или
конвективного теплообмена на криволинейных границах резко
Элементы высокого порядка. Машинная реализация
321
усложняет определение {f(e)} и [&(е)]. Распределение поверхност-
поверхностной нагрузки по узлам одинаково (V6, 2/з, */в или Ve. %, 3/s, Ve
в случае квадратичного и кубичного элементов), но длина грани-
границы должна быть использована в расчетах. Вычисление длины
криволинейной границы и составляет содержание данного раз-
раздела.
Математически длина дуги определяется интегралом
dx
A6.1)
где y=f(x), а точки а и Ь соответствуют границам дуги. В соот-
соотношении A6.1) суммируются длины d<?6, каждая из которых вы-
вычисляется по формуле <й?2 = dx2+dy2. Интегрирование в A6.1)
может быть заменено приближенно вычислением длины d % для
каждого малого приращения х с дальнейшим суммированием по
всем приращениям.
а Л. Xj Ь *
Фиг. 16.8. Аппроксимация кривой с использованием че-
четырех узлов.
Для вычисления приращения длины дуги d% можно исполь-
использовать одномерные функции формы. Рассмотрим кривую y=f(x)
на фиг. 16.8 с определенными граничными точками а и Ъ. Если
кривая аппроксимируется кубичным полиномом, необходимы два
дополнительных узла. Расположим их так, чтобы они делили кри-
кривую между точками о и & на участки равной длины. После того
как значения у в четырех узлах Yit Y2, Y3 и У4 определены, ап-
аппроксимирующее соотношение для у записывается в виде
=[N± N2 N3 Nt]
A6.2)
у*
21-763
322 Глава 16
Следующий шаг состоит в делении оси х на отдельные отрезки
(числом от 50 до 100) и вычислении длин дуг, соответствующих
каждому отрезку оси, по формуле
ГгJ. A6.3)
Сложение длин всех этих дуг дает длину дуги кривой в целом
Итак, в случае криволинейной границы возникает необходи
мость определения координат одной или двух точек, которые де-
делят кривую на два или три участка равной длины. Расположение
этих точек может быть определено в результате запоминания на
капливаемых приращений длины дуги по х. Как только полная
длина дуги станет известна, сравнительно просто пройти отрезок
в обратном направлении и найти две точки на оси х, между ко-
которыми должен располагаться узел. Далее, считая изменение
функции между этими двумя точками оси х линейным, определи
ем х координату узла. После определения х координаты узла, его
у-координата вычисляется по формуле A6.2).
Задачи
169. Напишите программу для определения длины кривой, ко-
которая аппроксимируется кубичным одномерным элементом. Про-
Проверьте программу, рассматривая кривую у 2 + х2 на отрезке от
х~1 до х—2. Сравните результаты вычислений по программе с
результатами, полученными по формуле A6.1).
Глава 17
ВЫВОД УРАВНЕНИЙ ДЛЯ ЭЛЕМЕНТОВ
С ПОМОЩЬЮ МЕТОДА ГАЛЁРКИНА
Уравнения для элементов, которые использовались в главах
прикладного характера, были выведены в гл. 5 путем минимизации
либо энергии деформации, либо функционала, связанного с ряг-
сматриваемым дифференциальным уравнением. Существуют дру-
другие способы получения уравнений для элементов. Преимуществом
этих способов является то, что отправной точкой для них служит
непосредственно само дифференциальное уравнение и, кроме того,
они исключают необходимость вариационной формулировки фи-
физической задачи. Один из способов, известный как метод Галёр-
кина, был предложен в 1915 г. Галёркиным как приближенный
метод решения краевых задач. В сочетании с интерполяционными
соотношениями метода конечных элементов метод Галёркина весь-
весьма эффективен при решении как краевых задач, так и задачи
Коши.
В этой главе обсуждается применение метода Галёркина к
решению дифференциальных уравнений первого и второго поряд-
порядка. Эти области приложения достаточно хорошо иллюстрируют
реализацию метода Галёркина, а также показывают возможность
его применения в других прикладных областях.
17.1. Метод Галёркина
Метод Галёркина обсуждался многими авторами. Применения
этого метода в сочетании с конечно элементной моделью рассмат-
рассматривались в работах [2, 3, 6]. Подробное изложение его содержит-
содержится также в работе [4]. С помощью метода Галёркина получается
приближенное решение дифференциального уравнения. При этом
должно выполняться следующее условие: разность между прибли-
приближенным и точным решениями должна быть ортогональна функ-
функциям, используемым при аппроксимации.
Если исходить из дифференциального уравнения Lu f=0
(L — дифференциальный оператор) и приближенное решение ис-
искать в виде u = l,NiUi, то для него будем иметь Lu—f = e, где е —
остаток или ошибка, поскольку это решение только приближен-
приближенное. Мы хотим сделать е малой величиной, насколько это воз-
возможно. При использовании одного из способов сделать е как мож-
21*
324 Глава 17
но меньшей величиной требуется выполнение равенства
О для каждой из базисных функций N\. Это равенство матема-
математически означаем чю базисные функции должны быть ортогональ-
ортогональны ошибке по области R.
Применение метода Галёркина в сочетании с методом конеч-
конечных элементов приводит к уравнениям
NpL((f)dR—0, p=i, /, k, . . ., A7.1)
~R
где ф искомая величина, которая аппроксимируется соотноше
нием
ф=[^., Nj, Nk, . . .]{Ф], A7.2)
а 1ф дифференциальное уравнение, определяющее ф. Пусть
тогда формула A7.1) принимает вид
е=0. A7.3;
Верхний предел интегрирования равен длине одномерной области,
в которой ищется решение.
Высший порядок производных, которые могут содержаться в
L((p), не ограничен, он определяется физическим смыслом задачи.
Однако высший порядок производных, который допустим в A7.1),
на единицу больше порядка непрерывности интерполяционных со-
соотношений. Так как все интерполяционные соотношения в этой
книге нулевого порядка непрерывности (непрерывна ф, но не ее
первая производная), в уравнения A7.1) могут быть включены
производные порядка не выше первого. Это ограничение может
вызвать некоторые сложности, но большинство из них можно npt
одолеть сокращением порядка Ь(ц>), используя интегрирование
по частям.
17.2. Изгиб балки
Уравнение упругой линии балки
Чх^~ — ~еТ A7-4)
служит удобной отправной точкой для данного обсуждения; оно
описывает одномерную задачу, и, кроме того, это одно из уравне-
уравнений, которые наиболее часто рассматриваются инженерами. На-
Вывод уравнений для элементов методом Галёркина 325
помним, что М — изгибающий момент в произвольной точке х
балки, Н-см, Е — модуль упругости, Н/см2, / — момент инерции
сечения, см4, и у— прогиб балки, см. Будем предполагать, что
М — известная функция координаты х, тем самым M/EI будем
считать заданной величиной.
Применение метода Галёркина к уравнению A7.4) приводит
к соотношению
(S
5
Интерполяционная функция для у определена на отдельном эле-
элементе, поэтому уравнение A7.5) должно быть переписано в виде
суммы
где R — число элементов, a L(e> — длина отдельного элемента.
Прежде чем начинать вычисления, необходимо выбрать функции
формы [№е)] и преобразовать интеграл A7.6) таким образом, что-
чтобы он содержал производные порядка не выше первого.
Ограничимся линейной моделью для у:
^}[tfW]{K). A7.7>
^ ^ 1--J-), -f J
Момент М — функция длины элемента, величина M/EI^ может
быть аппроксимирована также с помощью линейной модели:
I JVi • iFI I
Интеграл
[NW]T % dx
1 ' dx2
преобразуем путем интегрирования по частям, что дает
Г [№f i!| dx=lNM]T-^- —Г rf[iV(c)f d« dr., A7.9)
J, , dx* dx I _ dx dx v '
'> Эта величина представляет собой кривизну балки. — Прим. ред.
326
Глава 17
Подставляя A7.9) в A7.5), получаем в качестве исходного урав-
уравнения соотношение
xi
dx
-[.(-
dx
dx
T—)dx=0. A7.10)
III i
xi L{e)
Первое слагаемое в интеграле A7.10) представляет собой мат
рицу коэффициентов элемента [k{e)] в уравнении
rfcWl (V)— If(ei) (\7 11)
После суммирования по элементам второе слагаемое в интеграле
A7.10) будет соответствовать вектор-столбцу {/•"}. Член вне ин
теграла в A7.10) внисиг вклад в вектор столбец {F} при уело
вии, что производная dyjdx (наклон) определена на каждом кон
це элемента. Этот член не учитывается, если ничего не известно о
наклоне в узловых точках.
Вычислим интегралы в A7.10):
J_
dx
dx
X
т
—1
1
L
— 1
1
ч'к'
[ 1 И
Y,
dx,
или
Верхний индекс (е) отброшен, так как рассматривается отдель
ный элемент. Интегрирование выполняется в пределах от нуля до
L, так как функции формы в A7.7) выражены в местной системе
координат с центром в г'-м узле. L — длина элемента. Для второ
го интеграла имеем
Применение полученных соотношений иллюстрируется на следую
щем примере.
Вывод уравнений для злементов методом Галёркина
327
Пример
170. Консоль длиной 150 см жестко закреплена в точке
х = О и подвержена действию сосредоточенной силы величиной
4500 Н на свободном конце. Изгибная жесткость сечения EI рав-
равна 8,5-10е Н/см2. Требуется определить прогиб консоли в шести
узловых точках, расположенных на равном расстоянии друг от
друга.
Разбиение области на элементы, а также эпюра изгибающего
момента показаны ниже. Значения величины MJEI в узлах даны
в следующей таблице:
Узел
M/EI « Узел
1 —0,000794
2 —0,000635
3 —0,000476
4
5
6
M/EI
—0,000318
—0,000159
0,0
150см
E)
Эпюра моментов
67500 Н-СМ
К задаче 170. ?/=8,5-108 Н-см2; длина каждого элемента 30 см.
Запишем уравнения, соответствующие первому элементу:
_-1 Г 1— 1] { ^П __30_ [2 П i Mt/EI )
30 [_1 l\\Y}\ 6 [l 2\ \ MjlEl]
х
L
dy_
dx
х-0
Последний член в левой части уравнений исчезает, поскольку в
точке х — 0 угол поворота равен нулю. Этот член не появляется
в других уравнениях, потому что ничего не известно об угле по-
328
Глава 17
ворота ни в одной из других узловых точек. Коэффициенты в
уравнениях для остальных элементов остаются теми же самыми,
так как все элементы имеют одинаковую длину. В результате
¦суммирования матриц элементов получаем следующую систему
уравнений:
—1
— 1 2 —1
— 1 2 —1
— 1 2 —1
— 1 2 —1
— 1 1
150
1
1 4 1
1 4 1
1 4 1
1 4 1
1 2
—0,000794'
—0,000635
—0,000476
—0,000318
—0,000159
0,0
0
0
0
0
0
или
-1
2
-1
-1
2
-1
— 1
2 —1
— 1 2
— 1
— 1
1
0,33345
0,57155
0,42855
0,28605
0,14310
0,02385
Последняя система уравнений может быть решена без обра-
обращения матрицы, потому что Fi — 0. Из первого уравнения
получаем
Кх—Ка=0,33345
Y2=—0,33345.
Второе уравнение теперь может быть решено относительно У3,
третье — относительно Yu и т. д. Таким образом, для Y могут быть
записаны рекуррентные соотношения. Определяя п как глобаль-
глобальную степень свободы, будем иметь
или
yn+1=2Yn-Yn^-Fn,
Вывод уравнений для элементов методом Галёркина
329
Окончательные значения прогибов в узловых точках даны ниже.
Эти значения очень хорошо согласуются с теоретическими резуль-
результатами.
Узел
1
2
3
Метод
конечных
элементов
0
—0,3334
—1,2385
Теоретические
значения
0
-0,3335
—1,2388
Узел
4
5
6
Метод
конечных
элементов
—2,5719
—4,1929
—5,9550
Теоретические
значения
—2,5729
—4,1929
—5,9559
В рассмотренной выше задаче были получены рекуррентные
уравнения благодаря наличию граничных условий г/@)=0 и
г/'@)=0 того же типа, что и в задаче Коши. Если граничные
условия состоят в задании прогиба в двух или более точках, то
линейная система уравнений должна быть решена с помощью
процедуры, описанной в гл. 7. Последняя компонента вектора
{F} не существенна для данного примера, потому что значение
У6 может быть определено из пятого уравнения. Шестое уравне-
уравнение системы не будет выполняться, если в него подставить най-
найденные числовые значения Y5 и У6. Это объясняется тем, что, ре-
решая задачу Коши, мы произвольно урезали область задания ис
ходного дифференциального уравнения.
17.3. Двумерные уравнения теории поля
Ряд задач физики и техники может быть описан уравнением
вида
= 0. A7.14)
В предыдущих главах это уравнение было использовано при ре-
решении задач о течении жидкости, переносе тепла и о кручении
упругого стержня. Здесь уместно обсудить применение метода
Галёркина к решению уравнения A7.14).
Подстановка A7.14) в A7.1) дает
A7.15)
дх*
Прежде всего необходимо преобразовать A7.15) в уравнение, со-
содержащее только первые производные по х и у. Замечая, что
а
а*
дх*
ЫГ
dtp
330 Глава 17
можно записать
dx*
dx [[IVi dx J dx l/VJ dx •
Теперь первое слагаемое в объемном интеграле преобразуется
к виду
V V V
По теореме Остроградского — Гаусса имеем
J-^KS)^-!1^^-^- A7Л8)
V S
Точно так же можно преобразовать интеграл
j
Объединяя соотношения A7.17) и A7.18) с аналогичными соот-
соотношениями для приведенного выше интеграла и учитывая, что
dV=tdA и dS=tdm,
уравнение A7.15) можно переписать в виде
j
^L -2-1*1'«)«-0. (.7.19)
A
Здесь предполагается, что толщина элемента / равна единице.
Поверхностный интеграл в A7.19) может быть выражен че-
через величину ду/дп, где п — внешняя нормаль к поверхности.
В результате имеем
d[N]T дер \dA-.[[N)T QdA-
д д ) J l Ч
дх дх ~ ду ду
л
asc=o. A/.20)
— \\ЩТ
Первый интеграл в A7.20) вносит вклад в матрицу [?(е)], вто-
второй— в вектор {/(е)} из уравнения [fe(e)] {ф} {/(е)}. Третий интег-
интеграл участвует в образовании обеих величин [&(е)] и {/(е)}. Очевид-
Очевидно, если ду(дп обращается в нуль на границе, то третий интеграл
исчезает.
Вывод уравнений для элементов методом Талёркина 331
Неизвестная функция ф в уравнении A7.20) определяется со-
соотношением
так что
Подставляя полученные формулы в первый интеграл A7.20),
имеем
C(d[Nf d[N] d[Nf d[N]_\dAm
J \ dx dx ~ dy dy I l J>
что соответствует выражению
[В\т [В] dA {Ф} A7.21)
для задач теории поля.
Третий интеграл в уравнении A7 20) заслуживает более де-
детального рассмотрения, поскольку образует конвективную матри-
матрицу в задаче о переносе тепла. Предположим, что мы имеем ряд
треугольных элементов вдоль вертикальной границы, как показа-
показано на фиг. 17.1 (эта граница выбрана только из соображений
простоты), и хотим вычислить интеграл
\lN]r-^d% A7.22)
вдоль этой границы. Поток тепла вдоль границы соответствует теп-
тепловым потерям, вызванным конвективным теплообменом, и пред-
представляется величиной
-Й-=А(Ф.-Ф»). A7.23)
где ф„ — температура границы тела, а ф»— температура окру-
окружающей среды.
Температура внутри элемента дается соотношением
й> A7.24)
откуда имеем для точек поверхности
*, A7.25)
332
Глава 17
так как вдоль рассматриваемой границы Lt 0. Теперь для тепло-
теплового потока получаем следующее выражение:
$-=А(ф,-Ф=о)=А[0 L, I,]
дп
ф;
A7.26)
Фиг. 17.1 Поток тепла на границе элемента.
Подстановка A7.26) в A7.22) дает
Г [N]T -g- <ЙС=А Г [N]T [N] [Ф] d<&— Г [N\T АфсойЗС, A7.27)
S5 2? 26
где iV— [0 L2 L3]. Выполняя интегрирование в A7.27) с помощью
плоских L-координат, приходим к результатам, идентичным тем,
что получены в гл. 8.
Использование метода Галёркина непосредственно приводит
к слагаемым, которые в вариационной формулировке должны
быть добавлены к функционалу, чтобы учесть граничные условия.
Метод Галёркина применяется также при решении двумерных и
трехмерных задач теории упругости [5]. В результате получается
система уравнений, подобная той, которая соответствует вариаци-
вариационной формулировке этих задач.
Вывод уравнений для элементов методом Галёркина 333
17.4. Задача Коши
Метод Галёркина может быть использован при решении зада-
задачи Коши, а также при решении переходной задачи, обсуждавшей-
обсуждавшейся в гл. 11. В этом разделе будет рассмотрена задача Коши для
одного дифференциального уравнения, а затем проведено обобще-
обобщение на случай системы дифференциальных уравнений первого по-
порядка.
Рассмотрим дифференциальное уравнение
^8- + 4у=О A7.28)
с начальными условиями г/@)=0 и г/'@)=4. Это уравнение име-
имеет очевидное решение
Приближенное решение этого уравнения можно получить числен-
численно. Чтобы проиллюстрировать применение метода Галёркина, ис-
используем именно этот способ.
Подставляя A7.28) в A7.1), получаем
t = 0. A7.29)
Мы уже указывали на необходимость разбиения интеграла на
сумму и преобразования интеграла, содержащего производную
высокого порядка, в интеграл от первой производной. Подобное
преобразование уже рассматривалось по отношению к йг\)\йхг.
Учитывая формулу A7.9), получаем
где Те — шаг по времени-(длина) отдельного элемента. Уравнение
A7.29) может быть записано теперь в виде
-0, A7.30)
где Тг и Tj — значения времени, соответствующие узлам i и / эле-
элемента, a R — число элементов.
Применение формулы A7.30) будет проиллюстрировано с по-
помощью линейного интерполяционного полинома для у.
A7.31)
334
Глава 17
Соотношение A7.31) определено относительно местной системы
координат с началом в i м узле, что соответствует пределам ин-
интегрирования Тг — О и Tj = Te- Подстановка выражения A7.31) в
A7.30) дает
Б 1е
t О
е-1 0
f=0. A7.32)
Для первого элемента получаем следующие уравнения:
D1 1 Г 1 П (Y-i) at Г2 11 iY-.\ @1
¦" оi тА + в —I"'- A7-33>
Любому другому элементу соответствуют уравнения
так как во всех других узлах угол поворота не определен. Объ-
Объединяя уравнения для отдельных элементов и предполагая длину
элементов одинаковой, получаем
1—4
0
0
i •
1
Те
- 1 -1
—1 2 —1
— 1 2
— 1
4- «
1
2 -1
': '¦ _
2 1
1 4 1
1 4 1
ц
Уг
у*
¦
+
1 4 1
Y1
У2
у,
0
0
0
0
A7.35)
Заметим, что все уравнения, кроме первого, идентичны. Система
уравнений A7.35) может быть записана в виде
0,
A7.36а)
, A7.366)
где п — произвольный узел. Зная Те, из этих двух уравнений мож
но определить все значения {У}.
Вывод уравнений для элементов методом Галёркина
335
Пример
171. Требуется решить дифференциальное уравнение A7.28),
считая шаг по времени равным 1/16 с. Начальные условия сле-
следующие: г/@) =0 и #'@)=4. Сравнить результаты расчетов с ана-
аналитическим решением.
Рекуррентные соотношения, соответствующие рассматриваемо-
рассматриваемому уравнению, даны в A7.36). Заметим, что условие (/@) =0 = К4
позволяет решить уравнение A7.3ба) относительно Уг:
или
96
385
Уравнение A7.366) может быть решено относительно Yn+\. Полу-
Получаем соотношение
у 764 у .
"+1 385 "
откуда находим
Ш
385
'¦ х~ 385 ' 385 и>
К3=0,4948.
Повторяя эту процедуру для каждого временного шага, вычисляем
последовательно все узловые значения. Ниже приведены значе-
значения У, полученные численным методом, а также значения, соот-
соответствующие точному решению.
t
0
Vie
Vie
3/н
4/i,
Vie
Vi«
Vie
Vi,
Метод конечных
элеменгов
o.o
0,2494
0,4948
0,7326
0,9539
1,1703
1.3635
1,5354
1,6833
Точное
решение
0,0
0,2493
0,4948
0,7325
0,9589
1,1702
1,3633
1,5351
1,6829
t
Vie
10/16
u/ie
12/ie
13/ie
14/ie
15/ie
le/ie
Метод конечных
элеменгов
,8051
,8987
,9627
,9952
,9985
,9697
1,9101
1,8209
Точное
решение
1,8045
1,8980
1,9618
1,9950
1,9971
1,9680
1,9082
1 8186
В случае использования метода Галёркина при решении задачи
Коши получаются уравнения с двумя замечательными особенно-
особенностями. Шаг по времени может изменяться, если в этом есть не-
336 Глава 17
обходимость; могут варьироваться и функции формы, входящие
в [Л^(е)]. В случае большой величины шага по времени можно ис-
использовать элементы высокого порядка.
Изменение шага по времени вызовет модификацию системы
уравнений A7.35). Эта модификация будет выражаться в появле-
появлении более одной пары рекуррентных соотношений типа A7.36).
Некоторые из этих соотношений будут включать как новые, так и
старые приращения времени.
Если вместо линейного интерполирования A7.31) применить
функции формы для квадратичного элемента, вместо двух будут
получены три уравнения. Первые два уравнения используются для
определения У2 и Уз- Третье соотношение рекуррентное, оно выра-
выражает последовательно одно из узловых значений через три пре-
предыдущих:
yn+l = f(Yn, Уп-Ъ Уп-2).
Такая ситуация всегда возникает при решении задачи Коши с по-
помощью метода Галёркина; всегда имеется достаточное число урав-
уравнений, чтобы можно было вычислить значения У, требуемые для
проведения вычислений по рекуррентным формулам.
17.5. Система дифференциальных уравнений
первого порядка
Система дифференциальных уравнений первого порядка вида
4 Л=о A7-37)
обсуждалась в гл. 11, где было дано конечно разностное решение
этих уравнений. Теперь решим эту систему методом Галёркина.
В результате для вычисления значений {Ф} получим матричное
уравнение, которое несколько отличается от уравнения A1.23).^
Используя для интегрирования неизвестной величины ср линей-
линейную модель, можно записать
Ы&Фп + Л^Ф2;-, A7.38)
где индексы i и / используются для обозначения двух узловых зна-
значений, разделенных во времени на величину шага длины Те, а г
обозначает общее число узлов. Соотношение A7.38) в матричном
виде имеет вид
{ФЬ. A7.39)
Вывод уравнений для элементов методом Галёркина 337
Здесь {Ф} — матрица размера яХ1, a N\e) и №е) функции фор-
формы. Подстановка выражения A7.39) в A7.1) даег два матричных
уравнения:
о
т.
^} + [К]{ФИ {F})dt-0 A7.40a>
I { ^)dt==0- A7>40б>
о
Дифференцируя по времени соотношение A7.39), получаем
Подставляя A7.41) и A7.38) в A7.40а) и выполняя интегриро-
интегрирование, имеем
-4-[СН{ФЬ-{Ф};) + 4?-^Н2{ФЬ+{ФЬ)+4-{/гЬ=0. A7.42)
Преобразуя точно так же уравнение A7.406), получаем
г ^ )+41/ГЬ-0. A7.43)
Последние два уравнения могут быть объединены в одно:
Это уравнение для элемента, соответствующее одному шагу
по времени. Для получения системы уравнений, определяющей
значения {Ф}ь {Ф}г и {Ф}3, .... оно должно быть объединено с
аналогичными уравнениями для соседних временных шагов. Пусть
всем элементам соответствуют одни и те же приращения времени;
объединяя уравнения для первых двух шагов по времени, по-
22—763
338
Глава 17
лучим
X
х
(ф)
(ф)
l]
з
A7.45)
Так как {O}i известно, то первое уравнение в A7.45) можно ис-
использовать для вычисления {Ф}г- Все остальные уравнения, начи-
начиная со второго, идентичны между собой и могут быть записаны в
общей форме:
J4
A7.46)
Это соотношение позволяет вычислить все требуемые значения
{Ф}п для любого п больше двух.
При использовании формулы A7.46) следует иметь в виду
две особенности, ксторые отличают ее от результатов, полученных
разностным методом. Для вычисления {Ф}„+1 необходимо знать
два вектор столбца {Ф}„ i и {Ф}п, а кроме того, требуется пом-
помнить три матрицы размера [С]. Последнее требование приводит
к значительному загружению машинной памяти и представляет
определенный недостаток при решении систем большого порядка.
Для реализации метода Галёркина во временной области мож-
можно применить другую процедуру: рассматривая шаг по времени
как отдельный элемент, вычислить {Ф}:, используя {Ф}г. При
этом вектор столбец {Ф}3- может быть найден либо из уравнения
A7.42), либо из A7.43). Уравнение A7.43), видимо, более широ-
широко применяется, хотя A7.42) будет давать для {Ф}: значения,
почти идентичные тем, что получаются с помощью A7.43).
Как показано в работе [1], использование уравнения A7.43)
дает для {Ф}: значения, которые меньше осциллируют, чем в слу-
случае решения исходной системы A7.37) разностным методом, рас
смотренным в гл. 11.
Вектор {F} в A7.37) может изменяться со временем. В этом
случае его нужно вычислять для каждого временного шага и
уравнения A7.42) и A7.43) должны быть видоизменены.
Вывод уравнений для элементов методом Галёркина 339
17.6. Заключение
Сочетание метода Галёркина с кусочной аппроксимацией ме-
метода конечных элементов является чрезвычайно эффективным спо-
способом решения многих дифференциальных уравнений. Несколько
примеров, связанных с техническими расчетами, были обсуждены
в этой главе. Метод Галёркина, безусловно, получит широкое рас-
распространение благодаря тому, что он позволяет обходиться без
вариационной формулировки задачи.
Задачи
172. При осевом нагружении некоторого элемента конструкции
его перемещения описываются следующим дифференциальным
уравнением:
dx AE ~и>
где и — перемещение, см; Р осевая нагрузка, Н; Л — площадь
сечения, см2; Е — модуль упругости, Н/см2. Получите матрицы
элемента для этого дифференциального уравнения, считая величи
ну Р/АЕ постоянной.
173. С помощью матриц элемента, полученных в задаче 172,
вычислите узловые перемещения для детали конструкции, изобра-
изображенной ниже. Используйте два элемента равной длины.
50Q0H
120см
Е=2*Ю7Н/см
А=3см*
К задаче 173.
174. Определите матрицы элемента для дифференциального
уравнения в задаче 172, если величина Р/АЕ меняется линейно от
одного узла до другого. Используйте результаты решения зада-
задачи 108, рассмотренной в гл. 12.
175. Выведите уравнения для элемента, соответствующие диф-
дифференциальному уравнению A7.28). Используйте элемент с тремя
узлами (квадратичный). С помощью выведенных уравнений реши-
решите исходную задачу Коши для интервала O^f^l
22*
340 Глава 17
176. Используя линейный интерполяционный полином, получите
уравнения для элемента, соответствующие дифференциальному
уравнению первого порядка:
dt
¦где а и b заданные константы, а у@) известно.
177. Используя результаты, полученные в задаче 176, решите
одно из следующих дифференциальных уравнений. Сравните ре-
результаты с теми, что дает аналитическое решение.
а) г/' + Зу=0, . 0@) =4, 0<^ 1;
б) г/'—4г/ + 2—0, г/@)=1, 0<*< 1;
в) у' -\-2у—1=0, г/@) = 3, 0<?< 1/2;
г) у' 6г/-6=0, г/@) 0, 0<Г^ 1.
178. Решите задачу 176, применяя следующие элементы:
а) квадратичный интерполяционный полином; б) кубичный интер-
интерполяционный полином. Решите одно из уравнений в задаче 177.
179. Выведите уравнения для элемента, соответствующие диф-
дифференциальному уравнению второго порядка:
где a, b и с — заданные константы. Для у используйте линейный
интерполяционный полином.
180. Используя результаты, полученные в задаче 179, решите
¦следующие уравнения:
а) у"~Зу' + 4у=0, у@)=у'@) = 1, 0<^1/2;
б) /-2г/+1=0, у@)=2, г/'@)=0, 0</< 1/2;
в) у" + у' — 6=0, у@)=0, г/'@)=3. 0^г< 1/2.
ЛИТЕРАТУРА
!. Donea J., On the Accuracy of Finite Element Solutions to the Transient Heat-
Conduction Equation, Intern. J. for Numerical Methods in Engineering, 8, 103—
110 A974).
2. Martin H. C, Carey G. F., Introduction to Finite Element Analysis, McGraw-Hill,
N. Y., 1973.
3. Norrie D. H., deVries G., The Finite Element Method, Academic Press, N. Y.,
1973.
4 Sokonikoff I. S., Mathematical Theory of Elasticity, 2-nd ed., McGraw Hill, N. Y.,
1956.
5. Szabo B. A., Lee G. C, Derivation of Stiffness Matrices for Problems in Plane
Elasticity by Galerkin's Method, Intern. I. for Numerical Methods in Engineering,
1, 301—310 A969).
€. Zienkiewicz О С, The Finite Element Method in Engineering Science, McGraw-
Hill, London, 1971; есть русский перевод: Зенкевич О., Метод конечных элемен-
элементов в технике, изд-во «Мир», М, 1975.
Глава 18
УЧЕБНЫЕ ПРОГРАММЫ
Во всех предыдущих главах подчеркивалась необходимость
машинной реализации метода конечных элементов. Очевидно, что
метод конечных элементов не пригоден для проведения расчетов
вручную. В этой главе будут рассмотрены некоторые программы,
которыми следует пользоваться при изучении материала, пред-
представленного в гл. 2, 6 и 8 12. Настоящая глава не должна рас-
рассматриваться как последняя глава этой книги. Изложенный здесь
материал нужно использовать в качестве приложения при обсуж-
обсуждении конкретных применений метода конечных элементов.
Программы, приведенные в этой главе, далеки от тех сложных
программ, которые могут решать самые различные задачи. Они
не предназначены для того, чтобы конкурировать с имеющимися
стандартными программами. Эти программы преследуют только
учебные цели. Такие несложные программы весьма желательны с
учебной точки зрения, так как они сокращают до минимума класс-
классное время, требуемое для объяснения ее работы. Перечислим не-
некоторые характерные особенности, которые приводят к упрощени-
упрощениям в программе:
1. Используются элементы . только одного типа линейные
треугольники.
2. При разбиении области на элементы характеристики мате-
материала каждого элемента предполагаются одинаковыми.
3. Главные оси инерции параллельны координатным осям
х, у.
4. Каждая программа решает только однотипные задачи, на-
например задачу о кручении упругого стержня, двумерный случай
переноса тепла, двумерные течения жидкости или двумерные за-
задачи теории упругости.
5. Редко встречающиеся варианты счета исключаются.
6. Программы мало отличаются между собой в отношении тре-
требуемых исходных данных и организации их ввода.
Даже в том случае, когда разнообразие вариантов счета в
программе сведено к минимуму, методика программирования
включает такие характеристики, которые делают эффективным ис-
использование этих вариантов. Все коэффициенты системы уравне-
уравнений [^С]{Ф}~{^} хранятся в машинной памяти в виде отдельного
вектор-столбца. Такой способ исключает необходимость заранее
проставлять размеры отдельных компонент [К], {Ф} и {F} и зна-
342 Глава 18
чительно сокращает число ошибок, совершаемых неопытными
пользователями.
Относительное расположение [К], {Ф} и {F} в указанном век-
вектор столбце показано на фиг. 18.1. В программах учтено также, что
результирующая алгебраическая система уравнений имеет матри-
Фиг. 18.1. Относительное расположение [К], {Ф} и {F}
в вектор-столбце.
цу ленточного типа, поэтому в эту главу включен ряд подпро-
подпрограмм, выполняющих различные операции над матрицей [К]-
Каждая программа построена на основе блок схемы, представ
ленной в гл. 7. Специальные программы, включающие некоторые
модификации, обсуждаются в связи с каждой прикладной темой.
Ввод исходных данных для элементов осуществляется в том же
формате, в каком эти данные перфорируются программой GRID
после завершения ее работы. Это позволяет исключить еще один
источник ошибок при формировании исходных данных.
Представленные здесь программы написаны для ЭВМ с ми-
минимальными запоминающими устройствами. Исходные данные эле-
элементов не хранятся в машинной памяти, а вводятся вновь, если
необходимо вычислить результанты элемента. Тот, кто имеет дело
с ЭВМ, обладающей большим по объему запоминающим устрой-
устройством, может считать более удобным хранить информацию об
элементах в машинной памяти.
Написать программу можно несколькими способами. Эта гла-
глава содержит только те программы, которые являются результатом
работы самого автора по созданию ряда учебных программ, осно-
основанных на методе конечных элементов. Каждый пользователь мо-
может по желанию модифицировать эти программы в соответствии
с его учебными или исследовательскими целями, а также с учетом
возможностей ЭВМ.
Следующие программы написаны на алгоритмическом языке
ФОРТРАН IV [2].
18.1. GRID
Неверно составленные исходные данные для элементов — глав-
главный источник ошибок при использовании программ, основанных
на методе конечных элементов. Обработка исходных данных так-
также требует затрат времени. Существуют программы, которые ав-
Учебные программы 343
томатически вырабатывают исходные данные элементов. Эти про-
программы построены на различных принципах, но все они служат
одной цели: размещают узловые точки внутри рассматриваемой
области и затем разбивают область на элементы. Окончательным
результатом их работы является вывод на перфорацию номеров
узлов элементов и координат этих узлов.
Программа GRID вырабатывает исходные данные элементов
для представленных в этой главе программ, основанных на методе
конечных элементов. Для конструирования дискретной модели
рассматриваемого тела в GRID используется семейство четырех-
четырехугольных зон с восемью узлами (квадратичные четырехугольни-
четырехугольники). Эта программа может моделировать двумерные области, ко-
которые составляются из прямоугольников и треугольников, грани-
границы которых могут быть описаны кривыми второго порядка. В про-
программе осуществляется нумерация узлов элементов и вычисляется
величина (^+1), используемая для определения ширины полосы
ленточной матрицы. Не пытайтесь минимизировать R за счет пе-
перенумерации узлов.
Минимизация ширины полосы ленточной матрицы и связан-
связанные с этим программы обсуждаются в работе [1].
18.1.1. Четырехугольная зона
В программе GRID для предварительного разбиения на зоны
могут применяться только квадратичные четырехугольники. Этот
элемент, однако, обладает значительной гибкостью: может ис-
использоваться в качестве прямоугольника, четырехугольника обще-
общего вида или треугольника (фиг. 18.2). В последнем случае две
стороны четырехугольника используются для задания одной сто-
стороны треугольной зоны.
Восемь узлов, определяющих зону, нумеруются, как показано
на фиг. 18.2. Узлу 1 всегда соответствуют координаты g ц = 1.
Заметим, что один из угловых узлов (узел 5 на фиг. 18.2) всегда
будет на гипотенузе треугольной зоны.
При рассмотрении каждой четырехугольной зоны выполняются
пять основных операций:
1. Согласно введенным исходным данным, определяется число
строк и столбцов узлов.
2. Делается проверка, нет ли среди граничных узлов таких, ко-
которые уже были пронумерованы ранее. Если такие узлы есть, то
за ними сохраняются номера, которые им были приписаны раньше.
3. Узлы нумеруются последовательно, начиная от точки с ко-
координатами g —1, т) = + 1 и двигаясь слева направо (при изме
нении I от —1 до +1) и сверху вниз (при изменении rj от +1
до —1). Все узлы, пронумерованные раньше, пропускаются.
4. Номера всех граничных узлов сохраняются для последую
щих рассмотрений соседних зон.
344
Глава 18
5. Зона делится на треугольные элементы. Каждому элементу
приписывается определенный номер. Вычисляется величина (i?+l),
которая сравнивается с наибольшим значением (R+1), получен-
полученным в предыдущих расчетах.
Фиг. 18 2. Зоны, которые могут рассматриваться как четырехугольник.
Разбиение зоны на треугольные элементы осуществляется сле-
следующим образом. Рассматриваются четыре узла, которые образу-
образуют четырехугольник, как показано на фиг. 18.3. Вычисляются и
Фиг. 18.3. Совокупность четы- Фиг. 18.4. Изменение размеров элемен-
рех узлов, образующих два тов при разбиении области,
треугольных элемента.
сравниваются длины двух его диагоналей, после чего четырех-
четырехугольный элемент делится с помощью короткой диагонали на два
треугольных элемента. Эта процедура повторяется до тех пор, по-
пока не будут рассмотрены все множества, состоящие из соседних
четырех узлов.
Учебные программы
345
Размеры элементов можно варьировать, смещая узлы 2, 4, 6
или 8 относительно середин соответствующих сторон зоны. Сдвиг
этих узлов означает перемещение начала местной системы коор-
координат и приводит к разбиению, подобному тому, которое представ-
представлено на фиг. 18.4. Заметим, что координаты узлов, о которых идет
речь, должны оставаться внутри интервалов —1/2<;|<;1/2 или
1/21/ [3].
18.1.2. Составная область
Дискретная модель тела обычно конструируется с использо-
использованием нескольких четырехугольных зон, имеющих одну или не-
несколько общих сторон. Наличие обшей границы между диумя зо-
зонами требует задания некоторой дополнительной информации с
тем, чтобы можно было приписывать узлам, расположенным
вдоль общей границы, одни и те же номера независимо от того,
какая рассматривается зона. Вводимую для этой цели информа-
информацию будем называть «исходными данными соединения». Эти дан-
данные указывают ЭВМ, как рассматриваемая зона соединяется с
другими зонами.
Данные соединения для отдельной зоны состоят из четырех
чисел, представляющих собой номера кяждой из ее сторон. Сто-
Стороны четырехугольника пронумерованы так, как показано на
фиг. 18.5: первая сторона расположена между узлами 1 и 3, вто-
вторая— между узлами 3 и 5 и т. д.
Сторона 3
Сторона
Сторона 2
Сторона 1
Фиг. 18 5. Стороны четырехугольной зоны.
Составление данных соединения, вероятно, лучше всего про-
проиллюстрировать на примере области, состоящей из четырех зон,
как показано на фиг. 18.6.
Введем местную систему координат gr) и номер зоны. Нумера-
Нумерация зон совершенно произвольна. Система координат gr) обычно
ориентируется так, чтобы получалась наименьшая ширина полосы
ленточной матрицы жесткости. Правда, ориентация осей коорди-
346
Глава 18
нат, выбранная на фиг. 18.6, не обеспечивает это, поскольку здесь
преследуется цель — проиллюстрировать составление исходных
данных соединения. Сторонам каждой зоны соответствуют числа
1—4.
Фиг. 18.6. Тело, составленное из четырех зон в виде четырехугольников.
Данные соединения для области, составленной из четырех зон
(фиг. 18.6), сведены в следующую таблицу:
Зона
1
2
3
4
1
2
4
4
2
Сторона
<.
3
1
0
0
3
0
0
0
0
4
0
0
1
3
Первая строка данных устанавливает, что сторона 1 зоны I
соединяет ее с зоной 2, а сторона 2 зоны 1 соединяет ее с зоной 3.
Два нулевых значения строки означают, что вдоль сторон 3 и 4
зона 1 не соединяется ни с какими другими зонами. Каждой зоне
соответствует своя строка исходных данных.
18.1.3. Пояснения к программе
Входные данные для программы GRID могут быть разбиты на
пять групп: титульная карта, карта с параметрами программы,
х- и ^-координаты узлов, определяющих четырехугольные зоны,
данные соединения и данные зоны.
Учебные программы 347
Титульная карта A3 я строка листинга программы) содержит
текст утверждения, которое печатается в верхней части страницы
выдачи с целью идентификации.
Карта параметров программы A5-я строка) содержит три ве-
величины формата C13):
INRG Число зон
INBP Число граничных точек
IPCH Управление перфорацией 0 означает, что исходные
данные элемента не пер-
перфорируются, 1 означает
перфорирование исход-
исходных данных элемента
Считывание х и у координат происходит раздельно (строки 17
и 18). Сначала вводятся все х координаты, а затем все у коор-
координаты. Данные соединения считываются (строка 21) вслед за
координатами. Идентификатор NRG используется для обозначе-
обозначения номера зоны, а данные соединения хранятся в массиве с иден-
идентификатором JT.
Данные зоны считываются в строке 38. Эти исходные данные
следующие:
NRG Номер зоны
NROWS Число строк узлов
NCOL Число столбцов узлов
NDN Глобальные номера узлов,
определяющих четырехугольник
Восемь значений NDN должны быть подготовлены для формата
A113) в строке 39. Основные части программы разделяются кар-
картами с комментариями. Приведем обозначения некоторых других
важных переменных:
N Восемь функций формы для квадратичного четы-
четырехугольника
ХС
г , х и г/-координаты узлов зоны
NN Номера узлов зоны
NNRB Номера узлов, расположенных на границе области.
Это трехмерный массив, определяемый как NNRB
(зона, сторона, номер узла)
ХЕ, YE, NE х и г/-координаты и номера узлов элементарное
четырехугольника с четырьмя узлами, который де-
делится на два треугольника.
Последовательность операторов, представленных в строках
162—169, определяет величину (R+1), используемую при вычис-
вычислении ширины полосы ленточной матрицы.
348
Глава 18
18.1.4. Пример
Чтобы проиллюстрировать подготовку исходных данных для
программы GRID, рассмотрим задачу о кручении упругого стерж-
стержня с поперечным сечением в форме квадрата. Исходная область
анализа показана на фиг. 18.7. Как следует из теоретического рас-
рассмотрения задачи, максимальное сдвиговое напряжение наблю-
наблюдается на границе области в середи-
середине стороны квадрата. Эта точка со-
соответствует вершине угла в 90° на
фиг. 18.7. При приближении к цент-
центру сечения стержня сдвиговое на-
напряжение уменьшается до нуля. На-
Наличие градиента сдвигового напря-
напряжения указывает на то, что мы
должны проводить разбиение на
элементы таким образом, чтобы наи-
наименьшие по размерам элементы
встречались вблизи прямого угла.
Исходная треугольная область
разбивается предварительно на од-
одну четырехугольную и две треуголь-
треугольные зоны (подобласти), как показа-
показано на фиг. 18.8. Узлы, используемые
для задания четырехугольных зон,
нумеруются произвольно. Узлы 4 в
6 расположим несколько ближе к узлу б с тем, чтобы получить
наименьшие элементы вблизи прямого угла. Для разбиения второй
зоны на элементарные четырехугольники выберем пять строк и
пять столбцов. Такой выбор фиксирует число столбцов (пять) в-
первой зоне и число строк (пять) в третьей зоне, поскольку число
узлов вдоль общих границ различных зон должно быть одинако-
одинаковым. Самые крупные элементы будут получаться в первой и третьей
зонах, так как первая зона содержит только три строки узлов, а
третья зона содержит только три столбца узлов.
В табл. 18.1 представлены соответствующие рассматриваемой
области исходные данные для программы вместе с пояснительным;
текстом к каждой группе карт. Имеются карта данных соединения:
и общая карта данных для каждой зоны.
Окончательное разбиение на элементы и номера узлов показа-
показаны на фиг. 18.9. Использованное здесь расположение зон приводит
к наименьшему для величины (R + 1) значению среди тех, кото-
которые можно получить с помощью программы GRID. Для достиже
ния минимального значения {R+1) следует придерживаться об-
общего эмпирического правила: начинать с самой верхней зоны и
затем двигаться вниз и направо.
Фи1. 18.7. ОблаС1ь анализа в за-
задаче о кручении стержня квадрат
ного сечения.
/ 15 h 5
Фиг. 18.8. Предварительное разбиение области на зоны, используемое для гене-
генерирования исходных данных элементов.
/0
- 58.
Фиг. 18.9. Разбиение области в виде треугольника на элементы.
/WOf /7О0ЖВД
B/Q TI4HHDQ DUldV)!
L
8
I
I
I
I
9
I
I
I
I
9
0
I
I
I
€
L
6
I
8
9
8
I
Z
9
L
Z
I
I
€
9
9
9
s
€
€
г
I
ипизнпдзоэ
0
0
0
I
0
г
0
0
0
0
г
€
г
i
9
9
?
I
€
•
*
0
0
0
9
о,
г
•
•
0
0
9
0
г
i
•
•
0
0
9
о,
0
•
•
0
0
0
€
0
•
*
0
0
9
€
0
•
•
0
0
9
9
г
г
i
0
•
•
•
0
0
0
9
?
0
0
9
0
•
•
•
0
0
0
9
0
1
9
•
•
0
0
0
0
г
9
•
*
0
0
9
?
0
€
9
•
•
0
0
9
0
г
9
•
•
0
0
0
0
€
•
•
0
0
9
9
€
г
•
•
0
0
9
9
9
г
г
i
•
•
•
0
0
0
9
?
0
0
9
0
•
•
•
0
0
0
imoHngdoox-r
mu/Dcldodu aodwaivodou niudD}/ [_
з[ла]о ы d| |no js|n|o|i u|o|d n]o T[v ы з|м|э[р| |i м[зи з|ч|з
О
t
/
/
-
и
/
-
ч
f
Mil
г
i
i
9
l
/ 81
CJIHO rawwtiiljoc'n oi4HHt:'n'
PROGRAM GRIOI INPUT,OUT PUT,PUNCH,TAPE60=INPUT,TAPE61 = OUTPUT,TAPE62=
1PUNCH»
01 HE NS ION TITLEI II I , XPI100 >,YPA00) , XRGI4) , YR G( 9 > , N18 > , NDM8 >
01 MENS ION NNB1,21), YC ( 21, 21) , XC « 21, 21), NNRBB0.<>, 21» , JT B0, <•>
OIMENSION LBIJt.NEUOOl tX?((,C0»,rECO0>, MR Id ), 1COHP C,<. »
REAL N
0414 IC0MP/-1,1,1, -1,1,-1,-1,1,1,-1,-1,1,-1,1,1,-1/
04T4 IN/60/,10/61/, IP/6 2/, NeH/O/,NB/O/,.NEL/t/
c«
10 С INPUT 4N0 OUTPUT OF TITLE, CONTROL CARO, GLOBAL COORDINATES AND
С CONNECTIVITY DATA
c....,.,...,,,,...,,
RFAD(IN,17I TITLE
17 FORMAT AС A8I
15 REAO(IN.l) INRG, INBP.IPCH
1 F0R*AT<3i3l
REAO(IN,3I(XP(II,I-1,INBPI
REAO(IN.3I (YP(II,I = 1,INBPI
]. FORMAT (8F1Q.5I
20 D02I l.INRG
г READ(IN,8I NRG.(JT(NRG,Jl>J 1,UI
в F0RMATI5I3I
HRITEII0.36I TITLE
3b FORMATAH1////1X.10A8//1X.18HGLOBAL COORDINATES //IX,30HNUMBER
Zb IX COORO Y COORD I
HRITE(IO,30I II.XPIII,YP(II,1 l.INBP)
30 FORHAT (l*,U, 7t,f7.Z,bX,F7.Zi
WRITE(IO,21I
21 FORMAT (//IX,17HC0NNECTIVITY DATД/1Х,dlHREGION SIOE 1 Z
30 i34i
D026I = l, ISRG
2b HRITE(I0,22l l,(jril,JI,J 1,1,»
гг format (гх,п,11»х,1. Aг.с(<11
35 С LOOP ON THE REGIONS TO GrNERATE THE ELEMENTS
с •••
0016KK l.INRCi
RESOIIN,*.! NRG.NROHS.NCOl , NON
* MAT(HI3l
fUKA(HI3l
40 MRITE(IO,18I NRG.NROHS.NCOL,(NONIII,I 1,8)
18 FORMAT AH1///1X,1ZH»«» REGION ,Г2,6Н ••••//1DX,I 2,5H ROWS,10X,11
1.8И COLUMNS//10«,21HBOUNOaRY NODE NUMBERS,10X,8 I 51
С GENERATION OF THE ELEMENT NOO«L COORDINATES
0051-1,9
II?N0N (II
XRG(II=XP(III
5 tRG(I)-THlIIl
50 XRGI9I XRG(l)
YRGI9I -YRGd I
TR-NROWS-1
OETA 2./TR
TR-NCOL-1
55 DSI г./ТР
00121*1,NROWS
TR=I-1
ETA = 1.-TR»OET»
D012J=l,NC0L
60 TR J-l
si=-i.»TR»osr
NAI=-O.25*A,-SII*A.-ETAIMSI»ETA»1.I
NBl=0.50*(l.-SI**2l*(l.-ETAI
NCI=O.2541.»SI»»A.-ETAIMSI-ETA-1.I
65 N(ltl-fl.50'<l.»SI I • A-ЕГД'»г1
NEI=O.25»<1.>ST>'<1.»ETAI'(SI*ETA-1.I
NF1=O.5O*A.-SI»*2I»A.»ETAI
NG|=O.25M1.-SI)*A.»ETAI»CETA-SI-1.)
N(ei=e.50»(l.-SII*(l.-ETA»'2l
70 XC(I,JI=O.0
ГСП, JI>0.0
0012<=l,a
XC(I,J)::XC(IfJI»XRGlK)>N(K)
12 YC(I,J)*YC(I,JI»YRGIKI»N(KI
75 С
С GENERATION OF THf REGION MOOE NUMBERS
С
KN1=1
KS1 1
g 2 R
KS?CL
0050 1 = 1,1.
NRT-JT(NRG.It
IFINRT.EQ.O.ORtNRT.GT.NRG) GOTO50
J5 0056J=l,i.
56 IF( JT(NRT.J) .EQ.NRG) NRTS=J
K = NC0L
IF(I.E0.2.0R.I.?0.<.)
JL-1
90 JK-ICOMP(I,NR1St
IF(JK.EQ.-l) JL»K
OOI>ltJ<l,K
GO Т0С5,<.6,<.7,<.в> ,1
".5 NN(NROHS,J>=NNRB(NRT,HRTS,JL>
SS KN2 = NROttS-l
GOTO".".
l»b NN( J,NCOL>-NNRB(NRT,NRTS, JL>
KS2 NCOL-1
GOTO".".
100 ".7 NNA,J>=NNRB(NRT,NRTS, JL>
KN1-2
GOTO".".
".» NN(J,1>-NNRB(NRT,NRTS, JL>
KS1 I
105 lilt JL-JL»JK
51) CONTINUE
IF(KN1 .GT.KN2» GOT0105
IF(KS1.GT.KS2> GOT0105
0010 I=KN1,KN2
110 0010J=KS1,KS2
NB-NB»1
10 NN(I,J>*NB
С STORAGE OF THE BOUNOARY NOOE NUMBERS
115 С
001.214,NCOL
NNRB(NRG,1,I>,NN(NROWS,I>
".2 NNRB(NRG,J,I>-NNI1,I>
00".3I-1,N«OWS
120 NNRB(NRG,2,I> NN(I,NCOl>
".3 NNRB (NRG,".,I> NNA,1)
С OUTPUT OF THE REGION NOOt NUMBERS
IZb WRITE<I0,".9>
".9 FORMAT (//IX, 19HREGI0N NODE NUMBERS/»
00521-1,NROWS
52 WRITE<IO,53> INNII.JI.J l.NCOL»
53 FORMAT(IX,2015»
130 С
С OIVISION INTO TRIANGULAR ELEMFNTS
С
105 WRirE(I0,S5>
55 FORMAT(//3X,17HNEL NODE NUMBERS ,9X , ЧНХ ( 1 >, «Х.'.НГ ( 1» , «X.«»HX ( 2» , 8X,
135 li.HTB> ,9X,<.HXC) ,8X,".HIT ( J> I
K-l
005". I = 1,NROWS
005". J=1,NCOL
Xf(K>=XC(I.J)
1*0 ГЕ(М TCd.J»
NEIKI-NNI] , Jl
5* K=Ktl
L NROHS-1
00151=1,L
1<M 0015J 2.NC0L
01АЫ SIJRl ((XC(I,J>-XC(I»l,J-l>>»(YC(I.J>-YC(I»l,J-l»l>
DIAG2-SQRT((XC(IH ,JI-XC(I.J-1»>"ZKYO(I»1,J>-YC(I,J-1»>**2I
NRdl NCOC »I»J-1
NRB> NCOt. »I»J
150 NRCI NCOC »(I-1>*J
NR(<.( NCOC •II-1»»J-1
0015U 1,2
NEL NEC»1
IF((DIAG1/OIAG2>.ЬТ.1.02) G0T041
155 Jl NRA>
J2-NR(IJ»1>
3R<T2
J3R
GOT040
••I Jl NRdJI
160 J2 NR(IJ»1>
J3 NRdl
".0 LBA>-IABS(NE(J1I-NE(J2> 1+1
LBB» = IABS(NE(J2)-NE(J3H+1
LBC>-IAeS(NE(Jl>-NE(j3>»*l
165 D010riK-l,J
IF(LB(IK».LE.NBWI &OTO107
NBM LB(IK)
NELBH-NEL
10? CONTINUE
170 HRlrEIIO.JDll NEL,NE(J1>,NE(J2>,NE(J3>^XE(J1>,YE(J1>,XE(J2»,YE(J2>
1,XE(J3>,Yt(J3>
301 FORhATdX.'.IS, JX,6F12.<t>
IFdPCH.tQ.O» G0T015
HRITE(IP,303> NEL,NE(J1>,NE(J2>,NE(J3 I,XE(J1>,YE(J1>,XE(J2>,YE(J2»
1?5 l,XEU3I.Vf IJ3I
303 FORMAT (l»I3,6F10. ¦•>
15 CONTINUE
16 CONTINUE
MRITEdO.il) NBM.NELBM
ISO 51 FORMAT(///1X,21HB»NOHIDTH QUANTITY IS,D*,22H CALCULATED IN ELEMENT
* !<>
1,I<>>
STOP
END
Учебные программы 353
18.2. Подпрограммы для ленточной матрицы
Матрица коэффициентов [К] в уравнении [К] {Ф} = {F} яв«
ляется ленточной матрицей, и эффективные программы хранят ее
в машинной памяти в виде прямоугольного массива вместо квад-
квадратного. Такой способ запоминания [К] приводит к необходимо-
необходимости составления ряда подпрограмм, которые выполняют умноже-
умножение матрицы [К] на другие матрицы, модифицирование, разло-
разложение матрицы и решают соответствующую систему уравнений.
Набор подпрограмм, которые выполняют указанные операции,
представлен и обсуждается в этом разделе. Все эти подпрограм-
подпрограммы используются с программами, данными в разд. 18.4—18.8.
18.2.1. BDYVAL
Подпрограмма BDYVAL считывает заданные значения компо-
компонент {F} и {Ф} и модифицирует [К], используя процедуру вычер-
вычеркивания соответствующих строк и столбцов, обсужденную в гл. 7.
Ввод заданных значений следует формату из шести целых чисел,
двух интервалов и шести чисел с плавающей запятой F13, 2Х,
6F10.4). Шесть чисел с плавающей запятой соответствуют по по-
порядку шести целым числам, которые представляют собой задан-
заданные глобальные степени свободы. Считывание данных в этом фор-
формате повторяется до тех пор, пока не встретится нулевое или от-
отрицательное значение глобальной степени свободы. Варианты
входных данных показаны в примерах, связанных с конкретными
областями применения.
18.2.2. DCMPBD и SLVBD
Подпрограмма DCMPBD преобразует ленточную матрицу [К]
в верхнюю треугольную матрицу, используя процедуру гауссовско-
го метода исключения, обсужденную в гл. 7. Подпрограмма
SLVBD связана со вторым этапом решения системы уравнений;
она используется совместно с подпрограммой DCMPBD для по-
получения решения системы [К]{Ф} = {Р}. Подпрограмма SLVBD
прежде всего разлагает вектор {F}, а затем вычисляет методом
обратной прогонки значения компонент вектора {Ф}. Кроме того,
подпрограмма SLVBD осуществляет вывод искомых величин «а
печать. Значения компонент вектора {Ф}, соответствующие каж-
каждому варианту нагрузки, выводятся на печать, если целочислен-
целочисленная переменная ID равна нулю.
18.2.3. MULTBD
Подпрограмма MULTBD выполняет умножение ленточной мат-
матрицы [К] на прямоугольный массив [F]. В обозначениях пере-
переменных, используемых в данной программе, это произведение за-
23—763
SUBROUTINE 80YVALIGSM,GF,NP,NBH,NCLI
OIMENSION GSM(NP,NBHI,GF(NP,NCLI,IB(bl*8VC6I
COMMON/TLE/TITLEC20»
ОАТД IN/60/,10/61/
5 HRITEdCZOO) TITLE
ZOO FORMATtlHl, ///////, IX, ZOA<»I
С INPUT OF THE NOOAL F07CE VALUES
10 WRITE!10,2011
201 FORMATC/1X,15HBOUNOARY VALUES//1X,12HNO0AL FORCESI
00216JM=l,NCL
101 = 0
INK=0
15 гог REA0(iN,203iie,av
203 FORMATC6I3,2X,6F10.5»
IO = 0
D0204L*1,6
IF(IB(LI.LE.OI GOTO205
го id=id*i
I=I9(LI
201* GFCI,JMI = B\ML» *GFCI,JMI
GOro?06
205 INK=1
25 IF(IO.EQ.O) G0T0216
206 IFtI01.E0.lt G0r0222
HRITE(I0,217» JM
217 FORMAT (IX,12HLOAOING CASE,12»
222 WRITEt10,207» <IB(L>,6tf<LI,L=t,10»
30 207 FORMATtlX^tlS.El^.S.ZXM
IFCINK.EQ.lt G0T0216
101=1
go то гог
35 С INPUT OF THE PRESCRIBEO NODAL VALUES
c........
216 CONTINUE
HKlTEdO.ZOSI
208 FORMAT(////,IX,¦PRESCRIBED NODAL VALUES»»
•.0 INK=Q
209 reao(In,газ) ib,bv
10=0
D0221L=l,6
IF<IB(L) .LE.Ot СОГ0215
«.5 10=10*1
I=IB(Lt
BC=BV(L)
С
С MOOIFICATIOM OF THE CLOBAL STTFFNESS MATRIX ANO THE
50 С GLOBAL FOR.CE MATRIX USING THE НЕТнОО OF OELETIOM
С OF ROWS AND COLUMNS
С
K=I-1
O0211J=2,NBH
55 M=I*J-1
IF(M.GT.NP) GOT0210
OO218JM=3,NCL
218 GFCM,JMI = GFCM,JM)-GSMU,JfBC
GSM(I,JI=0.0
60 210 IFCK.LE.OI GOTO 211
0021<3JM=l,NCL
219 GFCK,JM)=GFCK,JM»-GSHCK,J»*8C
GSM(K,JI-0.0
K=K-1
6$ 211 CONTINUE
212 IF(GSM(I,l).LT.0.05> GSM(Ы) = 50000 С .
OO220JN=l,NCL
220 GF(I*JNIs(>SMII,ll*BC
221 CONTINUE
70 GO TO 21 <.
С OUTPUT OF THE BOUNDARY VALUES, (BVI
С
215 INK=1
/5 IFiIO.EQ.0t RETURN
214 HRITE(IO,207I (IBILI
IFdNK.EQ.ll RETURN
GO TO 209
ENO
SUBROUTINE OCMPBDIGSM.NP.NBWI
DIMENSION GSM1NP.NBW»
10=61
NP1-NP-1
5 DO226I=1,NP1
MJ=I*NBW-1
1FIMJ.GT.NP» MJ-NP
NJ-I*1
MK=NBW
10 IF11NP-I»1».LT.NRW» M<=NP-I»1
N0=0
OO225J=NJ,MJ
MK-MK-1
NO N0*1
15 NL = N0H
DO225K=1,MK
NK-NO»<
2 2b GSMIJ,K»=GSMIJ,K»-GSMII.NL»*GSMII,NM/6SMII,U
?26 CONTINUE
20 RETURN
END
SUBROUTINE SLVBa(GSM,GF,X,NP,Man,DCL.IOI
DIMENSION GSM1NP,NBW»,GF1NP,NCL»,X(NP,«CL)
COMMON/TLE/TITLE120»
10=61
5 NP1 = NP-1
OO265KK=1,NCL
JM=KK
С
С DECOMPOSITION OF THE COLUMN VECTOR GF« I
19 С
002501=1,NP1
IN61
JI61
IFIMJ.GT.NP) MJ=NP
NJ=I»1
15 L = l
OO250J=NJ,MJ
L = L*1
2 50 GF(J,KKH=GF(J,KK»-GSM( I,L»*GF(I,KK»/GSH(I.l»
С
20 С BACKWARD SUOSTITUTION FOR DETERMINATION OF XI )
С
XINP.KK»-GFINP.KK»/GSMINP.l»
OO252K=1,NP1
I=NP-K
25 MJ-NBH
IFII I»NBW-1I .GT .NP) MJ=NP-IH
SUM=0.O
D0251J-2.MJ
N-I»J-l
30 251 SUM = SUM»6SM(I,J) •)( IN.KK»
2 52 XII,KK» = IGFII,KK»-SUM»/GSMII,1»
С OUTPUT OF THE CALCULATED NODAL VALUES
3S inlD.EQ.l» GOT0265
WRITE(IO,26C) TITLE,K<
260 f ORMAT »1H1////I)i,20ii.//1X,26HNOO»L VdLUESi LOAQING CASE,12»
WRITEII0.26'.» II,XII,KK),I l.NP)
2 61. FORMAT I1X, 13. El* .5,3X,I3,El'».5,3X,IJ,Eli..5,3X,I3,El<..5,3X,I3,ei<(-s4
<<0 It m
265 CONTINUE
RETURN
END
SUBROUTINE MULTBOIGSM,GF,RF,NP,NBH,NCL»
DIMENSION GSMINP,NBW»,GFINP,NCLI,BF<NP,.NCL»
002/flKK=l,KJCL
002771=1,NP
S SUH=C.O
k*I-l
DO276J-2.NBH
M=J*I-1
IFIM.GT.NP» GOT0275
10 SU1=SUM«GSMII, J) •GFIM.KK)
ITS IFIK.LE.Ot G0T027b
SUM=SUMrGSMIK,J»»GFIK,KK>
K=K-1
276 CONTINUE • .
15 277 RFII.KK »=SUM»G5MII,1>»GF(I,KK»
27d CONTINUE
RETURN
ENO
356
Глава 18
писывается в виде [RF] = [GSM] [GF]. Подпрограмма MULTBD
необходима для решения нестационарных задач.
18.3. Обозначения
В программах, приведенных в разд. 18.4—18.8, используются
почти идентичные обозначения для описания основных переменных
параметров. Ниже даны некоторые из наиболее общих перемен-
переменных и их сокращенные обозначения.
А Вектор-столбец, содержащий матрицы {Ф},
{F} и [К] из уравнения [К] {Ф} = {F}
Номера узлов элемента
Степени свободы элемента (используются
только в STRESS)
Матрица жесткости (теплопроводности)
элемента
Вектор нагрузки для элемента
Узловые значения для отдельного элемента
Описательное утверждение, характеризую-
характеризующее решаемую задачу. Это утверждение
печатается на каждой странице выдачи
Номер входного устройства; используется в
операторах READ ( )
Номер выходного устройства; используется
в операторах WRITE ( )
Номер перфорационного устройства; ис
пользуется в операторах WRITE ( ), если
производится перфорация карт
Число глобальных степеней свободы для
NS
ND
ESM
EF
PHI
TITLE
IN
Ю
IP
NP
NE
NBW
NEL
NCL
XI, X2, X3
X(l), XB), XC)
Yl, Y2, Y3
Y(l), YB), YC)
В и С
AR4
AR2
JGF
задачи в целом
Общее число элементов
Ширина полосы матрицы системы уравне-
уравнений
Номер отдельного элемента
Номер варианта нагружения
^-координаты узлов элемента (узлы обхо-
обходятся против часовой стрелки)
у-координаты узлов элемента (узлы обхо-
обходятся против часовой стрелки)
Коэффициенты, которые встречаются при
вычислении матриц элемента
Учетверенная площадь элемента
Удвоенная площадь элемента
Величина, значение которой определяет ад-
адрес последней ячейки памяти, отводимой
для {Ф} в одномерном массиве А
Учебные программы 357
JGSM Величина, значение которой определяет ад-
адрес последней ячейки памяти для {F} в од-
одномерном массиве А
JEND Величина, значение которой определяет ад-
адрес последней ячейки памяти, отводимой
для [К] в одномерном массиве А
18.4. Программа TORSION
Программа TORSION вычисляет сдвиговые напряжения в уп-
упругом стержне некругового сечения. Теоретической основой про-
программы служит материал, изложенный в разд. 6.1. При составле-
составлении программы использовались положения, обсужденные в гл. 7.
Входные данные представлены титульной картой, картой с па-
параметрами программы, исходными данными элементов, значения-
значениями узловых сил и граничными значениями искомой величины, счи-
считываемыми подпрограммой BDYVAL, а также дополнительным
комплектом исходных данных элементов. Титульная карта считы-
вается в 18-й строке, а карта параметров программы-—в 20-й
строке. Переменные NP, NE, NBW и IPCH были определены вы-
выше в списке обозначений. Другие переменные, содержащиеся в
карте параметров, следующие:
G Модуль сдвига, Н/см2
SL Длина стержня, см
TORQUE Прикладываемый крутящий момент, Н-см
РСТ Удвоенное число осей симметрии. РСТ равно 1.0, если
осей симметрии не существует
Исходные данные элемента считываются в строке 46. Формат
этих данных совпадает с форматом данных, перфорируемых про-
программой GRID. Подпрограмма BDYVAL, обращение к которой
происходит в строке 82, также имеет операторы ввода данных.
Эти операторы обсуждаются в разд. 18.2. Исходные данные эле-
элемента, необходимые для вычисления сдвиговых напряжений, счи-
считываются в строке 92. Эти данные для элементов должны быть
точной копией данных, используемых при составлении глобальной
матрицы жесткости.
Величины, указывающие где именно внутри одномерного мас-
массива А хранятся узловые значения искомой величины, узловые
силы и глобальная матрица жесткости, находятся в строках 26,
27 и 28. Эти величины были определены в списке обозначений.
Входные данные для варианта задачи о кручении, показанного на
фиг. 18.9, представлены полностью, за исключением исходных
данных элементов, в табл. 18.2. Карта узловых сил, которая счи-
тывается при обращении к программе BDYVAL, состоит только
из одного числа —1, так как узловые силы отсутствуют в задаче
24-763
Входные данные прогоаммы TORSION
Таблица 18.2
5
6
7
i|
•1
'\
ь
0
:|
il
7
7
1
ll
q|r|s| |o|n| |p|r|o|b|l|e|m| |f|o|r| |t|e|x|t|b|o|o|k| | |Титульная карта
I 1 lMo|»l.l"l
4 5
6I41 I2I7I I hi 1 в] о| о| oj o
ol о|^| и
ilHi
-| Карта параметров
J программы
1
6
7
|
1
|
0
3
о|о
0
0
.
з|о|о
о
о|.
3
5J0
о
0
•
3
1|В
7
0
.
3
б|о
0
0
.
3
5|о|о
\ Исходные
[данные эле-
элементов
ш
0.25
М«1°1 I I М I 1 |0|.|2|5|0|0| I I I |О|.|О|6|2[5| | | | |О|.|1|4|3|7| | | | |o|.|o|5|o|o| J №юрШЫ)
I I I I I I Значения узловых сил
I I I I I I (-7 означает отсутствие данных)
Заданные
3
5
5
0
узловые значения искомой
i
5
2
0
2
5
3
0
0
0
величины
0
0
0.0 | | 0.0 |о|.О |[ 0.0 || 0.0 |
1 6
71 I М 1 I I 1°1Ф101°101 I 1 I 1°1«1310101°1 1 1 I 1°1«1315101°1 I I 1 1°1«13111В171 1 I I I°I»1315I°1°I 1 1 1 I I 1 1 I
6141 |з|'1 I2!6! I4!3! I I I 1°1«1216.101°1 I I 1 1°1«1°1 МММ I°I»I2I51°I°I I I I I°1*1°I6I2151 I 1 1 °:«М41317
сходные
. данные
элементов
FЬ карты)
PROGRAM TORSIONIINPUT,OUTPUT,PUNCH,TAPE60=INPUT,TAPE61»0UTPUT,TAPE
162=PUNCHI
DIMENSION NSCI,ESM<3,3I,EFCI,BCI,CCI,PHIC1
DIMENSION AIZSOO)
5 COMMON/TLE/TirLEI20t
REAL MOMENT
OATA IN/60/,ID/61/,IP/6 2/,NCL/1/,101/1/,KE/«/,MOMENT/0.O/.TAUMAX/в
t.O/
С OEFINITION OF THE CONTROL PARAMETERS
10 С NP - NUMBER OF GLOBAL DISPLACEMENTS» ME - NUMBER OF
С ELEMENTS, G - SHEA* MOOULUS. TORQUE - APPLIED TORQUE,
С SL - SHAFT LENGTH, !>CT - TWICE THE NUMBER OF AXES OF
С SYMMETRY, PCT s 1.0 WHEN NO SYMMETRY EXISTS
С IPCH - CONTROL FOR PUNCHING STRESSES
15 С
С INPUT OF THE TITLE CARO ANO THE PARAMETER CARO
REAO(IN,31TITLE
3 FORMAT B0A".)
20 REAO(IN.l) NP,NE,N3M,IPCH,G.SL,TORQUE,PCT
1 FORHAT CI3,feFlC.".l
GT G«C.m57/lS0.>/SL
С CALCULATION OF POINTERS ANO INITIALIZATION OF THE COLUMN VECTOR A
JGF=NP»NCL
JGSM-JGF»2
OGSKP»NeH
Jtj
00131-1,JENO
30 13 A(I)=0.0
С
С OUTPUT OF TITLE ANO OATA HEAOINGS
С
WRITE(IO,2<«> TITLE,G.SL,TORQUE
35 21» FORMATAH1//////1X,20A".//1X,15HSHEAR MOOULUS *F12.1/1X,17HLENGTH О
IF SHAFT -F7.2/1X.16HAPPLIEO TORQUE -F8.1//1X.12MELEMENT 0ATA//1X,
279HNEL NODE NUMBERS X(l) Y-ll) XI21 TI2)
40 С ASSEMBLYING Of THE GLOBAL STIFFNESS MATRIX AND GLOBAL FORCE MATRIX
с *••¦•••••
С
С INPUT ANO ECHO PRINT OF ELEMENT DATA
45 00 7 KK-l.NE
KtAUIlN,II NEL.NS.X1,Y1,X2,Y2,X3,Y3
WRITEC 10,23) NTL.NS.Xl-, Y1,X2,Y2,<3, Y3
23 FORMAT (IX, 13, 2X,3I<»,3X,6{2XF8.4i)
5Q С CALCULATION OF IHE ELEMENT STIFFNESS HBTRT.X ANO ELEMENT FORCE MATRIX
B(l)-Y2-Y3
BB)"Y3-Y1
B(J)-Y1-Y2
55 C(l) X3-X2
CB) X1-X3
CC)=X2-X1
AR«.-(X2#Y3»X J«Y1»X1«Y2-X2«Y1-X?«Y2-Xl«r3)'2.
0051 1,3
60 EF(I)sGT«ARl./6.
005J 1,3
5 ESMd, J)=(B(II'B(JI »C(I)>C(J))/AR4
С
С INSERTION OF ELfMENI PKOPERTItS INTO THt GLOBAL STIFFNESS MATRIX
fc5 С
0071-1,3
II NSII)
0015J=1,NCL
J5sjGF»(J-l)«NP»II
70 15 A(J5)=A(J5)»rF(I)
OO17J=1,3
JJ-NS( J)
JJsJJ-II»l
IF(JJI7,17,16
75 16 J5=JGSMMJJ-11«NP»II
A(J5)=A(J5)»FS4(I,Jl
17 CONTINUE
7 CONTINUE
С
80 С MODIFICATION ANO SOLUTION OF THE SYSTEM OF EQUATIONS
CALL BOYVALI»(JGSM»1I, A(JGF»1I ,NP, NBH,NCLI
CALL OCHPBO(A(JGSH»1I,NP,NBHI
CALL SLVBOIAIJGSHtll ,A (JGFUI , A ( 11 , NP, NBH, NCL, I Oil
С CALCULATION OF THE ELEMENT RESULTANTS
c*••••••••
С
С INPUT OF THE ELFMENT ОДТД
ЯО С
00 86 KK=1,NE
REAOIIN.ll NEL,NS,X1»Y1,XZ,YZ,X3,V3
С RETRIEVAL OF THE NOOAL VALUES
26 РНК IMA (Ш
100 С CALCULATION OF THE SMEAR STRESS VALUES ANO THISTING HOHPW
AR2<«2Y3»X3nXlr2X2yi3Y2 Х11ЛЛ
moment =момЕмт»А1?г» «phi (ii»PHitzi»PHi«3Mi/3.
105 BU)r?rJ
с(пхзхг
C12»=X1-X3
no СC) = хг-х1
J2*JGFK<EL
JJsjGf»N?»NEL
A(J2>*0.0
«(J?)»D.O
IIS DO 211=1,3
A(J2I*« (J2)-Bril«PHIir»/A(?2
21 AIJ3)sl|JJ)*C«H "РНИП/АЧг
«6 CONTINUE
MOMENT«MOMENT»PCT
t20 THEATA=»TOROO?/MOMENT
С CALCULATION AW OUTPUT OF THE TRUE NOOAL VALUES
C WRire«IO,30» TITLE
125 3fl FOSMATAH1//^1X,20A!|//1X,12HNODA1. VALWES J
OOJ1I=1,NP
31 AIII»A«fI'THEATA
HRITE(I0,32) (IA
32 FORMATUXI3
130 II
С OUTPUT OF THE SHEAR STRESS VALUES
С A(J2I = TAUZT, A«J3» = TAUZX
135 WRITECIO, 80ITITLE
80 FORMATI1X,/////1X, a«A!,//lX,16K?LEMeNT STRESSES//5X, 5*H ELEMENT
1 TAU2X TAUZY TAUMAX )
00881=1.NE
J2=JCF*I
140 3JGFNf
J3JGNfI
AtJ2»»AIJ2)«THEATA
AIJ3»=A<J3»»THEAr*
TM*X SaRT(A(J2»»«2
TM*X SaRTAJ22J3>
IFITMAX.lT.TAUMAXI GOT090
TAUMAX^TMAX
i?
90 wii?E<IO,e5> I,A(J3I,A«J2I,TMAX
«5 FORMAT«rx, 13. 3C5X, ?12.5I
IFIIPCH.FQ.fi» GOTdee
150 WRITE! IP, 89> I.ACJ3I ,AU2»,TMAX
69 F0RMAT«I3,2X,6E12.6»
88 CONTINUE
WRtrE(IO,eri THEATA,TAUMAX,Kf
87 FO4MATI //// 1X,*OHANGLE OF TWIST FO» THE APPLIED TORQUE Г5Г6.г
iss г.ан ocGRrcs/ix,<>6HMAxiMUM shear stress for the applied tor«ue isfj
2O.1/1X,<»2»MAXIMUM SHEAR STRESS IS LOCATED IN ELEMENTII.I
STOP
END
Учебные программы 361
о кручении стержня. Набор заданных узловых значений искомой
величины, считываемых подпрограммой BDYVAL, может оканчи-
оканчиваться либо нулем, либо целым отрицательным числом. Точно так
же оканчивается карта узлгтых сил.
В строке 150 программы предусмотрена возможность перфори-
перфорирования результантов элемента (сдвиговых напряжений) для
дальнейшего использования их при вычислении согласованных
результантов элемента, т. е. при вычислении узловых значений
напряжений согласно методике, изложенной в гл. 6. Программа
CONSTR вычисления согласованных узловых значений описана
в следующем разделе.
18.5. CONSTR
Программа CONSTR связана с реализацией теории согласован-
согласованных результантов элемента при вычислении узловых значений ре-
результантов элемента. Эта программа составлена для совместного
использования либо с TORSION, либо STRESS (программа реше-
решения двумерных задач теории упругости).
Программой предусмотрен ввод следующих перфокарт: титуль-
титульной карты, карты параметров программы, стандартных результан-
результантов элементов, исходных данных элементов.
Стандартными результантами элемента служат значения на-
напряжений, отперфорированные программой TORSION или
STRESS. Исходные данные элементов в точности совпадают с ис-
исходными данными элементов, используемыми программой
TORSION или STRESS.
Пример комплекта исходных данных для программы CONSTR
не будет приведен здесь, так как перфокарты с этими данными
(за исключением двух карт) перфорируются другими программа-
программами. Эта программа может быть также использована для вычисле-
вычисления узловых значений результантов элементов в задачах течения
грунтовых вод и переноса тепла. Однако программы для этих
двух прикладных областей должны быть модифицированы так,
чтобы они могли перфорировать выходные данные.
Приведем обозначения некоторых наиболее важных перемен-
переменных, которые используются в CONSTR и которые не были опре-
определены ранее:
STR Согласованные результанты элемента. Их число должно
быть не больше 7
JCSTR Величина, которая определяет адрес последней ячейки
памяти, отводимой для хранения стандартных значений
напряжений в одномерном массиве А
AREA Площадь отдельного элемента
ERM. Вектор нагрузки для элемента
ЕСМ. Матрица демпфирования элемента
PROGRAM CONST*! INPUT .OUTPUT, TAPE 60= I Nf>UT, T APE61*C
DIMENSION ECMI3.3» ,ERHC,7»,NSC»,STRG», A(i,500t
COMMON/TLE/TITLECZOI
•OUTPUT!
»,NSC»,STRG», AII.500
OATA IN/60/,ГО/61/,1О1/0/
5 C«
С NP - NUMBER OF NOOES, NE - NUMBER OF ELEMENTS.
С NBH - BANO HIOTH, MCL - NUMBFR OF STRESSES PER ELEMENT
С
10 С INPUT OF TITLE ANO PARAMETER CARD
REAOCIN.ll TITLE
1 F0RHATC2CAI.I
READ(IN,2I NP,NE,NBH,NCL
15 2 FORMAT(l»13t
С
С CALCULATION OF POINTERS ANO INITIALIZATION OF THE COLUMN VECTOR *
С
JGF=NP»NCL
20 JGSMsJGF»Z
JENO-JGSM»NP»NBW
JCSTRs JENO»NE*NCL
00131=1,JCSTR
13 A(II=0.0
25 С
С INP^T OF THf CONVENTIONAL ELEMENT RESULTANTS
0061=1,NE
REAOdN.bl NEL, (STRCJt , Jsl.NCLI
30 <t FORMAT(I3,2X,6E12.6I
006K=l,NCL
JlsJENO»(K-lt»NE»MEL
6 ACJltsSTMKI
С
35 С CALCULATION OF THE ELEMENT (Ct MATRIX AND THE ELEMENT (Rl MATRIX
OOtOKKl.NE
READ(IN,3 t NEL,NS,Xl,Yl,X2,Y2,X3.r3
3 FORMAT (¦.] 3.6F10.1.»
го areAs(x2*гз»хз*г1»х1*гг-хг»г1-хз*гг-
0051=1,3
OO8K=1,NCL
J1=JENO»(K-1I*NE»KK
в ?RM(I.KI-AI?FA»a(Jll/3.
D05 i3
D05J i,3
COEFsl.O
IF(I.EQ.J) COEFsZ.
5 ECMCI,JI=C0EF*AREA/12.
С INSERTION Of ELEMENT PROPERTIES INTO THE COLUMN VECTOR A(
0071=1,3
IINS(II
II=NS(II
0015J=l,NCL
55 J5=JGF»(J-1I*NP»II
15 A(J5I=A(J5I»ERM(I,Jl
D01?J=1.3
JJ-NSUI
JJ=JJ-II»1
6C IF(JJI17,17,16
16 J5=JGSMM JJ-11»NP»II
Alj5l = AU5l»Ecnil,JI
17 CONTINUE
7 CONTINUE
65 1.0 CONTINUE
С SOLUTION OF THE SYSTEM OF EQUATIONS
С
CALL DCMPBD(A(JGS4»1I,NP,N3HI
70 CALL SLVBO(A(JGSM»1I,A(JGF»1I,AAI,NP,NBH,NCL,1011
STOP
END
Учебные программы 363
18.6. FLDMCH
Программа FLDMCH может быть использована для анализа
двумерных безвихревых течений идеальных жидкостей, которые
рассматриваются в задачах о грунтовых водал. Программой пре-
предусмотрен ввод следующих перфокарт: титульной карты, карты па-
параметров программы, карты с исходными данными элементов,
узловых сил и заданных узловых значений искомой величины,
считываемых при обращении к BDYVAL. В списке обозначений не
встречались следующие переменные:
РХХ, PYY Коэффициенты проницаемости в направлении осей
х и у соответственно
VELX, VELY Компоненты вектора скорости течения в направле-
направлении осей х и у соответственно
В табл. 18.3 представлены входные данные для задачи о те-
течении грунтовых вод, обсужденной в разд. 9.2. Сеть разбиения
на элементы показана на фиг. 9.3. Значения узловых сил опреде-
определяются количеством воды, просочившейся вдоль русла реки и вы-
выкачанной в точках расположения двух насосов. Вдоль двух гра-
границ области заданы узловые значения искомой величины. Карта
с числом —1 для номера элемента была использована для завер-
завершения работы программы (строка 84), так как результанты эле-
элементов не представляли интереса и поэтому не вычислялись.
Программа вычисляет компоненты скорости, соответствующие
течению грунтовых вод и прямолинейному потоку. Компоненты
скорости произвольного потенциального течения не могут быть вы-
вычислены с помощью этой программы.
18.7. TDHEAT
Программа TDHEAT вычисляет распределение температуры в
двумерном теле, на границе которого либо происходит конвектив-
конвективный теплообмен, либо задана температура окружающей среды.
Входные данные аналогичны тем, которые используются в пре-
предыдущих программах. Вводятся следующие перфокарты: титуль-
титульная карта, карта параметров программы, карты исходных данных
элементов, узловые силы и заданные узловые значения искомой
величины, вызываемые подпрограммой BDYVAL, карты исходных
данных элементов или карта с числом 1.
Приведем обозначения наиболее важных переменных, которые
еще не были определены:
КХХ, KYY Коэффициенты теплопроводности в направлении осей
х и у соответственно
Н Коэффициент теплообмена
Входные данные программы FLDMCH
Таблица 18 3
ь
6
i\
i
4
'1
I
3
SI
g[r|o|u|njd|w|a|t[e|r| |p|r[q[b|l|e|m| |f|o|r[ |t|e|xjt|b|o|ojkj
15| И«| 1 171 11 I №1»М 11111 1ФЫ°1 I 1 \Kupm пара/петров программы
hi 6 ?
Nb|o1o
U|o|
Ш
Ф\.Ы
|i|i
2[5|.
|3folofof.1ol
ЖЕ
Значения узловых сил
15]O1OI*IO1 1 Исходные
I данные
I элементов
|3[7|s|.|o| ) {6^карты)
1
2
2
1
1
2
3
2
1
2
8
3
2
2
8
4
2
2
9
5
3
4
-
2
5
5
6
4
•
•
0
0
-
2
1
2
0
9
8
•
•
0
0
7
1
1
0
5
8
•
•
0
0
1
4
1
4
0
0
8
•
•
0
0
4
1
5
0
4
•
•
0
0
5
5
0
•
0
Заданные узловые значения искомой величины
4
1
2
4
2
3
4
3
4
4
4
5
5
4
1
2
2
0
0
0
0
•
•
0
0
2
2
0
0
0
0
•
•
0
0
2
2
0
0
0
0
•
•
0
0
2
2
0
0
0
С
•
•
0
0
2
0
0
•
0
2
0
0
•
0
щЛ] Завершение ввода исходных данных элеменщ§
PROGRAM FLOMCHdNPUT,OUTPUT,T»PE60=INPUT,TAPE61 = O
DIMENSION NSC1,ES!1C, 3 1 . В ( 31 ,C ( 31 , PHI 03» , A B500 »
C0MMON/TLE/TITLEC2»>
DATA IN/60/.IO/bt/,NCL/1/,101/»/
5 g DEFINITION OF THE CON Kg. дР»ММ|Т ERS^ ffi _ ^^ Qf
С НВИ - BANOWIOTH, PXX - PREMEABILITY IN X DIRECTION,
С PYY - PREMEABILITY IN THE Y OIRECTICN
10 С
С INPUT OF TnF TITLE CARD АЧО THE CONTROL »AR«
«EA0dN,31TITLE
15 3 FORM«TB0Ai.l
REAOdN.cl NP.NE.NBW.PXX.PYY
2 F0RMATCI3.1X,2F10.5l
С CALCULATION OF POINTERS ANO INITIALIZATION OF THE COLUMN VECTOR A( >
го с
JGF NP»NCL
JGSM=JGF»2
JENO=JGSM»NP»NBK
OO13I 1.JENO
гч i3 до o.o
С OUTPUT OF TITLE ANO DATA HEAOINGS
HRITECIO,!.) TlrLE.PKX.PYY
39 <| FORMATAH1////1K,20A'»//1X.5MPKX -, F ч . l/l « , ьмРГГ , F 3. 1// 1» , 78 HNEL
1 NODE NUMBER x(l) Yd) XB) YB) XC1
?<31 '
С ASSEMBLYING OF THE GLOBAL STIFFNESS MATRIX «ND GLOBAL FORCE M»TRIX
35 c.........
С INPUT ANO ECHO PRINT OF ELEMENT DATA
С
DO 7 KK=1,NE
VO REAOdN.ll NEL.NS, X1.Y1,X2,Y?, X3.Y3
1 FORMATCI3,6F10.l.l
HRITE(I0,231 NEL.NS,X1,Y1,XJ,YJ,X3,Y3
23 F0RMAT(lX,I3,2x,3l4,lx,6Bx,Fe.l)I
Mb С CALCULATION OF THE CONDUCTION MATRIX
С
B(l!-Ye-Y3
8B!SY3-Y1
BI31 =Yt-Y2
50 с(и=хз-хг
CB1sXl-XJ
CC!=X2-X1
AR4 (X2»Y3»X3>Yt»Xl»Y2-X2'Yl-X3pY2-Xl«Y13)»?.
0051-1,3
55 005J-1,3
5 ESM(I.J) (PXX«B( II'BUI ¦PYY'Cd) *C ( J) l/ARl.
С INSERTION OF ELEMENT PROPERTIES INTO THE COLUMN VECTOR Д( »
60 D07I=l,3
II-NS(I1
0017J 1,3
JJ*NS( Jl
JJ=JJ-II»1
65, IF(JJ117,17,16
» 16 J5 JGSMH JJ-11 «HP» II
A(J51 = A(J51*ESM(I, Jl
17 CONTINUE
7 CONTINUE
7a с
С MODIFICATION 4N0 SOLUTION OF THE SYSTEM OF EQUATIONS
CALL B0YV»L(»(JGSM*L),A(JGF»ll,NP,N8W,NCL)
CALL DCMPeO(A(J5SM«ll,NP,N4W>
7S .....JJtt SLVB0<4 <JGSM»1! ,4 (JGF»D,AA) ,NP,MBH,NCL,I01l
С CALCULATION OF THE ELEMENT RESULTANTS
g'"
ВО С INPUT OF THE ELEMENT ОАТД
00 86 IJ-l.NE
REAOdN.ll NEL,MS,X1,Y1,X2,Y2,X3,Y3
IF(NEL.LT.Q1 STOP
• S IFdJ.GT.ll GOT0S1
KRITE(IO,801 TITLE
e°.?22!!2T<1H1//</1*I?OA'*//1X'27HELf'1ENT 'E.LOCITY C0MP0NENTS//5X.37MEL
ltntNl VtLiX» l^EL(Y) I1
90 С RETRIEVAL OF THE NOOAL VALUES FOR THE ELEMENT
91 00201=1,3 —
366
Глава 18
100
105
но
115
II=NSCI»
?o phki»»a(ii»
CALCULATION OF THE VELOCITY COMPONENTS
B<1»"Y2-Y3
B<2)=Y3-Y1
BC) = Y1-Y2
c
C(Z»-xi-xj
ARz'lxl»YJ»X3«Yi»Xl»YZ-XZ*ri-X3'Y2-Xll>r3»
52 GRAOX=0.0
GRAOY=0.0
DO211 = 1, 3
GRAOX=GRADX*B<I» *PHI<I»/AR2
21 GRAOY=GRADY»C<I»'PHI<I>/AR2
VELX=-PXX*GRADX
VELY=-PYY*GRAOY
86 HRITE(IO,e51 NEL.VELX.YELr
es FORMATI7X.I3.5X.?12.5,5X,E12,5»
STOP
ENO
TINF Температура окружающей среды в точках поверхно-
поверхности конвективного теплообмена
JTAVE Величина, которая определяет адрес последней ячей-
ячейки памяти, отводимой в одномерном массиве А для
средних по элементу значений температуры
ISIDE Стороны элемента, на которых происходят конвектив-
конвективные потери тепла
В этой программе предусмотрена возможность перфорации
(строка 141) средних по элементу значений температуры, с тем
чтобы можно было использовать эти значения для анализа тем-
температурных напряжений с помощью программы STRESS (про-
(программа решения двумерных задач теории упругости).
В табл. 18.4 представлены входные данные для примера, рас-
рассмотренного в гл. 8. Приведены четыре карты с данными для эле-
элементов, которые модифицированы после того, как были отперфо-
рированы программой GRID. Модификация этих карт была не-
необходима в связи с тем, что на одной из сторон каждого из этих
элементов наблюдаются конвективные потери тепла. Так как по-
потери тепла в каждом случае наблюдаются на второй стороне эле
мента, то в столбце 75 каждой карты было пробито число 2. Если
конвективному теплообмену подвержено более одной стороны эле-
элемента, то еще одно число должно быть пробито в столбце 78 пер-
перфокарты. Конвективному теплообмену могут быть подвержены не
более двух сторон любого элемента.
Одно значение узловой силы соответствует линейному источ-
источнику в узле 21. Граничные значения искомой величины не заданы,
поэтому ввод заданных узловых значений ограничивается числом
— 1 в столбцах 2 и 3. Второй комплект карт с исходными данными
элементов необходим для вычисления результантов элемента: сред-
«d
e
:з
a
Та fit
ш
X
Q
b«
2
S
о
с
о
с
V
2
&>
3
оа
—
»» pi
|~- Гч
г- о
Ш О
«л О
—
-
¦О Q
14 О
-
*- О
@
¦л
-
-
во
о
Исходные Ыш
о
ш
о
о
О)
«
fO
m
ч^
о
m
гм
-
m
О
о
•-
ш
О
о
о
о
(О
tn
о
о
m
О
*т
и>
m
СП
m
•-
m
О
•-
ГМ
г^
ГМ
о
ш
о
in
о
СП ,
ш
о
"я-
ш
1Л
г^-
fO
О)
о
а>
"
ш
о
гм
со
г-
п
CN
О
Ш
О
in
о
о
ш
о
о
о
о
•-
(О
о
m
m
r-
fO
о
гм
(Г)
со
о
ш
о
•-
•-
ш
tn
m
•-
со
(О
о
иг
m
f^-
r*>
Oi
о
(Г)
со
CN
О
ш
о
г-
о
CD
О
О
О
m
•-
m
со
(Л
.-
fO
О)
ш
о
ш
о
in
г-
о
ш
ш
о
см
ш
Тп"
(Л
о
<-
0>
о
ш
о
in
•-
о
СО
о
см
о
m
о
гм
чу
Ш
О
,-
со
I
I
1
о
о
PROGRAM TOHEAT(INPUT.OUTPUT,PUNCH,TAPE60*INPUT,TAPE61*0UTPUT.ТАРЕЬ
12=PUNCHI
01 HENS ION NSC),ESMI3,3),EFI3),KI3),YC),ei3),CI3l
DIMENSION [SI0EI2I. AB500 I,PHIC1
5 COHHON/TLE/TITLEB0>
4EAL KXX.KYY.LG
DATA IN/eO/,IO/61/,NCL/l/.I01/0/,IP/62/l
С OEFINITION OF THE CONTROL PARAMETERS
С NP - NU48ER OF GLOBAL TEMPERATURES. NE - NUMBER OF
10 С ELEMENTS, NBK - BANO HIOTH, KXX - CONDUCTIVITY IN X OIRECTIONi
С KYY - CONOUCf IYITY IN THE Y (DIRECTION, H - CONVECTION
С COEFFICIENT. TINF - FLUIO TEMPERATURE
С
15 С INPUT OF THE TITLE CARO ANO THE CONTROL PARAMETERS
REAO<IN,31 TITLE
3 FORMAT B0AI.I
RE АО (I N,21 NP,NE,NBH.IPCH,KXX,KYY,H,TI»(F
20 2 FORMAT A.13,".F10. 51
С CALCULATION OF POINTERS ANO INITIALIZATION OF THE COLUMN VECTOR A
С
JGF=NP*NCL
2S JGSH=JGF«2
JEN0-JGSM»4P»NBH
00131=1,JE40
13 0A1=0.0
С
30 С OJTPJT OF tit.E «МО 0АТ4 HEADINGS
NRITedO,".» TITLE,KXX,KYY,H,TINF
i. FORM»TAH1,////1X.20AI»//1X,5HKXX = ,F7 .1, 1 OX ,5HKY Y - ,C7 . 1/1X , 1 ЧЧСО
1VECTI0N COEFF ,rr.l/lX,12HFLJID T^MP =., F 7 . L//1 X . 1 7HNEL NOOE NUH
35 2BER,6X,l<HX(l),6X,l.HY(l),6X,l<HXB),6X,l«HYB),6X,l<HXC).6X,l.HYC) )
С ASSEMBLYING OF THE GLOBflL STIFFNESS MATRIX ANO GLOBAL FORCE MATRIX
c. ........
С
1,0 С INPUT ANO ECHO PRINT OF ELEMENT DATA
С
DO 7 KK=1,NE
REAOIIN.il NEL,NS,XAI,YAI,XBI,YBI,XCI,YUI, IS IDE
FORMATUI36F104ZI3I
E ,
1 FORMATUI3.6F10.4,ZI3I
1,5 HRITE«IO,23I NEL.MS, «II l.Y (II,X B1,Y BI.XI3I, YCI
?3 FORMAT (lX,TJ,?X,JI1«,3<,6BX,Fe,4 1
С CALCJi-A'ION OF THE CONDUCTION MATRIX
50 B(llsYB1-YC1
BBI =YC1-Y(II
BC>=Ytll-Yt?l
C(ll=XCI-XI2I
CBI=XAI-XIII
55 CCI»XB1-XIII
ARl. (X(ZI*YCl«
0051=1,3
EF(I)JO
60 5 ESnfb J1=(KXX«B(II *8 (Jl »KYY»Cdl'C<JI I/AR1.
С CALCULATION OF THE CONVECTION RELATEO QUANTITIES
65 0010 I- 1,2
IFIISIOEItl.LE.OI GO'OB
J-ISIOEdl
12 FORMAT! li,23HCONVECTION FROM SI0E,I2,UH OF ELEMENT, Ш1
ro <=jn
Lg'sORT((X(KI-X(JII*'2KY(KI-Y(J>I**2I
HL=H»LG
EF(JI=EF (JI»4L«fINF/2.
75 EFIKI EF(<l»HL«TINF/2.
ESNIJ.JI ESHIJ, J lt-HL/3.
ESM(J.KI-ESM(J.KI»HL/6.
ESMK.JI ESHIJ.SI
10 ESM(K,KI ESMIK.Kl»HL/3.
*" С INSERTION OF ELEMENT PROPERTIES INTO THE CLOBAl. STIFFNESS MATRIX
С
в 0071=1,3
II NSI II
65 D015J-1.NCL
J5 (NCL»J-1I»NP»II
15 Д( J51-AI J5H-EFII1
DO17J=1,3
JJ NSIJI
4t JJ JJ-IIH
IFIJJI 17,17,16
lb J5 J&SMK JJ-1I'4P»II
A( J51«A( J5H-ESMII, Л
17 CONTINUE
45 7 CALL'BOYVflUACJSSMUbMJUFUI.bPtNeW.NCll
Учебные программы 369
CALL OCHPBO(A(jGSHfll,NP.NBHI
»»»»»»ii» SLVBO<A<J6SNHI .A (JGFUI , A(l) ,NP.NBW.NCL.IOll
mo с calculation of the Element resultants
c.........
С INPUT OF THE ELEMENT ОАТД
105 D0B6KK-1.NE
REAOdN.ll NEl,NS,X<l(,YU>,XC2>.Y<2>,T<C31,YCl
IFCNEL.LT.OI STOP
IFIKK.GT.ll GOT050
WRITEA0,801 TITLE
110 80 FORMAT <1H1,////IX,20Ai4//lX,14HELEMEMT RESl»LTANTS//bX,SSHELEMENr-
1 GRAO(XI GRAOCYI AVE TEMP I
С RETRIEVAL OF THF NOOAL VALES FOR THE ELEMENT
С CALCULATION OF AVERAGE TEMPERATURE
115 50 J1=JGSM»NEL
AUll=0.Q
D020I=1,3
IIsNSIII
120 PHIIIIsAITtt
20 AtJl> = A<Jll»PHIO>/3.
С CALCULATION ANO OUTPUT OF THE TEMPERATURE GRADIENTS
125
i3o cm =х(г!-х( li
AR2=(XBl»Y(JIH(n)»Vtl)»X(l)*Y|?l-XBt*Y(L»-X<3)*v(ai-y(lt«Y(lll
52 6S*OX»0.0
GROYO.O
00211=1.3
135 GRA0X=GRA<me(I>»PHI(II/AR2
21 &RAOY»GRAOY»C(II»PHI(II/ARZ
S6 WRITEII0.85I NEL,GRAO<.9RAOY.A(J1)
85 FORMAT» вХ,13,М5Х,Е1г.5> !
IFdPCH.EQ.OI STOP
i<»0 J2 = JGSM»i
HRITEUP.S3I (A(I»,I-J2,JU
53 FORMAT FE1Z.6)
STOP
END
ней по элементу температуры и градиента температуры в на-
направлении осей хну.
18.8. STRESS
Программа STRESS может быть использована для анализа
напряженно деформированного состояния тонких упругих двумер-
двумерных тел, на границе которых заданы внешние силы или переме-
перемещения. Рассматривается случай плосконапряженного состояния,
хотя программа легко может быть модифицирована для анализа
плоской деформации. Ввод данных осуществляется по той же схе-
схеме, что и во всех предыдущих программах. Вводятся следующие
перфокарты: титульная карта, карта параметров программы, кар-
карты исходных данных элементов, узловые силы и заданные узловые
значения перемещений, вызываемые подпрограммой BDYVAL,
карты исходных данных элементов или карты с числом —1.
Приведем обозначения наиболее важных переменных, не об-
обсуждавшихся ранее:
Входные данные программы STRESS
Таблица 18.5
1
S1
т
R
Е
5
6
7
i|
S
S
А
N
AIL
У
S
S
о|
р
R
О
BL
Е
М
F
О
Я
т
ЕХ
т
в
о|о
к
•1
\1
•1
гитульная карта
•1
7
2
7
3
и
Заданные узловые силы
7
9
0
1
4
«1
5
2
1
0
1
2
0
0
0
olo
0
0
•
0
0
•
2|5
0
0
•
0
olo
0
0
6
0
•
°l
3
•
5
olo
-WIU
\ntn
1
6
7
2
1
•
2
op
0
D
•
0
1
•
2
1
•
0
D
•
0
1
•
0
1
4
4
9
5
g
0
•
9
1
5
•
0
1
2
•
о
1
1
4
•
0
1
2
•
0
1
1
4
•
0
1
1
•
5
7J5 0
Р"-"чщ парамет-
программы
Исходные
L данные
элементе
jliWi карты)
1
8
1
1
8
3
1
р
5
1
8
7
1
8
9
5
5
0
0
0
1
1
0
0
0
•
0
1
1
0
0
0
•
0
1
1
1
0
0
0
•
0
5
5
0
0
•
0
Заданные узловые перемещения
у
0
6
2
2
2
7
1
1
1
1
7
2
2
2
9
1
1
2
2
в
2
2
2
1
3
3
2
2
1
1
4
4
2
2
3
1
5
5
2
2
5
0
0
0
0
•
•
•
•
0
0
0
0
0
0
0
0
•
•
•
•
0
0
0
0
0
0
0
•
•
•
0
0
0
—
0
0
0
_
•
•
•
0
0
0
0
0
0
•
•
•
0
0
0
0
0
0
•
•
•
0
0
0
1
б
7
I
2
I
•
2
о|о|о
0
•
°| I
•
2
I
0
I
о|.|о
I
I
•
о
I
гТ^ГГ
I 4 • О
I 4 . О
] Исходные
I данные
элементов
J {
PROGRAM STRESS I INPUT, OUTPUT,PUNCH,TAPB6C=INPUT,TAPEblsOUTPUT,
1TAPE62=PUNCHI
С
С DEFINITION OF THE CONTROL PARAMETERS
5 С NP - NUMBER DF GLOBAL DISPLACEMENTS» ME - NUMBER OF
С ELEMENTS, NBH - BANDHIDTH, IPCH - PUNCH COMTRDL,
С I TEMP - ELEMENT TEiPE&ATURE INPUT CONTROL.
С fm - ELASTIC MOOULUS, РЧ - POISSONS RATIO,
С ALPH» - COEF OF THERMAL FXP, TEMPI - INITIAL TEMP
10 С Т - ELEMENT 1HICKNESS
DIMENSION NS F1, N0C1,ESMF,6I,EFFI,В <в,Ы,СF.31 @C,31
DIMENSION STRACI,STRECI,ETCI,UFI,AA1000 I
oommon/Tle/Tiili i2ui
OATA IN/6 0/.ID/61/.IP/6 2/,NCL/l/,IDl/0/,IELR/g/
IS С
С INPUT OF THf TITLE CARD «NO THE CONTROL PARAMETERS
REAOFC.JITITLE
3 FORMAT120АЦ)
20 RE4DIIN.il NP.NE,NBH,ITEMP,IPCH,EM,PR,ALPHA,TEMP,T
1 FORMATE11,5F10.51
С GENERATION OF THE MATERIALS PROPERTY MATRTX О
25 R=EM7 (l.O-PR'PR)
OA,1I«R
0B,21:0A,11
DC, II «RM1.0-PRI/2.
DA,2I*PR»R
JO 0B,11-0A,21
D(l,31-0.0
DM, llsH.Q
DB.3I=C.O
DC,21-0.0
35 С
С CALCULATION OF THE POINTERS AND INITIALIZATION OF THE COLUMN-VECTOR К
JP = NE
JGF-JP+NP
40 JGSH=JGF»MP
JENOsJGSM»NP»N«W
00131=1,JENO
13 A(I•=0 .0
45 С INPUT OF ТИЕ AVERAGE TEMPER«TU« FOR EACH ELEMENT
IFUTEMP.Ee.OI ЬОТОб
READ(INll (All I I 1
С
С
IUTE.Ee.OI ЬООб
READ(IN,l4l (All I , I- 1.NE1
!•. FORMAT FГ12. 61
_ OUTPUT OR TITLE AND DATA HEADIN6S
6 «RITE A0.24 TITLE,EM.PR,ALPHA,T,TEMP
г» FO«MATAH1///1X, 2OA<.//1X,17HELASTIC MOOULUS »,F1 0. 1/ LX.16NP0ISSONS
55 1 RATIO -, F6.J/1X.21HC0FF OF THERMAL EKP =,F9.o/IX,13MELEMENT ТИТ.С
3KNESS *,*7.Z/\*, 21HINITIAL TEMPERATURE -, F5.1//1 X, 18HNEL NOOE NU
<.M8EeS,6X,l,HX(ll .6X,<>HYIll,eX,l>HXBl,6X№<>4Y(?|,6X,4H«[3l .SX.kHYIJI .
S6X.2HDT I
c.........
60 С ASSEMBLYING OF THE GLOBAL STirFMESS MATRIX *ND THE 6L0BAL FORCE VECTOR;
C*********
С
С INPUT AND ECHO PRINT OF ELEMENT DATA
65 007KK*1,NE
KtaLMlN.CI NEL.ND, Xl,rl,X2,YZ<X3,r3
I F0RMATDl3,6Fl?.4
OT=A(NEL>-TEMP
. «RITE(IO.?3I NEL.NO,XI,Yl,X2,Y2.X3¦Y3.0T
'0 t3 FORMATdX, I3,2X,3I'»,3X,7B<.Fe.i.ll
С CALCULATION OF THE GLOBAL OCF FROM THE NOOE NUMBERS
31 00191*1,3
H NSB»II*ND(II
С
С GENERATION OF THE В MATRIX ANO THE INITIAL STRAIN MATRI». ET
SO DO 2 0 1=1.3
DO 20 J'1,6
го ВA,л=о.а
Bd,il=Y2-Y3
B(l,3I«Y3-Y1
»5 Bd,5l»Yl-Y2
BB,2|sX3-X2
в(з!и'В(г,2г
40 BC,2l'Bd,ll
в(з. з>=е <г.«.>
8C.41=8A,31
8C,61=B(ll5l
45 ETdl = ALPHA»OT
ETBl«ETdl
ETCI*O.C
AR2=X2>Y3»X3»Y1»X1»Y2-X2»Y1-X5»Y2-X1»Y3
IFdELR.EQ.il G0T065
100 С
С MATRIX MULTIPLICATION TO OBTAIN С > (BTI(O>
no гг i*i.ft
Продолжение табл. 18.5
оо гг jai.3
105 Cd.JIM.I
ооггкч.з
гг си, j)«C(i,j)»b(k, I)'0(к, J)
С MATRIX MULTIPLICATION TO OBTAIN ESH «NO ЕР
110 С ESH » (BI)C)(9) = (C)(B)
С EF ¦ (в*Х0ХЕТ>- (СХЕТ>
00 27 1«1,6
SUH1«|,O_
SUHliO.0
0029K*lt3
29 SUN1«SUN1»C(I,K1»ET<K>
00 27 J16
SUN1SUN1C(
00 27 J<1,6
SUMs0.С
оо га k=i,j
120 га su«=sum»c(i,k)'3(k,j>
ES4II,Jl=SJN»T/<2. »AR2>
27 EF(I>=SUMl»T/2.
С
С INSERTION OF ELEMENT PROPERTIES IN THE GLOB»L NAT»ICES
125 С
J5=JGF»II
A(J5>*A<J5>»EF(I>
130 0017J=l,6
JJ=NS(J1
JJ=JJ»1-II
IF<JJ>17,17,16
16 J5=JCSM«(JJ-1>«NP^II
135 >(J5)-t(J5)*ESM(I, J)
17 CONTINUE
7 CONTINUE
С MODIFICATION «ND SOLUTION OF TME SYSTEM OP EQUATIONS
1U0 С
CALL 30VVAL(A(JGSH»l>,A(JGF»l),NP.NBW,NCL>
CALL OCMPBDIACJGSIOD^NP.NBH)
.....SSit SLVBO(A(JGSM»1>,A<JGF»1),A(JP»1),NP,NBW,MCL,ID1>
145 C^^LOOP TO CALCULATE ELEMENT RESULTANTS
HRITEdO.eOl TITLE
вО FORMAT(lHl,30Al4//lX,aSHELEHENT STRAINS AND SIRFSSES I
IELR-1
«6 REAO(IN,?> NEL.MD.«l.yi.X2.Y2.«3.»3
DT=A(NFL)-TEMP
C0T031
155 С RETRIEVAL OF THE ELEMENT MODAL DISPLACEMENTS
65 D053I-1.6.2
KS1=JP»NS(I>
HSZ- JP»NS(I»H
160 Ud)-A(NSl)
53 U(I*1)=A(NS2I
С CALCULATION OF THE STRAIN VECTOR. 'STRAIN) - <B> <IJI - (ETI
С
165 00 55 1=1.S
STRA(I)>0.0
ОО551Ь
ООк1,Ь
55 STRMI>=SIR4([I»8<I.KI 'иОО/АРг
I'D I- I.ALCULAT1UN uF iHE STKESb vECTOP. iSTRESSi - 1D1 (STRAIN)
DO5»I=1,J
STRE(I)-0.0
00 58 K=l,3
175 58 STRE(I)-STRE(I)»DII,KI•(STRA(K>-ET<11 I
С CALCULATION OF TME PRINCIPAL STRESSES
AA=(STPt(l>»STRE(J>>/2.
КО АЛ=50НТ((<5ТКЕ<1>5ТКЕ<
1г=АА-АВ
ТМгДВ
IF(ABS(STREA>-STRE(Z>>.LT.0.001I GOTD
185 AC=ATAS?<2.'STRE<3>,STRE<1>-STRE^> I
тнм (<иоо/зи15эгб5>'АС1/го
т <ио.о
go то qu
93 TMM-90.O
91. CONTINUE
190 С
С PRINTING OF THE RESULTS
HRITECIO.57) NEL
57 FORMATC/ 1X, 7HELEHENT. I>. >
195 WRITE(I0,«5) STRAA>,STRE<1>,S1,STRAB>,ST«EB>,S2,STRAC>.
lSTRE<3>,tn,TM4
95 FORNATC 5«,5KEXX =,€12.5,5X.SHSX* -,E1Z.5.5X,5HS1 =,E12.S/5X,4Hf»
I» -.E12.5.5X,5MS»» .E12.5,5X,5fS2 =.E'12.5/5X,5HGXY =,E 12.5,5<, SH
2TXV :,E12.5,<.X,6HTMAX =,E13.5,6X,5H1nJlE,F8.3.4M OEGREES )
20t IF(IpJh.EQ.J> 4oTO86
96 HRITEdP.lOO NEL,STREA>,STPE(Z>.STREA3>,S.1,S2.TM
100 F0RHAT<I3,2X,6E12.6)
IJ=IJ»1
IF(IJ.LE.NE) GOTOSfc
205 STOP
ENt
Учебные программы 373
ЕМ Модуль упругости
PR Коэффициент Пуассона
ALPHA Коэффициент теплового расширения
TEMP Температура начального установившегося состояния
Т Толщина тела
JTAVE Величина, которая определяет адрес последней ячейки
памяти, отводимой в одномерном массиве А для сред-
средних по элементам значений температуры
ITEMP Контрольная величина в задаче о тепловых напряжени-
напряжениях. 1ТЕМР=1 означает, что средние значения темпера-
температуры элементов должны быть считаны
IPCH Контрольная величина, которая управляет выводом на
перфорацию значений напряжений в элементах 1РСН = 1
соответствует перфорированию карт; 0 означает отсут-
отсутствие данных, предназначенных для перфорирования
В табл. 18.5 представлены исходные данные для задачи о вы-
выточке, обсужденной в гл. 12. Должна быть решена система из
190 уравнений, так как общее число узлов равно 95 и в каждом
узле рассматривается по две неизвестные компоненты вектора
перемещений. Число 0 в столбце 12 карты параметров указывает
на то, что при решении задачи данные о температуре элементов
нр понадобятся в расчетах; число 1 в столбце 15 указывает на то,
что значения напряжений в элементах должны быть отперфориро-
ваны для дальнейшего использования. Если в расчетах необходи-
необходимо учесть значения средней по элементам температуры, эти зна-
значения вводятся вслед за параметрами программы перед вводом
карт с исходными данными элементов.
ЛИТЕРАТУРА
1. Collins R. J., Bandwidth Reduction by Automatic Renumbering, Intern. I. for
Numerical Methods in Engineering, 6, 345—356 A973).
2. Organick E. I., A Fortran IY Primer, Addison-Wesley, Reading, Mass., 1966.
3. Steinmueller G., Restrictions in the Application of Automatic Mesh Generation
Schemes by Isoparametric Coordinates, Intern. I. for Numerical Methods in En-
Engineering, 8, 289—294 A974).
Глава 19
ЗАКЛЮЧИТЕЛЬНЫЕ ЗАМЕЧАНИЯ
Предыдущие 18 глав книги следует рассматривать как введе-
введение в прикладные аспекты метода конечных элементов. В них да-
даны обзор интерполяционных свойств базисных элементов и вывод
основных уравнений метода как аналитически, так и с помощью
численного интегрирования. Рассмотрены вопросы реализации ме-
метода на ЭВМ и получены численные решения некоторых простых
задач с помощью ЭВМ.
Слово «введение» подразумевает, однако, существование до-
дополнительного материала. Действительно, прикладные области,
рассмотренные в этой книге, — только небольшая часть всех воз-
возможных применений метода. Существует множество других обла-
областей приложения метода конечных элементов, которые не были
здесь затронуты, например почти все разделы механики деформи-
деформируемого твердого тела, динамические задачи. Эти области обсуж-
обсуждаются в работах [1, 3, 7]. Современные прикладные аспекты ме-
метода рассматриваются в технической литературе. Обширная биб-
библиография по методу конечных элементов содержится в рабо-
работе [6].
В этой книге не обсуждается математическое обоснование ме-
метода конечных элементов. В последние годы этой теме уделяется
много внимания со стороны математиков. Математические аспек-
аспекты метода, такие, как исследование сходимости и оценки ошибок,
рассматриваются в нескольких книгах (см., например, [2, 4, 5]).
По мнению автора, настоящий учебник снабдит читателя ба-
базисной информацией, на основе которой каждый желающий смо-
сможет углубить свои знания в любом из конкретных направлений.
Читатель теперь должен обратиться к технической литературе,
связанной с применениями метода конечных элементов в той об-
области, в которой он специализируется.
В настоящее время метод конечных элементов широко исполь-
используется как эффективный метод решения инженерных и физических
задач. Будущий инженер должен изучить основные идеи мешда
и современное его состояние. Именно изложению основ метода и
и посвящена эта книга; аспекты современного его состояния остав-
оставляются на усмотрение читателя.
Заключительные замечания 375
ЛИТЕРАТУРА
1. Cook R. D., Concepts and Applications of Finite Element Analysis, Wiley, N. Y.,
1974.
2. deBoor C, Mathematical Aspects of Finite Elements in Partial Differential Equa-
Equations, Academic Press, N. Y., 1974.
3. Gallagher R. H., Finite Element Analysis Fundamentals, Prentice-flail, Engle-
wood Cliffs, N. J., 1975.
4. Strang G., Fix G. J., An Analysis of the Finite Element Method, Prentice-Hall,
Englewood Cliffs, N. J., 1973.
5. Whiteman J. R., ed., The Mathematics of Finite Elements and Applications, Aca-
Academic Press, N. Y., 1973.
6. Whiteman J. R., A Bibliography for Finite Elements, Academic Press, N. Y.,
1975.
7. Zienkiewicz О. С, The Finite Element Method in Engineering Science, McGraw-
Hill, London, 1971: есть русский перевод: Зенкевич О., Метод конечных элемен-
элементов в технике, изд во «Мир», М., 1975.
Приложение А
НЕКОТОРЫЕ АСПЕКТЫ ВАРИАЦИОННОГО
ИСЧИСЛЕНИЯ
Вариационное исчисление связано с отысканием стационарных
значений функционалов. Функционал представляет собой опреде-
определенный интеграл, который принимает некоторое числовое значе-
значение при подстановке каждой конкретной функции в подынтеграль-
подынтегральное выражение. Например, интегралу
ь
/ = l F{x)dx (a)
при подстановке каждой конкретной функции F(x) соответствует
определенное числовое значение.
Основная задача вариационного исчисления состоит в отыска-
отыскании такой функции F(x), чтобы при произвольном бесконечно ма-
малом изменении этой функции 8F(x) величина / оставалась неиз-
неизменной. Рассмотрим функционал
ф, Фя)Жс, (б)
где х — независимая переменная; ф переменная, зависимая от х,
а фж первая производная ф по х. Варьирование / вызывается из-
изменением F(x):
ь ь
б/=J 8F(x) dx = J ( ? бФ + -^ бФя )dx. (в)
а а
Замечая, что
? (г)
и интегрируя по частям второй член подынтегрального выражения,
получаем
ь
F d
ь
а
(д)
Некоторые аспекты вариационного исчисления 377
Функционал / принимает стационарное значение, если 67 = 0.
Величина б/ в выражении (д) обращается в нуль, если равен нулю
интеграл, входящий в это выражение, а, кроме того,
Ф (а) = const, cp (b) — const,
и, следовательно,
бф(а)=бфF)=0, (е)
или
Так как б<р произвольна на отрезке между точками а и Ь, на этом
отрезке должно удовлетворяться дифференциальное уравнение
JL ^
ац> dx
что обеспечивает равенство нулю указанного интеграла.
Функционал может иметь несколько независимых переменных.
Рассмотрим функционал с тремя независимыми переменными:
(x, у, г, <р, <ря, уи, yz)dV. (и)
Произвольному бесконечно малому изменению F(x, у, г) соот-
соответствует вариация функционала
Используя соотношение (г), получаем
J [ <Эф Y dfx дх v r <Эфу ду
Интегрируя по частям второй член в (л) и применяя формулу
Гаусса, имеем
I
V
или
JHJ)
V 5 V
где /ж — направляющий косинус нормали к поверхности с осью х.
25—763
378 Приложение А
Преобразуя аналогичным образом другие члены в (л) и объеди-
объединяя результаты интегрирования, находим для вариации функцио-
функционала
F д / dF \ д I dF \ д
Стационарное значение / получается только при условии, что
выражения в скобках в обоих интегралах обращаются в нуль. Вы-
Выполнение этих требований позволяет записать дифференциальные
уравнения и граничные условия, которым удовлетворяет искомая
функция.
Соотношение (н) соответствует вариационн"ч формулировке
задач теории поля, обсужденных в этой книге. Рассмотрим функ-
функционал
Соотношение (н) устанавливает, что функция, сообщающая ста-
стационарное (минимальное) значение этому функционалу, должна
удовлетворять следующему дифференциальному уравнению:
dF д / dF \ д_ I dF \ д t dF \ Q
Рассматривая по отдельности каждое слагаемое, имеем
д 1ЛЛ.
дх \ дФ« ) — дх
ду \ дуу )~ ду
д(р
т ду j—^УУ ду* •
a / dF
дг
Объединяя результаты последних преобразований, получаем
Некоторые аспекты вариационного исчисления 379
Итак, функция, сообщающая стационарное значение функционалу
из формулы (о), должна удовлетворять дифференциальному урав-
уравнению для задач теории поля.
ДОПОЛНИТЕЛЬНАЯ ЛИТЕРАТУРА
Fung Y. С, Foundations of Solid Mechanics, Prentice-Hall, Englewood Cliffs,
N. J., 1965.
Huebner K. H., The Finite Element Method for Engineers, Wiley, N. Y4 1975.
Pars L. A., An Introduction to the Calculus of Variations, Heineman, London,
1962.
25'
Приложение Б
ДИФФЕРЕНЦИРОВАНИЕ МАТРИЧНЫХ
СООТНОШЕНИИ
Процедура минимизации, обсужденная в гл. 5, включает диф-
дифференцирование матричных произведений [N] {Ф} и {Ф}г[-<4] {Ф}
по {Ф}, где [N]—вектор-строка и [А]—квадратная матрица.
Указанное дифференцирование выполняется сравнительно просто,
но так как этой операции не уделяется внимания в большинстве
пособий по матричной алгебре, то мы расмотрим ее в этом при-
приложении.
Рассмотрим соотношение
Ф=[ЛП{Ф), (а)
где
]=]#!#. Nr],
Мы хотим вычислить величину производной ф по {Ф}, т. е.
ду/д{Ф}. Эта производная определяется следующим вектор-столб-
вектор-столбцом:
( дф
дф
дф
(б)
Компоненты вектор столбца производных (б) вычисляются с по-
помощью произведения (а), которое в развернутом виде записывает-
записывается следующим образом:
(Г)
Дифференцируя последнее соотношение, получаем
аФ _Л, Эф _., дф
дфх
ЭФ,
дФг
г
Дифференцирование матричных соотношений
381
Подстановка полученных выражений (б) дает
iNA
(Б1)
Дифференцирование {Ф}Т[ЩТ по {Ф} приводит к той же са-
самой формуле, так как это произведение идентично (в).
Рассмотрим теперь произведение вида {Ф}Г[Л]{Ф}. Операцию
дифференцирования этого произведения легко проиллюстрировать,
если ограничиться малым числом коэффициентов в матрице [А].
Пусть симметричная матрица [А] имеет размеры 2X2:
[А]
Г«п «12 1
I «21 «22 J
(Д)
и {Ф}г = [Ф1Ф2]. Используя условие симметрии ак а21, запишем
произведение в виде
Ф= {Ф1 г [А] {Ф1 =:аг1Ф{ + а^Ф, + а22Ф1.
Дифференцируя (е), имеем
(е)
(ж)
Подставляя эти соотношения в (б), получаем
20ЦФ! + 2Д12Ф2
или
д{Ф}
«21 «22
({Ф}Т{А]{Ф})=21А}{Ф}.
Ф,
(Б2)
ОТВЕТЫ К НЕКОТОРЫМ ЗАДАЧАМ
2. #=4.
3. См. фиг. 7.6.
5. См. фиг. 8.6 и 8.8 для аналогичного примера.
П. a) yVj=D,5—лг)/2,5, Nj=(x—2)/2,5.
382
Ответы к некоторым задачам
12. JV,=( 0,5-
13. Сторона ij x
Сторона ik x
17. Nt= -i- [3-
=~[ x+y-z],
18. Сумма коэффициентов должна равняться нулю.
19. -^-=-г [-
= %¦ в точке В.
20. и=1,38 мм, и=6,55 мм,
^i= i> Ns= "И". N
21.
22.
tA
2 1
1 2
О О
1
1
1
23. Элемент 1: г = 1, /=2,
элемент 2: /=2, /=3,
элемент 3: г=3, /=4,
элемент 4: /=4, /=5.
25. Элемент 1: г=1, /=2, ^=4,
элемент 2: t=4, /=2, fe=5,
Ответы к некоторым задачам
383
элемент 3: i=2, /=3, k=5,
элемент 4: t=4, /=5, k=6.
27. фA)=;
31. u^^N
34.
^j ф2.
(-Cx+Q
BС!+4С2)
39.
40.
43. D8,33
96,67
0
' '~ 96,67
48,33
О
45. Формула F.20), стр. 96.
384
Ответы к некоторым задачам
46.
48.
12
—4
0
—8
0
10
—2
0
—2
—6
0
—4
36
—8
—12
—12
—2
10
j
0
—7
0
0
—8
16
0
8
0
— 1
2
0
0
— 1
—8
— 12 -
0
28
—8
—2 —6
0 —7
0 0
10 —8
—8 27
0 —6
0"
-12
—8
—8
28_
0
0
— 1
0
—6
7
49. a)
/4=6,2857,
3,461 Wt =2,3077.
б) {F}7"=[6, 9, 9,4286, 3,4615],
в) Ut=Ut=Ua=Ut=2/3,
51a. [3,0, —7,38, 18,18, —15,71, 17,86],
10,29, 5,21, 0, 5,21, 0,29].
516. |3,0, -0,28, 14,10, 6,26],
[18,0, 0,5, 0, 3,5].
51в. [3,0, 0,06, 1,33, 0,26, 0,38],
[1,29, 1,07, 0,0, 0,64, 0,57].
62. [150, 84,5, 57,3, 46,5, 42,5, 41,4].
65.
66.
68.
¦4К_„ Г 1 11 is k; + kl
|=_**sl I Где кхх= ll '
39,56
7,07
7,07 —5,42'
35,81 —1,67
—5,42 —1,67 6,68
849,6
849,6
25,0
60,41
2,72
2,72 19,33
1,36 —4,08
19,33 —4,08 67,21
ТЛ
Ответы к некоторым задачам
385
70
71.
72.
2hA
12
33,33
16,67
th
12
1
1
Вт
Вт
(h
(>
1
2
1
в ;
В ]
_l_
l,-r
0
Г
1
2
^ЗЛ«
/зле
ЗА.)
а/)
! /•
(/
C
СО
3
l.+hj)
hi + hj)
0
0"
0
0
A
1
1
)
*Jjl\' СО
6
(hi + '<
0
12,22
—1,44
10,78
— 1
9
—7
,44
,38
,94
10,78
-7,94
18,72
74.
80.
94. На срединной поверхности трубопровода Т=550 К.
На внутренней поверхности изолятора Т—538 К.
На срединной поверхности изолятора Т=349 К.
95. Г(Я) + 8Я?Я;— 6Я?ЯУ—ЗЯ/) (#j—2R}Ri + 2RjW—R
[ Симметрично (ЗЯ? —SRJRt + 6R$R1 —Rt)\*
96a.
3 (Я, - Я,)
966.
Т -
+ R>
с 1
> Tt
с 1
386
Ответы к некоторым задачам
97. Точные значения
1016
{/}=Л<2 1134
1114
98.
Приближенные значения
( 839]
{f}=AQ 1104
[1080
99. fl52H0)
{/} =347031
C36080
100.
111.
113.
115.
116.
117.
118.
+:
ахх=22669,
19398
12344
7054
—12344 —70541
16208 —3363
—3363 10900J
,=-879,1,
аяя=9939,6, а =651,3, у
а
= 1680,7,
KJ,
94,7,
— 3247,2
—4296,9,
,469 0
0,483
Симметрично
—1,624 0,580 —0,077
0,483 —0,483 —0,483
2,533 —1,353 —0,271
2,175 0,338
0,551
—0,580-
0
0,870
-1,692
1,450
1,692
Ответы к некоторым задачам
387
119.
ffl uPuXik
in — 6
131. iVj=C^—L)(
N}=— 9x(x-
0
0
n
0
/D I QD \
(Hi + c-Hk)
0
x -L)/L\
L)I2L\
Nk*=xCx—L)/2L2.
133. —0,8.
134. —1,6.
135. 1
ffl p%u ?
»' 8 3
1
136- pw, ft T
\n— 6
138. 2,667.
139. 1,733.
147. Na=iLlLa(i
148. Г—1 2]
[-6 -4j-
149. П—4—4Ц
i
oo
0]
i-
¦(At + Aj + AJ (Ai + 4Aj + AJ
Симметрично (A( + 4Aj + A^
L1-1)DL3-1).
'31
[D__4L1_8L2) — 5j"
151. —5/24, 1/6.
153. —10/9.
162.
388
Ответы к некоторым задачам
164. 420/535, —16/535.
176.
179.
.(-
1 аТе
~2~+ 6
1 , аТе
2^3
Г,
L + а
67% A
2 1
=0.
X
0
Член у' встречается только в уравнениях для элемента, соответствую-
соответствующего первому временному шагу.
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Ансамбль 62
Аппроксимации сопряженной теория 101
Вариационное исчисление 376
Весовой коэффициент 258
Входные данные 346
Галёркина метод 323
Гаусса — Лежандра квадратура 259
Гаусса метод исключения 112
Генератор данных элемента 122
Гука закон 83
Данные соединения 345
Дискретизация области 17
Дифференцирование матричных соотноше-
соотношений 380
Длина дуги 321
Задача Коши 323, 333
Интегрирование численное 257
Источник линейный 162
— локализованный внутри элемента 156
— точечный 152
Исходные данные соединения 345
Карта с параметрами 346
Квадратура Гаусса — Лежандра 259
Ньютона — Котеса 258
Комплекс-элемент 30
Координат преобразования 253
— система естественная 253
КппРДИнаты радиальные 190
— объемные 50
плоские 47
Кранка Никольсона разностная схема 208
Массив одномерный 120
Матрица градиентов 93, 144 183, 212, 222,
248
— жесткости глобальная 71, 105
сингулярная 235
— ленточная 109
— упругих констант 223
— — характеристик 227, 229
— элемента 92
демпфирования 203
— Я"оби 2йЗ
Метод прямой жесткости 106
— исключения 113
Модификация системы уравнений Hi, 336
Мультиплекс-элемент 30
Нумерация узлов 25
Ньютона — Котеса квадратура 268
Обратная прогонка 113
Остроградского — Гаусса теорема 330
Подпрограммы для ленточной матрицы 353
Полином 10
— интерполяционный 30
для дискретизованной области 69
— — линейный 30
Призма прямоугольная 308
Программы учебные 341
Производные функций формы 275, 300
Результирующая система уравнения ПО,
187
Решение конечно-разностное 205
Симметрия геометрическая 188
— осевая 18
— радиальная 181
—¦ Центральная 181
Симплекс элемент 27
двумерный 34, 203
— одномерный 31, 203
трехмерный 39, 204
Симпсона формула 258
Система координат глобальная 44
— — локальная 44
— местная 44
уравнений дифференциальных первого
порядка 336
¦ модифицированная 252
Соотношения, определяющие элементы 303
Степень свободы 60
— — глобальная 107
Теория согласованных напряжений 304
результантов 217
Типичный элемент 14
Титульная карта 346
Триангуляризация 209
Узел 10
— глобальный 268
Узловая точка 10
Узловые значения 14
Уравнение матричное 336
— квазнгармонвчегкое 74
Уравнения метода конечных элементов 73
Устойчивость численная 208
Функция базисная 296
— единичная импульсная 152
— полевая 189
формы 32 61
— — для элементов высокого давлен»»
271
элемента 11
— линейная 12
Шаг временной 209
Шарнир неподвижный 24
— подвижный 24
Ширина полосы матрицы 25
Элемеш 10
— высокого порядка 242, 312
— двумерный 18
— изопараметрический 263
— квадратичный 1В, 243
— комплекс 30
— криволинейный 14
— кубичный 18, 243
— линейный 137
— мультиплекс 30
— одномерный 17, 46
— осесимметричный 204
— радиальный 204
— симплекс 27
— субпараметричеиеяй 263
— суперпарамецииеский 26Э
— тетраэдральный 280
— типичный 14
треугольный 270
трехмерный 18
— четырехугольный 289
¦ квадратичный 294
— — кубичный 294
— линейный 388
ОГЛАВЛЕНИЕ
Предисловие редактора перевода 5
Предисловие ,...., 7
Глава 1. Метод конечных элементов , 9
1.1. Основная концепция метода конечных элементов .... 10
1.2. Преимущества и недостатки 14
1.3. Структура книги 15
Литература 16
Глава 2. Дискретизация области 17
2.1. Типы конечных элементов 17
2.2. Разбиение области на элементы 21
2.3. Нумерация узлов 27
2.4. Заключение 27
Литера1ура 29
Глава 3. Линейные интерполяционные полиномы 30
3.1. Одномерный симплекс-элемент 31
3.2. Двумерный симплекс-элемент 34
3.3. Трехмерный симплекс-элемент 39
3.4. Интерполирование векторных величин 42
3.5. Местная система координат 44
3.6. Свойства интерполяционного полинома 51
Литература 58
Глава 4. Интерполяционные полиномы для дискретизованной области 59
4.1. Скалярные величины 59
4.2. Векторные величины 63
4.3. Выводы 64
Глава 5. Рассмотрение некоторых краевых задач с помощью метода ко-
конечных элементов 66
5.1. Простой пример: перенос тепла в стержне 67
5.2. Повторное рассмотрение примера 72
5.3. Уравнения метода конечных элементов: задачи теории поля 73
5.4. Уравнения метода конечных элементов: теория упругости . . 79
Литература 88
Глава 6. Кручение стержня некругового сечения 89
6.1. Общая теория кручения стержня 89
6.2. Построение матриц элементов 92
6.3. Стандартные результаты элемента 98
Оглавление 391
6.4. Согласованные результанты элемента 101
Литература 104
Глава 7. Реализация метода конечных элементов на ЭВМ 105
7.1. Прямое построение глобальной матрицы жесткости .... 105
7.2. Система линейных уравнений 108
7.3. Общая блок-схема вычислений 116
7.4. Решение задачи о кручении бруса с помощью вычислительной
машины 122
Литература 133
Глава 8. Перенос тепла за счет теплопроводности и конвекции . . . 134
8.1. Уравнения переноса тепла 134
8.2. Одномерный случай переноса тепла 136
8.3. Двумерный перенос тепла 144
8.4. Трехмерный случай переноса 1епла 150
8.5. Преобразования координат 151
8.6. Точечные источники 152
8.7. Машинная реализация 156
Литература 165
Глава 9. Гидромеханика, безвихревое течение ........ 166
9.1. Двумерный случай течения грунтовых вод 166
9.2. Рассмотрение задачи о течении грунтовых вод с помощью ЭВМ 168
9.3. Безвихревое течение идеальной жидкости 173
9.4. Заключение 178
Литература 180
Глава 10. Радиальные и осесимметрические задачи теории поля ... 181
10.1. Симметрические двумерные задачи теории поля .... 181
10.2. Осесимметрические задачи теории поля 188
10.3. Машинная реализация 196
Литература 199
Глава 11. Нестационарные задачи теории поля 200
11.1. Соотношения, определяющие элементы 200
11.2. Матрица демпфирования элемента 203
11.3. Конечно-разно :тное решение дифференциальных уравнений
11.4. Численная устойчивость и колебания 205
11.5. Решение задач на ЭВМ 209
Литература 210
Глава 12. Механика деформируемого твердого тела. Теория упругости. 211
12.1. Теория упругости. Одномерный случай , 212
12.2. Двумерные задачи теории упругости 218
12.3. Трехмерные задачи теории упругости 226
12.4. Осесимметрические задачи теории упругости 229
12.5. Решение с помощью ЭВМ 234
Литература 241
Глава 13. Элементы высокого порядка. Одномерный элемент .... 242
13.1. Квадратичные и кубичные элементы ....... 243
13.2. Применение квадратичного элемента 247
392 Оглавление
13.3. Естественная система координат. Преобразования координат.
Матрица Якоби 253
13.4. Применение численного интегрирования при определении мат-
матриц элемента 257
13.5. Субпараметрические, изопараметрические и суперпараметриче-
суперпараметрические элементы 263
Литература 269
Глава 14. Треугольный и тетраэдральный элементы высокого порядка 270
14.1. Функции формы для элементов высокого порядка .... 271
14.2. Вычисление производных функций формы 275
14.3. Составление матриц элементов 278
14.4. Тетраэдральные элементы 284
Литература . . 288
Глава 15. Четырехугольные элементы 289
15.1. Линейный четырехугольный элемент 289
15.2. Квадратичные и кубичные четырехугольные элементы . . . 294
15.3. Вычисление производных функций формы 300
15.4. Соотношения, определяющие элементы 303
15.5. Прямоугольные призмы 308
Глава 16. Элементы высокого порядка. Машинная реализация . ¦ . 312
16.1. Машинная реализация 312
1Ь.2. Примеры применения ... 315
16.3. Криволинейные границы 320
Глава 17. Вывод уравнений для элементов с помощью метода Галёркина 323
17.1. Метод Галёркина 323
17.2. Изгиб балки 324
17.3. Двумерные уравнения теории поля 329
17.4. Задача Кэши 333
17.5. Система дифференциальных уравнений первого порядка . . 336
17.6. Заключение 339
Литература 340
Глава 18. Учебные программы 341
18.1. GRID 342
18.2. Подпрограммы для ленточной матрицы 353
18.3. Обозначения 356
18.4. Программа TORSION 357
18.5. CONSTR 361
18.6. FLDMCH 363
18.7. TDHEAT 363
18.8. STRESS 369
Литература 373
Глава 19. Заключительные замечания 374
Приложение А. Некоторые аспекты вариационного исчисления .... 376
Приложение Б. Дифференцирование матричных соотношений .... 380
Ответы к некоторым задачам 381
Предметный указатель 389