/



















































































































































































































































































































































































Author: Уокер Р. Мэтьюз Дж.




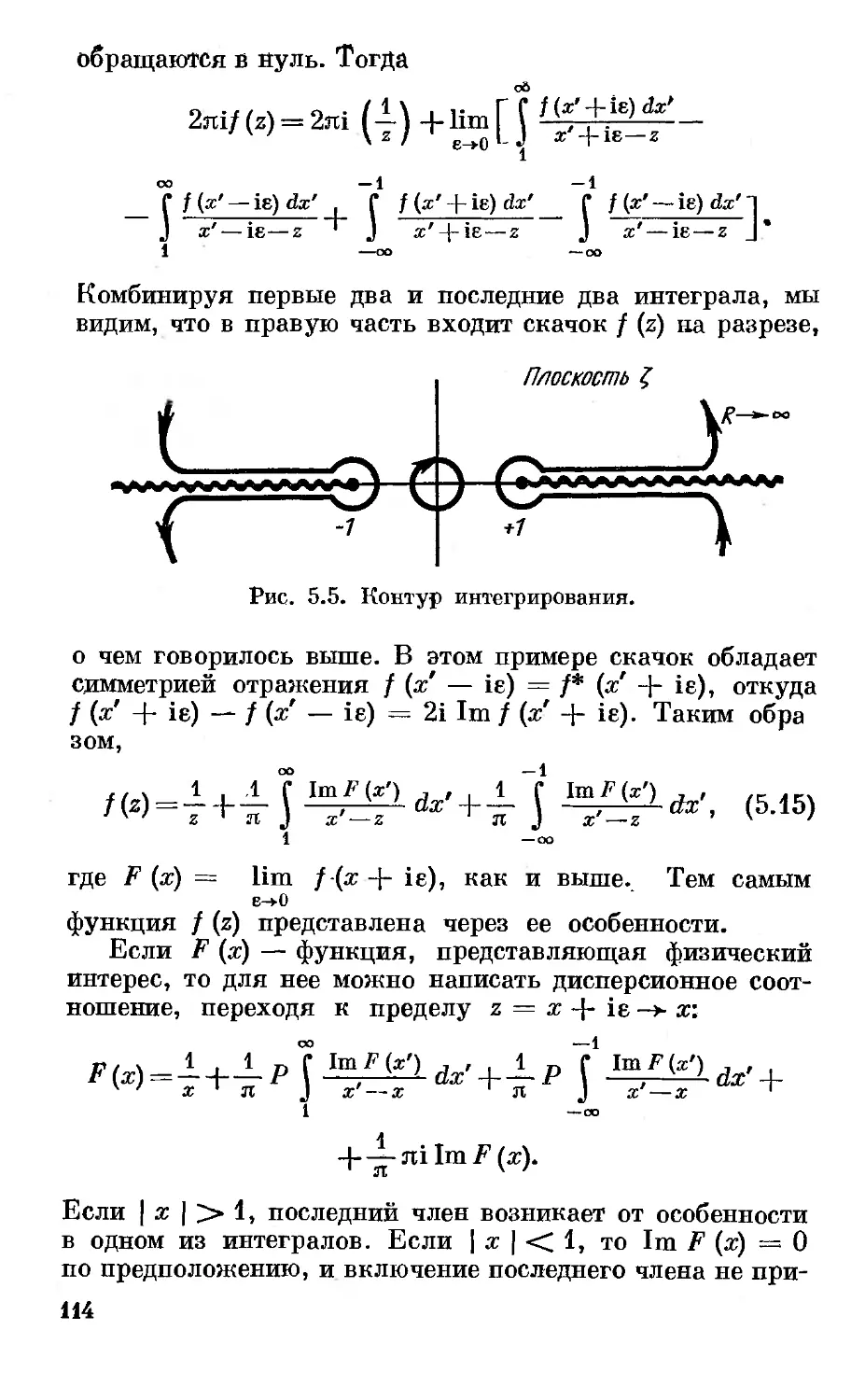
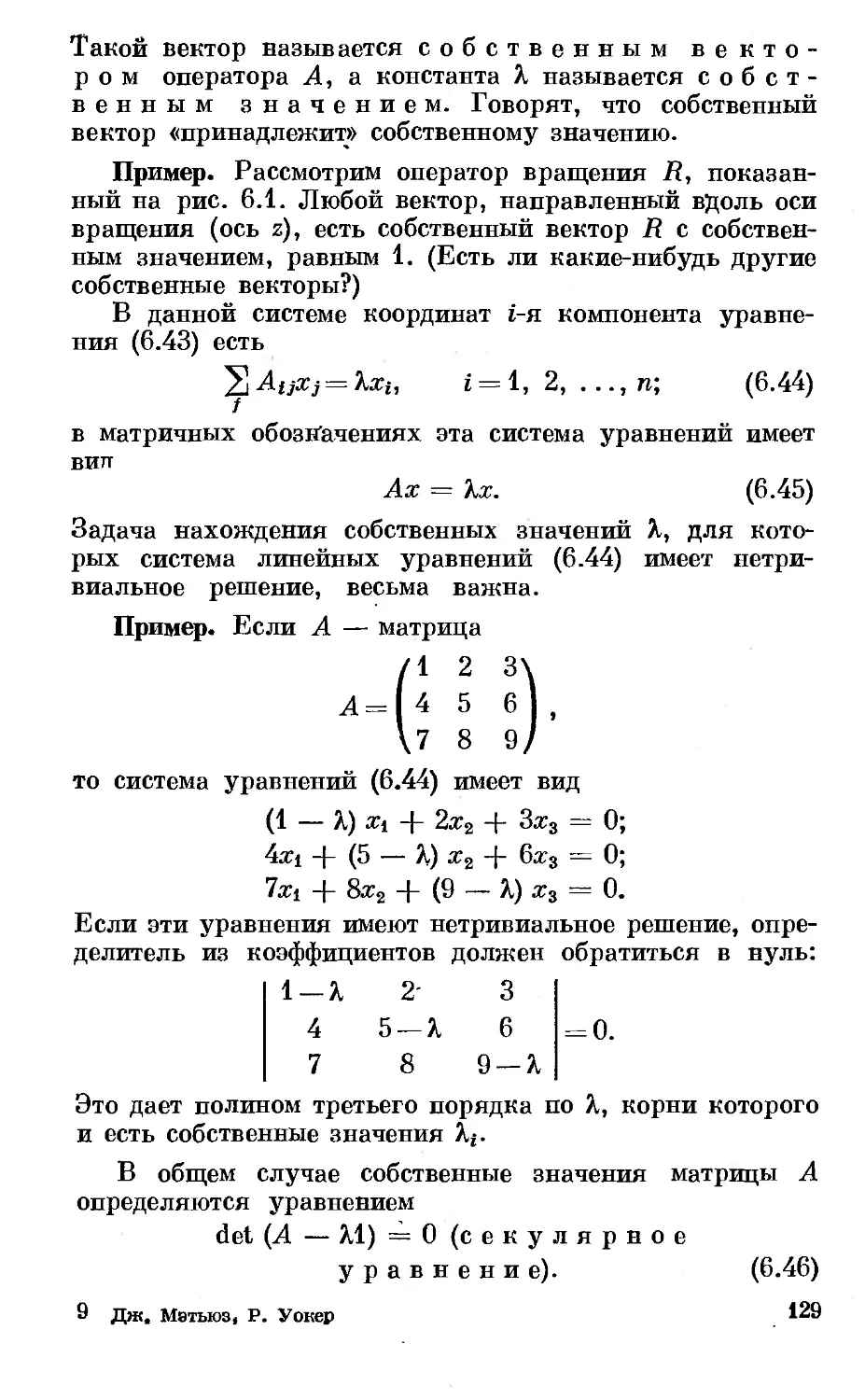
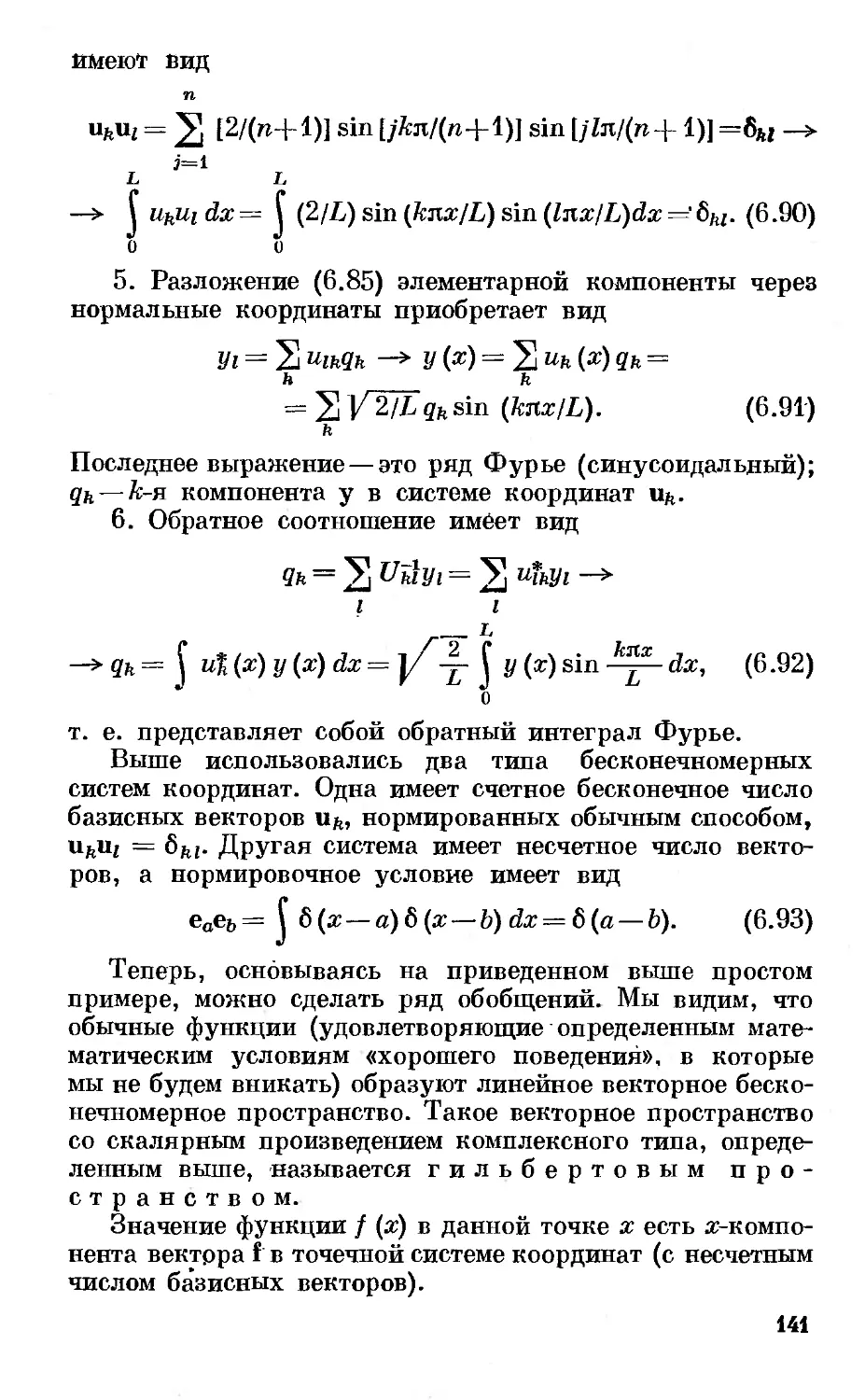
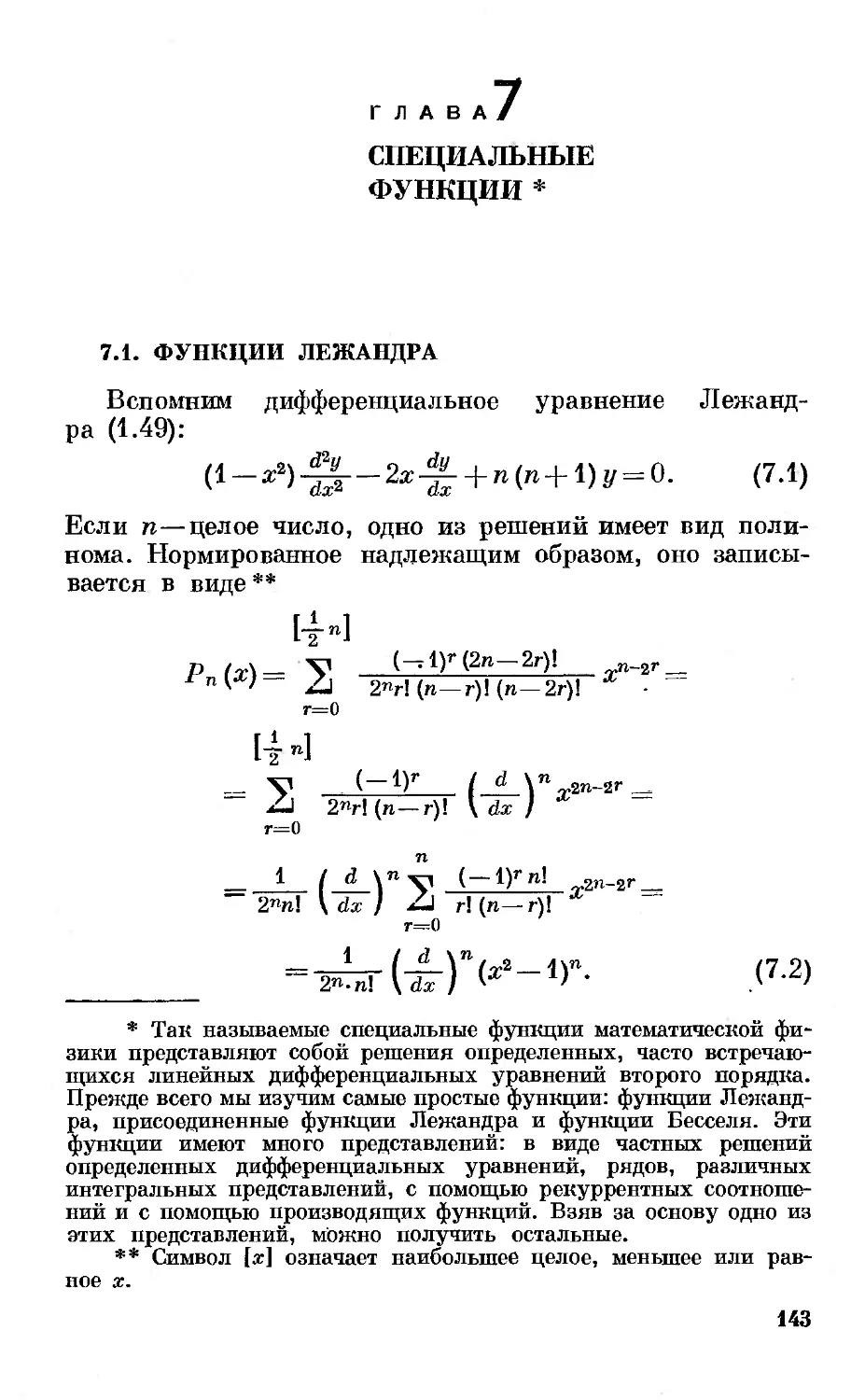
Text
Дж.Мэтъюз, Р.Уокер
МАТЕМАТИЧЕСКИЕ МЕТОДЫ ФИЗИКИ
В книге излагаются математические методы, наиболее часто используемые
при решении физических, задач. В отличие от других учебников аналогичной
тематики авторы делают ударение на обучение математическим методам
посредством решения простых примеров. Во многих примерах содержатся
нетривиальные трюки, дающие возможность бистро и красиво решить
поставленную проблему. Научные сотрудники и аспиранты физических
специальностей могут использовать эту книгу и как справочник, и как пособие
для повторного изучения математических методов. Для студентов старших курсов
инженерно-физических вузов книга может сложить пособием для
самостоятельного изучения предмета.
Содержание
Предисловие к переводу 5
Глава 1. Обыкновенные дифференциальные уравнения 8
1.1. Решение в замкнутой форме 8
1.2. Решения в виде степенных рядов 18
1.3. Приближенные методы 26
1.4. Метод ВКБ 30
Глава 2. Бесконечные ряды 42
2.1. Признаки сходимости 42
2.2. Общеизвестные ряды 44
2.3. Преобразование рядов 46
Глава 3. Вычисление интегралов 52
3.1. Элементарные методы 52
3.2. Вычисление интегралов с учетом симметрии 55
3.3. Интегрирование по контуру 58
3.4. Табулированные интегралы 65
3.5. Приближенные разложения 70
3.6. Методы седловойточки 73
Глава 4. Интегральные преобразования 81
4.1. Ряды Фурье 81
4.2. Преобразования Фурье 86
4.3. Преобразования Лапласа 92
4.4. Другие пары преобразований 95
4.5. Применения интегральных преобразований 95
Глава 5. Дальнейшие применения комплексных переменных 105
5.1. Конформные преобразования 105
5.2. Дисперсионные соотношения ПО
Глава 6. Векторы и матрицы 118
6.1. Линейные векторные пространства 118
6.2. Линейные операторы 119
6.3. Матрицы 122
6.4. Преобразования координат 125
6.5. Задачи на собственные значения
6.6. Диагонализация матриц
6.7. Пространства бесконечной размерности
Глава 7. Специальные функции
7.1. Функции Лежандра
7.2. Функции Бесселя
7.3. Гипергеометрическая функция
7.4. Вырожденные гипергеометрические функции
7.5. Функции Матье
7.6. Эллиптические функции
Глава 8. Дифференциальные уравнения в частных производных
8.1. Примеры
8.2. Общее рассмотрение
8.3. Разделение переменных
8.4. Методы интегральных преобразований
8.5. Метод Вниера—Хопфа
Глава 9. Собственные функции, собственные значения и функции
Грина
9.1. Простые примеры задач на собственные значения
9.2. Общее рассмотрение
9.3. Решение краевых задач методом разложения по собственным
функциям
9.4. Неоднородные задачи. Функции Грниа
9.5. Функции Грниав электродинамике
Глава 10. Теория возмущений
10.1. Обычная невырожденная теория
10.2. Преобразование рядов
10.3. Теория возмущений с вырождением
Глава 11. Интегральные уравнения
11.1. Классификация
11.2. Вырожденные ядра
11.3. Ряды Неймаиа и Фредгольма
11.4. Теория Гильберта—Шмидта
11.5. Метод Вниера—Хопфа и интегральные уравнения
11.6. Интегральные уравнения в дисперсионной теории
Глава 12. Вариационное исчисление
12.1. Уравнение Эйлера—Лаграижа
12.2. Обобщение основной задачи
12.3. Решение задач на собственные значения с помощью вариационного
исчисления
Глава 13. Численные методы
13.1. Интерполяция
13.2. Численное интегрирование
13.3. Численное решение дифференциальных уравнений
13.4. Корни уравнений 293
13.5. Суммирование рядов 297
Глава 14. Вероятность и статистика 302
14.1. Введение 302
14.2. Основные законы теории, вероятностей 302
14.3. Комбинации и перестановки 305
14.4. Биноминальное распределение, распределения Пуассона и Гаусса 306
14.5. Общие свойства распределений 310
14.6. Обработка экспериментальных данных 314
Глава 15. Тензорный анализ и дифференциальная геометрия 323
15.1. Декартовы тензоры в трехмерном пространстве 323
15.2. Кривые в трехмерном пространстве. Формулы Френе 329
15.3. Общий тензорный анализ 330
Глава 16. Введение в группы и представления групп 342
16.1. Определения 342
16.2. Подгруппы и классы 344
16.3. Представления групп 346
16.4. Характеры 349
16.5. Физические применения 358
16.6. Бесконечные группы 367
16.7. Неприводимые представления SUB), SUC) и О+C) 376
Литература 387
Предметный указатель 389
Предметный указатель
Абелева группа 342 Бесселя интеграл 159
Абсолютный минимум 276 - уравнение 17, 153
Алгебра группы 343 - - второе решение 155
- Ли 374 Бесселя производящая функция 158
Антилинейиость 127 - интегральное представление 158
Антисимметричная матрица 123 Бесселя фундции 153
Антисимметричный символ Леви- - - модифицированные 161
Чивнта 327 - - ортогональность и нормировка 156
Антисимметричный тензор 334 - - рекуррентные соотношения 154
Апостериорная вероятность 302 - - сферические 161
Априорная вероятность 302 Биноминальное распределение 307
Асимптотический ряд 71 Биноминальный коэффициент 305
Аффинор 329 Бинормаль 330
Базис векторного пространства 119 Блоха волновые функции 174
Бейеса теорема 304 Бора-Зоммерфельда условие
bern(x), bein(x) 161 квантования 41
Бернулли дифференциальное Борцовское приближение 251
уравнение 10 Брахистохрона 267
- числа 45 Бэшфорта-Адамса-Милна метод 291
Бесконечная группа 367 Вариации постоянных метод 14
Вариационное исчисление 264
- - для задач на собственные значения
275
- - для интегральных уравнений 281
- - для изопериметрических задач 272
Вариационная производная 266
Вейерштрасса эллиптические
функции 183
Вектор-столбец 125
Вектор-строка 127
Векторы 118
- ортонормиров энные 128
- собственные 129
- базисные 119
Вещественная матрица 123
Вероятностей теория 302
Вниера-Хопфа метод 208, 259
ВКБ-метод 30
ВКБ-фукции 33
Возмущений теория 237
Волновая функция в импульсном
пространстве 91
Волновое уравнение 188
Вольтерра интегральное уравнение
247
Вырожденная гипергеометрическая
функция 169
- теория возмущений 243
Вырожденное гипергеометрическое
уравнение 168
Вырожденное собственное значение
130
- ядро интегрального уравнения 248
Гамильтона вариационный принцип
266
Ганкеля функции 160
- - сферические 194
Гамма-функция 53
- асимптотическое разложение 74
Гаусса распределение 306
Гельмгольца уравнение 193
Генераторы группы 369
Гиббса явление 83
Гильберта преобразование 95, 262
Гильберта-Шмидта теория 254
Гильберта пространство 141
Гиперболические дифференциальные
уравнения в частных производных
188
Гипергеометрическая функция 163
- - интегральное представление 165
Гипергеометрический ряд 43, 161
Гипергеометрическое уравнение 163
Главная нормаль 330
Томографическое преобразование
163
Гомоморфные группы 346
Горнера метод для корней полиномов
295
Грама-Шмидта ортогонализация 131
Грниа функции 223
- - для колеблющейся мембраны 226
- - для колеблющейся струны 224
- - для обыкновенного
дифференциального уравнения 223
- - для уравнения Лапласа и
волнового уравнения 231
Грегори ряд 83, 300
Группа 342
- абелева или коммутативная 342
- бесконечная 367
- знакопеременная 355
Группа класс 345
- подгруппа 344
- порядок 342
- представление 346
- симметрическая 343
- физические применения 358
- характеры 349
Даламбера признак сходимости 42
Двоякопериодическая функция 179
Декартовы тензоры 323
Дельта-символ Кронекера 85
Дельта-функция Дирака 87
- трехмерная 91
Диагонализация матриц 136
Диагональная матрица 123
Диада 329
Дирака дельта-функция 87
- трехмерная 91
Дирихле краевое условие 186
Дисперсионные соотношения ПО,
262
- - с вычитанием 117
Дисперсия 311
Дифференциальная геометрия 323
Дифференциальные уравнения 8
- - ВКБ-метод для решения 30
- - в полных дифференциалах 9
- - в частных производных 184
методы интегральных
преобразований 202
методы разделения переменных
192
метод Вниера-Хопфа 208
- - изобарические 11
- - графическое решение 27
- - линейные 12
- - однородные 10
- - решения в виде степенных рядов
18
- - численные решения 290
Диффузии уравнение 184
Дуальное пространство 127
Замкнутости свойство 221
Знакопеременная группа 355
Идемпотентная матрица 124
Изображений метод 208
Изоморфный 344
Изопериметрические задачи 272
Инвариант матрицы 133
Инвариантная подгруппа 346
Интеграл вероятности ошибок 68
Интегральная показательная функция
67
Интегральное преобразование 81
Интегральные уравнения 247
- - вариационный подход к решению
281
- - в дисперсионной теории 262
Интегральные уравнения линейные
247
- - неоднородные 249
- - однородные 249
- - с вырожденным ядром 248
- - транспонированные 249
Интегральные синус и косинус 55
Интервал 337
Интерполяция 282
Интегрирующий множитель 9
Квадрупольный магнит 107
Классы в группе 345
Клеро уравнение 10
Ковариантная производная 338
Ковариантный вектор 332
Ковариантный тензор 332
Когредиентный 126
Колебание круглой мембраны 245
Комбинации 305
Коммутативная группа 342
Коммутация операторов 120
Компоненты линейного вектора 120
Конгруэнтное преобразование
Константы структуры группы Ли 374
Контравариантный вектор 331
- тензор 332
Контратредиентный 126
Контурное интегрирование 58
Конформное преобразование 105
Координатные преобразования 125
- - конгруэнтные 134
- - подобие 126
Координатные преобразования
унитарные 338
Корни уравнений 293
Косинус-преобразование Фурье 89
Коши краевое условие 186
- интегральная формула 110
Коши-Римаиа дифференциальные
уравнения 105
Коши теорема 105
Краевые условия для уравнений в
частных производных 185
Кривизна кривой 330
Кристоффеля символы первого и
второго рода 338
Кронекера дельта-символ 85
Кручение 330
Куммера преобразование 171
- функция 169
Лагерра полином 170
Лаграижа множитель 272
Лапласа интегральное представление
для полиномов Лежандра 144
- преобразование 92
Лежандра дифференциальное
уравнение 19, 143
- функции 143
Ли алгебра 374
- группа 368
Линейная векторная функция 119
- скалярная функция 126
Линейное векторное пространство
118
- интегральное уравнение 247
- дифференциальное уравнение 12
Лиенара-Вихерта потенциал 236
Ложного положения метод 294
Матье функции 171
Матрица 128
Матрицы преобразование 125
Меллина преобразование 95
Метрика векторного пространства
127
Метрический Тензор 337
Наискорейшего спуска метод 73
Наименьших квадратов метод 318
Невырожденная теория возмущений
237
Невырожденный оператор 121
Неголономные условия 273
Неймана ряд 250
Неймана краевое условие 186
Неоднородное интегральное
уравнение 249
Неполная гамма-функция 73
Несобственное вращение 327
Неприводимое представление 347
Неопред елейных коэффициентов
метод 13
Неточное представление 347
Нормальная матрица 138
- подгруппа 346
- форма гиперболического уравнения
188
Нормальное распределение 308
Нормальные колебания 135, 197
Обобщенная сила 335
Обратная матрица 123
Обратный оператор 121
Общий тензорный анализ 330
Обыкновенная, точка
дифференциального уравнения 18
Однородная функция 10
Однородное интегральное уравнение
247
- обыкновенное дифференциальное
уравнение 10
Особое решение дифференциального
уравнения 11
Определяющее уравнение 20
Ортогональная матрица 123
Ортогональности теорема 348
Относительный тензор 334
Отношений закон 335
Ошибок функция 68
Параболическое уравнение в частных
производных 188
Парсеваля теорема 88
Паули спиновые матрицы 384
Перевала методы 73
Перестановки 305
Плоский источник 206
Плотности функция 220
Плотность тензора 334
Подгруппа 344
Подобия преобразование 126
Полиада 329
Полнота базиса собственных
функций 221
Порядок дифференциального
уравнения 8
Постоянная разделения 192
Правдоподобия функция 315
Правильная особая точка 19
Представления группы 346
Преобразование конформное 105
-рядов 46, 241
Присоединенная функция Лежандра
26, 149
Присоединенное дифференциальное
уравнение Лежандра 149
Проекционный оператор 121
Производящая функция 145
- - для функций Бесселя 158
- - для полиномов Лежандра 145
Простейшие дроби 48
Псевдоскаляр 328
Псевдотеизор 328
Пауссона распределение 308
Расходящиеся волны 196
Регулярное представление 354
Резольвенты ядро 252
Римаиа символ 163
Римаиовой кривизны тензор 340
Родрига формула 144
Руиге-Кутта метод 291
Рэлея-Рнтца вариационный принцип
278
Свертки теорема 98
Связи формулы в ВКБ-методе 32
Седловой точки методы 73
Секулярное уравнение 129
Симметрическая группа 343
Симметричная матрица 123
Симметричное ядро 254
Симметричный тензор 334
Симпсона правило 286
Синус-преобразование Фурье 89
Скалярное произведение 127
Сложения теорема для сферических
гармоник 150
Смежный класс группы 344
Смещения ядро 259
Собственное вращение 327
Собственные векторы 129
- -матрицы 216
Собственные векторы свойства
ортогональности 217
Собственные значения 28, 129
- - вырожденные 130
- - интегрального уравнения 248
- - эрмитовой матрицы 130
Собственные функции 216
Соприкасающиеся параметры 14
Сопряженная линейность 127
Сопряженное представление группы
SU( 3,380
Специальные функции 143
Спиновые матрицы Паули 384
Спинорное представление 386
Среднее значение 310
Стандартное отклонение 310
Стационарной фазы метод 80
Стирлинга формула 74
Стокса области 37
- явление 36
Суммирование рядов 297
Субматрица 124
Существенно особая точка 19
Сферические гармоники 150
Сходимости признаки 42
Таблица группы 344
Тензор 326
- декартов 323
- антисимметричный 334
- метрический 337
- относительный 334
- римаиовой кривизны 340
Тензорный анализ 323
Теплопроводность в кубе 199
- в бесконечной среде 205
- в попубесконечноп среде 207
-в слое 201
Точечный источник 206
Точечное представление 346
Транспонированная матрица 123
Транспонированное интегральное
уравнение 249
Трапеций правило 286
Триада 329
Уиттекера функция 171
Унитарная матрица 123
Унитарное представление 348
Условная вероятность 303
Флоке теорема 172
Фредгольма интегральные уравнения
247
- решение 253
- теоремы 249
Френе формулы 330
Френеля интегралы 68
Фундаментальное решение 229, 232
Фундаментальный тензор 336
Функционал 264
Функциональная производная 266
Фурье-Бесселя преобразование 95
Фурье-преобразование 86
- в трех измерениях 91
Фурье-ряд 81
- в комплексной форме 85
Характеристики уравнения в частных
производных 187
Характеристическая функция
распределения 311
Характеры группы 349
Хевисайда ступенчатая функция 93
Хи-квадрат распределение 321
Хилла уравнение 174
Центральная предельная теорема 313
Цепная дробь 176
Циклоида 268
Частный интеграл 12
Численное дифференцирование 285
- решение дифференциальных
уравнений 290
Численные методы 282
Шварца принцип симметрии 113
Шлефли интегральное представление
для полиномов Лежандра 144
- интегральное представление для
функций Бесселя 158
Штурма-Лнувилля
дифференциальное уравнение 219,
275
Шура лемма 348
Эйлера- Маклорена формула 298
Эйлера-Лаграижа уравнение 264
Эйлера преобразование 50, 301
- углы 324
Эйри интеграл 102
Эквивалентность представлений
групп 347
Элементы матрицы 122
Эллиптические интегралы 69
- уравнения в частных производных
186
- функции Вейерштрасса 183
Эллиптические функции Якоби 177
Эрмита дифференциальное
уравнение 24
- полиномы 24
Эрмитов линейный оператор 218
Эрмитово сопряженная матрица 123
- ядро 254
Якоби полиномы 167
- эллиптические функции 177
ПРЕДИСЛОВИЕ
К ПЕРЕВОДУ
Можно назвать десятки книг, в которых достаточно
полно излагаются математические методы, используемые
в физике. Чем выделяется среди них книга Дж. Мэтьюза
и Р. Уокера? В ней нет тяжеловесных математических
теорем с дюжинами лемм и скучными доказательствами.
Например, вместо громоздких и многочисленных усло-
условий, накладываемых обычно на функции, применяется
простой термин «физически разумные функции». В то же
время это и не сухой справочник для физика, а пособие,
читая которое можно самостоятельно воспроизвести все
выкладки, связанные с определенным методом, не обра-
обращаясь к другим источникам.
Педагогическая ценность книги состоит в том, что
авторы особое внимание уделяют примерам. Научному
сотруднику, желающему вспомнить математические мето-
методы, читать эту книгу легко и интересно, так как вместо
единой теории в каждом методе для решения проблемы
применяется тот или иной ветривиальный подход.
В. П. Крайнов
ПРЕДИСЛОВИЕ
Книга написана на основе курса лекций по математи-
математическим методам физики, который авторы в течение не-
нескольких лет читали в Калифорнийском технологическом
институте.
Основное внимание уделялось современному матема-
математическому аппарату, используемому для анализа физиче-
физических задач. Предполагается, что читатель знаком с кур-
курсом общей физики: механики, электричества и магнетизма,
основ квантовой механики и т. д. Из этих областей физики
и подбирались примеры.
Кратко говоря, это книга о математике для
физиков. Уровень Строгости изложения отражает
современные подходы в теоретической физике.
Предполагается, что читатель имеет также представ-
представление о следующих математических дисциплинах: 1) систе-
системах линейных уравнений и определителях; 2) векторном
анализе, включающем операции дифференцирования
в криволинейных координатах; 3) основных дифферен-
дифференциальных уравнениях; 4) комплексных переменных
и теореме Коши.
Сделаем ряд замечаний о более или менее необычных
аспектах книги. Во-первых, представленный материал
не связан логической последовательностью. Время от
времени вводится новый объект, причем читатель не под-
подготавливается к нему. Это, конечно, происходит не из-за
иррациональности или раздражительности авторов — про-
просто таков путь физики. Студентам, специализирующимся
по теоретической физике, часто требуется внутренняя
уверенность, прежде чем они погрузятся в середину незна-
незнакомого объекта; этот курс предназначен дать опыт и сме-
смелость при изучении задач, для которых подготовка чита-
читателя недостаточна.
В связи с этим имеется существенная дрд
в детальности рассмотрения. Некоторые вопросы изложе-
изложены схематично, в то время как другие исследуются очень
подробно. Тем не менее это учебник, а не справочник;
материал - рассчитан на изучение в течение одного года.
Курс, из которого возник этот учебник, первоначально
основывался на лекциях профессора Р. П. Фейнмана
в Корнелльском университете.
Дж. Матьюз
Р. Уокер
ГЛАВА
ОБЫКНОВЕННЫЕ
ДИФФЕРЕНЦИАЛЬНЫЕ
УРАВНЕНИЯ*
1.1. РЕШЕНИЕ В ЗАМКНУТОЙ ФОРМЕ
Порядок и степень дифференциального урав-'
нения определяются производной высшего порядка после
того, как уравнение рационализовано. Например, урав-
уравнение
имеет третий порядок и вторую степень, так как после
рационализации оно содержит член (cPy/dx3J.
Приведем сначала методы, которые наиболее эффек-
эффективно применяются к решению уравнений первого поряд-
порядка. Если уравнение можно записать в виде
А (х) dx + В (у) dy = О, A.1)
то говорят, что переменные разделяются. В этом
случае решение находится непосредственным интегриро-
интегрированием.
Пример.
— a;2 = sinCr = C".
Можно непосредственно проинтегрировать уравнение
более общего вида
А (х, y)dx + B (х, у) dy = 0. A.3)
* Применение интегральных преобразований для решения диф-
дифференциальных уравнений рассматривается в гл. 4. В гл. 9 рас-
рассмотрены применения функций Грина и методов, использующих
собственные функции; в гл. 13 изучают численные методы.
Если левая часть A.3) есть полный дифференциал du от
некоторой функции и (х, у), то интегрирование дает реше-
решение и(х, у) = С. Такое уравнение называют уравнением
в полных дифференциалах. Необходимое и
достаточное условие того, что уравнение A.3) является
уравнением в полных дифференциалах, есть
дА/ду = дВ/дх. A.4)
Пример.
(x + y)dx + xdy = 0; A.5)
А = х.+ у; В = х; дА/ду = дВ/дх = 1.
Решение: ху -\- xV2 = С.
Иногда можно найти такую функцию К (х, у), что
X (A dx -f- В dy) будет полным дифференциалом, хотя
A dx + В dy может им и не быть. Назовем такую функ-
функцию ^интегрирующим множителем. Мож-
Можно показать, что такие множители всегда существуют
(для уравнения первого порядка), однако не существует
общего способа их получения.
Рассмотрим общее линейное дифференциальное урав-
уравнение первого порядка
^ + f(x)y = g(x). A.6)
Попытаемся найти интегрирующий множитель Я, (х), та-
такой, что уравнение
Я (х} [dy + f{x)y dx] = b(x)g (x) dx
будет полным дифференциалом. С правой частью все
в порядке. Критерий A.4) того, чтобы левая часть была
полным дифференциалом, имеет вид ЙЯ, (x)/dx = Я, (х) f (x).
Отсюда находим интегрирующий множитель
[j] A-7)
Пример.
A.8)
Интегрирующий множитель равен exp -J I [(I -\-x)/x] dxY =
— х exp x;
х exp x (y'-\ i-f- y\ = exp 2x.
9
Теперь имеем уравнение в полных дифференциалах;
поэтому
хуехрх = \ ехрBж) dx-= ехр Bх)/2-\-С;
у = ехр (х)/2х + С (ехр (—х))/х.
Часто можно упрощать дифференциальное уравнение,
делая разумную замену переменной.
В дифференциальном уравнении
у' = f(ax+by + с) A.9)
переменные разделяются, если сделать замену v = ах -\-
+ Ьу + с.
В качестве следующего примера рассмотрим урав-
уравнение Бернулли
у' + f (х) у = g (х) уп. A.10)
Оно становится линейным, если заменить v — уг~п (эта
подстановка становится очевидной, если сначала разде-
разделить уравнение на уп).
Функция / (х, у, . . .) любого числа переменных назы-
называется однородной функцией степени г по этим пере-
переменным, если / (ах, ау, . . .) = arf (x, у, . . .). Дифферен-
Дифференциальное уравнение первого порядка
А (х, уLх + В (х, у) dy = 0 A.11)
называют однородным, если А и В — однородные функции
одинаковой степени. Подстановка у = vx в A.11) приво-
приводит к разделению переменных.
Пример.
ydx + {2Vw-*)dy = 0; A.12)
y — vx\ dy = vdx-\-xdv;
vx dx -\- Bx j/V—x) (v dx -f- ж dv) = 0;
2i#» dx + B Vv - l)x dv = 0.
Ясно, что в последнем уравнении переменные разделяются.
Заметим, что этот подход связан с соображениями
размерности, хорошо известными из физики. Если пред-
предполагать все х, у, . . . имеющими одну и ту же размер-
размерность (например, длины), то однородная функция — это
просто функция, обладающая размерностью. Тогда пере-
переменная v = у/х безразмерна. Отсюда вытекает обобщение
10
идеи однородности. Предположим, что уравнение А их -\-
-f- В dy = 0 обладает размерностью, причем размерность
у есть некоторая степень т с размерностью х, т. е.
А {ах, ату) = а"А(х, у), В (ах, ату) = а"-т*В(х, у). A.13)
Такие уравнения называются изобарическими.
Подстановка у = vxm позволяет разделить переменные.
Пример.
ху2 (Зу dx + x dy) — Bу dx — х dy) = 0. A.14)
Сопоставим х «вес» 1, а у — вес т. Первый член имеет вес
Зт + 2, а второй т + 1. Поэтому уравнение является
изобарическим с весом т =¦ —1/2. Отсюда ясно, что
целесообразно ввести «безразмерную» переменную v =
= у ~\[ х. Чтобы избежать дробных степеней, положим
v = ху2, х = v/y2, dx = dv/y2 — 2v dy/y3. Тогда уравне-
уравнение A.14) приобретает вид Cv — 2) у dv -{- 5v (I — v) dy—
= 0, т. е. переменные разделяются.
Уравнение вида
(ах +by + c)dx + (ex + fy + g) dy = 0, A.15)
где a, . . ., g — постоянные, можно сделать однородным
с помощью подстановки х = X + а, у — Y -f- p. Здесь
а и Р —; надлежащим образом выбранные постоянные
[в случае, если af Ф be; если af=be, уравнение A.15)
еще более тривиально].
Уравнение вида
у-ху' =f (у') A.16)
называется уравнением Клер о. Чтобы решить
его, продифференцируем уравнение по х. В результа-
результате имеем у" [/' (у') -\- х\ = 0. Положим " у" = 0; тогда
у = ах -\- Ъ. Подставим решение в исходное уравне-
уравнение A.16); получаем b = f (а). Следовательно, у = ах +
+ / (а) — общее решение. Однако есть еще возможность:
/' (у') + я = 0- Исключая у' из этого и исходного урав-
уравнения A.16), получаем решение, не содержащее произ-
произвольной константы. Оно известно как особое реше-
н и е.
Пример.
у = ху' + (у'J. A.17)
Это уравнение Клеро с' общим решением у = сх + са.
Однако мы должны также рассмотреть возможность
11
2y' + x = 0. Находим особое решение я2 Ц- Ау = 0,
которое является огибающей семейства линий,
даваемых общим решением (рис. 1.1). Пунктирная пара-
парабола — это особое решение, а прямые линии, касательные
к параболе,— общее решение.
Далее обсудим ряд методов, полезных для дифферен-
дифференциальных уравнений высших порядков. Важный случай
представляет линейное уравнение с по-
постоянными коэффи-
у циентами:
' + воУ = /(*)• A-18)
Если / (х) = 0, то. уравне-
уравнение однородно; в противном
случае оно неоднородно.
Заметим, что если линейное,
уравнение однородно, то сум-
сумма двух решений есть также
решение, в то время как в
случае неоднородного урав-
уравнения это неверно.
Общее решение неоднород-
неоднородного уравнения есть сумма
общего решения соответству-
соответствующего однородного уравне-
уравнения и какого-либо решения неоднородного уравнения
(так называемый частный интеграл). В дей-
действительности это утверждение верно для любого линей-
линейного дифференциального уравнения с постоянными или
переменными, коэффициентами.
Решения однородного уравнения AЛ8) с / (х) = 0
в общем случае имеют вид. у = ехр (тх). Подстанов-
Подстановка решений в однородное уравнение дает скптп +
-f- an-\mn~* -f~ ... -f- Co
Рис. 1.1. Решения дифферен-
дифференциального уравнения A.17) и
их огибающая (пунктирная
линия).
0. Если п корней равны соот-
т2, • • ., тп, то общее решение равно
. . + сп ехр (тпх), (сг — произвольные
ветственно т\
ci ехр {пых) +
константы).
Предположим, что два корня совпадают (twi = пг2)-
Тогда есть только (п — 1) решение, а нам нужно еще одно.
Для его нахождения выполним предельную процедуру,
в которой пг2 стремится к mi. Тогда [ехр (т^х) —
— ехр (mix)]/(m2 — mi) есть решение. Когда т2 становится
12
равным /rti, это решение переходит в х ехр (mix). Это и есть
дополнительное решение. Если совпадают три корня
(mi = т» = пг3), то есть три решения ехр (mix),
х ехр (mjX) и ж2 ехр (mix) и т. д.
Найти частный интеграл, вообще говоря, труднее.
Если / (х) имеет только конечное число линейно незави-
независимых производных, т. е. / (х) — линейная комбинация
членов вида хп, ехр (ах), sin kx, cos kx или, в более общем
виде, хп ехр (тх) cos ax и хп ехр (тх) sin ax, то решение
находится непосредственно методом неопределен-
неопределенных коэффициентов. В качестве у (х) возьмем
линейную комбинацию / (х) и ее независимых производ-
производных и определим коэффициенты из требования, чтобы
У (х) удовлетворяло дифференциальному уравнению.
Пример. у" + Зу' +2у = ехр (х). A.19)
Общее решение однородного уравнения находится из усло-
условия т2 + Ът + 2 = 0 (т = —1, —2):
у = ci ехр (—х) -f с2 ехр (—2х).
Ищем частный интеграл в виде у = Аех. Подстановка
в уравнение A.19) дает А = 1/6. Таким образом, общее
решение есть у = ехр (ж)/6 + Cj ехр (—х) -}- с2 ехр (—2х).
Если / (х) или член в / (х) есть также часть общего ре-
решения однородного уравнения, то частный интеграл может
содержать этот член и его производные, умноженные
на некоторую степень х. Чтобы увидеть, как работает
метод, читателю предлагается решить пример A.19)
с правой частью в виде ехр (—х).
Есть несколько формальных способов нахождения
частных интегралов. Если обозначить dldx буквой D, то
можно записать уравнение A.18) в виде
(D - mt) (D-m2) . .. (D - тп) у = f (x). A.20)
Формальное решение A.20) имеет вид
y==(D-mi)(D-m2) ... (D-mn)
или, разлагая на элементарные дроби,
Что означает / (x)l(D — tw)? Это решение линейного урав-
уравнения первого порядка (D — т) у = f (x); оно триви-
тривиально [см. A.6)].
13
Другой способ состоит в поочередном делении A.20)
на множители, т. е.
(D — т2) (D — ms) ... (?> — тп) у =
= / (хI(р - пи). A.22)
После вычисления правой части делим на D — т2, вычис-
вычисляем снова и т. д.
Рассмотрим наконец очень важный метод нахождения
частного интеграла — метод вариации постоян-
постоянных. Этот метод полезен еще тем, что его можно приме-
применять к линейным уравнениям с переменными коэффи-
коэффициентами. Прежде чем обсуждать и применять метод, рас-
рассмотрим сначала понятие соприкасающиеся
параметры.
Предположим, что заданы две линейно независимые
функции i/i (х) и у2 (х). Определим двухпараметрическое
семейство кривых
ctyi (х) + с2у2 (х). A.23)
Рассмотрим произвольную функцию у (х). Ясно, что
аппроксимировать ее формулой A.23), выбрав подходя-
подходящим образом с\ и с2, в общем случае невозможно. Попы-
Попытаемся осуществить более скромную задачу аппроксима-
аппроксимации у (х) кривой семейства A.23) в окрестности некоторой
фиксированной точки х = хо. Так как в нашем распоря-
распоряжении есть два параметра, естественный выбор состоит
в том, чтобы подогнать точно значение у (х0) и н а -
клон у' (хо); т. е. с\ и с2 определяются из системы двух
уравнений
y(x) = cy(x)-]cy(x); 1
1 ( ]
Величины Ci и с2, получаемые таким способом, меняются
от точки к точке (когда меняется хо) вдоль кривой у (х).
Они называются соприкасающимися пара-
параметрами, так как кривая, которую они определяют,
касается у (х) в рассматриваемой точке. Это понятие,
конечно, можно обобщить на произвольное число N функ-
функций yi и параметров с,-; Cj выбирают так, чтобы воспроиз-
воспроизвести функцию у (х) и ее первые (N — 1) производные
в точке хо-
Возвратимся теперь к изучаемой проблеме решения
линейных дифференциальных уравнений. Для простоты
14
ограничимся уравнениями второго порядка. Рассмотрим
неоднородное уравнение
Р (*) У" + q(x)y' +г (а) у = s (а) A.25)
и предположим, что мы знаем общее решение однородного
уравнения cij/i (х) + с2у2 (х). Будем искать решение A.25)
в виде
у = щ (х) ух (х) + и2 (х) уа (х), A.26)
где ut (x) — функции, подлежащие определению. Чтобы
подставить A.26) в A.25), нужно вычислить у' и у". Из
A.26) имеем
. у' = ЩУ[ + и2у'2 + и[у1 + и'2у2: A-27)
Прежде чем переходить к у", заметим, что удобно нало-
наложить условие, чтобы сумма двух последних членов
в A.27) равнялась нулю:
0. A.28)
Это позволяет избежать вторых производных от щ.
Теперь
У'^ЩУ[ + и2у'г, A.29)
и,. дифференцируя, находим
У" =
Заметим, что условие A.28) не только упрощает последую-
последующие выкладки, но также делает величины т и щ сопри-
соприкасающимися параметрами [ср. A.26) и A.29) с A.24)].
Окончательно, подставляя A.26), A.29) и A.30)
в исходное дифференциальное уравнение. A.25) и исполь-
используя тот факт, что 1/1 и у2 — решения однородного уравне-
уравнения, получаем
Р (х) {u'ly'i + *4j'2) = s- A.31)
Теперь A.28) и A.31) — линейные уравнения относитель-
относительно щ. Их решение очевидно и предоставляется читателю.
Пример. Рассмотрим дифференциальное уравнение
*у -2у = х. A.32)
Общее решение соответствующего однородного уравнения
ху __ 2у = 0 A.33)
15
лбгче всего найти, если заметить, что у = хп — естествен-
естественное решение. Подстановка в A.33) дает юг = 2 или —1,
так что общее решение имеет вид qx2 -(- с2/х. Поэтому
попытаемся найти решение A.32) в виде
A-34)
у. = щх2 Н
Дифференцируя, получаем
r \
у =2хщ — -^и2-
Наложим условие
h ujx.
r
\-х2щ-\-
1
X
Щ
_ «;=о. A.35)
Тогда
-i «2 A-36)
-~и2. A.37)
Подставляя A.3.4) и A.37) снова в дифференциальное
уравнение A.32), находим 2х*и1 — и^ = х. Решая его сов-
1 X
местно с A.35), имеем и[ = -^-^1 Щ~—ч"! ui~
= L_i_c • и — 5
Итак, общее решение A.32): у——^—f-c±rc2-J——.
Кратко упомянем о нескольких методах решения диф-
дифференциальных уравнений:
1. Если зависимая переменная у отсутствует, то выбе-
выберем у' = р за новую зависимую переменную. Это пони-
понижает порядок уравнения на единицу.
2. Если отсутствует независимая переменная х, то
выберем у за новую независимую переменную, а у' = р
за новую зависимую переменную. Это также понижает
порядок уравнения на единицу.
3. Если уравнение однородно по у, выберем v = In у
за новую зависимую переменную. Результирующее урав-
уравнение не содержит у, и подстановкой v' = р можно сокра-
сократить порядок уравнения на единицу.
4. Если уравнение изобарическое, причем х имеет вес
1, а у — вес т, то следует ввести зависимую переменную
у = vxm и независимую переменную и — In x. Тогда
16
получается уравнение, в котором новая независимая
переменная и отсутствует.
5. Всегда нужно проверять возможность, что уравне-
уравнение есть полный дифференциал. Например, часто встре-
встречающееся уравнение у" = / (у) можно сразу же проинте-
проинтегрировать, если умножить обе части на у'.
6. Иногда помогает замена переменной. Рассмотрим
линейное уравнение второго порядка
y" + f(x)y' + g(x)y = O. A.38)
Подстановка
у = v (х) p (х) A.39)
приводит к линейному уравнению для v (x), которое легче
решить, если выбрать р (ж) надлежащим об'разом. Уравне-
Уравнение для v (х) имеет вид
2 ¦? + /)*' + f+% + №) v = 0. A.40)
7. Если известно одно решение исходного уравне-
пия A.38), то можно взять р в качестве этого решения
и тем самым исключить из A.40) член с v. Это весьма
полезно, так как общее решение находится непосредствен-
непосредственным двойным интегрированием.
8. Другой путь состоит в том, чтобы выбрать
/> = ехр[—t j/(*)&:] A.41)
и исключить из A.40) член с первой производной. Это
полезно при качественном анализе уравнения; такая про-
процедура особенно важна при использовании приближен-
приближенных методов решения.
Пример. Уравнение Бесселя имеет вид
х*у" + ху' + (жа - п2) у = 0. A.42)
Подстановка у = и (х) р (х) с р (х) = х'1/2 дает
= 0. A.43)
Это уравнение не содержит члена с первой производной
и весьма удобно для нахождения приближенного поведе-
поведения функций Бесселя при больших х, например, с помо-
помощью метода В:КБ (см. разд. 1.4).
2 Дж. Мэтьюз, Р. У опер 17
1.2. РЕШЕНИЯ В ВИДЕ СТЕПЕННЫХ РЯДОЁ
Прежде чем изучать в общем случае решения в виде
рядов, рассмотрим простое нелинейное уравнение
у" = х -у2. A.44)
Будем искать решение в виде у = с0 + Cix -\- с2х2 + . . .
Тогда A.44) приобретает вид
2с2 + вс3х [- 12саж2 + . . .— х — с* — 2с0С]Ж —
— {с\ + 2Сос2) ж2 - ...
Приравнивание коэффициентов при одинаковых степе-
степенях х дает
С2 — 2^со» сз — "е" з"сос1> С4— 12е* '12е*' ¦""
Пусть, папример, мы ищем решение с у @) = 0, у' @) = 1.
Тогда
со = О, c1=l, с2 = 0, с3 = 4, с4=-1/12, ... A.45)
Этот метод решения очень полезен; однако для обоснова-
обоснования его следует изучить сходимость рядов и т. д.
Дадим теперь краткий обзор общей теории решений
в виде степенных рядов для линейных дифферен-
дифференциальных уравнений. Рассмотрим уравнение
5 + /п-,И-?3-+ • • • +/о(*H = О. A.46)
Если /о(ж), , . ., fn-i(x) аналитичны в точке х = хо
(в смысле теории функций комплексных переменных), то
Хо называют обыкновенной точкой дифферен-
дифференциального уравнения. Вблизи обыкновенной точки общее
решение дифференциального уравнения можно записать
в виде ряда Тейлора, радиус сходимости которого есть рас-
расстояние до ближайшей особенности дифферен-
дифференциального уравнения; под особенностью подразумевается
точка, в которой функция неаналитична.
Ряд Тейлора — это степенной ряд
У= S ст(х-х0)т, A.47)
т=0
коэффициенты которого удобно находить подстановкой
в дифференциальное уравнение (как . в рассмотренном
выше примере)
18
Если хо — не обыкновенная точка, но (х — х0) /n_i (ж),
(ж — х0J /п_2 (ж), . . ., (х — хо)п /о (ж) регулярны в х0, то
хй называют правильной особой точкой
дифференциального уравнения. Вблизи правильной осо-
особой точки всегда можно найти по меньшей мере одно реше-
решение вида
У = х° 2 ст(х-х0)т, с0ф0, A.48)
причем показатель s первого члена не обязательно целое
число. По-прежнему ряд сходится в любом круге, не вклю-
включающем никаких особенностей, кроме х0.
Алгебраические выкладки, состоящие в подстановке
ряда A.47) или A.48) в дифференциальное уравнение,
упрощаются, если х0 = 0. Таким образом, обычно удобно
сначала перейти к началу координат в точке х0, т. е. пере-
переписать уравнение, введя новую независимую переменную
Z = X — Хо.
Если точка не является ни обыкновенной, ни правиль-
правильной особой, то она называется существенно
особой.
Пример. Рассмотрим сначала случай разложения в ряд
около обыкновенной точки: дифференциальное
уравнение Лежандра имеет вид
A - х2) у" - 2ху' + п (п + 1) у = 0. A.49)
Точки х = ±1 — правильные особые точки. Разложим
сначала решение в окрестности обыкновенной точки х — 0:
оо
У= 2
m=0
Подстановка в дифференциальное уравнение A.49) дает
2— и(и+1)
я(п+1)[6-п(и-
(+)
C2 — 2 0) 3 — 6
С4 — 24
_[2-п(и + 1)][12-
Общее рекуррентное соотношение имеет вид
2* 19
Отметим, что это двухчленное рекуррентное соотношение
(оно связывает только два коэффициента). Его индексы
различаются на два. Это можно получить непосредственно
из вида дифференциального уравнения. Итак, общее реше-
решение дифференциального уравнения A.49) равно
A.51)
Заметим, что если п — четное (нечетное) целое число,
то четный (нечетный) ряд в A.51) обрывается на члене хп.
В случаях, представляющих физический интерес, х =
= cos 6. Поэтому требуются решения, хорошо ведущие
себя на отрезке —1 ^ х ^ 1. Позже мы увидим, что бес-
бесконечные ряды A.51) в точках х = ±1 расходятся; поэто-
поэтому для сходимости необходимо, чтобы п было целым чис-
числом. Возникающие полиномы Рп (х), нормированные
условием у A) =' 1, называются полиномами Ле-
Лежа н д р а.
Пример. Для уравнения Бесселя
х2у" + *У' + (ж2 - т2) у = 0 A.52)
точка х = 0 является правильной особой точкой. Следо-
Следовательно, гарантировано существование решения в виде
оо
у = х* 2 спхп, софЪ.
п=0
Из дифференциального уравнения легко увидеть, что
получается двухчленное рекуррентное соотношение. Если
подставить этот ряд в дифференциальное уравнение, то
коэффициент при Xs равен с0 (s2 — т2) = 0, откуда
S2 _ т* = 0. A.53)
Это соотношение называется определяющим
уравнением. Его корни равны s = ±т.
Далее рассмотрим коэффициент при х**1:
Ci [(s + IJ — т2] = 0. Следовательно, с4 = 0, за исклю-
исключением простого случая т = 1/2, s = —т = —1/2. Но
20
и в этом случае можно положить Ci = 0, так как члены,
опускаемые при этом, эквивалентны тем, которые входят
во второе решение с s = -f- тп = -\- 1/2.
Итак, ограничимся четными значениями п и напишем
у = х±т (со + с2х2 + с„х* +...)•
Легко получить рекуррентное соотношение
сп+2 ^1 ni М 44^
Следовательно, решение имеет вид
] С1-55)
Нормированный надлежащим образом, этот ряд назы-
называется функцией Бесселя (см. гл. 7).
Если тп — не целое число, то существует два незави-
независимых решения уравнения, которые даются выраже-
выражением A.55) с s = + т. Если тп — целое число (которое
можно считать положительным или равным нулю), то
можно выбрать только значение s = + тп; при s = —тп
все знаменатели в A.55), начиная с некоторого, обращают-
обращаются в нуль. Если, прежде чем положить s = — тп, умножить
решение на (s + тп), чтобы сократить обращающиеся
в бесконечность множители, то получается решение, крат-
кратное решению с s = -\- тп (это легко проверить).
Такая ситуация напоминает о трудности, возникающей
при нахождении независимых решений дифференциально-
дифференциального уравнения с постоянными коэффициентами A.18).
Будем поступать аналогично. Пусть
у(х, s) =
Этот ряд получается, если использовать рекуррентное
соотношение A.54) для сп+2/сп, не полагая в нем s =
= ± тп. Обозначим L дифференциальный оператор урав-
уравнения Бесселя L — х2 d?/dz2 + х dldx + (х2 — тп2). Тогда
Ly (ж, s) = с0 (s — тп) (s + тп) Xs.
Как видно, для того чтобы у (х, s) было решением
уравнения Бесселя Ly = 0, s должно равняться ±тп.
Однако если тп — положительное целое число, то
[(s + тп) у (х, s)]s=_m равно у (ж, тп), ¦ умноженному на
г\
константу; поэтому нужно искать второе решение. Для
этого рассмотрим результат, полученный подстанов-
подстановкой (s + т) у (х, s) в уравнение Бесселя. Находим
L [(s + т) у (ж, s)] = с0 (s + тJ (s — т) xs. Производная
от правой части по s при s = — т обращается в нуль. Сле-
Следовательно,
есть решение уравнения Бесселя, и это не что иное, как
второе решение, которое мы искали.
Пример. Найдем второе решение уравнения Бесселя
для т = 2:
у (х, s) == coars [ 1 s(s
s(s + 2)(s+4)(s+6)
Имеем
(s + 2) у (х, s) = сох* [(в + 2) -
а;4
Вспоминая, что (d/ds) xs = Xs In а: и
d /uv \ uv ... I u' v' w' \
—-,— I I = I 1 г • • • • • • I i
ax \w ... I w ... \ и ' v w I
получаем
(x, s) In x +
1 1 \ „ .
s(s+4)
/1 1 1_U4_
\ s s + 4 s + 6^ ...
Полагая s=—2 и замечая, что [(s+2)y (ж, s)]s=_2 =
= — -^y(x, 2), находим
A.59)
Это решение и у (х, 2) являются двумя независимыми
решениями уравнения Бесселя сга = 2,
гг
Пример. Рассмотрим далее дифференциальное урав-
уравнение
(d2tydx2) + (E — х2)$ = 0. A.60)
Это уравнение Шредингера для одномерного гармониче-
гармонического осциллятора (в соответствующих единицах). Если
пытаться непосредственно разлагать решение A.60) в сте-
степенной ряд в точке ж ¦== 0, то получается трехчленное
рекуррентное соотношение. Это до некоторой степени
неудобно *, так что имеет смысл отыскать преобразование
переменных, которое привело бы к более простому урав-
уравнению.
Часто помогающий в таких случаях прием состоит в вы-
выделении множителей, соответствующих поведению реше-
решения вблизи некоторой особенности или особенностей. Где
особенности этого уравнения? В конечной z-плоскости их
нет; отвлечемся на некоторое время для рассмотрения
особенностей на бесконечности.
Рассмотрим дифференциальное уравнение
у"+ Р(х)у' +Q(x)y = 0. A.61)
Вспомним, что 1) х = 0 — обыкновенная точка, если Р
и Q регулярны в ней; 2) х = 0 — правильная особая точ-
точка, если хР и x2Q регулярны в ней. Положим z = \1х.
Уравнение приобретает вид
где р (?) = Р (ж), q (z) = Q (ж). Тогда х = оо есть обыкно-
обыкновенная точка или сингулярность уравнения A.61) в зави-
зависимости от того, будет ли z = 0 обыкновенной точкой или
сингулярностью уравнения A.62). Итак, ж=оо—обык-
ж=оо—обыкновенная точка, если 2х — х2Р (ж) и ж4(> (ж) регулярны
в ней, и х = оо — правильная особая точка, если в этой
точке регулярны хР (х) и x2Q (ж).
Используя эти критерии, мы видим, что дифферен-
дифференциальное уравнение A.60) весьма сингулярно при ж = оо.
При больших х уравнение можно приближенно записать
в виде
х2$ = 0, A.63)
* Трехчленные рекуррентные соотношения часто можно иссле-
исследовать методами цепных дробей (см. разд. 7.5).
23
и его решение имеет вид
-ф ~.ехр (±ж2/2), A.64)
так как, если подставить каждую функцию в дифферен-
дифференциальное уравнение A.63), то члены, доминирующие
на бесконечности, взаимно уничтожатся.
В квантовой механике физически допустимые решения
не должны обращаться в бесконечность при ж —> оо; поэто-
поэтому целесообразно сделать замену
-ф = у ехр (—ж2/2). A.65)
Эта замена переменной, конечно, не обеспечивает желае-
желаемого поведения на бесконечности, и, следовательно, нуж-
нужно отобрать решения у (ж), которые ведут себя правильным
образом. В действительности в общем случае можно ожи-
ожидать у (ж) —>¦ ехр (ж2), чтобы расходящееся решение вело
себя как -ф ->- ехр (+ж2/2).
После замены дифференциальное уравнение A.60) при-
приобретает вид
у" - 2ху' + (Е-1)у = 0. A.66)
[Если обозначить Е — 1 = 2п, то A.66) называется д и ф -
ф е р е нц иальным уравнением Эрмита.]
Можно получить общее решение этого уравнения в виде
степенного ряда, сходящегося всюду, причем рекуррент-
рекуррентное соотношение для коэффициентов будет содержать
только два члена. Рекуррентное соотношение имеет вид
) — Е
а решение
у = coll + A-Е) -ж2/2! + A - Е) E - Е) X
_ х ж4/4! + . . .] +
+ с, [х + C - Е) -ж3/3! + C — Е) G —. Е)х A.67)
X жв/5! + ...].
Если Е = In -f- 1, где п — целое число, один из рядов
обрывается после члена хп (четный или нечетный ряд,
в зависимости от п). Возникающий при этом полином
называется полиномом Эрмита Нп (ж) порядка
п [точное определение см. G.103I. Другой ряд можно
исключить, полагая равным нулю его коэффициент с0 или
Сь Тогда получающееся решение A.65) будет стремиться
к нулю на бесконечности.
24
Если никакой из рядов A.67) не обрывается, его пове-
поведение при больших х определяется далекими членами,
для которых рекуррентное соотношение приближенно
имеет вид ст+2/ст « 21т. Таким образом, каждый ряд
при больших ж ведет себя как ехр (ж2), и ty ~ ехр (ж2/2),
как и следовало ожидать. Поэтому решение ij), которое
остается ограниченным при ж ->- ± оо, возможно только
при Е — 2п -f- 1, где п — целое число, т. е. г]з = г]зп (x) —
= Нп (ж) e~xib для
Е = Еп = 2п + 1. A.68)
Этот пример показывает, как граничные условия могут
накладывать ограничения на допустимые^ значения кон-
константы, содержащейся в дифференциальном уравнении.
Допустимые решения ф„ называются собственны-
собственными функциями дифференциального оператора
—(d?/dx2) -f- x2, принадлежащими к собственным значениям
Еп (см. гл. 9).
Пример. Рассмотрим теперь кратко присоеди-
присоединенное уравнение Лежандра
= 0. A.69)
Отметим, что при т = 0 оно сводится к уравнению
Лежандра. Начало координат — обыкновенная точка,
а х == ±1 — правильные особенности.
Непосредственная попытка написать решение в виде
степенного ряда около точки х = 0 снова приводит к трех-
трехчленному рекуррентному соотношению. Попытаемся опре-
определить поведение около х = ±1. Положим х = ±1 + z
и напишем приближенно дифференциальное уравнение
при | z | <^ 1. Вблизи каждой особенности имеем zy" +
+ у' — (m2/4z) у == 0. Это уравнение имеет решения у =
= z+m/2 и z~m/2, причем первое из них имеет правильное
поведение, если т *^> 0. Поэтому в A.69) целесообразно
сделать замену переменной у — v A — ж2)™/2. Тем самым
выделяется поведение одновременно вблизи обеих особен-
особенностей. Уравнение приобретает вид
A — ж2) v" — 2(m+l) xv +
+ [и (п + 1) — т (т + 1)] v = 0; A.70)
его решение в окрестности ж = 0 находится непосредст-
непосредственным разложением в ряд. Рекуррентное соотношение
25
для коэффициентов имеет вид
Снова получаются решения v (x) в виде четных и нечетных
рядов. Каждый из них ведет себя вблизи х = ±1 как
A — х*)~ш, если ряд не обрывается. Ограниченное реше-
решение существует только в том случае, если пит таковы,
что один из рядов обрывается после некоторого члена
хт. Из A.71) найдем соответствующее условие
п — m = r>0, г — целое число. A-72)
Обычно в физических задачах п и тп — целые числа.
Можно проверить, что тогда у с точностью до константы
совпадает с функцией
A-яа)|т|/2 (d/dxfmi Pn(x), A.73)
которая называется присоединенной функ-
функцией Лежандра. Более подробно эти функции
будут рассматриваться в гл. 7.
1.3. ПРИБЛИЖЕННЫЕ МЕТОДЫ
Часто возможно качественно изучить поведение реше-
решений дифференциального уравнения с помощью графиков.
Пример. Для уравнения первого порядка
dyldx = ехр (—2ху) A.74)
можно нарисовать несколько линий в плоскости ху, ука-
указывая для каждой из них наклон графического решения,
проходящего через эту точку (рис. 1.2). Очевиден прибли-
приближенный вид решений.
Пример. Рассмотрим нелинейное уравнение второго
порядка
у" = х - уЬ A.75)
Если нарисовать параболу х = у2 (рис. 1.3), то мы видим,
что у" положительно внутри параболы и отрицательно
вне ее. Если ограничиться решениями, начинающимися
вблизи начала координат и идущими вправо, то можно
установить несколько типов решений: 1) решения, осцил-
осциллирующие около верхней ветви параболы; 2) критическое
неосциллирующее решение, стремящееся к верхней ветви
26
параболы сверху; 3) решения, стремящиеся к — оо; 4) кри-
критическое неосциллирующее решение, стремящееся к нижней
ветви параболы сверху.
1
/ /
—
1
/
v
/
f
4
»
4
4
4
4
У
'
t
*
t
t
**'
i
i
й
i
Рис. 1.2. Наклоны графических решений уравнения A.74).
Решение A.45) в форме степенного ряда, найденное
ранее [с у @) =0, у @) = 1], принадлежит к первому типу.
Пример. Рассмотрим од-
одномерное уравнение Шре-
дингера для частицы с
массой т в потенциале
У (ж):
= ~Bт/П2)[Е
У (аIф.
A.76)
Рис. 1.3. Некоторые типы реше-
решений уравнения у" = х — #2.
Если Е > V (ж), то ф"Л|Г<
<0, и ф искривляется на-
навстречу оси ж, т. е. ф имеет
осцилляторный, или «сину-
«синусоидальный», характер. Если Е < F (ж), то ф"/1»]) > 0, и^ф
искривляется от оси х, т. е. ф имеет «экспоненциальный»
характер. Если наложить граничные условия, чтобы ф
оставалась всюду конечной, то решение с неограниченно
растущим «экспоненциальным» поведением неприемлемо.
Предположим, что V (ж) выглядит, как показано на
рис. 1.4,
27
Если Е > V3, все решения всюду осциллируют и все
допустимы, т. е. ни одно из них не расходится на беско-
бесконечности.
Если У2 < Е < V3, большинство решений расходится
при х-*--\- сю. Однако можно найти решение, которое
Рис. 1.4. Потенциал
V (х) для
гера.
уравнения Шредин-
«экспоненциально» затухает при х —>¦ + сю. Это однознач-
однозначно определяет допустимое решение (кроме амплитуды)
ФМ >.''
Рис. 1.5. Физически допустимое решение уравнения
Шредингера для F2 < Е <_ F3-
и, в частности, фиксирует фазу в левой области, где реше-
решение носит осцилляторный характер. Качественный вид
решения показан на рис. 1.5.
Если Vi < Е < F2, ситуация становится сложной; ф
ведет себя «экспоненциально» на обоих концах. Если
выбрать ф так, чтобы она не росла слева, то почти всегда ф
будет расти справа. Только для определенных значений Е
можно найти физически допустимые решения. Они назы-
называются собственными значениями..
Если Е < Vi, то физических решений не существует,
28
Другой метод, который часто позволяет получить
полезные приближенные решения, состоит в пренебреже-
пренебрежении малыми членами, в итерациях и т. д.
Пример.
dyldx = ехр (—2ху). A.77)
Посмотрим на решение вблизи х ->• оо. Предполо-
Предположим, что у > 0. Следовательно, dyldx л; 0 и у ¦х а =
= const. Теперь подставим это предположительное реше-
решение снова в A.77): dyldx » ехр (—lax). Тогда у да
«а — ехр(— 2ах)/2а. Выполним еще одну итерацию
ехр (— 2ах
¦ а —
ехр( — 2ах) (l -|-— exp( — 2ax)
ехр (— 2ах) 1
2а 1
A.78)
Если ряд A.78) сходится, то, вероятно, он представляет
собой решение. Вообще говоря, ряд расходится.
Пример.
= x — y* A.79)
(см. графическое рассмотрение, рис. 1.3).. Попробуем под-
подставить у ж У^х. Тогда у" «; 0, так что у = ах -f- b:
Это не похоже на первую попытку, так как мы не очень
искусно работали с «малым» членом у". Выберем другой
путь:
у* = х - у" « х - (Vby =
Следующая итерация дает
У = 1^ + 4-*-»- -^х-*>*+ ¦ ¦ ¦ A-80)
По указанной выше классификации это решение типа 2.
Можно искать решение другим методом. Напишем
A.81)
29
Подставляя A.81) в дифференциальное уравнение A.79),
получаем
— Ч4х-3/г + г\" = — 2т] Ух — г]*. AЯ2)
Пренебрежем последним членом. Уравнение все еще
остается сложным. Далее можно пренебречь первым' или
вторыми членом. Если предположить | т)" | <^ | 2т] Ух |,
то получаем ц ^ х~2/8, т.. е. предыдущее решение A.80).
Конечно, нужно проверять согласованность решения
и приближения, сделанного при его нахождении, именно
что (Ve х~2)" <С ^ (Vs ж~2) Ух. При больших х это неравен-
неравенство хорошо соблюдается.
Другое решение можно получить, если пренебречь
членом ж~а/2 в уравнении A.в2) вместо г\"; т. е., если
предположить \r\"\ ^> | — V4a:~3/2|, мы получаем дифферен-
дифференциальное уравнение
т]" + 2Кгт1 = 0. A.83)
Приближенное решение этого уравнения можно найти
методом ВКБ, который будет рассматриваться в следую-
следующем разделе. Находим
-4^
sin
х*" + б) . A.84)
Итак, получаются осцилляторные решения типа 1. Нужно
только проверить согласованность предположения l*)"!^
1.4. МЕТОД ВКБ
Метод Вентцеля — Крамерса — Бриллюэна (ВКБ)
служит для нахождения приближенных решений урав-
уравнения
(d2y/dx*) + f(x)y = O, A.85)
причем на / (х) наложен ряд ограничений, рассматривае-
рассматриваемых ниже. Вспомним, что любое линейное однородное
уравнение второго порядка можно привести к этой форме
посредством преобразования A.41). Такую же форму иаде,ет
одномерное уравнение Шредингера.
30
Решения уравнения A.85) с постоянной / (х) наводят
на мысль о подстановке
у = ехр Aф {х)). A.86)
Уравнение приобретает вид
0. A.87)
Если предположить величину ф" малой, то в первом
приближении
])dx. A.88)
Условие применимости (малость ф") имеет вид
Из A.86) и A.88) видно, что l/]// есть, грубо говоря, одна
«длина волны», или «экспоненциальная длина», для реше-
решения у. Таким образом, сделанное приближение справед-
справедливо, если изменение / (х) на одной длине волны мало
по сравнению с | / |.
Следующее приближение легко найти итерацией.
Положим в A.87) ф" « ± /-]/2/72. Тогда
(ф'J«/±4—\ *'»
Два знака соответствуют двум приближенным решениям;
их можно скомбинировать для образования общего
решения:
+ с_ ехр [ — i f 1Л7(ж) da;]} . A.90)
Таким образом, мы нашли приближение к общему
решению исходного уравнения A.85) в любой области, где
выполняется условие A.89): Метод не годится, если / (х)
изменяется слишком быстро или если / (ж) проходит через
нуль. Последнее представляет серьезную трудность, так
как часто приходится «сшивать» осцилляторное решение
в области, где / (х) > 0, с «экспоненциальным» решением
31
в обл-асти, где / (х) < 0 [см., папример, обсуждение урав-
уравнения A.76)].
Рассмотрим эту задачу подробнее, чтобы получить так
называемые формулы связи, которые связывают
константы с+ и с_ решений ВКБ с каждой стороны от
точки, где /(ж) = 0.
Предположим, что / (х) проходит через нуль в точке х0
и положительна справа от нее, как показано на рис. 1.6.
Рис. 1.6. Графики функции / (х) и двух точных реше»
ний уравнения A.85); одно из них, yi (х), является осо-
особым решением: оно стремится слева к нулю.
Предположим далее, что / (х) удовлетворяет условию A.89)
в областях как слева, так и справа от хо, так что любое
частное решение у (х) можно приближенно записать
в области х <^ хо (/ (ж) •< 0) как
у (х)
—щ ехр [ + j \Г — i(x)dx\Ar
У
A.91)
а в области х ^> х0 (/ (х) > 0)
ехрГ + i
/И L ,
X
i
A.92)
32
Здесь всюду берутся положительные корни. Если / (х)
вещественно, то решение, вещественное в левой области,
будет также вещественно справа. Условие вещественности
означает, что если а и Ъ вещественны, то d = с*.
Наша задача состоит в том, чтобы «сшить» приближен-
приближенные решения, описывающие одно и то же точное решение
по разные стороны от х0, т. е. найти с и d, если известны
а и Ъ, и решить обратную задачу. Чтобы найти такую
связь, нужно использовать приближенное решение, кото-
которое было бы справедливо вдоль всего определенного пути,
связывающего области х по обе стороны от х0, на котором
годилось бы приближение ВКБ. Одна процедура, исполь-
использованная Крамерсом и Джеффрисом, состоит в том, чтобы
использовать решение, справедливое на вещественной оси
около х0 (см. обсуждение в конце разд. 4.5).
Вторая процедура, предложенная Цвааном и Кемблем,
состоит в том, чтобы отойти от вещественной оси в районе
точки х0 и использовать путь, огибающий х0 в комплекс-
комплексной плоскости, вдоль которого приближение ВКБ остается
справедливым. Мы выберем эту вторую процедуру, так
как она не только дает формулы связи, но и позволяет
также оценить ошибки в приближении ВКБ. Кроме того,
более поучительна и примененная здесь техника.
Источник ошибок важен, так как мы хотим использо-
использовать приближенные решения в широком диапазоне х,
включающем много длин волн или длин изменения экспо-
экспонент. Таким образом, возникают опасения, не накопятся
ли постепенно ошибки и не приобретет ли приближенное
решение ошибочную фазу, например, в области, где оно
осциллирует.
Определим функции ВКБ для уравнения A.85)
следующим образом: х
W±(*)'= [/(*)Г1/4ехр [± i j VT(F)dx\. A.93)
Мы должны рассматривать их как функции комплексной
переменной х; чтобы избежать неоднозначности в выборе
корней / (х), нужно провести удобные разрезы в плоско-
плоскости х. Функции A.93) удовлетворяют (точно) дифферен-
дифференциальным уравнениям, которые можно получить диффе-
дифференцированием:
J
A-94)
3 Дж. Мэтьюа, Р. У опер. 33
\
J
Если определить
то W± (х) суть точные решения уравнения
W"± + If (x) + g (x)] W± = 0 A.96)
и приближенные решения уравнения
У" + f(x)y = O A.97)
пригодны в случае | g (х) | <^ | / (х) |. Уравнение A.97)
регулярно в точке жо, в то время как уравнение A.96)
имеет в ней особенность. Соответственно у (х) регулярно
в Хо, a W± имеют особенности в ней.
Определим теперь функции а± (х):
у (х) = а+ (х) W+ (ж) + а_ (х) W. (х); A.98)
у' (ж) = а+ (ж) W+ (ж» а_ (ж) WL (ж), A.99)
где у (х) — решение A.97), а а± — не что иное, как сопри-
соприкасающиеся параметры, обсуждаемые ранее в связи с ме-
методом вариации постоянных. Приближение ВКБ соответ-
соответствует простому случаю, когда а+ и а_ считаются посто-
постоянными.
Решим уравнения A.98) и A.99) относительно а± (ж):
yWL-y'W- . yW'+ - y'W+
а+ ~ W+WL—W'+W- ' W+WL— W'+W-'
где знаменатели представляют собой вронскиан W+ и W_.
Вронскиан постоянен, что легко можно увидеть из диффе-
дифференциального уравнения A.96). Из точных выражений
A.93) имеем W+WL — W+W- = — 2i, так что
-y'W+). A.100)
Дифференцируя эти равенства и используя дифферен-
дифференциальные уравнения A.96) и A.97) для исключения у"
и W"±, получаем
^=-±±(yW'±-y"WT) = + 4rg(x)yW^ A.101)
или, вспоминая A.93) и A.98),
^ = + т1^Ь+«^р[='=2'к№)^]}.
A.102)
34
Любое из выражений A.101) или A.102) можно исполь-
использовать для оценки ошибки, которая может накопиться
вдоль большого интервала х в приближении ВКБ.
Пример. Функции ВКБ, связанные с уравнением
у" + ху = 0, A.103)
для х ^> 0 имеют вид
W± {х) =¦- х~Ч* exp (± i С x1'* dx\ = x~ll* exp
A.104)
Они точно удовлетворяют уравнению A.96):
т. е. / (х) = х, g (х) = — 5аг2/16. Можно записать реше-
решение A.103) в форме A.98):
у (х) = а+ (х) W+ (х) + а_ (х) W_ (x).
При больших х общее решение A.103) хорошо описы-
описывается приближением ВКБ:
-x^ + b), ж-^оо, A.105)
так что а+ -*¦ (А/2) exp (i6), ct_-> (A/2) exp (—i6) при
х—>¦ с». Исследуем ошибку в этом решении ВКБ, когда
величина х уменьшается; эта ошибка определяется откло-
отклонением а+ (х) и а_ (ж) от постоянных значений, приведен-
приведенных выше. Если а± (х) меняются не сильно, то из A.102)
приближенно имеем
X яг-1/* [^ exp (± i6) + 4 ехР (+ 1б) ехР ( Т 2i T ж3
и Аа±, т. е. изменения а± на интервале [xlt cx>], даются
соотношениями
2Aa±/A « B/A) f (da±/dx) dx = ± i -^- exp (± i6) X
oo
A.106)
3* 35
Второй член в скобках менее важен, чем первый, и мы
видим, что относительная ошибка | Аа± |/| а± | лишь
порядка 10—20% даже для такого малого х, как х± =
= 1. При больших Xi ошибка становится очень малой.
В частности, не накапливается никакой существенной
ошибки в фазе на сколь угодно большом числе «длин волн».
Возвратимся теперь к проблеме оценки изменений
функций а± (х) в общем случае. Интегрируем уравне-
уравнение A.102) вдоль контура Г в комплексной плоскости
от х\ до ж2:
(da±/dx) dx = + Y \ / ± dx +
Будем рассматривать только такие контуры, для которых
A.108)
где ds = \ dx \ — элемент длины вдоль Г. Обычно назы-
называют такой контур «хорошим».
Вдоль хорошего контура первый член в правой части
A.107) не производит существенного изменения Аа±. Вто-
Второй член может быть существен в том случае, когда
| Wzf/W± | ^> 1; т. е. вдоль хорошего пути а+ может ме-
меняться только в области, где ее функция W+ мала по вели-
величине по сравнению с W_. Даже в этой области а+ не мо-
может меняться, если а_ равно нулю или близко к нулю.
Аналогичные утверждения справедливы для а_, если всю-
всюду поменять местами знаки «+» и «—».
В областях, где | WJW+ | > 1 или | W+IW- | > 1,
коэффициент при малой функции может меняться весьма
заметно; такое поведение называется явлением
С т о к с а. ЕГто изменение не оказывает никакого суще-
существенного влияния на функцию у (ж) в этой области, так
что нет противоречия с тем, что приближение ВКБ с по-
постоянными а+ и а_ здесь предполагается законным.
Полученные выше результаты используем теперь для
Нахождения формул связи ВКБ. Вспомним определе-
определения A.93) и проведем разрез вдоль вещественной оси от
точки хо до + оо. Будем считать корни [/ (ж)]1/4 и [/ (ж)]1/2
положительными вещественными корнями на верхней сто-
36
роне этого разреза. Тогда для х < х0
хп
W± (х) = ехр (- i (я/4)) [ - / (*)Г1/4 ехр ( ±
Возвращаясь к A.91) и A.92), имеем
a+->aexp(i(n/4));
0; \
\ A.
110)
Для того чтобы найти области Стоке а, где
1 W+IW^ | ^> 1 или | WJW+ | Э> 1. заметим, что вблизи
а:0 функция f (х) ж К (х — х0) и границы этих областей
качественно схожи с границами для / (х) = К (х — х0).
х
Эти границы проходят там, где \ Y^f(x)dx—вещественное
число, так как тогда | W+ \ = \ W- |. Для / = К(х — х0),
обозначая х — х0 = г ехр (i0), имеем
X
\ VJTF) dx = К1'2 -^-(х- хоK/2 = \ К1/2г3'г ехр Ц C9/2)].
A.111)
Это выражение вещественно по направлениям 0=0,
2лУЗ, 4п/3, и из A.93) легко видеть, какая из W+ или W_
доминирует в каждой области между этими границами.
На рис. 1.7 показаны области Стокса; указан также
хороший путь Г, связывающий области х <^ хо и х ~^> хд
на вещественной оси, где требуется связать решения ВКБ.
Теперь легко найти формулу связи для специального
решения ух (х), которое имеет убывающее экспоненциаль-
экспоненциальное поведение слева от х0. Для этого решения а = 0,
т. е. а+ (х) = 0 в начале пути Г. Таким образом, в обла-
области 2 а_ (х) остается постоянной вдоль пути Г, даже если
| W+/W- | ^> 1; а+ остается близкой к нулю. В области 1
I WJW+ | Э> I» так чт0 а- остается постоянной, хотя и
а+ может (и будет) меняться. Так как а_ постоянна вдоль
всего пути Г, из A.110) находим
d =6 ехр (i (я/4)). A.112)
Если 6 вещественно, то из условия вещественности сле-
следует с = d*.
37
Таким образом, формула связи для решения у\ (х)
с убывающим экспоненциальным поведением при х < х0
(нормировано условием 6 = 1) имеет вид'
A.113)
2 Г f
==— COS \
УТЩ
Поворот стрелки в обратную сторону — тонкий вопрос.
Мы знаем только, что растущий экспоненциальный член
Область 1
Рис. 1.7. Области Стокса на комплексной плоскости
х вблизи точки х0, где / (х) обращается в нуль.
слева будет отсутствовать для некоторой фазы вблизи
точки —я/4 справа.
Рассмотрим далее более общее решение у2 (х) с аф 0.
Так как исходное уравнение линейно, то коэффициенты
в выражениях A.91) и A.92) должны быть линейно свя-
связаны
с = Аа+ВЬ; d = Са + Db. A.114)
Из A.112) находим, что
? = ехр( — i(n/4)); D = exp (i (я/4)). A.115)
При вещественных а и 6 условие вещественности d — с*
означает, что
С = A*; D = В*, A.116)
38
второе из которых нам уже известно. Другое общее соот-
соотношение можно получить из того, что вронскиан у\у\ —
—у2у'1 двух пезависимых решений уравнения ?/"+/ (ж) у==0
постоянен. (Чтобы увидеть это, продифференцируйте
вронскиан.) Напишем
y1(x) = <?'w+ + a-iW-> y2(x) = <2)W+ + al2)W_. A.117)
Вспоминая, что у' = d+W'+ -j- aJW'_ и вронскиан W+W'_ —
— W'JY- = — 2i, находим
ctfV" = const = K.
A.118)
Вычисляя эту константу при х <^ х0 из A.110), имеем
К = exp (i (я/2)) («ife2 — «2^i)i гДе «i и fet — коэффициен-
коэффициенты а и 6 приближения БКБ A.91) для у\ '(ж), а я2 и &2 —
коэффициенты для у2 (х). Аналогично находим для х ^>
К = cid2 — c2di =^
= (AD - ВС) (atb2 - cj&i).
Таким образом,
exp (i (n/2)) = i = AD - ВС --= AB* -A*B = 2i Im AB*.
Но В = exp (— i (я/4)), так что A exp (i (л/А)) = R
R — неопределенная вещественная постоянная,
тельно
А = R ехр (- i (я/4)) + i exp (i (я/4));
Б = ехр ( — i (я/4));
С = /J exp (i (я/4)) +1 ехр (- i (я/4));
/) = ехрA(я/4)),
i/2, где
Оконча-
ОкончаA.120)
и так как i? не определено, то мы еще не можем выразить
с и d через а и 6. Однако зто все, чего мы можем достичь:
R определить нельзя. Другой путь, приводящий к этоц
неопределенности, состоит в том, что асимптотический
вид решения типа у2 (х) на рис. 1.6 для х < х0 не опреде-*
ляет 1/2 (#) для х > х0. Выразим теперь а и b через с id,
39
Уравнения A.114) легко обращаются, и мы находим
а = ехр (—i (я/4)) с + exp (i (я/4)) d; ]
Ъ = [у ехр (i (я/4)) - /J ехр (- i (я/4))] с +
у ехр (- i (я/4)) - R ехр (i (я/4))] d.
A.121)
Таким образом, можно найти а, но нельзя найти Ъ. Этого
можно было ожидать, так как а_ (х) изменяется чрезвы-
чрезвычайно сильно в области 2 на рис. 1.7, кроме специального
случая а+ = 0. Можно было ожидать этот результат
и из того, что при аф 0 величина Ъ неизмеримо мала,
так как убывающая экспонента ничтожна по сравнению
с растущей. Опуская по этой причине 6, можно написать
вторую формулу, связывающую два выражения A.91) и
A.92) для у (х). Удобно выбрать вещественное решение,
полагая с = -»- ехр Aф) и* d = у ехр (—i<?). Тогда
A.122)
в случае, если ф не слишком близко к —я/4. Как мы виде-
видели, стрелку нельзя повернуть, так как фазу ф нельзя опре-
определить, если мы знаем только, в какой мере представлена
растущая экспонента.
Очень легко помнить формулы связи A.113) и A.122),
рисуя качественные картинки типа рис. 1.6. Рассмотрим
сначала уг (х) с убывающей экспонентой слева от х0. Спра-
Справа от хо функция у\ (х) ведет себя как косинус, для кото-
которого фаза заключена между —я/2 и 0, если х = хо- Вспом-
Вспомним, что фаза равна —я/4. Далее, амплитуда волны коси-
косинуса справа «выглядит» больше, чем амплитуда экспо-
экспоненты слева. Вспомним, что она вдвое больше. Эти заме-
замечания воспроизводят результат A.113). Аналогичное пра-
правило для запоминания результата A.122) получается,
если рассмотреть решение у2 (х), которое в правой обла-
области сдвинуто по фазе с г/i (х) на 90°. С помощью такой же
процедуры непосредственно получаются формулы связи,
аналогичные A.113) и A.122) для случая, когда наклон
/ (х) в точке хо отрицателен, а не положителен.
40
В заключение рассмотрим применение метода ВКБ
в квантовой механике. Рассмотрим уравнение Шредингера
для частицы в потенциальной яме
(<Щ>/<1х*) + Bm/%z) [E-V (х)] ф = О A.123)
с V(х), показанным на рис. 1.8;
положительно для а<а;<6,
отрицательно для х < а, х
(ж) = Та" 1Е
... ., f
I
Рис. 1.8. Типичная одномерная потенциальная
яма.
Если ф (ж) ограничена при а; < а, то в области я < а; < 6
формула связи A.113) утверждает следующее:
Если ф(а;) ограничена при х~^>Ъ, то в области
аналогично получаем
ь
ж^-^^-т)- <1Л25>
Эти два выражения должны совпадать, откуда вытекает
условие
A.126)
Результат очень похож на правило квантования Бора —
Зоммерфельда.
а
ГЛАВ
БЕСКОНЕЧНЫЕ
РЯДЫ
2.1. ПРИЗНАКИ СХОДИМОСТИ
Необходимый критерий для изучения сходимости
бесконечного ряда состоит в сравнении его с рядом, о ко-
котором известно, сходится он или расходится. Например,
геометрическая прогрессия
1/A _ х) = 1 + х + х2 + Xs + ... B.1)
'сходится при | х | < 1 и расходится при | х | > 1. Это
приводит кпризнаку сходимости Далам-
б е р а: если предел отношения | ап+1/ап | последова-
последовательных членов бесконечного ряда «i + а2 + а3 + ¦ • •
при п—>- оо есть число, меньшее единицы, то ряд сходится.
Если предел больше единицы, ряд расходится. Если пре-
предел равен единице, то необходимо дальнейшее исследова-
исследование.
Второй критерий — это сравнение с несобственным
интегралом. Ряд / A) + / B) + / C) + ... сходится или
расходится одновременно с несобственным интегралом
оо
I / (ж) dx, если / (х) монотонно убывает. Рассмотрим,
например, ряд для ^-функции Римана
m = l+-z-+-gr + i-+-" B-2)
Отношение последовательных членов
.. B.3)
«п \п+1) \ п) п
при /г-»~оо стремится к единице. Таким образом, сравне-
сравнения с геометрической прогрессией недостаточно. Однако
42
так что критерии для сходимости ^-функции есть s>l.
Это позволяет усилить признак сходимости Даламбера:
если
«п+1
с s>l, то ряд сходится (в случае комплексного s усло-
условие сходимости состоит в неравенстве Res>l).
Пример. Рассмотрим гипергеометрический
ряд
F(a, b; с;ж) = 1+-^--^-+-
Отношение последовательных членов равно
(•+¦9
х= (l
Ь —с—1
Таким образом, ряд сходится, если | х | < 1, или при
I ж | = 1 *
а+6 — с<0. B.7)
Можно еще более усилить признак сходимости Далам-
Даламбера, если рассмотреть очень медленно сходящийся ряд,
такой, как
оо
2j n (In n)« = 2 (In 2)* + 3 (In 3)* + * ' * B-8)
Сравнивая этот ряд с интегралом
J z(lRx)s = s— I (In жM"!.' ^ ^
видим, что ряд B.8) сходится, когда s>l. Отношение
последовательных членов в B.8) равно
an+i _ п Г Inn И» /. 1_
an iH-1 Lln(n+l)J " V n+-"
= 1— ^ Ь--- B.10)
* Если а, Ь, с — произвольные комплексные числа, то усло-
условие B.7) следует заменить на Re (а + Ъ — с) < 0.
43
Пример. Рассмотрим решение уравнения Лежандра
в виде ряда A.51)
^- + п(п + 1) (n-2) (n J
Отношение последовательных членов
а; _ (п— 2i + 4)(w + 2t — 3) 2
«м ~ B{-3)B«-2) * *
Для больших i
Таким образом, если ж2=1, то ряд расходится.
Конечно, имеются и другие признаки сходимости;
например, если знаки ап чередуются и ап стремится к нулю
монотонно, то ряд 2 ап сходится (но не обязательно абсо-
п
лютно).
2.2. ОБЩЕИЗВЕСТНЫЕ РЯДЫ
Читатель наверняка знаком со следующими простыми
рядами:
J- + 4+.-.= 2-^-. B.12)
а=0
Испол ьзуя соотношение Эйлера exp (ix) = cos x -j- i sin #,
из B.12) находим
sin ж = ж —|j-+-§}-— ... + •••; B.13)
cosa;=l_^-+?L_... + ... B.14)
Почленно интегрируя ряды для A-\-х)~г и (l-j-я2),
получаем
«—J-+-J—... + ... B.16)
44
Другие элементарные функции, такие, как tg x, ctg ж,
sec а; и т. д., имеют, вероятно, ме.нее известные разложе-
разложения в ряд. Для некоторых рядов коэффициенты выражают-
выражаются посредством так называемых чисел Бернулли или чисел
Эйлера.
Определим числа Бернулли с помощью раз-
разложения функции [ехр (х) — I], которая встречается
весьма часто. Для того чтобы исключить особенность
в точке х = 0, умножим функцию на х:
.. B-17)
ехрИ-1 =«Ь +
Отсюда
а разделив на х все члены уравнения, получим
Положим сп = Вп/п\. Тогда
B.18)
Приравнивая члены с одинаковыми степенями х, имеем
\ — Я- п— Д° I Bi • О — В
• О — В° -1-
> и^ 3! -"Г
-1- I тт т п
3! -"Г 2!-1! + ix.2\ и т- Д-
B.19)
Кроме первого уравнения, уравнения B.19) можно запи-
записать в краткой форме символически: {В -j- l)n — Вп = 0.
Здесь под В$ понимается в действительности Bs. Несколь-
Несколько первых чисел Бернулли равны
Яо = 1; Б2=1/6; Б4= -1/30; Би = }
Дв=-1/30, ...; [ B.20)
Б1= —1/2; Б3 = Б5 = Б7= ... =0. J
Заметим, что обозначения в различных учебниках много-
многообразны, так что нужно быть внимательным при исполь-
использовании формул.
Как пример использования чисел Бернулли в каче-
качестве коэффициентов в степенных рядах для общеизвест-
45
ных функций рассмотрим
РУЛ I 1 т\ PYTl ( 1 т\ * *
Обозначим ix = y/2. Тогда
expj^+exp^-^) / 2 X _
Cl^a;-1exP(.!//2)-exp(-.y/2) -1 V + ехр (»)-1 / ~
^_ 2i / у у \ _2л_
у V 2 "Г" ехр(у) —1 Г~ г/
п четные
Заменяя у на 2\х, находим
«е* = ± 3 (-ir-^|f)!l. B.22,
тг четные
Соотношение tg х == ctg a; — 2ctg 2ж позволяет найти сте-
степенной ряд для tg х.
2.3. ПРЕОБРАЗОВАНИЕ РЯДОВ
Данный неизвестный ряд к известному можно свести
различными способами.
Пример.
/ (х) = 1 + 2х + За;2 + 4ж3 +... B.23)
Почленно интегрируя, имеем
х
Далее дифференцируем:
^^ = "dF\ 1-я ) = A—жJ •
[Этот результат можно было получить и непосредственно
из биномиального ряда B.11).]
Пример.
Дважды дифференцируя, находим
46
Отсюда с помощью двух интегрирований получаем
Константы интегрирования в этой процедуре нужно
вычислять, рассматривая ряд при определенных значе-
значениях х; например, при х = 0 ряд B.24) дает / @) = 1/2.
Пример.
..)- B.25)
Это простая геометрическая прогрессия; следовательно,
р, 1 1 — a cos 6
~~ 1 —aexp(i6) ~~ 1 —2a cos6+а*"
Пример.
S=4r+i+i+--- B-26)
Определим
./(ж)--2Т + -зГ+-4Г+ •••
Тогда 5=/A),
f'(x) = x + x* + ^- + ~+ ... =xext>(x),
х
f(x)= \ x exp (x) dx = x exp (x) — exp (x) -\-1,
Пример.
«i m{m— 1) - m(m— 1) (m — 2)
Н 2i 1 3i
= S n\(m—n)\ ' B*27)
n
Положим /(ж) =21 П!(Г-1П)! жП' 5 = /D)- Но /(*) =
= A + жO", поэтому 5 = 2™.
Теперь рассмотрим на первый взгляд очень простой
случай [ср. с B.2)]
•*=2-|г=1 + Т + Т + Ж+---=^B)- B-28)
п=1
47
Предыдущие примеры наводят на мысль ввести функцию
Таким образом,
ЬA»)^. 5 = - | i?iLz*L <fc. B.30)
К сожалению, этот интеграл так же трудно вычислить,
как и ряд.
Ряд B.28) можно выразить через числа Бернулли. Что-
Чтобы найти это соотношение, начнем с написания ряда Фурье
для cos кх (ряды Фурье обсуждаются подробнее в гл. 4):
оо
Y+ ^ (Ап cos nx^-Bn sin nx); B.31)
п=1
coskx—четная функция, так что членов с синусами нет
(Вп = 0). Коэффициенты Ап даются формулами
= (-ir ffgl*" . B.32)
о
Таким образом,
, 2к sin kn I I cos х , cos2a: совЗж • \
cos/ca;= - \-^ W^T+ к*-Ь Р=9~+ •••/•
B.33)
Полагая в B.33) х = п, находим
kn ctg Ы = 1 + 2к* (-^i-j- + -^4- + -^9- +•-•)¦
B.34)
Это разложение котангенса на простейшие дроби.
Разлагая B.34) в степенной ряд по к, получаем
-1. + -I.+ ..
B.35)
48
где ?Bк)— функция, определенная в B.2). Сравнивая
B.35) со степенным рядом B.22) для котангенса, выра-
выраженным через числа Бернулли, находим
Таким образом,
1+
1 + 1б + 8Г+---=^D)" 48 —W B8)
И Т. Д.
Закончим этот раздел обсуждением преобразования,
которое полезно как для аналитического, так и для
численного суммирования рядов. Положим, что
*(*)= 2 bnzn B.39)
п=0
ряд, сумма которого известна, и что необходимо просум-
просуммировать ряд
/(*)= 2 cnbnzn. B.40)
71=0
Исключим из B.40) Ь„;
f (z) = сД, + qbtz + c2b2z2 + c3baz3 + ... = cog (z) +
+ (cj — c0) V 4- (c2 — c0) fc2za + (c3 — c0) fc3z3 + ... = co? (z) +
+ (c4 - c0) zg' (z) + (c2 - 2ei + c0) bjes +
+ (c3 - 3c4 + 2c0) 63z3 +-...= cog (z) + (c, — c0) zg' (z) +
B.41)
Последовательные коэффициенты представляют собой не
что иное, как крайние разности в разностной таблице
коэффициентов с„:
со
с4 —с0
с4 с2—2с4-|-с0
c2 — Ci • с3 —Зсг+Зс! —с0
с2 с3 —2+
с3 — с2
с3
4 Дж. Мэтьюз. Р. Уокер
Наиболее типичный пример такого преобразования —
преобравование Эйлера. Положим
Тогда
ь-(-1Г v-W—Й^ T
и т. д. Следовательно, если /(z)= 2 (~ l)ncnzn, то
71=0
преобразование Эйлера показывает, что
-2с1+ с0) (-JL_J_... + ...]. B.43)
Рассмотрим, например, ряд
[Конечно, нам уже известно, что / (z) = — In (I + z).] Это
очень медленно сходящийся ряд; оказывается, что при
| z | > 1 он расходится. Из разностной таблицы
1 1
Т 3
"~6 4
J_ i. ±
3 12 5
_J_ _^
12 20
i. i.
4 30
i_
20
J_
5
50
видим, что
Для значений z, например, вблизи единицы зтот новый
ряд сходится значительно лучше. Оказывается, что он
сходится для всех положительных z.
Это один из приемов, с помощью которых можно преоб-
преобразовать один ряд в другой, более быстро сходящийся.
В гл. 13 рассмотрена важная практическая задача — на-
нахождение суммы ряда численными методами.
ГЛАВА О
ВЫЧИСЛЕНИЕ
ИНТЕГРАЛОВ
3.1. ЭЛЕМЕНТАРНЫЕ МЕТОДЫ
Рассмотрим некоторые полезные приемы вычисления
интегралов. Стандартный прием при расчете интеграла
ехр (— t2) dt = -|- Уп C.1)
состоит в использовании полярных координат. Полагая
t — иУа, находим
оо
J ехр (— at2) dt = \ Уп/а. C.2)
Если же t = u2, то
оо
f ехр (— t*) tdt = ^ У п. C.3)
ОО
Вычислить \ ехр (— 24) dt не так просто. Положим
C.4)
Заменим переменную ta = u, t = ul'a, dt=—u<-1'a^~1du.
Тогда
Ia = -i- j ехр (— и)
52
Определим теперь гамма-функцию Y(z*
оо
Г (z) = j exp (— и) и*-1 du, C.5)
так что
Более подробно гамма-функция рассмотрена в разд. 3.4;
отметим, что из C.1) следует Г (-п-) = У~я;.
Другой полезный прием состоит во введении ком-
комплексных переменных.
Пример.
оо
/ = I ехр (— ах) cos Хх dx =
о
оо
Г 1
= Re \ exp (—ax) exp (i^a;) da; = Re g_.^-. C.7)
Следовательно, / = e/(ea + ^2). Кроме того, используя
мнимую часть, с помощью этого метода можно вычислить
другой интеграл;
оо
f ехр(—ах)sinKxdx== Я/(ва + X2). C.8)
Очень полезен метод интегрирования по частям; он,
вероятно, хорошо известен читателю.
Следующий полезный прием состоит- в дифференциро-
дифференцировании или интегрировании по параметру.
Пример.
/ = \ ехр (— ах) cos "кх • х dx. C.9)
о
ОО
Положим /(«)= \ ехр(—ах)cosKxdx = a/(a2-{-№). Тогда
53
Мы предполагали здесь, что операции дифференцирова-
дифференцирования и интегрирования можно переставлять местами.
В физических приложениях это почти всегда име место.
Пример.
Положим /(«)= f «?(-"*)ч^'д^ так что / = /@).
{
. ¦ = — I ехр (— ах) sin xdx— Г", v,
da J- аи+1
^C—arctga.
Но /(оо) = 0. Следовательно, С=я/2;
/ («) = Л._ arctga и / = /@) = ^-. (З.Н)
Иногда можно скомбинировать некоторые производные
от интеграла и образовать дифференциальное уравнение.
Пример.
оо
/" (а) + / (а) = \ ехр (— ax) da; = 1/а.
о
Это уравнение легко решается методом вариации постоян-
постоянных (см. разд. 1.1). В результате получаем
а а
т , \ С sin t ,. . С cos t ,.
/(а)= —cosa \ —(Й-fsma \ —-f—dt.
Но /(а) и все ее производные обращаются в нуль при
а=оо. Таким образом,
а а
т / \ • f cos t ,, f sin t ,
/(a) = sina \ —— dt^cosa \ —^—dt.
oo oo
54
Определим функции интегральный косинус
и интегральный синус:
]^t. C.13)
Таким образом, /(a) = sina-Cia4-cosa(n/2— Sia). Функ-
Функции Si а и Cict табулированы [1J.
оо
Наконец, полезные интегралы i ехр(—ax2)xndx
(к = 0, 1, 2, ...) можно вычислить, зная первые, два
интеграла
jexp( — ax^)dx = ~y^-; \ exp( — ax^)xdx = ~ C.14)
и дифференцируя их несколько раз.
Заметим, что если параметр подынтегрального выраже-
выражения содержится также и в пределах интеграла, то диффе-
дифференцирование выполняется по следующему правилу:
«а,
j M^L ^,a)-^.f{a{a),a). C.15)
3.2. ВЫЧИСЛЕНИЕ ИНТЕГРАЛОВ С УЧЕТОМ
СИММЕТРИИ
Вычисление некоторых интегралов можно значитель-
значительно упростить, используя симметрии, существующие в за-
задаче. Проиллюстрируем принципы расчета на нескольких
интегралах по телесному углу.
Пример. Рассмотрим интеграл
- (ЗЛ6)
где г—единичный радиус-вектор и F, (р) — обычные сфе-
сферические угловые координаты: ra = sin6cos9, rv —
= sin 8 sin <p, rz = cos9. Так как ^ориентация системы
55
координат произвольна, то можно выбрать ось z вдоль к
и получить (предполагая fcl)
2Л +1
-1
Интегралы
J f C-18)
можно вычислить посредством дифференцирования 11
(для этого следует заменить в знаменателе 1 на а, про-
продифференцировать по а и положить а равным снова 1).
Например,
j — А;2). C.19)
Другой пример:
/4 (к, а) = J ад йЩ1 + to). C.20)
Этот интеграл сложнее по той причине, что два вектора а
и к задают два направления, и поэтому нельзя выбрать
полярную ось вдоль обоих направлений. Однако направ-
направление а тривиально в том смысле, что его можно «выдет
лить». Рассмотрим интеграл
J (k) = j г dQ/(l + Щ. C.21;
Ясно, что /i (к, а) = aJ.
Вектор J (k) должен быть направлен вдоль к, так как
нет другого выделенного направления. Следовательно,
J (k) = Ак. C.22)"
Чтобы вычислить скаляр А, умножим на к обе части C.22).
Получаем
Таким образом,
Л(к, a)=ilak = i?-ak[l—^.1п[±?]. C.23)
56
Пример. Чтобы вычислить интеграл
/2 (к, а) = \ аг dQ/(l + кгJ,
заменим в интеграле 1± (к, а) 1 на а и продифференци-
продифференцируем, как это делалось выше. Более простой метод состоит
в дифференцировании /4 (к) по к. С одной стороны,
_ а г <из ^ г
ак J 1+k; J
С другой стороны, используя C.47), имеем
(к) к dh (к) 2як / 2 1 , 1 + Ал
Сравнивая C.24) и C.25), находим
Г <ЙЗг _2як / 2 1 , 1 + А\
и, следовательно,
? 2лка
Другие примеры использования соображений симмет-
симметрии— вычисление таких интегралов, как
Ф4(а, Ь)=
Ф2(а,Ь, с, d)=
Чтобы вычислить Ф}, заметим, что эта величина есть ска-
скаляр, линейный по а и по Ь. Единственная возможность
такова, что Ф1 = A (ab), где А — число. Чтобы найти Л,
положим а и b равными z. Тогда
Ф! (i, z) = А = j dQ (rzJ = [ dQ cos2 В = 4я/3.
Следовательно, Ф! (a, b) = Dя/3) (ab).
Расчет Ф2 выполняется аналогично. Так как Ф2 —
скаляр, линейный по четырем векторам а, Ь, с, d и инва-
инвариантный к любой перестановке этих векторов, то он дол-
должен иметь вид
Ф2 = В [(ab) (cd) + (ас) (bd) + (ad) (be)],
57
где В — число; В находится, если доложить а = Ь = с =
= d = z, так что
- •» - " «ч С ' - Г
Ф2(х, z, z, z) = 3Z?= \ dQ(r-zL = \ dQ cos4 В = 4я/5.
Следовательно, /? = 4я.'15 и
Ф2 (a, b, с, d) = ^ [(аЬ) (cd) + (ас) (bd) + (ad) (be)].
В ааключение упомянем еще тождество
dU ^Г. C-28)
ab
которое было использовано Фейнманом для упрощения
вычисления интегралов, возникающих в квантовой тео-
теории поля. В качестве примера применения C.28) вычис-
вычислим интеграл
Г^C.29)
, 1) = Г
J
Используя C.28), преобразуем C.29) к следующему виду:
1
ф (к, 1) = j du \ , ^~JZ V C-30)
В C.30) интеграл по телесному углу в- точности равен
Iz[hu-\-l(l — и)], причем /2 находится из C.19). Таким
образом,
1
Это элементарный интеграл, хотя и весьма громоздкий.
Ответ имеет интересную форму
где Л = 1 — Ы, Б = УA — А2)A — Р).
3.3. ИНТЕГРИРОВАНИЕ ПО КОНТУРУ
Одно из наиболее мощных средств расчета определен-
определенных интегралов вытекает из теоремы о вычетах в теории
функций^комплексного переменного. В этом разделе мы
58
проиллюстрируем метод" контурного интегрирования на не-
нескольких примерах. Перед изучением этого материала
читателю, который не знаком с теорией функций комплекс-
комплексного переменного, рекомендуется посмотреть (или изучить)
определенные разделы этой теории.
Теорема о вычетах утверждает, что если функция / (z)
аналитична в области, ограниченной замкнутым контуром
С, за исключением конечного числа полюсов и изолиро-
изолированных существенно особых точек внутри С, то интеграл
/ (z) вдоль контура С равен \ / (z) dz = 2niS, где 2 —
сумма вычетов по всем полюсам и существенным особен-
особенностям внутри С.
Вычеты в полюсах и изолированных существенно осо-
особых точках можно находить следующим способом. Если
/ (z) имеет простой полюс (полюс первого порядка) при
z = zo, то вычет равен
а_, = [(* - zo) / WU,- (З-32)
Если / (z) записать в виде / (z) = q (z)/p (z), причем q (z)
регулярна, a p (z) имеет простой полюс в z0, то вычет / (z)
в zo можно вычислить по формуле
L C-33)
Если z0 — полюс га-го порядка, то вычет
Если zo — изолированная существенно особая точка, то
вычет находится с помощью разложения в ряд Лорана.
Проиллюстрируем на нескольких примерах метод кон-
контурного интегрирования.
Пример.
= f
C.35)
Рассмотрим ф dz/ (I + z2) вдоль контура, изображенного
на рис. 3.1. Вдоль вещественной оси интеграл равен 21.
Вдоль большого полукруга в верхней полуплоскости он
59
стремится к нулю, так как
z — R exp (iB), dz='\R exp (iB) с
™»1Г ( exp(-i6)"d6
1+z2 Д2
О, когда R —> оо.
Вычет функции 1/A + z2) = l/(z + i) (z — i) в z = i равен
l/2i. Таким образом, 2/ = 2ni (l/2i) = n, / = я/2. Отме-
Отметим, что важная часть задачи состоит в выборе такого
«обратного» пути, вдоль которого вклад легко считается
(предпочтительно, чтобы он равнялся нулю).
Плоскость г
-л-l
Рис. 3.1. Контур для интеграла Рис. 3.2. Последователь-
C.35). ная RL-цепь.
Пример. Рассмотрим последовательно соединенные со-
сопротивление R и индуктивность L (рис. 3.2). Предполо-
Предположим, что V (t) — импульс напряжения, т. е. очень боль-
большой импульс, действующий очень короткое время. Как мы
увидим в гл. 4, с хорошей точностью можно написать
где А — область под кривой V (t). Ток, созданный напря-
напряжением ехр(ш^), равен ехр(ш^)/ (R-\-ia>L). Таким обра-
образом, ток, возникающий вследствие импульса напряжения,
равен
exp (icot)
C.36)
Вычислим этот интеграл.
Если t <C 0, подынтегральное выражение экспонен-
экспоненциально мало при Im а> ->¦ —оо, так что можно замкнуть
60
онтур большим полукругом в нижней полуплоскости й,
доль которого интеграл стремится к нулю (справедли-
ость этой процедуры обеспечивается леммой Жордана).
{онтур не содержит никаких особенностей, так что / (t) =
= 0.
Если t > 0, то контур следует замыкать большим
юлукругом в верхней полуплоскости. Тогда
Пример.
/=
C.37)
Подынтегральное выражение не является четным, так
что нельзя распространить пределы до —оо. Рассмотрим
Плоскость г
Рис. 3.3. Контур для интеграла C.37).
интеграл \ inztfe/^ + z8). ; Подынтегральное выражение
многозначно; можно разрезать плоскость, как показано
на рис. 3.3, и определить lnjz вещественным (lnz=.lna;)
выше разреза. Тогда снизу "от разреза Inz = Inz + 2ni
и интегрирование вдоль указанного контура дает
ф In z dz/(l -(- z3) = — 2ni/. С другой стороны, используя
метод вычетов, находим
In z dz
1+гЗ
ыч Уз
Таким образом, / = Bя|АЗ)/9.
При интегрировании вокруг точки ветвления (как
в этом примере) необходимо показать, что интеграл по бес-"
конечно малому кругу вокруг точки ветвления равен
Плоскость г
Рис. 3.4. Контур для интеграла C.38).
нулю. В рассмотренном примере такой интеграл ведет
себя как г In г и при г -> О стремится к нулю.
Пример.
л
/= Г d6/(a + bcos6), >;>Ь>0. C.38)
Подынтегральное выражение четно, так что 2/ =
= I dQ/(a + Ъ cos 6). Если интегрировать вдоль единич-
о
ного круга, показанного на рис. 3.4, с z = exp(iB), dz =
= iexp(iB)d6,
exp(i6)H-exp(—i9) _ 1 / , 1 \ .* oQx
— о TV ' TJ» \p-ov)
то тогда
2/ =
dz/iz
2 f dz
i J bz*+2az+b m
62
Подынтегральное выражение имеет два полюса. Произве-
Произведение корней равно единице; один из них—внутри,
а другой—снаружи единичного круга. Полюса находятся
'-g— 1. Тогда
в точках х1Л = — -г- ±
2/ = -r-2ni (вычет вг,= ~"~S"^~V 1?— Ч '
2Ьхг+2а
Пример.
г
C.40)
Рассмотрим интеграл ф )fzdz/(l+z2) вдоль контура
на рис. 3.5. Выберем Y^z положительным на верхней
Плоскость z
Рис. 3.5. Контур для интеграла C.40).
части разреза. Тогда <t>]/rzdz/(l + z2) = 2/. С другой сторо-
стороны, используя_теорию вычетов, получаем <т>}/~z dz/(l -\- z2) =
= лУ~2. Следовательно, / = п/^
Пример.
63
f exp (az\ dz
Целесообразно рассмотреть интеграл \ , ' вдоль
некоторого контура. Один путь указан на рис. 3.6; он
Плоскость г
Рис. 3.6. Возможный контур для интеграла C.41).
включает знакомый большой полукруг. Заметим, что к ве-
величине а следует добавить определенную мнимую часть,
чтобы интеграл вдоль полукруга обращался в нуль. Тогда
Плоскость z
1
*-*-<*>
Рис. 3.7. Другой контур для интеграла C.41).
/ = 2niS. Здесь бесконечное число полюсов. При z = in
вычет равен — exp (ina), при z = З'т вычет равен — ехр (Зта)
и т. д. Таким образом,
/= 2m ^exP(i3ta) ^ п
1 — exp Braa) sin па '
Теперь можно положить 1ша->-0.
64
Другой способ состоит в том, чтобы использовать
контур, показанный на рис. 3.7. Вдоль вещественной оси
мы получаем /. Вдоль Im z = 2ni находим
_ Г ехр(а(*+2ш)) _ ?
J exp(z+2iu) + l rv '
Итак, [1 — ехр Bпш)\ I = 2п\ х {вычет в z = п\) =
= —2niexp(ina). Как и выше, находим / = n/sin зга.
Поимер.
+i
I=\dx/Vi — х* A + ж2).
C.42)
Рассмотрим интеграл ф —, вдоль контура, изо-
О J/1 — z2(l-|-z2)
браженного на рис. 3.8. На верхнем берегу разреза по-
I
Плоскость z
Рис. 3.8. Контур для интеграла C.42).
лучаем /, а на нижнем берегу к нему добавляется еще /.
. / 1 '
Следовательно, 2/ = 2ni|—;—j=r-\--t
\ 2л |/ 2 '
3.4. ТАБУЛИРОВАННЫЕ ИНТЕГРАЛЫ
Еще раз исследуем гамма-функцию, определенную для
Re z > 0 с помощью интеграла
Г (z) = f ж2-1 ехр (— х) dx.
5 Дж. Мэтьюз, Р. Уокер
C.43)
65
Интегрирование по 'частям дает
Г (z) = (z - 1) Г (z - 1), Re z > 1, C.44)
Таким образом, из Г A) = 1 получаем
Г B) = 1, Г C) = 2, Г D) = 6., . . ., Г (п) =
= (п — 1)!. C.45)
Гамма-функцию можно аналитически продолжить на всю
комплексную плоскость с помощью рекуррентного соот-
соотношения C.44), за исключением простых полюсов в точках
* = 0, -1, -2, , . .
Интересный интеграл, связанный с гамма-функцией,
встречается при рассмотрении
Г (г) Г (в) = j х*-1 ехр (- х) dx j у8-1 ехр (- у) dy.
о о
Положим х-\- у = и, x = ut,
оо и
Г(г)Г(в)= С du \ dx-xr-x(u — aj^expf — и) =
о о
о° . 1
- [ ехр( — и)ит+"-гги f dt-f-1 (l-t)s~1 = r (r + s) Б {г, s),
о о
о о
где В (г, s) — бет а-ф у н к ц и я,
= J я'-а-яГ1^- C-46)
J
Очевидно, что интегральное представление для В (г, s)
верно только при Rer>0, Res>0.
Интересный случай этого соотношения имеет вид
1
Г (z) Г A — z) = Г A) В (z, I - z) = j х*-1 A -*)-« d*.
Положим a; = f/(l + f). Тогда
66
Этот интеграл можно вычислить, используя контур
на рис. 3.9. Результат равен
Г (z) Г A - z) = я/sin nz. C.47)
Такой расчет справедлив только для О <С Re z << 1, однако
обе части равенства C.47) являются аналитическими функ-
функциями z (кроме z = 0, ±1, ±2, . . •), так что можно рас-
распространить результат на всю плоскость.
Плоскость t
сю
Рис. 3.9. Контур для интеграла 1 [t*-ldtl(i + t)].
Другой интеграл — так называемая интеграль-
интегральная показательная функция
X
Ei(a;)= \ exp (t)dt/t. C.48)
—со
Это определение обычно сопровождается разрезом плоско-
плоскости х вдоль положительной вещественной оси. Таким обра-
образом, Ei (x) однозначно определена для отрицательных
вещественных х; для положительных х следует различать
Ei (х + ie) и Ei (ж — ie).
Две функции, связанные с Ei (x),— это интегральные
синус и косинус:
х
Sia;= f sin tdt/t; C.49)
л
Cix=\ costdt/t. C.50)
5* 67
Интеграл вероятности ошибок определяется
следующим образом:
х
erf х = -4=- [ ехр (— t2) dt. C.51)
Связанные с ним тригонометрические интегралы известны
как интегралы Френеля
X X
{х) = f cos (jtf2/2) <Й, S (ж) = С sin (jrf2/2) <Й. C.52)
о о
о о
Другой табулированный класс интегралов — эллипти-
эллиптические интегралы. Они представляют собой инте-
интегралы вида
где А, В, С, D — полиномы, a S — полином третьей или
четвертой степени (конечно, не точный квадрат!).
Не будем углубляться в теорию; сделаем лишь ряд
замечаний, большинство которых читатель может прове-
проверить самостоятельно. В первую очередь
s_ f
S +
C+D
где Е и F—рациональные функции (отношения поли-
полиномов). Разлагая F на множители, мы видим, что един-
единственные иеэлементарные интегралы, которые требуется
вычислить, это
x^dx и С Ах ,о __.
-W;Hn^)^?W C'55)
Все интегралы /„ можно вычислить, зная Jo, J1 и /2,
а все интегралы Нп — зная Ht, Jo, Ji и J2. Следова-
Следовательно, требуется вычислить лишь интегралы
Т — f dx Г — f xdx Г _ f x*dx TJ — f dx
°"JW; '"JW: !"JW; '"
C.56)
Из многих стандартных форм для S рассмотрим только
форму Лежандра: S = A — xz)(l — к2х2). Тогда
/0 =
68
/0 = j dx/V{l — x2) (l —
Интеграл
X
F= j dx/V{l-x2)(l — k*x*) C.57)
о
называется неполным эллиптическим инте-
интегралом первого рода в форме Лежандра.
Обычно полагают х = sin ф и определяют
ф
, к) = \ Ц'/Vl — к* sin2 ф'. C.58)
Ъ
Если заменить xz = и, то /i становится «элементар-
«элементарным» интегралом.
Вместо /2гв качестве стандартного интеграла исполь-
используют неполный эллиптический инте-
интеграл второго рода в форме Лежандра:
X
i~\/\ 1-2г2 Лг
v \ * ах C.59)
о
Снова полагают х = sin ф и табулируют
' 1 — к2 sin2 ф' д,ф'. C.60)
Интеграл Hl вычислить труднее. Определяют непол-
неполный эллиптический интеграл третьего
рода в форме Лежандра
П(ф, п, к)=\ 2 , ^ , ~ C-61)
о
ф
= \ аф' . C.62)
J (l + nsin2*')!/1 — &asm24>'
о
При ф = эх/2 имеем полные эллиптические интегралы:
Я/2
K(k)=F^., b)=~ \ ^ . 2 ; C.63)
Я/2
? (&) = ? (-|, к) = f 1^1— &а sin2 ф йф; C.64)
Я/2
П(п, /с) = П (-^-, п, к] ¦-- \ —7====. C.65)
\2 / J A + г»2 sin2 ф) ~у\—№ sin2 ф
69
Среди многочисленных применений эллиптических ин-
интегралов отметим следующее: 1) движение простого маят-
маятника; 2) расчет" индуктивности катушки; 3) расчет длин
конических сечений; 4) вычисление телесных углов кру-
кругов, рассматриваемых под углом.
Большое число интегралов выражаются табулирован-
табулированными функциями; тогда очень полезны их инте-
интегральные представления. Например,
Г ™Щ=-Мх). C.66)
п Pn(cosQ), C.67)
-cose Г V2
где Jo (x) — удобным образом нормированное решение
уравнения Бесселя для т = О, известное под названием
функции Бесселя; Рп — полином Лежандра. Более под-
подробно такие интегральные представления «специальных»
функций рассмотрены в гл. 7.
3.5. ПРИБЛИЖЕННЫЕ РАЗЛОЖЕНИЯ
Часто можно получить полезное выражение для дан-
данного интеграла посредством разложения подынтегрального
выражения в ряды различного типа.
Пример.
+4 /6 \
— *2 + -2Т~Г + •••—•••) dt =
X+5i Йг+ ... — -..)• C.68)
Этот ряд сходится для всех х, однако он полезен только
при малых х (х <; 1).
Часто целесообразно интегрирование по частям.
Пример. Предположим, нужно вычислить erf x для
больших х. Когда х —*- оо, erf x —*-1. Выясним, насколько
70
функция отличается от единицы:
DO
1— erix = —-|=- f exp( — tz)dt.
.Вьщсшним несколько раз интегрирование по частям:
ехр(—ta) dt
2Р
X
, f 3
г J T
3 exp(-t2)
T i :
и т. д. После п интегрирований по частям находим
'erf х= 1 т=-
1-3 1-3-5
4_С *\n~i 1-3-5 ... Bи-3)
1-3-5. ..Bп-1)
fiq
Члены в скобках приводят к бесконечному расходящему-
расходящемуся ряду. Ряд не сходится ни для каких х, так как его чле-
члены, начиная с некоторого, растут с ростом п. Тем не менее
выражение с конечным числом членов очень полезно при
больших х.
Выражение C.69) будет точным, если включить «оста-
«остаток», т. е. последний член, содержащий интеграл. «Оста-
«Остаток» меняет знак с ростом п. Это означает, что при
учете п членов ряда ошибка по величине меньше, чем
следующий член. Таким образом, точность приближен-
приближенного выражения в скобках максимальна, если ограни-
ограничиться суммированием до члена, предшествующего наи-
наименьшему.
Выражение в скобках в формуле C.69) представляет
собой пример асимптотического ряда. Точ-
Точное определение такого ряда (Пуанкаре)
S (Z) = Co + -7- + -§-+ ...+-? + ... C.70)
71
есть разложение / (z) в асимптотический ряд [/ (z) ~ S (z),
где ~ означает «асимптотически равно»]; для любого п
ошибка при обрыве ряда на члене cnz~n стремится к нулю
быстрее, чем z~n, когда | z | —»- оо в некотором интервале
arg z. Таким образом,
lim zn[f(z)-Sn{z)] = О C.71)
|z|->oo
для arg z в данном интервале. [Сходящийся ряд
стремится к / (z), когда п —>- оо при фиксированном zT
в то время как асимптотический ряд стремит-
стремится к / (z), когда z -»- оо при фиксированном п.]
Из этого определения легко показать, что асимптоти-
асимптотические ряды можно складывать, перемножать и интегри-
интегрировать для нахождения асимптотических рядов суммы,
произведения и интеграла от соответствующих функций.
Кроме того, асимптотическое разложение данной функции
/ (z) однозначно, однако асимптотический ряд не опреде-
определяет однозначно функцию / (z).
Мы не доказывали, что ряд в формуле C.69) был асим-
асимптотическим рядом, но это нетрудно сделать.
Пример.
— X X
Ei (— х) = f exp (t) dt/t = С exp (— t) dt/t {x > 0);
—oo oo
X
Ei( — x)= — ех$(~х)/х— f exp( — t)dt/t* =
oo
X
— — exp (— x)/x + exp (—x)/x* + 2 ^ exp (— t) dt/t3.
Продолжая тем же способом, находим
-Ei(-x)= exp(-*} [1-1+4-4+... — ..
C-72)
Можно использовать этот результат а) как асимпто-
асимптотический ряд для Ei(—х):
C.73)
72
б) как точное выражение для расчета некоторых интег-
интегралов [предполагая наличие таблицы Ei(#)]. Из формулы
C.72) имеем
(-1)" еху(-х)
Г, 1 2J
LЛ ~т+"р"~ •¦•. + • ••
+(-1)" {n~2)l 1
C.74)
Этот интеграл называется неполной гамма-
функцией.
3.6. МЕТОДЫ СЕДЛОВОЙ ТОЧКИ
Другие важные способы приближенного расчета инте-
интегралов известны под названием методов седло-
вой точки (перевала). Наиболее важный из
Рис. 3.10. График функции txe~t при больших а;.
них — это метод наискорейшего спуска
иллюстрируем этот метод, отыскивая приближенное
жение для Г (х) при положительных и больших х
. Про-
выра-
выраВид подынтегрального выражения при больших х
зан на рис. 3.10. Найдем максимум:
C.75)
пока-
пока= x.
Теперь аппроксимируем подынтегральное выражение осо-
особым способом, записывая его в экспоненциальной форме
73
exp [/ (t)] и используя разложение / (t) в ряд Тейлора
вблизи максимума (разложение в ряд Тейлора, например,
самого подынтегрального выражения было бы нецелесо-
нецелесообразно, если стремиться ограничиться лишь небольшим
числом членов). Подынтегральное выражение в фор-
формуле C.75) имеет вид exp [/ (t)] = tx exp (—t) =
= exp {x In t — t), так что / (t) = x In t — t; /' (t) =
= x/t — 1; /' = 0 при t = x, f" (t) = — x/fi. Далее раз-
разлагаем / (t) около точки t = x:
oo
\
dt
DO
exp (x In x — x) \ exp Г — -^(t — xJ]
(если x ^> 1, то, распространяя нижний предел интегри-
интегрирования до —ooj получаем очень маленькую погреш-
погрешность). Вычисление интеграла по t дает Г (х + 1) я*
л; У~2пххх ехр (—х). Это первый член формулы
Стирлинга, которая представляет собой асимптоти-
асимптотическое разложение гс! = Г (п + 1):
К этому асимптотическому ряду мы еще возвратимся
в конце главы.
В общем случае метод наискорейшего спуска приме-
применяют к интегралам вида
7(a)=fexp(a/(g))tfe, C.77)
Ъ
где a — положительное и большое число; С — такой кон-
контур в комплексной плоскости, что его концы не вносят
существенного вклада в интеграл. В действительности
этот метод дает первый член асимптотического разложе-
разложения / (а), справедливого при больших а.
Если / (z) = и + iv, то наибольший вклад в / (а) ожи-
ожидается от тех частей контура, где и велико. Идея метода
наискорейшего спуска состоит в следующем: нужно де-
деформировать контур С так, чтобы область большого и
сжалась в столь короткий участок, сколь это возможно,
74
Чтобы увидеть, как надо деформировать контур, необ-
необходимо более или менее подробно исследовать поведение
функций и и v. Однако некоторые общие особенности
справедливы для любой регулярной функции / (z). Ни и,
ни v не могут иметь максимум или минимум нигде, кроме
особенности, так как V2u = 0 и v2f = 0. Например, если
д2и/дх2 << 0, то д2и/ду2 > 0, так что «пологий участок»
поверхности и (х, у), где
ди/дх = ди/ду = 0, C.78)
должен быть «седловой точкой»," вблизи которой поверх-
поверхность похожа на седло или на горный перевал (рис. 3.11).
Из уравнений Коши — Римана ди/дх = dv/ду, dv/dx =
= — ди/ду заключаем, что равенство C.78) приводит
к соотношениям dv/ду = 0 и dv/dx = 0. Следовательно,
/' (z) = 0. Таким образом, седловая точка функции
и (х, у) есть также1 седловая точка функции v (x, у), а так-
также точка, где /' (z) = 0.
Вблизи точки z0 имеем / (z)да / (z0) -f у /" (z0) (z — zo)a.
Положим /" (z0) = p exp (Ш), z — zo = sexp(i^). Тогда
2 C.79)
v да v (xOt Уо) + у ps2 sin F + 2ф).
Мы видим, что на поверхности и (х, у) пути наискорей-
наискорейшего спуска с седловой точки в долины начинаются в на-
направлениях cos @ + 2ф) = — 1. В этих направлениях
величина v = v (х0, уо) постоянна. Если отходить дальше
от точки z0, то путь наискорейшего спуска следует в на-
направлении —grad и, перпендикулярном линиям постоян-
постоянного и. Таким образом, путь следует вдоль кривой
v (х, у) = const = v (хо, уе), так что множитель exp (iai>)
в исходном подынтегральном выражении не дает осцилля-
осцилляции, которые разрушили бы всю картину. Поэтому дефор-
деформируем первоначальный контур С так, чтобы он прошел
по пути наискорейшего спуска. Используя в интеграле
C.77) приближение C.79), находим
/ (а) да ехр (а/ (z0)) Г ехр (— (а/2) ps2)>xp (Ц) ds; I
-i. r C-8°)
/ар ехр (а/ (z0)) exp (ij>), )
75
Рис. 3.11. Топография поверхности и = Re / (z) для типичной функции / (z) вблизи седловой
точки z0.
Жирные сплошные линии проведены из седловой точки через середины долин и хребтов; пунктирные линии—
это линии уровня u=u(ao, !/o)=COIlst' Кривая АА'-путь наискорейшего спуска.
где ф имеет одно из значений —9/2 ± я/2 в зависимости
от направления движения через перевал (ф — угол накло-
наклона пути в седловой точке). Например, если В = я/2, есть
Рис. 3.12. Две
возможности
для путей наи-
наискорейшего
спуска.
две возможности (рис. 3.12). Гораздо более вероятно, что
правильна первая возможность; чтобы быть уверенным
в этом, исследуют «участки горных цепей», которые про-
проходятся. Если они выглядят, как показано на рис. 3.13, а,
Хребет
а
Am'
Хребет
Рис. 3.13. Различное расположение «горных хребтов» для
двух случаев, показанных на рис. 3.12.
то действительно правилен выбор ф = я/4. С другой
стороны, если горы выглядят так, как показано
на рис. 3.13, б, то правилен второй выбор, ф = — Зя/4.
В качестве примера использования метода наискорей-
наискорейшего спуска с более общим контуром исследуем асимпто-
асимптотический вид Г (z) при комплексных z, не делая никаких
упрощений, основанных на наших предыдущих вычис-
вычислениях этой функции:
Г(г)=
Г<* + 1) =
C.81)
77
Положим: z = а ехр AE). Тогда
со
Г (z-f 1) = [ ехр [а (in t -у) ехр (ф)] dt C.82)
о
и
/ (t) = (in * - i-) ехр (ф); /' (*) = A —I) ехр (ip);
/(*„) = (In *-l) юр (if);
Таким образом, р = I/a2, В = я; — p. Чему равно ф?
Пользуясь условием cos (В + 2ф) = — 1, находим ф = р/2
или р/2 — п.
При рассмотрении этого примера с вещественным z мы
имели р = 0 и j> = 0, так чтр наиболее разумным сейчас
кажется выбор ф = р/2. Однако, так как иногда нужно
более подробно исследовать топографию поверхности и =
= Re / (t), на рис. 3.14 для рассматриваемого примера
показаны хребты и долины, причем взят случай р = я/4.
Этот рисунок подтверждает выбор ф = р/2. Ясно, что пер-
первоначальный, путь интегрирования вдоль вещественной
оси t нужно деформировать так, чтобы он проходил через
седловую точку to = z по пути наискорейшего спуска
(т. е. долинам) в направлении, определяемом углом
ф = Р/2.
Далее из C.80), пользуясь методом наискорейшего
спуска, можно написать следующее выражение для
Г (z + 1):
Г (z + 1) — УЪю. ехр (z In z—z) ехр (iP/2);
Г (z + 1) ~ /2л"гг+1/2 ехр (-z). C.83)
Первоначальное интегральное представление для Г (z)
действительно только в области Re z >• 0. Однако резуль-
результат C.83) в действительности верен для всех | z | -v oo
в случае, если точка z достаточно- удалена от отрицатель-
отрицательной вещественной оси.
78
Результат C.83) является первым членом асимптотиче-
асимптотического ряда для гамма-функции. Найдем следующие члены.
Сначала напишем
Г (z) да V2n (z - if'1'2 exp [ - (z -1)] да
-1'* (l_i-)*-1/2exp[-(z-l)] я-
¦V2n:
2-1/2
exp( — z).
Положим далее
T(z)
C.84)
ku^const у
/
/
v=const
Рис. 3.14. Топография поверхности и =» Re / (t) =
= Re (lnt—t/г) exp (if) для случая z = Зехр [i (n/4)].
Константы Л, В, ... можно найти из рекуррентного
соотношения для гамма-функции T(z-\-l) = zT(z). Исполь-
Используя C.84), имеем
Г (z +1) = У2п (z + 1)г+1/2 exp [ — (z + 1)J X
vh-U A i Д I 1
XL +z"+T+(z + lJ + -- -J =
x L1
79
= V2n exp [ (z +1-) In 2 — z -f
__
12z2 12z3 + 402*
X
С другой стороны, C.84) приводит также к следующему
равенству:
Сравнивая соответствующие члены в обоих рядах, полу-
получаем А = 1/12, В = 1/288, . . . Этот результат согла-
согласуется с формулой C.76), приведенной выше для z = п.
Мы не доказали справедливость этой процедуры, тем
не менее она дает правильный ответ.
Рассмотрим еще один метод приближенного расчета
интегралов. Это так называемый метод стацио-
стационарной фазы; он относится к интегралам вида
/= j exp[ia/(z)]dz, C.85)
где а положительно и велико, а / (z) вещественна вдоль
контура С. До тех пор пока не выполнено условие /' (z) =
= 0, вклады в / от соседних участков z будут сильно со-
сокращаться из-за быстро осциллирующего характера
exp [ia/(z)]. Таким образом, следует обратить внимание
яа точки контура, где /' (г) = 0 и использовать результат
Ясно, что этот метод весьма тесно связан с методом наи-
наискорейшего спуска. Отметим, что если подынтегральное
выражение для обоих методов записать в одной и той же
форме exp [a/ (z)], то в методе наискорейшего спуска путь
интегрирования проходит вдоль кривой' Im / (z) = const,
а в методе стационарной фазы — вдоль кривой Re / (z) =
= const.
ГЛАВА *+
ИНТЕГРАЛЬНЫЕ
ПРЕОБРАЗОВАНИЯ
4.1. РЯДЫ ФУРЬЕ
Начнем с рассмотрения функции / @), определенной
в интервале 0 ^ 6 <С 2я. Ищем ее разложение в виде
оо
/F) = (Д/2)+ ^(AnCOsnQ + BnSinnQ). D.1)
n=l
Коэффициенты можно найти, если умножить обе части
D.1) на cosnG (или sinnB) и проинтегрировать от 0 до 2я.
2я> 2it
/F)cosn6de, Bn = (l/n) j f(Q)sinnQdQ. D.2)
Ряд D.1), называемый рядом Фурье для / (В), схо-
сходится во всех точках к у [/ (В +) + / (В —)], если функция
/ F) на интервале 0 ^ 6 <С 2я ограничена [2].
Ряд Фурье периодический, так что он точно повторяет
функцию / F) на участках 2я ^ 6 < 4я, —2я <! В < О
и т. д. Не обязательно начинать с интервала [0, 2л]; годит-
ся любой интервал длиной 2я. Часто более удобен интер-
интервал от —я; до п.
Можно выделить типы функций, для которых неко-
некоторые, члены ряда Фурье обращаются в нудь.
1. Четные функции: / (—6) = / @) или / Bл — 6) =
= / (В) и т. д. Остаются только косинусы, т. е. Вп = 0.
Пример показан на рис. 4.1.
2. Нечетные функции: / (—6) = — / F). Остаются
только синусы, т. е. Ап = 0. Пример показан на рис. 4.2.
3. Четные функции, симметричные относительно я/2:
/ (я/2 + 6) = / (я/2 — В). Остаются только косинусы
с четными п, т. е. Вп = 0, A^n+i = 0. Пример показан
на рис. 4.3.
6 Дж. Мэтьюз. Р. Уокер 81
-2ж
2Ж В
Рис. 4.1. Четная функция с периодом 2л.
№
-2ж -ж О
ж гж в
Рис. 4.2. Нечетная функция с периодом 2л.
/щ
-2Ж -Ж О
гж в
Рис. 4.3. Четная функция, симметричная относительно
л/2.
Очевидно, существует много таких возможностей. Рас-
Рассмотрим теперь несколько примеров рядов Фурье.
Пример.
1, о<е<л,
: ;
Это нечетная функция, так что членов с косинусами нет.
Она симметрична относительно л/2, откуда следует, что
нет четных членов с синусами. Для нечетных п имеем
2я Я/2
Вп = A /л) J / F) sin nQ dB = D/л) j / F) sin nQ dB = А/па.
о с
Следовательно,
^/п\ 4 / . п , sin 30 . sin 50 , \ ,, г\
^e)==ir(smeH з ' 5 !"•••)• D-4)
Этот ряд неравномерно сходится вблизи точки разрыва.
Последовательные приближения показаны на рис. 4.4.
Рис. 4.4. Зависимость частичной суммы ряда Фурье D.4) от числа
членов.
Отметим всплеск, называемый явлением Гиб-
б с а. В пределе бесконечно большого числа членов всплеск
остается конечным — приблизительно 0,18.
Если в ряде Фурье D.4) положить 6 = я/2, получаем
П . 1 1 1 // с\
_=1__ + т__+..._... D.5)
Этот ряд известен как ряд Грегори. Его можно
также вывести из разложения arctg х = х — (ж3/3) +
+ E/5)
Пример.
/ F) = cos кв (—л < 6 < л).
Ряд Фурье для cos кд уже упоминался в связи с числами
Бернулли. Так как / (G) четно, то остаются только члены
6* 83
с косинусами:
я
Таким образом,
JQ 2k sin кп ( 1 cos в . cos 20
.. + ...). D.6)
Конечно, можно обобщить ряды Фурье так, чтобы
представить функции, периодичные с некоторым периодом
L, отличным от 2л. Положим х = QL/2n. Тогда интервал
длины 2л в переменной 6 переходит в интервал длиной L
в переменной х. Наши формулы приобретают вид
2nnx , г, ._ 2nnx
^„COS—^
n=l
x) cos —j— df;
sin ? Ах.
L
2 Р
D.7)
К этому интервалу можно также применить все сделан-
сделанные выше замечания о четности, нечетности и т. д.
В данной задаче нужно исследовать, что брать за основ-
основной интервал L. Предположим, что функция / (х) задана
в интервале 0 < з; < о. Можно разложить / (х) в ряд
Фурье с периодом а:
оо
2япх . „ _.. 2ппх \ , ц\
а
п=1
Ясно, что для произвольной функции / (х) нужны как ко-
косинусы, так и синусы. Иными словами, отдельно косинусы
или синусы не образуют полной системы.
С другой стороны, можно произвести разложение толь-
только по синусам, если определить / (х) на участке —а << х <С
< 0 равенством / (—х) = —/ (х). Возьмем теперь в каче-
качестве периода ряда Фурье величину 2а. Тогда
f(x)= 51 Вп sin (ппх/а). D.9)
п=1
84
Таким образом, мы выбросили косинусы, но удвоили
число членов с синусами; система функций по-прежнему
остается полной.
Часто удобно записывать ряды Фурье в комплексной
форме
/F)= 2 anexp(m6), D.10)
П=—оо
или, в более общем случае,
оо
/(*)= 2 anexvBninx/L). D.11)
П=—оо
Чтобы вычислить коэффициенты ап в D.11), умножим обе
стороны на ехр (—2nimx/L) и проинтегрируем от 0 до L
(или какому-нибудь другому интервалу длиной L). Тогда
мы замечаем, что
\ ехр (— 2nimx/L) exp Bninx/L) dx = L8mn, D.12)
где 8тп называется б-символом Кронекера и опре-
определяется равенствами
0, если тфп;
D13)
{0,
1,
{
1 если m =
Сл едовател ьно,
L оо
A/L) j / (х) ехр (— 2nimx/L) dx = 2 «Л» = ат.
0 п=—оо
Заметим, что знак показателя экспоненты изменился:
оо
f(x)= 2 anexpBninx/L),
П——оо
V D.14)
\ / (x) exp (— 2ninx/L) dx.
о
В физических применениях часто представляет инте-
L
рее величина A/L) \ \f(x) |2 dx. Разлагая / (х) в комплекс-
0
ный ряд Фурье D.11), получаем
| fl(x) p?fe=i-jda;BoB exP Bsdnx/L)) X
On
X ( 2 От exp (— 2nimx/L) \ =
Результат D.15) показывает, что каждая компонента
Фурье / (х) вносит вклад в интеграл \ | / (х) \zdx незави-
oJ
симо от других компонент Фурье. Интерферирующих чле-
членов вида а*ат нет. [Сравните замечания, сделанные ниже
в связи с примером D.26).]
4.2. ПРЕОБРАЗОВАНИЯ ФУРЬЕ
Начнем с комплексного ряда Фурье
/ (х) = 2 ап ехР Bninx!L),
п
L/2
ап = A /L) \ / (х) ехр (— 2ninx/L) dx.
-L/2
Рассмотрим случай L —> оо. Тогда сумму можно пре-
преобразовать в интеграл следующим образом: определим
2nn/L = y и Lan — g(y). Так как п в сумме возрастает
оо оо
каждый раз на единицу, то ^ Fn— \ Fndn =
П=—оо
= (L/2n) \ F(y)dy, где F(y) = Fn. Таким образом, полу-
—оо
ченные выше формулы приобретают вид
D.16)
= j f(x)exp( — ixy)dx.
86
Величина g (у) называется преобразованием
Фуръе от /(х) и наоборот. Положение множителя 2л
довольно произвольно; часто величины fug определяют
более симметрично:
g(y)exp(ixy)dy,
f(x)exp(-ixy)dx.
D.17)
Выражения D.16) или D.17) можно скомбинировать
следующим образом:
ОО СО
/(ж) = A/2я) j dyexp(ixy) j / {х') exp (- ix'y) dx' =
—со -co
CO OO
= f dx'/(x')(l/2n) f exp[i(x — x')y]dy. D.18)
Равенство D.18) удовлетворяется для любой функции
/ (х); это позволяет сделать интересный вывод об интегра-
оо
ле к- \ exp [i (х — х') у] dy как функции х'. Он равен
ОО
нулю всюду, кроме точки х' = х, а интеграл от него
по любому промежутку, включающему х, равен единице,
т. е. эта функция имеет бесконечно высокий и бесконечно
узкий пик в точке х' = х.
Обычно определяют б-функцию (Дирака) б (х) следую-
следующим образом:
+ь
f 6(x)dx=i, a, fe>0.
—а
Из. этих уравнений следует, что
D.19)
D.20)
для любой функции f{x), в случае если интервал инте-
интегрирования включает точку х~
87
Проделанные выше операции над интегралами Фурье
показали, что
оо
6(ж) = A/2п) j ехр (ixy) dy. D.21)
— оо
Это интегральное представление 6-функции.
Дельта-функцию можно использовать, чтобы выразить
оо
важный интеграл I | / (х) |2 dx через преобразование
Фурье D.16) от f(x):
\f(z)\*dx = j dx(l/2n) j g*(y)exp(-ixy)dy(i'2n)x
—CO —OO
oo
X j g(y')ejq?(ixy')dy' =
— oo
CO OO CO
= (l/2n) j dyg*(y) j dp'g(/)(l/2n) j d*exp(i (*/'-*/)*) =
oo —oo
CO
dyg*(y) j dy'g(y'N(y'-y) =
oo
= (l/2n) j dyg*(y)g(y). D.22)
— oo
Это равенство называется теоремой Парсеваля.
Она полезна для понимания физической интерпретации
преобразования Фурье g (у), если известен физический
смысл / (х) [см. пример D.26I.
Предположим, что / (х) — четная функция. Тогда
оо О
J /(х)ехр (— \ху) dx =
—оо
= J / (х) [ехр (ixy) + ехр (— ixy)] dx =
оо
= 2 | / (ж) cos a# dx, jD.23)
Заметим теперь, что g (у) — также четная функция.
Поэтому
со
/ (х) = A/п) f g (у) cos xy dy. D.24)
Ъ
Функции / (х) и g (у), определенные теперь только для по-
положительных х и у, называются косину с-п р е о б р а-
зованиями Фурье по отношению друг к другу.
Рис. 4.5. Затухающая синусоидальная волна.
Рассматривая преобразование Фурье нечетной функ-
функции, получаем аналогичные соотношения Фурье между
с и н у с-п реобразованиями Фурье:
ОО оо
/ (х) = — J g (у) sin xy dy, g (у) = 2 j / (x) sin xy dx. D.25)
о о
Если нужно, можно симметризовать выражения, поставив
множитель 1//я перед каждым интегралом в D.23)—
D.25).
Подробные таблицы преобразований Фурье приведены
в работе [31.
Пример.
О U<0);
D.26)
ехр (— t IT) sin aot
Эта функция (рис. 4.5) может представлять, например,
координату затухающего гармонического осциллятора
?9
или электрическое поле в излученной волне, или ток
в антенне.
Преобразование Фурье / {t) равно
оо
g((o)= \ /(?)ехр( — Ш)сИ =
— оо
оо
= \ ехр (— tIT) sin (aot exp (— Ш) dt =
о
_±( i * \.
Физический смысл g (со) можно интерпретировать
с помощью теоремы Парсеваля D.22). Например, если
f (t) — напряженность из-
лученного электрического
поля, то излученная мощ-
мощность пропорциональна
\f (t)\2, а полная излучен-
излученная энергия пропорцио-
пропорциоРис. 4.6. Энергетический спектр
для затухающего колебания, по-
казанного на рис. 4.5.
нальна
но
|2 dt. По
Jl/W
о
теореме Парсеваля это рав-
оо
L jk(co)|2dco. Тогда
—оо
(со) |2 имеет смысл энер-
энергии, излученной в еди-
единичном интервале частоты (с точностью до множителя).
Предположим, что Т весьма велико (соо?1 Э> !)• Тогда
«частотный спектр» g (со) имеет довольно резкий пик при
<о = ±соо. Например, вблизи со = соо
_1 1
2 п/,
Когда со = coo ± 1/Г, «амплитуда» g (со) уменьшается
в У^2 раз, а излученная энергия | g (со) |2 падает в два
раза. Другими словами, ширина Г, на которой мощность
убывает до половины максимальной, равна Г « 2/Г.
На рис. 4.6 показан энергетический спектр | g (со) |2.
Этот результат есть типичный «принцип неопределен-
неопределенности», и он очень тесно связан с принципом неопределен-
90
ности Гейзенберга в квантовой механике. Время Т, в тече-
течение которого что-либо осциллирует, обратно пропорцио-
пропорционально ширине Г, представляющей собой меру «неопре-
«неопределенности» частоты.
Преобразования Фурье легко обобщить на большее
число измерений. Например, в трехмерном пространстве
имеем пару преобразований
ф(к)= fd3x/(x)exp(-ikx);
\ D-27>
Как и выше, из них можно получить интегральное пред-
представление
D.28)
причем трехмерная 6-функция определена соотношениями
Fх) = 0, х^=0; 1 d3x6(x) = l, в случае если начало коор-
координат лежит внутри области интегрирования; далее имеем
D.29)
Такие пары преобразований представляют интерес в кван-
квантовой механике. Если / (х) — волновая функция частицы,
то преобразование Фурье ф (к) есть так называемая вол-
волновая функция в импульсном про-
пространстве. ФункцииУ| / (х) |2 и | ф (к) |2 суть распре-
распределения вероятности соответственно для координаты и
импульса.
Пример.
И''* ехр(-
D.30)
Это волновая функция, приводящая к гауссовому рас-
распределению вероятности; [ / (х) |2 имеет максимум при
'• = 0 и нормирована так, что \ d3x\ /(х) [2 = 1. Преобра-
Преобразование Фурье равно
ф (к) = N \ dsx • ехр (— г2/а2) ехр (— ikx).
91
Введем полярные координаты с осью z вдоль к. Обозна-
Обозначим cos 0 = а. Тогда
оо +1
ф (к) = 2nN \ г2 dr\ da-exp (— г2/a2) exp (—ikra) =
о ±i
= Dл/ft) N \ г dr exp (— r2/a2) sin кг = Dл/ft) (#/2i) X
о
оо
г dr exp (— r2/a2) exp (ikr) = -=?- iV exp (— &2a2/4) x
— oo
J
X
— оо
= -g- ЛГ exp (- ^
Наконец, вспоминая, что JV = B/яс2K^4, получаем
ф (к) = Bла2K/4 ехр ( — /Аг2/4). D.31)
Заметим, что преобразование Фурье гауссова распре-
распределения есть другое гауссово распределение. Чем уже рас-
распределение по х (т. е. чем меньше величина а), тем шире
распределение по к. Ширины Ах и Ак, грубо говоря, об-
обратно пропорциональны друг другу: Дх Ак « 1. Извест-
Известная из квантовой механики связь р = Йк (р — импульс)
преобразует это равенство во второе квантовомеханическое
соотношение неопределенности Ах Ар ~ 7L
Найденное выше распределение вероятности | ф (к) |2
есть гауссово распределение с центром в точке к = 0.
Можно ожидать, что аналогичное распределение с центром
в точке ко, выбранной произвольно, получается, если
стартовать с того же распределения вероятности по про-
пространству | / (г) |2. Как легко может проверить читатель,
это осуществляется просто умножением / (х) на exp (ikox).
4.3. ПРЕОБРАЗОВАНИЯ ЛАПЛАСА
Часто нас интересуют такие функции, для которых
не существует преобразования Фурье. Например, простая
функция / (х) = А = const и / (х) = х2 имеют расходя-
расходящиеся интегралы преобразования Фурье. Для многих
93
функций неприятности при + оо можно устранить умно-
умножением на множитель ехр (—сх), где с вещественно и
больше некоторой минимальной величины а. Хотя этот
множитель может изменить весь ход функции при х —>
->- — оо, нас часто интересует функция лишь для положи-
положительных х. Таким образом, можно позаботиться о поведе-
поведении при отрицательных х, введя второй множитель —
ступенчатую функцию (Хевисайда):
;
D-32)
[(d/dt) Н (?) = 6 (t); это можно установить, интегрируя
б-функцию].
Теперь функция / (х) ехр (— сх) Н (х) имеет преобраэо
вание Фурье:
g{y)= \ /(х)ехр( —сх)#(х)ехр( —m/)dz =
—СО
оо
= 1 / (х) ехр (— сх) ехр (— ixy) dx.
Обратное преобразование:
оо
/(х)ехр( — сх)#(х) = A/2я) [ g(y)exp(ixy)dy.
Введем теперь новую переменную
s = с + iy D.33)
и определим F (s) = g (у). Два вышеприведенных интегра-
интеграла приобретают вид
F(s)= \ f (х) ехр (— sx) dx, D.34)
о
f?x) Н (х) = (l/2ni) j F (s) exp (sx) ds, D.35)
с
причем путь интегрирования С идет вдоль прямой линии
Re s = с = const (рис. 4.7).
93
Функция F(s), получаемая из равенства D.34), назы-
называется преобразованием Лапласа от
/ (х). Интеграл существует только в правой полуплоско-
полуплоскости s, Re s > а, где а — минимальный предел для с.
В этой области преобразование F (s) аналитично; обычно
F (s) в левой полуплоскости можно определить с помо-
помощью аналитического продолжения.
Второй интеграл D.35) называется интегралом
обратного преобразования Лапласа.
Заметим, что для г>0 он дает / (х) {или, более точно,
А
у [/ (х +) + / (ж—)!}. а для
Плоскость S х < 0 он автоматически равен
нулю.
Начиная с этого места мы
будем опускать Н (х) в D.35)
™~ и писать просто
Im S
Re s
/(*) =
c+io
Рис. 4.7. Контур для интегра-
интеграла обратного преобразования
Лапласа D.35).
= (l/2ni) f F (s) exp (sx) ds,
c—ioo
D.36)
подразумевая, что все функ-
функции f(x), которые можно
трансформировать по Лапласу, равны нулю для отрица-
отрицательных аргументов.
Пример.
Этот интеграл существует для Re s > 0 (т. е. а, = 0). Заме-
Заметим, что F (s) имеет особенность (в этом примере простой
полюс) на граничной линии Re s = 0.
Можно проверить формулу обращения
c+ico
j
где с > 0. Если х > 0, замыкаем контур большим полу-
полукругом слева и / (х) = 1. Если х < 0, замыкаем контур
справа и / (х) = 0.
В конце этой главы помещена краткая таблица преоб-
преобразований Лапласа. Более полные таблицы можно найти
в книге [3].
4.4. ДРУГИЕ ПАРЫ ПРЕОБРАЗОВАНИЙ
Преобразования Фурье — Бесселя
(или преобразование Ханкеля):
со
g (к) = j / (x) Jm (Лис) х dx; D.38)
оо
/ (ж) = j g (к) Jm (кх) к dk. D.39)
Преобразование Меллина:
; D.40)
4>(z)dz. D.41)
-loo
Преобразование Гильберта:
4.5. ПРИМЕНЕНИЯ ИНТЕГРАЛЬНЫХ ПРЕОБРАЗОВАНИЙ
Сначала сделаем заключения об основных свойствах
преобразований Фурье и Лапласа.
1. Оба преобразования линейны.
95
2. Преобразования otn производных:
со
j exp (-sx) f (x) dx = exp (-sx) / (x)
CO
-f- s I exp (— sx) / (x) dx.
о
Преобразование Лапласа от / (x) будем записывать
в виде X [/ (х), s] или X [/ (хI, а преобразование Фурье —
в виде sp [/ (x)l. Тогда найденное выше соотношение мож-
можно записать так:
X [/' (x)I = sX [/ (x)I - / @). D.44)
Аналогично
X [/" (x)I = s*X [/ (x)I - s/ @) - /' @) D.45)
(отметим, что 0 означает на самом деле 0+). Для преобра-
преобразования Фурье проинтегрированные части обращаются
в нуль и
& [/' (x)I = \y&[f (x)I и т. д. D.46)
3. Преобразования от интегралов:
f(t)dtj= j dxexp( — sx) f f(t)dt =
oo
= f dt \ dxf(t)exp(— sx) = -^- ^ dt f(t)exp( —
0 t 0
oo oo
0 t
Таким образом,
D.47)
Для преобразований Фурье дела обстоят не так просто.
Предположим, что g (х) = \ / (х) dx есть неопределенный
интеграл от /(х). Тогда из D.46) if [/(х)] = ij/jF [g (x)].
Однако отсюда нельзя сразу сделать вывод, что
JF [# (#I = № I/ (ar)I/ij/. Почему? Можно ли иэ рассмотре-
рассмотрения уравнения х/ (ж) = g (х) заключить, что / (х) =
= g (х)/х? Нет, для точки х = 0 нельзя. Общий результат
96
есть f (x) = g (x)lx + СЬ (х),- где С — произвольная по-
постоянная. Таким образом,
& I j / (х) dx] = & If {x)]/iy + СЬ (у). D.48)
Этот произвол также очевиден из того факта, что I / (x) dx
определен с точностью до произвольной аддитивной
постоянной, и
& 1С] = 2пСЬ (у).
4. Сдвиг
— ixy)dx =
= j /(ж)ехр[ — iy(x — a)\dx.
оо
Поэтому
&lf(x + a)] = exp (iajr) ^ [/ (я?)]. D.49)
В случае преобразований Лапласа нужно быть более осто-
осторожным. Рассмотрим отдельно случаи а > 0 и a < 0.
При a > 0 функция / (а: -}- а) показана на рис. 4.8, б.
Так как преобразование Лапласа игнорирует / (х) при
х < 0 (на самом деле предполагает, что функция равна
нулю), то мы должны обрезать часть нашей функции, и
— sx)dx =
= j /(ж)ехр[— s(x — a)]dx,
так чтс
а
( Г
* /ф\ pvn (
I ч&г I CA1J I
a>0. D.50)
С другой стороны, f(x—а) показана на рис. 4.8, в, и
оо
X[f(x — a)]= \ f(x — a)exp( — sx)dx =
о
оо
— 1 / (х) ехр [ — s,(x + a)] ^x-
—а
' Дж. Мэтыоз. Р. Уокер 97
Поэтому
X[f(x- а)\ = exp (-as) X If (x)], a > 0. D.51)
5. Умножение на экспоненту.
Легко проверить две следующие формулы:
& [exp (ax) f (х); y] = &lf (z); у + io], D.52)
X [exp (ах) f (x); s] = X If (x); s — a]. D.53)
и-
Рис. 4.8. Функция / (ж), сдвинутая влево, / (ж + а), и вправо,
/ (х - а).
6. Умножение на степень х.
оо оо
Если g(y)= j / (х) exp (—\ху) dx, то g'(y)= — i f x/(a;)x
—оо —оо
X exp (— ixy) dx. Таким образом,
& [xf (x)] = i (dldy) & [f (x)l D.54)
Легко показать, что аналогичный результат справедлив
для преобразований Лапласа
X \xf (х)\ = — (ulds) X [f (x)].
D.55)
7. Теоремы свертки.
Пусть /i (х) и /2 (о;) — две произвольные функции.
Определим их свертку равенством
D.56)
Чему равно преобразование Фурье такой свертки? Про-
Простая замена переменной показывает, что
& U (х)] = & t/i (х)\ & I/2 (x)\ -const. ^4.57)
98
Значение константы в D.57) зависит от нашего выбора,
т. е. используем ли мы D.16) или D.17) и, если, D.16), то
какая из функций / (х) и g (у) рассматривается как ори-
оригинал и какая — как преобразование Фурье.. Читателю
предлагается для одного варианта вычислить константу
в формуле D.57). Важность результата состоит в том, что
с точностью до некоторой константы фурье-преобразова-
ние свертки равно произведению фурье-преобразований
«множителей» свертки.
Аналогичный результат справедлив для преобразова-
преобразований Лапласа. Если
X
*(z)=j dtU(t)U(x-t), D.58)
то
X \g (х)] = X \П (х)] -X [/2 {хI
Получим интересное обратное соотношение для преоб-
преобразований Лапласа. Предположим, X I/i] = gi (s) и
% f/г! = $г (s)> причем интегралы' Лапласа для gi (s) и
g2 (s) существуют соответственно для Re s > cci и Re s >
> a2- Тогда преобразование Лапласа для произведения
/i/2 имеет вид
c+ioo
X[fJ2] = (V2ni) j gi(z)gi{s~z)dz, D.59)
С—loo
где путь интегрирования проходит вдоль линии Re z = с
с (Re s — сс2) >• с > ai. Этот результат можно получить,
подставляя обратный интеграл Лапласа для /i (z) в инте-
интеграл X t/i/2].
Соответствующее соотношение для преобразований
Фурье имеет вид
оо
= A/2я) J ft (z) g2 (y-z) dz. D.60)
— 00
(Как и раньше, множитель 1/2л зависит от выбора преоб-
преобразований Фурье.)
Рассмотрим теперь несколько примеров применения
интегральных преобразований. Общая процедура состоит
в «преобразовании» задачи или переформулировании ее
через преобразованную функцию. При этом мы надеемся,
что в новой форме задачу решить легче.
7* 99
Пример.
Найти ток в цепи, показанной на рис. 4.9, если выклю-
выключатель замыкается в момент времени t = 0, а начальный
заряд конденсатора равен Qo:
RI + L (dl/dt) + {QIC) = Ео. D.61)
Строго говоря, нужно написать Е0Н (t), где Н (t) — сту-
ступенчатая функция D.32); однако при операциях с преоб-
Рис. 4.9. Последовательная RLC-цепъ.
разованиями Лапласа предполагается, что все функции
обращаются в нуль при t < 0.
t
Так как dQ/dt = I, то Q (t) = Qo + j / (t') dt', и
и
D.61) можно записать в виде
Применим теперь к обеим частям преобразование Лапласа.
Положим X [I @J = i(s):
Решение для i (s) находится с помощью простой алгебры:
i(s) = т
где a = R/2L, b=yi/LC — R2/iL2 [и 7@) = 0]. Однако
in bt] = — а . Поэтому
ls+a) +c
/ ft\ -^ Eq—(Qq/C) ехр (—at) sin bt D 62)
X [ехр (— at) sin bt] = — а . Поэтому
ls+a) +c
Пример. Рассмотрим связанные маятники, показанные
на рис. 4.10. Предположим начальные условия xt = х2 = 0,
Xj = v, х2 = 0 в t = 0. Уравнения Ньютона имеют вид
=—TJLxz + kiXi — x2). J
тх2=
D.63)
Положим %[Xi(t)]=Fi(s). Тогда преобразования Лапласа
I
m
к
I
m
Рис. 4.10. Связанные маятники,
двух дифференциальных уравнений D.63) суть
= - HI F2 + к (Ft - Fg).
Нужно решить эту систему алгебраических уравнений
относительно Ft и Fz- Находим
*(-++W+-+-f)'
Поэтому
(*—
sin I/ ~~
УТЛ
101
Аналогично вычисляется х2 (t). Отметим, что }fg/l + 2k/m
и I^g/l — угловые частоты двух нормальных колебаний.
В заключение дадим другой вывод формул связи
ВКБ A.113). Напомним, что эти формулы связывают
УМ
Рис. 4.11. Вид решения уравнения D.64), экспоненциально зату-
затухающего при х < 0.
экспоненциально малое решение с одной стороны от точ-
точки поворота с осциллирующим решением с другой сторо-
стороны. Рассмотрим дифференциальное уравнение
(d2y/da?) + ху = 0. D.64)
Это уравнение имеет решение, показанное приблизитель-
сю
но на рис. 4.11. Положим g (со) = \ у (х) ехр (—icoa:) dx.
Тогда преобразование Фурье дифференциального уравне-
уравнения D.64) имеет вид
—co2g (со) + i dgldo) = 0,
откуда находим g (со) = А ехр (—i (со3/3)) (А — произ-
произвольная константа). Таким образом,
Далее опустим несущественную константу А/2п.
К сожалению, этот интеграл нетривиален. Отчасти
по этой причине он имеет свое имя — интеграл
Э й р и. Для применения его к нахождению формулы
102
связи ВКБ нам нужны лишь асимптотические выражения
при больших | ж |, которые можно найти методом пере-
перевала (см. разд. 3.6). Отдельно нужно рассматривать два
случая х—у ± со.
1. Положим х -> -f- со. Седловые точки лежат на веще-
вещественной оси; мы должны пройти обе точки. Используя
обозначения, введенные в разд. 3.6, имеем
/ (со) = i (со — со3/3з:); /' (со) = i A — соа/ж);
/" (со) = — Bico/:z); /' (соо) = О =ф соо = ±
ф = +л/4; / (соо) = (± 2/3) i /г.
Следовательно,
я ух Г 2
У(*)~21У -^-ехр[±-з-1жь/2|ехр| +-^|;
., ±
D.66)
2. Положим х —> — со. Теперь —х — большой пара-
параметр, и
В лач случае седловые точки лежат на мнимой оси:
р ехр A8) = ^-(± i V^)
Топография поверхности и = Re / (со) показана на рис. 4.12.
Проходится седловая точка со2= —i]A — х с ф=0. Тогда
Мы видим, что обе асимптотические формулы D.66)
и D.67) представляют не что иное, как соответствующие
ВКБ-решения и связаны формулой связи A.113).
103
В табл. 4.1 приведен ряд наиболее часто употребляю-
употребляющихся преобразований Лапласа; для расширения этой
1т со
Хребет
v=const~D
Плоскость со
Хребет
v=const=0
Рис. 4.12. Топография поверхности и = Re / (ш) для функции
/ (ш) = — i ш + — в плоскости ш вблизи седловых точек
(?>i, 2 — ± i 1/—х. Если G) = rexp(i0), то и = Re/ (ш) = r sin 0+
гз гз
+ — sin 38 и i)=Im/(ffl) = —r cos 8 —'-5-; с cos 38.
6(—х) 6\—х)
таблицы можно использовать результаты пунктов 1—7
в начале этого раздела.
/(ж)
1
cosXs;
хп
ехр(—1.x)
оо
Ffs)=| exp (- sx) 1 (х) dx
0
ехр(—sx0)
Я/(«2+Я2)
s/(s2_J_?i2)
ГЛАВА
5
ДАЛЬНЕЙШИЕ ПРИМЕНЕНИЯ
КОМПЛЕКСНЫХ
ПЕРЕМЕННЫХ
5.1. КОНФОРМНЫЕ ПРЕОБРАЗОВАНИЯ
, Три свойства преобразований W = W (z), z = x -f- к/,
W = U + iV с помощью аналитических функций де-
делают их особенно полезными для решения двумер-
двумерных задач электростатики, магнитостатики, теплопере-
теплопередачи, гидр'одинамики, упругости (под двумерной задачей
не имеется в виду двумерность физического пространства;
предполагается только, что нет зависимости от одной из
декартовых координат, скажем z).
Первое свойство: из дифференциальных уравнений Ко-
ши — Римана следует, что
n d*V d*V __
Таким образом, каждое из U и V есть решение двумерного
уравнения Лапласа и [может представлять физические
величины, удовлетворяющие этому уравнению.
Второе свойство: из уравнений Коши — Римана сле-
следует, что
^F-^ + ^-^ = (gradt/)(gradF)==0' E'2)
так что векторы grad U и grad V перпендикулярны друг
другу. Эти векторы перпендикулярны соответственно кри-
кривым U = const и V = const, так что последние кривые,
подобно предыдущим, также взаимно перпендикулярны.
Третье свойство: преобразование конформно. Это озна-
означает, что при преобразовании не меняется угол пересече-
пересечения двух кривых. Этот факт следует из свойства анали-
аналитичности:
W (г) — W (z0) да W' (z0) (z — zo) для г вблизи г0. E.3)
105
Преобразование не является конформным в особой точке
преобразования, т. е. в точке, где функция W (z)] или
обратная функция z (W) неаналитичны.
При использовании конформных преобразований ищут
такое преобразование, которое дает эквивалентную задачу
с более простой конфигурацией границы.
Пример.
Найдем решение V2<J> (х, у) = 0 в первом квадранте
с граничными условиями ф = О вдоль осей х = О, у = 0.
Положим ? = z2. Тогда первый квадрант z-плоскости пре-
превращается в верхнюю полуплоскость ^-плоскости: гранич-
граничные условия нашей задачи преобразуются в граничные
Шоскость
¦Ф-о
\
У///////////////У
Рис. 5.1. Применение конформного преобразования
1 \
условия на вещественной оси % (рис. 5.1). Легко найти
аналитическую функцию ?, мнимая часть которой равна
нулю на вещественной оси, именно /(?) = ct,, где с —
произвольная вещественная константа. Это также анали-
аналитическая функция, мнимая часть которой и есть, таким
образом, решение исходной задачи
= Im cz2 = 2сху.
E.4)
Этот пример кажется весьма академическим, хотя реше-
решение ф может описывать электростатический потенциал
вблизи внутреннего угла изогнутого проводящего листа.
Однако результат применим к очень важной практической
задаче построения «оптических» систем для фокусировки
заряженных частиц. Эти фокусирующие системы представ-
представляют собой синхротрон с переменным градиентом магнит-
магнитного поля. Последнее меняется по закону
Вх = Су,
Ву = Сх.
E.5)
106
Если решение ф — магнитостатический потенциал, то
получающееся поле В = — \7$ имеет как раз желаемое
свойство. Чтобы создать поле в опыте, поверхность полюса
магнита располагают вдоль одной из гиперболических
эквипотенциальных поверхностей; на этой поверхности
Рис. 5.2. Поперечное сечение квадрунольной магнит-
магнитной фокусирующей линзы.
Гиперболические полюса создают поле Вх = Су, Ву = Сх.
Частицы движутся перпендикулярно плоскости листа.
создают нужный потенциал. В трех других квадрантах
следует симметрично расположить такие же магниты с по-
потенциалом переменного знака. В результате получается
так называемый квадрупольный м а~т н и т. Он
изображен на рис. 5.2. Такой магнит фокусирует частицы,
летящие в направлениях ±у, и дефокусирует частицы,
летящие в направлениях ±х *. Два таких последователь-
последовательно расположенных магнита, повернутые на 90° друг к дру-
* Предполагается, что частицы заряжены положительно и дви-
движутся перпендикулярно плоскости рисунка. Читатель может про-
проверить фокусирующие и дефокусирующие свойства, используя пра-
правило правой руки для сил, действующих на заряды в магнитном
поле.
107
гу относительно их общей оси, могут дать фокусировку
в обоих направлениях.
Возвратимся к конформным преобразованиям. Если
V = Im / (z) представляет физически интересную функ-
функцию, удовлетворяющую уравнению Лапласа, то каков
смысл ?/? Качественный смысл U очевиден из того факта,
что кривые U = const и V = const взаимно ортогональ-
ортогональны. Например, если V — электростатический потенциал,
то линии поля или линии сил будут идти вдоль кривых
U = const. Далее, из уравнений Коши — Римана следует
Q
U@-U (Р) = - j (W)» ds, E.6)
р
где Р T3.Q — две любые точки, а интеграл берется по любо-
любому пути, соединяющему Р и Q; ds — элемент длины пути;
(V^On — компонента градиента, нормальная к пути, при-
причем положительное направление считается вправо, если
двигаться от Р к Q. Аналогично
Q
V(Q)-V(P)=^(VU)nds. E.7)
р
Теперь если V — электростатический потенциал, то
— (AF)n равен ^„-компоненте электрического поля, пер-
перпендикулярной пути. Если путь идет вдоль поверхности
проводника (т. е. вдоль пересечения поверхности провод-
проводника с плоскостью ху), то Еп — электрическое поле, пер-
перпендикулярное проводящей поверхности и пропорциональ-
пропорциональное, согласно электростатическому закону Гаусса, плотно-
плотности поверхностного заряда. Так, в системе МКС плотность
поверхностного заряда а = гаЕп, а в СГС а = Еп/4п.
Интегрируя а вдоль проводящей поверхности, можно
найти полный заряд в этой области (на единицу длины
в z-направлении). Если определить С (Р, Q) как поверх-
поверхностный заряд между Р и Q на единицу длины, перпен-
перпендикулярной плоскости ху, то (в системе МКС)
Q
С(Р, Q)= -во j (W)nds = E0[U(Q)-U(P)]. E.8)
р
Пример. Используем конформное преобразование ? =
= a sin z для нахождения потенциала, создаваемого бес-
бесконечно длинной проводящей полосой. Ширина полосы —
108
1а, а ее заряд на единицу длины — X. Преобразование
? = a sin z показано на рис. 5.3.
Теперь физическую проблему можно сформулировать
как математическую задачу в плоскости ?. Заряженная
полоса имеет бесконечную протяженность в направлении,
перпендикулярном плоскости ? на рис. 5.3, а по ширине
Плоскость z
ж
1
Е
в
Г
F
В
0
н
с
А
G
Е\
F'
Плоскость 1
В'
-а
D'
О1
И'
А'
*а
С
1 'g'
Рис. 5.3. Конформное преобразование t, = a sin z.
Заметим, что плоскость ? «разрезана» вдоль вещественной оси при
I Re? | > а. Вертикальная полоса —^- :? Rez :? — преобразуется во
всю плоскость ?; то же происходит со всеми другими вертикаль-
вертикальными полосами шириной я в плоскости г.
расположена вдоль вещественной оси от —а до -{-а. Конеч-
Конечно, электростатический потенциал постоянен вдоль поло-
полосы; из соображений симметрии ясно, что линии O'D',
BE и А'С' направлены вдоль силовых линий, или линий
поля. Итак, наша задача состоит в нахождении аналити-
аналитической функции / (?), мнимая часть которой постоянна
при ?, лежащих на вещественной оси между —а и +а.
А вещественная часть / (Q должна быть постоянна для ?,
лежащих на вещественной оси вне этой полосы, а также
на мнимой оси. Чтобы найти / (?), переформулируем зада-
задачу в z-плоскость. Границы преобразуются, как показано
на рисунке, так что задача состоит в нахождении анали-
аналитической функции / (z), мнимая часть которой постоянна
для z на вещественной оси от —я/2 до -\-к12, а веществен-
вещественная часть постоянна вдоль линий BE, OD и АС. Решение
тривиально, а именно / = Kz (с К вещественным). Сле-
Следовательно, в плоскости ?
/ (О = Kz = К arcsin (?/a). E.9)
Нужно выбрать такое К, чтобы оно соответствовало
данному заряду "К. Если двигаться от точки А' к точке В',
109
то Re / = Кх увеличивается на —Кк, так что заряд
на верхней поверхности полосы равен —Кпео', следова-
следовательно, К = — К/2пго. Тогда потенциал в плоскости Z,
равен V = (— Х/2яе0) Im arcsin (?,/a).
Как выглядят эквипотенциальные поверхности? Отме-
Отметим, что V = — (Х/2яе0) у. Таким образом, если ? =
= ? + Щ, то
? = a sin x ch у = a sin x ch (!
Ц = a cos xsh у = — a cos ж sh
Исключая x из этих двух уравнений, имеем
a2ch2 w +a2sh2T1--'=1-
Эквипотенциальные поверхности представляют собой эл-
эллипсы.
5.2. ДИСПЕРСИОННЫЕ СООТНОШЕНИЯ
Интегральная формула Коши отражает существенный
факт, что значения аналитической функции / (z) вдоль
замкнутого контура внутри ее регулярной области опре-
определяют значения / (z) в любой точке внутри этого кон-
контура. Именно
f(z)-J- [-Ш-dL
где С — любой замкнутый контур, внутри которого и
на котором / (z) регулярна, а z — любая точка внутри С.
Формула Коши приводит к так называемым дис-
дисперсионным соотношениям, если приме-
применить ее описанным ниже способом к определенным функ-
функциям, имеющим физический смысл на части вещественной
оси. Это название обязано тому факту, что соотношения
такого рода были получены впервые Крамерсом и Крони-
гом в теории дисперсии оптических и рентгеновских лу-
лучей. В оптике дисперсионное соотношение представляет
собой интегральную связь между преломляющей и погло-
поглощающей частями коэффициента преломления при различ-
различных частотах. Так как эти части являются соответственно
вещественной и мнимой частями комплексного показа-
показателя преломления, то термин «дисперсионное соотношение»
используется для любого подобного интегрального соот-
110
ношения между вещественной и мнимой частями функции
комплексной переменной.
Сейчас дисперсионные соотношения имеют обширные
применения в теории взаимодействий элементарных ча-
частиц, где они применяются к амплитудам рассеяния. Это
приложение тесно связано с их первоначальным приме-
применением, так как показатель преломления света тесно свя-
связан с амплитудой рассеяния. Другие применения обнару-
обнаружились при анализе электрических цепей.
Рассмотрим сначала элементарную ситуацию, когда
/ (z) не имеет особенностей в верхней полуплоскости и
/ (z) -4- О при |z| ->- оо. Отме-
Отметим кратко физическую сущ-
сущность этого предположения.
«Отклик» ф (f) линейной систе-
системы на «возмущение» g (t) мож-
можно записать в виде ф (f) =
= j dt'R (t - t') g (О, где
К (t) — функция Грина си-
системы (см. разд. 9.4). Требо-
Требование причинности, состоящее
в невозможности возникнове-
возникновения «отклика» раньше «при-
«причины», означает, что К (t) =
= 0 при t < 0. Рассматривае-
Рассматриваемые функции / (z) представляют собой преобразования
Фурье таких функций Грина (см. разд. 4.2), а условие
К (t) = 0 при t < 0 означает, что преобразование Фурье
/ (z) = I dt exp (itz) K (t) не имеет особенностей
Im z > 0 и что / (z) ->- 0 при | z
плоскости z.
Применим далее формулу Коши, взяв в качестве кон-
контура вещественную ось и полуокружность большого
радиуса в верхней полуплоскости (рис. 5.4). Интеграл
по полуокружности обращается в нуль, так как при
R^ оо
Рис. 5.4. Контур, используе-
используемый для получения диспер-
дисперсионных соотношений E.12).
при
оо в верхней полу-
полу/(О
ДехрA6)Ы6 _
-
полукруг
гДе |/(?)|макс — максимальная величина /(?) на полу-
полуокружности, обращающаяся в нуль при Л-»-оо. Таким
111
образом,
Веществ, ось
Далее предположим, что представляющая физический
интерес функция есть / (z) на вещественной оси или, в слу-
случае если имеется точка ветвления, предел / (z) при z, стре-
стремящемся к вещественной оси сверху. Обозначая эту функ-
функцию F (х), имеем
F (x\ = \imf lx-\-i&) E 11)
е->0
где е положительно. Тогда из E.10) следует, что
*» = lim Г /(*<} da> =
e-i-0 J х ~~х~~1е
— оо
оо
= Р J ^dx' + niF(x),
где Р — символ главного значения. Таким образом,
ж —
E.12)
Это и есть дисперсионные соотношения для физически
интересной функции F (х). Эти соотношения записаны
в форме, в большинстве случаев неудобной для сравнения
с экспериментом. Причина этого состоит в том, что пере-
переменная обычно имеет физический смысл только при х > 0
или даже х > Xi ^> 0, так что вышеприведенные интегра-
интегралы содержат большую «нефизическую» область. Напри-
Например, х может быть энергией рассеиваемой частицы, кото-
которая не меньше массы покоя. В этой ситуации можно
использовать некоторую симметрию / (z), чтобы связать
интеграл по нефизической области и интеграл по физиче-
физической области.
112
Простой случай возникает, когда физическая область х
есть х ^ О, а / (z) имеет «четную» или «нечетную» симмет-
симметрию, определяемую равенством / (—z) = ± /* (z*). Для
четной симметрии имеем
±p\ r2+
га J х'+х ' га
EДЗ)
E.«4)
Аналогичные результаты получаются в случае нечетной
симметрии. Такой вид имеют оптические дисперсионные
соотношения, причем х — оптическая частота, a F (х) —
коэффициент преломления.
|,v До сих пор мы концентрировали внимание на диспер-
дисперсионных соотношениях в историческом плане. Связанный
с этим вопрос состоит в том, каким способом можно одно-
однозначно определить аналитические функции по их особен-
особенностям и поведению на бесконечности. Вдоль разреза тре-
требуемая информация — это просто скачок на разрезе, т. е.
разность значений функции на противоположных сторо-
сторонах разреза.
Некоторые из условий, необходимых для возможности
такого восстановления, пояснены следующими примерами.
Пример. Предположим, есть следующая информация
о функции / (z):
1) / (z) аналитична всюду, кроме полюса в точке z = О
с вычетом 1 и корневых точек ветвления от +1 до -f- оо и
от —1 до — оо вдоль вещественной оси;
2) / (z) ->- 0 при \z |-s- оо;
3) / (z) вещественна на вещественной оси от—1 до -\-i.
Из принципа симметрии Шварца сле-
следует, что / (z*) = /* (z).
Теперь применим формулу Коши, выбрав контур,
показанный на рис. 5.5. Как и в предыдущем примере,
интеграл вдоль, большой полуокружности юбращается
в нуль при R ->¦ оо. Предположим, что вблизи точек вет-
ветвления ±1 функция / (z) ведет себя так, что интегралы
по двум маленьким окружностям вокруг этих точек также
8
Дш. МэтыоЗ| Р, Уокер
обращаются в нуль. Тогда
оо
ti/ (z) = 2ni (—J -f-lim I
ie)dxf
-i
-i
_ С f(x' — ie,)dx' С f{x' + \e)dx' С f (x' — ie) dx'l
J x'— ie—z ~*~ J ж' + ie—z J x' — ie—z J*
1 —oo — oo
Комбинируя первые два и последние два интеграла, мы
видим, что в правую часть входит скачок / (z) на разрезе,
-7
Плоскость
У
+7
Рис. 5.5. Контур интегрирования.
о чем говорилось выше. В этом примере скачок обладает
симметрией отражения / (х' — ie) = /* (х + ie), откуда
/ (х + ie) — / (х — ie) = 2i Im / (х + ie). Таким обра
зом,
оо -1
где F (х) — lim /-(ж + ie), как и выше. Тем самым
Е->-0
функция / (z) представлена через ее особенности.
Если F (х) — функция, представляющая физический
интерес, то для нее можно написать дисперсионное соот-
соотношение, переходя к пределу z = х -{- ie -> х:
+irnilmF №-
Если | х | > 1, последний член возникает от особенности
в одном из интегралов. Если | х \ < 1, то Im F (х) = О
по предположению, и включение последнего члена не при-
114
водит к ошибкам. В любом Случае находим
Л J х' — Х
-со
E.16)
Посредством этой процедуры мы не получаем «другого»
дисперсионного соотношения, выражающего Im F \х) че-
через интеграл от Re F (х).
-7
Рис. 5.6. Контур интегрирования.
Если физическая область переменной х есть х > 1,
нам нужен еще принцип симметрии, чтобы связать Im F (х)
для х < — 1 с Im f (i) при х > 1. Это соотношение сим-
симметрии вытекает из физики задачи.
При получении представления E.15) был использован
выбор специального контура. Однако дисперсионное соот-
соотношение E.16) можно также получить, используя формулу
Коши вдоль контура, показанного на рис. 5.6:<
оо
Положим z =
и е->0. Тогда
w-H-i' 1 че*:-
Этот результат переходит в E.16), если взять веществен-
вещественную часть.
8* 115
Пример. Йайдем функцию / (z), имеющую следующие
свойства:
1) / (z) аналитична всюду, за исключением корневой
точки ветвления от z = 0 до z = оо вдоль вещественной
оси и простого полюса в точке z — — 1с вычетом 1;
2) / (z) -*¦ О при | z | -»- оо;
3) / (z) вещественна на отрицательной веществен-
вещественной оси;
4) при х -> О Im / (г + ie) = 1/A + *2)-
Рис. 5.7. Контур интегрирования.
Применим формулу Коши, выбирая контур, показан-
показанный на рис. 5.7. Результат можно написать, используя
предыдущий пример. Вычисляя интеграл, находим
да'
о
1 lnz
я 1-j-z2
z/2-
EЛ8)
С многозначной функцией In z требуется небольшая осто-
осторожность. Ответ, приведенный в E.18), предполагает, что
функция In z вещественна на верхней стороне разреза.
Закончим этот раздел описанием модификаций, кото-
которые можно сделать для нахождения дисперсионных соот-
соотношений для функции, не удовлетворяющей условию
/ (z) ->- 0 при | z | -»- оо.
Если A/z) / (z) -у 0 при | z | -> оо и A/z)/ (z), кроме
того, i удовлетворяет другим условиям, поставленным
в приведенных выше примерах, то дисперсионное соотно-
соотношение для / (z) можно получить из дисперсионного соот-
соотношения для A/z) / (z).
116
Конечно, множитель l/(z — х0) эквивалентен 1/z. По-
Полюс в точке z = хо, вводимый этим множителем [или
полюс, уже имеющийся в / (z)], можно устранить
вычитанием полюса в той же точке и с тем же вычетом.
Например, дисперсионное соотношение для функции
[/ (z) —/ (xo)V(z — х0), соответствующее E.12), имеет вид
'~х)
Л J {х' — х0) {х'~х)
E.19)
Вообще говоря, Im F (х0) = 0, и в этом случае
-,)^ E.20)
Это выражение называется дисперсионным со-
соотношением с вычитанием. Как легко ви-
видеть из приведенного примера, вычитательная процедура
улучшает сходимость дисперсионного интеграла.
ГЛАВА \J
ВЕКТОРЫ
И МАТРИЦЫ
6.1. ЛИНЕЙНЫЕ ВЕКТОРНЫЕ ПРОСТРАНСТВА
Общеизвестно использование обычных трехмерных век-
векторов для описания таких величин, как положение, ско-
скорость, сила и т. д. Дадим следующее определение линей-
линейного векторного пространства:
Линейное векторное пространст-
пространство — это система объектов (векторов) а, Ь, с, . . ., под-
подчиняющихся двум операциям:
1) сложение коммутативно и ассоциативно:
а + Ь = Ь + а; 1
(а + Ь) + с = а + (Ь + с); J к°т }
2) умножение на константу (скаляр) дистрибутивно
и ассоциативно:
Я (а + Ь) = Яа + ЯЬ; 1
Я (ца) = (Яц) а; (Я + ц) а = Яа + ца. / (Ь-г>
Кроме того, предположим: а) существование такого нуль-
вектора 0, что для всех а
а + 0 = а; F.3)
б) умножение на скаляр 1 не изменяет любой вектор,
1а = а, и, наконец, в) для любого а существует вектор
—а, так что
а + (—а) = 0. F.4)
Систему векторов а, Ь, . . ., и называют линейно
независимой, если не существует никакого урав-
уравнения
Яа + цЬ + ... + аи = 0, F.5)
кроме тривиального случая Я = р, = ... =0 = 0,
№
Если в определенном векторном пространстве суще-
существует п линейно независимых векторов, но нет ни одной
системы п -\- 1 линейно независимых векторов, то про-
пространство называют гс-мерным. В этой главе рассмотрены
в основном конечномерные пространства и лишь в конце
кратко исследованы бесконечномерные пространства.
Пусть ei, е2, . . ., е„ — система п линейно независи-
независимых векторов в гс-мерном векторном пространстве. Тогда
если х — произвольный вектор пространства, то суще-
существует соотношение Xei + це2 + • - • + oen + тх = О,
причем не все константы равны нулю, и в частности т Ф
Ф 0. Таким образом, х можно записать как линейную ком-
комбинацию ег:
х=2ад. F.6)
2=1
Говорят, что векторы et образуют базис, или коор-
координатную систему, а числа xt — компо-
компоненты х в этой системе. Векторы et называют базис-
базисными.
6.2. ЛИНЕЙНЫЕ ОПЕРАТОРЫ
Рассмотрим линейную векторную функ-
функцию- вектора, т. е. правило линейной связи каждого
вектора х с вектором ф (х)
ф (Яа + ^Ь) = %ф (а) + 11ф (Ь). F.7)
Достаточно знать п векторов ф (ег), которые удобно запи-
записывать через базис ег, т. е.
ФЫ = ^Ане}, F.8)
где А л — ;-я компонента вектора ф (ег).
Рассмотрим теперь произвольный вектор х. Пусть
ф(х) = у, тогда у = ф B ос^) = 2 %i 2 Апе}. Следова-
i i j
тельно, компоненты векторов х и у связаны соотношением
yj^'ZAjiXt. F.9)
i
Полученные соотношения можно изобразить другим
способом. Говорят, что связь векторов у и х обеспечивает-
т
ся линейным оператором А, действующим на х. Символи-
Символически * можно написать
У = Ах.
F.10)
Числа А и называются компонентами линейного
вектора А (или векторной функции ф) в системе координат
ег. А именно из F.8) нахо-
находим, что Ац — i-я компо-
компонента вектора Aej.
Наряду с векторами ли-
линейный оператор часто
имеет физический смысл,
не зависящий от выбран-
"У ной системы координат, и
его можно описать, не об-
обращаясь к конкретной си-
системе.
Пример. Смысл опера-
оператора обычного вращения
можно пояснить следую-
следующим образом: Rx — вектор,
полученный поворотом х (скажем, на 30е) вокруг вертикаль-
вертикальной оси в положительном направлении (правило правой
руки). Эта операция изображена на рис. 6.1. Координатная
система совсем не обязательна для определения оператора,
так как смысл понятия «вертикальный» не связан с коорди-
координатными системами.
Сумма и произведение линейных операторов, а также
произведение скалярного числа на оператор определяют-
определяются соотношениями:
Рис. 6.1. Результат действия обыч-
обычного оператора вращения.
(А + В) х = Ах + Вх;
(АВ) х = А (Бх);
(Ы) х = % (Ах).
F.11)
F.12)
F.13)
В общем случае АВ ф В А. Если, однако, равенство
соблюдается, то говорят, что А л В коммутируют.
• Символически оператор изображается обычным шрифтом, на-
например А. Далее, в разд. 6.3 буква А использована также для обо-
обозначения матрицы, представляющей этот оператор. Из контекста
должно быть ясно, какой смысл имеет символ в данном уравнении.
Нулевой и единичный операторы имеют очевидные свой-
свойства, а именно
Ох = 0 и 1х = х F.14)
для любого вектора х в нашем пространстве. Два операто-
оператора А и Б равны, если для любого вектора х' Ах = Вх.
Наконец, если существует оператор А~* со свойствами
АА-1 = А-1 А = 1, F.15)
то А~г называется обратным оператором по отноше-
отношению к А. Об операторах, имеющих обратные, говорят как
о невырожденных операторах.
В проведенном анализе, в частности в уравнении F.8),
предполагалось, что вектор ф (х) = Ах принадлежит тому
же пространству, что и вектор х. Это совсем не обязатель-
обязательно, что видно из следующего элементарного примера.
Пример. Рассмотрим пространство трехмерных радиус-
векторов х и обычную систему декартовых координат xyz
(см." рис. 6.1). Определим проекционный опе-
оператор Р так, что Рх — проекция х на плоскость ху,
т. е. Рх имеет те же самые координаты хну, что и х, но
нулевую z-компоненту. Пространство векторов Рх дву-
двумерно и, таким образом, отличается от пространства век-
векторов х *. Ясно также, что этот оператор Р не имеет обрат-
обратного.
Если ф (х) находится в другом пространстве, чем х,
то единственное изменение в проведенном выше анализе
состоит в том, что ф (ег) нужно выразить через базис f,-
в ф-пространстве. Тогда уравнение F.8) приобретает вид
ф(ег)=3^- F.16)
з
Теперь компоненты Ajt оператора А относятся к двум ба-
базисам ег и ij. Ясно, что оба пространства могут иметь раз-
различную размерность, как и в приведенном выше примере.
Если это так, то оператор А не может иметь обратного.
Этот факт очевиден из примера. В общем случае доказа-
доказательство следует из рассмотрения матриц.
* Двумерное пространство векторов Рх можно, конечно, рас-
рассматривать как подпространство исходного пространства векторов
х. В общем случае это не обязательно так.
121
6.3. МАТРИЦЫ
Совокупность введенных выше чисел Atj можно рас-
рассматривать как матрицу
F.17)
г- • -An
Числа Ац называют элементами матрицы.
В общем случае матрица есть прямоугольная таблица,
составленная из чисел, подчиняющихся определенным
правилам алгебры. Можно легко найти требуемые пра-
правила, если в векторных пространствах матрицы должны
представлять линейные операторы. Например, в дан-
данной координатной системе для операторных уравнений
F.11) — F.13) /-е компоненты имеют вид
2и+Д)л*1=5Мл*^
i v
Н xi = 2 Аи (Вх)г =
I li
i г
Так как х произволен, то отсюда непосредственно полу-
получаются следующие правила для сложения, перемножения
матриц и умножения их на константу:
(А + В)п = Аи + Вп; F.18)
(АВ)п= 2^ А; F-19)
г
Мл = И№ F.20)
Из этих соотношений наименее тривиально равенство
F.19). Относительно него заметим_ следующее:
1. Умножение матриц не коммутативно; АВ не обя-
обязательно равно В А.
2. /г-й элемент АВ есть сумма произведений элементов
/-й строки А на элементы г-го столбца В.
3. Если произведение АВ определять согласно F.19),
то число столбцов в А должно равняться числу строк
в В.
Все элементы нулевой матрицы равны нулю; элементы
единичной матрицы равны 8i}, т. е. б-символу Кронекера,
№
которйй был определен из уравнения D.13). Иными сло-
словами, матрица 1 диагональна с диагональными эле-
элементами, равными единице.
Для обратной матрицы А~г имеем условия
А'1 А = А А'1 = 1, F.21)
соответствующие операторным уравнениям в той же фор-
форме. Они могут удовлетворяться только в том случае, если
А — квадратная матрица с ненулевым детерминантом.
В этом случае
N"
Тогда
= 2 Aih
h
и то же самое для произведения А'1 А, откуда следуют
условия F.21).
Ряд матриц, тесно связанных с данной матрицей А,
приведен в табл. 6.1.-
Матрица
А
Транспонированная А
Комплексно сопря-
сопряженная .4*
Эрмитово сопряжен-
сопряженная Л+=(Л)*
Обратная А-1 (только,
квадратные матрицы
с детерминантом
Компоненты
Ац
(A*)ij = (Ац)*
г л 1 ч минор Aji
ТАБЛИЦА 6.1
Пример
U + i 2J
/ 1 1—i\
\-i 2)
1 ^ ~*\ ^
\ —1 —i l) 3—i
Дадим ряд дальнейших определений: А вещест-
вещественна, если А* = А; симметрична, если А =
= А\ антисимметрична, если А — — А; эр-
эрмитова, если А+ = А; ортогональна, если
А'1 = Д;упитарна, если 4 = 4+;диагональ-
123
н а, если Ai} = 0 для i ф ]\ идемпотентна, если
А2 = А.
След, или шпур, квадратной матрицы А есть сумма ее
диагональных элементов: Sp A = 2 Аа-
г
Приведем несколько соотношений для произведений
квадратных матриц, которые часто используются и могут
быть легко проверены:
(АВС)~1 = С~1В~1А~1 (если существуют все
обратные матрицы);
V F.23)
det (АВ) = (det А) • (det В) = det (В А).
В заключение подчеркнем, что иногда для упрощения
определенных алгебраических соотношений (и расчетов)
матрицы удобно подразделять на субматрицы, или
блоки.
Пример. Если матрицы А и В подразделить следующим
способом:
А =
«21
«31
«41
W51
«12
«22
«3?
«42
«52
«13
«23
«33
«43
«53
«14
«24
«34
«44
«54
«15^
«25
«35
«45
«5б/
ь12 ъ131
ь15
(A A \
A21 A22)'
(ту ту \
в" я)'
t>U #22/
F.24)
F.25)
631 Ьз2 ЬзЗ : &34 Ь35
041 °42 ^43 : ^44 645
Ч&51 ЬЪ2 Ъъз \ 654 Ь55 /
то они имеют вид матриц 2x2 из блоков, причем эле-
элементы Ац и Вц также являются матрицами. Легко уви-
увидеть, что правильный результат умножения матриц АВ
получается при умножении блоков матриц по обычному
правилу:
и Bi2\
21 -#22/
124
A2iBi2-\-A22B22f
F.26)
При этом Должны иметь смысл все произведений матриц,
содержащиеся в элементах последней матрицы. Это спра-
справедливо в том случае, если первоначальное разделение
столбцов в первой матрице совпадает с разделением строк
во второй. Следовательно, указанное в примере разделе-
разделение непригодно для произведения В А при вычислении его
через матричные блоки 2x2. (Читателю предлагается
определить, есть ли другое деление матрицы В, которое
позволяло бы вычислить оба произведения АВ и В А.)
6.4. ПРЕОБРАЗОВАНИЯ КООРДИНАТ
Как мы видели, в данной системе координат линейный
оператор представляется матрицей. Правая часть урав-
уравнения F.9) У} = 2 AjtXi есть частный случай матричного
г
произведения Ах, в котором стоящая справа матрица х
(и, следовательно, произведение у) имеет один столбец.
Такие матрицы называют векторами-столб-
векторами-столбцами.
Теперь поставим вопрос: как преобразуются компо-
компоненты векторов и линейных операторов при изменении
системы координат? Рассмотрим базис ej, выраженный
через нештрихованную систему соотношением
e*=2?«ei- F.27)
i
Коэффициент угу — это ?-я компонента е3- в нештрихован-
ной системе (отметим изменение условия порядка индек-
индексов); п2 коэффициентов ytj образуют элементы матри-
матрицы преобразования у, которая осуществляет
переход из одной системы в другую. Сначала рассмотрим
произвольный вектор х с компонентами xt и х\ в двух
системах. Тогда
Следовательно,
xi = %ytfi4, F-28)
что эквивалентно матричному уравнению
х = ух. F.29)
Линейная независимость базисных векторов е,- обеспе-
обеспечивает невырожденность матрицы у, так что она имеет
125
обратную. Умножая F.29) на у *, получаем
х = у'Ч. F.30)
Отметим, что компоненты xt преобразуются иначе, чем
векторы ег. Величины, которые преобразуются как xt,
называют преобразующимися контраградиент-
н о по отношению к величинам, которые преобразуются
как ег. Величины, которые преобразуются одинаково,
называют преобразующимися коградиентно друг
к другу.
Далее найдем закон преобразования для матричных
операторов. Запишем операторные уравнения у = Ах как
матричные уравнения в двух системах координат: у =
= Ах, у' = А'х'. Выражая х и у в первом уравнении
с помощью F.29) и умножая его на у1, получаем уу' =
= Аух', у' = у~*Аух'. Таким образом, искомое преобра-
преобразование имеет вид
А' = у~гАу, А = уА'у-1. F.31)
Это пример преобразования подобия.
Оно определяется для квадратных матриц следующим
образом:
А' = S^AS. F.32)
Любое алгебраическое матричное уравнение не меняется
при преобразовании подобия; например, уравнение
ABC + U) = 0 переходит в S^A (SS'1) Б (SS'1) CS +
+ S-^KDS = 0 или А'Б'С + W = 0.
По причинам, которые будут ясны ниже, особенно
важную роль в физике играют преобразования координат,
в которых матрица преобразования у ортогональна или
унитарна. Рассмотрим сначала линейную ска-
скалярную функцию вектора. Это понятие, связан-
связанное с понятием линейной векторной функции, использо-
использованной выше при определении матриц. Линейная скаляр-
скалярная функция — это правило, которое для каждого векто-
вектора х определяет линейным образом скаляр ф (х):
«*> (Я* + цу) = Ц (х) + ^ (у). F.33)
Если есть базис е,-, то линейную скалярную функцию
удобно определить п числами at = ф (ег), которые мы на-
назовем компонентами скалярной функции ф. Тогда
126
Ф (х) = Ф (S Xiet) = 2 a&i. F.34)
Это выражение соответствует правилу умножения матриц,
в случае если компоненты at образуют в е к т о р-с т р о -
к у, т. е. матрица состоит из одной строки. Тогда F.34)
представляет собой матричное уравнение
ф (х) = ах. F.35)
Если записывать компоненты в другой (штрихованной)
системе координат, то скалярная величина ф (х) должна
остаться той же, т. е. ф (х) = а'х' = а'у~гх. Итак, тре-
требование инвариантности определяет закон преобразова-
преобразования at:
а = ctV1, a = ay F.36)
или а] = 2 a«Y«j.
i
Мы видим, что компоненты аг преобразуются контра-
градиентно по отношению к компонентам ж; вектора
и коградиентно по отношению к базисным векторам е^.
Линейные скалярные функции образуют векторное
пространство, которое отличается от пространства перво-
первоначальных векторов, но имеет ту же самую размерность.
Иногда его называют дуальным простран-
пространством.
Введем теперь понятие скалярного произведения и
с помощью него метрику исходного векторного про-
пространства. Для каждой пары векторов а и b определим
скалярное (или внутреннее) произве-
произведение ab, или (а, Ь), со следующими свойствами:
аЬ = (Ьа) *; F.37)
а (ЯЬ 4- цс) = ЯаЬ + цас; F.38)
аа ^- 0 и из аа = 0 следует а = 0. F.39)
Два вектора, скалярное произведение которых равно
нулю, называются ортогональными; длина век-
вектора а определяется как | аа I1/2.
Отметим, что из свойств F.37) и F.38) следует антили-
антилинейность скалярного произведения ab (или сопря-
сопряженная линейность) по первому аргументу,
т. е.
(Яа + jib) с = Я*ас + ц*Ьс. F.40)
127
Обычно скалярное произведение, удовлетворяющее
аксиомам F.37), F.38) и F.39), определяется следующим
образом:
аЬ = 2с?Ьг, F.41)
где сг- и bj — компоненты а и b в данной координатной
системе. Конечно, базисные векторы ег этой системы коор-
координат удовлетворяют условию
еге,- = 6Jlf F.42)
т. е. базисные векторы ортонормированы.
Какие условия налагаются на матрицу преобразова-
преобразования у при переходе к новому базису e[, чтобы новая систе-
система также была ортонормированной? Требуем
Таким образом, Y+Y = 1» и, для того чтобы вид F.41) ска-
скалярного произведения не изменился, у должна быть уни-
унитарной. В классической физике у обычно также веществен-
вещественна; следовательно, она ортогональна. Другие важные свой-
свойства унитарных преобразований относятся скорее к преоб-
преобразованию матриц, чем векторов. Преобразование подо-
подобия над унитарной матрицей оставляет ее унитарной,
а над эрмитовой матрицей — эрмитовой.
В конце раздела подчеркнем, что скалярное произ-
произведение, определенное выше, позволяет установить одно-
однозначное соответствие между векторами и линейными ска-
скалярными функциями, т. е. между исходным векторным
пространством и дуальным к нему. Свяжем с каждым
вектором а линейную скалярную функцию фа (х), опреде-
определяемую равенством фа (х) = ах. В координатной системе,
использованной в F.41) и F.42), фа имеет компоненты
Фа (е*) = о*.
6.5. ЗАДАЧИ НА СОБСТВЕННЫЕ ЗНАЧЕНИЯ
Если оператор А действует на вектор х, получающийся
вектор Ах, вообще говоря, отличен от х. Однако могут
существовать определенные (ненулевые) векторы, для
которых Ах равно х, умноженному на константу К, т. е.
Ах = Хх. F.43)
128
Такой вектор называется собственным векто-
вектором оператора А, а константа Я называется собст-
собственным значением. Говорят, что собственный
вектор «принадлежит» собственному значению.
Пример. Рассмотрим оператор вращения R, показан-
показанный на рис. 6.1. Любой вектор, направленный вдоль оси
вращения (ось z), есть собственный вектор R с собствен-
собственным значением, равным 1. (Есть ли какие-нибудь другие
собственные векторы?)
В данной системе координат i-я компонента уравне-
уравнения F.43) есть
^AtjXj = %Xi, i = l, 2, ..., п; F.44)
в матричных обозначениях эта система уравнений имеет
вия
Ах = Ях. F.45)
Задача нахождения собственных значений Я, для кото-
которых система линейных уравнений F.44) имеет нетри-
нетривиальное решение, весьма важна.
Пример. Если А — матрица
1 2 3>
= | 4
1 2 3\
4 5 6
J 8 9/
=0.
то система уравнений F.44) имеет вид
A -К)х1 + 2х2 + Зх3 = 0;
4xi + E — Я) х2 + 6ж3 = 0;
Ixi + 8ж2 + (9 — Я) хг = 0.
Если эти уравнения имеют нетривиальное решение, опре-
определитель из коэффициентов должен обратиться в нуль:
1-Я 2- 3
4 5-Я 6
7 8 9-Я
Это дает полином третьего порядка по Я, корни которого
и есть собственные значения Яг.
В общем случае собственные значения матрицы А
определяются уравнением
det (А — Я1) = 0 (секулярное
уравнение). F.46)
9 Дж, Мэтьюз, Р. Уокер 129
Если А — матрица порядка п х п, то будет п корней %,
но не обязательно различных.
Докажем теперь две важные теоремы, касающиеся"
собственных значений и собственных векторов эрмитовых
матриц. Пусть Н — эрмитова матрица, Xi и Я2 — два соб-
собственных значения, х± и х2 — два собственных вектора,
принадлежащих соответственно Xi и Х2,
= Х2х2. F.47)
Возьмем скалярное произведение х2 с первым уравне*
нием и xi со вторым:
х%Нху = ХцХ%хъ х\Ихг = Хгх\хг. F.48)
Левые части комплексно сопряжены друг другу, так как
ij ij
т. е.
(x*Exi)* = x*Hx2 F.49)
[xtj — i-я компонента Xj — см. замечания после уравне-
уравнений F.8) и F.27)].
Это важное свойство эрмитовых матриц. Следователь-
Следовательно, из F.48)
(Xi — Я*) x\xi = 0. F.50)
Предположим сначала, что Ki = Я2, Xi=x2 ф= 0. Тогда
x+xi = xfxi > 0, так что Xi = X*. Собственные
значения эрмитовой матрицы веще-
вещественны.
Предположим, напротив, Xi ф Х2. Тогда x^xi = 0.
Собственные векторы эрмитовой мат-
матрицы, принадлежащие различным соб-
собственным значениям, ортогональны.
Несколько собственных векторов могут принадлежать
одному и тому же собственному значению; такое собствен-
собственное значение называют вырожденным. Соответ-
Соответствующие собственные векторы также часто называют вы-
вырожденными. Выше мы видели, что собственные векторы
эрмитовой матрицы, принадлежащие к различным собст-
собственным значениям, ортогональны. Будут ли ортогональ-
ортогональны собственные векторы, принадлежащие одному и тому
же (вырожденному) собственному значению?
130
Предположим, что есть три независимых вектора Sci, х2
и х3, принадлежащие собственному значению Я. Ясно, что
любая их линейная комбинация — тоже собственный век-
вектор. Положим yi = xi, y2 = х2 + ctyi. Выберем а так,
чтобы yi и у2 были ортогональны. Следовательно,
yiy2 = 0 = yix2 + ctyiyi, a = —yiXjj/yiyi.
Теперь положим у3 = х3 + Pyi + ТУг- Выберем р и у
так, чтобы уз было ортогонально как к yi, так и к у2. Та-
Таким образом,
О =. yix3 + Pytyi -> р = — yix3/yiyi,
О = у2х3 + ТУаУа -^ у = — у2х3/у2у2.
Итак, мы сконструировали три взаимно ортогональных
вектора уг. Конечно, эту процедуру, известную под назва-
названием процедуры ортогонализации Г р а -
ма — Шмидта, можно распространить на произволь-
произвольное число вырожденных собственных векторов. Итак, мож-
можно произвести такие преобразования, что все п собствен-
собственных векторов эрмитовой матрицы будут взаимно ортого-
ортогональны (в случае, если все п собственных векторов линей-
линейно независимы; в справедливости этого мы убедимся
в разд. 6.6).
Из уравнения F.43) ясно, что собственные значения
и собственные векторы линейного оператора не зависят
от выбранной системы координат, которая использовалась
для их расчета. Из матричного уравнения F.45) Ах = %х
следует, что у'^Ауу^х = Ху~гх или А'х' = %х'. Итак,
если х — собственный вектор А, его преобразование х' =
= у~хх есть собственный вектор трансформированной
матрицы А', а собственные значения совпадают.
Предположим, что сделано преобразование к системе
координат, в которой базисные векторы е\ есть собствен-
собственные векторы А (предполагая, что они образуют линейно
независимую систему):
Ае\ = liei. F.51)
В этой системе матричный элемент A[j есть i-я компонента
вектора Ae'j, которая, согласно F.51), равна нулю или "к}
в зависимости от того, i ф j или i = /, т. е.
А'ц = Я,,6„. F.52)
Таким образом, матрица А' диагональна, а ее диагональ-
диагональные элементы — это собственные значения.
9* 131
Ввиду важности этой матрицы напишем вид матрицы
преобразования у. Вспомним, что ytj ¦— i-я компонента
нового вектора e'j в старой (нештриховэнной) системе,
т. е. /-й столбец у состоит из компонент собственного век-
вектора е'у.
(е\ е* е'п\
и"...))-
Если преобразование унитарно, собственные векторы
должны быть взаимно ортогональны (если необходимо,
с использованием процедуры Грама — Шмидта) и норми-
нормированы.
Выше мы видели, что собственные значения матрицы
не меняются при преобразовании подобия. Они являются
инвариантами матрицы. Другие инварианты —
это след и определитель
Tr A' = Tr S-US = Tr ASS'1 = Тг А; F.54)
det A' = det (S^AS) = det (S) (det A) (det S) =
= detA. F.55)
Эти инварианты не являются независимыми от собствен-
собственных значений. В действительности их можно вычислить
в системе, в которой А диагонально. Получаем
2я*; F.56)
det А = Ц %t. F.57)
Только собственные значения есть независимые инвари-
инварианты.
В заключение этого раздела приведем пример физиче-
физической задачи на собственные значения, где встречаются
матрицы.
Пример. Рассмотрим задачу молекулярных колеба-
колебаний, или, в общем случае, «малых колебаний» (классиче-
(классической) механической системы. Например, на рис. 6.2 схе-
схематически показана молекула воды и простая колеблю-
колеблющаяся система, состоящая из трех масс, связанных пру-
пружинами.
Конфигурацию, или состояние, такой системы
удобно описывать n-мерным вектором х, где п — числе
132
степеней свободы, т. е. утроенное число масс. Простая
система координат состоит из базисных векторов:
ei: масса 1 смещена на единицу длины в ж-направлении;
е2: масса 1 смещена на единицу длины в ^-направлении;
е3: масса 1 смещена на единицу длины в z-направлении;
е4: масса 2 смещена на единицу длины в ж-еаправле-
нии и т. д.
Рис. 6.2. Простые колебательные системы:
а—молекула воды; б—три массы, связанные пружинами.
Кинетическая энергия, выраженная через компоненты
в этой координатной системе, имеет вид
F.58)
где mt — масса, связанная с xt (т. е. т4 = т2 = т3 = массе
частицы 1, то4 == т5 = тъ = массе частицы 2 и т. д.), xt =
= dxjdt и М — диагональная матрица Mtj = nifiij.
Для колебаний малой амплитуды потенциальную энер-
энергию можно разложить в ряд Тейлора
a
В положении равновесия сила (dV/dxtH должна равняться
нулю; можно выбрать, кроме того, Fo = 0. Пренебрегая
членами третьего порядка, запишем потенциальную энер-
энергию в виде
F.60)
133
где V — вещественная симметричная матрица;
dw(d
Выражение для кинетической энергии упрощается,
если перейти к новой системе координат с базисом
' -1 :ef. F.61)
Матрица преобразования
/ 1
= 00
/mi
о —)= о
ут2
о
о
\
о о ...—4=
...—
тп/
F.62)
не унитарна, так что, например, вид скалярного произ-
произведения не будет оставаться инвариантным. Но это как
раз нам нужно для получения выражения F.64) для Т.
Имеем
= х'у,
так что
x'yMyx'=±x'x'; 1
x'yVyx' = ±x'Ax', J
где
А =
F.63)
F.64)
F.65)
(преобразование такого типа SVS называется конгру-
конгруэнтным преобразованием).
Теперь А вещественна и симметрична (и, таким обра-
образом, эрмитова), так что известны ее п вещественных соб-
собственных значений ^ип независимых вещественных соб-
собственных векторов uh; последние можно сделать ортонор-
мированными:
Auh = Xhuft. F.66)
Если произвести унитарное преобразование от систе-
системы e'i к системе ик (так как uk вещественны, преобразова-
преобразование ортогонально и унитарно) и обозначить координаты
вектора х в последней системе через qk, то получаем, что
134
потенциальная энергия также диагонализуется
т 1 • • i VI '.
V = у qAq =
где Л — диагональная матрица; Льг = Яьбьг. Известно,
что все собственные значения Кк вещественны и что "kh ~^-
^> О, так как, согласно F.59), V никогда не может быть
отрицательным, если равновесное положение устойчиво.
Лагранжевы уравнения движения, записанные через
обобщенные координаты qh; имеют вид
dt dgh dV* '
ОЛИ
ft + Xfc№ = 0. F.69)
Решения последнего уравнения:
A) Я
B)
Частоты иь называют нормальными часто-
частотами, a qh — н о-р мальными координата-
м и. Если только одно из qh Ф 0, то в системе возбуждено
нормальное колебание, при котором все исходные коорди-
координаты меняются гармонически со временем с общей часто-
частотой (Oft.
Некоторые из нулевых частот Kh — 0 соответствуют
переносам и вращениям системы как целого. Известно,
что собственные векторы, описывающие реальные коле-
колебания, ортогональны им (и друг другу). Можно показать,
что условия ортогональности с трансляционными и вра-
вращательными движениями формулируются физически как
неподвижность центра инерции при колебании и равен-
равенство нулю углового момента.
Наконец, перейдем- обратно к исходной (нештрихован-
ной) системе координат
х = U'q, х = ух = yU'q, F.71)
135
где у — матрица F.62); U' — унитарная матрица преобра-
преобразования от системы е[ к uh; Щк = щ^ = е?иь равно i-й
компоненте собственного вектора и& в системе е\. Тогда
каждая декартова координата xt представляется в виде
суммы по нормальным колебаниям:
= У, -^~ ah sin («Dfc* + бь) = У. uikak sin fat + 6^), F.72)
где мгь — i-я компонента uft в нештрихованной системе.
Ортогональность и нормировочные условия для ^об-
ственньйс векторов uft, выраженные через компоненты
нештрихованной системы, имеют вид
bhl = икщ = 2 Щкщ, = 2 mjUfcUji. F.73)
6.6. ДИАГОНАЛИЗАЦИЯ МАТРИЦ
Выше мы видели, что если собственные векторы обра-
образуют полную ортогональную систему, то квадратную мат-
матрицу можно диагонализировать с помощью унитарной
матрицы, образованной из собственных векторов. Покажем
сейчас, что это утверждение справедливо для эрмитовой
матрицы Н.
Уравнение
Ни, = "him F.74)
имеет по меньшей мере одно собственное значение и соб-
собственный вектор, так как секулярное уравнение F.46)
имеет по меньшей мере одно решение. Выберем ортонор-
мированную систему координат ej, в которой первый член
el равен ui (это можно сделать, так как существуют систе-
системы п линейно независимых векторов, включающих щ,
и, если необходимо, их можно ортогонализовать с помо-
помощью процедуры Грама — Шмидта). Преобразуя Н в эту
систему, получаем в первом столбце следующие элементы:
Ни = eitfu, = Xi6n. F.75)
136
Из эрмитовости Hf определяется первая строка, и можно
написать следующее выражение для //':
#' =
О О
о\
о
о
О
G
F.76)
где G — эрмитова матрица размерности п — 1 в векторном
подпространстве, ортогональном к щ. Повторим теперь
эту же операцию с G и продолжим ее до тех пор, пока Н
не будет полностью диагонализовано. При этом находятся
п независимых собственных векторов Н, образующих уни-
унитарную матрицу преобразования, которая диагонали-
зует Н.
Предположим теперь, что есть две эрмитовы матрицы
Hi и Н%. Можно ли их диагонализовать «одновременно»
одним и тем же унитарным преобразованием, т. е. можно
ли найти такую унитарную матрицу U, что
Dt = U^HiU, D2 = и-гН2и F.77)
обе диагональный
Так как диагональные матрицы, конечно, коммутируют
друг с другом, то
О = DiD2 - DJ)i = U-1 (#i#2 - #2#i) U; \ F.78)
tfi#2 - #2#i = 0. J
Таким образом, необходимое условие состоит
в том, чтобы матрицы Hi и Н2 коммутировали. Это усло-
условие также идостаточно. Предположим, что Hi и Н%
коммутируют. Положим U^HiU = D (диагонально),
и~гН2и = М (может быть и не диагонально); D и М ком-
коммутируют: DM = MD. Напишем i/'-й элемент этого урав-
уравнения
DltMt, = MtJD)S. F.79)
Таким образом, если Dti Ф Djj, то Mi} = 0. Однако это
не означает, что М диагонально, так как Hi может иметь
несколько вырожденных собственных значений, т. е. мо-
могут совпадать несколько элементов D. Предположим,
137
например, что равны первые три. Тогда
\
Д О О I
о я, о |
оох
о
. F.80)
о
Итак, М диагональна по блокам. Субматрица в левом
верхнем углу М эрмитова и может быть диагонализована
унитарным преобразованием, включающим только пер-
первые три строки и три столбца. При этом соответствующий
блок в матрице D умножается на единичную матрицу,
т. е. не меняется. Ясно, что, повторяя эту операцию, мож-
можно одновременно диагонализовать как М, так и D.
Сказанное выше ведет к общему условию, что матрицы
можно диагонализовать унитарным преобразованием. Рас-
Рассмотрим произвольную матрицу М. Можно написать
М = А + 1В, F.81)
где А и В обе эрмитовы, если выбрать
А = (М + М+)/2; В = (М — M+)/2i F.82)
(это аналогично разделению комплексного числа на веще-
вещественную и мнимую части). Теперь А и В можно диаго-
диагонализовать по отдельности. Но чтобы можно было диаго-
диагонализовать М, нужно, чтобы А и В диагонализовывались
одновременно. Это выполняется, если А и В коммути-
коммутируют, что эквивалентно коммутации М и М+. Матрица,
коммутирующая со своей эрмитово сопряженной, назы-
называется нормальной; матрицу М можно диагонализо-
диагонализовать унитарным преобразованием тогда и только тогда,
когда М — нормальная матрица. Отметим, что унитарные
матрицы так же, как и эрмитовы, удовлетворяют этому-
условию.
138
6.7. ПРОСТРАНСТВА БЕСКОНЕЧНОЙ РАЗМЕРНОСТИ
В этом разделе дается обобщение соотношений, полу-
полученных выше, на бесконечномерное векторное простран-
пространство. Сначала рассмотрим задачу колебаний «нагружен-
«нагруженной» струны, т. е. натянутой струны длиной L под напря-
напряжением' Теп равными массами, закрепленными на ней
через одинаковые промежутки длины. Эта система пока-
показана на рис. 6.3.
/77, Jh
^__тЩ_ I \Ll ?\—
Hi. V/,
x=L
Рис. 6.3. Колебания «нагруженной» струны.
Все массы одинаковы, т^—т.
В конце разд. 6.5 рассматривался пример описания
конфигурации или «состояния» системы посредством п-мер-
ного вектора у. Элементарный базис можно образовать
из векторов ег, где ег — конфигурация с 1-й массой, рас-
расположенной на расстоянии 1/|Апгг, а все остальные —
в положении равновесия (в разд. 6.5 эта система коорди-
координат называлась штрихованной). В этой элементарной
системе координата yi вектора у есть просто смещение
1-ш массы в единицах 1/У~гог. Можно показать, что соб-
собственные векторы ufe, соответствующие нормальным коле-
колебаниям, имеют компоненты (в элементарной системе)
иш = (uh)i = VlalL sin (Ikna/L), F.83)
где а — расстояние между массами; (п +1) а = L; константа
V^ введена для нормировки
uftu, = 1 = 2 Ba/i) sin2 (Шла/L). F.84)
i
139
Произвольную конфигурацию системы в любой задан-
заданный момент времени с помощью F.71) можно выразить
через нормальные координаты
У1 = 2 utkqh = 2 uihdk sin (aht + 8fe), F.85)
h k
причем частоты оказываются равными
(oft = Ут/та-2 sin (kna/2L). F.86)
Предположим, что число масс бесконечнв растет,
а длина L остается фиксированной. Вместо обозначения
данной массы индексом I удобно использовать перемен-
переменную координату х = la, которая в пределе становится
непрерывной переменной. Изменяется также ряд других
обозначений.
1. Компоненты у в элементарной системе равны уг->
-> У (я),
У = S У*ег -* у = U (ж) еж Дг- F.87)
2. Элементарная система координат переходит в точеч-
точечную координатную систему, т. е. базисный вектор е&
представляет собой б-функциональный сдвиг только в од-
одной точке, Ъ. Компоненты базисного вектора в элемен-
элементарной системе становятся равными
(ei)« = 6,m -* Ы, = 6 {х- Ъ). F.88)
3. Матрица преобразования от элементарной системы
к координатной системе собственных векторов имеет
такие элементы, что к-ш «столбец» образуется из компонент
ий элементарной системы, т. е.
иш = (uft), = V~2a/L sin (lkna/L) -»
-» uh (x) = ]/~2/Lsm (krtx/L). F.89)
4. Условия нормировки и ортогональности для собст-
собственных функций, вычисленные в элементарной системе,
D0
имеют вид
№+)] sin [jkn/(n+l)] sin
3=1
L Г,
—» \ щщйх= \ B/L) sin (knx/L) sin (lnx/L)dx = 8kl. F.90)
о о
5. Разложение F.85) элементарной компоненты через
нормальные координаты приобретает вид
h
fesin (knz/L). F.91)
Последнее выражение — это ряд Фурье (синусоидальный);
qu — к-п компонента у в системе координат щ.
6. Обратное соотношение имеет вид
„ X1 77-1,, X4 ,,* ,,
Qh — 2л ы У1 = 2j 1кУ[ —*¦
i i
->Ян= ) u%(x)y(x)dx=y -j- j у (х)sin -^-dx, F.92)
о
т. е. представляет собой обратный интеграл Фурье.
Выше использовались два типа бесконечномерных
систем координат. Одна имеет счетное бесконечное число
базисных векторов и^, нормированных обычным способом,
uhut = 8hl. Другая система имеет несчетное число векто-
векторов, а нормировочное условие имеет вид
еоеь= \ ^(х—а)8(х — b)dx = 8(a — Ъ). F.93)
Теперь, основываясь на приведенном выше простом
примере, можно сделать ряд обобщений. Мы видим, что
обычные функции (удовлетворяющие определенным мате-
математическим условиям «хорошего поведения», в которые
мы не будем вникать) образуют линейное векторное беско-
бесконечномерное пространство. Такое векторное пространство
со скалярным произведением комплексного типа, опреде-
определенным выше, называется гильбертовым про-
пространством.
Значение функции / (х) в данной точке х есть ж-компо-
нента вектрра f в точечной системе координат (с несчетным
числом базисных векторов).
141
Существуют Другие системы координат с базисами
из полных ортогональных систем функций, как, напри-
Мер, тригонометрических функций, которые уже упомина-
упоминались при рассмотрении рядов Фурье. Другие подобные
системы будут исследованы в гл. 7 и 8.
7. Скалярное произведение, вычисленное в точечной
системе координат, равно
ь
фчр = f ф* (х) -ф (х) dx. F.94)
а
8. Ортонормированная система фк полна, если «про-
«произвольный» вектор if можно разложить по функциям фи,
которые тем самым образуют базис:
S+ F.95)
к
или, беря ж-компоненту,
к
есть к-я компонента ч|з в системе фи'.
ь
ah = ДО =
а
9. Линейные операторы. Предположим, что К—линей-
К—линейь
J ф1 (х) -ф (х) dx. F.97)
ный оператор; символически ^> = Кф. В компонентах
имеем
ъ
% = ^ Кцф1 -> *Р (^ = \ к & х')ф(х')Ох'. F.98)
3 а
Последнее выражение встречалось раньше; К (х, х') —
ядро интегрального преобразования.
10. Уравнение на собственные значения Kty = Яд|з при-
приобретает вид
ь
\ К (х, х') -ф (х') dx' = Xty (x). F.99)
а
Это однородное интегральное уравнение, с которым мы
встретимся снова в гл. 11.
Закончим на этом обсуждение бесконечномерных про-
пространств. Некоторые из сформулированных здесь идей
появятся снова в гл. 8 и в других частях книги.
ГЛАВА
СПЕЦИАЛЬНЫЕ
ФУНКЦИИ *
7.1. ФУНКЦИИ ЛЕЗКАНДРА
Вспомним дифференциальное уравнение Лежанд-
ра A.49):
g ? = 0. G.1)
Если п—целое число, одно из решений имеет вид поли-
полинома. Нормированное надлежащим образом, оно записы-
записывается в виде **
p { \
у
r=0
1
~~ 2"n!
r=0
1 (.
2"r!
/ d
u
Bn-2r)! ^9r
2"r!(n—r)!(n—2r)! " ¦
-l)r
(n-r)\
n
r=0
/ d \
1 1П -У.2П-2»"
Л dz / x
\ l)r1. ^2n-2»"
r!(n-r)! Ж
| (a; ) .
* Так называемые специальные функции математической фи-
физики представляют собой решения определенных, часто встречаю-
встречающихся линейных дифференциальных уравнений второго порядка.
Прежде всего мы изучим самые простые функции: функции Лежанд-
ра, присоединенные функции Лежандра и функции Бесселя. Эти
функции имеют много представлений: в виде частных решений
определенных дифференциальных уравнений, рядов, различных
интегральных представлений, с помощью рекуррентных соотноше-
соотношений и с помощью производящих функций. Взяв за основу одно из
этих представлений, можно получить остальные.
** Символ [ж] означает наибольшее целое, меньшее или рав-
равное х.
143
Это так называемая формула Родрига для полино-
полиномов Лежандра. Несколько первых полиномов равны
Ро (х) = 1; Р3 (х) = -1 Eх3 -Зх); 1
± \ G.3)
Р2 (х) = -1 C*«- 1); рь (х) = -±.F3**- 70а* + 15*).
Из формулы Родрига непосредственно вытекает кон-
контурное интегральное представление. Используем фор-
формулу Коши
считая, что / (f). регулярна внутри контура, окружающего
точку z в положительном направлении. Дифференцируя
п раз по z, получаем
Следовательно, из G.2) находим
Это так называемое интегральное представ-
представление Шлефли для Рп (z).
Другое интегральное представление можно получить
следующим образом. Возьмем в качестве контура в инте-
интеграле Шлефли G.5) окружность с центром в точке z и ра-
радиусом | Y^z2 — 1,| т. е. t = z -f- Yz* + 1 exp (i^), где
ф меняется от 0 до 2я. Непосредственные алгебраические
выкладки приводят к равенствам t2 — 1 = 2 (t — zj x
X (z + Yz2 — 1 cos Ф) и dt = i (t — z) d$. Подставляя
их в G.5), находим
л
Рп (*) = 4 J (* + К^1! cos ф)" йф. G.6)
о
Это так называемое интегральное представле-
представление Лапласа для полиномов Лежандра.
Рассмотрим далее ряд
^hnPn(Z) = F(h, z). G.7)
и=0
Используем представление Лапласа
_1_ Г d»
л J 1— Az—aVz2H
G.8)
Функцию F(h, z) называют производящей функ-
ией полиномов Лежандра.
В качестве примера полезности производящей функции
приведем рекуррентные соотношения для полиномов
Лежандра:
„у.1dF z—h р
A — 2hz + h9) dF/dh = (z — h) F.
Сравнивая коэффициенты при hn, находим
(n + 1) Pn+i (z) - 2znPn (z) + (R - 1) Pn_, (z) =
= zPn (z) - Pn.t (z),
или
(n + 1) Pn+i (z) - Bn + 1) zPn (z) + nPn_i (z) = 0. G.9)
Второе рекуррентное соотношение получается диффе-
дифференцированием производящей функции G.8) по z:
A—2hz + W) dFldz = hF, что дает
P'n (Z)-2zP'n.l (Z) + P'n-2 (Z) = Pn-L (Z). G.10)
Из двух рекуррентных соотношений G.9) и G.10)
можно получить много других, например
P'n+i (z)-zP'n(z) = (n+1) Р„ (z); G.11)
z/>; (z) - Р;_ i (z) = nPn (z); G.12)
P;+1(Z)-P;_1(z) = Bn + l)Pn(z); G.13)
(z2 -1) P'n (z) = nzPn {z) - «/>„_! (z) и т. д. G.14)
Ю дж. Мвтьюз, Р, Уокер 145
Другое применение производящей функции состоит
в вычислении Рп (z) в различных точках. Например,
при z = 1 из G.8) находим
2 hnpn(i) = i/(i-h) = i+h+h*+h*+...
Поэтому
ЛгA) = 1. G.15)
При z = 0
п=0
1
Следовательно,
{О, если п нечетно,
'"-'>"'-""", есливчино. G-16)
Здесь использовано обозначение п!! = п (п — 2) х
X (п — 4) ... 5-3-1 (п — двойной факториал).
Исследуем теперь свойства ортогональности и норми-
нормировки полиномов Лежандра. Для этой цели используем
формулу Родрига G.2). Рассмотрим интеграл
+i
Imn = \ Р.т (X) Рп И dx (т < п) =
Л
Проинтегрируем п раз по частям:
n-l
2m+n
-i
146
Следовательно,
jmn = 0, так как (d/dx)m+n (ж2— 1)т = 0, если т < п. G.17)
Предположим т = п. Тогда]
]4г
-1 -1
и-кратное интегрирование по частям дает
(-1)" Г , 2 _ 1>и /_?\ 2п
7nn-22n(n!J ] I» l) \dx) (x l) dx-
]
-22n(n!JJ I1 x) ax.
Положим ж = 2м—1; тогда
о
[см. C.46)]. Следовательно,
/п„ = 2/Bп+1). G.18)
Мы показали, что
26mn/B« + l). G.19)
Любую «разумную» функцию* на интервале —
1 можно разложить в ряд по полиномам Лежандра
/(*)= S спРп(х). G.20)
Согласно гл. 6, величины сп можно считать компонентами
вектора f в системе координат с базисными векторами
* Условие того, чтобы функция обладала «разумным поведе-
поведением», время от времени встречается в этой книге. Здесь не будет
точной формулировки условия «разумности» функции. С одной сто-
стороны, если / (х) непрерывна и имеет конечное число максимумов
и минимумов или если, кроме того, она имеет конечное число разры-
разрывов, то разложение G.20) справедливо, т. е. ряд в правой части G.20)
сходится к / (ж). С другой стороны, для значительно более общих
функций / (х) разложение G.20) еще сходится в «среднем»
(см. разд. 12.3).
10* 147
Рп. Умножая обе части G.20) на Рт (х) и интегрируя
от —1 до -|-1> находим
+1
Cm = Щ± \ Рт (X) f (X) dx. G.21)
'I
Чему равно второе, линейно независимое с Рп (х)
решение уравнения Лежандра? Если в уравнении Лежан-
"фа заменить переменную [см. текст, следующий после
уравнения A.40I
y = vPn(x), G.22)
то получаем уравнение
A - ж2) ь"Рп (х) + v' [2 A - Х*УР'П (х) - 2хРп (х)] = 0.
Решение этого уравнения находится непосредственно
и равно
Таким образом, найдено второе решение. Обычно его
обозначают такг
]iz^[pAzW. G.23)
оо
Можно показать, что
fn-l(z), Qn(z)~ ±., G.24)
г»оо *
где /n_i — полином степени ге — 1 по z. Отметим, что
Qn (z) — многозначная функция; чтобы сделать ее одно-
однозначной, обычно разрезают плоскость z от —1 до +1 вдоль
вещественной оси и определяют Qn (z) вещественной для
вещественных z > 1. Тогда, если — 1 < х < 1,
Qn (х ± ie) = 1 Рп (ж) [in (iif) т i«] + />и (*)• G-25)
Если — 1<ж<1, то обычно под Qn(x) подразумевают
арифметическое среднее
Qn (х) = ~ [Qn (х + ie) + Qn {x - ie)] =
-1PB (x) In (}±f) + /„_! (a). G.26)
148
Полином /„_! (х) определяется из условия, что при z ->• оо
Qn{z) >-0 как г~(И+1). Например,
Л г 1_ Л к
Ясно, что /о=— 1 и (?! (z) = у z In у z_ t } — 1 и т. д.
Присоединенное дифференциальное уравнение Лежанд-
Лежандра имеет вид [см. формулу A.69)]
Легко убедиться, что если у — решение дифференциаль-
дифференциального уравнения Лежандра, то A—ж2)т/2 (d/dx)m у — реше-
решение присоединенного уравнения. Для положительного
целого числа т определим
Р% (х) = A -хТ'2 (iO" Pn (х). G.28)
Величину Р™ называют п р и соединенной функ-
функцией Лежандра.
Интеграл ортогональности и нормировки присоеди-
присоединенных функций Лежандра имеет вид
] §^:ldbr <7-29>
Подчеркнем, что равенство G.29) справедливо, если обе
функции имеют одинаковые значения т. Это условие
ортогональности можно получить тем же путем, что
и G.19).
Присоединенные функции Лежандра с фиксированным
т представляют также полную систему функций в том
смысле, что произвольную (разумную) функцию / (х)
можно разложить в ряд вида
/;И= 5спР™(Ж). G.30)
П=7П
Комбинируя G.30) с идеей рядов Фурье, которые уже
рассматривались в гл. 4, мы видим, что функцию /(й),
где Q обозначает совокупность углов 6 и ф, можно раз-
149
дожить в ряд
/ (О) = § 2 АтпР\Г1 (cos 6) ехр (ипф). G.31)
п=0 т=—п
Продолжим кратко рассмотрение основных свойств
Рп'. Обычно определяют сферические гармоники
P^ (cos 6) ехр (W, x
( —l)m, если m>0,
l, еслит<0. <72>
Предлагаем читателю проверить, что G.32) можно запи-
записать также в виде
rJm(Q) =
X—^—(cos2e-l)J. G.33)
Это равенство верно как для положительных,, так и для
отрицательных т. Из G.32) либо из G.33) следует, что
У!.-™@) = (-1)т17т@). G-34)
В G.32) нормировочная константа выбрана так, что
J dQYfm (О) УГт. (Q) = б„-бтт.. G.35)
Разложение G.31) теперь можно записать в виде
/(Q)=S S BlmYlm(Q), G.36)
го г
причем Вт легко находится из G.35):
G.37)
Покажем полезность таких разложений по сферическим
гармоникам на примере так называемой теоремы
сложения для сферических гармоник. Подставляя
G.37) в G.36), получаем
/ (О) = j ДУ/ (Q') 2 Y?m (Й') Ylm (Q). G.38)
im
J5Q
Так как G.38) верно для произвольной /(Q), то
SyL(Q')yte(G) = 5p-Qr). G.39)
lm
Функция б (Q — Q') характеризуется свойствами
б (Q - Q') = 0 при Q Ф Q', j dub (Q) = 1.' G.40)
Функция б (Q — Q'), конечно, зависит только от угла у
между направлениями Q и Q'. Из формул сферической
тригонометрии находим
cos у = cos 6 cos 6' + sin 6 sin 6' cos (ф — <?').
Так как функция б (Q — Q') зависит только от у, разло-
разложим ее в ряд по полиномам Лежандра
6 (Q -Q')=2 В,Р, (cos у). G.41)
Коэффициенты Вг даются формулой [см. формулу G.21)]
^ j dQ8 (Q - Q') P, (cos y), G.42)
так как 2nd (cos у) как раз равно элементу телесного
угла на сфере. Используя свойства G.40) функции
8(Q—Q'), из G.42) получаем
Теперь, используя G.39), G.41) и G.43), находим
2 Yfm (Q') Ylm (Q) = 2 ^Й1 pi (cos Vl G-44)
lm I
Чтобы закончить вывод, постулируем свойство сфериче-
сферических гармоник, справедливость которого будет очевидна
после прочтения гл. 8. Если произвольно повернуть оси
координат, любая сферическая гармоника Y[m (Q) стано-
становится линейной комбинацией сферических гармоник
Yim- {Щ от новых угловых координат Q. Подчеркнем,
что все эти гармоники имеют одинако-
одинаковый индекс I, т. е.
Ylm(Q)= 2 С1пт,У1т'{Щ, G.45)
2
m'=-I
151
причем коэффициенты Clmm- зависят от величины поворота
Q —>Q, а также от I, m и т'.
Так как из G.32) У,о = УB1 + 1)/4я Р, (cos 6), то член
Pj (cos y) в G.44) можно записать как Pt (cos y) =
= ]/Чя/B/-|-1) Y,o (Q), где Q —угловые координаты того
же направления, что и Q, но в другой системе коорди-
координат, полярная ось которой направлена вдоль Q'.
Тогда из G.45) имеем (с переставленными Q и Q')
P,(cosY) = 2 AlOm.(Q')Ylm.{Q).
m'=—l
Сравнивая с G.44), видим, что члены для каждого зна-
значения I равны, т. е.
i
4я ^ тт* „-,„ тт „-^ G.46)
7П=— I
С помощью G.32) выражение G.46) можно переписать
через присоединенные полиномы Лежандра;
Pi (cos у) = Р, (cos 6) Р, (cos 0') +
I
+2 S il
cosm(9 — 9 )•
m=l
Уравнение G.46) [(или G.47)] и есть искомая теорема
сложения.
Закончим этот раздел формулами для нескольких
первых сферических гармоник:
±1 = =F V^-gT sin 6 е±21Ф; У2' ±1 = т }^Ж sin 6 cos 9 e±21*
152
7.2. ФУНКЦИИ БЕССЕЛЯ
Мы уже приводили уравнение Бесселя A.52):
х2у" + *у' + (х* -т?)у = 0 G.48)
и решение в.виде ряда
Определим функцию Б е с с е л я Jm (х) как
= Zl rlT(m+r+i) \~2~)
r=0
Для целого т из этого определения находим
Т (v\ ( Л\т Т (v\ П tylY
Непосредственно из степенного ряда G.50) можно
получить рекуррентные соотношения
" тп-1 (•?) ~Г •'m+1 V^) ==
ЕГ ( — 1)г / х \m+2r-l (—l)r / a: \m+2»-+l-| _
L г1Г(т + г)\~Т) + г!Г(т + г + 2) \ 2 ) J ~
оо
/_Е_\ I I У Г ^ ) /д \2
V 2 / trH^^JLrir (m+r) \2 )
r=l
[1^ ^4^ VJ
J г!Г(т
r=l
г!Г(т4
J53
2т
Следовательно,
Jm-i (ж) + /m+1 (ж) = -^ Jm (ж).
Аналогично
"тп-1 (•*") — "m+1 W = ^-^т (ж)-
Складывая и вычитая G.52) и G.53), имеем
/m+1 (ж) = -^- Jm (ж) — J'm (ж).
G.52)
G.53)
G.54)
G.55)
На рис. 7.1 показаны первые три функции Бесселя
целого порядка.
>¦¦ -
Рис. 7.1. Функции Бесселя /0 (х), Jt (x) и /2 (ж).
Функции Бесселя полуцелого порядка легко выразить
через тригонометрические функции. Из решений в виде
ряда находим
Ji/s (ж) = {2/ях)Чг sin ж,
/_i/2 (ж) = B/яжI/2 cos ж.
Далее, из рекуррентных соотношений G.54) и G.55)
имеем
Js/n (х) — B/пхI^ (Их) (sin х — cos x);
/_з/2 (х) = B/яж)х/2 (—1/ж) (cos ж — sin x).
С помощью рекуррентных соотношений можно получить
и другие функции с полуцелым индексом.
Если т не есть целое число, то два независимых реше-
решения уравнения Бесселя суть Jm (ж) и J_m (x). Однако
если т — целое число, то они не являются независимы-
154
ми. Поэтому определяют функцию
У (^cosm^ (*)-/_„,(*) 5
т v ' sin тл ' v y
причем Jm (х) и Ут (ж) — всегда независимая пара реше-
решений. Чтобы показать это, можно вычислить вронскиан
Jm и Ym и проверить, что он отличен от нуля для всех
значений т (предлагаем это в качестве упражнения).
Ряд полезных интегральных соотношений находится
следующим образом. Из J'o (ж) — — /i (ж) получаем
f /, (ж) dx = - Jo (x). Из G.54)
[xnJn {x)Y = хп [/; (х) + -=-/„(«)] = xnJn^ (х).
Следовательно,
\xnJn^{x)dx = xnJn(x). G.57)
Также
[x~nJn (х)]' = ж-" [/; (*)--?-/„ (ж)] = -ж-"/п+1 (ж).
Следовател ьно,
j ж-"/п+1 (x)dx=- x~nJn (ж). G.58)
Функции Бесселя обладают свойством ортогонально-
ортогональности, аналогичным случаю полиномов Лежандра. Положим
¦Jm{kx) = f(x), Jm(lx) = g(x). Тогда
Умножая второе равенство на ж/ и вычитая первое,
умноженное на xg, имеем
ж/ (х) g (ж) dx = W^T2 [f (ж) g' (ж) - g (ж) /' (ж)];
b
|55
Если Jm (кх) и Jm (lx) обращаются в нуль в точках а
и Ъ, или если J'm (кх) и J'm (lx) обращаются в нуль в этих
точках, или выполняются более общие условия (напри-
(например, две функции обращаются в нуль в точке а, а две про-
производные — в точке Ь), то получаем
ь
\ Jm(кх) Jm(lx)xdx = 0 в случае, если кф1. G.59)
а
Чему равен интеграл при k=~V> Требуется вычислить
С У11(кх)хйх = ~щ j 'Jm(y)ydy, где у = кх. Интегрируем
один раз по частям
= \ У*Дп (У) -]jm (у) Гт (У) J/2 dy.
С другой стороны, из уравнения Бесселя имеем
y*Jm (У) = тЧп (у) - yJ'm (у) - уЧ'т (у).
Следовательно,
/ = \ № (У) -\J'm (У) [™?Jm(y) - yJ'm (у) ~
- У*Гт (У)] dy = \y4%l (у)-\ тЧиУ) + у У2 \J'm (У)]2-
Таким образом, вычислен «нормировочный интеграл»
j J*n (kx) xdx = ^(x* gi ) Рт (кх) +1 х* [J'm (кх)]*.
Если, например, Jm(kx) обращается в нуль при ж = 0
и х = Ь, то
ь
^^^ ^\ G.60)
Эти соотношения ортогональности обычно исполь-
используются для определения коэффициентов разложения функ-
функции в ряд по функциям Бесселя. Рассмотрим, например,
функцию f(x) на интервале 0<а;<а. Напишем
Е(М G.61)
п=1
156
Где кп выбраны так, что Jm(kna) = 0'. Тогда, так как
m (кпх) Jm (kpx) xdx = 6np -^- [Jm+1 (йра)]2, G.62)
j
0
то легко получить
Cn = j. / (x) Jrn (M X dxj~ [/m+1 {kna)]\ G.63)
Если требуется представить функцию на более общем
интервале а -< х <Z b, то можно использовать, например,
функции вида
Ym (ka) - Ym (kx) Jm (ka) G.64)
с к, выбранным так, чтобы функции обращались в нуль
при х = Ь.
Вспомним производящую функцию для полиномов
Лежандра
= 2 hnPn{z).
Попытаемся найти производящую функцию для функций
Бесселя целого порядка, т. е. нужно найти такую функ-
функцию F (z, h), что F (z, h) — 2 hnJn (z). Начнем с рекур-
n
рентного соотношения
Умножим его на hm и просуммируем по всем го. Полу-
Получаем
Интегрируя, находим
F(z, Л) = ф
где ф (z) — некоторая функция z, которую нужно опре-
определить. Подберем ф так, чтобы коэффициент в F при h°
равнялся /0 (z). Непосредственной проверкой убеждаемся,
что для этого необходимо ф (z) = 1. Тогда, если написать
ехр [| (h —i) ] = 2 Л"^п B), G.65)
157
находим
A) Uo (*) = /„ (*); C) Un(-z)=(-i)nUn(z);
B) Un^(z)+Vn+i(z)=^-Vn{z); D) U.n(z)=(-i)nUn(z).
Этого недостаточно, чтобы утверждать равенство Un (z) =
— Jn(z). Продифференцируем производящую функцию
по z:
т (h -т) 2 hnUn &=2 hn
Приравнивая коэффициенты при й.п в левой и правой частях
этого уравнения, находим U'n(z) = -~-[Un-i(z) — Un+l(z)].
Таким образом, 1/± = — U'o = — J'o = Jt, и все остальные
равенства следуют из рекуррентного соотношения.
Приведем пример, где используется эта производя-
производящая функция:
=2'•"А м
к
Следовательно,
Лг (Ж + у) = 2
Зная производящую функцию, легко получить интег-
интегральное представление Шлефли
, „ ехр 4- (t—г)
^& = -Щ-§ Д <IJ Л. G.67)
158
причем контур обходит начало координат й положитель-
положительном направлении. Если заменить ? = exp(iG), то
г / v If exp (iz sin 6) . ,.Q4 ,n
J»l*)==m) exp[(n+i)iei "»ч> (*)*>=
= ~ \ exp [i (z sin G — n6)] dG.
о
Следовательно,
я
Jn (z) = JL f cos (n6—z sin G) dG. G.68)
Это выражение называется интегралом Бес-
Бесселя.
Теперь рассмотрим интегральные представления функ-
функций Бесселя в несколько более общем плане.. В частности,
число п далее не будет предполагаться обязательно
целым. Рассмотрим интеграл
1 г ехр 2" (*—г)
и посмотрим, при каком условии он является решением
уравнения Бесселя. Подействуем сначала на /n(z) диф-
дифференциальным оператором Бесселя. Получаем
т(*—г)]
« /,, 1
-иг
причем выражение [^п (z, t)] означает, что нужно взять
разность значений функции Fn (z, t) на двух концах пути
интегрирования. Если выбрать путь так, чтобы эта раз-
разность равнялась нулю, то G.69) будет решением уравне-
уравнения Бесселя. Если п — целое число, достаточно взять
159
любой замкнутый контур. Конечно, если контур не вклю-
включает начала координат, интеграл G.69)# равен нулю.
Предположим, что п не обязательно целое число и что
z вещественно и положительно. Тогда Fn (z, t) равна нулю
при t~>0~\- и при t-> — оо. Таким образом, можно
получить два решения, контуры для которых показаны
1и'1)G\
Плоскость t
Рис. 7.2. Выбор контура для интеграла G.69),
Яающего решение уравнения Бесселя.
на рис. 7.2. Они называются функциями Ган-
Ганке л я первого и второго рода соответственно и всегда
дают два независимых решения уравнения Бесселя.
Если п — целое число, то из рисунка ясно, что
1 [Щ» (z) + Н™ (*)] = Jn (z). G.70)
Это соотношение верно также и в том случае, когда п
не есть целое "число.
Эти интегральные представления справедливы при
I arg z | < я/2. Если требуется найти представление,
которое годилось бы при | arg z — а \ < я/2, то нужно
определенным образом повернуть контуры. Предлагаем
это сделать в качестве упражнения.
Соберем вместе все найденные решения уравнения
Бессеяя. Включим также без доказательства ряд соот-
соотношений.
B) J_п (х). Если п — нецелое число, то это второе
линейно независимое решение. Если п — целое число, то
J-n (х) = (—1)"^п (ж).
C) Yn (x) = [cos nnJn (x) — J_n (a;)]/sin rot. Это всег-
всегда второе независимое решение.
D)
E)
160
2 ./ пя л \
"^8111^—2-Х) ^
Если х-> О, Jn (х) при п-^-О конечно. Все другие реше-
решения в начале координат расходятся. Асимптотические фор-
формы решений при х —*- оо имеют вид
г / > -. / 2
G.72)
где /n, Yn, H™ и Я|,2) подчиняются одинаковым рекур-
рекуррентным соотношениям G.52) — G.55). Отметим далее ряд
функций, связанных с функциями Бесселя.
1. Функции Бесселя от мнимого аргумента (модифи-
(модифицированные функции Бесселя):
In (z) = ДР^
; Кп (z) = ^ (Г Н? (iz); G.73)
In (z) ^- 0 при z -> 0 (в случае, если п > U; /0 @) = 1);
Кп (z) -+ 0 при z -> с».
2. Функции Ьегп (х) и bein ж, которые определяются
через функции Бесселя от аргумента с фазой Зя/4:
bein2;. G.74)
G.75)
3. Сферические функции Бесселя:
7.3. ГИПЕРГЕОМЕТРИЧЕСКАЯ ФУНКЦИЯ
Эта функция определяется так называемым г и п е р -
геометрическим рядом
Г (с)
Г(е)Г(Ь)
2
n=0
G.76)
Обозначение %F\ указывает, что есть два параметра, а и Ь,
«идущие в числитель», и один, с, «идущий в знаменатель».
Дж. Метыоз, Р. Уокер
Эта функция является решением дифференциального
уравнения
х A - х)у" + [с - (а + Ь + 1)х] у' - аЪу = 0, G.77)
которое имеет правильные особенности в точках х = О, 1
и оо. Можно использовать метод разложения в степенной
ряд (см. разд. 1.2), чтобы найти поведение решения вбли-
вблизи каждой из этих особых точек.
Предварительно рассмотрим общее линейное дифферен-
дифференциальное уравнение второго порядка с тремя правильны-
правильными особенностями. Обозначим эти особенности ?, tj и ?.
Запишем уравнение в виде
У" + Р{*)У' +Q (z) y = 0. G.78)
Из разд. 1.2 известно, что Р и Q имеют вид
р полином ~ полином .г, 7Qv
Используя условие, что бесконечно удаленная точка
является обыкновенной, находим
о 1 I D \ Е \ F
Далее методом, описанным в разд. 1.2, рассмотрим
решение вида у ^ (z — ?)а вблизи точки z = \. Опреде-
Определяющее уравнение имеет вид
Обозначим корни а4 и а2. Тогда
Если решить эти дна уравнения относительно A vlD через
ai и а2 и сделать то же самое с двумя другими особенно-
особенностями, то дифференциальное уравнение G.78) можно
записать в следующей форме:
(Е-чНч-Qtt-B Г ш«2
<«-Е)(«-П)С»-0 L (*-Е)(ч-
0 •" <*—П)СС—
162
Здесь использовались обозначения р и у для показателей
степеней при tj и ? соответственно.
Тот факт, что у является решением уравнения G.80),
часто записывают в виде
Г* ч С 1
У = Р{Щ. Pi Ti А G-81)
1«2 02 Y2 j
(Р — символ Римана). Заметим, что для того, чтобы z = оо
была обыкновенной точкой, необходимо выполнение усло-
условия a1 + a2 + pi + p2 + v1 + v2 = l.
Символ Римана соответствует общему решению
уравнения G.80). Из него можно найти шесть различных
специальных решений, которые ведут себя вблизи
особенностей степенным образом. Например, одно из зтих
шести решений ведет себя при z вблизи г\ как (z — "п)^1*
Конечно, эти шесть специальных решений не являются
независимыми.
Часто удобно помещать эти особенности в точки 0, 1
и оо. Для этого сделаем томографическое
преобразование:
(g—S) ("П—О /789ч
"-с-снл-е* G-82)
которое переводит .точки z = ?, т], ? в точки @ = 0, 1, оо.
Тогда оказывается, что
О 1 оо ^
\ Pi Vi «[• G.83)
1«2 Рг Уг )
Сделанное преобразование сдвинуло особенности, не
изменяя показателей. Можно, наоборот, изменить пока-
показатели, не сдвигая особенностей. Например,
С 1 Г 1 ч С ^
J G-84)
(z—w
V.a2 P2 Y2 J VP&2 + A P2—Л Y2
Комбинируя эти два типа преобразований, можно
свести общее уравнение G.80) или G.81) к уравнению
0 1 оо ^
G.85)
[0 0 ах).
[1-е с-а-Ь Ъ j
11» 163
Легко проверить, что выражение G.85) — не что иное,
как решение гипергеометрического уравнения G.77), на-
написанного в начале этого раздела. Гипергеометрический
ряд G.76) есть специальное решение этого уравнения,
которое ведет себя вблизи особой точки z = 0 как
(z — 0)° = 1.
Для нахождения второго решения сделаем преобра-
преобразование, аналогичное G.84), и получим
@1 оо "I
0 0 1 + а-с х \ .
с —1 с — а — Ъ l + b — c J
У = -
i + b-c
Следовательно, другое решение уравнения G.77) дается
формулой
у = x^-^Fi A + а — с; 1 + Ь — с; 2 — с; х). G.86)
Это решение, которое вблизи х = 0 ведет себя как
(х — ОI. Можно найти ц другие решения. Положим,
например, и = Их. Тогда
{01 оо
а 0 0
b с—а—b 1—с
{01 оо Л
0 0 а Л.
Ь—а с—а—Ъ 1 + а —с J
Следовательно, величина
у = х~а 2FX (а, 1 + а — с; 1 + а— Ь; Их) G.87)
есть другое решение гипергеометрического уравнения. Это
решение при х -> оо ведет себя как (Нх)а. Интересная
задача — связать эти решения, но здесь мы этого делать
не будем. Приведем типичную формулу такого рода:
V (П /)" /*• ^
Г(с)Г(а+Ь-с) г1 _ ,с_„_ь
+ Г(о)Г(Ь) l Z; X
X z^i (с — а, с —fc; 1+с — а — Ь; 1 —z). G.88)
164
Интегральное представление для 2Fi (я, Ь; с; х) можно
полнить следующим образом:
F In h- с- х\ - Г (С)
^ («> Ь, с, х) - г (е) г (
-Г(а)г[Ь)(СГ(с-Ь) S
n=0
<x> 1
?) V
Г (с— ft ^J
Г (а) Г F) Г (с .
п=0 О
Г (с)
"- — Ъ) J
Г(Ь)Г(С" 'о
= Т(Ъ)т1-Ъ)\ dt.t^(l-tr^(l~txr. G.89)
о
Чтобы интеграл сходился, здесь необходимо предполо-
предположить, что Rec>Refc>0.
Это представление наводит на мысль исследовать
более общую функцию
/ (х) = j г6 A - О0 A - tx)~a dt G.90)'
вдоль некоторого контура в качестве возможного решения
гипергеометрического уравнения. Можно непосредственно
проверить, что подстановка f(x) в гипергеометрическое
уравнение G.77) дает
= _ а \ dt -I- [tь A — t)с-ь A - tx)-"-1]. G.91)
F(t, x)
Таким образом, в случае если F возвращается к своему
исходному значению после обхода контура, мы действи-
действительно нашли решение. Если Re с > Re b > 0, то годится
вещественная ось от 0 до 1, и мы возвращаемся к фор-
формуле G.89).
165
Отметим, что подынтегральное выражение в G.90)
имеет три особенности: при t = 0, 1, 1/ж. Для контура
вокруг одной из них (или вокруг нескольких) величина
F, вообще говоря, не воз-
возвращается к своему исход-
исходному значению. С другой
стороны, если контур не
включает особенностей, то
интеграл G.90) равен нулю
по теореме Коши.
Общий выход из поло-
Рис. 7.3. Контур Похгаммера для
интегрального представления ги-
гипергеометрической функции, со-
содержащий две особенности.
жения состоит в том (сле-
(следуя Похгаммеру), чтобы
обходить особенности два-
дважды, используя контуры типа, показанного на рис. 7.3.
Чтобы избежать таких сложных контуров, предположим,
Рис. 7.4. Контур, удобный в случае, когда
с — целое число.
что с — целое число. Теперь можно использовать кон-
контур, показанный на рис. 7.4, и рассмотреть интеграл
(t -
- tx)~a.
G.92)
Разложим G.92) в ряд по степеням х:
Требуется вычислить интеграл I = ф ?° (t — 1)п~а dt
(п—целое число). Деформируем контур в круг большого
166
радиуса. Тогда
= & tn У ( — l)h <и~а)(и~а~1) ••• (га~а—^+1) dt _
ft0
Конечно, в случае если и — й;^= — 1, интеграл равен нулю
по теореме о вычетах. Итак, если п < — 1, то \ =0,
в то время как при п > — 1 | = 2ni (— l)n+1 f^Z
Предлагаем читателю проверить, что этот результат
можно записать также в виде
Возвратимся теперь к интегральному представлению
G.92) и используем G.93):
а(а+1)Г(Ь+2) х" _
"*"ГA+Ь-с)(с+1)!" 2! +---J-
__2ni ГF) р t h \
~~ (c—1)! " Г A+6—с) ^1-(а' о; с; ж;.
Следовательно, в случае, когда с—целое число (боль-
(большее нуля), имеет место следующее интегральное пред-
представление для 2^1 (о, Ъ; с; х):
ZF1 (а, Ъ; с; х) =
G.94)
Если а или b — отрицательное целое число, гипергео-
гипергеометрическая функция становится полиномом (так назы-
называемый полином Якоб и).
Причина столь подробного рассмотрения гипергео-
гипергеометрических функций состоит в том, что многие функции,
167
встречающиеся в математической физике, есть просто част-
частные случаи 2^1 (я, Ъ; с; х). Например, дифференциальное
уравнение Лежандра G.1) имеет три правильные особен-
особенности: в точках —1, +1 и об. Отсюда следует, что функции
Лежандра суть частные случаи гипергеометрической функ-
функции. Аналогично полиномы Якоби, упомянутые в преды-
предыдущем параграфе, встречаются при изучении свойств
преобразования сферических гармоник, связанных с пово-
поворотом системы координат. В следующем разделе будет
рассматриваться так называемая вырожденная гипергео-
гипергеометрическая функция, которая тесно связана с гипергео-
гипергеометрической функцией. Она включает в качестве частных
случаев* много функций, представляющих физический
интерес: функции Бесселя, решения уравнения Шредин-
гера для кулоновского потенциала (полиномы Лагерра),
решения уравнения Шредингера для потенциала гармони-
гармонического осциллятора (полиномы Эрмита), интегралы Фре-
Френеля из классической оптики и многие другие.
7.4. ВЫРОЖДЕННЫЕ ГИПЕРГЕОМЕТРИЧЕСКИЕ ФУНКЦИИ
Начнем с дифференциального уравнения для обыч-
обычной гипергеометрической функции х A — х) у" +
+ [с — (а -\- Ъ -\- 1) х] у' — аЪу = О с тремя правиль-
правильными особыми точками х = 0, 1, оо. Полошим теперь
х = z/b. Это сдвигает особенности в точки z = 0, Ъ, оо.
Устремим Ь —>- оо. Получаем
zy" +(c-z)y' -ay = 0, G.95)
где штрихи означают дифференцирование по z. Это диф-
дифференциальное уравнение имеет правильную особую точ-
точку в z = 0 и существенно особую точку в z = оо, которая
возникла от слияния Ъ -»- оо.
Вспомним два решения обычного гипергеометрического
уравнения
yi = 2Fi (а, Ъ; с; х);
Уъ = xx-^Fi A + а — с, 1 + Ъ - с; 2 — с; х).
Выполняя предельный процесс Ъ -у оо, получаем два ре-
решения вырожденного гипергеометрического уравнения:
]
G.96)
-c; 2-c;z). ]
168
Функция iFl(а; с; z) называется вырожденной
гипергеометрической функцией, или функ-
функцией Кум мер а.
Вспомним интегральное представление G.89):
1
2^(«, Ь; с; х)= Г{Ь)ТГ^С_Ь) j dt.tb-*(l-ty-b-i(\-tx)-a
(Re с > Re Ь > 0).
Меняя а ^ Ъ и устремляя Ь —> оо, имеем
1
G.97)
(Rec>Rea>0).
Кроме того, если с — целое число, то справедливо соот-
соотношение G.94):
2^ (а, Ъ; с; х) =
@,1)
где обозначение @,1) под знаком интеграла означает, что
контур включает точки г = 0 и 1 (см. рис. 7.4). Выпол-
Выполняя предельный переход, находим
@,1)
X(f_l)«-«-ierp(te), G.98)
где с по-преншему должно быть целым числом.
Другое интегральное представление ^(а; с; z) для
случая, когда с — целое число, имеет вид
@,1)
G.99)
Его легко проверить, разлагая подынтегральное выраже-
выражение в ряд по z и почленно интегрируя.
Многие часто встречающиеся функции являются ча-
частными случаями вырожденных гипергеометрических
функций. Приведем ряд примеров:
exp z = iFi (a; a; z)
{а — произвольное число); G.100)
^+4-; 2n+U ~2iz) ;
G.101)
Для и-го полинома Эрмита [см. A.67)]
1-й 3
ГК)
(-т)
Т
G103)
Если а — отрицательное целое число, то iFi (а; с; z)
становится полиномом; нормированный надлежащим обра-
образом, он называется полиномом Лагерра. Обычно
определяют (для п = 0, 1, 2, . . .)
Представляет некоторый интерес рассмотрение общего
решения вырожденного гипергеометрического уравнения.
Если с — не целое число, два решения имеют вид
J/i = iFi (а; с; z); i/2 = z1 jFj A + <г- с;2— с; z).
G.105)
Если с = 0, —1, —2, . . ., то i/i обращается в бесконеч-
бесконечность и
G.106)
Если с = 1, то i/i = i/8. Если с = 2, 3, 4, . . ., то #2 обра-
обращается в бесконечность; разделив его на соответствующую
Г-функцию для устранения расходимости, находим, что
уа пропорционален у1ш Определим тогда в качестве второго
170
решении функцию [см. G.56)]
A + g-c; 2-е; z)
ГB-с) "г
Иногда в вырожденном гипергеометрическом уравне-
уравнении делают замену y = uz~c/2 exp (z/2). Тогда находят
и==
с 1
Обычно определяют к==~— а и т = -^ (с — 1), так что
уравнение приобретает вид
4 1ы = 0. G.108)
Это уравнение имеет решения
-у—&; 2тп + 1; z\
_m + i- — Л; -
}
G.109)
Они неудовлетворительны (неполны) в случае, когда
с — целое число, т. е. когда 2т — целое число. Поэтому
определяют так называемую функц и"ю Уиттекера
тт Г (—2т) Г Bт) тллсл
WhtTn = —-f '—Щ-1 ' -щ; G.110)
г (т-»-*) г (T+»-*J
(z) и PF_h, m (— z) — два независимых решения урав-
уравнения Уиттекера G.108) для всех к, т.
Без доказательства приведем два последних соотно-
соотношения:
1) преобразование' Куммера:
iFi (а;.с; z) = exp z 1F1 (с — а; с; —z); G.111)
2) асимптотические формулы для больших | z |
Р-с (Re z > 0);
G.112)
Га (Rez<0).
171
7.5. ФУНКЦИИ МАТЬЕ
Уравнение Матье встречается в задачах волнового
движения с эллиптическими граничными условиями; про-
простейший пример — колебания поверхности эллиптиче-
эллиптической мембраны. К этому уравнению можно также свести
трехмерные задачи, в которых граница представляет
собой цилиндр эллиптического сечения; то же уравнение
возникает и в ряде других задач.
Однако более важен не определенный вид уравнения
Матье, а одно его свойство общего характера: линейное
дифференциальное уравнение с периодическими коэффи-
коэффициентами. Большую часть анализа в этом разделе можно
с соответствующими модификациями применить к любому
подобному дифференциальному уравнению.
В качестве стандартного вида дифференциального урав-
уравнения Матье возьмем следующий:
(d2y/dx*) + (о + р cos 2х) у = 0. G.113)
Это уравнение можно преобразовать к более привыч-
привычной форме с алгебраическими4коэффициентами; например,
замена
z-=cossx G.114)
преобразует дифференциальное уравнение G.113) в урав-
уравнение
4z A - z) (d?y/dz2) + 2 A — 2z) (dy/dz) +
+ [a + p Bz - 1)] у = 0. G.115)
Точки z = 0 и z = 1 — правильные особенности, z =
= oo — существенная особенность.
Однако уравнение Матье — не самый общий вид тако-
такого уравнения, т. е. не все дифференциальные уравнения
с двумя правильными и одной существенной особыми точ-
точками могут быть сведены к уравнению Матье.
Теперь докажем важную теорему, известную под назва-
названием теоремы Флоке.
В уравнении Матье G.113) переменная х обычно угол;
в этом случае нужно потребовать, чтобы решение у (х)
было периодическим с периодом 2зт. Для произвольных а
и р это невозможно. Пусть yi (х) и г/2 (х) — Два независи-
независимых решения уравнения Матье. Конечно, так как коэффи-
коэффициенты уравнения периодичны по х с периодом 2л, то
у± (х + 2я) и г/2 (х + 2л) суть также решения, и поэтому
их можно представить в виде линейных комбинаций
172
г/i (х) и г/2 (х)- Положим
У! (х + 2л) = Auyi (ж) + А21Уъ (х);
(ж + 2л) = A12yi (х) + А& (*) |
Теорема Флоке утверждает, что существует такое реше-
решение у (х), что
у(х + 2л) = ку (х), G.117)
где к — (комплексная) константа.
Пусть у (х) = Ci^i (x) + С2у2 (ж). Тогда
у (х + 2л) = (dAn + C2Ai2) yt (x) +
+ (CiAx + C2A2i) у2 (ж),
и если выполняется G.117), то
u + С2412 = kCi; 1 G.118)
-f-
Итак, С = ( г1 1 есть собственный вектор, а к — соответ-
соответствующее собственное значение матрицы
т. е.
(Ап
А
АС = кС. G.120)
Такой собственный вектор и собственное значение всегда
можно найти; это завершает доказательетво теоремы Фло-
Флоке. Получим полезное следствие этой теоремы. Опреде-
Определим ц, и ф (х) равенствами
или ц = -^—1пк, и ф(х) = ехр( — цх)у(х).
G.121)
Тогда
4> (х -\- 2л) = ехр.( — цх) ехр (—2цп) у (ж + 2л) =
= ехр (-цх) у(х) = ф (х). G.122)
Итак, теорема Флоке утверждает, что можно всегда найти
решение уравнения Матье в виде
у (х) = ехр (и*) ф (х), G.123)
где ф (х) имеет период 2л. Если ц, равно нулю или кратно
i, то у (х) также имеет период 2л. Если ц, мнимо, то у {х)
колеблется апериодически. Если ц, имеет вещественную
173
часть, то у (х) неустойчиво, т. е. обращается в бесконеч-
бесконечность при ж—>- -j- оо или х—*~ — оо.
Из .доказательства теоремы Флоке ясно, что теорема
и вид решения G.123) пригодны не только для уравнения
Матье, но также и для любого дифференциального урав-
уравнения второго порядка с периодическими коэффициента-
коэффициентами. Уравнение вида
(cPy/dx*) + f(x)y = 0, G.124)
где / (х) — четная периодическая функция, называется
уравнением Хилла, так как он впервые иссле-
исследовал это уравнение в связи с теорией движения Луны.
Такие уравнения встречаются также в теории движения
частиц в синхротроне с переменным градиентом (здесь
периодически меняется магнитное поле); они встречаются
и в квантовой теории металлов и полупроводников, так
как уравнение Шредингера для электрона в периодической
решетке имеет вид G.124) или трехмерного аналога этого
уравнения. В теории металлов так называемые волно-
волновые функции Блоха есть просто решение Флоке
вида G.123). Отметим, что дифференциальное уравне-
уравнение G.113) четно по х, так что наряду с у (х) решением'
является и у (—х). Итак, общее решение имеет вид:
у = А ехр (ця) ф (х) +
+ В ехр (—ух) ф (—х) [ф (х + 2зт) = ф (хI G.125)
Обсудим кратко, при каких аир существуют периоди-
периодические и другие типы решений. Предположим, что р — 0.
Тогда уравнение G.113) принимает вид
(d*y/dx2) + ay = 0. G.126)
Периодические решения с периодом 2я существуют, если
а = 0 (у = 1), а = 1 (у = sin x,cos х), а = 4 (у = sin 2x,
cos 2х) и т. д. Для произвольного Р ситуация изображена
на рис. 7.5.
Линии на рис. 7.5, обозначающие границы между
устойчивыми и неустойчивыми областями, соответствуют
периодическим решениям (ц = 0). Эти решения назы-
называются функциями Матьеи записываются в виде
се0 (х), cei (x), се2 (ж) ...
. . . sei (x), se2 (ж) ... G.127)
174
Обозначение можно понять, обращаясь к виду этих функ-
функций в предельном случае Р = 0. Они имеют симметрии
тригонометрических функций и сводятся к ним при
р = 0, т. е.
се2П (х) = 2 Ah cos 2кх; се2П+1 (х) = 2 Ah cos Bk +1) х;
h h
se2n (x) = 2 Аь sin
= 2 ^ft sin
h
x
(конечно, величины Ah различны для каждой функции).
Нестабильная
область
Стабильн/йя
Рис. 7.5. Плоскость 0$, на которой показан характер
решений уравнений Матье для различных значений
а и р.
Возможны различные нормировки. Положим, что
коэффициенты при соответствующем члене в ряде Фурье
равны единице. Например,
ft
ej (x) = cos x + ~ cos Зх + ...
G.128)
Как найти уравнения кривых а ф) для периодических
решений? Подставим ряд для у
r=="T + 2 (An cos nx + Bn sin nx) G.129)
n=l
175
в дифференциальное уравнение Матьё G.113). Приравни-
Приравнивая нулю коэффициенты при различных членах левой
части, находим
i- pBi + ~ pB3 = 0;
(a-4)J32
(а-9) As + ~ З.Ц + ~ ЭЛ5 = 0 (а-9) В3 + \- № -J- ^-ЭВБ"= 0
и т. д. и т. д.
Чтобы показать, как обращаться с такими трехчленны-
трехчленными рекуррентными соотношениями, рассмотрим вид реше-
решения се2п, в котором представлены только Ао, Аг, Ак, ...:
P^o + 2
РЛ2 + 2
РЛП_2 + 2 (а
(а
(а
—
аА
-4) А
— 16)^
*м.-
о + РА
2 + М-
2 = 0,
i = 0,
= о,
2 = 0
(и — четные).
Сначала может показаться, что для любых аир мож-
можно найти решение. Однако, если не позаботиться, коэффи-
коэффициенты Ап очень быстро растут, а именно Ап+2/Ап — и2.
Запишем рекуррентное соотношение в такой форме:
Следовательно,
Ап -Р
2{a—ri
-Р
2 (а— и2) —
Это цепная дробь.
176
G.130)
Теперь можно связать а и Р, приравнивая два выра-
выражения для А2/А0:
2(а-4)—^
2(а—16)—...
или
а = ?—р • G.131)
2<g-4>-
2(,-16) —.
Предположим, например, нас интересует решение се0 (х).
Это решение, которое начинается с а = 0, когда Р = 0.
Итерациями получаем
62 в2
«о»—V' Ко^/ Р2 Л LP2
Тогда из рекуррентного соотношения (вспоминая, что
А0 = 2) находим
л 2а_ Р 7Р3 ,
Аг — р ~ 4 1024 "Т" • • •'
„ 2 (а-4) . _ Р2 ,
так что
GЛ32)
7.6. ЭЛЛИПТИЧЕСКИЕ ФУНКЦИИ
Рассмотрим обычные тригонометрические функции до-
довольно необычным способом. Исследуем функцию i/ =
= sin x. Ее можно определить как решение одного из сле-
следующих дифференциальных уравнений:
A) у" + у = 0; у = 0, у' = 1 при х = 0; G.133)
B) О/'J = 1 - у2; у = 0, у' > 0 при х = 0. G.134)
В частности, предположим, что sin x определяется урав-
уравнением G.134). Что тогда известно о функции у = sin x?
Легко видеть, что у (х) должна выглядеть как кривая
12 Дщ. Мэтьюз, Р. Уокер *77
на рис. 7.6, т. е. у {х) осциллирует периодически между
значениями ±1 с периодом Р, определяемым равенством
+1 1
G.135)
Аналогично можно определить косинус и получить все
известные свойства тригонометрических функций.
Рис. 7.6. Полуколичественное решение уравнения
G.134).
Рассмотрим теперь дифференциальное уравнение
О/'J = A - У2) A - &у\ 0 < к < 1. G.136)
Определим у = sn x как решение, удовлетворяющее на-
начальным условиям у = 0, у > 0 при х = 0; sn x назы-
называется эллиптической функцией Якоб и.
Так как
то эллиптические функции на самом деле представляют
собой обратные функции по отношению к эллиптическим
интегралам; именно если у = sn х, то х = F (arcsin у, к),
где F — эллиптический интеграл Лежандра первого рода
[см. C.57)].
По тем же причинам, что и функция sin x, функция
sn х периодична с периодом
1
1
= 4 ( . dy
G.138)
где ЛГ — полный эллиптический интеграл первого рода
[см. C.63)]. Таким образом, у = sn x выглядит, как пока-
показано на рис. 7.7.
178
Интересная новая особенность sn x состоит в том, что
она обладает вторым (независимым) периодом Р'; sn ж —
двоякопериодическая функция. Чтобы
найти второй период, нужно перейти в комплексную
плоскость.
Рис. 7.7. График у = sn x при к2 — 0,5
\К = 1, 854...).
Рассмотрим конформное преобразование, производи-
производимое у = sn х или
у
-!
G.139)
Подынтегральное выражение имеет точки ветвления при
у = ±1, ±1/&. Определим подынтегральное выражение
равным +1, если начинать интегрировать с у = 0, и за-
затем продолжить его аналитически вдоль контура интегри-
интегрирования.
Это преобразование показано на рис. 7.8.
Во-первых, у = 0 преобразуется в х = 0. Будем уве-
увеличивать у вдоль вещественной положительной полуоси.
То же происходит с х, и, когда у достигает 1, х становится
равным полному эллиптическому интегралу К. Обойдем
сверху точку ветвления при у = 1 и продолжим дви-
движение вдоль вещественной оси к точке у = ilk, тогда
x =
G.140)
12* 179
й, когда у достигает l/k, х становится равным R-\-iK\
где
1/Ь
^..учайно оказывается, что если в этом последнем инте-
интеграле заменить переменную z2 = A — к2у2)/A — к2), то
-i/k -1
Плоскость у
1 УК
/J
-к
Плоскость х
d=e=h c
КиК'
IK'
а
К
Рис. 7.8. Конформное преобразование, производимое функцией
G.139):
v
ж=| dz/V"(l-z2) A-Ь222); верхняя полуплоскость у преобразуется в прямо-
угольник, изображенный на плоскости ж.
О
получается К' (к) = К (к'), где
к'2 = 1 _ ft?.
G.142)
Наконец, обойдем сверху точку у = Цк и продолжим
движение вдоль вещественной оси до бесконечности.
Теперь
и, следовательно, вещественная часть х убывает. Ког-
Когда у достигает оо, вещественная часть х равна
со
К~ \ dy/\^(y2—l)(kzy2 — l). Подстановка l/ky = z преоб-
разует интеграл в К, так что х = \К' при у = оо.
180
Теперь, выходя из начала координат, будем двигаться
вверх вдоль мнимой оси. Когда у достигает ioo, имеем
Замена переменной A + »/2)/A + k2y2) = z2 преобразует этот
результат в
х =
1/Ь
f
J
Наконец, если у выходит из начала координат и движется
к — сю вдоль отрицательной вещественной полуоси, то х
изменяется от 0 до —К, затем до —К -\- iK' и наконец
до i/T'.
Собирая эти результаты, видим, что верхняя полупло-
полуплоскость преобразуется во внутренность прямоугольника
в плоскости х (см. рис. 7.8).
Как возникает периодичность? Предположим, что мы
движемся вдоль контура типа, показанного на рис. 7.9.
Плоскость у
Рис. 7.9. Контур, оканчивающийся в верхней по-
полуплоскости у, но приводящий к точке х вне
прямоугольника рис. 7.8, б.
Это дает новое значение х вне прямоугольника, соответ-
соответствующее одному и тому же значению у. Чтобы увидеть,
как связаны оба значения х, деформируем контур рис. 7.9
в контур, показанный на рис. 7.10, б. Последний отли-
отличается от контура рис. 7.10, а только лишним обходом
точки у = 1. Старое значение х из контура, эквивалент-
эквивалентного контуру рис. 7.10, а, равно г + s. Новое значение,
получаемое из рассмотрения контура рис. 7.10, б, есть
х = г — s. Итак, (новое значение) = 2г — (старое значе-
значение). Но г = К; следовательно, (новое значение) = 2К —
{старое значение). Тем самым доказано, что
•sn х = sn BК — х).
G.145)
Таким же способом контур на рис. 7.11 позволяет
показать, что sn x = sn (x -\- 2iK'), а контур на рис. 7.12
Плоскость у
-1
Рис. 7.10. Контур, для которого точка х = г + s лежит внутри
прямоугольника (а) (см. рис. 7.8, б; заметим, что г = К), и контур
(б), отличающийся от контура (а) обходом точки у = 1. Следова-
Следовательно, он дает х = г — s.
приводит к условию периодичности, с которого мы нача-
начали, т. е.
sn х = sn (x + 4/sT). G.146)
Итак, мы получили, что у = sn x есть дважды перио-
периодическая функция с периодами 4К и 2iK'. Следовательно,
Плоскость у
Рис. 7.11. Контур, демонстрирующий периодич-
периодичность sn х = sn (x + 2iK').
при рассмотрении этой функции можно ограничиться пря-
прямоугольником с углами х = ±2К — \К', ±2К + i^'-
Функция имеет полюса в точках х = ±\К' и в углах,
а также нули в точке х = 0 и точках х = ±2К.
482
Мы видели, что у = sn x подчиняется дифференциаль-
дифференциальному уравнению
dy/dx = |AA-0*)A-*V)- G-147)
Определим еще две эллиптические функции
сп х = Vl— sn2 х, en 0 = 1;
Тогда
z = ]/4 — k2sn2x, dnO =
(d/dx) sn ж = en x -dn x.
G.148)
G.149)
G.150)
Любая аналитическая (за исключением полюсов)
двоякопериодическая функция называется эллиптиче-
эллиптической функцией. Функции sn x, en x, dn x принад-
принадлежат к классу, называемому эллиптическими
Плоскость у
Рис. 7.12. Контур, демонстрирующий периодич-
периодичность sn х = sn (x + 4if).
функциями Якоб и. Общее исследование двояко-
периодических функций весьма естественно приводит
ко второму классу эллиптических функций, называемых
эллиптическими функциями Вейер-
ш т р а с с а.
ГЛАВА
8
ДИФФЕРЕНЦИАЛЬНЫЕ
УРАВНЕНИЯ
В ЧАСТНЫХ ПРОИЗВОДНЫХ
8.1. ПРИМЕРЫ
1. Уравнение колеблющейся гибкой струны, или одно-
одномерное волновое уравнение, имеет вид
где с — скорость волн. Для гибкой струны с2 = Г/р, где
Г —натяжение, а р—линейная плотность.
2. Уравнение Лапласа
3. Трехмерное волновое уравнение
V^-4-^M. (8.3)
4. Уравнение диффузии
Если г);—температура, то
К теплопроводность
X —
Ср (удельная теплоемкость) X плотность"
5. Уравнение Шредингера
или, подставляя яр ~ ехр (— iEt/%),
*[LiE-V(x)№ = 0. (8.6)
Это уравнения, с которыми мы будем наиболее часто
встречаться. Отметим, что все они — линейные уравнения
второго порядка.
184
Бее написанные выше уравнения однородны. Это зна-
значит, что если гр — решение, то будет решением и г|), умно-
умноженное на любое число. Многие задачи сводятся к неодно-
неоднородному уравнению с членом, соответствующим прило-
приложенным «силам» или «источникам». Например, если сила
/ (х, t) на единицу длины приложена к колеблющейся
струне, то неоднородное уравнение имеет вид:
1^-^-^-=-Trf(x,t). (8.7)
Задача может быть неоднородной как вследствие крае-
краевых условий, так и вследствие неоднородности самого урав-
уравнения. Критерий однородной краевой задачи формули-
формулировался выше: если т)з — решение уравнения, удовлетво-
удовлетворяющее краевым условиям, то решением будет и яр,
умноженное на любое число. Пример неоднородного крае-
краевого условия встречается в задаче о колеблющейся стру-
струне, у которой конец х = 0 движется заданным образом,
ф @, t)=g (t).
Общее решение неоднородной задачи складывается
из любого частного решения задачи плюс общее решение
соответствующей однородной задачи, для которой как
уравнение, так и краевые условия однородны. Аналогич-
Аналогичный случай уже- обсуждался в гл. 1 при рассмотрении
обыкновенных дифференциальных уравнений.
8.2. ОБЩЕЕ РАССМОТРЕНИЕ
Прежде чем перейти к методам решения упомянутых
выше уравнений, кратко рассмотрим общее линейное диф-
дифференциальное уравнение второго порядка в частных
производных.
Сделаем, однако, одно ограничение, рассматривая
лишь две независимые переменные. Это делается для
того, чтобы упростить рассмотрение. Большая часть ре-
результатов непосредственно обобщается на уравнения
с любым числом независимых переменных.
Требуется вычислить функцию ty (х, у) в некоторой об-
области плоскости ху. Дифференциальное уравнение в част-
частных производных необходимо дополнить краевыми усло-
условиями определенного вида. Предположим, что они задают
значения яр и (или) некоторых ее производных на кривой,
ограничивающей область, внутри которой мы пытаемся
решить уравнение.
185
Обычно встречаются три типа краевых условий:
1) условия Дирихле: яр задается в каждой точке гра-
границы;
2) условия Неймана: (Vip)n> нормальная компонента
градиента задается в каждой точке границы;
3) условия Коши: яр и (Vip)n задаются в каждой точке
границы.
По аналогии с обыкновенными дифференциальными
уравнениями второго порядка можно было бы ожидать,
что условия Коши вдоль ли-
линии — наиболее естественный
вид краевых условий. Однако
здесь дело обстоит не так
просто.
Для обыкновенного (т. е.
-у -у одномерного) дифференциаль-
дифференциального уравнения второго по-
порядка для яр (х) задание'ф и'ф'
Рис. 8.1. Краевая кривая и в обыкновенной точке Хо вме-
единичный вектор п, перпен- сте с самим дифференциаль-
дикулярный ей. ным уравнением достаточ-
достаточно, чтобы определить все
высшие производные в точке х0 и тем самым гарантировать
существование решения вблизи х0 в виде ряда Тейлора.
Исследуем теперь соответствующий вопрос для диффе-
дифференциальных уравнений втор то порядка в частных про-
производных. А именно, будет ли достаточно задания яр и
(V^)n вдоль границы вместе с самим дифференциальным
уравнением для определения второй и высших производ-
производных от яр на краевой кривой и, следовательно, будет ли
существовать решение в виде ряда Тейлора вблизи кри-
кривой?
Предположим, что краевая кривая описывается пара-
параметрически уравнениями х = х (s), у = у (s), где s —
длина дуги вдоль границы (рис. 8.1). Предположим, что
вдоль границы задана яр (s) и ее нормальная производная
N (s). Компоненты единичного перпендикулярного век-
вектора п есть —dy/ds, dxlds, так что
*«=-¦?¦?+¦?•#• <8-8>
Это уравнение вместе с
d . . Sib их . &if dy /o „.
можно разрешить относительно первых производных ф:
: <8ЛО>
Хлопоты возникают со вторыми производными. Их
три: d2ty/dx2, d2ty/dxdy, d2ty/dy2. Два уравнения для них
находится дифференцированием (известных) первых про-
производных вдоль границы:
_d_ _#ф _ Щ_ их №>¦§ dy_. .R 1?.
ds ' дх дх* ' ds ~^ дхду ' ds ' (o.it)
d cty _ cPip dx d2ip dy .„ .„.
ds ' dy ~~ dx dy ' ds ~* dyi ' ds ' ( >
Третье уравнение получается из исходного дифферен-
дифференциального уравнения, которое запишем в виде
А *¦
= известная функция f{x,y,-^,^). (8.14)
Эти три уравнения (неоднородных) нельзя решить отно-
относительно вторых частных производных -ф в случае, если
детерминант из коэффициентов равен нулю:
dx/ds dy/ds О
О dx/ds dy/ds
= 0
А 2Б С
или
= 0. (8.15)
В каждой точке это уравнение определяет два направ-
направления, называемые характеристическими направлениями
в этой точке. Кривые в плоскости ху, наклон которых
в каждой точке совпадает с характеристическими направ-
направлениями, называют характеристиками диф-
дифференциального уравнения в част-
частных производных.
Итак, вторые производные определяются всюду, кро-
кроме точек, где краевая кривая является касательной к ха-
характеристикам. Дальнейшим дифференцированием можно
получить аналогичную систему совместных уравнений для
третьих (и высших) производных. Условие для их разре-
187
шимости содержит тот же детерминант. Следовательно,
краевые условия Коши определяют решение, если краевая
кривая нигде не касается характеристики.
Возвратимся к уравнению (8.15) для характеристик.
Если характеристики — вещественные кривые, то, конеч-
конечно, В2 > АС. Дифференциальные уравнения в частных
производных, удовлетворяющие этому условию, назы-
называются гиперболическими. Если В2 = АС,
уравнение называется параболическим; если
В2 < АС, оно называется эллиптическим. Из при-
примеров разд. 8.1 первый и третий — гиперболические, вто-
второй — эллиптическое, четвертый и пятый — параболи-
параболические уравнения (однако пятый пример несколько не-
необычен, так как не все его коэффициенты вещественны).
Обсудим выбор краевых условий, соответствующих
каждому из трех типов уравнений.' Начнем с гиперболи-
гиперболического уравнения. Мы видели, что, вообще говоря, усло-
условия Коши вдоль кривой, не являющейся характеристикой,
достаточны для определения решения вблизи кривой.
Полезное представление роли характеристик и краевых
условий получается, если считать характеристики кри-
кривыми, вдоль которых распространяется информация о ре-
решении. Смысл этого утверждения (и как оно работает)
легче всего понять на следующем элементарном примере.
Пример. Рассмотрим «простейшее» гиперболическое
уравнение с А = I, В = О, С — const = — 11с2. Это одно-
одномерное волновое уравнение
Характеристическое уравнение (8.15) для него имеет вид
/ dt \2 1 I dx\2 „ / dx \2
l-j—) г" i"J/ =^> или \~wr) =c- Итак, характери-
характеристики представляют собой прямые линии:
(х — ct) = ? = const;
(х + ct) = т) = const.
На рис. 8.2 показаны семейства этих линий.
Характеристики гиперболического уравнения обра-
образуют «естественную систему координат». Например, если
преобразовать уравнение (8.16) к новым координатам |
и т), получается уравнение в так называемой нормаль-
нормальной форме
ePty/dl дц = 0. (8.18)
Его решение очевидно;
1> = / (Б)
g (л).
(8.19)
где / и g — произвольные функции.
Теперь, если известна функция ч]э (х) и ее нормальная
производная N (х) = lie -d^ldt вдоль отрезка прямой АВ
Рис. 8.2. Характеристики одномерного волнового урав-
уравнения.
(см. рис. 8.2), можно найти функции / (?) и g (r\) вдоль все-
всего отрезка, на котором они имеют значения / (х) и g (x).
Имеем
и —•
с
откуда
(8.20)
Произвольное слагаемое интегрирования не имеет значе-
значения, так как оно сокращается всюду в сумме -ф = / + g.
Значения / (х) вдоль отрезка прямой АВ определяют
/ (?) вдоль всех характеристик ? = const, которые пере-
пересекаются с АВ. Аналогично значения g (z) определяют
g (т)) вдоль всех кривых т) = const, которые пересекаются
с АВ. Как / (?), так и g (т)), а следовательно, и -ф (ar, t)
определяются в общей области, где пересекаются оба типа
характеристик, т. е. в прямоугольнике AQBP, изображен-
изображенном на рис. 8.2.
189
Результаты, полученные для этого простого примера,
легко обобщаются на произвольное гиперболическое урав-
Рис. 8.3. Характеристики гиперболического
уравнения и краевая кривая SS', не
касающаяся характеристик. Условия Коши
вдоль дуги А В кривой SS' определяют
решение внутри области AQBP.
нение. Предположим, что система характеристик выгля-
выглядит, как показано на рис. 8.3, где SS' — краевая кривая.
Условия Коши вдоль дуги АВ
границы определяют решение
внутри «четырехугольной» об-
области, ограниченной характе-
характеристиками, проходящими через
А и В.
Сказанное выше позволяет
исследовать теперь более слож-
сложные ситуации. Рассмотрим, на-
например, границу и систему ха-
характеристик, показанные на
рис. 8i4. Условия Коши от А
до В определяют, поведение
вдоль всех вертикальных харак-
характеристик, которые пересекаются
с границей ABC, и вдоль всех
горизонтальных характеристик,
пересекающих дугу АВ. Чем
определяется тогда поведение
вдоль горизонтальных характе-
характеристик, начинающихся между В и С? Ясно, что доста-
достаточно условий Дирихле или Неймана вдоль ВС; усло-
190
Рис. 8.4. Система характе-
характеристик с краевой кривой
ABC, касающейся характе-
характеристики в точке В.
Рис. 8.5. Удобная граница
для обычной задачи диф-
диффузии.
вия Коши здесь слишком сильны и переопределяют ре-
решение.
Перейдем теперь к эллиптическим уравнениям. Ока-
Оказывается, что условия Коши на открытой границе в этом
случае совершенно неудовлетворительны в отличие от ги-
гиперболических уравнений. Рассмотрим, например, дву-
двумерное уравнение Лапласа. Если известна величина по-
потенциального и нормального поля (условия Коши) вдоль
конечной части вещественной
оси, то нам ничего не известно
о поле в других точках. Для
эллиптических уравнений ин-
информация не распространяется
вдоль характеристик (нет ве-
вещественных характеристик);
она, можно сказать, «диффун-
«диффундирует» внутрь с границ. Чтобы
определить потенциал в задан-
заданной области, граница должна
охватывать эту область, и нуж-
нужно знать либо потенциал (усло-
(условие Дирихле), либо нормальную
компоненту напряженности поля (условие Неймана) на
всей замкнутой границе (линейная комбинация функции
и ее нормальной производной также определяет решение,
так как эта комбинация — одно условие вдоль границы).
Можно было бы исследовать, удобен ли такой тип
условий для гиперболических уравнений. Ответ в общем
отрицателен. Основная причина состоит в том, что можно
найти ненулевые решения гиперболического уравнения,
которые (или их нормальные производные) обращаются
в нуль на определенных замкнутых границах. Существо-
Существование таких типов «нормальных колебаний» вызывает
трудности, если пытаться наложить условия Дирихле или
Неймана на замкнутой границе.
Рассмотрим, наконец, параболические уравнения. Они
всегда описывают процессы «диффузионного» типа и харак-
характеризуются необратимостью. Рассмотрим, например, одно-
одномерную задачу диффузии; .в удобных единицах имеем
д2\р/дх2 = dty/dt. Физически разумным условием на гра-
границе является условие Дирихле вдоль линии постоянного
t или условие Дирихле вдоль границы подобно той, что
показана на рис. 8.5. В любом случае решение находится
для будущих моментов времени, а -ф для прошедших мо-
191
ментов времени найти нельзя. Точнее говоря, решение
в обратном направлении неустойчиво. Если время дви-
движется вперед, процесс диффузии сглаживает особенности;
если — назад, то особенности возникают и решение про-
продолжить невозможно
В табл. 8.1 собраны типы краевых условий, соответ-
соответствующих различным типам уравнений.
ТАБЛИЦА 8.1
Граница
Уравнение
условие
Гиперболическое
Эллиптическое
Параболическое
Коши
Дирихле или Неймана
Открытая
Закрытая
Открытая
8.3. РАЗДЕЛЕНИЕ ПЕРЕМЕННЫХ
Обратимся теперь к точному решению некоторых диф-
дифференциальных уравнений в частных производных. Наи-
Наиболее употребительны методы, устраняющие члены с одной
или несколькими частными производными, так что полу-
получается уравнение с меньшим числом переменных. Эту
процедуру можно повторять, пока не получится обыкно-
обыкновенное дифференциальное уравнение. Первый метод, кото-
который мы рассмотрим, называется методом разде-
разделения переменных. Прежде чем исследовать
его в общем случае, решим ряд простых примеров.
Начнем с решения волнового уравнения в сферической
системе координат. Будем искать решение уравнения
1 ЗЦ) _п /8 94 4
в виде
ф (х, t) = X (x) T (t). (8.22)
Подставляя это пробное решение в дифференциальное
уравнение в частных производных (8.21) и деля на XT,
получаем
dt*
Левая часть зависит только от х, а правая — только от t.
Следовательно, они должны равняться постоянной, рав-
равной, скажем, —к2 (—к2 или к называется постоянной
192
разделения). Таким образом, уравнение разделяет-
разделяется на два, из которых одно зависит от времени
(d2T/dt2) + Jt = О, (8.23)
где со = кс. Его решение
{sin at 1
{} 2 (в24)
Обратимся теперь ко второму уравнению, содержащему
координатную функцию X (х). Это так называемое урав-
уравнение Гельмгольца
V2X + к2Х = 0, (8.25)
или, в сферических координатах гбф,
Ы'1» V -IF) +7^Г?-Ж (sm0 Ж) +
Положим X = R (г) в (G) Ф (<f>). Подставляя X в (8.26)
и деля на /?9Ф, имеем
1 а I „ dR\ , 1 d / . „ d6'
Если умножить это равенство на г2 sin2 6, то третий
член будет зависеть только от ф, а остальные — только
от г и 6. Следовательно,
или
т2ф = 0.
Решение этого уравнения равно
/ sin т<Ь \
Ф = , , или Ф = exp (± imS). (8.28)
\cosm^ / r\ r/ \ i
Уравнение с переменными г, 6 приобретает вид
.1 d I „ dR\ , 1 d t . п dd \
¦ оп • -г- I Г2 —г- I -\ 5ZT^—?Г * -«Г 1 Sin 6 -rjr- I —
г2/? dr \ dr I ' ra6 sin G dG \ d6 /
13 Дж. Мэтьюз, Р. Уокер 193
Если умножить его на г2, то первый и четвертый члены
будут зависеть только от г, а второй и третий — только
от 6. Таким образом,
(8.29)
Если заменить cos 6 = х, уравнение (8.29) переходит в
= 0. (8.31)
Это не что иное, как уравнение, для присоединенных
полиномов Лежандра G.27). Его решения равны
в = РГИ, Q?{x) (8.32)
(присоединенные функции» Лежандра).
Радиальное уравнение (8.30) после замены перемен-
переменной R = u/\^r приобретает вид
1\2
(8.33)
& ^—\» = о.
Это не что иное, как уравнение Бесселя G.48) с х = кг.
Следовательно,
J™ Yfr) . (8.34)
Определим так называемые сферические функции
Бесселя
^)\ (8-35)
и сферические функции Ганкеля
h\U2)(x) = il(x)±inl(x). (8.36)
Можно показать, что
194
В книге [41 приведены рекуррентные соотношения, асим-
асимптотическое поведение и другие свойства сферических
функций Бесселя.
Если к = О, так что dtyldt = 0, и имеем дело с уравне-
уравнением Лапласа, то радиальное уравнение (8.30) приобре-
приобретает вид
r+1r—д = 0, (8.39)
решения которого суть
{ (8-40)
Таким образом, найдены следующие решения:
„ "h if^Ol f exP (~b im\
\exp (— icof)/ \exp (— im<'x
Гехр (+ ипф) 1 Г Р™ (cos в) 1 f rl
(8.42)
где каждая скобка представляет собой линейную комби-
комбинацию двух функций, содержащихся в ней. Вследствие
линейности исходного дифференциального уравнения лю-
любая комбинация таких решений есть снова решение.
Пример. Для иллюстрации полезности этих решений
рассмотрим следующую краевую задачу. Исследуем зву-
звуковое излучение, создаваемое антенной в форме «расколо-
«расколотой пополам сферы», т. е. -ф подчиняется волновому урав-
уравнению (8.21) и при г = а
Foexp(-koo*), ^
я (8-43)
— Foexp( —i<oof), -у-
С самого начала ясно, что нужны лишь решения с © =
= соо, так что к = ко= со0/с. Далее, так как краевые
13* 195
Условия аксиально симметрйчйы, то нужно брать решейия
только с т == 0. Так как все выражения должны хорошо
вести себя при cos 6 = ± 1, то годятся лишь Pt с целы-
целыми I. Следовательно, пробное решение имеет вид:
¦ф = ехр (— ico0t) 2 Pi (cos 6) [Aljl (A^r) -f- Btni (kor)],
Испбйьзуем теперь тот факт, что на бесконечности
имеются только расходящиеся волны. Для боль-
больших х
. , ч 1
[х —Г
т ехР (± i [*-
Таким образом, искомые радиальные функции суть
й[1) (&ог), так как тогда при г —> сю функция ф ~ — X
Xexp[i(ft0'"—©oOl представляет расходящуюся волну.
Решение приобретает вид
•ф = ехр (— коог) 2 AlPl (cos 6) h\l) (kor). (8.44)
Наложим теперь краевое условие при г = а:
Vo,
Для определения Ai умножим обе части равенства на
Pm(cos6) и проинтегрируем от — 1 до + 1- Тогда, так как
Pt (cos в) Рт (cos G) sin e dQ = 2Щ- бгт,
получаем
я/2
= v0 j j
0 Я/2
196
"Конечно, работают лишь нечетные I. Если I нечетно, то
Но из G.13)
FiKx)dx-27+1
Следовательно,
Используем соотношения G.15) и G.16):
О (I нечетное);
и (Z чстное).
Результат равен
так что окончательное решение имеет вид
¦ф (г, 6, t) = Fo exp (- ifflo*) 2 (- 1)(г)/2 X
Х1-гГГЛГ; -у.у^.Р|(еов9).
Пример. В качестве второго примера разделения пере-
переменных рассмотрим колебания круглой мембраны. Диф-
Дифференциальное уравнение, описывающее малые колебания,
имеет вид
4r-S-- (8-46)
Исследуем периодические решения, описывающие нор-
нормальные колебания мембраны. Они имеют вид
197
и (х, t) = и (х) ехр (—icoit). Подставляя в (8.46), находим
уравнение для и (х):
V2w + к2и = 0, (8.47)
где к = (о/с — волновое число. В двумерных полярных
координатах
так что (8.47) приобретает вид
1 д I ди
(|
Ищем решение в виде м (г, 6) = В (г) в (9). Разделяя
переменные, находим
= 0 -> в = ехр (± inG);
Уравнение для i? — это уравнение Бесселя, так что
(850)
Прежде чем искать решение задачи о колебаниях
мембраны, обобщим эту процедуру разделения перемен-
переменных для трехмерных цилиндрических' координат. Лапла-
Лапласиан равен
Решения уравнения Лапласа V2iJ) = 0 имеют вид
f/m(ap)l fexp(oz) "I (ехр (i/тгф)
/l 1
(ap)l fexp(oz) "I (ехр (i/тгф) 1
^P)/lexp(-aZ)J 1ехр(-1тф){ * (" ;
В то же время решения уравнения Гельмогольца
= 0 даются соотношениями
Г-МК/^^рЛ fexp(iaz) 1ГехрAтф
ЫДК&2—a2p)J 1ехР( — iaz)i lexp( — г
При /с = 0 решения (8.53) сводятся к решениям уравнения
Лапласа; при а = 0 они сводятся к решениям задачи
о двумерных колебаниях мембраны (8.49), (8.50).
J98
Возвратимся к задаче о мембране; амплитуда колеба-
колебаний должна иметь вид
fcosmGl
и = Jm (кг) |gin mQJ exp (± Ш). (8.54)
Функция Ym (kr) исключается, гак как она неограниченно
растет при г ->- 0. Из требования однозначности решения
следует, что т должно быть целым числом. Если мембрана
закреплена при г = R, то при г = R должно быть и = 0.
Следовательно, Jm (kR) = 0. Нули функций Бесселя табу-
табулированы в различных справочниках [1]. Некоторые из
них равны (приблизительно):
/о (ж) = 0, х w 2,40; 5,52; 8,65; ... ^
Ji (х) = 0, х & 3,83; 7,02; 10,17, ... > (8.55)
J2 (х) = 0, х « 5,14; 8,42; 11,62, ... J
Итак, колебания мембраны с наинизшими частотами опи-
описываются законами
=^, @ = 2,40^-, М^/0B,40-^) ; Q
, 3,83 ооос
fc = -r, @ = 3,83-^-, «
, 5,14 сл/с
fc—o) = 514 M
fc=^, © = 5,52-^., M~/
Справа от каждого типа колебаний показан условный ри-
рисунок, указывающий на узлы, т. е. точки, в которых и
всегда равно нулю.
Отметим, что вторая и третья частоты соответствуют
двум независимым типам колебаний. Это пример вырожде-
вырождения, с которым мы встречались в гл. 6.
Пример. В качестве последнего примера использования
метода разделения переменных для решения краевых задач
найдем температуру внутри куба с ребром L. Куб при тем-
температуре Т = 0 в момент времени t = 0 помещают в теп-
тепловую ванну с температурой Т = То. Нужно решить
уравнение
t-w- (8-56>
199
Предположим Т ~ ехр (— U). Тогда V2?1 + — Т = О,
-д-2 + "я~г" + -^гг" = ^- Разделение переменных дает
Т ~ ехр (iaa; + ipz/ + iyz) с а2 + р2 + -р2 = к/к.
Выбирая начало координат в одном из углов куба,
запишем краевое условие в виде: Т = То для х = О, L;
Т = То для у = О, L; Т = То для z = О, L. Заметим, что
это — хотя и очень простое — неоднородное граничное
условие. Частное решение (8.56) равно Т = То, а общее
решение однородного уравнения должно удовлетворять
соответствующим однородным краевым условиям: Т =
= 0 на поверхности. Итак,
m m ¦ xi /~i • 1лх . mm/ . nnz , Л ,.
T = Т0 + V Ctan sin -у- sin —^- sin —f— exp (— klmnt),
Iran
(8-57)
ti ттг» / i V t'
Для определения констант Cimn имеется условие:
Т = 0 при 2 = 0. Следовательно,
2 ^ton sin (lnx/L) sin (mny/L) sin (nnz/L) = — jT0.
Умножим на sin (l'nx/L) sin (m'ny/L) sin (n'nzlL) и проин-
проинтегрируем по всему кубу. В результате находим
I о, . если Z, m, и все нечетные;
С j v?lmn ' ' ' '
^0 во всех других случаях.
Таким образом, при
-'•{*-у 2 Tir-
нечет.
X ехр [ - (Z2 + т2 + п2) к -^f-] } . (8.58)
Для f^>L2!y. только первый член суммы существен;
тогда
(8.59)
Решение (8.58) не очень удобно при малых Р, в конце
разд. 8.4 будет рассмотрен метод, дающий удобное реше-
решение при малых t.
200
о
щИзолщия
I
D
Во всех рассмотренных примерах разделение перемен-
переменных достигалось представлением решения в виде произве-
произведения функций, каждая из которых зависит от меньшего
числа переменных, чем в ис-
исходном уравнении. Однако
для ряда задач проблема раз-
разделения переменных решается
другими способами, например
представлением решения в виде
суммы функций, каждая из ко-
которых зависит от меньшего
числа переменных.
Пример. Рассмотрим беско-
бесконечную пластину толщиной D,
проводящую тепло и изолиро-
изолированную с одной стороны (х = D).
Пусть вначале температура Т
равнялась нулю, а затем к по-
поверхности х — 0 стало подво-
подводиться тепло (например, от из-
излучения) с постоянной ско-
скоростью Q кал1(см2'сек). Эта ситуация показана на рис.
8.6. Найдем температуру внутри пластины в зависимо-
зависимости от координаты и времени.
Нужно решить одномерное уравнение диффузии
f
'¦//¦
Рис. 8.6. Бесконечная пла-
пластина толщиной D, прово-
проводящая тепло; поверхность
х = D изолирована; тепло
с постоянной скоростью
подводится к поверхности
х = 0 в количестве
Q кал/(см2 -сек).
дТ
К
(8.60)
с заданными неоднородными краевыми условиями. Каче-
Качественная зависимость температуры от времени ясна из фи-
физических соображений. После начального переходного
периода ожидается линейный рост температуры со вре-
временем в каждой точке. Следовательно, будем искать част-
частное решение в виде
Тр = и (х) + at. (8.61)
Это приводит к разделению переменных, причем уравне-
уравнение для и имеет вид
<Pu/dx2 =-- а/к (8.62)
с решением и (х) = A/2)(а/к) х2 + ах + Ъ. Для этого част-
частного решения величину Ъ можно выбрать произвольно,
а константы а и а определяются краевыми условиями
—Ки @) = Q, и (D) = 0. Решение, удовлетворяющее
201
этим условиям, равно
и (х) = V2 (Q/KD) (х — DJ, а = Qk/KD = Q/CpD,
приводя к следующему частному решению:
Предлагаем читателю закончить задачу, находя общее
решение однородного уравнения Тс и используя его, что-
чтобы удовлетворить начальному условию Т (х, 0) — Тр +
+ Тс = 0 при t = 0.
В классической механике описанный метод разделения
переменных используется главным образом при решении
дифференциального уравнения Гамильтона — Якоби [5].
8.4. МЕТОДЫ ИНТЕГРАЛЬНЫХ ПРЕОБРАЗОВАНИЙ
Покажем, как можно использовать различные инте-
интегральные преобразования для решения некоторых краевых
задач. Основная особенность преобразований состоит
в том, чтобы перейти к уравнению, содержащему произ-
производные iro меньшему числу переменных. Кроме того, бо-
более автоматически учитываются граничные условия.
Пример. Рассмотрим распределение температуры в по-
полубесконечной области х > 0, если сначала Т = 0,
а плоскость х = 0 поддерживается при Т = То. Уравне-
ние диффузии имеет вид -^-g- = —-. Краевые ус-
условия: A) Т {х, 0) = 0; B) Т @, t) = Го.
Тот факт, что нам нужны только времена t > 0, наво-
наводит на мысль использовать преобразование Лапласа по t
(нас интересуют также лишь х > 0, но преобразование
Лапласа по х нецелесообразно. Почему?). Положим
оо
F{х, s) = f exp(st)T (x, t)dt. (8.64)
о
Преобразование Лапласа дифференциального уравнения
имеет вид
d2F/dx* = sF/x, (8.65)
так как при t = 0 величина Т равна нулю.
Второе краевое условие приобретает вид
F @, s) = Тф, (8.66)
202
Итак, решая уравнение (8.65) и используя (8.66), полу-
получаем
F(x, *) = (ВДехр (-/«/,«*), (8.67)
так как решение ~ ехр ( + Vs/xх), конечно, не годится.
Теперь для нахождения решения следует сделать
обратное преобразование
c+ioo
Т{х, t) = -^r- j ^exp(-V^x)exp(st)ds. (8.68)
о—ioo
Подынтегральное выражение многозначно. Разрежем пло-
плоскость s вдоль отрицательной вещественной полуоси и рас-
рассмотрим контур, изображенный на рис. 8.7. Так как весь
Пноскость s
Рис. 8.7. Плоскость s с разрезом и контуром для рас-
расчета интеграла обратного преобразования Лапласа
(8.68) (в кружках — номера интегралов J\, /2 и т. д.).
интеграл по замкнутому контуру рис. 8.7 равен нулю, то
вклад от J\ равен
Ji = /2 " 3 •'4 «5 "в«
J 2 и /б равны нулю,
Ji = — 2ni -^г То ~ — То,
— ix
ехр (st) as =
exp
203
Аналогично
Jb = ~Ы \ "Т" ехр ^ж ^ ^ ^ ехр (~ s^ ds'
о
о
поэтому
оо
•^з + «^5 = ¦— \ —— ехр (— st) sin( x У s/к) ds.
К J S
о
Положим s = z2. Тогда
оо
J3 + J5 = -5^L [ *L ехр (- te*) sin (ж
J Z
с
и
(l — ~ j
T(x, t) = 2 (l — ~ j А ехр (- te2) sin (ж VWz)) . (8.69)
Предлагаем читателю найти этот интеграл. Результат
имеет вид*
[(^±)] (8.70)
Отметим, что ответ получен в замкнутой форме, а не
в виде бесконечного ряда, возникающего обычно при
использовании метода разделения переменных. Однако
эта особенность возникает скорее от неограниченности
области изменения х, чем от метода преобразований. Чтобы
решить эту задачу методом разделения переменных, нуж-
нужно было бы рассмотреть пластину конечной толщины D и
после решения устремить Д к оо. При таком предельном
переходе решение в виде ряда преобразуется в интеграл,
вычисление которого дает результат (8.70). Читателю
будет полезно выполнить эту процедуру.
Пример. В качестве второго примера, где используется
один из методов интегральных преобразований для решения
* Этот расчет иитеграла (8.68) непосредствен и поучителен;
однако существует более простой метод. Именно, если продифферен-
продифференцировать обе стороны (8.68) по х и заменить переменную интегриро-
интегрирования и = "\А, то с помощью тривиальной деформации контура
т
находим, что дТ/дх = —т^— ехр {—x*liy,t), откуда вытекает (8.70).
204
уравнении в частных производных, рассмотрим Другую
задачу диффузии. Найдем распределение температуры
Т (х, t) в бесконечном твердом теле, если задано Т (х, 0) =
= / (х). Ничего не зависит от у и z, так что -от = Щ"
Для разнообразия сделаем преобразование Фурье по пере-
переменной х:
оо
Т(х, *)= \^F(k, Oexp(ifcr); (8.71)
F(k, t)= С dxexp( —ife)?1^, f). (8.72)
— со
Таким образом,
с решением
F {к, t) = $ (к) ехр (— kbit).
Начальное условие дает
оо -оо
F (к, 0) = j Г (ж, 0) ехр (— \кх) йх= \ f (х) ехр (—\кх) dx.
,—оо —оо
Следовательно,
оо
ф(к)= \ f (х) ехр (— \кх) dx
—оо
Б
оо
F{k,t)= j f(x) dx ехр (— ikx) ехр (—kbit). (8.73)
—оо
Делая обратное преобразование Фурье, получаем
оо оо
Т(х, *)= j (dk/2n) ехр (ikz) f dr'/(;r')exp(—ikx'— №v.t) =
oo
'/(a;') J (dft/2n) exp [ik(x-x')-k*Kt]. (8.74)
—oo —oo
Интегсал по к берется легко:
ехр [ — {х — х')Щм].
205
Следовательно,
оо
Т (х, t) = С dx'f (xr
— с»
Функция
ехр [ — (х — х')
(8.75)
G (x, t; х') == У(Щтп) ехр [ — [х — x'f/int]
есть функция Грина для рассмотренной задачи.
В следующей главе функции Грина будут обсуждаться
более подробно.
O(x,t;O)
t=0+
tMIWQ
t Велико
Рис. 8.8. Функция Грина G (x, t; 0) для одномерной задачи тепло-
теплопроводности с заданным начальным распределением температуры.
Предположим, что первоначальный «источник» тепла
/ (х) (т. е. начальное распределение температуры) пред-
представляет собой плоский источник б (х). Тогда
Т (х, t) = ]/"(Т74яйг) ехр (- хЩуН) = G{x,t;0). (8.76)
Это распределение имеет гауссову зависимость от ж с ши-
шириной, растущей как ~\ft (рис. 8.8).
Каково распределение, возникающее от точечно-
точечного источника б (х) при t = 0? Его можно найти,
используя предыдущий результат. Пусть / (х, t) — отклик
на плоский источник б (х) при t = 0. Пусть g (r, t) — от-
отклик на точечный источник б (х) при t = 0.
206
Тогда из рис. 8.9 видно, что
f(x, t)= [ 2nydyg(r, t)= \ 2nrdrg(r, t).
i i
Следовательно,
df/dx^-2nxg(x,t); |
(8.77)
Используя ранее найденную функцию / (х, t) для пло-
плоского источника (8.76), сразу получаем формулу
g (r, t) =
ехр (—г2/4к0,
(8.78)
представляющую отклик на точечное распределение
Т (х, 0) = б (х).
Рис. 8.9. Связь переменных жиг
для задач о плоском и точечном
источниках.
Это распределение от точечного источника представ-
представляет собой другой пример функции Грина; позднее мы
рассмотрим ее более детально. Проиллюстрируем полез-
полезность функций Грина на двух задачах диффузии.
В первом примере рассмотрим отклик на начальное
точечное распределение температуры в з; = a j = г = 0
Ь полубесконечном твердом теле х > 0, если оно первона-
первоначально (t = 0) поддерживалось при Т = 0 (кроме источ-
источника), а граница х = 0 поддерживается все время при
Т = 0. Ответ находится с помощью суперпозиции функции
207
источника в х = а, у = z = О
и функции отрицательного источника в х= —a, y = z =
Этот второй, «фиктивный» источник называется изоб-
изображением.
Метод изображений, должно быть, хорошо известен
читателю из электростатики, где он часто используется.
В следующем примере рассмотрим задачу о кубе, перво-
чально находившемся при нулевой температуре; грани ку-
куба поддерживаются при Т = 0; Т (х, t = 0) = S (х), где
х = 0 — центр куба. Температурное распределение в по-
последующие моменты времени можно найти, либо разделяя
переменные, либо складывая бесконечную систему изобра-
изображений. Первое решение удобно при больших t, а второе —
при малых t.
8.5. МЕТОД ВИНЕРА — ХОПФА
Исторически этот метод появился для решения опре-
определенного типа интегрального уравнения; однако он позво-
позволил решать ряд краевых задач, которые очень трудно
поддаются обычным методам. Этот метод представляет
собой обобщение метода интегральных преобразований;
в нем производится аналитическое продолжение преобра-
преобразований Фурье по переменной преобразования с вещест-
вещественной оси в комплексную плоскость. Итак, рассматри-
рассматривается преобразование Фурье функции / (х)
= j /(x)exp( — ikx)dx (8.81)
—оо
для комплексных & = o}-f-iy. Тогда
оо
F(k)= f /(x)exp(vx)exp( — iax) dx. (8.82)
—оо
Множитель ехр (ух) может привести к расходимости инте-
интеграла либо при х-»- +оо, либо при х-»- — оо в случае,
если / (х) недостаточно быстро сходится. Сходимость
208
интеграла может иметь место для ограниченного интер-
интервала у. Этот интервал у = Im к зависит от асимптотиче-
асимптотического поведения / (х) следующим образом:
1. Если
/ (х) ехр (ах) —> 0 при х -^ + оо,
^0 при х-н»-оо с a>p,
1
,J
то F (к) — аналитическая функция к в полосе р <С Im к <;
<а.
2. Если / (х) = 0 для всех х <; 0, то, конечно, р может
быть произвольным отрицательным числом. В этом слу-
случае не только F (к) аналитична при —оо <; Im к < а, но
и F (к) -*- 0 равномерно при Im к -у — оо, так как теперь
оо
— \ / (ж) ехр (ух) ехр (— icox) dx.
о
Чтобы увидеть, насколько сильнее это второе утвер-
утверждение, рассмотрим функцию ехр (—х2). Разумеется, р*
равно —оо, и преобразование Фурье F (к) — ехр (— к2/4)
аналитично во всей нижней полуплоскости. Но / (х)
не обращается в нуль при ж<Ои, конечно, F (к) не стре-
стремится равномерно к нулю при Im&—>•—оо.
Подчеркнем кстати, что все, что говорилось о связи
поведения / (х) на ±оо с аналитичностью F (к), может
быть переформулировано в обратном направлении; пове-
поведение F (к) на ±оо (в действительности при Re к —>- ±оо)
определяет область аналитичности функции / (х), пред-
представляющей собой обратный интеграл.
В дополнение к этим свойствам преобразований Фурье
следует рассмотреть тривиальное разложение функции
комплексной переменной на сумму двух функций. Это
разложение является характерной особенностью любого
решения по методу Винера — Хопфа, используется ли он
для краевой задачи, для интегрального уравнения или
для других случаев.
Предположим, что определенная- функция F (к) ана-
аналитична в полосе р<1тй;<;а и стремится к нулю
на концах полосы (Re А -»- ± оо). Тогда F (к) можно запи-
записать как сумму двух функций
F (к) = F+ (к) + F_ (к), (8.84)
где F+ (к) аналитична при Im к > р и стремится к нулю
при Im к —^ -f- оо, в то время как Р_ (к) аналитична при
Im ^<аи стремится к нулю при Im к -»- — оо.
14 дж. мэтьюз, Р. Уокер 209
Для к внутри полосы по теореме Коши имеем
Т
1 Т
-oo+ifl -cxi+ia
Первый интеграл аналитичен при Im к > р (также при
Im к <с р\ но это нас не-интересует), и его можно отожде-
отождествить с функцией F+ (к); аналогично второй интеграл
отождествляется с F „ (к). Легко показать, что разложе-
разложение однозначно. Иногда такое разложение можно осуще-
осуществить, если быть достаточно внимательным. Предполо-
Предположим, например, что
F (к) = \1{к + i)Yk — i. (8.86)
Эта функция имеет полюс при к = — i и корневую точку
ветвления при к = -\-i; она аналитична в полосе | Im к |<
<С 1. Определим квадратный корень условием
^1=* ехр [ —
Тогда можно написать
причем F_ (А;) находится из условия отсутствия полюса
в к = — L
Проиллюстрируем метод Винера — Хопфа. Решим дву-
двумерное уравнение Лапласа
= 0 (8.88)
в верхней полуплоскости (у > 0), удовлетворяющее сле-
следующим краевым условиям:
A) ф-+0, когда у-+ оо;
B) ф = ехр (—ах) (а > 0) при у = 0, ж > 0;
C) дф/ду = С ехр Fх) F > 0) при у = 0, х < 0.
Положим
ф (х, 0) = / (х); (дф/ду) (х, 0) = g (x). (8.89)
210
Тогда из B) и C) заключаем, что
ехр (— ах) (х > 0),
:*)={
СехрFх)(х<0).
(8.90)
-г'Л
Решаем уравнение (8.88) с краевым условием A)
посредством преобразования Фурье
по х; напишем
1 Плоскость к
ф(х,у)= j -§-exV(ikx)F(k,y),
где преобразование F (к, у) удов-
удовлетворяет уравнению д2Р/ду2—k2F =
= 0. Таким образом, для веществен-
вещественных к имеем F (к, у) — ф {к) X
X ехр (— | к \у).
Чтобы продолжить функцию
F (к, у) на комплексную плоскость
к, заменим для вещественных к функ-
функцию | /с | на
Vk2 + № (8.91)
с разрезами, идущими в ± ioo, как
показано на рис. 8.10. Корень опре-
определен как /&2 + к2 —> + к при Пек-
числения устремим X к нулю.
Итак,
11
Рис. 8.10. Плоскость
к с разрезами, соот-
соответствующими функ-
функции ~[/к2 + к2.
> 4- оо. После вы-
оо
ф(х,у)= J (dk/2n) ехр (ikx) ехр ( - /ft» + Х2у) Ф (Л). (8.92)
—оо
Требуется найти Ф(к), удовлетворяющую краевым усло-
условиям (8.90)
f(x)= j (dft/2n)exp(ift*)<D(ft), (8.93)
— оо
оо
=— J (dk/2n) exp (ikx) /Л2 + ^2 Ф (&). (8.94)
14* 211
Обращение этих двух преобразований Фурье дает сле-
следующий результат:
оо
Ф(к)= f dx exp (— ikx) f (x) =
— CO
0 CO
= ( J + j) dxexp(-ikx)f(x) =
— oo 0
CO
== Ф+ (k) + [ dx exp (— ikx — ax) = Ф+ (к) + 4- • т—U- (8.95)
о
J
о
и аналогично
где Ф+ (к) — преобразование Фурье функции, обращаю-
обращающейся в нуль при х > 0, в то время как ч|;_ (к) — преобра-
преобразование Фурье функции, обращающейся в нуль при
ж<0.
Приравнивая эти два выражения для Ф (к}, имеем
Перепишем эти уравнения в виде
(8.97)
В этой форме оба члена в левой части удовлетворяют усло-
условиям, определенным для F+ (к) и F_ (к). Правую часть
F (к) = F+ (к) -f- F_ (к) следует разложить так, чтобы
найти Ф+ (к) nty_(k). Знание каждой из этих двух функ-
функций позволяет получить Ф (к). Эта процедура является
существенным моментом метода Винера — Хопфа. Каждую
часть F (к) можно разложить, если быть достаточно вни-
внимательным.
212
Сначала имеем
1 1 __ 1 / 1 1
fc+ifc ' УаГЛХ, ~~ ft + ifc \ 1/fc^TX У— ifc— i^
1 11/ 1 1 + i 1 \
' У-ifc-i^ ¦ л+ifc ~~ k+ib \ т/л^Ж Уг ' УьП)
Уг
1 1
Аналогично
Поэтому
Подставляя этот результат в выражение для Ф (к) через
Ф+(к), находим
Ф(к) =
1 —i
У2
Теперь можно перейти к пределу Х-^-0. Отметим, что
Таким образом,
1/2
— 1—i 1
(8.99)
213
Решение задачи дается соотношениями
оо
Jdk
2^- exp (ikx) exp (— | к | у) Ф (к) =
С
I—i dk 1 у а .С 1
—1« ' Уб
= zKe \
J
Нужно вычислить интеграл
/(Ц, Д) = f
(8.100)
= ех
ехр (~
где
= exp (ua) J (u, a),
J Л/у — а У
(8.101)
= -2
0
Если u = 0, то
oo
J(u, a)= j dy/yYy — i
a
214
V«
оо
= 2 J dz/(z2 + a) = п//а.
Таким образом, С(а) = л/У"а и
и
J (и, а) = (п/УИ) - 1/я J (Л/ |Лг) ехр (- to) =
о
J/a
(8.102)
Следовательно,
I (u, a) = (я/l/a) ехр (ua) A — erf У па). (8.103)
Используем этот результат для нахождения интегра-
интегралов в выражении (8.100) для ф(х, у). Получаем
ф (х, i/) = Re Гехр ( — az) (l — erf У — az) —
- i ¦?- ехр (bz) A - erf Kbz) ]. (8.104)
где z = x + ij/- Читателю предлагается найти (или из
исходных принципов, или проверкой по краевым усло-
условиям), какой знак нужно выбрать для каждого квадрат-
квадратного корня. Функция ошибок для комплексного аргумен-
аргумента табулирована в книге [6].
ГЛАВА
СОБСТВЕННЫЕ ФУНКЦИИ,
СОБСТВЕННЫЕ ЗНАЧЕНИЯ
И ФУНКЦИИ ГРИНА
9.1. ПРОСТЫЕ ПРИМЕРЫ ЗАДАЧ НА СОБСТВЕННЫЕ
ЗНАЧЕНИЯ
Собственные значения матриц рассматривались в гл. 6.
Это были значения параметра X, для которого существуют
нетривиальные решения v уравнения
Mv = h>, (9.1)
где М — рассматриваемая матрица. Обобщим теперь эту
идею и рассмотрим задачу на собственные значения для
любого линейного оператора М, будь то матрица,
дифференциальный оператор, интегральный оператор
и т. д. Основное уравнение было только что написано; при
этом v — определенный объект в зависимости от вида М.
Если М — матрица, то v — вектор-столбец; если М —
дифференциальный оператор, то v — функция и т. д. Реше-
Решения v написанного выше уравнения называются собст-
собственными функциями, собственными
векторами и т. д.
Задачи на собственные значения имеют много общего,
имеем ли мы дело с матрицами или с более общими линей-
линейными операторами. Наиболее важны подобные задачи
в физике, где часто чстречаются трехмерные операторы
в частных производных второго порядка. Примеры этой
главы отражают важность таких задач; однако не следует
забывать, что большая часть методов может быть обобще-
обобщена на любые другие типы задач на собственные значения.
Пример. В качестве очень простого примера рассмот-
рассмотрим задачу нахождения собственных значений и собствен-
собственных векторов матрицы
J • (9-2)
Уравнение Mv = %v эквивалентно двум уравнениям
A _ Я) vt + v2 = 0, vt + A — Ц v2 = 0,
216
(VA
Где обозначено v= I I . Собственные значения и при-
принадлежащие им собственные векторы равны
Q (9.3)
Отметим несколько фактов.
1. Вследствие однородности исходной задачи собствен-
собственные решения определены только с точностью до произволь-
произвольного постоянного множителя.
2. Если X равно собственному значению, то соответст-
соответствующая неоднородная задача (М — К) v = и (и =^= 0),
вообще говоря, не имеет решения.
3. Матричное произведение двух собственных векто-
векторов равно 0.
4. Произвольный двухкомпонентный вектор можно за-
записать как линейную комбинацию собственных векторов.
Эти четыре свойства весьма общие; они относятся ко
всем задачам на собственные значения.
Пример. Рассмотрим уравнение для струны, закреп-
закрепленной в точках х=0мх=Ьк колеблющейся с угло-
угловой частотой со (одномерное уравнение Гельмгольца)
(d2u/dx2) + к2и = 0 (к = со/с). (9.4)
Так как при х = 0 величина и = 0, то и = a sin кх. Так
как при х = L и = 0, то к = nn/L, где п = 1, 2, 3, ...
Это собственные значения к. Собственным значением этой
задачи нужно было бы назвать величину —к2. Конечно,
это различие не очень важно, и можно называть соб-
собственным значением величины —к2, или к2, или к.
Отметим, что для решения задачи на собственные зна-
значения дифференциальное уравнение требует указания
области, изменения переменных и граничных условий,
а также того, чтобы задача была однородной. Читателю
йредлагается во втором примере найти аналогию четырех
свойств, упомянутых после первого примера.
Рассмотрим, наконец, пример трехмерной задачи.
Пример.
Vaw + k2u = 0 внутри сферы г = R (9.5)
ъ граничным условием: и = 0 на г = R. Решения имеют
вид и = ji фг) Pf (cos 6) exp (±iw<?), m, I — целые числа,
217
I ^- т. Собственные значения определяются из условия
/i (kR) = 0. Таким образом, они равны к ^ 3,14//?,
4,49/Д, . - .
9.2. ОБЩЕЕ РАССМОТРЕНИЕ
Рассмотрим линейный дифференциальный оператор L
и задачу на собственные значения Lu (х) = Ки (х). Пред-
Предположим, что указана область Q и наложены удобные
граничные условия. Оператор L называют эрмито-
эрмитовым, если
и* (х) Lv (х) dsx = [ \ v* (х) Lu (x) dsxj ,
где звездочка означает комплексное сопряжение, а и и
v — произвольные функции, удовлетворяющие гранич-
граничным условиям. Величину в левой части написанного урав-
уравнения часто называют «и, у-матричным элементом L», или
«матричным элементом L между и и и», или просто «LUD».
Очевидна связь с эрмитовыми матрицами, определенными
в гл. 6.
Пусть L — эрмитов оператор. Рассмотрим некоторое
собственное значение Kt и собственную функцию щ, при-
принадлежащую к %i. Тогда Lut (x) = ^tUt (x). Соответствую
щее уравнение для другой^ пары hj, щ (х) есть Luj (x) =
= %jUj (x). Тогда
\ uf (х) Ьщ (х) d3x = hi \ и* (х) Ui (x) d3x;
я я
\ и* (х) Lu7- (х) dsx — Kj [ и? (х) uj (x)
а я
Так как L — эрмитов оператор, то левые части ком-
комплексно сопряжены. Поэтому
(** - Я?) J
я
u| (х) щ (х) d3a; = 0. (9.6)
На этом этапе становится ясным, что мы повторяем
доказательство определенных свойств собственных зна-
значений и собственных векторов эрмитовых матриц из
разд. 6.5. Из соотношения (9.6) следуют аналогичные вы-
выводы, если рассмотреть два случая; i = / и Я; =^= Kj.
218
1. Собственные значения эрмитова дифференциаль-
дифференциального оператора вещественны.
2. Собственные t функции эрмитова дифференциаль-
дифференциального оператора, принадлежащие различным собственным
значениям, ортогональны. Под ортогональностью и (х)
и v (х) подразумевается равенство [см. уравнение F.94)]
uv = \ и* (х) v (x) dsx = 0. (9.7)
Наиболее известная система ортогональных функций—
система тригонометрических функций. Они являют-
являются собственными функциями в следующей задаче на соб-
собственные значения:
(d?u/da?) + lu = 0; 0 < х < 2л; 1
и @) = и Bл); и @) = и' Bл). J
Эрмитов ли оператор dt/dx2? Давайте проверим:
2я
J. (j! dv 2-Я
и —=- v dx — и*
4 31
_ f du* dv
J dx dx
cte.
Проинтегрированная часть обращается в нуль вследствие
периодичности и и v. Проинтегрируем по частям еще раз:
2л 2Л 2я
\ и -j-o- v ах= —j— f + \ у
J dx2 dx ' J
0 0 0
¦и* dx.
Снова проинтегрированная часть исчезает, так что d2/dx2—
действительно эрмитов оператор, если наложены периоди-
периодические граничные условия (9.8).
В качестве другого примера на собственные значения,
содержащего эрмитов оператор, рассмотрим так называе-
называемое дифференциальное уравнение
Штурма — Лиувилля
[ № ^Ч -1М и № + ЯР & и (х) = 0, (9.9)
где р (х), q (х) и р (х) — вещественные функции; р (х) пред-
предполагается неотрицательной на изучаемом интервале.
Нужно исследовать два вопроса:
1. Является ли оператор L = р (d2/dx2) + р' (d/dx) — q
эрмитовым? Справедливость этого факта проверяется так
же, как и в более простом случае оператора d2/dx2.
219
2. Каково влияние функции р (х) в случае, когда она
не равна 1? Можно непосредственно проверить все преды-
предыдущие выкладки с так называемой функцией плот-
плотности р (ж), присутствующей в члене, который содер-
содержит собственное значение. Единственное изменение состо-
состоит в том, что под ортогональностью теперь понимается
выражение
ь
UfUj=\ и* (х) uj (х) p (х) dx = 0, если Xt^Xj. (9.10)
а
Часто две или более собственные функции принадле-
принадлежат к одному собственному значению. Эта ситуация назы-
называется вырождением, а о рассматриваемом собственном
значении говорят как о вырожденном. Отметим, что про-
произвольная линейная комбинация собственных функций,
принадлежащая к вырожденному значению, есть снова
собственная функция для того же самого значения.
Используя процедуру Грама — Шмидта, можно всегда
сконструировать ортогональную систему собственных
функции.
Итак, возможны такие преобразования, что собствен-
собственные функции эрмитова оператора образуют ортогональ-
ортогональную нормированную систему, будучи ортогональными:
иг -щ = 0 (i Ф f) и нормированными: ut -иг = 1. Эти два
условия можно записать так:
щ ¦ Uj = [ j сРжыТ (х) щ (х) р (х)] = 6и. (9.11)
Из свойства 4, указанного в начале этой главы, вместе
с примером рядов Фурье следует, что любую функцию,
подчиняющуюся соответствующим условиям, можно раз-
разложить в ряд по собственным функциям. Это означает, что
при очень общих условиях собственные функции эрмито-
эрмитова оператора образуют полную систему. Таким образом,
это утверждение представляет собой обобщение теоремы,
доказанной в гл. 6, на случай бесконечномерного про-
пространства. Это свойство справедливо для всех обычно
встречающихся в физике дифференциальных уравнений.
Рассмотрим разложение вида
/ (х) = 2 спип (х). (9.12)
п
Если ип выбраны ортонормиро ванными, то очень легко
определяются сп:
Hm-/=2oiUm-uit = 2 с„бпто = сто. (9.13)
и п
220
Подставляя этот результат снова в первоначальный ряд,
получаем полезное формальное соотношение
= 2 ип (х) j ffix'u* (х') / (х') р (х') =
п Q
= j d*x'f (x') p(x') 2 «п (х) uS (х).
Следовател ьно,
(9.14)
Иногда его называют соотношением полноты,
а иногда — свойством замкнутости собст-
собственных функций. Отметим интересное сравнение с соот-
соотношением ортогональности (9.11).
9.3. РЕШЕНИЕ КРАЕВЫХ ЗАДАЧ МЕТОДОМ
РАЗЛОЖЕНИЯ ПО СОБСТВЕННЫМ ФУНКЦИЯМ
Есть тесная связь между разложением функции
по собственным функциям дифференциального оператора
и решением уравнения в частных производных, получае-
получаемого либо методом разделения переменных, либо методом
интегральных преобразований.
Предположим, что уравнение в частных производных
содержит дифференциальный оператор L по отношению
к одной из переменных. Если представить решение в виде
суммы по собственным функциям L, то комбинация про-
производных L исключится из уравнения и заменится соб-
собственными значениями; тем самым уравнение сводится
к другому уравнению с меньшим числом переменных.
Пример. Рассмотрим задачу с мембраной, исследован-
исследованную в гл. 8, начиная с уравнения (8.46):
1 д / ди \ 1 д^и 1 д%и л -л л р-.
7 аГ \r~dF) ~*~W~d№ ^г W~ • . (У- )
Можно было бы сначала исключить производные по г, 0
вли t; выберем 0. Оператор Le = cPldffi имеет собственные
функции exp (±in0), принадлежащие к собственным зна-
значениям —п2, где п —• целое число, определяемое краевы-
221
ми условиями и Bл) = и @), и Bл) = и' (О). Таким
образом, представим и в виде суммы
оо
и = 2 /» (г, t) [exp (in0) + ап ехр (- ш0)], (9.16)
п=0
где коэффициенты /„ — функции оставшихся переменных
rut. Дифференциальное уравнение сводится к следую-
следующему виду:
г дг У дг
Далее исключим производные по г, разлагая fn
по собственным функциям оператора
Lr = irT +—-4 -?- (9-18)
3Г2 ' г дг г* v '
с краевыми условиями: и (г = 0) конечно и и (г = R) =
= 0. Это функции Бесселя /„ (&,-„/-) с собственными зна-
значениями —Щп, причем /n (kjnR) = 0. Итак,
оо
п (Г, I) — ?j gjn \l) •> п \к]пГ), (У. 1У;
где коэффициенты gjn зависят от оставшейся перемен-
переменной t. Дифференциальное уравнение приобретает вид
= 0 (9.20)
с решениями
gjn (t) = exp (±icojnt). «in = cAM. (9.21)
Собирая результаты, имеем решение (8.54), которое
было найдено методом разделения переменных
оо
и (г, 6,0= S AinJn (kinr) (sin гс0 + Bn cos n0) X
j,n=l
X (sin cojni + Cjn cos eoini). (9.22)
9.4. НЕОДНОРОДНЫЕ ЗАДАЧИ. ФУНКЦИИ ГРИНА
Как подчеркивалось в гл. 8, задача может быть неодно-
неоднородной вследствие дифференциального уравнения или
вследствие краевых условий. В конце этого раздела уви-
увидим, что обычно возможно преобразование от одного вида
неоднородности к другому.
222
Рассмотрим сначала неоднороДйое урайнеййе
Lu (х) — 1и (х) = / (х) (9.23)
в. области J.2, где L — эрмитов дифференциальный опера-
оператор, а и (х) подчиняется обычным (однородным) краевым
условиям; К — заданная постоянная. Для решения урав-
уравнения разложим и (х) и / (х) по собственным функциям
оператора L:
гг(х) = 2спи„(х), /(х)= 2 <**«»(*)• (9.24)
п п
Уравнение (9.23) приобретает вид
2 сп (К — ^) ип (х) = 2 dnun (x).
п п
Следовательно, поскольку собственные функции ип (х)
линейно независимы, то cn = d7l/(Xn — %), или, так как
dn = un- /, это равенство можно записать как сп =
„ — К). Поэтому
=2
п п . Q
Это выражение можно записать в виде
= \G(x, x')/(x')dV, (9.26)
где так называемая функция Грина определяется
соотношением
G (х, х') = 2 «п (х) и* (х')/(Яп - Я). (9.27)
п
Заметим, что функция Грина определяется дифференци-
дифференциальным оператором (почти всегда эрмитовым), заданной
областью и надлежащими краевыми условиями. Иногда
пишут G (х, х'; К), чтобы подчеркнуть зависимость G от Я,
а не только от х и х'.
Найдем дифференциальное уравнение, которому удов-
удовлетворяет G (х, х'). Предположим, что в проведенном
выше расчете / (х) есть 8 (х — хо). Тогда получаем решение
и (х) = j G (х, х') б (х' - хо) dsx = G (х, хо).
а
Следовательно, G (х, х') есть решение уравнения
LG (х, х') - № (х, х') = б (х — х'), (9.28)
223
удовлетворяющее надлежащим краевым условиям. Этот
результат можно было бы также получить, действуя опе-
оператором L — Я на выражение (9.27) для G (х, х') в виде
бесконечного ряда и используя условие полноты (9.14).
Таким образом, функция Грина имеет простой физиче-
физический смысл. Это решение задачи для единичного точечного
источника / (х) = б (х — х').
В (9.27) отметим особенность, встретившуюся впервые
в начале этой главы. Если % равно собственному зпаче-
нию (так что существует нетривиальное решение однород-
однородного уравнения), то при решении неоднородного уравне-
уравнения возникают серьезные трудности. Если X равно соб-
собственному значению %п, функция Грина (9.27) обращается
в бесконечность и не существует решения и (х) в случае,
если правая часть неоднородного уравнения не подчи-
подчиняется условию
Ji?(x)/(x)eP* = O. (9.29)
Рассмотрим частный пример — струну длиной Z, ко-
колеблющуюся с угловой частотой о. Уравнение и краевые
условия имеют вид
(d2u/dx2) + к2и = О, и @) = и (Z) = 0,
к = (а/с. (9.30)
Чему равна функция Грина?
Первый метод: положим к2 = — К, d?uldx2 —
— Хи = 0. Собственные значения равны Кп = — (пп/ГJ
с п = 1, 2, 3, ... Нормированные собственные функции
равны ип = У~2/1 sin (плх/l). Следовательно, общая фор-
формула
приобретает вид
г. /v 2 -^ sin (nnx/l) sin (nnx'/l)
Ь(Х X)—j-2
Полученные выше результаты иллюстрируют общее
соотношение симметрии для функций Грина:
G (х, х) = [G (х, х'I *• (9.32)
Физический смысл этого результата для вещественных
функций Грипа есть соотношение взаимно-
224
с т и, т. е. отклик в точке х на единичное точечное возму-
возмущение в х' равен отклику в х' на единичное точечное воз-
возмущение в х.
Второй метод: попытаемся решить дифферен-
дифференциальное уравнение
(tfulda?) + к2и = б (х — х), (9.33)
которому удовлетворяет функция G (х, х'). При физиче-
физической интерпретации результата полезно иметь в виду, что
(9.33) — не зависящее от времени уравнение для колеблю-
колеблющейся струны, на которую действует сила, пропорцио-
пропорциональная— 8 (х — х') ехр (—iwf). Для х, отличных от х',
имеем d2u/dx2-\- к2и = 0. Следовательно,
a sin кх (х < х'),
bsink(x-l) !*>*'). <9'34>
Как определить константы а и Ь?
Проинтегрируем дифференциальное уравнение (9.33),
которому удовлетворяет G (х, х'), от точки х' — б до х' -\-
+ 8, где 8 бесконечно мало. Результат имеет вид
dG
{
dx x'-e
(9.35)
Интегрируя еще раз, находим
\х'-е = О, (9.36)
т. е. G (х, х') как функция х непрерывна в точке х = х',
а ее первая производная в этой точке скачком возрастает
на 1. Используя выражение (9.34) для G, из этих условий
получаем
a sin кх' = Ъ sin к (х — I);
ка cos кх' + 1 = kb cos к (х — I).
Решение этих совместных уравнений имеет вид
sin к(х' — I) , sin кх'
а~~ ksinkl ' к sinkl '
и функция Грина равна
sinkx-sink(x' — I) @ <#<¦?')>'
x )=
ftsinftZ
( si
\ si
или, с- помощью более кратких обозначений,
G<*' *') = -ftirosinfcc<.sin*(*-*)<, (9.37)
15 Дж. Мэтьюз, Р. Уокер 225
где х< = min (х, х'); (I — х)< — min 1A — х), {I — х')].
Тот же результат получится, если решить уравнение
d2u/dx2 -{- к2и = f (x) методом вариации постоянных.
Теперь обратимся к двумерной функции Грина. Можно
было бы сразу написать формальную сумму по нормиро-
нормированным собственным функциям
аналогично (9.31); однако здесь
мы используем второй подход
и решим дифференциальное
уравнение.
Задача совпадает с задачей
для круглой мембраны; урав-
уравнение и граничные условия
имеют вид
, = 0 приг^Д. ](9-38)
Рис. 9.1. Координаты для
функции Грина круглой Из физических соображений
мембраны. ясно, что G (х, х') может за-
зависеть только от г, г' и 0 —
угла между х и х'. Выберем х' в качестве оси сфери-
сферических координат (рис. 9.1).
Теперь G — решение уравнения
k2G = 6 (х - х'), (9.39)
где 8 (х — х') — двумерная 8-функция; \ б (х — х') d2x—
= 1 для любой области интегрирования, содержащей х'.
При х Ф х'
V2G + k2G = 0. (9.40)
Решение этого уравнения, удовлетворяющее краевым
условиям, можно записать в виде
S AmJm (&Г) COS TO0 (r < г'^
G={ %Bm[Jm(kr)Ym(kR)-Ym(kr)Jm(kR)]X (9-41)
I m
[ X cos mQ (r > г')-
Заметим, что решение при г > г' выбрано так, чтобы оно
автоматически обращалось в нуль при г = R.
Константы Ат и Бт,определяются из сшивки решений
(9.41) на окружности г' = г. Подобно одномерному слу-
случаю, G непрерывна, но ее производная (т. е. ее градиент)
226
имеет разрыв в точке х = х'. Чтобы найти особенность,
проинтегрируем дифференциальное уравнение (9.39) для
G по области, содержащей точку х = х'. Находим
),, dl = l, (9.42)
где мы использовали двумерный аналог теоремы Гаусса:
f Vu <Рх = f u dS,
V 2
2 — поверхность, охватывающая объем V.
,r~r'*e
Рис. 9.2. Применение теоремы Гаусса для области вокруг точки х'.
В качестве области, включающей точку х', выберем
область, изображенную на рис. 9.2. Пренебрегая вкладом
на краях области, из (9.42) получаем
JdG „ Г dG
дг J дг ~~ '
r'+е г'—е
где I—длина дуги. Так как dl = r'dQ, то это дает
dG dG I \ 1
дг r'+е дг \г'—е/ г'
(в случае, если интервал интегрирования включает точ-
точку х'; в противном случае получаем нуль). Следовательно,
\ дг
dG
'+? дг
т'-
Положим
dG
дг
dG
дг
cos m0.
Умножим, как обычно, обе стороны на cosm'G и про-
проинтегрируем по В от —п до п. Результат имеет вид
1
— — лГ /F / /Q 44^
15* 227
где
m'
Таким образом,
dG
r'+e
(
I
dG
dr
2,
1,
r'—e
если т' = 0,
если т' > 0.
Яг' Zi 8m C
m
гв. (9.44)
Это равенство — условие, накладываемое на скачок гра-
градиента G.
Теперь можно написать два совместных уравнения для
коэффициентов Ат и Вт из (9.41). Из условия непрерыв-
непрерывности G при г = г' имеем
AmJm {кг") = Вп [Jm (kr') Ym (kR) -
- Ym (kr') Jm (kR)\.
Из условия (9.44) получаем
Вп [Гш (кг') Ym (kR) - Y'm (kr') Jn (kR)] -
Решение равно
л Jm (Щ Ym {kr')~Jm (kr') Ym (kR)
Am - 2emJm(kIt) '
где использовано соотношение
Jm (x) Y'm (x) - J'm (x) Ym(x) = 2/nx. (9.47)
Заметим, что, как и раньше, G (х, х') = G (х', х).
Возвратимся к исходному уравнению (9.39) для функ-
функции Грина и решим его другим методом:
V2G + k?G = б (х — х'), (9.48)
где б (х — х') — двумерная б-функция, локализованная
в точке «источника» х'.
При решении появляются две трудности: одна состоит
в том, чтобы обеспечить надлежащую особенность в точке
источника х'; другая — в том, чтобы удовлетворить крае-
краевым условиям. Иногда удобно разделить две трудности,
228
отыскивая решение в виде
G (х, х') = и (х, х') + v (х, х'), (9.49)
где и имеет особенность в точке х' [т. е. подчиняется урав-
уравнению (9.48)] и не связана с краевыми условиями. В то же
время функция v, имеющая «плавное» поведение в х' [т. е.
удовлетворяющая однородному уравнению (9.48)], подби-
подбирается так, чтобы G (х, х') удовлетворяла краевым усло-
условиям. Иногда функцию и (х, х') называют фундамен-
фундаментальным решением (9.48).
Особенность в точке х' может быть найдена интегри-
интегрированием уравнения (9.48) по малому элементу поверх-
поверхности с центром в х'. Функция и ищется в форме ы(р),
где р = |х—х'|. Из теоремы Гаусса [см. (9.42)] имеем"
р
I ^2G'2npdp = 2npdG/dp, так что
о
р
2яр (dG/dp) + к2 \ G ¦ 2яр dp = 1
о
и
G (р) -+ A/2я) In р + const, когда р ->- 0. (9.50)
Тогда функция и (х, х') должна вести себя так же вблизи
р = 0. Особое решение уравнения (9.40) Yo (kp) при малых
р имеет вид
Yo (kp) ->- B1 п) In p + const.
Таким образом,
G = Ч^о (kp) + v (х, х'). (9.51)
Теперь напишем v = ^ AnJn (kr) cos nQ с Ап, выбран-
выбранными так, чтобы G удовлетворяла краевым условиям, т. е.
G (г = R) = 0 = i Yo (kpR) + ^ AnJn (kR) cos nQ;
n
2Я
^oikprAcosnQ dQ,
229
где p2R = R2J\-r'2 — 2/fr'cos0 (рис. 9.3), а е„ определено*
в (9.43). Результат имеет вид
G (х, х') = 1 Yo (ftp) - 2 2;П^)е! f Y° <*Р«>
COS
n=0
(9.52)
Такой вид функции Грина удобен для некоторых целей;
ее легко представить для низких частот со и положений
источника х', не слишком близких к краям.
Подытожим три выражения для функции Грина, полу-
полученные выше: 1) формальная су^ша по собственным функ-
функциям (9.27); 2) решение одно-
однородного уравнения с граничны-
граничными условиями на одной из сто-
сторон «поверхности», содержащей
источник; два решения сшива-
сшиваются на этой поверхности так,
чтобы в точке источника воз-
возникла особенность; 3) форма
G (х, х') = и (х, х') + v (х, х'),
где и — фундаментальное реше-
решение, a v обеспечивает краевые
условия.
Если задача неоднородна
в силу краевых условий, а не
вследствие самого дифферен-'
циального уравнения, то решение также можно запи-
записать через функцию Грина. По существу, примеры гл. 8,
рассматривающие передачу тепла с начальными распре-
распределениями температуры, были примерами этого типа,
так как начальные условия — это краевые условия по
времени.
Другой путь состоит в том, что задачу с неоднородны-
неоднородными краевыми условиями можно непосредственно преоб-
преобразовать в задачу с однородными краевыми условиями
и неоднородным уравнением (возможно также и обратное).
Соответствующее преобразование неоднозначно, и нужно
быть внимательным, чтобы выбрать то, которое ведет
к простому дифференциальному уравнению.
Пример. Рассмотрим снова задачу о передаче тепла
(см. раздел 8.3). Бесконечная пластина толщиной/? и с на-
начальной нулевой температурой имеет теплоизолирующую
230
Рис. 9.3. Координата рд для
круглой мембраны.
поверхность х — D; тепло подводится к - поверхности
i = 0c постоянной скоростью Q кал/(см2 -сек). Математи-
Математическая задача имеет вид
д2и (х, t) \ ди(х, t)
ди
и(х,0) = 0, ¦?¦
* т ' ' I (9.53)
= 0 —
' дх
где v. = К/Ср, К — коэффициент теплопроводности, С —
удельная теплоемкость и р — плотность.
Заменой переменной задачу можно преобразовать к за-
задаче с однородными краевыми условиями (по х): v (x, t) =
= и (х, t) — w (x), где w (х) удовлетворяет условиям
dw \ n dw
0,
Q
= — -jt . Кроме того, iv (x) подби-
dx \x=D ' dx
рается так, чтобы операция d2w/dx2 в дифференциальном
уравнении легко выполнялась и давала простой резуль-
результат. Простейший выбор — это, вероятно, парабола
w (х) = (Q/2KD) (х — DJ. (9.54)
Тогда дифференциальное уравнение (9.53) приобре-
приобретает вид
&v I dv _ Q ,q _,..
ОХ* К Ot HU
Частное решение равно
%n(x-D)*. (9.56)
Оно совпадает с решением (8.63).
В заключение покажем, как функции Грина позволяют
преобразовать дифференциальное уравнение в частных
производных в интегральное уравнение. Рассмотрим, на-
например, уравнение
V2m (x) = / (х) и (х) (9.57)
в некоторой области Q с подходящими краевыми условия-
условиями. Пусть G (х, х') — функция Грина уравнения Лапла-
Лапласа * для определенной области и граничных условий.
Тогда
V2G(x, х') = б(х - х') (9.58)
* Можно было бы также назвать G (х, х') функцией Грина дли
уравнения Пуассона. Вообще говоря, нужно указывать, для какого
у равнения написана функция Грина — однородного и,ии неодно
ронного.
23J
и решение уравнения V2w (x) = g (x) равно
»(x)=(ft'G(x,x')g(x'). (9.59)
Итак, исходное дифференциальное уравнение (9.57) экви-
эквивалентно интегральному уравнению
ы(х)= \ dVG(x, x') /(х')м(х'). (9.60)
Заметим, что краевые условия включены в само интеграль-
интегральное уравнение. В гл. 11 дается интересный пример приме-
применения этого уравнения [см. уравнение (И.18I.
9.5. ФУНКЦИИ ГРИНА В ЭЛЕКТРОДИНАМИКЕ
Кратко обсудим две функции Грина, важные в электро-
электродинамике. Рассмотрим сначала уравнение Лапласа
У2ф = 0 (9.61)
в бесконечной области. Краевое условие имеет вид ф —у 0
при г—>- сю. Чтобы найти функцию Грина, нужно решить
уравнение
V2<J> (х) = б (х - х'). (9.62)
Конечно, ф может зависеть только от скалярной величи-
величины г = | х — х' |. Следовательно, удобно выбрать начало
координат (сферических) в точке х'.
При всех х^х' V2<Hx) =0. Поэтому
(cos e) ехр (±im(p) •
Вследствие сферической симметрии и краевого условия
на бесконечности единственная зависимость — это ф =
= Air. Для нахождения А проинтегрируем дифферен-'
циальное уравнение (9.62) по объему сферы радиусом R,
охватывающей начало координат. Это дает
f ^=— 1/4я.
Следовательно, функция Грина (т. е. потенциал точечного
заряда или кулоновский потенциал) равна
Заметим, что это «фундаментальное решение» уравне-
уравнения (9.62).
232
В следующем примере рассмотрим волновое уравнение
0-^^g^- = 0 (9.64)
в бесконечной области. Требуется решить уравнение
iS O. (9-65)
Во-первых, ясно, что решение зависит только от х—х'
и t — t'. Поэтому можно без потери общности положить
х' = 0, t' = 0. Далее введем преобразование Фурье Ф для ф:
ф (х, t) = \ -?&¦ \ -g- Ф (к, со) exp [i (kx-cof)]; (9.66)
Ф (к, со) = \ d?x \ Мф (x, t) exp [ — i (kx —со/)]. (9.67)
Преобразование Фурье дифференциального уравнения
имеет вид I—к2~\—2~)Ф = 1, так ЧТо
Ф (к, со) = с2/(со2 — к?с2). (9.68)
Тогда
[i (kx-cof)]
,q fiq
Если выбрать полярную ось координат в к-пространстве
вдоль вектора х, то интегрирование по углам проводится
легко, и получаем
„ ~ Плоскость оо
I / .\ 1 С8
X
exp[i(fcr- cot)]
(г = |х|). (9.70)
Рис. 9.4. Плоскость ш с по-
полюсами подынтегрального вы-
выражения для (9.70).
Возьмем теперь интеграл
по со. Возникает проблема
обхода двух полюсов на пути интегрирования (рис. 9.4).
Как выбрать путь интегрирования? Возникающая неопре-
неопределенность непосредственно связана с отсутствием крае-
краевых условий в исходной задаче. Чтобы увидеть это, заме-
заметим, что единственное различие между обходом над полю-
полюсом и под полюсом или через каждый полюс состоит в том,
233
что к ф добавляются различные части exp [ik (r ± ct)\lr.
Но эти функции — сферически симметричные решения
однородного уравнения (9.64).
Далее, дифференциальное уравнение (9.65) содержит
возмущение в точке х = 0, t = 0. Весьма разумное крае-
краевое условие состоит в том, чтобы положить ф = 0 для
t < 0; т. е. до возмущения ничего нет. Чтобы удовлетво-
удовлетворить этому условию, нужно провести контур на рис. 9.4
над обоими полюсами. Тогда при t < 0 контур можно
замкнуть в верхней полуплоскости, и внутри него нет
полюсов.
Если t > 0, нужно замкнуть контур в нижней полу-
полуплоскости и
и
exp (—tot) __
и2-
• 4" • -^— \ dk exp (ikr) \ dco exp (— icoi) X
OO
= — c2 I d/c exp (ikr) [exp (— i/crf) — exp (ikct)] =
Вторая б-функция не работает, так как и г и ? положи-
положительны. Следовательно,
0, если
v_c(« —f')], если
(9.72)
Покажем на примере применение этой функции Грина.
Решение уравнения
имеет вид
'34
Используя б-функцию, интегрируем по f и находим
/ (х', t --|x-x
<9-74>
Это выражение называется запаздывающим потен-
потенциалом, так как источник в подынтегральном выраже-
выражении вычисляется в предыдущий момент времени
1 1
t |х — х'|; здесь —|х — х'| — время распространения
возмущения на пути | х — х' | со скоростью с. Рассмот-
Рассмотрим пример /(х', t') = 6[x' — l(Ol- Он описывает точеч-
точечный источник, движущийся по пути | (t). Тогда
1 с
Конечно, единственный вклад в интеграл возпикает,
когда х' и t' удовлетворяют уравнениям х' = | (t'),
л
t — t'=—\x — х'|. Вопрос состоит в том, какой вклад
возникает от этой точки г
Вычислим более общий интеграл
I их dy dz dt б [Д (xyzt)] б [/2 (xyzt)] X
X6[f3(xyzt)]8[h(xyzt)].
(9.75)
Заменой переменных преобразуем этот интеграл от пере-
переменных xyzt к /1/2/3/4- Интеграл приобретает вид
| б (Л) б (/2) б</3) б (/4) =
_ d (xyzt)
U df-г dfs &U
причем последнее выражение (якобиан), вычисляется при
Д = /2 = /3 = /4 = 0- Подробнее якобиан расписывается
следующим образом:
дх дх дх дх
dy dy dy dy
dfl ^/2 ^/3 ^/4
dz dz dz dz
dt dt dt dt
d (xyzt)
8 (/1/2/3/4)
(9.77)
235
Легко проверить, что
d{xyzt) г а (ЩзЦ -1-1
Hhhhh) ~L d(xyzt) J *
Чему равен якобиан в нашем частном случае?
Расчет определителя производится непосредственно и
дает
в (/1/1/3/4) 4 1 |-(х'-х)
d(x'y'z't') с |х' — х|
Следовательно,
где х'= !(?') и/' = ( |х —х'|. В электродинамике это
выражение называют потенциалом Лиенара —
В и хер та.
ГЛАВА
10
ТЕОРИЯ
ВОЗМУЩЕНИЙ
10.1. ОБЫЧНАЯ НЕВЫРОЖДЕННАЯ ТЕОРИЯ
Рассмотрим задачу на собственные значения
Lu = Ku, A0.1)
где L может быть матрицей или линейным дифференциаль-
дифференциальным оператором. Требуется найти собственные векторы
ип и собственные значения %п:
Lun = %nun. A0.2)
Предположим, что L приближенно равно L0, собст-
собственные векторы которого и°п и собственные значения "к%.
известны:
L°u°n = K<. (Ю.З)
Положим
L = L° + Q, A0.4)
причем Q в некотором смысле мало. Тогда
К = К + К"+..., (Ю.5)
ип = и°п + 2 a?Wm +..., (Ю.6)
m
где Кп} и а(тп малы, как и Q. Мы также предположили,
что невозмущенные собственные векторы и°т образуют
полную систему; удобно считать их ортонормирован-
ными:
и°т.и°п = 8тп. A0.7)
Теперь подставим пробные выражения A0.5) и {10.6)
для кп и ип в исходную задачу на собственные значения
A0.2). Получаем
= (К+W +...)(«? + S «-«< +...). (Ю.8)
т
237
Нулевое приближение в этом уравнении имеет вид
Ь°и°п = КиЧг, A0.9)
т. е. не представляет ничего нового. Члены первого
порядка дают
Qu°n + 2 a^rXmu°m = Wrt + К 2 aSl!.4. A0.10)
т т
Умножим обе части A0.10) на ы?. Получаем очень важ-
важный результат
К-<№=№. A0.11)
Тогда исправленное собственное значение Х„ равно * Кп =
Q ()
Как вычислить Ят'п? Умножим уравнение первого приб-
приближения A0.10) на и°т{тфп). Результат равен u°m-Qun =
= (Ki—Щ «ш- Предположим Ц^фЪ,^ это случай,
когда невозмущенное собственное значение не вырож-
вырождено. Тогда
Из A0.11) и A0.12) видно, что возмущение Q можно
считать «малым», если числа uam-Qu%, малы в сравнении;
с разностями А," — %?т.
Замечание об обозначениях: будем сокращенно запи-
записывать uln-Qun ->- Qmn. Такое представление общего
линейного оператора Q матрицей Qmn с помощью «сис-
«системы координат» иЪ обсуждалось в гл. 6 несколько
более абстрактно (см. также разд. 9.2).
Заметим, что дифференциальный эрмитов оператор
представляется эрмитовой матрицей. В этих обозначе-
обозначениях результаты A0.11) и A0.12) имеют вид
W = Qnn A0.13)
а%п = QmnliK - Кп) (т ф п). A0.14)
Чему равно ай{? Оно не определяется из уравнения пер-
первого приближения A0.10). Предположим, что новые
собственные векторы также образуют ортонормирован-
ную систему:
., ,, Л.о [ V „A) „о i \ /7,о [ VI A) о [ \
ит• ип == [ит -(- /_j ат'тит' -г ...) • \ип -|- /j аП'Пип- -|- ...; =
т' п'
=omn -\-апт -\-атп-\- ... (IV.id)
* Символ О (х) означает «член порядка ж».
238
Если Q — неэрмитов оператор, то члены первого поряд-
порядка, вообще говоря, не сокращаются. Если Q — эрмитов
оператор, что обычно имеет место, то при т=?= п члены
первого порядка в A0.15) будут сокращаться. При т = п
требование ип-ип = 1 налагает условие
Re a?> = 0. A0.16)
Мнимая часть а^п остается совершенно неопределенной.
Причина этого состоит в том, что собственный вектор мож-
можно всегда умножить на комплексное число с модулем 1:
ип ->¦ exp (i6)un = A + i6 + . . .) ип, A0.17)
не нарушая ортонормированности собственных векторов.
Рассмотрим теперь несколько примеров.
Пример.
/2 + е 1-е \
L=\l-e 2 + 2eJ
/2 1\
Невозмущенные нормированные собственные векторы
и собственные значения равны
Тогда с помощью общего формализма получаем
^' = ^11 = ^A 1)<?E)=е/2,
так что
далее
„A) _ Qal
4
откуда
<1) (?2i е_ „A) Q12 _ jb_
239
Эти результаты можно проверить, решая возмущенную
задачу точно.
Пример. Рассмотрим круглую мембрану радиусом а
с точечной массой т, помещенной на расстоянии Ъ от цен-
центра. Найдем сдвиг наинизшей частоты.
Основное уравнение имеет вид
7V2u = p (d2u/dt2). A0.19)
Если и — ехр (—itoi), то G7р) V2" = — ?оаы. Это стан-
стандартная задача на собственные значения с оператором
G7р) V2 и собственным значением —со2. Положим р =
= ро + Ар- Здесь ро означает однородную плотность.
Тогда невозмущенный оператор равен G7ро) V2, а возму-
возмущение Q равно *
Q = - (ГДр/р;> V2. (Ю.20)
Наинизшее невозмущенное собственное значение и при-
принадлежащая ему собственная функция равны
Л°~ V а } ро ' "Ь- УЙР/1B,4О)-
Отметим, что и° нормировано так, чтобы выполнялось
исходное предположение A0.7): \ сЮ \ rdr(u"J = l.
Тогда
2Я> а
Но
Q< = - (ГДр/рй V2< = - (Др/ро) Я.Х- (Ю.21)
Кроме того, в рассматриваемой задаче величина Др равна
умноженной на т б-функции в точке г = Ь- Таким
образом,
* Можно заметить, что разложение (р0 + Др) «Ро1 — PoPi
верное для малых Др, не очевидно, когда Др представляет собой
б-функцию. Тем не менее процедура корректна; читатель, который
не доверяет физической интуиции, может построить строгое дока-
доказательство.
240
или
]
К~ Ро lW<^r~0>J - U [/iB,40)]2 •
где М = розта2 — полная масса мембраны. Сдвиг частоты
дается формулой
to 2 Я» 2M [/tB,40)]2 * И^-^J
Пример. Уравнение Шредингера для атома водорода
имеет вид
[ - (ft«/2m) V2 + V (х)] ф (х) = Е$ (х),
где пг — приведенная масса электрона, Е — собственное
значение энергии, V (х) — кулоновский потенциал —е2/г.
Рассмотрим 2р-состояние с магнитным квантовым числом
+1:
¦фгл (х) = С (х + iy) ехр (—к/2а0),
Е2р = — е2/8с0,
где а0 — боровский радиус, равный Я2/те2. Если предпо-
предполагать функцию ij52p (х) нормированной, то константа С
равняется I/V^MjiOo. Чему равен энергетический сдвиг
АЕ при включении малого возмущения AF = Kz2/al?
Формула A0.13) позволяет сразу же найти ответ:
АЕ = J d?r$tр (х) (Xz2/a02) ф2р (х) =
+ у2) z2 ехр (—г/а0) = 6Я.
г2 dr f
10.2. ПРЕОБРАЗОВАНИЕ РЯДОВ
Изложенный выше формализм, хотя и непосредствен,
но довольно сложен в высших порядках. Рассмотрим крат-
кратко другой подход, который ведет к весьма элегантному
«преобразованию» предыдущего ряда.
Требуется решить уравнение Lu = ku, (L° -\- Q) и =
= "ки. Запишем его в виде
Lou ~ки = — Qu. AQ.23)
16 Дщ. Мэтьгоз, Р- Уокер 241
Ё гл. 9 мы уже убедились в том, что решение урав-
уравнения
(Lo — Я,) и = / A0.24)
равно
u(x)= j G(x, x')/(x')dV = 2^K-/)/(^n-ty- (Ю.25)
п
Следовательно, задача имеет формальное решение
и = ^1^(и^-0и)/(К-К)- (Ю.26)
п
Конечно, неприятность состоит в том, что в этом уравне-
уравнении величина и встречается как справа, так и слева;
Предположим, что при Q ->- 0 и -+ iin, К -^ К.- Обозна-
Обозначим это решение ип и выделим из суммы A0.26) п-ш член.
Это дает
ип = си^ + 2 < «• Qun)l(K - Я,»,), A0.27)
тфп
где
c = uZ-QuJ(kn-k°n). A0.28)
Решим теперь методом итераций точное уравнение
A0.27) для ип:
тфп
, >п >п и% {vPm-Q
-г 2л 2л (Kn-i
тфп рфп
-r\u°
U°mQmn I V "V "mQmpQpn
кКг {пКд Кр)
тфп тфпрфп
A0.29)
Таким образом, из A0.28) и A0.29) имеем
c(kn-K) = <-Qun =
— I/I l_ V QnmQmn | XI V QnmQmpQpn
242
бткуда получаем элегантный точный ряд для
> + Zj г _го Ь
(
тфп рфп
Этот ряд лучше, чем полученные ранее, так как можно
сразу же написать член любого порядка; но он обладает
тем недостатком, что содержит Кп как справа, так и сле-
слева; возникающее уравнение для %п нужно решать либо
итерациями, либо с помощью других приближений.
10.3. ТЕОРИЯ ВОЗМУЩЕНИЙ С ВЫРОЖДЕНИЕМ
Когда рассматриваемое собственное значение вырож-
вырождено, обсуждавшиеся методы требуют некоторых измене-
изменений. Например, формула A0.12)
приводит к бесконечному а"},, если и°т вырождено с и",
т. е. если %%. = Я,™ (конечно, в том случае, если выраже-
выражение u°m-Qu°n не равно нулю; ниже мы увидим, что оно
действительно отлично от нуля).
Различие между вырожденной и невырожденной ситуа-
ситуациями начинается с собственной функции нулевого приб-
приближения ы?. Если Я°г не вырождено, то 4 с точностью до
фазы однозначно определяется из условия нормировки.
Однако если есть система функций и°а, принадлежащих
к одному и тому же собственному значению, то какую
линейную комбинацию этих функций взять в качестве ы??
Другая постановка задачи состоит в том, чтобы рас-
рассмотреть возмущение, которое выключается постепенно.
Вообще говоря, возмущение будет устранять вырождение.
Вопрос: когда возмущение исчезает, а ип -*- и? (по опре-
определению ц?), то какая линейная комбинация и°а обра-
образует u°J
Круглая мембрана представляет собой простой физи-
физический пример этой задачи. В гл. 8 мы видели, что вторая
невозмущенная частота вырождена; она соответствует
двум типам колебаний, изображенным на рис. 10.1. Пред-
Предположим теперь, что исследуется влияние малой точечной
массы, закрепленной на поверхности мембраны. Физиче-
16* 243
Скй йсйо, что Два решения этой задачи в нулевом прибли-
приближении имеют узлы соответственно вдоль и перпендику-
перпендикулярно диаметру, проходящему через точечную массу.
Правильные функции нулевого приближения часто
можно написать из соображений симметрии или других
Рис. 10.1. Два типа колебаний, соответствую-
соответствующих второй нормальной частоте колебаний
круглой мембраны.
физических соображений. Как мы сейчас убедимся,
в любом случае они находятся по теории возмущений.
Представим и°п в виде линейной комбинации
<= 2 О& A0-31)
а=1
где и„ образуют произвольно выбранную ортонормиро-
ванную систему. Вспомним также уравнение первого
приближения A0.10):
Q< + 2 aSMjAn = А?Ч? + К 2 а"п<. (Ю.32)
т т
Подставляя A0.31) в A0.32) и умножая скалярно на up —
член вырожденной системы (т. е. Я,р = к& — Я-n), получаем
4 2 а%п<№+а№%=№ 2 (&ф№
1 1
2
а=1
2
а=1
ИЛИ
2V
2
а=1
A0.33)
Это E-компонента матричного уравнения
Qi& = Wdk A0.34)
в системе координат с базисными векторами и°а. Такдм
образом, величины а„, представляющие и? в этой систе-
244
ме, есть собственные векторы N х iV-матрицы Q,
а поправки первого порядка А41' есть соответствующие
собственные значения.
Если перейти к новой системе координат с базисом
и°п, то Q будет диагонально, а его диагональные эле-
элементы равны изменениям в первом порядке, т. е.
<?n'n = X«'6n.n. A0.35)
Далее, умножая A0.32) скалярно на и°т (с hm?=Ki), для
поправок и? в первом порядке получаем то же соотно-
соотношение, что и в невырожденной теории: a"'n = Qmn/G& —
-ад,).
Покажем теперь, как теория возмущений применяется
для решения вырожденных задач.
Пример. Рассмотрим упоминавшуюся выше задачу
о круглой мембране. Второе невозмущенное собственное
значение равно
а две нормированные и ортогональные собственные функ-
функции, принадлежащие к Я^, имеют вид
83—J cose
Ha? Jo C,83) ' '
,—;-— /i (з,83— \ sinG
о -I / 2 \ aj_
P ~У no?' Jo C,83)
Возмущение Q дается формулой Q = — (ГДр/р^) V2, где
Лр — плотность, создаваемая точечной массой т, поляр-
полярные координаты которой равны (Ь, ф). Можно непосред-
непосредственно проверить, что Q представляется матрицей
Ъп 1~-\">- а)\ Т /3,83 , х
,83)]2 ' р0
T_ I 3,8
' р0 \ а
(cos2 ib sin ib cos ib\
• , , 2 , Ь A0-37>
SiniJ5COS1J3 Sirrif /
245
Матрица 2x2 в скобках имеет собственные значения
и собственные векторы
(cos яЬ\ / — sin яЬ
Sin 1J5/ \ COS 1J5
Следовательно, правильные собственные функции
нулевого порядка имеют вид
и\ = (cos я|з) Ua + (sin я])) и\,
< = ( — s\n^)u°a + (cos^)ul. J (Ю.38)
В системе с этими базисными векторами Q приобретает
вид
,83)р
3,83
\0 0J *
Диагопальные элементы равны к\и и Я,"', a wj и и\ —
как раз функции пулевого приближения, описывающие
типы колебаний, которые были угаданы ранее в этом
разделе.
Эти расчеты можно обобщить, рассматривая эффекты
высших порядков от возмущения на вырожденные соб-
собственные значения и собственные функции.
ГЛАВА
ИНТЕГРАЛЬНЫЕ
УРАВНЕНИЯ
11.1. КЛАССИФИКАЦИЯ
Интегральное уравнение — это уравнение, в котором
неизвестная функция находится под знаком интеграла.
Рассмотрим несколько простых типов таких уравнений.
Общее линейное интегральное уравнение, содер-
содержащее одну неизвестную функцию / (х) под знаком интег-
интеграла, записывается в виде
ь
Ь J K(x, y)f{y}dy + g{x) = h{x)f[x)J A1.1)
где h (х) и g (х) — известные функции х; К — постоянный
параметр, часто играющий роль собственного значения;
К (х, у) — ядро интегрального уравнения. Если h (х) =
= 0, то имеем уравнение Фредгольма пер-
первого рода; если h (х) = 1 — уравнение
Фредгольма второго рода. В любом случае,
если g (х) = О, уравнение однородн о.
Иногда К (х, у) равно нулю при у > х. В этом случае
верхний предел интегрирования равен х, и уравнение
называют уравнением Вольтерра.
Часто удобно записывать уравнение A1.1) в символи-
символической форме
KK g=hf, A1.2)
где К — оператор, который означает «умножить на ядро
К (х, у) и проинтегрировать по у от а до fc». Уравнения
в этой форме легко сравнивать с операторными уравне-
уравнениями, содержащими матрицы или дифференциальные
операторы.
Вспомним, что ранее, в разд. 6.7, мы встречались с ин-
интегральными уравнениями как непосредственным обобще-
обобщением матричных операторных уравнений, а в разд. 9.4—
в связи с функциями Грина.
247
11.2. ВЫРОЖДЕННЫЕ ЯДРА
Если ядро К (х, у) имеет вид
то его называют вырожденным. Интегральные
уравнения с вырожденными ядрами решаются элементар-
элементарными методами. Вместо общего обсуждения рассмотрим
простой пример.
Пример.
/ (х) - х + X ( (ху* + х*у) f (у) dy. A1.4)
Ъ
Определим
1 1
A=^y*f(y)dy, B=^yf(y)dy. A1.5)
о о
Тогда A1.4) принимает вид
f (х) = х + Ых + КВх2. A1.6)
Подставим теперь A1.6) в уравнения A1.5):
ill D1-7>
Решение уравнепий A1.7) имеет вид
, 60+Я • д_ 80
240 — 120Я,— ^ ' 240 - 120Я,— № '
так что решение исходного интегрального уравнения
имеет вид
'И- 24D-1201-W * A1-8)
Заметим, что есть два значения X, при которых реше-
решение A1.8) расходится. Такая картина знакома нам; К
назовем собственными значениями инте-
интегрального уравнения. Однородное уравнение имеет нетри-
нетривиальные решения, только если X равно одному из соб-
собственных значений. Эти решения называются собственны-
собственными функциями оператора К.
248
Итак, если ядро вырождено, то проблема решения инте-
интегрального уравнения сводится к решению системы алгеб-
алгебраических уравнений, т. е. к значительно более простому
объекту..Если вырожденное ядро A1.3) содержит N чле-
членов, то будет N собственных значений, но не обязательно
все они различны.
Замечая, что любое разумное ядро можно представить
в виде бесконечной суммы вырожденных ядер, Фредгольм
получил ряд теорем, которые мы приведем без доказатель-
доказательства. Для читателя, знакомого с уравнениями на собствен-
собственные значения и алгебраическими уравнениями, они вполне
очевидны*.
1. Либо неоднородное уравнение
ь
K(x, y)f(y)dy A1.9)
имеет (однозначное) решение для любой функции g
(т. е. К не есть собственное значения), либо однородное
уравнение
ь
^ A1.10)
имеет по меньшей мере одно нетривиальное решение (X —
собственное значение, а решение — собственная функция).
2. Если К не есть собственное значение (первая альтер-
альтернатива), то К не будет также собственным значением и для
«транспонированного» уравнения
A1.11)
в то время как если К — собственное значение (вторая
альтернатива), то оно является также собственным зна-
значением и для «транспонированного» уравнения, т. е.
уравнение
A1.12)
имеет по меньшей мере одно нетривиальное решение.
* Строго говоря, теоремы годятся только для интегральных
уравнений с ограниченными ядрами и конечными пределами инте-
интегрирования, т. е. для несингулярных интегральных уравнений.
Теория сингулярных интегральных уравнений строится ¦ иначе.
249
3. Если К — собственное значение, то неоднородное
уравнение A1.9) имеет решение тогда и только тогда,
•когда
ь
\(x)g(x)dx = 0 A1.13)
для любой функции ф (х), которая удовлетворяет транспо-
транспонированному однородному уравнению A1.12).
Заметим, что второе утверждение есть аналог того
факта, что данная матрица и транспонированная к ней
имеют одинаковые собственные значения. Необходимость
условия A1.13) следует немедленно, если умножить A1.9)
на ф (х) и проинтегрировать по х.
11.3. РЯДЫ НЕЙМАНА И ФРЕДГОЛЬМА
Простейший подход к решению интегрального урав-
уравнения
ь
/ (х) = g (х) + К j К (х, у) f (у) dy A1.14)
а
это метод итераций; начнем с приближения / (х) да g (x).
Подставив его в интегральное уравнение под знак инте-
интеграла, получим второе приближение, затем повторим
процесс. Получающийся ряд
ь
/ (х) = g (х) + % j К (х, у) g (у) dy +
а
ь ъ
+ W j dy j dy'K (x, у) К (у, у') g (у') +... A1.15)
а а
известен как ряд Неймана, или решение
Неймана интегрального уравнения A1.14). В случае
если ядро К (х, у) ограничено, ряд сходится при доста-
достаточно малых К.
Пример. В квантовомеханической теории рассеяния
на потенциале V (г) приходится искать решение уравне-
уравнения Шредингера
V4W—^-У(т)Ц(т) + Щ(т) = 0 A1.16)
250
с граничными условиями: функция ф (г) ехр (—iEtlfi)
представляет собой сумму налетающей плоской волны
с волновым вектором к0 и расходящейся волны при г -у
->- оо; к* = ft» = 2mE/h*.
Уравнение V2^1 + ^*Ф = / (г) с граничными условия-
условиями для функции ч]) (г) ехр (—iiot) в виде расходящейся вол-
волны имеет функцию Грина, равную (см. гл. 9)
G(t г')= 1
(iii7)
Таким образом, как и в разд. 9.4, можно преобразо-
преобразовать задачу рассеяния к интегральному уравнению
_ 2т С dsr' exp(ifclr~r<D V (
4пй2 J аг |г-г'| к i/VO»
A1.18)
где член ехр (ikor) — решение однородного уравнения,
подбираемое так, чтобы удовлетворить граничным усло-
условиям. Решение можно записать в виде ряда Неймана
A1.15). Уже первая итерация дает очень важный резуль-
результат, известный как борновское приближе-
приближение
V (Г
Возвратимся к интегральному уравнению A1.14). Бо-
Более элегантное, но и более сложное решение в виде ряда
было найдено Фредгольмом. Он разбивал интервал а <
< ж < b на много интервалов, заменял интеграл суммой,
решал получающиеся алгебраические уравнения и затем
переходил к пределу бесконечно большого числа делений
интервала. Результат состоит в том, что решение инте-
интегрального уравнения A1.14) равно
ь
f(x) = g(x) + h \R(x,y, %)g(y)dy, A1.20)
251
где R(x,y,K)— так называемое ядро резольвенты,
т. е. отношение двух бесконечных рядов
A1.21)
D(x,y,K) =
-ч
dz
К(х,у) К(х,
-ттг \ dzdz'
K(z,y) K(z,
К(х,у) K(x,z) K(x,z')
K(z,y) K(z,z) K(z,z')
K(z',y) K(z',z) K(z',z')
D (k) = 1 — К \ dzK (z, z)
K(z, z) K(z,.z')
K(z',z) K(z',z')
+ ...,
A1.22)
A1.23)
Эти, довольно сложные формулы имеют другую, более
элегантную форму, которая аналогична формализмам тео-
теории возмущений, используемым в различных областях
современной физики. Будем изображать каждое ядро К
линией; К (х, у) будет вертикальной линией: К (х, у) -у |.
Если есть два ядра К с общей переменной интегрирования,
соединяем две линии, ставя крестик для обозначения сое-
соединения. Например,
jdzK(x,z)K(z,y)
fdzK(z,z)
jdzK(x,y)K(z,z)
а
I О
С помощью этих рисунков можно решать уравнение Фред-
го льма:
A1.24)
Здесь в последовательных членах опущены степени К; их
можно учесть: каждому крестику, т. е. каждому интегри-
интегрированию, должен соответствовать множитель Я.
252
Проверка подтверждает следующее правило (ойо оче-
очевидно также из исходной формулировки через детерми-
детерминанты): каждый член в знаменателе, кроме 1, получается
«соединением концов» в предыдущем члене в числителе
делением на число имеющихся К и изменением знака.
Заметим также, что можно получить ряд Неймана A1.15),
если в A1.24) выполнить деление
R =
A1.25)
Иными словами, произведение A1.25) и знаменателя
в A1.24) дает числитель последней формулы. Два свой-
свойства, указанных в этом параграфе, полностью опреде-
определяют решение Фредгольма.
Сконструируем, например, следующую связь членов.
Член третьего порядка в знаменателе получается соеди-
соединением концов второго порядка в числителе; результат
имеет вид
Для нахождения члена третьего порядка в числителе
соберем члены третьего порядка в произведении знаме-
знаменателя на ряд A1.25). Получаем
А
ЮОО-}
о
Знаменатель имеет интересный вид
A1.26)
253
что можйо увидеть, если разложить в ряд это выражение.
Важность решения Фредгольма состоит в том, что как
степенной ряд A1.22), так и ряд A1.23) определенно схо-
сходятся (в отличие от ряда Неймана, который часто расхо-
расходится). Собственные значения можно найти, если искать
нули знаменателя.
11.4. ТЕОРИЯ ГИЛЬБЕРТА - ШМИДТА
Рассмотрим теперь метод, совершенно отличный от ме-
методов Неймана и Фредгольма. Этот метод основан на рас-
рассмотрении собственных функций и собственных значений
однородного интегрального уравнения.
Ядро К (х, у) называют симметричным, если
К (х, у) = К (у, х), и э р ми т о в ы м, если К (х, у) =
= К* (у, х). Собственные значения эрмитова ядра веще-
вещественны, а собственные функции, принадлежащие к раз-
различным собственным значениям, ортогональны; две функ-
функции / (х) и g (x) называются ортогональными, если
j /* (x) g (x) dx = 0.
Доказательства этих утверждений практически иден-
идентичны соответствующим доказательствам в гл. 6. Сход-
Сходство очевидно, если записать интегральное уравнение
в символических обозначениях A1.2). Тогда уравнение
на собственные значения приобретает вид
KKf = /. A1.27)
Ограничимся эрмитовыми ядрами и начнем исследова-
исследование с вырожденного ядра
К{х,х>)= 2 /«(*)?(*')• A1-28)
а=1
Соответствующее однородное интегральное уравнение
имеет вид
ь
к (х, х') и (ж') dx' =
^^)u(x')dx'. A1.29)
а
Определим
j ?(*>(*') <**' = *«. A1-30)
254
так что
ф) = Ь%саи{х). A1.31)
а
Итак, любую собственную функцию и (х) можно предста-
представить в виде линейной комбинации N функций fa (х). Ясно,
например, что не может быть больше N линейно незави-
независимых собственных функций.
Подставляя выражение A1.31) в A1.30) и определяя
Аар = j Га (х) h (x) dx = А$а, A1.32)
получаем
c« = ^2>Wp. A1.33)
Р
Таким образом, собственные значения К являются
обратными величинами (ненулевым) собственным значе-
значениям эрмитовой матрицы Аар. Из гл. 6 известно, что числа
с?р, в которых индекс i различает собственные векторы
матрицы А, удовлетворяют условию ортогональности
сш.сШ = 2с?>*с<?> = 0, если 1ф]. A1.34)
а
Чтобы увидеть, какая нормировка удобна, обозначим и<4>
i-ю собственную функцию; аналогично обозначается и^К
Тогда
(х) иО) (х) dx = hXj ^ cWcp j /* (x) /p (x) dx =
Следовательно, выбираем
%<?*?> = 6и/Ь, A1.35)
a
так что
f u(J>* (x) utf> (x) dx = 6tJ, (H-36)
т. е. собственные функции ортонормированы.
Отметим, что, согласно A1.35), числа У%1^ обра-
обраП
()
зуют унитарную матрицу. Поэтому
S^Mf^fiw.- (и.37)
255
Это полезное свойство ортогональности; оно позволяет,
например, «решить» уравнение ц(')(ж) = !1гУ]41)/пМ от~
носительно fa (ж):
/«(*)= 2 ^V^*). A1.38)
i
В свою очередь, отсюда можно выразить ядро К (ж, х')
[см. A1.28)] через его собственные функции:
к (х, х')=2 /« (*) /s («о=22 с«} *u<
a a ij
(Ц.39)
Этот результат доказан здесь только для вырожденного
ядра; однако он справедлив и в общем случае для эрми-
эрмитовых матриц, в случае если они непрерывны и имеют
конечное число собственных значений одного знака.
Такой подход можно обобщить на неоднородное урав-
уравнение. Используем теорему, которая непосредственно вы-
вытекает из A1.39). Любую функцию, которую можно пред-
представить через ядро К (х, у) как «источник», т. е. любую
функцию вида
$ A1.40)
(яр произвольно, a Kf—эрмитов оператор), можно разло-
разложить в ряд по собственным функциям К (х, у):
ф(х) = ^стЫ(х), A1.41)
i
где
с,= f uV*(x)$(x)dx=(l/ki) j uW*{x)ty{x)dx. A1.42)
В общем случае собственные функции ц<4> (х) не образуют
полной системы функций. Не любую функцию, а только
функцию, связанную с источником, можно разложить
по u,W (х). Эта ситуация не является необычной. Рассмот-
Рассмотрим, например, трехмерные векторы и оператор Р, проек-
проектирующий вектор г в плоскость ху. Оператор Р имеет два
независимых собственных вектора, скажем ех и еу; любой
вектор вида г' = Рт можно разложить по ним, хотя с про-
произвольным вектором этого сделать нельзя.
256
Теперь можно решить неоднородное уравнение
Ф(х) = е(х) + К^К(х, у) ф (у) dy. A1.43)
Представим разность как
t(x)-g(x) = y?ciuW(x), A1.44)
где, согласно A1.42),
d - j dxuW (х)* №(x)-g (х)\ = К AД,) J и<*> (х)* ф (х) их.
A1.45)
Таким образом, если определить
dt = j dzu<*> (х)* ф (ж), ef = J &ги<*> (х)* g (x), A1.46)
то A1.45) принимает вид Cj = dj — ei-~{'k/'ki)di. Следова-
Следовательно, ^г=тгZXe' и Ci~ % Я е'~ Подставляя их
в A1.44), получаем следующее выражение для ф (х):
или
ф (*)=Ф)+я2u(i) (х)/(х« -х) Ju
Если сравнить этот последний результат с решением
A1.20), то видим, что найдено представление ядра ре-
резольвенты в виде ряда
Т1
Символически исходное уравнение A1.43) записыва-
записывалось в виде
ф = g + 1Кф, A1.49)
формальное решение которого равно
ф=A — -kK)-1 g. A1.50)
Отметим, что разложение оператора в этом выражении
в степенной ряд дает непосредственно ряд Неймана
ф (х) = g + IXg + WK*g + №Ksg + . . . A1.51)
Так как, с другой стороны, согласно A1.20),
ф = A + Ш) g, A1.52)
17 Дж. Мэтьюз. Р. Уокер 257
то получаем формальное тождество
A — КК)'1 = 1 + АЛ- A1.53)
Интересно сравнить эти результаты с результатами,
полученными для дифференциальных уравнений в^част-
ных производных (см. разд. 9.4). Предположим, что диф-
дифференциальный оператор L имеет собственные значения
хг и собственные функции u(i), удовлетворяющие заданным
краевым условиям. Неоднородное дифференциальное урав-
уравнение имеет вид
?ф+/ = хф, A1.54)
где неоднородный член / — известная функция. Согласно
(9.26) и (9.27), решение записывается через функцию
Грина следующим образом:
J A1.55)
где
Отметим, что G (х, х') — интегральный оператор ядра, и
уравнение A1.55) символически записывается так:
ф = G/. A1.57)
Дифференциальное уравнение A1.54) и интегральное
уравнение A1.49) имеют одинаковый символический вид,
если положить х = 1/Я, и %f = g и отождествить L с К.
Согласно A1.57) и A1.52), решения этих уравнений равны
ф = A + ^Л) S и ф = Gf = -5— Gg. Поэтому можно ожи-
дать, что операторы A + KR) и -г- G записываются одина-
одинаково через соответствующие собственные функции и соб-
собственные значения. Чтобы проверить это, напишем A1.56)
cxj = lJXt и к = Ш. Тогда
Щ — Y.
и A1.56) приобретает вид
G (х, жО = X 2 ^ (х) и<*> (хТ + W 2
258
где использовано соотношение полноты (9.14). Интеграль-
Интегральное ядро б(х—х') эквивалентно единичному оператору,
так что находим
Это выражение имеет ту же форму, что и 1 + %R.c R, кото-
которое дается разложением A1.48).
11.5. МЕТОД ВИНЕРА — ХОПФА
И ИНТЕГРАЛЬНЫЕ УРАВНЕНИЯ
Уравнения Вольтерра часто можно превратить в диф-
дифференциальное уравнение с помощью дифференциро-
дифференцирования.
Пример.
X
и(х).= х + j xyu(y)dy = x + xf(x), A1.59)
о
где / (х) = \ уи (у) dy. Тогда
о
Решение этого уравнения равно/(х) = —1 + С ехр (ж3/3),
так что
и {х) = Сх ехр (rV3). A1.60)
Чтобы найти С, подставим решение обратно в исход-
исходное интегральное уравнение. Получаем С = 1.
Если ядро является функцией только от х — у, то оно
называется ядром смещения. Если пределы инте-
интегрирования от — с» до +оо, то используют преобразо-
преобразование Фурье. Рассмотрим уравнение
K(x-y)f(y)dy. A1.61)
Сделаем преобразования Фурье (они отмечены черточками
сверху)
оо
j dxf(x)exp(-ikx) = T(k) и т. д. A1.62)
—оо
17* 259
Преобразование интегрального уравнения имеет вид
7 (А)=?(*)+хк(кO(к). (и.63)
Следовательно,
7(Л)=—!?Й—. A1.64)
Задача решается обращением этого преобразования.
Если пределы интегрирования от 0 до х, а К есть ядро
смещения и, кроме того, функции обращаются в нуль п|»и
х <С О, то используется преобразование Лапласа.
Метод Винера — Хопфа, уже обсуждавшийся в связи
с дифференциальными уравнениями в частных производ-
производных, также можно использовать для определенных инте-
интегральных уравнений. Их называют уравнениями типа
Винера — Хопфа:
(-oo<x<oo). A1.65)
Отличительные особенности этих уравнений—ядро сме-
смещения и полубесконечный интервал интегрирования.
Положим / (х) = /+ (х) + /_ (х), где /+ = О при г>0и /-=0
при ?<0. Тогда
/+(*) + /-(*) = ?(*)+ J K(x-y)U(y)dy. A1.66)
—оо
Сделаем преобразования Фурье
Запишем их в виде
7-ФI1-К(к)] + п(к) = ф(к). A1.67)
Предположим теперь, что
{ехр( — ах), когда х —> оо,
о ч (И-68)
ехрфх), когда х—> — оо. v '
Следовательно, К (к) аналитична в полосе —р < Im к <
< а. Предположим, что ф (х) достаточно хорошо ведет
себя на бесконечности, так что <$> (к) также аналитична
в этой полосе.
260
При рассмотрении исходного дифференциального урав-
уравнения A1.65) разумно предположить, что / (к) по мень-
меньшей мере аналитична на отрезке —р < Im к < а. Таким
образом, предполагается, что все выражения в A1.67)
аналитичны на некотором отрезке у < Im к < б. Далее
представим 1 — К (к) в виде отношения двух функций
1 — К (к) = )' , где А {к) аналитична при Im к < б,
& (К)
& В (к) — при Im к > у. Заметим, что такое представле-
представление существенно эквивалентно разложению функции
In [1 — ~К (к)] = 1пА {к) — In В (к) A1.69)
на разность двух функций, каждая из которых аналитич-
аналитична в надлежащей области; в принципе для любого случая
нам уже известно, как сделать это [см. уравнение (8.85)].
Уравнение A1.67) принимает вид
7- (*) А (к)]+ Т+ (к) В(к) = В (к) ф (к). (И.70)
Разложим В {к) ф (к) на сумму функций аналогично тому,
как это делалось выше:
В (к)~ф (к) = С (к) +D (к), A1.71)
где С (к) аналитичЪа при Im к > у, a D (к) — при Im к <
< б. Итак,
J+ (к) В (к)-С (к) = - Т_ (к) A(k)+D (к), A1.72)
причем функция в левой части аналитична при Im к > у,
а функция в правой части — при Im к < б. Таким обра-
образом, обе функции должны быть равны одной функции.
В действительности /+ (к) и /_ (к) стремятся к нулю при
Im к = ± оо, а функции А, . . ., D ведут себя самое
худшее, как полиномы. Следовательно, обе части напи-
написанного выше уравнения равны некоторому полиному.
Отсюда определяются функции /+ и /_ с точностью до не-
некоторых неизвестных констант. Последние можно опреде-
определить по физическому смыслу или с помощью подстановки
решения в исходное интегральное уравнение.
261
11.6. ИНТЕГРАЛЬНЫЕ УРАВНЕНИЯ
В ДИСПЕРСИОННОЙ ТЕОРИИ
В гл. 5 мы получили соотношения вида
F(x) = ± f g,(x')dx'. , A1.73)
v ' n J x'—x—le ' v '
_ак называемые дисперсионные соотношения.
Математики называют их преобразованиями
Гильберта. Интегрирование обычно производится
вдоль некоторой части вещественной оси. Функция
A1.74)
аналитична всюду, кроме части вещественной оси, где
проходит линия разреза. Отметим, что
/ (х + ie) = F (х). A1.75)
Чтобы найти / (z) или F (х), нужна некоторая информа-
информация о g (x). Если g (x) вещественна, то она равна мнимой
части F (х). По физическим соображениям, в которые мы
не будем углубляться, величину g (x) часто называют п о -
глощательной частью F (х).
В качестве первого примера решения такого интеграль-
интегрального уравнения рассмотрим функцию
g(x)=\F (х) fh (x), A1.76)
где h (х) — некоторая известная вещественная функция *.
Следовательно, нужно решить нелинейное интегральное
уравнение
М \FWh№ 11?
х'—х—ie
Оно выглядит сложным. Существенное упрощение дости-
достигается введением вместо / (z) величины
*<*>=75Г A1-78)
В случае если /(z) нигде не обращается в нуль (сущест-
(существенное предположение), то ее обратная величина ^анали-
^аналитична всюду, кроме разреза. Далее, разрыв ф на разрезе
* Это типичное условие, налагаемое на амплитуду упругого
рассеяния из унитарности. Например, из унитарности часто следу-
следует, что F (х) имеет вид F (х) ^ ' sin 6 (х), причем 6 (х) и
h (х) вещественны. Отсюда следует Im F (х) =¦ | F (г) \2h (x).
262
равен
ф (х + ie) — ф (х—ie) = 2i Im ф (х + ie) =
2j ImF^) 2ih(x\ fH 7Q)
" |*4*)P - ^Л(ж). A1./У)
Таким образом, так же как и в расчете первоначальных
дисперсионных соотношений, к функции
r v ' п J ж' — z
можно применить формулу Коши. Решение исходной
задачи равно
f(x) = _i=._r_L г м*-)*п-1 A1<80)
v ' ф(ж+№) I Я J ж' —a;—iej v '
в случае, если ф (z) нигде не обращается в нуль.
В качестве второго примера предположим, что функ-
функция g (x) имеет вид
g (х) = h* (x) F (х), A1.81)
причем h (х) = eie sin б, а б (ж) — заданная веществен-
вещественная функция *. Еще раз обратимся к соотношению
--1 ^
~ П J
x'—z
и заметим, что / (х + ie) — f(x — ie) = 2\h* (x) F (x). Следо-
Следовательно, дисперсионное соотношение можно записать
в виде
(i
Вследствие тождества 1—2ifo* (х)=ехр [—216 (х)] это равен-
равенство записывается в виде
Вместо обратной величины / рассмотрим теперь лога-
логарифм /: L (z) =- In / (z). Тогда L (x + ie) — L (x—ie) = 2i6 (x),
где Z/ — аналитическая функция z (в случае если / не
обращается в нуль) всюду, кроме разреза. Следовательно,
= exp [JL j j^']^ ]. A1.82)
• Это снова типичное условие, которое налагают на амплитуду
рассеяния из унитарности.
ГЛАВА \Z.
ВАРИАЦИОННОЕ
ИСЧИСЛЕНИЕ
12.1. УРАВНЕНИЕ ЭЙЛЕРА — ЛАГРАНЖА
Основная задача вариационного исчисления состоит
в том, чтобы найти функцию у (х) так, чтобы функционал,
или функция этой функции, не менялся при малых изме-
изменениях у (х). Глава начинается с обычной демонстрации
того факта, как простая вариационная задача приводит
к дифференциальному уравнению Эйлера — Лагранжа.
Покажем на нескольких примерах основную проблему
вариационных расчетов. Рассмотрим функцию
F (у, dyldx, x) A2.1)
и интеграл
ь
/ = j F (г/, dyldx, x)dx = I [у (х)]. A2.2)
а
Такой интеграл часто называют функционалом.
Он представляет собой обобщение функции, так как опре-
определяет число, зависящее от функции, а не от другого
числа.
Требуется выбрать такую функцию у (х), чтобы
/ [у (х)] был максимален, или минимален, или (в более
общем случае) стационарен, т. е. нужно найти у (х), чтобы
при замене у (х) -*- у (х) -\- | (х) с достаточно малым |
величина / не менялась в линейном приближении по ?.
Для того чтобы привести эту задачу к задаче опреде-
определения экстремума обычной функции, рассмотрим смещение
у(х)-+у (х) + си] (*), A2.3)
причем а мало, а т] (х) — произвольная функция. Если
величина / [у (х)^имеет экстремум, то в этой точке
-!г-| =0 A2.4)
для всех г\{х).
264
Теперь
/(а)=
а«). A2.5)
Итак, мы требуем (для всех т)) выполнения равенства
Чтобы упростить задачу, наложим дальнейшее усло-
условие. Будем рассматривать только такие вариации, которые
a
Рис. 12.1. Вариационные кривые у (х), свя-
связывающие фиксированные конечные точки
р и<?.
исчезают на концах интервала а и Ъ, т. е. из всех функций,
соединяющих две фиксированные точки Р и Q,
отберем функции, обеспечивающие стационарность
/ [у (х)] (рис. 12.1). Принимая во внимание обозначение
A2.3), имеем tj (a) = tj (b) = 0.
Проинтегрируем теперь по частям второй член в A2.6);
тогда это уравнение приобретает вид
Проинтегрированная часть обращается в нуль, так как tj
равно нулю на обоих концах. Следовательно, «ели инте-
266
грал должен равняться нулю для произвольных т)(х), то
мы должны потребовать, чтобы
«L *.?=0. A2.8)
ду dx ду' v '
Левую часть этого уравнения часто пишут в виде 8F/8y
и называют вариационной или функцио-
функциональной производной F по у *.
Дифференциальное уравнение A2.8) называется урав-
уравнением Эйлера — Лагранжа. Вместе с надлежащими крае-
краевыми условиями оно эквивалентно исходной вариацион-
вариационной задаче.
Таким образом, многие законы физики можно форму-
формулировать либо с помощью дифференциального уравнения,
либо посредством эквивалентного вариационного прин-
принципа. В классической механике хорошо известен следую-
следующий пример: вариационный принцип Гамильтона
«2
&\Ldt = O A2.9)
эквивалентен уравнениям движения Лагранжа
dt
A2.10)
Здесь лагранжиан L есть функция (обобщенных) коорди-
координат qu скоростей qt и времени. В свою очередь, уравнения
Лагранжа эквивалентны уравнениям Ньютона.
В определенных случаях можно один раз проинтегри-
проинтегрировать уравнения Эйлера — Лагранжа. Предположим,
например, что F не зависит от у. Тогда уравнение Эйле-
Эйлера — Лагранжа A2.8) имеет вид dldx-dFldy' — 0, так что
dFldy' = const. A2.11)
Во втором примере предположим, что F не зависит
от х. Снова можно свести уравнение Эйлера — Лагранжа
к уравнению первого порядка
II
0
* Иногда определяют выражение в левой части уравнения (d2.8)
как вариационную производную Ы1Ьу от соответствующего функци-
функционала /.
266
Уравнение Эйлера — Лагранжа, умноженное на у', имеет
вид
. ??__ , _а_ of _0
ду "их ду'
Добавляя и вычитая у" (dF/dy'), получаем -=— [F —
— y'-g-r) — 0- Это приводит к уравнению первого порядка
г—у -т-т- = const. A2.13)
ду
Рассмотрим пример. Пусть А и В — две точки на вер-
вертикальной плоскости, причем А выше В. Вдоль какой
кривой, соединяющей А и
В, частица скатится за
кратчайшее время (без тре-
трения)? Эта знаменитая за-
задача была предложена
Джоном Б ернулли. Кривая
называется брахисто-
брахистохроной (по гречески
«кратчайшее время»). Оче-
Очевидное упрощение состоит
Рис. 12.2. Брахистохрона.
в том, чтобы поместить
точку А в начало коорди-
координат и*отсчитывать у вниз
(рис. 12.2). Требуется минимизировать время падения.
Скорость частицы равна v = dsldt, где s обозначает длину
дуги вдоль траектории. Следовательно, dt = dslv, и пол-
в
ное время равно t = I {dslv). Элемент длины пути равен
i
ds — ]/l + у'2 dx, и если частица в точке А находилась
в состоянии покоя, то из закона сохранения энергии сле-
следует, что v = V^2gy. Следовательно,
х0
t —
A2.14)
Подынтегральное выражение не содержит явно х.
Опустим постоянный множитель \^2g и обозначим F =
\( + у'2)/У- Из уравнения F — у' dF/ду' = const полу-
получаем у A -\- у'2) = С. Выражение 1 + г/'2 можно упростить
267
подстановкой у' = ctg В. Тогда у = ^ ,2 = С sin2 0 =
= -J-(l —cos29) и
-||-=-^.-Jl == С tg В sin 29 = С A - cos 26).
Интегрируя это уравнение, находим х = -^-B9— sin 2В),
где 8 = 0 в начале координат, х = у = 0. Полагая С = 2А
и 29= ф, имеем
х = А (ф — sin ф), у = А A — cos ф). A2.15)
Мы нашли параметрические уравнения для циклоиды.
По такой кривой движется точка на окружности колеса,
катящегося по оси х.
12.2. ОБОБЩЕНИЕ ОСНОВНОЙ ЗАДАЧИ
Довольно тривиально следующее обобщение основной
задачи. Предположим, что нужно найти максимум функ-
функционала
ь
I [у (х), z (х)] = j F (у, у', z, z\ х) dx, A2.16)
а
причем на краях интегрирования фиксированы условия
У (а) = У\, У (Ь) = у2; z (a) = zu z (b) = za.
Напишем уравнение Эйлера — Лагранжа для каждой
зависимой переменной отдельно:
6FdFd JF(\
by ~ ду dx' ду' -U'
b?__j>?___d_ ЛИ —о
bz ~ dz ~ dx' dz' ~
Следующим простым обобщением является включение
высших производных. Предположим, что требуется найти
максимум выражения
ь
/ 1У (*)] = j F (у, у', у", х) dx, A2.18)
а
268
причем у т. у' фиксированы в точках а и Ъ. Легко пока-
показать, что имеет место следующее условие:
Заметим, что мы обобщили определение вариационной
производной.
Приведем далее случай нескольких независимых пере-
переменных. Рассмотрим функционал
/ [/ (х. У)] = J J F (/, fx, /„, х, у) dx dy, A2.20)
причем G—некоторая область в плоскости ху, fx = df/dx
и fv = df/dy. Функция / должна изменяться так, чтобы
ее значения на границе G оставались постоянными. Тогда
условие стационарности /[/] имеет вид
6F _ dF d 8F d OF _„ ,99,
~W~Tf dx' dfx~ly~' dfy ~u- K^-^4
Мы еще раз обобщили определение вариационной произ-
производной.
При интерпретации различных производных в уравне-
уравнении A2.21) требуется некоторая осторожность. В уравне-
уравнении A2.21) при расчете dFldf, dFldfx и т. д. все перемен-
переменные, от которых зависит F, рассматриваются независи-
независимыми (т. е. /, fx, fv, x и у). При нахождении производной
dldx в (dldx) {dFldfx) величины х и у являются независимы-
независимыми переменивши, а у считается постоянным при дифферен-
дифференцировании dldx. Итак, операция [df (x, y)]/dx означает
df/dx, и уравнение Эйлера — Лагранжа A2.21) есть обыч-
обычное дифференциальное уравнение в частных производных
для / (х, у).
На примере брахистохроны мы видели, что удобно
выражать решение параметрически, т. е. в виде х = х (t),
У = У (*)• гДе t — параметр. Следовательно, можно скорее
говорить о задаче определения этих двух функций, чем
о задаче определения у (х). Если рассматривать х и у как
функции t, то функционал
A2.22)
приобретает вид
п . н
\ \&{x, у, х, y)dt, A2.23)
¦ • • • • • •
где х = dxldt; у = dy/dt; <р (х, у, х, у) = xF (у, у/х, х).
Тогда уравнения Эйлера имеют вид
o о
дх л д-х -и> ву л ^-и-
Оказывается, что уравнения A2.24) не являются незави-
независимыми: одно из них следует из другого. Предлагаем
читателю доказать, что
x — — --^-4-и — —.-^_ =0 A2 25)
. I * dt a'x) \ dy dt a'yl '
Рассмотрим теперь очень важное обобщение на пере-
переменные концы интегрирования. Предположим, что нужно
ъ
найти максимум функционала / = \ F (у, у', х) dx, но
а
величина у (Ь) допускается произвольной. Как и выше,
если к у добавить приращение г\ (х), то изменение / равно
ь
dF
а
Ь
Конечно, должно удовлетворяться уравнение Эйлера —
Лагранжа; в противном случае мы могли бы найти вариа-
вариацию г\ с г\ (Ь) = 0, которая меняла бы /. Но в дополнение
к этому уравнению должно быть [из условия обращения
в нуль 81 при произвольной ц (&)] условие
"* (п—. и\ о г 19 97\
~Т{—7~~ 1Л- С// V« I X^»^f I
Если обе концевые точки не закреплены, то dF/dy',
конечно, должно обращаться в нуль на обоих концах.
Рассмотрим другую возможность. Предположим, что у
фиксирован в точке х — а, а вторая концевая точка может
свободно двигаться по кривой g (х, у) = 0. Теперь
270
где Ах— смещение верхней концевой точки (рис. 12.3).
Отметим, что Ау = ц (Ь) + у' (Ь) Ах. Требование Ag = О
на конце кривой приводит к условию -^Ах-\--^-Ау = 0,
§
.
= 0, или
УМ' /
i
i
их 1
"—1
1
I
1
Рис. 12.3. Вариация конечной точки Ь вдоль
кривой g (ж, у) = 0.
Кроме того, из условия б/ = 0, помимо уравнения Эйле-
pa—Лагранжа, вытекает условие на конце FAx -\- -^~г "Ч = 0
при х = Ь. Исключая^ из последних двух уравнений Ах
и "П, получаем искомое условие
Здесь все вычисляется в рассматриваемой концевой точке.
В качестве примера, где используется это условие, рас-
рассмотрим нахождение кривой, вдоль которой частица будет
скатываться Наиболее быстро из заданной точки на задан-
заданную кривую (а не в заданную точку, как в задаче о брахи-
брахистохроне). Как и в A2.14), имеем F = 1/^A -\- у'2)/у, так
что условие A2.28) в переменной концевой точке имеет вид
1 9g у' J>?_n
или
ду
i
дх
-1
A2.29)
Отсюда вытекает очевидный факт, что кривая^наискорей-
кривая^наискорейшего спуска должна пересекать кривую «места назна-
271
чения» под прямым углом. Можно показать, что пер-
перпендикулярность у (х) и g (x) возникает всегда, когда
подынтегральное выражение имеет вид / (а;, у)\/Г\ -f- у'2.
Рассмотрим последнее обобщение основной задачи.
Оно состоит в нахождении максимума одного функционала
y',x)dx A2.30)
при условии постоянности другого функционала
ь
J\y(z)]=\G(y,y',z)dx. A2.31)
а
Иногда такие задачи называют изопериметриче-
с к и м и, так как классический пример — это нахожде-
нахождение кривой фиксированной длины, охватывающей макси-
максимальную площадь. Другой пример — нахождение кривой
у (х) заданной длины L, которая приводит к максималь-
максимальному объему, получаемому вращением у (х) вокруг оси х.
Обычная техника для решения задач такого типа со-
состоит в использовании множителей Лагран-
ж а. Предположим, что нужно найти максимум функции
двух переменных / (х, у). Мы должны удовлетворить усло-
условиям fx = 0, fv = 0. Предположим теперь, что нужно
найти максимум / (х, у) при условии g (x, у) = const.
Начнем с равенства df = 0 = fx dx -\- fv dy. Если бы dx
ш dy были независимы, то можно было бы сделать вывод
/ж = fv = 0. Однако они не являются независимыми, но
подчиняются условию dg = gx dx + gy dy = 0. Следова-
Следовательно, fjgx — fylgy Если обозначить это отношение К,
то имеем
h — лвг/ —и-
Это не что иное, как уравнения, которые мы получили бы,
если бы пытались найти максимум функции / — "kg
(К = const) без дополнительных ^условий. Величина Я
называется множителем Лагранжа. Конечно, решения
будут зависить от Я,; "к подбирается 'так, чтобы g (x, у)
принимало правильное значение.
Результат имеет простой геометрический смысл. Изоб-
Изобразим контурную карту функции / (х, у) (рис. 12.4). Пока-
Покажем также линию g (x, у). Если бы не было никаких огра-
272
ничений, то решением была бы точка А («вершина горы»).
А при условии, что мы должны оставаться на кривой
g (х, у) = const, решением, конечно, будет точка В, где
кривые g = const и / = const параллельны. Это приводит
к уравнениям A2.32).
Рис. 12.4. Линии уровня для, функции / {х, у)
и кривая g (х, у) = С.
Эта техника применима при произвольном числе огра-
ограничений (ограничений должно быть меньше, чем незави-
независимых переменных). Если требуется найти максимум
f (х, у, z, . . .) при условиях
gx (х, у, z, . . .) = const, I /12 33)
g2 (х, у, z, . . .) = const, J v • /
нужно искать максимум функции / — %igi — A,2g2 — • • •»
где "hi — неопределенные (постоянные) множители Лаг-
ранжа.
Этот метод применим также для неголономных,
т. е. неинтегрируемых условий. Предположим, что на ва-
вариации наложено ограничение
А (х, у, . . .)dx + Б (х, у, . . .) dy +
+ С(х, у, . . .)dz+ ¦ ¦ ¦ =0, A2.34)
которое нельзя проинтегрировать (или же мы не знаем,
как это сделать). Тогда максимум / [х, у, z, . . .) находит-
находится из решения уравнений fx = KA, fv = KB, . . .
Вернемся теперь к решению вариационной проблемы.
Легко видеть, что нахождение максимума I F dx при
условии \ G dx = const состоит в решении уравнения
18 Дж. Мэтьюз, Р. Уокер 273
Эйлера — Лагранжа для F + XG, где %. — неопределен-
ный (постоянный) множитель Лагранжа. Для доказа-
доказательства этого существует несколько способов. Рассмот-
Рассмотрим, например, вариации двух функционалов, возникаю-
возникающие от изменения 8у функции у (х):
б/ = f -^-8
f 8ydx
\ A2-35)
. J
Теперь потребуем, чтобы для всех бг/, таких, что б/ = О,
величина б/ также обращалась бы в нуль. Ясно, что это
возможно только в том случае, когда отношения 8F/8y
и 8G/8y постоянны и не зависят от х. Это эквивалентно
требованию стационарности интеграла
\(F+W)dx. A2.36)
Другой способ получения сформулированного выше
результата состоит в использовании следующих аргумен-
аргументов:
1. Мы хотим найти функцию у(х), которая обеспечи-
вает максимум IJy (х)] = \ F (х, у, у') dx, причем вариа-
«о
ции ог/ (х) ограничены условием
J [у (х)] — f G (х, у, у') dx = /0 = const.
2. Эквивалентная задача состоит в том, чтобы найти
функцию у(х), которая обеспечивает максимум / [г/(ж)] +
+ yj [у (х)] при указанных выше ограниченных вариа-
вариациях. Здесь % постоянна.
3. Функция у (х, К), которая обеспечивает максимум
выражения / + KJ для произвольных вариаций 8у, нахо-
находится из обычного уравнения Эйлера — Лагранжа для
подынтегрального выражения F -\- ^G.
4. Если найдено значение %i, для которого это решение
у (х, %i) удовлетворяет условию / [у (х, hi)] = Jo, то оно
также обеспечивает максимум / -f- %J длялограниченных
вариаций и есть не что иное, как решение всей задачи.
274
12.3. РЕШЕНИЕ ЗАДАЧ НА СОБСТВЕННЫЕ
ЗНАЧЕНИЯ С ПОМОЩЬЮ ВАРИАЦИОННОГО ИСЧИСЛЕНИЯ
Предположим, что требуется решить определенное
дифференциальное уравнение. Часто оказывается, что
можно придумать функционал, для которого уравнение
Эйлера — Лагранжа является рассматриваемым диффе-
дифференциальным уравнением. Рассмотрим, например, урав-
уравнение Лапласа V2$ = 0 в объеме V и с ф, заданным на гра-
границе объема V. Это эквивалентно нахождению минимума
функционала
A2.37)
что можно легко проверить. Подынтегральное выражение
A2.37) равно
р = -(уф)* = -Ц—) +(_) -Ц-) J,
так что dF/дф^О, дР/д(дф/дх) = дф/дх и т. д., и урав-
уравнение Эйлера — Лагранжа имеет вид
dF
ZJ dx д(дф/дх) '
xyz
Рассмотрим другой пример — уравнение Штурма—
Лиувилля (9.9)
A2.38)
Оно является уравнением Эйлера — Лагранжа для функ-
функционала
ь
I [и (х)] = \ [ри'2 + (q — %р) ы2] dx. A2.39)
а
Однако это самая лучшая форма, так как %, вообще
говоря, неизвестно. Другой путь состоит в нахождении
минимума
ь
/ [и (х)] = j (ри'2 + qu*) dx A2.40)
а
18* 275
йри условий
ь
J [и (х)] = f ры2 dx = const. A2.41)
а
Итак, собственное значение "к имеет смысл множителя
Лагранжа. Так как равенство A2.41) есть нормировочное
условие для и(х), то ясно, что эта последняя вариа-
вариационная процедура эквивалентна нахождению минимума
Далее, если умножить уравнение A2.38) на и (х), проин-
проинтегрировать от а до Ъ и вьшолнить интегрирование по ча-
частям, то видим, что экстремальное значение К (и) в дей-
действительности равно собственному значению Я,.
Можно также показать [7], что собственные значения
%п дифференциального уравнения Штурма — Лиувилля
имеют следующие свойства: 1) существует наименьшее
собственное значение Я,о; 2) если п-*- оо, то Я„->- + оо;
3) более точно — если и->- оо, то Я,п ~ const-и2. Теперь,
согласно A2.42), экстремальные значения функционала,
ъ
l(pu'* + qu*)dx
К[и(х)] = ^—Ь A2.43)
являются Собственными значениями Я,п. Таким образом,
абсолютный минимум К равен наименьшему
собственному значению Я,о. Это очень мощный метод для
нахождения наинизшего собственного значения. Метод
легко обобщается на задачи в пространстве нескольких
измерений.
Отметим, что пробная функция и (х), справедливая
с точностью до членов первого порядка, при подстановке
в A2.43) приводит к приближенному собственному зна-
значению, справедливому с точностью до членов второго по-
порядка. Чтобы убедиться в этом, положим
и ~ щ + ciui + с2щ + . . ., A2.44)
где щ — точные собственные функции, a ct малы. Если щ
нормированы, то и также нормировано с точностью до
276
членов второго порядка. Тогда оценка Ко имеет вид
ь ь
J [;>K + u'1c1+ .. •J + ?К + с1ы1+ ..\f\dx. Но j {ри? +
а а
Ь
-\-qui)dx = Ki и I (pu'iu'j + quiUj) dx = 0 для 1ф] (дока-
а
жите это!). Следовательно, оценка Ло приобретает вид
(Ло + с\\ + с*Л2 + ...) [1 + О (с*)]. A2.45)
Как утверждалось, она отличается от Ко членами второго
порядка. Интересно вычислить члены второго порядка.
ь
Для этого нужно знать также \ pu2dx = l +Cj+c|+ ...
а
Оценка A2.43) приобретает в этом случае вид
Этот результат отражает типичные особенности вариацион-
вариационного расчета, что К не может быть меньше Ко и что К рав-
равно Яо только в случае, когда все ct = 0, т. е. и = щ.
Пример. Оценим наинизшее собственное значение "к
уравнения
,м = 0, и = 0 при ж = 0 и х = 1. A2.46)
их*
Правильный ответ, конечно, Л = я2.
Рассмотрим пробную функцию м = жA — х). Тогда,
1 1
согласно вариационному принципу, Я,^ \ u'2dx \ u2dx —
— A/3)/A/30) = 10, что весьма близко к п2 (но больше).
Можно было бы улучшить эту оценку, полагая и =
= жA—х) {\-\-с1х-\-...) и варьируя параметры а, чтобы
минимизировать К.
Трудность метода состоит в выборе пробной функции.
Хорошая пробная функция должна удовлетворять трем
условиям: 1) удовлетворять краевым условиям; 2) быть
качественно похожей на ожидаемое решение; 3) желатель-
желательно, чтобы она приводила к разумно простым расчетам при
нахождении функционала К [и (х)].
277
Пример. В качестве примера дадим оценку наинизшей
частоты круглой мембраны радиусом а:
I (VuJ dx dy
I u* dx dy
л
A2.47)
Попытаемся искать и = 1 — г/а. Тогда вариационная
оценка имеет вид к2 ^ зг/(зга2/6) = 6/а2. Правильное наи-
наинизшее значение равно к2 = B,405 . . ./аJ » 5,78/а2.
Пример. В качестве последнего примера рассмотрим
так называемый вариационный принцип
Рэлея — Ритца для определения наинизшего соб-
собственного значения знергии в уравнении Шредингера
Щ = Щ, A2.48)
где Д — гамильтониан, или оператор энергии. Соответ-
Соответствующая вариационная задача состоит в нахождении
минимума функционала
). A2.49)
Например, попытаемся найти энергию основного состоя-
состояния (наинизшую энергию) для квантовомеханического
гармонического осциллятора; уравнение Шредингера
имеет вид
f| (-oo<a;<oo). A2.50)
В качестве пробной
Хехр( — х2). Тогда
функции возьмем я]) = A + ах2) X
_ а
8+
64
1+ 2 + 16
Минимум находится с помощью решения квадратного
уравнения 23а2 + 56а — 48 = 0, а = 0,6718. Это дает
Е < 1,034 (правильный ответ Е = 1). Этот метод приме-
применим в случае, когда Н — эрмитов оператор (см. разд. 9.2).
Все, что мы обсуждали, касается только наинизшего
собственного значения. Но, как, например, использовать
вариационный принцип для нахождения второго собствен-
собственного значения? Для этого выполним такой же вариацион-
вариационный расчет, но ограничимся пробными функциями, орто-
278
тональными к собственной функции наинизшего состоя-
состояния. Очевидно обобщение на собственные функции более
высоких состояний.
Матрицы также имеют собственные значения. Как для
них выполняются вариационные расчеты? Аналогия оче-
очевидна. Предположим, что нужно найти максимум функции
м 5j MijX
а
#! = const. Получающиеся уравнения можно записать
или, эквивалентно, максимум 5j MijXiXj при условии
2
в виде
1х, A2.52)
причем собственное значение Я, снова выступает как мно-
множитель Лагранжа.
Вариационный подход позволяет продемонстрировать
полноту собственных функций уравнения Штурма — Лиу-
вилля. Предположим, что мы ищем функцию / (х), кото-
которую хотим представить как линейную комбинацию соб-
собственных функций щ (х) уравнения Штурма — Лиувил-
ля. Функции щ подчиняются условию ортонормирован-
ъ
ности I utUj p dx — 8tj. Тогда вычисляют
а
Ь
/ (я)=2сгЩ (*)»Ci = J Uifpdx- A2-53)
i
i
Чтобы проверить это разложение, положим
A2.54)
A2.55)
Тогда функция г])„ (ж) = Д„ (х)/8п является нормированной
функцией, которая ортогональна к щ, щ, ...,ип. Теперь
279
минимум функционала
находимый при условии, что я]) нормирована и ортого-
ортогональна к первым п собственным функциям щ (х), равен
Кп+1. Таким образом, / [г])„ (ж)] >¦ А,п+1 или
A2.56)
Но легко видеть, что / [Дп (х)] остается конечным,
когда п -> со. Сначала отметим, что для любой функции
¦g (x), удовлетворяющей краевым условиям, простое интег-
ь
рирование по частям дает / [g (х)] = \ g (ж) [Lg (x)] dx, где
а
L — дифференциальный оператор Штурма — Лиувилля,
L=-ipi+^- Тогда
Ь п Ь
/ [An] = j / [Lftdx-2 2 с, j / [Lut] dx +
il
i=l
Ь
Так как / [Д„] положителен, как и Xt для достаточно
больших i, то конечность / [А„] очевидна.
Теперь из A2.56) видим, что lira 6^ = 0, т. е.
п-юо
lim \ Г/ (х) - ^ cm (x)V pdx = 0. A2.57)
a i=l
Обычно формулируют этот результат, говоря, что «ряд
71=1
сходится «в среднем» к / (х). Для всех физических вопро-
вопросов это столь же хорошо, как и обычная («в каждой точ-
точке») сходимость.
280
Закончим зту главу указанием, как можно применять
вариационные принципы к интегральным уравнениям.
Задача нахождения максимума (или минимума) функцио-
функционала
ь ь
/ [ф (*)] = J { К\х, у) ф (х) ф (у) dx dy, A2.59)
К(х,у) = К(у, х)
при условии нормировки
ь
ф2 (х) dx = const A2.60)
а
дает непосредственно результат
ь
4>(x) A2.61)
(докажите это). Уравнение A2.61) — линейное интеграль-
интегральное уравнение в стандартной форме. Отметим, что для
функции ф (х), удовлетворяющей этому интегральному
уравнению, функционал
1.
A2.62)
Таким образом, собственные значения симметричного ядра
можно характеризовать вариационным способом, подобно
тому как это делалось для собственных значений диффе-
дифференциального уравнения Штурма — Лиувилля.
ГЛАВА
ЧИСЛЕННЫЕ
МЕТОДЫ
13.1. ИНТЕРПОЛЯЦИЯ
Предположим, что по таблице значений некоторой
функции / (ж) (табл. 13.1) следует найти sin х для значе-
значений х, не указанных в таблице, например для х = 0,1432.
Можно решать задачу графически, рисуя гладкую кривую
по четырем заданным точкам и находя затем значения
для промежуточных величин х.
ТАБЛИЦА 13.1
о
0,1
0,2
0,3
sin а;
0,00000
0,09983
0,19867
0,29552
Для удобства с точки зрения аналитичности гладкую
кривую обычно представляют в виде полинома
/ (х) = А + Вх + Сх2 + Dx* + ... A3.1)
и используют данные точки для вычисления коэффициен-
коэффициентов А, В, С, D. В рассматриваемом случае заданы четыре
точки, так что можно ограничиться коэффициентами по D
и положить все последующие равными нулю.
Непосредственный расчет коэффициентов таким спо-
способом весьма утомителен: для нахождения интерполяции
нужно решать четыре совместных линейных уравнения.
Можно посоветовать несколько путей к сокращению вы-
выкладок. Отметим основную идею.
Предположим, что задана таблица значений у = / (х)
(табл. 13.2), в которой значения х отстоят друг от друга
Т А Б ЛИЦ А 13.2
VI
282
на одинаковом расстоянии (как в большинстве реаль-
реальных таблиц), т. е.
хг = Xi + h, х3 = х2 + h = Xi + 2/г и т. д. A3.2)
Определим теперь оператор Е равенством Еуп = yn+i
и оператор Д равенством А = Е — 1. Таким образом,
Ауп = (Е-1)уп = уп+1 - уп, A3.3)
А2#„ = Ауп+1 — Ауп = (уп+2 — уп+1) —
- (Уп+1 - Уп). A3.4)
Заметим, что
Уъ = У (xi + h) = tfi/t, уз = У fa + Щ = ?yi
или, в общем случае,
#п+1 = yfa + nh) = Епу1. A3.5)
Если в этом уравнении мы формально положим п про-
произвольным числом (не обязательно целым), то получим
интерполяционную формулу:
В этом бесконечном ряде в общем случае удерживают
только несколько первых членов; тогда получают такое
же приближение для у (х), что и приближение полино-
полиномами, упомянутое в начале этого раздела. Если, напри-
например, пренебречь третьей и более высокими разностями, то
мы находим
у B-a)yz + ^f^y3. A3.7)
Если пользуются таблицей с первой и второй разностями,
то наиболее удобна, вероятно, первая форма; в общем
случае — последняя.
При внимательном исследовании последней формы вид-
видно, что ее можно было бы написать сразу из следующих
283
соображений. Так как мы предполагали третью и более
высокие разности равными нулю, то считаем у квадратич-
квадратичным по ос. Далее, при х = х2 (ос = 1) у = у2, а при х —
= х3 (ос = 2) у = у3. В том и в другом случаях в ответе
не содержится величины yt, так что коэффициент при yi
должен равняться const-(ос — 1) (ос — 2). Константа рав-
равна 1/2, так чтобы у = yi при х = ж4 (ос = 0). С помощью
аналогичных соображений можно найти другие коэффи-
коэффициенты в последней строке A3.7).
Рассмотрим другой пример, использующий такие же
соображения. Напишем сразу соответствующую формулу,
где удерживаются также и третьи разности
a(a-Z)(g-3)
Коэффициенты в формулах A3.7) и A3.8) называются
интерполяционными коэффициентами Лагранжа; имеются
большие таблицы, в которых они выражены как функции а.
В проведенном выше анализе величины независимой
переменной предполагались равноотстоящими друг от
друга. Однако нетрудно написать коэффициенты Лагран-
Лагранжа и в общем случае. Например, из таблички
*1 У\
Х2 Уг
*з Уз
можно образовать для у «приближение гладкой кривой»:
../.л _ (х—хя)(х — х3
x%-xi) (х2-х3)
(х—xj)(x—x2)
Иногда необходимо оценить ошибку данной интерпо-
интерполяционной формулы. Продемонстрируем метод оценки
на формуле A3.7):
. д . a (a—1) «о
у = у! + аАу! + v2, A2yt.
По теореме Тейлора
+hY +
i/з = i/i +2 %'i
284
#2 — yi = hy[ + Yh2y"i + -^y["h3+ • •., |
Л2*/! = Уз - 2у2+ft = W + й3уГ + • • • >
Таким образом, оценкой A3.7) для величины y(xi-\-aJi)
является ряд
+у^+т w+...) +
4 гГ+..- A3.11)
С другой стороны, (точный) ряд Тейлора для y(xi-\-ah)
имеет вид
У1 + аку\ + у a?h*y\ + i ash?y™ +..., A3.12)
и ошибка равна разности выражений A3.11) и A3.12),
т. е.
-|-(а —1)(а—2)/г3г/™ + малые члены. A3.13)
Более точно ошибка равна (а/6) (а — 1) (а — 2) h3y"'t
где третья производная вычисляется где-то внутри интер-
интервала Хх ^ X ^ Х3.
Как оценить у"'? Этот вопрос сводится к вопросу
о численном дифференцировании, кото-
который тесно связан с интерполяцией. Самый легкий способ
получения формул состоит во введении оператора D:
Dyn = yk A3.14)
(здесь снова рассматриваются аргументы функции, равно-
равноотстоящие друг от друга). Какова связь между операто-
операторами D и другими операторами Е и Д? Она находится
с помощью ряда Тейлора
= (l + hD +\hW* +i-ft3?K+ ...) Уп = exp (hD)yn.
Таким образом,
A3.15)
285
или
A3.16)
Чтобы ответить на поставленный выше вопрос о у'",
из равенства A3.16) заключаем
Dntt(Mh)n, A3.17)
так что
у>"ж±АЗу. A3.18)
13.2. ЧИСЛЕННОЕ ИНТЕГРИРОВАНИЕ
Принцип численного интегрирования тот же, что и для
численного дифференцирования и интерполяции; функция
аппроксимируется полиномом, а полином интегрируется
точно. В общем случае не пытаются подгонять всю функ-
функцию одним полиномом. Вместо этого интервал интегриро-
интегрирования делят на много малых подынтервалов и используют
в каждом подынтервале свой аппроксимирующий полином.
Наиболее простой из этих методов основан на пра-
правиле трапеций. Если исследуемый интеграл равен
ь
\f{x)dx, A3.19)
а
то интервал а -^ х -^ Ъ делят на п подынтервалов длиной
h = (Ъ — а)/п. В каждом подынтервале функция заме-1
няется прямой линией, соединяющей значения функции
на каждом из концов. Получаем
где у0 = f (а), i/j = / (а + h), . . ., уп.\ = / (Ъ — h),
Уп = f (Ь).
Более точная и полезная формула называется пра-
правилом Симпсона. Интервал а ^ х -^ Ь делится
на четное число подынтервалов. По значениям функции
в точках а, а + h, a + 2h строится одна парабола, дру-
другая — по значениям в точках а + 2h, а + 3/г, a -f- Ah
и т. д.
286
Чему равна площадь под параболой (рис. 13.1)? Пусть
площадь равна А = h (ayi + fiy2 + уу3). Требуется най-
найти коэффициенты а, р, у. Иэ соображений симметрии а =
= у. Рассмотрим параболу у = хг от —1 до +1. Тогда
У± — Уз = 1» У % = О И А = 2/3 = а + у. Следовательно,
Рис. 13.1. Элемент площади в правиле
Симпсона.
а = у = 1/3. Чтобы найти р, рассмотрим случай yi =
= У2 = I/з — !• Аппроксимирующая кривая — это гори-
горизонтальная линия у = 1, и А = 2h = h A/3 + Р + 1/3).
Следовательно, Р = 4/3, и получаем формулу
А = (Ш) (wi + 4i/2 + у3).
A3.21)
В более общем случае интервала от а до Ь, причем интер-
интервал разделен на п частей, результат имеет вид
ь
it
/ (х) dxttj- (у0 + 4j/i + 2у2 + 4j/3 -f 2ул + ... + 4yn-i+yn)-
A3.22)
Чтобы повысить точность, можно было бы продолжить
рассмотрение и аппроксимировать функцию кубическими
кривыми. Однако на практике обычно ограничиваются
правилом Симпсона, а для повышения точности увеличи-
увеличивают число подынтервалов.
Другой путь повышения точности состоит в отказе от
требования равноотстоящих абсцисс и подгонке положе-
положения точек, в которых вычисляется функция, а также
коэффициентов так, чтобы аппроксимировать функцию
полиномом максимально возможного порядка. Например,
с помощью правила Симпсона для трех точек мы полу-
получаем формулу, точно описывающую полиномы второго
порядка. Но если точки х%, в которых вычисляется функ-
функция, являются свободными параметрами, то имеется всего
шесть параметров, и можно описать любой полином до
пятого порядка. Этот подход называется интегриро-
интегрированием по Гауссу. Кратко рассмотрим его.
287
Мы хотим сконструировать формулу для интеграла
/ (х) dx да с,/ («О + с2/ (я2) + с,/ (*3), A3.23)
которая была бы точной для полиномов пятого или более
низкого порядка. Величины сг и xt можно было бы опреде-
определить непосредственно из этого условия, однако получаю-
получающиеся шесть уравнений с шестью неизвестными весьма
сложны (например, они нелинейны по xt). Вместо этого
используем трюк, позволяющий вычислить сразу xt (ct
вычислим позже).
Как выбрать жг? Рассмотрим полином, корни которого
равны xt:
g (x) = (х — xi) (x — х%) (х — х3). A3.24)
Тогда гауссово интегрирование по формуле A3.23), при-
примененное к интегралу
ь
j g (x) dx, A3.25)
а
конечно, дает нуль. Более того, интегрирование по Гауссу
интеграла
ь
^g(x)${x)dx A3.26)
а
дает нуль для любой функции ф (х).
р^- Рассматриваемый метод предполагается точным для
полиномов до пятого порядка. Так как g (х)—третьего
порядка, то равенство
ь
^g(x)dx = 0 A3.27)
а
должно быть точным. Аналогично
ь
0 A3.28)
^*g(x)dx = 0 A3.29)
а
288
и
должны быть точными равенствами. Интеграл I xsg (x) dx
а
не обязательно равен нулю, хотя и его оценка по Гауссу
дает нуль. Это происходит по той причине, что x3g(x)—
полином шестого порядка, а наша формула годится толь-
только для полиномов до пятого порядка.
Три условия «ортогональности», A3.27), A3.28) и
A3.29), определяют g (x) с точностью до произвольного
множителя и тем самым определяют xt. Без потери общ-
общности можно выбрать а = —1, Ъ = +1. Тогда g (x) —
полином Лежандра Р3 (х). Очевидно обобщение резуль-
результата на случай числа точек, большего трех.
Из аналогичных соображений определяются веса, или
коэффициенты сг в A3.23), т. е. мы требуем, чтобы метод
был точным для / (х) = 1, х, х2. Это приводит к трем
уравнениям
-j(b2 —a2) = 0^ + 02X2 +с3х3; К A3.30)
-i- (b3 - а3) = Clx\ + С2х\ + сгх\. J
Так как xt теперь известны как нули Р3 (х), то из этих
трех уравнений можно определить си с2, с3.
Интегрирование по Гауссу можно обобщить, введя
весовую функцию р (х), т. е. сконструировать формулу
ь
/ (х) р (х) dx « df (xt) + c2f (x2)+ ...+ cnf (xn), A3.31)
где 2п констант ct и xt выбираются так, чтобы формула
была точной для / (х) = 1, х, хй, . . ., х2п~1. Дальнейшие
выкладки аналогичны приведенным выше; например, вели-
величины xt являются корнями полинома gn (x), определяе-
определяемого из равенств
ь ь
J gn (х) р (х) da: = 0, j gn (х) р (а;) х dx = 0, ...
A3.32)
gn (х) р (а:) ж"-1 dx = 0,
19 дж. мэтьюз, Р. Уокер 289
Если р=^=]1, то gn, конечно, больше не будет полиномом
Лежандра Рп.
Иногда требуется вычислить несобственный интеграл
вида
^(x)dx. A3.33)
Есть несколько способов численного расчета такого инте-
интеграла.
Прежде всего можно использовать правило Симпсона
, A3.34)
производя сложение до тех пор, пока следующие добавки
не окажутся пренебрежимо малыми. Этот метод работает
лучше всего, если / (ж) стремится к нулю быстро и плавно.
Другой подход — это интегрирование по Гауссу с со-
соответственно выбранной весовой функцией. Например,
если подынтегральное выражение ведет себя примерно
как ехр (—х), то полезна формула
/ (х) ехр (— х) dx та cj (ж,) + c2f (хг) + . .. + cnf (xn).
A3.35)
Наконец, часто помогает замена переменной. Например,
оо 1
J/(,)&= j/^)-^. A3.36)
о о
Если f(x) при х -> оо стремится к нулю по меньшей мере
так же быстро, как 1/х2, то новое подынтегральное выра-
выражение конечно при t = 1 и может быть проинтегрировано
стандартными методами.
13.3. ЧИСЛЕННОЕ РЕШЕНИЕ ДИФФЕРЕНЦИАЛЬНЫХ
УРАВНЕНИЙ
Существует много подходов для численного интегриро-
интегрирования дифференциальных уравнений. Рассмотрим только
одно дифференциальное уравнение первого порядка
= /(* 0)
и приведем два ^типичных и широко используемых ме-
метода для его решения.
290
Первый —метод Рунге — Кутта. Предположим,
что при ж = ж0 у = г/о- Выберем интервал бж и вычислим
последовательно
г/о); ]
1 с
k2=6x-f
A3.38)
/с4 = бж • / (ж0 + бж, г/о + к3).
Тогда при ж = жо + бж величина утуо-\--
-^-2к3-^к^. (Это похоже на правило Симпсона при инте-
интегрировании у' от ж0 до жо + бж.)
Точно таким же путем можно продолжить операции
для нахождения у в точке ж0 + 2бж и т. д.
Второй метод, метод Бэшфорта — Адам-
с а — Милна, предполагает, что решение как-нибудь
Щ ( = го + бг)
я:2( = з:1 + &х)
а:з( = ж2 + ^)
ТАБЛ1
г/о
У\
г/г
Уз
1Ц А 13.3
У'о
Ух
Ук
У'з
начинается, т. е. что есть таблица типа табл. 13.3. Про-
Продолжаем решение следующим образом:
1. «Предсказываем» г/4 равенством г/4 = г/0 +
+ -о-бж Bz/j — г/г + 2г/з). [Эту формулу можно получить,
выражая у' посредством а (х = х0 -\- абж), используя
написанную выше интерполяционную формулу, удержи-
удерживающую третьи разности, и интегрируя затем у' для нахо-
нахождения г/4 — г/0.]
2. Вычисляем y't = f (#4, г/4).
3. «Поправляем» г/4 с помощью формулы уй = г/2 -)-
+ -д- бж (г/2 + 4г/з + г/1) (правило Симпсона).
19* 291
Сравнение предсказанного и поправленного значений
j/4 позволяет оценить точность вычислений. Именно, по-
погрешность предсказываемого результата равна
|L(&cMj,(»>, A3.39)
в то время как ошибка в поправленной формуле равна
4о(Ь*Гу<*- A3.40)
Таким образом, можно сформулировать следующее пра-
правило. Если разность между предсказанным и поправлен-
поправленным значениями г/4 меньше 14 в последнем десятичном зна-
знаке, то на этом расчет заканчивается. В противном случае
нужно либо поправить у еще раз, либо сделать интервал
8х меньше.
Помимо малости ошибки метод численного интегриро-
интегрирования должен обладать другим важным свойством — ста-
стабильностью. Покажем важность этого свойства. Для этого
рассмотрим способ решения дифференциального уравнения
У' = f (x, у), A3.41)
в котором используется только правило Симпсона. От таб-
таблицы
*о г/о у'о
Xi J/i y'i
мы переходим к точке х2 с помощью уравнения
бж(г/[+4г/' + г/) +
з з yz)\-
A3.42)
Решим это уравнение для г/2 методом проб и ошибок (или
иным путем) и затем точно так же перейдем к точке у3.
Чтобы показать, что в этой кажущейся на первый
взгляд весьма разумной процедуре скрыт серьезный де-
дефект, применим ее к тривиальному дифференциальному
уравнению
у' = ay (a = const). A3.43)
Формула экстраполяции у2 = у0 + -§" ^х (Уо + **У\ + У2.) при-
приобретает вид
У* = Уо + (абж/3) (у0 + 4*/! + у2). A3.44)
292
Это линейное разностное уравнение с постоянными коэф-
коэффициентами. Такие уравнения имеют много аналогий
с линейными дифференциальными уравнениями с постоян-
постоянными коэффициентами (см. разд. 1.1). Стандартный под-
подход состоит в том, чтобы найти решение в виде
Уп = кп, A3.45)
где к — константа, которую нужно определить. Подстав-
Подставляя A3.45) в разностное уравнение A3.44), получаем для
к квадратное уравнение
~абхк- (l +1«бж) =0.
При малых абя; его решения равны
1 + абж;
-1+^-абж.
Таким образом, общее решение разностного уравнения
есть произвольная линейная комбинация уп «* A -)- а6х)п «
даехр (ах) и
уп
В действительности первое решение является правиль-
правильным решением исходного дифференциального уравнения
A3.43). Если а отрицательно, то второе решение A3.46)
чрезвычайно сильно осциллирует и рано или поздно уйдет
от правильного решения. Итак, этот метод нестабилен.
Решая дифференциальное уравнение первого порядка
с помощью разностного уравнения второго порядка, мы
получили лишнее нестабильное решение.
13.4. КОРНИ УРАВНЕНИЙ
Часто сталкиваются с проблемой более или менее точ-
точного нахождения х из равенства
/ (*) = 0, A3.47)
причем / (х) достаточно сложно, так что непосредственное
решение невозможно.
Простой способ решения — составление таблицы, ко-
которая содержит аргументы х вблизи желаемого корня
(табл. 13.4). Тогда по отношению к обратной функции
293
( — 1 + -|"а&с) " « (— 1)п ехр (— ах/3) A3.46)
•ТАБЛИЦА 13.
3 4
11 (*)
1,76
0,41
-0,16
-0,32
задача представляет собой обычную интерполяцию с неоди-
неодинаковыми расстояниями между соседними значениями
аргумента. Здесь можно использовать метод Лагранжа.
В рассматриваемом примере корень находится с помощью
уравнения, аналогичного A3.9) для четырех точек
@—0,41) @+0,16) @+0,32)
A,76-0,41) A,76 + 0,16) A,76 + 0,32)
@—1,76) @+0,16) @+0,32)
"^ @,41 —1,76) @,41 + 0,16) @,41 + 0,32)
@—1,76) @—0,41) @+0,32)
xl
(-0,16—1,76) (-0,16—0,41) (—0,16+0,32)
Х2 +
ХЗ +
@-1,76) @-0,41) @ + 0,16)
(—0,32 —1,76) (—0,32—0,41) (—0,32 + 0,16)
X 4 = 2,37.
Если / (х) можно рассчитать для произвольного х, то
лучше применить другой метод. Он состоит в последова-
последовательных итерациях, с помощью которых можно достичь
любой степени точности. В общем случае достаточно ли-
линейной интерполяции. Например, найдем положительный
корень уравнения
/ И = E - х) ехр (х) - 5 = 0.
A3.48)
Сначала вычислим х\ = 5, / E) = —5; х2 = 4,5, / D,5) »
^ 40. На рис. 13.2 показана линейная интерполяция
между этими значениями. Далее интегрируем
4'5) =4,944, /D,944) = 2,859;
Ж4=B'859)-75+59-D-944) =4,964, /D,964)^0,154;
(Иногда этот способ называют методом ложного
пол ожения.)
Другой путь состоит в том, что улучшение оценки х
достигается методом Ньютона, в котором используется
294
f(x) и f(x) (см. рис. 13.3):
"n~T
/(*!.)
A3.49)
Этот метод может оказаться неудачным в случае, если
/ (х) вблизи нуля имеет точку перегиба или какие-либо
особенности.
Рис. 13.2. Линейная интер-
интерполяция между точками (х±,
yi) и (х2, у2) для нахождения
точки х3.
foo.
Рис. 13.3. Иллюстрация метода
Ньютона для получения улучшен-
улучшенной оценки корня / (х): хп+1.
Очень простой способ, которым часто пытаются ре-
решать уравнение вида
х = / (х),
это непосредственная итерация
A3.50)
т- Д-
Если схема сходится, то часто она является самым бы-
быстрым способом оценки х. Условие сходимости требует,
чтобы вблизи корня выполнялось неравенство | /' (х) \ ¦<
<1-
Наконец, для нахождения корней полиномов очень
полезен метод Горнера. Он основан на двух алго-
алгоритмах, первый из которых вычитает из всех корней поли-
полинома заданную константу, а второй умножает все корни
полинома на 10. Наиболее удобно выполнять расчеты
с отделенными коэффициентами.
Вместо подробного обсуждения метода рассмотрим
пример применения этого метода,
295
Найдем корень уравнения
а* - Зх2 — 2х + 7=0, A3.51)
лежащий между 1 и 2. Уменьшим корни этого полинома
на 1, т. е. напишем его как полином по переменной х' =
= х — 1. Это удобно делается с помощью повторного
искусственного деления:
1 _3 -2 +7 11
+ 1 —2 -4
1 -2 -4 I +3
+ 1 -1
1 —1 | —5
+ 1
(Новый полином равен а? — Ъх + 3.) Умножим далее кор-
корни на 10. Это делается умножением коэффициента при
наивысшей степени х на 1, следующего коэффициента —
на 10, затем — на 100 и т. д. Таким образом, мы получаем
коэффициенты
—500 +3000
Теперь вычтем из корней число 6
1 _j_o —500 +3000
1
1
+6
+6
+6
, + 12
+ 6
+ 36
-464 1
+ 72
I —392
-2784
+ 216
296
Снова умножим все корни на 10 и затем вычтем ив
них 5:
1 4-180 —39 200 +216 000 I 5
+925 —191375
1 4-185 —38275 I 4-24625
+ 5 4-950
1 4-190
+ 5
— 37 325
1
4-195
Так как 24 625/37 325 « 0,66, то для искомого корня
получаем приближенное значение х да 1,6566.
13.5. СУММИРОВАНИЕ РЯДОВ
Прежде всего начнем с метода, в котором складывают
члены ряда до тех пор, пока оставшимися членами нельзя
будет пренебречь. Такой прием хорош, если ряд быстро
сходится. Однако многие часто встречающиеся ряды схо-
сходятся слишком медленно, чтобы можно было применять
этот метод.
Рассмотрим, например, ряд
2
п=1
A3.52)
В табл. 13.5 даны несколько первых членов. Ясно, что
для получения точности в четвертом знаке после запятой
нужно сложить около 100 членов.
п
1
2
3
4
5
т
1/П2
1,0000
0,2500
0,1111
0,0625
0,0400
АБ Л И ЦА 13.5 1
S
1,0000
1,2500
1,3611
1,4236
1,4636
297
Для оценки бесконечных рядов можно использовать
несобственные интегралы. Например,
J dx/x* < 2 1/гс2 < f dx/xK A3.53)
6 п=6 5
Эти неравенства очевидны из рис. 13.4. Таким образом,
0,1667 < 2 1/гс2< 0,2000,
а комбинируя этот результат с пятью первыми членами,
находим
1,6303<
1.6636.
71=1
A3.54)
Ситуация все еще неудовлетворительна; среднее из двух
пределов 1,6470 определено не очень точно. Правильный
ответ известен [см. формулу B.37)]: зх2/6 = 1,6449 . . .
Рис. 13.4. Соотношения между рядом и интегралом, де-
демонстрирующие неравенства A3.53).
Более точное сравнение ряда и соответствующего инте-
интеграла дает формула Эйлера — Маклорена.
Ее проще всего получить с помощью операторов Е и D,
рассмотренных в разд. 13.1. Прежде всего напишем при-
приближение трапеций
ь
A3.55)
298
С другой стороны, точное значение интеграла равно
С f(x)dx = g(b) — g(a), где g (х) = J / (х) dx. ТогдаDg (а) =
A3.56)
Итак,
(интеграл) — (приближение)
где Вп—-числа Бернулли, рассмотренные в гл. 2 [см. фор-
формулы B.17) и B.20)]. Окончательный результат можно
записать в виде
ь
]f(z)dx = h[±f{a)+f(a+h)+...+f{b-h) +
'-... A3.57)
Улучшая приближение трапеций, можно применять
эту формулу для оценки как интегралов, так и рядов.
Продемонстрируем последнее применение. Полагая а = 6,
Ъ = оо, h = 1 и / (х) = 1/а;2, из A3.57) имеем
f^?-- Г— -L-4- — — 4- -4- —
30^5
299
Следовательно,
Zj rfi ' J ж» "r 2 " 62 Gx» \e "• 30z5 |б
n=6 6
• • • "Г •
5
Добавляя этот результат к сумме 2 I/' получаем
п=1
2 1/гс2« 1,6450, A3.58)
что лишь на единицу в последнем знаке отличается от
правильного ответа.
Предположим, что мы хотим избежать вычисления
любой суммы вручную
II» 1
n=l
Последний ряд расходится. Причина в том, что формула
Эйлера — Маклорена обычно приводит к асимптотическо-
асимптотическому ряду (см. разд. 3.5), а не к сходящемуся ряду. Вообще
говоря, в этом случае численные расчеты не годятся, если
члены начинают быстро расти.
Закончим эту главу демонстрацией трюков, которые
можно использовать для резкого улучшения сходимости.
Предположим, что требуется вычислить число зх. Для этого
используем ряд
arctg х ~ х —^- -f- -=— ... + ... A3.60)
Полагая х = 1, находим
i = l_i-+i-_...+... (ряд Грегори).
Он сходится очень медленно. Положим теперь # =
Тогда
_ _ L_
^f+5-9 7-27
300
Он сходится, конечно, лучше. Еще лучше сходится ряд,
если положить ж = 1/5;
1 1,1
На самом деле 4oc = n/4-fp\ где (беря тангенсы)
120_l + tgP ,o t 1
Й9— 1-tgP ^P-arClg239'
Таким образом,
я = 16а-4р = 16 arctgi— 4arctg^- = 16 (-§—
. 1 . \-л1Л * | _
"г 5-55 '" " ' "' ' / V 239 3-2393 Т"
A3.61)
Итак, число я выражается через два быстро сходящихся
ряда.
В качестве второго примера вычислим In 2. Можно
было бы начать с ряда
In а+ х) = х—?-+?-- ... + ..., A3.62)
1 1
откуда находим In 2 — 1 —у +-3"— • • • + Этот ряд схо-
сходится очень медленно. Чтобы улучшить сходимость, за-
заметим, что
Полагая х = 1/3, имеем
Этот ряд сходится значительно лучше.
Если мы хотим, чтобы ряды сходились быстро, нуж-
нужно брать числа порядка 1. Например,
1пЗ—In 2 = In у {х = 1/5);
21n3-31n2 = ln|- (ж = 1/17).
Эти сротношения выражают In 2 и In 3 через два очень
быстро сходящихся ряда.
Для улучшения сходимости . ряда иногда можно
использовать также преобразование Эйлера (см. разд. 2.3).
301
ГЛАВА
14
ВЕРОЯТНОСТЬ
И СТАТИСТИКА
14.1. ВВЕДЕНИЕ
Из эксперимента известно, что если обычную монету
бросать N раз и «орел» выпадает Nh раз, то отношение
NhlN приблизительно равно 1/2. Чем больше N, тем ближе
отношение к 1/2. Этот результат сформулируем в виде сле-
следующего утверждения. Вероятность «орла» равна 1/2.
В более общем случае, если эксперимент выполняется
N раз, a Ns — число «успешных событий» и если отношег
ние NJN имеет предел при N -> оо, то говорят, что ве-
вероятность успеха равна NJN.
Такой тип вероятности называют апостериор-
апостериорной вероятностью, т. е. нет попытки предска-
предсказать результат, его просто измеряют.
Если пытаться предсказать результат, то это приводит
к определению априорной вероятности. Если
эксперимент имеет N возможных исходов, причем все они
равноправны, a Ns событий из них приводят к «успеху»,
то априорная вероятность успеха равна NJN. Конечно,
слово «равноправны» очень важно. Мы не будем опреде-
определять, когда два события равноправны; просто предполо-
предположим, что существуют равновероятные явления.
Конечно, два типа вероятности должны всегда давать
один и тот же ответ. Если апостериорная вероятность
оказывается отличной от априорной, то мы заключаем,
что некоторые события ошибочно предполагались равно-
равновероятными. В дальнейшем мы не будем различать эти
типы вероятности.
14.2. ОСНОВНЫЕ ЗАКОНЫ ТЕОРИИ ВЕРОЯТНОСТЕЙ
Пусть Р (А) — вероятность какого-либо события А,
происходящего при выполнении эксперимента. Конечно,
Р (А) лежит между 0 и 1. Если событие А происходит, то
Р (А) = 1; если нет, то Р (А) = 0.
302
Чтобы продемонстрировать некоторые более сложны
вероятности, рассмотрим эксперимент с п равновероят-
равновероятными исходами, включающими два события: А и В. Поло-
Положим
щ — число актов, в которых происходит событие А, но
не В;
пг — число актов, в которых происходит событие В,
но не Л;
п3 — число актов, в которых происходят события и А м В;
щ — число актов, в которых не происходит ни событие А,
ни В.
Так как исчерпаны все возможности, то щ + п2 + п3 -)-
+ щ = п.
Очевидно, вероятности событий А и В даются форму-
формулами
Р(А)=ъ±ъ.\ P(?) = .^±^L. A4.1)
Определим более сложные вероятности. Вероятность того,
что случается либо А, либо В, либо оба события, равна
A4.2)
Вероятность того, что одновременно происходят события
А и В, называется одновременной вероятностью А и В:
Р{АВ) = ^-. A4.3)
Наконец, можно определить условные вероятно-
вероятности; вероятность того, что происходит событие А при
условии, что событие В произошло, равна
Р(А\В)= . A4.4)
Аналогично
^ A4.5)
Из этого простого примера можно извлечь два важных
правила. В действительности легко увидеть, что они вер-
верны и в общем случае
Р {А + В) = Р (А) + Р (В) — Р {АВ); A4.6)
Р (АВ) = Р (В) -Р (А \В) = Р (А) -Р (В | А). A4.7)
Пример формулы A4.6) представляет вероятность, что
при вытаскивании одной карты из каждой из двух колод
303
по меньшей мере одна будет тузом. Ответ равен
р_^_ . J L__JE_
13 ~ 13 169 169
(отметим, что предполагается, что каждую карту из коло-
колоды можно вытащить с одинаковой вероятностью).
В качестве примера применения A4.7) рассмотрим
вероятность вытащить две карты бубновой масти при по-
последовательном вытаскивании двух карт из одной колоды:
Р B бубны)=Р A бубна) -Р A бубна | 1 бубна)=i-.j| = ^.
Если два события взаимно исключают друг друга, что
означает Р (АВ) = 0, то из A4.6) следует
Р (А + В) = Р (А) + Р (В). A4.8)
Если Р (АВ) = Р (А)-Р (В), то говорят, что события
А и В статистически независимы. Отмстим, что отсюда
следует, согласно A4.7),
Р (А | В) = Р (А), Р (В \А) = Р (В). A4.9)
Для условных вероятностей можно получить несколь-
несколько интересных соотношений. Например, из
Р (АВ) = Р (В) Р (А | В) A4.10)
и Р (АВ) = Р (А) Р (В | А) выводим
A4.11)
Записывая аналогичное соотношение для Л и С и деля
их, получаем так называемую теорему Бейеса
Р\В\А) _^Р{В) Р{А\В)
Р(С\А) Р(С) Р(А\С)
A4.12)
В качестве простого примера этой теоремы рассмотрим
старую задачу о трех ящиках А, В, С, содержащих соот-
соответственно две золотые монеты, одну золотую и одну
серебряную и две серебряные монеты. Произвольно выби-
выбирается ящик, и из него произвольно вынимается монета.
Монета золотая. Какова вероятность, что вторая монета
также золотая? Если,обозначить D событие вытаскивания
первой золотой монеты, то требуется вычислить Р (А \ D).
304
Имеем Р (С | D) = О и
Р{А\Р) Р {А) Р(Р\А) _ 1/3 J__9
Р (В | D) ~ P{B)P(D\B) ~ 1/3 * 1/2 -" *ш
Так как Р(Л \D) + P(B\D) + P(C\D) = 1, то получаем
§ ± 0. A4.13)
14.3. КОМБИНАЦИИ И ПЕРЕСТАНОВКИ
Число перестановок п объектов равно п\, так
как первое положение можно занять любой из п частиц,
второе — любой из оставшихся п — 1 частиц и т. д. С по-
помощью аналогичных соображений находим, что число
упорядоченных подсистем, содержащих т объектов из п,
равно
п (п — 1) ... (п — т + 1) = п\1{п — т)\. A4.14)
Если искать просто число подсистем, содержащих т объек-
объектов из п, не думая о порядке, в котором они появляются
(«число комбинаций т объектов, взятых из п»),
то мы должны разделить полученный выше результат
на ml, так как каждую комбинацию можно переставить
т\ способами и столько раз она появляется в выраже-
выражении A4.14). Итак, число комбинаций т объектов из п
есть биноминальный коэффициент
*! ч| =( п ). A4.15)
ml (п—те)! \ге—т) v '
Можно задать более сложные вопросы. Например,
сколько различимых перестановок можно сделать среди п
объектов, если имеется щ тождественных объектов одного
сорта, п2 тождественных объектов другого сорта и т. д.
Полное число перестановок равно п\, но каждая разли-
различимая перестановка встречается щ\, гс2!, . . . раз. Следова-
Следовательно, число различных перестановок равно
)
В качестве следующего примера вычислим, сколько
комбинаций можно составить из п объектов, если каждый
раз берется т объектов и допускаются повторения. На-
Например, число комбинаций из трех объектов, взятых каж-
каждый раз по два, причем допускаются повторения, равно
шести: И 12 13 22 23 33. Для получения общей формулы
заметим, что число комбинаций из п объектов, взятых
20 Дж. Метыоз, Р. Уокер 305
каждый раз по т, причем допускаются повторения, равно
числу способов, сколькими можно распределить т одина-
одинаковых шаров в п ящиках. В приведенном выше примере
было три ящика. Обозначая два шара крестиками, полу-
получаем шесть распределений. Они показаны в табл. 14.1.
1
2
3
XX
—
—
X
X
—
X
—
X
т
XX
—
АБ Л ИЦ
X
X
А 14.1
—
XX
Эти распределения соответствуют приведенным выше
шести комбинациям, причем соблюдается тот же порядок.
Чтобы пронумеровать теперь число способов, скольки-
сколькими можно распределить т тождественных объектов среди
п ящиков, напишем в любом порядке т крестиков и п — 1
вертикальных линий. Например, если m = 6 и к = 4, то
размещение XX | | X X X X | соответствует двум шарам
в первом ящике, ни одного во втором, четырем в третьем
и ни одного в четвертом. Полное число размещений т
(тождественных) крестиков и п — 1 (тождественных) ли-
линий дается формулой A4.16):
1)! ml
\ т )
v '
В приведенном выше примере п = 3 и т = 2, так что это
число равно („) = 6, как и должно быть.
Сравнительно простые примеры, рассмотренные здесь,
полезны для нахождения так называемых функций рас-
распределения (Бозе — Эйнштейна, Ферми — Дирака, Мак-
Максвелла — Больцмана) в статистической механике систем
невзаимодействующих частиц.
14.4. БИНОМИНАЛЬНОЕ РАСПРЕДЕЛЕНИЕ,
РАСПРЕДЕЛЕНИЯ ПУАССОНА И ГАУССА
Возвратимся к теории вероятности. Вычислим вероят-
вероятность того, что при бросании монеты п раз «орел» (о) вы-
выпадает точно т раз. Результаты последовательных п бро-
бросаний монеты можно представить в виде последователь-
306
ности п чисел «о» или «р» (решка)
ооро ... p. A4.18J
Вероятность каждого такого исхода равна A/2)п; число
подобных размещений с тп «орлами» равно '
= (п \ ,
^—¦—^
так что искомая вероятность равна
Слегка обобщая задачу, можно поставить вопрос:
какова вероятность тп «успехов» и п — тп «неудач», при п
повторениях эксперимента, если вероятность успеха рав-
равна р, а вероятность неудачи 1 — р? Нетрудно получить
ответ
{^m{i — p)n-m. A4.20)
Это распределение вероятности называется биноми-
биноминальным распределением.
Практическое значение имеют два различных предела
биноминального распределения при больших п. Сначала
предположим, что п и рп велики. Конечно, Р (т) будет
иметь пик вблизи тп = рп. Используя формулу Стирлин-
га C.76) для факториалов, перепишем вероятность тп
успехов в виде
A4.21)
Положим теперь тп = пр -\- !¦, где !¦ <^ пр. Удерживая
только главные члены, получаем
Р(тп)= * . 1 ехр Г—1 J?——1. A4.22)
V ' -\/2пп УрA — р) L 2 прA — р) J ^ I
Это распределение обычно записывают в виде
A4-23)
20* 307
где о = YnP (I — Р) — мера ширины распределения.
Формула A4.23) — так называемое гауссово, или
нормальное распределение. Оно является
весьма хорошим приближением даже при довольно неболь-
небольших значениях п. Например, в табл. 14.2 мы взяли п =
= 10 и р = 0,4 и сравнили величины гауссова и бино-
биноминального распределений.
т
0
1
2
3
4
5
р (т>бином.
0,0060
0,0403
0,1209
0,2150
0,2508
0,2006
р<т>гаусс.
0,0092
0,0395
0,1119
0,2091
0,2575
0,2091
т
6
7
8
9
10
Т АБЛI
р<т>бином.
0,1115
0,0425
0,0106
0,0016
0,0001
1ЦА 14.2 1
Р (т>гаусс.
0,1119
0,0395
0,0092
0,0014
0,0001
Второй предел биноминального распределения, пред-
представляющий интерес, относится к случаю, когда п -*¦ оо
и р —*- 0 таким образом, что произведение пр = а остается
постоянным. Согласно A4.20), вероятность т успехов
равна
v '
-р)п
т\ (п—т)\ ^
Учитывая наложенные условия и считая т
{n-m)\
Следовательно,
т)
п, имеем
exp(—a).
A4.24)
Это распределение называется распределением
Пуассона. Отметим, что, как и следовало ожидать,
S р И - 1.
Распределение Гаусса A4.23) возникает, когда экспе-
эксперимент с конечной вероятностью успеха повторяется
очень большое число раз. Это распределение показано
на рис. 14.1. Оно имеет ширину порядка YnP A — Р)
(в зависимости от того, на каком уровне измерять шири-
308
ну); важный результат состоит в том, что ширина пропор-
пропорциональна У^п. При п -*¦ оо распределение становится все
шире и шире,.но относительная ширина, т. е. (ширина)/п,
стремится к нулю.
п
с
Of*
Z6=ZVnpA-p)
пр
т
Рис. 14.1. Распределение Гаусса. Максималь-
Максимальное значение Р (т) равно С 1/~\/2пс, ширина
2а = 2Упр A — р).
С другой стороны, распределение Пуассона A4.24)
применяется в случае очень большого числа эксперимен-
экспериментов, а вероятность успеха в каждом эксперименте очень
1
1
Т -г
1 Z 3 4 5 6 7 /П
Рис. 14.2. Распределение Пуассона для а = 2.
мала, так что ожидаемое число успехов а является конеч-
конечной величиной. Классический пример распределения
Пуассона — это вероятность того, что в течение заданного
отрезка времени на распределительный щит станции посту-
поступит т телефонных вызовов. Можно считать, что каждая
секунда обозначает отдельный эксперимент, а успехом
называть телефонный вызов в течение этой секунды. Более
интересный пример (по крайней мере, для физиков) —
это распределение по времени числа космических частиц
(или отсчетов, производимых любым другим случайным
явлением). Для достаточно малого а распределение Пуас-
309
сона весьма асимметрично. На рис. 14.2 оно показано для
а = 2. Конечно, если а ^> 1, то распределение переходит
в гауссово распределение. Тогда полуширина равна о =
= упр A - р)« ух
14.5. ОБЩИЕ СВОЙСТВА РАСПРЕДЕЛЕНИЙ
До сих пор мы обсуждали вероятности только дискрет-
дискретных событий, вероятность одного успеха, двух успехов
и т. д. Можно также определять непрерывные распреде-
распределения вероятности. Например, если х — переменная,
которая может принимать любое вещественное значение,
то можно определить р (х) — вероятность распределения
величины х — с помощью следующего определения:
р (х) dx — вероятность, что х лежит в малом интервале
dx около х. Когда на рис. 14.1 мы показывали распределе-
распределение Гаусса в виде гладкой кривой, то мы в действитель-
действительности имели в виду непрерывное распределение вероятно-
вероятности. Более точно, если заменить дискретную переменную т
непрерывной переменной х, среднее значение которой рав-
равно х = пр, то, так как го меняется скачками на единицу,
в пределе больших п следует написать
Р (т) = р (х) Ах с Да; = 1.
Таким образом, распределение Гаусса по т переходит
в непрерывное распределение Гаусса по xi
. A4-25)
где использовалось уравнение A4.23) с ? = те — пр —>
—> х — х. Как и раньше, о = ]/гпрA — р).
Среднее значение (или ожидаемое значение) вели-
величины х равно
{х) = %Р(х)х, A4.26)
х
если х принимает только дискретные значения. В непре-
непрерывном случае
(х) = [ р (х) х dx. A4.27)
Среднее значение любой функции от х равно
</(*)>= jp(x)f{x)dx. A4.28)
310
Пример. Для распределения Гаусса A4.25) среднее
значение х равно
<ж>
а среднеквадратическое отклонение ж от его среднего
равно
оо
A4.30)
В общем случае величина {{х — яJ} называется дис-
дисперсией х, а ее квадратный корень — стандарт-
стандартным отклонением, обычно обозначаемым а. Мы
видим, что для распределения Гаусса стандартное откло-
отклонение равно полуширине а, а тг-й момент распределения
р (х) определяется как среднее значение хп:
(хп) = \ р (х) хп dx. A4.31)
Попутно отметим полезное соотношение между вторым
моментом, средним значением и его дисперсией. Имеем
{{х — xf) = (х2 — 2х (х) + (жJ) =
= (ж2) - {х)\
т. е.
о2 = <ж2) — (жJ. A4.32)
Часто распределение характеризуют его моментами.
Это приводит к определению функции, производящей
моменты, так называемой характеристической
функции распределения. Она равна преобра-
преобразованию Фурье от плотности вероятности
ф (к) = \ йж-ехр iikx) p (х). A4.33)
Напишем, как возникают моменты, когда функцию ф (к)
разлагают в ряд по к:
ф(&)= J dxp(x) (l + ifcc -±-к*х*—^-к3х*+ ...) =
^ V?f .. A4.34)
311
Таким образом, характеристическая функция есть произ-
производящая функция для моментов.
Пример. Характеристическая функция для распреде-
распределения Гаусса равна
4>(к) = j dx-ex? (ikx) L_g exp [ -
X exp I ikx к"-) ^
ф (к) = exp (ikx) exp (— &2c2/2). A4,35)
Гауссов множитель в ф (к) означает, что существенны
только малые к; ф (к) очень мало при | к | ^> 1/а (ср.
с принципом неопределенности из разд. 4.2).
Теперь продемонстрируем применение характеристиче-
характеристических функций. Предположим, что х — случайная пере-
переменная с распределением вероятности р (х), а у — неза-
независимая случайная переменная с распределением вероят-
вероятности q (у). Рассмотрим теперь некоторую величину z,
которая является функцией х и у: z = f (x, у). Что можно
сказать о вероятности распределения z; например, чему
равна вероятность того, что z лежит в некотором интер-
интервале dz около z0?
Рассмотрим различные моменты распределения z.
Имеем
<z> = j j / {х, у) р (ж) dxq (у) dy,
<z2>= J { [f(x, y)]*p(x) dxq (y) dy и т. д. A4.36)
Таким образом, характеристическая функция z-распреде-
ления равна
Ф (к) = J J exp [ikf (х, у)] р (х) dxq (у) dy. A4.37)
Если / (х, у) есть просто х-\-у, то имеем
Ф (к) = j j exp [ik (x + у)] p (x) dxq (y) dy =
» j exp (ikx) p (x) dx f exp (iky) q (y) dy. A4.38)
312
Это очень важный результат. Характеристическая функ-
функция для суммы двух независимых переменных равна
произведению отдельных характеристических функций.
Конечно, можно обобщить этот вывод на произвольное
число переменных.
Наиболее важное следствие- этой теоремы — это так
называемая центральная предельная тео-
теорема. Предположим, что случайная переменная х имеет
распределение вероятности р \х), причем первый и второй
моменты равны х и (ж2). Предположим далее, что сделано
п «измерений» х и образовано среднее
a^^fa+Хг+...+Хп). A4.39)
Каково распределение Р (а) случайной переменной а?
Вместо Р (а) исследуем распределение Q {а — х) перемен-
переменной а — х, среднее значение которой равно нулю. Оба
распределения эквивалентны, так как Р (а) = Q (а — х).
Характеристическая функция Q (а — х) равна
&(a — x)]Q(a — x)da =
Ф(к) = [
exp |—[fo—x) + (x2 — x)+ ...+(xn — x)]j x
X p (Xi) dxi ... p (xn) dxn =
= j exp [^- (xt — x) J p (Xi) dxi x
X J exp [-?- (ъ-х)] p (xz) dx2 ... = [ф (А) ]2 , A4.40)
где ф (к) — характеристическая функция переменной
(х — х), которая по определению х и а имеет первый
и второй моменты 0 и а2. Итак,
= \
k(x—x)]p(x)dx = l — ~
A4.41)
и из A4.40)
что в пределе большого п переходит в
ф (к) —+ ехр [ — к*оЧ2п]. A4.42)
313
Обращая это преобразование Фурье или ссылаясь
на A4.35), для большого п находим
Следовательно, распределение среднего из большого числа
измерений х имеет гауссову форму с центром в точке х
и стандартным отклонением в п1/2 раз меньше, чем для
распределения х.
Выше -мы предполагали, что величины х и о каким-то
образом известны. Обычно это не имеет места. Задача
оценки х (и иногда а) из экспериментальных данных со-
составляет часть общего вопроса об интерпретации экспери-
экспериментов и обсуждается в следующем разделе.
14.6. ОБРАБОТКА ЭКСПЕРИМЕНТАЛЬНЫХ ДАННЫХ
При интерпретации экспериментальных результатов
мы используем идею относительного правдоподобия. Его
можно «вычислить» по теореме Бейеса следующим образом.
Пусть А — возможная теория, В — альтернативная
теория, Е — экспериментальный результат. Мы хотим
сравнить Р (А | Е) и Р (В \ Е) — вероятности, что А и В
выполняются при условии, что имеется эксперименталь-
экспериментальный результат Е. Теорема Бейеса утверждает, что
Р{А\Е) Р{А) Р{Е\А)
Р(В\Е)~ Р{В) Р(Е\В) ' \1ч.-*±)
Предположим теперь, что Р (А) = Р (В); это означает,
что две теории априори «равновероятны». Иногда это
не выполняется, и тогда следует применять уравнение
A4.44) как оно есть. Но если это предположение выпол-
выполняется, то
Р(А\Е) _ Р{Е\А) , ,
Р{В\Е) Р(Е\В) ' \>-ч.ы)
Величины справа имеют простой смысл: зто вероятности
получить результат Е, если правильны соответственно
теория А или В. Таким образом, относительная вероят-
вероятность двух теорий определяется отношением вероятностей,
предсказываемых этими двумя теориями, при условии, что
действительно получается результат. Конечно, наиболее
вероятная теория та, для которой вероятность макси-
максимальна.
314
Предположим, что мы хотим в теории определить пара-
параметр а. Мы выполняем эксперимент и получаем ответ.
Если вероятность L (а) получения этого ответа как функ-
функция а выглядит подобно кривой на рис. 14.3, а, то мы
имеем «хороший» эксперимент, и а определяется с хорошей
точностью. С другой стороны, если кривая вероятности
выглядит как на рис. 14.3, б, то мы не уверены в резуль-
результате а = а*.
а
а
Рис. 14.3. Функции относительного правдоподобия L (а) для пара-
параметра а, находимого из «хорошего» эксперимента (а) и статистиче-
статистически «плохого» эксперимента (б).
Если кривая относительно узка, то она часто имеет
гауссову форму. Тогда экспериментальные результаты
можно описать, задавая значение максимального правдо-
правдоподобия а* и стандартное отклонение
1V2
Да=
Г \ (a-a*
to Т/2
i • A4.46)
Заметим, что Да совпадает со стандартным отклонением
а, если а — случайная переменная со средним значением
а* и распределением L (а). Конечно, L (а) не есть истин-
истинное распределение вероятности а; истинным распределе-
распределением является б-функция, если а — параметр, имеющий
определенное (хотя и неизвестное) значение.
Если L (а) имеет гауссову форму, то
т / \ 1 Г (а —а*J
L (а) = —-7=— ехр — ¦ -
' У 2я a L
d I r i * /
и стандартное отклонение равно
л Г d2 , -г . ,~\
Да = о = -г-5- In L (а)
L da2 v ' J
-V2
A4.47)
A4.48)
315
Если в эксперименте не набрана статистика или функ-
функция правдоподобия отличается от гауссовой по какой-либо
другой причине, то лучше всего нарисовать график функ-
функции правдоподобия.
Продемонстрируем на примере принцип максимального
правдоподобия. Определим среднее время т жизни неста-
нестабильной частицы. Экспериментально наблюдается не-
несколько частиц. Первые живут время ti, вторые ?2 и т- Д-
Как из этих результатов получить наиболее вероятное
время?
Вероятность распада частицы, имеющей среднее время
жизни т, в момент t за время dt равна
р (t) dt = -i- exp (— tli) dt. A4.49)
Таким образом, вероятность удачи в эксперименте про-
пропорциональна
L (т) = — ехр ( — tn'r) — exp (—12/т) X
X —exp ( - ух) ... ~ ехр ( - tjr);
A4.50)
l
Максимум L(x) находится с помощью дифференцирова-
дифференцирования по т:
ния по т:
Следовательно, значение максимальной вероятности равно
т. е. просто среднее из наблюдаемых времен tt.
Если число частиц достаточно велико, так что L (т)
приближенно имеет гауссову форму, то можно также най-
найти стандартное отклонение. Согласно A4.48), имеем
п
-1/2
316
Это выражение не является независимым от т, как зто
было бы для точного гауссова распределения. Вычисляя
его в точке т*, получаем *
A4.52)
Другое применение принципа максимального правдо-
правдоподобия состоит в определении числа параметров в теории
в случае, когда экспериментальных точек больше, чем
параметров. Кроме того, вследствие экспериментальных
ошибок невозможно идеальное согласие теории и экспе-
эксперимента. В качестве примера такой задачи рассмотрим
данные, показанные на рис. 14.4. Угловое распределение
в ядерной реакции исследова-
исследовалось посредством измерения
дифференциального сечения
на различные углы (указаны
ошибки). Мы хотим согласо-
согласовать данные с «теоретической»
кривой вида
а (8) = а0 + а± cos 8 +
+ с2 cos2 8 + с3 cos2 8 A4.53)
и найти наиболее вероят-
вероятные значения параметров ат.
В более общем случае
предположим, что измеряется
N величин, для которых по-
получаются экспериментальные
значения xt со стандартными ошибками сг. Предположим,
что имеются также «теоретические» выражения для этих
величин и что эти выражения содержат систему п пара-
параметров ат, значения которых требуется подогнать так,
чтобы получить наилучшее согласие с экспериментом.
Назовем ?j (а4, а2, . . ., ап) «теоретическим» выражением
для xt.
Рассмотрим случай, когда распределения вероятности
для экспериментальных результатов являются гауссо-
30 ВО 90 120 в, грав
Рис. 14.4. Типичное угловое
распределение в ядерной реак-
реакции. Показаны эксперименталь-
экспериментальные данные и обработка по ме-
методу наименьших квадратов.
* В этой процедуре ошибка обычно переоценивается; более
удобная процедура состоит в усреднении — — In L (т)
по функции правдоподобия. Однако если разница велика, то,
вероятно, лучше прежде всего начертить график функции' правдо-
правдоподобия.
317
выми. Тогда функция правдоподобия пропорциональна
N
Lf/y /-I /-I \ __. PYT1 1 — ^» . * * О*/ I
I Cv4 j U-*>) • • • j LLjiJ ЛГ/Q KjAIJ I ^^ 71 n . I f
A4.54)
и мы хотим подогнать параметры ат так, чтобы полу-
получить максимальное правдоподобие. Это эквивалентно
минимизации показателя экспоненты
и результат по этой причине называется методом
наименьших квадратов. Величина %2, опре-
определяемая равенством A4.55), будет далее использована
[см. A4.71)].
Чтобы найти наиболее вероятные значения а™ величин
ат, возьмем производные A4.55) по этим параметрам:
A4.56)
г=1
Решение этих уравнений получается в красивой форме,
если ?4 — линейные функции параметров о,-, т. е. если
п
Ь= 2 Cimflm A4.57)
m=l
с известными коэффициентами cim. Тогда условия макси-
максимального правдоподобия A4.56) приобретают вид
= Vfi^iLa,. A4.58)
Oi ti
Определим теперь «вектор данных» X и «матрицу
измерения» М следующими формулами:
N
318
заметим, что X зависит от экспериментальных результа-
результатов х% и ошибок О;, в то время как М зависит только от
ошибок (М.— симметричная матрица).
Тогда условия A4.58) можно записать в виде матрич-
матричного уравнения
X = Ма A4.61)
с решением
а = М-ХХ. A4.62)
Далее исследуем ошибки, связанные с определенными
выше параметрами ат. Есть два подхода к этой проблеме;
оба они приводят к одинаковой алгебре и одинаковым
результатам. Один из них состоит в том, чтобы рассматри-
рассматривать функцию A4.54) как функцию вероятности парамет-
параметров ат и с помощью нее вычислять среднеквадратические
отклонения' ((ст — а%J). Другой подход заключается
в том, чтобы представить себе повторения всего экспери-
эксперимента большое число раз одним и тем же путем (т. е.
с теми же ошибками ot) и затем вычислить среднеквадра-
тическе отклонения ат, получаемые в индивидуальных
экспериментах из глобального среднего по всем экспери-
экспериментам ат. Черта сверху обозначает среднее по всем
мыслимым экспериментам. Конечно, значение такого сред-
среднего неизвестно, но оно и не потребуется.
Чтобы найти ошибки в параметрах, требуется вычис-
вычислить ожидаемое среднеквадратическое отклонение ((ат —
— стJ) или, в более общем случае, ({ат — ат) (at — ai)).
Из A4.62) и A4.59) имеем
(о™ - ат) = 2 (М~%* (** - *к) =
k
= 2 (M~XU^r (xj-xj)> A4.63)
{i?j—xj) (Xi-xt)) = otfij, A4.64)
так как индивидуальные эксперименты xt предполагаются
статистически независимыми. Следовательно,
~ат) (а, - Щ)) = ^ (М-%ь 2L (М-1),, И*. а? Ь„ =
kjpi a3 °г
= 2 (М-%* (М-1)„ (M)ph = (М-%,, A4.Р5)
кр
319
и стандартное отклонение в ат равно
Лат = <(ат -атJ)*/2 = V(M^)mm. A4.66)
Далее^в общем случае перекрестные члены ((ст — ат)х
X(at — at)) с I Ф т не равны нулю. Это означает, что
параметры ат не являются статистически независимыми
и их ошибки коррелируют. (Конечно, можно было бы диа-
гонализовать матрицу М~х и тем самым найти систему ста-
статистически независимых комбинаций ат.)
Ошибка, связываемая с каждой величиной, зависящей
от параметров ат, может быть найдена из матрицы оши-
ошибок М~1.
Пример. Найдем ошибку в z = с4 + 2с2. Флуктуация,
или среднеквадратическое отклонение, равна
<(z -ф = <[(Ol - щ) + 2(а2 - а2)]2) =
= «Ci - а4J) + 4 ((а4 - щ) (а2 - а2)) + 4 ((а2 - а2J) =
= (М-% + 4 (М-%+4 (M-iJ2. A4.67)
До сих пор мы предполагали, что теоретические выра-
выражения Zt правильны для некоторых значений параметров.
[Они могли бы быть значениями больших средних ат,
если нет «систематических» экспериментальных ошибок.
Тогда мы бы имели xt = %t (am).]. Найденные выше ошиб-
ошибки Дст чувствительны к этому предположению и не дают
указания на его правильность. По этой причине далее мы
рассмотрим вопрос: хороша ли форма используемых тео-
теоретических выражений? Ответ однозначен: нельзя делать
вывода, что данная теория правильна, лишь потому, что
она дает хорошее согласие с экспериментом; с другой
стороны, если согласие плохое, то либо неудачны теоре-
теоретические выражения, либо экспериментатор недооценил
своих ошибок (или сделал ошибку).
Рассмотрим один количественный критерий хорошего
согласия, известный под названием проверка на
5С~к в а д р а т. Проверка состоит в определении, будет ли
показатель A4.55) в функции правдоподобия больше, чем
ожидаемый статистически.
Если хь — истинное среднее xt, то (нормированная)
вероятность наблюдения х± в dxi, x2 в dx2 и т. д. равна
Р (xit х2, ..., xN) dXi dx2 . .. dxN =
n^:U^ A4'68)
320
Определим
7i =-?-(*! xt) A4 69)
и
Q (?*) dqt... dqN = P (xt) dxl ... dxN.
Тогда
и @ зависит от qt только через
2<??=X2, A4.71)
f=l
причем х2 — квадрат «радиуса», т. е. расстояние в JV-мер-
ном евклидовом пространстве от начала координат до
точки с декартовыми координатами д4 . . . qN.
Так как Q (qt) зависит только от %2, оно имеет одно и
то же значение всюду на «сферической» поверхности в N
измерениях. Распределение вероятности %2 должно
иметь вид
сферическая
оболочка, х.
=2Сехр (-5Са/2) х"~* ^Х = Сехр (-%2/2) %N~2-2% d%.A4.72)
Определим константу С из нормировки
о о
Отсюда C = [2JV/2r(iV/2)]-1. Таким образом, из A4.72)
РEС2) ^a-2jv/2r(JV/2)exP(-X2/2) (t)WV-i dt- A4.73)
Это распределение х2 известно как хи-квадрат (х2)
распределение с JV степенями свободы. Веро-
Вероятность, что ха больше наблюдаемого значения Хо» равна
I
A4.74)
Таблицы этой функции приведены в различных спра-
справочниках. Если эта вероятность велика, то, конечно,
согласие теории с экспериментом хорошее.
21 Дж, Мвтыоз, Р. Уокер 321
При обсуждении распределения ЗС2 предполагалось,
что известны истинные параметры ат и, следовательно,
истинные средние величины хь. Однако на практике это
не так: мы подгоняем параметры ат к наиболее вероятным
значениям с™, которые дают наилучшее согласие с экспе-
экспериментальными данными. Используя эти наилучшие
значения <4 для вычисления наблюдаемого %2 [соглас-
[согласно A4.55)], мы, конечно, получаем меньшее значение, чем
получили бы с фиксированными ат. Например, если число
подгоняемых параметров п равно числу эксперименталь-
экспериментальных точек N, возможно идеальное согласие и %2 = 0.
Если N ~> п, то оказывается, что в качестве числа сте-
степеней свободы в %2-проверке A4.74) нужно использовать
число N' = N — п вместо N.
Закончим эту главу замечанием о роли априорных
вероятностей. Нужно иметь в виду, что использование
функций правдоподобия предполагает равными априорные
вероятности для различных «теорий», т. е. Р (А)/Р (В) «
л? 1. Вообще говоря, это разумное предположение, и для
хорошего эксперимента нет большой разницы. В тех слу-
случаях, когда известно, что данная «теория» невозможна,
соответствующая вероятность Р (А) = 0. Кроме того,
предыдущие эксперименты могут сделать априорную
вероятность некоторых теорий больше, чем других. Влия-
Влияние неравных априорных вероятностей можно учесть, если
возвратиться к основному уравнению A4.44), основанному
на теореме Бейеса.
ГЛАВА
15
ТЕНЗОРНЫЙ АНАЛИЗ
И ДИФФЕРЕНЦИАЛЬНАЯ
ГЕОМЕТРИЯ
15.1. ДЕКАРТОВЫ ТЕНЗОРЫ В ТРЕХМЕРНОМ
ПРОСТРАНСТВЕ
Сначала опишем влияние вращения декартовых коор-
координат на векторы в обычном трехмерном, пространстве.
Рассмотрим, что происходит, если повернуть систему
У
Рис. 15.1. Две системы координат, повер-
повернутые одна относительно другой на угол 6
вокруг оси z.
координат на угол б в положительном направлении вокруг
оси z (рис. 15.1). Новые компоненты вектора выражаются
через старые с помощью соотношений
Ах = Ах cos б + Ау sin б,
Ау = — Ах sin Q-\-Ay cos б , Az = Az,
которые можно записать в виде А = МА, причем матри-
матрица М определяется как
(cos б sin б 0\
— sin6 cose О). A5.1)
0 0 1/
По аналогии легко найти матрицы, описывающие враще-
вращения вокруг оси х или у.
21* 323
Если рассматривается более одного вращения, то
используется более детальное обозначение; например,
Mz @), где индекс z показывает ось вращения, а аргу-
аргумент 0 — угол вращения.
Произвольную ориентацию системы координат можно
получить, делая три последовательных поворота вокруг
осей координат. Обычно их производят следующим обра-
образом:
1. Вращение (xyz) на угол а вокруг оси z дает (x'y'z').
Матрица, описывающая это вращение, есть Mz (a).
2. Вращение (x'y'z') на угол р вокруг оси у' дает
(x"y"z"). Матрица, соответствующая этому вращению,
есть МУ' (Р).
3. Вращение (x"y"z") на угол у вокруг оси z" дае!
(xyz). Матрица, связанная с этим, есть Мг- (у).
На рис. 15.2 показаны эти последовательные враще-
вращения. Отметим, что р и а — обычные полярные координа-
координаты, задающие направление окончательной оси z относи-
относительно исходной системы координат. Углы (а, р, у) назы-
называются углами Эйлера. Матрица преобразования,
описывающая все вращение, равна *
М (а, р, у) = Me (у) М^ (р) Мг (а) =
cos у sin у 0 >
- sin у cos у О
0 0 1,
cos a
XI —sin а
(cos
— sin
О
/ cos p cos а cos у— cos P sin а cos-у+ *
—sin p cos v
—sin a sin -у • +cosx sin -у
—cos p cos а sin-у— —cos p sin а sin -у+
sin P sin у
—sin а cos-у +cosacosY
\ sin p cos a sin p sin a cos p
A5.2)
* Для некоторых целей удобно описать реориентацию системы
координат через вращения вокруг исходной системы. Можно пока-
показать, что та же реориентация координат, что на рис. 15.2, может
быть осуществлена тремя вращениями (читай справо налево):
М (а, Р, у) = Mz (a) My (P) Mz (у).
324
Компоненты вектора относительно новой системы (А)
связаны с компонентами в старой системе (А) соотноше-
A = MA.
Отметим, что М — ортогональная
Также det М = 1.
матрица:
A5.3)
м-1 = м.
у,у"
Рис. 15.2. Диаграмма, показывающая три последова-
последовательных поворота на углы Эйлера а, р, у.
Определим теперь вектор в трехмерном пространстве-
это любой объект А, который имеет три компоненты в де-
декартовой системе координат и преобразуется по форму-
формулам -г f j
А = МА
A5.4)
при вращении координат, где М — матрица A5.2).
Матрица преобразования " М, определенная здесь,
является обратной (или транспонированной) к матрице у
ненГо?ТиТяо^ 5° ЛеГК° УВИД6ТЬ' сРавнивая УРа-
нения (it>.4) и (Ь.ЗО). Называть ли матрицу М матрицей
преобразования или ее обратную матрицу - это, конечно,
вопрос определения. Наиболее «естественное» определение
зависит от способа, которым определяется преобразова-
преобразование, ь гл. b это делалось с помощью представления новых
Оазисных векторов ej в виде линейных комбинаций ста-
325
рых векторов ej.'C другой стороны, здесь преобразование
определяется заданием новых компонент Аг вектора А
в виде линейных комбинаций старых компонент Aj.
Отметим разницу между определением вектора A5.4)
и постулатами, приведенными в разд. 6.1 для абстрактного
векторного пространства. Рассмотрим, например, урав-
уравнение
Е = -^д-Г (закон Кулона), A5.5)
определяющее электрическое поле Е в точке г, создавае-
создаваемое точечным зарядом е в начале координат. Величины Е
и г в этой главе являются векторами, так как
они удовлетворяют условию A5.4). Однако их нельзя
считать частью одного абстрактного векторного простран-
пространства; их сумма, не имеющая смысла по соображениям раз-
размерности, ничего физически не значит.
Рассмотрим далее объекты со свойствами преобразова-
преобразований, отличными от векторов. Например, если At и Вг —
компоненты двух векторов, то можно образовать комби-
комбинацию с девятью компонентами («внешнее» произведение
двух векторов)
Ti}- = AtB,. A5.6)
Из A5.4) непосредственно следует способ, которым пре-
преобразуются эти компоненты при вращении системы коор-
координат
Ttj=^MihMnTM. A5.7)
hi
Любой объект, который имеет девять компонент и пре-
преобразуется таким образом, называется тензором
второго ранга.
Пример. Тензор инерции твердого тела имеет компо-
компоненты
- J r/ftpfo, A5.8)
б
{ J
объем тела объем тела
где р — плотность; г — длина радиус-вектора г, компо-
компоненты которого равны rt. Заметим, что второй интеграл
содержит внешнее произведение г с самим собой и, таким
образом, является тензором второго ранга.
Что можно сказать о символе Кронекера, который
умножается на первый (скалярный) интеграл в /?
{О, если i-фй
/л сг (\\
1, если ?=/' (во всех системах координат). * ' '
326
Будет ли 6jj, определенный таким образом, тензором?
Преобразование A5.7) требует
Ъи = 6tJ = S MlhMn8hl = 2 ^iftMЛ = (ММ)и = 6W.
fcz ft
Таким образом, 6t] есть тензор второго ранга.
Очевидным обобщением определения тензора второго
ранга получаются тензоры третьего и более высокого
рангов. Тензор ранга п имеет Зп компонент, которые при
вращениях системы координат преобразуются как произ-
произведения AtBj . . . Gi компонент п векторов, т. е. преобра-
преобразование содержит п множителей Mik .... «Внешнее»
произведение двух тензоров рангов пят, конечно, дает
тензор ранга п + т. Вектор — зто тензор ранга 1, а ска-
скаляр — тензор ранга 0.
Рассмотрим теперь так называемый антисиммет-
антисимметрический символ Леви — Чивита
1, если i/А; = 123, 231, 312, л
мах координат.
во всех систе-
егЛ=| —1, если ijk — 321, 213, 132,
^ 0 в остальных случаях
A5.10)
Является ли е^ь тензором? Т.е.,
= S МцМ}тМhn?imn. Заметим, что для произвольной
1тп
матрицы Aij3 х 3
2 AnAjmAknEimn = Btjh det A. A5.11)
Imn '
Итак, поскольку при всех вращениях det M = 1, то
etjk действительно тензор (третьего ранга).
Преобразование, матрица которого М ортогональна,
но имеет определитель — 1, часто называют несобст-
несобственным вращением. Несобственное вращение
получается из собственного вращения
(det M = -\- 1) после отражения или инверсии. Если при-
применить несобственное вращение к системе координат, то
правая система становится левой.
Теперь мы видим, что Eilh в действительности не яв-
является" тензором, если допустить возможность det M =
= —1. Тензор, закон преобразования для которого есть
Аи... = 2 МаМп ...Аы.... det M, A5.12)
Wi..
337
называется псевдотензором; (е^-ь) — псевдотен-
псевдотензор. Внешнее произведение тензора и псевдотензора есть
псевдотензор, а произведение двух псевдотензоров есть
тензор, так как (det МJ = 1.
Закон преобразования A5.7) для тензора второго ранга
можно записать в виде
~Т = МТМ-1. A5.13)
Итак, если А — вектор, то
ТА = (МТМ-1) (МА) = МТА, A5.14)
так что ТА — также вектор. Это пример свертки; если
два индекса в тензоре положить равными друг другу
и просуммировать от 1 до 3, то получается новый тензор
с числом индексов, меньшим на два. Например,
B Так..) =2 51 МиМ1тМ}пМкр ... Т1пПр... =
i i Imnp...
= 2 blmMjnMkp ... Тцппр... =
Imn...
= 51 MjnMhp ... B Tnnp..X A5.15)
n... I
и можно написать B Тцпр...) = Snp..., где S — тензор,
содержащий на два индекса меньше, чем Т. В частности,
вектор ТА образуется из тензора Т и вектора А посред-
посредством следующих операций.
1. Умножение тензора на вектор дает тензор третьего
ранга TtjAh.
2. Свертка второго и третьего индексов дает вектор
{TA)t = YiTtlAi. A5.16)
j
Свертка АВ двух векторов А и В инвариантна при
вращениях:
АВ=(МА)(МВ) = АММВ = АВ. A5.17)
Конечно, такой объект является скаляром, т. е. тензо-
тензором нулевого ранга. Векторное произведение
2ешЛБ, = (АхВ)ь A5.18)
г)
есть псевдовектор, а величина
2 в,Л4,ВА = А-(В х С) A5.19)
есть псевдоскаляр,
328
Тензор второго ранга Tt] = AjBt, образованный внеш-
внешним произведением двух векторов, иногда обозначается
символом, называемым диадой АВ, а линейная ком-
комбинация диад 2 ^ftA.ftBft называется аффинор ом.
Заметим, что важен порядок векторов в диаде: АВ =/= ВА.
Если Т = АВ, то свертка
V, = 2 Ttfii A5.20)
ii
может быть записана в виде
V= ABC = (В-С) А. A5.21)
Аналогично триада ABC есть тензор третьего
ранга с компонентами Tijk = A}BjCk; аналогично опре-
определяются п о л и а Д ы.
15.2. КРИВЫЕ В ТРЕХМЕРНОМ ПРОСТРАНСТВЕ.
ФОРМУЛЫ ФРЕНЕ
В предыдущем разделе обсуждался частный тип пре-
преобразования координат, а именно вращение декартовых
координат в трехмерном пространстве. Сейчас мы перей-
перейдем к рассмотрению общих преобразований координат.
Однако прежде сделаем краткое отступление об аналити-
аналитическом описании кривых в трех измерениях.
Кривую можно описать уравнением
х = ф (t), A5.22)
где х — вектор, выходящий из начала координат в точку
кривой, & t — параметр, меняющийся вдоль кривой.
Квадрат элемента длины дуги равен
A5.23)
Можно решить это уравнение и получить t (s) или s (t).
Таким образом, длина дуги вдоль кривой используется
как параметр. Обычно мы делаем эту операцию, так как
она приводит к наиболее простым формулам; очевидно
обобщение на произвольный параметр.
Запишем далее уравнение кривой в виде
х = ф (*) A5.24)
и образуем вектор
а, (в) = d$/ds. A5.25)
329
Легко видеть, что а — единичный вектор вдоль касатель-
касательной к> кривой.
Из равенства ос2 = 1 получаем
a-(da/ds) = 0. A5.26)
Итак, da/ds перпендикулярно а; определим величину
da/ds = тф, A5.27)
где Р — единичный вектор, а к положительно. Заметим,
что Р называется главной нормалью кривой,
ах — кривизной.
Как вычислить d$/ds? Из Р •§ = 1 мы видим, что d$/ds
перпендикулярно р. Напишем
¦f- = ClU + C2Y (Y=o X p). A5.28)
Вектор у называется бинормалью кривой. Заме-
Заметим, что ос, р, y образуют в каждой точке кривой правую
систему координат. Из а-Р = 0 получаем
a -dfi/ds + p -da/ds = 0 A5.29)
или
d + и = 0, С± = —и. A5.30)
Величина — С2 обычно записывается как т и называется
кручением.
Рассмотрим, наконец, d\/ds:
n dv , da n dv n
1 ds ' • ds ds '
Следовательно,
dY/^s = Tp. A5.31)
Собирая полученные выражения, находим три уравнения
da/ds = иР; d$lds = —xa — ту; dy/ds = тр. A5.32)
Они называются формулами Френе.
15.3. ОБЩИЙ ТЕНЗОРНЫЙ АНАЛИЗ
Обобщим основные положения первого раздела этой
главы на случай произвольного преобразования координат
[были рассмотрены только линейные ортогональные пре-
330
образования (вращения) в трех измерениях], т. е. пред-
предположим, что новые координаты х являются произволь-
произвольными функциями старых координат х:
xt ¦*=¦ xt (x±, я2, . . .) A5.33)
или, более кратко, х = х (х).
Рассмотрим точку Р с координатами х и соседнюю точ-
точку Q с координатами х + dx. Можно предположить, что
величины dx суть компоненты малого вектора от Р до Q;
такое представление не обязательно, но оно поясняет
дальнейшее обсуждение.
Предположим, что система координат меняется. Те-
Теперь Р имеет координаты х, a Q — координаты х -\- dx,
и dxt = ^ (dxildxj) dxj. Следуя Эйнштейну, исполь-
используем всюду далее следующее условие суммирования:
по всякому индексу, повторяющемуся в одном и том же
члене дважды, производится суммирование. Итак,
dxt — (dxt/dxj) dxj. A5.34)
Любой объект А1, преобразующийся по закону
А* = (dxildxj) A\ A5.35)
называется контравариантным вектором.
Согласно A5.34), дифференциалы координат dxt являются
контравариантным вектором.
Закон преобразования A5.35) совпадает с законом
А = МА A5.3) для декартовых координат, за исключе-
исключением того факта, что теперь матрица преобразования
Mi} —.dxjdxj может меняться в зависимости от положе-
положения точки в пространстве.
Второй тип векторов образуется величинами
дф/dxi, A5.36)
где ф — скаляр, т. е. величина, которая не меняется при
преобразовании координат. Более точно, величина ф
не меняется в каждой точке. Функциональлая зависи-
зависимость ф от координат, конечно, меняется при переходе
от одной системы координат к другой. Далее, согласно
правилам дифференцирования,
4?- = _?*-.-EfL. A5.37)
дхх дх} дх. ^ '
331
Любой объект, который преобразуется согласно закону
B~i = (dxj/dxt) Bj, A5.38)
называется ковариантным вектором. Заме-
Заметим, что контравариантные индексы ставятся вверху,
а ковариантные — внизу. Чтобы полностью перейти
к этому обозначению, начиная с этого момента мы будем
на всех координатах ставить индексы вверху, так как диф-
дифференциалы dxl образуют контравариантный вектор.
Сравним уравнения A5.38) и F.36): а\ — aftji- Вспо-
Вспоминая, что теперь у = М~х [см. абзац, следующий за
формулой A5.4)], находим, что законы преобразования
те же, что создаются обратной матрицей М~г:
(М-^ц = дз?1д?. A5.39)
Это легко проверить:
ъя пит лх dxh SzJ dzk s
A5.40)
Таким образом, мы показали, что компоненты линейной
скалярной функции, которые, как мы видели в разд. 6.4,
преобразуются контраградиентно к компонентам вектора,
образуют ковариантный вектор.
Тензоры более высокого ранга, определенные
в разд. 15.1, имеют те же законы преобразования, что
и произведения векторов. Например, для тензоров второго
ранга имеется три различных закона преобразования:
контравариантный тензор: Tli =
смешанный тензор: rj =-Щ—^-7?; [ A5.41)
ковариантный тензор: 'f.. — —%- • х_. Ты. I
Конечно, можно продолжить такие рассуждения и опре-
определить тензоры с произвольным числом ковариантных
и контравариантных индексов,
332
Вспомним, что декартовы тензоры можно было сверты-
свертывать, полагая два индекса равными и суммируя по ним.
То же самое можно сделать и с более общими тензорами
в случае, если один индекс вверху, а другой — внизу.
Положим, например, что Аг} и Bh — тензоры, а Сг =
= Ai}Bj. Тогда
dxi
A5.42)
так что Сг — действительно контравариантный вектор.
Как и в декартовых координатах, символ Кронекера
оказывается тензором, если записать его как 6} с одним
индексом наверху, а другим внизу (проверка предостав-
предоставляется читателю). Аналогично, как и выше, антисиммет-
антисимметричный символ Ejj-... оказывается «не совсем» тензором.
В этом разделе мы рассматриваем произвольное число
измерений. Однако eijh определен равенством A5.10)
только для трех измерений. В общем случае символ опре-
определяется следующим образом:
если индексы образованы четной
перестановкой 12 ... п;
если индексы образованы нечетной
перестановкой 12... п;
0 в других случаях.
Упорядочение чисел 12 ... п называется четной (нечет-
(нечетной) перестановкой 12 ... п, если оно отличается от
стандартного порядка четным (нечетным) числом переста-
перестановок пар чисел.
Объект с законом преобразования
-1,
A5.43)
п индексов
Аы... = ¦
dxi
дх6
дха
дх
дх
A5.44)
где*| дх/dx \ — якобиан преобразования
дх± дх% дхп
дх
дх
дх,.
дхп
A5.45)
333
называется относительным тензором с ве-
весом w. Читателю предлагается проверить, что etjh... —
относительный ковариантный тензор с весом —1, a ei'fe---,
который численно равен eiJk, — относительный контра-
вариантный тензор с весом +1.
Пример. Элемент «объема» dnx = dx*dx% . . . dxn пре-
преобразуется согласно закону
dnx=dnx
дх
дх
дх
дх
-1
A5.46)
Таким образом, dnx — относительный скаляр с весом —1.
Относительный тензор с весом +1 называется плот-
плотностью тензора. Причина такого названия состоит
в том, что интеграл \ dnxA (x) есть абсолютный скаляр
(скаляр с весом нуль), если А — скалярная плотность.
Кроме e>ijh..., другие тензоры и относительные тензоры
тоже могут иметь определенные свойства симметрии. Тен-
Тензор может быть симметричным или антисимметричным
относительно перестановки двух или более индексов! Если
все эти индексы ковариантные или контравариантные, то
свойство симметрии инвариантно относительно преобра-
преобразования системы координат.
Символ e,-jft... можно использовать для образования
антисимметричных тензоров. Например, если Atj — тен-
тензор, то
AtjeP*-= В?"ш A5.47)
есть относительный тензор с весом +1, который анти-
антисимметричен по своим контравариантным индексам. Или
если R*1 — относительный тензор с весом +1, то
Я4Ч"Ы... = Пг... A5.48)
есть абсолютный тензор, который антисимметричен по сво-
своим ковариантным индексам.
Пример. Если Vt — относительный вектор с весом —1
в трех измерениях (псевдовектор), то
Vteiih = Tih A5.49)
есть антисимметричный тензор. Таким образом, имеется
однозначное соответствие между ковариантными псевдо-
псевдовекторами веса —1 и антисимметричными контравариант-
выми тензорами второго ранга.
334
Рассмотрим далее важную теорему, так называемый
закон отношений. Сначала продемонстрируем ее
на простом примере. Пусть А и — такой объект, что
Aid — ковариантныи вектор для каждого контравариант-
ного вектора и3. Отсюда следует, что Аи — ковариант-
ный тензор.
Доказательство. Аци1 —(дхк/дхг) Ами1 согласно гипо-
гипотезе. Преобразуем теперь вектор и1 в левой стороне:
Так как это справедливо для произвольного ит, то
-г dxi dxh . ,. -
отсюда следует, что Aij-^—~ =—r=r А^т- Умножая обе сто-
стога Qxi
га™
роны на —=—, получаем доказательство утверждения:
дх1
— дх^ дхт
А — Ahm. Это доказательство легко обобщить.
1
Ац =.
дхг дх1
Если произведение АВ — С- тензор, причем В — произ-
произвольный тензор, то А — тензор. Произведение может
содержать любое число сверток пар верхних и нижних
индексов между А и В (но не внутри А или В; то, что
А\ — скаляр, еще не означает, что А) — тензор).
Пример. Обобщенная сила — это объект с п компонен-
компонентами, причем для произвольного смещения dxl точки при-
приложения силы произведение
ft dxl = W A5.50)
является скаляром, а именно работой, производимой
силой. Следовательно, ft — ковариантныи вектор.
Продемонстрируем применение этой теоремы на сле-
следующем примере. Обратный к ковариантному тензору
второго ранга есть контравариантный тензор второго ран-
ранга. Это означает, что, задавая ковариантныи тензор Ati,
определим объект Вг\ равенством АцВ^ = 6^. Доказан-
Доказанную выше теорему нельзя применить к этому уравнению
непосредственно, так как А — не произвольный тензор,
а определенный. Вместо этого рассмотрим произвольный
контравариантный вектор иг. Тогда АцУ? — произволь-
произвольный ковариантныи вектор vt. Но Blivj = B^Ajhuh =
= 6ftUft = иг. Таким образом, умножение произвольного
вектора i> на Б дает вектор и. Следовательно, В есть тензор.
335
Выберем некоторый определенный симметричный несин-
несингулярный ковариантный тензор gtj и назовем его фун-
фундаментальным ковариантным тензо-
тензором. В действительности не требуется, чтобы он был
симметричным, но если это так, то выкладки и результаты
удобнее. Тензор, обратный к gtj, запишем в виде g1'-:
= <$. A5-51)
Используя фундаментальный тензор gtj, можно уста-
установить однозначное соответствие между ковариантными
и контравариантными векторами. Для каждого ковариант-
ного вектора щ имеется контравариантный вектор иг,
определяемый равенством
ui = gvUj. A5.52)
Аналогично
Щ = guu}. A5.53)
Имея в виду это соответствие, в общем случае щ и wJ назы-
называют ковариантными и контравариантными компонентами
вектора и.
Опускание или поднятие индексов применимо также
и к тензорам:
Atj = gnA* = gfhgjiA". A5.54)
Фундаментальный тензор можно использовать также
для получения относительного тензора из тензора и наобо-
наоборот, или, в общем случае, чтобы изменить вес относитель-
относительного тензора. Для этого используют вид преобразования
det g, который мы сейчас найдем. Обозначим дхЧдз? =
= уи. Тогда
- дх* dxi
8 a^ 8tl =
или, в матричном обозначении, g = ygy. Следовательно,
det g — (det yJ det g,
(detgjVsi = det-y • (det gI^ = 1-^-1 (det gI'*. A5.55)
I dx I
Итак, (det gI/2 есть относительный скаляр с весом -f-1,
и его можно использовать как фактор, повышающий вес
относительного тензора на 1.
336
В геометрии Римана фундаментальный тензор связан
с так называемым интервалом ds соотношением
ds2 = gu йхЧз?, A5.56)
где ds2 — скаляр; тензор gtj подбирается определенным
образом и называется метрическим тензором.
Из A5.56) видим, что для обычной декартовой системы
координат метрический тензор равен 6^-, так что не тре-
требуется делать различие между контравариантными и ко-
вариантными тензорами.
Ранее мы отмечали [см. A5.37)], что производная от
скаляра есть (ковариантный) вектор. Однако легко видеть,
что дифференцирование тензора, отличного от скаляра
т, - dxi
не производит тензора. Например, если vt = ^rVj, то
дх*
v+ ?L.l?L.±L H557)
дх* дх*дхк dxi dxh dxl
Если бы справа был только второй член, то величина
dVildx4 была бы тензором. Однако первый член услож-
усложняет ситуацию. Этот член возникает, так как матрица
преобразования дхЧдх1 меняется в зависимости от положе-
положения в пространстве. В декартовой системе координат этот
член отсутствует, и в этом заключается трудность.
Покажем теперь, как можно преодолеть эту трудность,
используя фундаментальный тензор gti. Рассмотрим про-
производную от фундаментального тензора
- дхь dxl
8 8
дх1дХ™ dxi
+ B*_.j*L.j*Lto A5.58)
dx* dxl дхт дхП
Напишем еще два уравнения, полученных перестановкой
индексов в последнем уравнении (пишем только индексы):
mi к I kl к I kl к I n kl
= + 4-
/ mj I mij m i j n '
I n kl
m i n
337
22
Дж.
jm
i
Мвтыоа,
к
' и
р.
1
т
Уокер
kl
+
к
j
1
mi
kl
+
к
j
Если вычесть поСЛедпее уравнение из Суммы первых
двух и определить символ Кристоффеля пер-
первого рода
»¦ *!-
то получаем
дх1 дх™ дхп
дхк
д*х™ '
• A5.60)
дхк
Это уравнение можно решить относительно второй про-
производной; находим
^{ТГ^^{8} A5.61)
где введен символ Кристоффеля второго рода
- я" X-ih 71 IA Ч РЛ\
~о LJ ^ J" ^XtJ.O^J
Теперь можно определить так называемую ковариант-
ную производную ковариантного вектора. Подставим
выражение A5.61) для второй_ производной х через
х в уравнение A5.57) для dvtldx*. Имеем
ddj _ dxi dxl dvj
dxh dxi dxk dxl
, Г dxi ( I dxl dxm ( j
что можно также записать в виде
Итак,
есть ковариантный тензор второго ранга, так называемая
ковариантная производная от vt.
338
Оказывается, что ковариантная производная контра-
вариантного вектора равна
{1} <15-65>
Как и в обычных расчетах, ковариантная производная от
произведения образуется почленным дифференцированием
множителей. По аналогии с привеченными выше выраже-
выражениями для ковариантных производных векторов обра-
образуется ковариантная производная тензора *:
Ковариантную производную относительного тензора
определяют следующим образом. Пусть Аы.'.\ — относи-
относительный тензор с весом w. Определим абсолютный тен-
тензор Bhi\\\ = Аы\\\ (detg)~w/2. Ковариантная производная
Вы..'.;а от Вы'", образуется по формуле A5.66), а кова-
ковариантная производная Аы'.'.'. определяется как
Мы видим, что в общем случае ковариантная произ-
производная тензора усложнена присутствием символов Кри-
стоффеля. Однако существуют некоторые ковариантные
производные, которые не содержат их. Ниже приводятся
некоторые из таких простых производных.
1. Ковариантная производная от скаляра есть обычная
частная производная, определенная в A5.36):
ф;к = дф/dx11. A5.67)
2. Если At — ковариантный вектор, то операция
rot A
(rot Л)„ = Л^-Л,-: , = -|§—Й- A5-68)
дает антисимметричный ковариантный тензор. Символы
Кристоффеля сокращаются из Ai; j и Ауу t по соображе-
соображениям симметрии. Тот факт, что дАг/дз? — dAj/dx1 есть
* Ковариантная производная любого тензора или относитель-
относительного тензора есть относительный тензор с тем же весом, но с допол-
дополнительным ковариантным индексом.
22* 339
тензор, можно непосредственно увидеть из уравне-
уравнения A5.57), так как члены со вторыми производными
сокращаются.
3. Если R1 — относительный тензор с весом -|-1, то
свернутая ковариантная производная, представляющая
собой относительный скаляр с весом +1) имеет простую
форму
Е\ . = dRildxi (= «div R»). A5.69)
4. Особенно проста, а именно равна нулю, ковариант-
ковариантная производная от фундаментального тензора:
ёи; и = 0. A5.70)
Читателю рекомендуется проверить свойства 3 и 4.
Предположим, что мы дифференцируем дважды кова-
риантно ковариантный вектор ui; jk = (ui; j); h. Это не
не равно ui; ку, действительно,
Щ; зк — Wi;[fcj = RijhUl, A5.71)
где
Из сформулированной выше теоремы следует, что Rij^
должен быть тензором. Он называется тензором
римановой кривизны.
Рассмотрим теперь задачу нахождения кривой xt =
= хг (f), которая минимизирует интеграл
Если, как и в A5.56), рассматривать Y.Sn ^ ^ как
элемент интервала, то интеграл определяет расстояние
вдоль пути. В этом случае для такой кривой употребляет-
употребляется название «геодезическая». Однако мы рассмотрим ана-
аналитическую задачу нахождения минимума / независимо
от геометрического или физического смысла.
Напишем уравнения Эйлера — Лагранжа для подын-
подынтегрального выражения
340
[ср. уравнение A2.17)]. Непосредственной . проверкой
можно убедиться, что результат записывается в виде
л- = 7—A"' A5'74)
Г i I dxi
{ jk } "л
где s — «длина дуги», определенная равенством
, ds 1/ dxl dxi
Если рассматривать s как параметр, s' = l, s" = 0,
то дифференциальное уравнение A5.74) для геодезичес-
геодезической кривой приобретает вид
xi d«*n H-7fi.
Символы Кристоффеля появились как при ковариант-
ном дифференцировании, так и в геодезии. Отсюда сле-
следует, что можно установить связь между обоими понятия-
понятиями: ковариантным дифференцированием и геодезией.
На самом деле имеется много различных соотношений.
Например, рассмотрим ковариантную производную «ка-
«касательного» вектора иг = dx4ds вдоль геодезической ли-
линии. Ковариантная производная вдоль геодезической
линии равна
i dxi d2xi Г i Л dxh dxi n ,.K 77.
и- j-j—= , , + 1 ., У -з— --j— =*0 A5.77)
• ' ds ds2 ' [_jk ) ds ds ч '
[согласно уравнению A5.76)]
Итак, геодезическая кривая — это кривая с «постоянной»
касательной, т. е. касательным вектором с нулевой кова-
риантной производной вдоль кривой. Геометрически это
означает, что геодезические кривые являются «прямыми
линиями» в пространстве.
ГЛАВА
16
ВВЕДЕНИЕ В ГРУППЫ
И ПРЕДСТАВЛЕНИЯ
ГРУПП
16.1. ОПРЕДЕЛЕНИЯ
Группа G — это система элементов gu g2, . . . вместе
с правилом для комбинирования («умножения») любых
двух из них в «произведение». При этом должны выпол-
выполняться следующие четыре условия:
1. Произведение gtgj любых двух элементов группы
должно быть элементом группы.
2. Умножение элементов ассоциативно: (gigj) gh =
= gi (gjgk)-
3. Имеется единичный элемент группы gi = /, назы-
называемый единичным элементом, так что для всех gt в G
выполняется Igt = gtl = gt.
4. Каждый элемент имеет единственный обратный,
т. е. для каждого gt имеется единственный элемент группы
gj1 — такой, что gtgj1 = gixgt — I.
Группа с конечным числом элементов называется
конечной группой; число элементов в конечной группе есть
порядок группы. Мы сосредоточим наше внимание на ко-
конечных группах; в последних двух разделах этой главы
будут кратко рассмотрены некоторые бесконечные группы.
Групповое умножение не обязательно коммутативно;
т. е. gtgj не обязательно равно gjgt. Если gtgj = gjgt для
каждой пары элементов в группе, то ее называют ком-
коммутативной, или абелевой группой.
Если S — любая подсистема группы G, то Sgt будет
обозначать систему элементов, которая получается, если
каждый элемент в S умножить на gt слева. Аналогичное
обозначение используется для умножения справа. Отме-
Отметим, что число элементов в Sgt равно числу элементов
в S. Если agt = bgi (а и Ъ в S), то, умножая слева на gj1,
имеем а = Ъ. В частности, Gg = G; если всю группу умно-
умножить слева (или справа) на любой элемент, то результат
представляет некоторую перестановку в группе.
342
Часто обобщает группу, чтобы образовать алгебру.
Алгебра — это система элементов, образующих ли-
линейное векторное пространство, в котором, помимо сло-
сложения, операция умножения определена так, чтобы удов-
удовлетворялись постулаты групп. Исключение представляет
нуль алгебры, для которого нет обратного. Например,
данная группа G с элементами gt (i = 1, . . ., h) приводит
h
к линейной комбинации 2 ct8i элементов групп с веще-
ственными коэффициентами ct\ совокупность таких линей-
линейных комбинаций образует алгебру. Произведение опре-
определяется очевидным образом:
Ы2 ^i
i—i i=i
Так как G — группа, то каждое произведение gtgj есть эле-
элемент gk группы G; следовательно, произведение является
элементом алгебры.
Закончим это введение несколькими примерами для
конечных групп.
1. Группа перестановок п объектов. Эта группа назы-
называется симметрической группой п. объектов
и обозначается Sn. Типичный элемент S6 можно записать
в виде [2 4 1 5 3]; это означает, что второй объект следует
поставить первым, четвертый объект — вторым и т. д.
Умножение двух элементов осуществляется посредством
перестановки сначала справа, а затем слева. Например,
[2 4 1 5 3] [5 1 2 3 4] abcde = [24153] eabcd =
= acedb ==[13542] abcde.
Следовательно,
[2 4 1 5 3] [5 1 2 3 4] = [1 3 5 4 2]. A6.1)
Очевидно, порядок Sn равен и!. Отметим следующую очень
полезную операцию для симметрической группы Sn: раз-
разложение перестановки на циклы. Например, перестановка
[31254] помещает первый объект вторым, второй объект
третьим, а третий объект первым; это составляет один
цикл, который можно обозначить A 2 3). Кроме того,
обмен четвертого и пятого объектов образует цикл из двух
цифр D 5); итак, в циклических обозначениях переста-
перестановку можно написать в виде A 2 3) D 5). Другой пример:
343
перестановка [1 3 5 4 2] в циклических обозначениях
выглядит как A) B 5 3) D).
Очевидно, что порядок, в котором пишут циклы, несу-
несуществен и что можно циклически переставлять числа
внутри каждого цикла.
2. Группа целых чисел 0, 1, 2, 3. «Умножение» групп
есть слежение (по модулю 4). Например, 1x2 = 3,
2x3 = 1.
3. Группа преобразований
равностороннего треугольни-.
ка в себя (группа симметрии
равностороннего треуголь-
треугольника). Эта группа содержит
шесть элементов (рис. 16.1):
/ — тождество, треугольник
в покое; А — треугольник
поворачивается на 120° по ча-
Рис. 16.1. Равносторонний тре- совой стрелке; В — треуголь-
угольник. ник поворачивается на 240°
по часовой стрелке; С — тре-
треугольник отражается относительно линии Р; D — тре-
треугольник отражается относительно линии Q; Е — тре-
треугольник отражается относительно линии R. Эта группа
совпадает с ?3; изменяются лишь наименования у элемен7
тов группы. Мы говорим, что эта группа изоморфна
с S3. Они имеют одинаковую таблицу умножения или
таблицу группы.
16.2. ПОДГРУППЫ И КЛАССЫ
Подсистема группы G, которая сама является группой,
называется подгруппой G. Пусть S — подгруппа G; рас-
рассмотрим системы Sgi, Sgz, . . ., Sgn, получаемые посред-
посредством умножения- S последовательно на каждый элемент
группы слева. Эти системы называются правыми
смежными классами S *.
Заметим теперь, что две системы Sgi и Sg2 либо тожде-
тождественны, либо не имеют ни одного общего элемента. Пред-
Предположим, что они имеют общий элемент, т. е. Sigi = s2g2 =
= g (si и s2 в S). Тогда g2 = s^sigi, Sg2 = Ss^Sigi = Sgu
При этом учитывается, что s^si имеется в S, и 5s = S>
еели s в S (так как S — группа).
* Некоторые авторы исключают S из системы смежных классов.
344
Итак, если Sg± — Sgz, то мы видим, что ^y 2
что содержится в S. В действительности это критерий того,
что два смежных класса одинаковы.
Если отметить два следующих факта: 1) каждый эле-
элемент группы появляется по меньшей мере в одном смеж-
смежном классе 5и2) каждый смежный класс имеет h' элемен-
элементов, причем h' — порядок S, то из этих фактов следует,
что вся группа G расщепляется на смежные классы S,
причем каждая имеет h' элементов. Следовательно, если
h — порядок G, то h должно равняться h', умноженному
на некоторое целое число. Итак, порядок подгруппы равен
делителю порядка группы.
Если А — какой-нибудь элемент конечной группы, то
последовательность элементов (называемая периодом А)
А, А2, . . ., Av = I A6.2)
образует абелеву подгруппу порядка р, где р — наимень-
наименьшее целое число, для которого Ар = I. Число р назы-
называется порядком А. Заметим, что все элементы в этой по-
последовательности различны, так как если А1 = Ah для
I < k < р, то умножение на (А1)'1 дает Ah~l = / в про-
противоположность гипотезе.
Пример. Рассмотрим элемент А группы симметрии
треугольника, причем период А содержит элементы
А, А2 = В, А3 = 1, A6.3)
так что порядок А равен 3. Каждый из элементов С, D
и Е имеет порядок 2.
Представляет интерес также и другой путь разбиения
группы на подсистемы. Назовем два элемента а, Ъ группы
G эквивалентными, если существует такой элемент груп-
группы g, что
g-^ag = Ъ. A6.4)
Теперь можно разбить группу на подсистемы так, что все
элементы в каждой подсистеме эквивалентны друг другу.
Такие подсистемы называются классами.
Если рассматривать элементы группы как преобразо-
преобразования, то уравнение A6.4) имеет простой «физический»
смысл. Преобразование Ъ получается выполнением сна-
сначала преобразования g, затем а и наконец g. Иными
словами, Ъ — то же самое, что и а, но в другой системе
координат.
345
Например, циклические обозначения дают элегантное
разбиение симметрической группы Sn на классы. Два
элемента Sn принадлежат к одному классу тогда и только
тогда, когда они имеют одинаковую циклическую струк-
структуру, а отличаются только числами, возникающими внутри
квадратных скобок. Например, элементы [461352] и
[361425] в Se одного и того же класса, так как их
разбиение в циклы дает соответственно A 3 4) B 6) E)
и B 5 6) A 3) D). Две перестановки эквивалентны, исклю-
исключая нумерацию переставляемых объектов. Читателю пред-
предлагается найти элемент группы g, который преобразует
одну из этих перестановок в другую посредством уравне-
уравнения A6.4).
Отметим, что по определению в классе содержится тож-
тождественный элемент. Далее, два элемента различных по-
порядков не могут быть в одном и том же классе, так как
равенство ah = I означает bh = (g^agI1 = /.
Если подгруппа S для каждого элемента g в группе G
обладает свойством
g^Sg = S, A6.5)
то S называется инвариантной, или нормаль-
нормальной подгруппой. Иными словами, инвариантная
подгруппа образована из классов; если она содержит
часть какого-либо класса, то она содержит весь класс.
16.3. ПРЕДСТАВЛЕНИЯ ГРУПП
Представлением группы G называется систе-
система квадратных несингулярных матриц Mi, M2, ¦ • .,
по одной матрице для каждого элемента g, причем
равенство gtgj = gk означает MtMj » Mk. A6.6)
Другими словами, это система матриц, которые умножают-
умножаются так же, как и элементы группы и по этой причине так-
также образуют группу. Если матрицы имеют порядок
п х п, то имеем тг-мерное представление. Каждая группа
имеет одномерное представление, в котором каждый эле-
элемент группы представлен числом 1.
Если матрицы, соответствующие различным элементам
G, различны, то обе группы изоморфны, а представ-
представление называется точным.
Если одна матрица М представляет более одного эле-
элемента группы G, то группа G называется, гомоморф-
346
ной матричной группой, и представление
неточно.
Рассмотрим некоторое представление D. Будем запи-
записывать матрицу, соответствующую элементу группы g,
символом D (g). Довольно тривиальным путем можно
образовать представление D':
D' (g) = S-W (g) S, A6.7)
где S — любая несингулярная матрица. Матрицы D (g)
и D' (g) связаны преобразованием эквивалентности. Такие
представления называются эквивалентными.
В дальнейшем они будут рассматриваться как одно пред-
представление.
Рассмотрим два представления Da} (g) и Dm (g). Можно
образовать новое представление
Если Da} и D<2) имеют размерности /г4 и гс2> TOi разу-
разумеется, размерность Da)@Dw равна щ-\-пг. Представ-
Представление D называется приводимым и делится на два
меньших представления Da> и Dm *.
Представление D (g), не имеющее вида A6.8) и неприг
водимое к такой форме с помощью преобразования экви-
эквивалентности, называется неприводимым пред-
представлением. Неприводимые представления груп-
группы — это «строительные кирпичи» для исследования пред-
представлений этой группы, так как произвольное представле-
представление можно разложить на линейную комбинацию неприво-
неприводимых представлений. Например, если можно привести
преобразованием подобия D (g) к виду
то часто пишут
D(g)
ж
1 °
\ °
\о
0
?)A)
0
0
0
0
?)B)
0
(gH?<2>
0
0
0
?)C)
(f)(
C) fe). A6.9)
* Строго говоря, представление называется приводимым, если
оно эквивалентно представлению вида I n п<2« Уи полностью
приводимым, если оно эквивалентно виду A6.8).. Для унитарного
представления нет различия между обоими определениями.
347
Сформулируем несколько очень важных теорем о пред-
представлениях групп. Они справедливы для конечных групп
и для всех рассмотренных в этой главе бесконечных
групп. Доказательства их можно найти в математических
книгах, посвященных теории представлений групп.
1. Каждое представление эквивалентно унитарному
представлению, т. е. представлению, в котором каждый
элемент группы представлен унитарной матрицей. Итак,
без потери общности в дальнейшем можно рассматривать
только унитарные представления.
2. Матрица, коммутирующая с каждой матрицей не-
неприводимого представления, кратна единичной матрице.
Иными словами, если D (g) неприводима и если D (g) A =
= AD (g) для всех элементов g в группе, то А кратно
единичной матрице.
3. (Лемма Шура). Пусть Dll) и Dl2) — два неприво-
неприводимых представления размерности пу и гс2- Предположим,
что существует такая матрица А, что ADa) (g) = Dm (g) A
для всех g в группе G. Тогда либо А = 0, либо nl = nz,
detА^=0, и представления Dll) и DB) эквивалентны
одно другому.
4. (Теорема ортогональности.) Пусть группа G со-
содержит h элементов, и пусть ее неэквивалентные непри-
неприводимые (унитарные) представления суть DA) (размер-
(размерности щ), DlZ) (размерности п%) и т. д.; D {) (g) — матри-
матрица; обозначим типичный матричный элемент D^ (g)- Тогда
Сумма пробегает по всем g в G.
Теорема ортогональности — очень удобный прием. Рас-
Рассмотрим сф — матричный элемент в i-м неприводимом
представлении. Когда g пробегает h элементов группы G,
то Da& принимает h значений; можно рассматривать их
как вектор с h компонентами. Теорема ортогональности
утверждает, что этот вектор, «умноженный на себя», равен
h/щ, и в то же время он ортогонален любому подобному
вектору другого представления, и более того любому век-
вектору другого направления в том же представлении.
Сколько таких векторов? Представление D(i) размер-
размерности nt образовано матрицами с nt строками и пг столб-
столбцами и, следовательно, содержит п\ таких векторов. Итак,
848
полное число векторов равно
причем сумма пробегает по всем (неэквивалентным) не-
неприводимым представлениям. Но очевидно, что не может
быть более h^ независимых векторов с h компонентами.
Следовательно,
S«!<fe. A6.12)
В действительности можно показать, что выполняется
равенство.
Простой пример, который можно использовать для про-
проверки высказанных утверждений, дается группой iS3, т. е.
симметрической группой из трех объектов.- Эта группа
имеет три неприводимых представления, показанных
в табл. 16.1.
e
[1 2 3]
12 3 1]
[3 1 2]
[3 2 1]
[2 1 3]
[1 2 3]
1
1
1
1
1
1
D<2)
1
1
1
1
-1
-1
ТАБЛИЦА 16.1 j
2
/1 04
lo i/
i /-1 Узч
2 I-УЗ -l)
i /-1 -Узч
T \уз -l/
l z1 узч
T 1уз -l)
i /i -Уз\
Tl-Уз -i /
/-1 оч
\o i)
16.4. ХАРАКТЕРЫ
Характеристика представлений матрицами, которые
соответствуют различным элементам группы, до некоторой
степени произвольна. Можно было бы сделать преобразо-
преобразование подобия
D (g) -> D' (g) = SD (g) S-\ A6.13)
которое привело бы совершенно к другой системе матриц;
однако два представления эквивалентны, т. е. одинаковы
349
Для большинства физических целей. Желательно иденти-
идентифицировать представление с чем-то, что было бы инва-
инвариантно при преобразованиях подобия.
Оказывается, что для этой цели весьма удобную систе-
систему чисел представляет след матриц представления.
Они, конечно, не меняются при преобразованиях подобия,
и посредством их различают представления.
Следовательно, определим характер %<*> (g) как след
матрицы D(l) (g):
= 2 #«!(*)• A6.14)
Из матриц, представленных в табл. 16.1 для трех непри-
неприводимых представлений группы Ss, можно образовать
таблицу характеров (табл. 16.2).
е
]1 2 3]
2 3 1]
3 1 2]
3 2 1]
2 1 3]
13 2]
хш
1
1
1
1
1
1
Т АВЛ1
х<2)
1
1
1
1
1
1
[Ц А 16.2
х<з,
2
1
1
0
0
0
Отметим некоторые особенности этой таблицы. Харак-
Характер единичного элемента — который в этой группе есть
[12 3] — дает размерность представления, так как шпур
единичной матрицы п X п равен п. Итак, в таблице харак-
характеров можно прочесть размерности различных неприводи-
неприводимых представлений.
Другая важная особенность рассматриваемой таблицы
состоит в том, что некоторые системы элементов группы
имеют одинаковые характеры, т. е. [2 3 1] и [3 1 2] имеют
одинаковый характер в каждом представлении; то же
относится к [3 2 1], [2 1 3] и [1 3 2]. Общий результат
таков, что два элемента группы, принадлежащие одному
классу, имеют одинаковый характер в любом пред-
представлении.
Доказательство. Пусть g\ и g2 принадлежат одному
классу. Тогда gt = hgji, где h — некоторый элемент
350
группы б. Следовательно, в любом представлении
D Ы =D(h)D Ы D (Л-*); Х Ы =
= Тг D Ы = Tr [D (h) D (g2) D (ft-*)] =
= Tr Ш (fe-1) I» (ft) ? (g2)] = Tr Ш (/) D (g2)] =
= Tr D Ы = x (* 2), A6.15)
причем / обозначает единичный элемент группы G.
Таким образом, характеры являются функциями клас-
класса; для данного представления имеется один характер
для каждого класса; характеры для S3 записаны
в табл. 16.3.
Класс
С,
С3
ТАБЛИЦА 16.3
„B)
„C)
2
—1
О
Матрица Ss была разделена на три класса:
[1 2 3] [2 3 1] [3 1 2] [3 2 1] [2 1 3] [1 3 2] A6.16)
Из сформулированного соотношения ортогональности
A6.10) для матричных элементов неприводимых пред-
представлений непосредственно вытекает важное соотно-
соотношение ортогональности для характеров групп. Если
%{1\ ХB)» • • •— характеры неприводимых представлений,
С\, С2, . . ., Cs — различные классы, a ph обозначает
число элементов группы в классе С^, то
A6.17)
Как обычно, здесь h равно числу элементов в группе.
Если рассматривать характеры каждого неприводи-
неприводимого представления как s-мерный вектор, имеющий по од-
одной компоненте для каждого класса, то тот факт, что они
все ортогональны, означает, что не может быть более s
различных неприводимых представлений. В действитель-
действительности (это можно показать) их всегда точно s, так что таб-
таблица характеров квадратна; неприводимых представле-
представлений столько же, сколько и классов.
351
Компактный способ выражения соотношения ортого-
ортогональности для характеров состоит в том, что матрица
с (?/)-м элементом
V~Pj/h X(i) ipi) A6.18)
является унитарной.
Рассмотрим теперь приводимое представление D, т. е.
представление, которое после надлежащей замены коор-
координат (преобразование подобия) выглядит как
fD(a)(g) 0\
D(g) =
A6.19)
В другой форме
D (g) = Dw (g) © D{b) (g) © ..., A6.20)
где Dw, D№) ... — различные неприводимые представле-
представления. Очевидно, что шпур D равен сумме шпуров раз-
различных субматриц, содержащихся в D, т. е.
.. A6.21)
Предположим, что D содержит первое неприводимое
представление Da) ct раз, второе — с2 раз и т. д. Можно
написать
A6.22)
Тогда для характера D получаем
A6.23)
Умножая обе стороны на /зд(з) (Сь)* и суммируя по к,
находим (с учетом соотношения ортогональности для
характеров групп)
т
A6-24)
Здесь черта сверху означает усреднение по всей группе.
Последний результат демонстрирует применение харак-
характеров. Если задано любое представление D, то все, что нам
352
нужно для разложения D по неприводимым представле-
представлениям, это вычислить %-шпуры. Тогда формула A6.24)
показывает, сколько раз содержится каждое неприводи-
неприводимое представление Z)(i) в О.
В качестве примера разложим представление S3.
Представление D образуется посредством представления
матрицами перестановок (образующих S3). Например,
единичный элемент [1 3] представляется единичной
матрицей 3x3
A 0 0\
0 10 1.
0 0 1/
Элемент группы [2 13], который обменивает первый
и второй объекты, представляется матрицей
@ 1 0\
1 0 0
0 0 1/
так как
0
1
0
1
0
0
°\
0
l/
(a
\b
\e
и т. д. Читателю предлагается написать все шесть матриц;
приведем здесь только таблицу характеров нового пред-
представления
Класс Ct C2 Ся A6.25)
X 3 0 1
Теперь можно найти коэффициенты ct в разложении
D = CiDa> ® czD™ © c3DC> A6.26)
с помощью общей формулы A6.24) и таблицы характеров
для S3 (табл. 16.3):
-l).l] =0;
Следовател ьно.
D = Da»©D«3>. A6.27)
23 Дж, Мэтыоз, Р. Уокер 353
Рассмотрим следующий пример. Каждая группа пб-
рядка h имеет h X ^-представление, называемое регу-
регулярным представлением. Оно образуется
перестановками элементов группы, вызванными умноже-
умножением справа на каждый отдельный элемент группы.
Используя для модели снова S3, обозначим элементы груп-
группы следующим образом:
gi = [1 2 3], g2 = [2 3 1], q3 = [3 1 2],
g4 = [3 2 1], g5 = [2 1 3], ge = [1 3 2].
Конечно, gi представляется единичной матрицей 6x6.
Умножим на g2 справа
ft-
¦gz,
-g5,
"ft.
¦gi-
A6.28)
Теперь рассмотрим каждый элемент группы как вектор-
столбец
ft =
0
0
0
, g2
\J 1
1
0
0
0
и т. д.
A6.29)
Тогда матрица, осуществляющая перестановку A6.28),
равна
/ 0 0 1 0 0 6\
10 0 0 0 0
0 10 0 0 0
0 0 0 0 0 1
0 0 0 4 0 0
0 0 0 0 10,
A6.30)
Эта матрица представляет g2 в регулярном представле-
представлении iS3. Более формальное определение этого представле-
представления имеет вид
1,
0
если
в других случаях.
A6.31)
354
Чему равен характер % (g) для этого представления?
Конечно, х (gi) = 6, в то время как все остальные % (g)
равны нулю. Таблица характеров имеет вид
A6.32)
Если D = ctDa)
Cl = -J-[1х6] = 1, c2 = l[lx6] = l, c3 = |[2x6] = 2.
Тогда
D = ?)A»©D'2)©2i)<3). A6.33)
Регулярное представление произвольной группы столь
же просто исследовать, как и этот тривиальный пример.
Используем два элементарных факта.
1. Характер % регулярного представления для произ-
произвольной группы порядка h равен
( h если g = /;
I. U в остальных случаях.
2. Характер %(i) (/) для неприводимого представле-
представления Z)(t) равен nt размерности D(l).
Отсюда следует, что регулярное представление со-
содержит каждое неприводимое представление Z)(t) nt раз,
где п, — размерность Z)(t). Кстати, этот вывод подтвер-
подтверждает сделанное ранее заключение:
5>! = й- A6.34)
г
Закончим этот раздел примером конструирования таб-
таблицы характеров для группы. Рассмотрим _44 — группу
четных перестановок четырех объектов, называемую часто
знакопеременной группой четырех
объектов. Выпишем -=--4! = 12 элементов
[1234] = / [1342] = А [1423] = В [3241] = С
[4213] = D [2431] = Е [4132] = F [2314] = G A6.35)
[3124] = Н [2143] = / [3412] = К [4321] = L
23* 355
Разобьем далее группу на классы эквивалентных эле-
элементов. Непосредственный расчет дает четыре класса:
С, =1, С2= A, D, Е, Н, Л
Г — Д Г F Г Г — Т К- Г М6.36)
Так как число неприводимых представлений равно числу
классов, то имеется четыре неприводимых представления
Da\ D'2), D(S\ Da> и четыре характера хA\ ХB)» ХC)» ХD)-
Размерности /г* этих представлений можно найти из
4
условия 2 п\ = h = 12. Только одна система четырех
квадратов при сложении дает число 12, именно
!¦ + Is" + 12 + 32 = 12, A6.37)
так что щ = па = п3 = 1, п4 = 3, и эти числа представ-
представляют собой четыре характера класса С\ (единичный эле-
элемент). Известно также, что одно представление (назовем
его Dai) тривиально; %ai = 1 для всех С*. Итак, имеется
начало таблицы характеров. Оно показано в табл. 16.4.
Класс
сг
с*
Ха)
1
1
) 1
1
х<2)
1
—
—.
—j
-т
АВ Л ИЦ
х<3)
1
—
—.
А
16.4 1
ХD>
3
—
—
Другое соображение, помогающее найти характеры,
можно получить следующим образом. Предположим, что
g — элемент группы порядка т [см. 'A6.2)], a D (g) —
матрица, представляющая g в /г-мерном представлении.
Тогда равенство gm = I означает
lD(g)\m =
A6.38)
Если для диагонализации D (g) выполнить преобразова-
преобразование подобия, то последнее уравнение приобретает вид
0
•
0
0
к
0..
0
0... 0\ /1 0 0...0Ч
0 i 1 I 0 1 0...0 I
П У
. . к/ \о 1/
A6.39)
356
так что величины Яй, т. е. собственные значения
равны т-и корням из единицы.
Тогда характер равен
D{g),
A6.40)
т. е. характер % равен сумме п т-х корней из еди-
единицы.
Применим теперь этот результат для одномерных
представлений Z)<2) и Z)<3) группы At. Порядки элементов
в классах Си Сг> ^з> Ci равны соответственно 1, 3, 3, 2.
Итак, % (С4) может быть только ±1, в то время как % (С2)
и х (С'з) могут иметь значения 1, со или со2, где со —куби-
—кубический корень из единицы, со = exp Bni/3). Эти сообра-
соображения вместе с требованием A6.17) ортогональности
с 5СA) определяют зс<2) и %<3)- В частности, если %<2) (С2) =
= <а, то B) (С) 2 б
мнимую
Х<2) (Сг) = Х
с % % B)
хB) (Сз) должно равняться <а2, чтобы сократить
часть в соотношении ортогональности. Выбор
<2) (^з) = 1 несовместен с требованием орто-
орто()
гональности, так что должно быть %{2) (Са) = <а и
^B) (с3) = Ю2 (или наоборот). Далее, х<2) (С*) = 1. Эти
же выводы справедливы для %<3), так что теперь характе-
характеры имеют вид, изображенный в табл. 16.5.
Класс
Ci
c2
1
1
1
1
z<2)
1
0)
@2
1
-T
АБ ЛИЦ
ZC)
1
0J -
0)
1
A
16.5
ХШ
3
Последний столбец легче всего заполнить, если исполь-
использовать его ортогональность с остальными тремя столбца-
столбцами. Если обозначить числа в последнем столбце 3,^г, у, z,
то [отметим со* = со2 и (со2) * = со]
3 + Ах + Ay + 3z =
3 + 4соя + 4со2?/ + 3z =
3 + 4со2а; + Аау + 3z =
''I
0;
0.J
A6.41)
357
Непосредственное решение этой системы уравнений при-
приводит к окончательной таблице характеров (табл. 16.6).
Класс
Ci
с*
с3
С4
1
1
1
1
*<2)
1
Си
со2
1
-т
АБ ЛИЦ
х<3)
1
©2
Си
1
А
16.6: 1
3
0
0
—1
16.5. ФИЗИЧЕСКИЕ ПРИМЕНЕНИЯ
Продемонстрируем применение методов теории групп
на паре примеров.
Рассмотрим задачу на собственные значения для диф-
дифференциального оператора в частных производных в слу-
случае двух или трех измерений. В гл. 8 мы видели, что ча-
часто возникает вырождение; несколько колебаний, т. е.
собственных функций, могут принадлежать одному соб-
собственному значению. Иногда это может быть случайным,
однако часто это связано с некоторой симметрией рас-
рассматриваемой системы.
Например, второе и третье колебания квадратной мем-
мембраны вырождены; любая линейная комбинация
и
1
1
1
A6.42)
представляет собой колебание с той же частотой. Очевид-
Очевидно, это не случайно, а следует из того факта, что квад-
квадратная мембрана переходит в себя при повороте ее на 90°.
Чтобы более точно сформулировать эту идею симмет-
симметрии, рассмотрим симметрическую группу нашей физиче-
физической системы, а именно систему всех преобразований
объекта, которые оставляют его динамически неизменным.
Одна часть мембраны может быть, конечно, закрашена
красным цветом, а верх, скажем, зеленым, так что враще-
вращение не оставляет ее неизменной; однако вращение не влия-
влияет на динамику.
Рассмотрим теперь определенную собственную функ-
функцию. Если применить некоторый элемент нашей симмет-
358
рической группы к этой функции, то мы должны полу-
получить другую собственную функцию с тем же собственным
значением. Этот факт очевиден, хотя его можно доказать
математически. Если элемент группы, действующий на
собственную функцию, не приводит к другой собствен-
собственной функции с тем же собственным значением, то система
не инвариантна к такому преобразованию, т. е. в симмет-
симметрическую группу включено некоторое преобразование,
не относящееся к ней.
Все эти вырожденные собственные функции можно рас-
рассматривать как векторное пространство, причем элементы
группы производят линейные преобразования в этом про-
пространстве. Выбирая систему координат, можно предста-
представить эти преобразования матрицами; таким «образом, мы
получаем представление нашей симметрической группы.
Следовательно, можно использовать результаты теории
представлений групп, найденные ранее в этой главе.
Отметим два следующих момента.
1. Следует использовать нормированные ортогональ-
ортогональные функции для базисных векторов так, чтобы представ-
представления были унитарны. В противном случае большинство
результатов этой главы непригодно.
2. Если имеется несколько различных ортонормирова-
ных систем базисных векторов, то неважно, какой из них
пользоваться; так как отдельные допустимые представ-
представления различаются лишь эквивалентным преобразова-
преобразованием.
Применим эти идеи к наинизшим собственным функ-
функциям квадратной мембраны. Наинизшая собственная
функция, не имеющая узлов, остается неизменной под
действием всех элементов симметрической группы. Следо-
Следовательно, это колебание приводит к представлению, кото-
которое ставит в соответствие каждому элементу группы
число 1.
Два колебания:
U
Т
смешиваются элементами группы и производят двумер-
двумерное представление. (Эта симметрическая группа имеет
только одно двумерное представление.)
359
Следующее колебание не вырождено:
I
j.
I
i
Следовательно, оно производит одномерное представле-
представление, однако это представление имеет —1 на некоторых
местах, так что это — нетривиальное представление, про-
производимое наинизшим колебанием. Читателю предла-
предлагается написать это представление и всю таблицу харак-
характеров.
В качестве другого примера рассмотрим уравнение
Шредингера для п тождественных частиц, например элек-
электронов в атоме с п электронами. Пустья|э (xi, хг, . . ., хп)—
собственная функция с определенной энергией Е. Тогда
я]) (xiU xiz, . . ., xin), где н, i2, . . ., in — произвольные
перестановки 1, . . ., п, должна также быть собственной
функцией с той же энергией Е, так как мы поменяли дина-
динамически эквивалентные частицы. Таким образом, система
всех собственных функций с энергией Е порождает пред-
представление симметрической группы п объектов. Если рас-
рассматриваемые частицы — электроны, то принцип Паули
утверждает, что допустимо только одно представление,
а именно полностью антисимметричное представление,
в котором любой обмен двух электронов меняет знак вол-
волновой функции я|).
Как применить этот формализм к определенной зада-
задаче? Простейший тип задачи, которую можно обсудить,
касается снятия вырождения возмущением, понижающим
симметрию физической системы. Рассмотрим систему с вы-
высокой степенью симметрии, для которой задача на соб-
собственные значения имеет вид
Щ = Ц. A6.43)
Система собственных функций -фь я|э2, • • •> tyn> принадле-
принадлежащих к некоторому собственному значению К, произво-
производит представление симметрической группы S оператора L0.
Мы хотим узнать, как расщепляется эта вырожденная
система при наложении возмущения Q, причем ему соот-
соответствует симметрическая~группа S', которая^является
подгруппой S. Процедура очевидна из предшествующего
обсуждения. Система ipi, г];г, . . ., г];п производит некоторое
360
представление S'. Если разложить это представление
на неприводимые представления, то базисные векторы для
каждого неприводимого представления под действием опе-
оператора L0 + Q остаются еще вырожденными, однако соб-
собственные функции, принадлежащие к различным непри-
неприводимым представлениям, не обязательно будут иметь
одно и тоже возмущенное собственное значение.
Вместо подробного рассмотрения общего случая при-
приведем частный пример. Рассмотрим круглую мембрану,
возмущенную четырьмя массами в вершинах концентри-
концентрического квадрата:
В отсутствие возмущения колебания мембраны либо невы-
невырождены, либо двукратно вырождены. Теория групп
ничего не может сказать нам о невырожденных колеба-
колебаниях, но возникает следующий интересный вопрос. Будет
ли возмущение снимать вырождение пары вырожденных
колебаний?
Начнем с рассмотрения симметрической группы и ее
таблицы характеров. Симметрическая группа — это груп-
группа симметрии квадрата; она содержит восемь элементов:
/ (единичный), R (вращение на 90°), R2, R3, Р (отражение
относительно линии, -проходящей через центр), Pi?, Pi?2,
PRb. Легко получить, что классы имеют вид
Ci: /, С4: Р, PR2, Л
С2: i?, i?3 Съ: PR, PR3. \ A6.44)
С3: R\ J
Методами, аналогичными тем, что использовались ранее
в этой главе, находим таблицу характеров для нашей
группы (табл. 16.7).
Рассмотрим теперь вырожденную пару невозмущенных
собственных функций:
я|I ~ sin тв, я|J ~ cos mQ. A6.45)
Нужно решить, будет ли приводимо или неприводимо
двумерное представление D симметрической группы, по-
порождаемое ipi и г|;г.
Класс
с2
С%
С4
Сь
ха>
1
1
1
1
1
кB)
1
1
1
—1
^
эс<3)
1
1
1
—1
1
— TAB ЛИ
х<4)
1
j
1
1
—1
Ц А 16.7 1
Х<5)
2
0
2
0
0
Начнем с равенств Ityi = я)э2, /я|э2 = я|э2. Тогда / пред-
представляется матрицей
/1 04
Vo i)
A6.46)
х@
Далее, действие Л на ifj или я|J эквивалентно умень-
уменьшению 0 на я/2. Таким образом,
A6.47)
Следовательно, R представляется матрицей
(
COS
sin-
mK
— sin-
cos
mK '
A6.48)
и x(C2) = 2cos(t?iji/2). Продолжая таким же путем, на-
находим, что представление D имеет следующий характер:
тл
% (Q = 2 cos тл,
= X (Q = 0.
A6.49)
Теперь можно разложить Z) на неприводимые пред-
представления; результат имеет вид
D = -1 [ 1 + 2 cos -^- + cosтя] [Z)'11 + Z)<2)] +
+-i- [ 1 — 2 cos -^p-+cos отя] [Z)<3> + /)<*>J +
362
-L [1 _ cos mn] Z)<6) =
+ Z)<2\ 7?г = 4, 8, 12, ... ,
\ m = 2, 6, 10, ....
Z)<6\ m = l, 3, 5, 7,
A6.50)
Итак, если тп четно, то представление приводимо и равно
сумме двух одномерных представлений, так что возмуще-
возмущение может снять вырождение. С другой стороны, если те
Рис. 16.2. Колеблющийся треугольник.
нечетно, то представление неприводимо и невозможно ника-
никакое расщепление, так как симметрия связывает все со-
состояния.
Отметим, что в этом примере мы из теории групп сде-
сделали качественные заключения; величина расщепления,
производимого возмущением, не исследовалась. Это общая
особенность аргументов теории групп. Однако теперь мы
перейдем к проблеме, в которой применение теории групп
позволяет реально рассчитать числа.
Рассмотрим три массы m в вершинах равностороннего
треугольника, связанные пружинами. Пусть постоянная
пружин равна к (рис. 16.2). Как найти нормальные коле-
колебания этой механической системы? Предположим, что
массы могут двигаться только в плоскости листа.
Пронумеруем массы, как показано на рисунке. Пусть
координаты массы mi относительно ее равновесного поло-
положения равны xi, j/t; аналогично обозначим координаты
для остальных масс. Представим конфигурацию системы
шестимерным «вектором состояния» \. В «элементарной
363
системе координат», показанной на рис. 6.2, % имеет ком-
компоненты
I = (zi, уи x2, y2l xs, ys). A6.51)
Кинетическая и потенциальная энергии системы равны
[ср. уравнения F.58) и F.60)]
j
И
A6.52)
Второй закон Ньютона дает уравнение
Для нормального колебания имеем
Тогда A6.53) приобретает вид
S
= ЯЬ, где К =
A6.53)
exp(— itat).
A6.54)
Нормальные колебания описываются собственными век-
векторами матрицы F, а собственные значения дают частоты.
Разберем, как теория групп позволяет найти эти
частоты. Во-первых, каждый собственный вектор произ-
производит неприводимое представление, когда мы действуем
на него всеми элементами симметрической группы. Таким
образом, в координатной системе, диагонализующей V,
имеем
/К \
у¦ —
A6.55)
и т.
Первые na йовых координатных векторов являются соб-
собственными векторами, принадлежащими к собственному
значению %а, они преобразуются один в другой согласно
неприводимому представлению Z)'a); следующие щ соб-
собственных векторов принадлежат к %ь и преобразуются
согласно Z)(b) и т. д.
Следует кратко рассмотреть симметрическую группу.
Она состоит из шести элементов: /, R, i?2, Р, PR, PR2,
где / — единичный элемент, R поворачивает треугольник
на 120° в положительном направлении (против часовой
стрелки) и Р отражает относительно вертикальной линии,
проходящей через центр. Характеры группы показаны
в табл. 16.8. Эта группа симметрии — не что иное, как
S3 (ср. табл. 16.1 и 16.3).
Класс
c^R, Щ
С3(Р, PR, РЩ
Т
зсA)
1
1
1
АБ ЛИЦ
1
1
—1
А 16.8 1
хC)
2
1
0
Когда различные элементы группы действуют на тре-
треугольник, они производят линейные преобразования ?j.
Например, если R действует на треугольник, то
A6.56)
где матрица D (R) равна
@ 0 г\
г 00), г =
0 г 0/
V!
2
A6.57)
Аналогично
D(P) = \p 0 0 , р=[ 1 . A6.58)
\0 0 р/
Какие представления включает в себя Z)? Его характер
равен
% (Ci) = 6, 5с (С8) =0, х (С3) = 0,
365
Й отсюда следует [ср. A6.32) и A6.33)]
A6.50)
Заметим, что D эквивалентно регулярному представлению
нашей симметрической группы. Эта частная особенность
случайна; в общем случае ее нет.
Далее в координатной системе с собственными векто-
векторами V в качестве базиса можно написать
О \ Z)A)
?<2>
v=
\о
A6.60)
Здесь указаны трансформационные свойства различных
собственных векторов. Отметим, что две пары собственных
векторов, преобразующихся как D(S\ не обязательно
имеют одно и тоже собственное значение.
Как выглядит матрица D (G) V в этой специальной
системе координат (G — произвольный элемент симметри-
симметрической группы)? Ответ очевиден:
Конечно, ее нельзя использовать непосредственно, так
как мы не знаем, какова эта координатная система (неиз-
(неизвестны собственные векторы). Однако шпур этой матрицы
инвариантен по отношению к координатным преобразо-
преобразованиям, так что
Tr D(G)V= ll%a) (G) + КХ™ (G) + (Ki
5C
<3)
A6.62)
в любой системе координат.
Теперь шпуры можно вычислить непосредственно,
используя частные формы A6.52), A6.57) и A6.58) соот-
соответственно для V, D (R) и D (Р):
Tr D (/) V = 6, Tr D (К) V = |-, Tr D {Р) V = 3. A6.63)
366
Следовательно, собственные значения удовлетворяю*
уравнениям
— G-31 ~Ь ^зг) = 3/2, 7,1 — 7,2 = 3,
откуда
%% = 3, 7.2 = 0, 7-31 + 7-32 = 3/2. A6.64)
Можно было бы определить отдельно X3i и 7.32, рас-
рассматривая величины типа Тг V2 = К\ + 7| + 2 G.^ + Т-У-
Однако более простой способ состоит в том, что три сте-
степени свободы должны иметь нулевое собственное значение:
две трансляционные и одна вращательная. Таким образом,
Яз1 = О, А-32 = 3/2. A6.65)
Мы определили все собственные значения, не решая
никакого секулярного уравнения.
16.6. БЕСКОНЕЧНЫЕ ГРУППЫ
Закончим эту главу кратким обсуждением групп с бес-
бесконечным числом элементов. Приведем некоторые приме-
примеры бесконечных групп, встречающихся в физике, и рас-
рассмотрим их неприводимые представления. Доказатель-
Доказательства утверждений можно найти в книге [8].
Будем рассматривать бесконечные группы, элементы
которых будут нумероваться вещественными параметрами,
меняющимися непрерывно; типичный элемент группы бу-
будет записываться в виде g (хи х2, . . ., хп) = g (х). Если
требуется п таких параметров, то группа называется п-
параметрической группой. Очевидно, для. бесконечной
группы нельзя написать в обычном смысле таблицу умно-
умножения. Если произведение g (х) и g (у) есть g (z), т. е.
g (хи х2, . . ., хп) g (уи у2, . . ., уп) =
= g (zi, z2, . . ., zn),
то п параметров zb z2, . . ., zn являются функциями от
параметров хи ж2, . . ., хп, уи . . ., уп. «Таблица умно-
умножения» для бесконечной группы состоит из п веществен-
вещественных функций, причем каждая зависит от 2п веществен-
вещественных аргументов
Zl =/l (XU . . ., Уп), A6.66)
**п in V^-l) • • м Уп)-
367
Разумеется, бесконечная группа должна уДоЁлетЁорять
общим постулатам о группах, данным в разд. 16.1. Наибо-
Наиболее жесткое требование накладывается ассоциативностью:
lg (*) g (у)\ g(z) = g (х) [g (у) g (Z)]. A6.67)
Из требования A6.67), выраженного через функции
ft (x> У) A6.66), следует, что равенство
ft (/ (*, У), *) = ft (*, / (У, z)) A6.68)
выполняется для всех х, у, z. Если функции f{ (x, у)
A6.66), кроме совместности с постулатами о группах,
непрерывны и обладают производными всех порядков, то
мы говорим огруппе Ли. Ниже приведены несколько
примеров.
1. Группа двумерных линейных преобразований коор-
координат вида
х' = ах + by + с, 1 A6.69)
у' = dx + еу + /. J
Требование существования обратного преобразования
означает, что параметры а, ...,/, появляющиеся
в A6.69), должны удовлетворять условию ае — bd^= 0.
Разумеется, эта группа является шестипараметрической
группой.
2. Группа всех унимодулярных унитарных матриц
ге X ге, т. е. группа всех п X n-унитарных матриц с детер-
детерминантом 1. Эта группа обычно называется SU (п). Мож-
Можно показать, что SU (и) имеет п2 — 1 параметр. Напри-
Например, общий элемент группы SU B) можно записать в виде
exp(ig)cosT] exp(i?)sinT]
— ехр(—ig)sinт) ехр ( —ig) cos
t]/ ' " '
с тремя вещественными параметрами |, т), ?.
3. Группа всех вещественных ортогональных п X re-
матриц, обычно обозначаемая О (п). Если хотят ограни-
ограничиться матрицами О (п) с детерминантом -)-1 (а не —1), то
говорят о группе О+ C). Например, О C) — это группа
вращений в трехмерном пространстве; О>+ C) — группа
собственных вращений. Так как для определения враще-
вращения требуется три параметра (например, три угла Эйлера),
О C) — трехпараметрическая группа. В общем случае
число параметров в О C) равно уп(п- 1).
368
Следует отметить, что приведенные примеры содержат
трансформационные группы, т. е. группы, связанные
с преобразованием переменных. Если такие преобразова-
преобразования линейны и однородны, то группа переходит в группу
матриц. Ниже будут рассмотрены трансформационные
бесконечные группы *.
Интересно рассмотреть окрестность начала координат
бесконечной группы. Обозначим единичный элемент груп-
группы g @) (все параметры равны нулю). Тогда g @) g (x) =
— g (x) для всех х. Рассмотрим теперь эти элементы груп-
группы с бесконечно малыми параметрами. Определим генера-
генераторы группы. Для каждого параметра имеется один гене-
генератор; они определяются формулами
X, -- lim g (е' °' °' ''" 0) ~g @' °' ''" 0) •
X = lim g@'e' °' •••'°)-g(°'0' •••' °) .
0 8
E-s-0
Хп = lim -
E-s-0
A6.71)
Существование «производных» в A6.71) обеспечивается
предположением, что группа является группой Ли.
Для того чтобы придать смысл разностям элементов
группы, которые появляются в определениях A6.71), сле-
следует более подробно рассмотреть идею координатных пре-
преобразований. Рассмотрим типичное преобразование R,
переводящее координаты х в координаты х' = Rx. Напри-
Например, если преобразование есть вращение осей координат
на угол 90° вокруг оси х в положительном направлении,
то координаты х, у, z приобретают вид
х' = Хг у' = z, z' = — у. A6.72)
Однако мы не будем ограничиваться только линейными
преобразованиями координат (какими являются враще-
вращения).
В любом случае с каждым преобразованием R можно
связать оператор OR, который действует на функции пере-
* На самом деле это не ограничивающее предположение. Если
группа не определена как группа преобразования, то можно всегда
рассматривать ее как эффективное преобразование вп-мерном пара-
параметрическом пространстве, т. е. элемент g (x) производят преобра-
преобразование у -*¦ z, даваемое A6.66).
24 дж. Мэтьюз, Р. Уокер 369
менной х. На последнюю, в сёою очереДь, действует преоб-
преобразование R. Определим Ов так, что OR, действующий
на произвольную функцию / (ж), дает новую функцию
g (х), которая численно равна / (Rx), т. е.
ORf(x)=f(Rx). A6.73)
Рассмотрим физический смысл A6.73) в частном слу-
случае, когда R — обычное пространственное вращение.
/fir)
Рис. 16.3. Вращение осей координат вокруг оси х на 90° (а)
и действие соответствующего оператора вращения О на функ-
функцию / (х), «сконцентрированную» вдоль положительной оси
Z (б).
Уравнение A6.73) показывает, что новая функция OR /,
вычисленная в любой точке, равна первоначальной функ-
функции /, вычисленной для трансформированных координат.
Например, если R — вращение на 90° вокруг оси х, опре-
определенное формулами A6.72), то A6.73) дает OR f (x, у, z) ---
= / (х, z, —у). Предположим, что / (х, у, z) имеет неко-
некоторую определенную особенность на положительной оси z
(х = у = 0, z > 0). Тогда OR / обладает той же особен-
тостью при х = z — 0, у < 0, т. е. на отрицательной
оси у (рис. 16.3). Таким образом, можно рассматривать
370
оператор OR как поворачивающий функцию / на 90°
вокруг оси х, причем оси координат не изменяются.
В последующих рассуждениях не всегда будут разли-
различаться преобразования координат R и операторов OR,
однако читатель должен ясно понимать различие; мы
попытаемся во всех местах указывать, какой тип объектов
рассматривается. Чтобы увидеть, что требуется опреде-
определенная осторожность, рассмотрим влияние последователь-
последовательных операций OR и Os- Повторно используя A6.73),
получаем
OnOsf (x) = Osf (Rx) = / (SRx). A6.74)
Уравнение A6.74) утверждает, что оператор OROs свя-
связан с преобразованием координат SR; когда переходят
от одного к другому, порядок операций переставляется.
Отметим заблуждение, которое часто возникает при
выполнении манипуляций типа A6.74). Из A6.73) следует,
что
Osf (ж) = / (Sx). A6.75)
Подействуем на обе стороны A6.75) оператором OR. Слева
получаем OpPsf (x); справа, так как A6.73) утверждает,
что действие Or на функцию сводится просто к дейст-
действию R на аргумент, получаем / (RSx). -Таким образом,
OrOs /(*)=/ (RSx). A6.76)
Этот результат противоречит A6.74) и является ошибоч-
ошибочным.
Ошибка заключена в последнем шаге, когда мы дей-
действовали на обе части равенства A6.75) оператором OR;
Or действует на функции, но не на числа; две части
равенства A6.75) могут быть равны численно, но они —
различные функции. Приведем простой пример. Опреде-
Определим оператор О равенством Of (х) = / (х2) и рассмотрим
две функции g (х) — х, h (x) = 2х. Теперь, разумеется,
h(x) = g Ba:), A6.77)
но действие оператора О на обе стороны A6.77) приводит
к неправильному результату Oh (х) = Og Bх) = g Dж2) =
= 4ж2. Правильный результат: Oh (х) = h (х2) = 2х*.
Перестановка операторов A6.74) уже встречалась
раньше. Например, если R — матрица, описывающая
вращение координат, то можно рассмотреть соответст-
соответствующую матрицу TR, которая вращает также вектор,
24* 371
оставляя координаты фиксированными. Хорошо известно,
что TR = Е~г, так что если выполняются два таких
вращения, то мы получаем
TRTS = R^S'1 = (SR)-1 = TSR. A6.78)
Перестановки порядка в матрицах A5.2) и матрицах,
приведенных в сноске к этой формуле,— тесно связаны.
Возвратимся к определению генераторов A6.71). Имея
в виду сделанное отступление, следует решить, рассматри-
рассматривать ли преобразования как операции над координатами
или над функциями от этих координат. Примем последнее
соглашение. Тогда можно точно найти генераторы для
некоторых типичных групп Ли.
1. Рассмотрим шестипараметрическую группу, опре-
определенную выражениями A6.69). Отметим, что единичный
элемент этой группы имеет параметры а = 1, Ь = 0, с =
= 0, d = 0, е = 1, / = 0. Если обозначить типичный
элемент группы как g (а, Ь, с, d, e, /), то, согласно A6.71),
первый генератор равен
X
Таким' образом, действуя генератором Ха на произволь-
произвольную функцию f{x, у), имеем
Xaf(x, y) = Um±{fl(l + e)x, y]-f(x, y)} = x^f{x).
Следовательно, генератор Ха есть дифференциальный
оператор х (д/дх):
Ха = х-д!дх. A6.79)
Аналогично
Xbf(x, у) = ГЦш gA' е' °' °' *' 0)~gA' °' °' °' '' 0)-1 / (х, у)=
Le-*0 e J
[f(
c - . 7. y) — f(x, y)\ = y-zzf(.x, У)-
e-»0 c ox
Следовательно,
Хь = у д/дх. A6.80)
Аналогичными рассуждениями находим остальные гене-
генераторы
Хс = д/дх, Xd = х-д/ду, Хе = уд/ду,
Xf = д/ду. A6.81)
372
2. Рассмотрим группу SU B), типичный элемент кото-
которой дается формулой A6.70). Обозначим две переменные,
преобразуемые этой 2 X 2-матрицей, через щ и и2. Тогда,
применяя A6.71), непосредственно находим два генера-
генератора Х|, Хч;
Xlf (щ, щ) = [lim g^0,0)-g@,0,0)-| =
Е-+0
и аналогично
Хч = и2'д/дщ — щ -д/дщ. A6.83)
Однако непосредственное вычисление Xj с помощью
A6.71) невозможно. Неудобство состоит в том, что
? не является хорошим параметром при пользовании им
вблизи начала координат, так как если т] = 0, то g (§, т], Q
становится независимым от ?. Это известный недостаток;
рассмотрим, например, выделение направлений в про-
пространстве с помощью обычных полярных углов .6, ф. Вдоль
полярной оси (G = 0) ф теряет смысл. Точнее говоря,
если брать градиенты на единичной сфере, то d/dQ — весь-
весьма разумный оператор вблизи G = 0; однако здесь д/дф
всегда обращается в нуль. Чтобы получить оператор
с конечным градиентом, нужно разделить д/дф на sin G
(или G, что то же самое вблизи G = 0).
Итак, имеется две возможности. Мы могли бы исхо-
исходить из другого набора параметров в A6.70), так что
ничто не было бы сингулярным вблизи единичного эле-
элемента группы. Однако вместо этого мы поступим так, как
рекомендуется в предыдущем абзаце, т. е. вычислим Xj
с т], не равным нулю. Получаем Х% = i sin rj X
X (Щ ^ Ь ui ~п— I • " качестве третьего генератора
возьмем
Xi = X?/sin т] = i (и2 -д/дщ + щ -8/ди2). A6.84)
3. Рассмотрим, наконец, О C) — группу вращений
в трех измерениях. Чтобы избежать трудностей, с кото-
которыми мы встретились при рассмотрении группы SU B),
не будем пользоваться углами Эйлера для характеристики
бесконечно малых вращений. Вместо этого заметим, что
373
любое бесконечно малое вращение можно составить из
вращения Qx вокруг оси х, вращения Qv вокруг оси у
и вращения 62 вокруг оси z. Вычислим соответствующие
генераторы:
Xxf(x, у, z) = lim— [f(x, i/cos e + z sine, zcose—у sine)—
Таким образом,
Циклическая перестановка х, у, z дает два других
генератора
Сделаем некоторые замечания о важности понятия
генератора группы. Во-первых, коммутатор [Xt, Xj\ =
= XtXj—XjXi двух генераторов всегда есть линейная
комбинация генераторов:
[Хи Xj] = 2 с* Xft. A6.87)
Вещественные константы c\j в A6.87) называются кон-
константами структуры группы Ли.
Соотношение A6.87) приводит к понятию алгебры Ли,
связанной с данной группой Ли. Эта алгебра образуется
всеми линейными комбинациями генераторов
ciXi + с2Х2 + • • • + спХп A6.88)
с вещественными коэффициентами ct. В качестве «произве-
«произведения» двух элементов алгебры берется их коммутатор.
Например, «произведение» двух элементов Xi + Х2 и
Х3 — 2Х4 определяется как
[Хь Х3] - 2 [Хь Х4] + [Х2, Х3] -
— 2 [Х2, Х4]. A6.89)
Из A6.87) следует, что выражение A6.89) имеет форму
A6.88), т. е. само есть элемент алгебры.
Ясно, что группа Ли полностью определяет структуру
соответствующей алгебры Ли. Существенно, что верно
также и обратное; локальная структура (структура в неко-
некоторой окрестности единичного элемента) группы Ли нол-
374
ностью определяется алгеброй Ли, т. е. константами
структуры c\j в A6.87).
Наконец, отметим, что для данной матр„*ной группы
[например, SU B) или О C)] легко сформировать гене-
генераторы. Элементы группы представляют собой матрицы,
а не операторы преобразования A6.73). В этом представ-
представлении мы просто вставляем соответствующие матрицы
прямо в определяющие уравнения A6.71); разность,
а на самом деле производная — это хорошо известная
операция над матрицами. Например, из вида A6.70)
типичного члена SU B) дифференцированием немедленно
получаем
/i 0\ / 01\
M) М) A6-90)
Чтобы найти X'i, вспомним, что нужно разделить Х$
на sinT]; получаем
Предоставляем читателю проверить дальнейшие утверж-
утверждения.
1. Алгебры Ли, определенные формулами A6.82),
A6.83) и A6.84) для SU B) и формулами A6.85) и A6.86)
для О C), являются изоморфными. Это означает, что если
произвести однозначное соответствие
Xi ^ 2ХХ, Хп ^ 2ХУ, ХЕ ++ 2XZ, A6.92)
то две алгебры будут одинаковы. Это вытекает из правил
коммутации в обеих алгебрах
?'Xri; [Х'ъ, Xn]=2Xi; [Xn, X|]=2Z{;1
[Хх, Ху] = Xz; [Xv, Xz] = Хх; [Xz, Хх] = Ху. J
Возможны различные варианты соответствия A6.92).
2. Генераторы матриц A6.90) и A6.91) для группы
SUB) не удовлетворяют соотношениям коммутации A6.93),
которые были получены для представлений дифферен-
дифференциальными операторами A6.82), A6.83) и A6.84). В дей-
действительности из факта обращения порядка операций
в A6.74) для двух типов объектов следует, что знаки всех
коммутаторов должны меняться при переходе от одной
картины к другой. Коммутаторы матриц A6.90) и A6.91)
375
с точностью до знака минус совпадают с коммутатора-
коммутаторами A6.93).
3. Матричные представления генераторов О C), интер-
интерпретированные как преобразования координат, по анало-
аналогии с A6.90) и A6.91) записываются в виде
@ 0 0\ /0 0—1
0 0 11, Ху=\ 0 0 0
0-10/ \1 0 0
Хх= 0 0 1, Xv = 0 0 0 , Xz =
По-прежнему коммутаторы матриц A6.94) равны по вели-
величине и обратны по знаку коммутаторам A6.93).
16.7. НЕПРИВОДИМЫЕ ПРЕДСТАВЛЕНИЯ SU B), SV C)
И О+ C)
8JJ B). Начнем рассмотрение с неприводимых матрич-
матричных представлений группы SU B). Прежде всего имеется
тривиальное одномерное представление D1, в котором
каждый элемент группы представлен числом 1.
Далее, имеется двумерное представление D2, состоящее
из самих матриц A6.70). Как и в предыдущем разделе,
можно рассматривать двумерные векторы, на которые
действуют эти матрицы; такой вектор будем записывать
в виде иа (а = 1, 2).
Можно также рассмотреть представление из матриц,
комплексно сопряженных исходным матрицам A6.70),
т. е. каждая матрица в SU B) представляется своей ком-
комплексно сопряженной. Вектор, который трансформируется
этой сопряженной матрицей, будем записывать с индексом
вверху, например *Я.
Далее можно продолжить и определить тензоры; если,
например, иа и va — векторы, преобразуемые A6.70),
а и?а — сопряженный вектор, преобразуемый матрицами,
комплексно сопряженными A6.70), то объект м„р, преоб-
преобразующийся как UaVftiv'v, есть тензор. Ясно, что тензоры
можно определить с произвольным числом верхних и ниж-
нижних индексов.
Преобразования различных компонент тензора одна
в другую для каждого элемента группы SU B) образуют
представление группы. Будем говорить, что представле-
представление генерируется тензором. Например, вектор иа генери-
генерирует представление D2, а скаляр генерирует цредставле-
376
ние D1. Все тензоры генерируют представления, но неко-
некоторые из них приводимы, а некоторые эквивалентны дру-
другим представлениям.
Рассмотрим объект с двумя индексами еар, определен-
определенный как
в1а = 1, e2i = —1, ен = е22 = 0. A6.95)
Это двумерный знакопеременный символ Леви — Чивита;
сравните с A5.10). Будет ли еар тензором? Пусть А —
произвольная матрица SU B). Тогда еар преобразуется в
AavApeev6 = -^ai^4p2— ^a2^pi (сумма по повторяющимся индексам) =
0, если a = Р;
АцА22 — Ai2A2i = det A = 1, если a = 1,
Р = 2;
2iAi2 — А-ъъАи = — det А = —1, если a = 2,
Итак, еар -г- тензор относительно SU B). Аналогично еаР,
численно равный eaV,— также тензор.
Далее заметим, что по верхнему индексу и по нижнему
индексу можно просуммировать (свернуть); это приводит
к тензору с числом индексов, меньшим на два (ана-
(аналогично контравариантным и ковариантным индексам
разд. 15.3). Например, если ка и уР — векторы, то вели-
величина uav& после какого-либо преобразования А группы
SU B) приобретает вид Aa$u$AafV* — АуаАарщи^ =
= Uaif*-, так что UajiP- инвариантно, как и следовало ожи-
ожидать. Аналогично из тензора и„р можно образовать век-
вектор va = Ua$, а из тензоров uap и v*6 можно образовать
Тензор Wa = UayvV& И Т. Д.
Теперь мы в состоянии сконструировать неприводимые
представления группы SU B). Во-первых, не пренебре-
пренебрегая никакими представлениями, можно ограничиться тен-
тензорами со всеми индексами внизу. Например, тензор м„р
образуется линейными комбинациями компонент тензора
ь'аРтб = ?vJi,?6nuaB и наоборот, так нто представления,
генерируемые ы^р и t>apV6. эквивалентны. Отметим, что
тензор еар выполняет роль «понижающего» тензора,
по аналогии с фундаментальным тензором gti, приведен-
приведенным в разд. 15.3.
Далее заметим, что тензор uapv... должен быть полно-
полностью симметричным по всем своим индексам, если он гене-
377
рирует неприводимое представление. Предположим обрат-
обратное, что тензор uapv... не симметричен, скажем, по пер-
первым двум индексам, uapv... ф ират...- Тогда можно было
бы образовать тензор vy = ea^uapv... = ui2v... — u2iy c чис-
числом индексов на два меньшим. Представление, генерируе-
генерируемое uapv..., было бы тогда приводимо, так как оно содер-
содержало бы (меньшее) представление, генерируемое t>v....
Таким образом, общее неприводимое представление
SU B) характеризуется полностью симметричным тензо-
тензором uapv..., который генерирует это представление. Если-
тензор и имеет п индексов, то имеется п + 1 независимых
компонент, и, следовательно, соответствующее представ-
представление имеет размерность п + 1. Результаты такого ана-
анализа собраны в табл. 16.9.
Представ-
Представление
Тензор (полностью
симметричный)
-ТАБЛИЦА 16.9
Представ- Тензор (полностью
ление симметричный)
$17C). Большая часть анализа, выполненного для
группы SU B), верна и для группы SU C). Снова вводим
векторы иа, где а теперь пробегает значения от 1 до 3.
Унитарные унимодулярные 3 X 3-матрицы, образующие
SU C), действуют на вектор иа. Таким образом, можно
говорить, что вектор иа генерирует трехмерное представ-
представление D3, в котором каждый элемент группы представлен
самим собой.
Как и выше, можно определить векторы ua с верхними
индексами, которые преобразуются как комплексно со-
сопряженные векторов с нижними индексами. Они генери-
генерируют представление Ds, в котором каждая матрица SU C)
представлена своей комплексно сопряженной. В противо-
противоположность аналогичной ситуации в группе SU B) это
представление D3 не эквивалентно представлению D3.
Снова определим тензоры с произвольным числом верх-
верхних и нижних индексов. .Например, если вектор иа под-
подвергается преобразованию
A6.96)
378
то тензор. м?„ преобразуется следующим образом: и?'в =
= AapAfrjAyttfL, где А — произвольная матрица в SU C).
Знакопеременный символ по-прежнему является тен-
тензором, но теперь, конечно, он имеет три индекса, т. е.
два численно равных объекта
A, если сф7 = 123, 231 или 312;
eaPv = eapv = | 1, если oPy = 321, 213 или 132; A6.97)
^0 в остальных случаях,
вследствие условия унимодулярности являются тензора-
тензорами в SU C). Доказать это предоставляем читателю.
Наконец, свертывание индексов по-прежнему является
законной операцией, как и в случае SU BJ, если один
индекс суммируется сверху, а другой — снизу. Доказа-
Доказательство, которое мы опускаем, следует непосредственно
из унитарности матриц SU C).
Теперь можно пронумеровать неприводимые представ-
представления SU C). Верхние и нижние индексы более не экви-
эквивалентны, так как знакопеременный символ теперь имеет
три индекса вместо двух, и его нельзя использовать для
увеличения или уменьшения одного индекса.
Поэтому следует рассматривать тензоры как с верх-
верхними индексами, так и с нижними. Если такой тензор
должен производить неприводимое представление SU C),
то необходимо выполнение двух условий:
1. Он должен быть отдельно симметричен по всем своим
верхним и нижним индексам. Если, например, Мор"; Ф
Ф "ар"."> то можно образовать тензор ^Ц = ea+i6w?p
с числом индексов, меньшим на один, и представление
было бы приводимо. Конечно, нет требования симметрии,
связывающего верхние и нижние индексы.
2. Он должен обладать нулевым следом; любая сверт-
свертка верхнего индекса с нижним должна давать нуль. В про-
противном случае можно было бы образовать тензор с числом
индексов на два меньше, и представление было бы приво-
приводимо. Следы, образованные суммированием двух верх-
верхних индексов или двух нижних индексов, не обязательно
должны равняться нулю, так как это не инвариантная
свертка.
Таким образом, общее неприводимое представление
группы SU C) генерируется тензором с т верхними и п
нижними индексами; тензор должен быть полностью сим-
симметричным по всем своим верхним индексам, полностью
379
симметричен по всем своим нижним индексам, и все сверт-
свертки одного верхнего индекса с одним нижним индексом
должны давать нуль. В табл. 16.10 приведены некоторые
неприводимые представления _SU C). Можно показать,
что размерность общего неприводимого представления
SU C) равна -| (т + 1) (п + 1) (т + п + 2). Представ-
Представления Ds, Ds, DB и D6 и т. д. называются сопряжен-
сопряженными представлениями.
m
0
0
l
0
1
2
n
0
1
0
2
1
0
Пред-
Представление
?>3
ZK
Z)e
D»
D»
Тензор
1
и°
ига
мар
«?
иар
m
0
1
2
3
ТАБЛИЦА
п
3
2
1
0
Пред-
Представление
?)Ю
/IБ
/I5
16.10
Тензор
"ар
PV
мк
„aPV
O+C). В заключение рассмотрим важный вопрос на-
нахождения неприводимых представлений О+ C) — группы
вещественных унимодулярных ортогональных 3 X 3-мат-
риц, которые описывают вращения в трехмерном евклидо-
евклидовом пространстве. Как и в предыдущих случаях, задача
решается методом конструирования тензоров; в данном
случае — это декартовы тензоры разд. 15.1.
В действительности после исследования групп SU B)
и SU C) должно быть ясно, что общее неприводимое пред-
представление О* C) генерируется симметричным тензором
ранга п с нулевым следом. Например, скаляр приводит
к тривиальному представлению D1. Вектор (п = 1) гене-
генерирует трехмерное представление D3, в котором каждое
вращение представлено обычной 3 X 3-ортогональной
матрицей. Симметричный тензор Ttj имеет шесть незави-
независимых компонент; исключение шпура оставляет пять.
Эти пять величин генерируют пятимерное неприводимое
представление D5 и т. д. Можно показать, что симметрич-
симметричный тензор ранга п с нулевым следом имеет 2п -\-1 незави-
независимых компонент, так что соответствующее представле-
представление имеет размерность 2п + 1.
Эти представления наиболее элегантны, когда опери-
оперируют со сферическими гармониками FJm @, ф) (см,
380
разд. 7.1), т. е. тривиальное представление D1 состоит
из преобразований Yoo (Q) в себя, «векторное представле-
представление» Ds описывает преобразования трех сферических гар-
гармоник У1т (Q) (т = 1, 0, —1) в их линейные комбинации
при вращении. В общем случае преобразования 2п + 1
функций Ynm (Q) с данным п друг в друга генерируют
неприводимое представление D2n+1 группы О+C).
Так как сейчас мы-рассматриваем влияние вращения
на функции, именно на сферические гармоники (а не
на координаты), то операторы вращения опреде-
определяются согласно формуле A6.73). Таким образом, дейст-
действие вращения R на данную сферическую гармонику
Yim (Q) определяется как ORYlm (Q) = Ym (RQ), где
RQ обозначает новые значения 0, ф, связанные с направ-
направлением Q, после того как на оси координат подействовал
оператор вращения R (R сохраняет фиксированное в про-
пространстве направление Q). Иными словами, новая функ-
функция O^Yim №) — это функция, получаемая вращением
Уim №) вместо осей координат (ср. рис. 16.3).
Обычно определяют матрицу вращения Dlm-m (R) фор-
формулой
^Dln,n{R)Yln.{u). A6.98)
т'
Обратим внимание на порядок индексов Dlm-m в A6.98).
Он выбирается вполне определенным. Чтобы понять,,
почему — рассмотрим влияние двух последовательных
операторов вращения OR, Og на сферическую гармонику
0ROsYlm(Q) = Ylm(SRQ,) [из формулы A6.74)] =
= SDm'm(S) Ylm.(RQ) = SDlm.m(S) SDln.m.(R)Yln.(Q) =»
m' m' m"
= S IS Dlm-m> (R) D'm-m (S)] Yln~ (Q). A6.99)
m' m'
Из уравнения A6.99) следует, что матрицы вращения
Dm'm (R) образуют матричное представление операторов
вращения OR.
В табл. 16.11 приведены элементы матрицы вращения
Dm'm (офу) в зависимости от углов Эйлера а, E, у. Сделаем
несколько замечаний.
1. Обзор табл. 16.11 приводит к общему заключению,
что зависимость Dlm'm (офу) от а и у довольно травиальна.
381
m= 1
ТАБЛИЦА 16.11-
— 1
exP(-ic01+C2OsPexp(-iv)
exp (-i
exp( ice)
sin p
cos p
exp (ia)
exp(,a)
sin
exp( ia)
exp(ia)
1+C°SP
exp(iv)
Можно показать, что
Dlm-m (apT) = exp ( —im'o) dlm-m (p) exp ( —imy), A6.100)
причем «приведенная матрица вращения» dm-m (Р) дана,
например, в книге [8]. На самом деле свойство A6.100)
непосредственно вытекает из определения A6.98) и того
факта, что сферическая гармоника Угт (8, ф) зависит от ф
только через множитель exp (imj>) [см. G.32) или G.33)].
2. Если в A6.98) положить т = 0, то получаем
(ДО) =
m'
A6.101)
Рассмотрим теперь аргумент i?Q полинома Лежандра в ле-
левой части A6.101). Пусть направление Q имеет полярные
координаты 6, ф. После действия оператора вращения
на оси координат ось z оказывается направленной вдоль
линии с полярными координатами р, а (относительно пер-
первоначальных осей). Итак, полярный угол RQ — это угол
X между этими двумя направлениями:
cos х = cos a cos p + sin a sin p cos (ф — a). A6.102)
Следовательно, A6.101) приобретает вид
/B1 + 1)/4я Pt (cos x) = S Ят'о (apT) ^i»- F, Ф)- A6.103)
nt'
Сравнение A6.103) и теоремы сложения G.46) для сфери-
сферических гармоник приводит к следующему соотношению;
Dlm0 (ару)- 1/jt/BZ + 1)У,*,(р, a). A6.104)
3. Тот факт, что сферические гармоники ортонорми-
рованы на единичной сфере [см. G.35)], означает, что
наши представления унитарны:
Dlm-m (R-1) = Dlmm- (R)*. A6.105)
382
Закончим эту главу кратким исследованием изомор-
изоморфизма, отмеченного в предыдущем разделе, между алгеб-
алгебрами Ли групп О+ C) и SU B). Начнем с О+ C).
Произвольный элемент О+ C) вблизи начала коорди-
координат (единичный элемент) можно записать в виде 1 -f-
+ &хХх + QyXy + QzXz, где Xz, Xy, Хг — генераторы,
подчиняющиеся условиям коммутации A6.93), а ва бес-
бесконечно малы. Определим Ха = —iJa (а = 1, 2, 3),
так что элемент группы приобретает вид
1 — iQxJx - iQvJy - iB2/z = 1 - 16-J. A6.106)
Каков смысл бесконечно малого вектора 8? Можно сделать
вывод, что элемент A6.106) описывает бесконечно малое
вращение, величина которого равна величине вектора 8,
в то время как ось вращения направлена вдоль направ-
направления 8.
Как получить оператор конечного вращения? Конеч-
Конечное вращение можно рассматривать как последователь-
последовательность бесконечно малых вращений. Следовательно, опе-
оператор для конечного вращения равен
iim (i —Le.j\ (i—Lq.j)... (i—-q-j) x
X (n множителей) = exp( — i6-J). A6.107)
Конечно, экспонента в A6.107) — это только формаль-
формальный прием, так как аргумент является оператором. Мож-
Можно рассматривать экспоненту как сокращение ее ряда
Тейлора или ее представления в виде произведения.
Обратимся теперь к SU B) и произведем взаимное
соответствие A6.92), т. е. для Jx в A6.107) вместо iXx
возьмем оператор -^ Х?. То же сделаем для Jv и Jz. Таким
образом, элемент A6.107) группы О+ C) идентифици-
идентифицируется с элементом
ехр [—(i/2) 0-S] (S = iX?, iXv, iXE) A6.108)
группы SU B). Это позволяет сделать однозначное соот-
соответствие элементов О+ C) с элементами SU B) (по мень-
меньшей мере, в окрестности единичного элемента). Как мы
увидим при рассмотрении целой группы, соответствие
имеет вид не один на один, а два на один.
Из этого соответствия непосредственно вытекает ма-
матричное представление для О+C), которое отличается от
383
тензорных представлений, найденных ранее в этом раз-
деле.^Мы уже отмечали, что матрицы A6.90) и A6.91)
дают представление генераторов SUB), за исключением
того факта, что знаки коммутаторов изменены на обрат-
обратные. Итак, матрицы, обратные по знаку к A6.90), A6.91),
дают представление. Вспоминая i в определении S [см.
A6.108)], получаем
0 1\ /0 — i\ /1 0\
i о)' Mi о)' Mo-i)' A6Л09)-
Эти матрицы называются спиновыми матрица-
матрицами Паули.
Рассмотрим вращение вокруг одной из координатных
./сей, например вращение 6 вокруг оси х. Согласно
A6.108) в представлении SU B) это можно отождествить
с матрицей ехр [—(i/2) QSX\. Экспоненту легко вычислить.
Квадраты матриц'Паули равны единице: S% = S® = S% =
= 1; следовательно,
= L1 ~"гг ("г")
6-LS*sin |-= I "a й I- A6Л1°)
Комбинируя три таких вращения; можно выразить эле-
элемент SUB), соответствующий произвольному вращению,
через углы Эйлера а, р, у. Однако нужно быть вниматель-
внимательным к порядку выполнения операции вращения. Если
рассматривать вращения как преобразования координат,
то следует использовать A5.2). Однако мы используем
операторы вращения, применяя, в частности, соотношения
коммутации A6.93). Следовательно, порядок вращений
должен совпадать с порядком, приведенным в примеча-
примечании к формуле A5.2). Таким образом, с вращением
R (аРу) для О*C) сопоставляется матрица
ехр [- (i/2) aSz] ехр [-(i/2) QSu]expl—(il2)ySx] A6.111)
384
группы SUB). Вычисление этого произведения предлагаем
читателю в качестве упражнения; результат имеет вид
/ e-i(a/2)c03Pe-i(v/2) _e-Ha/2)singei(v/2) \
r" П A6.112)
I eHa/2)sitl?e-i(v/2) eU«/2)cos|ei(V/2) /
Отметим, что A6.112) — действительно общий элемент
SUB) [ср. с A6.70)].
Мы получили весьма интересное двумерное представ-
представление группы 6>+C), которое было полностью опущено
в нашей предыдущей нумерации представлений. Исполь-
Используем матрицы A6.112), т. е. векторное представление D2
группы SUB). При этом возникает трудность, тесно свя-
связанная с половинными углами в A6.112). Имеются две
матрицы, обратные по знаку. Обе нужно связать с каждым
вращением в О+C). Рассмотрим, например, вращение
на угол а вокруг оси z. Согласно A6.112), это представ-
представляется матрицей
/exp[-i(a/2)] 0 \
I 0 exP[i(a/2)]J' A
Когда а возрастает от 0 до 2л, оператор вращения,
конечно, возвращается к единичному элементу, в то
время как A6.113) превращается в матрицу
— 1 0\
0 -1/'
т. е. в умноженный на —1 единичный элемент SUB).
В рамках ограничений, налагаемых этим соответст-
соответствием «два на один», мы на самом деле получили значитель-
значительно больше, чем только новое представление О+C). Все
представления SUB), приведенные в табл. 16.9, можно
теперь рассматривать как представления О+C), так как
установлено соответствие между элементами групп SUB)
и О+C) *. Представления группы SUB): D1, D3, D6, . . .
* На языке математики такое соответствие называется гомо-
гомоморфизмом. Если бы оно было взаимооднозначным, то оно пред-
представляло -бы изоморфизм.
25 Дж. Мэтьюз, Р. Уокер 385
оказываются не чем иным, как представлениями группы
О+C): скаляром, вектором, симметричным тензором со
следом нуль и т. д. Другие представления называются
спинорными представлениями, а двухкомпонентный «век-
«вектор» иа часто называется спинором. Эти двузначные пред-
представления имеют одинаковый физический смысл с одно-
однозначными представлениями в квантовой механике, где
операторы вращения отождествляются с угловым мо-
моментом.
ЛИТЕРАТУРА*
1. Я н к е Е., Э м д е Ф., Л ё ш Ф. Специальные функции. Перев.
с 6-го, перераб. нем. изд. Изд. 2, стереотипное. М., «Наука»,
1968.
2. Уиттекер Э., Ватсон Дж. Курс современного ана-
анализа. Перев. с англ. Изд. 2. Ч. 1 и 2. М., Физматгиз, 1962—1963.
3. Б е й т м е н Г., Э р д е й и А. Таблицы интегральных пре-
преобразований. Перев. с англ. М., «Наука», 1969.
4. Ш и ф ф Л. Квантовая механика. Перев. с англ. М., Изд-во
иностр. лит., 1959.
5. Голдстейн А. Классическая механика. Перев. с англ.
М., Изд-во иностр. лит., 1956.
6. Фаддеева В. Н., Терентьев Н. В. Таблицы функции
г
w (z) ¦= e~zS 11 + —7= I e'8 dt) для комплексных аргументов.
\ У л J I
M., Гостехиздат, 1954.
7. Морс Ф., Фешбах Г. Методы теоретической физики.
Т. 1, 2. Перев.. с англ. М., Изд-во иностр. лит., 1958—1960.
8. Вигнер Е. Теория групп и ее приложения к квантовомеха-
нической теории атомных спектров. Перев. с англ. М., Изд-во
иностр. лит., 1961.
9. А р с е н и н В. Я. Математическая физика. Основные урав-
уравнения и специальные функции. М., «Наука», 1966.
10. А р ф к е н Г. Математические методы в физике. Перев. с англ.
М., Атомиздат, 1970.
11. Б ё й т м е н Г., Э р д е й и А. Высшие трансцендентные
функции. Функции Бесселя, функции параболического цилин-
цилиндра, ортогональные многочлены. Перев. с англ. М., «Наука»,
1966.
12. Б е й т м е н Г., Э р д е й и А. Высшие трансцендентные функ-
функции. Гипергеометрическая функция. Функции Лежандра.
Перев. с англ. М., «Наука»,-1965.
13. Б е й т м е н Г., Э р д е й и А. Высшие трансцендентные функ-
функции. Эллиптические и автоморфные функции. Функции Ламе и
Матье. Перев. с англ. М., «Наука», 1967.
14. Г р а д ш т е й н И. С, Р ы ж и к И. М. Таблицы интегралов,
сумм, рядов и произведений. Изд. 5. М., «Наука», 1971.
15. Д в а й т Г. Б. Таблицы интегралов и другие математические
формулы. Перев. с англ. Изд. 3. М., «Наука», 1969.
* Составлена переводчиком.
25* 387
16. Джеффри с Г., Свирлс Б. Методы математической
физики. Вып. 1—3. Перев.. с англ. М., «Мир», 1969.
17. К о п с о н Э. Асимптотические разложения. Перев. с англ. М.,
«Мир», 1966.
18. К у р а й т Р., Г и л ь б е р т Д. Методы математической физи-
физики. Т. .1, 2. Перев. с нем. М., Гостехиздат, 1951.
19. Лаврентьев М. А., Ш а б а т Б. В. Методы теории функ-
функций комплексного переменного. Изд. 3. М., «Наука», 1965.
20. Л и Ц з у н- д а о. Математические методы в физике. Перев.
с англ. М., «Мир», 1965.
21. С и г а л И. Математические проблемы релятивистской физи-
физики. Перев. с англ. М., «Мир», 1968.
22. Снеддон И. Преобразования Фурье. Перев. с англ. М.,
Изд-во иностр. лит., 1955.
23. Титчмарш Е. Введение в теорию пнтегралов Фурье. Перев.
с англ. М.— Л., Гостехиздат, 1948.
24. Функции математической физики. Справочное руководство.
Перев. с франц. М., Физматгиз, 1963.
25. Ш в а р ц Л. Математические методы для физических наук.
Перев. с франц. М., «Мир», 1965.
26. Э р д е й и А. Асимптотические разложения. Перев. с англ.
М., Физматгиз, 1962.
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Абелева группа 342
Абсолютный минимум 276.
Алгебра группы 343
— Ли 374
Антилинейность 127
Антисимметричная матрица 123
Антисимметричный символ
Леви-Чивита 327
Антисимметричный тензор 334
Апостериорная вероятность 302
Априорная вероятность 302
Асимптотический ряд 71
Аффинор 329
Базис векторного пространства
119
Бейеса теорема 304
Ъетп (х), Ъе\п (х) 161
Бернулли дифференциальное
уравнение 10
— числа 45
Бесконечная группа 367
Бесселя интеграл 159
— уравнение 17, 153
— — второе решение 155
Бесселя производящая функция
158
— интегральное представление
158
Бесселя функции 153
— — модифицированные 161
— — ортогональность и норми-
нормировка 156
— — рекуррентные соотноше-
соотношения 154
— — сферические 161
Биноминальное распределение
307
Биноминальный коэффициент
305
Бинормаль 330
Блоха волновые функции 174
Бора — Зоммерфельда условие
квантования 41
Борцовское приближение 251
Брахистохрона 267
Бэшфорта — Адамса — Милна
метод 291
Вариации постоянных метод 14
Вариационное исчисление 264
— — для задач на собственные
значения 275
— — для интегральных урав-
уравнений 281
—' — для изопериметрических
задач 272
Вариационная производная 266
Вейерштрасса эллиптические
функции 183
Вектор-столбец 125
Вектор-строка 127
Векторы 118
— ортонормированные 128
— собственные 129
— базисные 119
Вещественная матрица 123
Вероятностей теория 302
Винера — Хопфа метод 208, 259
ВКБ-метод 30
ВКБ-фупкции 33
Возмущений теория 237
Волновая функция в импульсном
пространстве 91
Волновое уравнение 188
Вольтерра интегральное урав-
уравнение 247
Вырожденная гипергеометриче-
гипергеометрическая функция 169
— теория возмущений 243
Вырожденное гипергеометриче-
гипергеометрическое уравнение 168
389
Вырозкденное собственное значе-
значение 130
— ядро интегрального уравне-
уравнения 248
Гамильтона вариационный прин-
принцип 266
Ганкеля функции 160
— — сферические 194
Гамма-функция 53
— асимптотическое разложение
74
Гаусса распределение 306
Гельмгольца уравнение 193
Генераторы группы 369
Гиббса явление 83
Гильберта преобразование 95,
262
Гильберта — Шмидта теория 254
Гильберта пространство 141
Гиперболические дифференци-
дифференциальные уравнения в част-
частных производных 188
Гипергеометрическая функция
163
— — интегральное представ-
представление 165
Гипергеометрический ряд 43,161
Гипергеометрическое уравнение
163
Главная нормаль 330
Томографическое преобразова-
преобразование 163
Гомоморфные группы 346
Горнера метод для корней поли-
полиномов 295
Грама — Шмидта ортогонализа-
ция 131
Грина функции 223
— — для колеблющейся мем-
мембраны 226
— — для колеблющейся стру-
струны 224
— — для обыкновенного диф-
дифференциального уравнения
223
— — для уравнения Лапласа
и волнового уравнения 231
Грегори ряд 8а, 300
Группа 342
— абелева или коммутативная
342
— бесконечная 367
— знакопеременная 355
Группа класс 345
— подгруппа 344
— порядок 342
— представление 346
— симметрическая 343
— физические применения 358
— характеры 349
Даламбера признак сходимости
42
Двоякопериодическая функция •
179
Декартовы тензоры 323
Дельта-символ Кронекера 85
Дельта-функция Дирака 87
— трехмерная 91
Диагонализация матриц 136
Диагональная матрица 123
Диада 329
Дирака дельта-функция 87
— трехмерная 91
Дирихле краевое условие 186
Дисперсионные соотношения
110, 262
— — с вычитанием 117
Дисперсия 311
Дифференциальная геометрия
Дифференциальные уравнения 8
— — ВКБ-метод для решения
30
— — в полных дифференциалах
9
¦— — в частных производных
184
— — — — методы интеграль-
интегральных преобразований 202
— — — — методы разделения
переменных 192
— — — — метод Винера —
Хопфа 208
— — изобарические 11
— — графическое решение 27
— — линейные 12
— — однородные 10
— — решения в виде степенных
рядов 18
— — численные решения 290
Диффузии уравнение 184
Дуальное пространство 127
Замкнутости свойство 221
Знакопеременная группа 355
390
Идемпотентная матрица 124
Изображений метод 208
Изоморфный — 344
Изопериметрические задачи 272
Инвариант матрицы 133
Инвариантная подгруппа 346
Интеграл вероятности ошибок 68
Интегральная показательная
функция 67
Интегральное преобразование 81
Интегральные уравнения 247
— — вариационный подход к
решению 281
— — в дисперсионной теории
262
Интегральные уравнения линей-
линейные 247 С
— — неоднородные 249
— — однородные 249
— — с вырожденным ядром 248
— — транспонированные 249.
Интегральные синус и косинус
Интервал 337
Интерполяция 282
Интегрирующий множитель 9
Квадрупольный магнит 107
Классы в группе 345
Клеро уравнение 10
Ковариантная производная 338
Ковариаитный вектор 332
Ковариантный тензор 332
Когредиентный — 126
Колебание круглой мембраны
245
Комбинации 305
Коммутативная группа 342
Коммутация операторов 120
Компоненты линейного вектора
120
Конгруэнтное преобразование
Константы структуры группы
Ли 374
Контравариантный вектор 331
— тензор 332
Контратредиентный — 126
Контурное интегрирование 58
Конформное преобразование 105
Координатные преобразования
125
— — конгруэнтные 134
— — подобие 126
Координатные преобразования
унитарные 338
Корни уравнений 293
Косинус-преобразование Фурье
89
Коши краевое условие 186
— интегральная формула 110
Коши — Римана дифференци-
дифференциальные уравнения 105
Коши теорема 105
Краевые условия для уравне-
уравнений в частных производных
185
Кривизна кривой 330
Кристоффеля символы первого
и второго рода 338
Кронекера дельта-символ 85
Кручение 330
Куммера преобразование 171
— функция 169
Лагерра полином 170
Лагранжа множитель 272
Лапласа интегральное представ-
представление для полиномов Лежан-
дра 144
— преобразование 92
Лежандра дифференциальное
уравнение 19, 143
— функции 143
Ли алгебра 374
— группа 368
Линейная векторная функция
119
— скалярная функция 126
Линейное векторное простран-
пространство 118
— интегральное уравнение 247
— дифференциальное уравне-
уравнений 12
Лиенара — Вихерта потенциал
236
Ложного положения метод 294
Матье функции 171
Матрица 128
Матрицы преобразование 125
Меллина преобразование 95
Метрика векторного простран-
пространства 127
Метрический тензор 337
Наискорейшего спуска метод 73
Наименьших квадратов метод
318
391
Невырожденная теория возму-
возмущений 237
Невырожденный оператор 121
Неголономные условия 273
Неймана ряд 250
Неймана краевое условие 186
Неоднородное интегральное
уравнение 249
Неполная гамма-функция 73
Несобственное вращение 327
Неприводимое представление
347
Неопределенных коэффициентов
метод 13
Неточное представление 347
Нормальная матрица 138
— подгруппа 346
— форма гиперболического
уравнения 188
Нормальное распределение 308
Нормальные колебания 135. 197
Обобщенная сила 335
Обратная матрица 123
Обратный оператор 121
Общий тензорный анализ 330
Обыкновенная точка дифферен-
дифференциального уравнения 18
Однородная функция 10
Однородное интегральное урав-
уравнение 247
— обыкновенное дифференци-
альпое уравнение 10
Особое решение дифференциаль-
дифференциального уранения 11
Определяющее уравнение 20
Ортогопальная матрица 123
Ортогональности теорема 348
Относительный тензор 334
Отношений закон 335
Ошибок функция 68
Параболическое уравнение в
частных производных 188
Парсеваля теорема 88
Паули спиновые матрицы 384
Перевала методы 73
Перестановки 305
Плоский источник 206
Плотности функция 220
Плотность тензора 334
Подгруппа 344
Подобия преобразование 126
392
Полиада 329
Полнота базиса собственных
функций 221
Порядок дифференциального
уравнения 8
Постоянная разделения 192
Правдоподобия функция 315
Правильная особая точка 19
Представления группы 346
Преобразование конформное 105
— рядов 46, 241
Присоединенная функция Ле- •
жандра 26, 149
Присоединенное дифференциаль-
дифференциальное уравнение Лежандра 149
Проекционный оператор 121
Производящая функция 145
— — для функций Бесселя 158
— — для полиномов Лежан-
Лежандра 145
Простейшие дроби 48
Псевдоскаляр 328
Псевдотензор 328
Пауссона распределение 308
Расходящиеся волны 196
Регулярное представление 354
Резольвенты ядро 252
Римана символ 163
Рпмановой кривизны тензор 340
Родрига формула 144
Рупге— Кутта метод 291
Рэлея — Ритца вариационный
принцип 278
Свертки теорема 98
Связп формулы в ВКБ-методе 32
Седловой точки методы 73
Секулярное уравнение 129
Симметрическая группа 343
Симметричная матрица 123
Симметричное ядро 254
Симметричный тензор 334
Симпсона правило 286
Синус-преобразование Фурье 89
Скалярное произведение 127
Сложепия теорема для сфериче-
сферических гармоник 150
Смежный класс группы 344
Смещения ядро 259
Собственное вращение 327
Собственные векторы 129
— — матрицы 216
Собственные векторы свойства
ортогональности 217
Собственные значения 28, 129
— — вырождепные 130
— — интегрального уравне-
уравнения 248
— — эрмитовой матрицы 130
Собственные функции 216
Соприкасающиеся параметры 14
Сопряженная линейность 127
Сопряженное представление
группы SUC) 380
Специальные функции 143
Спиновые матрицы Паули 384
Спинорное представление 386
Среднее значение 310
Стандартное отклоните 310
Стационарной фазы метод 80
Стирлинга формула 74
Стокса области 37
— явление 36
Суммирование рядов 297
Субматрица 124
Существенно особая точка 19
Сферические гармоники 150
Сходимости признаки 42
Таблица группы 344
Тензор 326
— декартов 323
— антисимметричный 334
— метрический 337
— относительный 334
— римановой кривизны 340
Тензорный анализ 323
Теплопроводность в кубе 199
— в бесконечной среде 205
— в полубесконечной среде 207
— в слое 201
Точечный источник 206
Точечное представление 346
Транспонировавная матрица 123
Транспонированное интеграль-
интегральное уравнение 249
Трапеций правило 286
Триада 329
Уиттекера функция 171
Унитарная матрица 123
Унитарное представление 348
Условная вероятность 303
Флоке теорема 172
Фредгольыа интегральные урав-
уравнения 247
— решение 253
— теоремы 249
Френе формулы 330
Френеля интегралы 68
Фундаментальное решение 229,
232
Фундаментальный тензор 336
Функционал 264
Функциональная производная
266
Фурье—Бесселя преобразование
95
Фурье-преобразование 86
— в трех измерениях 91
Фурье-ряд 81 '
— в комплексной форме 85
Характеристики уравнения в
частных производных 187
Характеристическая функция
распределения 311
Характеры группы 349
Хевисайда ступенчатая функ-
функция 93
Хн-квадрат распределение 321
Хплла уравнение 174
Центральная предельная тео-
теорема 313
Цепная дробь 176
Циклоида 268
Частный интеграл 12
Численное дифференцирование
285
— решение дифференциальных
уравнений 290
Численные методы 282
Шварца принцип симметрии 113
Шлефли интегральное представ-
представление для полиномов Лежан-
дра 144
— интегральное представление
для функций Бесссля 158
Штурма—Лиувилля дифферен-
дифференциальное уравнение 219, 275
Шура лемма 348
393
Эйлера—Маклорена формула 298
Эйлера—Лагранжа уравнение
264
Эйлера преобразование 50, 301
— углы 324
Эйри интеграл 102
Эквивалентность представле-
представлений групп 347
Элементы матрицы 122
Эллиптические интегралы 69
— уравнения в частных произ-
производных 186
¦— функции Вейерштрасса 183
Эллиптические функции Якоби
177
Эрмита дифференциальное урав-
уравнение 24
— полиномы 24
Эрмитов линейный оператор 218
Эрмитово сопряженная матри-
матрица 123
— ядро 254
Якоби полиномы 167
— эллиптические функции 177
ОГЛАВЛЕНИЕ
Предисловие к переводу 5
Предисловие 6
Глава 1. Обыкновенные дифференциальные
уравнения- 8
1.1. Решение в замкнутой форме 8
1.2. Решения в виде степенных рядов . . . : 18
1.3. Приближенные методы 26
1.4. Метод ВКБ 30
Глава 2. Бесконечные ряды 42
2.1. Признаки сходимости . . . ^ 42
2.2. Общеизвестные ряды 44
2.3. Преобразование рядов 46
Глава 3. Вычисление интегралов 52
3.1. Элементарные методы 52
3.2. Вычисление интегралов с учетом симметрии * 55
3.3. Интегрирование по контуру 58
3.4. Табулированные интегралы 65
3.5. Приближенные разложения - . . 70
3.6. Методы седловой точки ' . . . . 73
Глава 4. Интегральные преобразования . . 81
4.1. Ряды Фурье 81
4.2. Преобразования Фурье : 86
4.3. Преобразования Лапласа 92
4.4. Другие пары преобразований 95
4.5. Применения интегральных преобразований 95
Глава 5. Дальнейшие применения комплекс-
комплексных переменных ? . 105
5.1. Конформные преобразования ...... 105
5.2. Дисперсионные соотношения 110
395
Глава 6. Векторы и матрицы 118
6.1. Линейные векторные пространства .... 118
6.2. Линейные операторы ... 11'9
6.3. Матрицы 122
6.4. Преобразования координат ....... 125
6.5. Задачи па собственные значения 128
6.6. Диагонализация матриц 136
6.7. Пространства бесконечной размерности . . 139
Глава 7. Специальные функции . 143
7.1. Функции Лежандра 143
7.2. Функции Бесселя 153
7.3. Гипергеометрическая функция 161
7.4. Вырожденные гипергеометрические функции 168
7.5. Функции Матье 172
7.6. Эллиптические функции 177
Глава 8. Дифференциальные уравнения в ча-
частных производных 184
8.1. Примеры 184
8.2. Общее рассмотрение 185
8.3. Разделение переменных 192
8.4. Методы интегральных преобразований . . 202
8.5. Метод Винера — Хопфа 208
Глава 9. Собственные функции, собственные
значения и функции Грина .... .216
9.1. Простые прпмеры задач на собственные зна-
значения 216
9.2. Общее рассмотрение 218
9.3. Решение краевых задач методом разложе-
разложения по собственным функциям 221
9.4. Неоднородные задачи. Функции Грина . . 222
9.5. Функции Грина в электродинамике . . . 232
Глава 10. Теория возмущений . 237
10.1. Обычная невырожденная теория .... 237
10.2. Преобразование рядов 241
10.3. Теория возмущений с вырождением . . . 243
Глава 11. Интегральные уравнения . 247
11.1. Классификация , . 247
11.2. Вырожденные ядра . 248
11.3. Ряды Неймана и Фредгольма 250
11.4. Теория Гильберта — Шмидта 254
11.5. Метод Винера — Хопфа и интегральные
уравнения 259
11.6. Интегральные уравнения в дисперсионной
теории '. 262
396
Глава 12. Вариационное исчисление ... 264
12.1. Уравнение Эйлера — Лагранжа .... 264
12.2. Обобщение основной задачи 268
12.3. Решение задач на собственные значения
с помощью вариационного исчисления . . 275
Глава 13. Численные методы 282
13.1. Интерполяция . ." 282
13.2. Численное интегрирование ...:.. 286
13.3. Численное решение дифференциальных
уравнений " 290
13.4. Корни уравнений 293
13.5. Суммирование рядов 297
Глава 14. Вероятность и статистика . . 302
14.1. Введение 302
14.2. Основные законы теории-вероятностей . . 302
14.3. Комбинации и перестановки 305
14.4 Биноминальное распределение, распреде-
распределения Пуассона и Гаусса 306
14.5. Общие свойства распределений 310
14.6. Обработка экспериментальных данных . . 314
Глава 15. Тензорный анализ и дифференци-
дифференциальная геометрия 323
15.1. Декартовы тензоры в трехмерном про-
пространстве 323
15.2. Кривые в трехмерном пространстве. Фор-
Формулы Френе 329
15.3. Общий тензорный анализ '. . 330
Глава 16. Введение в группы и представле-
представления групп 342
16.1. Определения 342
16.2. Подгруппы и классы ...:...... 344
16.3. Представления групп 346
16.4. Характеры 349
16.5. Физические применения 358
16.6. Бесконечные группы 367
16.7. Неприводимые представления SU B),
S?/C) и О+C) 376
Литература 387
Предметный указатель 389