/



































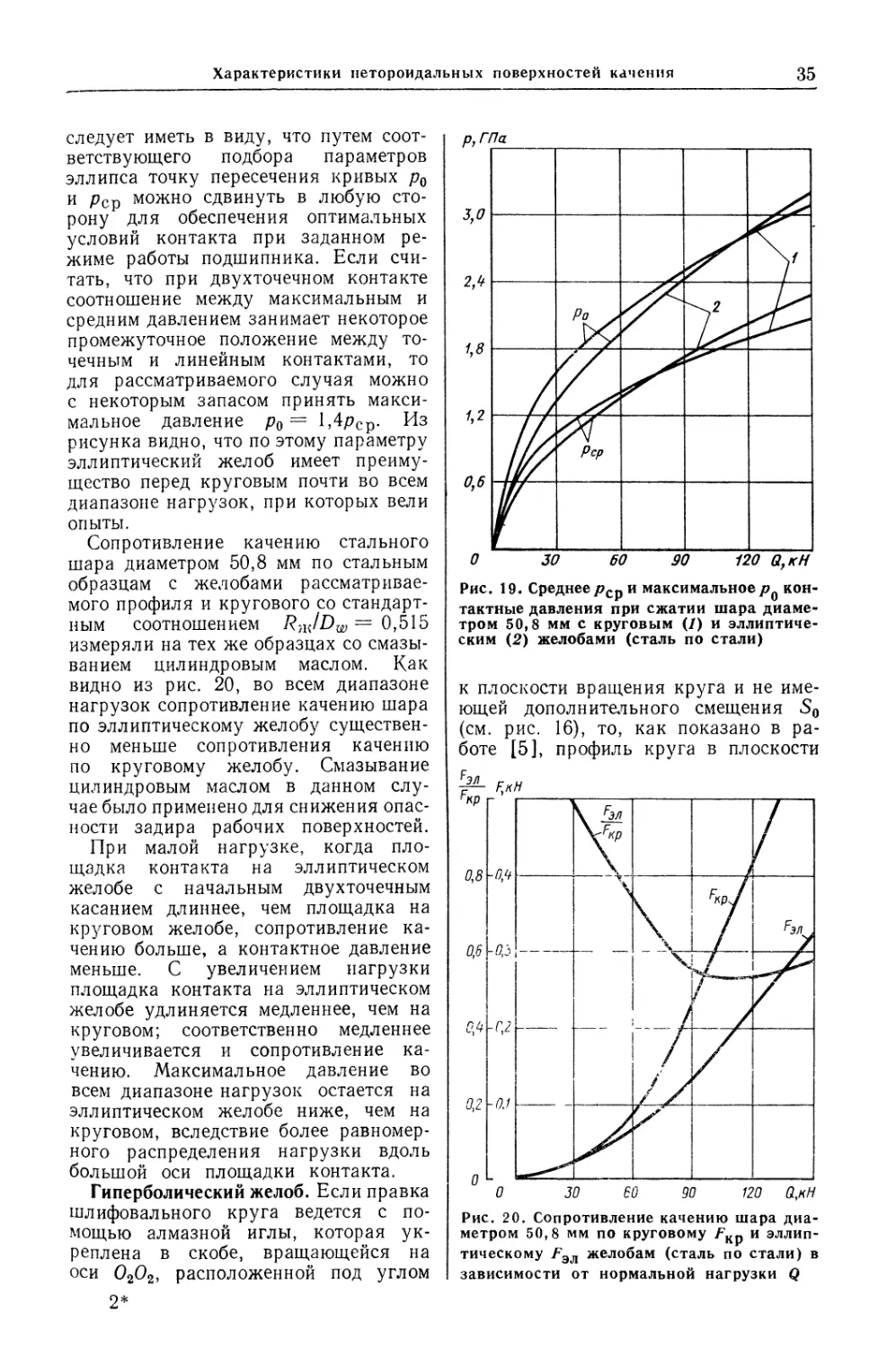





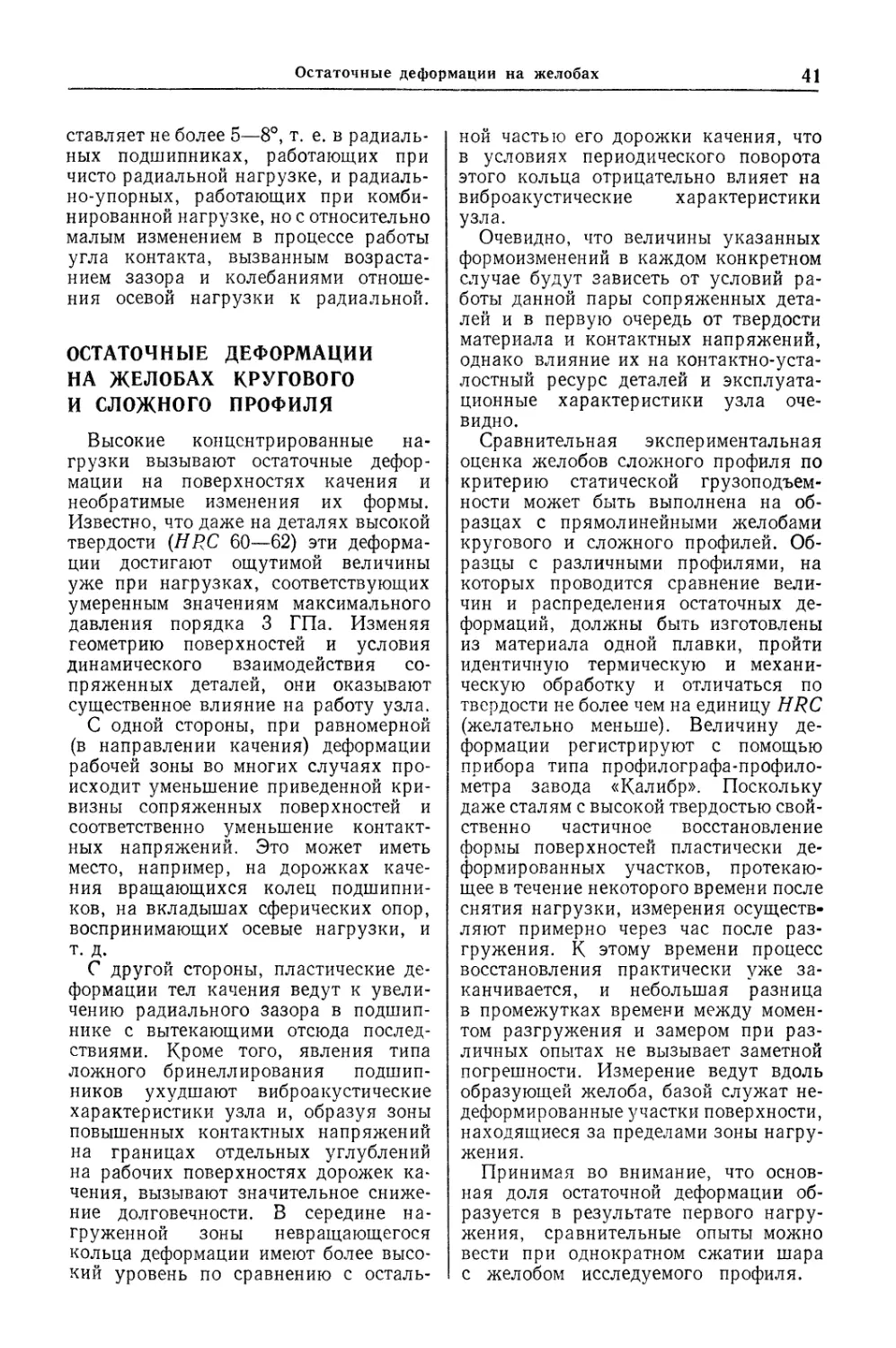















































































































































































Text
ПРЕЦИЗИОННЫЕ ОПОРЫ
СВЛинешн
А.В.Орлов
Ю. Б. Табачников
ПРЕЦИЗИОННЫЕ
ОПОРЫ КАЧЕНИЯ
И ОПОРЫ С ГАЗОВОЙ
СМАЗКОЙ
основы
ПРОЕКТИРОВАНИЯ
МАШИН
РЕДАКЦИОННЫЙ СОВЕТ:
Председатель - К. В. Фролов
(главный редактор издания)
Члены. Е А. Башинджагян,
В. В. Бойцов, В. С. Васильев,
Р. Ф. Ганиев, И. А. Глебов,
А. П. Гусенков, Ф. М. Диментберг,
Ю. Н. Дроздов, И. Н. Жесткова,
В. П. Когаев, К. С. Колесников,
Г. В. Крейнин, И. П. Ксеневич,
Н. Д. Кузнецов, Е. С. Матвеев,
Г. А. Николаев, Г. В. Новожилов,
И. Ф. Образцов, Г. С. Писаренко,
Ю. Н. Работнов, Г. П. Свищев,
А. А. Туполев, М. К. Усков,
А. И. Целиков (зам. председателя),
Е. И. Шемякин
СВ.Пинегин
А. В. Орлов
Ю. Б. Табачников
ПРЕЦИЗИОННЫЕ
ОПОРЫ КАЧЕНИЯ
И ОПОРЫ С ГАЗОВОЙ
СМАЗКОЙ
СПРАВОЧНИК
МОСКВА « МАШИНОСТРОЕНИЕ » 1984
ББК 34.445
П32
УДК 621.822.6—187.4 (035)
621.822.57
Рецензент М. П. Ковалев
Пинегин С. В. и др.
П32 Прецизионные опоры качения и опоры с газовой смаз-
кой: Справочник/С. В. Пинегин, А. В. Орлов, Ю. Б. Табач-
ников. — Машиностроение, 1984. — 216 с., ил. — (Основы
проектирования машин).
В пер.: 1 р. 30 к.
Рассмотрены особенности конструирования, технологии изготовления и
эксплуатации прецизионных опор качения и опор с газовой смазкой в узлах ма-
шин и приборов. Описаны технологические приемы и оснастка для обеспечения
необходимой точности элементов модернизированных шарикоподшипников. Даны
рекомендации по выбору и расчету прецизионных опор и опор с газовой смазкой.
Для инженерно-технических работников, занимающихся проектированием,
исследованием и эксплуатацией машин и приборов.
2702000000-118
П 038 (01)-84
118 84
ББК 34.445
6П5.3
© Издательство «Машиностроение», 1984 г.
ОГЛАВЛЕНИЕ
Предисловие ................... 7
Глава 1. Условия выбора типа
опоры.......................... 8
Сравнительные характери-
стики опор качения и газовых
опор........................ 8
Возможные варианты совме-
щения подшипников и усло-
вия, определяющие целесооб-
разность их применения 13
Список литературы .... 16
Глава 2. Расчет и конструиро-
вание прецизионных
шариковых опор с мо-
дифицированной фор-
мой рабочих поверхно-
стей ................. 18
Возможности повышения
качества подшипников ... 18
Основные принципы совер-
шенствования форм поверх-
ностей качения............. 25
Геометрия и оснрвные харак-
теристики нетороидальных
поверхностей качения ... 27
Сложный профиль поверх-
ности качения.............. 37
Остаточные деформации на
желобах кругового и слож-
ного профиля .............. 41
Расчет давлений на негер-
цевских площадках кон-
такта ..................... 42
Прогнозирование энергети-
ческих потерь при качении
тел со сложным профилем 54
Области и условия примене-
ния опор с поверхностями
качения некругового про-
филя ...................... 59
Примеры использования
приведенных рекомендаций 61
Радиально-упорные шари-
коподшипники с желобами
сложного профиля .... 67
Список литературы .... 69
Глава 3. Технологическое обес-
печение подшипников
с модифицированными
профилями рабочих по-
верхностей ................... 71
Метод обработки............ 71
Конструкция механизма
правки круга .............. 73
Контроль желобов некруго-
вого профиля *............. 77
Глава 4. Опоры с газовой смаз-
кой .......................... 79
Уравнения движения газа
в смазочных зазорах подшип-
ников скольжения .... 79
Уравнения динамики вала 83
Составляющие главного век-
тора и главного момента реак-
ции смазочного слоя ... 85
Глава 5. Газостатические опоры 87
Классификация опор ... 87
Характеристики ограничи-
телей расхода.............. 90
Методы постановки задач
определения поля давления
в зазоре газостатических
опор....................... 96
Глава 6. Статические характе-
ристики газостатиче-
ских опор ................... 112
Кольцевой подпятник и его
аналог — прямолинейная
модель.................... 112
Радиальный подшипник . . 117
Поправочные коэффициен-
ты, учитывающие дискрет-
ность наддува............. 122
Глава 7. Динамические харак-
теристики газостати-
ческих опор .... 131
Вопросы исследования ус-
тойчивости равновесия га-
зовых опор ............... 131
Упрощенный анализ динами-
ОГЛАВЛЕНИЕ
ческой устойчивости газо-
статических опор (квази-
стационарный метод) . . 132
Анализ динамических ха-
рактеристик газостатиче-
ских опор при произволь-
ных значениях параметра
сдавливания (метод возму-
щений) ................... 137
Унифицированная расчет-
ная схема................. 142
Результаты расчета динами-
ческих характеристик газо-
статических опор с различ-
ными ограничителями рас-
хода ..................... 157
Глава 8. Вопросы практическо-
го расчета газостати-
ческих опор .... 162
Односторонний подпятник 162
Двусторонний подпятник 169
Расчет многоопорных систем 176
Список литературы .... 190
Приложение 1 к гл. 6 . . 193
Приложение 2 к гл. 7 . . 198
Предметный указатель . . . 211
ПРЕДИСЛОВИЕ
Возрастание скоростей и энергона-
пряженности современных машин и
приборов с одновременным ужесточе-
нием требований к ним по надежности,
габаритным размерам и массе вызы-
вают необходимость совершенствова-
ния подшипников качения и в первую
очередь за счет совершенствования
форм поверхностей качения. Оказы-
вается, придание этим поверхностям
специальной формы, по сравнению
с общепринятой тороидальной, обе-
спечивает более рациональное рас-
пределение давления по пятну кон-
такта и снижает максимум напряже-
ний. Это, в свою очередь, повышает
статическую и динамическую грузо-
подъемность подшипников, уменьшает
энергетические потери в них, либо
позволяет получать оптимальные для
заданных условий работы соотношения
этих характеристик. Сравнительные
испытания показали, что таким об-
разом можно в 1,6—1,8 раза повы-
сить долговечность подшипников ка-
чения, а возможность установки под-
шипников меньших размеров при сох-
ранении расчетных нагрузок может
обеспечить существенное снижение ме-
таллоемкости узла трения.
Опоры другого типа — подшипники
с газовой смазкой — сравнительно
недавно вышли из стадии лаборатор-
ных исследований Однако уже се-
годня можно привести сотни примеров
успешного испытания их в промыш-
ленности. Гироскопы, турбодетандеры,
турбокомпрессоры, шпиндельные узлы
металлорежущ ьх станков, различное
медицинское оборудование, испыта-
тельные стенды, видеомагнитофоны,
вычислительные машины — вот не
полный перечень механизмов, в кото-
рых использование подшипников с га-
зовой смазкой позволило поднять их
технико-экономические показатели
на качественно новый уровень.
Успешное внедрение опор с газовой
смазкой в различных отраслях про-
мышленности объясняется прежде все-
го свойствами газового смазочного
материала, выгодно отличающими его
от жидкостного. Минимальные поiери
на трение, а следовательно, и незна-
чительное тепловыделение, являющие-
ся следствием малой вязкости газов,
позволяют достигать очень больших
частот вращения, а также ввиду от-
сутствия скачков сил трения при от-
носительном перемещении узлов, раз-
деленных смазочным газовым слоем,
становится возможным осуществлять
также перемещения с минимальной
скоростью скольжения. Подшипники
с газовой смазкой, не теряя своих
эксплуатационных качеств, могут рабо-
тать в широком диапазоне температур
и давления (вязкость газов практи-
чески не зависит от температуры и
давления), а также в зоне повышенной
радиации (газы не подвержены фазо-
вым изменениям).
Кроме того, у правильно рассчитан-
ных и с необходимой точностью изго-
товленных узлов на опорах с газовой
смазкой изнашивание рабочих по-
верхностей практически отсутствует.
Газ, выходящий под повышенным дав-
лением из зазоров опор, не загрязняет
окружающую среду и предохраняет
рабочие поверхности от попадания на
них через смазочный зазор пыли, ма-
сла и т. п. По этой же причине опоры
с газовой смазкой не требуют приме-
нения уплотнений и сборников, что
упрощает их конструкцию Наконец,
для смазывания опор некоторого клас-
са машин, например, турбокомпрессо-
ров, может быть использована лю-
бая газовая среда, воздух, водяной
пар, гелий и др , т. е. та же среда,
в которой работают эти машины.
В справочнике первая часть посвя-
щена методам расчета подшипников
качения с оптимизированными профи-
лями дорожек качения. Во второй ча-
сти изложена методика расчета стати-
ческих и динамических характеристик
газостатических опор с различными
системами наддува газа в зазор. При-
веденный материал позволит инжене-
рам-разработчикам рассчитывать ос-
новные эксплуатационные характери-
стики указанных типов опор практи-
чески без использования дополнитель-
I ной литературы.
Глава
УСЛОВИЯ ВЫБОРА
ТИПА ОПОРЫ
СРАВНИТЕЛЬНЫЕ
ХАРАКТЕРИСТИКИ ОПОР
КАЧЕНИЯ И ГАЗОВЫХ ОПОР
За последнее время широкое раз-
витие получили газовые подшипники,
которые в силу своих свойств зани-
мают среди опор особое место. Газо-
вые подшипники обеспечивают успе-
шное решение сложных технических
задач, вместе с тем они имеют также
и вполне определенные специфические
недостатки, которые ограничивают
возможности автономного их приме-
нения. В этом отношении весьма пер-
спективным представляется исполь-
зование так называемых совмещенных
опор, представляющих собой комби-
нацию в одном узле газового подшип-
ника с подшипником качения. Такая
комбинация может дать положитель-
ные результаты лишь в случае пра-
вильного учета особенностей совмеща-
емых подшипников и конкретных тре-
бований к проектируемому узлу.
Исследовательские работы в этом
направлении только начинаются.
Они имеют большое практическое зна-
чение, поскольку удачное сочетание
положительных свойств газовых под-
шипников и подшипников качения мо-
жет существенно повысить надежность
и быстроходность опоры.
Потери на трение. Одним из основ-
ных требований к подшипникам яв-
ляется минимальный момент трения.
В этом отношении газовые опоры имеют
несомненное преимущество перед опо-
рами качения. В процессе работы ша-
рикового или роликового подшипни-
ка происходит сложное относительное
движение отдельных его элементов,
в зонах контакта которых имеют место
потери энергии, с которыми суммиру-
ются потери на трение в смазочном
материале и деталей подшипника в ок-
ружающей среде. В результате при-
веденный коэффициент трения /а, под
которым понимают отношение момента
трения подшипника к произведению
приложенной к нему нагрузки и ради-
уса его посадочного отверстия, дости-
гает сравнительно большой величины:
от 0,002 — для однорядных шарико-
вых подшипников, работающих под
радиальной нагрузкой, до 0,01 —
для игольчатых и конических ролико-
вых подшипников [2]. Потерянная
в подшипнике энергия уходит на ин-
тенсивное циклическое передеформи-
рование материала поверхностных сло-
ев, его изнашивание, накопление в нем
усталостных повреждений и нагрев
рабочих элементов, т. е. на разрушение
подшипника, такой уровень потерь
в ряде случаев оказывается недопу-
стимо высоким.
Потери в газовых подшипниках воз-
никают лишь за счет трения внутри
слоя газообразного смазочного матери-
ала. Вследствие малой вязкости газа
эти потери крайне малы. Момент
трения концентрического радиального
подшипника определяют по формуле
М,р = (2Л|Л/?3Е(О)/С, (1)
где р, — динамическая вязкость сма-
зочного материала; R — радиус под-
шипника; L —длина подшипника;
С — средний радиальный зазор;
со — угловая скорость.
По этой формуле можно с достаточ-
ной степенью точности определить и
момент трения концентрического ра-
диального подшипника с внешним
наддувом. С увеличением относитель-
ного эксцентриситета в потери в под-
шипнике возрастают, но это прираще-
ние весьма мало, и при значениях 8
0,5 им можно пренебречь [4].
Момент трения в симметрично на-
груженных упорных подшипниках
с гладкими поверхностями определяют
по формуле [4]
Л1Тр = тТ0о-г0- (2)
где г0 — внешний радиус подшипника;
г; — внутренний радиус подшипника;
Сравнительные характеристики опор качения и газовых опор
9
h — зазор между поверхностями;
со — угловая скорость.
В последнее время проводятся ис-
следования, в которых при расчете
момента трения газостатического под-
шипника учитываются потери энергии
на изменение кинетической энергии
массы газа, поступающего через жик-
леры в зазор между валом и втулкой
подшипника. Авторами принято, что
в момент входа в зазор кинетическая
энергия вращательного движения сма-
зочного материала (газа) равна нулю
[6]. Выходя из зазора по торцам под-
шипника, эта масса газа имеет уже не-
которую среднюю тангенциальную ско-
рость. Следовательно, в процессе про-
хождения через зазор она приобретает
некоторую дополнительную энергию.
При ламинарном режиме среднемассо-
вая тангенциальная скорость газа,
уходящего из подшипника, равна со/?/2.
Отсюда, каждая единица массы газа
получает приращение момента со7?2/2,
причем оно происходит в непосред-
ственной близости к выходным отвер-
стиям инжекторов и обусловлено вяз-
костью смазочного материала. Момент,
который необходимо приложить к валу,
чтобы сообщить смазочному матери-
алу указанное приращение углового
момента:
ЛГ = ,
где т — массовая скорость течения
смазочного материала. Таким образом,
общий момент трения на валу газового
подшипника
м'гр = мтр + м' =
2я/?3Лр,со ( тсоТ?2
= С 1 2 ’
При оптимальной величине радиаль-
ного зазора, обеспечивающей мини-
мальный момент трения, М' ~ Л4тр/3.
Эксперименты по исследованию момен-
та трения газостатического подшипника
методом выбега подтвердили резуль-
таты теоретических исследований.
В качестве примера найдем момент
трения подшипника, имеющего сле-
дующие параметры: 7? = 25,4 мм;
L = 66 мм; С = 45,2 мкм. Принимаем
п = 36 000 об/мин. и, воспользовав-
шись^ формулой (1), найдем момент
трения применительно к случаю ра-
боты подшипника в воздушной среде.
Известно, что
(О = 2^- « 3600 с-1
60
Н-с
и 17,5-10"6.
м2
Тогда
6,28-25,43-10"9-66-10~3 X
X ...м3'м,Н,с. = 95-ю-4 Н-м.
м2-с-м
В соответствии с приведенными вы-
ше данными примем, что общий мини-
мальный момент трения
, 4
/Итр =Л4тр = 127-10"4 Н-м.
Для сравнения потерь на трение в га-
зовом и шариковом подшипниках оп-
ределим момент трения шарикового
подшипника, равноценного по несущей
способности рассмотренному. Несущая
способность газостатического под-
шипника
Р = x\pLd,
где р — разность между давлением
наддува и давлением окружающей
среды; т] — коэффициент нагрузки;
d — диаметр шипа. При оптимальном
эксцентриситете 8 — 0,44-0,6 прини-
маем т] = 0,2. При р — 0,5 МПа не-
сущая способность рассмотренного га-
зового подшипника Р = 370 Н. Для
шарикового подшипника типоразмера
6000019Е предельная частота враще-
ния 40 000 об/мин, диаметр отверстия
d = 9 мм.
Момент трения шарикоподшипника
хР=лд4-
Для радиальных шариковых подшип-
ников приведенный коэффициент тре-
ния принимают равным 0,002. Следо-
вательно, для выбранного подшипника
типоразмера 6000019Е Л4тр=0,002х
X370-4,5-10"3 = 33-10"4 Н-м, т. е.
в 3,8 раза меньше, чем в газостатиче-
ском с той же несущей способностью,
10
УСЛОВИЯ ВЫБОРА ТИПА ОПОРЫ
Согласно экспериментальным дан-
ным [5] момент трения подшипника
типоразмера А36205 (наружный диа-
метр Z)H = 52 мм, ширина В — 15 мм)
при радиальной нагрузке 200 Н, осе-
вой 40 Н и частоте вращения
36 000 об/мин составляет 75-10"3 Н-м,
т. е. в 6 раз больше момента трения
газостатического подшипника при-
мерно того же диаметра. При этом не-
обходимо иметь в виду, что несущая
способность (или динамическая грузо-
подъемность) подшипника типоразмера
А36205 равна 13,1 кН вместо 0,37 кН
для газового подшипника.
Предельная быстроходность. Бы-
строходность подшипников качения
принято оценивать произведением ча-
стоты вращения вращающегося кольца
на диаметр отверстия подшипника (j)
либо на средний (т. е. по центрам тел
качения) диаметр подшипника (dcp).
Различают кратковременную предель-
ную быстроходность, соответствующую
времени работы подшипника от десят-
ков минут до нескольких часов, и
ресурсную быстроходность, при ко-
торой подшипник может работать в те-
чение длительного времени, обес-
печивая необходимый ресурс работы
узла. Предельно достигнутое кратко-
временное значение скоростного па-
раметра dn ~ 2-Ю6 мм-об/мин при
смазывании масляным туманом и
dn = 2,7-106 мм-об/мин при смазы-
вании под давлением со свободным
сбросом масла [5] Значения скорост-
ного параметра с обеспечением ре-
сурса в сотнях часов составляют соот-
ветственно 1,2-106 и 2,2• 106 мм-об/мин.
Наибольшая частота вращения в под-
шипниках с коротким ресурсом ра-
боты равна 250 000 об/мин.
Предельная быстроходность подшип-
ников качения ограничивается сле-
дующими основными факторами:
1) нагревом рабочих элементов под-
шипника, приводящим к изменению
величины зазора, внутренней геометрии
подшипника и механических свойств
материала;
2) действием центробежных сил,
пропорциональных квадрату окруж-
ной скорости комплекта тел качения;
вызываемое ими увеличение нагрузки
на наружном кольце приводит к сни-
жению долговечности и, кроме того,
при вращающемся вале создает опас-
ность «юза» па внутреннем кольце,
3) вибрацией, которая определяется
несовершенством форм рабочих по-
верхностей, а также условиями входа
тел качения в рабочую зону и выхода
из нее.
Быстроходность газовых подшип-
ников принято определять окружной
скоростью шейки вала. Считается,
что максимальные окружные скорости
утах в современных газовых подшипни-
ках составляют 300—350 м/с. Для
разработанных экспериментальным на-
учно-исследовательским институтом
металлорежущих станков (ЭНИМСом)
пневмошпинделей ип1ах = 1504-190 м/с
при частоте их вращения до
300 000 об/мин. В головке бормашины
с воздушными радиальными подшип-
никами и воздушной турбиной была
получена частота вращения до
650 000 об/мин [4]. Основной причи-
ной, ограничивающей быстроходность
ротора на газовых подшипниках, яв-
ляется динамическая неустойчивость,
возникающая при появлении полу-
скоростного либо синхронного вихря.
Несущая способность. В отноше-
нии несущей способности газовые под-
шипники существенно уступают под-
шипникам качения. Как было отмечено
выше, динамическая грузоподъемность,
например, шарикоподшипника типо-
размера А36205 составляет 13,1 кН,
в то время как для газостатического
подшипника приблизительно с тем же
наружным диаметром при давлении
наддува 0,6 МПа она равна 0,37 кН.
Несущая способность газодинамиче-
ского подшипника, если принять его
удельную нагрузку равной 0,05 МПа,
будет вдвое меньше несущей способ-
ности газостатического подшип-
ника.
Долговечность. В процессе работы
отдельные детали подшипника каче-
ния совершают сложное движение по
отношению друг к другу. В зонах кон-
такта при взаимодействии деталей как
в поверхностных, так и во внутренних
слоях материала происходят опреде-
ленные качественные изменения, ко-
торые при соответствующих условиях
приводят к изнашиванию, выкрашива-
нию или даже объемному разрушению
деталей подшипника.
Сравнительные характеристики опор качения и газовых опор
11
Газовые подшипники в этом отно-
шении имеют несомненные преимуще-
ства. Во-первых, по принципу работы
они являются менее нагруженными
по сравнению с подшипниками каче-
ния. Во-вторых, в них отсутствует
касание рабочих поверхностей, кото-
рые разделены воздушной прослойкой
с очень малой вязкостью, что теорети-
чески исключает возможность изнаши-
вания. Практически же касание шипа
с подшипником при скорости, не рав-
ной нулю, имеет место в периоды пуска
и остановки газодинамического под-
шипника (а также и газостатического,
если наддув осуществляется от насоса
с приводом от вала, опирающегося на
этот подшипник) и в случае колебаний
либо мгновенных перегрузок. Правиль-
но спроектированный газовый под-
шипник при правильной эксплуатации
способен работать практически в безыз-
носном режиме, чего нельзя сказать
об опорах качения применительно
к большинству случаев их использо-
вания.
Жесткость. Жесткость газовых под-
шипников гораздо выше жесткости
подшипников качения, хотя в первом
случае несущим элементом является
газ, а во втором — детали, выполнен-
ные из материалов с большим модулем
упругости. Объясняется это огром-
ной разницей в площадях, передаю-
щих нагрузку от вала к корпусу
опоры. Если в газовом подшипнике
суммарная площадь контакта исчи-
сляется десятками и даже сотнями
квадратных сантиметров, то в под-
шипнике качения она часто составляет
десятые доли квадратного миллиметра,
что и обусловливает большую его
упругую податливость.
Жесткость опоры в зависимости от
условий работы узла и предъявляемых
к нему требований может играть как
положительную, так и отрицатель-
ную роль. Так, в зубчатых передачах
упругая податливость валов и опор
способствует снижению динамических
нагрузок, но при несимметричном рас-
положении колес она вызывает нерав-
номерность распределения нагрузки
вдоль зуба и снижение долговечности
передачи. В передачах Новикова уп-
ругие деформации опор приводят, кро-
ме того, к ухудшению виброакусти-
ческих характеристик узла. Исполь-
зование в шлифовальных шпинделях
газовых подшипников, более жестких
по сравнению с шариковыми, вызывает
ускоренное засаливание круга.
Шумность. В этом отношении га-
зовые подшипники обладают оче-
видными преимуществами. Подшипник
качения в процессе работы неизбе-
жно возбуждает колебания широкого
спектра. Причиной этого являются
отклонения форм поверхностей доро-
жек качения и тел качения, раз-
мерность тел качения, непостоянство
контактной жесткости. Увеличение
точности обработки может лишь ча-
стично снизить виброактивность под-
шипника качения, в то время как
газовый подшипник в устойчивом ре-
жиме работает практически бесшумно.
Устойчивость. Устойчивость яв-
ляется одним из наиболее «слабых
мест» газовых подшипников. При до-
стижении валом так называемой кри-
тической угловой скорости о)к (или
при подходе к ней) наступает явле-
ние полускоростного вихря, т. е. вих-
ревого движения оси шипа с угловой
скоростью, равной или близкой поло-
вине критической угловой скорости
вала. В настоящее время разработаны
методы подавления полускоростного
вихря, в ряде случаев находящие ус-
пешное применение. Второй возмож-
ной причиной потери газовыми под-
шипниками устойчивости является
синхронный вихрь, вызываемый дис-
балансом ротора. Последнее приводит
к нарушению нормальной работы и
опор качения, но в меньшей степени.
Работоспособность в особых услови-
ях. Диапазон условий работы опор
осей и валов современных машин и
приборов чрезвычайно широк. Так,
одни из них испытывают малую на-
грузку, которая определяется лишь
собственной силой тяжести ротора;
другие в процессе работы испытывают
значительные перегрузки, постоянные
или кратковременные, под влиянием
которых даже закаленные до высокой
твердости подшипниковые стали дефор-
мируются пластически. Применение
газовых подшипников при больших
перегрузках нецелесообразно вслед-
ствие их относительно низкой несущей
способности.
12
УСЛОВИЯ ВЫБОРА ТИПА ОПОРЫ
Снижение работоспособности под-
шипников качения при высоких тем-
пературах связано с двумя обстоятель-
ствами: изменением механических ха-
рактеристик материала деталей под-
шипника и нарушением исходной вну-
тренней геометрии подшипника вслед-
ствие температурных деформаций. Вли-
яние этих факторов может быть в не-
которой степени ослаблено соответ-
ствующим подбором материалов с боль-
шей термостойкостью и меньшим коэф-
фициентом теплового расширения.
Проблема сохранения работоспособ-
ности газовых подшипников при вы-
соких температурах является менее
сложной, так как детали этих под-
шипников могут быть изготовлены из
незакаленных материалов и, следова-
тельно, менее подвержены тепловым
воздействиям. Большое значение имеет
внутренняя геометрия подшипника,
поскольку температурные деформации
шипа, втулки и корпуса могут пов-
лечь существенные изменения размеров
и формы последних и вызвать снижение
работоспособности. Тем не менее для
условий относительно невысокой нагру-
женности, в случае работы при вы-
соких температурах, газовые подшип-
ники являются более перспектив-
ными.
В большинстве случаев газовые под-
шипники конструируют таким образом,
что они воспринимают лишь какую-то
вполне определенную нагрузку —
осевую либо радиальную. Объясня-
ется это необходимостью точного вза-
имного расположения рабочих поверх-
ностей. Конические газовые подшип-
ники способны нести комбинирован-
ную нагрузку, но их изготовление
сопряжено со значительными - техно-
логическими трудностями. Конструк-
ция узла усложняется, если вал, не-
сущий радиальную нагрузку, воспри-
нимает знакопеременную осевую на-
грузку. В этом случае узел должен
содержать три отдельных газовых под-
шипника (радиальный и два упорных)
либо два конических. По возможности
следует использовать подшипник ка-
чения, поскольку один радиальный
подшипник (или при больших осе-
вых нагрузках — два радиально-упор-
ных) может воспринимать радиальную
и знакопеременную осевую нагрузки.
Узел в целом получается проще,
дешевле и компактнее.
В процессе работы подшипников
качения чаще всего имеют место сле-
дующие виды повреждений его деталей:
износ рабочих поверхностей, выкра-
шивание, «ложное бринеллирование».
Гораздо реже, преимущественно в вы-
сокоскоростных подшипниках, про-
исходит разрушение сепаратора. По
мере изнашивания в подшипнике уве-
личиваются зазоры, растет неравно-
мерность распределения нагрузки по
телам качения, ухудшаются вибро-
акустические характеристики. Оста-
точные деформации возникают в слу-
чае чрезмерного нагружения опоры,
когда максимальное контактное дав-
ление превышает некоторый допусти-
мый для данного материала уровень.
Они также вызывают увеличение зазо-
ров и изменение исходных условий ра-
боты подшипника. «Ложное бринел-
лирование» появляется в подшипни-
ках при транспортировании по желез-
ной дороге узлов в собранном виде.
Разрушение в виде выемок на дорож-
ках качения колец либо на поверх-
ностях шариков возникает в резуль-
тате накопления материалом усталост-
ных качественных изменений под воз-
действием многократного цикличе-
ского нагружения.
Каждое из этих повреждений при-
водит к ухудшению эксплуатационных
характеристик подшипников, но в боль-
шинстве случаев не вызывает немед-
ленного выхода узла из строя. На-
блюдаются случаи, когда вся поверх-
ность дорожки качения одного из
колец сплошь покрыта выемками в ре-
зультате выкрашивания, но заклини-
вания подшипника не происходит (за-
клинивание более вероятно в высоко-
скоростных подшипниках в плохо
спроектированных узлах с плохим
теплоотводом, когда вследствие не-
равномерных температурных деформа-
ций отдельных элементов зазор в под-
шипнике становится отрицательным).
В газовом подшипнике отсутствует
непосредственный контакт перемеща-
ющихся одна относительно другой
поверхностей, и потому, теоретически,
он должен работать в безызносном
режиме. Изнашивание рабочих по-
верхностей подшипника происходит
Возможные варианты совмещения подшипников
13
в результате их касания в периоды пу-
ска и остановки, либо под воздействием
значительных вибраций и динамиче-
ских перегрузок, а также за счет по-
падания в зазор твердых частиц или
веществ, вызывающих их фреттинг-
коррозию. Изнашивание рабочих по-
верхностей газового подшипника и
нарушение исходной формы и размеров
деталей подшипника может привести
к существенному снижению несущей
способности опоры. Изменение чистоты
поверхности и физико-механических
характеристик материала увеличивает
опасность схватывания и задиров.
Возможность попадания в подшипник
твердых частиц, размер которых боль-
ше радиального зазора, создает опас-
ность задира и требует создания на
рабочих поверхностях специальных ка-
навок. Принимая во внимание высокие
скорости относительного перемещения
рабочих поверхностей, твердость ко-
торых во многих случаях сравнительно
невелика, следует иметь в виду, что
задир может вызвать практически
мгновенный выход подшипника из
строя. С этой точки зрения несоблюде-
ние соответствующих норм изготовле-
ния и эксплуатации газовых подшип-
ников влечет за собой серьезные по-
следствия.
Правильно спроектированные газо-
динамические подшипники просты в
обслуживании и не требуют каких-
либо вспомогательных устройств. Ис-
пользование газостатических подшип-
ников сопряжено с необходимостью
применения систем очистки газа, его
подвода и регулирования давления.
В отдельных случаях возникают до-
полнительные трудности с отводом
отработавшего газа. В этом отношении
газостатический подшипник может
быть в известной мере приравнен
к подшипникам качения, в которых
осуществляется смазывание под дав-
лением. Требования к вспомогатель-
ным системам газовых подшипников
должны быть более высокими, по-
скольку случайное попадание в рабочий
зазор крупных твердых частиц либо
кратковременное отключение подачи
газа вызывают выход подшипника из
строя. Попадание же твердых частиц
в подшипник качения вызывает только
небольшие вмятины на отдельных его
деталях, а кратковременное прекра-
щение смазывания лишь в очень ред-
ких случаях может привести к выходу
его из строя.
Вышедшие из строя подшипники
качения заменяют, как правило, но-
выми, что существенно • сокращает
трудоемкость и сроки ремонта. За-
мена или ремонт газового подшип-
ника связаны с несколько большими
трудностями, поскольку серийное про-
изводство опор этого типа еще не нала-
жено, а изготовление их требует вы-
сокой точности.
Таким образом, свойства рассмот-
ренных опор весьма различны, и со-
четание их путем правильного совме-
щения в одном узле газового подшип-
ника с подшипником качения может
существенно улучшить эксплуатаци-
онные характеристики проектируемого
устройства.
ВОЗМОЖНЫЕ ВАРИАНТЫ
СОВМЕЩЕНИЯ ПОДШИПНИКОВ
И УСЛОВИЯ, ОПРЕДЕЛЯЮЩИЕ
ЦЕЛЕСООБРАЗНОСТЬ
ИХ ПРИМЕНЕНИЯ
Раздельная установка подшипников.
Как уже говорилось, газовые под-
шипники имеют относительно малые
потери на трение, что обусловливает
возможность использования их при
высоких частотах вращения. Кроме
того, простота конструктивных форм
основных деталей газового подшип-
ника и допустимость применения ма-
териалов с относительно малой (по
сравнению с подшипниками качения)
твердостью обеспечивают большую их
надежность при работе в условиях
высоких температур. Эти особенности
газового подшипника удачно исполь-
зованы в конструкции, схема которой
показана на рис. 1 Вал 1 агрегата
установлен на малогабаритном под-
шипнике качения 2, который воспри-
нимает полностью осевую нагрузку
и небольшую часть радиальной, и
на газовом подшипнике 3, расположен-
ном в зоне высоких температур и не-
сущем основную долю радиальной
нагрузки.
Параллельная установка подшип-
ников. Как показывают теоретические
14
УСЛОВИЯ ВЫБОРА ТИПА ОПОРЫ
Рис. 1. Раздельная установка газового и
шарикового подшипников
расчеты и эксперименты, жесткость
газовых подшипников значительно вы-
ше жесткости шарикоподшипников.
Это обстоятельство может быть исполь-
зовано для увеличения надежности вы-
сокоскоростных подшипников пу-
тем параллельной установки в опорах
шарикового и газового подшипников.
Схема такой установки подшипников
показана на рис. 2. Вал 1 установлен
на шарикоподшипнике?, который в ста-
тике воспринимает всю нагрузку, при-
ходящуюся на данную опору. При этом
шарикоподшипник подбирают, монти-
руют и при необходимости предвари-
тельно подгружают осевой нагрузкой
таким образом, чтобы газовый под-
шипник 3 в неработающем состоянии
имел гарантированный радиальный
зазор. Благодаря этому исключается
возможность непосредственного (ме-
таллического) контакта рабочих по-
верхностей вала и втулки в периоды
пуска и остановки, который является
основной причиной выхода газового
подшипника из строя. Во время работы
значительная доля рабочей нагрузки
приходится на газовый подшипник,
Рис. 2. Параллельная установка газового
и шарикового подшипников
который может быть как газостатиче-
ским, так и газодинамическим. Ча-
стично разгруженный шарикоподшип-
ник работает в более легком режиме,
что увеличивает его долговечность.
Приведенная схема может быть
также использована и для увеличения
надежности узлов, подвергающихся
резким динамическим нагрузкам В та-
ком случае желоба колец шарикового
подшипника должны иметь оптимизи-
рованный профиль, обеспечивающий
значительное увеличение контактной
жесткости при некотором критическом
уровне нагрузки. За счет этого при
мгновенных чрезмерных перегрузках
основная часть нагрузки приходится
на шариковый подшипник, в резуль-
тате чего предотвращается металличе-
ский контакт в газовом подшипнике.
Вследствие кратковременности дей-
ствия экстремальных нагрузок такое
перераспределение сил не должно выз-
вать существенного накопления по-
вреждений во вращающемся шарико-
подшипнике.
Схема параллельной установки под-
шипников может улучшить тепловой
режим шарикового подшипника за
счет охлаждения его отработавшим
газом. Поступающий в подшипник
поток должен иметь определенное на-
правление, с тем чтобы облегчить
движение комплекта тел качения и тем
самым уменьшить величину касатель-
ных сил в зонах контакта тел качения
с внутренним кольцом подшипника.
Указанные факторы также могут спо-
собствовать увеличению надежности
опоры в целом.
Последовательная установка: под-
шипник качения — газовый подшип-
ник. Известно, что «слабым местом»
газового подшипника является его
подверженность повреждениям в пе-
риоды пуска и остановки. В началь-
ный момент пуска поверхности вала
и втулки работают в условиях трения
без смазочного материала, а в случае
пуска с быстрым возрастанием частоты
вращения они подвергаются и локаль-
ному тепловому удару, который кроме
отрицательного влияния на стойкость
материала против задиров и на износо-
стойкость может вызвать также и рез-
кое искажение формы рабочих поверх-
ностей с последующей концентрацией
Возможные варианты совмещения подшипников
15
нагрузки на отдельных их участках.
При остановке имеют место аналогич-
ные явления. Все это относится глав-
ным образом к газодинамическим под-
шипникам, но в значительной степени
также и к газостатическим подшипни-
кам в тех случаях, когда нагнетающий
насос приводится от вала, установлен-
ного на этих же подшипниках.
Условия пуска и остановки могут
быть в известной мере облегчены при-
менением схемы, показанной на рис. 3
Вал 1 смонтирован на шариковых под-
шипниках 2, наружные обоймы кото-
рых установлены на втулке 3, выпол-
няющей функцию вала газового под-
шипника 4.
До образования (или после исчез-
новения) газовой пленки между со-
пряженными поверхностями деталей 3
и 4 вращение «вала обеспечивается
подшипниками 2. При этом втулка 3
приводится во вращение моментом
трения в шариковых подшипниках,
который значительно меньше момента,
приводящего во вращение вал 1,
Следовательно, частота вращения
втулки 3 возрастает более плавно, и
опасность теплового удара сни-
жается
Как известно, потери на трение
в газовых и шариковых подшипниках
возрастают с увеличением скорости.
Следовательно, габаритные размеры и
конструкции этих подшипников могут
быть выбраны таким образом, чтобы
в рабочем режиме частота вращения
вала распределялась между ними в же-
лательном соотношении. При этом
общий момент трения опоры уменьша-
ется, а предельная ее быстроходность
возрастает, поскольку быстроходность
каждого из подшипников в отдельности
имеет свой предел для шарикового
он определяется главным образом уве-
личением центробежных сил и нагре-
вом, для газового — неустойчивостью
при достижении определенной скоро-
рости.
Возможности улучшения характери-
стик опоры при использовании при-
веденной схемы могут быть расширены
путем придания желобам колец формы,
обеспечивающей существенное сниже-
ние^потерь’на трение в шарикоподшип-
никах и, следовательно, повышение
их предельной быстроходности.
Рис. 3. Последовательная установка: под-
шипник качения — газовый подшипник
При ударном нагружении или силь-
ной кратковременной перегрузке га-
зового подшипника возможно разру-
шение газового слоя и возникновение
контакта между поверхностями быстро-
вращающегося вала и втулки. В сов-
мещенной опоре вероятность задира
в таком случае уменьшена за счет
поворота вала (и связанных с ним
масс) в подшипниках качения. По
той же причине снижается вероятность
разрушения рабочих поверхностей га-
зового подшипника в случае попадания
в зазор посторонних частиц. Кроме
того, при последовательной уста-
новке подшипников лучше демпфиру-
ются удары, воспринимаемые опорой,
благодаря большей по сравнению с га-
зовым подшипником упругой подат-
ливости шарикового подшипника. Это
также уменьшает вероятность разру-
шения газового слоя.
С другой стороны, газовый слой яв-
ляется своего рода демпфером для
колебаний, возбуждаемых вращаю-
щимися деталями, затрудняя распро-
странение этих колебаний, он снижает
виброакустическую активность агре-
гата в целом
Приведенная схема установки под-
шипников представляет интерес с то-
чки зрения устойчивости работы вы-
сокоскоростной опоры. Расчет энерге-
тических потерь в газовом подшипнике
ведут исходя из предположения о ла-
минарном течении газа в зазоре между
валом и втулкой. Однако при появ-
лении колебаний вала, приводящих
к неустойчивости подшипника, харак-
16
УСЛОВИЯ ВЫБОРА ТИПА ОПОРЫ
Рис. 4. Последовательная установка: газо-
вый подшипник — подшипник качения
тер течения смещается в сторону
более резко выраженной турбулент-
ности, а момент трения увеличивается.
В результате происходит перераспре-
деление скоростей между газовым и
шариковым подшипниками, что соз-
дает предпосылки для возврата газо-
вого подшипника в устойчивый режим.
Подшипник качения в приведенной
схеме работает в более благоприятных,
чем обычно, условиях благодаря ча-
стичному демпфированию газовым сло-
ем динамических нагрузок, а также
благодаря возможности поворота на-
ружного кольца, вследствие чего в зону
максимального нагружения попадает
последовательно вся дорожка ка-
чения этого кольца.
Последовательная установка: газо-
вый подшипник — подшипник каче-
ния. Одной из основных причин, огра-
ничивающих быстроходность подшип-
ников качения, является то, что по
мере увеличения частоты вращения
вала возрастают центробежные силы,
с которыми тела качения действуют на
наружное кольцо подшипника. В ре-
зультате увеличиваются контактные
напряжения на наружном кольце,
что отрицательно сказывается на дол-
говечности подшипника, и возрастает
сопротивление качению шариков (или
роликов) по наружному кольцу. Это
в свою очередь, повышает уровень
тангенциальных сил на вращающемся
кольце подшипника и вероятность
проскальзывания относительно него
тел качения. Центробежные силы воз-
растают пропорционально квадрату
окружной скорости комплекта тел
качения. Следовательно, уменьшение
ее должно существенно улучшить ско-
ростные характеристики опоры. Ука-
занное обстоятельство использовано
в конструкции, приведенной на рис. 4.
Здесь вал 1 вращается в газовом под-
шипнике 2, втулка которого запрес-
сована в стакан 3, вращающийся на
шариковых подшипниках 4, смонти-
рованных на подвижном пальце 5,
укрепленном в корпусе 6. Такая
конструкция является довольно слож-
ной и требует высокой точности изго-
товления. Вместе с тем она может
помочь решению многих серьезных
практических задач, поскольку наряду
со снижением центробежных сил обе-
спечивает лучшее демпфирование уда-
ров и повышает аварийную безопас-
ность узла.
Исходя из результатов проведенного
сравнительного анализа основных эк-
сплуатационных характеристик под-
шипников обоих типов, можно утвер-
ждать, что применение совмещенных
опор, особенно при соответствующей
оптимизации ’форм рабочих поверхно-
стей шарикоподшипников, является
перспективным во многих отношениях.
Совмещение подшипников может быть
применено в газовых турбинах для
повышения надежности подшипника,
работающего в условиях высоких тем-
ператур, а также в ряде высокоско-
ростных машин и приборов для увели-
чения их долговечности, быстроход-
ности и аварийной безопасности.
СПИСОК ЛИТЕРАТУРЫ
1. Высокоскоростные подшипники/
Н. А. Спицын, Н. С. Цыплакова,
С. Г. Аграс, В. В. Денисова М.:
НИИавтосельхозмаш, 1966. 92 с.
2. Красковский Е. Я. Трение в под-
шипниках. — В кн.: Опоры осей и ва-
лов машин и приборов/Под ред.
Н. А. Спицына и М. М. Машнева. Л.:
Машиностроение.^Ленинград, отд-ние,
1970, с. 209—233.
3 Панфилов Е. А, Опоры скольже-
ния с газовой смазкой. — В кн.: Опоры
осей и валов машин и приборов/Под
ред. Н. А. Спицына и М. М. Машнева.
Список литературы
17
Л.: Машиностроение. Ленинград, отде-
ление, 1970,с.155—183.
4. Подшипники с газовой смазкой.
Пер. с англ./Под ред. Н. С. Грэссема
и Дж. Пауэла. М.: Мир, 1966. 176 с.
5. Спицын Н. А., Машнев М. М.
Высокоскоростные подшипники каче-
ния. — В кн.: Опоры осей и валов ма-
шин и приборов. Л.: Машиностроение,
Ленинград, отд-ние, 1970, с 265.
6. Шейнберг С. А., Жедь В. П.,
Шишеев М. Д. Опоры скольжения с
газовой смазкой. М.: Машиностроение,
1969. 334 с.
Глава ме
возможности ПОВЫШЕНИЯ
КАЧЕСТВА ПОДШИПНИКОВ!
Возрастание скоростей и нагружен-
ности современных машин и приборов
с одновременным повышением требо-
ваний к ним по надежности, габарит-
ным размерам и массе, а также разви-
тие новых областей машиностроения
вызывают необходимость совершенст-
вования опор качения, применяемых
в основных узлах большинства меха-
нических систем и во многом определя-
ющих их работоспособность и долго-
вечность. Специалистами отечествен-
ного и зарубежного машиностроения
проведена в этом направлении боль-
шая работа, позволившая повысить
статическую и динамическую грузо-
подъемность подшипников, их надеж-
ность и предельную быстроходность
Были разработаны новые конструкци-
онные и смазочные материалы, усо-
вершенствованы методы механической,
термической и термохимической обра-
ботки, созданы новые покрытия и улуч-
шены способы их нанесения.
Однако возможности этих средств
к настоящему времени в значительной
мере исчерпаны. Например, дальней-
шее повышение твердости деталей под-
шипника и чистоты их рабочих поверх-
ностей выше определенного, установ-
ленного многолетней практикой, опти-
мального уровня не приводит к увели-
чению долговечности по критерию кон-
тактной прочности Статическая грузо-
подъемность также не может быть
повышена путем дальнейшего увеличе-
ния твердости колец подшипника и
тел качения ввиду вероятности хруп-
кого их разрушения. Создание сверх-
твердого поверхностного слоя сопря-
жено с большими технологическими
трудностями и также усугубляет опас-
ность хрупкого разрушения. Что ка-
сается энергетических потерь в под-
шипнике, то основными их составля-
ющими являются затраты энергии,
связанные с относительным проскаль-
РАСЧЕТ
И КОНСТРУИРОВАНИЕ
ПРЕЦИЗИОННЫХ
ШАРИКОВЫХ ОПОР
С МОДИФИЦИРОВАННОЙ
ФОРМОЙ РАБОЧИХ
ПОВЕРХНОСТЕЙ
зыванием сопряженных поверхностей,
гидродинамическими явлениями в сма-
зочном материале и несовершенной уп-
ругостью материала. Возможности для
снижения указанных потерь за счет
создания экономически выгодных но-
вых материалов и покрытий со значи-
тельно более совершенной упругостью
и меньшим коэффициентом трения (по
сравнению с существующими) весьма
ограничены.
Существенным резервом повышения
качества подшипников остается совер-
шенствование их конструкции и в пер-
вую очередь — формы рабочих по-
верхностей дорожек качения, несу-
щих приложенную к подшипнику на-
грузку. Конструкция подшипника, а
именно размеры и количество тел ка-
чения, форма сепаратора, его материал
и способ центрирования в последние
годы значительно перерабатывались
и совершенствовались. Повышена уп-
ругая податливость отдельных эле-
ментов подшипника с целью уменьше-
ния контактных напряжений. Поверх-
ности же качения продолжают профи-
лировать дугой окружности либо пря-
мой линией, и лишь в редких случаях
их сочетанием. Однако исследования
показывают, что наиболее распростра-
ненная благодаря универсальности и
относительной простоте изготовления
тороидальная форма желоба не явля-
ется лучшей ни по долговечности под-
шипника, ни по легкости его хода.
Для достижения наиболее высокой ра-
ботоспособности подшипника его по-
верхности качения следует профилиро-
вать с учетом конкретных условий ра-
боты данного узла и предъявляемых
к нему требований.
Критерии работоспособности опор
качения. Диапазон условий работы
опор качения современных машин и
приборов чрезвычайно широк. Как
правило, подшипники работают при
сравнительно высоких нагрузках, ког-
да максимальные контактные напря-
Возможности повышения качества подшипников
19
жения на их рабочих поверхностях
составляют 2,5—4 ГПа. Во многих
случаях они подвергаются существен-
ным кратковременным перегрузкам и
ударным воздействиям, расчетные кон-
тактные напряжения при которых до-
стигают 5 ГПа и более. С другой сто-
роны, в отдельных конструкциях опоры
качения играют вспомогательную роль,
лишь удерживая тот или иной элемент
в определенном положении и не вос-
принимая существенной нагрузки.
Скоростные режимы подшипников так-
же имеют широкие пределы. В различ-
ных узлах даже одного механизма,
например в гироскопе, подшипники
могут работать при частотах вращения
от долей до нескольких десятков ты-
сяч оборотов в минуту. Интервал
рабочих температур подшипников со-
ставляет несколько сот градусов, при-
чем возможна эксплуатация в ваку-
уме, различных газовых и жидких
средах, при самых разнообразных ус-
ловиях смазывания
Динамическая грузоподъемность яв-
ляется основной характеристикой под-
шипников общего назначения, рабо-
тающих при умеренных скоростях и
нагрузках. Она определяет долговеч-
ность и габаритные размеры опорного
узла, а также надежность машины,
длительность межремонтных периодов,
удобство и стоимость эксплуатации.
Статическая грузоподъемность опо-
ры качения характеризует ее способ-
ность работать в условиях вращения,
сопровождаемого периодическими зна-
чительными перегрузками и ударами
как в процессе работы, так и во время
транспортирования При нагрузке, пре-
вышающей статически допустимую, на
дорожках или телах качения возни-
кают значительные местные деформа-
ции, которые делают опору практиче-
ски неработоспособной.
Подшипники, предназначенные для
работы в жидких средах, должны
иметь достаточное сцепление между
вращающимся кольцом и телами каче-
ния (тяговый момент), необходимое
для преодоления гидродинамического
сопротивления среды, предотвращения
значительного проскальзывания и
интенсивного изнашивания рабочих
поверхностей. Это справедливо и для
подшипников, работающих с быст-
рым увеличением частоты враще-
ния, когда инерционность комплекта
тел качения может в начальный момент
вызвать потерю сцепления между ними
и ведущим кольцом с последующим
разогревом этих деталей и заклинива-
нием подшипника.
Момент трения и вибрационные ха-
рактеристики являются основными
критериями работоспособности высо-
коскоростных легконагруженных опор.
Они определяют не только быстроход-
ность подшипника, но и возможность
его использования в проектируемом
узле Потерями при качении часто
пренебрегают, поскольку они сущест-
венно (в десятки раз) меньше потерь
на трение скольжения. При этом,
однако, не учитывают то, что энергия,
затрачиваемая на преодоление сопро-
тивления качению, поглощается глав-
ным образом в поверхностных слоях
материала, наиболее ответственных
с точки зрения прочности. Эта энер-
гия уходит на интенсивное цикличе-
ское передеформирование поверхност-
ных слоев, которое приводит к необра-
тимым качественным изменениям ма-
териала, накоплению усталостных по-
вреждений и усилению изнашивания.
При этом нагрев деталей подшипника
вызывает изменение зазоров, потерю
точности и плавности хода, а в некото-
рых случаях может явиться причиной
снижения твердости рабочих поверх-
ностей и уменьшения их несущей
способности, либо изменения свойств
смазочного материала с образованием
на дорожках качения твердых «на-
плывов», увеличением момента трения
и вероятности разрыва сепаратора.
Все это приводит к снижению надеж-
ности и долговечности опоры.
Сказанное в особой степени отно-
сится к высокоскоростным подшипни-
кам типа подшипников газотурбинных
двигателей, а также к приборным под-
шипникам, которые несут сравнительно
небольшую нагрузку, но должны иметь
возможно меньший и предельно ста-
бильный момент трения. Большую роль
легкость хода играет также и в тяжело
нагруженных опорах поворотных уст-
ройств ряда механизмов, где вся мощ-
ность, а также габаритные размеры
и масса привода определяются уров-
нем энергетических потерь в узле.
20
ПРЕЦИЗИОННЫЕ шариковые опоры
6)
Рис. 1. Ролики мо,п фицированной формы
Улучшение характеристик подшип-
ников путем модификации формы по-
верхностей качения. Опыт конструи-
рования и эксплуатации, например,
таких механизмов, как зубчатые пе-
редачи, где условия на рабочих по-
верхностях весьма сходны, а в неко-
торых отношениях и существенно сло-
жнее, чем в опорах качения, показал,
что модификация форм этих поверх-
ностей значительно повышает грузо-
подъемность узла и его предельную
быстроходность, снижает шум и виб-
рацию. В передачах Новикова путем
использования принципиально новых
форм рабочих поверхностей достигнуто
существенное снижение контактных
напряжений и улучшение условий
смазывания. Благодаря этому значи-
тельно возросла передаваемая мощ-
ность и снижена их металлоемкость.
Работы по модификации форм поверх-
ностей ограничиваются главным обра-
зом мерами по снижению влияния пере-
косов и явлений типа краевого эффекта
в роликовых подшипниках с помощью
так называемого бомбинирования, ког-
да образующая роликов (реже колец)
очерчивается дугой некоторого по-
Рис. 2. Подшипник с конусной бомбиной
на ролике
стоянного радиуса (рис. 1, а). Суще-
ствуют также ролики с прямыми
(рис. 1, б) либо сферическими скосами
(рис. 1, в). Исследования и эксплуата-
ционные данные подтвердили высокую
эффективность этих методов. Так,
в работе [9] отмечено, что даже пря-
мые конические скосы по концам ци-
линдрических роликов, внедренные на
отечественных железнодорожных под-
шипниках, резко сократили усталост-
ное выкрашивание у краев роликов.
Еще лучший эффект дают сферические
скосы, плавно сопрягающиеся с ци-
линдрической поверхностью и обе-
спечивающие более равномерное рас-
пределение нагрузки вдоль линии кон-
такта. В некоторых случаях сфериче-
ские скосы наносят на бомбинирован-
ном ролике, что позволяет без повыше-
ния вероятности концентрации на-
грузки по концам увеличить радиус
бомбины и, следовательно, снизить
общий уровень контактных напряже-
ний. Придание торцам роликов сфери-
ческой формы, обеспечивающей их
точечный контакт с ограничивающими
поверхностями, также снижает момент
трения подшипника и повышает его
быстроходность.
Бомбинирование роликов имеет сле-
дующие недостатки. При больших
нагрузках симметричная бомбина сни-
жает концентрацию нагрузки по срав-
нению с цилиндрическим роликом, но
распределение давлений по длине ро-
лика остается существенно неравно-
мерным. Большой радиус бомбины
не исключает возможности выхода
зоны максимальных давлений на вну-
тренний торец подшипника, а малый
радиус увеличивает эти давления вслед-
ствие перехода от линейного к точеч-
ному контакту и уменьшения его дли-
ны. Конусная бомбина («веретенооб-
разный» ролик) в случае правильного
ее расчета обеспечивает наиболее бла-
гоприятное распределение нагрузки
на самых тяжелых режимах работы,
при которых углы перекоса 0 осей
колец достигают значительных вели-
чин (рис. 2). Изготовление таких под-
шипников сопряжено с определенными
сложностями как технологического, так
и организационного характера и ве-
роятностью ошибок при сборке. Пос-
леднее затруднение может быть ис-
Возможности повышения качества подшипников
21
ключено бомбинированием вместо ро-
ликов дорожки одного из колец
(рис. 3).
Недостатком бомбинирования и при-
дания роликам скосов является также
большая вероятность их поворота в не-
нагруженной зоне вокруг оси, пер-
пендикулярной к площадке контакта,
под воздействием возникающих в про-
цессе сложного движения ролика инер-
ционных сил, обусловленных кориоли-
совым ускорением. В бессепаратор-
ном подшипнике этот поворот ограни-
чен кольцами подшипника и для ци-
линдрического ролика определяется
зазором z в ненагруженной зоне
(рис. 4).
Возможный угол поворота ролика
ф = arcsin (2//L),
где f = У2zR — z2 У2zR, следова-
тельно, ф = arcsin У8zR/L. С умень-
шением диаметра ролика на его торце
за счет бомбины или скоса на вели-
чину А угол поворота увеличивается
до <р == arcsin У8 (z + A) R/L, т. е.
весьма значительно, поскольку обы-
чно А> Юг. Ограничение поворота
сепаратором или бортиками колец
неэффективно, так как вызывает по-
явление дополнительных сил трения
и динамической нестабильности тем
большей, чем больше разность между
углами поворота в нагруженной и не-
нагруженной зонах. Закругление тор-
цов роликов снижает потери на тре-
ние, но увеличивает опасность пово-
рота коротких роликов.
Описанное выше не умаляет преи-
муществ и эффективности упомянутых
способов модификации форм поверх-
ностей качения роликоподшипников
и лишь свидетельствует о необходи-
мости дальнейшего их совершенство-
вания. Наиболее целесообразным пред-
ставляется конусное бомбинирование
одного из колец, для улучшения устой-
чивости ролика и технологичности —
предпочтительнее внутреннего.
Возможна также другая модифика-
ция формы поверхностей качения ро-
ликовых подшипников, технологиче-
ски более простая, но достаточно эф-
фективная. В большинстве конструк-
ций роликовые подшипники, и осо-
бенно конические, монтируют на кон-
Рис. 3. Подшипник с конусной бомбиной
на внутреннем кольце
цах осей и валов, несущих довольно
большую радиальную нагрузку. Уп-
ругие прогибы валов при этом Дости-
гают значительных величин, вызывая
перекос подшипника и концентрацию
нагрузки на концах роликов, обращен-
ных к середине вала (в случае кон-
сольного вала — к нагруженной кон-
соли). Как показывает опыт, даже
в случае умеренной твердости деталей
(HRC 48—50), работающих с переко-
сом, приработки их не происходит.
Появление в зоне концентрации даже
сравнительно мелких выемок выкра-
шивания ведет к образованию новых
Рис. 4. Поворот ролика относительно оси,
перпендикулярной к площадке контакта
22
ПРЕЦИЗИОННЫЕ ШАРИКОВЫЕ ОПОРЫ
Рис. 5. Роликоподшипник со скосом:
а — на ролике; б — на дорожке качения кольца
концентраторов напряжений и оча-
гов разрушения. Одновременно ухуд-
шается и смазывание перегруженных
участков, так как усложняются усло-
вия образования масляной пленки и
облегчается ее разрушение при про-
хождении зоны контакта над ранее об-
разовавшимися выемками. В резуль-
тате участки, которые на первом этапе
несли основную долю нагрузки, доволь-
но быстро теряют свою несущую способ-
ность. Их место занимают новые об-
ласти, но и они вскоре начинают раз-
рушаться — зона концентрации на-
пряжений не исчезает, а лишь переме-
щается вдоль линии контакта.
Это свидетельствует о недопустимо-
сти пренебрежения концентрацией на-
грузки, которая вследствие упругих
деформаций системы имеет место в боль-
шинстве средне и тяжело нагруженных
конструкций и с которой обычно
борются увеличением диаметра ва-
ла или размера подшипника. Для
увеличения долговечности ролико-
подшипников может быть применен
метод, в основе которого лежит мак-
симально полное использование несу-
щей способности роликов в момент
наибольшего нагружения подшипника
и отсутствие перегрузки отдельных
их участков при меньших уровнях
нагрузки. Для этого ролик цилиндри-
ческого подшипника должен иметь
такую конусность, чтобы угол между
его образующими был равен углу
перекоса 0 осей колец подшипника
при наибольшей его нагруженности
(рис 5, а), благодаря чему при мак-
симальной нагрузке будет получена
предельно возможная (для прямоли-
нейной образующей) равномерность
распределения давления по длине ро-
ликов. Более равномерное распределе-
ние давления может быть достигнуто
и приданием конусности дорожке ка-
чения одного из колец (рис. 5, б).
В коническом подшипнике конусность
ролика необходимо увеличить на
угол 0. При радиальной нагрузке на
подшипнике Qr < Qr тах уже не будет
прилегания роликов к кольцам по
всей их длине, и концентрация на-
грузки возникает у внешнего торца
подшипника. Но, как показывает рас-
чет для аналогичных условий контакта
применительно к прямозубым зубча-
тым передачам, уровень напряжений
при этом не превышает предельного,
имеющего место при Q/?max, вследствие
более низкой общей нагруженности
узла, и потому не является опасным.
Приведенные в работе [5] результаты
испытаний на консольных зубчатых
передачах, работавших с большим пе-
рекосом, показывают высокую эф-
фективность описанного метода моди-
фикации рабочих поверхностей.
Изготовление роликоподшипников с
коррекцией конусности колец (что
предпочтительнее, поскольку умень-
шает возможность ошибок при сборке)
или роликов не вызовет технологиче-
ских затруднений. Для повышения
эффективности потребуется лишь раз-
биение серии подшипников на несколь-
ко групп с индексацией в соответствии
с ожидаемым диапазоном значений
угла упругого перекоса в процессе
работы опорного узла. Даже в случае
некоторого несовпадения этого угла
с углом модификации продольного
Возможности повышения качества подшипников
23
профиля долговечность подшипника
будет выше долговечности стандарт-
ного подшипника за счет меньшей кон-
центрации нагрузки, а также в ре-
зультате того, что при разных нагруз-
ках такой подшипник будет работать
с концентрацией давления на разных
концах ролика.
Экспериментальные исследования
показывают, что более благоприятное
распределение нагрузки вдоль линии
контакта, полученное путем совершен-
ствования форм рабочих поверхностей
роликоподшипников, позволяет уве-
личить их долговечность более чем
в 2 раза Для уменьшения энергети-
ческих потерь в масляной пленке
(за счет снижения градиента скорости)
в средней части дорожек качения мо-
гут быть выполнены прямоугольные
углубления 5—10 мкм (рис 6). Благо-
даря этому повышается легкость дви-
жения при больших частотах вра-
щения и сравнительно малых нагруз-
ках.
Изложенное свидетельствует о не-
сомненной перспективности работ по
повышению качества опор качения
путем совершенствования форм их
рабочих поверхностей В области ша-
риковых подшипников в этом направ-
лении накоплен гораздо меньший опыт,
и в большинстве случаев их поверх-
ности качения профилируют дугой
окружности независимо от назначения
подшипника, условий его эксплуата-
ции и предъявляемых к нему требова-
ний. Но в случае тороидального желоба
нагрузка передается через эллиптиче-
ское пятно контакта, распределяясь
резко неравномерно. В результате не-
сущая способность значительной ча-
сти рабочего объема материала недо-
используется, в то время как в центре
пятна максимальное давление pQ в 1,5
раза выше среднего. Долговечность же
подшипника обратно пропорцио-
нальна р%, а глубина лунок, которые
образуются на дорожках качения
вследствие пластического деформи-
рования материала и ограничивают
статическую грузоподъемность под-
шипника, пропорциональна pj. Вы-
сокая напряженность материала при-
водит также к увеличению гистерезис-
ных потерь в точке контакта вследст-
вие более полного проявления не-
Рис. 6. Роликоподшипник с углублениями
на дорожках качения
совершенства упругих свойств ма-
териала.
С другой стороны, при имеющихся
обычно соотношениях радиуса желоба
и диаметра шара R^'D^ = 0,515ч-
-4-0,54 и значительной кривизне пятна
контакта в осевой плоскости подшип-
ника, в процессе качения возникают
значительные силы дифференциального
проскальзывания Они способствуют
возрастанию энергетических потерь
в подшипнике, изнашиванию и нагре-
ванию его элементов и снижают дол-
говечность опоры.
В шарикоподшипнике с дорожкой
качения кругового профиля имеется
лишь один регулируемый параметр,
определяющий геометрию рабочих
поверхностей и напряженное состоя-
ние на контакте, — отношение радиуса
желоба к диаметру шара R^lbw.
С увеличением его снижаются энерге-
тические потери, но возрастают кон-
тактные давления. Уменьшение же
соотношения R-^lDw снижает кон-
тактные давления, но вызывает увели-
чение потерь в подшипнике и каса-
тельных сил на контакте, что также
отрицательно сказывается на долго-
вечности. При фиксированной форме
желоба отсутствует возможность уп-
равления законом распределения на-
грузки в пределах площадки контакта
с целью получения оптимальных для
заданных условий работы опоры ста-
тических и динамических ее характе-
ристик.
Возможности конструктора сводят-
ся к варьированию в узких пределах
радиусом желобов и соотношением
этих радиусов на внутреннем и на’
24
ПРЕЦИЗИОННЫЕ ШАРИКОВЫЕ ОПОРЫ
Рис. 7. Трехточечный подшипник
ружном кольцах. Многолетние иссле-
дования показали ограниченность
возможностей такого варьирования,
и в результате возрастающих требова-
ний в подшипниковой промышлен-
ности разработаны так называемые
трех- и четырехточечные шарикопод-
Рис. 8. Некруговые профили дорожек ка-
чения подшипников и шариковых винтовых
передач
шипники (рис. 7). Характерной осо-
бенностью такого подшипника явля-
ется профиль желоба одного или обоих
его колец, имеющий форму арки, ко-
торая описывается сочетанием двух
дуг обычно одного и того же радиуса Rr,
центры которых смещены относитель-
но плоскости симметрии подшипника
[2]. Такой подшипник представляет
собой как бы комбинацию двух ра-
диально-упорных подшипников, спо-
собную воспринимать осевые нагрузки
переменного направления, но имею-
щую лишь один ряд шариков. Если
одно из колец выполнено разрезным,
то подшипник может иметь увеличен-
ное число тел качения и, соответствен-
но, повышенную грузоподъемность.
Однако такие подшипники сохраняют
основной недостаток подшипников с же-
лобами кругового профиля — суще-
ственную неравномерность распреде-
ления давления по площадке контак-
та. Кроме того, при определенном соот-
ношении между радиальной и осевой
составляющими нагрузки зона кон-
такта распространяется одновременно
на обе половины кольца, и в зависи-
мости от геометрии рабочих поверхно-
стей, величины нагрузки и упругих
характеристик материала возможны
два случая: площадка контакта либо
расчленяется на две зоны, либо за-
хватывает стык между полукольцами,
будучи очерченной одним контуром.
Первый случай напоминает качение
шара по призме, которому сопутст-
вуют значительные потери энергии на
поворот шара относительно оси, сов-
падающей с общей нормалью к сопря-
женным поверхностям. Потери на это
вращение могут быть уменьшены сбли-
жением точек начального контакта и
соответственно уменьшением централь-
ного угла между ними. Но при этом
зоны контакта смыкаются и сущест-
венно перекрываются, сокращается
общая площадь контакта и возрастают
напряжения. На стыке материал полу-
колец обладает повышенной податли-
востью и, следовательно, в большей
степени подвержен разрушению. В
большинстве случаев желоб профили-
руют таким образом, что площадка
контакта не захватывает стыка между
полукольцами. При этом теряется
наиболее ценный центральный уча-
Принципы совершенствования форм поверхностей качения
25
сток желоба, воспринимающий ради-
альную нагрузку «в упор», и возра-
стают потери на защемление шара и
его вращение.
В работе [9] приведен ряд комбини-
рованных профилей дорожек качения
(рис. 8), применяемых в приборных
подшипниках. В отдельных случаях
они предпочтительнее круговых, но,
будучи образованными из тех же про-
стейших элементов — прямая линия и
дуга окружности, обладают характер-
ными для этих форм ограничениями и
не являются кардинальным решением
проблемы. Одним из инициаторов ра-
бот по совершенствованию форм по-
верхностей качения является А. В. Ко-
ролев, которым проведены очень серь-
езные и трудоемкие исследования [3].
Геометрия и методы получения раз-
работанных им поверхностей сущест-
венно отличаются от описанных в на-
стоящей главе, но имеют ту же основ-
ную цель: путем изыскания наиболее
благоприятных законов распределения
нагрузки по площадке контакта по-
высить несущую способность деталей,
работающих в условиях качения под
нагрузкой.
ОСНОВНЫЕ ПРИНЦИПЫ
СОВЕРШЕНСТВОВАНИЯ ФОРМ
ПОВЕРХНОСТЕЙ КАЧЕНИЯ
Анализ показывает, что связь между
формой поверхностей качения и экс-
плуатационными характеристиками
подшипников является сложной и
в некоторых отношениях противоречи-
вой. Так, долговечность опоры увели-
чивается по мере снижения максималь-
ного контактного давления. При неиз-
менных габаритных размерах опоры,
числе тел качения и их размерах кон-
тактное давление может быть снижено
увеличением конформности сопряжен-
ных поверхностей. Это одновременно
повышает жесткость опоры, которая
в ряде случаев имеет большое значе-
ние. Например, при работе зубчатых
передач, в особенности консольных и
передач Новикова, упругие деформа-
ции подшипников приводят к перекосу
и отклонению от параллельности осей
валов либо к изменению межосевого
расстояния, что, в свою очередь, вы-
зывает неблагоприятное перераспре-
деление нагрузки на поверхностях
зубьев, ухудшение виброакустических
характеристик передачи и увеличение
динамических нагрузок с соответст-
вующим снижением ее долговечности
и грузоподъемности. Повышенные уп-
ругие деформации могут вызывать
также дисбаланс и нарушение ста-
бильности работы приборов при вы-
сокой частоте вращения. Следователь-
но, в этом плане увеличение кон-
формности поверхностей положитель-
но влияет на работу узла. Это отно-
сится и к подшипникам, для которых
по условиям эксплуатации основной
характеристикой является их статиче-
ская грузоподъемность, так как мест-
ные остаточные деформации резко сни-
жаются с уменьшением контактного
давления.
В ряде работ, выполненных за по-
следние десятилетия, убедительно по-
казано, что долговечность деталей,
работающих в условиях контактного на-
гружения, существенно зависит от тол-
щины масляной пленки, которая также
возрастает с увеличением приведенно-
го радиуса кривизны, т. е. с прибли-
жением радиуса желоба к радиусу ша-
ра. Вместе с тем с уменьшением радиуса
желоба увеличивается высота поло-
жения мгновенной оси вращения шара
относительно дна желоба. В резуль-
тате значительно возрастают потери на
дифференциальное проскальзывание,
которые являются одной из основных
составляющих энергетических потерь
в опорах качения. Их значение опре-
деляется уровнем контактных давле-
ний, коэффициентом трения сколь-
жения и длиной пути относительного
проскальзывания на отдельных участ-
ках зоны контакта. В общем виде
работа сил трения, вызываемых диф-
ференциальным проскальзыванием,
может быть представлена зависимостью
^д = J fPP dS, (ц
s
где f — коэффициент трения скольже-
ния сопряженных поверхностей; р —
контактное давление на данной эле-
ментарной площадке; р — расстояние
рассматриваемой площадки от мгно-
венной оси вращения шара относи-
26
ПРЕЦИЗИОННЫЕ ШАРИКОВЫЕ ОПОРЫ
тельно желоба; S — общая площадь
контакта. Коэффициент трения сколь-
жения зависит от материала деталей,
их смазки и состояния поверхностей,
т. е. факторов, которые выбирают
в оптимальном сочетании в зависимо-
сти от технологических возможностей,
экономической целесообразности, усло-
вий работы узла и предъявляемых
к нему требований, и дальнейшему
контролю фактически не подлежат.
Однако, оперируя формой рабочих
поверхностей, можно менять картину
распределения давления в пределах
площадки, а также положение мгно-
венной оси вращения шара по высоте
желоба. Благодаря этому создается
возможность предельно уменьшить
значение J ppdS в приведенном выра-
s
жен и и (1) без существенного возраста-
ния максимального давления р0 и та-
ким образом повлиять на величину
потерь, вызываемых дифференциаль-
ным проскальзыванием.
Говоря о трении в опорах качения,
необходимо иметь в виду, что контакт-
ное разрушение рабочих поверхностей
является не единственной и не всегда
основной причиной потери шарико-
подшипником работоспособности.
В высокоскоростных подшипниках, и
в особенности работающих с пластич-
ным смазочным материалом, наиболее
частым видом разрушения является
разрушение сепаратора, которому,
судя по резко возрастающим вибра-
циям, предшествует загустевание сма-
зочного материала и образование на
рабочих поверхностях отвердевших
неровностей. При этом возрастает ве-
личина и непостоянство тягового уси-
лия, передающегося сепаратором от
ведущих шариков к ведомым, а вме-
сте с ним тепловыделение в зонах
контакта шариков с сепаратором. Сни-
жение потерь па трение качения дол-
жно способствовать поддержанию бо-
лее умеренного температурного ре-
жима на поверхностях тел качения и
в смазочном материале и в значитель-
ной мере предотвращать изменение его
свойств и отвердевание. Тем самым
уменьшается динамическая нагрузка
на сепараторе и вероятность его раз-
рушения. То же следует сказать и
о заклинивании высокоскоростных
подшипников.
ВторойjiacTO встречающейся причи-
ной выхода подшипника из строя
является изнашивание рабочих по-
верхностей. Как известно, изнашива-
ние пропорционально работе трения.
Следовательно, профилируя желоб та-
ким образом, чтобы эта работа имела
наименьшую величину и вместе с тем
была по возможности более равномер-
ной по площадке контакта, можно
добиться уменьшения изнашивания и
искажения формы рабочи/Х поверх-
ностей.
Таким образом, вероятность отыска-
ния формы поверхности, которая удов-
летворяла бы всем перечисленным
требованиям к опоре во всех возмож-
ных режимах ее работы, представля-
ется весьма затруднительной. Однако
в большинстве узлов решающей явля-
ется одна из основных характеристик
опоры: динамическая грузоподъем-
ность, статическая грузоподъемность,
момент трения или (в значительной
степени связанная с ним) предельная
быстроходность. Эта характеристика
и определяет пригодность подшипника
в проектируемом узле; остальные же,
в данном случае второстепенные, дол-
жны лежать в некоторых регламенти-
рованных пределах. Таким образом,
при модификации формы дорожек ка-
чения колец шарикоподшипников и
шариковых направляющих необхо-
димо стремиться к удовлетворению
следующих основных требований:
а) меньший по сравнению с круговым
профилем уровень контактных дав-
лений, обеспечивающий достаточную
динамическую и статическую грузо-
подъемность, и возможно более благо-
приятное их распределение по пло-
щадке контакта;
б) максимальное снижение потерь
на дифференциальное проскальзы-
вание.
Одним из решений задачи повышения
работоспособности шариковых опор
качения путем совершенствования форм
их рабочих поверхностей может быть
профилирование этих поверхностей та-
ким образом, чтобы основная доля
нагрузки воспринималась средней
(в направлении большой осн) частью
площадки контакта при возможно бо-
Характеристики нетороидальных поверхностей качения
27
лее равномерном распределении дав-
ления в этой зоне и ограничении уве-
личения области контакта с возраста-
нием нагрузки. Для этого зазор ме-
жду шаром и желобом в средней части
последнего по мере удаления от точки
начального контакта должен увеличи-
ваться вначале медленно, а затем,
начиная с некоторого заданного значе-
ния угла, — более быстро, выводя из
контакта боковые участки профиля и
тем самым препятствуя возрастанию
потерь от дифференциального про-
скальзывания.
Вторым возможным решением яв-
ляется придание желобу такой формы,
при которой начальное касание шара
с ним происходит по двум точкам,
расположенным вблизи мгновенной оси
качения шара в процессе работы опоры
под нагрузкой. В этом случае могут
быть снижены как максимальные кон-
тактные давления за счет более рав-
номерного распределения нагрузки по
площадке контакта, так и потери на
дифференциальное проскальзывание
вследствие уменьшения плеч сил тре-
ния скольжения для наиболее нагру-
женных участков поверхности. В обоих
случаях решающее значение имеет
правильный выбор параметров про-
филя, обеспечивающий наиболее бла-
гоприятные для заданного диапазона
нагрузки длину площадки контакта и
расстояния между точками начального
касания.
ГЕОМЕТРИЯ И ОСНОВНЫЕ
ХАРАКТЕРИСТИКИ
НЕТОРОИДАЛЬНЫХ
ПОВЕРХНОСТЕЙ КАЧЕНИЯ
В Институте машиноведения АН
СССР был разработан ряд форм по-
верхностей качения и исследованы их
характеристики (по сравнению с тра-
диционными формами) по контактным
давлениям и сопротивлению качению.
Ниже описаны те формы, которые
могут найти применение в шариковых
подшипниках и направляющих.
Желоб комбинированной формы.
Наиболее простым является профиль,
который представляет собой дугу ок-
ружности'^ радиуса, очень близкого
к радиусу шара, переходящую*1 по
<7/
Рис. 9. Желоб комбинированного профиля
(а) и пятно контакта шара с желобом ком-
бинированного профиля (б) (оргстекло по
оргстеклу)
краям в сопряженные с ней отрезки
прямой (рис. 9, а). В этом случае,
благодаря большей конформности по-
верхностей шара и желоба в средней
части области контакта, давление здесь
распределяется более равномерно, чем
при стандартном соотношении =
= 0,5157)^, а «отогнутые» края же-
лоба ограничивают возможность удли-
нения площадки контакта и соответ-
ственно возрастание энергетических
потерь с увеличением нагрузки. Та-
кой профиль условно назван комбини-
рованным. В первом варианте угол
охвата 2у0 составлял 30°, а радиус
центрального участка 7?0 = 0,5057)^.
Обработку вели методом врезного
шлифования. Правку шлифовального
круга по нужному профилю проводи-
ли с помощью специального устрой-
ства, в котором острие иглы благодаря
двойной системе направляющих со-
вершает последовательно круговое и
прямолинейное движения.
Преимущества и недостатки комби-
нированного профиля могут быть
проиллюстрированы результатами
сравнительных испытаний, которые бы-
ли проведены на образцах с прямоли-
нейными желобами модифицирован-
ной и стандартной формы при качении
по ним шаров диаметром 76,2 мм.
Желоба стандартной формы имели
Rm — 0,515 Dw = 39,24 мм; желоба
комбинированной формы 7?0 =
= 0,505 Dw = 38,50 мм, 2у0 = 30°.
Опыты вели при сочетании сталь по
28
ПРЕЦИЗИОННЫЕ ШАРИКОВЫЕ ОПОРЫ
контактные давления при контакте шара
с круговым желобом 1 и желобом комбини-
рованного профиля 2 (сталь по стали)
стали (сталь марки ШХ15, твердость
HRC 60—61, шероховатость Ra —
= 0,2-т-0,4 мкм) и пластмасса по пласт-
массе (органическое стекло).
Для определения среднего кон-
тактного давления шар сжимают с за-
данной нагрузкой с образцом, имеющим
желоб исследуемого профиля, вычис-
ляют площадь полученного отпечатка
и делят величину приложенной на-
грузки на найденную площадь. На
желобах комбинированной формы
площадка контакта представляет собой
полоску почти постоянной ширины с за-
круглениями по концам (рис. 9, б). С по-
вышением нагрузки концевые участки
становятся шире, что свидетельствует
о концентрации давления на них.
Сравним максимальные контактные
давления на желобах со стандартным
и комбинированным профилями. Зна-
чение ро для комбинированного про-
филя можно принять равным 1,4рср>
хотя такая величина является не-
сколько завышенной. Судя по форме
площадки контакта, распределение на-
пряжений здесь ближе к случаю ли-
нейного контакта, когда соотношение
между максимальным и средним на-
пряжениями равно 1,27, чем к то-
чечному, для которого это соотноше-
ние составляет 1,5.
Как видно из кривых на рис. 10,
при малых нагрузках давление на ком-
бинированном желобе ниже, чем на
круговом, поскольку разность кривизн
контактирующих участков здесь мень-
ше, а площадка контакта еще практи-
чески не распространяется на прямоли-
нейные участки желоба, где зазор на-
чинает резко увеличиваться. Большая
ось соответствующей площадки на
круговом желобе при этой нагрузке
примерно равна хорде, стягивающей
дугу радиусом 7?0 на комбинированном
желобе, т. е. а ж 7?0 sin у0 (см. рис. 9).
С увеличением нагрузки контактное
давление на комбинированном желобе
становится больше, чем на круговом.
Объясняется это тем, что возможность
удлинения площадки контакта в на-
правлении большой оси здесь ограни-
чена резким увеличением зазора ме-
жду шаром и желобом за пределами
кругового участка последнего. На
круговом же профиле зазор изменяется
плавно и непрерывно, и площадка
контакта с повышением нагрузки ра-
стет как в длину, так и в ширину.
При этом необходимо иметь в виду,
что точка пересечения кривых контакт-
ного давления (рис. 10) в случае не-
обходимости может быть сдвинута
вправо увеличением центрального угла
2у0 на желобе с комбинированным про-
филем.
Энергетические потери определяли
при медленном качении стального
шара под соответствующей нагруз-
кой по стальному желобу, а также пла-
стмассового шара (органическое сте-
кло) по пластмассовому желобу. Во
избежание схватывания и задиров ра-
бочих поверхностей их перед прокат-
кой смазывали.
Для получения более достоверных
результатов каждый опыт повторяли
при заданных условиях 8—12 раз.
Полученные в результате обработки
экспериментальных данных силы со-
противления качению приведены на
рис. 11. Сопротивление качению на
желобу комбинированной формы на
большей части диапазона нагрузок,
при которых проводили испытания,
на 20—50% меньше сопротивления
качению по круговому желобу. Так,
для стальных образцов при максималь-
ных контактных давлениях на круго-
вом желобе р0кр^2 ГПа соотноше-
ние Гк/Гцр 0,85; для давлений около
2,25 ГПа = 0,59 и для р§ кр —
— 2,50 ГПа Гк/Гнр — 0,5 (рис. 12).
Характеристики нетороидальных поверхностей качения
29
Рис. 11. Сопротивление качению шара по круговому желобу 1 и желобу комбинированной
формы 2 (сталь по стали)
Рис. 12. Соотношения между значениями сопротивления качению ^комб/^кр и межДУ
максимальными контактными давлениями р0 komq/po Кр (2) для желобов комбинированного
и кругового профилей (сталь по стали)
При малых нагрузках сопротивление
качению на комбинированном желобе
больше, чем на круговом, но с увеличе-
нием нагрузки оно повышается гораздо
медленнее и в дальнейшем оказывается
значительно меньшим сопротивления
качению на круговом желобе. Объяс-
няется это тем, что при малых нагруз-
ках длина площадки контакта сравни-
тельно невелика и на комбинированном
желобе укладывается в круговой уча-
сток, на котором радиус кривизны
меньше, прилегание поверхностей
плотнее и соответственно потери на
дифференциальное проскальзывание
больше, чем на круговом. С увеличени-
ем нагрузки площадка контакта на кру-
говом желобе удлиняется быстрее, чем
на комбинированном с «отогнутыми»
краями; мгновенная ось вращения
шара поднимается выше над дном же-
лоба, распределение давлений менее
благоприятное, и потери на трение
соответственно выше. Таким образом,
применением комбинированного же-
лоба можно достичь снижения сопро-
тивления качению для заданного ди-
апазона нагрузок на 30—50 %.
Уровень средних контактных дав-
лений для желоба комбинированной
формы при малых нагрузках меньше,
а при более высоких нагрузках не-
сколько больше, чем для желобов
стандартной формы. Для максималь-
ных контактных давлений это превы-
шение будет меньше вследствие более
равномерного, по сравнению со стан-
дартным желобом, распределения на-
грузки на желобе комбинированной
формы. Аналогичные результаты были
получены и в ходе исследований, вы-
полненных на пластмассовых образ-
цах.
Положение точки пересечения кри-
вых давления (рис. 10), а также кри-
вых сопротивления качению зависит
для данного диапазона нагрузок от
величины угла охвата 2у0 и соотно-
шения радиусов кривизны кру-
говых участков комбинированного и
стандартного желобов. Увеличение
угла 2у0 вызывает смещение точки пе-
ресечения обеих пар кривых вправо,
т. е. напряжения на комбинированном
желобе остаются на большем участке
диапазона нагрузок ниже, чем напря-
жения при контакте шара со стандарт-
ным желобом. Сопротивление качению
при этом возрастет. Увеличение же
соотношения Rq/Ra< смещает точку
30
ПРЕЦИЗИОННЫЕ ШАРИКОВЫЕ ОПОРЫ
пересечения кривых сопротивления ка-
чению и кривых контактного напряже-
ния влево. Указанными обстоятель-
ствами следует руководствоваться при
выборе желоба для наиболее ответст-
венного режима работы с целью полу-
чения оптимального соотношения ме-
жду контактной прочностью и со-
противлением качению.
Желоба комбинированного профиля
с малым углом охвата (порядка 30°)
и соотношением RjDw = 0,505,
обеспечивающие снижение сопротив-
ления качению, могут быть исполь-
зованы:
в подшипниках, которые несут
сравнительно небольшие нагрузки, но
по условиям должны иметь минималь-
ный момент трения,
в высокоскоростных шарикоподшип-
никах, работающих при чисто ради-
альной нагрузке, когда основным ли-
митирующим фактором становятся по-
тери на трение качения, вызывающие
усиленное изнашивание рабочих по-
верхностей и большое тепловыделение;
в опорах поворотных устройств и
подвижных столов отдельных механиз-
мов, где для уменьшения габаритных
размеров и затрачиваемой мощности
необходимо свести к минимуму сопро-
тивление качению;
в подшипниках, работающих без
смазочного материала, когда потери
от дифференциального относительного
проскальзывания рабочих поверхно-
стей шара и желоба становятся осо-
бенно значительными.
Желоба с большим углом охвата
(порядка 45—60°) и тем же соотно-
шением RjDw — 0,505, обеспечива-
ющие существенное снижение контакт-
ных напряжений при повышенном
уровне сопротивления качению, могут
быть использованы в тяжело нагружен-
ных сравнительно тихоходных опо-
рах, где лимитирующими являются
контактные напряжения и пластичес-
кие деформации в рабочей зоне, а
увеличение размеров опоры в целом
является нежелательным или невоз-
можным по конструктивным сообра-
жениям.
Эллиптический желоб с начальным
одноточечным контактом. Приведен-
ные выше результаты показывают, что
в случае правильного выбора парамет-
ров комбинированного профиля же-
лоба он может обеспечить существен-
ные преимущества по сравнению с кру-
говым профилем как в отношении
энергетических потерь, так и в отно-
шении характера распределения на-
пряжений в зоне соприкасания рабо-
чих поверхностей Вместе с тем при
более высоких нагрузках имеет место
расширение площадки контакта вбли-
зи концов ее оси, что свидетельствует
о некоторой концентрации нагрузки.
Указанное явление возникает вследст-
вие того, что в точках сопряжения вто-
рая производная функции, которой
описывается рассматриваемый про-
филь, терпит разрыв. Физически это
может быть объяснено следующим
образом. Вследствие малой разности
кривизн сопряженных поверхностей
на круговом участке профиля шар
с желобом имеют очень близкое при-
легание; в точках же сопряжения
дуги с прямолинейными отрезками
зазор начинает быстро расти. Практи-
чески, с учетом деформаций, эта раз-
ность тем больше, чем больше нагрузка
на шаре (или чем меньше модуль упру-
гости материала). Условия работы
приближаются к случаю сжатия кру-
гового цилиндра конечной длины
с бесконечной плитой (именно так мож-
но представить контакт шара с же-
лобом комбинированной формы, если
их площадку контакта развернуть на
плоскость), при котором четко про-
является так называемый «краевой
эффект».
Судя по формам площадок контакта
при различных нагрузках, параметры
профиля могут быть выбраны в соот-
ветствии с нагруженностью узла и
упругой податливостью опоры таким
образом, что в заданном диапазоне
условий будут реализоваться положи-
тельные свойства профиля при мини-
мальной концентрации давления на
отдельных участках. Однако остается
очевидной целесообразность разра-
ботки и исследований профилей, опи-
сываемых некоторой непрерывной
кривой, на которой отсутствовали бы
«особые» точки, где вторая производная
функции терпит разрыв. Кроме того,
обработка таких профилей технологи-
чески проще. В качестве одной из
таких кривых может быть выбран
Характеристики нетороидальных поверхностей качения
31
участок дуги эллипса, расположенный
у конца большой его оси.
Кривизна эллипса имеет наиболь-
шее значение на концах большой оси
и быстро уменьшается по мере удале-
ния от них. Поэтому, если дорожку
качения шариковой опоры обрабо-
тать по профилю, соответствующему
участку дуги эллипса, расположен-
ному у конца большой его оси (рис 13),
то при должном выборе параметров
эллипса будут получены более равно-
мерное по сравнению с круговым про-
филем распределение давления на
среднем участке зоны контакта и
более быстрый рост зазора между ша-
ром и желобом на крайних участках
профиля.
Для эллипса, описываемого
нением
урав-
2 2 X2
’Д2”'1~"В2'
точке
(2)
радиус кривизны в некоторой
К (Z,' х)
_ (В4 _ В2%2 л2х2)3/2
Р ~ ЛВ4
При х = 0 (т. е. на концах большой
оси эллипса)
р0-В2/Л. (3)
Зазор между шаром радиусом Rw
и желобом, описанным дугой эллипса
с полуосями А и В, при условии р0
> R^ определяется выражением
гЭЛ1 -
х2
В2
--|Дя2№-?-Л + /?да. (4)
(Вывод этой и последующих приведен-
ных в настоящей главе зависимостей
дан в работе [6].)
При контакте шара с круговым же-
лобом радиусом
гкр = У ~ x<i - У ~ -
-- + Rw- (5)
Разность в градиентах раскрытия
зазора
Арр — х X
1 А
х К в
Рис. 13. Контакт шара с эллиптическим
желобом
Па эллиптическом желобе зазор
раскрывается быстрее, чем на кру-
говом, при АГр 2> 0, т е. при значе-
ниях х, определяемых из неравенства
й7--->У^-*2- (6)
В качестве примера проследим ха-
рактер изменения вдоль площадки
контакта величины Агр, т е. разности
в скоростях раскрытия зазора между
шаром и желобом в случае эллипти-
ческого и кругового профилей, для
некоторого частного случая, когда
Rw = 1, = 0,5152?^ = 1,03 и
радиус кривизны эллипса в точке
начального контакта р0 = 1,01/?^.
Как следует из условия (6), эти ско-
рости становятся одинаковыми при
величине х, для которой соблюдается
равенство
Раскрывая это выражение и имея
в виду, что В2/А = ро = 1,01, а =
= 1,03, получаем
здесь А, В, х — безразмерные вели-
чины, отнесенные к Rw = 1.
При меньших значениях х зазор на
эллиптическом желобе раскрывается
медленнее, чем на круговом, при
больших — быстрее.
32
ПРЕЦИЗИОННЫЕ ШАРИКОВЫЕ ОПОРЫ
Рис. 14. Изменение вдоль оси X
зазора между шаром диаметром
50,8 мм и желобами эллиптиче-
ского профиля при Qo —
и А = 300 мм (/), 200 мм (2) и
100 мм (3), а также круговыми
при /?ж = 0,515Z)w (4) и /?ж =
= 0,505/)^ (5)
Hajpnc. 14 показано^изменение^за-
зоров между шаром диаметром 50,8 мм
и тремя различными ^желобами эл-
липтического профиля,’ а также ме-
жду шаром и желобами кругового
профиля.
Как видно из'приведенных данных,
характер раскрытия зазора в случае
эллиптического желоба более благо-
приятный по сравнению с круговым. В
средней части зазор раскрывается мед-
леннее, благодаря чему нагрузка здесь
распределяется более равномерно
вдоль большой оси площадки контакта.
У концов площадки зазор увеличива-
ется быстрее, что ограничивает рост
площадки в направлении большой ее
оси и тем самым обеспечивает умень-
шение потерь на дифференциальное
проскальзывание. Значительное из-
менение параметров эллипса не вызы-
вает существенного изменения скоро-
сти раскрытия зазора.
Рис. 15. Сопротивление качению шара диа-
метром 50,8 мм по круговому (/) и эллипти-
ческому с начальным одноточечным контак-
том (2) желобам (оргстекло по оргстеклу)
На рис. 15 представлены результаты
сравнительных экспериментов по оп-
ределению сопротивления качению на
образцах из оргстекла с эллиптическим ,
желобом при ро “ 0,5051)^ и круго-
вым при — 0,5151)^ в паре с ша-
ром диаметром 50,8 мм. Соотношение
^эл/^кр падает с увеличением нагрузки
вследствие более быстрого роста по-
терь на круговом желобе, вызванного
увеличением длины площадки контакта
и соответственно дифференциального
проскальзывания. Характерно, что
при качении шара по круговому же-
лобу уже под нагрузкой 5,5 кН на-
блюдалась существенная неравномер-
ность его перемещения. По эллипти-
ческому желобу шар перемещался
спокойно под нагрузкой 7 кН. Кон-
тактные давления на эллиптическом
желобе на всем диапазоне нагрузок
примерно на 10 % ниже, чем на кру-
говом.
Обработка эллиптического желоба.
Обработку ведут врезным шлифова-
нием методом копирования, который
обеспечивает наибольшую точность об-
работки и находит все более широкое
применение в условиях массового про-
изводства. В данном случае основным
является профилирование шлифоваль-
ного круга. В случае обработки желоба
с эллиптическим профилем исполь-
зуется приспособление, принцип ра-
боты которого показан на рис. 16.
Шлифовальный круг 1 радиусом 7?к,
вращающийся вокруг оси ОгОъ про-
филируется алмазной иглой 2, уста-
новленной в скобе 3. Последняя имеет
возможность поворачиваться вокруг
оси О2О2 приспособления. Ось О2О2
повернута относительно плоскости
вращения круга на угол ср. Таким об-
разом, при вращении скобы острие
иглы 2 описывает в плоскости NN
Характеристики нетороидальных поверхностей качения
33
окружность радиусом, равным 7?п.
Следовательно, если спроектировать
дугу окружности радиусом 7?п, лежа-
щую в плоскости NN, на диаметраль-
ную плоскость круга ТТ, то получим
на периферии круга дугу эллипса
с полуосями
А = Rn и В — /?п cos ф. (8)
Для этого наряду с вращательным
движением скобы 3, в результате
которого острие иглы получает пере-
мещение S в плоскости NN, необхо-
димо площадке 5, на которой смонти-
рована скоба, сообщить связанное
с этим перемещением S дополнительное
поступательное перемещение So —
= —S sin ф. В результате острие иглы
все время расположено в диаметраль-
ной плоскости ТТ. При согласовании
движений круг будет спрофилирован
по дуге эллипса, лежащей у конца
его большой оси. Важным является
то обстоятельство, что в полученные
зависимости (2), (4), (8) не входит
диаметр шлифовального круга. Сле-
довательно, износ круга не влияет на
форму желоба.
Эллиптический желоб с начальным
двухточечным контактом. Основные
геометрические соотношения. Если по-
луоси эллипса выбрать таким образом,
чтобы радиус его кривизны на концах
большой оси был меньше радиуса ша-
ра Rw, то первоначальное касание ша-
2 Пинегин С. В. и др.
ра и желоба произойдет в двух точках
N (рис. 17). Вследствие этого, во-
первых, произойдет уменьшение кон-
Рис. 17. Двухточечный контакт и площад-
ка соприкасания шара с эллиптическим же-
лобом
34
ПРЕЦИЗИОННЫЕ ШАРИКОВЫЕ ОПОРЫ
Рис. 18. (Изменение вдоль оси X зазора ме-
жду шаром и эллиптическим желобом в слу-
чае двухточечного контакта (/) и между ша-
ром и круговым желобом при /?ж = О,505£>^
(2) и^ж = 0,515/)^ (3)
тактных давлений, поскольку эпюра
давлений в случае двухточечного кон-
такта будет иметь два, но менее четко
выраженных максимума, и, следова-
тельно, приложенная нагрузка рас-
пределяется в пределах рабочей зоны
более равномерно, чем в случае одно-
точечного контакта. Во-вторых, зоны
максимального давления приближа-
ются к мгновенной оси вращения шара,
вокруг которой он поворачивается при
качении по желобу. Это должно выз-
вать уменьшение потерь на дифферен-
циальное проскальзывание, которые
являются существенной составляющей
общих энергетических потерь при ка-
чении шара по желобу.
В этом случае расстояние точки на-
чального контакта ог плоскости сим-
метрии желоба
г 1/ a2R2w~b4
C,i ~ V А2 — В* ’
(9)
радиус кривизны эллипса в точке на-
чального контакта
рс--= Л2/?з/В4 (10)
и зазор между шаром и желобом
2эЛ2 = А 1 — —
-|Л(д2-в2)(в2-/?2ю)/в.
(11)
Характер контакта и уровень сред- •
них давлений. Характеристики профиля
были получены в результате опытов,
выполненных на образцах из стали
ШХ15 с прямолинейными желобами
эллиптического и кругового профилей,
твердость которых HRC 60—61, ше-
роховатость Ra = 0,32-7-0,4 мкм.
Большая полуось эллипса А =
= 75,06 мм; малая В — 43,48 мм; *
диаметр шара — 50,8 мм. На
рис. 18 в безразмерных величинах
представлена функция зазора z ддя
эллиптического желоба и круговых
желобов с = 0,515£)ш и =
= 0,505/)ш (за характерную величину
принят радиус шара 7?ш). Как видно
из сравнения результатов, эллипти-
ческий желоб (кривая /) обеспечивает
более благоприятный по сравнению
с круговым (кривая 2 и 3) характер
изменения зазора, при котором дости-
гается большая конформность рабо-
чих поверхностей в средней части пло-
щадки контакта, и, следовательно,
более равномерное распределение
здесь контактных давлений. На опре-
деленном расстоянии от середины же-
лоба происходит быстрое возрастание
зазора, благодаря чему ограничивается
скорость удлинения контактной пло-
щадки. Для заданных параметров
эллипса кривизна в нижней точке
желоба ро = 0,99167?--, и в точках
начального касания рс = 1,0177?ш.
Площадка контакта в случае эллипти-
ческого желоба с начальным касанием
в двух точках напоминает восьмерку.
Среднее давление на эллиптическом
желобе при малых нагрузках меньше,
а при более высоких нагрузках не-
сколько больше среднего давления
на круговом желобе (рис. 19). Это объ-
ясняется ограниченной возможностью
роста длины площадки контакта шара
с эллиптическим желобом при увели-
чении нагрузки вследствие резкого
возрастания функции зазора на опре-
деленном удалении рассматриваемого
сечения от середины желоба. При этом
Характеристики нетороидальных поверхностей качения
35
следует иметь в виду, что путем соот-
ветствующего подбора параметров
эллипса точку пересечения кривых р0
и рср можно сдвинуть в любую сто-
рону для обеспечения оптимальных
условий контакта при заданном ре-
жиме работы подшипника. Если счи-
тать, что при двухточечном контакте
соотношение между максимальным и
средним давлением занимает некоторое
промежуточное положение между то-
чечным и линейным контактами, то
для рассматриваемого случая можно
с некоторым запасом принять макси-
мальное давление р0 = 1,4рср. Из
рисунка видно, что по этому параметру
эллиптический желоб имеет преиму-
щество перед круговым почти во всем
диапазоне нагрузок, при которых вели
опыты.
Сопротивление качению стального
шара диаметром 50,8 мм по стальным
образцам с желобами рассматривае-
мого профиля и кругового со стандарт-
ным соотношением R1VjDw = 0,515
измеряли на тех же образцах со смазы-
ванием цилиндровым маслом. Как
видно из рис. 20, во всем диапазоне
нагрузок сопротивление качению шара
по эллиптическому желобу существен-
но меньше сопротивления качению
по круговому желобу. Смазывание
цилиндровым маслом в данном слу-
чае было применено для снижения опас-
ности задира рабочих поверхностей.
При малой нагрузке, когда пло-
щадка контакта на эллиптическом
желобе с начальным двухточечным
касанием длиннее, чем площадка на
круговом желобе, сопротивление ка-
чению больше, а контактное давление
меньше. С увеличением нагрузки
площадка контакта на эллиптическом
желобе удлиняется медленнее, чем на
круговом; соответственно медленнее
увеличивается и сопротивление ка-
чению. Максимальное давление во
всем диапазоне нагрузок остается на
эллиптическом желобе ниже, чем на
круговом, вследствие более равномер-
ного распределения нагрузки вдоль
большой оси площадки контакта.
Гиперболический желоб. Если правка
шлифовального круга ведется с по-
мощью алмазной иглы, которая ук-
реплена в скобе, вращающейся на
оси О2О2, расположенной под углом
2*
Рис. 19. СреднеерСр и максимальноеpQ кон-
тактные давления при сжатии шара диаме-
тром 50,8 мм с круговым (/) и эллиптиче-
ским (2) желобами (сталь по стали)
к плоскости вращения круга и не име-
ющей дополнительного смещения So
(см. рис. 16), то, как показано в ра-
Рис. 20. Сопротивление качению шара диа-
метром 50,8 мм по круговому /кр и эллип-
тическому F3Jl желобам (сталь по стали) в
зависимости от нормальной нагрузки Q
36
ПРЕЦИЗИОННЫЕ ШАРИКОВЫЕ ОПОРЫ
Рис. 21. Изменение вдоль оси X зазора между
шаром Dw — 50,8 мм и эллиптическим желобом
при q0 = 0,505Z>,c, (/), круговым при /?ж =
= 0,515/)^ (2), гиперболическим при qq =
= 0,505Z>^ (3) и круговым при 7?ж = 0,505Z)^
(4)
Рис. 22. Сопротивление качению без смазки шара диаметром 50,8 мм по желобу с эллипти-
ческим профилем с q0 = 0,5051)^ (/), гиперболическим профилем с = 0,505/)^ (2)
и круговым с /?ж = 0,515/)^ (3) (оргстекло по оргстеклу)
XOZ приобретает гиперболическую
форму, которая описывается уравне-
нием
= У Як+*2[1£2 Ф-^к/'С^п соь2 Я )] .
(12)
Радиус кривизны желоба в некоторой
точке с абсциссой X определяется
зависимостью
(13)
где В, = RK, Vtg2 ср —
Л1 = #0 = /?П C0S'2 <₽•
При х = 0 получаем
Ро = RK cos2 tp^Ru/Rn — Sin2<p).
(14)
Радиус правки, который при дан-
ном угле установки скобы (р и радиусе
круга обеспечит необходимый ра-
диус кривизны ро гиперболического
желоба в нижней его точке,
Rn =- ^k/[cos2 Ф (Ig2 Ч1 + RK Ро)1-
(15)
Зазор между шаром и гиперболи-
ческим желобом определяется выраже-
нием
ггип^да-]/>2 -Х2-Як +
+ ]/'%2tg2<p4-[7?K- ”
— Аг (1 — / 1 — х2,'В2)]2.
(16)
На рис. 21 представлены значения
зазоров между шаром и желобами
различных профилей на различном
удалении х от точки начального кон-
такта. Наиболее перспективными из
приведенных форм желобов являются
гиперболическая и эллиптическая фор-
мы, которые обеспечивают сравнитель-
но небольшую величину зазора вблизи
Сложный профиль поверхности качения
37
точки начального контакта и затем
быстрое его увеличение. Это обуслов-
ливает более равномерное по сравне-
нию с круговым желобом распреде-
ление нагрузки по длине площадки
контакта и одновременно выводит из
контакта боковые участки, несущие
незначительную долю полезной нагруз-
ки, но существенно увеличивающие
потери на трение качения. По крите-
рию сопротивления качению гипербо-
лический профиль близок к эллипти-
ческому (рис. 22); контактные напря-
жения на нем несколько выше.
Наиболее перспективным из опи-
санных форм желоба является эллип-
тический профиль с начальным двух-
точечным контактом. В зависимости
от выбранных параметров эллипса,
определяющих расстояние между точ-
ками начального контакта и радиус
кривизны в этих точках, такой про-
филь может способствовать сущест-
венному снижению контактных напря-
жений в тяжело нагруженных опорах,
либо значительно уменьшать энерге-
тические потери при умеренном уровне
контактных напряжений в опорах,
которые работают при небольших на-
грузках, но по условиям эксплуата-
ции должны иметь минимальный мо-
мент трения.
сложный ПРОФИЛЬ
ПОВЕРХНОСТИ КАЧЕНИЯ
Из приведенных выше результатов
видно, что путем профилирования до-
рожки качения шарикоподшипника
или шариковой направляющей дугой
эллипса, либо придавая ей гипербо-
лическую форму можно существенно
улучшить такие важнейшие характе-
ристики опорного узла, как легкость
хода, его динамическую и статическую
грузоподъемность. Однако в ряде слу-
чаев необходимо более свободное варь-
ирование формы поверхности качения
для получения наиболее благоприятной
формы площадки контакта и закона
распределения на ней нагрузки В этом
плане наиболее перспективным яв-
ляется профиль, который был условно
назван «сложным», следует отметить
также его лучшую технологичность и
сравнительную легкость контроля.
Форма желоба и характер контакта.
На рис. 23 показан основной вид слож-
ного профиля, которым можно форми-
ровать поверхности качения шарико-
вых подшипников и направляющих.
Средняя часть профиля ВС на централь-
ном угле 2у0 очерчена дугой постоян-
ного радиуса /?0. Боковые сопряженные
с ней участки АВ и CD имеют пере-
менный радиус кривизны, который
в точках сопряжения равен 7?0 и воз-
растает по мере приближения к краям
желоба. Ось симметрии профиля мо-
жет быть повернута по отношению
к плоскости качения на угол а, равный
углу контакта шара в опоре. В част-
ном случае, при чисто радиальной на-
грузке а = 0.
Характер контакта шара с желобом
такого профиля и эпюра давлений пол-
ностью определяются параметрами
2у0, К — RjDw и радиусом кривиз-
ных боковых участков профиля р =
= f(y). При 2у0 > 60° и К > 0,515
площадка контакта имеет эллиптиче-
скую форму (рис. 24, а), а эпюра дав-
лений р представляет собой полуэл-
липсоид. С уменьшением этих пара-
метров площадка контакта укорачи-
вается, становится шире и при 2у0 =
— ЗО-г-500 и К = 0,505 приближается
по форме к полоске постоянной ши-
рины с плавными закруглениями по
концам (рис. 24, б). Эпюра давлений
на такой площадке в сечении ХОр
близка к прямоугольнику с закруглен-
ными верхними углами, а в сечении
УОр имеет форму полуэллипса.
С уменьшением радиуса централь-
ного участка до 7?0 < Rw возникает
двухточечное начальное касание, но
при 7?0 > 0,495 Dw обе зоны контакта
с возрастанием нагрузки быстро смы-
каются, и площадка, как и в случае
эллиптического желоба, напоминает
восьмерку (рис. 24, в). Эпюра давле-
ний на такой площадке имеет два мак-
симума. В обоих случаях площадка
контакта имеет ограниченную возмож-
ность удлинения и с увеличением на-
грузки растет главным образом в ши-
рину. Но на профиле отсутствуют осо-
бые точки, в которых вторая производ-
ная d2zldx2 (см рис. 24) терпела бы
разрыв, поэтому на площадке нет мест
концентрации давлений, как это наб-
людается, например, в случае комби-
38
ПРЕЦИЗИОННЫЕ ШАРИКОВЫЕ ОПОРЫ
Рис. 24. Пятна контакта и эпюры дав-
лений на желобах сложного профиля
при отношениях радиуса /?0 централь-
ного участка профиля к диаметру шара
Dw : Ro/Dw = °’515 (а); °’505
0,495 (в); 0,485 (г)
нированного желоба. В обоих случаях
давление вдоль оси X распределено
более равномерно, чем для стандарт-
ных круговых желобов с соотноше-
нием RyjDw = 0,515. При RqIDw
0,485 площадка контакта разде-
ляется на два участка, которые не смы-
каются даже при весьма высоких на-
грузках, соответствующих напряже-
нию р0 на круговом желобе порядка
5,5 ГПа (рис. 24, г).
Рис. 25. Характеристики профилей Р4 и Р5
по сравнению с круговым профилем
Сравнительные характеристики по
напряжениям и энергетическим поте-
рям. Исследования показали, что наи-
больший интерес представляют про-
фили, при которых площадка контакта
имеет форму, показанную на рис. 24, б
и в. Условия контакта на большей части
длины площадки здесь являются про-
межуточными между точечным (р0 =
= 1,5 рСр) и линейным (р0 = 1,27рср)
контактами с преимущественным ук-
лоном в сторону последнего. Поэтому
с возможной ошибкой в сторону недо-
оценки преимуществ рассматриваемой
сложной формы поверхности качения
в первом приближении можно прини-
мать р0 = 1,35рср.
На рис. 25 представлены характе-
ристики желобов со сложным профи-
лем Р4 (RjDw = 0,505; 2у0 — 30°;
площадка контакта показана на
рис. 24, б) и Р5 (RjDw = 0,485; 2у0 =
— 30°; площадка контакта приведена
на рис. 24, в) по сравнению с круговым
желобом R-^DW ~ 0,515 (диаметр шара
12,7 мм). Твердость HRC 60—61;
параметры шероховатости Ra = 0,32 ч-
4-0,4 мкм; смазывание цилиндровым
маслом. Как и следовало ожидать,
наименьшее сопротивление качению
имеет профиль Р4 с самым коротким
Сложный профиль поверхности качений
30
пятном контакта, затем следуют про-
фили Р5 и круговой с радиусом =
= 0,515/)цу = 6,54 мм. Каждая из
кривых может быть сдвинута в любом
направлении вдоль оси нагрузок пу-
тем соответствующего изменения пара-
метров профиля. При увеличении цен-
трального угла 2у0 и уменьшении ра-
диуса 7?0 кругового участка профиля
минимум кривой отношения /7СЛОж/7кр
смещается вправо, а минимум кривой
Росло>к/рокр ~ влево. Очевидно, что от
значений угла 2у0 и радиуса 7?0 зави-
сят соотношения сопротивления каче-
нию по этим желобам и соотношения
контактных давлений.
Верность этого положения подтвер-
ждается результатами сравнительных
испытаний, выполненных на сталь-
ных образцах с желобами сложного
профиля типа РЗ (RjDw — 0,505;
2у0 = 44°) и круговым профилем
(R-vJDw— 0,515) в контакте с шаром
диаметром 50,8 мм.
На рис. 26, а показаны характе-
ристики профиля по максимальным дав-
лениям и по сопротивлению качению
по сравнению с характеристиками
кругового профиля. С увеличением
центрального угла 2у0 минимальное
значение соотношения максимальных
давлений роРз/Рокр сдвинуто влево,
а сама кривая легла значительно ниже,
чем для аналогичного профиля А4,
имевшего 2у0 — 30° при том же соот-
ношении R$lDw — 0,505. Сопротивле-
ние же качению существенно возросло
вследствие увеличения длины площадки
контакта. Однако с увеличением на-
грузки падает соотношение сил тре-
ния качения Fp^F^. При нагрузке,
соответствующей максимальном/ кон-
тактному давлению на круговом же-
лобе около 3,4 ГПа, на желобе сложного
профиля давление и потери на каче-
ние меньше, чем на круговом.
Площадка контакта шара с желобом
профиля РЗ имеет вид полоски при-
мерно постоянной ширины (в средней
ее части) с плавными закруглениями
по концам (рис. 26, б).
С уменьшением радиуса RQ до 0,4852)
площадка контакта делится на две
области (см. рис. 24, г). Эксперименты
показали, что такой профиль не имеет
преимуществ перед круговым ни в от-
ношении величины контактного напря-
Рис. 26. Пятно контакта шара диаметром
50,8 мм при нагрузке 200 кН для желоба с
профилем РЗ [2у0 = 44°; = 0,505/)^,
(а) ] и сравнительные характеристики его
по сопротивлению качения F, максималь-
ному контактному напряжению /?0 и оста-
точным деформациям А (б)
жения, ни по уровню сопротивления
качению. Объясняется это тем, что
угол между центрами давления на уча-
стках контакта имеет сравнительно
большую величину, порядка 50—60°.
При этом на площадке контакта помимо
дифференциального проскальзывания
имеет место проскальзывание сопря-
женных поверхностей в результате
вращения поверхности шара относи-
тельно желоба вокруг осей ONr и ON2
с угловой скоростью (Одг = (о sin у
(где у = arcsin CH/RW), подобно тому,
как это происходит при качении шара
по призме (рис. 27). Кроме того, при
этом сумма контактных давлений на
обеих площадках
2 j pi dS ~ Q/cos у > О,
S
что также является причиной возра-
стания напряженности на контакте.
Но при несколько большем значении
радиуса 2?0 0,492)цу зоны контакта
с увеличением нагрузки смыкаются.
Такой профиль имеет существенное
преимущество перед круговым в слу-
чаях, когда по условиям эксплуатации
па ведущем контакте возникают боль-
шие тангенциальные усилия, приводя-
40
ПРЕЦИЗИОННЫЕ ШАРИКОВЫЕ ОПОРЫ
Рис. 27. Контакт шара с желобом сложного
профиля при Rq/Dw < 0,485
щие в стандартных подшипниках к по-
тере сцепления между вращающимся
кольцом подшипника и комплектом
тел качения.
Профиль с частично разгруженными
зонами. Возможен еще один вид слож-
ного профиля, целесообразность ис-
пользования которого вытекает из
следующего. Как показывает опыт экс-
плуатации шарикоподшипников, ра-
ботающих в водной среде или условиях
плохой смазки, износ дорожки каче-
ния в поперечном ее сечении сущест-
венно непостоянен. Достигая наиболь-
Рис. 28. Желоб с частичным разгружением
участков, расположенных вблизи зон чи-
стого качения (профиль А4), и пятно кон-
такта с желобом этого профиля
ших значений на дне желоба и вблизи
его краев, где работа сил трения,
вызванных дифференциальным прос-
кальзыванием, наибольшая, он срав-
нительно невелик вблизи зон чистого
качения, которые прилегают к точкам
пересечения желоба мгновенной осью
вращения шарика относительно же-
лоба. В результате эти зоны факти-
чески выступают над рядом лежащими
более изношенными и потому частично
ушедшими из-под нагрузки участками,
давление на них значительно возра-
стает, и они оказываются более под-
верженными контактному разрушению.
Исследования подтверждают, что очаги
разрушения довольно часто распола-
гаются вблизи зон чистого качения
и в случае работы при нормальной
смазке.
С точки зрения минимального уровня
энергетических потерь предпочтитель-
ным является эллиптический профиль
с начальным касанием в областях,
расположенных вблизи зон чистого
качения, либо профиль типа Р5
с RjDw ж 0,495. Вместе с тем именно
эти зоны наиболее подвержены контакт-
ному разрушению. Следовательно, в
сравнительно тяжело нагруженных
подшипниках, к которым по условиям
работы не предъявляют жестких тре-
бований по легкости хода и темпера-
турному режиму, представляется целе-
сообразным эти области частично раз-
грузить, придав профилю вид, пока-
занный на рис. 28. Площадка кон-
такта шара с желобом сложного про-
филя такого вида приведена в нижней
части рисунка. Как показал экспери-
мент, гл^ бину выемки целесообразно
принимать равной (5—7) 10"4 Dw, а
ширину — (0,04—0,05) Dw при рас-
стоянии средней части от середины
желоба (0,07—0,09) D w (большие зна-
чения соответствуют большей нагру-
женности подшипника). При таких
соотношениях размеров профиля ка-
навки располагаются вблизи зон чи-
стого качения и обеспечивают частич-
ное разгружение материала на наи-
более повреждаемых участках дорожки
качения. Отметим, что использование
такого профиля целесообразно лишь
в случае достаточно стабильного поло-
жения дорожки качения по ширине
желоба, когда ее угловой дрейф со-
Остаточные деформации на желобах
41
ставляет не более 5—8°, т. е. в радиаль-
ных подшипниках, работающих при
чисто радиальной нагрузке, и радиаль-
но-упорных, работающих при комби-
нированной нагрузке, но с относительно
малым изменением в процессе работы
угла контакта, вызванным возраста-
нием зазора и колебаниями отноше-
ния осевой нагрузки к радиальной.
ОСТАТОЧНЫЕ ДЕФОРМАЦИИ
НА ЖЕЛОБАХ КРУГОВОГО
И СЛОЖНОГО ПРОФИЛЯ
Высокие концентрированные на-
грузки вызывают остаточные дефор-
мации на поверхностях качения и
необратимые изменения их формы.
Известно, что даже на деталях высокой
твердости (HRC 60—62) эти деформа-
ции достигают ощутимой величины
уже при нагрузках, соответствующих
умеренным значениям максимального
давления порядка 3 ГПа. Изменяя
геометрию поверхностей и условия
динамического взаимодействия со-
пряженных деталей, они оказывают
существенное влияние на работу узла.
С одной стороны, при равномерной
(в направлении качения) деформации
рабочей зоны во многих случаях про-
исходит уменьшение приведенной кри-
визны сопряженных поверхностей и
соответственно уменьшение контакт-
ных напряжений. Это может иметь
место, например, на дорожках каче-
ния вращающихся колец подшипни-
ков, на вкладышах сферических опор,
воспринимающих осевые нагрузки, и
т. д.
С другой стороны, пластические де-
формации тел качения ведут к увели-
чению радиального зазора в подшип-
нике с вытекающими отсюда послед-
ствиями. Кроме того, явления типа
ложного бринеллирования подшип-
ников ухудшают виброакустические
характеристики узла и, образуя зоны
повышенных контактных напряжений
на границах отдельных углублений
на рабочих поверхностях дорожек ка-
чения, вызывают значительное сниже-
ние долговечности. В середине на-
груженной зоны невращающегося
кольца деформации имеют более высо-
кий уровень по сравнению с осталь-
ной частью его дорожки качения, что
в условиях периодического поворота
этого кольца отрицательно влияет на
виброакустические характеристики
узла.
Очевидно, что величины указанных
формоизменений в каждом конкретном
случае будут зависеть от условий ра-
боты данной пары сопряженных дета-
лей и в первую очередь от твердости
материала и контактных напряжений,
однако влияние их на контактно-уста-
лостный ресурс деталей и эксплуата-
ционные характеристики узла оче-
видно.
Сравнительная экспериментальная
оценка желобов сложного профиля по
критерию статической грузоподъем-
ности может быть выполнена на об-
разцах с прямолинейными желобами
кругового и сложного профилей. Об-
разцы с различными профилями, на
которых проводится сравнение вели-
чин и распределения остаточных де-
формаций, должны быть изготовлены
из материала одной плавки, пройти
идентичную термическую и механи-
ческую обработку и отличаться по
твердости не более чем на единицу HRC
(желательно меньше). Величину де-
формации регистрируют с помощью
прибора типа профилографа-профило-
метра завода «Калибр». Поскольку
даже сталям с высокой твердостью свой-
ственно частичное восстановление
формы поверхностей пластически де-
формированных участков, протекаю-
щее в течение некоторого времени после
снятия нагрузки, измерения осуществ-
ляют примерно через час после раз-
гружения. К этому времени процесс
восстановления практически уже за-
канчивается, и небольшая разница
в промежутках времени между момен-
том разгружения и замером при раз-
личных опытах не вызывает заметной
погрешности. Измерение ведут вдоль
образующей желоба, базой служат не-
деформированные участки поверхности,
находящиеся за пределами зоны нагру-
жения.
Принимая во внимание, что основ-
ная доля остаточной деформации об-
разуется в результате первого нагру-
жения, сравнительные опыты можно
вести при однократном сжатии шара
с желобом исследуемого профиля.
42
ПРЕЦИЗИОННЫЕ ШАРИКОВЫЕ ОПОРЫ
Рис. 29. Остаточные деформации А на пря-
молинейном стальном желобе, образовав-
шиеся при сжатии его с шаром диаметром
12,7 мм:
1 — желоб круговой; # = 0,5157)^; 2 —
желоб Р2; 2у = 50°; 7? — 0,5057) ;
HRC 61-62
В случае необходимости остаточные
деформации измеряют нормально ра-
бочей поверхности, для чего желоб
при каждом измерении наклоняют на
нужный угол в соответствии с его ра-
диусом и заданным расстоянием точки
Рис. 30. Остаточные деформации Д на пря-
молинейных желобах со сложным профилем
РЗ при RqIDw = 0,505 и 2 у0 = 44° (штри-
ховая) и круговым = 0,5157)^ (сплош-
ная) при сжатии их с шаром диаметром
50,8 мм, HRC 61 — 62
лоба. Результаты таких измерений
показаны на рис. 29 Обычно замеры
ведут в плоскостях, параллельных
плоскости симметрии желоба (т. е.
направлению внешней нагрузки) Из
представленных на рис 30 результатов
сравительных экспериментов видно,
что в широком диапазоне нагрузок де-
формации на желобах сложного про-
филя приблизительно вдвое меньше
деформаций на круговом желобе. Как
показано на рис. 25, при нагрузках,
соответствующих р0кР= ГПа, с
которых начинается интенсивное раз-
витие остаточных деформаций, желоба
сложного профиля типа РЗ имеют
перед круговым преимущество также
и по легкости хода.
РАСЧЕТ ДАВЛЕНИЙ
НА НЕГЕРЦЕВСКИХ
ПЛОЩАДКАХ КОНТАКТА
Известные решения контактной за-
дачи, приведенные в работах Г. Герца,
Н. М. Беляева, А Н. Динника, от-
носятся к случаям соприкасания тел
с поверхностями постоянной кривизны,
когда площадка контакта имеет форму
полоски либо эллипса [2]. Однако
при соприкасании, например, шара
с желобом некругового профиля или
двух роликов, если образующая хотя
бы одного из них имеет переменную
кривизну, площадка контакта имеет
форму, отличную от указанных.
Вследствие больших математических
трудностей точное решение контактной
задачи для указанных случаев отсут-
ствует. Это значительно сдерживает
работы по оптимизации форм рабочих
поверхностей для увеличения долго-
вечности таких ответственных узлов,
как опоры качения, зубчатые пере-
дачи, пара рельс—колесо, поскольку
предопределить величину и распреде-
ление давлений при сжатии тел слож-
ной формы оказывается невозмож-
ным.
Кроме того, поверхности деталей,
работающих в условиях контактного
нагружения при максимальном дав-
лении р0 > 3 ГПа, уже в самый на-
чальный период эксплуатации пре-
терпевают существенные формоизме-
Расчет давлений на негерцевских площадках контакта
43
нения, вызванные остаточными де-
формациями. Это обстоятельство в ряде
случаев усугубляется неравномер*
ным износом рабочих поверхностей,
который приводит к дополнительным
изменениям их формы. В результате
практически на протяжении всего
срока работы данной пары величина и
распределение контактных давлений
существенно отличаются от исходных
и не поддаются инженерному расчету.
Вместе с тем при решении ряда прак-
тических задач, связанных с опреде-
лением несущей способности деталей
со сложными поверхностями, форма и
размеры площадки контакта которых
могут быть определены эксперимен-
тально, необходимо знать закон рас-
пределения нагрузки на этой площадке.
Поэтому представляет интерес раз-
работка хотя бы приближенного ре-
шения, которое с приемлемой для
практических целей степенью точности
позволило бы судить о величине и
характере распределения давлений по
площадкам контакта неэллиптической
формы.
Область контакта известна. Рассмо-
трим случай соприкасания шара с пря-
молинейным желобом некругового
профиля. Разобьем площадку контакта
на ряд полос шириной dx, параллель-
ных малой оси площадки (рис. 31).
При этом предположим, что давление
вдоль каждой из этих полос (т. е. в на-
правлении оси OY) распределяется
по эллиптическому закону. Допущение
это оправданно, поскольку такой закон
справедлив как для линейного, так и
для точечного контакта. Рассматри-
ваемый же случай является промежу-
точным между ними и отличается лишь
характером распределения давления
вдоль площадки контакта. Зазор между
поверхностями в направлении оси X
изменяется медленно, а на профиле
желоба отсутствуют особые точки, где
вторая производная функции зазора
терпела бы разрыв и возникали бы
явления типа краевого эффекта. В ре-
зультате давление вдоль большой оси
площадки контакта изменяется плавно.
Поэтому в пределах каждой полосы
давление по ее ширине считаем постоян-
ным, учитывая малость величины dx.
Каждую из полос рассматриваем
как участок линейного контакта двух
Рис. 31. Распределение давления на пятне
контакта сложной формы
цилиндров. В этом случае половина
ширины площадки контакта
b = 1,128 + «2),
где q — нагрузка на единицу длины.
Отсюда нагрузка q на некоторой по-
лосе, находящейся на расстоянии х
от центра площадки,
<?х = ^(^1 + М(Ы28МЛ) =
= С2&2. (17)
Общая нагрузка на контакте
а а
Q — 2 j qxdx — 2С2 J dx.
о о
Следовательно, коэффициент про-
порциональности
С2 = (?/ 2 I. (18)
/ \ о /
Подставив это значение в зависимость
(17), получим
= /|2 (19)
/ \ о /
Как и ранее, принимаем эллиптиче-
ский закон распределения давлений
вдоль оси Y. При этом справедливо
соотношение
где рхо и рХу — давление в точках с ко-
ординатами х,0 и х,у.
44
ПРЕЦИЗИОННЫЕ ШАРИКОВЫЕ ОПОРЫ
Учитывая эллиптический закон рас-
пределения давления в направлении
оси У, получим, что общая нагрузка
на полосе длиной 2ЬХ и единичной ши-
рины
qx = 2 j pXydy = mpx0bxl'2. (20)
о
Приравнивая (19) и (20), получим
а
РхО = ^Ьх/п \(bxdx)- (21)
о
Поскольку рХу —
= Рхо]У1 то
а
л j bx dx
о
(22)
Для асимметричной относительно
оси Y площадки контакта
а2
Значение интеграла J ~ j b2x dx
—ях
удобнее находить численным методом,
например, с помощью формулы Сим-
псона или по формуле трапеций. При
четном числе п интервалов деления
площадки вдоль ее большой оси
а2
J= J b2xdx=&x[y0 + yn +
—а1
+ 4 (г/i + z/з + . . . + Уп-1) +
+ 2 (У2 + У4 + . . • + Уп_2)]/3,
где Лх — интервал деления, yt — b^.
При нечетном числе (п + 1) интер-
валов
а2
j b2xdx = \x [//0+г/„ +
—
+ 4 (ух + Уз + • • • + Уп_1) +
+ 2 (у2 + у4 + • • • 4~ Ч~
+ (уп 4- yn+iYZ-
Основным допущением приведенного
решения является то, что каждая
элементарная полоса, выделенная на
площадке контакта сложной формы,
рассматривается как часть площадки
контакта двух цилиндров с постоянной
нагрузкой на единицу длины. Обосно-
вание этого допущения приведено выше.
Для оценки вносимой погрешности
используем полученные зависимости
для случая, применительно к которому
имеется точное решение, и сравним
результаты.
Для эллиптической площадки кон-
такта с полуосями а и b
x2/a2 + y2jb2 = 1.
В данном случае у — Ьх, откуда
b2x = ~b2^/a2+b2
и ^b2dx = 2ab2/3. (23)
о
Полуширина площадки контакта в
сечении х
bx--=b ]/1—х*/а?.
Для х — 0, у — 0,bx = b и
= Qb/j ~ 3Q/(2nab),
т. е. получаем известную формулу
Герца—Беляева.
Для произвольной точки с коорди-
натами X, у
Рху = Рхй 1 - У2ib\-
Подставив сюда значение Ьх, после
несложных преобразований получим
Рху = Ро К1 — х2/а2 — у2,Ь2.
Расчет давлений на негерцевских площадках контакта
45
Для линейного контакта Ьх = Ь\
следовательно, при а = I 2 (/ — длина
площадки контакта)
а \
я j b2 dx I =
„ ~а /
Совпадение полученных зависимостей
с известными формулами Герца—Бе-
ляева свидетельствует о приемле-
мости допущений, принятых при ре-
шении данной задачи.
Использование в расчете перемен-
ной Ьх имеет то преимущество, что ее
определяют на заданном расстоянии х
без дополнительных пересчетов. Но
при определении нагруженности кон-
такта, остаточных деформаций рабочих
поверхностей, действующих на них
сил трения и температуры необходимо,
строго говоря, знать величину контакт-
ного давления, направленного нор-
мально рассматриваемому участку по-
верхности, а не параллельно прило-
женному усилию. В опорах качения
угол между этими направлениями мо-
жет достигать 30°. Однако описанный
в работе [5] расчет показывает, что
расхождение между значениями двух
указанных давлений не превышает
3 %. Объясняется это следующим об-
разом. Во-первых, суммарная на-
грузка на единицу длины, действую-
щая нормально сферической поверх-
ности контакта, больше приложенной
нагрузки. Во-вторых, длина дуги кон-
такта больше большой оси площадки,
измеренной в направлении оси X, и
давление в обоих случаях остается
примерно таким же.
Пример 1. Найдем распределение
давления на площадке контакта, полу-
ченной при сжатии нагрузкой 90 кН
стального шара диаметром 50,8 мм
со стальным образцом, имеющим эл-
липтический желоб, в случае началь-
ного касания в двух точках (см.
рис. 17). Исходя из формы площадки,
она наилучшим образом может быть
описана функцией, четной относительно
осей X и Y. Принимаем зависимость
вида
Ь2. = А + Вх2 + Сх4 + Dx?.
Размеры площадки следующие (мм)
х.......................... О 1
Ьх......................... 1,05 1,11
х..................... . . 6
Ь............................... 1,17
2 3 4 5
1,15 1,20 1,23 1,23
7 8 9 9,8
1,10 0,95 0,75 0
В качестве характерных примем сле-
дующие точки: х1~ 0, ЬХ1 — 1,05;
х2 ~-= 4, Ь^2= 1,23, х3 — 9, Ьх3 =
= 0,75; х4 = 9,8, Ьх^ — 0.
Составив систему из четырех урав-
нений приведенного выше вида и ре-
шив ее относительно постоянных коэф-
фициентов, получим А = 1,1025; В =
= 36,47354-10~3; С = —0,711893Х
X 10~3; D = 2,21355-10~6.
Учитывая, что bx = f (х) и а ~
= 9,8 мм, получим
а
j f (х)2 dx = Аа 4- Ра?/3 + СсР/Ъ +
о
+ Z?€z7/7 = 11,9954 мм3^ 12-10"9 м3.
Введя в уравнение
найденное значение интеграла (в м3),
Ьх (в м) и Q (в Н), получим
P.q - 9- 104^/(л12-10"В 9) Н/м2 =
= 2380Ьх ГПа.
Подставив соответствующие значе-
ния Ьх, получим следующую картину
распределения контактного давления
вдоль оси ОХ:
х, мм....................... 0 1
Рх0, ГПа.................... 2,50 2,64
X, ММ....................... 6
рло, ГПа.................... 2,78
2 2,73 3 2,85 4 2,92 5 2,92
7 8 9 9,8
2,62 2,26 1,79 0
46
ПРЕЦИЗИОННЫЕ ШАРИКОВЫЕ ОПОРЫ
Практические рекомендации по рас-
чету. В большинстве случаев пло-
щадка контакта бывает в той или иной
мере асимметрична относительно ма-
лой ее полуоси вследствие отдельных
отклонений формы сжимаемых поверх-
ностей или ошибок при снятии отпе-
чатка и его измерении. Поэтому для
1. Размеры площадки контакта
Номер сечения Интервал, мм Ширина площад- ки справа 2b'L, мм Ширина площад- ки слева 2&р мм I Усредненная по- луширина пло- щадки Ь}, мм
0 0 2Z>„ 26О Ьо
1 dx 2И' bi
2 dx 26, 2Ь 7 ^2
. . .
п—1 dx ^п- 1 bn_i
п dx 2^ гь; Ьп
1 \x 0 0 0
поверхностей, симметричных относи-
тельно плоскости pOY (рис. 31), наи-
более точные результаты могут быть
получены следующим образом. Об-
мер площадки проводят на инструмен-
тальном микроскопе. Вначале изме-
ряют общую длину площадки, далее
замер ведут, начиная с ее середины.
Определяют ширину площадки 2/>0
в сечении OY (рис. 32), затем ее ши-
рину 2Ь{ на расстоянии dx справа от
среднего сечения, 2Ь\ на расстоянии 2dx
и т. д. до конца площадки, после че~о
аналогично измеряют левую ее поло-
вину. По результатам измерений строят
график в координатах х (-f-а до —а),
2ЬХ и в соответствии с общим зако-
ном кривой корректируют отдельные
выпадающие значения 2Ь\ и 2Ь'[, после
чего данные сводят в табл. 1.
Здесь усредненная полуширина пло-
щадки
Интервал dx выбирают в зависимости
от формы площадки контакта и не-
обходимой точности определения кон-
тактного давления. Обычно достаточно
принять dx = Ьо.
Значение интеграла, входящего в
формулу
рхо = Qb.
а \
f ь2х dx I ,
Расчет давлений на негерцевских площадках контакта
47
определяют из зависимости
а п
J &2 dx = dx 2 [(fe(. + &(-_1)/2]2 +
0 i— 1
+ bx(bn/2)*. (24)
При существенно асимметричной от-
носительно оси OY площадке контакта
, ( а \
РхО = 2ЧЬх/ я >
' \ —a J
а
где J b2x dx =
—а
=--*{£ [(&;+&;_|)/2]2+
U=1
+ s и»;+^-,)/2]2)+
4 = 1 J
+ (С + Q 4.
Пример 2. Найдем описанным спо-
собом давления для случая, расмотрен-
ного в предыдущем примере (двухто-
чечный контакт, Q = 90 кН). Исход-
ные данные, полученные при измере-
ниях, и результаты их обработки по-
казаны в табл. 2. Подставляя значе-
ния Ь[ в зависимость (24), получим
J&2dx=l{[(l,05+l,H)/2j2 +
о
+ [(1,11 + 1,15)/2]2 +
+ [(1,15+ 1,20)/2]2 +
+ [(1,20 + 1,23)у2]2 +
+ [(1,23 + 1,23)/2]2 +
+ [(1,23 + 1,17),2]2 +
+ [(1,17+ 1,10)/2]2 +
+ [(1,10 + 0,95)/2]2 +
+ [(0,95 + 0,75)/2]2} +
+ 0,8 (0,75/2)2 = 11,4269 мм3,
максимальное контактное давление в
сечении х
pXQ = 9 -104+/3,14.11,43-10"9 Н/м2 =
= 2507+ ГПа.
2. Размеры площадки контакта и
контактное давление при сжатии шара
диаметром 50,8 мм силой 90 кн с
желобом эллиптического профиля при
начальном двухточечном контакте
Номер сечения Интер- вал, мм 2^', мм 2bl мм bi' мм ГПа
0 0 2,10 2,10 1,05 2,63
1 1 2,22 2,22 1,11 2,78
2 1 2,33 2,27 1,15 2,88
3 1 2,42 2,38 1,20 3,00
4 1 2,49 2,43 1,23 3,08
5 1 2,50 2,42 1,23 3,08
6 1 2,36 2,32 1,17 2,93
7 1 2,23 2,17 1,10 2,76
8 1 1,93 1,86 0,95 2,38
9 1 1,53 1,47 0,75 1,88
10 0,8 0 0 0 0
Результаты расчетов приведены в
последней строчке табл. 2. Превыше-
ние значений рхо на 5 % по сравне-
нию с полученными ранее данными
(см. пример 1) объясняется различием
методов определения интеграла, вхо-
дящего в расчетную формулу (21).
Расчет по заданным формам поверх-
ностей. Находящиеся в контакте тела
представим в виде двух цилиндров
со взаимно перпендикулярными осями,
круговой цилиндр 1 радиуса R =
= RwRjiRw + Я2), где Rw~ радиус
шара, a R2 — радиус кольца по дну
желоба, и цилиндру переменного ра-
диуса р, выбранного таким образом,
что зазоры между цилиндрами в плос-
кости X0Z равны зазорам между
сжимаемыми телами в той же плос-
кости; образующие цилиндра 2 па-
раллельны оси OY (рис. 33). Предпо-
48
ПРЕЦИЗИОННЫЕ ШАРИКОВЫЕ ОПОРЫ
Рис. 33. Контакт тела пере-
менной кривизны
ложим, что цилиндр 1 является жест-
ким телом, а цилиндр 2 обладает сум-
марной упругой податливостью ци-
линдров 1 и 2. Изменением радиуса R2
по ширине кольца в пределах пло-
щадки контакта пренебрегаем (для
подшипника серии 307 при радиаль-
ной нагрузке 170 кН расчетное зна-
чение R изменяется от 8,0 до 8,738 мм).
Введем следующие обозначения:
б — общее сближение тел 1 и 2;
Ux — упругая деформация тела 2 в се-
чении х в направлении оси Z
в плоскости XOZ-
—зазор между телами в плос-
кости XOZ в сечении %;
Ь[ — полуширина площадки контакта
в сечении
qt — нагрузка на единицу длины
(в направлении оси X) в сече-
нии Xi.
После деформации в пределах пло-
щадки контакта (для Ьх > 0) упругая
деформация
Ux = б — гл.
За пределами контакта это уравне-
ние недействительно, так как контур
деформированной поверхности уже не
является прямой линией.
Ввиду того, что р R, можно при-
нять, как и ранее, что каждая из по-
лос длиной 2ЬХ и шириной dx представ-
ляет собой элемент площадки кон-
такта цилиндра радиусом R с плоско-
стью при нагрузке qx,
В этом случае
<7 = &2/(1,128М);
р0 = 0,5642 К<пЯ) = 0,56/(11/?).
Обозначив 0,5/(г|7?) = Сг и учтя
сделанное выше допущение, получим,
что максимальное давление в сечении х
Рхо — Cibx. (25)
Согласно решению Буссинеску, уп-
ругая деформация U в точке, находя-
щейся на расстоянии г от места прило-
жения силы Р,
U = Р (1 — |12)/л£г.
Поскольку при расчете сближения
учитывается суммарная упругая подат-
ливость обоих тел, то в данном случае
,, Р м —P-'i | 1 —=
ЯГ к. А ^2 /
= К' , (26)
где К' = т] л.
Рассечем тела 1 и 2 плоскостями,
параллельными плоскости YOZ и от-
стоящими друг от друга на расстоя-
нии I — b (где b = 6п1ах для данной
площадки). Площадка контакта ока-
жется разбитой на ряд полос шири-
ной I, параллельных оси OY (рис. 34).
Нулевая полоса, на которой bt = Z?max,
расположена симметрично относительно
этой оси. Номера полос справа имеют
положительный знак, слева — отрица-
тельный Число полос п принимаем
таким, чтобы величина nl была заве-
домо больше длины площадки кон-
Расчет давлений на негерцевских площадках контакта
49
Рис. 34. Область контакта тел переменной кривизны
такта. Исходя из приведенных ранее
экспериментальных данных для жело-
бов сложного и эллиптического про-
филей, в первом приближении для про-
филей типа А1—АЗ можно принимать
длину контактной площадки
2а ж 2,5/?0 sin То
и полуширину
b = (0,84-0,9) 6кр.
Здесь 6ь-р — полуширина площадки
контакта на круговом желобе при той
же нагрузке. Меньшие значения b
относятся к нагрузкам, соответствую-
щим рокр = (2,54-3,0) ГПа, боль-
шие — к рокр — (3,54-4,5) ГПа.
Определим деформацию U ц в сере-
дине t-й полосы, вызванную воздей-
ствием нагрузки, распределенной на
полосе /, середина которой удалена
от точки О на расстояние х (т. е. Ьх —
— bj). Расстояние между полосами
X — х = (/—/) /. Следовательно, ра-
диус-вектор г центра рассматривае-
мого элемента площадки контакта
г = К (Х-%)2 + г/2.
При эллиптическом законе распре-
деления нагрузки в направлении
оси Y
Рху = С1Ьх У1 - У^х =
ь!
Uij= 2 j K'Pxyl dy =
о
bi
2/CCjZ
К (' —/)2/2 + у2
о
Найдя аналогичным образом Un,
исключив при этом некоторую огра-
ниченную область, находящуюся в не-
посредственной близости от рассма-
триваемой точки, можем составить
систему из п уравнений вида
S* ^/+^,7 = 8-4’ (27)
7=1
каждое из которых определяет упру-
гую деформацию на полосе L Система
содержит п + 1 неизвестных: п зна-
чений bi (некоторые из которых мо-
гут быть равными нулю) и 6. Недостаю-
щее уравнение можно получить из
условия равенства приложенной к те-
лам нагрузки сумме нагрузок, распре-
деленных по всем полосам, т. е.
Q= S Z&?/(1,27W (28)
Однако решение данной системы до
получения конкретных значений bi
представляет значительные математи-
ческие трудности. С практической точки
зрения более результативным является
решение методом конечных элементов.
Разобьем четверть /-й полосы на
пять подполос шириной 0,1/ линиями,
параллельными оси OY, и на четыре
участка длиной &г-/4 линиями, парал-
лельными оси ОХ (рис. 35). Эпюру
давлений на этой половине площадки
также разбиваем на четыреТучастка.
50
ПРЕЦИЗИОННЫЕ ШАРИКОВЫЕ ОПОРЫ
Обозначим давление по краям 1-го
участка р0 и рг посередине р0/1, для
второго участка соответственно ръ
Р2> Pi/2 и т- А-
Учитывая эллиптический закон расп-
ределения давления в направлении оси
0Y, из зависимости ру — pQ К1 — У2/Ь2
(при длине каждого участка 6^/4)
получим значения давления (рис. 35):
Ро/1 = О,9922ро; = О,9682ро;
Р1/2 = О,927ро; р2 = О,866ро; Р2,з =
= О,78О6ро; р:) = О,6614ро; р3/4 =
= 0,4841р0; р4 = 0.
Приравнивая каждый из участков
эпюры давлений дуге параболической
трапеции, находим, что площадь пер-
вого участка
= bi (Ро + 4^о/1 + ^1)/24
- 0,247375p0Z?/.
Аналогично получим площади 2, 3,
4-го участков
S2 = О,23О925ро^г;
S3 = 0, 193725р0^;
S4 = 0,1082416р0^.
Сумма приближенных значений
4
Vi Si — 0,7802666р06г-; точное значе-
i=i
ние площади эпюры давления S —
— nPobi/4 = 0,78539; относительная
ошибка приближенного расчета 0,6 %.
Нагрузка на каждом из элементов
площади 1-го участка шириной 0,1/
Q1 = SrO, 11 = 0,0248 pQbtl.
Принимая во внимание, что согласно
(25)
р0 — получим Qj = 0,0248С1&?/.
Аналогично, нагрузка на элементах 2,
3, 4-го участков
Q2 = 0,0230C16?Z,
Q3 = 0,0194(7^/;
04 = 0,0108С1&2/.
Полагаем, что эти нагрузки сосредото-
чены в центрах соответствующих эле-
ментов. Расстояние от точки А до
центра ближайшего к ней элемента 11
здесь первый знак в номере элемента
и в индексе при г — номер участка,
второй — номер подполосы.
Аналогично для элементов 2—5 1-го
участка
'.доа
Упростим полученные выражения.
Учитывая, что на деформацию в рас-
сматриваемой точке наибольшее влия-
ние оказывает нагрузка на близле-
Расчет давлений на негерцевских площадках контакта
51
жащем элементе, а для величины ги
при bi « I определяющим является
член /?//8, заменим I = Ь[ , в резуль-
тате чего получим
ги = 0,13463/?/; г12 - 0,19526/?/;
г13 = 0,2795/?/; г14 = 0,37165/?/;
г15 = 0,467/?/.
При этом же допущении, для 2-го
участка
r23 —
= 0,4507/?/;
r24 —
= 0,513/?/;
r25
тжр
= 0,5858/?/.
Аналогичным образом, для 3-го уча-
стка получим
г31 = 0,627/?/; Гз2 = 0,6427/?/; г33 =
- 0,67315/?/; гз4 = 0,71633/?/; г35 =
= 0,7701/?/;
для 4-го участка
г41 = 0,8764/?/; г42 = 0,88776/?/;
г4з “ 0,91/?/; г44 — 0,9424/?/;
г45 — 0,98393/?/.
Деформация в центральной точке А
i-й полосы, вызванная действием всей
нагрузки, распределенной на этой по-
лосе,
= (q, £ i;rn- + Q2 2 l/r2i +
\ 1=1 1=1
5 5
+ ^3 J] I r3i + Q4 1 ГхА
1 = 1 t-1
Подставив значения входящих в эту
зависимость величин и проведя рас-
четы, найдем
/7// = 3,891A,C1/?/Z.
Принимая во внимание, что А' =
= т]/л и С1— 0,5/т)/?, получим
0,159/7? и
Uи = 0,6185/?////? (29)
Найдем деформацию Un в центре
t-й полосы площадки контакта, выз-
ванную нагрузкой, распределенной на
полосе /= /+ 1. Разобьем половину
полосы / на четыре участка и примем,
что приходящаяся на каждый из этих
участков нагрузка сосредоточена в его
центре. Аналогично предыдущему, на-
грузки на 1—4-м участках полосы /
(?! = 0,248Сх6?/;
q2 = о.гзос^/;
23 = 0,194^/;
<?4 = 0,108С1^/.
Расстояния от точки А до центров
1—4-го участка полосы /
'" У“+-Й--’
-
Для данной полосы и последующих
основной составляющей является ве-
личина I, а не /?;, как это было при
подсчете Un. Поэтому, исходя из ус-
ловия bj I и заменив bj на /, полу-
чим: г± = /; г2 = 1,07/; г3 = 1,18/;
г4 = 1,33/. Отсюда
и<1 = 2К.1^ъ+^+ъ:)=
\ Г! Г2 Г3 rt /
=- 1,4164^'C16J;
- 0,2252^,//? = /(&2+1/^.
(30)
52
ПРЕЦИЗИОННЫЕ ШАРИКОВЫЕ ОПОРЫ
3. Значения коэффициентов влияния
т fm т fm т fm
0 0,6185 8 0,0310 16 0,0155
1 0,2252 9 0,0275 17 0,0145
2 0,1202 10 0,0248 18 0,0137
3 0,0815 11 0,0225 19 0,0130
4 0,0620 12 0,0206 20 0,0124
5 0,0496 13 0,0190 21 0,0117
6 0,0413 14 0,0176 22 0,0112
7 0,0354 15 0,0165 23 0,0108
Проведя аналогичные расчеты для
деформаций, которые вызываются в
точке наблюдения А действием нагру-
зок, распределенных на (i + 2)-й,
(i + 3)-й ... (/ /п)-й полосах, по-
лучим соответствующие им значения
коэффициентов влияния этих нагру-
зок на деформацию в данной точке:
/2, /з> •••> fm- Для полос, отстоящих
от среднего сечения i-й полосы на 71
и далее, т. е. при т = | /—i | 7,
можно с относительной ошибкой ме-
нее 0,3 % полагать нагрузку распре-
деленной на оси ОХ. В этом случае
коэффициент влияния fm — 0,248/ц?
(табл. 3).
Деформация в средней точке Xf
любой полосы i определяется воздей-
ствием всей нагрузки, распределенной
на площадке контакта, что дает воз-
можность составить п уравнений вида
/—
1
"Ь ~р" f= б (31)
1
Чтобы линеаризовать полученные
зависимости, воспользуемся тем, что,
как видно из приведенных выше дан-
ных (см. табл. 2), на 80—90 % длины
площадки контакта шара с желобом
сложного профиля b> bi >0,85b. По-
скольку принято I — Ь, заменим в пер-
вом члене зависимости (31) I на Ь^
В результате получаем систему п
линейных уравнений.
п 1
v?+ 2 /Л + 2 М=
/=Н-1
(32)
здесь zKi — исходный зазор между
поверхностями в середине i-й полосы.
Система содержит п + 1 неизвестных:
6 и п значений bi.
Недостающее уравнение, как и ра-
нее, получаем из условия равенства
суммы нагрузок на полосах общей при-
ложенной нагрузке, т. е.
Q = I ^/(1,272г]Я).
i=l
Если поверхности сжимаемых тел
симметричны относительно плоскости
YOZ, то область контакта также бу-
дет симметрична относительно этой
плоскости, и число неизвестных умень-
шится почти вдвое. В этом случае
искомую площадку контакта лучше
представить разбитой на (2ц + 1) по-
лос при том же условии I (2ц + 1)
> 2ц. Среднюю (нулевую) полосу рас-
положим симметрично относительно
оси ОХ, полосы справа имеют номера
с положительным знаком (1, 2, ..., п),
полосы слева — с отрицательным (—1,
—2, ..., —ц).
Уравнения, определяющие дефор-
мацию в середине f-й полосы, прини-
мают вид
+ 2 2 f=
j—i—1
= ZxJ. (33)
Как и ранее, здесь т равно абсолют-
ной величине разницы (/—i), причем /
берут со своим знаком, (ц + 2)-м
уравнением этой системы является
уравнение
/ п .
1,272П7?(? = / До+2^6Д . (34)
\ 1=1 /
Расчет давлений на негерцевских площадках контакта
53
В случае известной, симметричной
относительно оси 0Y области сопри-
касания, когда площадка контакта мо-
жет быть определена экспериментально
на моделях или натурных деталях,
упругое сближение сжимаемых тел оп-
ределяется, исходя из полученных за-
висимостей, уравнением
6= М + 2 ЕА- (35)
\ i=l ' /
где т = i.
Для площадки контакта шара с кру-
говым желобом при RhJDw = 0,515
соотношение полуосей alb » 10. Поэ-
тому для описанных выше поверх-
ностей, которые имеют более короткую
и симметричную относительно оси OY
площадку, достаточно принять i =
= ±9. Область соприкасания в этом
случае определяется решением си-
стемы, составленной из уравнений I—
X, полученных в результате подста-
новки в приведенную выше зависи-
мость (31) соответствующих значений
коэффициента [т и суммирования их
для каждой из полос от 0 до 9, а также
уравнения XI, полученного на основе
уравнения (28):
I. 0,6185&3 + 0,45046? + 0,240461 + 0,1636? + 0,12461 + 0,09926? +
+ 0,082661 + 0,070861 + 0,06261 + 0,0556g — RS = 0;
II. 0,225261 + 0,738761 + 0,306761 + 0,18226g + 0,13116? + 0,10336g +
+ 0,085061 + 0,072361 + 0,06296§ + 0,05586§ — RS = — Rz7,
III. 0,12026g + 0,306761 + 0,68056g + 0,274861 + 0,16156f + 0,116961 +
+ 0,093061 + 0,077161 + 0,06616g + 0,057961 — RS = —Rz2;
IV. 0,08156g + 0,182261 + 0,274861 + 0,659861 + 0,260661 + 0,15126g +
+ 0,109061 + 0,086861 + 0,07216g + 0,06196g — RS = — Rz3;
V. 0,06206g + 0,131161 + 0,161561 + 0,26066? + 0,649561 + 0,252761 +
+ 0,14506g + 0,104061 + 0,082661 + 0,06866g — RS = — Rzt;
VI. 0,04966g + 0,103361 + 0,116961+ 0,15126g + 0,252761 + 0,64336? +
+ 0,24776| + 0,140861 + 0,100561 + 0,07966В — RS = —Rz5;
VII. 0,04136g + 0,085061 + 0,093061 + 0,109061 + 0,145061 + 0,24776? +
+ 0,63916g + 0,24426? + 0,13786s + 0,098061 — RS = — Rze;
VIII. 0,035461+ 0,072361 + 0,077161 + 0,086861 + 0,1040&1 + 0,140861 +
+ 0,24426| + 0,636161 + 0,241761 + 0,135761 — RS = —Rz7;
IX. 0,013061 + 0,062961 + 0,066161 + 0,07216g + 0,082661 + 0,10056? +
+ 0,13786g + 0,241761 + 0,634061 + 0,239761 — RS = —Rz8;
X. 0,027561 + 0,055861 + 0,057961 + 0,06196g + 0,068661 + 0,07966? +
+ 0,098061 + 0,135761 + 0,23976| + 0,63226g — RS = — Rzs;
XI. + 26] + 2б| + 262 + 2b2 + 2&2 + 2b2 + 2b2 2&2 ^2 &2 =
= l,272r]RQ//;
XII. 0,032261 + 0,06566? + 0,06916? + 0,07586g + 0,087961 + 0,10846g +
+ 0,15426g + 0,30096? + 0,709162 _ =
XIII. 0,028661 + 0,057861 + 0,060261 + 0,064861 + 0,072261 + 0,084861 +
+ 0,10576? -I- 0,15196? + 0,29896? + 0.7073&2 — RS = — Rza.
О / О /i' у
Если выбранное число полос больше
действительного (например, полоса
i — 9 лежит за пределами контакта),
то соответствующее значение 6—г9
имеет отрицательный знак и в уравне-
нии X по крайней мере одно из зна-
чений Ь] меньше нуля. В этом случае
необходимо уменьшить выбранное
число полос. Приняв, например, i =
= 8, повторить решение, используя
вначале уравнения I—IX и уравне-
ние XI, полагая в них Ь9 = 0, затем
54
ПРЕЦИЗИОННЫЕ ШАРИКОВЫЕ ОПОРЫ
принять i = 7 и использовать уравне-
ния I—VIII при Ь8 = — 0 и т. д.
до получения решения, при котором
все корни будут рациональными.
В случае необходимости определе-
ния большой полуоси площадки кон-
такта с точностью до O,5bo при конеч-
ном значении i = 7 (для которого
все корни рациональны) в систему
вводят уравнения I—VIII, XI и XII
(Ь8 = Ь9 ~= 0), при i = 8 — уравне-
ния I—IX, XI и XIII (Z?9 = 0) Здесь
Ьп — полуширина конечного участка
площадки в его середине, размер ко-
торого в направлении большой полу-
оси меньше или равен O,5Z?o.
После определения размеров пло-
щадки контакта давления на ней рас-
считывают по формулам (21) и (22)
ПРОГНОЗИРОВАНИЕ
ЭНЕРГЕТИЧЕСКИХ ПОТЕРЬ
ПРИ КАЧЕНИИ ТЕЛ
со сложным ПРОФИЛЕМ
Как показывают результаты многих
исследований, основными составляю-
щими энергетических потерь при ка-
чении в условиях ограниченной смазки
упругих тел, рабочие поверхности ко-
торых имеют криволинейные образую-
щие, являются гистерезисные потери и
потери на дифференциальное про-
скальзывание [1].
Применительно к условиям каче-
ния гистерезисными потерями при-
нято считать разность энергий дефор-
мации и упругого восстановления де-
формированных объемов сжимаемых
тел. Для машиностроительных мате-
риалов причиной этих потерь яв-
ляется внутреннее трение, пласти-
Рис. 36. Элемент эллиптического пятна
контакта
ческое деформирование тончайших по-
верхностных слоев, содержащих микро-
неровности, окислы, смазочный ма-
териал, а также релаксация напряже-
ний, обусловленная несовершенной уп-
ругостью материала. Гистерезисные
потери определяются поэтому как не-
возвращенная при разгружении доля
энергии упругой деформации контак-
тирующих тел. Для каждого мате-
риала эта доля устанавливается на ос-
новании экспериментальных данных.
Так, для закаленной подшипниковой
стали, например, гистерезисные по-
тери принято считать равными 1 %.
Однако эта величина является услов-
ной, поскольку степень проявления
несовершенной упругости материала
зависит от уровня его напряженности
и вида напряженного состояния.
Потери от дифференциального про-
скальзывания возникают вследствие
того, что при качении друг по другу
тел с криволинейными поверхностями
чистое качение, в общем случае, имеет
место лишь в двух точках, лежащих
на мгновенной оси вращения одного
тела относительно другого. Ниже и
выше этой оси происходит относитель-
ное проскальзывание сопряженных ра-
бочих поверхностей во взаимно про-
тивоположных направлениях, которое
принято называть дифференциальным.
Расчет энергетических потерь для
желоба кругового профиля выполнен
в работах А. Пальмгрена, Г. Хит-
коута и Д. Тейбора.
Гистерезисные потери яри герцев-
ском контакте двух тел. Согласно
методике, разработанной Д. Тейбо-
ром [1] для эллиптического контакта,
работа упругого деформирования, за-
траченная на единицу пути каче-
ния, определяется исходя из следую-
щих положений. При качении под на-
грузкой Q шара по желобу кругового
профиля давление в точке с коорди-
натами х, у (рис. 36)
Рху = Ро (*2!а2 — у2/Ь2)',г,
где а и b — большая и малая полуоси
эллиптической площадки контакта;
р0 = 3Ql^nab)—давление в центре
площадки контакта.
Нагрузка, распределенная на по-
лоске шириной dy, расположенной
Протезирование encpiети’иских потерь
55
на расстоянии у от оси ОХ, равна
произведению этой ширины на поло-
вину площади эллипса с полуосями
Роу = Ро /1 — </2/62
и а' — а уЛ — У2!Ьг ,
т. е. dQy = (napjib2) (b2 — у2) dy
Общий момент относительно оси вра-
щения шара, вызываемый действием
нормальных сил, приложенных к пе-
редней половине площадки контакта
(рис. 37),
ь
М = (яар0/2Ь2) j (Z>2 — у2) ydy =-
о
= 3Q6/16.
Работа этого момента при прокатыва-
нии шара с радиусом R на пути, рав-
ном длине его окружности,
WQ 2лМ,
а при качении на единице пути
Р/ш - W0/(2nRw) r= 3Qb/(\6Rw).
Основная часть этой энергии возвра-
щается в виде работы сил упругого
восстановления, действующих на вы-
ходящей из соприкасания половине
площадки контакта. Разность затрачен-
ной и возвращенной энергии состав-
ляет гистерезисные потери. Если коэф-
фициент гистерезисных потерь обо-
значить через х, то вызванный ими мо-
мент сопротивления качению
Мг = хМ.
Коэффициент сопротивления каче-
нию определяют как отношение силы Г,
приложенной к шару на уровне его
центра в направлении движения, к нор-
мальной нагрузке, т. е. /к = F/Q. Из
условия равновесия шара (рис. 37)
Л4Г — FRW; отсюда
/г - 3xZ?/(16^). (36)
Приведенные зависимости справед-
ливы и для круговой площадки кон-
такта, которая является частным слу-
Рис. 37. Качение шара по плоскости
чаем эллиптической (а = Ь). Однако,
если кривизна желоба или тела каче-
ния в плоскости, перпендикулярной
к направлению качения, будет пере-
менной, площадка контакта примет
форму, отличную от эллиптической, и,
следовательно, зависимости будут ины-
ми вследствие существенной разницы
в законе распределения по ней прило-
женной нагрузки.
Гистерезисные потери при негер-
цевском контакте. Предположим, что
площадка контакта имеет форму, по-
казанную на рис. 38 (случай контакта
шара с желобом эллиптического про-
филя при начальном касании в двух
точках). Момент, действующий на шар
со стороны полоски длиной Ьх и шири-
ной dx, равен произведению величины
нагрузки qdx, распределенной по этой
площадке, на расстояние уг от оси ОХ
до центра тяжести элемента площадки,
ограниченной эпюрой давления, т. е.
-у*
т. ycdx j pxydy. (37)
о
Принимая во внимание, что в на-
правлении оси Y нагрузка в каждом
Рис. 38. Площадка контакта при двухточеч-
ном начальном касании шара с желобом пе-
ременной кривизны
56
ПРЕЦИЗИОННЫЕ ШАРИКОВЫЕ ОПОРЫ
Рис. 39. Положение мгновенной оси при ка-
чении шара по желобу
сечении контакта распределена по
эллиптическому закону (вследствие
постоянства кривизны сопряженных
поверхностей в рассматриваемой плос-
кости), получим
Ьх
J Pxydy^7ipx{ibx!^, (38)
о
где рх0 — давление посередине по-
лоски длиной 2ЬХ.
Величина ус определяется следую-
щим образом:
I/^х \
Ус = j РхуУ dy /1 j рху dy j;
о I \о /
Рху = Рхо /1 - У2/Ьх ;
Ьх
J РхуУ dy = Рх№ (39)
о
Ус -4М(Зл). (40)
Подставляя (38) и (40) в (37), полу-
чаем
тх = PxOb2xdxl3- (41)
Учитывая, что
/Л о = 2,Ж
-Qi
bx dx
и обозначив
а2
2Q/n \(b2xdx) = K2, (42)
получим
Рх, о = и тх = К^Ьхйх'З.
Общий момент от действия сил, рас-
пределенных по передней половине
площадки контакта,
(43)
При качании шара с радиусом Rw
работа этого момента на единице пути
IEUI — MlRw. Коэффициент сопротив-
ления качению, соответствующий ги-
стерезисным потерям,
(#2 \ / / С2 \
2х [ dx j /i 3nRw J b2 dx I.
-<7t / / \ J
(44)
Потери на дифференциальное про-
скальзывание при герцевском контакте.
Согласно методике, разработанной
А. Пальмгреном и Г. Хиткоутом, по-
ложение мгновенной оси определяют
из условия, что она пересекает пло-
щадку контакта в точках, где эпюра
давлений делится плоскостями, парал-
лельными направлению качения, на
три зоны таким образом, что сумма
объемов двух крайних зон равна объему
средней. При качении шара по желобу
кругового профиля эти точки отстоят
от плоскости симметрии на расстоянии
с — 0,348я, где а — большая полуось
эллипса контакта. Работу №д сил тре-
ния, возникающих при дифференциаль-
ном проскальзывании, в этом случае
рассчитывают следующим образом.
Если ААТ — дуга контакта с радиу-
сом р (рис. 39), то для некоторой про-
извольной точки Е (х, 0) этой дуги
радиус вращения относительно мгновен-
ной оси DrD
МЕ = (0,1211а2 —х2)/(2р).
Путь скольжения в этой точке за один
оборот шара
1Х = л (0,1211а2 — х2)/р.
Прогнозирование энергетических потерь
57
Если полуоси эллиптической площадки
контакта а и Ь, то в сечении х полуши-
рина площадки
у = b У1 — х2/а2 .
Учитывая эллиптический закон рас-
пределения давления вдоль обеих осей,
давление в точке Е
Рхо = Ро К1 — х2/а2 .
Общая нагрузка на полоске шириной
dx, расположенной на расстоянии х
от плоскости симметрии OZ, пропор-
циональна половине площади эллипса
с полуосями у и рхо. Следовательно,
qx = ярхо#^х/2 — лр0Ь(’ — х2/а2) dxj2.
Работа сил трения на этой полоске
за один оборот шара при коэффициенте
трения f
dW = flxqx =
= (/л2р0Ь/2а2р) (а2 — х2) X
X (0,1211а2 — х2) dx =
= (fn2pQb/2a2p) (0,1211а4 —
— 1,1211а2х2 + х4)б/х.
Разбивая область трения в пределах
каждой половины площадки контакта
на две зоны и принимая во внимание,
что плечо сил трения при х = с ме-
няет знак, получим, что работа этих
сил за один оборот шара
Гд =- 2 j (/л2р06,-2а2,о) (0,121 la4 —
о
— l,1211a2x2 + x4)rfx -
— 2 J (/л2р0/>/2а2р)(0,1211 fl4 —
о
— 1,121 la2x2 -ф xl) Jx =
= (/щ2р06/а2р) [2 (0,121 la4с —
— 1,121 1а2с3/3 + с5/5) + 0,0526a5].
После подстановки с — 0,348/7 и р0 —
= l,5Q/(na&), получаем
U/д = 0,161145n/Qa2/p. (45)
Найденная работа равна работе на
пути 2nRw силы Ед, приложенной на
уровне центра шара в направлении
качения и затрачиваемой на преодоле-
ние сил трения, возникающих вслед-
ствие дифференциального проскальзы-
вания, т е. 1Гд = 2л/?йУЕд. Отсюда
коэффициент сопротивления качению,
вызванного наличием дифференциаль-
ного проскальзывания,
/д. эл = ^д/Q “
Подставляя в это уравнение (45),
получим
/д.эл-0,080572М2/(^р). (46)
По формуле Пальмгрена—Хиткоута
момент, который необходимо приложить
к шару для преодоления сил диффе-
ренциального проскальзывания,
М = 0,324az/Q/2;
здесь at = a2/(2p) — глубина поверх-
ности контакта, измеренная от ее края
до нижней точки, причем радиус по-
перечной кривизны поверхности кон-
такта
Р ~ 2ЕжЕ&у/(/?ж + Rw),
где Rw и — абсолютные значения
радиусов шара и желоба соответст-
венно.
Поскольку М = F$RW, то
/д. эл ” Fд/Q — M/(R^Q) ~
- 0,324a2/Q1/(4p/?^Q) -
= 0,081 fa2/(рЕ^).
Расхождение с полученным ранее зна-
чением составляет 0,5 %. Для стан-
дартных шарикоподшипников =
= 1,03/?^ ир = 1,01478/?^. При та-
ком соотношении радиусов с ошибкой
менее 0,03 % можно принять
/д. эл = 0,08/а2//?2,. (47)
Р Друтовский предлагает при рас-
чете 44 учесть кривизну площадки кон-
такта в направлении ее малой полуоси b
путем введения величины а/ =
= Ь2/(2р/), которая определяет прира-
щение плеча сил трения, обусловленное
наличием этой кривизны (здесь р/ —
радиус кривизны площадки в плос-
кости вращения). Зависимость прини-
мает вид
44 = 0,324 (az + az) fQ/2.
Однако обычно b л? 0,1a и р/ > р.
Следовательно, для стандартных ша-
58
ПРЕЦИЗИОННЫЕ ШАРИКОВЫЕ ОПОРЫ
4. Распределение нагрузки по площадке
контакта
xi + ъг* Z+ qxi н Чх1
1 2,16 451,2 6 2,40 557,5
2 2,26 494,4 7 2,27 498,8
3 2,35 534,6 8 2,05 406,8
4 2,43 571,6 9 1,70 279,7
5 2,46 585,8 9,8 0,75 4j,6
рикоподшипников а/ < 0,01а/, т. е.,
учитывая приближенность определе-
ния /, этой составляющей можно
пренебречь.
Потери на дифференциальное про-
скальзывание при негерцевском кон-
такте. Первая часть задачи состоит,
как|и ранее, в отыскании положения
мгновенной оси, которое определяется
тем же условием- плоскости, парат-
лельные плоскости YOp (см. рис. 38)
и проходящие через точки пересе-
чения этой осью площадки контакта,
должны рассекать эпюру давлений та-
ким образом, чтобы сумма нагрузок
на крайних участках была равна на-
грузке на среднем. Ввиду того, что
область контакта здесь не описывается
определенной кривой, а зависит от
формы желоба, дать постоянные за-
висимости для положения мгновенной
оси при качении шара по желобам
различных профилей не представляется
возможным. Задачу решают исходя
из заданной формы и размеров пло-
щадки контакта и указанного выше
принципа. Учитывая сложнось закона
распределения нагрузки по таким пло-
щадкам, наименее трудоемким следует
признать графоаналитический метод.
В качестве примера определим по-
тери при качении шара по желобу эл-
липтическою профиля с начальным
касанием в двух точках (см. рис. 38).
Для шара диаметром 50,8 мм и желоба
заданной формы размеры золы кон-
такта при нагрузке 90 кН имели зна-
чения, указанные в табл. 2.
Распределение давлений вдоль оси ОХ
найдем, используя зависимость (21).
Значение входящего в нее интеграла
вычислим по формуле Симпсона
а
j dx = [ 1,052 + 0,952 +
о
+ 4 (1,112 4- 1,22+ 1,232 4- 1,112) +
4- 2 (1,152 + 1,232 4 1,172)] 4-
+ -А- (0,952 + 0,752) + 0,75® =
= 11,622.
Отсюда
// а
Л I &2 dx
\ б
- 246,5^ - КЬХ.
Максимальное контактное давление по-
середине i-й полоски, лежащей между
сечениями и хг-, пропорционально
средней длине этой полоски, т. е.
РХ[ — X (bXi_1 +
Полагая давление в пределах ширины
полоски dx = xt — постоянным,
найдем распределенную по ней на-
грузку (dx см. по табл. 2).
Чх = -:-g- + bx.ydx =
= 96,8(&x.._1 + 6x.)2dx.
Результаты расчетов приведены в
табл. 4.
Общая нагрузка на половине пло-
щадки контакта = 44,244 кН
при заданной 45 кН. Относительная
погрешность 1,7 % является след-
ствием приближенности использован-
ных методов вычисления нагрузки на
отдельных участках.
Построим график, показывающий
нагрузку, распределенную между се-
рединой контакта, т. е. нулевым се-
чением, и сечением х/ (рис. 40). Аб-
сцисса точки, соответствующей
— = 22,120 кН, равна расстоя-
нию с от плоскости YOp (рис. 38)
до точки пересечения площадки кон-
Применение опор с поверхностями качения некругового профиля
59
5. Вспомогательные величины для определения энергетических потерь,
вызванных дифференциальным проскальзыванием
xi x'i 4 qxi
0,5 0,342 451,2 154,3 5,5 — 0,248 — 557,5 138,3
1,5 0,303 494,4 149,8 6,5 — 0,484 -498,8 241,4
2.5 0,224 534,6 119,8 7,5 — 0,76 — 406,8 309,2
3,5 0,106 571,6 60,6 8,5 -1,075 -279,7 300,7
4,5 — 0,051 — 585,8 29,9 9.4 — 1,392 — 43,6 60,7
такта с мгновенной осью. Как видно
из рис. 40, в данном случае с =
= 4,20 мм, т. е. с — 0,43а по сравне-
нию с с — 0,348а для кругового же-
лоба.
Момент сил трения, возникающих
при дифференциальном проскальзы-
вании, равен сумме произведений рас-
стояния Li середины каждой из полос i
от мгновенной оси на величину дей-
ствующих на ней сил трения, т. е.
Мд = 2
1
Полагая радиус р поверхности кон-
такта в плоскости XOz (см. рис. 39)
равным радиусу шара получим,
Рис. 40. Суммарная нагрузка, распределен-
ная на части площадки контакта между ее
серединой и сечением х
что плечо силы трения, действующей
на полосе i,
= К-0/(2^) =
= (4,22 _ x/)/50,8;
здесь — расстояние от середины i-й
полосы до оси 0Z, Направление дей-
ствия сил трения на среднем участке
будем считать положительным, на
крайних — отрицательным (табл. 5).
Суммируя произведения qx^i с учетом
знаков плеч и сил трения, получим
момент сил трения, вызванных диф-
ференциальным проскальзыванием,
Мд = 2-1565,4/ = 3130,8/.
При качении шара на пути, соот-
ветствующем полному его обороту,
на преодоление сил трения, вызванных
дифференциальным проскальзыванием,
будет затрачена работа
Гд — 2лМд — 2лр/?д;
отсюда
/д. ЭЛ - ?д/0 — ^д/Ю^) =
- 3180,8//(9000-25,4) — 0,013695/.
ОБЛАСТИ И УСЛОВИЯ
ПРИМЕНЕНИЯ ОПОР
С ПОВЕРХНОСТЯМИ качения
НЕКРУГОВОГО ПРОФИЛЯ
Как показано выше, поверхности
качения некругового профиля обла-
дают рядом существенных преиму-
60
ПРЕЦИЗИОННЫЕ ШАРИКОВЫЕ ОПОРЫ
ществ по сравнению с традиционными
тороидальными поверхностями, полу-
чившими широкое распространение в
практике подшипниковой промышлен-
ности благодаря сравнительной про-
стоте изготовления и контроля. Кон-
тактные напряжения на желобах эл-
липтического и сложных профилей
распределены более равномерно, чем
на желобах с круговым профилем.
Так, эпюра давлений вдоль большой
оси площадки контакта шара с эллип-
тическим желобом при начальном
двухточечном касании имеет форму
кривой с двумя менее резко выражен-
ными максимумами, вместо одного
максимума для кругового желоба.
Аналогичная картина имеет место и
на желобах сложного профиля при К &
ж 0,495 с центральным углом 25—
35°. Наряду с более равномерным рас-
пределением давления, такие профили
обеспечивают существенное снижение
энергетических потерь. В случае фор-
мирования дорожки качения сложным
профилем, имеющим К = 0,505 и
2у0 — 40-7-50°, значительно умень-
шается максимальное контактное дав-
ление практически при том же уровне
потерь на контакте. При этом необ-
ходимо иметь в виду, что наиболее
полно эти преимущества реализуются
хотя и в достаточно широком, но все же
вполне определенном диапазоне на-
груженности, который определяется
параметрами профиля.
В случае необходимости возможно
большего снижения потерь на трение
качения, в сравнительно легконагру-
женных опорах следует ориентиро-
ваться на сложный профиль с неболь-
шой величиной центрального угла
(2у0 « 30°) при К = 0,4954-0,505, либо
на эллиптический желоб с двухточеч-
ным контактом, для которого точки
начального касания лежат вблизи
мгновенной оси вращения шара отно-
сительно желоба. Желоба такого типа
могут найти применение:
а) в высокоскоростных легкона-
груженных шарикоподшипниках,
когда основным лимитирующим фак-
тором становятся потери на тре-
ние качения, вызывающие интенсив-
ное тепловыделение, перераспреде-
ление зазоров, деструкцию смазоч-
ного материала и образование не-
ровностей на поверхностях качения;
б) в приборных подшипниках, ко-
торые несут сравнительно небольшие
нагрузки, но по условиям работы долж-
ны иметь минимальный и предельно
стабильный момент трения;
в) в опорах поворотных устройств
и подвижных столов отдельных меха-
низмов, где с целью уменьшения мощ-
ности и габаритных размеров необхо-
димо свести до минимума сопротив-
ление качению.
Для относительно тяжело нагру-
женных тихоходных опор, в которых
сопротивление качению имеет второ-
степенное значение, а лимитирующим
становится уровень контактных дав-
лений и пластических деформаций
в рабочей зоне, предпочтительным яв-
ляется сложный профиль с централь-
ным углом 2у0 = 50-7-60° и соотно-
шением Rq/D^ & 0,505.
В радиально-упорных шарикопод-
шипниках, работающих при комбини-
рованной нагрузке, ось симметрии
профиля при обработке желоба должна
быть повернута на угол, равный
углу контакта подшипника. Учитывая
износ и деформирование рабочих по-
верхностей, исходный радиальный за-
зор необходимо выбирать таким, чтобы
фактический угол контакта в начале
работы был на 2—3° меньше номиналь-
ного.
Для относительно тяжело нагружен-
ных подшипников, работающих при
нагрузках, приближающихся к стати-
чески допустимым, центральный угол
сложного профиля, стягивающий дугу
радиуса, близкого к радиусу шара,
должен лежать в пределах 38—46°.
Большие значения угла предпочти-
тельны в случае работы подшипника
при расчетной нагрузке Q, равной или
большей статической грузоподъем-
ности подшипника, меньшие — при
более легких режимах и более высоких
частотах вращения. Радиус среднего
участка профиля в этих случаях
желательно брать равным 0,505 от
диаметра шара. При меньших его зна-
чениях (в случае одноточечного началь-
ного контакта) будут увеличиваться
энергетические потери, при больших —
контактные напряжения.
Внутреннее кольцо подшипника
наиболее подвержено контактному
Примеры использования приведенных рекомендаций
61
разрушению вследствие высокого уров-
ня действующих здесь напряжений.
Поэтому на данной стадии работ по
повышению работоспособности ша-
рикоподшипников путем совершенство-
вания форм их поверхностей качения
был модифицирован желоб внутрен-
него кольца. Как показывают приве-
денные выше результаты, это дает
увеличение долговечности подшип-
ника на 60—80 %. Однако напряжен-
ное состояние в области контакта шара
с внутренним кольцом в значительной
мере зависит от условий контакта на
наружном, поскольку в большинстве
случаев вращается внутреннее кольцо,
и через весьма ограниченные площадки
соприкасания с двумя-тремя наиболее
нагруженными шарами оно должно
передать касательные усилия, прео-
долевающие силы сопротивления вра-
щению всего комплекта тел качения,
в том числе и силы трения на наруж-
ном контакте. Касательные силы, как
показано рядом исследований, значи-
тельно уменьшают долговечность де-
талей, работающих при качении под
нагрузкой. Поэтому модификация
формы желоба наружного кольца,
позволяющая снизить сопротивление
качению шара на наружном контакте,
будет способствовать облегчению ус-
ловий работы внутреннего кольца и
повышению долговечности подшип-
ника в целом. На первом этапе такая
модификация может выразиться в уве-
личении радиуса желоба наружного
кольца (0,525—0,54 диаметра шара).
Более перспективным является ис-
пользование описанных выше профи-
лей переменной кривизны.
Обработка желобов сложного про-
филя ведется на стандартном обору-
довании методом врезного шлифования.
Правку круга по сложному профилю
осуществляют с помощью специального
заправочного устройства.
Приведенные рекомендации могут
быть в равной мере использованы как
для шарикоподшипников, так и для
шариковых направляющих, поворот-
ных столов, и шариковинтовых пере-
дач с целью облегчения их хода, либо
для увеличения статической грузо-
подъемности, либо снижения габарит-
ных размеров и массы.
ПРИМЕРЫ ИСПОЛЬЗОВАНИЯ
ПРИВЕДЕННЫХ РЕКОМЕНДАЦИЙ
Конструкция и некоторые характе-
ристики радиальных шарикоподшип-
ников с желобами сложного профиля.
Условия работы пары шар—желоб
в реальном шарикоподшипнике значи-
тельно отличаются от условий ее
работы в изолированном виде, когда
отсутствует влияние таких существен-
ных факторов, как центробежные силы
и касательные силы на контакте вра-
щающегося кольца с телом качения
(не связанные с дифференциальным
проскальзыванием). Поэтому оконча-
тельный вывод об эффективности мо-
дификации форм поверхностей можно
сделать на основании проверки полу-
ченных результатов непосредственно
на подшипниках. В качестве опытного
был взят один из наиболее часто приме-
няющихся шарикоподшипник типораз-
мера 307. Основные данные этого под-
шипника:
внутренний диаметр d = 35 мм;
наружный диаметр D = 80 мм;
ширина В = 21 мм;
наружный диаметр внутреннего коль-
ца (по буртикам) d2 = 48,9 мм;
диаметр по дну желоба внутреннего
кольца = 43,212 мм;
внутренний диаметр наружного коль-
ца (по буртикам) D2 = 66,1 мм;
диаметр по дну желоба наружного
кольца jDj — 71,788 мм;
номинальный радиус желоба вну-
треннего и наружного колец 7?ж =
•= 0,5151)^= 7,36 мм;
число шариков z=7;
радиальный зазор g ж 20 мкм (соз-
дается за счет отклонений «в металл»
диаметров dt и Dj);
статическая грузоподъемность Со —
= 17 кН;
предельная частота вращения п =
= 8000 об/мин.
Центральный угол, стягиваемый ду-
гой желоба внутреннего кольца,
2увн =
= 2arccos [Яж — 0,5 (d2 — t/i)]/7?>K =
- 105°20',
62
ПРЕЦИЗИОННЫЕ ШАРИКОВЫЕ ОПОРЫ
наружного кольца
2ун —
= 2arccos — 0,5 (Z>i — D2)]/Rm =
= 105°20'.
Параметры профиля. В качестве
кривой, формирующей дорожки каче-
ния колец опытных шарикоподшипни-
ков, предназначенных для работы при
умеренных частотах вращения в усло-
виях нормальных температур, был
выбран описанный выше сложный про-
филь (см. рис. 23) с углом контакта
сс = 0. Этот профиль обеспечивает
возможность наиболее широкого варьи-
рования условий на контакте путем
соответствующего подбора величины
центрального угла 2у0, радиуса сред-
него участка 7?0 и закона изменения
радиуса кривизны р боковых участков
желоба. Для проведения сравнитель-
ных испытаний на долговечность были
изготовлены совместно с Всесоюзным
научно-исследовательским институтом
подшипниковой промышленности
(ВНИПП) четыре партии шарикопод-
шипников типоразмера 307. В первой
партии подшипники были стандартной
конструкции и имели внутренние и
наружные кольца с круговым профи-
лем при общепринятом отношении
радиуса желоба к диаметру шара
Ry^Dw~ 0,515. Подшипники трех
остальных партий имели наружные
кольца с желобами того же профиля,
а внутренние их кольца имели слож-
ные профили, которые были условно
названы Al, А2 и АЗ и отличались
лишь значением центрального угла 2у0.
Для определения нужного значения
этого угла найдем размеры площадки
контакта при нагрузках на подшип-
никах, приближающихся к статиче-
ски допустимым, пользуясь методикой
[2]. Диаметр шара Dw — 14,29 мм;
радиус желоба 7?ж = 0,515£)^ =
— 7,36 мм; диаметр кольца по дну
желоба 43,3 мм.
После соответствующих расчетов по-
лучим
а = 1,7755Q мм;
Ь = 0,15577 Vq мм;
Ро = 1,725 yfQ ГПа;
6 = 8,7-IO’3 мм;
здесь Q — нагрузка на шарике, кН.
Для подшипника типоразмера 307
статическая грузоподъемность Со =
== 17 кН, что соответствует значению
Q = 12,5 кН.
Подставив это значение Q в приве-
денные зависимости, получим: боль-
шая полуось площадки контакта а =
= 4,12 мм; малая полуось b = 0,36 мм;
максимальное давление р0 — 4 ГПа.
Центральный угол, стягиваемый пло-
щадкой контакта,
2у = 2 arcsin 4,12/7,36 = 68°.
Учитывая более равномерное распре-
деление нагрузки по площадке кон-
такта шара с желобом сложного про-
филя, а также приведенные ранее
результаты экспериментальных иссле-
дований и необходимость ограничения
уровня энергетических потерь в под-
шипнике, принимаем для основной
опытной партии подшипников с про-
филем А1 центральный угол 2у0 —
= 46°. Для контрольной партии с про-
филем А2 было принято 2у0 = 38°,
партия АЗ имела 2у0 — 54°. Во всех
случаях RjD^ == 0,505, т. е. 7?0 =
= 7,21 мм.
На рис. 41 представлены значения
начального зазора в области контакта
шара с круговым желобом и желобом
профиля А1 (в осевой плоскости под-
шипника) на различных расстояниях х
от точки начального касания. В сред-
ней части сложного профиля (кривая 2)
прилегание поверхностей более плот-
ное, чем кругового, за счет этого до-
стигается большая равномерность рас-
пределения усилия вдоль площадки
контакта. На данном этапе работы
было решено ограничиться модифика-
цией лишь внутреннего кольца, по-
скольку по признаку контактной уста-
лости в большинстве случаев оно ока-
зывается наиболее слабым элементом
подшипников общего назначения.
Контактные напряжения. Для
сравнительной оценки уровня контакт-
ных напряжений на внутренних коль-
цах всех четырех партий с помощью
сажевых отпечатков были сняты раз-
меры площадок контакта при нагруз-
ках, превышающих возможный диапа-
зон нагруженности подшипников.
Площадки контакта шарика с желобами
профилей Al, А2 и АЗ имели форму
Примеры использования приведенных рекомендаций
63
закругленных по концам полосок при-
мерно постоянной ширины, типа пока-
занных на рис. 24, б и отличались по
длине в соответствии с заданным цен-
тральным углом. Для круговых жело-
бов площадки контакта имели форму
эллипса. На рис. 42 даны эпюры кон-
тактного давления pv0 вдоль большой
полуоси площадки контакта, найден-
ные для рассматриваемых случаев
согласно приведенной выше методике.
Основные усталостные испытания
подшипников вели при радиальной
нагрузке 17,5 кН, которой соответ-
ствует нагрузка на шар около 12 кН.
Наибольшее давление имеет место на
круговом желобе при наиболее нерав-
номерном его распределении вдоль боль-
шой полуоси, наименьшее на желобе
с профилем АЗ, имеющем самую длин-
ную площадку контакта со значи-
тельно более равномерным распреде-
лением давления. Желоб с профилем А1
(2у0 = 46°) имеет самую ровную эпюру
давлений и более короткую площадку
контакта. На желобе с профилем А2
эпюра давлений приближается по фор-
ме к имеющей место эпюре на эллипти-
ческом желобе с начальным двухточеч-
ным контактом. Увеличение давления
вблизи концов площадки контакта
здесь происходит вследствие попереч-
ных деформаций шара («выпучивания»),
которые при сравнительно небольшом
для такой значительной нагрузки цен-
тральном угле 2у0 = 38° в условиях
тесного желоба (#0 = 0,505Рш) играют
существенную роль.
Полученные таким образом эпюры
давлений для Q — 8; 10 и 14 кН сви-
детельствуют о том, что отмеченные
преимущества желобов сложного про-
филя в отношении равномерности рас-
пределения давлений справедливы для
всего диапазона нагрузок, в котором
могут работать средне- и тяжело
нагруженные подшипники выбранного
типоразмера.
Контактная жесткость. Контакт-
ную жесткость пары шар —кольцо опре-
деляли при сжатии шара между двумя
внутренними кольцами подшипника
типоразмера 307 с желобами заданного
профиля. Относительное сближение ко-
лец фиксировали двумя нутромерами
с микронными головками, установлен-
ными на одинаковом расстоянии от
Рис. 41. Изменение вдоль оси X зазора ме-
жду шаром диаметром 14, 288 мм и желобом
внутреннего кольца подшипника типоразме-
ра 307:
1 — круговой профиль, 2 — профиль Л1
Рис. 42. Эпюры контактного давления
вдоль большой полуоси площадки контакта
шара диаметром 14,288 мм с желобами
сложных профилей и круговым при нагруз-
ке 12 кН
64
ПРЕЦИЗИОННЫЕ ШАРИКОВЫЕ ОПОРЫ
Рис. 43. Упругое сближение ’шара’’циаме-
тром 14,288 мм с внутренними кольцами
подшипника типоразмера 307, имеющими
желоба кругового и сложных профилей
плоскости симметрии желобов колец.
После предварительного нагружения
колец силой около 0,1 кН индикаторы
нутромеров устанавливали на нуль
и проводили нагружение. Упругое
сближение на одном контакте опре-
деляли как четверть суммы сближений
обоих концов осей. Каждый опыт про-
водили несколько раз.
Сводка полученных данных приве-
дена на рис. 43. Как и следовало
ожидать, наибольшие деформации име-
ют место на желобе профиля А2 с са-
мой короткой площадкой контакта
(2у0 =- 38°), а наименьшие — на жело-
бе профиля АЗ с наиболее длинной
площадкой контакта (2у0 = 54°). Де-
формации на желобе профиля А1
при умеренных нагрузкахХнесколько
меньше деформаций на круговом же-
лобе вследствие высокой конформно-
сти сопряженных поверхностей в пер-
вом случае. Однако на желобе слож-
ного профиля площадка контакта имеет
ограниченную возможность роста в дли-
ну, определяемую значением централь-
ного угла 2у0, за пределами которого
начинается быстрое увеличение зазора
между поверхностями. Поэтому с даль-
нейшим повышением нагрузки дефор-
мации на сложном желобе становятся
больше, чем на круговом.
Тепловыделение. Основная доля энер-
гии, которая затрачивается на преодо-
ление сопротивления качению, преоб-
разуется в тепловую энергию, уходя-
щую на нагрев элементов подшипника.
При этом тепловые очаги могут рас-
полагаться как непосредственно на
рабочих поверхностях в зонах относи-
тельного их проскальзывания, так и на
глубине, в области действия наиболь-
ших касательных напряжений. Послед-*
нее особенно проявляется в неметал-
лических материалах со сравнительно
малой теплопроводностью. Например,
при испытании под пульсирующей кон-
тактной нагрузкой текстолитовых образ-
цов начало разрушения в виде обугли-
вания основы материала наблюдалось
на некоторой глубине под центром
площадки контакта в зоне наибольших
сдвиговых деформаций. Теплоотвод
в этом месте затруднен, и аккумуля-
ция тепла приводит к разрушению ма-
териала с относительно небольшой
теплостойкостью. Для металлов, име-
ющих меньшую упругую податливость
и меньший уровень гистерезисных по-
терь, с одной стороны, и большую
теплопроводность, с другой, наиболь-
шая тепловая напряженность даже
в условиях ограниченного относитель-
ного проскальзывания сопряженных
тел будет иметь место непосредственно
на рабочих поверхностях. Этому спо-
собствует также и более высокий уро-
вень сил трения, поскольку на метал-
лических поверхностях обычно дей-
ствуют значительно более высокие кон-
тактные нагрузки.
Тепловыделение на рабочих поверх-
ностях деталей опор качения является
чрезвычайно серьезным фактором, во
многих случаях ограничивающим гру-
зоподъемность этих опор и их предель-
ную быстроходность. Поэтому для
контроля по данной "'характеристике
было проведено сравнительное иссле-
дование теплового режима колец под-
шипников типоразмера 307 стандарт-
ной и опытной конструкций с желобом
типа А1 (2у0 = 46°) на внутреннем
кольце и круговым желобом на на-
ружном при RyijDw— 0,515. На под-
шипник, установленный на консоль-
ном валу стенда, была надета обойма,
к которой с помощью рычажной си-
стемы от гидронагружателя прилага-
лась радиальная нагрузка.
Для измерения температуры торцы
обоих колец были открыты и просма-
Примеры использования приведенных рекомендаций
65
6. Температура на кольцах подшипников, °C
Кольцо подшипника Радиальная нагрузка на подшипник, кН
10 1 14 1 17,5
Профиль желоба
7?7,36 (круго- вой) А1 7?7,36 (круго- вой) А1 7?7,36 (круго- вой) А1
Через 1 ч.
Внутреннее (AGA) 56,4 62,3 76,4 73 83 83,5
Наружное (AGA) 53,2 60,5 75 69,7 81,2 80
Наружное (измерение парой) термо- 55,8 60 76 69,5 82 80
Через 2 ч
Внутреннее (AGA) 58,2 64,2 81 76,2 88,8 89,5
Наружное (AGA) 57,2 63 79 72,6 86,2 86,5
Наружное (измерение парой) термо- 58 62 80 72,5 87,2 86
Примечания. 1. Начальная температура образцов 40 °C; комнатная тем.
пература 24 °C. 2. AG А — система термовидения (Швеция)
тривались системой термовидения AGA
(Швеция). Контрольные измерения тем-
пературы наружного кольца вели с по-
мощью припаянной к нему термопары,
показания которой регистрировал са-
мопишущий прибор. Одновременно
фиксировалась комнатная температура.
Ввиду невозможности при выбранной
системе измерения регистрировать тем-
пературы выше 104 °C, опыты вели
при частоте вращения 500 об/мин на
нагрузках; 10; 14 и 17,5 кН. Перед
каждым опытом в испытуемый под-
шипник закладывали свежую порцию
смазочного материала ЦИАТИМ-203
и систему предварительно прогревали
до температуры 45—48 °C. Затем ма-
шину выключали для выравнивания
температуры по объему и опыт начи-
нали после ее падения до 40 °C. Тем-
пература наружного кольца практи-
чески стабилизировалась через 1,5 ч,
поэтому опыт проводили в течение
2 ч со съемом показаний через 1 и 2 ч.
Результаты измерений представлены
в табл. 6.
3 Пинегин J. В. и др.
При малой нагрузке, когда длина
площадки контакта шара с круговым
желобом не превышает длины хорды,
стягивающей центральный угол 2у0
на сложном профиле А1, сопротивле-
ние качению и, следовательно, тепло-
выделение на круговом желобе мень-
ше. С увеличением же нагрузки длина
площадки на желобе сложного про-
филя растет медленнее, чем на круго-
вом. Соответственно, рост потерь на
контакте и тепловыделение здесь также
замедляются. Приведенные результаты
показывают, что в отношении тепловой
напряженности характеристики опыт-
ных подшипников не хуже характе-
ристик подшипников стандартной кон-
струкции. Тепловыделение в подшипни-
ке в целом, судя по полученным ре-
зультатам, которые четко отслеживают
условия на контакте шара с внутрен-
ним кольцом, существенно зависит от
потерь на этом контакте, хотя они
являются лишь одной из составляющих
общих потерь в подшипнике, главными
среди которых, кроме названных, яв-
66
ПРЕЦИЗИОННЫЕ ШАРИКОВЫЕ ОПОРЫ
Рис. 44. Долговечность подшипников типо-
размера 307 при радиальной нагрузке
10,3 кН с профилем А1 на внутреннем коль-
це (сплошная) и круговым профилем (штри-
ховая)
ляются потери на контакте шара с на-
ружным кольцом, на рабочих поверх-
ностях сепаратора и в смазочном мате-
риале.
Долговечность модифицированных
подшипников по сравнению с долговеч-
ностью подшипников стандартной кон-
струкции. Радиальные подшипники
стандартной конструкции имели вну-
тренние и наружные кольца с желоба-
ми кругового профиля с обычным соот-
ношением R}VJDW = 0,515. Опытные
подшипники отличались формой же-
лоба внутреннего кольца, которая
в разных партиях имела профиль А1
(2у0 = 46°), А2 (2у0 = 38°) и АЗ (2у0 -
= 54°) при соотношении Rq/D^ —
= 0,505. Все подшипники комплекто-
вали с наружными кольцами завод-
ского изготовления.
С целью уменьшения влияния слу-
чайных факторов все подшипники ком-
плектовали шариками, наружными и
внутренними кольцами из одних и
тех же групп деталей, из материала
одной плавки и обработанных на одних
и тех же станках по одинаковой техно-
логии. Внутренние кольца были взяты
с припуском под шлифование желоба.
Шероховатость поверхности желоба
внутреннего кольца после шлифования
Ra = 0,184-0,24 мкм. Шлифование же-
лобов кругового профиля вели на том
же оборудовании и с применением
того же устройства для правки, что
и при шлифовании желобов сложного
профиля.
Методы доводки желобов сложной
формы в настоящее время не разрабо-
таны. Поэтому доводку всех внутрен-
них колец не проводили во избежание
искажения профиля.
Испытания подшипников проводили
во ВНИППе на машинах ЦКБ-50 по
общепринятой методике. Смазывание
проводили под давлением веретенным
маслом при частоте вращения
4000 об/мин. Подшипники, в процессе
работы которых имело место наруше-
ние смазывания или проворачивалось
на валу внутреннее кольцо, с испыта-
ний снимали и при обработке резуль-
татов пе учитывали.
Первую серию сравнительных испы-
таний проводили на подшипниках с то-
роидальным желобом внутреннего
кольца и подшипниках с профилем А1
при радиальной нагрузке 10,3 кН,
что соответствовало герцевскому ма-
ксимальному напряжению на круговом
желобе рокр=3,55 ГПа. Как видно
из представленной на рис. 44 гисто-
граммы, средняя долговечность под-
шипников опытной партии на 80 %
выше долговечности подшипников стан-
дартной конструкции.
Основные испытания проводили при
радиальной нагрузке 17,5 кН. Расчет-
ное максимальное контактное давле-
ние pQ на внутреннем кольце с торо-
идальным желобом, найденное соглас-
но методике [4], равно 4 ГПа. Напря-
жения Pq, найденные по эксперимен-
тально определенным размерам площа-
док контакта, имели следующие зна-
чения:
Профиль ..................... Круговой Al А2 АЗ
р0, ГПа ..................... 4,23 3,76 3,95 3,52
Расхождение между значениями рокр,
найденными по размерам площадок
контакта и методике [2], объясняется
тем, что в решении Герца учитываются
лишь первые члены функции зазора
между сопряженными поверхностями.
В результате на реальном контакте
зазор раскрывается быстрее, чем это
предусмотрено указанным решением
Герца, и замеренные площадки ока-
Радиально-упорные шарикоподшипники с желобами сложного профиля
67
7. Долговечность подшипников типоразмера 307 с желобами
кругового = 0,515£>И)) и сложных профилей Al, А2 и АЗ
на внутренних кольцах при радиальной нагрузке 17,5 кН
Характеристика Профиль желоба внутреннего кольца
круго- вой А1 А2 АЗ
Долговечность при надежности, ч- 90 % L90 50 % L60 18,7 83,1 29,9 137 29,3 124 17,5 85,1
Отношение долговечности модифицирован- ного подшипника к долговечности стан- дартного подшипника при надежности. 90 % Дяо 50 % ДБ0 1 1 1,6 1,65 1,59 1,49 0,94 1,02
зыгаются короче и несколько шире
расчетных, а рассчитанное по этим
размерам контактное напряжение
выше.
Результаты испытаний приведены
в табл. 7. Здесь Л90 и Л50 — долговеч-
ность при надежности 90 и 50 % со-
ответственно, а /<90 и /<50 — отношение
долговечности подшипников данной
опытной партии к долговечности под-
шипников стандартной конструкции
соответственно при надежности 90 и
50 %. Статистическую обработку ре-
зультатов испытаний проводили со-
гласно ГОСТ 25.501—78 с проверкой
принадлежности к данной выборке
крайних результатов по критерию
Груббса. Наилучшими в отношении
долговечности оказались подшипники
с профилем А1: при 90 %-ной надеж-
ности их долговечность на 60 % боль-
ше долговечности подшипников с кру-
говым желобом. Близкие к этому ре-
зультаты показали подшипники с про-
филем А2 Подшипники с профи-
лем АЗ, имевшие самую длинную пло-
щадку контакта и наименьшие контакт-
ные напряжения на внутреннем кольце,
показали наименьшую из опытных
подшипников долговечность. Это объяс-
няется более высоким уровнем дей-
ствующих здесь тангенциальных сил,
возникающих в процессе относитель-
ного дифференциального проскальзы-
вания сопряженных участков поверх-
ностей шара и желоба.
3*
РАДИАЛЬНО-УПОРНЫЕ
ШАРИКОПОДШИПНИКИ
С ЖЕЛОБАМИ СЛОЖНОГО
ПРОФИЛЯ
Конструкция подшипников. Особен-
ность конструирования радиально-
упорных шарикоподшипников заклю-
чается в том, что ось симметрии про-
филя должна быть повернута относи-
тельно плоскости вращения на угол,
равный углу контакта радиально-упор-
ного шарикоподшипника, исходное
значение которого определяется вели-
чиной радиального зазора.
Исследования проводили на под-
шипнике типоразмера 36206. Основ-
ные данные этого подшипника:
диаметр отверстия d — 30 мм;
наружный диаметр D — 62 мм;
диаметр по дну желоба внутреннего
кольца di — 36,475 мм;
диаметр по дну желоба наружного
кольца — 55,537 мм;
диаметр шарика Dw — 9,525 мм;
угол контакта а = 12°;
ширина подшипника В = 16 мм;
число шариков z = 9:
допустимая статическая нагрузка
Со= 13 кН;
предельная частота вращения /гггред“
= 10 000 об/мин.
Чтобы уменьшить изменение поло-
жения дорожки качения вследствие
изнашивания и пластического дефор-
68
ПРЕЦИЗИОННЫЕ ШАРИКОВЫЕ ОПОРЫ
мирования поверхностей качения, угол
контакта был принят равным 18°.
Желоб внутренних колец подшип-
ников опытной партии имел профиль,
показанный на рис. 23, причем цен-
тральный угол 2у0 = 42°, радиус цен-
трального участка профиля 7?0 =
= 0,505/)^ = 4,81 мм. Желоб наруж-
ных колец был тороидальным с обыч-
ным соотношением 7?ж — 0,515 Dw —
= 5,90 мм. Желоба обоих колец под-
шипников стандартной конструкции
имели круговой профиль с 7?ж =
= 4,90 мм. Как и ранее, была соблю-
дена наибольшая идентичность при
отборе деталей, обработке внутренних
колец и сборке подшипников обеих
партий. Подшипники комплектовали
из деталей заводского изготовления.
Исключение составили внутренние
кольца, на желобах которых был оста-
влен припуск под шлифование (в обеих
партиях). Желоба внутренних колец
всех подшипников после чистового
шлифования не доводились, шерохова-
тость поверхности Ra — 0,184-0,24 мкм.
Сравнительная долговечность. Испы-
тания на долговечность проводили
по установленной во ВНИППе мето-
дике на машинах типа ЦКБ-50 при
частоте вращения 4000 об/мин со сма-
зыванием под давлением веретенным
маслом. Нагрузка комбинированная:
радиальная 6,4 кН и осевая 3,2 кН.
Найденные согласно методике [2] для
внутреннего кольца с тороидальным
желобом параметры контакта при этой
нагрузке имели следующие значения:
2а = 4,45 мм: 2Ь = 0,406 мм; рокр =
— 3,18 ГПа. Площадка контакта на
желобе сложного профиля имела фор-
му полосы постоянной ширины 2Ь —
= 0,45 мм на длине 3,1 мм с плавными
закруглениями по концам, общая дли-
на площадки 2а — 3,35 мм. Макси-
мальное контактное напряжение на
ней, найденное согласно изложенной
в настоящей работе методике, росЛ —
— 2,65 ГПа. Как и ранее, учитывали
лишь подшипники, проработавшие до
разрушения одного из их элементов
при нормальных условиях смазки и
без проворота внутреннего кольца^на
валу испытательной установки. *
Долговечность подшипников с то-
роидальным желобом^при 90%-ной
надежности L90T = 55 ч, при 50 %-ной
надежности Л50т = 120 ч. Для подшип-
ников со сложным профилем на вну-
треннем кольце L9o сл = 102 ч и
L50 сл = 268 ч. Таким образом, отно-
сительное увеличение долговечности
модифицированных подшипников со-
ставляет соответственно К90 = 1,8 и
К50 = 2,5. Указанные значения го-
раздо меньше тех, которые можно
было бы ожидать, исходя из соотно-
шения
^сл/^тор = (Ро юр/Ро сл)9 = 4,6.
Это обстоятельство еще раз подчерки-
вает необходимость дальнейшего изу-
чения условий, которые определяют
опасное состояние материала в зоне
контакта. Эти условия в значительной
мере зависят от действующих каса-
тельных сил и не могут характеризо-
ваться однозначно величиной макси-
мального давления р0.
Основной причиной выхода из строя
подшипников обеих партий было вы-
крашивание на внутреннем кольце.
Однако, если такое разрушение имело
место во всех без исключения подшип-
никах с тороидальным желобом, то
в партии модифицированных подшип-
ников в пяти случаях из 18 выкра-
шивания на внутреннем кольце не
было Из этого можно заключить,
с одной стороны, что примененная
модификация профиля желоба вну-
треннего кольца приводит к увеличе-
нию прочности наиболее слабого звена
подшипника и, следовательно, осу-
ществляется в правильном направле-
нии. С другой стороны, основной при-
чиной выхода опытных подшипников
по-прежнему остается выкрашивание
на внутреннем кольце. Следовательно,
выбранный профиль не является луч-
шим из возможных. Кроме того, усло-
вия в зоне контакта шара с внутренним
кольцом в значительной мере опреде-
ляются условиями на его контакте с на-
ружным кольцом. Объясняется это
тем, что тангенциальное усилие, кото-
рое передается внутренним кольцом
нагруженным шарикам для вращения
всего комплекта тел качения, вклю-
чает и сопротивление качению на на-
ружном кольце. Это значит, что моди-
фикация формы его желоба с целью
уменьшения этого сопротивления будет
способствовать снижению напряжен-
Радиально-упорные шарикоподшипники с желобами сложного профиля
69
ности на контакте шара с внутренним
кольцом и, следовательно, повышению
долговечности опоры в целом.
Особенности кинематики. Каждый
из шариков радиально-упорного ша-
рикоподшипника, нагруженного ком-
бинированной нагрузкой, за один обо-
рот комплекта тел качения проходит
зоны с различными соотношениями
радиальной и осевой составляющих
QrlQa нагрузки на данный шарик.
Будучи наибольшим в нижней точке
подшипника на линии действия ради-
альной нагрузки, это соотношение по
мере ухода шарика от нижней точки
постепенно уменьшается и в верхней
зоне обращается в нуль. Соответствен-
но меняется и положение шарика от-
носительно торца подшипника, а вме-
сте с ним и угол контакта а. В нижней
зоне этот угол должен быть минималь-
ным, в верхней же зоне, где Qr = О,
максимальным. Как следует из геоме-
трических построений, изменение
угла а должно быть тем меньше, чем
меньше радиусы желобов колец под-
шипника. Для проверки этого вывода
с помощью инструментального микро-
скопа замерили положение следа ка-
чения в различных сечениях по окруж-
ности тех наружных колец обеих
партий, на которых указанный след
был наиболее четким благодаря тому,
что в процессе испытаний они не про-
ворачивались.
Найдем величину осевого колебания
шарика за один полный его оборот
вокруг оси подшипника. Расстояние
шарика от торца
N = 0,5В — Rw —(7?ж — Rw) sin а =
= 0,5-16— 4,7625 —
-(4,90 - 4,7625) sin а =
= 3,2376 — 0,1375 sin а.
Для стандартного подшипника средние
значения — 12° 51' и сх2 = 24° 22';
соответственно = 3,207 мм; N2 =
= 3,181 мм. Осевые колебания ша-
рика — N2 = 0,026 мм. Для опыт-
ного подшипника cq = 13° 14' и а2 =
= 19° 23'; = 3,206; N2 = 3,192;
N±-— N2 = 0,014 мм.
Таким образом, осевое колебание
шарика в опытном подшипнике почти
вдвое меньше, чем в стандартном, что
должно положительно сказаться на его
вибрационно-акустических характери-
стиках. Кроме того, с изменением угла
контакта шарика меняется окружная
скорость его центра тяжести vQt. Если
угловая скорость сепаратора сос, то
v0i — Roi®c>
где Rqi /?н 4~ (/?ж Rw) X
X cos а/.
Для рассматриваемого случая 7?н =
= 27,7685 мм; /?ж = 4,90 мм; Rw —
— 4,7625 мм и Roi ~ 22,8685 —
— 0,1375 cos а/.
Частота вращения сепаратора под-
шипника
лт = 0,5п ( 1
т
cos а,
где dm = 2Rqi — средний диаметр под-
шипника (по центрам тел качения);
п — частота вращения внутреннего
кольца.
Поскольку ведущими являются наи-
более нагруженные шарики, в обеих
последних формулах принимаем а =
= «min- Для стандартного подшипни-
ка dm = 22,7344; пт = 1183,06 об/мин
и для опытного dm — 22,7346; пт —
= 118,34 об/мин (при п = 4000 об/мин).
Соответственно разность окружных
скоростей шарика в нижней и верхней
(относительно линии действия радиаль-
ной нагрузки) точках для стандарт-
ного подшипника
Ди = cozn (R$ max R$ min) —
^~-(R^-Rw)^
X (cos amin — COS amax) = 1,09 мм/с
и для опытного Ду = 0,51 мм/с.
Таким образом, на стандартном под-
шипнике отставание шарика в верх-
ней зоне больше и соответственно
больше сила взаимодействия между
ним и сепаратором.
СПИСОК ЛИТЕРАТУРЫ
1. Боуден Ф. П., Тейбор Д. Трение
и смазка твердых тел/Пер. с англ. М.:
Машиностроение, 1968, с. 277—315.
2. Ковалев М. П., Народецкий М. 3.
Расчет высокоточных шарикоподшип-
70 ПРЕЦИЗИОННЫЕ ШАРИКОВЫЕ ОПОРЫ
ников. М.: Машиностроение, 1980.
373 с.
3. Королев А. В. Выбор оптималь-
ной геометрической формы контакти-
рующих поверхностей деталей машин
и приборов. Саратов: Изд-во Сарат.
ун-та, 1972, 70 с.
4. Орлов А. В. Влияние неточностей
положения валов на условия работы
зубчатых передач. М.: Наука, 1966.
95 с.
5. Орлов А. В. Оптимизация рабочих
поверхностей опор качения. М.: На-
ука, 1973. 83 с.
6. Пинегин С. В. Трение качения в
машинах и приборах. М.: Машино-
строение, 1976. 262 с.
7. Родзевич Н. В., Волков Н. Н.
Подшипники качения пар вагонов и
локомотивов. М.: Машиностроение,
1972. 146 с.
8. Степнов М. Н. Статистическая
обработка результатов механических
испытаний. М.: Машиностроение, 1972.
256 с.
9. Bogelsack G. Profilgestaltung bei
Kugellagern und Kugelschrauben fur
Hohe Genauigkeiten. — «Feingerate-
technik», 1967, 16 Ig, Heft 3, S. 110—
111.
3 ТЕХНОЛОГИЧЕСКОЕ
• ОБЕСПЕЧЕНИЕ
ПОДШИПНИКОВ
С МОДИФИЦИРОВАННЫМИ
ПРОФИЛЯМИ
РАБОЧИХ ПОВЕРХНОСТЕЙ
МЕТОД ОБРАБОТКИ
Единственным отличием описанных
выше модифицированных подшипни-
ков от стандартных является сложный
профиль их дорожки качения. По-
этому решающее условие практиче-
ской применимости приведенных ре-
комендаций заключается в возможно-
сти шлифования желобов сложного
профиля с помощью стандартного обо-
рудования.
Обработку желобов колец шарико-
подшипников проводят либо на стан-
ках с качающимся кругом, либо мето-
дом врезного шлифования. В первом
случае соприкасающаяся с изделием
режущая кромка шлифовального кру-
га, установленного в качающейся го-
ловке, описывает дугу заданного ра-
диуса и формирует, таким образом,
желоб кругового профиля. Придавая
головке дополнительное корректиру-
ющее движение, можно получать же-
лоба более сложных форм, в том числе
и описанных выше. Однако это потре-
бовало бы некоторого изменения кон-
струкции станка, что может быть це-
лесообразным в случае обработки боль-
ших поверхностей, когда врезное шли-
фование оказывается неприемлемым
из-за опасности прижогов. Метод врез-
ного шлифования является более про-
грессивным и нашел широкое распро-
странение на подшипниковых заводах.
Основным в этом случае является
точная правка круга по заданному
профилю.
Принцип работы приспособления для
правки круга показан на рис. 1.
Острие алмазной иглы J может совер-
шать одновременно два связанных
друг с другом движения: в плоскости
оси круга ОрМ (или параллельной ей)
и в плоскости его вращения. При этом
основное движение S* острия иглы
совершается по дуге окружности ра-
диуса /?0 с таким расчетом, чтобы эта
дуга АВ, являющаяся базовой линией,
наиболее близко вписывалась в точный
контур CD, по которому должно быть
обработано изделие. Вспомогательное
движение S2 иглы в плоскости враще-
ния круга предназначено для коррек-
ции его профиля на величину расхож-
дения между базовой линией АВ и
контурной CD. Пока острие иглы J,
перемещаясь по дуге АВ, остается
в плоскости симметрии шлифоваль-
ного круга ОгМ, он приобретает про-
филь, соответствующий этой линии.
Допустим, что острие J, достигнув
некоторой точки с центральным углом
у0, дальше наряду с движением
будет совершать корректирующее дви-
жение S2. Тогда, будучи на некотором
расстоянии рк от осевой плоскости
оно отойдет от плоскости симметрии
круга О±Е на расстояние L, и в ре-
зультате отклонится от дуги АВ на
величину 6V. Из треугольника
находим
6v = /^TP-pK, (1)
где текущий радиус круга в данном
торцовом сечении при правке его по
линии АВ
Рк = 7? — 7?0 (1 — cos 7);
где R — наибольший радиус круга.
На поверхности детали, которая
будет прошлифована спрофилирован-
ным таким образом кругом, в точке
с центральным углом у образуется соот-
ветствующее углубление, или отклоне-
ние профиля от основной линии АВ
«в металл» на ту же глубину 6V.
На рис. 2 схематически показан
один из возможных вариантов кон-
струкции приспособления для правки
по указанному способу. Алмазная
игла 1 установлена в ползуне 2, кото-
рый перемещается по направляющим
каретки 3 в плоскости симметрии О±М
шлифовального круга 4 или парал-
лельно ей. Направляющие каретки 3
могут быть круговыми и обеспечивать
72
ТЕХНОЛОГИЧЕСКОЕ ОБЕСПЕЧЕНИЕ ПОДШИПНИКОВ
а)
Рис. 1. Схема правки круга при шлифовании сложного профиля большой (а) и малой (б)
кривизны
Рис. 2. Принцип работы устройства для
правки круга
движение острия иглы по дуге неко-
торого радиуса 7?0 (см. рис. 1, а),
либо прямолинейными, расположен-
ными в плоскости параллельно
оси круга или наклонно к ней (см.
рис. 1, б). Ползун 2 (см. рис. 2) несет
толкатель 5, упирающийся в торцовый
кулачок 6. Благодаря этому каретка 3
совершает корректирующее движение
S2 в направляющих 7. Кулачок спро-
филирован таким образом, чтобы при
повороте иглы на некоторый угол у
(см. рис. 1, а) или при ее перемеще-
нии вдоль линии Л В на расстояние п
(см. рис. 1, б) она одновременно сме-
щалась в плоскости вращения круга
на расстояние L, обеспечивающее нуж-
ную коррекцию (или дп) профиля
круга. Как следует из выражения (1),
Л=/б| + 2бтрк. (2)
Основной идеей данной конструк-
ции является существенное увеличение
Конструкция механизма правки круга
73
точности правки круга по сравнению
с точностью изготовления кулачка,
управляющего корректировочным дви-
жением иглы. Найдем соотношение
погрешностей кулачка и профиля круга.
Допустим, что из-за погрешностей
изготовления кулачок в каком-то се-
чении вместо высоты L имел высоту
L' — L + AL. Согласно зависимо-
сти (1) это даст погрешность профиля
круга
= = У"Рк + ^,2 “
-/рТГТл
Упростим это выражение, восполь-
зовавшись формулой приближенного
исчисления
/рП7^ « Рк + L2/2pK,
которая для встречающихся на прак-
тике соотношений Л2/р£ < 0,08 дает
погрешность не более 0,1 %. Тогда
Д' = (L's-P)/2pK.
Пренебрегая членами второго порядка
малости, получим
Д' = ДШрк. (3)
Таким образом, при диаметре круга,
например, 300 мм и смещении каретки
L = 1,5 мм погрешность правки круга
будет в 100 раз меньше погрешности
изготовления кулачка. Очевидно, что
получить такое соотношение при ис-
пользовании копировальных уст-
ройств, которые привносят и собствен-
ные погрешности, по меньшей мере
весьма затруднительно. Во время об-
работки колец подшипника типораз-
мера 307 был использован круг диа-
метром 560 мм при смещении L =
— 1,3 мм (в пределах рабочей зоны
профиля, на которой располагается
площадка контакта). Соотношение по-
грешностей составляло соответственно
1,3/280 ж 0,005.
Описанный способ может быть ис-
пользован при обработке’методом врез-
ного шлифования деталей, рабочие по-
верхности которых не описываются
сочетанием простейших (с технологи-
ческой точки зрения) геометрических
линий — дугой окружности и прямой.
Сюда относятся бомбинированные ро-
лики, направляющие и кольца с до-
рожками качения непостоянной кри-
визны для шарикоподшипников и ша-
риковых опор; зубья зубчатых и чер-
вячных передач со сложным профилем
рабочих поверхностей, не описыва-
ющимся дугой окружности, циклои-
дой или эвольвентой; подшипники
скольжения с фасонными рабочими по-
верхностями и т. д. Сам принцип обра-
ботки обеспечивает высокую плавность
сопряжения отдельных участков про-
филирующей кривой.
Основное движение иглы в плоско-
сти оси круга должно совершаться
по прямой линии или дуге окружности,
которая наиболее близко прилегает
извне, т. е. со стороны противополож-
ной металлу, к контурной линии
изделия. Так, например, при шлифо-
вании конусного ролика с небольшой
бомбиной базовой линией является
прямая АВ, наклоненная к оси круга
(см. рис. 1,6). Если же обработке под-
лежит ролик сферического подшипни-
ка, образующая которого должна иметь
переменную, плавно меняющуюся кри-
визну, то базовой линией должна быть
дуга окружности EF, в которую наи-
более близко вписывается контурная
линия CD. Возможна также правка
с предварительным смещением иглы
от плоскости симметрии ОТМ в сто-
рону, противоположную направлению
корректирующего движения S2. Бла-
годаря этому расширяются возмож-
ности механизма правки без услож-
нения профиля кулачка. Таким обра-
зом может быть получен, в частности,
профиль с двухточечным начальным
касанием, при котором площадка кон-
такта имеет форму, показанную на
рис. 20 гл. 2. При этом принимают
/?о < 0t5Dw.
КОНСТРУКЦИЯ МЕХАНИЗМА
ПРАВКИ КРУГА
На рис. 3 показано устройство, раз-
работанное в соответствии со схемой,
приведенной на рис. 1, а. Поворотная
часть приспособления — скоба 8 уста-
новлена в центрах, укрепленных в не-
подвижной стойке 7 приспособления,
которая смонтирована на столе кругло-
шлифовального станка позади его зад-
74
ТЕХНОЛОГИЧЕСКОЕ ОБЕСПЕЧЕНИЕ ПОДШИПНИКОВ
Рис. 3. Устройство для правки круга при
обработке желобов некругового профиля
ней бабки. На скобе в шариковых
направляющих (на рисунке не пока-
заны) установлена каретка 3, в кото-
рой в цилиндрической державке 5
крепится алмазная игла 6. В нижней
части ползуна имеется ролик 2, ка-
тящийся при повороте скобы либо по
круговой плоской направляющей 1
(в случае правки по круговому про-
филю), либо по установленному на ней
профильному торцовому кулачку (при
правке по сложному профилю). Ролик
сообщает ползуну, а вместе с ним и
алмазной игле, корректирующее дви-
жение в направлении оси 00 поворо-
та скобы. Установку иглы на нужный
радиус Rq " осуществляют с помощью
дифференциального винта 4, держав-
ку 5 фиксируют контргайкой. Контро-
лируют радиус с помощью накладной
контрольной скобы 11 с индикатором
12 часового типа. Скобу устанавливают
на базовой поверхности Т поворотной
скобы приспособления. Регулирова-
ние зазоров в шариковых направля-
ющих осуществляют с помощью упор-
ных винтов, крепящихся в накладной
планке. Направляющие закрыты вой-
лочными уплотнениями. Установку
скобы в центрах регулируют диффе-
ренциальным винтом Р, перемеща-
ющим опору верхнего центра. Фикси-
руют опору шпилькой 10, которая
имеет с одной стороны скошенную
(клиновую) поверхность. После регу-
лирования опоры шпильку затягивают
гайкой. Приспособление устанавли-
вают таким образом, чтобы при каче-
нии ролика по горизонтальному уча-
стку кулачка острие иглы находи-
лось строго на уровне оси шлифоваль-
ного круга. Проверку перпендикуляр-
ности базирующей поверхности А на-
правляющей 1 по отношению к оси 00
выполняют с помощью индикатора
12, который во время отладки ус-
танавливается на закрепленной в верх-
нем положении каретке 3 и щупом
касается поверхности А (ролик в
это время от нее оторван).
Форма кривой, профилирующей
шлифовальный круг. Чтобы найти
уравнение кривой, определим коорди-
нату для произвольной точки спрофи-
лированного шлифовального круга
(рис. 4).
Ордината кривой
z ~ R рк 6^;
здесь рк = 7?-7?о + )/7?2 —х2;
"К Рк "I” Рк •
Отсюда
Как видно из рис. 4,
£ ~ (^х — ^о) tg ^х Tx/Rq,
l = (ТхШ9—%0) tg <р.
Следовательно,
Z = R - [(R - Ro)2 + 2 (R - Ro) X
X (^-х2)1/2 +ЯВ-*2 +
+ (TW/R% - 2TX0x/R0 + X2) tg2 <р]1/2-
(4)
Конструкция механизма правки круга
75
Радиус кривизны в точке профиля
с координатами х, z может быть опре-
делен из зависимости
Г, . / dz \2~.3/2/ / &Z \
'Mj + UryJ /Ы-
Геометрия кулачков и их обработка.
При обработке желобов, боковые уча-
стки которых профилируют дугами
заданного радиуса, кулачки рассчиты-
вают следующим образом. Положим,
необходимо прошлифовать кольцо с
профилем желоба AOD, показанным
на рис. 5. Здесь а — угол контакта;
2у0 —^центральный угол дуги постоян-
ного радиуса 7?0; и /?2 — радиусы
правого и левого боковых участков
профиля; Т — радиус вращения ро-
лика каретки; и у2 — текущие углы
поворота скобы справа и слева от
плоскости симметрии.
Приняв за начало координат центр
дуги радиуса 7?0 и направив коорди-
натные оси XOZ, как это показано
на рис. 5, получим значения углов:
Yoi = То — Тог = То + «•
Найдем для правого участка OD про-
филя ординаты гх и z2 противостоящих
Друг другу точек шара и желоба с абс-
Рис. 4. Геометрия профиля круга
после правки
циссой хх, соответствующей централь-
ному углу ух.
Xi = Ro sin ViJ /Их = (Ri — Ro) X
X sin Toii «1 = (Ri — Ro) cos v01;
?2 = j/^Rl (Xi + ^i)2 — w,-
Минимальный зазор между шаром
и желобом в сечении, параллельном
плоскости OZ и отстоящем от нее на
расстоянии хх,
^21 ~ г2 — г1-
Необходимая высота кулачка в со-
ответствующем сечении
Рис. 5. Профиль желоба переменной кривиз-
ны
76
ТЕХНОЛОГИЧЕСКОЕ ОБЕСПЕЧЕНИЕ ПОДШИПНИКОВ
Рис. 6. Кулачок для правки круга по слож-
ному профилю
Рис. 7. Обработка кулачка, используемого
в устройстве для правки круга по сложному
профилю
где рк — радиус шлифовального круга
в рассматриваемом сечении (без учета
корректировки). Расстояние от сече-
ния Sj до правого края плоской части
кулачка
= Г(5т71 —51пу0]). (6)
Аналогично для левого участка АО
профиля
х2 = Ro «in у2; m2 = (Ra — Ro) х
х sin у02;
n2 = (Rj — Ro) COSY02;
z3 = /Rg-xi;
z4 = / R'l — (x2 + m2)2 — n2;
S43 = z4 — z3;
^-43 = K643 + 2643pK ; (7)
Uy2 = R* (sin ?2 — sin Тог)- (8)
Обозначив UV1 = x± и L21 = У
(рис. 6), аппроксимируем поверхность
правой криволинейной части кулачка
круговым цилиндром с осью, парал-
лельной оси OZ. Радиус цилиндра i\
и положение его оси определяем по
трем характерным точкам 0, 1, 2 из
условия равноудаленности их от этой
оси:
ri = +Ус.; (9)
х = xj + Уа — У 2 (Xi + У1)/У1 .
с‘ 2х2 — 2хх ’
(Ю)
'А, =(X|+.7i--2X|XCi)/2</1. (11)
Как показывает расчет погрешно-
стей, возникающих вследствие при-
нятой аппроксимации, максимальное
отклонение полученных значений вы-
соты кулачка L21 и ^43 от заданных
при значениях у01 и у02 до 30° состав-
ляет не более 0,12 мм. Для левой
криволинейной части кулачка расчет
ведут аналогично.
Обработку кулачка выполняют фре-
зой на вертикально-фрезерном станке.
Заготовку кулачка 1 (рис. 7) устанав-
ливают на поворотном столе 2 таким
образом, чтобы ее торец был на рас-
стоянии ус от оси вращения стола,
Контроль желобов некругойого профиля
77
а линия АВ (см. рис. 6), которая на-
носится при разметке и отделяет на
обрабатываемой стороне заготовки пло-
скую часть кулачка от криволинейной,
находилась от намеченной заранее на
столе радиальной линии ОМ (см.
рис. 7), перпендикулярой торцу ND,
на расстоянии хс. Заготовку крепят
к установленному на столе угольни-
ку 4 с помощью болтов, входящих
в ее резьбовые отверстия. Съем ме-
талла производится при круговом дви-
жении стола с начальной установкой
фрезы 3 на радиус г либо при после-
довательном ее приближении к оси
стола (при поперечной подаче стола)
после каждого кругового прохода до
выхода на граничную линию АВ.
Для обработки второй криволинейной
поверхности кулачка производят его
перестановку с учетом найденных для
этой поверхности значений хс и ус.
В отдельных случаях поверхность
кулачка лучше аппроксимируется ци-
линдром, ось которого параллельна
OjKi или (см. рис. 6). При обра-
ботке каждой из криволинейных его
поверхностей заготовку устанавливают
таким образом, чтобы соответствующая
линия раздела (О±К1 или O-^NA распо-
лагалась вертикально. Это достигается
поворотом заготовки вокруг оси
на угол у0 — а при обработке правой
части кулачка и на угол у0 + а при
обработке левой части. Для лучшего
базирования заготовки установочный
угольник 4 должен иметь цилиндри-
ческий выступ радиусом
КОНТРОЛЬ ЖЕЛОБОВ
НЕКРУГОВОГО ПРОФИЛЯ
Контроль формы центрального уча-
стка желоба колец, имеющих профиль,
показанный на рис. 9 и 23 гл. 2,
проводят «на просвет» с помощью
шариков или скалок заданного диа-
метра. Форма периферийных участков
определяется формой кулачков, зада-
ющих корректировочное движение
иглы, и поэтому после проверки самих
кулачков и отладки устройства в до-
полнительном контроле не нуждается
Желоба более сложных форм выбороч-
но проверяют с помощью профило-
графа-профилометра, снабженного спе-
циальным устройством (рис. 8, а), ко-
торое обеспечивает возможность ис-
пользования этого прибора для кон-
троля поверхностей большой кривизны.
Это устройство предназначено для
записи профиля желоба внутреннего
кольца подшипника на профилографе-
профилометре типа Т-204 завода «Ка-
либр». Возможно также его использо-
вание с применением других приборов
аналогичного типа. Контролируемое
кольцо 1 устанавливают на нерабочей
части желоба на неподвижном штиф-
те 14 и ноже 8 и поджимают штифтом 15.
Устройство крепят на столе 9—10,
где возможно его перемещение с по-
мощью микрометрических винтов в двух
взаимно перпендикулярных направле-
ниях для совмещения центра устано-
вочного шарика 2 с осью вращения
поворотного стола 11—12, смонтиро-
а)
78
ТЕХНОЛОГИЧЕСКОЕ ОБЕСПЕЧЕНИЕ ПОДШИПНИКОВ
ванного на основании 13. Шарик 2
(или, в случае его отсутствия, ролик)
имеет радиус, равный радиусу цен-
трального участка желоба кольца.
С шариком соприкасается игла 3, за-
крепленная в рычаге 7. Последний
с помощью хомутика 4 установлен на
корпусе 5 датчика профилографа и
передает перемещение иглы 3 датчи-
ку 6. Шарик 2 поджимается к кольцу
пластинчатой пружиной (на схеме не
показано). Столу 11 сообщается вра-
щательное движение относительно
оси 00 с помощью реверсируемого при-
вода. При первой настройке прибора
стол 9 устанавливается таким образом,
что центр шарика, а следовательно, и
точка, из которой описана средняя
часть профиля желоба, совмещаются
с осью О поворотного стола (рис 8, б).
Такая установка осуществляется с по-
мощью микрометрических винтов, обес-
печивающих регулирование положе-
ния стола 9 в двух взаимно перпенди-
кулярных направлениях.
Показателем правильности установ-
ки стола является отсутствие переме-
щения записывающей иглы профило-
графа при повороте стола. После на-
стройки пружина, прижимающая ша-
рик, отводится в сторону, шарик уда-
ляется, а стол 12 профилографа сме-
щается по направляющим в сторону
иглы 3 на расстояние, приблизительно
равное диаметру шарика, до ее каса-
ния с дном желоба (рис. 8, в). Далее
стол поворачивают в одно из крайних
положений, включают запись и ме-
ханизм поворота стола и снимают про-
филограмму желоба в осевом сечении
кольца. Линией отсчета является дуга
радиуса, равного радиусу установоч-
ного шарика 2. При точном соответ-
ствии профиля желоба этой дуге про-
филограмма представляет собой пря-
мую линию. В местах отхода профиля
от линии отсчета на профилограмме
будут фиксироваться отклонения в мас-
штабе, установленном настройкой про-
филографа.
На рис. 9 показана профилограмма,
снятая с желоба с профилем типа А4.
На этом профиле вблизи зон чистого
качения сделаны небольшие углубле-
ния с целью частичной их разгрузки
(см. гл. 2) Как показал опыт эксплуа-
тации, при незначительной изоляции
от внешней вибрации прибор устойчиво
работает с увеличением записи по вы-
соте до 4000 (т. е. 1 мм отклонения на
профилограмме соответствует откло-
нению профиля 0.25 мкм). С помощью
описанного устройства можно контро-
лировать форму желоба кольца любого
профиля, сравнивая его профилограм-
му с профилограммой эталонного
кольца.
4 ОПОРЫ С ГАЗОВОЙ
• СМАЗКОЙ
УРАВНЕНИЯ ДВИЖЕНИЯ ГАЗА
В СМАЗОЧНЫХ ЗАЗОРАХ
ПОДШИПНИКОВ скольжения
Основное уравнение газодинамиче-
ской теории смазки, так называемое
уравнение Рейнольдса, можно полу-
чить из общих уравнений динамики ла-
минарных потоков вязкого газа —
уравнений Навье—Стокса [17], либо
из анализа условий равновесия эле-
ментарного объема газа под действием
приложенных к нему давлений и на-
пряжений сдвига [36]. При выводе
уравнения Рейнольдса обычно исполь-
зуются следующие допущения.
1. Отношение поперечного и про-
дольного линейных масштабов, а так-
же соответствующих масштабов ско-
рости газа в смазочном слое намного
меньше единицы. Например, отноше-
ние толщины смазочного слоя Ао (ха-
рактерный масштаб зазора, равный С
&ля радиальных подшипников и Со для
подпятников) к длине смазочного слоя
Lq [характерный масштаб длины, рав-
ный R для радиальных подшипников
(см. рис. 3) и 7?н для подпятников
(см. рис. 2)] имеет порядок h0/L0 ж
ж 10"3, т. е. пренебрежимо мало по
сравнению с единицей.
Таким образом,х если пренебречь
кривизной смазываемых поверхно-
стей, то развертку цилиндрических
поверхностей вала и подшипника мож-
но рассматривать как прямоугольную
область на плоскости в обычной (де-
картовой) системе координат (рис. 1).
В этом случае движение газа в зазоре,
ограниченном реальной (рис. 1, а) и
эквивалентной (рис. 1, б) поверхно-
стями, будет приблизительно (ошибка
около 1 %) одинаковым.
2. Газовый смазочный слой в зазоре
подшипника можно рассматривать как
сплошную среду. Это допущение на-
кладывает определенные ограничения
на значение средней толщины сма-
зочного слоя. Критерием оценки этого
допущения является число Кнудсена
[14]:
Kn -= lplhG,
где 1Р — средняя длина свободного
пробега молекулы газа (для воздуха
при нормальных условиях 1р ж
ж 0,06 мкм). При небольших числах
Кнудсена (Кп < 0,01) газ можно рас-
сматривать как сплошную среду. При
0,01 < Kn < 1, строго говоря, обыч-
ная теория газовой смазки, основанная
на использовании классических урав-
нений гидродинамики, неприемлема.
Однако в этом диапазоне чисел Кнуд-
сена с некоторой условностью газ еще
можно рассматривать как сплошную
среду, кроме областей, примыкающих
к рабочим поверхностям подшипни-
ков, где течение газа происходит со
скольжением. В этом случае в исходные
уравнения вводят поправки, учитыва-
ющие «эффект проскальзывания» газа,
который может существенно умень-
шить как трение, так и несущую спо-
собность.
3. Силами инерции в смазочном слое
можно пренебречь. Одним из условий
выполнения этого допущения является
малость модифицированного числа Рей-
нольдса [24]:
R Ро£о£о/!
г \ Ао /
которое представляет собой отношение
сил инерции к силам вязкости. В этом
выражении р — коэффициент динами-
ческой вязкости газа, р0 — плотность
газа, UG — характерная скорость
скольжения. Для большинства типов
применяемых в настоящее время под-
шипников это условие выполняется.
Однако с возрастанием относительных
скоростей движения поверхностей, осо-
бенно при больших смазочных зазо-
рах, пренебрежение силами инерции
может привести к ошибке в оп редел с-
80
ОПОРЫ С ГАЗОВОЙ СМАЗКОЙ
Рис. 1. Действительный (а) и эквивалент-
ный (б) профиль зазора в радиальном под-
шипнике
= const, где х — показатель поли-
тропы; 1 х k), частными случаями
которого являются адиабатический
(х = k) и политропный режимы.
5. Массовые силы пренебрежимо
малы, так как собственная сила тя-
жести элементарного объема газа очень
мала.
С учетом изложенных выше допу-
щений уравнение газодинамической
теории смазки — уравнение Рейнольд-
са, записанное в векторной форме,
имеет следующий вид:
d i v (— Н3р grad р + AUНр) +
(,)
где Н — hlh$ и h — безразмерная и
размерная величины зазора; р =
= р/ро — относительное давление в
смазочном слое; р0 — характерное аб-
солютное давление, равное давлению
наддува ps или давлению окружающей
среды ра;
число сжимаемости * 1
нии интегральных характеристик опор
более 10 % [7, 14].
В газостатических или гибридных
опорах, когда наддув газа в зазор осу-
ществляют через подводящие устрой-
ства типа простой или кольцевой диа-
фрагмы, инерционные эффекты ока-
зывают определяющее влияние на ра-
боту этих устройств. Однако, если
весь смазочный слой в зазоре подшип-
ника является безынерционным, то,
выполняя определенные ограничения,
накладываемые на вид функции исте-
чения, влиянием инерционных эффек-
тов на входе газа в смазочный слой
можно пренебречь.
4. Температура в смазочном слое
постоянна, т е предполагается, что
тепловой режим в смазочном слое изо-
термический (р/р = const). Следствием
этого предположения является по-
стоянство коэффициента динамической
вязкости (р), который дл£ определен-
ного газа зависит практически только
от температуры При этом изотермиче-
ское уравнение Рейнольдса, описы-
вающее распределение давлений в сма-
зочном слое, может быть обобщено
на любой баротропный режим (р/р* —
6^0L0 .
P.hl ’
(2)
число сдавливания
12и/,§ .
(3)
/0 — масштаб времени; grad, div —
операторы градиента и дивергенции
вектора
Уравнение (1) позволяет по задан-
ным функциям координат и време-
ни Н, U, которые характеризуют гео-
метрию смазочного слоя и кинематику
ротора, найти распределение давления
в смазочном слое газовой опоры, а по
нему рассчитать интегральные харак-
теристики опоры: несущую способ-
ность, жесткость, расход газа, момент
сопротивления и др.
Нелинейное уравнение (1) путем
введения новой искомой функции Р =
1 Впервые этот безразмерный ком-
плекс — один из основных физических
критериев газодинамических (или гибрид-
ных) опор, но в другом обозначении (%)
введен С. А Шейнбергом,
Уравнения движения газа в смазочных зазорах
8!
= р2 можно преобразовать к «квази-
линейному» виду:
div (—Н3 grad Р + 2AUH К?) +
(4)
Векторная форма записи уравнений
(1) и (4) удобна тем, что она инва-
риантна по отношению к геометрии
потока в смазочном зазоре подшипника.
Выражение для операций векторного
анализа div и grad в этих уравнениях
можно записать в любой декартовой
или криволинейной (цилиндрической,
сферической и др.) системе координат,
одна из координатных линий которой
направлена по нормали к поверхности
смазочного слоя, а две другие произ-
вольным образом ориентированы вдоль
поверхности
Задаваясь соответствующей системой
координат, определяемой геометриче-
ской формой рабочих поверхностей
(плоская, цилиндрическая, сфериче-
ская, коническая и др.), преобразуем
уравнение (4) применительно к наибо-
лее распространенным типам газовых
опор с гладкими рабочими поверх-
ностями.
Плоский кольцевой (круговой) под-
пятник (рис. 2). Операторы div и
grad в уравнении (4) выражаются
в полярной системе координат г, ф,
где г — радиальная и ф — угловая ко-
ордината. За продольный линейный
масштаб Lo принимаем внешний ра-
диус подпятника за продольный
масштаб скорости Uo — характерную
линейную скорость вращающейся по-
верхности подпятника на его перифе-
рии (Uo = соо7?н, гДе % — характер-
ная угловая скорость). После преобра-
зований уравнение (4) приводится
к виду
?~(гН3 =
дг \ дг / дер \ дф /
L <4
д(нур)]
° dl I
(5)
Рис. 2. Плоский кольцевой подпятник
Уравнение (5) интегрируется в области
О ф 2л;
гв < г < 1,
где гв = Рв — внутренний ра-
диус кольцевого подпятника (естествен-
но, для кругового подпятника гв = 0).
На границе области интегрирования
задаются условия периодичности
Р(Ф)= Р(ф+2л); (6)
на границах смазываемых поверхно-
стей
Г = Гт, )
\P = Pa^Pl (7)
Для рассматриваемого подпятника
с идеально плоскими непараллельны-
ми рабочими поверхностями уравнение
профиля толщины зазора будет иметь
ВИД
h --= h'o + yr cos ф [h'Q==hQ(l--£,z)l,
(8)
или, если перейти к безразмерным ве-
личинам,
Я = А/Ло = 1 — 8/ + yr cos q)
В уравнениях (8) и (9) приняты
следующие обозначения: h0 — мас-
штаб толщины смазочного слоя (зазор
при некоторой нагрузке, условно при-
нятой за номинальную); h'o —само-
устанавливающийся рабочий зазор при
действительной осевой нагрузке; 8/ —
относительное^ осевое смещение пяты
82
ОПОРЫ С ГАЗОВОЙ СМАЗКОЙ
L=2RJL
Рис. 3. Радиальный подшип ник:
а — вид в плоскости XOZ (у -
-- 0); б — вид X'OZ (sr = 0j,
в — сечение z > 0 (О" — центр
сечения вала)
(0 < < 1); у — угол между рабо-
чими поверхностями пяты и подпят-
ника [ось X совпадает с максимальным
радиальным сечением смазочного слоя
(ф = 0), а ось Z — с осью вращения
вала]; г, ф — радиальная и угловая
координаты, причем последняя отсчи-
тывается от максимального радиаль-
ного сечения смазочного слоя в сторону
вращения вала.
Для рассматриваемого подпятника
(Zi const) главный вектор сил дав-
ления, приложенный со стороны сма-
зочного слоя к рабочим поверхностям
пяты и подпятника, не равен нулю.
Если же поверхности пяты и подпят-
ника строго параллельны (h = hQ —
— const), то главный вектор сил дав-
ления равен нулю (отсутствует эффект
«смазочного клина»).
Радиальный подшипник (рис. 3)
Для радиального цилиндрического под-
шипника уравнение (4) запишем в дву-
мерной цилиндрической системе ко-
ординат z, ф (осевая и угловая ко-
ординаты); радиальная координата г
направлена по нормали к поверхности
смазочного слоя и не должна входить
в число независимых переменных урав-
нений Рейнольдса, т. е. давление в этом
направлении не меняется. Полагая,
что Lq — R, Uo ~ (HqR (здесь w0 —
характерная угловая скорость, R —
радиус вала), и вводя безразмерные
величины радиальной и осевой коорди-
нат (г = r/R, z=z/R), после преоб-
разований уравнения (4) получим
dz \ dz / дф \ дф /
л Г, д(я/р)].
= 2 Ло) (?) ——тг—- + ст —-
v 7 дф di J
(10)
Уравнение (10) интегрируется в об-
ласти
0 С ф 2 л,
—Л Z <
где Л = llR — удлинение подшипника;
Z — половина длины подшипника.
На границе области интегрирования
условие периодичности имеет такой
же вид, что и (6), а условия на грани-
цах смазываемых поверхностей при
z ~ н-А
Р=~Ра = Р2а- (Н)
Теперь остается записать уравнение
профиля толщины смазочного слоя
в радиальной цилиндрической опоре
для произвольного положения шипа
в подшипнике. Это положение можно
представить себе (рис. 3) как поворот
оси вала в плоскости перекоса X'OZ'
из соосного положения вокруг центра
симметрии подшипника О на угол у
(рис. 3, б) (угол между вертикальной
плоскостью XOZ и плоскостью пере-
коса X'OZ' равен ф) (рис. 3, в) и сме-
щение центра вала вдоль оси X (в пло-
скости поперечного сечения подшип-
ника, проходящей через центр его
симметрии, точку 0) в точку О'
(рис. 3, а) Таким образом, если в ра-
диальном подшипнике смазочный слой
заключен между идеально цилиндри-
ческими поверхностями радиусами R
и R', то с точностью до величин по-
Уравнения динамики вала
83
рядка (С/7?)2, где С = /? — R' — сред-
ний радиальный зазор при концен-
тричном положении вала в подшип-
нике, уравнение профиля толщины
смазочного слоя будет иметь вид
Н = h/C = 1 — ?r cos ф —
— (у/Х) z cos (ф — ф). (12)
Здесь ег и у — радиальное и угловое
смещения вала из соосного положения,
отнесенные соответственно к величи-
нам С и CIKR (последняя величина
есть максимальный угол перекоса
вала); ф, z—угловая и осевая (нор-
мированная по масштабу R) коорди-
наты, первую из которых отсчитывают
от плоскости радиального смещения,
вторую — от среднего поперечного се-
чения опоры.
УРАВНЕНИЯ ДИНАМИКИ ВАЛА
Если местная толщина h смазочного
слоя и скорость скольжения U (угловая
скорость вала со) не являются из-
вестными функциями времени, то урав-
нение Рейнольдса (4) следует интегри-
ровать совместно с уравнениями дина-
мики вала. Уравнения динамики по-
ступательных и угловых (относительно
центра инерции) перемещений вала
под действием внешних сил и моментов,
а также реакций смазочного слоя
можно представить в следующей обоб-
щенной векторной форме [18]:
И (d2e/dt2) = We (/) + W {Р (/)}; '
(13)
Здесь М — масса ротора; || 11| — тен-
зор инерции ротора; е, у — искомые
векторы поступательного и углового
перемещений ротора соответственно;
We, 3?е — главные вектор и момент
внешних сил, которые можно считать
заданными функциями времени или
известными константами; W, 3?—глав-
ные вектор и момент реакций смазоч-
ного слоя, которые выражаются через
интегральные функционалы давления,
определяемые из уравнения Рей-
нольдса:
(*) (Л) L 3?k' > J
X|/>[A l)dA,
где i — орт k-й координатной оси;
twky f&k—известные функции коорди-
нат.
В силу последнего обстоятельства,
а также того, что проекции искомых
векторов и В их производные входят
в коэффициенты уравнения Рейнольдса
[через уравнение профиля толщины
смазочного слоя и| закон изменения
вектора скорости скольжения U (/)],
уравнение (4) и интегродифференциаль-
ные уравнения (13) с соответствующи-
ми им условиями [к уравнениям (13)
присоединяются обычные начальные
условия] составляют единую систему.
Так выглядит обобщенно расширен-
ная постановка основной задачи газо-
динамической теории смазки.
Нормируя величины, входящие в си-
стему уравнений (13), следующим об-
разом
IIIII = /о1|7||; [We, W] =
= AoPo[We, W];
[>e, $] =Ло£оРо1Л. (!4)
e = hoe; у = yoy', (у0 = hol'Lo),
t = ht;
где IQ — характерный (например, осе-
вой) момент инерции вала; Ао — мас-
штаб площади несущей поверхности,
приведем уравнения динамики к без-
размерной форме:
М (d4/drf = We (z) + {Р (/)}; (а)
+ &\p(t)\, (б) (15)
м = MhQlAQpotl; /о =
“ ^0^0/oPoz6
84
ОПОРЫ С ГАЗОВОЙ СМАЗКОЙ
Два безразмерных комплекса масшта-
бов в уравнениях (15) — массовый М
и инерционный параметры 70 — сле-
дует, вообще говоря, рассматривать
как дополнительные динамические кри-
терии подобия газовых опор; такими
критериями являются также задавае-
мые функции We (f), ^е, (t). Эта
группа критериев подобия заменяет
собой кинематические критерии, кото-
рые приходится использовать в тех
случаях, когда уравнение Рейнольдса
рассматривается изолированно от урав-
нений динамики вала или, в общем
случае, подвижного элемента опоры.
Существует довольно широкий класс
нестационарных задач газовой смазки,
в которых характерное время неста-
ционарного процесса оказывается не-
определенным; к ним, в частности, от-
носятся задачи исследования устой-
чивости систем с газовыми опорами.
Тогда встает вопрос о выборе масштаба
времени /0, входящего в параметр
сдавливания а, а также в параметры М
и70. В таких случаях критериями подо-
бия могут быть только два из этих
трех параметров, а третий используют
для того, чтобы выразить искомый
масштаб времени через комбинацию
масштабов непосредственно задавае-
мых величин, имеющую размерность
времени. Можно, например, положить
о = 1 (тем самым исключая этот пара-
метр из числа критериев подобия).
Тогда согласно (3)
t0 = 12p.Zg/ft§p0, (16)
затем подставим величину /0 в выраже-
ния (15) для М и 70. Подобный выбор
масштаба времени довольно часто ис-
пользуется при решении задач устой-
чивости газовых опор.
Можно поступить иначе. Если иссле-
дуют устойчивость при малых возму-
щениях, то во многих случаях оказы-
вается возможным изолированно рас-
сматривать влияние осевых, радиаль-
ных и угловых возмущений [7]. Тогда
система (15) распадается на отдельные
подсистемы или уравнения. Анализ
динамического поведения опоры при
малых осевых и радиальных возмуще-
ниях можно вести на основании урав-
нения Рейнольдса в совокупности с
уравнением типа (15а), т. е. из ана-
лиза, естественно, исключается инер-
ционный параметр 70, и в таком случае
масштаб времени удобно находить
из условия М ее 1, что дает
— V Mh0‘ Аоро. (17)
При исследовании динамики опоры под
действием малых угловых возмуще-
ний уравнение (15а) заменяют уравне-
нием (156); из рассмотрения выпадает
массовый параметр М, и для определе-
ния масштаба времени соответственно
используют условие 70 ее 1, откуда
(18)
Г /iO-LoAl
Масштабы (17) и (18) удобны тем,
что им можно придать конкретный фи-
зический смысл. В самом деле, вели-
чину AQp0 естественно рассматривать
как масштаб несущей способности
опоры, а величины A^p^lh^ — как мас-
штаб ее осевой или радиальной жестко-
сти. Тогда становится очевидным, что
величина (17) пропорциональна пе-
риоду собственных колебаний линей-
ной динамической системы с одной
степенью свободы, масса которой рав-
на М, а линейная жесткости —
(Аоро)/ Ао. Тоже самое относится к ве-
личине (18), только теперь следует
говорить об угловых собственных ко-
лебаниях линейной системы с моментом
инерции /0 и угловой жесткостью
(Ао7§/9о)/Ло.
Хотя газовая опора в действитель-
ности представляет собой нелинейную
систему с распределенными параме-
трами [24], можно предположить, что
истинный период ее свободных колеба-
ний имеет тот же порядок, что и пе-
риод собственных колебаний соответ-
ствующей линейной системы с одной
степенью свободы. Таким образом,
величины (17) и (18) можно рассма-
тривать как масштабы периодов сво-
бодных колебаний газовых опор, воз-
никающих под действием осевых, ра-
диальных или угловых возмущений.
Выражения (17) и (18) окончательно
определяют структуру параметра сдав-
ливания [см. (3)] применительно к слу-
чаям малых возмущений различного
вида.
Составляющие вектора и момента реакции смазочного слоя
85
СОСТАВЛЯЮЩИЕ
ГЛАВНОГО ВЕКТОРА
И ГЛАВНОГО МОМЕНТА
РЕАКЦИИ СМАЗОЧНОГО СЛОЯ
Рассмотрим сначала радиальную опо-
ру (см. рис. 3). Считая геометрические
параметры 8Г, у, ф, связанные с вели-
чиной и характером внешней нагрузки,
условно заданными и не зависящими
от времени, соответствующее силовое
воздействие на вал со стороны смазоч-
ного слоя будет определяться аэроди-
намическими силами и моментами, соз-
даваемыми нормальными (удельными
силами давления) и касательными
(удельными силами трения) напряже-
ниями. Влияние сил трения на несу-
щую способность и восстанавливающий
момент* пренебрежимо мало, поэтому
составляющие сил и моментов в проек-
циях на оси координат будут иметь
вид [24]
WX 1 _
WY ApG
к 2 л
f , f _ Feos (pl
X I az \ p dep,
J J sin (p
—к о L f
~&x 1 __ _
Sy J ” ARpn ~
X 2л
= 4T f H PX
-к 0
(19)
где f = X, V; A — 4R2\ — площадь
продольного сечения подшипника; р0 =
= ра (для газостатических опор р0 =
= ps). Используя (19), можно опре-
делить удельную радиальную несущую
способность (коэффициент несущей спо-
собности) и удельный восстанавлива-
ющий момент:
WГ Г а +
&XY - 1 5х + 5^ (20)
Составляющие момента часто бывает
удобнее выразить в системе осей Xх,
У', Z, связанной с плоскостью пере-
коса X'0'Z:
sin (ф — W1 .
^ф =
— COS (ф — ф)]
2?Х COS ф + &Y sin ф
3?Y COS Ф — sin ф
(21)
В положении статического равнове-
сия аэродинамические составляющие
(20) и (21) равны по величине и про-
тивоположны по знаку соответствую-
щим составляющим главного вектора
(1Уе) и главного момента (3?е) внешних
нагрузок. При этом линия действия ра-
диальной нагрузки и соответствующей
реакции смазочного слоя в общем слу-
чае не совпадает по направлению с век-
тором радиального смещения ег, а ли-
ния действия векторов внешнего мо-
мента перекоса и восстанавливающего
момента — с вектором углового сме-
щения вала у. При вращении вала,
которое и является основным источ-
ником такого рассогласования, ис-
пользуют дополнительную статическую
характеристику — угол нагрузки (угол
положения), определяющий величину
и направление поворота вектора ра-
диальной нагрузки Wer = —Wr отно-
сительно вектора радиального смеще-
ния £г. Угол нагрузки Ф является од-
ним из показателей статической устой-
чивости подшипника, которая воз-
можна при очевидном условии_| Ф | <
< л/2, или, что то же самое, Wx < 0
(составляющая аэродинамической силы
по линии центров направлена проти-
воположно радиальному смещению
вала). При отсутствии вращения вала
(газостатическая опора, работающая
в режиме подвеса, А — 0) | Wy | <
<с | Wx |, I 2?Х' | « | &Y' I, т. е. угло-
вое рассогласование между векторами
внешних сил (моментов) и вызываемых
ими статических смещений весьма не-
велико.
86
ОПОРЫ С ГАЗОВОЙ СМАЗКОЙ
Без учета погрешностей изготовле-
ния рабочих поверхностей радиального
подшипника составляющие Wz и 3?z
зависят только от сил трения. Для
опор с вращающимся валом величи-
на 3?z выполняет функцию момента
сопротивления. При соосном положе-
нии вала и подшипника, когда ег =
= у = О, его величина 3?z [36 ]
3?z^ — (2лц(оТ?3Л)/С, (22)
где L = 27?Х — длина подшипника.
В отличие от радиальной опоры
каждая из газодинамических составля-
ющих подпятника (см. рис. 2) выра-
жается либо только через нормальные,
либо только через касательные напря-
жения. Составляющие сил и моментов,
зависящие только от нормальных на-
пряжений (давлений), в проекциях
на оси координат имеют вид
Z~ Apo ~ л(1-г*)Х
1 2л
X J Г dr j (р — Ра) dip; (23)
гв о
1 2Л
= H(T^)j ^dr\px
гв о
— sin ф‘
cos ф
б/ф,
где А = л — RQ = tcR* (1 —
— — площадь кольцевого подпят-
ника; pQ = ра (для газостатических
опор р0 = ps).
В газостатических подпятниках
(А = 0) составляющая 3? х практи-
чески равна нулю.
Используя выражение (23), можно
определить удельную осевую несущую
способность (коэффициент осевой несу-
щей способности) и удельный восста-
навливающий момент (коэффициент вос-
станавливающего момента) подпятника.
Из трех остальных газодинамических
составляющих подпятника Wх, Wy
и S?z, зависящих только от сил тре-
ния, интерес представляет главным
образом момент сопротивления, вели-
чина которого при отсутствии пере-
коса (у = 0) следующая:
= (24)
S’xl 1 Г^х'
— 4/?нРо L-3V
где h'Q = h0 (1 — &z) — фактическая ,
толщина смазочного слоя при отсут-
ствии перекоса.
Глава 5»
ГАЗОСТАТИЧЕСКИЕ
ОПОРЫ
КЛАССИФИКАЦИЯ ОПОР
Газостатические опоры удобно клас-
сифицировать по двум основным при-
знакам: геометрической конфигурации
рабочих поверхностей (плоские, цилин-
дрические, конические и сферические)
и типу ограничителей расхода, авто-
матически регулирующих давление
в смазочном газовом слое в зависимо-
сти от изменения зазора (внешней на-
грузки) (рис. 1, табл. 1). В свою оче-
редь, ограничители расхода подразде-
ляют на два типа [23, 26]: сопловые,
1. Ограничители расхода (пассивного типа)
в которых перепад давления между
камерой наддува и смазочным слоем
создается почти исключительно за счет
сил инерции потока, и капиллярные,
в которых этот перепад в определя-
ющей степени обусловлен силами вяз-
кого трения. Несмотря на объединение
капиллярных каналов, пористых вста-
вок и вкладышей, щелевых каналов и
ограничителей расхода в виде ступени
в один тип, течение газа через них
подчиняется совершенно разным зако-
нам, соответствующим уравнениям Пу-
азейля, Дарси и Рейнольдса. Наиболь-
Сопловые
Простые (кольцевая диафрагма), дискретный вход газа
Кольцевые (простая диафрагма); дискретный вход газа
С пористыми вставками; дискретный вход газа
Капиллярные
Соединенные микроканавкой; линейный вход газа и переменное
давление вдоль микроканавки
Капиллярный канал, дискретный вход газа
Щелевой канал, линейный или линейно-прерывистый вход газа
Ступень в зазоре; линейный вход газа
Пористый вкладыш, вход газа сплошной, через всю пористую
поверхность
88
ГАЗОСТАТИЧЕСКИЕ ОПОРЫ
Рис. 1. Геометрия рабочих поверхностей газостатических опор:
а — плоская (прямолинейная, круговая, кольцевая); б — цилиндрическая; в — кониче-
ская; г — сферическая
шее применение нашли сопловые огра-
ничители расхода, представляющие со-
бой отверстия наддува малого диаметра
(0,1—1,0 мм; реже, для особо крупно-
габаритных и тяжело нагруженных
опор, применяют отверстия наддува
диаметром 2—3 мм), причем если ми-
нимальным сечением входа газа в за-
зор является кольцевое сечение сма-
зочного слоя, образованное выходной
кромкой отверстия и поверхностью
вала или пяты, то такие ограничители
расхода называют кольцевой диаф-
рагмой. Если отверстие заканчивается
карманом, выполненным зенковкой не-
посредственно в теле подшипника, либо
за’счет заглубления жиклера, то само
отверстие является минимальным се-
чением входя газа в зазор. Такие огра-
ничители_называют простой диафраг-
мой.
К разновидностям ограничителей
типа простой диафрагмы относится
отверстие наддува, имеющее форму
поперечного сечения в виде сопла
Лаваля [23, 31]. Благодаря смещению
критического сечения из зазора внутрь
отверстия влияние изменения зазора
на расход газа в таких ограничителях
снижается. Из-за сложности изготов-
ления они мало изучены и практически
не используются на практике. Ограни-
чители расхода в виде отверстий над-
дува, соединенных микроканавкой, так-
же можно отнести к типу простых
дифрагм [33, 36]. Микроканавки поз-
воляют более полно использовать по-
тенциальные возможности простых диа-
фрагм, в значительной степени компен-
сируя потери несущей способности и
жесткости, обусловленные дискрет-
ностью наддува.
К капиллярным ограничителям рас-
хода относятся капиллярные каналы,
представляющие собой жесткие трубки
(поперечное сечение трубки может быть
и не круглым) с большим (более 10)
отношением длины к диаметру (либо
другому характерному размеру попе-
речного сечения), пористые вставки
(шайбы) и вкладыши, щелевые каналы
и ступени.
Шпиндельные узлы машин и при-
боров на опорах с газовой смазкой,
как правило, представляют собой ком-
бинацию двустороннего подпятника
(реже одностороннего, и тогда силовое
замыкание пяты и подпятника проис-
ходит либо под действием внешних
сил, создаваемых, например, воздуш-
ным нагружением, вакуумом, магнит-
ным полем, либо под действием соб-
ственной силы тяжести одного из эле-
ментов опоры) и одного или несколь-
ких радиальных подшипников.
Двусторонний кольцевой газоста-
тический подпятник (рис. 2) состоит
из пяты в виде диска, выполненного
как единое целое с валом /, двух коль-
цевых газостатических подпятников 3
и 6, закрепленных во фланцах 2 и 5,
и проставочного кольца 4. Газ от
внешнего источника (пневмосеть или
баллон сжатого газа) через газораспре-
делительные'каналы под давлением ps
поступает в кольцевые каналы флан-
цев, откуда через ограничители рас-
хода (на рисунке показаны кольцевые
диафрагмы) и смазочный зазор под-
пятников выходит в атмосферу под
давлением ра. Когда осевая нагрузка
на вал W? равна нулю, зазоры в ле-
вом и правом подпятниках равны
(&! = h2 = Со), и, следовательно, реак-
ция смазочных слоев также равна
нулю, т. е.
rf = 0.
Классификация опор
89
Рис. 2. Двусторонний кольцевой газостатический подпятник
При смещении пяты под действием
внешней нагрузки зазор Со в ле-
вом подпятнике уменьшается до hlf
а в правом увеличивается на такую же
величину до Л2. С уменьшением зазора
его гидравлическое сопротивление уве-
личивается, что сопровождается ро-
стом противодавления на ограничите-
лях расхода, а среднее давление
в зазоре возрастает до тех пор, пока
результирующая реакция смазочного
слоя wzi не уравновесит внешнюю
нагрузку Wz и реакцию смазочного
слоя WZ2 со стороны правого подпят-
ника. Таким образом, суммарная реак-
ция смазочных слоев двустороннего
газостатического подпятника, урав-
новешивающая внешнюю нагрузку Wzej
равна алгебраической сумме реакций
смазочных слоев каждого из подпят-
ников:
Fz=rf =
Предположим, что жесткость смазоч-
ного слоя каждого из подпятников
в центральном положении пяты рав-
на При перемещении пяты на
величину 8z изменения реакций сма-
зочных слоев подпятников будут равны
8z^Z’ а их суммарное изменение
равно 2&ZK'Z. Следовательно, в отли-
чие от несущей способности, жесткость
двустороннего газостатического под-
пятника представляет собой уже не
разность, а сумму соответствующих
жесткостей обоих смазочных слоев, т. е.
KZ^2KZ.
На рис. 3 показана конструкция ра-
диального газостатического подшип-
ника. Газ от внешнего источника по-
ступает в кольцевой канал корпуса 3,
откуда под давлением ps через два
ряда ограничителей расхода (на ри-
сунке показаны кольцевые диафрагмы)
входит в зазор между цапфой вала 1
и подшипниковой втулкой 2 и затем
течет к торцам подшипника, где он
выходит в окружающую среду под
давлением ра. Так же как и в подпят-
никах, газ, проходящий через каждый
ограничитель расхода, испытывает дей-
ствие двух последовательно соединен-
ных гидравлических сопротивлений:
самого ограничителя расхода и участ-
ков зазора на длине от плоскостей
наддува до торцов подшипника.
При концентричном положении цап-
фы в подшипнике (е — 0) сопротив-
ление течению газа в зазоре везде
одинаково и давления газа в любой
точке кольцевого сечения зазора равны.
90
ГАЗОСТАТИЧЕСКИЕ ОПОРЫ
Рис. 3. Радиальный двухрядный газостатический подшипник
Если под действием внешней на-
грузки Wre цапфа вала смещается отно-
сительно подшипника на величину
эксцентриситета е, то сечение кольце-
вого зазора становится переменным
(А = С — е cos (р) и, следовательно,
сопротивление течению газа в зазоре
будет неодинаковым, что сопровож-
дается соответствующим изменением
противодавления на ограничителях
расхода (давление pdt на входе в за-
зор). В зоне минимального зазора
давление на входе в зазор максимально
(р£ах)и, наоборот, в зоне максималь-
ного зазора —минимально (р™/п). Та-
ким образом, образующаяся разность
давлений в смазочном слое или, бо-
лее строго, главный вектор сил дав-
ления в смазочном слое Wr уравнове-
шивает внешнюю нагрузку Wre.
ХАРАКТЕРИСТИКИ
ОГРАНИЧИТЕЛЕЙ РАСХОДА
Функция истечения. Рассмотрим га-
зодинамические характеристики наи-
более распространенных типов огра-
ничителей расхода: простой и кольце-
вой диафрагм, капиллярного канала,
пористой вставки и щелевого канала,
расчетные схемы которых показаны
на рис. 4.
Назначение любого ограничителя
расхода — создавать перепад давле-
ния между камерой наддува и сма-
зочным слоем (рз — pd), что является
необходимым условием для обеспе-
чения жесткости смазочного слоя.
Связь между перепадом давления на
ограничителе расхода и соответствую-
щей величиной расхода устанавлива-
ется видом функции истечения ft (pd) =
“ 6 (Pd) — $ (yPd), которая факти-
чески выражает собою закон истече-
ния газа через ограничитель данного
типа. Эта функция представляет собой
отношение действительного расхода
газа т через ограничитель к соответ-
ствующему предельному /и*, который
достигается в общем случае при pd~*
0, т. е.
# (Pd) = Q (Pd) = m/m*. (1)
Простая и кольцевая диафрагмы (см.
рис. 4, а и б) Чтобы кольцевая диаф-
рагма могла выполнять функции огра-
ничителя расхода, должно удовлетво-
ряться условие
Dd>±h, (2)
означающее, что площадь кольцевой
диафрагмы меньше площади попереч-
ного сечения подводящего канала.
Характеристики ограничителей расхода
91
Необходимым (как будет показано
ниже, далеко не достаточным) для про-
стых диафрагм является условие
Dd > Г>3о/4Л. (3)
При отсутствии кармана (Dd = Dd0)
из (3) следует условие, отличающееся
от (2) лишь знаком. Оба условия за-
писаны в предположении, что диа-
метры Dd и Dd0 достаточно малы,
чтобы можно было пренебречь изме-
нением местной толщины смазочного
слоя h по контуру его выходного се-
чения. Практически постоянным по
этому контуру оказывается и давление
на входе в смазочный слой, обычно
принимаемое равным давлению pd
за диафрагмой.
Будем считать, что в простой диаф-
рагме длина Ld и диаметр Dd0 (в об-
щем случае ширина) — величины од-
ного порядка, и газ перед диаф-
рагмой находится в покое. Полагая
термодинамический режим истечения
через диафрагму адиабатическим и
изэнтропическим, как это обычно при-
нято в задачах газовой динамики
дозвуковых потоков, запишем выра-
жение для определения массового рас-
хода газа через диафрагму, справед-
ливое во многих случаях как для про-
стых, так и для кольцевых диафрагм:
т = 4dajKps(>sX
_ Л / А 2±Ц
хИ Л (4)
где Ad — площадь выходного (мини-
мального) сечения сопла; Ad =
= л£>^0/4 — для простых диафрагм;
Ad — nDdh — для кольцевых диаф-
рагм; aj — коэффициент расхода;Tps,
ps — давление и плотность газа в^ка-
мере наддува; k — показатель адиа-
баты (k = 1,4 для одноатомных^газов
и 6= 1,67 для двухатомных); Pd~
~ Pdlps—относительное противодав-
ление.
Формальный анализ функции т (pd)
показывает, что в интервале 0
pd С 1 она имеет единственный
максимум, который достигается при
k
/2 \ k-\
’ (5)
Рис. 4. Типы ограничителей расхода:
а — простая диафрагма; б — кольцевая ди-
афрагма: в — капиллярный канал, г — по-
ристая вставка; д — щелевой канал (вари-
ант А — радиальный подшипник, вариант
В — кольцевой подпятник)
92
ГАЗОСТАТИЧЕСКИЕ ОПОРЫ
внутрь сопла и повлиять на истечение
газа, так как этому будет противодей-
ствовать сам газовый поток, достиг-
ший звуковой скорости в выходном
сечении сопла. Таким образом, при
Pd< Р* расход газа, а также скорость,
давление и другие параметры потока
в выходном сечении сохраняют крити-
ческие значения. Непосредственно за
выходным сечением давление скачко-
образно уменьшается от р* до pd-
Восходящую ветвь функции т (pd)
необходимо заменить горизонталью
т — т*, проходящей через точку мак-
симума функции, и искомая функция
истечения [см. (1)] будет
о (Pd) =
Рис. 5. Функция О и различные формы
ее аппроксимации:
1 — аппроксимация ЛПИ О’ (Д^) ~ |7 1 —
3
2 — & (р^) = 1 — pj; 3 — изэнтропическая
формула (7); 4 — аппроксимация Прандтля
(8); 5 — аппроксимация Лунда Ц (р^)
= 17 1 - pd; 6 - О (pd) = 1 - pd
т. е. при том значении относительного
противодавления pd (это значение на-
зывают критическим), которое соот-
ветствует звуковой скорости газа в вы-
ходном сечении сопла. При этих ус-
ловиях максимальный (критический)
расход газа, приходящийся на единицу
площади выходного сечения (ad — 1,
его значение будет уточнено ниже),
тД - = ]/>spsX
/ 2 \2(/г-1)
Чт+т) - <6'
Восходящая ветвь функции т (pd),
выражаемой формулой (4) (0 pd <
< р*), оказывается физически нереа-
лизуемой [17]. Действительно, пред-
положим, что относительное проти-
водавление pd медленно уменьшается,
начиная от pd — 1, расход при этом
возрастает от нуля, пока не достигнет
критического значения при pd = Р*.
Можно уменьшать Pd и дальше, но
соответствующие возмущения, ско-
рость распространения которых равна
скорости звука, не смогут проникнуть
1 при
/Н-1
\ 2
2 / k—1 \
X р/ ( 1 - р/ /
. при P^^Pd^: 1.
(7)
На рис. 5 (кривая 1) показан график
функции Ф (pd) для двухатомных га-
зов, чаще всего применяемых в каче-
стве газовых смазочных материалов.
В этом случае р* = 0,528 (для одно-
атомных газов р* = 0,487). Сложную
функцию (7) аппроксимируют более
удобными для практических расчетов
приближенными формулами, различ-
ные модификации которых изображены
графически на рис. 5. Впервые вопрос
о влиянии способа аппроксимации
функции истечения на точность рас-
чета интегральных характеристик газо-
статических опор был рассмотрен в ра-
боте [9].
В дальнейшем будем придерживаться
аппроксимации Прандтля, которая
фиксирует границу между критическим
и докритическим режимами наддува
(pd 0,5) на рис. 5, кривая 2:
fl (Pd) =
1 при pd^0,5;
2 VPd(\-Pd)
при 0,5 pd 1
Характеристики ограничителей расхода
93
Изложенный выше подход в опре-
делении функции истечения базируется
на физической модели, справедливой
как для простых, так и для кольцевых
диаграмм. Считалось, что течение газа
в проточной части диафрагмы чисто
инерционное, тогда как в смазочном
слое — чисто вязкостное и безынер-
ционное. В простой диафрагме области
инерционного и вязкостного течений
обычно разделены карманами, внутри
которых допустимо считать газ покоя-
щимся, что в большей мере соответ-
ствует принятой модели, чем для коль-
цевой диафрагмы, у которой эти об-
ласти приходится, несколько отсту-
пая от физической реальности, непо-
средственно смыкать. В окрестности
кольцевой диафрагмы существует неко-
торая промежуточная область вязко-
инерционного течения, трудно под-
дающаяся учету. При докритических
режимах наддува влияние области
вязкоинерционного течения на инте-
гральные характеристики опор незна-
чительно. Иначе обстоит дело при кри-
тических режимах наддува через коль-
цевую диафрагму. Пройдя через диаф-
рагму со звуковой скоростью, газовый
поток продолжает ускоряться, однако
по мере удаления от диафрагмы усили-
вается тормозящее влияние вязкости
газа в смазочном слое, которое приво-
дит к резкому переходу от сверхзву-
ковой скорости потока к дозвуковой;
область такого перехода принято на-
зывать «псевдоскачком». Ускорение
сверхзвукового потока между кольце-
вой диафрагмой и «псевдоскачком»
может сопровождаться значительным
уменьшением давления, которое ввиду
большой диссипации энергии, харак-
терной для перехода через «псевдо-
скачок», восстанавливается далеко не
полностью. При критических режимах
истечения через кольцевую диафрагму
расположенная в ее окрестности вяз-
коинерционная область смазочного
слоя, включающая «псевдоскачок», ока-
зывает влияние на весь смазочный слой,
хотя относительные размеры этой об-
ласти обычно малы.
Аналогичные явления могут в опре-
деленных условиях возникать и при
применении простых диафрагм, но для
предсказания такой возможности уже
нельзя использовать чисто геометри-
ческое условие (3), выполняемое даже
с многократным запасом. Действи-
тельно, даже при критических режимах
истечения через простую диафрагму
поток газа внутри кармана не может
разогнаться до сверхзвуковой ско-
рости, он практически полностью тор-
мозится без существенного изменения
энтропии Обычно считают, что из
кармана газ поступает в смазочный
слой со скоростью, много меньшей
скорости звука, и поэтому можно не
делать различия между давлением
в кармане pd и давлением на входе
в смазочный слой (рс). Но, с другой
стороны, можно допустить, что коль-
цевое сечение смазочного слоя, опи-
рающееся на внешний контур кармана,
играет роль дополнительного дрос-
селя (типа кольцевой диафрагмы),
который создает перепад давления
(pd — рс) на выходе из кармана, по-
добно тому как простая диафрагма
создает перепад давления (ps — pd)
на входе в карман. Если принять
такую схему двойного дросселирова-
ния, то, очевидно, при критическом
режиме вторичного дросселирования
(на выходе из кармана) следует ожи-
дать возникновения «псевдоскачков»
в окрестностях карманов, что и наблю-
дается в действительности.
Возникновение критических режи-
мов вторичного дросселирования будет
заведомо исключено, если условие (3)
модифицировать следующим обра-
зом [35].
Dd>l~W'
t£)- 191
Однако при больших давлениях над-
дува техническая реализация усло-
вия (9) затруднительна: потребный
диаметр кармана может оказаться
слишком большим, и во избежание
чрезмерного увеличения объема кар-
мана, когда возможны автоколебания
типа «пневмомолот» [31, 32], придется
соответственно уменьшить его глубину
настолько, что карман перестанет вы-
полнять свои функции.
В силу указанных выше недостатков
опор с простыми и кольцевыми диаф-
94
ГАЗОСТАТИЧЕСКИЕ ОПОРЫ
рагмами представляется оправданным
проявляющийся в последнее время
повышенный интерес к другого типа
ограничителям расхода, способным эф-
фективно работать в более широком
диапазоне давлений наддува, чем диаф-
рагмы.
Капиллярный канал (см. рис. 4, в).
Предположим, что удлинение капил-
ляра весьма велико, т. е /м = L^lDa >
1, где Ld — длина капилляра;
Dd — его диаметр. Тогда можно счи-
тать течение газа в нем, как и в сма-
зочном слое, безынерционным и изо-
термическим Уравнение, описываю-
щее распределение давления вдоль ка-
пилляра, имеет вид [24]
(|0>
d£2 д1 ’ 7
где р ~ (p/ps)2 — квадрат относитель-
ного давления; g _== tjLd — безразмер-
ная координата; t = ///0— безразмер-
ное время; ——5-------- ПО
RdPs4
— параметр нестационарности для ка-
пилляра.
Уравнение (10) представляет собой
осесимметричный аналог уравнения
Рейнольдса [см. (10) гл. 4] для ра-
диального подшипника (д!ду = 0, Н —
= 1). Отличие по существу состоит
лишь в замене параметра сдавливания о
параметром
Уравнение (10) следует интегриро-
вать при условиях:
р = 1 при g = 0;
Р = fприё=1,
\ Ps /
(12)
где Pd — заранее неизвестная функция
времени, масштаб которого (/0) удобно
рассматривать как характерное время
изменения этой функции. Если, в част-
ности, Pd не зависит от времени, т. е.
/0 —> сю, то соответствующее стацио-
нарное уравнение (10) при условии (12)
имеет очевидное решение:
Р- 1-(1-Р^)д. (13)
Предельный массовый расход через
капилляр в расчете на единицу пло-
щади (расход при истечении в вакуум
Pd — 0) при стационарных условиях
истечения
. _ Dd(>sps
mA~64ti.Ld ’
а соответствующая функция истечения,
в отличие от (8), линейна относительно
квадрата давления и имеет вид
^prf)=l-p2, [0(Prf)=l-PJ.
(15)
При нестационарном режиме функция
истечения
0 (Pd) = I дР/д £|ё=1 (16)
определяется путем решения краевой
задачи (10)—(12) и, вообще говоря,
не выражается в явном виде.
Щелевой канал (см. рис. 4, д). Фак-
тически щелевой канал можно рас-
сматривать как часть смазочного слоя,
в которой противоположные поверх-
ности параллельны и неподвижны,
а для расчета давлений в щели непо-
средственно использовать уравнение
Рейнольдса, положив Н — 1 (т. е
приняв за поперечный линейный мас-
штаб Ло постоянную ширину щели hd),
Л= 0 и заменив параметр о на пара-
метр нестационарности для щелевого
канала
где Rt — радиус линии наддува.
Для радиальной опоры (см. рис. 4, д,
вариант А) расчет давления в щелевом
канале сводится к решению следующей
задачи:
дг \ дг / дф2
= 2arff2^K^-; (18)
Р = Pd при г — 1;
Р = 1 при г = ге = ,
где Re — радиус входного сечения
щели; /?! — радиус выходного сече-
Характеристики ограничителей расхода
95
ния шели, принятый за масштаб ра-
диальной координаты.
Для полпятника (см. рис. 4, д, ва-
риант В)
(19)
дг2 ' д^2 d dt ’
Р - 1 при z — О, Р = Pd
- ,
при Z -
где Ld — осевая протяженность щели;
Рг — радиус цилиндрической щели,
принятый за масштаб координаты г.
В обоих случаях дополнительно
используется условие периодичности
(см гл. 4). Если Ра не зависит от вре-
мени и угловой координаты ср, то обе
задачи (18) и (19) стационарны и осе-
симметричны; только при этих огра-
ничениях они имеют точное аналити-
ческое решение в замкнутой форме.
1_р.
^+—х
X In г — вариант А;
/>(*) = l-(l-Pj)X
X ---вариант В
(20)
При этих условиях предельный мас-
совый расход (Pd = 0) на единицу
площади выходного сечения
hdf>sPs
24(17,
( Ri In re — вариант A;
( Ld — вариант В,
а соответствующая функция истечения
имеет точно такой же вид, что и для
капилляра (15).
При нестационарных режимах функ-
ция истечения для щелевых каналов
0 (РД --
In ге | dPjdf |f==1 —
— вариант А;
Id I дР, дг —
— вариант В
(22)
определяется решением одной из крае-
вых задач (18) или (19), и, так же как
и для капилляров, не выражается
в явном виде.
Пористая вставка (см. рис. 4, г).
Предположим, что течение газа через
пористую вставку одномерное, чисто
вязкостное и подчиняется линейному
закону Дарси [17]:
л /(’п dp
Н dt
(23)
где — скорость фильтрации, усред-
ненная по площади пористой вставки;
kn — коэффициент проницаемости.
С учетом (23) предельный массовый
расход через пористую вставку на
единицу площади при стационарных
условиях истечения
* __knPsPs
А~ 2Ld ’
(24)
а соответствующая функция истече-
ния Ф (pd) = 0 (Pd) имеет такой же
вид, что и (15). Можно ожидать, что
при нестационарных режимах наддува
через пористую вставку эта функция
практически не изменится, так как
соответствующий параметр нестацио-
нарное™, аналогичный параметру о^
для капилляра [см. (11)], по-види-
мому, достаточно мал ввиду обычной
малости удлинения пористых вста-
вок.
Характерным недостатком обычных
пористых материалов является неста-
бильность коэффициента проницаемо-
сти k{l во времени. Еще большие за-
труднения могут быть вызваны тем,
что в результате чистовой обработки
рабочей поверхности пористого эле-
мента вдоль нее образуется поверх-
ностный слой пониженной проницае-
мости, и тогда линейная функция исте-
чения (15), как и формула (23), в ко-
торой коэффициент проницаемости ku
считается постоянным вдоль пористой
вставки, уже неприменимы. Правда,
за последние годы эти ограничения
в значительной степени сняты за счет
получения методом спекания высоко-
качественных пористых материалов на
основе сплавов алюминия, коррозион-
но-стойких сталей и др., а также за
счет усовершенствования технологи-
96
ГАЗОСТАТИЧЕСКИЕ ОПОРЫ
ческих приемов обработки рабочих
поверхностей пористых материалов.
Коэффициент расхода. Для любых
реальных ограничителей расхода дей-
ствительная величина предельного рас-
хода т* меньше соответствующего
теоретического значения т* , или, что
то же самое, эффективная площадь
истечения меньше номинальной пло-
щади.
Коэффициент расхода ad — т*/т*
для некоторых типов ограничителей
расхода (простых и кольцевых диаф-
рагм, капилляров) определен в резуль-
тате весьма тщательных модельных
экспериментов [10]. В работе пока-
зано, что основным физическим кри-
терием подобия устройств наддува
является специальное число Рейнольд-
са
— Psas^do/Ps “
~ (DdoPs/Ps)V(25)
где за характерную скорость принята
скорость звука as в камере наддува,
которая выражается через термоди-
намические параметры газа ps, ps, Ts
и его физические постоянные Й (га-
зовая постоянная) и k (показатель
адиабаты). Из (25) следует, что для
сохранения подобия по числу Рейнольд-
са давление наддува необходимо умень-
шить (увеличить) по сравнению с на-
турными условиями обратно пропор-
ционально увеличению (уменьшению)
размеров модели. В условиях экспе-
риментов 1 * * параметр Re^ изменялся
в пределах 104—105, и в этом диапа-
зоне его влияние на расходные харак-
теристики различных устройств над-
дува оказалось почти неощутимым.
В работе [10] показано, что коэф-
фициент расхода для простых диаф-
рагм ad ж 0,88, для кольцевых ad ж
ж 0,8. Эти значения следует рассмат-
ривать как верхний предел ad, кото-
рый может быть достигнут лишь при
достаточно высоком уровне техноло-
гии изготовления и сборки элементов
подводящих устройств. В противном
случае коэффициент расхода может
уменьшаться чуть ли не вдвое [41 ],
1 Эксперимент проведен в ЛПИ имени
М. И. Калинина Н. Д Заблоцким и
В. С. Карповым.
если диаметр проходного сечения диаф-
рагмы очень малХ(порядка 0,1 мм).
При таких малых диаметрах, видимо,
существенную роль начинает играть
качество обработки отверстия.
МЕТОДЫ ПОСТАНОВКИ ЗАДАЧ
ОПРЕДЕЛЕНИЯ ПОЛЯ
ДАВЛЕНИЯ В ЗАЗОРЕ
ГАЗОСТАТИЧЕСКИХ ОПОР
Для газостатических опор с системой
дискретных питателей основное урав-
нение Рейнольдса, строго говоря, не-
обходимо интегрировать в многосвяз-
ной области (т. е. в области, ограни-
ченной снаружи внешним контуром
смазочного слоя и изнутри контурами
выходных сечений питателей) совместно
с уравнением газового потока внутри
подводящих устройств (ограничите-
лей), сращивая на входе в смазочный
слой их решения по давлениям и
расходам. Однако уравнения, отно-
сящиеся к подводящим устройствам,
чаще всего не фигурируют непосред-
ственно в расчетах газостатических
опор, рассматривается лишь урав-
нение Рейнольдса, а влияние подво-
дящих устройств учитывается функцией
истечения Ф (pd) = 0 (Pd), которая
в зависимости от выбранной матема-4
тической модели опоры вводится либо
в само уравнение Рейнольдса, либо
в граничные условия к нему. Такая
упрощенная постановка задачи оправ-
дывается тем, что течение газа в под-
водящих устройствах часто оказы-
вается близким к одномерному и ста-
ционарному безотносительно к тому,
удовлетворяет ли этим же допущениям
течение внутри смазочных слоев, и
тогда соответствующее уравнение га-
зового потока в подводящем устрой-
стве имеет простое аналитическое ре-
шение, на основании которого непо-
средственно определяется вид функ-
ции истечения d (pd).
Постановка и решение каждой кон-
кретной задачи, связанной с расчетом
газостатических опор, опирается на ту
или иную математическую модель ре-
альной системы наддува. Основная
роль в разработке таких моделей при-
надлежит кафедре гидроаэродинамики
ЛПИ им. М. И. Калинина.
Определение поля давления в зазоре газостатических опор
97
Схема линий наддува. Эта модель
предусматривает аппроксимацию ряда
дискретных питателей (или питающей
щели) линейным источником. Коли-
чественной характеристикой ограни-
чителя расхода можно считать пло-
щадь истечения которая либо
конструктивно задана, либо пропор-
циональна местной толщине смазоч-
ного слоя h (для ограничителя типа
кольцевой диафрагмы, см. ниже).
В общем случае
Ad = AdoHx (H = h/h0), (26)
где т = 0 или 1 в зависимости от типа
ограничителя расхода, а характерная
площадь истечения Лс/0 при т~ 1
определяется по масштабу толщины
смазочного слоя h0.
Сформулируем основные положения,
на которые опирается модель линий
наддува:
а) суммарная характерная площадь
истечения ряда питателей, а также
суммарный объем их карманов, если
они имеются, непрерывно и равномерно
распределены вдоль линии наддува,
иначе говоря, величины Л^о, V0 (ха-
рактерная площадь истечения и объем
карманов на единицу длины линии
наддува) принимаются постоянными
вдоль линии;
б) истечение газа через любой уча-
сток линии наддува подчиняется
тому же закону, который имеет место
для реального питателя;
в) в области, расположенной непо-
средственно над линией наддува (вклю-
чая область расположения карманов),
перетекания газа вдоль линии не учи-
тываются.
Вводя двумерную систему коор-
динат %, т], где координата % отсчи-
тывается вдоль линии наддува, а ко-
ордината т] — вдоль поверхности сма-
зочного слоя по нормали к линии над-
дува, составим дифференциальное ус-
ловие баланса массовых расходов на
этой линии, которое должно быть
включено в общую постановку задачи:
+ (»•)•] (27)
4 Пинегин С. В. и др.
Здесь ре/ — плотность газа над линией
наддува (внутри кармана); первый
член условия (27) выражает изменение
массы газа в кармане; т° — расход
газа через дросселирующие устрой-
ства в расчете на единицу длины ли-
нии наддува; (/п°)~, — расходы
газа, поступающего в смазочный слой
через противоположные «берега» ли-
нейного источника, на единицу его
длины (индекс «плюс» соответствует
«берегу», обращенному в сторону уве-
личения координаты 1]; в ту же сто-
рону условно ориентированы состав-
ляющие расхода (m®)", (^)+. Индекс
«минус» в условии (27) соответствует
тем составляющим расхода, которые
направлены внутрь кармана. Рас-
крывая значения всех членов, вхо-
дящих в (27), и переходя к безразмер-
ным величинам, получим условие ба-
ланса расхода в виде
оу д(/Л) = (Pd) -|- //3-тх
X [(grad4P)+ — (grad^/>)-]. (28)
Условие (28) содержит кроме ранее
введенного числа сдавливания еще
два безразмерных комплекса масшта-
бов:
т = 24^^%^//!^^;
V = 2V»/ft0L0, (29)
первый из которых, обычно называе-
мый параметром режима, является
основным критерием подобия опор
с наддувом, второй же характеризует
отношение суммарного объема карма-
нов к объему смазочного слоя.
Строго говоря, в условии баланса
расходов должен был бы фигуриро-
вать не объем кармана, а объем про-
странства, ограниченного поверхно-
стью кармана, противоположной по-
верхности смазочного слоя, и цилинд-
рической поверхностью, опирающейся
на контур выходного сечения кармана.
Иначе, если объем отдельного кармана
Ук = где Dd — диаметр вы-
ходного сечения кармана, б — его
глубина (см. рис. 4, а), то изменение
массы газа следовало бы определять
в объеме у*. = nDd (6 + Л), что при-
98
ГАЗОСТАТИЧЕСКИЕ ОПОРЫ
вело бы к появлению дополнительного
члена
р ft0 d(Hfpd)
6 dl
(30)
в левой части условия (28). Однако
этим членом можно пренебречь, пред-
полагая, как это обычно и имеет место
в действительности, что глубина кар-
мана много больше толщины смазоч-
ного слоя (б > hQ).
В принципе дополнительный член
типа (30) сохраняется и при отсут-
ствии карманов (если только ограни-
чителями расхода не являются коль-
цевые диафрагмы), но вместо комплекса
V (hQ/d) в нем появляется малый
параметр V, пропорциональный отно-
шению суммарной площади выходных
сечений подводящих каналов к пло-
щади несущей поверхности опоры;
в реальных опорах это отношение обыч-
но не превышает величины порядка
10~3. Поэтому следует ожидать, что
и при отсутствии карманов влияние
упомянутого члена незначительно, за
исключением того случая, когда число
сдавливания о достигает значений по-
рядка О (V*-1).
С учетом изложенных выше сооб-
ражений дальнейший анализ будет
опираться на условия баланса расхо-
дов в форме (28). Это условие наряду
с начальными и граничными условиями
следует присоединить к основному
уравнению Рейнольдса [см. гл. 4,
формулу (4)].
Фактически условие (28) получено
в предположении, что опора имеет
одну линию наддува, что справед-
ливо для случая произвольного числа
таких линий. Условие баланса рас-
ходов на некоторой /-й линии над-
дува по-прежнему имеет вид (28),
следует только сделать замены т—>
V-» й;> V»
в выражениях (28) и (29), где
I/Q — суммарная характерная площадь
истечения ограничителей расхода, рас-
положенных вдоль /-й линии над-
дува, и суммарный объем соответ-
ствующих карманов, отнесенные к дли-
не /-й линии. Примем, что каждая
линия наддува представляет собой
окружность тогда
Imj, Vj] = " 1т, Й];
Ру ~ Acfoj!f'j = Rj/Lq, (31)
где — суммарная характерная
площадь истечения через все линии
наддува, а т и V имеют следующий
вид (V — суммарный объем карманов):
т - \2рт\Ам^п^р$-,
V = V/nLlh0. (32)
Запишем условие (28) применительно
к рассматриваемым в данной работе
геометрическим конфигурациям опор.
Кольцевой подпятник с одной ли-
нией наддува', при г = /д
op a%lF‘! - Л» +
где г1 = 7?1/7?н — безразмерная ве-
личина радиуса линии наддува.
Радиальный подшипник с двумя сим-
метрично расположенными кольцевыми ч
линиями наддува: при z — ±bk
oV d%Pd- = inQ (Pd) +
+ 2//3—t / _ dP\ (34)
\ dz dz г
где X = IJD — удлинение подшип-
ника; b — 1±/1 — относительная раз-
движка плоскостей наддува.
Таким образом, применительно к га-
зостатическим опорам задача о рас-
чете давлений в смазочном слое ста-
вится следующим образом. Для коль-
цевого подпятника она сводится к ин-
тегрированию уравнения (5) гл. 4
с соответствующими граничными ус-
ловиями (6), (7) гл. 4 и дополнитель-
ными условиями на линиях наддува
(33) гл. 5. Для радиального подшип-
ника с двумя линиями наддува (под-
шипник с одной линией наддува может
рассматриваться как частный случай,
Определение поля давления в зазоре газостатических опор
99
когда b — 0) имеем уравнение (10)
гл. 4 с соответствующими граничными
условиями (6), (11) гл. 4 и условием
на линии наддува (34) гл. 5.
Во многих случаях решение постав-
ленной задачи целесообразно искать
в два этапа: сначала уравнение Рей-
нольдса интегрируется отдельно для
каждой подобласти, на которые линии
наддува делят смазываемую поверх-
ность, с использованием граничных
условий и формальных условий сра-
щивания Р~ — Р+ — Pd на линиях
наддува. После этого формальное ре-
шение, содержащее неизвестные ве-
личины Pdj, подставляется в условия
баланса расходов (33) или (34), из
которых эти величины и определяются.
В частности, как будет показано ниже,
стационарная задача газовой смазки
(о == 0) для опор, имеющих одну или
две симметричные линии наддува,
вдоль которых толщина смазочного
слоя не меняется, сводится к решению
алгебраического уравнения
(Pd-Pa)l'e(Pd) = m;, (35)
где £ — функция, зависящая от кон-
фигурации опоры и ее геометриче-
ских параметров, имеет вид:
| In q | — для однорядного
кругового подпятника;
1 ri lnri
In _£_ ±---для одноряд-
rB In гв
ного кольцевого
£ _ подпятника
Х(1 — Ь)
——— — для двухряд-
ной (или одноряд-
рой b = 0) ради-
альной опоры.
(36)
Для ограничителей расхода типа
капиллярных или щелевых каналов,
а также для пористых вставок функция
истечения 9 (Pd) выражается линей-
ной зависимостью (15) (для щелевого
ограничителя эта зависимость, строго
говоря, справедлива при условии под-
разумеваемого здесь постоянства про-
тиводавления вдоль линии наддува)3
4*
Рис. 6. Графическое решение уравнения
(35)
и уравнение (35) становится линейным.
Не относящееся к числу задаваемых
величин противодавление pd в этом
случае
Pd--~P2d^(Pa + m)/(l+m); (37)
0(РЛ = ^(Pd)-(l-Pa)/(l+«);
(tn = /тД).
Для опор с ограничителями типа
диафрагм целесообразно воспользо-
ваться графическим решением уравне-
ния (35). Такое решение представлено
на рис. 6 в виде серии кривых pd ~
= Pd (mt>), построенных при различ-
ных значениях параметра ра — pcJps~
= в предположении, что функция
О’ (pd), графики зависимости которой
от задаваемых параметров mt, и ра
приводятся на том же рисунке, аппрок-
симирована выражением (8).
Определим значение параметра ре-
жима т для рассматриваемых типов
ограничителей расхода, имея в виду,
что суммарная площадь истечения
следующая:
для опоры с простыми
диафрагмами
ndNn п2 .
~^0’
для опоры с кольцевыми
диафрагмами
TMdNDdh^
(38)
100
ГАЗОСТАТИЧЕСКИЕ ОПОРЫ
2. Расчетные формулы параметра режима т для различных типов
ограничителей расхода
Простая диафрагма Кольцевая диафрагма Щелевой канал Капиллярный канал Пористая вставка
BndNDdo BndNDd hQPS ММ3 ld \ha ) l=Ld!Ri- — подпятник — радиальный подшипник 3 ndN ( Dd V 3 ^nd^^d^n 2 I h0Ld
2 (Ле—1) ( А+1 ) li
для опор с капиллярными каналами
и пористыми вставками
(39)
для опор с щелевыми каналами
(40)
Подставив в (32) соответствующие
значения предельных расходов тА
и суммарных площадей истечения A
получим расчетные формулы пара-
метров режима т для различных типов
ограничителей расхода (табл. 2). Фор-
мулы необходимо домножить на вы-
бранное значение коэффициента рас-
хода ad, т. е. теоретическое значение
параметра режима ffi заменить его
эффективным значением тэ:
тэ — адт. (41)
Расход газа на наддув. Суммарный
предельный расход газа через опору
т* = т^Амг (42)
В этом выражении предельный расход
на единицу площади истечения т*А
определяется из первой формулы (32).
Тогда, унифицированная формула для
определения предельного расхода газа
через опору будет иметь вид
. nkh%ps _
m* = т,
12
(43)
где показатель адиабаты k, дина-
мический коэффициент вязкости и
скорость звука в газе as определяют
по таблицам физических свойств га-
зов [1].
Используя соотношение (1), полу-
чим окончательную формулу для оп-
ределения действительного расхода
газа через опору:
M'^Ps
«0 (Pd).
(44)
В инженерной практике для харак-
теристики газостатических опор часто
используется понятие объемного pact
хода Qa газа, приведенного к нор-
мальным (760 мм ртутного столба;
Т = 293 К) условиям:
а2
£>а = —- = — m = Qati (Pd),
Ра kPa
(46)
(45)
где предельное значение приведенного
объемного расхода
Q“ ~ 12цра т'
Предельные величины массового и
объемного расходов т* и Q*, которые
вычисляются по исходным данным и
не зависят от искомого противодавле-
ния pd, представляют определенный
практический интерес, так как дают ре-
альную оценку максимально возмож-
ных потребностей опоры в сжатом газе
безотносительно к конкретным экс-
пл у атацион н ым режима м.
Определение поля давления в зазоре газостатических опор
101
Рассмотрим вопрос о критических
режимах истечения газа через огра-
ничители расхода типа диафрагм. Ос-
новываясь на аппроксимации Прандт-
ля (8), фиксирующей границу между
критическим и докритическим режи-
мами истечения газа через диафрагмы,
подставим в (35) критическое значе-
ние относительного противодавления
Pd = P*d « 0,25 (pd = Р*,= 0,5) и
соответствующее этому значение функ-
ции истечения -0 (pd) = 0 (Р(у) — 1.
Получим верхний предел значений
параметра режима
0,25
т < т* =--------, (47)
при которых скорость истечения через
диафрагму достигает скорости звука.
Кроме того, применительно к простым
диафрагмам можно показать [35], что
предельное значение параметра режима
т = т**, при котором и ниже кото-
рого вторичное дросселирование яв-
ляется критическим (при условии ра <С
« 1):
(48)
где Р = AdJAdi, Adx — площадь от-
верстия наддува; — площадь
кольцевого сечения смазочного слоя,
опирающегося на внешний контур
кармана.
Метод «точечных источников» и
оценка пределов применимости схемы
линий наддува. При всех преимущест-
вах схема линий наддува обладает
недостатком — она не учитывает дис-
кретность наддува и потому может
дать завышенные значения несущей
способности и жесткости опоры. Ра-
зумеется, это не относится к случаю
наддува через щелевые ограничители.
Но если наддув осуществляется через
дискретные питатели (диафрагмы, ка-
пилляры и т. п.), то необходимо иметь
отчетливое представление о степени
точности аэродинамического расчета
опор в рамках этой схемы и о ее прак-
тической применимости.
Для обоснования и оценки точности
схемы линий наддува используем тео-
ретическую модель — схему «точеч-
ных источников», значительно более
сложную с точки зрения математиче-
Рис. 7. Кольцевой подпятник с дискретны-
ми питателями
ской реализации, но зато и гораздо
более адекватно схематизирующую
опоры с дискретными питателями.
Основная идея схемы «точечных источ-
ников» состоит в следующем. В ряде
случаев стационарное уравнение Рей-
нольдса удается свести к известному
линейному уравнению Лапласа, и тогда
имеет место формальная математиче-
ская аналогия между искомым реше-
нием уравнения Рейнольдса и удовлет-
воряющим уравнению Лапласа гидро-
динамическим потенциалом плоского
безвихревого течения идеальной нес-
жимаемой жидкости, которое созда-
ется системой «точечных источников»,
геометрически подобной системе пита-
телей газовой опоры. Эта аналогия
позволяет решать задачи газовой
смазки с помощью тех же методов
теории функций комплексного пере-
менного [18], которые эффективно
применяют для решения задач гидро-
механики плоских течений.
Чтобы свести уравнение Рейнольд-
са (1) гл. 4 к уравнению Лапласа,
достаточно принять в нем а == Д =
= 0, Н = 1, что соответствует слу-
чаю газового подвеса (невращающегося
подшипника) с постоянным зазором,
работающего в стационарном режиме.
Рассмотрим кольцевой упорный под-
вес единичного внешнего радиуса с од-
ним рядом питателей (рис. 7), для
которого стационарное распределение
квадрата давления в смазочном слое
постоянной толщины описывается
уравнением
Ап д / дР\ . д*Р _
ДР ЕЕ Г -4— ( Г -т— = 0,
дг \ дг / 1 дф2
(49)
102
ГАЗОСТАТИЧЕСКИЕ ОПОРЫ
где Д — оператор Лапласа, выражен-
ный в полярных координатах г, <р.
Искомое решение должно быть перио-
дическим по координате <р, с периодом
2л
ф = — число питателей). По-
мимо очевидных граничных условий
на периферии подпятника и на кон-
туре центрального вентиляционного
отверстия при г — 1, г — гв
Р^Ра = (Pa/Ps)*, (50)
где ра — наружное давление. Это ре-
шение должно удовлетворять следую-
щим условиям баланса массовых рас-
ходов через питатели:
(Pdii) + (j) gradnP</Y/t = 0;
V*
_ __24цт* (51)
m>l hlpsps
при k — 0,1,..., N— 1.
В силу упомянутой периодичности
решения по ф достаточно удовлетво-
рить одному из N условий (51). В этих
условиях уь — контур выходного се-
чения &-го питателя, рассматриваемый
в дальнейшем как окружность ра-
диуса rd<^ 1; Ц — направление внеш-
ней нормали к этому контуру; —
предельный (критический) массовый
расход через &-й питатель. Условие (51)
аналогично стационарному условию
баланса расходов на линии наддува
и отличается от последнего лишь тем,
что является интегральным, а не диф-
ференциальным.
До сих пор подразумевалось, что
неизвестное относительное давление
Pdk = КPdk постоянно по контуру yk.
Такое предположение физически оп-
равдано, но в рамках математической
модели точечных источников оно не
может быть строго соблюдено. Поэтому
целесообразно несколько ослабить ус-
ловие (51), заменив аргумент функции
истечения 0 его средним значением
по контуру у к- Используя символ
( }к Для обозначения операции
усреднения по этому контуру, а также
учитывая, что все питатели эквива-
лентны по расходу, преобразуем (51)
к виду
™0 (<Р> а) + Nrd (grad^ = 0, (52)
где т — обычный параметр режима,
определяемый согласно (32).
Представим, что внутри каждого
контура Ук расположен «точечный ис-
точник», и пусть % (£) — комплексный,
потенциал соответствующей системы
источников; £ = ге*ф (z — К — 1) —
комплексная координата). Решение
уравнения Лапласа (49) будем искать
в виде
P = ^ + Re%(g, (53)
где Re % (0 — действительная часть
комплексного потенциала, который сог-
ласно (50) и (51) должен удовлетво-
рять условиям
Ц|=1, I q = rB:Rex(O = 0; (54)
4’ = ^- (55)
Контурный интеграл в последнем ус-
ловии записан с учетом известного
свойства аналитических функций комп-
лексного переменного, согласно кото-
рому производная dyjdt> не зависит
от направления дифференцирования.
Искомый комплексный потенциал
системы источников естественно рас-
сматривать как линейную суперпози-
цию потенциалов отдельных источ-
ников (xh):
N— 1
Х(?) = ^£ хь(Г). (56)
k=Q
Константа D, пропорциональная мас-
совому расходу (равномерно распре-
деленному между всеми источниками),
определится из условия (55).
Начнем с решения вспомогательной
задачи: временно исключим одно из
условий (54) (при | £ | = гв), предпо-
ложив, что центральное вентиляцион-
ное отверстие отсутствует. Для под-
пятника с закрытым центром областью
определения каждой функции %к (0
в выражении (56) является эксцентрич-
ное кольцо на комплексной плоско*
Определение поля давления в зазоре газостатических опор
103
сти заключенное между внешним
контуром | £ | = 1 и контуром соот-
ветствующего питателя у^ (рис. 8, а).
При rd < 1 конформное отображение
. (С-г.е^)
1 _
переводит упомянутую область в кон-
центричное кольцо
(57)
' d ~ Tdl\l ~~ г\) 1 г I 1
на комплексной плоскости г (рис. 8, б).
Таким образом, задача сводится к оп-
ределению комплексного потенциала
центрального источника с нулевой
действительной частью на внешнем
контуре подпятника. Этот потенциал
описывается стандартной функцией
Xft ~ In г.
Опуская промежуточные выкладки,
запишем окончательное решение урав-
нения Лапласа для кругового
пятника
P = Pa + DQ(rlt ф);
Qin, <р) =-Linx
под-
r2N + r\N — 2 (Г1Г)^ cos Ф
Х 1 + (Hr)27V — 2 (rir)N cos Мф
(59)
Константа D, входящая в общее
решение (59), определяется следующим
выражением:
= пмйт'
где Pd — средняя величина квадрата
относительного противодавления на
любом из контуров yki а функция
Nr?~ хг,
rd, W)«ln-L^. (61)
1 — r\N
Для расчета константы D (60) не-
обходимо предварительно найти ве-
личину Pd, решив уравнение
Pd - Ра т , е , им
-fer = T''(r-^ “>1'
(62)
Рис. 8. Конформное отображение эксцен-
тричного кольца на концентричное:
а — плоскость £ = £ 4~ itj; б — плоскость
Z = х 4- iy
которое иллюстрирует утверждение
о том, что в ряде случаев условие ба-
ланса расходов для опор различной
конфигурации сводится к стандарт-
ному уравнению (35). Таким образом,
решение (59) для подпятника с закры-
тым центром полностью определено.
При наличии центрального венти-
ляционного отверстия уже не удается
найти решение уравнения Лапласа (49),
удовлетворяющее условиям (50), в виде
конечной комбинации элементарных
функций; в этом случае решение можно
представить с помощью быстро схо-
дящихся рядов.
Конформное отображение]
z — г In
г в
переводит концентричное кольцо, рас-
положенное на плоскости £ между
окружностями Г и Гв (рис. 9, а),
в бесконечную полосу шириной 2/ ==
Рис. 9. Конформное отображение кольца
на полосу и схема метода аналитического
продолжения:
а — плоскость £ = % + 1ТК б — плоскость
г = х + i'J, • — основной ряд источников;
О и X — дополнительные ряды источни-
ков и стоков
104
ГАЗОСТАТИЧЕСКИЕ ОПОРЫ
— | In гв |, границы Г' и Г в которой
симметричны относительно оси X комп-
лексной плоскости Z (рис. 9, б). При
ЭТОМ окружность г = /*!, вдоль кото-
рой расположены питатели или схе-
матизирующие их «точечные источ-
ники», отображается на горизонталь
1 И
у — у±= In -—== , а расстояние между
V 'в
источниками на плоскости Z равно
угловому расстоянию ф=2л/Лг на
плоскости Тогда функцию / в иско-
мом решении (53) можно было бы
трактовать как комплексный потен-
циал бесконечного ряда источников,
т. е.
N
X = % (г) =- Р in sin -у (г — г0), (63)
где D — постоянная расхода; г0 —
комплексная координата произволь-
ного источника на плоскости Z. Но,
согласно (54), действительная часть
% (г) должна обращаться в нуль на
границах полосы, а функция (69)
этим свойством не обладает.
Устранение указанного несоответ-
ствия достигается методом аналити-
ческого продолжения. Дополним основ-
ной ряд источников z = iyv (обозна-
чим его цифрой /, рис. 9, б) «фиктив-
ным» рядом стоков той же мощно-
сти (/'), расположенным за преде-
лами области интегрирования — 11^.
z И вдоль линии z = i (21 — z/x),
т. е. ряды I и Г симметричны отно-
сительно границы полосы z — И. Оче-
видно, комплексный потенциал двой-
ного ряда /—Г
. N t
sin — (z - z0)
X (z) = D In----;
sin —(?--?’)
[?o = Rez0 + i (21 — z/,)] (64)
удовлетворяет необходимому условию
Re % = 0 [см. (54)] на одной из гра-
ниц полосы z — И, но не удовлетво-
ряет ему на границе z = —И. Поэтому
естественно ввести еще один двойной
ряд источников и стоков II—1Г,
представляющий собой зеркальное от-
ражение двойного ряда /—Г относи-
тельно границы z = —И. Теперь на
этой границе Re % = 0, но появляется
неравномерность на границе z — il,
для устранения которой следует, в свою
очередь, зеркально отразить двойной
ряд II— 1Г относительно границы
z — И и т. д. В результате бесконеч-
ного числа последовательных отра-
жений относительно чередующихся
границ полосы получим периодическую
систему двойных рядов, отстоящих
друг от друга на 4/ (рис. 9). Как' и
в предыдущем случае, опуская про-
межуточные выкладки, запишем окон-
чательное решение для однорядного
кольцевого подпятника 1
P = Pa + D[Q(rly Ф) + £(/1, ср)].
(65)
Функция Q (г1У ср) определяется
уравнением (59), а функция S (г1У ф)
имеет вид
О / X Л 7 I In Г-1 I |
S(rx, Ф) = N~~-
|1пгв| 1
00 < 1 r2nN
л-У-LlzZl^
Г Z-J п 1 _ r2nN
п=\ в
(1 — r2nN) cos цУф.
в I
(66)
Константа D в решении (65) и средняя
величина квадрата относительного про-
тиводавления Pd на контуре питателя
связаны соотношением
D = (/>,)=.
Pd-Pa
Z (ri, rd, N)+S (rlt 0) • (67)
Значение Pd определяют из уравне-
ния
Pd — Pa rh
Q(Pd) ~ N ^i’ rd> A/)| —
-5(^,0), (68)
аналогичного уравнению (62) для под-
пятника с закрытым центром; оба
1 Решение для бесконечной полосы с
«точечными источниками» было найдено
Я. М. Котляром (1958 г ) и Л. Г. Степа-
нянцем (1967 г.)
Определение поля давления в зазоре газостатических опор
105
эти уравнения являются разновидно-
стями типового уравнения (35). Вы-
ражениями (65)—(67), а также (59), (61)
для функций Q (г1} ф), f (r1} rj, N) пол-
ностью определяется искомое решение
уравнения (49) для кольцевого под-
пятника с одним рядом питателей (это
решение легко обобщить на случай,
когда число рядов питателей произ-
вольно). Если выполнить процедуру
предельного перехода А/—>оо упо-
мянутых выше выражений, то ре-
зультат будет совпадать с соответ-
ствующим решением, получаемым
в рамках схемы линий наддува
гораздо более простым путем. Так
выявляется взаимосвязь между ма-
тематическими моделями линий над-
дува и «точечных источников» — пер-
вая из них оказывается предельным
случаем второй (если уравнение Рей-
нольдса сводится к уравнению Лап-
ласа). Практически это означает, что
точность схемы линий наддува харак-
теризуется скоростью сходимости ре-
шений, получаемых по схеме источ-
ников для последовательно возрастаю-
щих значений А/, к своему пределу
при N—> оо.
Некоторые характерные результаты
расчета 1 * давлений в смазочном слое,
а также основных интегральных ха-
рактеристик кольцевого подпятника
(имеющего один ряд питателей с огра-
ничителями расхода типа простых
диафрагм) — удельной несущей спо-
собности w и удельной осевой жест-
кости /Сс, полученные с учетом дискрет-
ности наддува, приведены на рис. 10—
13; штрихпунктирные линии на этих
рисунках соответствуют схеме линий
наддува (Af—>оо).
2
-ф/2 1
X | б/ф J rVPdr — Ра, (69)
4/2 гв
где ф — 2xjN — период решения (65)
по переменной ф; wz — абсолютная
несущая способность; А — площадь
1 Расчет выполнен на кафедре гидро-
аэродинамики ЛПИ им. М. И. Калинина.
кольца, ограниченного внешним кон-
туром подпятника и центральным вен-
тиляционным отверстием.
Под удельной осевой жесткостью
понимают величину
л* = =
\ де /е>0
=____h<> (dwz \
Aps \ dh /h^h„
[Л = Ы1~е)], (70)
где е — относительное осевое смеще-
ние подпятника; h — толщина сма-
зочного слоя (принимаемая постоян-
ной вдоль поверхности подпятника);
hQ — ее характерное значение. Как
видно из соотношений (67) и (68), ве-
личина Ао = h при 8=0 входит
в решение (65), фигурирующее в фор-
муле (69), только через параметр
режима т. В частности, для рассмат-
риваемого случая дросселирования
газа через простые диафрагмы (см.
табл. 2) tn ~ l/h% (~ — знак пропор-
циональности). При наличии осевого
смещения решение (65) остается в силе,
если в нем /г0 заменить на h = hQ (1 —е)
и соответственно т на т/(1 — е)3.
Таким образом, рассматривая удель-
ную несущую способность как функ-
цию параметра т, целесообразно ис-
пользовать для непосредственных рас-
четов удельной жесткости следующую
формулу, вытекающую из (70):
в
(71)
с помощью которой были получены
графики, показанные на рис. 12 и 14.
Из рис. 10, где представлены эпюры
давления в различных сечениях сма-
зочного слоя подпятника, видно, что
пики (локальные максимумы) давления
над питающими отверстиями выра-
жены тем резче, чем меньше число
отверстий N. Поскольку максималь-
ное давление в смазочном слое рас-
сматриваемой опоры ограничено (оно
не может быть больше давления над-
дува, т. е. р 1), то пики возрастают
за счет снижения среднего уровня
давления в слое, что приводит к умень-
106
ГАЗОСТАТИЧЕСКИЕ ОПОРЫ
Рис. 10. Распределение давления
в кольцевом подпятнике с дис-
кретными питателями (просты-
ми диафрагмами) при т — 4;
ра = 0; гв = 0,5; = 0,75;
rd = 0,01:
а — сечение г = f\; б — сечение
Ф = const
О)
Рис. 11. Удельная несущая способность
кольцевых подпятников с различным числом
питателей (простых диафрагм) при ра — 0;
гв = о,5; = 0,75; rd = 0,01
Рис. 12. Удельная осевая жесткость коль-
цевых подпятников с различным числом пи-
тателей (простых диафрагм) при ра — 0,
гв = 0,5, = 0,75, rd = 0,01
Рис. 13. Удельные несущая способность (а) и осевая жесткость (б) кольцевых подпятни-
ков с различными диаметрами карманов при ра = 0; гв = 0,5; ^ = 0,75;--------------АГ =
= 20; —.------N = со
Определение поля давления в зазоре газостатических опор
107
шению несущей способности и жест-
кости опоры по мере уменьшения числа
питателей (рис. 11, 12). Тот же ре-
зультат получается и при уменьшении
относительного радиуса выходного се-
чения питателя г^. Пики давления
становятся более резкими, средний
уровень давления падает. Из выра-
жений (59), (65) и (67), в частности,
видно, что при г а —>0 избыточное
давление в любой точке смазочного
слоя (за исключением той, где распо-
ложен «точечный источник») неогра-
ниченно убывает. С этим согласуется
последовательность кривых несущей
способности и жесткости, соответствую-
щих различным значениям параметра
rd (рис. 13).
Как показывают рис. 11—13, из-
менение числа питающих отверстий и
их относительного радиуса не влияет
на общий характер зависимости несу-
щей способности и жесткости от основ-
ного эксплуатационного параметра
опор с наддувом — параметра режи-
ма tn. Во всех случаях удельная не-
сущая способность одностороннего
упорного подвеса монотонно возра-
стает с параметром th, стремясь к не-
которому конечному пределу при th —>
—>00 (рис. 11, 13, а), а удельная осе-
вая жесткость, достигнув некоторого
максимума, затем асимптотически убы-
вает до нуля (рис. 12, 13, б). Такое
поведение интегральных характери-
стик опоры становится понятным, если
учесть, что при т —> сю давление в сма-
зочном слое достигает своего верх-
него предела [Р^—> 1, что следует из
уравнения (77)], перепад давления
между камерой наддува и входом
в смазочный слой отсутствует, т. е.
ограничитель расхода по существу
перестает выполнять свои функции.
Очевидно, в таком случае давление
в смазочном слое рассматриваемой
опоры практически не будет реаги-
ровать на возможные изменения тол-
щины слоя (обусловленные измене-
ниями внешней нагрузки, случай-
ными возмущениями и т. п.), что
означает потерю жесткости, стати-
ческой устойчивости, а тем самым —
и работоспособности опоры.
Штрихпунктирные кривые (М—>оо
на рис. 11 —13) характеризуют верх-
ний предел действительных значений
несущей способности и жесткости под-
веса с дискретным наддувом, причем
дискретность в гораздо большей сте-
пени влияет на жесткость опоры,
чем на ее несущую способность, и
это влияние усиливается с увеличе-
нием параметра режима th. Если
учесть, что в реальных газовых опорах
относительный размер питающего от-
верстия обычно имеет порядок га
~ 0 (10~2), а параметр режима th
стараются выбирать из условия мак-
симума удельной жесткости, то сог-
ласно рис. 11—13 минимальное число
питателей, при котором модель линий
наддува обеспечивает удовлетвори-
тельную для инженерной практики
точность расчета кольцевого подпят-
ника, должно быть не менее 20. Заме-
тим, что графики рассчитаны для
случая гх — 0,5 (1 + гв), когда ряд
питателей расположен на одинаковом
расстоянии от границ смазочного слоя.
Если же питатели сдвинуть в сторону
одной из границ, то минимально необ-
ходимое их число может значительно
увеличиться. Поэтому вместо числа
питателей целесообразно использовать
иной, более универсальный критерий
применимости теоретической модели
линий наддува — отношение расстоя-
ния между питателем и ближайшим
выходным сечением смазочного слоя
(г = 1 или г — гв) к расстоянию между
соседними питателями. Предположим,
что это отношение должно быть не
меньше единицы, т. е.
min(l—-г,, Г1 —гв) .
- v) <72»
Отсюда следует, что
При гв = 0,5; гх = 0,75 (что соответ-
ствует графикам на рис. 11 —13) из (73)
вытекает как частный случай условие
N 20, чем аргументируется пра-
вильность выбора константы (приня-
той за единицу) в правой части соот-
ношения (72).
Можно ожидать, не прибегая к до-
полнительному трудоемкому анализу,
108
ГАЗОСТАТИЧЕСКИЕ ОПОРЫ
Рис. 14. Бесконечная полоса на комплекс-
ной плоскости Z
что условия типа (73) применены в оце-
ночном плане к подпятнику с двумя
или несколькими линиями наддува,
а также к слабонагруженному радиаль-
ному подвесу. В первом из этих слу-
чаев в условии (73) следует сделать
замену i\ —> г;, где г; — относитель-
ный радиус /-го ряда питателей, и
применить условие отдельно к каж-
дому ряду. Во втором случае есте-
ственным геометрическим аналогом ус-
ловия (73) применительно к двухряд-
ному радиальному подвесу является
условие
9тг
где % — удлинение подвеса; b — рас-
стояние между питающими плоско-
стями, отнесенное к длине подвеса.
Согласно (74), для типичных значе-
ний параметров Л и Ь, равных соот-
ветственно 1 и 0,5, число питателей
в одном ряду, достаточное для схема-
тизации ряда питателей линии над-
дува, должно быть не меньше 12.
Условия (73), (74) не только харак-
теризуют пределы применимости мо-
дели линий наддува — наименее тру-
доемкой и наиболее практичной среди
известных теоретических моделей га-
зовых опор с наддувом, но и могут
рассматриваться как условия рацио-
нального проектирования таких опор,
предотвращающие неоправданные по-
тери в величинах несущей способ-
ности и жесткости.
Теперь рассмотрим радиальный га-
зостатический подшипник с симмет-
ричным двухрядным наддувом. В соос-
ном положении радиальный подшип-
ник с удлинением % и относительной
раздвижкой b можно рассматривать
как бесконечную полосу шириной 2%
на комплексной плоскости Z — х +
+ iy (рис. 14) с двумя рядами источ-
ников, раздвинутыми на расстояние
26%. Расстояние между соседними ис-
точниками в одном ряду ф = 2л/N
(2N — общее число питателей в ра-
диальном подшипнике). Без ограни-
чения общности анализа можно счи-
тать, что одна пара источников рас-
положена на оси Y. Решение уравне-
ния Рейнольдса для квадрата давле-
ния будем искать в виде
P = Pa + PReX(2); Х(г) =
= Х+(г) + %-(г), (75)
где D — постоянная расхода; Re —
символ действительной части комп-
лексной величины; %+, — комплекс-
ные потенциалы, соответствующие ря-
дам источников z — Ub'k и скоррек-
тированные методом аналитического
продолжения таким образом, чтобы
удовлетворялись граничные условия
х+ (± /X) = х- (± а) = 0. (76)
Воспользуемся известным решением
для полосы с одним рядом источников:
. N6
+ — (Ь—у);
Уо = 6Х; у$ = (2—5) X;
5=1 — Ь,
(77)
где — символ тэта-функция Якоби.
Отделяя в этом решении действитель-
ную часть, получим
Rex'- (г) =-1-1пх
ch ТУ (у—у0)—cos ТУх ।
Лch N (у — i/g) — cos /V г *
+ 2 sh М (л - у) X
k=\
Определение поля давления в зазоре газостатических опор
109
Xcos kNx
г-у (*• —г/);
л _ shfeVAA p-2kNh
k~ sh2m
(78)
Геометрически очевидно, что
X' (Z) = Х+ (z); z = х — iy,
т. е. Re %“ (г) получается из (78) про-
стой заменой у на —у. В результате,
учитывая (75), получим
ReX(2) = -^+ =
_1_ Г ch /V (г/ — у0) — cos Nx
2 LchW(y — у5) — cos Ax'
ch N (у + у0) —- cos Nx
ch N (у + Уо) — cos Nx.
+ 2 Ch kN у cos kNx + Nbk,
k=\
_ «a
“ sh kNK '
(79)
С вычислительной точки зрения послед-
нее выражение удобнее представить
в виде
Bk = е~(2+^)/г^
। _ ^—2 kN К *
(79а)
Чтобы найти противодавление pd =
— К Pj, в решении (88) целесооб-
разно выделить сингулярную часть
[обозначим ее Q (х, у)], содержащую
логарифмическую особенность в центре
рассматриваемого питателя. Если центр
имеет координаты х = 0, У ~ Уо~
= ЬХ, то
ReX(z)=Q(x, y) + S(x, у);
Q (х, у) = In [ch N (у— у0) — .
— cos Nx],
(80)
где S (х, у) — та часть решения, кото-
рая регулярна (аналитична) в окрест-
ности точки х — 0, у — yQ.
Используя (79) и (80), определим
величину следующим образом:
Pd = Pa + D[{Q(x, у))0 +
+ S(0, yQ)], (81)
где ( )0 — символ операции
усреднения по контуру у0 рассматри-
ваемого питателя. Если относительный
радиус питателя rd, нормированный
по радиусу подшипника Р, достаточно
мал, то прибегать к операции усред-
нения нет необходимости, так как зна-
чение функции Q (х, у) с точностью
до величин высшего порядка малости
оказывается постоянным на контуре у0.
Действительно, разлагая аргумент ло-
гарифма в ряд Тейлора в окрестности
точки х = 0, у = уо и отбрасывая
члены высших порядков, получим
1 (N2
Q(x, у)^-гт(+[х® +
Nr
+ (j/-</o)2]} = ln-?-, (80а)
V £
где г — относительный радиус окруж-
ности с центром в особой точке, в част-
ности на контуре у0;
Q(*. 2/)r=r.«(<2 (*, г/))о»
а
аНп-^-. (81а)
/2
Далее, преобразуя условие баланса
расходов на контуре питателя (почти
совпадающее с условием (55) гл. 5,
только в правой части появляется
дополнительный множитель 1/2, отра-
жающий наличие двух рядов питате-
лей) точно таким же образом, как это
сделано для кольцевого подпятника,
получим следующее выражение для
константы D в общем решении (81):
D = -^-Q(Pd). (82)
Исключая D из совокупности выра-
жений (81), (82), используя (81а)
и определяя 5 (0, у0) непосредствен-
по
ГАЗОСТАТИЧЕСКИЕ ОПОРЫ
ной подстановкой значений х — О,
у = yQ в соответствующую часть ре-
шения (79), составим уравнение для
определения Pd‘- j
" = “I- <83>
которое с точностью до геометрического
множителя совпадает с уравнениями
(35), (62) и (68).
В данном случае этот множитель
г _ l/jvl.
fN = f (N, rd, X, b) «
in 0-^
(1 Oq) (1 02)
s* (I + 6t)(i - б,у
(84)
s _ 6о _ -Ж6
ба—ё?-е
Этим и завершается формальное
построение решения уравнения Рей-
нольдса для ненагруженного радиаль-
ного газостатического подшипника
с дискретными питателями.
Метод неравномерно распределен-
ного наддува. Этот метод — самый
универсальный и является обобщением
методов «линий наддува» и «точечных
источников», которые вытекают из
него как частные случаи. При приме-
нении этого метода поверхность сма-
зочного слоя, через которую осуще-
ствляется наддув, рассматривается как
непрерывная или кусочно-непрерыв-
ная совокупность источников, плот-
ность распределения которых можно
задавать произвольной неотрицатель-
ной функцией с фиксированным сред-
ним значением. Иными словами, вся
поверхность подшипника вместе
с участками, занимаемыми отверстиями
наддува, рассматривается как сплош-
ная пористая поверхность с неравно-
мерной проницаемостью. При этом
предполагается, что наибольшая про-
ницаемость имеет место на участках,
занимаемых в реальных подшипниках
отверстиями наддува, а закон истечения
газа через пористую поверхность сов-
падает с законом истечения газа через
дискретные отверстия.
В такой постановке задачи можно
обобщить вывод уравнения Рейнольдса,
отказавшись от условия непроницае-
мости поверхности подшипника, сог-
ласно которому нормальная скорость
газа на его поверхности обращается
в нуль. Обобщенное стационарное урав-
ние Рейнольдса в этом случае имеет
вид (а= 0) [11]
(н9.дР\ д/ 7/з^.А =
Эф \ Эф / дг \ дг /
— тФ (ф, г) 0 (Р^) , (85)
где Ф (ф, г) — функция распределения
проницаемости, удовлетворяющая ин-
тегральному условию
К 2Л
J dz J Ф(2, ф) </ф = 1, (86)
—% о
физический смысл которого заклю-
чается в том, что суммарный крити-
ческий расход через опору не должен*
зависеть от выбранного закона рас-
пределения.
Метод неравномерно распределен-
ного наддува максимально упрощает
постановку задачи в том смысле, что'
она не требует никаких дополнитель-
ных условий баланса к уравнению Рей-
нольдса (нелинейность в точках или
на линии наддува переходит в само
уравнение Рейнольдса). Для его интег-
рирования нужны лишь очевидные
граничные условия на внешнем кон-
туре смазочного слоя (р = ра~ const).
Если функцию Ф (г, ф) подобрать
так, чтобы на участках, занимаемых
в реальном подшипнике отверстиями
наддува, она была постоянной, а во
всей остальной области равнялась
нулю, то в этом случае уравнение (85)
будет соответствовать задаче, решае-
мой методом «точечных источников».
Функцию Ф (z, ф) можно аппроксими-
ровать и гладкими зависимостями,
удовлетворяющими условию (86). Та-
Определение поля давления в зазоре газостатических опор 111
ким образом, метод неравномерно рас-
пределенного наддува позволяет свести
задачу для многосвязной области с не-
линейными граничными условиями
к задаче для односвязной области с ли-
нейными условиями.
В настоящее время этот метод рас-
пространен и на нестационарные за-
дачи газовой смазки опор с простыми
диафрагмами [8]. Соответствующее
обобщенное нестационарное уравне-
ние Рейнольдса в этом случае имеет
вид
дг \ дг / 3<р \ <Э<р /
д(Нр) , „ д(Нр)
дг ' д1
— [(pd) — <rV J Ф (г, <р), (87)
где V — относительный объем карма-
нов; t — время.
Простота граничных условий
[к уравнению (85) или (87) достаточно
присоединить условие на внешнем
контуре смазочного слоя ] делает метод
неравномерно распределенного наддува
особенно удобным для численного ин-
тегрирования задачи.
6 СТАТИЧЕСКИЕ*
• ХАРАКТЕРИСТИКИ
ГАЗОСТАТИЧЕСКИХ ОПОР
КОЛЬЦЕВОЙ подпятник
И ЕГО АНАЛОГ —
ПРЯМОЛИНЕЙНАЯ МОДЕЛЬ
Если у кольцевого подпятника на-
ружный 2/?н и внутренний 2/?в диа-
метры выбраны так, что выполняется
условие
(1)
то кривизной контуров кольцевого
подпятника можно пренебречь и схе-
матизировать последний бесконечной
полосой, имеющей ширину Lo =
— — /?в, иначе говоря, прямоли-
нейной моделью (рис. 1) *. При нали-
чии одной линии наддува эта модель
имеет единственный геометрический
параметр х — отношение расстояния
линии наддува до ближайшей границы
* Такая модель может представлять и
самостоятельный интерес, например, при
расчете плоских прямолинейных направ-
ляющих металлорежущих станков и при-
боров.
Рис. 1. Прямолинейная модель кольцевого
подпятника *
полосы. Он может меняться в преде-
лах 0 < х 0,5. В работе [24] пока-
зано, что наилучшим из всех возмож-
ных, с точки зрения нагрузочных
характеристик, положений линии над-
дува в прямолинейной модели подпят-
ника с однорядным наддувом явля-
ется симметричное положение (х =
— 0,5), т. е. если перейти к реальному
кольцевому подпятнику, удовлетворяю-
щему условию (1), то радиус линии
наддува целесообразно принять ж
«0,5 (7?н+ 7?в).
Формула для расчета удельной несу-
щей способности
ш'
W — __----=
boPs
1 (Pd—Ра) (2Pd + Pa)
3 Pd "I" Pa ’
(2)
где w' — реакция смазочного слоя на
единицу длины полосы; pj — отно-
сительное противодавление, опреде-
ляемое из уравнения (35) гл. 5, в ко-
тором следует положить £ = х (1—х).
Формула (2) позволяет, в частности,
построить нагрузочную характеристи-
ку подпятника w (s), где 8 = 8^—
относительное осевое смещение из ис-
ходного положения равновесия, в ко-
тором толщина смазочного слоя счи-
тается постоянной, и равной Л =
= Ло (Н = 1). При чисто осевом сме-
щении толщина слоя по-прежнему
постоянная и составляет h = h'Q (1 —8),
где h'Q — самоустанавливающийся ра-
бочий зазор при действительной осе-
вой нагрузке. В этом случае условие
[формула (35) гл. 5], из которого
с помощью графиков (см. рис. 6 гл. 5)
или аналитических выражений опре-
деляется pj, остается в силе, если
в параметр режима т (см. табл. 1,
гл. 5) вместо Ао ввести или, иначе го-
воря, заменить /пна/п'=/п(1—8)~3+т,
где т = 1 для кольцевых диафрагм
Кольцевой подпятник и прямолинейная модель
113
и т = 0 для всех остальных типов
ограничителей расхода.
Учитывая сказанное, получим сле-
дующее уравнение:
(Pd~ Pa)/®(Pd) = ffl' № =
= т(\ — 8)3~т, (3)
которое при фиксированных значе-
ниях т и ра представляет собой функ-
циональную связь между параметра-
ми Pd и 8.
Обозначая индексом 8 дифференци-
рование по 8, получим из выражения (2)
2
3
Pd +
(Pd + Ра)2
—
PdPd>
(4)
где р% определяется из уравнения (3)
по известному правилу дифференци-
рования неявной функции (параметры
т и ра при этом считают фикси-
рованными):
-2 -2
,е . 3-Т Pd-Pa
Pd 1 — 8 т' (8) I »' (pd) I -I- 2pd ’
(5)
где для диафрагм
R'(w)l =
' 0 при Д/^0,5;
ПРИ Pd
0,5; (6)
для остальных типов ограничителей
I (Pd) I Ш
Величину ш8 можно трактовать как
удельную осевую жесткость подпят-
ника в исходном положении равновесия
(h — h0). Иногда осевую жесткость
удобнее связать с толщиной слоя
в смещенном положении [h'Q = h0 (1—
— 8) J; соответствующий коэффициент
удельной осевой жесткости обозначим
через К8. Коэффициенты и №
связаны между собой, а также с аб-
солютной осевой жесткостью в рас-
чете на единицу длины линии над-
дува К8 следующим образом:
В исходном положении равновесия
(8 — 0) = № = К8. Подставляя
уравнение (5) в (4), выражая т' (8)
через pd с помощью уравнения (3)
и учитывая (7), получим
К8 = 4-(3~т) X
о
х Pd <fid — Ра) (Pd + 2pQ) # (pd) . ,8)
(Pd + Ра) [2pd& (Pd) +
+ (prf-Pa)P' (Ml
В реальных газостатических опорах
значение ра (1 > ра> 0), как пра-
вило, намного ближе к нулю, чем
к единице, поэтому при оценочных
расчетах можно принимать ра ~ 0.
Тогда (2) и (8) принимают вид
2 _
w = у Pd'
Кг = 4-(3-Т) X
о
_______Pd® (Pd)
(Pd) + Pd P' (Pd) I
(9)
в частности, для подпятников с капил-
лярными, щелевыми и пористыми ог-
раничителями получим соотношения
о ____________
W = -5- Vm/(1 + й);
О
К'" = К«(1 +Й)3, (10)
удобные для сравнительной оценки
статических характеристик подпятни-
ков с различными ограничителями
расхода.
Характерные результаты расчета
удельных величин несущей способности
и осевой жесткости рассматриваемой
прямолинейной модели подпятника при
различных значениях параметров т
и ра приведены на рис. 2. Для сопо-
ставимости результатов расчета при-
ведем связи между параметрами коль-
цевого подпятника и его прямоли-
нейной модели:
(7)
h0 ho
"»пр = -Ц—- Ih. (11)
Г1
114
СТАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ ГАЗОСТАТИЧЕСКИХ ОПОР
Уравнение (13) должно интегри-
роваться:
приг_=гв Р~=Ра=р2;
при 7=^ p- = p+=pd =
(14)
при г = 1 Р+ = Ра == р2,
Рис. 2. Удельные несущая способность (а)
и осевая жесткость (б) подпятника (пря-
молинейная модель) с простыми диафраг-
мами:
где индексы «—» и «+» соответствуют
подобластям гв г ri> ri < г 1,
на которые область интегрирования
гв < г < 1 разбивается линией над-
дува г = ff. Неизвестное относитель-
ное противодавление = ^Р^ оп-
ределяют из дополнительного условия
баланса расходов при г — rf.
(15)
вытекающего из (33) гл. 5.
Подставляя решение уравнения (13)
Р — Ао Bq In Г
при Гв<г <гх;
Р+ - Ра — в 1П Г
при гг г 1,
(16)
где
—.-----т -> оо;
режим
------- — критический
ш Г1/ГВ
Очевидно также, что ра пр = Ра- Кроме
того, расположение линии наддува
должно соответствовать условию
и = [min (1 — Г1, Г1 — Гв)]/( 1 — гв).
(12)
Для кольцевого подпятника при
постоянной толщине смазочного слоя
(Н ~ 1) распределение давления газа
в зазоре — осесимметричное, и соот-
ветствующее уравнение Рейнольдса
имеет вид (Л = 0; а = 0)
(13)
где г — радиальная координата, отне-
сенная к наружному радиусу под-
пятника.
о __ Рд . о Pd Р а
° 1п Г1/Гв ’ ~ | 1п Г, | ’ -
й
удовлетворяющее условиям (14), п (15), \
получим алгебраическое уравнение "
-2 -2
О (Pd) X гв In гв / 4
(17) •
Согласно (23) гл. 4 удельная несущая |
способность кольцевого подпятника ]
(рис. 3, a) i
_ wz j
Wz "(rf-tyPs ’ ]
(18) j
Кольцевой подпятник и прямолинейная модель
115
где
1 (ср )2
(Pd’ Ра, С) = —6 а X
X [ф(срй) —Ф(сра)]; (19)
g = ]/2j1П-^; (20)
V Pd-Pa
W2 = W2 (Pd, РаЛс) =
= Л е~(Ас₽а)2 г*' (^d) -
-^(Дсрй)]; (21)
Д = VIn rB/ln q — 1; (22)
X х
ф (х) = j е~*2 dx; V = J ev2dx —
о о
табличные интегралы [37]. Удельная
осевая жесткость кольцевого подпят-
ника (рис. 3, б)
=__________$Pdk________
2pd + т | fl' (pd) | ’
где s = 3 — т;
(l-2c2p2)
X (1 + 2Л2с2р2) w2
В .частном случае ра—> 0 коэффициенты
несущей способности и осевой жестко-
сти связаны соотношением
Ке = (spd^z)/(2pd + т I -О' (pd) |).
(24)
Осесимметричный характер задачи
полностью сглаживает в рамках схемы
линий наддува разницу между аэро-
динамическими характеристиками под-
пятников с капиллярными, щелевыми
и пористыми ограничителями расхода.
Подпятники с простыми и кольцевыми
диафрагмами имеют одну и ту же несу-
щую способность, если их физические
и геометрические параметры прини-
мают одинаковые значения (в рамках
схемы линий наддува критериями подо-
бия кольцевого подпятника являются
четыре параметра: т, ра, гг и гв),
а отношение соответствующих величин
осевой жесткости при докритиче-
Рис. 3. Удельные несущая способность (а) и осевая жесткость (б) осесимметричных под-
пятников с наддувом через простые диафрагмы при различных значениях физических па-
раметров:
-------------кольцевой подпятник (гв — 0,2; == 0,6);-------— прямолинейная
модель; —— круговой подпятник (rt = 0,6)
116
СТАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ ГАЗОСТАТИЧЕСКИХ ОПОР
При определении угловой жесткости
кольцевого подпятника стационарное
уравнение Рейнольдса является дву-
мерным, и относительная толщина
смазочного слоя определяется выра-
жением (9) гл. 4. С учетом очевидных
граничных условий и условия баланса
расходов на линии наддува, вытекаю-
щего из уравнения (33) гл. 5 при о — О,
задача решается методом возмущения
первого приближения (у 1). Реше-
ние этой задачи выполнено в работе
[24], здесь же приведем лишь оконча-
тельный вид унифицированной фор-
мулы для расчета коэффициента угло-
вой жесткости кольцевого подпятника:
Kt _-----=
яЯнО-'в)^
Здесь величины и ш2 определяются
формулами (19) и (21):
(.Pd' Ра< С КЮ;
ra2 = ay2(/5j, ра, Дс|Л2);
геометрические параметры £ и х оп-
ределяются соответственно выраже-
нием (17) и
I 9' (ЛО I — Для диафрагм;
1 —для капилляров
и пористых вста-
вок;
2Xj cth 2Xj — для щелей, (27)
_ 3 1 + Д2
“2(1 - Ъ |i-d х
/-0,5(1 + ^)
л 1+O,5ml7x
X ['в 0 - г1) (®2 - w2) - (25)
М1-гв) + [1- (2сР«)2] X ]
X ^1— [1 + (2 AcpJ2]
8 J *
где = 7^/2 -— относительное удли-
нение щелевого ограничителя; i —
= 2/3 — для кольцевых диафрагм; i —
— 1 — для остальных типов ограни-
чителей расхода.
Исходными данными для расчета
величины КУ являются физические
параметры т, ра, геометрические па-
раметры гв, и (при щелевых огра-
ничителях расхода) Zj, а также кон-
станта i. Характерные результаты
расчетов угловой жесткости кольце-
вого подпятника, проведенных по фор-
муле (25), представлены на рис. 4 и 5.
В заключение приведем формулы для
расчета несущей способности и жест-
кости кругового (без центрального
вентиляционного отверстия) подпят-
ника. Удельная несущая способность
Радиальный подшипник
117
Рис. 5. Удельная угловая жесткость коль-
цевого подпятника (rR = 0,2; = 0,6);
--------простая диафрагма (1);---
кольцевая диафрагма (2);---------капил-
ляр (За, Зй, или щель при 0); —.-------
щель (4а, 4е при — 0,25; 4 б7, 4г при Х^ =
= 0,5)
При Ра—>0 последняя формула
преобразуется к виду
1 1/ л
W* = ~2 V 2lta^i
X Ф(2 /| In Г11) pd.
где Ф — стандартное обозначение ин-
теграла вероятности
Ф W = ф (* /2).
Расчетная формула для определения
удельной осевой жесткости кругового
подпятника имеет вид
№ = -А- ке =
«rhps
М1 ~ 2с2р2) wz + PaPd - pffi
2pd + ft\ 'О'' (М I
где А8 — абсолютная (размерная)
осевая жесткость; h0 — толщина сма-
зочного слоя в исходном положении
равновесия; tn — модифицированный
коэффициент режима, в данном слу-
чае tn = th | In/j |; s = 2 для кольце-
вых диафрагм и s — 3 для остальных
типов ограничителей расхода; с и
'0'/ (Pd) определяют соответственно по
формулам (20) и (6).
РАДИАЛЬНЫЙ ПОДШИПНИК
Для слабонагруженных радиальных
газостатических подшипников, когда
радиальное и угловое смещения вала
из соосного положения малы по сравне-
нию с максимально возможными сме-
щениями, зависящими от радиального
зазора, расчет аэродинамических сил
и моментов сводится к определению
двух коэффициентов жесткости — ра-
диального и углового 7(v. Эти
коэффициенты практически полностью
характеризуют несущие свойства ра-
диального газостатического подшип-
ника в малой окрестности соосного
положения равновесия, т. е. 1,
у — (KR/C) у <С 1 [24]. _При этих
условиях коэффициенты А8 и
целесообразно рассчитывать методом
малых возмущений: стационарное урав-
нение Рейнольдса (А = 0; о = 0) с со-
ответствующими граничными усло-
виями и условиями на линиях
наддува, содержащих ту или иную
функцию истечения (в зависимости
от типа ограничителя расхода), интег-
рируется путем разложения искомого
решения в степенной ряд по относи-
тельному эксцентриситету. Опуская
процедуру построения такого решения
(она подробно изложена в работе [24]),
приведем итоговые унифицированные
расчетные формулы для двухрядного
газостатического подшипника (одно-
рядный подшипник следует рассмат-
ривать как частный случай двухряд-
ного, приняв b = 0), справедливые
для всех рассматриваемых в этой ра-
боте ограничителей расхода:
0,75шу
ch А, + §&nUT ch bXsh 51
sh b X sh П 8 bl x
+"W); ( *
=-------=
wwps л
118
СТАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ ГАЗОСТАТИЧЕСКИХ ОПОР
0,75л (2 Г , , _ о_ ,
= —К— (Т [
^)_^[/v-(th4+
+"5и)< <»>
В формулы (28) и (29) входят следую-
щие вспомогательные выражения и
обозначения:
_ s _
2/3— для кольцевой диафрагмы;
= 1 —для остальных типов огра-
ничителей расхода;
V = (Pd — Р0)/л5;
Б = 1 — b (Ь = IJI) (см. рис. 3 гл. 5);
f sh^£zX) dx;
J KP-x
(30)
Г /71
Z2 J
ch X (1 — x) “I
~x L Sh X (1 - x) J dx’'
(31)
В выражении (34) 0' (P^) означает
дифференцирование функции истечения
по Pd. При этом следует иметь в виду,
что соотношение О' (р^) = 2p^0' (Pj)
соответствует известному правилу
дифференцирования сложной функции
[таковой является функция 0 (Р^) =
= 0 (р|)]. Если функция истечения
0 (Pd) для диафрагм аппроксимируется
формулой Прандтля, то
|е'(^)| = —=
*Pd
0 при Р^<0,25;
2 {1-------при Pd > 0,25.
Q(Pd)\ 2VPdl
(35)
Таким образом, исходными данными
для расчета коэффициентов жесткости
Кгг и Д'7 рассматриваемого радиаль-
ного газостатического подшипника
являются физические параметры т,
ра> константа 1, зависящие от типа
ограничителя расхода, и геометриче-
ские параметры — удлинение % и отно-
сительная раздвижка линий наддува Ь,
к которым добавляют параметр ге
при щелевом наддуве.
В рамках линейной постановки за-
дачи расчет несущей способности Wr
радиального газостатического подшип-
ника сводится к расчету его радиаль-
ной жесткости:
о Pd~bP2a .
P -2 -2 ’
Pd-Pa
ibK sh 5X -|- ch 1
(32)
(33)
sh % + 0,5mUr sh b*k sh 5К ’
Ur =
' I 3' (Pd) I — Для диафрагм;
— для капиллярных
каналов и пористых
вставок;
—-----In ге — для щелевых
1
каналов.
(34)
Wr = Wr/4LR2ps = к%, (36)
а восстанавливающий аэродинамиче-
ский момент Lxy, являющийся линей-
ной функцией угла перекоса у, к рас-
чету угловой жесткости:
Lxy = Lxy/4LR3Ps = К*у; (37)
у = (LR/C) у.
Рассмотрим вопросы практического
расчета жесткостных характеристик
радиальных газостатических подшип-
ников. Интегралы 7®, 7? и 7| не выра-
жаются в элементарных функциях.
Правда, переходя к новой переменной
интегрирования £ = К % (Ь — х) [24],
их можно свести к выражениям, вклю-
чающим стандартные затабулирован-
ные функции. В целях сокращения
Радиальный подшипник
119
Рис. 6. Графики функций (Г), /V (Г) и /V (Г) газостатического подшипника:
а — однорядный наддув, X — 0,5; b = 0; б — двухрядный наддув, X — 1,0; 1,2; 1,5;
b = 0,5
расчетных операций, на рис. 6, а, б
представлены графики функций
(Г), ^1 (^) и ^2 (П Для наиболее
часто встречающихся на практике зна-
чений X и Ь, На этих графиках по оси
абсцисс отложено значение квадрата
относительного давления
Г = Рй/^ = (р^)2 = 0 4- 1,
имеющего очевидную связь с параме-
тром р [см. формулу (32)]:
_ 1 — £>Г
~ 1 —Г ‘
Можно еще упростить процедуру
расчета. В частности, для упомянутых
выше значений геометрических пара-
метров (Ь = 0; X = 0,5 и b — 0,5;
X = 1,0; 1,2; 1,5) довольно громоздкую
формулу (28) можно представить в виде
отношения двух функций:
578 ? (Г) /опч
(38)
где Г = 1 — 1\_ _
Функции F (Г) и F (т} Ur) в виде
расчетных формул сведены в таблицу.
На рис. 7 и 8 в качестве примера
приведены результаты расчета ради-
альной К* и угловой КУ жесткости
газостатического подшипника единич-
ного удлинения с различными ограни-
чителями расхода при двух значениях
давления наддува (ра =0 и 0,5).
Значение параметра режима /п, при
котором угловая жесткость радиаль-
ного подшипника достигает максимума,
превышает значение, максимизирую-
120
СТАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ ГАЗОСТАТИЧЕСКИХ ОПОР
Функции Г (Г) и F (т, Ur)
Геометри- ческие па- раметры подшипника F (Г) Р(гй, Ur)
X b
0,5 0 4.179Z 1 + 0,23 Im Ur
1 0,5 2,435(- У?Pd (/g + 0,341 Уг ) 1 + 0,1904m Ur
1,2 0,5 l,818Z]/rPj (/g + 0,403 ]/f) • 1 + 0,208m Ur
1,5 0,5 l,222Z)/fPrf (/q + 0,492 j/f ) 1 + 0,226m
Рис. 7. Удельная радиальная жесткость как
функция физических параметров ненагру-
женного радиального газостатического
подшипника с двухрядным наддувом через
кольцевые диафрагмы при X = 1; b = 0,5:
О — верхняя граница критических режи-
мов наддува
щее его радиальную жесткость в 1,5—
2 раза. Кроме того, сравнивая графики,
видим, что кольцевые диафрагмы не
столь значительно проигрывают по
угловой жесткости, как по радиальной.
Из (28) непосредственно следует, что
отношение величин радиальной жест-
кости подшипников с кольцевыми и
простыми диафрагмами равно 2/3 неза-
висимо от параметров подшипника (это
справедливо и для осевой жесткости
подпятников). Отношение же соответ-
ствующих величин угловой жесткости
переменно: например, для рассматри-
ваемого подшипника единичного удли-
нения оно возрастает от 0,81 при tn —>
—> 0 до 1 при_т -> сю.
функция физических параметров ненагру-
женного радиального газостатического под-
шипника с двухрядным наддувом через про-
стые диафрагмы (X — 1; b = 0,5)
Радиальный подшипник
121
При всей простоте и физической
наглядности аналитическое решение
уравнения Рейнольдса с использова-
нием метода возмущений (или его моди-
фикаций) приводит к большим погреш-
ностям в определении нагрузочных
характеристик радиальных газостати-
ческих подшипников при 8Г 0,5.
В этом случае применяют численные
методы решения задачи. Для числен-
ного интегрирования уравнений эллип-
тического типа, каким является ста-
ционарное уравнение Рейнольдса (при
Л = 0; а = 0), обычно применяют
метод сеток, который позволяет за-
менить решение уравнения в частных
производных решением системы алгеб-
раических уравнений.Область интегри-
рования покрывают прямоугольной
сеткой, произвольно выбранный узел
которой имеет координаты ф/,
Величина // = г^+1 — Zk или /ф =
= Ф?+1 — Ф? называется шагом сетки
вдоль оси Z или ф соответственно.
Если применить аффинное преобразо-
X г
вание координат ф = х, z — — z , то
область интегрирования станет квад-
ратной: х £ [0, 2л], z' £ [—л, л]
(рис. 9). Это позволяет выбрать одина-
Рис. 9. Область интегрирования уравнения
Рейнольдса
ковый шаг I = lx = lz вцолъ осей X
и Z', что приводит к улучшению сходи-
мости итерационного процесса решения
системы алгебраических уравнений и
более равномерному распределению
погрешности по узлам сетки.
Далее, уравнение Рейнольдса запи-
сывают в канонической форме в пере-
менных х, а производные, входящие
в него, аппроксимируют в каждом
узле при помощи конечно-разностных
соотношений. На торцах подшипника
Рис. 10. Нагрузочные характеристики Wr (£f) радиального газостатического подшип-
ника (численный метод ЛПИ) при ра = 0,2; b = 0,5;
а — Х=1;б-Х = 1,2; в - X = 1,5
122
СТАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ ГАЗОСТАТИЧЕСКИХ ОПОР
(2 = ±л) давление в узлах сетки равно
атмосферному, а на линиях наддува
(г = ±Ьл) давление вычисляют при
помощи стационарного (о = 0) усло-
вия баланса расходов [(34) гл. 5],
которое заменяют разностными урав-
нениями.
На рис. 10 показаны нагрузочные
характеристики Wr (&г) радиального
газостатического подшипника, рассчи-
танные в ЛПИ численным методом.
Сопоставление их с соответствующими
значениями, рассчитанными по линей-
ному соотношению Wr (8Г), показы-
вает, что при умеренных нагрузках,
когда 8Г 0,5, формула (36) вполне
приемлема для инженерных расчетов
(относительная погрешность не пре-
вышает 10—15 %). Характерно, что
функция Wr (8Г) чаще всего возрастает
медленнее, чем по линейному закону;
иначе говоря, формула (36) дает завы-
шенные значения несущей способности.
Если же параметр режима достаточно
мал (in 1), то при малых и умерен-
ных 8Г имеет место обратная законо-
мерность. Поэтому учет нелинейности
нагрузочной характеристики приводит
к некоторому уменьшению оптимальной
величины параметра режима по мере
возрастания 8Г.
ПОПРАВОЧНЫЕ
КОЭФФИЦИЕНТЫ,
УЧИТЫВАЮЩИЕ
ДИСКРЕТНОСТЬ НАДДУВА
Кольцевой подпятник. Пусть для
фиксированных значений коэффициента
давления ра и геометрических пара-
метров rlt гв (см. рис. 7 гл. 5) по схеме
линий наддува рассчитаны зависимости
® (m)N ->оо» К где W, к —
удельные значения несущей способ-
ности и осевой жесткости подпятника;
т — стандартный параметр режима
(см. табл. 1 гл. 5); N — число питате-
лей. Задача сводится к тому, чтобы
ввести в эти зависимости поправку на
дискретность наддува, учитывающую
влияние параметров N и гj ==
(относительного радиуса выходных кон-
туров питателей). В дальнейшем усло-
вимся употреблять индексы N и оо
в тех случаях, когда, соответственно,
учитывается или не учитывается дис-
кретность наддува. Для упрощения
анализа исключим из рассмотрения
параметр ра, приняв ра <С 1 или,
в пределе, ра —> 0.
Сформулируем следующую основную
гипотезу, подтверждаемую результа-
тами конкретных расчетов кольцевого
подпятника (см. рис. 11—14 гл. 5):
да„ (т) KN (т) ~
“’«>('”) “ Лоо Ой)
= rF (N, rd, гв, Г1). (39)
Здесь Гу — корректирующая функ-
ция, зависящая только от геометри-
ческих параметров («коэффициент на-
стройки по вертикали»); т — модифи-
цированный параметр режима;
«* = mNtN = (40)
где Coo — геометрические множи-
тели, которые, как и коэффициент Гу,
будут определены ниже.
Заметим, что индексы W и оо при
параметре /п, структура которого не
зависит от того, учитывается ли дис-
кретность наддува, указывают лишь
на то, что «сходственные» значения
этого параметра [при соответствии
которых в результаты расчета по схеме
линий наддува достаточно ввести, со-
гласно (39), геометрический множитель
Гу] не совпадают для опор, рассчиты-
ваемых с учетом и без учета дискрет-
ности. Эти «сходственные» значения
mN и ™оо связаны соотношением (40),
из которого следует, что если требуется
рассчитать подпятник с дискретным
рядом питателей при mN ~ т, то за
основу берут соответствующие резуль-
таты расчета подпятника с линейным
источником наддува при значении па-
g
раметра режима т^ = т. Таким
Ьоо
образом, вместо (39) можно исполь-
зовать следующие выражения:
WN («)SMrH'”)rv;
^(т)з^(Гнт)Гу; (41)
Гн = ^n/^D’
где Гн — коэффициент настройки по
горизонтали. Модифицированный па-
Поправочные коэффициенты, учитывающие дискретность наддува
123
раметр режима пг фигурирует в универ-
сализированном уравнении [формула
(35) гл. 5]:
Pd-Pa
Wd)
= m,
(42)
которое следует из условия баланса
расходов и охватывает опоры различ-
ной геометрии с одним или двумя
идентичными рядами питателей, без-
относительно к тому, учитывается или
не учитывается дискретность наддува.
Согласно (42) фиксированному т (при
заданном ра — У Ра) соответствует
фиксированное значение относитель-
ного противодавления pd = УР^. Та-
ким образом, в результате настройки
по горизонтали оказывается, что
PdN = Pdco- (43)
Перейдем к определению коэффи-
циента настройки по горизонтали Гн.
Согласно формулам (36) гл. 5 примени-
тельно к кольцевому подпятнику
1п
Г1 In г, .
г в In Г в '
(44)
Получение соответствующей вели-
чины приведено в предыдущей
главе. Сопоставляя выражения (40),
(42) гл. 6 и (63), (74), (77) гл. 5, видим,
что
О) = |/лН-
- «(г, <р)г=Г1> ф_0;
Nr^^rd
fN = f (N, riy rd) « In —.* (45)
1 — ry
^S(N, rv rB) = slw + s22V;
. ЛГПпгН». _
I In rB I ’ 2W~
1 (fl kN — riNy*
k r~kN — rkN
' в 'в
I J2 \ — N-
In 1—(— )
\ rB /
Рис. 11. Качественный вид эпюр давления
в кольцевом сечении (г = п) подпятника
Выражения (44) и (45) полностью
определяют искомый коэффициент
гн = Sjy/Soo- Выполнив предельные
переходы в выражениях (45), можно
убедиться, что и Гн—> 1 при
W —>оо. Для определения коэффи-
циента настройки по вертикали Гу
придется использовать некоторые до-
полнительные допущения, в частности
(это допущение, хотя и было
ранее упомянуто, до сих пор явно не
использовалось). При распре-
деление давления и несущая способ-
ность оказываются пропорциональ-
ными относительному противодавле-
нию Pd [см. формулу (29)]. Следует
иметь в виду, что коэффициенты про-
порциональности, входящие в соотно-
шения ж Pdoo, wN ж pdN, раз-
личны. Можно ожидать, что эти коэффи-
циенты будут приблизительно одинако-
выми, если в последнем соотношении
заменить pdw на — среднее значение
давления на линии расположения пита-
телей г = Г£. Таким образом, прини-
маем следующую дополнительную ги-
потезу:
^/^оо ~ Pl/Pd
(46)
[здесь и в дальнейшем опускается
черта над обозначениями безразмерных
давлений; опущен также индекс оо
в обозначении pd<x> с учетом равенства
(43)]. К соотношению (46) следует
присоединить связь между р± и pd.
На рис. 11 приведен качественный вид
эпюр давления в кольцевом сечении
г = Ti, построенных на основании
рис. 10 гл. 5 и равенства (43). Полагая,
124
СТАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ ГАЗОСТАТИЧЕСКИХ ОПОР
что функция р — Ро, где р0 = р
-у) - Р (Г- Ф)г=г1( ф=М>/2 блиЗКа
к кусочно-квадратичной по углу ф,
и усредняя ее в пределах периода
О < ф < 2л/М, нетрудно убе-
диться в том, что
Pi ~ Ро + “з" (Pd — Ро) —
_ Pd + 2ро 1 + 2а
------3— з—Pd> (47)
а = Po/Pd-
Подставляя (47) в (46) и учитывая, что
при условии (43) левая часть соотно-
шения (46) представляет собой по
определению коэффициент настройки
по вертикали Гу [см. (39) и (41)],
получим
Гу^(1+2а)/3. (48)
Величину а найдем, используя послед-
нее выражение (47), а также формулы
(61), (74) гл. 5 при ра—>0:
а = /v^;
v№ |-s(rb W2) = |-
S (г, <р)г=Г1_ <р=ф/2’ (49)
?№ <7(w> ri) = (2(ri> 4’/2) =
s(rl, ’l’/2) = S(^ rr rB) =
~ S1N + ®2W‘>
” ,.b (r—kN kN\2
, - V (—J) VI ~ 1 >
'2№ 7 I k r~kN — rkN
A=1 в гв
где величины Ayy, Sjy определяются
формулами (45).
Совокупность формул (41), (44), (45),
(48) и (49) определяет искомые поправки
на дискретность наддува. Возможно,
что при малых N кусочно-квадратич-
цая аппроксимация эпюры давления
на линии расположения питателей
может привести к явно завышенным
значениям несущей способности и
жесткости; тогда давление на этой
линии можно приближенно заменить
его минимальным значением, т. е.
вместо (47) будем иметь
Pi & Ро< (47а)
а вместо (48)
Гу = а. (48а)
Круговой подпятник. Распростра-
ним на этот случай основную гипотезу
(39). Соответственно остаются в силе
соотношения (40), (43). Для геометри-
ческих коэффициентов ZN получа-
ются более простые выражения, кото-
рые следуют из формул (36) и (67) гл. 5:
U = |lnri|; ^=|/jv//^(50)
fa имеет прежний смысл [см. (45)].
Вместо (46) примем следующую до-
полнительную гипотезу:
WN/W°o * PB/Pd, (51)
где рв — приблизительное значение
среднего давления в области г гъ
которое определим на основании допу-
щения
Р (r)r<ri « Рц + (Р1 ~ Рц), (52) '
где р (г) — давление в произвольном
кольцевом сечении г = const, усред-
ненное по окружности подпятника; -
рц — давление в центре подпятника<!
(г = 0). По определению рв имеем,
используя (52),
ri
2л f z . . Pi + Рц
Рв = -^-рР0г<гЛ’—2^-
(53)
Величина pi — среднее давление на
линии расположения питателей. Вновь
используя (47) и полагая
₽ = Pn/Pd< (54)
а также учитывая, что левая часть?
соотношения (51) в силу выражений
(41) и (43) есть коэффициент настройку
по вертикали Гу, получим
Гу = (1 + 2а-]-3P)/6. (55|
Поправочные коэффициенты, учитывающие дискретность наддува
125
Выражения для аир следуют из (47),
(54) и (61) гл. 5 при ра->0:
f IN ' /дг
где /дг, рдг определяют согласно (45)
и (49). Вспомогательный параметр а
имеет различную структуру для кольце-
вого и кругового подпятников, хотя
его геометрический смысл в обоих
случаях одинаков. Соотношение (51)
можно упростить, заменив в нем рв
на Pq= р (Г1, ф/2) или на рц. Тогда
соответственно
Гу = а,
(55а)
или Гу = р. (556)
Такой подход может дать резуль-
таты, более близкие к истине при ма-
лом числе питателей. Таким образом,
искомые поправки на дискретность
наддува для кругового подпятника
определяются выражениями (41), (50),
(55) или (55а), (556) и (56).
Радиальный газостатический под-
шипник с симметричным наддувом.
Постулируем, что основная гипотеза
в форме (41) остается в силе примени-
тельно к радиальной жесткости /Сг,
т. е.
KrN (tn) » Кгоо (Гнт) Гу;
Гн = ?jv/?oo-
Учитывая, что
, =2L,
feoo 2 ’
(57)
(58)
согласно формуле (36) гл. 5 имеем 1
гн» 14
1 fl.„ (1 —6i)A7rrf |
NM (Г (1—6o)(l—62)|
v о+бпо-ф
£ k 1-sg
Для определения второго поправоч-
ного коэффициента Гу воспользуемся
соотношением
KrNIKro°~ PB/Pd, (6°)
1 Подразумевается, что произведение
значительно меньше единицы.
аналогичным соотношению (46), где
рв — приближенное значение среднего
давления в области | у | Ь\. Чтобы
найти рв, принимаем [сравнить с (47)]
/ и \ 2
Р (у) ~ Рс + ) (Р1 - Рс)
при
\У\
(61)
где р (у) — давление, усредненное по
х; рс — среднее давление на линии
симметрии у = 0; рх — то же, на линии
наддува у — ЬК. Величину рг будем
по-прежнему рассчитывать с помощью
соотношения (47), понимая в нем под
р0 значение р (х = ф/2, у = ЬК), а ве-
личину рс примем равной р (х — ф/4,
у = 0) (имея в виду, что давление на
линии у = 0 максимально при х = 0
и минимально при х = ф/2).
Величина рв в соотношении (60)
по определению [с учетом аппрокси-
мации (61)]
ък
Рв ~ тМ P(y)dy= РЦ2/?С (62)
oh j о
о
Подставляя (62) в (60) и обозначая
₽ = pjpd,
(63)
а также учитывая, что левая часть
соотношения (60) равна Гу [согласно
(43) и (57)], получим
Гу = (1 + 2а + 6р)/9. (64)
Коэффициенты а и Р, как следует из
(47), (63) гл. 6 и (79), (81) гл. 5 (при
Ра->0),
____L_ in. 20+Sx)
W [ (1 +6о)(1 + 62)^
0 + 6f)0-62A)~.
' } k l+6g
126
СТАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ ГАЗОСТАТИЧЕСКИХ ОПОР
г ,________L_ In 1+61 d-
Г₽ “ Мб 1 + боба +
Совокупность формул (57), (58), (64)
и (65), а также последние три выраже-
ния (84) гл. 5 полностью определяют
искомые поправки на дискретность
наддува для радиального подвеса. При
малых N вместо (64) могут больше
подойти те же соотношения (55а) или
(556), которые были рекомендованы для
подпятника.
Энергетические затраты. Потребляе-
мая мощность, как и расход смазочного
материала, является одним из показа-
телей экономичности опоры. В само-
поддерживающихся опорах потребляе-
мая мощность обеспечивается приво-
дом вала и выражается через момент
сопротивления смазочного слоя:
tf = co|^z|. (66)
Формулы для расчета момента сопро-
тивления <2^, который в данном случае
уравновешивается вращающим момен-
том ^*2» приведены в гл. 4. В част-
ности, момент сопротивления ненагру-
женных радиальных подшипников вы-
ражается формулой Петрова (22) гл. 4,
которая практически применима и
к слабонагр уженным подшипникам.
Эта формула получила многочисленные
экспериментальные подтверждения как
для гидродинамических, так и для газо-
вых опор, работающих без принуди-
тельной подачи смазочного материала.
Эксперименты, относящиеся к слабо-
нагруженным радиальным газовым
опорам с наддувом, свидетельствуют
о том, что для обеспечения равномер-
ного вращения вала требуется момент
значительно большей величины, чем та,
которая предсказывается формулой
Петрова; соответственно увеличивается
и потребляемая мощность привода
W = g>(|2’z| + 2’;z). (67)
* Здесь и далее условимся пренебре-
гать потерями на трение на свободных
участках вала,
Дополнительный внешний момент 3?
зависящий от давления наддува, затра-
чивается на то, чтобы сообщить «за-
крутку», или, точнее, момент коли-
чества движения газу, подводимому
в смазочный слой через питатели [41 ].
На основании известной теоремы об
изменении момента количества движе-
ния в векторной форме, применительно
к произвольному движущемуся объему
т сплошной среды, имеем [17]
А г
J г X рч> dx. (68)
т
Здесь р — плотность среды; г — радиус-
вектор, характеризующий положение
произвольной точки движущегося
объема относительно некоторой непод-
вижной точки; V — местный вектор
скорости среды.
Предположим, что в некоторый мо-
мент времени t движущийся объем т
совпадает с неподвижным объемом,
занимаемым смазочным слоем, а замкну-
тую поверхность S, ограничивающую
этот неподвижный объем, назовем
согласно принятой в гидроаэродина-
мике терминологии контрольной по-
верхностью движущегося объема [17].
Тогда, если поля скоростей и плотно-
стей в смазочном слое стационарны, то ‘
вместо (68) получим
^'е = \ rxpvvnds, (69)
где vn — проекция скорости на внеш-
нюю нормаль к контрольной поверх-
ности.
Применим векторное уравнение (69)
к радиальному подшипнику, спроекти-
ровав его на ось вращения Z (см.
рис. 3 гл. 4). Область интегрирования *
S удобно разделить на три участка:
S = Si + S2 + S8, где Sf соответ-
ствует «непроницаемой» части кон-
трольной поверхности (поверхности
вала или стакана); S2 — выходным
сечениям питателей; S3 — выходным *
(торцовым) сечениям смазочного слоя. >
Очевидно, интеграл по обращается »
в нуль, так как на этом участке vn = 0;
интеграл по S2 также равен нулю ввиду ;
того, что газ, подаваемый в смазочный
слой, первоначально не обладает мо-
Поправочные коэффициенты, учитывающие дискретность наддува
127
ментом количества движения. Таким
образом, в уравнении (69) достаточно
выполнить интегрирование лишь по
выходным сечениям смазочного слоя;
в одном из этих сечений vn — vZt
в другом vn = —vz. Тогда, учитывая,
что проекция векторного произведения
под знаком интеграла на ось Z с точ-
ностью до величин порядка О (hlR)
равна (г X pfl)z ~ #Руф, и полагая,
с той же точностью, dS — Rd(pd^,
где R — внутренний радиус стакана;
Ф — угловая координата; £ — радиаль-
ная координата, отсчитываемая от
поверхности вала (удобнее _ перейти
к безразмерной величине | = £/h),
получим из (69)
2 /2л
^z=^2pas J й^х
1=1 \0
1 \
X f | vz | d% I . (70)
о ) z==zi
Z-го
Здесь zt — осевая координата
торца; ра — плотность окружающей
среды (предполагается, что термодина-
мические параметры газа при переходе
через выходное сечение смазочного слоя
меняются непрерывным образом).
Используя выражения для состав-
ляющих скорости смазки [24]
(71)
Л2 др г г.
Vz~ 2ц dz
можно было бы выразить искомый
дополнительный момент привода 3?'eZ
через распределение давления в сма-
зочном слое.
Для упрощения дальнейшего анализа
ограничимся случаем соосного распо-
ложения вала и подшипника (h = С).
Тогда, представив последнее выраже-
ние (71) в виде
кг = 6(ог)срН1 — I),
1
, . f ,г № др
(кг)ср- J Vzdl- 12(г дг
о
и, полагая в соответствии с принятой
теоретической моделью линий наддува
др/dq — 0, найдем что внутренний
интеграл в уравнении (70)
1
j Оф I »г I 4 = 6й>Я | Ог |ср X
0
1
х J l(i-i)24 = -^-|oz|cp.
о
и, следовательно,
1 2
Z'eZ = s’ Е (| уг|ср)2=г. =
* 1=1 1
2 .
— 1l(i)R3Cpa yj (| Vz |Ср)г=ег
1=1 1
Но величина = 2nRCpa (| v2 |ср)г=г*.
очевидно, представляет собой массовый
расход газа через i-e торцовое сечение
подшипника, а иц + tn2 = tn — сум-
марный расход газа на выходе из
смазочного слоя. Поскольку режим
работы подшипника считается ста-
ционарным, то из условия сохранения
массы газа в смазочном слое следует,
что упомянутый выше расход т равен
расходу газа, направленному из камеры
наддува в смазочный слой. Таким
образом, предыдущее выражение для
3?'eZ принимает окончательный вид:
^’е2 = ~^т. (72)
Этот результат впервые получен
Беннеттом и Маршем [42], хотя и менее
строгим путем. Подставляя последнее
выражение и (22) гл. 4 в (67) гл. 6,
найдем мощность привода, потребляе-
мую ненагруженной радиальной опо-
рой с наддувом:
W = ^w2fl2[m + (4npflL)/CJ. (73)
* Заметим, что при ра -> 0 (когда опо-
ра помещена в вакуум) в этом выражении
появляется неопределенность вида 0, оо
(так как в этом случае др/dz |2=z. -> оо),
которая после раскрытия оказывается ко-
нечной величиной.
128
СТАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ ГАЗОСТАТИЧЕСКИХ ОПОР
Эта формула успешно выдержала
экспериментальную проверку для сла-
бонагруженных опор.
Беннетт и Марш предложили простое
условие минимизации потребной мощ-
ности привода, применимое, однако,
при довольно жестких ограничениях.
Будем считать фиксированными габа-
ритные размеры подшипника, тип и
расположение питателей, вид газовой
смазки, термодинамические параметры
газа в камере наддува и в окружающей
среде, параметр режима т. При этих
условиях можно считать фиксирован-
ным (по крайней мере для ненагружен-
ного подшипника) и давление на входе
в смазочный слой'р^, заранее неизвест-
ное. Тогда, согласно (44) гл. 5, расход
пропорционален кубу характерной
толщины смазочного слоя hQ — С, и
(73) можно представить в виде
N = + N2 = В±/С + В2С3, (74)
где Вг и В2 — константы. Отсюда
следует, что потребная мощность при-
вода минимальна при dNldC = 0, т. е.
при
С = (Вх/ЗВ,)174, (75)
а ее величина в этом случае
Л^тш = 4-^- = 4^- (76>
о и о
Таким образом, при минимальных
затратах мощности одна четвертая ее
часть расходуется на изменение мо-
мента количества движения подводи-
мого газа.
В соответствии с ограничениями, при
которых справедливо выражение (74),
варьирование среднего зазора С в этом
выражении должно сопровождаться
одновременным изменением размеров
питателей, чтобы сохранить параметр
режима т постоянным. В этом можно
убедиться с помощью табл. 1 гл. 5, где
приведена структура параметра т для
различных типов ограничителей рас-
хода.
Все, что говорилось выше о затратах
мощности привода на работу радиаль-
ных опор, применимо с небольшими
изменениями и к кольцевым подпятни-
кам (см. рис. 2 гл. 5). В частности,
остается в силе формула (67), в которой
момент сопротивления 3?z ПРИ отсут-
ствии перекоса осей рассчитывается по
выражению (24) гл. 4, а дополнитель-
ный момент по-прежнему опреде-
ляется на основании векторных выра-
жений (68), (69). Интегрирование в по-
следнем из этих выражений достаточно
выполнить по той части контрольной
поверхности S, которая соответствует
выходным сечениям смазочного слоя
г = = /?в, г = R2 = 7?н. В первом
из них vn = —vr, во втором Vn — vr,
В отличие от радиального подшипника,
площади выходных сечений смазочного
слоя подпятника неодинаковы. В ре-
зультате проектирования векторного
уравнения (69) на ось вращения под-
пятника Z получим выражение
2 /2 Л
%'eZ = Ра S U * Х
i=l \0
1
X J v<p | Vr I df
О
которое является аналогом выражения
(70), только теперь под £ следует
понимать осевую координату, отсчи-
тываемую от поверхности подпятника
и отнесенную к местной толщине сма-
зочного слоя h. Для определения со-
ставляющих скорости газа уф, vr
можно воспользоваться формулами
(71), заменив R на г в первой из них и г
на г во второй.
При отсутствии перекоса осей, когда
распределение давления в смазочном
слое без учета дискретности наддува
осесимметрично (dpldq = 0), имеем вы-
ражение
&'eZ = 4 (mX + т^2в), (78)
которое получается из (77) точно
таким же образом, как (72) из (70).
Здесь тв, тн — массовые расходы газа
через внутренний и наружный контуры
подпятника. Чтобы установить, как
распределяется суммарный расход
т = тв + тв между этими конту-
рами, заметим прежде всего, что при
наличии осевой симметрии массовый
расход через произвольное кольцевое
Поправочные коэффициенты, учитывающие дискретность наддува
129
сечение подпятника г — const тг =
= 2лЛ0гр | vr Up, где | vr |ср — модуль
средней радиальной скорости газа
в этом сечении. Учитывая, что | vr |ср ~
— | dp!dr | и что в силу предполагаемой
изотермичности смазочного слоя р ~~ р,
получим mr ~ г \ dPldr (, где Р —
— (pips)2- Отсюда, следует, что
та ~ | dP/df |?=1; тв ~ rB | dP/dr |?=Гв
(г = г/7?н’> Гв = /?в//?н).
Используя осесимметричное решение
уравнения Рейнольдса для кольцевого
подпятника с одной линией наддува и
ряда несложных алгебраических пре-
образований, формулу (78) приводим
к виду
= гв);
/с,.
(79)
где г± — радиус линии наддува, отне-
сенный к наружному радиусу подпят-
ника. Как видно, формулы (72) и (79)
для дополнительного момента привода
различаются лишь безразмерным гео-
метрическим множителем f (rt, rB),
принимающим значения от 0 до 1.
В частности, при гв = 0, что соответ-
ствует подпятнику с закрытым центром,
f = 1.
Подставляя (79) вместе с выражением
(24) гл. 4, где можно принять h'Q — Яо,
в (67), определим мощность привода,
потребляемую соосно расположенным
подпятником:
1 О О
= Y [mf (Г1- Гв) + X
x(l-4). (80)
Это аналог формулы (73) для радиаль-
ной опоры. Структурная формула типа
(74), вытекающая из (73) при тех же
ограничениях, следует и из (80),
достаточно лишь заменить С на h0.
Поэтому условие минимума мощности
(75) и его следствие (76) относятся и
к подпятнику. Разумеется, мощность,
5 Пинегин С. В. и др.
потребляемая опорами с наддувом, не
ограничивается мощностью привода,
пропорциональной угловой скорости
вала со, иначе пришлось бы допустить,
что газовые подвесы работают без
затрат мощности. В действительности
даже при отсутствии вращения вала
наддув газа в смазочный слой сам по
себе неизбежно сопровождается поте-
рями энергии, которые должны ком-
пенсироваться дополнительными за-
тратами мощности. Проще всего оце-
нить эти потери следующим образом.
Полная внутренняя энергия газа в бал-
лоне, питающем камеру наддува, с уче-
том известных термодинамических соот-
ношений [17]
Е = cvTM = a?sM/[k (k -1)], (81)
где cv — теплоемкость газа при по-
стоянном объеме; as — скорость звука;
k — показатель адиабаты газа; Т —
его абсолютная температура; М —
масса газа в баллоне; если считать, что
при истечении газа из баллона темпе-
ратура в нем не меняется, то постепен-
ное уменьшение полной энергии остаю-
щегося в баллоне газа, характеризуе-
мое величиной dEldi, оказывается про-
порциональным массовому расходу
газа т — —dM/dt, поступающего из
баллона через камеру наддува в сма-
зочный слой подшипника. Очевидно,
в процессе работы подшипника давле-
ние газа в баллоне, а вместе с ним его
масса и энергия сохранялись бы по-
стоянными, если бы к баллону непре-
рывно подводилась мощность
dE
N^--dT = T(^l)m-
Однако на практике нет необходи-
мости непрерывно подкачивать баллон
сжатым газом. Для нормальной работы
подшипника достаточно поддерживать
постоянное давление в камере наддува
ps, что обеспечивается редуктором.
Давление в баллоне при этом может
уменьшаться, но оставаясь значительно
выше ps. Поэтому наддув газа в под-
шипник и подкачку баллона можно
проводить не одновременно. Ясно
также, что полезная мощность компрес-
130 СТАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ ГАЗОСТАТИЧЕСКИХ ОПОР
сора или иного устройства, питающего
баллон сжатым газом, необязательно
должна соответствовать величине Ws,
определяемой формулой (82); она может
быть и больше и меньше: в первом слу-
чае баллон накачивается быстрее, чем
опорожняется, во втором медленнее.
Таким образом, хотя формула (82)
относится к любым опорам с наддувом,
однако в отличие от ранее найденной
потребной мощности привода N, кото-
рая действительно должна затрачи-
ваться и притом непрерывно в течение
всего периода работы подшипника,
величина Ns условна. По существу
энергетические затраты на наддув пра-
вильнее характеризовать не мощ-
ностью, а энергией
ЬЕ = V&p/(k — 1), (83)
необходимой для повышения давления
в баллоне на величину Ар по сравнению
с наружным давлением. Формулу (83),
в которой V — объем баллона, полу-
чаем из (81) с учетом очевидной связи
М = pV, уравнения состояния газа
р/р — RT и термодинамического соот-
ношения cvl&, = \l(k— 1). При этом
температура в баллоне считается по-
стоянной. Энергия &Е может быть
подведена за тот или иной промежуток
времени в зависимости от мощности
компрессора.
Определение расхода смазочного ма-
териала и энергетических затрат явля-
ется необходимым этапом проектирова-
ния газовых опор с наддувом. Однако
главной задачей проектирования оста-
ется все же обеспечение необходимой
несущей способности и жесткости.
7 ДИНАМИЧЕСКИЕ
• ХАРАКТЕРИСТИКИ
ГАЗОСТАТИЧЕСКИХ ОПОР
ВОПРОСЫ ИССЛЕДОВАНИЯ
УСТОЙЧИВОСТИ РАВНОВЕСИЯ
ГАЗОВЫХ ОПОР
Среди нестационарных задач газовой
смазки наибольший практический инте-
рес представляют задачи исследования
устойчивости равновесия газовых опор.
Естественно стремление многих иссле-
дователей применить к этим задачам
методы классической теории устой-
чивости, основоположником которой
является А. М. Ляпунов. На практике
наибольшее применение нашел метод
малых возмущений, который позволяет
правильно судить об устойчивости
механической системы на основании
оценки ее динамического поведения
в малой окрестности невозмущенного
состояния (например, положении рав-
новесия). Однако классическая теория
устойчивости, в том числе известные ее
теоремы, обосновывающие метод малых
возмущений, справедливы для систем
с сосредоточенными параметрами (иначе
говоря, для систем с конечным числом
степеней свободы), движение которых
описывают обыкновенными дифферен-
циальными уравнениями. К таким
системам принадлежат, в частности,
гидродинамические подшипники. Что
касается опорных узлов с газовой
смазкой, то они представляют собой
динамические системы качественно
иного типа — с распределенными пара-
метрами. Уравнения движения подвиж-
ных элементов газовых опор оказыва-
ются не дифференциальными, а инте-
гродифференциал ьными. Это обуслов-
лено сжимаемостью газообразного сма-
зочного материала, вследствие чего
уравнение Рейнольдса для газовых
опор, на основании которого опреде-
ляют реакции смазочного слоя, фигу-
рирующие в уравнениях движения,
нелинейно и существенно нестацио-
нарно (для подшипников с несжимае-
мым смазочным материалом оно ли-
5*
нейно и квазистационарно, т. е. время
содержится в нем лишь как параметр,
а не как переменная интегрирования).
Современное состояние проблемы
исследования устойчивости систем
с распределенными параметрами изло-
жено в книге Т. К. Сиразетдинова
[28], которому, в частности, принадле-
жит теорема, позволяющая, при выпол-
нении определенных условий, утвер-
ждать, что исходная нелинейная си-
стема с распределенными параметрами
устойчива в некотором смысле, если
доказана устойчивость «в малом» для
соответствующей системы, линеаризо-
ванной методом возмущений. Однако
сложность математического аппарата,
использованного в этой теореме, за-
трудняет проверку условий, при кото-
рых она выполняется. Поэтому на
практике о достоверности результатов
анализа устойчивости газовых опор,
полученных методом возмущений,
обычно судят на основании выборочного
сравнения с данными эксперимента или
результатами прямого численного
интегрирования исходных нелинейных
уравнений динамики совместно с урав-
нением Рейнольдса. Такое сравнение
пока не выявило случаев, когда бы ме-
тод возмущений давал качественно не-
верные результаты; этот метод получил
широкое распространение в задачах
анализа устойчивости газовых опор.
Опоры с жидкостной смазкой как
системы с сосредоточенными параме-
трами имеют дискретный спектр соб-
ственных частот, число которых соот-
ветствует числу степеней свободы.
Такими же свойствами обладают и газо-
вые опоры, хотя можно было бы ожи-
дать, что в них, как в системах с рас-
пределенными параметрами, спектр
собственных частот непрерывен. В дей-
ствительности, если пренебречь угло-
выми возмущениями, то газовый под-
пятник (или радиальный подшипник)
обычно ведет себя как «квазиодномер-
ная» система, имеющая одну собствен-
132 ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ ГАЗОСТАТИЧЕСКИХ ОПОР
ную частоту, а скоростной радиальный
подшипник с газовой смазкой — как
«квазидвумерная» система с двумя
собственными частотами. Причем сво-
бодные колебания, соответствующие
большей из этих частот, всегда зату-
хают, т. е. сохранение или потеря
устойчивости связаны с характером
свободных колебаний, которым соот-
ветствует наименьшая собственная ча-
стота. В этом отношении опоры
с жидкостной смазкой ведут себя точно
так же.
Кроме того, следует подчеркнуть, что
повышенная склонность газовых под-
шипников к потере устойчивости не
всегда обусловлена сжимаемостью га-
зового смазочного материала: в значи-
тельной степени она обусловлена тем,
что газовый смазочный слой в отличие
от жидкостного всегда является сплош-
ным, поскольку газы не подвержены
кавитации. Указанные выше аналогии
в какой-то степени оправдывают воз-
можность квазистационарного подхода
к анализу устойчивости газовых опор,
согласно которому аэродинамические
силы и моменты опоры, при заданных
конструктивных и эксплуатационных
параметрах, зависят лишь от поступа-
тельных и угловых перемещений оси
вала и от скорости этих перемещений,
как это имеет место и для опор с жидко-
стной смазкой. Такой подход, намного
упрощающий анализ устойчивости,
фактически предполагает, что параметр
сдавливания о достаточно мал [24].
УПРОЩЕННЫЙ АНАЛИЗ
ДИНАМИЧЕСКОЙ УСТОЙЧИВОСТИ
ГАЗОСТАТИЧЕСКИХ ОПОР
(КВАЗИСТАЦИОНАРНЫЙ МЕТОД)
При малых значениях параметра
сдавливания (о < 1) уравнение Рей-
нольдса можно рассматривать изоли-
рованно от уравнения динамики опоры,
а в линейной части асимптотического
разложения искомого решения по отно-
сительному осевому смещению и его
производным ограничиться тремя пер-
выми членами. В этом случае уравнение
динамики осевых перемещений под-
вижного элемента газостатической
опоры имеет такой же вид, как и для
опор с несжимаемым смазочным мате-
риалом:
М& Wjg 4- = 0, (1)
где М — массовый параметр; ш®, w1 —
коэффициенты статической жесткости
и демпфирования смазочного слоя. Это
обычное уравнение свободных колеба-
ний линейной системы с одной степенью
свободы. Свободные колебания такой
системы затухают, либо вообще не
возбуждаются (т. е. после устранения
источника возмущений система моно-
тонно приближается к состоянию рав-
новесия) тогда и только тогда, когда
выполнены условия
Wq>0, Wj>0. (2)
Первое из этих условий представляет
собой условие статической устойчи-
вости, которое практически всегда
выполняется, за исключением предель-
ного случая т —> оо, когда жесткость
смазочного слоя обращается в нуль.
Таким образом, в рамках квазиста-
ционарного подхода анализ устойчи-
вости сводится к исследованию знака
коэффициента демпфирования.
Рассмотрим прямолинейную модель
кольцевого подпятника (см. рис. 1
гл. 6). Коэффициент демпфирования
линейно зависит от параметра V, и,
таким образом, последнее условие (2)
приводит к следующему ограничению
на относительный объем питающих
карманов в опоре с простыми диафраг-
мами (s = 3):
< Кп max
go (k) + Ygi (k) + y2g2 (k) .
~ 45(1 —6) (1 +6)3(1 + 26) ’
k = Pa/Pd> go W = — 4 (1 + k) X
X (8 + 246 — 27£2 — 125&3); (3)
gi (k) = 14 + 566 4- 89^2 + 108£3 4-
4- 33£4;
g2 (k) = 1 4- 4k 4- 5£2 4- 4P-
y = [mn|^' (Pd)\VPd-
В предельном случае >0 (k —> 0)
условие (3) имеет вид
Vn< [(Т— 2) (у 4- 16)]/45. (4)
Анализ динамической устойчивости
133
Очевидно, в этом случае при у 2
(или, что то же самое, при тп 1,3)
подпятник абсолютно неустойчив, т. е.
условие (4) не может быть удовлетво-
рено ни при каком выборе относитель-
ного объема карманов, даже при отсут-
ствии последних (Кп = 0).
На рис. 1 представлены результаты
расчета границ устойчивости прямо-
линейной модели подпятника с про-
стыми диафрагмами по условию (3).
Видно, что диапазон режимного пара-
метра nin, в котором опора абсолютна
неустойчива (соответствующие нерабо-
чие участки кривых, расположенные
ниже горизонтальной оси, показаны
штрихом), сужается по мере уменьше-
ния относительного давления наддува
р$/ра и при pjpa 4 исчезает совсем.
Сопоставляя кривые рис. 1 и рис. 3
гл. 6, можно также заключить, что при
значительных давлениях наддува опти-
мальные (по величине осевой жест-
кости) значения параметра thn = 2т
попадают в область абсолютной не-
устойчивости. Квазистационарный под-
ход к анализу устойчивости прямо-
линейной модели кольцевого подпят-
ника при осевых возмущениях можно
обобщить и на случай угловых возму-
щений. В качестве расчетной модели
применяют две бесконечной длины
прямолинейные полосы шириной 21
каждая, с симметричным однорядным
наддувом; расстояние между линиями
наддува равно 2R. «Критическое» зна-
чение относительного объема карманов
V — Уптах на границе области устой-
чивости (при ра —> 0) в этом случае
имеет вид
у^у _ (Т —2) (у— 16)
, 19 - р + 4 V /5)
12 600 \ 1
где R = R/1.
Сравнивая (4) и (5), видим, что пер-
вый член правой части выражения (5)
представляет собой критическую вели-
чину относительного объема кармана
при поступательных возмущениях. По-
скольку второй член существенно поло-
жителен, то из (5) следует, что угловые
Рис. 1. Верхние границы области устойчи-
вости прямолинейной модели подпятника
(квазистационарный метод, <у -> 0)
возмущения не нарушают устойчи-
вости равновесия, если обеспечена
устойчивость при поступательных воз-
мущениях.
Теперь рассмотрим квазистационар-
ные условия устойчивости двухрядного
газостатического подшипника с про-
стыми диафрагмами. Ограничимся слу-
чаем радиальных возмущений, так как
есть основания ожидать, что в данном
случае они более опасны, чем угловые.
Приведем формулы, позволяющие рас-
считывать «критическое» значение пара-
метра Vniax, по достижении которого
теряется устойчивость радиального
газостатического подшипника.
'7"1ах = |^|2 [24v -£- +
+ (8B-3v-g-)|^|-Z>|^|2]; (6)
А = X - th Ы - ф [-^у- +
+ Ра - Ло cth
в = Pd th ьх + A- X
(7)
134 ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ ГАЗОСТАТИЧЕСКИХ ОПОР
г sh 26Х — 26Х 1
С = р\ ch2 ЬЪ +
। о «к С^Ь 5Х—/ ft ,
+ sh 5Х
sh 26 X + 26Х )
p|ch26X +
, , sh 2БХ — 26% .
+ ' shm—’
th6X /so .
pd + sh5X ’
s _ 3v ch bk sh 5X
ch X + Г ch M sh 6k
-2 й2
Pd Pa .
X(l — b) ’
lb _ 3 Pd + Pa
2 Pd + PaPd + Pa
0)
Интегралы /со, /сь /50 имеют вид
I СП
_ Isn
bK
C zn
У у Pl+vz
' ch z ~
sh z
dz.
(10)
Значения интегралов (10), рассчитан-
ные на ЭВМ, приведены в табл. 1.
Вспомогательный параметр pd (отно-
сительное противодавление), который
Рис. 2. Верхние границы области устойчи-
вости двухрядного (Ь = 0,5) радиального
газостатического подшипника:
------------ра = 1/3,------ра = 1/5
удобно рассматривать как основной
расчетный параметр (он меняется от
ра до 1),гсвязан ^задаваемыми пара-
метрами т и ра соотношением
fn = 2v/ft(pd), (И)
где $ (pd) определяется формулой (8)
гл. 5.
Вспомогательный параметр Г, вхо-
дящий в первую формулу (9), удобно
рассчитывать следующим образом:
0 при р^0,5;
(12)
Вместо параметра V можно исполь-
зовать модифицированный параметр
(эффективный относительный объем
карманов)
V V
—для подпятников;
V V
2nRLC ~ 4Х ДЛЯ ра'
диальных опор,
(13)
где V — суммарный абсолютный объем
карманов; гв — относительный радиус
вентиляционного отверстия подпят-
ника. Параметр VQ удобен тем, что он
имеет четкий геометрический смысл
отношения объема карманов к действи-
тельному или характерному объему
смазочного слоя.
На рис. 2 представлены результаты
расчета по формуле (6) границ области
устойчивости радиального газостати-’
ческого подшипника в плоскости пара-
метров /и, VQ. Каждая кривая Уэ (/и),
соответствующая фиксированному зна-
чению параметра ра, определяет верх-
нюю границу области устойчивости по
отношению к радиальным возмуще-
ниям.
1. Значения интегралов (10), используемых для расчета квазистационарных условий устойчивости двухрядных
газостатических подшипников •
П Л ?а~ 0 Ра = 1/5 Ра 1/4 Pa = 1/3
га 1 СО ^S0 ^С0 ISQ 1 cl 1 со so 1 cl fC0 I SO Cl
X == 1,0; Ъ == 0,5
0 209,18 33,947 10,240 5,041 1,576 0,619 4,032 1,261 0,495 3,024 0,946 0,371
0,1 10,459 1,697 0,512 3,507 0,950 0,337 3,013 0,838 0,303 2,441 0,700 0,258
0,2 5,229 0,849 0,256 2,611 0,639 0,214 2,326 0,590 0,201 1,969 0,520 0,182
0,3 3,486 0,566 0,171 2,080 0,477 0,155 1,895 0,451 0,149 1,651 0,411 0,139
0,4 2,615 0,424 0,128 1,730 0,378 0,120 1,599 0,363 0,117 1,421 0,338 0,111
0,5 2,092 0,339 0,102 1,480 0,312 0,0982 1,384 0,302 0,0963 1,248 0,286 0,0929
0,6 1,743 0,283 0,0853 1,294 0,266 0,0829 1,219 0,259 0,0816 1,113 0,247 0,0793
0,7 1,494 0,242 0,0731 1,150 0,231 0,0715 1,090 0,226 0,0707 1,004 0,218 0,0691
0,8 1,307 0,212 0,0640 1,034 0,204 0,0629 0,986 0,200 0,0623 0,915 0,194 0,0612
0,82 1,275 0,207 0,0624 1,014 0,199 0,0615 0,967 0,196 0,0609 0,899 0,190 0,0598
0,84 1,245 0,202 0,0609 0,994 0,195 0,060 0,949 0,192 0,0595 0,883 0,186 0,0585
0,86 1,216 0,197 0,0595 0,975 0,191 0,0587 0,932 0,188 0,0582 0,868 0,182 0„0573
0,88 1,188 0,193 0,0582 0,957 0,186 0,0573 0,916 0,184 0,0569 0,854 0,179 0,0560
0,9 1,162 0,189 0,0569 0,940 0,183 0,0561 0,899 0,180 0,0557 0,840 0,175 0,0549
0,92 1,137 0,184 0,0556 0,923 0,179 0,0549 0,884 0,176 0,0546 0,826 0,172 0,0538
0,94 1,113 0,180 0,0545 0,907 0,175 0,0538 0,869 0,173 0,0534 0,813 0,168 0,0527
0,96 1,089 0,177 0,0533 0,891 0,172 0,0527 0,855 0,169 0,0524 0,801 0,165 0,0517
0,98 1,067 0,173 0,0522 0,876 0,168 0,0517 0,841 0,166 0,0513 0,788 0,162 0,0507
1,0 1,046 0,169 0,0512 0,861 0,165 0,0507 0,827 0,163 0,0503 0,776 0,159 0,0497
X = lt2; I > == 0,5
0,0 4,996 1,851 0,875 3,747 1,389 0,656 253,30 49,265 17,873 6,246 2,314 1,094
0,1 3,695 1,219 0,529 2,996 1,018 0,451 12,665 2,463 0,894 4,296 1,381 0,589
0,2 2,844 0,857 0,352 2,410 0,757 0,318 6,332 1,232 0,447 3,188 0,929 0,374
0,3 2,313 0,654 0,260 2,017 0,597 0,243 4,221 0,821 0,298 2,537 0,692 0,270
0,4 1,950 0,526 0,2046 1,735 0,491 0,195 3,166 0,616 0,223 2,107 0,549 0,210
0,5 1,685 0,439 0,168 1,522 0,415 0,162 2,533 0,493 0,179 1,802 0,453 0,171
0,6 1,484 0,376 0,142 1,356 0,359 0,138 2,111 0,410 0,149 1,574 0,386 0,145
0,7 1,326 0,328 0,123 1,223 0,316 0,121 1,809 0,352 0,128 1,398 0,335 0,125
0,8 1,199 0,291 0,109 1,113 0,282 0,107 1,583 0,308 0,112 1,257 ' 0,296 0,110
Анализ динамической устойчивости
СП»
136 динамические характеристики ГАЗбСТАТИЧЕСКИХ ОПОР
Продолжение табл.
Анализ динамических характеристик
137
АНАЛИЗ ДИНАМИЧЕСКИХ
ХАРАКТЕРИСТИК
ГАЗОСТАТИЧЕСКИХ ОПОР
ПРИ ПРОИЗВОЛЬНЫХ
ЗНАЧЕНИЯХ ПАРАМЕТРА
СДАВЛИВАНИЯ (МЕТОД
ВОЗМУЩЕНИЙ)
Прежде чем перейти к рассмотрению
унифицированной методики, покажем
отдельные этапы решения задачи, кото-
рые будут положены в основу ее по-
строения, на примере ранее использо-
ванной прямолинейной модели кольце-
вого подпятника (рис. 1 гл. 6).
Запишем для этого случая неста-
ционарное уравнение Рейнольдса
• дх2
dt
(14)
Оно при граничных условиях х = О
<TnVn = тпе (Р) +
dt
ЯР
+ 2HS-^- (а)
dx
(15)
и при X= 1
Р = Ра = ра (б)
присоединяется к уравнению динамики
осевых перемещений подвижного эле-
мента опоры
— d2H
Mn-jp = (16)
где
w(l) =
ш°
2/ps —
we
We ~ 2Zps
1
J
0
- К Pal dx.
Здесь оп, Vn и mn — соответственно
параметр сдавливания, относительный
объем карманов и коэффициент режима
прямолинейной модели. Соотношения,
которыми они должны быть связаны
с соответствующими значениями коль-
цевого подпятника, имеют вид
ап = 0(1 — Г1)2; /пп =
(17)
8 — относительное осевое смещение из
положения равновесия; 7И°, пу° —
соответственно масса подвижного эле-
мента, статическая внешняя нагрузка
и нестационарная реакция смазочного
слоя, приходящиеся на единицу длины,
которую отсчитывают вдоль линии
наддува.
Используя обычный метод возмуще-
ний (| 8 (?) | <С 1), будем искать реше-
ние задачи в виде разложения в ряд
по степеням малого параметра 80,
за который принимаем некоторое ха-
рактерное (например, среднее или
максимальное) значение функции
| 8 (?) |, причем ограничимся линейной
частью разложения, т. е. отбросим
члены порядка О (sg):
/?(?) = 1+80//1(?);
P(xJ) = PQ(x) + ^P1 (х,?) +
+ 0(8g), (18)
где Ро (х) — стационарное решение
уравнения Рейнольдса. Подставляя
(18) в исходные уравнения и граничные
условия и группируя члены порядка
О (е0), получим линейную систему пер-
вого приближения:
d2Pi оп дРх
дх2 ]/'р«
= (19)
при х = О
gnVn dPj дР х .
2/Р’о dl dx ~г
+ «п|0' (Pd)|P1 = 2s//1-^-;
(20)
138 ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ ГАЗОСТАТИЧЕСКИХ ОПОР
при X = 1
Pi = 0;
м 1 f Л(х,?)
“ W 2 J Г7м*)
о
dx =
(21)
Здесь использовано разложение функ-
ции истечения в ряд Тейлора:
0 (Р) = 0 (Ро + е0Р1 +•••) =
= 0(^) + ₽о0'(^)^ + О(«В).
(22)
где = Ро (0), и учтено то обстоя-
тельство, что 0' (Р^) = dft/dPd 0.
Разложение (22) не учитывает измене-
ния вида функции истечения под
влиянием нестационарности, поэтому
настоящий анализ пока не распростра-
няется на опоры с капиллярными и
щелевыми ограничителями расхода.
(Приведенный ниже унифицированный
метод расчета динамических характе-
ристик распространен и на этот тип
опор.)
Ввиду отсутствия внешних динами-
ческих нагрузок естественно принять,
что искомая функция Нг (?) описывает
свободные колебания подвижного эле-
мента опоры, вызванные случайным
возмущением. Будем нормировать
искомую частоту v по маштабу v0 =.
= 1/?0, который выбираем из условия
Мп = 1. Как было показано в гл. 4,
выбранный таким образом масштаб
можно трактовать как собственную
частоту колебаний линейной динами-
ческой системы с одной степенью сво-
боды, в некотором смысле эквивалент-
ной газовому подшипнику (т. е. си-
стеме с распределенными параметрами,
в которой, вообще говоря, нельзя
выделить дискретные степени свободы).
Соответствующее выражение для мас-
штаба времени
/0 = Р0/2л = l/v0 = lrM°h0/2lps.
(23)
(где То — период колебаний упомяну-
той выше эквивалентной системы) окон-
чательно определяет структуру числа
сдавливания оп.
Можно предположить, что подвиж-
ный элемент опоры перемещается по
тому же закону, что и простой гармони-
ческий осциллятор, который может
обладать положительным или отрица-
тельным демпфированием (это предпо-
ложение не противоречит уравнениям
первого приближения, как будет видно
по ходу дальнейшего анализа). Тогда
Н± (?) =• Re = еа* cos vi
(^ = a + ?v; v = v/v0), (24)
где i — Y — 1; Re — символ действи-
тельной части комплексной величины.
Решение уравнения (19) ищем в виде
Рх (М) = Re I/ (х) e/J] =
~ (х) cos vZ— а (х) sin vf] (25)
[/ (Х) = «(Х)Н-!1>(Х)].
Такая форма решения предполагает,
что с того момента, когда статическое
равцовесие оказалось нарушенным,
прошел достаточно большой промежу-
ток времени, вследствие чего можно
пренебречь влиянием начальных усло-
вий на распределение давления в сма-
зочном слое. Вместо коэффициента
затухания (или роста) колебаний а
более удобно в дальнейшем исполь-
зовать параметр
а = а/v - — 6/л, (26)
где 6 — логарифмический декремент
затухания (6 < 0, если колебания
возрастают).
Подставляя (24), (25) в (19) и (20),
получим следующее линейное диффе-
ренциальное уравнение с комплекс-
ными коэффициентами для функции
/ (х) и соответствующие граничные
условия (' — производная по х)
Г (X)
^O'n-V
^р^)
f(x) =
— Ро (х);
при х = 0
Г (0)- Пп f (0) = sAn;
при X = 1
Z(l) =0,
(27)
Анализ динамических характеристик
139
где введены следующие вспомогатель-
ные обозначения:
k = k/v = а + G сгПу — anv —
= 12ц/*г(Л^)-1;
Пп=4[/Йп|6' (Р<х)1 +
। k(3nvVд "1 е
2 к?; -I’
(28)
Дп = ^-Рй = -^-0(^)-
Модифицированное число сдавливания
onv в отличие от оп заранее неиз-
вестно, так как оно выражается не
через заданный]! масштаб частоты
v0 = 1//0, а через искомую действитель-
ную частоту свободных колебаний v.
Уравнение (27) можно интегрировать
независимо от уравнения динамики
(21), считая параметры а и v (или onv)
условно заданными величинами, кото-
рые затем определяют из уравнения
динамики.
Удельную динамическую реакцию
смазочного слоя входящую в (21),
представим согласно (25) в виде
еМ- (‘ Ц*)
J УРо(х)
О
dx
(w? cos vt + sin vty,
1 Г 1 Ги(х)“
2 j кРо (х) Ь(*)_
о
(29)
dx
и будем рассматривать аэродинамиче-
ские коэффициенты как функции
упомянутых параметров a, v. Вид этих
функций определяется структурой ре-
шения уравнения (27). Тогда, подстав-
ляя выражения (24), (29) в уравнение
(21) и учитывая (26) и (28), получим
после группировки членов, пропор-
циональных cos v? и sinv/, нелинейную
систему алгебраических уравнений
с двумя неизвестными a, v:
^i(v,a) _ (v, а)
*2 = —йг--
(30)
Выясним физический смысл коэффи-
циентов и io*, для чего сопоставим
выражения (24) и (29). Очевидно,
выражает амплитуду той составляющей
динамической реакции смазочного слоя,
которая находится в противофазе (при
wcx > 0) или в фазе (при < 0) с изме-
нением толщины слоя. Естественно
назвать w? коэффициентом динамиче-
ской жесткости опоры. Составляющая
динамической реакции, величина кото-
рой выражается коэффициентом и;*,
сдвинута по фазе относительно колеба-
ний толщины смазочного слоя на угол
+л/2, при этом вЦсилу последнего
уравнения (30) знаки величин и a
должны быть противоположны. Таким
образом, обладает свойствами коэф-
фициента демпфирования: колебания
возрастают при < о и затухают при
доз > 0. В тех случаях, если бы тако-
вые были возможны, когда опора не
имеет собственных частот, т. е. под-
вижный элемент, выведенный случай-
ным возмущением из положения равно-
весия, монотонно приближался бы
к нему или монотонно удалялся от
него, не могло бы существовать и
действительных решений системы (30),
соответствующей режиму свободных
колебаний.
Таким образом, условия разреши-
мости системы (30) имеют вид
sign — — signa;
(31)
sign = sign (1 — | a |).
Для сравнения рассмотрим линей-
ный гармонический осциллятор
с демпфированием, имеющий те же
параметры свободных колебаний v и а,
что и исследуемая газовая опора.
Предположим также, что частота его
колебаний при отсутствии демпфиро-
вания совпадает с выбранным ранее
масштабом частоты колебаний подвиж-
ного элемента опоры v0. Классическое
уравнение свободных колебаний такого
осциллятора удобно представить в виде
^r+2ftV°^+vo!/ = 0; v0 = Kc/m.
(32).
140 ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ ГАЗОСТАТИЧЕСКИХ ОПОЙ
где п — приведенный коэффициент
демпфирования; с — статическая жест-
кость; М — масса.Через эти величины,
которые могут считаться непосредст-
венно заданными, выразим параметры
колебаний:
V = v/vQ — У1 — п2; а = —6/л =
= — niy 1 —п2. (33)
Для газовой опоры как колебатель-
ной системы с распределенными пара-
метрами соответствующие связи (30)
между динамическими коэффициентами
(которые по физическому смыслу
сопоставимы с упомянутыми выше
коэффициентами осциллятора с, п) и
параметрами свободных колебаний v,
а имеют неявный характер. Динамиче-
ские коэффициенты выступают уже не
как задаваемые, а лишь как промежу-
точные величины, представляющие
интерес только для определения струк-
туры уравнений (30) и для проверки
выполнения условий (31). Параметры
же v, а являются важными характери-
стиками опоры, которые определяют
ее поведение при различных динами-
ческих режимах работы.
Наиболее рациональным представля-
ется следующий путь решения системы
(30). Из этой системы непосредственно
вытекает соотношение (onv = c^v)
й (a, anv) = (а, anv) +
+ ffnv) =0,
(34)
которое будем рассматривать как урав-
нение относительно а, считая onv
условно заданным параметром (оче-
видно, он может принимать любые
положительные значения, как и оп).
Уравнение (34) при фиксированном
удобно решать итерационным мето-
дом «половинного деления». Значения
коэффициентов w? и на каждой
итерации однозначно определяются
функцией f = и + iv, которая явля-
ется решением задачи (27), и соотно-
шениями (29).
Найдя корень уравнения (34) а = а',
рассчитаем с помощью первого выра-
жения (30) соответствующие значения
v = v' и ап = а-
V'--= У(а , anv)/(l - а'2);
°п = CTnvA'- (35)
Таким образом будет решена система
(30) и найдено соответствие между
задаваемым значением числа сдавлива-
ния ап = а' и искомыми значениями
параметров колебаний а — a', v = vf.
Решая уравнение (35) для других
значений условно задаваемого пара-
метра (0 < tfnv < оо) и затем
используя выражение (35), получим
зависимости а = а (ап), v — v (оп),
которые можно рассматривать как
динамические характеристики опоры
при ^фиксированных параметрах /пп,
Ра, Уп.
Поскольку согласно (24) и (26) при
/—> оо имеем Н1—> 0, если а < 0
(т. е. положение равновесия асимптоти-
чески устойчиво), и //i—>оо, если
ос> 0, то значение оп = о*, которое
является корнем уравнения а (оп) =
— 0, соответствует границе устойчи-
вости. Варьируя параметры /йп, ра,
Уп в граничных условиях к уравнению
(27), можно рассчитать указанным выше
образом произвольный набор кривых
а — а (оп). Совокупность точек их
пересечения с осью абсцисс образует
границу устойчивости (точнее, гипер-
поверхность нейтральной устойчи-
вости) в пространстве задаваемых пара-
метров Сц, /пп, ра, 7П. Таким образом,
анализ устойчивости равновесия в дан-
ном случае рассматривается в кон-
тексте более общей задачи определения
параметров свободных колебаний
опоры.
Анализ устойчивости можно рас-
сматривать и как отдельную задачу.
Тогда целесообразно сразу принять
а = 0, т. е. вместо (34) решать уравне-
ние wf (onv) = 0. Определив значение
Onv как корень уравнения (onv) =
— 0, находим соответствующее значе-
ние коэффициента динамической жест-
кости wf (onv)a=o, а затем по аналогии
с (35) — относительную частоту неза-
тухающих колебаний опоры на границе
Анализ динамических характеристик
141
Рис. 3. Характеристики свободных колебаний прямолинейной модели подпятника при
Л, = 0,2; Vn = 0,2:
а — коэффициент затухания; б — относительная собственная частота; --------- — чис»
ленно-аналитическое решение, —-------метод усреднения
устойчивости v = v* и критическое
число сдавливания оп — а*:
V* = у (о*у)а=0;
^ = <4Л*- (36)
Проведя аналогичные расчеты при
различных значениях тп, ра, Vn> на“
ходим зависимость о* — о* (тп, ра,
Vn), т. е. уравнение гиперповерхности
нейтральной устойчивости в простран-
стве задаваемых параметров. В рамках
изложенного метода анализа динамиче-
ских характеристик возможны различ-
ные способы решения линейной крае-
вой задачи (27). Приближенный способ
решения [24], который позволяет с по-
мощью операции усреднения функции
(КЛ) (*)) 1 свести уравнение (27)
к уравнению с комплексными постоян-
ными коэффициентами, представляется
наиболее рациональным. Очевидность
этого особенно' полно проявляется при
расчете реальных кольцевых подпятни-
ков и радиальных опор, поскольку для
них реализация численных методов
интегрирования оказывается гораздо
более сложной, чем для рассмотренной
здесь прямолинейной симметричной
модели.
Некоторые характерные результаты
расчета параметров свободных колеба-
ний и границ устойчивости прямоли-
нейной симметричной модели подпят-
ника с простыми диафрагмами представ-
лены на рис. 3—5.
На рис. 3, а показаны два характер-
ных типа зависимостей коэффициента
затухания а от числа сдавливания:
либо опора, неустойчивая при малых ап
[а > 0, амплитуда колебаний возра-
стает со временем, соответствующий
участок кривой а (ап) лежит ниже оси
абсцисс], приобретает устойчивость
с увеличением оп, либо она устойчива
при любых ап, но все же можно указать
некоторый ограниченный диапазон зна-
чений оп, в котором смазочный слой
обладает наилучшими демпфирующими
свойствами. Этот диапазон соответ-
ствует области максимума кривых
тп = 2.
Рис. 3, б подтверждает рациональ-
ность выбора масштаба времени tQ
в форме (23), которая вытекает из
условия ТИц = 1. Действительная ча-
стота свободных колебаний газовой
опоры v оказывается соизмеримой
с выбранным масштабом частоты v0 —
= 1Д0, хотя и отличается от него,
причем в рассматриваемых здесь слу-
чаях v= v/vq < 1. В таком же отно-
шении находятся и числа сдавливания
оп и anv, пропорциональные частотам
v0 и v, первое из которых является
одним из критериев подобия, а второе
фигурирует в качестве параметра за-
дачи (14).
142 ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ ГАЗОСТАТИЧЕСКИХ ОПОР
Рис. 4. Границы замкнутых областей неу-
стойчивости прямолинейной модели под-
пятника в плоскости параметров <гп, тп
при ра = 0,2:
----------- — численно-аналитическое
решение;---— метод усреднения
На рис. 4 показаны границы области
неустойчивости прямолинейной модели
подпятника в плоскости параметров
тп, ап при различных значениях Уп
и фиксированном ра — 0,2. Для каж-
дого значения Уп устойчивость нару-
шается внутри замкнутой области,
ограниченной кривой Vn — const и
осью ординат (оп = 0). Ширина этой
области по параметру тп при оп —> 0
соответствует результатам квазиста-
ционарного анализа (см. рис. 1). Про-
тяженность соответствующего отрезка
оси ординат на рис. 4 равна расстоянию
между точками пересечения квази-
стационарной кривой ра — 0,2 (см.
Рис. 5. Нижняя граница области абсолют-
ной устойчивости прямолинейной модели
подпятника при ра — 0,2:
----------- — численно-аналитическое
решение;---— метод усреднения
рис. 1) с горизонталью Vn = const.
С увеличением оп, как видно из рис. 4,
ширина области устойчивости практи-
чески остается такой, какая предсказы-
вается квазистационарным анализом,
пока оп < 1, а затем быстро уменьша-
ется до нуля; при оп> 10 опора ста-
новится абсолютно устойчивой, т. е.
ее устойчивость не нарушается, ка-
ковы бы ни были значения остальных
параметров опоры. Влияние относи-
тельного объема карманов на минималь-
ное значение параметра оп, превыше-
ние которого гарантирует устойчи-
вость, иллюстрируется графиками
рис. 5, построенными по предельным
точкам кривых рис. 4, в которых
доп/дпга — 0.
УНИФИЦИРОВАННАЯ
РАСЧЕТНАЯ СХЕМА
Предполагая, что кольцевой под-
пятник нагружен чисто осевой силой,
расчет его динамических характеристик
будем вести отдельно для двух видов
малых возмущений: осевых (вариант
1а) и угловых (вариант /б), имея
в виду, что при одновременном дей-
ствии тех и других получим простое
наложение соответствующих результа-
тов (если пренебречь величинами вто-
рого порядка малости). Ненагружен-
ный радиальный подшипник будем рас-
сматривать также отдельно для двух
видов возмущений: радиальных (ва-
риант Па) и угловых (вариант Пб).
Приведем к единообразной форме
различные модификации исходного
уравнения Рейнольдса [формулы (5)
и (10) гл. 4]. Переходя в этих уравне-
ниях к новым переменным
х = <jp, у = — In г, т = I (Iat 16);
(37)
х = (р, y = z, т — 1 (Па, Пб),
заменим их единым уравнением (Л = 0)
дх \ дх ) ду \ ду /
= 2аФ(у) д.; (38)
ф({/) = (е-2^ (1^6)
[ 1 (Па; Пб)
Унифицированная расчетная схема
143
2. Значения функций для определения
относительной толщины смазочного слоя
Функ- ции Варианты
1а 16 Па 116
6 ez - «н V =-^-ч С 0 гг 1 Y = ~V
н. (х, у) 1 е~У cos х COS X 1 — у COS X к J
Относительную толщину смазочного
слоя Н можно выразить следующим
образом:
Н (х, у, т)= 1 + 6 (т)//j (х, у), (39)
где функции 6 (т), Нг (х, у) и масштаб
времени /0 определяют по табл. 2 и 3.
В области интегрирования уравне-
ния (38) координата у изменяется
в пределах 0 у у2, где нижний
предел соответствует периферии под-
пятника или среднему поперечному
сечению радиальной опоры, а верхний
предел — контуру центрального вен-
тиляционного отверстия или торцовой
поверхности подшипника. Пусть у =
= У1 «^) — координата линии над-
дува. Величины #1 и #2 — унифициро-
ванные геометрические параметры
опоры, которые с учетом (37) выража-
ются следующим образом:
^1 = 110^1, у2 = | In гв | (7а, 16);
(40)
У1 — ЬК, у2 = ^ (11а, 116),
3. Определение масштаба времени
где гх, гв — относительные радиусы
линии наддува и вентиляционного
отверстия подпятника; b — относитель-
ная раздвижка линий наддува радиаль-
ной опоры. Линия наддува делит об-
ласть интегрирования уравнения (38)
на две подобласти: 0 у уг, у± <
< у у2. Величины, относящиеся
к каждой из этих подобластей, усло-
вимся помечать соответственно индек-
сами ", +. Используя (40), запишем
унифицированное условие баланса рас-
ходов на линии наддува:
У = У1
д]^Р
дх
: оУх
(4„
которое следует присоединить к урав
нению (38):
при у = у! Р~ = Р+; (42)
при У~У2 р = ра=ра> (43)
при у = 0 Р — Ра (1а, 16);
дР
= Р(х+я, -9> (116). («)
В уравнении (41) использованы «ло-
кальные» параметры тх и относя-
щиеся только к линии наддува:
_ _ ( [т, V] (1а’ !б);
( [й/2,7/21 (На,Нб);
Масштаб времени Варианты
1а 16 Па Пб
tl с»м Со'э СМ С13
0 (‘ - 4) У я я **• 1 W tO хз сл 4KR2PS WR*PS
Обозначения: е2, 8f, у — мгновенные значения относительных величин осе-
вого, радиального и углового смещений соответственно из положения равновесия; у —-
угол между осями подвижного и неподвижного элементов опоры; Со — толщина сма-
зочного слоя подпятника в положении равновесия; С — средний радиальный зазор;
RH — наружный радиус подпятника; / = L/2 — половина длины радиального подшип-
ника; X = 1/R — удлинение радиального подшипника; /э — экваториальный момент
инерции подвижного элемента опоры.
144 ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ ГАЗОСТАТИЧЕСКИХ ОПОР
Предположим, что подвижный эле-
мент опоры, выведенный из состояния
равновесия, совершает свободные по-
ступательные или угловые колебания,
амплитуда которых мала по сравнению
с соответствующим максимальным пе-
ремещением, допускаемым микрогео-
метрией опоры. Тогда обобщенное пере-
мещение б (т), входящее в уравнение
(39), можно представить в виде
б (т) = б0 Ree^T = d0eaTcos vt (б0<1),
где k = а + iv — коэффициент зату-
хания (или роста) колебаний; i —
= К —1; Re — символ действитель-
ной части комплексной величины; v =
— v/v0 — относительная частота сво-
бодных колебаний подвижного эле-
мента опоры; здесь v0 = 1//0; Zo —
масштаб времени, определяемый
согласно табл. 3. »
Решение уравнения (38) будем искать
в виде разложения по малому пара-
метру б0, удерживая первые два члена
разложения:
Р (х, у, т) = Ро (у) +
+ 60 Re [Ше*т]Х(х)+0(б2);
(45)
/({/) = и ((/) +|'у (у);
( 1 (la)',
( cos х (16, На, Нб).
Первый член разложения (45) Ро
представляет собой стационарное осе-
симметричное решение уравнения
Рейнольдса, полученное в гл. 6. В уни-
фицированной форме это решение имеет
вид (индекс / относится к вариантам
1а, 16, индекс II — к вариантам
Па, Пб)
Р± (у) = + В±у,
50П Pd = = °’
о— _ р — й2- ~R — Pi
^01 ~ Ра~~ Ра’ ~ »
(46)
РдУ2 — РаУ1,
Уъ — Уг
g+ _ ___Pd Ра •
У 2 — У1 ’
Pd — Ра _ ? ( ч
m0 (Pj) ~ UZ/1’ “
[ (У2 — У1) У1
I У2
I У 2 — У1
I 2
(1а, 16);
(Па, 116).
Последнее из этих выражений следует
рассматривать как уравнение для опре-
деления неизвестного относительного
п -2
квадрата противодавления = pd по
заданным параметрам m, Ра, у±, у2.
Для решения этого уравнения можно
пользоваться графиками (см. рис. 6
гл. 5).
Функция f (у) в разложении (45)
определяется из уравнения
r(y)-[i+^(y)lf(y) = Q(y)t
(47)
где k = kfv = а + t; а — —б/л =
— alv — параметр амплитуды свобод-
ных колебаний подвижного элемента;
б — логарифмический декремент зату-
хания колебаний (б < 0 — колебание
возрастает); ov~ ov — модифициро-
ванное число сдавливания;
Ф G/) =
Ф(//) .
VРо (У) ’
/ =
О (1а);
1 (16, Па, Пб)-,
(48)
Q =
2/?о¥Ф (у) Ро (у) (1а, Па);
[2kovW(y)Po (//) + ЗР0] (16);
у [2к^уФ (у) Ро (у) - ЗР») (16) •
Линейное дифференциальное урав-
нение с комплексными коэффициентами
(47) с помощью процедуры усреднения
функции (Ф)"1 по характерной площади
опоры хорошо аппроксимируется урав-
Унифицированная расчетная схема
145
нением с постоянными коэффициентами
[24]
Г (у) + Q (//); (49)
при y = 0 f =0 (Ia,I6,I16)\
№ =
(la);
1+0*^ (16,1 la, 116);
Q(y) =
2N2(B* + B*y) (la);
2(N2- 1)(B* +B±y) (Ha);
[2(№-1)В±Н-ЗВ±]е“г/ +
+ 2(N2—l)B±ye~y (16);
K-^^-^y^ + B^)-
. -ЗВ*] (116).
Следуя обычному принципу суперпо-
зиции, решение этого уравнения можно
представить в виде суммы частного
решения однородного уравнения /0 (у)
и произвольного частного решения
неоднородного уравнения f (у):
f (У) = /о W +1 (г/);
/о (У) =
— 1
(Ci + C^, W = 0;
N = X + £|Х,
где комплексные константы Cj = Cjr-}-
+ iCjI (i — h 2) находят из гранич-
ных условий, которые получаются
после подстановки (39) с учетом (45),
а также соответствующего разложения
функции истечения, в условия (41)—
(44);
Г = /+;
df+
-4-+y]f = -^g(y1);
ay
при у — y3 f+ = 0; (51)
Структура членов, входящих в (51)
и последующие соотношения (кроме
стандартных обозначений), раскрыва-
ется в табл. 5 и 6. Условия (51) позво-
ляют найти комплексные константы
в общем решении (50). Обозначим их
^17?; ^2 = £ц; D3 = ^27?’
^4 C2i;
^5“ с17?; ^6^ ^7~^27?;
d8 = c+
Отделяя действительную и мнимую
части решения (50), получим
(уУ
(у).
Г DJ
Ы/Г(у) +
Г— Д>1 _
+ р р2 (у) +
Г D41
+ п р4 (у) +
L из J
«+ (уУ
У + (у).
D3
Di.
(У) +
«’ (уУ
(у).
[р] ft (У) +
(52)
Del rZ)7l
+ n ft (У) + п Из (У) +
LU8 J
D3
-D,
ft (У) +
й* (уУ
_Й+(У)]’
гДе ft (У^ 1“ фундаменталь-
ная система частных решений однород-
ного (й = 0) уравнения (49):
Л* (у) = еК±!/ cos |Х ± у; (у) =
_ Sjn р, (53)
ft (у) — е~%±У cos И ± У>
f^ (У) =eXhizsinp=fcy.
146 ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ ГАЗОСТАТИЧЕСКИХ ОПОР
Последние члены в формулах (52)
равны
[й± (у), v* (у)] =
[-2Р±(у),0] (!а);
[(апВ* - 2Р± (у)) e-y,
— xB±e“J'] (16);
-2p±P±(z/), -2t±P±(i/)] (На);
X-‘ [^B±-2p±//P0±(j/);'l Пб)
q1B±-2x±yP^(y)]. j
(54)
Линейную алгебраическую систему
для определения постоянных Dlt
£)2, ...,£)8, получаемую подстановкой
выражений (52) с учетом (53) и (54)
в условия (51), предварительно рас-
члененные на действительную и мни-
мую части, запишем в матричной фор-
ме:
II «тп II II И = 11 Ml (т,п =
= 1,2, ...,8). (55)
Если выделить подматрицу
I #ц#12#1з«14 _
j #2]#22«23«24
1 ° 1 01
о 1 о 1 Г
V — р~ — X р“
Р~ А~ — Р~ — X”
(56)
то остальные 56 элементов матрицы
Ц#тп|| приобретут единообразный вид
для всех четырех вариантов 1а, 16,
Па, Пб. При этом
«15 — #16 = «17 ~ «18 ~ О’»
#25 — «26 «27 = «28 ~ 0»
#41 — — «32» «42 — «31» «43 — — «34 >
«44 = «зз; (57)
#45 — — «36» «46 — «35> «47 ~ «38»
«48 ~ «37»
«61 = —«52» «62 = «51» «63 = «54»
«Н ~ а^' = —а^’ а$6 ~
«67 «58» «68 «57»
«71 ~ а12 ~ а13 ~ а74 ~ 0»
«81 ~ а82 — «83 ~ «84 ~ 0;
«85 ~ —«76» «86 == «75»
«87 ~ «78» «88 = «77*
Таким образом, фактически остается
рассчитать следующие 20 коэффициен-
тов [для сокращения записи условимся
обозначать ft (yt) = f*,; f* (y2) = fk2;
(k = 14-4)]:
«31 = /lP «32 = Al’ «33 = /зР
a?A = hv a35 = —Тп; a36 = ^;
а37 ~ ?31'’ a38 = “ /4?
a5i = + »!«) AT — (h- + ’ll) A?
а52 = — (н + ’ll) Al~
— + ’i«)/T;
а53=~(^ —’1«)/з1 —
а54 (н — ’ll) Al — “’l/?) Ар
(58)
а55 = -^М + нМ> «56 =
= р+/^ + х+/+;
«57 = ^М + нМ- «58 =
«75 = /12’ «76 = /22’ «77 = /з2’
«78 = /42-
Элементы вектор-столбца || Ьт || в ма-
тричном уравнении (55) приходится
рассчитывать отдельно для каждого
из четырех рассматриваемых вариан-
тов.
Для варианта 1а:
bl = 2р2а; ь2 = &3 = ь4 = 0;
b5=2Pd’)/?—(s—2)(59)
/’б = 2^’1р fe7 = 2Pg; b^ = Q.
Унифицированная расчетная Схема
147
Для варианта 16 (гх == е у', гв =
= е-г/2, Д=В“ —В+; под Ь5а, Ьеа
понимаются коэффициенты Ьъ, Ь6 пре-
дыдущего варианта 1а):
= 2р2 — ахВ~; Ь2 — кВ~;
Ь3 — — ахДгр Ь4 = w\r р
&5= {£5a + 4aX-(11l +
+ “1«) В~]} г,;
^6 = {^6a~~ х [ A
- ат],) В-}) Гр (60)
ь7 = (2Ра + ах | S+| ) гв; й8 =
= -х | 5+К
для вариант На:
bi = b2 — 0 j
<»з==2(р_-р+)р1, й4==
= 2(-с--т+)р2, (61)
Z’5 = 2(^p~— TJjT") p2d +
+ (2р+— s);
b6 = 2 + 4iP~) Ра + 2Ai+;
fe7 = 2p+p2; 68 = 2т+р2.
Для варианта Пб (Л — удлинение
опоры):
bm = V1^, т = 1 4- 8;
bi = ~ 0;
&з = 2 (р- - Р+) P^i — &qR;
б4 = 2 (т~ — т+) p2dyl — А?,;
(62)
б5 == 2 [р“ (1 + П«Р|)-
— т~П^1] Pd + 2Р+ (Ai/i- p2d) —
— «Дур
6б = 2[т~(1 + T]^i) +
+ P-n^i] Pd + 2-c + (A^[ — p%);
b7 = 2p+p^2 + АдЛ;
б8 = 2т+р^/2 + Ai/p
Напомним, что величина = Pd в
формулах (59)—(62) является корнем
уравнения, структура которого опре-
деляется последним выражением (46).
Теперь коэффициенты и свободные
члены алгебраической системы (55)
известны, и ее можно решить любым
стандартным методом обращения ма-
триц, используя ЭВМ небольшой мощ-
ности. После этого искомое решение
унифицированного уравнения Рей-
нольдса формально будет полностью
определено в первом приближении,
т. е. с точностью до величин порядка
$3 — квадрата относительной ампли-
туды свободных колебаний. Правиль-
нее было бы сказать, что полученное
решение уравнения Рейнольдса уста-
навливает связь между распределением
давления в смазочном слое и пара-
метрами свободных колебаний опоры
v — v/v0, а (фактически вместо v в
этом решении фигурирует модифици-
рованное число сдавливания ov = av);
тем самым дальнейший анализ сво-
дится к определению этих параметров.
Составим обобщенное выражение для
удельных динамических реакций сма-
зочного слоя, порождаемых поступа-
тельными или угловыми свободными
колебаниями:
Ш _ Г«- (у)
V PV (У) Ь- (у)
dy —
f Ш р+(у)1,
J
У' 1(У) =
е—2«/
—2^— для варианта 1а\
е~3^
— ------z—- для варианта /б;
2(1_е-^2)
л
-щ- для варианта //а;
л у
Для варианта Пб.
(63)
148 ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ ГАЗОСТАТИЧЕСКИХ ОПОР
По физическому смыслу величины
<7i, q$ являются обобщенными анало-
гами соответствующих величин wf,
Wi для плоской модели подпятника.
Коэффициент q$ пропорционален ам-
плитуде той гармонической состав-
ляющей реакции смазочного слоя (осе-
вой, вариант /а; радиальной, вариант
Па; реактивного момента; варианты
16, Пб), которая колеблется в проти-
вофазе с соответствующим поступа-
тельным или угловым перемещением
подвижного элемента опоры. Так же
интерпретируется коэффициент q*t с
той лишь разницей, что он соответ-
ствует другой гармонике колебаний
аэродинамической силы или момента,
сдвинутой по фазе на 90° относительно
колебаний подвижного элемента. Та-
ким образом, коэффициент q^ характе-
ризует осевую, радиальную или уг-
ловую динамическую жесткость сма-
зочного слоя, a q{ — его демпфиру-
ющие свойства по отношению к коле-
баниям того или иного вида. Величины
</f, q\ нормированы по следующим
масштабам:
вариант 1а вариант 16
л (R2 — р л (R" — R^p
Со Cq
вариант Па вариант Пб
4A/?2ps
С С '
При таком способе нормирования и
выборе масштаба времени в соответ-
ствии с табл. 3 исходные уравнения
динамики поступательных и угловых
перемещений подвижного элемента
опоры после их линеаризации «по
первому приближению», с учетом раз-
ложения (45) приводят к следующей
единообразной форме (при Л4П = 1):
— (64)
где б — обобщенное перемещение, оп-
ределяемое по табл. 4; </х — обобщен-
ная удельная динамическая реакция
смазочного слоя, которая связана с ко-
эффициентами <7i, q[ тем же соотно-
шением (29), которое связывает соот-
ветствующую динамическую реакцию
прямолинейной модели подпятника
с коэффициентами w{, wf. Учитывая
эту связь, а также выражения (45),
можно свести уравнение (64) к системе
двух нелинейных алгебраических урав-
нений
(V, а) <?; (v, а)
---------: v2 — — •-----------
1 — а2 2а
(65)
в которой неизвестными являются
параметры свободных колебаний а,
v = v/v0 — tQv. Вид функций q{ (у, а)
и ql (v, а) фактически определен вы-
ражениями (63). Из этой системы
следует соотношение
4 («• <\) = (a, av) +
О (У
+ °’ (66)
которое можно рассматривать как урав-
нение относительно а, если считать
<yv — gv условно заданным параме-
тром.
Очевидно имеется полная формаль-
ная аналогия между системами (65)
и (30), как и между уравнениями (66)
и (34), достаточно лишь сделать за-
мены: wct на q{ и ^4 на q[.
Далее обратим внимание на следу-
ющее. Излагаемая здесь унифициро-
ванная методика расчета, относящаяся
к подпятникам и радиальным подшип-
никам с ограничителями расхода типа
диафрагм, не претерпевает радикаль-
ных изменений, если вместо диафрагм
используют капилляры или щели.
Это объясняется тем, что общая по-
становка задачи газовой смазки в рам-
ках математической модели линий
наддува не зависит от типа ограничи-
теля расхода, который влияет лишь
на структуру функции истечения
0 (Р^) в унифицированном условии
баланса расходов на линии наддува
[см. формулу (41)]. Особенности дина-
мического анализа опор с капилляр-
ными и щелевыми ограничителями
расхода, рассмотренные в работе [24],
учтены в приводимых ниже табл. 5 и 6
Унифицированная расчетная Схема
149
вспомогательных параметров. Отметим
лишь, что этот анализ включает до-
полнительный физический параметр
ad [см. (11) и (17) гл. 5], который рас-
сматривают как вспомогательный па-
раметр, а в качестве дополнительного
критерия подобия используют универ-
сализованный геометрический пара-
метр
E=ldtHd, (67)
где
(Dd/h0—для капилляров;
Н d == 1 1 н «
\hdlho — Для щелей;
(68)
Id-
ld = Lj/R-jl — для всех опор
с капиллярами
и подпятников
со щелями;
| In г/1 — для радиальных опор
со щелями.
4. Использование параметров
в зависимости от типа ограничителя
Тип ограни- чителя Параметр
V Е S
Д1 + — 3
д2 — — 2
К — 4- 3
Щ — + 3
Обозн ачения: Д15 Д2, К. Щ —
простая и кольцевая диафрагма, капилля-
ры и щели. Знак «4-» или «—» указывает,
вводится или не вводится данный параметр
для опоры с тем или иным ограничителем
расхода. Структура параметров Е и V
определена формулами (67) и (68).
Здесь Dd — диаметр капилляра; h0 —
характерная толщина смазочного слоя;
hd — ширина щели; Ld — длина ка-
пилляра или протяженность щели;
7?i — радиус линии наддува.
Поскольку параметр Е включен в
число критериев подобия, то величины
ц и ld~ которые фигурировали
в гл. 5 в качестве самостоятельных
геометрических параметров опор с ще-
левым наддувом, равно как и соответ-
ствующая обобщенная величина ld
[см. (68)], уже не могут быть крите-
риями подобия: они однозначно свя-
заны с ранее выбранными критериями
подобия следующим соотношением:
Как будет видно, параметр Е в дина-
мических характеристиках опор с ка-
пиллярным наддувом играет ту же
роль, что и относительный объем кар-
манов V в опорах с простыми диафраг-
мами.
Искомые безразмерные параметры
свободных колебаний подвеса v, а
рационально было бы рассчитывать,
используя в качестве исходных данных
значения параметров, которые яв-
ляются критериями подобия подвесов.
К ним относятся:
основные физические параметры под-
весов- /п, ра, о;
параметры макрогеометрии, за ко-
торые можно принять унифицирован-
ные параметры у-,. у*. и число линий
наддува nd} _
дополнительные параметры V, Е,
s, вводимые лишь для некоторых ти-
пов ограничителей расхода или за-
висящие от типа ограничителя (табл. 4).
Приведенный перечень исходных па-
раметров не вполне соответствует пред-
лагаемой здесь формальной логиче-
ской схеме расчета величин v, а,
которая в данном случае представляет-
ся целесообразной. В частности, в этой
схеме из числа задаваемых параметров
исключается параметр сдавливания о.
Вместо него условно задается модифи-
цированный параметр ov, который,
в отличие от о, не является критерием
подобия, так как зависит от искомой
величины v. Тем не менее такая замена
наилучшим образом согласуется со
структурой расчетных формул, в ко-
торых о фигурирует только как сомно-
житель произведения o-v = ov. При
этом параметр о формально перево-
дится в разряд определяемых величин;
его значение непосредственно находим
вслед за величиной v, используя ус-
ловно заданное значение ov.
150 ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ ГАЗОСТАТИЧЕСКИХ ОПОР
Рис. 6. Структурная схема расчета параметров свободных]колебаний газостатических опор
Напомним, что система уравнений
(65) для определения искомых пара-
метров a, v сводится к одному уравне-
нию (66) для а, которое практически
приходится решать тем или иным ме-
тодом последовательных приближений.
Поэтому в число условно задаваемых
параметров целесообразно включить
наряду с ov начальное приближение
искомой величины а. Тогда в предла-
гаемой расчетной схеме параметр а
формально будет фигурировать и как
условно задаваемый, и как опреде-
ляемый.
Эти предварительные замечания по-
могают уяснить логическую структуру
схемы расчета параметров свободных
колебаний (рис. 6). В частности, со-
гласно этой схеме, вспомогательные
параметры, перечень и способы расчета
которых будут специально рассмотрены
в табл. 5 и 6, разделяют на две группы:
первая из них не зависит, а вторая
зависит от условно задаваемых пара^
метров ov и а. Такое разделение делает
расчет более экономным, исключая
часть промежуточных величин из ите-
рационного цикла по параметру а,
т. е. для одного расчетного случая
вспомогательные параметры I группы
рассчитывают один раз, а параметры
II группы столько раз, сколько потре-
буется итераций по а, чтобы удовле-
творить соответствующему трансцен-
дентному уравнению (66) с заданной
степенью точности. Заметим, что дру-
Унифицированная расчетная схема
151
гая искомая величина —v определяется
лишь после того, как найдено истин-
ное значение а, т. е. никаких итера-
ций по параметру v (или по av) не
требуется.
Фигурирующая в одном из блоков
расчетной схемы фундаментальная си-
стема частных решений (у), fk (у)
(k — 14-4) [см. (53)] формирует «од-
нородную» часть общего решения (52),
определяющего уравнения первого
приближения (49), которая не за-
висит от переменной структуры сво-
бодного члена этого уравнения Q (у).
Эта структура учитывается добавоч-
ными членами й± (у), v± (у) в общем
решении (52). Последнее рассчиты-
вается в области 0 у у2 [функции
ц" (у), и~ (у) — в области 0 у уъ
а функции и+ (у), v+ (у) — в области
У1 У У2 ] с таким шагом, чтобы
метод трапеций или метод Симпсона
обеспечивал достаточную точность ин-
тегралов, которые входят в аэродина-
мические коэффициенты (63) и, вообще
говоря, не выражаются через элемен-
тарные функции. В той же области
и с тем же шагом должны быть рассчи-
таны функции (у). Это относится
и к функции PJ (у) — стационарному
решению унифицированного уравнения
Рейнольдса (38), определяемому со-
гласно (46). Заметим, в частности, что
выделение расчета функций (у) в от-
дельный блок обусловлено структурой
матрицы коэффициентов || атп || алге-
браической системы (55), из которой
находят константы Dn (п = 14-8) в об-
щем решении (52): элементы матрицы
многократно выражают через значения
функций fk (у) в точках у = yi, у =
= У2-
В целом расчетная схема унифици-
рована по всем рассматриваемым ва-
риантам макрогеометрии и внешних
возмущений (варианты 1а, 16, На,
II6), однако степень унификации от-
дельных ее блоков неодинакова. Име-
ются некоторые, хотя и небольшие,
различия в способах определения эле-
ментов упомянутой матрицы || атп ||
для разных вариантов [см. (56)].
Но эти варианты существенно разли-
чаются структурой свободных членов
системы (55), т. е. каждому варианту
соответствует собственная группа фор-
мул для определения элементов век-
тор-столбца |ртп|| [см. (59), (62)], что
является отражением межвариантных
различий в структуре свободного члена
уравнения (49), которыми вызваны и
соответствующие различия в опреде-
лении функций (54), входящих в общее
решение (52).
Все прочие формальные расхожде-
ния между четырьмя упомянутыми
вариантами проявляются только в бло-
ках расчета вспомогательных пара-
метров. В этих же блоках локализо-
ваны все различия, связанные с из-
менением типа ограничителя расхода.
Характер этих различий отчетливо
виден из табл. 5 и 6, где перечислены
вспомогательные параметры I и
II групп и указаны способы их рас-
чета. Типы ограничителей обозначены
так же, как и в табл. 4 и, кроме того,
использовано обозначение Д, относя-
щееся одновременно к простым и коль-
цевым диафрагмам. Если тип огра-
ничителя не указан, то соответству-
ющая строка таблицы относится к лю-
бому из рассматриваемых здесь огра-
ничителей. Прочерк в графе означает,
что в данном случае соответствующий
параметр либо не имеет определенного
смысла, либо не фигурирует в расчет-
ной схеме.
Табл. 5 и 6 почти полностью кон-
кретизируют расчетную схему, при-
веденную на с. 150, произвольным
остается лишь выбор итерационного
алгоритма, реализуемого в блоке кор-
ректировки расчетного значения пара-
метра а. Результатом вычислений для
каждого конкретного расчетного слу-
чая (когда задаваемые параметры,
а также условно задаваемый параметр
ov фиксированы) является ответ на
вопрос о том, какие значения искомых
величин а и v соответствуют определен-
ному значению параметра о, который
по существу относится к числу зада-
ваемых, хотя в данной расчетной схеме
он оказывается искомым. Варьируя ov,
получим зависимости а (о) и v (о).
Если же варьируются и значения ве-
личин, входящих в блок задаваемых
параметров, то результаты расчета
представятся как функции^многих пе-
ременных а (о, т, ра---), v (о, tn, ра...).
В частности, уравнение а (а? tn.
152 ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ ГАЗОСТАТИЧЕСКИХ ОПОР
5. Вспомогательные параметры I группы
Параметр Тип огра- ничителя расхода Варианты
1а | 16 1 Па | Пб
С Любой (Уг — Z/i) У1 у2 У 2 —Ух 2
г- Любой 1 — &~2У1 %У1 —
г+ Любой е~%У1 — е~%У2 2 (У2 —У1) —
ld Д, К —
Щ — f тЕ3 V nd
rd д, к —
Щ 1 |е±2^-1 Г *d
Pd д Pd “ Ра ( 1, Pd < 0,5; О (р,\ = J } 2/ЛРл>°-Ъ
к То же, при Ф (pd) — 1 —
щ Решение в явной форме Pd- 1/Ра+** У i +
G д 1*' (^)|
к, щ —
Любой 2 Pd + PaPd + Й
Унифицированная расчетная Схема
153
Продолжение табл. 5
Параметр Тип огра- ничителя расхода Варианты
1а | 16 I Па Пб
Д —
К щ 3 1 + 2 1 + Pd + Pd
Любой
Р+ Любой Г+ф
Pd Д —
К
щ гл
во Любой р2а p2d
во Любой -2 -2 ^2 - рау\ У 2 — Ух
в- Любой Pd-Pa Ух 0
в+ Любой У> — Ух
в+ Любой — в+ р* —
А Любой В~ — В+ == в- -I- I В+ I
А Любой — в- — в+ = = В- + I В+1 —
♦ Знак «плюс» соответствует случаю, когда щель расположена в теле подшипника
знак «минус» соответствует ее расположению в теле вала.
Динамические характеристики газостаТйчесКйХ 6пб!>
6, Вспомогательные параметры II группы
Параметр Тип огра- ничителя расхода Варианты
1а 16 Ila | 116
avd Д —
К — E2a 3 v
Щ е 2^i£2ov 2qv mE
d± Любой — 1 + p±ava
е* Любой — + (₽*)2 а2 0 + а2)
d' Д, К —
Щ — 1 + №yda
e' Д. К —
Щ — |3 .а а 4- р2а2 . (1 + а2) 1 d vd 1 vd ' 1
gi> gt Любой Vv 1 4- а2 ± а
Любой J/^ 1^ + e± +
u* Любой j/" d± H- e± —
Д —
К 1 / $d®yd 1 / $dGyd У 2 " У 2 ё2
щ См. преды- дущую строку у ^d' + e'±d
Унифицированная расчетная схема
155
Продолжение табл. 6
Параметр Тип огра- ничителя расхода Варианты
1а 16 | Ila 116
V, ц" Д —
К X', ц'
Щ X', р/
X Любой — 1 av(l 4-a2) —
р± = 1 - р± Любой — e± J^4-e±
Любой — J-fc 4- e±
Любой — 4[(p+)2- _(X+)2]_p+
41 Любой — t+ (1 — 8p+)
Д1 tnG + Vova V(Tv 2ndpd ' 2ndpd
Д2 mG q 2,,dpa ’
К _ sh 2V 4~ ц," sin 2ц" nd ch 2V — cos 2ц"
щ m ц" sh 2K" — K" sin 2ц" f~nd ch 2A." — cos 2ц"
156 ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ ГАЗОСТАТИЧЕСКИХ ОПОР
ра...) = 0 определяет границу устой-
чивости (точнее, гиперповерхность ней-
тральной устойчивости) в простран-
стве параметров о, т, ра... В тех
случаях, когда это уравнение не-
разрешимо, опора абсолютно устой-
чива.
Напомним, что рассматриваемые в
этой главе свободные колебания под-
весов возможны при —1 < а < 1 [см.
(31)]. Уточним также пределы изме-
нения других параметров и возмож-
ности непосредственного расчета не-
которых предельных случаев по пред-
лагаемой методике. Так, параметр ov,
в принципе, может принимать любые
неотрицательные значения (0 о\> <
< оо); то же относится и к параметру
о. Однако в формулах, фигурирующих
в расчетной схеме, не всегда можно
полагать ov = 0 — это допустимо
только для вариантов Па, Пб с диа-
фрагмами и щелями, тогда как при
капиллярном наддуве в расчетных
формулах появляются неопределенно-
сти, вызывающие аварийный останов
ЭВМ, на которой проводятся вычисле-
ния. По отношению же к вариантам
1а и 16 квазистационарный случай
o,v—> 0 оказывается особым (см. с. 154).
Практически в этом случае можно обой-
тись простой экстраполяцией расчет-
ных кривых, если расчеты доведены
до достаточно малых значений ov.
Теоретически же нетрудно показать,
что при ov—>0 в системе (65) а =
= Я\ = 0> 41 = <710. где <710 — К0ЭФ’
фициент статической жесткости (осе-
вой, радиальной или угловой, см.
гл. 6). В результате система сводится
к уравнению v = j/"qciQ, которое пред-
ставляет собой безразмерную запись
известной формулы линейной теории
колебаний, устанавливающей связь
между собственной частотой, жест-
костью и массой линейного гармони-
ческого осциллятора. В противополож-
ном предельном случае, когда av—> сю,
находят отражение специфические
свойства решения нестационарного
уравнения Рейнольдса, которые про-
являются при наличии малого пара-
метра при старших производных. Эти
вопросы выходят за рамки данной
работы, отметим лишь, что как при
сю, так и при Оу—> 0, смазочный
слой не обладает демпфирующими свой-
ствами, т. е. а — 0.
Параметр Е теоретически может при-
нимать те же значения, что и (Jv или О',
но в реальных подвесах едва ли воз-
можны значения Е, превышающие ве-
личину порядка единицы. Во избежа-
ние аварийного останова ЭВМ, в рас-
четных формулах нельзя непосред-
ственно полагать Е = 0.
В предельных случаях т — 0 и
т—> сю, и подвес практически нерабо-
тоспособен: в первом случае отсут-
ствует наддув, во втором же по суще-
ству перестают выполнять свою роль
ограничители расхода, что приводит
к потере осевой и радиальной статиче-
ской жесткости. Однако при наличии
свободных колебаний проявляется по-
бочный «эффект сдавливания» смазоч-
ного слоя, независимо от того, осуще-
ствляется ли наддув. Поэтому, в част-
ности, случай т = 0 перестает быть
тривиальным, т. е. избыточные давле-
ния в смазочном слое уже не равны
нулю. Этот случай удобно использо-
вать в качестве контрольного варианта
для отладки программы расчета на
ЭВМ, поскольку весь комплекс расчет-
ных формул при т — 0 существенно
упрощается и становится хорошо обо-
зримым [так, решение системы (55)
записывается в простой аналитиче-
ской форме, а интегралы в выражениях
(63) приводятся к элементарным функ-
циям]. Следует учесть, что в расчет-
ных формулах, относящихся к капил-
лярным и щелевым ограничителям,
непосредственный предельный переход
недопустим. Другим отладочным ва-
риантом применительно к радиальным
подвесам с диафрагмами может быть
случай, когда o,v — 0. Для подвесов
с кольцевыми диафрагмами следует
придерживаться ограничения т >
> 0,25 — избегая возникновения
аномальных критических режимов над-
дува.
Практически интересный и относи-
тельно простой предельный случай
Ра —> 0, широко использованный в
гл. 6 для анализа статических характе-
ристик подвесов, здесь, к сожалению,
использовать не удается без специаль-
ного преобразования интегралов, через
Расчет динамических характеристик
157
которые выражаются аэродинамиче-
ские коэффициенты (63) и которые при
ра —> 0 оказываются несобственными.
РЕЗУЛЬТАТЫ РАСЧЕТА
ДИНАМИЧЕСКИХ
ХАРАКТЕРИСТИК
ГАЗОСТАТИЧЕСКИХ ОПОР
С РАЗЛИЧНЫМИ
ОГРАНИЧИТЕЛЯМИ РАСХОДА
Параметры свободных колебаний v
и а были рассчитаны на ЭВМ типа
ЕС-1020. Характерные результаты рас-
четов представлены на рис. 7—15,
причем рис. 7—11 относятся к кольце-
вым подпятникам (с простыми и коль-
цевыми диафрагмами, а также с ка-
пиллярными ограничителями расхода),
совершающим осевые или угловые ко-
лебания, остальные рисунки — к ра-
диальным подшипникам (ограничители
расхода — простая и кольцевая диа-
фрагмы, щель) с радиальными или уг-
ловыми колебаниями вала. В этих
расчетах варьировались все исходные
безразмерные параметры опор, за ис-
ключением обобщенных параметров
макрогеометрии уъ у2, которые со-
ответственно принимались равными
0,431 и 1,204 для подпятника и 0,75
и 1,5 для радиального подшипника.
Из (40) следует, что первая пара зна-
чений определяет относительные ве-
личины внутреннего радиуса подпят-
ника (гв = 0,3) и радиуса линии над-
дува (гх = 0,65), а вторая — удлине-
ние подшипника (X = 1,5) и относи-
тельную раздвижку линий наддува
(Ь = 0,5).
Из рис. 7—15 можно сделать вывод
об отсутствии качественных различий
между сериями кривых, относящихся
к подпятникам и радиальным под-
шипникам. Качественный характер по-
лученных результатов не зависит и от
того, относятся ли они к поступатель-
ным, т. е. осевым, либо радиальным
колебаниям, или к угловым колеба-
ниям. Отметим лишь, что при угловых
возмущениях относительная собствен-
ная частота v приблизительно вдвое
меньше, чем при поступательных. По-
следнее обстоятельство является отра-
жением того, что удельная угловая
жесткость подвесов, как правило, до-
статочно мала по сравнению с удель-
ными величинами осевой и радиальной
жесткости.
Тип ограничителя расхода, вообще
говоря, существенно влияет на дина-
мическое поведение подвеса. Для под-
весов с кольцевыми диафрагмами, ще-
лями или капиллярами не обнаружено
случаев, когда амплитуда свободных
колебаний возрастала бы со временем
Рис. 7. Характеристики свободных колебаний кольцевого подпятника с простыми и коль-
цевыми диафрагмами (гв = 0,3; — 0,65; т — 2; ра — 0,2):
а — коэффициент затухания; б — относительная собственная частота;
--------------простая диафрагма, осевые колебания;---------простая диафрагма, уг-
ловые колебания; {1,2 — V = 0; Г, 2' — V = 0,4; 1", 2" — V = 0,8);----------коль-
цевая диафрагма, осевые колебания (5); —. —.---кольцевая диафрагма, угловые коле-
бания (4)
158 ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ ГАЗОСТАТИЧЕСКИХ ОПОР
Рис. 9. Влияние коэффициента давления ра
на коэффициент затухания а и относитель-
ную частоту v осевых свободных колебаний
кольцевого подпятника с простыми диаф-
рагмами (тв = 0,3; гх = 0,65; ~пг — 2;
7 = 0,4)
Рис. 8. Влияние параметра режима т на ко-
эффициент затухания а и относительную
частоту v осевых свободных колебаний
кольцевого подпятника с простыми диа-
фрагмами (гв = 0,3; гх = 0,65; ра = 0,2;
V = 0,4):
---------- — кольцевой подпятник;
----------прямолинейная модель подпят-
ника
(а>0), что означает потерю устой-
чивости равновесия. Более того, ре-
зультаты расчета параметров свобод-
ных колебаний, относящиеся к этим
типам ограничителей, в качественном
отношении одинаковы. Если же огра-
ничителями расхода являются про-
стые диафрагмы, то при малых и
умеренных значениях параметра сдав-
ливания о — до нескольких десят-
ков — возможны колебания с возра-
стающей амплитудой, причем угловые
колебания такого рода могут осуще-
ствляться в более широком диапазоне
значений параметра о, чем поступатель-
ные. Затуханию свободных колебаний
Рис. 10. Характеристики свободных колебаний кольцевого подпятника с капиллярными
ограничителями расхода в зависимости от параметра режима т (гв = 0,3; = 0,65;
ра = 0,2; Е — 0,8):
а — коэффициент затухания; б — относительная собственная частота;------------------
осевое колебание;---------угловые колебания;--------------«неустойчивые» участки
кривых v (о), для которых соответствующие участки кривых а (о) лежат ниже оси абс-
цисс (а > 0)
Расчёт дийаМйчеСких характеристик
15й
Рис. 11. Влияние параметра Е на характеристики радиальных (сплошные) и угловых
(штрихпунктирные) свободных колебаний кольцевого подпятника с капиллярными огра-
ничителями расхода при т — 4:
а — коэффициент затухания; б — относительная собственная частота;---------осевые
колебания;--------угловые колебания;---------«неустойчивые» участки кривых v (о),
для которых соответствующие участки кривых а (о) лежат ниже оси абсцисс (а > 0)
Рис. 12. Характеристики радиальных свободных колебаний радиального подвеса с надду-
вом через простые диафрагмы, кольцевые диафрагмы или щели при к — 1,5 (Ъ = 0,5;
т = 4; ра = 0,2):
а — коэффициент затухания; б — отно-
сительная собственная частота; -----
— простая диафрагма (/ — VQ — 0;
/' — Уэ — 1);-------кольцевая диа-
фрагма (2);---------щель (3 — Е =
= 0,2; 3' — Е = 0,4; 3" — Е = 0,8)
Рис. 13. Влияние параметра режима т на характеристики радиальных и угловых свободных
колебаний радиального подвеса с простыми диафрагмами при к = 1,5; Ь = 0,5; р =
= 0,2; Уэ = 1:
а “ коэффициент затухания; б — относительная собственная частота;----------------
радиальные колебания; —------угловые колебания
160 ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ ГАЗОСТАТИЧЕСКИХ ОПОР
Рис. 14. Влияние параметра режима т на характеристики радиальных и угловых свобод-
ных колебаний радиального подвеса с кольцевыми диафрагмами (% — 1,5; Ъ = 0,5;
Ра = М):
а — коэффициент затухания; б — относительная собственная частота;- -—........
радиальные колебания;--------угловые колебания
может способствовать увеличение па-
раметров /й, ра и уменьшение относи-
тельного объема карманов V.
Судя по кривым а = а (а), для
любого подвеса существует оптималь-
ное конечное значение параметра
сдавливания о, при котором смазоч-
ный слой обладает наилучшими демп-
фирующими свойствами по отношению
к поступательным или угловым воз-
мущениям, т. е. отрицательное зна-
чение коэффициента затухания а ста-
новится наибольшим по абсолютной
величине. При этом угловым коле-
баниям соответствуют большие опти-
мальные значения о, чем поступа-
тельным. В предельных случаях при
Рис. 15. Влияние параметра режима т на характеристики радиальных и угловых свобод-'
ных колебаний радиального подвеса с наддувом через щели (X = 1,5; Ь = 0,5; ра — 0,2;
Е « 0,2):
а — коэффициент затухания; б — относительная собственная частота} — —
радиальные колебания; — -----угловые колебания
Расчет динамических характеристик
161
а—>0 и а->оо демпфирование от-'
сутствует (а = 0). Относительная ча-
стота свободных колебаний v довольно
слабо зависит от типа ограничителей
расхода и каких бы то ни было пара-
метров подвеса, изменение которых
в самых широких пределах меняет
величину v не более чем в 1,5—2 раза,
как это видно из приведенных гра-
фиков. В частности, по мере усиления
нестационарных эффектов, т. е. с уве-
личением параметра о, частота, как
правило, медленно возрастает, стре-
мясь к некоторому конечному пределу
при . о—> оо.
В заключение следует отметить, что
по характеру кривых v (о) можно
косвенно судить об устойчивости опо-
ры. Действительно, v (о) — монотонно
возрастающая функция, если устой-
чивость сохраняется при любых о;
в противном случае функция v (о)
обязательно имеет минимум при зна-
чении о, соответствующем (по крайней
мере, приблизительно) границе устой-
чивости а = 0.
Пинегип С В. и др.
8 ВОПРОСЫ
• ПРАКТИЧЕСКОГО
РАСЧЕТА
ГАЗОСТАТИЧЕСКИХ
ОПОР
Краткий анализ статических и ди-
намических характеристик газостати-
ческих опор, проведенный в безраз-
мерных величинах, дал возможность
установить критерии подобия газовых
опор и выразить закономерности их
поведения в форме, справедливой не-
зависимо от конкретных размеров опор,
эксплуатационных условий, физиче-
ских свойств газовых смазок и т. п.
Эта глава имеет целью показать на
наиболее характерных примерах, как
практически применить полученные
ранее безразмерные соотношения к не-
посредственному расчету и проектиро-
ванию реально используемых газовых
опор и их систем.
ОДНОСТОРОННИЙ подпятник
Односторонними условимся назы-
вать обычные подпятники, которые
воспринимают осевые нагрузки, дей-
ствующие лишь в определенном на-
правлении. Двусторонние же подпят-
ники могут воспринимать и противо-
положно направленные осевые усилия.
Ограничимся наиболее практичной
схемой кольцевого подпятника с од-
норядным наддувом, приведенной на
рис. 2 гл. 4 и рис. 2 гл. 6. Обычно
в конкретных расчетах таких подпят-
ников так или иначе фигурируют
следующие основные факторы:
вид газовой смазки, который до-
статочно охарактеризовать тремя ве-
личинами: показателем адиабаты k,
коэффициентом динамической вязко-
сти р, и скоростью звука в газе as
(эти величины можно найти во многих
справочниках, например [1]), причем
последние две являются функциями
температуры Т;
характерные давления: в камере
наддува ps и в окружающей среде ра;
основные макрогеометрические раз-
меры: наружный радиус /?н, внутрен-
ний радиус /?в, радиус линии наддува
Rf>
средний рабочий зазор Ло;
число питателей N и их размеры:
а) для простых диафрагм — диа-
метр кармана — Dj, дросселирующего
отверстия — Dd0} глубина кармана —
6;
б) для кольцевых диафрагм — диа?
метр отверстия Dd\
в) для капилляров — диаметр и дли-
на капилляра Dd> Ld-,
г) для щелей — толщина щели hd
и ее осевая протяженность
внешняя осевая нагрузка wez, ко-
торую будем считать статической (во
многих случаях она создается только
весом ротора, тогда wez = Mgt где
М — масса ротора; g — ускорение сво-
бодного падения; отметим, что масса
М представляет, вообще говоря, и
самостоятельный интерес);
осевая жесткость смазочного слоя
*г-,
массовый расход газа m (или при-
веденный к атмосферной плотности
объемный расход Qa).
Кроме этих величин, которые усло-
вимся считать основными, в расчете
могут фигурировать и некоторые до-
полнительные величины, в частности
моментная нагрузка угловая
жесткость смазочного слоя КУ, угол
рассогласования осей у, экваториаль-
ный момент инерции вала /э, а также
параметры свободных колебаний ро-
тора — частота v и фактор затуха-
ния а.
Почти всегда можно заранее задать
вид газовой смазки, расчетную тем-
пературу Т и наружное давление ра.
Большинство других перечисленных
величин могут быть как задаваемыми
так и определяемыми, в зависимости от
специфики требований, предъявляе-
мых к газовым Опорам в различных
технических приложениях. Часто в ка-
честве основной цели проектирования
выдвигается требование, чтобы опора
выдерживала заданную нагрузку, ко-
Односторонний подпятник
163
торая, таким образом, включается
в число исходных данных. Это требо-
вание может сопровождаться конструк-
тивными, технологическими и эксплуа-
тационными ограничениями, налагае-
мыми на габаритные размеры опоры,
размеры питателей, давление наддува
и т. п. Величины, лимитированные
наиболее жестко, целесообразно при-
соединить к исходным данным, а
остальные определить в процессе про-
ектирования. Жесткость и расход, как
правило, заранее не задают, но бы-
вают и исключения: например, в не-
которых опорах приборного типа не-
обходимо с большой точностью вы-
держивать положение центра масс
чувствительного элемента, и тогда
выдвигается дополнительное требова-
ние минимальной гарантированной
жесткости. Возможны . также случаи,
когда опора должна в течение опреде-
ленного времени работать, используя
ограниченный запас сжатого газа, или
когда в качестве смазочного материала
вместо обычного воздуха приходится
использовать дорогостоящие инертные
газы. В подобных случаях немаловаж-
ной задачей проектирования становит-
ся минимизация расхода смазочного
материала.
Различным вариантам технических
требований соответствуют, вообще го-
воря, различные конкретные методики
расчета опоры одного и того же типа,
хотя все они могут опираться на единый
теоретический подход.
Рассмотрим некоторые общие во-
просы проектирования односторонних
подпятников. Эта разновидность опор
специфична тем, что средняя по по-
верхности подпятника величина рабо-
чего зазора Ао не является конструк-
тивно задаваемым параметром, а са-
моустанавливается таким образом, что-
бы статическая внешняя нагрузка wez
(будем пока предполагать ее строго
соосной) уравновешивалась реакцией
смазочного слоя wz- Если заданы
основные размеры 7?я, 7?в, наруж-
ное давление ра и осевая нагрузка wez,
то, пренебрегая дискретностью над-
дува, можно утверждать, что условие
статического равновесия вала wez —
== wz выполняется лишь при фикси-
рованном значении абсолютного про-
тиводавления на линии наддува
которое не зависит ни от давления
наддува ps, ни от вида газовой смазки,
ни от микрогеометрии подпятника.
Значение pd проще всего определить
с помощью приближенного соотно-
шения (2) гл. 6, применимого к коль-
цевым подпятникам при условии
« 0,5 (7?н + Яв), которое будем счи-
тать выполненным1, приняв w =
= weZ/Aps, где А = п (Rh — Rb): по-
лучим
рй=^2т(1 + +'г~1)ра; т =
Очевидно, должно быть ps min pd,
где pSmin—минимально необходимое
давление наддува. При ps min = Pd
подпятник практически неработоспо-
собен, так как не обладает осевой
жесткостью [О (pd) = 0; tn—>оо].
Верхний предел рабочего диапазона
давлений наддува (psmax) зависит от
типа ограничителей расхода. При ще-
левом (или капиллярном) наддуве тео-
рия пока не выявила каких-либо опре-
деленных условий, лимитирующих ве-
личину Psmax, и ее выбор может опре-
деляться как конкретными техниче-
скими возможностями системы, обес-
печивающей подачу сжатого газа в ка-
меру наддува, так и соображениями
экономии. Следует учесть, что с уве-
личением давления наддува расход
газа растет значительно быстрее в опо-
рах со щелевыми ограничителями, чем
в опорах с ограничителями типа диа-
фрагм. При использовании кольцевых
диафрагм следует избегать критиче-
ских режимов наддува, а для этого
должно быть соблюдено условие
Ps max < %Pd %Ps mln, (2)
вытекающее из формулы (9) гл. 6,
которое весьма жестко лимитирует
рабочий диапазон давлений наддува,
особенно при небольших внешних на-
грузках, когда противодавление рд
лишь ненамного превышает наружное
давление ра. Поэтому вряд ли целе-
1 Это условие позволяет также значи -
тельно упростить расчет осевой жесткости
и анализ динамической устойчивости, пре-
небрегая кривизной контуров подпятника.
164
РАСЧЕТ ГАЗОСТАТИЧЕСКИХ ОПОР
сообразно применять кольцевые диа-
фрагмы в односторонних подпятниках
(к двусторонним подпятникам это за-
мечание не относится).
Если же ограничителями расхода
служат простые диафрагмы, то макси-
мальное давление наддува следует вы-
бирать, руководствуясь соображения-
ми динамической устойчивости. На
основании графиков рис. 1 гл. 7
можно принять
Ps шах ~ (3)
тогда при ps <ps max будет заведомо
исключено возникновение условий аб-
солютной неустойчивости, при кото-
рых стабилизация опоры не обеспечи-
вается никаким выбором объема кар-
манов. Можно, вопреки условию (3),
принять Psmax> ^ра, но в таком слу-
чае необходимо следить за тем, чтобы
расчетное значение основного эксплуа-
тационного параметра подвеса — па-
раметра режима 1
_ Pd — Pa
m~'t~ &(pd)
= Pd = ^-} (4)
\ Ps Ps /
не попадало в область абсолютной
неустойчивости т' т т". В част-
ности, при р8 = 5ра эта область, как
видно из рис. 1 гл. 7 (йгп ~ =
= 2йг£), имеет границы йг'—0,14/£;
т" = 0,48/?. По мере дальнейшего
увеличения отношения pslpa эти гра-
ницы несколько раздвигаются, при-
ближаясь к своим предельным поло-
жениям:
-f Л 0,65
т -> 0, т -> •
Чем выше максимальное давление
наддува, тем труднее реализовать ус-
ловие, исключающее возникновение
критических режимов вторичного дрос-
селирования через контур кармана и
связанных с ними аномальных явле-
ний [см. формулу (9) гл. 5].
1 Вообще говоря, во всех конкретных
расчетах вместо теоретического значения
параметра режима т должно фигурировать
его эффективное значение mQ — ^d™' где
— эмпирический коэффициент расхода
(см. с. 96).
После того как с помощью формулы
(4) (которая относится не только
к диафрагмам, но и к щелям и капил-
лярам) найдено значение йг, соответ-
ствующее принятому значению давле-
ния наддува, можно воспользоваться
табл. 2 гл. 5 для определения равно-
весной величины среднего рабочего
зазора й0 по другим заданным пара-
метрам микрогеометрии подпятника.
Если рассчитывается подпятник с про-
стыми диафрагмами, число N и диа-
метр проходного сечения которых
считаются заданными, то для одноряд-
ного варианта наддува (nd = 1) по-
лучим, согласно этой таблице,
йо =
BNP2d0
4mps
(5)
Коэффициент В зависит только от
вида смазочного материала и тем-
пературы газа; в частности, для тем-
пературы воздуха около 15 °C В =
= 0,042 кг/с2.
Характерные значения коэффициен-
та В с учетом коэффициента расхода
ad = 0,8 для различных термодина-
мических параметров воздуха приве-
дены в табл. 1.
Проектировать подпятник следует
с таким расчетом, чтобы рабочий за-
зор оказался не слишком малым;
как правило, должно выполняться
условие
г,.—р~ > (1.5-г 2) 10-4, (6)
Лц--- АВ
1. Значение коэффициента В для воздуха
(к = 1,4)
Температура, °C Вязкость ц- 10®, Па*с Скорость звука as, м/с S’ Г а II СО — тз 11 £ Ц) «
10 1,74 313,4 0,0303
20 1,79 344,1 0,0342
40 1,91 355,6 0,0377
60 20,3 366,8 0,0413
80 21,5 377,7 0,0451
100 22,9 388,2 0,0493
Односторонний подпятник
165
в противном случае приходится предъ-
являть чрезмерно жесткие требования
к точности обработки смазываемых по-
верхностей во избежание местных кон-
тактов между ними. Впрочем, даже при
очень высоком уровне технологии об-
работки поверхностей и их строгой
параллельности не следует допускать,
чтобы зазор между ними был менее
2—3 мкм, иначе начинает сказываться
вредный эффект разреженности газа
[14] — средняя длина свободного про-
бега молекул газа становится соизме-
римой с толщиной смазочного слоя.
Для подпятника с простыми диафраг-
мами требуется также определить раз-
меры карманов Dd и 6, которые це-
лесообразно подчинить условию
NDft
IR^-R^ho <Vnmax’
(7)
вытекающему из формул (3) и (17)
гл. 7. Величину Vnmax можно найти
по формулам (3) гл. 7 или по графикам
на рис. 1 гл. 7. Тем самым обеспечи-
ваются как устойчивость подпятника,
так и устранение нежелательных кри-
тических режимов вторичного дрос-
селирования.
Далее, используя формулы (7), (8)
гл. 7 и (45) гл. 6, найдем осевую жест-
кость Л8 и расход Qa. Этим в основ-
ном завершается проектирование и
предварительный расчет односторон-
него подпятника. До сих пор, однако,
условия работы подпятника предпо-
лагались несколько идеализированны-
ми — не учитывались моментные на-
грузки. Характерной их разновид-
ностью являются нагрузки, обуслов-
ленные несовпадением линии действия
осевой силы с продольной осью сим-
метрии подпятника (например, если
роль внешнего осевого усилия играет
вес вала, то внешний момент может
возникать из-за несовпадения центра
тяжести вала с его геометрическим
центром). Тогда условие статического
равновесия wez = ш/, из которого
было определено противодавление
следует дополнить условием равнове-
сия внешнего и аэродинамического
моментов. Считая, что моментная на-
грузочная характеристика близка к
6 Пинегин С. В. и др.
линейной, можно записать это допол-
нительное условие в виде
weZ\ = ARnpJ^y (у = -у) ,
(8)
где А — абсолютная несоосность осе-
вой силы, т. е. радиальное смещение
линии ее действия от осесимметричного
положения; КУ — коэффициент угло-
вой жесткости смазочного слоя, опре-
деляемый для кольцевых подпятников
по формуле (29) гл. 7; у — угловое
рассогласование осей вала и пяты,
вызванное внешним моментом wez^-
Относительный перекос у (0 у 1)
предполагается достаточно малым в том
смысле, что можно пренебречь его влия-
нием на осевое поддержание опоры,
т. е. считать что он не меняет средней
величины зазора Ло. Минимальная же
величина зазора, достигаемая при пере-
косе на внешнем контуре подпятника,
hmin — hQ (1 — у). Из уравнения (8)
можно найти, например, такое макси-
мальное значение несоосности А ~
= А*, которому соответствует мини-
мально допустимая величина зазора
^mln = h*.
Отметим, что хотя условие (7) исклю-
чает возникновение автоколебатель-
ных режимов, вал может вибрировать
под влиянием внешних периодических
воздействий, которые в данной работе
не рассматриваются. В подобных слу-
чаях важно предотвратить резонанс-
ные явления, и с этой точки зрения
особый интерес представляют частоты
свободных колебаний вала — как осе-
вых, так и угловых. Обозначим эти
частоты соответственно через Vj и v2,
если они имеют размерность в рад/с,
а те же частоты, выраженные в гер-
цах, — через v(, v2 (очевидно, Vj =
= 2nv^, i — 1,2). За характерные мас-
штабы этих частот примем величины
1 1/ Aps 1
V01=^i=Lw Vo2=^=
(9)
где /э — экваториальный момент инер-
ции вала. Если окажется, что соответ-
166
РАСЧЕТ ГАЗОСТАТИЧЕСКИХ ОПОР
ствующие характерные значения па-
раметра сдавливания
12p7?„v
= ь2 (£ = 1,2) (10)
hoPs
не превышают нескольких единиц, то
для определения собственных частот
можно воспользоваться «квазистацио-
нарными» соотношениями [24 ]
' V01 /==7 ' v02 /=т;
vi=2SV*’
(Н)
где К8, КУ — удельные величины осе-
вой и угловой жесткости смазочного
слоя. Соотношения (11) приемлемы для
инженерных оценок даже при аг- > 1,
а более точные значения vf —
1 2л 1
получаются с помощью графиков Vf =
— Vi (о/), приведенных в гл. 7. Там же
приведены графики = а/ (Of) для
определения логарифмического декре-
мента затухания осевых и угловых
свободных колебаний 6f = —(аг7л).
Пример. Рассмотрим кольцевой под-
пятник, основные размеры которого
7?н — 0,04 м; /?в = 0,01 м; =
= 0,025 м. Наддув осуществляется
через простые диафрагмы (Z)^o —
= 0,35 мм = 3,5-10~4 м; Dd = 5 мм =
= 5-10'3 м), число которых N = 8.
Осевая нагрузка wez 250 Н. В ка-
честве смазочного материала исполь-
зуется воздух. Наружное давление
Ра — Ю5 Па, относительное давление
наддува pslpa по эксплуатационным
условиям не должно превышать шести.
Расчетную температуру примем рав-
ной 15 °C.
Прежде всего определим, приемлема
ли в данном случае теоретическая мо-
дель подпятника, не учитывающая
дискретность наддува. Согласно усло-
вию (82) гл. 6 при значениях /?н,
/?в, дискретностью можно пре-
небречь, если N > 10, тогда как в ис-
ходных данных принято N = 8. Однако
это условие не следует абсолютизиро-
вать, оно справедливо лишь в сред-
нем, поскольку степень влияния дис-
кретности зависит не только от числа
питателей, но и от относительного
радиуса выходного сечения питателя
rd— Dd/(2Rii)> с увеличением кото-
рого влияние дискретности ослабе-
вает. Так при rd < 0 (10~2) точность
условия (82) гл. 6 может оказаться не-
достаточной, а уже при rd — 0,05
оно, напротив, становится чрезмерно
жестким. Поэтому в рассматриваемом
случае (rd « 0,08) можно ожидать,
что при заданном числе питателей
N = 8 точность расчета без учета
дискретности наддува будет вполне
удовл етвор ител ьн ой.
Найдем вспомогательные величины,
которые фигурируют в дальнейших
расчетах. Площадь несущей поверх-
ности подпятника
А = п (R2 — «2) = 4,71 • IO'3 м2;'
безразмерные геометрические пара-
метры
— Rr/Rh — 0,25; = —
= 0,625;
Y 1 Н 1п — 0,470
£ = In — -—i = 0,916-----=
rB lnrB — 1,386
= 0,311;
физические параметры воздушной смаз-
ки [1]
k = 1,4; р » 1,8-10'5 Па-с, as = 1
= 340 м/с,
(параметры р и as определены при
расчетной температуре 15 °C), а также
соответствующие значения функций
(»d = 1)
F № = (т+т)2 = 0,578;
В — 12pas F (k) = 0,042 кг/с2
(без учета а^),
через которые согласно табл. 1 (гл. 5)
выражается основной эксплуатацион-
ный параметр т.
Используя выражения (1), рассчи-
таем давление в кармане при макси-
мально возможной, по исходным дан-
ным, внешней нагрузке wez — 250 Н:
= 2-0,324(1 + |/"Г08)= 1,96.
Ра
Односторонний подпятник
167
Примем относительное рабочее давле-
ние наддува равным pjpa =3 (ра =
— 1/3); тогда pd = pd/ps = 0,65, а со-
ответствующее значение функции ис-
течения, согласно формуле Прандтля
(8) гл. 5, 'О’ (pd) = 0,955. Используя
(4), можно найти значение параметра
режима т, при котором внешняя осе-
вая нагрузка wez уравновешивается
реакцией смазочного слоя wz- Предва-
рительно рассчитаем модифицирован-
ный параметр режима:
. Pd — Pa 0,652 —0,332
т~ $(Pd) ~ 0,955 ~
= 0,325 (тп = 2т = 0,65),
по которому с помощью графиков
рис. 15 гл. 7 или соотношений (41)
гл. 7 найдем значение Vmax ж 0,5,
необходимое для определения макси-
мально допустимого объема карманов
[см. формулу (7)]. Далее находим
_ т [0,325 t
ffl = rW’05;
а затем по формуле (5) определяем
характерную величину самоустанав-
ливающегося рабочего зазора при вы-
бранном давлении наддува ps = ЗХ
ХЮ5 Па:
_3,/' 4,2-10~2-8 (3,5-10*4)2
V 4-1,05-3-105
= 3,2-10 5 м = 32 мкм.
Глубина кармана согласно (7) долж-
на удовлетворять условию
я (/?н — /?х) h0 ~
d< птах~
_ 4-2,5-10~2 (4 — 2,5) • 10~2-3,2-1(Г5 z
~ 8(5-10~3)2 Х
X 0,5 = 1,2-10“4 м = 120 мкм.
Необходимо отметить следующее. По-
скольку глубина кармана и рабочий
зазор в данном случае оказались ве-
личинами одного порядка, то под 6
следует понимать не глубину кармана,
а расстояние между его дном и проти-
воположной поверхностью вала (обыч-
но это расстояние отождествляют с глу-
биной кармана, подразумевая, что
6*
6 > Ло). Тем самым будет частично
учтен дополнительный член (30) гл. 6,
который появляется в условии ба-
ланса расходов (33) гл. 7 при д/й0 —
~ О (1). В этом члене остается неучтен-
ной зависимость относительного за-
зора Н от времени. Можно показать,
что если бы такая зависимость была
учтена, то применение квазистацио-
нарного анализа привело бы к менее
жесткому условию устойчивости, чем
условие (41) гл. 7. Таким образом,
максимально допустимая глубина кар-
мана
д' = 6 — h0 = 120 — 32 = 88 мкм
фактически определена здесь с неко-
торым запасом в сторону уменьшения.
Проверим, обеспечивается ли от-
сутствие критических режимов вто-
ричного дросселирования. Для этого
согласно условию (9) гл. 5 необходимо,
чтобы минимальный диаметр кармана
(£ = 2 при pjpa = 3)
Г) _ г _
Vd rain~§ 4ft7~
(3,5-10~4)2 _ 10-3 м--2 мм
~2 4-3,2-Ю-6 —2'10 м 2 мм-
Как видим, условие (9) гл. 5 выпол-
няется с трехкратным запасом (по ис-
ходным данным Dd = 5 мм).
Сравнивая расчетное (2) гл. би
асимптотическое (т —> оо) значения
удельной несущей способности (при
т — 0,325 и т->оо соответственно),
легко убедиться в том, что в рассма-
триваемом случае ра~ 1/3 подпят-
ник обладает двукратным запасом не-
сущей способности, т. е. теоретически
может выдерживать осевую нагрузку
до 500 Н. Действительную нагрузку
можно значительно увеличить по
сравнению с тем максимумом, который
обусловлен исходными данными
(250 Н). Однако не следует допускать,
чтобы она была слишком близкой
к теоретическому пределу, иначе под-
пятник может стать практически не-
работоспособным вследствие резкого
уменьшения рабочего зазора и осевой
жесткости.
Расчетные значения удельной осе-
вой жесткости можно найти по фор-
муле (23) гл. 6: приняв т — 0,325
168
РАСЧЕТ ГАЗОСТАТИЧЕСКИХ ОПОР
Рис. 1. Абсолютные значения рабочего за-
зора, осевой жесткости и расхода воздуха
одностороннего подпятника при различных
осевых нагрузках (исходные данные приве-
дены в примере)
(это соответствует осевой нагрузке
ttJeZ— J25O Н) и Ра~ 1/3, получим
1С8 = « 0,37, что лишь ненамного
меньше максимальна достижимого при
ра = 1/3 значения, равного прибли-
зительно 0,39. Абсолютная осевая жест-
кость
rr8 _ Aps 77г_
-~h^KZ~
4,71-10"3*3« 10б А 2__
3,2-10’5 *0,37
= 1,6-107 Н/м.
Найдем теперь объемный расход,
приведенный к наружному давлению:
л (3,2-10"*)8(3-108)® ln4.nQW
“ 12-ТЛЮТ10®-------1.05-0,955 -
= 4,3-10'4 м3/с(яг 1,5-Ю3 л/ч).
До сих пор все расчеты велись на
верхнем пределе заданного диапазона
осевых нагрузок 0 < wez 250 Н.
Расчетные графики изменения рабо-
чего зазора, осевой жесткости и рас-
хода в этом диапазоне нагрузок при-
ведены на рис. 1 (для постоянного
давления наддува ps = Зра). При этом
оказывается (хотя, вообще говоря,
это не всегда так), что глубина карма-
на, обеспечивающая устойчивую ра-
боту подпятника при максимальной
нагрузке, удовлетворяет условию ус-
тойчивости и при меньших нагрузках;
не нарушается и условие (9) гл. 5.
Возникает вопрос, насколько удачен
выбор давления наддува. Увеличивать
его по сравнению с ранее выбранным
значением, по-видимому, нецелесооб-
разно, хотя исходные данные и до-
пускают такую возможность. Уже при
pjpa = 4 максимально допустимая по
условию (7) глубина кармана 6' =»
= 6 — hQ в несколько раз меньше,
чем при ps/pa = 3. В дополнение
к расчету оценим допустимое откло-
нение соосности нагрузки и частоту
свободных колебаний вала на смазочт
ном слое. Предположим, что относи-
тельное отклонение от параллельности,
смазываемых поверхностей у не должно;
превышать 0,2, и, прежде-чем восполь^
зоваться соотношением (8) для опре-
деления соответствующего отклонения-
от соосности А, найдем коэффициент
угловой жесткости подпятника^
По формуле (25) гл. 6 находим ==
— 0,072 при т = 1,05 (wez — 250 Н);
ра = 1/3. Тогда из (8) получим
д ARHpsKvy
weZ
4,71 • 10*®-4-10~2-3-105-0,72 0,2 _
< 2,5-10® ~
— 0,033 м,
т. е. допустимое относительное откло-
нение от соосности внешней нагрузки,
нормированной по внешнему радиусу
подпятника, А = А//?н 0,8.
Примем массу вала М = 5 кг. В та-(
ком случае согласно формулам (9)
и (10) (при wez = 250 Н, ps ~ Зра)
_____ । /4,71-10~3-3.105 _
v°x“ V 5-3,2-10-®
ягЗ-103 с'1,
_ 12-1,8-10'5 (4-10-2)2-3-10® ~
СТ1~ (3,2- Ю’5)2- 3-10* *
яг 3,4.
Значение ог достаточно мало. При этом
частоту осевых свободных колебаний
вала, имея в виду характер зависимо-
сти vx = vx (о^), где vx = vx/v01, можно
Двусторонний подпятник
169
рассчитывать при Gj—> 0. Этому случаю
соответствует первая «квазистационар-
ная» формула (11), из которой, под-
ставив в нее найденное выше значение
удельной осевой жесткости К8 = 0,37,
получим собственную частоту при осе-
вых возмущениях:
vj = /сГ37 « 300 Гц.
Аналогично по формулам (9) и (11)
можно рассчитать собственную ча-
стоту при угловых возмущениях v£,
предварительно задав экваториальный
момент инерции вала /э.
ДВУСТОРОННИЙ подпятник
Применение двусторонних подпят-
ников (рис. 2 гл. 7) целесообразно
не только в тех случаях, когда внеш-
няя .сила может действовать как в по-
ложительном, так и в отрицательном
направлении оси, но и при односторон-
них осевых нагрузках. Ниже будет
показано, что двусторонние подпят-
ники в некоторых отношениях пред-
почтительнее, чем односторонние. Тор-
цовые зазоры на обеих сторонах под-
пятника либо аэродинамически авто-
номны («открытый» вариант, рис. 2, а),
либо соединены боковой перемычкой
(«закрытый» вариант, рис. 2, б).
За характерную величину зазора Ло
в двустороннем подпятнике обычно
принимают Со — половину осевого хо-
да подпятника. Обозначая индексами
1 и 2 противоположные стороны под-
пятника, получим следующие выраже-
ния, которые определяют местную ве-
личину торцового зазора h как функ-
цию полярных координат г и ф:
ftl,2 = A1.2 + Yl,2? cos ср;
л;,2 = со(1 * * * +8z); (12)
Y -
Здесь (/= 1, 2)—зазор при от-
сутствии перекоса; у, у, у^ — абсо-
лютное (в радианах) и относительное
значения угла перекоса, нормирован-
ные соответственно по угловым масшта-
бам С0/₽н, h^R^ где /?н—внешний
Рис. 2. Двусторонний кольцевой подпятник:
а — «открытый» вариант; б — «закры-
тый» вариант
радиус подпятника; 8/ (—1 < 8/ <
< 1) — относительное осевое смещение
вала из симметричного положения,
при котором торцовые зазоры одина-
ковы (/ij = Л2).
Рассмотрим сначала «открытый» ва-
риант двустороннего подпятника
(рис. 2, а). Его можно трактовать как
совокупность двух односторонних под-
пятников, параметры которых, зави-
симые от соответствующих характер-
ных зазоров h{ и h'2, попарно взаимо-
связаны через осевое смещение 8/ —
единый параметр двусторонней опоры Ч
В частности, из соотношений (1) видна
такая взаимосвязь между параметрами
Yi и Ya- Среди критериев подобия, опре-
деляющих статические характеристики
упорных подвесов, от характерного
зазора зависит только параметр ре-
жима. В соответствии с табл* 1 гл. 5
и вторым соотношением (12) получим
(«~»— знак пропорциональности) '
tn^CQS; ^i,2 ~ S
~ [Со (1 b^)I"s, _
1 По отношению к одностороннему под-
пятнику осевое смещение оказывается лишь
формальным параметром в силу произ-
вольности выбора масштаба толщины за-
зора.
170
РАСЧЕТ ГАЗОСТАТИЧЕСКИХ ОПОР
где fh — единый параметр режима
двустороннего подпятника; /п1>2 —
обычный параметр режима односто-
роннего подпятника с характерным
зазором h± 2; s = 2 для кольцевых
диафрагм и s = 3 для простых диа-
фрагм, капилляров и щелей. Оче-
видно, при 8/ = 0 имеем fhr — fh2 =
= /п, а в общем случае
fh
*h,2=---------- = m'(±zz). (13)
(1=Ре7)5
Соотношение (13) позволяет легко
выразить статические характеристики
«открытого» двустороннего подпятника
через соответствующие характеристики
одностороннего подпятника. Так, при
отсутствии перекоса (у = 0) удельная
несущая способность двустороннего
подпятника с параметром режима th
и осевым смещением 8Z выражается
следующим образом:
Fz(m,ez) = .^- =
= wz [fhr (8z)] — wz [fh' (— ez)J, (14)
где W и w относятся соответственно
к двустороннему и одностороннему
подпятникам; Wz — осевая реакция
смазочного слоя; wz [fh' (±87)] —
удельная несущая способность одно-
стороннего подпятника с параметром
режима m1>2 — fh' (±87). Например,
удельная несущая способность дву-
стороннего подпятника с простыми
диафрагмами при fh = 1 и 87 = 0,5
равна разности удельных величин не-
сущей способности односторонних под-
пятников, для которых параметры ре-
жима — 0,5“3 — 8; /п2=1,5”3 =
= 0,3. Для определения упомянутых
величин можно либо непосредственно
воспользоваться формулой (18) гл. 6,
относящейся к одностороннему коль-
цевому подпятнику, либо прибегнуть
к прямолинейной расчетной модели
подпятника, которой соответствуют
формула (2) гл. 6 и графики рис. 2
гл. 6. При использовании последнего
способа следует перейти от обычного
параметра режима к модифицирован-
ному параметру /п1>2 = /п1>2С-
Осевая и угловая жесткости «от-
крытого» двустороннего подпятника,
в отличие от его несущей способности,
представляют собой уже не разность,
а сумму соответствующих жесткостей
обоих смазочных слоев. В самом деле,
если жесткости обоих слоев поло-
жительны (возможны, как исключение,
нулевые, но не отрицательные зна-
чения), то создаваемые каждым из них
дополнительные аэродинамические си-
лы и моменты, обусловленные из-
менениями первоначального положе-
ния равновесия вала, должны противо-
действовать этим изменениям, т. е.
суммироваться.
Удельная осевая жесткость одно-
стороннего подпятника (в гл. 6) вы-
ражалась одним из двух различным
образом нормированных коэффициен-
тов: коэффициент /С8, так же как и
Kz, был приведен к действительной
величине зазора при отсутствии пе-
рекоса [за таковую можно принять
величину Л12, см. (12)], а коэффи-
циент we = wf — к выбранному мас-
штабу зазора h0. Оба коэффициента
связаны простым соотношением (7)
гл. 6, очевидным обобщением которого
в данном случае является соотношение
^zi 2~ wzi 2 0 8z)- Учитывая это,
а также имея в виду (13) и обозначая
через W& и 1Г8 абсолютную осевую
жесткость двустороннего подпятника
и его удельную жесткость, приведен-
ную к характерному зазору h0 — Со,
получим, по аналогии с выражением
(14), следующую связь между'коэф-
фициентами осевой жесткости двусто-
роннего и одностороннего подпятни-
ков:
е*) = ^Ъ =
= wz [tn' (ez)] + wz [т' (— ez)] =
(ez)l
1-е2 + 14-ez
(15)
Значения коэффициента при тх =
— (8z) и т2 — fh' (—87) для коль-
цевого подпятника рассчитывают по
формуле (23) гл. 6. Можно воспользо-
ваться также соответствующей при-
ближенной формулой (8) гл. 6, не
учитывающей кривизну подпятника.
Двусторонний подпятник
171
2. Предельный объемный расход газа через опору
Ограничитель расхода
Простая диафрагма Кольцевая диафрагма Капилляр Щель
(k) -^-asDd0 WVF(*) ^asDdh0 л "dN Ddpj л fld hdPs
М-1 \ k + 1 * * * * * J 256 lipa 12 ‘d
Обозначения- nd ~~ число линий наддува (для подпятника принимается
nd~ 1), удлинение капилляра; — эффективная относительная длина щелевого
канала (см. табл. 1 гл. 5).
Эта таблица применима и к радиальным (строго говоря, ненагруженным) подвесам.
Определим теперь угловую жест-
кость двустороннего подпятника, огра-
ничиваясь случаем соосного располо-
жения вала и неподвижных элементов
опоры. В этом случае, по крайней мере
при малых угловых возмущениях по-
ложения равновесия [у1>2 < 1, см.
(12)], допустимо использовать линей-
ное соотношение 3? XYi ~ Kfrl, где
К] V ~ 1’2) — коэффициенты
восстанавливающего момента и угловой
жесткости f-го смазочного слоя. Ана-
логичное соотношение справедливо для
двустороннего подпятника как единого
целого: 2? xy = где характери-
стики двустороннего подпятника
3?xy и имеют тот же смысл, что и
характеристики S?xyi и К] /-го слоя.
Очевидно, &XY = 'S'xYi + &XY2,
если восстанавливающие моменты нор-
мированы по одной и той же величине,
например по ARBps. Последнее ра-
венство, вместе с только что упомяну-
тыми соотношениями, к которым сле-
дует присоединить ранее использо-
ванное соотношение (13) и связь между
угловыми параметрами -у, -у12 [см.
(12)], приводит к искомому выражению
для удельной угловой жесткости дву-
стороннего подпятника — абсо-
лютная угловая жесткость, имеющая
размерность Н-м/р ад):
(т, е,) = —=
V 7 В AR»PS
__ &XY1 + S’xYi = 4V1+4V2 =
Y Y
1 — 1 + &Z
(16)
Это выражение по своей общей струк-
туре аналогично выражению (15) для
осевой жесткости.
Из основных статических характе-
ристик осталось определить расход
воздуха на наддув. Для односторон-
него подпятника его можно рассчи-
тать по формулам (45) и (46) гл. 6.
При этом может быть полезной сле-
дующая вспомогательная таблица, ко-
торая непосредственно вытекает из
выражения (46) гл. 6 и табл. 1 (гл. 5).
Расход газа через z-й смазочный
слой двустороннего подпятника можно
по аналогии с выражением (45) гл. 5
представить в виде Qai = Qai® (pdi),
где Qai (hi) = Qa (h0), t. e. Qai точно
так же зависит от hi — Со (1 + &z)
[см. (12)], как Qa от h0~ Со. Но,
согласно табл. 2, при наддуве через
простые диафрагмы, щели и капилляры
Qa не зависит от hQ, и, следовательно,
в этих случаях Qai = Qa, а при над-
дуве через кольцевые диафрагмы Qa ~
— ha, откуда Qai,2 = Qa (I eZ).
В результате, вновь учитывая (13),
172
РАСЧЕТ ГАЗОСТАТИЧЕСКИХ ОПОР
получим для двустороннего подпят-
ника
Q (т, ez) - Qa/Q*a =
= (1 — ^z)T # {Pd [m' (ez)]} +
+ (1+82)т^{рЛ^(-^)]}, (17)
где т — 3 — s, т. e. т = 1 для опоры
с кольцевыми диафрагмами и т — О,
если используют другие типы ограни-
чителей расхода. Способы определения
вспомогательной величины pd (исполь-
зуемой также при расчете несущей
способности, осевой и угловой жест-
кости) по заданному значению пара-
метра режима подробно изложены
в гл. 5.
Из расчетных формул (14)—(17) вид-
но, что осевое смещение 8Z является
самостоятельным параметром двусто-
роннего подпятника, тогда как при
рассмотрении одностороннего подпят-
ника этот параметр используется лишь
в качестве вспомогательного, в част-
ности для установления связи между
различными модификациями параметра
режима. Параметр sz — аналог от-
носительного эксцентриситета 8Г в ра-
диальных опорах, с той лишь разни-
цей, что 1 8Г 0, а 1 > 8Z > —1.
Однако практически достаточным ока-
зывается расчетный диапазон 0
8Z < 1, поскольку, в силу условий
симметрии, удельная несущая способ-
ность двустороннего подпятника Wz —
нечетная функция параметра 8Z [т. е.
Wz (—bz) = — Wz (_£z)L _a коэффи-
циенты жесткости и и относи-
тельный расход Q — четные функции
f^z (~ez) = ®z (»z) и т. п.].
Рассмотрим два предельных случая:
8Z = 0 (осевая нагрузка отсутствует)
и 8Z—> 1 (нагрузка достигает теорети-
ческого предела грузоподъемности под-
пятника). Обозначим, в частности,
Q(in, ez)ez=o = Q0(m);
Q("»- 8z)ez-»l =
те же индексы используем в обозначе-
ниях других статических характери-
стик двустороннего подпятника. В пер-
вом случае из выражений (14)—(17)
следует
Wzo (т) = 0; F|o (th) = 2К% (тУ
Wl(m) = 2ЛТ (т)-,
Q„(m) = 2d[pd(m)],
(18)
т. е. коэффициенты осевой и угловой
жесткостей и расхода удваиваются по
сравнению с соответствующими вели-
чинами для одностороннего подпят-
ника. Во втором случае
^Zoo («) -= “’zoo - (2“sm);
^zoo Й=^Л1(2-5т);
(19).
Wl(m) =(2-sm);
(?Oo("’) = 23^^[Pd(2’s^)].
Для определения величины wZoo можно
воспользоваться формулой, не учи-
тывающей кривизну контуров подпят-
ника, либо принять pd = 1 в более
точной формуле (18) гл. 7.
Некоторые результаты расчета ста-
тических характеристик двустороннего
подпятника в диапазоне 0^8Z^l,
полученные на основании формул
(14)—(19) (с использованием прямоли-
нейной модели), приведены на рис. 3
и 4. Нагрузочная кривая 1TZ (ez)
(рис. 3) имеет такой же качественный
характер, как и соответствующая кри-
вая Wr (8Г) для радиального подвеса.
Степень ее нелинейности оказывается
наибольшей при наддуве через про-
стые диафрагмы, что находит отраже-
ние в наиболее значительном умень-
шении осевой жесткости с ростом
осевого смещения [кривые l^z(sz)].
На расход газа (рис. 4) осевое смещение
влияет относительно слабо, чем, кстати,
косвенно подтверждается правомер-
ность принятого упрощения, согласно
которому расход газа через радиаль-
ную опору определяют без учета экс-
центриситета.
Двусторонние подпятники по своему
поведению во многом близки к ради-
Двусторонний подпятник
173
3. Удельная несущая способность
двустороннего подпятника с простыми
диафрагмами (р -> 0)
0
0,125
0,25
0,375
0
0,240
0,294
0,301
0/0,667
0,583
0,549
0,523
0,5
0,625
0,75
оо
0,290
0,270
0,250
0
0,500
0,481
0,463
0
Рис. 3. Влияние осевого смещения на несу-
щую способность Wg и осевую жесткость
двустороннего подпятника [т = 1;
ра = 0,2;г, =(1+ гв)/2];
-----наддув через простые диафрагмы;
-----— наддув через кольцевые диафраг-
мы
альным подвесам; вместе с тем они
ведут себя в некоторых отношениях
качественно иным образом, чем одно-
сторонние подпятники. Это иллюстри-
руется, в частности, с помощью табл. 3,
рассчитанной для симметричной пря-
молинейной модели двустороннего под-
пятника (см. рис. 1, х — 0,5).
Сопоставляя табл. 3 с соответству-
ющими графиками (см. рис. 2 гл. 7)
для одностороннего -подпятника, ви-
дим, что параметр режима оказывает
качественно различное влияние на
несущую способность одностороннего
и двустороннего подпятников. В то же
время очевидна качественная аналогия
между данными табл. 3 и графиками
(см. рис. 12 гл. 7), относящимися
к радиальному подвесу. В обоих слу-
чаях удельная несущая способность
имеет максимум по параметру режима
при конечном значении последнего,
причем оптимальное значение этого
параметра монотонно уменьшается с
ростом осевого или радиального сме-
щения вала. В частности, при > 1,
как видно из табл. 3, несущая способ-
ность, возрастая по мере уменьшения
параметра /п, теоретически достигает
наибольшей величины при неограни-
ченном уменьшении этого параметра,
после чего скачкообразно падает до
нуля. В этом смысле и следует трак-
товать двухзначность величины
(Wz)^ при « = °-
Рассмотрим некоторые особенности
расчета динамики «открытых» двусто-
ронних подпятников. При анализе
динамических характеристик газоста-
тических опор фигурировали две груп-
пы динамических характеристик: па-
раметры свободных колебаний вала
на смазочном слое (относительная ча-
стота колебаний v и фактор затуха-
ния а) и характеристики самого сма-
зочного слоя — обобщенные коэффи-
циенты динамической жесткости и
демпфирования qclt q[f которые в даль-
нейшем для удобства условимся обо-
значать соответственно через qc, qs.
Характеристики первой группы счи-
тали основными, второй — вспомога-
тельными (последние не включали
Рис. 4. Влияние осевого смещения на рас-
ход газа через двусторонний подпятник
1;ря = 0,2;г1 = (1+ rB)/2Ji
---------наддув через простые диафраг-
мы; -----— наддув через кольцевые диа-
фрагмы
174
РАСЧЕТ ГАЗОСТАТИЧЕСКИХ ОПОР
в число выходных данных). Для рас-
чета параметров свободных колебаний
вала, поддерживаемого двусторонним
подпятником, целесообразно выделить
результаты расчета динамических ко-
эффициентов одностороннего подпят-
ника qc, qs (при осевых и угловых
возмущениях) как функций числа сда-
вливания ov, параметра режима tn
и других аргументов в специальную
серию графиков и таблиц. Такую серию
можно построить, используя выраже-
ния
qc = v2 * * * * * (1 — a2); qs = — 2v2a, (20)
которые непосредственно вытекают из
уравнений (50) гл. 7, если предвари-
тельно рассчитаны характеристики v,
а одностороннего подпятника как
функции аргументов о, tn и др. (На-
помним, что параметр сдавливания о
связан с условно задаваемым пара-
метром ov простым соотношением ov =
= OV.)
В начале этой главы было отмечено,
что среди стационарных критериев
подобия односторонних подпятников
только параметр tn непосредственно
зависит от характерной толщины сма-
зочного слоя hQ. Аналогичным свой-
ством обладает нестационарный кри-
терий о и модифицированный пара-
метр ov. Переходя к анализу динами-
ческих характеристик двустороннего
подпятника, целесообразно ввести «ло-
кальное» число сдавливания г-го сма-
зочного слоя 0 — 1,2) по ана-
логии с ранее введенным «локальным»
параметром режима /п; [см. (13)].
Поскольку ov— l/h% (h0 — Со) и со-
ответственно то, учиты-
вая (12), получим
2 = ([ = av (± е2). (21)
Очевидно, ovl = oV2 == av ПРИ 8z —
— 0. Под ov следует теперь понимать
единое число сдавливания двусторон-
него подпятника, определяемое точно
так же, как и для отдельного односто-
роннего подпятника.
Кроме параметра режима и числа
сдавливания, в динамическом анализе
могут фигурировать еще относитель-
ный объем карманов V, а также (для
опор со щелевым или капиллярным
наддувом) параметр Е, определяемый
формулой (67) гл. 7. Эти дополнитель-
ные параметры, как и параметры т
и ov, зависят от характерной вели-
чины зазора и, следовательно, тоже
подлежат «локализации» для каждого
f-го слоя двустороннего подпятника.
Учитывая, что V—1//г0 и Е — hQ,
получим, по аналогии с выражениями
(13) и (21), следующие выражения
для соответствующих «локальных» па-
раметров:
_ у —
(22)
fi, 2 = Е (1 =F ez) = Е' (± sz).
Подразумевается, что параметры V
и Е определяют единообразно как для
одностороннего, так и для двусторон-
него подпятника (в последнем случае
Естественно, что динамические коэф-
фициенты f-го слоя двустороннего под-
пятника qa и qSi должны зависеть от
локальных параметров /п/ и [до-
полнительные параметры (22) пока не
учитываем], как соответствующие ко-
эффициенты отдельного односторон-
него подпятника от параметров tn и
ov. Это позволяет найти коэффициенты
динамической жесткости qc^ и демпфи-
рования qs^ двустороннего подпят-
ника, параметры которого принимают
значения /п, ov, 87, как линейную
суперпозицию аналогичных коэффи-
циентов двух односторонних подпят-
ников, для одного из которых tn = тх,
ov = avi> а Для Другого — th = пг2,
Оу = ov2, где m;, ov^ (i = 1,2) опре-
деляют выражениями (13) и (21). По
аналогии с соотношениями (15) и (16),
связывающими коэффициенты стати-
ческой жесткости двустороннего и од-
ностороннего подпятников, получим
ez) =
q':, slm (ez),av(ez)] (
- i~Tz +
+ • (23)
Фактически это выражение относится
только к подпятникам с наддувом
Двусторонний подпятник
175
через кольцевые диафрагмы. При над-
дуве через простые диафрагмы и щель
(или капилляры) будем соответственно
иметь [см. (22) ]
‘Zc.ssC”’ V 8z) =
Яс, s [rn (ez), av (ez), V (ez)]
1 —
4c,s[m (—ez), <Tv(—ez),
, V'(-ez)] .
+ l+ez
(24)
«c.ssC*’ E> 8z) =
Яс, s [m (ez), Ov (ez), E' (ez)] r
1 - ez +
Яс, S [m (— ez), Ov (— ez),
, E’(-ez)]
+ l+eZ
Чтобы найти параметры свободных
колебаний вала, поддерживаемого дву-
сторонним подпятником, — относи-
тельную частоту v2 (нормированную
по тому же масштабу v0, который был
принят для одностороннего подпят-
ника) и фактор затухания а2, необ-
ходимо решить систему трансцендент-
ных уравнений
вытекающую из уравнения динамики
осевых или угловых свободных коле-
баний вала, точно так же, как и ана-
логичную систему (50) гл. 7 для вала,
поддерживаемого односторонним под-
пятником. Обозначение q^ (vz,
следует принимать в том смысле, что
в линеаризованном уравнении Рей-
нольдса, на основании которого рас-
считывают динамические коэффициенты
qc и qs отдельных смазочных слоев
двустороннего подпятника, входящие
в (23) и (24), принимают v = и
а — av.
Отметим, что хотя системы (50)
гл. 7 и (25) данной главы однотипны
и могут быть решены одним и тем же
методом [24], однако функции ^с, s (v,
а) и <7c>s2(v2, а2), вообще говоря,
не являются идентичными, и между
параметрами свободных колебаний дву-
стороннего и одностороннего подпятни-
ков в общем случае не существует до-
статочно простой связи, которая изба-
вила бы от необходимости решать
систему (25), если решена система
(50) гл. 7. Такую связь удается уста-
новить, по крайней мере, в одном прак-
тически интересном частном случае
8/—> 0, когда согласно соотношениям
(23), (24) <7CjSS= 2^c>s. С учетом по-
следнего равенства, из системы (25)
получим соотношение
2а
(%> as) + у-А- % (%, a2) = 0,
(26)
которое можно использовать в ка-
честве уравнения для определения
величины а^ как функции условно за-
даваемого параметра cfv = cfv2. Это
уравнение полностью совпадает с урав-
нением [см. (51) гл. 7] для односторон-
него подпятника, так что функции
(av) и a (av) ПРИ 8z->0 оказы*
ваются тождественными. Но тогда из
(25) гл. 8 и (50) гл. 7 следует, что
v = v ]/*2 при фиксированном зна-
чении ov. Переходя от ov к исходному
параметру сдавливания о, равному
ov/v для одностороннего и cfv/vs для
двустороннего подпятников, оконча-
тельно получим искомые связи
Vv (a) = K2v (о /2), as (о) =
= a(o]/r2) -при 8/—>0, (27)
которые практически можно использо-
вать для расчета параметров свобод-
ных колебаний слабонагруженных дву-
сторонних подпятников по аналогич-
ным параметрам односторонних под-
пятников. Чтобы получить графики
зависимостей (о) и as (о) из соот-
ветствующих графиков v (о) и а (о),
последние достаточно «сжать» по го-
176
РАСЧЕТ ГАЗОСТАТИЧЕСКИХ ОПОР
ризонтали в Y2 раз, а график v (о),
кроме того, «растянуть» по вертикали
в то же число раз (не меняя масштабов).
Соотношения (27) указывают, в част-
ности, на то, что двусторонний под-
пятник в определенном смысле более
устойчив, чем односторонний. Значе-
ния параметра сдавливания, характе-
ризующие верхнюю границу области,
в которой возможны неустойчивые
режимы (см. рис. 18 гл. 7), уменьша-
ются в j/"2 раз.
Квазистационарное условие устой-
чивости [см. (41) гл. 7], относящееся
к одностороннему подпятнику с про-
стыми диафрагмами, как и соответ-
ствующие графики (см. рис. 15 гл. 7),
остается полностью справедливым для
ненагр ужен кого двустороннего под-
пятника (в^ — 0)- Упомянутое усло-
вие эквивалентно условию положитель-
ности коэффициента демпфирования,
который, как было показано выше,
лишь удваивается при переходе от
одностороннего подпятника к ненагру-
женному двустороннему. По-видимому,
можно не сомневаться в том, что если
двусторонний подпятник устойчив при
отсутствии нагрузки, то он сохраняет
устойчивость и под нагрузкой.
Рассмотренные выше способы опре-
деления характеристик двустороннего
подпятника по соответствующим ха-
рактеристикам одностороннего подпят-
ника, разумеется, применимы только
к «открытому» варианту (см. рис. 2, а).
Расчет же «закрытого» варианта дву-
стороннего подпятника, проточная
часть которого составляет единое це-
лое (см. рис. 2, б), технически гораздо
более сложен. Последнее обстоятель-
ство может считаться отражением того,
что нет оснований ожидать каких-то
реальных выгод от использования «за-
крытого» варианта, который к тому же
конструктивно менее удобен, чем «от-
крытый». Двусторонние подпятники
удобнее односторонних в том отноше-
нии., что допускают большую свободу
выбора параметров наддува. В одно-
стороннем подпятнике определенных
размеров эта свобода при заданной
внешней нагрузке ограничивается в
первую очередь условием статического
равновесия вала wez — wz* которое
жестко фиксирует величину аэродина-
мической силы wz и тем самым —
средний уровень давления в смазоч-
ном слое. Аналогичное условие для
двустороннего подпятника Wez =
= ^z — wiZ — W2Z является менее
жестким, поскольку оно фиксирует
лишь разность аэродинамических сил
шХ2, действующих на противопо-
ложные торцовые поверхности вала,
сами же эти силы могут варьироваться
изменением параметров наддува. Прак-
тически это позволяет существенно
ослабить ограничения, часто весьма
стеснительные, которые приходится на-
кладывать на верхний предел рабочего
диапазона давлений наддува при ис-
пользовании односторонних подпятни-
ков с простыми и кольцевыми диафраг-
мами. С другой стороны, следует
учесть, что нижний предел допусти-
мых давлений наддува у двустороннего
подпятника несколько выше, чем у од-
ностороннего, поскольку в первом слу-
чае один из двух смазочных слоев
фактически создает дополнительную
нагрузку w2z, которая действует в ту
же сторону, что и внешняя нагрузка
^Z-
РАСЧЕТ МНОГООПОРНЫХ
СИСТЕМ
Основные особенности расчета мно-
гоопорных систем с газовой смазкой
удобно рассмотреть на одном из наи-
более типичных примеров такой си-
стемы (рис. 5): вал поддерживается
двумя радиальными подвесами с сим-
метричным двухрядным наддувом и
двусторонним подпятником с надду-
вом в одном кольцевом сечении.
Целесообразно начать с некоторых
замечаний о расчете изолированных
радиальных подвесов. Макрогеометрию
радиального подвеса с двухрядным
наддувом можно охарактеризовать сле-
дующими параметрами (см. рис. 3
гл. 6): внутренним радиусом под-
шипника 7?, его относительным удли-
нением X и относительной раздвижной
линией наддува Ь. Кроме этой группы
конструктивных параметров, в кон-
кретных расчетах радиальных подве-
сов фигурируют те же факторы, что
и в расчетах подпятников, в частности
таким же остается набор конструктив-
Расчет многоопорных систем
177
ных параметров питателей, с един-
ственным отличием, отражающим из-
менение формы питающей щели;
вместо осевой протяженности щели
Ld в расчет включают ее наружный
радиус Очевидными аналогами
осевой нагрузки Wez и осевой жест-
кости являются радиальная на-
грузка Wer и радиальная жесткость
Л®, а аналогом относительного осе-
вого смещения вала в двустороннем
подпятнике 8/ — радиальный эксцен-
триситет 8Г.
Все, что говорилось о различных
возможных подходах к расчету под-
пятников, остается справедливым и
для радиальных опор. Поскольку су-
ществует сходство между основными
закономерностями изменения харак-
теристик двусторонних подпятников
и радиальных подвесов, то естест-
венно ожидать, что и методы их про-
ектирования и расчета должны быть во
многом похожими. В некоторых отно-
шениях расчет радиальных подвесов
проще, чем двусторонних подпятников,
так как, в отличие от последних, ради-
альные подвесы не являются состав-
ными опорами, подчиненными допол-
нительным связям типа (14)...(17) и
(26), которые могут значительно
усложнить расчет. Необходимо учесть.
что если формулы, приведенные в ра-
боте, позволяют рассчитывать и тя-
жело нагруженные подпятники, то
при расчете радиальных подвесов при-
ходится ограничиться случаем слабо-
нагруженного или умеренно нагру-
женного вала, когда относительный
эксцентриситет 8Г значительно меньше
единицы.
Слабонагруженный радиальный
подвес, используемый в одноопорной
конструкции, можно было бы рассчи-
тывать в такой же последовательности,
как и слабонагруженный двусторон-
ний подпятник, пример расчета кото-
рого был рассмотрен выше. В част-
ности, при наддуве через простые
диафрагмы параметр режима т вновь
может быть выбран на основании
разумного компромисса между требо-
ваниями максимальной жесткости, в
данном случае радиальной, и доста-
точного запаса устойчивости. Послед-
ний может быть определен по квазиста-
ционарным кривым нейтральной ус-
тойчивости рис. 5 (гл. 7), аналогичным
кривым рис. 1 (гл. 7) для подпятника.
Остаются в силе табл. 1 (гл. 5) и вы-
текающая из нее формула (5) для
расчета характерной толщины сма-
зочного слоя hQ (под которой теперь
подразумевается средний радиальный
зазор С), а также вспомогательная
178
РАСЧЕТ ГАЗОСТАТИЧЕСКИХ ОПОР
табл. 2, с помощью которой рассчи-
тывают расход газа и давление на
выходе из питателей рсГ, условие докри-
тического наддува; условие функцио-
нирования кольцевой диафрагмы как
ограничителя расхода; условие, исклю-
чающее критические режимы вторич-
ного дросселирования, и т. д. Таков
далеко не полный перечень соотно-
шений, которые являются общими
для подпятников и радиальных под-
весов. Поэтому нет необходимости
отдельно рассматривать вопросы прак-
тического расчета радиальных под-
весов.
В многоопорной схеме (рис. 5)
все опоры считаются аэродинами-
чески независимыми.В принципе можно
было бы подпятник и один из радиаль-
ных подвесов заменить совмещенным
радиально-упорным подвесом, сма-
зочный слой которого представляет
единое целое. Однако последний ва-
риант конструктивно менее удобен
и не имеет заметных эксплуатацион-
ных преимуществ. Согласно исследо-
ваниям, проведенным в ЛПИ, совме-
щение радиального и упорного под-
весов позволяет повысить радиальную
(осевую) грузоподъемность только пу-
тем снижения осевой (радиальной)
грузоподъемности.
Каждому из подвесов рассматривае-
мой многоопорной схемы соответствует
своя собственная локальная система
геометрических и физических пара-
метров, статических и динамических
характеристик. Используемые в даль-
нейшем индексы i (i — 1, 2) и т в обо-
значениях этих параметров и харак-
теристик относятся соответственно
к одному из двух радиальных подве-
сов либо к двустороннему подпятнику.
Последний состоит из двух изолиро-
ванных односторонних подпятников.
Величины, относящиеся к односто-
роннему подпятнику, условимся обо-
значить индексом t. Наряду с упомя-
нутыми локальными, в дальнейшем
анализе будут фигурировать и неко-
торые глобальные величины, харак-
теризующие многоопорную систему как
единое целое. Обозначения таких ве-
личин будем помечать индексом 2,
за исключением тех случаев, когда
их глобальный характер очевиден.
Например, qCi — динамическая жест-
кость i-й радиальной опоры, нормиро-
ванная по соответствующему локаль-
ному масштабу; qc^ — суммарная ди-
намическая жесткость системы, нор-
мированная по некоторому глобаль-
ному масштабу; qc^ — та часть сум-
марной жесткости, которая создается
f-й опорой. Можно сказать, что qc^t —
локальная величина, нормированная
по глобальному масштабу.
На многоопорный вал (рис. 5),
рассматриваемый как абсолютно твер-
дое тело, действует сосредоточенная
радиальная внешняя нагрузка We
и распределенная нагрузка от собствен-
ной силы тяжести, которую можно
заменить сосредоточенной силой G,
приложенной в центре тяжести вала
с координатой z = zq (осевую коор-
динату z отсчитывают от точки при-
ложения внешней нагрузки We). Си-
стема внешних сил We и О, поскольку
она несимметрична, вызывает не только
радиальные, но и угловые смещения
вала, которые будем характеризовать
соответственно величиной (в точке
z — 0) и углом у. Осевого смещения
вала эти силы не вызывают, так как
не имеют осевых составляющих. Под,
действием сил We и G вал соосного
Жжения, показанного на рис. 5
тиром, смещается в такое поло-
[е, при котором внешние силы и
шаемые ими моменты уравнове-
шиваются силовыми и моментными
реакциями двух радиальных подве-
сов IT/, -- 1, 2), а также момент-
ной реакцией подпятника ^т. Для
определения искомых величин у
воспользуемся следующей системой
уравнений статики (последнее из них
выражает равновесие моментов отно-
сительно точки z=0):
W1 + W2-We—G = Q}
^т + ^1 + ^-Г1г1-Г2г2+ >
+ Gzq — 0,
(28)
где zt и z2 — координаты геометри-
ческих центров радиальных подвесов.
Приведем систему (28) к безраз-
мерному виду. В соответствии с под-
ходом, принятым и обоснованным в ра-
Расчет многоопорных систем
179
боте [24], будем рассматривать все
опоры как слабонагруженные, по-
лагая, что их несущая способность
(восстанавливающий момент) изме-
няется пропорционально радиальной
(угловой) жесткости смазочного слоя.
Кроме того, примем во внимание со-
отношения (18) для слабонагружен-
ного двустороннего подпятника. То-
гда
, 2 = ^1, , 2 ~
~ ^1, 2Ps^\, 281, 2>
Со — осевой зазор в ненагруженном
двустороннем подпятнике.
В качестве основных глобальных
масштабов, относящихся к многоо-
порной системе в целом, примем сле-
дующие величины: R — линейный
макромасштаб; С — линейный микро-
масштаб; Л^ = 47?2 — масштаб пло-
щади, равный площади продольного
сечения подшипника радиальной опоры
единичного удлинения; у0 = C/R —
угловой масштаб. Соответственно, пе-
рейдем к безразмерным величинам
^1, 2 — ^1, 2^Ps^l, 2 ~
8
С
У =
То С
^Л1>2^ЬТ1,2; (29)
Z
Z=~'~R
<^т = A^RBps^
т
« ~ 2ATRnpsK^T.
Здесь К® (i — 1, 2) — удельная ра-
диальная жесткость i-й радиальной
опоры; К1 — удельная угловая жест-
кость той же опоры; К/ — удельная
угловая жесткость одностороннего
кольцевого подпятника. Характерные
плсщади опор определяют следу-
ющим образом:
^1, 2 — 2 — 47?2Xi) 2»
Ат=- л (Rl-Rl), (30)
где 2 — относительное удлинение
соответствующей радиальной опоры.
Локальный параметр 8^ 2 — ^i, 2^>
входящий в (29), представляет со-
бой относительную величину радиаль-
ного смещения вала в точке z = z1} 2
(ех 2 — соответствующее абсолютное
смещение; радиальный зазор С под-
разумевается одинаковым для обоих ра-
диальных подвесов), а у1>2= ?/?1,2тах>
Тт = max — локальные относи-
тельные величины угла перекоса осей
в радиальных подвесах и в подпят-
нике; здесьУц 2шах = ClR'kx, 2> Тттах“
= C0/Ru — максимальные углы пе-
рекоса, допустимые микро- и макро-
геометрией этих опор, если каждую
из них рассматривать изолированно;
We 1____1 Г 1
G ] ~ Aj)s L G J
(31)
С учетом выражений (29)—(31),
а также геометрических соотношений
Ч, 2 = 2 (% 2 = - YZ1, 2); '
.... С RH
Yi,a = 4 гт; Yt =
^1, 2 = \ 2^2’
ЛГ- 4 R2 (* Гв)Л2 1/в ~ RfJ
(32)
получим, вводя геометрический па-
раметр
Х = Л.(1_4) с /7W (33)
2 Cq \ 1\ /
следующую безразмерную форму ис-
ходных уравнений (28):
Ml (е2 — Y?i) +
+ k2^(82-vz2)-Fe-G = 0; (34)
-М1 (₽8- ?Zi)Zj-
— (е2 - уг2) г2 + Gzg 0,
180
РАСЧЕТ ГАЗОСТАТИЧЕСКИХ ОПОР
т. е. линейную алгебраическую систему
для определения искомых величин 82
и у, которую удобно записать в виде
Pie2-P2Y = >e+G;
P2es P3V = ^а’
р, = +
?2 ~ ~Ь ^2г2^2’
p3 = zX7 + /^ + ^ +
+
Таким образом,
_ (¥e + G)p3-GzGp2 .
2 Мз-Р?
_ (Ге + ^Рз-бгср!
т R R R9 *
Р1РЗ — Р2
Рассматриваемая многоопорная си-
стема выдерживает заданную наг-
рузку без контакта рабочих поверх-
ностей вала и подшипников, если
выполняются условия
1Тт1 = -^-^|У1 = бт < 6? <1;
| Т;| + |е;| = Х. |yI + |s2-Vz;| =
(< = 1- 2).
(37)
Знаки модуля употреблены здесь
ввиду того, что величины у и 8^ могут
оказаться и отрицательными, т. е.
ось вала может поворачиваться в на-
правлении, противоположнохм ука-
занному на рис. 5 (это возможно, если
We < G и центр тяжести вала сильно
смещен вправо), - а радиальное сме-
щение вала в точках, достаточно уда-
ленных от начала координат z = 0,
может быть направлено противопо-
ложно внешним силам We и G.
Выбор величин 6*, 6? в условиях
(37) в какой-то степени произволен
и зависит от уровня технологии из-
готовления и сборки многоопорной
системы и отдельных ее элементов.
Кроме того, линейные соотношения
(29) между аэродинамическими си-
лами (моментами) и коэффициентами
жесткости дают тем большую по-
грешность, чем больше значения 8/,
Vi и ут. Для оценочных расчетов можно
принимать 6* » 6* « 0,5.
Предельную грузоподъемность си-
стемы проще всего оценить следующим
графическим способом: с помощью
выражений (36) и (37) строим по двум
произвольным точкам линейные функ-
ции
6Т = 6Т (Ге), 6Х - 6Х (Ге),
62 - 62 (Те),
считая вес вала заданным. Находим
абсциссы точек пересечения полу-
ченных графиков соответственно с го-
ризонталями: 6Т = 6*, — Sf, 62 = 62*.
Из трех значений этих абсцисс Ге =
== Ге*т, Ге — Г*1, Ге =Ге2 выби-
раем наименьшее; обозначим его Ге.
Таким образом, максимальная рас-
четная нагрузка на вал [см. (31)]
Перейдем теперь к определению
динамических характеристик много-,
опорной системы, распространив на
нее подход, принятый в гл. 7 для изо-
лированных опор, согласно которому
систему рассматривают как совокуп-
ность трех независимых подсистем,
реагирующих соответственно только
на осевые, радиальные или угловые
возмущения. Такой подход, предпо-
лагающий систему слабонагружен-
ной, позволяет на каждом этапе ана-
лиза ее динамического поведения учи-
тывать лишь один из трех видов воз-
мущений. Рассмотрим отдельно воз-
действие каждого вида возмущений
на динамику системы.
Осевые возмущения воспринимаются
только подпятником, для которого,
поскольку он -считается слабонагру-
женным (ут < 1, а осевая статичес-
кая нагрузка отсутствует), остаются
в силе соотношения (27) между ха-
рактеристиками свободных колебаний
двустороннего и одностороннего под-
пятников. Учитывая, что в данном
случае параметры осевых свободных
колебаний многоопорной системы,
очевидно, совпадают с соответствую-
Расчет многоопорных систем
181
ш,ими параметрами изолированного дву-
стороннего подпятника, получим из
(27)
vs (а2) = vT (о2) = /2v( (аг И2); |
as(o2) = aT(o2) = af (огК2). J
(38)
Индексы S, т, t относятся соответ-
ственно к системе в целом, двусторон-
нему и одностороннему подпятникам.
Надстрочный индекс г показывает, что
колебания осевые (в дальнейшем не-
которые величины, характеризующие
радиальные и угловые колебания, по-
мечены индексами г, у). Чтобы облег-
чить практическое использование со-
отношений (38), напомним также, что
- T,t, 2 1 /
vs,T,t V* ’ ° У МС9
° „ (39)
z_12p/?2Hv2
° C9ps ’
где v — абсолютная частота свобод-
ных колебаний; площадь Лт опреде-
ляют согласно (30); М — масса вала.
Для определения величин vt и
а/, входящих в (42), можно восполь-
зоваться , сплошными кривыми (см.
рис. 82гл. 7), которые иллюстрируют
осевые колебания изолированного одно-
стороннего подпятника. Если же зна-
чение о2 достаточно мало, то допустимо
использовать квазистационарное соот-
ношение vt = j/"К®, вытекающее из
(65) гл. 7, при о2—> 0, где К® — удель-
ная статическая жесткость односто-
роннего подпятника, определяемая по
формуле (23) гл. 6.
Осевая устойчивость рассматривае-
мой многоопорной системы полностью
обеспечивается устойчивостью дву-
стороннего подпятника, которая под-
чинена тому же условию, что и ус-
тойчивость одностороннего подпятника.
Реальная опасность потери устой-
чивости может возникнуть лишь при
наддуве через простые диафрагмы.
В этом случае целесообразно восполь-
зоваться квазистационарным усло-
вием [см. (5) гл. 7)] или графиками
(см. рис 1 гл. 7) для прямолинейной
модели подпятника с учетом соотно-
шений (17) гл. 7, связывающих пара-
метры прямолинейной модели и коль-
цевого подпятника. Выбрав с помощью
графиков значения параметров под-
пятника ра, т? = VT = Vt, при
которых обеспечивается достаточный
запас устойчивости, можно рассчитать,
например, средний осевой зазор Со
и размеры карманов (полагая осталь-
ные размеры заданными).
Радиальные возмущения, действую-
щие на многоопорную систему, вос-
принимаются 2 только радиальными
подвесами. Уравнение динамики ра-
диальных перемещений вала, поддер-
живаемого двумя такими подвесами,
в малой окрестности соосного поло-
жения приводит (если воспользо-
ваться методом возмущений) к сле-
дующей системе трансцендентных
уравнений:
= — а|);
-2 ,п (40)
v2 — ~'?ss/2as>
формально совпадающей с системой
(65) гл. 7 для изолированного подвеса.
Здесь и — относительная ча-
стота и коэффициент затухания ради-
альных свободных колебаний много-
опорного вала; = v2/vq; vj =
= /(T^j/WQ; <zc2, ?e2 —сум-
марные коэффициенты радиальной ди-
намической жесткости и радиального
демпфирования, нормированные по
величине А^р^С. Эти коэффициенты
можно представить в виде
%, ss ~ %, SSI + ^с, S22 ~
— Si + ^C,S2» (41)
г№ ?c.S2( (MH i = l'2) вы’
ражает ту часть суммарной динами-
ческой жесткости или коэффициента
демпфирования, которая создается
смазочным слоем гго радиального
подвеса, причем величины qc> sZi нор-
мированы по глобальному масштабу
A^pjC, а величины qCiSi — по ло-
кальному масштабу AtpslC\ выра-
жение (41) получено с учетом связи
между величинами Л. и А %. Из (65)
182
РАСЧЕТ ГАЗОСТАТИЧЕСКИХ ОПОР
гл. 7 следует, что локальные аэроди-
намические коэффициенты (i = 1,2)
Яс1=^1 С1 —
VSi = - 2^«г-
(42)
где V/, a-j — параметры радиальных
свободных колебаний вала, которые
соответствовали бы случаю, когда вал
поддерживается только t-м радиаль-
ным подвесом; =
= У (4;PS)/(MC).
Последовательность соотношений
(40)—(42) устанавливает связь между
искомыми глобальными динамичес-
кими характеристиками и мно-
гоопорного вала и локальными ха-
рактеристиками V/, а/ (t — 1,2), причем
последнее можно непосредственно
найти с помощью графиков, анало-
гичных сплошным кривым (см. рис. 9—
12 гл. 7), относящимся к радиальным
свободным колебаниям изолирован-
ных подвесов.
Рассмотрим, как воспользоваться
связью между глобальными и локаль-
ными характеристиками свободных ко-
лебаний для практических расчетов.
Предварительно введем следующие гло-
бальные и локальные параметры [учи-
тывая, что —Vq-j/X. из (32), (40),
(42)]:
г 12^М г г-
а “ c2ps ; “ а
г
Vfl
г г — г i
aw = a.v(. =а—. (43)
Локальные аэродинамические коэф-
фициенты qCi и qsi непосредственно
зависят от соответствующего локаль-
ного числа сдавливания 6Vj, пропор-
ционального частоте V/, которая за-
ранее неизвестна. Построим зависи-
мости == (о2) и (</)
по исходным зависимостям v. = v. (cf£)
и а. = а. Рекомендуемый по-
рядок построения таков:
а) зависимости (о0 и a. (oj)
(t = 1,2) перестраиваем в виде -v.
и а,(<4), где <z=<vz;
б) полагая = orv2 = , по фОр-
мулам (42) рассчитываем зависимости
qci (oQ и qsi (о^), а затем по формуле
(41) — зависимости qcZ (с^);
в) решая квадратное уравнение
- 42as - <7s2 = 0, (44)
которое следует из системы (40), по-
лучим
21 а '
4sS
*
Вторую ветвь решения (45) со знаком
«плюс» перед корнем отбрасываем,
так как при qsZ = 0 она дает а2—> оо.
В действительности же а2 = 0, что
следует из уравнения (44). Используя
(45), получаем зависимость (сг^),
а затем, с помощью первого или вто-
рого выражения (40), — зависимость
vs«);
г) полученные в п. в) зависимости
перестраиваем в виде v2 (ог), а2(ог),
где or = <4/v2. Параметр ог, в от-
личие от о^, выражается через не-
посредственно задаваемые величины.
Переход от характёрщстик радиаль-
ных свободных колебаний одноо-
порных подвесов к соответствующим
характеристикам многоопорного вала
совсем не сложен, хотя в общем случае
и не удается получить явной анали-
тической связи между глобальными
параметрами v2 и а2 и локальными
параметрами V/ и а/. Однако в случае,
когда оба радиальных подвеса гео-
метрически и аэродинамически иден-
тичны, вновь будем иметь простые
соотношения того же типа, что и
(38):
Vs (</) = K2v1; 2 (°г К2);
as(ar) = «s(or/2). (46)
Расчет многоопорных систем
183
Из (40) и (41) вытекает следующее
условие устойчивости многоопорной
системы при радиальных возмущениях:
9s2 = 41 + Ms2>0- (47>
В принципе оно может выполняться,
если даже один из коэффициентов
демпфирования qsl или qs2 отрица-
телен. Тем не менее для упрощения
анализа устойчивости целесообразно
вместо (51) использовать «усиленную»
систему условий
<?si>0; <?S2>O, (48)
которую следует трактовать в том
смысле, что радиальная устойчивость
многоопорной системы заведомо обес-
печивается устойчивостью изолиро-
ванных радиальных подвесов. Послед-
ние же всегда могут быть стабилизи-
рованы соответствующим выбором
локальных параметров. В частности,
при наддуве через простые диафрагмы
параметр режима щ и эффективный
относительный объем карманов
Z-го радиального подвеса можно выб-
рать на основании квазистационар-
ных кривых нейтральной устойчи-
вости, аналогичных кривым, приведен-
ным на рис. 5 гл. 7, подобно тому,
как локальные параметры подпятника
тт и выбирают на основании кри-
вых, приведенных на рис. 1 гл.. 7.
Угловые возмущения восприни-
маются как радиальными подвесами,
так и подпятниками. Они стремятся
повернуть вал относительно его
центра (центра тяжести). Поскольку
осевая координата центра инерции
вала zq (см. рис. 5) не совпадает с ко-
ординатами геометрических центров
радиальных опор и z2, то по отно-
шению к этим геометрическим цент-
рам вал, поворачиваясь относительно
центра инерции, условно принимае-
мого за неподвижную точку, не только
совершает поворот, но и смещается
в радиальном направлении соответ-
ственно на величины (zq —z±) -у и
(z2 — zq) у, где у — угол поворота.
Таким образом, угловые возмущения
вызывают не только моментные, но
и силовые реакции смазочного слоя
радиальных подвесов. Иначе говоря,
динамика угловых перемещений вала
зависит как от коэффициентов угло-
вой динамической жесткости и угло-
вого демпфирования радиальных под-
весов и' подпятников qV sb qV s2,
st» что очевидно, так и от коэффи-
циентов радиальной жесткости q^ sl
и радиального демпфирования qrc s2.
Уравнение динамики малых уг-
ловых перемещений вала относительно
центра инерции приводится к системе
трансцендентных уравнений
где
v2 = vs/vV V? = / (Л2№р3)/(/эС).
Система (49) с точностью до масштаб-
ных коэффициентов формально сов-
падает с системой (40), относящейся
к радиальным возмущениям. Здесь
vs, v2, as — абсолютная и относи-
тельная частоты и коэффициент за-
тухания вала в рассматриваемой си-
стеме опор; /э — экваториальный
момент инерции вала относительно
центра инерции; qc%, qsZ — суммарные
коэффициенты угловой динамической
жесткости и углового демпфирования
многоопорной системы, нормирован-
ные по величине (4z7?ps)/y0 ~
— (47?4ps)/C [сравнить с (41)]
Яс, sS = st + ^Яс, si + ^Я^ s2 +
+ (ZG~~ sl +
+ M22-5g)2<s2- (50)
Здесь, в частности, учтено соотно-
шение qV ST st> котоРое по-
лучается из тех же соображений, что
и (18); параметр х определяют по фор-
муле (33).
Первые три члена правой части вы-
ражения (50) характеризуют вклад
угловой динамической жесткости
(углового демпфирования) отдельных
опор, а последние д$а члена — вклад
радиальной жесткости (радиального
184
РАСЧЕТ ГАЗОСТАТИЧЕСКИХ ОПОР
демпфирования) опор в суммарную
величину угловой динамической жест-
кости (углового демпфирования) мно-
гоопорной системы. Рассмотрим, на-
пример, как получается предпослед-
ний член выражения; локальная отно-
сительная величина радиального
смещения вала в опоре с координатой
геометрического центра Zj равна
(zq—Zi) ylC. Если эта величина, как
здесь и предполагается, весьма мала,
то радиальную динамическую реак-
цию смазочного слоя, нормированную
по локальному масштабу Arps, можно
„ (ZQ — zA V г
принять равной — где
qrci — коэффициент радиальной ди-
намической жесткости опоры. Таким
образом, получим абсолютную ве-
личину радиальной динамической
реакции опоры (zQ —
— zi)y^p которая создает момент
WC1 (гб— zi) относительно центра инер-
ции вала. Абсолютный вклад этого
момента в суммарную угловую ди-
намическую жесткость системы
^ci (?G — Z1) __ Alps 7 \2 аг
-----У------—Q-'G V qci‘
Если эту величину отнести к приня-
тому глобальному масштабу угловой
жесткости М?р81С, то получим пред-
последний член выражения (50) для
Коэффициенты si, q?sl, qrcs{
(i — 2) в выражении (50) определяют
с помощью соотношений, аналогич-
ных соотношениям (42), через соот-
ветствующие пары локальных ве-
личин (v^, aj), (-v?, а?) или (yrit aj),
а последние могут быть непосредственно
сняты с графиков vt (а^), at
и т. п., подобных тем, которые при-
ведены в гл. 7 для случаев осевых,
угловых и радиальных свободных ко-
лебаний односторонних подпятников
и радиальных подвесов. Применительно
к расчету многоопорных систем эти
графики было бы удобнее перестроить
в виде vt (o7z), at (o7z) и т. п., где
o7z == а?7г Это позволило бы свя-
зать аэродинамические коэффициенты
Яс, st' fl, st и Яс,si с параметрами
°vt ~ “ r2n ’
Go”s
orv( = <Tvi'=avi =
12^4Z /^^2
C*Ps ~\C Ян/ v/’
пропорциональными действительной
(искомой) частоте свободных коле-
баний v2, от которой упомянутые
коэффициенты действительно зависят
(формальный масштаб частоты, ко-
торый входит вместо v2 в параметры
0^, о/ и о?, не может оказывать вли-
яния на аэродинамику опоры).
_ Помимо локальных параметров (51),
введем глобальные
12рЯ2^
a v = —;
C2Ps
av = 0^2 = ovi =
\ с Ян ) vt
(52)
где масштаб vj определяется последним
выражением (52).
Итак, если требуется построить зави-
симости характеристик угловых свобод-
ных колебаний многоопорной системы
v2 и а2 от глобального параметра о7,
который выражается через задаваемые
величины, то можно придерживаться
следующего пор ядка:
а) исходные зависимости vt (o'7),
at (о)’) для угловых свободных коле-
баний изолированных подпятников и
(о?). «,• (о?) И Vt. (а<), а(. «) для
угловых и радиальных свободных ко-
лебаний изолированных радиаль-
ных подвесов, полученные в гл. 7,
перестраивают в виде
(Ov)> (av)> где X
v,- (fl)' а,- (fl)> где а* = а?’
Расчет многоопорных систем
185
б) с помощью соотношений (42)
рассчитывают локальные аэродина-
мические коэффициенты, входящие в
правую часть выражения (50) как функ-
ции параметра о^, а затем по (50)
определяют зависимости qc% и
(av)’ которые входят в уравнения
(49);
в) с помощью выражения (45),
вытекающего из (49) [как и из (40)],
рассчитывают зависимости (о^),
ах (ov);
г) эти зависимости перестраивают
в виде vs (ov), а2 (ov), где оу =
=
Условие устойчивости многоопор-
ной системы по отношению к угловым
возмущениям
+
+ (гс — zi)4i +
+ ^2 (г2 Zg)2 ^s2 > 0 (53)
вытекает из (49) и (50) точно" так же,
как соответствующее условие (48) для
радиальных возмущений — из (40) и
(41). Его можно заменить «усиленной»
системой условий
9^>0; ^>0; <&>0; qrsl > 0;
£2>0, (54)
которая является аналогом системы
(71). Последняя входит в (54) как
составная часть. Таким образом, ра-
диальная устойчивость многоопор-
ной системы заведомо обеспечивается,
если система оказывается устойчивой
к угловым возмущениям.
С другой стороны, если устойчивость
исследуется в «квазистационарном»
приближении (а это всегда идет «в за-
пас» устойчивости), то условие угло-
вой устойчивости изолированного под-
веса всегда выполняется при выпол-
нении соответствующего условия
радиальной или осевой устойчивости.
Поэтому, присоединив к системе (54)
условие осевой устойчивости qzst > 0
подпятника, что позволит дать общую
оценку устойчивости многоопорного
7 Пинегин С. В. и др.
вала при малых возмущениях различ-
ного вида, можно в то же время иск-
лючить из упомянутой системы пер-
вые три условия, относящиеся к уг-
ловым возмущениям. Таким образом,
для практических целей можно реко-
мендовать следующую упрощенную
систему угловой устойчивости многоо-
порного вала в целом:
'^>0; ^>0; <j>0. (55)
Выполнение их достаточно обеспечить
при сколь угодно малом значении
параметров сдавливания.
Пример. Пусть заданы размеры мно-
гоопорной системы с газостатичес-
кими опорами (рис. 5): а = 0,47 мм;
а0 = 0,015 м; = Л2 = 0,1 м; Я =
= 0,05 м; 7?в = 0,053 м; 7?н ~ 0,077 м;
Л = 0,1 м; zx = 0,17 м; г2 — 0,535 м.
Вал выполнен сплошным из стали
(ее плотность р= 7,8-103 кг/м3).
В радиальных подвесах используют
двухрядный наддув с относительной
раздвижкой между питающими плос-
костями Ьг — Ь2 = 0,5; число пита-
телей в каждом ряду N = 12. На каж-
дой стороне подпятника имеется один
ряд питателей, расположенных на
расстоянии 7?х = 0,065 м от оси
вала; их число в ряду примем равным
Nt ~ 28. Ограничители расхода —
простые диафрагмы с диаметром про-
ходного сечения = 3,5-10”4 м и
диаметром Dd = 5-10”? м. Смазоч-
ным материалом служит воздух; рас-
четное давление наддува ps = 5-105 Па,
наружное давление ра = 10® Па;
расчетная температура 15 °C.
Требуется определить средний
радиальный зазор С, осевой ход под-
пятника 2С0, допустимую внешнюю
нагрузку We, расход воздуха Qa,
собственные частоты системы vj;,
v£, соответствующие осевым, радиаль-
ным и угловым возмущениям поло-
жения равновесия вала.
Найдем прежде всего вспомогатель-
ные величины, необходимые для даль-
нейших расчетов. Первую группу та-
ких величин составляют масса вала
М, координата центра инерции zq
(см. рис. 5), экваториальный момент
инерции вала (определяемый отно-
сительно поперечной оси, проходящей
186
РАСЧЕТ ГАЗОСТАТИЧЕСКИХ ОПОР
через центр инерции). Массу вала
представим в виде суммы М = Мк +
+ Мп» гДе индекс «к» относится к кон-
сольной части вала, индекс «п» —
к пяте:
Рассчитаем безразмерные геомет-
рические параметры радиальных под-
весов и подпятника:
с « 2R 2R
Л1 = Л2 = Л = — = -j— =
Мк = л^ар = л (5« 10“2)2 0,47 X
X 7,8-103 = 28,8 кг;
Мп = лЯ 2HaQp = л (7,7 • 10~2)2 X
X 1,5-10~2-7,8-103 = 2,18 кг,
М — 31 кг.
В системе отсчета, принятой на
рис. 5, координаты центров инерции
консольной части вала и пяты
?к — А + aQ Н—2~ ~ + 0,015 4"
+ 0,235 = 0,350 м;
гп = Д + -4- = 0,1 + 0,0075 =
= 0,1075 м;
отсюда
__ MKzK + Mnzn ____
ZG~ М “
0,1
Яв _ 0,053
ож
= =0 844
0,077 ’
Затем, используя (36) гл. 5,
соответствующие значения
Гв =
найдем
вспомо-
гательного параметра £, фигурирую-
щего в универсальном условии ба-
ланса расходов (35) гл. 5:
С = = 0,25 (i =1,2);
gT = In « 0,093.
гв 1пг2
Безразмерные значения координат
геометрических центров радиальных
опор и центра инерции вала
28,8-0,350 + 2,18-0,1075
31
= 0,333 м.
zt 0,17
Zi ~ R “ 0,05
0,535
0,05
= 3,4;
= 10,7;
z2 =
Z2
R
z6 = — =
Экваториальный 7 момент инерции
можно рассчитать по формуле
э
а2 + 37?2
12
0,333
0,05
= 6,66.
Глобальный масштаб площади As
и соответствующие локальные масш-
табы [см. (30), (32)J
+ 4,
ао + 3^н
12
+ (ZG Zn)2
0,472 + 3 (5-10"2)2 ,
IO ”1"
+ (1,7-10~2)2j +2,18 х
‘ (1,5-10"2)2 + 3(7,7-Ю-2)2
12 +
+ o,32521 =0,78 кг-м2.
Л2 = 4Я2 = 4 (5-10’2)2 = 10“2 м2;
А. = 4Я2\ = Л2 = 10’2 м2 (4=1,2);
лт = я (Rl — R2b) = я [(7,7-10~2)2 —
— (5,ЗЛО*2)2] « 10*2 м2.
-Значения физических параметров
воздушной смазки и некоторых свя-
занных с ними величин при заданной
расчетной температуре приведены
на с. 164. В частности,
р, 1,8-10’5 Па-с, as = 340 м/с;
F (k) = 0,578, В = 0,042 кг/с2.
Расчет многоопорных систем
187
Перейдем теперь к определению
основных параметров наддува. Коэф-
фициент давления определен исход-
ными данными:ра= palps — 1/5. Кроме
того, наддув в данном случае харак-
теризуется системой локальных па-
раметров режима /n1=/n2==/n, mT,
относящихся к радиальным подвесам
и к подпятнику. Их структура соот-
ветствует табл. 1 (гл. 5) (напоминаем,
что в качестве ограничителей расхода
приняты простые диафрагмы), а раз-
личаются они масштабом зазора /г0,
числом питателей в одном ряду и
числом рядов питателей, которые при-
няты h0 = С, N = 12, пв, = 2 Для
радиальных подвесов и h0 = Со Nt —
= 28, п/ = 1 для подпятника, причем
величины С и Со подлежат определению.
При выборе эксплуатационного зна-
чения тт можно руководствоваться
теми же соображениями, что и для
расчета изолированного двустороннего
подпятника (см. пример на с. 169).
Как и в упомянутом расчете, примем
тт = гптСт “ 0,8 откуда
тт
0,8
0,093
= 8,6.
Тогда в соответствии с табл. 1 (гл. 5),
получим следующее значение среднего
торцового зазора:
-j3/ BntNtD2d0
Go —
4/nTps
3/ 4,2-IO’»-1-28 (3,5-10’4)«
V 4-8,6-5-105
= 2-10’! м = 20 мкм,
т. е. осевой ход подпятника 2С0 =
= 40 мкм. Согласно рис. 1 гл. 7 при
выбранном значении тп = 2тт — 1,6
и заданной величине ра = 0,2 отно-
сительный объем карманов должен
удовлетворять условию Уп< КПтах —
— 0,85. Для расчета допустимой глу-
бины кармана можно воспользоваться
соотношением (7), в котором под N
следует понимать N/ = 28 и под
h0 — найденную величину Со. Вместо
глубины кармана в соотношении (7)
должна была бы, строго говоря, фи-
гурировать сумма 6 + hQ = 6 + Со<
Таким образом,
х <Л ^i) у _______ 11 х
L NtDd J
X Cq =
Г 4-6,5-10~2 (7,7 — 6,5) • 10~2
“L 28(5-10"3)2
— 1 J 2-10~5 7-10"! м = 70 мкм.
Значения параметра режима ради-
ального подвеса (т) выберем из ус-
ловия максимума радиальной жест-
кости. Тогда, согласно рис. 28 гл. 6,
т = 2. При этом угловая жесткость
будет близка к максимальной, и, кроме
того, такой выбор в данном случае
не создает затруднений для обеспе-
чения устойчивости. Средний радиаль-
ный зазор С находим так же, как и
торцовый зазор Со, заменив в соот-
ветствующем выражении nt на nd =
=2, Nt — на N = 12 и fnt на т =2.
В результате получим С ^3,2-10"& м =
= 32 мкм. Согласно рис. 26 (гл. 7)
при т = 2 и ра = 1,5 эффективный
относительный объем карманов Уэ
должен быть меньше величины V3max~
= 0,23. Отсюда, учитывая, что сум-
марный объем карманов питателей
каждого радиального подвеса V —
= xftDffiidN, где 6—глубина кар-
мана, и заменяя 6 на б + С (по тем
же соображениям, в силу которых
делалась аналогичная замена для под-
пятника), находим (/ =* 1,2)
Л <-- / р . \ _
6<\М^|Уэшах’“ /
_ Г 8-5-10^-10^ 1
” L 2-12 (5-10’3)2 ’ J Х
X 3,2-10’5 = 4,5-10’* м = 0,45 мм.
Допустимая глубина карманов в ра-
диальных подвесах оказывается в 6
раз больше, чем в подпятнике. Целе-
сообразно унифицировать размеры кар-
манов, приняв, например, 6= 0,05 м:
тогда все достаточные условия ус-
тойчивости (58) будут заведомо вы-
полнены, причем последние два —«
с многократным запасом.
188
РАСЧЕТ ГАЗОСТАТИЧЕСКИХ ОПОР
Рассчитаем далее суммарный объем-
ный расход воздуха, приведенный
к атмосферному давлению. Учитывая,
что соответствующие расходы Qai и
через оба радиальных подвеса
приблизительно одинаковы (неболь-
шое различие может быть вызвано
перекосом вала) и что расход QaT
через двусторонний подпятник равен
удвоенному расходу Qat через одно-
сторонний подпятник (если толщина
смазочного слоя в последнем случае
равна половине осевого хода двусто-
роннего подпятника), а также прини-
мая во внимание последнее соотно-
шение (46) гл. 5, получим (/— 1,2)
Qa = Qat + Qai + Qaz = 2 (Qat + Qat) —
= 2 (Qatftt + Qaifti),
где = 0 (pat); •&{=& (pdt)- Зна-
чения функций *6/, fy, как и их аргу-
ментов pdti Pdi (относительных про-
тиводавлений на входе в смазочный
слой подпятника и радиального под-
веса), можно найти по графикам рис. 5
(гл. 6). Полагая, как и ранее, ра =
= 1/5; mt — mT — 0,8; fht — mt^ =
= 2-0,25 = 0,5, находим Ф/ = 0,77;
= 0,91. С помощью табл. 2 состав-
ляем выражения для предельных
расходов и Q*t (при переходе
от Q*z к Q*z следует лишь заменить
п = 2 на nt = 1 и Nt—12 на Nt —
= 28) и окончательно находим
Ра
X (ntNt$t + nN^t) = 1,571 -0,578-5 X
X 3,4 • 102 (3,5-10”4)2 (1,28-0,77-2 X
X 12-0,91) = 8,2-10”8m3/c«3-104л/ч.
Перейдем к определению грузоподъ-
емности многоопорной системы. Для
этого прежде всего рассчитаем два
вспомогательных параметра: безраз-
мерный коэффициент веса вала G
и геометрический параметр х [см. (31),
(32)]; обозначая через g ускорение
свободного падения, получим
- G _ Mg 31-9,8
°-Л2р2 Д2Р2 10-2-5-10?
= 6,Ы(Га,
= 11571 (1- 0,6882)4(^У =
= 2,9
Приведем теперь необходимые для
дальнейших расчетов значения коэф-
фициентов аэродинамической жест-
кости опор:
Л, = 0,4; Л/= 0,154; К® = 0,72;
Л? = 0,17 (7=1, 2).
Коэффициент осевой жесткости под-
пятника Д'® определен по формуле (23)
гл. 6 при т = 0,8 и ра = 0,2; коэф-
фициент угловой жесткости рас-
считан по формуле (25) гл. 6 при иг ~
= 8,6; ра = 0,2; гв = 0,7; = 0,85.
Коэффициенты жесткости радиаль-
ных подвесов и КУ определены
соответственно по формулам (28) гл. 6
и (29) гл. 6. Заметим, что коэффициент
Д® не нужен для расчета статической
грузоподъемности, но он понадо-
бится при определении собственных
частот вала. По найденным значениям
Д}\ Д? и Д? с помощью формул (35),
приняв Xi= Х2= 1, рассчитаем вспо-
могательные константы:
£1=2Д® = 2-0,72= 1,44;
р2 = +z2) Kf =
== (3,4 + 10,7)-0,72 = 10,15;
Р3 = хКУ + 2К/+(^+^)Л? =
= 2,9-0,154 4-2-0,17 +(3,42 +
+ 10,12)-0,72 = 82,5,
которые затем используем для расчета
величин dT, и 62 [см. (37)]*, ха-
рактеризующих степень отклонения
от соосносности вала относительно
неподвижного элемента соответ-
ствующей опоры, как функций внеш-
ней нагрузки We. Эти величины вы-
* Не путать с глубиной кармана, такжф
обозначающейся символом О,
Расчет многоопорных систем
189
ражаем через относительное радиаль-
ное смещение оси вала 82 (в точке
z = 0) и относительный угол пово-
рота оси у, которые, согласно (36),
связаны с внешней нагрузкой следую-
щим образом:
_ + (^з G __
2~ ₽1Рз—
82,5Ге+(82,5 — 6,66-10,15) X
ХбЛ-Ю’8 _
- 1,44-82,5— 10,158
= 82,5^е + 0’91, = 512ге + 0,058;
15,0
₽1Рз-₽1
10,15Ге+(10,15 —
— 6,66-1,44)-6,1 • 10'2_
~ 15,8
= 0,64Ге +0,0021.
Далее, по (32) находим аналогич-
ные связи для локальных величин
относительного радиального смещения
вала в средних сечениях радиальных
подвесов z = = 3,4; z = z2 = 10,7:
8Х = 82 — = (5,2 — 3,4-0,64) We +
+ 0,058 —3,4-0,0021 =3,0Ге +
+ 0,051;
82 = 8s-:?z2 = (5,2 —
— 10,7-0,64) №е + 0,058— 10,7 х
X 0,0021 = — l,6Fe + 0,036.
Как видно из последнего выражения,
82 < 0, т. е. смещение при We > 0,02
направлено противоположно внеш-
ней нагрузке. Для дальнейшего ана-
лиза достаточно ограничиться этим
случаем.
Согласно (37)
s - С 32 0,077
т~ Со R 1 Yl 20 0,05 Х
Х(0,64Г<- + 0,0021)= 1,6Г<.+
-f-0,0052 < 6т;
6т = Xj | у | -j- | 8j | = у + =
= з,бге + 0,053 <бГ;
62 = 12 I Y | + I e2 I = Y — «2 =
= 2,2Ге-0,034 <62-
Величины 6j, 6;’, можно задать
исходя из условия (9) гл. 6, выполне-
ние которого исключает возникно-
вение аномальных критических ре-
жимов вторичного дросселирования че-
рез контуры карманов питателей.
Расчет показывает, что согласно этому
условию при выбранных значениях
pjpa~ Ь, Dd = b-]STZ м, Dd0 =
= 3,5-10“4 м зазор в зоне располо-
жения питателей должен быть более
15 мкм. Это требование будет заведомо
выполнено, если учитывая, что Со —
= 20 мкм и С = 32 мкм, принять
6* = 0,25; df = 6^ = 0,5. Тогда из
трех упомянутых выше ограничений
6Т < 6*, dj <61*, 62 <6+ накладывае-
мых на величину внешней нагрузки,
наиболее жестким оказывается второе;
оно дает
ге < 6*.^..^953 = 0,125,
0,0
или, учитывая последнее соотношение
(31),
ге= Л2р8¥е< 10"2-5-105-0,125 =
=625 Н.
Таков расчетный предел грузоподъем-
ности рассматриваемой многоопор-
ной системы.
Заключительный этап расчета —
определение собственных частот вала
v|, и при осевых, радиальных
и угловых возмущениях. Сначала с по-
мощью выражений (39), (40) и (42)
найдем характерные масштабы этих
частот [штрих здесь и далее означает,
что соответствующая частота выра-
жена в герцах, т. е. (v*)' = Vo/2jc
и т. и.]:
1 1/ 10-2-5-10? „
~ 2« V 31-2-Ю^ -45° Гц'
190
РАСЧЕТ ГАЗОСТАТИЧЕСКИХ ОПОР
= 355 Гц;
(W = — \f _
V0/ 2л у 1ЭС
1 1/10'* 1 2 (5-10~2)2-5-105
= 2л У 0,78-3,2-10"?
= 115 Гц.
Действительно, значения собствен-
ных частот ([v^) = (vj) и т. п.]
проще всего определить в «квазистацио-
нарном» приближении, заменяя коэф-
фициенты динамической жесткости
(например, в выражении (49) qyct за-
меняют на К] и qrcl на Kf и т. д.).
Тогда,из (49), а также первого выра-
жения (48), в котором полагаем а2 « 0,
и аналогичных выражений для слу-
чаев осевых и радиальных возмуще-
ний получим (i = 1,2)
« уй? = /?0Л = 0,894;
« y^Kf + WI = =
= /2-0,72= 1,20;
+ (?6 — *i)2 +
+ Х2(г2 — ZG)2 K2 =
= У^ + ^ + [(га-г1У+
+(г2-г0)2] Ке( =
= / 2,9-0,154 + 2-0,17 +
* ’'’ [(6,7 — 3,4)2 + (10,7 — 6,7)2] х
X 0.72 = 4.5,
и, соответственно,
(v|)' = 450-0,894 = 400 Гц;
(/)" = 355-1,20 = 425 Гц;
(у1)' = 115-4,5 = 520 Гц.
Полученные «квазистационарные»
частоты тем ближе к истинным, чем
меньше соответствующие числа сдав-
ливания о*, о', (о* = (Jzv% и т. д.).
Используя выражения (43), (47) и (5),
имеем
24n^(v*)'
-----Z2------=
CqPs
24л-1,8Ю“5 (7,7-10“2)24-102
(2 10“5)25Ю5
г ( R Со V W
V С ) ^у
X
- X Qv =
0,05 20 у 425
0,077 32 ) 400
425 2>8^3»4-
Эти значения, особенно первое, не
дают оснований утверждать, что по-
грешность «квазистационарного» спо-
соба определения собственных частот
в данном случае пренебрежимо мала.
Тем не менее можно считать, что этот
способ обеспечивает приемлемую ин-
женерную оценку собственных частот.
Более точное их определение практи-
чески оказалось бы довольно трудоем-
кой процедурой и потребовало бы,
в частности, дополнительных рас-
четов кривых, аналогичных приведен-
ным на рис. 6 ... 12 гл. 7.
СПИСОК ЛИТЕРАТУРЫ
1. Варгафтик Н. Б. Справочник по
теплофизическим свойствам газов и
жидкостей. М.: Физматгиз, 1963. 384 с.
2. Гидродинамическая теория смаз-
ки: Классики естествознания/Под ред.
Л. С. Лейбензона- М-; Л-: Гостехиздат^
1934. 562 С?
Список литературы
191
3. Грудская Е. Г. Влияние вторич-
ного дросселирования на динамиче-
ские характеристики радиальных га-
зовых опор. — Трение и износ, 1982,
№ 4, т. III, с. 677—683.
4. Грудская Е. Г. Исследование
устойчивости газовых подвесов. — Ма-
шиноведение, 1981, № 2, с. 93—98.
5. Грудская Е. Г., Карпов В. С.
Расчет несущей способности радиаль-
ных газовых подшипников с дискрет-
ным наддувом газа. — Машиноведе-
ние, 1981, № 3, с. 92—97.
6. Денхард, Пэн. Применение под-
шипников с газовой смазкой в при-
борах. — Проблемы трения и смазки,
1968, № 4, с. 75—78.
7. Дроздович В. Н. Газодинамиче-
ские подшипники. Л.: Машинострое-
ние. Ленинград, отд-ние, 1976, 208 с.
8. Заблоцкий Н. Д. Постановка не-
стационарных задач теории газовой
смазки методом неравномерно распре-
деленного наддува. Машиноведение,
1981, № 6, с. 82—85.
9. Заблоцкий Н. Д. Влияние закона
истечения воздуха через устройство
наддува на аэродинамические харак-
теристики упорного подшипника. —
Машиноведение, 1969, № 2, с. 64—69.
10. Заблоцкий Н. Д., Карпов В. С.
Экспериментальное исследование си-
стем наддува газовых опор. — В кн.:
Проблемы развития газовой смазки. М.:
Наука, 1972, ч. II, с. 26—39.
11. Заблоцкий Н. Д., Сипенков И. Е.
Один способ постановки задачи о при-
нудительной газовой смазке подшип-
ников скольжения. Л.: Машинострое-
ние. Ленингр. отд-ние, 1966 (Тр. ЛПИ,
№ 265). с. 34—41.
12. Каннингэм, Флеминг, Андерсон.
Экспериментальное определение несу-
щей способности и потерь мощности в
реальных газовых подшипниках с ше-
вронными канавками. — Проблемы
трения и смазки, 1971, № 3, с. 72—78.
13. Каннингэм, Флемин, Андерсон.
Экспериментальное исследование устой-
чивости радиальных газовых подшип-
ников с шевронными канавками. —
Проблема трения и смазки, 1969, № 1.
14. Константинеску В. Н. Газовая
смазка/Пер. с рум. М.: Машинострое-
ние, 1968. 718 с.
15. Котляр Я. М. Некоторые при-
меры движения вязкого газа в узком
зазоре переменной толщины. — Изв.
АН СССР. ОТН, 1958, № 5, с. 71—
75.
16. Котляр Я. М. Течение вязкого
газа в зазоре между двумя коаксиаль-
ными цилиндрами. — Изв. АН СССР.
ОТН, 1957, № 5.
17. Лойцянский Л. Г. Механика
жидкости и газа. 5-е изд. М.: Наука,
1978. 736 с.
18. Лойцянский Л. Г., Лурье А. И.
Курс теоретической механики. I. II.
М.: Гостехиздат, 1955, 326 с.
19. Лохматов А. А. Работа упорных
подшипников со спиральными канав-
ками, выполненными на роторе нагне-
тателя. — Проблемы трения и смазки,
1968, № 4, с. 343—347.
20. Малоноски, Пэн. Статические и
динамические характеристики упор-
ного подшипника со спиральными ка-
навками. — Теоретические основы ин-
женерных расчетов, 1965, № 3, с. 43—
49.
21. Осепьян Л. С., Сипенков И. Е.
Определение угловой жесткости цилин-
дрического газового подвеса. Л.: Ма-
шиностроение, 1970, с. 110—116 (Тр.
ЛПИ, № 313).
22. Пинегин С. В., Емельянов А. В.,
Табачников Ю. Б. Газодинамические
подпятники со спиральными канавка-
ми. М.: Наука, 1977. 107 с.
23. Пинегин С. В., Поспелов Г. А.,
Пешти Ю. В. Опоры с газовой смазкой
в турбомашинах ограниченной мощно-
сти. М.: Наука, 1977. 149 с.
24. Пинегин С. В., Табачников Ю. Б.,
Сипенков И. Е. Статические и динами-
ческие характеристики газостатиче-
ских опор. М.: Наука, 1982. 265 с.
25. Подшипники с газовой смазкой:
Пер. с англ./Под ред. Н. С. Грэссема
и Дж. У. Пауэлла М.: Мир, 1966.
424 с.
26. Расчет радиальных газостатиче-
ских подшипников турбомашин атом-
ной энергетики: Руководящий техниче-
ский материал (РТМ 108. 129. 101—76).
М.: 1976, 85 с.
27. Сергеев С. И. Динамика крио-
генных турбомашин с подшипниками
скольжения. М.: Машиностроение,
1973. 304 с.
28. Сиразетдинов Т. К. Устойчивость
систем с распределенными параметра-
ми. Казань: КАИ, 1971. 180 с.
192
РАСЧЕТ ГАЗОСТАТИЧЕСКИХ ОПОР
29. Синг, Маланоски. Влияние сред-
ней длины свободного пробега молекул
на характеристики упорных подшип-
ников со спиральными канавками. —
Проблемы трения и смазки, 1969, № 1,
с. 23—28.
30. Стифлер. Расчет жесткости и
демпфирования кругового упорного
подшипника с внутренней компенса-
цией. — Проблемы трения и смазки,
1974, №3, т. 96, с. 54—61.
31. Табачников Ю. Б. Плоские аэро-
статические опоры металлорежущих
станков и приборов. М.: НИИМАШ,
1973. 75 с.
32. Табачников Ю. Б., Галанов Н. С.,
Шустер В. Г. Исследование области
устойчивости плоских кольцевых аэро-
статических опор с круговой микро-
канавкой. — Станки и инструмент,
1974, № 6, с. 11—17.
33. Табачников Ю. Б., Галанов Н. С.
Методика расчета плоских кольцевых
газостатических опор с круговой мик-
роканавкой и ее экспериментальная
проверка. — Машиноведение, 1974,
№ 1, с. 96—103.
34. Табачников Ю. Б., Сипенков И. Е.
Расчет тихоходных шпиндельных уз-
лов на опорах с газовой смазкой. —
В кн.: Исследование и применение
опор скольжения с газовой смазкой
(Тезисы докладов), Винница, 1983,
с. 26—27.
35. Табачников Ю. Б.,Сипенков И. Е.
Исследование эффектов вторичного
дросселирования в опорах с газовой
смазкой. — В кн.: Исследование и
применение опор скольжения с газо-
вой смазкой (Тезисы докладов), Вин-
ница, 1983, с. 22—23.
36. Шейнберг С. А. и др. Опоры
скольжения с газовой смазкой. 2-е изд.
М.: Машиностроение, 1979. 336 с.
37. Янке Э., Эмде Ф., Леш Ф. Спе-
циальные функции: Пер. с нем. М.:
Наука, 1977. 344 с.
38. Hamrock В. J., Fleming D. Р.
Optimization of self-acting herringbone
drooved journal bearings for maximum
radial load capacity. — In: 5th Intern,
gas Bearing Symposium, 1971.
39. Fleming D. P., Hamrock B. J.
Optimization of self-acting herringbone
journal bearings for maximum stabi-
lity. — In: 6th Intern. Gas Bearing
Symp., Southampton, 1974, CI..
40. Mori H. A theoretical investiga-
tion of pressure depression in externally
pressurized gas-lubricated circular thragt
bearings. — Trans. ASME. Ser. D,
1967, vol. 83, No 2, p. 201—208.
41. Benett J., Marsh H. The brictio-^
nal torque in externally pressurized bea-
rings. — In: Proc. VI Intern. Gas Bea-
ring Symp., Southampton, 1974, AI/I —
AI/8.
42. Design of Gas Bearings. Mecha-
nical Technology incorporated. New
York, 1969.
Приложения
193
ПРИЛОЖЕНИЕ 1
1. Корректирующие функции Гн, Гу и для кольцевых подпятников
rd N Гн Гу Гн Гу <*N
6 4,286 гь= 0,2 0,600 0,400 5,124 Гъ = 0,3 0,572 0,358
10-4 8 3,370 0,649 0,473 4,000 0,615 0,423
12 2,485 0,720 0,580 2,891 0,683 0,525
18 1,925 0,786 0,680 2,182 0,752 0,628
6 3,186 0,642 0,463 3,736 0,613 0,420
IO"3 8 2,544 0,696 0,545 2,956 0,661 0,492
12 1,935 0,771 0,657 2,197 0,735 0,602
18 1,559 0,837 0,755 1,720 0,805 0,708
6 2,085 0,715 0,572 2,349 0,686 0,529
IO"? 8 1,719 0,775 0,663 1,916 0,741 0,611
12 1,384 0,851 0,776 1,504 0,818 0,728
18 1,192 0,909 0,864 1,257 0,885 0,828
6 1,560 0,774 0,662 1,687 0,750 0,625
3-Ю-? 8 1,325 0,836 0,755 1,419 0,807 0,710
12 1,122 0,908 0,862 1,173 0,883 0,824
18 1,017 0,957 0,935 1,037 0,941 0,911
6 1,316 0,814 0,721 1,380 0,794 0,691
5-10-2 8 1,142 0,875 0,813 1,190 0,851 0,776
12 0,999 0,942 0,914 1,019 0,923 0,884
18 0,935 0,983 0,975 0,934 0,973 0,960
6 0,985 0,889 0,833 0,962 0,885 0,827
ю-1 8 0,893 0,946 0,919 0,875 0,936 0,904
12 0,834 1,000 1,000 0,810 0,994 0,991
18 0,825 1,026 1,038 0,795 1,027 1,041
194
ПРИЛОЖЕНИЯ
Продолжение табл. 1
rd N Гн Гу Гн Гу
6 6,124 ГЬ = 0,4 0,555 0,333 7,357 гъ — 0,5 0,545 0,317
10'4 8 4,759 0,385 0,385 5,709 0,573 0,359
12 3,401 0,650 0,475 4,049 0,623 0,435
18 2,514 0,716 0,574 2,949 0,682 0,524
6 4,362 0,596 0,394 5,077 0,588 0,382
10-« 8 3,438 0,636 0,454 3,998 0,619 0,429
12 2,520 0,701 0,552 2,909 0,675 0,513
18 1,927 0,771 0,656 2,189 0,738 0,608
6 2,600 0,674 0,511 2,796 0,676 0,515
10-? 8 2,117 0,719 0,578 2,288 0,712 0,567
12 1,639 0,789 0,684 1,769 0,772 0,658
18 1,340 0,858 0,787 1,429 0,835 0,752
6 1,760 0,747 0,621 1,708 0,773 0,659
3-10-? 8 1,486 0,793 0.690 1,472 0,805 0,708
12 1,219 0,862 0,793 1,225 0,860 0,790
18 1,059 0,923 0,885 1,066 0,914 0,871
6 1,369 0,803 0,704 1,202 0,857 0,785
5-10-? 8 1,193 0,847 0,770 1,093 0,881 0,821
12 1,024 0,910 0,865 0,972 0,925 0,887
18 0,929 0,963 0,945 0,898 0,966 0,949
6 0,939 0,933 0,899 0,526 1,133 1,199
10-1 8 0,795 0,962 0,943 0,578 1,086 1,129
12 0,759 1,004 1,005 0,629 1,069 1,103
18 0,752 1,033 1,050 0,669 1,066 1,100
6 8,942 г в = 0>6 0,540 0,309 11,074 Гв = 0,7 0,541 0,312
10"4 8 6,939 0,560 0,340 8,621 0,553 0,329
12 4,899 0,403 0,403 6,077 0,584 0,375
18 3,529 0,653 0,480 4,341 0,628 0,442
Приложения
195
Продолжение табл. 1
rd N гн Г/ гн
6 5,888 0,587 0,381 6,737 0,600 0,400
IO"3 8 4,649 0,610 0,416 5,367 0,611 0,417
12 3,372 0,657 0,485 3,908 0,645 0,468
18 2,511 0,713 0,569 2,895 0,694 0,541
6 2,834 0,700 0,550 2,599 0,781 0,671
10"2 8 2,2359 0,722 0,584 2,114 0,776 0,665
12 1,845 0,771 0,656 1,739 0,801 0,702
18 1,493 0,826 0,738 1,449 0,843 0,765
6 1,377 0,859 0,788
3-10'? 8 1,266 0,864 0,797 — — —
. 12 1,117 0,896 0,844
18 1,008 0,932 0,899
6 0,700 1,071 1,106
5-IO'? 8 0,758 1,020 1,030 — — —
12 0,778 1,007 1,011
18 0,782 1,014 1,020
2. Корректирующие функции Гн, IV, и (Здг для радиальных подшипников
rd N Fh rv aN rd N ГН rv &N
X = 1; ; b — 0,5; nd = = 2
10~4 6 3,473 0,574 0,471 0,537 6 2,474 0,659 0,557 0,636
8 2,783 0,632 0,545 0,599 2- IO"8 8 2,034 0,720 0,638 0,701
12 2,121 0,712 0,646 0,687 12 1,622 0,799 0,738 0,785
18 1,702 0,786 0,736 0,766 18 1,369 0,863 0,821 0,855
6 2,705 0,635 0,533 0,608 6 2,243 0,686 0,585 0,668
10~3 8 2,207 0,696 0,612 0,673 4-10“3 8 1,860 0,748 0,667 0,733
12 1,737 0,775 0,713 0,759 12 1,506 0,825 0,766 0,815
18 1,446 0,843 0,799 0,831 18 1,292 0,885 0,845 0,880
196
ПРИЛОЖЕНИЯ
Продолжение табл.-2
Td N Гн Гу aN rd N rH Гу aN $N
Х = I ; b = 0,5; tid = 2
6 2,108 0,705 0,604 0,689 6 1,572 0,799 0,699 0,798
6-Ю-3 8 1,759 0,766 0,685 0,754 3- io-? 8 1,357 0,857 0,781 0,858
12 1,438 0,841 0,784 0,834 12 1,170 0,921 0,869 0,924
18 1,247 0,899 0,860 0,895 18 1,068 0,963 0,929 0,967
6 2,012 0,719 0,618 0,705 6 1,401 0,839 0,741 0,845
8- IO’3 8 1,687 0,780 0,700 0,770 5-10-2 8 1,229 0,895 0,820 0,902
12 1,391 0,854 0,797 0,848 12 1,085 0,952 0,903 0,960
18 1,215 0,909 0,871 0,907 18 1,012 0,986 0,955 0,994
6 1,938 0,730 0,630 0,719 6 1,170 0,908 0,811 0,925
Ю-? 8 1,631 0,791 0,712 0,783 10"1 8 1,056 0,957 0,885 0,973
12 1,353 0,864 0,808 0,860 12 1,030 0,974 0,926 0,985
18 1,190 0,918 0,880 0,916 18 1,065 0,964 0,931 0,969
3. Корректирующие функции Гн. » Гу, «tv и для радиальных подшипников
rd N Гн Гу rd N rH Гу aN
X: = 1,5; b = 0,5; nd ~ 2
6 2,649й' 0,646 0,565 0,614 6 1,829 0,755 0,680 0,739
КГ* 8 2,188 0,703 0,636 0,676 4-IO'3 8 1,574 0,809 0,750 0,797
12 1,747 0,777 0,727 0,756 12 1,337 0,872 0,831 0,865
18 1,468 0,840 0,804 0,825 18 1,229 0,907 0,876 0,902
6 2,137 0,707 0,629 0,684 6 1,739 0,772 0,697 0,758
101|)8 8 1,805 0,763 0,700 0,744 6-Ю-8 8 1,506 0,825 0,766 0,815
12 1,491 0,832 0,787 0,819 12 1,292 0,885 0,845 0,880
18 1,298 0,886 0,855 0,878 18 1,165 0,929 0,902 0,926
1=1,5; & = : 0,5; tid = 1 2
6 1,983 0,730 0,653 0,710 6 1,675 0,784 0,711 0,773
2- IO’8 8 1,689 0,785 0,724 0,769 8-IO’3 8 1,458 0,836 0,779 0,828
12 1,414 0,851 0,808 0,841 12 1,260 0,895 0,856 0,891
18 1,246 0,902 0,872 0,896 18 1,144 0,937 0,911 0,935
Приложения
197
Продолжение табл. 3
rd N гн Гу 0W rd N гн Гу aN
6 1,625 0,794 0,721 0,784
10'? 8 1,421 0,846 0,789 0,839 6 1,267 0,885 0,817 0,888
12 1,236 0,903 0,864 0,900
18 1,127 0,943 0,917 0,942 5- IO"? 8 1,153 0,927 0,876 0,931
6 1,381 0,852 0,783 0,851 12 1,057 0,967 0,935 0,973
3-10? 8 1,238 0,898 0,845 0,899
12 1,113 0,945 0,910 0,948 18 1,008 0,991 0,970 0,996
18 1,046 0,975 0,952 0,978
198
ПРИЛОЖЕНИЯ
ПРИЛОЖЕНИЕ 2 К ГЛ. 7
Динамические характеристики кольцевого подпятника с однородным наддувом
при осевых возмущениях (гв = 0,3; — 0,65). Тип ограничителя — простая
диафрагма
Параметр режима т Фактор за- тухания (см. с. 140) п Число сдав- ливания Частота сво- бодных ко- лебаний V Параметр сдавл и ва- нн я Параметр режима т Фактор за- тухания (см. с. 140) п Число сдав- ливания а Частота сво- бодных ко- лебаний V Параметр сдавлива- ния а
Ра = = 0,2;”1 0 —0,046 100 0,73 137,38
0,006 1 0,76 1,31 4 —0,025 200 0,73 273,04
0,012 2 0,76 2,62 —0,013 500 0,74 679,41
0,031 5 0,76 6,59 —0,009 1000 0,74 1354,90
0,056 10 0,75 13,40 —
0 0,078 20 0,71 28,00 —0,033 1 0,44 2,28
0,053 50 0,67 74,34 —0,064 2 0,44 4,52
0,021 100 0,66 150,46 —0,137 5 0,46 10,81
0,002 200 0,67 299,66 —0,195 10 0,51 19,72
—0,005 500 0,67 742,70 6 —0,212 20 0,58 34,27
—0,005 1000 0,68 1478,36 —0,153 50 0,69 72,20
—0,088 100 0,74 135,60
—0,002 1 0,65 1,54 —0,046 200 0,75 266,57
—0,004 2 0,65 3,09 —0,023 500 0,76 661,29
—0,009 5 0,65 7,70 —0,014 1000 0,76 1317,02
—0,014 10 0,65 15,29
2 —0,014 20 0,66 30,32 —0,050 1 0,36 2,79
—0,012 50 0,66 75,20 —0,094 2 0,36 5,50
—0,012 100 0,67 149,55 —0,189 5 0,39 12,80
—0,010 200 0,67 297,30 —0,253 10 0,44 22,49
—0,008 500 0,68 739,71 8 —0,266 20 0,53 37,60
—0,006 1000 0,68 1474,88 —0,200 50 0,66 75,30
—0,123 100 0,73 137,13
—0,019 1 0,55 1,83 —0,066 200 0,75 265,86
—0,036 2 0,55 3,65 —0,034 500 0,76 655,82
—0,080 5 0,56 8,91 —0,020 1000 0,77 1302,86
4 —0,119 10 0,59 16,88
—0,128 20 0,65 30,97 10 —0,069 1 0,30 3,32
—0,084 50 0,71 70,52 —0,125 2 0,31 6,50
to о о Параметр режима т
1 1 1 1 1 оооооооооо о о о о о о о о о о оо - to — ^jrf^oowto 1 1 1 1 1 оооооооо О О — — — 4^ — О S? ' СЛ 00 4^ СО -4 — СЛ <1 ооо — оооооооо || 1 1 1 1 1 1 II о о о о о о о о о о о о — io со сл io io t04^004^00OC0C0C0 •^JCOtOOO — №СЛСЛ4^ Фактор за- тухания (см. с. 140) п
о сл to — О О О О СЛ tO — ОООООООСЛЮ — о о сл to — Р о о о О СЛ ooooocnto — о сл to — о о о о сл to — — ООООООООСЛ Число сдав- ливания (Г, V
О О О О о о о о о о слслоослслослосл СЛСЛСОЮСООООСОФ^СЛ о р р р р р р р II "о СЛ СЛ СЛ Р о Р Р 4^00С0ЬЭ00 4^СЛО О ьо р р р р р р р р р Vj ~-4 "-4 ~-4 СЛ СЛ СО 4^ СО •о СЛ СЛ to Ф» О — 04^ Частота сво- бодных ко- лебаний V
СЛ -4 СО — to — о оо со — СЛ со сл to 4^ 4^ СЛ -4 СО — io сг> io io Pl сл сл io — сл СЛ СО — 00 О — 00—‘ О СЛ сл -о 00 — — СЛ СО 00 СО — О со о — СЛ -4 to — io 00 Р сл оо оо сл со О СЛ О 00 сл — со to to о to — cocno>oo-<i4^coto — 00 СЛ ^4 СО 00 О to Ф» 4^ io 4^ io 4^ io СО 00 сл 004^СЛ-4КЭСЛКЭСЛ4^ Параметр сдавлива- ния 0
оо о 4^ Параметр режима т
1 1 1 1 1 1 1 1 1 1 о о о о о о о о о о О О О "— "— io io — о о to оо сл — О СЛ Д ОО СО 4^> СО -о СЛ оо — СЛ 4^ — СО -q 1 1 1 1 1 1 1 1 1 1 о о о о о о о о о о о о о о — — о о tO Q0 СЛ СО 4=*» СО tO СЛ СО 00 4^C0Ot04^00C0OO । I I I I Г I I । । р р р р р ° р р р р о о о — о о о о о о 4^СЛООСОООСОООСЛЬЭ — — сл сл о — слсососокэ Фактор за- тухания (см. с. 140) п
о сл to — О О О О СЛ tO — ОООООООСЛЬЭ- о сл to — о о о о сл to — ооооооослкэ — о сл to — о о о о сл to — ОООООООСЛЬО — Число сдав- ливания
О Р Р Р Р -° Р Р Р Р Р Р Р Р сл сл 4^ со оо оо 4^4^00 — СЛ to 4^ СО СЛ СЛ р р р р р р р р р р -4 *-4 "-4 -4 СЛ СЛ СЛ 4^ ~4^ **4*. C0t0tOOCT>-4OO4^4^ р р р р р р р р р р ^4 -4 СЛ О СЛ СЛ СЛ СЛ СЛ СЛ — О-44*.СЛ — -4СЛСЛСЛ Частота сво- бодных ко- лебаний V
со сл to — 4^00-44^«^3COtO — СЛ О сл — <! 00 to to сл to Р — io Р со io Р оо сл Р 4^ >— too — — to СЛ СО со со о to — СЛСО-44^-'4СОЬЭ — СО О о оо СЛ сл о О 4^ to io io сл о оо со о Ъо сл io со О СЛ СЛ СЛ — СЛСОСООО £ -4 to — — — со сл со — Р со -4 -4 СЛ to -4 СО СО — io io io — io io 4^ О СЛ 00 — co — слслсо — — слсо Параметр сдавлива- ния а
Продолжение прилож. 2
to о о Параметр режима т
о о о о о о о о о о “о “о о о “о “о — о о СО Ф О') ОО ОО tO tO О Ф tO СЛСЛЬОО“ЧСЛ“ЧООС0СЛ о о о о о о о О О 1 о “о “— “to “to “сл “о “со “— а ОООСЛСООО — ОФ II О СИ ~<J О ЬО СО СО СЛ О II . ф 1 1 1 1 1 1 1 1 1 1 о о о о о о о о о о о “о “о “>— “to “to “to “to о ООф-ЧФЬОСОСОСОЬОО Фактор за- тухания (см. с. 140) п
О СП to — О О О О СП tO 1—1 OOOOOOOCntO»—‘ И— ЬЭ осльо — о о о о сл to to oooooooto — ^1 О СЛ to —‘ о о о о сл to — ооооооосльо — Число сдав- ливания dv
о о о о о о о о о о о Ъ Ъ Ъ bi сл сл о о о СЛФ1000ГОСЛ — ФСЯ о О О О О О О О О II “о> “о “сл “сл “ф “— “to ““Ч “~<J © фсосоьоьо-<!0 — сл^ 0,30 0,31 0,34 0,40 0,49 0,63 0,70 0,73 0,74 0,75 Частота сво- бодных ко- лебаний V
СЛ“ЧСО — tO^JtOOOOCO — СО -Ч О О СО 00 00 00 СО — \о “о "со ~<j “— — — сл ООООСООСЛСЛООЬЭСЛ СЛЧСОн-h-t- о со ф со — — -ч о СО О СО 00 “Ч сл ьо — “со “•<! “to “о 00 00 “со 00 “со ф-чосоососо — со COOtOb— ОО-^-Чф-^ФЬО—* сл Ф со to со О СЛ Ф о со “о “ф “ф “н-* “со о “о “сл со ^JCOtOOOtO — 00 — to Параметр сдавлива- ния о
00 о ф Параметр режима т
1 1 1 1 1 1 1 1 1 1 о о о о о о о о о о о о о “— “to “to “— “о “о ССФ^ЮФФМ^ООФ -q-ЧСЛФОСООСЛФФ 1 1 1 1 1 1 1 1 1 1 о о о о о о о о о о о о ““Ч “— “— “— “— “—‘ “о “о СОФООФООСЛОСЯЬО о о о “Ч о to со о сл —0,006 —0,011 —0,027 —0,045 —0,075 —0,103 —0,093 —0,066 —0,045 —0,036 Фактор за- тухания (см. с. 140) п
О СП to — о о о о сл to — ОООООООСЛЮ — о сл to — о о о о сл to — ооооооосльо — о сл to — О О О О СЛ to — ОООООООСЛЬО — Число сдав- ливания dv
о о о о о о о о о о “•<! “•<! “-ч о “о СЛ “ф “со со “со о о о о о о о о о о “•<! “•<! “•<! “ст> “о “сл “ф Ф “ф “ф СОЬООООСОСЛСООФФ о о о о о о о о о о '*->q “-Ч “о “о “а> “сл “сл “сл СЛ СЛ — о-чсл — -чслслслсл Частота сво- бодных ко- лебаний V
СО О tO — OlOOOO^NWtO»- to “Ч о сл со оо ьо to сл ьо “ьо “о СЛ “сл СО 00 “со “со “сл “*<! ЬО-ЧСЛЬОООООЬО — со COOtO — ОСОООФ*<!СОЬО — СООСЛООСООООФЬО “о “сл “to о “со “ф “ф “со “сл “to СЛ О — СО — 00 — “Ч СО , 00 ф to — о — CD СЛ 00 СлЭ — (^0 •<! ф со — СЛ 00 СО СО — о Ф Ф “со О “— О ОО сл О СП — 00 О Ф to со Параметр сдавлива- ния (У
д
о
о
^4
*
<т>
я
s
<т>
а
а
J=t
о
to
ПРИЛОЖЕНИЯ
ю о о Параметр режима tn
1 1 1 1 1 оооооооооо "о "о о "— "о "— "о "о WCnNONDOOO^^W 1 1 1 1 1 1 о о о о о о о о о 1 "о "о "to "to "сл "— "сл "to G CDOOO^COWCnOtO II ЬО^ГОФ»Ф»Ф»ОЬООИ ф 1 1 1 1 1 1 1 1 1 1 о о о о о о о о о о о "о "о "ю "to "to "to о С0Ф»00Ф»ЮО00Ю — CD ‘ООО»— ЮЮСО*ЧООС0Ю Фактор за- тухания (см. с. 140) п
о сл to •— о о о о сл ю — ОООООООСЛЮ — _ ьэ о сл ю »— о о о о сл to to , О О О О О О О Ю •— т*’ о сл to — о о о о сл to — ооооооослю*— Число сдав- ливания av
о о о о о о о о о о "cd "о "cd сл сл Ъ сл о> "cd СЛФ^ЮОФ^-ЧООФоФ» О -О -О -О -° -° -° -О -° "CD "cd "сл СЛ "ф“ "to "to "о "-q ® Ф-СОСОЮЮСООФ-Ф-^ о о о о о о о о о о "-«q "-q "-q CD "cd "фь. Ф» "co "co "co фхСОЮОЮООФ» — о Частота сво- бодных ко- лебаний V
СЛ СО •— со со to CD со Ф- to О j— 00 JO JO О 00 СО J— о со "сл "со "сл "ю "— "сл "— "сл со oowwooo-^сл сл ^q Со CD со ф- СО ►— 00 *ч О JO о СО JO CD JO СО J— "со "оо "со "со "cd "to 00 "— "со ООСОСОФ»Ф»ЮС^Ф>.СЛ CO CD Ю — _ _ to И— “О фа> о J— СЛ ф». CD co “co “-q “co ""~q "сл — >—» -q сл co СЛСОЮФ^'^ОСЛСО»— co Параметр сдавлива- ния 0
00 cd ф- Параметр режима т
1 1 1 1 1 1 1 1 1 1 о о о о о о о о о о "о о "о "— "— "to "to "— "о "о Ф»СЛООСОСОФ»ГООООФ» ОСОФ^Ф-ЮФ-ОО^ — •— 1 1 1 1 1 1 1 1 1 1 оооооооооо "о "о "о "— "— "— "— "о "о "о ф»СЛ00ЮСЛ^Ф»ОФ-Ю ОЮОСОСОЮ^-^Ф-Ю 1 1 1 1 1 1 1 О О О О О J3> о о о о о "о "о ООО о "о со СЛ *4 ►— COCD»— ООО OtOOOCnOCDCD»— to ►— Фактор за- тухания (см. с. 140) п
о сл to — о о о о сл ю >— ооооооослю — о сл to *— о о о о сл to — ооооооослю»— о Сл to СГ - о о о о сл to —* ооооооослю^- Число сдав- ливания ov
о о о о о о о о о о "<1 "-q "-q "CD "CD "сл Ф“ "со "со "со ф» со - го - СО 00 О CD sP sP ~О -О -О S5 -° -О -° "*ч "*ч "-q "cd "ст> "сл "ф» "фь. Фь "ф* СО to О CD — СО 00 СЛ Ф» Ф» оооооооооо ~-q CD "cd "сл "сл "сл сл "сл "сл •— О'ОФь'-ОСОСОфьфьСЛ Частота сво- бодных ко- лебаний V
СО CD to — СЛООООфьООСОЮ»— Ф». со со 00 — JO со JO СЛ Ю "о "фь. "to "»— "со "сл "to "со "сл "*ч ф» ф» — <ООСЛ>— со to со СО CD to — ^qcooocnoocoto — j— оо j-q о jo jo о j— ф^ jo Ф» "сл "оо "оо "о "сл "to COCO-OOOCOtO»— СЛФ^ОО фь. ю •— >— о СЛ 00 со ►— о GoocncnjqoojDWj-1 ф» CD "со "оо "ю Ф- *4 Ю CD 00 СОЮФ^^ООО^СЛ^СО Параметр сдавлива- ния о
Продолжение прилож.
ND о о Параметр режима fh
1 1 1 1 1 1 о о о о о о о о о о О О О "— "— О ND "ND "—* О ОЭСЛООЬЭСЛООЬОСООСЛ COWOOONUl^WhO о о о о о о о о 1 о "о "— "nd "со "сл "nd "nd а СЛ 00 СЛ СЛ О Ф- ND CD II NDOOUiOCO-qooOO II о оооооооооо "о "о "о "— "nd "nd "nd "nd "0 ^СЛОО-Ь.№ООООЮ-0 — 4^-^IONDCOCOCOCOND Фактор за- тухания (см. с. 140) п
О СЛ NO — О О О О сл NO — ОООООООСЛ№ — >— ND О СЛ ND — О О О О СЛ ND ND 0000000— rql О СЛ ND — О О О О СЛ ND — OOOOOOOt^lND — Число сдав- ливания €Г„, V
о о оооооооо СЛ СЛ СЛ СЛ СЛ "й^ "й^ сл сл "сл слй^ьфсооослй^осой^ 0 0 000000 "сл "сл "сл сл "й^ "nd "nd "-q 5s ^COCONDNDOOOND qq О О О О О О О О О О "<J "-'i "сл "сл 4^ "co "co "co "co ф>. co — 00 — 00 co й^ — о Частота сво- бодных ко- лебаний V
слчоо- СО -q ND О СО й^ ND О О ND JO СО 4^ NO 00 СО j— 4^ -q — — "со "со сл "со "— СЛ -q ND CD СО 00 ND —‘4^СЛСЛ СЛ -q CO — — СЛ CO й^ CO ND --q -q О CO О JDO 0 00 ND — 4^» 00 "CO 4^ О ND О CO Й^СЛСЛСО — -<JNDO CO O ND — >£*00 00>£*00>£*ND — сл ** 0 сл — — сл й^ сл oo о "сл "оо "-q "сл "со "-q "сл "со -q-^CDOCHNDCOCD — со Параметр сдавлива- ния о
00 O 4^ Параметр режима т
1 1 1 1 1 1 1 1 1 1 о о оооооооо О О О "— "— ND ND "— 0 О 4^ СЛ СО >£* СО й^ ND СЛ *q >£* ND -<J — CO 00 — ND CO 00 — 1 1 1 1 1 1 1 1 1 1 0 000000000 00 0 — "— "— "— 0 "0 "0 ^^JCOW-qQWOow- NDO^OOUlNDCOCOCO-qcO 1 1 1 1 1 1 о о о о о о о о о о "о "о "о "— "— "о "о "о "о о 4^СЛ00С0СЛ-Ч — ND — о — СЛСЛОООСЛЙ^ООЙ^ОО Фактор за- тухания (см. с. 140) п
О СЛ ND — О О О О СЛ ND — OOOOOOOUIND — О СЛ ND — О О О О СЛ ND — OOOOOOOt^lND — О СЛ ND — О О О О СЛ ND — OOOOOOOt^lND — Число сдав- ливания Оу
ОООООООООО Ч -ч О СЛ СЛ 4^ W w W ►^NDO-^ООСОООСЛСЛ О О О О О О О О О О -^1 "сл СЛ "сл "сл "й^ 4^- 4^ "фь со — со сл со — -^слй^й^ О О О О О О О О О О "сл "сл "сл "сл "сл "сл "сл "сл — o*<14^-qo — СОй^СЛ Частота сво- бодных ко- лебаний V
CO О ND — СЛ CO OO 4^ 00 й^ ND — О О ND О 00 CO СЛ ND >1 "сл "сл "co "co "nd "4^ "0 "сл -q сооослслсл-^*чьфсо СО о ND — *<lCO00U100C0ND — 50 00 ND 4^ 00 — —» 4^ ND Sj Ъ? bi "to "to сл "nd СОй^Ой^СЛООй^й^СЛОО Й^ЧЮ- — — СО сл 00 со — о о -q *q со со со со — "со ND ND "— "й^ "о "сл "со "сл 00 — со — сл о оо — со оо со Параметр сдавлива- ния о
□
‘О
о
X
о
*
л
я
S
о
я
S
о
*
nd
я
"О
S
О
*
гч
я
S
ъа
О О Параметр режима tn
1 1 1 1 1 1 о о о о о о о о о о О О О ‘ О ND СО "— о ^Q100W44U10WCT> О О О О О О о О 1 О О ND СО СЛ ND СО ° 05 ОО 05 СЛ ND СЛ *<1 ОО и ND СО *О 4^ О СЛ СЛ 4^ II 1 1 1 1 1 1 1 1 1 1 о о р о о о о р р р "о "о о - "nd "nd "nd "nd "— "о 4*> СЛ CO СЛ ND ОО ОО “ 05 ND-NtCONDCO-NlOCOOsND Фактор за- тухания (ем. с. 140) п
О СЛ ND — О О О О СЛ ND —* OOOOOOOOIND — К— ND О СЛ ND О О О О СЛ ND ND ,, ООООООО — pl О СЛ ND >— О О О О СЛ ND — OOOOOOOCnND — Число сдав- ливания av
О .° Р Р Р -° .° Р Р Р 05 'О5 "о> "(СЛ СЛ "ф>. 00 СЛ 05 "О5 Cl^NOOWWOWW^ р р р р р р р р L 05 05 СЛ СЛ 4*. ND ND "-<1 ~ 4^WWNDND4COO О р р р р р р р р р р "•<1 "•<! <1 05 05 4*. СО СО СО СО 4^СО^--<1000С04^ — О Частота сво- бодных ко- лебаний V
СП Ы W ~ W 'xl to 05 О Д to О СО ND СО р 05 сл СО СО J— 05 СО СЛ СЛ "оо "“О 4*. 4^ "»— СЛ 4^ ND 05 ND 05 О СО СО 05 ЦП Ы W - 05 СО 4^ СО ND “d “d О Р Р Р Р Р ~ Г* ~4^ 00 СО "сл СЛ 4^ 4^ Ю054^-<1СЛ0004^ СО 05 ND — 4^ 00 00 ^004^ND*— Р р Р р ND j— СЛ р. р СО "СО "“О 4^ 00 "сО "СЛ 00 СЛ "СО 4^ СЛ 05 00 4^ О СЛ ND СО Параметр сдавлива- ния о
00 05 4^ Параметр режима иг
1 1 1 1 1 1 1 1 1 1 о р р р р р р -° р р О О О "—‘ ND ND ND О О 4^СЛ<ОСЛОСО»— СЛ-41СО 4^ СО 05 »— СП ОО 05 W (О Ч 1 1 1 1 1 1 1 1 1 о о о о о о о о о о "о о "о "— "— о о "о 4^СЛСО4^00О5>— ~-ЗСО»— СОС04^СЛСЛСОС00005 1 1 1 1 1 1 р о р о о р о р о р "о "о "о "— "— "о "о "о "о "о 42»UlCO42»^00^CnND — ND 00 — OND^4 — СЛ-^4^ Фактор за- тухания (см. с. 140) п
О СЛ ND •— О О О О СЛ ND — OOOOOOOUIND — О СЛ ND — О О О О СЛ ND — OOOOOOO^ND»— О СЛ ND — О О О О СЛ ND — OOOOOOOOIND — Число сдав- ливания
О Р Р Р Р Р Р Р Р Р "•<1 "-<1 "-<1 05 СЛ 4^ 4^ СО СО СО 4^ ND О 05 СО СО ND 00 05 05 О О О О О О О О о О "•<1 "-<1 05 05 "СЛ СЛ "45*- 4^ 4^ 4^ С0^-С0СЛ00О 05 4^4^4^ Р Р Р Р Р Р Р Р Р Р "*Ч "о5 05 "о5 "сл 4^ "4^ "сл СЛ СЛ *-CO*4COO500COND4^4^ Частота сво- бодных ко- лебаний V
СО 05 ND >— СЛСОООСЛ004^(0>—• СЛ СЛ J— 4^ О СО СО СЛ ND М— О 4^ "— СО СО "-J "— СЛ V1 СЛ4^0СЛ0004ь>4^СОСО COO5ND — -<1СО00СЛ004^Ю^- ND СО СО СО СЛ О ~ 4* ЬЭ ‘ "-о "со "сл 00 "nd "-о nd "сл nd I— ОО ND СЛ — ND •— 4» СЛ 00 -О ND •— — — со СЛ 00 ИЙ. ND ~ Р Р Р Р Р Р ° Р °° Р •—‘ 05 05 00 *« 05 "сл СЛ 05 00 00 СО СО 00 СЛ 05 СЛ СО 4^ Параметр сдавлива- ния о
Продолжение прилож. 2
ю О о Параметр режима т 204 ПРИЛОЖЕНИЯ Продолжение прил о^ж. 2
1 1 1 1 1 1 1 1 1 1 О о о о о о о о о о О о о о "о ~— — — о о OUI^WQCOWOOOO 1 1 1 1 1 1 1 1 1 L О О О О О О О О О О о о о о о о "о о о о а — ЮС04^4^ОО4^Ю — II СО СЛ 4^ — *<! 4^ to ОО о О II ,111111111 | о о о о о о о о о о "о о "о "— "ю "ю "ю "ю "— "о Ф»СЛОСЛЮОО*<| — — СЛ Ф-ООО-ООСЛ-иОЮО Фактор за- тухания (см. с. 140) п
о сл ю — о о о о сл ю — ОООООООСЛЮ — СЛ и— О СЛ to — -*• О СЛ to- co О О О СЛ to — о о о о сл to — ОООООООСЛЮ — '4sl ОООООООСЛЮ — Число сдав- ливания &v
О О О О О О о о о о V1 V V1 V| V "о "сл СЛ СЛ СП •о о сл co — СЛ 00 4^ — — ОООООООООО^ ООО О О О О о о о Vi Vi Vi Vi Vi "о Ъ ~o ~o ~o Vi Vi Vi Ъ "о V*- co co co "co •ООФ»С0ЮООФ>.4^С0 Ф-С0 - -МО-ООФь — о Частота сво- бодных ко- лебаний V
со о ю — о СЛ О СО 00 — jfx 00 о О О *О О СО — о "ю V со "со о Ю СО "со "со СО4^ — ЮСЛ*Ч — 4^О*<1 co о Ю — соою — О СЛ о СО <о Ю — ф»0000Ф»004^Ю — «<1 JO 00 О О 00 сл “Ч СО — СТ) о со о СО ю СЛ 4Ь. О СО о о "о Vi сл "оо "о V) 'сл "4^ V*- о ~о "оо "со "оэ "о "сл "со оФ»*<1Ю*<1оаэо4^оо — юослоосл-иосооо Параметр сдавлива- ния о
оо о 4^ Параметр режима т
1 1 1 1 1 1 1111 о о о о о о о о о о о о о — "— "ю со "о со Ю "— о С0СЛО^1СЛЮ^1ЮОСЛ00 СПОФьСОСЛСЛСО — ОЭО — 1 1 1 1 1 1 1 1 1 1 о о о о о о о о о о "о "о о — "ю "ю "ю "ю "— "о ооя^ооф»юоо*<1 — о сл ООСЛ4^ОО*<14^ОО 1 1 1 1 1 1 1 1 1 о о о о о о о о о о о о "о "— "— ю "ю "— "о "о ЮС0ОООЮ — СЛ ч 4^ сослююсоооо-о- Фактор за- тухания (см. с. 140) п
О СЛ Ю — О О О О СЛ to — — ООООООООСЛЮ — О СЛ ю — о о о о сл ю — ОООООООСЛЮ — О СЛ ю — О О О О сл ю — ОООООООСЛЮ — Число сдав- ливания av
о о о о о о о о о о о 00 "©О V| V О V со со "со ю "ю — 000004^0 — о to ОО N о о о о о о о о о о 00 00 V V "о СЛ 4^ "со "со "со — О00СЛ*<1004^ 00 4^4^ о о о о о о о о о о "00 Vi V V] Vi "сл "сл V. "4^ V о о 00 о — о — О CO CO Частота сво- бодных ко- лебаний V
to о to — С0ЮСЛС0*<14^С0Ю — — 4х jo 5^ 5° ~ 5я 5я 00 V- о "о> О Ъ Ю о 00 СЛ о о •О СО О О — 0*4 — — CD ф-. ю о ю — С0ЮСЛС0-400Ю- сл 4х 5я -V1 5^ 5я "о V оо Vi V Vi "0 "со "оо 'о *<1ООСЛЮОСЛО — о ю о ю — СЛС0СЛ00*<100 — — к> — J-4 Ю о СО о О 4х "о Vi "— "— о V 0 "0 "0 со осооооооооослсл Параметр сдавлива- ния а
to о о Параметр режима т
1 1 1 1 1 1 о о о о о о Т— о о о о О — О Ч СО N to СП S О Ф 1 1 1 1 1 1 .,11111 1 1 III о о О О О О О О О О 1 О О О О О О о О о о О О JD о о Т— Т— Т— о о о о о й о о Т— Т— То cd То cd То cd То Т— Т— сл о о to о Ч М W н- II 4^ СТ) со-чсосл^слсооооо ь— -Чи- СО О to ОО СО 4^ “Ч II t04^‘4t0‘4t0OC0C04^00‘<lCr> ф Фактор за- тухания (см. с. 140) п
сл to •— О О О СЛ tO *— »— Ъ1 К- о сл to ь- *’ослю>— о о о о сл to >— -и, ООООСЛЮЮ — — ooooooooito»— ч| ОООООООООСпСЛЮ»— Число сдав- ливания ov
о о о о о о cd сл сл сл сл сл со со сл to •— •— II О JZ> о о О О JD О О О о о о а> о о о о о о о о о о Vq Vq о Тх> сл Тл сл Тт> о о ~ оо оо -ч -ч сх> 4^ Tf^ со со Т— to То То 4^tO004^004^“4‘~*COCO 1x3 •— О -Ч to to -ч О Q СО СО СО Частота сво- бодных ко- лебаний V
Ч со — оо 4* ОО J0 оо То о Т— сл То То со tO 4^ 4^ tO Ч со о to — tooto>— сл СО СО СЛ 00 СО •— C0t0OC0004b4>.C0t0t0'- JO J5> JO j4 JT> j4 J4 00 CO >— to J4 О JO j— JO CO to O0 cr> J4 00 4^. о 4ь. T^. To ч T— Tt> To T- сл To о 4ь. оо To 4^ -ч -ч о То То То То СЛСЛОЧЧЧСОСООООО СО to СЛ СЛ to оо Ч 4b. СО ОО ОО 4^. Параметр сдавлива- ния а
00 cd to Параметр режима пг
1111 о о о о То То Т— о >— СЛ 4^ Ч CD СО 4* 00 III 1 1 1 1 1 1 о о о о о о о о о о о о о Т— То То То То Т— о ^aiCO^OSOOOUl — 4b40C001CDUlWCD 1 1 1 1 1 1 1 1 1 1 о о о о о о о о о о о о о Т- Т- То Т- Т- о о 4^СЛЧ*— СЛ О CD 4b о w ~t000t04bt04b>-44b 1111 ° ° „° w° о о о о 4ь. СЛ Ч СО н— to 4b. Ч Фактор за- тухания (см. с. 140) п
О СЛ to — О СЛ to и— О О О О СЛ tO ОООООООСЛЮ«— о сл to •— о о о о сл to •— ооооооослю»— о сл to — о о о о о о о о Число сдав- ливания Оу
О о о о То То То То 00 to 00 Ч о о о о о о о о о о Vq ч ч ч cd Сл 4ь. То То СО ООЧСЛЮСЛЮСОЧ4ь4^ о о о о о о о о о о Ч ч Vq Vq Тл сл СЛ Фь Трь. ЧОСОН-ОЧОСЛСОСО о о о о Ч Ч Ч CD 4b СО О Ч Частота сво- бодных ко- лебаний V
to — СЛ СЛ Ч со То сл о cd со СО Ч 4^ to cd to — N^OWNWtOH- О JO О JO Ч 00 СО СО СЛ tO Ч 4*. То cd о сл То То 00 То 4^СЛООСОСЛ4^4^СОЬОО to о to ►— C0O44b.4COtO»-- JCD О JO J— СЛ СЛ О J— 4b. jo Т- То То Ч 00 То Т— о CD То CD00*— О н- Q СЛ СО 05 сл 149,04 284,98 688,37 1349,53 Параметр сдавлива- ния о
Продолжение прилож.
о 5 00 Параметр режима иг Продолжение прилож. 2
OOOOOOOOOO*Q О О "-* о ~ ~-* о о ° СЛЧГО^1СОДЧ0ОО^ II О *41 СО — ф- N Ю О сл II о 1 1 1 1 1 + 1 1 1 III р р р р р р р р р р р р р О О V V- ND О> СО О> СЛ О> СО V V ОО-ОООФьФьСЛСОООоО СО—‘ND-sJCOOO^CnNDCHO-OO 1 1 1 1 1 1 р р р р р р р О О V* ND СО О Д U1 О о Д ND ND Q О 00 О -О Фактор за- тухания (см. с. 140) п
•— сл к— О СЛ ND — О СЛ ND — О О О О СП ND — _О О О О СЛ ND ND — —* ooooooochnd — ~1ооооооооослслю — OCHND — OOOOCHND — О О О О О О О Число сдав- ливания (Т , V
II о о о о о о о о о о о о о о о о о о о о о о о р V V о> о> сп V. V* сп "о о v V V V о V* V* со со V nd nd nd СО ND 00 ND 4b* СИ СЛ СЛ ND СО СО 00 СЛ — — -ОСЛОСЛСОСОФьСО р р р р р О р V V V V о V со СО 00 сл — со оо — Частота сво- бодных ко- лебаний V
СО о ND — Ю СЛ ND - СЛ СО СО СЛ СО ND О^О^ОО^^СОГОЮ- О 00 Ф* — ND Ф* —* 00 СО — ND — фь — •— р 4^ р 00 О р 00 р О V- 00 . V] о СП о ND СП о О V СП СО СП о 00 V ND СО О СИ СО ND ND 00 00 4^ ND СО —* ^OCONDCOCOCHCOCHNDOO^ ND О ND — СЛ Ф» СЛ 4b. Ч Д W Ч 4b. 4b О Ю — ND 4^ О СО СЛ О СО СО О ND ND СЛ ND ND Параметр сдавлива- ния о
О ND Параметр режима т
1 1 1 1 1 1 1 1 1 1 р о р р р р р р р р О О "—* “—* ND ND ND "—* о о •^слослослслсосоо ОО - О СО СП СЛ Ч 00 СО 1 1 1 1 1 1 1 1 1 1 о р р р р р р р р Р о о о . "L— V V* о о ^OCOCOOOO-oJNDCnCO OO^'OCHOOONDNDOOCD 1 1 1 1 1 1 1 1 1 1 р р р р р р р р р р о о о V* V о о о о ф*осософ*оосо>— о OO^OOND^O-OOOO Фактор за- тухания (см. с. 140) п
О СЛ ND — О О О О СЛ ND —* OOOOOOOCHND — О СЛ ND — О О О О СЛ ND — OOOOOOOCHND—• OCHND — О О О О СЛ ND —* OOOOOOOCHND—* Число сдав- ливания av
р р р р р р р р р р Vi Vj Vj сл сл сл V* со со со ООСЛСОСОСО — ND44b.>4b. р р р р р р р р р р -М С> СГ> СЛ *4^ »4^ •OCnND00ND4^00CnC0C0 sP -° -° -° -° -° -° -° .° Vl Vi o> о сл сл сл сл сл сл 4^NDCOCHCO4S»ND — — — Частота сво- бодных ко- лебаний V
ND СЛ ND — ОоСЛ-Ч^ЧООЮ-. Р 5я ?° р р> 5° 5° 5° 5я со nd ND О СЛ СП V- 00 СО •^СООО^ООСЛ-МСОо со о ND *— ОСЛ*<14^00СОЬО — О р р р О О О j— фь р СЛ ND СО V- "(£) •<! “nd О> СО qtlCO — ООО—* О ND N СП СО О ND — СЛ СО 00 Сл 00 W - л JLO ND р р Ф* *41 СО р СО *— О СО V СО СО ND ND Vj “<£) “<£) -OCO^CHOOND-^lCO^-^l Параметр сдавлива- ния о
я
х
Sa
О
PI
a
x
о о 00 Параметр режима т
О О О О О ‘tsl 1 1 1 1 1 1 1 III О Р -О Р> Р Р Р Р Р Р Р Р О 1 1 1 1 1 1 1111 ООО о о о о о о о о Фактор за-
— ьэ оо — о а о О — — Ю О> 00 о 00 о> 00 — О О — — ю оо о оо ю — о тухания
о ю М 4^ Ч и нР- СО — COSO^^CHOOOOO 4^ О О О 4^- — 00 >- СЛ 4^ S (см. с. 140) п
о оо сл оо II соо^оои^-сл-чо^оо-чо 00 сл .-ч сослслююои^-сл
р О СЛ Ю — О ,СЛ to — Число сдав-
ю — . ООООСЛЮЮ — — оооослю — — ливания
О О СЛ Ю — Т*| ооооооооослслю — oooooooocnto»—
О О О О О II ооооооооооооо ооооооооооо Частота сво-
ЪА «л «А >. Л А.* .. Ь. ЪА ЪА U
4^ 00 СЛ О> СО Р Ч-Ч-Ч-ЧОи^и^ООООь— ю ю ю ЧЧЧ^Ф^СО&ОСОЮЮ бодных ко-
— 00 О — 00 05 со-чслоо-чслослсосой^оо СО-Ч4^С>ЮОО — 00Ю00-Ч лебаний V
ю о ю — to о ю — Параметр
4*. Ю — <7>й^04^004^4^00ЮЮ- •ЧСЛ04^004^00Ю —
оо о о оо —* оо^ооооюю^юооо-чоо^ ооосооооьоьоосл-чоо сдавлива-
W W ч* W W Ч* W ч* ч* «* w w>
to оо о ю сл ^оою4^-ч-чюсоюо4^ю’оо Ц^ООСЛОСООСЛ — ООО
ч со со оо со — С 4^- О - OOOOOOOOOCOU*. •ЧСЛОООООО-ЧООСЛООЦЬ.
о to о Параметр режима т Продолжение прилож. 2
—0,050 —0,094 —0,187 1 1 1 1 1 1 1 1 1 1 о о о о о о о о о о о о '*>— '*>— о о сл^ослоооослои^-ьо ЬООСО^Ф-ЬОООСЛ-^СЛ 0,003 0,005 0,002 —0,036 —0,114 —0,173 —0,151 —0,107 —0,069 —0,051 1 1 1 1 1 о о о о о о о — — ю сл оо оо со ю 00 о ю — оо Фактор за- тухания (см. с. 140) п
сл го - О СЛ to — О О О О СЛ to — ОООООООСЛЮ — о сл to — о о о о сл to — ОООООООСЛЮ — 50 100 200 500 1000 Число сдав- ливания cr<v
о о о оо со оо S 4^ р> р р р р р р р р р ^^чоосли^и^й^и^ ^СЛЬ0^ОЬ0-44^00Ь0 о о о о о о о о о о Vj Vj "(Ji Q5 СЛ СЛ 4^- СЛ СЛ СЛ Й^ЮСОи^-ЧОСООО — р р р р р "•<1 "-ч со о> сл оо ю оо ю оо Частота сво- бодных ко- лебаний -V
2,96 5,84 13,57 СО о ЬО — оо-чиь-oocoto — — о со со со оо — — Ф>- to “ч 00 Ю 00 СО о Ю СО о со ЬОЬО-ЧСОИ^ЬООСЛООСЛ оо о ю — , . слсосослоо^ю^ оо оо о о о о Р оо — о сл о* о г: сл р со со ^чоооо-чооо^о-ч ооою — о со со о со — ОО СЛ Ю Р о со сл оо о )£ь ф» Ф» оо 4^ Параметр сдавлива- ния о
о 00 СП Параметр режима tn
Illi 1 1 III p -° .° .° .° .° p .° .° .° О О "— "tO 4 00 "сп 00 "сп 00 "— "— сл40осл>04^сл4^сооооо tO — 4C0Ot0O4C0t04CD 1 1 1 1 1 1111 р р р .° р р р р р р "о "— "о "to "оо "сп "оо "to "—* "о СЛ — 44^ — ОООСЛ004 Ю4^4^СЛ — 400СаЭ4СЛ 1 1 1 1 1 1 1 о о о о о о р "о "о "— — "to "to "to СЛ -4 — СП — СП 4^ to О — to 4^ о 00 Фактор за- тухания (см. с. 140) п
о сл — ОООСЛЮЮ — — оооооооослслю — о to — о о о сл to — — ОООООООСЛЮ — ослю — оооослю — о о о о о о о Число сдав- ливания ov
О S.0 -Р Р 4 4 СП СП 4* 4* 00 00 "к- ЬО "to "to С04С004СЛОСЛСОС04^00 р р р р р .° .° .° .° .° "ч "•<! "о "о 4^ 00 "оо "оо "to "tO oowo^ooootooo-ч р р р р р р р "4 "-4 "-4 СП СП "сл 4^ 00 СП 00 00 — о to Частота сво- бодных ко- лебаний V
44^4^004^4^00t0t0 — О р фк 00 to 4^ ОО 00 р 4 00 р "4 о "со "сл "со сл "о оо "сп "сл "to оо 400С0ОСПСЛС0004ЮС04^ to to •— 4^44^ 00 4^0010 — сл to сл to to to p СЛ -4 p "to "— "оо 00 СЛ "oo 00 -4 "o "cr> О00-4СЛСЛ00-4 — co 4^ юою — 00 СЛ -4 4ь 00 4ь to р 4 р Р — р р 4^ "— "сп "оо "со "to 00 О со СП 4^ СЛ 4 си Параметр сдавлива- ния о
го о Параметр режима tn
1 1 1 1 1 1 1 р р р р р .° р р р р "о "о "— "к- * 7- о "о "о "о СЛ~<]-— осооо — оою—* ЮЮ4^4^44^4^СОСЛЮ Illi 1 О О О О О О О О О О О "о "— "to "to "cr> "— "о "to "сл "to "— а 00WO4^4Ot0WWOO .. to -4 to -4 СП — 00 — — to — || Фактор за- тухания (см. с. 140) п
о сл го — о о о о сл to — ОООООООСЛЮ — о сл to — 5? о о о сл to to — — ООООООООСЛЮ — xqj Число сдав- ливания ov
р о о о о о о о о о 4 4 О СП Ц1 ф>. 4^ Ф» СЛ U1 ^№0^04(0000- р -° -° .° .° .° .° р р "4 "си "си "сл "to Фк "— "оо "оо "си "сг> Р tooo — tocoo — tocooto ф Частота сво- бодных ко- лебании V
ОО сг> to •— СЛСОСОСЛ004^Ю — 4^4^> — 4coto — осо — со о "to "о оо "сл "со "оо "со "со W Ul N ОО О - 4 СО СО ОО о to — ОСОСПСОСПСЛОООО — р сл р р р о р — р оо — "— "-4 00 оо о> "сл "— "-4 00 СП СПСО-4СОООООСЛСОООСЛО о Параметр сдавлива- ния о
Продолжение прилож.
s
Sa
О
*
w
a
s
ПРЕДМЕТНЫЙ
УКАЗАТЕЛЬ
А
Анализ динамических характеристик
газостатических опор при произволь-
ных значениях параметра сдавлива-
ния (метод возмущений) 137—142 —
— Граница устойчивости 140
— Границы замкнутых областей не-
устойчивости 142
— Коэффициент динамической же-
сткости опоры 139
— Характеристики свободных коле-
баний 141
Анализ динамической устойчивости
газостатических опор (квази стаци-
онарный метод) 132—136 — Верхние
границы области устойчивости: двух-
рядного радиального газостатиче-
ского подшипника 134; прямолиней-
ной модели подпятника 133
— Квазистационарные условия устой-
чивости двухрядного газостатического
подшипника с простыми диафрагмами
133
— Расчет квазистационар ных усло-
вий устойчивости двухрядных газо-
статических подшипников 135
Б
Комбинирование 20
«Бринеллирование ложное» 12
Быстроходность предельная 10 —
Динамическая неустойчивость 10
— Факторы, ограничивающие быстро-
ходность 10
Г
Гиперповерхность нейтральной устой-
чивости 140, 141
Д
Деформации остаточные на желобах
кругового и сложного профилей 41,
42 —
Деформации температурные 12
Движение газа в смазочных зазорах
подшипников. Уравнения 79—81 —
Векторная форма записи уравнений 81
— Действительный и эквивалентный
профиль зазора в радиальном под-
шипнике 80
— Инерционные эффекты в газоста-
тических или гибридных опорах 80
— Используемые допущения 79
— Основное уравнение газодинами-
ческой теории смазки (уравнение Рей-
нольдса) 79
— Температура в смазочном слое 80
Динамика вала. 83, 84 —
Дополнительные динамические кри-
терии подобия газовых опор 84
— Нестационарные задачи газовой
смазки 84
Расширенная постановка основной за-
дачи газодинамической теории смаз-
ки 83
Долговечность модифицированных под-
шипников по сравнению с подшипни-
ками стандартной конструкции 66, 67
Ж
Жесткость 11
— двустороннего газостатического
подпятника 89
—радиального газостатического под-
шипника 117
210
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
3
Затраты энергетические 126—130 —
Контрольная поверхность движуще-
гося объема 126
— Момент сопротивления 126
— Мощность, потребляемая в само-
поддерживающихся опорах 126
— Полная внутренняя энергия газа
в баллоне, питающем камеру над-
дува 129
— Суммарный и массовый расход газа
128, 129
— Условие минимизации потребной
мощности привода 128
И
Изнашивание рабочих поверхностей
газовых подшипников 13
К
Классификация газостатических опор
87 — Геометрия рабочих поверхно-
стей 88
— Двусторонний кольцевой газоста-
тический подпятник 88, 89
— Жесткость двустороннего газоста-
тического подпятника 89
— Ограничители расхода пассивного
типа 87
— Радиальный двухрядный газостати-
ческий подшипник 90
— Реакция смазочных слоев 88
Контроль желобов некругового про-
филя 77, 78 — Схема контрольного
устройства 77
Коэффициент динамической жестко-
сти 139
— расхода 96
Коэффициенты, учитывающие ди-
скретность наддува 122—130 — Коль-
цевой и круговой подпятники 122—
125
Радиальный газостатический под-
шипник с симметричным наддувом 125,
126
Л
Линиинаддува_97—100 — Дифферен-
циальное условие баланса массовых
расходов 97
— Задача о расчете давлений в сма-
зочном слое 98
— Количественная характеристика
ограничителя расхода 97
— Кольцевой подпятник с одной ли-
нией наддува 98
— Параметр режима 97
— Радиальный подшипник с двумя
симметрично расположенными коль-
цевыми линиями наддува 98
— Расчетные формулы параметра
режима для различных типов ограни-
чителей расхода 100
— Функция истечения 99
— Число сдавливания 97, 98
М
Метод аналитического продолжения
104
— возмущений 117, 137—142
— квазистационар ный 132—136
— неравномерно распределенного над-
дува 110, 111
Метод «точечных источников» и
оценка пределов применимости схемы
линий наддува 101—ПО — Бесконеч-
ная полоса на комплексной плоско-
сти 108
— Кольцевой подпятник с дискрет-
ными питателями 101
— Комплексный потенциал системы
источников 102
— Конформное отображение кольца
на полосу и схема метода аналитиче-
ского продолжения 103
Предметный указатель
211
— Конформное отображение эксцен-
тричного кольца на концентричное 103
— Построение решения уравнения
Рейнольдса для ненагруженного
радиального газостатического под-
шипника с дискретными питателями 110
— Распределение давления в кольце-
вом подпятнике с дискретными питате-
лями 106
— Удельные несущая способность и
осевая жесткость кольцевых под-
пятников 105, 106
— Условия баланса массовых расхо-
дов через питатели 102
Механизм правкй круга. Конструк-
ция 73—77 — Геометрия кулачков
и их обработка 74
— Геометрия профиля круга после
правки 75
— Кулачок для правки круга по слож-
ному профилю 76
— Профиль желоба переменной кри-
визны 75
— Регулирование зазоров в шарико-
вых направляющих 74
— Устройство для правки круга при
обработке желобов некругового про-
филя 74
Модификация формы поверхностей
качения 20—25 — Коррекция конус-
ности колец или роликов 22, 23
— Некруговые профили дорожек каче-
ния подшипников и шариковых винто-
вых передач 24
— Подшипник с конусной бомбиной
на ролике и на внутреннем кольце
20, 21
— Ролики модифицированной формы
20
— Роликоподшипник со скосом и
с углублениями на дорожках качения
22, 23
— Тороидальный желоб 23
Трехточечный подшипник 24
О
Обработка желобов сложных про-
филей 71—73 — Погрешности кулачка
и профиля круга 73
— Принцип работы устройства для
правки круга 72
— Схема правки круга при шлифова-
нии сложного профиля большой и ма-
лой кривизны 72
Ограничители расхода капиллярные
87 — Сопловые 87, 88— типа простой
диафрагмы 88 — Типы 90, 91
Ограничители расхода 90—96—Ап-
проксимация Прандтля 92
— Капиллярный канал 94
— Коэффициент расхода 96
— Критические и докритические ре-
жимы наддува через кольцевую диаф-
рагму 93
— Максимальный (критический) рас-
ход газа 92
— Массовый расход газа через диаф-
рагму 91
— Основной физический критерий по-
добия устройств наддува 96
— Пористая вставка 95, 96
— Простая и кольцевая диафрагмы
90, 94
— «Псевдоскачок» 93
— Функция истечения 90, 92
Опоры газостатические 87—111 —
— Вопросы практического расчета
169—192
— Классификация 87—90
— Методы постановки задач определе-
ния поля давления в зазоре 96—111
— Статические характеристики 112—
130
— Характеристики ограничителей
расхода 90—96
Опоры газостатические. Динамиче-
ские характеристики 131—161 —
Анализ динамической устойчивости
(квазистационарный метод) 132—136
212
ПРЕДМЕТНЫЙ указатель
— Анализ характеристик при произ-
вольных значениях параметра сда-
вливания (метод возмущений) 137—
142
— Исследование устойчивости равно-
весия газовых опор 131, 132
— Метод малых возмущений 131
— Потеря устойчивости 132
— Результаты расчета характеристик
опор с различными ограничителями
расхода 157—161
— Унифицированная расчетная схема
142—157
— Уравнение Рейнольдса для газо-
вых опор 131
Опоры качения и газовые 8—13
— Долговечность 10
— Жесткость 11
— Несущая способность 10
— Потери на трение 8
— Предельная быстроходность 10
— Работоспособность 11
— Устойчивость 11
— Шумность 11
— совмещенные 8
Опоры с газовой смазкой 79—86 —
Плоский кольцевой (круговой) под-
пятник 81, 82
— Составляющие главных вектора
и момента реакции смазочного слоя
85, 86
— Уравнения движения газа в сма-
зочных зазорах подшипников сколь-
жения 79—81
— Уравнения динамики вала 83, 84
Опоры с поверхностями качения не-
кругового профиля 59—61 — Обра-
ботка желобов сложного профиля 61
— Повышение работоспособности ша-
рикоподшипников 61
Определение поля давления в зазоре
газостатических опор. Методы по-
становки задач 96—111 — Метод не-
равномерно распределенного наддува
НО, П1
— Метод «точечных источников»
и оценка пределов применимости схе-
мы линий наддува 101—ПО
— Расход газа на наддув 100, 101
П
Поверхности качения нетороидаль-
ные. Геометрия и основные характе-
ристики 27—37 — Выбор параметров
профиля 30, 31
—^Гиперболический желоб 35
— Желоб комбинированного профиля
27, 28
— Изменение зазоров между шаром
и различными желобами 32
— Изменение площадки контакта
с изменением нагрузки 29
— Контактные давления: при сжатии
шара 35; среднее и максимальное 28
— Контакт шара с эллиптическим же-
лобом 31
— Обработка эллиптического желоба
32
— Основные геометрические соотно-
шения 33, 34
— Потери на дифференциальное
проскальзывание 34
— Распределение приложенной на-
грузки в пределах рабочей зоны 34
— Сопротивление качению без смазки
шара 36
— Сопротивление качению шара: по
желобам разных профилей 29; в зави-
симости от нормальной нагрузки 35
— Схема правки круга по эллиптиче-
скому профилю 33
— Уровень средних давлений 34
— Характер контакта 34
— Эллиптический желоб с начальным
одноточечным (30—33) и двухточеч-
ным (33—35) контактом
Повреждения подшипников 12, 13
Подпятник двусторонний 169—176 —
Влияние осевого смещения на несу-
Предметный указатель
213
щую способность, осевую жесткость
и расход газа через подпятник 173
— Квазистационар ное условие устой-
чивости 176
— Особенности расчета динамики
«открытых» подпятников 173
— Осевая и угловая жесткости «от-
крытого» подпятника 170
— «Открытый» и «закрытый» вари-
анты 169
— Относительный объем карманов
174
— Параметр режима и число сдавли-
вания 174, 176
— Предельный объемный расход газа
через опору 171
— Удельная несущая способность
170, 173
Подпятник кольцевой 122, 123
Подпятник кольцевой и его аналог —
прямолинейная модель 112—117 —
Нагрузочная характеристика 112
— Расчет удельной несущей способ-
ности 112, 114—116
— Удельные осевая и угловая же-
сткость 114—117
Подпятник круговой 124, 125
Подпятник односторонний 162—
169 — Абсолютные значения рабочего
зазора, осевой жесткости и расхода
воздуха при различных осевых на-
грузках 168 — Проектирование и
предварительный расчет 163—165
Подпятник плоский кольцевой (круго-
вой) 81, 82
Подшипники 18—24 — Интервал
рабочих температур 19
— Контактные напряжения на рабо-
чих поверхностях 19
— Критерии работоспособности опор
качения 18, 19
Подшипники газовые 8
— газостатические 9
— Динамическая и статическая грузо-
подъемность 19
— качения 8
— Момент трения и вибрационные ха-
рактеристики 19
Подшипник радиальный газостати-
ческий 117—122 — Коэффициент же-
сткости 117, 118
— Метод малых возмущений 117
— Область интегрирования уравне-
ния Рейнольдса 121
— Радиальная и угловая жесткость
119, 120
— Расчет несущей способности 118
— с симметричным наддувом 125
— Поправки на дискретность над-
дува для радиального подвеса 126
— Унифицированные расчетные фор-
мулы для двухрядного подшипника
117—119
— Численные методы определения
нагрузочных характеристик 121
Подшипник радиальный с газовой смаз-
кой 82 — Уравнение профиля толщины
смазочного слоя 82, 83
Потери гистерезисные при герцевском
контакте двух тел 54, 55
— при негерцевском контакте 55
Потери на дифференциальное про-
скальзывание при герцевском контак-
те 56—58 — Коэффициент сопроти-
вления качению 57 — Работа сил
трения на полоске 57 — Распределе-
ние нагрузки по площадке контакта
58 — Формула Пальмгрена — Хитко-
ута 38
— при негерцевском контакте 58, 59 —
Вспомогательные величины для опре-
деления энергетических потерь от
проскальзывания 59 — Суммарная
нагрузка, распределенная на части
площадки контакта 59
Потери на трение 8, 15 — Несущая
способность газостатического под-
шипника 9
— Общий момент трения на валу газо-
вого подшипника 9
214
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
— Определение моментов трения 8, 9
— в газовых подшипниках 8
Профиль поверхности качения слож-
ный 37—41 — Дифференциальное про-
скальзывание 39, 40
— Желоб сложного профиля 37, 38
— Контакт шара с желобом сложного
профиля 40
— Проскальзывание сопряженных
поверхностей 39
— Профиль с частично разгруженными
зонами 40
— Пятна контакта 38
— Сравнительные характеристики по
напряжениям и энергетическим по*
тер ям 38
— Форма желоба и характер контак-
та 37
— Эпюры давлений на желобах слож-
ного профиля 38
Профиль с частично разгруженными
зонами 40, 41 — Контактное разруше-
ние 40
— Разгружение материала на наиболее
повреждаемых участках дорожки
качения 40
— Угловой дрейф дорожки качения
40, 41
Р
Работоспособность опор в особых усло-
виях И, 12 — Виды повреждений дета-
лей подшипников качения 12
— Обслуживание 13
— Остаточные деформации 12
— Снижение работоспособности под-
шипников качения при высоких тем-
пературах 12
— Температурные деформации 12
Расход газа максимальный (крити-
ческий) 92
— массовый 91
— на наддув 100, 101 — Критические
режимы истечения газа через ограни-
чители расхода типа диафрагм 1Q1
Расчет газостатических опор 162—
192 — Двусторонний подпятник 169—
176
— Односторонний подпятник 162—169
— Расчет многоопорных систем 176—
190
Расчет давлений на негерцевских пло-
щадках контакта 42—54 — Значения
коэффициентов влияния нагрузок
на деформацию 52
— Контакт тела переменной кривиз-
ны 48
— Область контакта известна 43
— Область контакта тел переменной
кривизны 49
— Практические рекомендации по
расчету 46
— Распределение давления на пятне
контакта сложной формы 43
— Схема измерения пятна контакта 46
— Формула Герца — Беляева 46
— Элемент области контакта и распре-
деление давления на нем 50
— по заданным формам поверхностей
47
Расчет многоопорных систем 176 —
190 — Глобальные и локальные пара-
метры 182
— Коэффициенты радиальных же-
сткости и демпфирования 183
—- Коэффициенты угловых динами-
ческой жесткости и демпфирования
радиальных подвесов и подпятников
183, 184
— Локальные и глобальные величины,
характеризующие многоопорную си-
стему 178
— Осевые возмущения и устойчивость
180, 181
— Особенности расчета 176, 177
— Предельная грузоподъемность 180
— Пример расчета 185—190
— Радиальные возмущения 181—185
— Радиальная нагрузка, жесткость И
эксцентриситет 177
Предметный указатель
215
— Расчетная схема многоопорной
системы с газостатическими опорами
177
— Угловые возмущения 183
— Условие устойчивости 185
Расчет динамических характеристик
газостатических опор с различными
ограничителями расхода 157—161 —
Влияние параметра режима и коэф-
фициента давления на коэффициент
затухания и относительную частоту
осевых свободных колебаний кольце-
вого подпятника 158
— Характеристики свободных коле-
баний кольцевого подпятника с про-
стыми и кольцевыми диафрагмами 157;
с капиллярными ограничителями рас-
хода 158
С
Совмещение подшипников 13—17 —
Возможности улучшения характе-
ристик 15
— Параллельная установка 13, 14
— Последовательные установки 14—16
— Раздельная установка 13, 14
— Расчет энергетических потерь
в газовом подшипнике 16
Способность несущая 10 — Сравни-
тельная характеристика 10
У
Устойчивость 11 — Полускоростной
и синхронный вихри 11
Усталостные испытания 63
Ф
Формы поверхностей качения 25—
27 — Дифференциальное проскаль-
зывание 25, 26
— Долговечность деталей в условиях
контактного нагружения 25
— Конформность поверхностей 25
— Причины разрушения подшипни-
ков 26
— Требования при модификации фор-
мы дорожек качения 26
Ш
Шарикоподшипники радиально-упор-
ные с желобами сложного профиля
67—70 — Конструкция подшипников
67
— Осевое колебание шарика 69
— Особенности кинематики 69
— Причины разрушения подшипни*
ков 68
— Сравнительная^долговечность 68
Э
Энергетические потери при качении тел
со сложным профилем. Прогнозирова-
ние 54—59 — Гистерезисные потери
на дифференциальное проскальзыва-
ние 54
— Гестерезисные потери при контакте
двух тел: герцевском 54, 55; негернев-
ском 55
— Качение шара по плоскости 55
— Площадка контакта при двухточеч-
ном начальном касании шара с жело-
бом переменной кривизны 55
— Положение мгновенной оси при ка-
чении шара по желобу 56
— Потери на дифференциальное про-
скальзывание при контакте: герцев-
ском 56—58; негерцевском 58, 59
— Элемент эллиптического пятна
контакта 54
Эпюры давлений на желобах сложного
профиля 38
Сергей Васильевич Пинегин,
Александр Васильевич Орлов,
Юрий Борисович Табачников
ПРЕЦИЗИОННЫЕ ОПОРЫ
КАЧЕНИЯ И ОПОРЫ
С ГАЗОВОЙ СМАЗКОЙ
Справочник
Редактор Е. В. Медведева
Художественный редактор С. С. Водчиц
Технический редактор Л. А. Макарова
Корректоры О. Е, Мишина и
А. П. Озерова
ИБ № 3022
Сдано в набор 27.02.84. Подписано в пе-
чать 08.10.84. Т-20211. Формат OOXQOVie-
Бумага типографская № 1. Гарнитура ли-
тературная. Печать высокая.4 Усл. печ. л.
13,5. Усл. кр.-отт. 13,5. Уч.-изд. л; 17,69.
Тираж 9 000 эЙз. Заказ 60. Цена 1 р. 30 к.
Ордена Трудового Красного Знамени изда-
тельство «Машиностроение»,
107076, Москва, Стромынский пер., 4.
Ленинградская типография. № 6 ордена
Трудового Красного Знамени Ленинград-
ского объединения «Техническая книга»
им. Евгении Соколовой Союзполиграфпро-
ма при Государственном комитете СССР
по делам издательств, полиграфии и книж-
ной торговли.
193144, г. Ленинград, ул. Моисеенко, 10.